/













































































































































































































































































































































































































































































































































































































































































































Author: Белоусов Б.Н. Попов С.Д.
Tags: техника средств транспорта автодорожный транспорт транспорт
ISBN: 5-7038-2713-2
Year: 2006


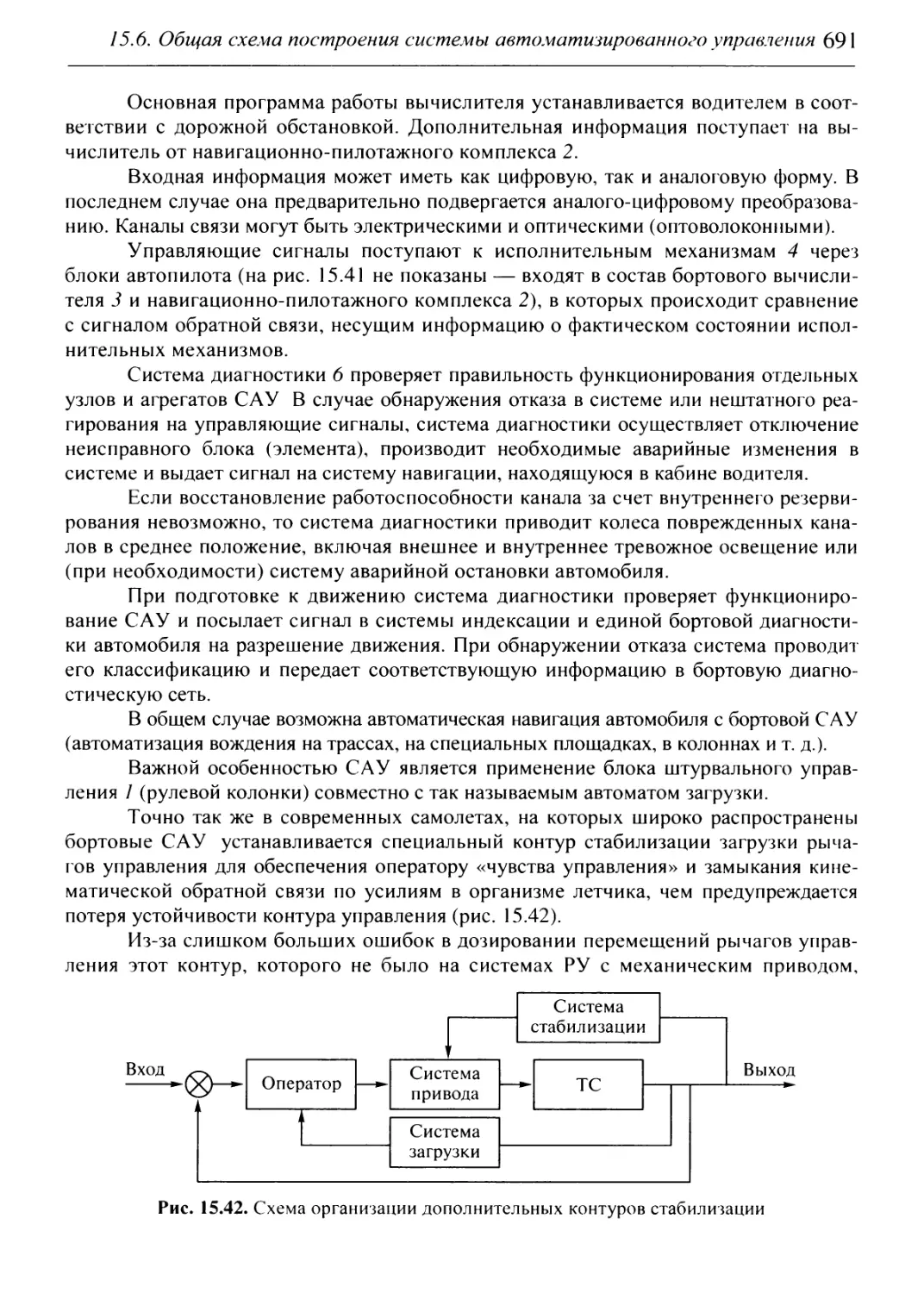
Text
Б.Н. Белоусов, С.Д. Попов
Колесные
транспортные
средства
особо большой
грузоподъемности
Москва
Издательство МГТУ им. Н.Э. Баумана
2006
УДК 629.113
ББК 39.335.4
Б438
Рецензенты:
д-р техн, наук, проф. Г.И. Гладов,
д-р техн, наук, проф. С.Б. Шухман
Белоусов Б.Н., Попов С.Д.
Б438 Колесные транспортные средства особо большой грузоподъемности.
Конструкция. Теория. Расчет / Под общ. ред. Б.Н. Белоусова. —М.: Изд-во
МГТУ им. Н.Э. Баумана, 2006. — 728 с., ил.
ISBN 5-7038-2713-2
В монографии обобщены обширные результаты исследований, выполненных
авторами и с их участием, по созданию комплексных транспортных средств особо
большой грузоподъемности в рамках НИОКР, проводимых НИИ «Специального
машиностроения» (НИИ СМ) и Научно-производственным центром «Специального
машиностроения» (НПЦ СМ) МГТУ им. Н.Э. Баумана. Основные материалы изда-
ния публикуются впервые.
Содержание монографии соответствует курсу лекций, которые авторы читают
в МГТУ им. Н.Э. Баумана.
Для инженерно-технических и научных работников автомобильной промыш-
ленности и организаций, связанных с разработкой колесных транспортных средств,
а также для аспирантов и студентов высших технических учебных заведений маши-
ностроительных специальностей.
УДК 629.113
ББК 39.335.4
ISBN 5-7038-2713-2
© Б.Н. Белоусов, С.Д. Попов, 2006
© Оформление. Издательство МГТУ
им. Н.Э. Баумана, 2006
Посвящается памяти профессоров П.В. Аксенова,
Н.Ф. Бочарова, Г.А. Смирнова иЮ.В. Пирковского
ПРЕДИСЛОВИЕ
В книге рассматривается история развития колесных транспортных средств
особо большой грузоподъемности (КТС ОБГ), основы методологии их проектиро-
вания, теории и расчета отдельных агрегатов и систем, а также особенности их об-
щих конструктивных решений.
Под КТС ОБГ понимается группа полноприводных колесных транспортных
средств (ТС) грузоподъемностью 25 т и более с числом осей более трех. Подобные ТС
используются при перевозке тяжелых неделимых крупногабаритных грузов, а также
как транспортные базы для различных технологических комплексов.
Конструкции КТС ОБГ развиваются особым путем, обусловленным высокими
нагрузками, большими габаритными размерами и условиями использования. Соответ-
ственно и подходы к проектированию таких ТС отличаются от подходов к проектиро-
ванию многоцелевых полноприводных автомобилей. Разработчиками и производите-
лями КТС ОБГ практикуется индивидуальный подход, подразумевающий формирова-
ние шасси в соответствии с конкретными задачами, поставленными потребителем.
Гибко варьируются значения основных параметров шасси, конфигурация ходовой час-
ти, несущей системы, тип и состав трансмиссии, двигатель, упругие элементы подвески
колес. Меняется количество осей, в том числе ведущих и неведущих, шасси одного ти-
па может изготавливаться с различным количеством управляемых осей, варьируются
конструкции двигателя, узлов и агрегатов трансмиссии. Существенно различаются тип
и размер шин, устанавливаемых на шасси. В связи с индивидуальным характером раз-
работки, производства и использования часто применяются конструктивные решения,
нетрадиционные для мирового автомобилестроения. Поэтому каждый положительный
или даже отрицательный опыт создания образца КТС ОБГ требует внимательного изу-
чения для учета при проектировании новых машин.
Огромный вклад в развитие теории и практики создания КТС ОБГ внесли
профессора МГТУ им. Н.Э. Баумана Н.Ф. Бочаров и Г.А. Смирнов, а также тесно
сотрудничавшие с университетом профессора П.В. Аксенов и Ю.В. Пирковский. В
книге рассматриваются уточненные для подобных ТС отдельные положения теории
и расчета, связанные с общими конструктивными решениями. Понятие общих кон-
структивных решений, введенное П.В. Аксеновым, включает технические решения,
определяющие число и размещение осей по базе, схемы рулевого управления и
трансмиссии, а также принципы общей компоновки.
Авторы надеются, что настоящая книга будет полезна для инженерно-техни-
ческих и научных работников автомобильной промышленности и организаций, свя-
занных с проектированием и созданием колесных транспортных средств, а также
для аспирантов и студентов высших учебных заведений, осуществляющих подго-
товку специалистов соответствующих отраслей.
Авторы с благодарностью примут все критические замечания и пожелания,
которые будут высказаны читателями.
ВВЕДЕНИЕ
Колесные транспортные средства особо большой грузоподъемности име-
ют огромное значение для экономики и обороны любой страны. В «Толковом
ловаре по автомобильному транспорту» Ю.И. Егорова и А.Н. Нарбута к этой
группе автомобилей отнесены колесные ТС для перевозки грузов массой от 25 т
и более. Таким образом, группу КТС ОБГ автомобильного парка страны состав-
ляют карьерные автомобили-самосвалы (БелАЗ, МоАЗ), тяжелые автопоезда для
перевозки длинномерных грузов общей массой 50 т и более в составе тягачей
ОАО «Русич» — КЗКТ или МЗКТ и полуприцепов ЧМЗАП или ФГУП «КБ «Мо-
тор», многоосные специальные колесные шасси (СКШ) ОАО «БАЗ» и МЗКТ, а
также автомобильные краны на базе многоосных шасси иностранного производ-
ства. За рубежом группу КТС ОБГ образуют карьерные самосвалы, многоопор-
ные колесные транспортные средства и многоосные шасси с автомобильными
кранами.
Одним из способов повышения эффективности грузового автомобиля как
транспортного средства является увеличение его грузоподъемности. Этим объ-
ясняется появление с середины XX в. группы многоосных и многоопорных ТС
числом осей более трех (от 4- до 12-осных), с числом опор более 20, имеющих бо-
лее 100 колес, грузоподъемностью до 500 т и более. Многоопорные автомобили
способны перевозить к месту назначения модули цехов, фабрик и заводов, морских
доков и других сооружений огромных размеров и масс.
Исторически развитие конструктивной схемы автомобиля шло путем увели-
чения числа колесных осей. Для повышения приспособляемости КТС к условиям
плохих дорог и вследствие существующих пределов допустимых нагрузок на ко-
лесную ось в его конструкцию последовательно вводились третья, затем четвертая,
пятая колесные оси и т. д.
Одним из наиболее важных факторов, способствовавших формированию но-
вых требований к карьерному транспорту, стало все более частое применение мощ-
ных гидравлических экскаваторов. Очевидно, что реализация эксплуатационных
возможностей этих экскаваторов, способных работать со всеми разновидностями
горных пород, заставила конструктивно измениться и ТС, работающее с ними в од-
ном технологическом комплексе. Так была создана группа карьерных самосвалов
особо большой грузоподъемности.
КТС ОБГ принципиально отличаются от общетранспортного автомобиля.
Как всякие сложные машины, они имеют свою теорию, устанавливающую общие
Введение
5
закономерности функционирования их конструкций и указывающую основные на-
правления, а также пути их дальнейшего развития и совершенствования.
Основой теории КТС ОБГ является теория автомобиля, созданная академи-
ком Е.А. Чудаковым на основе трудов Н.Р Бриллинга, В.И. Гриневецкого,
Н.Е. Жуковского и развитая в дальнейшем Г.В. Зимелевым, Б.С. Фалькевичем и др.
В ней рассматриваются общие вопросы движения главным образом 2-осного авто-
мобиля с одной ведущей осью.
Развитие теории и конструкции многоосных КТС ОБГ стало возможным бла-
годаря работам советских ученых и инженерно-технических работников: Я.С. Агей-
кина, А.С Антонова, Д.А. Антонова, П.В. Аксенова, Н.Ф. Бочарова, М.С. Высоцкого,
А.И. Гришкевича, В.П. Ефимова, К.С. Колесникова, Н.И. Коротоношко, Л.Г Крас-
невского, В.И. Медведкова, Ю.В. Пирковского, В.Ф. Платонова, Р.В. Ротенберга
В.М. Семенова, Г.А. Смирнова, Ю.А. Степанова, Б.Л. Шапошника, В.Е. Чвялева,
Я.С Фаробина, Н.Н. Яценко и др. Российские и белорусские ученые и инженеры в
настоящее время продолжают занимать ведущее положение в решении теоретиче-
ских и практических проблем развития КТС ОБГ
Размещение на одном образце КТС ОБГ большого количества систем и меха-
низмов с использованием различных видов энергии (механической, гидравличе-
ской, электрической) приводит к значительному увеличению собственной массы
таких транспортных средств, повышению сложности их конструкции, эксплуата-
ции, ремонта и т. п.
Создание многоосных КТС ОБГ для армии, используемых в качестве базы
для разработки различных агрегатов и боевых машин, определило качественный
скачок в развитии этой группы транспортных средств, получивших принципиально
новые изменения в своей конструкции.
Особый вклад в развитие конструкции КТС ОБГ внесла белорусская школа
автомобилестроения. Именно на территории Белоруссии были созданы гиганты ав-
томобилестроения БелАЗ, МАЗ, МоАЗ и МЗКТ Следует отметить также работу
российских заводов КЗКТ, ЗИЛ, БАЗ и КБ «Мотор». Специалисты этих предпри-
ятий совместно с учеными спроектировали современные транспортные средства,
имеющие аналогов за рубежом.
Совершенствование многоосных автомобилей и широкое распространение
автопоездов происходило одновременно. Автопоезда наиболее эффективно исполь-
зуются на магистральных автомобильных дорогах. Теория и практика создания ма-
гистральных автопоездов достаточно хорошо освещена в научно-технической лите-
ратуре, например М.С. Высоцким. В то же время обобщенных публикаций, посвя-
щенных разработке многоосных автомобилей, практически нет. Поэтому в данной
работе основное внимание уделено теории и практике многоосных КТС ОБГ Тяже-
лые колесные автопоезда рассматриваются только в первой части книги при анализе
конструктивных особенностей многоосных тягачей, предназначенных для букси-
ровки прицепов и полуприцепов общей массой 60 т и более.
На рис. В.1 и В.2 представлены примеры общих видов многоосных КТС ОБГ
и тяжелых автопоездов общей массой 90 т и более, а в табл. В.1, В.2 и В.З приведе-
ны значения некоторых параметров их технической характеристики.
6
ntif//.
7
д
Рис. В.1. Общие виды КТС ОБГ-
а — многоопорный транспортер фирмы «Коммето»; б — шасси 7904 фирмы МЗК1 (Беларусь); в — авто-
мобиль-самосвал БелАЗ (Беларусь); г — трубовоз фирмы «Формост» (Канада); с) — грузовой автомобш
МАЗ-2000 «Перестройка» (Беларусь)
8
Введение
Рис. В.2. Общие виды тяжелых колесных автопоездов:
гача КЗКТ-7427 и прицепа ЧМЗАП; б — эксперимента;
— автопоезд в составе тягача КЗКТ-74281 и полуприцепа: г
Введение
9
Таблица В. 1
Основные параметры технической характеристики КТС ОБГ
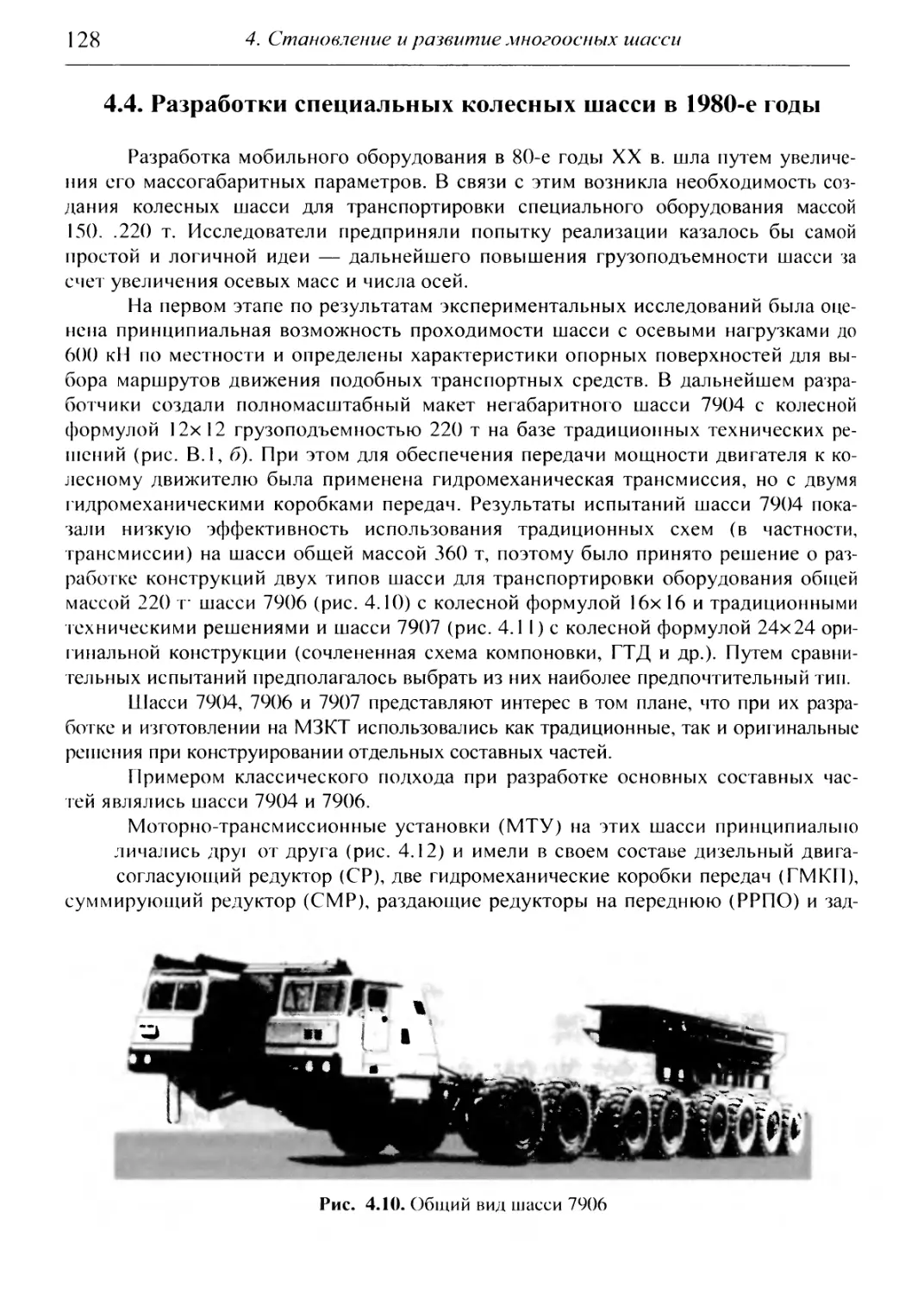
Параметр МАЗ-543 (Беларусь) КЗКТ-80051 (Россия) 7906 (Беларусь) 7907 (Беларусь)
Колесная формула 8x8 8x8 16х 16 24x24
Полная масса, т 40,0 50,0 220,0 220,0
Мощность двигателя,
кВт 386,0 321,5 11043,0 882,0
Максимальная ско-
рость, км/ч 65,0 60,0 40,0 40,0
Габаритные размеры, мм:
длина 11300 12150 27900 28500
ширина 3070 3070 4800 4700
высота 2970 3245 4500 4500
колея 2375 2200 3820 3504
Дорожный просвет, мм 450 500 500 500
Размер шин 1500x600-635 18.00-24 1980x750-737 1660x670-687
Формула управляемо-
сти 12-00 12-00 1234-0000 1234-0000- 9101112
Минимальный радиус
поворота, м 13,5 18,0 30,0 27,5
Тип трансмиссии ГМП ГМП ГМП (две) Электромеха- ническая
Примечание. ГМП — гидромеханическая передача.
Таблица В. 2
Основные параметры технической характеристики
тяжелых колесных автопоездов
Параметр КЗКТ-74281- 9990 (Россия) КЗКТ-7427 (Россия) МАЗ-73132- 9990 (Беларусь) Т 6066/05 «Мол» (Бельгия)
Колесная формула Полная масса, т1 8x8 8x8 8x8 6x6
автопоезда 94,0 180,0 100,0 150,0
тягача 24,0 55,0 45,15 60,0
Мощность дви-
гателя, кВт 478 478 386 318
Максимальная ско-
рость, км/ч Габаритные разме- 70,0 45 60 25
ры тягача, мм:
длина 10208 10208 10815 10350
ширина 3070 3070 3070 3350
высота 3100 3100 2920 4070
колея 2800 2800 2375 2800
К)
Введение
Окончание табл. В.2
КЗКТ-74281- КЗКТ-7427 (Россия) МАЗ-73132- Т 6066/05
Параметр 9990 (Россия) 9990 (Беларусь) «Мол» (Бельгия)
Дорожный просвет, мм 450 450 400 400
Размер шин 18.00-24 18.00-24 1500x600-635 14.00-24
Формула управляе- мости Минимальный ра- 12-00 12-00 12-00 -00
диус поворота, м Тип трансмиссии 18.0 гмп 18,0 ГМП 13,5 ГМП 10,68 ГМП
Таблица В.З
Основные параметры технической характеристики карьерных самосвалов
Параметр МАЗ-525 БелАЗ-540 МАЗ-530 БелАЗ-548
Колесная формула Грузоподъем- 4x2 4x3 6x4 4x2
ность, т Масса автомобиля в снаряженном 25 27 40 40
состоянии,т Коэффициент ис- 24 21 38 28
пользования тары База автомобиля, 0,96 0,78 0,95 0,70
мм Длина автомобиля, 4780 3550 4900 4200
мм Минимальный ра- диус поворота по колее переднего 8220 7180 10515 8160
колеса, м Номинальная мощ- ность двигателя, 12,0 8,4 14,0 9,5
кВт Удельная мощ- 221 265 331 368
ность, кВт 4,4 5,5 4,2 5,4
Тип трансмиссии Тип подвески: Механическая ГМП ГМП ГМП
передней Рессорная Пневмогидрав- лическая Рессорная Пневмогид- равлическая
задней Без подвески Без подвески Без подвески Без подвески
Шины Максимальная 17.00-32 18.00-25 18.00-32 21.00-33
скорость, км/ч 30 53 40 55
Введение
И
Книга состоит из трех частей. В первой части изложены история развития
конструкции и общая методология проектирования, которая включает основы авто-
матического проектирования, а также оценку областей и условий использования
КТС ОБГ общие требования к эксплуатационным и потребительским свойствам,
краткий анализ конструкций составных частей (узлов, агрегатов и систем) сущест-
вующих серийных и опытных образцов.
Во второй части книги приводятся общие сведения, необходимые как исход-
ные данные при проектировании КТС ОБГ
В третьей части книги рассмотрены основы теории и расчета нетрадицион-
ных технических решений, а также частные и специальные требования к составным
частям ТС.
Фирмами-производителями КТС ОБГ практикуется индивидуальный подход,
подразумевающий формирование образца в соответствии с конкретными задачами,
поставленными потребителем, поэтому приведенные в книге многочисленные спра-
вочные данные могут представлять практический интерес для разработчиков пер-
спективных моделей.
УСЛОВНЫЕ ОБОЗНАЧЕНИЯ
Р, R F — активная сила и реакция — внутренние силы в подвеске и шине, возникающие от деформации уп- ругих и перемещения демпфирующих элементов
т G М J N D и п 5 t V, v V g — масса — сила тяжести — момент — момент инерции — мощность — динамический фактор — передаточное число — кпд — путь — время — скорость движения — продольное ускорение — ускорение свободного падения
(0, И,, CD,, — угловые скорости и ускорения , (Dr — частота вращения и угловая скорость вращения насосного и турбин- ного колес гидротрансформатора — изменение амплитуды вертикальных колебаний
Y’Ф % — изменение амплитуды поперечно- и продольно-угловых колебаний — относительный коэффициент затухания колебаний (коэффициент апе- риодичности)
С А, А 8 А8, /гсг, Ац, 5,.(/в) ЦХ)< А,, ! Di — жесткость — прогиб и скорость прогиба подвески — коэффициент демпфирования в шине — угол увода колеса — боковая деформация шины — статический и динамический ходы подвески — длина (длина волны) неровности — спектральная плотность высот макропрофиля дорог — путевая частота границы зон средних и коротких неровностей — коэффициент спектральных плотностей
Условные обозначения
13
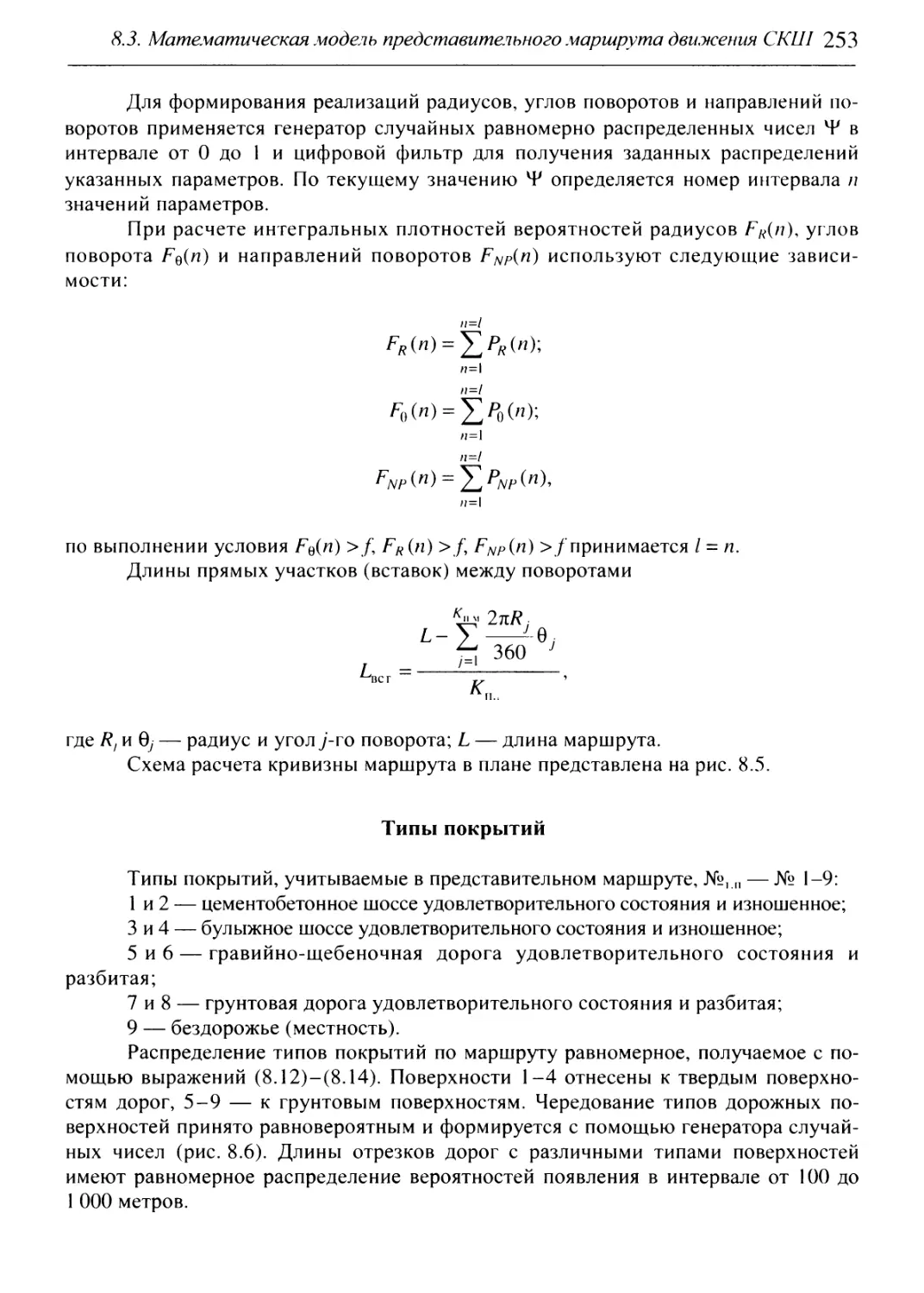
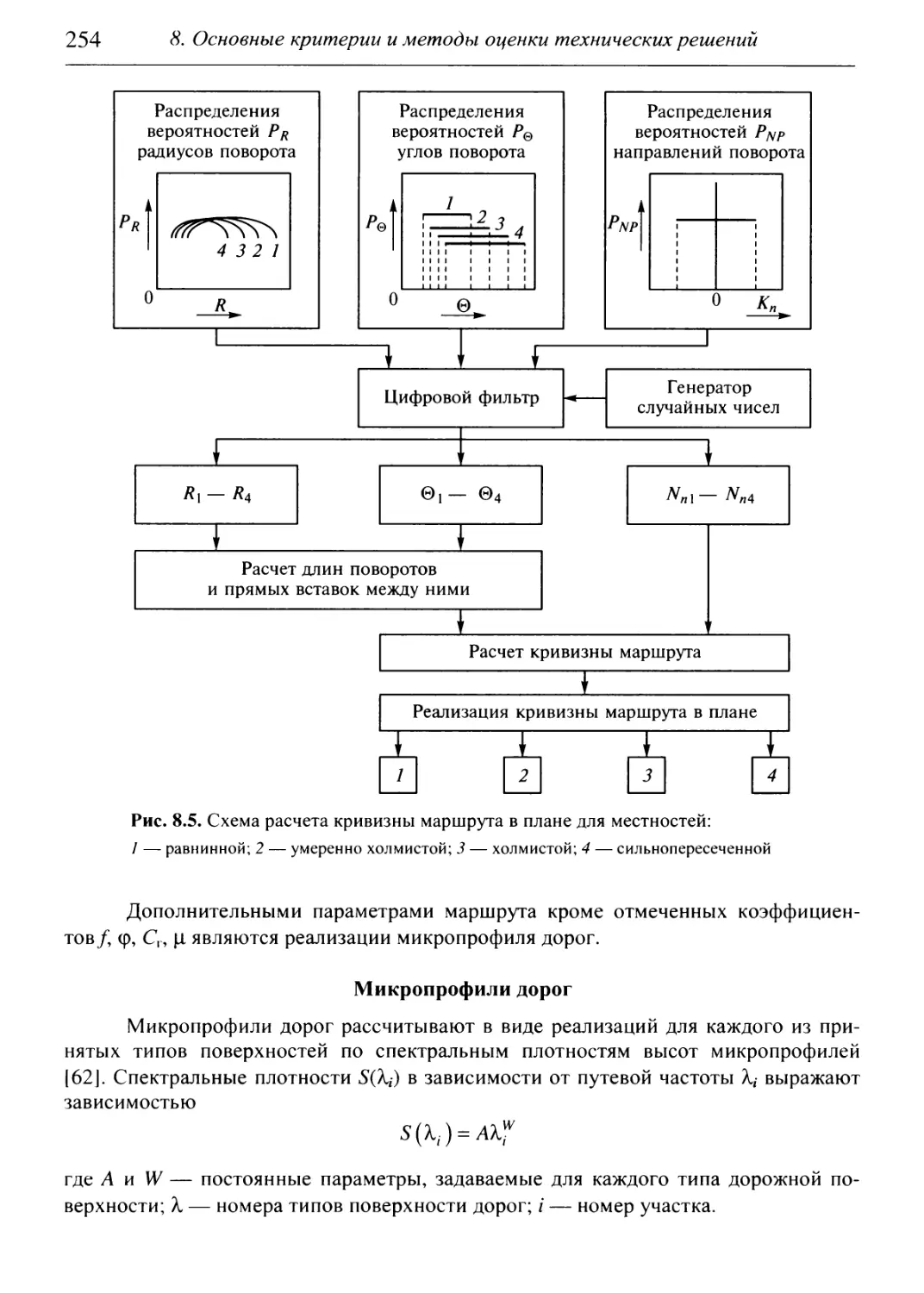
F,(h) — интегральная плотность вероятностей радиусов
Fe(n) — интегральная плотность вероятностей углов поворота
FNp(n) — интегральная плотность вероятностей направлений поворотов
5(Л/) — спектральная плотность в зависимости от путевой частоты
р(Л,) — коэффициент корреляции параллельных сечений микропрофиля
'Y(i) — фаза гармонических составляющих реализации
М: и — математические ожидания реализаций полусуммы и полуразности мик-
ропрофилей колей
г — радиус колеса
R — радиусы: поворота, проходимости, поперечный и т. п.
ос, р, 8, 9, у — углы поворота (управляемых колес, закрутки торсионов подвески и
т. п.), бокового увода, подъема, спуска и крена
L, В, I — линейные размеры
h( — высота центра масс
/?, — глубина колеи
Хр — расстояние от передней (задней) оси КТС ОБГ до полюса схемы руле-
вого управления в продольном направлении
в, hB — продольная и вертикальная координаты расположения рабочего места
водителя
— текущая кривизна траектории движения
— вертикальная линейная координата перемещения колеса
F — площадь поперечного сечения СКШ
С,, — удельное сопротивление грунта вдавливанию (коэффициент осадки
грунта)
f — коэффициент сопротивления качению колесной оси
ф — коэффициент сцепления колеса
5К — коэффициент скольжения колеса
КС} — коэффициент блокировки дифференциала
Примечание. Во всех формулах используются размерности в системе СИ, т. е. сила
измеряется в Н, давление — в Па, жесткость — в Н/м, линейные размерности
в м, скорость — в м/с, рад/с (с-1). Исключение составляют отдельные примеры, эмпирические
выражения и графики, взятые из литературы 70-х годов XX в., а также, в некоторых случаях,
использованные в интересах обеспечения преемственности.
СПИСОК ПРЕДПРИЯТИИ
иктп НАМИ — Институт комплексных транспортных проблем — Центральный научно-исследовательский автомобильный и автомотор- ный институт
МАДИ КЗКТ МЗКТ МАЗ БелАЗ ЯМЗ КамАЗ ЗИЛ УралАЗ БАЗ МАМИ ВАБТВ МИЭиА ЧЗДМ ЧМЗАП МоАЗ — Московский автомобильно-дорожный институт — Курганский завод колесных тягачей — Минский завод колесных тягачей — Минский автомобильный завод — Белорусский автомобильный завод — Ярославский моторный завод — Камский автомобильный завод — завод имени И.А. Лихачева — Уральский автомобильный завод — Брянский автомобильный завод — Московский автомеханический институт — Военная академия бронетанковых войск — Московский институт электроники и автоматики — Челябинский завод дорожных машин — Челябинский механический завод автомобильных прицепов — Могилевский автомобильный завод
Часть I
ОСНОВНЫЕ ЭТАПЫ РАЗВИТИЯ
ОБЩИХ КОНСТРУКТИВНЫХ РЕШЕНИЙ КТС ОБГ
Глава 1
Развитие отечественных и зарубежных
транспортных средств ОБГ
1.1. КТС ОБГ за рубежом
Развитие вооружения и военной техники (ВВТ) всегда служило мощным им-
пульсом для бурного развития сопутствующих отраслей техники и, в частности, ав-
томобилестроения, поэтому наиболее оригинальные конструкции КТС ОБГ создава-
лись и создаются для нужд армии и в соответствии с условиями их использования.
Производством КТС ОБГ занимаются как специализированные, так и обще-
транспортные зарубежные фирмы. Кроме того, для обеспечения высокой адаптив-
ности к требованиям заказчика существует ряд фирм, выпускающих в широком
диапазоне узлы и агрегаты к данным ТС. Ниже приводятся типичные примеры об-
щей компоновки КТС ОБГ и краткий обзор конструкций их основных агрегатов и
систем.
Начиная с конца 60-х и начала 70-х годов XX в. в ведущих странах НАТО
получила развитие концепция мобильного базирования вооружения и военной тех-
ники. При этом приоритет имели направления развития транспорта, связанные с
воздушным и морским базированием ВВТ В наземном базировании страны НАТО
пошли в направлении создания стационарных сверхзащищенных и сверхглубоких
стратегических пусковых установок и мобильных оперативно-тактических ком-
плексов. Хотя в США и предпринимались отдельные попытки создания подвижных
наземных комплексов стратегического назначения (например, межконтинентальных
баллистических ракет (МБР) MX), но практической реализации эти программы не
получили.
Характерным примером использования многоосных ТС при разработке под-
вижных наземных межконтинентальных ракетных комплексов в США является
программа создания ракетной системы «Миджетмен».
В качестве возможных способов базирования малогабаритных МБР «Мид-
жетмен» рассматривались мобильное базирование на защищенных транспортно-
пусковых установках (ТПУ) и сверхзащищенных шахтных пусковых установках.
При мобильном способе базирования малогабаритной МБР «Миджетмен» на защи-
щенных ТПУ предусматривалось размещение и хранение ракет в дислоцирующихся
16
Развитие отечественных и зарубежных транспортных средств ОБГ
Рис. 1.1. Автопоезд в составе колесного прицепа и гусеничного тягача
под ТПУ МБР «Миджетмен»
на территории США защищенных подвижных пусковых установках, способных
выдержать избыточное давление во фронте ударной волны 1,8...2,1 кПа.
ТПУ изготовленная фирмой «Мартин Мариэтта», представляла собой авто-
поезд в составе колесного прицепа и гусеничного тягача (рис. 1.1). При этом прицеп
разработала фирма «Мартин Мариэтта», а гусеничный тягач, гидравлическую сис-
тему и систему подвески для ТПУ — фирма «Катерпиллар Трактор». Длина ТПУ
вместе с тягачом составляла 27,7 м, ширина — 3,65 м, высота тягача — 2,9 м, масса
тягача — 32,2 г, масса ТПУ вместе с ракетой (13,6 т) — 47,4 т. Предполагалось,
на огневой позиции ТПУ опускается на грунт и ее боковые части откидываются,
образуя тело обтекаемой формы шириной 7,3 м со стальной юбкой, прилегающей к
опорной поверхности.
Тягач снабжен 4-тактным дизельным двигателем модели 3412 V-12 фирмы
«Катерпиллар Трактор». Мощность двигателя — 559 кВт (750 л.с.). Он использует-
ся для привода гусеничного шасси тягача и прицепа. Сцепление между тягачом и
ТПУ на прицепе быстроразъемное, что позволяет тягачу после доставки ТПУ на
огневую позицию быстро переместиться в укрытие.
Фирма «Боинг» в отличие от фирмы «Мартин Мариэтта» предпочла колесное
шасси как для тягача, гак и для ТПУ на прицепе (рис. 1.2). Это обеспечило пере-
движение ТПУ со скоростью около 100 км/ч. Тягач 4-осный (восемь колес), ТПУ — на
3-осном прицепе (шесть колес, все ведущие). В созданном экспериментальном об-
разце управляемыми являлись только колеса тягача. В конструкции была преду-
смотрена центральная система регулирования давления в шинах во время движения.
Шины со стальными бандажами имели высоту 1,37 м и ширину 0,61 м. На тягаче
установлен дизельный двигатель мощностью 559 кВт (750 л.с.), а на прицепе (ТПУ) —
двигатель такого же типа мощностью 410 кВт (550 л.с.). Длина ТПУ вместе с тяга-
чом составляла 28 м, ширина — 3,65 м, высота — 2,8 м, масса тягача — 20,4 т, а
масса ТПУ вместе с ракетой — 74,8 т.
На огневой позиции эта ТПУ также ложится на грунт, при этом она сначала
опускается так, что просвет между корпусом и опорной поверхностью составляет
примерно 40 см, а затем совершает контролируемое падение на грунт. Нижние бо-
ковые кромки ТПУ острые, и под действием веса они частично заглубляются в
КТС ОБГ за рубежом
17
Рис. 1.2. Автопоезд в составе колесных прицепа и тягача под ТПУ МБР «Миджетмен»
грунт Затем развертывается юбка, закрывающая кромки и обеспечивающая уп;
пенис. Вентиляционные отверстия создают условия обтекания, препятствующие
опрокидыванию пусковой установки (ПУ) под воздействием ударной волны. Попе-
речное сечение лежащей на грунте ПУ имеет форму треугольника со скругленной
вершиной.
Многообразие ТС, применяемых под ВВТ предполагает также широкое
пользование специальных колесных прицепов и полуприцепов, грунтовых техно,
гических тележек, специальных «колесных ходов» использованием контейнера
ракеты в качестве несущего элемента.
Примером такой компоновки может служить разработанный в США в 70-е
ды XX в. фирмой «Вабко» активный автопоезд с электроприводом к колесам за;
ней оси седельного тягача и полуприцепа (рис. 1.3). Масса автопоезда — около 200
На нем установлен дизельный двигатель мощностью 987 кВт (1325 л.с.
Заслуживают внимания сведения о разработке и создании многоосных шасси
коммерческого назначения. Так, фирма «Фаун» (Германия) серийно выпуска 3-, 4-
Рис.1.3. Транспортер под МБР MX
18
Развитие отечественных и зарубежных транспортных средств ОБГ
Рис. 1.4. Шестиосное шасси с краном фирмы «Фаун» (Германия)
и 5-осные шасси для автокранов грузоподъемностью до 125 т. Однорамные 6-, 7- и
8-осные шасси поставляются малыми сериями для автокранов грузоподъемностью
до 400 т (рис. 1.4). Характеристика общих конструктивных решений крановых шас-
си приведена в табл. 1.1 [1J.
Таблица 1. /
Общие конструктивные решения крановых шасси фирмы «Фаун»
Группа Схема шасси (тележечная) Формула
колесная осевая управляемости привода осей
1 ОО ООО 10x6 2-3 12-300 10045
II ООО 000 или ОО оооо 12x6 12x6 3-3 2-4 123-000 12-3006 000456 000456
III ОООО ООО 14x8 4-3 1234-007 1204500
IV ООООО ООО 16x8 5-3 12340-678 00305670
Почти на всех шасси фирмы «Фаун» применяется V-образный дизель фирмы
«Дойтц» V6 или V8 воздушного охлаждения мощностью от 127 до 313 кВт (от 170
до 420 л.с.). На 7- и 8-осных шасси используют дизели МТИ водяного охлаждения
мощностью от 335 до 395 кВт (от 450 до 530 л.с.).
Шасси под автокраны изготавливают как со всеми ведущими колесами, так и
с ведущими колесами только осей задней тележки. Все ведущие колеса имеют
2-ступенчатый простой или планетарный редуктор. Большая часть осей многоосных
1.1. КТС ОБГ за рубежом
19
шасси под автокраны управляемая. У 8-осного шасси управляемыми являются семь
осей. Рулевое управление имеет гидроусилитель. В случае буксировки шасси
с неработающим двигателем гидроусиление руля осуществляется от специального
насоса, приводимого в действие от колес шасси.
На всех шасси семейства для изготовления рам применяют специальные вы-
сокопрочные стали. Рамы сварные. Лонжероны рамы заменены одной коробчатой
рамой, которая имеет большее сопротивление на изгиб и кручение, чем лонжерон-
ная [2].
Целую гамму автомобилей ОБГ выпускает фирма «Ман» (Германия). Значе-
ния основных параметров технической характеристики многоосных шасси фирмы
приведены в табл. 1.2.
Таблица 1.2
Значения основных параметров технической характеристики
автомобилей фирмы «Ман» (Германия)
Параметр Шасси
30.321 VFAK 35.365 VFAK 40.321 DFAK 40.365 DFAK 48.365 VFAK
Колесная формула 8x8 8x8 6x6 6x6 8x8
Полная масса, т 35,0 35,0 40,0 40,0 48,0
Грузоподъемность, т 24,7 24,3 30,0 28,6 37,0
Габаритные размеры, мм:
длина 8235 8235 7635 7635 8260
высота 3100 3180 3264 3264 3160
колея колес:
передних 1990 1990 1990 1990 1990
задних 1800 1800 1800 1804 1804
база 1500 + 1500 + 3825 + 3825 + 1500 +
+ 3100 + + 3100 + + 1400 + 1400 + 3125 +
+ 1350 + 1350 + 1400
Мощность двигателя, кВт 235 268 268 268 268
Максимальная скорость,
км/ч 116 121 116 116 116
Кроме того, «Ман» является крупнейшим европейским поставщиком специ-
альных армейских автомобилей тактического назначения, поступающих на воору-
жение армий стран-членов НАТО. Фирма предлагает две параллельные гаммы ав-
томобилей военного назначения: доработанные серийные грузовики и машины спе-
циального назначения.
Серия тяжелых тактических автомобилей SX2000 включает шасси 4x4, 6x6,
8x8, 10х 10 полной массой 22...50 т, грузоподъемностью 12...27 т. Они оборудованы
унифицированными рядными или V-образными дизельными двигателями «Ман» с
числом цилиндров от 6 до 12, мощностью от 194 до 745 кВт (от 260 до 1000 л.с.),
многоступенчатыми механическими или автоматическими коробками передач, ры-
чажно-пружинной или гидропневматической подвеской колес, централизованной
системой подкачки шин, имеющих размеры 14.00R20, 16.00R20, 24.00R22.5. Авто-
20 / Развитие отечественных и зарубежных транспортных средств ОБГ
мобили способны преодолевать подъемы крутизной 60 %, броды глубиной 1,5 м.
Специальные варианты оснащаются полностью бронированными кабинами, всеми
управляемыми колесами, автоматическими системами подкачки шин. По заказам
автомобили выпускаются в низкорамных, авиадесантных или особо узких исполне-
ниях. Главным назначением автомобилей серии SX2000 является перевозка специ-
ального оборудования и тяжелого вооружения. Наиболее тяжелым является шасси
MAN 45.1000FFAEG (с колесной формулой 10х 10) длиной 13,2 м, предназначенное
для монтажа тяжелых гаубиц, мостоукладочного и кранового оборудования, пожар-
ного оснащения или сменных контейнеров массой под груз до 27 т.
Фирма «Алвис» (Великобритания) занимается производством тяжелых пол-
ноприводных колесных шасси и тягачей с колесной формулой 6x6 и 8x8. Основой
программы является шасси «Униповер» (8x8). Шасси выполнено по тележечной
схеме с двумя передними управляемыми осями. На нем могут быть установлены два
типа рядных 6-цилиндровых дизельных двигателей с турбо наддувом: «Камминз»
М-38ОЕ мощностью 279,4 кВт (375 л.с.), рабочим объемом 11 л и «Перкинс»-410Тх
мощностью 300,2 кВт (403 л.с.), рабочим объемом 12,2 л. Автоматическая коробка
передач ZF Автомат-бНР обеспечивает шесть передних и одну реверсивную пере-
дачу, которая является гидродинамическим тормозом-замедлителем и снабжена
гидронасосами для привода двух валов отбора мощности. Раздаточная коробка —
планетарная одноступенчатая. Подвеска всех колес — на параболических рессорах.
На шасси установлены колеса с широкопрофильными шинами 475/80R20, автома-
тическая система изменения давления воздуха в шинах. Цельнометаллическая ка-
бина рассчитана на пять человек и снабжена независимой системой отопления и
кондиционером. Грузоподъемность шасси — до 24 т, полная масса — 39 т, максималь-
ная скорость — 91 км/ч, полная масса автопоезда с тягачем на базе шасси — 110 т,
максимальная скорость — 80 км/ч. Существует модернизированный вариант с дви-
гателем «Камминз» мощностью 301,7 кВт (405 л.с.). Есть также вариант 12x12 для
перевозки мостовых секций.
На базовой серии М разработано семейство седельных тягачей МН. Тягачи
рассчитаны на работу в составе автопоезда полной массой 110... 117 т, предназначен-
ного для быстрой переброски танков при температуре от -31 до +55 °C, и способны
преодолевать брод до 1,2 м. Максимальная скорость шасси с полной нагрузкой дос-
тигает 85 км/ч. На тягаче МН-6660 (6x6) используется рядный 6-цилиндровый ди-
зель «Камминз» КТА-19 рабочим объемом 19 л, мощностью 447,0 кВт (600 л.с.). На
модели МН-8875 (8x8) применяется дизель «Камминз» QSK-19 рабочим объемом
19 л, мощностью 558,8 кВт (750 л.с.). На обоих тягачах устанавливается автомати-
ческая 5-ступенчатая коробка передач ZF, объединенная с 2-ступенчатой раздаточ-
ной коробкой. Межосевые и межколесные дифференциалы снабжены блокировками
с пневматическим приводом. На тягачи устанавливают две независимые лебедки,
обеспечивающие силу тяги по 250 кН каждая.
Вся гамма моделей «Ивеко» (Италия) подразделяется на серийные граждан-
ские автомобили, приспособленные для использования в армии, и грузовики такти-
ческого и специального применения. Гражданские автомобили серии «Евро Транс-
портер» отличаются рамами повышенной прочности и применением только рессорных
подвесок. В рассматриваемом классе грузоподъемности (более 24 т) выпускают мо-
1.1. КТС ОБГ за рубежом
21
дели 6x4, 6x6 грузоподъемностью 16...24 т при полной массе 26...30 т и модели
8x4, 8x8 грузоподъемностью 22...29 т при полной массе 32...40 т. На 3-осные тягачи
«Евро Транспортер» устанавливают двигатели мощностью 224...313 кВт (300...
...420 л.с.). Следует отметить, что все модели «Евро Транспортер» выполнены на базе
дорожных автомобилей и могут считаться внедорожными условно.
Фирма «Ошкош» (США) специализируется на производстве тяжелых армей-
ских транспортных шасси, применяемых для выполнения военных задач в непо-
средственной близости от зоны боевых действий. В современную программу фирмы
входят несколько полноприводных многоосных машин, предназначенных для ско-
ростной переброски тяжелой боевой техники и военного снаряжения по дорогам и
бездорожью, монтажа специального оборудования и ракетного вооружения. «Ош-
кош» выпускает седельный тягач М-911 (6x6), работающий в составе автопоезда,
полной массой до 102,5 т. Он относится к стандартизованной в армии США группе
«Транспортеры тяжелого оборудования» (Heavy Equipment Transporter) — НЕТ
Автомобиль оснащен 2-тактным двигателем фирмы «Дейтрот Дизель» V8 рабочим
объемом 12,1 л и мощностью 335 кВт (450 л.с.), автоматической 5-ступенчатой ко-
робкой передач «Аллисон». Тягач имеет собственную массу 18 т, габаритные разме-
ры 9 373x2 896x3 404 мм и развивает скорость до 72 км/ч. В 1990 г фирма выпус-
тила новый седельный тягач М-1070 (8x8), создававшийся для скоростной перебро-
ски американского основного танка М-1А1 на автопоезде общей массой до 105 т. Он
принадлежит к категории «Системы для перевозки тяжелого оборудования» (Heavy
Equipment Transporter System) — HETS. На тягаче установлены колеса с односкат-
ной ошиновкой. Управляемыми являются колеса передней и задней осей. На тягаче
применяются дизельный двигатель аналогично М-911, оснащенный турбонаддувом
и развивающий мощность 372,5 кВт (500 л.с.), а также автоматическая коробка пе-
редач. Кабина тягача — полубронированная, рассчитана на шесть человек, включая
экипаж перевозимого танка. Подвески всех колес — на полуэллиптических рессо-
рах. Масса тягача — 18,6 т, длина — 9 195 мм, высота — 3 735 мм.
Специальные шасси фирмы «Рено» (Франция) представлены двумя военны-
ми моделями гражданской серии. На базе шасси 385.40 (8x4) монтируется ремонт-
но-эвакуационное оборудование. На данном шасси 385.40 устанавливают рядный
6-цилиндровый дизель рабочим объемом 11,1 л, мощностью 287 кВт (385 л.с.) с
турбонагнетателем и механическую 16-ступенчатую коробку передач. В конце 1998 г
начался выпуск армейского шасси 400.32 (8x8) с двигателем мощностью 292 кВт
(392 л.с.) с полезной нагрузкой 20...26 т и полной массой 32...38 т.
Фирма «Мол» (Бельгия) уже более 40 лет разрабатывает и производит разно-
образные специализированные ТС, включая автомобили для работы в составе буро-
вых комплексов, сочлененные тракторы, крановые шасси, самодвижущиеся платфор-
мы и т. п. Важное место в ее продукции занимают и тягачи полной массой 50.. .70 т для
перевозки крупногабаритных прицепов.
Наиболее характерные из таких ТС — 3- и 4-осные полноприводные седель-
ные и балластные тягачи с кабиной за или над двигателем. Седельные тягачи рабо-
тают в составе автопоездов полной массой до 150 т, балластные — до 250 т. На ТС,
предназначенных для движения по дорогам, устанавливают шины 14.00x24 с
2-скатной ошиновкой колес задней тележки, на внедорожные — шины 26,5R25 или
29,5x25 с односкатной ошиновкой всех колес.
22 J Развитие отечественных и зарубежных транспортных средств ОБГ
Основные технические параметры некоторых тягачей фирмы «Мол» приве-
дены в табл. 1.3.
Таблица 1.3
Основные параметры технической характеристики тягачей фирмы «Мол»
Параметр Т 5264/05 Т 60066/05 NG 250 ТВ 800
Колесная формула 6x4 6x6 8x8 6x6
Масса, кг:
снаряженного тягача 16400 23700 28480 —
полная тягача 52000 60000 60000 66000
полная автопоезда 150000 150000 250000 154000
Габаритные размеры, мм:
длина 8500 103350 8190
ширина 2996 3350 3000
высота 3200 4070 3190
База, мм 4225 + 4550 + 1450 +
+ 1550 + 1900 + 3040 +
+ 1510
Двигатель: Камминз KXD Камминз MWM
модель NTS 400 BF12L413 КТ450 TBD234
рабочий объем, см3 14000 19144 14000 21600
мощность, кВт (л.с.) 298 (405) 318 (432) 335 (456) 600 (815)
крутящий момент, Н м 1559 1470 1831 2950
Диапазон передаточных чи-
сел коробки передач 10,93-0,89 4,43-0,59 4,07-0,54 —
Передаточное число мостов 10,77 15,19 14,4 11,915
Максимальная скорость тя-
гача (автопоезда), км/ч 60 (25) 72 (25) 60 (20) 80 (30)
Минимальный радиус пово-
рота, м 10,68 — 15 15
Для наиболее полного удовлетворения требований заказчиков фирма
«Мол» устанавливает на свои ТС двигатели и трансмиссии различных типов. Так,
на дорожных тягачах — седельном Т 5264/05 и балластном ТС 250 (рис. 1.5) —
применяются рядные 6-цилиндровые бензиновые двигатели фирмы «Камминз» с
наддувом, а на седельных тягачах Т 6066/05 и ТВ 800, рассчитанных на тяжелые
условия эксплуатации, — 12-цилиндровые V-образные дизели фирм KXD и
«MWM Дизель» соответственно. Автомобили TG 250 и ТВ 800 можно оборудо-
вать и двигателями «Даймлер-Бенц» или американской фирмы «Детройт Дизель»
серии 71, 72 и 92 в сочетании с автоматической трансмиссией фирмы «Аллисон».
Это вызвано тем, что упомянутые фирмы имеют широко развитую сеть по сер-
висному обслуживанию.
На автомобилях TG 250 и Т 6066/05 фирмы «Мол» установлена авто-
матическая трансмиссия «Кларк» с блокируемым гидротрансформатором и 8-сту-
пенчатой коробкой передач. Коэффициент трансформации — 2,536. Тягач Т 2564/05
оборудован 2-дисковым сухим сцеплением и 15-ступенчатой коробкой передач
фирмы «Фуллур», однако предусмотрена возможность применения автоматической
г
Рис. 1.5. Тягач ТС 250 фирмы «Моз
коробки. Тягач ТВ 800 имеет автоматическую трансмиссию фирмы «Ренк» 7-сту-
пенчатой коробкой передач, блокировкой гидротрансформатора и гидрозамедлите-
лем. Коэффициент трансформации — 2,5.
Ведущие мосты к тягачам «Moj поставляет фирма «Кресслер». Они обору-
дованы планетарными колесными редукторами. На всех моделях тягачей блокиру-
ется дифференциал на первом мосту задней тележки, а на ТВ 800 — межколесные
дифференциалы всех осей.
Передняя подвеска тягачей фирмы «Мол» — на полуэллиптических листовых
рессорах с гидравлическими амортизаторами двухстороннего действия, задняя — ба-
лансирная. Лишь на тягаче ТВ — гидропневматическая подвеска всех колес.
Рабочая тормозная система — 2-контурная, пневматическая, действует на все
колеса (тормоза барабанные), а стояночная — на колеса задней тележки при помо-
щи пружинных энергоаккумуляторов.
Рама — из высоколигированной стали, лестничного типа. На нее навешива-
ется седельно-сцепное устройство фирмы «Джост» с диаметром отверстий под
шкворень 88,9 мм, балластный мост с платформой или платформа под буровое обо-
рудование. Поперечины крепятся к лонжеронам болтами. На тягачах Т 5264/05 и
TG 250 рама выполнена с усиленным передним бампером (для обеспечения пере-
возки грузов методом «тяни—толкай»). За кабиной предусмотрены места для уста-
новки двух механических лебедок с тяговым усилием до 30 т, а также электропнев-
моразъемы для прицепов и полуприцепов (в варианте «тяни—толкай» последние
есть также на раме спереди).
Тягачи «Мол» капотной компоновки оборудуют 2-местной цельнометалличе-
ской кабиной на 3-точечной подвеске, состоящей из резиновых элементов и амортиза-
торов. Сидения водителя и пассажира подрессорены и снабжены гидроамортизаторами.
На бескапотных тягачах «Мол» кабина — 7-местная, опрокидывающаяся, 3-дверная
(третья дверь находится сзади справа). На модели ТС 250 три передних сидения уста-
новлены на гидроподвеске, заднее, выполненное в виде скамьи, может использоваться
как спальное место. Откидывается кабина при помощи гидроподъемника.
24
Развитие отечественных и зарубежных транспортных средств ОБГ
Все кабины тщательно шумо- и виброизолированы. Они укомплектовывают-
ся защитным солнечным щитком, кондиционером, баком для питьевой воды, ра-
диоприемником и отопителем.
Фирма «Скания» (Швеция) в качестве специальных ТС использует усилен-
ные стандартные шасси, которые комплектуются более мощными силовыми агрега-
тами, многоступенчатыми трансмиссиями, приводом на все колеса или дополнитель-
ными подъемными осями, оборудуются бронированными кабинами. В классе ОБГ
фирмой выпускаются шасси Р124СВ 8x6 HZ полной массой до 40,5 т с дополни-
тельной осью на пневматической подвеске. Наиболее мощным в программе фирмы
«Скания» является седельный тягач T144GB 6x4 NZ, оснащенный дизельным дви-
гателем V8 с рабочим объемом 14,2 л, мощностью 394,9 кВт (530 л.с.), механиче-
ской 14-ступенчатой коробкой передач со встроенным гидродинамическим замед-
лителем, двумя лебедками с тяговым усилием по 196,2 кН и 6-местной кабиной.
Тягач предназначен для работы в составе автопоезда полной массой до 120 т и, в
частности, для перевозки танков на 5-осном прицепе фирмы «Лоор».
В производственной программе фирмы «Татра» (Чехия) специальные шасси
ОБГ представлены двумя основными моделями. Первая модель шасси
T816G3LIWA с колесной формулой 8x8 — предназначена для установки специаль-
ного оборудования. Наиболее современный вариант шасси полной массой 32 т ком-
плектуется дизельным двигателем «Дойтц» 1015С V8 жидкостного охлаждения с
турбонаддувом рабочим объемом 15,9 л, мощностью 405,3 кВт (544 л.с.), автомати-
ческой коробкой передач «Твин Диск». Вторая модель седельный тягач
Т816-6VWN9T-43.610 с колесной формулой 8x8, оборудованный дизельным двига-
телем MTU V12 с турбонаддувом мощностью 618,4 кВт (830 л.с.) при 2100 об/мин.,
автоматической коробкой передач «Твин Диск», двойной кабиной на 6-8 человек и
двумя лебедками с силой тяги по 245,3 кН. Тягач предназначен для работы в соста-
ве автопоезда полной массой до 120 т, имеет запас хода до 1000 км и развивает мак-
симальную скорость 85 км/ч.
Начиная с середины 1970-х годов широкое распространение за рубежом по-
лучили сочлененные автомобили высокой проходимости. Сочлененная схема ком-
поновки известна с 1913 г но свое развитие она получила в конце XX столетия,
особенно в конструкциях сочлененных автомобилей-самосвалов. В настоящее вре-
мя, например, ежегодно более 30 % автомобилей-самосвалов грузоподъемностью
18...40 т выпускаются сочлененными. От обычных автомобилей они отличаются
наличием «ломающейся» (шарнирной) рамы, а от автопоездов — конструкцией со-
членения отдельных звеньев. Шарнирное сочленение — нерасчленяемое, малой
длины и с управляемыми степенями свободы в горизонтальной и вертикальной
плоскостях.
Принципиальные конструктивные отличия сочлененных автомобилей позво-
ляют использовать на всех мостах одинаковые шины низкого давления и больших
размеров; снизить жесткость и массу рам; хорошо приспосабливаться движителю к
макрорельефу местности.
Благодаря этим преимуществам по сравнению с аналогичными однозвенны-
ми ТС могут быть повышены грузоподъемность, проходимость и поворотливость
сочлененных автомобилей; улучшена плавность их хода; снижены динамические
нагрузки на элементы ходовой части; уменьшена металлоемкость [3].
1.1 КТС ОБГ за рубежом
25
Рис. 1.6. Сочлененный автомобиль «Де; » фирмы «Формост» (Кана,
Сочлененные автомобили по компоновке, областям использования и грузо-
подъемности (от 0,5 до 180 т) классифицируют так же, как и обычные автомобили 11 ].
Что касается классификации по шарнирной связи, они делятся на два типа — се-
дельные и прицепные. У сочлененных автомобилей седельного тина звенья соеди-
няются общей грузовой платформой, связанной со звеньями шарнирами по типу
сдельных устройств автопоездов с полуприцепами.
Сочлененные автомобили прицепного типа могут быть с одной или двумя—
тремя степенями свободы в шарнире.
В первую подгруппу входят модели канадской фирмы «Формост» (Канада).
Ею создано и испытано в условиях вечной мерзлоты и пустыни семейство сочле-
ненных автомобилей с колесными формулами 4x4, 6x6 и 8x8 (рис. 1.6) грузоподъ-
емностью от 9,0 до 45,5 т, предназначенных для эксплуатации в сложных дорожных
и различных климатических условиях. На них предусмотрена установка серийных
агрегатов, используемых для автомобилей, работающих в тяжелых юрожных ус;
виях. Все модели семейства — 2-звенные, с шинами низкого давления (типа пнев-
мокатков) и различным числом слоев корда (в зависимости от осевой нагрузки).
Управление их поворотом осуществляется «силовым» способом, т е. путем сила,
вания его звеньев при помощи гидронилиндров. Максимальный угол относительно-
го поворота звеньев в плане равен 38. .45° в каждую сторону.
Сочлененное ТС «Лаустер» (Германия) с электрической трансмиссией
(рис. 1 7) представляет собой сочлененный 2-звенный тягач с комбинированным
колесно-пневмокатковым движителем. Шарнирная связь звеньев имеет две степени
свободы. В горизонтальной плоскости угол складывания звеньев ± 43° а поперечно-
вертикальной плоскости — ± 30° Поворот автомобиля осуществляется при склады-
вании звеньев в горизонтальной плоскости. Степень свободы в поперечно-
вертикальной плоскости позволяет копировать колесами профиль опорной поверх-
ности. Силовая установка, состоящая из дизеля мощностью 480 кВт (653 л.с.) и
синхронного бесщеточного генератора с масляным охлаждением, расположена
задней части шасси. Высокие тяговые возможности в тяжелых дорожных условиях
26
Развитие отечественных и зарубежных транспортных средств ОБГ
Рис. 1.7. Тягач «Лаустер» (Германия)
обеспечивают два соединенных с корпусом пневмокатка с мощными грунтозацепа-
ми в форме «елочки». Внутри каждого катка размещен тяговый электродвигатель
(ТЭД), коробка передач (многоступенчатый редуктор) и дифференциал. В качестве
ТЭД движителя применены асинхронные 4-полюсные ТЭД с масляным охлаждени-
ем, имеющие максимальную частоту вращения 10000 мин"1 и номинальную мощ-
ность 150 кВт (204 л.с.).
Оси катков соединены с осями колес картерами, которые выполняют функ-
ции маятниковых рычагов. Между маятниковыми рычагами и корпусом установле-
ны гидроцилиндры. Полости гидроцилиндров соединены с пневматической каме-
рой, выполняющей функции упругого элемента подвески. С помощью гидроцилиндров
можно принудительно менять наклон маятниковых рычагов, регулируя тем самым
просвет между опорной поверхностью и катками от максимальной величины для
движения по усовершенствованным дорогам до заглубления катков в грунт в тяже-
лых дорожных условиях. В большинстве случаев силу тяги можно значительно уве-
личить путем незначительного касания опорной поверхности.
В зависимости от состояния опорной поверхности электропривод в сочета-
нии с регулируемой подвеской обеспечивает движение автомобиля в нескольких
режимах: только на колесах, только на пневмокатках, на колесах и одном катке, на
всех колесах и на двух катках. Передний каток может использоваться и в качестве
лебедки для вытаскивания застрявших автомобилей или самовытаскивания. Пере-
ход с одного режима на другой осуществляется за несколько секунд.
Значения основных параметров технической характеристики сочлененных
автомобилей различных фирм приведены в табл. 1.4.
Развитие конструкции составных частей. Все фирмы, занятые поставкой
на рынки тяжелых колесных машин, сталкиваются с существенной ограниченно-
стью объемов поставок. Масштабы закупок этой техники не позволяют поддержи-
вать крупносерийные производства или производства со средней серийностью (по
масштабам автомобильной промышленности). В результате крупные предприятия-
изготовители колесных транспортных средств большой и особо большой грузо-
1.1. КТС ОБГ за рубежом
27
подъемное™ в мировой практике отсутствуют. Как следствие, отдельные неболь-
шие фирмы или дочерние предприятия крупных концернов не способны создавать
базовые узлы и агрегаты нетрадиционных для массового автомобилестроения тех-
нических решений для комплектации своей продукции и вынуждены ограничивать-
ся использованием широкой кооперации внешних специализированных фирм. Этим
объясняется консервативность основных технических решений. Исключением яв-
ляются лишь многоопорные транспортеры, сочлененные колесные машины и кра-
новые шасси [4].
Таблица 1.4
Параметры технической характеристики сочлененных автомобилей
Параметры D-250 (Англия) «Комман- дер-3» (Канада) WD-3 (Голлан- дия) D-550 (Англия) «Магнум-4» (Канада)
Назначение Самосвал Шасси Самосвал Самосвал Транспортер
Колесная формула 6x6 6x6 6x6 6x6 8x8
Грузоподъемность, т Масса в снаряжен- 25,0 27,2 30,0 55,0 63,5
ном состоянии,т Габаритные разме- ры, мм: 18,6 29,5 18,0 37,0 37,2
длина 9820 13500 9150 ИЗЗО 16260
ширина 2062 3500 3500 3650 3990
высота Минимальный ради- 3100 3100 3150 4370 4150
ус поворота, м Мощность двигате- 7,5 9,5 10,5 10,8 17,2
ля, кВт Максимальная ско- 174 258 189 342
рость, км/ч 50 32 45 48 37
Размер шин Число щененей сво- 26,5x25 66x43,00-25 23,5x25 33,25x29 66x43,00-25
боды шарнира 2 1 2 2 1
И все же вместе с поиском новых общих конструктивных схем автомобилей
ОБГ шли и идут интенсивные работы по поиску и разработке нетрадиционных для
мирового автомобилестроения технических решений их составных частей.
Одной из главных проблем при создании КТС ОБГ является обеспечение не-
обходимых тягово-скоростных свойств. С этим связаны оптимизация характеристик
силовой установки и трансмиссии, выбор схем раздачи мощности по колесам, типа
трансмиссии для ТС каждого класса грузоподъемности в зависимости от предна-
значения, условий использования и применения. Особенно это актуально для мно-
гоосных колесных машин и специальных колесных шасси (СКШ).
Обеспечение необходимых тягово-скоростных свойств только увеличением
мощности силовой установки в большинстве случаев оказывается недостаточным.
Поэтому зарубежные автомобильные фирмы ограничивают мощности двигателей,
28 / Развитие отечественных и зарубежных транспортных средств ОБГ
применяемых на автомобильных транспортных средствах (АТС) всех классов, и
вместе с тем увеличивают число и автоматизируют процесс переключения ступеней
в коробках передач. Интенсивные НИОКР проводятся по созданию системы авто-
матизированного управления движением (САУД) автомобиля в целом. Важнейшее
место в этих исследованиях уделяется определению схемы рациональной передачи
мощности (крутящего момента) двигателя к каждому колесу в зависимости от усло-
вий его качения.
Таким образом, одно из наиболее целесообразных решений задачи повыше-
ния тягово-скоростных свойств, по мнению иностранных и отечественных специа-
листов, находится в области совершенствования трансмиссий, систем управления
ими и создания САУД.
В настоящее время не вызывает сомнения, что существенное улучшение
тягово-скоростных свойств может быть достигнуто в том случае, если принятые
конструктивные решения позволят обеспечить необходимое (оптимальное) со-
четание величин подводимых к колесам крутящих моментов с величинами реак-
ций на ведущих колесах. Этот вопрос связан с компоновкой ходовой части ав-
томобиля, выбором принципиальной схемы трансмиссии и характеристик ее
агрегатов, распределяющих крутящий момент двигателя по ведущим колесам, с
характеристиками колесного движителя, принципами построения системы
управления и способом ее реализации.
Ниже рассмотрим эволюцию конструкции основных агрегатов и систем КТС
ОБГ на примере трансмиссии (гидромеханической трансмиссии, тягового электри-
ческого и гидрообъемного привода) и системы рулевого управления некоторых за-
рубежных и отечественных транспортных средств высокой проходимости, большой
и особо большой грузоподъемности.
1.2. Гидромеханические передачи
Наиболее ярким представителем изготовителей составных частей КТС ОБГ
является фирма «Аллисон», которая была основана в 1915 г. и вскоре куплена фир-
мой «Дженерал Моторе». Более 30 лет она занималась в основном проектированием
и изготовлением авиационных двигателей. Однако в 1944 г фирмой была разрабо-
тана гидромеханическая передача (ГМП), которая после изменений под названием
CD 850 применялась на танке М460, а затем на других самоходных машинах. В
гражданских целях автоматические ГМП фирмы начали использоваться в 1950 г. на
городских автобусах, в 1960-х годах их стали устанавливать и на грузовые автомо-
били средней грузоподъемности (ГМП серии МТ), в начале 1970-х годов появилось
второе поколение ГМП «Аллисон» — серии АТ, МТ и НТ, а недавно появилось
третье их поколение — серия WT [18, 59, 60].
С начала 1948 г. фирма «Аллисон» выпустила свыше 1,5 млн ГМП. В на-
стоящее время они применяются в комплекте с двигателями мощностью 52... 1678 кВт
(70...2250 л.с.).
Фирма использует многочисленные обозначения своих изделий, рассмотрим
их подробнее. Для ГМП применяют следующие обозначения: СТ — ГМП с гидро-
1.2. Гидромеханические передачи
29
трансформатором (ГТ); CLT ГМП с ГТ и с фрикционом его блокировки;
CLBT — ГМП с ГТ, фрикционом его блокировки и гидравлическим тормозом-
замедлителем; DP — вариант CLBT с параллельными потоками мощности в меха-
нической передаче; ТТ — ГМП с 2-турбинным ГТ; TRT — то же, что и ТТ, но с
одинаковым числом передач переднего и заднего хода; CRT — то же, что TRT, но с
обычным ГТ; АТ, МТ, НТ — автомобильные ГМП на малые, средние и большие
мощности. Обозначения промышленных ГТ: ТС — просто ГТ; VTC — ГТ с пово-
ротными лопастями реактора.
За буквенным индексом стоят обычно три или четыре цифры, которые обо-
значают соответственно типоразмер ГТ (может отсутствовать, тогда цифр будет
только три), индекс передаваемой мощности или момента, число передач переднего
хода и номер модификации.
По назначению ГМП разделены на три группы: для грузовых автомобилей и
автобусов (серии АТ, МТ, НТ и V), тяговые (серии CLBT и DP), для машин цикли-
ческого действия.
Рассмотрим принцип действия и основные параметры этих ГМП.
Серии для грузовых автомобилей и автобусов (табл. 1.5), как и другие се-
рии фирмы «Аллисон», унифицированы по ГТ, фрикционам, блокам систем
управления, картерам, планетарным механизмам. Например, два передних плане-
тарных механизма с четырьмя фрикционами (рис. 1.8, а) используют во всех сери-
ях и модификациях для получения трех высших передач (включением Ф|Т2, Ф|ТЬ
Ф|Ф2) и передачи заднего хода (включением Ф2Т2), изменяют лишь соотношения
чисел зубьев, т. е. передаточные числа, или вводят дополнительные планетарные
механизмы с фрикционами.
Так, в 4-ступенчатых ГМП (рис. 1.8, б) дополнительная низшая (первая) пе-
редача организована при помощи третьего планетарного механизма с тормозом Т3
(включаются Ф| и Т3). Задний ход включают Ф2 и Т3.
5-ступенчатые ГМП отличаются от 4-ступенчатых наличием еще одного пла-
нетарного механизма с тормозом Т4 (расположены в дополнительном картере, при-
Ф1Ф2Т1Т2
Рис. 1.8. Схемы включения фрикционов планетарных механизмов ГМП серии АТ,
МТ, НТ и V фирмы «Аллисон»
30 / Развитие отечественных и зарубежных транспортных средств ОБГ
соединяемом к основному). Фирма выпускает их в двух вариантах. Первый
(рис. 1.8, в), обозначаемый индексом CR (например, MT654CR, HT754CR), имеет
передачи с плотным (1,25-1,33) геометрическим рядом (у MT654CR он также
близок к гармоническому) передаточных чисел, кроме первой передачи (1,8-1,9),
при общем диапазоне 3,7-4,2. У него предусмотрено автоматическое переклю-
чение всех передач, он рекомендуется для тягачей междугородних автопоездов.
Второй вариант (рис. 1.8, г), в обозначение модификаций которого входят буквы
DR (MT653DR, HT50DR), имеет ряд передаточных чисел, приближающийся (как
и у 4-ступенчатых ГМП) к гармонической прогрессии, причем начинается он
(первая передача) с 2,3-2,5, его диапазон ~8. Переключение, начиная со второй
передачи, автоматическое. Эти ГМП предназначены для автобусов и грузовых
автомобилей.
По желанию заказчика на ГМП серий НТ700, CLBT и СР перед механичес-
ким редуктором в дополнительном картере-проставке устанавливается гидравличе-
ский 2-полостной тормоз-замедлитель, ротор которого закреплен на валу турбины
ГТ, а на ГМП серий МТ600 и НТ700 — 2-полостной 2-ступенчатый замедлитель,
ротор которого закреплен на ведомом валу передачи (при этом в обозначении моде-
ли ГМП добавляется буква В, например: МТВ600, НТВ700). Первая ступень замед-
лителя — 2-полостный гидравлический тормоз — эффективен при средних и высо-
ких скоростях движения, а вторая — фрикционный дисковый тормоз, работающий в
масле, — обеспечивает замедление автомобиля при малых скоростях движения
вплоть до остановки.
Тяговые ГМП (табл. 1.6) рассчитаны на передачу мощности 332....1 678 кВт
(445...2250 л.с.). Ранее выпускавшихся в 1970-х годах ГМП серий 3000 (кроме
CZT3461) и 4000 (с 1977 г.) не стало. Их заменили серии 9600 и 9800, которые имеют
пять, шесть или восемь передач переднего хода и одну — заднего, кроме серии 9800,
выпускающейся без нее. Они снабжены фрикционом блокировки ГТ, некоторые мо-
дели — гидрозамедлителем, и оснащены автоматическим или ручным (по желанию
заказчика) переключением передач. Система ручного переключения состоит из пере-
ключателя и клапана управления, соединенных электрическим кабелем. Она гермети-
зирована и работает от сети с напряжением 12 или 24 В, не требуя технического об-
служивания.
Фирма выпускает также серии 5000 и 6000 тяговых ГМП, используемых в
нефтепромысловых установках. Здесь электрическое управление недопустимо, по-
этому устанавливается ручное гидравлическое.
Система автоматического переключения передач имеет логическую (на базе
микропроцессора) и гидравлическую исполнительную части. Микропроцессор ос-
нащен программируемым постоянным запоминающим устройством, куда заложена
программа для конкретных условий использования ГМП. Элементы системы посто-
янно контролирует встроенный блок диагностики. Если обнаруживается неисправ-
ность, ее местоположение фиксируется.
До постановки на производство система автоматического переключения
прошла испытания, эквивалентные времени эксплуатации в 140 тыс. ч, которые
подтвердили, что она повышает не только производительность и топливную эко-
номичность ТС, но и надежность самой ГМП.
Таблица 1.5
Основные параметры ГМП серии для грузовых автомобилей и автобусов
Модель ГМП Максимальная мощность, кВт/максимальный момент, Н • м Максимальная частота враще- ния, мин-1 Сухая масса, кг Габарит- ная дли- на, мм Модель ГТ (коэффициент трансформации) Передаточные числа передач переднего/ заднего хода
АТ 545 175/603 2400-4000 125 691 ТС230(2,6), ТС270(2,0), ТС290( 1,7) 3,45-2,25-1,41- 1/5,02
МТ 643 186/867 2200-4000 231 773 ТС350(3,0), ТС360(2,9), ТС380(1,8) 3,58-2,09-1,39- 1/5,67
МТ 653 DR 186/867 2200-4000 273 920 ТС35О(3,О), ТС360(2,9), ТС378(2,3) 8,05-3,58-2,09- 1,39-1/5,67
МТ647, МТ648 186/1058 2000-3000 255 773 ТС430(3,6), ТС470(3,0), ТС495(2,2) 3,58-2,09-1,39- 1/5,67
MT654CR 224/1288 1800-3000 310 920 ТС430(3,6), ТС495(2,2), ТС497(2,7) 4,17-2,21-1,66- 1,27-1/5,67
НТ740, НТ741 332/1871 1900-2400 381 950 ТС470(2,7), ТС487( 1,5), ТС497(2,7) 3,69-2,02-1,38- 1/6,04
НТ747, НТ748 272/1491 1900-2400 381 950 ТС488( 1,7), ТС495(2,4), ТС486( 1,8) ТС497(2,7), ТС499( 1,9), ТС487( 1,9) 3,69-2,02-1,38- 1/6,04
HT754CR, HT755CR 332/1871 1800-2600 426 1041 ТС488( 1,7), ТС495(2,4), ТС496( 1,8) ТС497(2,7), ТС470(2,7), ТС487( 1,5) 3,69-2,0-1,58-1,25- 1,0/9,65 или 2,96 7,97-3,19-2,02-
HT750DR, HT755DR 332/1871 1900-2500 426 1041 ТС488( 1,7). ТС495(2,4), ТС487( 1,5) 1,39-1,0/4,72 или 17,22
Таблица 1.6
Значения основных параметров тяговых ГМП
Модель ГМП Максимальная мощность, кВт/максимальный момент, Н м Максималь- ная частота вращения, мин-1 Сухая масса, кг Габарит- ная дли- на, мм Модель ГТ (коэффициент трансформации) Передаточные числа передач переднего/заднего хода
CL(B)T754 CL(B)755 332/1764 2500 444 1387 ТС470(3,0) ТС490(2,6) 5,18-3,19-2,02-1,38-1,0/9,93 или 4,72
CL(B)T5961 373/2136 2500 954 1380 ТС570(3,0) VTC(l,8-2,4) 4,0-2,68-2,01-1,35-1,0- 0,67/5,12
DP8962 727/4474 2300 1678 1836 ТС840(2,3) ТС1070(1,7) 4,24-2,32-1,69-1,31-1,0- 0,73/5,75
CLBT9681 933/5017 2100 1678 1836 ТС 1060(1,8) ТС 1070(1,7) ТС 1080(1,6) ТС 1080(1,6) 4,24-3,05-2,32-1,67-1,0- 0,67/5,75 или 4,13
1.3. Электрические трансмиссии
33
Рис. 1.9. С хемы включения фрикционов передач тяговых ГМП фирмы «Аллисон»
Базовый узел тяговых ГМП фирмы «Аллисон» состоит из двух планетар-
ных механизмов, фрикциона Ф2 и тормозов Т2 и Т3 или Фь Ть Т2 (рис. 1.9, а}.
Фирма продолжает совершенствовать тяговые ГМП. Пример модификации —
ГМП серии DP, предназначенные для двигателей мощностью до 718 кВт (975 л.с.).
В этих ГМП (рис. 1.9, б, в) введены дополнительные планетарный механизм и тор-
моз перед ним, а также частично изменены соединения звеньев. За счет такого ус-
ложнения достигнуто разветвление потока мощности в планетарных механизмах на
всех передачах, кроме первой, и заднего хода, что снижает нагрузки на зубчатые
колеса ГМП. Однако при постановке на производство в конце 1970-х годов ГМП
серии CLBT 9600, рассчитанных на еще большую мощность (до 920 кВт, или 1250 л.с.),
фирма использовала более раннее решение — схему на рис. 1.9, г (без разветвления
потока мощности). В частности, это сделано на модели CLBT 9681, которая имеет
шесть передач переднего хода и одну — заднего. Эта ГМП, по данным фирмы,
лучше всего подходит для КТС ОБГ
1.3. Электрические трансмиссии
Как показывает анализ теоретических и экспериментальных работ, все боль-
ше специалистов предлагают отказаться от применения механической трансмиссии
и перейти к индивидуальному подводу мощности к каждому колесу, так как воз-
можности совершенствования механической связи в многоколесном движителе
практически исчерпаны или близки к этому.
Обычно рассматривают два варианта таких приводов — электрический и
гидрообъемный, причем оба варианта уже нашли применение на некоторых специ-
альных транспортных средствах.
Создатели КТС ОБГ проявляют постоянный интерес к использованию в качест-
ве трансмиссии электрического и электромеханического приводов. Такой интерес
34 / Развитие отечественных и зарубежных транспортных средств ОБГ
объясняется рядом значительных преимуществ электротрансмиссий (ЭТ), прежде
всего тем, что они непрерывные и могут быть автоматизированы, а также легко под-
даются автоматизации, управление ими не требует больших физических усилий со
стороны водителя. Путем соответствующего регулирования можно добиться полу-
чения практически любых необходимых характеристик (гибкость регулирования).
Наконец, что особенно важно, электротрансмиссия благодаря простоте связей между
агрегатами может быть легко выполнена многоприводной и дистанционной.
Электрической называется передача, в которой преобразование факторов си-
лового потока приводного двигателя машины (ДВС, ГТД и др.) во всем диапазоне
регулирования осуществляется электрическим трансформатором крутящего момен-
та. Простейший трансформатор механического силового потока состоит из двух
главных электрических машин, одна из которых работает в режиме генератора
электрической энергии, другая — в режиме электродвигателя.
Если в передаче кроме ЭТ установлены ступенчатые (фрикционно-зубчатые)
редукторы или другие механические распределяющие механизмы, передача называ-
ется электромеханической.
Электрические передачи на автомобилях пытались применять еще в первые
годы автомобилестроения. Неоднократно создавались не только опытные, но и се-
рийные образцы с ЭТ как у нас в стране, так и за рубежом, преимущественно карь-
ерных самосвалов. Внимание конструкторов к ЭТ не ослабевает и поныне, особенно
в связи с созданием многоприводных автомобилей, активных автопоездов и карьер-
ных самосвалов ОБГ
Однако все положительные стороны не могли полностью компенсировать
существенные недостатки ЭТ К ним относятся прежде всего большие габариты и
масса электрических машин. В реальных передачах удельная масса доходила до
11 15 кг/кВт (15...20 кг/л.с.), современные электромашины имеют 4...6 кг/кВт
(6...8 кг/л.с.), тогда как у механических коробок передач она составляет
1,5...2,5 кг/кВт (2...3 кг/ л.с.). Несмотря на это, ЭТ все чаще стали применяться в
автопоездах с активными прицепами, в многоосных машинах и карьерных самосва-
лах. Монтаж электромашин в ступице ведущих колес (мотор-колесо) дает большие
компоновочные преимущества по сравнению с другими типами трансмиссий.
Транспортные средства различного целевого назначения с электроприводом
колес впервые разработала фирма «Летурно» (США). Первые ТС с электрическим
приводом этой фирмы — многозвенные (до 13 звеньев), имеют длину более 100 м и
грузоподъемность до 180 т. В качестве первичных источников энергии используются
дизельные или газотурбинные двигатели, которые приводят в действие генераторы
постоянного или переменного тока. Максимальная мощность силовой установки, со-
стоящей из двух ГТД, составляет 3 456 кВт (4700 л.с.). Тяговые генераторы и ТЭД
переменного тока работают на трехфазном токе напряжением 300 В и частотой 120 Гц.
ТЭД переменного тока — индукционного типа с короткозамкнутым ротором. В сис-
теме управления трансмиссией используется одна из фаз переменного тока.
На рис. 1 10 представлен разрез мотор-колеса фирмы «Летурно» со встроен-
ным в неподвижный кронштейн электродвигателем /, 2-рядным простым редукто-
ром 2 (эпициклическое колесо которого прикреплено к ступице автомобильного
колеса) и электромагнитным стояночным тормозом 3 (служебное торможение осу-
ществляется переводом двигателя в генераторный режим).
1.3. Электрические трансмиссии
Рис. 1.10. Схема электромотор-колеса фирмы «Летурно:
36
Развитие отечественных и зарубежных транспортных средств ОБГ
Рис. 1.11. Схема электромотор-колеса фирмы «Дженерал Электрик»
1.3. Электрические трансмиссии
37
Для уменьшения модулей зубчатых колес и снижения радиальных нагрузок
редуктор выполнен с разветвленным потоком при двух параллельных блоках про-
межуточных колес.
Фирма «Летурно» выпускает мотор-колеса нескольких типоразмеров, созда-
вая на их основе разнотипные машины вплоть до многозвенных активных поездов.
Несколько иначе выполнено мотор-колесо фирмы «Дженерал Электрик»
(рис. 111). Здесь корпус двигателя непосредственно служит осью колеса, а картер
редуктора вынесен за пределы колеса и лишь ведущая шестерня второго ряда рас-
положена консольно и входит в зацепление с венцом ступицы колеса. Стрелками на
рисунке показано движение воздуха, охлаждающего двигатель. Редуктор мотор-
колеса вынесен за пределы обода колеса и имеет малый аксиальный размер, что не
уменьшает дорожный просвет машины.
Корпус редуктора снабжен фланцем 8 для закрепления к раме, которая при
такой конструкции редуктора может быть поднята значительно выше оси колеса. В
редукторе большого диаметра можно реализовать большое передаточное число и
применить малый быстроходный электродвигатель. Электродвигатель размещается
внутри обода 5 и его корпус 10 является осью колеса. На корпус 10 посажены под-
шипники 14 большого диаметра. Охлаждающий воздух подается в электродвига-
тель через патрубки 2, 7 и выбрасывается наружу через жалюзи 11с защитным ко-
зырьком 12. Полость редуктора отделена перегородками 3. Венец 1, соединенный с
ободом колеса через зубчатую муфту, связан с двигателем через шестерни 6, 4 и 9.
Вал электродвигателя опирается на подшипники 13 и 5. Полость 15 служит для за-
полнения охлаждающей жидкостью. В конструкции не предусмотрена установка
тормоза, поэтому торможение может осуществляться только элетродвигателем при
движении машины. Однако в других конструкциях мотор-колес «Дженерал Элек-
трик» со стороны коллектора устанавливаются дисковые тормоза.
Повышенный интерес к разработке и использованию ЭТ в конструкции КТС
ОБГ различного назначения подтверждается большим потоком патентов на элек-
тромотор-колеса (ЭМК). На рис. 1.12 и 1 13 приведены некоторые схемы элетромо-
тор-колес, защищенные патентами [6].
Фирма «Берлие» (Франция) выпускает ТС высокой проходимости, со-
стоящее из одноосного тягача ТХ-40 и одноосного скрепера-прицепа грузоподъ-
емностью 40 т. Обе оси транспортного средства снабжены электромотор-колеса-
ми, которые выполнены с одно- или 2-скоростными редукторами. Максималь-
ный крутящий момент в 12 раз больше минимального при использовании ЭМК с
односкоростным редуктором и в 36 раз — при 2-скоростном редукторе. В пер-
вом варианте максимальная скорость ТС — 40 км/ч, максимальный преодоле-
ваемый подъем — 20 %, во втором — 70 км/ч и 40 % соответственно. В качестве
источника энергии применяется дизельный двигатель «Камминз» Т8 мощностью
316 кВт (430 л.с.) совместно с генератором «Браун-Бовери» (Швейцария). Дви-
гатель и генератор установлены на съемной дополнительной раме. Генератор —
6-полюсный, с независимым возбуждением, номинальная мощность 220 кВт
(300 л.с.). Тяговые электродвигатели (ТЭД) ЭМК — 4-полюсные, с независимым
возбуждением, имеют номинальную и максимальную частоту вращения 1 800 и
3 600 об/мин соответственно.
38
Развитие отечественных и зарубежных транспортных средств ОБГ
Рис. 1.12. С хема электромотор-колеса по патенту DE 19709577С2:
/ — приводной )летродвигатель; 2 — зубчатое колесо; 3 — сателлит; 4 — шариковый подшипник;
счупица колеса; 6 — обод колеса; 7 — комбинированный тормоз (пневматический и гидравлический);
8— плавающая скоба; 9— гидропривод; 10— картер; 11 — трубопровод; /2 — монтажное отверстие;
13 — вал зубчаюго колеса 2; 14 — вал-шестерня; 15 — коронное зубчатое колесо (эпицикл); 16 — ось
ли ia
Фирма «Сименс» (Германия) спроектировала турбоэлектрический привод для
ТС грузоподъемностью 20 т с одновальным ГТД мощностью 300 кВт и униполярным
4-полюсным генератором с воздушным охлаждением. Совместно с фирмой «Зан-
дер Фабрик» (Германия) для этого ТС разработаны ЭМК, состоящие из ТЭД посто-
янного тока, 2- или 3-ступенчатого редуктора, рабочего дискового и стояночного
барабанного тормоза. ТЭД с параллельным возбуждением имеет номинальную
мощность 132 кВт (180 л.с.) при 2 550 об/мин. Кратковременный пусковой момент
при трогании с места превышает номинальный в 2,5 раза. На ТС высокой проходи-
мости используется также комбинированный привод движителя, когда часть колес
имеет механический привод, а остальные — электрический. При движении таких ТС
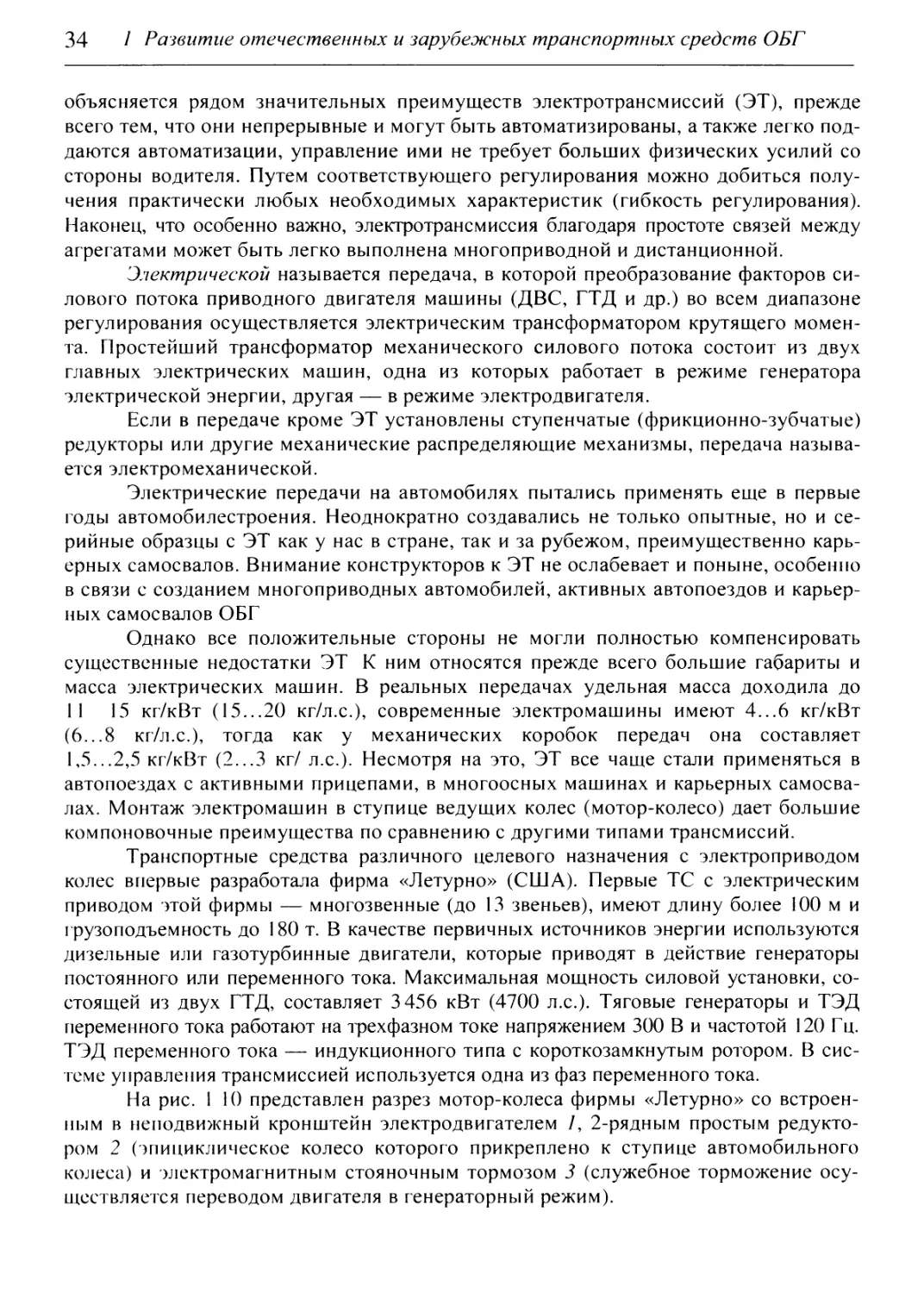
Рис. 1.13. Схема электромотор-колеса по патенту 2109372:
/ — механизм в сборе; 2 — обод колеса; 3 — шина; 4 — картер тормозного механизма; 5 — картер элек-
|родвигателя; 6 — воздушный зазор; 7 — обмотка статора; 8 — обмотка ротора; 9 — полый вал; 10 —
механизм, распределяющий мощность; И — планетарный механизм в сборе; 12 — вторая ступень плане-
тарного механизма; 13 — солнечная шестерня; 14 — эпицикл второй ступени; 15 — сателлит первой ступсп
/6 — эпицикл второй ступени; 17 — солнечная шестерня; 18 — сателлит второй ступени; /9 — во,
счупицы колеса; 20 — крышка планетарною механизма; 21 — вал электродвигателя; 22 — юрмозной
диск; 23 лавающая скоба; 24 — барабанная прокладка; 25 — крышка картера 4', 26 — рама авюмоби.
по дорогам ведущими являются колеса с механическим приводом, а при движении
по бездорожью для улучшения проходимости дополнительно включается электри-
ческий привод остальных колес. Характерным примером таких ТС является автопоезд
40 1 Развитие отечественных и зарубежных транспортных средств ОБГ
М-437 (США) грузоподъемностью 13,6 т, состоящий из одноосного тягача и связан-
ного с ним шаровым шарниром прицепного звена. Привод на колеса тягача — меха-
нический оз дизельного двигателя мощностью 200 кВт (268 л.с.). На одном валу с ди-
зельным двигателем установлен генератор переменного тока с номинальным на-
пряжением 518 В и частотой до 200 Гц. Генератор вырабатывает электроэнергию
для питания ТЭД прицепного звена. Шины на всех колесах низкого давления диа-
метром 1,83 м, тормоза многодисковые с пневматическим приводом.
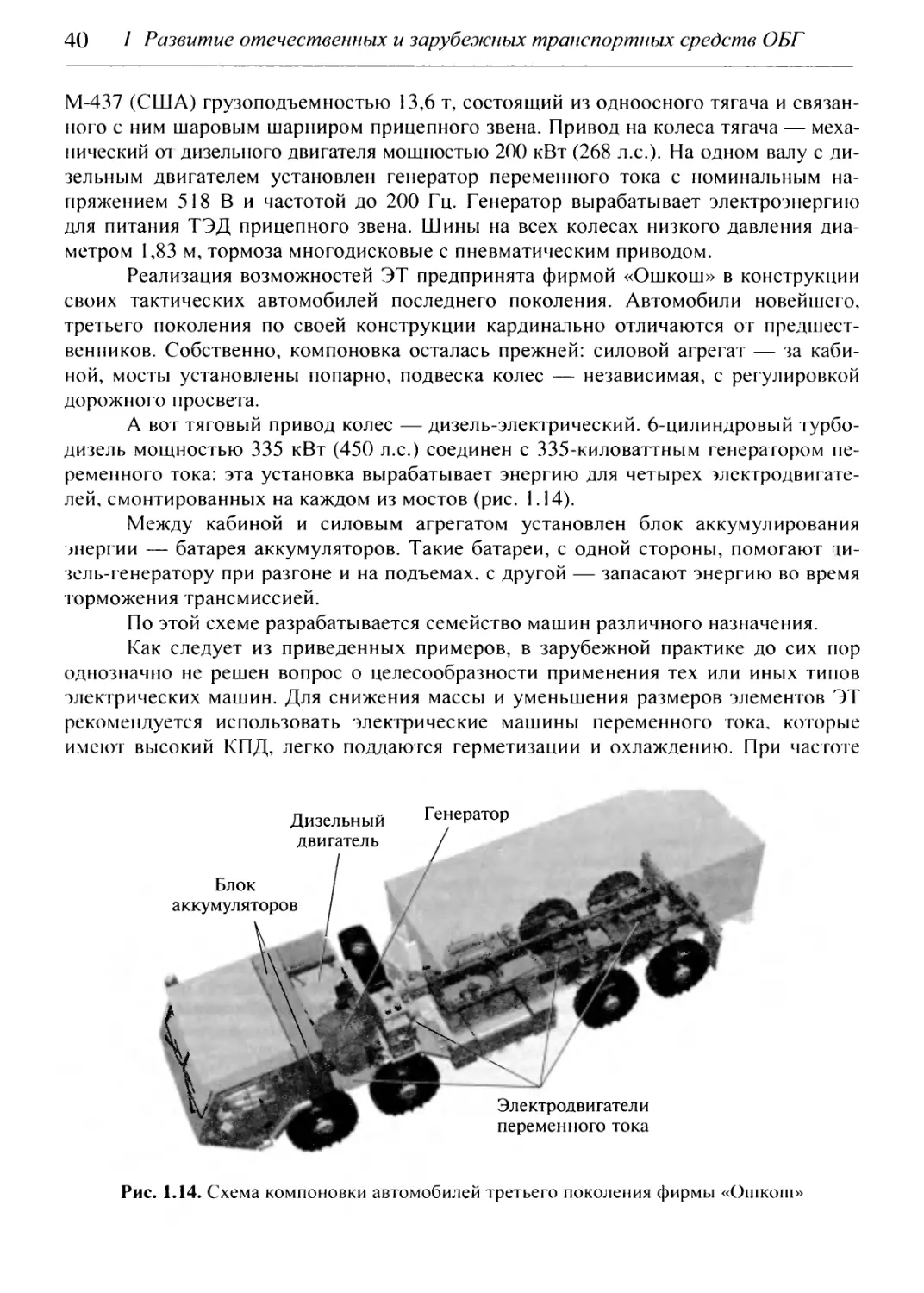
Реализация возможностей ЭТ предпринята фирмой «Ошкош» в конструкции
своих тактических автомобилей последнего поколения. Автомобили новейшего,
третьего поколения по своей конструкции кардинально отличаются ог предшест-
венников. Собственно, компоновка осталась прежней: силовой агрегат — за каби-
ной, мосты установлены попарно, подвеска колес — независимая, с регулировкой
дорожного просвета.
А вот тяговый привод колес — дизель-электрический. 6-цилиндровый турбо-
дизель мощностью 335 кВт (450 л.с.) соединен с 335-киловаттным генератором пе-
ременного тока: эта установка вырабатывает энергию для четырех электродвигате-
лей, смонтированных на каждом из мостов (рис. 1.14).
Между кабиной и силовым агрегатом установлен блок аккумулирования
энергии — батарея аккумуляторов. Такие батареи, с одной стороны, помогают щ-
зель-генератору при разгоне и на подъемах, с другой — запасают энергию во время
торможения трансмиссией.
По этой схеме разрабатывается семейство машин различного назначения.
Как следует из приведенных примеров, в зарубежной практике до сих пор
однозначно не решен вопрос о целесообразности применения тех или иных типов
электрических машин. Для снижения массы и уменьшения размеров элементов ЭТ
рекомендуется использовать электрические машины переменного тока, которые
имеют высокий КПД, легко поддаются герметизации и охлаждению. При частоте
Рис. 1.14. Схема компоновки автомобилей третьего поколения фирмы «Ошкош
1.4. Гидрообъемные трансмиссии
41
вращения приводного двигателя менее 1000 об/мин применяют синхронные генера-
торы, получившие наибольшее распространение в тяговом электрическом приводе.
При более высокой частоте могут использоваться униполярные или асинхронные
генераторы с конденсаторным возбуждением.
Ранее в ЭМК применяли ТЭД постоянного тока с последовательным или па-
раллельным возбуждением, обладающие высокими габаритно-массовыми показате-
лями. Следующим этапом совершенствования конструкции ЭМК стало использова-
ние в них асинхронных ТЭД с короткозамкнутым ротором, имеющих хорошие га-
баритно-массовые показатели. Но для их регулирования необходима сложная
полупроводниковая система управления, не обеспечивающая необходимого быст-
родействия и индивидуального управления приводами каждого колеса. За рубежом
ведутся также ОКР по созданию ЭМК с использованием в них других типов ТЭД,
например синхронных, работающих по схеме вентильного двигателя и на постоян-
ных магнитах, изготовленных с использованием редкоземельных металлов [61.
Таким образом, неоспоримые преимущества тягового электрического приво-
да предопределили возможность его использования на ТС различных типов и на-
значения, в том числе на транспортных средствах, предназначенных для перевозки
тяжелых неделимых грузов в условиях бездорожья. По мнению авторов, важным
направлением дальнейшего совершенствования тягового электрического привода
является создание новых конструкций электрических машин, обладающих широким
диапазоном регулирования, а также систем автоматического управления ими, осно-
ванных на микропроцессорном управлении и обеспечивающих возможность рацио-
нального управления приводами колес (подвод мощности к колесу) в зависимости
от дорожных условий.
1.4. Гидрообъемные трансмиссии
Общие положения
Гидрообъемная трансмиссия (ГОТ) обладает рядом следующих положитель-
ных качеств, определяющих возможность ее применения для перспективных образ-
цов КТС ОБГ [3J:
простота, бесступенчатость и плавность изменения числа оборотов и кру-
тящего момента гидромашин, скорости перемещения и усилия силовых гидро-
цилиндров;
быстрота осуществления разгона, торможения и реверсирования ввиду очень
малых моментов инерции гидроагрегатов;
возможность полного затормаживания гидромашин без использования фрик-
ционных тормозных устройств;
большая энергонапряженность и малый удельный вес насосов 0,5... 1,5 кг/кВт
(0,7...2 кг/л.с.) и гидромоторов 0,2...0,5 кг/кВт (0,3...0,7 кг/л.с.). Возможность соз-
дания больших усилий при малых габаритах;
простота получения большого передаточного числа без использования ре-
дукторов;
42 / Развитие отечественных и зарубежных транспортных средств ОБГ
высокая устойчивость работы некоторых типов гидромашин на малых числах
оборотов, возможность преодоления ими больших пусковых моментов сопротивле-
ния приводных механизмов, обеспечение работы на «ползучих» скоростях;
возможность автоматизации и обеспечения работы гидропривода по любому
заданному алгоритму;
достаточно высокая скорость и точность реагирования на командные сигна-
лы, возможность их усиления;
небольшое трение и износ деталей гидроагрегатов как следствие работы в масле;
малые затраты цветных металлов;
широкая возможность унификации и стандартизации гидроагрегатов и их
деталей;
наличие всесторонне исследованного теоретического аппарата конструиро-
вания гидроприводов и технологическая отработанность гидромашин различных
классов.
Известно, что по ряду своих возможностей гидростатический привод значи-
тельно превосходит механический и, по крайней мере, по технологичности, затратам
цветных металлов, обеспечению высоких пусковых моментов и «ползучих» скоро-
стей может превосходить электромеханический привод.
Важным преимуществом может обладать ГОТ при создании машин с колес-
ной формулой 8x8, 10x10, 12х 12 и т. д., для которых механическая и гидромехани-
ческая трансмиссии имеют сложную конфигурацию, низкий КПД и слабую приспо-
собленность для автоматизации и обеспечения целесообразной раздачи мощности.
В этих условиях ГОТ, выполненная по раздельно-агрегатной схеме, не уступает
механической по массе, стоимости и КПД и сообщает машине ряд перечисленных
выше дополнительных преимуществ.
Возможность использования гидрообъемного привода в автомобильной
технике была выявлена еще в 1897 г., когда в немецкой патентной литературе
появились предложения по конструкции гидрообъемного трансформатора для
замены зубчатой передачи. Проводились опыты применения его для транспорт-
ных целей.
На первой автомобильной выставке в Берлине демонстрировалось ТС с гид-
рообъемной передачей Питтлера. В 1909 г. были проведены испытания автомобиля
с ГОТ Ленца. На одном из английских танков времен Первой мировой войны была
установлена гидропередача Дженни, которую пробовали установить и на автомо-
биль. Однако все попытки установки ГОТ на транспортное средство долгое время
наталкивались на ряд технологических трудностей и недостатков, присущих гидро-
приводу (высокие массогабаритные показатели, необходимость герметизации и
фильтрации жидкости, недостаточный КПД, ограничения по тепловому режиму
работы и др.), и отсутствие рациональных алгоритмов управления для работы сис-
темы автоматизированного управления (САУ). В то же время гидропривод широко
внедрялся в станочное производство, авиацию и железнодорожный транспорт, где
эксплуатация ГОТ осуществлялась на длительных стационарных режимах. Одними из
первых теоретические основы использования ГОТ для тепловозов практически
применили специалисты тепловозной лаборатории МВТУ им. Н.Э. Баумана. Сегод-
ня за рубежом, например фирмой «Секмафер» (Франция), выпускается ГОТ для
1.4. Гидрообъемные трансмиссии
43
тепловоза с дизелем мощностью 643 кВт (862 л.с.). Благодаря применению ГОТ
вместо электромеханического привода масса тележки тепловоза снизилась на 7 т,
неподрессоренная масса — на 2 т. Этой же фирмой создана ГОТ для тепловоза с
дизелем мощностью 6 400 кВт (8576 л.с.). Давление жидкости в таких гидромаши-
нах достигает 60 МПа.
В конце 50-х — начале 60-х годов XX в. проблема установки ГОТ на автомо-
биль вновь стала актуальной. В это время в мировом автомобилестроении намети-
лась тенденция использования гидропривода для активизации дополнительных ко-
лес прицепного звена автопоезда.
Серийное производство первых машин с гидрообъемным приводом дополни-
тельных колес было организовано в 1960-х годах фирмой «Деере энд К°» (США). В
1967 г в СССР был создан автопоезд ЗИЛ 137-137Б с гидрообъемным приводом
колес полуприцепа.
В 1970-х годах производство машин с этим типом привода начали многие за-
рубежные компании: «Леви» (Канада), «Роберт Бош» (ФРГ), «Зизу» (Финляндия).
Объемная гидравлическая трансмиссия, разработанная фирмой «Зизу», использует-
ся рядом компаний Италии, Голландии и Финляндии для активизации прицепных
звеньев лесовозов, трубовозов, контейнеровозов и других машин.
По данным фирмы «Зизу», лесовоз, оснащенный объемной гидравлической
трансмиссией, развивает тягу на 25 % выше, чем без нее, преодолевает подъем в 1,5
раза круче и, несмотря на высокие стоимость и трудоемкость технического обслу-
живания, окупается в два раза быстрее из-за того, что по погодным условиям может
работать большее количество дней в году. Кроме того, фирма отмечает, что исполь-
зование объемной гидравлической трансмиссии позволяет при необходимости
уменьшить радиус поворота машины.
Опыт эксплуатации автопоезда ЗИЛ 137-137Б с объемной гидравлической
трансмиссией прицепного звена показал, что на влажных грунтовых дорогах, на
мокром песчаном грунте, в условиях снежного покрова увеличение тяги автопоезда
достигало 200 %, автопоезд мог преодолевать подъем в 1,5 раза большей крутизны
и заболоченные участки с твердым основанием на глубине 0,3...0,4 м, свободно
передвигаться на подъемах и поворотах в условиях песчаной местности.
Существующие в настоящее время гидрообъемные трансмиссии дополни-
тельных ведущих колес можно разделить на две группы:
с асинхронным приводом, когда привод основного насоса осуществляется от
первичного вала коробки передач, т. е. частота вращения вала насоса не зависит от
используемой передачи;
с синхронным приводом, когда привод основного насоса осуществляется от
вторичного вала коробки передач, т. е. частота вращения вала насоса изменяется
синхронно с частотой вращения основных ведущих колес машины.
Гидрообъемные трансмиссии с асинхронным приводом для обеспечения ки-
нематического соответствия частот вращения основных и дополнительных ведущих
колес требуют применения регулируемого насоса или регулируемых насоса и гид-
ромоторов. Это существенно удорожает трансмиссию, так как стоимость регули-
руемых, например, аксиально-поршневых машин на 50...60 % выше, чем у нерегу-
лируемых. Кроме того, стоимость трансмиссий данного типа увеличивается и за
счет довольно сложной системы управления.
44 / Развитие отечественных и зарубежных транспортных средств ОБГ
В гидрообъемных трансмиссиях второй группы во многих случаях применя-
ют нерегулируемые гидромашины. Так, например, в приводах колес полуприцепов
такую трансмиссию использовали «Зизу» и ЗИЛ.
Основным преимуществом трансмиссий этой группы является меньшая
стоимость и возможность обходиться без сложной системы управления. Это обес-
печивается тем, что при переходе на другую передачу в коробке передач частота
вращения вала насоса изменяется в соответствующее число раз, вследствие чего
можно ожидать автоматического обеспечения синхронности вращения основных и
дополнительных ведущих колес машины. Однако это не всегда происходит, потому
что значительное изменение частоты вращения вала насоса оказывает значительное
влияние на его КПД. В результате необходимость в системе управления все же ос-
тается, но используется она уже для компенсации указанных зависимостей характе-
ристик объемного гидропривода от условий его работы. Также в некоторых конст-
рукциях система управления применяется для получения технологических скоро-
стей или обеспечения режима торможения машины.
Несмотря на перечисленные выше различия, для обоих типов гидрообъемных
трансмиссий характерны общие особенности.
Все гидрообъемные трансмиссии используются в достаточно узком диапазо-
не скоростей движения машины, что объясняется особенностями рабочих процессов
объемных машин. Так, скоростной диапазон работы объемной гидравлической
трансмиссии лесовоза фирмы «Зизу» составляет 10 % от всего скоростного диапа-
зона машины; на автопоезде ЗИЛ 137-137Б гидрообъемная трансмиссия работает
только при включенной низшей передаче в раздаточной коробке и первой или вто-
рой передаче в коробке передач (скорость до 7 км/ч). В конструкции трансмиссий
предусматривается механическое или гидравлическое блокирование системы
управления гидрообъемной трансмиссии, исключающее ее применение на более
высоких рабочих, а тем более транспортных скоростях.
Наибольшее распространение получили объемные гидравлические трансмис-
сии с мотор-колесами, построенными с применением низкооборотных высокомо-
ментных радиально-поршневых гидромоторов (фирм «Зизу» или «Поклейн») без
дополнительного механического редуктора или высокооборотных аксиально-
поршневых гидромоторов (например, фирмы «Зундштранд») в совокупности с по-
нижающим механическим редуктором. При этом в конструкции мотор-колес преду-
сматриваются устройства, обеспечивающие отключение колеса от гидромотора при
движении машины на высоких скоростях.
Наиболее интересным на сегодняшний день является вариант гидрообъемного
привода колес полуприцепа, построенный по бортовой схеме, регулирование переда-
точного отношения в котором происходит за счет изменения объема вспомогательно-
го регулируемого насоса. При этом привод основных нерегулируемых насосов осу-
ществляется от вторичного, а вспомогательного регулируемого насоса — от первич-
ного вала коробки передач. Эта схема удовлетворяет наибольшему числу требований
к гидрообъемным трансмиссиям дополнительных ведущих колес, позволяет упрос-
тить САУ режимами работы гидрообъемной трансмиссии и автоматизировать про-
цессы блокирования и разблокирования межколесной связи в гидропередаче без
ухудшения ее характеристик.
1.4. Гидрообъемные трансмиссии
45
В конце 50-х — начале 60-х годов XX в. также были начаты теоретические и
экспериментальные работы по созданию ГОТ для автомобилей.
В 1955—1956 гг. в одном из научно-исследовательских институтов Москвы
был изготовлен макет 3-колесной машины с ГОТ Два аксиально-поршневых регу-
лируемых насоса приводились в движение от двигателя мощностью 15 кВт (20 л.с.) и
подавали жидкость двум нерегулируемым поршневым гидромоторам, вращающим
задние колеса автомобиля. Данный макет испытывался параллельно с аналогичной
колесной машиной, имеющей механическую трансмиссию, с целью сравнения их
тягово-динамических показателей. Было установлено, что эти показатели у машины
с ГОТ выше.
С 1960 г на заводе им. М.И. Калинина в Москве серийно выпускался малога-
баритный тягач Д-456, предназначенный для производства грузоподъемных и зем-
ляных работ. В его трансмиссию входили винтовой нерегулируемый насос и сту-
пенчато-регулируемые винтовые 6-секционные моторы. Насос был соединен с дви-
гателем через повышающий редуктор, гидромоторы расположены в заднем мосту и
соединены с колесами через понижающий редуктор. Целью работ являлось опреде-
ление возможности использования на автомобилях ГОТ на винтовых гидроагрега-
тах. Была установлена работоспособность винтового насоса до 12 000 об/мин и вин-
товых гидромоторов до 6 000 об/мин. Однако КПД трансмиссии на винтовых гидро-
агрегатах оказался низким. Гидростатическая трансмиссия тягача состояла из двух
поршневых регулируемых вручную насосов, приводимых в работу от дизельного
двигателя мощностью 12,0 кВт (16 л.с.). Каждый насос был соединен трубопрово-
дом с поршневым нерегулируемым гидромотором. Моторы через бортовые редук-
торы приводили во вращение два ведущих колеса каждого борта тягача. Для смен-
ного оборудования Д-456 были выполнены гидроприводы. Масса тягача составила
1 640 кг, максимальная сила тяги — 14,0 кН.
В 1964 г в МАМИ была установлена и проходила испытания эксперимен-
тальная автоматическая ГОТ на аксиально-поршневых гидроагрегатах. Трансмис-
сию установили на автомобиле «Москвич-410». Целью испытаний являлась отра-
ботка системы автоматики и рационального регулирования. Было установлено, что
при рациональном автоматизированном регулировании топливная экономичность
автомобиля с ГОТ на хорошей дороге близка к автомобилю с механической транс-
миссией, а в трудных дорожных условиях она оказывается даже лучше.
В 1964 г в одной из научно-исследовательских организаций Москвы была
создана и проходила испытания экспериментальная ГОТ на винтовых гидроагрега-
тах, установленная на автомобиле ЗИЛ-150.
В это же время в США фирмой «Ниагара Фронтиер Транзит Систем» был
изготовлен 78-местный городской автобус. В нем дизель мощностью 141,6 кВт
(190 л.с.) приводит в действие аксиально-поршневой насос и два гидромотора. Пол-
ная масса автобуса — 13 900 кг.
В этот же период времени отделением фирмы «Белойт Хайбоб» (США) был
построен лесовоз с ГОТ Насос лесовоза — регулируемый, сдвоенный, лопастного
типа — соединен напрямую с двигателем. Регулируемые гидромоторы приводят
во вращение оси через редукторы. Каждый мотор питается от отдельной секции
насоса. Давление в трансмиссии — 2,1 кПа (210 кг с/см2). ГОТ лесовоза исполь-
зуется для привода не только колес, но и лебедки, бульдозерного, навесного и
46
Развитие отечественных и зарубежных транспортных средств ОБГ
другого оборудования. Максимальная скорость машины — 26 км/ч, собственная
масса — 850 кг
В 1961 г в США был выпущен экспериментальный плавающий автомобиль с
колесной формулой 4x4 с ГОТ и кузовом из стеклопластика, в котором поршневой
регулируемый вручную насос напрямую соединен с карбюраторным двигателем
воздушного охлаждения «Кохлер К-622» мощностью 30 кВт (40 л.с.). Поршневые
нерегулируемые гидромоторы установлены в колесах, при этом моторы передних
колес могли отключаться. Давление в трансмиссии — 2,1 кПа (210 кг с/см2). Мак-
симальная скорость автомобиля — 80 км/ч. Скорость на плаву — 10 км/ч. Привод
винта — гидравлический. Масса автомобиля — 540 кг
В 1962 г была изготовлена транспортная амфибия с ГОТ Машина предна-
значалась для обеспечения нефтеразведывательных работ. Аксиально-поршневой
автоматически регулируемый насос амфибии напрямую соединялся с двигателем
мощностью 335,3 кВт (450 л.с.). В каждом колесе машины установлено по два
поршневых нерегулируемых гидромотора разных рабочих объемов и 2-ступенчатые
редукторы. Моторы соединены последовательно, крестообразно. Агрегаты ГОТ
используют для привода винтов и лебедки. Давление в трансмиссии — 4,2 кПа
(420 кг с/см'). Максимальная скорость амфибии — 56 км/ч.
В 1963 г в США фирма «Яр Вуд» создала аэродромный тягач с ГОТ Планиро-
вался серийный выпуск таких тягачей в количестве 237 штук. Схема ГОТ включала
автоматический регулируемый поршневой насос для передачи мощности 89,4 кВт
(120 л.с.) и четыре поршневых гидромотор-колеса.
В 1964 г в Канаде была разработана 2-звенная машина с ГОТ типа мотор-
колесо с использованием воздушной подушки. В том же году в США автоброне-
танковый центр АТАС изготовил экспериментальный 3-осный грузовой плаваю-
щий автомобиль с ГОТ. Схема ГОТ включала серворегулируемый насос, непо-
средственно соединенный с карбюраторным двигателем. Серворегулируемые мо-
торы, расположенные в колесах, имели систему отключения от колес. Были
предусмотрены системы гидроторможения, блокировки колес и осей, водометные
движители.
Тогда же и в дальнейшем за рубежом проводились большие работы по созда-
нию ГОТ для колесных и гусеничных тракторов, автокаров, строительно-дорожных
машин. Одними из первых таких транспортных средств, оснащенных ГОТ, стали
колесные тракторы «Фордзон Майор Фергуссон», гусеничный трактор «Варнз-90
Порше», автокар «Гидроматик», строительно-дорожные машины «Гидро-Сталле» и
др. Работы в области совершенствования ГОТ вели фирмы «Виккерс», «Денисон»,
«Келлот», «Гар Вуд», «Буллард энд К°», «Локхид», «Мармон Хиер» (США); «Лу-
кас», «Гамильтон», «Доути», «Хитлок» (Англия); «Порше», «Гидромеханик», «Ган-
смаг», «Гидроматик», «Демаг», «Питтлер-Тома» (ФРГ) и др.
Сегодня ГОТ выпускаемых за рубежом тракторов в большинстве случаев вы-
полнены по нераздельно-агрегатной схеме. Иногда за гидромотором устанавливают
2-ступенчатый редуктор. Давление в таких ГОТ — 30.. .40 МПа.
В результате проведенных фирмой «Интернешнл Харвестр» (США) сравни-
тельных испытаний универсально-пропашного трактора с ГОТ и механической
трансмиссией установлено, что ГОТ увеличивает производительность трактора при
1.4. Гидрообъелтые трансмиссии
47
подборе и брикетировании сена на 28,9 %, на погрузочных работах — до 24,9 %, при
заготовке фуража — до 25,4 % и при пахоте — до 7,4 %.
Несмотря на перечисленные преимущества, ГОТ до настоящего времени не
находит широкого применения на тракторах. Выпуск зарубежных тракторов с ГОТ
составляет 2...3 % от общего количества. Причина, сдерживающая их производст-
во, — высокая стоимость гидропривода. Трактор, оснащенный ГОТ, на 20 % доро-
же обычного. Наиболее распространены за рубежом ГОТ на малогабаритных колес-
ных машинах, используемых в качестве садово-огородных тракторов, газонокоси-
лок, тягачей, подборщиков, машин для уборки снега, мусора и т. д. Масса этих
машин составляет 170...600 кг, мощность двигателя — 6... 15 кВт. Так, в США
40...50 % садово-огородных тракторов оснащено ГОТ
По мнению зарубежных специалистов, перспективным направлением являет-
ся использование ГОТ на городских автобусах и автомобилях коммунального хо-
зяйства. В результате применения гидроаккумулятора и системы рекуперации энер-
гии ГОТ дает возможность уменьшить расход топлива для автобуса на 30 %. Соче-
тание системы управления с рекуперацией энергией позволит снизить расход
топлива в городском цикле движения на 40...50 %. При этом обязательным услови-
ем становится использование САУ ГОТ
Сегодня, по мнению ряда авторов, экономически и технически оправдано
применение ГОТ на многоосных автомобилях и самосвалах большой грузоподъем-
ности. Фирма «Секмафер» (Франция) выпускает ГОТ для самосвала грузоподъем-
ностью 120 т (полная масса — 308 т) с двигателем мощностью 985 кВт (1320 л.с.).
Самосвал развивает скорость 50 км/ч и преодолевает подъем в 25 %.
Преимущества ГОТ особенно могут проявиться при ее применении на мно-
гоосных автомобилях с колесной формулой 8x8 и более, для которых механическая
или гидромеханическая трансмиссии имеют сложную конструкцию, высокую стои-
мость, низкий КПД и не позволяют обеспечить рациональную раздачу мощности по
колесным движителям. В СССР на базе автомобильного шасси с колесной форму-
лой 8x8 был создан самоходный кран грузоподъемностью 25 т, снабженный ГОТ
Первым опытным образцом шасси с колесной формулой 12x12 с ГОТ было
шасси Э547АГ которое по сравнению со своим аналогом с гидромеханической
трансмиссией имело снаряженную массу на 3 250 кг меньше. При этом полная мас-
са приборов ГОТ вместе с рабочей жидкостью составила 2 697 кг
В настоящее время ГОТ широко применяется на самоходных тележках (мно-
гоопорных транспортных средствах) грузоподъемностью до 1 000 т, предназначен-
ных для перевозки крупногабаритных неделимых грузов (атомных реакторов, кор-
пусов судов, космических аппаратов, блоков обжиговых печей, буровых установок
и г. д.). Самоходные ТС сверхбольшой грузоподъемности с ГОТ выпускают фирмы
«Шейерле», «Камаг» (Германия), «Николас» (Франция) и др. Как правило, тележки
строят по модульному принципу и в зависимости от потребности в транспортировке
конкретного груза из отдельных модулей собирается тележка — платформа необхо-
димой грузоподъемности. Например, многоопорная платформа «Отомаг» фирмы
«Николас» грузоподъемностью 500 т имеет 192 колеса, из которых все или значи-
тельная часть — ведущие. Обычно каждая пара 2-скатных колес имеет общую неза-
висимую подвеску и один приводящий их в движение гидромотор, расположенный
48 7. Развитие отечественных и зарубежных транспортных средств ОБГ
между колесами. ГОТ содержит несколько насосов. Система управления каналами
ГОТ построена на основе микропроцессорной техники. Более подробно принципи-
альные схемы ГОТ многоопорных КТС ОБГ будут рассмотрены ниже.
Таким образом, краткий обзор и анализ разработок гидрообъемных транс-
миссий для различных АТС показывает перспективность их применения для акти-
визации колес тракторов, строительно-дорожных машин, малогабаритных колесных
машин, городских автобусов, многоосных машин большой грузоподъемности, мно-
гоопорных транспортных средств, прицепов и полуприцепов.
Особо перспективным, на наш взгляд, следует считать применение ГОТ на
малогабаритных и многоопорных КТС ОБГ В этом случае реализуются такие пре-
имущества ГОТ, как сравнительно низкие удельные массогабаритные показатели,
возможность выполнения ГОТ по раздельно-агрегатной схеме, бесступенчатость,
возможность рекуперации энергии, реализации оптимальных алгоритмов управле-
ния. Это может позволить уменьшить расход топлива и повысить тягово-динами-
ческие показатели СКШ.
Принципы построения схем гидрообъемных трансмиссий
В настоящее время на колесных машинах применяют ГОТ различных схем.
Они отличаются друг от друга компоновкой гидроагрегатов (взаимным расположе-
нием насосов и мотора, их соединением с двигателем и колесами) и комплектацией
(используют одиночные и составные насосы и моторы).
Моторы выполняются, как правило, высокооборотными или высокомомент-
ными. При этом используют всевозможные типы моторов (аксиально-поршневые,
радиально-поршневые, лопастные шестеренчатые и др.) и различные способы их
регулирования (ступенчатое, бесступенчатое, смешанное). Регулируются или толь-
ко насос, или моторы, или все гидроагрегаты. Применяются равные и неравные
диапазоны регулирования насосов и моторов.
Для многоприводных машин требуются трасмиссии с большим диапазоном
регулирования (12-36) и динамическим фактором не ниже 0,7 Диапазоны регули-
рования должны быть экономичными, т. е. такими, при которых КПД ГОТ не сни-
жается ниже определенного заданного значения (около 0,7).
С целью уменьшения рабочего объема и массы гидромашин, повышения
КПД ГОТ необходимо расширение общего диапазона за счет диапазона гидромото-
ров. Под диапазоном будем понимать отношение максимальных и минимальных
значений чисел оборотов (скоростной диапазон) или крутящих моментов (силовой
диапазон) моторов (колес).
В связи с этим для многоприводных СКШ варианты с нерегулируемыми гид-
ромоторами, а также варианты, имеющие бесступенчато-регулируемые моторы с
узкими диапазонами регулирования, рекомендовать нецелесообразно.
Используемые в вариантах схем ГОТ регулируемые гидромашины позволяют
не только обеспечивать тягово-динамические характеристики КТС ОБГ но и в по-
ложении нулевой подачи отсоединять двигатель для его пуска и работы на холостом
ходу, плавно изменять скорость ТС, применять задний ход, торможение двигателем,
1.4. Гидрообъемные трансмиссии
49
частичное стояночное торможение, реализовать любой заданный алгоритм управ-
ления движением и выполнить все требования к САУ ГОТ
Нерегулируемые и ступенчато-регулируемые насосы и моторы не позволяют
отсоединять двигатель, следовательно, не обеспечивают плавное трогание с места, а
также «ползучие» скорости. Насос не реверсирует подачу и машина не имеет задне-
го хода, нельзя провести затормаживание моторов для стояночного торможения.
Невозможно реализовать большое число алгоритмов управления. В связи с требо-
ванием бесступенчатости работы ГОТ необходимо, чтобы один или все типы гид-
ромашин регулировались бесступенчато или смешанно.
Смешанное регулирование предпочтительнее бесступенчатого при обеспече-
нии заданных алгоритмов управления.
В целом для многоприводных машин наиболее целесообразными оказывают-
ся только два варианта схем ГОТ — со смешанным регулированием насоса и сту-
пенчато-смешенным регулированием гидромоторов.
В схемах ГОТ используют различные способы управления и узлы вспомога-
тельного оборудования для обеспечения работы АТС (пуска и холостого хода дви-
гателя, наката машины, торможения и т. д.).
Однако в целом можно утверждать, что стройной теории построения автомо-
бильной ГОТ, базирующейся на основных принципах теории автомобиля, до на-
стоящего времени не существует.
Принципы разработки систем автоматизированного управления ГОТ
и опыт их применения
Все применяемые и разрабатываемые САУ ГОТ предназначены для управ-
ления передаточным отношением гидропередачи. Большая часть алгоритмов и
схем САУ ГОТ заимствована разработчиками из теории управления следящими
гидроприводами, результаты которой широко применяются в робототехнике, ста-
ночном производстве и т. д., поэтому им часто присущи однолинейность (однока-
нальность) и неприспособленность к работе с высокодинамичным и объемным
полем параметров воздействия на ГОТ В этой связи следует отметить отсутствие
ясности по многим аспектам в теоретических основах управления многоканальной
ГОТ в разных режимах работы и условиях эксплуатации, хотя исследования в
этом направлении ведутся достаточно интенсивно. Например, С.Б. Шухманом и
В.И. Соловьевым для применяемых и перспективно разрабатываемых САУ ГОТ в
зависимости от вида входного сигнала предложены следующие принципы управ-
ления ГОТ
I. САУ класса постоянной мощности (N). Управление ведется по отклонению:
а) угловой скорости вала двигателя;
б) момента нагрузки двигателя;
в) угловой скорости колес транспортного средства;
г) давления насосной установки ГОТ
II. САУ класса постоянной скорости (V), обеспечивающие постоянную ско-
рость транспортного средства.
50 / Развитие отечественных и зарубежных транспортных средств ОБГ
Системы, построенные в классе постоянной мощности, предназначены обеспе-
чить работу двигателя на постоянном заданном (оптимальном) режиме регуляторной
характеристики для каждого положения педали настройки системы. Системы этого
класса стремятся скорректировать момент сопротивления нагрузке изменением пере-
даточного отношения ГОТ В специальной литературе описано около 50 систем этого
класса, отличающихся способами коррекции момента сопротивления и определения
нагрузки в зависимости от особенностей предполагаемой эксплуатации автомобиля.
Достоинством систем, построенных по принципам класса N, является возможность
автоматической настройки ГОТ на преимущественный режим работы двигателя в
данных условиях. Однако системы, построенные по принципам класса N, недостаточ-
но пригодны к работе с дизельными двигателями, требуют сложной аппаратуры кон-
троля параметров и управления исполнительными устройствами ГОТ Использование
таких принципов построения систем управления требует решения задачи поиска оп-
тимальных параметров многофакторного пространства, однозначного теоретического
решения которой на сегодня не имеется.
Одна из первых экспериментальных систем автоматического управления ре-
жимом работы двигателя класса N создана В.В. Калинниковым и В.А. Петровым в
начале 1960-х годов на базе автомобиля «Москвич-410» с экспериментальной ГОТ
Подобная по принципам построения система разработана в середине 1980-х годов
фирмой «Гидроматик» (ФРГ). Эта система нашла широкое применение на многих
транспортных средствах.
Такие же принципы управления реализованы в САУ ГОТ трактора
«Utpak 2006» совместно фирмами «Дойтц» и «Бош» (ФРГ). Однако из-за высокой
стоимости и низкой надежности она была заменена на САУ ГОТ фирмы «Линде
АГ». При этом коррекции подверглись не алгоритмы управления, а лишь схемы
исполнительных механизмов.
САУ, выполненная по принципу регулирования по отклонению давления на-
сосной установки, используется на отечественных и зарубежных экскаваторах с
ГОТ и в ряде других машин, в приводах различных гидросистем технологического
оборудования. Достоинствами ее построения являются простота и надежность в
работе. Однако область применения такой САУ ограничена использованием нере-
гулируемых гидромоторов. Соответственно, ее использование в качестве системы
управления многоканальной ГОТ нецелесообразно.
САУ, функционирующие в классе V, с одной стороны, поддерживают работу
двигателя на заданных режимах регуляторной характеристики, а с другой — обес-
печивают постоянную скорость движения машины. Такие системы нашли примене-
ние на тракторах и автомобилях, вынужденных работать на заданной, в большинст-
ве случаев «ползучей», скорости. Подобная экспериментальная система была создана
для трактора ГТ-55 Липецкого тракторного завода в Кубанском сельскохозяйст-
венном институте Л.И. Гром-Мазничевским для САУ ГОТ тракторов ДТ-14Б, ГТ-50,
МТЗ-50Б, МТЗ-80Б; В.А. Петровым для САУ ГОТ экспериментального трактора
К-700 с двигателем ЯМЗ-238НБ.
Основным недостатком САУ класса постоянной скорости является ее много-
составность, т. е. обязательное наличие в ней системы класса N. Это снижает на-
дежность, динамические качества САУ ГОТ и т. д.
1.4. Гидрообъемные трансмиссии
51
Сопоставление САУ ГОТ и принципов их функционирования показывает,
что в существующих САУ не нашло отражение важное преимущество ГОТ — воз-
можность управления индивидуальной раздачей мощности по колесным движите-
лям в зависимости от условий и режимов эксплуатации. Это объясняется отсутстви-
ем однозначного методического аппарата определения оптимальных характеристик
для управления отдельным каналом силового привода трансмиссии и взаимодейст-
вием каналов при их несимметричной работе.
Кроме того, рассмотренные выше принципы управления ГОТ не учитываю!
тенденцию мирового автомобилестроения на сопряжения существующих САУ всех
агрегатов и систем АТС в единую модульно-коммутационную сеть. В связи с чем не
учитывается информационный и силовой обмен при взаимодействии с другими
САУ агрегатов и систем машины (двигателя, подвески, рулевого управления и т. д.).
Таким образом, необходимо сформировать теоретические основы для орга-
низации управления ГОТ Этот методологический аппарат должен определить ми-
нимальный набор оптимальных критериев управления ГОТ и алгоритмы управле-
ния, учитывающие индивидуальную адресную реакцию САУ на несимметричное
отклонение значений параметров во всех каналах многоканальной ГОТ; правила
взаимодействия каналов, принципы осуществления квазистационарной работы дви-
гательной установки; обеспечение параметров взаимодействия САУ ГОТ со всеми
САУ транспортного средства и общей САУД машины.
Таким образом, разработка гидрообъемных трансмиссий и систем управле-
ния ими для перспективных образцов КТС ОБГ может базироваться на значитель-
ном опыте их применения и разработки в мировом автомобилестроении, достигну-
том уровне управления следящими приводами. Этот опыт показал, что большинство
разрабатываемых автомобилей с ГОТ характеризовались рядом существенных дос-
тоинств. Особенно преимущества ГОТ проявляются в сложных нагрузочных усло-
виях эксплуатации АТС.
Наиболее близким аналогом перспективных ГОТ для многоосных шасси мо-
гут служить ГОТ многоопорных транспортных средств, выполненные по раздельно-
агрегатной модульной схеме. Заслуживают внимания принципы разработки ГОТ
малогабаритных АТС.
На данных типах АТС перспективными следует считать схемы со смешан-
ным управлением насосной и моторной частями ГОТ Эти схемы позволяют обес-
печить необходимые тягово-динамические качества СКШ и ГОТ и реализовать раз-
личные типы САУ Современный этап разработки АТС с ГОТ несомненно характе-
ризуется направленностью на повышение позитивных свойств ГОТ посредством
создания рациональной САУ и разработки алгоритмов ее функционирования.
Как показывает опыт применения САУ ГОТ на экспериментальных и серий-
ных образцах, существующие принципы управления позволяют выполнить ряд
сформулированных требований к перспективным САУ, по крайней мере, обеспе-
чить устойчивую работу ГОТ на АТС с приемлемыми показателями экономичности
и тяговой динамики. Для полной реализации этих требований принципы управле-
ния необходимо дополнить коррекцией несимметричности режимов качения колес,
они должны учитывать взаимодействие управляемых автономных каналов и работу
САУ в единой САУД АТС.
52 / Развитие отечественных и зарубежных транспортных средств ОБГ
Состав ГОТ и систем их автоматизации. Гидромашины
В общем виде ГОТ включают следующие основные элементы: насосную часть,
моторную часть, вспомогательное оборудование и элементы САУ
Основными элементами гидрообъемных передач являются гидромашины, со-
ставляющие насосную и моторную части ГОТ В гидрообъемных передачах приме-
няются, как правило, роторные гидромашины. Далее будут подробнее рассмотрены
основные типы гидромашин, используемых в объемных гидроприводах. Исходя из
требований к ГОТ и САУ выбора рациональной схемы с гидромашинами смешан-
ного регулирования, рассмотрим те гидромашины, которые допускают регулирование,
реверс и обратимы. При этом будем ориентироваться на минимум массогабаритных
показателей и экономичный КПД (0,85...0,95). Из широкого спектра существующих
гидромашин указанным требованиям в большинстве случаев удовлетворяют акси-
ально- и радиально-поршневые машины.
Наибольшее распространение в ГОТ получили аксиально-поршневые маши-
ны с наклонным блоком, и среди них гидромашины с двойным несиловым карда-
ном. Свое название они получили от двойной крестово-шарнирной муфты или кар-
дана. Кардан соединяет входной вал гидромашины с блоком цилиндров. Он не уча-
ствует в передаче потока мощности от вала к жидкости, а только синхронизирует
вращение вала и блока цилиндров и поэтому называется несиловым. Несмотря на
это, в переходных режимах, когда блок цилиндров испытывает большие ускорения,
кардан оказывается нагруженным и может выходить из строя. Существуют также
гидромашины с силовым карданом, но они получили гораздо меньшее распростра-
нение из-за больших масс и моментов инерции вращающихся частей.
Недостаток аксиально-поршневых насосов с двойным карданом — сравни-
тельно сложные подвод жидкости к распределителю и отвод от него. Кроме того,
при регулировании подачи люлька описывает дугу и объем (габарит), занимаемый
гидромашиной, увеличивается. По данной схеме изготовлены широко распростра-
ненные гидромашины гаммы типа II (табл. 1.7). Аксиально-поршневые гидромаши-
ны типа II Д (дистанционное управление) и гидромоторы типа II М (местное, руч-
ное управление) являются основными элементами гидроприводов в различных сис-
темах автоматического и полуавтоматического, ручного или дистанционного
управления. Они обладают небольшими объемными и механическими потерями,
имеют жесткую кинематическую связь между валом и поршневым механизмом, что
обеспечивает хорошую устойчивость вращения при малых расходах и скоростях.
Недостаток гидромашин данного типа — сравнительно невысокое значение макси-
мального давления — 16 МПа. Это ограничение связано в основном с нагрузочной
способностью шарнирной связи штока с поршнем.
Гидромашины гаммы типа II целесообразно использовать для гидрообъем-
ных приводов небольшой мощности, к массогабаритным показателям которых не
предъявляются жесткие требования.
Среди иностранных образцов гидромашин гаммы типа II М близкими по
классу являются гидромоторы фирмы «Прага» (табл. 1.8). Они предназначены для
гидросистем мобильных и стационарных объектов. Моторы являются нерегулируе-
мыми, реверсивными.
1.4. Гидрообъемные трансмиесии
53
Таблица 1.7
Характеристики гидромашин типа II М
Параметр Значения характеристик машин классов
5 10 20 50
Расход гидромотора, см3/об Наибольшая частота вращения вала 71 142 251 790
насоса, мин1 Наибольшая производительность насо- са и расход гидромотора (теорети- 1440 1440 1440 980
ческие), л/мин Давление в полости нагнетания, МПа: номинальное 102 204 361 774
максимально допустимое Момент, развиваемый на валу, Н м: 10 10 10 10
при номинальном давлении 105 210 370 1 170
при максимальном давлении 158 315 556 1760
Масса, кг, не более 31,5 54,5 83 210
Габаритные размеры, мм 421х130х х200 527x176х х246 615х200х х305 825х276х х425
Таблица 1.8
Характеристики гидромоторов «Прага» ряда ДМ
Параметр Значения характеристик машин классов
АМ12 АМ16 АМ28 АМ56 AM 105 AM 125
Давление, МПа: номинальное 25 25 25 25 25 25
максимальное 35 35 35 35 35 35
Расход гидромотора, см3/об 12,5 16 28.5 56 105 125
Момент инерции, кг м21О’3 0,456 0,688 1,80 5,54 15,8 21,1
Частота вращения, 1/мин: номинальная 1920 1920 1920 1500 1500 1500
максимальная 6000 6000 4800 3600 3000 3000
Момент, Н м: номинальный 47 60 108 209 397 473
максимальный 65 85 149 293 550 662
Масса, кг 6,5 10,1 12,5 23,5 42,5 54
Основные параметры гидромашин гаммы типа II Д представлены в табл. 1.9.
Рабочее давление гидромашин этого класса — 21 МПа, максимальное рабо-
чее давление — 35 МПа, максимальное значение КПД — 0,9...0,92.
Подобные типу II Д, приемлемые для применения в ГОТ характеристики
имеют зарубежные аналоги, например регулируемые аксиально-поршневые гидро-
насосы с наклонным диском фирмы «Денизон Гидравликз» (США) серий P6W,
P7W, P8W (табл. 1.10).
54 / Развитие отечественных и зарубежных транспортных средств ОБГ
Таблица 1.9
Основные характеристики гидромашин с наклонным диском
Типоразмер Рабочий объем,см3 Максимальная рабочая частота вращения, мин”1 Предельная частота враще- ния, мин”1 Расстояние между опора- ми вала, мм
20 33,3 3800 4800 68
21 51,6 3500 4400 80
22 69,8 3200 4000 88
23 89,0 2900 3660 95
24 118,7 2700 3400 104
25 165,8 2400 3000 117
26 227,3 2100 2650 130
27 333,7 1900 2400 147
Таблица 1.10
Характеристики насосов «Денизон Гидравликз»
Параметр Значения характеристик гидронасосов типов
P6W P7W P8W
Расход гидронасоса, см3/об 98 1 19 131
Рабочее давление, МПа 34,5 34,5 31,0
Максимальное давление, МПа 41,4 41,4 31,0
Максимальная частота вращения, мин” 3000 3000 2100
Рабочая частота вращения, мин”1 2050 1950 1800
Момент инерции вращающихся частей,
кг м2 0,027 0,027 0,027
Масса, кг 81 81 81
Радиальные гидромашины наилучшим образом компонуются с планетарными
рядами и позволяют решить проблему массогабаритных показателей даже в случае
применения в трансмиссиях гусеничных машин. В настоящее время в отечествен-
ной промышленности отсутствует гамма обратимых, реверсивных и регулируемых
гидромашин, которые можно было бы использовать для создания гидрообъемных
передач транспортных машин.
В зарубежных конструкциях наиболее примечательными являются гидрома-
шины, в которых установлены поршни со сферической рабочей поверхностью. Це-
лесообразность применения этих машин обусловлена простотой конструкции и
сравнительно низкой стоимостью. Такие конструкции применяют в гидромеханиче-
ских коробках передач для автомобилей высокой проходимости и в трансмиссиях
гусеничных машин, в частности гусеничной машины М2 (США).
В настоящее время применяют два типа гидромашин с поршнями сферичес-
кой формы: с блоком поршней и с блоком цилиндров.
В гидромашинах первого типа блок поршней является ротором. Поршни
имеют форму сферических поясов и закреплены на радиальных выступах ротора.
Цилиндры опираются на обойму. Сопряжения цилиндров с обоймой имеют гидро-
1.4. Гидрообъемные трансмиссии
55
статическую разгрузку. Жидкость к каналам поступает по радиальным каналам в
выступах ротора.
В гидромашинах второго типа поршни выполнены в виде шаров и размеще-
ны в блоке цилиндров. Поршни обкатываются по обойме, радиальный желоб кото-
рой аналогичен желобам подшипников качения.
Современный этап развития гидромашин характеризуется разработкой
гидроаппаратов подобных типов, в том числе для мобильных машин, с высокими
предельными величинами параметров (удельная масса — 0,14...0,18 кг/кВт, удель-
ный объем — 22000...29000 кВт/м3, долговечность — 6000...8000 ч) и встроенными
системами управления. Другие типы гидромашин (лопастные, винтовые, шестеренча-
тые), как правило, в качестве основных агрегатов ГОТ не применяются. Это вызвано их
недостатками: повышенными объемными и механическими потерями, низким КПД в
широком рабочем диапазоне, нестабильностью вращения на малых оборотах, пульса-
цией, низкими значениями передаваемых давлений и моментов, громоздкостью.
Рабочие жидкости
Рабочие жидкости (РЖ) в ГОТ выполняют две основные задачи. Они являют-
ся рабочим телом ГОТ, т. е. ее элементом, и обеспечивают работоспособность и
надежность всех узлов гидропривода. Для выполнения второй задачи РЖ выполня-
ют функции смазочного, охлаждающего агента. Можно утверждать, что повсемест-
ное распространение гидропривода и надежды на его реализацию в автомобиле-
строении во многом связаны с появлением в последние десятилетия широкого ас-
сортимента РЖ.
Из отечественных жидкостей наиболее подходящей по своим качествам для
самоходных машин является загущенное минеральное масло АМГ-10. Оно представ-
ляет собой раствор полимерной присадки в легкой маловязкой масляной основе.
Легкие масляные фракции имеют пологую вязкостно-температурную характеристи-
ку и низкую температуру застывания, но их вязкость при высоких температурах
оказывается недостаточной. Масло содержит присадки, обеспечивающие антикор-
розийную защиту и хорошие смазывающие свойства, предотвращающие разруше-
ние резиновых и других изделий. Этими же свойствами обладает загущенное мине-
ральное масло АГМ. Препятствием к использованию этих масел на самоходных
машинах может служить их высокая стоимость.
Для гидрообъемных передач строительных и дорожных машин созданы и ре-
комендованы в качестве основных рабочие жидкости ВМГЗ и МГ-30. Первая из них
подходит для работы при отрицательных температурах окружающего воздуха, вто-
рая — при положительных.
Жидкость ВМГЗ используют в качестве всесезонной для районов крайнего се-
вера и в качестве зимней — для районов с умеренным климатом. Она обеспечивает
нормальную работу гидромашин в диапазоне температур от -40 до +65 °C и кратковре-
менную — в диапазоне от -50 до +70 °C. При температурах воздуха ниже -40 °C не-
обходим предварительный подогрев рабочей жидкости. Жидкость ВМГЗ относится к
загущенным маслам на нефтяной основе и содержит присадки, обеспечивающие ан-
тиокислительные, противоизносные, антикоррозионные и антипенные свойства.
56 J Развитие отечественных и зарубежных транспортных средств ОБГ
Рабочая жидкость МГ-30 используется в качестве всесезонной для южных
районов и в качестве летней — для районов с умеренным климатом. Она обеспечи-
вает длительную работу гидромашин в диапазоне температур от -50 до +70 °C и
кратковременную — в диапазоне от -10 до +70 °C. Рабочая жидкость МГ-30, так
же, как и ВМГЗ, содержит различные присадки, улучшающие ее свойства.
Срок службы жидкостей ВМГЗ и МГ-30 составляет 3 500...4000 ч, что в 2-3
раза превышает срок службы других нестандартных масел. Заменителями этих ра-
бочих жидкостей являются масла АУ и И30А.
Ряд усовершенствований в технологии переработки нефтяных фракций по-
зволил в последнее время получить новые углеводородные жидкости с исключи-
тельно ценными свойствами. Эти жидкости углубленной переработки имеют луч-
шие свойства, чем синтетические. Одним из примеров такой жидкости является
Ml0 7415. Однако указанные разработки относительно дороги в эксплуатации. В то
же время известны гидрообъемные передачи, где в качестве рабочей жидкости ис-
пользуется дизельное топливо. Оно применимо в ГОТ для кратковременного режи-
ма в исключительных вынужденных условиях.
Вспомогательные системы ГОТ
К оборудованию данного назначения относятся бак для запаса масла, система
подпитки, силовые элементы системы управления, клапаны, регуляторы расхода, сис-
тема прокачки трансмиссии, система дренажа для сбора и отвода в бак утечек жидко-
сти, радиатор для охлаждения масла, фильтры и т. д. Особенностью ГОТ является
необходимость скрупулезной разработки названных систем, так как их недостатки
оборачиваются существенным падением КПД, повышением массогабаритных показа-
телей ГОТ и АТС в целом.
Одной из основных вспомогательных систем является система подпитки. Она
служит для обеспечения нормальной работы замкнутого гидропровода путем под-
держания заданного давления и компенсации утечек. В большинстве конструкций
применяется следующая схема работы системы подпитки. Насос подпитки засасы-
вает рабочую жидкость из бака через фильтр, размещенный на входе насоса под-
питки, и через подпиточный клапан подает ее на вход насоса гидропередачи. Па-
раллельно с фильтром обычно устанавливается перепускной клапан, срабатываю-
щий при засорении фильтра и возрастании давления перед фильтром до
определенной величины. В качестве подпиточных могут использоваться лопастные,
шиберные или шестеренчатые насосы.
Силовые элементы системы управления гидрообъемными машинами позво-
ляют варьировать рабочий объем и соответственно передаточное отношение гидро-
передачи. Это достигается путем изменения угла наклона управляющего органа с
помощью механизма управления. В механизмах управления используют гидравли-
ческие и электрические усилители.
В гидрообъемных передачах применяют обратные, переливные и предохра-
нительные клапаны. При давлениях порядка 40...50 МПа использование клапанов
прямого действия нерационально, так как при этом для увеличения усилия прихо-
дится устанавливать пружину больших размеров. Для устранения пружины приме-
1.5. Схемы рулевого управления
57
няют клапаны непрямого действия (обратные и предохранительные), в которых для
управления основным клапаном используют вспомогательный игольчатый клапан.
Если для питания гидроусилителей, управляющих гидромашинами, применяется
отдельный насос, то для снижения затрат мощности на его привод может быть ус-
тановлен переливной клапан с изменяемым управляющим давлением на слив.
Функции предохранительного клапана заключаются в организации слива РЖ из
системы в бак или газа из бака при превышении их давления выше допустимого
уровня.
Регулятор расхода применяют, если гидрообъемная трансмиссия содержит
несколько гидромоторов, приводящих во вращение отдельные колеса. В этом слу-
чае он обеспечивает дифференциальную связь между колесами, выполняя функции
механизма блокировки дифференциала.
Система прокачки служит для удаления из ГОТ механических частиц и воз-
духа. Как правило, она состоит из крана прокачки, фильтров, перепускных клапанов
и трубопроводов. Прокачка производится периодически в профилактических целях
или каждый раз после подсоединения к АТС полуприцепа, прицепа, демонтажно-
монтажных работ, долгой стоянки и т. д.
Таким образом, развитие современных гидромашин и систем управления ими
создает предпосылки для создания на их базе рациональных схем ГОТ для АТС и
реализации на них новых алгоритмов управления.
В насосной части ГОТ целесообразно использовать насосы со смешанным
управлением и реверсированием, обеспечивающие высокие значения давлений.
Моторная часть перспективных АТС с ГОТ может состоять из высокообо-
ротных моторов с редукторами или высокомоментных без редукторов. Требования
управляемости, реверсивности и обратимости сохраняются.
Требованиям к гидромашинам, в том числе по массогабаритным показателям
и экономичности, удовлетворяют аксиально- или радиально-поршневые машины,
применяемые в мировой практике в ГОТ
Важным условием эффективной работы ГОТ является наличие и рациональ-
ная компоновка вспомогательных систем ГОТ, позволяющих наиболее полно ис-
пользовать возможности гидропривода.
1.5. Схемы рулевого управления
Кроме типа трансмиссии (тягового привода) и движителя для обеспечения
высокой проходимости КТС ОБГ огромное значение имеет схема рулевого привода
управляемых колес [5].
Несмотря на то что схема со всеми управляемыми колесами впервые появи-
лись на паровом автомобиле «Котта» в 1901 г эта идея опередила свое время. Ино-
гда к ней пробуждался некоторый интерес, но он не стимулировался ни требова-
ниями рынка, ни техническими возможностями. В настоящее время положение рез-
ко изменилось.
Первой начала серийный выпуск автомобилей со всеколесным управлением
компания «Ниссан» (Япония) в августе 1985 г., установив электрогидравлическую
58 1 Развитие отечественных и зарубежных транспортных средств ОБГ
систему рулевого управления «Хикас» на легковом автомобиле «Скайлайн». Сейчас
компания работает над созданием системы «Суперхикас» второго поколения.
В настоящее время легковые автомобили со всеколесным рулевым управлени-
ем выпускаются фирмами «Ниссан», «Мицубиси», «Мазда» и «Хонда» (все — Япо-
ния). Эти автомобили активно управляются путем изменения угла поворота задних
управляемых колес. Такое управление изменением угла поворота осуществляется в
зависимости от скорости движения («Ниссан», «Мицубиси», «Мазда») или угла пово-
рота рулевого колеса («Хонда»).
Системы рулевого управления с регулированием по скорости движения
обеспечивают поворот задних колес в противофазе с передними при скорости до
30...50 км/ч и синфазно при более высоких скоростях на угол 0,5...8,0° Система
рулевого управления с регулированием по углу поворота рулевого колеса обеспечи-
вает поворот задних колес в противофазе с передними при угле поворота рулевого
колеса до 250° свыше этого значения — синфазно.
Грузовые автомобили выполняются со всеколесным рулевым управлением
пока в качестве «автомобиля будущего года» фирмами «Лейленд», ТРВ, «Ниссан».
Фирма ТРВ считает наиболее перспективной областью применения данных
систем управления шасси кранов и грузовые автомобили, эксплуатирующиеся в
Западной Европе с ее более загруженными дорогами. Серийно выпускаются шасси
со всеколесным рулевым управлением для перевозки крупногабаритных неделимых
грузов, установки кранового оборудования фирмами «Коммето», «Шейерле», «Ка-
маг», «Като».
Проведенные учеными Калифорнийского университета исследования пока-
зывают, что при повороте всех колес (задних в ту же сторону, что и передних) фазо-
вое запаздывание автомобиля по управляющему воздействию уменьшается. При
этом для быстрой смены полосы движения снижаются требования к скорости воз-
действия на рулевое колесо. Увеличивается также степень использования сопротив-
ления шин уводу. Поворот задних колес в противофазе с передними при движении с
низкими скоростями позволяет уменьшить минимальный радиус поворота транс-
портного средства, что облегчает его маневрирование в ограниченном пространст-
ве, снижает момент сопротивления повороту.
По тенденциям развития систем рулевого управления с приводом на все ко-
леса их можно условно разделить на несколько групп.
Группа 1. Рулевые управления с подключаемым приводом на колеса задней
оси. Эти конструкции характеризуются тем, что в основных транспортных режимах
эксплуатации автомобили управляются традиционным способом, т. е. поворотом пе-
редних колес. Задние колеса подключаются автоматически либо принудительно при
маневрировании в стесненных условиях и при малых скоростях движения. Привод
обеспечивает поворот задних колес на тот же угол, что и передних, и обычно снабжен
реверсом. Таким образом, рулевое управление автомобиля имеет два режима работы:
транспортный и маневренный. Последний дает возможность поворота с радиусом, в
два раза меньшим, чем при транспортном режиме, а также при включении реверса
(гак называемое «крабовидное» движение, когда все колеса повернуты в одну сторону
на один и тот же угол) (рис. 1.15). В средствах массовой информации сообщалось о
подобных системах управления, разрабатываемых фирмой «Фольксваген».
L5. Схемы рулевого управления
59
Рис. 1.15. Дополните; возможности, обеспечиваемые подключением
поворота задних колес:
а — поворот минимальным радиусом относительно центра поворота О\ «крабо-
твижение (показано стрелкой)
Группа 2. Рулевые управления с приводом, постоянно действующим на все
колеса автомобиля. Их, в свою очередь, можно условно разделить на две подгруп-
пы: рулевые управления с «жесткой» и «гибкой» геометрией поворота.
В системах рулевого управления с «жесткой» геометрией поворота привод на
определенные колеса, чаще всего на передние, одной или нескольких осей остается
традиционным, механическим, а ряд других колес управляется по определенному
закону. Такие системы применяются, например, в многозвенных ТС. Первое звено
имеет обычный привод рулевого управления, а последующие — самостоятельный
привод со входом сигнала от управляемых колес переднего звена. Этот привод мо-
жет быть механическим, гидравлическим, электрическим, со следящим действием
или без него.
Системы рулевого управления с «жесткой» геометрией поворота подходят и
для транспортных средств со всеми управляемыми колесами. В этом случае перед-
ние колеса управляются обычным образом, а задние — в соответствии с определен-
ным заданным законом. При этом бортовым компьютером вычисляется определен-
ная зависимость передаточного числа между задними и передними колесами с уче-
том различных факторов.
Системы рулевого управления такого типа дают возможность существенно
повысить маневренные свойства ТС, сохраняя устойчивость движения на высоких
скоростях. В качестве примера можно привести работы, проводимые специалиста-
ми фирмы «Хонда» Фуружава Осами и Сано Сеити. Один из типовых вариантов
такой системы рулевого управления приведен на рис. 1.16.
К недостаткам подобных систем можно отнести некоторую ограниченность
их функционирования. Дело в том, что «жесткая» геометрия поворота характеризу-
ется одним неизменным алгоритмом работы системы управления, определяющим
однозначную функциональную зависимость угла поворота каждого из колес авто-
мобиля от угла поворота рулевого колеса. При этом соотношения между углами
60
Развитие отечественных и зарубежных транспортных средств ОБГ
К гидросистеме Заднее
Рис. 1.16. Система рулевого управления «Хонда»:
1чик угла поворота рулевого колеса; 2, 3 — корректирующие
4 — управляющий золотник; 5 — датчик обратной связи
поворота передних и задних колес могут быть весьма различными на разных углах
поворота рулевого колеса. Так, например, у автомобилей «Хонда Прелюдия» и
«Мазда-626» при малых углах поворота рулевого колеса задние колеса поворачи-
ваются синфазно, т. е. в ту же сторону, что и передние (рис. 1.17, кривая 2), но на
меньший угол, обеспечивая высокую устойчивость движения. При больших углах
поворота рулевого колеса, т. е. при маневрировании, задние колеса начинают пово-
рачиваться в противофазе к повороту передних колес, уменьшая радиус поворота.
(Прямая / на рис. 1.17 является осью абсцисс.)
«Гибкая» геометрия характеризуется алгоритмом работы системы управле-
ния, позволяющим получать значительный спектр способов поворота автомобиля:
за счет только передних или только задних колес, «крабовидное» движение, пово-
рот относительно середины базы и др. Для обеспечения такого управления требует-
ся автономный силовой привод каждого из управляемых колес и бортовой компью-
тер, производящий расчеты управляющего воздействия на привод, исходя из необ-
ходимой кинематики поворота. Подобные системы
рулевого управления пока реализованы только в спе-
циальных транспортных средствах, например в само-
ходных модулях особо большой грузоподъемности
итальянской фирмы «Кометто», и будут рассмотрены
далее.
Кроме вышеназванных, широкое применение
получили схемы рулевого управления с использова-
нием гидравлической системы силового складывания
звеньев сочлененных колесных машин (СКМ). Такие
схемы позволяют использовать шины больших разме-
ров (даже пневмокатки), обеспечивают высокие значе-
ния параметров поворотливости и поворачиваемости.
Рис. 1.17. Зависимость угла
поворота задних колес 0| от
угла поворота передних 02,
реализуемая РУ «Хонда»
Глава 2
Многоопорные транспортные средства
2.1. Общие сведения
Достаточно широкое применение при строительстве получили многоопорные
колесные транспортеры, предназначенные для перевозки крупногабаритных неде-
лимых грузов 119].
К таким транспортерам предъявляются специальные требования: обеспече-
ние проезжаемости с многотонным негабаритным грузом по существующей дорож-
ной сети, создание возможностей для размещения и закрепления особого груза, а
также его погрузки и разгрузки.
С учетом этих требований, например во Франции, разработан специаль-
ный транспортер грузоподъемностью 40 т для перевозки мостов и других круп-
ногабаритных элементов конструкции. Это 4-осная машина с дизельным двига-
телем и гидростатической передачей «Поклейн». Нагрузка на каждую ее ось со-
ставляет 20 т А фирма «Шейерле» (Германия) создала семейство специальных
транспортеров большой грузоподъемности (рис. 2.1).
Характеристики общих конструктивных решений специальных многоопор-
ных транспортеров большой грузоподъемности представлены в табл. 2.1. и 2.2 [1 ], а
также в главе 9.
Номенклатура выпускаемых изделий семейства фирмы «Шейерле» следующая:
низкорамные прицепы грузоподъемностью до 400 т;
низкорамные полуприцепы грузоподъемностью до 120 т;
тележки с индивидуальным (самостоятельным) управлением грузоподъем-
ностью до 70 т;
Рис. 2.1. Многоопорный автомобиль-транспортер ОБГ МТ 120.8.2 фирмы «Шейерле:
62
2. Многоопорные транспортные средства
платформы на колесном ходу грузоподъемностью до 200 т;
специальные транспортные средства грузоподъемностью до 400 т;
приводные оси транспортеров со встроенным гидростатическим приводом, а
также без привода, способные нести нагрузку 30...40 т.
Таблица 2.1
Основные параметры технической характеристики
многоопорных автомобилей фирмы «Шейерле» (Германия)
Параметр Марка автомобиля
МТ 120.8.2 мт 180.12.2 мт 300.20.4 мт 400.26.4
Грузоподъемность, т 113 180 270 370
Собственная масса, т Число опор: 47 60 130 150
ведомых 6 10 16 22
ведущих 2 2 4 4
Число колес 32 48 80 104
Шины Габаритные размеры, м: 10.00-20 10.00-20 10.00-20 10.00-20
длина 18,3 22,48 26,06 26,06
ширина 5,0 6,0 9,4 10,0
Дорожный просвет, мм Радиус поворота, м: 200 200 250 250
внешний 10,25 13,6 17,1 17,5
внутренний Максимальная скорость, км/ч: 2,25 3,0 4,15 3,5
с полной нагрузкой 8 8 8 8
без нагрузки Силовая установка: 20 20 20 20
тип двигателя Дизель Дизель Дизель Дизель
мощность, кВт (л.с.) 212 253 212x2 253x2
(285) (340) (285x2) (340x2)
Трансмиссия ГОТ ГОТ ГОТ ГОТ
Различные модификации ТС семейства получаются путем наращивания осей
и тележек-модулей (рис. 2.2) как в продольном, так и в поперечном направлениях.
Таким образом, эти транспортные средства могут быть с двумя, тремя и четырьмя
рядами тележек. В каждом ряду бывает от одной до десяти тележек.
Начальным модулем служит 2-осная тележка К-50 грузоподъемностью 40 т. Она
имеет восемь колес. Размеры тележки 3 000x3 275 мм, собственный вес 7,5 т. Колеса
имеют гидравлическую подвеску. Все колеса управляемые. Рама сварная. Базовые
тележки позволяют составлять транспортное средство различной грузоподъемности.
Один из однозвенных тяжеловозов имеет 20 осей. Ведущих осей четыре.
Двигатели расположены посередине рамы, что позволяет уменьшить погрузочную
высоту. Привод колес гидростатический. Все колеса управляемые. Тяжеловоз ос-
нащен двумя кабинами — передней и задней. В качестве трансмиссии используется
ГОТ, гидродвигатели которой смонтированы в осях опор.
2.1. Общие сведения
63
Таблица 2.2
Общие конструктивные решения многоопорных автомобилей [1]
Группа Условная схема шасси Число опор
общее ведущих управляемых
1 Однозвенные 8-26 2-4 2-26
Q | Q Q | Q Q | Q Q । Q
2 Сочлененные прицепного типа 24 6 12
Q I Q Q I Q Q I Q Q | Q
3 Сочлененные седельного типа 48 12 48
о1рЛр16 р1рЛр1Р
Французская фирма «Николас» разработала тяжеловоз «Аутомас Роутир»
(рис. В.2, б). Он состоит из трех частей: передняя и задняя части — опорные плат-
формы, на них опирается средняя несущая часть. Каждая платформа трейлерного
типа имеет 96 колес, расположенных в 12 рядах на 24 качающихся осях.
Передние шесть рядов (48 колес) приводятся в движение 24 гидростатически-
ми двигателями конструкции этой фирмы. Число ведущих колес может выбираться
водителем от 16 до 48 в зависимости от характера дороги. Синхронизация передней и
задней частей шасси осуществляется с помощью электронного устройства.
На каждой платформе за кабиной водителя расположен дизельный двигатель,
соединенный приводом с насосом гидросистемы, гидромоторы которой вмонтиро-
Рис. 2.2. Тележка-мо/ ль грузоподъемностью 25 г
64
2. Многоопорные транспортные средства
ваны в оси опор. Несущая система мостового типа выполнена телескопической. Ши-
рину ее можно изменять от 2,6 до 4,3 м, а высоту — от 3,53 до 5,07 м.
Лонжероны несущей системы выполнены из легированной стали. Длина гру-
зовой платформы — 14 м. Максимальная длина груза — 10 м. Погрузочная высота —
1,08 ± 0,27 м. Мощность двигателей составляет 2x477 кВт (2x640 л.с.). Удельная
мощность — 1,27 кВт/т (1,7 л.с./т). Максимальная скорость движения — 18 км/ч.
Преодолеваемый подъем — 5 %. Шины размера — 8,25-15-PR18.Транспортер с гру-
зом 500 т при длине 58 м имеет общий вес 760 т.
Фирмой «Камаг» (Германия) также выпускаются многоопорные транс-
портные средства. Они предназначены в основном для перевозки больших сек-
ций судов. Эти ТС имеют подъемные платформы с приводом от гидроцилинд-
ров, что позволяет существенно облегчить погрузку и разгрузку
Минимальная высота платформы над поверхностью дороги — 1 520 мм, макси-
мальная — 2 130 мм, высота подъема — 610 мм.
Транспортные средства «Камаг» выпускаются в вариантах от 2- до 24-осного
исполнения, причем каждая ось имеет четыре колеса. Максимальная грузоподъем-
ность транспортеров варьируется по необходимости от 68 до 443 т в зависимости от
числа осей. Образец транспортера с 24 осями имеет ширину 6,1 м и длину 24 м. Все
оси транспортера управляемые, что обеспечивает высокую маневренность его в
стесненных местах. Рулевое управление снабжено гидроусилителями. При поворо-
тах колеса могут поворачиваться на угол до 70° Подвеска гидравлическая.
На транспортерах устанавливают дизельные двигатели «Дойтц» или «Кам-
минз» мощностью от 127 до 253 кВт (от 170 до 340 л.с).
Выпущены две новые модели транспортеров фирмы «Камаг» грузоподъемно-
стью 450 и 500 т, также предназначенные для судостроительных заводов. Последняя
модель имеет платформу 9x20 м. Максимальная высота платформы — 2,7 м. В
транспортере предусмотрено 28 осей с четырьмя колесами на каждой оси, из кото-
рых восемь являются управляемыми. Двигатель мощностью 323 кВт (440 л.с.) в со-
вокупности с гидростатической трансмиссией обеспечивает преодоление подъемов в
6 % и скорость движения до 6 км/ч.
Хотя зарубежные фирмы, производящие многоопорные транспортные сред-
ства, решают вопросы конструкции и компоновки отдельных узлов и агрегатов, все
они придерживаются единого, продиктованного транспортной необходимостью
подхода ко всей машине в целом.
Так, фирмы «Николас», «Кометто» (рис. В.1, а) и «Камаг» применяют прин-
цип моноблочного многоопорного автомобиля, тогда как фирма «Шейерле» исполь-
зует составные транспортные средства из тележек (например, как на рис. 2.2) и раз-
мещает тяговые гидродвигатели равномерно в каждом из модулей ТС, при этом
управляющий блок вместе с кабиной водителя-оператора навешивается на передний
торец первого модуля, силовой блок — на задний торец последнего модуля. Этим
достигается абсолютная стандартизация типажа выпускаемых изделий.
Фирма «Кометто» при создании многомодульного транспортера грузоподъ-
емностью до 1 880 т использовала определенное количество активных и пассивных
(не имеющих привода) модулей (рис. 2.3 и 2.4). Более подробно анализ применяе-
мой фирмами компоновки проведен в главе 9.
2.1 Общие сведения
65
12080
Рис. 2.3. Активный модуль А фирмы «Кометто»:
3 — ведущие и ведомые колеса соответственно; 2 — подвеска; 4 — кабина води юля;
ливный и масляный баки соответственно; 7 — силовая установка; R\ 10200 мм — минимальный
радиус поворота по внешнему габариту; Ry = 4200 мм — минимальный радиус поворот по внутрен-
нему габариту
Рис. 2.4. Пассивный модуль D фирмы «Кометто»:
/?, = 14400 мм — минимальный радиус поворота по внешнему габариту; Ry = 7600 мм — минимальны
радиус поворота по внутреннему габариту
- 2918
66
2. Многоопорные транспортные средства
Рис. 2.5. Рама транспортного средства фирмы «Николас»:
/—прицепной мо, 2 — сое, тельная траверса; прицспо 4 — рама
Все рамы многоопорных ТС в целях снижения собственной массы и обеспе-
чения требуемых прочностных свойств выполняются решетчатого типа (рис. 2.5) и
состоят из продольных силовых сварных балок коробчатого сечения с приваренны-
ми к ним поперечными связующими элементами различного профиля, к которым
крепятся подвески колес.
Конструктивные элементы рам изготавливают из стального листового проката со
следующими механическими характеристиками: предел текучести — 353 МПа, предел
прочности на растяжение — 608 МПа. Химический состав применяемых специальных
сталей, %: С = 0,19; Si = 0,65; Мп = 0,92; Р = 0,013; S = 0,005; Сг = 0,9; Мо = 0,43.
Центральные, наиболее нагруженные балки выполняют из специальных сталей
(предел прочности на разрыв — 784...931 МПа, предел текучести — 686 МПа, удар-
ная вязкость при температуре окружающей среды 45 °C достигает 4,15 кг м/с).
2.2. Трансмиссия
Гидропривод колес на многоопорном автомобиле применен неслучайно.
Только гидрообъемная или электрическая трансмиссия могут обеспечить привод
всех основных силовых агрегатов многоопорного автомобиля благодаря способно-
сти довольно просто подводить мощность к любой точке ТС. С помощью ГОТ
обеспечивается автономный привод колес ведущих опор, система управления, сис-
тема подъема и горизонтирования грузовой платформы и система торможения ав-
томобиля.
Принципиальная схема гидрообъемной трансмиссии рассматриваемых авто-
мобилей изображена на рис. 2.6. Мощность от двигателя подводится непосредст-
венно к валу гидронасоса Н, который в нагнетающей магистрали А создает высокое
2.2. Трансмиссия
67
Рис. 2.6. Принципиальная схема ГОТ'
А — магистраль высокого давления: Б — магистраль низкого давления; В — перепускная маг
Г— сливная магистраль; Д — магистраль отбора потока жидкости для системы управления и по;
платформы; Мь М2 — гидромоторы левой и правой опор ТС соогвстственно; Н — гидронасос;
г идробак ГОТ; 2 — фильтр; 3. 8 — охлади г ели рабочей жидкости; 4 — подии ючньГ' насос; 5, 7 — пре-
дохрани гельпые клапаны; 6 — обратные клапаны; <-рабочее движение жидкости; — сброс
жидкое г и
давление порядка 350...400 кг/см2. К магистрали А подключены два гидромотора:
левой М( и правой М2 опор автомобиля. Предусматривается частичный отбор пото-
ка жидкости для привода системы управления и подъема погрузочной платформы
через магистраль Д. Валы гидромотора с обоих концов соединены с ведущими ко-
лесами транспортера. Отработавшая в гидромоторах и других системах РЖ по ма-
гистрали низкого давления Б поступает в резервуар / Просочившаяся через уплот-
нения жидкость собирается в магистрали В, по которой стекает в резервуар.
Для компенсации утечки, а также для охлаждения масла гидрообъемная переда-
ча имеет систему подпитки и охлаждения, состоящую из подпиточного насоса 4, одного
или двух фильтров 2; охладителей рабочей жидкости 3 и 8. Для предохранения подпи-
точного насоса от перегрузки он снабжен предохранительным клапаном 5. Гидрообъ-
емные машины являются обратимыми и могут работать как в режиме насоса, так и в
режиме мотора. Например, если автомобиль затормаживают, то его гидромоторы могут
перейти на режим работы насоса, а насос — на режим работы гидромоторов. При этом
магистраль высокого давления А становится магистралью низкого давления, а магист-
раль низкого давления Б — магистралью высокого давления. Система подпитки в этом
случае должна быть подключена к магистрали А. Переключение магистралей произво-
дится автоматически, для чего служат обратные клапаны 6.
Для предохранения передачи от перегрузки к магистралям А и Б подключены
предохранительные клапаны 7, открывающиеся при возникновении в нагнетающей
магистрали максимального давления, на которое рассчитана система. При открытом
клапане 7 рабочая жидкость стекает в резервуар по сливной магистрали Г Поскольку
при торможении автомобиля рабочая жидкость должна отводить от гидромоторов теп-
ловую энергию, в магистрали Г имеется дополнительный охладитель 8.
68
2. Многоопорные транспортные средства
Рис. 2.7. Вариант исполнения ГОТ многоопорного транспортера:
2 — I дромотор; 3 — муфга отключения; 4 — редуктор; 5 — дифференциал
Так работает принципиальная схема, реальная схема значительно сложнее из-
за наличия элементов автоматики, управляющей передачей и трансформацией энер-
гии жидкости. Еще один вариант схемы ГОТ для многоопорного транспортера
представлен на рис. 2.7
2.3. Опоры
Опоры имеют гидравлическую подвеску, которая используется для подъема
и опускания платформы на ±350 мм при погрузке и разгрузке груза. Предусмотрена
система горизонтирования платформы.
Конструктивные схемы управляемой колесной опоры представлены на
рис. 2.8. Основой опоры является картер оси и фасонный С-образный шарнирный
рычаг В верхней части рычага установлена поворотная цапфа (погон), соединяю-
щаяся с грузовой платформой. Через шарнир внизу рычаг соединяется с картером
оси колес. Вторая связь верхней части рычага и картера оси колес осуществляется
через гидропневматический элемент, являющийся упругим элементом подвески и
гидроподъемником.
Наиболее часто применяется так называемая трехточечная схема, в которой
подвески всех колес транспортного средства разделены на три контура, их геометри-
ческий центр образует гидравлическую точку. Линии, соединяющие эти центры,
образуют треугольник устойчивости.
При движении по участкам дорог с плохим покрытием допускается кратковре-
менное соединение подвесок в 4-точечный контур. Это обеспечивает повышение ус-
тойчивости при движении с грузом. За счет установки на каждом гидроцилиндре под-
вески отсечных клапанов или вентилей появляется возможность отсоединения одного
из цилиндров от остального контура, что необходимо для проведения ремонтных ра-
бот на опорном модуле.
Фирма «Кометто» придерживается конструкции подвески, выполненной в
виде параллелограмма (рис. 2.8, а), и применяет ее, меняя лишь геометрические
размеры практически на всех видах выпускаемых ею транспортных средств. На
2.3. Опоры
69
рис. 2.8, а параллелограмм образуется верхним 8 и нижним 7 рычагами, установ-
ленными с одной стороны шарнирно на стойке 3. С другой стороны на них крепится
ось качания 6 балансира 5. Это позволяет при движении по дорогам с большими
неровностями обеспечивать горизонтальное положение оси качания балансира, что
ведет к значительному уменьшению нагрузок в элементах подвески. Между стой-
кой 3 и нижним рычагом 7 подвески установлен силовой гидроцилиндр 9, который
воспринимает нагрузку, приходящуюся на него от транспортного средства. Она может
достигать 11 т при скорости движения 30 км/ч, при этом давление в полости гидро-
цилиндра составляет 19 МПа. Максимальная величина хода подвески равна 600 мм.
Для создания нормальных условий движения гидроцилиндр подвески должен быть
установлен в среднее положение, при этом ход подвески вверх и вниз составит по
300 мм. Отклонение от этого правила может быть допущено только на непродолжи-
тельное время при движении по ровной поверхности.
Стойка подвески колес опирается на раму транспортного средства с помо-
щью подшипникового узла, в конструкции которого применяется либо роликовый
конический подшипник (фирмы «Кометто», «Шейерле», как на рис. 2.8, а), либо
комбинация из сферических и шарикового упорного подшипников (фирмы «Нико-
лас», рис. 2.8, б). Для продления ресурса подшипникого узла при эксплуатации ТС в
тяжелых дорожных условиях фирма «Гольдхофер», например, использует конст-
рукцию подшипника с опорным кольцом большого диаметра.
Дополнительные схемы и внешний вид опор ТС фирмы «Кометто» и «Нико-
лас» представлены на рис. 2.8, в, г, д.
В транспортных средствах с малой погрузочной высотой находит применение
поперечная параллелограммная подвеска с ходом, равным ±180 мм, обеспечивающим
поворот колес вокруг вертикальной оси шкворня. Максимальная нагрузка на до-
рожное полотно, передаваемая данной подвеской, составляет 59 кН при скорости
движения 20 км/ч. Рабочее давление в цилиндрах подвески — 19 МПа.
У многоопорных ТС нагрузка на одну колесную стойку может достигать 150 кН
при скорости 5 км/ч. Несмотря на то что в гидросистеме предусмотрен контроль за
давлением жидкости манометрами в каждой из трех опорных точек, фирма «Комет-
то» рекомендует при работе со своими транспортными средствами пользоваться но-
мограммой для определения предельной нагрузки на подвеску и соответственно на
дорожное полотно. По этой номограмме (рис. 2.9), имея значение параметра давления
жидкости, показываемого на манометре, можно определить нагрузку, приходящуюся на
подвеску. На рис. 2.9 показаны значения статического давления при трех возможных
положениях рычага подвески колес, при которых номинальные предельные величины
могут достигать 22,5 МПа при среднем положении хода подвески и 19,0... 25,5 МПа —
в стадии подъема и опускания. При движении по дороге с неровной поверхностью, а
также во время опускания и динамического подъема возможно кратковременное уве-
личение давления до 28 МПа.
Использование номограммы для практических расчетов иллюстрируется сле-
дующими примерами.
Пример 1. ТС загружено при среднем положении подвески. На манометре
давление 16,0 МПа. Для определения нагрузки на подвеску и возможной скорости
движения проводится горизонтальная линия через ординату Р = 16,0 МПа, находит-
ся точка пересечения с прямой 2, из которой опускается вертикальная линия, и таким
70
2. Многоопорные транспортные средства
Рис. 2.8. Опора многоосных транспортеров:
а — конструктивная схема фирмы «Кометто»: / — рама ТС; 2 — ось вращения подвески; 3 — стойка;
4 — колесо с тормозами; 5 — балансир; 6 — ось качания балансира; 7, 8 — нижний и верхний рычаги
cooibcicibchho; 9 — гидроцилиндр; /0 — цпуцер; б — конструктивная схема фирмы «Николас»: / —
рам; ТС; 2 — упорный подшипник; 3 — сферический подшипник; 4 — ось вращения подвески; 5 —
гидроцилиндр; 6 — балансир; 7 — колесо с тормозами; 8 — тормозной цилиндр; 9 — рычаг; /0 — бо;
блокировки; // — сюйка; 12 — илуцер с обратным клапаном; 13 — шарнир управления повороюм
ко. 'ма и общий вид фирмы «Коме по»; л, б — схемы и общий вид фирмы «Николас»
2.3. Опоры
71
72
2. Многоопорные транспортные средства
Рис. 2.9. Номограмма для определения значений скорости, давления в гидро-
системе и нагрузки на ось для ТС фирмы «Кометто»:
ломаная ля определения скорости самоходного ТС и давления в системе при во,
2, 4 — прямые для определения давления в подвеске ТС и нагрузки на ось при
среднем, нижнем и верхнем положениях подвески соответственно
образом находится нагрузка G = 10,8 т. При подъеме из этой точки вертикали
вверх до пересечения с ломаной / находится максимальная скорость движения
V= 30 км/ч.
Пример 2. При особых условиях нагружения нагрузка на подвеску колес G =
10,8 т. Для проверки правильности этой величины проводится вертикальная ли-
ния, проходящая через абсциссу G = 10,9 т до пересечения с прямой 4 (находится
давление 13,7 МПа) и далее до пересечения с прямой 3 (находится давление 18,3 МПа).
Следовательно, во время нагружения статическое давление, показываемое маномет-
ром, находится в пределах от 13,7 до 18,3 МПа. В середине хода подвески колес
манометр будет показывать статическое давление Р = 16 МПа. Таким образом пре-
дупреждается перегрузка конструкции транспортного средства.
Процесс расчета, приведенный в примерах 1 и 2, легко автоматизируется.
Важными элементами подвески колес являются шины и дисковые колеса.
На всех видах неактивного подвижного состава (прицепы и полуприцепы) КТС ОБГ
применяют в основном шины 7,50х 15 или 8,25х 15 с дисковыми колесами 5,00х 15.
На многоопорных автомобилях устанавливают шины 7,50x20 с дисковыми колеса-
2.4. Рулевое управление
73
ми 5.00x20. Количество таких шин на одной стойке, как правило, четыре, е. на
одной оси имеется восемь шин.
Наиболее нагруженные детали подвески колес выполняют из специальных
сталей следующего химического состава, %: С = 0,25; Мп = 1,11; Si = 1,35; Р = 0,024;
S = 0,015; Ni = 0,24; Сг = 0,63; Мо = 0,34.
2.4. Рулевое управление
Для многоопорных ТС с числом осей больше двух возникают проблемы уст-
ранения бокового скольжения шин при движении по криволинейной траектории и
обеспечения требуемой маневренности. Эти проблемы решаются введением обяза-
'льного поворота всех или части колес вокруг соответствующего единого мгно-
венного центра поворота ТС. Такой поворот колес может осуществляться с помо-
щью чисто механического привода либо гидромеханической и электронно-гидрав-
лической систем.
Механический привод управления поворотом колес пассивных модулей шар-
нирно-рычажного типа может быть двух видов.
На рис. 2.10 представлена схема с боковым расположением продольных управ-
ляющих тяг 4, закрепленных с помощью сферических шарниров на управляющих ры-
чагах 3 и установленных на верхней части подвески колес. При повороте водила /, ус-
тановленного на раме 2, управляющий импульс передается передней тягой на рычаг
передней подвески колес 5 и далее через тяги 4 и рычаги 3 — на остальные колеса.
На рис. 2.11 приведена схема с центральным расположением управляющих
продольных тяг 3. Передаточные рычаги 5 устанавливаются в средней части моду-
ля, обычно в специальной нише продольной силовой балки рамы. В обоих видах
механического привода поворота колес прицепов модульного типа в управляющих
рычагах для обеспечения поворота всех колес по заданному закону при их стыковке
в различных вариантах имеется ряд скоординированных отверстий, в которые соот-
ветствующим образом устанавливаются продольные 4 (см. рис. 2.10) или попереч-
ные 4 (см. рис. 2.1 1) управляющие тяги.
Применение схемы с боковым расположением управляющих тяг на модулях
позволяет сократить количество шарниров и тяг, упростить обслуживание, монтаж
и демонтаж модулей в ТС при их перестыковках, использовать центральную про-
дольную силовую балку прицепа простого коробчатого типа без окон и ниш. Но при
этом повышается погрузочная высота платформы модуля на 150 мм по сравнению
со схемой, представленной на рис. 2.1 1. Поэтому, несмотря на целый ряд преиму-
ществ, схема рис. 2.10 не позволяет получить низкорамные модули.
Широкое распространение в конструкциях ТС получили гидромеханические
системы управления криволинейным движением.
На рис. 2.12 показана гидравлическая система управления поворотом колес
пассивного модуля, состоящего из двух соединенных между собой модульных те-
лежек. В эту систему входят четыре цилиндра двойного действия 5, соединенные
между собой трубопроводами 6. Штоки гидроцилиндров крепятся к управляющим
рычагам 4, один из которых через тягу 3 подсоединен к водилу 2 с дышлом 1.
74
2. Многоопорные транспортные средства
Рис. 2.10. Схема механической системы управления поворотом колес с боко-
вым расположением управляющих тяг
/ — во, 2 — рама прицепа; 3 — управляющие рычаг 4 — про;
5 — рыча! передней подвески ко.
Кроме того, гидросистемы управления поворотом включают ручной насос, кра-
ны высокого давления и баки для рабочей жидкости, которые также служат емкостью
ля гидросистем подвески колес. В последнюю гидросистему входят свои краны высо-
кого давления, коммутирующая гидравлическая аппаратура, энергоаккумуляторы.
Все эти системы просты по своей конструкции и в эксплуатации требуют
только внешнего осмотра на предмет отсутствия утечек рабочей жидкости.
В конструкциях активных модулей гидромеханические системы в чистом виде
использоваться не могут. Каждая опорная колесная стойка должна поворачиваться
самостоятельно. Поэтому широкое применение нашли электронно-гидравлические
системы управления поворотом колес с использованием бортовых микрокомпьюте-
ров, осуществляющих с помощью датчиков, устанавливаемых на поворотных ва-
лах опорных колесных стоек и рулевых колонках, согласованное выполнение геомет-
рии управления ТС, подчиняющееся заданным законам.
Гидромеханический привод управления поворотом опорных стоек, приме-
няемый большинством зарубежных фирм, представлен на примере многоопорных
2 А. Рулевое управление
75
Рис. 2.11. Схема механической системы управления поворотом колес с цен-
тральным расположением управляющих тяг
/ — води; 2 — рама; 4 — продольные и поперечные управ;
5 — передаючный рыча!: 6 — подвески с колесами
Рис. 2.12. Гидравлическая система управления поворотом колес пассивного модуля:
.4 — управ: ющий рычагг дроци; др; 6—[рубонроводы
16
2. Многоопорные транспортные средства
Рис. 2.13. Механизм управления поворотом колес многоопорного активного
модуля А фирмы «Кометто»:
2 — рычаг; 3 — тяг лсчий рычаг; 5 — ось вращения рыча! а 4\
дроцилиндр
автомобилей фирмы «Кометто». На рис. 2.13 показана конструкция механизма управ-
ления поворотом опорных колесных стоек активного модуля А. На раме / установле-
на шарнирно-рычажная система, состоящая из двуплечего рычага 4, вращающегося
вокруг оси 5 и соединенного тягой 3 с рычагом 2 поворота колесной стойки. На оси
вращения рычага 2 устанавливается датчик фактических значений угла поворота ко-
леса. Привод осуществляется гидравлически от силового гидроцилиндра 6, который
управляется микрокомпьютером с помощью сервовентиля.
