












































































































































































































































































































































































































Author: Перунов Ю.М. Фомичев К.И. Юдин Л.М.
Tags: военно-инженерное оборудование и работы по инженерному обеспечению пути сообщения противорадиолокационные средства военная топография кибернетика оружие радиоэлектроника
ISBN: 5-93108-039-2
Year: 2003




Ю.М. Перунов
К.И. Фомичев
Л.М. Юдин
РАДИОЭЛЕКТРОННОЕ ПОДАВЛЕНИЕ
ИНФОРМАЦИОННЫХ КАНАЛОВ
СИСТЕМ УПРАВЛЕНИЯ ОРУЖИЕМ
Под редакцией
докт. техн, наук, проф. Ю.М. Перунова
Москва “Радиотехника”2003
РАДИОТЕХНИКА
УДК 623.624
П26
ББК 32.811.2
Рецензент
докт. техн, наук, проф. В.Н. Саблип
Перунов Ю.М., Фомичев К.И., Юдин Л.М.
П26 Радиоэлектронное подавление информационных каналов систем управления
оружием/ Под ред. Ю.М. Перунова.-М.: “Радиотехника”, 2003.-416 с.: ил.
ISBN 5-93108-039-2
Рассмотрены радиоэлектронное подавление информационных каналов систем управле-
ния оружием, необходимость и возможность радиоэлектронного подавления РЛС как ос-
новных информационных каналов; приведена методика оценки энергетических требований
с учетом различных факторов, сопутствующих постановке радиоэлектронных помех; опи-
саны методы и техника создания помех РЛС различных типов и назначений; дан анализ
тенденций и перспектив развития средств РЭП и бортового радиоэлектронного оборудова-
ния; показана целесообразность и приведена методика оценки средств РЭП по критерию
“эффекта вность-сто имость”.
Для инженеров и научных работников; может быть полезна студентам и преподава-
телям радиотехнических специальностей ВУЗов.
УДК 623.624
П26
ББК 32. 811.2
ISBN 5-93108-039-2
© Авторы, 2003
© Издательство “Радиотехника”, 2003
По сея щает ся 6 0-л ет и ю
Государственного Центрального
научно-исследовательского
радиотехнического институт а,
основанного в 1943 г.
академиком А.И. Бергом
Из истории ЦНИРТИ
Центральный научно-исследовательский радиотехнический институт (ЦНИРТИ) (первона-
чальное название НИИ-108) создан в суровые годы Великой Отечественной войны Постановлением
Государственного Комитета Обороны от 4 июля 1943 г. но инициативе крупнейшего ученого Акселя
Ивановича Берга (первого начальника института и в последствии академика, адмирала-инженера,
Героя Социалистического Труда).
Поводом к созданию института явилась необходимость иметь в нашей стране единый научно-
технический центр по проблемам радиолокации, показавшей к тому времени высокую эффектив-
ность при проведении боевых операций в различных условиях.
Благодаря своему авторитету в научных кругах и личным связям, А.И. Бергу удалось в крат-
чайшие сроки привлечь к работе в созданном институте крупнейших ученых в области радиотех-
ники, физики и математики, таких как академики Б.А. Введенский, В.А. Фок, член-корреспондент
АН СССР (позднее - академик) М.А. Леонтович, профессора А.М. Кугушев, М.С. Нейман, И.С.
Джигит, И.С. Гоноровский, С.Г. Калашников и др. Среди них были и пионеры радиолокации -
создатели первой импульсной РЛС Н.Я. Чернецов и П.А. Погорелко.
Тематика института охватывала различные теоретические и экспериментальные аспекты
развития радиоэлектроники страны.
В соответствии с возложенными на институт задачами с начала 1944 г. разворачиваются ра-
боты по: самолетной радиолокационной технике (А.А. Расплетин, Б.Ф. Высоцкий и др.), РЛС об-
наружения наземных целей (А.А. Расплетин, Г.Я. Гуськов и др.), наземным РЛС дальнего обнару-
жения (В.П. Сосульников и др.), защите РЛС от помех (Н.И. Оганов, В.А. Аудер и др.), радиотехни-
ческой разведке и радиопротиводействию (Н.И. Оганов, Т.Р. Брахман, Б.Д. Сергиевский, Е.Е.
Фридберг и др.), телевизионной технике (А.Я. Клопов, А.А. Селезнев и др.), распространению ра-
диоволн (Б.А. Введенский и др.), электровакуумным и полупроводниковым приборам (Л.Н. Ло-
шаков, С.Г. Калашников и др.) и другим направлениям.
Наиболее важными направлениями явились радиопротиводействие и радиотехническая раз-
ведка, ставшие в дальнейшем базовыми направлениями института.
В результате сформировались мощные коллективы опытных специалистов в области новой
техники по различным направлениям, что в дальнейшем позволило не только создать ряд новых
организаций по важнейшим направлениям, но и укрепить кадрами существующие.
Так, в 1950 г. для организации нового направления техники из института была откомандиро-
вана большая группа специалистов, в том числе А.А. Расплетин, ставший руководителем основно-
го направления КБ-1 (в последствии академик, Герой Социалистического Труда, именем которого
названа одна из улиц Москвы), Б.В. Бункин, ставший позднее генеральным конструктором, ака-
демиком, Героем Социалистического Труда.
В 1952 г. группа специалистов (Н.И. Оганов, Р.М. Воронков и др.) была переведена в радио-
технический институт АН СССР.
В 1954 г. в связи с организацией Института радиотехники и электроники (ИРЭ) АН СССР из
НИИ-108 еще была откомандирована большая группа специалистов (С.Г. Калашников и др.)
В 1957 г. создается филиал института в Калужской области, позднее ставший Калужским на-
учно-исследовательским радиотехническим институтом (КНИРТИ), куда были направлены на ра-
боту многие сотрудники НИИ-108.
В 1958 г. создается филиал института по разработке РЛС дальнего действия, ставший позднее
НИИ дальней активной радиолокации (НИИДАР), куда было переведено 267 сотрудников НИИ-
108, в том числе В.П. Сосульников.
В 1960 г. был переведен в СКБ-567 из НИИ-108 отдел в составе 49 человек во главе с Г.Я.
Гуськовым (в последствии член-корреспондент АН СССР, Герой Социалистического Труда).
Дальнейшее развитие базового направления разработки средств радиоэлектронной борьбы
было определено действиями выдающихся организаторов этого направления Н.П. Емохоиовым,
П.С. Плешаковым, Ю.Н. Мажоровым, А.А. Зиничевым и др.
Деятельность ЦНИРТИ высоко оценена руководством страны. Указом Президиума Верхов-
ного Совета СССР от 29 августа 1969 г. за заслуги в создании и производстве новой техники ин-
ститут награжден орденом Ленина. Многие сотрудники института также награждены орденами и
медалями, удостоены Ленинской и Государственных премий, являются заслуженными изобрета-
телями СССР и РФ.
СОДЕРЖАНИЕ
Введение..............................................................13
ЧАСТЬ ПЕРВАЯ
Общая характеристика методов радиоэлектронного
подавления радиолокационных систем управления
оружием систем ПВО....................................................15
Глава 1. Возможности радиоэлектронного подавления РЛС.................15
1.1 Задачи, состав и общая характеристика РЛС ПВО................15
1.2. Возможности нарушения работоспособности РЛС управления
оружием системы ПВО с помощью организованных помех..............22
1.3. Классификация методов радиоэлектронного подавления РЛС......26
1.4. Структура радиоэлектронной борьбы ..........................30
Глава 2. Пространственно-энергетические соотношения при создании
радиоэлектронных помех................................................34
2.1. Факторы, определяющие условия создания помех................34
2.2. Эффективная поверхность рассеяния защищаемых объектов.......35
2.3. Антенны в технике РЭП.......................................38
2.4. Влияние земной поверхности на распространение сигналов помех..39
2.5. Распространение радиоволн в атмосфере.......................41
2.6. Энергетические соотношения при создании активных помех РЛС и ГСН ..44
2.7. Энергетические соотношения при создании помех радиолиниям
управления зенитными ракетами....................................54
2.8. Основные энергетические соотношения при РЭП радиолиний связи.58
Литература к ЧАСТИ ПЕРВОЙ...............................................68
ЧАСТЬ ВТОРАЯ
Методы и техника создания помех радиолокационным
системам обнаружения и распознавания..................................69
Глава 3. Методы и техника создания помех РЛС обнаружения..............69
3.1. Типы РЛС обнаружения..........................................69
3.2. Методы создания помех по дальности РЛС обнаружения..........70
3.3. Методы создания помех по угловым координатам РЛС
обнаружения......................................................73
3.4. Техника создания шумовых помех РЛС обнаружения..............76
3.5. Методы и техника создания помех импульсно-доплеровским
и непрерывным РЛС обнаружения...................................108
5
Глава 4. Помехи РЛС, создаваемые из вынесенной
точки пространства......................?.....................111
4.1. Основные принципы постановки помех из вынесенной точки
пространства...................................................111
4.2. Частотные диапазоны постановщиков помех прикрытия..........114
4.3. Выбор диаграммы направленности антенных систем самолетов-
постановщиков помех прикрытия..................................115
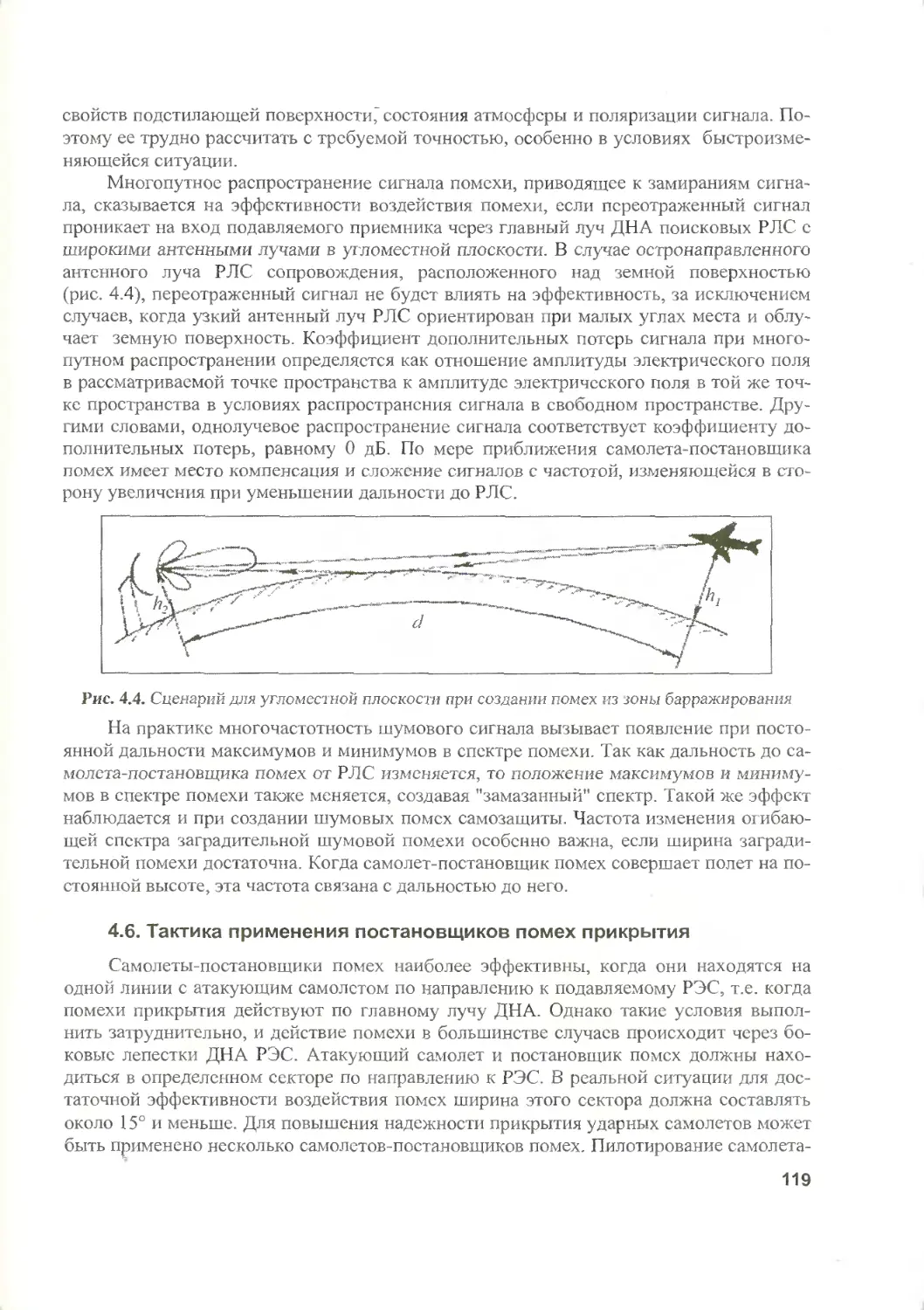
4.4. Эффективность воздействия шумовых помех прикрытия из зон
барражирования.................................................117
4.5. Влияние многолучевого распространения сигнала на эффективность
помех прикрытия................................................118
4.6. Тактика применения постановщиков помех прикрытия...........119
4.7. Возможности повышения спектральной плотности помех
прикрытия РЛС и ГСН, использующих непрерывное
и квазинепрерывное излучение...................................123
Глава 5. Методы и техника противодействия радиолокационному
распознаванию........................................................131
5.1. Классификация методов распознавания и возможности его подавления
помехами....................................................131
Литература к ЧАСТИ ВТОРОЙ............................................135
ЧАСТЬ ТРЕТЬЯ
Методы и техника создания помех радиолокационным системам
сопровождения и наведения ...........................................137
Глава 6. Методы и техника создания помех импульсным и непрерывным
с ЛЧМ РЛС сопровождения по дальности.................................137
6.1. Функции канала селекции целей по дальности и основные пути
нарушения его работы...........................................137
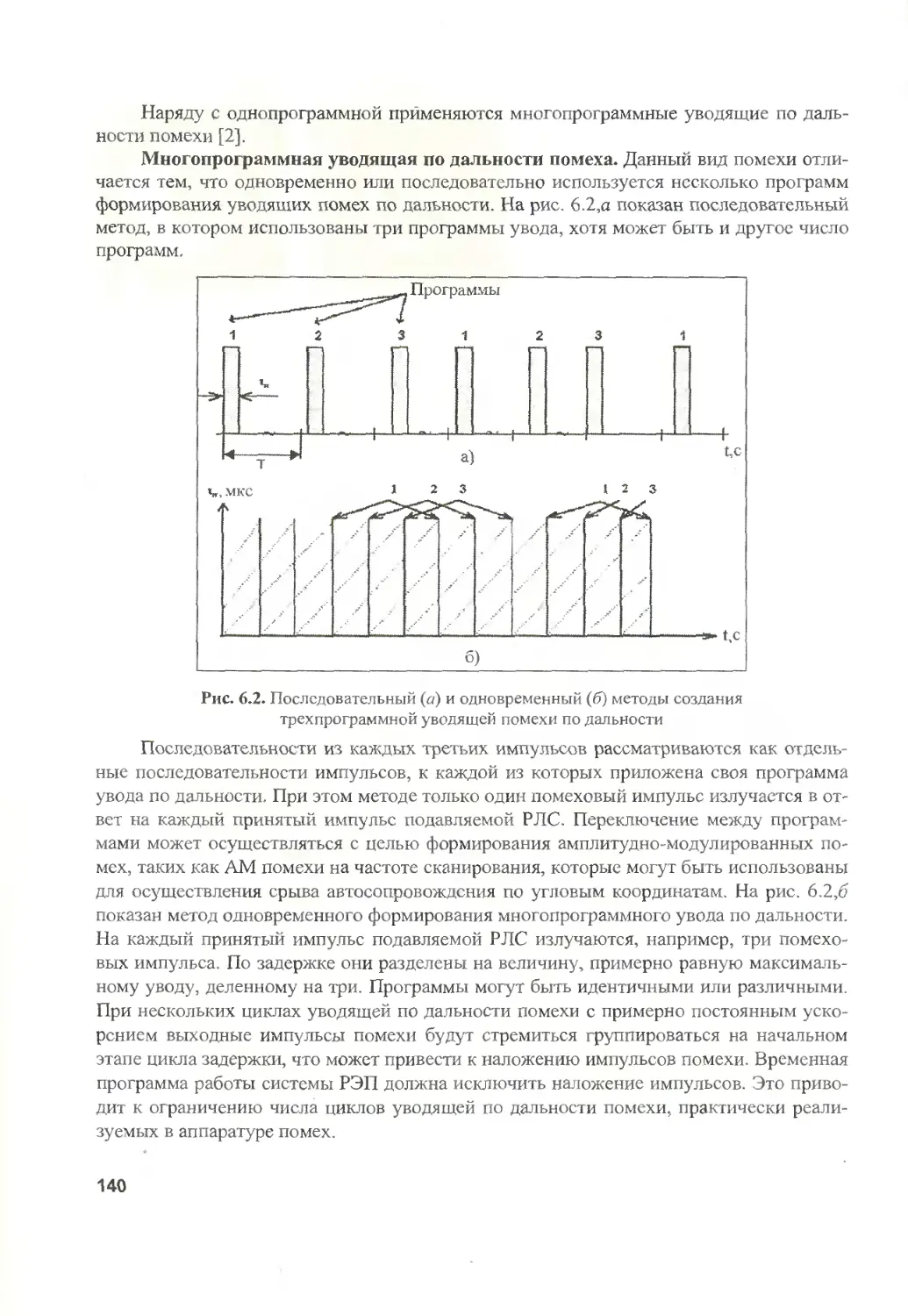
6.2. Уводящие по дальности помехи...............................138
6.3. Прицельные и заградительные-по частоте шумовые помехи......147
6.4. Пассивные помехи...........................................148
6.5. Многократные ответные помехи создания ложных целей.......148
6.6. Создание помех по дальности РЛС с последетекторным
интегрированием................................................152
6.7. Технические средства реализации создания помех радиолокационным
системам сопровождения по дальности ............................156
6
Глава 7. Методы и техника создания помех импульсно-доплеровским
РЛС сопровождения по скорости .......................................180
7.1. Принципы селекции целей по скорости........................180
7.2. Возможности РЭП каналов селекции целей по скорости.........181
7.3. Уводящие по скорости помехи................................183
7.4. Узкополосные шумовые помехи со спектром доплеровских частот.190
7.5. Помехи по скорости со свипированием частоты................191
7.6. Мерцающие помехи доплеровским РЛС..........................192
7.7. Формирователи уводящих и маскирующих помех по скорости.....193
7.8. Радиоэлектронное подавление двухканальной системы
сопровождения, использующей одновременно импульсное
и непрерывное излучения.........................................199
7.9. Согласование увода по скорости и дальности.................201
Глава 8. Методы и техника создания помех РЛС сопровождения
по направлению, работающим моноимпульспым методом....................204
8.1. Роль систем сопровождения по направлению и возможности их
подпавления.....................................................204
8.2. Принципы моноимпульсной радиолокации.......................207
8.3. Помеха на кроссполяризации.................................209
8.4. Когерентные помехи, создаваемые из двух разнесенных
в пространстве точек............................................220
8.5. Мерцающие помехи, создаваемые из двух и более точек
пространства....................................................230
8.6. Прерывистые помехи.........................................235
8.7. Помеха на частоте коммутации приемных каналов..............236
8.8. Помеха по зеркальному каналу приема........................237
8.9. Расстроенная по частоте помеха, действующая на скатах
полосы пропускания подавляемого приемника.......................238
8.10. Двухчастотная помеха......................................239
Глава 9. Мете цл и техника создания помех РЛС сопровождения
по направлению, работающим со сканированием антенного луча............242
9.1. Методы и техника создания помех угломерным системам
сопровождения РЛС с коническим сканированием луча...........242
9.2. Методы и техника создания угловых помех РЛС сопровождения
“на проходе”................................................265
Глава 10. Адаптивные методы РЭП РЛС сопровождения по направлению......268
10.1. Необходимость адаптации при РЭП...........................268
10.2. Принципы адаптации при радиоподавлении РЛС и структура
адаптивной системы РЭП......................................269
7
Глава 11. Перенацеливающие помехи.....................................281
11,1. Принцип создания перенацеливающих помех...................281
11,2. Перенацеливание на облака дипольных отражателей............281
11.3. Перенацеливание на пассивные ловушки.......................294
11.4. Перенацеливание на передатчик помех одноразового действия.298
11.5. Перенацеливание на подстилающую поверхность................303
Глава 12. Передатчики ретрансляционных помех...........................307
12.1. Идеология создания передатчиков ретрансляционных помех.....307
12.2. Основные характеристики усилительного тракта ретранслятора.308
12.3. Задержка переизлучаемого сигнала в ретрансляторе..........3 14
12.4. Время восстановления импульсного ретранслятора.............317
12.5. Временное стробирование ретранслятора для обеспечения
развязки.......................................................318
12.6. Упреждающий синхронизирующий импульс.......................319
12.7. Канал защиты импульсного ретранслятора от перегрузки.......320
12.8. Ретранслятор с ФАР и двумя диаграммообразующими схемами....322
12.9. Ретранслятор с автоматическим переизлучением сигналов
в направлении подавляемой РЛС..................................323
12.10. Ретранслятор направленного действия с решеткой Ван-Атта...324
12.11. Сравнение характеристик передатчиков генераторного
и ретрансляционного типов.......................................325
Литература к ЧАСТИ ТРЕТЬЕЙ............................................329
ЧАСТЬ ЧЕТВЕРТАЯ
Методы и техника создания помех радиолокационным системам,
работающим со сложными сигналами.......................................332
Глава 13. Принципы работы РЛС со сложными сигналами....................332
13.1. Причины появления и широкого использования РЛС
со сложными сигналами..........................................332
13.2. Принцип работы РЛС с ЛЧМ- и ФКМ-сигналами..................333
13.3. Общие принципы организации РЭП РЛС
со сложными сигналами..........................................334
Глава 14. Возможности перехвата сложных сигналов РЛС...................335
14.1. Сравнения дальности действия РЛС со сложными сигналами
и систем РТР...............................................335
14.2. Приемная аппаратура системы РЭП РЛС со сложными
сигналами..................................................337
8
Глава 15. Методы и техника создания помех РЛС с широкополосными
сигналами..................................................341
15.1. Метод РЭП РЛС со сжатием импульса, основанный
на формировании накрывающих помеховых импульсов................341
15.2. Передатчик ложных целей для РЛС с ЛЧМ.....................343
15.3. Передатчик уводящих помех по дальности импульсной
РЛС с ЛЧМ.....................................................344
15.4. Принципы создания помех РЛС с ФКМ-сигналами...............346
15.5. Передатчик ложных целей для РЛС с ФКМ-сигналами
и быстрой перестройкой по частоте..............................348
15.6. Создание помех РЛС с ФКМ-сигналами путем разрушения
фазовой структуры кода.........................................349
15.7. Помеха в виде накрывающего импульса с ложной доплеровской
частотой......................................................350
Глава 16. Создание помех РЛС с быстрой перестройкой рабочей частоты....351
16.1. Общие положения...........................................351
16.2. Способы создания помех РЛС с быстрой перестройкой частоты.353
16.3. Генератор ложных целей с использованием набора
узкополосных шумов............................................357
16.4. Генератор ложных целей с устройством запоминания
на основе широкополосного источника радиошума.................358
16.5. Передатчик имитационных ответных помех....................359
Глава 17. Методы создания помех радиовзрывателям.....................363
17.1. Общие сведения о радиовзрывателях.........................363
17.2. Основные способы РЭП радиовзрывателей.....................368
Литература к ЧАСТИ ЧЕТВЕРТОЙ.........................................370
ЧАСТЬ ПЯТАЯ
Тенденции и перспективы развития средств
радиоэлектронного подавления.........................................372
Глава 18. Радиоэлектронное подавление систем военного назначения
с помощью компьютерных вирусов и электромагнитного оружия............372
18.1. Общие понятия о компьютерных вирусах и их основные свойства.372
18.2. Реализуемость компьютерных РЭП..............................373
18.3. Защита от компьютерных РЭП..................................375
18.4. Общие понятия об электромагнитном оружии..................376
9
18.5. Пути проникновения электромагнитного импульса
в радиоэлектронную аппаратуру....................................377
18.6. Реализация электромагнитного оружия........................378
18.7. Тактика применения электромагнитного оружия................381
18.8 Защита от электромагнитного оружия..........................383
Глава 19. Управление ресурсами в системах РЭП..........................384
19.1. Необходимость управления ресурсами РЭП.....................384
19.2. Организация управления ресурсами РЭП.......................387
Глава 20. Оценка средств РЭП по критерию “эффективное гь-стоимость”....390
20.1. Целесообразность оценки средств РЭП по критерию
“эффективность-стоимость” ........................................390
20.2. Энергетический потенциал станции помех.....................390
20.3. Коэффициент подавления.....................................392
20.4. Качество помех.............................................392
20.5. Скважность помех...........................................393
20.6. Поляризационные характеристики помех.......................393
20.7. Методика применения критерия “эффективность - стоимость”
для минимизации затрат на создание системы РЭП...................394
Глава 21. Тенденции развития средств РЭП и бортового
радиоэлектронного оборудования.........................................400
21.1. Тенденции развития средств РЭП.............................400
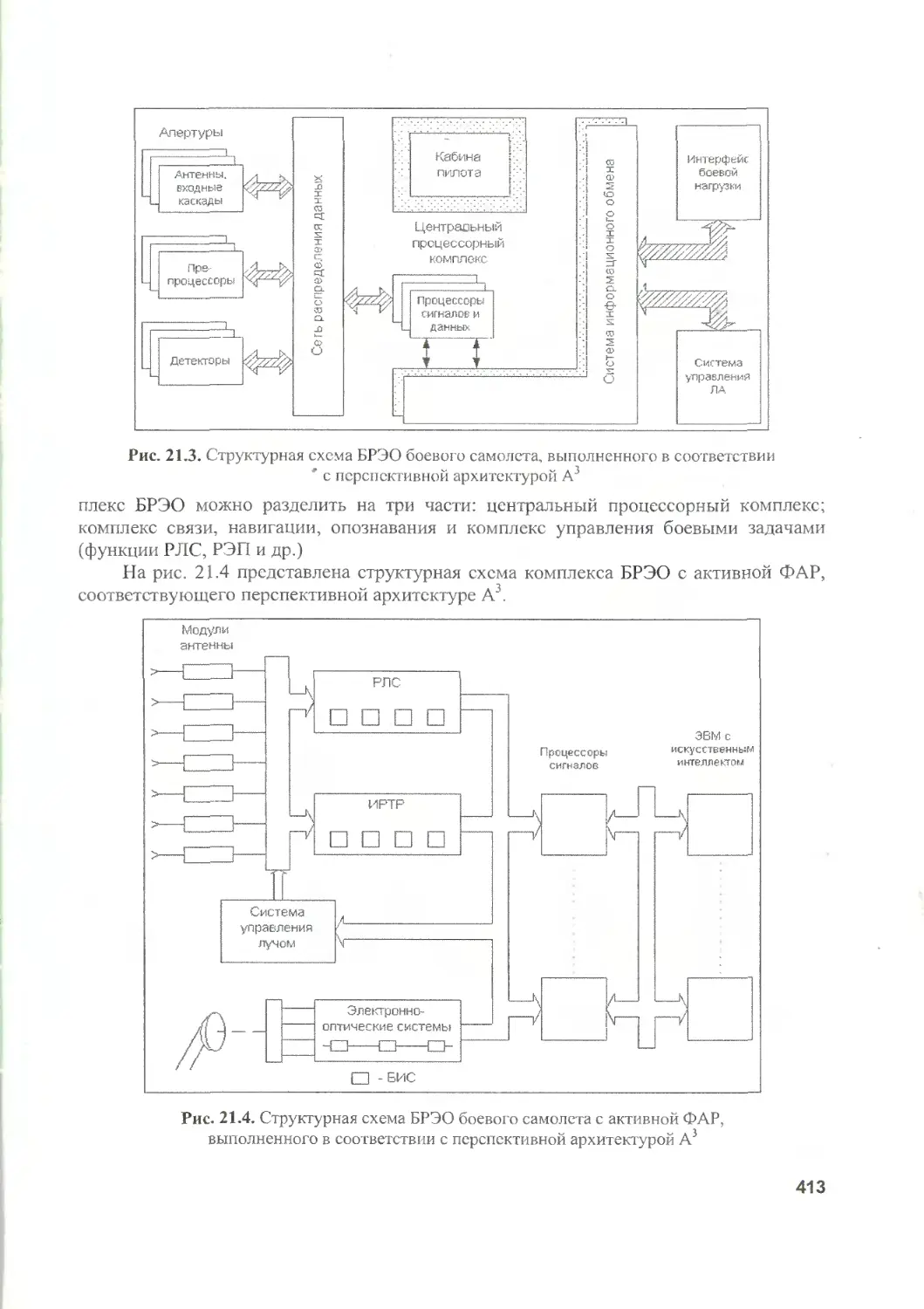
21.2. Тенденции развития авиационного бортового радиоэлектронного
оборудования................................................410
Литература к ЧАСТИ ПЯТОЙ...............................................414
Перечень принятых сокращений
АМ - амплитудная модуляция
АПЧ - автоматическая подстройка частоты
АРУ — автоматическая регулировка усиления
АС — автоматическое сопровождение
АСД - автоматическое сопровождение по дальности
АСН - автоматическое сопровождение по направлению
АСС - автоматическое сопровождение по скорости
АФАР — активная фазированная антенная решетка
АФВ - аналоговый фазовращатель
АЦП - аналого-цифровой преобразователь
БПЛА - беспилотный летательный аппарат
БРЛС - бортовая радиолокационная станция
БРЭО - бортовое радиоэлектронное оборудование
БЧ - боевая часть
В и ВТ - вооружение и военная техника
ВИМ - временно-импульсная модуляция
ВТО - высокоточное оружие
ГОН - генератор опорных напряжений
ГСН - головка самонаведения
ДНА — диаграмма направленности антенны
ДПЛА - дистанционно пилотируемый летательный аппарат
ДО - дипольные отражатели
ДОС - диаграммообразующая, схема
ДЧП - двухчастотная помеха
ЗА - зенитная артиллерия
ЗРК - зенитный ракетный комплекс
ЗУ - запоминающее устройство
ЗУР — зенитная управляемая ракета
ПК - инфракрасное (тепловое) излучение
ИКО - индикатор кругового обзора
ИС - интегральная схема
КПД - коэффициент полезного действия
КРЭП - компьютерное радиоэлектронное подавление
КСВН - коэффициент стоячей волны по напряжению
КРУ - командная радиолиния управления
ЛА - летательный аппарат
ЛЗ - линия задержки
ЛЦ - ложная цель
ЛЧМ - линейная частотная модуляция
МГД - магнитогидродинамический генератор
МИЧ - мгновенное измерение частоты
МЛАР - многолучевая антенная решетка
ОМП - ортомодовый разделитель поляризации
11
ПВО - противовоздушная оборона
ПКР - противокорабельная ракета
ПОД - передатчик помех одноразового действия
ПП - постановщик помех
ППП - переключатель приемопсредачи
ПРО - противоракетная оборона
ПСП - псевдослучайная синхронная последовательность
ПХ - пеленгационная характеристика
ПЧ — промежуточная частота
РВ - радиовзрыватель
РЛС - радиолокационная станция
РЛС ДО - РЛС дальнего обнаружения
РЛС КИИ - РЛС квазинепрсрывного излучения
РЛС НИ - РЛС непрерывного излучения
РЛС ОЗП - РЛС обзора земной поверхности
РПЦ - радиолокатор подсвета цели
РСН - равносигнальное направление
РТР - радиотехническая разведка
РЭБ - радиоэлектронная борьба
РЭП - радиоэлектронное подавление
РЭС - радиоэлектронная система
СВН - средства воздушного нападения
СДЦ - селекция движущихся целей
СМ - смеситель
СП - станция помех
СРП - счетно-решающий прибор
ТВД - театр военных действий
УНЧ - усилитель низкой частоты
У О - управление оружием
УПЧ - усилитель промежуточной частоты
ФАР - фазированная антенная решетка
ФАПЧ - фазовая автоматическая подстройка частоты
ФКМ - фазово-кодовая манипуляция
ЦАП - цифроаналоговый преобразователь
ЦЗС - цифровая запоминающая система
ЦУ - центр управления
ЧИР - частотно-избирательный разделитель
ЧИС - частотно-избирательный сумматор
ЧМ - частотная модуляция
ШОУ-систсма защиты от маскирующих помех, состоящая из
широкополосного усилителя, ограничителя и узкополосного усилителя
ШП - шумовая помеха
ЭВМ - электронно-вычислительная машина
ЭМО - электромагнитное оружие
ЭПР - эффективная поверхность рассеяния
12
Введение
В современных условиях развитие и использование вооружений и военной техни-
ки (ВиВГ) характеризуются высокой насыщенностью их радиоэлектронным оборудо-
ванием, обеспечивающим решение задач автоматического или автоматизированного
ведения разведки, связи, управления и наведения оружия.
Объявленная в шестидесятых годах XX века США и их союзниками концепция
ведения боевых действий по принципу “увидел - выстрелил - поразил” реализуется в
создании глобальных стратегических и тактических систем и комплексов разведки,
связи и управления войсками, а также высокоточного оружия (ВТО), обеспечивающего
автоматический выбор и поражение гражданских и военных объектов.
В качестве информационных каналов разведки, связи, управления и наведения в
большинстве случаев используется электромагнитное излучение всего спектра частот,
освоенных на сегодня техникой.
Последние региональные конфликты (Ирак, Югославия) подтверждают высокую
боевую эффективность ВТО, разработанного в рамках программы упомянутой концепции.
В настоящее время ВТО позволяет оперативно с минимальными потерями унич-
тожить большинство наземных, морских, воздушных, а в ближайшем будущем и кос-
мических целей. Такая высокая эффективность современного оружия обеспечивает, на-
пример, уничтожение до 80 % самолетов противника в первой проводимой воздушной
операции. Альтернативой снижения эффективности оружия поражения является разру-
шение информационных каналов ВиВТ.
Для решения этих задач применяются средства радиоэлекгронной борьбы (РЭБ),
которые обеспечивают блокирование информационных каналов разведки, связи,
управления и наведения ВиВТ путем создания достаточного уровня электромагнитной
мощности помех, спектральные характеристики которых должны быть оптимальными
дпя конкретных сигналов информационных каналов, подлежащих подавлению.
Появление средств РЭБ было обусловлено изобретением радио, которое на пер-
воначальном этапе своего развития использовалось как средство связи. В 1905 г. во
время русско-японской войны радистами русского флота впервые в мире было успеш-
но реализовано создание активных помех радиоканалам связи японских кораблей.
Дальнейшее развитие радиотехники, расширение области применения электромаг-
нитных волн, особенно в системах измерения дальности - радиолокаци и, привело к необ-
ходимости разработки теории и технологии создания средств радиоэлектронной борьбы.
Во время второй мировой войны для обеспечения эффективной защиты самоле-
тов-бомбардировщиков Англии и США от немецких средств ПВО, оснащенных РЛС
управления зенитной артиллерией, были разработаны и широко применялись пассивные
и активные средства РЭБ, позволившие практически исключать возможности нормаль-
ной работы этих РЛС, что приводило к значительному снижению потерь самолетов.
В СССР первые три специальных радиодивизиона по подавлению (“забивке”) не-
мецких радиостанций в диапазоне длин волн 400...700 м были сформированы в декаб-
ре 1942 г., которые блокировали связь между верховным командованием немцев с ок-
руженной группировкой Паулюса под Сталинградом.
13
Бурное развитие радиоэлектроники, широкое внедрение радиоэлектронных тех-
нологий во все сферы деятельности человечества, особенно в сферу военной техники,
определило рождение и непрерывное соревнование “меча” и “щита” на информацион-
ном уровне. Развитие и совершенствование “меча” - электромагнитных каналов ин-
формации, применение все более сложных сигналов, методов и средств их обработки -
определяют необходимость повышения эффективности “электронного щита”, обеспе-
чивающего достаточную стойкость парирования при использовании “меча”.
Цель данной книги - рассмотрение методов и техники радиоэлектронного подав-
ления информационных каналов систем управления оружием. Опа написана на основа-
нии открытых отечественных и зарубежных публикаций, а также использованы неко-
торые открытые материалы, полученные в результате исследований непосредственно
авторами, и включает пять частей.
В первой части, состоящей из двух глав, дастся общая характеристика методов
радиоэлектронного подавления (РЭП) радиолокационных средств управления оружием
системы ПВО. Анализируются возможности радиоэлектронного подавления РЛС, при-
водится классификация пригодных для этой цели методов РЭП, рассматривается мето-
дика пространственно-энергетических расчетов при создании радиоэлектронных помех
применительно к различным тактико-техническим условиям.
Во второй части, включающей три главы, рассматриваются методы и техника соз-
дания помех РЛС обнаружения и распознавания. Уделено внимание средствам защиты
РЛС обнаружения от помех; рассмотрены прицельные и заградительные по частоте шу-
мовые помехи, пассивные помехи, многократные ответные помехи, ложные цели.
В третьей части, состоящей из семи глав, рассматриваются методы и техника соз-
дания помех РЛС сопровождения и наведения применительно к радиолокационным
системам различных типов, в том числе РЛС с импульсивным и непрерывным излуче-
нием, импульсно-доплеровским РЛС, моноимпульсным и РЛС со сканированием ан-
тенного луча. Основное внимание уделено уводящим помехам по дальности, скорости
и угловым координатам. Рассмотрены некоторые методы защиты от помех.
В четвертой части подробно представлены методы и техника радиоэлектронного
подавления РЛС со сложными сигналами, получившими широкое распространение в
радиолокационной технике различного назначения. В соответствии с этим кратко рас-
смотрены принципы работы РЛС с внутриимпульсной частотной модуляцией и фазово-
кодовой манипуляцией, отмечено их отличие по помехозащищенности от РЛС с про-
стыми сигналами. Описаны специфические методы и техника РЭП таких РЛС, включая
РЛС с быстрой перестройкой частоты. Уделено внимание приемной аппаратуре систе-
мы РЭП РЛС со сложными сигналами и возможностям перехвата сигналов РЛС с по-
вышенной скрытностью, а также методам создания помех радиовзрыватслям.
Пятая часть книги посвящена описанию тенденций и перспектив развития средств
РЭП. В соответствии с компьютеризацией радиолокационной техники рассмотрены
возможности подавления систем военного назначения с помощью компьютерных ви-
русов и электромагнитного оружия. Уделено внимание целесообразности управления
ресурсами в системах РЭП и их оценки по критерию “эффективность - стоимость”.
Рассмотрены тенденции развития и бортового радиоэлектронного оборудования.
Авторы признательны Т.А. Швыревой и П.А. Фомину за компьютерный набор
материалов книги и подготовку графического и иллюстрационного материала.
Особую признательность авторы выражают докт. техн, наук, проф. В.Н. Саблину,
взявшему на себя труд по рецензированию данной книги.
14
ЧАСТЬ ПЕРВАЯ
Общая характеристика методов
радиоэлектронного подавления
радиолокационных систем управления
оружием системы ПВО
ГЛАВА 1. ВОЗМОЖНОСТИ РАДИОЭЛЕКТРОННОГО ПОДАВЛЕНИЯ РЛС
1.1. Задачи, состав и общая характеристика РЛС ПВО
Современная противовоздушная оборона основана на широком использовании
радиолокации, связи и радиотелеуправления. Радиоэлектронные средства позволяют
дать своевременную и достаточную информацию о воздушной обстановке в опреде-
ленном районе и быстро реагировать на изменение этой обстановки. Информацией о
воздушной обстановке пользуются для распределения целей между такими средствами
поражения воздушных целей, как истребители-перехватчики, зенитные ракеты и зе-
нитная артиллерия. Радиоэлектронные средства ПВО должны обеспечить вывод
средств поражения для последующей атаки цели без получения от наземных средств
ПВО дополнительной информации о ее координатах, а также устранить накопившуюся
в процессе наведения ошибку и поразить цель. Противовоздушная оборона может быть
объектовой и территориальной.
Технические средства ПВО можно условно отнести к трем основным контурам:
обнаружения и целсраспределения, наведения, самонаведения.
Контур обнаружения и
цслераспрсдсления представ-
ляет собой совокупность свя-
занных между собой радио-
локационных станций даль-
него обнаружения (наземного
и воздушного базирования),
опознавания целей и обра-
ботки информации на базе
ЭВМ (рис. 1.1). Просматри-
вая пространство охраняемой
зоны РЛС ДО, определяют
наличие в ней целей, их госу-
дарственную принадлеж-
ность и координаты. Данные
об обнаруженных целях пе-
редаются по линиям связи в
систему обработки информа- Рис. 1.1. Структурная схема контура целсраспределения
15
ции, где осуществляется их анализ и производится целераспределенис с учетом воз-
можности собственных средств поражения-воздушного противника. После принятия
командиром решения об обстреле цели данные целеуказания передаются на выбранные
средства поражения (зенитная артиллерия (ЗА), зенитные ракетные комплексы (ЗРК)).
Между сетью РЛС ДО, командно-координационным центром, боевыми позициями ЗА,
ЗРК, а также перехватчиками должна быть обеспечена связь.
Основным средством защиты обороняемой территории являются пилотируемые
самолеты-перехватчики. Они очень мобильны и, в зависимости от боевой обстановки,
могут быстро перебазироваться и обеспечить перехват целей на больших дальностях.
Продолжительность боевых действий перехватчика практически ограничивается толь-
ко наличием на его борту оружия, так как при дозаправке в воздухе он может осущест-
влять перехваты до тех пор, пока не израсходует полностью боекомплект. Но для того,
чтобы управлять и наводить самолет-перехватчик на цель, необходимо обеспечить ее
обнаружение, которое обычно осуществляется наземной РЛС, хотя возможны и другие
способы, например, основанные на сообщениях с постов воздушного наблюдения, ра-
диотехнических средств разведки, осуществляющих пассивное обнаружение, с кораб-
лей и самолетов, а также со спутников. Все эти сообщения поступают в центр обработ-
ки и отображения информации
(рис. 1.2). Возможно несколько
режимов работы системы наве-
дения и перехвата (табл. 1.1).
При принятии командиром ре-
шения на перехват нарушителя
перехватчик по командам с
пункта наведения выводится в
заданный район, где он обнару-
живает цель и самостоятельно
завершает перехват. Основные
функции подсистем наведения и
перехвата приведены в табл. 1.2.
Следует отметить, что неавто-
матизированный режим пере-
хвата (ручной) менее эффекти-
вен, особенно в случае перехва-
та скоростных целей.
Временные задержки в обновлении передаваемой информации на борт перехват-
чика влияют настолько сильно, что эффективность перехвата резко снижается. Поэто-
му в системе наведения и управления перехватчиком обработка поступающей инфор-
мации о воздушной обстановке, процесс управления и наведения, а также функции об-
наружения и сопровождения автоматизированы с использованием ЭВМ. С помощью
ЭВМ информация представляется в алфавитно-цифровом виде на дисплеях для того,
чтобы облегчить определение стратегии обороны и оптимально распределить свои ре-
сурсы, а также вести накопление данных для расчета различных параметров перехвата.
При этом возможен полностью автоматизированный перехват цели путем передачи
данных через командную линию на борт перехватчика.
Рис. 1.2. Структурная схема самолетного комплекса
перехвата целей
16
Таблица 1.1. Режимы работы системы наведения и перехвата
Режим Дальнее обнаружение Определение местоположе- ния самолета Госопознаванис Передача сообщений
Автомати- ческий Автоматическое обнаружение Автоматическое определение местоположе- ния Автоматическое Линия передачи данных
Ручной Операторы РЛС обнаружения Операторы РЛС наведения По реакции на команды Речевой канал связи
Попеременное использование других элек- тронных датчиков Операторы РЛС наведения РЛС обнаружения Заранее заплани- рованный маневр Но навига- ционным каналам или коммерческой связи
Применение оптических, акустических и других неэлектронных датчиков информации Пассивное обнаружение, наблюдатели Пассивное определение местополо- жения (триангуляция) Инспекция перехватчиком —
Таблица 1.2. Подсистемы ПВО и их функции
Подсистема Функции
Сеть Pj)C дальнего обнаружения и целеуказания Обнаруживает самолет противника, приводит ПВО в состояние боевой готовности, определя- ет координаты, курс й скорость цели
РЛС наведения перехватчика на цель Индикация положения всех своих и вражеских самолетов. Вывод перехватчика в положение, выгодное для атаки.
Система распознавания Опознавание своих самолетов
Радиолокационный высотомер Определение высоты чужого самолета- перехватчика, поддержание курса на чужой самолет.
ЭВМ Определение точки перехвата, накопление и восстановление данных для наземных станций наведения и командных пунктов.
Центр обработки информации Индицирование на-дисплее воздушной обстановки, управление воздушным боем.
Линия связи "земля-воздух" и "воздух- земля" Передача команд наведения и обмен информацией между пунктом наведения и перехватчиком
БРЛС перехватчика Сближение с чужим самолетом, управление перехватчиком для вывода его в точку пуска ракет и применения оружия.
Система наведения ракет "воздух-земля" Наведение ракеты на цель
Ракетный взрыватель Подрыв ракеты вблизи цели
17
Типовым элементом объектовой ПВО является зенитная артиллерия. Она более
дешевая в производстве, а эксплуатационные требования к обслуживающему персона-
лу намного ниже, чем при обслуживании ЗРК или самолетов-перехватчиков. Наиболее
важным ограничением ЗА является ее малая дальность стрельбы. Максимальная верти-
кальная дальность стрельбы составляет примерно половину горизонтальной дальности,
что нс позволяет во многих случаях обеспечивать защиту всего обороняемого района
от современных ударных самолетов. Другое серьезное ограничение ЗА - неуправляе-
мая траектория снаряда во время его полета. При скорости снаряда 900 м/с самолеты на
средней и большой высоте располагают достаточным временем для совершения укло-
няющего маневра от баллистической траектории снарядов. Неконтактные взрыватели
зенитных снарядов несколько снижают эффективность противозенитного маневра. В
связи с малым радиусом поражения снаряда его траектория должна проходить очень
близко к самолету или обеспечивать прямое попадание в него. Только снаряды очень
большого калибра имеют радиус поражения до 15 м. Поэтому нужна либо точная ин-
формация о положении цели для эффективности выстрела, либо плотность огня в тре-
буемом объеме должна быть такой, чтобы уничтожить самолет. Для снарядов большо-
го калибра с их малой скоросзрсльносгью. большой дальностью и, следовательно,
большим временем полета прицельный огонь требует точного определения положения
самолета. Поэтому в ЗА крупного калибра обычно применяется радиолокационная или
оптическая система управления огнем. Радиолокационная система управления ЗА бо-
лее предпочтительна, так как позволяет сравнительно легко измерить дальность до це-
ли, тогда как оптические системы обычно используют дальномеры с малой базой. Даже
если РЛС сопровождения будет полностью неэффективна из-за воздействия помех,
система ЗА остается еще способной стрелять благодаря наличию оптической системы
сопровождения, которая в условиях видимости дает более точную, чем РЛС, информа-
цию об азимуте и угле места цели. В этом случае для стрельбы потребуется только вы-
сота цели от радиолокационных высотомеров.
Объектом воздействия помех в контуре обнаружения и целсраспределения явля-
ются РЛС дальнего обнаружения и целеуказания наземного и воздушного базирования,
а также линии радиосвязи. При нарушении помехами работы средств дальнего обнару-
жения противник может быть обнаружен средствами ближнего обнаружения, которы-
ми непосредственно оборудуются боевые позиции ЗРК. Если РЛС ближнего обнаруже-
ния также будет выведена из строя помехами, то для поиска целей остается использо-
вание средств сопровождения систем оружия, что менее эффективно по сравнению со
специальными поисковыми РЛС ввиду узости их диаграмм направленности. Исключе-
ние составляют РЛС с сопровождением "на проходе", имеющие сравнительно широкое
поле обзора, и многофункциональные РЛС с быстрым управлением антенного луча,
имеющие высокие характеристики как в режиме поиска, так и в режиме сопровожде-
ния. Постановка помех многофункциональным РЛС должна производиться с учетом их
наиболее уязвимых мест.
Дальность действия систем опознавания "свой - чужой" соизмерима с дальностью
действия поисковых РЛС. Неправильное опознавание на этапе обнаружения цели, вы-
званное действием помех, приведет к неправильному распределению командным цен-
тром своих и чужых объектов, чрезмерному рассредоточению своих сил, к поражению
собственных объектов.
18
В решении задачи по перехвату и уничтожению опасных целей большую роль иг-
рает командно-координационный центр, осуществляющий сбор и обработку всей ин-
формации от звеньев системы ПВО. Если РЛС поиска и обнаружения поражена поме-
хами или перегружена большим числом целей, то может нарушиться координация дей-
ствий всех систем оружия. В этом случае согласованная и отработанная система ПВО
прсвращасгся в совокупность не связанных друг с другом систем оружия, самостоя-
тельно действующих против внезапно обнаруженных целей. Такой результат может
быть достигнут при выведения из строя средств связи помехами, если даже все осталь-
ные звенья системы ПВО функционирует нормально.
Основу современных средств поражения воздушного противника, входящих в
контур наведения, составляют зенитные ракетные комплексы, состоящие из зенитных
управляемых ракет (ЗУР) и функционально связанных средств, обеспечивающих по
данным целеуказания обнаружение, опознавание и захват указанной цели на автосо-
провожденис, а также пуск и наведение ракеты на эту цель для ее поражения. В силу
того, что РЛС обнаружения и целеуказания является многоканальной по целям, обычно
ей придается не одно, а несколько одноканальных по цели средств управления ЗУР.
Такое сочетание позволяет одновременно обстреливать несколько целей (по числу од-
ноканальных средств управления ЗУР). Одноканальные по цели средства управления
ЗУР могут обеспечить одновременное наведение на цель либо одной, либо нескольких
ЗУР. В соответствии с этим средства управления ЗУР называются одно- или многока-
нальными по ракете. Как правило, одному средству управления ЗУР придают несколь-
ко ракет, размещенных на одной или нескольких пусковых установках. От числа целе-
вых и ракетных каналов в ЗРК зависит его огневая производительность (количество
целей, поражаемых в единицу времени). Наряду с одноканальными в настоящее время
применяются и многоканальные по цели и ракете ЗРК.
Важной характеристикой ЗРК является зона поражения, представляющая ту часть
пространства, в пределах которого обеспечивается поражение типовых воздушных це-
лей с заданной вероятностью.
Границы зоны поражения ЗРК определяются досягаемостью ЗУР, их летно-
баллистическими и маневренными возможностями и располагаемыми перегрузками, а
также точностными характеристиками наведения ЗУР на цель.
Зоной пуска называется область пространства, при нахождении цели в которой в
момент пуска ракеты встреча ракеты с целью состоится в зоне поражения с заданной
вероятностью поражения. Чтобы встреча ЗУР с целью произошла в зоне поражения,
необходимо пуск ЗУР производить заблаговременно с учетом скорости цели и полет-
ного времени ЗУР до точки встречи.
Необходимая для этого дальность обнаружения РЛС равна:
^обн = Я + Ki (Каб + Кзр)’
где R - горизонтальная дальность до дальней границы зоны поражения; Гц - скорость
цели; Zpa6, Znjp - работное время ЗРК и полетное время зенитной ракеты соответственно.
Работное время комплекса в сумме с полетным временем ракеты до точки встречи
составляет цикл стрельбы ЗРК. Основное влияние это время оказывает на положение
дальней границы зоны поражения и ее глубину. В свою очередь, от глубины зоны по-
ражения зависит время пребывания цели в ней и возможность обстрела цели одной или
несколькими ракетами.
19
Рис. 1.3. Классификация способов наведения ЗУР
По способу наведения
ЗУР на цель ЗРК подразде-
ляются на комплексы с теле-
наведением (по лучу, ко-
мандное), самонаведением
(пассивное, полуактивное,
активное), комбинированным
наведением (теленавсдение
на средней дальности и само-
наведение на конечном уча-
стке полета ракеты или инер-
циальным наведением и са-
монаведением на конечном
участке траектории полета
ракеты) и наведением через
ракету (рис. 1.3). Зенитно-
ракетные комплексы с теле-
наведением используют две РЛС, одну для сопровождения цели, а другую для сопро-
вождения ракеты. Координаты цели и ракеты, полученные двумя радиолокационными
станциями, поступают в счетно-решающий прибор (СРП), который рассчитывает
опорную траекторию полета ракеты, выводящую ее в упрежденную точку встречи с
целью, и при отклонении ракеты от этой траектории вырабатывает команды управле-
ния. Эти команды передаются на борт ЗУР радиолинии управления (КРУ) с помощью
кодированных радиосигналов. После дешифрирования в приемнике ракеты они пода-
ются на автопилот, а затем после соответствующего преобразования - на рули ракеты,
корректируя ее траекторию полета. В ЗРК с телснаведенисм объектами воздействия
помех могут быть РЛС сопровождения цели, РЛС сопровождения ракеты и бортовой
приемник управления, а также радиовзрыватель ракеты.
Постановка помех по каналам передачи команд и ответчика - наиболее трудная
задача. Так, при постановке помехи каналу ответчика очень сложно сформировать по-
меховый сигнал прихода, который бы совпадал по времени, частоте и направлению с
сигналом ракетного ответчика, а по амплитуде превосходил бы его Трудности поста-
новки помех наведению ракеты по командному каналу обусловливаются, главным об-
разом, высокой эффективной излучаемой мощностью сигналов передачи команд и не-
возможностью воздействия помехи с защищаемого летательного аппарата (ЛА) по
главному лепестку ДНА командного канала в силу расположения его приемной антен-
ны в хвостовой части ракеты.
В случае самонаведения ЗУР на цель команды управления для наведения ракеты
на цель вырабатываются непосредственно на борту ракеты с использованием энергии,
отраженной или поступающей непосредственно от цели. Контур полуактивного само-
наведения состоит из РЛС визирования и подсвета цели и бортового угломерного ко-
ординатора ракеты.
При пассивном самонаведении команды наведения ЗУР вырабатываются на борту
ракеты с использованием энергии, поступающей от цели. При активном самонаведении
цель облучается первичным источником энергии радиоволн, расположенном на борту
ЗУР, а команды управления для наведения ракеты вырабатываются с помощью энергии,
20
отраженной от цели. При полуактивном самонаведении цель облучается РЛС подсвета,
расположенной вне ракеты и цели. Отраженные от цели сигналы подсвета принимаются
головкой самонаведения (ГСН), которая пеленгует цель и вырабатывает команды управ-
ления для наведения ЗУР. Такой метод наведения находит весьма широкое распростра-
нение в ЗРК, особенно малой и средней дальности действия. ГСН захватывает цель либо
при нахождении ЗУР на пусковой установке, либо в процессе полета ракеты.
Основными объектами воздействия помех в этом случае могут быть ГСН, радио-
взрыватель и РЛС подсвета цели.
Увеличение дальности самонаведения зенитной ракеты требует увеличения массы
и габаритных размеров бортовых и наземных средств ЗРК. Поэтому в комплексах
средней и большой дальности обычно используют комбинированное наведение, когда
на начальном и среднем участках траектории полета ракеты используется тсленавсде-
ние или инерциальное наведение, а на конечном участке траектории полета ракеты
осуществляется (пассивное, полуактивное или активное) самонаведение
В этом случае объектами воздействия помех могут быть РЛС визирования цели,
РЛС визирования ракеты, ГСН и линия передачи команд управления на ракету, а также
радиовзрыватель.
Дальнейшим развитием наведения ракет на цель является способ наведения "че-
рез ракету", когда на зенитной ракете используется координатор, следящий за целью по
сигналам подсвета. В данном случае непосредственно на ракете не вырабатываются
команды управления ракетой, а информация о положении линии визирования ракета-
цель по радиолинии передается с борта ракеты на наземный вычислитель, который вы-
рабатывает команды управления на основе имеющейся информации от наземных РЭС
о положении цели и ракеты и информации, принятой от ЗУР по радиолинии.
Эти команды передаются затем на борт ракеты, где они преобразуются и подают-
ся на рули ракеты, корректируя ее траекторию. В этом случае упрощается бортовая ап-
паратура ракеты и повышается точность наведения ракеты на цель за счет использова-
ния наземных средств обработки информации. В связи с внедрением в радиолокации
фазированных антенных решеток функции визирования цели, ракеты и подсвета цели
могут выполняться одним многофункциональным радиолокатором.
Объектами воздействия помех при использовании метода "наведения через раке-
ту" являются:
РЛС визирования цели или канал визирования цели многофункциональной РЛС;
РЛС визирования ракеты или канал визирования ракеты многофункциональной РЛС;
бортовой координатор;
линия передачи команд управления и информации на ракету;
линия передачи информации с ракеты на наземный вычислитель;
радиовзрыватель.
Особое место занимает использование лазерного оружия. Вследствие того, что
луч лазера распространяется практически мгновенно (со скоростью света), упрежден-
ного положения цели не требуется. Следовательно, нс нужно точно измерять даль-
ность. Однако из-за узкого лазерного луча требуется точное угловое сопровождение
цели, правда на очень коротком интервале времени. Поэтому для захвата цели берется
информация от обычной РЛС сопровождения. Отсюда следует, что эффективность ла-
зерного оружия может быть снижена в результате вывода из строя любого звена систе-
мы ПВО, приводящего к срыву целеуказания с требуемой точностью.
21
Рассмотрение принципов построения и функционирования ЗРК позволяет выде-
лить основные фазы функционирования ЗРК (рис. 1.4.).
Рис. 1.4. Основные фазы функционирования РЭС ЗРК
Практически на всех фазах функционирования ЗРК возможно создание помех,
снижающих, в той или иной мере, эффективность и боевые возможности ЗРК в целом.
1.2. Возможности нарушения работоспособности РЛС управления
оружием системы ПВО с помощью организованных помех
Возможности нарушения работоспособности большинства радиолокационных
средств вытекают непосредственно из принципа их работы, заключающегося в излучс-
22
нии радиосигналов в пространство и приеме отраженных объектами сигналов. Излуче-
ние сигналов нс только демаскирует радиолокационное средство и позволяет обнару-
жить его местоположение, но и определить основные характеристики режима его рабо-
ты: рабочую частоту, вид излучения (непрерывный, квазинспрерывный, импульсный),
поляризацию сигнала, вид и параметры модуляции сигнала (AM, ЧМ, ФКМ), ширину
спектра, длительность импульса, частоту следования импульсов, излучаемую мощ-
ность. Измеренные характеристики даю г возможность определить тип облучающей
защищаемый объект РЛС, сформировать помеховый сигнал в соответствии с преду-
смотренным заранее алгоритмом и нарушить нормальную работу РЛС со всеми выте-
кающими из этого последствиями для системы ПВО. При этом непосредственная зада-
ча РЭП может заключаться в создании условий, при которых отраженный от объекта
сигнал будет замаскирован более мощным помеховым сигналом, в результате чего ис-
ключается возможность извлечения из него полезной информации, необходимой для
системы ПВО, или создаются сигналы, несущие ложную информацию об объектах и
воздушной обстановке в целом. В результате этого в системе ПВО могут вырабаты-
ваться неверные решения, снижающие эффективность ее работы и влекущие за собой
последствия различной тяжести. Разумеется, методы создания той или иной помехи
могут быть различными, обусловленными различиями подавляемых РЛС и количест-
вом объектов, участвующих в РЭП [1-6].
Современные радиолокационные системы решают широкий круг задач, связанных с
обнаружением радиолокационных объектов, определением их местоположения в про-
странстве и оценкой параметров их движения. В соответствии с этим радиоэлектронное
воздействие на радиолокационную
систему в большинстве случаев тре-
бует знания конкретных функцио-
нальных характеристик аппаратуры,
определяющих возможности решения
возложенных на систему задач. Наи-
большего эффекта радиоэлектронное
подавление достигает тогда, когда
оно организуется целенаправленно с
учетом индивидуальных особенно-
стей подавляемой аппаратуры. С этой
точки зрения приемную радиолока-
ционную систему можно представить Рис. 1.5. Структурная схема приемной радиолока-
в виде совокупности устройств, изо- ционной системы с точки зрения возможностей
браженных на рис. 1.5. создания ей помех
Как видно из рисунка, основным устройством, определяющим возможность рабо-
ты системы в целом, является приемная антенна. Она обеспечивает прием сигналов, без
чего невозможно выполнение ни одной задачи, возложенной на радиолокационную
систему. Особо важную роль приемная антенна играет в обеспечении работы системы
определения угловых координат цели, в том числе системы автоматического сопрово-
ждения цели по направлению (АСН). Сигналы, принятые антенной от цели, проходят
преобразование частоты, после чего поступают на усилитель промежуточной частоты
(УПЧ), обеспечивающий поднятие их уровня до необходимой величины. Как правило,
в радиолокационных системах, предназначенных для точного определения координат
23
цели и параметров ее движения, УПЧ снабжается системой автоматической регулиров-
ки усиления (АРУ), позволяющей обеспечивать требуемый динамический диапазон
приемника и устраняющий амплитудные искажения принимаемых сигналов, способ-
ные существенно нарушить точность работы угломерных систем. С выхода УПЧ после
видеодетектирования сигналы поступают на индикатор.
За УПЧ обычно следуют системы селекции по дальности и скорости, обеспечи-
вающие измерение дальности и скорости выбранной цели и работу систем автоматиче-
ского сопровождения выбранных целей по дальности (АСД) и скорости (ACC). С вы-
хода системы селекции целей сигналы поступают на угломерную систему, обеспечи-
вающую АСН.
Каждое из перечисленных устройств может быть объектом РЭП. Так, антенная
система в совокупности с системой АСН может являться объектом РЭП, нацеленным
на срыв режима автосопровождения цели по направлению или существенное искаже-
ние угловых координат цели. Известен большой набор средств РЭП угломерных сис-
тем. Часть из них рассчитана на подавление конкретных типов угломерных систем.
При их создании обычно требуется информация о принципах и параметрах системы
АСН подавляемой РЛС. Например, применительно к РЭС с коническим сканированием
луча эффективной является помеха с амплитудной модуляцией на частоте сканирова-
ния в противофазе. Но для этого нужно знание частоты сканирования луча РЛС и син-
хронизация огибающей модуляции помехи с огибающей модуляции отраженных сиг-
налов РЛС от цели.
При РЭП РЛС с сопровождением "на проходе" (с линейным сканированием) эф-
фективна помеха, создающая энергетическую асимметрию принимаемого сигнала. Реа-
лизация ее возможна путем псреизлучения усиленной части пачки зондирующих им-
пульсов РЛС. Иными словами, при создании помех конкретным типам угломерных ра-
диолокационных систем требуется достаточно точная информация о принципах работы
подавляемой системы и определенная синхронизация работы передатчика помех с ра-
ботой подавляемой РЛС. Наряду с такими помехами существует ряд помех более уни-
версального характера. Универсальность их сказывается в том, что они применимы к
угломерным радиолокационным системам различных типов и поэтому не требуют при
своей реализации знаний принципов и параметров работы подавляемых РЛС. К таким
видам помех угломерным системам, работающим в режиме автоматического сопрово-
ждения цели по направлению, относятся: поляризационные, когерентные, мерцающие
помехи; помехи, воздействующие по боковым лепесткам ДНА; перенацеливающие на
подстилающую поверхность, на активные или пассивные ловушки (выбрасываемые и
буксируемые), на дискретные дипольные образования. Как правило, перечисленные
виды угловых помех требуют повышенных уровней мощности.
Преобразователь частоты условно можно рассматривать как объект воздействия
помехи по зеркальному каналу и двухчастотной помехи. В первом случае помеха соз-
дается на частоте, сдвинутой относительно несущей частоты РЛС на удвоенную вели-
чину промежуточной частоты приемника подавляемой РЛС. Формируемая по сигналу
зеркальной частоты пеленгационная характеристика - неустойчива в направлении на
источник помехи. Двухчастотная помеха представляет собой совокупность двух поме-
ховых сигналов, разнесенных по частоте на величину промежуточной частоты подав-
ляемого приемника. Механизм воздействия такой помехи связан с ее детектированием
в преобразователе частоты и формированием нсзнакопсременной пеленгационной ха-
рактеристики, исключающей возможность работы системы пеленгации цели.
24
Система АРУ может являться объектом воздействия прерывистой помехи с изме-
няющимся коэффициентом заполнения. При большом уровне мощности такая помеха
может ввести приемник в режим насыщения и нарушить передачу амплитудных соот-
ношений принимаемых сигналов, что отрицательно скажется на работе угломерной
системы, особенно моноимпульсного типа, поскольку нарушается амплитудно-
фазовый баланс каналов.
Объектом воздействия помехи, расстроенной по частоте примерно на половину
ширины полосы пропускания усилителя может стать УПЧ. В этом случае создаются
условия, когда принимаемый сигнал помехи проходит приемник на скатах амплитудно-
частотной характеристики УПЧ или фильтра доплеровской селекции. Такой вид поме-
хи эффективен при подавлении многоканальных приемных систем моноимпульсного
типа, поскольку приводит к разбалансу по амплитуде и фазе приемных каналов и, как
следствие, к нарушению работы угломерной системы.
Системы АСД и АСС предназначены для обеспечения слежения за выбранными
целями по дальности и скорости. Работа этих систем неразрывно связана с операциями
селекции интересующих целей по указанным параметрам. В соответствии с этим уси-
лия при организации РЭП в этом случае могут быть направлены на создание .как мас-
кирующих, так и имитационных (дезинформирующих) помех. Особую роль при этом
играют имитационные (уводящие) помехи, способные вызвать срыв режима автосо-
провождения цели по дальности и/или скорости и перевод систем АСД и АСС в режим
сопровождения цели по помехе. В этом случае существенно облегчается создание уг-
ловых помех. Анализ показывает, что большинство известных помех системе АСН
требует значительного повышения мощности по сравнению с помехами другим систе-
мам РЛС. Комбинирование данных помех с уводящими помехами по дальности и ско-
рости приводит к снижению требуемой для их реализации мощности до уровня мощ-
ности, необходимой при создании эффективной помехи системам АСД и АСС. В соот-
ветствии с этим значение помех системам АСД и АСС следует оценивать не изолиро-
ванно от помех другим системам РЛС.
Индикатор обеспечивает визуальную информацию об обстановке в пространстве,
составляющем зону ответственности радиолокационной системы. Поэтому основная
цель средств РЭП в отношении данного структурного устройства РЛС состоит в том,
чтобы нарушить возможность наблюдения за обстановкой или исказить реальную кар-
тину этой обстановки. Первая цель может быть достигнута с помощью активных, пас-
сивных маскирующих помех, вторая цель - с помощью имитационных и комбиниро-
ванных помех.
Проведенное рассмотрение радиолокационного приемника как объекта РЭП сви-
детельствует о необходимости комплексного подхода к оценке возможностей и эффек-
тивности радиоэлектронного подавления РЛС. Изолированное рассмотрение функцио-
нальных систем, входящих в РЛС, не позволяет в полной мере оценить эффективность
РЭП РЛС. Так, например, подавление только систем АСД и АСС еще не решает задачи
РЭП. Если при этом работоспособность угломерной системы будет сохранена, РЛС
может выполнить боевую задачу, например, связанную с обеспечением полуактивного
наведения ракет или управлением наведения ракет триангуляционным методом. Если
при этом учитывать открывающиеся благоприятные энергетические возможности по
созданию угловых помех и использовать эти возможности, то подавление систем АСД
и АСС резко возрастает. В соответствии с этим возрастает роль помех системам селек-
25
ции целей в комплексе средств РЭП, повышается важность изыскания путей создания
таких помех в целях эффективной защиты объектов электронными методами.
1.3. Классификация методов радиоэлектронного подавления РЛС
Основу методов РЭП составляют активные и пассивные помехи, нацеленные, как
указывалось выше, на создание маскирующего или дезинформирующего эффекта. По-
мимо них к основным методам РЭП следует также отнести методы силового энергети-
ческого подавления, рассчитанные на выведение из строя определенных элементов
приемных устройств, например, детекторов и транзисторов, в результате чего прием-
ник становится неработоспособным; методы воздействия на окружающую среду, в ко-
торой распространяются радиосигналы подавляемых РЭС, сводящиеся к созданию ис-
кусственных ионизированных образований в атмосфере, порождающих отражения и
преломление радиоволн, искажение формы зондирующего и отраженного от объекта
сигналов, ослабляющих мощность зондирующих и отраженных сигналов; методы
уменьшения эффективной площади рассеяния (ЭПР) целей, позволяющие увеличивать
скрытность проникновения
объектов на защищаемую тер-
риторию и снижающие даль-
ность возможного обнаруже-
ния таких объектов с помощью
радиолокационных средств;
методы уничтожения РЭС с
помощью наведения на них ра-
кет по их излучению; методы
противорадиолокационного
маневра, позволяющие защи-
щаемому объекту своевремен-
но уклониться от поражающих
средств системы ПВО. (В це-
лях наглядности основные ме-
тоды подавления РЭС прсд-
Рис. 1.6. Классификация методов создания ставлены в виде структурной
активных и пассивных помех схемы на рис 1 6.)
В связи с широким использованием в системах ПВО цифровых методов обработ-
ки информации для управления оружием стало возможным также создание компью-
терных помех путем внедрения в ЭВМ компьютерных вирусов.
Перечисленные выше методы, кроме методов создания активных и пассивных
помех, имеют универсальный характер в том смысле, что не зависят от конкретного
исполнения РЭС и в данной книге не рассматриваются. Что касается методов создания
помех, то в подавляющем большинстве их характер определяется функциональными и
конструктивными особенностями подавляемого РЭС. Поэтому их классификацию це-
лесообразно проводить применительно к основным функциональным системам РЭС, к
которым относятся системы обнаружения, распознавания, селекции и автоматического
сопровождения целей по дальности, скорости и направлению, а также системы управ-
ления и связи, радиовзрыватели.
26
Схема такой классификации, представленная на рис. 1.6, имеет укрупненный ха-
рактер, поскольку не предусматривает детализации методов, обусловленной специфи-
кой принципов работы каждой из перечисленных систем. Детализация методов будет
дана позднее, при рассмотрении методов и техники создания помех радиолокационным
системам различных типов.
Как видно из рис. 1.6, методы создания помех по принятой классификации разби-
ваются на методы создания помех радиолокационным системам обнаружения и распо-
знавания, методы создания помех радиолокационным системам автоматического со-
провождения по дальности, скорости и направлению, методы создания помех линиям
управления, системам связи и радиовзрывателям. К пассивным помехам относятся ди-
польные отражатели, искусственные ионизированные образования, ложные цели и ло-
вушки. Их действие может носить как маскирующий, так и имитационный характер.
Активные помехи создаются с помощью передатчиков помех. По эффекту дейст-
вия они могут разделяться на маскирующие и имитационные. К активным маскирую-
щим помехам относятся шумовые и хаотические импульсные помехи. В их задачу вхо-
дит маскировка сигналов, отраженных от реальных целей, на индикаторах РЛС, ис-
ключающая обнаружение и распознавание целей. Активные имитационные помехи
обычно предназначаются для дезинформации и создают в системах обработки ложную
информацию. Эти помехи более скрытного действия, чем маскирующие. При их дейст-
вии может происходить перегрузка соответствующих информационных каналов РЭС, в
результате чего снижается их пропускная способность и становится недостаточной для
обработки всей информации, необходимой для выделения истинной цели. При этом
помеховый сигнал, имитирующий цель, не должен существенно отличаться по своим
параметрам от истинного, иначе он может быть отселектирован. Среди активных помех
выделены помехи линиям радиоуправления и связи, использующим кодированные сиг-
налы и имеющим специфические особенности при их подавлении по сравнению с по-
давлением радиолокационных каналов.
Помехи радиолокационным системам автоматического сопровождения можно
разбить по объекту воздействия на помехи системам сопровождения по дальности
(РЛС с импульсным и непрерывным ЧМ-излучением), по скорости (РЛС с непрерыв-
ным излучением), по дальности и скорости (РЛС с когерентно-импульсным излучени-
ем) и по направлению (РЛС с любым видом излучения) (рис. 1.7).
Поскольку помехи системам сопровождения по дальности и/или скорости вызы-
вают рассогласование строба селекции с отраженным от цели сигналом, они будут спо-
собствовать созданию энергоемких помех по направлению и повышать эффективность
перенацеливающих помех.
В свою очередь, помехи системам автоматического сопровождения по направле-
нию можно разбить на одноточечные помехи (поляризационные, на частоте сканирова-
ния, помехи на комбинированных частотах), многоточечные (мерцающие и немерцаю-
щие из нескольких объектов, когерентные) и помехи из вынесенной точки (помехи из
зон барражирования и перенацеливающие помехи) (рис. 1.8). Перенацеливающие по-
мехи можно классифицировать по объектам, на которые перенацеливаются радиоэлек-
тронные средства. В настоящее время известны перенацеливания на земную или вод-
ную поверхность, дипольные образования, на активные сбрасываемые или буксируе-
мые ловушки.
27
Рис. 1.7. Классификация помех радиолокационным системам автоматического
сопровождения целей
Рис. 1.8. Классификация помех автоматическому сопровождению по направлению
Можно видеть, что класс активных помех намного больше класса пассивных по-
мех. Это неслучайно, так как активные методы формирования создают существенно
большие и более разнообразные возможности для подавления РЭС по сравнению с пас-
сивными помехами. В то время как пассивные помехи используют, в основном, один
параметр - интенсивность отраженного радиолокационного сигнала, активные помехи
используют все параметры, содержащиеся в радиолокационном сигнале, свойства ан-
тенных и приемных систем радиолокаторов, а также особенности приемных устройств
28
обработки информации. По ширине частотной полосы активные помехи можно разде-
лить на заградительные, прицельные и ответные (ретрансляционные). Заградительные
помехи имеют достаточно широкий спектр частот, во много раз превышающий полосу
пропускания приемника РЛС; прицельные - сравнительно узкий спектр, соизмеримый
с полосой пропускания подавляемого приемника. Ответные или ретрансляционные по-
мехи характеризуются высокой точностью наведения помехи по частоте и спектру по-
мехи, мало отличающимся от спектра реального сигнала.
Формирование активных помех может осуществляться следующими способами:
генераторным; ретрансляционным; ретрансляционно-генераторным.
Типы радиотехнической защиты ЛА: индивидуальная, взаимная, групповая и зонная.
По энергетическому уровню методы создания активных помех можно разделить
на силовые и комбинированные. Силовые методы являются наиболее энергоемкими,
так как для своей реализации они требуют мощных передатчиков помех из-за необхо-
димости обеспечения требуемого энергетического превышения сигналом помехи сиг-
нала отраженного от защищаемого объекта. Комбинированные методы создания помех
менее энергоемкие и предусматривают предварительный срыв селекции цели по даль-
ности и/или скорости или перевод строба селекции с отраженного от цели сигнала на со-
провождение ложного сигнала, что создает благоприятные энергетические условия для
эффективного воздействия помех автоматическому сопровождению цели по направле-
нию из-за того, что в стробе селекции РЛС отсутствует отраженный сигнал. В этом слу-
чае энергетический уровень сигнала помехи на входе приемника подавляемой РЛС опре-
деляется только превышением некоторого порогового уровня над уровнем собственных
шумов, при котором еще возможно сопровождение цели без наличия помех.
Различные виды радиоэлектронного подавления вызывают в радиолокационных
системах управления оружием следующие основные эффекты:
нарушение процесса обнаружения (пропуск цели):
дезориентацию оператора РЛС;
задержку обнаружения цели или задержку начала автосопровождения цели;
сопровождение ложной цели;
перегрузку систем обработки информации чрезмерным количеством ложных целей;
нарушение способности измерения радиолокационными средствами дальности,
скорости и направления цели;
создание ошибок в измерении дальности, скорости и направления цели;
срыв автосопровождения цели или ракеты.
Достижение указанных эффектов возможно при правильной реализации перечис-
ленных методов создания помех в аппаратуре РЭП и ее установке на соответствующих
защищаемых объектах.
Так как РЭС развиваются и модернизируются, то средства и методы РЭП также
должны непрерывно совершенствоваться. Успехи в РЭБ зависят не только от уровня
технического прогресса в области радиоэлектроники, являющейся ее основной эле-
ментной базой, но и также от состояния научной разработки методов радиоэлектронно-
го подавления, степени их реализации в аппаратуре и от успехов в разработке принци-
пов эффективного применения этой аппаратуры в боевых действиях.
Опыт разработки средств РЭП указывает на настоятельную необходимость не-
прерывного совершенствования технической базы радиоэлектронного подавления и
создания средств целевого назначения для выполнения конкретных оперативно-
тактических задач. При этом критериями эффективности этих средств будут военная
29
применимость и соответствие их основным принципам современной войны с учетом
результатов строгого анализа характера угрозы. В связи с этим можно отметить сле-
дующие основные направления в РЭБ:
прогнозирование успехов противника в радиоэлектронной технике и в РЭП;
развитие и интеграция систем РЭП, когда на самолете или корабле системы наве-
дения на РЛС, предупреждения об излучении, создания активных и пассивных
помех соединяются в единый бортовой комплекс обороны самолета (корабля), и
создание единого интегрированного комплекса систем РЭС и РЭП;
широкое использование ЭВМ и цифровых процессоров в радиоэлектронных ком-
плексах зашиты для обработки и анализа информации об окружающей радиоэлек-
тронной обстановке в реальном масштабе времени, выявления объектов подавле-
ния, формирования сигналов помех, выбора оптимального режима противодейст-
вия и управления подсистемами РЭП;
внедрение автоматического, в том числе с использованием искусственного интел-
лекта и полуавтоматического режима работы передатчиков помех с привлечением
оператора для контроля и управления при возникновении нестандартной радио-
электронной обстановки;
увеличение энергетического потенциала передатчиков помех путем непосредст-
венного наращивания выходной мощности их оконечных устройств и/или приме-
нением направленных антенных систем на основе многолучевых антенных реше-
ток (МЛАР) и активных фазированных антенных решеток (АФАР);
управление и концентрация мощности помехи по направлению, частоте и времени
излучения для повышения эффективности противодействия в условиях наличия
многих угроз;
контроль эффективности воздействия помех на РЭС управления оружием (УО)
для создания адаптивных систем РЭП.
Военные конфликты показывают, что в современной войне средства РЭБ являют-
ся необходимыми факторами обеспечения успеха боевых действий всех видов
вооруженных сил и неотъемлемой частью любой военной операции. Из анализа
опыта их применения видно, что использование этих средств значительно повы-
шает "выживаемость" самолета при преодолении современной ПВО. Конечно, не-
ожиданности при ведении РЭБ всегда возможны. Однако их эффект может быть
минимизирован, если учесть уроки РЭБ, и при разработке средств противодейст-
вия исходить из слецующих положений;
системы РЭБ должны обладать структурой, позволяющей гибко и быстро реаги-
ровать на новые угрозы;
следует быстро использовать полученные в ходе боевых действий разведданные;
средства противодействия должны рассматриваться как составная часть всей сис-
темы вооружения.
1.4. Структура радиоэлектронной борьбы
Радиоэлектронная борьба является в настоящее время весьма сложной областью,
охватывающей военные действия, при которых электромагнитная энергия использует-
ся для определения, уменьшения или предотвращения использования противником
электромагнитного спектра действий, при которых остается возможным применение
электромагнитного спектра для работы своей радиоэлектронной аппаратуры. Она
включает в себя следующие подобласти.
30
Радиоэлектронное подавление - действия, выполняемые с целью предотвращения
или уменьшения эффективности использования противником электромагнитного спектра.
Защита от помех - действия, предпринимаемые для того, чтобы, несмотря на ис-
пользование противником электромагнитного спектра для ведения РЭБ, обеспечить эффек-
тивное использование электромагнитного спектра своими радиоэлектронными средствами.
Радиоэлектронные средства непосредственной поддержки РЭБ — действия,
направленные на поиск, перехват, определение местоположения, регистрацию и ана-
лиз излучаемой средствами противника электромагнитной энергии с целью использо-
вания полученной информации для поддержки своих военных операций.
Эти средства создают источник информации, необходимой для функционирова-
ния систем РЭП, защиты РЭС от помех,, обнаружение РЛС и предупреждения экипажа
самолета об облучении и сопровождении самолета РЛС, а также наведении на него
управляемого радиоэлектронными средствами оружия.
Электромагнитная совместимость - действия, направленные на обеспечение
способности своей радиоэлектронной аппаратуры систем связи и управления оружием
функционировать в определенных условиях без заметного ухудшения качества работы
вследствие непреднамеренного электромагнитного излучения.
Между перечисленными подобластями существует взаимодействие и происходит
непрерывное состязание в части совершенствования средств радиоэлектронной борьбы.
Чтобы представить взаимодействие средств РЭП и помехозащиты, а также основ-
ные закономерности этого взаимодействия, необходимо прежде всего предположить,
что все современные страны имеют одинаковую научно-техническую и технологиче-
скую базу и что всякий раз, когда в одной стране изобретается новый принцип по-
строения радиоэлектронной системы, то же самое и в то же время может быть сделано
в других странах. Поэтому, как только новый тип радиолокатора разрабатывается и по-
ступает на вооружение или для использования в мирных целях, можно предположить,
что немедленно будут предприняты попытки создать противодействие радиолокаторам
этого типа. Виды средств РЭП, которые могут быть при этом использованы, определя-
ются на основе сведений о "другой стране", включая ее тактику и стратегию, аппарату-
ру, рабочие диапазоны, технологию и т.д.
В соответствии с этим успешная разработка средств РЭП требует наличия данных
о РЭС управления оружием противника. Эти данные получают с помощью радиораз-
ведки, для чего соответственно оборудованные наземные станции, корабли, самолеты и
искусственные спутники перехватывают сигналы РЭС, измеряют рабочую частоту и
другие параметры радиосигналов. Для получения информации также используется
шпионаж, аварии военных самолетов, изменение политической обстановки при экспор-
те военной техники, а в военное время - захват радиоэлектронных средств противника.
Для разработки средств РЭП имеют значения следующие характеристики систем
оружия, управляемого радиолокационными станциями:
диапазон рабочих частот;
тип сигнала: импульсный с малой или большой скважностью, непрерывный, не-
прерывный с ЧМ и т. д.;
внутриимпульсная модуляция: ЛЧМ, ФКМ;
скачкообразная перестройка несущей частоты РЛС или работа на разнесенных
частотах;
эффективная излучаемая мощность передатчика РЛС;
длительность импульса, модуляция длительности импульсов, использование
групп импульсов;
31
период повторения радиоимпульсов, модуляция периода повторения;
модуляция сигнала из-за сканирования антенного луча;
характеристики ДНА РЛС в главном луче и в боковых лепестках;
поляризационные характеристики антенной системы РЛС;
способ сопровождения цели по угловым координатам;
способ наведения ракет;
способность работать в пассивном режиме по импульсным и непрерывным сигналам;
характеристики неконтактных взрывателей;
способы взаимодействия с другими системами оружия и их носителями;
число, местоположение, максимальная дальность действия и другая информация
о назначении РЛС;
используемые способы защиты от воздействия помех и их характеристики.
Среди возможных способов защиты РЛС от воздействия помех представляют ин-
терес для РЭП следующие сведения [7-9]:
способы селекции движущихся целей (СДЦ); •
виды АРУ приемника;
способы накопления сигнала в приемнике;
наличие схемы, состоящей из широкополосного усиления, ограничителя и узко-
полосного усилителя (ШОУ);
способ поддержания в приемн ике постоянного уровня ложных тревог;
применение корреляционных методов;
алгоритм обработки сигнала в приемнике;
наличие сторожевых стробов в каналах автосопровождения;
обработка сигнала в фазированной антенной системе РЛС;
способы подавления приема сигналов помех, воздействующих через боковые ле-
пестки;
способы пассивного определения дальности;
другие меры защиты РЛС от диполей, помех по дальности, скорости и угловым
координатам, от ложных целей, возможности ручного сопровождения.
На определенном этапе РЭП может быть достаточно эффективным для подавле-
ния РЛС, но разработка средств защиты РЛС вновь восстанавливает баланс, отбрасы-
вая радиоэлектронное подавление назад, т. е. сводя к нулю его эффективность. В целом
данная ситуация имеет вид цепной реакции: радиолокационная аппаратура - средства
РЭП - РЛС со средствами защиты - модернизированные средства РЭП - усовершенст-
вованная радиолокационная аппаратура - усовершенствованные средства РЭП и т. д.
до бесконечности. Поскольку все факторы равноценны, соперничество может продол-
жаться долгие годы. Можно видеть, что средства РЛС и РЭП развиваются параллельно
и каждое их взаимодействие приводит к ответной реакции другой стороны и появле-
нию все новых и новых технических решений и средств. Для того чтобы выстоять или
одержать верх в таком соперничестве, необходимо знать слабые места в системе ра-
диоэлектронных средств противника, с тем, чтобы при необходимости оказать им эф-
фективное противодействие. Сюда относится создание помех РЛС противника, вывод
из строя средств и линий связи, создание помех для систем наведения его самолетов и
ракет, а также ухудшение условий для оптического наблюдения.
На основании накопленного опыта можно сделать вывод, что наиболее эффектив-
ный способ сохранения преимущества в области РЭБ заключается в комбинированном
применении всех существующих методов ведения РЭБ. Сочетание чрезвычайно слож-
32
них технических средств и строго согласованных тактических способов их применения
может обеспечить успех только в случае комплексного применения и полного исполь-
зования всех имеющихся возможностей РЭБ. Это предполагает наличие большого ко-
личества самой разнообразной по назначению аппаратуры РЭП, а также средств их
доставки, чтобы они, включенные в виде составных частей в системы оружия, могли
найти оптимальное применение в любых условиях боевой обстановки на суше, море, в
воздухе и космосе.
Все способы ведения боевых действий с применением средств РЭП должны учи-
тывать то обстоятельство, что пренебрежение какой-то технической или тактической
возможностью может привести в ходе РЭБ к образованию уязвимого звена в обороне.
Поэтому при разработке и создании систем оружия и средств РЭП необходимо учиты-
вать все технические возможности и то, что ни одна страна не остановится перед необ-
ходимостью даже крупных затрат, чтобы удержать приоритет в этой области. Важной
отличительной чертой вновь создаваемых систем радиоэлектронной борьбы должна
быть их минимальная уязвимость к потенциальной угрозе, создаваемой новыми и усо-
вершенствованными радиоэлектронными средствами противника.
Техника РЭП представляет собой очень обширную область, которая включает
разнообразные методы, технические решения и тактические приемы, и находится в по-
стоянной эволюции. В связи с этим можно дать только первоначальную ориентацию
относительно методов, которые используются в РЭП. Если попытаться представить в
общем аспекте характеристику методов и техники РЭП, то можно обнаружить почти
полное отсутствие общих решений для большинства проблем и, наоборот, наибольшая
эффективность достигается обычно аппаратурой! помех, приспособленной по возмож-
ности точнее к индивидуальным характеристикам подавляемого радиолокатора.
При организации РЭП необходимо учитывать, что любой системе управления
оружием присущи следующие функции:
поиск и обнаружение нарушителя;
опознавание государственной принадлежности ("свой - чужой");
передача по линии связи информации об обстановке в зоне ответственности;
обработка этой информации;
выработка команд управления;
передача команд управления по линии связи;
наведение оружия и открытие огня по нарушителю.
В соответствии с этим усилия при организации РЭП должны быть направлены на:
ухудшение радиолокационной видимости цели с помощью радиопоглощающих
материалов и других мер, снижающих ЭПР цели;
ухудшение условий радиолокационной видимости цели путем создания маски-
рующих активных или пассивных помех;
дезинформацию системы опознавания относительно государственной принад-
лежности цели путем создания ей имитационных помех;
нарушение работы каналов передачи информации и команд управления путем
создания им активных помех;
перегрузку датчиков системы управления оружием ложными целями с помощью
имитационных помех;
создание ошибок в наведении оружия;
ложные срабатывания оружия.
Все это находит широкое применение в РЭП.