На рис. 2.14 представлена конструкция механизма управления поворотом
стоек колес пассивного модуля D. Поскольку модуль D может эксплуатироваться
самостоятельно, конструктивное исполнение его несколько отлично от модуля А,
прежде всего тем, что здесь имеется удлиненный рычаг 4 поворота колесной стойки 3
с целым рядом отверстий для механического соединения продольных управляющих
тя! по образцу рис. 2.10.
Универсальность механизма управления поворотом стоек колес модуля D обес-
печивается применением рычага 6, вращающегося на оси 2 и соединяющегося тягой 5 с
рычагом поворота колесной стойки 4. При использовании модуля D совместно с моду-
лем А привод механизма управления поворотом колесной стойки осуществляется гид-
роцилиндром /, установленным на раме 7, по тому же принципу, что и для модуля А.
Датчик фактических значений угла поворота размещается на оси вращения стойки колес.
2.4. Рулевое управление
77
Рис. 2.14. Механизм управления приводом поворота колес пассивного модуля D
фирмы «Кометто»:
/ — си; дроцилипдр; 2 — шкворень; 4 — рычаг поворота;
5 — гяг оворотный рычаг; 7 — рама
Фирма «Николас» на своих многоопорных автомобилях применяет механизмы
управления поворотом стоек подвески колес иного типа. Здесь используется в качестве
привода не гидроцилиндр, а гидромотор, на выходном валу которого установлена шес-
терня, вращающая во внутреннем зацеплении зубчатое колесо, закрепленное на под-
вижной части стойки подвески колес.
На рис. 2.15 приведена блок-схема управления поворотом стоек колес с различ-
ными типами привода. На рис. 2.15, // показана схема, разработанная и применяемая на
многоопорных автомобилях фирмы «Камаг». Ее основное отличие от схемы, показан-
ной на рис.2.15, / и применяемой фирмой «Николас», заключается в типе привода меха-
низма поворота (позиции 10, 11 и /2).
В обеих блок-схемах электронно-гидравлические системы идентичны и основа-
ны на применении микропроцессорного управления, которое позволяет осуществлять
согласованный поворот подвесок колес по заданным программам для нормального,
параллельного («крабового») и «синусоидального» движения как одиночного модуля,
так и транспортного средства (рис. 2.16).
Исходными данными для расчета, проводимого микропроцессором, являются
следующие параметры:
угол требуемого поворота (задается датчиком рулевого колеса);
количество модулей в транспортном средстве;
78
2. Многоопорные транспортные средства
Рис. 2.15. Блок-схема электронно-гидравлического управления поворотом колес много-
опорною автомобиля с различными типами привода:
/ — тидромотор; // — гидроцилиндр; / — рулевое колесо; 2 — задающий потенциометр; 3 — тормозное
приспособление рулевого вала; 4 — блок поиске! логических ошибок; 5 — микропроцессор; 6 — анализа юр
режима движения; 7 — блок аварийной остановки; 8 — блок пропорциональною подтормаживания рулевою
ва. 9— пропорциональный сервовенipl 10— нетто. 'льны'' привод механизма поворота; // — стойка
двески ко. 'а; 12 — потенциометр фактических значений угла поворота; 13 — индуктивный датчик с,
!4 — пропорциональные электромагниты; 15 — блоки контроля пропорциональности смещения
16 — индикаторы текущих и заданных значений утла поворота; 17 — т итератор переменною на-
пряжения; 18 — блок питания; /9 — блок выбора программ движения {а — нормальное движение.
жение « (/ = 90°; лытое и боковое «диаюпа. движение», О — движение «
20 ля превышени данных параметров
расстояние между отдельными колесными линиями в модулях в поперечном
направлении;
общая длина транспортного средства.
2 А. Рулевое управление
79
Рис. 2.16. С хемы поворота, реализуемые рулевым управлением многоопорного ТС «Кометто»:
поворот с5— бо ой новоро!; в—ueiiipa. повороцл «крабовый хо;
Каждая опорная стойка транспортного средства имеет собственный регули-
ровочный контур, который позволяет с помощью установленного на оси вращения
управляющего рычага датчика обратной связи 12 (см. рис. 2.15) измерять текущее
значение угла поворота стойки, с помощью пропорционального сервовентиля 9
сравнивать разницу между его заданным и текущим положениями и управлять ра-
ботой гидравлических поворотных цилиндров или моторов.
Работа электронно-гидравлической системы управления поворотом стоек ко-
лес происходит следующим образом. Регулируемый аксиально-поршневой насос,
приводимый в действие от дизельного двигателя, под соответствующим углу пово-
рота рулевого колеса / давлением подает рабочую жидкость на сервовентили 9. В
положении прямолинейного движения они закрыты. При вращении рулевого колеса / в
ту или иную сторону встроенный генератор 17 подает напряжение на индуктивный
датчик смещения 13, который воздействует на пропорциональные электромагниты 14,
и они смещают управляющие золотники проходного клапана сервовентиля 9. Величи-
на смещения контролируется установленным на каждой стойке пропорциональным
контрольным блоком 15. Микропроцессор 5, исходя из заданного назначения и в
зависимости от программы рулевого управления и программированной тригоно-
метрической функции, рассчитывает текущие углы поворота отдельных стоек колес
транспортного средства.
Если водитель поворачивает рулевое колесо быстрее, чем вращаются
опорные стойки подвесок колес //, то возникающее рассогласование улавлива-
ется микропроцессором, который с помощью анализатора режима движения 6
через блок пропорционального подтормаживания 8 создает на рулевом вале
тормозном приспособлении 3 дополнительное согласованное усилие, противо-
положное вращению рулевого колеса. Таким образом, водитель обеспечивается
обратной связью.
80
2. Многоопорные транспортные средства
Модули ТС, следующие по внутренней траектории, являются задающими для
работы микропроцессора. Величина угла поворота остальных колес вычисляется из
значений угла поворота рулевого колеса задающего модуля транспортного средства.
Быстродействие работы компьютера позволяет заново определить величину угла пово-
рота стоек подвески колес для каждого модуля и транспортного средства в целом с ин-
тервалом 0,1 с. Вычисленное таким образом значение углов поворота колес всех моду-
лей ТС через управляющий контур передается на гидравлические пропорциональные
клапаны, которые подают рабочую жидкость соответственно разнице между текущим и
требуемым значениями углов поворота. Поворот транспортного средства осуществля-
ется до тех пор, пока разница между ними не будет равна нулю. За этим следят специ-
альные индикаторы 16 текущих и заданных значений угла поворота стоек каждой оси.
Различные нагрузки и условия сцепления вызывают рассогласование поворот-
ных усилий. Для синхронизации управления каждого из модулей составного ТС при-
меняется специальная программа. Она допускает погрешность управления в пределах
от 0 до 9° Погрешность 0 градусов практически невозможна. В практике рекоменду-
ется значение погрешности приблизительно 3° Для контроля этого параметра на
пульте водителя имеется сигнальная лампа 20, зажигание которой означает, что гео-
метрия управления поворотом составных модулей транспортного средства нарушена.
Схема системы рулевого управления КТС ОБГ «Кометто» представлена на рис. 2.17
Применение микропроцессора позволяет при необходимости составлять ТС
из трех продольных модулей, его ширина может достигать 99,9 м с интервалом 0,1 м,
длина при стыковке — также 99,9 м.
Рассмотрим работу отдельных элементов электрогидравлического управ-
ляющего клапана. Он состоит из четырех функциональных частей: сервовентиля 9 с
управляющими золотниками, двух пропорциональных электромагнитов 14 и индук-
тивного датчика 13 (см. рис. 2.15).
К гидросистеме
Рис. 2.17. Система рулевого управления «Кометто»:
/ — борювой вычислительный комплекс; 2 — усилитель обратной связи; 3 — управ-
ляющий золотник; 4 — пакет программ; 5 — задатчик автомата загрузки штурвала; 6 —
датчик обратной связи; 7 — автомат загрузки штурвала; 8 — селектор выбора схемы
поворота; 9 — датчик угла поворота рулевого колеса
2.4. Рулевое управление
81
В принципе, управляющий сервовентиль выполняется как гидравлический
клапан с электромагнитным управлением, но вместо простых электромагнитов в
нем установлены пропорциональные. Ток в катушках этих магнитов передвигает
золотник вправо или влево, сжимая пружины до тех пор, пока сила сжатия пружины
и магнитная сила не уравновесятся. Пропорциональные электромагниты не облада-
ют достаточной точностью, поэтому перемещение золотника необходимо контро-
лировать. Это достигается применением практически неизнашивающегося индук-
тивного датчика. Напряжение в пропорциональных электромагнитах как функция
от смещения золотника регулируется электроникой. В итоге получается жесткая
зависимость между смещением золотника и количеством проходящей через клапан
рабочей жидкости.
В случае каких-либо неисправностей управляющий клапан можно переклю-
чить с автоматического на аварийное ручное управление.
Энергоснабжение электронной системы управления осуществляется от блока
питания 18, который преобразует нестабильное напряжение автомобильной акку-
муляторной батареи, равное 12 В («Камаг») и 24 В («Николас»), в строго опреде-
ленное напряжение нескольких номиналов. Так, внутреннее питание блока, приме-
няемого фирмой «Камаг», происходит под напряжением ± 15 В, питание потенцио-
метров как фактических, так и заданных значений — под напряжением ± 10 В, а
питание микропроцессора и его периферийных устройств — под напряжением ± 5 В.
Таким образом, краткий анализ конструкций многоопорных транспортеров по-
казывает, что проблема сохранения дорожного полотна решается равномерным раз-
мещением опор в проекции транспортера на дорогу. Транспортное средство должно
вписываться в габариты дорог и их кривизну. Эта проблема решается тем, что все
колеса ТС являются управляемыми и их поворот обеспечивается на углы до 90°
Проблема удобства размещения, погрузки и разгрузки груза решается путем
применения грузовой платформы больших размеров и обеспечением возможности
переменной погрузочной высоты с помощью гидравлической системы опор.
Однако многоопорные автомобили имеют один очень существенный недостаток:
высокие нагрузки на колесные опоры и давление в местах контакта колес исключают
возможность использования этих транспортных средств ОБГ на дорогах и местности с
малой несущей способностью опорной поверхности. В то же время потребность в КТС
ОБГ, имеющих высокую проходимость по мостам и в условиях бездорожья, очень ве-
лика. Для решения этой проблемы можно использовать идею частичной разгрузки дви-
жителя благодаря применению принципа воздушной подушки.
Глава 3
Автомобили-самосвалы большой
и особо большой грузоподъемности
3.1. Общие сведения
Развитие горнодобывающей промышленности во всем мире базируется на
преимущественном применении открытого способа добычи полезных ископаемых.
Массовый переход в начале 60-х годов XX в. к этому прогрессивному способу стал
возможным благодаря созданию добывающей и транспортной отраслей, обеспечи-
вающих его высокопроизводительной техникой, экскаваторами и специальными
большегрузными карьерными самосвалами.
Первый опыт применения на открытых разработках большегрузных автомо-
билей в СССР был получен в начале 50-х годов XX в. на Жирновском карьере Вол-
годонстроя при добыче строительного сырья, где использовались автомобили-само-
свалы МАЗ-525 грузоподъемностью 25 т. Эти автомобили создавались на Минском
автозаводе и выпускались небольшими партиями до 1958 г В 1959 г их конвейер-
ное производство наладили на Белорусском автозаводе. Таким образом, было поло-
жено начало создания в стране нового перспективного направления автомобиле-
строения — выпуска карьерных автомобилей-самосвалов для добывающих отрас-
лей промышленности и крупного строительства. Правда, в конструкции МАЗ-525
еще не учитывалась специфика транспортных операций в карьерах, и он разрабаты-
вался по традиционной схеме компоновки (с расположением кабины за двигателем),
фактически по «методу подобия» со строительными автомобилями-самосвалами
малой грузоподъемности. Поэтому он имел ряд недостатков: большие собственную
массу и радиус поворота (см. табл. В.З), низкую скорость движения, нерациональ-
ные значения параметров характеристики подвески.
Отсутствие у конструкторов технологических карьерных автомобилей-
самосвалов достаточных знаний о специфике горнодобывающих предприятий, гео-
логических условиях карьеров, о значениях параметров добывающей техники при-
вело к тому, что из опасения превысить величину осевой нагрузки, принятую на
МАЗ-525, автомобиль-самосвал грузоподъемностью 40 т первоначально был выпу-
щен 3-осным с колесной формулой 6x4. И только через несколько лет после корен-
ного изучения проблемы его заменили 2-осной моделью.
3.1 Общие сведения
83
К началу 1960-х годов уже четко и однозначно были сформулированы прин-
ципы создания нового семейства карьерных автомобилей-самосвалов.
Базовыми моделями этого семейства, освоенного в середине 1960-х годов на
Белорусском автозаводе, стали автомобили БелАЗ-540 грузоподъемностью 27 и
БелАЗ-548 грузоподъемностью 40 т. Они коренным образом изменили эффектив-
ность технологии транспортных операций в карьерах, в частности в 2 раза повысили
выработку автомобильного парка (в расчете на 1 т грузоподъемности автомобиля).
Высокая степень унификации новых автомобилей способствовала быстрой поста-
новке их на производство, несмотря на наличие целого ряда оригинальных узлов,
ких, как гидромеханическая передача, пневмогидравлическая подвеска переднего и
заднего мостов, гидропривод высокого давления и др., облегчила их освоение в
массовой эксплуатации на сотнях предприятий всех отраслей горнодобывающей
промышленности и строительства СССР и 40 зарубежных стран [9, 10, 11].
В табл. В.З приведены некоторые значения параметров технических характе-
ристик автомобилей-самосвалов БелАЗ-540, БелАЗ-548 и выпускавшихся до них
МАЗ-525 и МАЗ-530, а на рис. 3.1 представлен общий вид последующей модифика-
ции — БелАЗ-7547
В состав этого семейства входили также автомобили-углевозы БелАЗ-7510
(грузоподъемностью 40 т), одноосный автомобиль-тягач для работы со скрепером
вместительностью 15... 18 м3 аэродромные тягачи и многие другие. Все модели се-
мейства имели схему компоновки «кабина рядом с двигателем», ставшую затем
традиционной для карьерных автомобилей-самосвалов. Гидромеханическая переда-
ча, примененная вместо механической коробки передач, позволила увеличить их
среднюю скорость движения на подъемах на 15...20 %, уменьшить динамические
нагрузки в элементах трансмиссии примерно в 2 раза, облегчить управление на пе-
ресеченных трассах карьеров. Введение пневмогидравлической подвески дало воз-
можность реализовать значительно возросшие на всех режимах работы автомобиля
скорости движения, создать необходимый комфорт для водителя.
Рис. 3.1. Автомобиль-самосвал БелАЗ-7547 грузоподъемностью 45 г
84
Автомобили-самосвалы большой и особо большой грузоподъемности
В дальнейшем Белорусский автозавод полностью перешел на выпуск автомо-
билей-самосвалов БелАЗ-7540 грузоподъемностью 30 т и БелАЗ-7548 грузоподъем-
ностью 40...45 т с двигателями ЯМЗ-840 мощностью 308 и 477 кВт, снабженных
5-ступенчатой гидропередачей.
На новых карьерных самосвалах БелАЗ грузоподъемностью 30...55 т и специа-
лизированных машинах (погрузчиках, шлаковозах, аэродромных тягачах и др.) уста-
навливают ГМП собственного изготовления. Все они выполнены по вальной схеме,
которая, как известно, имеет ряд преимуществ перед планетарной при ее использовании
на короткобазных транспортных средствах: широкие возможности при построении ря-
дов передаточных чисел и соотношения между ними; возможность уменьшения длины
ГМП и расстояния между входным и выходным фланцами, поскольку фрикционные
муфты можно размещать на параллельных валах; уменьшение потерь мощности в ра-
зомкнутых фрикционных муфтах, времени разрыва потока мощности и динамических
нагрузок при переключении передач за счет снижения моментов инерции вращающих-
ся масс; возможность унификации фрикционных муфт.
Первая белазовская ГМП типа 3+1 была создана в начале 1960-х годов. Она
отличается особой простотой конструкции, ремонтопригодностью, низкой себе-
стоимостью изготовления. Выпускается с различными модификациями входных и
выходных редукторов отбора мощности и устанавливается на поливооросительных
машинах, тяжеловозах, шлаковозах, аэродромных тягачах и т. д.
Выпуск второй ГМП типа 5+2 был начат в 1980-е годы. Она заменила на
карьерных самосвалах 3-ступенчатую передачу. Результаты: на 10... 15 % снизился
расход топлива в расчете на 1 т перевезенной массы, на 20...30 % повысилась про-
изводительность самосвалов.
Это было достигнуто благодаря рациональному выбору передаточных чисел
трансмиссии, увеличению числа ступеней, введению автоматической блокировки
гидротрансформатора.
У новой ГМП силовой диапазон передаточных чисел равен 6,14, тогда как у
3-ступенчатой он составлял 3,5. Она снабжена комплексным 4-колесным непро-
зрачным гидротрансформатором (рис. 3.2) с турбиной центростремительного типа.
Блокировка и разблокировка этого ГТ осуществляется автоматически на всех сту-
пенях в зависимости от частоты вращения турбинного вала. Насосное колесо / гид-
ротрансформатора, представляющее собой отливку из алюминиевого сплава, уста-
навливается на шариковом радиально-упорном подшипнике 2, который фиксирует
его от осевых перемещений. Слева оно опирается на роликовый подшипник 3. На-
сосное колесо соединяется с кожухом 4 насосного колеса при помощи болтов. Ко-
жух приводится во вращение от двигателя.
Турбинное колесо 5 гидротрансформатора, отлитое из алюминиевого сплава,
при помощи болтов соединяется со ступицей турбинного колеса 6. Ступица на
шлицах жестко устанавливается на валу турбинного колеса 7 Вал опирается на ша-
риковый радиально-упорный подшипник 8, который фиксирует его от осевых уси-
лий, и роликовый подшипник 3.
Колеса реакторов 9 и 10, также представляющие собой отливки из алюминие-
вого сплава, установлены на роликовых муфтах свободного хода 11 Осевые усилия
через бронзовые плавающие шайбы 12 передаются на ступицу муфты свободного
3.1. Общие сведения
85
Рис. 3.2. Конструкция унифицированного гидротрансформатора Л Г-470:
/ — насосное колесо; 2, 8 — шариковый радиально-упорный подшипник; 3 — роликовый подшипник;
4 — кожух; 5 — турбинное колесо; 6 — ступица турбинного колеса; 7 — турбинное колесо; 9, /0 —
леса реакюров; //, 13 — муфта свободного хода; /2 — бронзовые плавающие шайбы; 14 — упорная
в 1улка
хода 13 (справа) и упорную втулку 14 (слева). С целью уменьшения износа площадь
опорных поверхностей плавающих шайб в ГТ существенно увеличена по сравне-
нию с предыдущей конструкцией. Существует вариант конструкции ГТ с блокиров-
кой турбинного и насосного колес на тех режимах работы, когда преобразование
момента отсутствует (на режиме гидромуфты).
86 3. Автомобили-самосвалы большой и особо большой грузоподъемности
Всего выпускается три модификации гидротрансформатора — для работы
соответственно с двигателями мощностью 260...320, 370...450 и 510...600 кВт при
номинальной частоте вращения коленчатого вала 2 100 мин’1
Механический редуктор рассматриваемой ГМП — 4-вальный, с электрогид-
равлическим переключением ступеней. На трех валах (первичном, диапазонном и
реверсивном) расположены по две фрикционные муфты. Шестерни всех ступеней
прямозубые, находятся в постоянном зацеплении. Одна из каждой пары жестко со-
единена с валом, вторая посажена на параллельном валу на подшипниках. Ревер-
сивный вал находится в жесткой кинематической связи с первичным валом через
шестерни постоянного зацепления, диапазонный и выходные валы не имеют жест-
кой кинематической связи ни с первичным, ни с реверсивным валами.
В ГМП, предназначенных для работы с двигателями мощностью до 500 кВт
(680 л.с.), каждый вал установлен на двух подшипниках; валы для двигателей мощ-
ностью 515...600 кВт (700...815 л.с.) имеют дополнительную промежуточную опору.
Переключение передач осуществляется под нагрузкой, управление — элек-
трогидравлического типа, ручное и автоматическое.
Фрикционные муфты, установленные в ГМП, — с быстрым и надежным
включением, гарантированным выключением при высоких частотах вращения. Это
обеспечено ступенчатым исполнением поршня, наличием механизма плавного
включения и введением устройства для компенсации силы центробежного давления
жидкости, действующей на поршень и препятствующей его возвращению в исход-
ное положение.
Унифицированная фрикционная муфта, имеющая 14 пар трения, устанавли-
вается в 5-ступенчатую ГМП на передаваемую мощность до 500 кВт (680 л. '.), а так-
же в 3-ступенчатую ГМП. Уже освоенная модификация 6+1 рассчитана на мощ-
ное ть 5 15...600 кВт (700...815 л.с.), отличается числом пар трения (их 18), более
высокой (до 10 мкм) фильтрацией масла, наличием промежуточной опоры для ва-
лов, усиленными подшипниками и шестернями.
В конструкции используется гидромеханический тормоз-замедлитель лопаст-
ною типа. Он посажен на ведущий вал коробки передач и играет роль вспомога-
тельной тормозной системы, предназначенной для поддержания постоянной скорос-
ти самосвала при его движении под гору. Этот тормоз-замедлитель тоже претерпел
изменения: его вариант, устанавливаемый на самосвалах грузоподъемностью
45...55 т, имеет примерно на 15 % большую эффективность замедления и фактиче-
ски превратился в основную энергопоглощающую тормозную систему.
Возможно использование конструкции многодискового маслоохлаждаемого
фрикционного тормоза с гидроприводом, встроенного в ГМП вместо тормоза-за-
медлителя лопастного типа.
Белорусский автозавод выпускает и еще несколько моделей ГМП, например
типа 6+2, с раздачей мощности вперед. Но устанавливают ее не на самосвалах, а на
подземных поездах МоАЗ-7405. Есть и ГМП с раздачей мощности в обе стороны.
Их применяют на погрузчиках БелАЗ и АО «Амкодор» грузоподъемностью до К) т,
а также на автогрейдере 43ДМ.
На всех новых карьерных самосвалах грузоподъемностью 45...55 т и отдель-
ных модификациях грузоподъемностью 30 и 42 т установлена электронная система
3.1 Общие сведения
87
автоматического управления ГМП, которая повышает эксплуатационную эффектив-
ность самосвала, обеспечивая оптимальные режимы переключения передач, тем са-
мым освобождая водителя от ручного переключения и защищая ГМП от ошибочных
управляющих воздействий. Например, она исключает пуск двигателя при включен-
ных передачах; включение первой передачи при включенных тормозе-замедлителе и
рабочей тормозной системе; возможность включения любой передачи, кроме первой
и заднего хода, при непрогретой ГМП; изменение направления движения самосвала
только при частоте вращения выходного вала ГМП, не превышающей 80 мин 1
Электронная система также включает тормоз-замедлитель, если частота вращения
коленчатого вала двигателя превысит (к примеру, при движении на спуске) допус-
тимую, и контролирует цепи электромагнитов.
Возможные неисправности или ошибочные действия водителя высвечивают-
ся на информационном табло, установленном в кабине.
В конце 70-х годов XX в. начался процесс вытеснения автомобилей-само-
свалов грузоподъемностью 27 и 40 т из крупных карьеров основных горнодобы-
вающих отраслей. Это объясняется интенсивным увеличением объемов перевозок в
карьерах, ростом мощностей предприятий, существенными изменениями горно-
технических условий добычи, углублением карьеров до 250...350 м, увеличением
среднего расстояния транспортировки до 3...4 км. На смену им в 1980-х годах при-
ходят (в средних и крупных карьерах) автомобили-самосвалы особо большой гру-
зоподъемности — от 75 до 180 т. Их семейство, разработанное на БелАЗе, включает
гри базовые модели (с колесной формулой 4x2 грузоподъемностью 75, 110 и 180 т).
Все они с тяговым электроприводом и электромотор-колесами. Выпуск первого
автомобиля-самосвала БелАЗ-549 грузоподъемностью 75 т был начат в 1977
БелАЗ-7519 (на рис. 3.3 — его модификация БелАЗ-7548) грузоподъемностью 110 т —
в 1981 г Первую партию БелАЗ-7525 (рис. 3.4) грузоподъемностью 180 т изгото-
вили в 1983 г В 1993 г БелАЗ выпустил 280-тонный самосвал БелАЗ-7550. Он
создан с использованием мотор-колес своего предшественника, 180-тонного самосвала
Рис. 3.3. Автомобиль-самосвал БелАЗ-7548 грузоподъемностью 42 т
88
-самосвалы большой и особо большой грузоподъе.
Рис. 3.4. Автомобиль-самосвсЫ БелАЗ-75215 грузопо.
*лАЗ-75214, но отличается от него целым рядом совершенно новых конструктив-
ных решений. Например, колесная формула представляет собой не лассиче-
лов вариант 4x2, а 4x4; рама — шарнирно-сочлененная; силовая
установка расположена поперечно; пневмогидравлические цилиндры двески со-
нопарно поперечным пневматическим балансиром; вертикальное шарнир-
ленение передней и задней полурам выполнено двух шаровых опорах,
из которых регулируется по высоте. Использование двух ведущих мостов с
'мыо шинами позволило создать оригинальную машину грузоподъемностью 280
Рис. 3.5. Автомобиль-самосвал БелАЗ-7555 грузоподъемност ью 55 г
Общие сведения
89
Рис. З.б. Автомобиль-самосвал БелАЗ-75303 грузопо;
а мощный (2355 кВт, или 3200 л.с.) дизель придал ей высокие тягово-динамические
качества.
В 1995 г БелАЗ включил в гамму выпускаемой техники 55-
Бел АЗ-7555 (рис. 3.5) и 200-тонный самосвал БелАЗ-75303 (рис. 3.6) с трансмиссией
переменно-постоянного тока.
Значения основных параметров технических характеристик некоторых авто-
мобилей-самосвалов особо большой грузоподъемности приведены в табл. 3.1 и 3.2.
Основные параметры технической характеристики автомобилей-самосв!
особо большой грузоподъемности
Параметр БелАЗ-549 БелАЗ-7519 БелАЗ-7521
Колесная формула I рузоподьем ность, Масса в снаряженном соею ним. База, Габаритные размеры, мм: лине ширина высота Наименьший радиус поворота по к переднего колеса, м Номинальная мощность, кВт Удельная мощность, kBt/i Максимальная скорость, км/ч Тип )лекгричсской трансмиссии 4x2 75 66 4450 10250 5360 4750 11,5 773 5,5 50 Постоянного тока 4x2 1 10 85 5300 12.0 957 5,0 50 Постоянного тока 4x2 180(170) 145 (155) 6650 (6700) 13500(13815) 7600 (7800) 6930 (6450) С тока
90
Автомобили-самосвалы большой и особо большой грузоподъемности
Окончание табл.
Параметр БелАЗ-549 БелАЗ-7519 БелАЗ-7521
Подвеска Шины Пневмогид- равлическая 27,00-49 Пневмогид- равлическая 33,00-51 Пневмогид- равлическая 40,00-57
Примечание. В скобках приведены данные для модификации с дизель-генсраторным
агрегатом 9-26ДГ
3.2. Трансмиссия
Карьерные автомобили-самосвалы БелАЗ-549, БелАЗ-7519 и БелАЗ-7521
оснащены 6- и 8-цилиндровыми дизелями ДМ21А (соответственно мощностью
773 и 957 кВт). Наряду с ними на автомобилях-самосвалах грузоподъемностью
75 и 110т применены двигатели чешского производства («Пилстик» 8РАЧ-185)
мощностью 810...880 кВт, а на автомобиле БелАЗ-7521 — тепловозный дизель-
генераторный агрегат 9-26ДГ с двигателем 124Н26/26 мощностью 1700 кВт Тя-
говые генераторы самосвалов имеют мощность 600... 1 350 кВт, тяговые элетро-
двигатели — до 560 кВт.
Двигатель и тяговый генератор крепятся через резиновые амортизаторы на
общей подмоторной раме и образуют единый силовой агрегат (дизель-генератор).
Для уменьшения вибраций двигателя и повышения надежности амортизаторов
последние установлены наклонно. Двигатель оборудован предпусковым подогре-
вателем типа ПЖД-600 и обогревателем топлива, подключенным к системе охлаж-
дения.
Трансмиссия автомобилей электрическая, работает на постоянном токе.
генератора ГПА-600, электромотор-колес, аппаратуры
Она состоит из тягового
Рис. 3.7. Тяговая и тормоз-
ная характеристики транс-
миссии автомобиля-самосва-
ла Бел АЗ-7519:
......— порожнего автомобиля;
груженого автомобиля
регулирования и управления (вся она размещена в
утепленном шкафу, расположенном на верхней
площадке капота). Трансмиссия позволяет автома-
тически изменять величину тягового усилия на ве-
дущих колесах в зависимости от дорожных условий
и достаточно полно отвечает требованиям, предъяв-
ляемым к карьерным автомобилям. Особенность
электрической трансмиссии — бесступенчатое регу-
лирование возбуждения тяговых электродвигателей
при работе их в режиме электродинамического тор-
можения. Тяговая и тормозная характеристики
трансмиссии автомобиля-самосвала БелАЗ-7519 по-
казаны на рис. 3.7 Здесь представлены зависимости
электродинамического торможения (Рт) при полной
нагрузке и в снаряженном состоянии. Кривая D по-
казывает зависимость динамического фактора от
скорости движения.
Таблица 3.2
Динамика основных параметров технической характеристики автомобилей-самосвалов большой грузоподъемности
Параметр Модификация БелАЗ
7522 7523 7526 7527 7909 75221 75501
Базовая модель БелАЗ-540 БелАЗ-548 БелАЗ-7510 БелАЗ-7525 БелАЗ-549 — —
Год начала выпуска 1965 1967 1972 1972 1976 1982 1993
Грузоподъемность, т 30 42 30 42 75 180 280
Снаряженная масса, т 21,5 29,5 21,4 29,3 67,0 145 200
Емкость кузова, м3 15,0 21,0 19,0 27,3 35,0 70,0 НО
Габаритные размеры, мм: длина 7250 8120 7435 8395 10250 13500 15250
ширина 3480 3787 3480 3787 5300 6300 6900
высота 3480 3910 3620 4135 4750 7700 6750
База, мм 3550 4200 3550 4200 4450 6650 6650
Колея, мм: передних колес 2800 2800 2800 2800 4100 6000 6900
задних колес 2400 2540 2400 2540 3730 5200 6900
Мощность двигателя, л.с. 360 500 360 500 1050 2300 3150
Тип трансмиссии Максимальная скорость, км/ч 55 Механ 55 ическая 55 55 Эл 60 ектрическая 60 60
Расход топлива, л/100 км 100 138 100 138 235 420 600
92
Автомобили-самосвалы большой и особо большой грузоподъемности
Электромотор-колесо (Авторское свидетельство № 185216, СССР B60PI/02)
включает тяговый электродвигатель ДК-722 мощностью 360 кВт, 2-рядный диф-
ференциальный редуктор с общим передаточным числом 31,63, стояночный и ко-
лесный тормозные механизмы и ступицы колес. Устройство редуктора в составе
лектромотор-колеса показано на рис. 3.8.
Крутящий момент к ведущей (солнечной) шестерне первого ряда редуктора
передается от тягового электродвигателя через торсионный вал. В водиле, которое
размещено в крышке на шариковых подшипниках, на осях установлены три сателлита
первого ряда, каждый на двух цилиндрических роликовых подшипниках. Коронная
шестерня через шлицевую втулку связана с крышкой. Таким образом, крутящий мо-
мент от солнечной шестерни первого ряда через сателлиты и коронную шестерню
передается к ступице заднего колеса. Модуль шестерен первого ряда — 7 мм, переда-
точное число — 5,83.
В шлицевом отверстии внутреннего фланца водила первого ряда редуктора
установлена солнечная шестерня 8 второго ряда редуктора. Она входит в зацепле-
ние с тремя сателлитами второго ряда, установленными на осях в корпусе / Эти
сателлиты входят в зацепление с коронной шестерней, которая через шлицевую
втулку соединена со ступицей 6 колеса. Модуль шестерен второго ряда — К) мм,
передаточное число — 3,77
Ступица 6 колеса установлена на двух конических роликовых подшипниках.
К ней с внутренней стороны крепится тормозной барабан 2. Корпус редуктора мон-
тируется на балке заднего моста.
Неподвижные соединения деталей редуктора уплотняются резиновыми уплотни-
'льными кольцами, фланец торсионного вала — двумя манжетами, ступица колеса —
двумя крупногабаритными манжетами (рабочий диаметр 920 мм). Чтобы исключить
попадание грязи к манжетам 5, в крышке ступицы установлено грязезащитное уп-
лотнение 4. Для повышения долговечности уплотнения ступицы на наружной по-
верхности ее упорного кольца приклеена и закреплена винтами термообработанная
подманжетная лента.
Смазка шестерен и подшипников первого ряда осуществляется разбрызгива-
нием масла и дополнительно — при помощи маслоуловителей, которые захватывают
его из периферийного масляного кольца, образующегося при вращении ступицы;
смазка шестерен и подшипников второго ряда — разбрызгиванием масла при вра-
щении элементов редуктора.
Одним из основных узлов механической трансмиссии любого автомобиля
является дифференциал. Он перераспределяет угловые скорости колес в зависимо-
сти от радиуса их качения или радиуса поворота автомобиля так, что полусумма
этих скоростей всегда равна угловой скорости карданного вала. Автомобили особо
большой грузоподъемности с электротрансмиссией сконструированы и построены
без традиционного карданного вала и механического дифференциала, так как вра-
щение ведущих колес осуществляется от электрических двигателей, встроенных
непосредственно в эти колеса (мотор-колеса). Двигатели мотор-колес включены
параллельно на общий генератор. Задача перераспределения угловых скоростей при
криволинейном движении самосвалов БелАЗ первого поколения с электротранс-
миссией решена следующим образом.
7
5
1
3.2. Трансмиссия
Рис. 3.8. Электромотор-колесо БелАЗ-7519:
/, 2 — водило 1-й и 2-й ступени соответственно; 3,4 — корона 1-й и 2-й ступени соответственно; 5 — корпус редуктора мотор-колеса; 6 — сателлит
быстроходной ступени; 7— сателлит тихоходной ступени; 8. 9 — солнечная шестерня 1-й и 2-й ступени соответственно; 10 — электродвигатель
\О
94 5. Автомобили-самосвалы большой и особо большой грузоподъемности
Зависимость относи-
значения угловой
со от относительного
момента нагрузки М
При движении автомобиля по прямолинейному
участку угловые скорости колес различаются незна-
чительно. Во время же поворота соотношение угло-
вых скоростей левого и правого колес имеет вид
со, R
со2 R- А
Рис. 3.9.
зольного
скорости
значения
электродвигателя ДК-717*
/ — напряжение на якоре 300 В;
2 — напряжение на якоре 550 В;
ючка А — температура двигателя
115 °C, сопротивление якорной пе-
ни 0,1 Ом, нащузка внешнего коле-
'а 0,4 оз номинально! о моменча
где CDi, — угловая скорость внешнего и внутренне-
го колеса соответственно; R — радиус поворота; А —
расстояние между осями колес.
Это соотношение справедливо для случая, ког-
да проскальзыванием между колесом и грунтом мож-
но пренебречь, колеса имеют одинаковый радиус
качения. Для самосвала БелАЗ-549 наименьший ра-
диус поворота по оси переднего наружного колеса
составляет К) м, а расстояние между осями — 3,9 м.
Тогда соотношение угловых скоростей будет
равно 1,64.
Для электродвигателя ДК-717, устанавливаемого на мотор-колесах автомо-
билей БелАЗ, на рис. 3.9 приведена зависимость относительного значения угловой
скорости от относительного значения момента нагрузки.
В процессе торможения колеса, находящегося на меньшем радиусе поворота,
до скорости, при которой выполняется вышеприведенное соотношение, момент элек-
тродвигателя возрастет в 4,5 раза по сравнению с моментом электродвигателя внеш-
него колеса. В такой схеме электропривода избыточный момент электродвигателя
внутреннего колеса будет препятствовать повороту автомобиля, вызывая преждевре-
менный износ протектора шин и элементов кинематических звеньев автомобиля.
Известна схема 2-двигательного электропривода, в которой якорные цепи
электрических машин, не связанных общим валом, соединены последовательно и
включены на общий генератор. Очевидно, что при таком включении ток генератора
может свободно перераспределяться между электрическими двигателями в функции
нагрузки на последние. Соответственно изменяются и угловые скорости валов элек-
трических машин. Такая схема в литературе получила название электрического
дифференциала (ДЭ), поскольку ее механические характеристики эквивалентны
характеристикам привода с механическим дифференциалом. Схема ДЭ реализована
в электротрансмиссиях самосвалов БелАЗ, начиная с конструкции БелАЗ-549.
Подобная схема применяется и в конструкциях зарубежных карьерных само-
свалов. Блок-схема ДЭ системы «Стейтекс», используемая, например, на автомоби-
лях-самосвалах фирмы «Юклид» (США) грузоподъемностью 170 т, представлена на
рис. 3.10.
Электропривод переменно-постоянного тока выполнен с синхронным генера-
тором (СГ), питающим электродвигатели мотор-колес независимого возбуждения
через трехфазный выпрямительный мост (ВМ). Цепи возбуждения тяговых электро-
двигателей включены в другую обмотку СТ через регулируемый выпрямитель Свм.
3.2. Трансмиссия
Рис. 3.10. Блок-схема электрического дифференциала системы «Стейтекс» тяговых двигателей самосвала фирмы «Юк.
96 3. Автомобили-самосвалы большой и особо большой грузоподъемности
Полюса СГ на период его пуска подключают через бустерное устройство к
аккумуляторной батарее бортовой сети с последующим переключением обмотки
возбуждения синхронного генератора (ВСГ) в функции тока на обмотку III СГ через
регулируемый выпрямитель возбуждения генератора (ВГ) (/В1 В схеме (/вм приме-
нена отрицательная обратная связь по току возбуждения двигателей, а в схеме £/В1 —
по напряжению возбуждения (/ВС1 В двигательном режиме включено реле Р\. Об-
ратные связи: по току якоря /м2 — через усилитель А6, напряжению генератора U\ —
через усилитель Л7, частоте вращения электродвигателя (Omi — через усилитель А8,
мощности нагрузки через А5 формируют сигнал на усилителе ЛЮ. Диоды Д5-Д8
выполняют логическую операцию «или».
В начале двигательного режима ток в якорях составляет 2 500 А, при этом
напряжение генератора сравнительно низкое, мощность — низкая и сигнал на уси-
лителе ЛЮ будет контролироваться усилителем Л6. С увеличением скорости дви-
жения автомобиля достигается нижний угол зависимости между напряжением и
гоком генератора, в результате начинает работать ограничитель мощности с усили-
телем Л5. При напряжении 1 600 В срабатывает усилитель Л7, ограничивающий
напряжение на генераторе СГ причем ограничение мощности по напряжению гене-
ратора обеспечивается через резистор 7?6, по току якоря — через 7?4. Мощность ге-
нератора в зависимости от скорости ограничивает усилитель Л8, который настраи-
вают на скорость движения автомобиля на 3,2 км/ч ниже точки срабатывания реле
защиты от максимально допустимой скорости. Опорный сигнал нагрузки формиру-
ется усилителем Л4 в функции частоты вращения дизеля. Усилитель ЛЗ формирует
кривую опорного сигнала с тремя участками различной крутизны, отрицательный
сигнал разницы напряжений между Ur и (/М2 (разницы напряжений якорей элек-
тродвигателей) суммируется на Л4 с положительным сигналом ЛЗ и при значитель-
ной величине AU напряжение генератора ограничивается до 800 В. Опорный сигнал
возбуждения двигателей вырабатывает блок Л2. В режиме торможения Т включено
реле 7?2. Амплитуда опорного сигнала торможения блока Л1 определяется положе-
нием тормозной педали 7?1. В зоне больших токов первого или второго тяговых
двигателей Ml или Л/2, выбираемых логикой «или» блока Л9, работает отсечка по
току с крутопадающей характеристикой. Точка начала отсечки сдвигается по оси
токов в зависимости от уровня скорости электродвигателя.
Усилитель Л1 полностью запирается, когда суммарный сигнал скорости ав-
томобиля и тока якоря двигателя превышает уровень сигнала педали /?1, который
подается с выдержкой времени. Как в двигательном, так и в тормозном режимах
через Л 11 дифференцируется ток якоря и контролируется скорость изменения тока
нагрузки.
Опыт эксплуатации самосвалов подтвердил высокую эффективность элек-
тропривода, включенного по схеме электрического дифференциала.
Белорусский автозавод постоянно работает над совершенствованием тягово-
го электропривода своих большегрузных самосвалов. Цель — улучшить их тягово-
динамические свойства, повысить надежность и экономичность. Результаты этой
работы — несколько вариантов, наиболее удачным из которых признан привод пе-
ременно-постоянного тока (рис. 3.11), применяемый на модификациях самосвала
грузоподъемностью 130 т.
3.2. Трансмиссия
97
Рис. 3.11. Блок-схема электропривода переменно-постоянного
тока самосвалов БелАЗ грузоподъемностью 130 т
Основу силовой цепи данного привода составляет тяговый генератор G1,
приводимый дизелем (на схеме не показан). Каждая из двух статорных обмоток ге-
нератора подключена к выпрямителю (соответственно UZ\ и UZ2). Выходные цепи
выпрямителей в тяговом режиме соединены в последовательную цепь с якорными
обмотками и обмотками возбуждения тяговых электродвигателей MI и М2.
Током возбуждения генератора управляет система автоматического регули-
рования. В режиме стандартного электродинамического торможения она подключа-
ет выходную цепь выпрямителя UZ\ к обмоткам возбуждения тяговых электродви-
гателей.
Тяговый электропривод самосвала грузоподъемностью 130 т имеет ряд принципи-
альных особенностей, качественно отличающих его от электроприводов, применявших-
ся, например, на самосвалах грузоподъемностью 110 и 120 т.
Во-первых, в качестве источника питания здесь применен бесколлекторный од-
ноопорный генератор переменного тока повышенной удельной мощности, по габарит-
ным размерам соизмеримый с генератором ГПА-600 и приспособленный для сочлене-
ния с дизелями, имеющими номинальную частоту вращения 1 500 и 1 900 мин *.
4 - 2918
98
Автомобили-сам ос валы большой и особо большой грузоподъемности
Во-вторых, в нем нет вращающегося возбудителя, т. е. система возбуждения —
статическая, силовая цепь выполнена по схеме электрического дифференциала, в ко-
торой благодаря последовательному включению тяговых электродвигателей обеспе-
чивается принудительное равенство их токов и моментов. Это улучшает управляе-
мость самосвала при поворотах, повышает ресурс тяговых электродвигателей.
В-третьих, система управления обеспечивает плавное бесконтактное ав-
томатическое регулирование магнитного потока тягового двигателя в зоне огра-
ничения максимального напряжения, в результате чего свободная мощность ди-
зеля задействована полностью при любых возможных скоростях.
В-четвертых, диапазон эффективного электрического торможения в этом
приводе значительно расширен: тормозное усилие сохраняется при движении на
малых скоростях и даже при нулевой скорости самосвала. Это позволяет сократить
число включений механических тормозов в забоях и отвалах, следовательно, повы-
шает срок их службы.
В-пятых, в системе управления предусмотрена возможность контроля пара-
метров внешней характеристики дизель-генератора путем нагрузки последнего на
собственные тормозные резисторы. Это означает, что настраивать систему можно
без использования внешнего нагрузочного реостата. И вообще, поскольку преду-
смотрена электронная система управления, ее можно настраивать уже на этапе из-
готовления аппаратуры. Это сокращает затраты времени и расход топлива на вы-
Рис. 3.12. Предельные динамические характеристики для тягового (а и б) и
тормозного (в и г) режимов электропривода переменно-постоянного тока
самосвала БелАЗ:
а — передаточное отношение редуктора мр = 31,63; б — ир = 38,1; в — ир = 31,63;
г — ир = 38,1; D — динамический фактор; РЛ — тормозная сила
3.3. Ходовая часть
99
полнение регулировочных работ. Кроме того, имеется возможность поддержания
постоянства входной (а не выходной, как в других электроприводах) мощности тя-
гового генератора, при этом исключаются перегрузки дизеля, особенно при движе-
нии самосвала на трассах с тяжелым продольным профилем.
Рассматриваемый тяговый электропривод предназначен для работы на двух
модификациях самосвала, отличающихся передаточным числом ир редуктора мотор-
колес (31,63 и 38,1). Его предельные динамические характеристики для тягового (а и б)
и тормозного (в и г) режимов показаны на рис. 3.12.
Используя характеристику тягового режима, можно определить установив-
шуюся скорость движения в этом режиме на трассе с заданными продольным укло-
ном i и удельным сопротивлением качению /как скорость, соответствующую дина-
мическому фактору:
D-i+f\ f= 0,012 + 0,0003 V
По динамической характеристике тормозного режима можно определить ус-
тановившуюся скорость при торможении на трассе с продольным уклоном и
удельным сопротивлением качению / как скорость, соответствующую удельной
тормозной силе Ь, т. е. отношению суммарной силы на ведущих колесах к массе
самосвала (Ь = / -/).
3.3. Ходовая часть
Рассмотрим примеры конструктивного использования основных систем, аг-
регатов и узлов ходовой части автомобилей-самосвалов БелАЗ.
Рама автомобилей БелАЗ — сварная (из листовой стали 10ХСНД с пределом
текучести 4 000 МПа). Она состоит из двух лонжеронов коробчатого сечения пере-
менной высоты, соединенных четырьмя поперечинами. Толщина стенок лонжеро-
нов — 14 мм, верхней и нижней полок — 25 мм.
Подвески пневмогидравлические, передняя — независимая, задняя — зависи-
мая. Передние колеса и задний мост подвешены на четырех пневмогидравлических
цилиндрах, которые выполняют роль пневматических рессор и гидравлических
амортизаторов.
Цилиндры подвесок воспринимают только вертикальные усилия. Продольные
и поперечные нагрузки, а также моменты передаются в передней подвеске шкворне-
вым устройством, в задней — центральным рычагом и поперечной штангой.
Шкворень передней подвески диаметром 260 мм жестко соединен с поворот-
ным кулаком; перемещаясь вместе с колесом вдоль своей оси, он поворачивается в
кронштейне, закрепленном на раме. В качестве подшипников скольжения и направ-
ляющих шкворня служат металлофторопластовые втулки, вставленные в расточки
кронштейна. Втулки уплотнены резиновыми манжетами, которые защищены от
повреждения полиуретановыми грязесъемниками. Верхний конец шкворня шар-
нирно соединен с цилиндром подвески.
Подвеска заднего ведущего моста (рис. 3.13) включает два пневмогидравли-
ческих цилиндра 2, центральный рычаг и поперечную штангу /. Цилиндры
100 3. Автомобили-самосвалы большой и особо большой грузоподъемности
Рис. 3.13. Подвеска ведущего моста:
/ — поперечная штанга; 2 — гидроцилиндр подвески; 3 — крышка; 4 — шарнирная
связь; 5 — шаровая опора гидроцилиндра
расположены сзади картера моста, шарнирно соединены с мостом и рамой при по-
мощи шаровых опор диаметром 150 мм. Центральный рычаг коробчатого сечения
задним концом приварен к картеру моста, передним — через проушину, шарнирный
подшипник и палец — соединен с поперечиной рамы. Шарнирный узел закрыт за-
3.3. Ходовая часть
101
щитным чехлом, а сферический подшипник дополнительно уплотнен сальником.
Поперечная штанга 1, расположенная над мостом, одним концом через шарнирный
подшипник и палец соединена с кронштейном моста, другим — с кронштейном рамы.
Затяжка пальца в кронштейнах производится при помощи разрезной конусной
втулки. Каждый шарнирный узел закрыт двумя резиновыми пыльниками, а под-
шипники дополнительно уплотнены сальниками. Система задней подвески обеспе-
чивает вертикальное перемещение моста относительно рамы на величину полного
хода цилиндров (290 мм) и поперечный перекос моста на 8° в обе стороны.
Цилиндр подвески (рис. 3.14) представляет собой пневматическую рессо-
ру поршневого типа в комбинации с гидравлическим амортизатором. Упругим
рабочим элементом служит технический газообразный азот. В качестве РЖ при-
меняется жидкость МГП-10. Передние и задние цилиндры конструктивно оди-
наковы и отличаются только размерами. Диаметры штока и поршня переднего
цилиндра равны соответственно 220 и 250 мм, заднего — 250 и 280 мм. Полный
ход штока — 320 мм.
Цилиндр подвески (Авторское свидетельство 572110, СССР 5В60Р1/02) состоит
из трубы 24 основного цилиндра и штока 6 с приваренным к нему поршнем и пере-
городкой амортизатора. К нижней части штока крепится нижняя крышка /5, под-
жимающая к торцу штока кожух 26; к верхней части основного цилиндра — верх-
няя крышка 4. В верхней и нижней крышках установлены подпятники и шаровые
опоры диаметром 120 (передний цилиндр) и 150 мм (задний).
На перегородке амортизатора расположены два клапана сжатия 7 и корпус 10
клапана отбоя амортизатора, в котором перемещается шток /7с двумя продольны-
ми пазами переменного сечения, выполняющими функцию дросселя клапана отбоя
амортизатора. Шток предназначен также для привода плунжерного насоса /2.
Кожух 26 образует полость В, в которую до уровня контрольных пробок 17
заливается рабочая жидкость для компенсации утечек из полостей А и Б и смазки
уплотнения штока. Герметичность подвижного соединения основного цилиндра 24
и кожуха 26 обеспечивается скребком 29 и кольцом 28. Для предохранения наруж-
ной поверхности основного цилиндра от пыли и грязи служит защитный чехол 25,
закрепленный между кольцом 9 и уплотнителем 8. Герметичность всех неподвиж-
ных соединений обеспечивается резиновыми уплотнительными кольцами круглого
сечения, а подвижного соединения штока с основным цилиндром — фторопласто-
вой манжетой /9, рабочие кромки которой разжимаются распорным кольцом 20.
Манжета устанавливается с натягом, изменять который можно набором регули-
ровочных прокладок 22 и пружиной 23. Натяг новой манжеты устанавливается в
пределах 2,0...2,3 мм. Герметизация полости Б обеспечивается фторопластовы-
ми шайбами 30. Чтобы предохранить кожух 26 от перегрузок при повышении
давления в полости В (за счет возможных утечек масла через манжету и другие
соединения и при изменении объема этой полости), в конструкции предусмот-
рен предохранительный клапан 27 Для приведения в рабочее состояние ци-
линдр заполняется азотом через заправочные клапаны 5.
Принцип работы цилиндра подвески следующий. При ходе сжатия (наезде на
препятствие) шток перемещается в цилиндре вверх и сжимает газ в полости А. За
счет увеличения давления газа над поршнем ход сжатия упруго ограничивается. При
102 3. Автомобили-самосвалы большой и особо большой грузоподъемности
Рис. 3.14. Цилиндр подвески:
А. Б и В — полос I и; / — шаровая опора: 2 — крышка; для шик; 4 — верхняя крышка;
правочный клапан; 6 — инок; 7 — клапан сжашя; 8 — yikioi нигель; 9, 14 и 28 — кольца; К)— корпус
клапана О1боя; 11 — шток; 12 — насос; 13 — стопорный винт; 15 — нижняя крышка; 16 и 27 — продо-
льные клапаны; 17 — пробка; 18 — прижимная гайка; /9 — манжсма инока; 20 — распорное
21 — уплотнительное кольцо; 22 — регулировочные прокладки; 23 — пружина; 24 — труба
линдра; 25 — защитный чехо; 26 -— кожух; 29 — скребок; 30 — шайба
3.4. Рулевое управление
103
ходе отбоя (после преодоления препятствия) нагрузка на шток уменьшается и он
перемещается вниз.
Для гашения колебаний, возникающих при движении автомобиля, цилиндр
имеет гидравлический амортизатор, состоящий из двух клапанов сжатия 7, корпуса
клапана отбоя 10 и штока 77 с двумя продольными пазами переменного сечения.
Клапаны сжатия позволяют рабочей жидкости перетекать из полости А в кольцевую
полость Б при ходе сжатия. При ходе отбоя они закрываются, и жидкость из полос-
ти Б в полость А поступает только через отверстия в корпусе клапана отбоя и про-
дольные пазы переменного сечения на штоке, проходное сечение которых изменя-
ется по мере разжатия цилиндра. Это создает необходимое сопротивление перете-
канию РЖ из полости Б в полость А и препятствует полному разжатию цилиндра.
Штоки амортизаторов переднего и заднего цилиндров подвески отличаются конфи-
гурацией и глубиной паза переменного сечения.
Для поддержания постоянного уровня рабочей жидкости в полости А
служит плунжерный насос /2, установленный в расточке нижней крышки 15. Он
вступает в работу при значительных колебаниях автомобиля и только при пони-
жении уровня рабочей жидкости в полости А. При нормальном ее уровне шток
//не касается плунжера насоса. В случае понижения уровня масла при колеба-
ниях автомобиля шток 6 перемещает плунжер насоса вниз, шарик клапана за-
крывает выход РЖ из полости насоса. Под давлением масла открывается обрат-
ный клапан, через который рабочая жидкость поступает в полость А по каналам
в плунжере насоса и штоке. При разжатии цилиндра под давлением РЖ плунжер
насоса перемещается вверх, в полости под ним создается разрежение, и масло из
полости В поступает под плунжер.
3.4. Рулевое управление
Рулевое управление (РУ) автомобилей БелАЗ состоит из механического и гид-
равлического приводов. Механический включает планетарный редуктор с передаточ-
ным числом 12,25, который вступает в работу посредством рулевого колеса, рулевой
колонки, угловых редукторов и карданных валов и, в свою очередь, приводит в дейст-
вие золотник гидрораспределителя. Последний направляет рабочую жидкость в ци-
линдры поворота, установленные на каждом переднем колесе и работающие син-
хронно, при этом каждый цилиндр имеет свой независимый масляный контур.
Принцип работы РУ следующий. Рабочая жидкость насосами 19 (рис. 3.15)
из бака 17 подается в гидравлические золотниковые распределители 16 и 21 и далее
к распределителю 8 рулевого управления. Часть масла заполняет трубопроводы и
полости цилиндров 3 поворота, остальное через фильтры 14 сливается в бак.
Полости цилиндров поворота через зазоры и каналы в золотниковой паре
распределителя 8 сообщаются одновременно с напорными и сливными гидроли-
ниями и заполняются маслом под давлением, создаваемым дросселями, а также со-
противлением гидролиний и зазоров в золотниковой паре распределителя.
При повороте рулевого колеса вправо рычаг выходного вала планетарного
редуктора 25 через тягу перемещает золотник 7 распределителя влево. При этом
104 3. Автомобили-самосвалы большой и особо большой грузоподъемности
Рис. 3.15. Принципиальная кинематическая и гидравлическая схемы рулевого ления
БелАЗ:
лопка рулевая (с угловым редукюром); 2 — управляемые колеса; 3 — гидрав: чры;
। и рулевой фапеции; 5 — следящая тяга; 6 — центральный рычаг; 7 — золошик; < дрорасире-
9 — уравнительные клапаны; К) — дроссели; // — переливные клапаны; /2 — предохранитель-
ные клапаны; /3 — блок обратных клапанов; 14 — фильтры; /5 — перепускные клапаны; /6 и 2/ — па-
рораспределители опрокидывающего механизма; 17 — масляный бак; /Я, 20 — arpeiaiw дублирующе!о
привода; /9 — насосы; 22 — угловой редуктор; 23, 24, 26 — карданные ва. , 25 — плане!арный редукюр
правые полости цилиндров остаются сообщенными с напорными гидролиниями от
насосов /9, а левые соединяются со сливной магистралью. Поршень правого цилинд-
ра выдвигается, а левого — вдвигается; центральный рычаг 6, вращаясь по направ-
лению движения часовой стрелки, через рулевые тяги 4 поворачивает управляемые
колеса автомобиля вправо.
При повороте рулевого колеса влево золотник 7 распределителя перемещается
вправо и масло от насосов подается в левые полости цилиндров поворота. Правые
полости при этом соединяются со сливной гидролинией. Левый цилиндр разжимает-
ся, правый — сжимается. Центральный рычаг 6 поворачивается против направления
движения часовой стрелки и через тяги 4 поворачивает управляемые колеса влево.
3.5. Тормозное управление
105
После прекращения вращения рулевого колеса золотник гидрораспределите-
ля остается в крайнем положении, и масло поступает в цилиндры, вызывая даль-
нейший поворот колес и центрального рычага 6. Связанное с ним следящей тягой 5
водило планетарного редуктора также продолжает поворачивается. Так как рулевое
колесо неподвижно, при незначительном движении водила золотник распределите-
ля перемещается в нейтральное положение и соединяет нагнетательную магистраль
со сливной. Поворот управляемых колес прекращается.
Если давление в одном из контуров превысит 10 МПа, открывается предо-
хранительный клапан 12 этого контура, и жидкость через него и пружинную по-
лость переливного клапана 11 сливается в бак. Когда давление в напорной гидроли-
нии понизится, пружина предохранительного клапана 12 закроет его, слив прекра-
тится. Расход РЖ через дроссельное отверстие 10 станет нулевым, давление в
полостях переливного клапана 11 выравняется, и его золотник под действием уси-
лия пружины займет первоначальное положение, разъединяя напорную гидролинию
с линией слива.
Уравнительные клапаны 9 предназначены для выравнивания давлений в кон-
турах и отключения разгерметизированного контура от исправного. При работаю-
щих насосах давление рабочей жидкости, действующее на торец золотников урав-
нительных клапанов, превышает усилие пружин, и золотники соединяют напорные
гидролинии. В этом случае давление в обоих контурах выравнивается. При разгер-
метизации одного из контуров давление РЖ в нем падает, и золотник уравнительно-
го клапана под усилием пружины перемещается, отключая канал, соединяющий
напорные магистрали, и, тем самым, поврежденный контур.
Автомобили оборудуются также дублирующим приводом рулевого управле-
ния, которым принято пользоваться для буксировки автомобиля в случае поврежде-
ния его двигателя, основных насосов рулевого управления или элементов других
систем, не влияющих на работу ходовой части. Электродвигатели насосов дубли-
рующего привода подключены к аккумуляторным батареям. От них масло поступа-
ет в контуры рулевого управления.
3.5. Тормозное управление
В БелАЗах последнего поколения предусмотрены четыре тормозные систе-
мы: рабочая, стояночная, запасная и вспомогательная.
Рабочая система включает тормозные механизмы барабанно-колодочного типа
на передних и задних колесах и гидравлический привод (рис. 3.16). Тормозные меха-
низмы — с автоматической регулировкой зазора между колодкой и тормозным ба-
рабаном, гидропривод — 2-контурный, с раздельным торможением передних и зад-
них колес. Принцип его действия основан на использовании энергии давления жид-
кости, накопленной в специальных устройствах — пневмогидроаккумуляторах.
Гидравлическая схема рабочей тормозной системы работает следующим об-
разом.
Масло из бака / через фильтр 17 насосом 18 подается к блоку управления 3
и предохранительному клапану 2. При отсутствии давления или низком его значе-
106 3. Автомобили-самосвалы большой и особо большой грузоподъемности
Рис. 3.16. Принципиальная гидравлическая схема рабочей тормозной системы:
ляный бак; 2 — предохрани юльный клапан; 3 — блок управления; 4 — обратые к.
и // — выводы подсоединения соответственно датчиков давления в пневмоаккумуля юрах, маномсчра и
сигнала юрможения; 7 — пневмоаккумуляторы; 8 — тормозные краны; 9 — регуляторы давления; /9.
/7. /5 — цилиндры колесных тормозных механизмов; /2 — золотник отключения насоса; 13 — цилиндр
управления; /6 — раздели тельный клапан; 17 — фильтр; !8 — насос
нии в пневмогидроаккумуляторах 7 золотник 12 перекрывает слив в бак, и рабо-
чая жидкость через обратные клапаны 4 нагнетается в пневмогидроаккумуляторы.
При достижении заданного давления (11,0... 11,5 МПа), определяемого уставкой
регуляторов 9, золотник 12 соединяет нагнетательную магистраль насоса со сливом.
Разделение гидропривода на два независимых контура обеспечивается об-
ратными клапанами 4 и разделительным клапаном 16.
Если давление превышает заданные пределы (из-за неисправностей в системе ре-
гулирования), РЖ сливается в бак через предохранительный клапан.
3.6. Кабина
107
При нажатии на педаль тормозная жидкость из главного тормозного цилинд-
ра 13 поступает в цилиндры привода секций тормозных кранов 8. Секции обеспе-
чивают подачу РЖ к колесным цилиндрам 10, 14 и 75 из пневмогидроаккумулято-
ров. При отпускании педали рабочая жидкость из колесных цилиндров сливается
в гидробак.
Отводы 5 и 6 предназначены для подсоединения датчиков манометров и реле
аварийного падения давления, отводы 11 —для включателей «стоп-сигнала».
Стояночная тормозная система состоит из двух тормозных механизмов, тор-
мозного привода с пневматическим управлением и приборов контроля. Тормозные
механизмы постоянно замкнутого типа расположены на валах тяговых электродви-
гателей. В качестве запасной тормозной системы используется стояночная тормоз-
ная система с дополнительным усилением тормозного момента.
Вспомогательная тормозная система, применяемая для поддержания посто-
янной скорости автомобиля на спусках, — это тяговый электропривод, работающий
в режиме электродинамического торможения при переключении тяговых электро-
двигателей на генераторный режим. Внешней нагрузкой в этом режиме для них
служат тормозные резисторы, частично охлаждаемые специальным вентилятором.
3.6. Кабина
БелАЗ постоянно работает над совершенствованием конструкции кабины и
ее оборудования — сидения, органов управления, систем очистки воздуха и шумо-
защиты. В итоге на основе конструкторских и дизайнерских решений для автомо-
билей-самосвалов созданы три кабины с высоким уровнем поузловой унификации и
усовершенствованных комплектующих.
Первая из них — одноместная, предназначенная для самосвалов грузоподъ-
емностью 30...55 т. Ее внутренняя ширина — 1240 мм, объем — 3 м3 Вторая —
двухместная, с внутренней шириной 1486 мм и объемом 3,6 м3, она устанавливается
на самосвалах грузоподъемностью 65...90 т. Третья, тоже двухместная и с теми же
внутренними размерами, предназначена для машин грузоподъемностью 120...220 т.
Одноместная кабина имеет второе малогабаритное место для стажера, двух-
местная — откидное стандартное сидение.
Отличительные внешние особенности кабин семейства: ветровое стекло на-
клонено относительно вертикали на 15° назад, а не вперед, как это было в первых
модификациях; внутренний объем увеличен на 15 %.
Силовые каркасы всех кабин — коробчатого сечения, изготавливаются из
высокопрочной стали с пределом текучести 800 МПа (8 000 кгс/см“). К раме авто-
мобиля кабины крепятся через четыре резиновых амортизатора. Сварные каркасы с
прочным их креплением к раме в сочетании с защитным козырьком платформы на-
дежно защищают водителя в случае опрокидывания самосвала (система безопасно-
сти ROPS по стандартам ИСО 3471 и SAEJ 1040С) и при загрузке {FOPS по стандар-
ту ИСО 3449). Большая площадь остекления в сочетании со сферическими зеркала-
ми обеспечивает хорошую обзорность как впереди, так и сзади машины. По заказу
потребителя на внутреннюю поверхность стекол может быть наклеена солнцеза-
щитная пленка дымчатого цвета.
108 Автомобили-самосвалы большой и особо большой грузоподъе.
Просторное рабочее место с удобно расположенными органами управления,
регулируемая по высоте и наклону рулевая колонка, пневмоподрессоренное сиу
ние, мягкая обивка на боковых стенах и потолке, надежная звуко- и виброизоляция
дают комфортные условия для водителя. Микроклимат в кабине зимой по; дер-
живается отопителем, запитанным от системы охлаждения двигателя, летом
двумя электровентиляторами отопителя. Наружный воздух, засасываемый ими,
проходя через картонный фильтр, очищается от пыли. Кроме того, в кабине преду-
смотрено место под установку накрышного кондиционера KL 2 С/4 немецкой фир-
мы «Конвекта» с холодопроизводительностью 4 800 ккал/ч.
3.7. Автомобили-самосвалы МоАЗ
Могилевский автомобильный завод специализируется на произвол
леройно-транспортных автопоездов с одноосными тягачами, саморазг ружающихся
автопоездов для работы в подземных выработках и лноприводных (4x4) само-
лов (рис. 3.17-3.19).
Могилевские самосвалы нужны там, де нельзя эффективно использовать iicikl
дные карьерные самосвалы БелАЗ: на крупных строительствах с ooj
ляных работ, для перевозки вскрышных пород при добыче полезных ископае-
мых открытым способом и на других работах в тяжелых дорожных условиях.
Рис. 3.17. Самосвал МоАЗ-7505:
ъма компоновки
3.7 Автомобили-самосвалы МоАЗ
109
Рис. 3.18. Схема компоновки самосвала МоАЗ-7503
Рис. 3.19. Схема компоновки самосвального автопоезда МоАЗ-7405-9586
Такие возможности самосвалам придают особенности их конструкции
(табл. 3.3): мощные двигатели, короткая база, привод на все мосты, широкопрофиль-
ные шины низкого давления, большой дорожный просвет и т. д.
Таблица 3.3
Характеристика самосвалов МоАЗ
Параметр МоАЗ-7503 МоАЗ-7505 МоАЗ-7506
Двигатель: модель ЯМЗ-8401.10-01 ЯМЗ-238Б ЯМЗ-8424.10
мощность, кВт (л.с.) 441(600) или (по заказу) «Камминз ТА-10» 220 (299) 312,5 (425)
Масса самосвала, кг: полная 78000 или 246 (335) 42600 57400
перевозимого груза ЗЗООО 19600 25400
Колесная формула 4x4 4x4 6x4
Кузов: объем, м3 30 15,5 20,5
погрузочная высота, м 2,9 3,04 3,65
опрокидывающий механизм Гидравлический 2-цилидровый
Трансмиссия Колеса Размерность шин, дюйм Максимальная скорость, км/ч 50 Г идромеханическая Бездисковые 26,5-25 56 50
Преодолеваемый подъем, град 12 7 И
110 3. Автомобили-самосвалы большой и особо большой грузоподъемности
Самосвалы МоАЗ оснащены гидромеханической трансмиссией и пневмогид-
равлической подвеской всех мостов, чем объясняются их высокие динамические
качества и плавность хода. Комфортабельная кабина (одноместная, но с дополни-
тельным сидением для стажера), удобное расположение органов управления, не-
большие усилия, требующиеся для поворота колес, привода педалей и рычагов
управления, хорошие вентиляция и отопление, термо- и шумоизоляция, обзорность
при движении вперед и задним ходом — все это обеспечивает водителю МоАЗ
удобство и безопасную работу.
Для работы в шахтах, тоннелях и вообще в стесненных условиях предназна-
чен самосвальный автопоезд МоАЗ-7405-9586 (см. рис. 3.19). Его конструктивная
особенность — наличие дублирующих органов управления, позволяющих исполь-
зовать автопоезд в качестве «челнока» (вперед и назад без разворотов).
Машина оснащена дизелем ЯМЗ-238КМ2 мощностью 140 кВт (190 л.с.), с ко-
торым она способна развивать максимальную скорость 40 км/ч. Грузоподъем-
ность автопоезда — 22 т, его полная масса — 41,5 т, преодолеваемый при полной
загрузке угол подъема — 9° наименьший радиус поворота — 7,5 м.
Рассмотренные в данной главе общие тенденции развития автомобилей-
самосвалов характерны для всего мирового автомобилестроения и отражают наибо-
лее прогрессивные его направления дальнейшего развития. Несколько подробнее
формирование технического облика зарубежных самосвалов ОБГ будет рассмотре-
но в главе 9.
Глава 4
Становление и развитие
многоосных шасси
4.1. Начальный этап исследований, становления и развития
многоосных шасси под моногруз
Начало интенсивных исследований, связанных с разработкой транспорт-
ных средств для транспортировки тяжелого неделимого моногруза, относится к
60 - 7()-м годам XX в. Именно к этому периоду следует отнести основополагающие
идеи и конструктивные решения, на базе которых в последующем, вплоть до на-
стоящего времени, развивались специальные колесные шасси (СКШ) ОБГ под мон-
таж и транспортировку специального оборудования.
В конце 1960-х годов в СССР были развернуты поисковые работы по созданию
габаритных колесных ТС для транспортировки моногруза весом 60... 100 т и более.
Конечной целью исследований являлась разработка и обоснование общих конструк-
тивно-компоновочных схем колесных транспортных средств и их составных частей, а
также определение значений параметров их технической характеристики.
На этом этапе был проведен глубокий анализ развития средств транспорти-
ровки тяжелых неделимых грузов (моногрузов) как в нашей стране, так и за рубе-
жом. Определены условия эксплуатации, влияющие на выбор схем ТС, в том числе
несущая способность дорог и грунтов, характеристики автомобильных дорог, до-
рожных сооружений и мостов.
Исследованы возможности создания колесных ТС под группы грузов массой
60,79...84, 109...114, 136...141 и 164...169т.
Уже на стадии предварительной проработки был сделан вывод о целесообразности
определенного однозвенного шасси под каждую группу грузов.
В качестве исходных для разработки ТС были приняты следующие моменты:
повышение грузоподъемности достигается за счет увеличения числа осей;
распределение массы по осям равномерное;
снижение профильных нагрузок в ходовой части ТС возникает за счет расста-
новки осей по тележечной схеме, применения балансирных связей подвески колес, а
также 2- и 3-звенного шасси с различными типами сцепки;
движение колесных ТС осуществляется по подготовленным маршрутам, про-
ложенным по дорогам и разведанной местности.
112
4. Становление и развитие многоосных шасси
Уже на начальном периоде стала ясной нецелесообразность широкого ис-
пользования автопоездов для транспортировки моногруза по местности из-за при-
сущих им недостатков (более высокие значения массогабаритных показателей,
худшие маневренные возможности), поэтому из дальнейших работ по созданию
транспортной базы под специальное оборудование они были исключены.
Непосредственно перед проведением поисковых исследований по компонов-
ке и другим общим конструктивным решениям составных частей в укрупненном
виде были обоснованы ограничения по основным параметрам технической характе-
ристики будущего ТС.
Некоторые из этих параметров, представляющих интерес с точки зрения со-
временных взглядов на перспективные транспортные средства, приведены ниже:
Габаритные размеры:
высота с изделием не более 4 500 мм
ширина не более 3 400 мм
длина минимально возможная
Колея 2600 мм
Максимальная нагрузка на ось 125...150 кН
Размещение осей по базе тележечное
Трансмиссия электрическая, гидростатическая или
Подвеска гидромеханическая гидропневматическая, независимая
Суммарный ход колеса (с частичной или полной гидробалан- сирной связью упругих элементов тележки одного борта) до 500 мм
Рама лонжеронного типа, комбинированная
Углы въезда и съезда (хребтовая, трубчатая с надрамником) или ступенчатая переменного сечения не менее 20°
Угол боковой статической устойчивости (без учета податливости шин и рессор) 27...30°
Максимальный угол поворота управляе- мых колес 38°
Число мест в кабине не менее 2
Однозвенные шасси рассматривались только для монтажа изделий массой
60...84 т.
В результате конструктивно-компоновочных проработок, а также расчет-
ным путем и по аналогии с существующими в то время большегрузными ТС были
получены значения параметров технических характеристик 8-осного ТС грузо-
подъемностью 60 т (рис. 4.1) и 12-осного ТС (рис. 4.2) грузоподъемностью 84 т,
которые приведены в табл. 4.1. В этой таблице для сравнения помещены значения
некоторых технических параметров существующего в настоящее время шасси
79221 (16x16) [8].
Данные табл. 4.1 представляют интерес в том плане, что до настоящего
времени практически ни один из основных параметров гипотетических шасси не
достижим для современных шасси примерно такого же класса грузоподъемности.
4. /. Начальный этап исследований и развития многоосных шасси
113
Рис. 4.1. Компоновочная схема шасси 16x16 грузоподъемностью 60 т:
Ц длина монтируемого оборудования (груза)
0,43Аг
20°
--------10000 -
5800
-<— ►! "* _ g______।
СаХРФФФ'ФФФФсх;
<^м]750 - J кгч МСЧ ИСЧ 1сч
1750 х 5 = 8750
6000
24400
Рис. 4.2. Компоновочная схема шасси 24x24 грузоподъемностью 84 т:
Ц —длина монтируемого оборудования (груза)
Кроме того, рассматривалась необходимость применения на шасси электри-
ческой или гидростатической трансмиссий, газотурбинной или комбинированной
силовой установки для достижения приемлемых показателей по скорости движения.
В рамках научно-исследовательских работ теоретически и экспериментально
исследовалась возможность достижения заданных технических требований. В част-
ности, проведен оригинальный эксперимент по совместной работе разнотипных
силовых установок на одну трансмиссию тяжелого колесного ТС с использованием
6-осного макетного образца на базе агрегатов автомобиля «Татра-813». После уста-
новки на него двух 2-вальных ГТД, в качестве которых были использованы авиаци-
онные турбостартеры типа ТС-20, образец получил название 1ОЗГ
Краткая характеристика шасси 103Г представлена в табл. 4.2.
В пользу применения на большегрузных транспортных средствах комбини-
рованных силовых установок авторы проведенных исследований приводят следую-
щую аргументацию.
В соответствии с техническими требованиями к перспективным шасси мощ-
ности силовых установок должны быть в пределах 1 120...2235 кВт (1 500...3 000 л.с.).
До настоящего времени наиболее отработанной конструкцией силовой установки
являлся дизельный двигатель. Однако в существующем габаритном объеме, отво-
димом в таких транспортных средствах под двигатель, оптимальная мощность ди-
зеля находится в пределах 374...484 кВт (500...650 л.с.).
114
4. Становление и развитие многоосных шасси
Таблица 4.1
Основные параметры технической характеристики СКШ
Параметр Однозвенное 8-осное шасси грузоподъем- ностью 60 т Шасси 79221 Однозвенное 12-осное шас- си грузоподъ- емностью 84 т
Полная масса, т 93,0 120,0 135,0
Масса перевозимого груза, т 60,0 84,0
Нагрузка на ось, т 11,6 15,0 11,2
Масса в снаряженном состоянии, т 33,0 50,0
Колесная формула Габаритные размеры с изделием, мм: 16x16 16x16 24x24
длина 21200 24400
ширина 3 350 3 350 3 350
высота (по изделию) 4000 4000
База, мм 16500 20000
Колея, мм 2600 2700 2600
Радиус поворота наружного колеса, м 14,5 17,0 19,25
Габаритный коридор, м Двигатель: 4,1 6,1
тип комбиниро- дизель комбиниро-
ванный ванный
(дизель + (дизель +
ГТД) ГТД)
мощность, кВт (л.с.) 894(1200) 633(850) 1267(1700)
Удельная мощность, кВт ( л.с./т) Максимальная скорость движения, 9,61 (13,0) 5,28 (6,67) 9,39(12,65)
км/ч 60 40 60
Средняя скорость, км/ч:
по дорогам с твердым покрытием по профилированным грунтовым 40-Л5 25—30 40-^15
дорогам 25—30 20—25 25—30
Запас хода по контрольному расходу
топлива, км 250 500 250
Параметры проходимости:
подъем,град. 15 10 15
угол въезда, град. 20 20
угол съезда, град. не менее 75 не менее 75
Глубина преодолеваемого брода, м 1,2 1,1 1,2
Дорожный просвет, мм 500 475 500
Стремление получить от этих двигателей более высокие мощностные показа-
тели за счет турбонаддува приводит к уменьшению срока службы, надежности и
усложнению их конструкции.
4.1 Начальный этап исследований и развития многоосных шасси
115
Таблица 4.2
Краткая характеристика шасси 103Г
Параметр Значение
Колесная формула Осевая формула Масса шасси в снаряженном состоянии, т Грузоподъемность, т Силовая установка: основной дизельный двигатель 5Д-20: номинальная мощность, кВт (л.с.) максимальный крутящий момент, кг м вспомогательный газотурбинный двигатель: тип марка номинальная мощность, кВт (л.с.) максимальное число оборотов турбокомпрессора, об/мин максимальное число оборотов вала привода, об/мин масса, кг габаритные размеры, мм: длина максимальный диаметр Размер шин, мм Максимальная скорость, км/ч 12x12 3-3 13,86 22,0 224 (300) 96 2-вальный ТС-20 2x60 (2x80) 50500 3 000 37,5 888 236 1200x500-508 70
Газотурбинные двигатели (ГТД) обеспечивают мощность силовой установки
745... 1200 кВт (1000... 1500 л.с.) при приемлемых габаритных размерах. Однако
положительный экономический эффект от применения мощных одиночных ГТД на
тяжелых ТС можно ожидать в случае обеспечения двигателю длительной работы
при загрузке 0,6... 1,0 /Vmax. Такой режим возможен при длительной эксплуатации
транспортных средств на хороших дорогах со скоростью, близкой к максимальной.
Эксплуатация же ТС под монтаж специального оборудования происходит в раз-
личных дорожных условиях. Исследования показали, что в таком случае ГТД по-
лучит загрузку 0,3...0,6 7Vmax, что составляет половину всего срока службы. Вели-
чина удельного расхода топлива при этом будет равняться 186...251 г/(кВт ч)
(250...350 г/(л.с. ч)), а режим максимальной мощности составит всего 5...6 %.
Проведенные экспериментальные исследования на шасси 103Г подтвердили
принципиальную возможность создания комбинированной силовой установки для
тяжелых ТС. Полученные результаты привели к следующим выводам.
Комбинированная дизель-газотурбинная тяговая установка (КДГТУ) позво-
ляет достичь мощности порядка 894... 1341 кВт (1 200... 1 800 л.с.) без ухудшения
компоновочных возможностей монтируемого оборудования.
В этой силовой установке основным, постоянно работающим двигателем яв-
ляется дизельный, и только при преодолении участков с большим суммарным со-
противлением к нему подключается вспомогательный ГТД без теплообменника.
Ссылаясь на зарубежные источники информации, авторы исследований утвержда-
ли, что топливная экономичность КДГТУ несколько лучше одиночного дизельного
двигателя сопоставимой мощности.
116
4. Становление и развитие многоосных шасси
При необходимости получить мощность силовой установки порядка
1 490...2 235 кВт (2 000...3 000 л.с.) целесообразно основной дизель заменить на ГТД
с теплообменником. Высокая степень загрузки основного ГТД в комбинированной ус-
тановке и кратковременная работа вспомогательного двигателя (не более 10...25 %)
позволяет в целом получить удовлетворительную топливную экономичность практи-
чески во всем мощностном диапазоне.
Выбор силовой установки для современных и перспективных шасси большой
и особо большой грузоподъемности остается актуальным и в настоящее время, так
как статус дизеля как самого отработанного, но ограниченного по мощности двига-
теля (для автомобиля) не изменился, а экономичность существующих ГТД пока еще
остается проблемой.
При разработке перспективных СКШ большой грузоподъемности, по нашему
мнению, не следует исключать вариант использования на них комбинированной
силовой установки.
В конце 1960-х — начале 1970-х годов исследования электрических и гидро-
объемных трансмиссий бурно развивались, поскольку уже тогда были известны
такие их преимущества перед механическими трансмиссиями, как простота и удоб-
ство компоновки; отсутствие жесткой кинематической связи между элементами
трансмиссии (это позволяет осуществлять управление любым элементом независи-
мо); уменьшение типоразмерного ряда применяемых агрегатов и возможность их
широкой унификации; повышение тягово-динамических качеств, проходимости,
маневренности.
Представляют практический интерес сравнительные массовые показатели
различных типов трансмиссий (табл. 4.3) по данным тех лет. Из таблицы следует,
что массовые показатели электрической и гидрообъемной трансмиссий сопостави-
мы, но прогрессивнее, чем у механической и гидромеханической.
Таблица 4.3
Массовые показатели различных типов трансмиссий
для шасси особо большой грузоподъемности
Тип трансмиссии Ориентировочная масса трансмиссии шасси с различной колесной формулой, т
16x16 20x20 24x24 32x32
Механическая или гидромеханическая 15,0 20,6 25,0 34,0
Электрическая на постоянном токе 12,6 16,0 20,0 25,0
Электрическая на переменном токе Гидрообъемная с регулируемыми мотора- 10,0 13,0 15,0 20,0
ми в колесе Гидрообъемная с нерегулируемыми мото- 11,5 14,4 23,0
рами в колесе 8,2 10,3 12,4 16,5
Учитывая достижения современной технологии и перспективы ее развития, а
также качество используемых материалов, в настоящее время следует ожидать еще
большую разницу в массовых показателях в пользу электро- и гидрообъемных
трансмиссий.
4.1 Начальный этап исследований и развития многоосных шасси
117
В данных исследованиях не ставилась проблема эффективного использова-
ния преимуществ этих типов трансмиссий, которая предполагает проведение глубо-
ких исследований по взаимодействию колесных движителей с опорной поверхно-
стью в различных режимах и условиях движения и создание на этой основе алго-
ритмов функционирования системы управления рациональным распределением
мощности. Как показал последующий опыт разработки и использования на шасси
электротрансмиссий, без проведения таких исследований большинство преиму-
ществ этих трансмиссий остаются нереализованными.
Проведенные в рамках исследований тех лет аналитические (кинематичес-
кие) исследования поворотливости шасси показали, что вписываемость в закруг-
ления при сопряжениях в одном уровне дорог 4-й и 5-й категорий всех однозвен-
ных шасси под нагрузки 79...84 т может быть признана удовлетворительной толь-
ко при всех управляемых колесах. Справедливо было отмечено, что введение всех
управляемых колес ухудшает устойчивость как прямолинейного движения, так и
на повороте, и усложняет систему управления. Последующие исследования пока-
зали, что эта «болезнь» вполне излечима применением запаздывания поворота
задних колес относительно передних или использованием других законов управ-
ления, а упрощение конструкции привода практически при любых алгоритмах
управления может быть достигнуто с помощью рулевых приводов, работающих
по другим физическим принципам (например, электрогидравлического или элек-
тромеханического привода с программным управлением поворотом колес).
В интересах выбора и обоснования системы подрессоривания перспективных
шасси был проведен широкий комплекс исследований по установлению закономер-
ностей влияния параметров этих систем на плавность хода, вибронагруженность
экипажа и нагруженность ходовой части. Сделаны важные выводы о положитель-
ном влиянии увеличения хода подвески до 500 мм на плавность хода и вибронагру-
женность экипажа, а также о необходимости применения гидробалансирных связей
между колесами одного борта с целью снижения профильной нагруженности ходо-
вой части. В ходе этих исследований даны рекомендации о целесообразных значе-
ниях параметров систем подрессоривания для шасси различных классов грузоподъ-
емности, которые были использованы промышленностью при разработке шасси
последующих поколений.
Таким образом, результаты выполненных в СССР в конце 1960-х — начале
1970-х годов научно-исследовательских работ позволили [1]:
сформировать технический облик ТС, предназначенного для монтажа и
транспортировки моногруза, как однозвенное многоосное шасси, разрабатываемое
под конкретный вид оборудования (см. рис. 4.1 и 4.2);
сформулировать и обосновать основные технические требования к транс-
портным средствам данного класса, которые явились основой для промышленной
разработки целого поколения СКШ;
создать основополагающий научный задел для последующих теоретических
и экспериментальных исследований по улучшению значений параметров шасси под
моногруз.
118
4. Становление и развитие многоосных шасси
4.2. Транспортные средства на воздушной подушке
Несмотря на то что технический облик транспортной базы подвижных ком-
плексов к середине 1970-х годов был сформирован полностью, в этот же период
продолжались масштабные поисковые исследования по созданию ТС, способных
обеспечить проходимость комплексов в условиях бездорожья. К ним были отнесе-
ны транспортные средства на воздушной подушке (ТСВП), которая предназнача-
лась для частичной разгрузки колесного движителя при движении ТСВП по болотис-
той местности и как средство обеспечения допустимой дорожным законодательст-
вом осевой нагрузки СКШ при их движении по дорогам общего пользования (1-4
категорий).
Согласно техническим требованиям, ТСВП должны были иметь грузоподъ-
емность 5, 20 и 60 т, быть приспособленными для перевозки длинномерных грузов
и снабженными системой создания воздушной подушки для разгрузки движителя с
целью повышения проходимости по слабым грунтам.
По тем временам эта задача в автомобильной технике была новая и достаточ-
но сложная по следующим причинам. Во-первых, наличие воздушной подушки в
машинах со сравнительно длинной опорной базой (20...30 м) по существу исключа-
ло возможность применения для этих целей гусеничного движителя. Во-вторых,
известные приемы проектирования, которые широко использовались в автомобиль-
ной промышленности при создании СКШ с колесным движителем, здесь, в силу
специфических требований, были трудно применимы. И в-третьих, отсутствовал
опыт проектирования и создания таких транспортных средств.
Однако усилиями кооперации научно-исследовательских учреждений и
предприятий промышленности была сделана попытка создания макетного образца
сочлененного многоколесного ТСВП грузоподъемностью 5 т. Ввиду того, что прак-
тически все составные части образца были оригинальны не только для того време-
ни, но и с точки зрения современных представлений, ниже приводятся его основные
конструктивные решения и результаты испытаний. Столь подробное описание, воз-
можно, сыграет положительную роль при разработке отдельных узлов перспектив-
ных шасси.
Общая компоновка
Макетный образец представлял собой 2-звенную машину с колесной форму-
лой 14x14 со всеми управляемыми колесами, оборудованную агрегатами для соз-
дания воздушной подушки и предназначенную для перевозки груза по слабым
грунтам, дорогам общего пользования и местности. Общая компоновочная схема
макетного образца приведена на рис. 4.3, а общие виды — на рис. 4.4 и 4.5.
Звенья корпуса соединены между собой шарниром, допускающим угол скла-
дывания звеньев только в продольно-вертикальной плоскости на ±17,5° Для увели-
чения площади контакта с грунтом применялись 14 ведущих колес с арочными ши-
нами модели ОИ-28 размером 1 000x600. Подвеска — индивидуальная гидропнев-
матическая — установлена в поворотных погонах с максимальным углом поворота
±83° с обеспечением «крабового» хода.
4.2. Транспортные средства на воздушной подушке
119
Рис. 4.3. Компоновочная схема макетного образца 14х 14:
/ — первое звено: торос звено:
Рис. 4.4. Общий вид макетного образца 14х 14 с воздушной но.
В переднем звене располагались 4-местная кабина с соответствующими ор-
ганами управления, силовое отделение с 4-тактным дизельным двигателем 5Д20.
моторно-вентиляторное отделение с газотурбинным двигателем ГТД-350 и два вен-
тилятора для создания воздушной подушки.
В нижней части переднего звена размещались шесть поворотных погонов,
которых были установлены балансиры, пневморессоры и колеса с арочными шинами.
К каждому колесу выполнен механический привод через раздаточный редуктор, гита-
ру и редуктор колеса. Поворот колеса в погоне осуществлялся электроприводом.
Заднее звено представляло собой грузовую платформу, выполненную из алю-
миниевых сплавов, в нижней части которой размещались восемь поворотных пого-
Рис. 4.5. Общий вид макетного образца 14х 14 без воздушной подушки
120
4. Становление и развитие многоосных шасси
нов, аналогичных передним. В этом звене размещались узлы и агрегаты трансмиссии,
гидросистемы дифференциала и изменения клиренса. В кормовой части заднего звена
были расположены водометные движители для обеспечения тяги на плаву.
Воздушная подушка формировалась камерным способом с гибким ограждени-
ем по периметру макетного образца. Носовое и бортовое ограждения полностью раз-
мещались под корпусом машины, а кормовое частично было вынесено за пределы
корпуса. Для придания образцу удовлетворительной поперечной статической устой-
чивости воздушная подушка разделялась на две части продольной эластичной завесой
баллонного типа. Воздух каждым вентилятором засасывался из атмосферы и нагне-
тался в соответствующую полость ВП через отверстия в донной части машины.
Силовая установка
Силовая установка представляла собой серийный дизельный двигатель 5Д20
мощностью 179 кВт (240 л.с.), выполненный в блоке с коробкой передач и систем,
обеспечивающих его работу.
Трансмиссия
Трансмиссия выбиралась из следующих соображений. Из проведенного ана-
лиза следовало, что классическая механическая трансмиссия, имеющая высокий
КПД, неприемлема из-за наличия большого числа ведущих колес и необходимости
обеспечения дифференциальной связи между ними. Упрощение трансмиссии ведет
к циркуляции мощности, износу шин, снижению КПД.
При анализе различных приводов авторы проекта пришли к выводу, что гид-
равлический привод практически не ставит сложность трансмиссии в зависимость
от числа ведущих колес, при этом легко обеспечивается управляемая дифференци-
альная связь и защита от перегрузок, элементы трансмиссии удачно компонуются в
корпусе, вплоть до размещения силовых агрегатов непосредственно в ведущих ко-
лесах. Однако такого гидростатического привода с приемлемыми характеристиками
по массе, надежности и КПД в то время не было. Требовалось создать трансмиссию,
которая сочетала бы в себе положительные свойства как механического, так и гид-
ростатического приводов.
В результате была разработана и применена на макетном образце комбиниро-
ванная схема трансмиссии с индивидуальным механическим приводом каждого коле-
са. Гидростатический привод в такой трансмиссии (во втором потоке мощности)
обеспечивал блокируемую дифференциальную связь всех ведущих колес и защиту
привода каждого колеса от перегрузок.
Схема трансмиссии макетного образца приведена на рис. 4.6.
Принцип работы трансмиссии заключается в следующем. При движении ма-
шины мощность от двигателя через главный фрикцион /, коробку передач 2, угловые
редукторы 3 подается к продольным валам 4 и через пару шестерен и сателлиты 7
суммирующих редукторов 5 к эпициклическим шестерням 6 планетарных механиз-
мов. С водила 8 каждого суммирующего редуктора через коническую пару (на
рис. 4.6 не показана) мощность подводится к ведущим колесам. Развивающиеся при
этом тяговые усилия на колесах, обусловленные силой сопротивления движению,
создают на солнечных шестернях планетарных механизмов (валах гидромашин) реак-
тивные моменты и соответствующие им реактивные давления в гидромашинах.
Колесная передача
Рис. 4.6. Схема трансмиссии макетного образца 14x14:
1 — ДВС: дуктор: довой рсдукюр: 4 — механическая пере;
7—со. Л’ — води. 9—гидромоюр
данетарный редукюр ко. 6 — эпицикл;
4.2. Транспортные средства на воздушной подушке
122
4. Становление и развитие многоосных шасси
Если колеса вращаются с одинаковым числом оборотов (случай прямолиней-
ного движения), то водила планетарных механизмов также вращаются с одинако-
вым числом оборотов. При этом валы гидромашин будут остановлены. Так как ка-
меры гидромашин 9 и коллекторы сообщены между собой (дифференциал разбло-
кирован), в силовом коллекторе установится общее для всех гидромашин
реактивное давление. Это обусловит равенство тяговых усилий на колесах, а нали-
чие гидравлической связи — одновременность возникновения тягового усилия в
контакте колес с опорной поверхностью.
Если колеса вращаются с разным числом оборотов (поворот, буксование, пре-
одоление препятствий), то подведенная к суммирующим редукторам отстающих ко-
лес мощность разделится в планетарных механизмах на два потока. Часть мощности
будет подводиться к отстающим колесам в соответствии с их фактической скоростью.
Другая часть — к гидромашинам, преобразуясь в них в гидравлическую мощность.
При этом из гидромашин отстающих колес, работающих в насосном режиме, рабочая
жидкость под давлением будет вытесняться через регуляторы расхода в общий кол-
лектор и далее через обратные клапаны — в гидромашины привода забегающих ко-
лес, которые, работая в моторном режиме, обеспечивают необходимые по кинематике
движения в повороте приращения скорости вращения забегающих колес.
Система управления блокировкой предусматривает возможность как совмест-
ной, так и раздельной (по звеньям) блокировки дифференциала. Принудительная
полная блокировка дифференциала осуществляется путем закрытия дросселей регу-
ляторов расхода рабочей жидкости. В этом случае выход жидкости из гидромашин
перекрыт, через гидродифференциал мощность не проходит. Следовательно, все
колеса, независимо от внешних сопротивлений, будут вращаться с одинаковыми
угловыми скоростями.
Представляют интерес некоторые результаты заводских и полигонных испы-
таний трансмиссии. Из их анализа следует, что в положении «Разблокировано» гид-
родифференциал обеспечивает в повороте различные скорости вращения отдельных
колес и работает надежно во всех режимах.
В процессе испытаний выявлено увеличение свободной силы тяги при блоки-
ровании гидромеханического дифференциала в условиях разбитой размокшей грун-
товой дороги на 17 %; снежной целины и топкого болота — на 25 %; болотистой
местности (с использованием вакуумирования шин) — на 10 %.
Таким образом, идея создания подобной трансмиссии представляется очень ин-
тересной, требует более глубокого изучения и теоретического обоснования. При ее реа-
лизации на макетном образце разработчики не смогли решить проблему очистки масла
и герметизации гидравлической части.
Ходовая часть
На макете было установлено 14 ведущих управляемых колес с арочными ши-
нами модели ОИ-28. Внутренняя полость шин была снабжена металлической кон-
струкцией звездообразной формы (бандажом), которая позволяла шинам принимать
форму этого бандажа при вакуумировании шин системой изменения давления в
них. Это позволяло улучшить проходимость по болотистой местности. Каждое ко-
лесо устанавливалось на П-образном балансире. Передача вертикальной нагрузки от
4.2. Транспортные средства на воздушной подушке
123
колеса на корпус осуществлялась через пневмогидравлическую рессору. Полный
ход рессоры составлял 300 мм, динамический ход — 250 мм. Переменный клиренс в
пределах 490...740 мм обеспечивался системой регулирования дорожного просвета.
Идея создания вакуумированных колес при разработке новой транспортной
базы требует пристального внимания. На первый взгляд она дает достаточно боль-
шие преимущества при прохождении участков местности со слабыми грунтами.
Однако ее использование требует глубокой научной проработки и обоснования.
Механизм управления поворотом
На макетном образце применялась принципиально новая система рулевого
управления как по программированию поворота колес, так и по исполнительным при-
водам. Все 14 колес были выполнены управляемыми с обеспечением максимального
угла поворота до 83° Система управления позволяла осуществлять поворот восемью
способами: относительно каждой из семи осей и плоскопараллельное («крабовое»)
движение (рис. 4.7).
Каждый канал управления поворотом колеса (рис. 4.8) представлял собой
электрический следящий привод и содержал следующие элементы: сельсин-датчик
(СД), коммутационный блок (КОМ), фазочувствительный выпрямитель (ФЧВ),
виброусилитель (ВУ), транзисторный блок (ТБ), контакторный блок (КБ), блок ре-
зисторов (БР), блок переключения режимов (БПР), электродвигатель гидравличе-
ского насоса (ДГН), тахогенератор привода (ТГП), сельсин-приемник (СП) и колес-
ный редуктор (РЕД).
Ротор СД воспринимает угол поворота от программирующего устройства, а
следящая система обеспечивает поворот колеса, связанного с ротором СП, на этот
же угол. При этом скорость отработки автоматически изменяется в зависимости от
угла рассогласования (разности углов поворота роторов СД и СП).
Кинематическая схема механизма поворота колеса показана на рис. 4.9.
Работоспособность системы РУ проверялась на заводских и полигонных ис-
пытаниях. Результаты заводских испытаний, проведенных в вывешенном состоянии
макета, характеризуются следующими данными:
отработка приведения колес к согласованному положению при резком пово-
роте штурвала сразу на два оборота составила 14... 18 с;
неодновременность отработки — 1,5...2,0 с;
средняя точность приведения колес к исходному положению (при возвраще-
нии справа и слева) — ±0,5° (отдельные отклонения до 1,5...2,0°);
средняя точность приведения колес в положение, требуемое по закону кине-
матики, составила 1,5° (отдельные отклонения до 4°).
При полигонных испытаниях проведены экспериментальные исследования
по определению управляемости макета. При максимальных углах поворота управ-
ляемых колес (83°) и различных способах поворота наружный габаритный радиус
составил 8,0...12,9 м, внутренний габаритный радиус — 0,25...2,00 м, а минималь-
ный радиус поворота — 6,15 м.
Максимальное отклонение движения макета от прямолинейного в зависимо-
сти от различных скоростей и способов поворота при подруливании составило:
при скорости 10 км/ч и повороте вокруг 4-й оси — ± 1,45 м;
Il
7
VI
Will
Wf-
Плоскопараллельное
движение
4. Становление и развитие многоосных шасси
Рис. 4.7. Кинематические схемы способов поворота относительно осей I-VII
4.2. Транспортные средства на воздушной подушке
125
Рис. 4.8. Блок-схема следящего рулевого привода макетного образца 14x14
Рис. 4.9. Кинематическая схема механизма поворота колес макетного образца 14x14
126
4. Становление и развитие многоосных шасси
при скорости 20 км/ч — ±0,65 м;
при скорости 10 км/ч и отключенных поворотных колесах 3-й и 7-й осей —
±0,82 м, а при отключенных колесах 4-й и 7-й осей — ±0,5 м;
при скорости 10 км/ч и перенесении оси поворота на 6-ю ось — ±0,45 м.
Параметры поворотливости макета, полученные в ходе экспериментальных
исследований, можно считать положительными, за исключением значений скорости
поворота управляемых колес и точности отработки задаваемого сигнала.
В связи с тем, что на макетном образце выявилось большое количество отка-
зов, пробеговые испытания в полном объеме завершить не удалось. Причиной де-
фектов является попытка одновременной реализации множества принципиально
новых конструктивных решений на одном образце (с листа) без детальной теорети-
ческой и экспериментальной проработки отдельных оригинальных агрегатов и сис-
тем, а также без моделирования их взаимодействия. Таким образом была скомпро-
метирована хорошая идея.
Кроме того, прекращению работ с данным макетным образцом во многом
способствовало то обстоятельство, что потребности заказчиков обеспечивали более
простые транспортные средства, а также не существовало «свободной» промыш-
ленной базы, способной реализовать технические идеи, заложенные в макете. Все
это предопределило дальнейшую судьбу данного весьма перспективного, на наш
взгляд, направления создания ТС. И хотя разработка ТСВП продолжалась еще дли-
тельное время, были созданы несколько оригинальных самоходных и прицепных
комплексов грузоподъемностью 10, 20 и 60 т, прошедших испытания в Тюменской
области, накоплен уникальный теоретический и экспериментальный материал, до
промышленного производства в силу вышеуказанных причин дело не дошло.
4.3. Общие конструктивно-компоновочные решения
Одновременно с созданием ТС под моногруз на этом этапе шла интенсивная
разработка получившего официальный статус общего конструктивно-компоновоч-
ного решения (см. рис. 4.1 и 4.2) СКШ под специальное оборудование, ставшего в
дальнейшем традиционным.
В этом плане заслуживает внимания созданный в СКВ В.А. Грачева в конце
1960-х годов опытный образец шасси ЗИЛ-135Э с электротрансмиссией. Это было
первой, наиболее глубокой и полной попыткой разработки СКШ с ЭТ
Для этого шасси специально разработали тяговые электродвигатели постоян-
ного тока ДТ-22 мощностью 22 кВт каждый и генераторы постоянного тока ТЭТ-120
мощностью 120 кВт с приводом от двух карбюраторных двигателей ЗИЛ-375.
Управление трансмиссией осуществлялось посредством изменения возбуждения
генератора. Элементы ЭТ имели удовлетворительные по тем временам габаритно-
массовые и удельно-мощностные показатели. К примеру, на созданном в более
позднее время (1980-е годы) шасси 7907 применялись перспективные типы элек-
трических машин (тяговые синхронные вентильные двигатели мощностью 30 кВт),
удельная мощность которых составляла 0,176 кВт/кг, а у двигателей ДТ-22 на шас-
си ЗИЛ-135Э — 0,244 кВт/кг.
4.3. Общие конструктивно-компоновочные решения
127
В ходе сравнительных испытаний опытного образца ЗИЛ-135Э с шасси
ЗИЛ-135ЛН (с ГМП) было выявлено снижение эксплуатационного расхода топлива
на 14.. .20 % по всем видам дорог, увеличение средних скоростей движения на К).. .20 %,
повышение некоторых показателей проходимости (например, максимального угла
подъема). Допустимо предположить, что при соответствующих теоретических про-
работках, направленных на полное использование потенциальных возможностей ЭТ
и ее изготовлении на современной элементной базе, можно достичь еще более зна-
чительных преимуществ перед традиционными трансмиссиями.
Судьбу этого технического решения предопределило «нежелание» промыш-
ленности осваивать новый вид электротехнической продукции, который планирова-
лось выпускать небольшими партиями.
Подводя итоги теоретических и экспериментальных работ, связанных с соз-
данием СКШ под монтаж моногруза в начальный период их становления и разви-
тия, можно сказать следующее. В результате исследований были определены наи-
более рациональные для автомобилестроительной промышленности основные
конструктивно-компоновочные схемы и значения параметров технической харак-
теристики СКШ, реализация которых удовлетворила существовавшие на этот пери-
од и на ближайшую перспективу требования к монтируемому оборудованию. Таким
образом, на данном этапе сложился стереотип ТС, в котором использовались (см.
рис. 4.1 и 4.2):
дизельный танковый (автомобильный) двигатель;
гидромеханическая трансмиссия с приводом на все колеса шасси;
независимая рычажно-торсионная или гидропневматическая подвеска колес;
рулевое управление с управляемыми колесами передних или передних и зад-
них осей и гидромеханическим приводом.
Эти технические решения условно можно назвать традиционными, так как
на их базе, удовлетворяя потребности в грузоподъемности за счет изменения чис-
ла осей шасси, было создано несколько поколений СКШ. Разработанные в этот же
период оригинальные конструкции СКШ с нетрадиционными техническими ре-
шениями составных частей так и остались макетными образцами по целому ряду
причин, среди которых основными являются:
отсутствие глубоких теоретических проработок и отрыв от промышленной
базы дальнейшего производства;
стремление без предварительной отработки отдельных узлов и систем соеди-
нить их в одном образце;
низкие качество, технический и технологический уровень, а поэтому и не-
высокая надежность элементов, на базе которых создавались оригинальные со-
ставные части шасси, а иногда и отсутствие таковых с приемлемыми характери-
стиками.
Вместе с тем следует отметить, что перспектива дальнейшего совершен-
ствования СКШ основывается на многих конструктивных решениях, которые
были использованы при создании макетных образцов того периода. И многие
идеи, предложенные в тот период времени, могут быть реализованы в настоящее
время.
128
4. Становление и развитие многоосных шасси
4.4. Разработки специальных колесных шасси в 1980-е годы
Разработка мобильного оборудования в 80-е годы XX в. шла путем увеличе-
ния его массогабаритных параметров. В связи с этим возникла необходимость соз-
дания колесных шасси для транспортировки специального оборудования массой
150. .220 т. Исследователи предприняли попытку реализации казалось бы самой
простой и логичной идеи — дальнейшего повышения грузоподъемности шасси за
счет увеличения осевых масс и числа осей.
На первом этапе по результатам экспериментальных исследований была оце-
нена принципиальная возможность проходимости шасси с осевыми нагрузками до
600 кН по местности и определены характеристики опорных поверхностей для вы-
бора маршрутов движения подобных транспортных средств. В дальнейшем разра-
ботчики создали полномасштабный макет негабаритного шасси 7904 с колесной
формулой 12х 12 грузоподъемностью 220 т на базе традиционных технических ре-
шений (рис. В.1, б). При этом для обеспечения передачи мощности двигателя к ко-
лесному движителю была применена гидромеханическая трансмиссия, но с двумя
гидромеханическими коробками передач. Результаты испытаний шасси 7904 пока-
зали низкую эффективность использования традиционных схем (в частности,
трансмиссии) на шасси общей массой 360 т, поэтому было принято решение о раз-
работке конструкций двух типов шасси для транспортировки оборудования общей
массой 220 т шасси 7906 (рис. 4.10) с колесной формулой 16х 16 и традиционными
техническими решениями и шасси 7907 (рис. 4.1 1) с колесной формулой 24x24 ори-
гинальной конструкции (сочлененная схема компоновки, ГТД и др.). Путем сравни-
тельных испытаний предполагалось выбрать из них наиболее предпочтительный тип.
Шасси 7904, 7906 и 7907 представляют интерес в том плане, что при их разра-
ботке и изготовлении на МЗКТ использовались как традиционные, так и оригинальные
решения при конструировании отдельных составных частей.
Примером классического подхода при разработке основных составных час-
гей являлись шасси 7904 и 7906.
Моторно-трансмиссионные установки (МТУ) на этих шасси принципиально
личались дру! от друга (рис. 4.12) и имели в своем составе дизельный двига-
согласующий редуктор (СР), две гидромеханические коробки передач (ГМКП),
суммирующий редуктор (СМР), раздающие редукторы на переднюю (РРПО) и зад-
Рис. 4.10. Общий вид шасси 7906
4.4. Разработки специальных колесных шасси в 1980-е годы
129
Рис. 4.11. Общий вид шасси 7907
нюю (РРЗО) оси. а также шесть редукторов мостов (РМ) для шасси 7904 и восемь —
для 7906, колесные редукторы (КР) по числу колес.
Удельная мощность шасси 7904 составляла 3.75 л.с./т (2,75 кВт/т), а у шасси
7906 — 6.8 л.с./т (5.0 кВт/т), что обеспечивало максимальные скорости движения
этих шасси 25.2 и 30,0 км/ч соответственно.
Из-за отсутствия ГМП для передачи большой мощности необходимыми
массогабаритными показателями на обоих шасси применялся блок гидромеханиче-
ских передач, состоящий из двух аналогичных ГМП. работающих в силовом потоке
параллельно. Поэтому в конструкцию трансмиссии пришлось дополнительно вво-
дить согласующий и суммирующий редукторы. Кроме того, в отличие от классиче-
ской схемы трансмиссии с одной раздаточной коробкой (или раздающим редукто-
ром) на переднюю и заднюю тележки в трансмиссии рассматриваемых ТС выпоз
пены по два раздающих редуктора. В целом МТУ шасси 7904 и 7906 представляю!
собой сложную и громоздкую конструкцию с большими массогабаритными пара-
метрами и низкими удельными показателями габаритной мощности и перспективы
использования не имеют
Рис. 4.12. Принципиальная кинематическая схема трансмиссии шасси 7904 и 7906
130
4. Становление и развитие многоосных шасси
В рамках поиска новых технических решений МТУ для СКШ были последо-
вательно созданы макетные образцы шасси 547Э (12x12), 7907 (24x24) и 7923
(16 х 16) с электрической трансмиссией.
Сравнение результатов испытаний свидетельствует, что по некоторым ос-
новным показателям СКШ с ЭТ превосходят шасси такой же грузоподъемности с
ГМТ, в том числе по проходимости и тягово-скоростным свойствам; по гибкости
компоновки за счет возможности установки составных частей ЭТ в любых местах
шасси, удобных для размещения; по трудоемкости техобслуживания; по ремонто-
пригодности за счет блочно-модульной конструкции; по живучести за счет возмож-
ности продолжения движения при отказе нескольких тяговых двигателей.
Вместе с тем, работы по созданию этих трансмиссий велись в основном в на-
правлении приспособления существующих конструкций промышленных электроаг-
регатов, спроектированных без учета характера и режимов эксплуатации шасси.
Поэтому при анализе конструкций и результатов испытаний опытных образцов был
выявлен ряд существенных недостатков. Особенно это относится к шасси 7907
Во-первых, трансмиссия этого шасси (рис. 4.13) выполнена с промежуточ-
ными элементами, каковыми являются механические редукторы (МР), передающие
крутящий момент от тягового двигателя на колесные редукторы (КР). Такая конст-
рукция лишь усложняет и утяжеляет трансмиссию и снижает КПД. Более прогрес-
сивное техническое решение применено на шасси 547Э и 7923, у которых тяговые
двигатели (рис. 4.14) встроены в колеса, образуя модуль электромотор-колесо.
Во-вторых, мощность первичного двигателя (ГТД) на шасси 7907 составляла
882 кВт, а генератора — 625 кВт, что приводило к неполному использованию воз-
можностей двигателя.
Для электрических трансмиссий рассматриваемых образцов общими недос-
татками являлись:
несовершенство конструкции генератора и тяговых электродвигателей, при-
водящее к ограничению максимальной скорости и свободной силы тяги на крюке;
недостаточная надежность элементов ЭТ из-за неотработанности конструк-
ции и отсутствия требований к ним;
несовершенство системы автоматического управления и регулирования, вы-
ражающееся в неспособности использовать важнейшие преимущества ЭТ — инди-
видуальное управление приводами колес в зависимости от дорожных условий и
максимальную загрузку двигателя.
Анализ этих и других материалов позволяет сделать вывод о недостаточной
глубине теоретической базы создания ЭТ автомобильного типа для СКШ с учетом
особенностей их конструкции и условий использования, а традиционный подход к
разработке трансмиссий для шасси такого класса грузоподъемности на примере шас-
си 7904 еще раз убеждает, что он не имеет перспективы. Значения массовых парамет-
ров различных типов МТУ опытных образцов СКШ представлены в табл. 4.4.
Подход к разработке систем рулевого управления для рассматриваемых шас-
си не отличался новизной. На шасси 7904 хотя и применялась схема с управляемы-
ми колесами двух передних и двух задних осей, однако привод поворота колес,
состоящий из традиционных рычагов и тяг и растянутый по длине более 20 м
(рис. 4.15), представлял собой сложную и громоздкую конструкцию. Аналогично была
Г
САУ
кр) ) (КР) (КР) (КР) (КР) (КР) (КР) (КР) (КР) (кр) (кр) ((КР.
МР I МР I МР I МР 1 МР I МР 1 МР 1 МР 1 МР 1 МР 1 МР 1 МР 1
дН| ДНШ ] ДНП ДНШ ] g ДНШ 1 ДНп ДНШ ] ДНШ ] ДНп днш ] ДНп 1 ДНп ДНп] ] ДНп днш ] ДНп днш ] ДНп днш ] дПп] днш
МР 1 МР 1 МР 1 МР 1 МР | МР | МР 1 МР 1 МР I МР I МР I МР I
кр) У (кр') )( ( кр) )( ( кр) У ГкрЛ )( Гкр^ )( Гкр) )( Гкр) )( Скр) )( (кр) )(( кр) )( (кр
Рис. 4.13. Принципиальная схема электромеханической трансмиссии шасси 7907'
ГТД — газотурбинный ПР — понижающий редуктор: Г — генератор; САУ — система авюмат чес ко го управления; МР — механический
редуктор; Д — тяговьГ П — преобразователь; КР — колесный редуктор
(gg) ((эм)) ((эмк) ((эмк) ((эмк) ((эмк) ((эмк) (((эмк)
I п I
□п
□П □□
Пр
□Ь
□р Пр
nil ЕЬ
((эмк) (((эмк) ((эмк) ((эмк) ((эмк) ((эмк) ((эмк) ((g)
Рис. 4.14. Принципиальная схема электрической трансмиссии шасси 7923 (547Э):
ГТД — газотурбинный ПР — понижающий редуктор: Г — генератор: САУ — система автоматического управления; П — преобразователь.
ЭМК— )лек1ромоюр-ко.
4.4. Разработки специальных колесных шасси в 1980-е годы
Абсолютные и относительные показатели массы МТУ СКШ
Таблица 4.4
Марка, тип составных частей Мощность силовой установки, кВт (л.с.) Шасси Масса, кг Удельная масса, кг/кВт (кг/л.с.) Удельная масса (отно- шение массы агрегата к массе снаря- женного шасси), % Габаритный объем, з м Объемная мощность, кВт/м3 (л.с./м3)
Двигатель дизельный:
КамАЗ-740.10 309 (420) БАЗ- 69501 1278 4,15 (3,05) 7,1
ЯМЗ-8401 478 (650) КЗКТ-74281 1870 3,91 (2,88) 7,4
УТД-25 танковый 294 (400) БАЗ-6944 800 2,73 (2,0) 4,7
А-38 танковый 478 (650) МАЗ-547В 1100 2,3(1,69) 4,0
В-58 танковый 522 (710) МАЗ-7917 1300 2,49 (1,83) 4,06 — —
М-351 судовой Двигатель газотурбин- ный: 1100(1500) МАЗ-7906 7220 6,56 (4,82) 10,3 5,94 185(445)
ГТД-1000А 736(1000) МАЗ-547Э 960 1,3 (0,96) 3,4
ГТД-НООТМФ Трансмиссия: 880(1200) МАЗ-7907 1550 1,76(1,3) 2,22 2,7 326 (445)
механическая 309 (420) БАЗ-69501 3680 11,9 (8,86) 20,4
ГМП 386 (252) МАЗ-543 6230 16,14(11,87) 30,6
ГМП 478 (650) МАЗ-7911 6210 12,99 (9,57) 29,0
ГМП 478 (650) МАЗ-547В 8760 13,5 (9,95) 31,8 — —
ГМП (две) 1100(1500) МАЗ-7906 17600 14,0(11,8) 25,0 12,0 91,8 (125)
Окончание табл. 4.4
Марка, тип составных частей Мощность силовой установки, кВт (л.с.) Шасси Масса, кг Удельная масса, кг/кВт (кг/л.с.) Удельная масса (отно- шение массы агрегата к массе снаря- женного шасси), % Габаритный объем. м3 Объемная мощность, кВт/м3 (л.с./м3)
Электрическая: постоянного тока вентильного типа: с колесными ре- дукторами 736(1000) 880(1200) МАЗ-547Э МАЗ-7907 8060 20050 9,95 (8,06) 22,7 (16,7) 29,3 27,8 16,0 55 (74,7)
с мотор-колесами 880(1200) МАЗ-7923 14650 16,7 (12,2) 21,5 11,3 77,8(116)
МТУ: Д + ГМТ 1100(1500) МАЗ-7906 24820 22,6(16,6) 35,5 17,94 61,4(83,5)
ГТД + ЭТ 880(1200) МАЗ-7907 21600 24,9(18,2) 30,9 18,0 49,0 (66,5)
134
4. Становление и развитие многоосных шасси
Рис. 4.15. Схема привода РУ шасси 7904
сконструирована система РУ на шасси 7907 с управляемыми колесами четырех пе-
редних и четырех задних осей. А на шасси 7906, длина которого составляла более 26 м,
управляемыми являлись колеса только четырех передних осей. Такая схема обеспечи-
вала поворот с минимальным радиусом 34,0 м и создавала большое сопротивление
движению при поворотах.
Примером решения проблемы является созданный в 1990-е годы в МГТУ
им. Н.Э. Баумана макетный образец шасси 79085 (8x8) со всеми управляемыми колесами
(рис. 4.16), способный реализовывать поворот относительно любой оси и движение. По-
ворот колес на этом макете осуществляется электро гидравлическим следящим приводом
(ЭГСП). Схема такого привода применительно к шасси 7904 представлена на рис. 4.17
для сравнения его по сложности со штатным приводом этого шасси (см. рис. 4.15).
Наиболее совершенной в настоящее время представляется система рулевого
управления с «гибкой» геометрией поворота (рис. 4.17), разработанная на кафедре «Ко-
лесные машины» МГТУ им. Н.Э. Баумана и реализованная на полномасштабном объек-
Э79085 массой 56 т (см. рис. 4.16 и 4.17, б). В результате проведенных научных ис-
дований был разработан алгоритм функционирования бортового компьютера с зало-
женными в его основу новейшими достижениями теории движения колесных машин.
Рис. 4.16. Общий вил шасси 8x8 со всеколесным РУ
4.4. Разработки специальных колесных шасси в 1980-е годы
135
а
б
Рис. 4.17. Схема РУ с электрогидравлическим следящим приводом (ЭГСП):
а — принципиальная схема рулевого управления объекта Э79085: / — штурвал; 2 — штурвальная ко-
лонка; 3 — датчик курса; 4 — датчик положения полюса поворота; 5 — автомат загрузки штурвала;
6 — аналого-цифровой преобразователь; 7 — бортовой компьютер; 8 — цифроаналоговые преобразова-
тели; 9 — электронные блоки управления; 10 — 3-канальный рулевой агрегат; // — поворотный кулак;
12 — I идроцилиндр; б — схема компоновки РУ с ЭГСП на 6-осном шасси
В первую очередь это относится к возможности получения любой необходи-
мой зависимости передаточного числа от угла поворота рулевого колеса, что прак-
тически невозможно в механических системах РУ. Пример такой характеристики
приведен далее на рис. 15.12.
136
4. Становление и развитие многоосных шасси
В зоне, соответствующей малым углам поворота рулевого колеса, т. е. движе-
нию, близкому к прямолинейному, что обычно характерно для высоких скоростей дви-
жения, машина имеет малую чувствительность к управлению, а значит, высокую курсо-
вую устойчивость движения. При больших углах поворота рулевого колеса маневрен-
ные свойства резко увеличиваются.
Основная же задача алгоритма функционирования бортового компьютера и раз-
работанной на его основе программе расчета — согласовать между собой углы поворо-
та каждого из колес при выбранном способе управления. Так как задатчик положения
полюса поворота выполнен таким образом, что позволяет непрерывно изменять его
место (а не дискретно, как, например, у «Кометто») алгоритм становится универсаль-
ным, способным реализовать практически любой способ управления транспортным
средством. На рис. 4.18 приведен пример расчета угла поворота одного из управляемых
колес ТС, где Т — выходной сигнал, пропорциональный углу поворота /-го колеса ав-
томобиля; Р — входной сигнал, пропорциональный углу поворота штурвала; у— вход-
Рис. 4.18. Графическая иллюстрация алгоритма работы бортового
компьютера РУ шасси 79085:
Р — поворот рулевого колеса; у— угол, соответствующий углу Р; \|/ — угол
поворота колеса
4.4. Разработки специальных колесных шасси в 1980-е годы
137
Рис. 4.19. Сравнение маневренных свойств ТС с различными способами поворота:
а — про го г п МАЗ-7908; б — объект Э79085
ной сигнал, пропорциональный положению полюса поворота; i — порядковый номер
колеса.
Структура алгоритма такова, что расчет углов поворота каждого колеса про-
водится независимо. Это применимо к транспортным средствам с любым количест-
вом осей и колес на них. Реализация принципиальной схемы РУ (см. рис. 4.17, а) и
алгоритма работы бортового компьютера (см. рис. 4.18)
на объекте Э79085 со всеколесным рулевым управле-
нием обеспечило ему следующие преимущества по
сравнению с прототипом:
а) уменьшение радиуса поворота и габаритного
коридора (рис. 4.19);
б) снижение затрат мощности двигателя авто-
мобиля на повороты с малыми радиусами (рис. 4.20).
За счет того, что все колеса объекта поверну-
ты согласно необходимой кинематике, боковой увод
шин отсутствует, как и проскальзывание в месте
контакта протектора с дорогой. Прототип же, как и
все автомобили, имеющие несколько осей с непово-
Рис. 4.20. Сравнение затрат
мощности Nдон в зависимос-
ти от скорости движения Vx
различными схемами управ-
ления:
/ — прототип МАЗ-7908; 2 —
объект Э79085; 3 — прямо:
нейное движеп
рачивающимися колесами, расходует дополнитель-
ную мощность на деформацию шин и трение в пятне
контакта. Экспериментальная зависимость, приве-
денная на рис. 4.20, получена при радиусе поворота
25,6 м — одинаковом как для прототипа, так и для
объекта Э79085. Мощность, требуемая на поворот
прототипа (кривая /), практически в два раза превы-
шает энергетические затраты объекта Э79085 (кри-
138
4. Становление и развитие многоосных шасси
вая 2), которые, в свою очередь, весьма близки к мощности прямолинейного
движения.
Кроме того, Э79085 имеет дополнительные преимущества по сравнению со
своим прототипом.
1. Более рациональное выполнение маневра автомобиля по курсу.
Это преимущество наиболее актуально именно для многоосных длиннобаз-
ных транспортных средств особенно при постановке объекта на стоянку задним
ходом. Штатная система рулевого управления прототипа приводила к заклинива-
нию шасси между рядом стоящими автомобилями. Возможность же менять поло-
жение полюса, а значит, и центра поворота, создает широкие возможности для ма-
невра. Хорошо обеспечивается необходимое для маневрирования пространство
площадки при выезде со двора. Место, достаточное для поворота объекта Э79085
под прямым углом с последующим выездом из ворот, для прототипа было слишком
тесным. Причем, если прототип, двигаясь в габаритах объекта Э79085, начинал по-
ворот раньше, то при подъезде к воротам он не успевал повернуть на 90° и не впи-
сывался в воротный проем.
2. Снижение энергозатрат водителя на управление автомобилем.
В качестве одного из примеров реализации такого преимущества служит си-
туация объезда препятствия. Водителю прототипа приходится сначала вращать руль
вправо, двигаясь вокруг центра поворота, расположенного в одной точке, а затем
производить быструю перекладку руля для обеспечения выравнивания курса, пово-
рачиваясь вокруг другого центра. Объект Э79085, используя «крабовидное» движе-
ние, легко объезжает препятствие.
Наиболее совершенные системы РУ оборудованы встроенной электронной
системой, управляемой бортовым компьютером. Они способны реализовать боль-
шое число необходимых схем поворота, позволяют получать нелинейную характе-
ристику передаточного числа. Это дает возможность понизить чувствительность
автомобиля к управлению при прямолинейном и близком к нему движении по тра-
ектории с большими радиусами и существенно ее повысить при маневрировании.
Такие алгоритмы управления вызывают повышение курсовой устойчивости движе-
ния при повышенных скоростях движения в сочетании с хорошей маневренностью.
На наш взгляд, электрогидравлический, особенно автономный, рулевой при-
вод в настоящее время и в обозримом будущем в силу своих достоинств может рас-
сматриваться как наиболее перспективный.
Подводя итог рассмотрению хода работ по развитию СКШ с начала 1980-х
годов, следует заметить, что ни один из разработанных опытных образцов шасси с
традиционными и нетрадиционными техническими решениями составных частей не
был принят к производству. Объяснение этому факту могут дать известные полити-
ческие и экономические события, произошедшие в СССР и мире в это время.
Главные итоги развития СКШ за последний период можно сформулировать
следующим образом.
На основе огромного объема теоретических и экспериментальных работ многих
организаций СССР (в первую очередь Минского завода колесных тягачей — МЗКТ)
были разработаны и поставлены на производство автомобили, шасси и тягачи с числом
ведущих осей от четырех до 12 и грузоподъемностью от 20 до 220 т. При этом все они
4.4. Разработки специальных колесных шасси в 1980-е годы
139
были полноприводными, имели двигатели большой мощности (от 177 до 1104 кВт или
от 240 до 1500 л.с.), гидромеханические трансмиссии, 2-ступенчатые раздаточные
коробки и приводы мостов с планетарной колесной передачей, разрезные мосты с
независимой торсионной или пневмогидравлической подвеской, широкопрофиль-
ные низкого давления большегрузные шины с регулируемым внутренним давлени-
ем, дифференциальные приводы ведущих колес, включающих самоблокирующиеся
и блокируемые межколесные и межмостовые дифференциалы. Однако при созда-
нии этих КТС ОБГ был практически использован стереотип общей компоновки с
разработанными ранее характерными техническими решениями (см. рис. 4.1 и 4.2).
Совершенствование конструкции СКШ на базе традиционных технических
решений (получение нового качества на более высоком уровне) невозможно, так как
образцы шасси, находящиеся в эксплуатации и планируемые к производству, ис-
черпали возможности по совершенствованию своей конструкции и имеют практи-
чески одинаковые параметры технической характеристики.
По данной же схеме создано семейство шасси и тягачей на КЗКТ При этом
использованы многие технические решения, предложенные МЗКТ
Параметры технических характеристик базовых образцов семейства КЗКТ
представлены в табл. 4.5.
Основные параметры базовых образцов семейства КЗКТ
Таблица 4.5
Параметр КЗКТ- 8005 КЗКТ-8014
Колесная формула Грузоподъемность, т Полная масса, т Максимальный подъем, град Двигатель: тип модель мощность, кВт (л.с. Размерность шин, дюйм Максимальная скорость, км/ч 8x8 22,5 50 18,0 Дизель ТМЗ-8424.10 312,5 (425) 18,00-24 60 10x8 40 66 21,5 Дизель ТМЗ-8424.10.08 349 (460) 18,00-24 60
Опыт создания СКШ, результаты теоретических и экспериментальных ис-
следований, технические и технологические наработки, существующие в различных
оборонных отраслях промышленности, являются в настоящее время достаточным
фундаментом для создания шасси нового поколения, отвечающего современным и
перспективным требованиям.
Часть II
ОБЩИЕ СВЕДЕНИЯ О КТС ОБГ
Глава 5
Методология формирования общего облика
колесных транспортных средств ОБГ
5.1. Общие положения
Материалы глав 1—4 показывают, что, несмотря на накопленный опыт, за;
ча создания нового КТС ОБГ отнюдь не стала тривиальной.
Необходимость в разработке нового колесного шасси возникает из потребнос-
тей общества по следующим причинам:
происходит моральное устаревание существующих машин;
возникают новые задачи, решение которых с помощью шасси существующих
типов или невозможно, или экономически нецелесообразно.
Проектирование нового шасси означает разработку комплекта технической
документации, позволяющего организовать его производство и эксплуатацию. В
свою очередь, техническая документация может рассматриваться как модель шасси,
представленная в графическом, числовом либо ином виде. Уровень современного
развития вычислительной техники открыл принципиально новые возможности для
автоматизации процесса проектирования, причем степень автоматизации во многом
определяется возможностью и качеством формализации проектной задачи (доста-
точно строгой ее постановкой и наличием алгоритма решения).
Исходными данными на этапе проектирования шасси являются результаты
анализа:
предполагаемых областей и условий использования транспортного средства,
исходя из его главного предназначения;
современных и перспективных требований к эксплуатационным и потреби-
тельским свойствам ТС в широком диапазоне их возможного использования в эко-
номике;
эффективности применения транспортного средства по его главному предна-
значению, а также выбор технического критерия (критериев) и метода (методов) ее
оценки;
конструктивных решений возможных прототипов и основных тенденций разви-
тия мирового автомобилестроения по ТС соответствующего класса грузоподъемности.
В настоящее время неизвестны алгоритмы прямого синтеза сложных техни-
ческих объектов и их разработка осуществляется многократным повторением ана-
5.1. Общие положения
141
лиза различных вариантов проектных альтернатив. Создание нового колесного
транспортного средства в этом отношении не является исключением и в самом об-
щем случае состоит из следующих основных этапов (рис. 5.1).
1 Определяются цели и задачи проектирования.
2. Формируется основная идея (замысел, концепция) будущего шасси и намеча-
ются варианты решения проектной задачи (альтернативы). В основе этого процесса
лежит способность человека синтезировать новые идеи и принципы, благодаря которым
удается добиваться скачкообразного улучшения характеристик проектируемого объек-
та. Это значит, что на начальных этапах проектирования особенно велика роль руково-
дителя разработки, его опыт, интуиция, информированность и квалификация. В частно-
сти, создание в нашей стране СКШ, которые до сих пор во многом превосходят зару-
бежные аналоги, стало возможным благодаря тому, что их разработкой руководили
такие выдающиеся конструкторы, как Б.Л. Шапошник, В.А. Грачев, успешно использо-
вавшие результаты исследований группы ученых во главе с П.В. Аксеновым.
Тем не менее развитие техники в целом и многоосных СКШ в частности по-
казывает, что только очень немногие проекты являются совершенно новыми. И да-
же в них многие технические решения принимаются на основе прошлого опыта.
Рис. 5.1. Алгоритм процесса проектирования многоосного колесного шасси
142
5. Методология формирования общего облика КТС ОБГ
3. Выполняется инженерный анализ, в ходе которого проводятся:
определение структуры и параметров проектируемого шасси;
проверка соответствия замысла физическим законам и другим ограничениям,
вытекающим из специфических требований к КТС ОБГ
На этом этапе широко используются как физические (реализованные матери-
ально), так и математические (абстрактные) модели, которые с определенной степе-
нью допущения отражают реальные ТС во взаимодействии с внешней средой и ус-
ловиями эксплуатации, а также способны давать необходимую информацию о
сложной системе, получившей название «водитель — машина — среда».
Физическими моделями, наиболее часто используемыми при проведении ин-
женерного анализа КТС и его основных агрегатов, являются:
макеты шасси (габаритный, габаритно-посадочный, макет внешнего вида и др.);
продувочные модели отдельного шасси и транспортно-технологического
комплекса в целом;
модели крупногабаритных колесных движителей;
различные испытательные стенды.
Физическое моделирование связано со значительными материальными и
временными затратами, однако оно дает наиболее полное и достоверное представ-
ление об исследуемых процессах и является единственно возможным при опреде-
лении новых закономерностей. Роль физического моделирования возрастает при
создании шасси, реализующих новые концепции (нетрадиционные технические ре-
шения).
Математическое (аналитическое) моделирование позволяет провести иссле-
дования и получить результаты в общем, удобном для анализа виде. Однако по-
строение таких моделей требует существенного упрощения и схематизации объек-
тов исследования, что снижает достоверность результатов. Численное моделирова-
ние имеет более широкие возможности и стало одним из основных методов
исследования сложных объектов и процессов, обеспечивая высокую точность и дос-
товерность результатов.
4. Принятие решения.
Его цель — выбор единственного решения среди возможных проектных аль-
тернатив. Этот выбор носит компромиссный и неоднозначный характер, поскольку
каждому варианту присущи как достоинства, так и недостатки. На четвертом этапе
осуществляется многошаговый процесс выбора и анализа, причем каждый шаг су-
жает область поиска, ограничивая как число альтернатив, так и число учитываемых
факторов.
В наименьшей степени поддается формализации первый этап проектирова-
ния (генерация вариантов решения задачи). Только если решение базируется на из-
вестных элементах, поиск их рационального сочетания может быть формализован.
Соотношение необходимых объемов математического и физического моде-
лирования в значительной степени определяет возможности формализации инже-
нерного анализа. В случае разработки принципиально нового шасси роль и объем
физического моделирования возрастают.
Формализация процесса принятия решения возможна, если цель проектиро-
вания удается описать при помощи какого-то показателя, являющегося функцией
5.1. Общие положения
143
проектных параметров. Тогда эта задача сводится к отысканию такого сочетания
параметров, при котором данный показатель достигает экстремального значения.
Проблема состоит в том, Что существование глобального экстремума в задаче о
проектировании столь сложного объекта, как колесное шасси, входящего в состав
транспортно-технологического комплекса (см. рис. 5.1) (даже при наличии бесспор-
ного, всеобъемлющего и однозначного показателя качества), не только не доказано,
но и сомнительно. Напротив, опыт развития этих объектов (гл. 1-4) говорит о су-
ществовании множества почти равнозначных локальных экстремумов, выбор между
которыми далеко не очевиден. Кроме того, проблема формирования показателя ка-
чества проектного решения по новому колесному шасси еще весьма далека от удов-
летворительного решения. Наконец, следует иметь в виду, что показатели качества
проектного решения не постоянны, а изменяются с течением времени (иначе говоря,
шасси, которое раннее было признано оптимальным, в настоящее время может ока-
заться далеко не самым лучшим вариантом). Поэтому роль руководителя разработ-
ки на данном этапе вновь возрастает, так как принятие им ошибочного решения, в
лучшем случае, ведет к преждевременному прекращению разработки. Научно-
обоснованная методология синтеза общего облика ТС и автоматизация процессов
анализа проектных альтернатив должны помочь руководителю разработки в приня-
тии решения прежде всего за счет максимального сжатия области рациональных
(конкурентоспособных) проектных альтернатив.
В проектировании КТС ОБГ и СКШ в частности, важнейшую роль играет
системный подход, предполагающий:
изучение создаваемой системы как единого объекта, выполняющего опреде-
ленные функции в конкретных условиях (рис. 5.2);
возможность членения сложных систем на относительно самостоятельные
подсистемы (например, подсистемы-иерархические уровни 1-5 на рис. 5.2);
возможность членения подсистем на подсистемы более низкого порядка
(подсистемами самого низкого порядка являются элементы, внутренняя структура
которых не представляет интереса для решения задач данного уровня, однако их
свойства влияют на свойства других подсистем и системы в целом, например уров-
ни 6-10 на рис. 5.2).
Таким образом, важнейшей задачей методологии автоматизированного про-
ектирования СКШ является разработка приемлемых математических моделей, уст<
навливающих количественные связи между параметрами и характеристиками сис-
темы. (Параметры верхнего уровня превращаются в характеристики при переходе к
низшему уровню. Например, грузоподъемность шасси является параметром при
исследовании транспортной системы в целом. Она же становится характеристикой
при формирования облика шасси — элемента этой системы.)
Построение математической модели проводят в следующем порядке:
определяют перечень параметров, которые могут оказать заметное влияние
на результаты моделирования (число параметров должно обеспечивать достаточ-
ную информацию для принятия решений, необходимых на рассматриваемом уровне
разработки проекта);
устанавливают связи между параметрами, а также между параметрами и ха-
рактеристиками (наибольшую сложность представляет выделение наиболее суще-
144
5. Методология формирования общего облика КТС ОБГ
Рис. 5.2. Иерархическая структура модели многоопорного колесного шасси с
электроприводом ведущих колес (фрагмент)
ственных связей, что зависит от стадии проектирования, типа решаемой задачи,
опыта разработчиков и полноты априорных сведений о проектируемом шасси);
из формализованного описания модели исключают параметры, которые не
удается связать с характеристиками и другими параметрами (оставляют для рас-
смотрения на последующих этапах проектирования);
разрабатывают алгоритм решения задачи;
создают необходимое программное обеспечение, включающее отладку и опти-
мизацию программных комплексов, решение тестовых задач и т. п.);
выполняют необходимые расчеты;
5.2. Иерархическая структура СКШ как сложной технической системы 145
проводят анализ результатов расчета;
подготавливают материалы для принятия решения руководителем разработки.
При проектировании шасси руководствуются следующими основными
положениями об оптимальности систем:
система должна оптимизироваться в целом как единый объект с заданным
целевым назначением (система, состоящая из оптимальных подсистем, необяза-
тельно будет оптимальной);
система должна оптимизироваться по единственному и определенному коли-
чественно критерию, отражающему цель проектирования;
полученная оптимальность системы всегда относительна, так как оптимиза-
ция проводится при конкретных количественных ограничениях на оптимизируемые
параметры.
В связи с этим важнейшей задачей методологии проектирования КТС ОБГ
является синтез взаимосвязанного комплекса критериев, который позволит:
объективно оценить результаты проектирования на каждом иерархическом
уровне членения системы;
найти для каждого элемента подсистемы параметры, обеспечивающие высо-
кую эффективность системы в целом.
5.2. Иерархическая структура специального колесного шасси
как сложной технической системы
Общий подход к описанию структуры СКШ
Специальное колесное шасси является сложной технической системой с раз-
витой иерархической структурой (см. рис. 5.2, уровни 4-10).
Известно, что при решении задач по созданию законченных объектов нет
необходимости строить всю иерархию системы — достаточно изучить системы и
подсистемы на один-два порядка выше и ниже. При создании нового образца
СКШ необходимо рассматривать по крайней мере транспортную систему, в рам-
ках которой предполагается его применение и в иерархии которой оно имеет
сложные связи.
Шасси как исходную систему, в свою очередь, можно членить на подсистемы
более низкого уровня, каждая из которых допускает последующее деление на ряд
подсистем, элементов, агрегатов и узлов (см. рис. 5.2).
Иерархические уровни связаны между собой отношениями двух типов:
1) структурные отношения, упорядочивающие состав ее элементов, блоков,
агрегатов и взаимосвязь частей (сплошные линии на рис. 5.2);
2) функциональные отношения, характеризующие те функции, для выпол-
нения которых создается данная подсистема (пунктирные линии на рис. 5.2).
Каждому иерархическому уровню соответствует свой перечень вопросов, по-
сле ответа на которые становится возможным принятие проектных решений, соот-
ветствующих этому уровню.
146
5. Методология формирования общего облика КТС ОБГ
Рис. 5.3. Структурные
связи между этапами
проектирования СКШ
На высоких иерархических уровнях — 1 и 2 — не-
обходимо определить типы, технико-экономические ха-
рактеристики и количество шасси, входящих в состав
транспортной системы, районы и условия их эксплуата-
ции, наиболее вероятные маршруты движения, описать
пункты постоянного и временного базирования и их обо-
рудование, способы обслуживания и т. д. Ответ на эти
вопросы оформляют в виде документа, называемого тех-
ническим заданием на новое СКШ (рис. 5.3). На следую-
щих трех уровнях формируют технический облик шасси,
определяют компоновочную схему, габаритные и основ-
ные конструктивно-компоновочные размеры шасси,
структуру и состав его основных агрегатов и систем. Ре-
зультаты этих работ оформляют в виде технического
предложения, которое описывает общий облик СКШ, и
эскизного проекта, подтверждающего в целом возмож-
ность его реализации.
На последующих уровнях решаются проектно-конструкторские задачи по
разработке узлов и деталей всех агрегатов и систем шасси — это этап рабочего
проектирования. Результаты оформляют в виде технической документации,
предназначенной для производства и эксплуатации шасси.
Таким образом, при правильной организации работ проектные решения при-
нимаются последовательно, что обеспечивает все большую детализацию проектируе-
мого шасси по мере перехода на более низкие иерархические уровни (см. рис. 5.2).
Структура конструкторских бюро (КБ), которые специализируются в основ-
ном на разработке новых машин, в каком-то смысле воспроизводит иерархическую
структуру разрабатываемого объекта (см. рис. 5.2, уровни 4-10). КБ обычно имеют в
своем составе подразделения, ответственные за формирование общего облика изде-
лия (бюро общих видов, общей компоновки и др.), имеющие формально или факти-
чески наиболее высокий статус среди других структурных подразделений. Конст-
рукторские бюро, занятые сопровождением серийной продукции, обычно имеют
более размытую структуру без отчетливой иерархии составных частей.
Облик шасси, его структуру, компоновку, геометрию и размеры можно опи-
сать с помощью конечного числа символов, которые называются параметрами
шасси. Такими параметрами, например, являются коэффициент общего сопротив-
ления движению в заданных условиях, удельная сила тяги (динамический фактор),
коэффициент грузоподъемности, аэродинамические коэффициенты. Параметры
шасси обозначают как символами, так и числами. Например, компоновку опорно-
ходового комплекса описывают с помощью системы специально разработанных
обозначений — кодов.
Свойства шасси можно описать с помощью другого набора символов — харак-
теристик шасси (например, скорость движения, запас хода по расходу топлива,
ресурс и др.). Чаще всего свойства шасси описывают системами чисел. Характери-
стики в общем случае являются функциями как параметров, так и других характе-
ристик.
5.2. Иерархическая структура СКШ как сложной технической системы 147
Характер связей на этапах разработки технического задания,
технического предложения и эскизного проекта
Прямые связи (сплошные линии на рис. 5.3) служат для передачи вниз резуль-
татов работы на верхнем иерархическом уровне, т. е. содержат информацию, являю-
щуюся исходной для организации работы на нижнем уровне. Кроме того, эта инфор-
мация является основой для формулирования критериев и ограничений при решении
задачи данного уровня (так называемые дисциплинирующие условия).
Например, прямые связи между уровнями «Разработка технического задания»
и «Разработка технического предложения» передают переменные, характеризующие
регламентируемые свойства будущего шасси.
Прямые связи между уровнем «Разработка технического предложения» и
уровнем «Разработка эскизного проекта» передают общее описание будущего шасси,
подтверждающее возможность полного или частичного выполнения технического
задания. Это описание формализуется в соответствии с принятой у разработчика сис-
темой проектирования и обмена технической документации (общий вид шасси, его
общая компоновка, площади и объемы грузовых платформ или отсеков, массовые и
центровочные характеристики шасси, полная весовая сводка, аэродинамические ха-
рактеристики шасси с грузом и без груза, характеристики устойчивости и управляе-
мости, результаты предварительных расчетов на прочность, эксплуатационные харак-
теристики, общие сведения о конструкции, системах и агрегатах шасси, силовой ус-
тановке, бортовом и специальном оборудовании и пр.).
Обратные связи для уровня «Разработка технического задания» передают раз-
работчикам транспортной системы (заказчикам СКШ) прогнозируемые технико-
экономические характеристики нового шасси, выражаемые через обобщенные пока-
затели эффективности (например, через коэффициент грузоподъемности, удельный
расход топлива, среднюю скорость движения по типовым маршрутам и др.).
На уровень «Разработка технического предложения» по обратным связям
поступает информация о конструктивно-компоновочных характеристиках различных
схем шасси, характеристики двигателей, трансмиссий, оборудования и систем,
свойств разрешенных для применения конструкционных материалов и т. д.
Проектирование шасси, как правило, ведется сверху вниз, причем работа на
каждом уровне должна быть направлена на подтверждение характеристик, заявлен-
ных на более высоком уровне. В то же время прогнозный характер информации тре-
бует осуществления итерационных циклов между различными уровнями. При этом
возникает опасность принятия не вполне обоснованных или ошибочных решений в
случае игнорирования каких-то связей (по субъективным причинам или невозможно-
сти учета некоторых факторов, или отсутствия достоверной информации на данном
этапе проектирования).
Так, например, при разработке в 1970-е годы колесного шасси ЗИЛ-135ЛМ для
размещения тактического ракетного комплекса «Луна» требовалось обеспечить высо-
кую маневренность шасси в сочетании с высокой проходимостью по пересеченной
местности (тактическое требование) и жесткостью несущей системы (требование по
обеспечению функционирования целевого оборудования). При этом ширина шасси
жестко ограничивалась размером грузового люка транспортного самолета Ан-12
(требование по обеспечению оперативной подвижности).
148
5. Методология формирования общего облика КТС ОБГ
Для реализации требований более высокого иерархического уровня разра-
ботчики шасси использовали компоновочную схему опорно-ходового комплекса со
сближенными средними осями, крупногабаритные шины и разработали жесткую и
широкую лонжеронную раму. Для достижения приемлемого уровня поворотливос-
ти шасси в этих условиях пришлось применить рулевое управление с передними и
задними управляемыми колесами, причем колеса передней и задней осей поворачи-
вались синхронно.
Таким образом, маневренность шасси (минимальный радиус поворота и ши-
рина коридора при повороте) была обеспечена. Однако критическая скорость (ско-
рость потери курсовой устойчивости) оказалась на уровне 22...23 км/ч. При этом
максимальная скорость шасси, определенная тактико-техническим заданием, находи-
лась на уровне 60 км/ч, а скорость, которую обеспечивала мощность энергоустановки
шасси, достигала 80...85 км/ч. В результате получили колесное шасси, скоростные
возможности которого значительно превосходили безопасный уровень. В то время
особенности движения колесных машин с задними управляемыми колесами не были
исследованы, теория нестационарного бокового увода находилась еще в зародыше и
особенности устойчивости движения автомобиля с передними и задними управляе-
мыми колесами были конструкторам неизвестны. Таким образом, это типичный при-
мер ошибочного решения, принятого по объективным причинам (отсутствие нужной
информации на момент принятия решения).
Впоследствии производство шасси ЗИЛ-135ЛМ было передано на Брянский
автомобильный завод. Схема с задними управляемыми колесами привилась из-за
очевидною конструктивно-компоновочного преимущества — хорошей маневрен-
ности автомобиля при ограниченных углах поворота колес и, соответственно, не-
больших колесных нишах. Это особенно выгодно при создании корпусных пла-
вающих шасси. К тому времени теория устойчивости многоосных колесных ма-
шин, в том числе машин с задними управляемыми колесами, уже получила
достаточное развитие. Была разработана теория нелинейного и нестационарного
бокового увода автомобильных шин. В частности, изучены причины потери ус-
тойчивости автомобилями с задними управляемыми колесами и разработаны ре-
комендации по расчету и конструированию их рулевых управлений. Тем не менее
3-осные колесные шасси БАЗ были снабжены рулевым управлением, обеспечи-
вающим синхронный поворот передних и задних управляемых колес и до настоя-
щего времени оборудованы такой системой. Это может служить примером явной
ошибки субъективного характера.
Другая поучительная история — создание шасси с двумя двигателями. Требо-
вания по подвижности ракетного комплекса «Луна» могли быть выполнены только
при обеспечении удельной мощности шасси на уровне 11,2... 12,6 кВт/т (16... 18 л.с./т).
Полная масса перспективного оборудования оценивалась в пределах 20...22 т. Это
означало, что колесное шасси необходимо оборудовать двигателем мощностью не
менее 224 кВт (320 л.с.), а предпочтительнее 268...290 кВт (360...390 л.с.). Отечест-
венная промышленность не располагала в то время серийными автомобильными
двигателями нужной мощности, а применение танкового дизеля было признано не-
приемлемым из-за его недостаточного ресурса. Субъективным фактором в этом
случае являлось стремление разработчиков использовать при создании шасси соб-
5.2. Иерархическая структура СКШ как сложной технической систе. 149
ственную производственную базу (на момент разработки — двигательное произ-
водство ЗИЛа, располагавшее только рядными бензиновыми двигателями ЗИЛ-120
мощностью 77 кВт (НО л.с.) и двигателями семейства ЗИЛ-130 мощностью
105...126 кВт (150... 180 л.с.)).
Для выхода из создавшегося положения было принято решение о примене-
нии на проектируемом шасси 2-двигательной моторно-трансмиссионной установ-
ки. Это решение и было реализовано вначале на основе двигателей ЗИЛ-120, а
позднее — на основе двигателей ЗИЛ-375Я4. Разработчики шасси стремились как
можно больше повысить проходимость машины (что вообще отличало тогда стиль
проектирования и направленность работы СКВ ЗИЛа). Для этого в соответствии со
взглядами, которые высказывались в то время многими специалистами в области
подвижности колесных машин, в том числе и руководством СКВ ЗИЛа, трансмис-
сия шасси была выполнена по блокированной бортовой схеме. В результате двига-
тели работали раздельно на каждый борт трансмиссии и связывались между собой
только через взаимодействие ведущих колес с опорной поверхностью.
На то время разработчики колесных машин не имели научного обоснования
особенностей работы многомоторных силовых установок в системах с эластичными
колесами и не могли предвидеть дальнейших последствий принятого решения.
Позднее было выяснено, что в таких системах начинается интенсивная циркуляция
мощности между двигателями, вызванная кинематическим рассогласованием режи-
мов их работы из-за эластичности колес. К этому добавились также технологичес-
кое и регулировочное различия в характеристиках самих двигателей.
У шасси, выполненных по схеме ЗИЛ-135, положение усугублялось рассогла-
сованием работы двигателей при повороте шасси, когда колеса разных бортов кати-
лись с различными радиусами. Карбюраторные системы питания двигателей не по-
зволяли регулировать работу двигателей на частичных и полных нагрузках, а системы
холостого хода уже тогда отличались значительной автономностью. Сами карбюра-
торы имели ощутимый разброс регулировочных характеристик, поэтому попытки
обеспечивать синхронность работы двигателей регулировкой их холостого хода были
совершенно бесполезны. На опытных образцах шасси ЗИЛ-135 были применены гид-
ромеханические коробки передач (ГМКП), что несколько смягчало положение.
Брянский автозавод, которому передали серийное производство, освоить
столь сложные по тому времени трансмиссии не смог и заменил ГМКП серийными
механическими коробками передач. Шасси БАЗ-135ЛМ имело в эксплуатации ог-
ромный расход дефицитного топлива (100 л/100 км бензина АИ-93 или Б-70) и по-
ниженный ресурс двигательных установок. При управлении возникали специфичес-
кие проблемы. Так, например, крайне затруднено было переключение передач, осо-
бенно при движении по сложным грунтам. При вывешивании передних и задних
колес шасси могло начать самопроизвольный, независимый от водителя поворот по
бортовому принципу из-за циркуляции мощности между двигателями (что харак-
терно для этого шасси при преодолении уступов и валиков, а также при входе на
крутой спуск и завершении крутого подъема). Это было особенно опасно при по-
грузке комплекса в транспортный самолет или при выходе из ворот узкого бокса.
Сходные причины вынудили создателей первого отечественного серийного пла-
вающего бронетранспортера применить двухмоторную силовую установку на основе
150
5. Методология формирования общего облика КТС ОБГ
бензиновых двигателей ГАЗ-40 мощностью 63 кВт (90 л.с.). По ряду причин, в основ-
ном производственного характера, двигатели были сгруппированы не по бортам, а
по мостам. При движении по грунту левый двигатель приводил первый и третий
мосты, а правый — второй и четвертый, причем межмостовые участки получив-
шихся «тележек» имели блокированную связь. Позднее экспериментально было
установлено, что этот вариант несколько лучше, чем раздельный привод бортов от
независимых двигателей.
Описанные технические решения трудно квалифицировать как ошибки из-за
отсутствия информации, так как в то время только таким путем можно было решить
поставленные задачи в заданные сроки и без организации дополнительного мотор-
ного производства.
В 1980-х годах недостатки колесных машин с двумя двигателями достаточно
полно проявились в эксплуатации. Особенности работы автомобильных многомо-
торных энерготрансмиссионных установок с эластичными колесами к тому времени
были уже хорошо изучены. Большую работу в этом направлении провели, в частно-
сти, МВТУ им. Н.Э. Баумана и ряд других организаций.
Кроме того, развивалась теория автоматического регулирования двигателей,
позволившая теоретически описать и проанализировать работу нескольких ДВС
разной мощности в блокированных контурах. Имелся опыт создания судовых мно-
гомоторных силовых установок с двигателями различной мощности (и даже раз-
личных типов), работающих на общий гребной вал. Был также известен и изучен
опыт создания многомоторных гусеничных (танк «Шерман», БТР М-559) и колес-
ных («Твистер» и др.) транспортных машин. На Брянском заводе были построены и
испытаны опытные образцы колесного шасси БАЗ-135 с одним дизельным двигате-
лем ЯМЗ-238, разработаны и производились серийно колесные шасси БАЗ-135МБ
также с одним дизельным двигателем семейства ЯМЗ. Существовал и серийно вы-
пускался мощный двигатель ЯМЗ-240. Были построены опытные образцы 12-ци-
линдрового двигателя КамАЗ, а в разработке и в производственной программе Кам-
ского автозавода на перспективу находились 10-цилиндровые наддувные и безнад-
дувные модификации дизелей семейства КамАЗ-740.
В целом отечественная моторостроительная промышленность уже распола-
гала потенциальными возможностями по обеспечению колесных шасси БАЗ авто-
мобильными двигателями нужной мощности. Соответствующие предложения по
этому вопросу были разработаны, в частности, в МВТУ им. Н.Э. Баумана, вплоть до
проработок общей компоновки моторного отсека 4-осных шасси БАЗ для несколь-
ких вариантов двигателей.
Однако было принято так называемое волевое решение и 4-осные шасси БАЗ
оборудовали двумя двигателями КамАЗ-740 в сборе с серийными механическими
коробками передач КамАЗ. Поскольку основная схема трансмиссии этих шасси вос-
производила трансмиссию шасси БАЗ-135 и была бортовой, то и двигатели работали
каждый на свой борт. В результате все проявившиеся ранее недостатки на шасси
нового семейства БАЗ только усугубились.
Проблема осложнилась еще и тем, что вместо бензиновых двигателей с отно-
сительно хорошей приспособляемостью (особенно при работе по частичным харак-
теристикам) были применены дизельные двигатели, оборудованные всережимными
5.2. Иерархическая структура СКШ как сложной технической систе. 151
регуляторами топливных насосов высокого давления (ТНВД), которые при всех
рабочих положениях педали управления подачей топлива поддерживали постоян-
ную частоту вращения вала с точностью не менее 5...7 %. Из-за этого, например
при повороте шасси, регулятор дизеля забегающего борта уменьшал подачу топли-
ва и снижал мощность двигателя, иногда вплоть до его полного отключения.
В техническом отношении такой проект является одним из наиболее ярких
примеров ошибочного решения, принятого по субъективным причинам. При этом
следует иметь в виду, что речь идет о конкретном инженерном решении и что про-
блема многомоторных энергетических установок для специальных колесных шасси
и боевых колесных машин не так проста, как обычно считается.
Для уменьшения опасности грубых ошибок, совершаемых по объективным
причинам, необходимо расширять объем научно-технического задела по перспек-
тивным направлениям развития внедорожной транспортной техники, чтобы забла-
говременно проверить и отработать новые технические решения, намечаемые к ис-
пользованию на перспективных колесных шасси, что существенно снижает риск
ошибок из-за принятия необоснованных решений.
Модели СКШ
Дополнительные возможности открываются с развитием численных методов
анализа и принятия решений на основе моделей, адекватно отображающих иссле-
дуемые объекты или процессы.
Опыт показал, что усложнение моделей далеко не всегда приводит к повы-
шению качества принимаемых проектных решений, иными словами дополнитель-
ные затраты на проектирование не окупаются качеством проектных разработок.
Необходим разумный компромисс между точностью, временем и стоимостью про-
ведения расчета. В настоящее время едва ли может быть создана некая универсаль-
ная модель специального колесного шасси, пригодная для решения всех типов про-
ектных задач. При этом большое значение сохраняют частные люде. позволяю-
щие глубоко анализировать какие-либо отдельные стороны процессов или свойства
объектов (см. рис. 5.2). Это означает, что каждому этапу проектирования (см. рис. 5.3)
соответствуют свои модели, отличающиеся степенью детализации, т. е. числом учи-
тываемых факторов и связей между ними — модели «иерархичны».
На каждом иерархическом уровне модель шасси представляет собой некото-
рый набор субмоделей, отражающих различные стороны структуры и функциони-
рования машины и ее подсистем (см. рис. 5.2).
На верхних иерархических уровнях (уровни 1-3 на рис. 5.2) проектирования
используются преимущественно модели функционирования (использования по
предназначению) транспортно-технологических систем и комплексов. Модели шас-
си в этих случаях должны отличаться максимальной степенью обобщенности (одна-
ко без потери информации о специфических качествах именно данного конкретного
СКШ). Кроме того, эти модели должны быть достаточно чувствительны к измене-
нию основных тактико-технических параметров и свойств шасси, чтобы разработ-
чик монтируемого на шасси оборудования, действующий на данном иерархическом
уровне, мог оценить эффективность предлагаемых ему путей и способов реализации
тактико-технического задания. Особую роль при построении таких моделей приоб-
152
5. Методология формирования общего облика КТС ОБГ
ретает компактное и адекватное описание условий функционирования (использова-
ния) шасси и транспортно-технологического комплекса в целом.
На этапе «Разработка технического предложения» (см. рис. 5.3) нужна модель
шасси, отличающаяся гораздо большей степенью детализации и полноты, так как
она предназначена для получения надежной информации о возможности достиже-
ния поставленных целей, о реализуемости предлагаемых проектно-конструкторских
решений, а также для оценки сравнительной эффективности этих решений.
Такую модель СКШ образуют с помощью методов весового расчета, динами-
ческого и аэродинамического расчетов, прочностных расчетов, расчетов устойчиво-
сти и управляемости и пр. Эти методы объединяют в отдельные блоки, которые
фактически представляют собой субмодели (частные модели) для общей модели
колесного шасси.
На ранних этапах разработки проекта СКШ используют следующие основ-
ные частные модели (рис. 5.4).
1. Геометрическая модель. Формирует зрительный образ проектируемого
шасси (документально обычно оформляется в виде чертежей общего вида шасси и так
называемых плазовых чертежей общей компоновки шасси). Модель описывает отно-
шения между параметрами шасси и характеристиками его формы и размеров. С ее
помощью определяют обводы, площади, объемы, поперечные сечения шасси и его
агрегатов. Модель используют для весовых, аэродинамических и прочностных расче-
тов, а также отображения результатов проектирования. На более поздних этапах раз-
работки проекта она применяется при разработке технологической документации,
оснастки и программ для станков с числовым программным управлением. В настоя-
щее время существует достаточно много мощных программных средств, позволяю-
щих создавать весьма совершенные геометрические модели колесных шасси, его со-
ставных частей и использовать их на всех стадиях автоматизированного процесса
разработки и подготовки производства в рамках «безбумажной технологии» (ком-
плексы семейств АВТОКАД, «КОМПАС» и др.).
2. Весовая модель. Обеспечивает информацию о массе шасси и его составных
частей (результаты оформляются в форме «весовой сводки», степень детализации кото-
рой определяется этапом разработки проекта). Модель описывает связи, существующие
между геометрией шасси, нагрузками, особенностями силовой схемы, величиной целе-
вой нагрузки, составом и размещением оборудования и снаряжения, с одной стороны, и
массой шасси и его составляющих, с другой. В скрытой форме модель отражает техно-
логический уровень производства, для которого ведется разработка колесного шасси.
3. Аэродинамическая модель. Обеспечивает информацию о перемещениях и
нагруженности неподвижного шасси или шасси, двигающегося с грузом/без груза под
действием ветра либо других факторов аэродинамической природы. Для многоосных
колесных шасси, имеющих большие размеры, относительно невысокие скорости
движения, а также расширенные требования по условиям эксплуатации, аэродинами-
ческая модель приобретает более важное значение, чем для обычных автомобилей.
Она должна обеспечить разработчика не только информацией, необходимой для рас-
чета топливной экономичности и сопряженных показателей эффективности, но и
предоставить возможность расчета управляемости и устойчивости шасси, обдувае-
мого шквалистыми ветрами с различных ракурсов. Однако уникальность, большие
Блоки
Субмодель
Модули
Субмодули
2-го уровня
Суб модул и
1-го уровня
Рис. 5.4. Структурная схема модели «Специальное колесное шасси» (верхние иерархические уровни)
5.2. Иерархическая структура СКШ как сложной технической системы 1
154
5. Методология формирования общего облика КТС ОБГ
размеры и сжатые сроки разработки часто затрудняют непосредственную продувку
шасси или его моделей в аэродинамических трубах и иных подобных устройствах.
Это требует разработки специфических комбинированных моделей, позволяющих
проводить теоретические оценки на ранних стадиях и этапах проектирования без
больших материальных затрат.
4. Модель подвижности шасси. Обеспечивает информацию о потенциальных
возможностях СКШ по выполнению транспортной задачи с требуемыми показателями
эффективности на заданном участке местности или при движении по заданному марш-
руту. В отличие от обычных автомобилей СКШ часто двигаются группами по одному и
тому же маршруту. Они имеют большие осевые нагрузки, приводящие к интенсивному
разрушению опорной поверхности, лавинообразно нарастающему после прохода каж-
дой очередной машины.
В связи с этим модели подвижности СКШ должны обеспечивать разработчи-
ка и заказчика данными о том, сколько шасси и в каких режимах способны преодо-
леть заданные участки маршрута (местности) в заданных климатических и погод-
ных условиях. Нагрузки от шасси очень больших размеров и массы (например, шас-
си 7904, рис. В.1, б) воздействуют на опорную поверхность значительно сильнее,
чем нагрузки от обычных автомобилей, поэтому модели их подвижности должны
учитывать глубинные особенности структуры преодолеваемых участков.
5. Модель маневренности шасси. Обеспечивает информацию о потенциаль-
ных возможностях СКШ двигаться в стесненных дорожных условиях или по пло-
щадкам ограниченных размеров. Отличительные особенности моделей маневреннос-
ти многоосных колесных шасси связаны прежде всего с их размерами и массой. В
большинстве случаев геометрические размеры шасси крайне затрудняют их пере-
движение по обычной дорожной сети. Это вынуждает применять специальные ал-
горитмы поворота управляемых колес.
Иногда схема поворота изменяется водителем непосредственно в ходе выполне-
ния маневра, что совершенно не свойственно обычным автомобилям.
Многоосные колесные шасси часто выполняются как многозвенные поезда.
При этом возникает проблема вписывания очень длинного и широкого многозвен-
ного поезда (см., например, рис. В.2, б) в контуры проезжей части извилистой доро-
ги ограниченной ширины (такая задача перед разработчиками дорожных автопоез-
дов встает достаточно редко).
Наконец, многоосные шасси предъявляют повышенные требования к точности
выполнения маневра. Это связано со следующими обстоятельствами.
Во-первых, водителю машины больших габаритов очень трудно оценить
движение различных точек ее частей, руководствуясь исключительно собственными
ощущениями, — предпочтительно применение специальных систем для наблюде-
ния за критическими точками корпуса. При этом по ряду причин увеличивается
опасность ошибки в определении положения точек какой-либо из частей машины
относительно окружающих предметов и строений. Маневрирование крупноразмер-
ного большегрузного шасси почти всегда происходит в таких условиях, когда ок-
ружающие объекты располагаются значительно ближе к нему, чем к оказавшемуся
в подобных условиях обычному автомобилю (причем в относительных величинах
это различие еще более ощутимо).
5.2. Иерархическая структура СКШ как сложной технической системы 155
Во-вторых, из-за большой массы СКШ с грузом разрушительные последст-
вия соприкосновения с окружающими предметами и строениями из-за незначитель-
ной ошибки водителя (часто почти незаметной для него) могут оказаться очень
серьезными.
Наконец, для многоосных шасси характерно маневрирование в столь стес-
ненных и одновременно опасных условиях, когда незначительная ошибка водителя
чревата катастрофическими последствиями (например, ошибка выполнения маневра
при погрузке шасси на железнодорожные платформы может привести к падению
машины на пути и разрушению не только шасси, но и окружающих объектов).
6. Модель управляемости и устойчивости шасси. Обеспечивает информа-
цию о способности двигающегося шасси подчиняться управляющему воздействию
в широком смысле, а также сохранять в допустимых пределах свои параметры дви-
жения при воздействии случайных внешних факторов. В силу традиций автомо-
бильной промышленности в эту группу включают также описания таких особых
случаев, как поперечное опрокидывание шасси с грузом/без груза и ряд других си-
туаций. В настоящее время установлено, что характер движения СКШ в типовых
ситуациях существенно отличается от движения обычных автомобилей, что и опре-
деляет своеобразие моделей этих групп.
Кроме того, к многоосным шасси предъявляют повышенные требования по
точности управления. Например, габаритный коридор обычного автомобиля даже при
большой скорости движения всегда уже выделенной для него полосы на дороге. В то
же время ширина практически всех СКШ превышает 3,0 м, а максимальные скорости
их движения уже находятся на уровне 40...45 км/ч и, видимо, будут в будущем уве-
личиваться. С учетом расширения габаритной полосы при движении угроза встречно-
го касания транспортных средств становится достаточно острой.
7. Модель энерготрансмиссионной системы шасси. Обеспечивает информа-
цию об эффективности преобразования внутренней энергии топлива в энергию плос-
копараллельного движения СКШ в заданном направлении. Составные части энерго-
трансмиссионных систем строятся на основе различных физических принципов. В
отличие от обычных автомобилей потери энергии в трансмиссии многоосных колес-
ных шасси чрезвычайно велики, что требует их детального учета на самых ранних
стадиях проектирования.
Повышение подвижности диктует необходимость создания автоматизиро-
ванных систем управления трансмиссий, обеспечивающих, в частности, индивиду-
альное управление рабочими режимами каждого из колес, взаимодействующих с
деформированным грунтом. Большинство современных трансмиссий требует обще-
го управления с энергетической установкой СКШ. Эти особенности привели к по-
явлению единой автоматизированной бортовой системы управления движением
шасси, проектирование которой требует разработки адекватной модели.
8. Модель колебаний шасси. Обеспечивает информацию о движении состав-
ных частей СКШ при его перемещении в заданных режимах по неровным дорогам, а
также о воздействиях всех видов на экипаж, груз и целевое оборудование в этих усло-
виях. Многоосность, большие размеры и своеобразие воздействия внешних факторов
накладывают на эти модели существенный отпечаток. В ряде случаев значительно
большее, чем у обычных автомобилей, влияние на экипаж и груз оказывает податли-
вость несущей системы СКШ, особенно шасси рамной конструкции.
156
5. Методология формирования общего облика КТС ОБГ
Совершенно особый случай, практически не встречающийся при моделирова-
нии колебаний обычных автомобилей, — это колебания неподвижного шасси с обо-
рудованием под действием кратковременно приложенной (импульсной) нагрузки.
В состав современной единой автоматизированной бортовой системы управ-
ления движением шасси входит подсистема управления подвеской колес, проекти-
рование которой также требует разработки адекватной модели колебаний и прин-
ципов синтеза системы автоматизированного управления.
9. Модель технико-экономического совершенства шасси. Особенности этой
модели определяются своеобразием задач, решаемых транспортно-технологическим
комплексом в целом, а также масштабами производства СКШ, серийностью и сопос-
тавимостью экономического эффекта от применения шасси с себестоимостью.
Описанная выше совокупность моделей представляет собой систему блоков
общей модели шасси.
Каждый из блоков общей модели шасси (блоки 1-9), в свою очередь, состоит
из ряда расчетных модулей. Членение блока на модули определяется перечнем за-
дач рассматриваемого этапа.
В последующих главах последовательно рассмотрено современное построе-
ние исходных данных для основных блоков модели «Специальное колесное шасси»
на разных этапах проектирования.
5.3. Процесс формирования облика
специального колесного шасси
Общие подходы к формированию облика СКШ
Облик СКШ формируется в процессе разработки технического предложе-
ния. Этот этап играет особую роль в процессе проектирования шасси, занимая
промежуточное положение между разработкой технического задания и разработ-
кой эскизного проекта. В процессе формирования облика СКШ принимается бо-
лее 70 % решений по проекту и от качества этих решений в огромной мере зави-
сит возможность создания ТС в заданные сроки при ограничениях финансирова-
ния программы.
Очень важное значение имеет осуществление многопараметрической оптими-
зации, позволяющей отыскивать наилучшее сочетание параметров, причем задачу
оптимизации параметров шасси, как правило, сводят к однокритериальной, что сущест-
венно упрощает ее решение. В качестве критериев обычно используют обобщенные
показатели, характеризующие технико-экономическое совершенство шасси, а выбор
того или иного из них в качестве единственного критерия определяется конкретной
постановкой задачи.
Так же, как и при проектировании большинства сложных транспортных объ-
ектов, в практике проведения работ по созданию новых колесных шасси встречают-
ся два подхода к решению поставленных задач.
Первый подход условно называется проектированием от технического за-
дания.
5.3. Процесс формирования облика специального колесного шасси
157
Состав и структура технического предложения в этом случае определяются сле-
дующим перечнем задач:
1) предварительное формирование облика шасси, отвечающего требованиям
технического задания;
2) оптимизация проектных параметров шасси по выбранному критерию с учетом
ограничений, вытекающих из требований технического задания и действующих норма-
тивных документов;
3) исследование изменений технико-экономических характеристик шасси, кото-
рые должны произойти при использовании новейших технических решений, и оценка
значимости этих изменений;
4) расчет технических и технико-экономических характеристик шасси с выбран-
ными параметрами.
В рамках первой задачи формируется допустимая область существования проек-
та, где находится допустимое решение, описываемое параметрами начального прибли-
жения.
Целью второй задачи является непосредственно оптимальное проектирование.
Третья задача — это параметрический анализ, направленный на оценку чувстви-
тельности проекта к изменению его альтернатив (вариантов схемных решений), пара-
метров и ограничений.
Решение четвертой задачи и состоит в уточнении характеристик шасси и доку-
ментировании результатов проектирования.
Важнейшее условие для получения наилучшего результата при таком подходе —
формулировка проектной альтернативы (синтез проектной гипотезы). Отбор (селекция)
плодотворных гипотез осуществляется на основе многократного анализа альтернатив-
ных вариантов и является наиболее сложной, интересной и малоизученной областью
проектирования.
В практике наиболее часто встречается другой подход к решению задач — про-
ектирование от прототипа.
Такое проектирование применяется при разработке модификаций СКШ на базе
имеющегося прототипа (базового шасси). Здесь основная часть схемных решений и
параметров в процессе проектирования остается неизменной (фиксированной).
Материалы главы 4, к примеру, показывают, что по этому варианту создавались все
серийные многоосные колесные шасси МАЗ (МЗКТ), тяжелые колесные тягачи КЗКТ и
некоторые другие изделия.
Одной из задач, решаемой проектированием от прототипа, является оснащение
шасси более совершенным двигателем или двигателем другого типа (например, заме-
на танкового дизеля автомобильным или переход от дизельной энергоустановки к
газотурбинной). При этом требуется определить объем и характер минимально необ-
ходимых доработок прототипа, связанных с его перекомпоновкой и изменением мас-
сы составляющих, а также технико-экономические характеристики модифицирован-
ной машины.
Другим примером может служить доработка проекта, связанная с заменой мате-
риалов в некоторых агрегатах, применением системы управления нового поколения,
заменой оборудования и т. д.
Отдельную группу в рамках второго подхода образуют задачи проектирования
модификаций для различных вариантов применения шасси (при различных загрузках и
158
5. Методология формирования общего облика КТС ОБГ
условиях использования) с максимальным задействованием агрегатов, систем, отсеков
прототипа (принцип модульности в проектировании). Примером решения задач этого
типа может служить разработка МЗКТ семейства многоосных колесных тягачей и
колесных шасси «Волат» на основе узлов и агрегатов, унифицированных с узлами и
агрегатами колесных шасси МЗКТ-547В, а также некоторых узлов и агрегатов
Минского автомобильного завода и зарубежного производства. Таким же примером
может служить семейство шасси и тягачей «Русич» — КЗКТ
Алгоритмы решения всех перечисленных задач могут иметь большие разли-
чия, так как для каждой из них существуют свои исходные данные, искомые пара-
метры, ограничения и критерии. Различны также степень и источники информаци-
онной обеспеченности задач.
Однако почти во всех алгоритмах можно выделить систему инвариантов (мо-
дулей) и использовать их комбинации для решения различных задач. Из модулей со-
ставляется основа обобщенной модели шасси, обеспечивающей реализацию произ-
вольных стратегий проектирования под управлением мониторной системы (рис. 5.5).
Алгоритмическая схема, показанная на рис. 5.5, вполне допускает как частич-
ную, так и полную автоматизацию процесса. В промышленности, связанной с разра-
боткой большегрузных автомобилей и многоосных колесных шасси, реализации ав-
томатизированного проектирования по подобным алгоритмам пока не существует. В
смежных областях промышленности такие примеры известны. Так, в авиационной
промышленности существуют программные комплексы, обеспечивающие автомати-
зированный синтез облика самолетов, которые функционируют по алгоритмам с
близкой структурой. Степень разработанности этого вопроса в авиационной промыш-
ленности достаточно велика — например, существуют даже учебно-исследователь-
ские программы типа САПР МАИ.
На рассматриваемом этапе проектирования информация о создаваемом шас-
си в основном ограничена знаниями о его необходимых характеристиках (сведения,
полученные из тактико-технического задания) и требуемых потребительских свой-
ствах, сведениями из прошлого опыта проектирования шасси аналогичного назна-
чения и данными научных исследований по новым техническим решениям.
Это предопределяет применение эмпирических и полуэмпирических методов
расчета, базирующихся на упрощенных теоретических формулах и аппроксимациях,
отражающих важнейшие параметрические связи. Чаще всего такие формулы получа-
ют обработкой и обобщением статистического и экспериментального материала. При
использовании этих формул и теоретических построений необходимо внимательно
следить за тем, чтобы не выйти за пределы ограничений и допущений, которые при-
нимались в ходе их разработки, тогда результаты расчетов во многих случаях оказы-
ваются весьма точными и достоверными. Если же этим требованием пренебречь,
можно получить грубые ошибки или вообще сделать недостоверные выводы.
Примером полуэмпирической теории, которая может с успехом использо-
ваться при расчете параметров управляемости и устойчивости СКШ на ранних ста-
диях проектирования, является алгебраическая теория бокового увода, разработан-
ная Д.А. Антоновым в 1980-е годы. Ее достоинство состоит в том, что важнейшие
характеристики крупногабаритных шин могут быть оценены только по их габарит-
ным размерам, что позволяет провести важнейшие расчеты проектируемой машины
5.3. Процесс формирования облика специального колесного шасси
159
Реультаты исследований НИО
промышленности,
заказчиков и отдельных
специалистов
Тактико-техническое
задание
Данные
по шасси-прототипам,
шасси-аналогам и по ранее
выполненным разработкам
Анализ входной
информации
Опыт разработок смежных
отраслей промышленности
(в т. ч. по составным
частям шасси)
Формирование системы
параметров и признаков
компоновочной схемы
шасси (/-е приближение)
Выполнение
процедуры
проектной
оптимитизации
Сведения о результатах
и опыте аналогичных
зарубежных разработок
Определение (задание,
вычисление) основной
системы размерных
параметров шасси
..."Т........
Расчет характеристик
подвижности шасси
(в широком смысле)
Расчет и (или) определение
составляющих весовой
сводки шасси
Решение
есть
Решения
нет
Решение
«весового уравнения»
шасси
Общая
компоновка шасси
(с грузом и без груза)
Решение неосуществимо
или неприемлемо
Оценка
осуществления и приемлемости
обшей компоновки
шасси
Решение осуществимо
и приемлемо
Расчет параметров
тактико-технической
характеристики шасси
Расчет и (или) оценка
технико-экономических
показателей шасси
Требования ТТЗ выполнены
неудовлетворительно
Разработка частных
технических заданий
на составные части шасси
Решение
о проведении оптимитизации
проектного решения
Опенка
степени и качества выполнения
требований ТТЗ
Требования ТТЗ выполнены
удовлетворительно
Оптимитизация
не производится
Оптимитизация
проводится
I
Рис. 5.5. Блок-схема формирования общего облика специального колесного шасси
без испытания реальной шины и даже при отсутствии таковой вообще. Их точность
вполне соответствует технологическому разбросу характеристик реальных шин.
В частности, в МГТУ им. Н.Э. Баумана алгебраическая теория бокового уво-
да применялась для расчетов поворотливости шасси с широкопрофильными шина-
160
5. Методология формирования общего облика КТС ОБГ
ми диаметром 1 600 мм с последующей экспериментальной проверкой полученных
данных — результаты оказались вполне удовлетворительными. Это позволило рас-
считать основные характеристики сверхкрупногабаритных шин диаметром 3 100 мм
(экспериментальное определение всего комплекса этих параметров было невозмож-
но по техническим и экономическим соображениям). Впоследствии отдельные па-
раметры этих шин все-таки удалось определить экспериментально. Кроме того, бы-
ли проведены эксперименты по оценке параметров поворотливости автомобилей-
самосвалов с этими шинами. Результаты совпали с расчетными, основанными на
алгебраической теории бокового увода.
В то же время следует помнить, что эти формулы были разработаны на основе
обобщения огромного экспериментального материала, полученного в ходе стендовых и
дорожных испытаний шин определенного класса (главным образом, диагональных то-
роидных и широкопрофильных шин автомобилей высокой проходимости однотипной
конструкции). Шины, резко отличающиеся от данных по конструкции и размерам, мо-
гут характеризоваться другими числовыми параметрами в рамках формул той же струк-
туры, но возможно и качественное изменение их характеристик. С таким эффектом, в
частности, столкнулись специалисты МГТУ им. Н.Э. Баумана при испытаниях сверх-
крупногабаритных радиальных шин для карьерных автомобилей-самосвалов.
Формирование и кодирование облика СКШ при проектировании
от технического задания
Обобщенная постановка задачи о формировании облика специального колес-
ного шасси при проектировании от технического задания формулируется следую-
щим образом: найти вектор параметров, характеризующих компоновку, структуру и
размеры шасси, который бы отвечал требованиям, предъявляемым к проектируемо-
му шасси, и обеспечивал достижение экстремума целевой функции.
Вектор искомых параметров представляет собой набор независимых пере-
менных, однозначно определяющих все остальные параметры и характеристики
шасси, а также значение целевой функции. Число параметров, предоставляющих
сведения о структуре, архитектуре и размерах шасси, даже на этапе разработки тех-
нического предложения достаточно велико, а формирование такого множества —
задача отнюдь не тривиальная и применительно к КТС ОБГ еще весьма далекая от
полного разрешения.
Облик шасси прежде всего характеризуется схемными признаками (общими
конструктивно-компоновочными решениями), которые определяют:
принципиальную конструктивную схему шасси (однозвенное шасси, автопо-
езд и пр.);
конструктивно-компоновочные особенности опорно-ходового комплекса
(число осей, их распределение по базе, количество и размещение управляемых
колес и пр.);
принципиальные особенности несущей системы (рамная, корпусная и пр.);
облик силовой установки (тип и количество двигателей, размещение возду-
хозаборников и радиаторов);
другие специфические особенности облика шасси.
5.3. Процесс формирования облика специального колесного шасси
161
Схемные признаки дискретны, и, следовательно, поддаются кодированию
при помощи какой-либо системы символов (кодов), например определенными чис-
лами, группами чисел или более сложными математическими объектами (вектора-
ми, тензорами и т. д.). При этом множество кодов, описывающих проектируемое
шасси, фиксируется в пределах каждого из вариантов расчета.
Членение и формализация схемных признаков СКШ — это достаточно тон-
кий, плохо разработанный и дискуссионный вопрос. В частности, явные сложности
вызывает однозначное определение границы между схемными признаками, опреде-
ляющими облик шасси в целом, и схемными признаками, определяющими облик его
составных частей и, следовательно, подлежащими анализу и применению на более
низких иерархических уровнях процесса проектирования.
Насколько известно, вопрос о разработке системы признаков многоосных СКШ,
ориентированной на формализацию и последующую автоматизацию процесса их про-
ектирования, ранее никогда не рассматривался с достаточной полнотой и детализацией.
Впервые общие вопросы классификации многоосных автомобилей были рассмотрены
П.В. Аксеновым [1] в рамках прикладной технической дисциплины, которую он начал
развивать под названием «Теория общих конструктивных решений многоосного авто-
мобиля». Предложенные им классификационное построение и система кодирования
признаков многоосного автомобиля в значительной степени были использованы при
построении формальной модели общего облика СКШ. В целом приводимые ниже сооб-
ражения целесообразно рассматривать как некий исходный пункт, содержание которого
требует дальнейшей разработки и уточнения.
Основные схемные признаки многоосного колесного шасси, на наш взгляд,
таковы:
целевое назначение транспортного средства;
звенность транспортного средства;
категория опорно-ходового комплекса;
класс опорно-ходового комплекса;
продольная компоновочная схема опорно-ходового комплекса (компоно-
вочная схема ТС);
способ управления маневром по курсу, или, как обычно принято говорить,
способ осуществления поворота с разбиением на две части: формула управления
гибкостью и формула управления поворотом колес;
класс несущей системы.
Признак «Целевое назначение транспортного средства». В качестве клас-
сификационной основы этого признака целесообразно использовать отраслевую
нормаль, действовавшую до недавнего времени в автомобильной промышлен-
ности и определявшую классификационные группы автомобильного подвижного
состава по назначению (грузовые автомобили, автомобили-самосвалы, автомо-
били-тягачи и т. д.).
В рамках данной книги рассматривается только девятая группа «Специальные
автомобили», которую более точно следует определить как «Транспортные средства
специального назначения». При описании облика СКШ эта группа расчленяется далее
по субпризнаку (признаку второго уровня, см. рис. 5.2) «Функциональное назначе-
ние» на машины транспортные (обеспечивающие исключительно перевозку груза и
никак не связанные с его фунционированием или применением), транспортно-техно-
6 - 2918
162
5. Методология формирования общего облика КТС ОБГ
логические (обеспечивающие перевозку груза, а также функционирование его
составных частей в процессе перевозки и применения) и технологические.
У транспортно-технологических машин преобладают по значимости именно
транспортные задачи, решению которых при формировании облика машины отдается
приоритет. Чаще всего эти ТС сохраняют отчетливые черты некоторой универсаль-
ности, образуя различные семейства, а также производятся и могут эксплуатироваться
в полном отрыве от технологического (целевого) оборудования. Таковы, к примеру,
транспортно-заряжающие машины, колесные шасси для различного специального
оборудования второго поколения («Луна»), самоходные буровые вышки и т. п.
Технологические машины обычно функционально и конструктивно интегри-
рованы с целевым оборудованием, применяются только совместно и без него само-
стоятельной функциональной ценности не имеют. К таким машинам, например,
относятся некоторые инженерные машины и специализированные геологические
комплексы.
Признак «Звенность транспортного средства». Этот признак (рис. 5.6)
отражает другое основополагающее разделение ТС — на однозвенные и много-
звенные, что кардинально определяет направления формирования их общего
облика. Известны КТС ОБГ с большим количеством звеньев. По предложению
П.В. Аксенова дальнейшее членение ТС ведется по субпризнаку «Тип сочленения
звеньев» с выделением сочленения седельного и прицепного типов.
При большом количестве звеньев резко возрастает возможность комбинации
прицепных и седельных вариантов сочленения, так как седельная грузовая платформа
также может разделяться и перекрывать одновременно несколько звеньев (но не всю
машину). В этом случае необходимо предварительно определить степень членения
грузовой платформы при помощи отдельного субпризнака «Дробность платформы».
Кроме того, следует учесть, что некоторые звенья могут иметь собственный опорно-
ходовой комплекс.
Предлагаемая классификационная структура удобна, так как она обеспечивает
простое кодирование признака и расшифровку его структуры при помощи числовых
множеств, легко развивается, дополняется и уточняется. Такое кодирование интег-
рируется в большинство широко распространенных программных продуктов.
Классификационные узлы, не содержащие информации, кодируются цифрой 0, а
содержащие информацию — 1 Описание полной структуры заданного признака
предполагает указание его собственного кода (первая цифра кода субпризнака) и кодов
всех образующих его субпризнаков. При необходимости глубина указания
субпризнаков может быть ограничена снизу в соответствии с рис. 5.6.
Например, структура кода для колесного шасси МАЗ-547 (рис. 5.7) выглядит
как {2, 1, 0, 0, 1}, что соответствует следующему: колесное шасси, однозвенное с
единой нерасчлененной платформой. Структура кода американской колесной
машины «Твистер» выглядит иначе: {2, 2, 2, 0, 1} — колесное шасси, 2-звенное,
индивидуальными грузовыми платформами звеньев, выполнено по прицепной
схеме.
Предложенная одним из авторов книги классификационная схема, в принципе,
достаточно просто обобщается на произвольное количество звеньев, однако при этом
возможное число субпризнаков низших уровней резко увеличивается. Это обощение
5.3. Процесс формирования облика специального колесного шасси
163
аомвнЕийидХэ иняобд
Рис. 5.6. Структура классификационного признака «Звенность транспортного средства;
Ряды Ярусы
Зоны
Ряды
Зоны
Рис. 5.7. Принципиальная схема формирования кода признака «Компоновочная схема ТС:
5. Методология формирования общего облика КТС ОБГ
Наименование признака
и его субпризнаков
2
3
4
о
5
6
о
Рис. 5.8. Структура классификационного признака «Категория опорно-ходового комплекса»
5.3. Процесс формирования облика специального колесного шасси
166
5. Методология формирования общего облика КТС ОБГ
носит почти формальный характер, так как подавляющее большинство реально су-
ществующих колесных шасси не имет больше трех звеньев, а все известные сверх-
многозвенные машины были выполнены по полностью прицепной или, значительно
реже, по полностью полуприцепной схеме. Таким образом, усложнение структуры за
счет ее расширения вправо (рис. 5.8) практически неоправданно.
Последнее замечание касается условного обозначения шасси в блоках по-
следнего структурного уровня. Эта схема обозначения была предложена П.В. Ак-
сеновым и представляется очень удобной и наглядной. Количество и расположение
колес у каждого звена в данном случае не имеет совершенно никакого значения
(носовой частью шасси считается левая сторона картинки).
По этой же схеме признак «Целевое назначение транспортного средства»
(код признака — 1) структурируется при помощи кодов субпризнаков первого
уровня («Функциональное назначение») следующим образом:
{1, 1} — транспортная машина;
{1,2} —транспортно-технологическая машина;
{1,3} —технологическая машина.
Теперь более полное описание шасси МАЗ-543 (код его облика) будет
выглядеть так: {{1, 2};{2, 1, 0, 0, 1}} — специальное колесное транспортно-техно-
логическое средство, однозвенное с нечлененной грузовой платформой. Колесная
машина «Твистер» опишется следующим кодом: {{1, 3};{2, 2, 2, 0, 1}} — специ-
альное колесное технологическое (боевое) транспортное средство, 2-звенное,
индивидуальными грузовыми платформами звеньев, выполнено по прицепной схеме.
Признак «Категория опорно-ходового комплекса звеньев». Общий облик
колесного шасси уточняется прежде всего по линии описания и кодификации осо-
бенностей его опорно-ходового комплекса (ОХК, см. рис. 5.8). В общем случае
развитие колесных машин происходит по двум принципиально различным направ-
лениям, которые «глобально» определяют их общий облик, — это машины с опорно-
двигательными устройствами одного типа (монодвижитель) и машины с опорно-дви-
гательными устройствами разного типа (полидвижитель), которые могут работать
одновременно или поочередно, а также выполнять опорно-двигательные функции в
полном объеме или только частично.
Известны такие комбинации, как одновременное применение колесного и
гусеничного движителей, колесного и шнекового движителей, колесного движителя
и воздушной подушки, колесного движителя и лыж. Теоретически возможен вари-
ант совмещения колесного и пневмокаткового движителей. При этом существовали
конструкции машин, в которых были реализованы идеи полной замены движителя
при изменении дорожных условий (шведские танки «Ландсверк», колесно-гусенич-
ные танки типа «Кристи» (Англия) и отечественные танки серии БТ, отечественная
гусенично-колесная боевая машина «Объект 911» и пр.). В рамках книги такие
варианты не рассматриваются и в классификационную схему не включаются.
Реализация этих идей в конструкции тяжелых наземных транспортных средств
настолько сложна технически, что движение по пути создания шасси ОБГ со смен-
ными движителями представляется практически бесперспективной, за единствен-
ным исключением, когда применяются дополнительные съемные приспособления
для кратковременного повышения проходимости (съемные ленточные, пластинча-
Процесс формирования облика специального колесного шасси
или псиные гусеничные обводы). Необходимо отметить, что опыт создания
высокой проходимости, способных механизированным путем полностью
переходить лесного на альтернативный (преимущественно гусеничный) дви-
жигель и обратно, оказался полностью отрицательным.
Существуют конструкции, в которых движители различных типов работают
(повременно во всех дорожных условиях (пример — полугусеничные машины,
коюрые широко применялись в Германии во время Второй мировой войны). В
отечественной литературе этот вариант, как правило, оценивается негативно. Такая
оценка, однако, представляется не совсем точной, подобная комбинация дижителей
рациональна при формировании некоторых разновидностей специальных внедорож-
ных транспортно-технологических комплексов.
В льнейшем шасси с комбинированными типами движителей подробно не
луг расе атриваться, так как книга посвящена вопросам проектирования колесных
|рансноргных средств. В связи с этим вопросы размещения составных частей вспомо-
।ашльных движителей в предлагаемом варианте структуры данного классификацион-
ною признака подробно не рассмотрены.
С/ дует также иметь в виду, что каждое звено многозвенной системы, в прин-
можсг быть оборудовано ОХК совершенно самостоятельного типа.
Структура признака «Категория опорно-ходового комплекса» показана на
рис 5.8. В ней учтены уже описанные ограничения на применение вариантов, связан-
ных с особенностями расматриваемых объектов. Кроме того, чтобы излишне не услож-
няю структура развернута только для первого звена сочлененной машины, так
ее продолжения очевиден. ЕВ тгой структуре код (по данному признаку),
например тлел и я ЮЗЕ" (см. рис. 4.3 и 4.5), описанного в гл. 4, выглядит следующим
обратом: | { X 1. 2, 1,0, 1 },{3, 2, 2. 1.0. 1 |}, первое звено имеет опорно-ходовой
леке с возможнетью эпизодической частичной разгузки, опорно-ходовой комплекс
шжигель, тип движителя — многоколесный; второе звено имеет опорно-
новой комплекс с возможностью эпизодической частичной разгузки, опорно-ходовой
леке имеет монодвижитель, тип движителя многоколесный.
При знак «Класс опорно-ходовот о комплекса». Этот признак (рис. 5.9) уточняет
ОХК нуге описания схемы распределения опорно-двигательных элементов в
гах горизонтальной проекции каждого из звеньев транспортного средства.
Вс многообразие ОХК колесных машин делится на два вида: машины с явно
выраженным линейным расположением колес вдоль бортов и столь же отчетливой
филировкой колес в поперечном направлении (осевые двухколейные
ашипы с более или менее произвольным распределением групп колес по
всей ее । оризонк лыюй проекции (многоколейные многоопорные схемы).
При проведении такого разделения возникает неопределенность следующего
характера. Некоторые многоопорные транспортеры оборудуют стоечными опорны-
ми ду гвумя колесами, расположенными на одной оси довольно далеко
гр\га. Эги модули размещаю! два ряда по длине машины, таким образом
тип ()ХК может быть отнесен к чейным с. >мам. Однако ширина таких
все г о 01 раничена и не с. лика. В результате расстояние между
1ями оказывается соизмеримым расстоянием между колесами в одном
они или менее равномерно распре/ мгяются по опорной площади
лучае ОХК классифицируется как многоопорный.
Рис. 5.9. Структура классификационного признака «Класс опорно-ходового комплекса»
5. Методология формирования общего облика КТС ОБГ
5.3. Процесс формирования облика специального колесного шасси
169
Каждая из стоек опорно-ходового модуля (ОХМ) может иметь не только два,
но и большее количество колес. Так, в МГТУ им. Н.Э. Баумана разрабатывался
вариант ОХМ для внедорожного транспортного средства с двумя симметричными
2-колесными тележками, размещенными на продольных качающихся рычагах
симметрично относительно центральной стойки (шины тороидные, с регулируемым
давлением воздуха, размерностью 12.00-18). С другой стороны, ОХК с линейным
расположением колесных узлов могут иметь двускатную ошиновку всех осей
(например, американский 4-осный тягач «Гигант»).
К комплексам с линейным расположением колесных модулей относятся такие
конструкции, у которых расстояние между внутренними боковинами шин можно
признать существенно большим, чем общая ширина профиля шин, установленных на
этом модуле (с учетом зазора между шинами одного модуля). Сдвоенными шинами
будем считать такие конструкции колес, у которых расстояние между смежными
боковинами шин соизмеримо или меньше ширины профиля одной шины.
Таким образом, код шасси МАЗ-543 по этому признаку — {4, 1, 1,0, 1} (одно-
звенное транспортное средство с линейно-осевым колесным опорно-ходовым
комплексом; ошиновка колес односкатная). Код транспортера «Шейерле» 400.26.4 —
{4, 1, 2, 1, 1} (однозвенное транспортное средство с колесным многоопорным рас-
пределенным ОХК; распределение опорных модулей рядно-осевое, двухрядное).
Признак «Продольная компоночная схема опорно-ходового комплекса».
Этот признак имеет в виду принципиальную схему размещения и группировки
колес по длине машины. Еще этот признак называется осевой формулой шасси.
В большинстве случаев колеса линейно-осевых ОХК распределяются вдоль
борта машины не равномерно, а трупами из относительно сближенных колес. Такие
группы принято называть тележками, поскольку на очень старых машинах тележ-
ки существовали. Тележечные конструкции сохранились у некоторых многоце-
левых 3-осных и 4-осных автомобилей. Многоосные колесные шасси не имеют, как
правило, колесных тележек в виде изолированных агрегатов или составных частей,
и этот термин имеет чисто традиционный характер, обозначая группу явно сбли-
женных колес.
Проекции колес многоопорных комплексов на вертикальную продольную
плоскость, в принципе, могут перекрываться. Однако если рассматривать отдельно
каждый ряд колесных опор, то к нему можно применить ту же терминологию и
обозначения, что и к линейно-осевым компоновочным схемам.
Для условного обозначения (символьного кодирования) осевой формулы
П.В. Аксеновым была предложена следующая система: цифрой обозначается количест-
во явно сближенных колес, горизонтальной чертой — промежуток между тележками.
Например, осевая формула 6-осного автомобиля со сближенными колесами второй и
третьей, а также четвертой, пятой и шестой осей (считая от носа к корме) выглядит так:
1—2—3. Эта схема хорошо согласуется с правилами кодирования облика, при-
меняемыми при автоматизированном проектировании транспортных машин. Для
согласования систем достаточно вместо горизонтальной линии обозначить просвет
между тележками цифрой 0 и выделить осевую формулу как монокод: {1, 0, 2, 3}.
При описании многоопорных систем нужно дополнить код индексом ряда.
Кроме того, в некоторых рядах носовые колеса могут быть несколько сдвинуты
170
5. Методология формирования общего облика КТС ОБГ
назад. Если считать начальной линией перпендикуляр, проведенный через центр
наиболее выдвинутого вперед колеса, то такое смещение также естественно коди-
руется цифрой 0. При таком подходе уже нет смысла разделять линейно-рядный и
многоопорный комплексы. Достаточно условиться, что если осевая формула
приводится для одного ряда (допустим, для первого), то имеется в виду ОХК
линейно-осевого типа, поскольку многоосных колесных шасси велосипедного типа
на практике не бывает. Во всех остальных случаях подразумевается многоопорный
комплекс. Это существенно упрощает структурную схему признака, так как
исключаются перекрещивающиеся связи.
Пример: продольная компоночная схема ОХК первого звена многозвенного
мнооопорного транспортного средства (5-й признак), имеющего 3-рядную схему
расположения модулей со сближенными крайними осями 4-опорного внешнего и
4-опорного внутреннего рядов и двумя сближенными опорами среднего ряда,
размещенными вблизи центра платформы. Эта схема имеет следующий код: {5, 1,
{1, {2, 0, 2}, 2, {0, 2, 0}, 3, {2, 0, 2}}}. Классификационная структура показана на
рис. 5.10.
Признак «Способ управления маневром по курсу», или, как принято
говорить, способ осуществления поворота при криволинейном движении ТС. Этот
признак определяет принципиальные способы создания сил и моментов, вынуж-
дающих шасси изменять траекторию движения.
При анализе облика обычных автомобилей достаточно описать количество и
расположение управляемых колес, так как для управления ими применяется
практически только один способ — рулевой поворот при помощи принудительного
отколонения плоскости качения части колес от направления продольной оси машины.
Для схематического описания системы обеспечения поворота обычных автомобилей
П.В. Аксеновым была предложена система символического кодирования, которую он
назвал формулой управления. В соответствии с ней колесу управляемой оси присваи-
вается цифровой код, формально соответствующий его порядковому номеру (считая от
носа машины к корме). Неуправляемому колесу присваивается код 0. Коды групп
управляемых и неуправляемых колес для наглядности разделются горизональной
чертой. Например, формула управления 4-осного автомобиля с передними и задними
управляемыми колесами выглядит так: 1—00—4.
При анализе специальных внедорожных автомобилей положение усложняет-
ся из-за необходимости принимать во внимание различные способы осуществления
поворота (например, бортовой поворот). У машин с комбинированными движи-
телями возможны варианты, при которых каждому типу движителя соответствует
наиболее свойственный ему способ воздействия на траекторию движения машины.
Например, колесно-гусеничная машина может эпизодически управляться при помо-
щи сочетания рулевого поворота (для колесной части опорно-ходового комплекса)
и бортового поворота (гусеничным приспособлением).
Многозвенные машины требуют рассмотрения еще одного принципа изменения
траектории движения — целенаправленным изменением угла между продольными
осями смежных звеньев. При этом возможны варианты:
1) специальный привод полностью и однозначно определяет текущий угол
между звеньями (силовое складывание звеньев);
5.3. Процесс формирования облика специального колесного шасси
171
2) специальная система только ограничивает пределы изменения угла между
звеньями или скорость складывания звеньев, само же складывание происходит из-за
взаимодействия смежных звеньев;
3) ограничивается только предельно допустимый угол складывания звеньев
при помощи упоров, само же складывание полностью определяется взаимодействи-
ем звеньев (подруливающие системы).
Многозвенные системы могут также управляться при помощи ОХК звень-
ев. При этом управление осуществляется и только с помощью движителей всех
или части звеньев, и совместной работой с приводами складывания звеньев. Напри-
мер, 2-звенный транспортер высокой проходимости, разработанный в МГТУ
им. Н.Э. Баумана, имел полностью управляемые колеса переднего звена и систему
ограничения угла складывания звеньев и скорости складывания звеньев, алгоритм
работы которой учитывал режимы движения, текущую конфигурацию транспорта в
плане и текущие углы поворота управляемых колес носового звена.
Кроме того, однозвенная машина двигается в вертикальной плоскости, копи-
руя в известном смысле профиль дороги. Повлиять на этот процесс радикальным
образом водитель не может (за исключением управления тангажом и креном в
сравнительно ограниченных пределах при помощи управления подвеской колес или
катков гусеницы (например, общее вертикальное наведение пушки шведского танка
серии S).
Многозвенные машины допускают принудительное изменение взаимного уг-
лового и линейного расположения звеньев в широких пределах не только в горизон-
тальной плоскости. Этими возможностями конструкторы широко пользуются (на-
пример, принудительное складывание в вертикальной плоскости секций 2-звенного
гусеничного транспортера Д-ЗО Ишимбайского машиностроительного завода).
Таким образом, при характеристике облика многозвенной машины необходимо
описывать ее угловую гибкость во всех трех координатных плоскостях, а также про-
дольную податливость (возможность контролируемого, в том числе принудительного,
изменения расстояния между смежными звеньями), причем это нужно выполнять для
каждого из межсекционных шарниров.
Возможно несколько путей решения такой задачи.
Первый путь состоит в том, чтобы для каждой из степеней свободы (каждой
из общих для всей машины координатных плоскостей) сформировать свой незави-
симый код. Этот вариант приводит к разрастанию объема кода, особенно для
многозвенных машин со сложными шарнирами. К тому же он не обладает нужной
степенью наглядности, так как описание каждого из шарниров сочлененной маши-
ны многократно повторяется и разнесено по разным составным частям общего,
достаточно сложного и длинного кода.
Более рациональный путь — полное кодирование каждого из шарниров с
переходом от одного шарнира к другому. Правда, при этом такой код уже не будет
характеризовать маневр по курсу. Фактически, этот код будет символизировать
способность многозвенной машины к пространственному маневру всеми звеньями.
С точки зрения общности второй подход к кодированию представляется
совершенно естественным, так как соответствует целям, ради которых и создаются
многозвенные машины с полностью или частично управляемыми шарнирами.
Наглядность и компактность кода также будут существенно выше.
172
5. Методология формирования общего облика КТС ОБГ
Рис. 5.10. Структура классификационного признака
Кроме того, при разработке структуры кода нужно учесть принципиальную
возможность применения расчлененных шарниров. В таких конструкциях два
обычно одинаковых по кинематике шарнира соединяются коротким промежу-
точным звеном, длина которого существенно меньше длины звеньев. Рассматривать
подробную конструкцию как 3-звенную нерационально, тем более, что соедини-
тельное звено лишено движителя и грузовой платформы.
5.3. Процесс формирования облика специального колесного шасси
173
«Формула управления опорно-ходовым комплексом»
Итак, представляется целесообразным признак «Способ управления манев-
ром по курсу» разбить на две самостоятельные части: формулу управления гиб-
костью и формулу управления движителем. Это оправдано также и тем, что при
создании многозвенных машин принципы, которые описывают эти два признака,
реализуются в облике машины практически независимо друг от друга.
174
5. Методология формирования общего облика КТС ОБГ
В соответствии с предлагаемой структурой код формулы управления гиб-
костью для 2-звенного транспортера МГТУ будет выглядеть так: {6, {2, 2}, {1, 1, 1},
3, 1} (признак управления гибкостью: нерасчлененный по складыванию в горизон-
тальной плоскости шарнир между первым и вторым звеном, оборудованный
системой ограничения угла складывания звеньев и скорости складывания звеньев;
расчлененный по складыванию в вертикальной плоскости шарнир между первым и
вторым звеном, причем первая и вторая секции оборудованы механизмом принуди-
тельного перемещения звеньев; нерасчлененный по складыванию в поперечной
плоскости шарнир со свободным относительным перемещением звеньев; принуди-
тельная система раздвижения звеньев (шагание по принципу «тяни-толкай»)). Та-
кого же типа 3-звенный транспортер будет иметь код {{6, {2, 2}, {1, 1, 1}, 3, 1}, {6,
(2,2), {1, 1, 1},3, 1)).
Структура признака «Формула управления движителем» очевидна из предла-
гаемой схемы (см. рис. 5.10). В ней учтены следующие особенности. В соответствии
с направленностью книги предполагается, что основной ОХК всех звеньев много-
звенного транспортного средства колесный. Главным способом управления
поворотом в этом случае можно считать рулевой (в разных его вариантах, которые
для описания облика шасси большого значения не имеют). В качестве основного
способа поворота машин с колесными ОХК меньше распространен нерулевой
способ, но его применение на КТС ОБГ вполне реально. В свое время в ВАБТВ
(Д.А. Антонов и др.) была обоснована и проверена экспериментально возможность
улучшения поворотливости колесных машин с рулевым способом поворота за счет
дополнительного подруливания по бортовому принципу. В настоящее время такой
способ реализован на новом БТР-90.
Дополнительные движители, которые реально применяются на КТС ОБГ
допускают только 2-рядную (по одному комплекту вдоль каждого борта) установку
и бортовой способ поворота. Структура признака учитывает эту особенность, что
позволяет заблаговременно исключить заведомо не реализуемые варианты.
Наконец, в схеме кодирования применена прямая запись цифрового кода
формул управляемости, что позволяет упростить схему и сократить запись полного
кода объекта. При бортовом повороте многоопорного колесного модуля может быть
использовано различное, в том числе и неполное, количество рядов опорно-ходовых
модулей. В связи с этим введен специальный код для этого субпризнака, построенный
точно так же, как и код для осевой формулы управления автомобиля при поворотных
колесах. Применение этих кодов аналогично.
Место и схему расположения ведущих осей (колес) часто относят ко
вторичным признакам ОХК, которые нужно учитывать только на последующих
стадиях проектирования. Так, например, П.В. Аксенов предлагает считать этот
признак основанием для выделения классификационных подгрупп транспортных
средств. Среди КТС ОБГ неполноприводное исполнение имеют только машины,
предназначенные для твердых дорог (карьерные самосвалы и многоопорные плат-
формы, да и то не всегда). Тем не менее традиция описания автомобилей относит
эту информацию к основным классификационным признакам транспортных
средств, что проявляется в обязательном упоминании количества ведущих колес в
заголовках технических характеристик автомобилей, приводимых в справочниках.
5.3. Процесс формирования облика специального колесного шасси
175
Та же традиция определяет применение для описания схемы привода
колесной формулы, построенной по схеме общее количество колес х количество
ведущих колес, например 8x8. Нетрудно видеть, что эта структура практически не
дает представления о схеме привода многоопорного многозвенного КТС, которая
нужна для ясного представления об его облике (отсутствует информация о месте
расположения ведущих опор в пределах контурной площади ОХК, об особенностях
ОХК каждого из звеньев, не учитывается возможность существования опор с
парными колесами, имеющими раздельный привод, неясно определены колеса со
сдвоенной ошиновкой, имеющие блокированный привод шин и т. д.).
Если учесть, что для начального этапа проектирования имеет значение не
количество ведущих шин, а количество активизированных колесных опор (что не
одно и то же), а также то, что реальные ОХК имеют выраженную рядную схему, то
можно предложить следующую классификационную структуру для признака
«Колесная формула ТС» (сохранено традиционное наименование признака): {код
признака «Колесная формула ТС»} {{номер признака «Колесная формула ТС»,
1 (номер первого звена), {1 (номер первого ряда ОХМ первого звена), {0, 0, ..., 4, 5,
..., N1}}, {М (номер последнего ряда ОХМ первого звена), {0, 0, 4, 5,
NM}}, номер признака «Колесная формула ТС», Q (номер последнего звена),
{1 (номер первого ряда ОХМ последнего звена}, {0, 0, ..., 4, 5, ..., Rl}, Р (номер по-
следнего ряда ОХМ последнего звена), {0, 0, 4, 5, RP}}}. В этой структуре
ядром является модифицированная колесная формула для ряда ОХМ, которая со-
держит сведения о количестве опор в одном ряду (количество членов внутри спис-
ка), наличии неактивизированных опор (имеют код «О»), их расположении вдоль
ряда (положение кода «О» в списке), наличии и расположении в ряду активизиро-
ванных опор (отличный от нуля код, которым является порядковый номер акти-
визированной опоры).
На этом можно считать законченным разработку описания общего облика
опорно-ходового комплекса многозвенного многоопорного КТС ОБГ и построение
соответствующего ему кода.
Продольная компоновочная схема ОХК («Компоновочная схема ТС»). В
целом облик колесного транспортно-технологического комплекса определяет вза-
имное расположение его главных составных частей. В большинстве случаев они
занимают достаточно большие объемы с явно выраженными границами в виде
переборок, днища, крыши и т. п. Эти объемы часто обозначают общим термином
«отсек» (обитаемый отсек, отсек экипажа, грузовой отсек и т. д.). Для формирова-
ния принципиального представления об облике машины необходимо описать взаим-
ное расположение самых крупных и функционально наиболее важных отсеков: для
размещения экипажа (или кабины), для размещения груза (или пассажиров), для
размещения энергетической установки (или мотоотсека), для размещения транс-
миссии (или трансмиссионного отсека).
В отличие от самолетов, отсеки колесных шасси достаточно свободно разме-
щаются в пределах контурного объема машины, занимая разные положения по ее
длине, ширине и высоте. Кроме того, они имеют различные размеры и форму в
зависимости от конструкции их основного оборудования (например, двигателя) или
функционального назначения. Форма этих отсеков, определенная по конфигурации
их основного оборудования, может оказаться достаточно сложной. Все это серьезно
176
5. Методология формирования общего облика КТС ОБГ
осложняет построение описания шасси, поддающегося формализации, с помощью
принятой системы кодирования признаков.
На этапе формирования облика СКШ важно получить только самое общее
представление о конфигурации комплекса, поэтому заменим сложные объемы отсе-
ков их простейшей аппроксимацией в виде параллелепипедов, а взаимное положе-
ние опишем максимально обобщенным образом.
Построим параллелепипед, ограничивающий контуры всего комплекса,
проведя плоскости через его носовой и кормовой перпендикуляры, вдоль бортов по
их крайним точкам, по крыше или верхней точке груза, включив так же опорную
поверхность. Этот параллелепипед условно членим на ярусы (по вертикали), зоны
(по длине машины) и ряды (поперек машины). К полученным областям легко
можно привязать обобщенные отсеки машины.
Членение на ярусы (см. рис. 5.7) получается естественным путем, так как все
машины имеют три очевидные горизонтальные плоскости: дорожную поверхность,
плоскость днища (или нижнюю плоскость лонжерона рамы), т. е. плоскость,
проходящую на уровне колеса в крайнем верхнем положении, и плоскость, про-
ходящую горизонтально через верхнюю точку машины с грузом максимально
допустимой высоты. Однако у многоосных шасси высота машины с грузом чаще
всего достаточно велика — 3,8...4,6 м и более. При дорожном просвете 500...600 мм,
шинах диаметром 1 600... 1 900 мм и ходе колес 250...500 мм высота третьего яруса
оказывается равной 2,5...2,9 м. Резкое различие в шаге сетки нежелательно, тем
более, что полученная разница соизмерима с размерами типовых отсеков для
составных частей. Представляется целесообразным введение дополнительного
членения верхнего яруса на два горизонтальных пояса приблизительно пополам.
Получаются четыре естественных яруса, которым можно присвоить номера (1-4),
например, нарастающие вверх. Номер будет служить кодом яруса.
Большинство колесных машин по тем или иным причинам имеют ограни-
ченную ширину. В то же время поперечные размеры таких элементов, как кабина,
нельзя произвольно уменьшать, так как они определяются габаритными размерами
человека и требованиями к обитаемости. Ширина колесного движителя также
обычно достаточно велика. В результате фронтальная проекция колесных шасси
имеет явно выраженное разделение на вертикальные «ряды» (см. рис. 5.7). Таких
рядов можно выделить у шасси классического типа по крайней мере три, причем
средний широкий ряд перекрывает продольную плоскость симметрии машины.
Большинство колесных шасси тяготеет к поперечной симметрии, поэтому членим
фронтальную проекцию на четыре симметричных вертикальных ряда приблизительно
одинаковой ширины и присваиваем им соответствующие номера (1-4), допустим,
считая слева направо. Эти номера будут являться кодом ряда.
Боковая проекция колесного шасси классического типа имеет наиболее
сложную конфигурацию. Однако в ней можно выделить две совершенно очевидные
зоны, которые существуют почти всегда носовой и кормовой свесы,
ограниченные вертикальной линией, касательной к крайней точке крайних колес.
Вторым совершенно естественным членением является вертикальная линия,
проходящая через центр массы комплекса (практически через середину расстояния
между крайними осями машины). Эта линия делит шасси на носовую и кормовую
5.3. Процесс формирования облика специального колесного шасси
\Т1
части. Кстати, такое деление машины производится в большинстве весовых расче-
тов, расчетов подвижности, аэродинамических расчетах и т. д.
Для больших многоосных шасси с длинными боковыми проекциями такое
деление оказывается слишком грубым. Так, например, носовой свес типичного
многоосного колесного шасси может иметь длину 1,5...3,0 м и в его пределах по
длине может разместиться одноместная или двухместная тандемная кабина, но не
более. Расстояние между крайними точками крайних колес 6-осного шасси может
лежать в пределах 12... 16 м, а у шасси с большим числом осей может быть еще
большим. При простом 4-членном делении длина второй зоны оказывается равной
6...8 м, что слишком много, так как в ней могут разместиться последовательно
несколько отсеков, не перекрывая друг друга, и это не будет зафиксировано кодом
размещения.
Из такого положения возможно несколько выходов. Наиболее простой состо-
ит в применении более дробного членения. При таком подходе целесообразно ори-
ентироваться на длину рабочего места водителя или пассажира, рекомендуемую
действующими в автомобильной промышленности стандартами и нормалями. В
соответствии с ними длина рабочего места находится в пределах 1 200... 1400 мм,
следовательно, длина однорядной кабины будет также близка к этим величинам.
Таким образом, вторую и третью области целесообразно разделить дополнительно
на две (лучше три) зоны.
Длина однозвенного шасси ограничена дорожным законодательством. Опыт
показывает, что длина корпусной машины (худший компоновочный случай) более
30...35 м при носовом свесе на уровне 3,0 м и кормовом свесе 1,5...2,0 м уже близка
к предельно допустимой. Это означает, что предложенная схема членения на зоны
обеспечивает в средней части шаг {шпацию) приблизительно 4,0...6,0 м (не более).
Таким образом, каждую из областей между свесами и средней линией разделим на
три зоны. Присваивая зонам номера 1-8, начиная от носового свеса к корме, можно
считать каждое число кодом зоны.
В конечном счете габаритный объем машины разбивается на неперекры-
вающиеся подъобъемы, каждый из которых характеризуется кодом яруса, кодом ряда и
кодом зоны (см. рис. 5.7). Объем большего размера будет описываться последователь-
ностью кодов объемов — составляющих. Для сохранения общности построений при
этом вначале располагаются объемы одного ряда и одной зоны в порядке возрастания
номера яруса, затем объемы следующего ряда в том же порядке, после этого — объемы
следующей зоны в том же порядке (соглашение о порядке кодирования). Например,
объем, в котором располагается левая кабина 4-осного колесного шасси МАЗ-543
(см. рис. 5.7), будет иметь код {{2, 1, 1},{3, 1, 1}}, т. е. она занимает приблизительно
объем второго и третьего ярусов левого ряда носового свеса.
Такая точность определения положения кабины достаточна, так как речь идет
не о строгом геометрическом описании компоновки шасси, а только о принципиаль-
ной характеристике его общего облика.
Таким образом, порядок применения этой системы кодирования состоит в
следующем:
определение единого перечня размещаемых составных частей и присвоение
каждой из них идентификационного кода (порядкового номера в списке);
178
5. Методология формирования общего облика КТС ОБГ
ориентировочное определение объемов, которые отсек данной составной час-
ти занимает на шасси (или на звене);
определение последовательности кодов этих объемов;
формирование списка кодов составных частей для одного звена;
формирование списка кодов этого признака для всех звеньев.
Предлагается следующий перечень составных частей и их кодов (система
допускает расширение перечня вниз):
1 — энергоустановка (мотоотсек);
2 — система трансмиссии (трансмиссионный отсек; у электрических
трансмиссий с мотор-колесами имеется в виду отсек преобразователей с оборудова-
нием в сборе);
3 — опорно-ходовой комплекс;
4 — кабина;
5 — грузовая платформа или отсек (объем).
Если в состав комплекса входят несколько расчлененных составных частей
одного и того же назначения, то к их основному коду добавляется код порядкового
номера, например: 42 — вторая кабина.
Структура кода расположения отсека: {код расположения отсека} {код
отсека, {{код положения нижнего левого переднего субобъема}, {код положения
следующего вверх левого переднего субобъема}, {код положения верхнего
правого заднего субобъема}}.
Структура кода субпризнака «Компоновочная схема первого звена»: {код
субпризнака} = {код признака «Компоновочная схема», код (номер) звена, {{код
положения отсека 11}, {код положения отсека 12}, {код положения отсека 21},
{код положения отсека 5N}}}.
Структура кода признака «Компоновочная схема ТС»: {код признака} = {{код
субпризнака «Компоновочная схема звена № 1»}, {код субпризнака «Компо-
новочная схема звена № 2»}}.
Признак «Класс несущей системы». Этот признак необходим, так как из-
вестны шасси с тремя принципиально разными вариантами несущих систем (цифра —
код субпризнака):
рамными (имеющими явно выраженную линейную несущую конструкцию,
объединяющую все составные части шасси и груз) — 1;
платформенными (имеющими явно выраженную 2-мерную или «плоскую»
несущую конструкцию, объединяющую все составные части шасси) — 2;
корпусными (имеющими явно выраженную пространственную несущую кон-
струкцию, объединяющую все составные части шасси и груз) — 3.
Структура кода этого признака проста и не требует пояснения специальными
схемами. При этом надо только помнить, что она по-прежнему должна строиться
для каждого из звеньев (в порядке их соединения) по следующей схеме: {код
признака «Класс несущей системы»} {{код признака «Класс несущей системы
звена № 1»}, {код признака «Класс несущей системы звена № N»}} = {{9 (номер
признака «Класс несущей системы»), 1 (номер звена № 1), код субпризнака «Класс
несущей системы» для звена №1}, ..., {9 (номер признака «Класс несущей
системы»), N (номер звена № N), код субпризнака «Класс несущей системы» для
5.3. Процесс формирования облика специального колесного шасси
179
последнего звена}}. Например, 2-звенный транспортер, разработанный в МГТУ
им. Н.Э. Баумана, будет иметь код {{9, 1, 3},{9, 2, 3}} — транспортер колесный
2-звенный, несущая система первого звена — корпусная, несущая система второго
звена — корпусная.
Строго говоря, научно-обоснованные классификационные схемы должны
быть построены по принципу дихотомии, исключающему возможность какого-бы
то ни было перекрытия признаков. В столь сложном техническом объекте, как ко-
лесное шасси, связи между составными частями многообразны и неоднозначны
прежде всего из-за многофункциональности большинства технических решений, а
также реализующих эти решения узлов и агрегатов. В результате попытки постро-
ить строгую классификацию колесных шасси, неоднократно предпринимавшиеся с
самых разных позиций, неизменно заходили в тупик и в них появлялись блоки с
неопределенным содержанием (типа «Смешанные конструкции» или «Комбини-
рованные изделия»), разрушавшие целостность классификационных структур. Од-
нако для построения алгоритма формирования общего облика шасси абсолютная
классификационная строгость не требуется. Достаточно лишь, чтобы паразитные (с
точки зрения классификационной системы) связи между признаками носили вто-
ричный характер. Иными словами, если связь между признаками не влияет ради-
кальным образом на характер соответствующего общего конструктивно-компоно-
вочного решения, то она признается слабой и временно игнорируется.
Следовательно, можно ввести в рассмотрение список компоновочных
признаков КТС ОБГ Пр(КТС) = {Пр|, Пр2, flpN} и множество вариантов до-
пустимых конструкций КТС ОБГ, имеющих одинаковый набор компоновочных
признаков Х(). В этом случае множество Хо определяет множество всех допусти-
мых конструкций КТС ОБГ данной конфигурации. Задание конкретной сово-
купности признаков (полного кода КТС ОБГ) определит конкретную реализа-
цию КТС ОБГ X.
Выделение множества Хо осуществляется при помощи системы компоновоч-
ных ограничений — системы равенств, неравенств и логических соотношений, свя-
зывающих между собой элементы списка Пр(КТС ОБ) и определяющих возмож-
ность их одновременной реализации. Компоновочные ограничения основаны на
опыте создания близких технических объектов, а также включают в себя «дисцип-
линирующие требования» более высоких уровней проектирования (например, огра-
ничения габаритов условиями беспрепятственной перевозки железнодорожным или
авиационным транспортом и т. п.). С их помощью проводится предварительная се-
лекция несовместимых признаков, их исключение и уменьшение числа допустимых
вариантов компоновочных схем КТС ОБГ Применительно к многоосным колесным
шасси описанный процесс исследован мало, что является серьезным препятствием
на пути создания системы их автоматизированного проектирования. Более того,
насколько известно, эти вопросы не разработаны также и в рамках автомобильной
промышленности в целом.
Таким образом, предложенная в книге система кодирования признаков
технического облика СКШ может быть положена в основу системы автоматизи-
рованного проектирования КТС ОБГ на стадии разработки технического пред-
ложения.
180
5. Методология формирования общего облика КТС ОБГ
5.4. Структура математической модели КТС ОБГ
Формализация процесса проектирования требует разработки знаковой моде-
ли КТС ОБГ в которой подробность информации будет возрастать по мере разви-
тия проекта.
Принципы построения такой модели достаточно глубоко развиты в авиацион-
ной промышленности. Модель строится путем представления КТС ОБГ как объекта
проектирования в виде конечного набора блоков, или «составных частей», и форма-
лизованных отношений между ними. Каждый блок соответствует отдельной части
конструкции, выполняющей определенные функции и, следовательно, имеющей:
определенное «имя», позволяющее однозначно идентифицировать его среди
других блоков;
перечень свойств, содержащих всю ту информацию об объекте, которая не-
обходима для анализа и синтеза проекта.
Для описания модели объекта проектирования используется древовидный
ориентированный граф, получивший название «дерево конструкции». Корневой
вершиной графа является сам объект проектирования (в данном случае — КТС ОБГ).
Вершинами первого уровня являются крупные подсистемы, блоки или модули кон-
струкции. Вершинами второго уровня являются подсистемы, выделенные из под-
систем первого уровня и т. д. Элементом называется «первичный блок», который не
подлежит дальнейшему членению на действующем этапе проектирования (уровень К)
на рис. 5.2).
В разделе 5.3 было показано, что при помощи системы конструктивных ограни-
чений формируется множество допустимых вариантов облика КТС ОБГ Для формали-
зованного описания этих ограничений необходимо располагать математической моде-
лью КТС ОБГ, состоящей из математического описания его свойств и математического
описания отношений между ними.
Прежде всего необходимо сформировать для каждого из уровней модели пе-
речень свойств, дающих исчерпывающую информацию об объекте на данном ие-
рархическом уровне и данном этапе проектирования. Таким образом, модель КТС
ОБГ приобретает дополнительную часть графа, содержащую структуру свойств в
виде древовидного ориентированного графа. Традиционно при изображении моде-
ли эту часть располагают в левой половине рисунка, а объектовую структуру — в
его правой части.
Структура дерева свойств должна быть доведена до такого уровня расчлене-
ния (уровня «элементарных свойств»), на котором каждое свойство может быть зада-
но определенным числом (параметром или характеристикой).
В дереве конструкций терминальным вершинам (т. е. тем, из которых ничего
не выходит) будут соответствовать простейшие агрегированные конструктивные
параметры, которые представляются целыми или действительными числами.
Все эти вопросы в теории проектирования КТС ОБГ разработаны очень слабо,
хотя в сложившейся практике конструкторской работы и во взаимоотношениях заказчи-
ков и разработчиков широко используется большое количество параметров и характе-
ристик многоосных колесных шасси. Таким образом, сформировать нужное множество
параметров, видимо, можно путем структурирования традиционных технических ха-
5.5. Алгоритм формирования облика КТС ОБГ
181
рактеристик автомобилей и их агрегатов. Система параметров даже в простейшем вари-
анте облика КТС ОБГ отличается очень большим числом составляющих. В учебных
изданиях обычно приводятся только общие контуры соответствующих графов для мо-
дели объектов проектирования. При этом удается оформить их полностью в виде от-
дельной схемы, что, несомненно, имеет ощутимые методические достоинства.
Анализ параметров, характеризующих модель КТС ОБГ, показывает, что многие
из них на ранних этапах проектирования могут иметь только прогнозный или даже оце-
ночный характер. В этих условиях задачу приходится решать поэтапно, оставляя при-
нятие решений по целому ряду параметров на более поздние этапы разработки или за-
давая их на основании прошлого опыта.
Основные факторы, которые формируют область существования проекта,
г. е. либо являются ограничениями при выборе проектных параметров, либо одно-
значно их определяют, это:
ограничения, диктуемые условиями физической реализуемости шасси, оди-
наковые для всех машин в пределах определенной концепции (задаются при помо-
щи «уравнений существования»);
ограничения, диктуемые требованиями директивного характера и одинако-
вые для всех машин определенного типа или класса;
ограничения, вытекающие из требований тактико-технического задания на раз-
работку конкретного шасси и, следовательно, специфичные именно для этого шасси.
В настоящее время требования к содержанию технического задания для объ-
ектов автомобильной промышленности в общем случае определены стандартами.
Решения о численных значениях исходных параметров данных должны был ь
приняты к моменту начала проектирования.
5.5. Алгоритм формирования облика КТС ОБГ
Проектирование КТС ОБГ реализуется в алгоритме, приведенном на рис. 5.1 и 5.5.
Данными, необходимыми для функционирования алгоритма являются:
числовые величины, определяющие значения тактико-технических характе-
ристик шасси (регламентируются тактико-техническим заданием);
признаки и параметры схемных решений (назначаются разработчиком на ос-
нове интуиции, анализа требований к шасси, опыта разработки шасси аналогичного
назначения, изучения результатов научных исследований).
Возможность функционирования алгоритма обеспечивается описанной выше
системой кодирования признаков и параметров.
Не вдаваясь в детальное описание алгоритма (он имеет общий характер и
подробно описан в специальной литературе по автоматизированному проектирова-
нию), обратим внимание на особенности организации оптимизационного процесса,
связанные с состоянием и уровнем развития теории и методов расчета многоосных
колесных машин. Вопросы составления весовой сводки, ее анализ и решение весо-
вого уравнения будут рассмотрены в последующих главах.
Как известно, принятие решения о выборе варианта компоновочной схемы
для последующей разработки на практике оказывается весьма затруднительным.
182
5. Методология формирования общего облика КТС ОБГ
Это связано с тем, что количество «эффективных» компоновочных схем на самом
деле очень велико (при отсутствии ограничений на число узлов вариаций конструк-
тивных параметров оно равно числу узлов сетки весовых коэффициентов). На по-
следующих уровнях проектирования происходит лавинообразное увеличение числа
вариантов компоновочных схем, сохраняющих значения характеристик и агрегиро-
ванных параметров первого уровня. Таким образом, существует проблема отсева
вариантов компоновочных схем при переходе с одного уровня иерархии на другой.
Первый метод сокращения количества вариантов «эффективных» компоно-
вочных схем — «декомпозиция частных критериев эффективности».
Применительно к проектированию КТС ОБГ возникает проблема формиро-
вания системы приемлемых критериев эффективности проектных решений. Эти
критерии должны отвечать требованию системности и иерархичности. В идеальном
случае желателен один общий критерий, оценивающий результат проектирования в
целом. При этом данный критерий должен быть безразмерным, изменяться в преде-
лах 0... 1 и члениться на частные критерии по методу дихотомии.
Поисками подобных критериев занимались многие исследователи (по этому
вопросу существует обширная литература). В частности, вопрос о целесообразности
построения единого критерия, оценивающего степень приближения результата раз-
работки к заданию, поставил Н.М. Балин, предложив использовать для этой цели
комплексный показатель назначения шасси (КПН). Известны частные критерии эф-
фективности, которые предлагались Я.С. Агейкиным, П.В. Аксеновым, М.И. Ипато-
вым (например, критерий «приведенные затраты») и рядом других исследователей.
К сожалению, приходится констатировать, что до настоящего времени структури-
рованная система критериев эффективности многоосных колесных шасси не созда-
на и требует интенсивной разработки. Более подробно этот вопрос будет рассмот-
рен в следующих главах.
Примером удачного частного критерия эффективности и его декомпозиции
может служить критерий «тактическая подвижность» и его субкритерий «внедо-
рожная подвижность», разработанные в ВАБТВ.
На примере опорной проходимости СКШ рассмотрим принципиальную раз-
ницу между понятиями параметр и критерий. Параметром, характеризующим в
самом общем виде способность колесной машины двигаться по слабым грунтам,
является среднее давление рср в контакте колеса с опорной поверхностью. Однако
знание этого параметра не позволяет напрямую оценить, достаточен ли уровень
проходимости шасси для использования в заданных условиях или нет.
Для ответа на этот вопрос предлагались как одиночные критерии проходимо-
сти, так и системы критериев (подробнее см. в гл. 8). Здесь приводится только
справка по некоторым из вариантов, которая позволяет показать разницу между
параметром, характеризующим проходимость в модели шасси, и частным критери-
ем эффективности «проходимость», который должен использоваться при выполне-
нии проектной оптимизации.
Простейшим вариантом критерия проходимости является критерий «свобод-
ная удельная сила тяги», определяемая как разность между максимально возмож-
ным в данных условиях сцеплением ведущих колес с грунтом и суммарным сопро-
тивлением качению движителя в этих же условиях:
5.5. Алгоритм формирования облика КТС ОБГ
183
Пр, =<ф-/
где £Сц — коэффициент сцепного веса шасси в заданной конфигурации; ср — коэф-
фициент сцепления;/— коэффициент сопротивления качению.
Используется также безразмерный критерий проходимости вида
где — момент сопротивления качению колес; Л/ф — момент сцепления колес с
грунтом.
Многими учеными рассмотрены системы показателей (критериев) для оценки
проходимости (что фактически означает некоторую декомпозицию исходного понятия),
например:
где Пр/? — показатель проходимости по несущей способности грунта; ps — сопро-
тивление грунта вдавливанию штампом; Прс — показатель проходимости по сцеп-
лению колес с грунтом; hv — глубина вдавливания штампа в грунт; Пр, — показа-
тель проходимости по тяге двигателя; ПрЛ — показатель проходимости по погруже-
нию колеса в грунт; hK — глубина колеи в грунте после прохода ТС.
Существуют более сложные комплексные критерии, позволяющие оценить не
только способность машины преодолевать различные препятствия на маршруте движе-
ния, но и эффективность ее применения на этом маршруте.
Более детально существующие частные критерии эффективности многоос-
ных колесных шасси будут рассмотрены в других главах книги.
Вторым методом сокращения числа проектных вариантов является выделе-
ние концептуально ориентированного подмножества компоновочных схем машины.
Этот подход основан на том, что задача понижения размерности множества
эффективных компоновочных схем существенно упрощается, если предварительно
определен перечень частных критериев эффективности и указана область, которой
принадлежат весовые коэффициенты каждого из этих критериев. Соответствующие
методики для общего случая проектирования описаны в специальной литературе.
Эти же методики применительно к проектированию многоосных колесных шасси,
включая составление перечня частных критериев эффективности, сопоставление им
системы научно обоснованных весовых коэффициентов, и методология практиче-
ского выделения концептуально ориентированных подмножеств компоновочных
схем находятся еще на самом начальном этапе развития.
Третий метод состоит в совместном анализе эффективности и стоимости
транспортно-технологического комплекса в целом и шасси в частности. Такой ана-
лиз проводится, если сформирован однозначный вектор концепций шасси (из моде-
184
5. Методология формирования общего облика КТС ОБГ
лей более высокого уровня) и известно минимально допустимое значение уровня
эффективности. Основы данного подхода были разработаны М.И. Ипатовым и по-
лучили известность среди специалистов под названием «Методика оценки по при-
веденным затратам».
Эффективность влияния этого критерия на принятие проектного решения
может быть очень велика. Так, например, в МГТУ им. Н.Э. Баумана проводилась
разработка специального шасси высокой проходимости полной массой 20...25 т.
Для шасси этого типа традиционно применялись гусеничные варианты. Примене-
ние критерия «оценка эффективности по приведенным затратам» показала, что пе-
реход на колесный движитель позволяет повысить эффективность использования
транспортно-технологического комплекса в отдельных случаях в 9-12 раз, что и
послужило основанием для принятия не традиционного, а альтернативного (конку-
рирующего) проектного решения.
Четвертый метод — «метод метрик». Суть этого метода состоит в следую-
щем. Множество шасси, имеющих различные компоновочные концепции, может
быть охарактеризовано различными множествами частных критериев эффективно-
сти. Все эти множества построены таким образом, что допускают определенные
«расстояния между элементами внутри каждого множества» (метрику для данного
множества) и «расстояния между ними», т. е. «отклонения одного множества от
другого», причем это отклонение может быть выражено некоторым числом. При-
нимается, что шасси одной концепции «не хуже», чем шасси другой концепции,
если это отклонение достаточно мало. Теперь можно внутри пространства частных
критериев эффективности задать область, внутри нее находятся варианты «наиболее
эффективных шасси», которые будут иметь преимущества над другими шасси во
всех комбинациях метрик и допустимых областей пространства частных критериев
эффективности.
5.6. Особенности проектного этапа
«Формирование облика КТС ОБГ»
Необходимость выполнения этого проектного этапа связана с тем, что при
разработке новых машин иногда требования внешнего проектирования не согласу-
ются с возможностями внутреннего проектирования — они либо завышены и по-
этому невыполнимы, либо занижены и не используют всех имеющихся возможно-
стей. Таким образом, требования внешнего проектирования должны быть корректно
согласованы с возможностями внутреннего проектирования.
Для этого необходимо:
исключить заведомо плохие варианты;
образовать множества допустимых вариантов;
среди допустимых вариантов определить варианты, обеспечивающие дости-
жение целей, сформулированных на этапе внешнего проектирования и отраженных
в тактико-технических требованиях к шасси.
Отсюда следует, что цель рассматриваемого этапа — формирование опти-
мального облика КТС ОБГ, который всегда будет результатом компромиссного ре-
5.6. Особенности проектного этапа «Формирование облика КТС ОБГ» 185
шения частных задач. В главах 1-4 на многочисленных примерах было показано,
что в отличие от массовых многоцелевых автомобилей создание КТС ОБГ почти
всегда индивидуально и направлено на достижение конкретной цели, иначе говоря,
является концептуальным. В этой части процесс создания КТС ОБГ особенно ма-
шин специального назначения, приближается к процессам создания таких сложных
транспортных объектов, как, например, самолеты и вертолеты.
В литературе приводятся данные, показывающие, что при разработке лета-
тельных аппаратов наиболее ответственные решения, определяющие дальнейшую
судьбу проекта, принимаются на начальных этапах работ в условиях неполной ин-
формации, причем не только в отношении путей реализации тактико-технического
задания, но и в отношении обоснованности самого задания.
Анализ причин возникновения неопределенности на этапе внешнего проек-
тирования КТС ОБГ выходит за рамки целей и задач данной книги.
Неопределенность на этапе внутреннего проектирования, как показывает
опыт, связана со следующими факторами:
задержка организациями-соисполнителями достоверной информации о ха-
рактеристиках разрабатываемых ими составных частей шасси, ее искажение в рек-
ламных целях или из-за неправильной оценки технологических возможностей и
опыта предприятия (пример — история разработки двигателя для танка Т-64);
недостаточная изученность некоторых процессов и физических закономерно-
стей, что наиболее отчетливо проявляется при принятии новых технических реше-
ний (пример — недостаточная изученность процессов управления потоками мощ-
ности в электрическом приводе колес многоопорной колесной машины).
Матрицы признаков компоновочных схем показывают, что число принци-
пиальных вариантов КТС ОБГ одинакового назначения очень велико. В настоящее
время уже ясно, что процесс выбора схемы неформализуем, но автоматизации под-
дается решение задачи о подготовке опорного варианта общего вида машины. При
этом предполагается, что заказчик нового транспортно-технологического комплекса
может установить упорядоченную последовательность значений частных критериев
эффективности, характеризующих КТС ОБГ только как транспортное средство.
Для достижения своих целей и заказчик, и разработчик должны располагать
единой моделью как транспортно-технологического комплекса, так и транспортного
средства, входящего в его состав. Структура и принципы построения такой модели
и алгоритм ее применения в интересах внутреннего проектирования описаны в дан-
ной главе. В последующих главах разрабатывается содержание основных структур-
ных блоков этой модели КТС ОБГ.
Глава 6
Области и условия использования КТС ОБГ
6.1. Технико-экономическая целесообразность использования
КТС ОБГ для перевозки грузов
Важнейшими исходными данными при проектировании транспортных
средств, и КТС ОБГ особенно, являются данные об области и условиях их исполь-
зования. Если область использования КТС ОБГ (его главное предназначение) за-
дается заказчиком ТС в техническом задании, то дорожно-климатические условия
в этом документе, как правило, оговариваются в общем виде. Например, указыва-
ется диапазон температур окружающего воздуха — +50...-50 °C — и возмож-
ность движения по всем видам дорог и местности. При выборе варианта решения
задачи и исследовании модели (см. рис. 5.1) разработчику КТС ОБГ требуются
знания конкретных значений (пусть даже типовых и осредненных) по возможным
дорожно-климатическим условиям использования ТС. Таких обобщенных данных
с анализом влияния их на конструкцию транспортного средства в технической
литературе нет.
Кроме того, для технико-экономического анализа и обоснования варианта
технического решения разработчику необходимы также знания по экономической
эффективности использования прототипов.
Глубокое технико-экономическое обоснование необходимости развития КТС
ОБГ для нужд экономики СССР было выполнено еще ИКТП при Госплане СССР и
НАМИ.
Расчеты ИКТП показали, что увеличение средней грузоподъемности парка
самосвалов в СССР за счет использования самосвалов ОБГ с 4,7 до 7,0 т позволило
на каждых 100 млн ткм уменьшить годовые издержки перевозок на 2 млн долл.;
сократить потребность в водителях и обслуживающем персонале на 750 человек;
уменьшить расход топлива при выполнении этих перевозок на 6 600 т.
По расчетам зарубежных специалистов увеличение полной массы автомоби-
ля па 20 % (например, с 45,5 до 55,4 т) снижает себестоимость перевозки 1 т км на
54 % (с 1,39 до 0,9 цента на т - км).
Во всех странах мира существует тенденция к увеличению грузоподъемности
автотранспортных средств. Рост полной массы автомобиля ограничивается сущест-
6.1. Техника-экономическая целесообразность использования КТС ОБГ 187
вующим дорожным законодательством, которое регламентирует осевую массу и
габаритные размеры. Так, для транзитного проезда во всех странах ЕЭС допускаются
автомобили и автомобильные поезда с габаритными размерами: длина — не более
18,5 м, ширина — не более 2,59 м и высота — до 4,12 м; с осевыми массами: на отдель-
ный мост — от 7,5 до 10 т (соответственно с одинарными и сдвоенными шинами), на
2-осную тележку — от 11,5 до 20 т в зависимости от расстояния между осями, на
3-осную тележку полуприцепа — до 24 т. В пяти странах Европы установлена предель-
ная осевая масса 13 т (Франция, Испания, Греция, Бельгия, Люксембург).
Теоретически установлено и экспериментально подтверждено, что увеличе-
ние осевой массы с 10 до 13 т экономически оправдано, так как требует повышения
стоимости строительства дороги в среднем на 2 % и дает существенный эффект в
снижении транспортных издержек и повышении качественных параметров созда-
ваемой инфраструктуры транспорта. Многими учеными доказано: для того чтобы
отечественные автомобили имели прогрессивные параметры, необходимо увели-
чить допустимую осевую массу до 13 т на одну ось и до 21 ...23 т на две спаренные
ведущие оси.
Таким образом, по существующему дорожному законодательству все КТС
ОБГ являются внедорожными и в обычных условиях им разрешаются только разо-
вые проходы по дорогам общего пользования, поэтому повышение грузоподъемно-
сти очень часто сопровождается увеличением числа осей — как ведущих, так и не ве-
дущих. В России и за рубежом появляется все больше многоприводных автомоби-
лей с четырьмя, пятью, шестью, восемью и более осями.
Необходимость развития КТС ОБГ определяется потребностями в перевозке
соответствующих грузов. Освоение природных ресурсов, строительство уникаль-
ных энергетических объектов и промышленных комплексов в зоне холодного кли-
мата вызывают значительное увеличение объемов перевозок грузов. Характерные
особенности грузовых автомобильных перевозок в условиях холодного климата
следующие:
увеличенный объем перевозок массовых грузов (продовольственные и промыш-
ленные товары, строительные материалы, оборудование, горючесмазочные материалы
(ГСМ) и т. п.) как на большие расстояния (до 1,5.. .2 тыс. км), так и в местном сообщении;
значительные объемы перевозок грузов с практически неограниченной пар-
тионностью единовременной отправки (лес, уголь, руда, вскрышные породы и г. п.)
на небольшие расстояния (3...5 км);
перевозки особо тяжелых неделимых грузов массой 100...500 т в пункты но-
вого освоения или на строительные объекты (для нефтяной, газовой, лесной и хи-
мической промышленности, для строящихся электростанций и других объектов).
Характерно также изменение структуры парка по грузоподъемности. Доля
автомобилей грузоподъемностью от 3 до 5 т постоянно уменьшается при одновре-
менном увеличении доли автомобилей общей массой до 3 т, а также большой и осо-
бо большой грузоподъемности. Это говорит о стремлении к увеличению средней
грузоподъемности парка, укрупнению партий перевозимых грузов, повышению эф-
фективности перевозок и сокращению числа используемых водителей.
Опыт использования самосвалов ОБГ показывает высокую экономическую
эффективность повышения их грузоподъемности. Так, опыт эксплуатации самосвалов
188
6. Области и условия использования КТС ОБГ
грузоподъемностью 108 т в технологическом цикле горных работ рудника «Цент-
ральный» ПО «Апатит» показал возможность существенного улучшения технико-
экономических показателей по сравнению с 40-тонными самосвалами: повышение
производительности труда в 3,1 раза, снижение себестоимости одного тоннокилометра
на 18 %, сокращение численности обслуживающего персонала в 3 раза. Экономиче-
ская целесообразность использования самосвалов ОБГ признана во всем мире.
Развитие ведущих отраслей мировой экономики — электроэнергетики, хими-
ческой и нефтяной промышленности, металлургического и энергетического машино-
строения — происходит за счет наращивания или переоснащения мощностей дейст-
вующих и строительства новых объектов, применения оборудования с высокой сте-
пенью заводской готовности. Кроме того, внедрение метода блочно-комплексного
строительства также вызвало необходимость обеспечить доставку на строительные
площадки отдельных элементов, полностью собранных на заводе. Надежность работы
промышленного оборудования и агрегатов, собранных в заводских условиях, значи-
тельно выше по сравнению с надежностью оборудования, смонтированного непо-
средственно на строительной площадке. При этом на 2-3 месяца и более сокращаются
сроки монтажа и пуска строящихся объектов. В конечном итоге это предопределяет
эффективность выпуска все более крупных неделимых изделий, например трансфор-
маторов, атомных реакторов, синхронных компенсаторов, корпусов судов, блоков
обжиговых печей, буровых станков, газгольдеров и других изделий массой от 40...60
до 200 г и более. Объем грузопотока подобных изделий в условиях развивающейся
экономики по оценкам отечественных и зарубежных специалистов должен постоянно
возрастать.
Перевозки крупногабаритных тяжелых грузов в Минавтотрансе РСФСР осу-
ществляло до распада СССР специализированное предприятие — объединение «Спец-
тяжавтотранс». Оно было создано в 1978 г
За период своего существования объединение перевезло более 5 млн т уникаль-
ных грузов с экономическим эффектом, достигающим 700 долл, за тонну переве-
зенного груза. Вот только несколько примеров из практики таких перевозок.
В 1982 г автотранспортники доставили оборудование с Уралхиммаша и Пен-
захиммаша на Димитровградский химический комбинат в Болгарии. Отдельные
виды этого оборудования имели массу более 500 т и длину свыше 30 м. Примеры
перевозки негабаритных тяжелых грузов представлены на рис. 6.1 и 6.2.
За период своего существования в сложных условиях объединением были
доставлены трансформаторы массой 100 т каждый из Термеза в Кабул (Афгани-
стан). Выполнено 15 рейсов с грузом из Польши в Клайпеду, Сумы, Сочи, Псков,
более 10 рейсов с оборудованием для промышленности СССР из Чехословакии.
Только за 1987-1988 гг «Спецтяжавтотранс» осуществил 86 рейсов из Финляндии в
г Заполярный Мурманской обл. с оборудованием для металлургического комбината
«Печенганикель». При этом был достигнут существенный экономический эффект.
Так, при перевозке в 1988 г шаровых мельниц с габаритными размерами
4 500x6 000 мм массой 150 т в количестве 60 единиц из Чехословакии на площадку
Криворожского горнообогатительного комбината окисленных руд при стоимости
всего объема в 1,6 млн руб. экономия составила 905 тыс. руб.
Изучение потребностей в перевозках негабаритных грузов ОБГ позволяет ус-
тановить требуемое распределение их партионности (табл. 6.1).
6.1 Технико-экономическая целесообразность использования КТС ОБ! 1 89
Рис. 6.1. Автопоезд с грузом ОБ1 в составе двух прицепов-гя> довозов и
Распределение иаргионности негабаритных грузов
Масса партии, Доля общего обьс; перевозок,
40-60 46,30
60-80 28.80
80-100 12,50
100-140 1 1,10
140-300 1,02
300-600 и более 0,28
Для перевозок негабаритных грузов большой массы применяю! различные
типы КТС ОБГ — прицепы, полуприцепы и самоходный грунтовый подвижный
состав (гл. 1-4). Если теория создания прицепов и полуприцепов особо большой
грузоподъемности достаточно хорошо разработана и для ее реализации на террито-
рии России имеется развитая производственная база, то теория общих проектиро-
Рис. 6.2. Автопоезд с грузом ОБГ в составе прицепа-тяжеловоза и тягача
190
6. Области и условия использования КТС ОБГ
вочно-конструктивных решений самоходных КТС ОБГ развита слабо и требуется
серьезное ее развитие и обобщение.
Таким образом, проведенный анализ показывает, что использование КТС
ОБГ для перевозки грузов экономически оправдано и технически целесообразно.
Для выпуска КТС ОБГ на промышленной базе России необходимо развитие и обоб-
щение теории их создания с использованием нетрадиционных для российского ав-
томобилестроения технических решений.
6.2. Условия использования КТС ОБГ
На эффективность использования автомобиля как ТС оказывают влияние кли-
матические факторы, ландшафтные, гидрологические и дорожные условия областей
использования. Учет возможных последствий воздействия совокупности факторов,
характеризующих условия использования транспортных средств, является важнейшей
задачей как при проектировании, расчете и испытаниях автомобилей, так и при выбо-
ре наиболее эффективного автомобиля для решения конкретных задач.
В климатологии принято различать климатообразующие факторы (радиаци-
онный режим, циркуляцию атмосферы и местные физико-географические особен-
ности) и климатические элементы (температуру воздуха, его влажность, осадки,
облачность и др.). В технической литературе в отношении совокупности климато-
образующих факторов и климатических элементов, влияющих на эксплуатационные
свойства машин, установился обобщенный термин «климатические факторы» [13]. В
такой интерпретации этот термин используется и в данной работе.
Районирование территории бывшего СССР для промышленных изделий по
ГОСТ 16350 проведено по среднемесячной температуре в наиболее холодный (ян-
варь) и наиболее теплый (июль) месяцы года с учетом относительной влажности
воздуха в 13 ч.
Наибольшее влияние на динамику автомобиля оказывают следующие клима-
тические факторы: температура окружающего воздуха, скорость ветра, атмосферное
давление, влажность воздуха и осадки. Их необходимо учитывать при конструиро-
вании автомобилей.
Изменение температуры воздуха в течение года (годовой ход) в данной точке
поверхности Земли зависит от множества факторов. Годовой ход средней темпера-
туры воздуха для зон континентального климата носит четко выраженный периоди-
ческий характер (рис. 6.3). Только в зонах тропического низкоконтинентального
климата годовой ход температуры характеризуется практически постоянным значе-
нием (кривая 2) [ 13].
Распределение на бывшей территории СССР средних температур воздуха в
холодные периоды года показывает, что отрицательные температуры в январе рас-
пространяются на 95 % территории. Характерным для Российской Федерации явля-
ется расположение района наиболее низких температур не в арктической, а в суб-
арктической зоне (район Верхоянска—Оймякона).
Положительные температуры воздуха в летний период распространяются на
всю бывшую территорию СССР, однако районами наиболее высоких температур
являются субтропические районы Средней Азии.
6.2. Условия использования КТС ОБГ
191
Рис. 6.3. Годовой ход температуры воздуха в различных климатических районах:
/ — Асуан; 2 — Сингапур; 3 — Ашхабад; 4 — Красноярск; 5 — Уэлен; 6 — Верхоянск;
7 — Антарктида, станция «Пионерская»
Для колесного транспортного средства особо большой грузоподъемности,
имеющего с грузом большую парусность, важнейшим климатическим фактором
является ветер. Важными параметрами характеристики ветра принято считать его
скорость и порывистость, определяющие величину ветрового напора — давление
ветра на единицу наветренной площади машины. Районами преобладания ветров
большой силы и скорости на территории бывшего СССР является большинство
прибрежных районов Северного Ледовитого и Тихого океанов, а районами преоб-
ладания весьма малых скоростей ветра — районы Сибири и центральные районы
РФ. Районирование территории бывшего СССР по расчетным значениям скоростей
ветра и скоростного напора проводилось по ГОСТ 1451 и предусматривало выделе-
ние семи районов с расчетными значениями скорости ветра нерабочего состояния
от 21 до 40 м/с.
Средние за месяц скорости ветра на территории России находятся в пределах
от 0,3 м/с (Оймякон) до 8,4 м/с (Уэлен). Изменение по месяцам средних скоростей
ветра в некоторых пунктах, по данным Справочника по климату СССР, представле-
но в табл. 6.2. В табл. 6.3 приведены вероятности возникновения ветра максималь-
ной скорости.
Давление воздуха существенно изменяется в зависимости от высоты над
уровнем моря. При этом каждой высоте над уровнем моря соответствует опреде-
ленное номинальное давление воздуха, приведенное в табл. 6.4.
Обобщенные данные по значениям климатических факторов в различных
климатических зонах Земли, которые необходимо учитывать при разработке конст-
руктивных решений, приведены в табл. 6.5.
192
6. Области и условия использования КТС ОБГ
Таблица 6.2
Среднемесячная скорость ветра
Населенный пункт Скорость ветра (м/с) по месяцам года (средняя)
I II III IV V VI VII VIII IX X XI XII
Верхоянск 0,5 0,4 0,8 1,4 2,4 2,4 2,2 1,8 1,4 0,9 0,6 0,6
Новосибирск 3,7 3,5 4,2 3,6 3,6 2,9 2,3 2,3 2,8 3,9 4,1 4,0
Кустанай 4,8 5,2 5,8 5,2 5,4 5,0 4,5 4,2 4,6 5,2 5,0 5,2
Форт Шевченко 6,9 6,9 6,9 6,4 5,7 5,2 5,0 5,0 5,8 6,15 6,8 6,7
Норильск 6,4 5,8 6,6 6,4 5,8 5,2 4,25 4,1 5,2 6,4 5,7 6,2
Уэлеп 6,3 5,8 5,4 5,7 5,0 5,4 7,1 6,4 7,1 8,2 8,4 6,3
Таблица 6.3
Характеристика наибольших в данном пункте скоростей ветра
Населенный пункт Скорость ветра (м/с), возможная один раз в период
1 год 5 лет 10 лет 20 лет
Оймякон 13 16 17 18
Якутск 15 17 20 22,5
Красноярск 21 25 26 28
Новороссийск 32 42,5 46 50
Находка 36 45 49 53
Пригодность опорных поверхностей для движения транспортных средств опре-
деляется их степенью ровности, деформируемостью и фрикционными свойствами. Эф-
фективность использования КТС ОБГ на сухих недеформируемых поверхностях зави-
сит от тягово-скоростных свойств, качества подвески и геометрических параметров
проходимости, а на деформируемых и скользких поверхностях — от параметров взаи-
модействия движителя с грунтом и механических свойств последнего.
Фрикционные свойства грунтов определяют тяговые возможности движителя,
которые оцениваются коэффициентом сцепления (рсц движителя с грунтом, а деформи-
руемость грунта и колесного движителя с эластичной шиной определяет сопротивле-
ние качению, которое оценивается коэффициентом сопротивления качению f
К основным параметрам, характеризующим механические свойства грунтов,
относятся:
весовая плотность грунта у;
модуль деформации Е (Па);
угол внутреннего трения ф0;
внутреннее сцепление грунта Со;
коэффициент трения резины по грунту фр;
толщина мягкого слоя грунта
параметр грунта Б, характеризующий влияние времени действия нагрузки на
деформацию;
модуль сдвига грунта Е'\
несущая способность грунта qs.
2918
Таблица 6.4
Влияние атмосферного давления (высоты над уровнем моря) на снижение мощности двигателя
Параметр Значение параметра на высоте над уровнем моря, м
0 500 1000 1500 2000 2500 3 000 3500 4000
Среднее атмосферное давление, кПа 102 95,7 89,7 84,5 79,5 74,6 70,3 65,8 61,8
Средняя относитель- ная плотность воз- духа 1,0 0,935 0,907 0,85 0,822 0,772 0,742 0,698 0,669
Средняя температура воздуха при 15 °C у поверхности зем- ли, °C +15 + 11,75 +8,5 +5,25 +2,0 -1,25 -4,65 -7,75 -11,0
Снижение мощности двигателя, %: дизельного без наддува; 0 1,0-1,5 3,0-3,5 6,0-7,0 8,0-9,0 11,0-12,0 15,0-16,0 20,0-21,0 28,0-29,0
дизельного с наддувом; 0 1,0 2,0 3,5 5,0 7,0 9,0 11,0 14,0
карбюраторного 0 6,0-7,0 16,0-17,0 25,0-26,0 33,0-34,0 40,0-41,0 46,0-47,0 52,0-53,0 56,0-57,0
194
6. Области и условия использования КТС ОБГ
Таблица 6.5
Параметры грунтовых поверхностей движения КТС ОБГ
Грунтовые поверхности Весовая плотность грунта, Н/м3 Модуль деформа- ции, МПа Толщина мягкого слоя грунта, м Угол внутрен- него трения, град Внутрен- нее сцеп- ление грунта, МПа Коэффи- циент трения резины по грунту
Грунтовые дороги:
весна 14000 8,0 0,32 11,00 0,03 0,15
лето 15 000 15,0 0,60 12,5 0,045 0,60
осень 14000 12,0 0,29 12,0 0,04 0,20
Размокшая грунтовая
дорога 13 000 1,0 0,25 12,0 0,005 0,20
Сухой песок 15 000 2,0 0,50 32,0 0,001 0,30
Размокшая пашня 11000 0,5 0,40 5,0 0,006 0,20
Заболоченный луг 12 000 1,5 2,00 3,0 0,02 0,20
Снежная целина 2 500 0,1 0,60 16,0 0,003 0,10
Лед — — — — — 0,15
Параметр грунта Б приближенно можно определить через угол внутреннего
трения по формуле
Б ~ К/2ф0,
где коэффициент К ~ 1 град/с, а <р0 — в градусах.
Модуль сдвига Е' можно ориентировочно определить как
Е'^К1+К2Со,
где коэффициенты Kj ~ 0,4 МПа и К2~ 20.
Механические свойства грунтов определяются их гранулометрическим
составом (размерами твердых частиц), влажностью, плотностью и дерновым
покрытием. Гранулометрический состав — наиболее стабильный параметр ха-
рактеристики грунта и обычно является основой классификации грунтов. Влаж-
ность, плотность и дерновый покров в течение года меняются в широких пре-
делах.
Грунты с большим содержанием глинистых частиц называют связными. Во-
да, всегда находящаяся в грунтах, оказывает неоднозначное влияние на их свойства.
При незначительном увлажнении связных грунтов вода способствует повышению
связности грунта. При превышении определенных пределов влажности, характер-
ных для каждого грунта, резко изменяются некоторые его параметры, поэтому со-
стояние связных грунтов определяется их влажностью (консистенцией), парамет-
ром которой является предел текучести и пластичности.
Предел текучести соответствует такой влажности, при которой грунт пере-
ходит в текучее состояние. Устойчивость под нагрузкой и связность грунта стано-
вятся незначительными. Преде. пластичности характеризует собой влажность,
при которой грунт из пластического состояния переходит в твердое.
6.2. Условия использования КТС ОБГ
195
В сухом состоянии связные грунты обладают достаточно высокими механи-
ческими свойствами. К таким грунтам относятся легкий суглинок, суглинок, глинис-
тый грунт. При влажности, примерно равной пределу пластичности, несущая способ-
ность их составляет в среднем qs = 0,29...0,7 МПа; внутреннее сцепление грунта Со =
= 0,035...0,1 МПа; угол внутреннего трения фо = 21... 17°, а модуль деформации Е =
= 25...50 МПа. При этом первые значения относятся к легким суглинкам, а вторые — к
глинистым грунтам. При влажности, примерно равной пределу текучести, эти
параметры будут иметь следующие значения: фо = 10...0°; qs = 0,07...0,09 МПа;
Со = 0,01...0,015 МПа, а модуль деформации Е = 3...4 МПа. Самые неблагоприят-
ные условия для движения создаются при влажности грунта выше предела текучести,
когда qs = 0,03.. .0,01 МПа; Со = 0,0.. .0,01 МПа; ф0 = 10.. .0°; Е = 0,3... 1,5 МПа 113].
Такое состояние грунтов характерно для периодов весеннего и осеннего пере-
увлажнения (периоды распутицы и дождей ). Глубина переувлажненного слоя грун-
та весной доходит до 30...50 см, осенью в период дождей — до 20...30 см, а летом
после дождей — до 10 см. Наиболее тяжелые для движения периоды — первые не-
дели после снеготаяния. В остальное время связные грунты имеют высокую пла-
стичность.
Свойства песчаных {несвязных) грунтов менее зависят от влажности. С уве-
личением влажности их сопротивляемость внешним нагрузкам сначала несколько
возрастает, а при достижении предела текучести вновь уменьшается. По сравне-
нию со связными грунтами пески отличаются повышенным углом внутреннего тре-
ния ф0 32...43° и почти полным отсутствием внутреннего сцепления Со
= 0,001 ...0,004 МПа. Основной вид деформации для них — деформация сдвига. Не-
сущая способность их в большей степени, чем у связных грунтов, зависит от разме-
ров вдавливаемого тела (штампа), повышаясь с его увеличением. Несущая способ-
ность песков сильно возрастает при наличии нижележащего твердого слоя.
Избыточно переувлажненные участки земной поверхности, покрытые слоем
торфа толщиной не менее 10 см, называются болотами, а при слое торфа менее К) см
или его отсутствии — заболоченными грунтами. Механические свойства таких по-
верхностей движения можно сравнивать с вязкими грунтами в период весенней рас-
путицы. Болота подразделяют на три вида:
сплошные, в которых торф располагается непосредственно на минеральном дне;
сапропелевые, в которых торфяная корка подстилается органическими или
полуорганическими илами (сапропелями);
сплавинные, в которых торфяная корка плавает в воде.
У сапропелевых болот несущая способность не превосходит значений q,
= 0,02...0,03 МПа при мощности торфяной коры Hv < 2,5 м. При мощности торфя-
ной коры Н{ > 3,5...4,0 м сапропель не оказывает влияния на несущую способность
болот. Сплавинные болота при толще торфяной коры Н} < 5...6 м практически
не проходимы для транспортных средств.
Основными отличиями торфа от минеральных грунтов при вдавливании
штампа являются очень большое уплотнение, отсутствие боковых сдвигов, замет-
ное влияние сопротивления торфа срезу по периметру штампа (колеса). В отличие
от минеральных грунтов несущая способность торфа не возрастает по мере увели-
чения размеров штампа, а, наоборот, уменьшается.
196
6. Области и условия использования КТС ОБГ
Снежная целина представляет большие трудности для движения транспорт-
ных средств. Возможность перемещения по снегу определяется его механическими
свойствами и глубиной покрова, которые меняются в очень широких пределах. Не-
сущая способность рыхлого снега qs, как правило, не превышает значения
< 0,02...0,03 МПа, а для слежавшегося — qs > 0,10...0,15 МПа и выше.
Обледенелые поверхности движения характеризуются малыми значениями
коэффициента сцепления фсц и, как недеформируемые поверхности, малыми значе-
ниями коэффициента сопротивления качению f Если значения обоих близки между
собой, движение может стать невозможным. Такие поверхности относятся к труд-
нопроходимым и опасным для движения из-за потери тяговых и тормозных свойств,
а также потери устойчивости.
Ориентировочные значения механических параметров, наиболее тяжелых для
движения грунтовых поверхностей (по данным НПО «Гидроспецгеология») приве-
дены в табл. 6.5.
Таким образом, в местах предполагаемого движения КТС (при выборе марш-
рутов движения) необходимо знание карты почвогрунтов и проведение постоян-
ных режимных наблюдений за сезонным изменением параметров характеристики
грунтов.
Укрупненная схема воздействия климатических факторов и атмосферных
осадков на систему человек—автомобиль—дорога представлена на рис. 6.4, где к
климатическим факторам относятся:
солнечная радиация, температура и влажность воздуха, колебания атмосфер-
ного давления, ветер, грозы (различная ионизация воздуха);
Рис. 6.4. Укрупненная схема воздействия климатических факторов на систему
человек—автомобиль—дорога
6.3. Основные требования к маршрутам движения
197
температура воздуха, туман, метель, пыльные бури и мгла, ветер;
солнечная радиация, низкие и высокие температуры воздуха, влажность воз-
духа, осадки, ветер, пыльные бури и мгла;
влажность воздуха, осадки, гололед, высота снежного покрова, глубина про-
мерзания грунта;
высокие и низкие температуры, влажность воздуха, осадки, ветер.
В результате этих взаимодействий в системе человек—автомобиль—
дорога создается сложный комплекс прямых и обратных связей: снижение каче-
ства управления автомобилем; воздействие тепла и газов (выделяемых автомо-
билем), пыли (образующейся при работе автомобиля), вибрации и шума; разру-
шение опорной поверхности; увеличение сопротивления движению, снижение
коэффициента сцепления колес с опорной поверхностью.
Таким образом, климатические факторы воздействуют комплексно на систе-
му человек—автомобиль—дорога, существенным образом влияют на производи-
тельность ее функционирования (интегральный показатель — средняя скорость
движения) и требуют учета при разработке теории общих проектировочно-кон-
структивных решений КТС ОБГ
6.3. Основные требования к маршрутам движения
Базовые документы, характеризующие местность, в которой предполагается
эксплуатация или испытания КТС ОБГ, должны содержать:
площадь района маршрута движения;
высоту маршрута движения над уровнем моря (максимальную и минимальную);
тип рельефа местности;
горизонтальную расчлененность местности;
тип грунтов (карта почвогрунтов);
состояние влажности грунтов;
продолжительность залегания и глубины снежного покрова;
плотность снега;
грузоподъемность ледяных переправ;
плотность речной сети;
рассеченность местности реками на маршруте движения;
плотность озер и характеристику растительности;
преимущественный способ движения (по дорогам или по целинному бездо-
рожью).
Важнейшим фактором использования КТС ОБГ является автомобильная до-
рога. При этом эксплуатационные свойства транспортного средства проявляются во
взаимодействии с макропрофилем поверхности дороги, ее микропрофилем и шеро-
ховатостью. К макропрофилю дороги с капитальным покрытием относятся неров-
ности длиной более 80... 120 м (спуски—подъемы), к микропрофилю — неровности
длиной от 0,25...0,5 до 50... 100 м и к шероховатостям — неровности длиной ме-
нее 0,20...0,25 м.
По своим особенностям автомобильные дороги могут быть подразделены на
следующие основные группы:
198
6. Области и условия использования КТС ОБГ
постоянно действующие с искусственным земляным полотном и покрытием
(шоссе) общего пользования',
строганные (грейдерные);
колейные',
лежневые',
щитовые',
автозимники',
проселочные',
внутрикарьерные и отвальные.
Все дороги общего пользования в зависимости от перспективной среднесу-
точной интенсивности движения автомобилей в обоих направлениях в соответствии
со СНиП 2.05.02 делятся на пять технических категорий.
Современные автомобильные дороги представляют собой сложные инженер-
ные сооружения. Кроме учета дорожных условий при организации движения и ис-
пытаний КТС ОБГ, для теоретического обоснования принимаемых технических
решений в математическую модель динамики транспортного средства должна вхо-
дить и дорога (описание маршрута движения как основного возмущающего воздей-
ствия). Как показывают многочисленные экспериментальные исследования, наи-
большее влияние на динамику КТС ОБГ оказывает макропрофиль. Наименьшей
считается неровность длиной 0,5 м, так как меньшую неровность крупногабаритные
шины просто не воспринимают.
Дорогу как пространственную кривую характеризует продольный профиль,
план, поперечный профиль. Продольный профиль определяет крутизну отдельных
участков дороги, план — извилистость дороги, поперечный профиль — поперечную
крутизну дорожной поверхности и ширину проезжей части.
Основным элементом продольного профиля дороги является уклон. Величина
продольного уклона — это одна из важнейших характеристик транспортных ка-
честв автомобильной дороги. Кроме того, переломы продольного профиля, обра-
зующиеся при изменении уклона, вызывают ряд ограничений скорости движения
КТС ОБГ Следовательно, величина радиуса кривизны вертикальной кривой, тип
переходной вертикальной кривой, ее длина могут рассматриваться как ограничите-
ли скорости движения и должны вводиться в модель движения КТС ОБГ
Основным элементом плана дороги является радиус поворота. Величина ра-
диуса поворота — это также одна из важнейших характеристик транспортных ка-
честв автомобильной дороги. На кривых малых радиусов центробежная сила вызы-
вает деформацию шин в поперечном направлении, что влечет рост затрат мощности
на качение колеса, увеличение расхода топлива и снижение скорости движения. В
связи с тем, что радиус кривизны формирует силу сопротивления движению на по-
вороте, его величина может рассматриваться как ограничитель скорости движения и
должна вводиться в модель движения КТС ОБГ
Основными элементами поперечного профиля дороги являются поперечный
уклон дорожной поверхности и ширина проезжей части. Ширина проезжей части
дороги определяется шириной полосы движения и их количеством. Ширина полосы
движения является еще одной важнейшей характеристикой транспортных качеств
автомобильной дороги.
6.3. Основные требования к маршрутам движения
199
Таким образом, анализ связи элементов дороги с динамикой КТС ОБГ по-
зволяет сделать следующий вывод. Основными элементами дороги, входящими в
модель динамики КТС ОБГ и ограничивающими потенциальную возможность
движения, должны быть продольный уклон, его длина, поперечный уклон, шири-
на полосы движения, шероховатость дорожного покрытия.
Причем, как показали экспериментальные исследования, техническая катего-
рия дороги не может служить критерием, позволяющим типизировать автомобиль-
ные дороги. Элементы продольного, поперечного профиля и плана автомобильных
дорог отличаются на 15...20 % в худшую сторону от регламентированных норма-
тивными документами значений.
Так, при обследовании учеными МАДИ автомобильных дорог II технической
категории Москва—Минск, Москва—Ярославль, Москва—Санкт-Петербург, Моск-
ва—Симферополь установлено, что достаточно часто продольные уклоны имели
10... 12 %. Следует также отметить, что при обследовании горных автомобильных
дорог нередко встречались подъемы в 10... 12 %, длина которых колебалась от 600
до 100 м, а также подъемы в 20 %, длина которых не превышала 600 м.
Уклон поперечного профиля исследованных дорог менялся от 0 до 4 %, хотя
по нормативным документам должен быть в интервале 1,5...2,0 %. Достаточно
большое количество радиусов горизонтальных кривых, имеющихся на обследован-
ных дорогах, выходит за пределы регламентированных нормативными документами
интервалов значений.
Наиболее вероятными элементами дороги II технической категории являются
подъем с углом 2,2° и длиной 495 м; спуск с углом 2,3° и длиной 512 м; вертикальная
кривая, сопрягающая продольные уклоны, выполненная по окружности радиусом
3 310 м; горизонтальная кривая, выполненная по окружности радиусом 1 170 м; уклон
поперечного профиля от 0 до 2,3°
Строганные (грейдерные) автомобильные дороги получили преимущественное
распространение в относительно сухих степных и лесостепных местностях, где некото-
рые из этих дорог имеют протяженность, измеряемую десятками и даже сотнями кило-
метров. Обычно ширина грейдерных дорог составляет от 6 до 10 м, а уклоны редко пре-
вышают 8... 10 ° Дороги данного типа возможно использовать для проезда в сухую
погоду и зимнее время.
Колейные и лежневые дороги оборудуют соответственно из продольно- и по-
перечно уложенных бревен и используют для проезда одиночных автомобилей и
автопоездов небольшой грузоподъемности.
Щитовые дороги оборудуют из бревен и пиломатериалов или металлических
гофрированных листов, а также бетонных плит. Эти дороги обычно собирают из
отдельных звеньев, доставленных на место монтажа автотранспортом. Грузоподъ-
емность щитовых дорог и их характеристики принимаются из расчета транспорт-
ных средств с наибольшими габаритами и осевыми нагрузками, которыми перево-
зится не менее 50 % грузов или интенсивность которых составляет не менее 25 % об-
щей интенсивности.
В суровых климатических условиях Севера довольно широкое распростране-
ние получили сезонные автомобильные дороги — автозимники, которые использу-
ются многоцелевыми автомобилями и автопоездами.
200
6. Области и условия использования КТС ОБГ
Проселочные дороги обычно накатываются автомобилями в благоприятный
для их движения период года. В распутицу (осеннюю и особенно весеннюю) и во
время дождей грунтовые проселочные дороги становятся труднопроходимыми. Ук-
лоны на этих дорогах определяются рельефом местности, но обычно не превышают
15...18 °
Внутрикарьерные и отвальные дороги по макропрофилю мало чем отлича-
ются от горных дорог, продольный профиль которых колеблется от 5 до 20 %. Сле-
дует также отметить, что при обследовании карьеров в разных климатических зонах
(на Крайнем Севере, Казахстане, в Сибири, в Центральной части России) достаточ-
но часто встречались подъемы с уклоном в 10... 12 %, длина которых составляла от
600 до 100 м, а также подъемы в 20 %, длина которых не превышала 600 м. Резуль-
таты обследования микропрофиля карьерных дорог и их классификация приведены
в табл. 6.6 и 6.7
Таблица 6.6
Результаты обследования микропрофиля карьерных дорог
Покрытие Место измерений Коэффициент неровности, мм2 с Высота неровности, мм
Тип Качество эмпирический рекомендуе- мый
Щебенка Щебенка Грунт песчаный Мелкий гравий Щебенка Скальный грунт Хорошее Хорошее Среднее Среднее Плохое Очень плохое Централь- ная часть России Сибирь Централь- ная часть России Казахстан Сибирь Казахстан 2,58-29,15 3,85-29,15 41,95-178,7 38,81-165,9 333-2215 7641-16950 2,0-30,0 2,0-30,0 30,0^150,0 30,0^150,0 450,0-6750,0 6750 и более 1,4-5,5 1,4-5,5 5,5-21,2 5,5-21,2 21,2-82,2 87,4-130,2 и более
Таблица 6.7
Классификация карьерных дорог
Классификация карьерных дорог Высота неровностей на длине двух баз автомобиля, мм Уменьшение скорости движения, %
Нормальные 1-5 10,0
Средней тяжести 6-20 10,0
Тяжелые 21-85 20,0
Особо тяжелые свыше 85 40,0
Климатические условия, недостаточная ширина дорог, неудовлетворительное
состояние поверхности полотна, малые радиусы поворотов и большие уклоны (17,
12 и 9 %) создают для КТС ОБГ экстремальные условия использования, которые
необходимо учитывать при проектировании и испытаниях опытных образцов [3].
6.3. Основные требования к маршрутам движения
201
Таким образом, повышение эффективности использования КТС ОБГ должно
вестись по двум направлениям:
создание теории общих проектировочно-конструктивных решений с максималь-
ным учетом воздействия внешних факторов (условий использования);
создание теории, позволяющей обосновывать требования к маршрутам дви-
жения и условиям использования КТС ОБГ для максимальной реализации возмож-
ностей, заложенных в конструкции транспортного средства.
В общем случае в математической модели маршрута движения при исследо-
ваниях, а также испытаниях КТС ОБГ типовой маршрут должен включать в себя
следующие элементы:
прямолинейный участок дороги II—IV технической категории длиной, доста-
точной для определения максимальной скорости движения (3...5 км);
прямолинейный участок дороги, моделирующий микропрофиль карьерных
дорог (характеристика для скального грунта, см. табл. 6.7) и синусоидальный про-
филь с длиной волны от одной до двух баз КТС ОБГ (длина участка 3...5 км);
прямолинейный участок дороги, моделирующий грунтовую дорогу V техни-
ческой категории и местность (характеристика по карте почвогрунтов, см. табл. 6.6),
длиной 3...5 км;
криволинейный участок дороги (без продольных уклонов) с кривыми в плане
от 15 до 60 м с чередованием кривых величиной, кратной минимальному радиусу
поворота, начиная с него;
участок горной дороги с подъемами и уклонами величиной в интервале от 8,7
до 30 % и длиной от 600 до 1000 м каждый;
участок макронеровностей типа: «насыпь» с углом въезда от 8,7 до 30 % и дли-
ной въезда до базы автомобиля; «насыпь с косогором» с углом въезда от 8,7 до 30 % и
углом поперечного уклона от 4,4 до 17,5 %; «выступ» высотой от 0,15 до 0,50 м; «ров»
по профилю «окопа» шириной до половины базы КТС ОБГ с числом осей от четырех и
более; участок местности с несущей способностью грунта, характерной для района
предполагаемого использования КТС ОБГ
В качестве краткого резюме по данной главе можно сказать, что использова-
ние приведенных выше материалов с конкретными значениями и рекомендациями
позволило специалистам МГТУ им. Н.Э. Баумана решить целый ряд серьезных за-
дач по проектированию и конструированию образцов КТС ОБГ которые получили
высокую оценку заказчика и положительные отзывы при демонстрации на специа-
лизированных выставках.
Глава 7
Основные требования к эксплуатационным
и потребительским свойствам
7.1. Общие положения
Эффективность использования КТС ОБГ зависит от уровня их эксплуатаци-
онных и потребительских свойств. К этим транспортным средствам, как и к любому
автомобилю, предъявляют следующие основные требования', простота конструк-
ции, надежность, живучесть, приемлемые габариты и масса, экономичность, прос-
тота обслуживания и ремонта.
К эксплуатационным свойствам этих машин можно отнести [4]:
удобство и безопасность использования по назначению и техническому об-
служиванию, тягово-скоростные свойства, топливную экономичность, значения
массовых и габаритных показателей, маневренность и устойчивость движения, про-
ходимость по дорогам и местности, пассивную и активную безопасность, экологич-
ность, надежность.
К колесным транспортным средствам ОБГ, которые предназначены для мон-
тажа и транспортировки специального оборудования, предъявляют особые техни-
ческие требования (схема на рис. 7.1), к которым относятся:
подвижность как способность к переходу из одного пункта в другой за опре-
деленное время (схема на рис. 7.2);
готовность к применению (схема на рис. 7.3), определяемая временем, необ-
ходимым для подготовки машин к движению;
обитаемость, обеспечиваемая соответствующими размерами кабины, ра-
циональным размещением органов управления и контроля, освещением, а также
значениями нормативных показателей микроклиматических, механико-акустичес-
ких и химических факторов;
надежность как свойство машины выполнять заданные функции, сохраняя
значения установленных эксплуатационных показателей в пределах, соответст-
вующих определенным режимам и условиям использования, технического обслу-
живания, ремонта, хранения и транспортирования (ГОСТ 13377);
живучесть (схема на рис. 7.1) как способность специальной автомобильной тех-
ники противостоять поражающим факторам современного воздействия и сохранять
работоспособность для выполнения поставленных задач.
7.2. Тягово-скоростные свойства и топливная экономичность
203
Рис. 7.1. Примерная структура особых технических требований к КТС ОБГ
Большинство требований по эксплуатационным и потребительским свойствам
КТС ОБГ определяется в соответствии с международными и национальными стандар-
тами. Однако специфика предназначения данных ТС требует уточнения значений от-
дельных показателей, связанных с областями и условиями их использования. Ниже рас-
сматривается обоснование и значения показателей только тех эксплуатационных
свойств, которые не регламентированы для КТС ОБГ официальными документами.
7.2. Тягово-скоростные свойства и топливная экономичность
Одним из основных достоинств и преимуществ КТС ОБГ, как и любого автомоби-
ля, по сравнению с другими видами машин наземного транспорта является высокая опе-
ративно-техническая подвижность. Естественно, что потребитель нуждается не только в
быстрой доставке и сохранности груза и оборудования, но и в обеспечении возможности
движения КТС ОБГ в различных эксплуатационных условиях при минимальных затратах
на перевозку. Это положение обусловливается как тяговыми возможностями машины, так
и расходом топлива при транспортировке грузов и оборудования.
Несмотря на множество работ и регламентирующих документов по тягово-
скоростным свойствам, четкие определения, достаточно полно характеризующие
тягово-скоростные свойства автомобилей, в технической литературе встречаются
редко. Современное представление по данному вопросу наиболее полно дано в ра-
ботах [3, 4, 15, 16]. Однако материалы и этих работ применительно к КТС ОБГ тре-
буют дополнения, так как ни одно значение из предлагаемых показателей для КТС
ОБГ не регламентируется нормативными документами.
Подвижность (мобильность)
Проходимость
Маневренность
Тягово-скоростные
свойства
Массогабаритные показатели Транспортабель- ность
_
Грузоподъемность
Дорожный
просвет
Поворачиваемость
Максимальная
скорость движения
Углы и радиус
проходимости
Устойчивость
Средние
скорости движения
Удельная
грузоподъемность
Приспособленнность
к погрузке-выгрузке
и первозке различны-
ми видами транспорта
Угол максимального
подъема
Управляемость
_ Максимально
устойчивая скорость
Габаритные
размеры
Вписываемость
в железнодорожный
габарит
Угол допустимого
крена
Плавность хода
Тип и мощность
двигателя
Монтажные размеры.
Размеры грузовой
платформы (отсека)
Высота
преодолеваемой
стенки
Приспособленность
к десантированию
парашютным
способом
Минимальный
радиус поворота
Удельная
мощность
Нагрузка
на ось
Ширина
преодолеваемого
рва
Глубина
преодолеваемого
брода
Тормозные
свойства
Масса
буксируемого
прицепа
База, колея
Время на подготовку
к погрузке
и движению
после выгрузки
Обеспечение
крепления при
транспортировке
204 7 Основные требования к эксплуатационным свойствам
Рис. 7.2. Примерная структура параметров подвижности КТС ОБГ
7.2. Тягово-скоростные свойства и топливная экономичность
205
Время подготовки
к движению
Время подготовки
двигателя к принятию
нагрузки
Время подготовки
к использованию
после хранения
Трудоемкость
приведения в готов-
ность после хранения
Трудоемкость
ЕТО, ТО, ТР
Периодичность КО
П родолжител ьность
КО
Приспособленность
к диагностике
Трудоемкость
подготовки к хранению
и ТО в ходе хранения
Рис. 7.3. Примерная структура параметров готовности к применению КТС ОБГ
В табл. 7.1 приведены измерители и показатели тягово-скоростных свойств и
топливной экономичности автомобилей, предложенные в работах 114, 30]. Эти дан-
ные дополнены значениями показателей, полученных с участием авторов по резуль-
татам многочисленных испытаний КТС ОБГ
Предложение ввести для оценки топливной экономичности КТС ОБГ часово-
го эксплуатационного расхода топлива требует пояснения.
Таблица 7 1
Классификация основных измерителей, показателей
и их значений для КТС ОБГ
Измеритель Показатель Значение показателя
Fk — сила тяги на ведущих колесах, Н Fklma — удельная сила тяги на ведущих колесах, Н/кг Ne/ma — удельная мощность, кВт/т /д.тах — максимальная сила тяги на ведущих колесах, Н Fk уд max — максимальная удель- ная сила тяги на ведущих ко- лесах, Н/кг DIllax — максимальный динами- ческий фактор N ГЛ max — максимальная удельная мощность, кВт/т Не менее 0,6.. .0,7 от полного веса машины с грузом 6-7 D > 0,50-0,6 4,0-5,8
206
7 Основные требования к эксплуатационным свойствам
Окончание табл. 7.1
Измеритель Показатель Значение показателя
mJNe — удельная масса КТС ОБГ, т/кВт i — уклон дороги, преодоле- ваемый КТС ОБГ, % V — скорость движения, км/ч Qs — расход топлива на 100 км пути, л (?ч — часовой расход топли- ва, кг/ч Суд тах — максимальная полная удельная масса, т/кВт /тах — максимальный подъем, преодолеваемый КТС ОБГ, % Vniax — максимальная скорость, км/ч Уср — средняя техническая ско- рость по дорогам, км/ч: с твердым покрытием по грунтовым дорогам Vmin _ минимально устойчивая скорость, км/ч QSK — контрольный расход топ- лива, л/100 км Gscp — средний эксплуатаци- онный расход топлива при движении по типовому марш- руту, л/100 км С\уд — удельный путевой расход топлива, л/т 100 км Q4 э — часовой эксплуатационный расход топлива при выполне- нии КТС ОБГ транспортной работы (с учетом затрат на под- держание теплового режима и подготовку двигателя), кг/ч 0,031-0,038 > 7 40-60 20-30 15-25 4-6 120-220 280-350 3,0-3,5 100-200
Топливную экономичность КТС ОБГ следует определять по существующим ме-
тодикам. Вместе с тем особенность их использования, прежде всего СКШ, состоит в
том, что двигатель в любое время года должен быть постоянно готов к пуску и приня-
тию нагрузки. В связи с этим при расчете суммарной топливной экономичности СКШ
должны быть учтены не только расходы топлива, необходимого для совершения дви-
жения, но и топлива, расходуемого на прогрев дизельного двигателя для поддержания
его в постоянной готовности к пуску и принятию нагрузки в условиях эксплуатации, в
том числе при отрицательных температурах воздуха. Сравнительная топливная харак-
теристика КТС ОБГ с одинаковой общей массой, но с ГТД (шасси 7907, 24x24) и ди-
зельным двигателем (шасси 7906, 16x16) представлена на рис. 7.4 и в табл. 7.2.
По экономичности (удельный расход топлива, г/кВт) ГТД незначительно усту-
пает судовому дизельному двигателю М-351 (в 1,2 раза). В объектовых же условиях
(в составе шасси) контрольный расход топлива ГТД почти в 2 раза выше, чем кон-
трольный расход топлива дизельным двигателем.
Согласно рис. 7.4, у шасси 7906 расход топлива при установившемся движе-
нии значительно ниже, чем у шасси 7907 на таком же режиме движения (так, при
V = 20 км/ч — в 2,17 раза). Это говорит о том, что шасси 7907 имеет трансмиссию,
которая не позволяет полностью реализовать возможности ГТД.
7.2. Тягово-скоростные свойства и топливная экономичность
207
Таблица 7.2
Значения показателей топливной экономичности дизеля и ГТД
в объектовых условиях [18, 57]
Шасси, колесная формула, трансмиссия Двигатель, мощность, кВт (л.с.) Удельный расход топлива, г/кВт (г/л. с.) Контрольный рас- ход топлива, л/100 км
7906, 16x16, ГМП Дизель М-351, 1100(1500) 239(176) 446 при V = 30 км/ч
7907, 24x24, ЭТ ГТД-НООТФ, 880(1200) 288 (212) 860 при V = 25 км/ч 800 при V = 29 км/ч
Рис. 7.4. Топливная характе-
ристика установившегося дви-
жения шасси 7906 (7) и 7907 (2)
При движении по бетонной дороге эксплуатационный расход топлива со-
ставляет:
у шасси 7907 — 901 л/100 км;
у шасси 7906 — 610 л/100 км, что меньше в 1,47 раза, чем у шасси 7907
Следовательно, разница между значениями эксплуатационного расхода топ-
лива у шасси с ГТД и дизелем на неустановившихся скоростях движения сущест-
венно снижается по сравнению с разницей, имеющей место при установившихся
скоростях движения. Это связано с большими затратами энергии при увеличении
скорости вращения элементов ГМП шасси 7906, имеющей большой суммарный мо-
мент инерции, низкий КПД гидротрансформатора на переменных режимах и более
высокий коэффициент вращающихся масс механической трансмиссии.
На холостом ходу расход топлива ГТД на шасси 7907 в 3,8 раза больше, чем
расход топлива дизелем на шасси 7906.
Средний эксплуатационный расход топлива составляет [18]:
у шасси 7906 с Vcp= 17,6 км/ч — 800 л/100 км;
у шасси 7907 с Vcp= 16,7 км/ч — 1270 л/100 км,
что больше в 1,4 раза, чем у шасси 7906.
Далее, на длительный прогрев дизеля на
шасси 7906 при низкой температуре окружающего
воздуха с помощью подогревателя и на холостом
ходу после пуска требуется 26...35 л в течение
суммарного времени 1,5...2,0 ч. В этих условиях
ГТД готов к принятию нагрузки через 8 мин. Пуско-
вые свойства дизеля и ГТД представлены в табл. 7.3.
При этом с учетом расхода топлива на подготовку
к движению (на время подготовки к пуску и под-
держанию постоянной готовности двигателя у шас-
си со специальным оборудованием) совокупный
годовой эксплуатационный расход топлива у шасси
7907 с ГТД может быть меньше на 30 %, чем у
шасси 7906.
208
7. Основные требования к эксплуатационным свойствам
Таблица 7.3
Показатели пусковых свойств шасси 7906 с дизельным двигателем
и шасси 7907 с ГТД
Показатель 7906 7907
1. Зимний период 1.1 Температура окружающего воздуха, °C 1.2 . Время готовности шасси к движению, мин, в том числе: время на подготовку двигателя к пуску и на пуск время на прогрев двигателя пробег на пониженных передачах для разогрева масла в трансмиссии 2. Летний период 2.1 Температура окружающего воздуха, °C 2.2 . Время готовности шасси к движению, мин, в том числе: время на подготовку двигателя к пуску и на пуск время на прогрев двигателя от -26 до -36 77-121 47-60 25-55 5-6 16 49 24 25 от -21,5 до -22 13-15 1-2 7 5-6 12 5-7 2-3 3-4
Для случая использования в качестве силовой установки ГТД при теплых ак-
кумуляторных батареях пуск его не требует предварительной тепловой подготовки,
по этой причине при расчете топливной экономичности СКШ с ГТД не следует
учитывать расход топлива для разогрева.
Как было отмечено, дизельные двигатели должны быть достаточно прогреты
для осуществления пуска в холодное время года, что особенно важно для двигате-
лей с низким ресурсом.
Например, дизельный двигатель В-38 может принимать полную нагрузку при
температуре охлаждающей жидкости не ниже 45°C. Опыт эксплуатации СКШ под-
тверждает, что при температуре окружающего воздуха -40 °C и ниже охлаждающая
жидкость двигателя должна подогреваться с помощью теплоэлектрических нагрева-
телей — ТЭНов.
При этом существует линейная зависимость изменения времени работы
ТЭНов от температуры окружающего воздуха (табл. 7.4).
Таблица 7.4
Длительность работы ТЭНов в зависимости от температуры окружающего воздуха [18]
Температура, °C 40 30 20 10 0 -10 -20 -30 40
Время работы ТЭНов в тече- ние суток, ч 0 4 7 10 13 16 18 21 24
Исследованиями доказано, что зависимость площади поверхности охлажде-
ния дизельных двигателей от их мощности имеет практически линейный характер и
7.3. Массогабаритные показатели
209
выражается формулой F = 0,01 Ne. Имея зависимость F = f(Ne) и зная суммарную
мощность ТЭНов, а также мощности электродвигателя с насосом для прокачки жидко-
сти в системе охлаждения двигателя (для двигателя В-38 она составляет 13,2 кВт), мож-
но рассчитать необходимую мощность ТЭНов для подогрева охлаждающей жидкости
любого другого двигателя. Определив мощность ТЭНов и время их работы в зависимо-
сти от температуры окружающего воздуха (см. табл. 7.4), можно найти расход электро-
энергии, а значит, и расход топлива при известном КПД электрогенератора и вспомога-
тельного двигателя внутреннего сгорания для его привода.
Среднесуточный расход топлива вспомогательного двигателя для подогрева
охлаждающей жидкости можно записать так:
СтСУТ = ^^подТ ' ,
ЛгенДдвбц
где А = 860 ккал/кВт — постоянный коэффициент; Л/1ЮД — электрическая мощность
ТЭНов, кВт; т — длительность работы ТЭНов, ч; т|дв — КПД вспомогательного дви-
гателя; т|ген — КПД генератора; QH = 10 300 ккал/кг — теплотворная способность
топлива.
Среднесуточный расход топлива для подогрева дизельных двигателей мощ-
ностью до 1000 кВт в климатических районах 80° северной широты и выше состав-
ляет до 100 кг (4,2 кг/ч).
Таким образом, часовой эксплуатационный расход топлива будет склады-
ваться из часовых расходов топлива на поддержание теплового режима транспорт-
ного средства (особенно КТС ОБГ специального назначения), предпусковую подго-
товку силовой установки и трансмиссии, выполнение собственно транспортной ра-
боты КТС ОБГ
Практика также показала, что увеличение мощности двигателя с целью по-
вышения Муд несколько улучшает тягово-скоростные свойства СКШ, но в то же
время приводит к усилению трансмиссионных узлов, рамы, подвески, т. е. к неиз-
бежному повышению общей массы шасси. Поэтому и вводится показатель полная
максимальная удельная масса СуД1
7.3. Массогабаритные показатели
Массогабаритные параметры в сочетании с другими показателями КТС ОБГ ха-
рактеризуют степень совершенства конструкции для заданных условий эксплуата-
ции, а также рационального использования материалов. Полная масса и грузоподъ-
емность транспортного средства являются главными классификационными пара-
метрами.
По грузоподъемности КТС ОБГ в основном образуют унифицированный ряд
от 25 до 200 т. Это в первую очередь относится к многоопорным транспортным
средствам, образуемым отдельными модулями. Кроме того, их можно разделить
еще на две большие группы. В первую входят транспортные средства, осевые на-
грузки которых не превышают действующих законодательных ограничений, поэто-
му они могут применяться на дорогах общего пользования. Вторая группа — ТС с
210
7 Основные требования к эксплуатационным свойствам
превышением действующих ограничений, которые могут работать вне дорог или на
дорогах общего пользования по специальному разрешению соответствующих
служб. Поскольку законодательные ограничения существуют во всех странах как по
массе, так и по габаритным размерам, то по габаритным параметрам КТС ОБГ де-
лятся на две группы так же, как по массовым параметрам.
Необходимо отметить, что абсолютные значения размеров, а также веса или
массы машины не являются достаточными для оценки ее массогабаритных показа-
телей. Очень важной характеристикой веса или массы КТС ОБГ является коэффи-
циент удельной грузоподъемности Kyjxv, т. е. отношение массы полезной нагрузки к
массе транспортного средства в снаряженном состоянии. Для современных базовых
транспортных средств ОБГ это соотношение составляет Kyjlv = 1,1...2,5. Точно так-
же судят и о габаритных размерах. В этом случае применяется коэффициент ис-
пользования габаритной площади Ку^п, который определяется как отношение пло-
щади, грузовой платформы, используемой под размещение массы полезной на-
грузки, к площади, образуемой габаритными длиной и шириной транспортного
средства. Важное значение для оценки массогабаритных показателей имеет рас-
пределение полной массы машины по колесам. У современных КТС ОБГ распре-
деление массы по осям, как правило, равномерное. Значения массогабаритных
показателей многоопорных ТС, рассчитанных по данным работы [19], приведены
в табл. 7.5-7.8.
7.4. Маневренность и управляемость движением,
проходимость по дорогам
Использование многоосных многоопорных транспортных средств особо
большой грузоподъемности, отличающихся большими габаритными размерами и
осевыми нагрузками, остро ставит проблему вписываемости этих машин в закруг-
ления и повороты существующей дорожной сети и обеспечения маневра при дви-
жении на местности, на строительных площадках и в других условиях.
В данной работе маневренность характеризует способность машины к измене-
нию своего положения на ограниченной площадке и в проездах заданной формы и раз-
меров [1, 2]. Для оценки маневренности применяют параметры установившегося пово-
рота, рассчитанные при малой скорости движения.
Маневренность КТС ОБГ характеризуется следующими показателями:
минимальным радиусом поворота по оси (относительно центра поворота)
следа переднего внешнего колеса;
наружным габаритным радиусом поворота;
шириной коридора, занимаемого автомобилем или автопоездом при повороте
с заданным наружным габаритным радиусом.
Основным оценочным показателем маневренности КТС ОБГ является ши-
рина коридора. Она равна разности радиусов двух точек машины — наиболее уда-
ленной от центра его поворота и наиболее близкой к нему — и характеризует
ширину коридора, необходимую при крутых поворотах, а также возможность
движения КТС ОБГ в проездах заданной формы и размеров.
Таблица 7.5
КТС ОБГ, применяемые для перевозки различных установок
Фирма-изготовитель, модель Грузо- подъем- ность, т КУД. г Длина платфор- мы, м Ширина платфор- мы, м Погру- зочная высота, м Длина ТС, м JZ 1Чуд. п Нагрузка на ось, Н Количе- ство шин
«Камаг», (/1504 115 3,97 7,000 3,300 1,6±0,3 10,000 0,70 180 32
«Шейерле», 1МК\ 20.8.2 90 3,00 15,000 2,750 1,4±0,3 15,000 1,00 300 32
«Николас», ASM 19-4а 130 5,91 9,300 3,250 1,5+0,6 10,850 0,86 190 16
«Камаг», (/1505 145 4,14 8,500 3,300 1,6 _о з 11,500 0,88 180 40
«Николас», ASM 19-5а 162 5,79 11,450 3,250 1,5 +0’6 13,000 0,71 190 20
«Кометто», E1L 120 4,00 7,550 3,200 1,6 ±0,3 10,600 0,77 150 40
«Камаг», (/1506 170 3,70 10,000 3,300 1,6 _о з 13,000 0,96 180 48
«Николас», 19-6а 194 5,71 13,100 3,300 1,5 +0'6 14,650 0,89 190 24
КТС ОБГ, применяемые для перевозки грузов на большие расстояния
Таблица 7.6
Фирма-изготовитель, модель Грузо- подъем- ность, т КУД. Длина плат- формы, м Ширина плат- формы, м Погру- зочная высота, м Длина ТС, м Куд. п Нагрузка на ось, Н Количе- ство шин
«Кометто», ETU НО 3,93 8,000 3,200 1,35±0,3 10,800 0,76 115 48
«Шейерле», М.6 128 5,57 8,400 2,430 1,5±О,3 12,675 0,66 250 24
«Николас», ASM 12-6а 119 4,76 10,350 2,500 । 2+0'65 12,350 0,88 240 24
«Кометто», ETL\ 150 4,41 11,000 3,200 1,35±0,3 14,000 0,81 115 64
«Николас», ASM 12-8а 158 4,65 14,050 2,500 1 21 16,050 0,91 240 32
«Кометто», ETL2 190 4,75 14,000 3,200 Ь35±0,3 17,200 0,83 115 80
«Кометто», ETL3 204 5,67 13,100 3,000 1,15±О,3 16,300 0,80 120 80
«Николас», ASM 19-10 283 4,96 19,100 3,250 I 5 +0.65 21,100 0,91 340 40
Таблица 7.7
КТС ОБГ, применяемые на судостроительных верфях
Фирма-изготовитель, модель Грузо- подъем- ность, т Длина платфор- мы, м Ширина платфор- мы, м Погру- зочная высота, м Длина ТС, м Куд. Нагрузка на ось, Н Количе- ство шин
«Камаг», {71402 103 4,12 8,000 5,000 1,6±О,3 15,000 0,89 320 16
«Шейерле», МТ\20.8.2 ИЗ 2,40 15,000 5,000 1,7±0,5 18,360 0,82 200 32
«Николас», ASM 25-4а 158 3,76 12,400 8,000 1,52+0’6 12,400 1,00 250 32
«Камаг», {71406 328 5,86 14,000 6,100 1,6±0,3 20,000 0,70 320 48
«Николас», ASM 25-6а 240 3,00 17,750 8,000 1,52+0'6 17,750 1,00 250 48
«Камаг», 14085 440 6,11 18,000 6,100 1,6 ±0,3 24,000 0,75 320 64
«Николас», ASN 25-8В 320 4,00 21,850 8,000 1,52+0’6 21,850 1,00 250 64
«Камаг», 14125 653 5,68 26,500 6,100 1,6±0,3 32,000 0,83 320 96
«Камаг», 1412 1316 5,96 26,500 10,000 1,6±0,3 32.000 0,83 320 192
Таблица 7.8
КТС ОБГ, применяемые на металлургических заводах
Фирма-изготовитель, модель Грузо- подъем- ность, т К>. Длина платфор- мы, м Ширина платфор- мы. м Погру- зочная высота, м Длина ТС, м Ку. Нагрузка на ось, Н Количе- ство шин
«Камаг», / 1602 38 3,80 7,000 2,700 1,6±0,3 13,000 0,54 120 8
«Шейерле», IMK 48.2.2 38,5 4,50 4,000 2,500 1,25±0,3 5,500 0,73 240 8
«Кометто», ETL 3.1 56,0 3,50 6,000 2,700 1,5±О,ЗО 8,400 0,71 120 12
«Камаг», / 1604 78,0 4,33 9,000 2,700 1,6±0,30 14,000 0,86 120 16
«Шейерле», IMK 120.10.2 95,5 3,90 8,500 2,700 1,25±О,ЗО 10,050 0,85 240 20
«Кометто», ETL 6 115 3,92 9,000 2,700 1,5±0,30 11,400 0,79 120 24
«Камаг», / 1606 118 4,54 12,000 2,700 1,6 ±0,3 17,000 0,70 120 24
«Шейерле», 1МК\ 44.12.2 116 4,14 9,300 2,700 1,5 _()>2 10,850 0,86 240 24
«Камаг», 11607 136 4,25 14,000 2,700 1,6±0,30 19,000 0,74 120 28
«Кометто», ETL 7 137 4,42 10,000 2,700 1,5±0,30 12,400 0,81 120 28
«Кометто», ETL 8 158 4,65 11,000 2,700 1,5±О.ЗО 13,400 0,82 120 32
7.4. Маневренность и управляемость движением, проходимость по дорогам 213
В документах Европейского экономического союза (ЕЭС) регламентируется
минимальные внешний и внутренний габаритные радиусы поворота, которые не
должны превышать соответственно 12,5 и 5,3 м. Таким образом, этим определяется
допустимая для дорожных транспортных средств ширина коридора 7,2 м.
Общепризнанного определения понятия «управляемость» до сих пор нет из-за
сложности процесса управляемого движения. Поэтому под управляемостью в данной
работе понимается ОСТовское определение. Управляемость — это свойство управляе-
мого водителем автомобиля сохранять в определенной дорожно-климатической обста-
новке заданное направление движения или изменять его в соответствии с воздействием
на рулевое колесо [31].
Рекомендуемые Правилами № 79 Комитета по внутреннему транспорту Ев-
ропейской экономической комиссии Организации Объединенных Наций (ЕЭК ООН)
и Отраслевым стандартом (ОСТ) 37.001.471 предельные значения показателей
управляемости и устойчивости автотранспортных средств приведены в табл. 7.9.
Таблица 7 9
Рекомендуемые Правилами № 79 ЕЭК ООН и ОСТ 37.001.471
предельные значения основных показателей управляемости и устойчивости
Наименование испытания Усилие Рр Значение для АТС категории
Усилие на рулевом колесе, Н На рулевом колесе при движении с ис- правным усилителем, Н При движении с неисправным усилите- лем, Н «На месте» с исправным усилителем, Н Не более 200 450 Не более 250
Под проходимостью понимается возможность движения КТС ОБГ по доро-
гам и сооружениям местности в зависимости от несущей способности опорной по-
верхности {опорная проходимость) и геометрических размеров дорожных условий
и сооружений, а также препятствий на местности {профильная проходимость).
В силу большого количества причин движение колесной машины происходит
по сложному пути, состоящему из прямолинейных и криволинейных участков раз-
личной кривизны и ориентации. Возможные условия использования КТС ОБГ рас-
смотрены в главе 6. Показатели характеристики автомобильных дорог СНГ приведе-
ны в табл. 7.10, а автомобильных мостов — на рис. 7.5 и в табл. 7.11. Габаритом
моста называется очертание, за которое не должны выдаваться никакие элементы
его конструкции (см. рис. 7.5). Габариты мостов обозначают буквой Г и числом,
соответствующим ширине проезжей части (ширине между бордюрами). Если есть
разделительная полоса, то она обозначается буквой С. Например, Г — 9+С+9. Уста-
новлено десять габаритов мостов, основные из которых приведены в табл. 7.11. Га-
барит Г—6 применяется только для деревянных мостов, а габарит Г—4,5 — только
в исключительных случаях в горной местности. Высота перекрытия всех мостов
устанавливается 4,5 м. Наиболее распространенная грузоподъемность мостов со-
ставляет 40...60 т и реже 80... 100 т [3].
214
7 Основные требования к эксплуатационным свойствам
Рис. 7.5. Поперечный контур габаритных мостов:
А — габарит моста по ширине верхней эстакады; В — общий габарит
моста по ширине; Г — габарит моста по тротуару
Таблица 7.10
Показатели характеристики автомобильных дорог стран СНГ
Категория дорог Допустимая скорость, км/ч Число полос движения Ширина полосы, м Ширина проезжей части, м Ширина обочины, м Ширина земляного полотна, м Радиус поворота, м
основ- ной на пе- ресе- ченной мест- ности в горах
I 150 до 4,8 3,75 2x7,5 3,75 22,5 1000 600 250
II 120 2 3,75 7,5 3,75 15 600 400 125
III 100 2 3,5 7,0 2,5 12 400 250 100
IV 80 2 3,0 6,0 2,0 10 250 125 60
V 60 1 4,5 4,5 1,75 8 125 60 30
Примечание. Согласно ГОСТ 21624, автомобильные дороги разделены на пять кате-
горий по условиям эксплуатции.
Таблица 7.11
Габариты автомобильных мостов [3]
Габарит моста Расстояние по свесу (на рис. 7.2), м
между бордюрами Г между опорами Б по верху А
Г —21 21 21,5 20
Г— 14 14 14,5 13
Г — 10,5 10,5 11,0 9,5
Г —9 9 9,5 8
Г —8 8 8,5 7
Г —7 7 7,5 6
Г —6 6 6,5 5
Г —4,5 4,5 5,0 3,5
Серьезные требования могут предъявляться к оперативной подвижности КТС
ОБГ определяемой возможностью их перевозки железнодорожным, водным и воз-
душным транспортом. Эти требования жестко ограничивают габаритные размеры ТС.
7.5. Безопасность транспортного средства
215
Требования по оперативной подвижности выполняются в зависимости от
главного предназначения КТС ОБГ с помощью различных конструктивных меро-
приятий (перевозка ТС модулями, частичная подразборка ТС и т. п.) или, например,
соответствующей подготовкой железнодорожных транспортировщиков.
Проблема обеспечения оперативной подвижности является сложной как для
разработчиков ТС, так и для их потребителей. В каждом конкретном случае между
ними находится взаимоприемлемый компромисс.
7.5. Безопасность транспортного средства
Безопасность транспортного средства — одно из важнейших эксплуатаци-
онных свойств, требования нормативных документов по которому должны быть
распространены на КТС ОБГ, так как от него зависят жизнь и здоровье людей,
сохранность автомобилей, грузов и других материальных ценностей. Условно
различают активную, пассивную и экологическую безопасность конструкций ав-
томобилей.
Активная безопасность обеспечивается теми свойствами и качествами кон-
струкции, которые помогают водителю предотвратить дорожно-транспортное про-
исшествия (ДТП). Из них к основным относятся тормозные свойства, предупреди-
тельная звуковая и световая сигнализация, эффективность освещения дороги фара-
ми и т. п.
Пассивная безопасность обеспечивается свойствами конструкции транс-
портного средства, которые в случае аварии сводят к минимуму травмирование во-
дителя и пассажиров. К ним относятся жесткость конструкции кабины, надежность
замков дверей и т. п.
Экологическая безопасность — это свойства ТС, позволяющие уменьшить
его вредное воздействие на участников движения и окружающую среду в процессе
эксплуатации. К ним относятся предельное количество выделяемых вредных ве-
ществ, возможность разрушения грунта и т. п.
Безопасность транспортных средств обеспечивается безотказностью всех ор-
ганов управления и механизмов, а также эргономическими показателями автомоби-
ля, от которых зависит степень утомляемости водителя.
В развитие соглашения Комитета внутреннего транспорта ЕЭК ООН о введе-
нии единых, базирующихся на всеобщем признании Правил допустимости использо-
вания оборудования и принадлежностей автомобилей разработан комплекс Правил
ЕЭК ООН, касающихся практически всех аспектов активной, пассивной и экологиче-
ской безопасности автотранспортных средств.
Официальные утверждения о соответствии АТС действующим Правилам
ЕЭК ООН являются необходимым условием для экспорта автомобильной техники.
В общем случае маркировка официального утверждения содержит пять эле-
ментов: знак Е\ порядковый номер страны, представившей официальное утвержде-
ние; номер Правила ЕЭК ООН, по которому выдано утверждение; номер последней
серии утвержденных поправок к указанным Правилам; номер официального утвер-
ждения.
216
7 Основные требования к эксплуатационным свойствам
Страны ЕЭС приняли соответствующие директивы, которые, как и Правила
ЕЭК ООН, регламентируют допустимые параметры АТС по безопасности конст-
рукции. Показателем соответствия автомобиля Директивам ЕЭС является знак Е,
удостоверяющий право его продажи в странах общего рынка [15].
Процесс проверки на соответствие Правилам ЕЭК ООН или Директивам ЕЭС
называется омологацией.
Национальные стандарты ряда стран по безопасности конструкций отличаются
от требований Правил ЕЭК ООН и Директив ЕЭС в сторону их ужесточения (Швеция,
Япония, США). Это приходится учитывать странам-экспортерам автомобилей.
Показатели тормозных свойств. Повышение безопасности работы КТС ОБГ
в условиях роста скоростей и интенсивности движения, а также увеличения массы
перевозимого груза связано с дальнейшим совершенствованием тормозных систем
транспортных средств.
Показателями эффективности рабочей и запасной тормозных систем явля-
ются тормозной путь и установившееся замедление в зависимости от начальной
скорости торможения, а показателем эффективности стояночной и вспомогатель-
ной тормозных систем — суммарная тормозная сила, развиваемая соответствую-
щей системой.
Тормозной системой колесной машины называется совокупность устройств,
предназначенных для осуществления процесса (фазы) торможения (по известной
тормозной диаграмме). В свою очередь, совокупность тормозных систем называется
тормозным управлением.
Нормативы эффективности тормозных систем автомобилей у нас в стране ус-
танавливают ГОСТ 22895, ГОСТ 4364, ГОСТ 23181.
Описание условий проведения тормозных испытаний, определения показателей
эффективности тормозных систем устанавливает ОСТ 37.001.067 «Тормозные свойст-
ва автомобильного подвижного состава. Методы испытаний по определению эф-
фективности тормозных систем».
Основным международным европейским документом, регламентирующим
требования к тормозным системам, является Правило № 13 Комитета по внутрен-
нему транспорту ЕЭК ООН. В странах ЕЭС действуют Директивы ЕЭС 71/320,
75/524, 79/489, 74/132, 85/647, 88/194, содержащие требования к тормозным систе-
мам, которые в основном идентичны требованиям Правила № 13 ЕЭК ООН.
Тормозное управление КТС ОБГ должно состоять из четырех тормозных систем:
рабочая тормозная система, предназначенная для регулирования скорости
колесной машины в любых условиях движения. Требования к эффективности этой
системы устанавливаются нормативными документами или указываются заказчиком
машины в техническом задании на ее разработку;
запасная тормозная система, которая служит для остановки машины в случае
отказа рабочей тормозной системы. Запасной тормозной системой может быть часть
(контур) рабочей тормозной системы, которая должна обеспечивать не менее 30 % эф-
фективности рабочей тормозной системы с максимальным замедлением ja= 2,8 м/с“;
стояночная тормозная система, предназначенная для удержания полностью
нагруженной колесной машины на максимальном уклоне, заданном технической
характеристикой машины. Для колесных машин, находящихся в эксплуатации, по
7.5. Безопасность транспортного средства
217
требованиям ГОСТ 25478 стояночная тормозная система должна удерживать маши-
ну полной массы на уклоне не менее 16 %. Для колесных машин в снаряженном
состоянии углы уклона дороги, на которых должна удерживаться машина стояноч-
ной тормозной системой, составляют 31 % и более. При этом усилие на рычаге руч-
ного включения этой системы не должно превышать 400 Н;
вспомогательная тормозная система служит для длительного торможения
колесной машины на затяжных спусках без использования других тормозных сис-
тем. Она должна обеспечивать спуск колесной машины со скоростью 30 ± 2,0 км/ч
по 7 %-ному уклону длиной 6 км. Замедление, которое должно обеспечиваться при
этом,уа = 0,6...2,0 м/с2
В двух или нескольких тормозных системах колесной машины допускается
одновременное использование общих элементов (например, тормозных механизмов,
источников энергии). На каждом КТС ОБГ должно быть не менее двух независимых
органов управления различных тормозных систем.
Элементы тормозного управления конструируются таким образом, чтобы они
выполняли свои функции вне зависимости от износа, старения, коррозии, вибрации,
воздействия радиоактивного заражения местности, светового и электромагнитного из-
лучения, возникающих в процессе эксплуатации.
Ряд элементов тормозного управления в соответствии с требованиями
ГОСТ 22895 для обеспечения безопасности движения должны иметь гарантиро-
ванную прочность, т. е. полностью исключается их выход из строя в результате по-
ломок на протяжении всего срока службы колесной машины. К таким элементам
относятся тормозная педаль и ее крепление, тормозной кран, главный тормозной
цилиндр, а также элементы привода этих аппаратов от педали, воздухораспредели-
тель, колесные исполнительные органы привода, регулировочные рычаги, разжим-
ные кулаки и другие аналогичные элементы. Любая поломка элементов гарантиро-
ванной прочности является чрезвычайным происшествием и требует не замены или
ремонта этого элемента, а изменения его конструкции или технологии изготовле-
ния, если в этом заключается причина отказа.
Расположение органов управления должно обеспечивать удобство управле-
ния и не создавать опасности для водителя и пассажиров при аварийном торможе-
нии или ДТП.
Необходимо, чтобы рабочая тормозная система действовала на все колеса
машины, ее действие было плавным, а распределение этого действия — рациональ-
ным, г. е. у любой колесной машины и при всех допустимых нагрузках передние ко-
леса (передняя группа колес) должны блокироваться раньше задних (задней группы
колес) в том случае, если отношение замедления машин к ускорению свободного па-
дения (9,81 м/с2) находится в пределах 0,15...0,30. Это означает, что опережающее
блокирование передних колес предписывается КТС ОБГ только на скользких дорогах.
Тормозные системы, имеющие колесные тормозные механизмы, должны
обеспечивать равномерное распределение тормозных сил между колесами одной
оси. При этом допустимое отклонение не может превышать 15 % наибольшего зна-
чения тормозной силы. Износ фрикционных поверхностей тормозных механизмов
должен компенсироваться за счет ручного или автоматического регулирования так,
чтобы величина зазоров постоянно оставалась в заданных пределах.
218
7 Основные требования к эксплуатационным свойствам
Система встроенных датчиков и сигнализации технического состояния тормоз-
ного управления должна удовлетворять требованиям ОСТ 37.001.283; пневматический
привод тормозных систем — ГОСТ 4354, а гидравлический привод — ГОСТ 21181.
При этом элементы тормозного привода необходимо надежно защитить от внешних
ударных воздействий и механических повреждений при движении колесной маши-
ны по местности.
Требования к системе внешнего освещения и световой сигнализации.
Для обеспечения водителя необходимыми условиями видимости на дороге доста-
точно оборудовать автомобиль фарами четырех типов: обязательной является уста-
новка от двух до четырех фар дальнего света, двух фар ближнего света, рекоменду-
ется установка противотуманных и фар-прожекторов дальнего света, особенно для
транспортных средств, предназначенных для перевозок на дальние расстояния.
Минимальный комплекс обязательных для КТС ОБГ светосигнальных прибо-
ров состоит из указателей поворотов, сигнала торможения, габаритных огней, фо-
наря освещения номерного знака, фонарей, обозначающих автопоезд.
Расположение, цвет и видимость внешних световых приборов должны соот-
ветствовать требованиям ГОСТ 8769.
Международными нормативными документами по внешним световым прибо-
рам являются правило № 48 ЕЭК ООН, Директивы ЕЭС 76/756, 80/233, 82/244,
83/276, 84/8, 89/278 и ISO-R-303. В странах СНГ в автомобильной светотехнике ис-
пользуются европейские нормы безопасности, поэтому требования государственных
стандартов, касающиеся светового оборудования транспортных средств, практически
совпадают с требованиями Правила № 48 ЕЭК ООН.
На все автомобили должны устанавливаться фары с европейскими или амери-
канскими асимметричными системами дальнего и ближнего света.
В автомобильной светотехнике в последние годы применяется осветительное
оборудование с использованием фар с галогенными лампами. Дальность действия
таких фар значительно больше, чем у обычных ламп накаливания, и может достигать
400 м. Фары с галогенными лампами целесообразно устанавливать на КТС ОБГ, ис-
пользуемых для перевозок на дальние расстояния.
Световые и цветовые характеристики, нормы и методы испытаний сигнальных
огней регламентируются ГОСТ 10984.
Требования к пассивной безопасности конструкции. Выполнение требова-
ний, касающихся прочности кабин автомобилей, применения дверных замков и пе-
тель, органов управления и элементов интерьера безопасной конструкции, являются
обязательными для повышения пассивной безопасности грузовых автомобилей всех
классов по грузоподъемности.
При создании травмобезопасного интерьера кабины должно предусматривать-
ся следующее:
размещение в углублении панели контрольно-измерительных приборов, кно-
пок и рукояток управления; в углублениях внутренних панелей дверей — рукояток
стеклоподъемников, внутренних ручек запирающих механизмов;
закругление нижнего края панели приборов (радиус кривизны не менее 10 мм);
применение противосолнечного устройства из светопоглощающего материала
и травмобезопасного безосколочного лобового стекла; исключение опасных неровно-
стей или острых краев в зоне возможного удара головой;
7.5. Безопасность транспортного средства
219
покрытие внутренних поверхностей кабины мягкими панелями, которые быст-
ро воспринимают форму ударяющейся части тела, за счет чего более равномерно рас-
пределяется ударная нагрузка;
оборудование рулевой колонки энергопоглощающим устройством для защиты
водителя от травм в случае столкновения автомобилей.
Статистика свидетельствует, что основными причинами тяжелых и смертель-
ных травм водителей и пассажиров грузовых автомобилей при опрокидывании и
столкновениях последних являются нарушение жизненного пространства внутри ка-
бины вследствие ее деформирования, соударение человека с элементами внутреннего
оборудования и его выпадение из кабины в результате самопроизвольного открыва-
ния дверей.
Основным документом, регламентирующим требования к прочности кабин,
является Правило № 29 ЕЭК ООН. В нем указывается, что в кабине грузового авто-
мобиля полной массой более 7 т должно сохраняться жизненное пространство после
воздействия на нее каждой из перечисленных ниже нагрузок:
динамической нагрузки (энергия удара 44,15 кДж) на переднюю часть каби-
ны, создаваемой с помощью свободно подвешенного маятника прямоугольной
формы (шириной 2 500 мм, высотой 800 мм, массой 1 500 ± 250 кг) в направлении,
параллельном продольной вертикальной плоскости автомобиля; центр тяжести ма-
ятника в момент удара должен находиться в среднем продольном сечении автомо-
биля на 150 мм выше точки центра тазобедренного сустава тела человека;
статической нагрузки, равной половине полного веса автомобиля (но не бо-
лее 98 кН), прикладываемой равномерно к поверхности крыши кабины;
статической нагрузки, равной 1,962 кН на 1 т массы груза, действующей по
всей площади задней поверхности кабины и создаваемой с помощью вертикальной
жесткой плиты, перемещающейся в направлении, параллельном продольной оси
автомобиля.
В России действует ОСТ 37.001.221, регламентирующий ударно-прочност-
ные свойства кабин грузовых автомобилей при опрокидывании и фронтальном
столкновении, а также методы испытаний по определению этих свойств. Отличи-
тельной особенностью данного документа по сравнению с Правилом № 29 ЕЭК
ООН является наличие норм вертикальной и поперечной жесткостей при ударных
нагрузках, а также более совершенный метод оценки деформации кабины. Наиболее
жесткие требования к прочности кабин грузовых автомобилей действуют в Швеции.
К колесным ТС ОБГ, предназначенным для длительной перевозки оборудова-
ния на большие расстояния, предъявляются следующие требования по безопасности:
высокая устойчивость при движении с грузом против опрокидывания под
действием ветра при скорости 20 м/с (при порывах до 25 м/с); в случае опрокидыва-
ния из емкостей не должны выливаться жидкости (горючее, масло, вода и т. п.),
чтобы не произошло самовозгорания;
прочность кабин должна обеспечиваться при избыточном давлении во фрон-
те воздушной волны не менее 0,03 МПа (0,3 кг/см“).
Требования по экологической безопасности. За последние годы все веду-
щие мировые фирмы, в том числе занятые производством грузовых автомобилей
большой и особо большой грузоподъемности, а также автопоездов, реализуют про-
граммы по улучшению экологических показателей своих транспортных средств.
220
7 Основные требования к эксплуатационным свойствам
Это связано с выполнением Правил ЕЭК ООН, которые постоянно ужесточаются. В
табл. 7.12 приведены международные нормы предельно допустимых количеств вы-
деляемых двигателем вредных веществ.
Таблица 7.12
Предельное количество выделяемых двигателем вредных веществ, г/кВт
Вредные вещества Правила ЕЭК ООН
№ 49-02 А «EUROA» № 49-02 Е «EURO-П» № 49-02 «EURO-Ш»
Дата введения
01.07.92 г 01.10.95 г. 01.10.98 г
Оксид углерода 4,5 4,0 менее 4,0
Углеводород 1,1 U менее 1,1
Оксид азота 8,0 7,0 5,4
Твердые частицы
(дымность) 0,36 0,15 менее 0,1
Одним из важнейших показателей, характеризующих совершенство конструк-
ции КТС ОБГ является уровень внешнего и внутреннего шума. Международные ев-
ропейские нормы на допустимые уровни внешнего шума автомобиля впервые были
приняты в 1968 г и включены в Правило № 6 ЕЭК ООН, а затем и в национальные
стандарты большинства стран Европы. В России ограничения на допустимый уровень
внешнего и внутреннего шума действуют с 1974 г. В настоящее время уровень шума
измеряется в децибелах по шкале А (дБА) (ГОСТ 17187, ГОСТ 27435 и ГОСТ 27436),
которая наиболее близко соответствует восприимчивости человеческого уха.
Между действительным снижением уровня шума и его значением в дБА су-
ществует логарифмическая, а не арифметическая зависимость. Например, снижение
уровня шума в 88 дБ на 2 дБ по шкале А соответствует действительному его сниже-
нию на 20 %, на 6 дБ — на 50 %.
Для снижения общего уровня шума ТС на какую-то величину в дБА необхо-
димо снижать его уровень от каждого из отдельных источников на эту же величину
в дБА.
С 1974 по 1982 г норма ЕЭС (Директива ЕЭС 70/157) на допустимый уровень
внешнего шума уменьшилась с 91 до 86 дБА. В 1983 г приняты еще более жесткие
нормы (84 дБА), которые введены для новых моделей с 1987 г., а для всех сущест-
вующих АТС — с 1989 г.
Общий уровень шума современного КТС ОБГ определяется в основном
уровнем шума силовой установки и систем обеспечения ее функционирования, аг-
регатов трансмиссии.
Постоянное снижение предельно допустимых уровней внешнего шума обуслов-
ливает необходимость непрерывного усовершенствования конструкции силовой уста-
новки, ее рабочего процесса, системы выпуска отработанных газов и впуска воздуха как
основных источников шума на КТС ОБГ. Пример схемы поля внешнего шума шасси
MA3-543M представлен на рис. 7.6.
7.5. Безопасность транспортного средства
221
Рис. 7.6. Схема поля внешнего шума шасси MA3-543M
При скорости движения 80 км/ч и более уровень шума от шин может превы-
шать уровень шума от остальных источников шума грузового автомобиля, причем он
зависит от рисунка протектора, степени износа шин, вида поверхности дороги, скорости
движения и нагрузки на шину. Снижение уровня шума, производимого шинами, без
ухудшения их долговечности является одной из наиболее сложных проблем.
Уровень шума на рабочем месте водителя в КТС ОБГ за последние 20 лет зна-
чительно уменьшился (например, для автопоездов — с 77 до 73 дБА при скорости
движения 80 км/ч). Ведущим западноевропейским фирмам по выпуску магистраль-
ных автопоездов удалось довести его в серийных образцах до 65...68 дБА. Это было
достигнуто за счет совершенствования конструкции двигателя, более качественной
герметизацией кабины, ее отделки более эффективными звукопоглощающими мате-
риалами, заполнением полостей вспенивающимися полимерами. Пример по допусти-
мым уровням помех речи (пассажиры общаются с водителем) приведен на рис. 7.7
Лучшим средством снижения уровня шума силовой установки служит ее шу-
моизолирующая капсула. Однако шумоизоляция ухудшает отвод теплоты от двига-
222
7 Основные требования к эксплуатационным свойствам
Рис. 7.7. Допустимые уровни помех речи в зависимости от расстояния между
собеседниками при различной силе голоса (пассажиры общаются с водителем):
А — КТС ОБГ; Б — нормы морского флота для рулевых рубок; 1 — крик; 2, 3, 4 —
громкий, повышенный, нормальный голос
теля, поэтому требуется соответствующее повышение эффективности работы сис-
темы охлаждения. Перспективным с точки зрения снижения уровня шума является
использование на АТС электрохимических силовых установок.
Для снижения уровня шума от вентилятора систем охлаждения уменьшают
частоту вращения вала вентилятора, выбирают соответствующие угол атаки лопа-
стей вентилятора и конструкцию кожуха вентилятора, а также совершенствуют его
привод (применяют гидравлическую или пневматическую муфту, которая включает
вентилятор, когда требуется дополнительное охлаждение двигателя).
Уровень шума системы выпуска отработанных газов можно уменьшить уста-
новкой глушителей повышенной эффективности.
Уровень шума трансмиссии зависит от ее типа (механическая, электрическая
или гидрообъемная), степени сбалансированности карданных валов, колес и шин,
класса изготовления различных редукторов.
В связи с высокой стоимостью конструкторско-технологических разработок, на-
правленных на решение экологических задач, их первоочередную отработку и внедре-
ние осуществляют на КТС ОБГ, имеющих наиболее высокую стоимость и быструю
7.5. Безопасность транспортного средства
223
окупаемость (карьерные автомобили-самосвалы и магистральные автопоезда с двух-
сменной и трехсменной эксплуатацией с годовым пробегом 100... 120 тыс. км).
Основные направления улучшения экологических свойств КТС ОБГ пред-
ставлены в табл. 7.13.
Таблица 7.13
Основные направления улучшения экологических свойств КТС ОБГ
Направление Содержание направления
Уменьшение эксплуатацион- ного расхода топлива Двигатели нетрадиционного типа (в том числе на альтер- нативных топливах) Микропроцессорные системы управления силовым агре- гатом (силовая установка — трансмиссия) Снижение коэффициента аэродинамического сопротив- ления Системы независимого автоматизированного подогрева двигателя (системы термостатирования) Оптимизация параметров теплового регулирования дви- гателя Оптимизация параметров двигателя и трансмиссии Снижение потерь в двигателе и агрегатах трансмиссии Повышение качества ГСМ
Совершенствование процесса сгорания топлива и очи- стки отработанных газов Малотоксичный рабочий процесс с оптимизированной (адап- тивной) топливной аппаратурой (р = 100 МПа) и ре- циркуляцией отработанных газов Нейтрализатор отработанных газов Сажевый фильтр Системы предпускового подогрева двигателя (снижение выделения при пуске холодного двигателя СО, СН и твердых частиц) Промежуточное охлаждение типа воздух — воздух Турбокомпрессор с регулируемой геометрией турбины Детали с керамическими элементами для теплоизоляции камеры сгорания и системы турбонаддува Двигатели нетрадиционного типа (газотурбинный, на аль- тернативных топливах)
Снижение шума и вибраций Совершенствование системы глушения шума выпуска отработанных газов Капсулирование двигателя и агрегатов шасси Шумоизоляция кабины Повышение точности и чистоты зубчатых передач Снижение аэродинамического сопротивления Оптимизация рисунка протектора Активное регулирование подвески
Снижение вредного воздейст- вия продуктов износа и ГСМ Безасбестовые фрикционные накладки Бескамерные шины повышенной ходимости (снижение выделения сажевой пыли в 1,5-2,0 раза)
224
7 Основные требования к эксплуатационным свойствам
Окончание табл. 7.13
Направление Содержание направления
Повышение экологичности за счет повышения техниче- ского уровня Повышение экологичности в производстве КТС ОБГ Снижение вредного воздейст- вия на опорную поверх- ность Антиблокировочная и противобуксовочная системы (снижение износа шин и тормозных накладок) Тормоз-замедлитель Пневмоподвеска (снижение интенсивности разрушения дорог) «Вечные смазки», исключение подтекания ГСМ Снижении износа шин за счет оптимального алгоритма функционирования системы рулевого управления Повышение производительности (средних скоростей движения, грузоподъемности, приспособленности к погрузке и выгрузке и т. п.) Увеличение периодичности технического обслуживания Внедрение микропроцессорной (МП) диагностики Совершенствование технологий изготовления Снижение снаряженной массы Применение экологически чистых материалов Разработка методики комплексной оценки влияния кон- струкции КТС ОБГ на разрушение почвогрунтов и их восстановление Создание автоматизированных систем выбора и регули- рования давления воздуха в шине в зависимости от условий движения транспортного средства Применение регулируемых и активных подвесок колес Оптимизация параметров колесного движителя
7.6. Эргономика
Общие положения
Конструктивные особенности КТС ОБГ, обеспечивающие легкость и удобст-
во управления ими, характеризуются эргономическими показателями, которые под-
разделяются на четыре группы:
гигиенические показатели, учитывающие степень соответствия рабочего мес-
та водителя санитарным нормам;
антропологические показатели, характеризующие степень удобства рабочего
места водителя;
физиологические и психологические показатели, определяющие соответствие
необходимых усилий на органах управления и других воздействий на водителя пси-
хофизиологическим возможностям его организма;
группа психологических показателей, определяющих приспособленность
конструкции к использованию имеющихся и формированию новых навыков води-
теля по восприятию и переработке информации.
Улучшению эргономических показателей автомобиля за рубежом уделяют
огромное внимание, так как это связано прежде всего с сохранением здоровья води-
7.6. Эргономика
225
телей, повышением производительности их труда, а также конкурентоспособностью
техники. Отечественные КТС ОБГ по этим показателям в значительной мере усту-
пают зарубежным образцам и во многом из-за этого не имеют рынков сбыта.
Гигиенические показатели
Одним и таких показателей является уровень внутреннего шума. Требования
к уровню внутреннего шума рассмотрены выше, так как этот показатель характери-
зует и экологические свойства КТС ОБГ
Уровень вибронагруженности рабочего места водителя также относится к
гигиеническим показателям. Вибрации возбуждают нервную систему человека, вы-
зывают головную боль, снижают остроту зрения, повышают утомляемость, ухуд-
шают психофизическую и рефлекторную деятельность.
В соответствии с ГОСТ 12.1.012 оценку вибрации, воздействующей на чело-
века, можно выполнить одним из следующих методов:
спектральным анализом нормируемых параметров, которыми являются сред-
ние квадратические значения (СКЗ) виброскорости или виброускорений в октавных
или третьоктавных полосах частот диапазона 0,7...90 Гц в характерных точках ав-
томобиля, расположенных в трех взаимно перпендирулярных плоскостях;
интегральной оценкой вибраций по частоте нормируемых параметров, кото-
рыми являются скорректированные значения виброускорений;
дозой вибрации, т. е. предельно допустимым временем нахождения человека
на рабочем месте.
ОСТ 37.001.291 устанавливает технические нормы предельно допустимых
вибраций на сидениях водителей грузовых автомобилей, а также в характерных точ-
ках подрессоренной массы транспортного средства.
В ОСТ 37.001.291 принята интегральная оценка вибраций, а в качестве нор-
мируемых показателей — скорректированные значения вертикальных и горизон-
тальных (продольных и поперечных) виброускорений на сидениях водителя и СКЗ
вертикальных виброускорений в характерных точках подрессоренной массы транс-
портного средства в диапазоне частот 0,7...22,4 Гц. По уровню вибронагруженно-
сти рабочего места водителя определяется время его непрерывной работы.
Положение точек измерения виброускорений на автомобиле, режимы и усло-
вия испытаний и измерений устанавливает ОСТ 37.001.275.
Международным стандартом по плавности хода является ИСО 2631-78
«Вибрация, передаваемая человеческому телу. Руководство по оценке воздействия
на человека».
Микроклимат на рабочем месте водителя определяется совокупностью темпера-
туры, влажности, скорости обдува воздухом и его химического состава.
Температура воздуха в кабине находится в прямой зависимости от температу-
ры наружного воздуха, температуры двигателя, теплоизоляции кабины, систем ото-
пления и вентиляции. Наиболее благоприятная температура — 18...24 °C. При повы-
шении этой температуры снижается внимание водителя, он плохо улавливает измене-
ния обстановки, возрастают время реакции и усталость. При температуре 17 °C и
ниже начинается охлаждение тела водителя. Температура 10 °C — минимально до-
8 - 2918
226
7 Основные требования к эксплуатационным свойствам
пустимая. В условиях низких температур падает работоспособность мышц, наблюда-
ется скованность и неточность движений человека. Чрезмерно теплая одежда стесняет
движение водителя, а обувь осложняет управление педалями.
Кабины КТС ОБГ, работающих в условиях жаркого климата, должны быть
окрашены светлой краской и оснащены кондиционерами. Для остекления кабины
следует использовать теплопоглощающие стекла.
Кабины КТС ОБГ, предназначенных для работы в условиях низких температур,
должны иметь термоизоляционные стенки, двойное остекление с электрообогревом,
уплотнения трубок, рычагов, педалей и дверок из морозостойких материалов. Отопле-
ние кабин необходимо осуществлять автономным отопителем повышенной мощности.
Терморегуляция организма человека зависит от влажности и подвижности
воздуха. Для большинства людей нормальной считается влажность 30...70 %. Чело-
век ощущает воздушные потоки при скорости их движения свыше 0,25 м/с. Ско-
рость движения воздуха в кабине и салоне автомобиля не должна превышать 1 м/с.
Температурные условия в кабинах автомобилей обеспечиваются системами
отопления, вентиляции и кондиционирования, требования к которым устанавливает
в России ОСТ 37.001.413.
Предельно допустимая концентрация вредных примесей в кабине автомо-
биля устанавливается требованиями ГОСТ 12.1.005, ГОСТ В 21116, ГОСТ 23185,
ГОСТ В 23186.
По уровню эргономических показателей кабины зарубежных КТС ОБГ, особен-
но тягачей, близки к легковым автомобилям. На них применяют независимый автома-
тический отопитель, кондиционер, холодильник, тахометр, тахограф, сидения с элек-
троподогревом и многими регулировками, обогреваемые зеркала заднего вида и другое
оборудование. К числу последних нововведений относится система кондиционирования
воздуха в кабине с автоматическим поддержанием заданной температуры, дистанцион-
ное управление поворотом правого зеркала и открытием правого бокового стекла. Ка-
бины внутри достаточно просторны, позволяют водителю 95 %-ной репрезентативности
стоять во весь рост не сгибаясь. Рулевое колесо имеет большой диаметр (500...550 мм)
как напоминание водителю, что он за рулем тяжелого транспортного средства. Для
улучшения звукоизоляции используется многослойное битумно-войлочное уплотнение
пола. Все кабины пылевлагонепроницаемы.
Антропологические показатели
Один из таких показателей — характеристика рабочей позы водителя. Фи-
зиологически правильная рабочая поза обеспечивает удобство управления автомоби-
лем, повышение точности и скорости моторных действий водителя, возможность
длительной непрерывной работы без значительного утомления, что особенно важно
для водителей большегрузных транспортных средств. Это достигается, когда все тело
человека находится в положении, близком к состоянию функционального покоя, а его
вес равномерно распределяется по площади опорных поверхностей.
Параметры рабочего места водителя грузовых автомобилей (размеры и регу-
лировка сидения, расположение органов управления) устанавливает ОСТ 37.001.413.
Характеристика рабочей позы при вождении определяется с помощью специального
манекена (рис. 7.8).
a
Рис. 7.8. Схема рабочего места водителя:
а — размерные параметры рабочего места водителя; б — необходимые перемещения сидения водителя и рулевой колонки
7.6. Эргономика
228
7 Основные требования к эксплуатационным свойствам
Рис. 7.9. Пример компоновки кабины КТС ОБГ
Обивка сидения водителя должна быть плотной и шероховатой. Материала-
ми для обивки служат плотные шерстяные и полушерстяные ткани, кожа, кожзаме-
нители и пластические материалы. Воздухопроницаемость материала должна быть
не менее 0.35 см 7(см2-с). Пример конструкции рабочего места водителя КТС ОБГ
представлен на рис. 7.9.
Физиологические показатели
Устанавливают усилия на органах управления и регламентируются ГОСТ 21398
(рассмотрены выше).
Психологические показатели
К устройствам, обеспечивающим внутреннюю визуальную информативность
автомобиля, относятся средства отображения информации и устройства, улуч-
шающие обзорность.
В процессе управления КТС ОБГ водителю необходима информация о со-
стоянии технических систем, которая должна поступать в кодированной форме от
приборов и индикаторов, находящихся на специальной панели.
Поскольку конструкция КТС ОБГ включает целый ряд нетрадиционных для
автомобилестроения систем, узлов и агрегатов, то поток информации на водителя
значительно увеличивается. Поэтому панель приборов должна иметь различные
индикаторы, показывающие состояние техники, течение процессов в ней, скорость
движения и т. п. Эти устройства необходимо конструировать с учетом законов вос-
приятия информации человеком: должно обеспечиваться быстрое прочтение и без-
ошибочное (однозначное) понимание водителем визуальной информации, посту-
пающей к нему от приборов панели. При этом необходимо учитывать, что пример-
но три четверти всех ДТП происходит по вине водителей. Управляя работой
техники, человек тем самым снимает некоторую неопределенность в ее функциони-
ровании, т. е. вносит в систему управления ею свою информацию. И чем более
сложную задачу ему приходится решать, тем большую неопределенность прихо-
дится снимать (большую информацию вносить в систему). Для этого ему требуется
достаточный объем исходных данных, но этих данных должно быть ровно столько,
сколько необходимо для принятия решения в конкретной ситуации.
7.6. Эргономика
229
OCT 37.001.202 регламентирует размещение панели приборов в кабине авто-
мобиля, номенклатуру контрольно-измерительных приборов и сигнализаторов, а
также принципы их расположения на панели.
Основное требование к компоновке панели приборов — сокращение времени
восприятия водителем показаний приборов при условии получения информации в
достаточном объеме.
Обзорность с места водителя определяет возможность наиболее полного
восприятия и правильной оценки им дорожной обстановки. Параметры обзорности
для грузовых автомобилей регламентированы ОСТ 37.001.413.
Улучшение обзорности (см. рис. 7.8) достигается приближением места водителя
к передней части автомобиля, увеличением площади ветрового стекла и установкой
ветрового стекла панорамного типа. Однако из-за больших габаритов КТС ОБГ и спе-
цифики их компоновки со смонтированным оборудованием этих конструктивных ме-
роприятий для оценки дорожной обстановки явно недостаточно, поэтому необходимо
оборудование КТС ОБГ телевизионными и радарными системами с выводом информа-
ции на панель приборов.
Большое значение для обеспечения обзорности независимо от метеорологи-
ческих условий имеют стеклоочистители, а также система обмыва и обогрева стекол.
Основное требование, предъявляемое к стеклоочистителям, — очистка как можно
большей части площади ветрового стекла и хорошее качество очистки за каждый
ход щеток. Система обдува и обогрева стекол должна предотвращать запотевание и
обмерзание лобового стекла при наружной температуре до -45 °C на всей очищае-
мой площади.
Водителю часто приходится оценивать дорожную обстановку позади транс-
портного средства, особенно при маневрировании на месте погрузки-разгрузки или
на строительных площадках. Для этой цели служат зеркала заднего обзора (телеви-
зионные или радарные системы), причем обзорность зависит от формы их отра-
жающей поверхности (выпуклая или плоская), размеров зеркала и места его разме-
щения относительно глаз водителя. Обзорность через зеркала заднего обзора долж-
на соответствовать требованиям ОСТ 37.001.451 и Правилу № 46 ЕЭК ООН.
В число психологических показателей входит и звуковая информативность ав-
томобиля. В настоящее время нет международных документов, унифицирующих зву-
ковые сигнализаторы и параметры их характеристики (силу звука, прерывность,
тембр). Звуковые сигналы служат для передачи водителю простейшей информации в
качестве предупредительной. В особо опасных случаях должно быть предусмотрено
дублирование аварийного светового сигнала прерывистым звуковым (например, о
недостаточном уровне жидкости в тормозной системе и давлении воздуха в ней и
шинах, сокращении до критической величины расстояния до препятствия и т. п.) [20].
При использовании звуковой информации снижается уровень визуальной на-
грузки водителя, улучшаются условия его работы и в конечном итоге повышается
безопасность движения. Это приобретает особое значение по мере увеличения чис-
ла приборов внутренней визуальной информативности автомобиля и повышении
интенсивности движения.
Подводя итог рассмотрению требований по эргономике, можно заключить
следующее. Совершенствование эргономических показателей автомобилей за рубе-
230 7 Основные требования к эксплуатационным свойствам
жом является приоритетной задачей, несмотря на большие ресурсы, которые оно
требует для своего осуществления. Для этого постоянно уточняются или вновь раз-
рабатываются нормативные документы и совершенствуется правовая база. У нас в
стране этой проблемой по установившейся традиции занимаются очень мало. Из
главных конструкторов КТС ОБГ и ученых лишь М.С. Высоцкий первым серьезно
обратил на это внимание [4].
Глава 8
Основные технические критерии и методы оценки
эффективности принимаемых для КТС ОБГ
технических решений
8.1. Анализ технических критериев совершенства
конструкции транспортных средств
Общие положения
Весь жизненный цикл транспортного средства сопровождается оценкой его ка-
чества и эффективности — совершенства. Эффективность (от слова эффект) — в
сфере человеческой деятельности термин общепринятый. Однако для каждого вида и
рода деятельности человека используют конкретные количественные критерии ее
оценки. Для оценки эффективности АТС таких общепризнанных критериев до на-
стоящего времени нет, поэтому работы многих ученых посвящены решению пробле-
мы создания методов оценки эффективности использования автомобильной техники
вообще и сравнительной оценки эффективности транспортного средства с различны-
ми вариантами технических решений его основных систем и агрегатов в частности.
При этом одним из важнейших этапов разработки подобных методов являет-
ся этап выбора и обоснования объективных количественных критериев, на базе ко-
торых строятся конкретные предложения по этой оценке. Несмотря на огромное
число работ, общепризнанной методики, построенной на основе охватывающего все
многообразие использования автомобиля критерия (комплекса критериев), нет. По-
этому авторы, прежде чем предложить в данной книге свою методику оценки эф-
фективности как оценку подвижности КТС ОБГ, провели краткий анализ известных
из научной печати подходов к решению данной проблемы.
В общем виде цель определения эффективности системы — оптимизиро-
вать ее для получения новой системы, модернизации существующей или выбора
варианта, наиболее близкого к оптимальному по определенному показателю эф-
фективности.
232
8. Основные критерии и методы оценки технических решений
Особенностью сложных систем является необходимость их оценки по многим
частным показателям качества: точности, надежности, стоимости и т. д. В соответст-
вии с принципом однозначности показатель эффективности системы в целом как кри-
терий оптимальности должен быть представлен в виде одного общего показателя,
включающего все учитываемые частные показатели качества. В общем случае эф-
фективность внедрения или модернизации системы оценивается показателем
где Э — эффект, т. е. величина, показывающая, что дает применение новой системы
или модернизация существующей; 3 — затраты на разработку, внедрение и экс-
плуатацию системы.
Теоретически показатель эффективности новой системы Е учитывает все за-
траты и выгоды от ее внедрения: вложение труда, удовлетворение качественно но-
вых потребностей, улучшение качества продукции и т. п. Однако не все эти показа-
тели могут быть непосредственно измерены. Поэтому в экономике было предложе-
но понятие экономической эффективности [21].
Если полный эффект от внедрения новой системы не может быть представ-
лен в денежном выражении, то используется понятие технико-экономической эф-
фективности, которое помимо экономии затрат труда учитывает измеримые техни-
ческие показатели новой системы:
F = F(yb уп), (8.1)
где yi, уэ, --,y/t — измеряемые технические показатели, называемые частными по-
казателями качества; п — количество учитываемых частных показателей качества,
включая расходы С = уп.
Частные показатели качества зависят от структурных и конструктивных па-
раметров, которые можно измерять в процессе разработки и внедрения систем:
y = Ji(x},x2, хт),
где i = 1, ..., n; А'|, х2, ..., хт — структурные и конструктивные параметры системы и
ее элементов.
Если функции J, и F известны, т. е. выражены аналитически, то не составляет
труда определить показатель эффективности £, так как параметры х2, х™ из-
вестны для каждого варианта системы. Именно они являются управляющими воз-
действиями при оптимизации системы в процессе ее разработки, поскольку разра-
ботка и модернизация системы заключается в выборе структуры и элементов систе-
мы, обеспечивающей ее максимальную эффективность.
Если функция F неизвестна, ограничиваются оценкой эффективности системы
по одному, наиболее важному частному показателю (например, по^О, а на остальные
накладывают ограничения, чтобы они не выходили за определенные пределы:
Е = У), УН,-,У,-,УВ,-, i = 2,3,...,n,
8.1. Анализ технических критериев совершенства конструкции ТС 233
где уж и ув/ — нижний и верхний пределы z-го частного показателя качества.
В зависимости от частного показателя качества один из пределов (верхний или
нижний) может быть не ограничен.
Оценка эффективности системы по одному частному показателю при огра-
ничении остальных частных показателей имеет тот недостаток, что решение задачи
оптимизации или выбора для реализации практически оптимального варианта сис-
темы будет неоднозначным.
Можно получить много вариантов систем с одинаковым или примерно оди-
наковым основным частным показателем качества у,- при существенно различаю-
щихся других частных показателях, удовлетворяющих ограничениям. В этом слу-
чае нельзя с уверенностью определить, какой вариант системы ближе к оптималь-
ному. Поэтому в качестве одного из методов определения эффективности было
предложено [21] для нахождения практически оптимального варианта сложной
системы заменить функцию показателя эффективности (8.1), если неизвестно ее
аналитическое выражение, линейной функцией, включающей все основные част-
ные показатели качества:
Е = Ь}у} + Ь2у2 + +Ьпуп, (8.2)
где Z?i, Ьъ — весовые коэффициенты при наличии ограничений ун/, у,,ув/.
Линейная форма показателя (критерия) эффективности сложных систем яв-
ляется наиболее простой функцией, учитывающей все основные частные показате-
ли качества. Ее используют для выделения практически оптимального (из конкури-
рующих) варианта без особых трудностей.
Самостоятельной задачей при использовании как линейной функции (8.2),
так и любых других, является определение перечня учитываемых (основных) част-
ных показателей качества системы у, и их весовых коэффициентов />,.
Технико-экономические критерии эффективности АТС
Обоснование выбора критерия и частных показателей принято начинать
с краткого обзора существующих зависимостей для определения их величин. При
этом прежде всего определяют, достижению каких целей должен способствовать
тот или иной показатель.
Очевидно, что для конструктора этот критерий должен служить средством
оценки совершенства конструкции автомобиля как сложной системы (в основном
шасси, т. е. силовой установки, трансмиссии и движителя). Но потребитель, для кото-
рого он в этом смысле может быть не понятен, едва ли будет руководствоваться вели-
чиной такого показателя и выбирает транспортное средство по своим параметрам.
Однако следует считать аксиомой, что параметры эксплуатационной эффективности
всегда являются производными от параметров совершенства конструкции автомоби-
ля, выбираемых и определяемых конструктором. При этом технико-экономический
анализ связывает воедино эти два аспекта.
Поэтому в работе [22] было предложено, что для выявления наиболее ра-
циональных с экономической точки зрения численных значений конструктивных
234
8. Основные критерии и методы оценки технических решений
параметров автомобилей методология технико-экономического анализа должна
быть построена так, чтобы можно было установить не только прямую связь между
конструктивными параметрами машины и ее экономическими показателями, но и
обратную связь, позволяющую оптимизировать создаваемую конструкцию. В свя-
зи с этим большую роль в технико-экономическом анализе играет применение
основных принципов прикладной кибернетики: изучение проектируемой машины
как системы, в которой каждый элемент — часть большой совокупности; обеспе-
чение оптимального решения многовариантных задач выбора численных характе-
ристик этих элементов по определенному критерию; использование характерных
кибернетических методов (моделирование, обратная связь и т. п.). Кибернетиче-
ский подход позволяет взаимно увязать четыре аспекта анализируемой системы:
технический, экономический, производственный и математический.
Для проведения системного технико-экономического анализа автомобилей в
работе [22] предложена классификация параметров и показателей, особенность ко-
торой заключается в следующем:
параметры и показатели сведены в пять групп (стандартизованные, конструк-
тивные, производственные, эксплуатационные, экономические), причем для отнесения
параметров и показателей «смешанного» характера (например, грузоподъемность) в
классификационную группу используется принцип приоритета, т. е. учитывается,
являются те или иные параметры и показатели первичными или производными в
процессе проектирования;
внутри классификационной группы параметры и показатели разграничива-
ются по характеру (например, конструктивные — по подгруппам: размерные, весо-
вые, силовые);
по характеру использования параметры и показатели классифицируются на
задаваемые вышестоящей организацией или заказчиком, выбираемые или получае-
мые при компоновке, рассчитываемые;
классификационные таблицы разрабатываются применительно к информа-
ции, известной на соответствующей стадии проектирования, тем более что ряд па-
раметров и показателей, рассчитываемых или выбираемых на определенной стадии
проектирования, на следующей стадии входит в группу задаваемых;
для стадий эскизного и технического проектирования классификационные таб-
лицы создаются как для автомобиля в целом, так и для основных агрегатов и систем.
Обосновывая данную классификацию, М.И. Ипатов особое внимание [22] уде-
ляет обеспечению на ранних стадиях проектирования достаточной точности расчета
средней скорости движения проектируемого и базового (сравниваемых) автомоби-
лей или проектируемых конструктивных вариантов автомобилей в данных дорож-
ных условиях. Эти расчеты являются, по мнению автора, исходными и наиболее
важными для определения производительности автомобиля.
В работе [23] впервые введено понятие конструктивной эффективности авто-
транспортных средств, определяемое как возможность АТС с заданным сочетанием
технических параметров обеспечить максимальную эффективность перевозок в кон-
кретных условиях эксплуатации при соблюдении нормативного уровня безопасности.
В этой же работе в качестве интегрального критерия конструктивной эффектив-
ности АТС предложено рассматривать рентабельность перевозок Цпер. Такой технико-
8.1. Анализ технических критериев совершенства конструкции ТС 235
х | £42.s + юр + + Л
\ Ли
экономический критерий позволяет привести все результаты и затраты к единой едини-
це измерения в конкретных условиях эксплуатации.
Рентабельность перевозок учитывает максимальное число показателей
свойств и технических параметров, связанных с конструкцией автомобиля, приве-
денных к общей единице измерения. К их числу отнесены: mip — масса груза, пере-
возимого АТС, т; уг — средняя скорость на маршруте, км/ч; Qs — средний эксплуа-
тационный расход топлива, л/100 км; Т1ор — удельная трудоемкость технического
обслуживания и ремонта, чел ч/1000 км; LAtc — ресурс АТС до списания или капи-
тального ремонта, км; пш, LH1 — количество (ед.) и ходимость шин, км; г11р — про-
должительность процесса погрузки-выгрузки за ездку, ч; &вып- коэффициент выпус-
ка; А:ИСц. пр — коэффициент использования пробега; £н — технико-экономическая
эффективность, соответствующая нижнему уровню частных показателей качества.
Зависимость интегрального критерия конструктивной эффективности от тех-
нических показателей и параметров имеет вид
Упер = (Л I ^вып^исп. пр )/{(МВЫП^ИСП. пр^1 Лз^ВЫП^ИСН. II ~ ) X
к
(t.p V^tc/V, (ГпрГЛвып +£|())}“h (8-3)
где к\-к\о — коэффициенты, учитывающие транспортные и экономические условия
эксплуатации.
Анализ структуры выражения (8.3) показывает, что с точки зрения конструк-
тора и потребителя общий интерес представляют значения v, и Qs. Значения данных
параметров автомобиля для потребителя являются исходными при выборе транс-
портного средства, а для конструктора — при его проектировании. Остальные со-
ставляющие интегрального критерия представляют собой показатели и параметры,
которые задаются техническим заданием или обеспечиваются конструктивными
приемами и организационными мероприятиями.
Средняя скорость движения v, и путевой расход топлива Q„ в свою очередь,
являются производными от энергетического совершенства автомобиля в целом и
его составных систем и агрегатов.
Выбор критерия (показателя), позволяющего оценивать энергетическое со-
вершенство автомобиля и его составных систем и агрегатов, дает возможность бо-
лее обоснованно принимать оптимальные конструктивные решения, способствует
дальнейшему повышению качества и эффективности перспективных автомобилей.
При этом важно, чтобы критерии оценки совершенства конструкции отдельных аг-
регатов и систем автомобиля влияли на формирование критерия оценки конструк-
тивного совершенства автомобиля в целом (например, на v, и QJ.
Требования к техническим критериям эффективности АТС
В теории автомобиля и в теории трактора существуют критерии, позволяю-
щие оценивать конструктивное совершенство как ТС в целом, так и его систем и
агрегатов.
236
8. Основные критерии и методы оценки технических решений
Рассмотрим кратко эти критерии с точки зрения совершенства конструкции
системы силовая установка — трансмиссия — колесный движитель, оценивающие
ее влияние на подвижность автомобиля.
Под совершенством этой системы понимается степень обеспечения конструк-
цией оптимального распределения крутящего момента (мощности) по ведущим коле-
сам в соответствии с компоновкой, режимами и условиями движения автомобиля.
Искомые критерии должны отражать изменение необходимой для движения
автомобиля мощности сравниваемого (оцениваемого) образца с существующим
прототипом или каким-то идентичным по предназначению автомобилем (идеаль-
ным автомобилем), имеющим оптимальные характеристики трансмиссии. При этом
критерии должны быть безразмерными, т. е. не зависеть от грузоподъемности, чис-
ла осей, типа шин и других конструктивных особенностей.
Таким образом, к таким критериям можно сформулировать следующие тре-
бования:
они должны позволять оценивать совершенство трансмиссии с точки зрения
обеспечения минимальных затрат мощности, необходимой для движения в различ-
ных дорожных условиях;
сравнение совершенства конструкции трансмиссии существующего (оцени-
ваемого) автомобиля должно проводиться с трансмиссией идентичного по предна-
значению автомобиля, обеспечивающей оптимальное распределение крутящего
момента по ведущим колесам, а также автомобиля, трансмиссия которого не отве-
чает требованиям оптимального распределения мощности;
критерии должны быть количественно связаны с изменением мощности (кру-
тящего момента), необходимой для движения автомобиля;
критерии должны быть безразмерными.
С изложенных позиций рассмотрим кратко рекомендуемые в настоящее вре-
мя в теории автомобиля и теории трактора технические критерии и показатели.
Оценка тягово-скоростных свойств АТС
Впервые в работах академика Е.А. Чудакова дано определение тяговых качеств
автомобиля, под которыми понималась способность АТС совершать движение на раз-
ных дорогах. При этом полагалось, что достаточно полно тяговые качества можно оце-
нить с помощью динамической характеристики, максимальной и средней скоростей
движения. В дальнейшем эти критерии нашли применение и получили дальнейшее раз-
витие в работах [22-51 ].
Установлено, что тягово-скоростные свойства во многом определяют эффек-
тивность использования автомобилей. Как следует из работы [29], под эффективно-
стью следует понимать возможность автомобилей выполнять перевозки на задан-
ных маршрутах с максимально возможными скоростями. Скоростные свойства, как
указывается В.Ф. Платоновым в работе [29], обычно оценивают с помощью средней
скорости движения. Из большого многообразия факторов, влияющих на скоростные
свойства автомобиля, автор выделяет удельную мощность, устойчивость и управ-
ляемость, тормозные свойства и плавность хода.
Из этих факторов при оценке тягово-скоростных свойств АТС наибольшее
внимание в работе [29] уделяется удельной мощности Ауд. Оценку тяговых возмож-
8.1. Анализ технических критериев совершенства конструкции ТС 237
ностей автомобиля предлагается осуществлять с помощью уравнений силового ба-
ланса и динамического фактора.
Для оценки эффективности автомобиля в данной работе предлагаются два
относительных показателя эффективности и производительности, учитывающие
экономические затраты, или показатели работы автомобиля при выполнении целе-
вой работы. Показатель эффективности определяется как отношение
где — уровень комплекса выполняемых автомобилем функций;
приведенные суммарные затраты; По/, ^фо/ — характеристики базового образца.
Показатель производительности (эффективности) равен
kvmvLk^cn Прv,ТДт
( + ^исп. пр VT^n )
(8.5)
где т, и — грузоподъемность и коэффициент ее использования; L — пробег ав-
томобиля; £исп пр — коэффициент использования пробега; vT — средняя техническая
скорость; Т и Д — суточное время работы и число рабочих дней за период; т — ко-
эффициент использования автомобиля в рассматриваемый период; tn — время на
погрузку и разгрузку.
Эти показатели раскрывают эффективность использования грузового авто-
мобиля на маршруте. Однако анализ входящих в зависимости (8.3)-(8.5) параметров
показывает, что данные показатели предпочтительнее применять при исследовании
эффективности работы машин в автотранспортных хозяйствах, но не использования
КТС ОБГ с оборудованием.
В работе [16] А.А. Токаревым предложено проводить расчетные исследова-
ния тяговых свойств на основе уравнений тягового и мощностного балансов. Так,
например, предлагается следующее уравнение мощностного баланса:
Ак —Ncy\N cos(X+Ga sinOt+И^у2 ) г-10 *
(8.6)
где NK — мощность на ведущих колесах автомобиля; Ne — эффективная мощность
двигателя; Г|^— коэффициент мощностных потерь; Pf— суммарная сила сопротив-
ления качению; Ga— вес автомобиля; — фактор сопротивления воздуха; та —
масса автомобиля; а — угол подъема дороги; у— скорость движения; — коэф-
фициент учета вращающихся масс.
В представленном уравнении автор не учитывает потери мощности в движи-
теле на буксование. Однако при интенсивном разгоне автомобиля с места окружные
силы на ведущих колесах принимают высокие значения. Это ведет к повышенным
тангенциальным деформациям шин и в ряде случаев — к проскальзыванию колес
относительно опорной поверхности, а значит, и к повышенным затратам мощности
на буксование движителя.
238
8. Основные критерии и методы оценки технических решений
К основным оценочным показателям тяговых свойств А.А. Токарев относит мак-
симальную окружную силу Рдтах на ведущих колесах и максимальный динамический
фактор £)тах, определяемые при заданной устойчивой скорости движения по прямой
горизонтальной дороге с усовершенствованным покрытием. К косвенным — удельную
мощность 7Vy, коэффициент приемистости при заданной скорости движения Г|7, макси-
мальный преодолеваемый автомобилем подъем атах. В качестве основных оценочных
показателей скоростных свойств им выделяются максимальная скорость Vmax; условная
максимальная скорость V>c„ которую может набрать автомобиль на ограниченном пути;
максимальное (среднее) ускорение разгона jmax; средняя скорость движения на типовом
маршруте Vcp, средняя скорость движения в ездовом цикле Уср,ц.
В работе А.С. Литвинова и Я.Е. Фаробина [31] дано наиболее полное опреде-
ление тягово-скоростных свойств как совокупности свойств, определяющих воз-
можные по характеристикам двигателя или сцепления ведущих колес с дорогой
диапазоны изменения скоростей движения и предельные интенсивности разгона
автомобиля при его работе на тяговом режиме в различных дорожных условиях.
Тяговым считается режим, при котором от двигателя к ведущим колесам подводит-
ся мощность, достаточная для определения сопротивления движению.
Авторы работы [31] выдвинули перечень наиболее употребительных и доста-
точных единичных показателей для сравнительной оценки тягово-скоростных
свойств автомобилей: максимальная скорость; условная максимальная скорость,
определяемая средней скоростью движения автомобиля на последних 400 м при его
разгоне на участке 2 000 м с полной подачей топлива и начале переключения пере-
дач при номинальной частоте вращения коленчатого вала; время разгона на пути
400 и 1 000 м; время разгона до заданной скорости; скоростная характеристика раз-
гон-выбег; скоростная характеристика разгона на высшей передаче; скоростная
характеристика на дороге с переменным продольным профилем; минимальная ус-
тойчивая скорость; максимальный преодолеваемый подъем; установившаяся ско-
рость на затяжных подъемах; ускорение при разгоне; сила тяги на крюке; длина ди-
намически преодолеваемого подъема.
Часть этих показателей имеет нормированные ОСТами и ГОСТами значения
либо их значения могут быть определены экспериментально или рассчитаны реше-
нием уравнения силового или мощностного баланса. Для этого, например, уравне-
ние силового баланса записывается в виде
т£м^-= Рк ~Рл~Р^
at
где Рл — сила дорожного сопротивления, равная сумме сил сопротивления подъему
и сопротивления качению; Рв — сила сопротивления воздуха.
Затем уравнение преобразовывается к виду
q dv 2 ,
т-^м --~ aiV + Рv + ci у
dt
где i — помер передачи; /?„ — коэффициенты, изменяющиеся вместе с переда-
точным числом и зависящие от соответствующих коэффициентов кубического
8.1 Анализ технических критериев совершенства конструкции ТС 239
трехчлена («, Ь, с), которым аппроксимируется зависимость мощности двигателя Ne
от частоты вращения коленчатого вала п. Коэффициенты а, Ь, с — постоянные для
данного двигателя.
Предложенный в работе [31] метод позволяет анализировать тягово-скорост-
ные свойства проектируемого автомобиля и сравнивать их со свойствами прототи-
па, исследовать эффективность различных конструктивных решений, направленных
на повышение тягово-скоростных свойств.
Однако необходимость применения в конструкции автомобиля принципи-
ально новых решений (ГТД, ГОТ, ЭТ и др.) требует поиска более эффективных по-
казателей как для оценки тягово-скоростных свойств автомобилей, так и для уста-
новления их функциональных зависимостей от конструктивных параметров, влия-
ние которых на тягово-скоростные свойства исследуется.
В этой связи многие авторы [29, 32, 33 и др.] используют как основной кри-
терий эффективности машины производительность и удельную производительность
(отнесенную к среднему расходу топлива Q):
п =^-
у Q
Показатель удельной производительности весьма удобен, поскольку он ком-
плексно характеризует не только тягово-скоростные свойства машины и ее топлив-
ную экономичность, но и эффективность конструкции в целом. По своей структуре
он близок к коэффициенту полезного действия, получившему широкое обсуждение
в технической литературе.
В работе Дж. Вонга [34] используется удельная транспортная эффективность,
определяемая как
т. V
1 у вх
где т{ — полезная нагрузка; V — скорость автомобиля; NBK— входная мощность.
В теории трактора [261 предлагается целый ряд показателей, позволяющих
достаточно объективно оценивать конструктивное совершенство трактора и от-
дельных систем и агрегатов.
КПД как критерий совершенства конструкции
Одним из основных показателей принят тяговый КПД трактора (т|,).
Он замеряется (или подсчитывается) для установившегося движения по горизон-
тальной поверхности без использования вала отбора мощности по формуле
^кр
П1=^7’
(8.7)
где /VKp — мощность, необходимая для преодоления тяговых сопротивлений агрега-
тируемых машин и орудий; Ne — мощность двигателя.
240
8. Основные критерии и методы оценки технических решений
Недостатком данного показателя является то, что при движении автомобиля
без прицепа Т|т будет близок к нулю.
Кроме коэффициента Г|т в теории трактора используют коэффициенты полезного
действия трансмиссии (Т|тр), внутренних потерь в движителе (Г|г), затрат мощности на
образование колеи (Т|сопР)- Последний коэффициент определяется по выражению
N
Псопр=1—(8.8)
’ е
где /VConp — мощность, затрачиваемая на образование колеи; Ne — номинальная
мощность двигателя.
Недостаток этой формулы заключается в том, что КПД изменяется в зависи-
мости от режима загрузки трактора. При увеличении Ne (например, агрегатирование
тяжелой машины) при незначительном росте Мсопр значение Т|сопр уменьшается.
Особый интерес представляют транспортный и полный КПД, предложенные
В.В. Ванцевичем [25], и близкие к ним по структуре коэффициенты, предложенные
В.Н. Шалягиным [27].
Для определения транспортного КПД в работах [25, 27] используют следую-
щие формулы:
т
IX
гктР=“----, (8-9)
£Х
i=\
т
где — часть мощности сопротивления, обусловленная действием перево-
/=|
п
зимого груза; — подведенная к движителю мощность; т — число мостов
/=1
автомобиля; п — число ведущих мостов.
Если сцепные условия правого и левого колес каждого моста различные, то
выражение (8.8) будет иметь вид
т
У N" •
т 4^ Ф11 п
П.„Р=1ХХ----------+ (8Л°)
'=* ^х ,=1
Z = 1
где индексами (') и (") обозначены правые и левые колеса соответственно.
В случае, если автомобиль не только перевозит в кузове полезный груз, но и
буксирует прицеп, транспортный КПД выражается формулой
с тпр
т IL IL ^<РГ'
п,тр=1Х,.+ ’ <81|>
,=i
i=\
8.1. Анализ технических критериев совершенства конструкции ТС 241
,z,np
где А(рг/- — дополнительное сопротивление качению, обусловленное полезным
/=1
грузом; тпр — число мостов одного прицепа; с — количество прицепов.
Если на крюке буксируется прицеп без груза, то предлагается использовать
тяговый КПД (8.7).
Как следует из формул (8.9)—(8.11), предлагаемые показатели являются в
полном смысле КПД машины, так как по определению любой КПД есть отношение
полезной мощности к мощности затраченной. По его величине в общем случае так-
же можно судить и о совершенстве конструкции трансмиссии. Однако этот коэф-
фициент не связан непосредственно с количественными показателями изменения
мощности и средней скорости движения, а также с расходом топлива. Например,
при увеличении КПД (8.10) на 5 % трудно определить, насколько уменьшилась не-
обходимая для движения мощность в связи с внесенными конструктивными усо-
вершенствованиями или насколько данная конструкция повышает vr и уменьшает Q,.
Кроме того, величина КПД, определяемая по формулам (8.10) и (8.11), не по-
зволяет оценить возможность и направления дальнейшего совершенствования
трансмиссии.
Использование эталонного КПД автомобиля как основного показателя со-
вершенства его конструкции предложено М.И. Погосбековым [28]:
L-------7 >
/(Gr +Ga ) + И>2
где/э — эталонный коэффициент сопротивления качению; тгр — масса груза; Г|Л/ —
КПД трансмиссии; Т|б — КПД буксования; f— фактический коэффициент сопро-
тивления качению; Gr = mv?g — масса груза; Ga — масса автомобиля в снаряженном
состоянии; WB — сила сопротивления воздуха.
При этом формула, предлагаемая в работе [28], отличается от выражений
(8.9)—(8.11) тем, что, во-первых, не раскрывает структуру КПД буксования, во-
вторых, вводит понятие эталонного коэффициента сопротивления качению (/,) и
фактического коэффициента сопротивления качению (/). Что касается КПД буксо-
вания, то М.И. Погосбеков полагает, что его величиной при движении по твердой
дороге можно пренебречь. Однако хорошо известно, что приложение к колесу кру-
тящего момента (или продольной силы) всегда вызывает изменение величины ра-
диуса качения, а следовательно, и величины буксования. Последняя будет весьма
ощутимой даже при движении по сухой дороге (особенно при наличии прицепа), а
тем более, если дорога мокрая или заснеженная (не говоря уже о движении по грунту).
Вводя понятия /и/э, М.И. Погосбеков утверждает, что/может быть замерен
достаточно точно методом тензометрирования. Но еще Г.В. Зимелев назвал/вели-
чиной условной, которая непосредственно измерена быть не может. Это нашло от-
ражение и в ГОСТ 17967 Определить с достаточной точностью можно только ко-
эффициент сопротивления качению в ведомом режиме. Его величина и приводится
во всех таблицах.
Об исключительной роли КПД при исследовании свойств автомобиля идет
речь в работе А.А. Токарева [30].
242
8. Основные критерии и методы оценки технических решений
Согласно [30J, КПД автомобиля
2
v
Па =---5—,
теЛи
(8.12)
где к. — коэффициент пропорциональности по пути выбега; у — плотность топли-
ва; 2s — расход топлива; Яи — удельный тепловой эквивалент топлива.
С помощью зависимости (8.12) предлагается анализировать не только авто-
мобили, близкие по назначению, но и автомобили разных типов. Так, КПД бензиновых
грузовых неполноприводных автомобилей при массе перевозимого груза 0,8...6,0 т
находится в пределах 0,062-0,206 и 0,040-0,117 — для полноприводных. Коэффи-
циент полезного действия легковых автомобилей находится в основном в пределах
от 0,090-0,110.
На основании проведенных исследований в работе [30] представлены сле-
дующие выводы: КПД — комплексный оценочный показатель качества автомобиля,
позволяющий учесть все виды потерь при его эксплуатации; КПД — важный инст-
румент при выборе рациональных конструктивных параметров автомобиля на ста-
дии его проектирования и оптимизации.
Вместе с тем при проектировании различных узлов, систем и для детального
исследования КПД последний следует математически выражать в функциональной
зависимости от характеристик и параметров этих узлов и систем.
Коэффициент добротности (совершенства) трансмиссии АТС
Максимальное приближение к упомянутым выше в данной главе требовани-
ям имеет коэффициент добротности (совершенства) трансмиссии, предложенный в
работе [35].
Его структура связана с тем, что в реальных условиях к каждому колесу под-
водится мощность 2VKp, отличающаяся от оптимальной NKonT, обеспечивающей ми-
нимальное сопротивление качению. Между ними существует разность
А^ = ^кр-^к.опТ-
С учетом того, что в формировании эксплуатационных свойств автомобиля
участвуют все колеса, коэффициент совершенства трансмиссии может быть пред-
ставлен в виде
I 2" 7
Х(^р-^к.опГ)
’ (8-|3)
I '’Осип
где п — число осей автомобиля; М)опт — оптимальная мощность, которая должна
быть подведена к движителю с данной трансмиссией в данных условиях движения.
Таким образом, у идеальной трансмиссии Кч = 1. У реальных трансмиссий Кч
может изменяться от нуля при полностью дифференциальной трансмиссии (трени-
ем в дифференциалах пренебрегаем) при отрыве одного из колес от поверхности
дороги до отрицательной величины, когда в полностью блокированной трансмиссии
возникает циркуляция мощности.
8.1. Анализ технических критериев совершенства конструкции ТС 243
В структуре этого показателя добротности (совершенства) трансмиссии
трудно учесть влияние коэффициента приспособляемости двигателя, точнее, опре-
делить это влияние количественно, так как это возможно только при оценке мощно-
стного баланса системы двигатель—трансмиссия—движитель. Однако это не ис-
ключает возможности использования идеи, заложенной в структуру Kq при разра-
ботке коэффициента, отвечающего всем требованиям, предъявляемым к критерию
оценки системы.
Для такого критерия-коэффициента, который условно назван в работе [54]
коэффициентом оптимального распределения мощности ^)рм, необходимо, чтобы
его величина количественно совпадала с количественным изменением передавае-
мой мощности оцениваемой трансмиссии по сравнению с трансмиссией, обеспечи-
вающей оптимальное распределение мощности по ведущим колесам. В конечном
виде, по мнению Ю.В. Пирковского и С.Б. Шухмана [52], изменение значения этого
коэффициента должно прямым образом отражать изменения средней скорости дви-
жения vr и расхода топлива Qs.
При разработке аналитического выражения м отдельные (правые и левые)
ведущие колеса осей не рассматриваются, так как в работе [52] важным является
оценка отдельного канала ГОТ. Тогда аналитическое выражение коэффициента опти-
мального распределения мощности будет иметь вид [54]
К
I _ Mta.ojir . 100 0/() = |----^Oa.oiii . .
М)а.ф J L М)а +
100
(8.14)
где М()аф = Л^оа + N — фактическая мощность, подводимая к движителю автомо-
биля трансмиссией (каналом), совершенство которой (которого) оценивается;
^0а — мощность, подводимая к движителю автомобиля, определяемая по уравне-
нию баланса мощности движителя (колеса) без учета коэффициента приспособляе-
мости; NnB — мощность, возникающая вследствие влияния коэффициента приспо-
собляемости двигателя.
Анализ выражения (8.7) показывает, что величина #орм равна проценту уве-
личения мощности, возникающему вследствие совершенствования схемы транс-
миссии (или одного канала).
Данный показатель можно применять, по мнению авторов, при сравнении ав-
томобилей с одинаковыми значениями весовых и конструктивных параметров,
одинаковыми двигателями, но имеющими разную схему трансмиссии, разную пере-
даточную функцию трансмиссии (например, передаточное число межосевого диф-
ференциала) и разную компоновку. При этом, чтобы использовать ^)рм для оценки
совершенства механической трансмиссии, нет необходимости учитывать распреде-
ление Адв по отдельным колесам или мостам. Если трансмиссия состоит из несколь-
ких каналов (например, ЭТ или ГОТ), то как допущение принимается, что N рас-
пределяется по каналам равномерно (или пропорционально их загрузке).
На основании вышеприведенных материалов, основными критериями для
оценки эффективности принимаемых технических решений КТС ОБГ могут быть
приняты сила тяги автомобиля, максимальная и средняя скорости движения, сум-
244
8. Основные критерии и методы оценки технических решений
марный коэффициент сопротивления движению, расход топлива. При решении от-
дельных вопросов (например, при оценке схем трансмиссии) могут использоваться
дополнительные критерии оценки, определяемые зависимостями (8.13), (8.14). Именно
эти показатели определяют подвижность КТС ОБГ как критерий эффективности и
могут быть положены в основу создания методики оценки подвижности СКШ.
8.2. Методы оценки показателей совершенства
конструкций транспортных средств
Общие положения
Исторически сложилось так, что в России до недавнего времени автомобиль
при его создании оценивался в значительной степени с позиций производителя, его
интересов, возможностей и проблем. Это привело к тому, что принятые в автомо-
бильной промышленности методы оценки технического уровня по показателям от-
дельных свойств, причем в стандартных, весьма далеких от реальных условиях, не
отражали интересы заказчика и требовали с его стороны проведения длительных и
дорогостоящих сравнительных испытаний альтернативных образцов ТС в реальных
условиях использования. Такой подход, когда образец создается практически для «ра-
зовых» перевозок неприемлем для процесса создания КТС ОБГ Кроме того, новые
экономические условия потребовали создания комплексной методики оценки конст-
рукции на всех этапах жизненного цикла автомобиля в условиях, близких к реальной
эксплуатации.
К сожалению, в существующих методиках анализа до сих пор остается нерешен-
ным целый ряд проблем: он проводится, как правило, после окончания стадии конст-
рукторских проработок и поэтому может лишь фиксировать конструктивную эффек-
тивность или неэффективность технического решения; он не сопутствует каждой ста-
дии, каждому этапу конструирования; в нем применяются весьма приближенные и
укрупненные методы расчета; наконец, отсутствует системный подход, при котором в
анализе использовалась бы информация по параметрам и показателям, соответствую-
щая данной стадии проектирования, проводился бы отбор и исследование конструктив-
ных параметров, влияющих на экономическую эффективность автомобилей. Все это в
ряде случаев приводит к существенным ошибкам в расчетах, необходимости доработки
или переработки конструкции транспортного средства.
При этом все существующие методики определения критериев по данному пе-
речню были разработаны по принципу раздельного рассмотрения влияния подсистем
автомобиля на его конструктивную эффективность по множеству практически не свя-
занных между собой математических моделей. Таким образом, сложная динамическая
система водитель — автомобиль — дорога (рис. 8.1) оценивалась простым набором
значений того или иного критерия конструктивной эффективности, полученного в ре-
зультате множества исследований не связанных между собой математических моделей.
На основании исследований, проведенных группой ученых (А.Ф. Стариков,
А.Н. Пархоменко и В.Г Корнилов) под руководством Б.Н. Белоусова, была создана
комплексная математическая модель подвижности специальных колесных шасси.
8.2. Методы оценки показателей совершенства конструкций ТС
245
Рис. 8.1. Структурная схема исследуемой динамической системы:
САУД — система автоматизированного управления движением КТС ОБГ' САУ — система а юматизирован-
ного управления функционированием подсистемы (составной части) КТС ОБГ; Z, у, у, ОС ci) —cooi-
ветственно вертикальные, боковые, поперечно- и продольно-угловые ускорения СКШ, а также ею ускорение
вокруг вертикальной оси Z; Г!ал — заданная скорость движения СКШ; оск — угол поворот управляемого
колеса; YR-} — сумма вертикальных реакций на колесах шасси; Л/< — крутящий момент на ко;
5 — скольжение колеса;/, (р, Си ц, Rx, Rv, R- — параметры воздействия внешних условий на ко;
всех параметров, указанных на рисунке, и их расчет описаны в материалах работы.)
Общие сведения о комплексной математической модели
В общем смысле подвижность (см. рис. 7.1 и 7.2) является комплексным тех-
ническим свойством оборудования, включающим такие важнейшие для транспорт-
ной базы потребительские свойства, как тяговая динамика, проходимость, способ-
ность к преодолению водных преград, надежность, приспособленность к техниче-
скому обслуживанию и ремонту и некоторые другие. В настоящей главе
используется более узкое определение подвижности, основанное на ограниченном
перечне показателей и понимаемое как способность СКШ обеспечивать быструю и
своевременную транспортировку оборудования по заданному (представительному)
маршруту.
Комплексная математическая модель, предложенная в данной книге, отража-
ет основы существующей теории общих проектировочно-конструктивных решений
246
8. Основные критерии и методы оценки технических решений
и является базой методики оценки эффективности использования (подвижности) СКШ
под специальное оборудование при движении по заданному маршруту.
Данная методика отвечает следующим требованиям:
позволяет адекватно, полно и детально описывать движение шасси в каж-
дый момент времени, в каждой точке представительного маршрута;
строится по принципу адаптивности;
учитывает возможность своего использования при проведении всех видов
испытаний образцов СКШ, а также при обосновании выбора маршрутов движения
при организации реальных перевозок грузов;
в научных исследованиях базируется на исходных данных, полученных в
ходе испытаний и реальной эксплуатации КТС ОБГ
Для выполнения указанных требований необходима разработка модели
маршрута, учитывающей разнообразие дорожных условий (см. гл. 6), встречаю-
щихся при эксплуатации, и разработка комплексной модели движения шасси,
учитывающей основные свойства СКШ (тяговую динамику, управляемость и ус-
тойчивость, проходимость и плавность хода и т. п.).
В качестве критерия оценки подвижности СКШ в данной методике выбрана
предельная скорость движения, усредненная по представительному маршруту.
Под предельной средней скоростью движения понимается технически осу-
ществимая (возможная) средняя скорость прохождения СКШ представительного
маршрута. При этом влияние психофизических свойств водителя на скорость
движения не учитывается. Ограничение скорости движения СКШ на маршруте
соответствует ограничениям по условиям тяговой динамики и проходимости,
обеспечения удовлетворительных показателей управляемости, устойчивости и
плавности хода, регламентируемой нормативно-технической документацией для
перевозимого оборудования, шасси и экипажа.
Представительным является маршрут, содержащий дорожные условия, ха-
рактерные для реальных маршрутов движения КТС ОБГ в районах возможного
использования.
Участок маршрута — это отрезок дороги, внутри которого значения про-
дольного уклона, кривизны дороги в плане и тип дорожной поверхности постоян-
ны или изменяются не более чем на определенную величину.
Представительный маршрут движения составлен из большого числа участ-
ков, параметры которых по статистическим данным соответствуют реальным до-
рогам. Представительность достигается включением в маршрут разнообразных
дорожных условий с учетом их удельного содержания и достаточной длины реа-
лизации маршрута. При этом для моделирования маршрута использованы данные,
приведенные в разделе 6.3.
Методика позволяет варьировать параметры конструкции СКШ для выбора
приемлемых значений. Она построена блочно по принципу связанности частных
математических моделей подсистем автомобиля и маршрута движения. Частная
математическая модель маршрута движения позволяет также осуществлять варьи-
рование параметрами дорожных поверхностей. Это необходимо для оценки каче-
ства существующих и прогнозируемых маршрутов движения с целью правильного
их выбора и разработки предложений по инженерному дооборудованию при орга-
низации перевозок грузов общей массой 25 т и более.
8.2. Методы оценки показателей совершенства конструкций ТС
247
Рис. 8.2. Структурная схема последовательности расчетов подвижности СКШ
Расчет подвижности СКШ разделяется на две части. В первой формируется
представительный маршрут или задается какой-либо конкретный реальный марш-
рут по результатам его измерений. Во второй части моделируется движение СКШ
по маршруту (рис. 8.2).
Представительный маршрут характеризуется данными по углу продольного ук-
лона дороги 0Су, кривизне дороги К в плане, номеру типа поверхности дороги Со-
ответственно этому с помощью исходных данных и математических моделей создаются
вероятностные реализации указанных параметров. Затем реализации разбиваются на
отдельные участки, параметры которых (0Су, К, №гп) заносятся в таблицу данных пред-
ставительного маршрута.
Реализации параметров дороги — это последовательности значений парамет-
ров дороги (в частности, высот макро- и микропрофиля дороги) для точек, располо-
женных в порядке возрастания координаты длины маршрута с фиксированным зна-
чением шага по длине.