2—1777
33
ГЛАВА 2. ПРОСТРАНСТВЕННО-ЭНЕРГЕТИЧЕСКИЕ СООТНОШЕНИЯ
ПРИ СОЗДАНИИ РАДИОЭЛЕКТРОННЫХ ПОМЕХ
2.1. Факторы, определяющие условия создания помех
Радиоэлектронная борьба, как и любые военные действия, осуществляется в про-
странстве и во времени. Когда самолет с передатчиком помех на борту входит в зону
обнаружения радиолокатора, между самолетом (передатчиком помех) и радиолокато-
ром возникает взаимодействие по схеме замкнутого контура "радиолокатор - самолет
(передатчик помех) -- радиолокатор". Связь между элементами этого контура осущест-
вляется с помощью электромагнитных волн, распространяющихся в пространстве меж-
ду радиолокатором и самолетом. Связующим звеном между пространством взаимодей-
ствия и радиоэлектронной системой (радиолокатором, передатчиком помех) служит
антенна. Приемная антенна улавливает энергию электромагнитных волн, распростра-
няющихся в атмосфере (в космическом пространстве), и направляет ее в линию пере-
дачи в виде токов высокой частоты. Передающая антенна, наоборот, преобразует энер-
гию электромагнитных колебаний, подводимую по линии передач к антенне, в энергию
электромагнитных волн, распространяющихся в пространстве. Размеры пространства
взаимодействия между самолетом с передатчиком помех на борту и РЛС ограничива-
ются максимальной дальностью обнаружения самолета, которая определяется излу-
чаемой мощностью радиолокатора и чувствительностью его приемника, способностью
самолета переотражать радиолокационный сигнал в направлении радиолокатора, а
также мощностью передатчика помех и чувствительностью его приемника. Эти пара-
метры с учетом дальности между радиолокатором и самолетом определяют на входе
радиолокационного приемника уровни сигнала, отраженного от самолета, и сигнала
помехи. Так как основным звеном радиолокатора, осуществляющим взаимодействие
через пространство с самолетом, является его антенная система, то она во многом бу-
дет определять уровень отраженного от объекта радиолокационного сигнала на входе
приемника радиолокатора и требования к мощности помехи. Чем больше величина
этого сигнала, тем более мощным должен быть передатчик помех. Поскольку электро-
магнитное излучение передатчика помех воздействует на радиолокатор через его ан-
тенную систему, параметры антенны радиолокатора непосредственно влияют на эф-
фективность воздействия помех. Необходимо также отметить, что момент включения
передатчика помех существенно влияет на эффективность РЭП. Например, в случае
подавления РЛС обнаружения, передатчик помех должен быть включен в строго согла-
сованное с реальной радиоэлектронной обстановкой время, так как преждевременное
его включение будет своего рода предупреждением ПВО об опасности, а задержка
приведет к своевременному обнаружению самолета. Поскольку взаимодействие между
радиолокатором и самолетом осуществляется через околоземное пространство, на ре-
зультаты взаимодействия будут влиять электрофизические характеристики атмосферы
и подстилающей поверхности. Совокупность факторов, определяющих взаимодействие
радиолокатора с защищаемым объектом с передатчиком помех на борту, представлены
на рис. 2.1.
Таким образом, энергетические харак1сристики сигналов помех и возможности
подавления радиолокатора во многом зависят от параметров антенной системы, спо-
34
Основные параметры
подавляемой РЛС:
мощность передатчика Р, чувствительность приемника Р„,„, ,
коэффициент усиления антенны G, уровни боковых лепестков
ДНА Т) , рабочая поляризация, вид излучаемого сигнала, длина
волны.
Антенная система РЛС-
Пространство
взаимодействия
Основные факторы:
влияние подстилающей поверхности, затухание
радиосигналов из-за гидрометеоров, поглощения в
атмосфере, влияние рефракции, потери при распространении
радиосигналов в свободном пространстве, дальность, высота
полета и размещения антенны РЛС
Антенная система
передатчика помех
Основные параметры
защищаемого объекта
с передатчиком помех.
ЭПР о , мощность передатчика помех Pv . коэффициент
усиления антенны передатчика помех (7П . чувствительность
приемника передатчика помех /-’припп , поляризация сигнала
помехи, вид помехи, рабочий диапазон частот, ширина спектра
помехи, сектор защиты.
Рис. 2.1. Факторы, определяющие характер взаимодействия радиолокатора
и объекта с передатчиком помех на борту
собности защищаемого объекта переотражать радиолокационные сигналы, условий
распространения радиоволн в пространстве взаимодействия и от взаимного располо-
жения радиолокатора, защищаемого объекта и передатчика помех. В связи с этим не-
обходимо оценить способность различных объектов переотражать электромагнитные
колебания, дать общее представление о радиолокационных антеннах с точки зрения их
роли в радиоэлектронной борьбе, а также определить влияние условий распростране-
ния радиоволн на их ослабление в пространстве взаимодействия.
2.2. Эффективная поверхность рассеяния защищаемых объектов
Объектами защиты с помощью средств радиоподавления могут быть различные
легательные аппараты (самолеты, вертолеты, спутники, ракеты, головные части балли-
стических ракет), а также корабли и наземные сооружения. Наиболее важная характе-
ристика этих объектов для радиоподавления - их отражающая способность, опреде-
ляющая свойство переизлучать падающую на объект электромагнитную энергию. Фи-
зическая сущность возникновения отраженных сигналов заключается в том, что элек-
тромагнитная волна, падающая на объект, вызывает в нем вынужденные колебания
свободных и связанных зарядов, синхронные с колебаниями падающего поля. Эти ко-
лебания создают вторичное электромагнитное поле, распространяющееся во всех на-
правлениях от объекта. Часть электромагнитной энергии поступает на вход радиолока-
ционного приемника и фиксируется в виде отраженного от объекта сигнала. Отражаю-
щие свойства зависят от формы и размеров объектов, материала, из которого они вы-
полнены, длины и поляризации падающей волны, направления облучения и приема.
Количественно они характеризуются ЭПР объекта, устанавливающей пропорциональ-
ность между мощностью отраженного от объекта сигнала Р и плотностью мощности
облучающей его электромагнитной волны
35
Р отр gI7] ,
(2.1)
где П{ - PGnJ^TiR2-, Р - мощность передатчика РЛС; Gng - КНД передающей антенны
РЛС; R - дальность до объекта.
Рис. 2.2. Зависимость ЭПР самолета F-86
от азимутального угла
при горизонтальной поляризации
В общем случае ЭПР зависит от на-
правления облучения и приема. График
зависимости ЭПР от угла облучения
(приема) называется диаграммой ЭПР
объекта. Диаграмму ЭПР или ЭПР мож-
но получить расчетным или опытным пу-
тем. Расчетный метод определения ЭПР
применим в основном только для объек-
тов простейших форм, а ЭПР реальных
объектов определяют, как правило, опыт-
ным путем с помощью непосредственных
радиотехнических измерений, выполняе-
мых на реальных объектах или на их мо-
делях. Для примера на рис. 2.2 приведена
экспериментальная зависимость ЭПР ис-
требителя F-86 от азимутального угла при
горизонтальной поляризации на частотах
9150, 2600 и 545 МГц [10]. ЭПР имеет
максимум в области углов 80... 100°, со-
ставляющий величину 300 м".
С увеличением длины волны ЭПР истребителя возрастает. При облучении само-
лета с хвоста (180°) ЭПР выше, чем при облучении с носа самолета (0°). При измене-
нии положения объекта относительно РЛС меняются фазовые соотношения между
сигналами, отраженными от его различных элементов. В результате возникают флук-
туации результирующего сигнала в точке приема, характер которых определяется ти-
пом объекта. Модуляционные особенности отраженных от реальных объектов радио-
локационных сигналов необходимо учитывать при радиолокационном подавлении
РЭС, особенно при создании имитационных помех, когда важно обеспечить хорошее
подобие сигналов помех сигналам реальных объектов. В противном случае становится
возможной селекция создаваемых ложных целей. Предпринимаются серьезные усилия
для снижения ЭПР и других демаскирующих признаков самолета. Традиционный путь
снижения ЭПР самолетов первоначально состоял в использовании радиопоглащающих
материалов. Например, такая технология была применена в самолете-разведчике SR-71.
Однако эта технология не позволяет снизить ЭПР самолетов до значений, при которых
можно было бы говорить о “самолете-невидимке”.
Самолет с низкими демаскирующими признаками должен иметь уникальную
конфигурацию и быть построен из материалов, которые как поглощают, так и прелом-
ляют радиолокационные сигналы. Стратегический бомбардировщик В-52 имеет боль-
шую ЭПР (до 100 м2) из-за наличия высокого вертикального стабилизатора и большого
корпуса, а также из-за расположенных на крыльях гондол реактивных двигателей, яв-
ляющиеся хорошими отражателями. Предполагается, что первоначальный вариант
бомбардировщика В-1 имел ЭПР, равную 10 м2, а ЭПР модифицированного варианта
В-1В едва достигала 1м2, и в дальнейшем будет еще меньше. Таких малых значений ЭПР
36
предполагается достигнуть путем введения целого ряда техничских новшеств. На новых
самолетах не будет острых кромок и выступающих углов из-за управляющих плоскостей
на крыльях самолета, которые хорошо отражают радиолокационные сигналы. Передняя
кромка крыла и фюзеляжа будет плавно закруглена, а образующие треугольник фюзе-
ляж, кабина и крыло придадут ему вид летящего клина. Двигатели будут скрыты в фюзе-
ляже, что позволит уменьшить ЭПР самолета. Для этой цели предполагается заменить,
где возможно, металлическую обшивку поглощающими материалами на основе графито-
вых пластиков, обладающих повышенной прочностью. Скрытые воздухозаборники реак-
тивных двигателей будут установлены на нижней части летающего крыла. Канал возду-
хозаборника будет иметь зигзагообразную конструкцию с тщательно рассчитанными из-
гибами, которые сводят к минимуму отражения радиолокационных сигналов. Кроме
снижения радиолокационной заметности предпринимаются меры для охлаждения вы-
хлопа реактивного двигателя, что будет способствовать защите самолета от ракет с теп-
ловой головкой самонаведения и от обнаружения ИК-датчиками. Снижение ЭПР самоле-
тов помимо уменьшения дальности радиолокационного обнаружения позволяет умень-
шить энергетические требования к мощности передатчика помех.
Диаграмма ЭПР кораблей имеет более тонкую лепестковую структуру, чем диа-
грамма самолетов, что объясняется значительно большими размерами и сложной кон-
струкцией кораблей. Экспериментальные исследования показывают, что флуктуации
ЭПР корабля, как и самолета, приближенно описываются экспоненциальным законом
распределения. В зависимости от тоннажа корабля его усредненную ЭПР о, м~ для 50-го
процентиля можно определить с помощью эмпирической формулы [II]:
СУ = 52 f '/2D3'2, (2.2)
где о - ЭПР; f - несущая частота РЛС, МГц; D - водоизмещение корабля в килотоннах.
Формула (2.2) была получена путем обработки результатов измерений ЭПР ко-
раблей различного класса в натурных условиях в диапазоне 3,25; 10 и 23 см.
В табл. 2.1 приведены усредненные значения ЭПР ряда типовых реальных объек-
тов, для защиты которых используется радиоэлектронное подавление РЭС.
Таблица 2.1. Среднее значение ЭПР типовых объектов
Наименование объекта ЭПР, м'
Б-52 100
FB-111 7
F-4 6
В-1 0,7
В-2 0.1
F-117F 0,025
Реактивный бомбардировщик 15...20
Подводная лодка в надводном положении 30...40
Малый корабль (50-200 т) 10...50
Средний корабль (1000-3000 т) 6- 1О3...2,5- 104
Большой корабль (104 т) 200000
Автомобиль, танк 7...10
Рубка подводной лодки 1
Головная часть баллистической ракеты 1...10’3
Человек 0,5...1,2
37
2.3. Антенны в технике РЭП
Функционирование любой аппаратуры РЭП немыслимо без антенных устройств,
и как бы ни был совершенен передатчик помех, его возможности по защите объекта в
конечном счете определяются параметрами антенных устройств с учетом их размеще-
ния на реальном объекте, где существенными являются ограничения на массу и габа-
ритные размеры аппаратуры. В силу того, что передатчик помех должен располагать
возможностью мгновенной реакции на угрозу, антенное устройство должно быть спо-
собно эффективно работать в широком частотном диапазоне и излучать (принимать)
радиоволны практически во всех направлениях. Последнее означает, что ДНА должна
быть по возможности близкой к круговой, т. е. слабонаправленной (усиление 0...5 дБ).
Естественно, что в этом случае энергетический потенциал передатчика помех будет в
основном определяться практически реализуемой выходной мощностью оконечных
каскадов передатчика помех. Это означает, что антенна должна пропускать большие
мощности. Достоинством слабонаиравлснных антенн является простота, низкая стои-
мость и способность работать при отсутствии информации о направлении на подав-
ляемые РЭС. Если сектор одновременного подавления ограничить шириной в несколь-
ко десятков и более градусов, то перекрытие всего требуемого сектора может быть дос-
тигнуто применением нескольких антенн, ДИ которых соответственно ориентированы
в пространстве и подключаются поочередно к общему передатчику. Однако в этом слу-
чае необходимо устройство для определения направления на подавляемые РЭС. По
мере увеличения ЭПР защищаемых объектов (например, кораблей) и необходимости
обеспечения все больших отношений помеха-сигнал технические требования к антен-
нам станции помех ужесточаются.
В современных условиях требуется эффективная излучаемая мощность помехи в
пределах от 10 кВт до 1 МВт при подавлении одновременно многих РЭС. К сожале-
нию, возможности повышения эффективной излучаемой мощности помехи путем уве-
личения выходной мощности передатчика помех ограничены мощностью передающих
ламп. Средний уровень СВЧ-мощности таких ламп в настоящее время составляет не-
сколько сотен ватт, а уровень импульсной мощности - несколько киловатт. В этих ус-
ловиях разработчик может использовать антенны с высоким коэффициентом усиления,
т. е. узконаправленные антенны.
Эти возможности хорошо реализуются во многолучевых антенных решетках, спо-
собных мгновенно концентрировать в узком луче в направлении подавляемых РЭС по-
мехи большой мощности. Для систем РЭП с такими антеннами эффективная мощность
излучения помехи определяется соотношением
P^rfG^ (2 3)
где Рп - мощность передатчика помех; Gn - КНД передающей помехи антенны; G| - ко-
эффициент усиления антенного элемента решетки; N - число элементов активной ан-
тенной решетки; Р{ - выходная мощность усилителя элемента решетки.
Можно видеть, что если коэффициент усиления антенного элемента решетки ра-
вен 10дБ, мощность усилителя элемента решетки 100 Вт и число элементов 10, то эф-
фективная излучаемая мощность такого передатчика помех составит 10э Вт. Рассмот-
ренный пример показывает практическую возможность достижения в аппаратуре по-
мех мегаваттного уровня. Из (2.3) ясно, что путем применения более узконаправленно-
го излучающего элемента можно наращивать излучаемую мощность помехи до трс-
38
буемого уровня. Однако это приводит к соответствующему сужению углового рабоче-
го сектора решетки, что, в свою очередь, ведет к необходимости увеличения числа ре-
шеток на борту объекта для зашиты в требуемом секторе. Кроме того, очень узкий луч
не всегда приемлем, так как во многих случаях подавляемая РЭС (например, ГСН) не
совпадает по направлению с излучателем (например, РГЩ), который будет пеленго-
ваться и на который будет наводиться узкий антенный луч решетки.
Наряду с концентрацией мощности помехи в нужном направлении помеховая ан-
тенна должна обеспечивать заданную поляризацию и часто не просто фиксированную,
а с изменяемыми ее параметрами. Это еще более усложняет структуру, увеличивает
массу и габаритные размеры антенных устройств передатчика помех, еще более уже-
сточает проблему их размещения на реальных объектах. При этом следует учесть, что
такие антенные системы должны быть широкополосными и работать с перекрытием по
частоте в октаву и более.
Современный боевой самолет буквально "облеплен" антеннами. Поэтому, говоря
об антенных системах, следует остановиться на их вкладе в величину ЭПР защищаемо-
го самолета. При создании помех РЛС ДНА передатчика помех направлена на подав-
ляемый радиолокатор, который нацелен максимумом своей ДНА на защищаемый са-
молет. В этом случае, радиолокационный сигнал, принятый антенной передатчика по-
мех, может отразиться от какой-либо неоднородности антенно-фидерного тракта и пе-
реизлучиться через ту же антенну в обратном направлении к РЛС. Наиболее сильное
обратное излучение от антенны будет наблюдаться при наличии неоднородности типа
короткозамкнутой или разомкнутой линии. В результате антенна может рассматри-
ваться как пассивный ретранслятор радиолокационных сигналов, по эффекту действия
аналогичный переотражающему объекту с ЭПР, определяемой выражением:
Ъи=-^-|П’П. (2.4)
где Gn - коэффициент усиления помеховой антенны; "к - длина волны; I Г | - коэффи-
циент отражения; Г) - КПД; у - коэффициент, учитывающий потери из-за рассогласова-
ния по поляризации.
Так, при Gu = 20 дБ и наличии в антенно-фидерном тракте неоднородности типа
короткозамкнутой или разомкнутой линии ЭПР антенны составит 0,75 мд в трехсанти-
мстровом диапазоне волн. Коэффициент усиления эквивалентного ретранслятора
А;кв.ретр=2Сп[дБ] - I01g[(KCBH+l)/(KCBH-I)]. (2.5)
Например, если антенна нагружена на вход (выход) ЛБВ с КСВН < 2, то при ко-
эффициенте усиления антенны 20 дБ эквивалентное усиление ретранслятора составит
30,5 дБ, что эквивалентно ЭПР около 0,5 м2.
Таким образом, антенна современного передатчика помех это нс просто элемент
согласования линии передачи с открытым пространством, но также и устройство, кото-
рое, если нс принять меры, может увеличить ЭПР защищаемого объекта.
2.4. Влияние земной поверхности на распространение сигналов помех
Сигналы помех, как и радиолокационные сигналы, представляют собой радио-
волны и поэтому подчиняются всем закономерностям, свойственным электромагнит-
ным колебаниям. В связи с этим на распространение радиоволн будут влиять поверх-
39
ность Земли и характеристики атмосферы или космического пространства. Земная по-
верхность влияет на распространение сигналов помех тем, что в точке приема образу-
ется интерференция радиоволн, прошедших по прямому пути, с радиоволнами, персот-
раженными земной или водной поверхностью. В тех направлениях, где эти поля ока-
жутся в фазе, произойдет усиление результирующего поля, а там, где они окажутся в
противофазе - его ослабление. Напряженности электрического поля прямой и переот-
раженной волн отличаются друг от друга по амплитуде и фазе из-за различия коэффи-
циента усиления помеховой антенны в направленный на приемник РЛС и участок от-
ражения от поверхности Земли, а также изменения амплитуды и фазы волны при отра-
жении от земной поверхности.
Если высота шероховатости подстилающей поверхности мала по сравнению с
длиной волны, то происходит зеркальное отражение. Количественно изменение ампли-
туды и фазы отраженной волны характеризуется коэффициентом отражения. Этот ко-
эффициент зависит от электрических параметров воды или почвы, длины волны, угла
Рис. 2.3. Зависимость коэффициента отражения
от угла скольжения для вертикальной (•)
и горизонтальной (х) поляризаций при длине
волны, равной 10 см: морская вода (а),
пресная вода (б), суглинок (в), песок (г)
скольжения, поляризации и характера поверхности (лес, луг, снег и т. п.).
На рис. 2.3 приведены зависи-
мости коэффициента отражения раз-
личных видов подстилающих по-
верхностей в I О-сантиметровом диа-
пазоне длины волны для вертикаль-
ной и горизонтальной поляризаций
облучающего сигнала. В случае го-
ризонтальной поляризации коэффи-
циент отражения сравнительно слабо
зависит от угла скольжения для мор-
ской и пресной воды, песка и суг-
линка. При изменении угла скольже-
ния от 0 до 28° коэффициент отраже-
ния при горизонтальной поляризации
для воды изменяется от 1,0 до 0,9, а
для песка и суглинка - от 1,0 до 0,5.
При вертикальной поляризации зави-
симость коэффициента отражения от
угла скольжения более существен-
ная, так как наблюдается значитель-
ное ослабление при углах Брюстера.
Коэффициент отражения при верти-
кальной поляризации значительно меньше, чем при горизонтальной. Для сравнения на
рис. 2.4 приведены зависимости коэффициента отражения морской воды и песка от уг-
ла скольжения при вертикальной поляризации облучающего сигнала 3-сантиметрового
диапазона [12].
Большое влияние на коэффициент отражения оказывает растительный покров. В
этом случае наблюдается очень слабая зависимость коэффициента отражения от угла
скольжения и его величина очень мала (около 0,1). Поляризация практически не влияет
на коэффициент отражения для поверхностей, покрытых растительностью, отражение
носит в большей степени диффузионный характер, чем зеркальный. С увеличением
40
Рис. 2.4. Коэффициент отражения от земной поверхности:
морская вода (а), песок (б)
длины волны облучающего
поверхность сигнала и высо-
ты растительного покрова ко-
эффициент отражения растет.
При прочих равных ус-
ловиях отраженный от под-
стилающей поверхности сиг-
нал только при малых углах
скольжения соизмерим с
прямым сигналом. Следова-
тельно, при этих углах будет
происходить их интерферен-
ция, которая ухудшает обна-
ружение целей. В результате
дальность обнаружения низ-
колетящих целей оказывает-
ся малой по сравнению с дальностью обнаружения в свободном пространстве и про-
порциональна корню восьмой степени от энергии излучения РЛС.
В случае создания помех радиолокаторам для защиты низколетящего самолета
влияние отраженного от подстилающей поверхности сигнала помехи будет проявлять-
ся в угловых ошибках пеленгации цели и тем больших, чем выше относительный уро-
вень псрсотраженного сигнала. Если его уровень соизмерим с уровнем прямого сигна-
ла, то при когерентности этих сигналов возможны значительные угловые возмущения,
превышающие угол места цели, так как в этом случае пеленгуется двухточечная цель,
состоящая из излучателя помехи и его антипода. В силу того, что коэффициент отра-
жения от реальных подстилающих поверхностей мал, обеспечение таких условий мо-
жет быть достигнуто соответствующим выбором формы ДНА передатчика помех.
Влияние поверхности Земли сказывается на появлении лепестковости в ДНА передат-
чика помех, что может привести к возникновению направлений, в которых уровень по-
мехи ниже, чем при отсутствии этого влияния Земли. Кроме того, при полете самолета
с передатчиком помех на борту на малой высоте подстилающая поверхность, псреот-
ражая излучаемые сигналы помех обратно к самолету, может понизить чувствитель-
ность приемного устройства, а в случае наличия ретрансляционного передатчика помех
- даже вызвать его самовозбуждение. Таким образом, подстилающая поверхность соз-
дает специфические условия для функционирования передатчиков помех, которые не-
обходимо учитывать при защите низколетящих самолетов.
2.5. Распространение радиоволн в атмосфере
Кривизна Земли ограничивает дальность прямой видимости и, следовательно, ра-
диогоризонт. Однако наличие в атмосфере явления рефракции радиоволн приводит к
тому, что радиогоризонт оказывается на дальности, большей дальности прямой види-
мости. Обычно с увеличением высоты показатель преломления радиоволн в атмосфере
падает (рефракция положительная). Так как скорость распространения радиоволн через
преломляющую среду (атмосферу) обратно пропорциональна показателю преломления,
то верхняя часть волны движется в атмосфере быстрее, чем нижняя. В результате этого
41
волна преломляется вниз, что обусловливает эффект огибания Земли радиоволнами и
распространения радиоволн за горизонт. С учетом положительной рефракции расстоя-
ние d, км, до радиогоризонта равно:
6Z = (3,56...4,12)(7^7 + 7^7), (2.6)
где /г?- расположения антенн над поверхностью Земли в метрах в точках приема и
передачи.
При распространении радиоволн в атмосфере также происходит их поглощение,
рассеяние и ослабление газами и гидрометеорами. На волнах, длиной выше нескольких
сантиметров, поглощением радиоволн атмосферными газами на трассах сравнительно
малой протяженности можно пренебречь. На более коротких волнах приходится при-
нимать во внимание молекулярное поглощение радиоволн в водяных парах и в кисло-
роде воздуха, которое имеет место при отсутствии осадков. Это явление связано с тем,
что энергия радиоволн затрачивается на колебания атомов и вращение молекул. По-
скольку большинство энергетических уровней имеет дискретный характер, переход с
одного уровня на другой при поглощении энергии радиоволн носит ярко выраженный
резонансный характер (рис. 2.5). Особенно сильно влияние поглощения радиоволн на-
блюдается на уровне моря, где имеется большая насыщенность атмосферы парами во-
ды. Так, даже на X = 3 см удельное затухание радиоволн в этом случае достигает
0,003 дБ/ км. С увеличением высоты трассы распространения радиоволн содержание
паров воды падает и удельное за-
тухание на X = 3 см снижается до
0,0015 дБ/ км. На этой высоте
укорочение длины волны сопро-
вождается резонансными полоса-
ми поглощения в кислороде. На-
пример, на X = 0,5 см удельное за-
тухание достигает 20 дБ/ км, а на
X = 0,25 см уменьшается более чем
на порядок и составляет 1 дБ/ км.
Следующие резонансные пики
поглощения в кислороде слабо
уменьшаются и становятся более
узкими. При этом удельное зату-
хание между резонансными пика-
ми на X = 0,3 см составляет около
0,01 дБ/ км и обнаруживает тенденцию к уменьшению с укорочением длины волны [13].
Ослабление в облаках и в дожде должно учитываться во всем диапазоне волн ко-
роче 10 см. Особенно сильно это явление сказывается на волнах длиной 1 и 3 см и ко-
роче. Ослабление радиоволн, вносимое облаками, зависит от концентрации в них воды.
Обычно концентрация воды /И изменяется от 1 до 2,5 г/мэ. Ослабление равно
7С0 = КХМ , дБ/км . (2.7)
Для водного облака К\ = 0,063 дБ / км м3/г при температуре 10° С и X = 3,2 см. От-
сюда Ко =(1...2,5),063 = (0,063...0,15) дБ7 км. Вносимое облаками ослабление радио-
42
волн уменьшается с увеличением длины волны. Например, при изменении длины вол-
ны от 1 до 3 см ослабление радиоволн уменьшается на порядок. У ледяных облаков ос-
лабление почти на два порядка ниже, чем у водяных. Ослабление, вызываемое дождем,
зависит от его интенсивности, температуры и длины волны. При дожде с интенсивно-
стью 25 мм / ч и t = 18 °C потери на X = 3,0 см составляют 0,65 дБ/ км, а при интенсивно-
сти 100 мм/ ч - 3,24 дБ/ км. С повышением температуры ослабление радиоволн дождем
уменьшается. Град и снег вносит потери, составляющие примерно 1 % от потерь, вызы-
ваемых дождем. Ослабление, вносимое туманом, зависит от расстояния видимости.
При температуре 0 °C удельное затухание, вносимое туманом, приведено в табл. 2.2
для различных длин волн и расстояний видимости.
Таблица 2.2. Удельное затухание, вносимое туманом
Видимость, м Затухание, дБ/км, при X
1,25 см 3,2 см 10 см
80 1,25 0,2 0,02
90 0,25 0,04 0,004
300 0,045 0,007 0,001
Ослабление зависит от температуры, с увеличением которой вносимые потери
падают. Так, при температуре 15 и 25 °C ослабление составляет 0,6 и 0,4 от ослабления
радиоволн в тумане при t = 0 °C. Более подробные данные по ослаблению радиоволн в
атмосфере можно найти в соответствующих справочниках. При расчетах ослабление
радиоволн в атмосфере в разах, вызываемое прохождением радиосигнала в одну сторо-
ну, может учитываться коэффициентом
7У1=Ю-°’1Хпр, (2.8)
где Кп - удельные потери радиосигнала, дБ/ км; D - протяженность участка трассы с
дополнительными потерями, км.
При прохождении радиосигнала дважды через одну и ту же область затухание со-
ответственно увеличится. При реальных расчетах предпочтительнее пользоваться еди-
ницей измерения децибелы. Например, если на трассе распространения действует не-
сколько факторов влияния, то сначала следует найти величину ослабления радиосигна-
ла в децибелах от каждого фактора, а затем определить их общий эффект путем сложе-
ния полученных потерь.
При одинаковых условиях сигнал помехи по сравнению с радиолокационным
сигналом будет ослабляться намного меньше, так как длина пути распространения ра-
диосигнала помехи в 2 раза меньше длины пути распространения радиолокационного
сигнала, Например, если в первом случае суммарные дополнительные потери сигнала
на трассе составляют 10 дБ, то для сигнала помехи они будут 5 дБ. Это означает, что
если отношение помеха-сигнал на входе радиолокатора при учете потерь только на
распространение радиоволн в свободном пространстве равно ос дБ, а дополнительные
потери из-за поглощения или затухания радиоволн в атмосфере в одну сторону состав-
ляют N{ дБ, то отношение помеха-сигнал в реальных условиях будет больше на дБ,
т. е. равно (ос + TV)) дБ.
43
2.6. Энергетические соотношения при создании активных помех
РЛС и ГСН
Общие положения. Энергетические соотношения при создании активных помех
целесообразно рассматривать применительно к двум основным типам передатчиков
помех: генераторному и ретрансляционному. Особенностью генераторного передатчи-
ка помех является независимость выходной мощности передатчика помех от расстоя-
ния между подавляемым радиолокатором и постановщиком помех, т.е. от уровня мощ-
ности радиолокационного сигнала, облучающего этот постановщик помех. Генератор-
ный передатчик помех обычно включается по команде, например, от приемника преду-
преждения об облучении, когда уровень сигнала на его входе от подавляемого радио-
локатора превысит определенную величину. После включения передатчик помех излу-
чает постоянный уровень мощности, равный произведению выходной мощности пере-
датчика помех и коэффициента усиления передающей антенны в направлении на по-
давляемую РЭС.
Для ретрансляционного передатчика помех характерны два режима работы: ре-
жим постоянного коэффициента усиления (линейный ретранслятор) и режим постоян-
ной выходной мощности. В первом случае ретранслятор характеризуется полным ко-
эффициентом усиления, равным произведению коэффициентов усиления приемной и
передающей антенн и усилителя. Во втором случае ретранслятор, помимо коэффици-
ента усиления характеризуется максимальной выходной мощностью. Важная характе-
ристика ретранслятора - реализуемый динамический диапазон входных сигналов, при
которых обеспечивается либо линейный режим усиления, либо уровень постоянной
выходной мощности. Ретрансляционные передатчики помех могут разрабатываться для
работы преимущественно в определенном режиме. Тем не менее в зависимости от рас-
стояния между ним и подавляемым радиолокатором один и тот же ретранслятор может
работать либо в линейном режиме, либо в режиме переизлучения сигналов с постоян-
ным уровнем выходной мощности. Например, при значительном удалении, когда ра-
диолокационный сигнал на входе ретранслятора сравнительно мал, ретранслятор мо-
жет работать в линейном режиме, но при приближении его к радиолокатору, когда
уровень входного сигнала существенно возрастает, выходной усилитель мощности на-
чинает работать в режиме насыщения, и мощность сигнала помехи перестает изменять-
ся пропорционально мощности радиолокационного сигнала на входе ретранслятора.
Энергетические соотношения целесообразно рассматривать для основных спосо-
бов радиоэлектронной защиты: самозащиты и прикрытия. При самозащите передатчик
помех находится на защищаемом объекте, а в случае помех прикрытия - на объекте,
пространственно не совпадающем с защищаемым объектом.
Уравнение противорадиолокации при создании помех РЛС с помощью пере-
датчика генераторного типа. При энергетической оценке действия активных помех
на РЛС необходимо учитывать взаимное расположение защищаемого объекта, поста-
новщика помех и РЛС, а также диаграммы направленности антенн РЛС и передатчиков
помех. Найдем отношение помеха-сигнал на входе приемника РЛС при создании помех
прикрытия, используя эквивалентную схему защиты, учитывающую распространение
радиоволн и основные параметры РЛС и передатчика помех (рис. 2.6). При этом учи-
тывается влияние подстилающей поверхности и ослабление радиоволн на трассе рас-
пространения, а также потери сигналов в случае рассогласования поляризации прием-
ной антенны РЛС и передатчика помех [10, 14, 15]. Ослабление радиолокационного
44
Рис. 2.6. Схема для определения энергетических характеристик отраженного
от цели радиолокационного сигнала и сигнала помехи, создаваемого
с помощью передатчика генераторного типа
сигнала в атмосфере в данном случае учитывается коэффициентом 10”°’2АЛ, так как ра-
диолокационный сигнал проходит атмосферу дважды {К - удельное затухание радио-
волн в атмосфере, дБ/км, R - протяженность трассы в атмосфере, км).
Влияние земной и водной поверхности на распространение радиолокационных и
помеховых сигналов можно учесть введением в соответствующие энергетические со-
отношения множителя g, который представляет собой отношение реальной напряжен-
ности электрического поля в точке приема к напряженности электрического поля в
этой же точке при распространении радиоволн в свободном пространстве. В случае
распространения радиоволн в одну сторону этот множитель по мощности равен g2, а
при распространении в обоих направлениях - g4 .
Минимальные энергетические потери сигнала помехи наблюдаются только в слу-
чае, когда поляризация антенны передатчика помех согласована с поляризацией при-
емной антенны подавляемого радиолокатора. В остальных случаях наблюдается увели-
чение потерь из-за различий их поляризаций. Если в передатчике помех и РЛС исполь-
зуются линейно-поляризованные антенны, то у = cos2A0n, где А0П - угол между векто-
рами поляризации.
В случае линейно-поляризованных антенн небольшие отклонения от точного со-
гласования по поляризации приводят к малым потерям сигнала помехи. Например, при
АОП=Ю° потери составляют всего 0,1 дБ. Однако при больших отклонениях возможно
полное подавление сигнала помехи. Множитель g2 может меняться от 0 (отраженный
от поверхности и прямой сигналы в точке приема равны по амплитуде, но противофаз-
ны) до 4 (отраженный от поверхности и прямой сигналы равны по амплитуде и син-
фазны). С учетом ослабления волн в атмосфере и из-за влияния поверхности Земли вы-
ражение для мощности радиолокационного сигнала, отраженного от самолета, примет
следующий вид:
45
PG Gnp<^2
(4лА2)2 4л
io-°-2*V
(2.9)
где Р - мощность передатчика РЛС; G, Gnp - усиление соответственно передающей и
приемной антенн РЛС в направлении на защищаемый самолет; о - эквивалентная по-
верхность рассеяния самолета; R - удаление самолета от РЛС; g4pc - коэффициент,
учитывающий влияние подстилающей поверхности на сигнал РЛС, отраженный от са-
молета; КГ°’2А7?- коэффициент, учитывающий затухание сигнала в атмосфере.
Уровень сигнала помехи на входе приемника РЛС для передатчика помех генера-
торного типа равен:
PG Gnnn(0)X2
_ * п п пр.п \ /
п.вх .
4л/?-
, л-°-1АЛп 2
л 10 gncY,
4 л
(2.Ю)
Плотность потока Эффективная
мощности помехи поверхность
на расстоянии Ru приемной ан-
тенны РЛС
где Рп- мощность передатчика помех; Gn- усиление передающей антенны передатчика
помех в направлении РЛС; Рп - удаление передатчика помех от РЛС; Спр.п(0) - усиле-
ние приемной антенны РЛС в направлении на передатчик помех; у - коэффициент,
учитывающий потери сигнала помехи из-за различия поляризационных характеристик
антенн передатчика помех и подавляемой РЛС; g2nc - коэффициент, учитывающий
влияние подстилающей поверхности на сигнал помехи; 10п~°’1ЛЛп- коэффициент, учи-
тывающий затухание сигнала помехи в атмосфере.
Для подавления нескольких радиолокаторов, использующих линейную горизон-
тальную и вертикальную поляризации, передатчик помех должен применять систему
либо с круговой поляризацией, либо с наклонной (0 = 45°). В этом случае потери сиг-
нала помехи составят 3 дБ и нет необходимости в сложном устройстве определения и
управления поляризацией помсхозой антенны.
Используя (2.9) и (2.10), находим отношение мощности помехи к мощности отра-
женного от цели сигнала на входе приемника РЛС (ап):
а
п.прикр
_ 1 10О,1К(2/<-/?п) ёпе
PG №ок g4c ’
(2.11)
где Убок =--—— - относительный уровень боковых лепестков приемной антенны
^пр.п (0)
РЛС в направлении на постановщик помех.
Выражение (2.11) для отношения помеха-сигнал характерно для случая, когда пе-
редатчик помех не совмещен с целью, т. е. для прикрытия защищаемого самолета вы-
несенным постановщиком помехи. Если передатчик помех совмещен с целью (случай
самозащиты) коэффициенты усиления приемной антенны радиолокатора в направле-
нии на цель и передатчик помех совпадают (2V6oK = 1):
46
а = 4Лу ] о01 KR
^п.самозащ Ч J 4 •
PG ° gpc
(2.12)
Тогда из (2.11), (2.12) можно видеть, что коэффициент ап в случае генераторных
помех прикрытия зависит прямо пропорционально удалению защищаемого самолета от
РЛС в 4-й степени и обратно пропорционально удалению постановщика помех от РЛС
во 2-й степени. Чем больше излучаемая мощность передатчика помех, тем больше уро-
вень помехи и, следовательно, больше коэффициент осп. Чем больше излучаемая мощ-
ность РЛС и о защищаемого самолета, тем меньше ос„. В случае самозащиты осп изме-
няется прямо пропорционально 2-й степени удаления самолета от РЛС.
Коэффициент ап определяет эффект воздействия сигнала помехи на радиолока-
тор. Для каждого радиолокатора существует минимальное значение осп min, начиная с
которого сигнал помехи создает требуемый помеховый эффект (маскировку сигнала
цели, срыв сопровождения и т. д.). Он зависит от структуры радиолокационных и по-
меховых сигналов, параметров радиолокационного приемника, вида обработки сигнала
в радиолокационном приемнике и типа индикатора, а также от режима работы РЛС
(обзор, автоматическое и ручное сопровождения).
При приближении защищаемого самолета к РЛС на дальность R' отношение по-
меха-сигнал может настолько уменьшиться, что помеха перестает создавать требуемый
эффект. Граница, при приближении защищаемого самолета к которой помеха перестает
быть эффективной, определяется условием:
п min-
ОблаСТЬ пространства, в которой выполняется условие осп > осп nijn, называется зо-
ной подавления РЭС помехами и находится численным или графическим решением
уравнений противорадиолокации. Пренебрегая потерями в среде распространения (К = О,
&пс=^Рс =1) и предполагая равенство ширины полосы пропускания приемника РЛС ши-
рине спектра помехи, эти уравнения имеют вид:
для помех прикрытия
min
(2.13)
для самозащиты
л Р^ R
= min ---
(2.14)
Отсюда следует, что минимальная дальность действия генераторного передатчика
помех прикрытия равна:
Д,~ (2-15)
\ 4тгу PUGU
а для самозащиты
| 1 PG
ап min . D „
4тгу PnGri
(2.16)
47
Если заданы значения ап, Ro самоЗЩ, Ru и параметры РЛС, то можно определить тре-
буемую мощность передатчика помех, используя выражения:
для помех прикрытия
(X <т R Y
(PC) М- , (2.17)
V П п/прикр 4^ 7?2 (Ро J 6
для самозащиты
Сзмизаш
А~п min &
4лу Р2
(2-18)
Сравнение полученных выражений показывает, что для помех прикрытия из вы-
несенного за пределы зоны поражения района баражирования требуемая мощность пе-
редатчика помех в
( Rn f w
— N&0K раз больше требуемой мощности передатчика помех для
самозащиты.
Если передатчик помех одинаково удален от РЛС (как и прикрываемый самолет,
Rn = Ro), но не совмещен с защищаемым самолетом, то требуемая мощность передатчи-
ка помех для прикрытия должна быть больше мощности передатчика самозащиты все-
го в NoOK раз. С энергетической точки зрения наиболее благоприятные условия насту-
пают, когда постановщик помех прикрытия находится впереди защищаемых объектов.
В этом случае требуемая излучаемая мощность уменьшится в
раз по сравнению
с передатчиком помех прикрытия, находящимся в удаленной зоне. Однако такой по-
становщик помех подвергается большей опасности, так как он вынужден находиться в
зоне поражения огневых средств ПВО.
Уравнение противорадиолокации применительно к ретрансляционному пе-
редатчику помех. В ретрансляционном передатчике помех сигнал помехи формирует-
ся путем усиления и модуляции принятого радиолокационного сигнала с последующим
излучением сформированного сигнала помехи в направлении подавляемого
радиолокатора.
Ретрасляционный передатчик можно охарактеризовать максимальной излучаемой
выходной мощностью (PG)n и его полным коэффициентом усиления, равным произве-
дению коэффициентов усиления усилителя ретранслятора, приемной и передающей
антенн, т. е.
’ /с _АГ
Ър.ретр^у^пер.рстр лпол •
Рассмотрим случай создания помех прикрытия, когда ретрансляционный передат-
чик пространственно нс совмещен с прикрываемым объектом защиты. Пусть РЛС со-
провождает один самолет, а другой самолет-постановщик помех создает помехи, для
его защиты. Так как РЛС сопровождает один самолет, то отраженный от него сигнал
РЛС принимается основным лепестком ДНА РЛС. Тогда на постановщике помех ра-
диолокационный сигнал принимается ретранслятором через боковые лепестки ДН пе-
редающей антенны РЛС, усиливается, наделяется помеховой модуляцией и излучается
в направлении РЛС, воздействуя на нее через боковые лепестки ДН приемной антенны.
48
Схема для определения энергетических характеристик сигналов в случае создания
помех прикрытия с помощью ретрансляционного передатчика приведена на рис. 2.7.
Согласно этой схеме отношение помеха-сигнал на входе подавляемого радиолокацион-
ного приемника равно:
Рис. 2.7. Схема для определения энергетических потерь радиолокационного
сигнала и помехового сигнала прикрытия для ретрансляционного
передатчика с постоянным коэффициентом усиления
Из (2.19), пренебрегая потерями в среде распространения (К = 0, gnc = g11c = 1), найдем
значение полного коэффициента ретранслятора в случае создания помех прикрытия:
поли ретр
^бок.пер-^бок-пр
(2.20)
Если принять Абок.пр = ^бок.пер= 1, а 7?п = R, то получим выражение для полного ко-
эффициента усиления ретранслятора в случае самозащиты. Можно видеть, что для по-
лучения на входе приемника подавляемого радиолокатора одного и того же отношения
помеха-сигнал, полный коэффициент усиления ретранслятора, создающего помехи
прикрытия, должен быть больше полного коэффициента усиления ретранслятора само-
защиты на величину, определяемую потерями сигнала из-за приема и воздействия по
боковым лепесткам ДНА подавляемой РЛС, а также различиями расстояний защищае-
мого самолета и постановщика помех от РЛС, т. е.:
(-^полн.ретр
прикр
полн.ретр
самозащ
^бок.пер^бок.пр
(2.21)
49
В данном случае отношение помеха-сигнал зависит от удаления РЛС как от за-
щищаемой цели, так и от постановщика помех. Предположим, что дальность до поста-
новщика помех остается неизменной, тогда нормированное отношение помеха-сигнал к
значению ап =у{7?) при R = Rn изменяется пропорционально четвертой степени расстоя-
ния между радиолокатором и прикрываемым самолетом.
Максимальная выходная мощность ретрансляционного передатчика помех при-
крытия определяется минимальной дальностью подавления и ап 1Т1№ и может быть най-
дена путем умножения уровня радиолокационного сигнала, принятого по боковым ле-
песткам передающей антенны РЛС, на коэффициент усиления передающей антенны
передатчика помех, что после преобразований выражается формулой:
. (2.22)
Можно видеть, что максимальная мощность ретрансляционного передатчика по-
мех в случае прикрытия связана с максимальной мощностью ретрансляционного пере-
датчика помех самозащиты следующим выражением:
Г R2 А (R V
(РСЛ = N anmin pz~? ® *41 I— fp’ р \ Д/ I I
X /п тах.прпкр 2V6oK.np вь,хтах 'самозащ Убок.пр J •
(2.23)
Мощность радиолокационного сигнала на входе усилителя ретранслятора в случае
прикрытия
Р - ^^бок.пср ^пр^'- _ „р Ц1р.р
4яЯ,2 Yl 4я '' (4яЛ„)2
(2.24)
Энергетические соотношения для противодействия ГСН ракеты полуактив-
ной системы с помощью ретрансляционного передатчика помех. Определим отно-
шение помеха-сигнал для случая противодействия ГСН полуактивной системы с по-
мощью ретрансляционного передатчика помех для случая самозащиты, воспользовав-
шись схемой, представленной на рис. 2.8.
Рис. 2.8. Схема для определения энергетических характеристик сигнала помехи
и сигнала, отраженного от цели, в случае создания помех самозащиты ГСН
с помощью ретранслятора с постоянным коэффициентом усиления
50
В этом случае мощность сигнала помехи на входе приемника ГСН для линейного
режима усиления ретранслятора
= PG 2 ^пр.ретр^ к G - 1 G'X 10~Q.lX(/?i+r) 2 2
пгсн 471/?^ 4л ц пср рстр 4ягI 2 4л ^рсгсп,
(2.25)
где у2 - у,у2.
Мощность радиолокационного сигнала, отраженного от цели, на входе приемника
ГСН:
Э _ PG G^" 1 -о. IX (Л,+г) 2 2
c.ich ~ . ? Ю орсорс.гсн •
4л /?Г 4л 4тщ-
(2.26)
Отсюда отношение помеха-сигнал на входе приемника ГСН:
р
с /вх.пр.ген
э2 к
Л- ____ 2 по.т.ретр
полн.ретр.о “ - Y
(2.27)
Ц
и не зависит от дальности R\ и г, а определяется только параметрами ретрансляционно-
го передатчика помехи и защищаемого самолета. Это является следствием линейного
режима работы ретрансляционного передатчика помех.
Если усилитель ретранслятора на расстоянии R} = /?1огр от РЛС насыщается и его
излучаемая мощность (PG)n остается неизменной в течение полета ракеты, то
= 4тгу-----
PG (J
(2 28)
и пропорционально квадрату R}. При этом R\ < 7?]огр.
Рассмотрим энергетические соотношения для противодействия ГСН с помощью
ретрансляционного передатчика, создающего помехи прикрытия.
В соответствии со схемой, приведенной на рис. 2.9, для случая создания ГСН по-
мех прикрытия, отношение помеха-сигнал на входе приемника ГСН равно:
апГСН
(2.29)
Отсюда полный коэффициент усиления ретранслятора для создания помех при-
крытия
по/гн.ретр
прпкр
N- №
1 ’оок.пр.Н оок.пер.рлс *
(2.30)
а максимальная излучаемая мощность передатчика помех прикрытия для защиты удар-
ного самолета до минимальной дальности Ro = Rmm определяется как
I =а PG—----------—N-
тах П 4^2 pl 'v оок.пр.ген
(2 31)
51
Рис. 2.9. Схема определения энергетических потерь сигнала подсвета и помехи
при создании помех прикрытия ГСН ретрансляционным передатчиком
с постоянным коэффициентом усиления
По сравнению со случаем самозащиты излучаемая мощность прикрытия в
раз больше при одинаковой минимальной дальности защиты. Получен-
ия —
оок.пр.гсн
Рис. 2.10. Номограмма для определения дальности
подавления РЛС генераторным передатчиком помех
самозащиты (а) и прикрытия (ап - 6 дБ, <з = 5 м2)
ные выше выражения для от-
ношения помеха-сигнал на вхо-
де подавляемого радиолокаци-
онного приемника РЛС или
ГСН позволяют определить ос-
новные характеристики генера-
торных (максимальная излу-
чаемая мощность, чувствитель-
ность их приемных устройств)
и ретрансляционных (макси-
мальная излучаемая мощность,
коэффициент усиления ретран-
слятора и чувствительность)
передатчиков помех в различ-
ных вариантах защиты.
На рис. 2.10 приведена
номограмма для определения
дальности подавления радиоло-
катора передатчиком помех ге-
нераторного типа при самоза-
щите и прикрытии.
52
Как следует из приведенных энергетических соотношений, дальность прикрытия
самолета вынесенным передатчиком помех R связана с дальностью от РЛС до поста-
новщика помех 7?п и энергетическими параметрами РЛС и передатчика помех:
n4_ п2
R ~4n(PG) ’
v /Ц.ЭКВ
(2.32)
где (Р0П.ЭКВ - эквивалентная излучаемая мощность передатчика помех в полосе про-
пускания подавляемого радиолокационного приемника с учетом ослабления сигнала
помехи боковыми лепестками ДНА подавляемого радиолокатора.
Очевидно,
(PG) =- ,
V А1.ЭКВ Л7 Af
’ бок.пр.рлс п
(2.33)
где Afc, - ширина спектров сигнала и помехи.
Пусть РПСП = 50дБ-Вт, Абок = 20дБ и Afn/Afc = ЮдБ. Тогда эквивалентная излучае-
мая мощность передатчика помех составит 20дБ Вт. Если (РС)рлс - 70дБ Вт, а отноше-
(PG)
ние ----= 50 дБ и постановщик помех барражирует от подавляемого радиолока-
' /П.ЭКВ
тора на удалении 50 км, то прикрытие самолета с ЭПР равной 5 м" и ап = 6 дБ обеспечи-
вается до минимальной
дальности 4 км. При уда-
лении барражировщика на
100 км минимальная даль-
ность подавления возрас-
тет до 5 км.
На рис. 2.11 приве-
дена номограмма, связы-
вающая минимальную
дальность подавления ра-
диолокатора вынесенным
ретрансляционным пере-
датчиком помех с удале-
нием постановщика помех
от радиолокатора. Эта но-
мограмма отражает сле-
дующую зависимость:
К
7?4 =--— 5 Рис. 2.11. Нормограмма для определения дальности подавления
Кр.экв РЛС вынесенным ретрансляционным передатчиком помех
где полное эквивалентное усиление ретрансляционного передатчика
2 /Z
х,- _ У________^полн.ретр
•‘'•р.экв — 77 77
^’'бок.пер-'''бок.пр
(2-35)
Если отношение —Е2М-40 дБ, то при удалении постановщика помех на 60 км
минимальная дальность прикрытия составит 6км. Коэффициент подавления, описы-
53
ваемый отношением помеха-сигнал на входе подавляемого радиолокационного прием-
ника, имеет статистический характер. Это связано с тем, что отраженный от цели сиг-
нал флуктуирует из-за случайных изменений ЭПР цели и условий распространения ра-
диоволн. Уровень сигнала помехи, в свою очередь, также имеет случайный характер,
обусловленный, например, изрезанностью ДН антенн передатчика помех (радиолока-
тора) и частотной характеристики усилителя передатчика помех, а также влиянием
земной и водной поверхностей.
2.7. Энергетические соотношения при создании помех радиолиниям
управления зенитными ракетами
Зенитный ракетный комплекс, использующий способ теленаведения или наведе-
ния "через ракету", имеет канал передачи информации между ракетой и РЛС, а также
канал визирования ракеты. Так, на ракете могут приниматься команды управления, пе-
редаваемые с РЛС, и в то же время с ракеты на радиолокатор может также передавать-
ся информация.
В соответствии с этим объектами радиоэлектронного подавления в рассматривае-
мом случае являются;
канал визирования ракеты;
канал приема команд управления ЗУР;
канал приема информации, сбрасываемой с ракеты на РЛС, при наведении "через
ракету".
Аналогичные каналы обмена информацией могут быть не только в системах ЗРК,
но и в других системах наведения оружия класса "воздух-повсрхность", например,
планирующей бомбы с телевизионным наведением. Подавление радиолинии управле-
ния приводит к разрыву контура наведения ракеты и к полному нарушению функцио-
нирования ЗРК. Создание помех радиолинии управления или каналу визирования раке-
ты может осуществляться как непосредственно с ударного самолета (самозащита), так
и с вынесенного постановщика помех.
На ракете подавление канала приема команд управления путем воздействия поме-
хи при самозащите или с помощью вынесенного постановщика помех происходит че-
рез боковые или задние лепестки ДН антенны хвостового приемника зенитной ракеты.
В большинстве ситуаций для обеспечения эффективности помехи мощность помехи на
входе хвостового приемника сигналов управления должна быть такой, чтобы конкури-
ровать с сигналом управления. В других случаях, например, когда на входе приемника
команд нет сигнала управления, мощность помехи в приемнике должна превосходить
определенный пороговый уровень. Отношение помеха-сигнал на входе подавляемого
приемника команд можно описать выражением:
а ..Д,,.. (й| । (я,
" Д» (/’С)чуспрл (РС\у
где (PG).,v - эквивалентная мощность передатчика команд (линия управления); <7пра -
коэффициент усиления приемной антенны хвостового приемника в направлении на
РЛС; 7?1 и/?2' удаление ракеты от РЛС и атакующего самолета; (Л:СП)ЭКВ- эффективная
мощность передатчика помех в полосе пропускания хвостового приемника; Сбок.пр.А -
коэффициент усиления приемной антенны хвостового приемника в направлении на
ударный самолет; у - коэффициент, учитывающий потери сигнала помехи в приемнике
(236)
54
из-за различий поляризации антенн передатчика помех и приемника; ?/бок - относитель-
ный уровень боковых лепестков ДН хвостовой приемной антенны в направлении ата-
кующего самолета (отношение усиления хвостовой приемной антенны в направлении
РЛС к усилению антенны в направлении на атакующий самолет).
Отсюда требуемая эквивалентная мощность передатчика помех самозащиты
ГТ /? 'А
т <2-37)
г \ । ,/
Так как ракета приближается к цели, то отношение R2/R] уменьшается и действие
помехи становится более эффективным. Для эффективного подавления линии радио-
управления необходимо обеспечить такое отношение помеха-сигнал на входе линейной
части подавляемого приемника в пределах его полосы пропускания, чтобы вносимая
ошибка в приеме команд могла обеспечить промах ракет, превышающий в несколько
раз радиус поражения боевой части ракеты (например, в 3 раза и более).
В случае создания помех линии приема команд управления ракетой с помощью
вынесенного постановщика помех:
_ (^п^п )-,кв 1 ^1
' (^)лу л/б0Д/?2п)
(2.38)
где Т?2п- удаление постановщика помех от ракеты.
Удаление ракеты от радиолокатора меняется от нуля до максимальной дальности, со-
ответствующей дальней границе зоны поражения подавляемого ЗРК. Энергетический по-
тенциал передатчика помех линии управления должен быть выбран таким образом, чтобы
обеспечить подавление командной линии на большей ее части диапазона дальностей.
Поскольку помеха должна быть эффективной до минимальных дальностей, соот-
ветствующих ближней границе зоны поражения, реализация се возможна путем увели-
чения эффективной мощности передатчика помех либо за счет приближения поста-
новщика помех к подавляемому радиолокатору. Если постановщик помех барражирует
вне зоны поражения ЗРК, то минимальная дальность подавления пинии управления
практически мало меняется. В то же время при самозащите с приближением ударного
самолета к РЛС сокращается минимальная дальность подавления радиолинии приема
команд управления.
Для подавления линии радиоуправления возможно также применение передатчи-
ков помех одноразового действия, которые могут находиться между РЛС и ракетой.
Это позволяет создать условия для прохождения сигнала помехи на вход подавляемого
приемника через главный луч ДН его антенны.
Рассмотрим энергетические соотношения для случая подавления линии приема
информации с ракеты. При этом помеха должна приниматься приемным устройством,
расположенным на РЛС.
При использовании для этой цели постановщика помех из зон барражирования
при расчетах можно полагать наклонную дальность до него постоянной. Отношение
помеха-сигнал на входе подавляемого приемника будет равно:
а
55
где (PG)p - эквивалентная излучаемая мощность передатчика на ракете; 7?зп - удаление
самолета постановщика помех от РЛС; А^ок.пр.рлс - усиление приемной антенны РЛС в
направлении на постановщик помех.
Из (2.39) следует, что после пуска ракеты с увеличением ее удаления от РЛС от-
ношение помеха-сигнал достигает критической величины, при которой нарушается
прием информации с ракеты. На дальностях до ракеты, меньших критической, прием
информации возможен. Таким образом, вокруг РЛС существует зона радиусом
/?1<
ап ^бок.пр.рлс
У(^п^п)экв
Кзп
(2.40)
внутри которой может быть осуществлен прием информации с ракеты. Вне этой зоны
радиолиния приема информации с ракеты оказывается подавленной. Задача радиоэлек-
тронного подавления радиолинии приема информации с ракеты состоит в сокращении
приема информации до такой степени, при которой снижается эффективность наведе-
ния ракеты.
Когда ракета приближается к цели, отношение дальностей увеличивается и, сле-
довательно, воздействие помехи становится более эффективным, особенно, если ДН
приемной антенны радиолинии, расположенной на РЛС, имеет одинаковое усиление в
направлении передатчика помех и ракеты. Так как ракета должна располагать возмож-
ностью широкого набора траекторий, зависящих от тактики поражения цели, то прием
антенной канала приема информации этой линии связи будет происходить по главному
антенному лучу (А/бок.пр= 1). Также может использоваться антенная система с узким лу-
чом, который направляется на ракету только тогда, когда нужно принять информацию.
В этом случае подавление линии приема информации с ракеты может происходить не
по главному лучу, а по ее боковым лепесткам в зависимости от взаимного положения
РЛС, ракеты и постановщика помех.
Рассмотренные выше энергетические соотношения для радиоэлектронного подав-
ления линии обмена информацией между зенитной ракетой и РЛС могут использовать-
ся при подавлении радиолокаторов визирования ракеты, например, в ЗРК с теленаведе-
нием. Увеличение дальности действия канала сопровождения зенитной ракеты в таких
комплексах достигается применением активного ответа. Для этого на ракете устанав-
ливается ответчик, который принимает сигнала РЛС и излучает ответные сигналы на
той же или другой несущей частоте. Запросные и ответные сигналы могут быть коди-
рованы. Ответные сигналы принимаются, декодируются в приемнике и отображаются
на индикаторе или используются в следящих системах для определения дальности и
угловых координат ракеты.
Отношение помеха-сигнал на входе приемника канала визирования ракеты по
сигналам ответчика:
_ , ( п п ^самозащ.экв 1 (
«п.самозащ-У N
V °/отв yV60K.np ( Л3 У
где 7?3 - удаление ударного самолета от РЛС,
_ (-^п6п)прэкв 1 ( У?, А
«„.„р„кр=7 (рс)^
(2-41)
(2.42)
56
Дальность действия передатчика помех по каналу визирования ракеты:
Y \ п п /самозаш.экв________1
пор (^)отв ^бок.пр
(2 43)
(2-44)
Отсюда мощность передатчика помех для подавления канала визирования ракеты
в случае самозащиты
|fy] <2-45>
Y -'пр J( Я1 )
и для прикрытия
а Л f (R V
(ВД,)„рт1р = . (2.46)
Y /np Jk 'ч ;
Передатчик помех может воздействовать на ракетный приемник сигналов запро-
са, на приемник сигналов ответчика или на то и другое одновременно. В первом случае
эффективное воздействие помех вызывает нарушение синхронизации ответчика с за-
просным сигналом или его ложный запуск. Во втором случае может быть нарушен
прием сигналов ответчика, в результате чего возникает маскировка дальности и появ-
ление угловой ошибки пеленгации ракеты.
Для создания помех линиям управления ракет применяется следующая тактика.
Самолет-постановщик помех летит вдоль линии боевого соприкосновения. На нем ус-
тановлена аппаратура радиотехнической разведки и создания помех по командам от
наземного центра. Самолетная аппаратура радиотехнической разведки измеряет харак-
теристики всех принимаемых радиосигналов и передает полученную информацию на
наземный центр управления, размещенный позади линии боевого соприкосновения. С
помощью мощной наземной ЭВМ центра управления анализируется тактическая си-
туация и по радиолинии на самолет передаются команды, в каком направлении и како-
му средству нужно создавать помехи. Формирование помех может осуществляться в
реальном масштабе времени. Для этой цели исполыукмся несколько таких самолетов
поддержки тактических боевых действий. При этом нс обязательно, чтобы системы ра-
диотехнической разведки и создания помех находились на одном носителе. Например,
одна система радиотехнической разведки может обеспечить необходимой информаци-
ей для командного управления многие постановщики помех линии управления. Обыч-
но системы передачи информации между РЛС и ракетой применяют кодирование сиг-
нала. Однако код может быть вскрыт. Если передатчик линии связи РЛС с ракетой ра-
ботает на частоте, лежащей вне рабочего диапазона ГСН зенитной ракеты, то исключа-
ется возможность режима наведения ГСН на перстатчик помех линиям связи. Когда в
линии связи используются амплитудно- или частотно-модулированные псевдослучай-
ными последовательностями сигналы, го помимо шумовых помех, могут использовать-
ся дезинформирующие помехи, среди которых можно выделить передачу ложных ко-
манд, способных вызвать, например, преждевременный подрыв боевой части (БЧ) ра-
кеты. Однако на формирование таких помех отводится весьма мало времени, не более
57
времени полета ракеты. Кроме того, могут быть использованы помехи с модуляцией
сигналом, содержащим многократно повторенную тактовую частоту кода, сигналом в
виде ложных импульсов при применении в линии передачи данных ВИМ, многократно
воспроизводящим запись команды с дополнительной фазовой модуляцией или без нее.
2.8. Основные энергетические соотношения при РЭП радиолиний
связи
Основные энергетические соотношения при радиоэлектронном подавлении
радиолиний связи генераторным передатчиком помех. Подверженность линии ра-
диосвязи воздействию преднамеренных помех зависит от уровней мощности радиосиг-
нала, помехи и собственного шума на входе приемника и их структуры [14-16]. Уро-
вень мощности собственных шумов на входе приемника определяется как
(2-47)
где к - постоянная Больцмана; Гэф - эффективная шумовая температура (в градусах
Кельвина); Д/пр - соответствующая полоса пропускания приемника.
Мощность принимаемого сигнала на входе приемника в полосе пропускания ли-
нейной части приемника, согласованной с полосой сигнала, равна:
гсспрА
(4л)2/?24£лрс ’
(2.48)
где Р - мощность передатчика линии связи; G - коэффициент усиления передающей
антенны линии связи в направлении на приемник; 6прс - коэффициент усиления при-
емной антенны линии связи в направлении на передатчик линии связи; Л — длина вол-
ны; R - расстояние между передатчиком и приемником линии связи; Lc - коэффици-
ент, учитывающий дополнительные потери сигнала в канале связи сверх потерь при
распространении его в свободном пространстве; £прс - коэффициент, учитывающий
потери сигнала в приемнике.
Аналогичное выражение можно получить для сигнала помехи на входе подавляе-
мого приемника в полосе пропускания линейной части приемника:
прп (л п2г Г
(4л) Яп£п£прп
(2.49)
где Рп - мощность передатчика помех; Сп - коэффициент усиления антенны передат-
чика помех в направлении на подавляемый приемник; 6пр п - коэффициент усиления
антенны приемника в направлении на передатчик помех; /?п - расстояние между пере-
датчиком помех и подавляемым приемником; £п - коэффициент, учитывающий до-
полнительные потери сигнала помехи связи сверх потерь при распространении его в
свободном пространстве; L - коэффициент, учитывающий потери сигнала помехи в
приемнике.
Путем сравнения дальности радиосвязи в отсутствие помех и при их наличии
можно оценить степень ухудшения линии радиосвязи. Дальность радиосвязи при от-
сутствии помех
58
'Р^ ] PG G„p^
„ N JL (4л)2 Л2/.Лрх^фД/пр ’
(2.50)
а при наличии на входе приемника преднамеренных помех
z p,.tc =__________________рсспр.ля,и.4Р.„_______________
£ лслПр.л2[(4я)2/гДпд1рп*7:1фд/-пр+/>пС„с„р.„лг]
(2.51)
Используя соответствующий критерий качества радиосвязи (разборчивость речи,
вероятность ошибки при приеме символов или другие), можно определить соответст-
вующие минимальные отношение сигнал-шум по мощности на входе подавляемого
приемника, при котором обеспечивается требуемое качество передачи информации.
Это отношение сигнал-шум определяет максимальную дальность радиосвязи. Если
дальность между передатчиком и приемником превышает максимальную дальность
связи, то качество связи может резко снизиться. Если же существует обратное соотно-
шение, то обеспечивается нормальная радиосвязь. Используя пороговые значения от-
ношения сигнал-шум (c/in)min и сигнал-помеха (c/n),nin, можно определить максималь-
ную дальность радиосвязи: при отсутствии помех
У ^GG„p.e
(2.52)
при воздействии помех
Р
^тпах.пом
Дл^Пр.С^^эфА/гпр "I”
(ВДЗЧр.п
(4л/д Y
(2.53)
где (PnGn) - мощность помехи в полосе пропускания приемника.
Отсюда отношение максимальной дальности радиосвязи при воздействии помех к
максимальной дальности радиосвязи без воздействия помех
Из полученных энергетических соотношений, полагая Lc ~ Епр „ , можно получить
выражение для минимальной излучаемой мощности передатчика помех в полосе про-
пускания подавляемого приемника, вызывающей нарушение радиосвязи:
59
(^n^n) min -
ЛЛпр.п^эф^Угip
(2-55)
Если излучаемая мощность передатчика помех превышает полученную мини-
мальную мощность передатчика помех, то радиосвязь нарушается. Максимальная
дальность от передатчика помех до подавляемого приемника, на которой достигается
нарушение радиосвязи,
R
1\i max
/’GGnp.c
^cAip дЛ^фА/пр
(2-56)
Если Rv < Rn max, то (с/п) < (с/п)пор и радиосвязь нарушается. Когда Лп > Rn П1ах, то
(с/п) > (с/п)пор и нарушения радиосвязи не происходит.
Представляет практический интерес случай воздействия сигнала помехи, когда на
входе приемника этот сигнал значительно превышает уровень мощности собственных
шумов. В этом случае отношение удаления передатчика помех от подавляемого прием-
ника к расстоянию между приемником и передатчиком линии связи определяется как
_ ifSA (^п) fiip.n Р 57)
к VWopA, PG G^-
Если распространение сигналов радиосвязи и помехи происходит по одной и той
же трассе, то Lc~Ln и данным выражением можно пользоваться для расчетов. Однако,
если трассы распространения оказываются разными, то расчеты становятся затрудни-
тельными, так как коэффициенты Lc и зависят от R и 7?п соответственно. Эти коэф-
фициенты учитывают дополнительное увеличение потерь сигнала связи и помехи со-
ответственно на трассах распространения относительно потерь на этих трассах в сво-
бодном пространстве.
Коэффициент Lc, сгрого говоря, является функцией от R и точный расчет мощно-
сти полезного сигнала на входе приемника должен учитывать кривизну земной по-
верхности, высоту антенн, наличие препятствий, многолучевость и другие факторы.
Многие модели распространения радиоволн основаны на предположении, что теорети-
ческие потери L над неровной поверхностью пропорциональны квадрату расстояния
между источником и приемником сигнала:
L = KR1 (2.58)
При измерении потерь L и уровня полезного сигнала Рпрс для различных трасс
одинаковой протяженности часто получается большой разброс значений указанных па-
раметров из-за разности путей распространения по профилю трассы. Тем не менее па-
раметры, измеряемые для одной трассы в течение длительного периода времени, могут
проявить себя и на соизмеримых дальностях и могут использоваться для расчета сред-
него значения и стандартного отклонения потерь.
60
Экспериментальные результаты подтверждают, что потери обычно имеют рас-
пределение, близкое к логарифмическому нормальному распределению, а стандартное
отклонение потерь возрастает с частотой сигнала и неровностью поверхности, но отно-
сительно мало чувствительно к длине трассы и высоте антенны. В случае связи с под-
вижным объектом мощность принимаемого сигнала претерпевает дополнительные из-
менения в течение коротких интерва-
лов времени из-за многолучевости
распространения радиоволн.
Для оценки влияния Земли на
распространение радиоволн были вы-
полнены расчеты напряженности элек-
трического поля с использованием
формул Введенского В.А. для условий
прямой видимости.
Результаты расчета приведены на
рис. 2.12 для сухой почвы при излу-
чаемой мощности 10 Вт, высоте рас-
положения антенн 1 м, коэффициенте
направленного действия антенн 1,5 и
длине волны 2 м. На этом же рисунке
представлены результаты экспери-
ментальных измерений, проведенных
с использованием передатчика со
Рис. 2.12. Зависимости напряженности электри-
ческого поля от расстояния с учетом влияния
поверхности Земли:
I - расчетная при вертикальном четвертьволно-
вом штыре; 2 - расчетная при горизонтальном
полуволновом вибраторе; (•) - эксперимент
штыревой антенной и десятиваттным
усилителем мощности и при приеме с
помощью селективного вольтметра.
Измерения проводились в полевых ус-
ловиях при расстояниях 16...90 м и
500...2000 м. Полученные в обоих слу-
чаях результаты совпадают с расчет-
ными и имеют ту же зависимость от
расстояния, которая была получена
расчетным путем, - амплитуда полей с
увеличением расстояния убывает про-
порционально квадрату расстояния, а
интенсивность сигнала, или мощность
его, убывает пропорционально рас-
стоянию в четвертой степени.
На рис. 2.13 представлены рас-
четные и экспериментальные данные
потерь сигнала с частотой 40 МГц для
случая распространения в свободном
пространстве (1), с учетом влияния
гладкой земной поверхности (2) и экс-
периментально измеренные (3). Можно
видеть, что если при распространении
радиоволн в свободном пространстве
Рис. 2.13. Зависимость потерь радиосигнала
с частотой 40 МГц от расстояния
при распространении: 1 — свободное пространство,
2 - идеальная гладкая земная поверхность,
3 - экспериментальные данные
61
Рис. 2.14. Зависимость коэффициента передачи
мощности в городе на открытом пространстве
для сухой почвы (G) = G? = 0 дБ). Нижняя линия
соответствует h} = /г2 = 0,5 м, верхняя - Л] = Л? = 1,5 м
потери сигнала изменяются на 6 дБ
при удвоении дальности, то в случае
распространения над идеальной глад-
кой земной поверхностью удвоение
дальности приводит к изменению по-
терь на 12 дБ. В то же время много-
численные экспериментальные
результаты измерения потерь при
влиянии Земли показывают
несколько большую величину потерь.
Причем потери растут с увеличением
дальности и показатель степени
возрастает до 5.
Таким образом, теория и экспе-
римент показывают, что из-за близо-
сти радиотрассы к Земле ослабление
поля вдоль нее происходит пропор-
ционально квадрату расстояния (в
свободном пространстве эта зависи-
мость пропорциональна расстоянию в
первой степени). В свою очередь мощность сигнала вдоль таких радиотрасс будет убы-
вать пропорционально четвертой степени расстояния (т. е. P-\/r4 вместо 1/R2 когда
влияние Земли нс учитывается). При наличии на трассе холмов, строений или лесисто-
го покрова степень затухания поля от расстояния превышает 2.
Величина показателя степени может быть уточнена экспериментальным путем.
Для иллюстрации на рис 2.14. приведены расчетные графики коэффициента передачи
мощности в зависимости от расстояния между антеннами для открытого пространства
в городе при высоте расположения антенн = 0,5 м и h2- 1,5 м для разных частот.
Данные зависимости также подтверждают, что показатель степени затухания при рас-
пространении радиоволн в условиях Земли равен 4. На практике в черте города условия
распространения являются более сложные и, как правило, более худшие.
Учитывая сложность расчета на модели распространения, для аналитических оце-
нок целесообразно иметь уравнение для средних значений мощности принимаемого
сигнала. Если уровень мощности полезного сигнала на входе приемника рассматривать
как среднее значение, а диапазон R ограниченным, то во многих случаях можно запи-
сать:
£ = KR2 = —Я",
(2-59)
где п - числовой показатель степени; Кс - коэффициент, не зависящий от R, но являю-
щийся функцией других параметров, таких, например, как высота антенны над Землей.
Подставляя (2.59) в (2.48), получаем:
KcPGGnpcX
(4л)2 R"
(2.60)
62
Для применения этого уравнения необходимы конкретные значения п и К. Эти
значения могут быть получены экспериментально или с помощью модели распростра-
нения. Дифференцируя обе части (2.60), получаем:
^10ё(Л.р.с)
d log (7?)
(2.61)
Таким образом, оценка п состоит в том, чтобы найти частные производные от Р11рс
и R в дБ. Если п меняется на протяжении R, то трасса должна быть разбита на доста-
точно малые участки, в пределах которых п можно считать постоянной величиной. Ес-
ли п определено для конкретной дальности R, то соответствующая величина Кс может
быть рассчитана с помощью уравнения для одного значения функции Рпр.с от R в пре-
делах этой дальности.
Для линий связи диапазона ОВЧ экспериментальные исследования показывают,
что для широкого диапазона дальностей п ~ 4. Если учесть затухание в атмосфере, то
пр.с
(2.62)
При определении уровня сигнала помехи на входе подавляемого приемника Рпрс
нужно учесть относительные поляризационные потери, так как передатчик помех нс
может обеспечить согласование поляризации помехи с рабочей поляризацией подав-
ляемого приемника. Эти относительные потери обычно описываются коэффициентом,
величина которого лежит в пределах (0 < у < 1). Кроме того, следует также учесть по-
тери сигнала помехи из-за фильтрующих свойств приемника, описываемых функцией
/(Д/пР, Л/п), где Д/Пр - эффективная полоса пропускания приемника, Д/п - ширина спек-
тра сигнала помехи. Если спектр сигнала помехи полностью сосредоточен в полосе
пропускания приемника, то /(Д/7,., Дбп) = 1. Если же спектр помехи превышает полосу
пропускания приемника, тоДД/^р, Afn) = Д/пР/ДД.
С учетом сказанного, средняя величина мощности сигнала помехи на входе при-
емника будет равна:
э _ KnPnGnGIlpnX -у 1]
прп /Л \2/nV" J (Э/г’Ч/пЛ
М («„)
(263)
где п - уровень сигнала помехи на входе приемника; Кп - коэффициент, аналогич-
ный Кс; Ри - мощность передатчика помех; Gn - усиление антенны передатчика по-
мех; Grfp п - усиление приемной антенны в направлении передатчика помех; р - коэф-
фициент качества помехи, описанный ниже; Rn - расстояние от передатчика помех до
приемника; £ - коэффициент затухания сигнала помехи на трассе.
Из (2.62) и (2.63) получаем отношение уровня сигнала помехи к уровню полезно-
го сигнала на входе приемника:
„ KnPnG„G R" (
с2 '-''-'пр.с 2Vn
,(аЛ-р/г„)
(2.64)
где схп -- отношение помеха-сигнал на выходе приемника.
63
Это уравнение связывает среднее отношение помеха-сигнал на входе подавляемо-
го приемника с параметрами линии связи и передатчика помех.
Для энергетических расчетов используют пороговый коэффициент подавления
O'-п min, который равен отношению минимально необходимой мощности помехи в виде
белого гауссовского шума к мощности полезного сигнала на входе приемника (в пре-
делах полосы пропускания линейной части приемника), при котором с заданной веро-
ятностью исключается возможность качественного приема информации подавляемой
линии связи. Реальный помеховый сигнал может значительно отличаться от белого га-
уссовского шума и, следовательно, для эффективного нарушения функционирования
линий связи потребуется другая мощность передатчика помех.
Отличие реального сигнала помехи от белого гауссовского шума учитывается ко-
эффициентом качества помехи, определяемым отношением коэффициентов подавления
при воздействии на подавляемый приемник белого гауссовского шума и реального
сигнала помехи соответственно. Коэффициент качества помехи обычно меньше едини-
цы, но в ряде случаев может быть и больше.
Из (2.62), (2.63) получаем:
R" _ 1 PG Кс Д/п
---— Qn mm--------------
К"
(2.65)
П PnGn Кп Д/пр
Поскольку для конкретных линий связи и передатчика помех каждый параметр
правой части в (2.65) является постоянной величиной, то и отношение расстояния R к
расстоянию 7?п для заданного ап min так же будет постоянной величиной.
При сравнительно малых размерах района расположения линий связи и передат-
чика помех (сотни метров) можно предположить, что условия распространения радио-
волн будут практически одинаковыми для сигналов связи и помех. Для этих условий
п - т и Кс = Кп. Кроме того, учитывая специфику применения линий связи можно с
большой вероятностью предположить, что в линии связи и передатчике помех исполь-
зуются антенны с ненаправленной диаграммой, т. е. Gnp.c = Gnp.n. Тогда (2.65) можно за-
писать для заградительной помехи, спектр которой шире полосы пропускания прием-
ника, в виде:
I 1 PG кс 4/п~_
(2.66)
Величина параметра С определяет размеры области, в пределах которой воздей-
ствие помехи эффективно.
Получим размеры области, в пределах которой воздействие помех эффективно
для случая, когда расстояние R фиксировано, а положение передатчика помех относи-
тельно приемника может меняться. В этом случае геометрическим местом точек, для
которых достигается пороговое соотношение помеха-сигнал, будет окружность радиу-
сом J = R/С, центр которой совпадает с положением приемника. Граница зоны подав-
ления описывается уравнением:
x2 + y2 = R2/c2 . (2.67)
Линия связи будет эффективно подавлена, если удаление передатчика помех от
подавляемого приемника не больше J. Значение параметра С определяется количест-
64
венными соотношениями основных характеристик линии связи и передатчика помех.
Если С = 1, то максимальная дальность подавления ,тах = Л. Перемещение передатчи-
ка помех внутрь зоны приведет к увеличению отношения помеха/сигнал на входе
приемника, т. е. к повышению эффективности воздействия помех.
Степень подавления линии связи можно оценивать коэффициентом сокращения
ее дальности действия в условиях воздействия помех:
RU = R/K , (2.68)
где К - „а
1 PG
п ВД 4/пр ’
В общем виде, когда условия распространения сигналов линий связи и передатчи-
ка помех различны, дальность подавления линии связи в условиях воздействия на нее
помех будет определятся выражением:
Если передатчик помех поднят над Землей на такую высоту, что ее влиянием
можно пренебречь, то показатель степени т -» 2. Так как линия связи функционирует
в условиях влияния земной поверхности, то для нее показатель степени п = 4. При этом
дальность подавления помехой
R^R'/c1. (2.70)
В данном случае может быть получен энергетический выигрыш или расширение
зоны подавления помехой.
Основные энергетические соотношения при радиоэлектронном подавлении
радиолинии связи ретрансляционным передатчиком помех. Ретрансляционный пе-
редатчик помех принимает информационный сигнал, наделяет его помеховой модуля-
цией, усиливает до требуемого уровня и излучает его в направлении подавляемого
приемника.
Для случая распространения радиоволн в свободном пространстве можно полу-
чить выражения для сигналов на входе подавляемого приемника от связного ( Р. вх) и
ретрансляционного (Рп вх) передатчиков:
PG Gnpk2
4 л R2 4 л
_ PG Gnvy 1 СУ2
4л г2 4л у перр4лЯ2 4л
(2.71)
где PG ~ излучаемая мощность связного передатчика; Gnp, G'p - коэффициенты уси-
ления антенны подавляемого приемника соответственно в направлении на связной пе-
редатчик и ретрансляционный передатчик; (7 - коэффициент усиления приемной
антенны ретранслятора в направлении на связной передатчик; ку ~ коэффициент уси-
ления ретранслятора; (7перр - коэффициент усиления передающей антенны ретрансля-
3—1777
65
тора в направлении на подавляемый приемник; г - расстояние от связного передатчи-
ка до ретранслятора; Rn - расстояние от ретранслятора до подавляемого приемника.
Отсюда отношение помеха-сигнал на входе подавляемого приемника
полн.р
(2.72)
где /<полн.р = GnppAyGnep р - полный коэффициент усиления ретранслятора.
Если в (2.72) подставить коэффициент защитной дальности А, = Rn/R , то
7^. (2-73)
, ?(4 л г | G
д— J
откуда
Передатчик помех ретрансляционного типа характеризуется не только полным
коэффициентом, но и излучаемой мощностью помехи. Если положить G'p = Gnp, т. е.
приемная антенна подавляемого приемника имеет круговую ДН в азимутальной плос-
кости, то излучаемая мощность передатчика помех
(С„Ч,,Л,„ ) = к„„„ р = атрРС) = ampPGk>.
(4nr ) \ K )
~T~
(2.75)
Для шумовой помехи
^пор
44
4/с ’
где Д/щ - ширина помехи спектра сигнала помехи; Д/с - ширина полосы пропускания
подавляемого приемника.
Рассмотрим энергетические соотношения для случая подавления наземным
ретрансляционным передатчиком помех наземной линии связи. Для приведенных выше
геометрических соотношений мощность полезного сигнала на входе подавляемого
приемника будет определяться соотношением:
, ч kcPGGnvk~
(Рс) =~------
вх (4л)2 7?"
(2.76)
где кс - величина, независимая от 7?, но являющаяся функцией других параметров, та-
ких как высота антенн над земной поверхностью.
Для линий связи диапазона ОВЧ экспериментальные исследования распростране-
ния радиоволн показывают, что часто справедливым оказывается п = 4 в широком диа-
пазоне дальностей.
Аналогично можно определить уровень сигнала ретрансляционной помехи на
входе подавляемого приемника:
66
(4л)2 г"
‘2 ^П1Л
^^^np.pA'vCnep.pX2—
(4л)" л;
(2.77)
Отсюда отношение помеха-сигнал на входе подавляемого приемника:
7?j V
J (4л)2/?" ’
(2.78)
Полный коэффициент усиления ретранслятора:
полн.р
а„(4л)2гУ /?п Y (4я)2 г"
V2 ( R ) " кик2
(2.79)
Полученные энергетические соотношения позволяют определить излучаемую
мощность ретранслятора из следующего выражения:
к ( R Y к
(Ш) = an^-PG^=anPG ЬМ V
V п/вых п з ( /? J Ас
(2.80)
Рассмотрим энергетические соотношения для случая, когда распространение сиг-
нала передатчика связи происходит в свободном пространстве, а сигнал ретрансляци-
онной помехи распространяется в условиях влияния земной поверхности.
В этом, случае можно получить следующие энергетические соотношения для
ретрансляционного передатчика помех:
отношение помеха-сигнал на входе подавляемого приемника
/ D \2 Л -
«„=М„ж.р - L ,, ; (2-81)
полный коэффициент усиления ретранслятора
ЛУ(4я)Ч'. ,282.
^полн.р Ctfi 7 12 ’ (2.OZJ
(/?) кпХ~
излучаемая мощность ретранслятора
R"
PnGn=anPG-$kn. (2.83)
К
Рассмотрим теперь случай, когда ретрансляционный передатчик помех поднят
высоко над земной поверхностью и осуществляет подавление наземной линии связи.
В этом случае на входе подавляемого приемника сигнал от наземного передатчи-
ка линии связи
kQPG 2
/ \2 ^пр^ ’
(4л) /?
(2-84)
а сигнал помехи
PG 1 GnpX2
, ? ЛПОЛН л гО л
(4 л)" г2 4л/?- 4л
(2.85)
67
Отсюда отношение помеха-сигнал на входе подавляемого приемника
кс ( 4л Яп J г2 ’
(2.86)
а излучаемая мощность ретранслятора
п2
РпСп=а,Л^-7 (2-87)
Л
В случае, если передатчик канала связи поднят высоко над земной поверхностью,
а ретрансляционный передатчик помех и подавляемое приемное устройство находятся
на поверхности, то основные характеристики ретранслятора и отношение поме-
ха/сигнал на входе подавляемого приемника определяются выражением:
а излучаемая мощность ретранслятора
R2
PnGn =anPG—^kn. (2.89)
К
Таким образом, приведенные выше энергетические соотношения позволят рас-
считать энергетические характеристики передатчиков помех генераторного и ретранс-
ляционного типов для подавления радиолинии связи.
Литература к ЧАСТИ ПЕРВОЙ
I. Van Brunt. Applied ECM/EW Engineering, USA, 1987, v. 1.
2. Вакин C.A., Шустов Л.Н. Основы радиопротиводействия и радиотехнической разведки. - М.:
Сов. радио, 1968.
3. Вакин С.А., Шустов Л.Н. Основы радиоэлектронной борьбы. Учебное пособие. Ч. 1. - ВВИА
им проф. Н.Е. Жуковского, 1998.
4. Chrzanowski, E.J. Active radar electronic countermeasures. - USA. Artech House. Inc., 1990.
5. Boyd, J.A. Electronic countermeasures. — USA. Penisular Publishing, 1978.
6. Леонов А.И., Фомичев К.И. Моноимпульсная радиолокация. — М.: Радио и связь, 1984.
7. Van Brunt. Applied ECM. Encyclopedia of ECCM tactics and techniques. - EW Engineering, USA,
1982, v. 2.
8. Stephen, L., Johnston, P.E. Radar electronic countermeasures. - USA. Artech House Inc., 1980.
9. Защита от радиопомех/ Под. ред. М.В. Максимова. - М: Сов. радио, 1976.
10. Boyd. J.A., Harris, D.R., King, D.D., Welch, H.W. Electronic countermeasures. - Peninsula Publish-
ing, 1960.
11. The International Countermeasures Handbook. EW Communications, Inc., 1977-78.
12. Cosgriff, R.L., Peak. W.H. and Taylor, R.C. Terrain Scatteiing Properities for Sensor System De-
sign/ Radars. V. 5. Radar clutter USA. The Artech Radar Library, 1975, pp. 165-286.
13. Справочник по радиолокации/ Под ред. Сколника. - М.: Сов. радио, 1976, т. 1, с. 231-256.
14. Radar Jamming: Equations. - The International Countermeasures Handbook, EW Communications,
Inc., 1979-1980, pp. 356-358.
15. Schleher, D. Curtis. Electronic warfare in the information Age. - The Artech House Radar Library,
1999.
16. Pettit, Ray H. ECM and ECCM Techniques for Digital Communications Systems. — Lifetime Learn-
ing Publications, 1982.
68
ЧАСТЬ ВТОРАЯ
Методы и техника создания помех
радиолокационных систем
обнаружения и распознавания
ГЛАВА 3. МЕТОДЫ И ТЕХНИКА СОЗДАНИЯ ПОМЕХ РЛС
ОБНАРУЖЕНИЯ
3.1. Типы РЛС обнаружения
В системе ПВО используются следующие типы РЛС: импульсные, непрерывные и
импульсно-доплеровские.
Принцип действия импульсной РЛС основан на излучении в пространство высо-
кочастотных импульсных сигналов с периодом повторения, согласованным с макси-
мальной дальностью обнаружения. Отраженный от цели сигнал после соответствую-
щей обработки в приемнике индицируется на экране индикатора или фиксируется ав-
томатическим устройством обнаружения.
Упрощенная структурная схема непрерывной РЛС представлена на рис. 3.1. Для
реализации непрерывной РЛС, как видно из рисунка, требуется когерентный высоко-
частотный передатчик и высокостабильный гетеродин. Сигнал гетеродина^ поступает
на первый смеситель, где смешивается с сигналом передатчика ^, в результате чего
формируется сигнал на частотеУо±Упч- Этот сигнал подается на второй смеситель, где
смешивается с отраженным от цели сигналом.
Рис. 3.1. Упрощенная структурная схема непрерывной РЛС
69
В результате формируется сигнал на частоте гетеродина, смещенный на частоту
доплера который далее подается на фазовый детектор, куда одновременно подается
сигнал гетеродина. На выходе фазового детектора выделяется сигнал только доплеров-
ской частоты, в результате чего обеспечивается обнаружение и селекция движущихся
целей. Для того, чтобы при этом обеспечивалась возможность измерения дальности,
частота передатчика модулируется по периодическому закону (обычно треугольному
или синусоидальному).
Структурная схема импульсно-доплеровской РЛС представлена на рис. 3.2. В
этом случае разрешающая способность по дальности такая же, как и в обычных им-
пульсных РЛС, но за счет использования высокой частоты следования импульсов воз-
никают проблемы неоднозначности измерения дальности, которые решаются обычно
путем модуляции или переключения трех сменных частот следования импульсов.
Приемо-
передающая
антенна
Рис. 3.2. Структурная схема импульсно-доплсровской РЛС
3.2. Методы создания помех по дальности РЛС обнаружения
Как указывалось выше, набор активных помех, реализуемых в современных сис-
темах РЭП, по целевому назначению можно разбить на две группы: маскирующие по-
мехи и имитационные [1-5].
В задачу активных маскирующих помех входит сокрытие информации о наличии
целей в зоне радиолокационного наблюдения. К наиболее универсальным видам мас-
кирующих помех относятся шумовые помехи. Действие их при достаточной мощности
приводит к тому, что экраны индикаторов РЛС полностью или частично засвечиваются
помехой, вследствие чего отметки реальных целей оказываются замаскированными
(рис. 3.3). Шумовые помехи подавляют в РЛС каналы обнаружения, селекции по даль-
ности и скорости, а также затрудняют угловую селекцию при большой мощности по-
мехи из-за их воздействия по боковым лепесткам диаграммы направленности прием-
ной антенны. Маскирующие шумовые помехи РЛС обнаружения могут быть сформи-
рованы следующими способами:
70
Рис. 3.3. Вид экрана ИКО при отсутствии помехи (о) и действии шумовой помехи
большой мощности на импульсную РЛС с фиксированной несущей частотой (б)
и с перестройкой несущей частоты от импульса к импульсу (в)
усилениехМ дробового или теплового шума электронных приборов в заданного диа-
пазоне частот для создания прямошумовой помехи, харак гсризусмой постоянной интен-
сивностью в широком спектре частот и нормальным законом распределения амплитуд;
флуктуационной модуляцией несущего колебания по амплитуде, фазе или частоте
либо их комбинацией;
путем запоминания радиолокационного сигнала и формирования из запомненных
копий помехового сигнала протяженной длительности вплоть до запоминания между-
импульсного интервала. В результате формируется наименее энергоемкий вид маски-
рующей помехи.
В зависимости от ширины спектра различают прицельную и заградительную шу-
мовые помехи. Прицельная шумовая помеха характеризуется узким спектром, соизме-
римым с полосой пропускания приемника подавляемой РЛС, и в этом отношении име-
ет энергетические преимущества перед заградительной помехой. С учетом разброса
приемников РЛС по полосе пропускания и возможной неточности наведения частоты
помехи на несущую частоту РЛС ширина спектра прицельной шумовой помехи обычно
выбирается равной 10 МГц.