248
8. Основные критерии и методы оценки технических решений
Основные данные
Номер блока участков Координата по длине дороги конца участка Уклон аУ Кривизна в плане К Номер типа поверхно- сти дороги №тп
1 Поверхности дорог с твердым (недеформи- руемым) покрытием Участки равнинной местности
2 Участки умеренно холмистой местности
3 Участки холмистой местности
4 Участки сильнопересеченной местности
5 Грунтовые поверхности дорог Участки равнинной местности
6 Участки умеренно холмистой местности
Участки сильнопересеченной местности
8 Участки холмистой местности
№•
Математическая
модель
маршрута
Дополнительные
данные
Параметры
повехностей дорог
Ф
Математическая модель движения СКШ
Рис. 8.3. Структура представительного маршрута
Кроме того, рассчитываются реализации всех типов дорожных поверхностей.
В качестве дополнительных данных для всех типов поверхностей используют зна-
чения коэффициента сопротивления качению/, коэффициента сцепления шин с по-
верхностью дороги (р, удельное сопротивление грунта вдавливанию Сг и степенной
показатель сопротивления грунта ц. Эти дополнительные реализации и данные ис-
пользуют в модели движения в соответствии с номером типа поверхности дороги
для текущего участка.
Структура представительного маршрута показана на рис. 8.3.
Движение СКШ моделируется с помощью математических моделей тяговой
динамики, управляемости и устойчивости, проходимости и плавности хода. На каж-
дом последующем участке маршрута проводится анализ параметров движения. По
результатам анализа происходит подключение к расчету одной или нескольких из
указанных математических моделей.
Модель движения включает также блок ограничений скорости, выполняю-
щий функции водителя. Под этой функцией в книге понимается поддержание мак-
симально возможной и безопасной для шасси и перевозимого груза скорости в
каждый текущий момент времени. В блоке анализируется достигнутая скорость
8.3. Математическая модель представительного маршрута движения СКШ 249
СКШ, и в случае превышения допустимой величины по одному из критериев она
снижается.
Совокупность указанных составных частей методики (см. рис. 8.2) позволяет
моделировать управляемое движение СКШ по представительному маршруту, мак-
симально приближенное к процессам реальной эксплуатации. В этом главное отли-
чие предлагаемой методики оценки эффективности использования (подвижности)
СКШ от ранее известных математических моделей и методик оценки динамики ав-
томобиля.
8.3. Математическая модель
представительного маршрута движения СКШ
Структура представительного маршрута
В целях упрощения использования данных маршрута в математической мо-
дели разработана их классификация. В соответствии с ней все данные маршрута
подразделены на четыре уровня. Первый уровень включает наименование геогра-
фического района, для которого проводится оценка подвижности СКШ.
В настоящей работе для иллюстрации выбран западный географический район
России. В нем рассматриваются (см. рис. 8.3) четыре характерных типа местности.
После географического района на втором уровне указываются удельные со-
держания типов дорог в местностях этого района. Таким же образом по данным ис-
следований существующих дорог рассчитываются удельные содержания твердых и
грунтовых поверхностей дорог
К третьему уровню относятся статистические характеристики, определяющие
вероятности появления тех или иных параметров маршрута. В качестве статистиче-
ских характеристик маршрута третьего уровня в соответствии со структурой пред-
ставительного маршрута определены следующие характеристики: спектральные
плотности макропрофилей дорог в различных типах местности, распределение ве-
роятностей радиусов и углов поворота дорог, распределение вероятностей типов
дорожных покрытий.
Четвертый уровень включает параметры, измеряемые непосредственно на
маршруте, воздействующие на модель движения СКШ, которые рассматриваются
ниже как основные и дополнительные параметры маршрута.
Данные четвертого уровня вычисляются в виде реализаций с помощью стати-
стических методов, т. е. совокупностей значений параметров для точек дороги, распо-
ложенных в порядке возрастания координаты длины маршрута с шагом по длине. К
ним относятся реализации высот макропрофиля дорог (пересчитываемые затем в ук-
лоны дороги), кривизны дорог в плане и типы дорожных поверхностей. В исследова-
ниях принято, что эти реализации статистически не зависимы друг от друга.
Маршрут обладает статистическим (вероятностным) характером, поэтому
необходимо выполнение следующего требования по обеспечению его представи-
тельности: длины всех реализаций уклонов, кривизны в плане и типов дорожных
поверхностей должны быть достаточно большими для статистической оценки. Это
250
8. Основные критерии и методы оценки технических решений
требование определяет особый порядок перехода от одного уровня данных маршру-
та к другому. Вначале проводится наиболее трудоемкий переход от третьего к чет-
вертому уровню: по распределениям вероятностей рассчитываются реализации ук-
лонов, кривизны в плане и типов дорожных поверхностей. Это позволяет получить
реализации достаточной длины, выбирая нужный шаг, исходя из условия обеспече-
ния приемлемой точности реализаций. Таким образом, при переходе от третьего к
четвертому уровню данных для любых маршрутов гарантированно обеспечивается
необходимая для статистических расчетов величина реализаций. Именно из таких
реализаций формируется любой маршрут. После расчета движения СКШ по сфор-
мированному маршруту при определении средних скоростей движения учитывают-
ся параметры первых двух уровней: географический район, удельные содержания
типов дорог в местностях, удельные содержания твердых и грунтовых поверхностей
дорог.
Основными элементами маршрута являются дорожные участки. Параметры
дороги от участка к участку изменяются случайным образом по заданным статисти-
ческим зависимостям. В целях упорядочения данные участки дороги объединяют в
восемь блоков (см. рис. 8.3). Первые четыре блока описывают дорожные условия на
поверхностях с твердыми покрытиями, вторые четыре блока — на грунтовых по-
верхностях. Каждый блок определяет дорожные участки для одной из четырех со-
ответствующих местностей.
Продольные уклоны дорог
Основные параметры маршрута (Ху, К, №г п определяются следующим образом.
По спектральным плотностям высот макропрофилей [62] с помощью преобра-
зования Фурье для равнинной, умеренно холмистой (среднепересеченной), холмистой
и сильнопересеченной местностей находят соответствующие реализации высот мак-
ропрофилей, которые затем пересчитывают в углы продольных уклонов дорог.
Спектральные плотности высот макропрофиля дорог для /-й местности
определяются зависимостями (рис. 8.4)
если Х,< X,,- (зона средних неровностей);
ОД,-
если Xz > Хг, (зона коротких неровностей);
о2(. = /С(Х,.,)\2
где X,, — путевая частота границы зон средних и коротких неровностей; Dlz, D2l
коэффициенты спектральных плотностей; X, — текущая путевая частота высот мак-
ропрофиля.
Количество точек спектральной плотности
К. = 2',+1,
Л. ’
где /s — окно спектра.
8.3. Математическая модель представительного маршрута движения СКШ 25 1
Спектральные плотности высот макропрофиля
К(Х)
Преобразование Фурье
Генератор
случайных
чисел
Рис. 8.4. Схема расчета продольных уклонов маршрутов для местностей:
1 — равнинной; 2 — умеренно холмистой; 3 — холмистой; 4 — сильнопересеченной
Минимальная круговая частота макропрофиля
X = —
/vmin . ’
чпах
где /тах — максимальная длина волны макропрофиля.
Шаг круговой путевой частоты макропрофиля
X —А.
_ /v,maxz /vmin
Кх-1 ’
252
8. Основные критерии и методы оценки технических решений
где Хтах, — максимальная круговая частота макропрофиля в z-й местности.
Количество точек высот макропрофиля по длине реализации
где /// — шаг по длине реализации макропрофиля,
' 2z'(/zJ2k)'
Реализация высот макропрофиля в соответствии с преобразованием Фурье
Z = £72^),.^..cos((Xmi -1)/гь)та/+Ф(7-)),
где К — номер точки высоты макропрофиля в реализации по длине; ф(у) — фаза,
выбранная случайно в диапазоне значений от -я до я; j — номер точки путевой час-
тоты спектральной плотности; i — номер местности.
Углы продольных уклонов дорог вычисляют по выражению
^А + 1 — ^к
hl
Схема расчета продольных уклонов приведена на рис. 8.4.
Кривизна дорог в плане
Исходными данными для расчета кривизны К дорог в каждой местности яв-
ляются распределения вероятностей появления на маршруте радиусов, углов и на-
правлений поворотов, имеющих определенные значения. Все значения этих пара-
метров разделены на интервалы.
Количество радиусов KRL, углов поворотов KQL и направлений поворотов
KNPL, значения которых находятся в L-м интервале, определяют зависимостями (фи-
гурными скобками обозначена операция нахождения целой части)
KRL={PR(L)KnM}-
KeL={PQp}KnM}-,
KnPL = { ?NP Ц) ^п.м } ’
где Pr(L), P&(L), Pnp(L) — вероятности появления радиусов, углов и направлений
поворотов в L-м интервале их значений; Кп м — количество поворотов на маршруте:
кпы=кп^,
где — количество поворотов на километре маршрута; L, — длина маршрута в z-й
местности.
8.3. Математическая модель представительного маршрута движения СКШ 253
Для формирования реализаций радиусов, углов поворотов и направлений по-
воротов применяется генератор случайных равномерно распределенных чисел 4х в
интервале от 0 до 1 и цифровой фильтр для получения заданных распределений
указанных параметров. По текущему значению Т определяется номер интервала п
значений параметров.
При расчете интегральных плотностей вероятностей радиусов FK(n), углов
поворота F0(n) и направлений поворотов FNP(n) используют следующие зависи-
мости:
/?=|
W = Z?0('O;
//=1
H = l
по выполнении условия F0(n) >/, FR(n) >f, FNP(n) > f принимается / = n.
Длины прямых участков (вставок) между поворотами
м
/=|
Ajc г
2 л/?,
---А
360 7
где Rt и 07 — радиус и угол j-го поворота; L — длина маршрута.
Схема расчета кривизны маршрута в плане представлена на рис. 8.5.
Типы покрытий
Типы покрытий, учитываемые в представительном маршруте, №1>п — № 1-9:
1 и 2 — цементобетонное шоссе удовлетворительного состояния и изношенное;
3 и 4 — булыжное шоссе удовлетворительного состояния и изношенное;
5 и 6 — гравийно-щебеночная дорога удовлетворительного состояния и
разбитая;
7 и 8 — грунтовая дорога удовлетворительного состояния и разбитая;
9 — бездорожье (местность).
Распределение типов покрытий по маршруту равномерное, получаемое с по-
мощью выражений (8.12)-(8.14). Поверхности 1-4 отнесены к твердым поверхно-
стям дорог, 5-9 — к грунтовым поверхностям. Чередование типов дорожных по-
верхностей принято равновероятным и формируется с помощью генератора случай-
ных чисел (рис. 8.6). Длины отрезков дорог с различными типами поверхностей
имеют равномерное распределение вероятностей появления в интервале от 100 до
1 000 метров.
254
8. Основные критерии и методы оценки технических решений
Рис. 8.5. Схема расчета кривизны маршрута в плане для местностей:
1 — равнинной; 2 — умеренно холмистой; 3 — холмистой; 4 — сильнопересеченной
Дополнительными параметрами маршрута кроме отмеченных коэффициен-
тов J, (р, Сг, ц являются реализации микропрофиля дорог.
Микропрофили дорог
Микропрофили дорог рассчитывают в виде реализаций для каждого из при-
нятых типов поверхностей по спектральным плотностям высот микропрофилей
[62J. Спектральные плотности S(XZ-) в зависимости от путевой частоты Z, выражают
зависимостью
где А и W — постоянные параметры, задаваемые для каждого типа дорожной по-
верхности; X — номера типов поверхности дорог; i — номер участка.
8.3. Математическая модель представительного маршрута движения СКШ 255
Количество точек спектральной плотности определяется из выражения
где is — окно спектра.
Граничные значения круговых путевых частот спектра
^max ^min
где Дх — ширина спектра, задаваемая по рекомендациям [62].
Шаг круговой путевой частоты находится из выражения
Шаг реализации по длине дороги
h,=—
(/7Х/2л)''
Количество точек реализации по длине дороги
256
8. Основные критерии и методы оценки технических решений
Для расчета реализаций по правой и левой колеям дорог используется коэф-
фициент корреляции параллельных сечений микропрофиля р(%):
Р(М= ' 2.
1+Ы
I "д )
где В — колея СКШ; ид — коэффициент дороги [62].
С помощью коэффициента корреляции рассчитывают спектральные плотно-
сти полусуммы Szi(kd и полуразности 5^(21,) микропрофилей колей:
ММ = Ж)(1+р(М);
По указанным спектральным плотностям получают (с помощью преобразо-
вания Фурье ) реализации значений полусуммы Z7 и полуразности у, микропрофи-
лей колей:
z7 cos(('A)A +Vi(0);
V; cos((zAc)VA + V2('))>
где /, j — порядковые номера точек путевой частоты и точек реализации по длине;
Vi(0, Жг(0 — фазы гармонических составляющих реализаций, выбранные с помо-
щью генератора случайных чисел в интервале от -я до я.
Реализации высот микропрофилей по правой (Zny) и левой (Znj) колеям:
z.17=(z7-a/
где Mz и МЦ1 — математические ожидания реализаций полусуммы и полуразности
микропрофилей колей:
1 Z •
“’-Й-
Схема расчета микропрофилей маршрута представлена на рис. 8.7.
Таким образом, объединенные и разделенные на участки реализации основ-
ных параметров маршрута — углов продольных уклонов дороги сх^, кривизны марш-
рута К в плане и номеров типов дорожной поверхности №т п — совместно с допол-
8.3. Математическая модель представительного маршрута движения СКШ 257
Рис. 8.7. Схема расчета микропрофилей маршрута
нительными данными — микропрофилем дорог и коэффициентами /, (р, С,, ц —
описывают дорожные условия и являются возмущениями для математической мо-
дели движения.
Исходные данные представительного маршрута
С использованием рассмотренных выше подходов к формированию условий
движения СКШ далее предлагается вариант представительного маршрута.
Важным вопросом при разработке маршрута является разбивка по видам дорог.
Наиболее обоснованной, на наш взгляд, для многоосных СКШ можно считать разбивку,
в которой доля дорог I—III категорий с твердым покрытием составляет 15 %, доля
грунтовых дорог различного состояния — 65 %, доля бездорожья — 20 %. Дороги с
твердым покрытием подразделяют на два вида: асфальтобетонное шоссе и булыжная
дорога ровного замощения в отношении 2 : 3 в соответствии с [62]. Эти виды, в свою
9 - 2918
258
8. Основные критерии и методы оценки технических решений
очередь, состоят из удовлетворительных и изношенных участков. Грунтовые дороги
разбивают на два типа: грунт удовлетворительного состояния и разбитый грунт в отно-
шении 3 1 в соответствии с [62]. Грунтовые дороги удовлетворительного состояния
включают гравийно-щебеночные удовлетворительные и изношенные участки.
При моделировании данного представительного маршрута учитывалось, что
наибольшее влияние на величину средней скорости движения СКШ по всему марш-
руту будут оказывать количество и виды переходов с одного однородного участка
(по типу покрытия) на другой, поэтому маршрут составлялся таким образом, чтобы
эти переходы встречались по случайному распределению и в то же время все воз-
можные варианты переходов присутствовали на маршруте.
Кроме того, отдельные параметры дорожных условий не учитывались на неко-
торых типах покрытий. Например, считалось, что асфальтобетонное шоссе в удовлетво-
рительном состоянии абсолютно ровное (по микропрофилю) и недеформируемое, а
параметры грунта, оказывающие влияние на проходимость СКШ, задают лишь при
движении по разбитому грунту и местности.
Разбивка по величине продольных уклонов дороги (макропрофиль) произво-
дилась следующим образом. Предполагалось, что маршрут является кольцевым и
проложен в среднепересеченной местности в условиях западной части России, на-
чинается и заканчивается на одном уровне. По статистическим данным было приня-
то, что максимальный подъем (спуск) на участке маршрута зависит от типа покры-
тия и составляет: для асфальта — 3° для булыжного шоссе — 5°, для грунтовых
дорог различного состояния — 7°, для местности — 9° При этом считалось, что
максимальные углы уклонов дороги встречаются не более чем на 30 % протяженно-
сти каждого типа покрытия, в остальных случаях величины этих углов составляют
меньшую величину.
Разбивка по величине радиусов закруглений дороги в плане и длинам участ-
ков поворота проводилась также по статистическим данным для дорог западной
части России. Кроме того, на каждом типе покрытия присутствовал поворот на 90° с
радиусом в 30 м для проверки маневренных свойств шасси.
При введении в маршрут участков с низкой несущей способностью грунта
для проверки ограничений по проходимости учитывалось, что маршрут будет про-
ходить по рыхлому суглинку (С, = 0,25; ц = 0,5), песку (С, = 1,0; ц = 0,25) и пахоте
(С, = 0,5; ц = 0,5), а также по уплотняемому задерненному грунту (С, = 1,0; ц = 1,0).
При описании микропрофиля задавалась функция ординаты неровности
в зависимости от пройденного пути, полученная через спектральные плотности для
различных типов покрытий. При этом, для того чтобы получить различные ордина-
ты под колесами одной оси шасси, реализация микропрофиля подавалась под раз-
личные борта шасси со случайным сдвигом по фазе.
По результатам предварительных исследований выяснено, что оценочные пара-
метры зависят от длин реализаций. При реализации длиной 20...25 км и выше значения
оценочных параметров стабилизируются. Поэтому длины представительных реализа-
ций макропрофиля и кривизны маршрута в плане должны быть не менее 20 км.
Исходя из этого, общая длина маршрута в математической модели принята 50 км.
Исходные данные для составления различных вариантов представительного
маршрута приведены в табл. 8.1-8.6 [7, 62].
8.3. Математическая модель представительного маршрута движения СКШ 259
Таблица 8.1
Значения параметров спектральных плотностей высот макропрофиля
Параметр, м/рад Местность
равнинная умеренно холмистая холмистая сильно- пересеченная
А. 2,0 10*3 1,6 10-’ 1,0 10“' 1,0
А 6,3 10' 6,3 10- 6,3 10- 6,3 10“
6,3 кг 4,0 ИГ2 2,5 10‘2 1,6 10"2
к 1,0 Ю"2 4,0 IO' 1,6 ю- 6,3 10 4
Таблица 8.2
Интервалы значений радиусов поворота маршрута в различных местностях
Местность Интервалы значений радиусов поворота для местности, м
1 2 3 4 5 6 7 8 9
Равнинная 100- 200- 300- 400- 500- 600- 700- 800- 900-
200 300 400 500 600 700 800 900 1000
(150) (250) (350) (450) (550) (650) (750) (850) (950)
Умеренно 48-96 96-144 144- 192- 240- 288- 345- 384- 432-
холмистая (72) (120) 192 240 288 345 384 432 480
(168) (216) (264) (312) (360) (408) (456)
Холмистая 40-80 80-120 120- 160- 200- 240- 280- 320- 360-
(60) (100) 160 200 240 280 320 360 400
(140) (180) (220) (260) (300) (340) (380)
Сильно- 24-48 48-72 72-96 96-120 120- 144— 168- 192- 216
пересеченная (36) (60) (84) (108) 144 168 192 216 240
(132) (156) (180) (204) (288)
Примечание. В скобках даны средние значения радиусов для каждого интервала.
Таблица 8.3
Распределение вероятностей появления радиусов поворота
Значение вероятностей появления радиуса поворота в интервалах радиусов для табл. 8.2
1 2 3 4 5 6 7 8 9
0,041 0,095 0,094 0,106 0,174 0,155 0,090 0,106 0,140
Таблица 8.4
Углы поворота маршрута в различных местностях
Угол Значения углов поворота по типам местностей, град:
равнинной умеренно холмистой холмистой сильно- пересеченной
Минимальный 3 6 7,5 12,5
Максимальный 18 36 45 75
9*
260
8. Основные критерии и методы оценки технических решений
Таблица 8.5
Параметры спектральных плотностей высот микропрофиля
Тип дорожных поверхностей Значение
А, м/рад W
Цементобетонное шоссе: удовлетворительного состояния 3,2 10“ -2,0
изношенное 6,5 10“ -2,0
Булыжное шоссе: удовлетворительного состояния 3,5 10-4 -1,07
изношенное 2,2 10’ -1,07
Гравийно-щебеночное шоссе: удовлетворительного состояния 2,5 10^ -2,0
изношенное 5,0 10^ -2,0
Грунтовая дорога: удовлетворительного состояния 2,5 10"4 -2,0
изношенная 8,0 10 -2,12
Бездорожье (местность) 1,0 10“2 -2,0
Таблица 8.6
Параметры дорожных поверхностей
Тип дорожных поверхностей Значение
f Ф С, Ц
Цементобетонное шоссе:
удовлетворительного состояния 0,020 0,75
изношенное 0,025 0,70
Булыжное шоссе:
удовлетворительного состояния 0,030 0,65
изношенное 0,050 0,65
Гравийно-щебеночное шоссе:
удовлетворительного состояния 0,025 0,60
изношенное 0,030 0,50
Грунтовая дорога:
удовлетворительного состояния 0,030 0,55 —
изношенная 0,100 0,45 1,0 1,0
Бездорожье (местность) 0,300 0,40 0,5 0,5
8.4. Математическая модель движения СКШ
Модель движения учитывает тяговую динамику, устойчивость и маневрен-
ность, проходимость, плавность хода. Для наиболее полного описания движения
многоосных шасси рассчитывают текущие кинематические и динамические харак-
теристики шасси с помощью численного интегрирования дифференциальных урав-
нений, описывающих основные составные части шасси, их взаимодействие между
собой и с дорожной поверхностью.
8.4. Математическая модель движения СКШ
261
Отдельные математические модели свойств многоосных шасси подключают
к расчету одновременно все или выборочно в зависимости от дорожных условий:
наличия поворотов и состояния поверхностей дорог Для этого осуществляется ана-
лиз параметров маршрута на каждом последующем участке. На маршруте скорость
движения шасси поддерживается максимальной по техническим возможностям
СКШ, а также по условиям безопасности движения.
Управление скоростью движения в математической модели осуществляется с
помощью блока ограничений скорости. Данные о текущих значениях координат шасси
и их производных, а также силовых факторах, получаемых в ходе расчета движения,
позволяют определять в каждой точке маршрута приемлемую текущую скорость дви-
жения для обеспечения безопасности шасси и перевозимого груза. При действии огра-
ничений скорость движения снижается путем принудительного притормаживания с
фиксированным замедлением до скорости, при которой все ограничения отсутствуют.
В математической модели имеется блок, управляющий процессом переклю-
чения передач с низшей на высшую и наоборот, а также блок, реализующий моде-
лирование блокировки и разблокировки гидротрансформатора.
Совокупность указанных особенностей позволяет моделировать управляемое
движение шасси по представительному маршруту, максимально приближенное к
процессам реальной эксплуатации.
При разработке математической модели процесса движения СКШ приняты
следующие дополнительные допущения.
Подрессоренная масса шасси — твердое тело, имеющее продольную и попе-
речную плоскости симметрии. Деформации подрессоренной массы на кручение и
изгиб не учитываются.
Система подрессоривания симметрична относительно продольной верти-
кальной плоскости. Характеристика упругих элементов подвески кусочно-
линейная. Упругие характеристики шин — линейные.
Система подрессоривания подвеска—шина принята независимой торсионной
или свечной в зависимости от конструкции исследуемого образца шасси.
Распределение нагрузки по осям в статическом положении — равномерное.
Неуравновешенность и гироскопические моменты вращающихся масс транс-
миссии и двигателя малы.
Правомерность принятых допущений для СКШ подтверждена многочислен-
ными экспериментальными исследованиями [1, 2].
Основным уравнением динамики, моделирующим движение СКШ в про-
дольном направлении, является дифференциальное уравнение продольного ускоре-
ния движения:
у _ # ( ~ ^сопр )
8ВРС
где g — ускорение свободного падения; Рк — усилие на колесах; РСО11 — суммар-
ная сила сопротивления движению; 8вр — коэффициент учета вращающихся масс;
G — масса шасси.
Сила тяги на колесах в общем виде может быть выражена как
262
8. Основные критерии и методы оценки технических решений
Mw
(8.15)
где М — крутящий момент двигателя; w — передаточная функция трансмиссии;
гк — радиус ведущего колеса.
Для механической дифференциальной трансмиссии выражение (8.15) имеет вид
Л/G G G Г|
Рк =---- р р р, (8.16)
где UKGP.K, Ut GK.P — передаточные числа соответственно коробки передач, разда-
точной коробки, главной передачи и колесного редуктора; Т|тр — КПД трансмиссии.
При этом выражение (8.16) используют, исходя из предпосылки, что оно
справедливо для всех ведущих колес. Эта предпосылка оправдана для автомобилей
с ведущими колесами двух-трех осей. Однако для многоосных транспортных
средств по этому выражению цепочка параметров трансмиссии рассчитывается от
двигателя до самого дальнего от него колеса или пары колес, и значение Рк спра-
ведливо только для них. Все же другие ведущие колеса (например, у шасси с колес-
ной формулой 12x12 таких колес остается 10) получают М двигателя, отличающий-
ся от рассчитанного по выражению (8.16). Однако для сравнительных исследований
использование в модели выражения (8.16) вполне оправдано.
Максимальная сила тяги на колесах, ограниченная сцеплением ведущих ко-
лес с дорогой,
Р^ = (pG cos осу, (8.17)
где (р — коэффициент сцепления; (/ — угол продольного уклона дороги.
В расчетах используется меньшее из значений, определяемых из выражений
(8.16) и (8.17).
Суммарная сила сопротивления движения СКШ
V р = р +р
где Ру = G(/cosocy +sinocy) — сила сопротивления движению на уклоне;/— ко-
эффициент сопротивления качению; Pw = KWFV2 — сила сопротивления воздуха;
F — площадь поперечного сечения СКШ; Kw — коэффициент обтекаемости; V —
скорость движения.
Коэффициент учета вращающихся масс определяется по формуле
8вр =(1,03. ..1,05) + (0,001. ..0,002)Gr2p,
где Gip — общее передаточное число трансмиссии.
Внешняя скоростная характеристика двигателя (дизельного) представлена в виде
Ne = Ni
8.4. Математическая модель движения СКШ
263
Me=MN
г \2
, со, со,
а + Ь—-+с —-
где Ne, Мс — мощность и крутящий момент при частоте вращения коленчатого вала
со,-; Мпах» MN — максимальная мощность и соответствующий ей крутящий момент
при частоте вращения коленчатого вала оу — текущая частота вращения колен-
чатого вала двигателя; оуу — частота вращения коленчатого вала, соответствующая
Nmaxi а,Ь, с — коэффициенты внешней скоростной характеристики:
К;-Ка(2Ка-\)
а =-----------;
(Ke-ir
(*Q-i)2
(/Q-l)2
где Ке = М 1Пах---коэффициент эластичности двигателя; Ка = ^тах----коэффи-
(Dyv N
циент приспособляемости двигателя; сомтах — частота вращения коленчатого вала,
соответствующая Л/тах.
Свободная мощность двигателя, определяющая тяговую динамику СКШ, на-
ходится из выражения
/V = N -N -N -N -N ,
св е охл вып во всп ’
где Nox, 7VBbHI, Кво, Квсп — потери мощности двигателя соответственно в системах
охлаждения, выпуска, воздухоочистки и на привод вспомогательных агрегатов;
/ \ 2
= (0,07...0,1б) wmax рч
^Ы11 =(0,03...0,04)^;
2
^С]] =(О,ОЗ...О,О4)/Утах
Для механической трансмиссии учитывается работа сцепления при трогании
СКШ с места:
^=(0,02...0,04)^ах р-
264
8. Основные критерии и методы оценки технических решений
й2 =
О)
А
pA/yv при Г > Г,;
ЧДц)
СО, = С02 =---- при СО] = со2,
Jj + J2
при этом С0|, (Ь|, со2, (Ь2 — угловые скорости и ускорения соответственно коленча-
того вала двигателя и ведомого вала сцепления; J\, J2 — приведенные моменты инер-
ции вращающихся частей соответственно двигателя и трансмиссии; Ma(t) — момент
трения муфты сцепления; р — коэффициент запаса муфты сцепления; t\ — время вы-
ключения муфты сцепления; t — текущее время.
В случае использования на СКШ гидромеханической передачи точки совмест-
ной работы двигателя и гидротрансформатора (ГТ) определяются по известным за-
висимостям:
Мн=\^н- (8.18)
(8-19)
^11.11
< = (8.20)
где Л/н и Л/' — крутящие моменты на насосном колесе ГТ от максимального и
свободного момента двигателя соответственно; су, — частота вращения насосного
колеса; су — текущая частота вращения коленчатого вала двигателя; Л/св — свобод-
ный момент двигателя; п, Г|и п — передаточное число и КПД согласующего ре-
дуктора (повышающей передачи).
Из условия совместной работы Мн = Л/' по формулам (8.18) - (8.20) опре-
деляется значение cd,, а затем выходная характеристика гидротрансформатора Л/,:
ТГ
01 =-----;
Ч = 4*. = Чв(Ц)Ч.п11п.,Лт>
где оу, Мт — частота вращения и крутящий момент на турбинном колесе ГТ; U —
внутреннее передаточное число ГТ; — коэффициент трансформации; Мк — те-
кущее значение крутящего момента двигателя.
Зависимость Мг (сог) является выходной характеристикой ГТ и используется
в формуле (8.16) вместо крутящего момента М для расчета Рк автомобиля с ГТ
Расчет указанных параметров для СКШ с нетрадиционными техническими
решениями, например с электрической трансмиссией и газотурбинным двигателем
8.4. Математическая модель движения СКШ
265
или другим альтернативным источником энергии, приведен в последующих главах
настоящей работы.
При движении по грунтовым дорогам с низкой несущей способностью по из-
вестному выражению рассчитывается величина коэффициента сопротивления качению
п
Хл
г -
1+1)
коэффициент сопротивления качению z-й колесной оси; Ьк — ширина профиля ко-
леса; Сг, — удельное сопротивление грунта вдавливанию (коэффициент осадки
грунта); ц — степенной показатель, характеризующий изменение сопротивления
грунта по глубине вдавливания; hri — глубина колеи после прохода z-й колесной
оси; GKI — нормальная нагрузка на z-й колесной оси; п — число осей.
Удельное сопротивление грунта вдавливанию увеличивается с каждым про-
ходом колесной оси и рассчитывается по формуле
Сг/.=Сг1П(Фк+1)ц
к=\
где С(1, Сг/ — удельное сопротивление вдавливанию под первой и z-й колесными
осями; ФЛ — коэффициент уплотнения грунта, численно равный приращению глу-
бины /zH, при проходе z-й оси.
Глубина колеи hri под z-й осью вычисляется методом последовательных при-
ближений из известной зависимости [52]
где
— радиус жесткого колеса, эквивалентного по кривизне де-
формируемому; — статический радиус деформируемого колеса; h4 =——
^ш.
радиальный прогиб шины; Сш р — радиальная жесткость шины.
Глубина колеи после прохода многоосного шасси по грунту определяется по
выражению
^Г.ДОП _ ’
/=1
При математическом описании процесса движения СКШ по деформируемым
опорным поверхностям используется простейшая общепринятая и хорошо согласую-
щаяся с экспериментальными данными модель оценки проходимости шасси [52, 54].
Учитывая представительность принятого маршрута в первую очередь с точки зрения
266
8. Основные критерии и методы оценки технических решений
распределения типов опорных поверхностей и то, что исследование проходимости
шасси не является основной целью расчета, а используется лишь для сравнительной
оценки с лучшим аналогом, такой подход можно считать достаточно правомерным.
При этом следует отметить, что блочное построение рассматриваемой методики, где
каждый блок описывает конкретное свойство шасси, позволяет, например при необ-
ходимости исследования движения СКШ по какому-либо конкретному маршруту,
характеризующемуся высоким удельным содержанием деформируемых опорных по-
верхностей, использовать любую другую, в том числе подробную (более детальную)
математическую модель оценки проходимости.
Для исследования поворачиваемости и устойчивости движения шасси представ-
ляется в виде единичного физического тела в соответствии с рис. 8.8 и 8.9, перемещаю-
щегося в продольном (по координате 2Q, поперечном (по координате У) направлениях с
учетом боковых кренов (по координате у) и вращающегося вокруг вертикальной оси Z.
При этом система подвижных координат жестко связана с центром масс машины.
В соответствии с расчетной схемой (см. рис. 8.8 и 8.9) движение СКШ по
криволинейной траектории описывается системой дифференциальных уравнений:
К — Rxj п cos (Xj п + Rxj л cos а, л j Rvi п sin ос, п + 7?v, л sin ос,- л j —
L/=i /=1
cosa,n +fR.„ со5а,.л)-Рдоп
+Vvoi;
cos ос,
Vv =-J- cosa,n +ЯИЛ cosa,,,)-ДRxi„ sina/n +Ryijl sina,
Mui L/=i /=i
sin«,n +.fRZnsince,л) -V/o,;
n
1 n
У ~ j । hc ^xi n sin ос, n + R^ л sin ос, л + R^
COS ОС, n +
(8.21)
cosoc, л since,n -fRzn since,
(b_
J ' 2 Z(^4'nC0S«» n Rxi
-Ryin sinOfJ n cos a,
n
'алсо«а,.л)-^(/?„пмпа,.
-flZJ1cosocZJ1
n
n
+ Ее (Rxi n sin a, n + RM л sin а,- л -fRz „ sin a, n -fRz л sin а, л +
/=1
n
+ *y л COS л + Ryi n COS ос,- n ) - Mcni п + Л/сп,- л j
/=]
8.4. Математическая модель движения СКШ
267
Рис. 8.8. Расчетная схема поворачиваемости СКШ:
О„, О, — фактический и теоретический полюса поворота; О — центр масс шасси
Рис. 8.9. Расчетная схема колебаний я-осного шасси:
М, т — подрессоренная и неподрессоренная массы соответственно; JU1 — моменты инерции подрессоренной массы СКШ; х — вертикальная,
поперечная и продольная линейные координаты; у, ф — угловая продольная и поперечная координаты перемещений подрессоренной массы;
вертикальная линейная координата /-го колеса; Ср — жесткость подвески колеса; — коэффициент сопротивления амортизатора подвески колеса;
F, — сила в подвеске; Y, — боковая сила, действующая на колесо; — боковая жесткость шины; Сш — вертикальная жесткость шины; R, — верти-
кальная реакция на колесо; q, — текущая координата микропрофиля под /-м колесом: /, — расстояние /-Й оси до центра масс; О, — центр масс /-Й
неподрессоренной массы (колеса)
268 8. Основные критерии и методы оценки технических решений
8.4. Математическая модель движения СКШ
269
где 7?и(п,л), /?у/(п,л)> Я.(п.л) — продольная, боковая и вертикальная (нормальная) реакции
в пятне контакта z-ro правого (левого) колеса с опорной поверхностью; Мпх — полная
масса СКШ; JY, J. — моменты инерции СКШ относительно продольной и вертикаль-
ной осей, проходящих через центр масс; В — колея шасси, м; hc — высота центра
масс, м; п — число осей шасси; а, (11.л) — угол поворота правого (левого) управляемого
колеса; /— коэффициент сопротивления движению; Л/сп/ (1ЬЛ) — момент сопротивле-
ния повороту колес правого и левого борта; Рдоп — дополнительная внешняя сила,
вызванная природными факторами или их совокупностью (сила сопротивления воз-
духа и т. п.) в продольном направлении при криволинейном движении; VK, VY — про-
дольная и боковая скорости движения центра масс СКШ; у— угол бокового крена;
(Q, — угловая скорость движения СКШ по криволинейной траектории.
Вертикальные реакции R. определяют при решении системы дифференци-
альных уравнений (8.26), приведенной ниже.
Боковые реакции Rvi рассчитывают с помощью углов увода шин 8„ исходя из
теории линейного увода:
Ryi (п, л) — (п, j
где Ку — коэффициент сопротивления боковому уводу.
Углы бокового увода шин определяют как угол между плоскостью вращения
колеса и вектором скорости колеса по зависимости
е У, + Z,G\ +
А — _£___._____£__
где lj — расстояние от центра масс КТС ОБГ до z-й оси.
Продольные реакции на Rxl определяют при решении уравнений тяговой ди-
намики КТС ОБГ (8.16). Дополнительная сила сопротивления движению в продоль-
ном направлении Рдоп при движении по криволинейной траектории
2/7
Лоп = ЕМ’
Момент сопротивления повороту колес правого и левого бортов КТС ОБГ с
учетом его качения по криволинейной траектории определяется из выражения
М = ^~ R 2(Р^/(п,л/к
с.п/(п,л) 3 р(п,л) 2к (I+0J5 /?пк/(п лА)’
где Ьк — ширина профиля шины; 1К — длина отпечатка шины; 7?п.ю(п, л) — радиус
траектории качения (правого, левого) z-ro колеса.
Значение Rn Ki находится из геометрических соотношений
_ /?,п±0,5/?
Ап. i (п. л) z , о \ ’
cos(otK/ Л) + 8,-)
где 7?vn — радиус траектории, описываемый полюсом поворота, вычисляется по
формуле
270
8. Основные критерии и методы оценки технических решений
tg|^Kicp +0,5 (81л+81п)] tg[o,5 (ос1ЪЛ +оспд1j+0,5 (81ЬЛ+8njl)j
где L база КТС ОБГ; ак1ср — угол поворота условного колеса;
5l 8iц — углы увода колес первой оси; осп осп? „ — углы поворота управляемых
колес последней оси; 8nj 8П,П — углы увода управляемых колес последней оси.
Движение СКШ по криволинейной траектории заданной кривизны обеспечи-
вается отслеживанием этой траектории условным колесом, расположенным в сере-
дине l-й колесной оси. Угол поворота этого колеса осК1Ср определяется при решении
дифференциального уравнения
O^Klcp „
----------—
dt
—- + VvCi\+/B--:~ + К—7--Vv2Ar(
dt x x B dt ‘dt2 X
где Kti — коэффициент, учитывающий точность отслеживания заданной траектории
водителем; ZB, ZzB — продольная и вертикальная координаты расположения рабочего
места водителя; Ко — текущая кривизна траектории движения.
В зависимости от значения ак1ср определяют углы поворота правых и левых
колес всех колесных осей КТС ОБГ:
«к,(п.л) =arctg
(/z+|/n| %pjtgaKlcp
где %p — расстояние от последней (задней) оси КТС ОБГ до полюса схемы рулевого
управления в продольном направлении; |/л| — расстояние от центра масс до по-
следней оси.
Под полюсом схемы рулевого управления понимается проекция полюса по-
ворота на продольную ось транспортного средства при его повороте с максимально
возможными углами управляемых колес.
Расчет всех прочих параметров, входящих в систему дифференциальных
уравнений (8.21), подробно рассмотрен в [7]. Следует отметить, что среди нетради-
ционных технических решений, использование которых предполагается на перспек-
тивных СКШ, вопрос применения всеколесного рулевого управления исследован
наиболее полно, конструкция и алгоритмы функционирования такой системы РУ
проверены в ходе экспериментальных исследований полномасштабного ходового
макета на базе шасси 79085 (см. рис. 4.16.) грузоподъемностью 40 т [5, 7].
Математическая модель поворачиваемости и устойчивости СКШ использует-
ся совместно с основной математической моделью тяговой динамики и математиче-
ской моделью нагруженности ходовой части и плавности хода при наличии поворо-
та на текущем участке.
Для расчета вертикальных нагрузок в ходовой части и плавности хода приня-
то, что подрессоренная масса является твердым телом, характеристика подвески —
кусочно-линейная, неподрессоренные массы (колеса) имеют по одной вертикальной
степени свободы.
8.4. Математическая модель движения СКШ
271
Система дифференциальных уравнений, составленная согласно расчетной
схеме (см. рис. 8.9), имеет вид
2п
/=1
2п
/=|
Л п 2 Л 2п
Ал = 0,5Я ^h^yi + Mgh^, (8.22)
к/=1 /=1 ) /=|
п п
J упФ — ~ ^2 ^/’зад^/ ’
/=1 /=1
= R4 - Fi,
где М, Мш — подрессоренная и полная массы СКШ; Jvn, Jvn — моменты инерции
подрессоренной части СКШ; z, у — вертикальная и поперечная линейные координа-
ты; <р, у — угловая продольная и поперечная координаты перемещений подрессо-
ренной части СКШ; hc — высота центра масс СКШ; — вертикальная линейная
координата перемещения z-ro колеса; у, — боковая сила, действующая на СКШ.
Силы, действующие в подвеске, определяются выражением
/;• = Fpz-+ Fa/+ FTp •, (8.23)
где Fp/ = CpAz — сила, определяемая характеристикой упругого элемента подвески
(рессоры, торсиона и т. п.); Fa/ = — сила, формируемая амортизатором подвес-
ки; Ду, Д, — прогиб и скорость прогиба подвески z-ro колеса КТС ОБГ* Ср, Fa —
жесткость рессоры и коэффициент сопротивления амортизатора, приведенные к
колесу.
По известному выражению сила сухого трения формируется как
( М я А
F • = 0,11 —, (8.24)
{ 2п J
где п — число осей.
Вертикальные и боковые силы, действующие в контакте шины с опорной по-
верхностью,
где Rwi = СШД1Ш —сила, формируемая упругими свойствами шины; /?ш а/ = Fa llJAUI/
сила демпфирования в шине; Сш, — радиальная и боковая жесткости шины;
2Т2
8. Основные критерии и методы оценки технических решений
^аш/ — коэффициент демпфирования в шине Z-го колеса; A8Z — боковая дефор-
мация шины /-го колеса.
В свою очередь, уравнения сил и перемещений имеют вид
Л=СрДр,.+^аДр/+0,11^-;
Е 2п
RZ/ ~ ^ш^ш/ ^а.ш Ар/ ’
<Yi=Cb\^ (8.26)
Д,- ±0,5By±/z(p;
Ацп — Qi ~ ^/ ’
A8 = /zcy-y,.,
где qt — текущая координата микропрофиля под /-м колесом.
Следует отметить, что системы уравнений (8.22) и (8.26) достаточно подроб-
но и полно описывают нагруженность ходовой части и плавность хода примени-
тельно к СКШ, имеющим традиционную систему подрессоривания подвеска—шина
типа независимой торсионной или свечной подвески в зависимости от конструкции
исследуемого образца шасси. Вместе с тем известно, что такие системы подрессо-
ривания не в полной мере соотвествуют перспективным требованиям, предъявляе-
мым к СКШ в части обеспечения удовлетворительной плавности хода и вибронагру-
женности экипажа, а также перевозимого оборудования. Поэтому одним из нетради-
ционных решений системы подрессоривания, предполагаемым для использования
на перспективных СКШ, является, например, управляемая длинноходовая С-об-
разная подвеска самолетного типа, подробное описание и особенности математиче-
ского моделирования которой рассмотрены в последующих главах.
В модель движения СКШ введены ограничения скорости для предотвраще-
ния аварийных ситуаций и сохранности перевозимого груза. На каждом шаге расче-
та проверяются следующие условия:
потеря проходимости по глубине колеи
'Ч.доп,
где h}доп — допустимое значение глубины колеи;
потеря проходимости по буксованию
f cos a +sinocy < <р;
потеря проходимости по недостаточной мощности двигателя
2п
YRti™2n
f cos a v + sin a v < —---;
невписываемость в поворот по углу поворота задающей оси
^1 < ^1доп ’
8.4. Математическая модель движения СКШ
273
где 0С1ДОП — допустимое значение угла поворота задающей оси;
невписываемость в поворот по скорости поворота руля
< ^1доп ’
где а1Доп — предельно допустимая скорость поворота руля;
боковое скольжение шасси при скольжении всех осей
>лм«,...+мг< MiiiCTC7-"s°-
где ак — угол поворота управляемого колеса;
динамическое опрокидывание СКШ на повороте
где уст — угол поперечной статической устойчивости; у — угол бокового крена на
повороте или при колебаниях; k3an — коэффициент запаса устойчивости;
невписываемость шасси в поворот по габаритному коридору
J~I < J-f
11 габ 11 габ. доп ’
превышение боковым ускорением допустимого (порогового) значения
V < V
У у доп ’
отрыв колес шасси от опорной поверхности
превышение допустимого значения угла поперечного крена
у<7доП;
превышение допустимого (порогового) значения величины вертикального
ускорения
7 < 7
^ДОП’
пробой подвески колес шасси
pi < Ардоп ’
где А — допустимое значение прогиба подвески.
При невыполнении хотя бы одного условия шасси принудительно притормажи-
вается с замедлением до скорости, при которой все указанные условия выполняются.
Таким образом, разработанная математическая модель движения шасси при
использовании ее совместно с моделью маршрута (условий) движения СКШ позво-
274
8. Основные критерии и методы оценки технических решений
ляет задавать и оценивать параметры многоосных шасси и их составных частей, а
также различные конструктивные решения: с дизельными двигателями, с механиче-
скими и гидромеханическими передачами трансмиссии, с различными схемами ру-
левого управления и различными характеристиками системы подрессоривания.
С другой стороны, учитывая, что значительного повышения уровня ТХ пер-
спективных СКШ можно достичь только применением в их конструкциях нетради-
ционных технических решений: энергоустановки в составе ГТД-генератора или в
виде другого альтернативного источника энергии, электрической или гидростатиче-
ской трансмиссии, несущей системы всеколесного рулевого управления и длинно-
ходовой С-образной подвески, разработанная математическая модель может рас-
сматриваться как базовый инструмент для исследования эффективности использо-
вания (подвижности) шасси.
В последующих главах приведены математические модели, описывающие
процессы функционирования вышеперечисленных нетрадиционных элементов кон-
струкции шасси. Эти модели как соответствующие блоки (см. рис. 8.2) входят в ме-
тодику оценки эффективности использования СКШ и позволяют тем самым про-
анализировать совершенство принятых технических решений.
8.5. Сравнительная оценка подвижности СКШ
на представительных маршрутах
При существующей конкуренции на рынках сбыта КТС ОБГ возрастают тре-
бования к эксплуатационным свойствам и, в частности, к готовности к началу дви-
жения, проходимости, средней скорости движения по дорогам и расстоянию ухода
от точки начала движения.
Учитывая, что потребитель предъявляет к СКШ жесткие требования по под-
вижности, сравнительная оценка тягово-динамических свойств существующих шасси
и шасси с перспективными требованиями проведена для одного из вариантов непре-
рывного движения на выбранном маршруте перевозки груза. При этом использована
методика оценки эффективности (подвижности) СКШ (далее Методика), созданная на
базе материала, изложенного в предыдущих разделах настоящей главы.
В качестве критериев оценки приняты средняя скорость движения по типам
дорог, коэффициент динамичности вертикальных нагрузок в ходовой части и рас-
пределение количества срабатывающих ограничений скорости движения из-за не-
совершенства той или иной системы шасси.
Коэффициент динамичности вертикальных нагрузок характеризует широко
известное специалистам соотношение между фактической вертикальной силой, дейст-
вующей в ходовой части в процессе движения, и статической вертикальной нагрузкой
на колесо. Коэффициент Кл косвенным образом и довольно точно оценивает совершен-
ство ходовой части (осевую формулу, тип подвески колес, колесный движитель) и не-
сущей системы. Для этого проводится сравнение принятого в расчетах запаса прочно-
сти (обычно в автомобилестроении для СКШ принимается /Сд= 2,0...3,0) с фактиче-
ским максимальным значением полученным на любом колесе шасси в ходе его
движения.
8.5. Сравнительная оценка подвижности СКШ на маршрутах
275
Рис. 8.10. Гистограмма средних скоростей движения и /Слтах по типам дорог при движении
СКШ в классе грузоподъемности 50, 70 и более тонн по представительному маршруту:
I — МАЗ-547В; II — 7917; III — 7922 по типам дорог: цементнобетонное шоссе (1 — удовлетворитель-
ного состояния; 2 — изношенное); булыжное шоссе (3 — удовлетворительного состояния; 4 — изно-
шенное); гравийно-щебеночное шоссе (5 — удовлетворительного состояния; 6 — изношенное); грунто-
вая дорога (7 — удовлетворительного состояния; 8 — разбитая); 9 — бездорожье (местность)
Анализ количества срабатывающих ограничений скорости движения позволяет
выявить лимитирующие максимальную скорость движения системы и узлы СКШ.
Характеристика дорожных поверхностей на маршруте и перечень действую-
щих ограничений приведены в разделе 8.4 настоящей главы. Результаты расчетов
скоростей движения и КД трех образцов СКШ по представительному маршруту при-
ведены на рис. 8.10. Сравнение расчетных данных с экспериментальными для одно-
го образца приведены в табл. 8.7
Таблица 8.7
Значения средней скорости движения СКШ по представительному маршруту,
полученные в ходе расчетов и экспериментальных исследований
Способ получения данных Средняя скорость при движении СКШ по участкам типового маршрута, км/ч
1 2 3 4 5 6 7 8 9
Расчет Экспери- мент 36,3 28-34 28,1 17-25 21,7 19-23 17,2 16-20 17,7 14,4 15-19 19,8 21-25 11,5 11-16 7,8
Главными, лимитирующими скорость движения системами СКШ являются:
ходовая часть, рулевое управление и трансмиссия.
276
8. Основные критерии и методы оценки технических решений
Использование ГМП, системы рулевого управления с управляемыми колесами
передних осей и гидромеханическим приводом, а также гидропневматической подвески
позволяет получить приемлемые параметры подвижности и ТХ в целом только для
СКШ с колесной формулой 8x8 общей массой не более 50 т. Об этом свидетельствуют
многочисленные теоретические и экспериментальные исследования, проведенные с
участием авторов данной работы [5-7], а также труды других ученых.
В работах установлено, что повышение тягово-динамических характеристик,
устойчивости, управляемости и характеристик ходовой части СКШ грузоподъемно-
стью 30...40 т, а также 70 т и более возможно только на базе нетрадиционных, прин-
ципиально новых технических решений МТУ, ходовой части и системы рулевого
управления.
Экспериментальные исследования по проверке Методики проводились с ис-
пользованием образца 4-осного СКШ БАЗ-69502 общей массой 30780,0 кг на участ-
ке шоссейной дороги Москва—Рязань и на грунтовом маршруте в состоянии осен-
ней распутицы, а также с использованием СКШ в составе оборудования в районе
Свердловской области.
При этом экспериментальным путем были определены следующие основные
параметры маршрутов: углы продольных уклонов, кривизна поворотов в плане и
состояние поверхности участков маршрута (сопротивление движению шасси).
Продольный уклон на участках оценен параметром угла наклона рамы шасси
в ходе его движения по маршруту с помощью закрепленного на раме гироскопа.
Продольный уклон наклона рамы при движении шасси имеет две составляющие:
первая — от колебаний шасси на подвеске, вторая — от изменения уклона дороги.
Выделение второй составляющей, необходимой для оценки уклона, из процесса
колебаний угла наклона рамы шасси проводилось путем определения его математи-
ческого ожидания для каждого участка маршрута. Таким образом, были получены
значения угла продольного уклона, осредненные по каждому участку маршрута.
За точку отсчета значений угла продольного уклона принималось положение
рамы шасси на горизонтальной площадке. Продольный угол в этом положении за-
мерялся оптическим угломером и учитывался при расчетах продольного уклона
участков маршрута.
Кривизна поворотов в плане (величина, обратная значению радиуса поворота)
определялась путем замеров углов въезда в поворот и выезда из него, а также длины
траектории движения шасси на повороте. Углы в плане измерялись с помощью курсо-
вого гироскопа, закрепленного на корпусе шасси. Длина траектории определялась по
показаниям тарировочного датчика оборотов колеса шасси. Тарировка этого датчика была
проведена на горизонтальном мерном участке грунтового маршрута длиной 200 м.
Сопротивление движению шасси оценивалось на трех прямых горизонталь-
ных участках маршрута методом выбега от максимально возможной по дорожным
условиям скорости движения до полной остановки шасси. Замедление, возникаю-
щее при этом, численно соответствует коэффициенту сопротивления движению.
Замедление определялось по показаниям датчика оборотов колеса в каждый теку-
щий момент времени выбега.
Микропрофиль участков дорог в состоянии на момент проведения эксперимен-
тальных исследований оценивался путем определения максимальных ходов подвески
8.5. Сравнительная оценка подвижности СКШ на маршрутах
277
шасси датчиками перемещений. Эти значения ходов могут служить затем для контро-
ля ровности дороги при сравнении отдельных участков маршрута между собой.
Значения ходов подвески шасси также служат для сопоставления микропро-
филя при эксперименте и расчете по Методике. Если различие значений экспери-
ментальных и расчетных ходов подвесок существенно (более 5... 10 %), то значение
амплитуды расчетной спектральной плотности дороги при генерировании микро-
профиля на ЭВМ необходимо изменить до устранения этого различия.
В результате проведения вышеуказанной части исследований маршруты бы-
ли разделены на однородные участки по параметрам продольного угла, кривизны
поворотов и состояния поверхности. Определены средние значения этих парамет-
ров на каждом участке маршрута.
Как показывает анализ данных табл. 8.7, результаты теоретических и экспе-
риментальных исследований имеют удовлетворительную сходимость.
Результаты использования Методики, полученные на стадии ее внедрения в
процесс анализа и экспертизы технических решений конструкций СКШ, предлагае-
мых промышленностью, а также в процесс конструирования шасси на предприяти-
ях-разработчиках, позволили сформулировать алгоритм комплексной оценки влия-
ния на подвижность СКШ общих проектировочно-конструкторских решений в
сложной динамической системе дорога — автомобиль — водитель.
Алгоритм комплексной оценки влияния предлагаемых промышленностью тех-
нических решений приведен на рис. 8.11. Суть алгоритма заключается в следующем:
изучение внешних условий воздействия при предлагаемой эксплуатации
СКШ и определение главных эксплуатационных свойств; составление представи-
тельного маршрута движения шасси, определение важнейших его характеристик и
уточнение математического описания в предлагаемой Методике. На основе опреде-
ления главных эксплуатационных свойств СКШ уточняются значения параметров
действующих ограничений;
на основе предлагаемых на стадии эскизного или технического проектов об-
щих проектировочно-конструкторских решений проводится уточнение комплекс-
ной математической модели движения и комплексная оценка влияния этих решений
на среднюю скорость движения по представительному маршруту, определение про-
ектировочно-конструкторских решений, не позволяющих достигнуть заданных
главных эксплуатационных свойств шасси;
расширенное и углубленное численное исследование каждого лимитирующе-
го эксплуатационные свойства проектировочно-конструкторского решения какой-
либо системы шасси в отдельности по частной математической модели. Определе-
ние рациональных параметров этой системы, обеспечивающих достижение главных
эксплуатационных свойств. Оценка технической возможности реализации рацио-
нальных параметров системы шасси на основе технико-экономического анализа
технического уровня предполагаемого производства;
комплексная оценка влияния общих проектировочно-конструкторских реше-
ний с новыми параметрами, полученными в ходе частных исследований, на среднюю
скорость движения СКШ по представительному маршруту и разработка окончатель-
ного варианта рекомендаций и предложений по предлагаемым в эскизном или техни-
ческом проектах техническим решениям.
278
8. Основные критерии и методы оценки технических решений
Этап № 3
| Уточнение ММ подвижности СКШ и выбор исходных данных для исследований |
Этап №4
Рис. 8.11. Схема алгоритма применения методики оценки эффективности использования
(подвижности) СКШ
Часть III
ОСНОВЫ ТЕОРИИ И РАСЧЕТА КТС ОБГ
Глава 9
Основные принципы построения
общей компоновки КТС ОБГ
9.1. Анализ тенденций развития общей компоновки
Общая компоновка заключается в определении рационального взаимного раз-
мещения, типа, схемы и значения основных узлов и агрегатов транспортного средст-
ва, его кабины и платформы, обеспечивающих выполнение автомобилем его функ-
ционального назначения с наибольшей эффективностью в заданных условиях экс-
плуатации и технологичность в производстве.
Задача общей компоновки ТС как одного из этапов процесса его создания с
обеспечением необходимых эксплуатационных свойств заключается в определении
основных его размеров и наиболее выгодного взаимного расположения агрегатов и
узлов, т. е. в правильном выборе компоновочных параметров. Задача эта в общем
случае многокритериальная.
Разработка любого транспортного средства проводится на основе сущест-
вующей концепции развития автомобилей данного класса грузоподъемности. Кон-
цепция, как правило, реализуется в общих технических требованиях и перспектив-
ных типажах машин. Особенно это характерно для автомобилей массового произ-
водства.
По данным работы [15], структура концепции, отражающая основные прин-
ципы системного подхода, представлена на рис. 9.1.
Для автомобилей массового производства большая работа ведется по изуче-
нию структуры рынка и тенденций спроса потребителей транспортных средств, по
определению номенклатуры модификаций (рис. 9.2) базовых моделей и построению
кратко- и долгосрочного прогноза развития (фирм, отрасли и т. п.).
Транспортные средства особо большой грузоподъемности выпускаются, в
лучшем случае, небольшими партиями, а то и в единичных экземплярах по разовым
заказам под конкретное оборудование или перевозимый груз. Для них особо важ-
ным при разработке общей компоновки является учет конкретных (довольно узких)
условий использования и применения, а также опыта проектирования подобных
транспортных средств.
280
9. Основные принципы построения общей компоновки КТС ОБГ
Рис. 9.1. Структурная схема создания мобильной машины
Как известно, выпускаемые КТС ОБГ по своему назначению делятся на три
основные группы:
многоосные специальные колесные шасси, предназначенные для монтажа и
транспортировки конкретного оборудования (см. рис. 4.1, 4.2);
карьерные автомобили-самосвалы;
многоопорные транспортные средства (см. рис. 2.1).
Рассмотрим для примера процесс формирования перспективного типажа карь-
ерных автомобилей-самосвалов [11] как наиболее массовой группы КТС ОБГ
В настоящее время конструкции выпускаемых карьерных автомобилей-
самосвалов в целом соответствуют специфике горно-технических условий добычи и
как технологический вид транспорта удовлетворяют требованиям своих многочис-
ленных потребителей. По общей компоновке эту группу КТС ОБГ можно разделить
на три вида:
2-осные однозвенные автомобили-самосвалы, предназначенные для работы в
открытых карьерах (см. рис. В.1, в) или шахтах и тоннелях;
9.1. Анализ тенденций развития общей компоновки
281
Колесная формула 4x4 Колесная формула 6x6 Колесная формула 8x8
Двигатели Двигатели Двигатели
А= 180 л. с. N = 180 - 240 л. с. N = 240 - 300 л. с.
(7а = 12,5 т Ga = 16 т Ga = 22 т Ga = 22 т
43206 4320 55571 5323-20
сЗШ
43206 4320 55571 5323-20
43206 43202 44202 53234
43202 5423
^окоУ^-ЧоЯоГ
43203 5323-21
^k^oRoF
4420 5323-21
44202
5557 5557
5557 5557
Щт^-ЧоЯоГ
43204 5323-21
43204
*"0^2)7*
АЦП 8/6-40 и
АЦ-3-4/6-40 АЦП 6/6-40 АЦП 9/6-40 53336
Рис. 9.2. Номенклатура модификаций на примере производства ОАО «УралАЗ
282
9. Основные принципы построения общей компоновки КТС ОБГ
17069
Рис. 9.3. Трехосный автомобиль-самосвал:
а — вид спереди: д сзади; в — вид сбоку
3-осные однозвенные автомобили-самосвалы, предназначенные для работы
на открытых площадках (рис. 9.3);
3-осные сочлененные автомобили-самосвалы широкого применения (рис. 9.4).
Горно-технические условия постоянно усложняются (углубляются карьеры,
увеличиваются объемы, плечи перевозок и т. п.), а открытые разработки сдвигаются в
9.1. Анализ тенденций развития общей компоновки
283
Рис. 9.4. Сочлененный автомобиль-самосвал
районы с холодным или, наоборот, жарким пустынным климатом, как правило, в мес-
та, удаленные от промышленно развитых центров страны и имеющие весьма ограни-
ченные трудовые ресурсы. А это значит, что уже в ближайшем будущем потребуется
более совершенная добывающая и транспортная техника, способная не только ком-
пенсировать вызванное перечисленными трудностями уменьшение реальной произ-
водительности, но и повысить ее. И здесь наряду с эффективными в новых условиях
карьерными автомобилями-самосвалами, используемыми в качестве магистрального
транспорта (для вывозки породы от экскаватора непосредственно в отвал или на
склад полезного ископаемого), нужны транспортные средства, пригодные для работы
при широко внедряемых циклично-поточной и других прогрессивных технологиях
добычи и транспортирования. При этом применяют комбинации различных ТС, экс-
плуатируемых в наиболее рациональной для каждого карьера зоне. В таких системах
автомобильный транспорт выступает как сборочный элемент транспортного процес-
са, работающий обычно на дне глубокого карьера, нижних горизонтах и доставляю-
щий породу от экскаватора к перегрузочным устройствам, размещенным в карьерах.
Плечо работы такого автомобиля-самосвала не превышает 1,5 км, но перевозки осу-
ществляют зачастую по неблагоустроенным дорогам с неровностями, крутыми укло-
нами, рытвинами, со сброшенными кусками породы.
Разработанный с учетом этих особенностей эксплуатации перспективный (на
15-20 лет) типаж (табл. 9.1) включает карьерные КТС ОБГ двух групп: для магистраль-
ных перевозок; для выполнения сборочных операций и доставки породы к перегрузоч-
ным устройствам. В нем сохраняется параметрический ряд (с коэффициентом 1,5-1,7)
автомобилей, который охватывает шесть классов грузоподъемности — от 30 до 280 т.
(Из второй группы исключен автомобиль-самосвал грузоподъемностью 250...280 т, так
как возможности его использования в условиях забоев будут ограничены.)
284
9. Основные принципы построения общей компоновки КТС ОБГ
Таблица 9.1
Типаж карьерных автомобилей-самосвалов
Показатели Класс грузоподъемности автомобиля-самосвала, т
30 50 80 120 180 250-280
Полная масса, т 51 Базовые 85 модели 140 210 315 440-490
Колесная формула 4x2 4x2 4x2 4x2 4x4 4x4
Нормативный пробег основных агрега- тов до капиталь- ного ремонта, тыс. км, не менее 300 300 350 350 400 400
Автомобили-самосвалы для магистральных карьерных перевозок (первая группа)
Мощность двигате- 346 562 948 1264 1900 2940
ля, кВт (л.с.) (470) (765) (1290) (1720) (2580) (4000)
Удельная мощность, кВт/т 6,76 6,62 6,76 6,03 6,03 6,03-6,6
Максимальная ско- рость, км/ч 50 50 50 50 45 40
Автомобили-самосвалы для сборочных операций (вторая группа)
Мощность двигате- 264 437 735 958 1470
ля, кВт (л.с.) (360) (595) (1000) (1300) (2000)
Удельная мощность, кВт/т 5,15 5,15 5,15 4,78 4,56
Максимальная ско- рость, км/ч 40 40 40 40 40 —
Первые пять представителей параметрических рядов имеют рациональные
для этой группы КТС ОБГ и ставшие уже традиционными для Белорусского автоза-
вода схему построения, колесную формулу (4x2) и базируются соответственно на
бескамерных радиальных металлокордных шинах 18.00-25, 24.00-35, 27.00-49,
33.00-52 и 40.00-57 (табл. 9.2). Наиболее крупный автомобиль-самосвал грузоподъ-
емностью 250...280 т представляет собой шарнирно-сочлененное ТС с колесной фор-
мулой 4x4 и 2-скатной ошиновкой передних и задних колес (шина 40.00-57). Такая
схема (4x4) выбрана неслучайно. При схеме 4x2 пришлось бы создавать новые ши-
ны значительно большего размера.
С учетом того, что время движения автомобиля с грузом на подъеме в глубо-
ких карьерах составляет более 60 % времени всего карьерного цикла, построение
ряда автомобилей первой группы — для магистральных перевозок (табл. 9.3) —
базируется на двигателях мощностью, увеличенной на 25...35 % по сравнению с
мощностью выпускаемых до этого автомобилей-самосвалов. Это позволяет повы-
сить скорость их движения на затяжных подъемах с уклоном 8 % до 15,5... 18,0 км/ч
и дает возможность уменьшить время движения из карьера глубиной 300 м до вре-
мени, необходимого для выезда из карьера глубиной 200 м.
9.1. Анализ тенденций развития общей компоновки
285
Таблица 9.2
Техническая характеристика шин
Показатель Марка шин
18.00-25 24.00-35 27.00-49 33.00-51 40.00-57
Допустимая нагрузка на
шину, кг, при макси- мальной скорости дви- жения 50 км/ч: 8650 14800 24600 32500 50500
по НТД по данным фирмы «Мишлен» 9250 18500 27250 38750 60000
Полная масса машины, т,
при равномерной на- грузке на шины: 51,9 88,8 147,6 195,0
по НТД по данным фирмы «Мишлен» 55,5 111,0 163,5 232,5 360
Примечание. НТД — научно-техническая документация.
Таблица 9.3
Техническая характеристика ряда автомобилей-самосвалов первой группы
Показатель Класс грузоподъемности, т
30 50 80 120 180 250-280
Масса, т: снаряженного автомобиля 21 35 60 90 135 190-210
полная 51 86 140 210 315 440-490
Коэффициент тары (использова- ния габаритной площади ) 0,7 0,7 0,75 0,75 0,75 0,76-0,75
Мощность двига- теля: номинальная, 346 563 949 1266 1899 2944
кВт (л.с.) (470) (765) (1290) (1720) (2580) (4000)
удельная, 6,78 6,62 6,78 6,02 6,02 6,03-6,62
кВт/т (л.с./т) (9,21) (9,0) (9,22) (8,18) (8,19)
Трансмиссия ГМП ГМП ЭТ ЭТ ЭТ ЭТ
Колесная формула 4x2 4x2 4x2 4x2 4x2 4x4
Размер шин 18.00-25 24.00-35 27.00-49 33.00-51 40.00-57 40.00-57
Весьма эффективным представляется также использование части запаса
мощности автомобилей на преодоление увеличенного, хотя бы до 10 %, руководя-
щего уклона карьерных трасс (а следовательно, уменьшения общего плеча вывозки),
благодаря чему производительность новых автомобилей-самосвалов при скорости
286
9. Основные принципы построения общей компоновки КТС ОБГ
движения 13... 15 км/ч увеличится на 23 % по сравнению с современными БелАЗами.
При этом существенно (на 3,4...6,4 млн м3) снижается объем вскрыши, поскольку
при увеличенном уклоне дорожной трассы разнос бортов карьера меньше.
Двигатели, требуемые для автомобилей-самосвалов первой группы (табл. 9.4),
можно создать путем форсирования дизелей: для классов грузоподъемности 30 и
50 т — семейства 140x140 Ярославского моторного завода; для 80, 120 и 180 т —
семейства ЧН21/21 Уральского турбомоторного завода; для 250...280 т — семейства
ЧН 26/26 Коломенского тепловозостроительного завода. Потребная для этих КТС
ОБГ удельная мощность — 6,03...6,77 кВт/т (8,2...9,2 л.с./т) — обеспечивается за
счет промежуточного охлаждения наддувочного воздуха.
Автомобили-самосвалы второй группы — для сборочных операций — преду-
смотрено оснащать силовыми установками меньшей мощности (удельная мощность
4,78...5,52 кВт/т, или 6,5...7,5 л.с./т), т. е. имеющими степень форсирования, близ-
кую к принятой на серийных автомобилях БелАЗ. Причем для снижения массы та-
ких автомобилей целесообразно применять двигатели соответствующих семейств с
меньшим числом цилиндров при той же (18,4...22 кВт/л, или 25...30 л.с./л) литро-
вой мощности.
Таблица 9.4
Техническая характеристика двигателей первой группы
Показатель Класс грузоподъемности автомобилей-самосвалов, т
30 50 80 120 180 250-280
Тип* 8Н 12Н 6Н 8Н 12Н 18Н
Рабочий объем, см3 Мощность, кВт (л.с.): 1722 2564 4361 5815 8723 22080
номинальная 346 562 948 1265 1897 2941
(470) (765) (1290) (1720) (2580) (4000)
литровая 20 21,9 21,9 21,8 21,8 17,8
(27,3) (29,8) (29,8) (29,6) (29,6) (24,2)
цилиндровая 43 46,9 158 158 158 158
Размерность цилиндра, (58,5) (63,7) (215) (215) (215) (215)
мм Среднее эффективное 140x140 140x140 210x210 210x210 210x210 210x210
давление, МПа Масса, кг Удельная масса, кг/ кВт (кг/л.с.) Моторесурс до капи- тального ремонта, 1,148 1300 3,76 (2,77) 1,148 1900 3,37 (2,48) 1,74 1,74 5800 4,57 (3,37) 1,74 8600 4,52 (3,33) 1,6
тыс. мото-ч 10 10 16 16 16 24
*Все двигатели — с турбонаддувом и промежуточным охлаждением наддувочного
воздуха.
На автомобилях-самосвалах обеих групп используется тяговое электрообо-
рудование нового поколения с синхронными генераторами переменного тока и по-
9.1. Анализ тенденций развития общей компоновки
287
следовательно соединенными ТЭД. И в той, и в другой группе предусмотрены мо-
дификации с двигателями, работающими по газодизельному процессу.
Автомобили-самосвалы первой и второй групп различаются трансмиссией.
Для первой в классах грузоподъемности 80 и 120 т предполагается наряду с ЭТ ис-
пользовать гидромеханическую с большим диапазоном коробки передач и микро-
процессорным автоматическим управлением; для второй — трансмиссии, повы-
шающие тяговый момент на ведущих колесах за счет снижения максимальной ско-
рости движения до 40 км/ч.
Все перспективные модели по сложившейся традиции оборудуют весьма
прогрессивными для этого типа КТС ОБГ агрегатами: пневмогидравлическими под-
весками высокого давления, гидроподъемниками опрокидывающего механизма; их
кузова, рамы и другие несущие элементы конструкций выполняют из термоупро-
ченных листовых сталей.
В целях рационального использования грузоподъемности автомобилей-само-
свалов предложено создать для каждого класса грузоподъемности по три типораз-
мера кузовов для перевозки вскрышных пород, рудных и нерудных ископаемых и
по одному — для транспортирования угля.
Новые автомобили-самосвалы имеют прогрессивные показатели по массе.
Так, коэффициент тары (использования габаритной площади) моделей с ГМП пре-
вышает 0,7, с электрической передачей — 0,75, у 250.. .280-тонника с колесной
формулой 4x4 — 0,78-0,80.
В конструкции дизель-генераторных агрегатов всех машин обоих рядов
должны вводиться объединенное регулирование двигателя и генератора, микропро-
цессорные системы управления и устройства, позволяющие оптимизировать функ-
ционирование других агрегатов (тормозов, рулевого управления, подвески), систе-
мы встроенной диагностики и современные информационные устройства.
Особого внимания требует обеспечение безопасности движения КТС ОБГ
поэтому предлагается дублировать каналы системы управления, влияющие на безо-
пасность, а все автомобили снабдить устройствами, улучшающими обзорность.
Решению важнейшего вопроса — снижению негативного воздействия на ок-
ружающую среду — будет способствовать оптимизация управления дизелем и
трансмиссией и, естественно, комплектование машин нейтрализаторами отрабо-
тавших газов, в частности 3-компонентными с противосажевыми фильтрами.
В семействе автомобилей-самосвалов БелАЗ типажом предусмотрена схема
компоновки с колесной формулой 6x4, но она признана менее эффективной, чем
схема с колесной формулой 4x4. Однако в мировой практике широко используется
схема компоновки с колесной формулой 6x6 как в однозвенных, так и в сочленен-
ных модификациях (см. рис. 9.3, 9.4).
Примером однозвенной модификации может служить 3-осный карьерный ав-
томобиль-самосвал «Терекс» концерна «Дженерал Моторе» (США) с дизель-
электрической моторно-трансмиссионной установкой (МТУ) грузоподъемностью 350 т
(см. рис. 9.3). Масса автомобиля-самосвала в снаряженном состоянии — 23 110 кг,
максимальная полезная нагрузка — 3 175 140 Н. Автомобиль-самосвал развивает мак-
симальную скорость до 45 км/ч. Максимальный угол наклона платформы при опро-
кидывании равен 55°, время ее подъема — 28 с, а опускания — 30 с. На автомобиле-
288
9. Основные принципы построения общей компоновки КТС ОБГ
самосвале установлен 16-цилиндровый V-образный дизель модели 16-645Е4 фир-
мы «Дженерал Моторе» с турбонаддувом и непосредственным впрыском топлива.
Угол развала блоков цилиндров дизеля составляет 45° Размерность цилиндра —
230x254 мм, рабочий объем двигателя — 169,15 л. Номинальная мощность дизеля —
2429 кВт (3300 л.с.) при частоте 1900 мин-1 Привод генератора модели AR10 пере-
менного тока с встроенным трехфазным выпрямителем осуществляется от дизеля.
Ведущие колеса автомобиля-самосвала приводятся во вращение тяговыми серийными
электродвигателями модели D79CF, встроенными в каждое колесо. Охлаждение тяго-
вого двигателя и цилиндра — воздушное.
Силовой агрегат вместе с системой охлаждения и всем вспомогательным
оборудованием смонтирован на подрамнике и представляет собой силовой модуль.
Этот модуль расположен в уплотненном подкапотном пространстве — капсуле, в
которой создается избыточное давление предварительно отфильтрованного воздуха,
что снижает уровень внешнего шума. Для охлаждения двигателя применены два
6-секционных радиатора, каждый из которых охлаждается отдельным лопастным
вентилятором. Вентиляторы имеют привод с автоматическим включением.
В результате применения ЭТ в значительной степени упрощена конструкция
силовой передачи автомобиля. Чтобы улучшить маневренность автомобиля-
самосвала и уменьшить его радиус поворота, колеса задних мостов выполнены
управляемыми. Подвеска колес гидравлическая, в ней предусмотрено автоматиче-
ское выравнивающее устройство нагрузки, приходящейся на задние мосты.
Независимая передняя подвеска в качестве направляющего аппарата имеет
поворотный шкворень в сочетании с качающейся свечной стойкой. Упругим эле-
ментом служит пневматическая резиновая подушка.
Два задних моста автомобиля-самосвала ведущие. Шины 40.00-57 рассчита-
ны на номинальную нагрузку 504 кН при давлении воздуха в них 4,9 кг/см2 На осях
ведущих колес смонтировано по две шины.
Широкое применение за рубежом с конца 1970-х годов получила сочлененная
схема компоновки, особенно в конструкциях автомобилей-самосвалов (см. рис. 9.4).
Грузоподъемность сочлененных автомобилей-самосвалов находится в пределах
24...55 т. Они, как правило, имеют шарнирную связь звеньев с двумя степенями
свободы: в горизонтальной (в плане) и в вертикально-поперечной (перемещение
вокруг продольной оси автомобиля) плоскостях. Система управления криволиней-
ным движением таких автомобилей построена на принципе силового складывания
звеньев в плане относительно друг друга гидравлическими цилиндрами.
Сочлененные автомобили по компоновке делят на два типа — прицепные и се-
дельные. Сочлененные автомобили прицепного типа (рис. 9.5) могут быть с одной
степенью свободы в узле связи звеньев или с 2-3 степенями свободы. У сочлененных
автомобилей седельного типа звенья соединяются общей грузовой платформой, свя-
занной со звеньями шарнирной связью по типу седельных устройств тягачей автопо-
ездов с полуприцепами (рис. 9.6, 9.7). Управление поворотом автомобилей обоих ти-
пов осуществляется, как правило, «силовым» способом при помощи системы гидро-
цилиндров, поворачивающих звенья в горизонтальной плоскости (в плане) на угол до
45° в каждую сторону. Шарнирная связь может допускать относительное перемеще-
ние звеньев в продольно- и поперечно-вертикальной плоскостях на угол до 30°.
9.1. Анализ тенденций развития общей компоновки
289
Рис. 9.5. Варианты схем компоновки сочлененного КТС ОБГ с грузовым звеном,
соответствующим по габаритам и грузоподъемности длине и массе моногруза:
а — автомобиль 6x6; б — автомобиль 8x8; в — автомобиль 10x10
Компоновочная схема многоосных однозвенных КТС ОБГ сложилась в 1960—
1970-е годы. Их характерными примерами могут служить схемы и образцы, пред-
ставленные на рис. 9.8, 9.9 и 4.6, 4.7 Схемы общей компоновки автомобиля ОБГ с
монтируемым оборудованием на примере автокранов представлены на рис. 9.10-9.12.
Выпускаемые зарубежными фирмами многоопорные КТС ОБГ по своему на-
значению делятся на 5 основных подгрупп:
для использования на металлургических заводах;
для применения на судостроительных верфях;
Рис. 9.6. Варианты компоновки сочлененного автомобиля седельного типа
с общей грузовой платформой для монтажа моногруза:
а — автомобиль 8 х 8; б — автомобиль 12x12
10 - 2918
290 9. Основные принципы построения общей компоновки КТС ОБГ
Рис. 9.7. Варианты схем компоновки сочлененного автомобиля в составе автопоезда:
а — с прицепом роспуском; б — с полуприцепом
Рис. 9.8. Схема компоновки шасси МАЗ-543
3070
Рис. 9.9. Схема компоновки шасси 8x8 нового поколения
9.1. Анализ тенденций развития общей компоновки
291
Рис. 9.10. Схема компоновки автокрана на шасси 8x8 полной массой 40 т:
д сбоку; б — вид в плане. Шины 16.00R25; А = 3670 мм; = 2700 мм; Е = 330 мм;
Р = 25°
для перевозки грузов на большие расстояния;
для перевозки объемных металлоконструкций и промышленных установок;
стандартные модульные ТС.
По конструктивному исполнению все многоопорные КТС ОБГ подразде-
ляют на полуприцепы, работающие совместно с седельными автомобилями, прицепы
10=
292 9. Основные принципы построения общей компоновки КТС ОБГ
Рис. 9.11. Схема компоновки автокрана на базе СКШ МАЗ -73131 общей массой 43 т:
а — вид сбоку; б — вид в плане
10640
13200
б
Рис. 9.12. Схема общей компоновки автокрана на базе МАЗ-6923 общей массой 39 т:
а — вид сбоку; б — вид в плане
9. /. Анализ тенденций развития общей компоновки
293
модульного типа, работающие с балластными автомобилями-тягачами, и однозвен-
ные многоопорные транспортные средства.
По грузоподъемности отдельных модулей КТС ОБГ образуют унифициро-
ванный ряд от 40 до 200 т и более. Кроме того, их можно разделить еще на две
большие группы. В первую входят КТС ОБГ осевые нагрузки которых не превы-
шают действующих законодательных ограничений, поэтому они могут применяться
на дорогах общего пользования (см. рис. 2.1). Вторая группа — КТС ОБГ с превы-
шением действующих ограничений, они могут работать вне дорог или на дорогах
общего пользования по специальному разрешению.
Производство КТС ОБГ осуществляется в основном по разовым заказам на не-
больших заводах, использующих гибкие технологии. Схемы их компоновки весьма
разнообразны, и принятие решения по ТС в большинстве случаев диктуется характером
перевозок и транспортируемого груза. Примером может служить КТС фирмы «Комет-
то» (рис. В. 1, а), схема общей компоновки которого представлена на рис. 9.13.
Хотя зарубежные фирмы по-разному решают вопросы конструкции и компо-
новки отдельных узлов и агрегатов многоопорных ТС, все они придерживаются
единого, продиктованного транспортной необходимостью подхода к решению ма-
шины в целом. Все многоопорные транспортные средства выпускают в модульном
исполнении, что позволяет осуществлять компоновку ТС требуемой грузоподъем-
ности и габаритов.
Так, фирмы «Николас», «Кометто» и «Камаг» применяют принцип моноблоч-
ного многоопорного автомобиля, тогда как фирма «Шейерле» размещает тяговые
гидродвигатели равномерно в каждом из модулей составного ТС, при этом управ-
ляющий блок вместе с кабиной оператора навешивается на передний торец первого
модуля, а силовой блок — на задний торец последнего модуля. Основой модуля явля-
ется опорная тележка (см. рис. 2.2), т. е. модуль более низкого уровня. Этим достига-
ется абсолютная стандартизация типажа выпускаемых изделий.
Стыковка отдельных модулей при компоновке транспортеров большой гру-
зоподъемности и габаритов может выполняться жестко встык с образованием
транспортера с цельной несущей платформой. Предусматривается также возмож-
ность расположения отдельных модулей либо групп модулей на расстоянии друг от
друга с соответствующим соединением гидроконтуров подвески и гидросистем
двигательных установок. Расстояние между модулями или группами модулей мо-
жет варьироваться в широких пределах с определенным установочным шагом как в
продольном, так и в поперечном направлениях. Величина этого шага зависит от
программы, закладываемой в электронную систему управления поворотом опорных
тележек, и в большинстве случаев составляет 0,1 м.
Фирма «Кометто» при образовании многомодульного транспортера исполь-
зует определенное количество активных и пассивных (не имеющих привода колес)
модулей.
Активные полноприводные модули, на каждом из которых размещены
12 пневмоколесных опорных тележек, сгруппированных в шесть осевых рядов,
имеют обозначение А; пассивные модули, имеющие также 12 опорных тележек (как на
рис. 2.2), получили обозначение D.
Модули А могут быть использованы либо одиночно, либо связываться с мо-
дулями D. При компоновке продольных линий модулей в каждой линии должен
294
9. Основные принципы построения общей компоновки КТС ОБГ
в V'
Рис. 9.13. Схема компоновки многоопорного ТС для перевозки летательного аппарата:
а — вид сбоку; б — вид в плане; в — схема поворота управляемых колес
быть хотя бы один полноприводный модуль. При выполнении маневров КТС ОБГ
поворот (см. рис. 2.16) каждой опорной тележки выполняется под контролем элек-
тронных следящих систем, которые управляются ЭВМ, установленными на каждом
полноприводном модуле А.
Многоопорные модули А могут образовывать между собой семь основных
вариантов компоновки, управление поворотом колес (см. рис. 2.16) которых осуществ-
ляется с помощью электроники. С этой целью применяют специальные программы
управления для каждой компоновочной схемы, закладываемые в блок памяти ЭВМ.
Для схем соединения с применением модулей А и D имеются дополнительные про-
граммы, которые также закладываются в блоки памяти ЭВМ модулей А.
9.1. Анализ тенденций развития общей компоновки
295
а
Рис. 9.14. Компоновочные схемы магистральных автопоездов с полноприводными тягачами:
а — седельного типа полной массой 38...44 т; б и в — прицепного типа полной массой соответствен
38...44 и 50...52 т
Весьма перспективными, по данным работы [4], являются принципиально
новые компоновочные схемы магистральных автопоездов, которые приведены на
рис. 9.14-9.16, а их общий вид — на рис. В.2, На рис. 9.14 приведены компоно-
вочные схемы магистральных автопоездов с полноприводными тягачами. При
одинаковых значениях коэффициентов сцепного веса по сравнению с автомоби-
лем-тягачем с колесной формулой 6x4 полноприводный тягач с колесной форму-
лой 4x4 имеет только четыре колеса в односкатном исполнении или шесть в 2-скат-
ном вместо соответственно шести и десяти, что уменьшает сопротивление каче-
нию, снижает расход топлива, массу снаряженного автомобиля и эксплуатаци-
онные затраты.
Компоновка «кабина над двигателем» затрудняет возможность создания тя-
гачей с колесной формулой 4x4 по традиционной схеме вследствие ухудшения по-
перечной устойчивости автопоезда и уменьшения полезного объема кабины. По-
этому в компоновочной схеме тягача с колесной формулой 4x4 (см. рис. В.2, ?, 9.14)
двигатель размещен горизонтально между мостами, что обеспечивает:
примерно равное распределение осевых нагрузок как от массы снаряженного ав-
томобиля, так и от его полной массы (в односкатном исполнении);
снижение вертикальной координаты центра масс вследствие более низкого
расположения двигателя;
упрощение конструкции кабины;
уменьшение уровня внутреннего шума и улучшение микроклимата в кабине;
улучшение эргономических показателей.
Кроме того, почти равное распределение осевых нагрузок позволяет исполь-
зовать одинарные широкопрофильные шины с более низким коэффициентом сопро-
тивления качению по сравнению со сдвоенными. В случае необходимости увеличе-
ния полной массы тягача можно создать вариант 3-осного автомобиля добавлением
третьего ведущего или неведущего моста (см. рис. 9.14, в).
Однако недостатком расположения двигателя между мостами является за-
трудненный доступ к нему для технического обслуживания.
296
9. Основные принципы построения общей компоновки КТС ОБГ
Рис. 9.15. Основные компоновочные схемы модульных автопоездов:
а, б — в составе одноосного тягача и полуприцепа полной массой соответственно 31 и 41 ; в, г — мною-
звенный автопоезд полной массой соот ветственно 62 и 82 т. Типовые модули: / — гяювый; 2 — кабина;
3 — верхняя рама; 4 — грузовой; 5 — рама; 6 — выкатная тележка и ведомая ось
Принципиально новое направление развития магистральных автопоездов
основано на применении в одном из МАЗов модульного принципа. Основные
компоновочные схемы модульных автопоездов, состоящих из отдельных типовых
модулей, показаны на рис. 9.15, а их реализация — на рис. В.2, г.
Тяговый модуль 7 включает в себя двигатель в блоке с коробкой передач, ве-
дущий мост разрезного типа и независимую пневмоподвеску ведущих колес.
Верхняя рама снабжена сцепным и фиксирующим устройством для соединения
с полуприцепом и служит основанием для установки кабины, топливного бака, сило-
вых цилиндров рулевого привода и поворотного круга.
Грузовой модуль — грузовая платформа с несущей рамой — представляет собой
сменный кузов. Грузовыми модулями могут быть также цистерна, контейнер и др.
14050
7,5 т 7,5 т Ют Ют Ют
9860 г [ 3240 г | 2400
15500
Рис. 9.16. Схема компоновки автопоезда
9.2. Основы модульного проектирования
297
Особенности компоновки модульных автопоездов следующие:
сочлененные модули образуют автопоезд в составе одноосного тягача (моду-
ли /, 2, 3) с тяговым модулем, расположенным под кабиной, и полуприцепа (модули
4, 5, 6);
сочлененные модули — кабина, верхняя рама и полуприцеп — образуют
единую жесткую систему, что наделяет автопоезд свойствами переднеприводного
автомобиля;
возможность распределения тяговых модулей по всей длине автопоезда, в
том числе и на прицепных звеньях;
возможность равномерного распределения осевых нагрузок и использования
широкопрофильных шин.
Основными преимуществами модульных автопоездов по сравнению с авто-
поездами традиционной схемы являются:
возможность получения большой гаммы транспортных средств различного
назначения грузоподъемностью 18...55 т при унифицированном производстве не-
большого количества модульных звеньев;
возможность путем подбора соответствующего числа модулей (тяговых, гру-
зовых и ведомых осей) формировать автопоезда, в большей степени приспособлен-
ные к конкретным условиям перевозок с учетом необходимых грузоподъемности,
грузовместимости, тягово-скоростных свойств;
повышение грузоподъемности автопоезда в результате реализации предельно
допустимой осевой нагрузки на первом управляемом мосту;
увеличение грузовместимости из-за отсутствия промежутка между кабиной и
передним бортом платформы;
снижение расхода топлива в результате уменьшения аэродинамического со-
противления автопоезда и замены 2-скатных шин широкопрофильными.
К недостаткам модульных автопоездов данного исполнения следует отнести
сложность систем управления и согласования работы нескольких тяговых модулей
многозвенных автопоездов; затрудненный доступ к узлам, агрегатам и системам
тягового модуля.
9.2. Основы модульного проектирования
Опыт развития отечественной и зарубежной промышленности показал, что
при частой сменяемости объектов производства, как одной из характерных черт
рынка, стандартизация, унификация и агрегатирование являются решающими усло-
виями для сокращения сроков освоения новых изделий, а также для применения
наиболее производительных и экономичных методов их изготовления. Примени-
тельно к транспортным машинам, и автомобилям в частности, этого можно достиг-
нуть, используя модульный принцип проектирования изделий. Такой принцип про-
ектирования по существу является стержневым при создании семейств автомобилей
двойного применения.
Сравнительный анализ вариантов различных автомобильных технических
систем и их составных частей при проведении унификации модульных автомобиль-
298
9. Основные принципы построения общей компоновки КТС ОБГ
них шасси, по аналогии с радиоэлектронной аппаратурой, базируется на общей тео-
рии исследования систем. В общем случае он осуществляется в три этапа: содержа-
тельное исследование, формализация и квантификация.
Содержательное исследование сводится к общему описанию автомобиля и
его потребностей, а также качественному описанию связей между модулями шасси.
Формализация включает схематическое и математическое описание автомо-
биля и связей между его модулями. Основным путем формализации является моде-
лирование, которое может быть иллюстрированным, описательным, количествен-
ным или качественным.
Квантификация представляет собой количественное выражение качествен-
ных признаков. Это наиболее сложный этап, сводящийся к установлению требова-
ний, предъявляемых к качеству модулей, исходя из требований к качеству КТС ОБГ
(прямая задача), или установлению степени влияния показателей качества модулей
на соответствующие показатели шасси (обратная задача).
В данной работе сделана попытка последовательно осветить все три задачи.
Под термином «унификация» (от лат. unio — единство, facere — делать) в
данной главе интерпретируется понятие ограниченного разнообразия. Это является
наиболее справедливым по отношению к таким группам КТС ОБГ как СКШ и ав-
томобили-самосвалы.
Корректное описание области унификации является необходимым условием
правильной постановки задачи по модульному проектированию. Если п > \ (п =
= 2, 3, ...), то унификация межсистемная, если п = 1 — системная, где п — число
рассматриваемых систем. Исходя из этих условий, для СКШ и карьерных автомо-
билей-самосвалов унификация, определяющая их модульное проектирование, на
современном экономическом этапе развития страны должна быть системной, т. е.
внутризаводской, однако обеспечивающей широкую возможность как по монтажу
различного оборудования (для СКШ), так и по использованию обеих групп КТС
ОБГ по предназначению.
В настоящее время в мировой практике проектирования изделий на основе
модулей можно отметить три основных направления:
1) применение функциональных модулей сравнительно малой сложности;
2) компоновка образцов изделий из крупных, функционально законченных
устройств и агрегатов;
3) применение модульного принципа на всех уровнях конструктивной иерар-
хии (модули более высоких уровней иерархии составляются из модулей более низ-
ких уровней).
Как отмечалось в гл. 5, наиболее гибким и свободным от недостатков, на наш
взгляд, представляется иерархический метод построения систем. Он заключается в
том, что типовыми элементами замены являются модули первого уровня, которые, в
свою очередь, объединяются, составляя более крупные модули второго уровня, и
т. д. Фактически модули первого уровня являются «строительным материалом» для
создания модулей более высоких уровней и систем в целом. При этом все модули
должны иметь единую сетку геометрических и присоединительных размеров.
9.2. Основы модульного проектирования
299
СКШ
Модуль 4-го
уровня
Модуль 3-го уровня
Модуль управления (кабина) Моторный модуль Трансмис- сионный модуль (комплексный модуль) Ходовой модуль (колесный держатель) Несущий модуль
-------1------
Модуль 2-го уровня
1-й контур трансмиссии /-Й контур трансмиссии Модули тормозной системы Модули рулевого управления
Модуль 1-го уровня
Узлы агрегатов и систем 2-го и 3-го уровней
-----------------------1---------------------
Модуль нулевого уровня
_______________________I_____________________
Детали и узлы узлов и систем 1-го уровня
Рис. 9.17. Пример иерархического построения конструкции мобильной машины типа СКШ
При таком подходе к проектированию, когда изделие представляет собой
сложный агрегат, в котором каждая функция выполняется отдельным модулем, за-
дача разработки изделия в целом поддается расчленению. Это позволяет уделить
больше внимания решению каждой подзадачи проектирования, так как работа рас-
пределяется между группами проектировщиков и открывает возможности модифи-
кации и модернизации модульной системы при малых затратах времени и ресурсов.
Возможная схема иерархического построения модульного проектирования пред-
ставлена на рис. 9.17, а ее реализация — на рис. 9.18-9.20.
Если модернизация автомобиля проводится в целях улучшения его парамет-
ров и повышения эффективности, то модификация выполняется не столько для по-
вышения его эффективности, сколько для расширения или изменения его возмож-
ностей по предназначению. Модификация изделий может быть многократной, при-
чем первичная модификация является базой для вторичной и т. д.
Модульный принцип построения изделий позволяет максимально продлить
срок их службы без существенного морального износа. Это достигается за счет по-
этапной модернизации отдельных модулей.
В целом все направления модульного проектирования изделий базируются на
общетехническом принципе агрегатирования, который заключается в следующем:
системы и другие сложные технические устройства представляют собой аг-
регат, состоящий из нескольких независимых устройств (модулей);
300
9. Основные принципы построения общей компоновки КТС ОБГ
Рис. 9.18. Основные этапы работ по комплексной унификации СКШ
расчленение на эти устройства (модули) производится так, чтобы каждый из
них выполнял определенную функцию и имел конструктивно-техническую закон-
ченность;
виды устройств выбираются так, чтобы их можно было собирать в агрегат с
заданными техническими свойствами;
функциональное многообразие агрегатов достигается различным сочетанием
устройств (модулей), а также возможностью наращивания структуры агрегатов в
процессе их использования;
9.2. Основы модульного проектирования
301
Рис. 9.19. Схема модульного построения СКШ
средства одного функционального назначения должны образовывать пара-
метрические ряды.
Основным условием агрегатирования является совместимость агрегатных
средств (модулей). Концепция совместимости (энергетической, информационной,
метрологической, конструктивной и эксплуатационной) основана на последова-
тельных унификации и стандартизации свойств и параметров модулей.
Рис. 9.20. Структура решения проблемы обоснования выбора элементной базы модулей
302
9. Основные принципы построения общей компоновки КТС ОБГ
В наиболее общем смысле модульный принцип проектирования заключа-
ется в создании колесной машины в виде совокупности различных самостоятель-
ных модулей, соединенных друг с другом. Такими модулями в колесной машине
являются несущая система, кабина, двигатель, отдельные агрегаты трансмиссии,
а также элементы систем подрессоривания, управления и торможения и др.
(рис. 9.21 и 9.22).
Преимущество модульного принципа заключается в возможности проведения
одновременной (конструкторской и производственной) работы над многими узла-
ми, что уменьшает время на проектирование всей колесной машины. Чтобы сокра-
тить объем оригинальной документации и сроки освоения в производстве, а также
облегчить обслуживание машин, необходимо стремиться к снижению числа моду-
лей. Для этого желательно агрегаты и детали трансмиссии, а также системы подрес-
соривания и торможения проектировать одинаковыми для всех колес машины, что
не представляется рациональным.
Модульный принцип позволяет наиболее просто и с наименьшими затра-
тами организовать конструирование и производство семейств автомобилей с
колесными формулами 6x6, 8x8 на базе одних и тех же агрегатов, но в то же
время может ухудшить некоторые показатели ТТХ. В качестве примера на рис. 9.17
приведено иерархическое построение конструкции гипотетического СКШ из мо-
дулей разных уровней. При этом СКШ как модуль четвертого уровня входит в
транспортный комплекс. Колесная машина имеет несколько модулей третьего
уровня: модуль управления (кабину), моторный модуль, несущий модуль, ходо-
вой модуль и связующие модули управления (рулевого и тормозной), которые
объединяются в одну сборочную единицу — мобильную машину-СКШ. Причем
наращивание, например колесных модулей, возможно как с изменением разме-
ров несущего модуля, так и без этого, что может привести к увеличению длины
или ширины СКШ, а следовательно, к возможности транспортировки грузов
различных размеров и массы. Любой из модулей третьего уровня состоит из мо-
дулей более низкого уровня. Самый низкий уровень — уровень комплектующих
сборочных единиц, который принят за нулевой, не имеет модульной иерархиче-
ской структуры.
Таким образом, все это подтверждает, что улучшение параметров конструи-
рования и производства находится в определенном несоответствии с задачами экс-
плуатации изделий.
Главным направлением развития модульного принципа проектирования для
зарубежных автомобильных фирм является обеспечение возможности изготовления
шасси из наименьшей номенклатуры деталей для использования, согласно всем су-
ществующим требованиям, в различных классах грузоподъемности автомобилей.
Результатом модульного принципа проектирования является автомобиль, соответ-
ствующий любым специальным требованиям заказчика и тем самым гарантирую-
щий рациональное использование, т. е. рентабельное капиталовложение. Например,
создается возможность оснащения шасси общей массой 36...40 т двигателями раз-
личной мощности, так как требования по мощности в зависимости от применения —
для перевозок на дальние расстояния или транспортировки грузов во внутригород-
ских перевозках — могут быть различными. Но при этом некоторые свойства ма-
шины ухудшаются.
9.2. Основы .модульного проектирования
303
Рис. 9.21. Автобусы особо большой вместимости:
а — внешний вид; б — схема компоновки сочлененного автобуса; в — схема компонов-
ки с 3-ярусным расположением сидений для пассажиров; г — схема компоновки с 2-ярусным
расположением сидений для пассажиров
304
9. Основные принципы построения общей компоновки КТС ОБГ
Рис. 9.22. Схема модульного построения тягача, предложенная КЗКТ Модули:
управления; 2 — моторный; 3 — силовой; 4 — спецоборудования; 5 — сцепной; 6 —
I овый; 7 — питания; 8 — несущий
Основные этапы работ по комплексу модульного проектирования представ-
лены на рис. 9.18-9.20, примеры модульной компоновки седельных и прицепных
автопоездов — на рис. 9.15.
В связи с несомненной перспективностью модульный принцип проектирова-
ния находит свое продолжение и при создании автобусов большой вместимости
(см. рис. 9.21), а также при изготовлении деталей, независимо от того, идет ли речь о
двигателе, коробке передач или о конструкции рамы.
Пример модульного построения седельного колесного тягача, предложенный
ОАО «Русич» — КЗКТ, представлен на рис. 9.19.
Способы реализации модульного принципа проектирования, рассмотренные
выше, характерны для шасси традиционной конструкции, оборудованных, в частно-
сти, механической и гидромеханической трансмиссиями. Если в колесном модуле
шасси при применении ЭТ или ГОТ в качестве модуля второго уровня выделить
трансмиссию, то ее можно составить из модулей первого уровня, которыми являют-
ся одинаковые независимые контуры (мотор-колеса) привода колесного модуля. В
свою очередь, каждый контур привода колес выполняется из модулей нулевого
уровня: сборочных единиц (модулей), которые приняты за базовые элементы при
проектировании агрегата, системы или изделия в целом.
В заключение следует отметить, что модульный принцип проектирования де-
лает возможным (методом замены отдельных модулей) в любой момент приспосо-
бить автомобиль к современному требованию рынка и уровню развития техники.
Это важный шаг в создании долговременных конструкций автомобилей.
9.3. Теоретические основы формирования типоразмерных рядов
305
9.3. Теоретические основы формирования
типоразмерных рядов
В общем случае задача оптимизации (формирования) типоразмерных рядов тех-
нических объектов, в том числе и СКШ, примыкает к установлению требований к глав-
ному параметру объектов и определению необходимого количества их типоразмерных
рядов, построенных по этому главному параметру.
Под типоразмерными рядами подвижной техники понимается совокупность
образцов, объединенных общностью назначения и ранжированных по величине
главного параметра.
В процессе проведения исследований используется ряд последовательно свя-
занных исходных понятий, определенных рекомендациями по методам построения
конструктивно-унифицированных рядов изделий машиностроения.
Взаимосвязь типоразмерных и конструктивно-унифицированных рядов выра-
жается в том, что каждое изделие, входящее в рассматриваемую систему машин, яв-
ляется одновременно как типоразмером типоразмерного ряда, так и базовой моделью
или модификацией конструктивно-унифицированного ряда.
Разработка взаимосвязанных типоразмерных и конструктивно-унифициро-
ванных рядов осуществляется на основе единого параметрического ряда значений
главного параметра изделий. При этом число базовых моделей типоразмерного или
конструктивно-унифицированного рядов изделий не может превышать числа чле-
нов параметрического ряда значений главного параметра изделий.
При построении параметрических рядов технических объектов в общем слу-
чае определяются номенклатура объектов, номенклатура их параметров, главный
параметр.
Определение номенклатуры объектов осуществляется с учетом потребно-
стей, технических возможностей и технико-экономической целесообразности по-
строения взаимоувязанных типоразмерных и конструктивно-унифицированных ря-
дов. В номенклатуру объектов включают все существующие и(или) предполагаемые
к выпуску объекты, параметры которых существенным образом влияют на технико-
экономическую эффективность производства и эксплуатацию объектов.
Выбор номенклатуры параметров объектов предусматривает выявление таких
параметров, которые определяют наиболее существенные конструктивно-техноло-
гические и эксплуатационные свойства объектов и обеспечивают высокий уровень
унификации их составных частей. Перечень параметров объектов и их составных час-
тей устанавливается, как правило, с учетом предъявляемых требований по следую-
щим группам: силовые параметры, параметры масс, кинематические, размерные, экс-
плуатационные (параметры экономичности, надежности и др.) и прочие параметры.
Главный параметр выбирается из определенной номенклатуры параметров.
При этом должны соблюдаться следующие требования:
главный параметр должен быть общим для всей номенклатуры изделий;
параметрический ряд его значений служит основой построения всех типо-
размерных рядов в системе технических объектов;
каждое конкретное значение главного параметра остается постоянным для
объектов, входящих в конструктивно-унифицированный ряд.
306
9. Основные принципы построения общей компоновки КТС ОБГ
Параметрический ряд значений главного параметра определяется на базе:
диапазона значений главного параметра, т. е. определения крайних членов
ряда, обеспечивающих требования потребителя;
числа членов параметрического ряда — рационального количества членов
ряда, позволяющего увязать требования потребителя и возможности изготовителя
при минимальных производственно-эксплуатационных затратах;
частоты ряда, т. е. интервалов между соседними значениями главного пара-
метра в параметрическом ряду.
Постановка задачи оптимизации параметрического ряда сводится к сле-
дующему. Из всех возможных вариантов параметрического ряда выбирается та-
кой, в котором значения главного параметра удовлетворяют потребителя изделий
при их максимальной эффективности. Под оптимальным параметрическим рядом
изделий машиностроения понимается такой ряд, который отвечает следующим
требованиям:
изделия со значениями главного параметра, входящими в ряд, должны быть
технически осуществимы и удовлетворять требованиям потребителей;
значения главного параметра, составляющие параметрический ряд, необхо-
димо подбирать из рядов предпочтительных чисел по ГОСТ 8032 (для любых неза-
висимых параметров);
параметрический ряд в целом должен соответствовать рекомендациям ИСО,
МЭК и других международных организаций по стандартизации.
В практике построения параметрических рядов применяют различные критерии
оптимизации. При построении параметрических рядов изделий машиностроения в
качестве такого критерия наиболее часто используют суммарные затраты на раз-
работку, производство и эксплуатацию изделий. В этом случае критерий оптимиза-
ции представляет собой зависимость суммарных затрат на проектирование, изго-
товление и эксплуатацию от значений этих параметров:
Q - Qn + Си + <2> =f(xt, Х2, .... Х„),
где Qu, Qu, — соответственно стоимость проектирования, заводская цена изделий
и стоимость эксплуатации; х2, .х„ — значения параметров всех членов ряда.
Задача оптимизации параметрического ряда представляет собой задачу ми-
нимизации суммарных затрат:
Q(xi, х2, ..., х„) —> min.
Стоимость проектирования группы изделий определяется числом разрабатывае-
мых типоразмеров и возрастает с ростом числа членов параметрического ряда. Суммар-
ная стоимость проектирования определяется по выражению
Qn =Ё^п,’
/=1
где уц. — стоимость проектирования изделия, у которого величина главного пара-
метра равна значению z-ro члена ряда х = х,.
9.3. Теоретические основы формирования типоразмерных рядов
307
При определении стоимости проектирования изделий учитывают расходы на
проведение научно-исследовательских работ, разработку конструкторской доку-
ментации, изготовление и испытания опытных образцов.
Суммарная цена изделия определяется по формуле
Си — Pi ’
/=1
где К — коэффициент, учитывающий снижение расходов при увеличении серийно-
сти. В соответствии с ГОСТ 20799
где По — исходное число членов ряда; q — цена изготовления одного изделия;
Pi — потребность в изделиях.
При определении цены изделий учитывают цену материалов, энергии, зара-
ботную плату рабочих, накладные расходы и т. д.
Расходы на эксплуатацию изделий могут возрастать при уменьшении числа
ряда вследствие замены изделий с меньшим значением параметра на изделия с
большим значением параметра за счет увеличения значений других показателей
(массы, габаритов, энергоемкости и т. д.). В то же время в результате оптимизации
параметрического ряда сокращается номенклатура изделий, находящихся в экс-
плуатации. При заданной потребности в изделиях сокращение их номенклатуры
приводит к увеличению повторяемости изделий. Это, в свою очередь, обеспечивает
снижение дополнительных затрат, связанных с сокращением объема требуемых
запасных частей, трудоемкостью технического обслуживания и ремонта, повыше-
нием надежности, уменьшением затрат на подготовку обслуживающего персонала.
Суммарные расходы на эксплуатацию определяют по формуле
/=|
где — коэффициент эквивалентного снижения расходов на эксплуатацию, учи-
тывающий сокращение номенклатуры изделий; ср. — расходы на эксплуатацию
полного изделия с параметром х = xt.
При определении расходов на эксплуатацию изделий учитывают цену запас-
ных частей, расходы на хранение, ремонт, техническое обслуживание, содержание и
обучение обслуживающего персонала.
С учетом суммарных затрат на всех этапах жизненного цикла изделий крите-
рий оптимизации определяется по формуле
п п п
<2 = Т^,+КТ. р> + к\ Т/ь, Pi
i=\ i=\ i=\
308
9. Основные принципы построения общей компоновки КТС ОБГ
Суммарные затраты рассчитывают на весь период производства и эксплуата-
ции изделий.
В некоторых случаях в качестве критерия используют не все суммарные затра-
ты, а только ту их часть, которая зависит от изменения параметра оптимизации. На-
пример, при массовом выпуске изделий иногда не учитывают затраты на проектиро-
вание ввиду их малой доли в суммарных затратах на производство и эксплуатацию.
В других случаях с целью повышения научной обоснованности рядов в кри-
терий оптимизации параметрического ряда в дополнение к рассмотренным суммар-
ным затратам включают, например, затраты на адаптацию модели, возникающие из-
за расхождений в интересах потребителей, стремящихся сократить номенклатуру
(из-за ограничений на материальные, трудовые и финансовые ресурсы).
Таким образом, в общем случае применительно к автомобильной технике,
выполняющей транспортную работу, общие затраты на перевозку укрупненно мо-
гут быть подразделены на две составляющие: затраты на производство и затраты на
эксплуатацию.
В дальнейшем при определении рационального типоразмерного ряда в каче-
стве примера будем рассматривать только одну группу КТС ОБГ — СКШ грузо-
подъемностью 20 т и более.
Задача формирования высокоунифицированных семейств сводится к уста-
новлению требований к главному параметру и определению необходимого количе-
ства типоразмерных рядов СКШ, для удовлетворения, например, потребностей в
шасси под монтаж оборудования. При этом число типоразмерных рядов должно
быть минимальным.
Рассмотрим метод формирования типоразмерного ряда СКШ, который бази-
руется на возможностях реализации конструктивно-компоновочных схем машин в
рамках унифицированных типоразмерных рядов с учетом обеспечения требуемой
подвижности и необходимой грузоподъемности.
Исследования и сложившаяся практика конструирования показывают, что ба-
зовые модели СКШ могут создаваться как унифицированные типоразмерные ряды
(УТРР) на единых узлах и агрегатах, если они имеют одинаковую нагрузку на ось и
отличаются колесной формулой. Практически для всех колесных машин в пределах
УТРР колесная формула принимается 6x6, 8x8 и т. д., при этом УТРР может вклю-
чать от одного до трех типоразмеров. Полные массы типоразмеров каждого УТРР
определяются по выражению
Мк = рп, (9.1)
где Мк — полная масса типоразмера с числом осей п\ р — нагрузка на ось в данном
УТРР
Определение величины предельной нагрузки на ось зависит от условий при-
менения машины и удельной статистической нагрузки на шину в пятне контакта ее
с опорной поверхностью. Ранее для СКШ была установлена предельная нагрузка на
ось до К) т, что ограничивалось условиями проходимости армейских машин. В по-
следние годы автомобили этого типа все чаще стали оснащаться широкопрофиль-
ными шинами, в результате чего при сохранении допустимых значений удельного
давления в пятне контакта нагрузка на ось возросла до 15,0...16,0 т. Таким образом,
9.3. Теоретические основы формирования типоразмерных рядов
309
предельное значение полной массы колесной машины 8x8 может составить
40,0...64,0 т.
Грузоподъемность Gr каждого образца типоразмерного ряда определяется
через коэффициент использования массы:
Gr = МкК„м (9.2)
Анализ результатов исследований показывает, что изменение Кн можно
описать линейной зависимостью в функции Мк типа
^и.м = а + ЬМК,
где а,Ь — коэффициенты, получаемые при статистической обработке информации.
Далее подход к выбору типоразмерных рядов следующий. До реализации
предельной осевой нагрузки 10,0...16,0 т за основу базового типоразмера принима-
ются СКШ с колесной формулой 6x6. Их ступенчатость выбирается из необходи-
мости удовлетворения потребностей грузоподъемностей экономики, сложившейся
практики и др. Наиболее распространенными классами грузоподъемности по опыту
мирового автомобилестроения являются 15; 20, 25; 20.. .25 и 40 т.
Если за модуль принять автомобиль 4x4, осевые нагрузки которого не пре-
вышают 10,0 т, то могут создаваться модели с колесной формулой 6х6и8х8с це-
лью увеличения грузоподъемности. Примеры таких машин в отечественной и зару-
бежной практике имеются. В этом случае полная масса каждого последующего ти-
поразмера выбирается из условия
1 , (4x4) _
мк=---------п. (9.3)
После этого устанавливается возможная грузоподъемность G, автомобилей
6x6 и 8x8 с учетом статистических данных:
Gr = МкКкм = Мк(а + Ь). (9.4)
Для построения системы УТРР всего типоразмерного ряда используется
принцип равенства грузоподъемности у двух базовых типоразмеров соседних УТРР
с различной колесной формулой. В данном подходе принято следующее условие:
(9.5)
где G™+1 — грузоподъемность базового типоразмера (т + 1)-го УТРР с числом осей и;
G™+1 — грузоподъемность базового типоразмера m-го УТРР с числом осей п + 1,
т — порядковый номер УТРР
Унифицированный типоразмерный ряд с большим порядковым номером
включает машины с большей полной массой и нагрузкой на ось.
Использование рассматриваемого принципа объясняется тем, что удо-
влетворение нужд потребителя (в данном случае в грузоподъемности) может быть
обеспечено шасси с различной колесной формулой и, следовательно, с различны-
ми проходимостью и монтажными характеристиками с учетом назначения монти-
310
9. Основные принципы построения общей компоновки КТС ОБГ
руемого оборудования и условий его боевого применения. В рассматриваемом
подходе грузоподъемность шасси с колесной формулой 8x8 низшего ряда опреде-
ляется через полную массу соответствующего по грузоподъемности образца выс-
шего ряда:
или
К к
/хи.мбхб . /хи.м4х4 /О '7\
М8х8 ~ М6хб ~ ’ А6хб “ М4х4 ~ W
^и.м8х8 ^и.мбхб
Расчеты по формулам (9.1)—(9.7) позволяют определить полные массы и гру-
зоподъемность всех возможных высокоунифицированных семейств (типоразмеров)
СКШ, входящих в систему УТРР в качестве автомобильных базовых шасси (АБШ).
Для СКШ в качестве главного параметра принимаются грузоподъемность,
или максимальная нагрузка на ось, или максимальная полная масса.
Грузоподъемность образцов определяется требованиями заказчика. Макси-
мальная полная масса образца находится в зависимости не только от грузоподъем-
ности, но и от снаряженной массы, которая определяется конструктивным исполне-
нием машин (их материалоемкостью). В связи с этим в качестве главного параметра
в типоразмерном ряду СКШ целесообразно принимать грузоподъемность.
Такой типоразмерный ряд может корректироваться в первую очередь исходя
из необходимости удовлетворения определенных потребностей заказчика.
В табл. 9.5 и 9.6 приведены результаты расчетов по определению возможных
типоразмерных рядов базовых моделей колесных машин, их полных масс и грузо-
подъемностей с учетом потребностей войск в СКШ, условий их боевого примене-
ния (для выбора колесной формулы при одинаковых или близких грузоподъемно-
стях) и целесообразности реализации различных конструктивно-компоновочных
схем с использованием единых узлов и агрегатов.
При этом в табл. 9.5 расчеты проведены для СКШ, оборудованного шинами
модели ВИ-203, имеющими размерность 1500x600-635 и обеспечивающими осевую
нагрузку 11,5 т, а в табл. 9.6 — с шинами модели ВИ-178 АУ, имеющими размер-
ность 1600x600-685 и обеспечивающими осевую нагрузку 15,0 т.
Таблица 9.5
Основные параметры типоразмерных рядов СКШ с осевой нагрузкой 11,5 т
Номер УТРР 6x6 8x8 12x12
Л/ю т, не более 33,5 <7, т, не менее 14,0 И, т, не более 45,5 G,,t, не менее 22,0 мк, т, не более 69,0 Сг, т, не менее 35,0
1 29,0 14,0 43,0 22,0 69,0 35,0
2 32,0 17,0 45,0 24,0
3 33,0 18,0 — — — —
9.4. Перспективная транспортно-технологическая колесная машина 31 1
Таблица 9.6
Основные параметры типоразмерных рядов СКШ с осевой нагрузкой 15,0 т
Номер УТРР 8x8 12x12 16x16
Л/к, т, не более 60,0 G,, т, не менее 35,0 Л/к, т, не более 80,0 G„t, не менее 55,0 ч, не более 120,0 С,, не менее 85,0
1 60,0 35,0 80,0 55,0 120,0 80,0
Анализ данных табл. 9.5 с позиций допустимых осевых нагрузок и полных
масс шасси показывает, что в 1-3 УТРР целесообразно при формировании общего
типоразмерного ряда СКШ ограничиться тремя типоразмерами для машин с колесной
формулой 6x6, двумя типоразмерами — для машин 8x8 и одним типоразмером —
для машин 12x12. В свою очередь, из данных табл. 9.6. следует, что в пределах
1 УТРР достаточно ограничиться одним типоразмером для машин с колесными
формулами 8x8, 12x12 и 16x16. Кроме того, с учетом равенства грузоподъемности
машин 12x12 и 8x8 в табл. 9.5 и 9.6 и принимая во внимание реальные массогаба-
ритные характеристики монтируемого оборудования, целесообразно шасси 12x12 с
осевой нагрузкой 11,5 т из УТРР исключить.
Таким образом, типоразмерный ряд, построенный на основе использования
высокоунифицированных семейств СКШ, может иметь вид:
14,0... 18,0; 22,0...24,0; 35,0; 55,0 и 80 т и более.
Коэффициент ряда равен 1,57
Существующий типоразмерный ряд отечественных КТС ОБГ в классах гру-
зоподъемности 22...24 и 80 т сформировался в результате реализации предшест-
вующих и действующего типажей с учетом потребностей страны и возможностей
промышленности и соответствует полученному теоретическим путем ряду. Более
того, по договору СНВ-2 было сокращено оборудование, в качестве транспортной
базы которого использовались реально существующие шасси, вписывающиеся в
полученный выше типоразмерный ряд в классах грузоподъемности 35,0 и 55,0 т.
Следует отметить, что для обеспечения минимальных эксплуатационных
расходов при монтаже и транспортировке ВВТ в различных дорожных и климати-
ческих условиях движения необходимо иметь достаточно широкую номенклатуру
модификаций базового изделия соответствующего типоразмера, каждая из которых
была бы приспособлена для определенного предназначения.
9.4. Перспективная транспортно-технологическая
колесная машина
Исходным пунктом при разработке возможного облика такого перспективно-
го КТС ОБГ, как транспортно-технологическая машина, должно служить потреби-
тельское требование — возможность движения с высокими скоростями по всем ви-
дам дорог и местности. Как показывает опыт испытаний и эксплуатации многоос-
ных СКШ, основным ограничивающим фактором при этом является консервативная
312
9. Основные принципы построения общей компоновки КТС ОБГ
на данное время концепция ходовой части традиционных КТС ОБГ, которая долгое
время обеспечивала выполнение потребительских свойств по подвижности и кото-
рая в начальный период создания подобных машин вполне обоснована (см. гл. 4).
Таким образом, ходовая часть КТС ОБГ во многом определяет облик перспектив-
ной колесной машины.
С учетом вышеизложенных основных принципов модульного проектирова-
ния можно сказать, что ходовая часть КТС ОБГ может рассматриваться как опорно-
ходовой комплекс и состоять из следующих основных модулей: направляющего
аппарата системы подрессоривания каждого колеса, систем межколесных связей,
упругодемпфирующей системы, тягового и тормозного модуля, системы управле-
ния поворотом (рулевой модуль), локальной системы энергообеспечения, локально-
го блока единой системы управления движением и т. п.
Результаты проработки создания нового облика КТС ОБГ на основе исполь-
зования существующих узлов и агрегатов для обеспечения определенной унифика-
ции с существующими машинами представлены на рис. 9.23 и 9.24.
Даже поверхностный анализ данных рис. 9.23 и 9.24 показывает следующие
недостатки конструкций:
консольное расположение колес требует чрезмерного усиления элементов их
крепления к рычажной системе;
малые объемы ниш для опорно-ходовых модулей не позволяют применить
пространственные конструкции для рычажных аппаратов и разнесенные схемы для
установки подшипников в сочленениях звеньев, что в сочетании с большими стати-
ческими нагрузками на колесо и высоким уровнем динамических нагрузок приво-
дит к гипертрофированию как осей шарниров, так и их подшипников;
ограниченные боковые габариты шасси не позволяют развернуть колеса на
достаточно большие углы, что резко снижает маневренность машины в стесненных
условиях;
рычажные элементы занимают непомерно большие объемы внутреннего кон-
тура машины, что усложняет размещение целевого оборудования, вытесняя его вы-
соко вверх.
Все эти недостатки отчетливо проявляются и при попытке синтезировать
возможный облик транспортного средства с 3-звенной тележкой подобного типа:
Рис. 9.23. Компоновочная схема КТС ОБГ с 3-опорной балансирной тележкой (вариант 1)
9.4. Перспективная транспортно-технологическая колесная машина 3 13
Рис. 9.24. Компоновочная схема КТС ОБГ с 3-опорной балансирной тележкой (вариант 2)
даже при ограниченных вертикальных перемещениях колес реальная машина имеет
явно нерациональную конфигурацию прежде всего из-за того, что все свободное
место в нижней части корпуса занимают рычажные устройства опорно-ходового
комплекса. Весовая отдача подобной машины едва ли может находиться на прием-
лемом уровне.
Результаты рассмотрения этой проработки (рис. 9.25) позволяют сделать не-
гативный вывод не только в отношении данной конкретной конструктивной схемы,
но и в части существующих еще до сих пор попыток реализовать на столь сложном
транспортном средстве нужные характеристики ходовой части с помощью рычаж-
но-механических межколесных систем различного уровня сложности. Разместить
такие системы на реальной машине и обеспечить ей нужный уровень весовой отда-
чи едва ли представится возможным. Наиболее правильным следует признать соз-
дание опорно-ходовых комплексов на основе индивидуальных колесных модулей, а
нужные характеристики придать комплексу за счет введения управляемых электри-
ческих и гидравлических межколесных связей.
Сверхдлинноходные индивидуальные модули различаются в первую очередь
по схеме направляющих аппаратов.
При синтезировании возможного облика перспективного КТС ОБГ рассмот-
рены следующие варианты:
амортизирующая стойка с пантографическим направляющим аппаратом
(см. рис. 9.25);
одноступенчатая амортизирующая стойка с направляющим аппаратом полу-
рычажного типа и 2-колесной одноосной тележкой (рис. 9.26);
Рис. 9.25. Общий вид шасси с пантографическим направляющим аппаратом
длинноходной подвески
314
9. Основные принципы построения общей компоновки КТС ОБГ
Рис. 9.26. Кинематика и компоновочные ограничения одноступенчатой
стоечной сверхдлинной подвески КТС ОБГ
одноступенчатая телескопическая амортизирующая стойка с 2-колесной од-
ноосной тележкой (рис. 9.27);
2-ступенчатая амортизирующая стойка с направляющим аппаратом полуры-
чажного типа и 2-колесной одноосной тележкой (рис. 9.28);
2-ступенчатая амортизирующая стойка с направляющим аппаратом полуры-
чажного типа, с реактивными штангами и одноосной тележкой;
3-опорная балансирная подвеска при безбалансирном соединении упругих
элементов (рис. 9.29).
Проработка облика перспективного КТС ОБГ, для примера, выполнена при-
менительно к трубоплетевозу, предназначенному для перевозки различных комби-
наций стандартных труб большого диаметра. В качестве прототипа принято 6-осное
шасси типа МАЗ (рис. 9.30). Сравнительная оценка параметров профильной прохо-
димости и маневренности колесных шасси представлены на рис. 9.31-9.34.
Оценочные проработки продольного силуэта машины показали, что вписы-
ваемость КТС ОБГ в продольный профиль дорог можно обеспечить при количестве
опор вдоль борта, не превышающем шести (6-осное шасси). В этом случае расчет-
9.4. Перспективная транспортно-технологическая колесная машина 3 15
Рис. 9.27. Кинематика и компоновочные ограничения одноступенчатой
полурычажно-стоечной длинноходной подвески КТС ОБГ
ная нагрузка на опорно-ходовой модуль будет составлять 9,5... 10,0 кН. Кроме того,
приемлемая вписываемость в продольный профиль дороги может быть обеспечена
только при группировке опор в условные тележки, приближенные к оконечностям
машины. Что совпадает с известным требованием к компоновке многоосных шас-
си, обеспечивающем подавление продольно-угловых колебаний корпуса, однако
создает определенные проблемы при обеспечении должного уровня маневреннос-
ти КТС ОБГ
Амортизирующие стойки с пантографическим направляющим аппаратом ти-
па пантограф в принципе могут обеспечить требуемые параметры по ходу колеса и
по использованию объема «колесных ниш» (см. рис. 9.25). В настоящее время в
МГТУ им. Н.Э. Баумана проводятся более глубокие исследования подобных конст-
рукций с целью определения их практической реализуемости. Поэтому практиче-
ские выводы о применимости стойки типа пантограф в опорно-ходовом комплексе
перспективного КТС ОБГ делать преждевременно.
Одноступенчатые амортизирующие стойки с направляющим аппаратом ры-
чажного и полурычажного типа (см. рис. 9.26) вписываются в приемлемый попереч-
ный габарит машины при ходах не более 600 мм на сжатие. При этом предпочте-
ние следует отдавать стойкам с реактивными штангами перед стойками традици-
онного для авиации полурычажного типа, так как проработки подобной стойки
316
9. Основные принципы построения общей компоновки КТС ОБГ
Рис. 9.28. Кинематика и компоновочные ограничения 2-ступенчатой амортизирующей
стойки с направляющим аппаратом полурычажного типа:
а — кинематика первой ступени телескопической сверхдлинной подвески; б — кинематика и компо-
новочные возможности подвески на шасси; в — компоновочная схема подвески
Рис. 9.29. Общий вид шасси с 3-опорной балансирной подвеской при
безбалансирном соединении упругих элементов
выявили неприемлемые перегрузки упругого элемента реактивными усилиями
при торможении и разгоне машины.
9.4. Перспективная транспортно-технологическая колесная машина 3 17
Рис. 9.30. Общий вид шасси при традиционной схеме подвески с малыми ходами колес
Рис. 9.31. Переезд макронеровности шасси с подвеской, обеспечивающей большие
вертикальные хода колес
Рис. 9.32. Переезд макронеровности шасси с 3-опорной балансирной подвеской
Полную реализацию предъявляемых требований могут обеспечить разрабо-
танные в МГТУ им. Н.Э. Баумана 2-ступенчатые управляемые амортизирующие
стойки с полным ходом колеса на сжатие 1 150... 1 200 мм (рис. 9.35, 9.36).
Конструктивно эти модули могут быть реализованы в одноколесном варианте и
более традиционном варианте — с одноосной 2-колесной тележкой (см. рис. 9.35, б).
Таким образом синтезирован возможный облик трубоплетевоза с 6-осным шасси на
основе 2-колесных 2-ступенчатых опорно-ходовых модулей стоечного типа (см.
рис. 9.35, 9.36).
Анализ данной проработки показывает следующее:
предельно допустимый по компоновочным соображениям диаметр шины на-
ходится на уровне 1600... 1650 мм;
применение 2-колесной одноосной тележки требует обеспечения возможно-
сти конструктивного поперечного скоса оси не менее, чем на 6° (лучше до 12°), что
ощутимо усложняет конструкцию шасси и резко увеличивает объемы, вытесняемые
модулем из корпуса;
введение перекоса оси тележки требует устройства демпфирования попереч-
ных колебаний осей и мощных упоров, способных воспринимать нагрузки при вы-
вешивании одного из колес тележки;
318
9. Основные принципы построения общей компоновки КТС ОБГ
Рис. 9.33. Схемы вписываемости колесных шасси в складки продольного профиля местности:
шасси прототип типа МАЗ; б — перспективное КТС ОБГ с длинноходной подвеской;
в — серийный автомобиль КраЗ-255Б
конструкция собственно рычажного механизма направляющего аппарата у
2-осной тележки получается более простой, компактной и технологичной, особенно
при использовании реактивных штанг;
вторую ступень модуля можно рассчитывать только на восприятие предель-
ных нагрузок при сжатии подвески и выполнять ее газогидравлический элемент без
разделяющих устройств;
тяговый комплекс подобной машины принципиально не может быть выпол-
нен на основе механической трансмиссии (рациональный вариант — электромотор-
колесная схема привода);
2-колесная тележка предоставляет разработчикам мотор-колес большие удоб-
ства для организации сборки и технического обслуживания;
применение 2-колесной тележки устраняет эксплуатационные затруднения при
замене поврежденных шин, так как колесные узлы имеют свободный доступ с внешней
стороны и автономную систему вывешивания тележки;
традиционная лонжеронная несущая система лестничного типа непригодна
для использования при создании опорно-ходового комплекса на основе модуля сто-
ечного типа;
при необходимости приемлемым решением может быть пространственная
несущая система ферменного или рамного типа на основе мощной «килевой» балки,
9.4. Перспективная транспортно-технологическая колесная машина 319
в
Рис. 9.34. Оценка поворотливости колесных шасси:
а — шасси прототип типа МАЗ; б — перспективное КТС ОБГ
в — серийный автомобиль КраЗ-255Б
стрингеров для крепления опорно-ходовых модулей и силовых элементов попереч-
ного набора;
оптимальным с точки зрения конструкции опорно-ходового комплекса сто-
ечного типа является применение несущего корпуса соответствующих очертаний.
Оценивая в общем результаты предложенной выше конструктивной прора-
ботки по стойке с 2-колесной одноосной тележкой следует признать, что трудности,
связанные с неравномерным распределением нагрузок по колесам тележки при быст-
ром движении КТС ОБГ по местности и при преодолении крупных неровностей, не
получают удовлетворительного разрешения. В этом случае наиболее целесообразен
вариант КТС ОБГ с 2-ступенчатой амортизирующей стойкой одноколесного испол-
нения.
Основная проблема при создании подобной стойки состоит в том, что при
жестком ограничении диаметра колеса необходимо воспринимать нагрузку на
уровне 9,5... 10,0 кН, а также обеспечивать приемлемый уровень опорной проходи-
320
9. Основные принципы построения общей компоновки КТС ОБГ
Труба 2500x24,0
а
Рис. 9.35. Высокоскоростной трубовоз высокой проходимости со сверхвысо-
кими ходами подвески колес:
а — вид сбоку; б — вид спереди
мости машины и возможность ее движения со скоростью 70...80 км/ч по относи-
тельно твердой дороге. В настоящее время решение подобной задачи теоретически
возможно только при использовании арочных шин.
9.5. Уравнения массы базовой машины и ее элементов
Общее уравнение массы транспортного агрегата
в относительных параметрах
Полную массу любой самоходной машины или агрегата можно представить в
виде уравнения
w0 = Wp+mKa +ma +тупр +тг +топ +таоп + тсу +ттр +т„, (9.8)
где шо — общая масса машины (агрегата) с грузом; тр — масса рамы (корпуса) с
учетом несущих элементов (лонжеронов), поперечных связей, бамперов и буксирных
ОО
9.5. Уравнения массы базовой машины и ее элементов
Рис. 9.36. Перспективный газотрубоплетевоз:
а — внешний облик; б — компоновочная схема
322
9. Основные принципы построения общей компоновки КТС ОБГ
устройств, рамных кронштейнов, кабин управления и оперения; тк а — масса колес-
ных агрегатов с учетом массы шин, ободьев и ступиц с подшипниковыми узлами,
системой центральной накачки и воздуха в шинах; — масса системы подрессори-
вания (амортизаторов) с учетом массы направляющих и упругих элементов, а также
системы регулирования и стабилизации корпуса; тупр — масса элементов управле-
ния машины с учетом рулевого управления с гидроусилителем руля, тормозной сис-
темы с колесными тормозами, воздушными ресиверами и т. п.; тТ — масса топлива с
учетом топливных баков и топливной аппаратуры, размещенной вне двигателя;
топ — масса опор вывешивания машины с учетом домкратов, опорных плит, попе-
речных балок и механизмов опор; тдоп — масса дополнительного оборудования с
учетом электрооборудования, лебедки и другой неучтенной массы; тс у — масса
силовой установки с учетом массы обслуживающих ее систем, охлаждающего масла;
— масса трансмиссии с учетом колесных приводов управления; тП — масса
полезной нагрузки с учетом кузова или платформы, а также технологического обору-
дования и технических систем для обслуживания груза.
Для удобства анализа и расчета характеристик массы на этапе проектирова-
ния запишем уравнение (9.8) в относительных параметрах, разделив левую и пра-
вую части уравнения на полную массу машины то. Тогда
1 = Sp + ^к.а + Ъ + Up + + U + Un + U + U + U (9-9)
т
где = —------относительные массы элементов правой части уравнения (9.8).
то
На основании анализа данных статистики и опыта проектирования базовых
машин все элементы уравнения массы можно разделить на три основные группы.
К первой группе относятся элементы, масса которых не зависит или практи-
чески не зависит от принятой в расчет энерговооруженности машины, а определяет-
ся в основном уровнем проходимости, допустимыми перегрузками, используемым
материалом и качеством проектирования.
Ко второй группе относятся элементы, масса которых существенно зависит
от энерговооруженности машины.
К третьей группе относятся элементы, составляющие полезную нагрузку маши-
ны, в том числе собственно груз и оборудование для его установки и обслуживания.
Первую группу элементов представим в виде суммы
£ = Sp + U + Sa + Up + + U + Un (9.10)
1
Вторую группу элементов выразим через удельные параметры
(9-и)
£тр=шутрЛГу„ (9.12)
9.5. Уравнения массы базовой машины и ее элементов
323
где ту с у и ту тр — удельные приведенные массы силовой установки и трансмис-
сии соответственно; Ny э — удельная эффективная (реализуемая на колесах) энер-
говооруженность машины.
Решив уравнение (9.9) относительно полезной нагрузки £п из уравнений
(9.10), (9.11) и (9.12), получим
(9-13)
1
При проектировании базовой машины для транспортного или другого под-
вижного агрегата в исходных данных обязательно указывают полную массу полез-
ной нагрузки или ее составляющих, а также габаритные размеры и положение цен-
тров масс.
Если абсолютная масса полезной нагрузки задана, имеются зависимости для
определения составляющих уравнения (9.17) и удельных приведенных масс в урав-
нениях (9.11) и (9.12), то при заданной энерговооруженности W может быть най-
дена относительная масса полезной нагрузки и по формуле (9.13) определяется пол-
ная масса машины
^эп
а затем и все составляющие элементы конструкции:
т^=то^. (9.14)
Накопленный статистический материал [3] по характеристикам отдельных
элементов конструкции, использование моделей элементов, а также некоторые за-
висимости между параметрами машин позволяют синтезировать аналитические вы-
ражения для расчета относительных масс элементов машин, пригодные для практи-
ческого использования на этапе проектирования.
Определение относительных масс элементов агрегата
Определение относительной массы рамы
В качестве модели рамы базовой машины с любым количеством осей примем
балку, опертую на две опоры и нагруженную эквивалентной равномерно распреде-
ленной нагрузкой собственного веса и расположенных на ней элементов (подрессо-
ренных масс). Такая модель является наиболее простой и в то же время достаточно
близкой к реальной раме, так как расчетная схема реальной рамы всегда представ-
ляется балкой на опорах (зависание на двух осях многоосной машины). Принятые
схемы нагружения в виде равномерно распределенной нагрузки подрессоренных
масс также довольно близко соответствуют нагружению реальной рамы.
324
9. Основные принципы построения общей компоновки КТС ОБГ
Рис. 9.37. Схема к расчету относительной массы несущей системы
д
е
Возможные случаи нагружения модели рамы (рис. 9.37, ж) и эпюры изгибаю-
щих моментов показаны на рис. 9.37, а, б. Случай а соответствует предельному на-
гружению, практически не достижимому для реальной рамы из-за отсутствия свесов
(консолей). Максимальный изгибающий момент в середине рамы имеет значение
9.5. Уравнения массы базовой машины и ее элементов
325
где /р — длина рамы; q — нагрузка на раму.
Такое же значение момента, как частный случай, будет и при зависании ма-
шины на одной средней оси, если число осей агрегата является нечетным, а их рас-
становка — равномерной.
Случай б соответствует нагружению реальной рамы. Изгибающий момент на
опорах или в середине рамы будет меньше максимального и в общем случае в зави-
симости от соотношения 1к/1р его можно выразить формулой
M = KHql*,
где Кн — коэффициент нагружения рамы, значения которого в зависимости от от-
ношения 4//р приведены на рис. 9.37, д.
Наиболее характерные поперечные сечения рам показаны на рис. 9.37, в, г.
Рама на рис. 9.37, в состоит из двух продольных лонжеронов, связанных поперечи-
нами. Лонжероны изготовляются из стандартных швеллеров, отношение h/b кото-
рых изменяется в пределах 2,0-4,0. Если при любом отношении h/b принять одина-
ковой толщину стенок 5 и длину средней линии сечения, что означает и одинаковую
массу на единицу длины лонжеронов, то экваториальный момент сопротивления
изгибу W может быть выражен общей формулой
W=y(/i + 6fe).
Тогда напряжения изгиба в опасном сечении рамы
ст_Л/_ 3KHqlp
W 8h(h + 6b)’
откуда
_a8h(h + 6b)
Ч~ з*н/Р2
Найдем приближенно полную массу системы
o8/i(A + 6Z?)
=----------
8 ^Hglp
и массу рамы
тр = 2(h + 2Ь)81р —,
где h — высота лонжерона; b — ширина полки лонжерона; у — удельный вес
материала рамы; g — ускорение свободного падения.
Тогда относительная масса модели рамы будет выражаться формулой
. =^=к 6(/i + 2fe)/pY _ ^Y
р то н (h + 6b) o/i н * oh ’
(9.15)
326
9. Основные принципы построения общей компоновки КТС ОБГ
где =---------------коэффициент формы поперечного сечения лонжеронов, зави-
ф (Л + 6Ь)
сящий от соотношения h/b, определяется по графику на рис. 9.37, е.
Учитывая, что для трубчатых рам (см. рис. 9.37, г) момент сопротивления
W = лЗг2
а
т = 2тс5г28/ —,
g
аналогичным путем получаем
* /nY
£ =-L=KhK (9.16)
то <5а
где d — диаметр трубчатой рамы; г — радиус трубчатой рамы; — коэффици-
ент формы, имеющий постоянное значение для трубчатых рам СКШ, равное 4,0.
Если диаметр трубчатой рамы принять равным высоте лонжерона (d = h),
то, согласно формулам (9.15) и (9.16), при равных условиях масса трубчатой рамы
будет на 10...30 % тяжелее лонжеронной. Однако заметим, что лонжеронная рама
требует наличия поперечин, масса которых соизмерима с массой самих лонжеронов
и не учтена формулой (9.15), а трубчатая — не нуждается в поперечных связях. За-
метим также, что лонжеронная рама открытого типа по сравнению с трубчатой
практически не сопротивляется кручению. Полярный момент ее сопротивления
кручению не превышает 4 % полярного момента сопротивления кручению трубча-
той рамы. Напряжения кручения в лонжеронных рамах могут в 2 раза и более пре-
вышать напряжения от изгиба. Отсюда и большая потребная масса поперечных свя-
зей, поэтому в отношении экономии массы трубчатые рамы предпочтительнее лон-
жеронных открытых рам.
Используя данные статистики [3], распространим формулы (9.15) и (9.16) на
реальные рамы. Так как нагрузка реальной рамы определяется только подрессорен-
ными массами, составляющими
«’подр =(0,78...0,9)то,
то в формулы (9.15) и (9.16) следует ввести коэффициент соотношения подрессо-
ренных и неподрессоренных масс
кт =-^е- = 0,78...0,9,
то
где большие значения относятся к машинам сравнительно невысокой ходимости
и с механическим приводом колес, а меньшие — к машинам высокой проходи-
мости с мотор-колесным приводом (электрическими или гидрообъемными транс-
миссиями).
9.5. Уравнения массы базовой машины и ее элементов
ЪТ1
К раме машины, согласно формуле (9.7), кроме лонжеронов отнесены попе-
речные связи, рамные кронштейны, бамперы и буксирные устройства, не учтенные
в формулах (9.15) и (9.16), масса которых в 1,5-2 раза может превышать массу лон-
жеронов. Поэтому в этих формулах необходимо ввести коэффициент конструкции
Кк =—= 1,5...2,0,
^ЛОНЖ
где меньшие значения относятся к трубчатым рамам, а большие — к лонжеронным
открытым рамам.
На реальную раму действуют динамические нагрузки, которые необходимо
учесть коэффициентом динамичности
=2,0...2,5,
где большие значения принимаются для скоростных (V > 60 км/ч) и высокопрохо-
димых машин.
Так как действующие напряжения должны быть меньше допускаемых, а по-
следние определяются нормами прочности как
где [о] — допускаемые напряжения; от — предел текучести материала рамы;
ит — запас прочности, принимаемый в пределах 1,4-2,0, то в формулах (9.15) и
(9.16) вместо о следует подставлять значения —.
"т
Самым распространенным материалом для изготовления рам являются низ-
колегированные стали типа 10ХСНД (от = 400 МПа), 19ФГС (ог =430 МПа),
30Т(от = 360 МПа), 14Г2С (от = 390МПа), 14Г2С (от = 370 МПа), 25ПС (от
= 280 МПа) и др.
Для учета характера приложения сосредоточенных сил в формулы (9.29) и
(9.30) введем коэффициент
Ксс =0,9... 1,05,
меньшие значения которого относятся к случаю, когда значительная часть нагру-
зок сосредоточена над осью (опорой) или над группой осей (как, например, у се-
дельного тягача), а большие — к случаю расположения сосредоточенных сил между
осями или на концах рамы.
У реальной рамы при одинаковой нагрузке на оси колес передние и задние
консоли рамы, как правило, оказываются не одинаковыми по длине, что является
следствием неравномерного распределения нагрузки по длине рамы. Эту нерав-
номерность учтем приведенной длиной рамы /р пр, для определения которой следу-
ет переднюю и заднюю группы осей заменить эквивалентными передней и задней
328
9. Основные принципы построения общей компоновки КТС ОБГ
опорами так, чтобы реакции на них были одинаковыми, а затем по компоновоч-
ному чертежу или расчетной схеме вычесть из длины /р реальной рамы разницу
между передней и задней консолями. Другими словами, необходимо привести
раму к расчетной схеме как показано на рис. 9.37, в. Тогда окончательно для
расчета относительной массы лонжеронной и трубчатой рам будем иметь соот-
ветственно формулы
/2 у
^=КИКфКтКкКдКс,Л-^-;
атп
/ (9.17)
/2 у
^ = кнк^кткккдк^^~.
бТа
При заданных Кл и пТ наименьшая масса рамы может быть получена для ко-
роткобазной машины с трубчатой рамой при lk/lp = 0,21 и при использовании лег-
ких и прочных сплавов. Так, например, если вместо стали 10ХСНД применить дю-
ралюминий (от = 200 МПа), то при прочих равных условиях масса такой рамы бу-
дет легче примерно на 25 %, а при использовании титановых сплавов — на 40 %.
Однако решение на применение этих материалов должно приниматься только на
основании тщательного технико-экономического анализа.
У большинства выполненных конструкций многоосных базовых машин боль-
шой грузоподъемности относительная масса рам без учета кабин управления и
оперения в среднем составляет
=0,07...0,104.
Высоту рамы h назначают, как правило, в пределах
/z = (0,06...0,07)/р.
Относительную массу рамы рассчитывают после разработки конструктивно-
компоновочной схемы машины. Массу кабин управления и оперения следует для
большей точности расчета задавать в абсолютных величинах и включать в массу
полезной нагрузки при расчете относительных масс элементов в пределах
ткаб -900... 1200 кг.
Определение относительной массы колесных агрегатов (движителей)
К колесным агрегатам относятся ступицы колес с подшипниковыми узлами и
элементами системы центральной накачки шин, ободья колес и шины. Встроенные
в ступицы колес колесные редукторы относятся к трансмиссии, а колесные тормоза
и тормозные барабаны — к тормозам системы управления машины и в массе колес-
ных агрегатов не учитываются.
Обработка большого количества статистического материала показала, что
относительная масса ступиц колес может назначаться в пределах
9.5. Уравнения массы базовой машины и ее элементов
329
=0,02.. ДОЗ,
при этом большие значения следует принимать для быстроходных машин, а мень-
шие — для тихоходных (Vmax < 50).
Достаточно стабильна и относительная масса ободьев колес:
U = 0,012...0,02.
Относительная масса шин в большой степени зависит от желаемого (проек-
тируемого) уровня проходимости, определяемого удельным минимальным давлени-
ем на грунт gmi Эта зависимость достаточно точно аппроксимируется эмпириче-
ской формулой
Ш <7™ N 0,05-
Относительная масса колесных агрегатов определяется как
^к.а =£ш +^об+^ст-
На рис. 9.38 приведена зависимость относительной массы колесных агрега-
тов от удельного давления на грунт, построенная по приведенным выше формулам
и статистическим данным выполненных конструкций. Из графика видно, что сни-
жение удельного давления, например с gmin =0,02 МПа до ginin =0,05 МПа, при-
водит к нарастанию относительной массы колесных агрегатов в 2 раза, что при фик-
сированной массе машины приведет к значительному снижению ее грузоподъемно-
сти. Кроме того, при нагрузке на колесо GK =5104 Н его диаметр возрастет с
Рис. 9.38. Зависимость относительной массы колесных
агрегатов от удельного давления на грунт
330
9. Основные принципы построения общей компоновки КТС ОБГ
Dm =0,95 м при gmin =0,02 МПа до DUJ = 2,1 м при gmin =0,05 МПа, что снизит
и компоновочные возможности машины. Следовательно, повышение проходимости
колесных машин за счет снижения удельного давления на грунт представляет собой
труднорешаемую техническую проблему.
Для машин высокой проходимости (gmin ~ 0,2...0,1 МПа) относительная мас-
са колесных агрегатов может составлять
^ка =0,070...0,10.
Определение относительной массы системы подрессоривания
К системе подрессоривания относятся упругие, направляющие и гасящие эле-
менты подвесок колес, а также элементы систем регулирования и стабилизации кор-
пуса. Основное влияние на относительную частоту системы подрессоривания по ре-
зультатам исследований оказывает полный расчетный ход колеса, тип подвески и на-
личие систем регулирования и стабилизации корпуса. Относительная масса системы
подрессоривания определяется как
(9.18)
где Ка — коэффициент, зависящий от типа упругого элемента (для листовых рес-
сор Ка = 0,07...0,08; для торсионных рессор Ка = 0,05...0,06; для гидропневматиче-
ских рессор Ка = 0,04...0,05); hK —полный ход колеса; £н э —относительная мас-
са направляющих элементов амортизаторов (для подвесок с листовыми рессорами
= 014...0,02; для подвесок с торсионными рессорами э = 0,012...0,016; для
подвесок с гидропневматическими рессорами э = 0,01...0,015); ^рег — относи-
тельная масса систем регулирования и стабилизации корпуса, если они предусмот-
рены конструкцией (для подвесок с металлическими упругими элементами £
= 0,01; для подвесок с гидропневматическими рессорами ^рег = 0,005).
Для машин высокой проходимости (/zk > 0,3 м) относительная масса систем
подрессоривания без систем стабилизации и регулирования может составлять
~ 0,025...0,05.
Определение относительной массы элементов управления машины
К элементам управления относятся рулевое управление с гидроусилителем
руля и элементы тормозной системы с колесными тормозами. Основное влияние на
массу элементов управления оказывает количество управляемых колес, а точнее
масса машины, приходящаяся на управляемые колеса, а также тип трансмиссии.
Относительная масса элементов управления определяется как
9.5. Уравнения массы базовой машины и ее элементов
331
гп
0,026^^ +^торм, (9.19)
то
где 1Иупр>о — масса машины, приходящаяся на управляемые колеса; то — полная
масса машины (агрегата); ^торм — относительная масса элементов тормозной сис-
темы колесными тормозами, по статистическим данным £торм = 0,015...0,023.
В машине, оснащенной гидрообъемной трансмиссией с 2-скоростными ко-
лесными редукторами, роль тормозов могут выполнять тормоза переключения пе-
редач самого колесного редуктора, и тогда масса тормозов учитывается удельной
массой колесного редуктора, а в формуле (9.19) величина ^торм ~ 0,0.
При одинаковой нагрузке на все оси машины относительная масса рулевого
управления определяется через отношение количества управляемых колес иупр к
общему количеству колес машины п^:
п
^упр =0,026^.
Определение относительной массы топлива
В относительную массу топлива включена масса топлива, топливных баков и
топливной аппаратуры, размещенной вне двигателя. Относительная масса топлива
определяется по формуле
где Ка — коэффициент, учитывающий массу баков ( Ка = 1,1... 1,2); D — динами-
ческий фактор машины, для которого определяется запас хода по топливу, D =
= 0,35...0,045; 5Т —запас хода по топливу, 5Т > 500 км; г|д,г|у,г|тр —коэффици-
енты, учитывающие отбор мощности на собственные нужды двигателя, систему
управления и КПД трансмиссии соответственно.
Как видно из формулы (9.20), относительная масса топлива не зависит от
удельной энерговооруженности машины, а определяется лишь типом двигателя,
сопротивлением движению, заданным пробегом машины без дозаправки и общими
потерями в силовой установке и трансмиссии.
Удельный расход топлива для дизельных двигателей составляет ge = 0,224...
.. .0,244 кг т/(кВт ч), а для карбюраторных двигателей ge = 0,30...0,32 кг т/(кВт ч).
Относительная масса опор
Если машина оборудуется опорами для вывешивания, то масса опор зависит
лишь от полной массы машины и по данным статистики [3] с учетом поперечных
балок, опорных тарелей и приводов может составлять
332
9. Основные принципы построения общей компоновки КТС ОБГ
^оп =0,020.. .0,032,
где большие значения относятся к выносным опорам.
Относительная масса дополнительного оборудования
К дополнительному оборудованию относятся система электрооборудования
шторными батареями, ЗИП индивидуальный, лебедки для самовытаскивания и дру-
гое неучтенное оборудование. По данным статистики [3] для существующих конст-
рукций многоосных машин относительная масса этого оборудования может состав-
лять
$доп = 0,010...0,015.
Относительная масса силовой установки
К силовой установке относятся ходовой двигатель или двигатели (если их не-
сколько); крепления двигателя на раме; системы, обслуживающие двигатель, с уче-
том масла двигателя и охлаждающей жидкости. Относительная масса силовой уста-
новки зависит от удельной энерговооруженности машины и удельной приведенной
массы силовой установки, а поэтому может быть определена по формуле
£ = т N
^эс.у '"у.с.у1’у.е*
Удельная приведенная масса силовой установки определяется как
где КДй — коэффициент, учитывающий массу узлов крепления двигателя на раме
машины ( Клв = 1,05... 1,1); ту дв — удельная масса двигателя по паспортным дан-
ным в состоянии поставки заводом-изготовителем (для карбюраторных двигателей
m дв =1,1...1,8 кг/кВт; для форсированных турбонаддувом дизельных двигателей
ту дв = 2,3...3,0 кг/кВт; для долговечных дизельных двигателей ту дв = 3,75...
.. .4,6 кг/кВт; для автомобильных газотурбинных двигателей с теплообменником
дПуДВ =0,8...1,2 кг/кВт с учетом обслуживающих его систем); т Д — удельная
масса систем двигателя для тяжелых многоосных машин по данным статистики,
ту с д = 2,1...2,4 кг/кВт; лд,Лу — коэффициенты, учитывающие отбор мощности
на соответственные нужды двигателя и систему управления (лдЛу = 0,80...0,85 );
Лтр — КПД трансмиссии, определяемый типом трансмиссии и количеством веду-
щих осей.
Для тяжелых многоосных машин с гидромеханическими трансмиссиями и
форсированными дизельными двигателями удельная приведенная масса силовой
9.5. Уравнения массы базовой машины и ее элементов
333
установки может составлять тусу =9... 12 кг/кВт, а для тех же машин с автомо-
бильным газотурбинным двигателем (АГТД) тусу = 3...4 кг/кВт, т. е. в 3 раза
меньше. Поэтому применение на тяжелых машинах АГТД является перспективным
направлением развития базовых машин.
Относительная масса трансмиссии
К трансмиссии относятся все передающие и преобразующие элементы, раз-
даточные и колесные редукторы, а также системы управления трансмиссией, масла
и смазки в ее элементах. Относительная масса трансмиссии, как и силовой установ-
ки, зависит от удельной эффективной энерговооруженности машины и удельной
приведенной массы трансмиссии ту,тр и определяется по формуле
^тр “ ^у.тр^у.е’
Удельная приведенная масса трансмиссии зависит от типа трансмиссии и ко-
личества ведущих осей. Средние статистические данные выполненных конструкций
машин дают следующие значения удельной приведенной массы трансмиссии: меха-
ническая трансмиссия машины с одной ведущей осью — ^у.Тр = 4...6 кг/кВт; меха-
ническая трансмиссия 3-осных полноприводных машин типа ЗИЛ, «Урал», КрАЗ —
тутр=8...1О кг/кВт; гидромеханическая трансмиссия многоосной машины типа
МАЗ-537, МАЗ-543 — диутр =18...20 кг/кВт; гидрообъемная трансмиссия незави-
симо от количества ведущих осей с 2-скоростными редукторами для машины высо-
кой проходимости — ^у.тр - Ю... 12 кг/кВт; электрическая трансмиссия на постоян-
ном токе независимо от количества ведущих осей — ту тр = 20...30 кг/кВт; элек-
трическая трансмиссия на переменном токе независимо от количества ведущих осей —
тутр = 18...25 кг/кВт.
Как видно из приведенных средних статистических данных, для многоосных
машин высокой проходимости целесообразно использовать гидрообъемные транс-
миссии. Особенно это выгодно для многоприводных машин и агрегатов, у которых
кроме привода колес имеется большое количество специальных приводов, напри-
мер приводы подъема груза, опор вывешивания, лебедок и т. п. а также для инже-
нерных машин, где все эти механизмы могут приводиться в действие от насосов
трансмиссии.
Для более точных расчетов удельной приведенной массы гидрообъемной
трансмиссии, кг/кВт, можно использовать следующую формулу:
Шу.тр
^у.К.р ^у.р.р ^у.М^Н^М
+-----урр— + _у------------+ _у----------+ т + т + т
Пк.р Пр.рПнПмПк.р ПнПмПк.р ПмПк.р
(9.22)
где ту к р — удельная масса колесных редукторов (ту к = 2,8...3,1 кг/кВт); ту р —
удельная масса раздаточных редукторов (^урр =0,4...0,6 кг/кВт); диу н — удель-
334
9. Основные принципы построения общей компоновки КТС ОБГ
ная масса насосов (ту н = 0,38...0,42 кг/кВт); wyM — удельная масса моторов
(тум =0,65...0,75 кг/кВт); туж — удельная масса рабочей жидкости (туж =1,0...
... 1,6 кг/кВт); туу —удельная масса аппаратуры управления {ту у = 0,4...0,6 кг/кВт);
тус м — удельная масса силовых магистралей (для стали 1Х18Н9Т (овр ~ 550 МПа)
при скорости течения жидкости в магистралях V = 6...8 м/с и среднем расстоянии
от силовой установки до колес /ср = 5 м ту с м = 1,0... 1,5 кг/кВт); JH, dM — диапа-
зоны регулирования по давлению и удельному объему соответственно; KN — ко-
эффициент запаса мощности гидромашин, зависящий от потребного моторесурса
трансмиссии и диапазона регулирования по давлению, он определяется по графику
на рис. 9.39 как отношение максимального давления гидромашин Дртах к расчет-
ному давлению Дртахр для заданного моторесурса Т и диапазону регулирования по
давлению JH; г|р т|н, т]м, Лк.р — КПД раздаточного редуктора, насосов, моторов и
колесного редуктора соответственно.
На рис. 9.39 показана зависимость удельной приведенной массы гидрообъ-
емной трансмиссии от диапазона регулирования и максимального расчетного дав-
ления в системе для трансмиссионных гидромашин типа НМ, построенная по фор-
муле (9.22). Исходные данные нанесены на поле графика. При максимальном дав-
лении в системе Дртах = 40 МПа передача обеспечивает моторесурс Т ~ 300 ч, а
при Дртах = 30 МПа Т ~ 800 ч.
При потребном диапазоне регулирования передачи dn-dM = 4...5, что при на-
личии 2-скоростных редукторов в мотор-колесах обеспечивает общий диапазон регу-
Рис. 9.39. Зависимость удельной приведенной массы гидрообъемной транс-
миссии от диапазона регулирования и максимального давления:
du = 2,0; тукр = 3,0 кг/кВт; wypp = 0,5 кг/кВт; ть ж = 1,3 кг/кВт; туу = 0,5 кг/кВт;
ту м = 1,2 кг/кВт; тун = 0,7 кг/кВт; тум = 0,4 кг/кВт
9.6. Расчет характеристик массы колесных машин
335
за пределы /путр = 10,5... 13,0 кг/кВт, что в 1,5-1,7 раза меньше, чем для гидромеха-
нической трансмиссии, и в 2 раза меньше, чем для электрической трансмиссии.
Относительная масса силовой установки и трансмиссии зависит от принятой
удельной эффективной энерговооруженности машины Му е, которая, согласно фор-
муле мощности, определяет максимальную скорость Vmax движения при заданном
динамическом факторе Dmi
KJ — g^minKnax /q пт\
где g — ускорение свободного падения.
Для обеспечения максимальной скорости Vmax =90 км/ч при £>min =0,03
потребная энерговооруженность, согласно формуле (9.23), составит /V =
= 0,00735 кВт/кг = 7,35 кВт/т. Относительная масса силовой установки и транс-
миссии для этого случая может составить:
для машин с гидромеханической трансмиссией
^тр + ^у = (ту с у + ту тр )Ny е =(12 + 20)- 0,00735 = 0,235;
для машин с гидрообъемной трансмиссией
^тр+^с.у = Кс.у +™y.TpWy.e = (12 +12)-0,00735 = 0,176.
п
Если учесть, что у существующих машин « 0,3 (см. формулу (9.20)), то
1
относительная масса полезной нагрузки будет лежать в пределах = 0,465...0,524
и коэффициент грузоподъемности машины будет близок к единице, т. е. машина
будет иметь полезную нагрузку, примерно равную массе самой машины.
9.6. Расчет характеристик массы колесных машин
Разработка и анализ конструктивно-компоновочных схем базовых машин
для транспортных агрегатов
КТС ОБГ под специальное оборудование (далее — транспортные агрегаты)
различного назначения могут быть выполнены по схеме самоходной машины или
автопоезда в составе тягача с полуприцепом, прицепом или несколькими прицепа-
ми. Выбор той или иной схемы транспортного агрегата и его базовой машины опре-
деляется назначением агрегата, общей массой перевозимого груза и его габаритами,
требованиями к тягово-динамическим свойствам и уровню проходимости. При этом
зачастую неясно, какая из схем таких агрегатов окажется эффективнее или целесо-
образнее. Поэтому на этапе проектирования эскизно прорабатывается несколько
336
9. Основные принципы построения общей компоновки КТС ОБГ
схем, после анализа которых выбирается оптимальная и проводится проектирование
агрегата выбранной схемы.
Конструктор, приступая к проектированию колесной машины под специаль-
ное оборудование, закладывает в нее технические требования, разработанные ин-
женерами заказчика, отражающие технические и технико-экономические требова-
ния главного предназначения транспортного агрегата. На основе этих требований
проводят проектировочный расчет машины, после чего приступают к ее конструи-
рованию.
Процесс конструирования — это творческий процесс, в основе которого кро-
ме технических знаний конструктора лежит его интуиция, т. е. способность выбрать
из всего разнообразия возможных конструктивных решений одно, наиболее пра-
вильное. Не следует думать, что интуиции конструктора предоставлена полная сво-
бода. Она ограничивается и равняется не только требованиям технического задания
заказчика, но и техническим требованиям рационального конструирования, выпол-
нение или невыполнение которых определяет степень совершенства или недостат-
ков конструкции.
Рациональные требования бывают общие и частные, или специальные. Общие
требования сводятся к обеспечению простоты конструкции, надежности, живучести,
компактности, малых габаритов массы, простоты обслуживания и ремонта, унифика-
ции, экономичности. Специальные требования отражают особенности главного тех-
нического предназначения машины. В техническом задании на проектирование базо-
вой машины для специального агрегата высокой проходимости и грузоподъемности
должны быть указаны его назначение, особенности и условия эксплуатации, общая
характеристика агрегата или комплекса агрегатов и исходные данные.
Для проектирования необходимы следующие исходные данные:
масса основного полезного груза
масса специального оборудования тТ,0;
габариты, объем и центры масс груза и специального оборудования (габарит-
ный чертеж);
минимальное удельное давление на грунт q;
запас хода по топливу 5Т;
общий гарантийный пробег за весь срок эксплуатации 5; распределение до-
рожных условии в процентах от общего пробега;
габаритные или дорожно-законодательные ограничения;
тягово-динамические качества и другие специфические параметры.
Разработку конструктивно-компоновочных схем колесной машины или агре-
гата начинают после приближенного расчета его общей массы на основе прототипа
разрабатываемой конструкции. Например, известно, что тяжелые многоосные ма-
шины высокой проходимости имеют коэффициент грузоподъемности, примерно
равный единице.
Коэффициентом грузоподъемности (полезной нагрузки) принято называть
отношение массы полезной нагрузки к массе базовой машины:
К„=—, (9.24)
"’бм
9.6. Расчет характеристик массы колесных машин
337
где тп — масса полезной нагрузки с учетом собственно перевозимого груза, специ-
ального оборудования и тары (кузова, грузовой платформы, бункеров и т. п.); тб.м —
масса колесной машины, полностью снаряженной с полной заправкой.
Для определения полной массы полезной нагрузки используют статистиче-
ские данные по выполненным конструкциям. Так, например, масса бортовой плат-
формы автомобилей составляет 15...20 % массы перевозимого на ней груза; масса
герметичного закрытого кузова рефрижераторов или кузовов специального назна-
чения для размещения оборудования и людей составляет 20...25 % массы перевози-
мого в нем груза; масса цистерны для топлива или других жидких компонентов мо-
жет составлять 25...30 % массы транспортируемого компонента; масса бункеров для
оборудования, размещаемого по бортам машины, составляет 10... 15 % массы раз-
мещаемого в них оборудования; масса автономных источников электроэнергии (дизель-
электрических агрегатов) без учета запаса топлива составляет в среднем 40...60 кг/кВт;
масса холодильных машин колеблется в пределах 60... 100 кг/кВт холодопроизводи-
тельности; масса грузовой стрелы с гидроцилиндром подъема составляет не менее
4...5 % массы поднимаемого груза.
Таким образом, просуммировав массу собственно груза, специального обо-
рудования, источников электроэнергии и запасов топлива на заданную автономию
агрегата, получают массу полезной нагрузки. Если эта масса размещается в кузове,
то добавляют массу кузова и получают полную условную полезную массу агрегата
тп. Затем, задавшись коэффициентом грузоподъемности машины /Сп, из формулы
(9.24) определяют массу базовой машины шбм и находят полную массу агрегата
ш() = ^бм + тп в первом приближении. При назначении коэффициента грузоподъем-
ности учитывают уровень проходимости и заданные тягово-динамические свойства
машины по сравнению с прототипом. Чем выше уровень проходимости и динамиче-
ские свойства машины, определяемые техническим заданием, тем ниже должен на-
значаться коэффициент грузоподъемности.
Следующим этапом является определение количества осей машины с учетом
того, что допустимая осевая масса не должна превышать допустимую (например, 10 т
на ось) по дорожному законодательству.
Иногда допускается для сверхтяжелых агрегатов немассового производства
осевая нагрузка 15 т и более на ось. Разделив общую массу агрегата т0 на осевую
массу тос, получим минимальное количество осей машины (агрегата):
Далее определяют нагрузку на одно колесо:
выбирают тип шины с учетом заданной проходимости и распределения дорожных
условий по заданию, строят график нагрузочной способности заданной шины, оп-
ределяют диаметр колеса £>ш при заданном удельном давлении на грунт q. Затем
приступают к разработке вариантов конструктивно-компоновочных схем базовой
338
9. Основные принципы построения общей компоновки КТС ОБГ
машины с учетом требований рационального конструирования, унификации колес-
ных машин, удобства обслуживания механизмов и систем, компактности и т. п. При
этом полезно помнить, что габариты ходовых двигателей (дизелей) для транспорт-
ных агрегатов вне зависимости от их типовой мощности Ne min = 150 кВт; Ne max =
= 600 кВт имеют ширину примерно 1 м, высоту 1,0...1,1 м и отличаются только длиной:
1,1... 1,2 м — для малых мощностей и 1,4... 1,6 м — для дизелей больших мощностей.
Системы, обслуживающие двигатель, требуют объема для их размещения по
бортам машины и в свободных ее местах, приблизительно равного объему самого
двигателя. Запасы топлива на пробег 500 км составляют примерно 2...3 % общей
массы агрегата, и для одной тонны топлива требуется около 2 м3 объема топливных
баков. Дорожный просвет (клиренс) машины при статической нагрузке должен со-
ставлять не менее 0,5 м. Передний и задний углы свеса машины должны быть по
чертежу не менее 25...30°; высота рамы машины должна составлять не менее 7...8 %
ее фактической длины. Кабины управления должны иметь размеры, не менее: длина —
1,6...1,8 м; высота — 1,5... 1,7 м; ширина (одиночной кабины) — 0,7...0,8 м. Дверцы
кабин должны быть по ширине не менее 60...70 см, а по высоте — не менее 1,2... 1,3 м.
Высота кузова по внутреннему размеру должна быть не менее 1,8.. 1,9 м. Неуправ-
ляемые колеса (не более трех осей) должны быть максимально сближены и иметь
зазор между колесами 5... 10 см. Управляемые колеса должны иметь зазор не менее
30...40 см. Кроме того, для тяжелых колесных машин допускается применять нега-
баритность нулевой степени. Для более полного использования поперечного очер-
тания габаритов погрузки железных дорог целесообразно применять подвески колес
с регулируемым дорожным просветом. В этом случае высота машины по борту мо-
жет быть принята больше на величину посадки колес за счет регулирования подвески.
Рассмотрим порядок предварительных расчетов и выявления общей конст-
руктивно-компоновочной схемы агрегата и его транспортной машины на конкрет-
ном примере [3]. Пусть требуется разработать конструктивно-компоновочную схе-
му полевой авторемонтной мастерской (ПАРМ) по техническому заданию и исход-
ным данным.
Полевая авторемонтная мастерская предназначена для ремонта и проведения
технического обслуживания автомобильной и другой колесной техники в полевых
условиях во время ведения боевых действий. Экипаж ПАРМ составляют пять чело-
век. Полная автономность действия ее по запасам топлива, воды и продовольствия
должна составлять не менее десяти суток. Потребляемая мощность электроснабже-
ния для работы станков, механизмов и оборудования оценивается в 20 кВт. Резер-
вирование источников питания двукратное. Все оборудование мастерской должно
размещаться в герметичном теплоизолированном кузове, общий объем которого
составляет 100 м3 Масса станочного и другого технологического оборудования с
запасными частями и материалами оценивается величиной ш1р= 20000 кг.
Агрегат должен иметь высокую проходимость и тягово-динамические свой-
ства, выражающиеся в следующем:
максимальная скорость движения Vmax > 60 км/ч;
минимальный динамический фактор £>min > 0,03;
максимальный динамический фактор £>тах > 0,5;
минимальное удельное давление на грунт gmin < 0,1 МПа;
9.6. Расчет характеристик массы колесных машин
339
запас хода по топливу 5Т > 500 км;
общий пробег за срок эксплуатации 5 > 20000 км.
Агрегат предполагается эксплуатировать в смешанных дорожных условиях
(50 % пробега по дорогам с твердым покрытием и 50 % пробега — по полевым до-
рогам). Он должен удовлетворять негабаритности нулевой степени без демонтажа и
иметь опоры для вывешивания и горизонтирования на площадке.
Допускается варьирование габаритов кузова в зависимости от принятой кон-
структивной схемы агрегата и изменение его планировки и положения центра масс
с сохранением заданного общего объема VKy3= 100 м3
По этим данным оценим вначале общую массу полезной нагрузки агрегата.
Примем удельную массу дизель-электрического агрегата диуза = 60 кг/кВт. Тогда
при мощности Аэ.а= 20 кВт и двукратном резервировании получим массу автоном-
ных источников электроснабжения
та и п = 2Af mv 3 = 2 20 • 60 = 2 400 кг
а.и.п э.а у.э.а
Примем удельный расход топлива дизель-электрического агрегата ge =
= 0,224 кг/(кВт ч). Тогда с учетом общего КПД = 0’25 за 1 ч работы будет из-
расходовано следующее количество топлива:
С учетом автономности действия, составляющего 10 суток (Т = 240 ч), и мас-
сы топливных баков получим общую массу топливной системы:
т^Т = 1,2Тттч =1,2 240-6-1700 кг
Будем полагать, что кузов оборудован холодильно-нагревательной установ-
кой холодопроизводительностью 4 кВт. Тогда масса систем кондиционирования
составит
тхн у ~ 400 кг
Масса членов экипажа с полной экипировкой
т}К ~ 400 кг.
Масса воды и продовольствия для членов экипажа при автономии в 10 суток
и суточной норме на человека в 20 кг составит
"inpo.i^ 1 000 кг.
Масса бытового оборудования кузова (столы, нары, стулья, умывальник,
плита и т. п.):
тбы> ~400 кг.
Масса комплекта маскопокрытия агрегата для маскировки
тк мп~ 300 кг.
340
9. Основные принципы построения общей компоновки КТС ОБГ
Так как кабины управления агрегата практически не зависят от массы и габа-
ритов агрегата, назначим их массу вместе с оборудованием кабины равной
ткаб ~ 1 200 кг.
Тогда полная (условная) масса перевозимого груза составит
^п.гр — ™гр "*"^а.и.п "*~^ЕТ + шхн.у ^эк + ^прод + ^быт + ^к.мп + ^каб ~
- 20 000 + 2 400 +1700 + 400 + 500 + 1000 + 400 + 300 + 1200- 28 200 кг.
Примем массу кузова равной 23 % от перевозимого груза, что составит
т =0,23тпгп -0,23-28 200-6 500 кг,
и определим в первом приближении полную условную массу основной нагрузки
= тк v _ + тп ™ =28 200 + 6 500 = 34 700 кг.
11 14. у. э 11.1 р
Зададимся коэффициентом грузоподъемности КП = 1,3 и найдем массу базо-
вой машины (см. формулу (9.24)):
т.. 34 700 _ , ___
м = ~~ 26 700 кг.
бм КП 1,3
Полная масса агрегата в этом случае составит
т0 = тб м + тп = 34 700 + 26 700 = 61 400 кг.
Приняв массу машины, приходящуюся на одну ось, равной 10 т, получим
6-осную машину.
Для проектируемого агрегата можно предложить широкопрофильную шину с
регулируемым давлением воздуха, и для нагрузки GK = 50000 Н (тос/2 ~ 5 000 кг)
при заданном gmin = 0,1 МПа находим диаметр шины £>ш = 1,5 м.
Теперь можно приступить к разработке и выявлению возможных конструк-
тивно-компоновочных схем базовой машины и агрегата в целом. При разработке
будем ориентироваться на использование дизельных двигателей и гидрообъемной
трансмиссии, а также на гидропневматическую подвеску колес.
Выполнение агрегата возможно по трем основным схемам [3]:
самоходного агрегата на едином 6-осном шасси;
автопоезда, состоящего из 4-осного тягача и 2-осного полуприцепа;
4-осной машины корпусной конструкции и 2-осного энергетического прице-
па, не отсоединяемого от основной машины.
Разработанные по этим трем вариантам конструктивно-компоновочной схе-
мы агрегаты с учетом сделанных выше рекомендаций показаны на рис. 9.40.
На рис. 9.40, а показана схема агрегата на самоходном 6-осном шасси, три
передние оси которого управляемы, а три задние — не управляемы. Силовая уста-
новка агрегата состоит из двух дизельных двигателей, расположенных в бункерах
по бортам рамы между задним и передним колесными ходами. В передней части
лонжеронной рамы смонтирована кабина управления агрегата и передняя опора
9.6. Расчет характеристик массы колесных машин
341
Рис. 9.40. Конструктивно-компоновочные схемы транспортного агрегата на базе:
а — 6-осного шасси; б — седельного автопоезда; в — прицепного автопоезда
взвешивания, в задней части рамы установлена поперечная балка с двумя задними
опорами. Дорожный просвет принят равным 0,5 м; высота лонжеронов рамы равна
1,0 м; длина рамы — 17 м. Рабочий ход колес принят равным 0,3 м. Подвеска колес
регулируется гидропневматическими рессорами и поперечными направляющими
элементами, обеспечивает посадку на 0,3 м при перевозке железнодорожным транс-
портом, поэтому высота по борту агрегата до линии скоса составляет 2,9 м. Погру-
зочная высота кузова равна 2 м.
Площадь поперечного сечения кузова при высоте 2,2 м, ширине 3,4 м с уче-
том очертаний негабаритности нулевой степени — 6,4 м2 Для получения заданного
объема VK у 3 = 100 м3 требуется длина кузова около 16 м, если кузов разместить на
шасси сразу за кабиной управления, то общая длина агрегата составит 4,2 м. При
этом центр масс кузова с оборудованием будет иметь высоту около 2,9 м, а поход-
ная высота агрегата составит 4,2 м, что с учетом возможности посадки колес на 0,3 м
позволяет обеспечивать перевозку агрегата железнодорожным транспортом без де-
монтажа кузова.
Основными недостатками схемы агрегата на самоходном шасси являются вы-
сокое положение центра масс кузова с оборудованием, что может сказаться на не-
достаточной боковой устойчивости агрегата в движении; неудобное для компонов-
ки очертание поперечного сечения кузова (высота кузова по борту до скоса 0,9 м);
неудобство обслуживания и демонтажа силовой установки и ее систем, располо-
342
9. Основные принципы построения общей компоновки КТС ОБГ
женных под днищем кузова между колесами в бункерах двигателей с доступом че-
рез крышки люков с одной стороны.
На рис. 9.40, б показана схема агрегата в виде автопоезда, состоящего из 4-осно-
го тягача и 2-осного полуприцепа с кузовом несущей схемы (рама полуприцепа отсут-
ствует). Общая длина полуприцепа с учетом выступа под сцепное устройство седельно-
го типа составляет 16 м при длине основной части кузова 12 м. Общий объем кузова —
около 110 м3 при общей походной высоте 3,3 м. С учетом компоновки подвесок колес
пол кузова находится на высоте 0,7 м от его днища и высота внутренней части кузова
составляет 2,0 м, при этом скосы бортов практически отсутствуют. Поперечные очерта-
ния кузова более приспособлены для компоновки внутреннего оборудования и разме-
щения обслуживающего персонала. Погрузочная высота кузова составляет 1,2 м, что
значительно удобнее, чем у схемы агрегата на рис. 9.40, а.
Четырехосный тягач имеет равномерную расстановку колес по длине, две пе-
редние его оси — управляемые, рама — лонжеронного типа, в ее передней части
размещена кабина управления. Силовая установка и обеспечивающие ее системы
размещены на раме тягача за кабиной управления сверху в специальном бункере,
обеспечивающем доступ к двигателю и системам практически со всех сторон. Цент-
ры масс полуприцепа и тягача располагают примерно на высоте 2 м от поверхности
дороги, что создает высокую устойчивость агрегата в движении. Использование
кузова несущей схемы позволяет снизить общую массу агрегата по сравнению со
схемой на рис. 9.40, а.
Основным недостатком схемы является большая общая длина, равная 23 м,
что на 4,6 м длиннее, чем у самоходного агрегата на рис. 9.40, а, более широкий
коридор поворота и больший радиус поворота, затруднителен маневр задним ходом.
На рис. 9.40, в показана схема того же агрегата в виде корпусного 4-осного шасси
с двумя передними управляемыми осями и 2-осного энергетического прицепа, на кото-
ром размещены двигатели силовой установки и обслуживающих ее систем, автономные
источники электроснабжения, все запасы холодильно-нагревательной установки. Объем
кузова корпусной несущей конструкции 4-осного шасси составляет примерно 100 м3,
кабина управления совмещена с корпусом основного кузова (автобусная схема). Все это
позволяет значительно уменьшить общую массу агрегата. При этом сохраняется высо-
кая маневренность агрегата, низкое положение центров масс, удобство обслуживания
энергетической установки и ее систем. Общая длина поезда составляет 21,0 м, что всего
на 2,6 м больше, чем на рис. 9.40, а.
К недостатку схемы на рис. 9.40, в следует отнести трудность маневрирова-
ния задним ходом.
Таким образом, разработанные варианты схем агрегатов и их краткий качест-
венный анализ дают основание для выбора расчетной схемы агрегата по рис. 9.40, в.
Для других условий и других по назначению машин предпочтение может быть от-
дано любой из приведенных на рис. 9.40 схем.
Расчет характеристик массы агрегата на этапе проектирования
После выявления общей конструктивно-компоновочной схемы агрегата, по-
лученной на основе предварительных (прикидочных) расчетов и разработки габа-
9.6. Расчет характеристик массы колесных машин
343
ритного чертежа, можно приступить к точному расчету характеристик массы агре-
гата при заданных тягово-динамических свойствах и уровне проходимости по мяг-
ким грунтам с использованием формул и рекомендаций п. 9.4. Рассмотрим порядок
этих расчетов для трех схем агрегатов (см. рис. 9.40) по исходным данным, приве-
денным ранее.
Самоходное 6-осное шасси (см. рис. 9.40, а)
По рекомендациям к формуле (9.17), используя габаритный чертеж, опреде-
ляем приведенную длину рамы /р пр= 15,3 м, отношение /к//р = 1,6/15,3 = 0,105 (при
зависании на крайних осях), что на рис. 9.37, д дает Кн = 0,07 Приняв для рамы от-
ношение h/b = 4,0, в соответствии с рис. 9.37, е получим = 3,6. Примем следую-
щие значения параметров: Км = 0,9; Кк = 2,0; Кл = 2,2; Кс с = 1,05; ит = 2,0. Для стали
10ХСНД примем о, = 400 МПа; у = 78000 Н/м3; h = 1,0 м.
По формуле (9.17) получим относительную массу рамы
/2 у
1 5 3^ 78ООО
= 0,07 3,6-0,9-2 2,2 1,05-2,0——^-- = 0,0715.
400-106 1,0
По графику на рис. 9.38 найдем относительную массу колесных агрегатов для
<7,111П = 0,1 МПа:
£ка= 0,0885.
Примем следующие значения параметров: Ка= 0,04; hK = 0,5 м; £н.>= 0,010;
^Рег = 0,005, и по формуле (9.18) получим относительную массу системы подрессо-
ривания
L = Ка h* + Ь э + ^пег = 0,04 • 0,5 + 0,01 + 0,005 = 0,035.
Примем величину ^торм = 0,0 (учтено в колесных 2-скоростных редукторах). Со-
гласно схеме рис. 9.40, а, определив отношение —по формуле (9.19), найдем
то
относительную массу системы управления
^„Р = 0,026^1+ ^торм = 0,026 0,5 + 0,0 = 0,013.
^()
Примем следующие значения параметров: Кс = 1,2; gi = 0,23; D = 0,04; 5Т =
= 500 км; т|дг|у = 0,85; г|тр = 0,7, и по формуле (9.20) найдем относительную массу
топлива и баков
= Кс = 0,23-0,04-500 ~
° 360г]дг|ут]тр 360-0,85-0,7
344
9. Основные принципы построения общей компоновки КТС ОБГ
Примем относительную массу жестко установленных опор £оП = 0,02, а отно-
сительную массу дополнительного оборудования £доп = 0,01. Тогда по формуле
(9.18) относительная масса конструкции составит
= ^Р + ^.а +^.ПР +ST +^ОП +^доп +^с.у =
1
= 0,0715 + 0,0885 + 0,035 + 0,013 + 0,027 + 0,02 + 0,01=0,265.
По формуле (9.49) найдем
N = = 9,8 0,03-360 = 0049 кВт/
уе 3600 3600
При общем диапазоне регулирования d = ^max = = 16,7 и 2-скоростном
редукторе Jrn = -Jd =4,1 по графику на рис. 9.39 определим удельную приведен-
ную массу трансмиссии
ту тр = 12 кг/кВт.
Примем Агдв= 1,1; ту дв = 4,6 кг/кВт; тусд = 2,1 кг/кВт и по формуле (9.21) по-
лучим удельную приведенную массу силовой установки
= кг/кВт.
’ У 0.85 0,7
По формуле (9.12) найдем относительную массу полезной нагрузки
тп 34700
-2- =------= 56 500 кг,
= 1 - L- (wy cy + "1у тр)Wy,3 = 1 - 0,625 - (12,35 +12) • 0,0049 = 0,616.
1
Полная масса агрегата
''ЭП v,viv
из которых масса кузова с оборудованием по исходным данным и расчетам тп =
= 33500 кг, а масса базовой машины тбм = 23000 кг. При этом составляющие эле-
менты базовой машины по формуле (9.14) будут иметь следующие значения:
= 1 200 кг; mn = 4 050 кг; тк _ = 5 000 кг; т„ = 2 050 кг; mvnn = 740 кг;
KdU г К.в a jHU у
mr = 1 520 кг; m01] = 1 130 кг; шдоп = 570 кг; тс у = 3 400 кг; т^ = 3 340 кг.
Коэффициент грузоподъемности машины
кП = i = зз5оо = 6
п тб м 23 000
9.6. Расчет характеристик массы колесных машин
345
Нагрузка на одно колесо GK = 46 000 Н, что при £>ш = 1,5 соответствует gmi
= 0,09 МПа, и проходимость машины будет несколько выше заданного уровня.
После подбора двигателей и элементов трансмиссии масса силовой установ-
ки и трансмиссии может быть уточнена и откорректирована, что при правильном оп-
ределении удельных масс элементов не вносит сколько-нибудь существенных изме-
нений в общую массу агрегата.
Автопоезд с 2-осным полуприцепом (см. рис. 9.40, б)
Расчет характеристик массы этой схемы проводится последовательно сна-
чала для полуприцепа, а затем для тягача. Так как кузов полуприцепа имеет тот же
объем, что и кузов на схеме на рис. 9.40, а, его полную массу можно принять такой же:
тп = 33500 кг.
Для определения полной массы полуприцепа необходимо учесть массу колес-
ных агрегатов, подвесок колес и опор. Если принять, что нагрузка кузова распре-
деляется поровну на задний колесный ход и седельно-сцепное устройство, то
уравнение массы в относительных параметрах выразится формулой
= 1-0,5(^ка+^а)-^оп
Поскольку характеристики проходимости, тип и ходы подвесок остаются
теми же, что и для схемы рис. 9.40, а, то можно принять
^ка =0,0885; =0,035; ^оп =0,02.
Относительная масса полезной нагрузки определится как
= 1 - 0,5(£к а + ) - £оп =1-0,5(0,0885 + 0,035) - 0,02 = 0,8565,
и полная масса полуприцепа составит
Согласно принятому распределению, нагрузка полуприцепа на седельно-
сцепное устройство тягача составит половину массы полуприцепа и будет яв-
ляться полезной нагрузкой тягача для расчета массы его конструкции:
тп= = 19550 кг.
пт 2
Кроме того, в полезную нагрузку тягача следует включить массу кабины
управления ткаб 1 200 кг, а также размещения силовой установки и насосов
трансмиссии и седельно-сцепного устройства тбунк = 1 500 кг. И наконец, к по-
лезной нагрузке тягача следует отнести массу силовой установки и трансмиссии,
необходимых для сообщения массе, приходящейся на задний колесный ход полу-
прицепа, тех же динамических свойств, что и для полной массы тягача. Согласно
346
9. Основные принципы построения общей компоновки КТС ОБГ
расчетам (см. рис. 9.40, а), ^с у + ^тр = 0,119. Тогда масса силовой установки и
трансмиссии для привода заднего колесного хода полуприцепа составит
'"с.у.пр +'%.пр = +М = 19 500-0,119 = 2340 кг.
Полная условная полезная нагрузка тягача
т1п.т ~ тп.т ^каб ^бунк (^с.у.пр "*"^тр.пр) —
= 19 500 +1 200 +1 500 + 2 340 = 24 590 кг.
Применительно к схеме тягача на рис. 6.40, б определим относительную
массу рамы
I2 У
= кн к<ь Км Кк К Кс спТ =
= 0,07 3,6 0,9-2-2,21,0-2,07-6 78000 = 0,035.
40-106-0,8
Примем следующие значения параметров:
£к.а =0,0885; =0,035; ^упр =0,013; =0,04; £доп =0,01;
mvcv =12,3 кг/кВт; mVTn =12,0 кг/кВт; =0,0049 кВт/кг.
у.су у-*р y-J
Тогда относительная масса конструкции
= Sp +^K.a +^а +^у.пр + £т + £доп =
1
= 0,035 + 0,0885 + 0,035 + 0,013 + 0,040 + 0,01 = 0,2215.
Относительная масса полезной нагрузки
£„ = 1 - Е- ("»у.су + "»улр )^у.э = 1 - о, 2215 - (12,3 +12) • 0,0049 = 0,6595.
1
Находим полную массу тягача
"Ъп.т
т0Т =------
24 590
0,6595
= 37 200 кг
и полную массу агрегата (автопоезда)
moZ = то.п + = 37 200 +19 550 = 56 750 кг,
что на 250 кг больше, чем по схеме на рис. 9.40, а.
Полная масса тягача без нагрузки на седельно-сцепное устройство будет
9.6. Расчет характеристик массы колесных машин
У\Л
ту - тОЛ - тпл = 37 200 -19 550 = 17 650 кг.
При этом составляющие элементы тягача будут иметь следующие значения:
Аикаб = 1 200 кг; тр = 1 300 кг; тк а = 3 280 кг; ma = 1 300 кг; ту пр = 480 кг;
тТ = 1 490 кг; Аибунк = 1 500 кг; тдоп = 370 кг; тс у + т^ = 6730 кг
Как видно из расчетов, по характеристикам массы схема автопоезда не усту-
пает схеме агрегата на самоходном шасси, несмотря на наличие добавочной массы
за счет бункера силовой установки и седельно-сцепного устройства (без учета соб-
ственной массы полуприцепа).
Автопоезд с 2-осным прицепом (см. рис. 9.40, в)
Расчет характеристик массы этой схемы проводится аналогично расчету схе-
мы на рис. 9.40, б с той лишь разницей, что вначале определяется масса основной
машины, а затем масса энергоприцепа. При расчете схемы целесообразно автоном-
ные источники электроснабжения тг,и э, холодильно-нагревательную установку тхн у
и запас топлива для автономных источников тг разместить на прицепе, а не в кузо-
ве основной машины. Тогда за вычетом упомянутых выше масс и с учетом массы
кабины управления масса снаряженного корпуса основной колесной машины (тяга-
ча) составит
^корп = 30 200 кг.
Относительная масса полезной нагрузки
^n=l-^.a-^a-^.np-^on-Un =
= 1 - 0,0885 - 0,035 - 0,013 - 0,02 - 0,01 = 0,8335,
а полная масса основной колесной машины (тягача)
Ч).М
^корп 30 200 ,
=----— =---------= 36 300 кг.
0,8335
Составляющие массы будут иметь следующие значения:
ткя = 3 250 кг; т„ = 1 280 кг; jnvn_ = 480 кг; топ = 730 кг; аилоп = 360 кг.
R.a ' a ' у.lip ' Ull ' ДОН
Для придания основной машине заданных тягово-динамических свойств тре-
буемая масса силовой установки, трансмиссии и топлива будет следующей:
mcy + mTp - том(£с у + £тр) = 36 300• 0,119 = 4 320 кг;
тТ = томЕ,„ = 36 300 0,027 = 980 кг.
Тогда полезная условная нагрузка прицепа
348
9. Основные принципы построения общей компоновки КТС ОБГ
^п.пр 9 800 lz1_nn
----- =--------= 14 500 кг,
0,6755
^п.пр (^с.у.пр + ^тр.пр ) ^а.и.э + ^хн.у
= 4 320 + 980 + 2 400 + 1700 + 400 = 9 800 кг.
Для прицепа получим
=^р+^к.а +^а +£доп =0,035 + 0,0885 + 0,035 + 0,027 + 0,02 = 0,2055;
I
£„=!-£- ("Jy.cy + ^улр )^у.э =1-0,2055-0,119 = 0,6755.
1
Полная масса прицепа
^э.пр
а полная масса агрегата
тоХ ~ то.м +'пэ.пр = ^6 300-14 500 = 50 800 кг,
что на 5 700 кг меньше, чем по схеме на рис. 9.40, а, и обусловлено наличием в кон-
струкции основной машины несущего корпуса, а также меньшей длиной рам.
Таким образом, расчет характеристик массы показывает значительное пре-
имущество схемы агрегата на рис. 9.40, в по сравнению со схемами на рис. 9.40, а, б.
Определение общего центра масс агрегата и центра подрессоренных масс
После определения полной массы агрегата и его составляющих необходимо
найти положение центра масс агрегата в целом и центра его подрессоренных масс.
Положение общего центра масс требуется для определения нагрузок на колеса и
расчета параметров устойчивости движения и плавности хода.
Для расчета положения центра масс необходимо иметь общую конструктив-
но-компоновочную схему агрегата, выполненную в масштабе. На эту схему после
размещения (компоновки) составляющих масс агрегата наносят положения центров
масс всех его элементов, как показано на рис. 9.41.
При этом на рис. 9.41 приняты следующие обозначения: шдоп — масса допол-
нительного оборудования с учетом ЗИП; Аикаб — масса кабины; тсу — масса сило-
вой установки; шупр — масса элементов управления машины; та — масса системы
подрессоривания (амортизаторов); тк а — масса колесных агрегатов с учетом массы
шин; штр — масса трансмиссии; тр — масса рамы корпуса; то — полная масса ма-
шины; тТ — масса топлива с учетом топливных баков; тп — масса полезной на-
грузки с учетом кузова или платформы.
Затем задают систему координат XY. Координатные оси и начало координат
можно выбирать произвольно, однако проще всего ось X совместить с поверхно-
стью колес, а ось Y — с передней плоскостью агрегата, как показано на рис. 9.41. В
этом случае общий центр масс агрегата находят как центр приложения равнодейст-
9.6. Расчет характеристик массы колесных машин
349
Рис. 9.41. Схема колесной машины для расчета центра масс
вующей всех сил от элементарных масс. Для этого составляют два уравнения мо-
ментов относительно каждой координатной оси:
imixi
1_____.
XX у,-
J
где X', y-t — координаты элементарных масс агрегата по компоновочному чертежу;
mj — элементарные массы элементов агрегата.