Заградительная помеха характеризуется широким спектром шумов, достигающим
величины 300...500 МГц, и в принципе, в отличие от прицельной помехи, может одно-
временно воздействовать на несколько РЛС, в том числе и на РЛС с ограниченной пе-
рестройкой по частоте. Но это дастся ценой энергетических потерь, поскольку для дос-
тижения одинакового эффекта передатчик заградительной помехи должен иметь зна-
чительно большую мощность, чем передатчик прицельной шумовой помехи, и много
энергии растрачивается бесполезно на прикрытие помехой участков диапа юна частот,
которые нс используются РЛС.
Канал обнаружения является важнейшим каналом РЛС любого типа. Поэтому не-
случайно, что в подавляющем большинстве при РЭП РЛС предусматриваются режимы
создания шумовых помех. При этом реализуются как заградительные, так и прицель-
ные по частоте шумовые помехи. Примерами таких систем являются американские са-
молетные системы РЭП AN/ALQ-94; -99; -119; -131; -97/137; -161; -165 и другие [6-10].
Кроме прицельных и заградительных помех применяются скользящие по частоте
шумовые помехи, представляющие собой сравнительно узкополосный шум (30-..40 МГц),
перестраиваемый в широкой полосе частот. Такие помехи позволяют в определенной
мере сохранить преимущества прицельных и заградительных шумовых помех, по-
скольку обеспечивают в течение определенного времени высокую плотность мощности
71
помехи во всех перекрываемых рабочих каналах РЛС. Эффект маскировки можно так-
же создать при перестройке частоты передатчика помех по хаотическому закону без
применения узкополосного шума.
Известно, что помеха со скользящей частотой предусмотрена в американской сис-
теме РЭП AN/ALQ-99E и западногерманской системе ES-400G [8].
К разряду маскирующих помех можно отнести также несинхронные импульсные
помехи с низкой и высокой частотами посылок. Такие помехи создают крупно- или
мелкозернистую структуру засветки индикаторов с яркостной отметкой или множество
перемещающихся по определенному или хаотическому закону импульсных отметок на
амплитудных индикаторах, затрудняя обнаружение реальной цели. Следует отметить,
что рассмотренные активные маскирующие помехи относятся к категории “силовых”
средств радиоэлектронного подавления, поскольку предусматривают подавление РЛС
ценой достаточно большой мощности.
К маскирующим помехам относится также двухчастотная помеха скрытного дей-
ствия. Принцип создания ее состоит в том, что в направлении подавляемой РЛС излу-
чаются два высокочастотных сигнала, частоты которых находятся в пределах рабочего
диапазона РЛС и разнесены на величину, равную промежуточной частоте приемника
РЛС. При действии такой помехи на выходе смесителя приемника РЛС за счет детек-
тирования будет формироваться сигнал промежуточной частоты, который будет вызы-
вать перегрузку приемника и препятствовать приему полезной информации. Скрыт-
ность двухчастотной помехи обусловливается тем, что ее действие может не сопрово-
ждаться помеховыми признаками на индикаторах. По имеющимся в распоряжении
данным двухчастотная помеха реализуется в американской системе AN/ALQ-99E [8].
В задачу имитационных помех входит не сокрытие (маскировка) полезной ин-
формации, а создание ложной информации. При воздействии их на каналы обнаруже-
ния это, как правило, проявляется в избыточности информации, создаваемой с помо-
щью помеховых сигналов с параметрами, мало чем отличающимися от параметров ре-
альных отраженных сигналов. Примером такой помехи каналу обнаружения РЛС явля-
ется многократная ответная помеха (МОП). Принцип создания ее состоит в том, что
передатчик помех в ответ на принятый импульс РЛС излучает на той же частоте серию
аналогичных по форме импульсов, разбросанных по дальности и углу и имитирующих
множество целей (рис. 3.4).
Рис. 3.4. Вид экрана ИКО при воздействии многократной ответной помехи
на РЛС с фиксированными рабочей частотой и частотой следования импульсов (о),
с фиксированной рабочей частотой и вобуляцией частоты следования импульсов (б)
и перестройкой рабочей частоты от импульса к импульсу (в)
72
Наличие такой помехи затрудняет оператору
выбор истинной цели и снижает эффективность рабо-
ты системы обнаружения и целеуказания. Поэтому
вместо реальной цели может быть предпринят пере-
хват многих ложных целей, что приведет к распыле-
нию сил и средств ПВО и скажется на вероятности
прорыва боевых самолетов к объекту. В целях повы-
шения эффективности многократная ответная помеха
может комбинироваться с шумовой помехой, в ре-
зультате чего имитируются цели, прикрываемые по-
становщиком помех, и создается иллюзия большей
вероятности, что ложные цели являются реальными
Рис. 3.5. Вид экрана ИКО РЛС
с фиксированными несущей
частотой и частотой
следования импульсов
при действии многократной
ответной помехи в сочетании
с шумовой помехой
(рис. 3.5) .
Учитывая широкое распространение маскирую-
щих и имитационных помех, разработчики РЛС
большое внимание уделяют их помехозащищенности
[11, 12]. Наиболее эффективным методом помехоза-
щиты является перестройка несущей частоты от им-
пульса к импульсу. В этом случае исключаются поме-
хи, создаваемые на ближних дальностях к РЛС (см. рис. 3.3,в и 3.4,в). Введение вобу-
ляции частоты повторения импульсов приводит к расплывчатости помеховых меток на
экране индикатора на дальностях, меньших дальности до постановщика помех, или их
полное устранения (рис. 3.4,6).
3.3. Методы создания помех по угловым координатам РЛС обнаружения
Помеха по дальности может быть одновременно и помехой по угловым координа-
там, если ее мощность достаточна, чтобы действовать через область боковых лепестков
ДНА РЛС. Как видно из приведенных в предыдущем разделе иллюстраций, мощная шу-
мовая помеха создает засветку экрана в направлении боковых лепестков ДНА РЛС и
имитирует наличие постановщиков помех, разнесенных в пространстве.
При создании МОП, используя соответствующую синхронизацию излучения от-
ветных импульсов с периодом обзора РЛС и соответствующую амплитудную модуля-
цию, можно имитировать сложную воздушную обстановку, характеризующуюся мно-
жеством ложных целей, нс отличающихся от реальных, разбросанных по дальности и
угловым координатам (рис. 3.5). Эффективность при этом повышается.
В целях усиления дезинформации по угловым координатам можно прибегнуть к
так называемой инверсной помехи, принцип создания которой поясняется рис. 3.6.
Как видно из рисунка, на вход системы РЭП поступает пачка импульсных сигна-
лов с огибающей, аналогичной форме ДН передающей антенны РЛС (рис. 3.6,я). Про-
ходя через усилительную систему, данные сигналы подвергаются инверсному усиле-
нию, согласованному с формой ДНА РЛС, благодаря которому мощность на выходе
системы РЭП понижается пропорционально увеличению мощности входных сигналов
и повышается при снижении входной мощности. В результате на выходе системы РЭП
формируется пачка импульсов с огибающей, обратной по форме ДНА РЛС (рис. 3.6,6).
Если инверсное усиление хорошо согласовано с формой ДН антенны РЛС, то при
73
Рис. 3.6. Принцип формирования
инверсной помехи: огибающая
зондирующего сигнала РЛС на входе
приемника системы РЭП (а),
огибающая ретранслированного
сигнала при инверсном усилении (б);
сигнал инверсной помехи
на входе приемника РЛС (в)
приеме такой пачки сигналов на выходе приемной
антенны РЛС будет формироваться широкая пачка
импульсов, захватывающая область боковых лепе-
стков ДНА и имеющая постоянную амплитуду
(рис. 3.6,в). В результате на экранах индикаторов
РЛС будет индицироваться метка цели увеличен-
ных размеров. При использовании инверсной
шумовой помехи вид на экранах индикаторов бу-
дет характеризоваться сплошной равномерной
засветкой в пределах сканирования антенны (рис.
3.7), существенно отличающейся от дискретной
засветки экранов при действии обычной шумовой
помехи (см. рис. 3.3) [5].
Принцип инверсного усиления можно исполь-
зовать и при создании многократной ответной по-
мехи. В совокупности с программированием лож-
ных целей по дальности, углам и размерам инверс-
ное усиление позволяет создать на экранах индика-
торов РЛС очень сложную обстановку, не позво-
Рис. 3.7. Вид экранов индикаторов типа В (а)
и ИКО (5) при действии инверсной шумовой помехи
на РЛС с фиксированной несущей частотой
ляющую радиолокатору при работе с
фиксированными несущей частотой
и частотой следования импульсов
обнаруживать реальные цели (рис.
3.8). Как видно, при использовании
инверсного метода формирования
помехи эффект действия ее создается
и по угловым координатам.
Структурная схема компенса-
тора боковых лепестков представ-
лена на рис. 3.9. В этом случае по-
меховый сигнал детектируется в
обоих приемниках А и В, и, если
уровень сигнала в приемнике В бо-
лее высокий, что указывает на по-
ступление его через боковые лепе-
стки ДНА РЛС, то этот сигнал
компенсируется.
Рис. 3.8. Вид экранов индикаторов типа В (а)
и ИКО (б) при действии инверсной многократной
ответной помехи на РЛС с фиксированными несущей
частотой и частотой следования импульсов
74
Рис. 3.9. Структурная схема системы компенсации боковых лепестков
Рис. 3.10. Диаграммы направленности
на согласованной поляризации и кроссполяризации
В процессе компенсации амплитуда и фаза помехового сигнала с помощью замк-
нутой обратной связи подстраиваются таким образом, чтобы помеховый сигнал мини-
мизировался в основном приемном канале. Цель этого метода компенсации - снижение
уровня помехового сигнала в основном приемном канале, и как следствие, улучшение
отношения сигнал-шум для сигнала, принимаемого главным лепестком ДНА приемни-
ка А. Показано [5], что с помощью данного метода можно достигнуть уровня компен-
сации порядка 30 дБ.
В ответ на данные методы поме-
хозашиты разработчики средств РЭП
предложили помеху, рассчитанную на
прохождение через боковые лепестки
ДНА РЛС на кроссполяризации. Осно-
ванием этого являются поляризацион-
ные характеристики антенн. Как пока-
зано на рис. 3.10, диаграммы направ-
ленности по уровню и форме сущест-
венно зависят от поляризации прини-
маемых сигналов. Поэтому сигнал,
вводимый в антенну с поляризацией,
отличающейся от рабочей поляриза-
ции, может существенно исказить ДН
антенн А и В, в результате чего логи-
ческие критерии эффективной компен-
сации такого сигнала станут неэффективными.
Из рисунка видно, что при приеме сигналов на кроссполяризации через боковые
лепестки ДН основная антенна А обеспечивает большее усиление, чем дополнительная В.
Поэтому сигналы на кросс-поляризации, поступающие через боковые лепестки ДНА,
не будут компенсироваться и будут проходить на анализирующие устройства. Иными
75
словами, компенсационный метод помехозащиты в этом случае становится неэффек-
тивным. Следует иметь в виду, что серьезное нарушение работы компенсационных
устройств возможно при достаточно точном наведении помехи на кроссполяризацию (с
точностью до единиц градусов) приемных антенн РЛС. В случае, когда РЛС имеет
единую приемопередающую антенну, наведение помехи на кроссполяризацию с ука-
занной точностью вполне достижимо по поляризации зондирующих сигналов РЛС,
совпадающей с поляризацией приемной антенны. Однако в ряде случаев приемная и
передающая антенны раздельные, и их поляризации могут не совпадать. В этом случае
наведение помехи на кроссполяризацию по зондирующим сигналам РЛС становится
невозможным.
3.4. Техника создания шумовых помех РЛС обнаружения
Техническим средством создания шумовых помех являются передатчики различ-
ных типов. Ниже приведены их основные характеристики и структурные схемы.
Основные характеристики передатчиков шумовых помех. Передатчики шумо-
вых помех - это устройства, излучающие щумоподобные сигналы в частотном диапазоне
подавляемой радиоэлектронной системы с целью уменьшения ее эффективности.
В упрощенном виде передатчик шумовых помех можно представить в виде по-
следовательного соединения генератора шума с выходной мощностью Рш, линии пере-
дачи и антенны с коэффициентом усиления Gn. Так как все высокочастотные элементы
между генератором шума и антенной обладают потерями, то излучаемая передатчиком
мощность шумовой помехи
-^изл
где Lo - потери в высокочастотном тракте.
Помимо излучаемой мощности передатчик шумовой помехи характеризуется цен-
тральной частотой и спектром, ширина которого определяется частотной характери-
стикой по уровню 3 дБ. Важными параметрами являются равномерность спектральной
плотности шумовой помехи по диапазону и стабильность, т.е. способность обеспечи-
вать номинальные рабочие характеристики при изменении питающих напряжений,
времени работы, климатических и механических условий применения.
Передатчики заградительных шумовых помех. Можно выделить несколько ос-
новных типов передатчиков заградительных помех: прямошумовые передатчики; пере-
датчики помех, использующие мощный источник высокочастотных колебаний, моду-
лируемый по частоте смесью периодического сигнала и шума, или частотно перестраи-
ваемый по пилообразному закону или случайному закону в заданном диапазоне частот
без модуляции или с дополнительной частотной модуляцией шумом; передатчики син-
хронных импульсных шумовых помех, а также передатчики, излучающие очень корот-
кие импульсы. Возможны также их комбинации.
Прямошумовой передатчик представляет собой передатчик заградительных помех
с маломощным задающим источником шума. В качестве задающего генератора может
использоваться полупроводниковый шумовой диод или резистор. Мощность шумовой
помехи постоянна во времени; спектральная плотность мощности помехи постоянна в
определенной полосе частот, и эта область частот не изменяется во времени. Диапазон
и полоса шумовой помехи определяются частотой гетеродинирования или полосовыми
фильтрами, обычно включаемыми между первичными источниками шума и антенной.
76
Прямошумовая помеха создается с помощью широкополосного усилителя с
большим коэффициентом усиления, реализация которого представляет серьезные тех-
нические трудности. Коэффициент полезного действия таких усилителей довольно
низкий, особенно при их работе в линейном режиме усиления, когда для сохранения
нормального закона распределения амплитуд шума необходимо, чтобы его средне-
квадратическое значение было на 10 дБ и более ниже уровня амплитудного ограниче-
ния. Работа усилителя в режиме насыщения позволяет реализовать максимальный
КПД, но при этом амплитудное ограничение выбросов шума изменяет его статистику,
делая его негауссовской. Однако, если частотная полоса прямошумовой помехи много
шире полосы пропускания подавляемого приемника, то распределение плотности веро-
ятности амплитуд шума на выходе УПЧ приближается к гауссовскому даже при силь-
ном ограничении. В передатчике заградительных шумовых помех с мощным источни-
ком шума в качестве генератора применяется ЛОВ, способная перестраиваться во всем
требуемом диапазоне частот. Частотная модуляция в широком диапазоне обеспечива-
ется генератором синусоидальных колебаний; для получения сплошного спектра име-
ется еще генератор шума. Шумовой сигнал может использоваться также для амплитуд-
ной модуляции. Управление полосой частот передатчика заградительных помех этого
типа осуществляется амплитудой модулирующего сигнала. Управление центральной
частотой заградительной помехи осуществляется изменением среднего напряжения на
управляющем электроде ЛОВ.
Один из вариантов такого передатчика заградительных помех - мощный управ-
ляемый напряжением генератор типа ЛОВ, модулируемый по частоте пилообразным
напряжением. Управление центральной частотой заградительной помехи осуществля-
ется средним постоянным напряжением на управляющем электроде ЛОВ, а управление
полосой частот спектра помехи - амплитудой пилообразного сигнала. Форма результи-
рующего спектра помехи близка к колоколообразной.
Для эффективного подавления РЭС период пилообразного сигнала модуляции пе-
редатчика заградительных помех не должен превышать величины, обратной величине
полосы пропускания подавляемого радиолокационного приемника (в этом случае со-
седние спектральные линии не подавляются друг другом). При подавлении РЛС с ЧМ
(со сжатием) период пилообразного сигнала должен быть равен длительности излучае-
мого РЛС сигнала, в этом случае в фильтре сжатия РЛС всегда будет присутствовать
сигнал помехи. При введении дополнительного источника шумовой модуляции сосре-
доточенный по спектру шум перестраивается по диапазону частот заградительной по-
мехи, а полученный сложный сигнал модулируется по амплитуде шумами, при этом
формируется сигнал помехи, очень близкий к белому шуму (непрерывный и однород-
ный спектр).
Другой тип передатчика заградительных помех может оыть реализован путем
частотной модуляции маломощного генератора сигнала помехи псевдослучайной по-
следовательностью импульсов. Для формирования такой последовательности в пере-
датчике заградительных помех используется регистр сдвига с обратной связью. Вы-
ходное напряжение регистра сдвига, преобразованное в аналоговую форму, использу-
ется для управления несущей частотой генератора. Если длительность псевдослучай-
ной последовательности синхронизировать с периодом повторения принимаемых ра-
диолокационных импульсов, то на индикаторе кругового обзора подавляемой РЛС соз-
дается картина наличия многих целей, обладающая большими дезинформирующими
77
свойствами, либо просто шумовые полосы. При использовании таких помех для подав-
ления нескольких РЛС частота синхронизации должна быть равна обратной величине
наибольшей длительности радиоимпульсов для этих РЛС.
Перекрытие всего частотного диапазона заградительной шумовой помехой может
осуществляться не непрерывно во времени, а дискретно импульсами. Этот вид загради-
тельной помехи называется шумовой накрывающей помехой - импульс шума как бы
накрывает отраженный от цели радиолокационный сигнал. Это очень эффективный
способ радиолокационного подавления как РЛС обнаружения, так и РЛС сопровожде-
ния, поскольку сигнал помехи всегда попадает в строб дальности РЛС.
Заградительная помеха может формироваться также путем излучения очень ко-
ротких импульсов. Чем уже импульс, тем шире его спектр. Поскольку средняя мощ-
ность последовательности импульсов очень мала, необходимо генерировать очень ко-
роткие импульсы с большой пиковой мощностью. Такая помеха вызывает переходные
процессы в цепях приемника РЛС. Недостаток такой помехи в том, что она может быть
ослаблена в приемнике с помощью амплитудного ограничителя.
Групповые передатчики заградительных помех. Достоинством таких пере-
датчиков является их функциональная простота и способность перекрывать весьма
широкую полосу частот. Однако последнее может оказаться и недостатком, если пе-
редатчики подавляемых средств имеют очень большую мощность. В этом случае
шумовая помеха будет недостаточно эффективно маскировать сигналы на экране ин-
дикаторов РЛС.
Увеличение энергетических возможностей передатчиков заградительных помех
может быть достигнуто размещением на одном носителе нескольких передатчиков, ка-
ждый из которых имеет свою передающую антенну [3, 4]. При этом в зависимости от
электронной обстановки можно увеличить спектральную плотности мощности помехи
либо в одной полосе частот, либо в несовпадающих полосах (более узких), но стыкую-
щихся и перекрывающих ту же общую частотную полосу, что и в первом случае. В
обоих случаях обеспечивается одинаковая спектральная плотность шумовой помехи.
Однако в первом случае выход из строя одного передатчика лишь уменьшает спек-
тральную плотность мощности помехи, тогда как воздействие помехи остается. Во вто-
ром же случае это вызовет появление нс замаскированного участка диапазона. Если
предположить, что все передатчики помех в группе одинаковы, то полная излучаемая
мощность группы передатчиков будет равна сумме мощностей, излучаемых каждым
передатчиком помех. Достоинство группы передатчиков шумовых помех, работающих
в одном диапазоне, состоит также в более равномерном распределении спектральной
мощности помехи по диапазону и в меньших потерях мощности вне этого диапазона
частот по сравнению со случаем раздельной настройки. Недостатком группового пере-
датчика помех является наличие дополнительных потерь результирующей излучающей
мощности, обусловленных трудностями размещения на носителе нескольких антенн и
эффектом взаимного влияния передатчиков. Компромиссным решением будет исполь-
зование двух или трех передатчиков помех, работающих в одном частотном диапазоне;
в этом случае удельные показатели, такие как отношение излучаемой мощности к мас-
се, габаритным размерам и потребляемой мощности, остаются еще приемлемыми при
сохранении остальных преимуществ группового передатчика.
Для повышения эффективности воздействия заградительных шумовых помех
кроме простого увеличения числа передатчиков могут использоваться другие способы
наращивания излучаемой мощности
78
На рис. 3.11,я приведена структурная схема передатчика с двумя источниками
шума. Оба передатчика работают на одной центральной частоте, имеют одинаковую
ширину спектра помехи и мощности Р\ и Р2, антенные системы их одинаковы и имеют
коэффициент усиления G. В этом случае суммарная излучаемая мощность шумовой
помехи будет равна (P\+Pt)G. Так как источники шума независимы, то интерференция
отсутствует. Аналогичный результат можно получить, используя один источник шума,
но с двумя усилителями на ЛБВ с выходной мощностью Р\, Р2 (рис. 3.11,6). В этом
случае сигналы от двух ЛБВ складываются синфазно и излучаются через общую ан-
тенну с коэффициентом G. Если принять, что потери на суммирование равны нулю, то
мощность, излучаемая таким передатчиком, также будет равна (Pi+ Pt)G, но для этого
достаточно одной антенны, что позволяет существенно облегчить решение проблемы
размещения антенных систем на самолете. В реальной системе при объединении пере-
датчиков помех всегда имеются потери, однако они не превышают 1 дБ. Недостаток
этого способа состоит в том, что если ЛБВ выйдет из строя, то излучаемая мощность
может уменьшиться более чем на 3 дБ, в зависимости от метода суммирования.
Рис. 3.11. Структурная схема передатчиков помех с раздельными передатчиками (о),
с суммированием мощноеги передатчиков (б), с фазированной антенной решеткой (в)
На рис. 3.11,6 показана другая структурная схема передатчика, использующая
один источник шума, две ЛБВ с выходной мощностью Р\, Р2 и две одинаковые антен-
ны с коэффициентом G. Путем соответствующей фазировки высокочастотных трактов
излучаемую мощность можно сделать равной 2(P\+P2~)G, а суммарная диаграмма на-
правленности (зависящая от величины разнесения антенн) будет иметь более узкий
луч, чем в двух предыдущих случаях.
Передатчики прицельных шумовых помех. Для радиоэлектронного подавления
РЛС обнаружения наряду с передатчиками заградительных помех используются пере-
датчики прицельных шумовых помех. Эти устройства представляют собой узкополос-
ные перестраиваемые по частоте СВЧ-генераторы, модулируемые по амплитуде или час-
тоте шумами или периодическим сигналом, либо их комбинацией. В таких передатчиках
также могут использоваться прямошумовые методы формирования помехи. Для опреде-
79
ления частоты сигналов РЛС, настройки передатчиков помех на несущую частоту подав-
ляемой РЛС и контроля за се работой применяется панорамный приемник с частотным
сканированием. Передатчик помех настраивается на частоту обнаруженной РЛС, причем
излучаемый сигнал периодически прерывается с тем, чтобы можно было проверить, не
изменила ли подавляемая РЛС частоту. От того, насколько точно передатчик помех мо-
жет быть настроен на требуемую частоту, зависит ширина спектра помехи.
Для подавления связных систем с непрерывным излучением берется узкий спектр
помехи, при этом передатчик настраивается с точностью до сотен или даже десятков
герц; если подавлению подлежит РЛС, то необходим спектр помехи более широкий, и
достаточна настройка передатчика с точностью 0,5 МГц.
Основное достоинство передатчика прицельных маскирующих помех заключается
в его способности концентрировать всю мощность в узкой полосе частот, в связи с чем
такой передатчик способен осуществить подавление связных приемников или приемни-
ков РЛС на больших расстояниях, чем это может обеспечить передатчик шумовых загра-
дительных помех. При определенных условиях такие передатчики помех способны пере-
грузить УПЧ подавляемых приемников, однако эти условия предполагают малые даль-
ности до РЛС и соответствующую ориентацию направленных антенн передатчиков по-
мех. Для обеспечения одной и той же дальности подавления РЛС передатчик прицель-
ных помех может быть меньше и легче, чем передатчик заградительных помех.
Механизм действия маскирующей помехи с флуктуационной частотой модуляции
основан на преобразовании в нем частотно-модулированного колебания в амплитудно-
модулированное. Приемник импульсной РЛС является амплитудным приемником, со-
стоящим из детекторного частотно-избирательного тракта (высокочастотная часть и
УПЧ) и, собственно, детектора. Эффективность ЧМ-помехи зависит от того, насколько
эффективно будет преобразована ее энергия в интенсивность флуктуаций на выходе
детектора, и в какой мере их вероятностные распределения и спектр обеспечивают
максимальное маскирующее влияние на характеристики обнаружения цели. В основ-
ном, интенсивность флуктуаций на выходе детектора приемника зависит от параметров
модулированных колебаний и полосы пропускания додетекторного тракта. Она опре-
деляется как разность между полной интенсивностью тока и средним значением тока
детектора. В [13, 14] развит общий метод исследования прохождения колебаний с
флуктуационной угловой модуляцией через тракт амплитудного приемника с квадра-
тичным детектором и получены формулы для расчета среднего квадрата тока, постоян-
ного тока и интенсивности флуктуаций от девиации частоты или фазы, времени корре-
ляции модулирующих флуктуаций, постоянной времени приемника для двух случаев,
когда частота модулированного колебания совпадает или расстроена относительно час-
тоты приемника. Полученные соотношения позволяют оценить изменение составляю-
щих тока детектора от таких характерных параметров, как эффективное отклонение
частоты, ширины модулирующего спектра и полосы пропускания приемника, которые
имеют важное практическое значение.
Маскирующие свойства частотно-модулированной флуктуациями помехи зависят
от ширины спектра модулирующего шума и полосы приемника. При частотной моду-
ляции широкополосными шумами на выходе УПЧ возникает случайная во времени по-
следовательность накладывающихся друг на друга импульсных откликов. Так как
средняя частота этих откликов оказывается много больше ширины полосы пропуска-
ния УПЧ, то процесс на его выходе приближается к гауссовскому, т. е. помеха оказы-
вается близкой к прямошумовой по эффекту воздействия.
80
В случае частотной модуляции низкочастотными шумами отклики приемника при
проходе его полосы пропускания несущей частотой сигнала помехи появляются раз-
дельно и представляют собой хаотическую во времени последовательность отдельных
импульсов с длительностью примерно обратно пропорциональной полосе пропускания
приемника. При этом увеличение эффективности связанно с тем, что на выходе второго
детектора приемника создается больше мощности видеосоставляющей, чем в случае
частотной модуляции широкополосными шумами. Кроме того, увеличение видеомощ-
ности более эффективно маскирует на экране индикатора отметки малоразмерных це-
лей. Это связано с мешающим эффектом, вызываемым сходством многих ярких точеч-
ных засветок с отметками от небольших целей. Главным недостатком такой помехи яв-
ляется то, что от нее можно защититься, так как помеха имеет прерывистый характер.
Во многих случаях для управления мгновенной частотой передатчика маскирующих
прицельных помех используются псевдослучайные последовательности, позволяющие
гибко управлять параметрами помехи. Кроме того, псевдослучайную последователь-
ность можно синхронизировать по времени с импульсами РЛС, это обеспечивает воз-
можность получения целого ряда преимуществ по накоплению шума в процессе интег-
рирования его в приемнике.
Недостатком передатчиков прицельных маскирующих помех является неполная
автоматизация их работы, в результате чего быстродействие их невысоко. Поэтому к
таким передатчикам предъявляется требование повышенной скорости настройки поме-
хи по частоте. Однако следует помнить, что даже передатчик прицельных шумовых
помех, способный настраиваться на несущую частоту РЛС за время, не превышающее
длительность импульса РЛС, не может замаскировать шумами интервал дальности ме-
жду радиолокатором и постановщиком помех, если РЛС перестраивается по частоте от
импульса к импульсу. Кроме того, для подавления каждой из обнаруженных РЛС или
канала связи в передатчиках прицельных маскирующих помех требуются отдельные
передатчики, сложность которых зависит от сложности подавляемого РЭС. К тому же
эти системы не приспособлены для создания помех РЛС, работающим одновременно
на различных несущих частотах.
Для создания прицельных шумовых помех многим РЛС в станциях индивидуаль-
ной защиты в качестве задающего устройства применяются генераторы с быстрой
цифровой перестройкой частоты. Для обеспечения малого времени установления час-
тоты, уменьшения посленастросчного дрейфа и высокой повторяемости настройки в
широкой полосе частот, например, в диапазоне от 2,5 до 5 ГГц, сигнал помехи форми-
руется путем смешивания в балансном смесителе колебаний генератора на диоде Ганна
с электронной перестройкой в диапазоне 12... 14,5 ГГц и модулируемого генератора
частоты 17 ГГц, имеющего полосу перестройки 1 ГГц. В высокочастотном генераторе с
помощью двух варакторов осуществляется раздельное управление частотой (через
цифроаналоговый преобразователь) и частотная модуляция с очень высокой частотой
(до 80 МГц), что позволяет получить весьма широкополосные сигналы помехи (до 600 МГц).
Такие генераторы, выполненные в виде интегральных схем, могут за 100 нс настраи-
ваться на заданную частоту с точностью до 3 МГц; в них используется тсрмостабили-
зация; они обеспечивают выходной сигнал мощностью 1 мкВт с относительным уров-
нем паразитной составляющей до - 60 дБ [15].
Все более широкое применение получают РЛС с когерентно-импульсным излуче-
нием. Подавление таких РЛС требует создания узкополосных шумовых помех с весьма
высокими уровнями спектральной плотности. В качестве формирователей узкополос-
81
ных помех в этом случае применяются цифровые устройства запоминания сигнала. В
них используется метод преобразования сигналов диапазона промежуточной частоты,
которые затем преобразуются из аналоговой формы в цифровую и запоминаются в бы-
стродействующем запоминающем устройстве с произвольной выборкой. По вызову из
памяти сигналы в цифровой форме проходят преобразования в обратном порядке, в ре-
зультате восстанавливаются частоты введенных в ЗУ сигналов (копий) СВЧ-диапазона.
Если считывание копий радиолокационных импульсов производится таким образом,
чтобы сформировался непрерывный сигнал, то такой сигнал после модуляции узкопо-
лосными шумами будет представлять собой помеху, способную нарушить функциони-
рование каналов дальности и скорости РЛС с когерентно-импульсным излучением. Та-
кой метод создания узкополосных шумовых помех используется в системе РЭП
AN/ALQ-161 американского бомбардировщика В-1В для противодействия новым и
перспективным импульсно-доплеровским РЛС [16].
Ниже рассматриваются различные схемы зарубежных передатчиков прицельных
помех.
Передатчик прицельных шумовых помех на лампе обратной волны. В таком пере-
датчике (рис. 3.12) имеется мощный СВЧ-генератор на ЛОВ, модулируемый по частоте
смесью шума и периодического (синусоидального) сигнала, либо по амплитуде шумовым
сигналом. Обычно источник шума генерирует шумы с полосой не более 10 МГц как для
частотной, так и для амплитудной модуляции. При этом выбирается небольшой индекс
частотной модуляции шумами и большой индекс частотной модуляции синусоидальным
сигналом. Если синусоидальная частота модуляции образует линейчатый спектр, то добав-
ление шумовой частотной модуляции образует сплошной спектр помехи. Ширина этого
спектра регулируется амплитудой синусоидального сигнала. Для наведения помехи на час-
тоту подавляемой РЛС используется панорамный приемник.
Рис. 3.12. Структурная схема передатчика прицельных шумовых
помех на лампе обратной волны
Одноантенный передатчик прицельных шумовых помех. Если передатчик шу-
мовых помех имеет одну антенну для приема и передачи, то в этом случае приемник и
перестраиваемый по частоте источник шума могут соединяться с антенной через цир-
кулятор. Приемник просматривает диапазон частот, представляющий интерес, обнару-
живает радиолокационный сигнал, включает передатчик шумов и настраивает его та-
ким образом, чтобы спектр помехи накрывал частоту РЛС. Такой передатчик помех
имеет сравнительно низкую чувствительность из-за того, что выходной сигнал помехи
82
через циркулятор проникает на вход приемника. Этот тип передатчика помех находит
применение на малоразмерных объектах для самозащиты или в передатчиках помех
одноразового действия.
Одноантенный передатчик прицельных шумовых помех с суммированием по
мощности. В таком передатчике используется один источник шума и несколько полу-
проводниковых усилителей, запитываемых от генератора шума с помощью разветвите-
ля; выходные сигналы усилителей суммируются синфазно, что позволяет обеспечить
результирующую мощность почти равной сумме мощностей отдельных усилителей.
Этот тип передатчика создает прямошумовую помеху. Он может использоваться в пе-
редатчиках помех одноразового действия.
Одноантенный передатчик прицельных шумовых помех, состоящий из не-
скольких мощных источников шума. Если в передатчике прицельных помех приме-
няется несколько мощных перестраиваемых по частоте источников шума, каждый из
которых настраивается на определенную частоту, то все эти источники шума с помо-
щью сумматора могут работать на общую широкодиапазонную антенну. Такой пере-
датчик может устанавливаться на любых объектах с пространственными ограничения-
ми, он обеспечивает одновременное формирование помехи многим РЭС, и может ис-
пользоваться также в качестве передатчика шумовых помех одноразового действия.
Передатчик прицельных шумовых помех с поисковым приемником. Для фор-
мирования прицельной по частоте шумовой помехи имеется приемник поиска и слеже-
ния за частотой РЛС, соединенный с усилителем на ЛЕВ; в состав передатчика входит
генератор шума. Принятый приемной антенной сигнал модулируется шумами, усили-
вается в ЛЕВ и поступает в передающую антенну. В передатчике прицельных помех
такого типа используются две антенны. Для одновременного подавления излучающих
РЛС в передатчике помех имеется несколько параллельных каналов. Каждый канал
представляет собой передатчик шумовых помех, состоящий из мощного широкополос-
ного источника шума, перестраиваемого фильтра и отдельной антенны. Выходной сиг-
нал каждого передатчика помех фильтруется с помощью полосового фильтра. Для
обеспечения электромагнитной совместимости (ЭМС) с радиоэлектронными средства-
ми, установленными на носителе, частотные характеристики полосовых фильтров пе-
редатчика выбираются с учетом рабочих частот этих средств.
Передатчик прицельных шумовых помех с коммутируемой многоотводной
линией задержки. В состав передатчика входят источники шума, многоотводная линия
задержки (ЛЗ), вращающийся переключатель, усилитель на ЛЕВ и антенна. Отводы ли-
нии задержки заведены на контакты переключателя: ползунок переключателя связан с
ЛЕВ. При периодическом вращении переключателя на вход ЛЕВ поочередно переда-
ются шумовые сигналы со все возрастающей задержкой, вследствие чего на выходе
ЛЕВ формируется непрерывный СВЧ-сигнал помехи. Время переключения очень мало
по сравнению с длительностью выборки шума, а время, в течение которого контакты
замкнуты, примерно равно длительности выборки. Переключатель может быть как ме-
ханическим, так и электронным, в последнем случае получается существенное увели-
чение быстродействия.
Передатчик прицельных шумовых помех, использующий высокочувствитель-
ный усилитель с частотно-избирательной обратной связью. В состав такого пере-
датчика помех вводится приемник мгновенного измерения частоты со своей антенной,
перестраиваемый полосовой фильтр, генератор шумового сигнала, использующий СВЧ
83
усилитель с внешней обратной связью, в цепи которого имеется частотно-
избирательный полосовой фильтр, и передающая антенна. Радиолокационный сигнал
принимается приемной антенной, измеряется его частота и настраивается центральная
частота полосового фильтра на несущую частоту сигнала РЛС. С выхода полосового
фильтра сигнал поступает в СВЧ усилитель генератора шумового сигнала, в котором
благодаря обратной связи быстро устанавливаются колебания с максимальной мощно-
стью на несущей частоте РЛС. Таким образом, создается шумовая помеха, прицельная
по частоте. Полоса и шумоподобные свойства помехи определяются характеристикой
полосового фильтра и тонкой структурой частотной характеристики усилителя.
Обычно передатчик прицельных шумовых помех с частотно-избирательной об-
ратной связью имеет несколько каналов. Каждый канал состоит из последовательно со-
единенных: полосового фильтра с требуемой шириной полосы пропускания, детектора,
усилителя и импульсного генератора, сопряженного с фильтром в цепи внешней об-
ратной связи усилителя. Полосовые фильтры связаны с приемной антенной через раз-
ветвитель. Для создания высокой спектральной плотности шумовой помехи ширина
полосы такого фильтра должна в 2-3 раза превышать полосу пропускания УПЧ прием-
ника подавляемой РЛС. Выходной сигнал каждого частотно-избирательного канала де-
тектируется, усиливается и используется для запуска импульсного генератора, дли-
тельность импульса которого определяет время создания помехи. Этот импульс вклю-
чает соответствующую цепь обратной связи; если строб-импульс не подается, то гене-
рация колебаний отсутствует и помеха не излучается.
Когда один или более частотно-избирательных каналов обратной связи замыка-
ются, усиление в замкнутой цепи становится больше единицы, и возникают колебания
в полосе, определяемой полосой пропускания фильтра; частота помехи определяется
частотой принятого сигнала РЛС и набегом фазы в генераторе с обратной связью. Мак-
симальная мощность помехи достигается при работе усилителя мощности в режиме на-
сыщения. Описанные передатчики используются для создания ложных целей для РЛС
противника.
Передатчик прицельных помех с многоканальными частотно-
избирательными системами. На рис. 3.13 показана структурная схема передатчика
прицельных шумовых помех, создающего за время длительности радиолокационного
импульса шумовую помеху на частоте РЛС.
Для определения требуемой частоты передатчика используется многоканальный
фильтровый приемник. Выходной сигнал каждого фильтра подается на детектор и со-
ответствующий коммутатор в частотном канале формирования шумовой помехи. Сиг-
нал от широкополосного источника шумов поступает на вход ЛБВ через частотно-
избирательную коммутационную систему, аналогичную той, которая имеется в прием-
ной системе. Характеристики ЛБВ выбираются такими, чтобы обеспечить на выходе
достаточно равномерный спектр шумов во всем частотном диапазоне, охватываемом
частотно-избирательным устройством.
84
Рис. 3.13. Структурная схема передатчика прицельных шумовых помех
с многоканальными частотно-избирательными системами
Передатчик прицельных шумовых помех с преобразованием частоты. Для по-
вышения чувствительности приемной подсистемы такого передатчика на входе под-
системы имеется маломощный усилитель СВЧ на ЛБВ. Сигналы с выхода ЛБВ через
разветвитель сигналов поступают на смесители, гетеродины которых соединены с со-
ответствующими смесителями выходного устройства. Выход каждого смесителя при-
емной части передатчика соединен с многоканальным частотно-избирательным уст-
ройством. Принятый сигнал проходит через соответствующий смеситель и фильтр
промежуточной частоты, детектируется, видеоимпульс с выхода детектора запускает
генератор импульсов, который открывает соответствующий коммутатор в схеме. При
этом в выходном канале на промежуточной частоте формируется шумовой сигнал с
шириной полосы, определяемой полосой пропускания фильтра. Этот шумовой сигнал
через сумматор поступает на вход смесителя обратного восстановления частоты, затем
усиливается в ЛБВ и излучается передающей антенной. В целом этот процесс проходит
очень быстро, и сигнал прицельной шумовой помехи формируется через очень корот-
кое (не более длительности радиоимпульса) время после приема радиоимпульса. Такой
передатчик помех имеет 100%-ную вероятность перехвата радиосигналов, так как при-
емные частотно-избирательные каналы постоянно открыты, и весь частотный диапазон
непрерывно просматривается.
Возможен более простой вариант передатчика прицельных шумовых помех с пре-
образованием частоты, в котором сокращено количество СВЧ-устройств приемного
тракта. В таком устройстве используется только один входной смеситель; выходы
входного многоканального делителя мощности нагружены на полосовые фильтры. Как
только в одном из каналов обнаруживается сигнал, его выход соединяется со смесите-
85
лем и одновременно от синтезатора частоты на входной и выходной смесители посту-
пает гетеродинирующий сигнал нужной частоты. Таким образом, высокочастотные
сигналы во всех приемных каналах обрабатываются последовательно. Включение ли-
ний задержки после фильтров обеспечивает компенсацию запаздывания при формиро-
вании гетеродинирующих сигналов синтезатором частоты.
Передатчик прицельных шумовых помех ответного типа. В таком передатчике
источник шума и полосовой фильтр заранее настроены на частоту подавляемой РЛС.
При приеме радиолокационного сигнала, частота которого лежит в пределах полосы
пропускания фильтра, производится автоматическое включение передатчика помех.
При проведении операции по радиоэлектронному подавлению РЭС может ис-
пользовать достаточно большое количество предварительно настроенных передатчиков
шумовых помех, например, передатчиков одноразового действия.
В многоканальной частотно-избирательной системе весь частотный диапазон по-
давляемых РЛС можно разбить на ряд более узких соприкасающихся полос, которые
просматриваются поисковыми приемниками с сопровождением частоты обнаруженно-
го сигнала РЛС. Принятый сигнал модулируется шумами, усиливается и излучается,
создавая прицельную шумовую помеху.
Многоканальный передатчик прицельных шумовых помех. В ряде случаев ис-
пользуются передатчики прицельных шумовых помех, приемная подсистема которых
представляет собой многоканальный широкополосный приемник, состоящий из вход-
ного усилителя, являющегося одновременно и источником теплового шума сигнала,
генерируемого непрерывно во всем рабочем диапазоне частот приемника. Каналы раз-
ветвителя настроены на определенные участки частотного диапазона; каждый частот-
ный канал представляет собой полосовой фильтр, последовательно с которым включен
коммутатор каналов. Управление коммутаторами каналов осуществляется под воздей-
ствием принятого сигнала РЛС с помощью специальной схемы, состоящей из детекто-
ра, видеоусилителя и формирователя строба управления. Формирователь строба управ-
ления каналом может иметь в своем составе пороговую схему, уровень срабатывания
которой устанавливается достаточно высоким для того, чтобы предотвратить случай-
ный запуск системы от шумов.
В таком передатчике помех для обеспечения развязки между входными и выход-
ными цепями и контроля работы обнаружения РЛС производится попеременное стро-
бирование приемной и передающей подсистем. При отпирании входного коммутатора
любой принятый сигнал РЛС в соответствии со своей несущей частотой попадает вме-
сте с шумовым сигналом в один из частотных каналов. В ответ на поступивший сигнал,
амплитуда которого превышает определенный пороговый уровень, в частотном диапа-
зоне соответствующего канала происходит замыкание коммутатора этого канала. Сиг-
нал помехи формируется путем модуляции принятого сигнала РЛС тепловыми шума-
ми, последующего суммирования сигналов в сумматоре и усиления в выходном усили-
теле, аналогичном входному и состоящем из нескольких каскадов ЛБВ. Если работает
не одна, а несколько РЛС, причем каждая на своей несущей частоте, то одновременно
могут быть открыты два или более частотных каналов.
Дополнительным свойством такого устройства является возможность одновре-
менного создания и заградительной помехи. В этом случае источник шума, в качестве
которого используется входной усилитель, с помощью коммутатора может соединяться
непосредственно с выходным усилителем. Причем коммутатор может работать автома-
86
тичсски. Поскольку мощность, необходимая для создания помех РЛС, обратно пропор-
циональна квадрату дальности, постановка заградительных помех может быть осуще-
ствлена и более удаленным РЛС. Преимущество этого передатчика помех заключается
в быстродействии, он выполняет просмотр в широком диапазоне частот в течение не-
большого промежутка времени одновременно на всех частотах и мгновенно выбирает
частотные каналы, по которым должна создаваться шумовая помеха.
Передатчик прицельных шумовых помех корреляционным системам опреде-
ления дальности до постановщика помех. В состав передатчика введена управляемая
линия задержки, обеспечивающая формирование шумового сигнала, создающего на
выходе корреляционной системы РЛС ложную отметку (пик). Использование несколь-
ких линий задержки обеспечивает более широкую дезинформацию корреляционных
систем определения дальности, так как в этом случае формируется сигнал помехи с
многопиковой корреляционной функцией [17].
Для эффективной маскировки отраженного от цели сигнала требуется достаточно
мощная шумовая помеха. Улучшить маскирующее действие непрерывной шумовой
помехи можно путем ее стробирования в момент приема радиолокационных импульсов
на защищаемом объекте (носителе). При этом уровень огибающей сигнала шумовой
помехи должен быть таким, чтобы в момент пауз в шумовой помехе каждый отражен-
ный радиолокационный импульс не превышал этот уровень. В результате создаются
условия, когда на экране индикатора РЛС практически невозможно выделить отражен-
ный радиолокационный сигнал. В таком передатчике помех на выходе формирователя
шумовой помехи имеется коммутатор, запираемый на время облучения защищаемого
объекта радиолокационными сигналами; запирание осуществляется синхронными
стробирующими импульсами, формируемыми путем приема и детектирования радио-
локационных сигналов [18].
Передатчики шумовых помех, прицельных по частоте и направлению. Мощ-
ность шумовых помех может быть использована более эффективно, если наряду с кон-
центрацией мощности помехи в указанной полосе частот сконцентрировать ее еще и в
узком луче в направлении подавляемой РЛС. Для обеспечения узконаправленного из-
лучения помехи в таких передатчиках применяются ФАР [19]. Структурная схема пе-
редатчика шумовых помех, прицельных по частоте и направлению, приведена на рис. 3.14.
Сигналы РЭС принимаются приемной антенной решеткой и поступают на диа-
граммообразующую схему (ДОС), каждый выход которой соединен с многоканальной
частотно-избирательной системой определения частоты сигналов РЛС. Частотно-
определительная схема состоит из разветвителя сигналов, полосовых фильтров, детек-
торов и импульсных генераторов, формирующих видеоимпульс с длительностью по-
рядка нескольких периодов повторения импульсов РЛС или с длительностью любой
требуемой величины.
Каждый источник широкополосного шума через многоканальный частотно-
избирательный коммутационный узел соединен со входом передающей ДОС. Цен-
тральные частоты отдельных полосовых фильтров этого частотно-избирательного узла
такие же, что и у фильтров приемной подсистемы для соответствующего направления.
Выходной шумовой сигнал каждого полосового фильтра передающего частотно-
избирательного узла поступает на сумматор сигналов через нормально закрытый высо-
кочастотный коммутатор, управляемый видеоимпульсом приемной подсистемы, кото-
87
Рис. 3.14. Структурная схема передатчика шумовых помех,
прицельных по частоте и направлению
рый определяет время излучения шумовой помехи в ответ на прием одиночного радио-
локационного сигнала. Сигналы всех каналов суммируются и подаются на соответст-
вующий вход передающей ДОС, а затем к ЛБВ и элементам антенной решетки. Таким
образом, сигнал, принятый с данного направления, поступит в свой частотный канал и
запустит импульсный генератор. Видеоимпульс, сформированный этим генератором,
откроет коммутатор соответствующего канала формирования сигнала помехи. Этот
процесс происходит очень быстро, например, за время, меньшее длительности радио-
локационного импульса. Все каналы формирования помехи по направлению функцио-
нируют описанным выше способом и независимо друг от друга.
Приемная и передающая антенные решетки для развязки должны быть либо раз-
несены в пространстве, либо работать в режиме разнесения во времени. Если развязка
между приемной и передающей антенными решетками достаточна, то передатчик по-
мех может принимать сигналы и излучать помеху одновременно. Обе решетки должны
быть идентичны, сопряжены по направлению и одинаковы, за исключением дополни-
тельных требований по пропускаемой мощности для передающей антенной решетки.
В рассматриваемом передатчике помех каждый канал по направлению разделяет-
ся на две многоканальные частотно-избирательные системы: частотно-определяющую
(приемную) и частотно-формирующую (передающую). Однако общее число частотно-
88
избирательных устройств можно уменьшить, что позволит упростить схему и снизить
стоимость передатчика. В этом случае определение частоты принимаемого сигнала и
коммутация каналов формирования шумового сигнала будет производиться так же, как
и в рассмотренном передатчике, а обработка сигналов - одновременно. Недостаток та-
кого устройства состоит в том, что при одновременной обработке сигналов с несколь-
ких направлений или на нескольких частотах сигнал помехи формируется на всех воз-
можных комбинациях частот и направлений.
Передатчики скользящих по частоте шумовых помех. Передатчики скользящей
по частоте помехи - это устройства, в которых узкополосный шумовой сигнал может пе-
рестраиваться в широком диапазоне частот. По своим характеристикам скользящая по
частоте помеха занимает промежуточное положение между прицельной и заградитель-
ной шумовыми помехами. В зависимости от скорости качания частоты такая помеха мо-
жет вызвать эффект шумовой помехи либо создать на индикаторе РЛС плотные им-
пульсные потоки, маскирующие отметку реальной цели. Поэтому такие передатчики по-
мех могут эффективно применяться против РЛС и связных приемников [3-5,20].
Основным элементом передатчика является генератор СВЧ-колебаний, модули-
руемый смесью шумового и периодического сигналов от двух различных источников,
при этом модуляция может быть как частотная, так и амплитудная. Управление диапа-
зоном и скоростью перестройки частоты осуществляется специальным устройством,
определяющим время, в течение которого помеха должна находиться в полосе пропус-
кания подавляемого приемника, а также от характеристик диаграммы направленности
антенн передатчиков помех и подавляемого приемника. Устройство управления учи-
тывает эти факторы и устанавливает оптимальные соотношение между временем на-
хождения сигнала помехи в полосе пропускания приемника подавляемой РЛС и часто-
той следования помеховых посылок.
Передатчики скользящей по частоте помехи сочетают в себе преимущества, свя-
занные с концентрацией мощности шумов в узкой полосе частот и с эффективным пе-
рекрытием широкой частотной полосы. Они могут более эффективно, чем передатчики
прицельных шумовых помех, использоваться против системы РЛС с различающимися
частотами. Несколько таких передатчиков, перестраиваемых с разной скоростью, могут
создать маскирующие помехи многим РЛС в заданном частотном диапазоне. Однако
такие передатчики помех более сложны, чем передатчики прицельных или загради-
тельных маскирующих помех.
В зависимости от скорости изменения несущей частоты передатчика помех воз-
можны следующие режимы работы:
режим медленной перестройки частоты Гпер, когда время прохождения сигналом
помехи полосы пропускания подавляемого приемника A/fip значительно больше дли-
„ тт^ ip
тельности радиоимпульса РЛС тп: --— »тп;
^пер
режим быстрой скорости перестройки частоты, когда время прохождения сигна-
лом помехи полосы пропускания приемника очень мало по сравнению с длительностью
А/пр
радиоимпульса: ---— «тп;
^пер
89
режим средней скорости перестройки, когда время прохождения сигналом помехи
полосы пропускания приемника соизмеримо с длительностью радиоимпульса: -~ тп.
^пер
Если передатчик помех имеет достаточно большую мощность, то предпочтителен
режим быстрой перестройки частоты, поскольку он обеспечивает большое количество
отметок на экране индикатора РЛС. (В радиолокации разработаны методы снижения
эффективности воздействия скользящей по частоте помехи, например, метод ШОУ, но
действенность его зависит от скорости перестройки частоты помехи - при средней ско-
рости перестройки этот метод оказывается менее эффективным.)
Вероятность подавления РЛС перестраиваемой по частоте помехой Р, определяет-
ся выражением:
где Q - скважность скользящей по частоте помехи, равная отношению времени пере-
стройки частоты помехи в заданном диапазоне частот ко времени прохождения помехой
полосы пропускания приемника подавляемой РЛС; п - число передатчиков помех.
Анализ этого выражения показывает, что для данной вероятности подавления Ру
число требуемых передатчиков помех п изменяется прямо пропорционально скважно-
сти. Если скважность будет уменьшена вдвое, то число передатчиков помех снизится
приблизительно вдвое. Для подавления РЛС с вероятностью 0,8 при скважности 80
требуется примерно 100 передатчиков помех, а при скважности 10 - около 10.
Для уменьшения скважности действия передатчиков перестраиваемых по частоте
помех можно изменять скорость перестройки частоты. При этом вблизи и в полосе
пропускания приемника подавляемой РЛС скорость перестройки частоты должна
иметь максимально допустимую величину Ум, вне этой полосы частота помехи должна
перестраиваться со скоростью Уб-
В этом случае вероятность подавления РЛС в зависимости от числа передатчиков
помех п для различных значений отношения скоростей быстрой и медленной пере-
стройки г - Рб/^м равна:
Р,= Цг»п+л>1)Г,
где В - диапазон частот перестройки; Вп - полоса шумовой помехи; п,- - число подав-
ляемых РЛС.
Расчеты показывают, что за счет рационального выбора режима перестройки час-
тоты передатчика помех можно значительно повысить вероятность подавления РЛС.
Передатчик скользящих по частоте помех с автоматическим изменением
скорости перестройки частоты. В этом случае сигналы передатчиков помех, модули-
рованных шумом, поступают через направленный ответвитель к передающей антенне,
а часть мощности сигнала помехи подается на балансный смеситель приемника и ис-
пользуется в качестве гетеродинного сигнала. Приемник предназначен для анализа
сигналов РЛС с целью определения се частоты и управления режимом перестройки
частоты и модуляции передатчика помех шумами. При отсутствии сигнала РЛС в по-
лосе приемника шумовой сигнал бланкируется, и передатчик помех излучает немоду-
лированный быстро перестраиваемый по частоте сигнал. Если приемник обнаружил
излучение РЛС, то перехваченный сигнал через приемную антенну поступает на ба-
лансный смеситель, который соединен с усилителем промежуточной частоты и детек-
тором, затем в видеоусилитель, устройство задержки и подавления шума и далее в блок
90
управления и синхронизации. Блок синхронизации включает модуляцию передатчика
шумами и управляет режимом генератора, определяющего скорость перестройки час-
тоты. Высокая скорость перестройки передатчика сохраняется до тех пор, пока раз-
ность между его частотой и частотой подавляемой РЛС не станет равной промежуточ-
ной частоте. Когда частоты становятся равными, включается модуляция шумами в пе-
редатчике и замедляется скорость перестройки частоты передатчика. В этот момент
УПЧ приемника стробируется, что обеспечивает необходимую развязку приемника и
передатчика при излучении помехи. При выходе разностной частоты за полосу пропус-
кания приемника, передатчик возвращается в режим перестройки с высокой скоростью.
Этот цикл повторяется, если происходит перехват сигнала этой же или другой РЛС [21].
Максимальная скорость перестройки частоты передатчика определяется соотно-
шением:
Гпер(макс) = Д/ПГ,
где Д/Г1 - полоса пропускания приемника станции помех, МГц; F - частота повторения
импульсов подавляемой РЛС, Гц.
Частота повторения импульсов РЛС устанавливается при определении типа РЛС,
подлежащей подавлению. Поэтому ширина полосы пропускания приемника станции
помех является единственной переменной при выборе режима работы рассматриваемо-
го передатчика помех.
Для увеличения времени воздействия скользящей по частоте помехи помимо опи-
санного способа замедления скорости перестройки используется переход на пере-
стройку частоты сигнала помехи в более узком диапазоне, охватывающем несущую
частоту подавляемого приемника, но без изменения скорости перестройки.
Передатчик прицельной шумовой помехи с поиском по частоте. Основным
элементом этого устройства является гетеродин с перестройкой частоты (рис. 3.15,п).
Поиск радиолокационного сигнала осуществляется путем перестройки частоты
гетеродина по пилообразному закону в пределах диапазона возможных частот работы
РЛС. В режиме поиска для обеспечения высокой вероятности перехвата сигнала ско-
рость перестройки выбирается достаточно медленной, чтобы перехват мог быть осуще-
ствлен за один цикл перестройки частоты. Перестройка продолжается до тех пор, пока
в полосе пропускания УПЧ не обнаружится сигнал РЛС (рис. 3.15,6).
В режиме захвата принятый сигнал детектируется и подается на генератор им-
пульсов, который формирует одиночный видеоимпульс длительностью около 100 мкс.
Этот видеоимпульс поступает в схему управления частотой гетеродина. В момент при-
хода видеоимпульса перестройка приостанавливается, происходит скачкообразное из-
менение частоты гетеродина вниз - к низкочастотной границе диапазона, после чего
возобновляется пилообразная перестройка с той же крутизной. Скорость перестройки
гетеродина в режиме захвата выбирают намного выше, чем в режиме поиска. Напри-
мер, она может быть такой, чтобы обеспечить прохождение полосы пропускания при-
емника за время, равное длительности радиолокационного импульса.
Для формирования помехи сигнал гетеродина через разветвитель подается на
смеситель, куда поступает также сигнал генератора промежуточной частоты, затем
проходит через фильтр, срезающий ненужные боковые полосы, и поступает в модуля-
тор, где модулируется шумами. После усиления в ЛБВ сигнал помехи излучается через
антенну в направлении подавляемого радиолокатора.
91
a)
Частота
Рис. 3.15. Структурная схема передатчика прицельной шумовой помехи
с поиском по частоте (а); зависимость перестройки частоты передатчика помех
от времени в режиме поиска и захвата сигнала РЛС (б)
Передатчик скользящих по частоте шумовых помех с остановкой на частоте
подавляемого приемника РЛС. Особенностью данного устройства является наличие
в нем приемника, перестраиваемого по частоте так же, как и передатчик помех.
Когда приемник перехватывает радиолокационный сигнал, перестройка несушей
частоты помехи прекращается, и передатчик скользящих помех действует на этой час-
тоте как передатчик прицельных маскирующих помех. Если передатчик имеет возмож-
ность следить за работой подавляемой РЛС, то прекращение излучения подавляемого
радиолокационного сигнала может послужить сигналом для возобновления перестрой-
ки частоты помехи.
Многие передатчики маскирующих помех сконструированы так, чтобы работать в
нескольких режимах: в прицельном, скользящем или заградительном; они могут рабо-
тать также по определенной программе. Такие передатчики быстрее перестраиваются
на подавление сигнала другой РЛС чем передатчики прицельных помех.
Передатчики скользящих помех с захватом подавляемого сигнала по частоте
имеют те же ограничения, что и передатчики прицельных помех. Подавление осущест-
вляется только в узкой полосе частот, поэтому в случае необходимости подавления бо-
лее чем одной РЛС в полосе частот должна быть сконцентрирована большая мощность
92
помехи. Такая концентрация мощности может быть обеспечена при использовании не-
скольких передатчиков помех. При этом нужно тщательно определить частотный диа-
пазон работы каждого передатчика помех либо разработать устройство для обнаруже-
ния только тех радиолокационных сигналов, на частотах которых следует создавать
помехи. Для этого в систему передатчиков шумовых помех вводят приемно-
анализирующее устройство и ЭВМ, которая в результате обработки полученной ин-
формации формирует команды, управляющие режимами работы передатчиков помех.
Управление центральной частотой, полосой шумов и параметрами перестройки часто-
ты каждого передатчика помех может производиться и вручную. Каждый передатчик
помех настраивается на определенную частоту используемых противником РЛС анало-
гично случаю простого размещения на носителе отдельных передатчиков помех,
предварительно настроенных на определенные частоты. Однако в управляемой системе
перестройка таких передатчиков в соответствии с изменением радиоэлектронной об-
становки может производиться во много раз быстрее, чем при их автономном и раз-
дельном применении. Шумовые полосы передатчиков помех настраиваются так, чтобы
они соприкасались по частоте друг с другом по уровню 3 дБ. Это позволяет увеличить
спектральную плотность мощности шумовой помехи на 6 дБ по сравнению с одним пе-
редатчиком заградительной помехи в той же суммарной полосе. Перестройка частоты
производится в части всего суммарного диапазона частот. При необходимости ско-
рость перестройки частоты помехи может быть синхронизирована со сканированием
антенны. Кроме того, скорость перестройки частоты помехи должна быть согласована
с полосой пропускания приемника подавляемой РЛС. Для затруднения перехвата по-
становщика помех, барражирующего вне зоны действия ракет системы ПВО, целесо-
образна постановка инверсных помех; при этом выделение частоты повторения радио-
импульсов в условиях работы многих РЛС производится ЭВМ. Постановщик помех
может нести от 20 до 30 передатчиков помех.
Контроль несущей частоты подавляемого приемника во время работы передатчи-
ка маскирующих прицельных помех осуществляется путем периодического выключе-
ния излучения передатчика помех. При этом можно менять длительность выключения
помехи и частоту повторения этих пауз. Если радиолокатор работает на фиксированной
несущей частоте, то для контроля оказывается достаточно одной паузы в излучении
помехи; чтобы осуществлять наблюдение за работой радиолокаторов с изменением не-
сущей частоты, потребуется достаточно много пауз [22].
Другой путь контроля работы РЛС при излучении шумовой помехи состоит в
компенсации шумовой помехи с п лмощью корреляционной техники, в результате чего
из принимаемого антенной сигнала (смесь радиолокационного сигнала и проникающей
шумовой помехи) можно выделить радиолокационный сигнал. Необходимая для ком-
пенсации часть сигнала помехи подается по коаксиальному кабелю или волноводу. В
случае использования в передатчике помех псевдохаотических шумов можно приме-
нить два синхронизируемых последовательно соединенных генератора, один из кото-
рых является источником модулирующего сигнала для передатчика помех, а другой
соединен с коррелятором. В этом случае необходима только обычная (не высокочас-
тотная) связь передатчика и коррелятора с синхронизируемыми генераторами псевдо-
хаотических модуляционных сигналов [3, 4].
Более подробно проблема контроля за работой подавляемой РЛС рассматривается
в следующем разделе.
93
Передатчики шумовых помех с контролем работы подавляемой РЛС. Для
обеспечения нормального функционирования передатчика шумовых помех, в процессе
его работы должно производиться постоянное наблюдение за сигналами подавляемой
РЛС. При этом в функции передатчика помех входит:
определение эффективности подавления РЛС путем фиксации изменений пара-
метров радиолокационных сигналов и режима работы РЛС;
определение совпадения частоты сигнала помехи с несущей частотой подавляе-
мой РЛС;
создание помехи достаточной мощности для эффективного РЭП;
обнаружение новых сигналов;
обеспечение реакции на внутрисигнальную кодовую структуру подавляемой РЛС.
При наблюдении за подавляемой РЛС в процессе создания помех обеспечивается:
использование антенной системы передатчика помех с достаточной развязкой
между передающей и приемной антеннами;
периодическое выключение передатчика помех, чтобы приемник мог принимать
радиолокационные сигналы во время пауз в излучении помехи, коэффициент за-
полнения которой близок к единице;
применение очень быстрой расстройки и настройки частоты передатчика помех,
позволяющей осуществлять наблюдение за сигналом подавляемой РЛС во время
расстройки;
снижение на входе приемной подсистемы уровня сигнала помехи от передатчика
помех с помощью различного рода компенсационных схем;
применение фильтрационных методов.
Необходимо заметить, что способы контроля не должны допускать длительного
функционирования подавляемой РЛС без воздействия на них помех. При этом прием-
ник передатчика помех должен наблюдать также и за излучением сигнала помехи, для
чего между приемной и передающей антеннами должна быть создана достаточно вы-
сокая развязка. Обеспечение нужной развязки может быть достигнуто различными
способами, включая разнесение антенн на большое расстояние друг от друга, исполь-
зование фюзеляжа самолета как экрана, установку между антеннами настроенных эк-
ранов, применение антенн круговой поляризации с противоположным направлением
вращения поляризации, использование антенн с высоким коэффициентом усиления,
позволяющим снизить требования к коэффициенту усиления аппаратуры помех и др.
Развязка обычно измеряется уровнями сигналов на выходе приемной и передающей
антенн. В случае, когда развязку между антеннами передатчика помех нельзя сделать
достаточной для обеспечения непрерывного наблюдения за подавляемой РЛС, пере-
датчик помех должен выключаться на непродолжительное время, либо расстраиваться
по частоте.
Непрерывный контроль излучения подавляемых РЛС позволяет получать инфор-
мацию, которая может быть использована для:
улучшения точности наведения передатчика помех по частоте;
создания помехи только в моменты работы подавляемой РЛС,
увеличения коэффициента использования передатчика помех;
непрерывного регулирования параметров сигнала помехи при изменении режима
и параметров сигнала подавляемой РЛС.
94
Во многих случаях управление частотой передатчика осуществляется вручную
оператором, который может наблюдать на приемном индикаторе, как настраивается
сигнал помехи на частоту подавляемой РЛС. Оператор РЭП может также периодически
расстраивать передатчик помех по частоте, чтобы проверять наличие сигнала подав-
ляемой РЛС. Для того чтобы приемник работал в режиме непрерывного наблюдения за
излучением РЛС, наводимая на входе приемника мощность передатчика помех с уче-
том потерь на развязку не должна превышать уровень минимально различаемого при-
емником сигнала.
Коэффициент заполнения сигнала помехи должен быть 0,99 и более с возможно
меньшим временем выключения помехи. В этом случае оператор РЛС будет неспосо-
бен обнаружить работу передатчика помех в режиме контроля излучения подавляемой
РЛС. Если такой режим применяется в вынесенном передатчике помех, то оператор
РЛС может увидеть атакующие самолеты во время паузы в сигнале помехи, если пауза
имеет большую длительность или она возникает слишком часто.
Передатчик шумовых помех с наведением по частоте способен вести наблюдения
за сигналом как РЛС, так и помехи. Сигнал помехи с выхода передатчика через на-
правленный ответвитель и переключатель поступает к передающей антенне. Приемник
соединяется с приемной антенной только тогда, когда передатчик помех работает на
нагрузку. При этом сигнал помехи, ослабленный аттенюатором, также подается на вход
приемника. Оператор РЭП может использовать индикаторы двух типов: панорамный и
измерителя мгновенного значения частоты. В любом случае он настраивает централь-
ную частоту помехи на максимум сигнала РЛС. Таким образом будет обеспечиваться
непрерывная индикация обоих сигналов, и оператор РЭП может постоянно контроли-
ровать обстановку. При этом он должен избегать периодического включения режима
контроля, так как это может позволить подавляемой РЛС засинхронизировать свою ра-
боту с моментами выключения помехи.
Контроль работы РЛС может осуществляться путем компенсации проникающего
на вход приемника сигнала помехи с помощью подаваемого на компенсатор сигнала
передатчика помехи с соответствующей фазой и амплитудой. Относительные переме-
щения антенн на постановщике помех могут вызвать ошибки в согласовании фазы в
канале компенсации, что вызовет ухудшение работы компенсатора с фиксированной
настройкой фазы. Поэтому важно обеспечить жесткое крепление антенн на носителе.
В другой схеме принимаемый сигнал РЛС вместе с проникающим сигналом по-
мехи проходит через компенсатор, где помеховый сигнал ослабляется при соответст-
вующей фазе и амплитуде сигнала канала компенсации; принимаемый радиолокацион-
ный сигнал анализируется в приемнике и используется для управления частотой им-
пульсного источника шума. Контроль работы РЛС может осуществляться передатчи-
ком помех также с помощью перестраиваемого режекторного фильтра на частоте сиг-
нала помехи. В этом случае спектр сигнала помехи определяется полосой пропускания
режекторного фильтра. Если частота передатчика помех настроена правильно, режек-
торный фильтр будет вызывать ослабление помехи на входе приемника на частоте по-
давляемой РЛС, и на индикаторе будет наблюдаться сигнал РЛС. Для прекращения из-
лучения помехи в эфир используется нагрузка, подключаемая к передатчику помех
вместо передающей антенны. Оператор РЭП должен одновременно перестраивать при-
емник, фильтр и частоту передатчика помех, пока на индикаторе не появится сигнал
РЛС; при этом излучение помехи полностью не прекращается, что увеличивает эффек-
95
тивность подавления РЛС. Режекторный фильтр и центральная частота шумового пе-
редатчика помех должны перестраиваться синхронно, а режекторный фильтр должен
пропускать к антенне всю мощность помехи.
В ряде случаев применяются передатчики прицельных шумовых помех, исполь-
зующие для фазовой модуляции сигнала на частоте подавляемой РЛС повторяющийся
бинарный код (рис. 3.16). Фазовая модуляция расширяет спектр помехи в зависимости
от типа и параметров бинарного кода. После регулировки амплитуды и фазы эта же
бинарная последовательность используется в приемном канале для декорреляции (уст-
ранения связей) смеси сигнала РЛС и проникающей помехи. В результате сигнал поме-
хи превращается в непрерывный сигнал, он может быть отфильтрован узкополосным
режекторным фильтром, настроенным на несущую частоту источника сигнала помехи
Рис. 3.16. Структурная схема передатчика прицельных шумовых помех
с контролем работы подавляемой РЛС, использующей бинарный код
Сигнал РЛС расширяется по спектру и будет восстановлен к своему первоначаль-
ному виду на выходе коррелятора. Следовательно, сигнал РЛС может наблюдаться и
использоваться для настройки первичного генератора сигнала помехи на частоту сиг-
нала РЛС. Конечно, при прохождении радиолокационного сигнала через режекторный
фильтр могут быть потери, зависящие от соотношения полосы фильтра и спектра де-
коррелированного радиолокационного сигнала. Вместо генератора бинарной последо-
вательности в схеме передатчика шумовых помех с контролем работы РЛС может быть
использован перестраиваемый генератор пилообразных колебаний, модулирующих по
частоте непрерывный сигнал первичного источника. В этом случае декоррелятор в
приемном тракте содержит дисперсионный фильтр, а коррелятор является частотным
модулятором.
96
Для контроля подавляемой РЛС в передатчике шумовых помех может быть при-
менена схема гетеродинирования, в которой используется обычный источник видео-
шумов, модулирующий по частоте как задающий источник сигнала помехи, так и
входной гетеродин. Когда смесь сигнала РЛС и проникающей помехи поступает на
входной смеситель, она преобразуется по частоте на промежуточную, усиливается ши-
рокополосным УПЧ и подается на режекторный фильтр, центральная частота которого
соответствует частоте сигнала перестраиваемого задающего генератора, преобразован-
ной на промежуточную. Так как процесс прямого и обратного преобразования частоты
осуществляется с помощью сигнала одного и того же гетеродина, то на промежуточной
частоте сигнал помехи будет иметь одну спектральную компоненту, которая может
быть отфильтрована, в то время как радиолокационный сигнал будет несколько расши-
ряться и только частично ослабляться в режекторном фильтре.
Обратное преобразование радиолокационного сигнала (большей его части) произ-
водится во втором смесителе, который может использоваться для настройки задающего
генератора на частоту РЛС. Контроль подавляемой РЛС может осуществляться также
методом стробирования по спектру. Этот метод очень сложен в применении из-за
весьма критических допусков на параметры высокочастотных узлов. Он состоит в не-
прерывном контроле одной половины спектра радиолокационного сигнала и в излуче-
нии дезинформирующих помех, содержащих спектральные составляющие только дру-
гой половины спектра радиолокационного сигнала. В результате можно одновременно
осуществлять наблюдение за радиолокационным сигналом и излучение помехи.
Передатчики шумовых помех для подавления РЛС с адаптивной перестрой-
кой несущей частоты. Создание шумовой заградительной помехи с равномерным
распределением спектральной плотности мощности помехи технически представляется
трудновыполнимым из-за наличия частотной неравномерности в антенно-фидерном
устройстве передатчика помех; влияния различного рода отражений в линиях переда-
чи, от подстилающей поверхности или от конструктивных элементов носителя. Поэто-
му в отдельных точках диапазона огибающая плотности мощности шумовой помехи
может иметь провалы. При обнаружении такого шумового сигнала оператор РЛС с пе-
рестройкой несущей частоты может настраивать свою РЛС на работу в этих частотных
точках и тем самым обеспечивать ее работу в условиях шумовых помех с минимальной
мощностью.
Для повышения эффективности воздействия заградительной шумовой помехи на
РЛС в спектре помехи формируется специальный провал (например, с помощью пере-
страиваемого по частоте режекторного фильтра). При априорной информации о пара-
метрах временного цикла функционирования системы этот Фильтр перестраивается та-
ким образом, чтобы позволит ь устройству помехозащиты РЛС обнаружить сформиро-
ванный провал в спектре помехи и перестроить частоту РЛС на этот провал. Однако во
время изменения частоты РЛС оператор РЭП может изменить частотное положение
провала в огибающей спектральной плотности мощности помехи так, что РЛС оказы-
вается снова в условиях воздействия шумовых помех высокого уровня. Формирование
провала в спектральной плотности мощности помех осуществляется непрерывно, а его
местоположение в пределах спектра заградительной помехи меняется скачкообразно
по случайному закону через время, которое необходимо устройству помехозащиты
РЛС на определение частоты провала в спектре помехи, принятие решения на измене-
ние частоты своего передатчика и его реализацию. Нейтрализация эффективности по-
4—1777
97
мехозащиты может быть улучшена, если частоту передатчика помех непрерывно кон-
тролировать и обеспечивать условия, чтобы она изменялась синхронно с перестройкой
фильтра [4].
Другой способ снижения эффективности помехозашиты РЛС с перестройкой час-
тоты состоит в попеременном излучении заградительной и прицельной шумовой поме-
хи. Диапазон рабочих частот РЛС полностью перекрывается спектром заградительной
помехи за исключением намеренно созданного провала в спектральной плотности
мощности шумовой помехи, положение которого может изменяться автоматически или
оператором вручную. В режиме прицельной шумовой помехи формируется спектр, ко-
торый заполняет только провал. Центральная частота спектра прицельной помехи из-
меняется в диапазоне рабочих частот РЛС. Схема помехозащиты РЛС в режиме про-
смотра рабочего диапазона частот обнаружит провал в спектральной плотности загра-
дительной помехи и перестроит частоту своего передатчика в область частот этого
провала. Однако к моменту завершения перестройки РЛС и началу излучения сигналов
провал заполняется прицельной шумовой помехой, т. е. помехой с высокой спектраль-
ной плотностью. Время работы передатчиков заградительных и прицельных помех вы-
бирается кратным периоду повторения радиоимпульсов РЛС и согласованным между
собой. Например, после пяти периодов излучения заградительной помехи в течение
одного периода излучается прицельная помеха. Затем длительность излучения загради-
тельной помехи сокращается, а прицельной увеличивается. При этом среднее значение
коэффициента заполнения остается примерно 50 %.
Выходные системы станций шумовых помех. Основные типы выходных сис-
тем. Выбор выходной системы аппаратуры РЭП для конкретных условий радиоэлек-
тронной борьбы зависит от характеристик подавляемых РЭС и экономических факто-
ров, которые должны быть тщательно взвешены, чтобы правильно определить их
влияние на успех операции. Габаритные размеры, масса, требования к первичным
источникам питания, условия эксплуатации выходных систем влияют на выбор
носителя аппаратуры помех.
В настоящем разделе описываются только основные принципы построения вы-
ходных систем станций шумовых помех [9, 23, 24]. При рассмотрении принимается,
что рабочий сектор выходных систем составляет 120° в азимутальной и 20° в угломе-
стной плоскостях, исключая случай всенаправленного излучения. Поляризация может
быть круговой или линейной. Ширина антенного луча в азимутальной плоскости при-
нята равной 15°. Это позволяет прийти к стандартной 8-лучсвой выходной системе.
Конечно, при необходимости, например, для получения большого коэффициента уси-
ления в узком луче, может быть использовано и другое число лучей. В общем случае
ширина антенного луча увеличивается при отклонении его от центральной оси антен-
ной решетки; в многолучевых системах, использующих матрицу Батлера, положение
отдельных антенных лучей меняется с частотой, а в системах с линзой Ротмана меняет-
ся только ширина отдельного луча - эти эффекты надо учитывать при разработке вы-
ходной системы станции помех.
Далее предполагается, что имеется один источник сигнала шумовой помехи мощ-
ностью 400 Вт. На практике могут использоваться источники сигнала помехи и мень-
шей мощности. В выходных системах с ФАР, например, используются ЛБВ 50 Вт; при
пренебрежении потерями полная средняя мощность восьмилучевой системы с ЛБВ
50 Вт равна полной мощности (400 Вт) источника помех.
98
Для формирования узкого луча в нужном направлении необходимые команды
управления на выходную систему могут поступать от других частей системы РЭП, на-
пример, от приемной решетки бортовой системы радиотехнической разведки, которая
определяет направление прихода сигнала РЭС, подлежащей подавлению, и может
обеспечивать выходную систему станции помех информацией о необходимом направ-
Всенаправленная ДН И'х,
в азимутальной Д-
плоскости
ДН изотропного излучателя
| / ДН шириной 120°
.—В азимутальной
f j плоскости
20$
ДНшириной №
В азимутальной
плоскости
Усиление, В6
20
ДН изотропного----
излучателя —
Всенаправленная ДН-
0 азимутальной
плоскости
ДИ шириной >20° —
в азимутальной
плоскости
АН ширНяои 14° ’
в азимутальной
плоскости
а)
лении излучения помехи.
Выбранные для дальнейшего рассмот-
рения параметры антенных лучей в азиму-
тальной и угломсстной плоскостях приведе-
ны на рис. 3.17.
На диаграмме направленности в угло-
мсстной плоскости (рис. 3.17,а) показано,
как возрастает усиление в луче по мере
уменьшения ширины ДН в азимутальной
плоскости от всенаправленной ДН до луча
шириной 120° и 15°; в качестве опорной
принята изотропная антенна. Соответствую-
щие лучи а азимутальной плоскости показа-
ны на рис. 3.17,6. Пунктиром отмечено по-
ложение 15-градусных лучей для многолуче-
вых антенн. Принимая коэффициент усиле-
ния в луче для описанных выше условий рав-
ным 0; 6 (360°); 11 (120°) и 20 (15°) дБ и пре-
небрегая потерями в высокочастотных трак-
тах, получаем следующие значения излучае-
мой мощности. 400, 1600, 5000 и 40000 Вт со- рис. 3 д? фОрМа диаграммы направленности
ответственно. Для одновременного создания антенной сисемы в угломестной (а)
помех многим РЭС, находящимся в разных и азимутальной (б) плоскостях
направлениях относительно передатчика по-
мех, может быть использована простейшая выходная система, имеющая генератор шу-
ма мощностью 400 Вт и одну всенаправленную (в азимутальной плоскости) антенну с
шириной луча в угломестной плоскости 20 °.
Однолучевая выходная система с одним сканирующим антенным элементом.
В такой системе тот же генератор шума может излучать помеху через рупорную антен-
ну, но в более узком азимутальном секторе. Если он установлен на самолете, то обес-
печивается излучение помехи в переднюю полусферу вдоль направления полета само-
лета. В этом случае излучаемая мощность помехи достигает 5 кВт. Если необходимо
обеспечить излучаемую мощность помехи 40 кВт, то следует применить еще более уз-
кий луч в угломестной плоскости. Для перекрытия сектора шириной 120° узкий луч
должен механически устанавливаться в нужном направлении с помощью внешнего
управления. Очевидно, что РЛС, попадающие в этот луч, будут эффект ивно подавлять-
ся, а все другие - нет из-за малого уровня излучения помехи через боковые лепестки
ДНА передатчика помех. Узкий луч увеличивает отношение помеха-сигнал на входе
подавляемой РЭС. Такие передатчики помех можно использовать на самолете при ус-
ловии, что проблема наведения может быть решена в реальном времени на борту по-
становщика помех.
99
Однолучевая выходная система с механическим наведением луча. В системе
применена сканирующая полусферическая линза Люнеберга с металлической отража-
тельной пластиной. Генератор шума соединен с облучателем, положение которого
фиксировано на периферии линзы, формирующей узкий луч. Антенный луч может пе-
ремещаться по направлению путем вращения линзы Люнеберга относительно ее цен-
тра, при этом направление луча меняется на удвоенную величину угла поворота линзы;
луч может перемещаться в трех измерениях. Другим достоинством такой системы пе-
редатчика помех является отсутствие мощных вращающихся сочленений или СВЧ-
переключателей, которые вносят потери. Однако эти преимущества должны быть со-
поставлены с предполагаемыми потерями в диэлектрике линзы Люнеберга.
Однолучевая переключаемая выходная система передатчика помех с многими
излучающими элементами, ориентированными в разных направлениях. В такой
системе вся мощность генератора шума излучается в нужном направлении узким лу-
чом с коэффициентом усиления 20 дБ. В схеме используются восемь одинаковых ан-
тенн, ориентированных так, чтобы обеспечить перекрытие сектора 120°. Одновременно
может сформироваться только один антенный луч, но система имеет гораздо большее
быстродействие, чем предыдущая. При этом в любом направлении будут формировать-
ся антенные лучи одинаковой формы, в отличие от случая формирования луча с помо-
щью линейной решетки, где луч искажается при отклонении его от центрального на-
правления. Полная апертура антенной системы в 8 раз превышает апертуру одноэле-
ментной системы. Для тактических самолетов "-акая группа антенн слишком велика,
однако такая система, но с несколько меньшим коэффициентом усиления в луче, может
успешно использоваться в ретрансляционных передатчиках помех, в пеленгаторах и в
системах радиоразведки, так как раздельно установленные антенны могут давать ин-
формацию о направлении на источник радиоизлучения. Эта система требует широко-
полосных быстродействующих (со’временем переключения несколько мкс) переключа-
телей, способных работать на уровнях мощности 400 Вт. Однако для передатчиков
ретрансляционного типа даже такое быстродействие может оказаться недостаточным.
Однолучевая переключаемая линзовая выходная система с мощным задающим
генератором шума. В такой системе для образования узконаправленных лучей с ко-
эффициентом усиления 20 дБ используется линза Люнеберга с периферийным распо-
ложением излучателей. Эта система имеет меньшую апертуру, чем предыдущая, и бо-
лее пригодна для управления положением луча в трехмерном пространстве.
Однолучевая переключаемая решетка с мощным задающим генератором шума.
Для формирования узконаправленного луча, положением которого можно управлять,
используется линейная решетка излучателей с диаграммообразуюшей системой на ос-
нове матрицы Батлера или линзы Ротмана. Апертура каждого антенного элемента ре-
шетки должна быть достаточной для перекрытия сектора 120°.
Многолучевая выходная система с многими излучающими элементами, ори-
ентированными в разных направлениях, и с мощным задающим генератором шума.
Такая система обеспечивает одновременное формирование нескольких лучей, но в ней
вместо одного переключат сля с проходной мощностью 400 Вт используются восемь пе-
реключателей с пропускной мощностью 50 Вт. Сигналы на все антенные элементы могут
подаваться одновременно, а излучаемая мощность в каждом луче уменьшится с 40 до 5
кВт. Управление направлением антенного луча осуществляется управляемым пере-
ключателем. Нагрузка служит для поглощения неиспользованной в переключателе
100
мощности. Такая выходная система может обеспечить максимальную излучаемую
мощность только в одном луче. Возможно такое построение переключателя, при кото-
ром формируются два луча в разных направлениях с половинной мощностью, или три
луча с 1/3 мощности в каждом и так далее. Однако такой управляемый делитель мощ-
ности оказывается очень сложным, потенциально имеет большие потери и отличается
малой надежностью. При необходимости обеспечения одинакового уровня сигнала на
каждом выбранном элементе (особенно для решетки с четным числом элементов) и
устранения интерференционных эффектов в соседних лучах возникают дополнитель-
ные проблемы. Этот тип выходной системы очень полезен, когда необходимо одно-
временно формировать сравнительно малое число лучей (два или три), и когда скоро-
сти переключения лучей не так высоки. Большое число соединений в переключаемом
делителе мощности не позволяет осуществлять переключение луча от импульса к им-
пульсу и, кроме того, приводит к значительным потерям.
Многолучевая линзовая система с мощным генератором шума. Возможны два
варианта построения этой системы. В одном из них для формирования узконаправлен-
ных лучей используется линза Люнеберга, в другом варианте может быть использована
диаграммообразуюшая схема с управляемым переключателем и делителем мощности.
Для уменьшения интерференционных явлений при формировании двух соседних лучей
в антенной решетке и диаграммообразующей схеме должна быть предусмотрена фазо-
вая идентичность каналов.
Многолучевая выходная система с многими излучающими элементами, ори-
ентированными в разных направлениях, с задающим генератором малой мощно-
сти. В такой системе сигнал от маломощного источника шума через делитель мощно-
сти и управляемый 8-канальный переключатель подается на ЛБВ с выходной мощно-
стью 50 Вт каждая. Так как переключатель работает на малом уровне мощности, то он
может быть быстродействующим, например, иметь скорость переключения менее 20
нс. Все антенны имеют одинаковое усиление 20 дБ и ориентированы так, чтобы обес-
печить полное перекрытие сектора 120°.
Основное достоинство такой выходной системы состоит в возможности исполь-
зования твердотельных усилителей и применении ее в случаях, когда вероятность од-
новременного включения двух лучей мала. Недостатком такой системы является боль-
шая апертура.
Многолучевая линзовая выходная система с задающим генератором малой
мощности. Для уменьшения размеров апертуры системы можно применить линзу
Люнеберга и диаграммообразующую схему на малом уровне мощности. Если излу-
чающие элементы решетки запитать ЛБВ с выходной мощностью 50 Вт каждая, то
можно обеспечить излучаемую мощность помехи в одном луче 40 кВт. При одновре-
менном формировании в такой системе нескольких лучей излучаемая мощность в каж-
дом из них уменьшается обратно пропорционально числу лучей. При этом необходимо
принять меры для фазировки и надлежащей подачи сигнала на ЛБВ, так как перегрузка
их и интермодуляшюнные явления могут исказить многолучевую диаграмму излуче-
ния. С аппаратурной точки зрения эта система представляет наилучший вариант вы-
ходной системы, так как объединяет в себе такие достоинства, как малый размер апер-
туры, способность одновременно формировать несколько лучей, высокий уровень из-
лучаемой мощности в луче, быстрое переключение луча из-за того, что коммутация ка-
налов осуществляется при малом уровне мощности. Однако такие факторы, как стои-
101
мость, сопряжение системы с уже выпущенной аппаратурой помех, применение против
бистатических РЛС и другие, могут затруднить использование этой системы Подоб-
ную выходную систему можно применять в качестве приемной подсистемы для созда-
ния переизлучающего устройства системы РЭП.
Многолучевая выходная система с управлением по фазе и задержке с мощным
генератором шума. Такая система подобна ФАР, используемой в РЛС для формиро-
вания одного луча в любом заданном направлении, но в ней имеются формирующие
схемы, способные создавать один или несколько лучей, и в этом смысле эта выходная
система отличается от антенной системы однолучевой РЛС. Фазовые модуляторы, ис-
пользуемые в схемах формирования и управления положением луча, обычно дискрет-
ного типа, управление ими осуществляется с помощью ЭВМ. В схеме используются
ферритовые или твердотельные фазовращатели, причем первые более предпочтитель-
ны при больших уровнях мощности. В этом случае необходимо использовать один
мощный источник шума.
Многолучевая выходная система с управлением по фазе или задержке с за-
дающим генератором малой мощности. Каждый излучающий элемент решетки со-
держит ЛБВ или твердотельный усилитель. Достоинство такой системы состоит в том,
что неисправность одной ЛБВ лишь незначительно ухудшает характеристики системы
в целом, а малый уровень запитки позволяет применять твердотельные фазовращатели
со скоростями сканирования луча в доли микросекунды, что, в свою очередь, позволяет
снизить требования к формированию лучей в зависимости от длительности импульса
подавляемого средства.
Однолучевая выходная система с управлением по задержке и с задающим ге-
нератором малого уровня мощности. В такой системе ЛБВ нс только усиливают, но
и формируют антенный луч в нужном направлении. Временная задержка или фаза в
ЛБВ изменяется путем регулировки напряжения на спирали. В качестве недостатка
следует отмстить то, что требуемый фазовый сдвиг может быть установлен только для
одной частоты. Эта выходная система особенно хорошо работает как однолучевая с
быстрым переключением луча.
Выходные системы передатчиков помех, использующие мостовые схемы.
Основой некоторых выходных систем являются мостовые схемы; рассмотрим их
свойства на примере двойного волноводного тройника. Если два синфазных сигнала
одинаковой амплитуды подать на такой мост, то на одном выходе (суммарном) они
сложатся, а на другом (разностном) - вычтутся. Если входные сигналы сделать проти-
вофазными, то на суммарном выходе они вычтутся, а на разностном сложатся. При по-
даче одного сигнала на суммарный вход моста на двух выходах будут появляться два
одинаковых синфазных сигнала с половинной мощностью входного сигнала; если один
сигнал подается к разностному входу, то на двух других выходах появляются два оди-
наковых по мощности, но противофазных сигнала.
Простейшая выходная система передатчика помех имеет входной двухпозицион-
ный переключатель, два моста - входной и выходной, два идентичных (по фазе и ам-
плитуде) усилителя на ЛБВ и две антенны. При одном положении входного переклю-
чателя входной сигнал делится пополам между двумя синфазными выходами (потеря-
ми пренебрегаем). Когда переключатель находится во втором положении, на тех же
выходах появляются одинаковые, но противофазные сигналы Если предположить фа-
зовую и амплитудную идентичность каналов с ЛБВ, то усиленные сигналы с первой
102
мостовой схемы будут объединяться во второй мостовой схеме. При этом, если сигна-
лы обоих каналов синфазны, то суммарная мощность сигналов двух ЛБВ поступает
только а одну антенну. В случае, когда эти сигналы противофазны, вся мощность по-
ступает во вторую антенну, Таким образом, обе ЛБВ могут направлять свою мощность
либо к одной, либо к другой антенне.
Выходная система с четырьмя секторными антеннами, использующая че-
тыре ЛБВ и восемь мостовых схем. Выходная четырехканальная система с восемью
мостовыми схемами изображена на рис. 3.18. При установке переключателя в положе-
ние 1 входной сигнал моста 1 будет делиться поровну между его выходами с нулевой
разностью фаз. Эти два сигнала поступают на мосты 2 и 4. Выходные сигналы моста 2
равны и синфазны с выходными сигналами моста 4. Полученные четыре сигнала уси-
ливаются ЛБВ, сохраняя соотношение их амплитуд и фаз. Два синфазных сигнала скла-
дываются в мосте 5. Аналогично, два синфазных сигнала, поданные на мост 6,
складываются на его суммарном выходе. Полученные таким образом сигналы подают-
ся на мост 7, на выходе которого образуется их сумма, подаваемая к антенне 1. На ос-
тальных выходах мостов 7 и 8 при этих условиях сигналы отсутствуют. Таким образом,
выходная мощность всех четырех ЛБВ будет подаваться только к антенне 1.