Для улучшения проходимости и устойчивости агрегата необходимо, чтобы
его центр масс находился как можно ниже по высоте, а по длине агрегата занимал
такое положение, при котором нагрузка на все колеса была одинаковой. Допуска-
ется перегрузка задних колес относительно передних не более чем на 5... 10 %.
Для расчета боковой устойчивости и плавности хода необходимо знать центр
подрессоренных масс агрегата. Поэтому для уточнения компоновки и получения
равномерной нагрузки рассчитывают центр подрессоренных масс по тем же форму-
лам. Для этого в них исключают моменты неподрессоренных масс, т. е.
колесных агрегатов, половину массы системы подрессоривания и часть элементов
трансмиссии и тормозов, расположенных в колесах, а вместо массы mQ подставляют
значение подрессоренной массы агрегата аиподр.
После определения центров подрессоренных масс определяют моменты
инерции подрессоренной массы относительно продольных поперечных осей, про-
ходящих через центр масс. Эти моменты инерции необходимы для расчета пара-
метров плавности хода.
Глава 10
Силовые установки колесных
транспортных средств
10.1. Общая характеристика силовых установок
Выбор силовых установок (СУ) в процессе проектирования КТС ОБГ является
важнейшей задачей, решение которой требует рассмотрения в общем виде основных
исходных данных по существующим и перспективными энергоустановкам. Подобные
сведения необходимы и в качестве исходных данных при автоматизированном проек-
тировании как блок силовых установок со своими закономерностями и тенденциями,
поэтому в данной книге рассмотрены в общем виде основные сведения по СУ, кото-
рые до настоящего времени широко публиковались.
Под силовой установкой понимается тепловой двигатель (или другой источ-
ник энергии) и обслуживающие его системы: питания топливом и воздухом, охлаж-
дения и смазки, запуска, подогрева и зажигания.
Основной частью СУ является двигатель — как правило, тепловая машина, в
которой энергия, выделившаяся при сгорании топлива, превращается в механиче-
скую энергию на выходном валу.
Двигатель с его внешними системами является одним из основных агрегатов
моторно-трансмиссионной установки КТС ОБГ, формирующим своими узлами,
системами и коммуникациями массу ТС в снаряженном состоянии и влияющим на
его тягово-динамические, экономические и другие свойства.
В этой связи выбор типа двигателя и его характеристик является важнейшим
этапом в процессе проектирования ТС.
В составе СУ КТС ОБГ применяют дизельные (ДВС) и газотурбинные (ГТД)
двигатели. Карбюраторные (бензиновые) двигатели из-за ограниченных мощностей
практически не могут быть использованы на КТС ОБГ, поэтому из рассмотрения в
данной работе они исключены.
При выборе двигателя для КТС ОБГ должны учитываться внешние характе-
ристики, габариты, масса и надежность.
Внешние характеристики дизельного и газотурбинного двигателей пред-
ставлены на рис. 10.1 и 10.2. Характеристики графически выражают зависимости
основных параметров двигателей (мощности Ne, крутящего момента Мк, часового Q4
10.1. Общая характеристика силовых установок
351
Рис. 10.1. Внешняя характеристика двигателя ЯМЗ-846.10
и удельного ge расходов топлива) от числа оборотов коленчатого вала двигателя со
при полной подаче топлива.
На характеристиках различают следующие обороты со коленчатого вала дви-
гателя:
сот|П — минимальные устойчивые обороты двигателя;
сом — обороты, соответствующие максимальному крутящему моменту;
соЛ,е — обороты, соответствующие минимальному удельному расходу топлива;
co/v — обороты, соответствующие максимальной мощности двигателя;
сотах —максимальные обороты двигателя.
Характер изменения кривой момента выражается коэффициентом приспо-
собляемости Км (коэффициентом момента), под которым понимается отношение
максимального момента двигателя к моменту при максимальной мощности.
Несмотря на непрерывное развитие и совершенствование поршневых двигате-
лей внутреннего сгорания и их широкое распространение на транспорте, они являют-
ся еще недостаточно совершенными тепловыми машинами и имеют ряд органических
недостатков, наиболее существенными из которых являются следующие [55]:
невысокий эффективный КПД; у дизельных двигателей он не превосходит
значений 0,4-0,41;
цикличность (прерывистость) рабочего процесса;
наличие сложного кривошипно-шатунного механизма;
352
10. Силовые установки колесных транспортных средств
Рис. 10.2. Внешняя характеристика 2-вального ГТД:
1 — при расчетном режиме работы компресса; 2, 3 — при нерасчетных режимах
высокие требования к свойствам и качеству топлива;
недостаточная приспособляемость к внешней нагрузке;
загрязнение окружающей среды выхлопными газами;
трудность запуска в холодное время года.
В силу этого поршневые двигатели еще не в полной мере удовлетворяют тре-
бованиям к СУ КТС ОБГ Поэтому инженерная мысль постоянно работает в на-
правлении создания новых двигателей, свободных в той или иной мере от недостат-
ков поршневых ДВС, среди которых наиболее перспективными являются автомо-
бильные газотурбинные двигатели (АГТД).
Автомобильные ГТД как перспективные двигатели СУ КТС ОБГ имеют ряд
существенных преимуществ перед поршневыми двигателями, а именно:
прямоточность и непрерывность рабочего процесса, обеспечивающие про-
стоту конструкции и резкое снижение габаритных и массовых параметров;
отсутствие системы охлаждения и связанных с ней узлов и деталей;
высокие пусковые качества при любой температуре окружающего воздуха;
высокая приспособляемость к внешней нагрузке, линейная падающая зави-
симость момента от оборотов;
малая требовательность к качеству топлива;
небольшие габаритные размеры и масса;
К их недостаткам относятся:
низкая экономичность;
плохая работа на переходных режимах;
10.2. Тенденции развития отечественного и мирового двигателестроения 353
высокая стоимость используемых материалов;
большая масса и габариты теплообменников и воздухоочистителей.
Таблица 10.1
Сравнительная характеристика двигателей
Тип двига- теля Удельная масса, кг/кВт Удельный расход топлива, кг/(кВт ч) Эффектив- ный КПД Коэффициент приспособ- ляемости Оценка пуска при низких температурах
Карбюра- торный Дизельный АГТД 1,1-2,0 2,3-5,0 1,0-1,4 0,3-0,36 0,22-0,25 0,35-0,45 0,3-0,35 0,35-0,41 0,25-0,30 1,25-1,35 1,05-1,115 2,0-2,5 Удовлетво- рительно Плохо Хорошо
Другим направлением развития СУ, относящихся к более далекой перспекти-
ве, является разработка безмашинных преобразователей химической энергии топ-
лива в электрическую — так называемых топливных элементов, которые находятся
сейчас в стадии теоретических исследований и экспериментальной проверки.
Сравнительная характеристика различных типов двигателей по основным па-
раметрам приведена в табл. 10.1.
10.2. Тенденции развития отечественного
и мирового двигателестроения
В мировой практике двигателестроения в последние годы наметилась тен-
денция развития многоцелевых двигателей и стремление сократить число разрабо-
ток специализированных конструкций [55].
Идея создания многоцелевых двигателей базируется на имеющемся в двигате-
лестроении научно-техническом заделе, разработанных новых высокопрочных и жа-
ростойких материалах и прогрессивных технологиях, в результате использования ко-
торых появилась возможность закладывать в основные элементы двигателей высокие
запасы механической и тепловой прочности без существенного увеличения их массо-
габаритных показателей и при сохранении неизменной общей конструктивной осно-
вы (размерности, числа и расположения цилиндров). Это позволяет проектировать
высокоэффективные модификации дизелей, которые, отличаясь друг от друга числом
цилиндров, конструкцией корпусных деталей, а также отсутствием или наличием аг-
регатов наддува и охладителей наддувочного воздуха, могут быть использованы в
составе силовых установок военных машин, на автомобильном и судовом транспорте
и т. п. при сохранении высокой (80... 85 %) степени унификации.
Среди причин, способствующих развитию многоцелевых транспортных ди-
зелей, можно выделить следующие: с одной стороны, наличие значительного науч-
ного задела, который в сочетании с высоким уровнем развития технологии в двига-
телестроении позволяет решать несколько функциональных задач на базе одной
универсальной конструкции двигателя, а с другой — сокращение производства ин-
дивидуальных двигателей, которое становится экономически нерентабельным. При
- 2918
354
10. Силовые установки колесных транспортных средств
этом очевидно, что косвенным путем создаются резервы промышленных мощно-
стей, способных в кратчайшие сроки (1,5-2,0 месяца) легко переориентироваться
на выпуск необходимого количества двигателей уже для конкретных объектов раз-
личной техники.
Получение рациональных значений энергетических показателей не преду-
сматривает создания специальных энергонасыщенных силовых установок для КТС
ОБГ Достижение этих показателей возможно путем доработки базовых моделей
дизелей. При этом главным направлением считается применение газотурбинного
наддува, позволяющего помимо повышения мощности выполнить экологические
требования, улучшить использование энергии отработавших газов и повысить
среднее эффективное давление рабочего процесса двигателя до величины, гаранти-
рованно обеспечивающей требуемый уровень безотказности и ресурса в экстре-
мальных условиях эксплуатации [18, 54].
Лучшие образцы зарубежных автомобильных дизелей имеют литровую мощ-
ность порядка 23...50 кВт/л и минимальный удельный расход топлива от 192 до
202 г/(кВт ч). Данные показатели достигаются повышением КПД рабочего цикла
за счет повышения максимального давления сгорания топлива, при этом дизели с
мощностью 200.. .450 кВт имеют среднее эффективное давление до 1,6 МПа [53, 55].
Для наиболее перспективных отечественных двигателей удельный расход
топлива составляет 203...217 г/(кВт ч), что на 5... 12 % выше, чем у зарубежных
аналогов.
Худшая топливная экономичность отечественных дизелей по сравнению с
зарубежными обусловливается более низкими внутрицилиндровыми давлениями
рабочего тела в процессе совершения полезной работы, а следовательно, и меньши-
ми значениями среднего эффективного давления. Так, среднее эффективное давле-
ние двигателей без наддува составляет 0,65...0,69 МПа, а дизелей с газотурбинным
наддувом — 0,85...0,95 МПа. Только перспективные дизели ЯМЗ семейства 840
имеют среднее эффективное давление, сравнимое с их зарубежными аналогами.
Например, для ЯМЗ-846 оно составляет 1,22 МПа. В связи с этим литровые мощности
отечественных двигателей находятся в пределах 13...23 кВт/л, что несколько мень-
ше литровых мощностей лучших зарубежных аналогов.
Повышению топливной экономичности современных дизелей в значитель-
ной степени способствует появление новых турбокомпрессоров [56] (ТКР) с КПД
50...60 % и повышением его в перспективе до 70 %, а также увеличением степени
наддува до 3-3,5.
Использование ТКР с высоким КПД и пологим протеканием его характери-
стики позволило довести запас крутящего момента до 20...23 %, коэффициент при-
способляемости — до двух и преодолеть такой существенный недостаток дизелей с
турбонаддувом, как дымность при низкой частоте вращения коленчатого вала.
Следующим направлением по улучшению топливной экономичности и сни-
жению токсичности отработавших газов является внедрение электроники в управ-
ляющие системы дизелей (фирмы «Форд», «Катерпиллер», «Камминз», «Тойота»,
«Рикардо» и др.) [56].
По известным данным применение электроники для управления подачей то-
плива в соответствии с нагрузкой, частотой вращения, температурой и массой воз-
духа на впуске позволяет на 15 % снизить удельный расход топлива.
10.2. Тенденции развития отечественного и мирового двигателестроения 355
Эту задачу в настоящее время под силу решить только сложной системе, по-
этому зарубежные фирмы уделяют большое внимание отбору тех функций системы,
выполнение которых приносит наиболее ощутимый эффект, получаемый в резуль-
тате компромисса между топливной экономичностью и динамическими свойствами
автомобиля, надежностью и стоимостью системы.
Так, фирма «Камминз» разработала силовой блок ХАР-1000 с дизельным
двигателем XAV-28 для перспективного танка четвертого поколения. Дизель XAV-28
является базовым для развертывания семейства 4-, 6-, 8- и 12-цилиндровых серий-
ных двигателей в диапазоне мощностей от 150 до 1 490 кВт. В двигателе применен
турбокомпрессор с элементами изменяемой геометрии проточной части, преду-
смотрена возможность отключения одного блока цилиндров. Вся его работа управ-
ляется бортовой ЭВМ.
Дизель XAV-28 на сегодняшний день является единственным чисто военным
дизелем с таким высоким уровнем компьютеризации, что уже говорит о его качест-
венном превосходстве над своими аналогами.
Отечественное двигателестроение в ближайшем будущем ориентировано в
основном на использование механических средств управления двигателем, хотя
ведутся работы и по применению электронных систем.
Анализ состояния и тенденции развития дизелестроения показывает, что тра-
диционные гидромеханические системы топливоподачи исчерпали свои возможно-
сти по снижению вредных выбросов на уровне требований Евро II. Радикальное
совершенствование характеристик двигателей под Евро III возможно только при
использовании электронных систем управления топливоподачей с повышенной
энергией впрыскивания в каждом цикле каждого цилиндра. Несмотря на удорожа-
ние приблизительно на 25...30 % транспортной силовой установки из-за примене-
ния электронных систем управления, двигателестроительные фирмы считают такие
затраты неизбежными, поскольку основным фактором остается постоянно ужесто-
чаемое нормирование эмиссии токсичных веществ.
Сложность использования электронных систем для двигателей отечественно-
го серийного производства заключается в их адаптации к сложившейся конструк-
ции двигателя и топливной аппаратуры. Поэтому для дизельных двигателей, на-
пример ЯМЗ, единственно возможным вариантом по снижению выбросов токсич-
ных веществ является использование топливной аппаратуры высокого давления
(ТАВД), которая получает развитие на транспортных дизелях зарубежного произ-
водства и облегчает внедрение электронных систем [56].
Данная ТАВД («столбикового» типа) представляет собой индивидуальные
для каждой форсунки насосы высокого давления («столбики») с общим приводом и
регулированием. Такая компоновка топливной аппаратуры позволяет за счет
уменьшения длины топливопровода высокого давления значительно уменьшить
объем линии нагнетания и, как следствие, повысить четкость процесса топливопо-
дачи, стабильность его характеристик и управляемость. Кроме того, увеличение
значений максимальных и средних давлений впрыскивания топлива дает возмож-
ность качественнее организовать смесеобразование и тем самым улучшить топлив-
ную экономичность дизеля. Разработанная конструкция ТАВД предполагает в
дальнейшем более легкую адаптацию электронных систем управления топливопо-
дачей.
356
10. Силовые установки колесных транспортных средств
Таким образом, совершенствование электронных систем управления двига-
телем и, как правило, топливной аппаратурой является основой концепции развития
ведущих двигателестроительных фирм мира и поддерживается на правительствен-
ном уровне. Гибкость электронных систем управления и такие возможности, как
адаптация к условиям эксплуатации, возможность локализации и компенсации не-
исправностей двигателя, позволили им найти спрос в двигателях военной техники.
Снижение массогабаритных показателей дизелей в основном происходит за
счет применения новых материалов, отличающихся небольшой удельной массой и
высокими физико-механическими свойствами (высокопрочный чугун и сталь, алю-
миниевые сплавы, пластмассы, композиционные материалы и керамика), а также за
счет конструкторских решений и совершенствования технологий изготовления.
Удельная масса лучших зарубежных образцов дизелей, выпускаемых веду-
щими фирмами «Катерпиллер», «Камминз», «Коматцу», составляет 1,2...4,3 кг/кВт.
Отечественные двигатели на сегодняшний день имеют удельную массу
3,2...5,2 кг/кВт, что в 1,2-2,6 раза превышает показатели зарубежных аналогов.
Наряду с уменьшением токсичности и расхода топлива особое значение при-
дается повышению надежности дизелей. Ресурс до капитального ремонта автомо-
бильных дизелей зарубежных фирм достиг 600...800 тыс. км. Кроме того, уже в
настоящее время на перспективные автомобильные двигатели они дают гарантию
ресурса до 1 млн км. Анализ надежности отечественных и зарубежных аналогов
показывает значительное отставание наших автомобильных дизелей в среднем в
1,6-3 раза. Сравнительные данные ресурса отечественных и зарубежных дизелей
мощностью свыше 298 кВт (400 л.с.) приведены в табл. 10.2.
Таким образом, для соответствия основных характеристик отечественных
двигателей уровню двигателей ведущих фирм мира необходимо:
введение наддува с охлаждением наддувочного воздуха;
разработка и освоение производства ТКР с высоким КПД;
применение топливной аппаратуры с высокими энергиями впрыскивания топ-
лива и совершенствование системы ее управления;
снижение массогабаритных показателей за счет прогрессивных технологий,
применения новых материалов и конструкторских решений;
разработка и внедрение электронных систем управления;
разработка двигателей, позволяющих удовлетворять экологическим нормам.
10.3. Основы концепции развития двигателей для КТС ОБГ
Состояние развития отечественных дизельных двигателей
Тягово-динамические свойства КТС ОБГ определяются значением макси-
мального крутящего момента СУ и прогрессивной характеристикой его протека-
ния, оцениваемой коэффициентом приспособляемости. Вместе с тем, СУ должны
иметь достаточно низкие массогабаритные показатели, обеспечивающие вписывае-
мость в заданный объем со всеми системами, и приемлемые эксплуатационные по-
казатели. В настоящее время еще не создана силовая установка, полностью
Таблица 10.2
Сравнительная характеристика ресурса отечественных и зарубежных дизельных двигателей мощностью свыше 300 кВт
Характеристика двигателей OM501LA («Мерседес- Бенс», Гер- мания) OM501LA («Мерседес- Бенс», Гер- мания) Д12С («Вольво», Швеция) ДБС14-09 («Скания», Швеция) BF8M-1O15C («Дойль», Германия) N5000E («Камминз», США) Сер. 55 (ДДА, США)
Число и расположение цилиндров Рабочий объем ци- линдров, л Мощность, кВт (л.с.) Ресурс до капремонта, тыс. км (мото-ч) 6V 12,0 до 313 (426) 1000,0 8V 16,0 до 423 (571) 1000,0 6Р 10,0 340 (460) 1000,0 8V 14.2 368 (500) 800,0 6V ИД 400 (544) 800,0 6Р 14,0 375 (507) свыше 1000.0 6Р 12,0 272 (369) 1200,0
Характеристика двигателей ЯМЗ-8401 ЯМЗ- 8424 ЯМЗ-846 ЯМЗ-847 ЯМЗ-7511 В-46-5МС В-85 Д12-525
Число и расположение цилиндров 12V 8V 8V 12V 8V 12V 12V 12V
Рабочий объем ци- линдров, л 25,9 17,2 17,2 25,9 14,9 38,9 38,9 38,2
Мощность, кВт (л.с.) 478 308 368 625 295 522 618 386
(650) (420) (500) (850) (400) (710) (840) (525)
Ресурс до капремонта, 1500,0 600,0 — — 800.0 40,0 — 40,0
тыс. км (мото-ч) (10000) (-) (7500) (5000) — — (700) (1000,0)
358
10. Силовые установки колесных транспортных средств
полностью удовлетворяющая всем предъявляемым к ней требованиям. Поэтому
выбор типа СУ обычно проводится на основании того, в какой мере она обеспечи-
вает выполнение технических требований, предъявляемых к ТС.
Развитие СКШ в направлении повышения их грузоподъемности и числа осей
потребовало высоких агрегатных мощностей СУ и ужесточило, по условиям компо-
новки, требования к их массогабаритным показателям.
Проблема создания СУ, отвечающей современным требованиям, предъяв-
ляемым к КТС ОБГ, рассматривается в следующих аспектах:
разработка и создание дизелей большой агрегатной мощности;
применение многодвигательных установок с использованием серийно выпус-
каемых дизелей;
разработка и создание автомобильных газотурбинных двигателей.
В основе решения этой проблемы лежит совершенствование поршневых дви-
гателей различного типа с последовательным переходом, наметившимся в послед-
нее время, к высокофорсированным турбопоршневым дизелям.
За последние 10-15 лет значительно повысился технический уровень отече-
ственных дизельных двигателей, используемых в качестве силовых установок АТС,
в том числе и СКШ. Динамика изменения основных показателей дизелей представ-
лена в табл. 10.3.
Таблица 10.3
Динамика изменения основных показателей двигателей с 1980 по 1993 г.
Дизель Мощность, кВт Удельный расход топлива, г/(кВтч) Литровая мощность, кВт/л Удельная масса, кг/кВт
Без наддува: 1980 г 1993 г. 154-386 125-213 223-226 218-224 9,9-14,2 14,3-14,9 3,9-7,5 4,6-5,4
С наддувом: 1980 г 1993 г. 221^178 85-625 224-227 196-215 12,3-14,9 17,6-24,2 3,2^1,9 3,1-5,3
Примечание. При проведении анализа использовались характеристики следующих
двигателей:
1980 г — дизели ЯМЗ-238Д, ЯМЗ-238М, ЯМЗ-238Н, КамАЗ-740, Д12А-525, Д12АН-650,
В-58-7;
1993 г дизели ГАЗ-544.10, ГАЗ-5424, ЗИЛ-645, Урал-744, 745, КамАЗ-7403,
КамАЗ-7406, КамАЗ-7482, ЯМЗ-8424, ЯМЗ-846, ЯМЗ-847, ЯМЗ-8401.
Для удовлетворения перспективных требований КТС ОБГ, в том числе СКШ,
необходимы дизели (в диапазоне рабочего объема 6...27 л), форсированные по лит-
ровой мощности до 30 кВт/л (41 л.с./л) 35 кВт/л (47,6 л.с./л).
Дизели перспективной автомобильной техники в этом случае должны харак-
теризоваться энергетическими показателями, значения которых приведены в
табл. 10.4.
10.3. Основы концепции развития двигателей для КТС ОБГ
359
Таблица 10.4
Рациональные параметры энергетических свойств перспективных дизелей
Параметр Автомобили многоцелевого назначения грузоподъемностью Многоосные колесные шасси и тягачи
до 1,5 т более 1,5 т
Диапазон мощности, кВт Тип рабочего процесса Компоновка Тип системы охлаждения Среднее эффективное давление, МПа Литровая мощность, кВт/л 70-150 Дизельный (впрыск бензина) 4Р, 6Р Жидкостная Воздушная 1,2-1,25 25-32 100-400 Дизельный 6Р, 8V Жидкостная Воздушная 1,38-1,45 25-29 350-800 Дизельный 8 V, 12V Жидкостная 1,35-1,55 25-28
В качестве СУ разработанных ранее СКШ классов грузоподъемности 12, 20 и
50 т применялись в основном дизели танкового типа. К моменту создания этих се-
мейств они удовлетворяли разработчиков шасси по величине мощности (от 220,6 до
522 кВт), массовым показателям (удельная масса от 2,49 до 3,89 кг/кВт) и расходу
топлива (удельный расход топлива от 217,6 до 239,4 г/(кВт ч)). Применение на
СКШ указанных семейств дизелей танкового типа объяснялось отсутствием в то
время автомобильных дизелей соответствующей единичной мощности.
Основные показатели отечественных танковых дизелей приведены в табл. 10.5.
Таблица 10.5
Основные показатели танковых дизелей, применяемых на СКШ
Марка двигателя Мощность, кВт Удельная масса, кг/кВт Литровая мощность, кВт/л Удельный рас- ход топлива, г/(кВтч)
5Д20К-300 220,6 3,02 13,87 224,4
УТД-25 294,0 2,72 13,87 224,4
Д12А-525А 386,0 3,89 9,95 239,4
Д12АН-650 477,9 3,24 12,32 217,6
В-58-7 522,0 2,49 13,45 217,6
Следует учитывать, что данные танковые дизели являются модернизацией
дизелей, созданных еще в 1930-е годы, и по своим характеристикам не соответст-
вуют современному уровню двигателестроения.
Высокий уровень форсирования танковых дизелей, применяемый для дости-
жения необходимой мощности, приводит к ускоренному износу цилиндропоршне-
вой группы и, как следствие, к высокому эксплуатационному расходу моторного
масла и низкой надежности.
Все это привело к тому, что разработчики СКШ в настоящее время отказы-
ваются от применения в качестве СУ танковых дизелей и переходят к использова-
нию автомобильных дизелей.
360
10. Силовые установки колесных транспортных средств
В современном двигателестроении приняты следующие принципы разработ-
ки дизелей автомобильного типа:
создание дизелей в виде унифицированных семейств, включающих модели с
различным числом цилиндров, в которых обеспечивается взаимозаменяемость мас-
совых быстроизнашивающихся деталей;
применение турбонаддува и промежуточного охлаждения наддувочного воз-
духа, позволяющих значительно расширить диапазоны мощности в каждом семей-
стве и в результате уменьшить число оригинальных двигателей в принятой номенк-
латуре двигателей для СКШ;
широкая унификация двигателей, которые являются базовыми при создании
модификации дизелей СКШ;
внедрение новых конструктивных решений, принятых в современном двига-
телестроении, обеспечивающих высокую конкурентоспособность по сравнению с
лучшими, серийно выпускаемыми зарубежными аналогами (индивидуальные го-
ловки цилиндров, механизмы газораспределения с четырьмя клапанами, улиткооб-
разные впускные тракты головок цилиндров, регулируемые вентиляторы системы
охлаждения с использованием гидромуфты, топливные насосы высокого давления с
повышенной энергией впрыска топлива и др.).
В настоящее время на ОАО «Автодизель» (ЯМЗ) завершается разработка но-
вого перспективного семейства дизелей с газотурбинным наддувом и охлаждением
наддувочного воздуха мощностью от 325 до 650 кВт (от 450 до 850 л.с.), основные
характеристики которых представлены в табл. 10.6.
Основные направления совершенствования СУ перспективных СКШ должны
быть ориентированы на применение автомобильных дизелей с газотурбинным над-
дувом и охлаждением наддувочного воздуха, повышение энергетических свойств
дизельных двигателей путем увеличения степени форсирования рабочего процесса
и улучшения эффективности энергопреобразования во всем поле эксплуатационных
режимов, а также за счет роста сопротивляемости деталей силовых механизмов теп-
ловым и механическим нагрузкам, обеспечивающей высокую безотказность и высо-
кий ресурс двигателей.
Наряду с повышением технических характеристик двигателей необходимо
улучшить их тяговые характеристики, обеспечить стабильность основных параметров
при движении в высокогорье, в жарко-пустынной местности и на Крайнем Севере.
Кроме того, следует снижать массогабаритные показатели отечественных дизелей, не
удовлетворяющие современным требованиям при сравнении с зарубежными аналога-
ми. Ресурс и безотказность отечественных дизелей существенно уступают лучшим
зарубежным образцам. Пока до конца не решены задачи по обеспечению многотоп-
ливности и герметичности дизелей при преодолении водных преград и т. д.
Несмотря на ряд положительных качеств, отечественные дизели автомобильного
типа имеют некоторые недостатки. Автомобильные дизели характеризуются также не-
достаточным уровнем форсирования по величине максимального крутящего момента и
низкими значениями коэффициента приспособляемости, равными 1,15-1,2. Поэтому с
целью повышения тягово-динамических характеристик СКШ разработчики вынуждены
применять гидродинамические и диапазонные передачи в сочетании с многоступенча-
тыми механическими коробками передач, что приводит к усложнению трансмиссии,
снижению надежности шасси и повышению трудоемкости их обслуживания и ремонта.
10.3. Основы концепции развития двигателей для КТС ОБГ
361
Таблица 10.6
Семейство дизелей Ярославского моторного завода
Показатель Марка дизеля
846 8461 8462 849 847 8471
Завод потребитель МЗКТ БАЗ БАЗ КрАЗ М(К)ЗКТ изтм
Число и расположе- V8 V8 V8 V8 V12 V12
ние цилиндров 90 90 90 90 90 90
Рабочий объем, л 17,24 17,24 17,24 17,24 25,86 25,86
Номинальная мощ- 373 373 335 335 596 596
ность, кВт (л.с.) Номинальная частота вращения колен- (500) (500) (450) (450) (800) (800)
чатого вала, мин'1 Максимальный крутя- щий момент Ме, 2100 2100 2100 2100 2100 2100
Н м Частота вращения 2000 2000 1800 1800 3150 3150
коленчатого вала 1200- 1200- 1200- 1200- 1300- 1300-
при Ме, мин-1 1400 1400 1400 1400 1500 1500
Масса, кг 1440 1460 1460 1430 2000 2000
Удельная масса, 2,15 2,18 2,41 2,37 1,86 1,86
кг/кВт (кг/л.с.) Удельный эффектив- ный расход топ- лива, г/(кВт ч) (г/(л.с. ч)): (2,88) (2,92) (3,24) (3,18) (2,50) (2,50)
минимальный 112 (150) 112 (150) 112 (150) 112 (150) 112(150) 112 (150)
номинальный Расход масла на угар, 125 (168) 125 (168) 125 (168) 125 (168) 125 (168) 125 (168)
% 0,4 0,4 0,4 0,4 0,4 0,4
Ресурс, ч Габаритные размеры, мм: 7500 7500 7500 7500 5000 5000
длина 1231 1341 1341 1341 1594 1594
ширина 1178 1166 1166 1166 1070 1070
высота Муфта привода вен- тилятора (фрик- 1220 1126 1126 1126 1220 1220
ционная) Система подогрева (предпусковая прокачка горячим маслом) Дублирующая систе- ма пуска (пнев- Нет Есть Есть Есть Есть Есть Есть
мостартер) » » » » » »
362
10. Силовые установки колесных транспортных средств
Рис. 10.3. Пример нерационального использования характеристик двигателя
ЯМЗ-846.10 в составе шасси 7930
Еще одним существенным недостатком является то, что формирование ха-
рактеристик отечественных дизелей автомобильного типа осуществляется с при-
оритетом наивысшей топливной экономичности. Для ее оценки до сих пор исполь-
зуется значение минимального удельного расхода топлива без учета характера из-
менения топливной экономичности во всем эксплуатационном диапазоне режимов
работы СУ Минимальный удельный расход топлива имеет место на режиме, близ-
ком к максимальному крутящему моменту при небольшом форсировании его по
абсолютному значению. Но этот режим работы двигателя не является наиболее
употребительным при эксплуатации СКШ и используется кратковременно для пре-
одоления больших дорожных сопротивлений. Поэтому улучшение топливной эко-
номичности только на этом режиме не может оказать заметного положительного
влияния на эксплуатационный расход топлива шасси.
Так, диапазон работы двигателя при минимальном удельном расходе топлива
(штрихованная зона на рис. 10.3) составляет лишь 25 % от всего диапазона работы
СУ на ТС.
В то же время невысокий уровень форсирования дизеля по крутящему мо-
менту отрицательно отражается на его тяговых показателях и ограничивает под-
вижность СКШ (см. график на рис. 10.3).
10.3. Основы концепции развития двигателей для КТС ОБГ
363
Энерговооруженность СКШ
Определяющим параметром для оценки уровня энерговооруженности ТС явля-
ется удельная мощность шасси. Для достижения высоких тягово-динамических пока-
зателей КТС ОБГ полной массой 40...80 т удельная мощность должна быть равной
8,1...8,8 кВт/т (11... 12 л.с./т). Это может быть достигнуто, например, на шасси
класса грузоподъемности 80 т применением двигателей мощностью 970... 1060 кВт
(1390... 1 440 л.с.).
Вместе с тем с ростом полной массы современных СКШ наблюдается тен-
денция снижения их удельной мощности. В табл. 10.7 приведено относительное
значение этого показателя для некоторых образцов серийных и перспективных
СКШ. За 100 % приняты показатели шасси с колесной формулой 8x8.
Таблица 10.7
Соотношение полной массы и удельной мощности СКШ
Тип шасси, колесная формула Полная масса СКШ, % Мощность силовой установки,% Удельная мощность СКШ, %
МАЗ-7911,8x8 100 100 100
МАЗ-7929, 10x8 150 90 59
МАЗ-547В, 12x12 210 124 59
МАЗ-7917, 14x12 260 135 52
МЗКТ-79221, 16x16 300 152 52
Анализ данных табл. 10.7 показывает, что с увеличением полной массы СКШ
в 1,5-3,0 раза мощность силовой установки возрастает в 1,24-1,52 раза, а удельная
мощность снижается в 1,6-2,0 раза.
Удельные мощностные показатели отражают качественную картину снижения
энерговооруженности шасси с ростом грузоподъемности и числа осей. Более нагляд-
но недостаточность мощности автомобильных дизелей можно проследить, используя
абсолютные величины. При этом принимается допущение, что на шасси класса гру-
зоподъемности 20 т вместо реальных дизелей установлены автомобильные дизели
семейства ЯМЗ-840-ЯМЗ-846 мощностью 368 кВт, а на шасси класса грузоподъемно-
сти 80 т — ЯМЗ-847 мощностью 625 кВт. Достаточным уровнем энерговооруженно-
сти будет считаться выполнение вышеуказанного условия: удельная мощность СКШ
должна составлять как минимум 8,1 кВт/т. Данные по уровню энерговооруженности
шасси с автомобильными дизелями семейства ЯМЗ-840 приведены в табл. 10.8.
Данные табл. 10.8 подтверждают ранее сделанный вывод, что использование
автомобильных дизельных двигателей обеспечивает достаточный уровень энерго-
вооруженности и, как следствие, высокие тягово-динамические свойства для шасси
класса грузоподъемности 20 т с колесной формулой 8x8. В то время как удельная
мощность СКШ полной массы 80 т и более с колесной формулой 12x12 и более
значительно ниже необходимого уровня энерговооруженности.
Следует отметить, что в отечественном двигателестроении при существую-
щем уровне технологии, качестве конструкционных материалов и моторных масел
максимально достижимый уровень литровой мощности составляет 25 кВт/л. Рабо-
чий объем (литраж) двигателя ЯМЗ-847 равен 25,85 л. Несложный расчет показыва-
364
10. Силовые установки колесных транспортных средств
ет, что при данных массогабаритных показателях резервы дальнейшего повышения
мощности автомобильных дизелей семейства 840 практически исчерпаны.
Таблица 10.8
Уровень энерговооруженности шасси с дизелями семейства ЯМЗ-840
Тип шасси, колесная формула Полная масса, т Мощность дизеля, кВт Удельная мощность, кВт/т
ЯМЗ-846 ЯМЗ-847
МАЗ-79 И, 8x8 41,4 368 — 8,89
МАЗ-7930, 8x8 45,0 368 8,18
МАЗ-7929, 10x8 60,0 368 — 6.13
МАЗ-547В. 12x12 82,5 625 7,58
МАЗ-7917, 14x12 105 625 5,95
МЗКТ-79221, 16x16 120 — 625 5,20
Это объясняется тем, что для увеличения рабочего объема необходимо уве-
личивать диаметр цилиндра и ход поршня. Существует известное ограничение по
средней скорости поршня (не более 10... 13 м/с), которое лимитирует работоспособ-
ность поршневых колец и гильзы цилиндров. Превышение средней скорости порш-
ня над указанными значениями неизбежно приведет к ускоренному износу цилинд-
ропоршневой группы, высоким расходам моторного масла и, как следствие, к со-
кращению моторесурса до уровня танковых дизелей.
Поэтому увеличение хода поршня при заданной средней скорости снижает
частоту вращения, а рост диаметра цилиндра (массы поршня) увеличивает динами-
ческие нагрузки, что требует усиления деталей двигателя. Таким образом, дальней-
ший рост мощности сопровождается резким ростом объема и массы дизельной СУ
По вышеуказанным причинам в настоящее время и в ближайшей перспективе
на отечественных моторных заводах не представляется возможным создать автомо-
бильный дизельный двигатель необходимой мощности для КТС ОБГ
Следует добавить, что использованные на шасси 7904 и 7906 дизели большой
мощности (1100 кВт) не предназначены для колесных ТС, относятся к промышлен-
ным (судовым) и не могут применяться на современных СКШ из-за неприемлемых
значений массогабаритных показателей (например, дизель М351УЗ имеет массу
7220 кг, объем 5,83 м, удельную массу 8,4 кг/кВт).
Новые энергетические установки
Наряду с разработками по транспортным дизельным двигателям с учетом
тенденций их развития, рассмотренным в разделе 10.2. настоящей главы, за рубе-
жом не прекращаются поиски иных решений, позволяющих создать высокоэффек-
тивные силовые установки для транспортных и боевых машин.
Зарубежные специалисты считают, что по критерию приспособленности эко-
номической характеристики двигателя к условиям работы транспортной машины
потенциальные преимущества имеет адиабатный двигатель.
Рабочий процесс адиабатного двигателя, как известно, рассматривается
как процесс с доведенным до минимума теплообменом с окружающей средой
10.3. Основы концепции развития двигателей для КТС ОБГ
365
при помощи теплоизоляции деталей, образующих камеру сгорания и выпускной
тракт. В общем случае рабочий процесс адиабатного двигателя характеризуется
формулой
PVk = const,
где Р и V — давление и объем рабочего газа; к — показатель адиабаты.
При этом работа полного цикла адиабатного двигателя рассчитывается по за-
висимости
L = -^-(T3-T4-7^+T2),
к -1
где R — универсальная газовая постоянная; к — показатель адиабаты (для воздуха
к= 1,4); Т\ — температура окружающей среды; Т2 — температура конца
R
сжатия; Р2 — давление газа после адиабатного сжатия с параметрами Р} и Vi; Р\ —
давление газа перед сжатием; V| — объем газа перед сжатием; V2 — объем газа в
конце сжатия; Т3 — температура газа после подвода теплоты; ТА — температура газа
после адиабатного расширения.
Работая над совершенствованием адиабатного двигателя, американские спе-
циалисты пришли к выводу, что проводимые конструктивные проработки не исчер-
пывают возможности по их совершенствованию. Одним из перспективных путей они
считают создание так называемого дизеля с минимальными потерями. На этом двига-
теле планируется получить значительное снижение потерь за счет комплекса конст-
руктивных мероприятий — применения газовых подшипников, бесколечных порш-
ней, сухих керамических подшипников с низким коэффициентом трения и твердых
смазок. Предполагается, что на этом двигателе можно применить большинство дета-
лей и узлов, отработанных ранее на обычном адиабатном двигателе и за счет умень-
шения мощности трения получить удельный расход топлива на уровне 154 г/(кВт ч)
(эффективный КПД = 54 %), отказавшись к тому же от масляной системы двигателя.
Известно, что в настоящее время двигателестроители ведут активные работы
по улучшению характеристик автомобильных дизелей большой мощности, в том чис-
ле и в направлении создания турбокомпаудных двигателей. В частности, повышение
энергетических, топливно-экономических и экологических показателей может дости-
гаться такими решениями, как турбонаддув и промежуточное охлаждение наддувоч-
ного воздуха; турбокомпаундирование (применение силовой турбины, соединенной
через редуктор с коленчатым валом двигателя); комбинированный наддув (турбоком-
прессор с инерционным наддувом во впускные трубопроводы); регулируемый наддув
(с отводом части воздуха за компрессором и газа перед турбиной); 2-ступенчатый
наддув (для повышения приемистости двигателя и дополнительного снижения ток-
сичности отработавших газов при сокращении продолжительности переходных про-
цессов); применение топливной аппаратуры с высокой энергией впрыскивания и пе-
ременным началом подачи в зависимости от частоты вращения коленчатого вала с
адаптивным микропроцессорным управлением и т. д. Схемы некоторых из перечис-
ленных конструктивных решений показаны на рис. 10.4.
366
10. Силовые установки колесных транспортных средств
Рис. 10.4. Схемы совершенствования дизельных двигателей:
а — принципиальная схема турбокомпаундного дизеля (ЯМЗ): Т — силовая турбина; К — турбина ком-
прессора; СВ — отвод свободного воздуха; СОВ — подача свободного основного воздуха на турбину
компрессора; ОНВ — основной насос воздуха; СР — силовой редуктор; б — принципиальная схема
аккумуляторной системы топливоподачи (типа Common Rail): ТНВД — топливный насос высокого
давления; ТПН — гопливоподкачивающий насос; АК — аккумулятор топлива; Ф — форсунка; УЭ —
управляемый электромагнит; БУ — блок управления; Д1 — датчик частоты вращения коленчатого вала
двжателя; Д2 — датчик нагрузки дизеля; КС — камера сгорания дизеля
Исследования показывают, что на сегодняшнем этапе развития двигателе-
строения единственным альтернативным типом двигателя, способным удовлетво-
рить требования, предъявляемые к СУ ТС полной массой 80 т и более по мощно-
сти, массе и габаритным размерам, является автомобильный газотурбинный дви-
гатель.
Масштабы ассигнований, выделяемых в наиболее развитых промышленных
странах на создание АГТД, создание и применение в них керамических материалов,
а также достигнутые результаты означают подготовку технологического прорыва в
мировом двигателестроении.
Большинство разрабатываемых АГТД имеют свободную силовую турбину
и регулируемый сопловой аппарат (РСА). Они могут выполняться с теплообмен-
ником различных типов или без него. Двигатели проектируются 2- или 3-валь-
ными (рис. 10.5).
Основной задачей, стоящей перед разработчиками АГТД, является повыше-
ние экономичности. Для этого на режимах частичных нагрузок и холостого хода
применяют регулировку проходных сечений в проточной части двигателей путем
поворота направляющих лопаток компрессора и сопловых лопаток силовой турби-
ны (РСА). Применение РСА позволяет не только улучшить экономичность на ре-
жимах частичных нагрузок, но и увеличить коэффициент приспособляемости дви-
гателя, а также дает возможность осуществить торможение двигателем. Вместе с
тем введение РСА приводит к заметному увеличению стоимости АГТД, усложняет
его конструкцию и эксплуатацию, может привести к снижению КПД силовой тур-
бины на расчетном режиме из-за утечек через зазоры в РСА и в результате измене-
ния углов атаки при повороте лопаток.
Развитие АГТД в нашей стране может быть проиллюстрировано следующи-
ми примерами. На ЯМЗ проведены работы по созданию АГТД мощностью
735... 1100 кВт. Двигатели выполнялись по 2-вальной схеме. Их удельный расход
топлива в стендовых условиях составил 381...408 г/(кВт • ч).
10.3. Основы концепции развития двигателей для КТС ОБГ
367
Рис. 10.5. Схемы АГТД:
а — 2-вальная схема: / — компрессор; 2 — теплообменник; 3 — камера сгорания; 4 — турбина ком-
прессора; 5 — силовая турбина; 6 — редуктор; 7 — нагрузка; б и в — 3-вальная схема: / — компрессор
низкого давления; 2 — компрессор высокого давления; 3 — теплообменник; 4 — камера сгорания; 5 —
турбина высокого давления; 6 — турбина среднего давления; 7 — турбина низкого давления; 8 — ре-
дуктор; 9 — нагрузка; 10 — воздухоохладитель; ТС — силовая турбина
Еще одно предприятие по изготовлению отечественных двигателей предложило
многотопливный АГТД для наземных транспортных машин высокой проходимости. Он
выполнен по 3-вальной схеме без теплообменника. Двигатель ГТД-1250А имеет мощ-
ность 919 кВт, удельный расход топлива в стендовых условиях 306 г/(кВт ч), массу
800 кг и габаритные размеры 1 929х 1 210x932 мм.
ГТД апробированы на нескольких образцах СКШ. На шасси также были испы-
таны модификации танковых ГТД — ГТД-1000А мощностью 735 кВт, ГТД-1000ТФМ
мощностью 882 кВт, ГТД-1250А мощностью 919 кВт. Масса всех двигателей
368
10. Силовые установки колесных транспортных средств
800...960 кг (1300... 1500 кг со вспомогательными системами), удельный расход
топлива в стендовых условиях — 306 г/(кВт ч).
Основные показатели некоторых отечественных АГТД приведены в табл. 10.9.
Таблица 10.9
Основные показатели отечественных АГТД
Марка двигателя Мощ- ность, кВт Удельная масса, кг/кВт Габаритная мощность, кВт/м3 Удельный расход топлива, г/(кВтч)
Опытный образец ГТД-НАМИ 258 2,90 235 258
Опытный образец ГАЗ-902.10 310 2,74 230 289
Проект ГТД-КОБМ 400 — 154 219
Проект ГАЗ-9031 480 1,98 390 230
Опытный образец ЯМЗ-Э901 735 2,04 285 381
Опытный образец ГТД-1000ТФМ 882 1,47 530 306
Проект ЯМЗ-Э904.10 1100 1,00 423 277
Как показывает анализ данных табл. 10.3, 10.6 и 10.9, лишь у перспективных
образцов АГТД, находящихся на стадии технического проекта (ГАЗ-9031, ГТД-КОБМ),
топливная экономичность приближается к соответствующим показателям танковых
и автомобильных дизелей. Поэтому широкому внедрению АГТД препятствуют их
низкая по сравнению с дизелями топливная экономичность, высокая стоимость
опытных образцов и потребность в значительных капиталовложениях для переос-
нащения производства при переходе на выпуск АГТД. Более подробно этот вопрос
рассматривается в п. 10.2.
Исследованиями подтверждена принципиальная перспективность примене-
ния в качестве энергоустановки СКШ с электрической трансмиссией газотурбо-
Рис. 10.6. Схема газотурбинной СУ для перспективных КТС ОБГ мощностью 1600 кВт:
КВД — компрессор высокого давления; ТВД — турбина высокого давления; КС1, КС2 — камеры сго-
рания; КНД — компрессор низкого давления; ТНД — турбина низкого давления; ТСД — турбина сред-
него давления; Harp — нагрузка (генератор); Per — регулятор; ПО — теплообменник
10.3. Основы концепции развития двигателей для КТС ОБГ
369
Рис. 10.7. Блок низкого давления ГТУ
электрической энергоустановки большой мощности. При исследовании возможно-
стей и перспектив применения в энергоустановках СКШ газотурбинных агрегатов в
МГТУ им. Н.Э. Баумана разработана (на глубину технических предложений) высо-
коэкономичная транспортная газотурбинная установка (ГТУ) открытого цикла мощ-
ностью 1 600 кВт.
Схема данной ГТУ представлена на рис 10.6.
Газотурбинная установка состоит из турбокомпрессорного блока высокого
давления (находящегося на одном валу с цанговым электрогенератором), турбоком-
прессорного блока низкого давления, газового рекуператора, промежуточного охла-
дителя, промежуточного подогревателя и системы форсирования.
370
10. Силовые установки колесных транспортных средств
Рис. 10.8. Блок высокого давления ГТУ
10.4. Особенности математического моделирования силовых установок 371
Установка работает по открытому циклу рабочее тело — воздух.
Турбокомпрессорный блок высокого давления состоит из центробежного
компрессора (КВД) и двух осевых турбин — высокого и среднего давления. Перед
турбиной высокого давления (ТВД) находится основная камера сгорания (КС1),
работающая по схеме микрофакельного сгорания. Сопловой аппарат ТВД является
также устройством раздачи топлива камеры промежуточного разогрева (КС2), тоже
выполненной по микрофакельной схеме.
Частота вращения блока определяется характеристикой электрогенератора и
составляет 24 000 мин-1
Вал вращается на двух опорных и одном упорном газовых подшипниках. Из-
за относительно невысокой температуры газа, Т{ = 1173 К, охлаждение рабочих и
сопловых лопаток турбин не предусмотрено.
Конструктивное исполнение основных блоков ГТУ представлено на рис. 10.7
и 10.8.
Таким образом, в технико-экономическом отношении АГТД имеют преиму-
щества по ряду показателей (тяговым свойствам, удельной массе и габаритной
мощности, долговечности, надежности, из-за отсутствия системы охлаждения) по
сравнению с дизельными двигателями. Сопоставимость удельных расходов топлива
становится возможной при больших мощностях, поэтому применение ГТД обосно-
ванно именно на КТС ОБГ
10.4. Особенности математического моделирования
дизельных и газотурбинных силовых установок СКШ
Для использования в составе общей математической модели (ММ) (см. гл. 8,
рис. 8.1 и 8.2) специального колесного шасси, позволяющей исследовать показатели
его подвижности методом моделирования на ПЭВМ, необходима модель дизельно-
го двигателя При выбранном подходе двигатель представляется в виде отдельного
элемента (блока) общей системы — СКШ, с которой он связан набором переменных
(рис. 10.9). Задачу создания математической модели дизельного двигателя можно
сформулировать как определение функциональных зависимостей (передаточных
функций), связывающих входные и выходные переменные. Так как модель должна
быть достаточно универсальной, т. е. позволять моделировать основные марки ус-
танавливаемых на СКШ дизелей, в ММ введен дополнительный блок уравнений для
Рис. 10.9. Общая структурная схема взаимодействия переменных в системе
дизельный двигатель — трансмиссия
При разработке ММ газотурбинного двигателя использованы подходы, изложенные в
работе [57J.
372
10. Силовые установки колесных транспортных средств
предварительного расчета коэффициентов передаточных функций по заданным ос-
новным показателям технической характеристики конкретного моделируемого дви-
гателя. К таким показателям дизельного двигателя отнесены:
Мюм — номинальная (максимальная) мощность;
Л/тах — максимальный крутящий момент;
частота вращения коленчатого вала:
о)д/— при номинальной мощности
Щду — при максимальном крутящем моменте;
(ох х — при максимальных оборотах холостого хода;
o)min — при минимально устойчивых оборотах;
о i — текущая.
Главной входной переменной, определяющей режим работы двигателя, явля-
ется положение органа управления подачей топлива — педали подачи топлива, или
рейки ТНВД.
На рис. 10.9 данная переменная обозначена как Кп. — коэффициент подачи
топлива. Диапазон ее изменения в относительных единицах — от 0 (педаль отпуще-
на) до 1 (педаль полностью нажата). Формирование этого сигнала при моделирова-
нии может осуществляться в отдельном блоке («водитель», «задатчик скорости» и
п.) по любому заданному закону, в том числе и при А^п т = const.
Силовой поток дизельного двигателя характеризуется двумя взаимозависимы-
ми факторами — силовым и скоростным. Силовой фактор — крутящий момент дви-
гателя (Л71В) шасси — был принят за выходную переменную, являющуюся результа-
том расчета по ММ дизеля на каждом шаге моделирования. Скоростной фактор —
частота вращения коленчатого вала дизельного двигателя сод — был принят за вход-
ную переменную. Поэтому второй входной переменной является текущая частота
вращения коленчатого вала двигателя сод. Для учета динамических свойств дизельно-
го двигателя, определяющих его инерционность, необходимо использовать еще одну
величину — производную частоты вращения коленчатого вала двигателя ф(.
Известно, что показатели работы дизельного двигателя в значительной сте-
пени зависят не только от режима его работы (/Сп т, <ад, Л/дв), но и от условий, в кото-
рых эта работа происходит. К таким условиям относятся параметры окружающего
воздуха (давление, плотность, температура, влажность, химический состав, запы-
ленность и др.), показатели применяемых топлива и масла. Существенное влияние
могут также оказывать техническое состояние двигателя, его пространственное по-
ложение на объекте и некоторые другие факторы. В данной модели учитывается
только влияние температуры окружающего воздуха (г) и высоты над уровнем моря
(Л), по которым определяется давление (Р) и плотность (ро) воздуха.
Момент, снимаемый с маховика дизельного двигателя и передаваемый в блок
«трансмиссия», определяется по выражению
^лв=(ЧжуСТ-^7)^л, (10.1)
где Л7ДВ ус1 — крутящий момент, развиваемый дизелем на установившемся режиме
6)д
при данной частоте вращения коленчатого вала в нормальных условиях; М: =— —
10.4. Особенности математического моделирования силовых установок 373
инерционный момент дизельного двигателя; — момент инерции подвижных дета-
лей дизеля; к:1 — коэффициент приведения показателей двигателя в зависимости от
внешних условий:
100 У'65 | р + 27зУК5
Р J Л 298 J
(10.2)
Плотность и давление окружающего воздуха корректируются в зависимости
от температуры и высоты над уровнем моря:
р() = 1,2928 - 0,0047536г + 0,000015738г;
р = е4<618333 Ро 9,%\h (Ю.З)
101325
За момент двигателя на установившемся режиме принимается одна из величин:
^в.с. = ^01 + ^02+ ^03Шд ’
Мper ~ (^min — ^тш )^п.т — ^д )^04 ’ (10-4)
47 г ор — ^05 ^д ’
где Л/в е Л/ре1, Л/тор — крутящий момент двигателя по внешней скоростной, регуля-
торной и тормозной характеристикам соответственно (рис. 10.9); £01, к{}5 — ко-
эффициенты апроксимации характеристик:
_ (957(WHOM - /И|ПахсоЛ. )со^
К01 “ z + lV1 max ’
<0w«0w-<0w)-
_ 2пм (М
max -957(WHOM).
К()2 — >
-Ww)
кт = 9570Л/ном . ( |о 5)
04 — z ч ’
<М<»хх -®w)
_-287W11OM
К05 “ э
CDn
где пм — обороты коленчатого вала двигателя, соответствующие максимальному
моменту.
При задании тормозной характеристики дизельного двигателя (коэффициента
&о5) сделаны допущения о ее линейности, а также о том, что для принудительного про-
кручивания дизеля, т. е. при его работе в тормозном режиме на номинальной частоте
вращения коленчатого вала, затрачивается мощность, примерно равная 28...35 % от
NH0M. Эти допущения основаны на имеющихся экспериментальных данных 157].
374
10. Силовые установки колесных транспортных средств
Критерием выбора Л/дв из выражения (10.4) является знак момента по регуля-
торной характеристике Л/рег, однозначно показывающий, в каком режиме работает
дизельный двигатель — в тормозном (Л/рег< 0) или двигательном (Л/рег > 0).
Таким образом, с использованием уравнений (10.1)—(10.5) момент дизельно-
го двигателя на входе в трансмиссию определяется по следующему алгоритму:
при Л/ре1 0 Л/дв. уст— min {Л/В.с. , Л/рег},
при Л/рег< 0 Л/дв.Усг= max {Л/рег, ИоР1-
Известно, что при наличии нагрузки на валу ГТД дифференциальное уравне-
ние моментов представляется в виде
Т— = мГТП-ме,
dt гтд
(10.6)
где Т — механическая постоянная времени двигателя, приведенная к его выходному
Мгтд - М
валу; М1ТД =------; Мс =----51— — относительное значение соответственно мо-
MNt-r
мента двигателя и момента сопротивления, равное отношению текущего значения к
номинальному моменту двигателя.
Из уравнения (10.6) следует необходимость описания характеристик момента
ГТД и момента сопротивления в общем случае для неустановившихся режимов.
Из теории лопаточных машин известно, что протекание крутящего момента
ГТД на эксплуатационных режимах работы достаточно точно определяется зависи-
мостью
^ГТД-^О
(^-1)со
CD()
(Ю.7)
где — постоянный коэффициент, равный отношению максимального крутящего
момента к значению момента, соответствующего максимальному КПД свободной
турбины; со — текущее значение частоты вращения свободной турбины; Л/() и (Ц> —
соответственно крутящий момент и частота вращения свободной турбины при ее
максимальном значении КПД (по линии оптимальной топливной экономичности).
В связи с тем, что с уменьшением частоты вращения свободной турбины при
постоянном отношении давлений и неизменных начальных параметрах расход газа
через ступень несколько увеличивается за счет уменьшения степени реактивности,
происходит соответствующее увеличение (пропорциональное увеличению расхода
газа) коэффициента
С учетом этого выражение (10.7) может быть представлено следующим образом:
Л/гтд - Мо
со0
(10.8)
где к° — коэффициент, учитывающий увеличение при уменьшении частоты
вращения свободной турбины.
10.4. Особенности математического моделирования силовых установок 375
В свою очередь, значения Л/о и to0 взаимосвязаны при определенном допуще-
нии следующей зависимостью:
А/ 0 — бЗООд
(Ю.9)
где а = —-----постоянный коэффициент, равный отношению крутящего момента
^o/v
к частоте вращения свободной турбины на номинальном режиме работы.
Однако определение MQ и too обычными методами затруднено не только на
переходных, но и на установившихся режимах работы двигателя. Поэтому при раз-
работке настоящей математической модели были использованы результаты экспе-
риментальных исследований [57], где величины Л/о и (Во определялись в объектовых
условиях при заторможенной свободной турбине.
При заторможенной свободной турбине крутящий момент зависит от скорост-
ного режима работы турбокомпрессора и от положения регулируемого соплового
аппарата свободной турбины. С учетом этого момент Мо представляется следую-
щим образом:
M = W Рса (10.10)
к\
где Л/стРСА — момент при заторможенной свободной турбине и определенном по-
ложении РСА.
При совместном решении уравнений (10.8)-(10.10) момент ГТД представля-
ется следующим образом:
КЦМN
Л/ГТД - Л^с.тРСА о
К К ц
л/^с.тРСА
После замены абсолютных значений Л/стРСа, to и Мтд относительными зна-
чениями согласно выражениям
Щ _ Мс.тРСА .
«„РСЛ- .
_ МпД
г™-
_ (О
СО =-----
^ON
уравнение (10.13) представляется в преобразованном виде:
к0К -1 г-=---_
Л/ГТД _ ^с.тРСА I n V^c.tPCA®'
7*4
376
10. Силовые установки колесных транспортных средств
На переменных режимах работы двигателя Мс тРСА определяется следующей
зависимостью:
^с.тРСА = ^с.т.д/(аРСА )’
где Мс — относительное значение динамического крутящего момента при за-
торможенной свободной турбине и номинальном угловом положении РСА;
f (арсл) — относительное изменение крутящего момента в зависимости от углово-
го положения РСА.
Значения Мс т д и f (аРСА) определяются из экспериментальных зависимо-
стей, полученных непосредственно в объектовых условиях. Для удобства исследо-
ваний характеристики крутящего момента при набросе и сбросе нагрузки представ-
ляются в дифференциальной форме, а функция /(аРСА) апроксимируется полиномом
3-й степени и определяется в зависимости от частоты вращения турбокомпрессора.
При набросе нагрузки динамический крутящий момент ГТД при затормо-
женной свободной турбине описывается экспоненциальной зависимостью вида
^с.т.д = Мс, - (М,т - МслЮ )е-' (10.11)
где Мс — момент ГТД при набросе нагрузки и заторможенной свободной турбине
в конце переходного процесса; Мс 10 — момент ГТД при заторможенной свободной
турбине в начале переходного процесса; z — постоянный коэффициент, варьируе-
мый в зависимости от времени приемистости турбокомпрессора.
Величина Мс зависит от частоты вращения турбокомпрессора и при номи-
нальном угловом положении РСА определяется уравнением
^с.т=Жк)-
Графически зависимость (10.12), найденная в ходе экспериментальных ис-
следований в объектовых условиях, представлена на рис. 10.10.
Дифференцирование уравнения (10.11) приводит его к виду
dM" q
-^y = zMCJ-zM^a.
at
С учетом эксплуатационного протекания момента ГТД в переходном процес-
се значение постоянного коэффициента z определяется зависимостью
3
г = —,
Гпр
где г„р — время приемистости турбокомпрессора ГТД.
Момент ГТД при заторможенной свободной турбине в переходном процессе
при сбросе нагрузки описывается зависимостью вида
10.5. Состояние развития электрохимических типов двигателей автомобилей ЪТ1
Рис. 10.10. Зависимость крутящего момента ГТД при заторможенной сво-
бодной турбине от частоты вращения турбокомпрессора при номинальном
угловом положении РСА
Л^с.т.л = Л^с.-ю + (Л/С.т - Мс.гО )е
где — момент ГТД при сбросе нагрузки и заторможенной свободной турбине
в конце переходного процесса; Мс — момент ГТД при заторможенной свободной
турбине в начале переходного процесса; zi — постоянный коэффициент.
Дифференцирование уравнения (10.20) приводит его к виду
^стд
—= -г,Л<
at
Таким образом, полученная ММ дополняет модели движения и маневра
СКШ в направлении математического моделирования дизельной и газотурбинной
силовой установок. Крутящие моменты дизеля и ГТД, рассчитываемые с использо-
ванием вышеприведенных уравнений, являются выходной характеристикой различ-
ных типов СУ и учитываются в качестве входного крутящего момента в прозрачной
(механической или гидромеханической) и непрозрачной (электрической) трансмис-
сии СКШ в методике оценки эффективности предлагаемых промышленностью тех-
нических решений на стадии проектирования СКШ, рассмотренной в гл. 8 настоя-
щей работы.
10.5. Состояние развития электрохимических типов
двигателей автомобилей
Как было показано выше, возможности отечественной промышленности по
созданию автомобильных дизельных двигателей большой мощности (свыше 625 кВт)
практически исчерпаны, а широкому внедрению автомобильных газотурбинных
двигателей препятствуют их низкая по сравнению с дизелями топливная экономил-
378
10. Силовые установки колесных транспортных средств
ность, высокая стоимость опытных образцов и потребность в значительных капита-
ловложениях для переоснащения производства при переходе на выпуск АГТД.
Кроме того, наиболее предпочтительным типом трансмиссии для многоос-
ных специальных колесных шасси полной массой 80 т и более является электриче-
ская трансмиссия (ЭТ). В выполненных конструкциях специальных колесных шасси
с ЭТ в качестве основного недостатка отмечались низкие значения коэффициента
полезного действия энерготрансмиссионной установки в составе первичного тепло-
вого двигателя (дизеля или ГТД) и электрической трансмиссии.
Это объясняется прежде всего необходимостью двойного преобразования
энергии — химической энергии топлива в механическую энергию выходного вала
первичного двигателя и далее механической энергии в электрическую посредством
электрогенератора, поэтому рассмотрим различные альтернативные источники
электрической энергии.
С середины 70-х годов XX в. в мире ведется активный поиск альтернативных
воздухонезависимых энергоустановок (ЭУ) с электрохимическими генераторами
(ЭХГ). В России такие работы начаты в первой половине 1970-х годов.
В основу действия ЭУ с ЭХГ положен принцип прямого преобразования хи-
мической энергии, выделяющейся при реакции топлива и окислителя, в электриче-
скую энергию без промежуточного превращения химической энергии в тепловую и
соответствующих потерь, присущих всем тепловым двигателям и определяемых
принципом Карно. Реакция превращения электрической энергии происходит в топ-
ливном элементе.
В состав энергоустановки с низкотемпературными топливными элементами
входят криогенная емкость; блоки системы защиты и управления; электрохимиче-
ский генератор; щит системы электропитания; насосы системы термостатирования;
теплообменник; емкость системы сбора продуктов реакции; интерметаллидные на-
копители, а также оборудование комплекса систем, обеспечивающих пожаро-
взрывобезопасность. Принципиальная схема ЭУ с ЭХГ показана на рис. 10.11.
К достоинствам ЭУ с ЭХГ относятся:
высокий КПД (70...75 % по сравнению с 20...30 % для традиционных энер-
гоустановок);
абсолютная экологическая чистота;
малая шумность;
низкий уровень температур и значительно меньшее по сравнению с традици-
онными ЭУ количество отводимого тепла;
высокая энергоемкость.
В настоящее время имеется возможность в течение 2-4 лет (в зависимости от
уровня мощности и энергоемкости) разработать, изготовить и поставить ЭУ с ЭХГ
со следующими показателями:
мощность 10.. .600 кВт (кратковременно до 4 000 кВт);
энергоемкость 100... 100 000 кВт ч;
удельная энергоемкость 150...200 Вт ч/кг (200...250 Вт ч/л.с.).
Энергоустановки с ЭХГ могут быть использованы как для морских, так и для
наземных объектов.
Помимо нетрадиционных источников электрической энергии с низкотемпе-
ратурными топливными элементами, существуют источники, относящиеся к классу
10.5. Состояние развития электрохимических типов двигателей автомобилей 379
Н2
Газовый
канал
(водород)
Анод
(пористый —
электрод)
А
— R
40Н
02
i80000000000000000000000 И0000й «00^1
н2^Ж
(продувка) ф
Электролит
W7////77/7
Катод
(пористый
электрод)
Газовый
канал
(кислород)
О2
PH (продувка)
Реакция на аноде
2Н2 + 4ОН -> 4Н2О + 4е
Реакция на катоде
О2 + 2Н2О -> 4ОН
Рис. 10.11. Принципиальная схема ЭУ с ЭХГ
энергетических систем металл — воздух (железо — воздух, цинк — воздух и алюми-
ний — воздух).
Работы за рубежом по системам алюминий — воздух были развернуты при-
мерно в начале 1980-х годов. Такие системы относятся к полутопливным элемен-
там (ПТЭ), так как рассчитаны на механическую перезарядку (установку комплекта
алюминиевых пластин), но в то же время не требуют заряда от внешней электриче-
ской сети, как традиционные аккумуляторные батареи (АКБ).
Рассмотрим кратко принцип действия ЭУ в виде ПТЭ алюминий—воздух.
В реакторе (блоке ячеек) установлены анодные пластины из низколегирован-
ного алюминиевого сплава и пористые воздушные катоды (из углерода и тефлона с
катализатором). Во время работы через воздушный электрод проходит смесь очи-
щенного воздуха и водяных паров, а через зазор между электродами непрерывно
прокачивается щелочной электролит. При работе расходуются алюминий, вода и
кислород воздуха.
Продуктом реакции является осадок гидроокиси алюминия, который вымы-
вается из ячеек потоком электролита и после промывки и последующей сушки в
отсеках ЭУ в виде тонкодисперсного порошка поступает в накопитель.
Гидроокись алюминия является готовым полуфабрикатом для промышленно-
го получения алюминия в обычном производственном цикле. Поэтому алюминие-
вые электроды служат возобновляемым звеном между промышленным источником
электроэнергии и электромобилем.
Хотя принцип действия ЭУ на ПТЭ алюминий — воздух экспериментально
обоснован, но при этом по-прежнему не решен комплекс инженерных проблем:
существует побочная (нетокообразующая) реакция простого растворения
алюминия в щелочном электролите, поэтому необходимо легирование пластин для
380
10. Силовые установки колесных транспортных средств
образования специальной окисной пленки, препятствующей этой реакции (напри-
мер, 0,04 % галлия, 0,4 % железа и 0,04...0,8 % магния). Это дорогая и сложная тех-
нологическая операция, которая до настоящего времени не отработана;
эффективность и надежность работы воздушного электрода требует даль-
нейшего совершенствования, поскольку именно воздушный электрод в основном
ограничивает мощность системы;
необходима отработка конструкции ячеек для удобной и быстрой замены
алюминиевых анодов, а также удаления гидроокиси алюминия;
не выяснены особенности работы системы в зимних условиях;
требуется создание комплексных опытных ЭУ, их экспериментальные испы-
тания и последующая оптимизация.
Помимо вышеуказанных проблем можно выделить еще один существенный
недостаток таких систем — непосредственное использование энергии рекуператив-
ного торможения электромобиля для данной системы исключается.
Основным разработчиком ЭУ типа алюминий — воздух является Lawrence
Livermore National Laboratory (LLNL; США). К работе привлечен также ряд специа-
лизированных фирм США для решения отдельных проблем.
После исследования моделей и полноразмерной ячейки ЭУ типа алюминий —
воздух, а также последующих расчетов и проектирования было установлено, что
система рассчитана на следующий режим эксплуатации:
первоначальный запас алюминиевых пластин 56 кг, т. е. при эффективности
36,0 т км/кг алюминия запас хода электромобиля до замены анодов составит около
1 600 км;
через каждые 400 км пробега проводится кратковременная остановка для до-
заправки 23 л воды (пригодна вода из водопровода) и удаления 41 кг гидроокиси
алюминия (примерно 10 л по объему);
замена комплекта анодных пластин на станции обслуживания через 1 600 км
пробега (используется обычная сеть станций) осуществляется за 20...30 мин.
После первых двух лет разработок определена эффективность по мощности
воздушного электрода. Она составляет 54 т км/кг алюминия, это возможный, дос-
тижимый в дальнейшем показатель. При этом КПД системы с учетом существую-
щих затрат электроэнергии на выплавку алюминия равен примерно 40 %.
На основании вышеизложенного можно сделать вывод о том, что применение
ЭУ с ЭХГ и энергетических систем металл — воздух в качестве силовых установок
КТС ОБГ, предназначенных для монтажа традиционных видов оборудования, до
2015 г. скорее всего нецелесообразно в первую очередь из-за того, что перспективы
совершенствования дизельных двигателей указанной мощности далеко не исчерпаны.
Глава 1 1
Основы теории и расчета
систем передачи мощности
от двигателя к колесному движителю
11.1. Общая характеристика, классификация и требования
к трансмиссиям
Глубокое изучение любой системы основано на анализе объекта исследова-
ния извне и изнутри: извне — это взаимодействие системы с окружающей средой,
изнутри — взаимодействие между структурными составляющими системы.
Системный подход рассматривает три вида основных структур трансмиссии
как системы: выход системы — ее вход, выход предшествующей подсистемы —
вход в последующую, выход предшествующей подсистемы — вход в несколько
последующих. Трансмиссии КТС ОБГ относятся, несомненно, к последнему виду
основных структур системы. Место трансмиссии в системе водитель—авто-
мобиль—дорога представлено на рис. 8.1.
Характер внутреннего взаимодействия между структурными составляющими
трансмиссий различных типов представлен на рис. 4.6, 4.12, 4.13 и 4.14, а на приме-
ре трансмиссии с ГОТ — на рис. 11.1.
Теория и расчет трансмиссий КТС ОБГ базируется на основных положениях
тех отраслей знаний, которые обеспечивают создание составных частей трансмис-
сии, например для механической — классическая механика; для ЭТ — электротех-
ника, ГОТ — гидродинамика и т. д. Главной задачей теории автомобиля в данном
случае является разработка законов, закономерностей, алгоритмов, в соответствии с
которыми должна функционировать трансмиссия, обеспечивая рациональное ис-
пользование мощности силовой установки и максимальное удовлетворение потре-
бительских свойств КТС ОБГ Основной проблемой при этом является обеспечение
рационального распределения мощности (крутящего момента) СУ по колесам
транспортного средства. Рассмотрению этой проблемы, т. е. закономерностей взаи-
модействия между структурными составляющими системы, и посвящены материа-
лы данной главы.
Трансмиссии КТС ОБГ весьма разнообразны и классифицируются по прин-
ципу действия или регулирования, по типу используемого трансформатора и т. д.
382 77. Основы теории и расчета систем передачи мощности
Рис. 11.1. Блок-схема основных внутренних связей в системе трансмиссии с ГОП:
РПТ — регулятор подачи топлива; БУ ГОТ — блок управления ГОТ; ДУ — дизельная установка; ГМК — гидромотор колеса; ПР — промежуточ-
ный редуктор; БКЧ — блок контроля частоты; ГН — гидронасос; ВК — ведущее колесо; КР — колесный редуктор; ГМ — гидромотор; ЭУ — энер-
гоустановка
ILL Общая характеристика, классификация и требования к трансмиссиям 383
По принципу действия трансмиссии подразделяются на механические, гид-
равлические, электрические и комбинированные; по типу используемого трансфор-
матора — на фрикционно-зубчатые ступенчатые, фрикционные непрерывные (с
вариаторами), импульсные, гидродинамические (гидромеханические), гидростати-
ческие (гидрообъемные), электрические (с мотор-колесами), электромеханические,
электрогидравлические; по признаку регулирования — на регулируемые, автомати-
зированные (автоматические).
При проектировании колесной машины, в частности ее трансмиссии, вначале
определяют параметры, обеспечивающие удовлетворение технических и потреби-
тельских требований к ТС, а затем переходят к оптимизации конструкции по главному
требованию. Если удовлетворены требования по грузоподъемности, тягово-дина-
мическим свойствам, проходимости, плавности хода и т. п. то в качестве главного
критерия может выступать масса автомобиля, зависящая от типа трансмиссии. На-
пример, в табл. 4.3 и 4.4 приведены весовые показатели трансмиссий различных ти-
пов для КТС ОБГ По данным этих таблиц очевидны преимущества гидрообъемной
трансмиссии.
Для развития теории движения КТС ОБГ в новом направлении необходимо
прежде всего установить взаимосвязь параметров и систем машин с эксплуатацион-
ными свойствами, обосновать оценочные показатели, по которым следует управ-
лять системами и машиной в целом. Например, анализ многочисленных исследова-
ний в области теории движения колесных машин позволяет выделить группу экс-
плуатационных свойств, на оценочные показатели которых оказывают огромное
влияние системы передачи мощности к ведущим колесам. Для КТС ОБГ — это тя-
гово-динамические свойства, маневренность и устойчивость движения.
Тягово-динамические свойства являются определяющим фактором эффек-
тивности использования автомобиля. Особую важность эти свойства приобретают
для КТС ОБГ При любых критериях оценки транспортной работы, выполняемой
автомобилем (т, т км и т. п.), и сравнительных оценках используются важнейшие
параметры его тягово-динамических свойств (максимальная и средняя скорости
движения на маршруте, удельная сила тяги и разгонная характеристика).
Поэтому для современных КТС ОБГ повышение их грузоподъемности, как
одного из действенных средств достижения максимальной эффективности, сопро-
вождается обязательным условием обеспечения требуемых тягово-динамических
свойств.
Общепринятыми критериями оценки, определяющими параметры тягово-
динамических свойств автомобиля, являются удельная мощность двигателя и сред-
няя скорость движения в различных дорожных условиях. В табл. 10.7 приведены
данные по динамике изменения удельной мощности для различных СКШ. имеющих
практически одинаковые показатели тягово-динамических свойств. Для многоос-
ных КТС ОБГ специального назначения с ростом полной массы ТС наблюдается
тенденция снижения удельной мощности. Данные табл. 10.7 свидетельствуют, что
только за счет повышения мощности двигателя улучшить показатели тягово-
динамических свойств КТС ОБГ практически невозможно.
Удельная мощность является в значительной мере условным показателем.
Этот показатель совершенно не учитывает характер протекания кривых внешней и
384
11. Основы теории и расчета систем передачи мощности
частичных характеристик двигателя, а также характеристику трансмиссии, которые
оказывают существенное влияние на использование мощности двигателя.
Характер протекания кривых внешней и частичных характеристик двигателя
влияет на приспособляемость двигателя. Приспособляемость двигателя в различных
странах оценивается разными параметрами:
коэффициентом приспособляемости по крутящему моменту
коэффициентом приспособляемости по оборотам
общим коэффициентом приспособляемости
*об — К to'
где MNe — крутящий момент двигателя, соответствующий максимальной мощности
двигателя; — номинальная частота вращения коленчатого вала, соответствую-
щая максимальной мощности двигателя; Л/ктах — максимальный крутящий момент
двигателя; <э>л/к 1пах — частота вращения коленчатого вала, соответствующая макси-
мальному крутящему моменту двигателя.
Величины средних скоростей и расходов топлива автомобилей (автопоездов)
с одинаковой удельной мощностью зависят в значительной мере от приспособляе-
мости двигателя и характеристики трансмиссии. Поэтому, по мнению английских,
итальянских и датских специалистов, главным условием улучшения тягово-
динамических свойств автомобиля, особенно КТС ОБГ является повышение тяго-
вого усилия на ведущих колесах, которое зависит от величины крутящего момента
двигателя и характеристики трансмиссии.
Английские специалисты считают [34], что на большегрузные автомобили и
автопоезда целесообразнее устанавливать относительно тихоходные экономичные
двигатели, обеспечивающие удельную мощность не менее 4,41 кВт/т (6,0 л.с./т) (за-
мер мощности по британскому стандарту), с высоким коэффициентом приспособ-
ляемости.
Специалисты фирмы «Мак» (США) считают, что наиболее подходящим па-
раметром, определяющим эксплуатационные показатели автомобиля, является не
максимальная, а средняя мощность, развиваемая двигателем в рабочем диапазоне
его оборотов. Этот параметр учитывает как приспособляемость двигателя, так и
число ступеней трансмиссии.
Развивая эту идею, французские фирмы по выпуску грузовых автомобилей
предложили оценивать мощность двигателя с помощью так называемой эквива-
лентной мощности.
Эквивалентная мощность определяет используемую мощность двигателя,
измеренную при средних рабочих оборотах п коленчатого вала двигателя, обуслов-
ленных наличием определенной трансмиссии.
11.1 Общая характеристика, классификация и требования к трансмиссиям 385
Выражение для определения соср имеет следующий вид [34]:
где п — число ступеней коробки передач автомобиля; мв — передаточные числа
второй и высшей ступени коробки передач соответственно.
Специалисты Ярославского моторного завода провели экспериментальные
исследования режимов работы двигателей ЯМЗ-236 при движении автомобиля по
дорогам с асфальтобетонным покрытием за пределами пригородной зоны (категория 1
эксплуатации), в городских условиях (категория 2) и режимов работы двигателей
ЯМЗ-238 и ЯМЗ-240Н соответственно на автомобилях КрАЗ-256Б и БелАЗ-548А во
время движения их в карьере (категория 3).
Средние скорости движения при регистрации режимов работы получены
следующие: 30...32 км/ч во время испытаний автомобилей МАЗ-500 в городских
условиях; 45...50 км/ч во время испытаний автомобилей МАЗ-500 в условиях меж-
дугородних перевозок; 21...23 км/ч во время движения автомобилей БелАЗ-548А в
карьере с грузом.
Анализ данных показывает, что преимущественные режимы работы двигате-
ля ЯМЗ-236 при движении одиночного автомобиля МАЗ-500 в городских условиях
находятся в узком скоростном диапазоне (970... 1170 мин”1) и широком нагрузочном
диапазонах — от режимов полной подачи топлива до режимов полного торможения
двигателем.
При движении одиночного автомобиля МАЗ-500 по шоссе двигатель ЯМЗ-236
преимущественно работает в узком нагрузочном и широком скоростном режимах.
Режимы работы двигателя ЯМЗ-238 при движении автомобиля-самосвала
КрАЗ-256Б по полному циклу в карьере такие же, как при движении одиночного
автомобиля МАЗ-500 по шоссе. Двигатель ЯМЗ-238 работает преимущественно в
зоне внешней скоростной характеристики, т. е. в узком нагрузочном и широком ско-
ростном диапазонах. Однако в связи с тем, что продольные уклоны дороги в карьере и
относительная загрузка самосвала КрАЗ-256Б больше, чем у автомобиля МАЗ-500,
режимы работы первого в зоне внешней скоростной характеристики при движении
с грузом на подъем становятся преобладающими.
Преобладающими режимами работы двигателя ЯМЗ-240Н самосвала БелАЗ-
548А при движении по полному циклу в карьере и особенно при движении с грузом
на подъем являются режимы в зоне внешней скоростной характеристики, т е. дви-
гатель ЯМЗ-240Н работает в узком нагрузочном режиме. Так, 58,1 % времени он
работает при крутящем моменте 1560... 1800 Н м (крутящий момент при макси-
мальной мощности равен 1665,0 Н м) во время движения автомобиля БелАЗ-548А
по полному циклу и 81,84 % времени работает в этом же диапазоне крутящего мо-
мента во время движения автомобиля с грузом на подъем.
Однако если преимущественные режимы работы двигателя ЯМЗ-236 при
движении МАЗ-500 по шоссе и преобладающие режимы работы двигателя ЯМЗ-238
при движении автомобиля КрАЗ-256Б в карьере распределяются в достаточно ши-
роком скоростном диапазоне, то преобладающие режимы работы двигателя ЯМЗ-240Н
- 2918
386
Основы теории и расчета систем передачи мощности
находятся в узком нагрузочном диапазоне и распределяются в узком скоростном
диапазоне.
Так, во время движения самосвала БелАЗ-548А по полному циклу двигатель
ЯМЗ-240Н 49,8 % времени работает в диапазоне частот вращения 1770... 1970 об/мин и
8,3 % времени в диапазоне частот вращения 1970...2170 об/мин, а при движении его
с грузом на подъем в этих же диапазонах частот вращения он работает 62,5 и 19,34 %
времени соответственно.
Таким образом, МТУ автомобилей-самосвалов КрАЗ-256Б и БелАЗ-548А при
работе в карьере обеспечивает работу двигателей в рациональном (с точки зрения
завода-изготовителя двигателей) нагрузочном и скоростном диапазонах, не обеспе-
чивая при этом главного (с точки зрения потребителя автомобиля) — высоких сред-
них скоростей движения автомобиля (35...40 км/ч для КрАЗ и 20...25 км/ч для
БелАЗ), хотя их удельная мощность находится на уровне европейских требований
(не менее 6,0 л.с./т).
Опыт разработки КТС ОБГ и проведенные расчеты показывают, что для дос-
тижения приемлемых показателей тягово-динамических свойств и проходимости
силовые установки КТС ОБГ должны иметь мощность не менее 800 кВт и внешнюю
скоростную характеристику, обеспечивающую эффективную работу в узком скоро-
стном и нагрузочном диапазоне. В настоящее время в нашей стране не существует
автомобильных дизелей такой мощности. Используемые на карьерных самосвалах и
опытных образцах специальных колесных шасси БелАЗ и МЗКТ дизели большой
мощности относятся к промышленным, они предназначены для работы в стацио-
нарных режимах и не могут быть использованы на перспективных образцах КТС
ОБГ из-за неудовлетворительных массогабаритных показателей.
Как уже говорилось ранее, единственным альтернативным дизелю типом
двигателя, способным в настоящее время удовлетворить требованиям, предъявляе-
мым к силовым установкам КТС ОБГ по мощности, массе и габаритным размерам,
является автомобильный газотурбинный двигатель [57].
Таким образом, для КТС ОБГ обеспечение необходимых тягово-динамичес-
ких свойств только за счет наращивания мощности силовой установки практически
невозможно. Необходима оптимизация при выборе схемы раздачи мощности и типа
трансмиссии для каждой группы КТС ОБГ в зависимости от их предназначения,
условий использования или специального применения.
Отличительной особенностью условий функционирования трансмиссий мно-
гоосных и многоопорных КТС ОБГ (с числом осей от 4 до 12) специального назначе-
ния является то, что количество возможных комбинаций режимов работы ведущих
колес в каждый конкретный момент времени существенно возрастает по сравнению с
КТС ОБГ с числом осей 2-3. Это особенно проявляется при криволинейном движе-
нии, движении по деформируемым грунтам и неровным опорным поверхностям, ко-
гда часть колес работает в ведущем режиме, а часть — в ведомом, свободном или
нейтральном. Возможен даже переход некоторых колес в тормозной режим. Причем
вероятность возникновения силовой и скоростной асимметрии увеличивается с уве-
личением числа осей (колес) и геометрических параметров КТС ОБГ
Автором работы [18] автомобили особо большого класса грузоподъемности
условно подразделяются на четыре группы: малой грузоподъемности — при полной
11.1. Общая характеристика, классификация и требования к трансмиссиям 387
массе до 20 т, средней — при полной массе 20...40 т, большой — при полной массе
40... 100 т, особо большой — при полной массе свыше 100 т. На основе обобщения
результатов исследований и испытаний, анализа используемых технических реше-
ний МТУ КТС полной массой от 20 до 100 т в работе [18] разработана методология
конструирования МТУ, выбора типа силовой установки и трансмиссии с использо-
ванием гидромеханической передачи. Применение ГМП, как уже отмечалось выше,
подняло на качественно новый технический уровень конструкцию КТС ОБГ произ-
водства МАЗ и БелАЗ, однако не решило проблему индивидуального подвода мощ-
ности к колесу многоосных автомобилей в зависимости от условий его качения.
Кроме того, увеличение общей массы КТС ОБГ до 100 и более тонн и числа осей
более шести привело к необходимости использования двух параллельных потоков
мощности с ГМП в каждом из них, громоздкой механической части трансмиссии и как
следствие к большим проблемам в компоновке машин (например, шасси 7904 и 7906).
Рост грузоподъемности и числа осей КТС ОБГ ведет к увеличению многооб-
разия возможных схем механической трансмиссии, которое связано с наличием или
отсутствием дифференциала в местах разветвления потока мощности.
Необходимость передачи значительной величины мощности (более 800 кВт)
и отсутствие разработанной ГМП для ее передачи обусловили применение, напри-
мер на шасси 7904 и 7906, трансмиссии с двумя ГМП, выпускаемыми серийно под
мощность до 600 кВт. Это, в свою очередь, потребовало установки дополнительно-
го агрегата — суммирующего редуктора. При этом параллельное размещение в
трансмиссии двух ГМП и соединение силовых потоков от них в одном редукторе
практически не позволяет применить блокировку гидротрансформаторов. Невоз-
можность блокировки ГТ приводит к повышенному расходу топлива, снижению
тягово-динамических свойств при движении шасси по шоссе и предъявляет повы-
шенные требования к системе охлаждения, что в условиях уплотненной компоновки
вызывает необходимость создания сложных систем по отводу и рассеиванию тепла.
Состав агрегатов трансмиссий шасси 7904, 7906 и 7907 для примера приведен в
табл. 11.1.
Таблица 11.1
Состав агрегатов в трансмиссиях шасси 7904, 7906 и 7907
Наименование агрегата Количество агрегатов в трансмиссии шасси
7904 (12x12) 7906 (16x16) 7907 (24x24)
Согласующий редуктор 1 1 1
Гидромеханическая передача 2 2
Суммирующий редуктор 1 1
Раздающий редуктор 2 4
Редуктор моста 6 8
Карданный вал 32 45 24
Колесная передача 12 16 24
Понижающий редуктор электродвигателя 24
Тяговый электродвигатель 24
Силовой генератор — — 1
388
Основы теории и расчета систем передачи мощности
Анализ данных табл. 1 1 1 показывает, что трансмиссия 6-осного шасси
7904 включает 24 основных агрегата, а 8-осного шасси 7906 — 32 основных агре-
гата, для привода которых используется 45 карданных валов. Кроме того, на шас-
си 7904 в 9 агрегатах, а на шасси 7906 в 13 агрегатах установлены дифференци-
альные механизмы (межтележечные и межосевые дифференциалы, муфты сво-
бодного хода), что в значительной мере усложняет конструкцию агрегатов и
трансмиссию шасси в целом.
Передача через трансмиссию мощности более 800 кВт вызывает необходи-
мость установки агрегатов большой массы, что в сочетании их с большим количест-
вом приводит к значительному возрастанию общей массы трансмиссии. Так, на-
пример, на шасси 7906 масса согласующего редуктора составляет 665 кг, ГМП —
1 100 кг, суммирующего редуктора — 710 кг, карданных валов — 3150 кг Общая
масса агрегатов трансмиссии на шасси 7906 составляет 17,6 т, а удельная масса
трансмиссии — 39,4 кг/кВт.
Применение на КТС ОБГ с колесной формулой 12х 12 и 16x16 двух ГМП и
большого количества механических редукторов снижает КПД трансмиссии. Теоре-
тически определено, что общий КПД трансмиссии на номинальном режиме ее рабо-
ты шасси 7904 равен 0,54, а шасси 7906 — 0,52, что свидетельствует о больших по-
терях мощности в агрегатах трансмиссии.
Рассмотренные выше сложности конструкции механических (гидромеханиче-
ских) трансмиссий КТС ОБГ привели к тому, что в настоящее время в стране и за ру-
бежом ведется поиск нетрадиционных для автомобилестроения гибких типов транс-
миссий.
Наибольший практический интерес в этом плане представляют электрические
трансмиссии. Главными достоинствами ЭТ являются их дистанционность и гибкость.
Гибкость ЭТ позволяет проще решать задачу передачи мощности от приводного дви-
гателя на ведущие колеса КТС ОБГ и прицепные звенья. Это особенно важно для
КТС ОБГ имеющих значительную длину (28...33 м) и большое число ведущих колес
(12 и более). Кроме того, ЭТ может обеспечить работу двигателя в квазистационар-
ном режиме.
Разработка ЭТ колесных машин ведется по трем основным направлениям: по-
стоянного тока, переменно-постоянного тока и переменного тока.
Электрическая трансмиссия постоянного тока применена на карьерных само-
свалах БелАЗ-549 (грузоподъемностью 75 т), переменно-постоянного тока — на
БелАЗ-7519 (грузоподъемностью 180 т). На МЗКТ проведены испытания макетных
образцов шасси с ЭТ переменного тока. Основные параметры конструктивно-компо-
новочных решений КТС ОБГ с электрической трансмиссией представлены в табл. 4.4.
К важным конструктивно-компоновочным показателям МТУ относится их
масса и габаритный объем. От массы МТУ зависит полная масса, грузоподъемность,
осевая нагрузка, топливная экономичность, динамические качества шасси и многое
другое. Габаритный объем влияет на компоновку и размеры КТС ОБГ, удобство раз-
мещения перевозимого груза и оборудования. Отсюда вытекает важность оценки мас-
согабаритных показателей при выборе МТУ для многоосной колесной автомобильной
техники и в первую очередь для КТС ОБГ
Сравнительная оценка параметров МТУ двух шасси (см. рис. 4.12 и 4.13) в
составе дизельного двигателя и ГМТ (образцы 1 и 2) и ГТД с ЭТ (образцы 3 и 4),
11.1 Общая характеристика, классификация и требования к трансмиссиям 389
проведенная по методике [18], представлена в табл. 1 1.2. За исходные данные при-
няты результаты сравнительных испытаний макетных образцов шасси 547В и 547Э
(соответственно образцы 2 и 3), а также макетных образцов шасси 7906 и 7907 (соот-
ветственно образцы 2 и 4). При этом значения параметров МТУ образцов 1 и 2 при-
нимались за 100 % и относительно них определялось процентное соотношение па-
раметров МТУ (образца 3 относительно образца 1, образца 4 относительно образца 2).
Тиб. ища 11.2
Абсолютные и удельные показатели МТУ многоосных КТС ОБГ
Показатель, Образцы с МТУ в составе
дизеля и ГМП ГТД и ЭТ
№ 1 №2 №3 №4
Колесная формула
12x12 16x16 12x12 24x24
Полная масса 100,0 100,0 101,2 100,0
Мощность двигателя 100,0 100,0 153,8 80,0
Суммарная мощность на колесах 100,0 100,0 172,1 76,0
Масса МТУ 100,0 100,0 90,6 87,0
Габаритный объем МТУ 100,0 100,0 99,4 103,0
Масса трансмиссии 100,0 100,0 91,9 113,9
Габаритный объем трансмиссии 100,0 100,0 91,3 113,3
Удельная масса МТУ 100,0 100,0 53,0 1 14,5
Объемная мощность МТУ 100,0 100,0 172,0 75,8
Удельная масса трансмиссии 100,0 100,0 53,7 151,3
Из данных табл. 1 1.2 видно, что МТУ образцов 1 и 3 имеют приблизительно
равные габаритные объемы, а массы МТУ этих образцов отличаются почти на 10 %
Однако различие мощностей на ведущих колесах более чем на 70 % (из-за большей
мощности двигателя и более высоких КПД трансмиссии) приводит к тому, что
удельные показатели МТУ, состоящей из ГТД и ЭТ (образец 3), значительно выше,
чем у МТУ машины, оснащенной дизелем и ГМП.
Сравнение параметров МТУ образцов 2 и 4 показывает, что масса МТУ шас-
си 7906 (образец 2) больше на 13 %, чем у шасси 7907 (образец 4), а габаритные
объемы примерно равны. И это притом, что при одинаковой грузоподъемности и
общей массе образцов шасси 7907 имеют на четыре оси (или восемь колес) больше.
Такое положение обусловлено в основном низкими удельными массогабаритными
показателями дизельной силовой установки с объектовыми системами шасси 7906,
которые больше соответствующих показателей ГТД по массе в 4,1 раза, а по габа-
ритным размерам — в 2 раза. В целом у шасси 7907 масса МТУ, приходящаяся на
1 кВт колесной мощности, меньше на 8,5 %, а габаритный объем больше на 8,3 %,
чем у шасси 7906.
Следует отметить, что резервы по улучшению массогабаритных показателей
и повышению КПД шасси 7907 (образец 4) имеют хорошие перспективы. Так, в
частности, размещение тяговых электродвигателей не в раме шасси, а в ступице
390
/ /. Основы теории и расчета систем передачи мощности
Рис. 11.2. Скоростная характеристика «разгон» по времени КТС ОБГ с различными типами МТУ:
/ — шасси 547Э (ГТД + ЭТ); 2 — шасси 547Д (Д + мех. КП); 3 — шасси 7906 (Д + ГПМ); 4 —
шасси 7907 (ГТД + ЭМТ); 5 — шасси 7917 (Д + ГПМ); ДР] н — потери мощности в генераторе
колес (применение мотор-колес, рис. 4.14) позволит отказаться от 24 угловых ре-
дукторов и 24 карданных валов, общая масса и габаритный объем которых состав-
ляют соответственно 5,5 т и 4,3 м? Одновременно это дает возможность повысить
КПД ЭТ до значения 0,58...0,60.
Стандартная разгонная характеристика КТС ОБГ с различными типами МТУ
представлена на рис. 11.2 и 11.3.
Анализ этих рисунков позволяет заключить, что показатели тягово-
скоростных свойств образцов с ЭТ находятся на уровне показателей однотипных по
грузоподъемности и числу осей образцов с МТУ в составе дизеля и ГМП.
Основным препятствием для широкого применения ЭТ на колесных машинах
является отсутствие достаточно обоснованных и отработанных технических требо-
ваний к трансмиссиям этого типа. Кроме того, разработка и создание ЭТ для колес-
ных машин выполняется двумя различными по своему профилю областями науки и
техники (автомобилестроением и электромашиностроением). При этом, как прави-
ло, специалисты одной из этих областей не имеют достаточной подготовки и знаний
Рис. 11.3. Скоростная характеристика «разгон» по пути КТС ОБГ с различными типами МТУ-
/ — шасси 547Э (ГТД + ЭТ); 2 — шасси 547 (Д + мех. КП); 3 — шасси 7906 (Д + ГПМ); 4 —
шасси 7907 (ГТД + ЭМТ); 5 — шасси 7917 (Д + ГПМ); ДРд— потери мощности в электродвигателе
11.1. Общая характеристика, классификация и требования к трансмиссиям 391
по специальным вопросам в другой области, чтобы квалифицированно решать по-
ставленные задачи. Вопросы проектирования и методы расчета основных парамет-
ров тяговых электродвигателей, генераторов и их систем регулирования примени-
тельно к ЭТ колесных машин разработаны недостаточно и слабо освещены в техни-
ческой литературе.
Вместе с тем при проектировании и изготовлении электрических трансмис-
сий для СКШ выявился ряд существенных недостатков:
работы по созданию ЭТ велись в основном в направлении приспособления
существующих конструкций электроагрегатов, спроектированных без полного уче-
та характера и режимов эксплуатации шасси;
технические требования к шасси с ЭТ задавались по принципу «не хуже»,
чем у шасси аналогичной грузоподъемности с ГМП.
Наиболее ярко эти недостатки проявились на шасси 7907 (см. схему МТУ на
рис. 4.13). На рис. 11.4-11.15 представлены зависимости показателей эксплуатаци-
онных свойств КТС ОБГ со схемой МТУ, показанной на рис. 4.13. Данные, приве-
денные на рис. 1 1.4-11.15 при проектировании КТС ОБГ с ЭТ, являются базовыми.
При получении в ходе проектирования показателей эксплуатационных свойств ни-
же базовых использование ЭТ является нерациональным.
Таким образом, для электрических трансмиссий всех рассмотренных выше
образцов общими недостатками являлись:
несовершенство конструкции генератора и тяговых электродвигателей, при-
водящее к ограничению максимальной скорости и свободной силы тяги на крюке;
недостаточная надежность элементов ЭТ из-за несовершенства их конструк-
ции и отсутствия требований к ним;
Рис. 11.4. Зависимость скорости движения шасси 24x24 от мощности ГТД и сопротивления
движению 'Р-
/ — Т = 0,02; 2 — Т = 0,04; 3 — Т = 0,06; 4 — Т = 0,08; 5 — Т = 0,10. Для всех кривых передаточн
число колесного редуктора 1/кр = 67,815;-максимальная мощность ГТД в объекте
392
/ / Основы теории и расчета систем передачи мощности
Рис. 11.5. Зависимость расхода топлива шасси 24x24 от мощности ГТД и сопро-
тивления движению Ч7:
/ — 4х = 0.02; 2 — 4* = 0.04; 3 — Ч* = 0.06; 4 — Ч* = 0,08; 5 — Ч7 = 0.10. Для всех кривых переда-
точное чис. лесного редуктора t7Kp = 67,815;-максимальная мощность ГТД в объекте
Рис. 11.6. Зависимость преодолеваемого шасси 24x24 сопротивления движению
Ч7 от фазного тока /, генератора ВСГ-625:
------01 ран генератора ВСТ-625
несовершенство системы автоматического регулирования, выражающееся в
неспособности использовать одно из важнейших преимуществ ЭТ — индивидуаль-
ное управление отдельными приводами колес в зависимости от дорожных условий
и режимов движения.
Анализ этих и других недостатков позволяет сделать вывод о недостаточной
дубине теоретических проработок в интересах создания ЭТ автомобильного типа
для СКШ с учетом особенностей их конструкции и условий использования. А тра-
диционный подход к разработке трансмиссий для шасси такого класса на примере
шасси 7904 и 7906 еще раз убеждает, что от него необходимо отказаться.
Новым интересным направлением в области создания тягового электропри-
вода для колесных транспортных средств была развернутая с 1990 г на базе Кам-
ского автомобильного завода научная работа по созданию концепции перспектив-
ного многоцелевого экологически чистого автомобиля 2000 г. Для проработки был
принят вариант МТУ, состоящий из автомобильного газотурбинного двигателя
11.1. Общая характеристика, кчассификация и требования к трансмиссиям 393
Рис. 11.7. Тягово-скоростная характеристика шасси 24x24:
ГТД в объекте 759 кВт; 2 — мощное it ГТД в объекте 950 кВ1.
по фазному юку генератора не более 2500 А
— 01 ран
и электрической трансмиссии переменного тока с асинхронными тяговыми элек-
тродвигателями. В рамках этой НИОКР специалистами МГТУ им. Баумана и
ВНИИтрансмаш при непосредственном участии авторов был создан макетный обра-
зец транспортного средства «Табун» на базе автомобиля КамАЗ с колесной форму-
лой 4x2. Он предназначался для проведения ходовых испытаний с целью отработки
технических требований к системе регулирования и управления перспективными
тяговыми электроприводами применительно к семейству автомобилей по проекту
«Табун». Основные параметры технической характеристики ходового макета пред-
ставлены в табл. 11.3, а его внешний вид — на рис. 1 1.16. Данные табл. 11.3, пока-
зывают, что на ходовом макете «Табун» была предпринята попытка уйти
сложившегося подхода (МЗКТ и НИИКЭ) к разработке ЭТ для колесных транс-
Рис. 11.8. Зависимость КПД Г|и электрической трансмиссии шасси 24x24 от мощности ГТД
в объекте:
/ — Т = 0.02; 2 — Т = 0,04; 3 — Т = 0,06; 4 — Т = 0,08; 5 — Т = 0,10
394
Основы теории и расчета систем передачи мощности
портных средств, особенно системы автоматического управления. Изменение час-
тоты вращения тяговых электродвигателей осуществлялось транзисторным регуля-
тором на основе принципа широтно-импульсной модуляции в отличие от общепри-
нятых теристорных преобразователей частоты.
Таблица 11.3
Техническая характеристика ходового макета «Табун»
Параметр Значение
Колесная формула Максимальная скорость (ограничена использованными редукторами), км/ч ГТД: номинальная мощность, кВт (л.с.) частота вращения выходного вала, мин- Генератор: тип номинальная мощность, кВт (л.с.) частота вращения, мин 1 Тяговый электродвигатель: поминальная мощность, кВт (л.с.) максимальная частота вращения, мин Габаритные размеры, мм: длина ширина высота База, мм Колея, мм 4x2 55 154 (210) 8000 Синхронный 130(177) 8000 44 (60) 5500 6000 3330 2960 3600 2980
Примечание. Система регулирования и управления тяговым электроприводом: регу-
лятор частоты вращения тяговых электродвигателей — транзисторный по току возбуждения
генератора; система управления движением — бесступенчатая от датчиков педали хода.
Рис. 11.9. Зависимость КПД Г|эмт электромеханической трансмиссии шасси 24x24 от мощ-
ности ГТД в объекте:
/ — У = 0.02; 2 — Т = 0,04; 3 — У = 0,06; 4 — У = 0,08; 5 — У = 0,10
11.1. Общая характеристика, классификация и требования к трансмиссиям 395
Рис. 11.10. Зависимость максимальной скорости v шасси 24x24 от передаточного числа
колесных редукторов (7кр при полной загрузке ГТД мощностью 759 кВт в объекте:
/ — Т = 0,02: 2 — Т = 0,04; 3 — Т = 0,06; 4 — У = 0,08; 5 — Т = 0,10; — ограничение часюгы
вращения электродвигателей до 6000 мин1; ----------ограничение частоты вращения элекфодвига-
телей до 9600 мин1
Рис. 11.11. Зависимость максимальной скорости v шасси 24x24 от передаточного числа
колесных редукторов t/K.p при полной загрузке ГТД мощностью 950 кВт в объекте:
/ — Т = 0,02; 2 — Т = 0,04;---ограничение частоты вращения электродвиг ателей до 9600 мин
Рис. 11.12. Зависимость потерь мощности в генераторе ДР1Н от сопротивления движению Ч7
и передаточного числа колесного редуктора (7к р:
/ — Uh р = 45,21; 2 — UK р = 52,8; 3 — Uh р = 67,815; 4 — U* р = 80,0; ЛТ, д — 759 кВт
Разработчики автомобильных трансмиссий достаточно большое внимание
продолжают уделять применению гидрообъемного Ои^Роста1^ич^ского) привода
(ГОП). При этом можно выделить три главных направления исследований: во-первых,
396
11. Основы теории и расчета систем передачи мощности
Рис. 11.13. Зависимость потерь мощности в электродвигателе &РЛ от сопротивления движе-
нию Ч7 и передаточного числа колесного редуктора UK р.
/к р = 45,21,2 — U. р = 52,8; 3 — U. р = 67,815; 4 — р = 80,0; /V) (д — 759 кВ г
Рис. 11.14. Зависимость КПД Г|Э] электротрансмиссии шасси 24x24 от сопротивления дви-
жению Ч7 и передаточного числа колесного редуктора Скр.
Рис. 11.15. Зависимость преодолеваемого шасси 24x24 сопротивления движению Ч7 от фаз-
ного тока /, генератора и передаточного числа колесного редуктора Скр.
/ — UK р = 80,0; 2 — UK р = 67,815; 3 — UK р = 52,8; 4 — UK р = 45,21
использование регулируемых гидромашин в основном или параллельном силовом
потоке для бесступенчатого изменения общего передаточного числа трансмиссии;
во-вторых, обеспечение привода некоторых осей ТС, включаемых только в особых
условиях движения, и в-третьих, создание многоканальных систем приводов с ин-
дивидуальным подводом мощности ко всем ведущим колесам (осям) ТС — гидро-
объемных трансмиссий.
11.1 Общая характеристика, классификация и требования к транс.
397
Рис. 11.16. Ходовой макет проекта «Табун»
Трансмиссии, создаваемые в рамках первого и второго направлений, ягъ
ся комбинированными и представляют собой комплекс взаимосвязанных гидрома-
шип и механических агрегатов. Использование ГОТ только для бесступенчатого
диапазонного изменения общего передаточного числа трансмиссии (первое направ-
ление) или для привода некоторых ведущих осей (второе направление) не позволяет
существенно улучшить показатели КТС, так как основным препятствием остается
большое число механических узлов и агрегатов — бортовых, центральных и koj
ных редукторов, раздаточных коробок и карданных передач. Потери мощности и
нерациональность ее распределения в этой механической части многоприво;
трансмиссий является одним из главных факторов, сдерживающих качественное
повышение важнейших свойств характеристики КТС ОБГ — тягово-динамических
свойств, проходимости и других.
Поэтому в настоящее время наибольший интерес представляет третье на-
правление использования ГОП в трансмиссиях многоосных транспортных с ре,
С учетом особенностей конструкции, специфических условий использования и
предъявляемым к автомобилям требованиям это направление находит свою реали-
зацию на многоосных КТС ОБГ погрузчиках, инженерно-строительных машинах и
других типах автомобилей.
Анализ применения ГОП в трансмиссиях КТС ОБГ показывает, что наиболее
'лесообразным является его использование на автомобилях, для которых критерии
удобства и легкости управления, возможности индивидуального бесступенчатого
регулирования подводимой к колесам мощности, приспособленности к автоматиза-
ции и дистанционному управлению доминируют над критериями стоимости и про-
стоты конструкции.
Основными препятствиями для широкого внедрения ГОТ в конструкции ав-
томобилей являются те же причины, которые уже отмечались при рассмотрении ЭТ
При этом ГОТ и ЭТ по своим функциональным возможностям достаточно гибко и
точно могут реализовать одинаковые алгоритмы передачи мощности от силового
агрегата к колесному движителю автомобиля. И если представить трансмиссию как
некий «черный ящик», то задача теории автомобиля сведется к поиску, разработке и
обоснованию рациональных закономерностей преобразования и наиболее эффек-
398
//. Основы теории и расчета систем передачи мощности
тивной индивидуальной передачи мощности силового агрегата к колесным движителям
в зависимости от условий работы каждого колеса многоосного транспортного средства.
Задача конкретного проектирования гибкой трансмиссии, работающей по заданному
алгоритму, будет отнесена к специалистам соответствующих областей знаний.
Таким образом, дальнейшее развитие КТС ОБГ связано с созданием гибких
МТУ с использованием новых способов распределения и передачи мощности. При
этом силовая установка МТУ по всем внешним скоростным характеристикам долж-
на быть максимально приспособлена к работе в узком скоростном и нагрузочном
диапазонах, а трансмиссия — обеспечивать рациональную индивидуальную пере-
дачу мощности к каждому колесу в зависимости от условий его движения для мак-
симальной реализации крутящего момента. Главная задача теории автомобиля в
этом процессе заключается в разработке законов (алгоритмов функционирования)
передачи мощности от двигателя к колесному движителю, а на их базе — общих
технических требований (ОТТ) к гибким схемам МТУ Конструктивная реализация
этих ОТТ невозможна без интеграции соответствующих областей науки и техники.
Вопросы выбора того или иного типа трансмиссии (ЭТ, ГОТ и т. п.), реали-
зующего заданные закономерности, необходимо решать автомобилестроителю исхо-
дя из экономических, массогабаритных или других критериев определенного автомо-
биля, основываясь на его предназначении и конкретных условиях использования.
Каждая группа КТС ОБГ каждый тип транспортного средства имеет свою
специфику, определяемую назначением машины и условиями ее работы. Поэтому
нельзя сформулировать требования к трансмиссиям, которые бы удовлетворяли
всем типам машин и не находились бы в противоречии друг с другом. Можно лишь
установить некоторые общие требования, касающиеся, по существу, двух качеств
машины: ее способности перевозить грузы с максимальной скоростью и развивать
на минимальной скорости максимальную силу тяги.
Трансмиссия КТС ОБГ должна удовлетворять следующим общим требованиям:
1) иметь непрозрачную характеристику или, говоря иначе, изменение нагруз-
ки на колесах машины не должно влиять на режим работы двигателя — двигатель
должен работать на постоянных оборотах при постоянной мощности;
2) непрерывно изменять факторы силового потока в соответствии с изме-
нением условий движения и условиями взаимодействия колеса с опорной по-
верхностью;
3) обеспечивать автоматизированное (автоматическое), а в случае необходи-
мости и принудительное регулирование;
4) иметь достаточно высокий КПД на всех режимах работы. Если это не уда-
ется сделать на всех режимах, то область высоких значений КПД должна прихо-
диться на наиболее применяемые режимы работы;
5) иметь минимально возможные габариты и массу;
6) быть надежной и долговечной в работе;
7) обеспечивать легкость разветвления потока мощности на ведущие колеса и
на вспомогательные приводы.
Математическая модель гидрообъемной трансмиссии описывает динамиче-
ские процессы взаимодействия элементов и подсистем, представленных на струк-
турной схеме ГОТ (см. рис. 1 1.1).
11.L Общая характеристика, классификация и требования к трансмиссиям 399
ММ ГОТ в общем виде определяется уравнениями нагрузки (сил, моментов,
действующих на входной вал гидронасоса и гидромотора) и уравнениями баланса
расходов, определяющих количество рабочей жидкости, проходящей через сечения
гидромашин.
Входной характеристикой ГОТ является момент на валу z-ro гидронасоса Л/н/,
который можно найти из уравнения нагрузки:
М"‘=Р" 2п~и''рШ,,Ь"
где Рп — давление напорной магистрали; б/н — удельный объем насоса; t/lip — пере-
даточное отношение промежуточного редуктора; — частота вращения выходно-
го вала гидронасоса; /?и — коэффициент, учитывающий потери механической энер-
гии в насосе и редукторе:
Ь„ = 0,06 105 </,, / 2л;
J,, — суммарный момент инерции вращающихся частей насоса:
=О,ОЗ(^,)4/3 105
Перепад давления жидкости в напорной магистрали Ри определяется преоб-
разованием дифференциального уравнения балансов расхода, учитывающего расхо-
ды утечек и потери на сжатие:
ч / = 1 J *11
где (2( — подача z-ro гидромотора оси; LH — коэффициент утечек, отнесенный к
напорной магистрали и насосной установке:
L,, =0,105 Ю6с/„ /2 л;
Еж — удельный модуль объемной упругости; VH — максимальный объем напорной
магистрали, включая камеры насосной установки.
Момент на валу z-ro гидромотора Мм/, как выходная характеристика гидро-
привода, находится из уравнения нагрузки, которое учитывает механические потери
и инерционную составляющую вращающихся частей соответствующих машин:
Мч''=^2^"Ч,С/кр/?м“"мА,^р’
где t/M — удельный объем гидромотора; ох, — частота вращения вала гидромотора;
Г^к.р — передаточное отношение колесного редуктора; — коэффициент механи-
ческих потерь гидромотора:
Ьм =0,09 1О'\ч/2л;
400
/ / Основы теории и расчета систем передачи мощности
/м — суммарный момент инерции вращающихся частей гидромотора и колесного
редуктора:
JM=0,06(^ ю5
Подача одного гидромотора оси QIMZ определяется уравнением баланса рас-
ходов с учетом составляющих расходов утечек и сжатия:
• V
£>• = П<7м + ’
*^ГМ/ М К.р /М Н j-. НМ’
^ж
где VM — максимальный объем камер моторных установок; LM — коэффициент уте-
чек, отнесенных к гидромоторам:
LM =0,05 106<ум/2л.
Основными переменными в математической модели ГОТ являются удельные
объемы гидромашин (<7|1(м)). Изменение этих величин позволяет организовать рас-
пределение давлений в магистралях, чем вызвать перераспределение силовой со-
ставляющей ГОТ-моментов. В то же время изменение удельных объемов, отра-
жающееся на расходе жидкости, приводит к изменению скоростной составляющей
потоков мощности в трансмиссии.
Таким образом, представленная математическая модель описывает в полном
объеме физические процессы, происходящие в гидроприводе при его работе в ка-
честве трансмиссии. Изменение определенных параметров ММ позволяет организо-
вать целесообразное распределение мощности в трансмиссии.
Предварительные уравнения управления включают:
1 Алгоритмы функционирования насосной установки, которая отвечает за
разгон колесной машины и отслеживает изменение линейной скорости автомобиля
вне зависимости от условий качения отдельных колес:
”((^нтах — — )^ре. ) — ^соог 4\\i ) ’
где линейная скорость ТС и заданный уровень ее значения; — ко-
эффициент регулятора; ЛГСОО1 — коэффициент соответствия; ЛГрег, АГСооп Твр определя-
ются характеристиками разрабатываемого гидропривода и свойствами его системы
управления; Твр — постоянная времени канала.
2 . Алгоритмы функционирования гидромоторной установки, которые опре-
деляются режимами движения и условиями эксплуатации каждого колеса ТС:
1 ) *7м/ х\2 ~ Чх\. ус i ’
2) Чхи ~ (Ч\\ max — — ^cooi к.ср к/1 ’
Ч.ср
3) Ч\й ~ (.Чхл max — (^м.уо “ ^cooi )) ’
ч,
2V
/1 \ ( ( If \\ КСР
Чхй = И/м max 'T/M.yci ^соог// ’
* к/
11.1. Общая характеристика, классификация и требования к трансмиссиям 401
5) Я mi ((^к/^coorl ^к/'^соог2 )<7м max ^м/^^вр’
где qM. — установочный объем гидромотора; б/мтах — максимальный объем гид-
ромотора; МК1 — крутящий момент на z-м колесе; Л/кср — средний крутящий момент
на колесах ТС; NKi — мощность на z-м колесе; 7VKcp — средняя мощность на колесах
ТС; сОк, — частота вращения z-ro колеса; о\.ср — средняя частота вращения колес
ТС; /Ссоо1| и Л’соо.г — коэффициенты соответствия режимам движения.
Для оценки предварительных алгоритмов был проведен расчетный экспери-
мент. Колесная машина с формулой 6x6 с ГОТ приведенной схемы совершала раз-
гон, поворот и выход из поворота на дороге с асфальтовым покрытием. В качестве
исходных данных для ГОТ выбирались параметры, использованные и при натурном
эксперименте:
Рп — давление подпитки;
Рц = 2500000 Н/м (25 бар = 2,5 МПа);
Ртах — максимальное давление в гидроприводе;
Ртах = 45000000 Н/м (450 бар = 45 МПа);
t/()M — начальный объем гидромотора;
cju.yci — установочный объем гидромотора;
< 7мтш — минимальный объем гидромотора;
< 7мтах — максимальный объем гидромотора;
t/м .пах =160 КГ6 м’/об.;
< 7м.ш„ = 33 1()"6м3/об.,
t/0M = t/Mycr= ИО 10“6м3/об.;
б/()н — начальный объем насоса;
< 7()н — 0,
^ом — максимальный объем насоса;
t/()M=125 10’6м3/об.;
К, — коэффициент пропорциональности насоса;
к,. = 0,897 м’/с;
V,, — максимальный объем напорной магистрали, включая камеры насосной
установки;
К, = 7,0 10^ м3,
VM — максимальный объем камер моторных установок;
К, = 3,2 Ю^м3;
Ju — суммарный момент инерции вращающихся частей насоса;
Л = 0,0193 Н м С2-
Л, — суммарный момент инерции вращающихся частей гидромотора и ко-
лесного редуктора;
Л, = 0,18 Н м с2;
v_ — задаваемая (требуемая) линейная скорость автомобиля;
— критерий упругости насосной части ГОТ;
— критерий упругости моторной части ГОТ;
^,(М) =^|(Ч)/ЕЖ, м5/Н.
402
Основы теории и расчета систем передачи мощности
Полученная математическая модель дополняет методику оценки эффектив-
ности (подвижности) ТС в части описания ГОТ и значительно расширяет рамки ее
использования.
Дальнейшие работы в этом направлении должны определить методику выбо-
ра рациональных алгоритмов по определенным критериям и сформулировать пред-
ложения по эффективному использованию управляемых ГОТ в КТС ОБГ
11.2. Основные направления развития
механических трансмиссий колесных машин
Использование на КТС ОБГ механических трансмиссий по-прежнему востре-
бовано промышленностью, поэтому в данной книге авторы посчитали нужным сде-
лать краткий анализ состояния их развития по материалам известных авторов.
Коробки передач
Для обеспечения минимальных эксплуатационных расходов при перевозке
грузов в разнообразных условиях движения необходимо иметь достаточно широ-
кую номенклатуру колесных машин, каждая из которых была бы приспособлена для
определенных целей. Это требует создания различных по мощности двигателей и
соответствующих агрегатов трансмиссии.
Чтобы избежать разработки новых агрегатов трансмиссии для каждого ново-
го или модернизированного двигателя, используют различные комбинации агрега-
тов механической трансмиссии: дополнительных коробок; раздаточных коробок;
ведущих мостов; многоступенчатых коробок передач.
На выпускаемых в настоящее время автомобилях Камского (КамАЗ-5320,
-53212, -5410, -54112, -55102 и др.), Кременчугского (КрАЗ-260, -260В, -255В1 и
др.) и Минского (МАЗ-6422, -5432, -5335, -53352 и др.) автозаводов применяются
гак называемые двухточечные коробки передач (КП), состоящие из собственно ко-
робки передач и делителя. Они обеспечивают два диапазона передаточных отноше-
ний с максимальными кинематическими диапазонами 9,65 (КамАЗ) и 10,89 (КрАЗ и
М \3). Однако очевидно, что такие кинематические диапазоны являются недоста-
точными, так как для большегрузных автомобилей в мировой практике явно про-
сматривается стремление применять коробки передач с еще большим диапазоном.
Например, на перспективных автомобилях ЗИЛ планируется применять ко-
робки передач с диапазоном 12, КамАЗах, МАЗах и КрАЗах — 12-15. На англий-
ских грузовых автомобилях 3-11.4x2 1 17L25 грузоподъемностью 1 1,6 т устанавли-
ваются КП с диапазоном 12,5 и делителем с передаточными числами 4,1 и 1,0. Ко-
робками передач с диапазоном 12,5 и делителями с двумя вариантами
передаточных чисел оборудуются американские «Аутокар-64Г» грузоподъемностью
18 т (передаточные числа делителя — 3,38; 1,0 и 1,0; 0,87), германо-итальянские
«190.42 Турбостар» и «190.42 РТ Турбостар» грузоподъемностью 1 1,5 т (3,8; 1,0 и
1,0 и 1,16; 1,0), японские CXZ180T и CXZ18Y грузоподъемностью 17,6 и 18 т (3,38;
1,0 и 1,16; 1,0).
11.2. Основные направления развития механических трансмиссий машин 403
Кроме того, за рубежом развивается направление, связанное с использовани-
ем автоматических коробок. Причем наряду с вальными (шестеренчатыми) короб-
ками передач широко применяются и планетарные [58].
Теоретические основы создания механических трансмиссий и синтез схем
привода к ведущим мостам и колесам подробно рассмотрены в работах 114, 25, 54,
58, 59 и др.]. В этих работах определены технический облик и основные требования
к параметрам данного типа трансмиссий, которые легко встраиваются в принятую
схему (см. рис. 8.1). Однако в них не затрагиваются перспективы создания плане-
тарных коробок передач. Поэтому рассмотрим данный вопрос более подробно.
Специализирующаяся на производстве гидромеханических передач для гру-
зовых автомобилей и автобусов, а также КТС ОБГ американская фирма «Аллисон»
в настоящее время запустила в производство новое поколение планетарных коробок
передач. Ее специалисты делают попытки создать типоразмерные ряды, отличаю-
щиеся числом планетарных механизмов и элементов управления.
Еще более крупную проблему представляет собой разработка типовых пла-
нетарных коробок передач, по кинематическому диапазону и реализуемым в них
передаточным отношениям отвечающих требованиям автомобилей всех типов и
классов. Но и эта проблема разрешима, в чем убеждает рассматриваемая в работе
[63] 6-ступенчатая планетарная коробка передач с тремя степенями свободы.
Кинематическая схема и схема силового потока данной коробки приведены
на рис. 11.17, а (см. работу [2]). На рис. 11.17, б кружками обозначены однорядные
планетарные механизмы а—г, верхними вертикальными линиями 2 — потоки эпи-
циклических шестерен, нижними 1 — потоки солнечных шестерен, горизонтальны-
ми 0— водила. Элементы управления (муфты М4, М5 и тормоза Тб, Т7, Т8, T9)
б
Рис. 11.17. Планетарная коробка передач:
а — кинематическая схема: б — схема силовог
404
17. Основы теории и расчета систем передачи мощности
Рис. П.19. Схема включения силового потока
планетарной коробки передач при включении
второй передачи
Рис. П.18. С хема включения силового потока
плансгарной коробки передач при включении
первой передачи
показаны двумя короткими параллельными линиями. Таким образом, коробка со-
стоит из корпуса, входного и выходного валов I и II, четырех однорядных планетар-
ных механизмов, четырех тормозов и двух муфт.
При включении муфт и тормозов согласно схеме включения элементов
управления на передачах звенья планетарных механизмов соединяются в опреде-
ленную кинематическую схему силового потока, в результате чего вращение от
входного вала I к выходному II передается с соответствующим этой схеме переда-
точным отношением.
Механизмы в каждом конкретном случае работают следующим образом.
На первой передаче (рис. 11 18) включены тормоза Т7 и Т8, вследствие чего
эпициклические шестерни 2 второго б и третьего в планетарных рядов заторможе-
ны. Эти ряды на первой передаче работают под нагрузкой, а первый а и четвертый г
ряды — холостые. Как видно из схемы силового потока, передаточное число короб-
ки в этом случае равно произведению передаточных чисел планетарных рядов бив.
Однако, по теории А.С. Антонова [2], в каждом из таких планетарных рядов при
заторможенной эпициклической шестерне реализуются передаточные отношения
2,44-5,88. Таким образом, в коробке на первой передаче можно получить переда-
точные числа 5,95-34,6.
На второй передаче (рис. 11 19) включаются тормоза Тб и Т8 и затормажи-
ваются солнечная шестерня 1 первого ряда а и эпициклическая шестерня 2 третьего
планетарного ряда в. На этой передаче под нагрузкой работают три планетарных
ряда — а, б и в, ряд г — холостой.
На третьей передаче (рис. 1 1.20) тормозом Т7 и муфтой М8 затормаживаются
эпициклическая шестерня 2 второго планетарного ряда б, а ряд в заблокирован
муфтой М5. Под нагрузкой на этой передаче работает только один планетарный
ряд — б, ряды а, в и г — холостые.
Рис. 11.21. Схема включения силового потока
планетарной коробки передач при включении
четвертой передачи
Рис. 11.20. С хема включения силового потока
планетарной коробки передач при включении
трсгьей передачи
11.2. Основные направления развития механических трансмиссий машин 405
Рис. 11.22. Схема включения силового
потока планетарной коробки передач
при включении пятой передачи
Рис. 11.23. Схема включения силового потока плане-
тарной коробки передач при включении передачи
заднего хода
На четвертой передаче (рис. 1 1.21) включены муфта М4 и тормоз Т8, забло-
кирован планетарный ряд б, а эпициклическая шестерня 2 планетарного ряда в за-
торможена. На этой передаче под нагрузкой работает только один планетарный ряд —
в, а ряды а, б и г — холостые.
На пятой передаче (рис. 1 1.22) включены тормоз Тб и муфта М5, заторможе-
на солнечная шестерня 1 планетарного ряда а и заблокирован планетарный ряд б.
Здесь под нагрузкой работают планетарные ряды а и б, ряды виг — холостые.
Если в схеме силового потока коробки (рис. 1 1 19) включить муфты М4 и
М5, то планетарные ряды бив блокируются, а коробка дает прямую передачу
На передаче заднего хода (рис. 1 1.23) включены муфта М4 и тормоз T9,
блокирован планетарный ряд б и заторможена эпициклическая шестерня планетар-
ного ряда г Под нагрузкой работают планетарные ряды виг, ряды а и б — холостые.
К сожалению, передаточные отношения, реализуемые в коробке на передачах
I и II, произвольно выбирать в этих пределах нельзя, поскольку они взаимосвязаны.
Поэтому в ходе исследования коробки передач выбраны и рекомендованы знамена-
тели прогрессии между передачами. В частности, установлено, что до диапазона,
равного 15-16 (отвечает требованиям автомобилей и гусеничных машин всех типов
и классов), знаменатель между первой и второй передачами не превышает 2,5,
вполне допустим для современных транспортных средств. В ходе дальнейшего уве-
личения кинематического диапазона первая передача отрывается от второй. При
этом первая передача выделяется в замедляющую, тогда вторая будет первой и т. д.
Однако это не недостаток коробки передач, а одно из ее преимуществ — благодаря
этому область применения коробки значительно расширяется.
Связи между планетарными рядами, составляющими КП, и расстановка эле-
ментов управления, оптимизированные в ходе исследований, позволили автору [63]
не только создать компактную и технологичную конструкцию коробки, но и обу-
словить ей большой (34,6) кинематический диапазон с семейством передаточных
отношений.
На основе модульного принципа проектируют гидромеханические автомати-
ческие и полуавтоматические коробки передач.
Рассмотренные схемы трансмиссии относятся к третьему виду основных
структур сложных систем. Кроме того, варианты данной схемы могут быть исполь-
зованы в качестве модуля в принципиально новых схемах трансмиссии.
Следует отметить, что планетарные коробки передач очень часто использу-
ются в составе с гидротрансформатором (ГТ).
406
/ / Основы теории и расчета систем передачи мощности
Г гидротрансформаторы
Теория расчета ГТ достаточно развита, но для получения цельной картины
концепции развития трансмиссии в данной работе приводятся наиболее интересные,
на наш взгляд, и общие закономерности этой теории и примеры ее реализации.
При расчете ГТ распространение получило определение расхода для каждого
значения передаточного отношения i = сОг/щ, из балансов напоров, что приводит к
наименьшим ошибкам, так как в балансе напоров наиболее полно учитываются экс-
периментальные коэффициенты (потерь на трение Хтр, на удар (р, отклонения пото-
ка) и геометрические параметры всех рабочих колес [59, 60].
В основу оптимизации выходных характеристик ГТ А.Н. Нарбутом [60] по-
ложены предложения Ю.Н. Лаптева и А.С. Гордеева, имеющие следующие особен-
ности.
1. Значения КПД на расчетном (безударном) режиме определяются из балан-
са напоров при условии несовпадения экстремумов передаточных отношений ГТ
(/ * /п Ф i(/), т. е. несовпадения режимов безударного входа во все рабочие колеса
(/ ), максимума КПД (/п) и экстремума расхода iq. Этот случай является общим и
включает в себя частный случай совпадения экстремумов передаточных отношений
(/ = = /<7), причем последний, как показали исследования [60], неприемлем для
автомобильных ГТ с центростремительной турбиной.
Принятые обозначения соответствуют следующим параметрам ГТ:
/ — передаточное отношение ГТ; — передаточное отношение ГТ при не-
совпадении режимов безударного входа во все рабочие колеса; zn — передаточное
отношение ГТ при максимуме КПД; iq — передаточное отношение ГТ при макси-
мальном расходе рабочей жидкости.
2. Введение в решение условия по п. 1 обеспечивает получение для заданных
/ коэффициента расхода q коэффициента напора hH- наибольшего из возможных
КПД и соответствующих этим параметрам всех углов лопаток, т. е. оптимальное
сочетание одновременно всех геометрических параметров (углов лопаток). Таким
образом, для m-колесного ГТ оптимизация производится одновременно по 2т гео-
метрическим параметрам.
Задание значений ь qсоответствует однозначно заданию параметров
выходных характеристик и прежде всего энергоемкости Хн* Ю4 -Aq.h^, прозрач-
ности П = А11О/АН* и П = Ано/Анм, коэффициента трансформации К1 = Ко (индексы обо-
значают: 0 — режим i = 0, м — режим с К, = 1).
По тексту п. 2 приняты следующие обозначения:
q — коэффициент расхода рабочей жидкости при Г в ГТ; hlC. — коэффици-
ент напора рабочей жидкости в ГТ при i П — прозрачность ГТ при i П — про-
зрачность ГТ общая; К — коэффициент трансформации ГТ; Ано и Анм — коэффици-
енты прозрачности ГТ при Ко и К = 1 соответственно; А — постоянный коэффициент.
3. Потери на трение определяются по [60], причем для обычных трехколес-
ных ГТ принимаются коэффициенты потерь на трение = £р = £ (индексы обо-
значают: Н — насос, Т — турбина, Р — реактор) и £ = ATpL/8Rrcp~ 0,16 (при коэф-
фициенте трения Х,.р = 0,08). Правомерность этого допущения подтверждается мно-
гочисленными экспериментами [60].
/1.2. Основные направления развития механических трансмиссий машин 407
Рис. 11.24. Безразмерные характеристики ГТ:
21 =0,56; =0,6; У =0,1
4. Для определения наибольшего КПД на расчетном безударном режиме
уравнение баланса напоров, записанное для безударного режима, преобразуется в
уравнение X* =/(/*, q*, /гн*), являющееся уравнением второй степени вида
где X — энергоемкость; A j, В\ и С — постоянные члены уравнения.
5. Преобразование уравнения баланса напоров осуществляется следующим
образом. Для m-колесного ГТ каждый из углов выражается через один из выбран-
ных 2m - (m + 2) = т - 2 углов, так как число углов (2m) превышает число имею-
щихся (т + 2) уравнений связи углов (т уравнений потерь на удар, уравнения напо-
ров на насосе и турбине). Подставив полученные выражения в уравнение балансов
напоров на безударном режиме, находится (т - 2) выражения ctg q ^ )•
Подстановкой исключаются все ctg (3„ из уравнения баланса напоров, и оно решает-
ся относительно КПД (Г|Д.
6. Расчет проводится в три этапа: а) задаваясь значениями /, (известны все
линейные размеры, т. е. относительные радиусы входа и выхода лопаток турбинно-
го и насосных колес и коэффициент ширины канала для каждого варианта), опреде-
ляется X б) вычисляются все характеристики ГТ [60] в функции от /; в) определя-
ются углы лопаток, причем углы лопаток и характеристики можно вычислять неза-
висимо друг от друга.
По данным работы [60] для трехколесного ГТ проведен расчет характеристик
ГТ и углов лопаток на ЭВЦМ.
Примеры графической интерпретации расчетов [60] представлены на рис. 11.24—
11.27. Анализ приведенных на них данных позволяет сделать следующие выводы.
408
11 Основы теории и расчета систем передачи мощности
Рис. 11.25. Зависимость значений углов лопаток р| и р2 от и 1
Рис. 11.26. Зависимость КПД Т|,
------Г21 =0,56;
(с/) и D(),75 (б) от коэффициента напора hn*
= 0,8; *2! =0,8; =0,8
11.2. Основные направления развития .механических трансмиссий машин 409
Рис. 11.27. Зависимость прозрачности П и коэффициента трансформации oi коэффициен-
та напора /?„
-----г21=(),56; =0.8; -21=0,8; =0,8
Коэффициент расхода q* оказывает существенное влияние на энергоемкость,
так как пропорционально q* При этом q* не влияет на прозрачность, если не
учитывать смещение режима iN, когда К= 1, из-за ухудшения КПД при увеличении q
Чем выше q тем ниже КПД и (рис. 1 1.26, 11.27), но на значения максимального
КПД оказывает влияние также i и Ан. (рис. 11.26). Таким образом, максимально до-
пустимое значение q определяется величиной допустимого снижения максималь-
ного КПД и может быть принято равным примерно 0,4 при 0,4 < / < 0,8 и = 0,16.
Коэффициент напора hu* в отличие от коэффициента расхода существенно
влияет не только на энергоемкость, но и на прозрачность (рис. 1 1.27) — с ростом /?,,
растет П, а также на зону высоких КПД (рис. 1 1.27) — с ростом значения актив-
ного диаметра Д() 75 уменьшаются, почти не влияя на значение максимального КПД.
Однако при малых значениях h„* (обычно при hH* = 0,4...0,6, если турбина центро-
410
11 Основы теории и расчета систем передачи мощности
стремительная и h^* = 0,6...0,8, если турбина осевая) наблюдается резкое ухудшение
КПД. Учитывая это обстоятельство, а также необходимость ограничить прозрач-
ность заданными значениями, можно установить границы допустимых изменений
Например, для ГТ дорожно-строительных машин — П < 1,6, а для автомобильных
ГТ допустимы, а иногда и необходимы большие значения П.
Расчетный режим i — при некотором снижении максимального КПД обес-
печивает увеличение зоны высоких КПД и если турбина центростремительная, и
смещение этой зоны при увеличении в сторону меньших передаточных отноше-
ний, если турбина осевая. Другие параметры характеристик зависят от / в значи-
тельно меньшей степени.
Углы лопаток (рис. 11.25) при увеличении q> приближаются к 90° причем
при всех hie углы р]н и р2н < 90°, Р2р > 90° а графики углов лопаток р)р, р1л, р2н рас-
полагаются по обе стороны от 90° и имеют наибольшую плотность около значения в
90° Углы выхода и угол р)н мало изменяются при изменении расчетного режима ь.
Проведенные исследования [60] показали, что у современных ГТ параметры
характеристик близки к предельным и при достигнутых коэффициентах сопротив-
ления £, нельзя ожидать заметного повышения максимального КПД и диапазона
высоких КПД. Однако есть неиспользованные возможности, например по упроще-
нию лопастной системы, по диапазону изменения энергоемкости для вновь созда-
ваемых параметрических рядов.
Примером, подтверждающим данный вывод, могут служить работы, прове-
денные НАМИ и БелАЗом, по выбору параметров унифицированных ГТ для семей-
ства автомобилей БелАЗ [59].
Для семейства автомобилей БелАЗ грузоподъемностью 27...65 т с двигате-
лями ЯМЗ мощностью 265...382 кВт (360...520 л.с.) был выбран комплексный од-
ноступенчатый четырехколесный гидротрансформатор БелАЗ-540, имеющий ак-
тивный диаметр Da = 466 мм (табл. 11.5 и рис. 11.28). Для использования этого ГТ с
тем или иным двигателем перед ним устанавливается согласующая механическая
Рис. 11.28. Внешняя характеристика ГТ:
7 — БелАЗ-540; 2 — ЛГ-470-23
11.2. Основные направления развития механических трансмиссий машин 41 1
передача, увеличивающая вес гидропередачи, усложняющая ее конструкцию и сни-
жающая КПД трансмиссии на 3...4 %.
В связи с этим для перспективных гидромеханических коробок передач семей-
ства автомобилей БелАЗ было предложено разработать серию унифицированных ГТ,
имеющих один и тот же круг циркуляции, а также все основные детали (ступицу,
муфту свободного хода и т. д.), но отличающихся углами входа лопаток насосного
колеса и колеса второго реактора с целью получения соответствующих нагрузочных
свойств [59]. В этом случае можно исключить согласующую передачу. Кроме того,
целесообразно использовать ГТ, отличающийся более широкой зоной с высоким
КПД, а также более высоким значением максимального КПД.
Из серии разработанных НАМИ гидротрансформаторов в наибольшей мере
этим требованиям и условиям работы на автомобилях БелАЗ удовлетворял четырех-
колесный одноступенчатый ГТ типа ЛГ-340-35 (табл. 11.5, рис. 11.29). Зарубежные
ГТ, применяемые на тяжелых автомобилях, обычно имеют КПД = 0,87.. .0,90 и коэф-
фициент трансформации К = 1,8.. .2,0.
Таблица 11.5
Основные параметры характеристики ГТ
Г идротранс- форматор Коэффициент трансформа- ции при Мак- сималь- ный кпд Передаточное отношение Макси- мальный коэффи- циент момента Коэффи- циент прозрач- ности Коэффи- циент обратной прозрач- ности
О - II кпд = = 80 %, к» при мак- сималь- ном КПД, i гидро- муфты,
БелАЗ-540 3,5 1,8 0,85 0,7 0,83 1,9 1,45 1,12
ЛГ-340-35 3,1 2,0 0,90 0,7 0,85 2,2 1,37 1,11
ЛГ-340-36 2,9 1,9 0,89 0,7 0,85 3,2 1,63 1,03
ЛГ-349-36Б 2,7 1,9 0,90 0,7 0,86 3,2 1,63 1,00
Л Г-340-3 8 2,9 1,9 0,89 0,7 0,85 2,0 1,40 1,05
Для ГТ, разработанных НАМИ, принята следующая система обозначений:
после букв ЛГ (литой ГТ) идет активный диаметр ГТ и далее порядковый номер
модели.
Сравнение характеристик ГТ, представленных на рис. 1 1.29, позволяет заклю-
чить, что КПД гидротрансформатора ЛГ-340-35 выше в основной рабочей зоне на
4.. .6 %. С увеличением размеров данного ГТ с D.d = 340 мм до D.a = 440.. .470 мм мож-
но ожидать увеличения КПД только на 1... 15 %, а /Со — на 5...8 %.
Выполненные исследования показали, что для двигателя ЯМЗ-240 лучше всего
использовать ГТ ЛГ-470-35 (рис. 11.29).
Характеристики двигателей на рис. 10.1 представлены двумя кривыми. Верх-
няя кривая крутящего момента соответствует стендовым испытаниям, нижняя — ре-
альным условиям эксплуатации с учетом отбора мощности на привод вспомогатель-
ных агрегатов двигателя и гидромеханической коробки передач. По данным БелАЗ,
это снижение мощности составляет 10... 12 %.
412
/ / Основы теории и расчета систем передачи мощности
1000
1500 2000 пе, мин
Рис. 11.29. Характеристика совместной работы ГТ Л Г-470 с различными двигателями:
/ — ЯМЗ-240Н; 2 — ЯМЗ-240; 3 — ЯМЗ-238
Зависимость = /(Пе), характеризующая совместную работу двигателя с ГТ,
представлена в виде полосы, ограниченной двумя кривыми, из которых левая соот-
ветствует / = 0, а правая — i = zM, т. е. передаточному отношению, при котором про-
исходит переход на режим гидромуфты.
При выборе режимов совместной работы двигателя и ГТ учитывались сле-
дующие обстоятельства.
Как известно, преобразующие характеристики малопрозрачных комплексных
гидротрансформаторов П| 1,3... 1,5 обладают большей полнотой и имеют более
растянутую зону с высоким КПД по сравнению с прозрачными ГТ П; = 1,7...2,0. В
связи с этим применение ГТ с малопрозрачной характеристикой способствует
улучшению тягово-динамических качеств автомобиля, а также позволяет умень-
шить диапазон механического редуктора, устанавливаемого за гидротрансформато-
ром. Последнее обстоятельство для тяжелых автомобилей имеет большое значение,
так как при этом ощутимо облегчаются условия работы фрикционов при переклю-
чении передач, а также снижаются относительные скорости во вращающихся фрик-
ционных элементах.
Режим совместной работы двигателя и ГТ выбирается исходя из компро-
миссных соображений. Это связано с тем, что условия, соответствующие макси-
мальному использованию мощности двигателя, не соответствуют условиям, при
которых достигается хорошая топливная экономичность. Так, например, для мало-
прозрачного ГТ с целью максимального использования мощности двигателя на ре-
жиме ГТ его активный диаметр необходимо выбирать таким образом, чтобы пю ~ пИ
(п1() — обороты двигателя при полной подаче топлива на режиме i = 0, п„ — оборо-
ты, соответствующие максимальной мощности двигателя).
11.2. Основные направления развития механических трансмиссий манат 413
Рис. 11.30. Сравнение внешних характеристик ГТ
а — ЛГ-470: б — ЛГ-470-36Б; в — Л Г-340-38; i — передаючнос чис;
Анализ выполненных конструкций позволяет заключить, что обычно для
большегрузных автомобилей с дизельными двигателями /?ю = (0,75.. .0,85)ин.
Для двигателя ЯМЗ-240 было признано целесообразным принять пи} = 0,8/z„,
и в соответствии с этим условием спроектирован ГТ Л Г-470-35 (см. рис. 11.29), а для
двигателя ЯМЗ-240Н — ГТ ЛГ-470-36, отличающийся от ЛГ-470-35 только углами
выхода лопаток насосного колеса. Экспериментальная характеристика прототипа
(ЛГ-340-38) представлена на рис. 1 1.30, а характерные параметры — в табл. 11.5.
Приведенные выше материалы показывают, что благодаря соответствующе-
му выбору геометрических параметров рабочих колес можно изменять нагрузочные
свойства ГТ
На рис. 11.31 представлены расчетные характеристики автомобиля типа
БелАЗ-540 с трехскоростной коробкой передач. На этом же рисунке показано изме-
нение КПД ГТ на передачах в зависимости от скорости.
Как видно из рис. 11.31, в основном рабочем диапазоне при скоростях дви-
жения от 4 до 50 км/ч гидротрансформатора ЛГ-470-35 имеет КПД выше на 4...6 %.
Соответственно при использовании данного ГТ снижается расход топлива, что ил-
люстрируется кривыми, характеризующими приведенный расход топлива, который
определялся по формуле:
g
- пр кпд
Под приведенным расходом топлива понимается расход топлива системы
«двигатель — ГТ», приведенный к выходному валу ГТ
Если учесть, что КПД трансмиссии вследствие исключения механической со-
гласующей передачи дополнительно повысится на 3...4 %, то можно ожидать, что в
целом в основном рабочем диапазоне КПД гидромеханической коробки передач с
ГТ ЛГ-470-35 будет выше на 6... 10 %.
414
/1 Основы теории и расчета систем передачи мощности
/ —ЛГ-430-35: 2 — БелАЗ-540 (I—III передач
На рис. 3.2 показана конструкция унифицированного ГТ, разработанного со-
вместно НАМИ и БелАЗом. Представленный ГТ позволяет реализовать рекомендо-
ванные характеристики.
Таким образом, унифицированные ГТ ЛГ-470 благодаря соответствующему
подбору формы лопаток насосного колеса и реактора при одном и том же круге
циркуляции и сохранении всех основных деталей могут быть использованы для ра-
боты с двигателями ЯМЗ мощностью от 265 до 382 кВт (от 360 до 520 л.с.). В чем
просматривается модульный принцип проектирования, но при этом вследствие по-
вышения КПД ГТ и исключения механической согласующей передачи, КПД ГМП в
основной рабочей зоне может быть увеличен не более чем на 6... 10 %. При этом
3...4 % приходится на механический редуктор.
11.3. Тормоза-замедлители трансмиссионного типа
Специфические условия эксплуатации КТС ОБГ работающих в тяжелых до-
рожных условиях, в гористой местности, на строительстве или в горнорудной про-
мышленности, вызывают значительную нагрузку на их тормозную систему. Движение
автомобилей с грузом на длительных и крутых спусках приводит к повышенному
нагреву и износу фрикционных тормозных механизмов. Поэтому в соответствии с
Правилами № 13 ЕЭК ООН на подобных автомобилях устанавливают вспомога-
тельные тормозные системы или тормоза-замедлители. Их основное назначение
заключается в поддержании безопасной скорости движения автомобиля на спуске и
при замедлении перед остановкой. Вспомогательная тормозная система должна
обеспечивать спуск КТС ОБГ со скоростью 30 ± 2 км/ч по 7%-ному уклону длиной
6 км. Замедление/\/, обеспечиваемое этой системой, должно быть больше 0,6...2,0 м/с2.
11.3. Тормоза-замедлители трансмиссионного типа
415
Наличие замедлителей дает возможность разгрузить рабочие тормоза, увели-
чить их долговечность и повысить производительность автомобиля за счет увеличе-
ния средней скорости движения. По данным американской фирмы «Кейс», годовая
экономия от использования энергоемких замедлителей на автомобилях-лесовозах и
автомобилях, работающих в горнорудной промышленности, может составить 540 долл,
на один автомобиль только за счет уменьшения износа рабочих тормозов.
В качестве вспомогательной тормозной системы применяются моторные,
электродинамические и гидродинамические замедлители. В режиме тормоза-замед-
лителя используются также специальные охлаждаемые фрикционные многодиско-
вые тормоза, работающие в масле. Подобные устройства устанавливаются, напри-
мер, на автомобилях-самосвалах «Катерпиллар» моделей 769 и 773 грузоподъ-
емностью соответственно 35 и 50 т.
Моторный замедлитель обеспечивает искусственное увеличение момента
сопротивления вращению вала двигателя в режиме принудительного холостого хо-
да, как правило, путем перекрытия выпускной трубы двигателя и отключения пода-
чи топлива. Такие замедлители используются в основном на автомобилях-
самосвалах европейского производства, например на «Эвелин-Барфорд» (Англия)
грузоподъемностью от К) до 35 т.
Однако эффективность подобных замедлителей невелика, так как она ограни-
чивается величиной давления в трубе, определяемой жесткостью пружин выпускных
клапанов. Кроме того, часть энергии сжатого воздуха в цилиндрах двигателя теряется
в такте расширения при закрытых впускном и выпускном клапанах.
Более широкому распространению замедлителей подобного типа препятству-
ет необходимость создания специальной конструкции для каждой модели двигате-
ля, а в некоторых случаях и конструктивных изменений двигателя. Отмечается так-
же повышенная шумность работы двигателя с замедлителем.
Большее распространение получили гидродинамические и электродинамиче-
ские замедлители.
Гидродинамические замедлители устанавливаются, как правило, в трансмис-
сии автомобиля. Американская фирма «Аллисон», специализирующаяся на произ-
водстве гидропередач для автомобилей различного назначения с двигателями мощ-
ностью от 200 до 1000 л.с., выпускает лопастной гидрозамедлитель (рис. 11.32),
который устанавливается между гидротрансформатором и планетарной коробкой
передач. Ротор замедлителя закреплен на валу турбины гидротрансформатора. Ра-
бочая полость, выполненная в форме сдвоенной гидромуфты, при включении за-
медлителя заполняется маслом, поступающим через клапан управления из гидрав-
лической магистрали гидропередачи. Время включения замедлителя составляет 2,4 с
при объеме рабочей полости 3,8 л.
Давление, создаваемое в периферийной части рабочей полости за счет дейст-
вия центробежных сил при вращении ротора, обеспечивает циркуляцию жидкости
через теплообменник, подключенный к системе охлаждения двигателя, и замедли-
тель по замкнутому контуру. Максимальное давление в рабочей полости замедлите-
ля 3,8 кгс/см2 при полностью включенном клапане управления устанавливается с
помощью клапана слива из гидротрансформатора. Тормозной момент регулируется
изменением уровня заполнения рабочей полости жидкостью при перемещении зо-
416
Основы теории и расчета систем передачи мощности
Рис. 11.32. Схема управления гидродинамическим тормозом-замедлителем «Аллисон»:
грозаме; лиюль; 2 — клапан слива из гидротрансформатора; н унравлсн дрозаме;
мем; 4 — прорези с ipe\ сторон; 5 — теплообменник
потника клапана, через прорези которого часть жидкости из замкнутого контура
замедлителя сливается в поддон.
Максимальный размер гидрозамедлителя (по диаметру) при его установке в
гидропередаче CLBT-750 равен 431 мм, а масса — 90 кг, что составляет 20 % сухой
массы гидропередачи. Гидрозамедлитель обеспечивает поддержание скорости 25 км/ч
при движении автомобиля полным весом 59 т в снаряженном состоянии на уклоне 5 %
с включенной прямой передачей в трансмиссии.
В настоящее время фирма устанавливает гидрозамедлители на многих моде-
лях гидропередач, используемых главным образом для автомобилей-самосвалов,
строительных и дорожных машин.
Особенностью гидрозамедлителя «Брэйк Сэйвер» (рис. 11.33) фирмы «Ка-
терпиллар» (США) является то, что он размещен в картере маховика двигателя 4, а
его лопастной ротор закреплен непосредственно на коленчатом валу двигателя ме-
жду задним коренным подшипником и маховиком. В качестве рабочей жидкости в
замедлителе используется масло системы смазки двигателя. Масло от насоса 3 по-
ступает к ограничительному клапану I, который в случае падения давления в сис-
теме смазки двигателя перекрывает доступ маслу к клапану 7 управления гидроза-
11.3. Тормоза-замедлители трансмиссионного типа
417
Рис. 11.33. Принципиальная схема управления гидрозамедлителем «Брэйк Сэйвер»:
I — масло; II — воздух
медлителем 6 и направляет его через фильтр 2 в двигатель. При включенном замед-
лителе благодаря насосному действию его лопастного ротора масло циркулирует по
замкнутому контуру между рабочей полостью замедлителя и теплообменником 8.
Пневматическое управление замедлителем осуществляется с помощью крана 5 руч-
ного управления и электропневматического клапана, отключающего замедлитель
автоматически при нажатии на педаль сцепления 9 или педаль подачи топлива 10.
Под действием давления воздуха, подаваемого через отверстие 1 (рис. 11.34), зо-
лотник клапана управления смещается вправо и масло от насоса через отверстия 2 и 3
поступает в рабочую полость замедлителя. Из нагнетательной полости замедлителя
масло по каналам 4 и 5 поступает к теплообменнику, из которого часть его через каналы
6 и 3 вновь возвращается во всасывающую полость замедлителя, а другая часть по ка-
налу 7 подводится к масляному фильтру и далее в систему смазки двигателя.
Тормозная эффективность замедлителя регулируется автоматически путем
изменения уровня заполнения маслом рабочей полости при изменении давления
Рис. 11.34. Клапан управления гидрозамедлителем «Брэйк Сэйвер»
14 - 2918
418
11. Основы теории и расчета систем передачи мощности
воздуха, подаваемого к левому торцу золотника. Для этого нагнетательная полость
замедлителя через каналы 4 и 8, дифференциальный клапан 9 и канал 10 сообщается
с внутренней полостью золотника, а торец плунжера клапана 9 находится под дей-
ствием давления масла, поступающего в замедлитель. При увеличении числа оборо-
тов ротора и повышении давления масла в канале 4 плунжер клапана 9 смещается
вправо, а под действием давления масла золотник клапана управления перемещает-
ся влево, перекрывая отверстие 2. Благодаря этому уменьшается степень заполне-
ния замедлителя и ограничивается тормозной момент. Масло в поддон двигателя
сливается через каналы 10.
Объединение замедлителя с двигателем позволяет использовать его в авто-
мобилях, оборудованных трансмиссией любого типа. При таком выполнении дости-
гается также минимальная протяженность гидравлических магистралей систем
управления и охлаждения. Замедлителем «Брэйк Сэйвер» по желанию заказчика
оборудуются двигатели «Катерпиллар» моделей 1693Т и 1693ТА мощностью 325 и
375 л.с. которые могут устанавливаться на грузовых автомобилях, автомобилях-
лесовозах и автомобилях-самосвалах.
Высокая энергоемкость современных гидрозамедлителей позволяет выпол-
нять их регулируемыми. Фирмы, производящие гидрозамедлители, устанавливают,
как правило, их максимальную мощность такой, чтобы она не превышала макси-
мальной мощности двигателя во избежание перегрева рабочей жидкости и воды
двигателя.
Анализ патентных материалов «Катерпиллар», например, за последние 10 лет
показывает, что фирма разрабатывает гидрозамедлители даже для грузовых автомо-
билей с дизель-электрической силовой установкой, где возможно реостатное тор-
можение электродвигателями. При наличии в такой трансмиссии эффективного
гидрозамедлителя, связанного с валом двигателя, можно использовать эффект тор-
можения двигателем с отключением подачи топлива. В этом случае отпадает необ-
ходимость в работе двигателя для привода вспомогательных агрегатов при тормо-
жении и уменьшается расход топлива.
Электродинамические замедлители входят в систему рекуперации энергии
электротрансмиссий и подробно рассмотрены в специальной литературе, например
по железнодорожным электровозам.
11.4. Общие принципы распределения мощности
в трансмиссиях современных и перспективных СКШ
Основные положения
До последнего времени разработчиками приводов движителя ТС широко ис-
пользовались традиционные методы проектирования, испытаний и исследований
трансмиссий механического и гидромеханического типов, достаточно простые и
эффективные для автомобилей с небольшим числом ведущих осей.
В простейшем случае распределения мощности по двум колесным движите-
лям применяют четыре группы проектировочно-конструктивных решений. Привод
11.4. Общие принципы распределения мощности в трансмиссиях
419
2-колесных движителей может быть независимым, блокированным, дифференци-
альным и с использованием муфт различного типа.
С увеличением числа ведущих колес количество схемных решений транс-
миссии увеличивается в геометрической прогрессии.
Поэтому актуальной является научно-техническая задача теоретического
обоснования общих принципов распределения мощности по ведущим колесам при
использовании перспективных систем приводов движителя.
Задача развития теории передачи мощности к колесному движителю ТС, как
составной части теории автомобилей, всегда находилась в центре внимания специа-
листов. По мере совершенствования конструкций автомобилей последовательно
возникала необходимость глубокого научного рассмотрения теоретических аспек-
тов создания и применения на них механических, гидро- и электромеханических,
гидрообъемных, электрических и комбинированных трансмиссий. При этом всегда
одним из важнейших оставался вопрос о рациональном распределении мощности
силовой установки между отдельными колесными движителями.
В многочисленных исследованиях по данному направлению, в частности,
было установлено, что в разных условиях и режимах движения (твердая или дефор-
мируемая опорная поверхность; разгон, установившееся движение или торможение;
движение по траектории с малой или большой кривизной; наличие или отсутствие
прицепной нагрузки и т. п.) соотношение крутящих моментов, подводимых к коле-
сам разных бортов и осей, должно быть различным. Из этого следовало, что наи-
лучшие показатели важнейших эксплуатационных свойств ТС — тягово-динами-
ческих, топливо-экономических, проходимости, устойчивости и др. — в постоянно
изменяющихся условиях движения могут быть достигнуты только при соответст-
вующем непрерывном регулировании мощности, подводимой к колесному движи-
телю в зависимости от условий его качения.
Возможности улучшения основных показателей эксплуатационных свойств
СКШ за счет совершенствования законов регулирования их трансмиссий отмеча-
лись в целом ряде теоретических работ авторов и нашли подтверждение в ряде экс-
периментальных исследований и испытаний образцов шасси с ЭТ
Вместе с тем анализ конструкций выполненных образцов отечественных и
зарубежных ТС с тяговым электрическим приводом показывает, что до настоящего
времени нет единого подхода в выборе критериев оценки схем трансмиссии и зако-
нов регулирования передачи мощности к ведущим колесам. Работы по ЭТ и ГОТ,
как отмечалось выше, ведутся в основном в направлении приспособления сущест-
вующих конструкций электрических машин и систем управления ими, спроектиро-
ванных без учета характера и режимов эксплуатации СКШ. Поэтому главное из
преимуществ этих трансмиссий — возможность индивидуального распределения
мощности по колесным движителям в зависимости от дорожных условий и режи-
мов движения — практически не используется.
Таким образом, проблема создания и применения на СКШ перспективных
трансмиссий предполагает в первом приближении ответы на следующие вопросы:
Каковы общие принципы распределения мощности по колесным движите-
лям для обеспечения заданных эксплуатационных и потребительских свойств
шасси?
420
11 Основы теории и расчета систем передачи мощности
Какой вид интерполяционной формулы отражает закон рационального (оп-
тимального) распределения мощности по колесным движителям СКШ?
Какой критерий необходимо использовать при оценке схем трансмиссий?
Какую научно-методическую базу из уже известных следует выбрать при
разработке теоретических основ методики количественной и качественной оценки
схем трансмиссий?
Для конкретизации основных задач, рассматриваемых в данной главе, принят
ряд общих допущений и ограничений.
Во-первых, принимается, что общие проектировочно-конструкторские реше-
ния, которые касаются выбора числа осей, размещения осей по базе и выбора схемы
рулевого управления, существенно влияющие на работу трансмиссии, считаются
заданными и не являются переменными факторами.
Так, для 4-осных и 8-осных СКШ принимаются следующие параметры ха-
рактеристики общих проектировочно-конструктивных решений:
Колесная формула 8x8 16x16
Осевая формула 2—2 2—2—2—2
Формула управляемости 12—00 123—00—678
Формула привода осей 1234 12345678
Во-вторых, исследования проводятся в основном применительно к непро-
зрачным (ЭТ, ГОТ) трансмиссиям. Для прозрачных трансмиссий теоретические ос-
новы методики оценки рассматриваются в общем виде. Режим работы и параметры
характеристики трансмиссии считаются заданными и соответствуют режимам рабо-
ты и параметрам характеристики трансмиссий перспективных СКШ.
В-третьих, процессы, происходящие в трансмиссии на первом этапе исследо-
ваний, не рассматриваются (ЭТ и ГОТ — «черный ящик» со входом и выходом).
Параметры характеристики шин принимаются постоянными и соответствуют пер-
спективным шинам СКШ.
В-четвертых, закономерности количественного и качественного изменения
эксплуатационных свойств в данных исследованиях устанавливаются только по
отношению к тягово-динамическим свойствам шасси. При этом рассматриваются
следующие принципы распределения мощности по колесам:
равенство крутящих моментов в приводах всех колес — полностью диффе-
ренциальная трансмиссия;
равенство частот вращения всех ведущих колес — полностью блокированная
трансмиссия;
равенство мощностей — произведений силовых (моментов) и скоростных (час-
тот вращения) факторов;
равенство абсолютных скольжений в пятне контакта колесного движителя с
опорной поверхностью.
С учетом принятых допущений и ограничений частными задачами данной
главы являются:
формулирование и обоснование общих принципов распределения мощности
по ведущим колесам СКШ;
разработка критерия комплексной оценки схемы трансмиссии;
/1.4. Общие принципы распределения мощности в трансмиссиях
421
обоснование и разработка теоретических основ общего метода анализа рас-
пределения мощности в трансмиссии на основе теории силового потока.
Исходные положения для формулирования общих принципов
распределения мощности по колесным движителям
Теория и практика движения автомобиля показали, что при достаточной
мощности двигателя высокие эксплуатационные свойства гарантируются при усло-
вии обеспечения достаточного запаса сцепных сил колес СКШ с опорной поверхно-
стью, по которой движется шасси. Математически это условие можно записать из-
вестной зависимостью вида:
5 — 1
Gcu<P > Ga (/ ± 0 ± J — + PW + ^кр = Е ’
1 Q /=|
где Gcu, Ga — сцепной и полный вес автомобиля соответственно;/! i = Т — сум-
марный коэффициент сопротивления движению автомобиля с учетом продольного
уклона дороги; т.Л — масса автомобиля; j — ускорение разгона, замедление; Pw, Ркр,
2п
— соответственно силы сопротивления воздушной среды, сопротивления на
/=|
крюке и величина полной силы тяги на колесах по двигателю; п — число осей авто-
мобиля; 5 — коэффициент учета вращающихся масс; о — коэффициент буксования.
Математически в общем виде рациональный закон распределения мощности
по колесным движителям может быть представлен следующим выражением:
/V
^• = /v/K/+^-^</v6yKI (Н 1)
где NKi — мгновенная мощность, подведенная к /-му колесу автомобиля; NfKi
мгновенная мощность сопротивления качению /-го колеса; — мгновенная
мощность внешних сопро явлений движению автомобиля; щ — число ведущих
осей (для СКШ nk = и); к — поправочный коэффициент, учитывающий условия
взаимодействия колесного движителя с опорной поверхностью.
Выражение (11.1) принято в качестве первого исходного положения при
формулировании общих принципов распределения мощности по колесам и закона
рационального распределения мощности.
В качестве второго исходного положения принята известная закономерность
изменения мощности сопротивления качению колеса от режима его качения.
Теоретически и экспериментально доказано, что наименьшее сопротивление
качению имеет колесо, не нагруженное продольной и боковой силами и движущее-
ся только под воздействием крутящего момента, равного моменту сопротивления
качению. Этот режим принято называть свободным режимом качения [521.
Третьим исходным положением является известная общая закономерность
изменения силы тяги на колесе в зависимости от буксования. Приблизительно для
многих типов грунтов и опорных поверхностей максимальная сила тяги соответст-
вует 30...40 % коэффициента буксования колеса. При большем значении коэффи-
422
11. Основы теории и расчета систем передачи мощности
циента буксования сила тяги начинает падать особенно резко — например, на льду
и мокрой дороге.
Четвертым исходным положением является утверждение, что каждое колесо
многоосного СКШ при движении находится в сложном взаимодействии с опорной
поверхностью. Причем условия и результаты этого взаимодействия, как правило, у
всех колес различные. Особенно резко изменяются условия при движении колесного
движителя на деформируемых и уплотняемых грунтах по одному следу. При прохож-
дении колеса по таким грунтам их механические свойства изменяются и поэтому па-
раметры взаимодействия последующего колеса с грунтами будут иные. Основываясь
на всех четырех исходных положениях, можно сформулировать в общем виде основ-
ные принципы и закон рационального распределения мощности по колесным движи-
телям, которому должна соответствовать выбранная схема трансмиссии.
Схема трансмиссии и ее функционирование могут считаться рациональными
при выполнении следующих условий:
во-первых, в любой момент, в любых условиях и режимах движения подвод
мощности к каждому колесному движителю должен быть равен мощности сопро-
тивления его качению, т. е. схема трансмиссии должна обеспечивать качение колес
в свободном режиме;
во-вторых, мощность, необходимую для преодоления внешних сопротивле-
ний движению (разгон, тяга на крюке, преодоление подъема и сопротивления воз-
духа, сопротивление при криволинейном движении и т. п.), схема трансмиссии
должна равномерно распределять по всем колесным движителям с учетом попра-
вочного коэффициента условий взаимодействия колеса с опорной поверхностью;
в-третьих, суммарная мощность, подведенная к колесному движителю, не
должна превосходить предельную мощность, соответствующую определенному
значению буксования колеса как в тяговом, так и в тормозном режиме движения.
По результатам исследований предлагается считать, что к = 1 при прямоли-
нейном движении шасси на твердой дороге и на неуплотняемых грунтах, когда ус-
ловия взаимодействия всех колес приблизительно одинаковы.
Основной темой дальнейших обсуждений в данной главе будет раскрытие
составляющих выражения (11.1) применительно к исследуемой схеме трансмиссии
и разработка общего метода ее анализа.
11.5. Анализ энергетического совершенства
различных схем передачи мощности к движителю
Общая методика анализа
Среди реально выполненных конструкций трансмиссий современных СКШ
еще не создано ни одной трансмиссии, которая обеспечивала бы рациональный за-
кон распределения мощности по колесным движителям согласно выражению (11.1).
В связи с этим возникает задача определения степени соответствия рацио-
нальному закону той или иной схемы трансмиссии. Для решения этой задачи нужна
общая методика анализа работы трансмиссий современных многоосных шасси.
11.5. Анализ энергетического совершенства различных схем передачи мощности 423
В /г-осном шасси может быть 2п точек, к которым подводится мощность для
привода колесных движителей. Вследствие этого трансмиссия многоосного шасси
представляет собой сложную передающую и преобразующую различные виды
энергии систему. При этом трансмиссии СКШ могут рассматриваться как системы
силовых следящих приводов с многоканальными исполнительными элементами.
Применение известных в теории автомобиля методов исследований в этом
случае затруднено. Необходимы новые методы, новая теоретическая база. В данной
работе в качестве теоретической базы принята теория силового потока, разработан-
ная для исследования и расчета силовых передач гусеничных и колесных машин
профессором А.С. Антоновым [2]. Положения теории силового потока А.С. Антоно-
ва, наиболее полно развитые в работах Ю.А. Степанова и П.В. Аксенова, использо-
ваны авторами.
Методология теории силового потока основана на переходе от реальной
сложной физической системы к расчетной схеме, которая дает возможность вы-
явить внутренние связи и закономерности, определяющие функционирование от-
дельных элементов системы. Преимущество теории силового потока состоит в том,
что ее методы и принципы позволяют рассматривать работу любой трансмиссии и
ее отдельных элементов независимо от типа механизмов, их устройства, форм пре-
образуемой и передаваемой энергии.
Вследствие применения теории силового потока можно предположить, что
полученные в данной главе закономерности распространяются на все типы транс-
миссий многоосных шасси.
Согласно теории силового потока, все многообразие преобразующих уст-
ройств, входящих в трансмиссию, сводится к трем типам узловых точек: разветв-
ляющейся, кинетической и обобщенной. В разветвляющейся узловой точке (УТ)
происходит преобразование только силовых факторов силового потока, а в кинети-
ческой — скоростных. Обобщенная УТ включает кинетическую и разветвляющуюся
УТ, поэтому в ней происходит одновременно преобразование силовых и скорост-
ных факторов. Эти типы УТ соединяются между собой направленными потоками
энергии {связывающими потоками). Кроме связывающих потоков передающая сис-
тема имеет аккумулирующие и рассеянные потоки.
Любая трансмиссия может быть представлена совокупностью УТ, связываю-
щих (направленных), аккумулирующих и рассеивающих потоков. Геометрическое
изображение такой совокупности дает схему силового потока (СП), которая являет-
ся исходной позицией, основой исследования силовой передачи.
В схеме силового потока трансмиссии многоосных шасси главным составным
элементом является колесо, изображенное в виде обобщенной УТ Схема сил, дейст-
вующих на колесо при его качении, и его обобщенная УТ представлены на рис 11.35.
Узловая точка колеса имеет следующие потоки:
вращательный поток со скоростным (Д и силовым А/Тэд факторами;
вращательный реактивный поток с силовым фактором MR = Mf + Му,
поступательный активный поток оси колеса со скоростным гк и силовым Рк
факторами;
поступательный реактивный поток оси колеса с силовым фактором Rx = Рк,
диссипативный (рассеянный) поток мощности Nt.
424
11. Основы теории и расчета систем передачи мощности
Рис. 11.35. Расчетная схема движения колеса в плоскости его вращения:
а — схема сил, приложенных к упругому колесу; б — обобщенная узловая точка упруг
По направлению потоков в УТ легко определить режим работы колеса. Так, у
тормозящего колеса направление потоков противоположно представленным на
рис. 11.35 (кроме AQ. Ведомое колесо имеет один активный поступательный поток от
рамы к колесу, а также реактивный и рассеянный потоки. Аналогичный подход ис-
пользуется для представления колеса в свободном и нейтральном режимах качения.
При качении колеса в общем случае, когда на колесо дополнительно действу-
ет боковая сила и поворачивающие моменты, обобщенная УТ колеса превращается
в векторную узловую точку. Тогда представленные на рис. 11.35 СП превращаются
в векторные потоки, которые математически описываются векторными величина-
ми. Важно при этом отметить, что число СП и геометрическое изображение при
этом не меняются.
Анализ всех возможных схем силового потока трансмиссий существующих
многоосных шасси позволил выявить общие свойства этих схем. Так, установлено,
что с учетом возникновения относительных потоков мощности через грунт и несу-
щую систему силовые потоки многоосных шасси являются замкнутыми контурами.
Такими замкнутыми контурами являются контуры между колесами одной оси (ле-
вым и правым) и между осями. Число отдельных замкнутых контуров равно (2п - 1).
11.5. Анализ энергетического совершенства различных схем передачи мощности 425
Пр
Рис. 11.36. Схема замкнутых контуров трансмиссий и-осного автомобиля:
а — замкнутый межколесный контур поперечно-вертикальной плоскости машины; б и в — замкнутые
межколесные контуры соответственно 3-осного и /?-осного ТС в продольно-вертикальной плоскости
Доказательство этой теоремы вытекает из схем на рис. 11.36, на котором представ-
лены замкнутые контуры СП трансмиссий 3-осного (б) и и-осного (в) полнопривод-
ных автомобилей.
Для СКШ с прозрачной схемой трансмиссии (механической, гидромеханиче-
ской — рис. 11.36, б).
1, 2, 3, ..., п замкнутых контуров образуют левые и правые колеса, связан-
ные между собой через главную передачу и полуоси. Относительный поток мощно-
сти через грунт показан пунктиром. Эти контуры называются межколесными, их
число равно у каждого автомобиля числу осей.
Четвертый контур образуют колеса передней оси, карданные валы, механиз-
мы раздаточной коробки и колеса второй оси. Пятый контур подобным же образом
образуют колеса второй и третьей оси. Четвертый и пятый контуры называются
426
11. Основы теории и расчета систем передачи мощности
межосевыми. Число межосевых контуров у любого автомобиля на единицу мень-
ше числа осей, т. е. п - 1.
Таким образом, общее число контуров равно п + п - 1 = 2п - 1. Для 3-осного
автомобиля число контуров равно пяти. При бортовой схеме трансмиссии у и-осно-
го автомобиля также 2п - 1 контуров, из которых 2(п - 1) находятся по бортам ав-
томобиля и один межбортовой, т. е. 2(п - 1) + 1 = 2п - 1.
Для СКШ с непрозрачной схемой трансмиссии (электрической с мотор-коле-
сами и гидрообъемной — рис. 11.36, в) подобные контуры образуют относительные
потоки мощности, связывающие колеса по осям и бортам через опорную поверх-
ность, подвеску и раму. Общие принципы распределения мощности по колесам в
таком контуре и являются предметом обсуждения данной главы.
В соответствии с вышесказанным формулируется важная для расчетов тео-
рема: трансмиссию любого многоосного автомобиля можно разложить на отдель-
ные взаимосвязанные контуры, число которых на единицу меньше удваиваемого
числа осей автомобиля.
Теорема позволяет общий расчет любой трансмиссии свести к последова-
тельному расчету распределения мощности по элементам одного контура, анало-
гично расчету по методу конечных элементов. В данном случае конечными элемен-
тами являются замкнутые контуры трансмиссии.
Общим свойством всех рассматриваемых замкнутых контуров является на-
личие в них большого числа упругих связей. Главными из них являются упругие
связи деформируемых шин с грунтом и упругие связи механических элементов кон-
тура (валы, шестерни, муфты и т. п.).
Подробный кинематический и силовой анализ замкнутых контуров различ-
ных типов (блокированных, дифференциальных, с муфтами различного конструк-
тивного исполнения) проведен в работах П.В. Аксенова и Ю.В. Пирковского.
Таким образом, можно сформулировать следующую последовательность ре-
шения задачи распределения мощности по колесам.
1. Сбор и конкретизация исходных данных для расчета, касающихся пара-
метров характеристики самого шасси, конструктивных решений трансмиссии,
внешних условий и режимов движения. Сведение всех исходных данных в таблицу.
2. Построение схемы силового потока трансмиссии и разложение ее на рас-
четные замкнутые контуры.
3. Определение суммарной мощности внешних и внутренних сопротивлений
движению шасси по известным в теории автомобиля зависимостям. Расчет распре-
деления суммарной мощности по расчетным замкнутым контурам.
4. Расчет распределения мощности по колесам каждого замкнутого контура
по методикам данной главы.
5. Сопоставление полученных результатов с рациональным законом распределе-
ния мощности. Оценка соответствия всей трансмиссии рациональному закону (11.1).
Критерий комплексной оценки схем трансмиссий
Идея разработки нового критерия оценки схем трансмиссий базируется на
гипотезе о рациональном законе распределения тяговой мощности по колесным
движителям, реализация которого обеспечивает шасси высокие эксплуатационные
11.5. Анализ энергетического совершенства различных схем передачи мощности 427
свойства. В соответствии с этой гипотезой принимается, что в любой бесконечно
малый промежуток времени существует рациональная величина подведенной к /-му
колесу мощности Мьрац- Она позволяет колесному движителю выполнять работу
при минимальных нагрузках и потерях мощности на качение, а также дает доста-
точные силы сцепления колесу с опорной поверхностью, позволяющие ему выпол-
нять функции по созданию силы тяги, устойчивости и управляемости движения.
При этом предполагается, что все колесные движители, работающие в рациональ-
ном режиме по мощности, обеспечивают в сумме высокие эксплуатационные свой-
ства автомобиля в заданных условиях и режимах движения.
Очевидно, что реальная подводимая к колесному движителю в данный мо-
мент времени и в тех же условиях мгновенная мощность N()ip будет отличаться на
какую-то величину от рациональной мощности. Поэтому можно записать:
A^ = ^pau-^ (Н.2)
Логично в качестве основы критерия оценки схемы трансмиссии принять от-
клонение реальной мощности от рациональной.
Легко доказать, что в разнообразных условиях работы колесного движителя и
при различных схемах трансмиссий разность (11.2) может быть как положительной,
так и отрицательной величиной. Поэтому в качестве общего критерия следует при-
нять среднеквадратическое отклонение. Учитывая, что в формировании рассматри-
ваемых эксплуатационных свойств шасси участвуют все его колесные движители и
все элементы трансмиссии, общий критерий можно записать так:
Г2Й
^(Л'о/рац-^О/р)2
*д.т = 1 ------Г,---------- ( " .3)
где К — общий критерий комплексной оценки схемы трансмиссии, получивший
название коэффициента добротности (совершенства) схемы; Уо</ — суммарная тяго-
вая мощность, которая должна быть подведена от двигателя к трансмиссии и рас-
пределена по колесным движителям шасси в заданных условиях и режимах его
движения.
Анализ выражения (11.3) позволяет определить пределы и условия измене-
ния j.
Так, при равенстве реальной и рациональной мощности К =1. Этот случай
соответствует идеальной трансмиссии, которая рационально распределяет мощ-
ность по колесам. Следовательно, высшим показателем добротности схемы транс-
миссии будет 1, или Клл = 100 %. По отношению к 100 % будут оцениваться все
прочие схемы трансмиссий.
Если трансмиссия не подводит тяговой мощности к колесным движителям,
то у)ф = 0 и Кл т = 0, т. е. трансмиссия имеет для расчетных условий нулевой коэф-
фициент добротности. Такой случай возможен, например, при полностью диффе-
ренциальной трансмиссии, когда при отрыве колес одной оси или одного колеса от
опорной поверхности тяговая мощность практически не подводится к колесным
движителям и шасси теряет подвижность.
428
11 Основы теории и расчета систем передачи мощности
При полностью блокированных схемах раздачи мощности при движении по
дорогам с твердым покрытием из-за возникновения циркуляции мощности в транс-
миссии Кл г может быть отрицательной величиной.
Таким образом, анализ формулы критерия оценки схемы трансмиссии пока-
зывает возможность его использования при проведении расчетов.
Математическая модель рациональной мощности,
подводимой к колесному движителю полноприводного шасси
Раздельное рассмотрение влияния подводимой мощности на тягово-
динамические свойства, топливную экономичность, управляемость и устойчивость
движения, надежность автомобилей позволяет сделать ряд обобщений и выводов.
Во-первых, установлено, что избыток подводимой мощности, так же как и ее
недостаток, отрицательно влияют на показатели каждого свойства автомобиля.
Во-вторых, каждому свойству соответствует своя строго определенная вели-
чина рациональной мощности, подводимая к колесному движителю, которая обес-
печивает наилучший показатель данного свойства. Так, например, для обеспечения
высокой проходимости путем уменьшения глубины прокладываемой движителем
колеи мощность, подводимая к колесу, должна быть равна мощности сопротивле-
ния качению колеса в свободном режиме. При необходимости обеспечения макси-
мальной силы тяги подводимая мощность должна быть максимальной, но не выше
мощности сцепления колеса с опорной поверхностью.
В-третьих, величина рациональной мощности зависит от возможностей колесно-
го движителя реализовать подведенную мощность. Например, при отрыве колесного
движителя от опорной поверхности рациональная мощность должна быть равна нулю.
Основываясь на этих трех обобщениях, можно записать математическое вы-
ражение для определения рациональной мощности, которая должна подводиться к
колесному движителю в любой момент времени и в заданных внешних условиях
движения шасси, в следующем виде
( с. N'
^Онр М)/ ран ~’ I fid “I I бук max ’
или в развернутом виде для недеформируемой опорной поверхности
( N'
^а>^,.рац = \ск/куа+-^к, <W6yKnlax, (11.4)
V п )
где Л/о/ф — мощность сцепления колесного движителя с опорной поверхностью; ЛУ()/ ран
рациональная мощность, которая должна быть подведена к z-му колесному движителю
шасси; Л^к/ — мощность свободного режима качения колесного движителя; W'
тяговая мощность, необходимая для преодоления внешних сил сопротивления движе-
нию шасси (сопротивления воздуха, подъема, разгона, криволинейного движения):
- У N /к/ = WT - ,
а 1 J К/ 1 КС/ ’
/=1
11.5. Анализ энергетического совершенства различных схем передачи мощности 429
п — число колес шасси; к, — поправочный коэффициент, учитывающий возмож-
ность колесного движителя реализовать мощность в заданных условиях и завися-
щий от сцепных свойств колесного движителя:
— тяговая мощность силовой установки, реализуемая на колесных движителях
шасси; срк/ — мгновенный коэффициент сцепления z-ro колесного движителя
опорной поверхностью в данных условиях движения; срП1ах — максимальный коэф-
фициент сцепления шины данной конструкции, полученный на сухой асфальто-
бетонной дороге при полном скольжении; — коэффициент сопротивления ка-
чению колесного движителя в свободном режиме; Уа — линейная скорость колесно-
го движителя; Л^ктах — мощность, соответствующая максимальному буксованию
колеса; R:I — вертикальная реакция на z-м колесе; GK — вертикальная нагрузка на
колесо в статике; Gd — вес автомобиля.
Из выражения (11.4) следует, что рациональная мощность равна мощности
свободного режима качения колесного движителя и части общей тяговой мощности
шасси, приходящейся на данный колесный движитель. При этом необходимо со-
блюдение двух ограничений непревышение мощности сцепления колесного
движителя с опорной поверхностью и мощности буксования (скольжения) колесно-
го движителя в заданных условиях движения.
При движении по деформируемым уплотняемым грунтам выражение мощно-
сти свободного режима качения колесного движителя имеет следующий вид [52j:
2 1 А
(2G2 )2g+l (1 ——ц + —ц2 1й)к,-
=^г-----------V ?---------------1ег>
(^)2и+1(Сг,.В)^+|^2+1|И + 1И2Ум+1
где Сг/, Ц — параметры характеристики грунта; сок/ — угловая скорость /-го колеса;
— радиус качения колесного движителя в свободном режиме; В — ширина ко-
лесного движителя; GKi — вертикальная нагрузка на z-e колесо в движении.
В расчетах необходимо учитывать изменение параметров характеристики
грунта при повторном проходе колесного движителя по одному следу. При повтор-
ном проходе сопротивление качению и прирост глубины колеи уменьшается по
сравнению с их значениями при проходе первого колеса. В данном исследовании
принимается, что ц при повторном проходе не изменяется, а Сг/ изменяется по сле-
дующей зависимости:
Q-=СП_|ЛН_|,
где Сг/_] — величина параметра характеристики грунта колеи при предыдущем
проходе колесного движителя; i — число проходов; ht_} — численное значение глу-
бины колеи при предыдущем проходе.
430
77. Основы теории и расчета систем передачи мощности
Численное значение глубины колеи при г-м проходе колесного движителя
определяется по известной зависимости
/I, =
2GK/
1
ц+0,5
/—13 1 о А
Спв72гкЦ2--ц + -ц^
Можно предположить, что при обеспечении рационального закона подвода
мощности ко всем колесным движителям СКШ будут получены высокие показатели
важнейших эксплуатационных свойств шасси, перечисленных выше. При этом по-
лученная зависимость определения рациональной мощности, подводимой к колесу,
может быть принята за основу при разработке алгоритма функционирования авто-
матической системы управления трансмиссией, а также при создании системы ав-
томатической раздачи мощности по колесным движителям любого многоосного
СКШ, особенно с непрозрачной трансмиссией.
Математические модели расчета реальной мощности,
подводимой к колесному движителю в контуре непрозрачной трансмиссии
При нахождении коэффициента добротности схемы трансмиссии по предло-
женной зависимости необходимо знать реальную мощность, подводимую к колесу в
заданных условиях данной оцениваемой схемой.
Для прозрачной (механической, гидромеханической) трансмиссии существу-
ет несколько методов определения этой мощности. Но поскольку для развития мно-
гоосных СКШ более важной является разработка теоретических основ распределе-
ния мощности в непрозрачной (электрической или гидрообъемной) трансмиссии, то
математическая модель расчета реальной мощности, подводимой к колесу в контуре
прозрачной трансмиссии в данном случае не рассматривается.
При исследовании прозрачной трансмиссии конкретного шасси примером
может служить математическая модель, описанная в гл. 8.
В качестве основного инструмента для обоснования общих принципов рас-
пределения мощности по ведущим колесам СКШ с непрозрачной трансмиссией
применена представленная в гл. 8 методика оценки эффективности (подвижности)
СКШ в районе использования. Так как при ее разработке были созданы математиче-
ские модели для прозрачной МТУ, то в соответствии с принятой методологией для
обеспечения возможности рассмотрения ЭТ с индивидуальным распределением
мощности по колесам была проведена доработка уравнения
и системы уравнений (8.7)-(8.9).
При этом математические модели, описывающие с различной степенью дета-
лизации процессы, происходящие в основных составных частях ЭТ (генераторе,
тяговых электродвигателях, преобразователях частоты и т. п.), разрабатывались
11.5. Анализ энергетического совершенства различных схем передачи мощности 431
специалистами в области электромашиностроения, что повышает степень достовер-
ности полученных результатов.
Для настоящих исследований использована математическая модель, в кото-
рой с помощью методов теории автомобиля с достаточной точностью описываются
динамические свойства СКШ с ЭТ с индивидуальным распределением мощности и
учитываются соотношения основных параметров шасси. При этом в соответствии с
принятым допущением электрическая трансмиссия рассматривается как «черный
ящик» и не учитываются особенности процессов передачи и преобразования энер-
гии, протекающих в электрических машинах при их функционировании.
В основу доработки положено математическое описание многоосного СКШ
(см. рис. 8.9), которое позволяет исследовать влияние предложенных выше общих
принципов (алгоритмов) распределения мощности по колесным движителям на тя-
гово-динамические свойства шасси в различных условиях движения.
Уравнение движения любого СКШ, в том числе имеющего электрическую
трансмиссию с индивидуальным распределением мощности по колесным движите-
лям, в общем виде представляется несколько преобразованной зависимостью (11.5):
dV _ - Ff ~ Pn ~ P\v
~dt~ 8M~a ’
где КЛ — суммарная продольная реакция в пятне контакта колеса с опорной поверх-
ностью; Ff— сила сопротивления качению шасси; PN — составляющая веса шасси
при движении на подъеме (спуске); Pw — сила сопротивления воздуха; 8 — коэф-
фициент учета вращающихся масс; — полная масса СКШ.
Расчет суммарной силы тяги Рк всех колес, определяемой суммарной про-
дольной реакцией Rx, для ЭТ существенно отличается от расчета Рк для СКШ с про-
зрачной трансмиссией и будет изложен при рассмотрении мотор-колеса.
Сила сопротивления качению шасси, составляющая веса при подъеме (спус-
ке) и сопротивление воздуха вычисляются известными методами теории автомоби-
ля и распределяются по колесам в соответствии с вышеизложенным методом анали-
за схем трансмиссий.
При математическом моделировании блока «Двигатель» (см. рис. 8.1) учитыва-
лись следующие соображения. Одним из положительных свойств ЭТ является ее непро-
зрачность, когда любое изменение нагрузки на колесах не оказывает влияния на режим
работы силовой установки. Поэтому первичный двигатель, как правило, работает в дос-
таточно узком нагрузочном и скоростном диапазоне, а САУ электрической трансмис-
сии обеспечивает режим постоянства мощности с соблюдением условия
М ;i(Dv = const, (1 1.6)
где Л/д — крутящий момент первичного двигателя; со— частота вращения выходно-
го вала двигателя; v — коэффициент жесткости.
В качестве первичных двигателей для СКШ с ЭТ могут быть использованы ди-
зели и автомобильные газотурбинные двигатели большой агрегатной мощности, кото-
рые в значительной мере отличаются характером протекания моментных и мощност-
ных характеристик. В данном случае нет необходимости учитывать внутренние процес-
432
11. Основы теории и расчета систем передачи мощности
сы преобразования энергии в силовых установках различных типов. Вопросы совмест-
ной работы АГТД и ЭТ подробно рассмотрены в главе 10. Кроме того, задачей настоя-
щих исследований является сравнительная оценка, обоснование общих принципов рас-
пределения мощности по ведущим колесам на основе определения максимально воз-
можных параметров, в первую очередь тягово-динамической характеристики СКШ в
различных дорожных условиях, достижение которых возможно только при полном ис-
пользовании мощности СУ Поэтому условие (11.6) можно записать в виде
мл^ = Л^дЛтр, (11.7)
где АЛ — максимальная мощность силовой установки в объектовых условиях с уче-
том потерь; Г|тр — КПД трансмиссии (в данном исследовании принято равным 0,7).
В качестве допущения предположено, что при математическом моделировании
движения шасси в случае действия каких-либо ограничений (условие методики гл. 8,
например, ограничение по боковому или вертикальному ускорению) мощность на
входе в трансмиссию не подается (водитель убирает подачу топлива) до момента
снятия действия ограничений, а затем плавно нарастает до максимальной.
Важнейшим элементом электрической трансмиссии является ЭМК, которое, в
свою очередь, объединяет в себе электродвигатель и колесо с упругой шиной, соеди-
ненные через редуктор. Для получения математической модели блока мотор-колесо (см.
рис. 8.1) рассматривается плоскопараллельное движение колеса в плоскости его враще-
ния. Расчетные схемы для этого случая представлены на рис. 11.35, где обозначены:
М1 эд — подведенный к колесу крутящий момент от блока МТУ в соответствии с при-
нятыми принципами распределения мощности; GK — вертикальная нагрузка на колесо;
гс — свободный радиус колеса; Рк — сила тяги; и vK — угловая и линейная скорости
колеса соответственно; — линейная скорость скольжения колеса по опорной поверх-
ности; точка О — мгновенный центр вращения колеса; RA и R- — продольная и верти-
кальная (нормальная) реакция в пятне контакта колеса с опорной поверхностью.
На основании расчетных схем (см. рис. 11.35) и принятого ранее подхода
(опуская предварительные выкладки) математическая модель колеса в окончатель-
ном виде может быть представлена следующей системой уравнений:
^ = ±(МТЭд,-М/;-Л/Л);
~ К - Сш Rzi - >~Rx, - rxi
dt Тш
Mj. =JK ----'>
J‘ K dt
^ct — — Rzi I >
Гк1 = гст — *-R, ’
*Rxi ~ (^ТЭД1 — M л ) / fKi,
11.5. Анализ энергетического совершенства различных схем передачи мощности 433
Рис. 11.37. Зависимость удель-
ной силы тяги Rx/R: от сколь-
жения 5
где Сш, X — радиальная и тангенциальная жесткость
шины соответственно; JK — момент инерции колеса;
Мл — инерционный момент, зависящий от измене-
ния угловой скорости колеса; гд, — динамический
радиус колеса; гк/ — радиус качения колеса; Тш — по-
стоянная времени шины; Mf — момент сопротивле-
ния качению; гст — статический радиус колеса; Сш —
радиальная жесткость шины; f — коэффициент со-
противления качению; 8/ — буксование z-ro колеса.
В системе уравнений (11.8) использована ве-
личина радиуса качения колеса без учета скольже-
ния. Вместе с тем известно, что между продольной
реакцией Rxl и скольжением 5, существует нелиней-
ная зависимость, вид которой представлен на рис. 11.37
Из данных рис. 11.37 следует, что продольная реак-
ция /?и, а следовательно, и сила тяги колеса Рк„ достигают максимального значения
при некотором 5пред, величина которого зависит от многих факторов и, как принято
считать, находится в пределах 0,15-0,4.
В настоящей модели для определения величины скольжения, когда оно не
достигает предельного значения, зависимость между продольной реакцией Rxt и
скольжением S, (рис. 11.37) аппроксимируется следующим выражением:
V гЧ №1/3-фД (11-8)
I к;,ф,)
где ср, — коэффициент сцепления колеса с опорной поверхностью; к — степенной
показатель.
Величина 5Г1ред также вычисляется в зависимости от коэффициента сцепления
с опорной поверхностью по эмпирической зависимости
Snpe., =Ф,'/3-Ф,-
С учетом скольжения действительная угловая скорость колеса и приращение
dcoK для расчета инерционного момента определяются по следующим зависимостям
Ч/ = VKi / [Гк/0 “ Si )]’
, (11.9)
где сок, — угловая скорость колеса на предыдущем шаге расчета при реализации
модели на ПЭВМ.
Линейная скорость колеса при криволинейном движении рассчитывается из
плана скоростей по следующему выражению
uK,= ^/?±^/(cosa,/?), (11.10)
434
II. Основы теории и расчета систем передачи мощности
где v — линейная скорость шасси; R — радиус поворота шасси (расстояние от полюса
поворота до полюса РУ); В — колея шасси; а, — угол поворота z-ro колесаj-й оси.
Линейная скорость колеса vKi при прямолинейном движении равна линейной
скорости шасси.
Величина продольной реакции не может превышать, кроме уже оговоренных
ограничений по скольжению, предельной силы по сцеплению, поэтому при реше-
нии системы уравнений (11.8) вводится обязательное выполнение условия
(11.11)
Если скольжение 5„ определяемое из выражения (11.8), превышает величину
511ред (ниспадающая ветвь кривой рис. 11.37), то проводится корректировка величи-
ны продольной реакции по формуле
1-($,-$пред)
1 - S'
пред
Кроме того, при расчете S, необходимо выполнение условия
1.
При движении шасси по деформируемому грунту коэффициенты f — сопро-
тивления качению и ф — сцепления колеса с опорной поверхностью, а также пара-
метры характеристики грунта Сг и ц, как уже было принято выше, изменяются в
зависимости от числа проходов колеса по одному следу — п. Характер изменения
коэффициентов / и ф, представлен на рис. 11.38. Поэтому в отличие от методики
гл. 8 в данной модели коэффициенты / и ф, могут быть различны под каждым коле-
сом, что дополнительно увеличивает кинематическое и силовое рассогласование в
замкнутых контурах (в приводах) отдельных колес шасси.
Изменение коэффициента сопротивления качению (см. рис. 11.38) в зависи-
мости от числа проходов рассчитывается по выражению
/;.=йксг,.йГ7ск,.(ц+1),
где Ьк — ширина профиля колеса; Сн — удельное сопротивление грунта вдавлива-
нию (коэффициент осадки грунта); GKi — нормальная нагрузка на z-e колесо; h,
глубина колеи z-ro колеса.
Удельное сопротивление грунта вдавливанию увеличивается с каждым про-
ходом колесной оси и рассчитывается по выражению
Сг,- =сг,П(Фк + 1)и
К=1
где С,1, Си — удельное сопротивление грунта вдавливанию на 1-й и z-й колесных
осях; Фк — коэффициент уплотнения грунта, численно равный приращению глуби-
ны колеи hlt при проходе z-й оси.
11.5. Анализ энергетического совершенства различных схем передачи мощности 435
Рис. 11.38. Характер изменения коэффициентов сцепления (р и сопротивления
качению f в зависимости от числа проходов колесного движителя п по одному
следу на деформируемой опорной поверхности
Аналитических выражений для расчета коэффициента ср, в зависимости от
числа проходов нет, но результаты многочисленных экспериментальных иссле-
дований, в которых участвовали авторы, показывают, что ср, растет в среднем на
15...20 % при последовательном проходе по деформируемому грунту колес 1-4
осей и далее остается практически постоянным. Поэтому график изменения ко-
эффициента сцепления ср, (см. рис. 11.38) в настоящей модели аппроксимирован
полиномом 3-й степени.
Таким образом, для решения системы уравнений (11.8) определены все
переменные, за исключением Л/тэд. При расчете Л7ТЭД необходимо учитывать
следующее.
Электрическая трансмиссия в настоящих исследованиях рассматривается как
некая идеализированная система распределения мощности, у которой отсутствует
влияние на выходные параметры входящих в нее элементов (например, генератора,
ТЭД, САУ). Условность описания трансмиссии в данной модели заключается в до-
пущении о том, что заданный вариант распределения мощности по колесам строго
реализуется в любой момент времени независимо от моделируемых условий и ре-
жимов движения шасси. Поэтому для блока МТУ (см. рис. 8.1), выполняющего
функции ЭТ с индивидуальным распределением мощности по колесам, выходным
параметром является крутящий момент Л/тэд, в приводах отдельных колес, форми-
руемый в соответствии с выбранным алгоритмом.
Для определения моментов Л7ГЭД/ (силовых факторов), характеризующих ра-
боту колесного движителя, необходим учет линейной vKi и угловой скоростей
движения /-го колеса (скоростных факторов), а также скольжения S, в пятне контак-
та колеса с опорной поверхностью.
С учетом выражений (11.7), (11.8), (11.9) и (11.10) формирование крутящих
моментов в соответствии с выбранными принципами (алгоритмами) распределения
мощности по колесам осуществляется следующим образом.
Для принципа равенства моментов полностью дифференциальная трансмис-
сия Л/Тэд/ рассчитывается с помощью системы уравнений:
436
11. Основы теории и расчета систем передачи мощности
2/1
^к.ср /=1
2п
Мдв = ^дЛтр
МТЭД/ Цс.ср 2п
(11.12)
где (Окср — средняя угловая скорость всех колес шасси; Л/дв — общий момент на
входе в трансмиссию, снимаемый с силовой установки.
Для принципа равенства мощностей Л/тэд, рассчитывается с использованием
ледующей системы уравнений:
(11.13)
где NK — мощность, подводимая к z-му колесу.
Для принципа равенства частот вращения рассчитывается с использо-
ванием следующей системы уравнений:
2п
^к.ср ~ ’
2п
(^к.ср ~ ^К/ ) . - /
Чш =-------------МТЭд/;
^KZ
дж ^дЛтр
= —-ч
^к.ср
А/
АЛэд/ =-rL + Ww,->
In
(П-14)
где ММ1 — приращение крутящего момента, который необходимо подвести к /-му
колесу, чтобы его угловая скорость была равна й\.ср; ^тэд/ — текущее (мгновенное)
значение крутящего момента, подведенного к /-му колесу.
Для принципа равенства скольжений А/тэд/ рассчитывается с использованием
следующей системы уравнений:
11.5. Анализ энергетического совершенства различных схем передачи мощности 437
2п
5 = 111_.
ср 2п ’
Msi = ($с - S, / 5, при 5ср < 5„
Si ~ (“^иред — “S')^ТЭД< / $i При 5ср > 5пре;
Еч,
-1=1____.
М^=—^- + М^
I 2п
где Л/s/ — приращение крутящего момента, который необходимо подвести к /-му
колесу, чтобы его скольжение было равно 5ср или 511рсд.
Подробное описание вывода систем уравнений (11.12)- 11.15) не приводится,
так как оно обосновано предыдущим материалом данной главы.
Таким образом, получена математическая модель электрической (гидрообъ-
емной) системы передачи мощности КТС ОБГ с различными принципами (алгорит-
мами) распределения мощности по колесам СКШ, которая в составе комплекса ММ
движения шасси (см. гл. 8) позволяет решать поставленные задачи.
Анализ непрозрачной схемы трансмиссии с различными
принципами распределения мощности по колесам СКШ
В качестве объектов для проведения теоретических исследований были вы-
браны КТС ОБГ, оборудованные ЭТ с различными принципами распределения
мощности по колесам, с колесной формулой 8x8 и 16x16, массогабаритные и гео-
метрические параметры которых соответствуют реальным СКШ. Правомерность
такого подхода подтверждается данными технического проекта на шасси M3KT-7923 с
колесной формулой 16x16, оборудованного МТУ в составе ГТД и электрической
трансмиссии. Массогабаритные параметры шасси M3KT-7923 аналогичны соответ-
ствующим показателям выбранных в качестве объекта исследований шасси с ди-
зельным двигателем и ГМП.
При имитационном моделировании условий движения шасси, оборудован-
ных ЭТ с различными принципами распределения мощности по колесам (модели-
рование блока «дорога», см. рис. 11.1), для создания максимального кинематическо-
го рассогласования с целью определения преимуществ и недостатков тех или иных
принципов распределения мощности из предложенного в гл. 6 и 8 типового мар-
шрута, реализованы:
прямолинейный участок дороги I категории длиной, достаточной для дости-
жения максимальной скорости движения, используемый для разгона шасси;
438
11. Основы теории и расчета систем передачи мощности
прямолинейные участки дороги длиной до 3000,0 м с опорной поверхностью
различных типов;
прямолинейные участки дороги длиной до 1000,0 м с опорной поверхностью
различных типов и углом подъема от 2° до максимально возможного по условиям
сцепления и мощности двигателя;
криволинейные участки длиной до 400,0 м с опорной поверхностью различ-
ных типов и радиусом поворота от 100 м до минимально возможного для данного
шасси;
участки дороги с различными свойствами опорной поверхности по бортам
шасси.
Тип опорной поверхности на всех участках определяется значениями коэф-
фициентов сопротивления качению и сцепления шин с поверхностью дороги. Раз-
битая грунтовая дорога и местность дополнительно описываются значениями
удельного сопротивления грунта вдавливанию Сг и степенного показателя сопро-
тивления грунта ц.
Для определения предельных средних скоростей движения осуществляется
движение шасси с ЭТ по представительному маршруту длиной 10 км (см. гл. 8),
включающему в себя все вышеперечисленные участки опорной поверхности. При
этом поочередно исследуются различные принципы распределения мощности по
колесным движителям.
По окончании прохождения представительного маршрута на экран ПЭВМ
как результат выводится гистограмма предельных средних скоростей движения и
среднеквадратические значения коэффициента добротности схемы трансмиссии на
различных типах опорных поверхностей, а также общая предельная средняя ско-
рость шасси за весь маршрут. Параметры поверхностей дорог задаются одинаковы-
ми для каждого участка маршрута с различными условиями под бортами СКШ в
пределах изменения коэффициентов /, ср, Сг и ц, определенных экспериментально
для данного типа дороги и приведенных в литературе [4, 6, 12, 29]. Характеристики
опорных поверхностей различных типов, представленные в табл. 11.5, взяты из ра-
боты по исследованию СКШ-7930 и -79221, а для автомобиля КамАЗ из [29].
При математическом моделировании условий движения шасси, оборудован-
ного ЭТ с различными принципами распределения мощности по колесным движи-
телям, необходимо учитывать, что при отсутствии каких-либо различий в условиях
и режимах работы всех ведущих колес, обоснованные выше принципы распределе-
ния мощности по колесам будут работать полностью идентично по любым оценоч-
ным показателям, так как в этом случае отсутствует кинематическое и как следст-
вие силовое рассогласование в нагружении приводов отдельных колес.
Поэтому проверка работоспособности ММ проводится с моделированием ус-
ловий движения, характерных для реальной эксплуатации СКШ. Рассматривается
криволинейное движение шасси по повороту с радиусом закругления в плане 55, 45,
35, 25 и 15 м. В качестве опорной поверхности принимается деформируемый грунт
с различной несущей способностью и сцепными свойствами по бортам шасси.
Свойства опорной поверхности задаются следующими коэффициентами: <рп - 0,4;
фя = 0,3;/п = 0,15;/л = 0,2; Сгп = 1; Сгл = 0,5; цп = 1; цл = 0,5. Индексы «п» и «л» обо-
значают правый и левый борт шасси соответственно.
/1.5. Анализ энергетического совершенства различных схем передачи мощности 439
Таблица 11.5
Характеристика опорных поверхностей различных типов,
используемых при моделировании представительного маршрута
Тип опорной поверхности Значения параметров характеристики по бортам
/ Ф с, Ц
правый левый правый левый
Цементно-бетонное шоссе: удовлетворительного состояния (тип 1) изношенное (тип 2) 0,02 0,25 0,03 0,03 0,75 0,65 0,70 0,60
Булыжное шоссе: удовлетворительного состояния (тип 3) изношенное (тип 4) 0,03 0,04 0,04 0,05 0,65 0,60 0,60 0,55
Гравийно-щебеночное шоссе: удовлетворительного состояния (тип 5) изношенное (тип 6) 0,03 0,035 0,035 0,45 0,60 0,50 0,50 0,40
Грунтовая дорога: удовлетворительного состояния (тип 7) разбитая (тип 8) 0,03 0,035 0,035 0,045 0,45 0,40 0,40 0,35 1,0 1,0
Бездорожье (местность) (тип 9) 0,15 0,20 0,40 0,30 0,5 0,5
Для определения максимально возможной скорости движения и максималь-
ного угла подъема по участкам с различными типами опорной поверхности осуще-
ствляется движение шасси, при котором конечное значение скорости, полученное
на каждом участке, является начальным для следующего участка с более жесткими
условиями движения (переход к большему значению угла подъема или меньшему
радиусу поворота).
Предварительный анализ результатов ММ показал, что максимально воз-
можные скорости движения и затраты мощности в процентном отношении к алго-
ритму равенства скольжений аналогичны для всех шасси, выбранных в качестве
объектов исследований. Поэтому в дальнейших материалах главы приводятся ре-
зультаты моделирования движения только одного наиболее представительного шас-
си 79221 с колесной формулой 16x16.
Исключение составляют исследования по определению максимального угла
подъема, данные по которым приводятся для шасси 7930 с колесной формулой 8x8.
Это объясняется тем, что из-за недостаточной мощности двигателя угол подъема,
преодолеваемый шасси 79221, имеет величину, недостаточную для значительного
перераспределения вертикальных реакций. А это приводит к получению практиче-
ски одинаковых значений угла подъема для всех принципов распределения мощно-
сти по колесным движителям СКШ.
440
11. Основы теории и расчета систем передачи мощности
Таким образом, для проведения теоретических исследований:
выбраны шасси КамАЗ-6350, M3KT-7930, -79221, основные ТТХ которых со-
ответствуют реальным образцам шасси с колесными формулами 8x8 и 16х 16;
сформированы условия движения шасси (участки опорной поверхности с
различными характеристиками, задаваемыми значениями/, ср, Сг, ц, радиуса пово-
рота и угла подъема);
разработана частная методика, устанавливающая последовательность оценки
влияния различных принципов распределения мощности по колесным движителям
на тягово-динамические свойства СКШ.
Результаты расчета коэффициента добротности схем трансмиссии автомоби-
ля типа КамАЗ-6350 представлены в табл. 11.6.
Таблица 11.6
Коэффициент добротности КЛЛ (8x8) схем трансмиссии автомобиля типа КамАЗ-6350
№ п/п Режим движения Значение схемы
блокированной дифференциальной
с грузом без груза с грузом без груза
1 Прямолинейное движение (тяжелый режим), v = 60 км/ч 0,882 0,541 0,997 0,914
2 Прямолинейное движение на подъ- ем i - 0,05, v = 20 км/ч 0,974 0,913 0,995 0,896
3 Прямолинейное движение разгон с j = 0,05 g до v = 20 км/ч 0,891 0,639 0,996 0,967
4 Криволинейное движение по ас- фальтированному шоссе с R = 14,5 м, v = 10 км/ч 0,209 -0,879 0,996 0,869
5 Криволинейное движение по сухо- му песку с R = 14,5 м, v = 5 км/ч 0,772 0,775 0,902 0,792
6 Криволинейное движение по суг- линку с R = 14,5 м, v = 5 км/ч 0,844 0,745 0,837 0,766
7 Криволинейное движение по пахоте с R = 14,5 м, v = 5 км/ч 0,854 0,742 0,872 0,795
8 Криволинейное движение по мокрой грунтовой дороге с R = 14,5 м, v = 5 км/ч 0,839 0,741 0,884 0,834
Анализ данных табл. 11.6 показывает, что схема трансмиссии автомобиля ти-
па КамАЗ-6350 (8x8) имеет неудовлетворительные показатели коэффициента доб-
ротности при прямолинейном движении без груза и при криволинейном движении с
минимальным радиусом с грузом и без груза. Низкие значения КЛЛ указывают на
исключительную неравномерность распределения мощности по колесам, а при по-
вороте — наличие циркулирующей (паразитной) мощности между осями автомоби-
ля в передней тележке.
Главной причиной низких показателей добротности схем трансмиссии авто-
мобиля типа КамАЗ-6350 являются принятые конструктивные решения — прежде
всего блокированная связь между мостами в тележках.
11.5, Анализ энергетического совершенства различных схем передачи мощности 441
Обращает на себя внимание серьезное ухудшение показателя К, схем транс-
миссии при эксплуатации автомобиля без груза. Главной причиной этого следует
считать неблагоприятное распределение общей массы автомобиля по осям в снаря-
женном состоянии. При принятой компоновке у автомобиля без груза наибольшая
масса приходится на передние оси, а распределение мощности по осям остается
неизменным, в результате возникает большое отклонение реально подводимой
мощности от — рационально требуемой. Для снижения влияния этого несоответст-
вия предлагаются следующие конструктивные доработки:
улучшение компоновки автомобиля;
применение межтележечного дифференциала с переменным внутренним пе-
редаточным отношением — одно для движения с грузом, второе для ненагруженно-
го автомобиля;
устранение блокированной связи мостов в тележках.
Данные расчета коэффициента добротности схем трансмиссии шасси типа
M3KT-7930 с различными принципами распределения мощности по колесным дви-
жителям представлены в табл. 11.7
Таблица /1.7
Коэффициент добротности Ка т схем трансмиссии шасси типа 7930 (8x8)
Прямолинейное движение с максимально возможной по ограничениям скоростью на участках типа Значение /Сдт для равенства
скольже- ний моментов частот вращения мощностей
1 0,980 0.961 0,856 0,957
2 0,975 0,957 0.848 0,953
3 0,979 0,959 0,842 0,958
4 0,974 0,955 0,840 0,952
5 0,980 0,960 0,850 0,954
6 0,978 0,956 0,843 0,952
7 0,977 0,956 0.843 0,952
8 0,900 0,869 0,792 0,858
Анализ данных табл. 11.7 показывает преимущества схем трансмиссии с ис-
пользованием принципов равенства скольжений и равенства моментов перед дру-
гими принципами, используемыми при анализе. При этом оба отмеченные принци-
па распределения мощности обеспечивают хорошую приспосабливаемость (адапта-
цию) трансмиссии к изменяющимся внешним условиям и режимам движения
шасси. Кроме того, в отличие от данных по автомобилю типа КамАЗ-6350 с меха-
нической трансмиссией, шасси типа 7930 (8x8) для всех вариантов схем имеет бо-
лее сглаженное изменение (отсутствие скачков) коэффициента добротности как на
твердых дорогах, так и на местности. Это можно объяснить эффектом возможности
регулирования подводимой мощности к колесу в зависимости от воздействия на
него опорной поверхности. Качественный характер формирования КЛ схем транс-
миссии с различными принципами распределения мощности для шасси типа 79221
(16x16) аналогичен шасси 7930.
442
11. Основы теории и расчета систем передачи мощности
Сопоставление данных табл. 11.6 и 11.7 дает основание полагать, что зако-
номерности формирования величин коэффициента добротности схем трансмиссии
при движении по дорогам с твердым покрытием отличаются от таковых при движе-
нии на деформируемых грунтах. Установление взаимосвязи Кдт с режимами движе-
ния и параметрами характеристики опорной поверхности заслуживает самостоя-
тельных углубленных исследований.
В табл. 11.8 приведены результаты расчета предельных средних скоростей
движения для шасси типа 79221 с различными вариантами управления ЭТ на типо-
вом маршруте, который сформирован по принципу максимального приближения к
реальным условиям использования КТС ОБГ данного класса грузоподъемности.
Таблица 11.8
Предельные средние скорости движения шасси типа 79221 (16х 16)
по типовому маршруту
Принципы распределения мощности Средняя скорость движения, км/ч, на участках типа
2 3 4 5 6 7 8 9 Весь маршрут
Равенство скольже- ний 54,5 39,1 27,5 27,2 23,0 22,0 18,4 12,5 8,3 16,2
Равенство момен- тов 52,9 37,9 26,4 25,9 21,9 20,8 17,6 11,5 7,6 15,4
Равенство частот вращения 47,8 34,9 24,7 24,4 20,8 20,0 16,3 7,4 14,5
Равенство мощно- стей 52,3 37,2 26,2 25,7 21,7 20,6 14,4 1 1,4 7,5 15,2
Как показывает анализ табл. 1 1.8, предельная средняя скорость движения у
принципа равенства скольжений выше, чем у алгоритмов равенства моментов и ра-
венства мощностей на 3...10 % в зависимости от типа опорной поверхности и на
1 1,5... 13 % выше, чем у алгоритма равенства частот вращения.
Незначительная по величине разница значений предельных средних скоро-
стей движения для различных принципов распределения мощности объясняется
тем, что параметры представительного маршрута (радиусы кривизны в плане не
менее 30 м, максимальные углы подъемов (спусков) не более 9° и т. п.) условия дви-
жения на них не обеспечивают значительного несимметричного нагружения приво-
дов отдельных колес.
С целью выявления максимальных значений критериев оценки эффективно-
сти при сравнительной оценке различных алгоритмов распределения мощности по
колесным движителям на рис. 11.39-11.42 показаны результаты расчетов для более
жестких дорожных условий, чем на представительном маршруте. Движение шасси
осуществляется по криволинейной траектории с радиусами кривизны в плане от 30
до 17 м (минимальный радиус поворота шасси 79221) с параметрами характеристи-
ки опорной поверхности/п = 0,025; <рп = 0,65 ;/л = 0,2; <рл = 0,3; Сгл = 0,5; рл = 0,5.
На рис. 11.39 максимально возможная скорость движения шасси с алгорит-
мом равенства скольжений принята за 100%. При этом снижение скорости шасси с
11.5. Анализ энергетического совершенства различных схем передачи мощности 443
Рис. П.39. Относительная
максимально возможная ско-
рость криволинейного движе-
ния шасси типа 79221 при
ТУдв = 588 кВт (800 л.с.):
Рис. 11.40. Относительные
затраты мощности на криво-
линейное движение шасси
типа 79221 со скоростью
v = 2 м/с:
Рис. 11.41. Относительные
затраты мощности на сколь-
жение при криволинейном
движении шасси типа 79221
со скоростью v = 2 м/с:
/ — равенство моментов; 2 —
равенство частот вращения; 3 —
равенство мощностей; 4 — шас-
си с ГМП
/ — равенство моментов; 2 —
равенство частот вращения; 3 —
равенство мощностей
/ — равенство скольжений; 2 —
равенство моментов; 3 — равен-
ство частот вращения; 4 — ра-
венство мощностей
алгоритмами равенства моментов и равенства мощностей составляет 9,0... 11,7 %,
для шасси с алгоритмом равенства частот вращения — 13,7... 18,3 %. Таким обра-
зом, с ростом кривизны преимущества шасси с алгоритмом равенства скольжений
по критерию максимально возможной скорости движения увеличиваются.
Аналогичный характер носит зависимость затрат мощности на движение с
заданной скоростью. На рис. 11.40 затраты мощности на движение шасси с алго-
ритмом равенства скольжений приняты за 100 %. При этом затраты мощности на
рис. 11.40 выражены через отношение мощности на криволинейное движение
(Мдпг) к мощности, необходимой для прямолинейного движения того же шасси.
Увеличение затрат мощности с ростом кривизны для шасси с алгоритмом равенства
моментов и равенства мощностей составляет 8,5... 11,5 %, для шасси с алгоритмом
равенства частот вращения — 8,5... 14,5 %.
Причины увеличения затрат мощности на движение могут быть объяснены
при рассмотрении критерия, характеризующего затраты мощности на скольжение.
На рис. 11.41 представлены зависимости изменения затрат мощности на скольжение
при уменьшении радиуса поворота шасси. Для шасси с принципом равенства
скольжений величина затрат мощности на скольжение составляет 5,6...6,0 % от
мощности на входе в трансмиссию и практически не изменяется при уменьшении
радиуса поворота. Для шасси с другими алгоритмами затраты мощности на сколь-
жение имеют большую абсолютную величину (например, для шасси с алгоритмом
равенства частот вращения — на 8,0...9,5 %) и с увеличением кривизны интенсивно
возрастают за счет роста кинематического несоответствия.
Совместный анализ данных рис. 11.39-11.41 позволяет сделать важный вы-
вод о том, что основное преимущество шасси с принципом равенства скольжений
444
11. Основы теории и расчета систем передачи мощности
Рис. 11.42. Максимальный
угол подъема а, преодоле-
ваемый шасси типа 7930 на
деформируемой грунтовой
поверхности:
/ — равенство скольжений; 2 —
равенство моментов; 3 — равен-
ство ас гот вращения; 4 — ра-
венсг о мощностей
заключается в реализации в пятне контакта колеса с
опорной поверхностью во всех условиях и режимах
движения большей продольной реакции /?х, а значит, и
силы тяги Рк при меньших суммарных затратах мощ-
ности на движение.
На рис. 11.42 показана зависимость изменения
максимального преодолеваемого угла подъема а для
шасси типа 7930 от коэффициента сцепления ср на
прямолинейном участке деформируемой грунтовой
поверхности со следующими параметрами характери-
стики опорной поверхности: f = 0,15, С, = 0,5, ц = 0,5
(влажный суглинок). Как следует из рис. 11.42, в за-
данных условиях наиболее ярко проявляются недос-
татки, свойственные шасси с принципом равенства
моментов.
Увеличение угла подъема приводит к уменьше-
нию вертикальной реакции на первой оси и несоблю-
дению условия (11.11). Скольжение в этом случае ста-
новится больше величины 5прел а дифференциальная
связь между колесами и осями шасси в конечном итоге
приводит к потере проходимости по сцеплению. По-
этому шасси с принципом равенства моментов по зна-
чению максимального угла подъема уступает шасси со всеми другими вариантами
распределения мощности по колесным движителям, например с принципом равен-
ства скольжений на 28,5...33,6 %.
Таким образом, разработанная математическая модель управляемого движе-
ния КТС ОБГ с ЭТ позволила провести теоретическую оценку эффективности раз-
личных принципов распределения мощности по колесному движителю. Наиболее
предпочтительным принципом из рассмотренных является принцип равенства
скольжений. При этом следует подчеркнуть, что подобные преимущества данный
принцип будет обеспечивать и КТС ОБГ с ГОТ
С увеличением несимметрии в приводах отдельных колес, свойственной ре-
альным условиям эксплуатации СКШ, в ЭТ с рассмотренными принципами распреде-
ления мощности усиливается проявление недостатков, свойственных традиционным
трансмиссиям. Во-первых, снижение сцепных свойств опорной поверхности ухудша-
ет подвижность шасси с дифференциальным приводом вплоть до полной ее потери
при достаточной мощности двигателя. И во-вторых, кинематическая несимметрия
при криволинейном движении приводит к существенному увеличению затрат мощно-
сти у шасси с блокированным приводом.
Принцип обеспечения равенства скольжений ведущих колес исключает поте-
рю подвижности КТС ОБГ при значительном буксовании (даже при полном выве-
шивании одного или нескольких колес), а также не допускает возникновения цир-
куляции мощности в трансмиссии при криволинейном движении шасси. Это в ко-
нечном итоге приводит к увеличению максимально возможной в различных
дорожных условиях скорости движения на 9,0... 18,3 % и предельных средних ско-
11.6. Перспективные электрические трансмиссии систем передачи 445
ростей движения по представительному маршруту на 5,3...! 1,6 %. При этом затра-
ты мощности на скольжение снижаются на 43...75 %, а угол преодолеваемого подъ-
ема увеличивается на 2...33,6 % по отношению к другим принципам распределения
мощности.
Таким образом, без учета технических сложностей реализации в конструкции
ЭТ рассмотренные принципы распределения мощности по колесным движителям
по степени влияния на тягово-динамические свойства СКШ можно расположить в
следующей предпочтительной последовательности:
равенство скольжений колес;
равенство моментов на колесах;
равенство мощностей в приводах колес;
равенство частот вращения колес.
11.6. Перспективные электрические трансмиссии систем
передачи мощности к движителю
Теоретические предпосылки для разработки ЭТ
Как было отмечено выше, важным свойством электрической трансмиссии яв-
ляется возможность индивидуального управления режимами работы каждого из
колесных движителей СКШ в соответствии с условиями их движения и состоянием
опорной поверхности. Такое управление, как известно, позволяет улучшить тягово-
динамические показатели, проходимость и подвижность шасси в целом как транс-
портной базы специальных агрегатов монтируемого оборудования.
Проблема организации такого управления заключается в разработке целесо-
образных принципов функционирования ЭТ и формирование на этой основе требо-
ваний к составным частям моторно-трансмиссионной установки (МТУ), к структуре
и принципам работы системы тягового электропривода в целом. Это же относится и
к гидрообъемной трансмиссии.
Исходные данные для разработки ЭТ или ГОТ должны базироваться на научно-
обоснованных принципах и алгоритмах изменения силовых и кинематических парамет-
ров в сечениях МТУ при различных режимах и условиях движения КТС ОБГ
Такая задача может и должна быть решена специалистами в области теории
автомобиля с помощью моделирования процессов функционирования МТУ При
этом для успешного использования результатов моделирования в интересах разра-
ботки требований к ЭТ и ее создания оно должно базироваться на теоретических
основах и аналогах (схемах замещения), понятных специалистами смежных облас-
тей знаний.
В данном параграфе с использованием подходов, изложенных в [6], предпри-
нята попытка создания такой модели шасси с ЭТ, в которой описание реальных
процессов, происходящих в электромеханических устройствах, заменено (где это
возможно) на описание аналогичных механических устройств. Главное условие за-
мены заключалось в выборе таких аналогов, принципы работы которых были бы
близкими к электромеханическим устройствам.
446
11. Основы теории и расчета систем передачи мощности
Это позволяет, во-первых, уйти от рассмотрения специфических и весьма
сложных процессов и закономерностей взаимодействия электрических величин (то-
ка, напряжения, активного и реактивного сопротивлений и т. д.), исследование ко-
торых является компетенцией специалистов в области электромеханики и автома-
тики. А во-вторых, значительно упростить математическую модель и сосредоточить
основное внимание на разработке принципов функционирования ЭТ с позиций тео-
рии автомобилей.
При разработке расчетной схемы (схемы замещения) и математической мо-
дели на данном этапе исследований приняты следующие допущения:
движение шасси осуществляется только в прямом направлении, по ровной
поверхности;
движение на подъем имитируется силой сопротивления подъему, как состав-
ляющей веса шасси, с учетом перераспределения нагрузки по осям;
изменение условий качения колес моделируется коэффициентом сопротивле-
ния качению и коэффициентом сцепления;
система управления ЭТ реагирует только на сопротивления движению и
сцепных свойств опорной поверхности.
С учетом вышеизложенного, а также принятых допущений схема замещения
МТУ с ЭТ имеет вид, предложенный канд. техн, наук В.Г Корниловым и представ-
ленный на рис. 11.43.
В общем виде схема включает две основные части — энергоустановку (ЭУ)
и электрическую трансмиссию (ЭТ).
Входным параметром ЭУ является перемещение задающего органа управле-
ния подачей топлива (ЛД, выходным — частота вращения выходного вала ЭУ ((рц).
В качестве обратной связи используется момент нагрузки (Л/н), зависящий от режи-
ма работы ЭТ
Внутренняя структура ЭУ представлена двигатель-генераторной установкой
(ДГУ) и регулятором подачи топлива (РПТ).
Входным сигналом для РПТ является перемещение задающего органа управ-
ления подачей топлива (Лт), а выходным сигналом — часовой расход топлива (2ч)-
В качестве обратных связей используется: частота вращения выходного вала ДГУ
(0)д), часовой расход топлива (2ч), скорость его изменения (2Ч) и характеристика
затухания регулятора (£р).
Для ДГУ входным параметром является расход топлива (2ч), а выходным —
угловая частота вращения выходного вала (сод). Обратной связью служит момент
нагрузки (Л/н) от ЭТ, который представляет собой сумму моментов тяговых элек-
тродвигателей (ТЭД).
Структурно ЭТ состоит из электромотор-колес (ЭМК), преобразователя час-
тоты (ПЧ), блока управления магнитным потоком (БУМП), блока корректировки
частоты (БКЧ) и блока вычисления механического скольжения в ТЭД (БВС). Ос-
новной объект управления в ЭТ — тяговые электродвигатели (ТЭД).
Выходным параметром ТЭД является электромеханический момент (Л/ТЭд),
который через передаточное число колесного редуктора (КР) подается на ведущие
колеса (ВК). Обратная связь осуществляется через угловую скорость ВК (щЭ с уче-
том передаточного числа КР.
Рис. 11.43. Расчетная схема электрической трансмиссии:
РПТ — регулятор подачи топлива; ДГУ — дизель-генераторная установка; ПЧ — преобразователь частоты; ЭТ — электротранс-
миссия; БКЧ — блок контроля частоты; БУМП — блок управления магнитным потоком; БВС — блок вычисления скольжения;
ТЭД — тяговый электродвигатель; КР — колесный редуктор; ВК — ведущее колесо
11.6. Перспективные электрические трансмиссии систем передачи
448
11. Основы теории и расчета систем передачи мощности
Преобразователь частоты (ПЧ), имея на входе перемещение задающего орга-
на управления частотой (Лр), угловую частоту вращения выходного вала ДГУ (сод),
магнитный поток (FMn) и сигнал ошибки (АсоД из блока корректировки частоты
(БКЧ), вырабатывает на выходе сигнал, определяющий величину изменения маг-
нитного поля 1УП ч статора ТЭД.
Взаимосвязь между Лт и Лр как функция ZzT = f (hp) или hp = f (Jt-д достаточно
сложна и обусловлена той или иной программой объединенного регулирования и
управления. В настоящей работе эта взаимосвязь не рассматривается.
Входным параметром для блока управления магнитным потоком (БУМП) яв-
ляется передаточное число ПЧ (/пч) и сигнал ошибки скольжения в ТЭД (А5ТЭД),
определяемый блоком вычисления скольжения ТЭД (БВС) относительно критиче-
ского скольжения тягового электродвигателя (Атэдк.р)-
На выходе БУМП вырабатывается сигнал, определяющий величину магнит-
ного потока ТЭД, который используется одновременно для коррекции передаточно-
го числа ПЧ.
В соответствии со схемой замещения работа ДГУ может быть описана диф-
ференциальным уравнением 1-го порядка
(QT -К t-M Км
ок =—------(11.16)
д j.
д
где (Од — угловая частота вращения выходного вала ДГУ; QT — часовой расход
топлива; Ми — момент нагрузки на валу ДГУ; Тд — постоянная времени ДГУ;
Kqt— коэффициент пропорциональности между подачей топлива и частотой враще-
ния вала ДГУ; КМн— коэффициент пропорциональности между моментом нагрузки
и частотой вращения вала ДГУ
Момент нагрузки Мн определяется как сумма моментов тяговых электродви-
гателей (Л/гэд) с учетом передаточного числа С/п ч преобразователя частоты:
2п
— ^(^ТЭД/^п.ч/
/=1
Подача топлива в ДГУ (Q4) согласно схеме замещения может быть определе-
на из решения дифференциального уравнения 2-го порядка, которое имеет вид:
Л _ (^г^гр ~Шд^ро ~^р^рбч ~С?ч) /1 | |
кА] э •) \ 1 * •1 ' /
ГР
где — параметр, определяющий положение рейки топливного насоса двигателя;
Е,р— коэффициент затухания регулятора подачи топлива; /Сгр— коэффициент про-
порциональности между положением задающего органа и подачей топлива; /Сро
коэффициент пропорциональности между частотой вращения вала ДГУ и подачей
топлива; Тр— постоянная времени регулятора подачи топлива.
Коэффициенты пропорциональности между различными величинами, вхо-
дящими в (11.16), (11.17) определяются из следующих формул.
11.6. Перспективные электрические трансмиссии систем передачи 449
Коэффициент А7Р можно найти из соотношения
— (0ч max — 0ч min) / (^i max — min
а коэффициент /fpo — по зависимости
Кро — («д I ах — 0)д min) / (0ч max — Q4 min
Коэффициент КМн зависит от соотношения максимальной частоты вращения
вала ДГУ сод тах и максимального момента нагрузки Мн т.
КМп ~~ Фд max / max,
а коэффициент Kq1 является обратной величиной коэффициента К,р:
КЧ1 = \IKV..
Таким образом, уравнения (11.16) и (11.17) описывают работу ЭУ шасси в зави-
симости от воздействия водителя на орган управления подачей топлива (Л,), момента
нагрузки Л/н на валу ДГУ и внутренних параметров функционирования этой системы.
Как отмечалось выше, основным объектом управления ЭТ является ТЭД. Для ЭТ
на переменном токе рекомендуется применять асинхронные тяговые двигатели (АД).
Очевидно, что для получения требуемого закона изменения выходной характе-
ристики АД (электромеханический момент) необходимо изменять состояние магнит-
ного поля статора и величину магнитного потока. При этом для устойчивой работы
АД механическое скольжение в ТЭД (5тэд) не должно превышать своего критическо-
го значения (5тэд к.р) за исключением случаев пуска АД. Под механическим скольже-
нием в ТЭД (5тэд) в данном случае понимается отношение значения мгновенной час-
тоты вращения ротора, определяемого электрическими величинами, подаваемыми на
ТЭД, и нагрузкой на колесо, определяемой условиями его взаимодействия с опорной
поверхностью, к расчетному значению мгновенной частоты вращения ротора, опре-
деляемого только электрическими величинами, подаваемыми на ТЭД.
Анализ принципов работы АД, характера изменения его выходной характе-
ристики, а также методов управления ею позволяет представить асинхронный дви-
гатель в виде устройства, содержащего соосные внешнюю и внутреннюю втулки
цилиндрической формы. Кольцевой зазор между этими втулками заполнен средой,
имеющей момент углового сопротивления. Тогда крутящий момент с внешней (ве-
дущей) втулки на внутреннюю будет передаваться посредством этой упругой среды
независимо от ее природы.
Проводя аналогии, можно предположить, что вращение внешней втулки
представляет собой магнитное поле статора, а вращение внутренней втулки анало-
гично вращению ротора АД. При этом упругие свойства среды имитируются вели-
чиной магнитного потока. При отсутствии нагрузки, приложенной к внутренней
втулке, максимально возможная величина частоты ее вращения будет определяться
свойствами магнитного потока (механическое скольжение равно 0), а при наличии
нагрузки — ее величиной и свойствами магнитного потока. Тогда работу системы
управления силового привода ТЭД можно организовать так, что она за счет регули-
рования значений электрических параметров, подаваемых на ТЭД, обеспечит рав-
ное механическое скольжение ТЭД всех колес транспортного средства.
- 2918
450
11, Основы теории и расчета систем передачи мощности
Такая замена позволяет описать работу АД в обобщенном виде, не затрагивая
процессы и закономерности, лежащие в области электротехники.
На основании вышеизложенного и в соответствии со схемой замещения
(рис. 1 1.43) выходной момент на валу АД с учетом демпфирующих свойств упругой
среды (в данном случае магнитного потока) можно записать в виде
МТЭд = FWn(%, -Ч^к.Р)-(Ч.ч
где F|/н— магнитный поток; Wll 4 — угловая скорость вращения магнитного потока
статора, определяемого преобразователем частоты, т. е.
Wr. Ч — ^п.4^0,'1»
где щк — угловая скорость вращения колесного движителя; £/кр— передаточное
число колесного редуктора; — коэффициент демпфирования магнитного потока.
Зная величину крутящего момента ЭМ, можно определить угловую скорость
ведущего колеса с учетом передаточного числа колесного редуктора
(Л^ТЭД^к.р “
ч =--------—!,
Л
где Rx— продольная реакция в пятне контакта колеса с опорной поверхностью;
радиус качения колеса под нагрузкой; JK — момент инерции колеса с учетом вра-
щающихся частей ЭМ и колесного редуктора.
Продольную реакцию можно определить по формуле:
н ।
— продольная скорость движения шасси; Еш — тангенциальная эластичность
шины; КП1— коэффициент демпфирования шины.
С учетом принятых допущений, уравнение прямолинейного движения запи-
шется в виде
V = — | Е Rxi - Е R- fi ~Fa~FW
,=l
где RXI— продольная реакция /-го колесного движителя; R:i— нормальная реакция
в пятне контакта с опорной поверхностью /-го колесного движителя; / — коэффи-
циент сопротивления качению /-го колесного движителя; Fa— сила сопротивления
подъему; т — масса шасси; Fw— сила сопротивления воздуха.
Вертикальные реакции /?-„ сила сопротивления воздуха и сила сопротивления
подъему определяются известными методами теории автомобиля.
Управление скоростью движения шасси при условии постоянства числа обо-
ротов ЭУ (непрозрачная трансмиссия) осуществляется регулированием передаточ-
ного числа ПЧ путем воздействия на соответствующий орган управления подобно
тому, как водитель переключает передачи в коробке передач. Рассматриваемая
трансмиссия позволяет сделать это бесступенчато, т. е. водитель задает положение
11.6. Перспективные электрические трансмиссии систем передачи 45 1
органа управления в соответствии с желаемой скоростью движения. Контур управ-
ления передаточным числом в соответствии с этим отрабатывает заданное переда-
точное число до выхода на заданный режим движения.
Работа такого контура ЭТ должна удовлетворять следующим требованиям.
Во-первых, учитывать возможную разницу в угловых скоростях ведущих ко-
лес, возникновение которой может быть обусловлено буксованием отдельных ко-
лес, движением по круговой траектории или рельефом опорной поверхности.
Во-вторых, согласовывать свою работу с контуром управления магнитным
потоком в тех же целях и для удержания величины механического скольжения в
ТЭД в докритической зоне.
Контур управления магнитным потоком в ЭТ должен обеспечивать плавное
уменьшение этой величины в зависимости от передаточного числа с учетом элек-
трического скольжения в ТЭД.
Исходя из вышеизложенных соображений, совместная работа контуров ЭТ,
связанных с управлением передаточным числом ПЧ и магнитным потоком, может
быть представлена в виде системы дифференциальных уравнений первого порядка
. (Лр ч —— Д(0к —/и ч)
/и ч — — ; (1 1.1 о)
' II.ч
Г/Ип - Т , V 1 1 1
‘ Мп
где Ар— положение органа управления ПЧ; Кцч— коэффициент пропорционально-
сти между положением органа управления ПЧ и его передаточным числом; K\fn—
коэффициент пропорциональности между величиной магнитного потока и переда-
точным числом; Дсок— разность между частотой вращения данного колеса и сред-
ней частотой вращения колесных движителей; Кы— коэффициент пропорциональ-
ности между Доу и передаточным числом; К/.— коэффициент пропорциональности
между передаточным числом ПЧ и величиной магнитного потока; К,— коэффици-
ент корректировки величины магнитного потока по механическому скольжению в
ТЭД; Т|1Ч, Тд/п— постоянные времени контуров управления ПЧ и магнитным пото-
ком; /п ч — ток ПЧ.
Коэффициенты пропорциональности в (11.18) и (11.19) могут быть определе-
ны из значений переменных величин, с ними связанных, методами последователь-
ных приближений или задания граничных условий функционирования описывае-
мой системы в положении равновесия.
Из приведенных уравнений функционирования ЭТ видно, что главная роль в
управлении скоростью движения шасси принадлежит водителю, а прочие функции,
связанные с регулировкой значений передаточного числа и электрических величин,
осуществляются автоматически. Причем значительное место в этом процессе отводится
величине и характеру изменения механического скольжения в ТЭД. Этот параметр яв-
ляется своего рода показателем условий работы ТЭД, который практически мгновенно
реагирует на режим работы колесного движителя, а значит, косвенным образом связан с
его скольжением в пятне контакта с опорной поверхностью. Это очень важно, посколь-
ку ранее было обосновано, что в ЭТ наиболее целесообразно осуществлять регулирова-
452
11. Основы теории и расчета систем передачи мощности
ние распределения мощности по колесным движителям, опираясь на условие равенства
скольжений в пятне их контакта с опорной поверхностью. Однако измерить этот пара-
метр с необходимой точностью в настоящее время сложно, в то же время механическое
скольжение в ТЭД, напротив, определяется очень просто. Поэтому механическое
скольжение в ТЭД совместно с другими параметрами можно использовать для построе-
ния алгоритмов работы ЭТ в целом.
На базе разработанной математической модели создано программное обеспе-
чение исследования процессов, происходящих в ЭТ при различных условиях и ре-
жимах движения шасси.
Примеры таких исследований приведены на рис. 11.44-11.46.
На рис. 11.44 показано изменение исследуемых параметров в процессе разго-
на шасси с места до заданной скорости. Для данного процесса характерным являет-
ся значительное в начальный момент и постепенно убывающее сопротивление дви-
жению вследствие действия сил инерции.
Из данных, приведенных на рис. 11.44, видно, что в момент трогания шасси с
места механическое скольжение в ТЭД имеет минимальное значение (5Тэд 0)
(кривая /), но интенсивный рост магнитного потока (кривая 7) и передаточного числа
преобразователя частоты (кривая 6), приводит к изменению механического скольже-
ния до пределов, обеспечивающих работу ТЭД в устойчивой зоне (5од < 0,12).
Момент ТЭД (кривая 2) вследствие интенсивного роста магнитного потока и
передаточного числа ПЧ резко растет в начале разгона и постепенно снижается по
мере уменьшения силы инерции и возрастания скорости движения (кривая 5) до
заданного значения.
Частота вращения выходного вала ДГУ (кривая 3) имеет характерную «про-
садку» в начале процесса разгона из-за больших нагрузок, но автоматическое уве-
личение подачи топлива (кривая 4) обеспечивает выход ДГУ на заданный режим.
%
90
80
70
60
50
40
30
20
10
0
29 30 31 32 33 34 35 36 37 38 39 40 /, с
Рис. 11.44. Характер изменения параметров ТЭД при разгоне шаееи с ЭТ:
/ аническое скольжение в ТЭД; 2 — moi ТЭД; 3 — nacioia вращения выхо,
4— рае лива первичного двигатез 5 — CKopoeib движения шасси; 6 — пере,
преобразователя частоты; 7 — магнитны" поток в ТЭД; 8 — часюта вращения ведущего коз
11.6. Перспективные электрические трансмиссии систем передачи 453
Рис. 11.45. Реакция ЭТ на ступенчатое изменение коэффициентов сцепления под первым
правым колесом (с (р = 0,7 до (р = 0,05) при движении шасси на подъем:
/ — частота вращения первого правого колеса; 2 — частота вращения первого левого ко; 3 — мо-
мент правого ТЭД; 4 — момент левого ТЭД
На рис. 11.45 представлена реакция ЭТ на ступенчатое изменение коэффициента
сцепления под первым правым колесным движителем с максимального значения (р = 0,7
до (р = 0,05 (имитация скользкой поверхности, например льда) при движении шасси на
подъем. Из приведенных данных видно, что момент на правом ТЭД резко и значитель-
но уменьшился (кривая 3). Одновременно произошло перераспределение момента на
другие колесные движители шасси для поддержания заданной скорости движения.
Из рис. 11.46 (кривая 4) видно, что момент на левом переднем колесном дви-
жителе увеличился на некоторую величину. На такую же величину произошло уве-
личение крутящего момента на других колесных движителях.
Рис. 11.46. Реакция ЭТ на ступенчатое изменение коэффициентов сцепления под первым
правым колесом (с (р = 0,7 до (р = 0,05) при движении шасси на подъем:
/ — механическое скольжение в первом правом ТЭД; 2 — передаточное ч 'ло прсобразоваге:
первого правого ТЭД; 3 — магнитный поток на первом правом ТЭД; 4 — механическое скольжен
первом левом ТЭД; 5 — передаточное число преобразователя частоты первою левою ТЭД; 6 — \и
нитпый поток на перво, левом ТЭД
454
11 Основы теории и расчета систем передачи мощности
В традиционных типах трансмиссий (например, механической с симметрич-
ным дифференциалами) в таких условиях следовало бы ожидать «раскрутки» ко-
лесного движителя, попавшего на опорную поверхность с низкими сцепными свой-
ствами, и падения крутящего момента на остальных колесных движителях, но в ЭТ
этого не происходит. Угловые скорости правого и левого колесных движителей
(кривые 1 и 2) остаются одинаковыми.
Описанная реакция ЭТ на изменившиеся условия произошла вследствие со-
вместной работы контуров управления передаточными числами и магнитными по-
токами. На рис. 11.46 видно, что в правом ТЭД, колесо которого попало на скольз-
кую поверхность, резко изменилось скольжение (кривая /). Это вызвало снижение
передаточного числа (кривая 2) и магнитного потока (кривая 5), что обеспечило в
конечном итоге значительное снижение крутящего момента, подводимого к право-
му колесу, попавшему в неблагоприятные условия. В то же время некоторое увели-
чение скольжения на левом ТЭД (кривая 4) вызвало соответствующее увеличение в
нем магнитного потока (кривая 6) и передаточного числа (кривая 5).
Программное обеспечение, созданное на базе математической модели, адек-
ватно отражающей качественную сторону процессов, происходящих в реальных
шасси с ЭТ в различных условиях движения, результаты исследований, проведен-
ных с его использованием, а также результаты, полученные при создании методики
комплексной оценки совершенства схем трансмиссий, послужили основой для раз-
работки научно-обоснованных требований к структуре построения, принципам и
алгоритмам функционирования электрических трансмиссий.
Конструкция перспективного автомобильного тягового электродвигателя
На базе этих и многих других исследований в области электротехники в НПЦ
СМ МГТУ им. Н.Э. Баумана совместно с ОАО «Авиаэлектромаш» был разработан,
изготовлен и испытан в объектовых условиях макета шасси типа 547В с колесной
формулой 12x12 и на стенде автомобильный тяговый электродвигатель, в конст-
рукции которого учитывались достижения предшествовавших исследований по дан-
ному вопросу.
Результатом совместной работы стал асинхронный электродвигатель АД60 и
понижающий редуктор РД60 с номинальной мощностью на выходном валу асин-
хронного электродвигателя 60 кВт. В процессе проектирования удалось конструк-
тивно объединить их в едином корпусе. Вследствие этого асинхронный электродви-
гатель и редуктор с конструктивной точки зрения можно рассматривать как единый
тяговый электромеханизм для мотор-колеса.
Кроме того, условие встраиваемости электромеханизма в колесный редуктор
шасси 547 В потребовали еще на этапе сборки электро механизм а установки штатных
автомобильных узлов (поворотного кулака и суппорта тормоза). Поэтому в окончатель-
ном виде тяговый электромеханизм мотор-колеса получился как агрегат, включающий
в себя собственно тяговый электромеханизм и узлы автомобиля. Внешний вид тягового
электромеханизма без суппорта тормоза представлен на рис. 11.47
По результатам предварительных теоретических исследований тип тягового
электродвигателя был однозначно задан как 3-фазный асинхронный электродвигатель
с широким диапазоном частоты питающего 3-фазного напряжения (от 40 до 1200 Гц),
11.6. Перспективные электрические трансмиссии систем передачи 455
Рис. 11.47. Схема тягового электромеханизма в сборе с колесным редуктором и поворотным
кулаком:
/ — поворотный кулак; 2 — клеммная коробка; 3 — статор; 4 — ротор; 5 — планетарный ре,
6 — тормозной барабан; 7 — колесный редуктор; 8 — обод колеса
поэтому выбор варианта исполнения асинхронного электродвигателя определялся
условиями его применения в части электромеханических характеристик, системой
управления, способом охлаждения и спецификой монтажа на объекте.
Основой для проектирования АД60 являлись заданные внешний и внутрен-
ний диаметры, мощность, максимальный пусковой момент и максимальный КПД.
Дополнительными параметрами служили диапазон возможных напряжений питаю-
щей сети и частота работы силовой установки (дизель-генератор), производитель-
ность системы охлаждения. Мощностные характеристики теплового двигателя и
источника электроэнергии не задавались и поэтому было принято, что источник
электроэнергии является источником бесконечной мощности.
В результате проведенных расчетов параметров был разработан асинхронный
электродвигатель с 15 парами полюсов, который позволял при питании 3-фазным пере-
менным напряжением с частотой 40 Гц получать синхронную частоту вращения
магнитного поля 167 об/мин, а при 3-фазном переменном напряжении с частотой
1200 Гц получать синхронную частоту вращения магнитного поля 5000 об/мин.
456
Основы теории и расчета систем передачи мощности
0,054 Ом о,О73 мГн 0,038 мГн 0,024 Ом
О | | | |
£ 0,9 мГн
о - . —. 1--------------------------
Рис. 11.48. Классическая схема замещения тягового электродвигателя
Расчетные параметры АД60 показаны на классической схеме замещения,
приведенной на рис. 11.48. Величины активных и индуктивных сопротивлений при-
ведены в абсолютных единицах. Конструктивно АД60 представляет собой обычную
конструкцию асинхронного электродвигателя.
Принципы проектирования высокоэффективных двигателей позволяют ут-
верждать, что для уменьшения массы и повышения КПД активная часть двигателей
должна иметь бубликообразный вид: статор и ротор сосредоточены на окружности
двигателя, а в центральной части, не участвующей в формировании электромагнит-
ного момента, активные материалы отсутствуют.
Внешний диаметр пакета сердечника статора составляет 420 мм. Пазы, в которые
укладываются медные проводники статора прямоугольного сечения, являются полуза-
крытыми и имеют прямоугольную форму размером 3,85x8,8 мм. На рис. 11.49 показан
запрессованный в корпусе электромеханизма магнитопровод статора с обмоткой.
Ротор АД60 выполнен по схеме беличьей клетки, изготовленный из прямо-
угольных медных стержней для улучшения пусковых характеристик. Размер паза в
пакете сердечника ротора составляет 2,65x5,45 мм.
Рис. 11.49. Вид статора с обмоткой запрессованного в корпусе
электромеханизма магнитопровода
11.6. Перспективные электрические трансмиссии систем передачи 457
Рис. 11.50. Кинематическая схема ротор АД60 — редуктор РД60 — выходной ваз
Внешний диаметр ротора АД60, равен 383 мм. Он опирается на неподвиж-
ную опору с помощью подшипников, расположенных с одной стороны ротора. По-
скольку форма ротора «бубликообразная», то внутри него центральная часть занята
понижающим редуктором. Опора у ротора одна, расположенная с одной стороны,
поэтому для исключения его биений на опоре установлены два подшипника рядом.
Рабочий зазор между ротором и статором составляет 0,5 мм.
Кинематическая схема ротор АД60 — редуктор РД60 — выходной вал при-
ведена на рис. 11.50. Редуктор РД60 планетарного типа с восемью сателлитами. Пе-
редаточное число редуктора — 2,628.
Ротор АД60 и редуктор РД60 охлаждаются маслом типа ИПМ-10. Расход
масла через электродвигатель определяется его тепловыделением и составляет око-
ло 2 л/мин на 1 кВт потерь. Давление масла на входе в электродвигатель должно
быть не менее 3...4 атм.
Охлаждающее масло поступает в корпус электродвигателя через герметизи-
рующий штуцер, проходит по спиральным каналам над пакетом магнитопровода
статора, а затем через дозирующие жиклеры, подается в полость ступицы ротора.
Под действием центробежных сил ИМП-10, омывает ступицу под пакетом ротора и
зубчатые колеса редуктора, после чего сбрасывается по торцам ротора на лобовые
части обмотки статора. Из сливной полости масло откачивается насосом и через
фильтр поступает в теплообменник, откуда нагнетающим насосом снова подается в
электродвигатель. При этом давление в полости электродвигателя за счет насоса
откачки, имеющего избыточную производительность, не превышает окружающего,
вследствие чего не требуется повышенная герметичность.
Для контроля температуры масла в электромеханизме установлен сигнализа-
тор температуры. Если температура масла превышает 150 °C, сигнализатор выдает
сигнал во внешнюю схему на отключение напряжения питания.
Для измерения частоты вращения ротора АД60 используется датчик частоты
вращения ДССП-5. Датчик реагирует на изменение магнитного поля, создаваемого
458
Основы теории и расчета систем передачи мощности
им самим. Магнитное поле меняется за счет вращения специального зубчатого ко-
леса, соединенного с ротором АД60. Чередование зубец — впадина изменяет маг
нитный поток в датчике и наводит в его выходной обмотке ЭДС с частотой, про-
порциональной частоте вращения ротора АД60.
Рис. 11.51. Сборка мотор-колеса на объекте
Конструктивно мотор-колесо состоит из колесного редуктора шасси 547 и
ТЭД, описанного выше. В колесном редукторе изменена конструкция ведущего ва-
ла и ступицы по сравнению со штатным редуктором 547В. В остальном конструк-
ция редукторов аналогична.
Контрольная сборка мотор-колеса представлена на рис. 1 1.51.
Глава 1 2
Колебания многоосного колесного шасси
с упругими шинами
12.1. Особенности вертикальных и продольно-угловых колебаний
Колебания КТС ОБГ имеющих огромные инерционные массы и достаточно
большие скорости движения, являются определяющими для расчета и конструирования
ходовой части и вторичного подрессоривания. Поэтому закономерности колебательных
процессов данной группы машин требуют отдельного детального рассмотрения.
Различные варианты упрощенных математических моделей пространствен-
ного движения кузова (корпуса) многоосной колесной машины, приспособленные
для решения как задач самого общего вида, так и различных частных задач, обсуж-
дались в главе 8.
При рассмотрении колебательного движения корпуса многоосного шасси уп-
рощают исследуемые процессы путем их членения на слабо связанные между со-
бою явления.
Автомобиль обычно конструируют так, чтобы обеспечить его устойчивое по-
ступательное продольное движение и уменьшить насколько возможно продольные
и особенно поперечные линейные колебания. С помощью целого ряда специальных
мероприятий подавляются самопроизвольные повороты шасси в горизонтальной
плоскости (так называемое «рыскание» по курсу).
Если все эти конструктивные мероприятия проведены успешно, то подрессо-
ренный корпус шасси будет при движении совершать только линейные вертикаль-
ные и поперечные, продольно-угловые и поперечно-угловые колебания. Считается,
что подрессоренный кузов многоосного шасси можно рассматривать как динамиче-
скую систему, движение которой описывается следующими обобщенными коорди-
натами (рис. 12.1 и 12.2):
вертикальное перемещение кузова машины на упругодемпфирующих ле-
ментах подвески (обобщенная координата z);
продольно-угловые перемещения, или продольно-угловые колебания, т. е.
повороты кузова относительно центра масс или его поперечной оси у (обобщенная
координата 0);
поперечно-угловые перемещения, или поперечно-угловые колебания, т. е.
повороты кузова относительно продольной оси х (обобщенная координата у).
460
12. Колебания многоосного колесного шасси с упругими шинами
Рис. 12.1. Схема подрессоривания корпуса многоосного шасси (продольная плоскость)
В общей математической модели движения кузова такая схематизация озна-
чает использование в неявном виде предположения о незначительности угловых
перемещений корпуса, что позволяет линеаризовать систему его общих кинемати-
ческих уравнений.
Рис. 12.2. Схема подрессоривания корпуса многоосного шасси (поперечная плоскость)
12.1. Особенности вертикальных и продольно-угловых колебаний
461
Действительно, предположим, что
ф = Ф + Дф,
< т| = Е + Дт|,
у = г + Ду,
(12.1)
где (ф, т|, у)т — углы Крылова, описывающие вращательные движения корпуса
СКШ относительно его центра масс и что
Дф = 0[£],
<ДТ| = О[£], (12.2)
Ду = 0[£],
где 0 [е] обозначена величина первого порядка малости.
Кроме того, введем понятие «эволюционного вращательного движения
корпуса» с угловой скоростью (Р, (?, Р)т, QKOpn = (Р, Q, Р)Т, заданной проекциями на
оси связанной системы координат СКЗ.
В этом случае система кинематических уравнений, описывающих движение
связанной системы координат СКЗ относительно нормальной земной системы ко-
ординат СКО, может быть записана в следующей форме
d
dt
^Дф^
Дг|
Л?,
cos(T)
cos(E)
— sin(F)
sin(E)
cos2(Г)
sin(T) cos(E) 0
— cos(F) Q Ду+ 0
cos(E) 1
cos2(f), I
sin(T) sin(E)
cos2(E)
0
tg(F)cos(E)
sin(F) cos (Г) A
cos(E) cos(E) 'Др'
cos(T) — sin(F) A? +
tg(T)sin(E) tg(F)cos(E) ^Дг,
cos(F)sin(E)
cos2(E)
0
— tg(T)sin(E)
Q AT|
(12.3)
Из этой формулы, считая как обычно параметры осцилляции величинами
первого порядка малости, а эволюционное движение независящим от осцилляции с
точностью до величин второго порядка малости, получаем
0 sin(r) cos(T) A
cos(E) cos(E)
a Hr E = 0 cos(T) -sin(F) Q ; (12.4)
at 1 tg(f)sin(E) tg(F)cos(E) w
462
72. Колебания .многоосного колесного шасси с упругими шинами
d
dt
лДфА
Дг|
Ay,
О
cos(E)
О cos(F)
1 tg(r)sin(E)
cos(T)
cos(E)
-sin(r)
tg(F)cos(E)
At/
J
+ ( 0 0 cos(r) cos(E) -sin(r) sin(E)" cos(E) — соз(Г) Q Ду+ ( 0 0 sin(E)sin(E) 2(E) 0 cos(F)sin(E) cos2(E) Q ДП + ()|e2
1 sin(E) cos2 (Г) cos(E) cos2(T) , [th 1 tg(T)cos(E) -tg(F)sin(E) 7 V)
(12.5)
Формула (12.4) представляет собой кинематические уравнения для эволюци-
онного движения корпуса шасси. Формула же (12.5) показывает, что в общем слу-
чае даже линеаризация кинематических уравнений не дает основания для безогово-
рочного использования гипотезы о независимости друг от друга продольно-угловых
и поперечно-угловых колебаний корпуса шасси, как это принято в теории автомо-
биля и предлагается для применения в большинстве руководств по оценке плавности
их хода и управляемости.
Если исключить из рассмотрения колебания при криволинейном движении шас-
си (R = 0), случай движения шасси по продольным неровностям, соизмеримым и с его
базой, или «макронеровностям» (Q = 0), и случаи бокового опрокидывания (Р = 0), то
d
dt
ЛДфЛ
Дг|
UyJ
sinT) cos(E) cos(F) A cos(E) ' \p''
0 cos(T) -sin(r) + 0|e2
1 tg(r)sin(E) tg(F)cos(E)
(12.6)
Наконец, если рассматривать только плоское движение шасси, не имеющего
статического крена и дифферента, то
'0
о
J
о
1
п
о
0,
d
dt
ЛДфЛ
Дт|
UyJ
ЛД/Р
Д<?
чДг,
+ 0[е2
(12.7)
Это означает, что только при выполнении всех перечисленных ограничений
проекции угловой скорости возмущенного движения корпуса на оси связанной сис-
темы координат равны производным по времени от возмущенной части соответст-
вующих углов поворота координатных осей, которые, в свою очередь, можно счи-
тать не зависящими друг от друга. При этих условиях расчетные схемы, приведен-
ные на рис. 12.1 и 12.2, можно применять для описания колебательного движения
корпуса или кузова автомобиля, что обычно и делается.
12.1. Особенности вертикальных и продольно-угловых колебаний
463
Чтобы определить положение в пространстве неподрессоренных масс, при-
веденных к колесам многоопорной машины, необходимо ввести еще 2п обобщен-
ных координат (п — число колес одного борта машины с рядным линейным опор-
но-ходовым комплексом). Тогда многоосное шасси моделируется как динамическая
система с 2п -г 3 степенями свободы.
Возможно существование различных частных случаев, позволяющих провес-
ти дальнейшее упрощение модели.
Так, например, при полностью симметричной системе вертикальные, про-
дольно-угловые и поперечно-угловые колебания не будут зависеть друг от друга, а
система уравнений движения распадется на три более простые системы.
Если подрессоренная система симметрична только относительно одной глав-
ной оси инерции (чаще всего продольной оси машины), то колебания в продольной
плоскости не будут зависеть от колебаний в поперечной плоскости. Это означает,
что шасси можно моделировать отдельно в продольной плоскости (динамической
системой с тремя степенями свободы) и в поперечной плоскости (динамической
системой с двумя степенями свободы).
При моделировании движения обычных автомобилей упрощение колеба-
тельной системы часто доводится практически до предела.
Предположим, что р — радиус инерции автомобиля в продольной плоскости,
— расстояние от центра масс до первой оси, /2 — расстояние от центра масс до
второй оси. Легко показать, что при выполнении условия
р2 = /,/2 (12.8)
колебания передней и задней частей машины в продольной плоскости можно счи-
тать независимыми и моделировать их раздельно при помощи двух так называемых
двухмассовых систем, на анализе которых построена вся традиционная теория под-
рессоривания автомобилей. Это допущение в целом приемлемо для обычных авто-
мобилей, так как большинство легковых машин, 2-осных и 3-осных грузовых авто-
мобилей с балансирной тележкой характеризуются следующими значениями коэф-
фициента распределения подрессоренных масс
£.. = — = 0,8... 1,2. (12.9)
/,/2
Многоосные колесные машины существенно отличаются от обычных авто-
мобилей по геометрии, соотношению между элементами весовой сводки и конст-
рукции несущей системы. В результате оказывается, что традиционная двухмассо-
вая модель для анализа их плавности хода принципиально неприменима.
Это определяется следующими обстоятельствами.
Во-первых, многоосные колесные машины (до колесной формулы 10x10) склон-
ны к интенсивным продольно-угловым колебаниям {«галопированию»). Водитель таких
машин и некоторые чувствительные элементы оборудования располагаются, как прави-
ло, на консоли рамы вблизи оконечностей ТС и поэтому подвержены влиянию допол-
нительных ускорений, возникающих при продольном раскачивании корпуса.
Во-вторых, неподрессоренные массы колес обычно составляют около 30 %
полной массы машины (см. гл. 9). Если машина имеет две оси, то масса агрегатов
464
12. Колебания многоосного колесного шасси с упругими шинами
каждой из осей будет составлять приблизительно 15 % от его полной массы. Это
означает, что колебания оси должны существенно сказываться на характере колеба-
ний машины в целом, особенно если автомобиль имеет «неразрезные» ведущие
мосты, что типично для многоцелевых машин повышенной проходимости.
Многоосные автомобили, как правило, имеют независимую подвеску колес.
В случае четырехосной машины неподрессоренная масса одного колесного узла
будет составлять 3,8...4,0 % от полной массы машины. Естественно, что влияние их
колебаний на колебания машины в целом будет значительно меньше. Относитель-
ная неподрессоренная масса опорно-ходового модуля шестиосного колесного шасси
будет еще меньше — 2,5...3,0 %. Таким образом, во многих случаях влиянием ко-
лебаний неподрессоренных масс (колес) на колебания подрессоренной массы (кор-
пуса) машины пренебрегаем.
В третьих, размеры СКШ обычно значительно больше размеров преодоле-
ваемых ими единичных препятствий. С другой стороны, многоосные шасси обычно
оборудуются колесами с шинами большого диаметра (1600...3000 мм). Размеры
пятна контакта и высота профиля этих шин намного больше высоты типичных до-
рожных неровностей.
Наконец, специальные шасси, как правило, передвигаются группами по по-
стоянным или по подготовленным маршрутам. В этих случаях формируется совер-
шенно определенный, неслучайный характер продольного профиля дороги. Это
означает, что колебания таких машин должны рассматриваться при воздействиях
иного характера, нежели воздействия на колеса обычных автомобилей.
С помощью расчетных схем, представленных на рис. 12.1 и 12.2 формируют-
ся дифференциальные уравнения вращательного движения корпуса с симметрич-
ным тензором инерции при совпадении его главных центральных осей с осями свя-
занной системы координат СКЗ. Для обычных автомобилей это условие обычно
выполняется, хотя и с некоторой натяжкой, для КТС ОБГ — не всегда. Так, напри-
мер, исследования большегрузных автомобилей-самосвалов показали, что это усло-
вие нарушается весьма ощутимо.
При разработке обычных автомобилей большое внимание уделяется верти-
кальным колебаниям характерных точек и продольно-угловым колебаниям. Попе-
речно-угловые колебания, по мнению многих специалистов, имеют меньше значе-
ние, так как они не представляют особой опасности для обычного автомобиля. Для
многоосных колесных шасси характерен достаточно высоко расположенный центр
масс и почти всегда ограниченная ширина. В связи с этим даже небольшие углы
крена с точки зрения поперечной устойчивости могут оказаться опасными.
С другой стороны, большая длина машины снижает вероятность попадания
колес одного борта на неровность, способную вызвать общий крен кузова, близкий
по величине к статическому пределу по опрокидыванию. Такие дорожные условия,
как правило, легко прогнозируются. Кроме того, длинная рама шасси имеет боль-
шую крутильную податливость (до 7...8° — МАЗ-547В), влияющую на поперечно-
угловые колебания СКШ. Эта особенность длиннобазных многоосных шасси вызы-
вает интерес к исследованию поперечно-угловых колебаний, возникающих вследст-
вие прохождения машины через несимметричные короткие и высокие неровности, а
также малоизученностью их закономерностей.
12.1. Особенности вертикальных и продольно-угловых колебаний
465
Наконец, СКШ часто оборудуются длинной кабиной, занимающей первый
ряд второго и третьего яруса носового свеса. Такие шасси имеют длинную и узкую
раму, имеющую небольшую крутильную жесткость. Вследствие этого ускорения на
рабочем месте водителя определяются не только параметрами системы подрессори-
вания колес, но и поперечно-угловыми колебаниями кабины, подвешенной на конце
длинной податливой рамы. Эта особенность многоосных шасси выходит за пределы
расчетных схем, приведенных на рис. 12.1 и 12.2.
Таким образом, двухмассовая модель неприменима даже для грубых оценок по-
казателей плавности хода многоосных колесных шасси (за исключением самых началь-
ных, «прикидочных» расчетов). Она хорошо известна и описывать ее нет смысла.
Простая модель (см. рис. 12.1 и 12.2), несмотря на все ее ограничения и не-
достатки, широко используется на начальных этапах проектирования колесных
шасси. Следовательно, ее основной вариант, различные его упрощения и частные
случаи целесообразно рассмотреть более детально.
На первом шаге построения модели характеристики всех ее элементов обыч-
но считаются линейными. Движение составных частей этой системы рассматрива-
ется в нормальной земной системе координат СКО.
Для обеспечения одинаковой системы обозначений в этом разделе и в наибо-
лее широко распространенной литературе по теории движения автомобиля будем
использовать систему обозначений и системы координат, показанные на рис. 12.1 и
12.2 (хотя это иногда и не совсем удобно).
Перемещение центра масс кузова шасси (координата z) измеряется от поло-
жения его статического равновесия. Перемещение центра масс колеса (координата х)
также измеряется от положения его статического равновесия. Причем предполага-
ется, что центр колеса совпадает с его центром масс. Возвышения и впадины на до-
роге задаются координатой у, которая измеряется относительно линии, являющейся
математическим ожиданием микропрофиля дороги. Заметим, что практически все-
гда микропрофиль дороги считается случайной функцией с постоянным математиче-
ским ожиданием (это условие, к сожалению, в явной форме обычно не оговаривается).
Уравнения движения системы, показанной на рис. 12.1, можно получить раз-
ными путями. Выберем наиболее простой вариант — используем теорему Кенига о
движении центра масс системы, принцип Даламбера и уравнения вращательного
движения твердого тела. Часто с этой целью применяют теорему Лагранжа, что в
данном случае представляется ненужным усложнением.
Колебания несимметричной машины
Рассмотрим многоопорную машину, имеющую несимметричную подвеску с
амортизаторами при следующих допущениях:
все упругие и демпфирующие элементы имеют линейные характеристики, иначе
говоря, жесткости всех упругих элементов и коэффициенты сопротивления всех демп-
фирующих элементов, приведенные к центрам колес, постоянны (но не одинаковы);
упругие характеристики шин линейны, т. е. их жесткости постоянны (но так-
же не одинаковы);
потери на внутреннее трение в шинах настолько малы, что ими можно пре-
небречь;
466
12. Колебания .многоосного колесного шасси с упругими шинами
все потери энергии в подвеске можно учесть соответствующим подбором ко-
эффициента сопротивления демпфирующего элемента (амортизатора);
все амортизаторы двусторонние, с одинаковыми коэффициентами сопротив-
ления как при прямом, так и при обратном ходе колес;
колеса не отрываются от грунта во время колебательных процессов;
коэффициент сопротивления движению постоянен;
подвеска симметрична относительно продольной оси машины (оси колес ле-
вого борта совпадают с осями соответствующих колес правого борта);
характеристики шин и элементов подвески правого и левого бортов одинаковы;
профиль дороги под правыми и левыми колесами одинаковый.
Опуская промежуточные выводы, относящиеся к теоретической механике,
приведем систему дифференциальных уравнений, описывающих движение много-
осной машины в продольной плоскости
MC + li Ен, +2’Jc,. +2ё£ Ц,/,+20£ С,/,- = 2£(ЦД. +С,Л);
/=1 /=| /=1 /=| /=|
< Л.ё + 2ё£ц,./,2 +20ХСЛ2 +2zf ц,/,. С,7,- = 2£(цД + С,Л)/,; (12.10)
/=1 / = 1 / = 1 i=\ /=1
ЁI тХ + + (С,- + с„„ )*, ।- гЁн,- - ^Ё с - 0Ё- 0Ё сс = Ё(с™
. /=1 /=1 /=1 /=1 /=| /=|
где Мк — масса корпуса (масса так называемых подрессоренных частей шасси);
Р/— коэффициент сопротивления амортизаторов подвески z-й оси; С, — жесткость
упругого элемента подвески z-й оси; Д — момент инерции корпуса относительно
поперечной оси, проходящей через его центр масс; mt — масса колеса z-й оси; С1Ш-
жесткость шины колеса z-й оси; цш/ — коэффициент демпфирования шины колеса
-й оси; — вертикальная координата дорожного профиля в точке контакта колеса
-й оси с дорогой; 0 — угол демпфирования (тангажа) корпуса; — вертикальные
перемещения центра масс корпуса; х1 — вертикальные перемещения центра колеса
z-й оси.
Эта система уравнений показывает, что возбуждение вертикальных колеба-
ний кузова многоосного шасси обязательно сопровождается возникновением его
продольно-угловых колебаний и колебаний колес.
Существуют два подхода к анализу колебаний многоосных колесных машин.
Первый подход, более ранний, основан на применении операционного ис-
числения (обычно в варианте одностороннего преобразования по Лапласу), что по-
зволяет перейти в уравнениях (12.10) к изображениям и впоследствии использовать
частотные методы анализа линейных динамических систем. Этот подход в теории
движения автомобиля стал традиционным.
Второй подход развивается в связи с появлением и широким распростране-
нием систем объектного моделирования, которые позволяют достаточно просто и
быстро осуществлять имитационное моделирование динамических систем (приме-
ром такой среды является пакет SIMULINK, расширяющий популярную среду
MATLAB). В последнее время второй путь становится все более популярным.
12.1. Особенности вертикальных и продольно-угловых колебаний
467
Тем не менее традиционное направление исследования колебаний многоос-
ных шасси не потеряло ценности, так как позволяет получить нужные оценки эф-
фективности создаваемых СКШ с небольшими затратами времени, обеспечивая
наглядность, достоверность и высокий уровень обобщения результатов. Кроме того,
в этом направлении накоплен большой расчетный и экспериментальный материал,
позволяющий быстро и надежно проводить сравнительный анализ предлагаемых
технических решений и выбранных параметров машины, что является, как было
показано в гл. 5, важным преимуществом, особенно отчетливо проявляющимся на
ранних стадиях проектирования шасси, когда большое количество просматривае-
мых вариантов требует принятия быстрого и принципиального решения без учета
малозначащих деталей.
При реализации первого, традиционного, подхода в уравнениях (12.10) пере-
ходят к изображениям по Лапласу (параметр одностороннего преобразования Лап-
ласа обычно обозначается буквой .$). Для сокращения записей вводятся следующие
обозначения:
«ю = Ес/>
/’io=ZG/z, ^2! =Хи><2 ЕСЛ2 (12.11)
а21 = ^11 > б/2() = ^10-
Тогда система уравнений (12.10) приводится к виду
(Л/ к.S- + 2а,! .у + 2<7|О)z + 2(/>,,.v + /?|() )0 = 2^ (|Л,.У + С,) х,-;
/=1
< (/V.v + b2l.s+/>2О)0 + 2(п21л +«20)г = 2]Г (|1,л+С,)/,х,.; (12.12)
/=|
Ё (т,s2 +V-,a + Cn ^-(aus + a^z-tb"s + (l )0 = Ё (Cum / )•
</=1 /•=!
В системе (12.12) волнистой чертой над переменными обозначается их изо-
бражение по Лапласу.
Теперь необходимо определить некоторые правила знаков для параметров,
входящих в формулы (12.12). Эти правила тоже традиционны, хотя и не совсем
корректны. Так, положительными считаются те расстояния от центра масс до осей
колес, которые при положительном значении угла 0, смещают элементы системы из
положения устойчивого равновесия в положительную сторону (которая определяет-
ся ориентацией осей земной системы координат СКО). Таким образом, у колес, оси
которых расположены впереди центра инерции машины, величины I, положитель-
ны, а у колес, оси которых расположены позади центра инерции, — отрицательны.
Если подрессоренная система симметрична относительно продольной и по-
перечной осей, то
468
12. Колебания многоосного колесного шасси с упругими шинами
п п п п
ь, = Z м = hZ = °; *>о=Z м = CZ = °;
z=l z=l z=l z=l
<*21 =uf?, =0, a20 =YCil,=C^li = °; (12.13)
Z—1 Z = 1 / —1 Z = 1
n n
£(g,7,) = Z(GO = o.
Z —1 Z=1
В этом случае уравнения (12.12) примут следующий вид:
(Мк52 + 2ans + 2я1О)2 = 2^(ц,-5 + С/)х/;
Z = 1
< (Iys2 + 2Z>2ls + 2fc2o)0=2^(g,s + C/)/,x,; (12.14)
Z = 1
Z(mis2 + H,-5 + Cnp, ) *, - («11* + «io)z = Z (C™ У* ) ’
.Z = 1 Z=1
где Спр, — приведенная жесткость системы подрессоривания колеса f-й оси.
Отметим, что у симметричной многоосной машины с эластичными шинами
связь вертикальных и продольно-угловых колебаний сохраняется, хотя и значитель-
но ослабевает, и осуществляется она через колебания неподрессоренных масс.
Следуя известным положениям теории систем подрессоривания, введем обо-
значения
diz(s) = М Ks2 +2ans + 2al0;
^ie(-’) = (b||S + b1o);
^2:(s) = (a2ls + a2o)’
d26(s) = Iys2 + 2b2is + 2b20;
^(s) = an-s + aio-
(12.15)
У несимметричной системы d\$(s) = d2:(s).
Свяжем между собой изображения перемещений xt(t) при помощи эффекта
«запаздывания» воздействия по времени, введя параметр
Ъ= —
V
где г) — скорость движения корпуса шасси.
Аналогичный прием применим к изображению координат микропрофиля под
каждым из колес у,(г). После этого, следуя известным положениям, введем обозна-
чения
12.1. Особенности вертикальных и продольно-угловых колебаний
469
*4 О) = 2^ (ц,,5 + С,- )ехр(-т,5);
/=1
К2(*) = 2^(|1, J + С, )/, exp(-T,s);
'=‘ (12.16)
КШ (s) = )exp(-V);
/=1
KAS) = Y,(mis2 +1V + Спр/ )«XP(-V)-
i=i
С учетом (12.15) и (12.16) уравнения (12.12) принимают вид
diz(s')z + 2die(s')Q = K^(s)x;
< d2e(s)Q+2d2z(s)z = K2(s)x-, (12.17)
(s)x - d3z (s)z - die(s)O = Кш (s)y.
Разделив левую и правую части каждого из уравнений системы (12.17) на
изображение координаты микропрофиля под передним колесом шасси y(s) = yiGv),
получим
'</, г да? (s)+2die да (5) - Kt да (5) = 0;
< 2d2z (s)Wz (s)+d2e (s)We(s) - к2 да(5) = 0;
d3z 's)w- 0) + Jie 0) - Kn {s)Wx (5) = -Кш (s'),
(12.18)
где в соответствии с работой [64]:
W-(s) = z(s)/y(s) — передаточная функция от дороги к вертикальному пере-
мещению центра масс корпуса шасси;
W0(s) = 0(s)/y(s) — передаточная функция от дороги к продольно-угловому
перемещению корпуса шасси («дифференту»);
М\-($) = x(s)/y(s) — передаточная функция от дороги к линейному вертикаль-
ному перемещению центра первого (носового колеса).
Выражения (12.18) можно рассматривать как систему линейных уравнений
относительно передаточных функций. Ее детерминант определяется формулой (с
учетом того, что d]Q(s) = d2z(s))
w
d\z(S~)
2d2z(s)
d3z(s)
2^,e(-s)
d2d(s')
die(s)
-K,(s)
-K2(s)
= ~K\ (s)[2</2.2(s)-d3. (s)d2Q(.?)] +
(12.19)
+К2сда(s)K.-(5) -да(s)J- Kn(s)[dl:(.5)</2e(.s)-4<72,2(Л)I.
Соответственно передаточные функции будут определяться следующими
выражениями:
12. Колебания многоосного колесного шасси с упругими шинами
(12.20)
/Сш(5)[ 2J2r(5)^2(5)-J20(5)^(5)]
А и/
(12.21)
^и/5)|2г/2г(5)^(5)-^1:(5)/Г2(5) |
A w
(12.22)
= KnM\^d2^S)~d\z^d2^\
A w
Положив теперь в формулах (12.20) —(12.22) = усо, получим амплитудно-
фазочастотные характеристики (АФЧХ) системы, где j — мнимая единица.
Для определения линейных ускорений, возникающих в центре масс кузова,
линейных ускорений колес и углового ускорения кузова, используются передаточ-
ные функции и соответствующие им (АФЧХ), получаемые умножением формул
(12.20)-( 12.22) нал2
Каждая составная часть подрессоренной системы машины, кроме вертикаль-
ных (переносных) перемещений, вместе с центром масс совершает еще относительное
движение при продольно-угловых и поперечно-угловых колебаниях. Это нужно учи-
тывать при оценке ускорений в точках, не совпадающих с центром масс машины.
Колебания симметричной машины
У полностью симметричной подрессоренной системы d|0Cv) = di:(^ = Cl-
Тогда из (12.19) имеем
Из формул (12.21) и (12.22) следует, что
w_(.v)=_______________________мдад___________.
W (.у) = ^U.(-0^2(-0
6 <ге(*) KAs)dtz(s)-Ki(s)d3:(s)
(12.23)
(12.24)
(12.25)
12.1. Особенности вертикальных и продольно-угловых колебаний
471
Следовательно, АФЧХ вертикальных и продольно-угловых колебаний сим-
метричной машины
VK(jco) =
_______^(»^|(>)
К „ (j <d)dt. (j со) - К} (». (j со) ’
адсо) = d'Jj(,y>____________________________
У®) кп ( ;®Ж W - К} (У®Ж- (У®)
(12.26)
(12.27)
Параметры формул (12.26) и (12.27) определяются с помощью выражений
di:(j(d) = (2al0 -Мксо2) + (2«И®)У;
^2б(У®) = (2^20 — Л® ) + (2^21®).Л
<зг(У®) = «1о + («и®)У-
При этом в силу полной симметричности системы и полной идентичности
всех колес и всех подвесок
2>, = »|1;
/=1
«10 =Т.С, =пС>
z=l
^2i =Sh,/,-2=hZ/,2;
i=\ i=\
ь^ = ^су =с^
i=\ i=\
^|(У®) = 2^( УИ,® + C,)exp(-jT,CO) = 2(J|1CO+ C)^exp(-jT,CO);
i=\ i=\
K2 (» = 2^( /Ц,(О+ q) ехр(-Д (0) = 2 (J|44O+ C) Yli exp(-Д (0);
/=1 /=1
(J®) = Х(СШ,- )<-'хР(-Л®) = CIU ^exp(-jT,-®);
z=l /=1
^,(7®) = Ё(-®,®2 + A®+ C„p,- )exp(-jT,CO) =
Z = 1
= [(c„p - mco2) + J(pco)] Y exp(-Д-co),
i=\
где T| — время запаздывания воздействия.
472
12. Колебания многоосного колесного шасси с упругими шинами
Таким образом,
dlr(jco) = (2пс - М ксо2) + (2лг|_1со) у;
^ге(» = (2с£/,2 - /v(02) + (2цсо£/2 )у-;
i=\ /=1
J3.(jco) = n[c + (nco)j].
С учетом проведенных преобразований формулы (12.26) и (12.27) можно за-
писать так:
2СШ (урсо + с) | £ ехр(-Дсо) |
W. (» = -----------г-------=-----; (12.28)
[(с-шй) )+y(p®)J</l.(j(i))-2(jpco+c)<3.-(»
2C]U (Дсо+с)[Х/, ехр(-Дсо)]
%(JCO) = --------ут-------=—-------------------------- (12.29)
<ге(» |_(с-тоГ)+ j(p(O)j6/1.(j(O)-2(jpco+c)6/3.-(J(O)
Из выражений (12.28) и (12.29) видно, что влияние фактора многоосности на
(АФЧХ) учитывается при помощи двух комплексных коэффициентов
С-(у®) = £ехр(-Дй))]; Се(у(О) = ехр(-Д(О)].
(=1 /=|
Эти коэффициенты иногда называют коэффициентами учета неодновремен-
ное™ воздействия на колеса при вертикальных и при продольно-угловых колебани-
ях корпуса шасси, или, короче, коэффициентами неодновременное™ по вертикаль-
ным и по продольно-угловым колебаниям. Они учитывают очевидный факт, что
одна и та же единичная дорожная неровность воздействует на колеса последова-
тельно по мере того, как они доезжают до этой неровности, т. е. неодновременно.
Коэффициенты неодновременности удобнее представить в показательной форме:
C-(J(O) = С_((В)ехр[—уФ_((О)],
С-(со) = JlXcos(T,(0)]2 +[^sin(T,.(0)]2 (12.30)
V /=1 i=\
Ф_(Ш) = arctg ^sin(T/(0) / ^cos(T/CO) ;
l /=1 / /=1 J
<2е(Л°) = Се(®)ехр[-;Фв(со)],
Се(<о) = cos(T,co)]2 + [f?, sm(T,.(o)]2 (12.31)
V z=i /=1
Ф0((О) = arctg £/, sin(T,(0) /£/,• cos(T,CO) .
\/=1 / /=1 /
12.1. Особенности вертикальных и продольно-угловых колебаний
АТ?
При расчетах обычно используют не комплексные функции (12.28) и (12.29),
а их модули — амплитудно-частотные характеристики. Это означает, что особый
интерес представляют модули комплексных коэффициентов неодновременности
(12.30) и (12.31).
При со = 0 значения коэффициентов неодновременности по вертикальным ко-
лебаниям отличаются от единицы, что неудобно при проведении сравнительных
оценок. Формулу (12.31) необходимо «нормировать» путем деления на значение
коэффициента в точке со = 0
J[£cos(T,(0)]2 + |^sin(T,O)|2
С„. (со) = -Ь=1----------. (12.32)
п
Значение второго коэффициента в точке со = 0 для полностью симметричной
системы, очевидно, равно нулю. Для приведения этого коэффициента к безразмер-
ной форме нужно отнести его значения к значению какого-либо характерного раз-
мера машины, например базы колесного шасси L:
I п п
JlX1'- cos(T,w)|2 + [£', Sin(T,(0)|2
Сне((0) = ----------- (12-33)
Зависимость нормированных коэффициентов неодновременности воздейст-
вия от частоты для различных скоростей движения шасси (10, 20, 30 и 40 км/ч) по-
казана на рис. 12.3 и 12.4. В качестве примера использована компоновочная схема
четырехосного СКШ, близкого по размерам и схеме размещения осей к колесному
шасси 7908, но искусственно приведенная к симметричному варианту (Ц = 4,2 м,
/2 = 1,4 м, /3 = -1,4 м, /4 = -4,2 м, L = 8,4 м).
С увеличением скорости движения время т,- запаздывания воздействия
уменьшается, поэтому темп нарастания т,о) в формулах (12.32) и (12.33) при увели-
чении со снижается и все зависимости как бы растягиваются вправо.
Рис. 12.3. Зависимость нормированного коэффициента неодновременности воздействия по
вертикальным колебаниям от частоты воздействия и от скорости движения полностью сим-
метричного шасси типа МАЗ-7908 при скорости движения:
/ — 10 км/ч; 2 — 20 км/ч; 3 — 30 км/ч; 4 — 40 км/ч
474
12. Колебания многоосного колесного шасси с упругими шинами
Рис. 12.4. Зависимость нормированного коэффициента неодновременное™ воздействия по
продольно-угловым колебаниям от частоты воздействия и от скорости движения полностью
симметричного шасси типа МАЗ-7908 при скорости движения:
/ — 10 км/ч; 2 — 20 км/ч; 3 — 30 км/ч; 4 — 40 км/ч
При о) = 0 нормированный коэффициент неодновременности воздействия по
вертикальным перемещениям полностью симметричной системы равен единице и
не зависит от скорости движения шасси. Нормированный коэффициент неодновре-
менности воздействия по продольно-угловым колебаниям полностью симметрич-
ной системы при со = 0 также не зависит от скорости движения и равен нулю. Его
максимальные значения также не зависят от скорости движения, хотя и достигаются
при различных частотах (чем больше скорость движения, тем больше частота, соот-
ветствующая экстремальному значению).
Несимметричная система подрессоривания
В большинстве случаев многоосные колесные шасси имеют несимметричные
подрессоренные системы. Чаще всего при этом характеристики подвески и шин
оказываются одинаковыми для всех колес. В этом случае формулы (12.11) выглядят так:
«н=иЦ; аю=пС- а2|=Ц^/,.; а20 = С,-£;
/’2O=C,Z/,2 (12.34)
б/21 = ^1 I; ^20 = до-
вели ввести обозначения d{}(s) С, + ps, v т/Мк и определить радиус
инерции корпуса как /?1П2 = Д/Мк, то передаточные функции приводятся к виду
[vV ].у6 + М2 [2v(X/,2) + (I + 2nv)T?HV2 Ц/ +
+ 2yWK|(l + 2HV)(X/,2)-2v(^/,.)2|J()2.s-2}XexP(-T,..y)+ (12.35)
/=|
+ {2|MK(^/zM)2.v2}£Z,.exp(-T,..v);
I
12.1. Особенности вертикальных и продольно-угловых колебаний
475
AVV W:(.x) = ^С,,, { 2<:/() (X li li eXP(~V) -
,=l „ (12.36)
- (МЛу + 2t/0 /,2 ехр(—ехр(—Т,л);
/=1 /=|
AvvWe(.v) = 2J0Clu {2J0(^/,.)£exp(-T,.y)-
,=1 ,, (12.37)
-(MK.v2 +2ш/0)^/,. 'xp(-T,,v)}^exp(-T,.v);
(,v) - -С,„ ЖЧЛ4 + 2Л/К | X /Г + 2л/?иу
(12.38)
+ 4г/021 <2 ~ (X // У I exp(-V).
/=1
Таким образом, знаменатель передаточных функций и соответственно формул
для определения АФЧХ несимметричной подрессоренной системы включает в себя
слагаемые с двумя видами сумм, определяющих неодновременность воздействия на
колеса шасси. Это означает, что применение коэффициентов неодновременности
воздействия по вертикальным и по продольно-угловым колебаниям для систем этого
вида, строго говоря, необоснованно.
Симметричный аналог несимметричной системы подрессоривания
Если носовую часть опорно-ходового комплекса зеркально отобразить
относительно вертикальной оси, проходящей через центр масс шасси, то получится
«симметричный аналог» несимметричной подрессоренной системы. Обозначим /,
координаты центров колес схемы-аналога и А/, = /, - /, тогда
+Д/,.) =£ Д/,.=Е (12.39)
/=1 i=] i=n/2
и формулу (12.35) можно преобразовать
Дц, /Л/к = - {М УI vV ]? + Мк 12v(X /,2) + (1 + 2nv)/?HV2 К/ +
+ 2(l + 2w)(£/,2)J02? }£ехр(-Т,.у)+ (12.40)
/=1
+ exp(-V)-2v££exp(-V)}£.
/=| /=1
Для большинства СКШ 8 невелико (например, для 4-осного шасси МАЗ-7908
|e/L| = 0,051, а для 6-осного шасси МАЗ-7916 |e/L| = 0,151). Это означает что в
первом приближении с помощью коэффициентов неодновременности воздействия
476
12. Колебания многоосного колесного шасси с упругими шинами
Рис. 12.5. Зависимость нормированного коэффициента неодновременности воздействия по
вертикальным колебаниям от частоты воздействия для реального несимметричного шасси
МАЗ-7908 и его симметричного аналога при скорости движения 20 км/ч:
/ — симметричное шасси; 2 — несимметричное шасси
можно оценить особенности колебаний многоосных колесных шасси также и с
несимметричной системой подрессоривания.
Представление об изменении зависимости коэффициентов неодновремен-
ности от частоты воздействия при отклонении схемы подрессоренной системы от
симметричности можно получить из рис. 12.5 и 12.6, на которых показаны графики
этих функций для реального несимметричного колесного шасси МАЗ-7908 и для его
симметричного аналога (скорость движения 10 км/ч).
С увеличением частоты величина нормированного коэффициента неодно-
временности воздействия по вертикальным колебаниям уменьшается. Это означает,
что при движении шасси по коротким неровностям влияние фактора многоосности
на вертикальные колебания центра масс выражено сильнее, чем при его движении
по длинным неровностям.
На больших скоростях движения запаздывание воздействия незначительно, и
нормированный коэффициент неодновременности по вертикальным колебаниям по
продольно-угловым колебаниям от частоты воздействия для реального несимметричного
шасси МАЗ-7908 и его симметричного аналога при скорости движения 20 км/ч:
/ —симмефичное шасси; 2 — несимметричное шасси
12.1. Особенности вертикальных и продольно-угловых колебаний
АГП
мере возрастания частоты воздействия уменьшается медленнее, т. е. при повыше-
нии скорости движения шасси амплитуда вертикальных колебаний его центра масс
увеличивается, а при снижении скорости — уменьшается. Эта закономерность объ-
ясняется тем, что при нарастании скорости движения запаздывание воздействия на
последующие колеса снижается и как бы увеличивается одновременность воздейст-
вия на все колеса машины. Естественно, что перемещение центра масс при одно-
временном перемещении всех колес в одном направлении будет значительно боль-
ше, чем при перемещении только какой-то одной группы колес, когда все остальные
колеса не изменяют своего положения.
Амплитуда продольно-угловых колебаний с увеличением скорости движения
уменьшается, так как при повышении одновременности воздействия на все колеса
машины уменьшается угловое перемещение корпуса.
Данные рис. 12.3-12.6 показывают, что частотные характеристики многоос-
ных колесных шасси существенно отличаются от частотных характеристик обыч-
ных автомобилей. Коэффициенты неодновременности воздействия как-бы модули-
руют эти функции, делая их пульсирующими, причем межрезонансная зона, хорошо
выраженная на частотных характеристиках двухмассовых подрессоренных систем,
практически исчезает.
Формулы, описывающие частотные характеристики многоосной подрессо-
ренной системы, легко в общем случае получить из формул (12.15) и (12.19-12.22)
путем подстановки /со вместо аргумента Формулы (12.28) и (12.29) определяют
частотные характристики полностью симметричной системы подрессоривания.
Наибольший интерес представляет промежуточный случай — несимметрич-
ная система подрессоривания с практически одинаковами колесами и упругодемп-
фирующими элементами подвески каждого из колес.
При традиционном подходе необходимо преобразовать формулы, определяю-
щие АФЧХ колебаний многоосного шасси, к явной алгебраической форме. Для
этого выделяют действительную и мнимую части в числителе и знаменателе,
затем исключают комплексную величину в знаменателе. Затем преобразуют по-
лученное выражение так, чтобы выделить в числителе и знаменателе характерные
полиноминальные структуры.
Эти действия применительно к формулам, описывающим передаточные
функции колебаний многоосного колесного шасси, чрезвычайно трудоемки, а
результат оказывается громоздким и практически непригодным для элементарного
анализа. Предпочтительнее провести прямое вычисление с последующей оценкой
соответствующих функций.
Детальный анализ особенностей колебаний многоосного колесного шасси с
различными вариантами исполнения системы подрессоривания проводится в
следующей главе. Здесь же показаны только основные особенности частотных ха-
рактеристик колебаний СКШ, что должно дать общее представление об их отличии
от соответствующих характеристик обычных автомобилей.
Для примера выбрано типичное 4-осное колесное шасси МАЗ-7310 и
условный симметричный аналог МАЗ-7310с. Параметры, использованные при
расчетах, приведены в табл. 12.1.
478
12. Колебания многоосного колесного шасси с упругими шинами
Таблица 12.1
Параметры шасси МАЗ-7310 и его симметричного аналога МАЗ-7310с
Параметр Обозначение МАЗ-7310 МАЗ-73 Юс
Полная масса, кг Мк 3,85 К)4 3,85 Ю4
Радиус инерции, м Л,П 3,624 3,624
Относительная неподрессоренная масса N 0,145 0,145
Координаты центров колес, м h 4,15 4,15
/•> 1,95 1,95
h -1,35 -1,95
h -3,55 -4,15
Жесткость упругого элемента подвески, Н/м 2,77 Ю5 2,77 Ю5
Жесткость шины, Н/м 5,00 Ю5 5,00 Ю5
Коэффициент сопротивления
демпфирующего элемента, Н с/м ц 1,00 104 1,00
Число осей п 4 4
Характер АФЧХ вертикальных и продольно-угловых колебаний иллюстри-
руется на примере симметричного шасси-аналога МАЗ-7310с, двигающегося со
скоростью 20 км/ч (со = 0...10 1/с), рис. 12.7 и рис. 12.8. Для реального несиммет-
ричного шасси эти графики имеют столь замысловатую форму, что применять их на
практике очень неудобно, поэтому они в данном разделе не приводятся.
Амплитудно-частотные характеристики (АЧХ) в этом отношении более
показательны, они значительно чаще используются при практических оценках и
270
arg |И<|г(со)|
Рис. 12.7. Нормированная амплитудно-фазочастотная характеристика вертикальных колеба-
ний симметричного 4-осного шасси-аналога МАЗ-73 Юс
12.1. Особенности вертикальных и продольно-угловых колебаний
479
Рис. 12.8. Амплитудно-фазово-частотная характеристика продольно-угловых колебаний
симметричного 4-осного шасси-аналога МАЗ-7310с
расчетах. Их отличие от АЧХ обычных автомобилей, а также влияние фактора
многоосности на колебания шасси хорошо видны при сравнении вертикальных,
продольно-угловых колебаний и колебаний колес реального шасси МАЗ-7310
(рис. 12.12—12.14) и его симметричного аналога МАЗ-7310с (рис. 12.9-12.11).
На рис. 12.9 и 12.10 наблюдается характерная пульсация кривых, вызванная
неодновременностью воздействия дороги на разные колеса шасси. Сама форма
кривых совершенно не соответствует АЧХ обычных автомобилей, что особенно
заметно на АЧХ продольно-угловых колебаний корпуса. Сложная форма кривых
Рис. 12.9. Нормированная амплитудно-частотная характеристика вертикальных колебаний
симметричного шасси-аналога МАЗ-7310с (скорость движения 20 км/ч)
480 J2. Колебания многоосного колесного шасси с упругими шинами
Рис. 12.10. Амплитудно-частотная характеристика продольно-угловых колебаний симмет-
ричного шасси-аналога МАЗ-7310с (скорость движения 20 км/ч)
связана с тем, что кроме неодновременности воздействия дороги присутствует
взаимосвязь вертикальных и продольно-угловых колебаний корпуса шасси. В то же
время АЧХ колебаний колес имеет вполне традиционую форму, так как у
симметричных подрессоренных систем колебания корпуса практически не
оказывают вляния на колебания колес шасси.
Рис. 12.11. Нормированная амплитудно-частотная характеристика вертикальных колебаний
колес симметричного шасси-аналога МАЗ-7310с (скорость движения 20 км/ч)
Рис. 12.12. Нормированная и ненормированная амплитудно-частотные характеристики вер-
тикальных колебаний шасси МАЗ-7310 (скорость движения 20 км/ч):
/ — симметричное шасси; 2 — несимметричное шасси
12.2. Особенности поперечно-угловых колебаний
481
Рис. 12.13. Амплитудно-частотная характеристика продольно-угловых колебаний шасси
МАЗ-7310 (скорость движения 20 км/ч)
Рис. 12.14. Нормированная и ненормированная амплитудно-частотные характеристики вер-
тикальных колебаний колес шасси МАЗ-73 10 (скорость движения 20 км/ч):
/ — |И«(о)|; 2 — |W(///a<(d)|
Отклонение схемы подрессоренной системы от симметрии резко усложняет
протекание колебательных процессов (рис. 12.12-12.14). Прежде всего это проявляется
в существенном усилении взаимосвязи колебаний корпуса и колес, а также
вертикальных и продольно-угловых колебаний. Характерно практическое исчезновение
так называемых межрезонансных зон, на использовании которых построено много
способов автоматизированого управления параметрами плавности хода. Это говорит о
том, что традиционные способы улучшения плавности хода, разработанные для
обычных автомобилей, могут оказаться неэффективными применительно к многоосным
колесным шасси (подробно эти вопросы рассмотрены в следующей главе).
12.2. Особенности поперечно-угловых колебаний
В первом приближении можно считать, что поперечно-угловые колебания
колесной машины с упругими шинами наблюдаются обычно в тех случаях, когда
микропрофиль дороги под правыми и левыми колесами различен. На самом деле
16 - 2918
482
12. Колебания многоосного колесного шасси с упругими шинами
возможно более сложное движение корпуса, но на начальных этапах проектирова-
ния можно ограничиться использованием упрощенной модели, в которой продоль-
но-угловые и поперечно-угловые колебания считаются независимыми друг от дру-
га. Это означает, что допустимо использование плоской (в поперечной плоскости)
расчетной схемы и соответствующих ей уравнений движения.
Уравнения движения, как и в случае продольно-угловых колебаний, можно
получить любым способом, однако проще всего построить их, применяя принцип
Даламбера,
+цД,п +(Ср + Си,)х,.п]-^[ц,г + С,г]-^[ц,.0 + С,.0]/,. =^СШ/
/=| /=| /=1 /=|
' +Ц/Л-Л +(ср + СшК]-Хпм + C,z]-£[ц,0 + с,0]/, = ^ciuiyh (12.41)
/=1 i=\ /=1 i=\
/JV + 0,5B2^(n,.v+C;v) = 0,5В2^[ц,(х,л -х,„) + С,(х,л -х,п)|,
/=1 /=1
где индексы «л» и «п» означают левый и правый борт соответственно.
В изображениях по Лапласу
+ Ц,$ + (Ср +СШ)]Х,П -г^[Ц,.5 + С,.]-0^[Ц,5 + С,.]/,. =^Сш,у,п;
/=| /=1 /=1 /=1
< +H,.v + (Cp +Сш)]х,л -г^[ц,5 + С,.|-0^|ц,.5 + С,.]/,. = ^С1Шу,л; (12.42)
/=| /=1 /=1 /=1
/ u VI< +О.5В2£(Ц,Х + С)] = O,5B2^(|1,..S4- С,.)(х,.л-х,
i=l i=\
Вычитая из первого уравнения (12.42) второе, получаем
+ (Ср + Сш )] (Х/П — Х/;1) — С1Ш- (у,п — У in )>
< /=l f „/=1 (12.43)
/Д,у|? +0,5В2£(ц,х + С)] = 0,5В2£(|Х,.у + С,)(х/Л -х,„
/=| /=1
Учитываем эффект «запаздывания»
(*„ - )£|«V2 + IV + (ср + CU, )lexp(-V) = (л - Ул )£С1Ш- ехР(-V);
,=1 /=1 (12.44)
л,ф| .у + 0,5В2 £ (ц,.л- + С)] = 0,5В2(хп - хл )^ (ц,.5 + С,)exp(-T,.s).
/=1 /=1
12.2. Особенности поперечно-угловых колебаний
483
Получаем
(хп Хл )Л'/7 (5) (уп Л)/Сш(л’),
/х,VI? + 0,5В2 ^(ц,.у + С)| = 0,5В2(х„ -x„)К,(s).
/=1
(12.45)
Если рассматривать перепад высот неровностей между правым и левым бор-
том шасси как входное воздействие (Ду) и исключить из (12.42) разность перемеще-
ний колес правого и левого бортов, то можно построить следующую функцию:
У /Л,(.1)|2?+В!£(МЛ + С,)|
/=1
(12.46)
Используем понятие о радиусе инерции в поперечной плоскости, тогда вы-
ражение (12.46) примет вид
Mv^,(.v)|2s2+B2^(H,.s + C,.)| R?
(12.47)
Эту функцию определим как передаточную, описывающую поперечно-
угловые колебания корпуса многоосного колесного шасси.
Подрессоренная система, имеющая одинаковые шины и упругодемпфирую-
щие элементы подвески, будет описываться более простым выражением для пере-
даточной функции
Кш^к^) в2
М xKn{s')[ls2 + иВ2(ц.у + С)| R2
(12.48)
Структура формул (12.48) показывает, что к поперечно-угловым колебаниям
корпуса многоосного колесного шасси в целом применимы все основные выводы,
полученные при анализе его продольно-угловых колебаний (при этом имеются су-
щественные отличия от характера движения кузова обычного автомобиля, пульса-
ции и т. д.). Для примера на рис. 12.15 и 12.16 показаны АЧХ характеристики попе-
речно-угловых колебаний 4-осного колесного шасси МАЗ-7310.
Входное воздействие при описании и исследованиях как вертикальных, так и
угловых колебаний типичного многоосного колесного шасси целесообразно зада-
вать, пользуясь «осредненным» профилем, что существенно упрощает расчеты. В то
же время встречаются, хотя и крайне редко, многоопорные колесные машины, у
которых оси правых колес не совпадают с осями левых колес. В этом случае описа-
ние микропрофиля опорной поверхности существенно усложняется.
16*
484
/2. Колебания многоосного колесного шасси с упругими шинами
Рис. 12.15. Нормированная амплитудно-частотная характеристика поперечно-угловых коле-
баний 4-осного колесного шасси МАЗ-7310
Рис. 12.16. Нормированная амплитудно-фазочастотная характеристика поперечно-угловых
колебаний 4-осного колесного шасси МАЗ-7310
12.3. Частотные характеристики скоростей вертикальных,
продольно-угловых и поперечно-угловых колебаний
При проектировании машины необходимо знать скорость колебательных
процессов, возникающих при движении шасси, поскольку она влияет на утомляе-
мость экипажа (наряду с амплитудой колебаний), а кроме того, скорость колеба-
12.4. Частотные характеристики ускорений различных колебаний 485
тельных процессов используется в расчетах демпфирующих элементов подвески (в
частности, необходимо знать интервал наиболее вероятных скоростей штока упру-
годемпфирующего элемента в заданных условиях движения).
Определим передаточную функцию скорости колебаний подрессоренной
системы как отношение преобразований по Лапласу скорости к преобразованиям по
Лапласу воздействий на машину со стороны дороги. Тогда для ее получения доста-
точно умножить выражение для передаточной функции колебаний подрессоренной
системы на параметр преобразования по Лапласу:
w _ v Кш(л)1 2d2:(s)K^s)-d2Q(s)K^)\
ДуТ
7 (12.49)
w , . = v ^„(.v)|4t/2:2(.v)-JL_(.v)</29(.v)|
VV • Л) л ,
Дц/
F F \|/ \ ° / 9 9 9
М(К,,(.?)|2Г+пВ-(Цл + с)| ЯИ1-
Дальнейшие преобразования здесь не приводятся, так как они имеют ру-
тинный характер, но позволяют получить комплект АФЧХ и АЧХ скоростей
процессов вертикальных, продольно-угловых и поперечно-угловых колебаний
СКШ. На рис. 12.17-12.20 показаны такие характеристики для шасси МАЗ-7310.
12.4. Частотные характеристики ускорений вертикальных,
продольно-угловых и поперечно-угловых колебаний
При проектировании машины важно располагать сведениями об ускорении ко-
лебательных процессов, происходящих при движении шасси, особенно об ускорении
Рис. 12.17. Амплитудно-частотная характеристика скорости вертикальных колебаний центра
масс шасси МАЗ-7310 (скорость 20 км/ч):
/ — |Wjj/((D)|; 2 — | WjjhXco)!
486
/2. Колебания многоосного колесного шасси с упругими шинами
Рис. 12.18. Амплитудно-частотная характеристика угловой скорости продольно-угловых
колебаний центра масс шасси МАЗ-7310 (скорость 20 км/ч)
30
20
10
1^(СО)|,
|И<7//НСО)|
/ / / / / /
/ / /
2^'''
/ \ 1Ч-ХГ И —’7
5
10
15
CD, 1/C
0
Рис. 12.19. Амплитудно-частотная характеристика скорости вертикальных колебаний не-
подрессоренных масс шасси МАЗ-7310 (скорость 20 км/ч):
/ — IW(/a(cd)|; 2 — |UWcd)|
Рис. 12.20. Амплитудно-частотная характеристика угловой скорости поперечно-угловых
колебаний центра масс шасси МАЗ-7310 (скорость 20 км/ч)
12.4. Частотные характеристики ускорений различных колебаний 487
вертикальных колебаний центра масс корпуса, так как этот параметр чаще всего
регламентируется различными нормативными документами. Кроме того, ускорения
в различных точках корпуса шасси позволяют составить представление о нагрузках,
действующих на установленные в этих местах элементы СКШ и использованы при
прочностных расчетах.
Определим передаточную функцию ускорения колебаний подрессоренной
системы как отношение преобразованного по Лапласу ускорения к преобразован-
ному по Лапласу воздействию на машину со стороны дороги. Тогда для ее получе-
ния достаточно умножить выражение для передаточной функции колебаний под-
рессоренной системы на квадрат параметра преобразования по Лапласу
ц/ _ ?2 (5) [^2z (5)^2 (5) ~ ^2е СУЖ1 СУ)1 .
Дц/
viz , х _ с2 .
^0 W ~ Л д ’
w _ 2 ^(-v)[4J2?(.)-Jl:(.)J2e(.)] (12-50)
Дц/
w ,si = __________адвд_____________Л!
Примеры АЧХ для шасси МАЗ-7310 показаны на рис. 12.21-12.24.
Для построения частотной характеристики ускорения произвольной точки
корпуса, заданной в связанной системе СКЗ координатами (хдз, улз, 0), используется
формула
W.iAU^ = W^jOi) + W^j(fi)xA. +W^j^yAy (12.51)
Рис. 12.21. Амплитудно-частотная характеристика ускорения вертикальных колебаний цен-
тра масс шасси МАЗ-7310 (скорость 20 км/ч):
/ — IVWco)|; 2 — |WW((0)|
488
12. Колебания многоосного колесного шасси с упругими шинами
Рис. 12.22. Амплитудно-частотная характеристика углового ускорения продольно-угловых
колебаний центра масс шасси МАЗ-7310 (скорость 20 км/ч)
Рис. 12.23. Амплитудно-частотная характеристика ускорения вертикальных колебаний не-
подрессоренных масс шасси МАЗ-7310 (скорость 20 км/ч):
Рис. 12.24. Амплитудно-частотная характеристика углового ускорения поперечно-угловых
колебаний центра масс шасси МАЗ-7310 (скорость 20 км/ч)
12.5. Спектральный анализ колебаний
489
Рис. 12.25. Амплитудно-частотная характеристика ускорения вертикальных колебаний на
рабочем месте водителя шасси МАЗ-7310 (скорость 20 км/ч):
/ — | 2 — |W/jj//a-(cd)|
Данные рис. 12.25 показывают, что ускорения на рабочем месте водителя ти-
пичного многоосного колесного шасси имеют очень сложный характер в результате
следующих причин:
взаимного влияния вертикальных, продольно-угловых и поперечно-угловых
колебаний несущей системы;
удаленности рабочего места водителя от центра масс шасси;
значительной ширины шасси и специфики перевозимого груза, что в сово-
купности приводит к значительному смещению водителя к внешнему борту машины;
общего влияния фактора многоосности.
Кроме того, при оценке эргономичности рабочих мест водителя и экипажа мно-
гоосного колесного шасси приходится в ряде случаев учитывать дополнительные пере-
мещения в зоне расположения рабочих мест, связанные с податливостью несущей сис-
темы машины. Все это делает задачу адекватной оценки ускорений на рабочих местах
водителя и экипажа, а также ускорений в точках расположения наиболее ответственных
составных частей перевозимого оборудования или груза достаточно сложной.
12.5. Спектральный анализ колебаний
В рассмотренных моделях колебаний многоосного колесного шасси, дви-
гающегося по неровной дороге, система подвески трактуется как линейная разомк-
нутая система автоматического регулирования, находящаяся под воздействием ста-
ционарного случайного возмущения.
Известно, что энергетический амплитудный спектр выходного сигнала такой
системы можно получить, умножив энергетический спектр входного воздействия на
квадрат функции, задающей соответствующую амплитудно-частотную характеристику.
490
/2. Колебания многоосного колесного шасси с упругими шинами
Входным воздействием для рассматриваемой задачи является микропрофиль
опорной поверхности (в частном случае — дорожного полотна). Общая характеристика
типичных вариантов дорожных покрытий и их описание приведены в гл. 6 и 8. Для эле-
ментарного анализа и предварительной оценки колебаний СКШ можно использовать
рекомендации [64], где предлагается следующая аппроксимация спектральной плотно-
сти микропрофиля, применимая для большинства дорожно-грунтовых условий:
2av|(a2+p2)v2+<o2]
со4 + 2(а2-р2)и2со2+(а2+р2)2г4 J
Параметры аир определяются для скорости движения 1,0 м/с. Обычно эти па-
раметры находятся в следующих пределах: а = 0,014...0,111 1/м и Р = 0,025...0,140 1/м
(размерность произведений av и Р?; — 1/с при измерении скорости в м/с). Если ско-
рость движения задается в км/ч, как это принято при описании движения транс-
портных машин, то численные значения и размерность этих параметров должны
быть соответствующим образом скорректированы.
В данном разделе при формировании иллюстративного материала предполагалось,
что шасси передвигается по грунтовым дорогам, характеризуемым следующими значе-
ниями параметров спектральной плотности: а = 0,017 ч/(с км) и 0 = 0,024 ч/(с км). Гра-
фики спектральных плотностей микропрофиля, соответствующих этим параметрам и
скоростям движения 10, 20, 30 и 40 км/ч, приведены на рис. 12.26.
Спектральная плотность амплитуд и ускорений продольно-угловых колеба-
ний несущей системы многоосного колесного шасси определяется формулами
5е(<О) = |%(7-(О)|2Ф(Ш); (12.53)
5е(Ф) = |%(И2 Ф(со) = со41%(7со)|2 Ф(со). (12.54)
Представление о характере зависимостей можно получить, рассматривая
движение четырехосного колесного шасси МАЗ-7310 по неровной грунтовой дороге
Рис. 12.26. Графики спектральных плотностей микропрофиля, соответствующих параметрам
а = 0,017ч/(с км) и 0 = 0,024 ч/(с км) при скорости движения:
/ — 10 км/ч; 2 — 20 км/ч; 3 — 30 км/ч; 4 — 40 км/ч
12.5. Спектральный анализ колебаний
491
Рис. 12.27. Спектральная плотность ускорений вертикальных колебаний несущей системы
многоосного колесного шасси МАЗ-7310 при скорости движения:
/ — 10 км/ч; 2 — 20 км/ч; 3 — 30 км/ч; 4 — 40 км/ч
Аналогичным образом готовятся исходные данные для проведения спектрально-
го анализа вертикальных колебаний центра масс многоосного колесного шасси.
Спектральная плотность амплитуд и ускорений вертикальных колебаний не-
сущей системы многоосного колесного шасси определяется формулами
5. (со) = |W_(jco)|2 Ф(<о),
(12.55)
5ь((0) = |VK.- (уо>)|2 ф(“) = “4 |^-(у®)|2 Ф(со). (12.56)
Характер зависимостей также иллюстрируется на примере движения 4-осно-
го колесного шасси МАЗ-7310 по неровной грунтовой дороге в интервале скоростей
10...40 км/ч. Это позволяет сравнить процессы вертикальных и продольно-угловых
колебаний несущей системы одного и того же шасси в одинаковых условиях дви-
жения (рис. 12.27-12.29).
Рис. 12.28. Спектральная плотность амплитуд продольно-угловых колебаний несущей сис-
темы многоосного колесного шасси МАЗ-7310
492
12. Колебания многоосного колесного шасси с упругими шинами
Рис. 12.29. Спектральная плотность ускорений продольно-угловых колебаний несущей сис-
темы многоосного колесного шасси МАЗ-7310
Для спектрального анализа поперечно-угловых колебаний несущей системы
шасси, кроме приведенной ранее информации, требуются сведения о спектральной
плотности входного воздействия, порождающего колебания шасси по углу крена.
Исследования микропрофиля дорог, предназначенных для передвижения
КТС ОБГ проводились очень редко (исключение составляет продольный микро-
профиль грунтовых дорог). Особенности поперечно-угловых колебаний многоос-
ного колесного шасси в поперечной плоскости описаны в работе 164]. В частности
показано, что при проведении проектных работ начальных уровней можно ис-
пользовать спектральную плотность входного воздействия с единой структурой.
При этом достаточно и Р = 0,112 1/с (0,031 ч/(с км)). Иначе говоря, поперечный
микропрофиль грунтовых дорог имеет обычно достаточно мелкие и короткие не-
ровности.
После определения структуры и числовых значений параметров входного
воздействия расчет поперечно-угловых колебаний несущей системы многоосного
колесного шасси не представляет сложностей.
Спектральная плотность амплитуд и ускорений поперечно-угловых колеба-
ний несущей системы многоосного колесного шасси определяется формулами
5¥(о>) = К(»|2Ф¥((О), (12.57)
для распространенных дорог можно принимать а = 0,15 1/с (0,042 ч/(с км))
5у((О) = |и^(»|2 ФУ((О) = со4 |WV(,/(D)|2 Ф,/®). (12.58)
Примеры зависимостей приведены на рис. 12.30-12.31.
Целью данной главы не является разносторонний анализ особенностей коле-
баний многоосного колесного шасси, методов их оценки и путей улучшения техни-
ческих характеристик. Эти вопросы подробно рассматриваются в разделе, посвя-
щенном расчету и проектированию систем подрессоривания и их элементов. Для
целей первичного анализа проектных решений и оценки отличия колебаний много-
осного колесного шасси от колебаний обычных автомобилей достаточно показать,
что приведенные результаты позволяют решать следующие задачи.
А. Оценка дисперсии (среднеквадратического отклонения) амплитуды и ус-
корения вертикальных, продольно-угловых и поперечно-угловых колебаний несу-
12.5. Спектральный анализ колебаний
493
Рис. 12.30. Спектральная плотность амплитуд поперечно-угловых колебаний несущей сис-
темы многоосного колесного шасси МАЗ-7310 при скорости движения:
/ — 10 км/ч; 2 — 20 км/ч; 3 — 30 км/ч; 4 — 40 км/ч
Рис. 12.31. Спектральная плотность ускорений поперечно-угловых колебаний несущей сис-
темы многоосного колесного шасси МАЗ-7310 при скорости движения:
/ — 10 км/ч; 2 — 20 км/ч; 3 — 30 км/ч; 4 — 40 км/ч
щей системы, а также перемещений и ускорений на рабочем месте водителя, членов
экипажа и в местах закрепления составных частей оборудования.
Например, дисперсия амплитуд продольно-угловых колебаний несущей сис-
темы находится так:
494
12. Колебания многоосного колесного шасси с упругими шинами
D|0(r)] = - fs0(co)Jco. (12.59)
71 о
Аналогичным путем определяются дисперсии амплитуд колебаний других
видов.
Б. Оценка вероятности колебаний с амплитудами или ускорениями, превы-
шающими заданные пределы. Такую оценку проводят при проектировании много-
осных колесных шасси, предназначенных для транспортировки некоторых видов
оборудования, чувствительного к динамическим нагрузкам. Если считать распреде-
ление дорожных неровностей нормальным центрированным, то и распределение
амплитуд колебаний несущей системы также будет нормальным центрированным.
Это позволяет построить функцию распределения вероятности амплитуд колебаний
и ускорений различных точек несущей системы и оценить вероятность превышения
этими величинами определенных (заданных) порогов.
Наиболее отчетливо особенности движения многоосных колесных шасси прояв-
ляются при анализе вертикальных ускорений в различных точках несущей системы. По
той же методике можно провести полный анализ колебаний несущей системы.
Дисперсия вертикальных ускорений в центре масс шасси МАЗ-7310, дви-
гающегося со скоростью 30 км/ч по различным грунтовым дорогам, определенная
по формуле типа (12.59), имеет следующие значения
7Х =(1,682 1,181 0,404 0,643)т м2/с4
Соответственно среднеквадратическое отклонение вертикальных ускорений
=(1,297 1,087 0,636 0,802)т м/с2
или среднеквадратическое отклонение в долях g
Gs? =(0,132 0,111 0,065 O,O82)T
Распределение вертикальных ускорений в центре масс шасси МАЗ-7310 в со-
ответствии с принятыми допущениями является нормальным (рис. 12.32) и опреде-
ляется по формуле
Рис. 12.32. Распределение вертикальных ускорений в центре масс шасси МАЗ-7310, дви-
гающегося по различным грунтовым дорогам со скоростью 30 км/ч:
, 2, 3 — грунтовые дороги различного качества
12.5. Спектральный анализ колебаний
495
Ж) =
(12.60)
Техническим заданием на проектирование шасси чаще всего определяется
уровень предельно допустимых ускорений в характерных точках корпуса. Напри-
мер, для одного из видов специального оборудования крайне нежелательным явля-
ется линейное перемещение с ускорением более 0,7#. Можно определить соотно-
шение между максимально допустимым и среднеквадратичным ускорением в неко-
торой точке при движении в заданном режиме, как
К
о
(12.61)
В соответствии с неравенством Гаусса вероятность появления ускорений,
превышающих заданный предельный уровень, определяется так:
В рассматриваемом примере
Кп =(5,294 6,318 10,798 8,567)т
Р = (5,34 10“ 2,68 10’ 1,67 10’4 6,43 10’4)Т
Таким образом, вероятность появления больших ускорений в центре масс
шасси МАЗ-7310, двигающегося сравнительно медленно по обычным грунтовым
дорогам достаточно мала.
Если теперь вычислить вероятность появления таких же вертикальных уско-
рений на продольной оси машины в ее носовой части (на уровне расположения ра-
бочего места водителя), то она окажется значительно выше
Р = (0,446 0,442 0,209 0,291 )т
Таким образом, для многоосных колесных шасси характерны ощутимые пе-
регрузки экипажа и оборудования, расположенного на носовой и кормовой консоли
рамы машины (из-за большой длины несущей консоли). При этом большие ускоре-
ния в этих зонах могут возникать при движении машины по сравнительно хорошим
дорогам с умеренными скоростями, когда ускорения в центре масс шасси находятся
на вполне приемлемом уровне. Это вызвано большой вероятностью возникновения
резонансных высокочастотных колебаний неподрессоренных масс (колес) и несу-
щей консоли рамы.
При увеличении скорости движения многоосных колесных шасси средне-
квадратичные значения амплитуды продольно-угловых колебаний обычно вначале
возрастают, затем достигают максимума в достаточно узком интервале скорости,
496
72. Колебания .многоосного колесного шасси с упругими шинами
после чего непрерывно уменьшаются. Несмотря на большую разницу в дисперсии
неровностей различных дорог, среднеквадратичные значения амплитуд отличаются
мало (при различии дисперсий в 2,5 раза среднеквадратические значения амплитуд
продольно-угловых колебаний различаются всего лишь на 20 %).
Ранее приводился пример определения перемещений и ускорений точки, на-
ходящейся на продольной оси шасси и не совпадающей с его центром масс. Важно
иметь модель, позволяющую оценивать параметры колебательного движения объ-
ектов, размещенных в произвольной точке несущей системы шасси (обычно на на-
чальных стадиях проектирования ограничиваются точками, расположенными в
плоскости (х3, уз) связанной системы координат СКЗ). Если задать положение точки
А координатами (хА, уА) в системе СКЗ, то очевидно, что вертикальные перемещения
этой точки определяются как
(г) = z(t) + 0(г) хА + v(r) уЛ (12.63)
Из (12.63) следует, что
2a(J®) = z(jco) + 0(jco) +V(J(O) (12.64)
При оценочных расчетах можно использовать единое входное воздействие
для формирования поперечно-угловых и продольно-угловых колебаний. При спра-
ведливости такого упрощения
S./(co) = |W.(yco) + W0(yojpx/, +И,ч/(усо)-уЛ|2ф(®) (12.65)
И
SM(co) = CD4|W.(yoj) + W0(y®)-x4 ул|2ф(со). (12.66)
Далее применяется весь описанный аппарат спектрального анализа колеба-
тельного движения объекта, закрепленного в точке А несущей системы шасси.
12.6. Пространственные модели колебаний
В ряде случаев применение упрощенных моделей оказывается недостаточ-
ным для адекватного описания колебаний многоосных колесных шасси, поскольку
такие модели не позволяют учесть упругие свойства несущей системы машины. В
то же время экспериментальные данные показывают, что упругость (податливость)
рамы может ощутимо влиять на результаты оценки плавности хода даже обычных
длиннобазных автомобилей, имеющих рамную конструкцию и в первую очередь это
относится к податливости несущей системы на кручение. Так, например, на рис. 12.33
[65] показана зависимость среднеквадратичных значений угла закручивания рамы
от скорости движения для короткобазного автомобиля ЗИЛ-130 — видно, что даже
на небольшой длине рамы углы закручивания могут достигать одного градуса. По
данным рис. 12.33 можно рассчитать, что рама автомобиля ЗИЛ-130 с вероятностью
10 3 закручивается на следующие углы:
12.6. Пространственные модели колебаний
№7
при движении по грунтовым дорогам — на 5,5°;
при движении по булыжным дорогам — на 5,5°;
при движении по дорогам с цементобетонным покрытием — на 0,835°
Это объясняется тем, что жесткость несущей системы на кручение часто со-
измерима с поперечной угловой жесткостью подвески. Рамы типичных многоосных
колесных шасси имеют большую длину при ограниченных размерах поперечного
сечения. Кроме того, кабины водителя и экипажа располагаются на длинных носо-
вых консолях рамы. В результате угловые перемещения в местах крепления кабин
существенно зависят от углов закручивания (колебаний) рамы, особенно при дви-
жении по разбитым грунтовым дорогам с крупными неровностями — т. е. в типич-
ных условиях эксплуатации многоосных колесных шасси.
Изгибная жесткость несущей системы также сказывается на результатах
оценки плавности хода и особенно на оценке вибронагруженности экипажа СКШ,
хотя это влияние обычно выражено значительно слабее (рис. 12.34).
Для оценки плавности хода в большинстве исследований считается допусти-
мым использование модели шасси, составленной из сосредоточенных масс, соеди-
ненных упругими и демпфирующими элементами, потому что плавность хода оце-
нивается в полосе низких частот — 0,7...22,5 Гц (дискретная модель). Это позволя-
ет применить на начальных этапах проектирования аппарат спектрального анализа
колебаний многоосного шасси.
При построении дискретной модели, учитывающей податливость рамы, обыч-
но применяется описанная ранее система допущений (см. § 12.1). Крепление основ-
ных агрегатов к раме считается жестким (рис. 12.35). На начальных этапах
проектирования многоосного шасси наиболее целесообразна простейшая стержневая
Рис. 12.33. Зависимость среднеквадратич-
ных отклонений угла закручивания рамы от
скорости движения автомобиля ЗИЛ-130 с
нагрузкой 4,0 т по различным дорогам:
/ — грунтовая дорога; 2 — булыжная дорога в
удовлетворительном состоянии; 3 — изношенное
цементобетонное покрытие; 4 — ровное цемен-
тобетонное покрытие; 5 — ровное асфальтобе-
тонное покрытие
Рис. 12.34. Зависимость от скорости средне-
квадратичных отклонений прогиба лонжеро-
нов в различных точках рамы автомобиля
ЗИЛ-130 (движение с нагрузкой 4,0 т по бу-
лыжной дороге удовлетворительного состоя-
ния):
Е — передний бампер; N — середина базы; М —
задний свес; Q — точка на расстоянии 0,62 м
слева от оси задней подвески
L
Рис. 12.35. Расчетная схема колебаний многоосного колесного шасси с несущей системой, упругой на изгиб и кручение, и мостовой
схемой опорно-ходового комплекса
/2. Колебания многоосного колесного шасси супругами шинами
12.6. Пространственные модели колебаний
499
модель рамы L65J. При определении параметров моделирующего стержня следует
иметь ввиду, что по имеющимся экспериментальным данным жесткость на кручение
несущей системы грузового автомобиля оказывается на 30...50 % больше жесткости
отдельной рамы.
Несущая система шасси моделируется стержнем, упругим на кручение и из-
гиб в вертикальной плоскости, с переменной погонной массой и жесткостью. Изгиб
стержня в горизонтальной плоскости не учитывается. Распределение масс и жестко-
стей по длине стержня должно соответствовать распределению этих параметров у
моделируемой несущей системы шасси.
При изгибе стержня пренебрегают инерцией поворота его сечений и дефор-
мациями сдвига, а при кручении считают, что поперечные сечения стержня остают-
ся плоскими и не деформируются. Естественно, что упругие колебания стержня
считаются малыми, а зависимости между деформациями и силовыми факторами —
линейными. Тогда дифференциальные уравнения колебаний стержня
2 (12.67)
£/.(а,)^|^1Д = Ми(х)Г),
I дх
где Сф = Сф(х) — жесткость стержня на кручение; Е1-(х) — жесткость стержня на
изгиб; МА(х, Г) — крутящий момент в сечении с текущей координатой х; Л7и(х, г) —
изгибающий момент в сечении с текущей координатой х; z(x, г) — перемещения оси
жесткости стержня, обусловленные его изгибом; (р(х, t) — угол поворота соответст-
вующего сечения стержня.
Силы внутреннего трения в несущей системе на этой стадии проектирования
рекомендуется учитывать при помощи гипотезы Фойхта (гипотезы вязкого трения).
При этом считается, что дополнительные напряжения, возникающие в стержне при
деформациях за счет действия сил неупругого сопротивления, пропорциональны
скорости деформаций, а распределение трения в стержне соответствует распределе-
нию его жесткостей:
дх dt у дх )
Е/. (х,/)Э ^Л,^+к. МEl. (х, t) =
дх dty дх )
где £ф, — коэффициенты, характеризующие вязкое трение при кручении и изгибе
стержня.
Обозначения, принятые на рис. 12.35:
х — текущая координата, задающая положение сечения стержня, моделирую-
щего несущую систему (начало отсчета совмещено с кормовым перпендикуляром
рамы); z(x, t) — вертикальные перемещения точек оси жесткости стержня; (р(х, г) —
углы поворота сечений стержня относительно продольной оси; £,(г) — вертикальное
перемещение центра массы моста (/ = 1 соответствует переднему мосту, i = п соответ-
500
12. Колебания .многоосного колесного шасси с упругими шинами
ствует заднему мосту); Р/(г) — угол поперечного поворота моста; С — центр массы
несущей системы; С, — центр массы моста; А — точка стержня, соответствующая оси
переднего моста; А| — точка стержня, соответствующая месту крепления носового
кронштейна рессоры z-ro моста; А2 — точка стержня, соответствующая месту крепле-
ния кормового кронштейна рессоры z-ro моста; 2/р, — расстояние между осями крон-
штейнов рессор z-ro моста; L — длина несущей системы; 2dt — колея z-ro моста; 2dpi
расстояние между рессорами z-ro моста; Ср/ — жесткость рессоры; гр, — приведенный
коэффициент сопротивления амортизатора; F, — сила сухого трения в подвеске z-ro
моста; Сн„ — радиальная жесткость шины z-ro моста; П1, — коэффициент вязкого тре-
ния шины z-ro моста; </,л(г) — ординаты микропрофиля дороги под левым колесом z-ro
моста; qin(t) — ординаты микропрофиля дороги под правым колесом z-ro моста.
Гипотеза вязкого трения не учитывает независимость коэффициента погло-
щения от частоты колебаний. Известны различные способы уточнения модели —
поправка Бокка ([65, 66]), гипотеза Сорокина ([65, 67]) и др. На ранних стадиях
проектирования решающим фактором является сокращение объема расчетов при
сохранении приемлемой точности результатов. Практика же показала, что на основе
гипотезы вязкого трения можно получить достаточно точные результаты.
При составлении дифференциальных уравнений колебаний стержня, модели-
рующего несущую систему, обобщенные координаты измеряются от положения
центров соответствующих масс при недеформированных упругих элементах под-
вески и при недеформированной несущей системе.
Методика построения модели достаточно подробно описана в [65].
Поскольку между изгибающим моментом в сечениях стержня, перерезываю-
щей силой и погонной нагрузкой выполняются соотношения
ЭЛ/и(х, г)
дх
dQ(x, t)
дх
то
--Т Gn ------- + ---- Gn ------- - ~mk ( X, Г ) J
дх J vdtdx[v дх ) ° ’
d2 (r-, i Э3 f 32z(x,r)')
Эх2 I ' Эх2 J ' dtdx2 I ' Эх2 J
(12.69)
(12.70)
где mk(x, t) — погонный крутящий момент, действующий на стержень.
При колебаниях стержень нагружается силами инерции и сосредоточенными
силами в местах крепления упругих и демпфирующих элементов подвески:
d2z т
q{x,f) = -m(){x) — + YJFq?>{x-x4-)-m^x)g\
Ot ч=\
Э2ф т
тк (х, г) = (х) —+ £ Fqdq§(x -xq),
dt q=}
(12.71)
12.6. Пространственные модели колебаний
501
где ш0(х) — погонная масса стержня; Fq — сосредоточенная сила, приложенная в
сечении стержня с координатой xq на расстоянии dq, от оси стержня; /ф(х) — погон-
ный момент инерции стержня.
Погонная масса стержня и его погонный момент инерции вычисляются с
учетом сосредоточенных масс агрегатов, закрепленных в точках с координатами х/
к
W = т'(М + T.mj^x~ xi
J=' (12.72)
;=1
Формулы (12.69) и (12.70) позволяют сформировать дифференциальные
уравнения колебаний упругого стержня, моделирующего несущую систему шасси
э2 (с Эф(х,гП Э2 э.Д ’ а, ) ’Мл < Э(р(х,г)А г Э2ф #1^,0 хч^’
Д(Е, (л.оДТдГк дх^ дх~ ) + EI.(x,t)d (12.73) ЭгЭх2 ( ’ Эх2 J
d^z т [ Эг б/=| q)-mn(x-)g.
В соответствии с рис. 12.35 предполагается, что внешние силы действуют только
в сечениях, соответствующих расположению мостов и точек их закрепления, поэтому
т п
У. Fq^x - ^) = X (+ Fni) 5(* - х,);
q=\ /=1
т п
У Fqdq^ ~Xq) = YAF ~ ~ Х‘ )’
/=1
(12.74)
С помощью формул (12.73) и (12.74) легко получить дифференциальные
уравнения колебаний стержня, моделирующего несущую систему многоосного ко-
лесного шасси
/ (xA_2L(C Э(р(хД)) / д2 (с (г _F }d8(x-
'ф(Л) 2 л э э ^Ф -ч ^ф -ч / . (^л/ ) ajO(x
dt дх~ V дх J dtdx\ ox J
Эх21 Эх2 J ' ЭгЭх2
гл / .Э2г(х
EIz (х>0——ту
дх J дг
= Ё(^/
/=1
(12.75)
502
12. Колебания многоосного колесного шасси с упругими шинами
Скачки перерезывающих сил и крутящих моментов в точках крепления под-
вески учтены структурой уравнений (12.75). Необходимо учесть еще условия на
концах стержня (изгибающие моменты, крутящие моменты и перерезывающие си-
лы на свободных концах стержня должны отсутствовать — равняться нулю):
(12.76)
Для сохранения общности моделей, описывающих с разной степенью при-
ближения колебания колесных шасси, в [65] предложено ограничиваться рассмот-
рением только низкочастотных колебаний и заменять дифференциальные уравнения
в частных производных системой обыкновенных дифференциальных уравнений с
помощью метода Бубнова-Галеркина [65, 68].
Решения уравнений (12.75) ищутся в следующем виде:
N
£ /7(х)е7(Г);
7,’1 (*2-77>
/V|
<р(х, г)=£у*(х)(рДг).
£=()
В качестве координатных функций используются собственные формы изгиб-
ных и крутильных колебаний стержня со свободными концами, имеющего точно
такое же распределение масс и жесткостей, как и у стержня, моделирующего несу-
щую систему. Это означает, что координатные функции являются решениями сле-
дующих краевых задач:
4k
dx2 dx2
пчМр2/(ху,
(12.78)
_£Г <Л|/(х)
dx _ ф dx
r d^{x)
<р dx >=
+ /<i>Wp2YW;
= о,
(12.79)
где р — частота собственных колебаний свободного стержня.
12.6. Пространственные модели колебаний
503
Решения краевых задач (12.78) и (12.79), удовлетворяют условиям ортого-
нальности [65, 68]: (x)fj Wfk (x)dx = 0, j *
*’ (12.80) Л)
или
J ' dx2 dx2
J ф dx dx
(12.81)
Естественно, что решениями краевых задач (12.78) и (12.79) являются функ-
ции, описывающие формы колебаний свободного стержня как твердого тела (при
/? = 0; проверяется непосредственной подстановкой):
7-1 « = 1;
< f^x) = X-Xc-
.VoW = 1,
(12.82)
где xQ— координата центра масс стержня.
Далее, следуя [65], выполняются такие преобразования:
в исходную систему дифференциальных уравнений (12.75) подставляются
выражения (12.77), определяющие принятую структуру решения;
правая и левая часть первого уравнения полученной системы умножаются на/’(.г);
производится интегрирование в пределах от 0 до L.
э2
Е fk
t=-l___________:
Эл2
dx +
д2 Е fk 7А(0
EI.(x,t)
а2
Эх2
Е fk (x)Qk (о
t=-l_________.
Эг
L д3
J ' 7 ЭгЭл2
Lt. , д2
о
L
о
п
\fM^(Fni + Fni)K
0 /=1
L
)- fw0(x)//^)g,
о
(12.83)
где j = -1,0 ... N.
504
72. Колебания многоосного колесного шасси с упругими шинами
Изменяя порядок интегрирования и суммирования, формулу (12.83), очевид-
но, можно представить следующим образом:
*=-! о Эх дх )
+Л.0Д(Г) f/.(x)2_fEI: (x,t)^^-]dx+
0 дх дх )
+^к (0 р”о (*)// О) Л W dx =
о
п L L
Е <F f/; 0)50 - Л) dx - g pn() (х)/у {x)dx}.
/=1 о о
(12.84)
Интегралы, входящие в уравнение (12.84), можно преобразовать, действуя по
следующей схеме.
Первый интеграл дважды интегрируется по частям и представляется в виде
-|И[е/ (x,f)^^H^2)^x = L(x)2y[EA(x,0^^^ (12.85)
' l/М Эх JJ Эх [ Эх Эх JJ0
-Ш «(.1.о^'|Г+к(-.о^02Оо>Л.
LM a? JJ„ J дх- дх-
Далее учитываются граничные условия (12.76)
jf^x)^ EI.(x,t)^^\dx = \EL(x,t)d ^^dx, (12.86)
J ' ЭхЧ Эх2 J о дх дх
условия ортогональности и вводится сокращенное обозначение для первого инте-
грала C/k
j*k;
(12.87)
Результаты преобразования второго интеграла, очевидно, отличаются от ре-
зультатов преобразования первого интеграла только множителем к-. Вводя обозна-
чение bjj = kzCJP переходим к преобразованиям третьего интеграла.
12.6. Пространственные модели колебаний
505
К нему может быть непосредственно применено условие ортогональности
(12.80), поэтому вводя для него обозначение ajk, сразу получаем
L
ajk (x)dx = 0, j*k-
< [ (12.88)
ajj = JA) (x)fj (x)~dx.
0
Четвертый интеграл преобразуется с использованием определения и свойств
8-функции
L
jfj(.x')^x-xi')dx =
о
(12.89)
Наконец, последний интеграл обозначается Gjk и с помощью условия ортого-
нальности (12.80) получим
г [0J, кФ-\-
(12.90)
В результате всех проведенных преобразований система уравнений (12.84)
преобразуется к виду
Y [CuQk (?) + Ьиёк (?) + а^к (?)] = £( + FnZ) fj (x,) - Gy,. (12.91)
k=-\ i=\
Окончательно имеем:
CJjej(t) + bjjQJ(t) + aJjQj{t) = £(F + F„i)fj(xi)-GJj, (12.92)
Z = 1
где / = -1,0, 1, ..., N.
Выполним такие же преобразования с первым уравнением системы (12.75).
Результат подстановки функции (12.77), умножения на у/х) и интегрирования
г
l д ХХмфло
|у7(х)/ф(х) -----
tv, "| А
ZXcfwaW
к=0 J
dx-
(12.93)
a2
vj (•*) -4 -4 Gp
* otox
3 ХфаМфло
——----------- dx = j\?7 (x)^ (Fni - F„,.) J,-5(x - x,. )dx.
dx
L
о
7
506
72. Колебания многоосного колесного шасси с упругими шинами
Изменив порядок суммирования и интегрирования, получим
Ё1 (0 рф WVJ - <S>k (0 Jv; W C<p dx ~
k=(} [ о о °* V dx ;
~k^k (0 /фу (x) ~ f C<₽ | = Ё (Fni ~ F"i) fvy (x)d&x - Xi )dx;
о ox ) J /=| 0
(12.94)
Результат преобразования первого интеграла формулы (12.94) при помощи
условия ортогональности:
L
a'jk = рФ(х)у/х)ф*(х)?& = о, /**;
< ” (12.95)
a'kk = jApWv*W2^ = °> J = k-
0
В результате преобразования второго интеграла формулы (12.94) имеем
^wkjW^4fc,
дх J дх\
дх ) дх
дук (х) А
* V/W
дх J
L _(с friwWW
о \ дх ) дх
L Л(с
о Д ф дх ) дх
(12.96)
С учетом граничных условий и применения условия ортогональности форму-
ла (12.96) примет следующий вид:
С'кк
‘f z , а2 г Э\|?д.(х)А n • ,
/с ГМл.о.
(12.97)
Результат преобразования свободного члена:
Ё (Fn, - Fn,) Jv* (X)dt8(x - Xi )dx = ^( F,i - Fui) J,-yk (xt). (12.98)
/•=1 0 z=l
Преобразуя первое уравнение системы (12.93), получаем
акк Фа (') - С'кк <рА. (?) - Ькк <р* (?) = Ё (Г-и ~ F"i) diФа (х,- ), (12.99)
/=1
где к = 0, 1, ..., Nt, bkk =
12.6. Пространственные модели колебаний
507
Для j = -1 с учетом того, что в соответствии с (12.82) f_\ = 1, и вводя обозна-
чение 0_| = z0, имеем из (12.92)
= £ ( F»i + }~М^’
i=\
L
м„ = риоОЖ
о
(12.100)
Для j = 0 с учетом того, что в соответствии с (12.82) /0(х) = (х - и вводя
обозначение 0О = а, имеем из (12.92)
Лг«(?) = Х(/;’л/ + Л./)(л- --«с);
/•=]
L
Л,- f(x, - лс)2 m^x)dx.
о
(12.101)
И для к = 0 с учетом того, что \|/0(х) = 1, имеем
Jxx^k =
/=|
L
о
(12.102)
Для значений j и к, отличных от единицы, получаем систему обыкновенных
дифференциальных уравнений
aj^j(о+bj^j(о+cjjQj(о=Z(F + F™)fj}~Gjj' j= *>•••’N;
1=1 (12.103)
n
4к^к(0-сккЪ({)-Ькк^к(.{) = ^Е^ - Fn^d^k(xi\ k = h-, W|-
Уравнения (12.100-12.102) описывают колебания несущей системы многоос-
ного колесного шасси как дискретной системы. Первая группа уравнений системы
(12.102) описывает изгибные колебания несущей системы шасси, а вторая группа
уравнений этой системы — ее крутильные колебания.
При выводе уравнений не использовались никакие предположения о конст-
рукции и исполнении системы подрессоривания, а мостовая схема опорно-ходового
комплекса использовалась только в качестве примера. Это означает, что полученная
модель применима для исследования колебаний многоосных колесных шасси с
опорно-ходовым комплексом произвольного типа.
508
/2. Колебания многоосного колесного шасси с упругими шинами
12.7. Пространственная модель колебаний
многоосного седельного автопоезда
В главах 1-4 было показано, что одной из достаточно широко распростра-
ненных моделей многоосных ТС особо большой грузоподъемности является много-
звенный автопоезд, причем чаще всего применяется 2-звенная седельная компо-
новочная схема. Этот вариант исполнения транспортеров не описывается рассмот-
ренными ранее моделями, однако при разработке специализированной расчетной
схемы можно использовать в целом принятую ранее систему допущений и огра-
ничений (рис. 12.36).
В частности, допускается, что автопоезд симметричен относительно про-
дольной плоскости, что он движется прямолинейно с постоянной скоростью, и
можно пренебречь влиянием тангенциальных реакций на вертикальные колебания
звеньев. Колебания звеньев автопоезда считаются малыми и не учитывается влия-
ние поперечных реакций на вертикальные колебания звеньев.
Несущие системы звеньев, точно так же, как и в § 12.6, моделируются стерж-
нями, имеющими переменные жесткости, погонные моменты инерции и массы и
работающими на кручение и изгиб в вертикальной плоскости. Изгиб в горизонталь-
ной плоскости и продольное сжатие стержней не учитывается.
Как и ранее сосредоточенные массы считаются жестко прикрепленными к
рамам звеньев автопоезда.
При моделировании изгиба стержней не учитываются инерция поворота се-
чений и деформация сдвига, а также считается, что точки сечения стержня, лежа-
щие на оси его жесткости, перемещаются по вертикали. При моделировании круче-
ния стержней не рассматривается явление депланации сечений.
Трение в несущей системе учитывается по гипотезе Фойхта (гипотезе вязкого
трения).
Считается, что сцепное устройство обладает упругостью в вертикальном и
продольном направлениях, а также при относительных поперечных наклонах несу-
щих систем звеньев (предполагается, однако, что при относительных поворотах
звеньев в продольной плоскости упругих сил не возникает, но имеет место момент
вязкого или сухого трения).
Наконец, все обобщенные координаты измеряются от положения статическо-
го равновесия системы.
На рис. 12.36 приняты следующие обозначения для седельного сцепного уст-
ройства: С| — вертикальная жесткость; Г| — коэффициент вязкого трения (в верти-
кальном направлении); С2 — продольная жесткость; г2 — коэффициент вязкого тре-
ния (в продольном направлении); другие обозначения аналогичны обозначениям на
рис. 12.35.
При выполнении всех этих условий дифференциальное уравнение изгибных
колебаний стержня, моделирующего несущую систему тягача, имеет следующий
вид (см. также формулы (12.75)):
12.7 Пространственная модель колебаний седельного автопоезда
509
о ‘|Х)
Рис. 12.36. Пространственная модель колебаний седельного автопоезда
510
12. Колебания многоосного колесного шасси с упругими шинами
Е1.т El (л,ОЭ2г;(2Л’?)К/пт(х)^-^-?) =
Эх“ Эх ) dtdx дх ) dt
YS.Fm + Ли ) 8(Х - л) - FKxhK 4~5(x~xK)-FK:5(x-xK) + M к-^-д(х-хк).
I _ । dx dx
(12.104)
Уравнение крутильных колебаний стержня, моделирующего несущую систе-
му тягача
/ д? (с Z. д2 (г Э(МХ’Г)) =
W ' dt2 Эх214'" Эх J ^ЭгЭхГ*"' Эх J
(12.105)
Е ( ~ Ли ) di 5(* ~ Xi ) ~ М К 5(Х ~ ХК ) + т„ (х^)-
i=\
В формулах (12.104) и (12.105) использованы следующие новые обозначения:
Е1:т(х) — изгибная жесткость стержня, моделирующего несущую систему тягача;
Сф(х) — крутильная жесткость стержня, моделирующего несущую систему тягача;
zm(x, t) — вертикальное перемещение оси жесткости стержня, моделирующего не-
сущую систему тягача; фш(х, Г) — поперечный угол наклона сечения стержня, моде-
лирующего несущую систему тягача; к:т — коэффициент, характеризующий внут-
реннее трение в стержне, моделирующем несущую систему тягача (при его изгибе);
к<?т — коэффициент, характеризующий внутреннее трение в стержне, моделирующем
несущую систему тягача (при его кручении); тт(х) — погонная масса стержня, модели-
рующего несущую систему тягача (включая сосредоточенные массы, закрепленные на
раме тягача); /фШ(х) — погонный момент инерции стержня, моделирующего несущую
систему тягача (включая моменты инерции агрегатов, закрепленных на раме тягача);
ЕКх — продольная составляющая реакции в седельно-сцепном устройстве; FK. — верти-
кальная составляющая реакции в седельно-сцепном устройстве; — суммарный мо-
мент, возникающий в седельно-сцепном устройстве при относительном поперечном
повороте несущих систем тягача и полуприцепа; hK — расстояние (по вертикали) от оси
седельно-сцепного устройства до оси жесткости стержня, моделирующего несущую
систему тягача; /г(х) — расстояние (по вертикали) от оси жесткости стержня, модели-
рующего несущую систему тягача, до центров тяжести его сечений.
Дифференциальные уравнения изгибных и крутильных колебаний стержня, мо-
делирующего несущую систему полуприцепа, можно записать следующим образом:
ЭхД - 1 Эх,2 ) ~”Э/ЭхД Эх,2 J dt2
X (Ли+Ли)5(*| -xu) + FKvhK\ v-8(x,-х|К1) +
+Лс.-8(х| -хК} )-Мк — 8(Х| -X,к।).
dx}
(12.106)
12.7 Пространственная модель колебаний седельного автопоезда 511
Э2ф„(х,,г) Э2 Г ЭфДх,,^ Э2 ( <р„(дс|,г)>|
° Эг Эх,2Гфп Эх, J ф"Э/ЭхД ф" Эх, J
Z < F»i ~ ) 4 50i - *1/) + м к ' 5(х, - х, к,) + т„ ght (х, )<pm (х,, t).
i-n
(12.107)
В формулах (12.106) и (12.107) применены следующие дополнительные обо-
значения: индексом «п» отмечены параметры, характеризующие несущую систему
полуприцепа; X! — продольная координата, описывающая положение элементов
модели несущей системы полуприцепа; hK\ — расстояние от оси седельно-сцепного
устройства до оси жесткости стержня, моделирующего несущую систему полупри-
цепа; Л|(Х]) — расстояние (по вертикали) между центром тяжести сечений стержня,
моделирующего несущую систему полуприцепа и осью его жесткости.
Усилия, действующие в седельно-сцепном устройстве, определяются соот-
ношениями
dtdx
(12.108)
М'к = 2rtdc2 |+2c,dc2 [фот (xk)-9„(x,J]; (12.109)
( Х=ХК °t Л|=А1Л-1 )
FKz = 2c\[z,AxK>
(12.110)
К >
кч ’
Д'! ’
Кх
-h ^’т
К дх
xo\ ~hK\ —n~
2
(12.112)
° hK dtdx
Л~~ЛА' 7
-h
Kl dtdx,
В формулах (12.108)—(12.112) использованы следующие обозначения: гк —
коэффициент вязкого трения; — жесткость, определяющая вертикальные силы
упругости, действующие в седельно-сцепном устройстве; г\ — коэффициент вязко-
го трения, определяющий вертикальные силы трения, действующие в седельно-
сцепном устройстве; 2dc — расстояние между опорами седельно-сцепного устрой-
ства; С2 — жесткость, определяющая продольные силы упругости, действующие в
седельно-сцепном устройстве; — коэффициент вязкого трения, определяющий
продольные силы трения, действующие в седельно-сцепном устройстве; х() — про-
дольное перемещение центра масс тягача; хО\ — продольное перемещение центра
масс полуприцепа.
Для применения метода Бубнова—Галеркина перемещения сечений стерж-
ней, моделирующих несущие системы, представляются следующим образом:
512
12. Колебания многоосного колесного шасси с упругими шинами
zm(xJ)^ г„,о+(х-хс)а,„+^e„y(z)/m/x); (12.113)
;=-i j=i
П2 П2
Фтк (Х)<ртк (0 = ф„,0 + £ф„* (Х)ф„* (?); (12.114)
к=О к=\
п3
X (inJ't)fnl(x\) = z„o\ + (х,-x1C|)a„+£9„/z)/„/X|); (12.115)
7=-1 7=1
п4 «4
ф„(-Г|, £ф«*(х1)ф»*^)=ф«о+Еф'>*(х1)<р»ис- (12.Н6)
к=ъ к=\
В формулах (12.113)-( 12.116) применены следующие дополнительные обо-
значения: хс— координата центра массы стержня, моделирующего несущую систему
тягача; хС\ — координата центра массы стержня, моделирующего несущую систему
полуприцепа; Ф,„* — функция, описывающая распределение углов относительного
поворота сечения рамы тягача по ее длине; Фпк — функция, описывающая распреде-
ление углов относительного поворота сечения рамы полуприцепа по ее длине.
Также, как и ранее, в качестве координатных функций f^x) и Ф/х) (j = -1,
к = 0, 1, ...) принимаются собственные формы изгибных и крутильных колеба-
ний свободных стержней, моделирующих несущие системы тягача и полуприцепа,
которые определяются путем решения краевых задач
P2rnmfm{x) = 0;
£Лда(х)/„:«=0 r=z,=0;
[£/.,m(x)/;(x)]'|t=o =0;
[£Ы*|)Л'(Л)Г- P2fn„f„(xt) = 0;
£M*i)/nVi)U, =°;
[£Л„(х1)/;(х1)]'| =0;
1х=0,
[Сфт(*)Фт(*)] + P2l<fm(.x)^m W = °;
Сфт(х)Ф;(х)|л=0 v=L=0;
[сфя (-«I )<К (*1)] + Р2/фи )ф„ <Л) = 0;
СрЛ*)ф'Л*)|Л=0 х=£) =0.
(12.117)
Кординатные функции должны удовлетворять условиям ортогональности
при j Ф к:
12.7. Пространственная модель колебаний седельного автопоезда 513
jm^fkmWdx = О;
О
L
^т(.х)ф ]т(.х)фк„,(х^х = О;
О
\mAx\)fjn^fknW^ =°;
О
ц
J Лр« Of )Фу«(*1 )ФкП01 )^1 = °-
<0
о dx dx
Lc дФim(x) d<5>i (xj
К,, (л) -М-.2^ = 0;
* dx dx
о dx} dxi
'Ъ ^/ф7«(^|)^я(х,)
cZX] — U.
dx\ dx}
I о
(12.118)
(12.119)
Действуя по уже описанной ранее схеме, можно получить систему обыкно-
венных дифференциальных уравнений, описывающих колебания подрессоренных
масс тягача и полуприцепа с учетом упругости несущих систем. Эти уравнения до-
полняются, естественно, уравнениями колебаний неподрессоренных масс тягача и
полуприцепа, методика получения которых не отличается от общеизвестной, а фор-
ма и структура определяются конкретным вариантом исполнения опорно-ходовых
комплексов тягача и полуприцепа.
Система дифференциальных уравнений, описывающих колебания подрессо-
ренных масс тягача и полуприцепа с учетом упругости несущих систем, имеет вид:
мт zOm (t) = X (F„i + ) - fk: ;
/=1
L
M,„ = \mm(x')dx.
0
(12.120)
Iyym&m(d) ^'.(Fni + Fni)(xi XC) FK:^XK xC^~^FKx^K
L '=l (12.121)
/, J(x, -xc)2 mm(x)dx.
о
17 - 2918
514
12. Колебания многоосного колесного шасси с упругими шинами
п П2
^и///Ф()/77 (О — Е, ( ^л/ — Лв ~ К + М (С) + g Е, Фа:ш (0^к О/и’
/ = 1 к=\
L
о
(12.122)
п
а jjm® jm (О + bjjnfo jm (О С jjm® jm (О = Е ( ^л/ + Fni ) fjm (Xi ) ~ FK; fjm (XK ) +
/=1
n
^rrmtyrmf} Ьггт Фrm^f) ^kk^ri (F.ii ^ni) ^/Фrm(Xi')
/ = !
(12.123)
"2
-M КФ,т (XK ) + g E ^nn VKk Г = 1, ..., и2 .
A=()
Mn E (Fv +Fm)+^J
i=n+\
мп = JXo)^-
0
(12.124)
m
hvA +Л1/)(-Ч -^ic, +MK-,
i-n
Ц 2
Л™ = f(*i, -x\ct)’ m„(x})dxv
0
(12.125)
m /»4
/1лПФо„(О= E (Fni-Fni)di +mk +M„gh^n(t) + g^<$kn(f)dkOn-,
i=n + ] k=\
X. J ^(p/7 (^1 )^l + M nh\
о
(12.126)
m
a ijift jn (0 “* (C + C.jjn®jn (0 = E ( Fni + Fni ) fjm (Xlz ) + FK; fjn (X1 K\ ) —
i=n+\
J = l,
(12.127)
^rrn^rn (0 brrn Ф/77 f ) Сккп Ф/77
/77
X (F -FI,)^(x1/) +
7 = 77+1
/74
+ МкФ,./7(Х|к, ) + gY^kn^rkn, r = h •-
A=0
12.7. Пространственная модель колебаний седельного автопоезда 515
Коэффициенты в уравнениях (12.120)-(12.127) определяются следующими
формулами:
<ijjm = jmm(x)[fjm(x)]2 dx;
0
L1 2
ajjn = fwn(*l)[//n(>l)] dxl-
0
(12.128)
,2
-|2
д2
сп» = IX™ О) -zyfjnM dx>
0 Ldx J
Li
Г д2
jj"
a,
-12
। dx\.
(12.129)
fh . — k c
\ JJm zm jjm’
I /э . — k C
I Z/п JJU’
L
0
= рфп(*1 )[ф™О| )]2 ^1-
0
Г Э "I
J(-4p/n (-*") Ф rm (•*) d*'
(12.130)
(12.131)
-12
i dxf.
(12.132)
/'П1 1~фП\ I/ -4 /Т1 V
[ о
(h = k C
rr/n ф/П^ГГ/П’
| h = k C
^Г/'П Л'фП'-'ГГПф
L
drkm ~ J^/77 (*Y&km rm (X^dx,
0
drkn =h\ (*1 )Ф*п (*1 )ф,-п (*1 )^1 •
0
(12.133)
(12.134)
^rrn
о
Ясно, если распределение погонных моментов инерции совпадает с распре-
делением погонных масс, то
d г кт
d г к\\
= 0;
= 0.
(12.135)
516
12. Колебания многоосного колесного шасси с упругими шинами
Система уравнений (12.120)-(12.127) дополняется уравнениями продольных
колебаний тягача и полуприцепа, при выводе которых рационально предположить,
что из-за малости тангенциальных реакций центр масс всей системы двигается
практически равномерно. Это позволяет рассматривать вместо двух обобщенных
координат только одну х = (х0 - х01).
Дифференциальное уравнение продольных колебаний тягача и полуприцепа
в этом случае имеет вид
д2
д(2
Кх
_мт+м,+м2 МП+М3+М4_
(12.136)
где + М\ + М2 — полная масса тягача; Мп 4- 4- М4 — полная масса полуприцепа.
Продольные ускорения центра масс тягача и полуприцепа определяются по
формулам:
(12.137)
m
причем М{} = Ми + ^Мj — полная масса автопоезда.
Глава 13
Основы теории и расчета систем подрессоривания
колес КТС ОБГ
13.1. Назначение, классификация и требования к подвескам колес
Основой любой системы подрессоривания (СП) автомобиля является подвес-
ка. При этом подрессоривание принято подразделять на первичное и вторичное.
Через системы подрессоривания реализуются рекомендации и требования по пара-
метрам колебаний транспортных средств и вибронагруженности их экипажа, рас-
смотренных в главе 12.
Подвеской называется совокупность устройств и деталей, связывающих ко-
леса с рамой или корпусом машины (первичное подрессоривание) или рамой и си-
дением водителя и пассажиров, а также рамой и корпусом смонтированного обору-
дования (вторичное подрессоривание).
Конструкция систем подрессоривания развивается исходя из необходимости
обеспечения приемлемого уровня плавности хода, вибронагруженности экипажа и
безотрывного контакта колес с дорогой.
Подвеска должна обеспечивать требуемую плавность хода машины, под ко-
торой понимается ее способность двигаться с заданными эксплуатационными ско-
ростями, обеспечивая сохранность грузов, нормальную работу механизмов, а также
необходимую вибронагруженность экипажа, не оказывая вредного влияния на фи-
зиологическое состояние водителя и пассажиров.
По своему назначению составные части подвесок делятся на три (четыре)
группы: упругий элемент, направляющее устройство, гасящее устройство — амор-
тизатор и система автоматизированного управления для активных и управляемых
подвесок.
По характеру связи (например, колеса с рамой) подвески подразделяют на за-
висимые, балансирные (групповые), независимые и опорные.
Традиционные схемы систем подрессоривания в качестве упругого элемента
включают в свою конструкцию листовую рессору, торсион или витую пружину, а в
качестве демпфирующего элемента — гидравлический амортизатор. Они позволя-
ют в основном удовлетворять требования к плавности хода существующих образ-
цов многоцелевых автомобилей и СКШ классов грузоподъемности 14... 18 т и
22...24 т. Вместе с тем многолетний опыт эксплуатации ТС с традиционными сис-
518 13. Основы теории и расчета систем подрессоривания колес КТС ОБГ
темами подрессоривания в реальных условиях применения показывает, что конст-
рукция таких подвесок значительно снижает эксплуатационные свойства автомоби-
ля при движении по дорогам IV, V категории и в условиях бездорожья. Так, по не-
которым данным, при движении по грунтовым дорогам средние скорости движения
автомобилей уменьшаются в 2-3 раза, расход топлива на единицу пути увеличива-
ется в 1,5-2 раза и себестоимость перевозок возрастает в 2-2,5 раза по сравнению с
движением по дорогам с усовершенствованным покрытием.
Системы подрессоривания существующих КТС ОБГ выполнены независи-
мыми, с гидропневматическими элементами, соединенными, как правило, по борту
гидробалансирными связями. Такая конструкция подвески колес обеспечивает СКШ
этого класса удовлетворительную плавность хода (уровни максимальных ускоре-
ний перевозимых грузов не превышают значения 1 g) и нагруженность ходовой час-
Это объясняется жесткими требованиями к маршрутам движения и малыми ско-
ростями движения СКШ (не более 30...40 км/ч).
Снижение требований к маршрутам и повышение скоростей движения КТС
ОБГ диктует необходимость кардинального изменения конструкции подвески ко-
лес, так как существующие конструкции СП не позволяют разрешить следующее
техническое противоречие. С одной стороны, большая нагруженность несущей сис-
темы (рамы) и ходовой части (осевые статические нагрузки более 150 кН), а также
ограниченные возможности по преодолению единичных препятствий (макронеров-
ностей) вызывают необходимость использования более «мягкой» длинноходной
подвески, чем существующие. С другой стороны, требование обеспечения попереч-
ной устойчивости не позволяет применять «мягкую» подвеску. Это техническое
противоречие можно преодолеть с помощью принципиально новых конструкций
СП: активных или пассивных регулируемых (управляемых) систем подрессоривания.
Теоретические аспекты активных виброзащитных систем для общего случая
подрессоривания твердого тела, а также частных случаев, например для подвески
сиденья водителя, исследовали многие ученые: В.Я. Балагула, М.М. Гайцгори,
М.Д. Генкин, В.В. Яблонский, С.А. Елисеев, С.В. Иносов, А.В. Синев, Ф.А. Фурман
и др. Применительно к автомобилям активное подрессоривание колес рассматрива-
ли в своих работах В.И. Кольцов, Р.И. Фурунжиев, А.Н. Останин, В.Д. Шарапов и
зарубежные авторы: Х.Б. Саттон, А.Г Томпсон и др. Всеми исследователями отме-
чалось, что наиболее эффективны с точки зрения плавности хода активные СП.
Активными называют подвески, в которых предусматривается комплекс тех-
нологических приемов для частичной или полной компенсации отклонений от за-
данных значений текущих вертикальных поверхностных сил, действующих через
детали подвески на корпус движущегося по неровной дороге КТС ОБГ
Активные подвески могут быть двух принципиально различных типов. В
подвесках первого типа отсутствуют пассивные упругодемпфирующие элементы.
При этом корпус автомобиля связывается с колесами посредством неупругих звень-
ев, имеющих возможность изменения хода подвески по управляющему сигналу.
Такого рода системы предпочтительно создавать с управлением по возмущению
(принцип Понселе).
В активной подвеске второго типа присутствуют пассивные упругодемп-
фирующие элементы, вызывающие переменное во времени усилие в подвеске. Уста-
13.1. Назначение, классификация и требования к подвескам колес
519
новленные же в подвеске активные элементы создают усилия для гашения колебаний
корпуса по принятому алгоритму. Этот тип активных подвесок вызывает в настоящее
время наибольший практический интерес по следующим причинам.
1. Меньшие энергозатраты на привод активных элементов, в связи с возмож-
ностью ограничения скорости отработки сигнала управления без потери работоспо-
собности.
2. Меньшее требуемое быстродействие системы управления.
3. Большая надежность, во-первых, из-за более простой системы управления,
во-вторых, вследствие того, что работоспособность автомобиля не теряется при вы-
ходе из строя системы управления.
Активные подвески обеспечивают кроме повышения плавности хода ограни-
чение чрезмерных «клевков» при торможении, трогании и разгоне, кренов на поворо-
тах, а также улучшение работы шин. Все эти качества могут быть определяющими
для их использования на СКШ, но для создания активных СП до настоящего времени
не решены следующие технические проблемы:
для активной подвески очень важно правильно выбрать период времени наблю-
дений (осреднения). При малом периоде времени наблюдения оценка имеет большую
погрешность конечной выборки, так что для стационарного процесса получаемые оцен-
ки значительно отличаются друг от друга. При этом невозможно определить, является
ли это отличие случайным, или изменились статические характеристики дороги. При
большом периоде времени наблюдения оценка получается достаточно точной, но авто-
мобиль тогда может длительное время ехать по булыжнику с подвеской, настроенной
на асфальт, прежде чем подвеска будет перестроена;
снижение вибронагруженности экипажа КТС ОБГ с помощью активной СП
колес не является очевидным. Активные подвески известных конструкций функцио-
нируют на частотах не более 2...3 Гц вследствие своей инерционности, а повышенная
вибронагруженность экипажа (ВНЭ) обусловлена колебаниями на частотах 4...8 Гц и
более;
затраты мощности в активных системах подрессоривания при вертикальных
колебаниях в некоторых условиях достигают значительных величин и с ростом ско-
рости движения СКШ эти затраты (по абсолютному значению) монотонно возраста-
ют. Наименьшее отношение затрат мощности в активных СП к суммарным затратам
мощности на движение имеет место на ровных дорогах с асфальтобетонным покры-
тием — оно составляет при этом 3...7 %. На тех же дорогах с изношенным покрытием
и на грунтовых дорогах удовлетворительного состояния — соответственно 15...20 %.
На дорогах с булыжным покрытием и при движении шасси по бездорожью это отно-
шение является наибольшим — 20.. .50 %.
Таким образом, внедрение активных систем подрессоривания, особенно для
СКШ, в ближайшее время является проблематичным в первую очередь из-за отсутст-
вия теоретической базы их создания. Поэтому на начальном этапе решение проблем,
связанных с обеспечением требуемых значений нагруженности ходовой части и не-
сущей системы, а также проблем вибронагруженности экипажа следует искать в ис-
следовании параметров и разработке конструкции управляемых подвесок.
Управляемыми будем называть подвески, содержащие дополнительные уст-
ройства для изменения своих параметров и характеристик в процессе движения
КТС ОБГ.
520 13. Основы теории и расчета систем подрессоривания колес КТС ОБГ
Пассивные регулируемые подвески являются простейшими по конструкции
из известных управляемых СП. В таких подвесках меняются характеристики упру-
гих элементов и (или) характеристики амортизаторов в зависимости от полной мас-
сы, дорожных условий и режимов движения. Пассивные подвески корректируют
характеристики отдельных своих подсистем в процессе движения КТС ОБГ автома-
тически или принудительно водителем в зависимости от типа дороги. Такие под-
вески применимы на СКШ при эксплуатации их на маршрутах с большой протя-
женностью однотипных по микропрофилю дорог или когда характер маршрутов и
чередование типов дорог заранее известны.
По результатам проведенных авторами исследований и анализа работ, посвя-
щенных колебаниям КТС ОБГ, можно сформулировать требования к подвескам колес.
Подвеска должна иметь:
1) большие значения рабочих ходов (динамические /гд > 500 мм и коэф-
фициент динамичности КЛ ~ 2,5...3,0), обеспечивающие движение КТС ОБГ без
ударов подвески в ограничители хода (упоры) и без отрыва колес от опорной
поверхности;
допустимые значения парциальных частот свободных колебаний подрессо-
ренных масс: вертикальных колебаний со7 = 10... 12 рад/с и угловых колебаний соф =
= 6,30...9,50 рад/с; максимальные амплитуды до 4...5° и вертикальные ускорения не
более 1,0... 1,5 g\
необходимую величину гашения колебаний, обеспечивающую снижение ам-
плитуды в 3-8 раз за один размах свободных колебаний, что соответствует коэффи-
циенту затухания Ki = 1,5...2,5 рад/с;
2) параметры подвески должны обеспечивать движение с заданными скоро-
стями: по грунтовым дорогам — не ниже 30...40 км/ч, а по разбитым и изношенным
дорогам и бездорожью — не менее 15...20 км/ч;
3) подвески должны надежно передавать горизонтальные и боковые силы и
их моменты от колес к раме и иметь соответствующую кинематику;
4) подвеска должна обеспечивать снижение неподрессоренных масс и воз-
никающих от них динамических нагрузок на упругие элементы и раму машины.
За счет этою снижать высокочастотные колебания (вибрацию) корпуса машины;
5) подвеска должна обеспечивать малые изменения траекторий качения ко-
лес, а также хорошую устойчивость и проходимость машины. Вертикальные пере-
мещения колес относительно рамы не должны вызывать повышенного поперечного
скольжения и колебаний в поперечной плоскости и не должны увеличивать нагруз-
ку на несущую систему;
6) подвеска должна иметь как минимум возможность регулирования дорож-
ного просвета вплоть до полной посадки машины на грунт и возможность стабили-
зации подрессоренной массы во время движения машины. В отдельных случаях
подвеска должна иметь возможность собственного выключения (блокирования),
например при работе с крановым оборудованием.
13.2. Анализ и математическое описание расчетных схем подвески колес 521
13.2. Анализ и математическое описание
расчетных схем подвески колес
Системы подвесок колес КТС ОБГ традиционной компоновки
Конструктивные схемы и решения опор КТС ОБГ во многом заимствованы
из авиастроения. По авиационной терминологии опорой называется конструкция,
состоящая из стойки и опорных элементов (колес). Стойка — конструкция, меха-
низм, обеспечивающий соединение и взаимодействие опорных элементов (колес) и
несущей конструкции (планера или рамы у транспортного средства).
Учитывая широкое распространение, которое получили в научно-техничес-
кой литературе по теории автомобиля понятия опора и стойка, эта терминология
сохранена и в настоящей главе.
Под опорой КТС ОБГ понимается ходовая часть многоосного автомобиля,
обеспечивающая взаимодействие несущей системы (рамы, корпуса) с дорогой, а
также обеспечивающая движение, торможение и маневрирование автомобиля. В
опору входит стойка и колесный движитель. Стойка — система рычагов, аморти-
заторов и силового привода колеса, обеспечивающая взаимодействие колесного
движителя и рамы автомобиля, а также передачу силового потока от двигателя-
энергоустановки к колесу. В данном параграфе рассматриваются опоры (стойки),
выполняющие только функции подвески колес автомобиля.
Все существующие кинематические схемы направляющего аппарата подвес-
ки можно условно свести к трем типам:
стойка, или свечной направляющий аппарат подвески, рис. 13.1, я;
рычажно-свечная подвеска, или на направляющей стойке, рис. 13.1, б;
подвеска на двойных параллельных поперечных рычагах, рис. 13.1, в.
Свечная (стоечная) подвеска
Рассматриваемая подвеска включает в себя направляющий аппарат безры-
чажного типа и гидропневматический упругий элемент, рис. 13.2.
Направляющий аппарат «самолетного» типа состоит из штока, соединенного
с цапфой мотор-колеса и направляющей трубы, соединенной с рамой автомобиля.
Рис. 13.1. Схемы направляющего аппарата подвесок автомобилей высокой проходимости:
а — стойка (свечная подвеска); б — рычажно-свечная; в — на двойных параллельных рычагах
522 13. Основы теории и расчета систем подрессоривания колес КТС ОБГ
Рис. 13.2. Свечная (стоечная подвеска)
Шток может свободно перемещаться в направляющей трубе в осевом направлении
и вращаться в ней в случае управляемого колеса. На неуправляемых колесах шток
через 2-звенный механизм и тягу застопорен от проворота на раму автомобиля.
Основные преимущества данной схемы по сравнению с традиционной:
уменьшение изменения колеи при вертикальном перемещении колеса;
более благоприятная кинематика перемещения колес;
большая компактность и малый занимаемый объем;
большие возможности по углу поворота управляемых колес, вплоть до вра-
щения вокруг направляющей трубы;
уменьшение числа мест крепления;
возможность постановки потребителю в виде единого узла;
возможность использования без значительных переделок на различных
транспортных средствах.
Подвеска с направляющей стойкой (рычажно-свечная)
Данный вариант подвески в современной литературе получил название — под-
веска на направляющей (пружинной или амортизационной) стойке. Прежнее назва-
ние — рычажно-свечная подвеска или подвеска Макферсона. Конструктивно-кинема-
тическая схема (применителько к шасси типа 36970) приведена на рис. 13.3.
Основные достоинства рассматриваемой подвески:
направляющие элементы объединяются в одну монтажную единицу;
меньшие (сравнительно с подвеской на поперечных рычагах) усилия в местах
крепления точек А и £>;
небольшое расстояние между точками В и G;
13.2. Анализ и математическое описание расчетных схем подвески колес 523
Рис. 13.3. Конструктивно-кинематическая схема рычажно-свечной подвески
большие монтажные объемы корпуса в зоне верхнего шарнира А (из-за от-
сутствия верхнего рычага);
несколько меньшее количество точек смазки;
возможность осуществления достаточно больших ходов подвески.
Недостатки подвески:
неблагоприятная кинематика;
невозможность собрать всю подвеску оси на одном силовом элементе (бал-
ке), и следовательно, недостаточная виброизоляция корпуса;
слабое противодействие тангажу при торможении и галопировании;
значительное трение между штоком и направляющей, а в тяжелых автомоби-
лях недопустимо высокие нагрузки на шток и необходимость в большом направ-
ляющем аппарате;
серьезные трудности, возникающие при конструировании рулевого привода с
удовлетворительной кинематикой (длинные высокорасположенные рулевые тяги);
небольшой зазор между шиной и стойкой.
В современных подвесках центр крена расположен примерно на той же высо-
те, что и у подвески на параллельных рычагах, и несколько понижается при нагру-
жении подвески, так как для его повышения приходится чрезмерно наклонять стой-
ку внутрь (см. рис. 13.3).
524 /5. Основы теории и расчета систем подрессоривания колес КТС ОБГ
Кинематические свойства подвески могут быть улучшены в основном за счет
удлинения нижних рычагов. Положительный эффект на легковых автомобилях по-
лучают также, смещая внутрь колеса точку В и создавая так называемое отрица-
тельное плечо обкатки.
Необходимость применения в точке В шаровой опоры на тяжелых автомоби-
лях может вызвать определенные технологические и эксплуатационные проблемы
(опыт доводки ГАЗ-4905).
Подвеска на поперечных двойных рычагах
Главное преимущество подвески этого типа (рис. 13.4 и рис. 13.5) — ее ши-
рокие кинематические возможности, позволяющие:
влиять на изменение высоты центров крена и тангажа, изменяя взаимное по-
ложение рычагов;
создавать различные зависимости углов развала и ширины колеи от верти-
кального перемещения колес, изменяя длину рычагов;
противодействовать изменению развала колес при боковом крене кузова,
уменьшить тенденцию к тангажу при торможении автомобиля и его склонность к
галопированию.
Подвеску на поперечных двойных рычагах легко выполнить в виде изолиро-
ванного узла, имеющего самостоятельное шумоизолирующее крепление к кузову.
Рис. 13.4. Конструктивно-кинематическая схема подвески на поперечных рычагах
13.2. Анализ и математическое описание расчетных схем подвески колес 525
12°
Рис. 13.5. Кинематическая схема подвески на двойных поперечных рычагах
Рулевой привод традиционного типа хорошо сочетается с этой подвеской,
причем тяги могут быть расположены на любой нужной высоте.
При достаточной длине рычагов возможна реализация значительных ходов
подвески при хорошей согласованности с кинематикой карданной передачи и руле-
вым приводом.
Главными недостатками такой подвески являются:
наличие верхнего рычага, занимающего большой объем, затрудняющего ис-
пользование широкой рамы;
большое количество точек смазки, требующее значительных затрат времени
при эксплуатации;
затрудненная очищаемость направляющего аппарата от пыли и грязи;
относительно большая масса и большое количество деталей.
Из известных независимых подвесок эта подвеска способна воспринимать
наибольшие относительные нагрузки при высокой долговечности: известна конст-
рукция, сохранившая работоспособность при 15-кратной ударной перегрузке (обра-
зец 019).
Наиболее серьезным обстоятельством, ограничивающим развитие подвесок
на поперечных рычагах, является невозможность использовать длинные верхние
рычаги на машинах с традиционной лонжеронной рамой и корпусных модификаци-
ях автомобилей. Применение хребтовой рамы смягчает влияние этого недостатка на
общие ТТХ автомобиля.
Остальные недостатки могут быть в значительной степени преодолены кон-
структорско-технологическими мероприятиями.
526 13. Основы теории и расчета систем подрессоривания колес КТС ОБГ
Схемы подвесок колес КТС ОБГ нетрадиционной компоновки
В настоящее время наблюдается тенденция к использованию в качестве
длинноходных подвесок авиационных шасси, которые могут воспринимать большую
нагрузку. Опыт по созданию таких шасси в авиации достаточно велик, их конструк-
тивные схемы весьма разнообразны. Для всех схем шасси силовые опоры могут
быть телескопическими или рычажными (рис. 13.6 и 13.7).
В телескопической силовой опоре амортизатор выполнен как одно целое со
стойкой. Ось колеса жестко связана со штоком амортизатора, и ее перемещение
относительно точки крепления шасси равно сжатию амортизатора &ЬАМ, тогда
смещение оси колеса AL0CI1 = ЫАМ cosccon.
В рычажной силовой стойке ось колеса соединена с амортизатором посредст-
вом рычага. Здесь величины перемещений оси колеса и обжатия амортизатора мо-
гут существенно отличаться: AL0Ckl =А£дм(р, где передаточное число ср равно от-
ношению силы, сжимающей амортизатор, к нагрузке на ось колеса.
Рычажные стойки подразделяются на две характерные группы: с внешним
амортизатором (выполненным отдельно от силовой стойки, рис. 13.7, а) и с внут-
ренним амортизатором (выполненным как одно целое с силовой стойкой, рис. 13.7, б).
Существуют и другие виды конструктивного исполнения рычажных стоек.
Сравнительный анализ конструкций автомобильных подвесок и рычажных
стоек авиационных шасси показал, что главное принципиальное отличие рычажных
стоек заключается в том, что в них система рычагов работает в продольно-
вертикальной плоскости, перпендикулярной оси колеса (рис. 13.8—13.11). В то
время как в автомобильных подвесках рычаги работают в поперечно-вертикальной
плоскости машины. Это отличие делает рычажные стойки более чувствительными к
воздействию продольных сил, действующих на колесо, чем автомобильные подвес-
ки. Поэтому при исследованиях КТС ОБГ с опорами в систему дифференциальных
уравнений (например, (8.21), (8.22)) необходимо вводить дополнительную силу Fx
(см. рис. 13.8-13.10), в качестве которой можно использовать меньшее значение Рк.
Существуют различные по конструкции типы стоек, которые схематично
можно привести к кривошипно-шатунной (см. рис. 13.8), полурычажной (см. рис. 13.9),
Рис. 13.6. Схема силовой стойки:
лескопическая; б — рычажная
13.2. Анализ и математическое описание расчетных схем подвески колес 527
Рис. 13.7. Рычажная стойка с внешним (я) и внутренним (б) амортизатором:
/ — стойка; 2 —амортизатор; 3 — рычаг
Рис. 13.8. Схемы кривошипно-шатунной стойки колеса:
а — кинематическая; б — расчетная
рычажной (см. рис. 13.10) и рычажно-балансирной (см. рис. 13.11). На всех рисунках
точка К соответствует точке крепления стойки к раме.
Кинематический расчет конструкций опор
Исходными данными для расчета и моделирования как рычажных стоек, так
и автомобильных подвесок являются следующие величины: статическая нагрузка на
колесо, допустимый максимальный коэффициент динамичности вертикальных на-
грузок, приведенная к оси колеса жесткость системы, приведенная к оси колеса ха-
528 V3. Основы теории и расчета систем подрессоривания колес КТС ОБГ
а
Рис. 13.9. Схемы полурычажной стойки колеса:
а — кинематическая; б — расчетная
а б
Рис. 13.10. Схемы рычажной стойки колеса:
а — кинематическая; б — расчетная
рактеристика амортизатора, дорожные условия движения транспортного средства и
допустимый динамический ход колеса (/гд).
Важнейшими исходными данными при моделировании движения КТС ОБГ
являются кинематические и динамические соотношения стойки опоры. Эти соот-
ношения легко определяются на основе анализа схемы реальной конструкции стой-
13.2. Анализ и математическое описание расчетных схем подвески колес 529
Рис. 13.11. Схема рычажно-балансирной стойки колеса
ки. Например, их вывод для кривошипно-шатунной стойки (рис. 13.8) выглядит
следующим образом.
На рис. 13.8 приняты следующие обозначения: точки А и D — точки крепле-
ния шатуна соответственно к рычагу и штоку амортизатора; В — ось вращения ры-
чага; С — проекция точки D на прямую, проходящую через точку В параллельно
оси амортизатора; ф = ф() + Аф — угол поворота рычага; Е — ось вращения колеса;
h: — высота стойки; hx — смещение оси Е относительно вертикальной оси, прохо-
дящей через точку крепления стойки к раме (точка /0; ф0 — установочный угол
стойки; ф — угол CBD\ 0 — угол BDA \ ур — угол DBA\ Р — угол BAD\ a0II — уста-
новочный угол стойки.
Геометрические размеры стойки характеризуются следующими линейными
величинами: LKB - КВ\ е - CD\ I = /0 + А/ = СВ\ гр = В A; LBb = ВЕ\ L = AD.
Величины LKB, /0, ф0 — соответствуют ненагруженному состоянию стойки.
Согласно введенным обозначениям, кинематические соотношения стойки
можно представить так:
г2 + е2 + L2 + /(2
Уо = arccos —--7==—; <Р = Ф0+Лф() =Фо+Уо+Ч'о-(Ур-Ч');
, . ... + е2 + L2 + (/0+Д/)2
«- = lkb cos «on + lbe sin ф - e sin aon; yp = arccos-, =^~;
2rp42+(/0+A/)2
, , . R Л2+г2-е2+(/0+Д/)2
nY = —LKB sin 0Con - LBE cos ф 4- e cos 0Co p = arccos------------.
При этом силовое соотношение будет иметь вид
530 /3. Основы теории и расчета систем подрессоривания колес КТС ОБГ
где
V, =-Lbe
Ф» — Lbe
Q = \fxKx + У-Г
W = фл FA + (рг F.,
cos <р cos©
Гр sin Р
cos ф sin 0
rpsinP
r sin ф cos 0
V: = lbe------
Гр sin P
T sinфsin0
Ф,- = ~lbe-----
rpsinP
Несмотря на сложную конструкцию, рычажные стойки наиболее полно отве-
чают условиям компоновки и требованиям, предъявляемым к многоопорным авто-
мобилям. Они обладают удовлетворительной плавностью хода, значительными хо-
дами подвески, возможностью регулирования характеристик упругого элемента и
амортизаторов, снижения динамических нагрузок в подвеске и т. д. Поэтому опоры
с рычажными стойками получили широкое применение в многоопорных автомоби-
лях и могут быть использованы на перспективных КТС ОБГ
13.3. Активные и регулируемые подвески,
системы стабилизации платформы
Пассивные подвески с регулируемыми характеристиками упругих элементов
Целью регулирования в таких подвесках является стабилизация статическо-
го и динамического ходов или отстройка собственной частоты колебаний корпуса
от преобладающей частоты возмущения.
Стабилизация статического хода означает и стабилизацию собственной
частоты колебаний при изменении в широких пределах веса подрессоренных час-
тей. Принципиальная схема подвески, в которой реализуется стабилизация статиче-
ского и динамического ходов, представлена на рис. 13.12. На схеме рама 1 упирает-
ся через пневмобаллоны 2, являющиеся упругими элементами подвески, на ось колеса
3, соединяющуюся с рамой с помощью кронштейна и рычагов 4. Верхний из рыча-
гов 4 упругой тягой 5 соединен с рычагом кулачка 6, размещенного в корпусе 7
клапана и замедлителя. Кулачек 6 взаимодействует с толкателем 8 клапана 9 и
поршнем 10 замедлителя.
При увеличении нагрузки объем и высота /г0 упругих элементов уменьшают-
ся, толкатель 8, перемещаясь влево, открывает клапан 9 и подключает баллоны к
компрессору. Уменьшение нагрузки приводит к перемещению толкателя 8 вправо и
образованию зазора между торцом толкателя и клапаном 9, при этом часть воздуха
из баллонов стравливается в атмосферу.
Таким образом, при любой нагрузке обеспечивается постоянство высоты /г0 и
объема газа за счет изменения массы упругого элемента со своей характеристикой
другим упругим элементом с новой характеристикой.
13.3. Активные и регулируемые подвески, системы стабилизации платформы 531
Рис. 13.12. Принципиальная схема подвески, в которой реализуется стабилизация статиче-
ского и динамического ходов
Подвески с регулируемым жестким кинематическим звеном
Целью регулирования в таких подвесках является стабилизация расстояния
от кузова до полотна дороги при любых статических нагрузках при неизменной ха-
рактеристике упругого элемента. В качестве жесткого кинематического звена ис-
пользуется жидкость, передающая усилие от оси колеса к упругому элементу. По-
этому такое регулирование применяется исключительно в пневмогидравлических
подвесках.
В качестве примера рассмотрим принципиальную схему на рис. 13.13. Здесь
рама 1 с помощью пневмогидравлического баллона 2 и балансира 3 соединена с
осью колеса 4. В свою очередь, ось 4 упругой тягой 5 и рычагом 6 соединена с зо-
лотником 7, размещенным в корпусе 8 гидравлического регулятора. Торцевые по-
лости золотника 7 сообщаются с калиброванным каналом 9, демпфирующим его
перемещения. Источником гидравлической энергии является насос 10. Ручное
управление может осуществляться от рукоятки 11
При увеличении нагрузки на колесо возрастает давление и уменьшается объ-
ем газа в пневмогидравлической рессоре 2, соответственно уменьшается и расстоя-
ние между осью колеса и рамой. При этом золотник регулятора перемещается вниз
и осуществляется подвод масла от насоса 10 в пневмогидравлическую рессору до
тех пор, пока не восстановится прежнее положение кузова, на которое настроен ре-
гулятор. При уменьшении нагрузки золотник перемещается вверх, масло из пневмо-
гидравлической рессоры отводится в бак и кузов опускается. При постоянной на-
грузке положение кузова можно регулировать принудительно поворотом рукоятки
11 Чтобы регулятор не реагировал на динамические изменения прогиба при коле-
баниях автомобиля на неровной дороге, торцевые полости золотника 7 заполнены
маслом и закрыты резиновыми диафрагмами. Обе полости сообщаются между со-
бой калиброванным каналом 9 и образуют гидравлический демпфер. Балансир 3,
532 13. Основы теории и расчета систем подрессоривания колес КТС ОБГ
Рис. 13.13. Принципиальная схема подвески с регулируемым жестким кинематическим звеном
упругая тяга 5 и рычаг 6 составляют кинематическое звено, которое через золотник
7 меняют давление Р в баллоне 2.
При описанном регулировании высоты кузова массовое количество воздуха ос-
тается неизменным, следовательно, неизменной остается и характеристика (жесткость)
упругого элемента. Однако через кинематическое звено осуществляется сдвиг неизмен-
ной характеристики вдоль оси Z (рис. 13.14) и одному и тому же положению кузова z, в
зависимости от нагрузки в нем, соответствуют давление Р, кривые 1-4.
Регулирование характеристик амортизатора
Регулирование амортизаторов имеет целью приспособить их характеристики
к переменным условиям эксплуатации.
Рис. 13.14. Изменение харак-
теристики упругого элемента
Силу сопротивления амортизатора можно изме-
нять путем увеличения или уменьшения проходных
сечений клапанов и натяга их пружин. При переменной
нагрузке на автомобиль важно, чтобы коэффициент
апериодичности оставался в требуемых пределах.
Необходимо регулировать сопротивление и в за-
висимости от дорожных условий. При движении авто-
мобиля по мелким и коротким неровностям, т. е. в об-
ласти высокочастотного резонанса, сопротивление
должно достигать максимума.