Рис. 3.18. Выходная чстырехканальная система, использующая восемь мостовых схем
При установке переключателя в положение 2 выходные сигналы моста будут в
противофазе. Выходные сигналы с ЛБВ 1 и ЛБВ2 будут подаваться на мост 5, где они
складываются на суммарном выходе. Выходные сигналы с ЛБВЗ и ЛБВ4 подаются на
мост 6, где они складываются также на суммарном выходе. Полученные сигналы по-
даются на мост 7. Так как эти сигналы противофазны, то суммарный сигнал появля-
ется на разностном выходе моста 7, и вся мощность излучается через антенну 2. Ра-
бота системы при установке переключателя в положение 3 и 4 происходит аналогич-
ным образом, за исключением того, что в этих случаях используются разностные вы-
ходы мостов 2 и 4.
103
Переключение антенных лучей в выходных системах с мостовыми схемами мож-
но осуществлять путем изменения фаз сигналов в каналах. В двухканальной выходной
системе для выравнивания фазовых и амплитудных характеристик обоих каналов в од-
ном из них применяются переменные аттенюатор и фазовращатель. В этом случае ЛЕВ
первого канала работает при неизменном напряжении на спирали, а ЛЕВ второго кана-
ла может работать при одном из двух значений напряжения на спирали. При одном на-
пряжении на мостовую схему поступают синфазные сигналы одинаковой мощности, в
результате чего вся мощность поступает к антенне 1. Для подачи всей помехи к антен-
не 2 необходимо напряжение на спирали ЛЕВ второго канала изменить на такую вели-
чину, чтобы ввести в этот канал дополнительный фазовый сдвиг на 180°. При этом на
мостовую схему поступают противофазные сигналы одинаковой мощности, что приво-
дит к подаче всей мощности к антенне 2. Вариантом этого способа выравнивания фаз
является использование в одном из каналов дискретного фазовращателя на 0 и 180°. В
некоторых случаях это может дать преимущество, так как изменение фазы путем изме-
нения напряжения на спирали ЛЕВ может привести к ограничению полосы частот.
Применение фазированных антенных решеток в станциях шумовых помех.
Применительно к радиоэлектронному противодействию фазированные антенные ре-
шетки обладают рядом достоинств:
повышенной эффективной мощностью излучения;
высокой гибкостью управления пространственным положением луча;
широкой полосой пропускания;
возможностью реализации новых методов радиопротиводействия;
высокой скоростью и частотой переключения луча;
возможностью создания шумовых и импульсных помех одновременно.
Такие характеристики, как изменение поляризации и микросекундные интервалы
времени переключения антенного луча, открывают перед системами РЭП с ФАР новые
возможности. Фазированные антенные решетки обеспечивают большое усиление и вы-
сокую скорость переключения луча в пределах широкого углового сектора, достигаю-
щего ±45° и более по азимуту и углу места. Полоса пропускания ФАР превышает окта-
ву. Ориентация узкого луча в пространстве подразумевает соответствующую точность
пеленгации подавляемого источника излучения. Для этой цели могут применяться при-
емные ФАР различной конфигурации: многолучевая решетка мгновенного измерения
пеленга, моноимпульсная и интерферометрическая решетки. В некоторых случаях одна
и та же апертура может быть использована как для измерения пеленга, так и для излу-
чения помехи, однако для этих целей предпочтительнее применение раздельных реше-
ток [25-27].
Многолучевая решетка мгновенного измерения пеленга представляет собой сово-
купность элементов, подключенных к пассивной ДОС. Количество элементов решетки
определяется требуемой точностью пеленгации. В качестве пассивной ДОС может ис-
пользоваться матричная схема Батлера или многолучевая линза. Матричная схема Бат-
лера собирается из ответвителей со сдвигом фазы 90° и нерегулируемых фазовращате-
лей. Она формирует несколько пространственных лепестков. Каждому каналу соответ-
ствует лепесток заданной формы и направления, определяемый крутизной изменения
фазы в схеме. Сканирование луча осуществляется изменением частоты. Потери пи-
тающей системы зависят от количества излучающих элементов. Усилители, установ-
104
ленные рядом с излучателями, уменьшают эти потери. Многолучевая линза также
формирует несколько пространственных лепестков, но с использованием оптических
принципов. В отличие от матричной схемы такого типа ФАР не позволяет осуществить
сканирование луча при изменении частоты, поскольку форма и направление отдельных
лепестков в ФАР определяются электрической длиной каналов. Антенна с линзой Рот-
мана обеспечивает быстрое управление лучами на высоком уровне мощности. Управле-
ние ориентацией луча может производиться и на низком уровне мощности.
В многолучевой ФАР каждый выходной сигнал ДОС включает детектор и лога-
рифмический видеоусилитель, выходы которых подключены к логической схеме изме-
рения пеленга, кодирующей номера тех каналов, по которым поступают сигналы. При-
ближенное измерение пеленга может быть произведено простой регистрацией канала, в
котором принимаемый сигнал имеет максимальную величину, а более точное - с по-
мощью дополнительных устройств, позволяющих сравнивать амплитуды сигналов в
соседних каналах. Благодаря этому методу можно добиться точности измерения пелен-
га в пределах 1/4... 1/8 ширины отдельного лепестка.
Чувствительность системы мгновенного измерения пеленга определяется усиле-
нием приемной антенны и тангенциальной чувствительностью детектора, зависящей от
величины мощности сигнала на входе детектора, при которой амплитуда выходного
сигнала в 2 раза превышает средний уровень шума. В настоящее время легко достига-
ются номинальные значения чувствительности в пределах от -30 до -45 дБ мВт. Более
высокую чувствительность можно получить, применяя твердотельные усилители, но в
этом случае возрастают сложность и стоимость системы. Система мгновенного изме-
рения пеленга определяет направления прихода всех сигналов в пределах широкого
диапазона частот. И в этом се основное преимущество, определяющее ее широкое
применение. Моноимпульсная система измерения пеленга имеет в своем составе ФАР
обычного типа и в ней используется суммарно-разностная обработка принимаемых
сигналов. Точность измерения пеленга в этом случае может превышать 1/20 ширины
луча. Чувствительность моноимпульсной системы измерения пеленга зависит, в пер-
вую очередь, от характеристик смесителя или предусилителя и обычно лежит в преде-
лах от -65 до -75 дБ мВт. В этой системе чаше всего применяется приемопередающая
ФАР, что сокращает объем и стоимость системы, а также устраняет погрешности из-за
параллакса при использовании раздельных ФАР для приема и передачи.
Моноимпульсныс ФАР обычно используются тогда, когда требуется высокая чув-
ствительность и точность измерения угла прихода сигнала. В системах РЭП примене-
ние таких ФАР является желательным, особенно когда на борту защищаемого объекта
имеются другие устройства, обеспечивающие опознавание источника излучения.
В схеме интерферометра для формирования лепестков ДН применяется четыре
неравномерно разнесенных элемента. Наиболее широкие лепестки формируются парой
элементов, разнесенных на минимальное расстояние, а наиболее узкие - парой элемен-
тов, разнесенных на самое большое расстояние. Компараторная схема работает на про-
межуточной частоте и служит для суммирования энергии от каждой пары элементов.
Амплитуда выходного сигнала зависит от разности фаз (т. е. угла прихода) СВЧ-
сигналов на каждой паре элементов, поэтому измерение пеленга может производиться
на основе сравнения сигналов как по амплитуде, так и по фазе.
105
Чувствительность приемного устройства с интерферометрической системой из-
мерения пеленга обусловливается потерями в антенне, смесителях и компараторе и но-
минально составляет от -50 до -60 дБ мВт. Точность пеленгации снижается из-за мно-
гократных отражений и фазовых погрешностей компонентов. Основное достоинство
интерферометрической приемной системы - относительная простота и дешезизна.
Для получения большого усиления и высокой эффективной мощности излучения
в системах РЭП можно использовать несколько типов решеток. Простейшая из них
имеет делитель мощности с единственным входом, на который подается сигнал от
мощного передатчика. Делитель мощности питает излучающие элементы через фазов-
ращатель. Линейные решетки этого типа дают усиление от 10 до 20 дБ. Коэффициент
усиления определяется числом элементов решетки. Диапазон рабочих частот решеток
этого типа превышает октаву и вполне соответствует требованиям системы РЭП. Уп-
равление по фазе обеспечивается с помощью ферритовых фазовращателей, обладаю-
щих сравнительно малыми (менее 1 дБ) потерями в пределах очень широкой полосы и
способных работать с высокими уровнями мощностей.
Фазированная решетка с когерентными усилителями применяется для получения
очень высокой эффективной мощности, питание ее осуществляется от нескольких уси-
лителей мощности. Выход маломощного генератора делится простым делительным
устройством, подключаемым ко входам этих усилителей. Для применения в качестве
усилителей мощности идеально подходят ЛБВ: у них широкая полоса пропускания и
высокий коэффициент усиления. С помощью четырех ЛБВ относительно несложно по-
лучить мощность в 1 кВт и перекрыть помехой диапазон, превышающий октаву. Выхо-
ды ЛБВ разветвляются по каналам излучающих элементов. Управление лучом осуще-
ствляется с помощью фазовращателей. Высокая эффективная мощность излучения дос-
тигается за счет когерентного сложения сигналов, излучаемых каждым элементом.
Для лаборатории бортового радиоэлектронного оборудования ВВС США разра-
ботана система РЭП, перекрывающая сектор ± 45° по азимуту. В ней использованы две
передающие и две приемные решетки, предназначенные для измерения азимута и угла
места источников излучения, Эффективная мощность излучения системы превышает
500 кВт. Четыре модуля ЛБВ генерируют мощность 1600 Вт, а коэффициент усиления
антенны превышает 25 дБ.
В многолучевой антенне с активными элементами в канал каждого излучающего
элемента включается усилитель. Специально для таких ФАР были разработаны миниа-
тюрные ЛБВ с номинальной мощностью 30...40 Вт в пределах полосы, превышающей
октаву. Сигнал, создаваемый маломощным генератором, разветвляется многопозици-
онным диодным переключателем по каналам излучающих элементов и поступает на
линзу. При прохождении сигнала через линзу фаза и амплитуда в каждом канале регу-
лируются оптически, и каждому каналу соответствует луч с фиксированным направле-
нием. Таким образом обеспечивается когерентная работа каждого усилителя в режиме
насыщения. Поскольку в тракте до ЛБВ потери почти отсутствуют, КПД системы
очень высок, и имеется возможность получить высокую эффективную мощность излу-
чения, требуемую при РЭП. Другой положительной особенностью многолучевой ан-
тенны с активными элементами является независимость характеристик линзы от часто-
ты и, следовательно, фиксированное положение луча в пределах всего диапазона [28].
106
Поляризационные характеристики антенных решеток представляют большой ин-
терес, особенно при создании помехи на кроссполяризации. Как известно, такого рода
помеха может создаваться как по главному лучу ДН подавляемой РЛС, так и по боко-
вым ее лепесткам. В первом случае действие поляризационной помехи основывается на
искажении ДН приемной антенны РЛС, обусловленном наличием у антенны кроме ос-
новной (рабочей) ДН паразитной ДН на кроссполяризации, существенно отличающей-
ся по структуре от ДН на рабочей поляризации. В результате искажения ДН помехой
наступает искажение пеленгационной характеристики радиолокационной системы, мо-
гущее привести к срыву сопровождения цели, излучающей эту (поляризационную) по-
меху [11]. При создании поляризационной помехи по боковым лепесткам ДНА РЛС
предусматривается нарушение работы системы компенсации боковых лепестков. Как
известно, боковые лепестки ДН антенны РЛС на основной поляризации подавляются с
помощью дополнительной (компенсационной) антенны. Эта антенна имеет широкую
ДН с усилением, несколько превышающим усиление максимального бокового лепестка
основной антенны. Система компенсации настраивается таким образом, что сигнал,
принятый через боковые лепестки ДН на основной поляризации, компенсируется в
приемнике РЛС. При воздействии помехи на кроссполяризации такой компенсации нс
происходит, и помеха сохраняет эффективность действия через боковые лепестки ДНА
РЛС. Для приема и передачи сигналов с произвольной поляризацией были разработаны
биполярные фазированные решетки. Измерение поляризации принимаемых сигналов и
подготовка соответствующих ответных действий производится с помощью несложных
устройств управления поляризацией, состоящих из схемы амплитудного контроля и
двух фазовращателей. Каждый фазовращатель подключается к вертикальным или гори-
зонтальным элементам биполярной решетки. Схема амплитудного контроля служит
для регулирования отношения составляющих поляризации, а фазовращатель - для под-
стройки разности фаз между вертикальной и горизонтальной составляющими. Измерив
фазу и амплитуду поляризационных составляющих принимаемого СВЧ-сигнала, мож-
но однозначно определить комплексное значение коэффициента поляризации для этого
сигнала и по нему сформировать поляризацию помехового сигнала. По мере того как
удается уменьшать ЭПР самолета, все большее значение приобретает проблема умень-
шения ЭПР антенны системы РЭП. В этом отношении ФАР обладают определенными
достоинствами. Так, при использовании в ФАР невзаимных ферритовых фазовращате-
лей оси приемной и передающей диаграмм таких решеток совпадают только в направ-
лении главных осей решеток, что определяет максимальную величину ЭПР в этом на-
правлении. В направлениях, отличных от направления главной оси, ЭПР ФАР умень-
шается во столько раз, во сколько уровень ее боковых лепестков ниже уровня главного
лепестка. Таким образом, применение ФАР позволяет снизить увеличение ЭПР объекта
за счет установки на его борту антенны и получить ряд других положительных харак-
теристик; ФАР весьма перспективны для систем РЭП, в том числе систем, создающих
шумовые помехи. Представляет интерес ФАР системы радиоэлектронной разведки для
работы в трех частотных диапазонах. Такая ФАР состоит из шести подсистем, каждая
из которых сканирует в секторе 60° по азимуту, перекрывая в целом 360°. Система
спроектирована для работы в частотном диапазоне с перекрытием 6:1. Диаграмма на-
правленности ФАР состоит из ряда узких лучей, положение которых можно менять по
желанию. Разнос фиксированных лучей по углу составляет около 4° при работе в двух
более низких диапазонах волн, и около 8° - при работе в третьем, более высокочастот-
107
ном диапазоне. Компьютер позволяет оператору системы обзора устанавливать необ-
ходимый сектор обзора по азимуту или ступенчато менять положение луча. Направле-
ние луча не зависит от частоты, что стало возможным при использовании фазовраща-
телей на линиях задержки с цифровым управлением (объемом 16 бит). Каждая подсис-
тема ФАР включает в себя поляризатор, обеспечивающий круговую поляризацию сиг-
нала. Габаритные размеры ФАР следующие: высота около 3,5 м, ширина 3 м, глубина 3
м. В каждой полосе частот работают две подсистемы; ФАР снабжается встроенной
системой контроля [27, 29-31].
Представляет интерес система РЭП, разработанная фирмой Loral Electronic Sys-
tems и рассчитанная на решение тактических и боевых стратегических задач. Система
предназначена для самолета F-16, но может использоваться и для самолетов F-15 и
F-14A. В состав ее входят устанавливаемые в носовой и хвостовой частях самолета фа-
зированные антенные решетки с коэффициентом усиления 9... 16 дБ, обеспечивающие
в передней и задней полусферах перекрытие по азимуту и углу места, равное 120° и 60°
соответственно. Система перекрывает частотный диапазон 4,8... 18 ГГц. Эффективная
излучаемая мощность при коэффициенте заполнения 100 % составляет на частотах 4,8;
7,5; 9; 12; 15; и 18 ГГц соответственно 0,25; 0,8; 1,3; 2,65; 3,0 и 2,5 кВт [32].
Фазированная антенная решетка передней зоны излучения состоит из 10 элемен-
тов, причем левый и правый секторы ее ДН (по 60°) обеспечиваются раздельными
группами по пять ЛБВ, а задняя зона - пятью ЛБВ. ФАР задней зоны создает девять
лучей (пять основных и четыре промежуточных), а ФАР передней зоны формирует по
пяти левых и правых лучей шириной 20x60°. За счет комбинированного включения
малогабаритных ЛБВ достигается повышенная надежность работы постановщика по-
мех. Так, при отказе одной ЛБВ излучаемая мощность снижается лишь на 20%.
Система может создавать непрерывные шумовые и импульсные дезориентирую-
щие помехи. Предусмотренное в системе регулирование мощности и коэффициента за-
полнения позволит в дальнейшем создавать поляризационные помехи моноимпульс-
ным РЛС. Маломощные высокочастотные сигналы для передатчиков вырабатываются
задающим генератором, после усиления они передаются на излучатели и элементы
формирования луча ДН антенн. На самолете F-16 в варианте постановщика помех ис-
пользуются два передатчика помех - носовой и хвостовой. Фазированные антенные
решетки носового передатчика размещаются на правом и левом бортах фюзеляжа в на-
плывах, имеющих радиопрозрачные обтекатели. Там же размещаются схемы выбора
положения луча, линзовые элементы формирования луча, пять приемников прямого
усиления и специальные антенны. Последние соединяются с супергетеродинным при-
емником, предназначенным для перехвата и анализа сигналов, а также с приемниками
прямого усиления, выполняющими функции пеленгатора. ФАР хвостового передатчика
монтируется непосредственно на поверхности хвостового оперения, а передатчик раз-
мещается в основании киля самолета. Охлаждение передатчиков воздушное.
В двухрежимной системе РЭБ AN/ALQ-161, разрабатываемой фирмой Northrop,
используется ФАР фирмы Scdco [33].
3.5. Методы и техника создания помех импульсно-доплеровским
и непрерывным РЛС обнаружения
Импульсно-доплеровские РЛС требуют высокой стабильности несущей частоты и
частоты следования импульсов, поэтому весьма чувствительны к методам РЭП. Этому
108
в определенной мерс способствует влияние многократных переотражений импульсов
от подстилающий поверхности и окружающих местных предметов, существенно нару-
шающих измерение дальности за счет возникающей неопределенности в поступлении
импульсов на вход приемника РЛС. Это особенно проявляется при средних и высоких
частотах следования импульсов и работе по нескольким целям одновременно.
Существенным преимуществом таких РЛС является способность измерять отно-
сительную скорость движения цели, используя для этого доплеровский сдвиг частоты,
что позволяет осуществлять селекцию целей по скорости и в процессе обнаружения ре-
альных целей отстраиваться от местных помех и отражений от диполей. Поэтому при
организации РЭП таких РЛС основная цель заключается в создании помех, нарушаю-
щих селекцию целей по скорости. При этом обычно прибегают к ответным помехам,
базирующимся на синхронном излучении помеховых сигнапов, имитирующих ложные
цели с реальными параметрами движения [5].
На рис. 3.19 представлена упрощенная структурная схема системы РЭП, способ-
ной формировать помеху по скорости доплеровским РЛС обнаружения. Система со-
держит устройство запоминания частоты, предварительный высокочастотный усили-
тель, усилитель мощности, приемник. При ретрансляции зондирующего сигнала РЛС
без дополнительной модуляции на выходе системы формируется сигнал, аналогичный
отраженному сигналу по дальности, скорости и направлению. Если сигнал РЛС запо-
минается и излучается через некоторое время с дополнительной модуляцией, то будет
формироваться ложная информация как по дальности, так и по скорости. Создание по-
мехи по скорости может обеспечиваться путем фазовой модуляции сигналов в высоко-
частотном усилителе либо в устройстве запоминания. В первом случае создаются лож-
ные цели на той же дальности, что и постановщик помех, но с различными доплеров-
скими сдвигами частоты (скорости). В последнем случае создастся большое количество
ложных целей, разбросанных по дальности и скорости.
Рис. 3.19. Структурная схема системы РЭП
На рис. 3.20 поясняется принцип создания заградительной помехи по доплеров-
ской частоте. В результате модуляции по фазе ретранслируемого импульсного сигнала
РЛС (рис. 3.20,а) импульсным сигналом частоты (рис. 3.20,6) на выходе системы
РЭП формируется сетка частот, расположенная симметрично относительно несущей
109
частоты РЛС и боковых составляющих спектра сигнала РЛС, сдвинутых относительно
их исходного положении на величину доплеровской частоты F&. Расстояние между со-
седними частотными составляющими спектра помехи равняется частоте модуляции
сигнала РЛС при прохождении им системы РЭП и выбирается с учетом разрешающей
способности РЛС по доплеровской частоте. Против РЛС обнаружения с непрерывным
режимом излучения, обладающей способностью селекции по скорости, может быть
применен тот же принцип создания заградительной по доплеровской частоте помехи.
Рис. 3.20. Принцип создания заградительной по частоте Доплера
помехи импульсно-доплеровским РЛС обнаружения
Поскольку доплеровские РЛС обнаружения используют в приемниках банки доп-
леровских фильтров с шириной полосы пропускания, соответствующей заданному раз-
решению системы по скорости, частота фазовой модуляции Fu должна выбираться та-
кой, чтобы формируемая заградительная по доплеровской частоте помеха перекрывала
все доплеровские фильтры, иными словами, чтобы в каждом фильтре оказывалось не
менее одной составляющей спектра помехи.
Измерение дальности в РЛС с непрерывным излучением обычно проводится с
помощью частотной модуляции сигналов по разности частот излученного и принятого
отраженного сигналов. Поэтому создание дезинформирующей помехи в этом случае
может быть осуществлено с помощью переизлучения сигнала РЛС с сооз встствующей
задержкой по времени.
Обязательным условием создания помех РЛС является обнаружение ее сигналов и
соответствующий анализ необходимых параметров. В соответствии с этим уделяется
110
большое внимание созданию таких РЛС, обнаружение работы которых было бы крайне
затруднительно. Одним из методов достижения данной цели является применение ши-
рокополосных сигналов, позволяющих рассредоточить излучаемую энергию в широ-
ком диапазоне частот и тем самым снизить ее уровень в полосе разведывательных при-
емников до величины ниже порога их чувствительности. Поскольку в этом случае за-
трудняется создание помех, использование широкополосных сигналов относится к эф-
фективным методам помехозащиты РЛС.
ГЛАВА 4. ПОМЕХИ РЛС, СОЗДАВАЕМЫЕ ИЗ ВЫНЕСЕННОЙ ТОЧКИ
ПРОСТРАНСТВА
4.1. Основные принципы постановки помех из вынесенной точки
пространства
Наличие боковых лепестков ДНА создаст благоприятные возможности РЭП ра-
диолокационных устройств из вынесенной точки и прежде всего для создания помех
прикрытия угловому каналу РЛС обнаружения и сопровождения.
Сигналы источников помех, принимаемые боковыми лепес гками ДНА, поступают
с направлений, не совпадающих с направлениями пеленгуемых целей, и своими дейст-
виями неизбежно ухудшают точность пеленгации, определения дальности и/или скоро-
сти и при определенных условиях могут вызвать срыв авгосопровождсния по направ-
лению. До недавнего времени создание помех по боковым лепесткам сдерживалось
требованием высоких уровней мощности помех и энергетическими ограничениями пе-
редатчиков помех. В настоящее время в связи с интенсивным развитием фазированных
антенных решеток и их использованием в системах РЭП появилась возможность суще-
ственно увеличить потенциалы станций помех, в результате чего помеха по боковым
лепесткам рассматривается как одна из реальных помех высокой эффективности РЛС
различного назначения, в том числе моноимпульсного типа [3, 6, 34]. Необходимо от-
метить, что при реализации помех по боковым лепестках ДНА помимо более высоких
уровней мощности помехи необходимо располагать чувствительной приемной систе-
мой на борту защищаемого объекта, способной принять сигнал подавляемой РЛС по
боковым лепесткам. Следует ожидать широкого применения беспилотных самолетов
для подавления РЛС по боковым лепесткам с помощью бортовых станций помех дос-
таточной мощности.
Радиотехническая защита летательных аппаратов (ЛА), находящихся в опреде-
ленной области пространства, с помощью помех из вынесенной точки осуществляется
постановщиком помех прикрытия путем излучения непрерывных маскирующих или
имитационных помеховых сигналов. По расположению постановщика помех прикры-
тия относительно защищаемых ЛА и подавляемых РЭС различают помехи прикрытия,
создаваемые постановщиком помех из зоны барражирования или непосредственно из
строя защищаемых ЛА, и постановщиком помех, летящим впереди строя защищаемых
ЛА. В связи с изменением тактической обстановки относительное положение поста-
новщика помех прикрытия может быстро изменяться. Однако всякий раз, как только
это возможно, пилотируемый постановщик помех прикрытия должен находиться вне
зоны поражения ЗРК. Это связано с тем, что постановщик помех прикрытия подвержен
атакам зенитных ракет, способных наводиться по сигналу помехи, когда он находится
111
в зоне действия огневых средств ПВО. В случае создания помех прикрытия вынесен-
ным вперед постановщиком помех вероятность обстрела его ракетами, использующи-
ми режим наведения по сигналу помехи, оказывается весьма большой. Однако этот вид
помех прикрытия обладает тем достоинством по сравнению с помехами прикрытия,
создаваемыми из зон барражирования или из строя, что может замаскировать позади
себя группы ударных ЛА, например, с помощью шумовых помех даже в том случае,
когда РЛС использует скачкообразную перестройку несущей частоты от импульса к
импульсу.
Основными объектами РЭП помехами прикрытия могут быть:
РЛС обнаружения, наведения ЛА и целеуказания;
РЛС управления огнем ЗА;
РЛС наведения и управления зенитными ракетами;
линии обмена информацией между ракетой и ЗРК;
БРЛС самолетов-перехватчиков;
системы связи;
самолетные средства радионавигации;
радиовзрыватели ракет;
системы госопознавания.
Сначала создание помех прикрытия нейтрализует РЛС обнаружения, нарушает
наведение самолетов-перехватчиков и препятствует раннему обнаружению групп
ударных самолетов и их распределению между ЗРК. Как только ударные самолеты не-
посредственно входят в зону ПВО, помехи прикрытия начинают создаваться всем РЭС,
связанным с управлением оружием, включая ГСН зенитных ракет. Для своего функ-
ционирования постановщик помех прикрытия должен иметь приемное устройство дос-
таточно высокой чувствительности для того, чтобы принять радиолокационные сигна-
лы через боковые лепестки передающей антенны РЛС, а передатчик помех должен
располагать достаточно большой мощностью помехи, чтобы, воздействуя на РЛС через
боковые лепестки приемной антенны, создавать на входе приемника требуемое превы-
шение отношения помеха-сигнал, которое обеспечивает срыв сопровождения пелен-
гуемых ударных самолетов или их необнаружение. Основным назначением передатчи-
ков помех прикрытия является защита многих ударных самолетов, летящих по разнйм
маршрутам. В связи с этим к этой аппаратуре предъявляются следующие специфиче-
ские требования, вытекающие из особенностей боевой обстановки:
1. Очень высокий уровень мощности помехи (по крайней мере в 1000 раз выше, чем у
передатчиков помех индивидуальной защиты) для того, чтобы обеспечить прохождение
сигнала помехи через боковые и задние лепестки ДН антенны подавляемой РЛС;
2. Очень высокая чувствительность приемного устройства, обеспечивающая при-
ем сигналов как по главному лепестку ДНА, так и по боковым и задним лепесткам;
3. Перекрытие очень широкой полосы частот, включающей рабочие частоты не
только РЛС сопровождения и наведения, но и РЛС обнаружения и целеуказания, а так-
же систем командования, управления и связи;
4. Высокая пропускная способность устройств обработки сигналов, способных в
реальном масштабе времени обрабатывать не только сигналы, принимаемые самой ап-
паратурой помех прикрытия, но и информацию, передаваемую от других источников.
Важную роль играет угол между направлением на прикрываемый самолет и на-
правлением на постановщик помех относительно подавляемой РЛС. Обычная ситуация
112
состоит в том, что прикрываемый самолет находится в главном луче ДНА РЛС, а по-
становщик помех - в боковых лепестках ДНА РЛС.
Совершенствование средств создания помех прикрытия стимулируется не только
прогрессом радиолокационной техники, но рядом новых факторов:
совершенствованием систем ПВО противника;
тенденцией авиации к ведению боевых действий по- преодолению ПВО на малых
высотах;
разработкой средств воздушного нападения с низким уровнем демаскирующих
признаков.
Наиболее важным направлением развития радиолокационной техники является
внедрение моноимпульсного метода сопровождения по угловым координатам и широ-
кополосных сигналов с внутриимпульсным кодированием. Были предприняты серьез-
ные усилия при создании средств индивидуальной защиты для противодействия моно-
импульсным РЛС. Было опробовано много различных методов с разной степенью ус-
пеха. Хотя моноимпульсная техника бросает серьезный вызов разработчикам средств
РЭП, создание помех прикрытия может сыграть важную роль по снижению эффектив-
ности этого метода помсхозащиты.
Сжатие импульсов представляет собой весьма эффективный метод помехозащи-
ты, так как он позволяет РЛС со сжатием стать сопоставимыми с короткоимпульсными
РЛС по мощности и разрешающей способности. Однако такие РЛС должны иметь ши-
рокополосное приемное устройство, перекрывающее весь частотный спектр широко-
полосного сигнала.
Маловысотный полет ударных самолетов значительно осложняет обнаружение
целей, поскольку проблема мешающих отражений не решена даже для систем поиска и
перехвата маловысотных целей, хотя эти средства оборудованы специальными устрой-
ствами обработки сигналов. Передатчик помех прикрытия может использовать эффек-
ты мешающих отражений, когда часть энергии сигнала помехи отражается от земной
поверхности и поступает на вход приемника РЛС с разных направлений, в том числе по
главному лучу ДНА. Чтобы в полной мере использовать эффект многолучевого рас-
пространения, у передатчика помех должна быть высокая мощность и ширина антен-
ного луча, достаточная для подсвета всей площади поверхности, дающей мешающие
отражения. Полевые испытания передатчиков помех прикрытия показали, что много-
лучевость распространения помехи и ее прохождение через боковые лепестки ДНА
существенно увеличивает эффективность воздействия. Непрерывный сигнал подсвета
помехой участков поверхности приводит к тому, что в приемник РЛС в определенный
момент времени поступает суммарная энергия по всем направлениям одновременно. В
результате суммирования энергия помехи значительно возрастает, как бы поднимая
уровень боковых лепестков, особенно когда отражения попадают в главный луч ДНА
РЛС. Таким образом, тактика маловысотного прорыва ПВО помогает использовать эф-
фект многолучевого распространения помехового сигнала, способствующего повыше-
нию надежности прикрытия ударных самолетов, и повышает вероятность дезориенти-
рования РЛС. Другое преимущество прохождения переотраженной помехи по главно-
му лучу состоит в уменьшении эффективности таких методов помехозащиты, как
бланкирование и компенсация боковых лепестков. Путем уменьшения чувствительно-
сти приемника можно избежать приема переотраженного сигнала помехи, но при этом
увеличивается вероятность пропуска низколетящих целей. Появление ЛА с низкими
113
значениями ЭПР позволяет сделать вывод, что это очень выгодно для передатчиков
индивидуальной защиты. Однако следует иметь в виду, что если уменьшение ЭПР ос-
ложняет задачу обнаружения ЛА, то наличие на борту передатчика помех является де-
маскирующим фактором. Поэтому естественно возникает вопрос о целесообразности
оснащения их передатчиками помех. В этом случае роль помех прикрытия тактической
авиации возрастает, так как ЭПР самолетов меньше, и задача их защиты упростится.
Таким образом, совершенствование средств создания помех прикрытия с учетом пер-
спективы должно идти в направлении повышения мощности передатчика, чувстви-
тельности приемника и производительности систем обработки сигналов с учетом по-
ложительных факторов: использования тактики маловысотного прорыва ПВО и сни-
жения ЭПР прикрываемых самолетов.
4.2. Частотные диапазоны постановщиков помех прикрытия
При постановке помех прикрытия самолетами-постановщиками помех, находя-
щимися в строю защищаемых ударных самолетов или вне его (сзади или спереди),
обычно используется непрерывное излучение шумовых заградительных помех в диапа-
зонах частот, перекрывающих рабочие частоты подавляемых РЭС. Наряду с шумовыми
помехами могут применяться имитационные. Несмотря на то, что при имитационных
помехах из-за импульсного излучения все же возрастает вероятность того, что опера-
тор РЛС может обнаружить и сопровождать ударный самолет, тем не менее помехи,
создающие много ложных целей, позволяют дезинформировать операторов РЛС и вы-
звать перегрузку систем обработки информации чрезмерным количеством ложных це-
лей, особенно в случае РЭП РЭС самолетов-перехватчиков. Для затруднения селекции
истинных целей среди ложных используется комбинация шумовой и имитационной
помехи. Из-за большой стоимости высокопотенциальных передатчиков помех затруд-
нительно одновременно перекрыть весь требуемый диапазон частот РЛС. Однако его
можно перекрыть поочередно с помощью нескольких синхронно свиппирующих по
частоте передатчиков прицельных шумовых помех, которые имеют повышенную эф-
фективность по сравнению с теми же передатчиками, но одновременно перекрываю-
щими весь частотный диапазон РЛС.
На рис. 4.1,а представлены диапазоны частот, которые могут быть использованы
гипотетическими зенитно-ракетными системами для защиты городов, военных соору-
жений, транспортных средств и военно-морских соединений. Помехи создаются всем
РЭС этих оборонительных систем в соответствии с приоритетом, определяемым их
опасностью для атакующих сил.
На рис. 4.1,6 показано требуемое распределение мощности помехи, излучаемой
самолетами-постановщиками помех, при максимизации располагаемой мощности. В
каждом конкретном тактическом случае будут свои характеристики, на которых осно-
вываются при принятии решения о степени опасности той или иной РЭС. Кроме того, в
процессе атаки будут меняться типы военных систем и РЭС, обеспечивающих их
функционирование. Однако в случае РЭП РЛС необходимо определить эффективную
излучаемую мощность помехи для каждого радиолокатора из условия, чтобы обеспе-
чить одинаковые дальности прикрытия всех атакующих самолетов.
Необходимо отметить, что ударная группировка, имеющая в своем составе само-
леты-постановщики помех с тренированными экипажами, располагающими возможно-
стью создавать шумовые помехи во всех диапазонах, имеет значительное преимущество
114
Рис. 4.1. Частотные диапазоны, используемые радиоэлектронными средствами
ЗРК ПВО (а) и примерные частотные диапазоны создания помех (б)
в начале конфликта по сравнению с ударной группировкой, самолеты которой обору-
дованы только передатчиками шумовых помех самозащиты, эффективность которых
зависит от априорных знаний подавляемых РЛС. Это связано с тем, что эффективность
шумовых помех, создаваемых самолетами-постановщиками помех, будет относительно
высокой против новых систем оружия, которые появятся в частотных диапазонах пере-
датчиков помех. Возможно использование методов создания дезинформирующих помех
для защиты ударных самолетов, которые будут эффективны против новых систем ору-
жия противника, но для этого потребуется время для разработки соответствующей аппа-
ратуры помех, ее производства и ввода в эксплуатацию. Эффективность постановщика
шумовых помех меньше зависит от априорных знаний параметров систем оружия про-
тивника, чем эффективность постановщика дезинформирующих помех и, следовательно,
постановщик шумовых помех будет особенно полезен в начале конфликта.
4.3. Выбор диаграммы направленности антенных систем самолетов-
постановщиков помех прикрытия
Самолеты-постановщики помех прикрытия должны обеспечить создание помех
всем РЭС ЗРК, представляющим непосредственную опасность для ударных самолетов,
преодолевающих зону ПВО. Поэтому сектор облучения помехами прикрытия должен
"накрывать" район расположения подавляемых РЭС. В этом случае ДНА постановщи-
ков помех определяется условиями их боевого применения. Если постановщик помех
находится над территорией противника, например, в случае выполнения операции РЭП
на сухопутном театре военных действий (ТВД), то более вероятным является излуче-
115
ние помех вкруговую в азимутальной плоскости. Когда осуществляется прикрытие ЛА,
атакующих корабельную группу, то сектор излучения помехи самолетом-
постановщиком помех ограничивается угловыми размерами корабельной группы. Та-
ким образом, азимутальный сектор излучения помехи прикрытия меняется от 360° до
десятков градусов. Понятно, что при использовании секторной диаграммы в азиму-
тальной плоскости ее пространственное положение должно сохраняться все время на
подавляемых объектах, несмотря на барражирование самолета-постановщика помех.
На рис. 4.2 приведены ДНА передатчика помех в азимутальной и угломестной плос-
костях, которые показывают, что горизонтальная поляризация при создании помех являет-
ся более критичной в угломсстной плоскости, чем в азимутальной. На обеих рабочих поля-
ризациях обеспечивается сектор излучения в угломестной плоскости 30° в нижней полу-
сфере. Конечно, в общем случае применения самолета-постановщика помех этого будет
вполне достаточно, но желательно уменьшить ширину луча в этой плоскости до 15° для
увеличения излучаемой мощности помехи. При необходимости суженный антенный луч
может электронно сканироваться по азимуту или его ориентация может быть фиксирована
по азимуту и наводиться на подавляемую РЛС маневром самолета в этой плоскости. В обо-
их случаях антенный луч неподвижен в угломестной плоскости.
Рис. 4.2. Диаграмма направленности самолетных фюзеляжных антенн передатчика
помех из зон барражирования в азимутальной (а) и угломестной (б) плоскостях
При высоте полета самолета-постановщика помех 12000 м на дальности 140 км
углы места распространения помеховых сигналов составляют менее 5°. При меньших
высотах полета постановщика помех углы места оказываются еще меньше. На ориен-
тацию антенного луча в направлении на РЛС влияет угол атаки самолета-постановщика
помех, на величину которого влияют три основных фактора: масса самолета, его ско-
рость и высота полета. Угол атаки может быть как положительным, так и отрицатель-
ным. Каждый тип самолета имеет свои характерные параметры и, следовательно, каж-
дый самолет должен изучаться отдельно на основе результатов летных испытаний. Во-
116
енные самолеты имеют индикаторы угла атаки, которые можно использовать при соз-
дании помех прикрытия в реальной ситуации.
Важно отметить, что неточное наведение антенного луча на РЛС уменьшает уро-
вень мощности помехи на входе подавляемого приемника подобно тому, как это про-
исходит при расстройке помехи по частоте. Поэтому при оценке эффективности воз-
действия помехи прикрытия необходимо учитывать оба отмеченных фактора.
4.4. Эффективность воздействия шумовых помех прикрытия из зон
барражирования
Основная задача самолета-постановщика помех прикрытия - маскировка атакую-
щих самолетов для снижения вероятности поражения их огневыми средствами ПВО.
При этом сам постановщик помех находится вне зоны поражения средств ПВО. При
этих условиях мерой эффективности помех прикрытия является дальность вскрытия
замаскированных помехами атакующих самолетов. Для большинства РЛС дальность
обнаружения цели в шумовой помехе происходит на малой дальности, где отношение
сигнал-помеха составляет 5... 15 дБ. Пусть РЛС обнаруживает ударные самолеты на
дальности 7?, где она способна начать их сопровождение и возможно получит доста-
точно информации для пуска ракеты. Эта дальность вскрытия цели в помехах различна
для каждой конкретной ситуации. Положим, что атакующий самолет имеет ЭПР, рав-
ную 1 м“. Эквивалентная спектральная плотность мощности помехи N, излучаемая в
направлении РЛС в полосе пропускания его приемника, равна 1 Вт/МГц, а наклонная
дальность от РЛС до самолета-постановщика помех d = 92 км. Уравнение, связываю-
щее эти параметры, имеет вид:
где к - постоянная.
Величины О’ и N связаны с R функцией четвертой степени, a d - второй степени.
Положим, что для данного радиолокатора при удалении его от постановщика по-
мех на 92 км и спектральной плотности мощности помехи 1 Вт/МГц дальность вскры-
тия прикрываемых самолетов с о - 1 м2 составляет 18 км.
Для того, чтобы найти, как повлияет увеличение спектральной плотности помехи
до 10 Вт/МГц, необходимо использовать номограмму (рис. 4.3) определения коэффи-
циента изменения дальности вскрытия. При оговоренных выше условиях этот коэффи-
циент составит 0,56, т. с. дальность вскрытия при спектральной плотности помехи
10 Вт/МГц уменьшится в 0,56 раза. Если постановщик помех удалится на 185 км, то при
первоначальных условиях дальность вскрытия возрастет в 1,41 раза.
Изменение только ЭПР прикрываемой цели приводит к следующему изменению
коэффициента изменения дальности вскрытия:
ЭПР, м2.........0,1 1 2 5 10 100
Коэффициент.....0,562 1,0 1,19 1,5 1,78 3,16
Шумовые помехи прикрытия сокращают дальность действия импульсной РЛС.
Относительное снижение дальности действия РЛС, определяемое как отношение мак-
симальной дальности действия РЛС при отсутствии помех к максимальной дальности
117
Рис. 4.3. Зависимость коэффициента изменения дальности вскрытия
от плотности мощности помехи и удаления самолета и постановщика помех от РЛС
действия РЛС при наличии помех от нескольких передатчиков, определяется выраже-
нием
, + Л (РС)Л,/Д^д„-Сг|,,
/=1 (4яКП1- Y „ г г
I 1 I ^^ф^бок.пр/^пр^п.пер
где (PG)n, - излучаемая мощность /-го передатчика помех; АЕШП,- - ширина спектра
шумовой помехи z-ro передатчика помех; Rni - расстояние от РЛС до z-ro передатчика
помех; Gnp, - коэффициент усиления приемной антенны РЛС; Абокпр,- - относитель-
ный уровень боковых лепестков ДН приемной антенны РЛС в направлении z-ro пере-
датчика помех; к - постоянная Больцмана; Гэф - эффективная шумовая температура
приемника РЛС; Апр - суммарный коэффициент, учитывающие потери радиолокаци-
онного сигнала в среде распространения и в трактах при приеме; £п.пер - суммарный
коэффициент, учитывающий потери сигнала помехи при передаче в среде распро-
странения и в трактах.
4.5. Влияние многолучевого распространения сигнала
на эффективность помех прикрытия
При создании помех из зон барражирования сигнал помехи от самолета-
постановщика помех может достигать антенны подавляемого радиолокатора как непо-
средственно, так и путем переотражения от земной поверхности или от любого отра-
жающего объекта, расположенного вблизи радиолокатора Прямой и переотраженные
сигналы не всегда достигают антенны подавляемого радиолокатора в фазе. Амплитуда
результирующего сигнала на входе радиолокационного приемника зависит от несущей
частоты сигнала, высоты полета постановщика помех и антенны радиолокатора, от
118
свойств подстилающей поверхности" состояния атмосферы и поляризации сигнала. По-
этому ее трудно рассчитать с требуемой точностью, особенно в условиях быстроизме-
няющейся ситуации.
Многопутное распространение сигнала помехи, приводящее к замираниям сигна-
ла, сказывается на эффективности воздействия помехи, если псреотраженный сигнал
проникает на вход подавляемого приемника через главный луч ДНА поисковых РЛС с
широкими антенными лучами в угломестной плоскости. В случае остронаправленного
антенного луча РЛС сопровождения, расположенного над земной поверхностью
(рис. 4.4), переотраженный сигнал не будет влиять на эффективность, за исключением
случаев, когда узкий антенный луч РЛС ориентирован при малых углах места и облу-
чает земную поверхность. Коэффициент дополнительных потерь сигнала при много-
путном распространении определяется как отношение амплитуды электрического поля
в рассматриваемой точке пространства к амплитуде электрического поля в той же точ-
ке пространства в условиях распространения сигнала в свободном пространстве. Дру-
гими словами, однолучевое распространение сигнала соответствует коэффициенту до-
полнительных потерь, равному 0 дБ. По мере приближения самолета-постановщика
помех имеет место компенсация и сложение сигналов с частотой, изменяющейся в сто-
рону увеличения при уменьшении дальности до РЛС.
Рис. 4.4. Сценарий для угломестной плоскости при создании помех из зоны барражирования
На практике многочастотность шумового сигнала вызывает появление при посто-
янной дальности максимумов и минимумов в спектре помехи. Так как дальность до са-
молета-постановщика помех от РЛС изменяется, то положение максимумов и миниму-
мов в спектре помехи также меняется, создавая "замазанный" спектр. Такой же эффект
наблюдается и при создании шумовых помех самозащиты. Частота изменения огибаю-
щей спектра заградительной шумовой помехи особенно важна, если ширина загради-
тельной помехи достаточна. Когда самолет-постановщик помех совершает полет на по-
стоянной высоте, эта частота связана с дальностью до него.
4.6. Тактика применения постановщиков помех прикрытия
Самолеты-постановщики помех наиболее эффективны, когда они находятся на
одной линии с атакующим самолетом по направлению к подавляемому РЭС, т.е. когда
помехи прикрытия действуют по главному лучу ДНА. Однако такие условия выпол-
нить затруднительно, и действие помехи в большинстве случаев происходит через бо-
ковые лепестки ДНА РЭС. Атакующий самолет и постановщик помех должны нахо-
диться в определенном секторе по направлению к РЭС. В реальной ситуации для дос-
таточной эффективности воздействия помех ширина этого сектора должна составлять
около 15° и меньше. Для повышения надежности прикрытия ударных самолетов может
быть применено несколько самолетов-постановщиков помех. Пилотирование самолета-
119
постановщика помех должно осуществляться так, чтобы воздействовать помехами че-
рез наиболее благоприятную область ДНА РЛС и удерживать помеховый луч в нужном
направлении. Он может кратковременно летать вдоль границы зоны поражения, где его
эффективность может быть меньше, и совершать полеты в направлении этой границы в
течение продолжительности атаки. Однако многие атаки малой продолжительности
могут быть обеспечены на одном заходе с помощью нескольких постановщиков помех.
Возможен круговой маршрут полета постановщиков помех, когда отсутствуют потери
из-за отклонения диаграммы направленности вследствие крена самолета в точке поворо-
та. Самолет-постановщик помех, летящий по кругу, всегда имеет крен. Тем не менее оба
эти маршрута позволяют обеспечить 80 % полетного времени туда и обратно без крена.
При барражировании в виде вытянутой петли в направлении РЛС полет без крена значи-
тельно увеличивается. Близкие развороты при этом не создают серьезных проблем, тогда
как дальние развороты приводят к выходу РЛС из ДНА постановщика помех.
Создание помех прикрытия из зон барражирования имеет большое преимущество
по сравнению с тактикой РЭП с помощью постановщика помех, находящегося в строю
и впереди атакующих самолетов, из-за того, что высокопотенциальный передатчик по-
мех находится вне зоны поражения ЗРК. Однако при этом следует учитывать возмож-
ность атаки его самолетами-перехватчиками противника. Постановщик помех в этом
случае может использовать противорадиолокационные ракеты и осуществлять их при-
крытие помехами.
Необходимо отметить, что постановщик помех из зоны барражирования обеспе-
чивает эффективное воздействие по главному и ближним боковым лепесткам ДНА
РЛС ЗРК в течение длительности атаки только по сосредоточенным на местности
группам РЛС и не может поддерживать одновременное эффективное подавление раз-
несенной группировки ЗРК. В случае атаки ударной группировки перехватчиком с
БРЛС, его движение непредсказуемо и, следовательно, постановщик помех прикрытия
не сможет находиться на линии, проходящей через группу атакующих самолетов и
БРЛС. При создании помех прикрытия из строя атакующих самолетов должно осуще-
ствляться наведение помехи по частоте и направлению в реальном масштабе времени.
Постановщик помех при этом должен лететь с той же скоростью, что и атакующие са-
молеты. Положение постановщика помех по азимуту и углу места может быть опреде-
лено с помощью пассивной пеленгации по сигналу помехи. Поэтому постановщик по-
мех может быть обстрелян ракетами в режиме наведения по сигналу помехи. Учитывая
это обстоятельство, им должны предусматриваться способы создания дезинформи-
рующих помех для противодействия ЗРК в этом режиме.
Когда помехи прикрытия создаются с помощью вынесенного вперед постановщи-
ка помех, подавление РЛС по главному и ближним боковым лепесткам ДНА выполня-
ется только для случая, когда РЛС сосредоточены на местности, но при этом поста-
новщик помех подвержен атакам ракет с режимом наведения по сигналу помехи.
На рис. 4.5 показана ситуация защиты атакующих самолетов от ракет ЗРК и ко-
раблей от противокорабельных ракет с активными ГСН, вынесенными в направлении
угрозы постановщиком помех. В обоих случаях на радиолокационном индикаторе типа
А наблюдается сигнал, отраженный от постановщика помех и от защищаемых объек-
тов. При этом шумовой сигнал помехи "накрывает" сигналы от объектов. Если пере-
датчик помех работает на поимпульсной основе, то объекты будут замаскированы с
помощью прицельной шумовой помехи с большой спектральной плотностью мощно-
сти для РЛС с перестройкой несущей частоты от импульса к импульсу [3].
120
Рис. 4.5. Тактические ситуации при защите самолетов от ракет ЗРК (а)
и кораблей от противокорабельных ракет (б) и вид индикатора дальности БРЛС (в)
Объекты
атаки, оборо-
няемые ЗРК
На рис. 4.6 показана тактика
поддержки атакующих самолетов
помехами прикрытия, создаваемыми
барражирующими самолетами-
постановщиками помех. Данная так-
тика основана на предположении,
что противник ожидает атаки из сек-
тора, в котором барражируют по
кругу самолеты-постановщики по-
мех. Впереди ударных самолетов по-
сылаются самолеты-постановщики
помех, которые сбрасывают диполь-
ные отражатели, образующие широ-
кую завесу. Некоторые из этих са-
молетов уходят в зоны барражиро-
Рис. 4.6. Ситуация прикрытия атаки вания. Основная группа самолетов-
с имитацией ложного направления постановщиков помех и ударных са-
молетов летит через завесу диполей
с выключенной аппаратурой помех. По достижению заданного рубежа (согласно гра-
фику атаки) осуществляется включение помех. Каждый постановщик помех следует
строго позади атакующих самолетов по отношению к подавляемому радиолокатору.
Самолеты-постановщики помех сопровождают атакующие самолеты до минимально
121
допустимой дальности, после че-
го они разворачиваются в разные
стороны, что не позволяет опера-
торам РЛС определить направле-
ние атаки и усложняет обстанов-
ку. После окончания атаки удар-
ные самолеты возвращаются по
намеченному маршруту. Самоле-
ты-постановщики помех уходят в
сектор, по которому возвращают-
ся ударные самолеты, для обеспе-
чения их прикрытия (рис. 4.7).
Как при атаке, так и при
выходе из нее ударных самоле-
тов необходимо, чтобы самоле-
ты-постановщики помех находи-
лись в положениях, где они по-
давляют РЛС по главному или
ближним боковым лепесткам
ДНА подавляемой РЛС. Чем
выше эффективность самолета-
постановщика помех, тем боль-
ше будет предприниматься по-
пыток со стороны противника
уничтожить его. Для этой цели
могут быть привлечены зенит-
ные ракеты дальнего действия,
наводящиеся на источник излу-
чения. Однако наиболее вероят-
ными для борьбы с самолетами-
постановщиками помех будут
самолеты-перехватчики.
Вероятность одновременной
атаки самолета-постановщика
Рис. 4.7. Маршруты полета самолетов-постановщиков
помех для прикрытия ударных самолетов при атаке
и выходе из нее
помех зенитными ракетами и са- Рис. 4.8. Тактическая ситуация перехвата самолстов-
молетом-перехватчиком мала. постановщиков помех с помощью самолетов-
Рассмотрим тактическую ситуа-
цию перехвата самолетов-постановщиков помех самолетами-перехватчиками противника
(рис. 4.8).
Ударные самолеты приближаются к ЗРК в угловом секторе 0. На расстоянии d от
ЗРК барражируют самолеты-постановщики помех прикрытия. Когда перехватчики на-
ходятся в районе ЗРК, то на удалении d они должны вести наблюдение за областью
пространства шириной 5, которая определяется как
TidO
180° '
122
Если принять в = 20°, d = 150 км, то S= 50 км.
По мере приближения перехватчиков к самолетам-постановщикам помех угол ви-
димости их увеличивается, что затрудняет визуальное обнаружение. Так как в этом
секторе одновременно работают несколько постановщиков помех на разных высотах,
то операторы РЛС перехватчиков встретятся с многоцелевой ситуацией. К тому же са-
молеты-постановщики помех будут создавать шумовые и дезинформирующие помехи
РЛС обнаружения перехватчиков и системам связи. Если перехват осуществляется с
помощью подачи команд, передаваемых голосом, то эффективным способом противо-
действия будет подача ложных команд пилотам перехватчиков. БРЛС обнаружения пе-
рехватчика может работать на частотах, отличных от частот РЛС ЗРК. Поэтому опера-
тор самолета-перехватчика не может быть уверен, что, сопровождая в пассивном ре-
жиме постановщик помех, он наводится на самолет-постановщик помех, который соз-
дает наибольшие трудности в функционировании РЛС ЗРК. Также оператор перехват-
чика встретится с ситуацией, когда один самолет-постановщик помех будет защищать
другие, и наоборот. Перехватчики могут быть направлены на наиболее эффективный
самолет-постановщик помех по информации с КП ЗРК с тем, чтобы удержать их в на-
правлении, откуда излучаются наиболее сильные помехи. При этом с КП будут пред-
приниматься попытки передать на перехватчики информацию об азимуте и угле места
постановщика помех, но практически он будет располагать только информацией об
азимуте при создании помех двумерному радиолокатору дальнего обнаружения.
Другой способ наведения перехватчиков на самолеты-постановщики помех со-
стоит в использовании на борту перехватчика системы пассивной пеленгации поста-
новщиков помех, частота настройки приемника которой контролируется оператором
командного пункта.
4.7. Возможности повышения спектральной плотности помех
прикрытия РЛС и ГСН, использующих непрерывное
и квазинепрерывное излучение
Селекция подвижных целей в РЛС КНИ и НИ основана на использовании эф-
фекта Доплера. Сигналы РЛС КНИ представляют собой последовательность когерент-
ных радиоимпульсов с малой скважностью. Это позволяет однозначно измерить допле-
ровские скорости целей с высоким разрешением, а измерение дальности до цели при
этом связано с устранением неоднозначности по дальности, например, путем вобуля-
ции частоты повторения или использования нескольких чередующихся частот повто-
рения импульсов. Стробирование приемника РЛС по дальности позволяет измерить
расстояние до цели и обеспечить разрешение целей по дальности. Так как собственные
шумы приемника попадают в выходные каскады приемника только во время действия
селекторного импульса, то после стробирования средняя мощность собственных шу-
мов на входе доплеровского фильтра уменьшается с увеличением скважности. В РЛС
КНИ обычно реализуется оптимальный приемник. Поэтому для создания эффективных
маскирующих помех необходимо и достаточно на входе доплеровского фильтра селек-
ции обеспечить определенное значение отношения удвоенной энергии полезного сиг-
нала к спектральной плотности шумовой помехи.
Для случая воздействия на РЛС КНИ широкополосной шумовой помехи
(Д/шш »A/c) С учетом того, что в приемнике используется энергия одной спектральной
123
составляющей, соответствующей несущей частоте сигнала, отношение помеха-сигнал
по мощности на входе линейной части приемника определяется выражением:
ссп 2Д/ШШ t Qoi
где Д/щщ - ширина спектра широкополосной шумовой помехи; Д/ - ширина полосы
пропускания доплеровского фильтра; Q — скважность, равная отношению периода по-
вторения радиоимпульсов к длительности селекторного импульса; q0 - требуемое от-
ношение сигнал-шум по энергии для достижения помехового эффекта.
Если сужать полосу шумовой помехи с центральной частотой, равной несущей
частоте радиолокационного сигнала РЛС КНИ, то при ширине спектра меньше удвоен-
ной частоты повторения импульсов спектр стробированного шума по времени на вы-
ходе доплеровского фильтра перестает быть сплошным.
Так как в приемнике РЛС КНИ в результате частотной фильтрации удаляются все
спектральные составляющие, кроме той, которая совпадает с несущей частотой сигна-
ла, то в случае узкополосной шумовой помехи отношение помеха-сигнал
с^п.уш 2Д/уш / Д/"q^ ,
где Д/"уш - ширина спектра узкополосной помехи.
Сравнивая значения коэффициентов подавления РЛС КНИ широкополосным и
узкополо’сным шумом, получаем
С^П.ШШ / С^п.уш — Д/шШ / £?Д/ушп.
Если положить, что ДД'ш= ^п = 1/Тповт, а Д/щШ = 1/тн, то
0Q1. шш^п.уш Тповт/ TUQ 1,
т:с. при таких условиях передатчики узкополосных и широкополосных шумовых помех
оказываются энергетически эквивалентными при подавлении РЛС КНИ. Качественно
это объясняется тем, что при широкополосной шумовой помехе энергетические потери
сигнала помехи из-за расширения спектра помехи компенсируются суммированием в
доплеровском фильтре вкладов в уровень помехи от соседних спектральных состав-
ляющих, образующихся в результате временного стробирования.
Анализ воздействия шумовых помех с произвольной шириной спектра на прием-
ник РЛС КНИ показывает, что в общем виде отношение помеха-сигнал может быть
описано выражением
ап=(2Д/ш/Дуфд0)- (1/(Р(Д/ш/2ГП0ВТ)),
где
1 ’ ДУф4' 4/ш< 2РП0ВТ,
1
!=. l + 2E[sin2(™/e)/(™/e)2] . h = 1,2...1=A/„/2F„1>„,
•*(АпП'^ПОВг) rt_|
2Рповт^—Д/ш £?’2РПовт ~ f
, Q, Vm>22PnOBT=2A/c.
На рис. 4.9 приведена зависимость коэффициента подавления РЛС КНИ от отно-
сительной ширины спектра шумовой помехи. Для сравнения там же приведена анало-
гичная зависимость коэффициента подавления для РЛС НИ. Для ширины спектра шу-
мовой помехи, меньшей удвоенной частоты повторения радиолокационных импульсов.
124
коэффициенты подавления для РЛС КНИ и НИ изменяются одинаково. Если ширина
спектра шумовой помехи больше обратной величины длительности радиоимпульса
РЛС (спектра радиолокационного сигнала), то коэффициент подавления для РЛС КНИ
оказывается меньше коэффициента подавления для РЛС НИ на величину скважности
квазинепрерывного сигнала. В промежуточной области (2FnoBT < А/ш < Д/Д коэффициент
подавления колеблется около своего среднего значения. Величина пульсаций макси-
мальна при прямоугольной форме спектра помехи и мала при гауссовской форме.
Рис. 4.9. Зависимость относительных коэффициентов подавления
РЛС НИ и КНИ для шумовой помехи с различной шириной спектра
Эффективность шумовых помех прикрытия оказывается тем выше, чем больше
спектральная плотность мощности помехи, чем ближе передатчик помех расположен к
подавляемой РЛС и чем меньше уровень боковых лепестков ДН приемной антенны
РЛС (ГСН) в направлении постановщика помех. Повышение спектральной плотности
шумовой помехи достигается, с одной стороны, увеличением излучаемой мощности
помехи, реализуемой на основе активных фазированных решеток, а с другой, - путем
сужения полосы помехи до минимально допустимой величины, т. е. перехода от загра-
дительной помехи к прицельной по спектру. Однако такой переход сопровождается
повышением требований к точности наведения помехи по частоте, особенно в случае
подавления РЛС с непрерывным или квазинепрерывным излучением, которое характе-
ризуется весьма узкой полосой доплеровской селекции. В данном случае необходимо,
чтобы сигнал узкополосной шумовой помехи прикрытия "накрыл" сигнал, отраженный
от прикрываемого самолета. Если постановщик помех прикрытия барражирует по
замкнутой траектории вне зоны поражения, оставаясь практически на одинаковом уда-
лении от РЛС, то доплеровское смещение сигнала помехи будет близко к нулю. Поэто-
му для обеспечения попадания сигнала помехи в фильтр доплеровской селекции РЛС
125
надо в ретрансляционном передатчике помех несущую частоту радиолокационного
сигнала, принятого от подавляемой РЛС, сдвинуть на величину доплеровской частоты
прикрываемого самолета. Зная скорость прикрываемого самолета в направлении РЛС,
длину волны РЛС, а также положение самолета и постановщика помех прикрытия от-
носительно РЛС, можно достаточно точно определить величину дополнительного вно-
симого доплеровского сдвига. Используя априорные данные о скорости полета и на-
правлении атаки прикрываемых самолетов, можно рассчитать эту частотную поправку.
Для компенсации неточности спектр сигнала помехи прикрытия расширяют путем ЧМ
(ФМ) доплеровскими шумами. Возможно более грубое определение частотной поправ-
ки путем расчета возможного диапазона доплеровских частот РЛС и перекрытия его с
помощью шумовой помехи. Если принять, что РЛС должна отслеживать самолеты с
максимальными скоростями, равными трем максимумам (ЗМ), то при длине волны 3 см
ей будет соответствовать доплеровская частота 60 кГц. Учитывая необходимость при-
крытия как приближающихся, так и удаляющихся от РЛС самолетов, ширина спектра
шумовой помехи составит около 120 кГц. При ширине фильтра доплеровской селекции
1 кГц энергетические потери сигнала узкополосной помехи в приемнике РЛС (ГСН)
составят около 21 дБ, а в случае широкополосной помехи 20 МГц - 43 дБ. Как можно
видеть, энергетический выигрыш от
применения узкополосной шумовой по-
мехи доплеровским РЛС равен 22 дБ.
Эффект действия такой помехи состоит в
том, чтобы создать в полосе доплеровских
частот приемника РЛС и ГСН мощный
шумовой сигнал даже в случае, когда по-
меха проникает в приемник через боковые
лепестки ДНА. Сопровождение сигнала,
отраженного от прикрываемого самолета,
теряется при отношении помеха-сигнал на
выходе фильтра доплеровской селекции
3 дБ и более. В результате РЛС и ГСН
вынуждены переходить в режим пеленга-
ции сигнала помехи прикрытия.
Помимо ретрансляционного пере-
датчика помех прикрытия может быть
применен также генераторный передат-
чик (рис. 4.10).
Рис. 4.10. Структурная схема передатчика
узкополосных шумовых помех прикрытия
для подавления импульсно-доплеровских РЛС
С помощью приемника точного измерения частоты и настраиваемого СВЧ-
генератора на частоту радиолокационного сигнала подсвета формируется непрерывный
сигнал, частота которого сдвигается на величину частотной поправки, вычисляемой
ЭВМ либо по априорным данным о скорости прикрываемых ударных самолетов, либо
по результатам измерения ее с помощью бортового импульсно-доплеровского радио-
локатора. Затем сдвинутый по частоте непрерывный сигнал модулируется шумами по
частоте (фазе) и амплитуде, усиливается и излучается в направлении подавляемой РЛС
и ГСН. Данный передатчик помех может создать весьма эффективную помеху с очень
высокой спектральной плотностью мощности за счет соответствующего сужения по-
лосы шумовой помехи, накрывающей доплеровскую частоту сигнала, принимаемого
приемником ракеты. Для этого необходимо, чтобы постановщик помех прикрытия рас-
126
полагал аппаратурой, способной определять частоту сигналов РЛС и рассчитывать
диапазон доплеровских частот подавляемых ГСН и передатчика помех соответственно
Рассмотрим точный способ определения необходимой частотной поправки.
На рис. 4.11,а показано взаимное расположение РЛС ЗРК, ракеты с доплеровской
ГСН после ее пуска, атакующего самолета и постановщика помех.
Рис. 4.11. Расположение РЛС ЗРК, ракеты с ГСН, ударного самолета и самолета-
постановщика помех прикрытия (о) и диаграммы их взаимных расстояний (б)
для случая, когда самолет-постановщик помех находится вне зоны поражения ЗРК,
но в главном луче или в ближних боковых лепестках ДНА РЛС
Зенитная ракета стремится перехватить атакующий самолет. Постановщик помех
находится вне зоны поражения ЗРК, но в главном луче или ближних боковых лепест-
ках ДНА РЛС подсвета цели и/или в главном луче ДНА опорного канала подсвета для
хвостового приемника ГСН ракеты. Самолет-постановщик помех прикрытия оборудо-
ван аппаратурой, включающей бортовой навигационный радиолокатор, быстродейст-
вующий и точный приемник станции помех для определения частоты РЛ сигнала,
управляемый по частоте передатчик шумовых помех, ЭВМ и импульсно-доплеровский
радиолокатор. Взаимное положение и расстояние между РЛС подсвета, ракетой, удар-
ным самолетом и постановщиком помех показаны на рис. 4. 11,6. Так как доплеровская
частота пропорциональна скорости изменения расстояния, то
Fnc — к Rnc', Fp = kRp; Fn=kRn,
Fc — kRc', F^—kRpz', Fpn=kRPn,
k=^,
c
где с - скорость света.
127
В дальнейших расчетах учтем, что скорость изменения расстояния при сближении
приводит к отрицательным доплеровским частотам.
Частота сигнала подсвета, принимаемая хвостовым приемником ракеты по опор-
ному каналу подсвета, равна /рЛС - Fp;
частота сигнала подсвета, принимаемого ударным самолетом, равна /рлс- Fc;
частота отраженного от цели сигнала, принимаемого носовым приемником раке-
ты, равна/рлс - Fc - Fpc.
После смешивания сигналов, принятых хвостовым и носовым приемниками ГСН
ракеты, результирующая разность частот (/рЛС - Fc - Fpc ) - (/рлс - Fp) = Fp - Fc - Fpc.
Частота сигнала подсвета, принимаемая на постановщике помех, равна/рлс - Fn.
Оператор РЭП на самолете-постановщике помех измеряет и использует для на-
стройки по частоте своего передатчика шумовых помех частоту принимаемого сигнала
РЛС подсвета, а так же информацию о положении и скорости ракеты и ударного самоле-
та, полученную с помощью его импульсно-доплеровского радиолокатора с учетом собст-
венной скорости полета. Для этого с помощью ЭВМ производят следующие расчеты.
Пусть центральная частота передатчика узкополосной шумовой помехи
Уоп ~./рлс — Fn + Г'комп 5
где FKOMn - частотная поправка, которая должна быть добавлена к принимаемой на са-
молете-постановщике помех частоте сигнала подсвета (/"рлс - Fn) для того, чтобы цен-
тральная частота сигнала помехи попала в полосу пропускания доплеровского фильтра
носового приемника, когда ГСН ракеты сопровождает ударный самолет.
Центральная частота сигнала помехи в носовом приемнике ракеты будет равна
f _ р + р -р
Урле 2 п 1 л комп 1 рп •
Для того, чтобы центральная частота сигнала помехи попала в полосу пропуска-
ния доплеровского фильтра ГСН ракеты, нужно, чтобы/рж -Fn + Ггомп - Fpn =/рлс - Fc -F^.
Откуда
Л-омп = FU-FC + Fpn - Fpc.
Импульсно-доплеровский радиолокатор, расположенный на самолете-постанов-
щике помех, сопровождает по дальности и скорости ракету и ударный самолет. Из-
вестно также положение РЛС подсвета по информации от навигационного радиолока-
тора или априорной информации. Частота сигнала РЛС подсвета принимается на борту
самолета-постановщика помех и точно измеряется с помощью приемника. Используя
эту информацию, компоненты частотной поправки FK0Mn могут быть рассчитаны сле-
дующим образом:
•
F„- определяется по Rn, которая равна скорости постановщика помех в направ-
лении подавляемого РЛС подсвета цели;
Fc - определяется либо импульсно-доплеровским бортовым радиолокатором, ли-
бо путем переноса системы координат измерений от самолета-постановщика помех к месту
расположения РЛС подсвета с помощью бортовой ЭВМ, которая рассчитывает Rc;
Fpn - можно измерить непосредственно с помощью бортового импульсно-
доплеровского радиолокатора. Так как этот радиолокатор сопровождает ракету и удар-
ный самолет по положению и скорости, то относительная скорость Rpc может быть
вычислена.
128
Если тактическая ситуация более простая, например, когда РЛС подсвета, ракета,
ударный самолет и самолет-постановщик помех находятся на одной прямой линии, то
FKOMn = Fn-Fc + (Fn-Fp)-(Fc-Fp) = 2(Fn-Fc) = 2Fnc.
Доплеровская частота Fnc определяется доплеровским бортовым радиолокатором
путем непосредственных измерений. Однако (Fn - Fc) можно определить также путем
использования импульсно-доплеровского радиолокатора. Предварительные указания
пилот}' ударного самолета о его скорости и направлении полета позволяют определить
Fc обычным образом еще до начала атаки. Доплеровскую частоту можно рассчитать,
так как известна скорость самолета относительно позиции ЗРК. Существуют и другие
способы учета ошибки в точности наведения помехи прикрытия по частоте.
Этот случай РЭП может быть распространен на случай защиты нескольких удар-
ных самолетов. При этом следует рассматривать средние значения скорости объектов,
когда предполагается, что все РЛС неподвижны, все постановщики помех имеют оди-
наковый вектор скорости, все ударные самолеты имеют одинаковый вектор скорости, и
все ракеты имеют одинаковый вектор скорости. Так как для доплеровского радиолока-
тора постановщика помех нет реальной возможности связать атакующие ракеты с
ударными самолетами, то используется другой, более приближенный способ для
управления центральной частотой передатчиков помех прикрытия.
В качестве источника помехового сигнала возможно использование системы цифро-
вого запоминания сигналов, формирующей из копии (выборки) радиолокационного сигна-
ла непрерывную последовательность ложных целеподобных сигналов с повышенной плот-
ностью заполнения межимпульсного интервала зондирующих радиоимпульсов.
В системе ПВО может быть несколько ЗРК. Поэтому одновременно может быть
включено несколько РЛС подсвета на различающихся частотах. В этом случае на каж-
дом постановщике помех станция помех прикрытия будет состоять из определенного
числа приемников точного измерения несущей частоты и настройки генератора непре-
рывных колебаний в реальном масштабе времени, равного предсказываемому числу
РЛС подсвета (рис. 4.12).
Приемник имеет циклический режим поиска, захвата и измерения, который ис-
ключает в один и тот же момент времени настройку других приемников, обеспечивая
условия захвата одним приемником частоты только одного сигнала РЛС подсвета. Вы-
ходы всех приемников служат для установки частоты односигнальных генераторов не-
прерывных колебаний, поступающих в устройство сдвига частоты, в котором будет
вводиться частотная поправка во все сигналы. Сформированные сигналы помех сум-
мируются, их спектры расширяются сначала с помощью частотной, а затем амплитуд-
ной модуляции шумами, усиливаются в ЛЕВ и поступают к передающей антенне с вы-
соким коэффициентом усиления, ориентированной в сторону ЗРК. Коэффициент уси-
ления антенны 20 дБ может быть получен с приемлемыми ограничениями по сектору
защиты. Результирующий спектр помехи прикрыт ия будет состоять из ряда сигналов,
соответственно разнесенных по частоте. При выходной мощности оконечной ЛБВ 500 Вт,
коэффициенте усиления антенны 20 дБ и одинаковом распределении мощности для
пяти сигналов помехи станция помех прикрытия будет обеспечивать эквивалентную
излучаемую мощность 10 кВт для каждой ГСН и РЛС подсвета [3].
5—1777
129
Рис. 4.12. Структурная схема передатчика узкополосных шумовых помех
прикрытия нескольких ЗРК
Возможность создания помех через область боковых лепестков ДН антенны су-
щественно снижает помехозащищенность РЛС. Поэтому большое внимание при проек-
тировании РЛС уделяется методам снижения уровня боковых лепестков ДНА. При
этом одним из распространенных методов, как указывалось выше, является метод ком-
пенсации боковых лепестков с помощью специального компенсационного канала с не-
направленной антенной на входе. В этом случае представляет интерес метод РЭП, ос-
нованный на создании помехи с переключаемой поляризацией из вынесенной точки
пространства. При реализации данного метода поляризация помехового сигнала изме-
няется с рабочей поляризации РЛС на ортогональную ей с частотой, сравнимой с вели-
чиной, обратной длительности импульса подавляемой РЛС. Метод помехозащиты, ос-
нованный на применении поляризационного компенсатора, использует вспомогатель-
ный приемный канал с ортогонально поляризованной приемной антенной системой.
Если поляризация сигнала помехи изменяется хотя бы один раз за длительность им-
пульса, то сигналы помехи на выходе основного и компенсационного приемных кана-
лов будут некоррелированными, и возможности компенсатора по подавлению сигнала
помехи ухудшаются. Эффект действия помехи на когерентные компенсаторы помех по
боковым лепесткам ДНА обусловливается в основном неконтролируемыми кроссполя-
ризационными характеристиками вспомогательной антенны. Постоянная времени ком-
пенсатора помех по боковым лепесткам обычно больше чем длительность импульса
РЛС, это приводит при переключении поляризации помехи с высокой частотой к воз-
никновению неоднозначности в фазовой следящей системе компенсатора. Иными сло-
130
вами, данный метод изменяет относительное усиление двух антенн в направлении на
помеху с частотой, которая не может быть отслежена и скорректирована корреляцион-
ным приемником. В результате бланкирование сигналов, принимаемых через боковые
лепестки ДНА, нарушается. Разновидностью рассмотренного метода является метод, в
котором время переключения поляризации выбирается равным постоянной времени
компенсатора помех. В этом случае следящая система компенсатора постоянно удер-
живается в переходном состоянии, что ухудшает его возможности по компенсации по-
мехи. Переключение поляризации мощной помехи в пределах длительности радиоло-
кационного импульса ограничено отсутствием мощных быстродействующих переклю-
чателей. Имеющиеся в настоящее время мощные переключатели обеспечивают пере-
ключение из одного положения в другое за время порядка нескольких микросекунд.
ГЛАВА 5. МЕТОДЫ И ТЕХНИКА ПРОТИВОДЕЙСТВИЯ
РАДИОЛОКАЦИОННОМУ РАСПОЗНАВАНИЮ
5.1. Классификация методов распознавания и возможности
его подавления помехами
Радиолокационное распознавание входит в состав основных функций, выполняе-
мых РЛС обнаружения, поэтому при радиоэлектронном подавлении РЛС обнаружения
предусматривается наряду с созданием помех каналу обнаружения еще и нарушение
функций распознавания. Иными словами, вопросам противодействия радиолокацион-
ному распознаванию также уделяется значительное внимание, что подтверждается
опытом локальных войн на Ближнем Востоке и в Южной Атлантике [35].
Разработано много методов, способных в той или иной степени нарушить или
ухудшить распознавание целей. Некоторые из них заключаются в создании маскирую-
щих помех, затрудняющих обнаружение целей. В этом случае функции обнаружения и
распознавания являются неразделимыми. Поэтому все методы, рассмотренные выше и
предназначенные для создания маскирующих помех каналу обнаружения, в равной ме-
ре относятся и к распознаванию. Другие методы сводятся к созданию ложной инфор-
мации, препятствующей правильному распознаванию целей и, естественно, снижаю-
щей эффективность системы обороны.
Классификация методов противодействия радиолокационному распознаванию
представлена на рис. 5.1.
Рассмотрим кратко методы, специфические для противодействия радиолокацион-
ному распознаванию.
Уменьшение ЭПР реальных целей. Этот метод реализуется по программе "Стеле",
нацеленной на создание трудно обнаруживаемых радиолокационными и инфракрас-
ными средствами ПВО самолетов, беспилотных летательных аппаратов и крылатых ра-
кет [36, 37].
Работы по данной программе начались в середине семидесятых годов и продол-
жаются до сих пор. Детали технологии "Стеле" засекречены, но основные направления
снижения ЭПР указываются в иностранной печати и включают:
совершенствование конфигурации планера, что предполагает уменьшение разме-
ров плоскостей, устранение возникновения "блестящих точек", образующихся
стыками поверхностей, острыми кромками, уголковыми элементами; специальную
131
Рис. 5.1. Классификация методов противодействия радиолокационному распознаванию
конструкцию воздухозаборников и выхлопных сопл двигателей, вынос их в верх-
нюю часть летательного аппарата;
освоение технологии производства и обработки композиционных материалов, не
отражающих электромагнитную энергию, с целью замены ими материалов в кон-
струкции ЛА;
создание высокоэффективных покрытий, поглощающих или рассеивающих энер-
гию радиолокационных сигналов;
уменьшение ИК излучения двигателей ЛА.
Наиболее оптимальной конфигурацией самолета представляется конструкция "ле-
тающее крыло". Такая конструкция создает благоприятные аэродинамические характе-
ристики и позволяет разместить большое количество аппаратуры и топлива за счет
увеличения внутреннего объема ЛА по сравнению с внутренним объемом обычного
самолета того же размера.
Отражающие свойства поверхности нижней части ЛА приближаются к отражаю-
щим свойствам металлического листа. Как известно, плоский металлический лист тео-
ретически обладает радиолокационной видимостью только при ортогональном облуче-
нии. Во всех других случаях он переотражает падающую на него электромагнитную
энергию по законам геометрической оптики в сторону, противоположную направле-
нию на облучающую его РЛС.
В качестве композиционных материалов используется кевлар, стекловолокно,
графито-кевларовое волокно и др. Затухание радиоволн в таких материалах достигает
20 дБ. Но их применение имеет и недостатки. Так, например, ухудшается экранировка
132
бортового оборудования от внешнего электромагнитного поля и атмосферного элек-
тричества, электромагнитного импульса, образующегося при ядерных взрывах. Это
важно, так как на борту ЛА имеется большое количество устройств цифровой обработ-
ки сигналов.
К недостаткам композитов также относятся: высокая стоимость изготовления и
обработки, недостаточная усталостная прочность, малая термостойкость, в результате
чего происходит их выгорание на сверхзвуковых скоростях полета; высокий коэффи-
циент трения и большая удельная масса покрытия.
Необходимая толщина поглощающего покрытия зависит от несущей частоты
РЛС. При уменьшении мощности отраженного сигнала до 1 % от падающей мощности
толщина d определяется по формуле
<7 = 1,15/0 = 0,279//£г,
где ег - диэлектрическая постоянная поглощающей среды; f - несущая частота; [3 - по-
стоянная затухания.
Расчеты показывают, что при несущей частоте 94; 35; 10 и 1,0 ГГц толщина тре-
буемого покрытия равна 0,3; 1; 3 и 30 см соответственно. Как видно, при более низких
частотах реализация покрытий проблематична и практически нереальна.
Другим недостатком поглощающих покрытий является их узкополосность. На-
пример, при использовании ферритового материала типа NZ - 51 уменьшение отражае-
мой мощности до 1 % достигается только в диапазоне частот 0,6... 1 ГГц. Таким обра-
зом, применение широкополосных сигналов может снижать эффект поглощающих по-
крытий на величину ЭПР.
Помимо рассмотренного пассивного метода снижения ЭПР, может применяться и
активный метод, сущность которого заключается в формировании СВЧ-излучений, ам-
плитуда и фаза которых подстраиваются таким образом, чтобы максимально скомпен-
сировать отраженный в сторону РЛС сигнал [38].
Искажение диаграммы обратного вторичного излучения реальных целей.
Данный метод противодействия распознаванию может осуществляться путем нанесе-
ния на ЛА проводящих и поглощающих покрытий, образующих распределенный коле-
бательный контур с управляемыми параметрами. Подключая дополнительно регули-
руемые элементы в такой колебательный контур, осуществляют регулировку затухания
контура по определенному закону. При этом изменяются величина и закон флуктуаций
ЭПР реальной цели, в результате чего затрудняется распознавание цели. Могут быть и
другие методы искажения характеристик отраженных от цели сигналов [35].
Имитация большой ЭПР малоразмерными ложными целями. В этом случае
увеличение ЭПР может осуществляться путем установки на малоразмерных ложных
целях уголковых отражателей и линз Люнеберга (при противодействии распознаванию
в высокочастотной части диапазона частот) или передатчиков ответных помех с сигна-
лами, максимально приближенными по своим параметрам к сигналам, отраженным от
реальных целей (при работе в диапазоне частот ниже 1 ГГц, где пассивные средства
типа уголковых отражателей имеют очень большие размеры, что не позволяет их ис-
пользовать на малоразмерных объектах). В последнем случае превышение имитируе-
мой ЭПР может поддерживаться на определенном уровне путем сравнения уровней
входного и выходного сигналов ответчика и соответствующего регулирования коэф-
фициента усиления передатчика ответных помех.
133
Имитация спектральных характеристик реальных целей. В одном из пат ен-
тов [39] предложена пассивная ложная цель в виде ракеты для имитации бомбарди-
ровщика, которая движется со скоростью бомбардировщика и имитирует рыскание,
вращения и линейные размеры бомбардировщика. Предлагаемая ложная цель пред-
ставляет собой буксируемые ракетой проволочные тросы с укрепленнььми на них ди-
полями различной длины, движущиеся по спирали. Для имитации бомбардировщика,
предполагается что достаточно 850 диполей, длины которых соответствуют резонанс-
ному отражению сигналов в диапазонах S (3 ГГц), X (9 ГГц), К (25 ГГц). Обычно ис-
пользуются диполи шести "резонансных" размеров. Известны ложные цели, имити-
рующие вертолеты [40]. При этом имитируется несущий винт, а в некоторых вариантах
и рулевой винт. Применение беспилотных дистанционно пилотируемых ЛА в качестве
ложных целей, имитирующих средства постановки помех, противорадиолокационныс
ракеты и другие реальные воздушные цели, позволяет противодействовать радиолока-
ционному распознаванию и отвлечь значительную часть активных средств ПВО для
борьбы с ними. Известны устройства, имитирующие сигналы, отраженные от гидроме-
теообразований и турбулентных неоднородностей атмосферы [41].
Имитация ложных целей естественного происхождения. По мнению зару-
бежных специалистов, спектр сигналов ложных целей естественного происхождения
(отражения от земли, гидрометеообразований, птиц и др.) находится в диапазоне час-
тот от 0 до 500 Гц. Поэтому для имитации таких целей часто используются генераторы
шумов [42].
Комбинированная ложная цель (оптическая и пассивная радиолокационная).
В этом случае ложная цель содержит источник видимого света для противодействия
оптическим системам обнаружения и распознавания и металлический светопрозрачный
отражатель для радиолокационной имитации цели-противодействия радиолокацион-
ным сигналам [43]. Радиолокационный отражатель выполнен из проволочной сетки с
размером ячейки около 0,1 X. При имитация ИК-излучсния для более достоверной ими-
тации бомбардировщика предлагается использовать сжигание топлива для реактивных
двигателей [44].
Имитация временной структуры радиолокационных портретов реальных це-
лей. Структурная схема устройства, позволяющего имитировать дальностные радиоло-
кационные портреты целей для РЛС с широкополосными сигналами и сжатием по дли-
тельности, показана на рис. 5.2.
Зондирующий импульс от РЛС, для которой создается имитируемый радиолока-
ционный портрет, поступает через приемную антенну, усилитель, устройство грубой
задержки и устройство точной задержки на выход имитатора. Устройство грубой за-
держки осуществляет задержку по времени, соответствующую расстоянию до бли-
жайшей блестящей точки имитируемой цели. Линия задержки с отводами обеспечивает
имитацию остальных блестящих точек цели. Амплитудные и фазовые модуляции вы-
полняются с помощью эталонных сигналов, соответствующих характеристикам целей
и нормируемым в блоке эталонов, где записаны коды радиолокационных дальностных
портретов имитируемых целей на всех ракурсах от 0 до 360°. С выхода модуляторов
сигналы, имитирующие соответствующие блестящие точки, поступают на сумматор
и далее в передающую антенну. Данное устройство позволяет имитировать не только
одномерные, но и двумерные, а также трехмерные радиолокационные портреты целей.
134
Рис. 5.2. Устройство для имитации радиолокационных портретов реальных целей
Для этого необходимо иметь на платформе несколько разнесенных в пространстве ан-
тенн. Для реализации этого способа также необходима быстродействующая ЭВМ с
большим объемом памяти [34, 35].
Литература к ЧАСТИ ВТОРОЙ
1. Вакин С.А., Шустов Л.Н. Основы противодействия и радиотехнической разведки. - М.: Сов.
радио, 1968.
2. Вакин С.А., Шустов Л.Н. Основы радиоэлектронной борьбы. Учебное пособие. Часть 1. -
ВВИА им. проф. Н.Е. Жуковского, 1998.
3. Van Brunt, L. V.B. Applied ECM/EW Engineering. - USA, 1978, v. 1.
4. Bovd, J.A. Electronic Countermeasures. - Penicular Publishing, USA, 1978.
5. Chrzanovski, E.J. Active Radar Electronic Countermeasures. - Artech House Inc. USA, 1990.
6. The International Countermeasures Handbook. - EW Communications, Inc., 1979-1980, pp. 349-354.
7. The International Countermeasures Handbook. - EW Communications, Inc., 1985, pp, 344-347.
8. The International Countermeasures Handbook. - EW Communications, Inc., 1986, pp. 57, 359-392.
9. Фомичев К.И., Юдин Л.М. Техника создания шумовых помех радилокационным системам об-
наружения: Обзор. - Радиоэлектроника (состояние и тенденции развития), НИИЭИР, 1987, т.
3, с. 1-43.
10. Klass, Ph. J. Self-protection jammers undergo reliability and flight testing. — Aviation Week and
Space Technology, 1985, v. 123, N 25, pp. 71-75.
11. Леонов А.И., Фомичев К.И. Моноимпульсная радиоолокация. - М.: Радио и связь, 1984.
12. Rassel, D.M. Tactical jamming aircraft increase power and frequency coverage. — Defence Electron-
ics, 1983, v. 15, N 4, pp. 78-80, 82, 85, 86.
13. Сергиевский Б.Д. Реакция приемника с квадратичным детектором на колебания, модулиро-
ванные флуктуациями по фазе или частоте. - Радиотехника и электроника, 1962, т. 7, № 5.
14. Сергиевский Б.Д. Реакция амплитудного приемника на колебания, модулированные флюктуа-
циями по фазе или частоте, при расстройке несущей частоты относительно приемника. - Ра-
диотехника и электроника, 1963, т. 8, № 12.
135
15. Kaidus. Voltage controlled oscillator techniques boosts airborne exciter’s capability. - Microwave
Systems News, 1983, v. 13, N 10, pp. 53-69.
16. Syndaram, G.S. Modem airborn electronic warfare. New concepts, programs and products proliter-
ate. - Intemetional Defence Review, 1985, v. 18, pp. 169-177.
17. Патент N3720944 (США).
18. Патент N 4307400 (США).
19. ECM design gain from union of phased arrays and solid state sources. - Communucations design,
1972, N 8, pp. 12-14.
20. Systems of the West. - The International Countermeasures Handbook. - EW Communications, Inc.,
1986, pp. 57-142.
21. Патент N3670333 (США).
22. Патент N38770995 (США).
23. Josefson, L. A broad band, circulary polarized, phase steered array. - Military Electronics Defence
Expo’79, pp. 273-284.
24. Фомичев К.И., Юдин Л.М. Бортовые средства противодействия. - Радиоэлектроника в 1979. -
НИИЭИР, 1980, т.З.
25. Phased Arrays for ECM. - The International Countermeasures Handbook. - EW Communications,
Inc., 1977, pp. 273-284.
26. Dan Jaw. Electronic Warfare antenna systems - past and present. - Microwave J., 1981, v. 24, N 9,
pp. 22-39.
27. Bardash, I. Phased arrays for ECM applications. - Microwave J., 1982, v. 25, N 9, pp. 81, 82, 84.
28. Archer, D.N., Black, A.A. Higher ERP with lens fed multibeam arrays. — Journal of Electronic De-
fence, 1982, N3,p. 51.
29. Drogin, E. ALQ-161: Time sharing jammer power. - Microwave Systems News, 1978, v. 8, pp. 55,
57,59,61-64, 110.
30. Richardson, D. Northrop ECM: from B-1B to F-SE. - Flight Intemetional, 1982, v. 122, N 3826, pp.
683, 684, 693.
31. Elint arrays scans 120 degrees over 3 bands. - Microwave Systems News, 1978, v. 8, N 5, p. 19.
32. Stein, K.J. Multibeam system provides power. - Aviation Week and Space Technology, 1981,
v. 114, p. 67, 69, 71.
33. Sundaram, G.S. Electronic Warfare at Northrop rapid growth and bright future. - International
Defence Review, 1984, v. 17, N 11, pp. 1703-1706.
34. Salzmann, A.R. Whether Support Jamming? - Defence Electronics, 1986, v. 18, N 1, pp. 65-70.
35. Набабин В.Г., Белоус О.И. Методы и техника противодействия радиолокационному распозна-
ванию. - Зарубежная радиоэлектроника, 1987, № 2, с. 38-47.
36. Ионов В. О программе создания “невидимых” самолетов. - Вестник ПВО, 1983, № 3, с. 38-47.
37. Sweetman, В. Stealth in srevice. - Interavia, 1987, v. 427, N 19, pp. 18, 39, 40.
38. Патент N 3568194 (США).
39. Патент N 4149156 (США).
40. Патент N 3011103 (США).
41. Хайкин С., Кеслер, Карри С. — ТИИЭР, 1978, т. 67, № 2.
42. Патент N3832712 (США).
43. Патент N 4037228 (США).
44. The International Countermeasures Handbook. - EW Communications, Inc., 1978-1979.
45. Патент N2134740 (Великобритания).