Принципиальная схема регулируемого амортиза-
тора представлена на рис. 13.15. В корпусе / с жидко-
13.3. Активные и регулируемые подвески, системы стабилизации платформы 533
стью размещен поршень 2 с полым штоком 3. В порш-
не 2 установлена расходная шайба 4. Сверление 5 со-
единяет внутреннюю полость 6 штока 3 со штоковой
полостью 7 цилиндра. Расходная шайба 4 охватывает
стержень 8 переменного по длине сечения, который
крепится к днищу корпуса. К гидроцилиндру крепится
кожух 9 компенсационной камеры 10.
В днище корпуса размещены предохранитель-
ный 11 и компенсационный 72 клапаны, которые ка-
налом 13 соединяют подпоршневую полость 14 с
компенсационной камерой 10. Там же установлен зо-
лотниковый клапан 15 с управляющим плунжером 16
и возвратной пружиной 17 Клапан 75 с помощью со-
единительной трубки 18 сообщает штоковую полость 7
с компенсационной камерой 10 на ходе сжатия. В на-
правляющем пояске стержня 8 выполнены вырезы 79,
обеспечивающие свободное перетекание жидкости.
При ходе сжатия объем подпоршневой полости
14 уменьшается, давление в ней повышается, управ-
ляющий плунжер 76, сжимая пружину 77, перемещает
клапан 15 вправо. При этом штоковая полость 7 тру-
бопроводом 18 соединяется с компенсационной каме-
рой. Жидкость из подпоршневой полости 14 через
кольцевой зазор, образуемый расходной шайбой 4 и стержнем 8 переменного сече-
ния, дросселируется в штоковую полость 7 и далее в компенсационную камеру 10.
Так как стержень 8 имеет переменное по длине поперечное сечение, то площадь
кольцевого зазора, а следовательно, и сопротивление меняются по заданному зако-
ну. При чрезмерном повышении давления открывается разгрузочный клапан 7 7
На ходе отбоя объем полости 7 уменьшается, находящаяся в ней жидкость
заполняет внутриштоковое пространство и дросселируется в подпоршневую по-
лость 14 через вышеупомянутый кольцевой зазор. При чрезмерном разрежении в
подпоршневой полости открывается компенсационный клапан 72.
13 16 17
Рис. 13.15. Схема регулируе-
мого амортизатора
Активная подвеска с упругим элементом, исполнительным гидроцилиндром
и механическим управлением
Простейший вариант подобной подвески представлен на рис. 13.16. Корпус 7
транспортного средства опирается в статическом положении на упругий элемент
подвески, состоящий из двух последовательно расположенных частей: вспомога-
тельного упругого элемента 2 и основного упругого элемента 3. Вспомогательный
элемент 2 играет роль измерительно-преобразовательного устройства, управляюще-
го работой гидравлического распределителя, к которому подводится жидкость от
насоса 4 из емкости 23. При этом через фильтр 22 утечки жидкости отводятся туда
же. Золотник 5 распределителя крепится к нижнему опорному концу вспомогатель-
ного упругого элемента 2 в точке а, а гильза распределителя — к корпусу 7 Распре-
делитель золотником 5, насосом 4 через каналы 22 и 23 управляет работой гидроци-
534 73. Основы теории и расчета систем подрессоривания колес КТС ОБГ
Рис. 13.16. Схема активной подвески с упругим элементом, исполнительным гидроцилин-
дром и механическим управлением
линдра, состоящего из корпуса 6 и поршня 7 Звенья гидроцилиндра скреплены с
противоположными опорными концами основного упругого элемента 3. Корпус
гидроцилиндра крепится к верхнему концу в точке а, а поршень через шток соеди-
нен с осью колеса 8.
Компенсационная камера С с пневматическим компенсатором 10 устанавли-
вается отдельно или крепится к гидроцилиндру 6. Она включает компенсационные
клапаны / 7 и /2 и дросселирующие отверстия 13 и 14.
При работе подвески в активном режиме отверстия 13 и 14 закрыты пробка-
ми /5 и 16. Подвод жидкости в поршневую полость А и в штоковую полость В гид-
роцилиндра осуществляется от распределителя по трубопроводам 17 и 18 через
разъемные соединения 19 и 20, минуя компенсационные клапаны 11 и 72. Трубо-
проводы 17 и 78 имеют гибкие участки, позволяющие им менять свою геометрию в
пределах деформации вспомогательного упругого элемента 2. Гидропривод подвес-
ки включает в себя также предохранительный клапан 27 в пределах, обеспечиваю-
щих максимальное перемещение золотника 5, измеряемое обычно миллиметрами
или долями миллиметра.
Разъемное соединение 25 позволяет регулировать нейтральное положение
золотника 5 при изменении веса корпуса 7 С помощью аналогичного соединения 26
можно регулировать и взаимное положение упоров 24.
На корпус 7 при движении по ровной дороге не будут действовать возмуще-
ния. Со стороны колеса на него через последовательно расположенные упругие
элементы 2 и 3 действует лишь постоянная сила, уравновешивающая вес корпуса 7.
13.3. Активные и регулируемые подвески, системы стабилизации платформы 535
Деформации основного и вспомогательного упругого элементов равны статиче-
ским. Следовательно, золотник 5 находится в нейтральном положении, когда обе
полости гидроцилиндра 6 соединены со сливом. Насос 4 может быть отключен от
приводного двигателя или работать на холостом ходу. Включение насоса в работу
происходит перед проездом неровных участков дороги.
При наезде колеса на выступающую неровность дороги сила, действующая
на корпус через последовательно расположенные упругие элементы, увеличивается и
они начинают деформироваться (сжиматься). Сжатие упругого элемента 2 приводит к
тому, что расстояние между корпусом и точкой а уменьшится, поэтому золотник 5
переместится вверх относительно гильзы распределителя. При этом средний и ниж-
ний буртики золотника 5 разобщат штоковую полость В со сливом и соединят ее с
напорной магистралью насоса. При этом полость А остается по-прежнему соединен-
ной со сливом. Жидкость под давлением поступает в полость В и, перемещая пор-
шень вверх, сжимает упругий элемент 3. Необходимо подчеркнуть, что упругий эле-
мент 3 при этом сжимается не под действием сил инерции корпуса 1, а под действием
усилия, развиваемого гидроцилиндром.
Таким образом, в точке а к вспомогательному упругому элементу от гидроци-
линдра прикладывается сила, имеющая противоположное направление по сравнению
с отклонением от статического значения поверхностной силы основного упругого
элемента 3. Как только равнодействующая сила от упругого элемента 3 и гидроци-
линдра, приложенная к точке а, станет равной статической или заданной величине,
восстановится первоначальная деформация вспомогательного упругого элемента 2,
что вызовет установку золотника 5 в нейтральное положение, и сжатие упругого эле-
мента 3 прекратится.
При наезде на яму сила, действующая на корпус / от упругих элементов,
уменьшается, следовательно, уменьшается и деформация вспомогательного упругого
элемента 2 — он начинает разжиматься. Вследствие этого расстояние между корпу-
сом 1 и точкой а увеличивается, поэтому золотник 5 смещается вниз относительно
гильзы распределителя. При этом средний и верхний буртики золотника 5 разобщают
полость А гидроцилиндра со сливом и соединяют ее с напорной магистралью насоса.
Полость В соединяется со сливной магистралью. Жидкость под давлением поступает
в полость А и перемещает поршень 7 вниз, упругий элемент 3 при этом растягивается.
Таким образом, в точке а от цилиндра прикладывается сила, компенсирующая
уменьшение статической. Как только равнодействующая сил от гидроцилиндра и уп-
ругого элемента 3 станет равна заданному значению, восстановится деформация
вспомогательного упругого элемента 2, золотник 5 займет нейтральное положение и
растяжение основного упругого элемента прекратится.
Следовательно, при движении по неровностям, вызывающим интенсивные ко-
лебания автомобилей с пассивными подвесками, активная подвеска (см. рис. 13.16)
может обеспечить практически неизменное положение по вертикали подрессоренного
корпуса, при этом колесо относительно корпуса будет совершать движение, опреде-
ляемое изменением микропрофиля дороги.
В случае выхода из строя элементов автоматики транспортное средство не
потеряет подвижность, так как данная подвеска может работать и в пассивном ре-
жиме. Для этого с помощью разъемных соединений 19 и 20 отсоединяют от гидро-
цилиндра подводящие трубопроводы 77 и 18. Открытые отверстия гидроцилиндра и
536 13. Основы теории и расчета систем подрессоривания колес КТС ОБГ
отсоединенные трубопроводы закрывают заглушками. С помощью пробок 15 и 16
открывают дросселирующие отверстия 13 и 14. Вместо разъемных соединений 19 и
20 можно использовать запорные вентили. При этом силовой гидроцилиндр пре-
вращается в обычный гидравлический амортизатор, гасящий колебания корпуса 1
на основном упругом элементе 3. Вспомогательный упругий элемент можно блоки-
ровать упорами 24.
При движении поршня 7 вверх объем полости А уменьшается, и жидкость
через калиброванное отверстие 13 дросселируется в компенсационную камеру, а
затем через компенсационный клапан 12 поступает в полость В, объем которой уве-
личивается.
При ходе отдачи, когда поршень идет вниз, объем полости В уменьшается, и
жидкость из нее через калиброванное отверстие 14 дросселируется в компенсаци-
онную камеру С. В полость А, объем которой увеличивается, жидкость поступает из
компенсационной камеры через компенсационный клапан 11 Коэффициент сопро-
тивления определяется площадью отверстий 13 и 14.
Таким образом, при работе подвески в пассивном режиме основной упругий
элемент 3 выполняет функции рессоры, а исполнительный гидроцилиндр — амор-
тизатора.
Активная подвеска с упругим элементом, исполнительным гидроцилиндром
и электрогидравлическим управлением
Схема на рис. 13.16 представлена лишь для того, чтобы нагляднее объяснить
принцип работы активной СП с упругим элементом в активном и пассивном режи-
мах. Однако установка двух последовательно соединенных упругих элементов
сравнимой жесткости в подвеску реального транспортного средства может вызвать
трудности конструктивного и технологического характера.
Чтобы их избежать, необходимо использовать в качестве вспомогательного
упругий элемент, жесткость которого значительно больше жесткости основного упру-
гого элемента. В частности, это может быть податливость корпуса (рамы) транспорт-
ного средства или даже направляющих рычагов подвески. При этом, естественно,
снижается чувствительность САУ и возникает необходимость применения электро-
гидравлической системы управления, где в качестве первичных измерителей поверх-
ностных сил установлены тензо- или пьезочувствительные преобразователи, реаги-
рующие на незначительные деформации вспомогательного упругого элемента или
локальные деформации рамы в точках крепления подвески.
На рис. 13.17 прямоугольниками 5 показаны возможные места установки
первичных высокочувствительных измерительных преобразователей на корпусе 1 и
рычаге в активной подвеске с упругим элементом 2 и исполнительным гидроцилин-
дром 4. Позицией 3 обозначено колесо. Для простоты элементы автоматики условно
не показаны. Основным условием правильной установки измерительных преобразо-
вателей 5 является их нахождение вне замкнутого силового контура, состоящего из
упругого элемента и гидроцилиндра, т. е. они должны увеличивать свои показания
при росте отклонения величины поверхностной силы упругого элемента от статиче-
ского значения и уменьшать показания при компенсации этих отклонений исполни-
тельным гидроцилиндром.
13.3. Активные и регулируемые подвески, системы стабилизации платформы 537
Рис. 13.17. Схема активной подвески с упругим элементом и исполнительным гидроци; дром
Принципиальная схема активной подвески с упругим элементом и электро-
гидравлической системой изображена на рис. 13.18. Корпус / транспортного сред-
ства связан упругим элементом 2 с осью колеса 3. Параллельно упругому элементу
установлен исполнительный гидроцилиндр 4 с поршнем 5.
Гидропроводами 6 и 7 рабочие полости гидроцилиндра соединены с гидрав-
лическим распределителем 8, имеющим три характерные позиции, обозначенные
цифрами I, О, II. Обратные клапаны 9 и 10, открывающиеся в сторону рабочих по-
лостей гидроцилиндра, соединяют их с маслобаком 11 и предотвращают разрыв
Рис. 13.18. Принципиальная схема активной подвески с упругим элементом, исполнительным
гидроцилиндром и электрогидравлической системой управления
538 /3. Основы теории и расчета систем подрессоривания колес КТС ОБГ
гидравлического потока, когда производительность насоса 72 при движении по ко-
ротким неровностям может оказаться ниже требуемой. Насос 72 регулируемой про-
изводительности с отрицательной обратной связью по давлению имеет предохрани-
тельный клапан 13. Из напорной магистрали насоса через постоянные дроссели 14 и
15 жидкость подводится в полости управления 16 и 17 гидрораспределителя 8. Из
полостей 16 и 17 жидкость вытекает через сопла 18 и 79, между которыми размеще-
на заслонка 20, с помощью которой осуществляется управление перемещением зо-
лотника распределителя 8.
На рис. 13.18 для простоты изображения показан подвод жидкости в управ-
ляющие полости 76 и 77 из основной нагнетательной магистрали. Однако с целью
устранения отрицательного влияния колебаний давления за насосом на надежность
управления в следящих гидравлических приводах питание магистралей управления
распределителем осуществляют часто от независимого маломощного источника
гидравлической энергии.
Последовательно с упругим элементом 2 и исполнительным гидроцилиндром 4
установлен чувствительный элемент или первичный измерительный преобразова-
тель 27, измеряющий величину суммарной поверхностной силы, действующей на
корпус 7 от элементов активной подвески. Сигнал с измерительного преобразовате-
ля 27 и задающего устройства 22 подается на вход сравнивающего устройства 23,
откуда сигнал рассогласования поступает в усилитель 24. Далее усиленный сигнал
рассогласования подается в электромеханический преобразователь 25, представ-
ляющий собой поляризованное электромагнитное устройство, управляющее пере-
мещением заслонки 20.
В статическом положении вес корпуса 7 воспринимается упругим элементом 2.
Так как обе рабочие полости гидроцилиндра соединены со сливом, то он в статиче-
ском положении разгружен, а положение поршня определяется деформацией упру-
гого элемента. Такое исходное состояние активной подвески исключает жесткий
удар в корпус при внезапном изменении высоты неровности.
Работа подвески на рис. 13.18 осуществляется следующим образом. При на-
езде колеса на выступающую неровность дороги сжимается упругий элемент, по-
верхностная сила, действующая на корпус 7, увеличивается, следовательно, увели-
чивается сигнал с измерительного преобразователя 27 по сравнению с сигналом с
задающего устройства 22. На выходе сравнивающего устройства 23 образуется по-
ложительный сигнал рассогласования, который усиливается в усилителе 24 и пода-
стся на вход электромеханического преобразователя 25. Последний отклоняет за-
слонку 20 вниз, прикрывая сопло 18 и открывая сопло 79, давление в полости управле-
ния 16 распределителя 8 увеличивается, а в полости 77 уменьшается. Золотник
распределителя смещается в позицию I, обеспечивая подачу жидкости под давлени-
ем в штоковую полость гидроцилиндра. При этом сила от гидроцилиндра, прило-
женная к корпусу 7, имеет противоположное направление силе от упругого элемен-
та, чем достигается частичная или полная компенсация изменения поверхностной
силы, действующей на корпус.
При наезде на яму упругий элемент растягивается, и сила, действующая на
корпус, уменьшается от статического значения. При этом уменьшается сигнал с
измерительного преобразователя по сравнению с сигналом с задающего устройства 22.
На выходе сравнивающего устройства 23 образуется отрицательней сигнал рассо-
13.3. Активные и регулируемые подвески, системы стабилизации платформы 539
гласования, который усиливается в усилителе 24 и подается на вход электромеха-
нического преобразователя 25. Последний отклоняет заслонку 20 вверх, прикрывая
сопло 79 и открывая сопло 18. При этом давление в полости 17 увеличивается, а в
полости 76 уменьшается, и золотник распределителя 8 устанавливается в позицию
II. Жидкость под давлением подается в надпоршневую полость гидроцилиндра 4,
который компенсирует уменьшение поверхностной силы, действующей на корпус.
При высокочастотном возбуждении колебаний производительность насоса
может оказаться недостаточной для своевременного заполнения рабочих полостей
гидроцилиндра. Поэтому для предотвращения разрыва гидравлического потока не-
достающее количество жидкости в гидроцилиндр будет подаваться через обратные
клапаны 9 и 10.
Таким образом, подвеска на рис. 13.18, обеспечивая стабилизацию поверхно-
стных сил, действующих на корпус автомобиля, сводит к минимуму его колебания,
а следовательно, и испытываемые им перегрузки.
Пневмогидравлическая активная подвеска с исполнительным гидроцилиндром
Реализовать описанный выше способ стабилизации поверхностных сил мож-
но и на базе получивших в последнее время достаточно широкое распространение
пневмогидравлических подвесок. В простейшем случае пневмогидравлический уп-
ругий элемент активной подвески установливается, как показано на рис. 13.18. Од-
нако при этом могут возникнуть некоторые компоновочные трудности. Поэтому
рассмотрим схемы пневмогидравлических активных подвесок, отличающиеся от
изображенной на рис. 13.18.
Принципиальная схема варианта активной пневмогидравлической подвески с
исполнительным гидроцилиндром показана на рис. 13.19.
Кузов 7 автомобиля через пневмогидроцилиндр 2 и рычаги 3 связан с коле-
сом 4, опирающимся на грунт 5. В гидроцилиндре 2 размещен поршень с полым
штоком 6. С помощью соединительной трубки 7 внутренняя полость 8 штока 6, час-
тично заполненная газом, сообщена со штоковой полостью 9 гидроцилиндра.
Поршневая полость 10 с помощью эластичного трубопровода 77 соединена с порш-
невой полостью 72 промежуточного гидроцилиндра 13, в котором размещен пор-
шень 14 со штоком 15. Штоковая полость 76 промежуточного цилиндра 13 трубо-
проводом 77 сообщена с гидравлической частью 18 шарового баллона 79, в котором
эластичной диафрагмой 20 отделен от жидкости газовый объем 27
Шток 75 соединен также с поршнем 22 исполнительного гидроцилиндра 23.
Поршень 22 делит объем гидроцилиндра 23 на поршневую 24 и штоковую 25 рабо-
чие полости, которые трубопроводами 26 и 27 соединены с гидравлическим распре-
делителем 28. Гидравлические полости управления 29 и 30 распределителя 28 через
постоянные дроссели 31 и 32 сообщаются с напорной магистралью насоса 33 регу-
лируемой производительности с отрицательной обратной связью по давлению. Из
управляющих полостей 29 и 30 жидкость вытекает через сопла 34 и 35, между кото-
рыми размещена заслонка 36, и сливается в маслобак 37 За насосом 35 установлен
предохранительный клапан 38.
Поршневая полость 10 пневмогидроцилиндра 2 каналом 39, а штоковая полость
9 каналом 40 соединены с первичными измерительными преобразователями давления
540 /3. Основы теории и расчета систем подрессоривания колес КТС ОБГ
Рис. 13.19. Принципиальная схема варианта активной пневмогидравлической
подвески с исполнительным гидроцилиндром
41 и 42. Сила, действующая от пневмогидроцилиндра 2 на корпус /, является линейной
функцией двух переменных — давлений в поршневой и штоковой полостях. Поэтому
сумматор 43 формирует сигнал, пропорциональный силе, действующей на корпус. Сиг-
нал с задающего устройства 44 и сумматора 43 поступает в сравнивающее устройство
45, откуда сигнал рассогласования подается через усилитель 46 на электромеханиче-
ский преобразователь 47, управляющий перемещением заслонки 36.
Особенностью пневмогидравлической подвески является наличие двух упру-
гих элементов — газа в камере прямого давления 2/ и в камере противодавления 8.
Поверхностная сила, действующая на корпус, является линейной функцией давле-
ний в этих камерах. Поддержание постоянного значения этой силы достигается ре-
гулированием давления лишь в поршневой полости пневмогидроцилиндра, что по-
зволяет значительно упростить САУ
При неработающих элементах автоматики подвеска на рис. 13.19 работает
как обычная пассивная. На ходе сжатия шток 6 поднимается вверх, жидкость из
поршневой полости 10 пневмогидроцилиндра по трубопроводу 11 перетекает в
поршневую полость 12 промежуточного цилиндра 13. Поршни 14 и 22 со штоком 15
смещаются влево, при этом объем полостей 24 и 16 уменьшается. Жидкость из што-
ковой полости промежуточного гидроцилиндра 13 поступает в шаровой баллон 79 и
сжимает газ за диафрагмой 20, а из поршневой полости исполнительного гидроци-
линдра 23 сливается в бак 37.
13.3. Активные и регулируемые подвески, системы стабилизации платформы 541
Объем полости 9 увеличивается и в нее поступает жидкость, вытесняемая че-
рез соединительную трубку 7 сжатым газом в камере 8.
При ходе отбоя жидкость из полости 9 по соединительной трубке 7 поступает в
полый шток 6, сжимая находящийся там газ. Объем поршневой полости 10 увеличи-
вается и давление в ней уменьшается, при этом газ в камере прямого давления 2/ вы-
тесняет жидкость из шарового баллона /9 в штоковую полость промежуточного ци-
линдра 13, поршень 14 смещается вправо и выдавливает жидкость в пневмогидроци-
линдр. В исполнительном гидроцилиндре 25 происходит свободное перетекание
жидкости из одной рабочей полости в другую через распределитель 28, а объем штока
15 компенсируется отводом или подводом жидкости из бака 37
В активном режиме подвеска на рис. 13.19 работает следующим образом.
При наезде на выступающую неровность давление в поршневой полости 10 пневмо-
гидроцилиндра 2 увеличивается. Измерительные преобразователи 41, 42 и сумматор
43 подают на вход сравнивающего устройства 45 сигнал, пропорциональный силе,
действующей на корпус 1 Этот сигнал сравнивается с сигналом с задающего уст-
ройства 44, и положительный сигнал рассогласования через усилитель 46 поступает
в электромеханический преобразователь 47, отклоняющий заслонку 36 вниз. При
этом сопло 35 прикрывается, а сопло 34 открывается, давление в полости управле-
ния 30 увеличивается и золотник распределителя 28 устанавливается в позицию I.
Жидкость от насоса 33 поступает в штоковую полость 25 исполнительного гидро-
цилиндра 23, перемещая поршни 22 и 14 влево. При этом поршень 14 вытесняет
жидкость из штоковой полости промежуточного гидроцилиндра 13 в шаровой бал-
лон и сжимает газ до тех пор, пока поверхностная сила, действующая на корпус, не
примет заданного значения.
При наезде на яму подвеска с САУ работает аналогично описанному выше.
Сила, действующая на корпус, уменьшается, усиленный отрицательный сигнал рассо-
гласования поступает в электромеханический преобразователь 47, заслонка 36 под-
нимается вверх и прикрывает сопло 34. Давление в полости управления 29 возрастает
и золотник распределителя 28 занимает позицию II, обеспечивающую подвод жидко-
сти от насоса 33 в поршневую полость 24 исполнительного гидроцилиндра 23. Пор-
шень 22 с помощью штока 15 перемещает поршень 14 вправо, последний вытесняет
жидкость из полости 12 в надпоршневую полость 10 пневмогидроцилиндра 2 до тех
пор, пока не компенсируется уменьшение поверхностной силы, действующей на кор-
пус 1 машины.
Необходимо отметить, что систему автоматической компенсации отклонений
от статического значения поверхностных сил, изображенную на рис. 13.19, можно
использовать для нескольких пневмогидроцилиндров 2, имеющих общую камеру
прямого давления 21
Если гидравлическую схему активной подвески (см. рис. 13.19) снабдить
дополнительными устройствами, то можно в широких пределах изменять клиренс
автомобиля.
Недостатком описанной пневмогидравлической активной подвески является
наличие промежуточного и исполнительного гидроцилиндров, которые по габарит-
ным, весовым и стоимостным характеристикам сравнимы с основным пневмогидро-
цилинром 2. Отмеченный недостаток отсутствует в активных пневмогидравлических
подвесках с исполнительным насосом.
542 73. Основы теории и расчета систем подрессоривания колес КТС ОБГ
Обычный состав современной системы автоматического управления подвес-
кой включает в себя следующую последовательность групп функциональных эле-
ментов: датчики — преобразующие устройства — исполнительные устройства. Бы-
строе развитие микроэлектроники дает возможность для нового пути развития ав-
томатических устройств автомобиля. Роль командного устройства в этом случае
играет микропроцессор.
Согласование входов и выходов микропроцессора соответственно с датчиками
и исполнительными устройствами производится через преобразующие устройства
входа и выхода. Одна бортовая микроЭВМ может служить для управления многими
агрегатами автомобиля. В этом случае управляющие программы для разных систем
запускаются в бортовом компьютере последовательно, причем в зависимости от ус-
ловий приоритет выполнения управляющих программ может меняться. В каждом
конкретном случае полная структура систем автоматического управления оригиналь-
ная. Как правило, более целесообразна комбинированная структура, включающая
механические регуляторы, автономные и связанные аналоговые и цифровые элек-
тронные блоки управления, центральный и периферийные процессоры.
Желательно подбирать для работы на одном процессоре управляющие про-
граммы с приблизительно одинаковыми требованиями к частоте перезапуска, кото-
рая должна быть с целью упрощения системы минимально возможной. Так, для
большинства систем управления двигателем, тормозами, подвеской подходит шаг
перезапуска управляющих программ 0,1 с. Управляющие программы, работающие в
процессоре, «зашиваются» в ПЗУ
Большинство же серийных автомобилей, оборудованных микропроцессор-
ными системами управления подвеской, имеют системы статического регулирова-
ния. При этом регулируемыми параметрами являются в большинстве случаев поло-
жение кузова, а также жесткость подвески и сопротивление амортизаторов.
Можно отметить, что быстродействие исполнительных устройств регулируе-
мых амортизаторов, применяемых фирмой «Тойота», составляет 0,1 с, что уже дос-
таточно для систем динамического регулирования, а фирма «Way-Assanto», разра-
батывающая амортизаторы с электронным управлением, планирует в скором вре-
мени довести быстродействие до 0,05 с.
Разработка управляющей программы — достаточно сложный процесс, свя-
занный с ее отладкой на всех стадиях. Большая часть отладочных процессов прово-
дится до этапа установки на опытный образец автомобиля — моделированием на
ЭВМ, что значительно удешевляет весь процесс разработки САУ
13.4. Выбор параметров демпфирования
и жесткости длинноходной подвески
Исходные предпосылки
Как показали результаты исследований в гл. 12, вследствие специфических
проектировочно-конструкторских решений специальных колесных шасси (значи-
тельной длины и высоты, значительных осевых нагрузок) и условий их применения
13.4. Выбор параметров демпфирования и жесткости длинноходной подвески 543
первостепенное значение приобретает способность систем подрессоривания обеспе-
чивать удовлетворительную профильную проходимость, плавность хода, устойчи-
вость против опрокидывания, нагруженность ходовой части и несущей системы.
С другой стороны, как показал анализ конструкций в главах 1-4, существует
устойчивая тенденция повышения грузоподъемности этих колесных машин, а следо-
вательно, увеличения базы и числа осей и повышения скорости движения, в том числе
по бездорожью. Все это в совокупности приводит не только к повышению виброна-
груженности, но и к увеличению динамических нагрузок, действующих на элементы
ходовой части и несущей системы автомобиля. Радикального же повышения плавно-
сти хода и снижения нагрузок можно добиться, только применяя длинноходные под-
вески с динамическим регулированием (активные и полуактивные). Развитию иссле-
дований и разработок в области управляемых подвесок этого типа в настоящее время
способствует прогресс микропроцессорной техники и технологии.
Рассмотрим выполненный на базе получивших в последнее время достаточно
широкое распространение гидропневматических (ГПР) и пневматических (ПР) рес-
сор вариант обоснования параметров длинноходной подвески.
В качестве исходных данных примем, что использование ГПР колес из-за на-
личия сухого трения приводит к увеличению передачи высокочастотных колебаний
(с резонансом на частотах 5...6 Гц) на несущую систему (раму). Рамы с повышени-
ем массы и особенно с увеличением числа осей КТС ОБГ становятся более подат-
ливыми и передают упругие колебания своей передней части на кабины. Поскольку
резонансы упругих колебаний рамы близки по частотам к резонансам колебаний
кабин на их подвесках, то происходит раскачивание кабин на частотах 4...6 Гц.
Подрессоренные сидения известных конструкций обеспечивают снижение средне-
квадратичных вертикальных ускорений экипажа в октавных полосах частот 4 и 8 Гц
только на 40...50 % и абсолютно не снижают уровень горизонтальных вибраций,
который достигает уровня вертикальных ускорений для существующих конструк-
ций КТС ОБГ
Подобные системы в настоящее время можно строить только на базе ГПР, ПР
и гидропневматических амортизаторов (ГПА). Структурные и функциональные мо-
дели этих устройств представлены на рис. 13.20-13.22 и 13.24.
Данные рис. 13.20-13.22 дают наглядное представление о сложности процес-
сов, без учета которых невозможно правильно выбрать параметры систем подрессо-
ривания. Типовые элементы гидропневматических устройств (ГПУ) представлены
на рис. 13.23.
В соответствии с современными представлениями опорно-ходовой модуль
должен обеспечивать:
полный ход колеса 500...700 мм;
поддержание статического положения середины оси по вертикали с точно-
стью 10 %;
плавное (безударное) регулирование дорожного просвета при неподвижном
ходовом макете в пределах полного хода колеса;
возможность автоматизированного (автоматического) и ручного регулирова-
ния параметров характеристики упругого и демпфирующего элемента;
полное силовое замыкание внутри модуля;
544 13. Основы теории и расчета систем подрессоривания колес КТС ОБГ
Рис. 13.20. Взаимосвязь физических процессов и явлений, характерных для работы пневмо-
гидравлических устройств
статические нагрузки на колесо от 50 до 75 кН, номинальную статическую на-
грузку на колесо до 73 кН;
возможность работы подвески при движении образца КТС ОБГ как по специ-
альным испытательным трассам, так и по дорогам общего назначения;
максимальную скорость движения до 80 км/час;
возможность изменения упругодемпфирующих параметров;
максимальное использование стандартных узлов и деталей автомобильной
промышленности, а также других отраслей машиностроения (гидропривода, редукто-
ров колес и др.), предполагаемый ресурс до 10 000 км.
В состав ОХМ должны входить рычажное направляющее устройство, колес-
ный редуктор, ступица колеса, барабанный тормозной механизм, шины, регулируе-
мые упругие элементы и амортизаторы, элементы системы управления, шланги, тру-
бопроводы и фитинговые устройства.
Рычажное устройство обеспечивает работу упругих элементов и амортизаторов
при перемещении колеса в продольной плоскости.
Данные требования могут быть реализованы длинноходной регулируемой
пневматической подвеской. Такая подвеска обеспечивает работу упругих элемен-
тов и амортизаторов при давлениях рабочего тела от 10 МПа и более. Кроме того,
большая масса неподрессоренных частей подвески КТС ОБГ требует применения
устройств, обеспечивающих безударное удержание колес ОХМ при полном ходе
отбоя.
В настоящее время подавляющее число регулируемых пневморессор больше-
грузных транспортных средств выполняются в виде поршневых упругих элементов
ОО
2918
а б
Рис. 13.21. Функциональная модель ГПР-
а — схема ГПР как «черный ящик»; б — схема внутренней функциональной структуры ГПР; АО..
мовные этапы функционирования ГПР
13.4. Выбор параметров демпфирования и жесткости длинноходной подвески 545
Рис. 13.22. И-ИЛИ-граф структурных решений ГПУ'
ПЦ — пневмоцилиндр
546 13. Основы теории и расчета систем подрессоривания колес КТС ОБГ
13.4. Выбор параметров демпфирования и жесткости длинноходной подвески 547
Рис. 13.23. Типовые конструктивные элементы ГПУ:
а — гидроцилиндр с одной рабочей полостью; б — гидроцилиндр с двумя рабочими полосами;
в — пневмоцилиндр; г — местное гидравлическое сопротивление; д — клапан; е — гидролиния
с разделительными устройствами двух типов: плавающих поршней и эластичных
диафрагм.
Следует отметить, что эластичные диафрагмы имеют ряд недостатков, ко-
торые не удовлетворяют разработчиков пневморессор высокого давления. Также
надо учитывать, что работа длинноходной подвески связана с большими расхо-
дами жидкости в гидроаккумуляторах (ГА). Такие расходы трудно обеспечить
при небольших габаритах гидроаккумуляторов с эластичными разделителями.
Устанавливать несколько подобных гидроаппаратов вряд ли целесообразно.
Лучше воспользоваться существующими конструкциями гидроаккумуляторов с
плавающим поршнем. Они имеют достаточный для ОХМ ресурс. Наличие силы
трения в поршневой группе гидроаккумулятора и ее влияние на нагрузочные
характеристики оценивается известными методами. В качестве силового цилин-
дра упругого элемента в исследуемой подвеске можно использовать цилиндры
различных устройств, работающих при давлениях 10 МПа и более ходом
поршня до 500...700 мм (например, цилиндры гидродомкратов).
Чтобы обеспечить безударное удержание колес ОХМ при полном ходе отбоя,
необходимо либо устанавливать энергоемкий буфер отбоя на направляющем уст-
ройстве подвески, либо воспользоваться ПР с противодавлением. У регулируемых
длинноходных пневматических рессор последний способ наиболее целесообразен.
Известно, что кроме необходимой характеристики ПР на отбое, противодавление
позволяет изменять нагрузочную характеристику (жесткость) при уменьшении ста-
18*
548 /3. Основы теории и расчета систем подрессоривания колес КТС ОБГ
Рис. 13.24. Функциональная схема работы ПР с амортизатором
тической нагрузки. Камеру противодавления можно сформировать с помощью го-
товых поршневых гидравлических амортизаторов (ГА).
Для успешного гашения колебаний опытной подвески необходимо также
применять регулируемые гидравлические амортизаторы двухстороннего действия.
Функциональная схема предлагаемой регулируемой ПР с противодавлением изо-
бражена на рис. 13.24, которая учитывает силы трения в силовых цилиндрах (СЦ) и
в поршневых группах ГА, а также перетечки жидкости в гидроамортизаторе.
Обоснование выбора поршневой пневморессоры с противодавлением
Пневматические рессоры с противодавлением (ППР) имеют следующие пре-
имущества:
меньше изменяется частота собственных колебаний подрессоренных масс
при изменении статической нагрузки;
значительно увеличивается энергоемкость подвески при работе на ходе отбоя;
подвеска может работать при отрицательных силах на отбое, что устраняет
необходимость установки специальных ограничителей.
Эти преимущества являются весьма существенными для подвески макетного
образца ОХМ. Длинноходная подвеска обладает возможностью варьирования энер-
гоемкостью при сжатии и отбое, при этом изменяется положение поршня силового
цилиндра при одинаковой статической нагрузке на упругий элемент. При наличии
регулируемых амортизаторов можно получить широкий диапазон динамических
характеристик упругих и демпфирующих элементов подвески. Это позволит не
13.4. Выбор параметров демпфирования и жесткости длинноходной подвески 549
только изменять положение центра тяжести подрессоренной массы, но и сделать
подвеску адаптивной к различным воздействиям со стороны поверхности дороги
(движение по дорогам с твердым покрытием, преодоление неровностей и т. д.).
Рабочее давление газа в пневморессорах при большой грузоподъемности
достигает десятков мегапаскалей, поэтому для оценки возможностей таких ПР це-
лесообразно воспользоваться безразмерными характеристиками. В основе их по-
строения лежит допущение о том, что можно пренебречь атмосферным давлением:
где раос —абсолютное; //иб —избыточное и /?а1М —атмосферное давления.
В случае медленно протекающих процессов сжатия и расширения газа ис-
пользуется уравнение изотермы
Р = АА
где ро — статическое давление в ПР; £ — степень сжатия.
При быстро протекающих процессах (ударное нагружение, большие скорости
движения) — уравнение адиабаты
р = Ро£к
где к — показатель адиабаты.
Существуют методы расчета нагрузочных характеристик, в которых рассмат-
ривается эквивалентный политропный процесс
Р = /’0£П
где П — показатель политропы, П = 1 ...к.
В этом случае для разных ППР показатель политропы может существенно
отличаться. Это связано с условиями теплообмена сжатого газа с окружающей сре-
дой. Достоверное значение величины показателя политропы может быть получено
только опытным путем.
Существуют различные методы расчета теплообмена в ППР, для которых не-
обходимы значения многих параметров: коэффициенты теплопередачи и теплопро-
водности и др. Поэтому при выборе и обосновании упругодемпфирующих характе-
ристик проектируемой ПР следует использовать изотермные и адиабатные нагру-
зочные характеристики
Р(Х) = Ро’Ч Л,; Р(Х) = Ро"%,
где % — ход поршня; Fu — площадь поршня.
Нагрузочная характеристика ПР с противодавлением может быть построена
по известной формуле
Р(Х) = I РоХ IМ ^и2бе" IF2; п = 1 И П = к,
где F] и F2 — соответственно площади давления поршней в первой и второй
камере; £| и е2 — соответственно степень сжатия в первой и второй камерах;
550 13. Основы теории и расчета систем подрессоривания колес КТС ОБГ
РоГ И Роз6 — противодавление в первой и второй камерах соответственно;
£ У01 .
Voi+X^i 1-X/^i’
^=у-;
F\
£ _ ^02 .
2 V02+XF2
^02=^-.
где V()| и V()2; Fb F2 — объемы камер и площади давления поршней первой и второй
полостей ПР соответственно; AOi и hQ2 — длина камер первой и второй полостей ПР
соответственно.
Если не учитывать влияния атмосферного давления, то удобно рассматривать
известные безразмерные характеристики
р(х) Li-x/^biJ L1—(х/^02)м
Vo, F2 j. Ро । F2
где р =-----; с, =----; п — показатель политропы.
4)2^1 Ро2^\
Коэффициент 5, есть отношение усилий, действующих на поршень силового
цилиндра ПР снизу и сверху при статическом положении упругого элемента. Коэф-
фициент 5, равен отношению приведенных высот столбов газа в статическом поло-
жении ПР
Последнее уравнение показывает, что все параметры нагрузочной характери-
стики ПР (площади, объемы, давления) могут быть охарактеризованы двумя коэф-
фициентами — ц и При одинаковых величинах р и Е, безразмерные характеристи-
ки одни и те же. В то же время обычные нагрузочные характеристики в этом случае
будут отличаться только масштабом. Следует подчеркнуть, что безразмерные ха-
рактеристики имеют начало координат в точке % = 0, т. е. положение ординаты со-
ответствует статической нагрузке ПР
Анализ безразмерных характеристик позволяет оценить влияние коэффици-
ентов р и на жесткость ППР При равном нулю, противодавление отсутствует, с
у
увеличением коэффициента £ жесткость ПР растет как при сжатии 0 < — < 1, так и
Хо
X
при отбое -1 < — < 0, где — перемещение поршня ПР при статической нагрузке.
Хо
При больших значениях коэффициента Е, жесткость ПР на большом диапазоне
изменения нагрузок изменяется мало, т. е. характеристика приближается к линейной.
Коэффициент р оказывает преимущественное влияние на левую часть (от-
бой) безразмерной характеристики. Чем больше величина коэффициента р, тем
круче падение кривой безразмерной характеристики, выше значение жесткости и
больше энергоемкость. Влияние коэффициента р на правую часть (сжатие) характе-
ристики в основном сводится к повышению жесткости вблизи статического поло-
13.4. Выбор параметров демпфирования и жесткости длинноходной подвески 55 1
I X I ( У ।
жения — = 0 . При значительных ходах сжатия —>0 влияние коэффициента
<Хо ) 1Хо )
ц незначительно.
Варьируя значения коэффициентов ц и можно получать нужные нагрузоч-
ные характеристики в необходимом направлении. Коэффициент £ пропорционален
величине противодавления р{}2, поэтому есть возможность менять величину без
изменения размеров силового цилиндра ПР
X
Очевидно, что при — = 1 безразмерная характеристика не имеет смысла, так как
Хо
это означает, что степень сжатия газа в ПР стремится к бесконечности (е —> °° ).
Определение основных параметров и характеристик опытной ПР с ОХМ
Эксплуатация телескопических ПР на большегрузных транспортных средст-
вах показывает, что максимальное отношение давлений ^тач = 3 позволяет избе-
Ро
жать пробоя подвески. Для длинноходной ПР, обладающей большей энергоемко-
стью, эта величина более чем достаточная при симметричной нагрузочной характе-
ристике упругого элемента.
Проектирование опытной ПР с заданными параметрами производилось на
основе следующих исходных данных и комплектующих:
силовой цилиндр рессоры — диаметром 160 мм, ходом поршня около 700 мм,
диаметром штока поршня — 140 мм;
в качестве основного упругого элемента использован гидроаккумулятор
(ГА1) типа АРФ 16/320, в качестве упругого элемента противодавления — гидроак-
кумулятор (ГА2) типа АРФ 2,5/320;
дросселирующие устройства встроенного двустороннего амортизатора пред-
ставляют собой стандартные регулируемые дроссели типа КВМК 32 Gl. 1,
передаточное отношение рычажного направляющего устройства подвески (L)
равно 1,44.
Максимальный ход поршня СЦ ограничивается расходом жидкости в ГА2,
объем которого равен 2 л. Эффективная площадь СЦ F\ составляет 0,02 м2, площадь
под поршнем F2 — 0,0047 м2 Полный ход поршня СЦ
- ———— - 0,4255 м = 425,5 мм,
0,0047
тогда полный ход колеса ОХМ составит
= 425,5 1,44 = 612,7 мм,
что соответствует современным требованиям.
552 /5. Основы теории и расчета систем подрессоривания колес КТС ОБГ
Рис. 13.25. Безразмерная характеристика ПР с противодавлением
Статическая нагрузка на ПР
А) =GL = 73-1,44 = 105 кН,
где G — нагрузка на колесо.
При симметричной нагрузочной характеристике (среднее положение порш-
ня) объем сжатого газа вГА1 — 9 л, в ГА2 — 1 л. В этом случае коэффициент ц
безразмерной характеристики ПР равен
1^90,0047
V02 F] 1 0,02
Задаваясь величиной коэффициента можно построить безразмерную харак-
теристику. На рис. 13.25 показана статическая (изотермная) безразмерная характе-
ристика ПР при заданном коэффициенте
^ = £^ = 0,2.
Pol
График безразмерной характеристики показывает следующее:
коэффициент максимального увеличения нагрузки превышает 2;
при максимальном ходе отбоя сила, удерживающая неподрессоренную массу,
превосходит статическую нагрузку на ПР
Избыточное давление сжатого газа в ГА1 в статическом положении
А = pH,6FА F (1-^) => р =—^—= 10510---= 6,56 МПа;
° 01 1 1,2 2 01 1 01 F|(l —0,02(1-0,2)
зарядное давление в ГА1
рИр, = 6,56— = 3,69 МПа => /?3иарб! = 3,59 МПа.
13.4. Выбор параметров демпфирования и жесткости длинноходной подвески 553
Р”а3рб = 4 МПа
Объем газа, дм3
Рис. 13.26. Изменения зарядных и рабочих статических давлений в ГА1
Избыточное давление в ГА2
Ар = 0,2-^- = 5,58 МПа => р'"6 = 5,48 МПа,
/ 02 0,235 /«2 ’
зарядное давление в ГА2
, =5,58—= 3,14 МПа => рт& = 3,04 МПа.
16
На рис. 13.26 показаны графики изменения зарядных и рабочих статических
давлений в ГА1.
Для гашения колебаний длинноходной подвески с ОХМ применяются двух-
сторонние регулируемые гидравлические амортизаторы. Расход жидкости через
дросселирующие устройства этих амортизаторов должен соответствовать расходам
жидкости при перемещении поршня СЦ. Учитывая, что максимальный расход жид-
кости возможен при максимальном ходе сжатия или отбоя ПР, а также что возник-
новение такого расхода может иметь место при низких частотах колебаний подвес-
ки (преодоление обособленных неровностей при малой скорости движения), можно
допустить максимальный расход жидкости через дросселирующие устройства не
более 6 л в секунду. Этим условиям удовлетворяют стандартные дроссели с обрат-
ным клапаном типа КВМК 32G1.1. Такие дроссели могут быть установлены непо-
средственно в трубопроводах опытной конструкции ПР ОХМ.
Оценка влияния сухого трения
на характеристику системы подрессоривания
При работе подвески с гидропневматическим упругим элементом одним из
силовых факторов, действующих на поршни гидроцилиндра, является сила сухого
554 /3. Основы теории и расчета систем подрессоривания колес КТС ОБГ
трения. Учет сухого трения делает математическую модель нелинейной, и для ее
включения или не включения в ММ проводят предварительные исследования. Для
этого применяют приближенные методы. В данном случае используется метод гар-
монической линеаризации, основанный на равенстве работ силы сухого трения и
силы, эквивалентной ей.
Определим силу сухого трения Ргр по следующей зависимости:
^гр — ^ip()
с/х
; = — — скорость перемещения поршня; Р1р0 — сила трения покоя.
dt
Заменим силу сухого трения Р1р эквивалентной силой гидравлического со-
противления /\|р, обеспечивающей за период такое же поглощение энергии, как
при действии силы сухого трения (рис. 13.27).
При гармонических колебаниях поршня гидроцилиндра
х = av sin cor,
где х — амплитуда колебаний; ах — постоянная гармонического уравнения; щ —
частота колебаний,
сила эквивалентного трения будет
„ , dx
Л.гр “ *тр — = kTVaxw cos cor.
Для определения £гр запишем равенство работ силы гидравлического трения
и силы сухого трения
Рис. 13.27. Зависимость для замены силы сухого трения эквивалентной силой гидравличе-
ского трения:
/ — сила сухого трения (Р1р(0); 2 — эквивалентная сила гидравлического сопротивления (Р,
3 — скорость перемещения поршня
13.4. Выбор параметров демпфирования и жесткости длинноходной подвески 555
где
^э.тр
2л
CD
Л.гр = J ^трС02^ cos2 dt = K к^юа*;
о
л
2 со
АР = 4 J Лро<°«л c"s<w dt = 4«ЛРо-
О
Таким образом, для гармонически линеаризованной зависимости коэффици-
ент эквивалентного трения будет иметь вид
г 7ШЛС0
Для оценки влияния сухого трения используем двухмассовую систему, экви-
валентную системе подрессоривания (рис. 13.28), где с„ и сш — коэффициенты же-
сткости подвески и шины; кц и kw — коэффициенты демпфирования подвески и ши-
ны; — кинематическое возмущение от дорожной поверхности; гМ и ^(0 —
обобщенные координаты неподрессоренной и подрессоренной масс.
Передаточные функции для перемещений подрессоренной и неподрессорен-
ной масс данной системы имеют следующий вид:
„ , > (^и,Р + Сш)("’2/’2+^1/’ + сп)
Н~ =-------------------7------------
А
LJ ( \ ((^Т ) Р + СП ) Р + 6111 )
Н г V р ) =---------------------
А
(А +^Р)р+^п
тгР2 +кпР + сп ’
где
Д = [«I, р2 + (Лп + к.гр + кш) р + (сп + сш)] х
х(те2р2 +кпр + си)-(кпр + сп)2
где р — давление жидкости, соответствующее кп.
Зададим амплитуду входного воздействия ах в виде
функции, убывающей обратно пропорционально л/со во
всей рассматриваемой области частот. Данное допущение
примем исходя из того, что при малых скоростях движе-
ния амплитуда неровностей дорожной поверхностии мо-
жет быть максимальна, в то же время движение с высокой
скоростью предъявляет более жесткие требования к каче-
Рис. 13.28. Простейшая
модель системы подрес-
соривания
556 73. Основы теории и расчета систем подрессоривания колес КТС ОБГ
ству дорожной поверхности. Зададим функцию <ял(со) в виде
«л (°>) =
2 Tt-0,15
Vco
т. е. при частоте возмущений, равной 1 Гц, амплитуда входного воздействия соста-
вит 0,15 м. Данная функция лишь отражает вид общей зависимости амплитуды от
частоты, однако позволит оценить влияние сухого трения в системе подрессорива-
ния, не усложняя ее значительно.
Учитывая, что р = усо и &гр= о/со, получим следующие выражения для переда-
точных функций:
„ , ч (^uJw+clll)(m2(ja))2+A:njco+c,
Н (со) =---------------------------------
А
А
7 •
Я (со) = ----------
m2(jto) + k„jo»+c„
где
Д= (/о)2 +[ кп + — + кш )jco+ (с„ +сш) (m2 (/со)2 +^пдо+с,
L V со J J
4
а =-----1—
тшг(со)
)-(Лг,уа>+с11)2
При оценке влияния сухого трения на характеристику системы подрессори-
вания зададимся следующими параметрами:
1) нагрузка, приходящаяся на одно колесо, равна номинальной статической,
е. М = 73 кН. Неподрессоренную массу примем равной 10 % от подрессоренной,
т. е. /7?2 + 0,1 m2 = М, например т2 = 6765 кг, т} = 676,5 кг;
2) коэффициент жесткости подвески определим из условия равенства часто-
ты собственных колебаний 1 Гц:
= ц2т2=(2тг I)2 6765 = 267,1 —;
м
3) коэффициент демпфирования подвески найдем, задавшись относительным
коэффициентом затухания \|/, равным 0,25:
кП = 2^у/с„т2 =2-0,25-^267,1-6765 =21,25-^^;
м
4) для данного примера возьмем шину 1600x600-685, имеющую следующие
параметры:
13.4. Выбор параметров демпфирования и жесткости длинноходной подвески 557
Рис. 13.29. Значение модуля передаточной функции H-2ll для виброускорений подрессорен-
ной массы:
/ — без учета сухого трения; 2 — с учетом сухого трения
коэффициент жесткости сш = 1300 —,
м
кН с
коэффициент демпфирования кш = 0,6 ---;
м
5) зададим заведомо большую силу сухого трения Ртр0 = 0,2#(Ш|+ш2) “
= 14,6 кН.
На графиках модулей передаточных функций системы (рис. 13.29 и 13.30)
сплошной линией показаны зависимости, полученные без учета сухого трения в гидро-
цилиндре, пунктирной — зависимости, показывающие влияние сухого трения на харак-
теристику системы подрессоривания. Из графиков видно, что сухое трение оказывает
незначительное влияние на передаточные функции подвески колесной машины в об-
ласти высоких частот. Наибольшее влияние, проявляющееся на резонансных участках,
характеризуется изменением значений модуля передаточной функции, составляющим
для отдельных параметров 30 %. При больших частотах возмущающего воздействия
сухое трение практически не оказывает влияния на большинство параметров.
Рис. 13.30. Значение модуля передаточной функции Н.1(/ для перемещений неподрессорен-
ной массы:
/ — без учета сухого трения; 2 — с учетом сухого трения
558 /5. Основы теории и расчета систем подрессоривания колес КТС ОБГ
13 .5. Конструкция длинноходной подвески колес в составе ОХМ
Опорно-ходовой модуль предназначен для передачи всех видов сил и момен-
тов, действующих между колесным движителем и несущей системой (рамой), для
гашения колебаний и снижения динамических нагрузок, возникающих при движе-
нии макета, а также для управления системой подрессоривания. ОХМ выполнен как
единая сборочная единица с унифицированным креплением к несущей системе.
Конструкция ОХМ обеспечивает:
полный ход колеса в вертикальном направлении — 620 мм;
точность поддержания статического положения — ±10 %;
плавное (безударное) регулирование дорожного просвета при неподвижном
транспортном средстве в пределах полного хода колеса;
возможность ручного регулирования параметров упругого и демпфирующего
лементов при неподвижном транспортном средстве;
полное силовое замыкание внутри модуля.
В состав ОХМ (рис. 13.31) входят следующие основные элементы:
направляющее устройство подвески;
упругодемпфирующий элементе регулируемыми параметрами;
система управления;
система трубопроводов;
Рис. 13.31. Общий вид опорно-ходового модуля:
а — вертикальный рычаг; б — гидроцилиндр; в — гидроаккумулятор; г — продольный рычаг;
д — цилиндрический шарнир; е — колесный редуктор; ж — шина
13.5. Конструкция длинноходной подвески колес в составе ОХМ
559
Рис. 13.32. Схема упругодемпфирующего элемента
колесный редуктор;
шина.
Направляющее устройство подвески является основным несущим элементом
системы подрессоривания. Оно связывает между собой колесный движитель, раму и
упругодемпфирующий элемент. Направляющее устройство состоит из вертикального а
и продольного г рычагов. Верхний конец вертикального рычага болтами жестко соеди-
нен с рамой. Продольный качающийся рычаг соединен одним концом с неподвижным
рычагом посредством цилиндрического шарнира д. На другом конце подвижного рыча-
га жестко закреплена ступица колесного редуктора е с шиной ж. В колесном редукторе
располагаются элементы тормозной системы макета и тяговый электродвигатель.
Упругодемпфирующий элемент (рис. 13.32) состоит из рабочего гидроци-
линдра а, пневмогидравлического аккумулятора (гидроаккумулятора) б, баллона
противодавления в и дросселей с регулируемым расходом жидкости г (Э — отвер-
стие для подачи и слива РЖ).
Рис. 13.33. Дроссель КВМК 32G1.1 ТУ2-053-1752
560 13. Основы теории и расчета систем подрессоривания колес КТС ОБГ
Рис. 13.34. Гидроцилиндр:
а — шток; б — корпус; в — полость
рабочего давления; полость
прог водавления
Рабочей жидкостью в гидросистеме является
масло МГЕ-10А ОСТ 38.01281.
Газовые полости гидроаккумулятора и балло-
на противодавления заполнены техническим азотом
сорта II (ГОСТ 9293).
В гидролиниях системы подрессоривания ус-
тановлены дроссели с обратным клапаном типа
КВМК (рис. 13.33). Регулировка дросселя осущест-
вляется посредством вращения корпуса а, который
изменяет размер проходного отверстия.
Дроссель позволяет устанавливать коэффици-
ент демпфирования за счет регулирования расхода
рабочей жидкости, перетекающей между гидроцилин-
дром и гидроаккумулятором. Регулирование дросселя
может осуществляться вручную лишь на неподвижном
КТС ОБГ Дроссели независимы друг от друга и на-
страиваются отдельно для каждого ОХМ.
Гидроцилиндр, используемый в ОХМ, пока-
зан на рис. 13.34. Его основными элементами явля-
ются цилиндр б и шток а, разделяющий полость
цилиндра на камеры рабочего давления в и противо-
давления г.
Он связан с продольным качающимся рычагом
подвески сферическим шарниром, а с неподвижной
частью ОХМ — цилиндрическим шарниром. Полость
рабочего давления и полость противодавления, свя-
занные с гидроаккумулятором и баллоном противо-
давления соответственно, заполнены рабочей жидко-
стью — маслом МГЕ-10А.
Гидросистема ОХМ оснащена поршневым
пневмогидравлическим аккумулятором АРХ-16/320
(рис. 13.35), имеющим объем 16 л и рассчитанным
на номинальное давление 32 МПа. Гидроаккумуля-
тор имеет две полости: жидкостную а, соединенную
с гидросистемой ОХМ, и газовую б, снабженную
зарядным узлом.
Баллон противодавления представляет собой
пневмогидравлический аккумулятор АРХ-2,5/320,
аналогичный гидроаккумулятору (см. рис. 13.35), но
имеющий объем 2,5 л.
Давление в рабочей полости гидроцилиндра, связанной с гидроаккумулято-
ром, может регулироваться за счет изменения объема жидкости. Для подачи жидко-
сти в рабочую полость гидроцилиндра служит насосная станция, закрепленная в
задней части рамы макета. Для слива жидкости из рабочей полости гидроцилиндра
предусмотрена резервная емкость, которая помимо этого обеспечивает запас жид-
13.5. Конструкция длинноходной подвески колес в составе ОХМ
561
Рис. 13.35. Пневмогидравлический аккумулятор АРХ-16/320 ТУ2-053-1410
кости, необходимый для регулирования параметров системы подрессоривания в
заданном диапазоне.
Изменение рабочего давления в гидросистеме позволяет регулировать жест-
кость подвески колесного движителя и высоту грузовой платформы. Изменение
рабочего давления в гидроцилиндре осуществляется как вручную на неподвижном
КТС ОБГ, так и автоматизированно для каждого ОХМ в отдельности.
Также можно изменять объем жидкости в полости противодавления, что по-
зволяет регулировать энергоемкость подвески на ходе отбоя.
Система управления дает возможность осуществлять статическую регули-
ровку параметров системы подрессоривания: коэффициентов жесткости и демпфи-
рования. Она включает в себя регулируемые дроссели КВМК 32G1.1, описанные
выше, распределительные трехпозиционные краны и насосную станцию, поддержи-
вающую необходимое для регулирования системы давление в трубопроводах.
Система трубопроводов связывает вместе элементы гидросистемы ОХМ и
обеспечивает надежный подвод рабочей жидкости в полости гидроцилиндра. Она
состоит из цилиндрических металлических трубок различного диаметра и распреде-
лительных устройств, соединенных между собой.
Опорно-ходовой модуль оборудован таким же, как у МАЗ-547, колесным ре-
дуктором и ступицей колеса, и стандартной камерной шиной, имеющей размер-
ность 1600x600-685.
Наиболее серьезным доводом в пользу рычажно-свечной подвески для тяже-
лых автомобилей следует считать возможность обеспечения достаточных ходов СП
и высвобождение объемов в верхней части узла, что позволяет создавать на базе
автомобиля эффективные модульные конструкции.
Недостатком рычажно-свечной подвески в этом случае представляется на-
груженность направляющего аппарата при расширении шины, что ограничивает
применение широкопрофильных шин (Н/В = 0,7...0,78).
Несмотря на сложную конструкцию, рычажные стойки наиболее полно отве-
чают условиям компоновки и требованиям, предъявляемым к многоопорным авто-
мобилям, — удовлетворительной плавности хода, значительным ходам подвески,
возможности регулирования параметров характеристики упругого элемента и амор-
тизаторов, снижению динамических нагрузок ходовой части.
562 13. Основы теории и расчета систем подрессоривания колес КТС ОБГ
Требования к системе подрессоривания автомобиля высокой проходимости,
определяемые в рекомендациях ИСО 2631, можно распространить и на автомобили
с рычажными стойками подвески колес.
13 .6. Анализ результатов экспериментальных испытаний
гидропневматической подвески для КТС ОБГ
Динамические характеристики пневматических рессор существенно зависят
не только от типа упругого элемента, но и от силы трения, степени сжатия газа и
частоты колебаний. Одной из причин, влияющих на изменение динамической жест-
кости ПР, является теплообмен между рабочим телом (газом) с одной стороны и
стенками цилиндра и окружающей средой — с другой.
Проанализируем результаты стендовых и лабораторно-дорожных испытаний
первой гидропневматической подвески, выполненной по схеме на рис. 13.32. Испы-
тания проведены Брянским автозаводом совместно с МВТУ им. Н.Э. Баумана. Рас-
сматривалась поршневая телескопическая ПР с эластичным разделителем, предна-
значенная для автомобилей высокой проходимости типа БАЗ.
Опытный образец ПР имел следующие основные параметры:
диаметр силового цилиндра — 90 мм;
максимальный ход поршня —140 мм;
статическая нагрузка — 24, 7 кН;
объем газа в статическом положении — 0,645 л;
зарядный объем газа — 1,26 л;
давление газа в статическом положении — 3,9 МПа;
зарядное давление газа — 2,2 МПа;
жесткость (изотермная) ПР в статическом положении — 243,8 кН/м.
Стендовые испытания пневморессоры
Пневморессора устанавливалась на стенде, который изменял частоту колебаний
от 5,5 до 13,1 1/с и амплитуду хода поршня от 50 до 100 мм. Стенд представлял собой
устройство в виде качающейся балки и кривошипно-шатунного механизма с редуктором.
По результатам испытаний подсчитывалась средняя динамическая жесткость
ПР по формуле
Сср = F2
д ц AV
На рис. 13.36 представлена зависимость величины СдР от частоты колебаний
со и степени сжатия 8. Дросселирующее устройство, установленное между силовым
цилиндром и газовой камерой ПР, существенно влияет на динамические характери-
стики упругого элемента. Это влияние можно оценить величиной «динамического
ужесточения» ПР
13.6. Анализ результатов экспериментальных испытаний подвески 563
Рис. 13.36. Зависимость величины C\v от частоты колебаний и степени сжатия газа в ПР
где Л/? — максимальные амплитуды изменения избыточного давления; Ду — со-
ответствующий максимальный ход поршня ПР
На рис. 13.37 показана зависимость динамического ужесточения ПР от частоты
колебаний, степени сжатия с и диаметра дросселирующего отверстия встроенного
амортизатора. Уменьшение диаметра дросселирующего отверстия значительно уве-
личило силу трения в силовом цилиндре ПР Работа силы трения, по данным испыта-
ний, составила 710... 1060 Н м. Величина силы трения достигала 20 % от статической
нагрузки на ПР, что связано с использованием V-образных уплотнительных элемен-
тов в силовом цилиндре.
Рис. 13.37. Зависимость коэффициента Др / Ду от частоты колебаний, степе-
ни сжатия и диаметра клапана встроенного амортизатора:
-----------диаметр клапана 8 мм;----------диаметр клапана 3,5 мм
564 /3. Основы теории и расчета систем подрессоривания колес КТС ОБГ
Анализ полученных при стендовых испытаниях результатов позволяет сде-
лать следующие выводы.
1. Динамическая жесткость ПР существенно увеличивается при увеличении
степени сжатия £ > 2. Однако с увеличением частоты колебаний при постоянной
степени сжатия динамическая жесткость снижается.
2. Динамическое ужесточение ПР также существенно увеличивается при ве-
личине степени сжатия £ > 2.
3. На динамические характеристики телескопической ПР влияют силы трения
и теплообмен.
Кроме стендовых были проведены лабораторно-дорожные испытания ПР в
составе системы подвески макетного образца 1-осного прицепа.
Основные характеристики этого образца:
вес прицепа при стендовых испытаниях — 38,5 кН, при дорожных испытани-
ях — 35,5 кН;
вес неподрессоренных частей составлял 0,90 кН;
полный ход колес прицепа — 300 мм;
передаточное число направляющего устройства с качанием рычагов в попе-
речной плоскости прицепа — 2;
шины размером 16.00-20;
дросселирующие отверстия при закрытом клапане сжатия — 3,5 мм, при от-
крытом клапане — 5 отверстий диаметром 3,5 мм, на отбой клапан отсутствовал,
при отключении клапана диаметр соединительного трубопровода — 8 мм.
При испытаниях варьировалось давление в шинах: 0,1; 0,15; 0,2; 0,225 и
0,25 МПа. Во время стендовых испытаний зарядное давление газа в ПР устанав-
ливалось равным: 2,42, 3,10, 3,40 МПа. Во время испытаний на комплексной ис-
пытательной трассе устанавливались следующие зарядные давления: 2,42, 3,02,
3,65 и 4,00 МПа.
На рис. 13.38 показаны характеристики шины 16.00-20 при различном давле-
нии воздуха. Ее жесткость при постоянной статической нагрузке более 30 кН со-
Рис. 13.38. Статические характеристики шины 16.00-20
13.6. Анализ результатов экспериментальных испытаний подвески 565
Рис. 13.39. Зависимость динамического ужесточения ПР Др / Ду от частоты и зарядного
давления:
/ — зарядное давление равно 3,4 МПа; 2 — 3,1 МПа; 3 — 2,42 МПа. Диаметр отверстия клапана амор-
тизатора для всех случаев равен 3,5 мм
ставляла от 250 до 580 кН/м. Эта величина сопоставима с жесткостью ПР, что явля-
ется существенным недостатком подвески прицепа.
Кроме того, следует отметить как недостаток и конструкцию направляющего
устройства, связанную со значительными перемещениями шин в поперечной плос-
кости. Их малая жесткость и большие перемещения в поперечной плоскости
уменьшали ход поршня ПР и снижали ее нагруженность.
На рис. 13.39 показана зависимость динамического ужесточения ПР Др/Ду
от частоты и зарядного давления. С увеличением частоты и уменьшением зарядного
давления динамическое ужесточение ПР существенно возрастает.
Рис. 13.40. Изменение дисперсии давления газа ПР в октавных полосах частот в зависимости
от скорости движения:
/ — октава 0,7... 1,4 Гц; 2 — октава 2,8...5,6 Гц; 3 — октава 1,4...2,8 Гц
566 Н. Основы теории и расчета систем подрессоривания колес КТС ОБГ
Рис. 13.41. Изменение дисперсии относительных перемещений поршня в ПР
в октавных полосах частот в зависимости от скорости движения:
/ — октава 0,7 1,4 Гц; 2 — октава 2,8...5,6 Гц; 3 — октава 1,4...2,8 Гц
Движение автопоезда по булыжнику осуществлялось со скоростями 10, 20,
30 и 40 км/ч. При заездах фиксировалось изменение давления сжатого газа и пере-
мещение поршня в ПР На рис. 13.40 и 13.41 показаны графики изменения диспер-
сии давления газа и относительных перемещений в октавных полосах частот в зави-
симости от скорости движения.
Лабораторно-дорожные испытания пневморессор
Для оценки динамических характеристик ПР были проведены испытания
прицепа на участках дороги с различными синусоидальными неровностями. Резуль-
таты этих испытаний представлены в виде графиков на рис. 13.42, где большие зна-
чения величин в области частот до 1 Гц можно объяснить резонансной раскачкой
подрессоренной массы.
Рис. 13.42. Зависимость величин Ар/Ау и \G/\y от частоты колебаний:
• и А — экспериментальные данные
13.6. Анализ результатов экспериментальных испытаний подвески 567
Как видно из графиков рис. 13.42, с повышением частоты колебаний имело
место увеличение жесткости ПР Результаты испытаний свидетельствовали об ин-
тенсивном теплообмене ПР с окружающей средой. Зарядное давление значительно
влияло на изменение перемещений, усилий и давлений в ПР Максимальные значе-
ния амплитуд получены при /?зар 2,42 МПа, они составили для перемещения
поршня — до 5...6 см, сил — до 10000 И, давлений — до 0,5 МПа и для перепада
температур — до 20 °C.
Анализ результатов испытаний гидропневматической системы подвески для
большегрузного транспортного средства позволяет сделать следующие выводы.
1. Существенное влияние на динамические характеристики телескопических
ПР оказывают особенности их конструкции (наличие трения, размеры дроссели-
рующего отверстия встроенного амортизатора, конструкция разделителя газа и
жидкости), степень сжатия газа, зарядное давление, ход поршня и частота колебаний.
2. Изменение динамических характеристик ПР связано с наличием теплооб-
мена газа с окружающей средой. Сравнение рабочих процессов в пневморессоре
целесообразно проводить, используя уравнения адиабаты (для быстро протекающих
процессов) или изотермы (для медленно протекающих процессов).
3. Проведение стендовых и лабораторно-дорожных испытаний телескопиче-
ских ПР в составе многоосных автомобилей не только требует больших затрат вре-
мени и средств, но и не дает возможности осуществить некоторые виды экспери-
ментальных исследований. Поэтому для исследовательских целей целесообразно
использовать макетные образцы транспортных средств, имитирующих работу
опытной подвески и позволяющих осуществить широкую программу испытаний.
Рис. 13.43. Общий вид стойки подвески колеса:
/ — стойка подвески; 2 — продольный рычаг; 3 — поворотное устройство; 4 — гидропневмагическая
рессора; 5 — гидроаккумулятор; 6 — тормозная камера
568 13. Основы теории и расчета систем подрессоривания колес КТС ОБГ
Рис. 13.44. Вариант системы автоматизированного управления системы подрессоривания
По результатам теоретических и экспериментальных исследований в МГТУ
им. Н.Э. Баумана разработано несколько вариантов стоек колес (см. § 9.2 и рис. 13.43) и
систем автоматизированного управления ими (рис. 13.44), которые реализованы в
макетных образцах КТС ОБГ
13.7. Конструирование и расчет подвесок
Расчет упругих элементов подвески
Торсионная рессора
Схемы торсионных рессор, которые представляют собой круглые метал-
лические стержни, работающие на кручение, хорошо известны и широко применяе-
мы на КТС ОБГ Один конец такой рессоры обычно крепится жестко на раме с по-
мощью кронштейна и шлицевого соединения, а второй соединяется с рычагом или
балансиром направляющего устройства. Расчет торсионной рессоры укладывается в
обычный расчет на кручение одиночного или пучкового стержня.
Гидропневматическая рессора
Расчетная схема типовой гидропневматической рессоры представлена на
рис. 13.45. Она состоит из цилиндра 1 с шаровой емкостью 2 для жидкости и газа
(азота) с давлением р и объемом IV, разделенных гибкой диафрагмой, а также пус-
тотелого штока 3 с поршнем, представляющим собой емкость с давлением q и объ-
емом Wip имеющим перепускную трубку внутри штока. На входе жидкости из ци-
линдра в шаровую полость установлена клапанная коробка 4 с дроссельными отвер-
стиями, выполняющими роль гидравлического демпфера. Различные конструкции
ГПР рассмотрены выше в главе 3 и на рис. 13.23.
13.7 Конструирование и расчет подвесок
569
За исходное принимается статическое положе-
ние рессоры Ас, когда на нее действует сила Ро, равная
собственному весу машины. При статическом поло-
жении рессоры ее прогиб считается равным нулю,
= 0, а силы, давления и объемы соответствуют
начальным значениям: Ро, И</0, <7о (см. рис. 13.45).
При ходе сжатия шток с поршнем поднимается
вверх и вытесняет жидкость из поршневой полости
через клапанную коробку в шаровую полость. Давле-
ние азота в ней повышается, а давление азота внутри
поршня уменьшается вследствие заполнения кольце-
вой штоковой полости через перепускную трубку.
При ходе отбоя все происходит наоборот: дав-
ление в поршневой и шаровой полостях снижается, а
в штоковой полости увеличивается и сила отбоя
уменьшается.
Уравнение равновесия ГПР под действием си-
лы Р с учетом того, что рабочая площадь поршневой
полости F| = Tid\2/4, а площадь штоковой полости F2 =
= я/4 (б/]2 - d22), можно записать так:
Р = pF} - qF2 - PzJJ\ - F2).
Рис. 13.45. Расчетная схема
типовой гидропневматиче-
ской рессоры:
/ — цилиндр; 2 емкость,
пустотелый шток; 4 — клапанная
коробка
Последний член уравнения представляет собой
силу, действующую на шток поршня и вызванную атмосферным давлением ра1М,
ввиду ее малости по сравнению с другими ею обычно пренебрегают. Тогда текущее
значение силы Р можно записать в виде
Р = pF} - qF2.
(13.1)
При ходе сжатия давление в шаровой полости изменяется по политропе с по-
казателем П = 1,25 (при собственной частоте колебаний подвески 0,9... 1,0 Гц)
(13.2)
где /?() = — приведенная высота столба в шаровой полости с площадью F\.
Го
При ходе штока вверх давление в штоковой полости будет уменьшаться по
зависимости
й
1 + ц —
)
(13.3)
570 /3. Основы теории и расчета систем подрессоривания колес КТС ОБГ
К) WC)
где ц =---- — относительная величина приведенных столбов газа; /i0= ——
h4(> ^2
приведенная высота столба газа в штоковой полости площадью F2.
Подставив значения р и q из формул (13.2) и (13.3) в (13.1), получим
Р =
PoF\
Q0F2
1 Лп '
h, ।
l-|i —
U
(13.4)
Жесткость рессоры Cp выразится уравнением
dP _ П/ff pofj ! n/iy0^0F2
dhr^-har +(ч/0^дГ'
При статическом положении рессоры (Ад = 0) будем иметь
Л) = FoFl “9о^2-
Введем в расчет соотношение сил
t _ 9о^2
PoFi ’
Тогда можно записать:
ро = PoFi ~^PoFi = PoFi G—£);
РоЛ - ; <7<Л= Ро
Для существующих конструкций = 0,12.. .0,16.
Если рессора не имеет штоковой полости, то в выражении (13.4) будет отсут-
ствовать последний член. Формула (13.4) используется для построения упругой ха-
рактеристики рессоры. Эта характеристика при наличии или отсутствии штоковой
полости будет нелинейной и прогрессивной; в первом случае — выпукло-вогнутой,
а во втором — вогнутой.
Гидравлическая рессора
Одна из возможных схем гидравлической рессоры, работающей по принци-
пу объемного сжатия в замкнутом объеме, представлена на рис. 13.46. Рессора
содержит цилиндр 1 с двумя уплотнительными узлами 3 и 7, а также шток 4 с
двумя диаметрами по длине и две дополнительные емкости 6 и 8, соединенные с
полостью цилиндра / через клапаны 5 и 9. Верхний узел крепления рессоры имеет
цапфы 2. При вдавливании штока в цилиндр объем жидкости в нем уменьшается,
а давление возрастает, и реакция давления жидкости на шток увеличивается. При
наличии одной емкости в цилиндре упругая характеристика рессоры получается
вогнутой. Тогда статический ход рессоры получается больше, чем рабочий. Для
13.7 Конструирование и расчет подвесок
571
Рис. 13.46. Схема гидравличе-
ской рессоры:
/ — цилиндр; 2 — цапфы;
уплотни тельные узлы; 4 —
5 и 9 — клапаны; 6 и 8 — емк< ти
того чтобы характеристика была выпукло-вогнутой,
используются две дополнительные емкости 6 и 8.
При полностью разгруженной рессоре они пе-
рекрыты клапанами и жесткость рессоры вначале бу-
дет высокой, затем включаются обе дополнительные
емкости и жесткость уменьшается. При обжатии рес-
соры выше статической нагрузки отключается внача-
ле одна емкость, а затем другая.
Рабочая площадь штока F для рассматриваемой
конструкции рессоры будет выражаться формулой
F = ^,2-^).
где d\ и d2 — диаметры нижней и верхней частей што-
ка 4.
Изменение объема жидкости при ходе сжатия
/?д штока с рабочей площадью F определяется выра-
жением
^W=kcMp-p^ = ^-(p-pO = hllF (13.5)
Еж
где W() — начальный объем жидкости в цилиндре при
начальном (атмосферном) давлении; £сж — коэффи-
циент объемного сжатия, представляющий собой от-
„ AVV
носительное изменение объема , которое прихо-
дится на единицу изменения давления; Еж — модуль объемной упругости жидкости,
т. е. обратная величина коэффициента объемного сжатия: Еж = —*—.
&сж
Из выражения (13.5) получим
hA=kcx^(p- р{}),
где п^ - — — приведенная высота столба жидкости в цилиндре.
F
Усилие гидравлической рессоры (пружины) определяется по известной фор-
муле
Р= pF
При расчете характеристик гидравлической рессоры следует учитывать зави-
симость параметров ксж и - от давления р в рессоре и температуры жидкости.
Wo
Такие зависимости для примера приведены на рис. 13.47.
572 /3. Основы теории и расчета систем подрессоривания колес КТС ОБГ
Рис. 13.47. Кривые сжимаемости синтетической рабочей жидкости
При расчете упругой характеристики рессоры необходимо учитывать, что
при подключении или отключении дополнительных емкостей меняется величина /i().
Расчет подвесок колес
Кинематика 2-рычажной подвески
Наиболее распространенной схемой подвесок КТС ОБГ, особенно СКШ, явля-
ется 2-рычажная подвеска, представляющая собой 4-звенный шарнирный механизм с
двумя неподвижными шарнирами, которыми рычаги подвески связаны с рамой.
Параметры независимых подвесок некоторых СКШ приведены в табл. 13.1.
Таблица 13.1
Параметры независимых подвесок некоторых СКШ
Параметры «Столвет» БТР-60ПБ БАЗ-135ЛМ МАЗ-543
Полный ход, мм 254 220 170 281
Статический ход, мм Жесткость рессоры, 165 110 70 122
дин/см 84,7 105 208 176
Собственная частота, Гц 1,32 (1-я ось) и 1,28 (3-я ось) 1,28 1,38 1,17
При выборе схемы подвески следует учитывать следующие соображения:
а) компоновочные:
агрегатированность и модульность конструкции;
унификация подвески по всем колесам;
13.7 Конструирование и расчет подвесок
573
минимальное вытеснение направляющим аппаратом внутренних объемов
корпуса и согласованность с геометрией технологического оборудования;
простота рулевых приводов;
минимизация высоты платформы;
б) эксплуатационные:
возможность управления параметрами упругого и демпфирующего эле-
мента, в том числе с учетом загрузки автомобиля;
возможность регулирования дорожного просвета;
минимальное время технического обслуживания;
согласованность ресурса подвески и переодичности ее обслуживания с ре-
сурсом и периодичностью обслуживания шасси;
согласованность сроков и режимов хранения подвески с требованиями к
шасси;
недефицитность эксплуатационных и расходных материалов;
способность воспринимать без разрушения ударные нагрузки при грубых
ошибках водителя;
возможность блокировки при выполнении технологических операций;
работоспособность (без дополнительного обслуживания) после преодоле-
ния брода или кратковременной навигации, т. е. в прибрежных морских
районах.
Кинематическая схема независимой подвески с поперечными рычагами при-
ведена на рис. 13.48. Буквами А, Б, D и С обозначены шарниры.
Длины рычагов /в и /н выбираются из условия компоновки машины и получе-
Рис. 13.48. Кинематическая схема независимой подвески с поперечными рычагами
574 13. Основы теории и расчета систем подрессоривания колес КТС ОБГ
ния такой кинематики бокового качения колеса при вертикальном ходе подвески
вверх и вниз от статического положения, которая обусловливает небольшие углы
поворота колеса v и небольшие изменения ширины колеи Д/С при необходимых ди-
намических прогибах (ходах) подвески вниз hc и вверх /гр, при этом h:i = hc + /гр.
Большая величина изменения колеи Д/С вызывает быстрый износ шины, а большой
угол качания (v > 2°) приводит к возникновению гироскопического момента на ко-
лесе и появлению осевых сил, действующих на подшипники ступицы колеса.
Наличие карданной передачи в приводе ведущего колеса осложняет подбор
кинематической схемы подвески и, кроме того, ограничивает возможности по уве-
личению ее полного хода, так как карданные передачи передают момент при углах
наклона в пределах 12... 13° Требуется найти такое положение и размеры кардан-
ной передачи, когда ее длина /к при качании колеса не изменяется (допускается из-
менение длины Д/к = 1 ...2 мм). В противном случае возникают осевые усилия в
шлицевом соединении карданного вала, передающиеся на крестовины и подшипни-
ки привода. При коротких рычагах (/в и /н) значительно меняется колея, увеличива-
ются размеры упругого элемента и угол качания карданного вала, а длинные рычаги
увеличивают габаритную ширину машины.
Предварительные размеры /в, /н и /к определяют графически (рис. 13.48). В
некотором масштабе строят три положения рычагов подвески и колеса: статическое,
верхнее и нижнее, находят точки положения шарниров а, а2 верхнего (коротко-
го) рычага /н, шарниров с, с2 нижнего рычага /н и точки положения Ь, Ь2 кар-
данного вала /к. Разделив дугу а}а2 пополам, находят точку а и, горизонтально от-
ложив /н, определяют положение шарнира В. Положение шарнира D длинного рыча-
га находят, отложив от точки С длину /н под углом а к горизонту.
В табл. 13.2 приведены геометрические параметры подвески, полученные в
процессе подбора рациональной кинематики направляющих устройств.
Таблица 13.2
Кинематические параметры 2-рычажной подвески (варианты), мм
Лс z'p Г Ao В» а, °
108 1 12 530 142,3 207 3 390
114 114 630 165 262 1 °10 400
75 100 630 156 230 1 220
Д/С 2 Др
275 335 82,5 261,5 19,5 2 1,5
280 403 1 12 325 2 1°30 2,2
220 220 10 350 18 18 0
После выбора кинематической схемы подвески рассчитывается упругая (при-
веденная) характеристика подвески в целом, т. е. находится зависимость нагрузки
колесо Рк от его хода hK по имеющейся характеристике упругого элемента
Р= /*(/?). Таким образом, необходимо установить характер изменения силового
13.7 Конструирование и расчет подвесок
575
Рис. 13.49. Торсионная подвеска КТС ОБГ с механическим приводом колес:
/ — колесо; 2 — ступица колеса; 3 — амортизатор; 4 — упор; лонжерон рамы; 6 — кронштейн;
7 — поперечина рамы; Я, 10 — упругие элементы торсионов; 9 — ведущий мост; / / — карданный вал;
/2, 13 — направляющие рычаги подвески
передаточного отношения рычагов подвески, связывающих силу Рк на колесо с си-
лой Р упругого элемента. Такой расчет называется приведением подвески к расчет-
ной схеме.
Приведение к расчетной схеме 2-рычажной подвески колеса
с независимыми продольными торсионами
Схема подвески колес представлена на рис. 13.49, а ее кинематическая схе-
ма — на рис. 13.50. Конструкция подвески включает поперечные рычаги /2 и 13,
которые через продольные торсионы 8 и 10 крепятся к раме кронштейнами 5 и 6.
В шарнирах А и С с рычагами соединяется кронштейн 2 колеса / ТС. Наличие
карданной передачи 11, соединяющий мостовой редуктор 9 и колесный редуктор,
привносит в кинематику подвески недостатки, отмеченные при рассмотрении
предыдущей схемы. В качестве демпфирующего элемента служит гидравлический
амортизатор 3, который крепится кронштейном 4 на кронштейне 5, соединенном с
Рис. 13.50. Кинематическая схема 2-рычажной подвески колес с продольными независимы-
ми торсионами
576 /3. Основы теории и расчета систем подрессоривания колес КТС ОБГ
поперечиной рамой 7 Подбор кинематической схемы данной подвески аналоги-
чен схеме на рис. 13.48.
Поскольку продольные торсионы выполняют функции упругого элемента,
важнее рассмотреть в данном случае расчет параметров торсионов.
После подбора кинематической схемы подвески определяются углы закручи-
вания верхнего осв и нижнего осн торсионов и полный ход подвески /гд = hc + Лр.
Известными являются также все геометрические размеры элементов подвески. Не-
известными величинами будут горизонтальные силы Тъ и Гн, а также вертикальные
силы Рв и Рн, приложенные в шарнирах А и С крепления рычагов со ступицей коле-
са, а также реакция колеса = Рк (где Рк — нагрузка на колесо). Таким образом,
будет неизвестно пять параметров. Для нахождения статической реакции на колесо
/?к в зависимости от угла закручивания торсионов можно использовать уравнения
статического равновесия системы — уравнения статического равновесия рычагов,
ступиц и сил по вертикали и горизонтали согласно рис. 13.50
И+7’в/|1 =Р„/В;
M„+Tal\ =РН1Н-
RA + PH(dB -d№) = T^;
RKdH + P„(ds - J„) = T„g;
Pn + PH = RK',
TB = T„,
где RK — вертикальная реакция на колесе; dB и dH — плечи обкатки колеса соответ-
ственно по верхнему и нижнему рычагам подвески.
В уравнениях статического равновесия моментов и сил, действующих на сту-
пицу (звено АОС на рис. 13.49 и 13.50), направления сил Рв, Гв, РИ и Тн приняты
противоположными одноименным силам, действующим на рычаги АВ и CD в шар-
нирах А и С.
Решая совместно систему уравнений статического равновесия, получим
р =R +
к D ’
где
А = /1Ч-/Мв+/„/з;
B = l'2dH-l'2dB+la^
D = l2lBlH — l2dBlH +l^dHlB;
Л/в ~ ’
MH = cHaH,
, cH — жесткость торсионов; ав, ан — углы закручивания торсионов.
Приведенная характеристика подвески, рассчитанная по вышепредставлен-
ным зависимостям, показана на рис. 13.51. Жесткость подвески определяется мето-
13.7 Конструирование и расчет подвесок
577
Рис. 13.51. Приведенная характеристика торсионной 2-рычажной подвески
дом численного интегрирования приведенной характеристики. Основой расчета
является статическая нагрузка на колесо РКХТ.
Как показывают данные на рис. 13.51, при линейной характеристике упругих
элементов (торсионов) характеристика подвески оказалась нелинейной (выпуклой)
вследствие неодинакового передаточного числа кинематических звеньев, зависяще-
го от хода колеса. Однако она остается достаточно близкой к линейной характери-
стике с постоянной жесткостью.
Для получения прогрессивной выпукло-вогнутой характеристики при линей-
ных характеристиках упругих элементов существует множество технических реше-
ний, одно из которых представлено на рис. 13.52 [3]. Данное решение отличается от
рассмотренного тем, что обратные концы верхнего и нижнего торсионов связаны
между собой с помощью рычагов 9 и 10, а также тяги 72. При этом жесткость верх-
Рис. 13.52. Торсионная подвеска с гидрообъемным (электрическим) приводом колес:
/ — колесо; 2 — гидромотор (электродвигатель); 3 — амортизатор; 4 — упор; 5 — лонжерон рамы; 6 —
кронштейн; 7 — поперечина; 8, 11 — лонжероны; 9, 10, 12 — рычаги и тяга, соединяющие торсионы;
13, 14 — направляющие рычаги
19 - 2918
578 13. Основы теории и расчета систем подрессоривания колес КТС ОБГ
3 4 5 6
12 11 10
Рис. 13.53. Гидропневматическая подвеска с механическим приводом колес:
2 — С1упица колеса; 3 — гидропневматическая рессора; 4, 8 — кронштейны; 5 — упор;
лонжерон рамы; 7 — поперечина рамы; 9 — ведущий мост; 10, 12 — направляющие рычаги подвес-
// — карданный вал привода колеса
него торсиона значительно выше жесткости нижнего торсиона, а рычаг 9 значи-
тельно длиннее рычага 10. При нагружении такой подвески обратные концы тор-
сионов оказываются подвижными. Нижний торсион является корректирующим, а
верхний — несущим. При движении подвески вверх рычаг 9 поворачивается в ту же
сторону, что и основной рычаг 14, а рычаг 10 — в обратную сторону движения ры-
чага 13. Таким образом, угол закручивания верхнего торсиона получается неболь-
шим, а нижнего — большим. Это позволяет, с одной стороны, увеличить ход под-
вески при небольшой длине несущего верхнего торсиона, а с другой стороны, полу-
чить прогрессивную выпукло-вогнутую характеристику путем изменения
соотношения плеч рычагов 9 и 10 при их повороте. Выбирая начальную установку
рычагов 9 и 10, можно получить любую нелинейную характеристику подвески.
Приведение к расчетной схеме 2-рычажной подвески колеса
с гидропневматической рессорой
Схемы подобных подвесок представлены на рис. 13.53 и 13.54. У первой
схемы ГПР 3 закреплена на верхних рычагах 72 подвески, а у второй — на нижних
рычагах 9, что позволяет при отсутствии карданного вала привода колеса увеличить
длину рессоры и получить большой ход колеса.
Кинематическая схема подвески показана на рис. 13.55. Связь между ходом h
колеса и ходом hд подвески устанавливается графическим построением после выбо-
ра кинематической схемы. Передаточное отношение кинематических звеньев от
нагрузки Рк на колесо к силе Р рессоры находится с помощью системы уравнений
равновесия элементов подвески под действием показанных на рис. 13.55 сил. При
этом все обозначения (цифровые и буквенные) соответствуют рис. 13.48.
13.7 Конструирование и расчет подвесок
579
Рис. 13.54. Гидропневматическая подвеска с гидрообъемным (электрическим) приводом колес:
/ — колесо; 2 — гидромотор (электромотор); 3 — гидропневматическая рессора; 4, 8 — кронштейны;
5 — упор; 6 — лонжероны рамы; 7 — поперечина рамы; 9, 10— направляющие рычаги подвески
При креплении рессоры на верхних рычагах
PB + Tj'2 = РВ1В;
TBl\ =Рн1и,
+ Рн = РБ
+ PB(da - dH) =
Рис. 13.55. Кинематическая схема 2-рычажной подвески с ГПР
19:
580 13. Основы теории и расчета систем подрессоривания колес КТС ОБГ
Решая приведенную выше систему уравнений, получаем
Рк = RK = РК,
b'(lHdBl\ -lHdHl'} -Шз)
где К =—------;------:------- — передаточное число кинематических звеньев.
При креплении ГПР на нижних рычагах подвески (в точке Е' рис. 13.55) бу-
дем иметь
Pb'=THl\ +РВ1Ы,
PJB=TBl'2-,
RK = PB + Рн;
RndB — Р hG4 - d«) + TBl3,
tb = t„,
где RK — вертикальная реакция на колесе.
Совместно решая уравнения системы, приведенной выше, получаем
PK = RK = РК,
где
у п tt I rirl! D п J у
"UWi1-W2-W3)
пуп о 1 В п ВпЭу
В качестве примера на рис. 13.56 представлена приведенная характеристика
схемы подвески, изображенной на рис. 13.55.
Рис. 13.56. Приведенная характеристика ГПР
13.7. Конструирование и расчет подвесок
581
Проектирование подвески колес с дополнительными функциями
При проектировании подвески заданными величинами являются статическая
нагрузка на колесо, статический ход и полный ход подвески колеса. Поэтому расчет
и проектирование начинают с выбора кинематической схемы подвески. После ее
выбора определяют передаточное отношение К и по нему находят статическую на-
грузку на рессору Рст.
Из кинематической схемы известными становятся и ходы рессоры АС1 и ИЛ.
Далее рассчитывают характеристику рессоры, а затем находят приведенную харак-
теристику подвески.
В качестве примера использования подвески колес для выполнения дополни-
тельных функций рассмотрим использование схемы 2-рычажной подвески с ГПР в
системах повышения устойчивости КТС ОБГ против бокового опрокидывания.
На рис. 13.57 представлен вариант использования комбинированной схемы
подвески для повышения поперечной устойчивости КТС ОБГ [3].
Подвеска выполнена с поперечным балансиром 4. Она содержит ГПР 5, за-
крепленные вверху на балансире 4, а внизу — на рычагах 72 направляющих уст-
ройств. Рычаги 77 и 72 направляющего устройства снабжены продольными торсио-
нами 8 и 10, обратные концы которых с помощью рычагов 9 связаны с 2-сторонним
Рис. 13.57. Подвеска колес КТС ОБГ с поперечным балансиром:
/ — колесо; 2 — рама; 3 — поперечина рамы; 4 — балансирная балка; 5 — гидропневматическая рессора;
6 — гидроцилиндр стабилизации; 7 — шток гидроцилиндра; 8, 10 — торсионы; 9 — рычаги; //, 12 —
направляющие рычаги
582 /5. Основы теории и расчета систем подрессоривания колес КТС ОБГ
штоком 7 управляющего гидроцилиндра 6. Рама машины 2 с грузом оказывается
вывешенной на балансире 4. ГПР обеспечивают высокую плавность хода благодаря
их прогрессивным характеристикам, а торсионы обеспечивают поперечную устой-
чивость и стабилизацию корпуса (изменение поперечного крена) с помощью гидро-
цилиндра 6, управляемого от датчиков крена.
Недостатком такой схемы подвески является увеличение погрузочной высо-
ты платформы из-за наличия поперечных балансиров над рамой машины, а также
большая сложность в регулировании дорожного просвета.
Для схем подвесок с ГПР интерес представляют дополнительные схемы ста-
билизации, которые базируются на принципах гидробалансира. На рис. 13.58 пока-
зана вариант такой схемы [3].
Принцип действия данной схемы стабилизации основан на прямом перекачи-
вании рабочей жидкости из рессор (7-^7) одного борта машины к рессорам (5-Я)
другого борта и обратно в соответствии с частотой поперечных собственных коле-
баний подрессоренной части машины с помощью регулируемых насосов 15 и 20,
приводимых в действие от двигателя 18 через редуктор 17 Насосы 15 и 20 управ-
ляются блоком управления производительностью (БУП) 14 по сигналу датчика кре-
на 12 и усилителя сигналов 13. Для восполнения утечек жидкости из рессор через
уплотнения насосов 15 и 20, питания органа управления производительностью и
изменения дорожного просвета предусмотрены насос управления 76, пополнитель-
ные баки 9 и 22 с поплаковыми регуляторами Юн 21 дорожного просвета, редукци-
онный клапан 7 7 настройки регуляторов 70 и 27 на заданную высоту дорожного
просвета и предохранительный клапан 79 системы.
Работает система следующим образом. При наклоне корпуса, например впра-
во, датчик крена вырабатывает сигнал, пропорциональный крену, и через усилитель
воздействует на орган управления производительностью насосов. Они начинают
перекачивать жидкость из левых рессор в правые до устранения крена. При обрат-
ном крене идет противоположный процесс перекачивания жидкости из правых рес-
сор в левые.
Если вследствие утечек жидкости через насосы 15 и 20 корпус просядет ниже
заданной величины (количество рабочей жидкости в баках увеличится), золотники
регуляторов 10 и 21 переместятся вправо и напорная линия насоса 76 соединится с
силовыми линиями насосов 75 и 20 (с рессорами), в результате положение подрес-
соренной массы (корпуса) восстановится. Для принудительного изменения дорож-
ного просвета (например, увеличения) необходимо уменьшить давление за редук-
ционным клапаном. Тогда жидкость из рессор будет сливаться в баки через регуля-
торы 10 и 21
Рассматриваемая схема отличается от других известных схем стабилизации, с
одной стороны, простотой конструкции и небольшой массой, а с другой, — мини-
мальными затратами энергии на боковую стабилизацию подрессоренной массы
(корпуса).
Еще раз можно повторить, что схем подвесок очень много, и все охватить не
представляется возможным. Поэтому в книге рассмотрены только те из них, кото-
рые, на взгляд авторов, при небольшом усовершенствовании с учетом современных
достижений могут быть использованы для разработки КТС ОБГ. Расчет и проекти-
13.7 Конструирование и расчет подвесок
583
Рис. 13.58. Принципиальная схема системы боковой стабилизации корпуса КТС ОБГ-
1-8 — гидропнсвматические рессоры; 9, 22 баки; 10, 21 регуляторы дорожного npocBeia;
// — редукционный клапан; 12 — датчик крена; 13 — усилитель сигналов; 14 — орган управления
производительностью насосов; 15, 16, 20 — насосы; 17 — редуктор; 18 — двигатель; /9 — предохрани-
тельный клапан
рование амортизаторов подвески авторы не затрагивали, так как данный вопрос хо-
рошо освещен в научно-технической литературе в отношении автомобилей и ника-
кого специального рассмотрения применительно к КТС ОБГ не требует.
Глава 14
Криволинейное движение многоосных
колесных шасси
14.1. Термины и определения
В общем случае под управляемым криволинейным понимается такое движе-
ние многозвенных колесных систем в горизонтальной плоскости, при котором про-
изводится целенаправленное формирование траектории центров масс каждого из
звеньев, ориентации продольной оси носового звена и взаимного расположения
осей всех последующих звеньев машины.
В частном случае можно рассматривать криволинейное движение однозвенного
колесного шасси, при котором водитель (оператор) или автоматическая система осуще-
ствляют целенаправленное формирование траектории центра масс машины и обеспече-
ние в каждый момент времени ориентации продольной оси несущей системы. Иногда
такое движение называют маневром шасси в горизонтальной плоскости, различая при
этом маневр скоростью и маневр поворотом. В данном разделе вопросы управления
скоростью центра масс шасси, касательной к его траектории, не затрагиваются.
При изучении криволинейного движения колесного шасси рассматривают
два случая: установившееся движение (установившийся поворот) и более общий
случай — неустановившееся движение (неустановившийся поворот). При изучении
последнего по предложению Д.А. Антонов [61] выделяют два периода:
активного управления (изменяются как интенсивность управляющего воз-
действия, так и управляемые параметры движения шасси);
пассивного выжидания (управляющее воздействие достигло нужного уровня
и управляющие устройства удерживаются в требуемом положении, но управляемые
параметры продолжают изменяться).
Второй случай иногда не совсем корректно называют эволюционным движе-
нием машины или режимом эволюции, имея ввиду такое движение, при котором,
несмотря на нулевые скорости перемещения органов управления, результаты воз-
действия на управляемые параметры еще не будут нулевыми. Этот случай также
называют режимом последействия или состоянием последействия.
Существование последействия нежелательно, так как водитель (оператор),
естественно, ожидает, что прекращение воздействия с его стороны на органы
управления приводит к прекращению изменения управляемых параметров, что на
самом деле не происходит, поэтому эволюционные характеристики машины могут
оказаться причиной возникновения опасных ситуаций.
14.1. Термины и определения
585
В общем случае маневренность машины в горизонтальной плоскости являет-
ся комплексным свойством. Наиболее полно оно проявляется в способности ТС в
кратчайшее время изменить направление движения на противоположное, занимая
при этом минимальную площадь опорной поверхности. Известно, что «качество»
такого маневра зависит от тормозных свойств машины, ее управляемости, поворот-
ливости, поворачиваемости, динамических качеств при разгоне и т. д.
В полном объеме эти качества характеризуют технический уровень как бое-
вых, так и специальных автомобилей. Для многоосных колесных шасси наиболее
важным показателем является способность машины изменять параметры поворота
при изменении положения органов управления на угол 0 (0 = (0Ь 02, 0„)т — пара-
метр, характеризующий отклонение органа управления поворотом от нейтрального
положения).
Следуя рекомендациям [61], поворот КТС ОБГ можно разделить на три фазы:
маневренную с активным управлением (со ^0,0^0), которая полностью ха-
рактеризуется понятием «управляемость машины»;
эволюционную, или пассивного последействия (О) Ф 0, 0 = 0);
установившуюся (со = 0,0 = 0), которая полностью характеризуется поняти-
ем «поворачиваемость».
Вторую фазу оценивают отдельно путем проведения специальных испытаний
«рывок руля» и «вход в круг».
Также проводится разграничение между поворотливостью и поворачиваемо-
стью колесных машин.
Следуя [61], под поворотливостью многоосного колесного шасси будем
понимать свойство, характеризующее способность машины за минимальное время
совершать разворот для движения в обратном направлении. Критерием (оценкой)
поворотливости, определенной таким способом, является минимально достижимое
время полного разворота, осуществляемого на свободной площадке без каких-либо
внешних ограничений на выполнение маневра.
Под поворачиваемостью многоосного колесного шасси понимается свойство,
характеризующее способность машины изменять курсовой угол, следуя управляю-
щему воздействию со стороны водителя или автоматической системы управления.
Современные крупногабаритные колесные шасси иногда оборудуются система-
ми рулевого управления, которые позволяют создавать криволинейные траектории
движения центра масс при неизменной ориентации продольной оси машины (пример
такой конструкции, разработанной в МГТУ им. Н.Э. Баумана, приведен в гл. 4. Кроме
того, рулевые системы подобного типа устанавливаются на шасси некоторых тяжелых
самоходных кранов. Близкий характер движения имеют некоторые современные легко-
вые автомобили с передними и задними управляемыми колесами и с податливыми на-
правляющими аппаратами задней подвески. Для определенности будем использовать
более узкое и широко распространенное понимание термина «поворачиваемость» как
способность колесной машины совершать преднамеренный поворот с изменением кур-
сового угла в соответствии с управляющим воздействием водителя.
Чем круче может повернуться машина, тем лучше ее поворачиваемость, по-
этому соответствующие характеристики представляются в виде зависимости кри-
586
14. Криволинейное движение многоосных колесных шасси
визны траектории характерных точек движения от управляющего воздействия во-
дителя. Чаще всего это зависимость радиуса кривизны траектории центра масс или
других характерных точек несущей системы (радиуса поворота) от угла поворота
управляемых колес. Во многих случаях, например при составлении технического
описания колесного шасси, указывают только граничные значения, характеризую-
щие поворачиваемость, то есть минимальные радиусы поворота характерных точек
при максимальном угле поворота управляемых колес.
В технических требованиях и описаниях чаще всего задается минимальный
радиус поворота, измеренный по колее наружного забегающего колеса, так как этот
параметр характеризует размеры минимальной зоны опорной поверхности, необхо-
димой для полного разворота машины без остановки.
Применяют и другие оценочные параметры поворачиваемости, в том числе:
радиус поворота колесного шасси, измеряемый от центра мгновенного поворота
до продольной оси машины (используется в большинстве расчетных зависимостей);
удельная сила тяги, необходимая для осуществления поворота шасси в за-
данных дорожно-грунтовых условиях;
минимальный радиус поворота шасси, при котором не происходит соприкос-
новения самой машины или перевозимого груза с окружающими предметами (так
называемый радиус ометания);
коэффициент использования сцепной силы на управляемых колесах (позво-
ляет определить степень приближения нагруженности контакта управляемых колес
к пределу по сцеплению с опорной поверхностью).
В принципе поворачиваемость колесного шасси тем лучше, чем меньше зна-
чение любого из перечисленных параметров. Рациональные ограничения на эти па-
раметры определяются условиями эксплуатации шасси конкретных типов и рас-
смотрены в § 8.4.
При последующем изложении теории криволинейного движения КТС ОБГ будут
использованы понятия избыточной, нейтральной и недостаточной поворачиваемости
многоосных колесных шасси (см. простейшую схему стационарного поворота колесно-
го шасси, приведенную на рис. 14.1). Предполагается общее знакомство читателя с ос-
новами теории бокового увода эластичного колеса в пределах обычных курсов теории
движения автомобиля. Более подробно теоретические и эмпирические модели качения
эластичного колеса по криволинейным траекториям изложены в работах [12, 61] и рас-
смотрены в гл. 8, а также при обсуждении вопросов, связанных с конструированием
рулевого управления (РУ) многоосных колесных шасси.
При построении схемы, представленной на рис. 14.1, принимается, что угол
увода оси равен среднему значению углов увода наружного и внутреннего колес
(корректность и пределы применения этого и аналогичных упрощений, так же как и
общие правила знаков и ориентации координатных осей, рассматриваются позднее).
Ясно, что
R =---------------------;
tg(0l -8l) + tg(e„ Z|41)
' х Ltg(e„+8„)
. см tg(el -§l) + tg(e„
14.1. Термины и определения
587
цмп
Рис. 14.1. Простейшая схема поворота колесного шасси с эластичными колесами
где R — радиус кривизны траектории проекции мгновенного центра поворота на
продольную ось шасси (так называемый полюс поворота); хсм — смещение полюса
поворота относительно середины базы шасси; 0| — средний угол поворота колес
передней оси; 0„ — средний угол поворота колес задней оси; 5] — угол увода шин
передней оси; 8,, — угол увода шин задней оси.
Для принципиального определения понятий избыточной и недостаточной по-
ворачиваемости можно ограничиться описанием движения шасси с большими ско-
ростями, так как при этом отчетливо проявляется явление увода при относительно
малых углах поворота управляемых колес.
При малых углах увода и соизмеримых с ними по малости углах поворота
управляемых колес можно линеаризовать числитель и знаменатель формул (14.1)
R =------------------;
(е|+е'') + (5'’-5') (142)
х _ цвп+&„)
/м (0t+0„ ) + (5„-5,)
В соответствии с формулами (14.2) вводятся следующие определения:
при нейтральной поворачиваемости шасси (8„ - 8|) = 0, следовательно, ради-
ус поворота зависит только от углов поворота управляемых колес и не зависит от
увода;
при недостаточной поворачиваемости шасси (8„ - 8|) < 0, кривизна поворота
за счет управляемых колес уменьшается из-за увода, следовательно, радиус поворо-
та зависит не только от углов поворота управляемых колес, но и от увода (в частно-
588
14. Криволинейное движение многоосных колесных шасси
сти, увеличивается по мере увеличения центробежной силы, действующей на пово-
рачивающее шасси при увеличении кривизны траектории);
при избыточной поворачиваемости шасси (5„ - 5j) > О, поворот за счет управ-
ляемых колес суммируется с поворотом за счет увода, следовательно, радиус пово-
рота зависит не только от углов поворота управляемых колес, но и от увода (в част-
ности, уменьшается по мере увеличения центробежной силы, действующей на по-
ворачивающее шасси при увеличении кривизны траектории).
Как было показано в гл. 4, при создании однозвенных многоосных колесных
шасси реализуются в основном так называемые рулевые способы осуществления
поворота — за счет поворота управляемых колес. У некоторых КТС ОБГ поворот
осуществляется при помощи принудительного складывания звеньев, иногда в соче-
тании с поворотом управляемых колес. Реже встречается поворот составных частей
опорно-ходового комплекса — как правило, отдельных колесных осей или групп
осей (тележек). Эти конструкции с точки зрения взаимодействия колес с опорной
поверхностью описываются в рамках теории рулевого поворота колесных машин.
Так называемый бортовой поворот в конструкциях КТС ОБГ практически не встре-
чается и поэтому рассматриваться не будет.
Для характеристики поворачиваемости принято использовать зависимость
относительной кривизны траектории движения от угла поворота управляемых ко-
лес. Из формулы (14.2) следует, что
4 = (е,+ел)+(3„-з1). (14.3)
К
Характеристику составляющей поворота шасси, которая обеспечивается не-
посредственно поворотом управляемых колес (первые слагаемые в формуле (14.3)),
называют рулевой поворачиваемостью. Второе слагаемое в этой формуле называют
шинной поворачиваемостью.
При крене подрессоренной системы элементы ходовой части могут изменять
свое положение по отношению к продольной оси машины (такой эффект характерен,
например, для рессорной подвески и мостовой схемы опорно-ходовых модулей шас-
си, для независимых подвесок с продольно-поперечной схемы направляющего аппа-
рата и, вообще говоря, для большинства независимых подвесок из-за неполного со-
гласования кинематики направляющего аппарата и рулевого привода). В результате
при повороте шасси из-за действия центробежной силы появляются дополнительные
углы поворота колес, что порождает и дополнительную составляющую всего поворо-
та машины. Эта составляющая называется креновой поворачиваемостью.
В зависимости от конструкции подвески креновая поворачиваемость может увели-
чивать или уменьшать общую кривизну движения, или вообще ее не изменять. Соответ-
ственно креновую поворачиваемость можно характеризовать как избыточную, недоста-
точную или нейтральную. При нейтральной «креновой» поворачиваемости возможно
движение шасси с дрейфом, который хотя и не оказывает влияния на радиус поворота, но
существенно влияет на смещение центра поворота вдоль продольной оси машины.
Если ввести в рассмотрение специфический поворот колес, зависящий от бо-
ковой силы и конструкции подвески, и обозначить его как 0кр, поворачиваемость
будет оцениваться следующей зависимостью:
14.1. Термины и определения
589
£
R
L
L
= ^- + (5„-51) +
- К —I кр
= ~ + (S„-8l) +
^0
- R -Lp
(14.4)
= (е„+е|)+(еКр„+екр|)+(5„-з1),
где — — относительная кривизна траектории полюса поворота при отсутствии эф-
Ro
фекта креновой поворачиваемости;
-Я-кр
— изменение относительной кривизны тра-
ектории полюса поворота, вызванное эффектом «креновой поворачиваемости»; 0кр) —
дополнительный поворот колес передней оси, вызванный креном корпуса шасси;
0кр„ —дополнительный поворот колес задней оси, вызванный креном корпуса шасси.
Шасси с избыточной поворачиваемостью наиболее маневренны. Тем не ме-
нее, как будет показано ниже, они склонны к потере устойчивости движения, по-
этому обычно рекомендуется проектировать машины с нейтральной или слабо вы-
раженной недостаточной поворачиваемостью (разность углов увода крайних осей
приблизительно -2° при удельной боковой силе P/Ga = 0,4).
Любую удельную боковую силу, действующую на шасси, можно оценить по
формуле
Ру _ _ jy
mag g ’
где r|v — удельная боковая сила; PY — боковая сила; Ga — вес шасси; та — масса
шасси; jy — боковое ускорение.
Результатом действия любой боковой силы будут боковой крен, деформация
подвески и дополнительный поворот колес шасси. Возникнут боковые реакции в
пятне контакта эластичных колес с дорогой и соответствующий им боковой увод
шин. Как следствие траектория движения центра масс искривится.
Зависимость удельной боковой силы, действующей на шасси, от относитель-
ной кривизны поворота, вызванного совместным действием всех факторов, порож-
денных этой боковой силой, получила название диа-
граммы поворачиваемости шасси.
Если характеристика подвески линейна, то за-
висимость креновой поворачиваемости от боковой
силы также будет линейна (обычно искажения, вно-
симые в работу подвески кинематическим несовер-
шенством или податливостью направляющего аппа-
рата, невелики). На рис. 14.2 показаны варианты
диаграммы поворачиваемости для двух крайних слу-
чаев:
избыточной линейной креновой поворачивае-
мости (линия ОА) и суммарной избыточной нерулевой
поворачиваемости (линия ОВ);
Рис. 14.2. Варианты диаграмni-
mbi поворачиваемости шасси:
I — область избыточной повора-
чиваемости; II — область недос-
таточной поворачиваемости
590
14. Криволинейное движение многоосных колесных шасси
Рис. 14.3. Диаграмма поворачиваемости многоосного колесного шасси с избыточной общей
поворачиваемостью
недостаточной линейной креновой поворачиваемости (линия ОС) и суммар-
ной недостаточной нерулевой поворачиваемости (линия OD).
Предположим, что боковая сила — это центробежная сила, возникающая при
движении центра масс шасси по криволинейной траектории.
В этом случае
Ga gL g R’
(14.5)
где v.d — скорость движения шасси.
При га = const получается линейная зависимость между удельной боковой
силой и относительной кривизной траектории движения центра масс. Соответст-
вующий этому случаю вид диаграммы поворачиваемости (шасси с явно выражен-
ной избыточной общей поворачиваемостью) показан на рис. 14.3.
Структура этой диаграммы позволяет определять составляющие поворачи-
ваемости при заданном режиме движения шасси. На шасси с базой L, двигающее-
ся по траектории с относительной кривизной ОВ, действует относительная боко-
вая сила ВА. Это движение характеризуется креновой поворачиваемостью CD и
шинной поворачиваемостью DE. Суммарная нерулевая поворачиваемость шасси,
или самоповорачиваемость, соответствует отрезку СЕ. Нерулевая поворачивае-
мость не контролируется водителем и возникает самопроизвольно как следствие
самого факта криволинейности траектории движения центра масс шасси.
Очевидно, что для удержания шасси на криволинейной траектории заданной
относительной кривизны необходимо повернуть управляемые колеса, создав до-
полнительную рулевую поворачиваемость, характеризуемую отрезком ЕА. При
этом отрезки OF и OG характеризуют поворачиваемость шасси только за счет кре-
новой и шинной составляющей соответственно. Прямая OV характеризует общую
поворачиваемость шасси.
14.2. Уравнения плоского криволинейного движения .многозвенного шасси 591
14.2. Уравнения плоского криволинейного движения
многозвенного колесного шасси
Общий подход к построению математической модели
плоского криволинейного движения КТС ОБГ
В главах 1^4 было показано, что КТС ОБГ отличаются разнообразием конст-
руктивных схем. Наиболее часто встречаются:
многоосные автомобили с различным числом и расположением управляе-
мых колес;
автопоезда с несколькими шарнирно-связанными секциями;
шарнирно-сочлененные машины с активными шарнирами.
Задачи, которые решаются на начальных этапах проектирования КТС ОБГ
также разнообразны и требуют различной степени детализации математической
модели и глубины описания происходящих явлений.
Принципиально различают внешние задачи, типичным примером которых
является навигация транспортного средства. При их решении требуется минималь-
ная степень детализации процессов, происходящих в узлах и агрегатах машины.
Математическая модель, с помощью которой решают эти задачи, называется урав-
нением плоского криволинейного движения шасси. Для их решения используют
простейшую модель криволинейного движения машины, записанную в проекциях
на оси связанной системы координат
\МЛ (vv +vv(o7) =
[7_со_
где M.d — масса транспортного средства; /- — момент инерции транспортного сре/
ства относительно вертикальной оси связанной системы координат; — проекция
скорости центра масс на продольную ось связанной системы координат; — про-
екция скорости центра масс на поперечную ось связанной системы координат; а). —
проекция угловой скорости транспортного средства на вертикальную ось связанной
системы координат; — проекция главного вектора внешних сил на попереч-
ную ось связанной системы координат; — проекция вектора главного мо-
мента внешних сил на вертикальную ось связанной системы координат.
Хотя в этой модели не учитывается большое количество конструктивных
особенностей реальных машин (в том числе центробежные моменты инерции, чле-
ны, содержащие произведения компонент вектора угловой скорости, особенности
движения колес и т. д.), она вполне приемлема для анализа элементарных случаев
криволинейного движения однозвенного многоосного колесного шасси по твердой
опорной поверхности.
В то же время, в основу модели общего вида можно положить уравнения дви-
жения корпуса многоосного колесного транспортера (см. в § 4.8). Все остальные
варианты занимают промежуточное положение между двумя крайними случаями
простейшей моделью и рассмотренной ниже модели общего вида.
592
14. Криволинейное движение многоосных колесных шасси
Расчеты по модели общего вида чрезвычайно трудоемки, что, как правило, не
оправдано на начальных этапах разработки многоосных колесных машин. В то же вре-
мя достаточно полное представление о большинстве процессов можно получить, как и
при анализе колебаний многоосной машины, при помощи более простых моделей.
Наиболее общей схемой большегрузного транспортного средства является
многозвенный автопоезд, составленный из к т^-осных звеньев, соединенных между
собой активными шарнирами. Каждое звено автопоезда можно рассматривать как
многоосную колесную тележку со всеми ведущими и управляемыми колесами.
Уравнения, описывающие движение такой машины, применимы для изуче-
ния большегрузных автомобилей с любой схемой, причем модели для транспорте-
ров с простой конструктивной схемой будут представлять собой результаты упро-
щения модели общего вида. Однако такой путь не всегда оказывается рациональ-
ным с точки зрения затрат времени на построение частной модели (например,
модель, описывающую плоский поворот однозвенного многоосного колесного шас-
си, проще и удобнее получить непосредственно).
В данной главе используются оба пути. Вначале будет описана общая схема
построения модели общего вида [61]. Это весьма громоздкие выводы, которые сами
по себе не представляют особого интереса, поэтому дается только основная схема
преобразований и главные отличия от методики, приведенной в [61]. Затем для про-
ведения анализа криволинейного движения однозвенного многоосного колесного
шасси будет приведена традиционная схема построения модели.
Поскольку для расчета управляющих воздействий необходимо знание боко-
вого и углового отклонений транспортного средства от заданной траектории и их
производных, то и решение уравнений движения будет строиться относительно
этих отклонений.
Кинематические соотношения для модели общего вида
Пусть система координат СКс: (хс, усд связана с заданной траекторией, как это
показано на рис. 14.4. При этом обозначения принятые на этой схеме соответствуют
обозначениям схемы § 8.4.
Присвоим каждому из звеньев автопоезда порядковый номер /, начиная от пер-
вого звена и считая звенья по направлению к корме. С каждым /-м звеном свяжем
систему координат СК,: (х,-, уд с началом в центре тяжести звена (точке С,). Оси коор-
динат этих систем ориентируем таким образом, чтобы ось х, была параллельна оси хс.
Продольная ось /-го звена образует угол р, с осью х,.
При этих условиях координаты любойу-й точки Ау продольной оси /-го звена
в системе СКГ будут определяться по следующим формулам:
[xij = ХС, +aij cos₽i = ХС, +auch
. а (14-6)
[Уу = Ус, + ац smP, = Ус, + a^i,
где i = 1, 2, ..., k\j = 0, 1, 2, ..., п\ хс — горизонтальная продольная координата цен-
тра масс /-го звена; ус — горизонтальная поперечная координата центра масс /-го
14.2. Уравнения плоского криволинейного движения многозвенного шасси 593
Рис. 14.4. Кинематическая схема плоского движения многозвенного колесного транспортера
звена; С, — центр масс z-ro звена; 5, — проекция точки AtJ на ось у,; atJ — расстоя-
ние между точками С„ и (положительным считается направление от центра масс
в сторону носовой части звена).
Пусть lt — длина z-ro звена автопоезда и aCj — расстояние между точками С„
(центром масс звена z) и (центром носового шарнира звена z). Эти параметры по
определению будем считать всегда положительными.
В этом случае в системе координат СКс
хс, = хс,_ -[(4-1 -аС,_, )с,-1 +ас,с/]- (>4-7)
Система координат СКс располагается на первом звене, а ее оси направлены
вперед по ходу движения автопоезда. При этом все координаты последующих
звеньев оказываются отрицательными и увеличиваются по модулю при удалении от
носового звена. Однако геометрические параметры, входящие в формулу (14.7),
594
14. Криволинейное движение многоосных колесных шасси
определены таким образом, что они всегда положительны. Для согласования знаков
в этой формуле вводится знак (-) перед квадратными скобками.
Формула (14.7) позволяет построить следующую рекуррентную схему:
хсу
' ХС2 ~ ХС\ “[(А “% )С1 +£/С2с2];
ХСУ ~аС2 )с2 + яС,сз]>
ИЛИ
V,
<ХС2 -[(/i-«clki+«c,c2];
V, = ХС, -[(А -% )q + ЯС, х2 ] - [(12 ~аС2 )я2 + яС/з]-
Перегруппировав члены в этих формулах, получим
хс, = хсе
< хСг =[хС| +aC|cl]-[/lclJ-[ac,c2];
/с, =[*с, +яс,с|]-[/1с1 + 12с2 ]-[яс,сз]-
Это соотношение может быть представлено рекуррентной формулой
хс, =[ХС, +%^i]~Z[Ai^]-[«c/71 <14-8)
Т] = 1
Таким же путем получается рекуррентная формула и для уС/:
= [>’С, +«cl*i]-X[/n-'nHac.AT (14-9)
Т]=1
При выводе формулы (14.9) следует помнить, что в принятой схеме автопоезд
двигается слева направо и поворачивает также направо. При таком выборе располо-
жения и движения звеньев для координаты у справедливы все соображения относи-
тельно выбора знаков, которые были приведены для координаты х. Это значит, что
для получения формулы (14.9) достаточно заменить функцию cos(p) на sin(p).
Формулу (14.8) преобразуем следующим образом:
/-1
хс, = [%с, + яс, <1 ] - X “ [аС, ci ] - liCi + lSi =
л=' . (14.10)
= [*с, + аС, cl ] - L [Al ] + [(А - аС, )с/ ] •
Т]=1
Обозначим bi = lj - ас расстояние от кормового шарнира z-го звена (точки
О/+|) до его центра масс (точки Cz). Это позволяет придать формуле (14.9) более
компактный вид
14.2. Уравнения плоского криволинейного движения многозвенного шасси 595
ХС, =[ЛС, +ac|Ci] + [/’,<,]-X[/ncTi]- (14.11)
П=1
По аналогии имеем
[>с,+%ii]4V,l-X[(11'sn]- (14.12)
Т]=1
Примем следующее соглашение о суммировании:
п
\ ~ если т > и;
к=т
т
Ак = Апп если т = п,
Л=т
где п, к, т — число осей шасси.
Введем вспомогательные функции
<
Hi =
П=1
Это позволяет представить рекуррентные соотношения (14.11) и (14.12) в бо-
лее компактном виде
К, = *с, + ас,Ч +bici~si’
' 11 (14.13)
[Ус, = Ус, + ac^+bisi-Hi.
По координатам центра масс звена несложно определить координаты любой
другой точки его продольной оси. Для этого следует использовать уравнения (14.6),
исключив из них координаты центра масс звена при помощи формул (14.13).
xij = xct + ас„ С, + b^ - S,- + aijCi = xC) + ac< q - Si + (/>,+ ) q. ;
Уу = Ус, + «qsi +bisi-Hi+aySj = vc- +«C|.v,-H, + (/?, +ai} )q
(14.14)
Обозначим dtj = bt + atj расстояние между центром кормового шарнира звена i
и произвольной точкой j продольной оси этого звена.
Системы координат СКГ и СК| выбраны так, что оси Осус и О\ Vi совпадают.
Это означает, что всегда
хС1 = 0.
Назовем расстояние между началами координат Ос и О\ боковым смещением
переднего звена относительно заданной траектории А (или просто боковым смеще-
нием первого звена)
596
14. Криволинейное движение многоосных колесных шасси
уС} - Д.
В этих обозначениях система (14.14) принимает вид
xij = aCtcl +dijCi-Si;
У/j =^+aCisl+dijsi-Ht.
(14.15)
В работе [61] предлагается провести упрощение формул (14.15), поскольку в
большинстве случаев при движении автомобиля pi < 0,3 рад. При этом (погреш-
ность не более 5 %)
хц = ас, +dijci-Si-,
Уи =^ + ac^l+dusi-Hi.
(14.16)
Применение формул (14.16) при выводе уравнений движения приводит к
ошибке, проявляющейся в появлении лишних членов в уравнениях движения носо-
вого звена. Возникают физически необъяснимые эффекты (например, инерция но-
сового звена оказывается зависящей от его углового положения).
Причина появления ошибки состоит в том, что при i = 1 в упрощенных фор-
мулах нарушается равенство лС) = лС| Это, в свою очередь, вызывается тем, что в
первом (упрощенном) слагаемом тригонометрические функции от угла р| отсутст-
вуют, а во втором формально сохраняются.
Наиболее правильный путь дальнейших действий — использовать при выво-
дах исходные формулы, что позволяет упрощать окончательный результат.
Обозначим, как это принято, 2Bip колею p-и оси z-ro звена автопоезда и опре-
делим колесо при помощи третьего индекса г, принимая для колес левой стороны
г = 1 и для колес правой стороны г = 2.
Для левого борта
f — Xip ~ BipSi
V (14.17)
~ У ip + &ip
Для правого
рф2 + (14 18)
— У ip ~ В ip
Обобщая формулы (14.17) и (14.18), получим
р/рт =xiP +B,/,sgn(l>5-r)i/;
[У/рг = У1р~в,р sgn(l,5-r)c,.
Таким образом, для описания положения в пространстве характерных точек
многозвенного автопоезда требуется знание k + 1 параметров (углов 01...0* и боко-
вого смещения переднего звена Д).
14.2. Уравнения плоского криволинейного движения многозвенного шасси 597
Уравнения плоского криволинейного движения многозвенного автопоезда
(модель общего вида)
Уравнения плоского движения многозвенного автопоезда имеют следую-
щий вид:
=
dtdqs dqs \=
где Т — кинетическая энергия автопоезда; qs — обобщенная координата, описы-
вающая движение звена 5; qs — обобщенная скорость звена л; 5 — номер звена;
Qs — обобщенные активные силы; Rs — обобщенные реакции неголономных свя-
зей; qs — обобщенные координаты.
Кинетическую энергию автопоезда Т можно представить как сумму Т, (кине-
тической энергии движения относительно системы координат (хс, у()) и Те (кинети-
ческой энергии переносного движения)
Т = ТГ + Те.
Уравнение движения автопоезда относительно полюса С
dt dqs dqs ' ' ' д=| 2
где Ц — переносные моменты и силы инерции.
В качестве обобщенных координат, описывающих положение и движение ав-
топоезда, можно рассматривать углы pi...0А. и боковое смещение переднего звена
относительно траектории А.
Кинетическая энергия автопоезда в движении относительно системы коорди-
нат (хс, ус) в общем случае
т;=о,5ХХН(А7+-^)+М2]> <14-19)
/=1 j=0
где ти — масса у-й составляющей части звена i; IzlJ — момент инерции у-й состав-
ляющей части звена i относительно оси г,.
Для раскрытия выражения (14.19) можно использовать как формулы (14.13),
так и их упрощенный вариант (14.16).
Учитывая нежелательность побочных последствий от применения упрощен-
ных формул, будем (в отличие от [61]) использовать основной вариант (14.15):
Уц =b + acc$i+dijc$i-НГ
После подстановки и выполнения соответствующих преобразований получа-
ется следующее выражение для кинетической энергии в относительном движении:
598
14. Криволинейное движение многоосных колесных шасси
2ТГ = X IL mU + (дс,2 )lV Z Z miJ + ZlV Z mij ^diJ2)+
/=1 7=0 /=1 j=0 i=\ 7=0
+2«c, Pi £/•(!-, Д Z mudu+ q )APi S Z mu+2AZqP- Z mijdu+
/=l А Г’ k n i='J=0 ,=l k 7=0« (14-20)
+2(aC| .v, )p, Y S: Y {my} + 2^ s, Sfi, £ my dy - 2(aC| c, )p, £ /7, £ m-y -
z=l j=() z=l j=() z=l j=0
-2AX/7,^m0- +X^2Ewy + Z^Z hij-
/=i j=o /=1 j=() z=i 7=0 /=1 7=0 z=i j-^
Обозначим M массу в целом автопоезда:
M=t±my,
/=1 7=0
Mf — массу z-ro звена:
м, =Y,mir
J=u
Mlk — массу части звеньев автопоезда, начиная от звена с номером i до звена с но-
мером к (без пропуска каких-либо звеньев):
к п к
Mik ZZWn;=ZMn>
п=/ 7=0 п=/
/,, — момент инерции элементов звена с номером i:
Далее рассмотрим подробнее сумму
Z [ mij dij ] = Z Lmu + aij)] = Z [mabi ] + Z lmuau ] =
7=0 7=0 7=0 7=0
= bi Z [mu ] + Z lmuaU ] = Mibi + Z lmUaU ]•
7=0 7=0 7=0
Параметр tzz/ определяет положение массы m,y относительно центра масс звена z
(предполагается, что все массы звена расположены вдоль его продольной оси). Это
означает, что
ZK"//]=°
7=0
14.2. Уравнения плоского криволинейного движения многозвенного шасси 599
и, следовательно,
7=0
Тогда
Ё m4du = Ё тч № + ач )2 = Ё тч (h:) + ^ "»,/ ) + Ё та (“?j) =
7=0 7=0 /=0 /=0 /=о
= Ё ти+ 2bi Ё та (“ч ) + Ё тиао = Mibi + Ё тча<!
7=0 7=о /=о 7=о
Обозначим
Л-/ = Z muaii +Z = Z m4aii+1
J=0 j=0 j=0
Полученные результаты позволяют выполнить дальнейшее упрощение выра-
жения (14.20)
2ТГ = + (М«с,2)р12 +2(Л/аС|С))Лр1 +2аС|р1Ём,^^1_,)₽, +2ДЁ^Л,<7Р/ +
/=| /=|
к к к к
+ZWZ₽,2 +2(«С|.?1)р|£л/Д -2{acc^±MiHi -
/=1 /=1 /=1 /=1
-2Ё М ДCiH^ - 2ЛЁ + Ё M,S2+ Ё М; Н2 + Ё Л-Д2
/=1 /=1 /=1 i=\ i=\
(14.21)
На следующем шаге преобразований вычислим частные производные, вхо-
дящие в формулу (14.19):
Hi
(14.22)
(14.23)
После этого выполним подстановку (14.22) и (14.23) в (14.21).
Рассмотрим следующую структуру:
600
14. Криволинейное движение многоосных колесных шасси
±в.
i=T |_n=r
7+1 А
Хвп +
кЛ=7' /
= А/(Ву-) + At+i(Bt + Вт+[) + Ат+2(Вт + Вт+} +Вг+2)+ +Ап(Вт +Вт+1 + +Вп) =
= АТ +А‘
<Г|=7'
+ Ап В^
= Вт^А,+Вт+] X Л>+Вт+2 Z A-AZA = S •
i=T i=T+\ i=T+2 i=n n=rL
/=Т|
(14.24)
Из (14.22) следует, что
В частности
ZA ±в,
i=T Ln^
= Z .
n=rL
z=T]
f А, ±В.
/=1 Lti=1
к к
= Е 8,Za
П=1 _
/=Т|
И
к
к
к
= £ (^n)₽nZw/ =Z(Mn7ncn)₽n=Z(w/7,<,)₽,-.
4=1 L
/=Г|
Т| = 1
Tогда формула (14.21) принимает вид
2Т,. =МА2 +(Мас.2)р12 +2(Л/«С1с1)Д|31 +2аС|р1Хм^,<(1_,.)р,. +2д£(Л/Д.-М^)с& -
/=1 /=1
к к к к
-2(aCi )^±(Miklic0_i^i +Х(",^)Р,2 -2Ё/лРп£(Л7,Ас(11_;))р,. +
z=4
А-
, V / R2
П=1
]Е^Л4Рп
/=1 |_П=1
I2 к г'
+YMi 2?псА
/=1 [_П=1
-12
(14.25)
Начнем в (14.25) суммирование co второго звена (i = 2 и т| = 2) и приведем
подобные члены, имея в виду, что Мхк = М,н С(1_|) = 1. Кроме того, можно показать, что
к к к
= )₽i2 +/i₽iZ(^,Ac(I_,))P(,+
4=1 /=4 i=2
к к
+ ^4 22 (^/AC(4-z) )P/
4=2 /=л
а также, что
14.2. Уравнения плоского криволинейного движения многозвенного шасси 601
[М«С|2+^i^i2 2Mxbxlx ] - M2kb2 М1Х2
и
(Mxbx-Mxklx)cx + (Maccx) = (Mxbx-Mlx + МаС] )с, = -M2kbxcx
Теперь выражение для кинетической энергии относительного движения пре-
образуется к виду
2ТГ = МЬ2 + [M2kb2 -Ml2®2 -2[М2^1С1]Лр, +2аС|р1^Л7Д.с(|_,.)р,. +
i=2
к к к
+2^Mfy -М^с& -2ас^±{М1к1,с^ + ±{Mib2®2 -
/=2 /=2 i=2
i=\
,П=1
Можно показать, что
Еч-
/=|
После подстановок, выделения инерционного члена с номером / = 1 и соот-
ветствующей перегруппировки членов в формуле для кинетической энергии отно-
сительного движения не останется составляющих, содержащих в неявном виде па-
раметры движения первого звена.
Для упрощения выкладок удобно выполнить промежуточные преобразования
/=1 |_Г| = 1 J / = 1 |_Г| = 1
к к ( i
= (Л//]2)р,2 +2(/lpl)£(M,.J,.C(1_0)p,. +^м,.
i=2 i=2 Ц=2
к \ ' -I
/=2 \r|=2 7
и ввести следующие обозначения:
^2кЬ\с\ - Q’
M2kb2+I:i=F0-,
М^-М^=МВ1к
В конечном счете получается следующее выражение для кинетической энер-
гии автопоезда в относительном движении:
602
14. Криволинейное движение многоосных колесных шасси
2Г,.=|ЛМ2-2С()Др|+Л)р|2]-
+2Д£л^сД -2X/nPnt(WAc(n-o)P- +
i-2 i=2 Г|=2 /=т|
(14.26)
k Г i \2 k ( j \2 k
+±Mi +±М. И'Л +EWZ+/a)P,2
/=2 <Л=2 J '=2 \n=2 J i=2
Следуя отдельным рекомендациям [61], выделим в (14.26) три составляющие
кинетической энергии:
а) зависящую только от параметров движения первого (носового) звена авто-
поезда
2^(4 Р.) = 27J, = Л/Д2 -2С0Др, + Л)Р12'
б) зависящую как от параметров движения первого (носового) звена автопо-
езда, так и от параметров движения прицепных звеньев
27;)||р(д, РМР,.})!,^
= 2Т0,пр=2
At^^/P-^Pii^^d-oP/
. /=2 /=2
в) зависящую только от параметров движения прицепных звеньев
27]1р({р,})|,=2д = 2Тпр = £W2 +Л,)₽,2 -2X/nPnZ(W/Mn-oA +
/=2 Т|=2 /=т|
к ( i . у к ( ; . у
+У, У, ^лг|Рч +У У ^1спРт1
/=2 ЧП=2 7 i=2 \т]=2 7
При таком подходе имеем
Тг =7;|(Д,Р1) + 27'О пр(Д, Р„ {р,.})|/=2,* +7’пр({р,.})|,.=2Д. =7'о+7'о,„р+7;1р.
Сравнивая полученные результаты с соответствующими формулами из [611,
можно обнаружить в последних дополнительные множители вида С| = cos Pi, появ-
ление которых связанно с использованием при выводах упрощенного варианта свя-
зи между обобщенными координатами и геометрическими координатами звеньев.
Кроме того, в формулах из [61] явно ошибочно присутствует член 6/цШц, для его
устранения следует изменить нижний предел суммирования с j = 1 нау = 0.
На следующем шаге выводов сформируем общие выражения для производ-
ных от кинетической энергии относительного движения по обобщенным скоростям
и обобщенным координатам. При этом постулируется отсутствие взаимосвязи меж-
ду обобщенными координатами и их производными.
Сначала выполним эту операцию применительно к производной по обобщен-
ным скоростям (промежуточные преобразования опускаются)
-у = М\- МгкЬхс& +^мв*<й !₽/•
14.2. Уравнения плоского криволинейного движения многозвенного шасси 603
В частности для однозвенного транспортного средства (z = 1) имеем
^ = МД-М2Лс,р,+^[МВ,1С,.]р,.=МД = М,Д.
Далее найдем производную от кинетической энергии относительного движе-
ния по обобщенной скорости р,
|^ = -^+о.5^-А
dpi dp] dp] dpj
dpi n=2 /=n
к
/=2
к
)R.+0,5-4- УМ: Уипрп
Эр,
/=2
<т]=2
; э
к
э
к
+л-г Хмв*с& +0’5ЧГ Рп£пР,
Эр| L/=2
эр,
i=2
<П=2
’л
(14.27)
э Г
+0’5чг Zw'+<-/)P/2
э
Эр,
L/=2 jj
формулы (14.27), содержащиеся в фигурных скобках, не зависят
Все члены
от рь поэтому
дТг
эр, Эр| ’ эр, Эр,
= -Ар, -С0Д^ + 0,5р,2 + FOP, 4-
эр, эр, эр, эр,
= Ар, ^--CoA + O,5p,2^-+Fop,।
Р| эр, ° Р| эр, 0Р| 1 эр, L1
Учтем, что:
Со зависит от pj:
Сф] Сф! opj /=2
= - Ар, - Со А Ж + 0,5р,2 + F0P, Ж - Ь} Л- р, У МВк с,
Р| эр, ° эр, Р1 эр, ° 1 эр, ’эр,Ь (
Р^М
i=2
к
i=2
Fo не зависит от р^
CV=M2kb\c\ =M2kb\ cosp,;
Л/2^12+Л1=Л),
а также, что постулируется взаимная независимость обобщенной координаты и со-
ответствующей обобщенной скорости и, следовательно, что
Э(Р| -р, ) = эр, _ Эр, = 0
эр, эр,
эр,
и
д
к
Чб" р,ХМВ,И(1-/)₽/ =YMBik^\
^Pi L
i=2
604
14. Криволинейное движение многоосных колесных шасси
После выполнения всех указанных преобразований выражение (14.27) пре-
образуется к значительно более простому виду
этг
эр,
-С()Д + F0P, -Х^9|-/)Р/ •
.i=2
В частности, для однозвенного автомобиля имеем
дТг
эр,
Наконец, для 5 > 1 имеем
к
дтг
эр.,
э
-^|₽1 Д + А т—^Wrtc,p, -
LdP.s i=2
’ к Г i А
д
ЭР. L/=2
к к а
£/п₽п£(л/Ас(п-/))₽/ +О’5З^Г Iм' 22zn^nPi
Эр. |_П=2
эр.,
(п-0
'=Л
к z •
д к '
+ 0,5~ У Л/J У/пспрп
’ z| Z—/ Л ЛГЛ
/=2 <П=2
э
эр,
Л
'л
i=2
Г к
+0,5— Е(мА2 + л,)р,2
л Ь=2
к
ЧЛ=2
э
эр.,.
Д‘_
' эр,.
_ 3iT" Х(^'Э,с(Л-,))Р,- - 22(^Рп)22(л^|Э,с(л_,))—г- +
^Рл
+ X^nPn
C'P.s
= -э,Р| +А YMBikci
.i=2 Эр.
apjx .1
1_/=2
к к
(14.28)
эр, П
эр,
+ У Л/ У /п^прп УДп~
2—/ 1 Л ЛГЛ Л Л
|_т]=2
" к
'=Л
эр.
+ К(М,.^+Л,.)р Д .
L/=2 эр5 _
Используя в формуле (14.27) символ Кронекера
Д = 8,ч,
ЭР,
<П=2 Дл=2
-Э|Р|
.i=2
получаем
дТг
Эр,
- X (Zn5n v )Е )Р/
_П=2
'=Л
л
+ YMi ХОД
/=2
<П=2 Дт]=2
.i=2
1=2 \Л=2 Дл=2
+ А YMBikc^s -
.i=2
к к
|_Л=2
+[£л/
i=2
'=П
(14.29)
/ У^ЛСлРл I У ^лсл\'
\Л=2 Дл=2
14.2. Уравнения плоского криволинейного движения многозвенного шасси 605
Учтем, что дельта-функция 3/Л = 1 только при i = s. Это означает, что
Кроме того, преобразуем суммы в других членах формулы (14.29), вклю-
чающих дельта-функцию 5/s
дТ к
-r+ = F$s-(MBskb^_s^ + (МВхксх)А-1х^М^с(х^, -
^Р.У /=Л
Рассмотрим подробнее формулу (14.31), учитывая следующее:
дельта-функция отлична от нуля только при совпадении индексов;
интервал i е [2, к] обязательно содержит значение любого 5;
интервал т| е [2, z] не обязательно содержит значение любого 5.
Зафиксируем произвольное значение 5 и рассмотрим следующую структуру:
B.si = 'е[2Д].
П=2
При этом возможны варианты (случаи):
а) значение верхнего предела i меньше заданного номера уравнения 5
i<s T| * s 55Л=0 -> Яч =0; (14.32)
б) значения верхнего предела i и номера уравнения 5 совпадают
i = s t\ = s 5ЛП]=5„. =1 -> Bsi=Bss=As, (14.33)
в) значение верхнего предела i больше заданного номера уравнения 5
i>s Т] = s S.s11 = = 1 -> Bxi = Bxx = Ax (14.34)
Формулы (14.32)...(14.34) можно интерпретировать с помощью единичной
функции
таким образом,
Bsi = L5nA =
П=2
606
14. Криволинейное движение многоосных колесных шасси
В этих обозначениях
= /7Д +(МВд,.Сд)Л-/д.Х(^Л,с(д_,))р, -
dPs
- X(ZnPn)X(^,^(
_П=2
'(П-0
/=Т]
к
)3,'5 +'1ХЛУ<
/=2
X
\П=2
XZn5nPn
\П=2
(14.35)
+ |XM< £('-w\
L=2
Рассмотрим подробнее результат преобразований, представленный формулой
(14.35). Наличие единичной функции в качестве сомножителя внутри внешнего
оператора суммирования означает, что все его члены с номерами i < 5 равны нулю.
В свою очередь, это значит, что суммирование можно начинать не с i = 1, а с i = л
(так как всегда 5 < к):
дТ
= Fsps -(Л7ВД.^|С(|_Л.))Р1 +(МВ.1.,Сд.)Л-/л£(МД.с(5_,.))р,. -
к
к
_П=2
(П-0
/=Г|
+ -|ХЛА ZvCv
X ZncnPn
кП=2
к
к
XV'iX
\П=2
(14.36)
- Х(/пРп)Х(мАс(п-о)8'\ +']ХЛ/< l* XZnC(
_П=2 /=п J
Рассмотрим следующую структуру:
к
ха
<=' Ln=2
<П=2
'(л-П)Рп
= Ха Х^Х^п
z=.s |_П=2
Ха Xвп + Xвп Xа •
/=5 _Л“2
Т|=у
=Ха Хвп +Ха Хбп
/=5 Ln-2
к
|_n=v
к
Г| = 5 [_/=П J
Применяем (14.37) к последнему члену формулы (14.35):
к
E^nc(s-n)l
П=л
Е ] ' Е ^ПС(л-П)Рп
I Ln=2
к
= /.sXW- XV(
i=s |_П=2
= <XW/ Х^(.<-П)Рп +ZvXWnHZnC(
/=.s Ln=2
(Л-Г|)РГ|
к
r|=s
(14.37)
,pn) XM< =
_'=n
(14.38)
14.2. Уравнения плоского криволинейного движения многозвенного шасси 607
При фиксированном л первый член в (14.38) может быть преобразован:
(»-n)Pn
|_П=2
.s-1 . .s-1
^r|6‘(s-n)Pr| ~ skis 2L^lC(s-n)Pn
r|=2 J Ln=2
Так как внутренняя сумма становится общим множителем для всех членов М,
внешнего оператора суммирования, формулу (14.38) приведем к виду
к
к 1
is 22 I i 22 ^nC(-?-n)Pn
/=.у [ _Г|=2
- ip,+/. iiM,i₽, •
/=2 /=л
(14.39)
Подставляем (14.39) в (14.36)
= ЛА -(^^|С(1-Л))Р, +(МВЛ,Сл)Д-/Л.^МВ,>с(д_,)р1. -
_Г|=2 /=г| _ /=2
Рассмотрим структуру
£ АД =S-
'=П
При этом возможны следующие случаи:
а) Г| < 5 5G [i,k] B = AS;
б) Г| = 5 В = As ,
в) Г| < 5 5 ё |z, к] —> В = 0.
Это означает, что
в = X АД =£(' - n) А (14.40)
/=Г|
Тогда
^- = (FS-Msbsls^s +(MBskcs)A-
^P.s
к s <I4'4I>
/=5+1 /=2
Для единообразия подхода выделим и объединим в формуле (11.41) все чле-
ны с угловой скоростью звена 5
= -2М^1,+М, +ЛД)РЛ+(MBslSs)b-
/=.s + l / = 2
608
14. Криволинейное движение многоосных колесных шасси
Вводя уточненное обозначение
= (Msbs2 -2Msb^+Mskl2 + Izs),
окончательно получаем (s > 1)
дТ s~ 1
-^ = F().vP.t-(MB.s^1c(l_v))P1 +(МВ5кс^-МВхк^с(^-1х X MBikc(s_^.
^Ps i=2 i=s+\
Далее нужно вычислить производные по времени от производных кинетиче-
ской энергии автопоезда в относительном движении по обобщенным скоростям.
В соответствии с принятым подходом получаем три группы формул (для
производной по скорости смещения носового звена dAldt, для производной по угло-
вой скорости носового звена d$Jdt, для производных по угловым скоростям при-
цепных звеньев dfyjdt).
Опуская промежуточные преобразования, запишем сразу нужные результаты.
Для производной по скорости смещения первого звена
d дт к к
--f=ma-(m2^,C1)P, +(Л12^151)р,2-Хтн,)₽,2
ЭД Й
Для производной по обобщенной угловой скорости первого звена О = 1)
d дТ
--^ = г()р,-(М2кЬ^ + (М2к^М +fe1X(MZV(1_,.))p,p,. -
at dp, /=2
- bx £ (MBik )p,. - bx jjMBlk )P,2
i=2 i=2
Для производных по обобщенным скоростям второго и последующих звеньев
I ~\'Т'
--^= Г()ЛРЛ +(Л/В^сл)Д-(Л/Вл^1с(1_5))р1 +(Л/В.!^1,(|_Л))Р,2 -
dps
- (MB^s, )Др, - (MBskbiSe_s)^s - MBsk X[(Ц,_.у))Р, ] -
i=2
к 5—1 к
-к Z l(^C«-v))P,l + ^X[(^(-S))P-2] + /v X l(^,^(,-.v))P,2]-
/=.$+1 i=2 /=л+1
i=2 i=s+\
Выведем формулы для производных от кинетической энергии по обобщен-
ным координатам.
Дифференцируя выражения для кинетической энергии относительного дви-
жения звеньев автопоезда, получаем систему следующих формул:
14.2. Уравнения плоского криволинейного движения многозвенного шасси 609
2~U Д 2 -2С0Др, + Л.Р,2 ] - 2Ь\р, XMBik+ 2д£МВ,кс& -
I i=2 i=2
к к к f i
-2 Z A Z )₽,•+Z Mi IZ Wn
П=2
\2 k ( i
+ YMi Z^A
> '=2
2^
эр,
• V
____ А^Д
\П=2 7
i=2 <n=2
+ ^(М^2+Л,.)рЛ = 0;
i=2 J
AP' ” 2Z?'₽i Z^a Др, =
dpi dpj /=2 dpi
= 2(M2kb^ )Др, + 2Z?,p, X (MBik s0_i} )p;;
i=2
-2(MB^,_5))p,p.t -2(^5,)ДрЛ + 2^/nPnZl^^-As IP,- -
П=2 /=n
А к к Г ( i У i
-2ZAZ[MAi(n-)s-.v]P/+2Zw/ ZWn JAM
П=2 z=r|
к
i=2
__ _________
An=2 An=2
НПФ
-2ЕХ- ЕдД ЕДАД
Ап=2
/=2 |_<П=2
Рассмотрим (при фиксированном 5) следующую структуру
В = £аЗ„
/=Т|
При этом возможны варианты:
к
А) 5<Г| Vz i^s 8/s=0 ЕА8/ч=0’
/=Т|
Б) 5 > Г| существует 5 = i е [Г|Д ] существует 8/л = 8SS = 1 —>
ZaAa=a5«=a
z=T]
Этот результат можно записать при помощи единичной функции
к
B = YAi^=E(s-^As (|4-42)
/=Т]
Тогда
к к к
2Е ZT|PnE^zZ?/5’(r|-/)P/^/.s ) “ 2Е AZn5(n-')P Д •
П=2 /=п П=л
20 - 2918
610
14. Криволинейное движение многоосных колесных шасси
Следовательно,
k к к к
Г|=2 /=т| т]=2 /=т]
к к
= 2± Msbsl^_^ -2± Msbsl^_s)^ = 0;
П=5 П=5
2^
ЭР,
^(МВ^.-^РД. -2(МВЛ^)ДрЛ. +2Хм,.
i=2
i=2
( i V i Л
EvA Z?ncnsnA
\П=2 Лп=2 7
( i у ' A
EVA E^AA
ЧП=2 Дт|=2 7
Учитывая полученные ранее структурные преобразования (формулы (14.37),
(14.40) и (14.42), получаем
А"! к [( i V i \
2£ч- ЕаА SVAA ~2YM. EvA EVAA
Ап=2
i=2 L<H=2
к
= 2ЕMj <} (E(i- 5)/,p, lns{
1 = 2
<П=2
'(п-А
nb’n ___
Лп=2
|ЛП=2
= 2£>,- /д[ X V(
__ !nS(n-'A
\П=2 )_
И
к
Соответствен но
dTr
Эр,
к Г ( ' А
-2(MBvY|.v(1-,))PiP,-2(МВ^М+2^М1 /,Р, Е/п^п-а)Рп
1=ч L \Л=2 7
Далее (промежуточные преобразования по-прежнему опускаются)
С учетом изменения индексов в операторах суммирования
2-^ = -2(Лад5(|_.?))РА -2(Л/Вл^5)Арл. +
+ 2М Y,P, I Х<-.\/-,)Р/ | + 2p,X(MM///vi(/-.s)
)Р,-
В соответствии с полученными результатами уравнения движения много-
звенного автопоезда будут иметь следующий общий вид:
а) для описания движения первого звена относительно заданной траектории
(после промежуточных преобразований и приведения подобных членов)
14.2. Уравнения плоского криволинейного движения многозвенного шасси 61 1
Mb-(M2kb^ +(Л/2^1.У,)Р|2 +Е(Л/В,*с,.)Р,- -XmvV,)P,2 = L& + (?д + /?д;
/=2 /=2
<
Л)Р|-b^MB,ks(X_^ +2P| +ЯР1;
i=2 i=2
(14.43)
б) для описания движения второго и последующих звеньев относительно за-
данной траектории (после промежуточных преобразований, структурирования и
приведения подобных членов)
F0.A + (Л/Вд1Сд)Д-(МВд,В|С(|_д.))р| + (МВд.^(|_д))р|2 -
/=2 /=5+1
+МВЛ,2[(/,.у(,_Л))р,2] + /Л £ [(MB1Vv(,_.v))p,2|-
/=2 /=д+1
-мвхк2[(Ц,_5))P,P.V)!-/, Е »(«)№]-
/ = 2 /=5' + 1
(ЕН-лД ]-Р., Е (14.44)
= У, + (МВд.,Сд.)Д-(Л/Вд.^|С(|_д.))р| +(Л/Вд^1.у(1_д))р|2 -
-MBsk Е1(/,<(,-д))Р,- ] + MBsk Е1(Ц,-.,))Р,2\-MBsk Е[(/,-'(,_д))р,рд )|-
i=2 i=2 i=2
E [(M^C(,_.v))p,] + /.5 £ [(MB,vv(,._.v))p,2|-
\/ = 2 / /=5 + 1 /=5+1
x [(wb,h(,-.s))P,Ps]- E =^, +eP> +*Pl
/=5+1 /=5+1
В правые части уравнений (14.43) и (14.44) входят обобщенные активные
(бд> Cpj, 6ps) и реактивные (7?д, R^) силы, действующие на виртуальном пере-
мещении, отнесенном к соответствующей обобщенной координате, а также соот-
ветствующие переносные силы инерции (LA, Lpp Lpy).
Главный вектор переносных сил инерции, соответствующий обобщенной ко-
ординате А, определяется следующим образом:
r Mv2 z . ч Mv2 (. А
=---—(Рс+Д) =---------1 + —
Рс Рс V Рс)
С достаточной для практических исследований точностью можно принять
20*
612
]4. Криволинейное движение многоосных колесных шасси
Mr2
Рс
Главный момент переносных сил инерции, соответствующий обобщенным
координатам ps, описывается соотношением
J =-1 d~ (dy’c
" dt2 [ dxc
(14.45)
Главный вектор сил инерции Кориолиса направлен по оси х и на виртуальном
перемещении 5А его работа равна нулю. Работа главного момента сил инерции Ко-
риолиса на виртуальном перемещении 5рл также равна нулю.
Обобщенные силы, соответствующие активным и реактивным силам, дейст-
вующим на каждое из звеньев автопоезда, определяются в следующем порядке:
1) находятся вариации работ активных и реактивных сил на соответствую-
щих им виртуальных перемещениях;
2) вариации работ активных и реактивных сил суммируются; полученная
сумма относится к вариации соответствующей обобщенной координаты.
Примем, что каждое звено многозвенного колесного автопоезда имеет j осей.
В свою очередь, каждое колесо:
повернуто на угол 0/г;
находится под действием активной движущей силы = (Pk - РДГ;
находится по действием реактивной боковой силы Рууг.
Обобщенная сила, действующая на Ге звено автопоезда и соответствующая
обобщенной координате А, описывается соотношением
п 2
«? + К),д EEs«nsinl0y> +sgn(«//)P1l+Pv„r cos[6,7r +sgn(a,7)p,]}.
7=1 r=l
Обобщенная сила, действующая на Ге звено автопоезда и соответствующая
обобщенной координате Р„ находится как
п 2
(2+Я)р, = la'J sgn(0vr) + sgn(av)av COS0yf ] +
;=1г=1 (14.46)
+pyljr laij cos 0O> - s8n (aij)aij sin 0O> 1}•
Обобщенные силы в правой части уравнения движения, соответствующего
обобщенной координате А, определяются суммированием обобщенных сил всех
звеньев автопоезда
(Qs+Rs + L^=Y(Qs+Rs)iS + L&
i=\
Обобщенные координаты ps независимы. Это означает, что обобщенные силы
в правых частях уравнений движения, соответствующих обобщенной координате рЛ,
14.2. Уравнения плоского криволинейного движения многозвенного шасси 613
могут быть получены при помощи формулы (14.45) и формулы (14.46) — в послед-
ней при / = 5:
(e.s+*s + MPs =(a+*jPs +^s
Частные случаи
Многоосное колесное шасси
Положение однозвенного колесного шасси в подвижной системе координат
определяется:
боковым смещением Д;
угловым отклонением [3 продольной оси от направления оси Охс, касательной
к заданной траектории.
Уравнения плоского движения шасси с произвольным числом ведущих и
управляемых осей можно получить из общих уравнений (14.41), описывающих
движение носового звена многозвенного автопоезда при k = 1,
МД = ^+ед+Яд;
Л0 ~ Лз +
Для однозвенного транспортного средства описание обобщенных сил упро-
стится, если уравнения движения составлять в проекциях на оси (х4/, ’J, повернутые
относительно осей (хс, у(.) так, чтобы ось ха совпадала с продольной осью шасси.
Учитывая, что
r Mv2 ( Д 'З Mv2
L^=-------1 + — --------
Pc \ Pc) Pc
и
получаем
( „ -Л Л п 2 п 2
м \ Д +--- =^^(Pt7>sin0y,.) + ^^(Pv#cose7.,.);
\ Pc J j=\ r=\ j=l г=\
' Р (₽ + v) = Х[((Рх72 COS0>2 - Pvj2 sin ej2) - (PxJi cos 0y| - PvJ\ sin 0yl)) dj ] +
7=1
n 2
+ £ £ ( Px jr sin 07'r + Pv Jr cos Qjr ) aJ
. 7=1 r=l
Для решения этих уравнений, очевидно, необходимо дополнительно знать
функции, связывающие между собой боковые и продольные силы, углы поворота
колес с параметрами движения.
614
14. Криволинейное движение многоосных колесных шасси
Шарнирно-сочлененное 2-звенное ТС
типа Косный тягач 4- 1-осный полуприцеп
Положение такой машины на плоскости в подвижной системе отсчета опре-
деляется боковым смещением А центра масс носового звена и угловым отклонением
Pi = Р продольной оси этого звена относительно оси хс, касательной к заданной тра-
ектории.
Угол 0 между звеньями изменяется принудительно, поэтому функция 0 = 0(7)
предполагается известной, и кроме того, р2 = 0 + р.
Для к = 2 получаем
М\ + (тхах -m2b}$ + a2m2($2 cosp2 -р22 sinP2) = ^д +2д
(/ +ш2/?|2)Р + (да|а1-m2Z?1)A + a2Z?lni2(P2cosp2-p22sinP2) = + QP| + 7?P)
Обобщенные силы определяются для к = 2 с учетом вектора и момента пере-
носных сил инерции
_ (т, + т2)(рс + Д)г2 (m1+m2)r2
^д - 2 ~ ;
Рс Рс
^3 ~- Л: 2 +т2 [(^2 ~а2 ) ]} V
В проекциях на собственные оси переднего звена имеем
..................................
(m| + m2)l Ан---l + (m1tz1 )р + (р + 0)(т2я2 -m2/2)cos0-
-(Р + 0)2 (т2а2 -m2/2)sin0 =
2
= Е(^Ь‘ S^n 9|r + Л-lr cos^lr + Л-2г s^n^2r c°s0+ Py2r cos02r cos О);
/•=1
< (mxax -m2b}) A + (/4 +т2/?12)(Р + \|/) + (/_2 +/п2/?22)ф-
-(P + tybxm2l2 cosO-(p + 0)2 bxm2l2 sinO =
2 2
= E E (cos - pyir sin 0,,-) {ax (2 - z) + [bx +12 cos 0 - d2 sgn(l,5 - r) sin 0](z -1)} -
/=1 r=l
-(Pyir sin 0/z. + Pyir cos 0/r){sgn(l,5 - r)(2 - z) -[d2 - bx sgn(l,5 - r)sin 0](z - 1)}
14.3. Устойчивость движения многоосного колесного шасси
Построим диаграмму поворачиваемости многоосного колесного шасси для
различных скоростей движения (рис. 14.5).
14.3. Устойчивость движения многоосного колесного шасси
615
Рис. 14.5. Диаграмма поворачиваемости многоосного колесного шасси для
различных скоростей движения
Точка D соответствует движению центра масс шасси со скоростью V\ по кри-
волинейной траектории с относительной кривизной OF Для обеспечения движения
с этой кривизной необходимо поворачивать управляемые колеса (отрезок DA). Точ-
ки А, В и С соответствуют движению центра масс со скоростями v4, и3 и v2 соответ-
ственно.
Точке А соответствует движение с такой же удельной боковой силой, что и в
точке D. Но для выполнения поворота с относительной кривизной ОН со скоростью
v4 > Vj вообще не требуется поворачивать управляемые колеса — машина будет
совершать поворот только за счет бокового увода шин и поворота колес из-за крена
несущей системы. Если снизить уровень боковой силы и сохранить скорость дви-
жения v - и4, то увода шин и поворота колес из-за крена несущей системы будет
недостаточно для удержания машины на траектории с относительной кривизной
КМ — возникает необходимость дополнительного поворота управляемых колес
(отрезок L1M). При этом скорости движения v2 и ?’3 занимают промежуточное поло-
жение между Vj и г4.
Повышая скорость движения, можно добиться такого положения, при кото-
ром прямая, изображающая зависимость удельной центробежной боковой силы от
относительной кривизны траектории, станет касательной к линии самоповорачи-
ваемости OG. Эта скорость называется критической скоростью прямолинейного
движения.
Предположим, что шасси движется прямолинейно со скоростью, превышаю-
щей критическую (рис. 14.6). Боковая сила и относительная кривизна траектории в
этом случае равны нулю, следовательно, прямолинейному движению соответствует
начало координат диаграммы поворачиваемости. Если теперь на шасси кратковре-
менно подействует небольшая боковая сила (точка /), то в контакте колес с дорогой
возникнут также боковые силы, которые, в свою очередь, вызовут увод шин. В со-
ответствии с характеристикой самоповорачиваемости (линия 0G) этому уровню
боковой силы соответствует разность углов увода крайних осей, равная отрезку /—2, а
616
14. Криволинейное движение многоосных колесных шасси
Рис. 14.6. Развитие процесса потери устойчивости прямолинейного движения
это означает, что центр масс шасси начинает двигаться по траектории с отно-
сительной кривизной 0—3 (радиус А/?).
Предположим, что боковое воздействие, вызвавшее этот поворот, прекрати-
лось. Тем не менее на центр масс машины, двигающейся со скоростью va по дуге с
радиусом А/?, будет действовать боковая центробежная сила, соответствующая от-
резку 3—4 на диаграмме поворачиваемости. Из данных на рис. 14.6 видно, что ве-
личина этой силы оказывается больше, чем величина боковой силы, удерживающей
машину на траектории и определяющейся боковым уводом шин. Равновесие вос-
станавливается путем увеличения боковых реакций, действующих в пятне контакта
шин с дорогой, что приводит к увеличению разности углов увода крайних осей до
уровня, соответствующего отрезку 5—6, что соответствует кривизне траектории 0—7
Таким образом, процесс становится саморазрастающимся. При возрастании боковой
силы до точки 9 и 13 боковая центробежная сила возрастет до отрезка 7—8 или 11—
12 для va и 7—6 и 11—10 для самоповорачиваемости (0G).
Значит, после воздействия небольшой боковой силы произвольного проис-
хождения, шасси начнет самопроизвольный и саморазвивающийся поворот без уча-
стия водителя с интенсивно уменьшающимся радиусом — вплоть до бокового зано-
са или бокового опрокидывания (отрезок 0—77, рис. 14.6). Иначе говоря, устойчи-
вое прямолинейное движение на скоростях, превышающих критическую,
невозможно.
Можно показать, что при малом боковом возмущении шасси, двигающегося
со скоростью меньше критической, происходит самопроизвольное восстановление
прямолинейного характера движения — оно является устойчивым.
Рассмотрим теперь криволинейное движение шасси со скоростью va, мень-
шей, чем критическая скорость прямолинейного движения (рис. 14.7).
Чтобы обеспечить криволинейное движение с постоянной скоростью va, не-
обходимо дополнительно поворачивать управляемые колеса. При этом, как видно
из рис. 14.7, угол поворота управляемых колес зависит от кривизны траектории и
имеет экстремум в точке С. В частности, для движения с относительной кривизной
О—7 вообще нет необходимости поворачивать управляемые колеса, т. е. не требует-
ся вмешательства водителя.
14.3. Устойчивость движения многоосного колесного шасси
617
Рис. 14.7. Изменение угла поворота управляемых колес, необходимого
для обеспечения поворота шасси с заданной кривизной
В точке С (рис. 14.8) на шасси действует удельная боковая сила 0—/, и она
совершает поворот с относительной кривизной 0—6.
Пусть теперь на шасси действует настолько малое боковое возмущение, что
результаты его воздействия находятся ниже порога чувствительности водителя. В
этом случае, в соответствии с диаграммой поворачиваемости, кривизна траектории
движения увеличится (отрезок 2—4), но водитель не сможет этого обнаружить и
будет удерживать управляемые колеса в исходном положении (отрезок 3—С, рав-
ный отрезку 4—5). Положение точки 5 показывает, что управляемые колеса шасси
повернуты чрезмерно и кривизна траектории самопроизвольно увеличивается (от-
резок 2—5). Процесс сопровождается увеличением боковой силы, действующей на
центр масс машины. Если это происходит достаточно быстро, то водитель не успе-
вает реагировать на происходящее, поворачивая управляемые колеса, и кривизна
траектории самопроизвольно нарастает вплоть до бокового заноса или опрокидыва-
Рис. 14.8. Развитие процесса потери устойчивости криволинейного движения шасси
618
14. Криволинейное движение многоосных колесных шасси
Рис. 14.9. Построение линии, разделяющей устойчивое и неустойчивое
движение на диаграмме поворачиваемости шасси
ния шасси. Дальнейшее приращение удельной боковой силы (отрезки 0—9; 0—13)
вызовет увеличение относительной кривизны (отрезки 9—10; 9—8; 13—14; 13—15)
до 0—7 или 0—16.
Таким образом, при заданной скорости движения справа от точки С распола-
гается зона неустойчивого движения.
Различным скоростям движения шасси соответствует различное положение
экстремума зависимости углов поворота управляемых колес от относительной кри-
визны траектории. Диаграмму поворачиваемости дополним кривой, описывающей
положение экстремальной точки С (кривая ОС) в зависимости от скорости криволи-
нейного движения (линия 0—1—2—3 на рис. 14.9). Зависимость выводится по-
строением касательных АВ, CD, ЕВ к кривой ОС и пересечением горизонтальных
прямых до прямой соответствующей скорости.
На диаграмму поворачиваемости (рис. 14.10) нанесем границы существова-
ния реальных движений:
Рис. 14.10. Диаграмма устойчивости движения многоосного колесного шасси
14.3. Устойчивость движения многоосного колесного шасси
619
прямую ON, соответствующую максимальной скорости движения шасси (оп-
ределяется по его технической характеристике);
прямую ОА, соответствующую максимальной кривизне поворота шасси
(минимальному радиусу поворота, определяемому по технической характеристике);
прямую NB, соответствующую предельной по сцеплению удельной боковой
силе (pv.
В результате получается график, который принято называть диаграммой
устойчивости движения многоосного колесного шасси.
Трапеция ONBM является областью существования реального движения шасси в
заданных дорожно-грунтовых условиях. Эту область можно разделить на три зоны:
зона устойчивого движения I (ODKM — ограничена лучом максимальной
скорости движения, границей устойчивого движения и линией максимально
возможной кривизны поворота);
зона неустойчивого установившегося поворота II (DEFBK — ограничена лу-
чом максимальной скорости движения, характеристикой самоповорачиваемости,
линией ограничения по сцеплению, линией максимально возможной кривизны по-
ворота, границей устойчивого движения);
зона невозможного установившегося поворота III (ENF, выше границы
зоны II).
Проектирование шасси должно обеспечивать перекрытие области реальных
движений областью устойчивого движения. Если это оказывается невозможным по
каким-либо соображениям, то следует вводить административные ограничения ско-
рости движения, сужая зону эксплуатационных режимов движения (подобный слу-
чай описан в гл. 4 и 5 на примере шасси БАЗ-135ЛМ).
Критическая скорость прямолинейного движения легко определяется из вы-
ражения (14.4) и (14.5). Если считать, что шасси должно совершать прямолинейное
движение при нулевых углах поворота управляемых колес, то
Р п 2
^ = -4(S.-61)+(e.p.-e,pl)].
где Pya — боковая сила, действующая на шасси.
В большинстве случаев многоосные колесные шасси с независимой под-
веской обладают нейтральной креновой поворачиваемостью. В этом случае, оче-
видно
v = SL
кр.пр •>
I ла
где цКр.Пр — критическая скорость прямолинейного движения шасси.
Критерием устойчивости криволинейного движения шасси (рис. 14.11), оче-
видно, является выражение:
<___________________________
gL "a[(5n-5,)+(eKp„-0Kpl)]
Ч'
620
14. Криволинейное движение многоосных колесных шасси
Рис. 14.11. Схема построе-
ния критерия устойчиво-
сти криволинейного дви-
жения многоосного шасси
Смысл данных на рис. 14.11 объясняется преды-
дущим рисунком.
Для оценки зависимости поворачиваемости мно-
гоосного колесного шасси от различных факторов удоб-
но использовать так называемую велосипедную расчет-
ную схему (рис. 14.12), подобную рассмотренной схеме
в § 8.4.
Предположим, для определенности, что для боко-
вых сил в контакте колес с опорной поверхностью спра-
ведлива гипотеза бокового увода, применяемая пока в
самой общей форме без каких-либо особых соображений
относительно структуры коэффициента сопротивления
боковому уводу. Будем также считать, что сопротивле-
ние качению колес пропорционально вертикальной на-
грузке на колеса. На схеме рис. 14.12 использованы уже
ранее упомянутые обозначения.
Правила выбора знаков очевидны из рис. 14.12. Положительным
направлением для всех углов считаем направление против хода часов.
Исключением является угол увода, для которого положительным считается на-
правление навстречу боковой силе, действующей на шину в пятне контакта (пятно
контакта как бы отжимается боковой силой). Полюс поворота в расчетной схеме на
рис. 14.12 расположен таким образом, чтобы направления всех сил и углов были
одинаковы. Это позволяет при выводе исключить ошибки, связанные с толкованием
знаков для параметров колес, расположенных по разные стороны от полюса пово-
рота
£[/?„ cos 0,. - sin 0,. - Pfrpi cos 0,. ] - Рв = 0;
Z = 1
Е[Л,sin 0, + Ryicos e, - Pfrpisin 0, ] - mJy = °;
'=' (14.47)
XIX, sin 0,+/?„•/,• cos0;-Py.p,- sin0, ]-jWc-/ =
К
В (14.47) применены следующие обозначения:
Ru — тангенциальные нагрузки в пятне контакта колес с опорной поверхно-
стью /-й оси (действующие на шину);
Ryi — боковые нагрузки в пятне контакта колес с опорной поверхностью /-й
оси (действующие на шину);
Мс — момент сопротивления повороту;
Рв — аэродинамическая сила сопротивления движению шасси;
Pfrpi — сила сопротивления движению колес z-й оси, действующая со сторо-
ны грунта на шину.
14.3. Устойчивость движения многоосного колесного шасси
621
Рис. 14.12. Упрощенная схема поворота многоосного колесного шасси
Основное уравнение гипотезы бокового увода в самой общей форме записы-
вается обычно в предположении, что боковая сила является реакцией опорной по-
верхности. Поскольку, в систему (14.47) входят силы, действующие на шину, и вве-
дено специфическое правило знаков для угла увода, это уравнение правильнее за-
писать так:
K.V, =-М<>
где КУ1 — коэффициент сопротивления боковому уводу шин z-й оси.
Используя гипотезу бокового увода и типовое представление о коэффициенте
сопротивления движению, получаем
п
Е И» COS Qi + КУ& Sln ~ Р1 i pr cos ] = рв;
/=|
E|Xi sln0, - КУ& COS 0,- -Pfrpi sinO, ] = ;
'=' (14.48)
У,[Яд.,/,- sin 0,- — cosG, — Pf,p,l, sin0( J = Mc + I.-
/=1 dt
I к
14. Криволинейное движение многоосных колесных шасси
Предположим, что движение совершается с малыми углами поворота колес и
с небольшими углами увода. Это означает, что уравнения (14.48) допускают
линеаризацию
/=1
П^А-М--АГРА] = Ч;
(14.49)
Z[ АЛА - - %ЛА ] = мс + Л
В системе (14.49) удобно выделить члены, содержащие углы увода передних
и задних колес
Ai5A +КМ, = PB-t,[(Rxi~frpRzi)']-nt[Kyi8iGi'\i
/=1 i=2
ку& + купьп =-mjy+Z[(A,- -ДА A]-Z[AA}
/=1 /=2
КУЫ + ^„8,/, =-л/с -/г ^+Ё[(А/ -frpRM]-XlKyM^
at i=\ i=2
Ц^ = А-5,).
A
Второе и третье уравнения этой системы позволяют определить углы увода
крайних осей шасси и, следовательно, разность этих углов
5> = -мс -Л^+П(А- - лРА)Л -ш]-£[ааа -Ш;
Ky\L I dt /=1 i=2 J
5„ = AAj + ^ZMAi -о]
8„ -§1 =Y]mjy
1
dt К
+7 Х(^-ЛрЛг,.А
L [/=1
14.3. Устойчивость движения многоосного колесного шасси
623
Уравнение (14.51) показывает, что шинная поворачиваемость зависит от тя-
говых сил, скорости движения, момента сопротивления повороту и увода всех
внутренних осей шасси.
Углы увода внутренних осей исключаются при помощи последней группы
уравнений системы (14.46):
к
(14.52)
Из (14.51) получаем
г 1 [, . d(S).
8i =----------------V«"V.v - м< - Л- +
КуЛЬ^КМ~1п)
i=2
(14.53)
Для удобства дальнейших преобразований формулу (14.53) представим в
следующем виде:
" J' - ill। J.,
j=\ j=\ 7=1
xKyj(ij-IM-ij) X Kyj(h-0/)
—---------+—— ----------.
RYKVJ «J-1») YKyj{lj-l„)
j=\ 7=1
Пользуясь формулой (14.52), исключим из выражения для шинной поворачи-
ваемости углы увода промежуточных осей
5„ - 8, = ь+с+1 £ A (Rxi - frM )0,. + 7 X АА, _
L i=\ L i=2 К
-0/)+tXa
L i=2 L i=2
где
624
14. Криволинейное движение многоосных колесных шасси
Ь(МС) =
+J_ X.
[куп Kyi)L’
сиу^г) = -
Kyl J L
Iz d(dz
~L~dT
(14.57)
(14.58)
Далее, при помощи (14.54) исключаем из (14.55) угол увода первой оси. При
этом, следуя [61], группируем члены таким образом, чтобы выделить составляю-
щие, относящиеся только к внутренним осям. После подстановки и выполнения
промежуточных преобразований получаем
8„ - 8j = a + b + c + d + e + f + g + h,
(14.59)
(14.60)
а(Рх{, Рхп, , А,) = ЛЛ|01 +LAnP'”Q" ; (14.61)
(14.62)
e(p) = —
LR
YKyiAi
i=2
у (ij-iM-ij)
_____________
(14.63)
i=2 ij=]
р;
/(A = 4
i=2
(01-е,)-
j=2____________
1ку^-1п)
(14.64)
Za
z=2
Wi + Kyi^,-------
(14.65)
g(A->9) = -
14.3. Устойчивость движения многоосного колесного шасси
625
(14.66)
(14.67)
Все слагаемые d...h относятся только к внутренним осям шасси, причем у
2-осного автомобиля они обращаются в нули.
Для использования формул (14.56)—(14.67) необходимо знать момент сопро-
тивления повороту и распределение тангенциальных сил между колесами шасси.
Для принятой при построении модели момент сопротивления повороту будет иметь
три составляющие:
Мс\ — момент сопротивления повороту, возникающий при взаимодействии
эластичной шины с опорной поверхностью;
Л/С2 — момент противодействия повороту, возникающий из-за различия меж-
ду тангенциальными силами, действующими на колеса противоположных бортов;
Л/с3 — момент противодействия повороту со стороны колес неуправляемых
осей.
При повороте колес на месте первая составляющая может достигать значи-
тельных величин. В настоящее время известно [61], что при движении даже с очень
малыми скоростями эта составляющая момента сопротивления повороту значитель-
но уменьшается. Так, например, при повороте с минимальным радиусом момент
сопротивления повороту колес уменьшается в 16-20 раз по сравнению с поворотом
колес на месте. При движении с большими скоростями кривизна траектории обычно
невелика и эта составляющая уменьшается еще больше. В целом принято считать,
что первой составляющей в большинстве случаев можно пренебречь.
Момент противодействия повороту из-за различия между тангенциальными
силами, действующими на колеса забегающего и отстающего бортов, определяется
особенностями конструкции трансмиссии и системы управления распределением
потоков мощности по ведущим колесам шасси. В простейшем случае этот момент
определяется степенью блокировки межколесных и межосевых дифференциалов. В
целом этот момент может быть значительным и им нельзя пренебрегать без прове-
дения специального анализа, методика которого приводится в гл. 11, посвященной
трансмиссиям специальных колесных шасси.
Третья составляющая автоматически учитывается самой методикой состав-
ления модели движения шасси.
Предположим, что шасси совершает стационарный поворот (cd = const, =
= const) с очень малой скоростью (га ~ 0). В этом случае, очевидно, с ~ 0 и d ~ 0.
Оставшиеся ненулевые члены (я, Ъ, е, ..., /г) определяют разность углов увода край-
них осей, не зависящую от скорости движения. Она может быть истолкована как
статическая, или исходная, часть шинной поворачиваемости [61].
Если шасси двигается быстро, то скорее всего оно находится на твердой до-
роге и углы поворота управляемых колес, задаваемые водителем, невелики (ясно,
626
14. Криволинейное движение многоосных колесных шасси
что при прямолинейном движении всегда 0, = 0, однако возможно и криволинейное
движение за счет шинной поворачиваемости также при условии 0, = 0). Тогда а = 0,
/'= 0 и g = 0. Кроме того, при прямолинейном движении отсутствует момент проти-
водействия (сопротивления) повороту, поэтому b = 0 и h = 0.
При любом режиме движения многоосного колесного шасси, кроме прямо-
линейного (р = 0) е Ф 0, и только у 2-осного автомобиля возможен случай е = 0.
В целом можно считать, что суммарная шинная поворачиваемость состоит из
статической шинной поворачиваемости ДЗИСХ = (б/, - б|)исх (которая не зависит от
скорости движения) и динамической шинной поворачиваемости (другое часто ис-
пользуемое название — дополнительная поворачиваемость) ДЗИСХ = (3,7 - З^доп
р = [(б„ + 0|)+А8ИСх ]+[лздоп + (екр„ + екр|)] = Рисх + ряоп, (14.68)
где р = L/R — относительная кривизна траектории движения центра масс шасси.
Исходная шинная поворачивамость в общем случае определяется по формуле
(14.56) при фактически нулевой скорости движения (тогда поворот формально ока-
зывается стационарным и угловое ускорение отсутствует)
^CK(Q) = a + b + e+f + g+h.
Зная исходную шинную поворачиваемость, можно построить линию, характери-
зующую исходную суммарную поворачиваемость, то есть график функции относитель-
ной кривизны траектории движения от угла поворота управляемых колес в виде
Рисх(0) = (е„ +О1) + А8Исх(0)- (14.69)
На диаграмме поворачиваемости, построенной в координатах (р; р), точки,
характеризующие исходную поворачиваемость, лежат, очевидно, на оси (0—р), так
как г|(га) = 0 при v.d = 0.
При управляемых колесах, установленных в среднее положение, линия, ха-
рактеризующая шинную поворачиваемость, проходит через точку
Рисх (°) = Абисх(0) = b + e + h.
В подавляющем большинстве случаев колесам, установленным в среднее по-
ложение, соответствует прямолинейное движение с «ползучими» скоростями (ис-
ключениями являются движение шасси по косогору и так называемое крабовидное
движение шасси со всеми управляемыми колесами, повернутыми в одну сторону).
При прямолинейном движении р = 0, тогда момент противодействия повороту от-
сутствует и, следовательно,
Рисх(0) = Д8исх(0) = 0.
Таким образом, линия исходной шинной поворачиваемости проходит через
начало координат диаграммы поворачиваемости (рис. 14.13). Диаграмма строится в
прямоугольных координатах: верхняя ордината — боковая сила T|v, нижняя ордина-
та — относительная кривизна траектории L//?max; ось абсцисс составляют относи-
14.3. Устойчивость движения многоосного колесного шасси
627
(£/Л)исх
Рис. 14.13. Диаграмма поворачиваемости 4-осного шасси с недостаточной
исходной и избыточной дополнительной поворачиваемостью
тельная кривизна траектории (текущая) L/R и угол поворота переднего управляемого
колеса 0]. I и IV квадранты содержат зависимость скорости движения (гс) и углы
поворота переднего управляемого колеса 0]. II квадрант содержит зависимость угла
поворота переднего управляемого колеса и относительную кривизну поворота раз-
ности углов увода управляемых колес (3,, - 3|)исх. Порядок использования диаграм-
мы следующий. Например, при скорости движения (точка В) находится точка А
возможной кривизны траектории и затем через II и III квадранты в IV находится
необходимый угол поворота колес.
Пусть теперь шасси совершает поворот с «ползучей» скоростью, т. е. углы
поворота управляемых колес отличны от нуля. Из (14.69) следует, что
Рисх = (0„ + 01) + А5ИСХ (0) = (0„ + 0,) + [а(Рх1, Рхп, 0,, 0„) +
+ Ь(МС) + е(рисх) + /(0) + g(P, 0) + h(Mc)].
Таким образом,
где
1-Ер 1-Ер 1-Ef
, (14.70)
628
14. Криволинейное движение многоосных колесных шасси
У 2-осного шасси, очевидно, Ер = 0, так же как и член формулы (14.70), за-
ключенный в квадратные скобки. Если при этом пренебречь сопротивлением возду-
ха («ползучая» скорость), считая, что шасси движется по горизонтальной плоскости
без прицепа (V/: РА1 0) и в трансмиссии отсутствует межбортовая и межосевая
циркуляция мощности (Л/с ~ 0), то
Риех(0) = (9„+0|)-
Иначе говоря, с поворотом управляемых колес точка, обозначающая исход-
ную поворачиваемость, смещается по оси (0—р) на (0„ + 0j). В общем случае это
смещение необходимо специально определять (или выполнять построение, пока-
занное на рис. 14.13).
Итак, каждому значению углов поворота крайних управляемых колес
соответствует своя начальная точка для кривой шинной поворачиваемости на оси
(0—р) (или, что то же, на оси (0—LIR)).
При увеличении скорости движения появятся скоростные (дополнительные)
составляющие шинной поворачиваемости. Из (14.59) и (14.68) следует, что
p(i - Ер) = (0„+е,)+(екр„+екр1)+«(Рх|, рт, е,, е„)+ымс)+c(yv, <о)+
+ [J(Jv,(b) + /(0) + g(P, 0) + /г(Мс)].
откуда
= f (0„ +6,) + а(Рл|,Ри„0,,0п) + fe(Mc) 1 +
[(1-Ер) (1-Ер) (l-£?p)J
, [(бкР„ +9кр1) t С(Д.,(Ь) ! Г /(0) ! </(Д.,(О) ! g(P,0) t h(Mc)
1 (1-Ер) (1-Ер) [(1-Ер) (1-Ер) (1-Ер) (1-Ер)
(14.71)
Члены, сгруппированные внутри первой фигурной скобки, нельзя считать
исходной поворачиваемостью шасси, так как момент сопротивления (противодейст-
вия) повороту и тангенциальные силы в общем случае зависят от скорости движе-
ния. Чтобы сохранить общность изложения и не углубляться в исследование транс-
миссии многоосных шасси, можно использовать следующий прием. Всегда допус-
тимо следующее представление:
Л/с (va) = Мс (0) - [Мс (0) + Мс (уа)] = Л/с0 - [М с0 + Мс (va)];
Л, (ч,) = Рх, (0) - [Рм(0)+л, (va)] = Рм - (Рм + Pxi (va)].
Тогда
Д Рх{)& + Ап РхОпвп А, (Рх01 - Рх[ )0, + Ап (Рх{)п - Рхп )0„
L L
~ ао(^гО1> 9), 0„) яг[Ех01, Ех1(1>), Рхп(и\ 0Н 0П];
Ь =
'1,1 Мо
ч К уП К у\ J L
1 1
---------1-------
Куп К3'1 >
(Мс0-Мс)
L
= ^о(Л/со)-МЛ/сО^с(^/)];
14.3. Устойчивость движения многоосного колесного шасси
Рх0&+Ку^„----
Ездч,)
7=1
KyiAi
>1
= ^M^-hv\Mv{},Mc{va}\.
(А/с0-Мс)
L
Теперь формулу (14.71) можно представить как композицию исходной пово-
рачиваемости (шасси движется с «ползучей» скоростью по криволинейной траекто-
рии, задаваемой поворотом управляемых колес) и дополнительной, или скоростной,
поворачиваемости, обусловленной влиянием скоростных факторов на процессы в
составных частях опорно-ходового комплекса и трансмиссии машины:
P[Er(va), Мс(va), 0(v„), екр| (va), 0кр„ (va), со, jy ] = рисх [P(01 > Ev0„, . 0] +
+ Рдоп [Ло1 > P.Mn, РХ(У«), Мс0, Мс (уа), 0], 0„, 0,0кр| (уа), 0крп (уа), (Ь, ].
где
Рисх [ ^х01 > Рх()п ’ ^сО >
f (0„ +0,) + + М^со) +
1(1-Ер) (1-Ер) (1-Ер)
/(9) + go(fo,9) + /гр(Мс0)
(1-Ер) (1-Ер) (1-Ер)
Рдоп [^xOI, РМп > РхМ Мс0, MQ (va ), 0,, 0„, 0, 0кр| (va ), 0кр„ (va ), СО, Д. ] =
ау[РхО|Лоп,Л1(^,Лп(Ч,)ЛЛ,] ! МЛ4с(),Мс(Уа)] !
(1-Ер) (1-Ер)
^ДЁг0, Ex(va),0] ! hv[Mc0,Mc(va)]
(1-Ер) (1-Ер)
(®крл "*"9кр| ) с(7у>*®)
(1-Ер) (1-Ер)
(1-Ер)
(14.72)
630
14. Криволинейное движение многоосных колесных шасси
Вернемся теперь к формуле, определяющей понятие удельной боковой силы,
которая действует на центр масс шасси:
Л
"'=7'
Последние два члена в формуле (14.72) могут быть преобразованы таким об-
разом, чтобы выделить в явном виде удельную боковую силу
, . , mgL t К .
d(jy,(H) = dy nу. -dy со.,
где
с __и + и.
V1 [ку„ ку1)’
п-1
dy = --------
Ёзд -1п)
_ 7=1
Имеем теперь (сокращая запись)
~ Ер)Р = ^Рисх [^х01 ’ ^хОи > ^с(Ъ — L{av + bv +1&V + К)]} + ^(^кр п + ®кр ] ) +
+Z?(Cv2 ЧА + dyln^y-
Откуда
_ £(]-£р)Р Т.рисх[Рл01, Мс0, 6] L{av+bv+[gv+hv]}
' mg(cvi+dln') mg{cx+dln) mg(cx+dln)
\ , (14.73)
M ®кр n + ®кр I ) Л (c,v2 — dy )®z
mg{cyX+dyln) mg(cyX+dyln)'
В общем случае:
момент сопротивления повороту зависит от кривизны траектории и усилий в зоне
контакта шин с дорогой, следовательно, является функцией боковой силы;
крен несущей системы зависит от боковой силы и соответственно креновая
поворачиваемость также зависит от боковой силы;
коэффициенты сопротивления боковому уводу шин зависят, по меньшей ме-
ре, от вертикальных нагрузок на колеса, а следовательно, зависят от боко-
вой силы.
14.3. Устойчивость движения многоосного колесного шасси
631
Таким образом, формула (14.73) является нелинейным алгебраическим урав-
нением, записанным относительно r]v. Его решение определяет диаграмму полной
поворачиваемости колесного шасси и строится итерационными методами. В качест-
ве начального можно использовать линейное приближение при постоянных коэф-
фициентах сопротивления боковому уводу, «ползучей» скорости движения, пренеб-
режимо малом моменте сопротивления движению и свободном режиме качения
колес
|0| _(1-Ер)2р-(еп+е,)-у(ё)^
mg(cyl + dyln)(\-Ep)
(верхний индекс в квадратных скобках обозначает номер приближения: [0] — нуле-
вые, или начальные, приближения).
Во многих случаях подвеска многоосных шасси выполняется таким образом,
что креновая поворачиваемость мала или полностью отсутствует. Кроме того, при
установившемся повороте со = const. Тогда формула (14.73) упрощается:
L(l-£p)p £рисх[Рх0|, ^Он,Л/сО,ё] L[(a„+Z,„) + (g„+M
mg(cyi + dyln) mg(cyi + dyl„) mg(cyi + dyl„)
На рис. 14.13 и 14.14 (II квадрант) хорошо видно, что знак разности углов
увода крайних осей (5n - 8j) может быть различным в разных областях диаграммы
полной поворачиваемости. Иначе говоря, шасси, обладающее в одних условиях
свойством недостаточной поворачиваемости, при других условиях может приобре-
сти свойства избыточной поворачиваемости.
Для повышения поворачиваемости шасси необходимо:
стремиться к созданию боковыми силами в пятне контакта колес возможно
большего поворачивающего момента (задействовав максимальное количество ко-
лес, организовав приложение боковых сил на как можно большем плече, используя
для управления всю колесную базу);
снижать момент сопротивления повороту (приближая оси с неуправляемыми
колесами к центру базы шасси и уменьшая базы их тележек);
стремиться приблизить центр мгновенного поворота к продольной оси шасси
(за счет максимального увеличения угла поворота управляемых колес, дополнения
нескольких осей с управляемыми колесами, уменьшения колесной базы, введения
передних и задних управляемых колес, использования шинной поворачиваемости в
дополнение к рулевой путем реализации различных вариантов бортового поворота).
Рассмотрим подробнее фрагмент диаграммы полной поворачиваемости для
многоосного колесного шасси с недостаточной исходной и избыточной дополни-
тельной поворачиваемостью, показанной на рис. 14.14.
632
14. Криволинейное движение многоосных колесных шасси
Рис. 14.14. Диаграмма поворачиваемости машины с избыточной исходной и
недостаточной дополнительной поворачиваемостью
Следуя [61], предположим, что криволинейное движение обеспечивается неко-
торым фиксированным углом поворота управляемых колес (рис. 14.15, кривая BTN).
Пусть далее шасси двигается с некоторой скоростью и6, которой соответствует «скоро-
стной луч» OS. Предположим, что в точке Т прямая, параллельная к оси абсцисс, прово-
дится к этому лучу (г;6), а также касательная к линии полной поворачиваемости. Это
означает, что кривизна траектории центра масс шасси соответствует точке G на луче OS
(р = T'G), угол поворота управляемых колес определяется отрезком GT (0„ + 0| = GT), а
разност ь углов увода крайних осей — соответственно отрезком ТТ (8„ - 8i = ТТ). Ана-
логично на лучах vx— v5 находятся точки С, D, Е, F, Q, Н, P,K,Rw М.
Построим из точки G кривую AGCDEQPR, эквидистантную кривой шинной
поворачиваемости BTN, и предположим, что на центр масс шасси подействовало
малое боковое возмущение Аг|.
Рис. 14.15. Схема определения области устойчивого движения на полной
диаграмме поворачиваемости
14.4. Устойчивость установившегося движения многоосного шасси 633
В этом случае возросшая до ОТ + Дт| боковая сила (при неизменном положе-
нии управляемых колес) вызовет увеличение кривизны поворота до р Т\ G и
начнется процесс самопроизвольного нарастания скорости движения шасси по кри-
вой ADEGT НКМ. После перехода точки Н процесс нарастания кривизны траекто-
рии станет лавинообразным, практически ничем не ограниченным (в рамках рас-
сматриваемой схемы). Это означает, что темп увеличения кривизны траектории мо-
жет оказаться столь большим, что физических и физиологических возможностей
водителя будет недостаточно для противодействия этому процессу путем измене-
ния положения управляемых колес или снижения скорости движения.
Понятно, что на меньших скоростях движение шасси будет устойчивым
«скоростные лучи» располагаются ниже луча OS).
Предположим теперь, что водитель обнаружил факт потери устойчивости и
начал снижать скорость движения. Пусть это произошло в тот момент, когда само-
произвольно нарастающая кривизна траектории достигла точки Н и водитель сумел
снизить скорость с f 6 до v5. Процесс нарастания кривизны траектории не прекратится,
так как новый «скоростной луч» будет по-прежнему значительно круче, чем каса-
тельная к кривой шинной поворачиваемости в точке Н. Если диаграмма полной пово-
рачиваемости имеет линию границы потери устойчивости GQPR, то можно обнару-
жить, что при скорости v5 условие устойчивости движения нарушено уже при кри-
визне траектории, соответствующей точке Q. Если же водитель сумеет в точке Н
снизить скорость с v5 до v4 (точка Н ), то положение будет исправлено, так как точка
Н окажется в зоне устойчивого движения (ниже граничной линии GQPR).