136
ЧАСТЬ ТРЕТЬЯ
Методы и техника создания помех
радиолокационным системам
сопровождения и наведения
ГЛАВА 6. МЕТОДЫ И ТЕХНИКА СОЗДАНИЯ ПОМЕХ ИМПУЛЬСНЫМ И
НЕПРЕРЫВНЫМ С ЛЧМ РЛС СОПРОВОЖДЕНИЯ ПО ДАЛЬНОСТИ
6.1. Функции канала селекции целей по дальности и основные пути
нарушения его работы
Каналы селекции целей по дальности имеются во всех радиолокационных систе-
мах, предназначенных для автоматического сопровождения целей в пространстве и на-
ведения средств поражения на опасные цели. Они являются измерителями дальности,
повышают избирательность системы наведения и самонаведения, благодаря чему обес-
печивается работа только по выбранной цели, а также помехозащищенность систем за
счет сокращения времени открытого состояния приемных устройств.
Целевое назначение помех по дальности состоит в том, чтобы сорвать селекцию
целей или ввести погрешность в определение дальности, нарушить непрерывность из-
мерения координат цели и заставить перейти на ручное сопровождение. Как уже ука-
зывалось выше, действие помех на каналы селекции целей в определенной мере ухуд-
шает помехозащищенность угломерного канала, поскольку срыв автосопровождения
цели по дальности приводит к необходимости повторного поиска, в процессе которого
возможен захват ложной цели, расположенной в другом направлении. Это влечет за
собой перенацеливание угломерной системы по направлению, увеличение угловых
ошибок или срыв АС. Нарушение селекции целей облегчает также энергетически соз-
дание помех системе автосопровождения по направлению.
Эффективное подавление систем автоматического сопровождения цели вынужда-
ет ЗРК перейти в режим ручного сопровождения, что превращает его, по существу, из
многоцелевого в одноцелевой комплекс. Дальность используется в расчетах упрежден-
ного угла при пусках ракет с командным управлением и стрельбе зенитной артиллерии.
Если она будет определяться с ошибкой, то упрежденная точка встречи также будет
определяться с ошибкой, что скажется на точности стрельбы. При пуске ракеты-
перехватчика ошибки в расчете упрежденной точки могут привести к увеличению пе-
регрузок ракеты при ее движении и снижению вероятности поражения цели.
Таким образом, каналы селекции целей по дальности выполняют важные функ-
ции в составе радиолокационных систем, и обеспечению их помехозащищенности раз-
работчики радиолокационной техники уделяют большое внимание. В свою очередь,
разработчики средств РЭП должны уделять достаточное внимание разработке методов
создания помех каналам селекции целей. При этом основной задачей, как и при радио-
противодействии другим функциональным каналам, является создание эффекта маски-
ровки полезной информации, сосредоточенной в отраженных от цели сигналах, с одной
137
стороны, и имитации ложной радиоэлектронной обстановки, с другой. Это может быть
достигнуто применением различных средств РЭП, основными из которых являются:
уводящие помехи;
прицельные и заградительные по частоте шумовые помехи;
пассивные помехи;
многократные ответные помехи;
комбинированные помехи;
помехи РЛС со сжатием импульса;
накрывающие по дальности помехи.
Ниже рассматриваются особенности каждого из перечисленных видов помех и
методы их реализации.
6.2. Уводящие по дальности помехи
Принцип создания уводящей по дальности помехи. Обычный метод создания
уводящей по дальности помехи при подавлении импульсного некогерентного радиоло-
катора основан на следующей процедуре [1]:
а) сигнал подавляемой РЛС принимается, усиливается с минимальной задержкой
и излучается, создавая для РЛС мощный сигнал подсвета;
б) большая мощность сигнала помехи приводит к уменьшению усиления приемника
РЛС вследствие действия АРУ, при этом происходит подавление в приемнике РЛС ис-
тинного (отраженного) сигнала от цели и захват стробом дальности сигнала помехи;
в) временное положение сигнала помехи формируется с последовательно возрас-
тающей задержкой или опережением от импульса к импульсу относительно истинного
сигнала цели до положения, соответствующего нескольким длительностям строба
дальности РЛС. Закон увода может иметь различные формы, но если одновременно
реализуется уводящая по скорости помеха, то производная по времени функция закона
формирования уводящей по дальности помехи должна соответствовать функции закона
формирования уводящей по скорости помехи во все соответствующие моменты време-
ни. Максимальное ускорение по дальности не должно превышать возможности систе-
мы сопровождения по дальности подавляемого радиолокатора;
г) после достижения требуемой величины увода строба дальности передатчик по-
мех выключается или излучается мощный шумовой импульс на рабочей частоте РЛС
для обеспечения в РЛС срыва сопровождения по дальности;
д) РЛС переходит в режим повторного поиска по дальности. Если это возможно,
то истинная цель захватывается радиолокатором на сопровождение по дальности;
е) процесс излучения помехи при необходимости повторяется.
Однопрограммная уводящая по дальности помеха. Процесс формирования та-
кой помехи может быть реализован с помощью ретранслятора с устройством запоми-
нания сигналов РЛС на время, равное максимальному времени увода по дальности, со-
ставляющему обычно несколько микросекунд. СВЧ устройство памяти содержит ЛБВ
и линию задержки, соединенные по схеме рециркулятора. Оно будет формировать ши-
рокий импульс на несущей частоте РЛС в ответ на каждый принятый радиолокацион-
ный импульс. Формирователь импульсов с программируемой задержкой запускается
синхронизирующим сигналом, сформированным при приеме радиолокационного им-
пульса, и может генерировать линейную, параболическую, экспоненциальную или лю-
бую другую форму закона увода. Каждый из импульсов выходной последовательности
138
Рис. 6.1. Изображения индикатора сопровождения
по дальности РЛС СОН4
данного формирователя открывает
импульсную ЛБВ, так чтобы обеспе-
чивалось формирование уводящей по
дальности помехи. На рис. 6.1 изобра-
жены экраны индикатора по дальности
РЛС сопровождения СОН-4 в случаях,
когда ретранслятор открыт и излучает
запомненный рециркулятором сигнал
длительностью 20 мкс (рис. 6.1,«) и
сигнал уводящей по дальности поме-
хи, полученный путем стробирования
запомненного в рециркуляторе сигна-
ла синхронным видеоимпульсом с программируемой задержкой (рис. 6.1,6).
В результате действия уводящей помехи радиолокационный дальномер, кото-
рый до этого сопровождал цель, перешел на сопровождение помехового импульса,
что привело к рассогласованию строба дальности с целью в сторону больших дально-
стей (до 1 км). Может быть применен рециркулятор на промежуточной частоте, а
также быстродействующие цифровые системы запоминания сигнала, с которых сиг-
налы считываются в необходимые интервалы времени с сохранением их спектров и
временной структуры.
Для запоминания может быть использован приемник поиска и захвата или источ-
ник прямошумовой помехи с набором входных фильтров для настройки на частоту по-
давляемого радиолокатора. Во всех случаях генерируется сигнал, спектр которого бли-
зок к спектру СВЧ-сигнала РЛС, или шумовой сигнал, спектр которого накрывает
спектр радиолокационного сигнала. При практическом создании уводящих помех па-
раметры временных циклов формирования уводящей помехи могут меняться в значи-
тельных пределах. Поскольку атака длится относительно малое время, важной характе-
ристикой является максимальное время увода, которое фактически определяет количе-
ство реализуемых в течение одной атаки циклов увода. При этом необходимо учиты-
вать, что всегда имеется первоначальная задержка в системе формирования ответной
помехи. Для эффективного действия помехи величина этой задержки должна состав-
лять малую часть длительности строба дальности подавляемой РЛС. Начальный цикл
увода необходим только для создания условия захвата и обработки сигнала помехи
системой АРУ РЛС и обычно составляет доли секунды. Закон увода может быть ли-
нейным или параболическим. Очень важен начальный участок цикла изменения отно-
сительной задержки помехового импульса, так как реализуемое при этом ускорение не
должно превосходить допустимую величину для подавляемой системы автосопровож-
дения по дальности РЛС. Скорость увода не должна превышать максимально возмож-
ную скорость перестройки строба дальности РЛС, в противном случае следящая систе-
ма по дальности автоматически сбросит с автосопровождения сигнал помехи. После
того, как величина увода достигла максимального значения, уводящая по дальности
помеха выключается на короткое время, и затем процесс повторяется вновь. Если ра-
диолокационный сигнал больше не принимается передатчиком помех, то излучение
уводящей по дальности помехи прекращается до появления другого радиолокационно-
го сигнала.
139
Наряду с однопрограммной применяются многопрограммные уводящие по даль-
ности помехи [2].
Многопрограммная уводящая по дальности помеха. Данный вид помехи отли-
чается тем, что одновременно или последовательно используется несколько программ
формирования уводящих помех по дальности. На рис. 6.2,а показан последовательный
метод, в котором использованы три программы увода, хотя может быть и другое число
программ.
Рис. 6.2. Последовательный (а) и одновременный (б) методы создания
трехпрограммной уводящей помехи по дальности
Последовательности из каждых третьих импульсов рассматриваются как отдель-
ные последовательности импульсов, к каждой из которых приложена своя программа
увода по дальности. При этом методе только один помеховый импульс излучается в от-
вет на каждый принятый импульс подавляемой РЛС. Переключение между програм-
мами может осуществляться с целью формирования амплитудно-модулированных по-
мех, таких как AM помехи на частоте сканирования, которые могут быть использованы
для осуществления срыва автосопровождения по угловым координатам. На рис. 6.2,6
показан метод одновременного формирования многопрограммного увода по дальности.
На каждый принятый импульс подавляемой РЛС излучаются, например, три помехо-
вых импульса. По задержке они разделены на величину, примерно равную максималь-
ному уводу, деленному на три. Программы могут быть идентичными или различными.
При нескольких циклах уводящей по дальности помехи с примерно постоянным уско-
рением выходные импульсы помехи будут стремиться группироваться на начальном
этапе цикла задержки, что может привести к наложению импульсов помехи. Временная
программа работы системы РЭП должна исключить наложение импульсов. Это приво-
дит к ограничению числа циклов уводящей по дальности помехи, практически реали-
зуемых в аппаратуре помех.
140
Оба упомянутые выше метода требуют наличия устройств запоминания несущей
частоты РЛС и программных схем управления для циклического формирования трех
основных участков цикла уводящей помехи по дальности: излучения помехи с мини-
мальной задержкой, программного изменения задержки и паузы в излучении сигнала
помехи. Для метода одновременного формирования нескольких программ уводящей по
дальности помехи необходимо увеличение коэффициента заполнения излучения поме-
хи. Преимущество обоих методов заключается в том, что следящая система по дально-
сти РЛС после ее увода с сигнала цели и выключения помехи имеет малые возможно-
сти повторного обнаружения и перезахвата сигналов, отраженных от цели.
Уводящая по дальности помеха с программируемым изменением мощности.
Существуют РЛС с автоматическим сопровождением по дальности, в которых для
обеспечения защиты от воздействия уводящих по дальности помех применяются схемы
выделения сигнала с наименьшим уровнем мощности. Этот метод помехозашиты
предполагает, что помеховый сигнал всегда значительно превосходит по амплитуде
сигнал, отраженный от цели. В соответствии с этим истинный сигнал цели на началь-
ном участке цикла увода по дальности определяется путем захвата из двух сигналов
меньшего по амплитуде и его последующего автосопровождения [2]. Для радиоэлек-
тронного подавления такой радиолокационной системы требуется обычная система
создания уводящей по дальности помехи, в которой дополнительно обеспечивается из-
менение мощности сигнала помехи. Она изменяется таким образом, чтобы ответный
помеховый сигнал на входе РЛС в течение начального интервала цикла помехи по сво-
ему уровню был меньше уровня отраженного от цели сигнала. На интервале цикла
увода мощность помехи постепенно возрастает до значения максимальной выходной
мощности передатчика помех. В этом случае строб дальности РЛС, работающей в со-
ответствии с логикой выделения и сопровождения наиболее меньшего сигнала, будет
отслеживать ложный сигнал уводящей помехи и уводиться им до максимальной даль-
ности увода, где после выключения помехи система АСД будет переходить в поиск.
Эффективность использования этого метода для подавления РЛС, не имеющих
схем выделения наименьших сигналов, ниже, чем эффективность обычной уводящей
по дальности помехи. Это происходит потому, что на начальном этапе цикла строб
дальности РЛС будет следить за самым сильным сигналом, которым является истин-
ный сигнал цели, а не помеха. После начала увода мощность уводящей по дальности
помехи станет выше мощности отраженного сигнала в момент времени, когда сигнал
помехи уже выйдет из строба дальности. Поэтому при использовании уводящей по
дальности помехи в условиях противодействия РЛС обоих типов (без защиты и с защи-
той) необходимо использовать как обычный метод формирования уводящей по дально-
сти помехи, так и метод с программным изменением мощности помехи. Последова-
тельное применение во времени двух этих методов формирования уводящей по даль-
ности помехи синхронизируется таким образом, чтобы обеспечить работу одной из
программ на этапе увода по дальности, а другой - на начальном этапе.
Уводящая по дальности помеха, использующая несколько помеховых им-
пульсов, разнесенных по периоду повторения импульсов РЛС. Данный метод соз-
дания помех используется против РЛС с автоматическим сопровождением по дально-
сти, работающих с постоянной или плавно изменяющейся несущей частотой. Он ана-
логичен обычной уводящей по дальности помехе, в которой дополнительно формиру-
ется множество импульсов, распределенных по периоду повторения, и используется
141
длительное запоминание частоты радиолокационных сигналов. Принимаемая последо-
вательность радиолокационных импульсов с фиксированной несущей частотой исполь-
зуется для настройки передатчика помех на несущую частоту РЛС. Поскольку система
запоминания частоты обеспечивает формирование непрерывного сигнала с несущей
частотой импульсов РЛС, одновременно можно реализовать несколько помеховых сиг-
налов с различной дальностью.
При этом помеховый импульс перемещается либо в направлении РЛС, либо от
нее относительно положения носителя с передатчиком помех этого типа.
Уводящая помеха системе сопровождения цели по дальности путем смеще-
ния ’’энергетического центра”. Задача этого метода создания помех состоит в нару-
шении сопровождения по дальности обычной импульсной РЛС сопровождения, когда
отсутствуют системы запоминания частоты в аппаратуре помех для формирования
уводящей помехи по дальности. Данный метод применяется во временной области и
отчасти подобен методу создания помех системам сопровождения по скорости путем
изменения положения энергетического центра в частотной области. Многие системы
сопровождения оценивают дальность но положению, когда отраженный радиолокаци-
онный импульс располагается посредине между двумя соседними временными строба-
ми. В этом случае система сопровождения по дальности интегрирует сигналы с выхода
стробирования и результаты сравнивает энергетически. Если средняя величина резуль-
тирующего сигнала отличается от нуля, то система сопровождения будет регулировать
положение стробов до тех пор, пока эта величина не станет равной нулю. При противо-
действии такой системе сопровождения по дальности передатчик помех создает боль-
шое отношение помеха-сигнал, обеспечивающее подавление отраженного сигнала от
постановщика помех сигнала до очень малой величины из-за действия системы АРУ
приемника РЛС. В результате помеховый импульс становится импульсом, который ра-
диолокационный приемник вынужден сопровождать. После ретрансляции усиленного
в течение короткого времени отраженного сигнала передатчик помех последовательно
уменьшает длительность ретранслируемого импульса. При этом система сопровожде-
ния будет смещать расщепленный строб по дальности в соответствующем направлении
.Скорость, с которой строб дальности уводится, должна быть согласована с возможно-
стями дальномерной системы сопровождения по ускорению. Эта скорость должна быть
небольшой и увеличиваться во времени так, чтобы система сопровождения по дально-
сти начала непрерывно перемещаться от энергетического центра реального отраженно-
го от цели сигнала. Ретранслятор полностью выключается в момент, когда достигается
максимальная скорость перемещения строба дальности (она сравнима с пределом по
ускорению для системы сопровождения по дальности). Если при этом наступает срыв
сопровождения по дальности, то никаких дальнейших действий не предпринимается.
Если срыва нет, то весь процесс может быть повторен. Данный тип передатчика уво-
дящих помех по дальности недорогой, но он не так эффективен, как передатчик уводя-
щих помех, применяющий систему запоминания частоты и обеспечивающий увод им-
пульса полной длительности на величину, превышающую несколько длительностей
радиолокационного импульса. Поэтому недостатком рассматриваемого метода РЭП
является малая величина увода по дальности, что делает невозможным полное исклю-
чение отраженного сигнала из строба дальности, когда помеховый импульс выключен.
Уводящая по дальности помеха, перенацеливающая строб дальности РЛС на
сигнал с ложной дальностью. Данный вид РЭП основан на использовании совместно
142
с уводящей по дальности помехой второго помехового сигнала, обычно смещенного по
дальности на некоторую фиксированную величину. В этом случае после увода строба
дальности РЛС с сигнала цели он переводится на сопровождение второго помехового
сигнала и удерживается на нем после окончания цикла увода. При этом строб дально-
сти РЛС будет отслеживать ложную дальность по помеховому сигналу. В данной си-
туации отношение помеха-сигнал стремится к бесконечности, благодаря чему могут
быть успешно применены энергетические методы создания помех по угловым коорди-
натам. Этот метод обеспечивает перенацеливание строба дальности подавляемой РЛС
на помеховый сигнал и не позволяет ему переходить в режим поиска, при котором воз-
можен повторный перезахват и последующее сопровождение сигнала цели. Для повы-
шения надежности перенацеливания мощность уводящей помехи может программно
снижаться при приближении к местоположению импульса с ложной дальностью.
Следует заметить, что одновременно можно использовать несколько перенацели-
вающих импульсов на разных дальностях относительно импульса подавляемой РЛС.
Но если такой метод применяется при подавлении импульсной РЛС, то это приводит к
увеличению радиолокационной заметности цели. В результате РЛС будет способна со-
провождать цель по угловым координатам и, вероятно, обеспечивать получение необ-
ходимой информации, хотя и с ошибкой по дальности, для успешного наведения раке-
ты на цель. Поэтому этот метод не рекомендуется использовать самостоятельно, его
необходимо применять в сочетании с помехами нарушения сопровождения по угловым
координатам. Например, самостоятельно его необходимо применять в сочетании с по-
мехами нарушения сопровождения по угловым координатам. Например, перенацели-
вающий сигнал может быть промодулирован по амплитуде для создания помехи на
частоте сканирования или быть сигналом от пассивной или активной ловушки или от
вынесенного постановщика помех.
Уводящая по дальности помеха системе сопровождения по дальности, рабо-
тающей в режиме поиска цели. Этот метод создания помех используется для подав-
ления импульсной радиолокационной головки самонаведения при работе ее в режиме
поиска по дальности. При этом осуществляется следующая совокупность операций: во-
первых, обеспечивается захват радиолокационного строба следящей системы по даль-
ности сигналом помехи; во-вторых, помеховый импульс уводится во времени в том же
направлении, в котором движется поисковый строб дальности с увеличивающейся ско-
ростью и мощностью, в-третьих, следящая система по дальности разгоняется настоль-
ко, что строб дальности ГСП продолжает свой цикл поиска по инерции без захвата ис-
тинного сигнала цели. Иными словами, этот метод РЭП препятствует переходу ГСН из
режима поиска в режим сопровождения. Но его нельзя применять, если ГСН уже пе-
решла в режим сопровождения цели по дальности. При этом предполагается, что ГСН
имеет стабильный (прогнозируемый) период повторения импульсов и фиксированную
несущую частоту.
Рассмотрим ситуацию, в которой низколетящая крылатая ракета, оснащенная
ГСН, атакует надводное судно, имеющее на борту систему РЭП. Когда крылатая ракета
летит в направлении на защищаемый корабль, предполагается, что строб дальности ее
ГСН движется от большой дальности к меньшей и затем вновь возвращается назад, пы-
таясь обнаружить отраженный от корабля сигнал, причем строб дальност и ведет поиск
от самой большой дальности до минимальной. Оптимальным моментом времени для
начала действия сигнала уводящей по дальности помехи является тот момент, когда
143
строб дальности ГСН достигает положения сигнала, отраженного от корабля. В этот
момент сигнал помехи захватывается стробом дальности, после чего помеха по парабо-
лическому закону изменения задержки уводит строб дальности в направлении меньших
дальностей сначала с постоянной скоростью, а затем с ускорением. В это же самое
время мощность помехового импульса увеличивается. Скорость движения строба им-
пульса увеличивается и после того, как он сместится с отраженного сигнала цели. В ре-
зультате строб дальности ГСН может оказаться неспособным захватить истинную цель.
Проблематичным для этого метода является то, что логика функционирования аппара-
туры РЭП не имеет возможности определить, когда строб дальности ГСН достигнет
временного положения, соответствующего пространственному положению корабля.
Эту проблему можно преодолеть ценой несколько более сниженной эффективности
помехи относительно той, которая обеспечивается при ранее описанном методе фор-
мирования. Для этого необходимо одновременное использование нескольких циклов
уводящей по дальности помехи в ответной последовательности помеховых сигналов.
Величина увода, если это необходимо, может быть различной от цикла к циклу в зави-
симости от конкретного применения данного вида РЭП.
При создании помех следящей системе по дальности может быть применен также
метод, который не требует для своей практической реализации устройств формирова-
ния уводящей по дальности помехи. На каждый импульс, принятый аппаратурой помех
защищаемого корабля, генерируется на рабочей несущей частоте РЛС широкий поме-
ховый импульс несимметричной формы с наклоном амплитуды плоской части импуль-
са в направлении от переднего фронта импульса к заднему. Поскольку поисковый
строб дальности ГСН движется в направлении уменьшения дальности, то он перейдет
на сопровождение передней части помехового импульса в силу отслеживания стробом
энергетического центра помехи, который смещен с сигнала цели в сторону переднего
фронта несимметричного импульса помехи. Имеющаяся при этом тенденция переме-
щения строба дальности ГСН с сигнала цели на помеху приводит к пропуску следящей
системой дальности ГСН отраженного от корабля сигнала. Излучение широкого поме-
хового импульса несимметричной формы должно осуществляться в ответ на каждый
принятый радиолокационный импульс. Поэтому работа аппаратуры РЭП будет незави-
сима от момента времени достижения стробом дальности ГСН положения отраженного
от защищаемого корабля сигнала.
Уводящая по дальности помеха РЛС с непрерывным ЧМ-излучением. В от-
личие от создания уводящей по дальности помехи РЛС с импульсным излучением при
подавлении РЛС с непрерывным ЧМ-излучением система запоминания частоты в сис-
теме РЭП не требуется, так как радиолокационный сигнал постоянно присутствует на
входе аппаратуры помех. Вместо запоминания частоты сигнала РЛС в аппаратуре по-
мех производится устранение дальномерной частотной модуляции в сигнале РЛС, по-
сле чего получают радиосигнал на несущей частоте РЛС с малыми частотными изме-
нениями. Для формирования уводящей по дальности помехи этот сигнал может затем
модулироваться по частоте дальномерной функцией с нарастающим смещением по
времени. Следует отметить, что данный тип передатчика помех работает в режиме од-
новременного приема и излучения, что требует при установке такой аппаратуры помех
на летательном аппарате обеспечения необходимой развязки между ее приемной и пе-
редающей антеннами. Структурная схема устройства, обеспечивающего формирование
уводящей по дальности помехи РЛС с ЧМ непрерывным излучением, приведена на
144
рис. 6.3. Эпюры сигналов, поясняющие работу устройства формирования уводящей
помехи, представлены на рис. 6.4. Закон частотной модуляции радиолокационного сиг-
нала выбран треугольной формы (рис. 6.4,а). Если самолет с передатчиком помех при-
ближается к подавляемой РЛС с постоянной скоростью, то несущая частота радиоло-
кационного сигнала на входе передатчика помех будет сдвинута на величину одно-
кратного доплеровского сдвига, соответствующего скорости сближения самолета, с
РЛС, и в остальном не будет отличаться от излученного радиолокатором сигнала. Этот
сигнал поступает на вход первой ЛБВ и на вход первого смесителя.
Поскольку подавляемая РЛС может иметь любое фиксированное значение несущей в
пределах ее частотной модуляции, а УПЧ, подключенный к выходу смесителя, имеет
сравнительно узкую полосу пропускания частот, предусматривается грубая АПЧ гене-
ратора №1. Дискриминационная характеристика этой системы АПЧ показана на рис.
6.4,6. Перестраиваемый по частоте генератор № 1 в режиме поиска обнаруживает ра-
диолокационный сигнал и переходит в режим слежения за ним. В результате он на-
страивается на некоторую усредненную частоту, отличающуюся от частоты радиоло-
кационного сигнала на величину центральной частоты УПЧ. Постоянная времени сис-
темы автоматически перестраиваемого по частоте генератора № К^елика по сравнению
с длительностью периода дальномерной модуляции РЛС (50мс). Эта система АПЧ
будет отслеживать частоту входного сигнала, например, с точностью 0,5 МГц при всех
изменениях несущей частоты входного сигнала, а также влияние электрических факто-
ров и условий окружающей среды.
Рис. 6.3. Структурная схема устройства, обеспечивающего формирование
уводящей по дальности помехи РЛС непрерывного излучения с ЧМ
145
Рис. 6.4. Эпюры сигналов, поясняющие работу устройства формирования
уводящей по дальности помехи РЛС непрерывного излучения с ЧМ
Выходной сигнал этой системы АПЧ показан на рис. 6.4,в. Этот сигнал имеет
спектр непрерывного сигнала, меняющегося во времени в пределах полосы 1 МГц. В
нем устранена неопределенность, связанная с несущей частотой ЧМ радиолокационно-
го сигнала, и сохраняется информация, содержащаяся в его частотной модуляции. Этот
сигнал поступает на вход смесителя № 2, являющегося составной частью системы точ-
ной АПЧ в основной полосе, ширина которой равна 1 МГц. Характеристика частотного
дискриминатора этой АПЧ приведена на рис. 6.4,г. Точность слежения за частотой
входного сигнала в этой системе АПЧ составляет порядка 500 Гц. Как и ранее, посто-
янная времени перестраиваемого по частоте генератора № 2\в€лика по сравнению с пе-
риодом дальномерной модуляции РЛС, равным для рассматриваемого примера 50 мс.
Перестраиваемый по частоте генератор № 2 будет отслеживать с помощью системы
АПЧ входной сигнал, поступающий с точки С на полосовой фильтр, и обеспечивать
прохождение выходного сигнала АПЧ (рис. 6.4,д). Время захвата системы точной АПЧ
№ 2 должно быть больше 0,1 с. Частотный дискриминатор, включенный на выходе по-
лосового фильтра, работает в полосе низких видеочастот, его выходной сигнал показан
на рис. 6.4,е. Сигнал с выхода этого дискриминатора используется для определения де-
виации частоты и закона ЧМ радиолокационного сигнала. В состав данной схемы вхо-
дит фазовращатель, который необходим для компенсации фазового сдвига, обуслов-
ленного интегрированием в цепи перестраиваемого по частоте генератора № 2. Связь
по переменной составляющей обеспечивает устранение влияния постоянной состав-
ляющей, в результате формируется инвертированный сигнал треугольной формы
146
(рис. 6.4,ж). Генератор пилообразного напряжения формирует сигнал переменной час-
тоты, начинающийся с отрицательного наклона пилы и с возрастающей во времени
частотой (рис. 6.4,з).
Указанные полярность пилообразного напряжения и соответствующее изменение
его частоты обеспечивают отслеживание треугольного закона модулирующей функ-
ции, которая затем используется для фазовой модуляции по спирали первой ЛБВ. Ре-
зультирующий сигнал показан на рис. 6.4,и. Поскольку дальномерная ЧМ теперь уст-
ранена из принятого радиолокационного сигнала, этот сигнал уже может быть исполь-
зован для его наделения помеховой ЧМ. Выходной сигнал частотного дискриминатора
(рис. 6.4,е) поступает также на линию задержки с отводами. Схема временного управ-
ления многопозиционным переключателем имеет временную функцию (рис. 6.4,к). На
рис. 6.4Г? приведен восстановленный сигнал дальномерной модуляции треугольной
формы с прогрессивно нарастающей задержкой (соответственно 1-, 2-,..., п-я позиции).
Управление частотой помехового сигнала обеспечивается за счет фазовой модуляции
по спирали второй ЛБВ последовательностью пилообразных напряжений (рис. 6.4^/).
Изменение частоты промодулированного СВЧ-сигнала показано на рис. 6.4,н. Сигнал
помехи будет иметь девиацию ±50 кГц, при этом модулирующая функция помехового
сигнала будет медленно смещаться по времени. Как упоминалось ранее, дальномерная
ЧМ радиолокационного сигнала устраняется в аппаратуре помех до усиления во второй
ЛБВ. Система подобного типа может обеспечить отношение помеха-сигнал более 20 дБ.
6.3. Прицельные и заградительные по частоте шумовые помехи
Шумовые помехи (ШП) являются наиболее универсальным видом маскирующих
помех. Действие их при достаточной мощности приводит к тому, что экраны индика-
торов РЛС, в том числе и индикаторы дальности, полностью или частично засвечива-
ются помехой, вследствие чего отметки реальных целей оказываются замаскированны-
ми. Эффект действия шумовых помех на канал селекции по дальности нс отличается от
эффекта действия на канал обнаружения (визуальный канал) РЛС. Как правило, при
подавлении канала обнаружения помехой подавляется и канал селекции цели по даль-
ности. Поэтому существует преемственность методов и техники создания маскирую-
щих шумовых помех указанным каналам РЛС. Методы и техника создания шумовых
помех РЛС обнаружения подробно рассмотрены в гл. 3.
Однако применительно к РЛС сопровождения, шумовые помехи могут комбини-
роваться с уводящими помехами по дальности, самостоятельное действие которых
обычно переводит ее в режим полуавтоматического или ручного периодического пере-
захвата цели по дальности. При этом для существенного затруднения сопровождения
по дальности цели может быть использовано либо поочередное действие шумовой и
уводящей помехи, либо одновременное, но в определенном соотношении по мощности.
Непрерывная ШП соответствующей мощности полностью исключает возможность да-
же грубой оценки дальности до цели. В то же время для нарушения селекции цели по
дальности в части всего диапазона дальностей используется помеха в виде широкого
шумового радиоимпульса, накрывающего отметку цели. Длительность шумового им-
пульса определяет вносимую неопределенность в оценку дальности до цели. Форма
огибающей широкого импульса может быть равномерной по длительности или возрас-
тающей (убывающей) к краям помехового импульса, что приводит к направленному
дрейфу строба селекции РЛС по дальности к краям импульса. Ограниченная длитель-
147
ность “накрывающей” по дальности помехи позволяет создавать одним передатчиком
шумовые помехи многим РЛС на основе временного разделения излучения помехи.
6.4. Пассивные помехи
Одними из первых, нашедших практическое применение средств создания пас-
сивных маскирующих помех радиолокационным станциям, являются дипольные отра-
жатели. Сбрасываемые, например, с самолетов дипольные отражатели разносятся вет-
ром и образуют протяженное отражающее облако. В результате на экранах незащи-
щенных РЛС образуется интенсивная засветка, маскирующая цели в пределах облака
диполей.
Как и в случае шумовых помех, маскирующий эффект по каналу обнаружения
будет сопровождаться аналогичным эффектом по каналу селекции по дальности. В со-
ответствии с этим при оценке возможностей создания пассивных помех каналу селек-
ции целей по дальности можно пользоваться результатами рассмотрения дипольных
отражателей как средств РЭП [3].
6.5. Многократные ответные помехи создания ложных целей
Многократная ответная помеха относится к разряду дезориентирующих (имита-
ционных) помех. Принцип создания ее состоит в том, что передатчик помех в ответ на
принятый зондирующий импульс РЛС излучает на той же частоте серию аналогичных
по форме импульсов, разбросанных по дальности и углу и имитирующих множество
целей. Наличие такой помехи затрудняет оператору выбор истинной цели и снижает
эффективность работы РЛС, в том числе канала сопровождения цели по дальности. В
этом случае высока вероятность захвата на сопровождение ложной цели со всеми вы-
текающими из этого последствиями. Следует отмстить, что при нарушении селекции
целей по дальности ложные цели, создаваемые с помощью различных устройств РЭП,
играют большую роль. При желании такие цели могут располагаться в любом месте в
пределах рабочих дальностей подавляемого радиолокатора, иметь тактико-технические
характеристики, аналогичные реальным целям [2, 4].
Ниже приводятся данные по ряду устройств, способных генерировать ложные це-
ли радиолокаторам различных типов.
Генератор ложных сигналов с делением частоты. Метод РЭП, реализуемый
данным генератором, основан на генерировании ложных целей подавляемому радиоло-
катору путем:
а) деления частоты входного высокочастотного импульсного сигнала на целое
число, в результате чего формируется легко управляемая промежуточная частота, на
которой можно использовать акустические или цифровые линии задержки при получе-
нии больших временных задержек, например порядка сотен мкс;
б) последующего умножения промежуточной частоты сигнала ложной цели до
значения первоначальной частоты входного высокочастотного импульса сигнала, уси-
ления и излучения высокочастотного сигнала. Преимуществом этого метода генериро-
вания ложных целей является то, что высокочастотная полоса частот сжимается про-
порционально коэффициенту деления, поэтому широкие высокочастотные полосы пе-
редатчика помех могут быть достигнуты при более низких их значениях на промежу-
точной частоте. Например, высокочастотная рабочая полоса от 1500 до 4500 МГц при
использовании деления на десять сжимается до рабочей полосы промежуточных частот
148
от 150 до 450 МГц. В этом состоит различие с генератором ложных сигналов, исполь-
зующим процесс гетеродинирования, при котором сохраняется на промежуточной час-
тоте та же ширина полосы частот, что и на высоких частотах, в результате чего ограни-
чение рабочей полосы частот передатчика помех на промежуточной частоте сохраняет
силу и в более низком диапазоне СВЧ.
Структурная схема генератора ложных целей с делением частоты представлена на
рис. 6.5. В генераторе используется предварительный усилитель на ЛБВ с низким уров-
нем шумов, включаемый перед частотным делителем. Частота входного сигнала
делится в частотном делителе, после чего сигнал проходит через входной направлен-
ный ответвитель на УНЧ, выходной направленный ответвитель, частотный умножи-
тель, усилитель на ЛБВ и затем излучается. Дополнительные ложные цели также гене-
рируются путем рециркуляции на промежуточной частоте принятого импульсного сиг-
нала в негенерирующем контуре запоминания. Более детально процесс генерации лож-
ных целей в этом случае описан ниже.
Рис. 6.5. Структурная схема генератора ложных целей с делением частоты сигналов
Генератор ложных целей с поиском и захватом по частоте. Данный метод РЭП
основан на генерировании ложных целей некогерентному радиолокатору, применяя
для этого приемник поиска и захвата в качестве системы высокочастотного запомина-
ния сигнала. Структурная схема генератора показана на рис. 6.6. Каждый принятый
импульсный сигнал подавляемого радиолокатора поступает на приемник поиска и за-
хвата, который захватывает частоту принятого сигнала. При методе поиска и захвата
обычно используется свип-генератор, который подсоединяется к контуру обратной
связи, содержащему дискриминатор частоты, но может применяться любой другой тип
системы поиска и захвата. Например, приемник поиска и захвата, который будет захва-
тывать частоту сигнала подавляемого радиолокатора за время длительности импульса,
будет обеспечивать применимость этого метода для радиопротиводействия некоге-
рентным радиолокаторам со скачкообразной перестройкой частоты от импульса к им-
пульсу. Если берется приемник поиска и захвата со свипирующим гетеродином, то в
каждый момент обычно может захватываться только один входной сигнал, так что он
149
будет использоваться в основном против одиночных радиолокаторов обнаружения или
слежения, т. е. в ситуации "один на один". В случае следящего радиолокатора схема
поиска и захвата может обеспечивать запоминание частоты, требуемое для создания
уводящей помехи по дальности. На выходе приемника поиска и захвата формируется
непрерывный сигнал на частоте, примерно равной частоте перехваченного сигнала.
Точность наведения по частоте является функцией, обратно пропорциональной време-
ни захвата, она может ограничиваться чувствительностью дискриминатора, динамиче-
ским диапазоном и кратковременной стабильностью генератора. Если наведения по
частоте с точностью до ширины полосы пропускания радиолокатора невозможно дос-
тигнуть, то можно применять амплитудную или частотную модуляцию шумами в це-
лях расширения спектра сигнала, чтобы обеспечить перекрытие частоты сигнала по-
давляемого радиолокатора. Детектор, показанный на входе генератора (рис. 6.6), снаб-
жает синхронизирующими импульсами устройство программирования ложных целей.
При необходимости можно создать много ложных целей.
Рис. 6.6. Структурная схема генератора ложных целей с поиском и захватом (а)
и эпюры принятой (б), преобразованной (в) и излучаемой (г) импульсных последовательностей
Каждый ложный импульс используется для запуска высокочастотного импульс-
ного модулятора и отпирания оконечного импульсного усилителя.
Генератор ложных целей с взаимообратным преобразованием частоты. В
данном случае ложные цели радиолокатору создаются путем преобразования входного
радиочастотного сигнала по частоте в сигнал промежуточной частоты, лежащей обыч-
но в диапазоне 50...500 МГц, при которой можно использовать низкочастотные линии
задержки для получения больших задержек по времени (порядка 250 мкс), и обратного
преобразования промежуточной частоты в высокую частоту для последующего усиле-
ния и передачи сигналов ложных целей.
На рис. 6.7,а показана структурная схема рассматриваемого генератора ложных
целей. Непосредственно на выходе приемной антенны имеется малошумящий усили-
тель для усиления сигнала перед его преобразованием по частоте. Сигнал гетеродина
150
используется как для входного, так и выходного смесителей в целях обеспечения пре-
образования сигнала промежуточной частоты в высокочастотный сигнал, очень близ-
кий к частоте подавляемого радиолокатора. Кратковременная нестабильность этого ге-
теродина в интервале времени между приемами сигналов радиолокатора и передачей
сигналов ложных целей - единственный источник частотной ошибки в данном процес-
се. Пониженный по частоте сигнал проходит направленный ответвитель, широкопо-
лосный УПЧ, второй направленный ответвитель и выходной преобразователь.
Рис. 6.7. Структурная схема генератора ложных целей с взаимообратным преобразованием
частоты («) и эпюры принятой (б) и передаваемой (в) импульсных последовательностей
Второй направленный ответвитель обеспечивает подачу сигнала на вход цепи об-
ратной связи с низкочастотной линией задержки (ЛЗ), где он задерживается по проме-
жуточной частоте и поступает обратно на первый направленный ответвитель. Задер-
жанные сигналы затем повторно усиливаются и снова циркулируют через линию за-
держки. Это позволяет получить много задержанных импульсов на каждый входной
импульс подавляемого радиолокатора. Поскольку в низкочастотной ЛЗ имеют место
потери мощности сигнала, для компенсации их могут потребоваться усилители, вклю-
чаемые до и после линии задержки. Контур запоминания, состоящий из ответвителей,
УПЧ и низкочастотной ЛЗ, имеет коэффициент передачи, немного меньше единицы,
поэтому процесс рециркуляции повторяется до тех пор, пока сигнал в контуре не за-
тухнет. Многие десятки повторяющихся сигналов можно легко сформировать, если по-
тери в цепи обратной связи сделать однородными в пределах полосы пропускания по
промежуточной частоте. На рис. 6.7,б,в показаны импульсные последовательности
входного радиолокационного сигнала и импульсная последовательность выходных им-
пульсов ложных целей соответственно. Поскольку от одного сигнала можно формиро-
151
вать много ложных импульсов, некоторые из таких импульсов могут перекрыть не-
сколько периодов следования импульсов подавляемого радиолокатора, создавая тем
самым ложные цели на дальностях, меньших, чем истинная дальность до носителя
средств РЭП, содержащего генератор ложных целей. Однако такие ложные цели на бо-
лее близких расстояниях могут создаваться только тогда, когда подавляемый радиоло-
катор имеет фиксированную несущую частоту, фиксированную частоту следования
импульсов и не является когерентным.
Существует много вариантов реализации этой основной идеи. Например, могут
использоваться ЛЗ, имеющие различные величины задержек, в комбинации с линией
задержки, показанной на структурной схеме рис. 6.7, для того чтобы получить ложные
цели в различных последовательностях и комбинациях. Также могут применяться ли-
нии с переменной задержкой. Пока понижающий и повышающий смесители запиты-
ваются одним и тем же гетеродином, несущая частота сигналов ложных целей будет
всегда истинной. Поскольку полоса пропускания генератора ложных целей данного
типа ограничена полосой пропускания на промежуточной частоте, другие варианты
будут включать методы увеличения эффективной высокочастотной полосы пропуска-
ния. Для того чтобы перекрыть более широкую полосу выходных частот, можно при-
менить быстро свипирующий по частоте гетеродин, но при этом импульсы входного
сигнала должны иметь "окраску" в соответствии с их частотой, с тем чтобы частота
свипирующего гетеродина могла быть правильно установлена для каждого сигнала
ложной цели, приходящего с выходного смесителя. Можно также использовать много
гетеродинов (перекрывающих полосу), но и в этом случае входной радиочастотный
сигнал должен иметь "окраску", для того чтобы правильная частота гетеродина вклю-
чалась, когда импульс ложной цели, соответствующий конкретному входному радио-
частотному импульсу, должен передаваться.
Имитация ложных целей когерентным РЛС сопровождения. Данный метод
имитации ложных целей по дальности любому типу когерентной РЛС, включая РЛС
сопровождения с ФКМ со сжатием импульса и/или скачкообразной перестройкой не-
сущей частоты, использует два или более самолета. Один самолет принимает радиоим-
пульс главного лепестка ДНА РЛС и передает его на другой самолет, который, в свою
очередь, после усиления ретранслирует радиоимпульс в направлении РЛС, принимаю-
щей его через боковые лепестки ДНА. Импульс помехи будет задержан относительно
отраженного радиолокационного импульса от первого самолета из-за задержки при
распространении и задержки в ретрансляторе второго самолета. В этом случае задер-
жанный радиоимпульс на экране индикатора РЛС выглядит как ложная цель, но более
удаленная. Доплеровский сдвиг несущей этого импульса включает составляющую от-
носительной скорости самолетов плюс составляющие скоростей самолетов относи-
тельно РЛС. Задержка между импульсами действительной и имитируемой целей будет
меняться в зависимости от относительного перемещения самолетов по мере их при-
ближения к РЛС. Имитируемая цель обрабатывается РЛС как истинная, поскольку она
представляет собой ретранслированную копию радиолокационного сигнала.
6.6. Создание помех по дальности РЛС с последетекторным интегри-
рованием
Последетекторное интегрирование предусматривает накопление принимаемых
импульсов с целью повышения отношения сигнал-помеха. Иногда его называют неко-
152
герентным интегрированием, поскольку накопление сигналов осуществляется по ви-
деочастоте и фазовые отношения интегрируемых сигналов никакой роли не играют.
Радиопротиводействие таким радиолокационным системам основано на формировании
повторяющихся с частотой следования импульсов РЛС шумовых импульсов со спек-
тром, согласованным с полосой пропускания подавляемого приемника. Реализация
данного метода РЭП может быть различной. На рис. 6.8 представлена структурная схе-
ма одного из вариантов передатчика повторяющихся шумов, формируемых с помощью
модуляции высокочастотного сигнала последовательностью серий шумов, образован-
ных многократным повторением рециркуляций выборки видеошума.
Рис. 6.8. Структурная схема передатчика повторяющихся шумов
Рассмотрим его работу с конкретными числовыми параметрами, приведенными
на рис. 6.9.
Как видно из рисунка, источник сигнала видеошумов стробируется импульсом
длительностью 1 мкс с периодом повторения 10 мс. Этот сигнал поступает на вход ре-
циркулятора Л. Ключ С замыкает петлю обратной связи на время 100 мкс, обеспечивая
99 циркуляций входного шумового импульса (рис. 6.9,в). При разработке рециркулято-
ра должны быть приняты меры для того, чтобы нарастание собственных шумов за 100
мкс было бы значительно меньше амплитуды последнего рециркулирующего импуль-
са Включение ключа В обеспечивает поступление 100-микросекундного псевдошумо-
вого импульса в рециркулятор В. Это предотвращает возникновение любых паразит-
ных шумовых сигналов в промежутках времени между 100 мкс шумовыми импульса-
ми, поступающими в рециркулятор В, который включается на время 10 мс, обеспечивая
99 циркуляций входного псевдошумового импульса (рис. 6.9,г). По прошествии 10 мс
устройство приводится в исходное состояние, и цикл повторяется. Таким образом, вы-
борка шума длительностью 1 мкс повторяется 100 мкс, а затем полученная последова-
153
Рис. 6.9. Эпюры сигналов, поясняющие принцип работы передатчика помех
с излучением ВЧ-сигнала, модулированного повторяющимися шумами,
сформированными последовательно соединенными рециркуляторами
тельность повторяется в течение 10 мс. Выходной непрерывный сигнал рециркулятора
В разветвляется и подается на амплитудный и частотный модуляторы. Метод ЧМ ис-
пользует фазовую пилообразную модуляцию. Таким образом, сигнал одночастотного
высокочастотного источника дважды модулируется, усиливается и излучается в на-
правлении подавляемой радиолокационной системы.
Описанное устройство создаст сигнал помехи с шириной полосы 1 МГц. В зави-
симости от конкретной ситуации могут быть использованы другие типы источников
ВЧ-сигналов для создания помех, другие числовые значения и параметры рециркуля-
торов. На рис. 6.10,а показана структурная схема другого варианта передатчика по-
вторяющихся шумов. Устройство состоит из приемной и передающей антенных сис-
тем, настраиваемого приемника, системы управления частотой, источника ВЧ-
сигнала и выходного усилителя на ЛБВ. Сигнал передатчика модулируется в ампли-
тудном модуляторе, вход которого соединен с регистром сдвига с обратной связью.
Принятые радиолокационные импульсы (рис. 6.10,6) позволяют ждущему мульти-
вибратору так синхронизировать регистр сдвига с обратной связью, чтобы он начи-
нал работать в той же точке каждого периода повторения радиолокационных импуль-
сов (рис. 6.10,е). При использовании этого метода РЭП радиолокационный приемник
принимает сигнал с псевдослучайной модуляцией, который интегрируется одновре-
менно с полезным сигналом, что приводит к снижению эффективности накопителя
видеосигналов. На рис. 6.11 показана структурная схема устройства, использующего
ретрансляцию задержанной выборки сигналов. В зависимости от конкретных усло-
вий управление двумя переключателями осуществляется синхронно с частотами
коммутации в диапазоне от 1 кГц до 10 МГц.
154
Приемная антенна Передающая антенна
Импульсные сигналы
РЛС
Огибающая
амплитуды
сигнала помехи
Рис. 6.10. Структурная схема передатчика повторяющихся импульсных
шумов (а) и эпюры входного и выходного сигналов (б,в)
Когда переключатели находятся в по-
ложении ], принятый сигнал усиливается и
подается на ВЧ-линию задержки. Через
время, равное t/2, переключатели коммути-
руются в положение 2. Этого времени дос-
таточно, чтобы сигнал прошел линию за-
держки туда и обратно и был готов к уси-
лению и ретрансляции. Переключатели ком-
коммутируются с частотой 1// Гц и остают-
ся в каждом положении в течение времени
f/2, которое равно удвоенному времени за-
паздывания в ЛЗ. Заметим, что в этом слу-
чае не возникает проблем с обеспечением
.развязки между приемной и передающей
антеннами, так как передача и прием нико-
гда не осуществляются одновременно. Од-
нако антенная система должна быть тща-
Рис. 6.11. Структурная схема ретранслятора
задержанной выборки
тельно сконструирована, поскольку может возникать паразитная связь, если приемная
и передающая антенны разнесены так, что за время распространения выходного сигна-
ла к приемной антенне устройство находится в состоянии приема. Хотя это и не самое
главное, этот метод создает ложные цели во временной области, при этом необходима
линия задержки с запаздыванием, равным половине временного интервала между лож-
ными целями.
155
6.7. Технические средства, реализации создания помех
радиолокационным системам сопровождения по дальности
Необходимость в системе запоминания частоты сигналов. Такая необходи-
мость обусловлена тем, что при создании уводящих помех по дальности и ложных це-
лей импульсным РЛС длительность создания помехи на частоте РЛС превосходит дли-
тельность зондирующего импульса РЛС, поступающего на вход системы РЭП, и излу-
чение помехи происходит в основном тогда, когда на входе системы РЭП сигнал РЛС
отсутствует. Запоминающие устройства также используются для обеспечения высокого
уровня развязки между приемом и передачей, давая возможность передавать запом-
ненный сигнал так, чтобы передача и прием никогда не совпадали во времени.
В системах РЭП используются различные типы запоминающих устройств: рецир-
куляторы радиоимпульсов; потенциалоскопы, работающие на ПЧ; настраиваемые по
частоте генераторы гармонических колебаний или источники шума; линии задержки;
запоминающие устройства рециркуляторного типа и взаимодействующие пространст-
венно-разнесенные ретрансляторы, в работе которых используется задержка при рас-
пространении в окружающем пространстве. Наиболее важными характеристиками за-
поминающих устройств любого типа являются следующие:
частотный диапазон;
динамический диапазон;
чувствительность;
длительность запоминания частоты;
спектральные характеристики запомненного сигнала;
когерентность;
быстродействие;
способность одновременно запоминать несколько сигналов;
информационная доступность (произвольная и регламентированная во времени);
способность считывания без разрушения информации;
стоимость, размеры, масса и энергетические характеристики.
Рассмотрим структуру и характеристики известных типов систем запоминания
частоты.
Рециркуляторы радиоимпульсов. При реализации увода строба дальности сиг-
нал помехи излучается в моменты времени после приема радиолокационного импуль-
са, длительность которого может составлять доли микросекунды, поэтому в станции
помех необходимо устройство для запоминания частоты этого импульса на довольно
длительный период, обеспечивающий требуемое рассогласование строба дальности
РЛС с отраженным от цели сигналом. Один из методов запоминания частоты в этом
случае основан на использовании рециркулятора импульсов, обеспечивающего высо-
кое быстродействие при обработке сигналов от импульса к импульсу, широкую мгно-
венную полосу и высокую пропускную способность [5]. На рис. 6.12,я показана струк-
тура типового рециркуляционного устройства запоминания частоты, в состав которого
входит ЛБВ основного тракта ретрансляции помехи.
На вход устройства могут поступать различные импульсные последовательности
с изменяющимися длительностью импульсов и частотой повторения. Однако длитель-
ность входного радиоимпульса обычно нормируется с помощью стробирующей схемы
до величины, равной длительности запаздывания в линии задержки. Нормированный
156
Рис. 6.12. Структурная схема рециркуляционного запоминающего
устройства (а) и его характеристика (б)
по длительности входной радиоимпульс усиливается ЛБВ и разветвляется по мощно-
сти на две части. Одна часть поступает на выход как часть формируемого импульса
помехи, а другая через ответвитель, коммутатор, линию задержки и второй ответвитель
поступает снова на вход ЛБВ. Коммутатор управляется импульсом, формируемым логи-
ческим устройством, который определяет длительность запоминания частоты. Коэффи-
циент усиления разомкнутого контура равен 10... 15 дБ. После окончания строб-
импульса и размыкания коммутатора происходит подготовка устройства к обработке
следующего входного радиосигнала. Поскольку длительность импульса на выходе
входной стробирующей системы равна запаздыванию в линии задержки, радиоимпульс
после первой циркуляции поступит на вход ЛБВ в момент прохождения через него
заднего фронта входного радиоимпульса. Передний фронт второго радиоимпульса по-
ступит на вход ЛБВ в момент прохождения через него первого радиоимпульса контура
и т. д. В результате на выходе устройства сформируется широкий СВЧ-радиоимпульс,
частота заполнения которого равна частоте заполнения входного радиоимпульса. При
формировании уводящей помехи по дальности этот широкий радиоимпульс стробиру-
ется и излучаются радиоимпульсы длительностью, равной длительности импульса по-
давляемой РЛС. Рабочая точка контура запоминания показана на рис. 6.12,6 в месте
пересечения амплитудной характеристики ЛБВ и характеристики вносимых потерь
контура. Входной импульс усиливается ЛБВ в точке А амплитудной характеристики
усилителя. Несмотря на потери в контуре, мощность импульса после первой циркуля-
157
ции (точка В) превзойдет мощность входного импульса, потому что усиление ЛБВ пре-
вышает затухание в контуре на 10... 15 дБ. Процесс рециркуляции с нарастанием мощ-
ности сигнала продолжается до тех пор, пока в результате уменьшения коэффициента
усиления ЛБВ в области насыщения оно нс сравняется с потерями в контуре. Стабили-
зация рабочей точки контура, таким образом, происходит в области глубокого насыще-
ния ЛБВ. Разработчики ЛБВ затратили немало усилий, совершенствуя характеристики
ЛБВ, используемых в запоминающих устройствах рециркулярного типа. Хорошая ра-
бота ЛБВ в рециркуляторе зависит от формы амплитудных характеристик, скорости
нарастания шумов при рециркуляции, характеристик взаимодействия сигналов, влия-
ния окружающей температуры, степени преобразования амплитудной модуляции в фа-
зовую [6].
Так как контур характеризуется достаточно широкой рабочей полосой и доста-
точно большим усилением, а усилитель генерирует собственный шум, этот шум при
замыкании контура будет нарастать с преобладанием спектральной составляющей, со-
ответствующей максимальному значению характеристик усиления контура. При значи-
тельном усилении этой составляющей контур перестанет функционировать как устрой-
ство запоминания частоты, превращаясь в генератор собственных колебаний [7]. На-
растанию собственных колебаний препятствует присущее любому усилителю свойство
подавления слабых сигналов в условиях насыщения [8]. Это подавление происходит
при наличии любого достаточно мощного сигнала, причем чем глубже насыщение, тем
сильнее подавление. В усилителе с плоским участком амплитудной характеристики в
режиме насыщения коэффициент подавления слабого сигнала достигает 6 дБ [9]. По-
давление слабых сигналов происходит в пределах всей частотной полосы пропускания
усилителя. Таким образом, в нормальных условиях входной радиоимпульс, амплитуда
которого обычно устанавливается предусилителем на достаточно большом уровне,
должен воспрепятствовать нарастанию собственных колебаний в контуре. Если рабо-
чий диапазон рециркулятора слишком велик и не позволяет реализовать нужное число
рециркуляций радиоимпульсов, т. е. имеет место чрезмерное нарастание собственных
шумов, то частотную полосу рециркулятора можно разделить на поддиапазоны. Для
обеспечения требуемой частотной неравномерности кольца рециркулятора в него
включаются эквалайзеры, которые компенсируют различия в потерях и/или усилении в
кольце путем введения частотно-зависимого затухания. Часто используются резона-
торные эквалайзеры или компенсация обеспечивается подстройкой усилителей. Точ-
ность запоминания частоты или, в общем случае, спектральная чистота запомненного
сигнала играет очень важную роль, когда станция помех используется против коге-
рентной РЛС.
Когерентная РЛС представляет собой РЛС, передаваемые последовательные им-
пульсы которой связаны между собой определенным соотношением фаз. При приеме
отраженных импульсов обрабатываются только те из них, у которых фаза несущей час-
тоты не выходит за определенные пределы (учитывая доплеровский эффект) по срав-
нению с фазой передаваемого импульса. Поэтому при создании уводящих помех по
дальности необходимо обеспечивать когерентность запомненного сигнала [10]. Из-
вестно, что огибающая спектра импульсного сигнала на входе устройства запоминания
частоты определяется функцией sinx/x. Если частота центральной компоненты этого
158
спектра такова, что электрическая длина замкнутого контура равна целому числу волн,
то после каждой циркуляции фаза не будет отклоняться от значения фазы центральной
компоненты входного радиоимпульса, т. е. фаза и частота не изменятся. В этом случае
запомненный сигнал будет когерентным. Однако, если электрическая длина замкнуто-
го контура равна нечетному числу полуволн, соответствующему частоте центральной
компоненты спектра, то после циркуляции фаза будет смещаться на 180°. В этом слу-
чае энергия будет концентрироваться в боковых составляющих спектра, отстоящих на
—по обе стороны от центральной частоты входного сигнала, т. е. при длительности
радиоимпульса 0,2 мкс данный разнос будет равен ±2,5 МГц. Результатом этого явле-
ния будет как потеря мощности сигнала помехи в приемнике РЛС, так и нарушение фа-
зирования (когерентности). Энергетические потери рециркулированного сигнала будут
зависеть от отношения ширины полосы спектра сигнала помехи к полосе пропускания
приемника подавляемой РЛС [11].
При приеме радиоимпульсов
с длительностью, равной запаз-
дыванию в рециркуляторе, на вы-
ходе рециркулятора формируется
пакет радиоимпульсов, суммарная
длительность которых в число
циркуляций раз больше, чем дли-
тельность входного радиоимпуль-
са. Радиоимпульсы в пакете име-
ют одинаковую несущую частоту,
но могут отличаться друг от друга
по фазе, когда суммарный набег
фазы в рециркуляторе на несущей
частоте не равен 2я. Следует
также отметить, что рециркули-
Рис. 6.13. Рельеф нормированного амплитудного
спектра рециркулированного сигнала
рованный радиоимпульс когерентен входному, так как он формируется из его выборки.
Ширина спектра рециркулированного сигнала зависит от величины фазовой манипуля-
ции. На рис. 6.13 для примера приведен рельеф нормированного амплитудного спектра
рециркулированного сигнала для случая, когда в пакете содержится четыре рециркули-
рованных импульса при изменении суммарного набега фазы на величину Д<р относи-
тельно целого числа 2д . По мере увеличения Д<р происходит смещение максимума
спектра в сторону меньших частот, и спектр становится несимметричным. При Д<р =тг
спектр снова симметричен относительно несущей частоты. При этом амплитуда со-
ставляющей на несущей частоте равна нулю, а энергия рециркулированного сигнала
концентрируется в областях, отстоящих от несущей на величину -~тз> гДе тз ~ запаз-
дывание в рециркуляторе. При нечетном числе импульсов в пакете и Дф = я амплиту-
да спектральной составляющей на несущей частоте равна 1/N, где N- число импульсов
в пакете.
159
Рис. 6.14. Зависимость энергети-
ческих потерь рециркулированного
сигнала от фазовой манипуляции
для различного числа импуль-
сов в стробе селекции по дальности
В связи с расширением спектра рециркулиро-
ванного сигнала при наличии фазовой манипуляции
наблюдаются энергетические потери при прохожде-
нии его через приемное устройство. На рис. 6.14
приведены расчетные коэффициенты W относитель-
ных потерь рециркулированного сигнала от величи-
ны фазовой манипуляции Д<р для различного числа
рециркулированных импульсов в пакете N, длитель-
ность которого равна длительности входного радио-
импульса [11]. Увеличение числа рециркулирован-
ных радиоимпульсов в радиолокационном стробе
селекции по дальности приводит к возрастанию
энергетических потерь при Д<р—. Так, при N = 3
максимальные потери составляют 7,2 дБ. Однако
максимальные энергетические потери рециркулиро-
ванного сигнала в радиолокационном приемнике но-
сят вероятностный характер из-за того, что несущая
частота РЛС не связана непосредственно с собствен-
ными частотами рециркулятора. Поэтому для ис-
ключения случаев, когда потери оказываются мак-
симальными, применяют вобуляцию набега фазы в
рециркуляторе. В результате обеспечивается некоторый усредненный уровень энерге-
тических потерь.
В когерентно-импульсных РЛС в результате доплеровской фильтрации использу-
ется одна центральная спектральная составляющая спектра радиолокационного им-
пульсного сигнала. Поэтому энергетические потери рециркулированного сигнала в та-
ком приемнике будут определяться уровнем спектральной составляющей на несущей
частоте РЛС. Как видно из рис. 6.14, уровень этой составляющей зависит от набега фа-
зы и числа рециркулированных импульсов в стробе дальностной селекции РЛС. При
отсутствии фазовой манипуляции в сигнале амплитуда составляющей на частоте несу-
щей максимальна и уменьшается с ее появлением. Существуют значения набега фазы,
при которых амплитуда сигнала на несущей равна нулю. Положение нулей при изме-
нении набега фазы на интервале 0,7Г зависит от числа рециркулированных радиоим-
пульсов в стробе дальностной селекции и определяется величиной L(p = 2n/N . Так как
набег фазы в рециркуляторе зависит от несущей частоты сигнала на входе рециркуля-
тора, то возможны случаи, когда амплитуда рециркулированного сигнала на выходе
фильтра доплеровской селекции приемника импульсно-доплеровской РЛС будет равна
нулю. Этот факт может быть использован в РЛС для снижения эффекта действия по-
мех, формируемых с помощью рециркулятора. Известны методы концентрации энер-
гии рециркулированного сигнала вблизи несущей частоты, которые состоят в создании
амплитудных различий в серии задержанных сигналов, в задержке на соответствую-
щий временной интервал соседних циркуляций или формировании их с разной дли-
тельностью.
Наличие в рециркулированном сигнале помехи фазовой манипуляции, приводя-
щей к энергетическим потерям при его обработке в приемнике РЛС, величина которых
160
зависит от несущей частоты, позволяет использовать это обстоятельство для защиты
РЛС от воздействия уводящей помехи по дальности. Способ зашиты основан на таком
изменении несущей частоты РЛС, чтобы амплитуда сигнала уводящей помехи по даль-
ности, наблюдаемая на экране индикатора типа А РЛС, была минимальна. Изменение
несущей частоты РЛС при этом сравнительно невелико и составляет величину, равную
I
2?3
Если запаздывание в рециркуляторе равно 0,2 мкс, то минимумы сигнала рецир-
кулированной помехи будут наблюдаться через 5 МГц при перестройке несущей часто-
ты РЛС. Для реализации этого способа защиты от воздействия уводящей помехи в РЛС
необходимо ввести устройства плавного и змснения несущей частоты передатчика РЛС
и контроля уровня сигнала помехи.
С целью нейтрализации возможности снижения эффективности помех, создавае-
мых на основе рециркулятора, необходимо сконцентрировать энергию сигнала помехи
на несущей частоте, например, введением в рециркулятор фазовращателя для управле-
нием набегом фазы [12]. Для концентрации энергии сигнала помехи, формируемой с
помощью рециркулятора импульсов, в полосе пропускания приемника подавляемого
радиолокатора следует обеспечить условия, при которых в рециркулированном сигнале
помехи отсутствует нестабильность фазы или ^е" величина находится в допустимых
пределах. Эти условия обеспечиваются, если полный набег фазы в рециркуляторе на
несущей частоте РЛС кратен целому числу 2л рад. Рециркулятор является очень ши-
рокополосным устройством, его мгновенный диапазон может достигать нескольких ги-
гагерц. Так как обычно реализуемая задержка в рециркуляторе в диапазоне СВЧ со-
ставляет десятые доли микросекунды, то несущие частоты, на которых выполняется
условие концентрации энергии помехи, будут чередоваться через несколько мегагерц,
и вероятность того, что несущая частота РЛС совпадет с этой сеткой собственных час-
тот рециркулятора мала. В связи с этим для эффективного воздействия помехи необхо-
димо настроить рециркулятор на несущую частоту путем изменения в нем набега фазы,
например, увеличением или уменьшением задержки. Для этого нужно измерить раз-
ность фаз между входным радиоимпульсом и его задержанной выборкой и в соответст-
вии с ней изменить фазовый набег в рециркуляторе, для чего в него нужно ввести мгно-
венный измеритель разности фаз и быстродействующий фазовращатель (рис. 6.15).
Рис. 6.15. Структурная схема рециркулятора с автоподстройкой набега фазы
Входной радиоимпульс поступает на вход детектора, измерителя разности фаз и
через переключатель на усилитель, линию задержки и на другой вход измерителя фазы
6—1777
161
Переключатель через время, равное" запаздыванию в линии задержки, переключается в
положение 2, и начинается рециркуляция выборки входного радиоимпульса. Одновре-
менно в измерителе фазы определяется разность фаз между входным радиосигналом и
задержанной из него выборкой, и на фазовращатель подается соответствующее напря-
жение, которое устанавливает в рециркуляторе набег фазы, близкий к целому числу
2тг рад. В результате манипуляция фазы существенно уменьшается и энергия помехи
концентрируется на несущей частоте РЛС. Переключатель остается в положении 2 в
течение времени запоминания, например, 5... 10 мкс. После этого он возвращается в
положение 1 и готов к приему следующего радиоимпульса, в том числе и на другой не-
сущей частоте. Точность коррекции набега фазы в рециркуляторе определяется вели-
чиной допустимых энергетических потерь сигнала помехи в приемнике РЛС, а также
соотношением между длительностью строб-импульса селекции по дальности и запаз-
дыванием в рециркуляторе. Чем выше эти требования, тем точнее нужно измерять раз-
ность фаз и отрабатывать ее. На практике может оказаться достаточным устанавливать
набег фазы, например, с точностью до 45°. В этом случае вместо фазовращателя непре-
рывного действия можно использовать дискретный фазовращатель на четыре градации,
что существенно упрощает построение схемы автоподстройки фазы рециркулятора.
При этом можно использовать гибридную схему, которая совмещает функции фазов-
ращателя и фазового детектора. Это позволяет уменьшить вносимые потери в кольце
из-за введения устройства автоподстройки набега фазы. На рис. 6.16 приведена струк-
турная схема передатчика уводящих помех по дальности, использующего рециркуля-
тор с дискретной автоподстройкой набега фазы.
Рис. 6.16. Структурная схема передатчика уводящих помех по дальности
с рециркулятором с автоподстройкой фазы
Входной радиоимпульс усиливается в усилителе № 1 и через коммутатор посту-
пает на рециркулятор, который формирует расширенный по длительности радиоим-
пульс, состоящий из состыкованных выборок входного радиоимпульса. Из этого ра-
диоимпульса в оконечном СВЧ-импульсном усилителе № 3 формируется уводящий по
162
дальности помеховый радиоимпульс. Синхронизация передатчика помех осуществля-
ется от продетектированного входного радиоимпульса логическим устройством, фор-
мирующим видеоимпульсы, управляющие работой коммутатора, и видеоимпульс с
программируемой задержкой. Рециркулятор работает следующим образом. Входной
радиоимпульс поступает на усилитель № 2 и на один вход фазового детектора, а за-
держанный сигнал - на другой вход фазового детектора. В результате амплитуды сиг-
налов на выходах фазового детектора функционально зависят от фаз между входным и
задержанным сигналом. Выход ЛЗ соединяется с фа ювращателем, который осуществ-
ляет сдвиг фазы задержанного сигнала на 0, 90, 180 и 270° с распределением сигналов
на входы четырехпозиционного переключателя. Этот переключатель управляется ло-
гическим устройством, которое управляется постоянными напряжениями, пропорцио-
нальными входным амплитудам фазового детектора. При этом переключатель устанав-
ливается в положение, обеспечивающее i юдстройку набега фазы в рециркуляторе, что-
бы указанное фазовое рассогласование было не более 45°. Входные напряжения детек-
торов фазового детектора образуют в зависимости от разности фаз входного и неза-
держанного сигналов определенную комбинацию. Логическая схема согласно комби-
нации напряжений устанавливается в нужное положение.
На точность запоминания фазы и частоты оказывают влияние также положение и
длительность передаваемого импульса уводящей по дальности помехи по отношению к
моменту поступления и длительности входного импульса соответственно. Если норми-
рованная длительность входного радиоимпульса рециркулятора равна длительности
радиолокационного радиоимпульса, и задержка переднего фронта излучаемого им-
пульса помехи в цикле увода кратна целому числу длительностей входного импульса,
то воспроизведение спектра сигнала РЛС помехой будет достаточно точным. При всех
других значениях длительности излучаемого импульса и временной задержки его пе-
реднего фронта в процессе увода искажения спектра усилятся. В свою очередь, в пере-
датчике помех воздействие неблагоприятных эффектов из-за расширения спектра сиг-
нала помехи может быть снижено в результате преднамеренного циклического измене-
ния набега фазы в рециркуляторе, так чтобы уменьшение амплитуды спектральных со-
ставляющих помехи нс было сосредоточено на дискретных частотах. При этом энерге-
тические потери сигнала помехи в приемнике РЛС будут предсказуемы и будут более
приемлемые величины средних потерь на всех частотах рабочего диапазона.
Среди применений рециркулятора радиоимпульсов можно отмстить возможность
с его помощью формировать имитационные помехи. Для примера рассмотрим струк-
турную схему передатчика дезинформирующих помех (рис. 6.17). Она представляет
собой широкополосную систему запоминания, в которой циркулирующий сигнал мо-
дулируется с намерением создать имитационную помеху. Передатчик приводится в
действие при поступлении на его вход радиолокационного импульса, превышающего
некоторый заданный пороговый уровень мощности. Предполагается, что передатчик
содержит устройство бланкирования, пропускающее только переднюю часть входного
радиоимпульса, чтобы устранить в рециркуляторе самовозбуждение. Во время запол-
нения линии задержки выборкой входного сигнала выходной усилитель запирается. За-
тем входной переключатель замыкает кольцо. Модулирующие сигналы могут пода-
ваться как на входной, так и на выходной усилители. Импульсная и амплитудная моду-
ляции обычно осуществляются с помощью выходного усилителя. Помимо предотвра-
щения самовозбуждения стробирование может быть использовано для контроля за ра-
163
Рис. 6.17. Упрощенная структурная схема создания дезинформирующих
помех на основе рециркулятора
ботой подавляемой РЛС (при увеличенном временном интервале запирания). Частот-
ная модуляция осуществляется с помощью либо первого усилителя, либо фазовой мо-
дуляции выходной ЛБВ, либо балансного модулятора, если вместо ЛБВ используется
твердотельный усилитель. Фазовая модуляция рециркулируемых сигналов приводит к
сдвигу частоты сигнала помехи. В РЛС КНИ эти помеховые сигналы имитируют мно-
жество целей, которые обрабатываются наряду с истинным отраженным от носителя
станции помех сигналом. Ложные цели могут располагаться под различными углами и
на разных дальностях [10, 12-14].
Устройства запоминания сигналов на основе приборов с зарядовой связью.
Память на приборах с зарядовой связью - это аналоговые ЗУ дискретных выборок
исходного сигнала. Выборки запоминаются и обрабатываются как дискретные анало-
говые пакеты заряда. В случаях, когда требуется запоминание нескольких выборок, ис-
пользуется параллельное или последовательно-параллельное схемное построение ЗУ.
Применительно к РЭП эти устройства применяются для формирования имитационных
помех путем записи сигналов импульсных РЛС, например, с ЛЧМ и запоминание их на
время нескольких периодов повторения радиолокационных импульсов и последующего
считывания его по команде в любой период времени. Устройство состоит из двух квад-
ратурных каналов на приборах с зарядовой связью, включенных по двухтактной схеме.
Такое включение снижает паразитное прохождение синхронизирующего сигнала, и
обеспечивается автоматическая компенсация смещения постоянного тока, вызванного
нарастанием теплового тока. Экспериментальное ЗУ для РЭП использует прибор с 64
каскадами, который обладает линейностью 40...60 дБ и временем хранения информа-
ции 3 мс. При частоте синхронизации 6 МГц на выходе прибора составляющие син-
хронизирующего сигнала и его боковые составляющие подавлялись так, что отноше-
ние полезного сигнала к шуму составляло 37 дБ. Качество работы ЗУ оценивается ете-
't 64
пенью ухудшения отношения амплитуд главного и боковых лепестков спектра исход-
ного радиосигнала после хранения. Экспериментально показано, что спектр сигнала с
полосой 6 МГц и длительностью задержки 12,6 мкс, с первоначальным отношением
32 дБ после задержки сигнала на 3 мс уменьшился до 28 дБ [15].
Устройство запоминания сигналов с использованием настраиваемого по час-
тоте генератора гармонических или шумовых колебаний. Запоминание частоты
может производиться приемным устройством, осуществляющим поиск сигнала по час-
тоте и настройку генератора гармонических колебаний на частоту принятого радиоло-
кационного сигнала. Одним из вариантов системы запоминания является приемная
система, в состав которой входит гребенка полосовых фильтров для определения не-
сущей частоты принятого радиолокационного сигнала и сопряженная с ней аналогич-
ная гребенка фильтров для выделения частотной полосы шума около несущей частоты
этого сигнала. Любой из этих запомненных сигналов можно стробировать, формируя
последовательность импульсов для создания уводящей помехи по дальности, ложных
целей и других помеховых действий. Следует помнить, что эти методы запоминания
частоты не обеспечивают когерентности сигнала помехи по отношению к радиолока-
ционному сигналу и поэтому нс могут быть использованы при создании помех коге-
рентным РЛС. Для обеспечения когерентности в схеме запоминания частоты обычно
применяются различные методы ФАПЧ, а также синхронизируемые генераторы с вы-
сокой спектральной чистотой. При этом серьезная проблема состоит в запоминании
радиоимпульсов малой длительности, например, короче 0,1 мкс. Ниже описывается
устройство запоминания частоты коротких радиоимпульсов на длительное время при
сохранении когерентности. На рис. 6.18 приведена структурная схема устройства запо-
минания частоты коротких радиоимпульсов, состоящего из рециркулятора радиоим-
пульсов и генератора с ФАПЧ.
Рис. 6.18. Структурная схема устройства запоминания частоты
короткоимпульсных chi налов
Входной радиосигнал длительностью, например, 0,1 мкс, с помощью рециркуля-
тора с автоподстройкой фазы расширяется до максимально возможной длительности
165
(например, до 10 мкс). С выхода рециркулятора расширенный радиоимпульс с фазиро-
ванными циркуляциями через переключатель П1 поступает на фазовый детектор, а че-
рез переключатель П2 - на двухканальной устройство, состоящее из линии задержки
(например, с запаздыванием 1 мкс) и дискретного фазовращателя на четыре градации
(я,я/2,7г/4,7г/8), соединенных со входом измерителя фазы. В результате генератор,
управляемый напряжением, подстраивается на несущую частоту расширенного радио-
импульса и стабилизируется. После этого переключатели П1 и П2 одновременно пере-
ключаются так, чтобы отключить фазовый детектор от рециркулятора, а выход генера-
тора, управляемого напряжением, соединить с двухканальным устройством, которое
стабилизирует частоту генератора. В результате такое устройство в целом позволяет
запомнить несущую частоту короткоимпульсных сигналов в течение очень длительно-
го времени [14].
Запоминание частоты с помощью линий задержки. Для задержки сигналов в
устройствах запоминания на основе рециркуляторов могут применяться самые разно-
образные устройства и материалы, а также линии задержки, работающие на частотах,
отличающихся от частоты входного сигнала. В этом случае необходимо осуществить
предварительно преобразование частоты: гетеродинирование, деление и/или умноже-
ние. Наряду с пьезоэлектрическими и магнитоэлектрическими преобразователями для
задержки сигналов используются акустические свойства таких материалов, как кварц,
ртуть или сплавы магнитных материалов. В качестве линий задержки в системах РЭП
также могут использоваться обычные коаксиальные кабели, например, в форме катуш-
ки или секции волноводов.
Последовательно включенные фиксированные линии задержки могут применять-
ся для формирования сигналов уводящей строб дальности помехи. Переключение ли-
ний задержки дает возможность получить на выходе схемы любую задержку. Очевид-
но, что в зависимости от потребности может быть построена любая комбинация задер-
жек сигнала. Программы построения последовательностей сигналов уводящей по даль-
ности помехи могут быть реализованы с помощью ЭВМ. Необходимо, чтобы быстро-
действие переключателей было высоким, поскольку время переключения должно быть
меньше периода повторения радиоимпульсов РЛС. Достоинством устройств запомина-
ния на линиях задержки является то, что они не нарушают когерентности и точно вос-
производят как внутриимпульсную модуляцию, так и длительность импульсов. В этом
существенное преимущество их перед простым рециркулятором, у которого выходной
импульс представляет собой асинхронную выборку из последовательности рециркуля-
ций нормированных по длительности импульсов, со спектральными искажениями и
потерей эффективной мощности помехи.
Обычно линиями задержки служат бухты коаксиального кабеля или волновода (в
зависимости от диапазона частот). Но размеры таких линий задержки велики. Так, для
получения задержки в цепи обратной связи устройства запоминания, равной
0,15...0,25 мкс (включая задержку ЛБВ, равную 0,015...0,02 мкс), необходимо иметь
коаксиальный кабель длиной 30...45 м. При этом возникает необходимость компенса-
ции потерь, достигающих 20 дБ/мкс в диапазоне 1...2 ГГп и 100 дБ/мкс в диапазоне
8... 12 ГГц. Затухание кабеля находится в обратной зависимости от его диаметра, по-
этому при выборе типа кабеля приходится идти на компромисс между его размерами и
массой, с одной стороны, и его потерями - с другой. Применение коаксиальных кабе-
лей в качестве линий задержки также связано с двумя другими проблемами, а именно:
166
с зависимостью затухания от частоты и температуры. Для компенсации частотной не-
равномерности по затуханию приходится прибегать к частотным корректорам. Все это
обусловливает малую пригодность таких линий задержки в бортовой аппаратуре, если
требуются сравнительно большие задержки сигнала по времени. Для получения боль-
ших задержек СВЧ-сигналов прибегают к акустическим линиям задержки, имеющим
малые размеры по сравнению с линиями на кабеле. Скорость распространения акусти-
ческих волн в различных материалах составляет 1... 5 км/с, поэтому физические разме-
ры акустических линий задержки примерно в 105 раз меньше размеров кабеля, эквива-
лентного по задержке [16].
Другим преимуществом акустических линий задержки является их температурная
стабильность. Общие потери акустической линии К?-диапазона на 200 нс примерно та-
кие же, как у коаксиальной линии при температуре 25°С и существенно ниже при тем-
пературе +95°С. Сравнительные данные линий задержки разных типов приведены в
табл. 6.1.
Таблица 6.1. Характеристики линий задержки на 200 нс в Х-диапазонс
Тип линии задержки Потери, дБ, при различных температурах, °C Размер линии, см3 Полоса частот
-54 25 95
Волноводная 13 18 22 =4,2- 104 полуоктавная
Коаксиальная диаметр кабеля - 0,7 см 31 45 57 «3,3- 103 много- октавная
Акустическая 44...46 46...47 46...48 <16 полуоктавная
Успехи в области технологии выращивания кристаллов позволили разработать
линии задержки сигналов СВЧ на основе магнитных свойств твердых тел. Такие твер-
дотельные линии задержки позволяют регулировать время задержки путем изменения
величины прикладываемого магнитного поля или частоты задерживаемого сигнала. В
качестве задерживающей среды используются монокристаллы феррита граната иттрия,
позволяющие создавать твердотельные линии задержки СВЧ-диапазона с управляемым
запаздыванием. Применение твердотельных линий задержек в аппаратуре РЭП вместо
громоздких и дорогостоящих коаксиальных и волноводных линий задержки является
целесообразным.
В табл. 6.2 представлены данные твердотельных линий задержки, работающих на
проход в различных диапазонах волн [17].
Таблица 6.2. Характеристики твердотельных линий задержки
Диапазон, ГГц Время задержки, мкс Полоса / вносимые потери, дБ Диапазон времени задержки, мкс
узкополосные широкополосные
0,3...1 10 10%/30 40% /50 0,1...40
Г..2 3 10%/35 50% /55 0,1...20
2...4 10%/40 40% /60 0,1... 10
4...8 1 6% /45 30% /75 0,1...6
8...12 0,5 3% /50 20% /75 0,1...4
167
Для уменьшения потерь в линиях задержки на железо-итриевом гранте (ЖИГ) ис-
пользуют эффект параметрического усиления. Однако полоса пропускания такой ли-
нии узкая (около 5 МГц) на всех частотах. При этом требуется сигнал накачки, частота
которого должна быть точно настроена на удвоенную частоту сигнала. Если частота
сигнала известна, то сигнал накачки может быть получен с помощью удвоителя часто-
ты. В системах РЭП частота сигнала не всегда известна. Поэтому становится необхо-
димым применение сложных частотно поисковых устройств, что существенно снижает
преимущества, обусловленные малыми массой и размером линий задержки на ЖИГ.
При использовании ультразвуковых линий задержки необходимо двукратное преобра-
зование частоты: сначала частота сигнала понижается до значений полосы частот ли-
нии задержки, затем, когда задержка сигнала осуществлена, частота повышается до
значений частоты входного сигнала.
Режим работы ЛБВ в системе запоминания частоты. Обычно номинальный
коэффициент передачи разомкнутого рециркулятора составляет 10... 15 дБ. С приходом
радиолокационного сигнала начинается процесс рециркуляции. В конце первой рецир-
куляции входной коммутатор замыкает цепь циркуляции и преграждает поступление
входного сигнала в рециркулятор. В результате этого входной сигнал дополнительно
усиливается еще на 15 дБ до тех пор, пока ЛБВ не войдет в нелинейный режим насы-
щения. Основной параметр, ограничивающий длительность запоминания частоты, -
подавление циркуляции во всем диапазоне частот из-за нарастания колебаний на соб-
ственных частотах рециркулятора. Стабильность амплитуды запомненного сигнала по-
сле нарастания сигнала зависит от коэффициента усиления разомкнутого кольца и
формы амплитудной характеристики ЛБВ в области насыщения. Нестабильность вы-
ходной мощности возникает, если увеличение коэффициента подавления превосходит
увеличение входной мощности при равенстве коэффициента подавления коэффициенту
усиления разомкнутого кольца. Это явление можно предотвратить, если разработать
ЛБВ с плоской характеристикой в области насыщения и поддерживать сравнительно
низким коэффициент передачи разомкнутого кольца.
Система запоминания частоты с использованием пространства в качестве
задерживающей среды. Для запоминания частоты сигнала может быть использована
задержка электромагнитных сигналов при распространении их в окружающем про-
странстве по определенным трассам. Например, два удаленных друг от друга на не-
сколько километров ударных самолета, атакующих зенитный комплекс противника,
могут взаимодействовать между собой в процессе создания ложных целей для РЛС
этого зенитного комплекса. С этой целью один из ударных самолетов принимает ра-
диолокационный сигнал и ретранслирует его, обычно с преобразованием частоты, в
направлении другого ударного самолета. Второй ударный самолет принимает этот сиг-
нал и, в свою очередь, ретранслирует его в направлении первого ударного самолета.
После нескольких циклов ретрансляции частота ретранслируемого сигнала снова пре-
образуется на несущую частоту сигнала РЛС, усиливается (до необходимого уровня) и
излучается в направлении подавляемой РЛС, имитируя ложную цель [1].
Цифровые системы запоминания сигнала. Эффективность имитационных и
маскирующих помех импульсным и когерентно-импульсным РЛС, в том числе с широ-
кополосными сигналами, во многом зависит от точности воспроизведения фазовых,
частотных и временных характеристик радиолокационного сигналов. В связи с этим
большое значение получили методы цифрового запоминания сигналов, которые обес-
168
печивают высокоточное воспроизведение структуры радиолокационного сигнала, и в
отличие от традиционной аппаратуры не требуют необходимости в измерении частоты
сигнала подавляемой РЛС [1, 18-27].
Принцип работы цифровых систем запоминания сигналов (ЦЗС) заключается в
следующем: СВЧ-сигнал РЛС принимается и преобразуется по частоте в сигнал более
низкочастотного базового диапазона с помощью фиксированного или перестраиваемо-
го по частоте гетеродина, который затем квантуется. Получающиеся в результате кван-
тования выборки преобразуются из аналоговой формы в цифровую и запоминаются с
помощью быстродействующего цифрового ЗУ с произвольной выборкой. Затем запом-
ненный сигнал выводится из ЗУ и преобразуется сначала в аналоговую форму в базо-
вом диапазоне с помощью цифроаналогового преобразователя. Далее запомненный
сигнал в аналоговой форме повышается по частоте с помощью того же местного гете-
родина, который используется при понижении частоты принимаемого сигнала до час-
тоты сигнала базового диапазона.
В простейшем виде системы ЦЗС для формирования непрерывного радиосигнала
из импульсного использовали преобразование частоты исходного сигнала в диапазон
0...5 МГц, из которого с помощью синхронизируемых счетчиков импульсов и порого-
вых схем сравнения формировали сигнал прямоугольной формы с периодом повторе-
ния синусоидального сигнала. Этот сигнал записывали в регистре со сдвигом и путем
циклического воспроизведения формировали непрерывный сигнал прямоугольной
формы промежуточной частоты, который после прохождения через ФНЧ для получе-
ния синусоидальной формы восстанавливался по несущей частоте в исходном диапазо-
не частот [22]. Более усовершенствованный вариант такого подхода к запоминанию
сигнала основан на следующем: сначала осуществляется амплитудное ограничение
преобразованного на промежуточную частоту сигнала для формирования сигнала пря-
моугольной формы, а затем - его запись в цифровой форме. Для устранения разрыва
фазовой непрерывности в рециркулированном сигнале используется запись всего ис-
ходного радиоимпульса.
В применяемых в настоящее время системах ЦЗС с одноразрядной дискретизаци-
ей амплитуды сигнал ПЧ до квантования подвергается “жесткому” ограничению для
соответствия динамическому диапазону АЦП. Однако в системах с многоразрядным
амплитудным квантованием амплитудное ограничение ухудшает их возможности, и
поэтому в них приходится применять достаточно сложные системы АРУ. С другой
стороны, системы с многоразрядным квантованием фазы менее восприимчивы к ам-
плитудному ограничению и обычно не нуждаются в АРУ. В системах ЦЗС для согласо-
вания высокого быстродействия квантователя с более низким быстродействием ЗУ
большой емкости обычно используются мультиплексоры, выполняющие преобразова-
ние последовательного кода в параллельный, и демультиплексоры для преобразования
параллельного кода в последовательный.
Упрощенная структурная схема системы цифрового запоминания высокочастот-
ных сигналов представлена на рис. 6.19.
Входной СВЧ-сигнал поступает на А-фазный преобразователь, где с помощью
сигналов гетеродина, представляющих собой сигналы на фиксированной частоте с раз-
личными фазами, преобразуются в сигналы промежуточной частоты с разными фазами.
Суммарные частотные составляющие на выходе преобразователя устраняются фильт-
рацией. Аналоговые сигналы ПЧ затем преобразуются в цифровую форму с помощью
169
j Запомненным
। сигнал
V
Рис. 6.19. Упрощенная структурная схема системы цифрового
запоминания высокочастотных сигналов
А-фазного АЦП и квантуются в цифровом квантователе. Требуемое число бит при этом
зависит от числа воспроизводимых параметров входного сигнала. Так, например, если
требуется воспроизвести только несущую частоту входного сигнала, а его амплитуда
не требуется, то достаточны две фазы преобразованного сигнала и только один бит для
представления полярности каждого из двух преобразованных сигналов.
До поступления в цифровое ЗУ сигналы квантуются по времени, в результате чего
образуются выборки с периодом синхронизации, используемые в цифровом ЗУ. Син-
хронизирующие сигналы могут иметь любую фазу, однако наилучшие результаты дос-
тигаются, когда их фазы имеют соответствующую связь с фазами преобразованных
сигналов. Квантованные выборки запоминаются в цифровом ЗУ с произвольной вы-
боркой, позволяющем осуществлять многократное считывание информации без ее раз-
рушения. Процесс восстановления входного сигнала включает многоканальное циф-
роаналоговое преобразование запомненных выборок с последующим их преобразова-
нием в TV-фазном преобразователе для восстановления частоты и фазы отдельных сиг-
налов, которые после суммирования образуют восстановленный СВЧ-сигнал [24].
Наиболее простая система цифрового запоминания сигналов получается при од-
нофазном преобразовании (TV = 1), когда не требуются квадратурные каналы, но при
этом на половину сокращается мгновенная полоса рабочих частот. По сравнению с
системами, имеющими многофазное преобразование, системы запоминания с однофаз-
ным преобразованием имеют на 60...80 % меньшую стоимость при хороших рабочих
характеристиках. Относительное изменение частоты и фазы в восстановленном СВЧ-
сигнале достигается путем соответствующей частотной или фазовой расстройки гене-
раторов А-фазных сигналов, используемых в TV-фазном устройстве восстановления
сигнала. При этом сохраняется внутрисигнальная модуляция запоминания сигнала.
Для сохранения информации не только о частоте (фазе), но и амплитуде входного
сигнала необходим дополнительный канал В этом случае цифровая система запомина-
ния строится в соответствии со структурной схемой, представленной на рис. 6.20.
170
Рис. 6.20. Упрощенная структурная схема системы цифрового запоминания
сигналов с сохранением амплитудной информации
Дополнительный канал включает в себя амплитудный детектор, АЦП, цифровое
ЗУ, ЦАП и амплитудный модулятор, предназначенный для восстановления амплитуд-
ной информации в запоминаемом СВЧ-сигнале [25, 26, 28].Цифровые запоминающие
системы обеспечивают когерентное и длительное запоминание радиосигнала и откры-
вают хорошие перспективы для повышения эффективности РЭП. С их помощью можно
синтезировать частоты СВЧ-сигналов, воспроизводить сигналы с ЛЧМ и ФКМ, созда-
вать уводящие помехи и генерировать многочисленные ложные цели. Они могут при-
меняться также в качестве источников шумовых и имитационных помех. В качестве
простейшего пути реализации узкополосной маскирующей и имитирующей помех РЛС
в зависимости от фазы ес функционирования предлагается использовать систему ЦЗС с
битовым амплитудным квантованием в синфазном и квадратурном каналах (рис. 6.21).
Объем памяти ЗУ при ширине полосы 50 МГц и длительности радиолокационно-
го импульса 10 мкс составляет 6 кБ [29].
171
Реализация систем цифрового Запоминания радиолокационных сигналов стала
возможна благодаря достижениям в таких областях, как СБИС, архитектурного по-
строения ЗУ и технике дискретизации и квантования сигналов. Типовые параметры
цифровой системы запоминания приведены в [27, 30, 31].
Основные параметры типовой системы ЦЗС
для создания дезинформирующих помех по дальности
Мгновенная полоса частот (расположенная на центральной
частоте опорного гетеродина), МГц......................................400
Диапазон перестройки мгновенной полосы......................сантиметровый
Динамический диапазон, дБ Вт...................................от -60 до -30
Длительность записываемого радиоимпульса, мкс....................от 0,1 до 27
Режимы создания помех
Уводящая помеха по дальности
Длительность интервала времени, когда задержка минимальна, с.........0,5.. .5
Длительность цикла увода, с.......................................0,5...20
Величина задержки, мкс...............................................1.. .30
Начальная задержка, нс..................................................60
Дискретность изменения задержки, нс.....................................40
Закон изменения задержки..........................параболический, возможны
другие путем перепрограм-
мирования
Режим перенацеливания на отставленный
по задержке импульс помехи с длительностью цикла, с.............1... 15
Ложные цели
Число ложных целей........................................2, 4, 8 или 16,
размещенных
через 26 мкс
Радиолокационный сигнал с квазинепрерывным
и непрерывным излучением..................излучение состыкованных копий
записанного сигнала с дополни-
тельной модуляцией
Системы ЦЗС непрерывно совершенствуются, их мгновенная частотная полоса
может составить 1...2 ГГц, а в перспективе - 2...5 ГГц. Уровень паразитных состав-
ляющих на выходе системы ЦЗС составляет -10...-20 дБ, если нс применяется фильт-
рация или многоуровневое квантование.
Точность воспроизведения радиолокационного сигнала зависит от способности
системы ЦЗС подавлять паразитные сигналы, его когерентности, мгновенной полосы и
динамического диапазона квантователя. Точность воспроизведения частоты импульс-
ных радиосигналов системой ЦЗС определяется фазовой ошибкой, накапливаемой в
интервале длительности импульсов, деленной на длительность импульса. Фазовая
ошибка уменьшается с увеличением числа разрядов как в случае амплитудного, так и
фазового квантования. Разрешающая способность по фазе амплитудного квантования
характеризуется дугой, стягивающей интервалы квантования при максимальном ра-
диусе, и равна arcsin(l/2A-1). В случае фазового квантования окружность делится на 22А
фазовых интервалов, где 27V - сумма разрядов синфазного и квадратурного каналов, и
разрешающая способность по фазе равна 360°/2'А. Эффективное время накопления ра-
диолокационного приемника РЛС с импульсным излучением обратно пропорциональ-
но ширине полосы пропускания приемника / . Поэтому наблюдаемая частотная по-
172
грешность, представляющая собой фазовую ошибку А0, накопившуюся за время на-
копления, равна /прДО. Даже в случае одноразрядного АЦП частотная погрешность
всегда меньше полосы пропускания приемника.
В зависимости от применения системы ЦЗС требования к способности подавлять
паразитные сигналы в типовом случае изменяются от -10 до -40 дБ и выше относительно
уровня полезного сигнала. При мгновенной полосе порядка нескольких сотен мегагерц
стабильность по частоте составляет обычно величину порядка сотен герц. Эти параметры
определяют структуру квантователя и его характеристики, а также вид квантования (ам-
плитудное или фазовое), быстродействие, разрядность, структуру распределения сигна-
лов синхронизации.
Функция амплитудного или фазового квантования выполняется АЦП. Типовой
АЦП включает параллельный преобразователь, который состоит из группы компарато-
ров и кодирующего устройства, преобразующего входные сигналы в двоичный код.
Оптимальная работа АЦП имеет место, когда амплитуда входного сигнала нормирова-
на и согласована с ним. Так, в случае 3-разрядного амплитудного квантователя теоре-
тически можно подавлять паразитные сигналы на 27 дБ относительно уровня несущей.
В реальных условиях уровень входного сигнала нестабилен, поэтому подавление пара-
зитных сигналов у амплитудного квантователя значительно хуже, чем в идеальном
случае. В то же время фазовый квантователь имеет большой динамический диапазон,
но более высокий уровень паразитных сигналов, например, 3-разрядный фазовый кван-
тователь имеет максимальный уровень паразитных сигналов -17 дБ, что ниже уровня
несущей. Фазовый квантователь имеет более простую конструкцию. Так, 3-разрядный
фазовый квантователь состоит из четырех компараторов и несложного кодирующего
устройства, в то время как амплитудный квантователь включает семь компараторов и
более сложные кодирующие устройства.
Мгновенная полоса систем ЦЗС определяется частотной полосой канала обработ-
ки сигналов промежуточной частоты. Она зависит от состояния техники АЦП и ЦАП.
Обычно мгновенная полоса выбирается как 0,9 тактовой частоты синхронизации. В
табл. 6.3 приведены параметры современных кремниевых АЦП и ожидаемых перспек-
тивных АЦП на арсениде галлия. В табл. 6.4 приведены основные характеристики раз-
рабатываемых систем ЦЗС на арсениде галлия. Рабочая полоса системы ЦЗС определя-
ется диапазоном частот, в пределах которого радиолокационный сигнал может быть
принят и обработан с помощью перестройки или переключения гетеродинов взаимного
преобразования частоты для обеспечения нахождения запоминаемого сигнала в мгно-
венной полосе системы ЦЗС.
Таблица 6.3. Полоса пропускания АЦП
Тип АЦП Частота синхронизации, МГц Основная полоса ЗУ, МГц Мгновенная полоса ЗУ с квадратурным пре- образованием, МГ ц
GaAs 3000 1350 2700
2000 900 1800
1000 450 900
1000 450 900
Кремниевые 500 225 450
500 225 450
200 90 180
100 45 90
173
Таблица 6.4. Основные характеристики перспективных цифровых ЗУ СВЧ-сигналов
на GaAs
Параметры Полевой транзистор с р - п переходами Г етсроструктура
Часто га квантования, ГГц 1 2...4
Мгновенная полоса, ГГц 0,5 1...2
Разрешение, бит 4...6 1...6
Кроме гетеродинного варианта обеспечения широкополосное™ систем РЭП с ис-
пользованием цифрового запоминания высокочастотных сигналов представляют инте-
рес системы со сверхширокополосной мгновенной частотной полосой, обеспечиваемой
применением октавных СВЧ-делителей и умножителей частоты. Так, в одной из таких
систем для обеспечения мгновенной полосы частот 0,125... 16 ГГц сигнал, поступаю-
щий на вход системы вначале с помощью каскадно соединенных октавных делителей
понижается по частоте до диапазона 31,25. ..250 МГц, запоминается в ЦЗС и затем вос-
станавливается по частоте в исходный диапазон частот с помощью каскадно-
соединенных удвоителей частоты.
В системе ЦЗС наблюдается три основных типа паразитных сигналов: просачи-
вающийся сигнал гетеродина, сигнал зеркального канала и интермодуляционные со-
ставляющие. Просачивающийся сигнал гетеродина опасен тем, что он может создавать
на выходе передатчика помех непрерывный сигнал в центре мгновенной полосы, кото-
рый может явиться как бы “маяком”. Он вызван недостаточной развязкой в однополос-
ном модуляторе. У самых лучших преобразователей развязка между гетеродинным
входом и его выходом составляет 55 дБ, в однополосном модуляторе сигнал зеркально-
го канала зависит от качества компенсации в нем этого сигнала. Так, при подавлении его
на 30 дБ относительно воспроизведенного сигнала требуется обеспечить результативный
баланс по амплитуде не хуже 0,55 дБ и 3,6° по фазе.
В первых системах ЦЗС применя-
лось одноразрядное преобразование, при
котором сигнал промежуточной частоты
сначала превращался в меандр, а затем
квантовался. В результате взаимодейст-
вия между гармониками меандра и со-
ставляющими кратной частоты выборки в
спектре сигнала промежуточной частоты
присутствуют все гармоники меандра как
в явном, так и в неявном видах. Амплиту-
ды паразитных составляющих в спектре
уменьшаются медленно. Например, 99-я
гармоника всего лишь на 40 дБ меньше
уровня воспроизведенного сигнала.
Возможны технические решения,
позволяющие уменьшить уровень пара-
зитных сигналов на выходе системы
ЦЗС простейших видов. На рис. 6.22
Рис. 6.22. Структурная схема передатчика помех
с цифровым ЗУ
приведена структурная схема такого
передатчика помех [32].
174
Принятый антенной радиосиг-
нал, усиленный и ограниченный по
амплитуде, преобразуется путем ге-
теродинирования в • смесителе в
диапазон промежуточных частот
0...I25 МГц. Фильтр нижних час-
тот ослабляет продукты преобра-
зования и амплитудного ограниче-
ния в сигнале промежуточной час-
тоты (рис. 6.23). С помощью дели-
теля этот сигнал поступает на два
канала, которые содержат регули-
руемые пороговые устройства с
емкостной связью и ЗУ. Выходные
сигналы ЗУ суммируются, посту-
пают на фильтр нижних частот,
восстанавливаются по частоте,
фильтруются, усиливаются в ЛБВ
и излучаются передающей антен-
ной в направлении подавляемой
РЛС. Функционирование ЗУ обо- Рис. 6.23. Временные диа1 раммы работы ЗУ
их каналов синхронизируется с частотой 250 МГц. Если уровень сигнала промежу-
точной частоты больше установленного порога срабатывания первого каскада регист-
ра сдвига, то ЗУ формирует “1”, которое запоминает это состояние, а если меньше, то
формируется “0”. В результате оба ЗУ формируют последовательности “0” и “ 1” в виде
прямоугольных волн (рис. 6.23,б,в), которые суммируются, образуя двуполярный сиг-
нал (рис. 6.23,г).
Спектральный анализ этого сигнала показывает, что изменяя уровни порогов сра-
батывания, т. е. соотношение tJT, можно минимизировать амплитуды гармоник. Кроме
энергетических потерь сигнала помехи представляет интерес суммарная мощность па-
разитных сигналов на выходе передатчика помех в связи с возможностью наведения
ГСН по этим сигналам. Уровень паразитных составляющих зависит от метода кванто-
вания и его разрядности (табл. 6.5). При многоразрядном преобразовании область зна-
чений амплитуд разбивается на ±2<лч)-1 уровней. В этом случае размах амплитуды ко-
лебания представлен 2АМ интервалами квантования. Так как ошибка квантования рас-
пределена равномерно в пределах ±0,5 интервала квантования, то среднсквадратиче-
ская ошибка составит 0,5/Тз интервала квантования. Теоретически отношение сиг-
нал-шум при аналогово-цифровом преобразовании составляет 1,22-2Л-1. Например,
при использовании 6-разрядного АЦП шумовой фон будет на 37,7 дБ ниже относи-
тельного уровня полезного сигнала. Однако практика показывает, что при многораз-
рядном АЦП образуется не непрерывный шумовой фон, а дискретный из интермодуля-
ционных составляющих, т. е. такой же, что и при одноразрядном АЦП, но более низко-
го уровня.
175
Таблица 6.5. Распределение мощности-передатчика помех между воспроизведенным
сигналом и паразитными сигналами в ЦЗУ
Вид преобразования Мощность максимальной паразитной составляю- щей, дБ Полная мощность паразитных составляю- щих, дБ Относительная мощность воспроизве- денного сигнала, % Относительная мощность па- разитных составляю- щих, %
Одноразрядное амплитудное с мерами подавления паразитных составляющих -14 -6,3 76,5 23,4
Одноразрядное амплитудное -9,5 -6,3 76,5 23,4
Двухразрядное фазовое аналого- цифровое -18 -13,1 95,1 4,9
Шестиразрядное амплитудное аналого-цифровое -35 -32,6 99,94 0,06
Применение многоразрядных АЦП позволяет уменьшить уровень паразитных со-
ставляющих, но при этом уменьшается мгновенная полоса и увеличивается емкость ЗУ
системы ЦЗС. Однако при анализе требований к такой системе запоминания было ус-
тановлено, что точное воспроизведение значения амплитуды ответного сигнала не яв-
ляется необходимым. В некоторых случаях формирование сигнала заданной амплиту-
ды дает определенные преимущества, позволяя, с одной стороны, оптимизировать
мощность передатчика помех, а с другой - регулировать амплитуду сигнала помехи.
Отказ от амплитудного АЦП в пользу фазового означает уменьшение разрядности
квантовая и, соответственно, экономию полосы частот, потребляемой мощности и мас-
сы устройства практически без снижения точности воспроизведения сигнала. Так, пу-
тем оптимизации формы сигналов при фазовом квантовании возможно устранить шу-
мовой фон и зависимость от длительности импульса, как это имеет место при обычном
одноразрядном преобразовании. В результате относительный уровень паразитных со-
ставляющих может быть уменьшен до 20 дБ.
В системе ЦЗС существует три основных причины фазовых и амплитудных по-
грешностей, характеризующих точность воспроизведения сигнала: дискретное пред-
ставление аналоговых непрерывных сигналов, АЦП и нестабильность частоты гетеро-
дина. Эта система идеально точна при обработке непрерывных сигналов. Для импульс-
ных сигналов погрешность запоминания частоты определяется фазовой ошибкой, на-
капливаемой в интервале длительности импульса, деленной на длительность импульса.
Эта ошибка зависит от разрядности преобразования (табл. 6.6).
Для обеспечения когерентности важное значение имеет стабильность задержки.
Так, отклонение задержки от импульса к импульсу только на 0,1 нс может привести к
изменению фазы на 360° при частоте 10 ГГц. Однако применение кварцевых генерато-
ров синхронизации со стабильностью частоты 10'12 обеспечивает нестабильность фазы
меньше 1° при задержке 10 мкс.
176
Таблица 6.6. Точность воспроизведения фазы и частоты одиночного радиоимпульса
при изменении разрядности АЦП
Разрядность Среднеквадратическая фазовая ошибка, град, при АЦП Среднеквадратическая частотная ошибка, Гц, при АЦП
амплитудном фазовом амплитудном фазовом
I 25,96 25,98 72,17 72,17
2 12,07 6,49 33,527 18,042
3 4,79 1,62 13,312 4,510
4 2,21 0,405 6,144 1,127
5 1,07 0,101 2,966 0,282
6 0,525 0,025 1,459 0,07
Системы ЦЗС имеют начальную задержку 10... 100 нс. Передатчик имитационных
помех с цифровой системой запоминания позволяет формировать много ложных целей
на всей дальности как когерентным, так и некогерентным импульсным РЛС с просты-
ми и сложными сигналами. Аналоговое запоминание сигнала уступает цифровому, по-
скольку обеспечивает максимальную длительность запоминания порядка 5 мкс (50
циркуляций при длительности каждой циркуляции 0,1 мкс). При большей длительно-
сти аналоговое запоминание идет с большими ошибками, существенно сказывающи-
мися на эффективности формируемой помехи.
Важным параметром цифровых ЗУ сигналов является потребляемая ими мощ-
ность. При тактовой частоте 500 МГц и одноразрядном АЦП как в синфазном, так и в
квадратурном каналах требуется емкость ЗУ 1 Кбит для обработки каждой 1 микросс-
кундной части импульсного сигнала. Поэтому при длительности сигнала 200 мкс ем-
кость памяти ЗУ составит 200 Кбит. Для логических схем с эмиттерными связями по-
требляемая мощность составит 0,2 мВт на бит. В этом случае ЗУ будет потреблять 50
Вт. При повышении тактовой частоты потребление сильно возрастет. Так, 6-разрядное
цифровое запоминающее устройство сигналов при тактовой частоте 3 ГГц требует ем-
кости ЗУ 3600 Кбит для запоминания импульса длительностью 200 мкс и будет по-
треблять около 900 Вт. Возможным решением может быть применение ЗУ на кремние-
вых логических элементах на КМОП-структуре, которые имеют почти на порядок
меньшее быстродействие (60...70нс). Если применить логические элементы на ком-
плиментарных МОП-структурах с потреблением 0,02 мВт на бит, то по сравнению с
памятью емкостью 200 Кбит ЗУ на логических элементах с эмиттерными связями по-
требление составит 4 Вт. Поэтому из-за сравнительно малого быстродействия прихо-
дится вводить дополнительные уровни мультиплексирования и демультиплексирова-
ния. Другое решение по снижению потребляемой мощности состоит в разработке ма-
ломощных и быстродействующих ЗУ на GaAs. При этом нс потребуется мультиплек-
сирования и демультиплексирования. В ряде программ по разработке перспективных
ЗУ на арсениде галлия предполагается получить для ЗУ емкостью 4Кбит при времени
выборки 1 нс потребление 1 Вт, а при емкости 16 Кбит и выборке 8 нс - 2 Вт.
В связи с тем, что повышение скорости обработки сигналов является основным
направлением совершенствования систем РЭП, главную роль в этом направлении бу-
дут играть элементы из арсенида галлия. Достоинствами цифровых систем запомина-
ния сигналов на арсениде галлия являются: высокое быстродействие, повышенная точ-
ность, расширение мгновенной полосы (до 750 МГц), меньшее число компонентов и,
как следствие, более высокая надежность. Так как задержка при распространении сиг-
177
нала в арсениде галлия сокращается в 4 раза, то пропускная способность таких систем
значительно увеличивается. Следствием этого является уменьшение времени реагиро-
вания и повышение вероятности своевременной и эффективной реакции на угрозу.
Точность воспроизведения сигналов повышается в результате того, что могут быть
увеличены частота выборок и разрядность квантования. К другим достоинствам этих
устройств можно отнести повышенную радиационную устойчивость, более широкий
диапазон рабочих температур. Если самая быстродействующая из цифровых схем за-
поминания сигналов на кремнии работает с шириной полосы около 250 МГц, то при-
менение в них схем на арсениде галлия способствует резкому увеличению мгновенной
полосы (до 750 МГц). Это позволяет обеспечить перекрытие весьма широкого требуемо-
го диапазона частот передатчиком помех с меньшим числом ЦЗС, а также упростить уст-
ройства взаимного преобразования частоты. В настоящее время выпускаются модули
ЦЗС с мгновенной полосой до 500 МГц, а в перспективе - до 1500 МГц при длительно-
сти запоминания 14,5 мкс (она может быть увеличена понижением тактовой частоты).
Технологический прогресс создания СВЧ-структур на арсениде галлия привел к
созданию модулей на СВЧ ИС для цифровых систем запоминания радиосигналов с вы-
сокой плотностью упаковки. Такой модуль объемом И см3, использующий десять ар-
сенид-галлиевых кристаллов СВЧ-диапазона, реализует шесть усилителей-ограни-
чителей, один квадратурный преобразователь с понижением частоты, два усилителя
промежуточной частоты и один квадратурный преобразователь с повышением частоты.
С помощью квадратурного смесителя входной сигнал преобразуется в два квадратур-
ных сигнала промежуточной частоты в диапазоне 1 МГц...1 ГГц, которые усиливаются
в усилителях промежуточной частоты с усилением 20 дБ, оцифровываются с помощью
АЦП, запоминаются в цифровой форме. Затем в ЦАП входной сигнал преобразовыва-
ется снова в аналоговую форму и с помощью квадратурного преобразователя с повы-
шением частоты восстанавливается по частоте в исходную. Выходной сигнал представ-
ляет собой запомненный сигнал с подавленной боковой полосой на 20 дБ и подавлением
сигнала гетеродина на 27 дБ. Отмечается, что сигналы промежуточной частоты квадра-
турных каналов согласованы по амплитуде и фазе на ±0,5 дБ и 5° соответственно [33].
Для формирования высокостабильного сигнала гетеродина в системах ЦЗС, а
также для генерирования сигналов узкополосных ответных помех используются синте-
заторы. Наибольший прогресс в этой области достигнут с помощью цифровых схем на
GaAs. Выбор несущей частоты осуществляется посредством изменения отношения де-
ления 10/11 с помощью счетчика программ. Точная дискретизация шагов ограничена
числом и диапазоном менее быстродействующих счетчиков программ. Частота на вы-
ходе синтезатора задается по единичному инкременту шестнадцатиричного счетчика
программ. На этой частоте производится фазовое сравнение.
Цифровые схемы на GaAs используются для предварительной настройки аналого-
вого напряжения генератора, управляемого напряжением, чтобы более точно устано-
вить частоту перед захватом сигнала. При этом повышается точность и значительно
снижается время, необходимое для настройки генератора, что обеспечивает более бы-
струю ответную реакцию системы РЭП.
С помощью метода квантования импульсов быстродействующий программируе-
мый делитель на GaAs управляет работой менее быстродействующих устройств на ло-
гических схемах со связанными эмиттерами. С выхода схемы квантования импульсов
сигнал поступает на фазо-частотный детектор, на который также подается сигнал
178
опорной частоты. Разность напряжений на выходе фазового детектора должна быть по-
стоянной. Управляющее напряжение, усиленное усилителем постоянного тока, по цепи
обратной связи передается к генератору, управляемому напряжением, который стано-
вится стабилизированным источником напряжения.
С помощью рассматриваемой техники можно выполнять деление в диапазонах
отношения от 10/11 до 1560/1561 по любому промежуточному инкременту, что
обеспечивает высокую точность в широком диапазоне частот. Ширина полосы может
достигать 2 ГГц, а величина шага синтезатора составляет менее 1 МГц, что позволяет
создать систему точной фазовой АПЧ для РЭП. Возможность достижения верхнего
предела широкополосности, равного 2 ГГц, позволяет сократить схему на семь ступе-
ней и выбрать оптимальное мультиплексирование, т. е. используя один источник для
нескольких различных устройств частотных синтезаторов. Это возможно в связи со
значительным снижением задержки распространения.
До разработки схем на GaAs на первом этапе применялись логические схемы со
связанными эмиттерами, которые пришли на смену медленным транзисторно-
транзисторным логическим схемам. Цифровые ИС на GaAs позволяют усовершенство-
вать все элементы счетчика, т. е. создать счетчик нового поколения. Для этого схемы
на GaAs должны заменить логические схемы со связанными эмиттерами, поскольку
уровень входных и выходных сигналов этих схем примерно одинаков. Кроме того, сис-
темы на основе логических схем со связанными эмиттерами транзисторно-
транзисторной логики используют преобразователи низкого напряжения, что повышает
сложность системы и снижает се характеристики.
В настоящее время ИС на GaAs очень дороги по сравнению с кремниевыми. По
мере совершенствования технологии выращивания кристаллов их стоимость будет
уменьшаться. Для объединения GaAs устройств в системы нескольких чипов должны
быть объединены в схемы, а несколько схем - в системы. Традиционная техника ком-
плексирования и межсоединений для этих целей нс пригодна. Высокие скорости обра-
ботки сигналов позволяют использовать новые, более сложные алгоритмы, а также из-
менить архитектуру всей системы, уменьшая параллелслизм в работе распределенных
систем, и снизить сложность системы.
На рис. 6.24 изображена структурная схема передатчика имитационных помех с
использованием ЦЗС на арсениде галлия. В этом передатчике в основной канал вклю-
чена СВЧ ЛЗ для компенсации запаздывания в измерении несущей частоты и установ-
ке частоты синтезатора для преобразования нужного участка частот в область проме-
жуточных частот 0...750 МГц. После преобразования из аналоговой формы в цифро-
вую она преобразуется 8-разрядным регистром при частоте синхронизации 1500 МГц в
восемь параллельных выходных сигналов. Со сдвигового регистра данные в парал-
лельном режиме подаются на регистр-защелку в интервалах времени, соответствую-
щих 1/8 тактовой частоты синхронизации, и далее на ЗУ с произвольной выборкой ем-
костью 4 Кбит или 16 Кбит. После обработки данные направляются в параллельно-
последовательный 8-разрядный сдвиговый регистр и далее на ЦАП. Сформированный
ВЧ-сигнал представляет собой копию входного сигнала. Число систем ЦЗС в передат-
чике помех может быть несколько. При этом работа запоминающего устройства про-
граммируется по времени и частоте. Использование при преобразовании частоты се-
лектированных сигналов генератора сетки частот, осуществляемого с помощью много-
канального коммутатора, обеспечивает перекрытие широкого диапазона частот с помо-
179
Рис. 6.24. Структурная схема передатчика имитационных помех
с использованием системы ЦЗС на арсениде галлия
щью устройства запоминания с узкой мгновенной полосой частот. На вход системы
ЦЗС можно подавать либо весь диапазоне частот, либо его часть, определяемую поло-
сой пропускания и настройкой фильтров на ЖИГ. Кроме того, СВЧ-переключатели и
фильтры на ЖИГ делают возможным ретранслировать сигналы во всем частотном диа-
пазоне одновременно либо только те, которые селектированы фильтрами ЖИГ.
Таким образом, системы ЦЗС привели к разработке аппаратуры РЭБ с различны-
ми мгновенными полосами рабочих частот и структурой. В них используются как од-
нобитовое, так и многобитовое квантования по фазе и амплитуде. При этом обеспечи-
вается меньший уровень паразитных сигналов, для уменьшения энергетических потерь
сигнала помехи при обработке его в приемнике РЛС, образованном путем пристыковки
запомненных копий радиосигнала, применяются методы устранения скачков фазы на
стыках копий. Использование системы ЦЗС с широкой мгновенной полосой позволяет
формировать помехи РЛС с перестройкой несущей частоты и упрощает устройство вза-
имного преобразования частоты. Многоканальное построение систем ЦЗС делает воз-
можным формирование помех одновременно нескольким РЛС. Однако широкая полоса
систем ЦЗС и многобитовое квантование существенно усложняют аппаратурную реали-
зацию. Тем не менее, необходимость создания помех РЛС, использующих широкополос-
ные сигналы для достижения одновременно высокой разрешающей способности по
дальности и скорости, по-прежнему стимулирует разработку все более быстродействую-
щих и более емких систем ЦЗС. Они будут применяться не только в новой аппаратуре
РЭП, но также и для модернизации уже существующих станций помех [29, 34, 35].
ГЛАВА 7. МЕТОДЫ И ТЕХНИКА СОЗДАНИЯ ПОМЕХ ИМПУЛЬСНО-
ДОПЛЕРОВСКИМ РЛС СОПРОВОЖДЕНИЯ ПО СКОРОСТИ
7.1. Принципы селекции целей по скорости
В системы управления оружием входят РЛС с непрерывным и квазинепрерывным
излучением, которые обычно имеют канал поиска и автоматического сопровождения
180
цели по скорости (доплеровской частоте), обеспечивающий селекцию движущихся це-
лей среди других и на фоне пассивных помех и отражений от местных предметов. В
основу селекции по скорости положен принцип частотной фильтрации сигналов, отра-
женных от целей, движущихся с различными радиальными скоростями относительно
РЛС. Информация о радиальной скорости цели содержится в величине доплеровского
смещения частоты отраженного сигнала. В указанных РЛС для наведения полуактив-
ных ракет не требуется точная информация о дальности, и выделение цели может быть
осуществлено на основе доплеровской селекции с помощью узкополосных фильтров.
Это позволяет применять в них относительно простой тип радиолокатора - радиолока-
тор с непрерывным излучением. Однако эти радиолокаторы имеют ограничение по
развязке приемной и передающих антенн. В этом отношении преимуществами облада-
ют импульсно-доплеровские РЛС, которые нашли широкое распространение в настоя-
щее время.
7.2. Возможности РЭП каналов селекции целей по скорости
Из-за узкой полосы пропускания фильтра доплеровской селекции РЛС с непре-
рывным и квазинепрерывным излучением широкополосные заградительные по частоте
помехи будут мало эффективны. В то же время прицельные шумовые помехи трудно
создавать из-за необходимости весьма точного наведения генератора помехи по часто-
те. В этом случае более эффективны передатчики помех ретрансляционного типа, по-
зволяющие в силу своей природы удовлетворять требованиям по точности наведения
помехи по част оте. Поэтому они весьма широко используются для создания различного
рода дезинформирующих помех таким РЛС. Так как доплеровские РЛС осуществляют
селекцию путем сопровождения доплеровского сдвига частоты отраженного от цели
сигнала, то основными видами помех будут помехи, нарушающие сопровождение и се-
лекцию целей по скорости. К таким помехам относят узкополосные шумовые помехи,
спектр которых перекрывает заданный диапазон возможных доплеровских частот от-
раженного сигнала, и уводящие по скорости помехи, создаваемые путем имитации
ложных доплеровских частот. Так как угломерные системы доплеровских радиолока-
торов выделяют сигнал ошибки по направлению из сигналов, прошедших узкополос-
ный фильтр доплеровской селекции, то увод строба скорости с сигнала цели позволяет
также обеспечить благоприятные энергетические условия проникновения в эти систе-
мы ложной угловой информации. В данном случае помеха системе автоматического
сопровождения по направлению создается либо после момента рассогласования строба
скорости с сигналом цели, либо после момента перенацеливания строба скорости авто-
селектора уводящей помехой на ложный доплеровский сигнал, отстоящий по частоте
от сигнала цели на определенную величину и наделенный помехой по угловым коор-
динатам. Уводящая помеха по скорости является наиболее известным способом нару-
шения селекции целей по скорости. Почти все способы создания помех по скорости
используют некоторые виды устройств сдвига частоты с помощью пилообразной ФМ,
На рис. 7.1 приведена структурная схема обобщенной системы создания помех по скоро-
сти. Радиолокационные сигналы принимаются и разветвляются на ряд каналов. При не-
обходимости каждый канал может использовать методы частотной селекции. Многока-
нальное программирующее устройство и генератор пилообразных колебаний обеспечи-
вает каждый канал отдельными программами для формирования помех по скорости.
181
Рис. 7.1. Структурная схема передатчика помех, нарушающих селекцию цели по скорости
Может также использоваться последовательное соединение, когда данный вход-
ной сигнал сдвигается по частоте более чем один раз. Выходные сигналы всех каналов
суммируются, усиливаются и излучаются в направлении подавляемого радиолокатора.
Возможны девять основных программ создания помех по скорости, однако, когда они
видоизменяются и используются в комбинации, число режимов становится еще боль-
шим. Программа 1 представляет собой обычную уводящую помеху по скорости, когда
увод может совершаться либо вверх, либо вниз по частоте. Программа 2 является вари-
антом программы 1, когда максимальная величина увода по скорости сохраняется
сравнительно длительное время. Программа 3 имеет много программ уводящей помехи
по скорости, создаваемых на основе временного разделения, используя для этого толь-
ко одно устройство сдвига частоты, или на основе распределения по мощности, ис-
пользуя много устройств сдвига частоты. Программа 4 использует фазовую модуляцию
пилообразным сигналом со случайной частотой, чтобы спектр выходного сигнала по-
мехи был подобен спектру при частотной модуляции шумами и сосредоточен в преде-
лах диапазона доплеровских частот радиолокатора (скорости). В качестве модулирую-
щего по фазе сигнала может применяться неограниченный или ограниченный по ам-
плитуде процесс, включая псевдослучайный. Отметим, что этот вид шумовой помехи
следует за перестройкой несущей частоты сигнала подавляемого радиолокатора и мо-
жет производить большие спектральные плотности мощности, например, 100 кВт/МГц.
Программа 5 создает одну или много фиксированных доплеровских частот, которые
могут мерцать и образовывать цели с ложной скоростью радиолокатору в системе по-
иска по скорости. Это может осуществляться с помощью псевдослучайных последова-
тельностей. Программа 6 создает две фиксированные частоты, которые переключаются
во времени (включаются и выключаются) с постоянной частотой, равной частоте скры-
того конического сканирования подавляемого радиолокатора сопровождения, или с пе-
ременной частотой, близкой к ней. При этом получается такой эффект, как и при воз-
действии амплитудно-модулированной помехи с перестраиваемой частотой сигнала
модуляции. Программа 7 является простой разновидностью программы 5. Если в опре-
деленных границах поддерживается постоянной радиальная скорость цели относитель-
182
но позиции ЗРК, то фиксированное смещение частоты вниз может перевести отражен-
ный от цели сигнал в область помех от местных предметов или в область близких к ну-
левым доплеровским частотам. Программа 8 отчасти подобна программе 1, за исклю-
чением того, что в данном случае отсутствует временной участок приостановки вблизи
доплеровской частоты радиолокационного сигнала. Программа 9 применяется для ра-
диоэлектронного подавления импульсных радиолокаторов со сжатием, использующих
ЛЧМ или ФКМ путем изменения внутриимпульсной структуры.
Кроме перечисленных видов помех, известны комбинированные помехи, когда
помеха каналу скорости сочетается с помехами другим радиолокационным каналам,
дальномерному и угломерному каналам, а также специальные виды помех по скорости,
рассчитанные на радиоподавление РЛС со специальными средствами помехозащиты
Ниже рассматриваются более подробно основные виды помех каналу селекции
целей по скорости [1, 36-40].
7.3. Уводящие по скорости помехи
Однопрограммная уводящая по скорости помеха. Данный метод создания по-
мех РЛС с автоматическим сопровождением по скорости (АСС) характеризуется тем,
что строб скорости РЛС переводится на сопровождение сигнала помехи и уводится по
частоте, после чего сигнал помехи выключается, что приводит к потере цели и перехо-
ду РЛС в режим поиска. Этот процесс периодически повторяется. Создание уводящей
по скорости помехи РЛС с АСС происходит в следующей последовательности:
а) радиолокационный сигнал (импульсный или непрерывный) принимается, уси-
ливается и ретранслируется в направлении подавляемой РЛС;
б) мощный ретранслированный сигнал из-за действия АРУ вызывает уменьшение
коэффициента усиления радиолокационного приемника, вследствие чего отраженный
от цели сигнал подавляется, и строб скорости РЛС захватывается сигналом помехи;
в) доплеровская частота переизлученного сигнала помехи последовательно меня-
ется (уводится) в сторону увеличения или уменьшения от доплеровской частоты сигна-
ла, отраженного от реальной цели, к доплеровской частоте, которая больше (или со-
ставляет доли при уводе по скорости вниз) доплеровской частоты сигнала, отраженно-
го от реальной цели. Во время цикла уводящей по скорости помехи могут быть уста-
новлены ложные доплеровские частоты. При этом возможны различные законы изме-
нения частоты, но если производится одновременно увод по дальности, то производная
функция изменения дальности должна быть равна во всех соответствующих точках
значению функции уводящей помехи по скорости;
г) по достижении максимальной величины увода по скорости передатчик
ретрансляционных помех выключается, вызывая срыв сопровождения цели. Отноше-
ние уровней сигналов при включенном и выключенном ретрансляторе должно быть та-
ким, чтобы не позволить ГСН наводиться на собственные шумы, излучаемые передат-
чиком помех;
д) РЛС переходит в режим перезахвата и начинает процесс поиска доплеровской
частоты сигнала цели. При этом через некоторое время возможен либо повторный за-
хват потерянного доплеровского сигнала, либо захват доплеровских сигналов от дру-
гих целей, включая и ложные. Во время поиска угломерная система размыкается или
находится в режиме памяти по углам или угловой скорости;
183
е) процесс увода по скорости-повторяется. Маневр самолета с максимальным ус-
корением повышает эффективность воздействия уводящей помехи по скорости.
Описанная последовательность создания уводящей по скорости помехи относится
к обычному способу ее формирования. На рис. 7.2 приведена структурная схема широ-
ко используемого передатчика уводящей по скорости помехи на основе ретранслятора
со сдвигом частоты на ЛБВ.
Рис. 7.2. Структурная схема ретрансляционного передатчика
уводящей помехи по скорости
Это несложный эффективный передатчик помех для противодействия ракетам с
ГСН доплеровского типа. Он может быть еще проще, если имеется одна антенна для
приема и передачи (показано штриховой линией на рисунке). Для разделения принято-
го сигнала и сигнала помехи используется циркулятор, но он не обеспечивает доста-
точной развязки для устранения самовозбуждения. Поэтому принятый и выходной сиг-
налы помехи попеременно стробируются таким образом, чтобы исключить одновре-
менную передачу и прием. Хотя радиолокационный приемник будет принимать
ретрансляционный сигнал помехи в течение менее чем 50 % времени, эффективное
воздействие помехи все же будет обеспечено. Так как стробированный высокочастот-
ный сигнал должен накапливаться для последующей передачи, то необходимо исполь-
зовать в тракте линию задержки. Задержка сигналов должна быть когерентной и доста-
точной величины, что может потребовать применения преобразования частоты вход-
ных сигналов в диапазон промежуточных частот для реализации требуемой задержки.
Можно обойтись без введения дополнительной задержки, а использовать запаздывание
184
в ЛБВ и тракте. Пилообразное колебание, управляемое по частоте, подается на спираль
ЛБВ с амплитудой, достаточной для получения в ретранслируемом радиолокационном
сигнале изменения фазы на 2л рад. Для успешной работы передатчика такая установка
амплитуды пилообразного колебания оказывается допустимой в 20 %-ной частотной
полосе. Однако подавление остатка сигнала на несущей частоте радиолокационного
сигнала должно быть тщательно проверено, так как если уровень сигнала на выходе
ЛБВ на несущей частоте входного сигнала оказывается больше уровня радиолокацион-
ного сигнала, отраженного от цели, то передатчик помех будет действовать как маяк.
Если сигнал помехи превышает остаток на несущей частоте сигнала на 6 дБ или боль-
ше, то строб скорости РЛС будет захватываться и уводиться помехой. Обычно коэф-
фициент подавления в диапазоне частот лежит а пределах 10...20 дБ. Если атака на са-
молет с передатчиком помех на борту длится кратковременно, то максимальная дли-
тельность цикла уводящей помехи по скорости становится важным параметром, так как
за время атаки нужно осуществить несколько циклов помехи.
В системе сдвига частоты всегда существует начальная (не нулевая) доплеровская
частота. В лучшем случае эта начальная частота достигает 20 Гц. Для практики важно,
чтобы эта начальная частота составляла не более 25 % величины разрешающей спо-
собности РЛС по скорости. Время действия сигнала помехи на несущей частоте необ-
ходимо лишь для того, чтобы воздействовать на систему АРУ подавляемого радиоло-
кационного приемника, и оно обычно составляет доли секунды. Закон изменения час-
тоты обычно линейный, но также возможен параболический или модифицированный
экспоненциальный закон. Имитируемое помехой ускорение не должно быть значи-
тельным, поскольку РЛС может автоматически сбросить сигнал уводящей по скорости
помехи. При уводе по скорости изменение на 20 кГц за 5 с соответствует скорости
4 кГц/с, или ускорению примерно 5g. После окончания цикла уводящей по скорости
помехи передатчик кратковременно выключается, а затем цикл помехи повторяется.
Если радиолокационный сигнал после действия уводящей по скорости помехи больше
не принимается, то уводящая помеха по скорости может не создаваться до тех пор, по-
ка не появится другой радиолокационный сигнал. Успешное действие уводящей по
скорости помехи, как уже отмечалось, может повысить эффективность других одно-
временно используемых способов РЭП, так как строб скорости уводится с отраженного
от цели сигнала, и соотношение помеха-сигнал становится значительным. Когда ис-
пользуется одновременно увод по скорости и увод по дальности, то должна быть пре-
дусмотрена их синхронизация. Если в ретрансляторе передатчика помех имеются уси-
лители на ЛБВ, то нужно тщательно проверить излучение передатчика помех во время
паузы, поскольку при высокой чувствительности система АСС может наводиться на
широкополосный выходной шум ретранслятора и обеспечивать сопровождение по уг-
ловым координатам самолета-постановщика уводящей по скорости помехи. Желательно,
чтобы в закрытом состоянии излучение шума уменьшалось не меньше чем на 60 дБ [1].
Многопрограммная уводящая по скорости помеха. Эта помеха функциониру-
ет подобно обычной уводящей помехе по скорости, но при ее создании одновременно
используется много программ, формируемых на основе разделения во времени или
распределения по мощности сигналов при подавлении одной или нескольких РЛС.
Этот способ РЭП уменьшает среднее время увода радиолокационного строба скорости
по сравнению с действием одиночного увода. При многопрограммной уводящей по
185
скорости помехе на основе разделения сигналов по мощности с использованием анало-
говых методов формирования могут применяться параллельно устройства сдвига час-
тоты с пилообразной фазовой модуляцией, выходные сигналы которых до усиления
суммируются. Если мощности выходных сигналов всех устройств сдвига частоты рав-
ны, то выходная мощность оконечного усилителя распределяется поровну между ними.
В начале каждого цикла уводящей по скорости помехи должна быть пауза в излучении
помехи. Программы уводов по скорости идут последовательно во времени. Следует
отметить, что каждая программа может иметь, при необходимости, различную дли-
тельность паузы, цикла и интервала во времени, когда частота увода минимальна, мак-
симальную частоту увода и закон увода. При другом способе формирования многопро-
граммной уводящей помехи по скорости на основе разделения по мощности использу-
ются цифровые методы формирования, которые создают гармоники сигнала уводящей
по скорости помехи. Для фазовой модуляции ретранслируемого сигнала применяются
выходные напряжения регистров сдвига с обратной связью. На рис. 7.3 приведена ре-
зультирующая зависимость частоты двухстороннего увода по скорости от времени.
Пауза в излучении показана в начале каждого цикла увода. Для уменьшения числа про-
грамм увода по скорости и сохранения выходной мощности ЛБВ, приходящейся на од-
ну спектральную составляющую, можно использовать однополосные модуляторы с по-
давленной несущей.
Рис. 7.3. Закон изменения частоты составляющих сигнала помехи при уменьшении
длительности модулирующей псевдослучайной последовательности для случая формирования
многопрограммной уводящей помехи по скорости на основе разделения сигналов по мощности
На рис. 7.4 иллюстрируется принцип формирования многопрограммного увода по
скорости на основе разделения сигналов во времени. В качестве устройства сдвига час-
тоты может использоваться усилитель на ЛБВ и формирователь пилообразного напря-
жения, подаваемого на спираль ЛБВ, частота которого изменяется таким образом, что-
бы обеспечить четыре программы увода по скорости на основе разделения сигналов во
времени. Мощность сигнала помехи будет постоянна, за исключением времени паузы в
излучении. Показан закон изменения четырех программ увода по скорости, исполь-
зующего 16 временных интервалов. На практике их может быть больше. Все програм-
мы имеют одинаковые законы увода по скорости, длительность паузы и интервала
186
Рис. 7.4. Принцип формирования многопрограммной
уводящей по скорости помехи на основе разделения
сигналов по времени
времени излучения помехи с мини-
мальной постоянной частотой в на-
чале цикла. Эффективность повы-
шается, если каждая программа
увода по скорости будет иметь свои
конкретные параметры, и програм-
мы будут несинхронными.
Уводящая по скорости поме-
ха с регулируемым уровнем мощ-
ности. Рассматриваемый метод
РЭП состоит в следующем: перво-
начально излучается сигнал на час-
тоте ГСН с высоким уровнем мощ-
ности, обеспечивающим большое
отношение помеха-сигнал, захват
помехи стробом скорости приемни-
ка атакующей ГСН и последующий
увод строба скорости на несколько
килогерц; затем мощность помехи
уменьшается до значения, превышающего на 3...12 дБ уровень собственных шумов
приемника ГСН, обусловливающего режим самонаведения на слабый сигнал. При
уменьшении уровня мощности помехи усиление приемника ГСН за счет действия АРУ
будет возрастать, что приведет к увеличению чувствительности ГСН к мешающим от-
ражениям, модуляционным "турбинным" составляющим отраженного сигнала, случай-
ным помеховым сигналам и внутренним шумам. Все это в целом ухудшает точность
наведения ракеты на цель. Маневр самолета, на борту которого находится такой пере-
датчик помех, повысит эффективность рассматриваемого метода. За время большей
части этапа самонаведения ракеты отношение мощности выходного помехового сигна-
ла, ретранслированного бортовым передатчиком помех, к мощности отраженного от
самолета сигнала подсвета остается в приемнике ГСН относительно постоянным. Это
зависит от расстояния между РЛС подсвета цели и самолетом и не зависит от расстоя-
ния ГСН-самолет до тех пор, пока передатчик ретрансляционных помех работает в ли-
нейном режиме. В общем случае расстояние между атакующей ракетой и самолетом
меняется много быстрее, чем расстояние между РЛС подсвета и самолетом при нахож-
дении РЛС подсвета на стационарной позиции. Поэтому разработчик системы РЭП
имеет в своем распоряжении средства для контроля отношения помеха-сигнал в преде-
лах естественных ограничений, так как он знает реальную бистатическую ЭПР своего
самолета. Принцип работы системы полуактивного самонаведения основан на созда-
нии с помощью РЛС подсвета сравнительно большого по своему уровню отраженного
от цели сигнала на входе ГСН атакующей ракеты. Этот отраженный сигнал обычно на
15 дБ и более выше на траектории полета ракеты. Следовательно, мощность выходного
сигнала передатчика ретрансляционных помех должна снижаться на 10 дБ и более от-
носительно отношения помеха-сигнал, равного единице. Характеристики передатчика
помех такого типа наилучшим образом могут быть оптимизированы путем моделиро-
вания. Во время первоначального увода строба скорости выходная мощность передат-
чика помехи максимальна. После завершения увода по скорости мощность помехи
187
плавно и быстро уменьшается до значения, которое обеспечивает низкое отношение
помеха-сигнал. Причем относительное время излучения таково, что преобладающими
являются интервалы времени, в течение которых помеха имеет низкую выходную
мощность.
Уводящая помеха по скорости с перенацеливанием на ложный сигнал. Дан-
ный вид помехи основан на использовании уводящей помехи по скорости совместно с
помеховым сигналом с частотой, смещенной на фиксированную величину от доплеров-
ской частоты сигнала цели. Этот помеховый сигнал захватывается стробом скорости
РЛС после окончания цикла уводящей помехи по скорости и смещения строба скоро-
сти РЛС к частоте данного помехового сигнала. В результате строб скорости РЛС пе-
ренацеливается на этот сигнал с ложной доплеровской частотой. Поскольку при этом
обеспечивается большое отношение помеха-сигнал, можно применить помеху для сры-
ва углового сопровождения. В случае обычной уводящей помехи по скорости ретранс-
лированный передатчиком помех сигнал уводит строб скорости РЛС к максимальной
частоте и затем этот процесс повторяется. В течение времени обратного хода уводящей
помехи по скорости РЛС переходит в режим поиска и может найти или не найти отра-
женный от цели сигнал. При воздействии перенацеливающей уводящей по скорости
помехи строб скорости РЛС после обратного хода будет оставаться на захваченном
сигнале с ложной доплеровской частотой, следовательно, строб скорости как бы "заце-
пляется" за сигнал с ложной доплеровской частотой и удерживается на ней. Этот спо-
соб может быть усовершенствован с помощью одновременного создания многих лож-
ных целей с фиксированными доплеровскими частотами, которые могут располагаться
по обе стороны от доплеровской частоты сигнала реальной цели. Следует отметить, что
применение только этого вида помех для подавления РЛС с непрерывным излучением
недостаточно, поскольку подавляемый радиолокатор, принимая переизлученный сиг-
нал помехи, будет способен сопровождать этот сигнал по угловым координатам и воз-
можно будет способен даже с ложной частотой обеспечить информацией систему со-
провождения для успешного перехвата цели зенитной ракетой. Неправильная (ложная)
доплеровская частота сопровождаемого сигнала может влиять на функционирование
неконтактного взрывателя, если используется радиолокационный взрыватель. Следова-
тельно, нельзя рекомендовать только один этот способ РЭП. Одновременно должны
быть использованы помехи по угловым координатам, например, угловые помехи, дей-
ствующие через систему АРУ или использующие неидентичность на скатах амплитуд-
но-частотных характеристик приемных каналов подавляемой РЛС моноимпульсного
типа, а также помехи из вынесенной точки.
Уводящая по скорости помеха наземной командной РЛС. Ракета с непрерыв-
ным режимом наведения по скорости может быть дезинформирована с помощью уво-
дящей по скорости помехи, излучаемой с защищаемого объекта. Однако эффектив-
ность помехи в этом случае существенно снижается за счет наземной РЛС ракетного
комплекса. Дело в том, что импульсный следящий радиолокатор ракетной системы об-
ладает способностью следить за скоростью изменения дальности ракеты и атакуемой
цели. Поэтому, даже если он не является радиолокатором доплеровского типа, допле-
ровские сдвиги частоты с точностью менее 1 кГц могут быть получены расчетным пу-
тем по изменениям дальности до цели во времени. Отсюда следует, что положение
строба скорости приемника ракеты при ее наведении может быть определено, так как
параметры движения ракеты известны. Эта информация передается на ракету по ко-
188
мандной радиолинии и используется для помехозащиты от уводящей помехи по скоро-
сти. Если передатчик уводящей помехи, установленный на самолете, уводит строб ско-
рости системы слежения ракеты за пределы допустимой точности по отношению к по-
ложению строба скорости, оцененному с помощью следящего радиолокатора, то его
помеховый сигнал распознается как ложный, система слежения по скорости ракеты пе-
реходит в режим поиска в пределах, близких к данным оценки скорости радиолокато-
ром, и приемник ракеты повторно захватывает истинную цель.
В целях преодоления данной помехозащиты целесообразно создавать уводящую
по скорости помеху с параметрами, обеспечивающими увод строба скорости ракеты от
цели сигнала на величину, не поддающуюся оценке методом сравнения с данными на-
земного радиолокатора. На рис. 7.5 показана зависимость изменения частоты выход-
ного сигнала самолетной станции РЭП. Параметры уводящей по скорости помехи (дли-
тельность увода и перерыв в уводе) устанавливаются при постоянном усилении ре-
транслятора таким образом, чтобы величина максимального увода частоты была меньше
предельной точности по доплеровской частоте следящего импульсного радиолокатора.
Рис. 7.5. Закон изменения частоты сигнала уводящей по скорости помехи ГСН
в случае, когда на борт ракеты от импульсном РЛС передается информация
о доплеровской частоте перехватываемой цели
При ширине строба скорости приемника ракеты в несколько сот герц строб может пе-
риодически уводиться на несколько килогерц без превышения пределов измерений до-
плеровской частоты наземной командной РЛС. Одновременно с уводящей по скорости
помехой может применяться угловая помеха для срыва режима автосопровождения по
угловым координатам. Следует заметить, что защита наземной радиолокационной сис-
темы от уводящей по скорости помехи будет затруднительна при использовании уво-
дящей по дальности помехи против следящего радиолокатора командной ЗРК. В этом
случае могут вызываться серьезные нарушения на ГСН режимов поиска и слежения.
189
7.4. Узкополосные шумовые помехи со спектром доплеровских частот
В данном методе РЭП принятый и усиленный радиолокационный сигнал модули-
руется по амплитуде и частоте так, чтобы сформировать узкополосный шум, сконцен-
трированный на несущей частоте радиолокационного сигнала и перекрывающий пол-
ностью или частично диапазон доплеровских частот. Он формируется путем фазовой
модуляции сигналом треугольной формы, который меняется по частоте от величины
менее 100 Гц до величины, например, 1 кГц со скоростью, равной 1/3 нижней частоты
модуляции. В то же время амплитуда ретранслируемого сигнала модулируется со
100 %-нои глубиной во время перестройки по частоте сигнала треугольной формы. По-
скольку модулирующий сигнал треугольной формы, то промодулированный помехо-
вый сигнал имеет спектр, распределенный в обе стороны от несущей принятого сигна-
ла с составляющими от самой низшей частоты. В этом случае в спектре помехи оста-
ются свободные от помеховой модуляции участки в интервале, симметрично располо-
женном относительно несущей частоты сигнала РЛС. Поэтому эти участки спектра за-
полняются с помощью амплитудной модуляции, так что выходной спектр передатчика
ответных помех имеет колокольную форму, перекрывая приблизительно интервал час-
тот относительно несущей сигнала РЛС в пределах удвоенной максимальной частоты
модулирующего сигнала.
С помощью ФМ низкочастотными шумами можно формировать помеху с очень
высокой спектральной плотностью мощности. Например, если спектр колокольной
формы перекрывает участок в ±5 кГц относительно несущей (в целом 10 кГц), а эффек-
Входная
мощность
сигнала I
помехи |
Частота Ж
входного
сигнала
помехи
/
f - 100 кЬ'ц
Длитсльносп
Режим 1 при ta= 0
в)
Рис. 7.6. Форма огибающей (а) и положение спектра шума
на частотной оси (б) при создании доплеровским РЛС
маскирующей по скорости помехи; изменение
паузы в излучении помехи для трех режимов (в)
тивная излучаемая мощность пе-
редатчика помех равна 1000 Вт,
то спектральная плотность мощ-
ности помехи будет 100 кВт/МГц.
Формирование доплеровских
помеховых шумов можно осу-
ществлять также путем хаотиче-
ского изменения частоты пило-
образного колебания, исполь-
зуемого для сдвига частоты. В
этом случае создается шумовой
спектр около несущей частоты
радиолокатора, препятствующий
доплеровскому радиолокатору
обнаружить истинный отражен-
ный сигнал. На рис. 7.6,в пока-
зана форма колебаний для не-
прерывных доплеровских шумов
(режим 7) и двух других вариан-
тов (режимы 2 и 3).
Для иллюстрации на
рис. 7.6,6 пределы изменения
частоты пилообразных колеба-
ний (положительных и отрица-
190
тельных), используемых для сдвига частоты, были выбраны равными ±100 кГц. В ре-
жиме 1 излучаются шумы с полосой спектра, равной 200 кГц около несущей частоты
подавляемого радиолокатора. Такой шумовой помеховый сигнал будет следовать за
изменением несущей частоты радиолокатора вследствие ретрансляционного способа
формирования помех. В этом режиме, как и в двух других, в спектре сигнала помехи
имеется провал около несущей частоты РЛС (на рисунке не показан), ширина которого
равна удвоенной минимальной частоте пилообразных колебаний, используемых для
сдвига частоты. Минимальная частота пилообразных колебаний обычно составляет ма-
лую часть ширины фильтра доплеровской селекции подавляемого радиолокатора, по-
этому провал в спектре помехи около несущей частоты РЛС обычно не является недос-
татком помехи. Если же в некоторых специфических случаях этот провал создает труд-
ности, то можно рекомендовать для формирования узкополосной шумовой помехи
применять двойную модуляцию сигнала: AM и ЧМ [1]. Режим 1 не позволяет прием-
нику подавляемого радиолокатора работать в режиме наведения по сигналу помехи
или в режиме пассивного сопровождения помехи по угловым координатам без излуче-
ния радиолокационного сигнала и вынуждает радиолокатор излучать во время его ра-
боты в режиме пассивного сопровождения. Режим 3 обеспечивает мерцание с фикси-
рованной частотой, а режим 2 - с переменной частотой переключения. Оба способа
предназначены для удержания радиолокационного приемника в состоянии непрерыв-
ного переключения режимов работы. Применяя этот способ РЭП, можно обеспечить
очень высокую спектральную плотность мощности помехи. Например, если аппаратура
помех, использующая этот способ, содержит усилитель на ЛБВ, обеспечивающий в не-
прерывном режиме 100 Вт, и антенну с коэффициентом усиления 16 дБ, то можно по-
лучить излучаемую мощность помехи 4 кВт при полосе помехи 200 кГц, сосредоточен-
ной около несущей частоты радиолокатора. Это обеспечивает спектральную плотность
шумовой помехи 20 кВт/МГц.
Другой способ формирования доплеровских шумов использует бифазный модуля-
тор с высоким качеством подавления остатка мощности на несущей частоте, который
запитывается псевдослучайной последовательностью. Причем необходимо, чтобы час-
тота синхронизации была равна предполагаемой максимальной доплеровской частоте,
а длительность последовательности была меньше, чем обратная величина ширины по-
лосы фильтра доплеровской селекции. Это означает, что в каждом фильтре доплеров-
ской селекции РЛС, по крайней мере, будет содержаться одна спектральная состав-
ляющая. Если по сравнению с этим длительность псевдослучайной синхронной последова-
тельности (ПСП) уменьшить, то можно сформировать сетку ложных доплеровских частот.
Когда совместно с этим способом используется сдвиг частоты, то спектральные состав-
ляющие будут перемещаться, создавая эффект действия на следящую систему скорости
многих уводов по скорости. Это может заставить следящую систему скорости радиолока-
тора скачком переходить от одной спектральной линии сигнала помехи к другой.
7.5. Помехи по скорости со свипированием частоты
Это ретрансляционный способ создания помех, использующий свипирование по
доплеровской частоте для подавления радиолокаторов сопровождения с автоматиче-
ской системой слежения по скорости и поиска. Реализация его показана на рис. 7.7.
Предположим, что ретранслятор работает в режиме постоянного коэффициента
191
Частота
сигнала
помехи на
выходе
ретранслятора
Режим 2 отличается отрицательным наклоном
изменения частоты
Длительность а)
б)
Рис. 7.7. Изменение во времени доплеровской частоты
сигнала помехи (а) и длительности периода
свиппирования частоты (б) при создании помех
РЛС с автоматической системой поиска
и слежения по скорости
усиления. Возможны два режима
изменения частоты по пилообраз-
ному закону, отличающиеся друг
от друга либо положительным
(режим 1 на рис. 7.7,а), либо отри-
цательным (режим 2 на рисунке не
показан) наклоном пилообразного
колебания, подаваемого на уст-
ройство сдвига частоты. При этом
перестройка частоты производит-
ся вверх или вниз. По периоду
свипирования также возможны
два режима (рис. 1.1,6). Период
свипирования может быть либо
постоянным (режим 4), либо пе-
ременным (режим 3). Центральная
частота и диапазон свипирования
могут быть настроены на извест-
ную величину или на критические
величины для подавляемого ра-
диолокатора. Все числовые при-
меры в рассматриваемом случае
выбраны как типовые и могут ши-
роко меняться для конкретных си-
туаций.
7.6. Мерцающие помехи доплеровским РЛС
При реализации данного метода РЭП формируются последовательно во времени
две ложные доплеровские частоты, расположенные с одной стороны от доплеровской
частоты сигнала цели. Если используется сдвиг частоты с противоположной полярно-
стью пилообразного колебания, то при необходимости могут быть сформированы две
ложные доплеровские цели по другую сторону от несущей частоты. Чередующиеся по-
лярности и различные частоты сдвига частоты могут создать дополнительные ложные
цели на любой стороне от несущей частоты. При этом коэффициент заполнения двух
ложных сигналов будет меняться так, чтобы строб селекции по скорости радиолокато-
ра смещался туда и обратно. Частота коммутации, равная 1/(0+^), может также изме-
няться (Л и 12 - длительности ложных целей).
Для повышения эффективности создание ложных по скорости целей можно соче-
тать с одновременным созданием узкополосного шумового сигнала на частоте отра-
женного от цели сигнала. В данном случае должна регулироваться мощность или ко-
эффициент усиления ретранслятора, чтобы сигналы ложных доплеровских частот зна-
чительно превышали по уровню узкополосный шумовой сигнал. При этом амплитуда
узкополосного шумового сигнала около несущей частоты радиолокационного сигнала
должна быть достаточной, чтобы обеспечить отношение помеха-сигнал около 6 дБ и
замаскировать сигнал, отраженный от цели. Например, для радиоэлектронного подав-
ления ГСН с непрерывным сигналом подсвета диапазона частот 10...20 ГГц могут ис-
192
пользоваться переключаемые доплеровские ложные сигналы на частотах 2 и 3 кГц,
расположенные по одну сторону от несущей частоты сигнала подсвета, и шумы, мас-
кирующие отраженный от цели сигнал. Строб скорости ракеты в этом случае не может
выделить и захватить отраженный сигнал и возможно перейдет в режим наведения по
сигналу узкополосной ЧМ-шумовой помехи. Однако, если приемник запрограммиро-
ван так, что до перехода в этот режим он переходит в поиск по скорости, или приемни-
ку необходимы шумовые сигналы определенного участка диапазона доплеровских час-
тот для удовлетворения критерия перехода в режим наведения на помеху, или шумы
недостаточно сильны для того, чтобы вызвать переход в этот режим, то строб скорости
ГСН может захватить один из ложных доплеровских сигналов. Когда этот ложный
доплеровский сигнал выключается, а другой включается, строб скорости ГСН обычно
захватывает новую ложную цель. Период мерцания ложных целей lA/i+fz) должен вы-
бираться примерно равным постоянной времени системы захвата приемника ГСН. Ес-
ли частоту мерцания выбрать в соответствии с частотой сканирования доплеровского
радиолокатора, то можно обеспечить одновременное создание помехи угломерному
каналу РЛС.
7.7. Формирователи уводящих и маскирующих помех по скорости
Для формирования уводящих или маскирующих помех по скорости РЛС с непре-
рывным или квазинепрерывным излучением наиболее широкое применение получил
ретрансляционный способ, когда радиолокационный сигнал переизлучается и наделя-
ется помеховой модуляцией. Поэтому формирование ложных доплеровских целей или
маскирование определенного участка доплеровских частот осуществляется с помощью
балансных модуляторов или устройств сдвига частоты. Например, для имитации поме-
хового сигнала с доплеровским смещением частоты можно использовать однополос-
ный модулятор с хорошо подавленными несущей и второй боковой частотной состав-
ляющей. Для формирования несколько ложных доплеровских частот в данном случае
потребуется несколько однополосных модуляторов. Однако наиболее широкое распро-
странение для этой цели получили фазовые модуляторы на основе управляемых высо-
кочастотных фазовращателей. Большинство электронных и твердотельных управляе-
мых фазовращателей имеют ограниченную модуляционную характеристику в пределах
нескольких л. Если фазовращатель позволяет изменить фазу на 2л, то вместо непре-
рывного изменения фазы можно использовать периодическое ее изменение во времени
от 0 до 2л со скачкообразным изменением фазы от 2л до 0 [41].
На практике желательно не только менять фазу высокочастотного сигнала, но и
одновременно усиливать его. Для этой цели можно использовать ЛБВ, которые имеют
достаточно высокий коэффициент усиления и линейную фазовую модуляционную ха-
рактеристику в интервале от 0 до 2л (рис. 7,8).
Фазовая модуляция в ЛБВ основана на модуляции задержки высокочастотного
сигнала при изменении напряжения спирали [42]. Когда напряжение спирали ЛБВ, а
следовательно и фаза сигнала на выходе ЛБВ, меняется линейно, то будет тот же эф-
фект, что и при доплеровском смещении частоты за счет движения объекта в простран-
стве. Между приращением фазы сигнала на выходе ЛБВ в линейном режиме усиления
и изменением напряжения спирали существует следующая линейная зависимость:
Д<р = -0,29^—,
К и0
7—1777
193
где (о0 - круговая частота сигнала; I - длина спирали; Vt - скорость электронов в ЛБВ;
Рис. 7.8. Структурные схемы устройств сдвига частоты (а,б)
и формы сигналов управления фазовым сдвигом (в,г)
В силу того, что усиле-
ние ЛБВ зависит от напря-
жения спирали, фазовой мо-
дуляции сопутствует пара-
зитная AM. Если изменение
фазы происходит линейно до
значения, кратного 360°, и
затем напряжение спирали
быстро возвращается до его
первоначального уровня, то
частота выходного сигнал
изменится на кратное значе-
ние частоты пилообразных
колебаний. Другим вариан-
том устройства, обеспечи-
вающего перенос частоты,
является дискретный управ-
ляемый фазовращатель [43].
Он представляет собой набор
дискретных фазовращателей,
в определенной последовательности включаемых в канал прохождения сигнала, фаза
которого в этом случае изменяется дискретно во времени (рис. 7.8,г). Нарастающее
скачкообразное изменение фазы эквивалентно линейному изменению фазы, и несущая
частота сдвигается на величину, равную обратной величине длительности цикла пол-
ного изменения фазы на 360°. Дискретный фазовращатель с минимальным дискретом
фазы 11,25° обеспечивает изменение фазы от 0 до 360° за 32 такта и позволяет осуще-
ствить качественный сдвиг частоты. В любом случае качество работы устройства сдви-
га частоты зависит от линейности изменения фазы и времени обратного хода, величи-
ны дискрета фазы и уровня паразитной амплитудной модуляции.
В спектре ФМ сигнала всегда существует область около центральной частоты,
свободная от помеховых составляющих из-за конечной величины нижней частоты мо-
дулирующего спектра. В зависимости от разрешающей способности РЛС по скорости,
в этой частотной области может просматриваться остаток мощности на несущей часто-
те, подсвечивающий защищаемый объект.
На практике ширина этой области может поддерживаться в пределах 20... 100 Гц.
При необходимости можно использовать сигнал с более низкой частотой, если обеспе-
чивается непосредственная связь со спиралью ЛБВ. Однако ввиду того, что на форми-
рование пилообразного сигнала с частотой 10 Гц требуется больше времени, чем с час-
тотой 100 Гц, скорость переключения положительных и отрицательных частотных бо-
ковых полос замедляется, и вероятность того, что оператор РЛС обнаружит сигнал,
возрастет.
На рис. 7.9,а приведена структурная схема устройства преобразования частоты,
при котором начальный сдвиг частоты может быть равен нулю, но скорость перемеще-
ния спектральных линий остается высокой. В этом устройстве используются два фазо-
194
вых модулятора, соединенных последовательно. В первом фазовая модуляция осуще-
ствляется положительным пилообразным сигналом со случайным изменением частоты
в интервале от fa до Д (рис. 7.9,6). Величины fa и/в могут быть выбраны достаточно вы-
сокими (от 100 до 200 кГц). У второго модулятора фазовая модуляция производится
г)
Рис. 7.9. Структурная схема устройства двухкратного сдвига частоты (а),
формы модулирующих сигналов № 1 (б) и № 2 (в), спектр выходного сигнала (г)
пилообразным сигналом фиксированной частоты (fa + /в)/2, как показано на рис. 1.9,в.
Отрицательный наклон пилообразного напряжения этого сигнала сдвигает частоту в
область низких частот, так что центральная частота спектра помехи по скорости теперь
совместится с частотой входного радиолокационного сигнала (рис. 7.9,г). В этом слу-
чае отсутствует область частот в окрестности несущей частоты входного сигнала, неза-
полненная помехой. Это устройство позволяет также формировать спектр помехи с
частотной асимметрией относительно несущей. Помехи, нарушающие обнаружение
целей, сопровождение или другие функции радиолокаторов с доплеровской обработ-
кой, включают в себя много различных способов радиоэлектронного подавления. Поч-
ти все эти способы создания помех используют описанные выше формирователи на ос-
нове ФМ, на которые подаются колебания специальной формы.
Для формирования помеховых сигналов с требуемой спектральной структурой в
качестве фазовых модуляторов широко используются обычные ЛБВ, а также твердо-
195
тельные аналоговые или дискретные фазовращатели. Они обеспечивают изменение фа-
зы до 360° с достаточной линейностью и малым уровнем паразитной AM Для получе-
ния большего, чем на 360° изменения фазы, а также формирования сигналов помех
сложной структуры, применяют их последовательное соединение или ЛБВ с простран-
ством дрейфа, которые имеют малый уровень паразитной AM, высокую крутизну мо-
дуляционной характеристики и малые уровни модулирующих напряжений.
Как уже отмечалось, для помеховой модуляции используются как периодические
регулярные во времени сигналы, так и случайные. В первом случае спектр модулиро-
ванных колебаний будет дискретный, во втором - сплошной [44]. Распределение ам-
плитуд спектральных компонент спектра при фазовой модуляции определяется вели-
чиной девиации фазы и видом модулирующего сигнала. В общем виде для формирова-
ния помех по скорости используется периодический несинусоидальный сиг нал.
Фазомодулированное колебание аналитически описывается выражением:
«0) = ^cos^r +<p(f) + <p0], (7-1)
где Ло- амплитуда колебания; о)0- круговая несущая частота; ф(/) - мгновенный фазовый
угол, изменяеющийся в соответствии с модулирующим сигналом; <р0- начальная фаза.
Если <р(г) - периодическая функция времени с наибольшим периодом Г, то ФМ
колебание можно представить в следующем виде:
Л-СО
a (t) = Сп cos [щог + nQf - <рп + <р0 ) (7.2)
Л—ос
где комплексная амплитуда спектральной составляющей
2Г
= т/а )ехр Н + п Q)z ” ]dt' С7*3)
о
Сп= Сп ехр (- /<;„).
Подставляя (7.1) в (7.2) и пренебрегая высокочастотными составляющими, полу-
чаем:
i т
С„ =yjexp_/[(?(/)-nQf] Jr. (7.4)
1 о
При представлении формы периоди-
ческого модулирующего сигнала в виде
отрезков прямых, позволяющих описать
основные формы модулирующих колеба-
ний, можно выполнить непосредственное
вычисление интеграла (7.4) и получить
замкнутые выражения для амплитуд спек-
тральных составляющих фазомодулиро-
ванного сигнала. В качестве примера рас-
смотрим случай, когда модулирующий сиг-
нал представляет собой периодическую трапециидальную функцию времени (рис. 7.10).
196
После соответствующих вычислений можно получить выражения для амплитуд
спектральных составляющих ФМ колебания:
. („ плт. \ . / 4 шгт9 \
sin Ад?---- sin Ад? +--------
С Л» \ *4,72 \ Т j
” Т (4 ллт, \ Т (. ктгг7 \
I Ад? —1 I Ад? + I
“(“I) ---МП -Т-^(Т1+Т2) С®8 Д<?- —- —П1-Т2) • (7-5)
пл 2 27 J [ 22
Общее выражение (7.5) позволяет получить спектры ряда конкретных ФМ коле-
баний. Если принять т2 = 0 и Т] = 7", то получим выражение для амплитудного спектра
колебания, модулированного по пилообразному закону с нулевым временем обратного
хода:
C,.sin^-^. (7.6)
Ад? —/171
Если Ад? = пл, то амплитуды всех спектральных компонент, кроме /i-й, равны ну-
лю, а п-я составляющая имеет амплитуду, равную единице. Когда Ад? # пл, спектр ко-
лебания состоит из ряда спектральных составляющих, разнесенных по частоте друг от
друга на величину, равную 1/Т.
При модуляции по симметричному пилообразному закону (ti = т2 = 772) имеем
С„------—------2-sinf&<p-^-V (7.7)
1 2>
В данном случае спектр модулированного колебания симметричен относительно
несущей частоты (п = 0).
Если положить Т] = т2 = 0, то получим выражение для амплитуд спектральных со-
ставляющих сигнала, модулированного по фазе сигналом прямоугольной формы:
2 . пл / пл \ (
Сп =—sin—cos Ад?-------. (7.8)
пл 2 у 2 )
В этом случае амплитудный спектр симметричен относительно несущей частоты
колебания. Амплитуды спектральных составляющих с четными номерами равны нулю.
Для обеспечения высокого качества уводящей помехи по скорости к модулирую-
щему пилообразному сигналу предъявляются следующие требования: наклон пилооб-
разного напряжения должен быть линейным, время обратного хода пренебрежимо ма-
лым и максимальная девиация фазы (размах) должна составлять 360°. Однако эти оп-
тимальные условия не всегда выполнимы из-за ограничений по размерам, массе и
стоимости аппаратуры. Отклонение параметров пилообразного колебания от опти-
мальных вызывает увеличение потерь преобразования и уменьшение коэффициента
подавления в спектре помехи остатка мощности на несущей частоте входного сигнала.
Потери при преобразовании частоты показывают насколько мощность выходного сиг-
нала с преобразованной частотой меньше мощности не преобразованного по частоте
197
сигнала при одном и том же уровне входного сигнала. Подавление сигнала на несущей
частоте характеризуется отношением выходной мощности сигнала с преобразованной
частотой к выходной мощности сигнала, частота которого равна частоте входного сиг-
нала. Типовая величина этого параметра лежит в пределах от -15 до -40 дБ в зависи-
мости от сложности устройства сдвига частоты. Этот параметр исключительно важен,
потому что от него зависит степень "подсвета" защищаемого объекта передатчиком
помех, когда станция помех может играть роль маяка, облегчающего наведение ракеты.
Для оценки этих параметров рассмотрим спектр ФМ колебания, модулированного
несимметричным пилообразным сигналом. Для этого положим Ti+t2= Т и Tt * т2. Тогда
С A<psin(A<p-wnTr)
(Д<р - + п(1-т)лj ’
где m =^тА/Т.
Спектр этого колебания асимметричен относительно несущей частоты колебания.
При Д<р = пттс (и=1, 2, 3,....) амплитуда /7-й спектральной составляющей максимальна и
равна т. Увеличение относительного времени обратного хода пилообразного колеба-
ния приводит к уменьшению асимметрии спектра и уровня максимальных амплитуд
спектра, а так же к обогащению спектра. Так, при т = 0,9 максимальный коэффициент
потерь преобразования по мощности в случае оптимальной девиации фазы (2\q2Opt =
= птп) равен 1/лЛ При т = 0,9 его величина составляет 0,92 дБ.
Коэффициент подавления сигнала мощности на несущей частоте входного сигна-
ла для случая оптимальной девиации фазы (A<popt = птл) определяется как
С2 2
Кподав = ~• (7.Ю)
(sin ппт I птгс)
При т = 0,9 и п =1 коэффициент подавления составляет -19,5 дБ. Для получения
больших значений коэффициентов подавления потребуется формировать пилообразное
модулирующее напряжение с еще меньшим временем обратного хода. Так, для обеспе-
чения в спектре подавления остатка мощности на несущей частоте входного сигнала
-40 дБ длительность обратного хода пилы должна быть не более 1 % от ее периода.
Однако это не единственный фактор, который влияет на параметры сдвига частоты с
помощью управляемого фазовращателя. В реальных условиях равенство девиации име-
ет место только для одного значения несущей частоты из-за зависимости крутизны фа-
зовой модуляционной характеристики от частоты, например, в широкополосных ЛБВ.
Поэтому для обеспечения высококачественного сдвига частоты в данном случае потре-
буется вводить частотно-зависимую регулировку амплитуды модулирующего пилооб-
разного напряжения или применить ЛБВ с пространством дрейфа.
В табл. 7.1 приведены величины остатка мощности на несущей частоте модули-
руемых по фазе колебаний для различных модулирующих сигналов, используемых при
создании помех доплеровским РЛС. Дальнейшее снижение уровня спектральной со-
ставляющей на несущей частоте РЛС возможно путем использования для формирова-
ния помеховых сигналов сложной формы нескольких фазовых модуляторов, соединен-
ных последовательно.
198
Таблица 7.1. Величины остатков мощности на несущей частоте при различных видах
фазовой модуляции
№ п/п Вид модулирующего по фазе сигнала Аналитическое выражение для остатка мощности Оптимальная величина Дф
1 Гармоническая модуляция одним тоном ) Нули функции Бесселя 0-го порядка
2 Гармоническая модуляция несколькими тонами некратных частот Цл2(дф.-) Нули функции Бесселя 0-го порядка
3 Пилообразная модуляция с нулевым и конечным временем обратного хода г / sin Д<р \ \ / Дф =л
4 Модуляция сигналом прямоугольной формы cos2 Дф Дф = тг/2
5 Модуляция сильно ограниченными по амплитуде флуктуациями с разным уровнем ограничения 2 Дф. + Дф_ cos — — 2 &ср+ + Дф_ = я
6 Модуляция шума с нормаль- ным законом распределения амплитуд и эффективной девиацией фазы Дф Эфф ехр(-Д<рЭфф) Определяется реализуемой девиацией фазы
7 Периодическое скачкообраз- ное изменение фазы i sin22V0^- Оптимальная величина
с дискретом фазы Дф и числом скачков Дго sin2^ 2 Дфд = 2tt/N0
С помощью фазовой модуляции можно получить многочастотный спектр с разно-
сом составляющих, равным частоте модулирующего напряжения. Фазовая пилообраз-
ная модуляция приводит к образованию многочисленных составляющих, кратных час-
тоте модуляции. По всей вероятности некоторые из этих спектральных составляющих
будут превышать уровень остатка мощности на несущей частоте входного сигнала. Так
или иначе спектр при ФМ очень сложен и должен учитываться как при разработке
станции помех, так и при проектировании средств и методов помехозащиты РЛС. При
разработках РЛС, у которых предусматривается защита от воздействия помех по ско-
рости, должна учитываться возможность помехового воздействия всех составляющих
выходного спектра станции помех.
7.8. Радиоэлектронное подавление двухканальной системы
сопровождения, использующей одновременно импульсное
и непрерывное излучения
Рассматриваемая в данном случае радиолокационная система состоит, по сущест-
ву, из двух РЛС, работающих на общую антенну, одна из которых - обычный импульс-
ный радиолокатор, а другая - доплеровский радиолокатор непрерывного излучения.
Информацию по угловым координатам сопровождаемой цели в этом случае можно
199
Рис. 7.11. Тактическая ситуация, иллюстрирующая
способ РЭП двухканальной системы сопровождения,
использующей одновременно импульсное
получить одновременно с выхода
приемных устройств импульсной и
непрерывной РЛС в зависимости от
складывающейся тактической си-
туации и качества данных, посту-
пающих от каждой РЛС. Перед
разработчиками средств РЭП в
данном случае встают две пробле-
мы: одна - подавление двух РЛС,
работающих на разных несущих
частотах, вторая - невозможность
маскировки самолета с помощью
дипольных отражателей из-за при-
сущей РЛС с непрерывным излуче-
нием возможности сопровождения
и селекции целей по доплеровской
частоте. На рис. 7.11 показана ти-
повая ситуация, соответствующая
рассматриваемому случаю. Зенит-
ный ракетный комплекс использует радиолокационную систему сопровождения с дву-
мя совпадающими лучами диаграмм направленности антенной системы, причем один
из лучей - импульсный, а другой - непрерывного излучения. Он выполняет задачу за-
щиты наземных объектов в показанной на рисунке заданной области. Дипольное обла-
ко образуется перед атакой ударных самолетов с помощью специального самолета. Это
облако дрейфует по ветру в направлении защищаемых ЗРК объектов При атаке само-
летов на ЗРК определяются наиболее опасные цели, после чего радиолокационные
средства ЗРК начинают их сопровождать для осуществления перехвата и уничтожения
ракетами.
Первоначально используется импульсный радиолокатор, так как он имеет в целом
лучшие способности по сопровождению, чем доплеровский радиолокатор непрерывно-
го излучения. Однако после вхождения атакующего самолета в полосу дипольных от-
ражателей импульсный радиолокатор быстро теряет сопровождаемую цель, если плот-
ность диполей в пространстве достаточно высока. Поэтому в этой ситуации сопровож-
дение целей должно осуществляться радиолокатором непрерывного излучения, если до
этого времени перехват цели ракетой не был осуществлен.
В рассматриваемом случае одним из тактических приемов, применяемым для по-
давления ЗРК, является использование беспилотных летательных аппаратов (БПЛА) с
повышенной радиолокационной видимостью (обеспечиваемой установкой на их борту
ретрансляторов), совершающих полет в направлении охраняемых ЗРК наземных объек-
тов. Курс полета этих БПЛА выбирается из условия формирования в радиолокационной
системе ЗРК примерно той же радиальной скорости, что и у атакующего самолета.
Бортовая аппаратура, обеспечивающая увеличение радиолокационной видимости
БПЛА, практически формирует множество спектральных линий вокруг частоты приня-
того сигнала доплеровской РЛС, и одна из этих спектральных линий всегда оказывает-
ся в пределах ширины радиолокационных стробов селекции по скорости, выставлен-
ных на отраженный от атакующего самолета сигнал. Поэтому в момент пуска БПЛА
200
РЛС непрерывного излучения переходит на сопровождение БПЛА, поскольку его сиг-
нал превышает по уровню сигнал, отраженный от атакующего самолета. Таким обра-
зом, если импульсная РЛС потеряет атакующий самолет при вхождении его в область
дипольных отражателей, то непрерывная доплеровская РЛС также не сможет обеспе-
чивать его сопровождение и выдачу информации о его местоположении, а перейдет на
сопровождение БПЛА. Защита атакующего самолета будет осуществлена.
Следует отметить, что рассмотренный метод РЭП основан на использовании двух
недостатков подавляемой радиолокационной системы: на неспособности импульсной
РЛС сопровождать самолет в облаке дипольных отражателей с высокой плотностью и
на плохой способности непрерывной РЛС селектировать цели по дальности.
7.9. Согласование увода по скорости и дальности
При создании уводящих помех по скорости РЛС КНИ необходимо учитывать, что
скорость цели может быть определена путем дифференцирования текущего значения
дальности цели, полученной из системы автоматического сопровождения по дально-
сти. Сравнение этой скорости со скоростью, измеренной с помощью системы автома-
тического сопровождения по скорости (по доплеровской частоте), позволяет выявить
либо их тождественность, либо несовпадение по величине или знаку скоростей (сопро-
вождается ложная цель) [45]. Если система автосопровождения по скорости выполнена
таким образом, что можно сбрасывать сопровождение сигналов, доплеровские сдвиги
которых не соответствуют результатам измерений скорости на основе дальностной ин-
формации, то такая система сопровождения по скорости будет сопровождать только
доплеровский сдвиг реальной цели. При этом может использоваться также результат
сравнения дальности из дальномерного канала с оценочным значением дальности, по-
лученным путем интегрирования скорости, измеренной доплеровским каналом. Сопос-
тавление координатной информации, полученной по двум каналам автосопровождения
РЛС, позволяет своевременно обнаружить уводящее действие помехи, заключающейся
в смещении строба дальности и скорости в сторону отраженного сигнала, т. е. зафикси-
ровать момент начала увода следящей системы с отраженного сигнала.
Для этого могут быть использованы различные критерии:
дальностный пороговый
Дпор ’
(7.П)
«О
скоростной пороговый
|4(<)-n(t)|>CV„p. (7-12)
пороговый по ускорению
|Д(0-И(0|>С^„ор, (7.13)
где Д,Д,Д ~ дальность и ее производные, полученные в системе автосопровождения
по дальности; V, V - скорость и ускорение, полученные в системе автосопровождения
по скорости (доплеровской частоте); Сдпор,СГпор,С^пор - величины порогов принятия
решения о начале действия уводящих помех. Они выбираются с таким расчетом, чтобы
201
ошибки измерения соответствующих величин (дальности, скорости и ускорения) не
приводили слишком часто к ложным тревогам.
Наличие раздельных каналов автосопровождения по дальности и скорости в им-
пульсно-доплеровских РЛС позволили в ряде случаев производить беспоисковый пере-
захват отраженного сигнала после того, как действие уводящей помехи обнаружено
одним из перечисленных выше критериев.
Так, перезахват отраженного сигнала после действия уводящей помехи по скоро-
сти может быть выполнен путем наведения следящей системы скорости по информа-
ции из канала автосопровождения по дальности:
КавеЯ(') = 4(0- (7-14)
В другом случае, после действия уводящей по дальности помехи, перезахват от-
раженного сигнала может быть произведен по информации из канала автосопровожде-
ния скорости:
t
Д»та(0"Д('о)+Д«А, (7.15)
to
где /о— какой-то момент времени, предшествовавший уводу по дальности.
Можно представить также ситуацию, когда перезахват отраженного сигнала мо-
жет быть осуществлен путем автосопровождения дальности и скорости по информации
из обоих каналов автосопровождения:
Д.а.ед(')-Д('0)+/^)А. (7Л6)
'О
Аппаратурная реализация в импульсно-доплеровских РЛС беспоискового переза-
хвата, используя информацию от двух независимых каналов сопровождения по дально-
сти и скорости, позволяет обеспечить практически непрерывное сопровождение отра-
женного сигнала в условиях действия уводящих помех по дальности или скорости, а
также уводящих помех, действующих циклически поочередно. Для восстановления
эффективности воздействия уводящих помех по дальности и скорости на импульсно-
доплеровскую РЛС необходимо формировать их таким образом, чтобы следящие сис-
темы по обеим координатам дальности и скорости уводились одновременно и согласо-
ванно. При этом степень согласования текущих параметров дальности и скорости
должна быть достаточной, чтобы не превышать установленные в системе защиты поро-
говые критерии по дальности, скорости и ускорению.
Таким образом, для подавления РЛС КНИ необходимо формировать согласован-
ный увод по дальности и скорости, т. е. обе помехи должны создаваться одновременно.
Направление полета ЛА, оборудованного станцией помех, по отношению к РЛС
не играет роли при согласовании этих двух типов уводящих помех, потому что в любой
момент времени РЛС воспринимает только радиальную составляющую скорости цели
и может измерить дальность и скорость сближения только в радиальном направлении.
Дальность и скорость истинной цели являются исходными параметрами при согласова-
нии уводящих помех по дальности и скорости, и их следует учитывать только для того,
чтобы внезапное их изменение не позволило РЛС квалифицировать поведение цели как
202
неестественное. Соответственно,
нужно позаботиться о том, что-
бы не были превышены допус-
тимые пределы максимального
допустимого ускорения стробов
дальности и скорости в следя-
щей системе РЛС как в началь-
ный момент увода, так и в лю-
бой другой момент цикла увода.
Увод стробов дальности и
скорости должен начаться в
один и тот же момент времени
(рис. 7.12).
На рис. 7.12,6 показано
изменение скорости имитируе-
мой цели. Процесс увода опи-
сан ниже на примере с числен-
ными значениями для большей
наглядности. Предполагается,
что РЛС работает на частоте
10 ГГц, максимальная скорость
имитируемой цели 250 м/с,
время увода 5 с, увод по даль-
ности осуществляется по пара-
болическому закону. Так как Рис. 7.12. Законы одновременного увода стробов
скорость - это первая произ- дальности и скорости
водная дальности, то она изме-
няется по линейному закону.
Уравнения движения имитируемой цели имеют вид:
1 2 т г
5 = — at и V = at,
2
где V- скорость имитируемой цели, м/с; а - константа 50 м/с2 ; Т ~ время, с; 5 - даль-
ность, м.
Максимальная дальность увода S = 250- 5/2 = 625 м.
Для РЛС эта дальность эквивалента 4,16 мкс. Как было показано при рассмотре-
нии создания помех доплеровским РЛС, доплеровская частота
F‘ с ’
где Vr - радиальная скорость цели; /о - частота РЛС; С — скорость света в свободном
пространстве.
Полагая, что заданная скорость имитируемой цели соответствует радиальной ско-
рости, для заданных условий, получаем:
203
7-7SO-1D10
F--------5----16,6-IO3 Гц = 16,6кГц.
д 3-1O8
Так как скорость изменяется по линейному закону, то ускорение (dv/dt) - величи-
на постоянная, равная 5,1g (g- ускорение силы тяжести, равное 9,8 м/с2).
Основными параметрами, которые следует принимать во внимание при разработ-
ках станции помех, являются максимально допустимые величины ускорения и скоро-
сти сопровождения целей РЛС; от них зависят другие параметры, которые могут отли-
чаться от приведенных выше; однако основные соотношения остаются справедливыми.
Закон увода по дальности и соответствующий ему закон изменения скорости и
ускорения могут быть экспоненциальными, т. е. кривые зависимости увода от времени
приблизительно представляют экспоненту. Они не могут быть точными экспонентами,
поскольку экспоненциальные функции начинаются с единицы, в то время как увод
должен начинаться с нулевого момента времени. Достоинство экспоненциальных
функций состоит в том, что все их производные - также экспоненциальные функции.
На практике экспоненциальные функции могут быть эффективно использованы даже
тогда, когда экспонента не является "чистой". Пользуясь экспоненциальными зависи-
мостями, точно также необходимо обращать внимание на то, чтобы максимальное ус-
корение ложной цели не превысило предельные возможности РЛС. Необходимо обра-
тить внимание на то, почему нельзя использовать простой линейный закон увода по
дальности. Так как первая производная дальности в этом случае - константа, скорость
также должна быть константой. Таким образом, в начале цикла увода по дальности
должен быть сформирован сигнал с фиксированным доплеровским сдвигом, соответст-
вующим этой константе. Скачкообразное изменение скорости предполагает бесконеч-
ное ускорение, на которое могут не отреагировать системы сопровождения по скоро-
сти. Указанные выше закономерности необходимо соблюдать также при создании ими-
тационных помех, например, создаваемых путем облучения образований из дипольных
отражателей, сбрасываемых с постановщика помех, сигналами, задержка и доплеров-
ская частота которых взаимосвязаны [45].
ГЛАВА 8. МЕТОДЫ И ТЕХНИКА СОЗДАНИЯ ПОМЕХ РЛС
СОПРОВОЖДЕНИЯ ПО НАПРАВЛЕНИЮ, РАБОТАЮЩИМ
МОНОИМПУЛЬСНЫМ МЕТОДОМ
8Л. Роль систем сопровождения по направлению и возможности
их подавления
Система автоматического сопровождения по направлению (АСН) является осно-
вой любой радиолокационной системы наведения управляемого оружия. Она обеспе-
чивает угловую селекцию и производит измерение угловых координат сопровождае-
мых целей. В большинстве случаев потеря информации об угловых координатах цели,
нарушение селекции по угловым координатам приводит к невыполнению основной за-
дачи, решаемой РЛС сопровождения. Поэтому разработчики РЛС уделяют большое
внимание работоспособности угломерных систем РЛС сопровождения, их точности и
помехозащищенности, а разработчики средств РЭП, в свою очередь, придают большое
значение подавлению угломерных систем РЛС сопровождения с помощью организо-
ванных помех.
204
В настоящее время известно много организованных помех, способных в той или
иной мере нарушить работоспособность угломерных систем сопровождения. Условно
эти помехи можно разбить на две группы. В первую группу входят все виды организо-
ванных помех, обладающих способностью действовать на различные типы угломерных
систем, в том числе и на моноимпульсные системы. При их создании необязательна
информация о принципах работы угломерной системы подавления РЛС. и в этом
смысле они являются универсальными. К таким помехам относятся: когерентная, по-
ляризационная, мерцающая, прерывистая, перенацеливающие помехи и помеха с выне-
сенной точки пространства [1, 36, 46-49].
Ко второй группе относятся помехи, рассчитанные на подавление конкретных ти-
пов угломерных радиолокационных систем. Отличительной особенностью этих помех
является то, что при их создании требуется знание принципов работы подавляемых уг-
ломерных систем РЛС или возможных недостатков реализации этих принципов в кон-
кретной аппаратуре. Так, например, моноимпульсный метод в идеальном исполнении
нечувствителен к амплитудно-модулированным помехам, излучаемым из одной точки
пространства. Однако при его реализации возможна неидентичность амплитудно-
фазовых характеристик приемных каналов, влияющая на точность пеленгации. Для
устранения этого влияния прибегают иногда к коммутации приемных каналов [46]. В
этом случае приемная система становится чувствительной к помехам с амплитудной
модуляцией на частоте коммутации. Зная это и располагая данными о режиме комму-
тации, можно создать AM помеху и существенно нарушить работу такой системы.