Этот пример показывает, что шасси с недостаточной поворачиваемостью при
определенных условиях также могут оказаться неустойчивыми.
Описанные методы анализа устойчивости движения КТС ОБГ применимы в
тех случаях, когда в результате испытаний известна или может быть достаточно
точно построена расчетным путем диаграмма полной поворачиваемости шасси. На
практике этот путь сопряжен со значительными трудностями, поэтому необходима
система аналитических критериев, определяющих при заданных условиях качест-
венную характеристику устойчивости движения машины.
14.4. Устойчивость установившегося движения
многоосного колесного шасси
Устойчивость шасси оценивается как относительно параметров его положе-
ния, так и параметров его движения.
Под устойчивостью положения шасси понимается устойчивость его равно-
весия относительно осей связанной системы координат. То есть устойчивость:
продольного опрокидывания (вращение вокруг оси уз);
бокового опрокидывания (вращение вокруг оси х3);
заноса и соскальзывания передней оси вбок (вращение вокруг оси ~3).
Под устойчивостью движения шасси понимают устойчивость параметров, ха-
рактеризующих его движение (поступательной скорости движения, скорости боково-
го смещения несущей системы, угловой скорость поворота несущей системы вокруг
оси Z3, бокового отклонения центра масс от заданной траектории, углового отклоне-
ния продольной оси несущей системы от заданного курса и т. д.).
634
14. Криволинейное движение многоосных колесных шасси
На ранних стадиях проектирования устойчивость движения колесного шасси
оценивают только по тем параметрам, которые связаны с безопасностью движения,
изменением направления движения или выходом из коридора движения (курсовому
углу, скорости изменения курсового угла, боковому отклонению центра масс от
курса, скорости изменения бокового отклонения, углу бокового крена и скорости
изменения угла бокового крена).
Известно [61], что колесные шасси с эластичными шинами принципиально
неустойчивы относительно курсового угла и бокового смещения. Поэтому целесо-
образно оценивать устойчивость их движения относительно дифференциальных
параметров, на которые водитель не может воздействовать непосредственно (скоро-
сти изменения курсового угла cdz3 и скорости изменения бокового отклонения цен-
тра масс от траектории движения vv3).
Задачу решают поэтапно, рассмотрев вначале устойчивость установившегося
движения.
При построении расчетной схемы обычно стремятся к раздельному иссле-
дованию движения в горизонтальной плоскости (маневр по курсу), поперечной
плоскости (крен) и продольной плоскости (дифферент), как это было показано в
главе 8 при построении общей модели криволинейного движения многозвенного
шасси.
Однако при исследовании курсовой устойчивости нельзя безоговорочно пре-
небрегать изменениями вертикальных реакций на колесах, возникающими при про-
дольно-угловых и поперечно-угловых колебаниях несущей системы. В результате
движения во всех плоскостях оказываются взаимосвязанными из-за влияния верти-
кальной нагрузки на уводные характеристики шин.
Для упрощения задачи в [61] предложена гипотеза о равной вероятности
встречи всех колес шасси с одной и той же неровностью, что позволяет учесть
влияние колебательного процесса на устойчивость движения при помощи коррек-
ции уводных характеристик, не выходя за рамки исследования изолированного
плоского поворота шасси.
В общем случае система уравнений движения 1-звенного многоосного колес-
ного шасси (при описанных ограничениях) имеет следующий вид:
т ------ + С0_ v.. = V Г Р.. cos 0. - R sin 0,- ~| - Р„ —G„ sin ОС;
' } J L А/ 1 У1 1J в а
т [ —Г~ - | = Z [ Sln + Rvi COS ;
V J ,=\ (14.74)
1 = Z [ Usin + Ryil,cos 0( ]-лТ;
=tg(e,.-5,.),
где ос — угол преодолеваемого подъема.
Рассмотрим возмущенное движение шасси с параметрами
14.4. Устойчивость установившегося движения многоосного шасси 635
5, = 80/ + Д8,-;
С0_ = С00_ + Дсог;
v v=t> v()+At> v;
р = Ро + Др = -^- + Др
А
Постановка задачи об устойчивости движения шасси имеет смысл только для
случаев движения со сравнительно большими скоростями, поэтому уравнения
(14.73) допускают линеаризацию по углам поворота управляемых колес
т I ~7^ + Ю- V ' I = 2L[Р'< ~ RviQi ] “ РВ - Ga Sln
V ш 7 /=1
т ~ ) = ZT + Ryi
z^ = Z[^0,+M]-Mc;
dt ,=i
I + x
* см =e,-8,.
I R
Кроме того, поскольку
v VI- rv-L(O_
tan (9,--8, ) = ^- = (14.75)
Vacos9c
TO
Систему уравнений (14.74) можно преобразовать в систему уравнений воз-
мущенного движения
ЛdAv п
т -----— — Лещ vх = cos 0,- J;
\ dt J /=1
«+-«сМ)дР = -д8,.
При определении возмущенной составляющей боковой силы пользуются ал-
гебраической теорией бокового увода Д.А. Антонова. При этом исходят из предпо-
ложения, что нагруженность пятна контакта шины с дорогой невелика, следова-
636
14. Криволинейное движение многоосных колесных шасси
тельно, коэффициенты сопротивления боковому уводу слабо зависят от угла боко-
вого увода. В этих условиях
*v/=*r()/+~ A3,-
\ 3b, Jg(=0
Из (14.75) следует, что
Др -/,Дсо_
АЗ, - 3 ' ~
v
С учетом этого уравнения возмущенного движения преобразуются к виду
d^vy "
mv,-----1—Ди,. >
dt
ЭМ
дд, Js,=o
cos 0Z —
Обозначая
-Дсо_ < mv v2-^
d/?v,
d Дсо_ A
I.vY--------Av,. >
dt
—— / cos 0
35, J8,=o
' _l ^3,- Jgj=0
= 0;
/z cos 0Z +
n
+Дсо-Х
Э/?у, "I
33, J8=0
I2 cos0j = 0.
cos 0Z
5,=0
Ii cos 0Z ;
/, cos 0, ;
8, =0
78, =0
I2 cos0Z ,
(14.76)
(14.77)
(14.78)
(14.79)
F =
1 n
" T-
1 - ;=i
dfy Х/=о
G =
получаем
d\v.. -
vx—j±+FAvy+(G- v/)A(0, =0;
и, + ЯДи +£Д(о =0.
* dt v г
(14.80)
14.4. Устойчивость установившегося движения многоосного шасси 637
Дифференцируем оба уравнения (14.80) по времени
dvr d\vx d2\vx dF dAvv
—---------Ft» r--— ч-----Ar.. +F-------1
dt dt dt~ dt dt
d(G-v 2) д 2 ^Aco.
4----------Aco_ + (G — V r )--— — 0;
dt x dt
dvx dAtf).. d2A(£r dH TJd^vx
---L+ vx -^ +------Ar .,+H------
dt dt dt2 dt----dt
dE д _ JAco_ A _
+ — Aco_ + E----^Aco_ = 0.
dt ' dt '
(14.81)
Для решения (14.81) относительно Avv, Acd- и их производных преобразуем
уравнения (14.80)
vx dAvx
Aar =--------------------z—Ar
(G-r/) dt (G-v2)
JA(O_ H A E dAvx EE
----= A v x +----------- +---------Ar..
dt-vx (G-rv2) dt---------(G-r/)rv
dbvv <G-Vy EF k F dX(o.
dt vx Hvx H dt
д E д vx JA(O.
Av=----Aar----
I ' H ' H
dt
Обозначим —- = j тогда
dt
+
'(j\.+£ + F) H
VY H
(14.82)
HG-EF
---—+H
EH
HvY
Aco.
= 0.
Если углы увода при эволюционном движении не зависят от времени (на-
пример, при стационарном повороте шасси) или, в частном случае, увод незначите-
лен, то
G = H = E = F=Q,
(14.83)
638
14. Криволинейное движение многоосных колесных шасси
и уравнения (14.82) принимают более простой вид
Av v +
j\+F + E 2vxjx
vx G-vx2
Acb, +
Avv +
H-
HG + EF
HG-EF
Асо_ = 0.
Av v = 0;
(14.84)
2jxF
Рассмотрим установившееся криволинейное движение (равномерный пово-
рот), при котором /\ = 0. Система (14.84) еще более упрощается:
HG + EF
Avy = 0;
HG-EF
Асо. = 0.
Ее оба уравнения имеют одинаковые коэффициенты и, следовательно, оди-
наковые по форме общие решения. Условие их устойчивости вытекает из требова-
ния к собственным значениям характеристического уравнения
E+F If E + fY„ EF-GH
----± А II - ~ Н-----
2vv 2vx ) vv2
(14.85)
Величины Е и F всегда положительны (с учетом определения знаков боковой
силы и угла бокового увода), так же как и скорость движения шасси. То есть для
выполнения условия (14.88) необходимо, чтобы
EF-GH
Н 2
Vr
(14.86)
Из (14.86), (14.76)-( 14.79) имеем
эм
78, =0
v?vr2
/z cos 0,
(14.87)
/yCosG, .
Из неравенства (14.87) вытекает, что критерием устойчивого движения мно-
гоосного колесного шасси, выполняющего стационарный поворот, является сле-
дующее требование к скорости его движения
14.4. Устойчивость установившегося движения многоосного шасси 639
Vx< n -z Z = 1 (dR 9 ЫЧ cose'- dot Д=о n X /=1 PM A _l J§,=0 n Z = 1 —— / cosO LUJ81=o' 2
n l=\ —~ cos 9; LUU 'j (14.88)
В частности, при справедливости гипотезы бокового увода, формализованной
в рамках алгебраической теории бокового увода в виде
Kyi QiKytyfii*
где КуОэ — экстремальное значение коэффициента сопротивления боковому уводу,
определенное при углах увода, близких к нулю; qi — общий коэффициент коррек-
ции для шин z-й оси, получим
к X[М c°s е/ ]Хkcos ] - X cos]
т COS0, ]
/=1
(14.89)
Если предположить, что все коэффициенты коррекции приблизительно оди-
наковы (это удобно, например, при проведении общего анализа влияния конструкции
шасси на устойчивость его движения), то формула (14.89) еще более упростится:
Второе слагаемое в числителе подкоренного выражения существенно меньше
первого, так как параметры lj имеют разные знаки (оси расположены примерно по-
ровну с разных сторон относительно центра массы). Определяющим для числителя
является первое слагаемое.
Качественную оценку явлений можно получить, если рассматривать только
прямолинейное движение, т. е. в формуле (14.89) пренебречь квадратичным членом
в числителе и предположить, что Vz: q, = q
640
14. Криволинейное движение многоосных колесных шасси
Относительный коэффициент сопротивления боковому уводу для большин-
ства шин автомобилей повышенной и высокой проходимости находится в пределах
4-6 [61], поэтому справедлива оценка
гЛ.< (6,3-7,7)
±[<]
/=|
Изменение положения центра масс вдоль продольной оси мало влияет на
числитель подкоренного выражения, но ощутимо меняет значение знаменателя.
Например, при смещении центра масс вперед начинают преобладать отрица-
тельные слагаемые, знаменатель уменьшается и критическая скорость возраста-
ет Одновременно с этим снижается нормальная нагрузка на колеса, располо-
женные позади центра масс, и соответственно уменьшаются их коэффициенты
сопротивления боковому уводу. Можно ожидать, что начиная с какого-то мо-
мента этот процесс станет преобладающим и критическая скорость вновь станет
уменьшаться.
Можно констатировать следующие общие правила:
чем больше база шасси, тем выше критическая скорость движения (за счет
возрастания квадратичного члена
чем больше у шасси колес, тем выше критическая скорость (за счет уве-
личения количества слагаемых в квадратичном члене и его соответственного
возрастания);
при прочих равных условиях шасси, у которых оси сгруппированы в носовую
и кормовую тележки, имеют более высокую критическую скорость, чем такие же
шасси, но с колесами, сгруппированными в центральную тележку;
устойчивость движения повышает применение «двускатной ошиновки» (осо-
бенно при введении двускатной ошиновки задних колес, так как при этом возможно
получение мнимых значений критической скорости).
В целом, чем меньше сумма
тем выше критическая скорость дви-
задние
жения шасси. Существенного уменьшения этой величины можно добиться следую-
щими конструктивно-компоновочными решениями:
1) смещением вперед центра масс шасси;
2) обеспечением условий для увеличения углов увода передних осей (умень-
шением q, передних осей);
3) обеспечением условий для уменьшения углов увода задних осей (увеличе-
нием q, задних осей);
4) уменьшением момента бокового крена и перераспределением нормальных
нагрузок между левыми и правыми колесами (увеличением коэффициента коррек-
ции по нормальной нагрузке колес всех осей);
14.4. Устойчивость установившегося движения многоосного шасси 641
5) обеспечением некоторой перегрузки осей, лежащих впереди центра масс
шасси (перераспределением коэффициентов коррекции по нормальной нагрузке
между колесами передних и задних осей);
6) введением стабилизаторов поперечной устойчивости, что создает пере-
грузку наружных (по отношению к центру поворота) колес и разгрузку внутренних
колес для осей, лежащих впереди мгновенного центра поворота;
7) установкой колес на максимально возможной колее (перераспределением
коэффициентов коррекции по нормальной нагрузке между левыми и правыми коле-
сами);
8) перераспределением момента крена, действующего на подрессоренные
массы таким образом, чтобы большая его часть пришлась на передние оси (увели-
чением рессорной колеи передних осей за счет увеличения угловой жесткости под-
вески передних колес и т. д.);
9) установкой на передние колеса амортизаторов с повышенным сопротивле-
нием как на ходе сжатия, так и на ходе отбоя;
10) применением конструктивно-компоновочных решений, обеспечивающих
уменьшение коэффициентов коррекции по тангенциальной нагрузке для всех пе-
редних колес и соответственно их увеличение для всех задних колес (например,
применением трансмиссии с передними ведущими и задними стабилизирующими
колесами);
11) проведением мероприятий, направленных на уменьшение тангенциаль-
ной нагруженности контакта, особенно задних колес (применением трансмиссий, не
допускающих возникновения циркуляции мощности и т. д.);
12) формированием кинематической схемы направляющего аппарата подвес-
ки таким образом, чтобы он обеспечивал на передних осях крен колес в сторону
крена корпуса, а на задних — в сторону, обратную крену корпуса (на передних ко-
лесах коэффициенты коррекции по крену меньше, чем на задних);
13) обеспечением интенсивного гашения колебаний на задних колесах путем
установки на них амортизаторов с повышенным сопротивлением на ходе отбоя
(возрастание на задних колесах величины коэффициента коррекции, учитывающего
колебания колес);
14) применением устройств, позволяющих при возникновении угрозы потери
устойчивости незначительно подтормаживать задние колеса (например, торможе-
ние двигателем, электродинамическое подтормаживание и т. д.);
15) применением на передних колесах более эффективных тормозных меха-
низмов, чем на задних колесах;
16) рациональным распределением тормозных сил по колесам шасси, причем
желательно применение специальной схемы и конструкции тормозной системы,
способной уменьшать тормозную нагрузку как при снижении сцепных свойств ко-
леса с дорогой, так и при уменьшении нормальной нагрузки на колесо;
17) применением на задних и передних колесах противоблокировочных уст-
ройств, способных сформировать на задних колесах повышенные стабилизирующие
свойства;
18) применением специальной конструкции привода управления поворотом
задних колес.
’/2 21 - 2918
642
14. Криволинейное движение многоосных колесных шасси
14.5. Устойчивость установившегося движения
многоосного колесного шасси
Вначале рассматривается движение с переменной скоростью по траектории с
постоянной кривизной. В этом случае условие (14.83) выполняется и можно рас-
сматривать систему уравнений движения в виде (14.84).
Следуя [63], запишем эти уравнения в более компактном виде
Если рассматривать случай jA = const, числители коэффициентов в уравнени-
ях (14.90) будут постоянными величинами.
Удельная мощность большинства колесных шасси невелика. У самых легких
машин она не превышает 20 л.с./т (например у шасси БАЗ-69501 — 14,9 л.с./т, БАЗ-
135ЛМ — 18,0 л.с./т). В результате при движении со скоростями 20...30 км/ч ин-
тенсивность разгона не превышает (0,1 ...0,2)g.
В [63] проведено исследование многоосных колесных машин с различными
габаритными размерами, общими компоновками и конструктивными схемами и
показывают, что \Н\ < 20
В соответствии со схемой проведения исследования, предложенной в [63],
решение уравнений типа (14.90) определяется в виде
-хр[Х(Г)г].
(14.91)
После подстановки (14.91) уравнения системы (14.90) преобразуются к обоб-
щенной структуре вида
Г2А, + zX + + 2A,Xz + (zX) + A/?(z) -I- thpfj') -I- ^(z)~l — 0.
(14.92)
Согласно [63], при vx > 10 м/с параметр X(z) меняется незначительно по мере
изменения скорости движения. Кроме того,
14.5. Устойчивость установившегося движения многоосного шасси 643
2X(z) + zX(z)-0. (14.93)
Это означает, что можно рассматривать далее приближенный вариант урав-
нения (14.92):
X2+2XXz + (zX) + Xp(z) + zXp(z) + <j(z) = 0. (14.94)
В [63] не рекомендуется использовать уравнение (14.94) для определения па-
раметров возмущенного движения, но показано, что при оценке условий потери
устойчивости движения ошибка в определении критической скорости находится в
пределах 4...6 %, причем значения скорости получаются заниженными.
Д.А. Антоновым разработан следующий метод для нахождения решения
уравнения (14.94).
Из этого уравнения следует, что
Х0 + 1Х(1) = -ф±^^ (14.95)
Выполняя подстановку X(z) = u(t)z(t), приведем уравнение (14.95) к виду
w(Z)z(Z)+z(Z)|zi(Z) + w(Z)/Z] = /(Z)/Z. (14.96)
Функция w(z) подбирается таким образом, чтобы член в квадратных скобках
обращался в нуль. Это уравнение имеет общее решение
«(')“• (14.97)
О । Z
В этом случае имеем
z(t) = c^f(jylt + c2, (14.98)
откуда
Х(?) = J-[c, + С2 ] = -[ р (z)dt + С3 ]. (14.99)
Для построения критерия устойчивости движения шасси относительно пара-
метра Дсо- необходимо вычислить интеграл (14.99) для функции fit), соответствую-
щей второму уравнению системы (14.90). Вводя обозначения а = + Е + И, р2 - а2
- fiEF -GH) и определяя постоянные интегрирования из условия (Z = 0) = ?\0,
лучим (промежуточные преобразования опускаются, подробности см. в [63])
1.2(0 = т—'-- (а + р)1п^±Ш-4Hv2 -7Р2 -4>W -
2(^-’Ло)1 Ч, v
р+7р2-4/л\2 )_
(14.100)
644
14. Криволинейное движение многоосных колесных шасси
Теперь частные решения можно построить в виде (14.91).
Легко убедиться, что
1
Х|(?) + ?Х|(?)
У|(0
У|(0
1
X2(z)+zX2(z)
(14.101)
= [X2(z)-A.i(z)] + z[X2(z)-Xi(z)]
И
[X2(z)-X1(z)] + z[X2(z)-X,(z)] = -£^2.
Подкоренное выражение может обратиться в ноль только при положитель-
ном Н, однако при этом шасси имеет отрицательную шинную поворачиваемость и
устойчиво, поэтому такой случай не имеет смысла исследовать специально.
При Н = 0 шасси имеет нейтральную шинную поворачиваемость. Подкорен-
ное выражение обращается в ноль при р2 = 0, что возможно только при установив-
шемся движении (этот случай уже рассмотрен).
Таким образом, при положительной динамической шинной поворачиваемо-
сти, когда шасси склонно к боковому заносу, имеет смысл исследование устойчиво-
сти его движения. В этом случае выполняется условие Н < 0, определитель (14.101)
отличен от нуля и решения (14.91)—(14.101) линейно независимы.
Общее решение можно построить в следующем виде:
ДСО_ = С| exp[Xq(/)]-I-ехр[Х2(Г)]. (14.102)
Условие устойчивости (14.102):
Х12(г)<0. (14.103)
Если считать, что разгон начинается с критической скорости, то ее опреде-
ляют из условия (14.103)
lim (X|2(Z))<0.
Этот предел легко найти, используя формулу (14.100). Опуская технические
подробности, приводим результат преобразований:
_ат£_--------4И„, <() (|4|04)
Можно убедиться, что первый член формулы (14.104) всегда положителен.
Знак и величина второго слагаемого определяются параметром
----. (14.105)
14.5. Устойчивость установившегося движения многоосного шасси 645
Пусть шасси имеет при установившемся движении недостаточную дополни-
тельную поворачиваемость. В этом случае числитель формулы (14.105) отрицателен
и, следовательно, Н > 0. Если при установившемся движении шасси имеет ней-
тральную поворачиваемость — Н = 0. В случае избыточной поворачиваемости Н < 0.
При нейтральной поворачиваемости в установившемся движении условие
(14.104) выполняется всегда.
При недостаточной поворачиваемости (14.104) преобразуем к виду
±----= < ос±р (14.106)
Р + 7Р2-4Ягл.2
с выполнением обязательного условия
Р2-4Ягл.2>0. (14.107)
Выполнение неравенств (14.106) и (14.107) при нижних знаках очевидно, так
как Н < 0. При верхних знаках
4Яу>2 Р2 Р о о
----- <----- =------------- - --< Р < ОС + р,
р + л/р2-4/7uv2 Р + 7р21+ L 47/vJ-
У “Р2
при этом условие (14.104) также выполняется.
При дополнительной избыточной поворачиваемости (14.104) условия ниж-
них знаков также выполняется всегда, поскольку Н < 0. При верхних знаках (14.103)
можно записать как
_р< Jp2-4//W 2 (14.108)
ос — р
В [63J показано, что наряду с (14.108), справедливо неравенство
Отсюда можно получить выражение для определения критической скорости
движения по Лак:
Таким образом, для шасси с нейтральной и недостаточной дополнительной
поворачиваемостью критерий устойчивости удовлетворяется всегда и критической
скорости не существует.
Для шасси с дополнительной избыточной поворачиваемостью критерий для
определения критической скорости по структуре не отличается от аналогичного для
21 - 2918
646
14. Криволинейное движение многоосных колесных шасси
установившегося движения. Кроме того, критическая скорость в этом случае фор-
мально не зависит от ускорения. Тем не менее из-за различия в тангенциальных на-
грузках, действующих на колеса шасси при равномерном движении и при разгоне,
результаты вычисления критической скорости по формулам (14.88) и (14.109) будут
отличаться и, следовательно, имеет место неявная зависимость критической скоро-
сти неустановившегося движения от продольного ускорения шасси.
В частности, у переднеприводной машины повышается устойчивость движе-
ния при разгоне за счет уменьшения коэффициента коррекции по касательным на-
грузкам на передних колесах и соответственного уменьшения коэффициентов со-
противления боковому уводу. Напротив, по этим же причинам у машины с приво-
дом на задние колеса снижается критическая скорость при разгоне.
Структура уравнений возмущенного движения относительно параметров Agt.
и Arv одинакова, поэтому построение критерия устойчивости неустановившегося
движения для них аналогично вплоть до формулы (14.99). Применительно к пара-
метру Дгц имеем
jy(r)^ = -jf
J \ 2va v~-G)
f j +E + F j v Y ttv2-G EF 2LF .
±J —----------г—H -Н-Ч-----------+ -dt.
H v~\ 1)2 1)2
Как и ранее, полагаем v2- G ~ v2 При этом
Выполняя интегрирование и определяя постоянные интегрирования по на-
чальным условиям vx (t = 0) = vA<), получаем
^1,2И = -—1--гJ («- 2Л ±у)In±Г7y2-4Hvv2 -7y2-4//i4
2(Vv-Vao)1. vx l
^j+'K~4Hv< 1.
Y + 7y2-4/7va20 J,
Следуя описанной выше методике, критерий устойчивости находим из усло-
вия
14.5. Устойчивость установившегося движения многоосного шасси 647
У ,,, «-2Л + У. 4/7ид
lim Л. ? (t) =-----±--------, =- < 0.
' 2,\ 2(-у-7у2-4Яг; )
Отсюда следует, что
-(а-2./х + У)±--^HVx <0- (14.110)
_у_7у2-4/7^
При Н = 0 имеем
а - 2 jx + у >0,
поэтому (14.110) выполняется всегда.
При Н > 0 дополнительно обеспечить выполнение условия у2 -4Н\\
При этом очевидно, что
4//v2 у2
----Г=^== ---------, - •- < у < а - 2.Д + у.
у + уУ2 -4//v2 У+Vy2 -4//гл2
и неравенство (14.110) выполняется всегда.
Наконец, при Н < 0 формула (14.110) с нижними знаками также выполняется
всегда.
Для случая с верхними знаками имеем
4/7 г2
(a-2/v-Y)
7у2 -4/7 г?2
Ясно, что при отрицательном Н
-------х-->0;
< (а-2д-у)
у< ^Y2 ~4/7t>2
(14.111)
поэтому
4/7 и 2
(а-2уд-у)
< 7Y2 -4/7t>2
Следовательно, после возведения правой и левой части (14.11 1) в квадрат и
упрощающих преобразований получим
4/7 у2________2у
(a-2j\-Y)2 а-2у;-у
Отсюда несложно определить критическую скорость
648
14. Криволинейное движение многоосных колесных шасси
<14.И2>
V -н
В [631 показано, что при отказе от допущения G = 0 формула (14.112) приво-
дится к виду
\EF-GH -2j.F
v х .
v -н
Это формулу можно записать в развернутом виде и использовать при техни-
ческих расчетах и оценках
()se/]S[<7/^03/ cose/]-E[^^v()3/// cose,] -2jJ cos0z]
< / = 1____________/-1______________i=\____________________/=1____________
« "!£[<7Aov< C(>S0,J
I /=1
Если ускорение обусловлено воздействием тангенциальных сил в зоне кон-
такта колес с дорогой, то зависимость критической скорости от ускорения может
быть весьма ощутимой из-за снижения коэффициента сопротивления уводу колес,
нагруженных касательными силами. Если же ускорение связано с иными причина-
ми, то его влияние на критическую скорость невелико [63].
Интересно, что при разгоне критическая скорость по Дг\ меньше, чем крити-
ческая скорость установившегося движения и чем критическая скорость по Дсо-. Это
проявляется в том, что при разгоне и потере устойчивости шасси вначале начинает
«плавать» поперек дорожного полотна и только позднее входит в боковой занос.
При замедлении, напротив, вначале происходит боковой занос шасси.
14.6. Устойчивость неустановившегося движения
многоосного колесного шасси в общем случае
При исследовании этого вопроса возникают значительные трудности. Для
упрощения проблемы Д.А. Антоновым предложена следующая система ограниче-
ний: движение рассматривается в тот момент, когда устойчивость еще не потеря-
на (со?\ = (); )/dt ~ 0); циркуляция мощности в трансмиссии отсутствует и,
более того, распределение тяговых сил по колесам близко к равномерному, т. е.
схема трансмиссии близка к дифференциальной (V/, dRxi/dt ~ dRXj/dt ); боковая
сила определяется в соответствии с гипотезой бокового увода и может быть рассчи-
тана в соответствии с алгебраической теорией бокового увода; распределение нор-
мальных нагрузок по колесам близко к равномерному, а все шины практически
одинаковы (V/, dRxi/dt ~ dRxj/dt); разгон совершается с места (т\ = 0); разгон
совершается с постоянным приращением ускорения jx - (djх/dt)f=Qt.
14.6. Устойчивость неустановившегося движения шасси в общем с.
649
Изложим только принципиальную схему построения критериев устойчивости
движения [61 ].
Производные по времени от боковой силы и от продольной силы в пятне
контакта шины с дорогой определяются дифференцированием уравнения, описы-
вающего проекцию сил на продольную ось шасси, и уравнения, формализующего
алгебраический вариант гипотезы бокового увода (с ограничением задачи случаями,
при которых допустимо считать, что (и/)/d ~ 1,5 ). Это позволяет найти производ-
ные от коэффициентов коррекции коэффициента сопротивления боковому уводу по
продольной нагрузке и оценить производную d /дЪ^/dt Дифференцируя
(14.80) по времени, получаем (14.81) при условии Н = 0, Ё 0. Далее полученные
уравнения исследуются так же, как и ранее.
Для параметра Док критерий устойчивости получается в виде
2 FE-GH
v' < -н
и по форме не отличается от критерия устойчивости движения при установившемся
повороте. Разница в значениях скорости возможна из-за различия в нагруженности
пятна контакта колес при установившемся и при неустановившемся разгоне и соот-
ветственного различия их коэффициентов сопротивления боковому уводу.
Для параметра Д?д критерий устойчивости выглядит так:
^FE-GH-2jxF 2GF fdjA Fj2
V' -И 2н[^У\
l dt
причем второй член очень мал и им можно пренебречь.
В [63] показано, что значения критической скорости при неустановившемся
разгоне ниже, чем при установившемся. Кроме того, многоосные шасси вообще
разгоняются относительно медленно (за исключением каких-то особых специаль-
ных машин, например тяжелых пожарных автомобилей, предназначенных для ту-
шения аварийных самолетов в аэропортах). Руководствуясь этими соображениями,
на начальных этапах проектирования многоосных колесных шасси обычно ограни-
чиваются оценкой устойчивости установившегося движения.
Глава 15
Основы теории и расчета
рулевого управления КТС ОБГ
15.1. Общие положения
Рулевое управление предназначено для обеспечения криволинейного движе-
ния ТС и поддержания заданного ему направления перемещения. Перспективы раз-
вития РУ связывают с использованием в его конструкции САУ Поэтому основное
внимание в главе уделено расчетным зависимостям, отражающим функционирова-
ние системы управления криволинейным движением с точки зрения теории автомо-
биля, обоснованию и построению алгоритмов функционирования автоматизирован-
ных (автоматических) систем управления.
Увеличение габаритных размеров и числа осей КТС ОБГ приводит к сниже-
нию их маневренных свойств. Основной причиной этого является одинаковый под-
ход к выбору схемы РУ независимо от числа осей и габаритных размеров ТС.
Например, на современных шасси с числом осей от четырех до семи приме-
няются в основном схемы РУ, в которых управляемыми являются колеса передних
осей. Причем тенденция такова, что с увеличением общего числа осей возрастает
число передних осей, имеющих управляемые колеса.
На рис. 15.1 представлены варианты использования управляемых колес на
известных многоосных шасси с числом осей от четырех до восьми. Как следует из
их анализа, увеличение числа передних управляемых колес (при увеличении их об-
щего числа) не решает проблему улучшения маневренных свойств СКШ такого ти-
па. Минимальный радиус поворота возрастает с 13,5 м у 4-осного шасси до 33.6 м у
8-осного. Схемы с передними управляемыми колесами привлекают лишь простотой
конструктивного исполнения привода РУ
Существенным недостатком таких схем являются повышенные затраты мощ-
ности при движении по криволинейным траекториям, особенно по таким, кривизна
которых соизмерима с минимальным радиусом поворота СКШ. Связаны они с
большим сопротивлением повороту, создаваемым неуправляемыми колесами зад-
ней тележки, база которой у рассматриваемых СКШ составляет 2,5...3,5 м, т. е.
27...32 % от общей базы.
Актуальность этой проблемы подтверждается еще и тем, что с ростом полной
массы СКШ происходит снижение удельной мощности — важнейшего показателя,
15.1. Общие положения
651
Рис. 15.1. Варианты использования управляемых колес на известных многоосных СКШ:
а — шасси 8x8, ЯП11П = 13,5 (MA3-543M); б — шасси 10x8, Я1П1П = 18,5 (МАЗ-7929); в — шасси 12x12.
/?,П1П = 225 (МАЗ-547В); г — шасси 14x12, /?|П1П = 26,5 м; д — шасси 16x16, /?1П1П = 33.6 (МАЗ-7906) (управ-
ляемые колеса заштрихованы)
определяющего степень подвижности СКШ. В табл. 10.7 приведено соотношение
этих показателей для рассматриваемых СКШ (за 100 % приняты показатели шасси
8x8). Анализ ее данных показывает, что с увеличением полной массы СКШ в 1,5-
3,0 раза мощность силовой установки возрастает в 1,24-1,52 раза, а удельная мощ-
ность снижается в 1,6-2,0 раза.
До 10 % номинальной мощности двигателя расходуется при движении СКШ
для нужд монтируемого оборудования. В связи с этим возникает проблема рацио-
нального использования мощности силовой установки для обеспечения подвижно-
сти СКШ в различных условиях, в том числе при движении по криволинейным тра-
екториям.
Одним из направлений решения проблемы улучшения маневренных свойств
СКШ и рационального использования мощности двигателя при движении по криво-
линейным траекториям можно считать совершенствование схем рулевого управле-
ния и способов поворота.
Известны динамический и кинематический способы управления поворотом.
Динамический способ управления заключается в регулировании соотношения
угловых скоростей колес различных бортов без изменения их положения относи-
тельно корпуса (так называемый танковый поворот). При этом образуются разные
по величине или направлению продольные реакции на колесах разных бортов, соз-
дающие поворачивающий момент.
Динамический способ упрощает привод ведущих колес, увеличивает полез-
ный объем кузова (платформы), создает предпосылки для использования на ТС шин
большого диаметра с целью улучшения проходимости. Его применение целесооб-
разно на короткобазных ТС. Для рассматриваемых типов СКШ, база которых со-
652
15. Основы теории и расчета рулевого управления КТС ОБГ
ставляет 7,7 м и более, динамический способ управления как основной неприемлем
из-за существенного возрастания сопротивления повороту с увеличением базы
СКШ, что требует значительных дополнительных затрат мощности для реализации
криволинейного движения.
На многоосных автомобилях с неповоротными колесами для снижения со-
противления повороту при движении по минимальным радиусам иногда использу-
ют подъемные или приподнятые крайние оси относительно средних. Их примене-
ние на СКШ также проблематично по следующим причинам.
Во-первых, подъем крайних осей увеличит нагрузку на средние и без того
тяжелонагруженные оси. На СКШ класса грузоподъемности 20 и 50 т нагрузка на
ось составляет 100... 150 кН. Увеличение этого параметра приведет к существенно-
му снижению проходимости при движении по деформируемым грунтам.
Во-вторых, требуется размещение на шасси узлов, обеспечивающих подъем и
опускание осей в зависимости от условий движения. Это конструктивное мероприя-
тие вызывает дополнительные трудности для СКШ, к которым предъявляются вы-
сокие требования по свободным объемам пространства в общей компоновке, пред-
назначенных для установки специального оборудования и систем обеспечения его
функционирования.
Динамический способ управления может применяться как дополнительный к
кинематическому способу. При этом, например, на автомобилях с передними
управляемыми колесами в случае одностороннего торможения неуправляемых ко-
лес возможно уменьшение минимального радиуса поворота на 13... 15 %. Тот же
эффект достигается на короткобазных ТС с числом осей не более трех. С увеличе-
нием базы шасси эффективность дополнительного использования силового способа
управления снижается, а мощность, необходимая для поворота, увеличивается.
Кроме того, для реализации такого способа потребуется система управления, обес-
печивающая регулирование интенсивности торможения в зависимости от режима и
условий движения ТС.
К числу кинематических способов управления относится складывание звень-
ев в горизонтальной плоскости сочлененных ТС. Его преимущество заключается в
значительном повышении маневренности шасси, так как радиус поворота сущест-
венно уменьшается по сравнению с однозвенными конструкциями. Но применение
таких ТС для транспортировки длинномерных моногрузов затруднено.
Наиболее распространенный кинематический способ управления — поворот
управляемыми колесами. При этом могут быть задействованы только передние, пе-
редние и часть задних или все колеса. Применение на СКШ такого способа управ-
ления обусловлено возможностью увеличения скоростей движения и маневренных
свойств, простотой конструктивной реализации привода РУ
Поворот управляемыми колесами двух передних осей используется на СКШ с
колесной формулой 8x8 (МАЗ-543, -7911 и их модификациях, БАЗ-6944, -6950, -69501,
-6953), управляемыми колесами трех передних осей на СКШ 12x12 (МАЗ-547В, -7905,
-7916), управляемыми колесами четырех передних осей на СКШ 14x12 и 16x16
(МАЗ-7912, -7917, -7906).
В схемах РУ некоторых образцов СКШ наряду с передними управляемыми
колесами используются управляемые колеса части задних осей. Примером может
15.1. Общие положения
653
служить шасси ЗИЛ-135ЛМ (8x8) и его модификации, в которых поворот обеспечи-
вается управляемыми колесами первой и последней осей. Аналогичная схема РУ
применена на негабаритном ТС 7904. На перспективных образцах шасси 7922 и
7923 с колесной формулой 16x16 управляемыми являются колеса трех передних и
трех задних осей. Их минимальный радиус поворота составляет около 17,0 м. Этот
показатель у шасси 7912 (17) с меньшим числом осей — 14x12, но с управляемыми
колесами четырех передних осей, равен 26,5 м. Такую же величину минимального
радиуса поворота имеет 12-осное шасси 7907 с управляемыми колесами четырех пе-
редних и четырех задних осей.
Преимущества схем РУ с управляемыми колесами передних и задних осей по
сравнению со схемами с передними управляемыми колесами в отношении манев-
ренных свойств общеизвестны. Однако они имеют существенный недостаток —
снижение устойчивости движения по переходным траекториям.
Причина этого заключается в разных по величине и направлению угловых
скоростях поворота шасси и колес задних осей, ведущих к появлению забросов бо-
кового ускорения с соответствующим кратковременным изменением знака боковых
реакций на колесах задних осей в начале и увеличением этих реакций в конце вы-
полнения маневра. Эти кратковременные импульсы боковых реакций воспринима-
ются шинами как ударная нагрузка, способная привести к потере сцепления колес с
опорной поверхностью в боковом направлении и заносу.
Один из способов борьбы с этим явлением — применение запаздывания по-
ворота колес задних осей относительно передних на угол около 0,1 рад (5...6°). Од-
нако, это конструктивное решение ведет к рассогласованию кинематики поворота
из-за того, что колеса передних и задних управляемых осей практически во всем
диапазоне углов поворота образуют свой мгновенный центр поворота О' О1
(рис. 15.2), а единый центр поворота с колесами передних
осей О" образуется за счет дополнительного увода шин.
Касаясь вопроса конструктивной реализации при-
вода РУ с запаздыванием поворота задних колес, следу-
ет отметить его усложнение в связи с необходимостью
введения в привод управления задними колесами меха-
низма запаздывания и устройства стабилизации для
прямолинейного движения. Если для 2-, 3-осных авто-
мобилей привод РУ задними колесами с учетом всех
этих конструктивных доработок выглядит не таким уж
сложным, то с увеличением числа осей сложность при-
вода существенно возрастает. Даже без механизма за-
паздывания и устройства стабилизации привод РУ мно-
гоосного шасси, например шасси 7904 (12x12) с управ-
ляемыми колесами двух передних и двух задних осей,
представляет собой довольно громоздкую конструкцию
(см. рис. 4.15), легкость и простота обслуживания кото-
рой вызывает сомнение.
Еще одним способом улучшения устойчивости
движения ТС с передними и задними управляемыми
Рис. 15.2. Схема повороте
СКШ с запаздыванием по-
ворота задних колес:
Х„ — полюс поворота; Хр —
п люс РУ
654
15. Основы теории и расчета рулевого управления КТС ОБГ
колесами является регулирование соотношения углов поворота управляемых колес
в зависимости от условий движения. Кинематика такой схемы РУ основана на ис-
пользовании специальных законов управления смещением полюса РУ
Под полюсом рулевого управления понимается проекция полюса поворота ТС
на его продольную ось.
При этом используются два основных принципа регулирования соотношения
углов поворота передних и задних управляемых колес, которые впервые обосновал
В.Г Корнилов. По первому принципу эти соотношения регулируются в зависимо-
сти от угла поворота передних колес и скорости движения. На большой скорости
при малых углах поворота передних колес колеса задних осей поворачиваются в ту
же сторону, что и передние (синфазно). По мере увеличения кривизны траектории и
уменьшения скорости движения колеса задних осей поворачиваются в противопо-
ложную сторону относительно передних (в противофазе). Второй принцип отлича-
ется от первого тем, что регулирование соотношения углов поворота передних и
задних колес по скорости отсутствует.
Рулевое управление с регулируемым соотношением углов поворота управ-
ляемых колес представляет интерес с точки зрения возможности его применения на
многоосных СКШ, которые в соответствии со своим предназначением передвига-
ются в различных дорожных условиях, вне дорог и в стесненных условиях (в пар-
ках, на строительных площадках и т. п.) при достаточно широком диапазоне изме-
нения скорости движения.
Применение на СКШ гибкой схемы РУ, например с электрогидравлическим
приводом, позволит решить ряд проблем. Во-первых, улучшить маневренные свой-
ства, повысить устойчивость движения и уменьшить затраты мощности на движе-
ние по криволинейной траектории.
Во-вторых, отказаться от громоздкой системы промежуточных рычагов и тяг
Оба рассмотренных принципа регулирования соотношения углов поворота
управляемых колес требуют использования системы автоматизированного (авто-
матического) управления. Для полного использования возможностей электроники
необходимо глубокое обоснование алгоритмов ее функционирования в системе
гибкого РУ
Поэтому разработка алгоритмов функционирования бортовых электронных
комплексов является одной из важнейших проблем при создании гибких систем
рулевого управления автомобилем и их САУ
Наличие в системе рулевого привода бортовой ЭВМ позволяет задавать раз-
личные управляющие программы. Подобные системы РУ применяются, например, в
конструкциях многоопорных КТС ОБГ
15.2. Основные требования к системе рулевого управления
РУ должно обеспечивать заданную траекторию движения КТС ОБГ с необ-
ходимыми исходными параметрами поворотливости, поворачиваемости и устойчи-
вости криволинейного и прямолинейного движения.
Основные требования, предъявляемые к системе РУ, следующие.
15.2. Основные требования к системе рулевого управления
655
1. Общие требования к системе РУ должны соответствовать требованиям
Правил ЕЭК ООН, ГОСТов, ИСО, ОСТов и другим нормативным документам. По
этим документам система РУ должна обеспечивать:
- эффективное длительное движение в заданных условиях с минимальной
утомляемостью водителя;
- полную реализацию эксплуатационных свойств автомобиля, заложенных в
его конструкцию;
- безопасность движения;
- заданный уровень показателей качества: управляемости, курсовой устойчи-
вости движения, маневренности.
2. Общие требования к всеколесному РУ с гибкой геометрией поворота долж-
ны учитывать возможность приобретения ТС ряда новых свойств:
- обеспечение различных схем поворота автомобиля с дискретным или не-
прерывным переходом от одной схемы управления к другой;
- сохранение водителю привычных ощущений и навыков в процессе управ-
ления.
3. Специальные требования, предъявляемые к гибким рулевым управлениям
кроме перечисленных в п. 2:
- стабилизация движения автомобиля по курсу;
возможность автоматизированного вождения по программам или во взаи-
модействии с САУ движением (в частности, автоматическое выполнение стандарт-
ных эксплуатационных маневров, использование внешнего радиотелеуправления
автомобилем, обеспечение автоматического движения в колоннах и др.);
- наличие системы резервирования;
- наличие системы встроенного контроля и индикации отказов.
Опыт, накопленный МГТУ им. Н.Э. Баумана в ходе выполнения НИР и иссле-
дований, направленных на повышение маневренности длиннобазных многоосных
шасси, позволяет утверждать, что задача создания таких систем РУ разрешима на со-
временном уровне. Автомобиль при этом оборудуется автоматизированной бортовой
системой РУ, в состав которой в общем случае входят следующие подсистемы:
- блок штурвального управления (рулевая колонка) с устройством (автома-
том) загрузки рулевого колеса (штурвала);
- бортовой вычислитель с системой аналого-цифроаналогового преобразова-
ния сигналов (при необходимости);
- блок исполнительных механизмов (рулевые машины или агрегаты);
- система индикации работы;
- система энергоснабжения.
Блок штурвального управления — это устройство, с помощью которого
управляющее воздействие водителя преобразуется в электрические сигналы, посту-
пающие в электрическую часть системы РУ
Применение механизма загрузки рулевого колеса (штурвала) необходимо для
имитации сопротивления перемещению рулевого колеса (штурвала) и формирова-
ния у водителя так называемого чувства дороги. Помимо механического неуправ-
ляемого нагружателя в него могут входить дополнительные управляемые устройст-
ва, изменяющие усилие на рулевом колесе по заданному алгоритму.
656
15. Основы теории и расчета рулевого управления КТС ОБГ
Бортовой вычислитель, опираясь на информацию, поступающую от датчи-
ков штурвального блока, формирует управляющие сигналы на рулевых агрегатах.
Водитель в зависимости от планируемого маневра и конкретной дорожной обста-
новки устанавливает необходимую программу его работы при помощи непрерывно-
го или дискретного задатчика алгоритма управления. Этот алгоритм предназначен
для обеспечения работы бортового вычислителя при выполнении расчетов по выра-
ботке сигнала на поворот каждого из управляемых колес автомобиля в зависимости
от поворота рулевого колеса при изменяемом положении полюса поворота.
15.3. Исходные данные для расчета системы рулевого управления
Для расчета системы РУ и алгоритма функционирования ее САУ необходимо
знание внешних условий возможного использования КТС ОБГ (см. гл. 8) и данных,
на основе которых принимаются конструктивные решения, обеспечивающие вы-
полнение требований к всеколесному РУ с гибкой геометрией поворота (§ 15.2,
пп. 2 и 3). Особенно это касается выбора кинематического передаточного числа и
обеспечения необходимой чувствительности ТС к управлению.
Эти расчеты требуют тщательного сопоставления с результатами статистиче-
ских данных экспериментальных наблюдений.
Исторически сложился определенный диапазон чувствительности исполь-
зуемой в конструкциях автомобильных РУ Его специальными расчетами долгое
время не занимались, а необходимые значения кинематического передаточного
числа выбирали исходя из требуемого усилия на рулевом колесе.
Кинематическое передаточное число
Статистические исследования, проведенные в МГТУ им. Н.Э. Баумана, опре-
делили диапазон разброса полного хода рулевого колеса для различных типов авто-
мобилей и различных дорожных условий, который позволяет более точно выбрать
величину кинематического передаточного числа (рис. 15.3-15.6).
Рис. 15.3. Распределение полного хода рулевого колеса (число полных обо-
ротов) для разных категорий автомобилей
15.3. Исходные данные для расчета системы рулевого управления
657
Число полных оборотов рулевого колеса
Рис. 15.4. Распределение полного хода рулевого колеса (число полных
оборотов) для легковых автомобилей
Число полных оборотов рулевого колеса
Рис. 15.5. Распределение полного хода рулевого колеса (число полных
оборотов) для грузовых автомобилей
Число полных оборотов рулевого колеса
Рис. 15.6. Распределение полного хода рулевого колеса (число полных
оборотов) для автобусов
658
75. Основы теории и расчета рулевого управления КТС ОБГ
Чувствительность транспортного средства к управлению
Чувствительность ТС к управлению — свойство реагировать на управляю-
щее воздействие водителя при стационарном движении. Это одна из важнейших
характеристик, определяющих управляемость автомобиля. Чувствительность свя-
зывает изменение кривизны траектории (или радиуса поворота) с поворотом руле-
вого колеса и определяется по зависимости:
Ch = dKpld$, (15.1)
где Кр — кривизна траектории; р — угол поворота рулевого колеса.
Чем больше величина чувствительности, тем активнее ТС реагирует на
управляющее воздействие водителя.
Скорость изменения кривизны траектории зависит не только от кинематиче-
ского передаточного числа РУ, но и от других конструктивных факторов, таких как
колесная база, колея, возможные углы поворота управляемых колес и т. п. Таким
образом, чувствительность позволяет задавать определенные свойства разрабаты-
ваемому ТС.
Так, при движении с большими скоростями желательна невысокая чув-
ствительность, чтобы неосторожный поворот руля, например от толчка на неровно-
сти дороги, не вызвал бы резкого поворота машины и не создал аварийной ситуа-
ции. При маневрировании же, наоборот, необходима высокая чувствительность,
обеспечивающая быструю реакцию ТС на поворот рулевого колеса. Такие свойства
особенно важны для длиннобазных многоосных или многоопорных ТС.
Одним из наиболее эффективных способов получения нужной характеристи-
ки чувствительности является создание РУ с гибкой геометрией поворота, обеспе-
чивающей автомобилю нужные свойства.
Статистические исследования, проведенные в МГТУ им. Н.Э. Баумана, опре-
делили обобщенный диапазон разброса значений чувствительности к управлению
для различных категорий автомобилей. Результаты исследований приведены на
рис. 15.7—15.10, где Мо — математическое ожидание, D — дисперсия и 5 —
Рис. 15.7. Обобщенное для всех категорий автомобилей распределение
чувствительности к управлению: Л/о = 1,64; D = 0,44; 5 = 0,66
15.3. Исходные данные для расчета системы рулевого управления
659
Рис. 15.8. Распределение чувствительности легковых автомобилей к управ-
лению: Мо = 2,14; D = 0,33; 5 = 0,68
Рис. 15.9. Распределение чувствительности грузовых автомобилей к управ-
лению: Мо= 1,17; £ = 0,09; 5 = 0,30
среднее квадратичное отклонение чувствительности. Чувствительность разрабаты-
ваемого КТС ОБГ должна находиться в реальном диапазоне, имеющемся в сущест-
вующем автомобильном парке.
Чувствительность, определенная по выражению (15.1), не является постоян-
ной величиной, а слегка изменяется в зависимости от угла поворота рулевого коле-
са. На рис. 15.11 приведены соответствующие данные по некоторым автомобилям
повышенной проходимости, а также по разработанному в МГТУ им. Н.Э. Баумана
макету с колесной формулой 12x12 для двух наиболее характерных режимов дви-
жения: повороту с минимальным радиусом (полюс поворота находится в середине
базы) и транспортному режиму (полюс в середине задней тележки). Для сравнения
приведены и данные по прототипу МАЗ-547.
660
75. Основы теории и расчета рулевого управления КТС ОБГ
Рис. 15.10. Распределение чувствительности автобусов к управлению:
Мо = 1,05; D = 0,11; 5 = 0,34
Относительный угол поворота
рулевого колеса
Рис. 15.11. Зависимость чувствительности к управлению от относительного угла поворота
рулевого колеса:
/ — МАЗ-547: 2 — макет 12x12 (полюс в середине задней тележки на 5-й оси); 3 — КраЗ-260; 4 —
макет 12x12 (полюс в середине базы); 5 — Урал-375; 6 — Татра-148; 7 — ЗИЛ-131; 8 — ГАЗ-66
Как видно из рис. 15.11, существует потенциальная возможность уменьшения
кинематического передаточного числа разрабатываемой системы РУ при сохране-
нии чувствительности в рациональных пределах.
Вопрос о выборе чувствительности РУ далеко неоднозначен. Следует иметь в
виду, что повышение чувствительности к управлению у ТС больших габаритов не-
избежно приведет к увеличению энергозатрат для нужд системы РУ. В дальнейших
15.3. Исходные данные для расчета системы рулевого управления
661
исследованиях нуждается и вопрос об адекватности
действий водителя при повышении чувствительности
крупногабаритного ТС к управлению. Рациональная
форма зависимости передаточного числа РУ от угла
поворота рулевого колеса, формирующая чувстви-
тельность, представлена на рис. 15.12.
Усилие на рулевом колесе
Усилие, необходимое для поворота рулевого
колеса, косвенно передает водителю информацию об
угле поворота управляемого колеса посредством си-
ловой обратной связи. Оно регламентируется норма-
тивными документами и не должно превышать 245 Н.
Разрабатывать автомат загрузки рулевого колеса сле-
дует исходя из требований этих документов и кон-
кретно примененного рулевого механизма (редуктора).
На ходовом макете 12x12, созданном в МГТУ
Рис. 15.12. Рациональная фор-
ма зависимости передаточного
числа рулевого управления от
угла поворота рулевого колеса:
/ — зона низкой чувс1ВИ1елыю-
сти; 2 — зона высоко” чувсг
гель ноет и
им. Н.Э. Баумана, установлено неуправляемое загрузочное устройство, имеющее
линейную характеристику с возможностью ее регулировки. Усилие на ободе руле-
вого колеса при его максимальном повороте составляет 100... 150 Н. Необходимое
демпфирование обеспечивается применением червячного рулевого механизма.
Энергетические параметры
Вопросы энергетической потребности индивидуального привода поворота
управляемого колеса включают:
- оценку наибольшего реального момента сопротивлению поворота колеса на
месте для определения требуемого рабочего давления гидропривода и параметров
силовых цилиндров;
- оценку наибольшей реально возможной угловой скорости поворота управ-
ляемого колеса для определения требуемого расхода рабочей жидкости и парамет-
ров силовых цилиндров;
- оценку мощности, необходимой на поворот управляемого колеса.
Оценка максимального момента сопротивления повороту колеса
В технической литературе приводятся различные подходы к определению
наибольшего момента сопротивления повороту управляемого колеса ТС. Например,
момент оценивается при повороте колеса неподвижного автомобиля на сухом ас-
фальтобетонном покрытии опорной площадки или используются расчетные и рас-
четно-экспериментальные зависимости при различных допущениях, таких как не-
учет влияния протектора, качения колеса при обкатке вокруг шкворневой оси и т. п.
Таким образом, вопросы расчета наибольшего момента сопротивления повороту
управляемого колеса единого теоретического обоснования в настоящее время не
имеют.
Для подтверждения рассмотрим несколько выражений, приводимых в раз-
личных источниках.
662
75. Основы теории и расчета рулевого управления КТС ОБГ
Для расчетной оценки применительно к шасси МАЗ-547В (прототипу макета
12x12) приняты следующие исходные данные:
- вертикальная нагрузка на колесо Рк = 70 кН;
- коэффициент сцепления ср = 0,8;
- длина пятна контакта / = 0,5 м;
- ширина пятна контакта 5 = 0,3 м;
- свободный радиус колеса гс = 0,8 м;
- радиус качения в свободном режиме гк = 0,77 м;
В [1] приводится выражение для определения момента сопротивления пово-
роту колеса, заимствованное из теории движения гусеничных машин
Л/сп = 0,375(рРк 3,14 / 5 /4.
Подставляя исходные данные, получим Л/С11 = 6,6 кН м.
Используя выражение Л.А. Гинцбурга
Ип = О,57’*ф(гс-гк),
получаем Мсп = 6,2 кН м.
А.С. Литвинов предлагает расчетное выражение с допущением прямоуголь-
ной эпюры нормальных реакций в пятне контакта
Чп = <р/Рк/4.
Отсюда Мсп = 7 кН м.
И наконец, в [12] момент сопротивления повороту колеса определяется по
выражению
МСП = О,14(?РКГК.
При подстановке исходных данных Мсп = 6,2 кН м.
Как видно, полученные по различным источникам значения Мсп весьма близ-
ки и находятся в пределах 6,2...7,0 кН. Следует отметить, что принятые и отмечен-
ные выше допущения увеличивают значение момента. Удельный момент (момент,
отнесенный к вертикальной нагрузке на колесо), или удельное плечо составляет
примерно 0,09...0,1 м.
В ходе проведенной МГТУ им. Н.Э. Баумана НИР экспериментально опреде-
лялись некоторые энергетические параметры поворота управляемого колеса авто-
мобиля. Объектами исследования были автомобиль повышенной проходимости
КамАЗ-43101 штатной комплектации с нагрузкой на переднюю ось 43 кН (опреде-
лялись энергетические параметры поворота колес оси) и ходовой макет 79085 (8x8)
с индивидуальным приводом поворота каждого из колес с нагрузкой на колесо 70 кН.
Экспериментальные данные для КамАЗа дают значение Мси = 3,5...4,2 кНм,
что соответствует удельному плечу 0,08...0,1 м. Это неплохо согласуется с приве-
денными выше расчетами с учетом замечания по поводу допущений.
Для ходового момента 79085 момент сопротивления повороту колеса впря-
мую не определялся. Однако рассчитывались требуемая и измерялись угловая ско-
рость поворота колеса, требуемая на поворот колеса мощность привода, а также
линейная скорость и перемещение штока выходного звена привода и усилие на нем
15.4. Выбор и математическое обоснование законов
663
при перекладке руля. По результатам расчетно-экспериментальных исследований
получено, что для рулевого управления макета 12x12 с нагрузкой на колесо 75 кН
Мсп = 8 кН м.
Оценка угловой скорости поворота управляемого колеса
Нормативы требуют максимально возможной скорости перекладки рулевого
колеса без перехватов 10 1/с. Передаточные числа рулевых механизмов у большин-
ства автомобилей находятся в пределах 18-22. Легко определить, что диапазон из-
менения угловой скорости поворота колеса находится в пределах 0,45...0,5 1/с.
Значения угловой скорости поворота колеса в различных режимах движения,
полученные в ходе экспериментальных исследований, следующие: для автомобиля
КамАЗ-43101 наибольшее отмеченное значение — 0,52 1/с, для макета 79085 (8x8)
при повороте на месте — 0,43 1/с.
15.4. Выбор и математическое обоснование
законов функционирования гибких схем рулевого управления
Под гибкими (нетрадиционными) понимаются схемы РУ, в которых полюс
РУ может в отличие от традиционных схем перемещаться вдоль продольной оси
КТС ОБГ по определенному закону в зависимости от
одного или нескольких параметров (рис. 15.13). Выбор
закона управления ими основан на результатах большо-
го числа теоретических исследований и практике зару-
бежных и отечественных автомобильных фирм, а также
расчетах, проведенных для различных видов этих зако-
нов с помощью аналогового вычислительного комплек-
са АВК-2 (3) Н.М. Назаровым и В.Г Корниловым. Для
сравнительной оценки схем РУ с регулируемым сме-
щением полюса РУ (РСП) использованы также некото-
рые варианты традиционных схем. По результатам
предварительных исследований выбрано два варианта
закона управлениями схемами РУ
Математическое обоснование законов
Рис. 15.13. Кинематика схе-
мы РУ с подвижным полю-
сом (программное измене-
ние положения полюса по-
ворота):
О/, Он — крайние положен
центра поворота; р. р' — край-
ние положения полюса поворо-
та; / перемещение полюс<
поворота р' в зависимости от
положения полюса РУ на оси ТС
функционирования схемы РСП-УС
В первом из них положение полюса РУ на про-
дольной оси КТС ОБГ зависит от двух параметров:
скорости движения автомобиля vx и задающего угла
поворота условного среднего колеса задающей оси а
X,, =/(а, vj.
Соответствующая схема в ходе исследований
получила условное название РСП-УС (регулирование
664
75. Основы теории и расчета рулевого управления КТС ОБГ
Рис. 15.14. Варианты управления смещением полюса РУ‘
1,2,3 — параболический, линейный и гиперболический законы
смещения полюса по углу и скорости). Устойчивость движения КТС ОБГ по пере-
ходным траекториям на повышенных скоростях может быть улучшена за счет пово-
рота задних колес на некоторый угол в ту же сторону, что и передних. Такая кине-
матика работы схемы РУ обеспечивается за счет смещения полюса РУ назад за пре-
делы базы шасси (рис. 15.13).
По мере увеличения угла поворота задающего (первого) колеса (Х| или (и)
снижения скорости движения vx полюс РУ должен перемещаться в направлении
середины базы для обеспечения поворота передних и задних колес в противофазе,
чтобы улучшить поворотливость и поворачиваемость ТС.
Основываясь на вышеизложенных рассуждениях, математических моделях
§ 8.4 и главы 14, а также данных, представленных на рис. 15.14, можно сформули-
ровать закон смещения полюса РУ в зависимости от задающего угла а и скорости
движения vx.
При малых скоростях движения на первое место выдвигаются требования по по-
ворачиваемости и поворотливости, поэтому синфазный поворот передних и задних ко-
лес не требуется. При таком режиме движения с увеличением кривизны траектории
полюс РУ желательно переместить в середину базы. Тогда исходное смещение полюса
РУ для бесконечно малой скорости движения зададим равным нулю Хр = 0 (точка А,
см. рис. 15.14). По мере увеличения задающего угла а до максимального значения атах
полюс РУ должен переместиться в середину базы (точка В, см. рис. 15.14). Кроме того, в
исследовательских целях было предусмотрено перемещение полюса РУ из исходного
положения (точка А) в середину базы (точка В) по различным видам траекторий (кривые
/, 2,3 на рис. 15.14). Тогда текущее смещение полюса РУ определится по зависимости
= ЛГ, |«Г
где К — показатель степени, определяющий вид кривой; К\ — коэффициент про-
порциональности по перемещению полюса.
15.4. Выбор и математическое обоснование законов
665
С увеличением скорости движения по траекториям малой кривизны на пер-
вый план все больше выдвигаются требования по устойчивости. В таких условиях
необходим синфазный поворот передних и задних колес в начале маневра и плав-
ный переход к повороту этих колес в противофазе, если это диктуется условиями
движения. Подобный эффект можно достичь, сместив семейство кривых АВ в по-
ложение А'В' (см. рис. 15.14) и поставив величину полученного смещения в зависи-
мость от скорости движения vx.
С учетом такого смещения текущее положение полюса РУ в зависимости от
угла и скорости запишется в виде
Хр = ^|а|ср \к +K2vmx
где ос1ср — средний угол поворота колеса правого и левого борта первой оси; К2 —
коэффициент пропорциональности смещения кривой по скорости движения ТС;
vx — текущая скорость движения ТС; т — параметр введен в исследовательских
целях для получения различных модификаций закона.
Преобразуем данное выражение
Xp=(|alcp|K <-Kv<v”)Km, (15.2)
где Kv = —- — коэффициент пропорциональности смещения кривой Хр по скоро-
к\
сти; Кт = К\ — коэффициент пропорциональности по перемещению.
Таким образом, при помощи коэффициентов Кт, Kv а также выбором ве-
личины показателей степени К и т при параметрах а и vx можно формировать раз-
личные виды закона перемещения полюса РУ Определение коэффициентов К,„ и
Kv в уравнении (15.2) производится исходя из начальных условий
^'/)max = 0,5L; vx = 0, а а = атях>
где X — максимально возможное перемещение полюса РУ, принятое в расче-
тах; L — база ТС; ос — текущее значение угла поворота условного среднего колеса
(задающей) первой оси; остах — максимальное значение угла ос, принятое в расчетах.
Тогда
Хртк = \а\кКт, (15.3)
откуда
Затем, задаваясь максимально возможной скоростью vx = илтах, нулевым зна-
чением задающего угла а = 0, а также найденным из (15.4) выражением для К,„, за-
пишем исходное смещение полюса РУ
- 2918
666
15. Основы теории и расчета рулевого управления КТС ОБГ
следовательно,
Хри =
Г-
п К X
°хтах ртах
Хри I «тах \к
С учетом (15.2) и (15.3) закон смещения полюса РУ принимает вид
1«Г *pimx У;Хри
I ос 1^ vm
I птах I Л'max
(15.5)
Графический вид функции Хр = /(ос, rv) для КТС ОБГ с колесной форму-
лой 8x8 и длиной базы L около 8,0 м при различных значениях параметров пред-
ставлен на рис. 15.14. Его анализ показывает, что с возрастанием угла а от 0 до 0,6 рад
и уменьшением скорости vx с 16 до 0 м/с величина смещения полюса РУ стремится
в область положительных значений и достигает своего максимума (Хр = 4,0 м) при
значении а = 0,6 рад и vx = 0. А при а = 0 и vx = гЛП1ах полюс РУ смещается за преде-
лы базы шасси на величину, соответствующую заданному значению Хри.
Рис. 15.15. Закон перемещения полюса РУ в схеме рулевого управления типа
РСП-УС применительно к шасси 8x8
15.4. Выбор и математическое обоснование законов
667
Рис. 15.16. Характер изменения перемещения полюса РУ Хр и величин углов поворота колес
шасси 8x8 при входе и поворот и установившемся движении по кругу:
А — период входа в круг; Б — движение по кругу; I — зона синфазного поворота колес; II — зона пере-
хода поворота колес в противофазу; III — зона установившегося поворота колес в противофазе; /, 2, 2 и
4 — поворот колес 1-й, 2-й, 3-й и 4-й осей соответственно
Пример функционирования схемы рулевого управления (при входе ТС 8x8 в
поворот и установившемся движении по кругу), полюс РУ которой перемещается по
одному из вариантов закона, представленных на рис. 15.14, приведен на рис. 15.15. Из
данных рис. 15.16 видно, что вход 4-осного КТС ОБГ в поворот и установившееся
движение по кругу сопровождаются в начальный момент синфазным поворотом всех
управляемых колес (зона I), а полюс РУ из отрицательной области начинает переме-
щаться в положительную. В дальнейшем, при переходе полюса РУ из отрицательной
области в положительную, колеса задних осей последовательно, начиная с крайней
задней оси, разворачиваются в противофазное состояние (зоны II и III).
Математическое обоснование законов функционирования схемы PC77 -У
Вторым вариантом закона управления смещением полюса РУ является зави-
симость его величины только от угла поворота задающего колеса а
Хр=/(а).
Закон в соответствии с рис. 15.17 может быть представлен зависимостью
Х„=(|а|к - а )Х„, (15.6)
668
15. Основы теории и расчета рулевого управления КТС ОБГ
Хр. м
Рис. 15.17. Варианты управления смещением полюса РУ схемы типа РСП-У:
1,2.3 — параболический, линейный и гиперболический законы
где ос — угол запаздывания поворота задних управляемых колес в противофазное
состояние по отношению к передним; Кп — коэффициент пропорциональности по
перемещению полюса РУ
Такая схема РУ получила условное название РСП-У (регулирование смеще-
ния полюса по углу).
При помощи параметров и ос а также выбором величины показателя К
можно формировать различные виды закона управления смещением полюса РУ
Расчет коэффициентов Кц и ос производится исходя из начальных условий, когда
Хртах = 0,5Л, а ос = остах Тогда выражение (15.6) преобразуется так:
Хртях =(|атях I* - а’)/С,
откуда
(|атах I* - а )
(15.7)
Затем, задаваясь исходным смещением полюса РУ Хри за пределы базы при
ос = О и полученным выражением для Кп, вычисляем ос из (15.5)
откуда
15.4. Выбор и математическое обоснование законов
669
у I п
* ри I ^max I
ос =—----------.
Хри-Хр,
После подстановки (15.7) и (15.8) в (15.6) имеем:
X,
(15.8)
X I ос \к
к ри I uma\ I
X — X
ри Л р max у
I «max
xp„|amaJ*
X — X
ри ртах
(15.9)
Р
I а,тач |*
/>!/•
Проведя некоторые преобразования, получим
I сс|к Хртач
I_____* ри____
v — X
\ ри ртах
Характер смещения полюса РУ Хр в зависимости от угла поворота задающего
колеса ос при
Рис. 15.18. Характер изменения положения полюса РУ в зависимости от параметров закона
управления типа РСП-У:
/ — параболический закон перемещения Хр внутри базы ТС; 2 — параболический закон перемещения Хр
со смещением полюса РУ за пределы базы ТС на один метр; 3 — линейный закон перемещения Хр со
смещением полюса РУ за пределы базы ТС на один метр; 4 — линейный закон перемещения Хр со сме-
щением полюса РУ за пределы базы ТС на три метра; 5 — гиперболический закон перемещения Хр со
смещением полюса РУ за пределы базы ТС на три метра; 6 — гиперболический закон перемещения Хр
со смещением полюса РУ за пределы базы ТС на три метра
670
15. Основы теории и расчета рулевого управления КТС ОБГ
В выражении (15.5) значения максимальных величин а и vxmax для различных
типов КТС ОБГ с числом осей от четырех до восьми примерно одинаковы, а длина
базы с ростом числа осей увеличивается. Поэтому в целях унификации законов
управления смещением полюса РУ и сокращения объемов исследований целесооб-
разно перемещение полюса РУ в обе стороны от задней оси Хри и %/?тах выразить в
относительных величинах через базу шасси
{х1!п^ = к^ц
[х^к^ь,
где Кх ,пач и — коэффициенты пропорциональности, определяемые для каждой
схемы РУ по соотношению кинематических показателей. Расчет этих коэффициен-
тов приведен ниже.
Тогда (15.5) можно записать в виде
Аналогично для (15.9)
(15.10)
Таким образом, полученные алгоритмы функционирования схем РУ с под-
вижным полюсом, а также позволяющие в исследованиях перейти к схемам РУ с
традиционной кинематикой, позволяют описать практически весь диапазон из-
вестных к настоящему времени схем.
15.5. Исследования поворачиваемости, поворотливости
и устойчивости движения КТС ОБГ с различными схемами РУ
Теоретические исследования проведены на аналоговом вычислительном
комплексе и ПЭВМ с использованием выражений (15.2) —(15.10) и системы диффе-
ренциальных уравнений (8.85), а экспериментальные исследования — с помощью
макетного образца КТС ОБГ 79085 с гибкой схемой РУ, серийных и опытных об-
разцов MA3-543M, -7930, -7906 и -7907
Схема с регулируемым смещением полюса рулевого управления
по углу поворота задающего колеса [РСП — У]
Как уже отмечалось, недостаточную устойчивость движения ТС с управляе-
мыми колесами передних и задних осей связывают прежде всего с явлением заброса
бокового ускорения на задней оси и изменением знака боковой реакции на ее коле-
15.5. Исследования поворачиваемости и устойчивости КТС ОБГ
671
сах. По результатам исследований причин этого явле-
ния было предложено несколько способов борьбы с
ним. Суть одного из них заключается в применении
запаздывания поворота колес задней оси относительно
колес передней оси на угол, равный около 0,1 рад.
Рассматривая кинематику работы схем РУ с
подвижным полюсом РУ с этой точки зрения, можно
заметить, что она реализует тот же принцип запазды-
вания.
Если в начале поворота полюс РУ находится за
пределами базы и колеса задних осей поворачиваются
синфазно передним, то с увеличением кривизны траек-
тории полюс РУ, перемещаясь вдоль продольной оси
КТС ОБГ пересечет середину его последней оси, вы-
звав поворот ее колес в противоположную сторону с
определенной задержкой. Разница с известным спосо-
бом запаздывания заключается в том, что в рассматри-
ваемой схеме присутствует синфазный поворот колес
на некоторый угол относительно передних и, что осо-
бенно важно, полная согласованность кинематики при
Рис. 15.19. Зависимость па-
раметров Кхи и К для различ-
ных углов запаздывания по-
ворота колес задней оси а;
1,2,3 — а, = 0,1,0,2; 0,3 рад
повороте управляемых колес.
Для исследуемой схемы РУ типа РСП-У можно
найти сочетание параметров, при которых будет обеспечиваться необходимый угол
задних колес оСз в противофазе относительно передних. С
запаздывания поворота
Рис. 15.20. Зависимость па-
раметров Кхи и К для различ-
ных углов поворота колес
задающей оси а для шасси
8x8 (L = 0,1) при угле запаз-
дывания ос3 = 0,1 рад:
— параболический закон
управления смещением полюса
РУ (/С = 2,0; КХ11 = 0.02);-
гиперболический закон управ-
ления смещением полюса РУ
(К = 0,1,/С„ = 2.43)
этой целью, приравняв к нулю (15.10), получим зави-
симость коэффициентов от кинематических показате-
лей схемы РУ
_ |а|*К,тах
I«|к -1 сстях '
Приняв в этом выражении /fvmax = 0,53 и а1Пах =
= 0,6, подставим в него К в пределах от 0,1 до 2,0, а вместо
а — необходимый угол запаздывания ос5. При этом
можно получить значение параметра Кхн для различных
углов запаздывания поворота задних колес, например,
для 0,1,0,2 и 0,3 рад (рис. 15.19).
Смещение полюса РУ из исходного положения в
середину базы для угла запаздывания = 0,1 рад приве-
дено на рис. 15.20. При минимальном К = 0,1 и макси-
мальном Кхи = -2,43 смещение полюса осуществляется по
гиперболе, в другом крайнем случае, когда К = 2,0, а КХ11 -
= 0,017, образуется параболический закон смещения.
Характер изменения величины бокового ускоре-
ния на задней оси при движении 4-осного КТС ОБГ
672
75. Основы теории и расчета рулевого управления КТС ОБГ
б
м/с2
2
1
О
-1
-2
-3
м/с2
2
1
О
-1
-2
-3
м/с2
2
1
О
-1
-2
в
Рис. 15.21. Характер изменения величины бокового ускорения на задней оси V3O шасси 8x8
при движении по «переставке»:
— К = 0,1, Kut = -2,43; ос, = 0,1,----К = 2,0; Кхи = -0,02; а, = 0,1; б — К = 0, 1; Kut = -4,31,
ос, = 0,2; — К = 2,0; Kut = -0,06; а, = 0,2; в — К = 0,1, Kut = -6,97; ос, = 0,3; — К = 2,0;
/Си, = -0,22; ос, = 0,3
по «переставке» со скоростью 9 м/с при предельных значениях параметров К и A\-niin
для углов запаздывания, равных 0,1, 0,2 и 0,3 рад, представлен на рис. 15.21-15.23.
Их анализ показывает, что при использовании гиперболического закона управления
смещением полюса РУ (X = 0,1) во всем диапазоне значений параметра Кхи
= 2,43...6,97 при всех принятых значениях углов запаздывания поворота колес зад-
ней оси а3 = 0,1...0,3 рад на графике кривой, отражающей изменение бокового уско-
рения над задней осью, наблюдаются забросы этой величины как в начале «пере-
ставки», так и при переходе ее во вторую фазу. Короткая по времени продолжитель-
ность этих забросов (0,4...0,5 с) дает основание полагать, что возникающие при этом
импульсы боковых сил на колесах задних осей будут носить характер ударной на-
грузки и снижать устойчивость движения по переходным траекториям.
15.5. Исследования поворачиваемости и устойчивости КТС ОБГ
673
Рис. 15.22. Характер переходного процесса при выполнении маневра «переставка» и гипер-
болическом законе перемещения полюса РУ (К = 0,1):
-------- скорость поворота колес задней оси, — боковое ускорение над задней осью,
—угловая скорость поворота шасси со,; — смещение полюса рулевого управления, Хр
Причина возникновения забросов бокового ускорения связана с разными по
величине и направлению угловыми скоростями поворота КТС ОБГ сос и колес задней
оси d3. Интенсивное смещение полюса РУ Хр по гиперболическому закону (К = 0,1)
вызывает быстрое изменение направления и резкое нарастание скорости поворота
колес задней оси d3 (рис. 15.22). Изменение направления скорости поворота колес
задней оси d3 в начале и середине маневра в противофазе с угловой скоростью по-
ворота шасси со- приводит к изменению направления бокового ускорения (забросу).
Переход к управлению смещением полюса РУ по параболическому закону с
увеличением значения параметра К до максимального, равного 2,0, и соответст-
вующим уменьшением значения параметра Кхц приводит к полному исчезновению
забросов бокового ускорения во всех фазах «переставки».
Плавный характер изменения бокового ускорения при выполнении «пере-
ставки» и меньший размах амплитуды этой величины, чем в случае гиперболиче-
ского закона управления смещением полюса РУ, позволяет утверждать, что исполь-
зование параболического закона позволит повысить устойчивость движения КТС
ОБГ по переходным траекториям.
При совершении маневра «переставка» с большей скоростью (10 м/с и выше)
при угле запаздывании а3 = 0,1 рад заброс бокового ускорения над задней осью v3O
674
15. Основы теории и расчета рулевого управления КТС ОБГ
----------г, = 10 м/с; ос, = 0,1 рад; = 10 м/с; ос, = 0,3 рад;---------г, = 8 м/с; ос, = 0,1 рад
в начале маневра вновь начинает проявляться и растет с повышением скорости.
Увеличение угла запаздывания до 0,3 рад приводит к исчезновению заброса и
уменьшению амплитуды бокового ускорения (рис. 15.23). Для определения рацио-
нальной величины ос, требуется исследование схем РУ по другим критериям.
На рис. 15.24 представлены результаты исследований поворотливости шасси
8x8 со схемой РУ типа РСП-У Их анализ показывает, что худшими свойствами
поворотливости обладает КТС ОБГ с углом запаздывания поворота задних колес
оц = 0,3 рад, особенно в интервале радиусов поворота /?п = 12...22 м. Это объясняет-
ся тем, что полюс РУ при угле поворота передних колес до 0,3 рад находится за
пределами базы, поэтому шасси двигается по кругу, одновременно совершая плос-
копараллельное движение, и занимает полосу значительной ширины.
С уменьшением угла запаздывания ширина колейного следа Нк во всем диа-
пазоне радиусов поворота уменьшается. Причем ширина колейных следов при уг-
лах запаздывания 0,1 и 0,2 рад отличается незначительно. Наилучшими свойствами
поворотливости по этому показателю обладает шасси со схемой РУ, в которой
управление смещением полюса РУ осуществляется по гиперболическому закону
(/С = 0,1) с углом запаздывания а3 = 0,1 рад, но ТС с такой схемой, как уже было до-
казано, имеет худшую устойчивость движения.
Исследование схемы РУ типа РСП-У применительно к КТС ОБГ 8x8 по кри-
териям поворотливости и устойчивости движения показало, что при параболиче-
ском законе управления смещением полюса РУ, обеспечивающем поворот колес
15.5. Исследования поворачиваемости и устойчивости КТС ОБГ
675
Рис. 15.24. Зависимость ширины колейного следа Нк от радиуса поворота /?„
шасси 8x8 с различными законами управления смещением полюса РУ:
/ — а, = 0,1; К = 0,1; 2 — а, = 0,1; К = 2,0; 3 — а. = 0,2; К = 2,0; 4 — а, = 0,3; К =
задних осей относительно передних с запаздыванием на угол оц = 0,1 рад на скоро-
стях движения 10 м/с и более, появляются забросы бокового ускорения v3O над
задней осью в начале движения по «переставке». При этом же законе управления,
но с большим углом запаздывания, равным 0,3 рад, устойчивость ухудшается с до-
полнительным ухудшением поворотливости КТС ОБГ
нии ширины колейного следа в широком диапазоне
радиусов поворота (12...22 м).
Учитывая сказанное, можно сделать следующие
выводы.
Для улучшения поворотливости, поворачиваемости
и устойчивости движения 4-осных КТС ОБГ с длиной
базы не более 8,0 м и схемой РУ типа РСП-У целесооб-
разно использовать параболический закон смещения по-
люса РУ с параметром К = 2,0 и углом запаздывания
а3 = 0,2 рад. Такие шасси по критерию устойчивости дви-
жения по переходным траекториям типа «переставка» и
свойствам поворотливости и поворачиваемости удовле-
творяет установленным НТД требованиям.
Для КТС ОБГ с большей длиной базы и большим
числом осей использование схемы РУ типа РСП-У без
корректировки параметров К и а3 положительного эффек-
та по уменьшению ширины колейного следа не дает.
Из данных, представленных на рис. 15.25, следу-
ет, что КТС ОБГ 16x16 (L = 13,2 м) со схемой РУ типа
Это выражается в увеличе-
ние. 15.25. Зависимость ши-
рины колейного следа Нк от
радиуса поворота /?„ шасси
16x16 с различными зако-
нами управления смещени-
ем полюса РУ:
-------К =2,0; а, = 0,2;
--------АГ = 0,8; а, = 0,1
676
15. Основы теории и расчета рулевого управления КТС ОБГ
РСП-У (К = -2,0; = 0,2 рад) с увеличением радиуса поворота с 17 м (/?min) до 30,0 м
Нк не только не уменьшается, но, наоборот, увеличивается. Это характерно для па-
раболического закона управления смещением полюса РУ и больших углов запазды-
вания (а} > 0,2 рад). Причем с увеличением базы эта тенденция усиливается.
Если для КТС ОБГ 8x8 (L = 7,8 м) со схемой РСП-У резкий рост зависимости
Нк = f(R) был получен при К = 2,0 и а, = 0,3 рад (см. рис. 15.25), то для КТС ОБГ
16x16 (L = 13,2 м) подобный рост Нк = f(R) происходит при меньшем угле запаз-
дывания = 0,2 рад.
Очевидно, что для достижения удовлетворительных показателей поворот-
ливости для шасси с большей длиной базы необходимо более интенсивное сме-
щение полюса РУ в направлении середины базы и уменьшение угла запаздывания.
При этом уменьшение параметров К и а, может отрицательно сказаться на устой-
чивости движения.
В ходе исследований было установлено, что уменьшение ширины колейного
следа Нк для КТС ОБГ 16x16 достигается уменьшением параметров закона управ-
ления смещением полюса РУ до значений К = 0,8, а, = 0,1 рад (см. рис. 15.24). Это
не приводит к ухудшению устойчивости при выполнении маневра «переставка».
При этом величина амплитуды бокового ускорения (рис. 15.26) на задней оси уве-
личивается на 0,2 м/с в обеих фазах «переставки» по сравнению с вариантом схемы РУ,
---------К = 0,8; ос, = 0.1;-----К = 2,0; сс, = 0,2 (схема РУ типа РСП-У)
15.5. Исследования поворачиваемости и устойчивости КТС ОБГ
когда К = 2,0 и а3 = 0,2 рад, а заброс бокового ускоре-
ния в начале маневра практически отсутствует.
Учитывая полученные результаты, а также ре-
зультаты аналогичных исследований, проведенных
для 5- и 6-осных КТС ОБГ размеры базы которых
занимают промежуточное положение относительно
размеров базы рассмотренных 4- и 8-осных КТС ОБГ,
можно сказать, что с увеличением базы L и числа осей
необходимо уменьшать угол запаздывания а3 и пара-
метр К закона управления смещением полюса РУ с
целью улучшения поворотливости и поворачиваемо-
сти в широком диапазоне радиусов траекторий. При
этом удовлетворительные показатели устойчивости
движения сохраняются благодаря многоопорности.
Рациональные величины а3 и К схемы РУ типа РСП-У
в зависимости от длины базы КТС ОБГ представлены
на рис. 15.27
Рис. 15.27. Рациональные
величины параметров Д' и ос,
закона управления смеще-
нием полюса РУ в схеме
типа РПС-У
Схема с регулированием смещения полюса рулевого управления
по углу поворота и скорости движения [РСП-УС]
В схеме РУ типа РСП-УС смещение полюса РУ регулируется в зависимости
от угла поворота задающего колеса а3 и скорости движения vx.
Закон управления смещением полюса РУ в схемах такого типа представлен
выражением (15.10). Заменим в нем текущий угол на угол запаздывания, а макси-
мально возможный угол поворота на максимальный угол запаздывания. Найдем из
полученного выражения зависимость угла запаздывания от скорости движения,
имея в виду, что смещение полюса РУ в данном случае равно нулю:
( vY V
«з = —— СЧтах (15.11)
Учитывая результаты исследования схемы РУ типа РСП-У, для схемы РУ ти-
па РСП-УС применительно к КТС ОБГ 8x8 примем параболический закон смеще-
ния полюса РУ в зависимости от угла поворота, т. е. параметр К = 2,0. Пусть для
максимальной скорости движения 60 км/ч (16,67 м/с) максимальный угол запазды-
вания а3 равен 0,3 рад.
Зависимость угла запаздывания а3от скорости движения vx и величины пара-
метра т при заданных значениях t>max и оцтах представлена на рис. 15.28. Его анализ
показывает, что с ростом скорости vx угол запаздывания увеличивается. Причем
интенсивность возрастания зависит от величины т. Чем меньше значение этого па-
раметра, тем быстрее увеличение а3, особенно в диапазоне малых скоростей движе-
ния от 0 до 5 м/с.
Исходя из опыта исследований схемы РУ типа РСП-У можно утверждать, что
большие углы запаздывания оказывают отрицательное влияние на поворачивае-
мость и поворотливость шасси. В то же время при движении с малыми скоростями
678
15. Основы теории и расчета рулевого управления КТС ОБГ
Рис. 15.28. Зависимость величины угла запаздывания ос, от скорости движения
и параметра т в схеме РУ типа РСП-УС:
/,2,3,4 —т = 0,1, 1,0; 1,58; 2,0
необходимость в больших углах запаздывания с точки зрения устойчивости движе-
ния отсутствует.
Исследование устойчивости движения КТС ОБГ 8x8 со схемой РСП-У показало,
что при движении со скоростью 10 м/с угол запаздывания должен составлять 0,2 рад.
Тогда 1,0 < т < 2,0 (см. рис. 15.28). Более точное значение этого параметра
вычисляется по формуле
/С1п-°^-
После подстановки заданных значений а, = 0,2 рад; «зтах = 0,3 рад; vx = 10 м/с;
глтах 16,67 м/с; К = 2,0 получим т = 1,58. Параметр, определяющий исходное
смещение полюса РУ при максимальной скорости движения t\max и максимальном
угле запаздывания а3тах, может быть найден из выражения
К
js __ ^чтах хтах
la I* '
I ^тах I
Данные результатов исследований устойчивости движения шасси МАЗ-543
(8x8) со схемой типа РСП-УС с различными значениями параметра т представлены
на рис. 15.29, а показатели поворачиваемости и поворотливости — на рис. 15.30.
15.5. Исследования поворачиваемости и устойчивости КТС ОБГ
679
8x8 со схемой РУ типа РСП-УС при движении по «переставке»:
/, 2, 3 — лп = О,I; 1,58; 2,0
Анализ этих рисунков показывает, что величина амплитуд бокового ускоре-
ния во всех фазах «переставки» при различных значениях параметра т отличаются
незначительно. Наибольшая амплитуда бокового ускорения v30 получена при т - 2,0,
при этом наблюдается заброс бокового ускорения в на-
чале совершения «переставки». Наименьшая величина
амплитуды бокового ускорения получена при т = 0,1,
при этом заброс бокового ускорения полностью отсут-
ствует, однако ширина колейного следа в диапазоне
радиусов поворота 10...25 м при т = 0,1 (см. рис. 15.30)
больше, чем при т = 1,58 на 0,1.. .0,2 м.
Таким образом, для улучшения свойств повора-
чиваемости, поворотливости и устойчивости движения
КТС ОБГ 8x8 с длиной базы не более 8,0 м со схемой
РУ типа РСП-УС целесообразен параболический закон
управления смещением полюса РУ с параметрами К =
= 2,0 и т = 1,58, обеспечивающими рациональное изме-
нение угла запаздывания поворота колес задней оси в
противофазе передним. Схема рулевого управления с
такими значениями параметров закона управления
смещением полюса РУ по критерию устойчивости дви-
Рис. 15.30. Зависимость
ширины колейного следа Нк
от радиуса поворота /?„
шасси 8x8 со схемой РУ
типа РСП-УС при различ-
ных значениях параметра т:
1у2 — т = 0,\, 1,58
680
75. Основы теории и расчета рулевого управления КТС ОБГ
жения по переходным траекториям типа «переставка» и свойствам поворотливости
и поворачиваемости удовлетворяет установленным требованиям.
Рассмотрим схему РУ типа РСП-УС для КТС ОБГ 16x16 типа 7922 (7923) с
длиной базы 13,2 м. При исследовании схемы РУ типа РСП-У применительно к
этому типу шасси было установлено, что параметр К равен 0,8, а угол запаздывания
0,1 рад. Произведя расчеты по зависимости (15.11) для скорости движения, равной
9 м/с, находим, что т = 1,43.
Итак, в результате теоретических исследований и проведенного анализа вы-
явлено влияние законов управления смещением полюса РУ и значений их парамет-
ров на свойства поворачиваемости, поворотливости и устойчивости движения КТС
ОБГ Определены рациональные закономерности изменения параметров управления
смещением полюса РУ и аналитические формулы их расчета в зависимости от базо-
вых размеров шасси. Полученные результаты реализованы в конструкции системы
РУ макетного образца КТС ОБГ 79085, и их адекватность реальной системе экспе-
риментально подтверждена.
Сравнительная оценка устойчивости КТС ОБГ с различными схемами РУ
при движении по траектории типа «переставка»
Рис. 15.31, 15.32 и 15.33 иллюстрируют результаты сравнительной оценки
Рис. 15.31. Изменение величины бокового ускорения V ю на задней оси шасси
8x8 с различными схемами РУ при движении по «переставке»:
--------схема РУ со всеколесным управлением, Хр = L/2;
--------схема РУ с управляемыми колесами;
-----схема РУ типа РСП-У(УС)
15.5. Исследования поворачиваемости и устойчивости КТС ОБГ
681
hn = 3,5 м) КТС ОБГ 8x8 типа MA3-543M (7908) с гибкими схемами РУ (РСП-У и
РСП-УС) и со схемами РУ в традиционном исполнении (управляемых колес только
передних осей; с управляемыми колесами передних и задних осей). Скорость дви-
жения в ходе исследований была вынужденно ограничена, поскольку шасси, имею-
щее схему РУ с управляемыми колесами передних и задних осей и фиксированным
положением полюса РУ в середине базы, неспособно совершить «переставку» с
указанными параметрами на скорости выше 9 м/с из-за скольжения в боковом на-
правлении колес задних осей.
Наибольший размах амплитуды бокового ускорения над задней осью v.iO
имеет КТС ОБГ с управляемыми колесами передней и задней осей и фиксирован-
ным положением полюса РУ в середине базы (см. рис. 15.31 и 15.32). Величина ам-
плитуды в первой фазе достигает 4,0...5,0 м/с2 а во второй — 3,5...3,9 м/с2 Это
в 2 раза больше, чем у схем с подвижным полюсом РУ
Для схемы РУ с управляемыми колесами двух передних осей величина ам-
плитуды бокового ускорения над задней осью составляет в первой фазе движения
по «переставке» 2,25 м/с2 а во второй — 2,15 м/с2 Это в 1,13 раза больше, чем у
схем с регулируемым положением полюса РУ Очевидно, что вероятность потери
устойчивости КТС ОБГ со схемами традиционного исполнения выше, чем в случае
использования на этих шасси схем с регулируемым положением полюса РУ
На рис. 15.32 представлены графики экспериментальных кривых, характери-
зующие изменение амплитуды бокового ускорения над задней осью шасси 79085.
Движение осуществлялось по «переставке» со скоростью 32 км/ч с использованием
----- — полюс в середине базы;
— полюс на 4-й оси;
--------полюс за 4-й осью
682
/5. Основы теории и расчета рулевого управления КТС ОБГ
варианта схемы со всеми управляемыми колесами и фиксированным положением
полюса РУ на продольной оси шасси в трех точках: в середине базы, на четвертой
оси, за пределами базы.
Анализ экспериментальных данных показывает, что худшей устойчивостью об-
ладают КТС ОБГ со всеми управляемыми колесами и фиксированным положением
полюса РУ в центре базы (сплошная кривая на рис. 15.32). При входе в «переставку»
наблюдается значительный заброс бокового ускорения длительностью около 1 с и ам-
плитудой 1,3 м/с2 В последующих фазах движения по «переставке» его величина дос-
тигает 5 м/с2 Полученные результаты еще раз подтверждают вывод многих ранее про-
веденных исследований о склонности шасси с такими схемами РУ к потере устойчивости.
Перенос полюса РУ на четвертую ось оказывает существенное влияние на
снижение (в 5 раз) максимальной амплитуды бокового ускорения (прерывистая
кривая на рис. 15.32) в сравнении с предыдущим вариантом. Следует также отме-
тить отсутствие заброса бокового ускорения. Такая схема имеет явные преимущест-
ва, так как меньшие значения ускорений соответствуют меньшим величинам боко-
вых сил, действующих на колеса задних осей, а значит, вероятность заноса кормо-
вой части КТС ОБГ (как наиболее опасного вида заноса) снижается.
Перенос полюса РУ назад за пределы базы шасси также уменьшает амплиту-
ду бокового ускорения. Но в первой фазе движения по «переставке» наблюдается
всплеск этой величины (до 2,5 м/с2) (штрих-пунктирная кривая на рис. 15.32), кото-
рый дает основание полагать, что удаление полюса РУ на значительное расстояние
оси шасси 79085 при движении по «переставке»:
--------по данным экспериментальных исследований;
• — по расчетным данным
15.5. Исследования поворачиваемости и устойчивости КТС ОБГ
683
за пределы базы по условиям устойчивости движения на больших скоростях неце-
лесообразно.
В случае расположения полюса РУ в непосредственной близости от четвер-
той оси шасси боковое ускорение над задней его осью при движении по «перестав-
ке» плавно изменяется на всем протяжении маневра, а углы поворота колес перед-
ней оси составляют около 0,2 рад.
На рис. 15.33 приведены графики боковых ускорений на задней оси по-
лученные экспериментальным и расчетным путем для макетного образца 79085 со
всеми управляемыми колесами и фиксированным положением полюса РУ в середи-
не базы при движении по «переставке» со скоростью 8,4 м/с (30 км/ч). Анализ гра-
фиков показывает, что данные расчетов и эксперимента хорошо согласуется как по
изменению величин боковых ускорений, так и по максимальным величинам уско-
рений в точке экстремума. Различие в характерах экспериментальной и теоретиче-
ской кривых на завершающем этапе маневра «переставка» объясняется дополни-
тельным воздействием водителя на органы управления вследствии повышенного
чувства опасности.
На рис. 15.34 представлены данные расчетов величины бокового ускорения
на задней оси изо КТС ОБГ 16x16 типа 7922 (23) с различными схемами РУ при
движении по «переставке» с параметрами /п = 30 м; АГ1 = 3,5 м со скоростью 9 м/с.
Анализ этих данных показывает, что амплитуда бокового ускорения на зад-
ней оси во всех фазах движения уменьшается по мере удаления пары осей с не-
управляемыми колесами к кормовой части шасси. Так, для схемы РУ 1-2-3-0-0-6-7-8
максимальная амплитуда в первой и второй фазах движения соответственно равны
2,35 м/с2 и 1,7 м/с2 а величина заброса в начале первой фазы составляет 0,85 м/с2
У КТС ОБГ со схемой РУ 1-2-3-4-0-0-7-8 амплитуда в первой фазе равна 1,65 м/с2
во второй — 1,2 м/с" Это в 1,42 раза меньше, чем у шасси со схемой 1-2-3-0-0-6-7-8.
Во столько же раз уменьшается заброс в начале маневра.
Эти варианты схем РУ выполнены на опытных образцах СКШ 7922 (23). Их
сравнение с различными типами схем РУ с регулируемым положением полюса РУ
(РСП-У, РСП-УС) показывает, что использование таких схем позволит устранить
заброс бокового ускорения в начальной фазе и снизить его амплитуду по отноше-
нию к рассмотренным схемам в первой фазе в 1,32-1,88 раза и в 1,25-1,7 раза во
второй.
Проведенный анализ дает основание утверждать, что схемы рулевого управ-
ления с регулируемым положением полюса РУ сохраняют свои преимущества и для
шасси с числом осей более четырех.
Сравнительная оценка свойств поворачиваемости и поворотливости КТС ОБГ
с различными схемами РУ при установившемся движении по кругу
На рис. 15.35 приведены данные теоретических, а на рис. 15.36 — экспери-
ментальных исследований свойств поворачиваемости и поворотливости КТС ОБГ
типа 79085 (8x8) при использовании схем рулевого управления с регулируемым
положением полюса РУ и с управляемыми колесами двух передних осей.
684
75. Основы теории и расчета рулевого управления КТС ОБГ
16x16 с различными схемами РУ при движении по «переставке»:
---------схема РУ 1-2-3-0-0-6-7-8;
— схема РУ 1-2-3-4-0-0-7-8;
— схема РУ типа РСП-УС; К = 0,8; w = 1,43
Анализ данных показывает, что при одном и том же максимальном угле по-
ворота колес передней оси, равном 0,6 рад, минимальный радиус поворота при ис-
пользовании схем РУ с регулируемым положением полюса РУ составляет 10,7 м, а
для КТС ОБГ с управляемыми колесами двух передних осей — 14,5 м, т. е. в 1,36 раза
больше.
Для шасси с такой схемой РУ с уменьшением радиуса поворота ширина ко-
лейного следа Як быстро увеличивается и при минимальном радиусе 7?min = 14,5 м
достигает величины 4,35 м. Шасси со схемой РУ типа РСП-У, двигаясь по кругу
такого же радиуса, имеет ширину колейного следа 3,77 м, т. е. в 1,15 раза меньше, а
для шасси со схемой РСП-УС Нк = 3,81 м, т. е. в 1,14 раза меньше. Практически
во всем диапазоне исследуемых радиусов ширина колейного следа для шасси с
15.5. Исследования поворачиваемости и устойчивости КТС ОБГ
685
Рис. 15.35. Зависимость ширины колейного следа Нк от радиуса поворота /?„
шасси 8x8 при различных схемах РУ:
--------схема РУ 1 -2-0-0; — схема РУ РСП-У; — схема РУ РСП-УС
Рис. 15.36. Результаты теоретических и экспериментальных исследований зависимости
ширины колейного следа Нк от радиуса поворота Rn: шасси 79085 со всеколесным РУ:
7 — эксперимент; 2 — расчет; шасси MA3-543M (схема РУ 1-2-0-0): 3 — эксперимент; 4 — расчет
686
/5. Основы теории и расчета рулевого управления КТС ОБГ
Рис. 15.37. Зависимость ширины колейного следа Нк от радиуса поворота Rn шасси 16x16
с различными схемами РУ:
— схема типа РУ РСП-УС;-----------схема типа РУ РСП-У;------- — схема РУ 1-2-3-4-0-0-7-8
регулируемым положением полюса РУ оказывается меньше, чем у шасси с управ-
ляемыми колесами двух передних осей. При этом результаты теоретических и экс-
периментальных исследований имеют хорошую качественную и количественную
сходимость.
На рис. 15.37 представлены результаты исследований поворачиваемости и
поворотливости КТС ОБГ типа 7922 (23) 16x16 с различными схемами РУ
Согласно полученным данным, шасси этого класса со схемой 1-2-3-4-0-0-7-8
во всем диапазоне радиусов (18...25 м) имеет ширину колейного следа больше, чем
то же шасси со схемами РУ типа РСП-У (УС). На радиусе, равном 18,0 м, у шасси
со схемой 1-2-3-4-0-0-7-8 на 0,58 м (в 1,13 раза) больше, чем у шасси со схемами
РСП-У(УС). Следует заметить, что более интенсивное уменьшение ширины колей-
ного следа с увеличением радиуса поворота наблюдается у шасси со схемой РСП-
УС, чем при схеме РСП-У Это обстоятельство показывает преимущество схем с
дополнительной регулировкой смещения полюса по скорости (РСП-УС), с умень-
шением которой угол запаздывания поворота задних колес существенно снижается,
улучшая поворачиваемость КТС ОБГ, так как полюс РУ при этом больше смещает-
ся в направлении середины базы. Однако, как показали исследования, эти преиму-
щества начинают проявляться и становятся ощутимыми лишь с увеличением базы.
Для КТС ОБГ с базой не более 8,0 м Нк при использовании схем РСП-У и
РСП-УС (см. рис. 15.35 и 15.36) практически одинакова. Таким образом, примене-
15.5. Исследования поворачиваемости и устойчивости КТС ОБГ
687
ние на многоосных КТС ОБГ 8x8 схем РУ с регулируемым положением полюса
позволяет значительно улучшить поворачиваемость на радиусах, близких к минималь-
ным (7?min меньше в 1,15 раза). Для этого класса КТС ОБГ (с базой не более 8,0 м)
вполне достаточна схема РУ с регулированием смещения полюса только по углу
поворота задающего колеса (типа РСП-У). С увеличением числа осей и базы шасси
целесообразнее применять схему РУ с дополнительным регулированием смещения
полюса по скорости (типа РСП-УС).
Сравнительная оценка затрат мощности КТС ОБГ с различными схемами РУ
при установившемся движении по кругу
На рис. 15.38—15.40 представлены результаты теоретических и эксперимен-
тальных исследований затрат мощности КТС ОБГ (8x8) типа MA3-543M (79805) со
схемой рулевого управления с регулируемым положением полюса РУ и управляе-
мыми колесами двух передних осей при установившемся движении по кругу раз-
личных радиусов в диапазоне скоростей 1,0...6,0 м/с.
Анализ рис. 15.38 показывает, что затраты мощности КТС ОБГ с управляемы-
ми колесами двух передних осей при движении по кругу радиуса 13,7 м на различных
скоростях в 1,3-1,6 раза больше, чем у шасси со всеми управляемыми колесами. А
при движении по кругу радиуса 20,0 м это различие составляет 1,15-1,33 раза.
Рис. 15.38. Зависимость затрат мощности Упов от скорости установившегося
движения по кругу vx шасси 8x8 с различными схемами:
--------с управляемыми колесами 1-й и 2-й осей;
— со всеми управляемыми колесами;
• — прямолинейное движение
688
75. Основы теории и расчета рулевого управления КТС ОБГ
Рис. 15.39. Зависимость затрат мощности У11ОВ от скорости движения vx шас-
си 7929 по кругу /?,, = 18... 19 м:
-------по данным эксперимента, схема РУ 1-2-000;
-------по расчетным данным, схема РУ 1-2-000;
— прямолинейное движение, эксперимент;
--------по расчетным данным, схема РУ 1-2-345
Приведенные данные свидетельствуют, что использование всеколесного
управления позволяет получить существенный выигрыш не только в улучшении ус-
тойчивости, поворачиваемости и поворотливости, но и в таком важном показателе,
как затраты мощности на совершение криволинейного движения, так как он прямо
связан с экономичностью транспортного средства и, в частности, с расходом топлива.
На рис. 15.39 представлены результаты теоретических и экспериментальных
исследований затрат мощности на установившееся движение по кругу КТС ОБГ
7929 (10x8), имеющего схему РУ 1-2-000. Согласно приведенным данным, требуе-
мая мощность для движения этого шасси по кругу радиуса 19,0 м со скоростью 3 м/с
составляет около 137 кВт (185 л.с.). Часовой расход топлива для таких условий
движения, исходя из нагрузочной характеристики двигателя ЯШ-8424, установлен-
ного на этом шасси, составляет 46 л/ч. Использование на КТС ОБГ 7929 всеколес-
ного РУ снижает затраты мощности в тех же условиях движения до 89 кВт (120 л.с.), а
часовой расход топлива составляет 34 л/ч, т. е. в 1,35 раза меньше, чем при схеме
РУ с управляемыми колесами двух передних осей.
15.6. Общая схема построения системы автоматизированного управления 689
Рис. 15.40. Зависимость затрат мощности 7УЛ0В от скорости ил шасси М АЗ-543 М
при криволинейном движении:
/ — Rn = 13,7 м; 2 — Rn = 20,0 м; 3 — прямолинейное движение;
-------по экспериментальным данным;
-------п0 расчетным данным
В подобных экспериментальных исследованиях, проведенных для КТС ОБГ
типа MA3-543M (рис. 15.40), были получены аналогичные результаты.
Таким образом, всеколесное управление обеспечивает уменьшение увода ко-
лес в боковом направлении, снижение вследствие этого затрат мощности на криво-
линейное движение и улучшение экономических показателей.
15.6. Общая схема построения системы автоматизированного
управления криволинейным движением
Общие положения
Важнейшим структурным элементом управления криволинейным движением
(рулевое управление) как подсистемы системы водитель—автомобиль—дорога
(см. рис. 11.1) является САУ криволинейным движением. Рассмотрим схему ее по-
строения на основе материалов данной главы, приведенных выше, и гл. 11
Перспективный привод РУ автомобилей с САУ должен удовлетворять сле-
дующим требованиям:
— обеспечивать различные схемы поворота автомобиля;
690
15. Основы теории и расчета рулевого управления КТС ОБГ
— максимально использовать психофизиологические и энергетические воз-
можности водителя;
— использовать системы стабилизации в контуре управления автомобиля,
обеспечивающие упрощение вождения и уменьшение утомляемости водителя;
— применять системы автоматизированного вождения по программам, нави-
гационным сигналам автоматизированного управления движением в колоннах (в
частности, автоматическое выполнение стандартных эксплуатационных маневров,
внешнее радиотелеуправление автомобилем и др.).
В общем случае в состав бортовой САУ РУ автомобиля должны входить сле-
дующие системы:
— блок штурвального управления (рулевая колонка) с автоматами загрузки
штурвала;
— навигационно-пилотажный комплекс;
— бортовой вычислитель;
— система аналого-цифроаналогового управления;
— блок исполнительных механизмов (рулевые машины);
— агрегаты и системы управления поворотом колес автомобиля;
— контрольно-измерительная аппаратура;
— диагностическая система;
— система энергоснабжения (источники и энергопроводы).
САУ функционирует в командном режиме (управление осуществляет води-
тель) или автоматическом (по программе или телерадиосигналам).
Принципиальная схема бортовой САУ РУ представлена на рис. 15.41.
Информация об угле поворота рулевого колеса 1 (возможно поступление од-
новременно нескольких сигналов при изменяемой схеме поворота многоосного ав-
томобиля) поступает в навигационно-пилотажный комплекс 2, оценивающий внеш-
ние параметры автомобиля (скорость, ускорение и т. д.), и далее в бортовой вычис-
литель 5, который формирует управляющие сигналы на все исполнительные
механизмы 4.
Рис. 15.41. Принципиальная схема бортовой САУ РУ:
рулевая колонка с автоматом загрузки (штурвальный блок); 2 — навигационно-пилотажный ком-
плекс: 5 — борювой вычислите; 4 — блок исполнительных механизмов; 5 — блок контролыю-
змсри 1елыюй ainiapaiypw; 6 — диагностическая система; 7 — система энергоснабжения; 8 — колесо ТС
15.6. Общая схема построения системы автоматизированного управления 691
Основная программа работы вычислителя устанавливается водителем в соот-
ветствии с дорожной обстановкой. Дополнительная информация поступает на вы-
числитель от навигационно-пилотажного комплекса 2.
Входная информация может иметь как цифровую, так и аналоговую форму. В
последнем случае она предварительно подвергается аналого-цифровому преобразова-
нию. Каналы связи могут быть электрическими и оптическими (оптоволоконными).
Управляющие сигналы поступают к исполнительным механизмам 4 через
блоки автопилота (на рис. 15.41 не показаны — входят в состав бортового вычисли-
теля 3 и навигационно-пилотажного комплекса 2), в которых происходит сравнение
с сигналом обратной связи, несущим информацию о фактическом состоянии испол-
нительных механизмов.
Система диагностики 6 проверяет правильность функционирования отдельных
узлов и агрегатов САУ В случае обнаружения отказа в системе или нештатного реа-
гирования на управляющие сигналы, система диагностики осуществляет отключение
неисправного блока (элемента), производит необходимые аварийные изменения в
системе и выдает сигнал на систему навигации, находящуюся в кабине водителя.
Если восстановление работоспособности канала за счет внутреннего резерви-
рования невозможно, то система диагностики приводит колеса поврежденных кана-
лов в среднее положение, включая внешнее и внутреннее тревожное освещение или
(при необходимости) систему аварийной остановки автомобиля.
При подготовке к движению система диагностики проверяет функциониро-
вание САУ и посылает сигнал в системы индексации и единой бортовой диагности-
ки автомобиля на разрешение движения. При обнаружении отказа система проводил
его классификацию и передает соответствующую информацию в бортовую диагно-
стическую сеть.
В общем случае возможна автоматическая навигация автомобиля с бортовой САУ
(автоматизация вождения на трассах, на специальных площадках, в колоннах и т. д.).
Важной особенностью САУ является применение блока штурвального управ-
ления / (рулевой колонки) совместно с так называемым автоматом загрузки.
Точно так же в современных самолетах, на которых широко распространены
бортовые САУ устанавливается специальный контур стабилизации загрузки рыча-
гов управления для обеспечения оператору «чувства управления» и замыкания кине-
матической обратной связи по усилиям в организме летчика, чем предупреждается
потеря устойчивости контура управления (рис. 15.42).
Из-за слишком больших ошибок в дозировании перемещений рычагов управ-
ления этот контур, которого не было на системах РУ с механическим приводом,
Рис. 15.42. Схема организации дополнительных контуров стабилизации
692
15. Основы теории и расчета рулевого управления КТС ОБГ
Органы Исполнительные
чувств органы
Кинестатическая обратная связь
Рис. 15.43. Блок-схема человек—оператор
имеет очень большое значение на современных скоростных самолетах, так как с его
помощью не только обеспечиваются оптимальные (по удобству управления) харак-
теристики управляемости, но и повышение безопасности пилотирования.
Как часть контура управления водитель условно может рассматриваться в ка-
честве системы автоматического регулирования, образованной связанными между
собой элементами: органами чувств (датчики); центральной нервной системой (сис-
тема обработки информации и выработки решения); исполнительными органами (ру-
ки, ноги, спина и т. д.) (рис. 15.43).
Информация о действии исполнительных органов передается в центральную
нервную систему через кинестетические рецепторы, осуществляющие обратные свя-
зи в организме человека, и система водитель—оператор оказывается замкнутой. В
связи с этим очень важно дозирование действий исполнительных органов как по
Рис. 15.44. Характер зависимости относительной ошибки Д от величины
необходимых перемещений Х11О1Р и сил Р11О1р
15.6. Общая схема построения системы автоматизированного управления 693
величине перемещений, так и развиваемым при этом усилиям, причем изменение
усилий ощущается водителем лучше, чем перемещения.
Как управляющее звено контура водитель обладает следующими свойствами,
влияющими на процесс управления: запаздывание ответной реакции на внешние сиг-
налы (на 0,2...0,3 с); способность к фильтрации внешних сигналов; способность к из-
менению собственной передаточной функции в широких пределах, включая интегри-
рование, дифференцирование и ряд других.
Потеря устойчивости контура управления может происходить как при слиш-
ком малом, так и при слишком большом изменении усилий на рычаге управления, так
как водитель наиболее точно дозирует перемещения рычагов и прикладываемые к
ним усилия в определенном диапазоне их значений. На рис. 15.44 представлено изме-
нение относительной ошибки А в перемещениях и усилиях на рычагах управления
при их различных значениях (%noTp, Лютр)-
Простейшая система (автомат) загрузки — это пружинный механизм с линей-
ной характеристикой, присоединенный одним концом к рычагу управления. Другой
его конец обычно крепится к выходному штоку так называемого механизма триммер-
ного эффекта.
Такой механизм устанавливается в тех случаях, когда возможна продолжи-
тельная работа с отклоненным рычагом управления. В этом случае он перемещает
точку крепления загрузочного механизма в сторону уменьшения усилия пружины.
Сухое трение в автомате загрузки с пружинами ухудшает управляемость. По-
этому предпочтительнее применение торсионных механизмов, имеющих и более про-
стую конструкцию.
При увеличении скорости, например полета самолета, быстро возрастают уси-
лия на рулевых поверхностях, вследствие чего из-за повышенной эффективности ор-
ганов управления линейных пружинных автоматов загрузки у летчика возникают за-
труднения с точным дозированием усилий, что может привести к потере устойчиво-
сти. Испытания ТС с гибким РУ показали, что можно ожидать развития аналогичного
эффекта при управлении автомобилем.
Один из способов улучшения характеристик управляемости по усилиям —
подключение к рычагам управления дополнительных пружин.
Одной из составляющих момента, препятствующего повороту управляемых
колес автомобиля, является стабилизирующий момент Л/ст. С ростом угла поворота
МС1 возрастает. Он несколько увеличивается и с ростом скорости. Механизм загрузки
должен имитировать эти процессы.
На впервые созданном в нашей стране (МГТУ им. Н.Э. Баумана) многоосном
шасси с дистанционным приводом рулевого управления (ДПРУ) в блоке штурвально-
го управления применен автомат загрузки с линейными пружинами в управлении по
двум координатам. Проведенные с его помощью эксперименты показали, что для вы-
бора оптимальных параметров автоматов загрузки бортовой САУ требуются допол-
нительные научные исследования.
Если в приводе исполнительного механизма РУ автомобиля установлен гидро-
усилитель руля, то при резком возрастании момента сопротивления повороту колес
желательно дополнительное нагружение штурвала.
Важным элементом бортовой САУ автомобиля является блок исполни-
тельных механизмов, по проектированию которого в автомобилестроении в на-
694
15. Основы теории и расчета рулевого управления КТС ОБГ
стоящее время нет никакого опыта. Из практики других отраслей наибольший
интерес представляют электромеханические и электрогидравлические блоки
исполнительных механизмов, каждый из которых может быть выполнен по раз-
личным схемам и с различными вариантами технических решений. В зависимо-
сти от их типа определяется и тип автоматизированной бортовой системы руле-
вого управления (АБСРУ).
В данной работе впервые даются рекомендации по выбору общих принципов
проектирования элементов АБСРУ автомобиля электромеханического и электрогид-
равлического типа.
Электромеханическое рулевое управление
Электромеханическое РУ включает в себя электромеханические (исполни-
тельные) агрегаты. Их тип почти полностью определяет схему и конструкцию АБСРУ
Электромеханические рулевые агрегаты
В электромеханических АБСРУ используют рулевые агрегаты (машины) не-
скольких принципиально различных схем.
Первую группу образуют рулевые агрегаты с исполнительными электродви-
гателями, вал которых непосредственно соединен с поворотным колесом механиче-
ской неуправляемой проводкой.
В качестве исполнительных используются электродвигатели как постоянно-
го, так и переменного тока.
Первые — это чаще всего двигатели независимого электромагнитного воз-
буждения и магнитоэлектрического возбуждения (с постоянными магнитами), как
правило, с зубцовым исполнением якоря (серий Д, ММ, ДПМ). Встречаются двига-
тели с гладким беззубцовым якорем (серии МИР, ПГТ), с меньшим моментом инер-
ции ротора, с печатным якорем (серии ПЯ, МРМ) и с полым ротором (серии ДПР).
Основное достоинство исполнительных двигателей (ИД) постоянного тока —
линейность механических и регулировочных характеристик. Главный недостаток —
значительные габариты, масса и наличие щеточно-коллекторного узла.
Для рулевых агрегатов автомобилей высокой проходимости необходимы ИД
большой мощности (3...5 кВт на колесо). Двигатели перечисленных серий для сис-
тем автоматики имеют значительно меньшие мощности (табл. 15.1).
Таблица 15.1
Основные параметры двигателей систем автоматики
Серия Мощность, кВт Обороты ротора, об/мин кпд
ДПМ-HI, Н2. НЗ 0,46-13,87 1800-9000 0,07-0,33
ДПР 0,92-18,50 2500-9000 0,20-0,53
ДМ 1,60^0,00 6000-8000 0,20-0,67
СД 5,00-230 2300-5500 0,15-0,63
СД.ДИ 10,00-250 6000-7500 0,26-0,70
Таким образом, рулевые приводы автомобиля требуют разработки спе-
циального мощного ИД постоянного тока и применения сложного многоступенчато-
го редуктора с передаточным числом 90-450.
15.6. Общая схема построения системы автоматизированного управления 695
Наиболее часто используется генераторное управление мощными ИД (изме-
нение выходного напряжения усилителя мощности). Например, в приводах поворота
танковых башен (мощность 3,5...4 кВт) получил распространение вариант с электро-
машинным усилителем. Эти приводы обладают коэффициентом усиления мощности
5000... 10000 и весьма малыми постоянными времени. Управление ими хорошо под-
дается автоматизации, они сравнительно дешевы и просты в производстве и эксплуа-
тации. Тем не менее практика разработки этих систем показала, что по быстродейст-
вию, точности регулирования, габаритам и массе они уступают электрогидравличе-
ским приводам, в том числе с радиально-поршневым ИД.
В качестве ИД переменного тока применяют 2-фазные асинхронные электро-
двигатели специального исполнения. Они достаточно полно отвечают основным тре-
бованиям к ИД рулевых машин (надежность и стабильность работы, быстродействие,
однозначность регулирования, простота управления, невозможность самохода). Из-за
отсутствия коллектора их надежность значительно превосходит ИД постоянного тока.
Эти двигатели получили широкое распространение в авиационных рулевых машинах
и приняты как основной вариант при разработке электромеханического АБСРУ ново-
го проекта МГТУ им. Н.Э. Баумана. Основной способ управления исполнительным
асинхронным двигателем — искажение вращающегося поля статора.
Для машин больших мощностей (сотни ватт) почти всегда применяют корот-
козамкнутые роторы типа беличья клетка, полые роторы в виде алюминиевого стакана
встречаются очень редко.
Параметры авиационных электрических рулевых механизмов, как правило, не-
достаточны для автомобилей. Так, например, рулевая машина типа РД-7А-7 автопилота
АП-40 имеет не большой предельный момент на ведущей звездочке. Это делает невоз-
можным прямое заимствование или незначительную доработку авиационных рулевых
механизмов и требует разработки специального автомобильного рулевого агрегата.
Исполнительные электромагнитные муфты
Иной принцип используется в приводах с электромагнитными муфтами
(рис. 15.45). Муфты не являются активными элементами, а только передают мо-
мент, развиваемый приводным двигателем (ПД). В большинстве случаев ПД не
управляются и не реверсируются, их угловая скорость поддерживается примерно
постоянной. Принцип работы привода понятен из схемы на рис. 15.45. Его реверси-
рование обеспечивается применением двух электромагнитных муфт, ведущие части
которых вращаются в противоположных направлениях. Таким образом, получается
довольно сложный агрегат, содержащий редуктор со значительным передаточным
числом (90-450) и не менее трех электрических машин.
Основные достоинства этого привода:
— большой коэффициент усиления по мощности;
— большие допустимые ускорения ведущих частей муфт из-за их малой инер-
ционности;
— несущественные ограничения на тип и характеристики приводного двигателя;
— сравнительная простота автоматизации управления.
Обычно используют порошковые и гистерезисные электромагнитные муфты,
позволяющие получать плавное регулирование момента на выходном валу привода.
696
15. Основы теории и расчета рулевого управления КТС ОБГ
Рис. 15.45. Схема рулевого механизма с электромагнитными муфтами:
ПД — приводной двигатель; М1 и М2 — 1-я и 2-я электромагнитные муфты соответственно
Порошковые муфты допускают ускорение на ведомом валу более 100000 рад/с2
и имеют коэффициент усиления по мощности, равный 120. Угловая скорость их веду-
щих частей не должна превышать 200...210 рад/с из-за больших центробежных сил,
действующих на порошок. Большой недостаток порошковых муфт — старение и износ
порошка.
Угловая скорость гистерезисных муфт ограничена только работоспособностью
подшипников и доходит до 1256 рад/с. Из-за большей инертности ведомых частей до-
пустимые ускорения не превышают 3000 рад/с. Коэффициент усиления по мощности
гистерезисных муфт при угловой скорости ведущих частей 620...630 рад/с лежит в
пределах 5-18.
В настоящее время неизвестны конструкторские проработки автомобильных и
мощных авиационных рулевых машин с электромагнитными муфтами, что не позво-
ляет обоснованно судить об их пригодности для АБСРУ КТС ОБГ
Рулевые машины с электромеханическими вариаторами скорости специально
не рассматриваются, так как опыт их применения в авиационной практике в целом
отрицателен из-за сложности конструкции, низкой надежности и затруднений при
реверсировании привода.
Электромеханическая АБСРУ
МИЭиА совместно с НПЦ СМ, НИИ СМ МГТУ им. Н.Э. Баумана разработа-
ны технические решения электромеханической автоматизированной бортовой сис-
темы рулевого управления с 2-фазным асинхронным двигателем в блоке исполни-
тельного механизма.
Принципиальная схема АБСРУ трех управляемых осей шасси представлена на
рис. 15.46. Система разработана для п управляемых осей и допускает наращивание их
Рис. 15.46. Принципиальная схема АБСРУ
цая схема построения системы автоматизированного управления 69
75
БУМШ
7 I
КФМ5
КФМ6
КФМ7
13
f '‘е ) 10 14 11 ( З'е )( 5-е
уколесо// / / уколесо/уколесо
ДОС1 ^ГГ/ТГ1/ЛВ1/фС
КВ1
кинематика
18 В
= к КФМ2
= к КФМЗ
КФМ1
ов
।--1 ФВ
КФМ2
КФМЗ
Табло
СУ
КФМ4 _.
КФМ8 =}кКФМ2
КФМ9
8
|к КФМЗ
Контроль
СУ
фА АЗС
фВ- 115 В
фС- 100 Гц
I ГТ
фА фВ фС
от генератора
28 В
Рис. 15.47. Общая схема АБСРУ полноприводного автомобиля:
/ — механизм рулевого колеса; 2 — автомат загрузки; 3 — редуктор с блоком датчиков угла поворота рулевого колеса (штурвал); 4, 5,6 — усилительный
конструктивно-функциональный модуль; 7 — цифровые вычислители; 8 — модуль внутреннего контроля вычислителя и управляющих блоков; 9 — блок
вторичных источников тока; 10 — редуктор; 11 — асинхронный электродвигатель; 12 — управляющая обмотка электродвигателя; 13 — датчик обратной
связи; 14 — тахогенератор; 15 — блок вторичного контроля; р — угол поворота рулевого колеса
698 15. Основы теории и расчета рулевого управления КТС ОБГ
15.6. Общая схема построения системы автоматизированного управления 699
количества присоединением идентичных модулей управлением элементов встроен-
ного контроля.
На рис. 15.47 представлена общая схема АБСРУ, в которую входят следую-
щие элементы.
Блок штурвального управления (БШУ) включает в себя: механизм рулево-
го колеса (/) с автоматом загрузки (2), редуктор (3) и блок датчиков угла поворота
штурвала ДПС-4-2. В качестве датчиков угла поворота (3) штурвала используются
три индукционные аналоговые датчики угла поворота 45Д-32-2 (питание — 36 В,
400 Гц) или цифровые фотоэлектрические датчики типа ФЭП 6Г5.315.003 (питание —
постоянное напряжение ± 15 В).
Блок управления колесным шасси (БУКШ) состоит из девяти конструк-
тивно-функциональных модулей (КФМ).
Модули КФМ1, КФМ2 и КФМЗ (4, 5 и 6) предназначены для создания сигна-
лов управления, подаваемых на исполнительные механизмы в форме временной
модуляции работы выходных тиристорных ключей в зависимости от входных ана-
логовых сигналов постоянного тока, формируемых в модулях КФМ5, КФМ6 и
КФМ7 (7). Каждый усилительный КФМ1, 2, 3 содержит элементы для управления
парой колес: КФМ1 — первой оси (первое и второе колеса); КФМ2 — второй оси
(третье и четвертое колеса); КФМЗ — третьей оси (пятое и шестое колеса).
Модули КФМ5, КФМ6, КФМ7 — это цифровые вычислители, предназначен-
ные для отработки и формирования аналоговых сигналов постоянного тока.
Модули КФМ4 и КФМ8 (Я) — служат для внутреннего контроля систем вы-
числителей (7) и управляющих блоков (4, 5 и 6).
Модуль КФМ9 (9) — блок вторичных источников питания ± 15 В и их резер-
вирования.
Блок исполнительных механизмов включает в себя: систему рулевых ме-
ханизмов (тяг); редуктор 2-фазный асинхронный электродвигатель ДВ1 (//)
(обмотки возбуждения (ОВ) подключены к фазам В и С генератора, на управляю-
щую обмотку (ОУ) (/2) подается напряжение фазы А, т. е. обеспечивается сдвиг фаз
90°’ датчик обратной связи (ДОС 1) (/3), сигнал с которого показывает установку
заданного значения угла поворота колеса в зависимости от поворота штурвала (сиг-
нала вычислителя); тахогенератор (ТГ 1) (/4).
Система энергоснабжения (питания) состоит из источника постоянного то-
ка (аккумулятора) напряжением + 27 В; силового генератора с напряжением в фазе
115 В и частотой f = 400 Гц.
Источники питания имеют автоматы защиты и включения.
Электропитание элементов схемы КФМ блока БУКШ обеспечивается
вторичного источника 6В3.233.088. На выходе источника ±15 Вс нулевой клем-
мой, на входе — напряжение 27 В от сети постоянного тока.
Вторичные источники электропитания (рабочий и резервный) со схемой
логики, обеспечивающей переключение отказавшего источника на резервный, раз-
мещающийся в КФМ9.
Блок контроля содержит элементы вторичного контроля (/5) и контроль-
ной панели.
В конструкции предусмотрены выносная панель элементов встроенного
контроля (кворум-элемент, сигнализатор напряжения, компаратор, элементы
«ИЛИ»), контейнер для АБСРУ, кабельная схема подключения БУКШ.
700
15. Основы теории и расчета рулевого управления КТС ОБГ
Оценка точности системы электромеханического рулевого управления
При проектировании РУ необходима оценка точности заданного соответ-
ствия угла поворота рулевого колеса р углу поворота управляемого колеса авто-
мобиля а.
Точность определяется в статике погрешностями (датчика угла р) и Л*ос
(датчика обратной связи по а), а в динамике — постоянной времени Г, которая
обратно пропорциональна добротности контура управления Д, Т = 1/Д.
При оценке точности, как правило, используются следующие общие зависи-
мости:
а/р = Кр/(КОС(ТР+1));
Т= 1/Д;
Д К КОСч
где Тр — постоянная времени резисторов; К — коэффициент пропорциональности,
определяющий скорость изменения угла р.
Из опыта работы со сходной системой управления известно, что статиче-
ская ошибка составляет 10 % при использовании в ДПС-4-2 датчиков 45Д-32-2
второго класса точности (6 %), а динамическая ошибка определяется допускаемой
добротностью Д = 1...5 1/с.
Динамическая ошибка проявляется как запаздывание поворота колеса ос от по-
ворота штурвала р.
Сигнал от датчика ДПС-4-2 преобразуется в напряжение на выходе вычисли-
теля (из КФМ 5, 6, 7) с дискретностью 0,15° р, если ртах = ± 90°
Считая, что при ртах = ± 90° и 0Стах = ± 48° на входе операционного усилителя в
КФМ 1, (2, 3) напряжение UiiX = ±10 В и £/(Х = ±10 В, получим К = 10/90 = 0,11 В/град;
Кос= 10/48 = 0,21 В/град.
Динамическая ошибка
Д (г —> оо) = КрК(\ - exp(t/T))l%,
где К = p/r; t — время поворота рулевого колеса на угол р.
В табл. 15.2 представлены расчетные значения динамической ошибки Д (г —► оо)
и соответствующие величины динамической ошибки, приведенной к повороту ко-
леса, 8V (Г —* оо) при варьировании значений коэффициента пропорциональности
(/< = 10...50 град/с) и добротности контура Д = МТ = 1...5 1/с:
8„ (f -♦ оо) = Д (/ ->• <х>)/Кос.
Таблица 15.2
Значения динамических ошибок системы РУ A (t —> ос) / 6a(Z —> оо)
в зависимости от Кос и Д
Кос, град/с Д, 1/с
1 2 3 4 5
10 1,1/5,2 0,55/2,6 0,37/1,73 0,275/1,3 0,22/1,04
20 3,3/15,6 1,1/5,2 1,1/5,2 0,825/1,4 0,66/3,12
30 6,6/31,2 2,2/10,4 2,2/10,4 1,65/7,8 1,32/6,24
15.6. Общая схема построения системы автоматизированного управления 701
Электрогидравлическое рулевое управление
Общая схема электрогидравлического АБСРУ
В электрогидравлическом АБСРУ в качестве исполнительного механизма ис-
пользуется электрогидравлический привод. Такой привод преобразует электриче-
ский управляющий сигнал в перемещение выходного звена исполнительного меха-
низма и усиление управляющего сигнала по мощности с использованием энергии
станции гидропитания.
На рис. 15.48 представлена структурная схема электрогидравлического сле-
дящего привода.
Различают приводы с дроссельным регулированием (регулируется давление в
исполнительном механизме) и объемным (регулируется объем жидкости, посту-
пающий в исполнительный механизм).
Основное преимущество РУ с объемным регулированием — более высо-
кий КПД особенно для приводов, выполненных автономно. В этом случае суще-
ственно упрощается обслуживание и эксплуатация рулевого агрегата, а также
изготовление автомобиля, поскольку исключаются трудоемкие операции по
монтажу гидросистемы, требующие высокой квалификации и исключительной
аккуратности персонала.
Зависимость изменения скорости перемещения выходного звена привода от
величины действующей на него внешней нагрузки (в частности, шарнирного мо-
мента А/ш, требуемого на поворот управляемого объекта) при постоянном значении
рассогласования между входным и выходным звеньями привода принято называть
механической (нагрузочной) характеристикой привода.
На рис. 15.49 представлены зависимости потребной мощности N и скорости
перемещения выходного звена 5 приводов с дроссельным и объемным регулирова-
нием в зависимости от шарнирного момента Мт на выходе.
Из рисунка видно, что при обеспечении одинаковой механической характе-
ристики потребная мощность автономного привода с объемным регулированием
несколько ниже, чем у привода с дроссельным регулированием.
Однако применение автономных приводов требует решения ряда техниче-
ских проблем, в частности охлаждения рабочей жидкости (для централизованных
гидросистем устройства охлаждения более просты и надежны).
Другой проблемой является обеспечение работоспособности рулевого агре-
гата в аварийных условиях, при остановке двигателей или обесточивании системы
электропитания. Эту проблему проще решить с помощью автономного привода РУ
с объемным регулированием.
Рис. 15.48. Структурная схема электрогидравлического следящего привода:
/ — управляющий сигнал; 2 — входное звено; 3 — сравнивающее звено; 4 — регулирующее устрой-
ство; 5 — масляный насос; 6 — выходное звено; 7 — обратная связь; 8 — исполнительное звено
702
15. Основы теории и расчета рулевого управления КТС ОБГ
Рис. 15.49. Зависимость скорости перемещения выходного звена 8 и потребная мощность N
от шарнирного момента Л/|1( на выходе приводов с дроссельным и объемным регулированием:
погребная механическая характеристика привода; 2 — механическая характеристика привода
дроссельным регулированием; 3 — механическая характеристика привода с объемным регулировани-
ем; 4 — потребная мощность привода с объемным регулированием; 5 — потребная мощность привода
дроссельным регулированием
Электрогидравлический привод РУ с дроссельным регулированием реализо-
ван в дистанционном приводе рулевого управления (ДПРУ) макета многоосного
шасси — Э79085, разработанном и построенном НПЦ СМ МГТУ им Н.Э. Баумана.
В практике автомобилестроения отсутствуют технические решения исполь-
зования электрогидравлических рулевых приводов, поэтому невозможно безогово-
рочно отдать предпочтение какому-либо одному типу рулевых агрегатов. Необхо-
димо разрабатывать все известные направления, накапливая опыт конструирования
и эксплуатации агрегатов автомобильного типа, и проводить научные работы для
сопровождения ОКР
В то же время практика смежных отраслей техники (авиационная промыш-
ленность) в использовании рулевых агрегатов с дроссельным регулированием и
централизованной системой весьма обширен.
В НПЦ СМ МГТУ им. Н.Э. Баумана проведен целый ряд работ по созданию
рулевого привода с дроссельным регулированием и централизованной системой для
многоосных машин, таким образом этот вопрос относительно изучен.
В связи с этим в рамках нового проекта КТС ОБГ рассматривается менее
изученный вопрос — создание электрогидравлического автономного рулевого агре-
гата с объемным регулированием автомобильного типа.
Рулевое управление с автономным приводом
Общая схема РУ с автономным приводом
Принципиальная схема гидросистемы рулевого управления показана на
рис. 15.50. В ее состав входят следующие системы и элементы:
15.6. Общая схема построения системы автоматизированного управления 703
Рис. 15.50. Принципиальная схема гидросистемы рулевого управления: А — механическая связь; Б — дренаж
704
15. Основы теории и расчета рулевого управления КТС ОБГ
— основная система: 1 — главный аксиально-поршневой насос с регулируе-
мой производительностью, 2 — магистральные фильтры, 3, 4, 6 и 16 — перепуск-
ные клапаны, 5 — запорные клапаны, 7 — исполнительный механизм;
— основная система управления и подпитки: 9 — шестеренчатый насос (с
системой защиты), 8 — золотник электрогидравлического усилителя, 13 — испол-
нительные цилиндры механизма поворота опорной шайбы главного насоса, 10 —
пополнительный бак системы подпитки, 17 — зарядный клапан, 20 — фильтр, 21 —
перепускной клапан;
— аварийная (дублирующая) система управления: 15 — гидроаккумулятор,
14 — золотник аварийного электрогидравлического усилителя, 19 — зарядный кла-
пан гидроаккумулятора;
— система охлаждения и смазки: 11 — шестеренчатый циркуляционный на-
сос (с системой защиты), 12 — теплообменник, 18 — дренажный бак (картер при-
водного электродвигателя). (Электрогидравлические преобразователи на схеме не
показаны.)
Работа автономного рулевого привода
Привод главного аксиально-поршневого насоса 7, шестеренчатых насосов
системы подпитки и управления подачей главного насоса 9, а также насоса 7 7 сис-
темы охлаждения осуществляется от одного асинхронного электродвигателя.
Управление наклоном поворотной шайбы главного насоса организовано при
помощи электрогидравлического привода, в первом каскаде которого использован
электрогидромеханический преобразователь ВС201 с «качающимся соплом» (воз-
можно применение преобразователя типа сопло—заслонка, если условия изготов-
ления и эксплуатации привода обеспечивают 8—9 класс чистоты рабочей жидкости
по ГОСТ 17216 и тонкость фильтрации до 6 мкм). Золотник 8 гидроусилителя под
действием разности давлений на торцах смещается от нейтрального положения,
направляя поток рабочей жидкости в полости исполнительных цилиндров 13 меха-
низма управления наклоном шайбы главного насоса.
К сливной магистрали системы управления и подпитки подключен пополни-
тельный бак 10, подзарядка которого производится от напорного штуцера насоса
подпитки. Этот же бак используется как компенсатор температурного расширения
жидкости. Первоначальная заправка гидросистемы и зарядка бака азотом произво-
дится через зарядные клапаны 17 Фильтрация жидкости в системе управления
осуществляется фильтром 20 с тонкостью фильтрации 6 (10) мкм и перепускным
клапаном 21
Основная гидросистема выполнена по замкнутой схеме. Система подпитки
подключена к ней с помощью перепускных (подпиточных) клапанов 6.
Магистрали высокого давления и слива соединены друг с другом каналами с
перепускными (защитными) клапанами 76, срабатывающими при появлении в на-
порной магистрали давления выше 32 МПа. Каждый из фильтров 2 основной систе-
мы снабжен клапаном отсечки и запорным клапаном 5, обеспечивающим движение
жидкости через фильтр только в одном направлении, а также перепускным клапа-
ном 3, через который осуществляется работа системы при засоренных фильтрах.
Гидроцилиндры исполнительного механизма 7 включены параллельно, чем обеспе-
15.6. Общая схема построения системы автоматизированного управления 705
чивается дублирование их функций и повышение надежности привода при потере
герметичности уплотнениями одного из цилиндров.
Поршни гидроцилиндров 7 выполнены как одно целое с зубчатыми рейками,
входящими в зацепление с цилиндрической шестерней поворота вала сошки 22.
Аварийная система рассчитана на 30 с работы и имеет гидроаккумулятор 15
и автоматический электрогидравлический усилитель, подключающиеся по сигналу
об аварийном падении давления в магистралях системы управления и подкачки или
по сигналу об отсутствии сопряжения в сети питания приводного электродвигателя.
Информация об угловых перемещениях элементов рулевой машины выраба-
тывается аналоговыми датчиками, установленными:
а) на валу сошки;
б) на опорном валу качающейся шайбы главного насоса.
Особенности конструкции автономного рулевого привода
Исполнительный механизм гидросистемы и электропривод объединены в ав-
тономный рулевой агрегат.
Асинхронный электродвигатель с охлаждением рабочей жидкости гидро-
системы вращает главный аксиально-поршневой насос и оба шестеренчатых насо-
са гидросистемы. Номинальная частота вращения вала двигателя весьма велика
(12000 об/мин), поэтому соединение агрегатов выполнено с помощью торсионного
валика с тороидными шлицами.
Вспомогательные насосы 9, 11 (рис. 15.50) — с внутренним зацеплением, а
гидроаккумулятор и бак подпитки — поршневого типа с наддувом азотом.
В качестве дренажного бака используется картер системы охлаждения элек-
тродвигателя, причем откачка масла производится насосом системы охлаждения.
Индикации переполнения картера нет, поэтому при доработке агрегата целесооб-
разно предусмотреть откачку рабочей жидкости из картера в пополнительный бак
через соответствующий фильтр и подключение системы охлаждения к общей гид-
росистеме.
Обслуживание рулевого агрегата сводится в основном к замене фильтров, ко-
торая выполняется снаружи без разборки машины. Крышки фильтров оборудованы
отсечными клапанами, сводящими к минимуму потери рабочей жидкости при ТО и
риск ее загрязнения.
Заправку пополнительного бака производят специальным приспособлением,
имеющим надежную систему очистки РЖ (тонкость фильтрации не менее 6 мкм).
Проверки уровня рабочей жидкости в данной конструкции нет. При доработке не-
обходимо предусмотреть индикатор положения поршней подпиточного бака.
Приводной электродвигатель по своим электрическим параметрам согласо-
ван с параметрами тяговой электрической сети. В случае остановки маршевого дви-
гателя он переводится на питание от мотор-колес, работающих в генераторном ре-
жиме, и (при движении с малой скоростью) от бортовой или внешней сети постоян-
ного тока через преобразователь частоты.
Рабочая жидкость — АМГ-10 (ГОСТ 6734) на нефтяной основе или полиси-
локсановая 7-5ОС-3.
706
75. Основы теории и расчета рулевого управления КТС ОБГ
Расчет деталей и узлов автономного рулевого привода
Расчет всех элементов проводится с учетом максимального момента, дейст-
вующего при повороте на колесо. Предполагается, что максимальные значения на-
грузок на рулевую систему достигаются при повороте неподвижных колес на бе-
тонном основании. Для расчетов можно использовать, например, формулу Гука
WK= 10Рк3/2цШ„|/2
где ц = 0,7-0,9 для твердого сухого грунта; Рк — вертикальная нагрузка на колесо;
А = 2,1 — эмпирический коэффициент; р1и — давление воздуха в шине, рш
= 0,05...4,0 МПа для шины размерностью 1300x530-533. В целом приведенный рас-
чет, как и все расчеты нагрузок на РУ в данной главе, является достаточно прибли-
зительными. Определенные по максимальному моменту элементы рулевого приво-
да, как правило, являются переразмеренными. Однако более точной методики рас-
чета рулевого привода в настоящее время не существует.
15.7. Всеколесное рулевое управление КТС ОБГ
с колесной формулой 12x12
Рулевое управление нового КТС ОБГ с колесной формулой 12x12, спроекти-
рованного и изготовленного НПЦСМ МГТУ им. Н. Э. Баумана, задает движение
автомобиля в нужном направлении.
На образце установлено всеколесное рулевое управление (ВРУ), которое
функционирует по алгоритму, изложенному в пп. 15.3 и 15.4. Оно состоит (рис. 15.51)
из рулевых механизмов 1 с задатчиками угла поворота, задатчиков полюса поворота 2,
бортового вычислительного комплекса (БВК) 3, гидравлической системы (масля-
ный бак 4, насос 5, гидропневмоаккумулятор 6 и бустер 7, предохранительный кла-
пан, фильтр, контрольно-измерительная аппаратура на схеме не показаны), датчи-
ков обратной связи (ДОС) 8 с приводом, кронштейнов с рычагами 9, поперечных
тяг 10 и сошек //
БВК вместе с ДОС и гидравлической системой образуют комплекс рулевых
следящих систем колесного механизма (КРСС КМ), функциональная схема которо-
го представлена на рис. 15.52.
Рулевой механизм (рис. 15.53) предназначен для приведения в действие РУ
Он установлен с правой стороны в передней и задней кабинах. Рулевой механизм
крепится на подрамнике 7 Движение от рулевого колеса 1 к задатчику угла поворо-
та 5 передается через рулевую колонку 2, карданную передачу 3 и рулевой редуктор 4,
который обеспечивает необходимое передаточное отношение между рулевым коле-
сом и датчиком. Для стабилизации движения и создания необходимого усилия на
рулевом колесе предусмотрен автомат загрузки 6, который с одной стороны закреп-
лен на макете с помощью кронштейна <3, а с другой соединен с рулевым редуктором
через сошку.
Состав рулевой следящей системы (РСС) — функциональная схема, которая
приведена на рис. 15.54:
15.7 Всеколесное рулевое управление КТС ОБГ с колесной формулой 12x12 707
Рис. 15.51. Схема всеколесного рулевого управления КТС ОБГ 12x12
Упр
сигналы
от СУД
Контр,
сигналы
к СУД
+75 В
в правое
1 левое
2 левое
2 правое
3 правое
4 левое
Блок ДОС к
Блок ДОС к
Блок ДОС к
Блок ДОС к
Блок ДОС к
Блок ДОС к
ДОС к
ДОСк
ДОСк
ДОСк
ДОСк
ДОСк
ДОСк
ДОСк
ДОСк
ДОСк
ДОСк
ДОСк
КЗ 1
К31
К31
К31
К31
K3I
К31
К31
K3I
К31
K3I
K3I
кол
кол
кол
кол
КОЛ
КОЛ
КОЛ
КОЛ
КОЛ
кол
кол
кол
К32
К32
К32
К32
К32
К32
К32
К32
К32
К32
I УМЦ ||~~УМЦ~|
от кк :
БП
75В/
-15В
Канал
упр ПК
БП
75В/
+ 15В
Канал
упр ЛК
Плата
ФД и пит
ДОС
Плата
контура
ЭГУ
Плата
контура
ЭГУ
Плата
ФД и пит
ДОС
1 правое
Блок ДОС к
4 правое
Блок ДОС к
кк
ГЦ
ЭГУ
кк
ГЦ
ЭГУ
кк
ГЦ
ЭГУ
кк
ГЦ
ЭГУ
кк
ГЦ
ЭГУ
кк
ГЦ
ЭГУ
кк
ГЦ
ЭГУ
кк
ГЦ
ЭГУ
Регулировка Регулировка
«Ок», «Оэгу», «Ок». «Оэгу»,
«Кк», «Dk» «Кк», «Dk»
6 левое
Блок ДОС к
5 правое
Б ток ДОС к
5 левое
Блок ДОС к
3 левое
Блок дос к
Фк
Переключение каналов
+24 В
КОНТРОЛЬНЫЙ вход
+ В Канал URX упр ^вх ЭГУ
вкл
708 /5. Основы теории и расчета рулевого управления КТС ОБГ
кк
ГЦ
ЭГУ
ОП 75 В
+24 |
ОП 24 В |
______________БУО
Плата каналов упр.
______________БУО
Плата каналов упр
Канал
упр Л К
Регулировка
Ок», «Оэгу»,
• Кк». «Рк»
БП
75В/
-Н5В
БП
75В/
-15В
Канал
упр ПК
Регулировка
«Ок», «Оэгу»
«Кк» «Dk»
Плата || Плата
ФД и пит|
ДОС
дос
Плата II Плата
контура контура
ЭГУ || ЭГУ
I УМЦ |[~~УМЦ~|
кк
ГЦ
ЭГУ
КК
ГЦ
ЭГУ
кк
ГЦ
ЭГУ
БУО
Плата каналов упр
Канал упр ЛК Канал упр ПК
Регу шровка «Ок» «Оэгу» «Кк». «Dk» Регулировка «Ок». «Оэгу», «Кк», -Рк»
БП 75 В/ + I5B Плата ФД и пит ДОС Плата ФД и пит ДОС
БП 75 В/ -15В Плата контура ЭГУ контура ЭГУ
УМЦ |[~~УМЦ~|
БУО
Плата каналов упр
Канал упр Л К Канал упр ПК
Perv шровка «Ок». «Оэгу» «Кк», «Dk» Регутировка •Ок» «Оэгу» • Кк» «1)к»
БП 75В/ -15В Плата ФД и пит ДОС Птата ФД и пит ДОС
БП 75В/ 15В Плата контура ЭГУ контура ЭГУ
1 УМЦ || УМЦД
БУО
Плата каналов упр |
Канал упр ЛК Канал упр ПК
Регулировка •Ок», «Оэгу» «Кк» «Dk» Регулировка «Ок» «Оэп» «Кк», «Рк»
БП 75В/ + I5B Птата ФД и пт- ДОС Плата ФД и пит| ДОС |
БП 75В/ 15В П тата контура ЭГУ Плата | контура ЭГУ |
| 1 УМЦ II УМЦД
БУО
Плаза каналов упр
Канал
упр ЛК
Рсгутировка
Ок», «Оэгу»,
• Кк», «Рк»
БП
75В/
15В
БП
75 В/
15В
Канал
упр ПК
Регулировка
•Ок». «Оэгу»,
«Кк» «Ок»
Плата Плата
ФД и пит ФД и пит
ДОС ДОС
Плата || Плата
контура контура
ЭГУ и „
| УМЦ || УМЦ |
ГТ
Сигнализация
состояния источников питания
и клапанов кольцевания
000 0
Лзбм
Задатчик
Рис. 15.52. Функциональная схема комплекса рулевых следящих систем колесного механизма (КРСС КМ)
15.7 Всеколесное рулевое управление КТС ОБГ с колесной формулой 12x12 709
Рис. 15.53. Рулевой механизм:
/ — рулевое колесо; 2 — рулевая колонка; 3 — карданная передача; 4 — рулевой редук-
тор; 5 — задатчик угла поворота; 6 — автомат загрузки; 7 — подрамник; 8 — кронштейн
— четыре сумматора (L1...Z4), предназначенные для суммирования электри-
ческих сигналов, блока электрогидравлического управления (ЭГУ);
— четыре электрических фильтра (Ф1 ...Ф4) для фильтрации помех;
— три корректирующие ячейки (КЯ1...КЯЗ) для коррекции динамических па-
раметров РСС и увеличения ее точности;
мощностной выходной каскад (МВК) для усиления управляющего сигнала;
— электромеханический преобразователь (ЭМП) для преобразования управ-
ляющего сигнала в механическое перемещение выходного звена;
— золотниковый распределитель (ЗР) для регулирования направления и рас-
хода рабочей жидкости, поступающей в гидравлический цилиндр;
— гидравлический цилиндр (ГЦ) для преобразования потока жидкости в ли-
нейное перемещение штока;
— датчики обратной связи по положению золотника (ДОСз) и по углу пово-
рота колеса (ДОСк) для преобразования механических величин в электрические;
— два фазочувствительных детектора (ФД1, ФД2), предназначенные для
преобразования сигналов переменного тока в сигналы постоянного тока;
— клапан кольцевания (КК) для соединения или разъединения полостей ГЦ в
зависимости от наличия или отсутствия в его обмотках электрического сигнала;
— реле (Р) для подключения обмоток КК к источнику электрического питания;
— перемычки (П) для отключения МВК от источников питания;
— регулятор нулевого положения колеса (Per. «Ок»);
— регулятор статического коэффициента передачи РСС (Per. «Крсс»
о
+75 В
+15 В I Питание
> электронных
-15 В I У^00 БУК
15. Основы теории и расчета рулевого управления КТС ОБГ
Рис. 15.54. Функциональная схема рулевой следящей системы (РСС)
15.7. Всеколесное рулевое управление КТС ОБГ с колесной формулой 12x12 71 1
— регулятор добротности контура РСС (Per. «Дрсс»);
— два блока питания. + 15В и -15В (БП+15В, БП-15В), общие для РСС пра-
вого и левого колес одной оси;
— источник питания переменного тока для ДОСз;
— источник питания переменного тока для ДОСк;
— кинематические звенья, связывающие шток ГЦ с колесом (К31), и колесо с
ДОСк (К32).
РСС работает следующим образом (см. рис. 15.54). От системы управления
движением (СУД) на вход РСС поступает управляющий сигнал (С/сул), который про-
ходит через Z1 и суммируется на Z2 с сигналом обратной связи по углу поворота
колеса ((/ос2). Сигнал (/суд - (/ос2 проходит через Ф1 и Z3 и на Х4 суммируется с сиг-
налом обратной связи по положению золотника ЗР ((/ОС|).
Сигнал исул - UOC2 - Uoc\ проходит через Ф2, КЯ2, КЯЗ и после фильтрации и
коррекции поступает на вход МВК, а с его выхода — в обмотки ЭМП. Под воздей-
ствием этого сигнала якорь ЭМП отклоняется от нейтрального положения, выход-
ное звено ЭМП смещает золотник ЗР и составляющий конструктивно единое целое
с золотником якорь ДОС} из нулевого положения. При этом одна полость ГЦ со-
единяется с линией нагнетания, а вторая — с линией слива, шток ГЦ начинает пе-
ремещаться.
Одновременно начинают поворачиваться связанное через К31 со штоком ГЦ
колесо и якорь ДОСК, соединенный с колесом через К32. При перемещении якорей
на выходах ДОС3 и ДОСК появляются сигналы переменного тока, пропорциональ-
ные соответственно величинам отклонения золотника ЗР и колеса от нулевого по-
ложения. Эти сигналы преобразуются ФД1 и ФД2 в сигналы постоянного тока,
фильтруются ФЗ и Ф4, и поступают на Х4 и Z2 ((/ос1 и (/ос2). В результате величины
Сеул ~ ^ос2 и Осул - ^ос2 - ^oci начинают уменьшаться, пока не установятся соотно-
шения
^суд — Оос2 — 0, ^суд — Оос2 ~ Гос\ — 0.
При этом золотник ЗР устанавливается в нулевое положение; рабочая жид-
кость в полость ГЦ не поступает; шток ГЦ и колесо не перемещаются; угол поворо-
та колеса соответствует величине сигнала управления на входе РСС
^7фК ~ ^суд-^-рсс,
где ЛГрСС — статический коэффициент передачи системы.
Для соединения полостей ГЦ между собой на вход РСС подается разовая ко-
манда РКсуд; по этой команде срабатывает Р, обмотки КК подключаются к вторич-
ному источнику питания (ВИП), КК открывается и соединяет полости ГЦ между
собой. Состояние КК индицируется светодиодами: зеленый — КК закрыт, красный —
КК открыт.
Предусмотрена возможность регулировки нулевого положения колеса, ста-
тического коэффициента передачи системы и добротности системы. Два последних
параметра регулируются путем подбора величины постоянных резисторов, которые
впаиваются в плату. Нулевое положение колеса регулируется с помощью перемен-
ного резистора и может подстраиваться в процессе эксплуатации.
712
75. Основы теории и расчета рулевого управления КТС ОБГ
Питание электрических цепей (за исключением обмоток КК) обеспечивается
БП+15В и БП-15В; возможность одновременного использования источников для
двух РСС одной оси определяется разной полярностью сигналов на выходах МВК
этих РСС при повороте колес оси в одну сторону. Питание на БП+15В и БП-15В
подается от ВИП и индицируется светодиодами.
Источники питания переменного тока для ДОС3 и ДОСК преобразуют по-
стоянное напряжение ±15В в переменное двухполярное напряжение прямоугольной
формы.
В режиме контроля или настройки на Z1 с пульта контроля и испытаний
(ПКИ) подаются стимулирующие сигналы ((/зус); реакция РСС и ее соответствие
ожидаемой оцениваются по величинам и характеру сигналов, пропорциональных
£/вх }пр = (сигнал на входе контура колеса), 7/вх эгу (сигнал на входе контура
электрогидравлического усилителя), 7обм (ток в обмотках ЭМП), (/фД1 (перемещение
золотника ЗР), (угол поворота колеса), которые с выходов РСС поступают в ПКИ.
Для анализа состояния РСС в СУД передаются телеметрические сигналы,
пропорциональные величинам перемещения золотника и угла поворота колеса (ТМ
^7фл1 и ТМ (/фД2).
В системах предусмотрена возможность увеличения добротности контура
(повышения точности) при низкочастотных изменениях Ucy. которая реализуется
путем подключения КЯ1 и подбора ее параметров.
Пульт контроля и испытаний (ПКИ) предназначен для подачи стимулирую-
щего сигнала Uiyc на вход одной из РСС и измерения величин (/вх упр, 7/вх згу, 7обм,
Сф; Сфд2 (Сфк) в контрольных точках той же РСС.
Стимулирующий сигнал может подаваться от потенциометрического «задат-
чика» или генератора, подключенного к гнездам «генератор» и «общий провод»
(ОП). Измерение величин перечисленных параметров производится с помощью пя-
ти стрелочных приборов, входящих в состав ПКИ, или с помощью внешних прибо-
ров, подключенных к соответствующим гнездам и гнездам ОП.
Для подключения контролируемой РСС шесть галетных переключателей
ПКИ устанавливаются в положение, соответствующее по номеру выбранной РСС.
Все перечисленные электронные ячейки, регуляторы и блоки питания, а так-
же ПКИ конструктивно объединены в блоке управления и контроля (БУК).
На рис. 15.55 представлен для примера сборочный чертеж блока управления
осью (БУО). В состав БУО входят: 2-канальная плата 7 каналов управления, две
платы 2 контура ЭГУ, 2-канальная плата 3 ФД и питания ДОС ЭГУ, 2-канальная
плата 4 ФД и питания ДОС45Д-32-1Б, два разнополярных БП 5. Электрическая
связь БУО с узлами и цепями БУК 6 осуществляется через колодки Х1...Х7 Меха-
ническая связь элементов БУО в единый блок обеспечивается шпильками 8 и ско-
бами 7 Общее количество БУО в составе БУК соответствует количеству осей —
шесть (см. рис. 15.52).
На радиаторах, которые крепятся на боковых сторонах БУК, монтируются 12
(по числу колес) МВК.
На боковой панели БУК (рис. 15.56) расположены:
- два разъема для приема от СУД управляющих сигналов на входы РСС и
разовых команд для включения КК (ВХ. УПР и ВХ. КК).
15.7. Всеколесное рулевое управление КТС ОБГ с колесной формулой 12x12 713
Рис. 15.55. Блок управления осью (БУО)
Рис. 15.56. Боковая панель БУК
- два разъема для передачи в СУД телеметрических сигналов, пропорциональ-
ных величинам перемещения золотника ЭГУ и углу поворота колеса (ТМ. ЭГУ и ТМ.
КОЛ), два разъема для подвода электропитания (ЭЛ.ПИТАНИЕ , оси 1-3, оси 4—6);
- 12 разъемов для передачи управляющих сигналов в обмотки ЭМП и КК,
714
75. Основы теории и расчета рулевого управления КТС ОБГ
подвода питания к ДОС3 и ДОСК и приема сигналов от них (блок РСС, 1Л...6Л,
1 П...6П, где цифра — номер оси, Л — левое колесо, П — правое);
- шесть индикаторов подачи питания 75 В на БП БУО (блок ОСЬ, 1 ...6);
- 24 индикатора состояния КК (блок КЛАПАНЫ КОЛЬЦЕВАНИЯ, 1Л...6Л,
1 П...6П, зеленый — КК закрыт, красный — КК открыт).
ПКИ укреплен на крышке БУК, которая вместе с ПКИ, в случае настройки или
проведения контроля КРСС КМ откидывается и фиксируется специальным зажимом.
В местах крепления БУК установлены амортизаторы.
Вторичный источник питания (ВИП) предназначен для защиты цепей электри-
ческого питания, узлов и блоков, входящих в состав КРСС КМ, от выбросов, прова-
лов напряжения и тока, переходных процессов, пульсаций и помех, возникающих при
эксплуатации бортового источника питания.
Для исключения взаимного влияния цепей питания каналов КРСС КМ цепь
+75 В бортового источника питания разделена в ВИП на шесть 2-проводных цепей. В
каждой из них установлены плавкий предохранитель, защитный диод и емкостной
фильтр, защищающие цепи питания БП+15В и БП-15В РСС правого и левого колес
одной оси.
Цепи +24 В используются только при включении КК и состоят из общей части
и шести независимых друг от друга участков, каждый из которых предназначен для
подвода питания к КК РСС правого и левого колес одной оси. В общей части уста-
новлены диод и мощный емкостной фильтр, в каждом независимом участке — плав-
кие предохранители.
Емкостные фильтры в цепях +75 В и +24 В конструктивно объединены в блок
фильтров защиты.
На передней панели ВИП расположены:
- две мощные клеммы для подведения напряжения +75 В от бортового источ-
ника, защищенные крышкой с фиксирующим винтом;
- разъем для подведения напряжения +24 В от бортового источника;
- переключатель, одновременно включающий напряжения +75 В и +24 В;
- индикатор подачи питания +75 В;
- два разъема для подачи электропитания в БУК (ЭЛ. ПИТАНИЕ КРСС КМ,
оси 1-3 и 4-6);
- предохранители в цепях питания 24 В и 75 В электрических узлов двух РСС
каждой оси (оси 1...6);
- предохранители в цепях вторичного питания (75 В/15 В и 75 В/24 В).
В местах крепления ВИП установлены амортизаторы.
Масляный бак смонтирован в моторном отделении верхней части ТС над на-
сосом. Его объем составляет 250 л.
На масляном баке имеются два окна для контроля минимального и максималь-
ного уровня масла. В корпусе бака имеется сетчатый маслозаборник.
К масляному баку подведены сливная и напорная магистрали.
Насос рулевого управления (рис. 15.57) — аксиально-поршневой, регули-
руемый с регулятором давления марки 313.3.107.3704, предназначен для подачи РЖ и
поддержания заданного давления в системе.
Насос функционально состоит из двух частей — качающегося узла и блока ре-
гулятора.
Качающийся узел включает вал 7, установленный в корпусе 27 на подшипни-
ках 5 и 6. Со стороны конца вала насос закрывается крышкой 3, уплотненной резино-
15.7. Всеколесное рулевое управление КТС ОБГ с колесной формулой 12x12 715
вым кольцом 4 с манжетой 2. Фланец вала через сферические головки шатунов 7 со-
единен с поршнями 8 и шипом 26. Поршни перемещаются в цилиндрах блока 9.
Величина хода поршней определяется углом, образованным осями вращения
блока цилиндров и вала / Блок 9 по сферической поверхности контактирует с рас-
пределителем 10, который противоположной стороной прилегает к опорной по-
верхности корпуса регулятора 23.
Блок регулятора состоит из установленных в корпусе 23 ступенчатого
поршня 19, пальца 20, фиксирующего винта 22, 2-кромочного золотника 2/ с баш-
маком и подпятником, 2-плечевого рычага 18, крышки 15 с резиновыми кольцами
/7, в которой размещены детали 12, 13, 14, 16, имеющие различное функциональное
назначение. Снизу блок регулятора закрывается стаканом 25 с кольцом 24.
Пневмогидроаккумулятор (ПГА) (рис. 15.58) предназначен для поддержа-
ния рабочего давления в гидросистеме при неработающем насосе.
Рис. 15.58. Пневмогидроаккумулятор
716
15. Основы теории и расчета рулевого управления КТС ОБГ
Рис. 15.59. Бустер
ПГА состоит из пневмоклапана /, стальной
гильзы 2, крышек 3 и 4, поршня 5. Крышки крепят-
ся с помощью гаек 6, воспринимающих давление
рабочей среды.
Поршень уплотняется резиновыми кольцами
10, 11, 12 и 13. Крышки уплотняются резиновыми
кольцами 7 с защитными кольцами 8. Пневмокла-
пан / уплотняется с помощью резинового кольца 9.
Стопорение гаек 6 осуществляется стопор-
ными винтами 14.
Бустер (рис. 15.59) —управляющий элемент
колеса. Он изготовлен из трех частей: гидроцилинд-
ра 1, являющегося силовым элементом, электрогид-
равлического распределителя (ЭГР) 2 и клапана
кольцевания 3. ЭГР представляет собой однокаскад-
ный электрогидравлический усилитель мощности
прямого действия и состоит из следующих основных
узлов (рис. 15.60): моментный мотор (ММ) / и зо-
лотниковый распределитель 2 с индукционным дат-
чиком положения золотника 3.
ЭГР имеет свой электрический соединитель 4
(блочная часть).
Приводом золотника является моментный
мотор (рис. 15.61), преобразующий маломощный
токовый сигнал в пропорциональное механическое
перемещение. Конструктивно моментный мотор —
автономное устройство, он монтируется и проверя-
ется отдельно, а также является взаимозаменяе-
мым. Это облегчает техническое обслуживание и
проведение ремонта. Моментный мотор — «сухой»
двигатель, герметично отделяемый от гидравличе-
ской части ЭГР армированной манжетой 1, уста-
новленной на валу 2. На валу жестко закреплен
якорь 3, который представляет собой узел, состоя-
щий из магнитомягкого сердечника с жестко закре-
пленными на его гранях четырьмя редкоземельны-
ми постоянными магнитами 4.
Якорь монтируется в расточку, образованную
на полюсах 5, с диаметральным зазором ~0,2 мм.
Вал в подшипниках 6, 7 крепится в крышках
8, 9, жестко закрепленных на полюсах 5, выпол-
ненных из магнитомягкого материала. Полюса, в
свою очередь, жестко установлены на статоре 10,
также выполненном из магнитомягкого материа-
ла. Расположенная ниже манжеты часть вала мо-
15.7 Всеколесное рулевое управление КТС ОБГ с колесной формулой 12x12 717
A-A
Рис. 15.60. Электрогидравлический распределитель
718
15. Основы теории и расчета рулевого управления КТС ОБГ
ментного мотора (приводной вал) выполнена с эксцентриситетом относительно
верхней части вала (эксцентриситет е = 2,5 мм, см. также сечение А-А на рис. 15.61).
Две расположенные на полюсах 5 катушки 11 образуют магнитный поток
управления в рабочих воздушных зазорах длиной /в.
Магнитный поток возбуждения (подмагничивания) создают в рабочих воз-
душных зазорах четыре постоянных магнита. Силовое взаимодействие потоков
управления и подмагничивания определяет действующий на якоре электромагнит-
ный момент, величина которого линейно зависит от величины тока в обмотках мо-
ментного мотора.
Сила, передаваемая на золотник 2 (см. рис. 15.61), соответствует отношению
электромагнитного момента к плечу длиной е (см. сечение А-А на рис. 15.60), ус-
танавливаемому эксцентриситетом осей якоря и приводного вала. Линейное пере-
мещение золотника 2 определяется произведением углового перемещения якоря на
плечо е (сечение А-А).
Передача силы от якоря на золотник (см. рис. 15.61) осуществляется через
подшипник 72, установленный на приводном валу. Подшипник взаимодействует
своим наружным кольцом с золотником. Величина зазора подшипник—золотник
составляет 1...3 мкм.
Перемещение золотника 2 при номинальном токе управления (/ном = ± 1,6 А)
= +1,0 мм.
"ном ’
Золотниковый распределитель (рис. 15.60) — 4-щелевой золотник с практи-
чески нулевыми перекрытиями — жестко связан с ротором индукционного датчика
4, обеспечивающего позиционную обратную связь. В гильзе 6 имеются четыре пары
прямоугольных окон, отсеченные кромки которых скомплектованы по перекрытиям
с отсечными кромками золотника. Такая форма окон обеспечивает линейную зави-
симость площади дросселирующей щели по ходу золотника, т. е. постоянный коэф-
фициент усиления по расходу во всем диапазоне перемещения золотника.
Гильза 6 (см. рис 15.60) посредством ввернутой в ее торец втулки 8 удержи-
вается в фиксированном положении в корпусе 15. Это положение определяется
взаимодействующими с втулкой и корпусом 15 пружиной 7 и регулировочным вин-
70 7/ 8 6
Рис. 15.61. Моментный мотор
15.7 Всеколесное рулевое управление КТС ОБГ с колесной формулой 12x12 719
том 9. Контровка последнего осуществляется гайкой 10. Вращением винта 9 обес-
печивается гидравлическая регулировка смещения нуля, выполняемая на ЭГР без
блока сопряжения.
Вращением регулировочного винта 13 (см. рис. 15.60) обеспечивается регу-
лировка смещения нуля ЭГР с подключенным блоком сопряжения. При сигнале
управления £/упр = 0 вращением винта 13 перемещают подпружиненный статор дат-
чика положения золотника ДОС 5, воздействуя на него втулкой 12 и добиваются
минимальной величины смещения нуля. Контровка регулировочного винта 13 обес-
печивается гайкой.
Регулировка смещения нуля осуществляется с использованием технологи-
ческого гидроцилиндра. Линии А и В ЭГР подключаются к полостям гидроци-
линдра.
На стыковой плоскости корпуса 15 (см. рис. 15.60) выполнены пять кольце-
вых проточек для установки резиновых колец круглого сечения, уплотняющих ка-
налы гидравлических линий.
Дренажная линия Y объединяет торцевые полости П1 и П2 золотника и не
связана непосредственно с линией слива Т Наличие Y обусловлено ограничением в
полости П1 давления не более 0,3 МПа. Если давление в линии Т, определяемое
условиями эксплуатации, не превышает этого значения, линию Y можно не исполь-
зовать.
При подаче на вход блока сопряжения входного сигнала £/у1|р = 0 он сравнива-
ется с напряжением, снимаемым с датчика ДОС. Разность этих величин Е = £/упр - UiK
поступает на вход усилителя, реализованного в блоке управления и далее преобра-
зуется в сигнал постоянного тока / на выходе усилителя мощности. Нагрузкой уси-
лителя мощности являются две параллельно включенные обмотки моментного мо-
тора. Комплексное сопротивление обмоток определяется совокупностью индуктив-
ного и активного сопротивлений. Активное сопротивление параллельно
включенных обмоток должно составлять 1,85 ± 0,4 Ом, максимальное значение тока
управления, соответствующего перемещению золотника в предварительном каскаде
усиления ЭГР, — /тах < ± 1,6 А.
Золотник перемещается соответственно величине тока /, в результате чего к
исполнительному механизму привода поступает управляющий расход рабочей жид-
кости Q.
Этот расход на выходе ЭГР определяет скорость перемещения исполнитель-
ного механизма (гидроцилиндра, гидромотора) и связанную с ним нагрузку.
Величина расхода при постоянной нагрузке практически линейно зависит от
сигнала управления (/упр.
Датчик обратной связи (рис. 15.62) предназначен для выдачи сигнала в
БВК о положении колеса в каждый момент времени. В корпусе привода 2 располо-
жен вал 6, вращающийся на подшипниках 11 От осевого перемещения вал 6 удер-
живается крышкой 1 Через промежуточное звено, включающее в себя маховик 3 от
вала 6 на потенциометр 9 передается угол, соответствующий углу поворота колеса.
Промежуточное звено необходимо для уменьшения погрешности измерения. По-
тенциометр фиксируется цапфой 8 и гайкой 7 в корпусе 4, который закрывается
крышкой 5. Для подключения кабеля предусмотрена розетка 10.
720
15. Основы теории и расчета рулевого управления КТС ОБГ
Рис. 15.62. Датчик обратной связи (ДОС)
Таким образом, в конструкции всеколесного рулевого управления КТС ОБГ с
колесной формулой 12% 12 реализованы последние достижения МГТУ им. Н.Э. Бау-
мана, изложенные в гл. 14 и 15 данной книги. При этом ВРУ представлена в реаль-
ной конструкции.
СПИСОК ЛИТЕРАТУРЫ
1. Аксенов П.В. Многоосные автомобили: Теория общих конструктивных ре-
шений. М.: Машиностроение, 1989. 280 с.
2. Антонов А.С. Армейские автомобили. Конструкция и расчет. М.: МО
СССР, 1970. 542 с.
3. Степанченко Э.П., Фалалеев П.П. Технологическое оборудование: Основы
конструкции и расчета базовых машин. М.: МО СССР, 1986. 364 с.
4. Высоцкий М.С., Гилелес Л.Х., Херсонский С.Г Грузовые автомобили: Про-
ектирование и основы конструирования. М.: Машиностроение, 1985. 256 с.
5. Белоусов Б.Н., Попов С.Д. Ловцов А.И. Всеколесное рулевое управление
для большегрузных многоосных АТС // Автомобильная промышленность. 2002.
№ 3. С. 11-14.
6. Тенденции развития теории и практики систем передачи мощности к дви-
жителю многоосных полноприводных транспортных средств / А.Н. Елисеев,
Б.Н. Белоусов, А.Ф. Стариков и др. М.: Академия проблем качества, отделение
спецтехники и конверсии, 2000. 76 с.
7 Научные подходы к обоснованию технического облика ходовой части
перспективных многоосных транспортных средств / А.Н. Елисеев, Б.Н. Белоусов,
А.Ф. Стариков и др. М.: Академия проблем качества, отделение спецтехники и кон-
версии, 2000. 48 с.
8. Чвялев В.Е. Автомобильная техника СКБ МАЗа и МЗКТ Неизвестное об
ивестном // Автомобильная промышленность. 2000. № 8. С. 7 -12.
9. Егоров А.Н. БелАЗ: Работа на перспективу // Автомобильная промышлен-
ность. 2000. № 9. С. 6 — 9.
10. Сироткин ЗЛ. Советские автомобили-самосвалы большой и особо боль-
шой грузоподъемности в прошлом, настоящем и будущем // Автомобильная про-
мышленность. 1984. № 10. С. 23 -25.
11. Сироткин З.Л., Осокин В.А. Перспективный типаж карьерных АТС // Ав-
томобильная промышленность. 1991. № 1. С. 7 -10.
12. Смирнов Г.А. Теория движения колесных машин. М.: Машиностроение,
1990. 352 с.
13. Кох П.И. Климат и надежность машин. М.. Машиностроение, 1981 175 с.
14. Высоцкий М.С., Гилелес Л.Х., Херсонский С.Г Грузовые автомобили:
Проектирование и основы конструирования. 2-е изд., перераб. и доп. М.. Машино-
строение, 2000. 256 с.
722
Список литературы
15. Ванцевич В.В., Высоцкий М.С., Гилелес Л.Х. Мобильные транспортные
средства: Взаимодействие со средой функционирования. Минск.: Белоруская наву-
ка, 1998. 303 с.
16. Токарев А.А. Топливная экономичность и тягово-скоростные свойства ав-
томобилей. М.: Машиностроение, 1982. 282 с.
17 Гришкевич А.И. Автомобили: Теория: Учебник для вузов. Минск.: Выш.
шк. 1986.208 с.
18. Шимков А.А. Создание моторно-трансмиссионных установок специализи-
рованных многоосных колесных шасси высокой проходимости: Дисс... докт. техн,
наук в форме научного доклада: 05.05.03. Минск, 1990. 59 с.
19. Сергеев В.А., Корнилов П.Ю. Зарубежные транспортные средства для
перевозки крупногабаритных тяжеловесных грузов. Обзорная информация.
ЦНИИТЭИавтопром, 1988.46 с.
20. Котик М.А., Емельянов А.М. Природа ошибок человека-оператора (на
примере управления транспортными средствами). М.: Транспорт, 1993. 252 с.
21. Чумаков Н.М., Серебряный Е.И. Оценка эффективности сложных техни-
ческих устройств. М.: Сов. радио, 1980. 192 с.
22. Ипатов М.И. Проблемы совершенствования технико-экономического
анализа на стадиях проектирования автомобиля. Реферат дисс... докт. техн, наук:
05.05.03. М. 1975. 30 с.
23. Иванов А.М. Технические пути повышения конструктивной эффективности
грузовых автотранспортных средств. Автореферат дисс... докт. техн, наук: 05.05.03.
М. 1995. 33 с.
24. Тракторы. Теория / В.В. Гуськов, Н.Н. Велев, Ю.А. Атаманов и др.; Под
общ. ред. В.В. Гуськова. М.: Машиностроение, 1988. 376 с.
25. Ванцевич В.В. Синтез схем приводов к ведущим мостам и колесам много-
приводных транспортно-тяговых машин. Дис.... докт. техн, наук: 05.05.03. Минск,
1992.412 с.
26. Лефаров А.Х., Высоцкий М.С., Ванцевич В.В., Кабанов В.И. Энергонагру-
женность и надежность дифференциальных механизмов транспортно-тяговых ма-
шин. Минск: Навука i тэхника, 1991. 157 с.
27 Шалягин В.Н. Транспортные и транспортно-технологические средства
повышенной проходимости. М.: Агропромиздат, 1986. 186 с.
28. Погосбеков М.И. Еще раз о КПД автомобиля // Автомобильная промыш-
ленность. 1996. № 12. С. 12-15.
29. Платонов В.Ф. Полноприводные автомобили. 2-е изд., перераб. и доп. М.:
Машиностроение, 1989. 312 с.
30. Токарев А.А. Топливная экономичность и тягово-скоростные качества ав-
томобиля. М.: Машиностроение, 1982. 224 с.
31 Литвинов А.С., Фаробин Я.Е. Автомобиль: Теория эксплуатационных
свойств. М.. Машиностроение, 1989. 240 с.
32. Автомобили. Специализированный подвижной состав / М.С. Высоцкий,
А.Г Выгонный, Л.Х. Гилелес, С.Г Херсонский; Под ред. М.С. Высоцкого. Минск:
Вышэйшая школа, 1987 152 с.
33. Высоцкий М.С. Основы проектирования автомобилей и автопоездов
большой грузоподъемности. Минск: Наука и техника, 1980. 200 с.
Список литературы
723
34. Вонг Дж. Теория наземных транспортных средств. Пер. с англ. М.. Ма-
шиностроение, 1982. 284 с.
35. Аксенов П.В., Белоусов Б.Н., Стариков А.Ф. Основные принципы анализа
и синтеза схем трансмиссии многоосных транспортных средств // Вестник МГТУ
им. Н.Э. Баумана. Серия Машиностроение, 1998. № 4. С. 88-89.
36. Шуп Т Решение инженерных задач на ЭВМ. Пер. с англ. М.: Мир, 1982.
238 с.
37 Сиразетдинов Т.К. Методы решения многокритериальных задач синтеза
технических систем. М.: Машиностроение, 1988. 160 с.
38. Математическая теория оптимальных процессов / Л.С. Понтрягин,
В.Г Болтянский, Р.В. Гамкрелидзе, Е.Ф. Мищенко. 4-е изд. М.: Наука, 1983. 392 с.
39. Понтрягин Л.С. Принцип максимума в оптимальном управлении. М.:
Наука, 1989. 64 с.
40. Ан толю нов Ю.Г Синтез оптимальных систем. Киев: Наукова думка,
1972. 320 с.
41. Болтянский В.Г Математические методы оптимального управления.
2-е изд., перераб. и доп. М.: Наука, 1969. 408 с.
42. Воронов А.А., Титов В.К., Новогранов Б.Н. Основы теории автоматиче-
ского регулирования и управления. М.: Высшая школа, 1977 519 с.
43. Петров Ю.В. Вариационные методы теории оптимального управления.
2-е изд., перераб. и доп. Л.: Энергия, 1977 280 с.
44. Гер.минтерн В.И., Каган Б.М. Методы оптимального проектирования. М.:
Энергия, 1980. 160 с.
45. Герминтерн В.И., Штильлюн М.С. Оптимизация в задачах проектирова-
ния. М.: Знание, 1982. 64 с.
46. Гащук П.Н. Оптимизация топливо-скоростных свойств автомобиля.
Львов: Вища школа, 1987 168 с.
47 Гуськов В.В. Оптимальные параметры сельскохозяйственных тракторов.
М.: Машиностроение, 1966. 196 с.
48. Бойков В.П., Белковский В.Н. Шины для тракторов и сельскохозяйствен-
ных машин. М.: Агропромиздат, 1988. 240 с.
49. Перспективные мобильные энергетические средства (МЭС) для сельско-
хозяйственного производства / В.В. Кацыгин, Г.С. Горин, А.А. Зенькова и др.
Минск: Наука и техника, 1982. 272 с.
50. Тяговые показатели модульного энерготехнологического средства
Г.М. Кутьков, А.Г Черных, Е.В. Габай, Л.М. Лукерчик // Тракторы и сельхозмашины.
1990. №6. С. 19-20.
51. Ванцевич В.В., Харитончик С.В. Повышение тяговых свойств многопри-
водных колесных машин в тяжелых условиях эксплуатации // Повышение эффек-
тивности работы колесных и гусеничных машин в суровых условиях эксплуатации:
Сб. трудов междунар. научн.-техн. конф., Тюмень, 20-22 ноября 1996. Тюмень,
1996. С. 21-22.
52. Пирковский Ю.В., Шухман С.Б. Теория движения полноприводного авто-
мобиля (прикладные вопросы оптимизации конструкции шасси). М.. ЮНИТИ-
ДАНА, 2001. 230 с.
724
Список литературы
53. Белов П.М. Двигатели армейских машин. Теория. М.: Воениздат СССР,
1971 306 с.
54. Пирковский Ю.В. Влияние конструктивных показателей автомобилей на
их динамические качества и топливную экономичность. М.: ИПК Минавтосельхоз-
маш СССР 1989. 18 с.
55. Подгаевский В.М. Тенденции развития семейств двигателей зарубежных
военно-гусеничных машин. Сборник НИИД. 1992. №4. С. 127-146.
56. Петров Л.К. Дизельная топливная аппаратура с электронным управлени-
ем // Автомобильная промышленность. 1993. № 4. С. 37-39.
57 Денисов А.В. Основы теории совместной работы газотурбинных силовых
установок с прозрачной и непрозрачной трансмиссиями многоосных автомобилей:
Дисс... докт. техн, наук: 05.05.03. М., 1991.395 с.
58. Галевский Е.А. Теоретические основы создания механических трансмис-
сий с согласованными динамическими параметрами транспортных машин. Авторе-
ферат дис... .докт. техн. наук: 05.05.03. М., 1998. 36 с.
59. Мазанов ИД. О выборе параметров унифицированных гидротрансформа-
торов для семейства автомобилей БелАЗ // Автомобильная промышленность. 1966.
№ 3. С. 25-27
60. Нарвут А.Н. Основы оптимизации выходных характеристик гидротранс-
форматоров//Труды МАДИ. Автомобили. 1972. Вып. 42. С. 121-130.
61. Антонов Д.А. Теория движения боевых колесных машин. М.: Изд-во
Минобороны СССР, 1993. 383 с.
62. Динамика системы «дорога-шина-автомобиль-водитель» Под ред.
А.А. Хачатурова. М.: Машиностроение, 1976. 535 с.
63. Степанов Ю.А. Типовая планетарная коробка передач для автомобилей
большой грузоподъемности // Автомобильная промышленность. 1992. № 5. С. 7-9.
64. Силаев А.А\ Спектральная теория подрессоривания транспортных машин.
М.: Машиностроение, 1972. 192 с.
65. Расчет эксплуатационных параметров движения автомобиля и автопоезда /
А.А. Хачатуров, В.Л. Афанасьев, В.С. Васильев и др. М.: Транспорт, 1982. 264 с.
66. Пановко Я.Г Внутреннее трение при колебаниях упругих систем. М.:
Физматгиз, 1960. 114 с.
67 Сорокин Е.С. К теории внутреннего трения при колебаниях упругих сис-
тем. М.: Гос. изд-во по строительству, архитектуре и строительным материалам,
1960. 131 с.
68. Колесников К.С., Сухов В.Н. Упругий летательный аппарат как объект ав-
томатического управления. М.: Машиностроение, 1974. 268 с.
Оглавление
ПРЕДИСЛОВИЕ
ВВЕДЕНИЕ 4
УСЛОВНЫЕ ОБОЗНАЧЕНИЯ
СПИСОК ПРЕДПРИЯТИЙ 14
Часть I. ОСНОВНЫЕ ЭТАПЫ РАЗВИТИЯ ОБЩИХ КОНСТРУКТИВНЫХ
РЕШЕНИЙ КТС ОБГ 15
Глава 1. Развитие отечественных и зарубежных транспортных средств ОБГ 15
1.1 КТС ОБГ за рубежом 15
1.2. Гидромеханические передачи 28
1.3. Электрические трансмиссии 33
1.4. Гидрообъемные трансмиссии 41
1.5. Схемы рулевого управления 57
Глава 2. Многоопорные транспортные средства 61
2.1 Общие сведения 61
2.2. Трансмиссия 66
2.3. Опоры 68
2.4. Рулевое управление 73
Глава 3. Автомобили-самосвалы большой и особо большой грузоподъемности 82
3.1. Общие сведения 82
3.2. Трансмиссия 90
3.3. Ходовая часть 99
3.4. Рулевое управление 103
3.5. Тормозное управление 105
3.6. Кабина 107
3.7 Автомобили-самосвалы МоАЗ 108
Глава 4. Становление и развитие многоосных шасси
4.1 Начальный этап исследований, становления и развития многоосных шасси
под моногруз 1 11
4.2. Транспортные средства на воздушной подушке 118
4.3. Общие конструктивно-компоновочные решения 126
4.4. Разработки специальных колесных шасси в 1980-е годы 128
Часть II. ОБЩИЕ СВЕДЕНИЯ О КТС ОБГ 140
Глава 5. Методология формирования общего облика колесных транспортных
средств ОБГ 140
5.1. Общие положения 140
5.2. Иерархическая структура специального колесного шасси как сложной
технической системы 145
5.3. Процесс формирования облика специального колесного шасси 156
5.4. Структура математической модели КТС ОБГ 180
5.5. Алгоритм формирования облика КТС ОБГ 181
5.6. Особенности проектного этапа «Формирование облика КТС ОБГ» 184
Глава 6. Области и условия использования КТС ОБГ 186
6.1. Технико-экономическая целесообразность использования КТС ОБГ для
перевозки грузов................................................. 186
726
Оглавление
6.2. Условия использования КТС ОБГ 190
6.3. Основные требования к маршрутам движения 197
Глава 7. Основные требования к эксплуатационным и потребительским свойствам 202
7 1 Общие положения 202
7.2. Тягово-скоростные свойства и топливная экономичность 203
7.3. Массогабаритные показатели 209
7.4. Маневренность и управляемость движения, проходимость по дорогам 210
7.5. Безопасность транспортного средства 215
7.6. Эргономика 224
Глава 8. Основные технические критерии и методы оценки эффективности
принимаемых для КТС ОБГ технических решений 231
8.1. Анализ технических критериев совершенства конструкции транспортных
средств 231
8.2. Методы оценки показателей совершенства конструкций транспортных
средств 244
8.3. Математическая модель представительного маршрута движения СКШ 249
8.4. Математическая модель движения СКШ 260
8.5. Сравнительная оценка подвижности СКШ на представительных маршрутах 274
Часть III. ОСНОВЫ ТЕОРИИ И РАСЧЕТА КТС ОБГ 279
Глава 9. Основные принципы построения общей компоновки КТС ОБГ 279
9.1 Анализ тенденций развития общей компоновки 279
9.2. Основы модульного проектирования 297
9.3. Теоретические основы формирования типоразмерных рядов 305
9.4. Перспективная транспортно-технологическая колесная машина 311
9.5. Уравнения массы базовой машины и ее элементов 320
9.6. Расчет характеристик массы колесных машин 335
Глава 10. Силовые установки колесных транспортных средств 350
10 .1. Общая характеристика силовых установок 350
10 .2. Тенденции развития отечественного и мирового двигателестроения 353
10 .3. Основы концепции развития двигателей для КТС ОБГ 356
10 .4. Особенности математического моделирования дизельных и
газотурбинных силовых установок СКШ 371
10 .5. Состояние развития электрохимических типов двигателей автомобилей 377
Глава 11. Основы теории и расчета систем передачи мощности
от двигателя к колесному движителю 381
111. Общая характеристика, классификация и требования к трансмиссиям 381
11.2. Основные направления развития механических трансмиссий колесных
машин 402
1 1.3. Тормоза-замедлители трансмиссионного типа 414
1 1.4. Общие принципы распределения мощности в трансмиссиях современных
и перспективных СКШ 418
1 1.5. Анализ энергетического совершенства различных схем передачи
мощности к движителю 422
1 1.6. Перспективные электрические трансмиссии систем передачи мощности к
движителю .............................................................. 445
Оглавление
727
Глава 12. Колебания многоосного колесного шасси с упругими шинами 459
12.1. Особенности вертикальных и продольно-угловых колебаний 459
12.2. Особенности поперечно-угловых колебаний 481
12.3. Частотные характеристики скоростей вертикальных, продольно-угловых и
поперечно-угловых колебаний 484
12.4. Частотные характеристики ускорений вертикальных, продольно-угловых
и поперечно-угловых колебаний 485
12.5. Спектральный анализ колебаний 489
12.6. Пространственные модели колебаний 496
12.7. Пространственная модель колебаний многоосного седельного автопоезда 508
Глава 13. Основы теории и расчета систем подрессоривания колес
КТС ОБГ 517
13.1. Назначение, классификация и требования к подвескам колес 517
13.2. Анализ и математическое описание расчетных схем подвески колес 521
13.3. Активные и регулируемые подвески, системы стабилизации платформы 530
13.4. Выбор параметров демпфирования и жесткости длинноходной подвески 542
13.5. Конструкция длинноходной подвески колес в составе ОХМ 558
13.6. Анализ результатов экспериментальных испытаний гидропневматической
подвески для КТС ОБГ 562
13.7 Конструирование и расчет подвесок 568
Глава 14. Криволинейное движение многоосных колесных шасси 584
14.1. Термины и определения 584
14.2. Уравнения плоского криволинейного движения многозвенного колесного
шасси 591
14.3. Устойчивость движения многоосного колесного шасси 614
14.4. Устойчивость установившегося движения многоосного колесного шасси 633
14.5. Устойчивость установившегося движения многоосного колесного шасси 642
14.6. Устойчивость неустановившегося движения многоосного колесного
шасси в общем случае 648
Глава 15. Основы теории и расчета рулевого управления КТС ОБГ 650
15.1. Общие положения 650
15.2. Основные требования к системе рулевого управления 654
15.3. Исходные данные для расчета системы рулевого управления 656
15.4. Выбор и математическое обоснование законов функционирования гибких
схем рулевого управления 663
15.5. Исследования поворачиваемости, поворотливости и устойчивости
движения КТС ОБГ с различными схемами РУ 670
15.6. Общая схема построения системы автоматизированного управления
криволинейным движением 689
15.7 Всеколесное рулевое управление КТС ОБГ с колесной формулой 12x12 706
СПИСОК ЛИТЕРАТУРЫ ........................................................ 721
Научное издание
Борис Николаевич Белоусов
Сергей Дмитриевич Попов
КОЛЕСНЫЕ ТРАНСПОРТНЫЕ СРЕДСТВА
ОСОБО БОЛЬШОЙ ГРУЗОПОДЪЕМНОСТИ
Редактор Л.А. Осипова
Корректоры Г.А. Беляева, О.В. Калашникова
Художник И.Г Столярова
Компьютерная верстка С. Ч. Соколовского
Компьютерная графика О.В. Левашовой
Оригинал-макет подготовлен в Издательстве МГТУ им. Н.Э. Баумана
Санитарно-эпидемиологическое заключение
№ 77.99.02.953.Д.00583.09.04 от 13.09.2004 г.
Подписано в печать 08.02.2006. Формат 70x100/16. Печать офсетная.
Бумага офсетная. Гарнитура «Таймс». Печ. л. 45,5. Усл. печ. л. 59,15.
Уч.-изд. л. 59. Тираж 1000 экз. Заказ № 2918
Издательство МГТУ им. Н.Э. Баумана.
105005, Москва, 2-я Бауманская, 5.
Отпечатано с оригинал-макета в ГУП ППП «Типография «Наука».
121099, Москва, Шубинский пер., 6.
Научное издание
Борис Николаевич Белоусов
Сергей Дмитриевич Попов
КОЛЕСНЫЕ ТРАНСПОРТНЫЕ СРЕДСТВА
ОСОБО БОЛЬШОЙ ГРУЗОПОДЪЕМНОСТИ
Редактор Л.А. Осипова
Корректоры Г.А. Беляева, О.В. Калашникова
Художник Н.Г Столярова
Компьютерная верстка С. Ч. Соколовского
Компьютерная графика О.В. Левашовой
Оригинал-макет подготовлен в Издательстве МГТУ им. Н.Э. Баумана
Санитарно-эпидемиологическое заключение
№ 77.99.02.953.Д.00583.09.04 от 13.09.2004 г
Подписано в печать 08.02.2006. Формат 70x100/16. Печать офсетная.
Бумага офсетная. Гарнитура «Таймс». Печ. л. 45,5. Усл. печ. л. 59,15.
Уч.-изд. л. 59. Тираж 1000 экз. Заказ № 2918
Издательство МГТУ им. Н.Э. Баумана.
105005, Москва, 2-я Бауманская, 5.
Отпечатано с оригинал-макета в ГУП ППП «Типография «Наука».
121099, Москва, Шубинский пер., 6.