В РЛС с коническим сканированием луча информация о направлении на цель из-
влекается из огибающей принимаемых отраженных сигналов, поэтому таким РЛС
можно создать помеху на частоте сканирования луча. Аналогично можно создать по-
меху РЛС с “сопровождением на проходе”. В соответствии с изложенным ниже рас-
смотрены помехи моноимпульсным системам, РЛС с коническим сканированием и
РЛС с сопровождением “на проходе”. Основное внимание при этом уделено моноим-
пульсным системам, как наиболее помехозащищенным. Применительно к ним рас-
смотрены все виды помех первой группы, а также помехи на частоте коммутации при-
емных каналов; помехи на зеркальной частоте; помехи, расстроенные по частоте на ве-
личину, равную половине величины полосы пропускания следящей системы подавляе-
мой РЛС и двухчастотная помеха.
Также следует учитывать специфику при радиоэлектронном подавлении самона-
водяшихся ракет. Как известно, наведение ракеты на цель в этом случае обеспечивает-
ся с помощью ГСН По принципам работы ГСН разделяются на три основные типа: ак-
тивные, полуактивные и пассивные, При противодействии тип ГСН является опредс-
ляющим. Так, активная ГСН отличается тем, что содержит в себе аппаратуру, анало-
гичную по принципам действия радиолокационной аппаратуре. Она содержит высоко-
частотный передатчик, формирующий сигналы, излучаемые через антенную систему в
пространство, приемник, принимающий отраженные от цели сигналы, систему сопро-
вождения цели по дальности, скорости и направлению. Активная ГСН может самостоя-
тельно обнаруживать цель, определять ее местонахождение, по принимаемым сигналам
рассчитывать параметры движения цели, предсказывать ее перемещение в пространст-
ве и обеспечивать наведение ракеты на цель. В соответствии с этим организация РЭП
активной ГСН принципиально не отличается от РЭП РЛС, поскольку, принимая сигна-
лы ГСН, можно определить все необходимые параметры для формирования прицель-
ной помехи (вид сигнала и его параметры, поляризацию сигналов и др.).
205
Полуактивная система наведения характеризуется отсутствием излучения и прие-
мом отраженных от цели сигналов, облучаемой вынесенным источником радиочастот-
ных сигналов, например, РЛС подсвета цели или специальными передатчиками под-
света, наводимыми на цель с помощью РЛС сопровождения цели. В этом случае часто-
та и вид сигнала подсвета и сопровождения могут различаться значительно. В состав
полуактивной ГСН входит приемная антенна, приемник, устройство обработки сигна-
лов (компьютер), система управления полетом ракеты. Компьютер обеспечивает выра-
ботку соответ ствующих управляющих команд наведения ракеты на цель. РЛС подсвета
цели может располагаться на носителе, производящем пуск ракеты, или на земной по-
верхности в месте размещения пусковых ракетных установок. Поскольку ГСН не излу-
чает высокочастотных сигналов, о структуре сигнала и несущей частоте, на которой
работает ГСН, можно судить только по сигналам подсвета цели. О рабочей поляриза-
ции, о частоте сканирования луча приемной антенны ГСН в пространстве, если таковое
применяется, можно только предполагать на основании априорных данных. Это об-
стоятельство сужает возможности РЭП, особенно в части создания эффективных по-
мех, прицельных по параметрам (например, помех на кроссполяризации или помех с
амплитудной модуляцией на частоте сканирования, являющихся эффективными при
воздействии на угломерные системы РЛС).
В пассивных ГСН используется энергия, порождаемая самой целью, обычно теп-
лового (ИК) характера, и не требуется создания специальных источников энергии. По-
этому аппаратура упрощается, а сам комплекс самонаведения оказывается наиболее
скрытным. После пуска самонаводящаяся пассивная ракета полностью автономна и
создание ей помех затрудняется. В этом случае приходится прибегать к расходуемым
средствам противодействия, выбрасываемым с защищаемого объекта. Такие средства
снабжаются источниками ПК-энергии и вызывают перенацеливание на себя ракеты.
В процессе самонаведения могут реализовываться различные методы наведения,
наиболее известным является метод параллельного сближения. Сущность его заключа-
ется в том, что линия “цель-ракета” (линия визирования) должна оставаться все время
параллельной самой себе. В этом случае ГСН следит за целью, измеряя ее угловое по-
ложение относительно неподвижной системы координат ракеты и сравнивая это поло-
жение с исходным значением в момент пуска ракеты. Возникающее при этом рассогла-
сование (сигнал ошибки) используется для управления положением ракеты в простран-
стве. Воздействие сигнала ошибки происходит до тех пор, пока линия визирования
(“цель-ракета”) не становится параллельной базовой (исходной) линии. Очевидно, что
создание угловых помех ГСН в этом случае неизбежно приведет к ошибкам в наведе-
нии ракеты. Однако при реализации метода параллельного сближения сигналом ошиб-
ки может быть не только рассогласование по угловым величинам, но также и рассогла-
сование по угловой скорости перемещения направления визирования, измеряемой с
помощью ГСН. Этот метод известен как метод пропорциональной навигации. В этом
случае сигнал рассогласования формируется на основе измерения угловой скорости
перемещения линии “цель-ракета” относительно исходного положения визирования
цели в момент пуска ракеты. Он воздействует на систему управления ракетой, изменяя
се курс до тех пор, пока скорость перемещения линии “цель-ракета” не станет равной
нулю. При радиопротиводействии ракете с самонаведением методом пропорциональ-
ной навигации создание только фиксированных угловых ошибок может оказаться ма-
лоэффективным и потребуется создание угловых помех, вызывающих интенсивные
изменения угловой скорости сопровождения.
206
Моноимпульсный метод пеленгации, как указывалось выше, нс чувствителен к
амплитудным флуктуациям принимаемых сигналов, поэтому не подвержен действию
AM помех. Однако, оценивая помехозащищенность моноимпульсных РЛС по отноше-
нию к современным видам помех, необходимо учитывать, что моноимпульсный метод
применяется лишь для измерения угловых координат. Что касается методов обнаруже-
ния, определения дальности и скорости, а также методов сопровождения по дальности
и скорости, реализуемых в моноимпульсных РЛС, то они принципиально не отличают-
ся от аналогичных функциональных методов, реализуемых в обычных одноканальных
РЛС сопровождения. Поэтому в этой части существует преемственность видов помех
и способов защиты от них между одноканальными и многоканальными (моноимпульс-
ными) координаторами. Поскольку измерению угловых координат (сопровождению по
направлению) предшествует поиск, обнаружение и селекция целей, помехозащищен-
ность угломерного канала также зависит от помехозащищенности каналов обнаруже-
ния и селекции целей. В соответствии с этим методы защиты их от организованных
помех, рассмотренные в предыдущих главах данной книги, должны учитываться при
комплексной оценке возможностей радио электронного подавления моноимпульсных
радиолокационных систем.
8.2. Принципы моноимпульсной радиолокации
Принцип моноимпульсного метода измерения угловых координат основывается
на одновременном приеме отраженных от цели сигналов двумя независимыми прием-
ными каналами по каждой координатной плоскости пеленгации (двумя в азимутальной
и двумя в угломссгной). Информация о направлении на источник принимаемых сигна-
лов формируется непосредственно при прохождении сигналов через приемную антенну
в виде амплитудных, фазовых или амплитудно-фазовых соотношении сигналов. При
этом весь объем необходимой информации извлекается при приеме каждого импульса
и практически не зависит от амплитудной модуляции принимаемых импульсных сиг-
налов. Это обусловливает почти полное отсутствие чувствительности моноимпульсной
системы к амплитудным флуктуациям сигналов и амплитудно-модулированным поме-
хам, что существенно отличает се от одноканальных угломерных систем. В зависимо-
сти от метода реализации антенной системы и принципа обработки сигналов с целью
извлечения из них угловой информации моноимпульсные РЛС различаются по струк-
туре исполнения. В [46] отмечено девять основных вариантов реализации моноим-
пульсного метода. При реализации амплитудного метода антенная система формирует
в каждой координатной плоскости две ДНА., каждая из которых отклонена от электри-
ческой оси антенны на определенный угол. При реализации фазового метода в каждой
координатной плоскости формируются пары параллельных ДНА, соосных с направ-
лением электрической оси антенны.
В качестве примера на рис. 8.1 приведена структурная схема наиболее распро-
страненной, амплитудной суммарно-разностной моноимпульсной системы пеленгации
в одной плоскости. Сигнал, обозначенный знаком А, равен разности амплитуд прини-
маемых сигналов и определяет положение источника сигналов относительно линии ви-
зирования антенны РЛС, например, в азимутальной плоскости. Знаком X обозначен
сигнал, равный сумме принимаемых сигналов, и, как правило, используется для нор-
мировки по амплитуде сигналов обоих каналов с помощью системы АРУ.
207
Фазовый
детектор
передающая
антенна
УПЧ
УПЧ
АРУ
"“Г-
______ Сигнал
ошибки (к следящей
угломерной системе)
Система пеленгации, например,
в угломестной плоскости имеет ана-
логичную структуру за исключением
того, что разностный сигнал обу-
словлен положением источника сиг-
налов в угломестной плоскости отно-
сительно линии визирования антен-
ны. Сигнал ошибки используется
обычно для поворота антенны с по-
Рис. 8.1. Структурная схема амплитудной суммарно-
разностной моноимпульсной системы пеленгации
мощью угломерной системы в поло-
жение, при котором линия визирова-
ния антенны совпадает с направлени-
ем на цель и когда сигнал ошибки
становится равным нулю. На рис. 8.2
представлена структурная схема фа-
зовой суммарно-разностной моноим-
пульсной системы пеленгации в од-
ной плоскости.
Отличие ее от амплитудной
системы, как указывалось, в конст-
рукции ангенны и в том, что разно-
Рис. 8.2. Структурная схема фазовой суммарно-
разностной моноимпульсной системы пеленгации
— Одноточечные
помехи
Поляризационные-
помехи (на крос-
поляр. >
Прерывистая
помеха
Помеха по
зеркальному
канал>
Двехчастотная
помеха
Тасстросная
по частоте
. помеха
Помехи
иОНЛПМЛ) ТЬСНЫМ
системам
Помехи из
вынесенной
точки
Помеха при-
крытия in 'ЮН
барражировал ня
Перенацели-
вающие
помехи
Многоточечные
помехи
Когерентные
помехи
Мерцающие
помехи
Непрерывные помехи
hi нескольких объектов
Малобазовые
помечи
Комбинированные
помехи
Рис. 8.3. Классификация помех моноимпульсным
угломерным системам
стный сигнал обусловливается раз-
ностью фаз принимаемых сигналов.
Иными словами, информация об уг-
ловом положении цели в
фазовой системе передает-
ся через фазовые соотно-
шения принимаемых сиг-
налов. В силу своей слож-
ности по сравнению с ме-
тодом конического скани-
рования моноимпульсный
метод первоначально на-
шел применение в РЛС со-
провождения ЗРК. По мере
технологического прогрес-
са в разработке малогаба-
ритных СВЧ комплексных
устройств и ФАР этот ме-
тод был реализован в бор-
товых РЛС, а затем в ГСН.
В настоящее время моно-
импульсный метод широко
используется в РЭС управления оружием. Рассмотрим методы РЭП моноимпульсных
систем. В соответствии с изложенным ранее возможные виды помех моноимпульсным
системам можно представить в виде структурной схемы на рис. 8.3.
208
8.3. Помехи на кроссполяризации
Принцип создания помехи па кроссполяризации и эффект ее действия. Прин-
цип создания такой помехи состоит в облучении приемных антенн подавляемых РЛС
высокочастотными сигналами на частоте РЛС с поляризацией, ортогональной рабочей
поляризации РЛС или близкой к ней [46, 49]. Действие ее основывается на том, что у
большинства существующих антенн при работе возникает кроссполяризационное из-
лучение, наличие которого обусловливает зависимость ДН приемных антенн РЛС и,
как следствие, их пеленгационных характеристик от поляризации принимаемых сигна-
лов, что приводит к снижению точности пеленгации цели и помехозащищенности. На
рис. 8.4 приведены ДНА амплитудной суммарно-разностной моноимпульсной системы
на основной (рабочей) и кроссполяризации. Знаком О обозначены ДНА на основной по-
ляризации, знаком К - на кроссполяризации.
Как видно из рисунка. ДНА при приеме
сигналов с ортогональной поляризацией по
отношению к рабочей поляризации, под ко-
торую спроектирована РЛС, не соответствует
принципам амплитудной моноимпульсной
пеленгации. Так, нули ДНА на кросс- поля-
ризации имеют место там, где на основной
поляризации ДНА имеют максимумы. Поло-
жение максимумов двух ДН на кроссполяри-
зации чередуется (рис. 8.4,а). В результате
суммарная ДН на кроссполяризации стано-
вится эквивалентной разностной, а разност-
ная - суммарной (рис. 8.4,б,в), и пеленгаци-
онная характеристика при приеме сигналов с
кроссполяризацисй терпит разрыв (рис. 8.4,г),
что соответствует полному нарушению рабо-
ты следящей системы. Иными словами, в
Рис. 8.4. Типичные ДН антенны
и пеленгационные характеристики
амплитудной суммарно-разностной
моноимпульсной системы
этом случае пеленгационная характеристика
в своей рабочей точке становится неустойчи-
вой, что вынудит антенну РЛС отклониться в
сторону от направления на источник сигна-
лов с кроссполяризацисй и приведет к еры ву
режима сопровождения цели.
Анализ рассматриваемой системы пока-
зывает, что при приеме сигналов с кросс-поля-
ризацией в азимутальной плоскости формиру-
ется разностная ДН, типичная для угломест-
ной плоскости, а в угломестной плоскости -
типичная разностная для азимутальной плос-
кости [46]. Иными словами, при приеме сиг-
налов на кроссполяризации наблюдается
функциональный “переворот” каналов пелен-
гации: угломестный канал становится азиму-
тальным, а азимутальный - угломсстным. На
рис. 8.5 представлены типичные пеленгаци-
Рис. 8.5. Типичные пеленгационные
характеристики фазовой суммарно-
разностной моноимпульсной системы
при приеме сигналов на согласованной
поляризации (S0) и кроссполяризацисй (Sk)
209
онныс характеристики фазовой суммарно-разностной моноимпульсной системы при пе-
ленгации источника сигналов в тех же условиях (для одной плоскости). Кроме того, про-
исходит нарушение нормировки угломерных каналов, так как система АРУ, работающая
по суммарному каналу, будет увеличивать коэффициент усиления этих каналов, что вы-
зовет резкое возрастание уровня собственных шумов.
С целью оценки влияния поляризационных характеристик принимаемых сигналов
на моноимпульсные системы с пространственной пеленгацией был проведен теорети-
ческий анализ апертурным методом комплексных ДН приемных антенн и пеленгаци-
онных характеристик систем в условиях приема сигналов с различной поляризацией.
Из результатов анализа следует:
1. Помеха на кроссполяризации действует на все типы моноимпульсных систем
пеленгования. Эффект действия помехи при этом в общих чертах одинаков, но имеют-
ся количественные различия, обусловленные особенностями обработки сигналов и
структурой ДН приемных антенн;
2. Основной причиной действия помехи на кроссполяризации является искажение
амплитудно-фазового распределения электромагнитного поля возбуждения в раскрыве
антенны, что приводит к искажению амплитудно-фазовых ДН антенны и. как следст-
вие, к искажению пеленгационных характеристик системы:
3. Искажение пеленгационных характеристик при действии помехи на кроссполя-
ризации проявляется в изменении крутизны и смещении точек устойчивого равнове-
сия. При ортогональной поляризации помехи во всех случаях в равносигналыюм на-
правлении (РСН) наклон пеленгационной характеристики меняется на обратный и сле-
дящая угломерная система теряет устойчивость по обеим плоскостям пеленгации.
Результаты теоретического анализа подтвердили, что вследствие трансформации
парциальных ДН при воздействии помехи на кроссполяризации в суммарно-
разностной моноимпульсной системе (амплитудной и фазовой) суммарная ДН стано-
вится разностной, а разностная - суммарной во всех плоскостях пеленгации. Это при-
водит к инверсии каналов пеленгования и полному нарушению работоспособности пе-
ленгационной системы из-за расфазировки координатной системы и нарушения нор-
мировки сигналов. Эффект нарушения нормировки сигналов проявляется в росте сиг-
нала ошибки, поскольку система АРУ в рассматриваемом случае будет работать по
разностному (не суммарному) сигналу с уровнем, приближающимся к нулевому.
Воздействие помехи на кроссполяризации с фиксированными поляризационными
параметрами не приводит к срыву автосопровождения цели по угловым координатам, а
вызывает отклонение РСН на некоторый угол в пределах ДНА от направления на ис-
точник помехи. В случае воздействия помехи с перестраиваемыми поляризационными
параметрами относительно кроссполяризационных в угломерном координаторе возни-
кают значительные угловые ошибки, которые по величине превышают ширину ДНА и
приводят к полному срыву автосопровождения. В простейшем виде такая помеха мо-
жет представлять собой периодически переключаемый сигнал с согласованной поляри-
зацией на сигнал с ортогональной поляризацией или сигнал с вобуляцией коэффициен-
та эллиптичности в определенном диапазоне параметров, охватывающем область орто-
гональных параметров поляризации антенны подавляемой системы. Если частота пере-
ключения или изменения поляризационных параметров сигнала помехи оказывается
соизмеримой с полосой пропускания угломерной следящей системы, то автосопровож-
дение по угловым координатам нарушается и происходит срыв сопровождения по на-
правлению.
210
Возникновение только угловых (систематических) ошибок без срыва углового со-
провождения цели постановщика кроссполяризационной помехи может не снизить эф-
фективность полуактивного ЗРК, так как сохраняется непрерывность подсвета цели, а в
ГСН обычно используют поляризацию, несовпадающую с рабочей поляризацией РЛС
подсвета цели. В связи с этим действие кроссполяризационной помехи целесообразно
сосредоточить на нарушении функционирования углового координатора ГСН ракеты.
Учитывая, что в ГСН для наведения ракеты на цель обычно применяется метод про-
порциональной навигации, в котором важную роль играет угловая скорость перемеще-
ния РСН, более предпочтительным будет воздействие кроссполяризационной помехи с
изменяемой поляризационной структурой, охватывающей область опасных кроссполя-
ризационных параметров антенной системы ГСН. Это вызывает существенное измене-
ние во времени угловых скоростей сопровождаемой цели, способствующее сходу раке-
ты с траектории наведения на цель. С казанное не исключает возможность эффективно-
го воздействия как на РЛС подсвета, так и на ГСН. например, поочередно. Эффектив-
ность кроссполяризационной помехи существенно выше в режиме захвата постанов-
щика помех на АС.
Необходимо отметить, поскольку помеха на кроссполяризации приводи! к иска-
жению рабочей ДН приемной антенны РЛС, определяющей возможности пеленгации
цели, она действует и на одноканальные угломерные системы и в этом смысле является
действительно универсальной, о чем говорилось выше.
Техника создания помехи на кроссполярнзации. Помеха на кроссполяризации
амплитудным моноимпульсным системам, как видно, в равной мере применима и против
фазовых моноимпульс ных систем.
Сигнал ошибки также претерпевает
искажение, поскольку сигналы, по-
ступающие на два приемных элемен-
та антенны, имеют сдвиг по фазе на
180° . Это обусловлено искажением
фазового фронта волны (рис. 8.6).
Как известно, источник сигна-
лов с поляризацией, соответствую-
щей поляризации приемной антен-
ны РЛС, формирует в пределах ши-
рины основного п боковых лепест- *>ис- Амплитудные и фазовые характеристики
ков ДНА синфазный фронт с пере- та ВОЯНЫ на согласованной поляризации
и кроссполярнзации
меной полярности при переходе от
лепестка к лепестку. При приеме сигналов с кроссполяризацией нулевое направление
приемной ДНА совпадает с направлением линии визирования антенны, и фазовый
фронт меняет полярность при прохождении направления визирования. Поэтому метод
создания помехи на кроссполярнзации часто рассматривается как метод, рассчитанный
на искажение фазового фронта волны, как и в случае когерентной помехи, рассмотрен-
ной ниже. Таким образом, чтобы создать помеху на кроссполярнзации необходимо на-
вести ее на ортогональную поляри 5ацию и обеспечить необходимую мощность. Чувст-
вительность приемной антенны РЛС к сигналам на кроссполярнзации примерно на 20 дБ
ниже чувствительности к сигналам на согласованной поляризации. Поэтому мощность
211
помехи на кроссполяризации должна быть примерно на 20дБ выше, чем при создании
помех на согласованной поляризации. В типичном случае требуется обеспечение пре-
вышения помехи над сигналом на входе антенны подавляемой РЛС при создании рас-
сматриваемой помехи порядка 30.. 40 дБ. Снижение требуемого уровня мощности в
этом случае возможно только при комбинировании помехи на кроссполяризации с по-
мехами нарушения селекции по дальности и скорости, например, с уводящей помехой
по дальности или скорости, когда можно ограничиться отношением помеха-сигнал,
равным 6 дБ.
Точность наведения помехи на кроссполяризацию обусловливается относитель-
ным уровнем кроссполяризационного излучения и должна быть достаточно высокой
(единицы градусов). Установлено, что при относительном уровне кроссполяри рацион-
ного излучения антенны -15 дБ, отклонение плоскости поляризации помехи относи-
тельно ортогональной не должно превышать ±10°. При меньших уровнях кроссполяри-
зации антенны подавляемой РЛС эта точность может повышаться до ±1°. Рассмотрим
ряд примеров технической реализации создания поляризационых помех. Облегчающий
реализацию помехи на кроссполяризации, как уже отмечалось. является случай, когда
подавляемая РЛС использует единую приемопередающую антенну. В этом случае по-
ляризация приемной и передающей антенн одна и та же, и на кроссполяризацию при-
емной антенны можно помеху наводить по поляризации излучаемых РЛС сигналов.
Для этого достаточно иметь на борту защищаемого объекта измеритель поляризации и
две ортогонально поляризованные приемные антенны, устанавливаемые в непосредст-
венной близости друг от друга. Принятые через эти антенны сигналы используются для
определения поляризации (по их амплитудам и фазовому сдвигу) и наведения поляри-
зации передающей антенны на ортогональную поляризацию к поляризации принятого
сигнала подавляемой РЛС. Вместо двух ортогонально поляризованных антенн возмож-
но применить рупор кругового сечения, соединенный с управляемым ферритовым по-
ляризатором с квадрупольным магнитным управлением, обеспечивающим независимое
управление величиной и положением плоскости внесения дифференциального фазово-
го сдвига, что позволит поляризационную структуру принимаемого сигнала преобразо-
вать в сигнал с линейной или круговой поляризацией С помощью ортомодового разде-
лителя поляризации (ОМП). фазового детектора, процессора можно сформировать сиг-
нал управления поляризатором. Алгоритм управления поляризатором обеспечивает та-
кое состояние поляризатора, чтобы на выходе одного канала ОМП был максимальный
сигнал, а на выходе второго — нулевой. Если теперь в этот канал ввести помеховый
сигнал, то в результате обратного поляризационного преобразования в поляризаторе на
входе рупора формируется сигнал, поляризация которого ортогональна поляризации
принятого сигнала. На рис. 8.7 приведена структурная схема передатчика помех, в ко-
тором с помощью приемного адаптивного поляриметра определяются параметры поля-
ризации поля принимаемой электромагнитной волны. Полученная информация исполь-
зуется для синтеза в передающем поляризаторе сигнала помехи с необходимой поляри-
зационной структурой.
В передатчике используется присмопередающая антенная система в виде двух ор-
тогонально поляризованных антенных элементов, два коммутационно распределитель-
ных устройства “присм/персдача”, адаптивный поляриметр, системный процессор и
поляризатор. Системный процессор анализирует и идентифицирует принимаемый сиг-
212
канал 1
Т-мосг
Г нбриднын
мое I
канал 2
АФВ
Адаптивны н
Компаратор
(шу м-детск гор)
ВЦ-сигнал
к системному
процессору
Гибридный
Т-мост
Двухканал кны и
приемник
АФВ
от адаптивного
от системного
к передающему
поляр! । штору
о г формирования
помехи
поляриметра
процессора
к передающим
_____ модулям
АФВ |—>-
Рис. 8.7. Структурные схемы передатчика помехи (а), адаптивного
поляриметра (б) и передающего поляризатора (<?). ДФВ — З-позицпонный
фазовращатель 180°, 90° и 45°; АФВ - аналоговый фазовращатель 0...900
нал по таким параметрам, как несущая частота, частота повторения радиоимпульсов и
их форма, амплитуда и вутрисигнальная структура. Результаты этого анализа сопос-
тавляются с имеющимися в ЗУ каталоге “угроз” данными и определяется приоритет
угрозы по степени ее опасности для защищаемого объекта. В режиме “прием” систем-
ный процессор подключает выходы ортогонально поляризованных антенных элемен-
тов к адаптивному поляриметру и подает на соответствующие смесители гетеродини-
рующие сигналы для частотной селекции “опасной” РЛС. Адаптивный приемный по-
ляриметр анализирует поляризацию принимаемого сигнала и передает необходимую
информацию в системный процессор и поляризатор. Затем по команде в адаптивный
поляриметр подаются квадратурные компоненты сформированного поляризатором
сигнала помехи и осуществляется корректирующее регулирование параметров поляри-
затора до тех пор, пока не будет достигнуто требуемое соответствие между поляриза-
213
цисй помехового и принимаемого из эфира сигналов. После этого системный процес-
сор подает команду на излучение помехи. Адаптивный поляризатор основан на сле-
дующем принципе: любая поляризация может быть реализована с помощью двух орто-
гональных компонент поля, амплитуда и фаза которых может регулироваться на тре-
буемое значение (рис. 8.7,6). Фаза регулируется аналоговыми и дискретными фазовра-
щателями, а амплитуда - с помощью комбинации двойного 7-моста, двух комплектов
фазовращателей и гибридного соединения. Управление фазовращателями осуществля-
ется вычислителем минимизирующего адаптивного алгоритма. Суммарный и разност-
ный сигналы с выхода двойного Г-моста подаются на двухканальный приемник, а за-
тем на фазоамплитудный компаратор для определения нуля по отношению разностного
п суммарного сигналов. Выходной сигнал компаратора поступает на вычислитель ми-
нимизирующего алгоритма, который по глубине нуля напряжения с выхода компарато-
ра вычисляет очередные позиции установки фазовращателей. Эта итеративная проце-
дура продолжается до тех пор, пока вычислитель не примет решение о том, что тре-
буемый уровень нулевого провала установлен и измерен с заданной точностью.
После этого вычислитель выдает в системный процессор измеренные параметры
поляризации дпя синтеза поляризации сигнала помехи. Поляризатор построен на тех
же компонентах и работает так же, как и адаптивный поляриметр. Процессор выдаст на
фазовращатели управляющие сигналы в ответ на информацию, переданную ему от сис-
темного процессора и адаптивного поляриметра. В результате этого формируются два
ортогонально поляризованных сигнала с требуемой амплитудой и фазой (рис. 8.7,6').
Другим вариантом является ретрансляционная система. Она использует две орто-
гонально поляризованные приемные антенны и две ортогонально поляризованные пе-
редающие антенны, усилители и элементы подстройки по амплитуде и фазе Антенны
связаны приемно-усилительными трактами таким образом, что составляющая принято-
го сигнала на горизонтальной поляризации излучается через антенну с вертикальной
поляризацией и наоборот. Приемно-усилительные тракты выравниваются по амплиту-
де и фазе, и в один из трактов включается фазовращатель на 180°, обеспечивающий
1 гротивофазность ретранслированных сигналов на входе передающих антенн. В резуль-
тате излучаемый сигнал (помеха) будет всегда ортогонально поляризованным по отно-
шению к принимаемому сигналу. Однако двухканальная система при работе в широкой
полосе частот требует высокой быстродействующей балансировки по амплитуде и фа-
зе, напрмер, по пи лот-сигнал у. Поскольку требуемая сочность наведения помехи на ор-
тогональную поляризацию оценивается единицами градусов, возможность такой ба-
лансировки, особенно в условиях работы по нескольким РЛС одновременно, является
проблематичной. Кроме того, возникает серьезная проблема с развязкой приемных и
передающих антенн.
В плане решения этих проблем представляет интерес система с временным стро-
бированием каналов ретрансляторов. Структурная схема такой системы представлена
на рис. 8.8,а.
В отличие от двухканальной ретрансляционной системы каждый капал данной
системы стробируется по времени в противофазе. В результате прием сигнала и излу-
чение помехи на одной и той же поляризации осуществляется разновременно, и развяз-
ка приемной и передающей антенн, работающих на согласованной поляризации, обес-
печивается. Что касается развязки приемной и передающей антенн одного и того же ре-
214
Передающая антенна
горн Ю1Г1 ЯНШИН I
поляризации
-[Устронство!
-| управления}
Приемная антенна
вертикальной
поляричашш
CipoC. |-
Приемнаи антенна Д
горизонтальной |
поаирнзаннн
За к-ржка | I Упряв
T.I ГД фазоар
Канал «
Канал №1
За юра ка
8.8. Структурная схема передатчика поляризационной
помехи ретрансляционного типа с временным
стробированием каналов (а) и эпюры входной (б)
и выходной (в) мощностей на согласованных
поляризациях (в данном случае вертикальной)
1 предающая Шиенпа
нертнкачьнон
поляризации
СВФ
силитесь
Ддктеаиюсхи
Рис.
трансляционного канала, то
она дополнительно обеспечи-
вается ортогональностью их
поляризаций. Приведенные на
рис. 8.8,6 и в эпюры поясняют
принцип применяемого
временного стробирования.
Скважность стробирования вы-
бирается несколько больше 2 в
целях гарантии отсутствия пе-
рекрытия приема и излучения
во времени. При этом учиты-
вается неизбежность задержки
сигнала в присмоусилительном
тракте и влияние отражений
помехи от местных предметов.
Если процесс приема и излу-
чения каждого капала сделать
разновремененным, то можно
использовать вместо двух один
высокочастотный усилитель с
коммутирующими устройст-
вами, как это делается в систе-
ме когерентных помех. Этим самым упрощается система и енпжаюзея требования по
амплитудно-фазовой балансировке каналов, поскольку высокочастотные усилители в
двухканальной системе являются основным источником разбаланса каналов по ампли-
туде и фазе при работе в диапазоне частот. Периодическое изменение направления
приема и передачи через ортогонально-поляризованные антенны формирует радиосиг-
нал на несущей частоте РЛС, состоящий из двух разновременных когерентных им-
пульсных последовательностей с соответствующей поляризационной структурой. Эф-
фект действия поляризационной помехи будет обусловливаться за счет интегрирования
ортогональных составляющих сигнала помехи в приемнике РЛС, восстанавливающего
одновременность действия обоих поляризационных составляющих и создающего эф-
фект действия поляризационной помехи. Чтобы это интегрирование имело место, пе-
риод стробирования сигнала РЛС должен быть много меньше длительности импульса
РЛС или обратной величины полосы пропускания фильтра доплеровской селекции
РЛС КПП и НИ. Следует отметить, что стробирование ортогональных каналов пере-
датчика помех или инвертирования одного усилителя в ортогональных каналах делает
возможным выделение частоты коммутации и использование ее для стробирования ра-
диолокационного приемника с целью приема сигнала помехи с одной поляризацией.
Рассмотренные варианты реализации поляризационной помехи применимы к по-
давлению РЛС с обшей присмопсредающсй антенной. Если в подавляемой РЛС ис-
пользуются раздельные для приема и передачи антенны, то реализация поляризацион-
ной помехи усложняется. Однако и в этом случае можно создать поляризационную по-
меху. Для наведения помехи на ортогональную поляризацию приемной антенны можно
215
использовать: прием паразитных сигналов гетеродина приемника РЛС (ГСН), излучае-
мых через приемную антенну и несущих информацию о поляризации приемной антен-
ны; наведение на ортогональную поляризацию по реакции антенной системы при воз-
действии помехи; прием отраженных от приемной антенны РЛС (ГСН) сигналов с ин-
формацией о поляризации приемной антенны. Для наведения помех на ортогональную
поляризацию по паразитным сигналам гетеродина приемника РЛС (ГСН) потребуется
приемник с высокой чувствительностью, поскольку уровень таких сигналов весьма
мал, способный селектировать эти сигналы в условиях сложной сигнальной обстанов-
ки. При этом предполагается наличие априорной информации о рабочей частоте гете-
родина РЛС (ГСН). При наведении поляризации помехи по реакции антенной системы
РЛС на воздействие помехи потребуется облучение подавляемой РЛС сигналами поме-
хи на частоте РЛС с поляризацией, меняющейся в пределах ожидаемых параметров ор-
тогональной поляризации приемной антенны РЛС. В момент, когда поляризация поме-
хи совпадает с ортогональной поляризацией, в угломерной следящей системе РЛС воз-
никнут угловые ошибки, которые приведут к тому, что антенная система отклонится на
некоторый угол от направления на постановщик помех. Это приведет к уменьшению
уровня мощности радиолокационного сигнала на входе приемника системы создания
поляризационной помехи, что может быть зарегистрировано и использовано для пре-
кращения изменения параметров поляризации помех и перехода на фиксированную
поляризацию, ортогональную поляризации приемной антенны, либо на поляризацию с
изменяемыми параметрами в узких пределах относительно предполагаемых парамет-
ров поляризации, ортогональной поляризации приемной антенны подавляемой РЛС. В
обоих случаях следует ожидать эффективного действия помехи на угломерную следя-
щую систему. При использовании отраженных от приемной антенны подавляемой РЛС
сигналов, несущих информацию о поляризации ее приемной антенны, потребуется об-
лучение антенной системы РЛС с борта защищаемого объекта и прием весьма слабых
сигналов в условиях достаточно плотной сигнальной обстановки. В принципе это воз-
можно, но требует достаточно сложной и чувствительной аппаратуры.
Кроме перечисленных методов, поляризационную помеху можно создать по ап-
риорной информации о рабочей поляризации приемной антенны РЛС. Неточность ин-
формации при этом можно компенсировать периодическим изменением поляризации
помехи в соответствующих узких пределах. Пределы изменения поляризации можно
ориентировочно оценить по поляризации передающей антенны, измеряемой по зонди-
рующим сигналам РЛС, принимая во внимание, что во избежание существенных по-
терь в чувствительности и, следовательно, в дальности действия, поляризация прием-
ной антенны не должна сильно отличаться от поляризации передающей антенны. На-
пример, при линейной поляризации, предположительно, можно ограничиться качанием
плоскости поляризации в секторе, не превышающем 45° (относительно ортогональной
поляризации). Скорость качания должна быть согласованной с полосой пропускания
угломерной следящей системы РЛС и не должна быть высокой. По этим соображениям
сектор качания следует выбирать по возможности как можно меньше.
При реализации помехи на кроссполяризации значительное внимание уделяется
разработке антенной системы, которая (в совокупности с обтекателем) должна иметь
высокую поляризационную чистоту и обеспечивать требуемое (например, 40 дБ) от-
216
ношение мощности помехи на кроссполя-
ризации к мощности полезного сигнала
при силовом способе создания помехи
(рис. 8.9).
Антенны с горизонтальной и верзи-
кальной поляризациями тесно связаны и
развернуты относительно друг друга на 90°
с точностью выше десятой доли градуса.
Обтеказ ель имеет тенденцию добавлять
кроссполяризационные компоненты к лю-
бому поляризованному сигналу. В общем
случае обтекатель с криволинейной по-
верхностью вызывает большее искажение
поляризации, чем плоский обтекатель. Ти-
пичная кроссполяризационная диаграмма
реальной системы показана на рис. 8.9,6.
При изменении частоты следует ожидать
появления асимметрии и хаотичности в
данной поляризационной диаграмме [1].
Ранее указывалось, что снижение требуе-
мого уровня мощности помехи на кроссно-
ляризации возможно за счет комбинирова-
ния ее с уводящей помехой по дальности
или по скорости. На рис. 8.10 приведена структурная схема системы, позволяющая
осуществить такое комбинирование помех.
Рис. 8.9. Сгруктурная схема антенной системы
передатчика помех на кроссполярнзации (п)
и ее кроссполяризационная диаграмма (б)
Рис. 8.10. Структурная схема системы создания кроссполяризационной помехи
в комбинации с уводящими помехами по скорости и дальности
В системе имеется два канала: один — для приема сигналов с вертикальной поля-
ризацией и передачи сигнала помехи на горизонтальной поляризации, другой - для
приема сигнала с горизонтальной поляризацией и передачи сигнала помехи на верти-
кальной поляризации. В каждом канале на входе параллельно включены приемники.
217
обеспечивающие синхронизацию работы данной системы РЭП с частотой повторения
импульсов РЛС В каждом канале имеется регулируемый фазовращатель. Общий мо-
дулятор для формирования уводящей по скорости помехи работает на оба канала, бла-
годаря чему закон увода доплеровской частоты будет для обоих канатов одинаковым.
Сдвиг частоты сигнала помехи сопровождается подавлением на 20,.,30 дБ сигнала на
несущей частоте, остающемся после модуляции. Устройства формирования уводящей!
помехи по дальности включены в оба каната и имеют общее управляющее устройство,
так что законы увода строба дальности одинаковы для обоих каналов. На выходе сис-
темы установлен быстродействующий переключатель, способный коммутировать вы-
ходные сигналы от импульса к импульсу, обеспечивая излучение сигнала поляризаци-
онной помехи.
Поляризационная помеха паря ту с когерентной помехой относится к перспектив-
ным эффективным средствам подавления I СП ракет моноимпульсного тина. Она спо-
собна лишить ГСН угловой информации о цели или. по меньшей мерс, значительно
снизить точность сопровождения и наведения. Исследования по реализации поляриза-
ционной помехи ведутся в течение многих лет. В связи с этим представляет интерес
разработка фирмы Adams-Bussell Со ортомодовых волноводных преобразователей по-
ляризации, предназначенных специально для систем РЭП и позволяющих в широкой
полосе частот формировать сигналы с различными поляризациями, в том числе орто-
гональной поляризацией. Сообщается, что этой фирмой создан ортомодовый мост,
способный работать с высокой средней (более 1 кВт) и импульсной (55 кВт) мощно-
стью в полосе частот от 6.5 до 18,2 ГГц, а в итальянской фирме Elettronica [50] ведутся
исследования помехи на кроссполяризации.
Методы зашиты от помехи на кросспо.тяризации. При совпадении поляриза-
ций приемной и передающей антенн обеспечение наведения на кроссполяризацию с
требуемой точностью по зондирующему сигналу РЛС не представляет проблем. Одна-
ко поляризация приемной антенны РЛС может не совпадать с поляризацией передаю-
щей и тогда реализация помехи на кроссполяризации превращается в серьезную про-
блему. Рассогласование поляризаций антенн рассматривается как один из методов за-
щиты РЛС от действия помехи на кроссполяризапии, основанный на использовании в
РЛС сопровождения отдельных передающей и приемной антенн. Антенны монтируют-
ся таким образом, чтобы между ориентацией их рабочих поляризаций существовало
рассогласование, которое практически нс сказывается на качестве работы РЧС в обыч-
ных условиях. В этом случае наведение помехи на кроссполярмзацию по зондирующе-
му сигналу РЛС будет неэффективным.
К другим способам защиты от кроссполяризационной помехи относятся: способ
компенсации кроссполяризационной помехи и поляризационная селекция сигналов.
Способ компенсации иллюстрирован на рис. 8.11 [2].
На защищаемой РЛС устанавливается дополнительная антенна, ориентированная
в том же направтснии, что и основная, с поляризацией, ортогональной рабочей поляри-
зации РЛС, и дополнительный приемный канал. Кроссполяризацион ,ая помеха,
имеющая большую мощность, будет приниматься дополнительной антенном и через
приемно-усилительный канал подаваться на компенсатор. На тот же компенсатор будет
поступать через основную антенну сигнал и кроссполяризациопная помеха. В резуль-
тате на выходе компенсатора (вычитающего устройства) выделяется полезный сигнал
цели. Устройство и работа компенсатора кроссполяризационной помехи аналогична ком-
218
Рис. 8.11. Принцип компенсации кроссполяризационных помех
пенсации помех, действующих по боковым лепесткам ДНА. В моноимпульспых РЛС с
суммарно-разностной обработкой сигнала такие компенсаторы должны быть в каждом
канале. Кроссполяризационная составляющая отраженного от цели сигнала при этом
компенсируется незначительно в силу случайности амплитудных и фазовых соотноше-
ний. Следует однако отметить возможность преодоления такой помехозащиты. Она ос-
нована на одновременном использовании двух отдельных передатчиков помех равной
мощности. Поскольку работа поляризационного компенсатора основывается на ис-
пользовании когерентности между вертикально и горизонтально поляризационными
составляющими помехового сигнала, использование двух раздельных некогерентных пе-
редатчиков помех с вертикальной и горизонтальной поляризациями приводит к разруше-
нию логики работы системы помехозащиты и снижению ее эффективности до нуля.
Поляризационная селекция основана на использовании поляризационных реше-
ток, устанавливаемых в раскрывах антенн РЛС, пропускающих сигналы на рабочей по-
ляризации практически без потерь и сильно отражающих сигналы с кроссполяршаци-
ей. Иногда в качестве поляризационного фильтра применяется сам отражатель антен-
ны, для чего его изготавливают в виде системы металлических пластин, ориентирован-
ных параллельно рабочей поляризации. В этом случае кроссполяризационная компо-
нента сигналов проходит через отражатель и не попадает на вход приемника [2, 46].
Как уже отмечалось, в моноимпульсном угловом координаторе при действии
кроссполяризационной помехи наблюдается инверсия каналов пеленгации и наруше-
ние нормировки сигналов. Если в координаторе можно распознать действие кросспо-
ляризационной помехи и определить ее появление, то для снижения эффекта ее дейст-
вия необходимо осуществить обратную инверсию каналов пеленгации, стробирование
по угловой скорости на время прохода помехой области опасных значений парализа-
ционных параметров или перевод угловой следящей системы в режим памяти по углам
или угловой скорости. Информацию о действии кроссполяризационной помехи на мо-
ноимпульсный пеленга гор возможно снимать с выхода квадрупольного канала сум-
марно-разностного моста, выходной сигнал которого при отсутствии действия угловых
помех близок к нулю. Кроме того, может быть использовано несовершенство реализа-
ции передатчиков поляризационных помех с временным разделением каналов.
Однако радикальным решением защиты моиоимпульсного угломера будет двух-
поляризационный прием, но который для своей реализации требует существенного ус-
ложнения пеленгатора, а именно, удвоения числа приемных каналов.
219
8.4. Когерентные помехи» создаваемые из двух разнесенных
в пространстве точек
Принцип создания и эффект действия когерентной помехи. Принцип форми-
рования когерентной помехи, являющейся одним из методов РЭП, разработанным для
Рис. 8.12. Принцип создания
когерентной помехи
радиоэлектронного подавления моноимпульсных
РЛС сопровождения, заключается в создании фазо-
вой неоднородности в раскрыве приемной антенны
путем облучения ее когерентными сигналами из
двух разнесенных точек пространства [1,46^9, 51J.
Применительно к защите самолета данный принцип
создания когерентной помехи поясняется рис. 8.12,
где показан самолет, движущийся радиально по на-
правлению к наземной следящей радиолокационной
системе. При этом антенны передатчика помех, ус-
тановленные на крыльях, размещаются на линии,
перпендикулярной к линии радиолокационного ви-
зирования самолета. Приемная антенна, располагае-
мая по центру фюзеляжа самолета, обеспечивает
прием сигналов подавляемой РЛС. При этом принятый сигнал делится по мощности,
усиливается, его фаза в обоих каналах регулируется таким образом, чтобы излучаемые
передающими антеннами сигналы были противофазны и равны по амплитуде. В резуль-
тате во всех точках линии визирования РЛС оба сигнала будут компенсировать друг дру-
га, формируя нулевой уровень по осевому направлению апертуры антенны РЛС.
Вдоль направления апертуры антенны подавляемой РЛС возникают и другие нулевые
уровни, положение которых можно определить. Так, при установке передающих антенн на
расстоянии d друг от друга положение нулей будет определяться условием d sin© - nk, где
О - угол между линией визирования центра базы и угловым положением нулевого уровня;
Л - длина волны; п - целое число. Поскольку 7? » d , кривизной фронта волны можно в
данном случае пренебречь. Первый нуль (н = 1) будет возникать на расстоянии с/sinO = Л,
точно равном длине волны; другие нули будут возникать при п = 2,3 и т. д.
Расстояние первого нуля от осевого направления S’ = R tg 0, что при малых углах
0 (когда sin 0 - tg 0) дает равенство S ~ RX /d, где R - расстояние между постановщи-
ком помех и РЛС. Теоретические исследования показывают, что если пеленгуемая цель
представляет собой двухточечный источник когерентных сигналов, то формируемый
ею фазовый фронт резуль гкруюшей
электромагнитной волны при оп-
ределенных амплитудно-фазовых
соотношениях сигналов отличается
от сферического фронта волны,
создаваемого точечным источни-
ком сигналов (рис. 8.13.), вследст-
вие чего точность пеленгования
таких целей с помощью РЛС раз-
личных типов, в том числе и РЛС,
Рис. 8.13. Искажение фазового фронта волны
при создании когерентной помехи
работающих моноимпульсным ме-
тодом, ухудшается.
220
Обусловливается это тем, что при пеленгации точечных источников сигналов с ма-
лыми ошибками радиолокационная система в конечном счете ищет направление нормали
к фазовому фронту отраженных от цели радиоволн. Искажение фазового фронта за счет
интерференционных явлений многоточечного источника сигналов цели или за счет
управления параметрами излучаемых помеховых сигналов неизбежно приводит к соот-
ветствующим изменениям положения направления визирования РЛС. Иными словами,
действие когерентной помехи проявляется в отклонении равносигнального направления
подавляемой РЛС в сторону от направления на цель-постановщик помех. Значение
ошибки пеленгования двухточечного источника сигналов, как показали исследования, в
зависимости от амплитудных и фазовых соотношений сигналов может быть определено с
помощью следующего математического выражения:
Рис. 8.14. Зависимость угловых ошибок от амплитуды
и фазовых соотношений принимаемых сигналов
— = -г--------------=г, (8.1)
'Р,, 2| 1 + а2 + 2а cos а I
где Д0 - угловая ошибка, отсчитываемая от середины базы (середины расстояния меж-
ду источниками); - угловая база источников (см. рис. 8.12.); а - отношение ампли-
туд сигналов; о. — фазовый сдвиг сигналов па входе приемной антенны РЛС.
Выражение (8.1) аналогично
выражению, определяющему из-
менение наклона фазового фронта
волны от двухточечного источника
по сравнению с фазовым фронтом,
формируемым точечным источни-
ком сигналов. Значение ошибки
пеленгования, как можно видеть из
(8.1), зависит от расстояния между
излучающими источниками, сдвига
фаз излучаемых ими сигналов и
отношения их амплитуд на входе
пеленгационной системы (рис. 8.14).
Максимальная ошибка дости-
гается при противофазное™ сигна-
лов (а— 180°) и равенстве их амплитуд (а = 1). При положении постановщика помех на
линии визирования РЛС форм] [руется нулевой сигнал и одновременно происходит ис-
кажение фазового фронта в направлении визирования антенны РЛС, приводящее к из-
менению направления сопровождения цели, излучающей когерентную помеху (см. рис.
8.13). По существу действие когерентной помехи приводит к трансформированию од-
нолепестковой ДН приемной антенны в двухлепестковую, и пеленгационные характе-
ристики существенно искажаются. При действии на суммарно-разностную моноим-
пульсную систему когерентная помеха в силу отмеченного обстоятельства приводит к
функциональному перевороту угломерных каналов: суммарный канал функционально
становится разностным, а разностный - суммарным. В результате следящая система
теряет свою работоспособность, как и в случае действия помехи на кроссполярнзации.
При этом нарушается нормировка сигналов, осуществляемая по сигналу суммарного
канала, приводящая к возникновению систематических угловых ошибок, превышаю-
щих ширину ДН приемной антенны РЛС, и. как следствие, к срыву режима автосопро-
вождения цели.
221
При строго радиальном полете защищаемого самолета по отношению к подавляе-
мой РЛС раскрыв ее приемной антенны будет длительное время находи гься в зоне ин-
версии фазы, что приводит к возникновению существенных угловых ошибок сопрово-
ждения. Однако, если ракурс самолета изменится, то области инверсии фазы будут по-
следовательно пересекать раскрыв антенны РЛС и угломерный координатор будет
испытывать кратковременные угловые возмущения, эффект действия которых зави-
сит от инерционности угломерной следящей системы. Поэтому для достижения вы-
сокой эффективности когерентной помехи особенно следует стремиться создать не-
обходимые условия длительного удержания зоны инверсии фазы на раскрыве прием-
ной антенны подавляемого угломера. Это условие принципиально может быть вы-
полнено с помощью перекрестной ретрансляции, когда, несмотря на изменение ра-
курса самолета, зона инверсии фазы будет автоматически всегда находиться в тече-
ние длительного времени на раскрыве приемной антенны РЛС, совмещенной с се из-
лучающей передающей антенной.
Следует отметить, что, поскольку ошибки пеленгования пропорциональны вели-
чине угловой базы, увеличивающейся с уменьшением расстояния до подавляемой РЛС,
максимальная эффективность действия когерентной помехи должна проявляться на
близких дальностях. На больших дальностях, когда угол видения (угловая база) источ-
ников, размещенных в пределах геометрических размеров постановщика помех, мал,
ошибки пеленгования незначительны, поэтому ожидаемая эффективность когерентной
помехи на больших дальностях до постановщика помехи мала.
Поскольку сигнал когерентной помехи в направлении на РЛС близок к нулевому,
при реализации этой помехи требуются значительно большие (на 20...30 дБ) уровни
мощности, чем при создании одноточечных помех (кроме помехи на кроссполяриза-
ции). Поэтому в данном случае также целесообразно сочетать когерентную помеху с
уводящими помехами по дальности и скорости, как и при реализации помехи на кросс-
поляризации.
Следует отметить, что когерентная помеха рассматривается как одна из эффскив-
ных и перспективных помех РЛС и ГСН моноимпульсного шла. Однако данные но се
реализации остаются весьма ограниченными. Можно предположить, что изготовление
опытных образцов аппаратуры создания когерентной помехи началось в 1981 г. Это
предположение отчасти подтверждается сообщением о летных испытаниях передатчи-
ка когерентной помехи [52]. На приведенном в [52] снимке самолета можно видеть ан-
тенны, установленные на концах крыльев, что является характерным для реализации
когерентной помехи. Другим вариантом, как указывается в [50], может быть система с
совмещенными или близко расположенными передающими антеннами, ортогонально
поляризованными. В этом варианте системы предусматривается комбинирование коге-
рентной помехи с поляризационной. Такое предположение можно сделать и на основа-
нии варианта системы с разнесенными в пространстве передающими антеннами с орто-
гональными поляризациями, о котором указывается в [53]. Уделяется большое внима-
ние отработке широкополосных аттенюаторов, переключателей и фазовращателей с
высоким быстродействием.
О реализации когерентной помехи можно также судить из материалов, посвящен-
ных требованиям к системам РЭБ [54]. В них говорится о прогрессе в части помехоза-
щищенности РЛС и о необходимости в связи с этим улучшения методов искажения фа-
зового фронта радиоволн, что присуще когерентной помехе. Поскольку необходимым
222
условием действия когерентной помехи является обеспечение на входе приемной ан-
тенны РЛС (РГС) противофазности и равенства амплитуд сигналов с достаточной точ-
ностью, создание эффективной когерентной помехи РЛС с раздельными передающей и
приемной антеннами и каналами ретрансляции требует решения ряда технических за-
дач по обеспечению идентичности амплитудно-частотных и амплитудно-фазовых
характеристик каналов ретрансляции в требуемом динамическом диапазоне входных
сигналов. Когерентная помеха может использоваться не только для защиты ЛА, но и
для защиты надводных кораблей от ПКР, а гак же РЛС от ПРР.
Техника создания когерентных помех. Как отмечалось выше, при создании эф-
фективной когерентной помехи необходимо обеспечить на входе приемной антенны
подавляемого радиолокатора сигналы, излучаемые из двух разнесенных в пространстве
точек, с амплитудными соотношениями, близкими к равенству, и фазовым сдвигом,
близким к 180°. В этом случае область инверсии фазы сигнала помехи должна весьма
точно совпадать с апертурой приемной антенны подавляемого средства. Это весьма
высокие требования, поэтому техническая реализация такой помехи требует неорди-
нарных решений. Среди них можно выделить передатчики когерентной помехи на ос-
нове интерферометра и перекрестной ретрансляции. В первом случае интерферометр
определяет направление на источник излучения и путем соответствующего изменения
относительной разности фаз между излучаемыми разнесенными антеннами сигналов
ориентирует область инверсии фазы на это направление. На рис. 8.15 приведена упро-
щенная структурная схема передатчика помех на основе интерферометра [55]. В нем
принятые двумя пространственно разнесенными приемопередающими антеннами сиг-
налы РЛС сравниваются квадратурными фазовыми детекторами, а полученная инфор-
мация используется процессором для обеспечения и поддержания требуемых соотно-
шений между помеховыми сиг-
налами по фазе и амплитуде. В
режиме приема сигнал от од-
ной из антенн разделяется по
мощности на две части. Одна
часть мощности этого сигнала
поступает к смесителю для по-
нижения частоты, а через квад-
ратурный мост к фазовым де-
текторам. Другая часть подаст-
ся на вход двухканального уст-
ройства, состоящего из квадра-
турного моста, двух смесите-
лей-перемножителей и сумма-
тора. Сигнал, принятый другой
антенной, суммируется в 180-
градусном гибридном мосте с
выходным сигналом двухка-
нального устройства, понижа-
ется по частоте и используется
в качестве опорного сигнала Рис. 8.15. Структурная схема передатчика когерентных
для квадратурных фазовых де- помех на основе интерферометра
223
текторов. Аналоговые сигналы с выходов квадратурных фазовых детекторов подаются
на смесители-перемножители двухканального устройства для формирования в процес-
се настройки сигнала, который в 180-градусном гибридном мосте используется для
компенсации сигнала принятого другой антенной. При достижении компенсации вы-
ходные напряжения фазовых детекторов совместно представляют разность фаз межу
сигналами, принимаемыми пространственно разнесенными антеннами. При этом про-
цессор по оцифрованной информации фазовых детекторов включает передатчик, про-
изводит по управляющей программе установку фазовращателя и аттенюатора основно-
го тракта формирования двух противофазных сигналов. В результате область инверсии
фазы сигнала помехи совпадает с направлением на РЛС. Однако в том случае, когда
подавляемый радиолокатор имеет объединенную приемо-передающую антенну, наибо-
лее перспективной схемой построения передатчика когерентных помех является схема
перекрестной ретрансляции. В этом случае, независимо от положения постановщика
помех относительно РЛС, обеспечивается равенство путей прохождения сигналов от пе-
редающей антенны через ретранслятор к приемной антенне РЛС и, следовательно, равен-
ство фазовых сдвигов обоих сигналов, обусловленных протяженностью проходимого ими
пространства. Поэтому, в принципе, фазовый сдвиг сигналов помехи на входе приемной
антенны РЛС будет определяться дополнительным сдвигом фазы за счет включения в один
из ретранспящтонных каналов, фазовращателя на 180°. Однако это не всегда выполняется,
поскольку требуется идентичность амплитудно-фазовых характеристик высокочастотных
усилителей в широкой полосе рабочих частот.
Идентичность амплитудно-частотных характеристик усилителей на ЛБВ в рабо-
чем диапазоне частот возможно улучшить с помощью амплитудных корректоров, вы-
полненных на основе решетки перестраиваемых резонаторов для поглощения прохо-
дящей энергии в определенных участках диапазона частот с целью выравнивания зави-
симости коэффициента усиления ЛБВ от частоты. С помощью мостовых схем и ампли-
тудных корректоров можно создать фазовые выравниватели. Наибольшая трудность в
выравнивании частотных и фазовых характеристик усилителей на ЛБВ возникает из-за
присущей им микроструктурной неравномерности и вносимой ими временной задерж-
ки, эквивалентной тысячам электрических градусов, так как требуется применение ам-
плитудных и фазовых выравнивателей с мелким шагом, что весьма усложняет их кон-
струкцию. Лампы бегущей волны являются нелинейным элементом, поэтому проблема
идентичности их характеристик еще более усугубляется из-за различий частотно-
фазовых характеристик в линейном и нелинейном режимах усиления. Кроме того в
ЛБВ, работающей в нелинейном режиме усиления, набег фазы зависит от амплитуды
усиливаемого сигнала, поэтому на входе ЛБВ желательно устанавливать амплитудный
ограничитель. В более выгодную сторону от ЛБВ будут отличаться твердотельные
усилители, имеющие к тому же существенно меньшую неравномерность амплитудно-
частотных характеристик и зависимость фазы от амплигуды усиливаемого сигнала.
Однако они располагают в диапазоне СВЧ гораздо меньшей выходной мощностью, чем
ЛБВ (до 1 Вт). Поэтому при необходимости иметь большую выходную мощность сле-
дует применять ФАР или усилители на мостовых схемах, фазированные антенные ре-
шетки могут работать в передатчиках помех на прием и передачу в режиме временного
разделения.
Данную проблему можно решать по-другому. Одно из решений основывается на
автоматическом выравнивании электрических длин высокочастотных усилителей с ис-
224
пользованием пилот-сигнала (рис. 8.16). В пе-
редатчике используется гетеродин, настроен-
ный на частоту, расположенную на краю ра-
бочего диапазона частот. Сигналы гетеродина
подаются на вход обоих ВЧ-усилитслсй. По-
сле усиления с выхода усилителей данные
сигналы через полосовые фильтры поступают
на фазовый детектор, где сравниваются по
фазе. В случае, когда электрические длины
усилителей различаются, на выходе фазового
детектора формируется сигнал ошибки, про-
порциональный разности фаз сравниваемых
сигналов. Этот сигнал ошибки используется
для регулировки скорости распространения
электронного луча в одной из ЛБВ и вырав-
нивания электрических длин ВЧ-усилителей.
Для того, чтобы сигнал гетеродина не излу-
чался в пространство, в антенные тракты
включают соответствующие фильтры [ 1 ].
Как в случае двухканального передатчи-
ка когерентной помехи с разнесенными при-
емными и передающими антеннами, так и в
Рис. 8.16. С 1руктурная схема передатчика
когерентной помехи с автоматическим
выравниванием электрических длин
ВЧ-усилитслей
случае совмещенных приемопередающих антенн другой важной проблемой является
необходимость обеспечения развязки, которая ограничивает реализуемый коэффици-
ент усиления. В первом случае развязка должна обеспечиваться путем пространствен-
ного размещения приемных и передающих антенн на ЛА и использования соответст-
вующих экранов. Болес трудна эта проблема в^ втором случае, когда развязка опреде-
ляется в основном циркуляторами или СВЧ-мостовыми схемами, позволяющими объе-
динить двухканальный усилитель для режима перекрестной ретрансляции. Практиче-
ски развязка в этих условиях, учитывая широкий диапазон рабочих частот передатчика
помех, составит 25...30 дБ. Это позволит реализовать коэффициент усиления в каждом
канале около 20 дБ, что при коэффициенте усиления антенн 10...20 дБ позволит обес-
печить полный коэффициент усиления ретранслятора с перекрестным усилением
40...60 дБ. Дальнейшее увеличение развязки можно решить путем введения стробиро-
вания по времени. Для этого в каждый канал ретрансляции включают быстродейст-
вующие переключатели и линии задержки. Стробирование может осуществляться мно-
гократно в течение длительности импульса подавляемой РЛС. При этом скорости пере-
ключения должны быть, по крайней мере, в 2 раза выше скорости переключения поло-
сы пропускания приемника подавляемой РЛС, они могут быть существенно снижены
при подавлении непрерывных и импульсно-доплеровских РЛС. Вследствие высокой
скорости стробирования приемник подавляемого радиолокатора будет усреднять при-
нимаемые импульсные последовательности, и действие когерентной помехи по-
прежнему будет иметь место. При временном стробировании из-за расширения спектра
излучаемого сигнала происходят потери эффективной мощности помехи, и для их ком-
пенсации импульсную мощность передатчика помех следует увеличить в значение ко-
эффициента заполнения си гнала помехи в квадрате раз. При создании когерентной по-
8—1777
225
моусилитсльных каналов системы в единый ка
d
а)
мехи ретрансляционные каналы должны соответствовать друг другу по фазе в пределах
около 10°. Возможность согласования ретрансляционных каналов с указанной точно-
стью в широкой полосе частот и в большом динамическом диапазоне является одним
их главных технических препятствий применения двухканальных передатчиков коге-
рентной помехи. Поэтому более прогрессивным решением является объединение прие-
[, как показано на рис. 8.17 [1, 56].
С целью объединения осущест-
вляется стробирование каналов по
времени, для чего в каждый канал
вводится стробирующее устройство
по входу и коммутирующее устрой-
ство по выходу. Применение в каждом
из каналов задержки на половину
периода стробирования обеспечивает
одновременность приема и одновре-
менность последующего излучения
сигналов помехи, в результате чего в
пространстве будут формироваться
необходимые нулевые уровни сигнала
с соответствующим искажением фазо-
вого фронта помехового сигнала и
обеспечиваться эффект действия коге-
рентной помехи. Работа системы по-
ясняется эпюрами мощности на ее
входе и выходе (рис. 8.17,6). Посколь-
ку в этом случае аппаратура помех
использует один усилитель, быстро
переключаемый между ретрансляци-
онными трактами, проблема слежения
за фазовыми сдвигами в усилителе ис-
ключается, требуется только слежение
за фазой в широкополосных элемен-
тах. Необходимо отметить, что рас-
смаэриваемая система когерентной
помехи со стробированием по времени также имеет потери эффективной мощности, обу-
словленные расширением спектра излучаемого сигнала. Однако эти потери можно ком-
пенсировать увеличением усиления в ВЧ-усилителе без опасения паразитных связей, по-
скольку развязка антенн осуществляется их пространственным разнесением на полную
базу системы когерентной помехи, обычно равную размаху крыльев самолета. Используя
эффект интегрирования в радиолокационном приемнике РЛС КНИ и НИ стробированно-
го помехового сигнала, ЛЗ в системе может быть исключена.
В этом случае каналы перекрестной ретрансляции излучают поочередно, создавая
в пространстве и в широкополосной части приемного тракта подавляемой РЛС после-
довательность радиоимпульсов, манипулированных по фазе с относительным скачком
фазы 0, 180°. В узкополосной части приемного тракта, полоса пропускания которой
много уже спектра строб-импульса, эта последовательность радиоимпульсов интегри-
руется, создавая эффект действия когерентной помехи. Так как каналы перекрестной
ki 1
iffinon______t
......пппппп ,
'^h п п п п п п ,
Unnnnnn ,
б)
Рис. 8.17. Структурная схема передатчика
когернтной помехи со стробированием
по времени (а) и эпюры сигналов,
поясняющие его работу (б)
226
ретрансляции работают поочередно со скачком фазы 0, 180°, то это может быть при-
знаком когерентной помехи со стробированием и использовано для помехозащиты.
Когерентная помеха может быть создана и для РЛС с раздельными антеннами для
приема и передачи. Но в этом случае потребуется оптимизация параметров помехи
(амплитуды и фазы), например, по реакции РЛС на воздействие. Изменяя плавно ам-
плитуды и фазы излучаемых сигналов в определенных пределах и с определенной ско-
ростью можно получить оптимальный вариант их значений, при которых угломерная
следящая система испытывает воздействие помехи. В результате этого антенная систе-
ма будет отклоняться от направления на цель или дрожать относительно этого направ-
ления. В обоих случаях это скажется на уровне принимаемого от РЛС сигнала на борту
постановщика помех, что можно зарегистрировать и использовать для последующей
более тонкой подстройки помехи по амплитуде и фазе вплоть до получения срыва ре-
жима сопровождения. Методы адаптивного РЭП позволяют при наличии на защищае-
мом ЛА датчика о координатах приближающейся ракеты с ГСН также оптимизировать
воздействие помехи и в случае полуактивного ЗРК путем соответствующего регулиро-
вания соотношения амплитуд и фаз излучаемых сигналов. По результатам измерения
пеленга на атакующую ракету в передатчике когерентной помехи устанавливаются не-
обходимые значения фаз и амплитуд излучаемых помеховых сигналов. Точность пе-
ленгации ракеты с полуактивной ГСН (otl), необходимая для выполнения условий ба-
ланса фаз когерентной помехи с ошибкой , должна соответствовать условию
2лт//Л ’
где cZ/X - нормированная база размещения излучателей на защищаемом объекте.
Если принять dl\ ~ 100...500 и оф =<0,3 рад, то получим ип = (1...5Г 10'4рад, что
трудно реализуемо на практике.
В случае полуактивного ЗРК для подсвета цели может использоваться либо РЛС
сопровождения цели, либо специальный передатчик, ориентация антенны которого
управляется РЛС сопровождения цели. Поэтому при использовании переда гчика помех
на основе перекрестной ретрансляции зона инверсии фазы будет находиться и стабили-
зироваться на РЛС сопровождения или на антенне передатчика подсвета цели. В зави-
симости от траектории наведения атакующей ракеты полуактивная ГСН будет после-
довательно пересекать зоны инверсии фазы и эффект воздействия будет зависеть от
длительности нахождения ее в зоне инверсии фазы. Устройства для создания когерент-
ной помехи могут быть и пассивными. Простейшая пассивная система - совокупность
двух рефлекторов, параллельно установленных на концах крыльев самолета. Такие
рефлекторы псреотражают сигналы РЛС, и эти сигналы превышают по уровню сигна-
лы, отраженные от самолета в направлении облучающей его РЛС, и при определенных
условиях создают эффект действия когерентной помехи [57].
Когерентная помеха является энергоемким видом помех системам автоматиче-
ского сопровождения по направлению. Коэффициент подавления для силового соз-
дания когерентной помехи составляет 2О...25дБ. Для снижения энергетических тре-
бований при ее реализации можно применять комбинированные методы, когда дей-
ствию когерентной помехи предшествует создание уводящей помехи по дальности
и/или скорости. В этом случае передатчик когерентной помехи сначала создает уво-
227
дящую помеху по дальности, а затем - когерентную помеху на сигнале с ложной
дальностью (рис. 8.18).
передающие
антенны
Рис. 8Л 8. Структурная схема аппаратуры создания когерентной помехи,
комбинированной с уводящей помехой по дальности
В результате действия уводящей помехи по дальности строб селекции РЛС рассогласо-
вывается с отраженным от цели сигналом и перенацеливается на задержанный сигнал
по дальности, на котором формируется сигнал когерентной помехи. В этом случае сиг-
нал когерентной помехи не конкурирует с отраженным сигналом и коэффициент по-
давления составит всего лишь 6 дБ, что достаточно для увода строба дальности. В каж-
дом канале передатчика помех установлена система цифрового запоминания сигналов.
Идентичность фазовых характеристик каналов поддерживается с помощью устройства
калибровки. В режиме калибровки выбирается соответствующий опорный сигнал из
блока опорных генераторов и с помощью коммутаторов калибровочный сигнал поступает
на вход систем ЦЗС, установленных в обоих каналах. Разность фаз запомненных сигналов
с выходов систем ЦЗС с помощью направленных ответвителей поступает на фазовый де-
тектор, где выделяется управляющий сигнал, который после фильтрации автоматически
корректирует разность фаз сигналов каналов. Фазовращатель, установленный в другом ка-
нале, используется для введения фазового сдвига, необходимого для эффективного прояв-
ления когерентного эффекта. Перед поступлением запомненных сигналов на ЛБВ и после
введения необходимых фазовых сдвигов фазовращателями предусмотрено создание уво-
дящей помехи. После цикла увода по дальности сигналы каналов усиливаются ЛБВ и излу-
чаются в направлении подавляемой РЛС [58].
Некоторые возможности защиты РЛС от когерентных помех. Анализ спосо-
бов радиоэлектронного подавления и помехозащиты радиоэлектронных средств пока-
зывает, что любой помехе присущи ограничения, которые могут быть использованы
для снижения ее эффективности. Когерентная помеха не является исключением. Воз-
можности защиты радиолокационных средств от воздействия когерентной помехи, в
основном, связаны с несовершенсгвом се аппаратурной реализации. Даже при идеаль-
ной реализации способа перекрестной ретрансляции, эффективного воздействия на
РЛС можно ожидать только в случае совмещения приемной и передающей антенн. Это
связано с тем, что зона инверсии фазы ориентируется в направлении на источник излу-
чения. Поэтому бистатические РЛС и полуактивные ГСН в этом случае не будут под-
вержены эффективному воздействию когерентной помехи из-за того, что зона инвер-
228
сии фазы не стабилизирована в течение длительното времени на апертуре приемной
антенны, а будет лишь кратковременно пересекать ее, и эффект будет сильно зависеть
от инерционности (полосы пропускания) следящей системы по направлению и динами-
ки сближения.
Способ перекрестной ретрансляции труден в реализации из-за необходимости
поддержания идентичности по амплитуде и фазе взаимообратных каналов переизлуче-
ния с высокой точностью. Возможный способ решения этой проблемы состоит в при-
менении инвертируемого усилительного тракта. Однако, если в системе перекрестной
ретрансляции отсутствует линия задержки, то излучаемый сигнал помехи в простран-
стве и в широкополосном тракте приемника представляет состыкованную фазоманипу-
лированную последовательность когерентных радиоимпульсов со скачком фазы, близ-
ким к 180°. Частота повторения радиоимпульсов равна частоте инвертирования общего
усилителя. Структура этого сигнала помехи сохраняется в и мрокополосном тракте по-
давляемого приемника, а эффект когерентной помехи, как отмечалось ранее, проявится
после прохождения этим сигналом узкополосного фильтра накопления системы сопро-
вождения по направлению. Если до этого фильтра каким либо способом можно устра-
нить фазовую манипуляцию, то помеховый эффект будет существенно снижен. Одним
из известных способов устранения фазовой манипуляции со скачком 180° является уд-
воение частоты. Это преобразование можно произвести в широколосном тракте прием-
ника до фильтра накопления. Кроме того, если можно выдели гь из сигнала помехи час-
тоту коммутации каналов перекрестной ретрансляции, то путем синхронного строби-
рования или противофазной модуляции можно размодулировать и изменить его струк-
туру в сторону уменьшения скачков фазы на интервале накопления. Частота инверти-
рования общего усилителя ретранслятора обычно согласовывается с полосой пропус-
кания фильтра накопления приемника. В этом случае частота коммутации каналов бу-
дет наименьшей для простых непрерывных радиолокационных сигналов, а в случае
импульсных или широкополосных chi налов существенно возрастет. Поэтому, приме-
нение короткоимпульсных или широкополосных сигналов затрудняет реализацию пе-
рекрестной ретрансляции из-за необходимости значительного увеличения частоты ин-
вертирования, это потребует применения в них быстродействующих, мощных СВЧ-
переключателей. Отмеченные выше недостатки перекрестной ретрансляции для созда-
ния когерентной помехи были связаны с тем, что разнесенные антенны передатчика
помех излучали поочередно. Устранение этого недостатка возможно, оно связано с
введением в каналы ретрансляции линий задержки. С помощью стробирования можно
осуществить раздельный во времени режим «Прием» и «Передача» одновременно
обеими антеннами передатчика помех. При этом обеспечивается развязка. В результате
в пространстве одновременно существуют два когерентных противофазных сигнала
помехи, разделить их в подавляемом приемнике нельзя. Однако этот сигнал манипули-
рован по, амплитуде с частотой, обратно-пропорциональной длительности введенной
задержки. В приемнике можно выделить сигнал с частотой стробирования и использо-
вать его для исключения приема сигнала когерентной помехи. В результате в систему
обработки приемника поступает только стробированный сигнал, отраженный от сопро-
вождаемой цели. Во всех случаях следует стремиться к повышению помехозащищен-
ности систем автосопровождения РЛС по дальности и скорости от воздействия уводя-
щих помех, что может исключить применение менее энергоемких комбинированных
способов создания когерентных помех.
229
8.5. Мерцающие помехи, создаваемые из двух и более точек
пространства
Принцип создания мерцающих помех и эффект их действия. Мерцающие по-
мехи относятся к групповому средству защиты. Принцип создания их заключается в
том, что передатчики помех, установленные на защищаемых объектах, включаются и
выключаются по программе. Простейший вариант программы - поочередное включе-
ние и выключение данных передатчиков. В этих условиях радиолокатор наблюдает це-
ли в той последовательности, в какой производится включение и выключение передат-
чиков помех. При этом передатчики помех могут включаться по случайному закону,
чтобы не дать РЛС возможности сопровождать отдельную цель в течение времени,
достаточного для точного определения ее местоположения [1, 46, 47, 58].
Эффект действия мерцающих помех. Действие такой помехи основывается на ог-
раниченной разрешающей способности угломерного координатора. Как показано в [46],
при наличии двух постановщиков помех, нс разрешаемых по направлению, радиолокатор
отслеживает положение энергетического центра, определяемого выражением:
Д0_ Р-Лб-РА') (82.
где Ч7,, - угол между постановщиками помех; Д0 - угол между направлениями на энер-
гетический центр и середину угла Ч7,; (/); Рп2 (О - мощность помехи, излучаемой
первым и вторым постановщиками помех соответственно; Рс(/) — мощность сигнала,
отраженного от каждого из постановщиков помех.
Из данного выражения следует, что положение энергетического центра излучения
определяется в основном соотношением мощностей источников помех и характером
изменения мощности помехи во времени. При очередном включении и выключении
передатчиков помех РЛС, следящая за постановщиками помех, будет стремиться от-
слеживать преимущественно то одну, то другую цель, вследствие чего антенна РЛС
будет раскачиваться по углам в такт с коммутацией помехи. Это существенно затруд-
нит определение угловых координат целей и их разрешение по направлению.
При создании мерцающих помех ракета с радиолокационным наведением в на-
чальный момент движется в направлении энергетического центра совокупности помех
и не различает по направлению самолеты-постановщики помех. По мере ее движения
расстояние между ракетой и целями уменьшается, а угол между направлениями на по-
становщики помех увеличивается, в результате чего наступает момент, когда ГСН ра-
кеты начинает разрешать по направлению отдельные источники помехи. С этого мо-
мента ракета будет наводиться на одну из разрешаемых целей. Поскольку дальность до
цели с момента ее разрешения по направлению сравнительно невелика, а допустимые
перегрузки ракеты ограничены, то ракета не успевает точно выйти на цель и проходит
ее со значительным промахом, не причиняя ей вреда.
Величина промаха может быть рассчитана на основе выражения, связывающего
критический угол разрешения и промах ракеты [47]:
a/_Z6 1 nglj
1 2^H.eJp
(8.3)
где А/ - промах (в линейных единицах); /б - проекция линейной базы (расстояния
между целями) на плоскость, перпендикулярную линии визирования; ng - предельно
230
допустимая перегрузка ракеты; Котн - относительная скорость сближения ракеты с це-
лью; бкр - критический угол разрешения целей.
Для того, чтобы система пеленгации отслеживала перемещающийся в простран-
стве энергетический центр излучения, частота коммутации передатчика должна соот-
ветствовать условию:
F .
F* < , Fc c- полоса пропускания следящей системы.
При более высоких частотах коммутации следящее устройство будет усреднять
угловые ошибки и отслеживать направление на энергетический центр источников по-
мех. Очевидно, выбор слишком низкой частоты коммутации также недопустим, по-
скольку в этом случае атакующая ракета будет успевать наводи гься на один из поста-
новщиков помех при излучении им помехи. Оптимальная частота мерцания обычно
выбирается в пределах 0,5... 10 Гц. При принятой линеаризации пеленгационной харак-
теристики требуемое превышение мощности помехи над сигналом, необходимое для
перенацеливания РЛС в секторе 0,8 равно 9 дБ. Если размер угловой базы целей
превышает пределы линейного участка пеленгационной характеристики, то расчеты
следует производить с учетом реальных ДН. Учитывая тенденции рассредоточения са-
молетов в пространстве при групповых полетах, наиболее реальным будет вариант воз-
действия помех через область боковых лепестков ДН антенны подавляемой РЛС в ус-
ловиях разрешения целей по дальности, скорости и направлению. Поэтому дальнейшее
совершенствование метода создания мерцающих помех, предположительно, должно
идти по пути управления индивидуальными бортовыми средствами помех с помощью
каналов связи в том числе и с помощью системы JT1DS и увеличения мощности пере-
датчиков мерцающих помех до уровней, гарантирующих воздействие помехи через бо-
ковые лепестки ДН подавляемых РЛС с низким уровнем. При этом режим синхронной
мерцающей помехи является одним из самых эффективных.
Варианты реализации мерцающих помех. При создании синхронных мерцаю-
щих помех возможны следующие варианты [1].
1. Два самолета, находящиеся на одинаковом расстоянии от РЛС, используют для
передачи информации межсамолетную линию связи, работающую вне частотного диапа-
зона РЛС. Один самолет является ведущим, он управляет частотой коммутации и через
линию связи включает передатчик помех другого, ведомого самолета. Однако потеря од-
ного из самолетов в этом случае делает защиту неэффективной, если отсутствует запас-
ной самолет, способный заменить выведенный из строя. Кроме того, такая линия межса-
молетной связи дорога и не всегда можно обеспечить ее помехозащищенность.
2. Для синхронизации работы передатчиков помех используется обычная борто-
вая навигационная система или наземная станция наведения самолетов. Эти системы
передают требуемые данные для синхронизации и обеспечивают этим последователь-
ное синхронное мерцание помехи. При этом предполагается, что для обеспечения
скрытности работы в навигационной системе приняты соответствующие меры, исклю-
чающие возможность создания ей помех. Достоинство этого метода — отсутствие доро-
гостоящей линии связи.
3. Система вообще нс использует никакой линии связи. Один из самолетов осна-
щается передатчиком помех малой мощности, например, 10 Вт, который постоянно
включен. Другой самолет имеет передатчик прерывистых помех гораздо большей
мощности, например, 500 Вт. Во время паузы мощного передатчика одноцелевая РЛС
231
будет сопровождать 10-ваттный передатчик помех, поскольку этой мощности доста-
точно, чтобы замаскировать обе цели на приемлемых дальностях до РЛС. Когда вклю-
чается мощный передатчик помех, РЛС переходит на сопровождение этого передатчи-
ка, так как его мощность в 50 раз больше, чем мощность непрерывно излучающего пе-
редатчика помех. Но если ведущий самолет будет сбит или его передатчик помех вый-
дет из строя, то дру’ ой самолет становится очень уязвимым для ракет противника, ра-
ботающих в режиме наведения на сигнал помехи.
4. Один самолет (ведущий) находится позади другого самолета. Ведущий самолет
может быть одним из самолетов атакующей группы или обычным самолетом-
постановщиком помех прикрытия, который обычно находится в таком положении. Он
осуществляет управление последовательным включением путем излучения своего пре-
рывистого шумового сигнала в направлении хвостовой антенны другого самолета. В
бортовой аппаратуре РЭП ведомого самолета при этом должна быть обеспечена хоро-
шая развязка между передающей антенной, излучающей вперед, и антенной, прини-
мающей сигналы с задней полусферы. Альтернативное решение состоит в использова-
нии в передающем и приемном трактах фильтров, чтобы приемная антенна принимала
сигнал от ведущего самолета вне частотного диапазона помехи, создаваемой ведомым
самолетом. В этом случае аппаратура помех ведущего самолета должна иметь несколь-
ко более широкую частотную полосу, чем аппара гура помех ведомого самолета.
5. Метод создания синхронных мерцающих помех предполагает использование
стабильных, точных часов, синхронизированных до вылета. В этом случае летное зада-
ние должно содержать инструкции оператору РЭП относительно времени начала
включения помехи. Следует отметить, что эффективность мерцающих помех зависит
от расстояния между самолетами, их скорости, разрешающей способности ГСН ракеты
по угловым координатам, маневренности ракеты (допустимой перегрузки) и других па-
раметров, характеризующих конкретную обстановку.
Поскольку эффект нарушения разрешающей способности по направлению дости-
гается только при условии отсутствия разрешения постановщиков помех по дальности
и скорости, наиболее простым путем создания мерцающих помех, очевидно, является
использование передатчиков прицельно-заградительных шумовых помех, несинхронно
коммутируемых с низкой частотой. При этом режим несинхронной коммутации не-
сколько снизит эффективность защиты по сравнению с синхронно коммутируемыми
помехами, однако обеспечит ряд существенных преимуществ при его реализации,
включая снижение стоимости и сохранение автономности действий самолетов защи-
щаемой группы.
Создание мерцающих помех с помощью передатчиков помех, перестраивае-
мых по частоте. Эффект действия мерцающих помех можно создать с помощью раз-
несенных в пространстве передатчиков, непрерывно перестраиваемых по частоте. В
этом случае, как и при мерцающей помехе, РЛС поочередно будет наблюдать различ-
ные цели по мере того, как частота передатчиков помех последовательно попадет в по-
лосу пропускания приемника РЛС. Мешающий эффект угломерному каналу в этом
случае будет несколько напоминать эффект обычной групповой цели с той лишь раз-
ницей, что разрешение по дальности целей будет невозможно, поскольку передатчики
помех работают в непрерывном режиме.
Если скорость качания частоты передатчика установить в соответствии с требова-
ниями воздействия на угломерный канал, то РЛС в момент совпадения частоты помехи
232
Рис. 8.19. Режимы частотной перестройки
передатчиков помех
с частотой настройки ее приемника будет переходить на автосопровождение соответ-
ствующего постановщика помех. При выходе частоты помехи за пределы полосы про-
пускания приемника РЛС будет продолжать сопровождение той же цели, но уже по от-
раженному сигналу. В момент совпадения частоты помехи, излучаемой с другого са-
молета, с частотой приемника дальномерный канал РЛС окажется забитым помехой,
вследствие чего селекция цели по дальности нарушится, и РЛС перейдет на автосопро-
вождсние новой цели по помехе. Поскольку самолет, излучающий в последнем случае
помеху, будет находиться в другом направлении, то антенная система повернется в это
новое направление. Аналогичное перенацеливание произойдет при повторном вхожде-
нии помехи от первой цели или другой новой цели. В результате поочередного воздей-
ствия помех, излучаемых с разнесенных в пространстве постановщиков часто гно-
перестраиваемых помех, антенная система будет переходить с сопровождения одной
цели на сопровождение другой, и, следовательно, будет испытывать раскачку в соот-
ветствии с программой работы передатчиков помех. Допустимые при этом скорости
перестройки частоты помехи довольно низкие, что является ее ограничением, так как
при перестройке в широком частотном диапазоне интервалы между воздействиями по-
мехи будут велики, что существенно снизит ожидаемый эффект “мерцания” сопровож-
даемой цели. При высоких скоростях перестройки, когда время между воздействиями
становится соизмеримым с постоянной времени приемника, ожидаемый эффект в уг-
ломерном канале приближается к эффекту групповой цели, независимо от разности
дальностей от РЛС до отдельных целей группы, поскольку разрешение по дальности в
этом случае нарушается действием помехи.
Преимущество помехи с качанием
частоты состоит в действии ее на многие
РЛС, рабочие частоты которых перекры-
ваются диапазоном перестройки частоты
передатчиков, и сравнительной простоте
аппаратуры помех.
При создании помехи с качанием по
частоте может использоваться различное
число передатчиков шумовых помех.
Центральная частота, полоса и закон пе-
рестройки каждого из них могут регули-
роваться вручную или автоматически с
помощью ЭВМ. Сигналы управления
формируются на основе информации,
поступающей с приемной системы ра-
диотехнической разведки. На рис. 8.19
показаны три варианта возможных ре-
жимов работы такой системы создания
помех с использованием четырех пере-
датчиков:
а) каждый из передатчиков помех
настроен на фиксированную конкретную
частоту, используемую противником.
Этот вариант аналогичен индивидуаль-
233
ной настройке четырех передатчиков помех на конкретные частоты РЛС, однако при
их работе в составе системы настройка передатчиков помех и реагирование на измене-
ния входных сигналов могут происходить быстрее, чем при их индивидуальной раз-
дельной настройке;
б) режим частотной перестройки каждого передатчика помех, обеспечивающий
перекрытие полной полосы частот/i -/?, путем перестройки каждого передатчика по-
мех в заданной части полосы. Частота перестройки передатчиков помех при желании
может быть выбрана соответствующей частоте сканирования пространства антенного
луча подавляемой РЛС, в результате чего помеха будет синхронизирована с разверткой
на ИКО РЛС. При подавлении нескольких РЛС скорость перестройки частоты передат-
чиков помех может оперативно изменяться;
в) каждый передатчик шумовых помех перестраивается по частоте по пилообраз-
ному закону во всей полосе частот. Ширина шумовой полосы каждого передатчика по-
мех выбрана так, чтобы они, гранича своими спектрами друг с другом по уровню 3 дБ,
создавали сплошное перекрытие по частоте (на рис. 8.19 в целях упрощения это не по-
казано). Этот метод может обеспечивать повышение мощности на 6 дБ, по сравнению с
работой одного передатчика помех в режиме заградительной помехи с перестройкой
полосы частот.
Следует отметить, что мерцающая помеха независ] тмо от способа се реализации,
как и когерентная помеха, излучаемая из двух разнесенных в пространстве точек, явля-
ется универсальной в том смысле, что при определенных условиях может действовать
на системы пеленгации различных типов. Объясняется это тем, что действие ее в ко-
нечном счете также связано с изменением наклона фазового фронта радиоволны, при-
нимаемой антенной РЛС.
Мерцающая помеха относится к достаточно исследованным в плане реализации
видов помех. Действие ее проверялось в различных режимах как методом моделирова-
ния, так и с помощью летных испытаний, в ходе которых для синхронизации использо-
валась линия связи TACAN. В перспективе предполагается при реализации мерцающих
помех использовать более совершенную систему JTIDS, рассчитанную на распределе-
ние тактической информации, в том числе в интересг^х системы РЭП AN/ALQ-I65 [31].
Работы нацелены на проработку коллективных методов защиты и включают модерни-
зацию конкретной системы AN/ALQ-119 (с линией TACAN) и летные испытания дей-
ствия мерцающей помехи на систему ЗРК “Улучшенный Хок”. В ходе этих испытаний
применялись многие передатчики помех. Поэтому можно предположить, что режим
мерцающей помехи предусмотрен во многих зарубежных системах РЭП, в частности, в
таких системах, как AN/ALQ-119, AN/ALQ-137, AN/ALQ-161, AN/ALQ-165, AN/ALQ-
172 и др. В западногерманской системе РЭП ES-400G, эффективная мощность излуче-
ния которой составляет около 60 кВт, наряду с другими режимами предусмотрен ре-
жим создания шумовой помехи со свипированием частоты, что при групповых полетах
носителей такой системы в принципе позволяет также создавать мерцающие помехи.
Возможные методы защиты от действия мерцающих помех. В соответствии с
изложенным мерцающая помеха рассматривается как эффективный вид помехи систе-
мам наведения управляемых ракет, и разработчики радиолокационных систем пред-
принимают меры по защите от ее действия. Приведенное выражение (8.3) показывает,
что промах тем больше, чем больше критический угол разрешения. Отсюда следует,
что увеличение разрешающей способности РЛС по углу будет снижать эффективность
234
действия мерцающей помехи. Поэтому методы увеличения разрешающей способности
моноимпульсных РЛС, описанные в [46], относятся и к методам повышения помехоза-
щищенности по отношению к мерцающим помехам. При коммутации передатчиков
помех по прямоугольному закону можно блокировать направления, с которых внезапно
появляются мощные сигналы, и препятствовать переходу следящей системы на сопро-
вождение нового мощного источника сигналов (помехи). Тем самым основная цель,
которую преследуют мерцающие помехи, заключающаяся в срыве или ухудшении раз-
решения целей, нс будет достит нута. В этом случае создаются условия сопровождения
только одного выбранного источника мерцающих помех. Для нейтрализации этого ме-
тода помехозашиты обычно используется плавное изменение мощности помехи.
Средством увеличения помехозащищенности моноимпульсных РЛС от мерцаю-
щих помех и помех с качанием частоты является также уменьшение боковых лепестков
ДНА, поскольку это приводит к увеличению требуемой мощности помехи.
Для защиты угломерной следящей системы от действия помех с перестройкой
частоты, создаваемых с разнесенных в пространстве точек, может применяться адап-
тивная ступенчатая перестройка частоты РЛС, В этом случае можно предусмотреть два
сторожевых фильтра, настроенных на частоты ниже и выше частот действующей поло-
сы пропускания приемника, и смену рабочей частоты производить в момент вхождения
помехи в один из сторожевых фильтров.
Известно, что перспективным методом защиты от различных типов помех являет-
ся управление формой ДН приемной антенны и формирование провалов в направлении
источников активных помех. Пространственная селекция постановщиков помех полу-
чила широкое распространение благодаря внедрению в радиолокационную технику
ФАР, позволяющих управлять процессом формирования ДНА и менять их структуру.
Этот метод может быть применен и для защиты РЛС от мерцающих помех.
8.6. Прерывистые помехи
Прерывистые помехи предназначены для воздействия на РЛС сопровождения и
рассчитаны на нарушение работы системы АРУ. Как известно, система АРУ широко
используется в РЛС сопровождения для обеспечения работы радиолокационного при-
емника в пределах динамического диапазона, а также для нормирования входных сиг-
налов, поступающих к радиолокационным системам сопровождения по угловым коор-
динатам, дальности и скорости. Поэтому нарушение работы системы АРУ вызывает
ухудшение функционирования РЛС сопровождения и особенно ее угломерной систе-
мы. Это может быть достигнуто путем создания мощных прерывистых помех с перио-
дом коммутации сигнала помехи меньше постоянной времени системы АРУ и малом
коэффициенте заполнения сигнала помехи [1]. Действие прерывистой помехи состоит в
том. что информация об угловом положении сопровождаемой цели поступает в систе-
му АСН не непрерывно, как это происходит при отсутствии помехи, а дискретно, с пе-
рерывами, длительность которых зависит от парамегров системы АРУ подавляемого
радиолокатора и характеристик помехи. Перерывы в информации приводят к умень-
шению коэффициента передачи системы автосопровождения по направлению и, как
следствие, к росту динамических ошибок сопровождения цели.
Прерывистая помеха действует на РЛС сопровождения различных типов, в том
числе и на моноимпульсные системы сопровождения. Как известно, нормированию
сигналов в моноимпульсных системах суммарно-разностного типа отводится важная
235
роль и это нормирование осуществляется с помощью системы АРУ суммарного канала.
Нарушение работ ы системы АРУ с помощью прерывистой мощной помехи неизбежно
приводит к нарушению нормальной работы РЛС, появлению существенных угловых
ошибок. Нарушение работоспособности РЛС в этом случае происходит также и за счет
периодического насыщения приемника ложной прерывистой помехой, поскольку в ам-
плитудных моноимпульсных РЛС информация о направлении на цель содержится в
амплитудных соотношениях принимаемых сигналов и насыщение приемника будет
приводить к искажению (или полному снятию) угловой информации принимаемых
сигналов. Нарушение работоспособности моноимпульсной угломерной системы может
быть достигнуто также с помощью мошной импульсной помехи, частота повторения
импульсов которой значительно ниже частоты следования импульсов РЛС [1]. По-
скольку система АРУ обычно проектируется на основе заданного количества прини-
маемых импульсов, то снижение количества поступающих импульсов может серьезно
повлиять на выполнение системой АРУ своих функций и, как результат, на работу уг-
ломерной следящей системы РЛС. Реализация рассмотренных выше методов чрезвы-
чайно проста и не требует информации о типе угрожаемого радиолокатора сопровож-
дения. Если при этом не прибегать к очень большим превышениям мощности помехи
над сигналом, прерывистую помеху следует сочетать с уводящими помехами по даль-
ности и скорости. Известно, что помеха, нацеленная на подавление системы АРУ при-
емника РЛС сопровождения, предусмотрена в западногерманской системе РЭП
ES-400G. Это позволяет сделать вывод, что прерывистая помеха является вполне ре-
альной и с ней можно встретиться при выполнении боевых операций. Очевидно, сни-
жение эффективности прерывистой помехи может быть достигнуто путем расширения
динамического диапазона приемника РЛС и применения мгновенной АРУ.
8.7. Помеха на частоте коммутации приемных каналов
В целях снижения неидентичности амплитудно-фазовых характеристик моноим-
пульсных приемников иногда прибегают к коммутации приемных каналов с половин-
ной частотой следования импульсов, в результате чего подключение усилителей про-
межуточной частоты производится поочередно то к одной, то к другой антенне. При
этом за счет неидентичности амплитудно-фазовых характеристик приемных каналов
угловая ошибка принимает то положительное, то отрицательное значение, и в усред-
ненном сигнале ошибки дополнительная ошибка за счет неидентичности каналов будет
значительно уменьшена. Коммутация приемных каналов может осуществляться также
с произвольной частотой, не связанной с частотой следования импульсов. Однако при
определенных условиях введение коммутации сделает такие системы уязвимыми со
стороны амплитудно-модулированпых помех, излучаемых из одной точки пространст-
ва. Анализ показывает, что при действии помехи, модулированной по амплитуде с час-
тотой коммутации каналов, возникают систематические ошибки пеленгации. Ошибки
пеленгации, возникающие при действии помехи с синхронной амплитудной модуляци-
ей на частоте коммутации, близки по значению к ошибкам в аналогичной системе пе-
ленгования без коммутации, возникающим за счет неидентичности амплитудно-
фазовых характеристик приемных каналов [1].
Возможность создания синхронной помехи на частоте коммутации маловероятна
из-за скры гного характера частоты коммутации. Но это справедливо только в том слу-
чае, когда коммутирующее устройство идеально согласовано с приемными каналами и
236
не воздействует на передающий капал. Если это условие не выполняется, то излучае-
мые в пространство сигналы будут нести информацию о частоте и фазе коммутирую-
щего процесса, которую при наличии на борту постановщика помех соответствующей
аппаратуры можно выделить и использовать для создания эффективной прицельной
помехи на частоте коммутации приемных каналов РЛС. Наведение помехи по частоте
коммутации возможно также по реакции передающей антенны на воздействие помехи,
в этом случае помеха модулируется по амплитуде сигналом скользящей частоты в диа-
пазоне, охватывающем диапазон возможных частот коммутации, и излучается в на-
правлении РЛС. В момент времени, когда частота модуляции помехи становится рав-
ной частоте коммутации, возникают ошибки в системе пеленгации РЛС и передающая
антенна соответственно отклоняется в сторону от направления на цель-постановщик
помех. Это отклонение фиксируется на борту постановщика помехи по изменению
уровня сигнала подавляемой РЛС, скольжение частоты модуляции помехи приостанав-
ливается и производится медленная ее подстройка до получения максимального эф-
фекта действия помехи. В результате модуляция помехи оказывается на частоте ком-
мутации приемных каналов, и действие помехи будет эффективным.
8.8. Помеха по зеркальному каналу приема
Помеха по зеркальному каналу представляет собой высокочастотный сигнал на
зеркальной частоте, расположенной симметрично несущей частоте полезного сигнала
относительно частоты гетеродина. Действие такой помехи приводит к формированию
противофазного сигнала ошибки и, как следствие, к нарушению устойчивости следя-
щей системы в равносигнальном направлении. Данный метод особенно эффективен
при воздействии на фазовые моноимпульные РЛС, в которых направление на цель оп-
ределяется тут ем измерения разности фаз [38].
На рис. 8.20 приведена структурная схема устройства, реализующего помеху это-
го вида.
Детектор
Импульсный
генератор
Рис. 8.20. Структурная схема передатчика помехи по зеркальному каналу приемника РЛС
Сигнал РЛС принимается антенной, усиливается в усилителе на ЛБВ и поступает
в смеситель. Часть мощности сигнала с выхода усилителя на ЛБВ ответвляется, детек-
тируется для формирования модулирующих видеоимпульсов. Модулирующие сигналы
включают выходную импульсную ЛБВ в ответ на каждый выходной радиолокацион-
ный импульс. В состав устройства входит гетеродин, частота которого равна удвоенной
промежуточной частоте приемника РЛС.
С помощью этого гетеродина в смесителе происходит преобразование сигнала
РЛС по частоте. Очевидно, что для эффективного создания такой помехи необходимо
априорное значение промежуточной частоты приемника РЛС. Однако и при полностью
237
Рп
Сигнал помехи Сигнал помехи
пр
Гс+2Г11р Г
неизвестных параметрах РЛС наведение помехи на промежуточную частоту теоретиче-
ски возможно по реакции передающей антенны РЛС на воздействие помехи, как и в
случае постановки помехи на частоте коммутации приемных каналов. За смесителем
расположен полосовой режекторный фильтр,
вырезающий сигнал на частоте РЛС и ниж-
нюю боковую полосу / - 2/1р и пропускаю-
щий частоту/ + 2 /р через выходной усили-
тель на ЛБВ. На рис. 8.21 показан спектр
Рис. 8.21. Относительное положение сигна- частот, где частота гетеродина РЛС/- выше
лов на частотной оси несущей частоты РЛС/.
Частота помехового сигнала должна быть выше частоты/, чтобы соответствовать
частоте зеркального канала РЛС. Пунктирные линии показывают случай, когда/ ниже
частоты РЛС и поэтому помеховый сигнал должен быть на нижней зеркальной частоте.
Приведенная на рис. 8.20 структурная схема обеспечивает формирование ответной по-
мехи, когда каждый помеховый импульс приходит к РЛС практически одновременно с
импульсом, отраженным от цели-постановщика помех. Использование одновременно с
воздействием по зеркальному каналу дополни гельных методов формирования помехи
повышает его эффективность.
В свою очередь, в РЛС применяются меры защиты от помех по зеркальному кана-
лу. Например, РЛС может быть сконструирована таким образом, чтобы обеспечивать
сопровождение по угловым координатам на зеркальной частоте, а также иметь специ-
альные смесители с режекцией зеркальной частоты. В этом случае создание помехи по
зеркальному каналу требует очень большой мощности, что практически становится не-
реализуемым [ 1 ].
8.9. Расстроенная по частоте помеха, действующая на скатах полосы
пропускания подавляемого приемника
У некоторых моноимпульсных систем точность сопровождения может умень-
шаться из-за неточной настройки приемника на принимаемый сигнал, что обусловли-
вается наличием неидентичности частотных характеристик приемных каналов по про-
межуточной частоте. Этот недостаток может использоваться при организации РЭП мо-
ноимпульсным РЛС, например, путем излучения помехи с несущей частотой, отли-
чающейся от рабочей частоты РЛС примерно на половину полосы пропускания прием-
ника по промежуточной частоте. Эффективность такой помехи зависит от степени не-
идентичности приемных каналов моноимпульсных РЛС на этих частотах. При созда-
нии рассматриваемой помехи передаваемый системой РЭП сигнал смещается по часто-
те относительно несущей частоты радиолокатора так, чтобы биения с сигналом гетеро-
дина радиолокатора создавали ложный сигнал, попадающий на скат полосы пропуска-
ния по промежуточной частоте приемника радиолокатора. При необходимости могут
генерироваться два таких сигнала, обеспечивающие ложные сигналы на каждом скате
полосы пропускания приемника. Во многих случаях это оказывается более легким, чем
генерировать один такой сигнал. Если передатчик помех обеспечивает отношение по-
меха-сигнал, достаточное для компенсации потерь из-за нахождения сигналов помехи
на скатах полосы пропускания, и создание требуемого превышения помехи над полез-
ным сигналом в приемном канале 6 дБ и более, то радиолокационный приемник будет
вынужден сопровождать ложный сигнал. Положение ложного сигнала на скатах поло-
238
сы пропускания может совпадать с частотами, на которых трудно управлять фазовой
характеристикой радиолокационного приемника, и могут существовать ошибки согла-
сования по фазе, что будет вызывать неустойчивость углового сопровождения радио-
локаторов, чувствительных к фазе сигнала [38].
На рис. 8.22 приведена структурная схема такого передатчика помех. Он пред-
ставляет собой импульсный ретранслятор, использующий ЛБВ с непрерывным режи-
мом для усиления сигналов малого уровня и мощную импульсную ЛБВ в качестве вы-
ходной лампы. Видеодетектор вырабатывает входной сигнал для формирования моду-
лирующего импульса. Радиолокационный сигнал проходит через балансный смеситель
и управляемый аттенюатор. Характеристика балансного смесителя позволяет форми-
ровать на выходе обе боковые составляющие с очень малым уровнем остатка на несу-
щей частоте входного сигнала. При подаче на балансный смеситель сигнала с одной
частотойУё создаются две боковые составляющие с частотами fc ±/0. Возможен также
однополосный режим работы.
постоянного уровня с постоянной частоты с
изменяемой частотой или фазой изменяемым уровнем
Рис. 8.22. Структурная схема импульсного передатчика расстроенной по частоте помехи,
действующей на скатах полосы пропускания подавляемого приемника РЛС
Величина сдвига частоты f0 должна быть достаточной, чтобы сигнал попадал на
скаты полосы пропускания с относительным уровнем от 10 до 30 дБ. При формирова-
нии помехи можно использовать фиксированный сдвиг по частоте и постоянную мощ-
ность ретранслятора. При изменении частоты помехи ложные сигналы скользят вверх и
вниз по скатам полосы пропускания приемника, создавая амплитудную модуляцию.
Возможны также другие законы изменения частоты, мощности и фазы, например тре-
угольные, параболические, пилообразные. Описываемая помеха не создаст сигналы на
частоте настройки приемника, поэтому не действует подобно обычному маяку. Систе-
мы защиты радиолокатора, использующие переход на сопровождение по помехе, могут
быть в данном случае неэффективными. Для повышения эффективности данную поме-
ху можно использовать совместно с другими видами помех. Так, эффективность поме-
хи можно повысить с помощью комбинирования ее с уводящей по дальности и скоро-
сти помехой, так как в этом случае в стробе дальности (скорости) радиолокатора будет
отсутствовать отраженный от защищаемого объекта сигнал, и требования к мощности
помехи системы по угловым координатам существенно снижаются.
8.10. Двухчастотная помеха
Сущность двухчастотной помехи (ДЧП) заключается в том, что в направлении
подавляемой РЛС излучаются два высокочастотных сигнала, частоты которых нахо-
239
дятся в пределах рабочего диапазона РЛС, но разнесены друг относительно друга на
величину, равную промежуточной частоте приемника РЛС. При воздействии на при-
емник такая помеха детектируется в смесителе и формирует си1нал промежуточной
частоты. Эффект действия такой помехи может проявляться в перегрузке приемника,
создании дезинформации и нарушении работы угломерного координатора. Перегрузка
приемника возникает, например, при двухчастотной непрерывной помехе достаточной
мощности. При отсутствии дополнительной модуляции помехи оператор РЛС может
даже не подозревать о воздействии помехи, и потерю чувствительности приемника бу-
дет расценивать, как неисправность аппаратуры, и, соответственно, не сможет принят ь
меры защиты от помех. Если один или оба сигнала двухчастотной помехи подвергнуть
фазовой модуляции шумами, то действие такой помехи будет эквивалентно действию
шумовой помехи [49]. При воздействии помехи на РЛС импульсного типа, например на
РЛС типа AN/APQ-5I, действие двухчастотной помехи проявляется преимущественно
в насыщении видеодетсктора. Если РЛС доплеровского типа, то подавление приемника
происходит в результате насыщения системы АРУ.
При воздействии на пеленгационные системы двухчастотная помеха существенно
искажает пеленгационную характеристику (ПХ). Эти искажения, как показал анализ,
проявляются в том, что пеленгационная характеристика, описываемая при нормальных
условиях работы нечетной функцией, становится четной (однополярной). В равносиг-
нальном направлении крутизна ПХ падает. При отклонении антенны от равносигналь-
ного направления отработка внесенного углового отклонения происходит с различной
скоростью. При отклонении антенны в сторону положительной ветви ПХ по сигналу
помехи, совпадающей с ветвью ПХ по полезному сигналу, антенная система РЛС на-
чинает отрабатывать внесенную ошибку с достаточно высокой скоростью, которая по-
степенно замедляется. Область равносигнального направления совпадает с областью
неустойчивого состояния. Поэтому наличие дрейфа угломера (крутизна в этой области
очень мала) будет вызывать сначала медленное, а затем все убыстряющееся движение
антенны РЛС в сторону от направления на источник помехи, вызывая срыв АС. Введе-
ние начального углового рассогласования положения источника помехи будет сокра-
щать время для срыва АС. В зависимости от знака и величины этого рассогласования
движение антенны будет происходить с различной угловой скоростью. Однако отра-
ботки начального углового рассогласования, которое обычно наблюдается по полезно-
му сигналу, в данном случае не будет. Естественно, что динамика движения источника
помехи (маневр) будет существенно влиять на время срыва АС. Чем выше угловые пе-
регрузки движения источника ДЧП, тем меньше потребуется времени для срыва АС. В
результате возможность автосопровождения источника такой помехи полностью ис-
ключается. Равносигнальное направление антенной системы РЛС в этом случае будет
отклоняться от направления на постановщик помехи, и будет наступать срыв режима
автосопровождения цели. Анализ показал также, что действие двухчастотной помехи
проявляется неодинаково для различных типов моноимпульсных систем. Так, если
суммарно-разностная и фазово-фазовая системы теряют в этих условиях возможность
автосопровождения, то амплитудно-амплитудная моноимпульсная система практиче-
ски сохраняет свою работоспособность.
Преимуществом двухчасготной помехи является то, что при ее создании не тре-
буется наведения по несущей частоте. Однако реализация такой помехи требует апри-
орных знаний промежуточной частоты подавляемого радиолокатора и ширины его по-
240
лосы пропускани я а также повышенных уровней мощности. Последнее обусловлива-
ется тем, что коэффициент передачи супергетеродинного приемника в режиме прямого
детектирования примерно на два порядка ниже коэффициента передачи в режиме гете-
родинирования. Для проявления эффекта воздействия ДЧП на следящий угломер необ-
ходимо обеспечить соотвествующий уровень мощности помехи на входе подавляемого
приемника. Если в фильтре селекции по дальности или скорости приемника угломера
находится полезный сигнал, то требуемый абсолютный уровень мощости ДЧП опреде-
ляется энергетическими параметрами подавляемого угломера, величиной ЭПР защи-
щаемого объекта, его удалением, потерями непосредственного детектирования в сме-
сителе. Мощность сигнала промежуточной частоты на выходе смесит еи1я для радиоло-
кационного сигнала пропорциональна произведению мощности гетеродина Рт и мощ-
ности радиолокационного сигнала Рс на входе смесителя, т. е. PCBblx= КСРСРГ, а для по-
мехового сигнала Рпвых = A?n/>n]/>n2, где Кс и Кп - коэффициенты пропорциональности,
Рп| и Лц - уровни мощности помеховых сигналов на входе приемника.
Следует отметить, что двухчастотная помеха эффективна при отсутствии высоко-
частотных преселекторов на входе РЛС, сужающих рабочий диапазон частот до мини-
мума. В случае, когда преселекторы имеются, двухчастотная помеха будет селектиро-
ваться. При наличии в схеме РЛС высокочастотного преселектора можно применять ам-
плитудно-модулированную помеху, частота модуляции которой равна промежуточной
частоте приемника подавляемого радиолокатора. Непосредственное детектирование та-
кой помехи в смесителе приемника РЛС обеспечивает образование помехового сигнала.
> В состав передатчика двухчас готной помехи входят два генератора, которые ав-
томатически настраиваются на частоту подавляемого радиолокатора. Оба генератора
снабжены устройствами, позволяющими разносить их частоты относительно частоты
подавляемого радиолокатора на определенную величину. Каждый наводимый по час-
тоте генератор питает свой собственный усилитель мощности и передающую антенну.
Детекторная цепь выделяет импульсы подавляемого радиолокатора, которые исполь-
зуются для синхронизации работы усилителей мощности в импульсном режиме. Такой
метод создания помех требует значительных уровней мощности, достаточных для ком-
пенсации высоких потерь, вносимых смесителями и полосовыми фильтрами подавляе-
мого mohoi (мпульсного радиолокатора, поэтому в каждом канале используются мощ-
ные импульсные усилители на ЛБВ и антенны с высоким коэффициентом усиления [1].
В качестве импульсных источников высокой мощности вместо ЛБВ можно использо-
вать магнетроны, частоты которых смещены относительно рабочей частоты подавляе-
мого радиолокатора, а разность частот устанавливается равной промежуточной частоте
подавляемого радиолокатора/пч.
Возможен вариант передатчика двухчастотной помехи, в котором сигнал РЛС де-
тектируется с целью обеспечения передачи высокочастотных помеховых импульсов
синхронно с импульсами подавляемой РЛС. Единственный генератор автоматически
настраивается на частоту РЛС, затем его сигнал модулируется по амплитуде сигналом
промежуточной частоты РЛС, установленной заранее, усиливается и излучается. Пер-
вый смеситель РЛС будет дсмодулировать этот сигнал, в результате в приемнике по-
давляемой РЛС будет создаваться ложный сигнал промежуточной частоты. Другой ме-
тод формирования пары частот, разнесенных на промежуточную часто гу приемника
РЛС, предусматривает использование местного генератора, настроенного на частоту,
точно равную половине промежуточной частоты, и балансной модуляции с подавлени-
ем несущей частоты. Создание двухчастотной помехи возможно также при излучении
241
передатчиком одного сигнала на частоте, отстоящей от частоты гетеродина на полови-
ну промежуточной частоты. В этом случае смеситель РЛС производит вторую гармо-
нику частоты, равную промежуточной частоте. Необходимо отметить, что если проме-
жуточная частота РЛС неизвестна, то любой метод реализации двухчастотной помехи
можег использовать свипирование частот. В этом случае помеха будет действовать
только часть времени, и эффективность ее соответственно уменьшится. При неизвест-
ной промежуточной частоте можно применять также свипирование частоты помехи в
сочетании с контролем за реакцией РЛС (наведение на ПЧ по реакции на воздействие
помехи). Использование двухчастотной помехи в сочетании с уводящей помехой по
дальности или другими аналогичными помехами может привести к усилению эффек-
тивности помехи, так как в этом случае РЛС будет осуществлять сопровождение толь-
ко по помеховому сигналу, не совпадающему с отраженным сигналом. Отношение по-
меха-сигнал становится бесконечно большим при любой мощности помехи, требуемая
эффективная мощность помехи снижается до уровня, необходимого для обеспечения
увода строба дальности (скорости). При защите моноимпульсных РЛС от действия
двухчастотной помехи можно использовать методы, описанные в главе 3 (п. 3.4).
ГЛАВА 9. МЕТОДЫ И ТЕХНИКА СОЗДАНИЯ ПОМЕХ РЛС
СОПРОВОЖДЕНИЯ ПО НАПРАВЛЕНИЮ, РАБОТАЮЩИМ
СО СКАНИРОВАНИЕМ АНТЕННОГО ЛУЧА
9.1. Методы и техника создания помех угломерным системам
сопровождения РЛС с коническим сканированием луча
Принцип работы угломерной системы РЛС с коническим сканированием
луча. Метод сопровождения угловых координат путем конического сканирования луча
является одним из первых методов, нашедших применение в угломерных радиолока-
ционных системах. Из истории Второй мировой войны известно эффективное исполь-
зование в борьбе с авиацией РЛС орудийной наводки помех, таких как GL-MK-3 (Анг-
лия), 5CR-584 (США), "Вюрцбург-С и Д" и "Большой Вюрцбург" (Германия). Все они
осуществляли пеленгацию цели методом конического сканирования луча.
При реализации данного метода антенной РЛС формируется вращающийся с час-
тотой сканирования луч, максимум которого смещен относительно электрической оси
антенны на определенный угол 0О и в процессе сканирования описывает в пространст-
ве конус.
При облучении через такую антенну цели, смещенной относительно ее электри-
ческой оси на угол 0, отраженный сигнал от нее будет модулироваться по амплитуде,
причем глубина модуляции отраженных сигналов будет определять величину откло-
нения цели от равносигнального направления, совпадающего с электрической осью
антенны РЛС, а фаза-направление отклонения цели. Низкочастотная огибающая от-
раженных сигналов при их приеме выделяется и используется в качестве сигнала
ошибки, несущего информацию о направлении на цель. Для этого высокочастотный
сигнал усиливается в приемнике РЛС и дважды детектируется (по видеочастоте и низ-
кой частоте) (рис. 9.1.)
242
Рис. 9.1. Упрощенная структурная схема РЛС с коническим
сканированием луча. ППП - переключатель приемо-передачи
Выделенная низкочастотная огибающая усиливается в узкополосном усилителе
низкой частоты и подается на два фазовых детектора, где умножается на опорные орто-
гональные сигналы генератора опорных напряжений (ГОН). В результате вырабатыва-
ются сигналы ошибки по азимуту и углу места, которые обычно используются для
управления антенной по азимуту и углу места в прямоугольной системе координат. С
помощью этих сигналов ошибки антенна поворачивается в соответствии с их величи-
ной и полярностью до положения, когда сигналы ошибки становятся равными нулю. В
этом случае электрическая ось антенны будет направлена на цель и амплитуда отра-
женных сигналов не будет зависеть от положения ее луча, т. е. модуляция сигналов за
счет сканирования луча будет отсутствовать. Направление, в котором оказывается ан-
тенна в данном случае, называется равносигнальным направлением (РСН). В первом
приближении сигнал на входе приемного устройства может быть записан математиче-
ски в виде
E(t) = Ет [1 + тс cos (f2cz + <рс)] cos со/, (9.1)
где £>с- угловая частота сканирования антенны; <рс- начальная фаза огибающей на час-
тоте сканирования; w - несущая угловая частота;
u f(e0-e)-F(o0+e)
с Утх+Ут1« f(о„-в)+ F(e0+оу
- коэффициент амплитудной модуляции на частоте сканирования; F(0O±6) - нормиро-
ванные диаграммы направленности антенны, повернутые относительно друг друга в
плоскости пеленгации на 180°. Таким выражением можно пользоваться вплоть до зна-
чений угла рассогласования 0 ~ Оо 5/2 ,5 - ширина ДНА по половинной мощности.
243
При больших значениях углов рассогласования аппроксимация входного сигнала
функцией вида (9.1) дает значительные погрешности, поскольку возникает отклонение
модуляции от гармонического закона, появляются гармоники частоты сканирования.
После преобразования по частоте, усиления, низкочастотного детектирования и
фильтрации сигнал на частоте сканирования, несущий информацию о направлении на
цель, может быть записан с точностью до постоянного коэффициента в виде
U(t) = Iтотс cos (Qcr + (рс ) = Uотс [cos Qcf cos <рс - sin Qcr sin <pc ]. (9.3)
На выходе фазовых детекторов формируются сигналы ошибки по азимуту и углу
места в виде
гт ттт ч • sinср_
t/cop = Z7(0sin Qcr ~ 0 с——,
(9.4)
UCOz = ^(0 COS Qcr = Q с~-.
Эти сигналы используются, как уже указывалось, для наведения антенны РЛС по
направлению. Поскольку в процессе слежения за целью угловые рассогласования со-
ставляют малую величину, функции F(6 0 ± 6) можно линеаризировать, разложив их в
ряд Тейлора, ограничиваясь двумя членами,
F(0o±0)-r(eo)(i±ne),
где
ЭГ(6)
*W0_O
- нормированная крутизна пеленгационной характеристики в ли-
нейной ее части
Подставляя линеаризированные функции ДНЛ в (9.2), получим тс - [10.
В результате математически доказано, что глубина модуляции отраженного от
цели сигнала за счет сканирования ДНА действительно пропорциональна углу рассо-
гласования цели.
Возможность создания помех РЛС с коническим сканированием. Поскольку
информация о направлении на цель передается с помощью амплитудной модуляции
отраженных от цели сигналов, РЛС с коническим сканированием оказывается очень
чувствительной к амплитудно-модулированным помехам. Поэтому работа РЛС с кони-
ческим сканированием может быть серьезно нарушена мощной ретрансляционной по-
мехой с амплитудной модуляцией на частоте сканирования в противофазе [59, 60]. В
случае, когда сканируются передающая и приемная антенны, создание такой помехи не
представляет трудностей, поскольку в этом случае сигналы, облучающие цель, содер-
жат информацию о частоте сканирования. Требуется только выделить эту информацию
и использовать ее для наведения модуляции помехи по частоте сканирования. В связи с
этим открытое сканирование (когда сканируется передающая антенна) является невы-
годным для РЛС, поскольку снижает ее помехозащищенность. Более выгодно скрытое
сканирование, когда сканирует только приемная антенна. Такой режим сканирования
приводит к тому, что станция помех на борту самолета не может произвести простей-
шим способом измерение параметров сканирования, и метод создания прицельной по
частоте сканирования в противофазе помехи становится неприемлемым.
244
В этом случае в передатчике помех может быть применена медленная перестрой-
Рис. 9.2. Классификация помех РЛС с коническим
сканированием луча
ка частоты модулирующего сигнала в пределах предполагаемого диапазона частот ска-
нирования, в надежде попасть на истинную частоту сканирования и создать необходи-
мый помеховый эффект. Кроме помехи с амплитудной модуляцией со скользящей час-
тотой сканирования, в рассматриваемом случае можно применять помехи с амплитуд-
ной модуляцией низкочастотными шумами с шириной спектра, перекрывающей ожи-
даемый диапазон частот сканирования.
Классификация воз-
можных помех РЛС с кони-
ческим сканированием луча
представлена на рис. 9.2. Ряд
указанных на схеме помех
носит универсальный харак-
тер, поскольку они пригодны
для подавления и других ти-
пов РЛС сопровождения по
направлению. К ним отно-
сятся все многоточечные по-
мехи, помеха на кроссполя-
ризации и помехи из выне-
сенной точки. Их действия и
методы снижения их эффек-
тивности такие же, как и в
случае РЭП моноимпульс-
ных систем. Поэтому ниже
рассматриваются только те
виды помех, которые явля-
ются специфическими для
РЛС с коническим сканированием луча.
Прицельная по частоте сканирования помеха РЛС с открытым коническим
сканированием. Рассмотрим метод анализа воздействия угловых помех на РЛС с ко-
ническим сканированием в общем виде. Пусть помеха представляет высокочастотный
сигнал, модулированный по амплитуде с частотой, равной частоте сканирования стан-
ции. Тогда воздействие такой помехи по своему характеру будет равносильно поступ-
лению отраженного сигнала от какой-то цели. Система автосопровождения РЛС начнет
поворачивать антенну в соответствии с глубиной и фазой модуляции помехи, стремясь
запеленговать ложную цель. Но при отклонении антенной системы от направления на
источник помех появляется модуляция за счет сканирования антенны и, как следствие,
сигнал ошибки, побуждающий антенну вернуться в исходное положение (в направле-
ние на источник помехи). С увеличением отклонения антенны от направления на ис-
точник помехового излучения этот сигнал ошибки растет и, следовательно, растет про-
тиводействие помехе, отклоняющей антенну. В определенный момент составляющие,
вызванные модуляцией помехового сигнала, с одной стороны, и отклонением антенны
от направления на источник помехи, с другой, уравновесятся и антенная система зай-
мет положение статического равновесия. Угол отклонения, соответствующий этому
равновесному состоянию, является конечным результатом воздействия помехи. Антен-
245
ная система будет направлена в некотором ложном направлении относительно истин-
ного направления на цель-поставщик помех.
Условия статической компенсации действия помехи действием сигнала ошибки и,
следовательно, ошибки измерения угловых координат цели, вызванные действием по-
мехи, могут быть найдены аналитически из условия равенства нулю результирующей
глубины модуляции суммарного сигнала (полезного и помехи), находящегося в канале
автосопровождения цели.
Проиллюстрируем описанную методику математически. В целях упрощения
предположим, что имеет место сканирование РЛС только на прием (скрытое сканиро-
вание) и полезный и помеховый сигналы имеют одинаковые несущие частоты. Тогда
для установления режима полезный и помеховый сигналы на входе приемной антенны
могут быть представлены следующим образом:
E(t) = Ес cos &t,
. ч (9-5)
МО = £п [1 + тп C°S W - <Рп )] COS ®
где Ес и Еп - амплитуды полезного (отраженного) и помехового сигналов; тп - коэф-
фициент модуляции помехового сигнала; Qn и <рп - угловая частота и фаза модулирую-
щего сигнала помехи.
Сканирующая приемная антенна осуществляет амплитудную модуляцию прини-
маемой смеси сигнала и помехи, в результате чего на входе приемника напряжение
сигнала принимает вид:
£(0=[£c(0 + £n0)][1+"ZcCOS(Qc/-(Pc)] • (9-6)
Подставляя (9.5) в (9.6), получаем
Е (/) - -|ес + Еп р + т„ cos (Q„( - <р„ )]|- [1 + тс cos (£2CZ - <рс)] cos ал -
+ тс cos (Qcr - <рс) + а + а тс cos (Qcr - <рс) + а wn cos (Qnr - <рп ) + (9.7)
+ а/^ )cos [(Qn -Qc)r-(<pn -<pc)] +cos[Qn +Qc]r + (% -<pc)(j.costof,
где а=Еп/Ес .
После преобразования по частоте и линейного детектирования на выходе детек-
тора выделяется огибающая сигнала в виде
Un = к , к ДЕС |(1 + а)+ тс (1 + a)cos(Qcr - <рс) + атп cos(q,/ - <рп ) +
+ an^^cos [(Q1 - QC)г -(фп - фс)] + cos [(Q „+ Qc )r + (фп + <pc )^|, (9.8)
где kx - коэффициент преобразования частоты; kR — коэффициент детектирования.
На выходе узкополосного усилителя низкой частоты, настроенного на частоту
сканирования, будут выделяться только те составляющие, которые будут иметь частоту
Qc или частоту, отличающуюся от Qc не более чем на половину полосы пропускания
УНЧ. В соответствии с этим частотные составляющие (Q„ ± Qc) не пройдут через УНЧ,
246
как и постоянная составляющая. В результате на выходе УНЧ с точностью до постоян-
ного коэффициента получим
иун =^’'c^c(l + a)cos(Qc/-q>c) + awricos(Q,/-g)„)P. (9.9)
На выходе фазового детектора после перемножения сигнала (9.9) на опорные сиг-
налы и последующего усреднения в узкополосном фильтре получим сигналы ошибки
по азимуту и углу места:
Цв = sinQ.J = ккфЕс <рс + ^l^sin [(Qп-Qc)t -<рп]}, (9.10)
иу.м = t/ун cos Qct = ккфЕ_ cos <pc + cos [(n п- П c )f - <pn ] |, (9.11)
где k$- коэффициент передачи фильтра.
Если |Q п- Пс| >2nAFcc (частота помехи отличается от частоты сканирования бо-
лее чем на полосу пропускания следующей системы ДЕСС), то
= ^ф£с + sin <рс, (9.12)
£у.м = ^ф£с cos (рс . (9.13)
Помеха в этом случае будет оказывать полезное действие, увеличивая мощность
отраженного сигнала и тем самым "подсвечивая" цель. При |Qn - Qc| s 2лА7'сс первые
слагаемые в полученных выражениях представляют полезные составляющие сигнала
ошибки, обусловленные сканированием антенны, вторые - помеховые составляющие,
обусловленные действием помехи. Можно видеть, что величина помеховой состав-
ляющей зависит от разности частот (Qn - Qc) и достигает максимума при Qn = Qc.
В соответствии с этим представляют интерес два случая, когда Qn = Qc - случай при-
цельной по частоте сканирования помехи и |Qn -Qc| < 2лДЕСс -случай расстроенной (в
пределах полосы пропускания следящей системы) помехи на частоте сканирования.
В первом случае имеем
UZ3-U’
ат,, .
sin<pc + 11 sm <р,
cos<pc + cos<pt
(9-14)
(9-15)
где U' = кк<рЕс.
Из (9.14) и (9.15) видно, что помеха рассматриваемого типа по своему действию
эквивалентна некоторой фиктивной цели, не совмещенной в пространстве с истинной
целью. Иными словами, помеховый сигнал порождает ложную информацию, имитируя
наличие второй цели (фиктивной), угловые координаты которой отличаются от коор-
динат истинной цели.
247
Известно, что следящая система работает таким образом, чтобы сигнал ошибки на
выходе фазового детектора уменьшался до нуля. Поэтому, приравнивая нулю выраже-
ние (9.14), можно найти условие равновесия системы и, следовательно, установившее-
ся положение антенны по азимуту:
(1 + а)тс . а/л„ .
----—sin qpc + —sin Фп = 0.
Отсюда
(1 + а)/лс . ат., .
---- ---sin фс -^sinфп .
Очевидно, равенство выполняется только при условии
sinфс = — sinфп; (1 + а)/ис - атп,
откуда следует
фс=фп+180°, (9.16)
Таким образом, условие равновесия антенной системы при воздействии прицель-
ной по частоте сканирования помехи возможно только тогда, когда фаза помеховой
модуляции отличается на 180° от фазы огибающей сигнала ошибки. При этом РСН ан-
тенны отклоняется от направления на цель на величину, определяемую как
(9-18)
1 + а
Аналогичные условия можно получить, приравнивая нулю (9.15).
Из (9.18) следует, что в принципе даже при бесконечно большом значении мощ-
ности помехи нельзя получить коэффициент полезной модуляции тс больше коэффи-
циента модуляции помехового сигнала.
Физически это объясняется тем, что в составе спектра помехового сигнала наряду
с двумя боковыми составляющими, переносящими помеховую информацию, всегда
имеется составляющая несущей частоты, передающая информацию об истинных коор-
динатах источника помеховых сигналов.
Ранее была установлена связь между тс и углом отклонения антенны в виде
тс = р0.
Подставляя это в (9.18), находим
0 = £к_Е_. (9.19)
ц 1 + а
Величину ц можно найти, если задана форма диаграммы направленности антенны
РЛС, и тогда из (9.19), задаваясь величинами угловой ошибки и тп, можно определить
требуемое превышение мощности помехи над мощностью полезного сигнала. По-
скольку величина угловой ошибки при действии помехи прямопропорциопальна тт то
при реализации помехи следует стремиться к максимальной глубине модуляции. С
248
этой точки зрения представляется целесообразным амплитудную модуляцию осущест-
влять не по гармоническому закону, а по прямоугольному. Так, например, модуляция
по закону "Меандр" позволяет получить эффективную модуляцию помехи примерно на
30 % больше, чем при модуляции по гармоническому закону, поскольку амплитуда
первой гармоники фурье-преобразования сигнала меандровой формы в 4/л раза больше
максимальной амплитуды синусоидально-модулированного сигнала.
Рассмотрим второй случай, когда |Q n-Qc| < 2л AFCC.
В этом случае, как следует из выражения (9.12), условие равновесия в азимуталь-
ной плоскости пеленгации определяется выражением
-— -----sm<pc-----уП-sm [(Qn - Qc )t - Фп ].
Отсюда следует, что должно выполняться условие
sin <рс = -sin [(^ - Q с )t - % ].
Фаза ср'п = (Qn - Qc)r - <рп является линейной функцией времени. Так как
|Q„ - Ц.| < 2л AFCC, a AFC.C имеет величину порядка герца, то эта функция будет медлен-
но меняющейся.
Поскольку величина фазы <р'„ определяет направление на фиктивную цель, ее из-
менение породит перемещение фиктивной цели в пространстве. Это, в свою очередь,
приведет к смещению РСН, так как следящая система автоматически будет отрабаты-
вать условие баланса фаз
Ф'п= Фс + 180°.
Следовательно, ось РСН, отклонившись от направления на цель на угол 0 , будет
вращаться вокруг истинного направления на цель, образуя поверхность конуса. На-
правление вращения будет определяться знаком разности частот. При этом следует
учитывать характеристики передачи замкнутой следящей системы. В соответствии с
этим (9.19) принимает вид
е»«=Ф(у«>)ЧгЦе''АЕ'> (9-20>
ц(1 + а)
где ф (/со) - функция передачи замкнутой следящей системы; AQ - разностная частота
между частотой модуляции помехи и частотой сканирования.
Коэффициент передачи следящей системы при расстройке частоты модуляции
помехи обычно выше, чем при модуляции на частоте сканирования (AQ = 0). Вследст-
вие этого, при некоторой расстройке частоты модуляции помехи относительно частоты
сканирования следует ожидать более высокой эффективности, чем в случае Qn = Qc.
Увеличения эффективности в этом случае также следует ожидать за счет специфиче-
ского движения РСН в пространстве. Поскольку характеристики следящей системы,
как правило, различны по азимуту и углу места и полоса пропускания следящей систе-
мы в угломестной плоскости обычно уже (система менее чувствительна), чем в азиму-
тальной плоскости, траектория движения РСН в пространстве при действии помехи,
модулированной расстроенной частотой сканирования, будет эллиптической, а не кру-
говой. В результате движение РСН будет неравномерным и в некоторый момент вре-
249
мени будут возникать более высокие линейные ускорения, чем при движении по кру-
говой траектории. Вероятность срыва режима слежения и потери цели за счет действия
помехи возрастает.
Помехи по частоте сканирования РЛС со скрытым коническим сканирова-
нием. В РЛС со скрытым сканированием предающая антенна не сканирует, а направ-
ление максимума ее ДН совмещено с равносигнальным направлением сканирующей
приемной антенны. Скрытое сканирование применяется в пассивных и полуактивных
ГСН. Это обстоятельство не позволяет простыми средствами реализовать наиболее
эффективную прицельную помеху на частоте сканирования. Необходимы специальные
высококачественные приемники, позволяющие в излучаемом сигнале обнаружить час-
тоту скрытого сканирования РЛС за счет перекрестной связи между каналами скани-
рующей и несканирующей передающих антенн, а в ГСН, например, путем приема из-
лучения сигнала гетеродина. Кроме того, частоту скрытого сканирования РЛС и ГСН
возможно определить либо путем облучения антенных систем подавляемых средств
сигналами передатчика помех с последующим анализом спектральной структуры от-
раженного сигнала, либо путем анализа реакции РЛС сопровождения на воздействие
адаптивной AM помехи. Если создание прицельной по частоте сканирования помехи не
представляется возможным, прибегают к помехе заградительного типа по частоте ска-
нирования. Методы реализации такой помехи могут быть различные. Наиболее извест-
ны два из них: метод, основанный на применении модуляции скользящей частотой в
диапазоне ожидаемых частот сканирования, и метод, использующий низкочастотную
шумовую модуляцию со спектром, перекрывающим диапазон ожидаемых частот ска-
нирования подавляемой РЛС. Модуляция может создаваться также сеткой частот, рас-
положенных в пределах ожидаемого диапазона частот скрытого сканирования. Рас-
смотрим эти методы.
Помеха с амплитудной модуляцией скользящей частотой сканирования.
Наилучшим законом скольжения частоты является линейный закон, поскольку он
обеспечивает равную вероятность эффективного воздействия помехи на все РЛС, час-
тоты сканирования которых перекрываются диапазоном перестройки частоты модуля-
ции помехи. В этом случае сигнал помехи на выходе антенны РЛС со скрытым скани-
рованием, принимая во внимание, что реакция следящей системы на помеховые воз-
действие всегда противоположна по фазе, можно представить в виде
Еп (')-£„[! + тп cosQ(r)j(l-тс cos Qj) cos со/ . (9-21)
Соответственно отраженный от цели сигнал
£c(/) = £c(l-wccosQ Ct)cos<ot.
Тогда результирующая огибающая отраженного от цели сигнала и помехи, моду-
лированной скользящей частотой, с точностью до постоянного коэффициента может
быть представлена, в виде
£(/) = £с jl + ap + wncosQ(f)^(l-wccosQc/), (9.22)
где Q(0 - закон изменения частоты помеховой модуляции.
Если скольжение частоты модуляции происходит в пределах полосы пропускания
усилителя сигнала ошибки (УНЧ), то на входе фазовых детекторов угломерной систе-
мы РЛС при Ес = 1 будем иметь
250
E^ = amn cosQ(r)-amc cosQcr-/nc cosQcr -
amm. r_ z 4 , ammc T~, \ _ , ,,,
--- cos [Q(r) - QcrJ----cos [Q[t) + Qc/ j. (9.23)
Умножая (9.23) на опорное напряжение, изменяющееся по закону cosQcf или
sinQcr и учитывая узкополосность следящей системы, не пропускающей составляющие
частоты [Q(r)+Qc], 2QC, [Qc(r)+2QC] и Q(f) (при скольжении от частот выше 10 Гц), по-
лучим управляющее напряжение одного из каналов (например, угломестного) в виде
х ат„ \ 1 апк тс ат т. г„/ ч i
t/(f) = —^cos[Q(r)-Qcf]------------^со5[Й(г)-2Йсг] . (9.24)
Очевидно, наиболее существенным является первый член, вызывающий макси-
мальное воздействие в момент прохождения скользящей частотой полосы пропускания
следящей системы, в соответствии с условием
[Q (г) - Qc ] <; AQCC s 2л AFC с,
где AQCC - полоса пропускания следящей системы по угловой частоте. Последний член
определяет помеховый эффект при выполнении условия, когда частота модуляции дос-
тигает удвоенной частоты сканирования
[fi(()-2Qc]£2nAF„.
Что касается остальных компонентов выражения, то они появляются за счет мо-
дуляции сканирования помехового и отраженного сигналов и определяют сигнал
ошибки, стремящийся удержать антенную систему в направлении на источник помехи.
Если при скольжении частоты модуляции помехи удвоенные частоты сканирования не
захватываются, то управляющее напряжение на выходе низкочастотного фильтра фа-
зового детектора с учетом реакции на воздействие сигнала с переменной частотой оп-
ределяется как
1/(0-2^-Гр(г)-Йс]-(а + 1)^. (9.25)
Приравнивая (9.25) нулю, найдем условие равновесия антенной системы в виде
mc-^|F[C(r)-Qe]|, (9.26)
где F[Q(r) - Qc] - динамический коэффициент передачи, определяющий реакцию низ-
кочастотного фильтра на сигнал с переменной частотой.
При Q(r) = Qc F[Q(r) - Qc] = 1 и (9-26) превращается в известное выражение
(9.18), определяющее результат воздействия прицельной по частоте сканирования
помехи.
Из анализа типичных динамических характеристик избирательных систем, полу-
чающихся при воздействии на них сигналов постоянной амплитуды, но с переменной
частотой, следует, что по мере увеличения скорости скольжения частоты, максимум
коэффициента передачи системы понижается, в соответствии с чем понижается и эф-
фективность помехи. Поэтому для каждой конкретной системы существует предельная
251
(9.27)
скорость изменения частоты модуляции, превышение которой с точки зрения эффек-
тивности помехи недопустимо.
Очевидно, при реализации оптимального режима перестройки частоты скорость
скольжения должна выбираться такой, чтобы продолжительность воздействия помехи
Гв при ее вхождении в полосу пропускания следящей системы было бы не меньше по-
стоянной времени системы тс.с, т. е. ta тс.с. Так как продолжительность воздействия
определяется эффективной шириной полосы пропускания следящей системы ДЕС.С и
скоростью скольжения частоты VQ, то
2АК
t =---£
va
Учитывая равенство тсс = 1/Л/7с.с, получаем условие оптимальной скорости сколь-
жения частоты в виде
(9.28)
При этом условии эффективность помехи с модуляцией скользящей частотой в
момент ее вхождения в полосу следящей системы не будет ниже эффективности поме-
хи с модуляцией частотой сканирования. Результаты экспериментов показывают, что
длительность нахождения помехи в полосе пропускания системы автоматического
управления антенной в течение нескольких секунд будет обеспечивать срыв режима
сопровождения постановщика помех при отношении помеха-сигнал, составляющем
примерно 10 и 20 дБ для скрытого и открытого сканирования соответственно. Этот
способ можно использовать совместно с другими видами помех, например, с уводящей
помехой по дальности или скорости. В этом случае требования к превышению помехи
над сигналом снижаются примерно до 6 дБ.
Недостатком помехи при медленном скольжении частоты является периодичность
ее действия. В интервалах между эффективными воздействиями помеха не действует и,
если срыва режима сопровождения не произошло, может случиться, что за время пере-
рыва в действии помехи радиолокационное устройство успеет выполнить возложенную
на него задачу. При быстрой перестройке частоты модуляции помехи время воздейст-
вия на подавляемую следящую систему меньше ее постоянной времени и недостаточно
для того, чтобы получить максимальный эффект от воздействия помехи. Однако часто-
та следования возмущений следящей системы достаточно высока, и эффективность
помехи приближается к эффективности действия заградительной узкополосной шумо-
вой помехи, рассмотренной ниже. При действии такой помехи антенная система по-
давляемой РЛС испытывает хаотические колебания по углам, но срыва режима автосо-
провождения цели, как правило, не наступает. Если требуются очень большие диапазо-
ны перестройки частоты при создании помехи со скользящей частотой сканирования,
то разработчики средств РЭП могут рассчитывать на гармоники частоты модуляции,
генерируемые при меандровой форме амплитудной модуляции. Например, при пере-
стройке частоты в диапазоне 20...60 Гц, третья гармоника будет перекрывать диапазон
60... 180 Гц, а пятая - диапазон 100...300 Гц. В результате с помощью перестройки час-
тоты в диапазоне 20...60 Гц при меандровой форме амплитудной модуляции непре-
рывно перекрывается диапазон 20...300 Гц, хотя и со снижением эффективной глуби-
ны модуляции по гармоникам.
252
Помеха с низкочастотной шумовой модуляцией по амплитуде. С целью упро-
щения анализа предположим, что на систему автосопровождения действует только по-
меха. Отраженный сигнал во много раз меньше помехового сигнала и системой АРУ
полностью подавлен или выведен за пределы следящего строба действующей помехой.
Тогда на выходе детектора сигнал ошибки можно представить в виде
Е (г) = кЕп [1 + тп (t)] [1 + тс (г)] = кЕп [1 + тс (г ) + т„ (г) + тс (г)тп (г)], (9.29)
где тп (?) - функция модуляции помехи низкочастотными шумами; тс (г) - функция
модуляции помехового сигнала за счет сканирования антенны; к — коэффициент пере-
дачи приемного тракта; Еп - амплитуда сигнала помехи.
Очевидно, то mc(t) = /zzccos(Qc t + фс).
Если усилитель сигнала ошибки (УНЧ) широкополосный и пропускает весь
спектр шумов mn(t), то напряжение на выходе фазового детектора в одном из двух
угломерных каналов может быть получено умножением выражения (9.29) на опорное
напряжение (например, на cosQcr). В соответствии с этим и учитывая работу системы
АРУ, устраняющую зависимость сигнала ошибки от величины входного сигнала, по-
лучим
е (0 = [™с (0+(0+W МО]cos Qc' • (9-30)
Из (9.30) следует, что помеха с низкочастотной шумовой модуляцией воздейству-
ет двумя путями: за счет прямого прохождения, когда частотные компоненты модули-
рующего спектра шумов mn(f) образуют с частотой сканирования разностные частоты,
попадающие в полосу пропускания следящей системы; за счет комбинированного про-
хождения, когда частотные компо-
ненты модулирующего спектра mn(t)
образуют с частотными компонен-
тами спектра сигналы ошибки mc(f)
разностные частоты, попадающие в
полосу пропускания следящей сис-
темы. Если спектр мощности низко-
частотных шумов mn(t) имеет рас-
пределение, показанное на рис. 9.3,
то участки спектра модулирующих
шумов, воздействующие на следя-
щую систему за счет прямого и ком-
бинационного прохождения, могут
быть представлены участками, при-
мыкающими к нулевой частоте и
частоте сканирования.
В соответствии с этим (9.30) может быть представлено в ином виде:
е (г) = wc cos <рс + mnQ (г) + /лп0 (г )тс cos <рс, (9.31)
где mnQ(t) - часть модулирующего спектра, сконцентрированная в полосе 2AQC.C, рас-
положенной симметрично относительно Qc, a mno(f) - часть модулирующего спектра,
равная AQCC и сконцентрированная в области, примыкающей к нулевой частоте.
Рис. 9.3. Спектр низкочастотных шумов и его состав-
ляющие, воздействующие на следящую систему
253
Если принять во внимание, что полоса следящей системы обычно имеет величину
1...2 Гц, а спектр шумов - десятки герц., то при определении и типо можно пользо-
ваться следующими комбинированными выражениями:
(9.32)
Д7?п
(9.33)
Д7?п
где т](0) и T](Q) - интенсивность шумов на нулевой частоте и частоте сканирования;
Jo2(q)sq
AFn - ширина спектра низкочастотных шумов; AFCC =—— =------------энергетиче-
2л 2л Ф2 (О)
ская полоса пропускания следящей системы; Ф(О) и Ф(0) — коэффициенты передачи
следящей системы при Й * йс и Q = Qc. Среднее значение управляющего напряжения
в силу независимости mn(t) и cosQf при равенстве нулю среднего значения модули-
рующих шумов равно e(r) = тс costpc.
Таким образом, флуктуации управляющего напряжения не вызывают в рассмат-
риваемом случае систематической ошибки, а вызывают лишь беспорядочные колеба-
ния РСН антенны около истинного направления на цель. Поскольку типй и тип0 незави-
симы между собой, то величина среднеквадратической ошибки при их действии равна
сумме среднеквадратических ошибок, вызванных каждой частью флуктуаций отдельно:
/л2 = + m20m2 cos2 <рс . (9.34)
Уравнение (9.34) справедливо для разомкнутой системы. В реальных условиях
флуктуационная помеха создает эффект ложной цели, заставляя следящую систему ус-
танавливать антенну в такое положение, чтобы в каждый момент величина управляю-
щего напряжения стремилась к нулю. Поэтому в (9.34) вместо /«2ccos2cpc следует напи-
сать т2 . Тогда получим для замкнутой следящей системы:
2 2 2 2
т =mnQ+m^m •
Отсюда
__ ~
(9.35)
1-^о
Среднеквадратическая угловая ошибка в каждом из угломерных каналов равна
о2=т2/ц2, (9.36)
где ц - пеленгационная чувствительность антенны. Подставляя в (9.36) значения /ппй и
тг,о, получаем
254
- 2mJ-^n(C2)
2
О =---
ц2
(9.37)
(о)
"AR v '
Если помеху модулировать равномерным низкочастотным шумовым спектром в
диапазоне возможных частот сканирования, то т](0) = 0; w20 = 0; r((Q) = l и расчетная
формула (9.37) преобразуется к виду:
2 2w2AFcc
о “---Z---- .
Если учесть наличие отраженного сигнала, то
2
— ' ' 22AF
Отсюда эффективная ошибка
(9.38)
о2
(9.39)
а
1 + а
2AFC
а
О =—-----------rffl
(9.40)
Сравнивая анализируемую помеху с прицельной по частоте сканирования поме-
хой, убеждаемся, что эффективность помехи с низкочастотной шумовой модуляцией
I af~
ниже в -----— раз. Физически это объясняется уменьшением эффективного коэффи-
V 2Д7?с.с
циента модуляции пгп составляющими помехового спектра, попадающими в полосу
пропускания следящей системы. Компенсировать это увеличением мощности не пред-
ставляется возможным, поскольку в спектре помехи присутствует несущая частота, ко-
торая обусловливает формирование полезной информации и частично компенсирует
ложную информацию. Эффективный коэффициент модуляции можно увеличить с
20...40 % до 100 % путем двухстороннего ограничения модулирующих шумов. При
этом, несмотря на то, что в результате сильного ограничения вероятностное распреде-
ление шумов перестает быть нормальным, в следящей системе, имеющей полосу зна-
чительно более узкую, чем ширина модулирующего спектра, шумы будут восстанавли-
вать нормальное распределение.
Расчет показывает, что для получения эффективного коэффициента модуляции
порядка 95 % при двухстороннем симметричном ограничении шумов и линейной мо-
дуляционной характеристике необходимо, чтобы эффективное значение шумов пре-
вышало порог ограничения в 4 раза. В этом случае среднеквадратические ошибки воз-
растают примерно в 2,5 раза по сравнению с ошибками при неограниченных шумах.
С учетом динамической ошибки системы результирующая среднеквадратическая
ошибка
где о2 , о2 - среднеквадратические динамическая и флуктуационная ошибки.
255
Ширина спектра генерируемых низкочастотных помех выбирается на основании
априорных знаний частот сканирования РЛС, подлежащей подавлению. Если спектр
шумов выбран правильно, то помеха будет действовать одновременно на многие РЛС
со сканированием, в том числе и на РЛС с перестройкой частоты сканирования, если
только спектр модулирующего шума перекрывает диапазон перестройки частоты.
Однако, как уже отмечалось, эффективность помехи с низкочастотной шумовой
модуляцией будет существенно ниже эффективности помехи с прицельной по частоте
сканирования модуляцией и даже помехи с модуляцией скользящей частотой. Объясня-
ется это тем, что помеха создастся в сравнительно широком спектре частот, в том числе и
в тех участках диапазона, в которых РЛС нс работает. Поэтому использовать такую по-
меху можно только тогда, когда нельзя с необходимой точностью определить частоту
сканирования подавляемой РЛС, а применение помехи с модуляцией скользящей часто-
той сканирования не эффективно в силу, например, наличия в РЛС логической системы
перестройки частоты сканирования по оценке эффективности действия помехи.
Заградительная по частоте сканирования помеха может также создаваться путем
модуляции по амплитуде сеткой частот, если распределение спектральных линий по-
мехи по всей полосе возможных частот сканирования выбирается таким, что по край-
ней мере одна из них всегда попадает в полосу следящей системы углового сопровож-
дения РЛС независимо от того, как меняется частота сканирования.
Помеха РЛС с коническим сканированием, основанная на снижении количе-
ства излучаемых импульсов. Информация о направлении на цель, как показано выше,
полностью определяется амплитудной модуляцией принимаемых отраженных от цели
сигналов, поэтому точность пеленгации определяется качеством формирования и пере-
дачи этой информации угломерной следящей системе РЛС. При импульсном режиме
работы РЛС последнее определяется количеством импульсов, приходящихся на каж-
дый период сканирования антенны. Именно импульсы являются переносчиками сигна-
ла амплитудной модуляции, поэтому при проектировании РЛС всегда предусматрива-
ется обеспечение определенного количества импульсов на период сканирования, чтобы
качество передачи формы огибающей принимаемого сигнала соответствовало требуе-
мой точности пеленгации. При заданной частоте следования импульсов это обеспечи-
вается соответствующим выбором частоты сканирования. Поэтому при работе РЛС по
отраженному сигналу все оптимизировано, и точность пеленгации обеспечивается на
уровне требований.
Однако в ряде случаев система пеленгации РЛС вынуждена работать по помехе,
когда ее мощность значительно превосходит мощность полезного сигнала. Принцип
конического сканирования позволяет это, поскольку помеховый сигнал также при про-
хождении приемной антенны подвергается амплитудной модуляции за счет ее скани-
рования. В результате помеховый сигнал оказывается одновременно носителем полез-
ной информации о положении цели в пространстве. Выделяя эту информацию скани-
рованием из сигналов помехи, следящая система обеспечивает наведение антенны на
источник помехи. Однако точность наведения антенны в этом случае будет зависеть от
помехи, насколько точно она передает полезную угловую информацию. На этом об-
стоятельстве и основана помеха со снижением количества излучаемых импульсов. Она
обычно комбинируется с уводящей помехой по дальности (скорости). В начальный
момент создания такой угловой помехи на каждый принятый импульс РЛС излучается
импульс помехи. В этот момент создается уводящая помеха по дальности (скорости),
256
которая обеспечивает увод следящего строба с сигнала истинной цели. Как только это
достигается, число импульсов, излучаемых системой РЭП, постепенно начинает снижаться
до определенного минимума, при котором выделение полезной амплитудной модуляции из
сигналов помехи становится некачественным и сильно возрастают ошибки пеленгации.
Важным при этом является условие поддержания минимального количества импульсов на
период сканирования, при котором еще работают детектирующие устройства угломерной
системы. Исследования показывают, что частота следования импульсов помехи может
быть снижена в 10 раз по сравнению с рабочей частотой следования импульсов при сохра-
нении требований к обнаружению цели. В этом случае полностью нарушается процесс вы-
работки сигнала ошибки, и следящая угломерная система будет работать так, как работает
при отсутствии ошибок. Конечный результат этого - срыв режима сопровождения. Другим
эффектом, имеющим место в некоторых РЛС при снижении частоты следования помехо-
вых импульсов, является нарушение работы системы АРУ. Низкой частоте поступающих
импульсов будет соответствовать низкий уровень сигнала в цепи АРУ, что приведет к
подъему усиления в приемном тракте до уровня насыщения. Это обстоятельство приведет
к срезу амплитудной модуляции помеховых импульсов и, как следствие, устранению угло-
вой информации.
Поскольку моноимпульсные угломерные системы также требуют определенной
последовательности принимаемых импульсов для обеспечения системы АРУ, рассмот-
ренный метод создания помех применим и против моноимпульсных РЛС. Таким обра-
зом, данный метод универсальный. Он действует на многие типы РЛС, и при его реа-
лизации не требуется информация о принципах работы угломерной системы подавляе-
мого радиолокатора. Реализация метода чрезвычайно проста, поскольку требуется
только амплитудная модуляция прямоугольной формы, снижающая постепенно коли-
чество излучаемых импульсов помехи. Но при этом требуется комбинирование с уво-
дящими помехами по дальности (скорости), если не прибегать к очень высоким пре-
вышениям помехи над сигналом (более 20 дБ).
Помеха с балансной модуляцией на частоте конического сканирования.
Большинство активных помех обладает демаскирующими признаками, потому что для
их эффективности необходимо определенное превышение помехи над сигналом. Чем
больше это превышение, тем с большей дальностью может быть обнаружен объект с
источником помехи. В этом случае помеха эквивалентна увеличению отражающей по-
верхности объекта.
При создании ответной помехи на частоте сканирования эффект действия помехи
с увеличением отношения помеха-сигнал растет медленно и, как показывает выраже-
ние (9.19), достигает своего предельного значения, определяемого глубиной модуляции
помехи, только при бесконечно большом отношении помеха-сигнал. Физически это
объясняется наличием несущей частоты в сигнале помехи, обеспечивающей формиро-
вание полезной для следящей угломерной системы составляющей и частично компен-
сирующей эффект действия помехи.
В соответствии с изложенным представляет интерес ответная помеха с подавлен-
ной несущей [61]. Сигнал помехи в случае подавления несущей частоты можно пред-
ставить выражением
£n(0 = ^nCos(Qnr + (pn)cos(cor + vPn), (9.41)
9—1777
257
где Еп ~ суммарная амплитуда боковых частот; Qn - частота модуляции помехи; срп -
фаза сигнала модуляции; - фаза высокочастотного сигнала помехи.
Если источником ответной, помехи будет линейный усилитель (ретранслятор), мо-
дуляция помехи осуществляется с частотой сканирования РЛС в противофазе, а РЛС, на
которую воздействует помеха, имеет сканирование на прием и передачу, то сигнал поме-
хи и отраженный сигнал на входе приемника подавляемой РЛС принимает вид:
M0 = £nCosQc/[l -т cosQcz]cos(w/ + Тп),
(9-42)
Ес (г) = Ес [1 - тс cos Qc/] cos (coz + ).
Отсюда амплитуда результирующего высокочастотного сигнала будет равна
Е (/) = Ес [1 - тс cos Qcr]Ml + a2 cos’ Qct + 2аcos Qcz cos AT
(9.43)
где mc - глубина модуляции за счет сканирования; ос - отношение помеха-сигнал по на-
пряжению поля в месте приема; Qc- частота сканирования РЛС.
Разлагая модуль корня в ряд Фурье, выделяя из (9.43) составляющую первой гар-
моники и приравнивая ее нулю, можем найти условие статического равновесия антен-
ной системы:
= ?
' Ро + Рз/2’
(9.44)
где р0, J3j, р2~ коэффициенты гармонического разложения модуля корня, зависящие от
отношения помеха-сигнал ос и сдвига фаз по высокой частоте ДЧ/.
В реальных условиях АТ с равной вероятностью может принимать любые значе-
ния. С целью выяснения влияния сдвига фаз АТ на результирующую глубину модуля-
ции тс были произведены расчеты для ряда значений относительного сдвига по фазе.
Рис. 9.4. Зависимость эффективности
действия помехи на частоте сканирования
от отношения помеха-сигнал при двух
значениях разности фаз ВЧ- сигналов и
помехе с несущей (---) и без нее (—)
Результаты расчетов для АТ = 0 и 180° пред-
ставлены на рис. 9.4. Там же приведены данные
для ответной помехи с несущей частотой при
100 %-ной глубине модуляции на частоте ска-
нирования и гех же значениях сдвига по фазе.
Из приведенных кривых видно, что ответ-
ная помеха без несущей частоты в случае син-
фазности и противофазное™ высокочастотных
сигналов (помехи и отраженного сигнала) при
небольших отношениях помеха-сигнал более
эффективна, чем помеха с несущей. Максималь-
ная эффективность отмечается при отношении
помеха-сигнал, равном единице, когда достига-
ется величина тс = 1,0 (при АЧ7 = 0) и щс = -1,0
(при АЧ7 = 180°).
С увеличением отношения помеха-сигнал
сверх а = 2 (6 дБ) эффективность помехи без
несущей падает и становится меньше помехи с
несущей.
258
Проделанный анализ показывает, что воздействие ответной помехи с балансной
модуляцией частотой сканирования сопровождается искажениями модулирующего
сигнала. В модулирующем сигнале появляется постоянная составляющая и четные
гармоники частоты сканирования. Искажения определяются степенью подавления от-
раженного сигнала помехой.
В результате с ростом отношения помеха-сигнал эффективность помехи с баланс-
ной модуляцией на частоте сканирования падает. Иными словами, существуют опреде-
ленные границы отношений помеха-сигнал, за которыми помеха становится мало эффек-
тивной. Так, при балансной модуляции частотой сканирования для обеспечения ошибки
сопровождения не ниже тс = 0,5 в случае синфазности помехи и отраженного сигнала
требуется отношение помеха-сигнал в пределах ± ЗдБ.
При полном подавлении отраженного сигнала исходная частота модуляции пол-
ностью трансформируется в четные гармоники. В этом случае для сохранения эффек-
тивности помехи последнюю целесообразно модулировать с половинной частотой ска-
нирования. Тогда в результате удвоения в канале приемника получается составляющая
частоты сканирования.
Очевидно, для того чтобы не быть зависимым при выборе частоты модуляции от
степени подавления отраженного сигнала помехой, помехи с балансной модуляцией
следует модулировать одновременно как частотой сканирования, так и половинной
частотой сканирования. Поскольку частоты сканирования могут быть известны только
приблизительно, то помехи с балансной модуляцией следует модулировать шумовым
сигналом со спектром, охватывающим диапазон от половинных частот до частот ска-
нирования, или соответствующим многочастотным сигналам. Это уменьшает зависи-
мость эффективной помехи с балансной модуляцией от отношениям помеха-сигнал, а
также создавать помеху одновременно многим станциям с коническим сканированием.
Но при этом неизбежно снижение эффективности действия помехи по сравнению с ба-
лансной модуляцией частотой сканирования или с половинной частотой сканирования.
Полученные выше результаты теоретического рассмотрения воздействия на сис-
тему АСН с коническим сканированием приводили к условиям статического или дина-
мического равновесия, из которых не вытекала возможность срыва АС по направле-
нию. В рассмотренных случаях РСН антенны РЛС либо отклонялось на определенную
величину от направления на источник помехи (помеха на частоте сканирования), либо
вращалось с некоторой угловой скоростью около направления на цель (помеха, рас-
строенная по частоте относительно частоты сканирования), или совершало хаотические
перемещения относительно направления на источник (помеха, модулированная по ам-
плитуде низкочастотным шумом). Такой результат является следствием ряда ограниче-
ний, использованных в теоретическом анализе, а именно:
линейная трактовка основных процессов в системе АСН,
неучет контуров управления АСН и параметров ДНА.
Экспериментальные исследования и моделирование АСН с коническим сканиро-
ванием подтверждают, что условия статического или динамического равновесия при
действии AM помех на частоте сканирования соблюдаются только при сравнительно
малых угловых ошибках сопровождения, когда наблюдаемые процессы действительно
можно считать линейными. Они также показывают наличие срыва АС постановщика
помех при определенных для данной системы АСН пороговых отношениях помеха-
сигнал. При этом величина этого порогового отношения зависит от уровня боковых ле-
пестков ДНА, параметров и нелинейности контура управления.
259
Техника создания помех па частоте сканирования. На рис 9.5 представлена
структурная схема передатчика помех, позволяющего формировать прицельную по
частоте сканирования помеху в противофазе одновременно нескольким РЛС с откры-
тым конических сканированием.
Обычно тракт усиления содержит малошумящий усилитель на ЛБВ, работающий
в непрерывном режиме, и выходной мощный импульсный усилитель на ЛБВ, рабо-
тающий с ограничением по скважности. В рассматриваемой схеме принимаемый сиг-
нал с выхода антенны поступает на многоканальную систему разделения сигналов.
Разделение сигналов может основываться на различии направления их прихода, несу-
щей частоты, частоты повторения импульсов, длительности импульсов или комбина-
Рис. 9.5. Структурная схема передатчика помех,
формирующего прицельную по частоте
сканирования помеху одновременно
нескольким импульсным РЛС
ции указанных параметров. Выходные сигналы системы разделения поступают на N
выходов, обозначенных на схеме
символами 51], S2, S„. Каждый из этих
сигналов детектируется и поступает
на два канала. Один канал состоит из
демодулятора огибающей частоты
сканирования, подобного детектору
импульсов, к которому подключен
инвертор, обеспечивающий формиро-
вание стробирующего сигнала. Вто-
рой канал содержит импульсный уси-
литель и стробируемый каскад, на
управляющий вход которого подастся
выходной сигнал с канала демодуля-
ции огибающей частоты сканирова-
ния. В результате выходной сигнал
пары указанных каналов представляет
собой последовательность видеоим-
пульсов, совпадающих по времени с
радиолокационными импульсами и
модулированных прямоугольными
сигналами, противофазными по от-
ношению к сигналу модуляции ска-
нирования принятой последователь-
ности радиолокационных импульсов.
Та же самая процедура выпол-
няется для каждой из принимаемых последовательностей импульсов подавляемых ра-
диолокаторов. Импульсы с выходов TV-каналов затем суммируются и используются для
запуска генератора импульсов, который управляет выходным усилителем на импульс-
ной ЛБВ. Каждая последовательность импульсов будет отдельно модулироваться соот-
ветствующей частотой сканирования в противофазе. В результате помеховые сигналы,
излучаемые для подавления каждого из радиолокаторов, будут иметь оптимальную
структуру модуляции, обеспечивающую максимальную эффективность воздействия.
При воздействии одновременно на несколько РЛС более выгодна мгновенная ин-
версная помеха на частоте сканирования. Сущность инверсной прицельной помехи по
частоте сканирования в противофазе заключается в том, что при се формировании ис-
260
пользуется ретранслятор с коэффициентом усиления, обратно пропорциональным ам-
плитуде входного сигнала. В результате помеховый сигнал всегда имеет амплитудную
модуляцию, совпадающую полностью с частотой модуляции сигнала РЛС, облучаю-
щей цель-постановщик помех, но с перевернутой на 180° фазой. Иными словами, в
данном случае за счет применения инверсных усилителей автоматически формируется
помеха на частоте сканирования. При этом в излучаемом помеховом сигнале практиче-
ски будет отсутствовать запаздывание по фазе огибающей и, следовательно, эффектив-
ность от ее действия будет выше. При этом эффект действия будет постепенно возрас-
тать, поскольку с увеличением отклонения РСН РЛС от направления на постановщик-
помехи глубина модуляции сигналов РЛС за счет сканирования будет увеличиваться,
что неизбежно приведет к увеличению глубины модуляции инверсной помехи.
Аппаратура создания мгновенной инверсной помехи обладает, кроме того, повы-
шенной пропускной способностью. Практически она обеспечивает формирование при-
цельной по частоте сканирования помехи одновременно большому числу РЛС, по-
скольку формирование инверсной помехи происходит в ответ на каждый принятый
импульс, а вероятность совпадения во времени импульсных последовательностей, при-
надлежащих разным РЛС, маловероятна.
Рассмотренные варианты передатчиков прицельных по частоте сканирования по-
мех рассчитаны на подавление РЛС с открытым сканированием, а при закрытом скани-
ровании они не работают. Однако создание прицельной по частоте сканирования поме-
хи возможно и РЛС со скрытым сканированием. Одна из таких возможностей основы-
вается на использовании паразитной модуляции. Дело в том, что каждый радиолокатор
со скрытым сканированием имеет в излучаемом сигнале модуляцию по закону скани-
рования, обусловленную перекрестными связями между сканирующей приемной ан-
тенной и не сканирующей передающей. Несмотря на то, что эти связи невелики и глу-
бина паразитной модуляции с частотой сканирования крайне незначительна, все же
имеется принципиальная возможность ее выделения с помощью современных прием-
ников высокого класса. Но это, конечно, является сложным делом и требует специаль-
но спроектированных приемников. Возможность определения частоты скрытого ска-
нирования возрастает, если прием сигналов РЛС производить через боковые лепестки
ее ДНА. В этом случае уровень паразитной модуляции частотой сканирования увели-
чивается по сравнению с ее уровнем в сигнале, принимаемом по главному лепестку
РЛС. Но для практической реализации данного метода требуется вынесенная относи-
тельно защищаемого объекта приемная аппаратура, способная измерять частоту пара-
зитной модуляции, и линия связи для передачи полученной информации в реальном
масштабе времени на самолет, сопровождаемый РЛС со скрытым сканированием [1].
Другим возможным методом наведения помехи на частоту скрытого сканирова-
ния является адаптивный метод, основанный на оценке эффективности помехи по ре-
акции подавляемой РЛС на воздействие помехи со скользящей частотой сканирования.
Выше отмечалось, что метод модуляции помехи сигналов со скользящей частотой
сканирования позволяет решить задачу подавления РЛС со скрытым коническим ска-
нированием, но он обладает рядом ограничений. Прежде всего, для обеспечения срыва
режима сопровождения постановщика помех по угловым координатам необходимо до-
вольно медленное скольжение частоты модуляции помехи, что при широком диапазоне
скольжения, определяемом диапазоном ожидаемых частот сканирования, приводит к
большим интервалам между воздействиями помехи, за время которых РЛС могут ус-
261
петь выполнить свою задачу. Если скорость скольжения частоты увеличить, частота
воздействия помехи на РЛС возрастет, но эффективность помехи в момент совпадения
частоты ее модуляции с частотой сканирования снизится. В этом случае срыва режима
сопровождения помеха не вызывает, а вызывает только в соответствующий момент
увеличение угловых ошибок сопровождения, поскольку в этот момент антенна не-
сколько отклоняется по углу, мощность радиолокационного сигнала, облучающего
цель-постановщик помех, уменьшается. Это можно зарегистрировать с помощью пре-
емника системы РЭП как реакцию РЛС на воздействие помехи и использовать для пе-
рехода от модуляции скользящей частотой сканирования в широком диапазоне частот
к модуляции помехи, близкой по частоте к частоте сканирования РЛС. В этом и состо-
ит принцип адаптивного метода создания прицельной по частоте сканирования помехи
РЛС со скрытым сканированием луча, описанный более подробно в главе 10.
Частоту скрытого сканирования РЛС можно определить также по результатам
анализа сигнала, отраженного от антенны подавляемого радиолокатора. В этом случае
система РЭП использует простое устройство радиолокационного типа, которое излуча-
ет сигнал в направлении радиолокатора и принимает сигнал, отраженный от антенны
подавляемого радиолокатора со скрытым сканированием антенного луча. Принятый
сигнал детектируется, в результате чего выделяется сигнал частоты сканирования, ко-
торый используется для противофазной модуляции на частоте сканирования помехи.
Очевидно, при реализации адаптивного метода система РЭП становится элемен-
том замкнутого контура, состоящего из подавляемой РЛС, защищаемого объекта и пе-
редатчика помех.
Техника создания заградительных по частоте сканирования помех сравнительно
простая. Для этого в передатчике помех достаточно предусмотреть источники модули-
рующих сигналов, например, шумов с параметрами, согласованными с диапазоном
предполагаемых частот сканирования подавляемых РЛС. и этими сигналами модули-
ровать переизлучаемый сигнал, как это делалось при модуляции выделенной из зонди-
рующих сигналов РЛС огибающей на частоте сканирования в противофазе. Помимо
шумов и сигналов со скользящей частотой при этом можно использовать амплитудную
модуляцию псевдослучайной последовательностью с требуемыми параметрами.
Структурная схема передатчи-
ка, реализующего данный метод соз-
дания заградительной помехи, пред-
ставлена на рис. 9.6 [1].
В схему передатчика входит
балансный амплитудный модулятор,
формирователь прямоугольных сиг-
налов для балансного модулятора,
регистр сдвига с обратной связью и
таймером, генератор шума и мощная
выходная ЛБВ. Управление регист-
ром сдвига обеспечивает формиро-
вание сигналов прямоугольной фор-
мы с частотой, изменяющейся по псевдослучайному закону. Передатчик может форми-
ровать ретрансляционную помеху на частоте РЛС. При формирования ретрансляцион-
ной помехи принятый сигнал РЛС проходит через балансный амплитудный модулятор,
затем усиливается в выходной ЛБВ и излучается передающей антенной. Тактовая час-
Рис. 9.6. Структурная схема передатчика помех
с псевдослучайной ДМ
262
тота режима сдвига/ё выбирается примерно равной удвоенному значению ожидаемой
частоты сканирования подавляемой РЛС. Благодаря этому первый нуль огибающей
спектра помехи оказывается смещенным относительно несущей частоты РЛС /ё на ве-
личину /ё (выше и ниже). Вместо регистра сдвига в передатчике может применяться на-
бор генераторов напряжения прямоугольной формы, работающих на фиксированных
частотах. В этом случае можно обеспечить излучение ответного импульсного сигнала на
несущей частоте РЛС, промодулированного по амплитуде с помощью последовательно
подключаемых генераторов напряжения прямоугольной формы, частоты которых рас-
пределены в диапазоне возможных частот сканирования. Вместо последовательного под-
ключения может использоваться одновременное подключение нескольких генераторов,
но при этом эффективная глубина модуляции помехи для каждой подавляемой РЛС бу-
дет соответственно ниже.
Методы защиты от помех па частоте сканирования. На рис. 9.7 представлена
схема одного из методов защиты от помех на частоте сканирования, сущность которого
заключается в компенсации любой внешней модуляции принимаемых сигналов.
Рис. 9.7. Принцип защиты РЛС от помех на частоте сканирования
При реализации данного метода используется дополнительная антенна В без ска-
нирования с широкой ДН и дополнительный приемник для приема и обработки сигна-
лов, принятых через эту антенну. Антенна А - приемная антенна РЛС со сканировани-
ем луча. В результате сигналы, принимаемые через антенну А, содержат в себе как
внешнюю помеховую модуляцию, например, на частоте сканирования в противофазе,
так и модуляцию за счет сканирования приемной антенны, обусловленную отклонени-
ем источника помех от линии визирования антенны. Сигналы, принятые через антенну
В, будут содержать только внешнюю модуляцию. После усиления и детектирования в
каждом из каналов формируются сигналы модуляции, которые подаюгся на вычитаю-
щее устройство и вычитаются один из другого. В результате компенсируются все сиг-
налы внешней модуляции, поскольку они одинаковы в обоих каналах, и остается толь-
ко составляющая модуляции, обусловленная сканированием приемной антенны А и со-
держащая полезную информацию о положении цели-постановщика помех. Таким обра-
зом, помеховая модуляция снимается, и помеха перестает быть эффективной [36].
Следует отмстить, что при этом компенсируется модуляция, обусловленная от-
крытым сканированием передающей антенны, что эквивалентно снижению пеленгаци-
онной чувствительности системы. Но эффект от компенсации помехи на частоте ска-
нирования значительно превосходит потери в чувствительности (и точности) системы
пеленгации РЛС.
263
Компенсация помехи рассмотренным выше методом может осуществляться в
двухантенной РЛС с коническим сканированием, одна из антенн которой сканируется
на передачу и прием, другая - только на прием. Лучи сканируют с фазовым сдвигом на
180°, поэтому на выходе вычитающего устройства в этом случае формируется суммар-
ный сигнал ошибки и частичной компенсации полезной модуляции, имевшей место в
рассмотренном выше устройстве помехозащиты, не происходит. Качество компенсации
помехи на частоте сканирования зависит от идентичности амплитудно-частотных харак-
теристик основного и вспомогательного каналов, которая обеспечивается лишь в преде-
лах их полосы пропускания. Поэтому воздействие расстроенной по несущей частоте по-
мехи на скатах амплитудно-частотных характеристик каналов может снизить эффектив-
ность компенсационной защиты РЛС с коническим сканированием. При этом частотная
расстройка может быть фиксированной или изменяемой с частотой сканирования.
При работе РЛС с открытым сканированием можно применить для ее защиты от
прицельных по частоте сканирования помех дезинформацию по частоте сканирования
путем дополнительной модуляции излучаемых сигналов по амплитуде с частотой, от-
личающейся от частоты сканирования более чем на полосу пропускания следящей сис-
темы. Глубина амплитудной модуляция зондирующих сигналов РЛС с частотой скани-
рования обычно определяется единицами процентов, поэтому нетрудно ее замаскиро-
вать более глубокой модуляцией на ложной частоте сканирования. В этом случае в
системе РЭП будет выделяться огибающая с ложной частотой сканирования, и исполь-
зование ее для модуляции помехи будет неэффективным.
Против данного метода защиты, однако, есть путь снижения его эффективности.
Так, если открытое сканирование в РЛС сопровождения осуществляется вращением
плоскости поляризации зондирующих сигналов с частотой сканирования, то при прие-
ме зондирующих сигналов такой РЛС через антенну с фиксированной линейной поля-
ризацией принимаемый сигнал будет иметь двойную модуляцию: с ложной частотой
сканирования и с удвоенной частотой сканирования за счет вращения плоскости поля-
ризации зондирующих сигналов. Глубина модуляции с удвоенной частотой сканирова-
ния будет существенно превалировать над модуляцией с ложной частотой сканирова-
ния, поэтому при детектировании принятых сигналов будет выделен в основном сигнал
на удвоенной частоте сканирования. Поделив его по частоте на два, можно получить
сигнал на частоте сканирования, пригодный для формирования прицельной по частоте
сканирования помехи.
Для защиты РЛС от действия помехи с модуляцией скользящей частотой скани-
рования можно применять автоматическую перестройку частоты сканирования по ин-
формации о создании противником такой помехи. Для получения такой информации
можно использовать установку из двух дополнительных (сторожевых) фильтров, на-
строенных на частоты, смещенные относительно рабочей частоты сканирования в ту
или другую сторону на величину, превышающую ширину полосы пропускания следя-
щей угломерной системы. В этом случае создаваемая противником помеха со скользя-
щей частотой сканирования сначала проходит один из сторожевых фильтров (верхний
или нижний, в зависимости от направления перестройки частоты амплитудной моду-
ляции помехи) и только после этого попадает в полосу следящей системы и воздейст-
вует должным образом на угломерную систему. Если предусмотреть запасные рабочие
частоты сканирования и соответствующую логику быстрого перехода на работу с эти-
ми запасными частотами в момент прохождения помехой сторожевого фильтра, то
264
можно избежать попадания помехи в полосу следящей системы и, следовательно, уст-
ранить эффективное ее воздействие на угломерную систему РЛС с коническим скани-
рованием луча.
Контрмерой такой защите может рассматриваться ответная помеха, модулирован-
ная низкочастотными шумами со спектром, одновременно перекрывающим полосы
пропускания сторожевых фильтров. Такая помеха будет вызывать непрерывное сраба-
тывание системы перестройки частоты сканирования по случайному закону и, как ре-
зультат, вызывать увеличение динамических ошибок слежения за целью по направле-
нию, способных в определенные моменты привести к срыву режима автоматического
сопровождения и потере цели. В данной ситуации будет полезным отключение систе-
мы автоматической перестройки частоты сканирования и переход на работу РЛС с
фиксированной частотой сканирования. Эффект действия помехи снизится до уровня,
создаваемого ответной помехой с амплитудной модуляцией низкочастотными шумами,
рассмотренной выше.
9.2. Методы и техника создания угловых помех РЛС сопровождения
"на проходе"
Принцип сопровождения цели ’’ на проходе". РЛС с сопровождением "на прохо-
де" формирует обычно два веерообразных антенных луча, один из которых непрерывно
сканирует в азимутальной плоскости, другой - в угломестной. Излучаемые через эти
сканирующие антенны сигналы имеют разные несущие частоты и поляризации. На входе
каждого из независимых приемных каналов отраженный от цели сигнал имеет форму
пачки импульсов с огибающей, повторяющей форму ДНА, которые следуют с частотой
сканирования. Угловая информация извлекается либо методом энергетического взвеши-
вания сигналов, позволяющим находить центр пачки и, следовательно, направление на
цель, либо методом счета импульсов, содержащихся в пачке, и нахождения импульса, со-
ответствующего середине пачки и позволяющего также определять направление на цель.
Преимуществом РЛС с сопровождением "на проходе" является возможность одновре-
менного автоматического сопровождения нескольких целей. Определение положения
центра пачки сигналов производится с помощью пары разнесенных по времени следящих
стробов, и в этом отношении напоминает работу следящей системы по дальности. Кри-
терием того, что линия визирования антенны РЛС направлена на цель, является равенст-
во энергий сигналов, попадающих в оба строба. Цель на другой дальности, но располо-
женная в том же направлении, что и первая цель, может быть отселектирована за счет
разности времен прихода сигналов. При наличии целей на одной и той же дальности, но в
различных направлениях, селекция целей производятся по углу.
Угловые помехи РЛС с сопровождением "на проходе". Поскольку РЛС с со-
провождением "на проходе" получает информацию об угловом положении цели из
огибающей последовательности отраженных от цели импульсов, организация РЭП та-
ких РЛС, прежде всего, идет по пути реализации методов, способных исказить оги-
бающую пачки импульсов принимаемых РЛС, и тем самым сместить энергетический
центр пачки в сторону от истинного положения. Делается это обычно путем смещения
момента излучения помехи относительно момента облучения постановщика помех
главным лепестком ДНА РЛС. Для этого система РЭП, установленная на самолете,
принимает последовательность (пачку) радиолокационных импульсов, модулирован-
ных по амплитуде в соответствии с формой ДНА РЛС и частотой ее сканирования, из-
265
меряет эту частоту и синхронизирует свою работу с ней. Смещение энергетического
центра пачки достигается сокращением числа ретранслируемых импульсов в составе
пачки. В результате взаимодействия с отраженным от цели сигналом сигнал помехи
приведет к искажению формы пачки импульсов на входе приемника РЛС и, как следст-
вие, к смещению равносигнального направления системы автосопровождения РЛС в ту
или иную сторону. Иными словами, в угломерной системе в данном случае возникает
систематическая угловая ошибка ±Д9. Данный метод иллюстрируется на рис. 9.8.
Форма отраженного от цели
сигнала при отсутствии помех
Форма отраженного от цели
сигнала при наличии помехи
со смещением энергетического
цетра влево
Форма отраженгюго от цели
сигнала при наличии помехи
со смещением энергетического
цетра вправо
t
Рис. 9.8. Принцип помехового смещения энергетического центра
пачки импульсов РЛС с сопровождением "на проходе"
Смещение энергетического центра можно производить плавно, создавая уводя-
щую по углу помеху. Можно периодически менять направление смещения энергетиче-
ского центра пачки ретранслируемой помехи путем попеременного излучения то од-
ной, то другой части (половины) пачки импульсов с частотой, лежащей в полосе про-
пускания следящей угломерной системы, создавая раскачку равносигнального направ-
ления РЛС и увеличение динамических ошибок системы вплоть до срыва режима авто-
сопровождения.
Представляет интерес инверсная помеха, когда каждый принятый импульс РЛС
усиливается обратно пропорционально его амплитуде [1, 36, 62]. В результате форми-
руется сигнал помехи, огибающая которого представляет собой зеркальное отображе-
ние формы ДНА РЛС. При прохождении через приемную антенну сигнал помехи при-
обретает вид плоского широкого импульса. На индикаторе "угол-дальность" появляет-
ся широкая засветка по углу и сосредоточенная по дальности. В этом случае операторы
не смогут провести точное определение пеленга цели и сопровождать ее вручную. Пе-
ленг может быть определен лишь грубо, по положению середины засветки, в предпо-
ложении ее симметричности относительно направления на цель. Автоматическое
сопровождение по угловым координатам также будет невозможно, поскольку угловая
ширина отметки цели много больше ширины угловых стробов, и система автоматиче-
ского наведения будет блуждать в пределах этой отметки. Точность пеленгации будет
266
грубой, что скажется на снижении эффективности огня, управляемого данной РЛС. Ес-
ли при формировании инверсной помехи ввести асимметрию, то эффект действия по-
мехи будет еще более значительным.
Совместное применение непрерывной шумовой и инверсной помех вызовет за-
светку значительной части экрана индикатора "угол-дальность". Работа оператора в
режиме автоматического или ручного сопровождения окажется в таких условиях прак-
тически невозможной. При этом будет нарушено сопровождение не только по углу, но
и по дальности. При сочетании инверсной помехи с многократной ответной помехой
имитируются ложные цели, находящиеся на различных дальностях и направлениях.
Необходимо иметь в виду, что уводящие по углу помехи требуют точной информации
о частоте сканирования луча антенны и сравнительно легко реализуются, если РЛС
применяет открытое сканирование. При закрытом сканировании луча создание помех
затрудняется, и помехозащищенность РЛС возрастает. В этом случае можно использо-
вать низкочастотные шумовые амплитудно-модулирующие помехи со скользящей час-
тотой сканирования. Однако эффективность таких помех ниже, чем прицельных по
частоте сканирования помех. Для наведения помехи на частоту закрытого сканирова-
ния можно применить адаптивный метод, когда используется информация о реакции
РЛС на воздействие помехи.
Разрабатываются современные РЛС сопровождения с использованием электрон-
ного сканирования. Такие РЛС способны сопровождать большое количество целей од-
новременно с помощью программируемого переключения луча антенны только в на-
правления, где ранее были обнаружены цели. Поскольку электронное сканирование
может осуществляться по случайному закону, и время стояния луча в направлении той
или иной цели минимальное, достаточное для определения параметров цели, создание
угловых инверсных помех таким РЛС становится трудным делом, особенно, если для
пеленгации цели используется моноимпульсный метод.
Наличие в РЛС с сопровождением "на проходе" двух радиолокационных каналов
сопровождения (по азимуту и углу места), работающих на разных частотах, позволяет
организовать эффективную групповую защиту самолетов. Так, если на одном из само-
летов разместить передатчик шумовых помех, настроенный на частоту азимутального
канала, а на другом - передатчик шумовых помех, настроенный на частоту угломест-
пого канала, и если оба самолета будут находиться достаточно близко друг от друга в
пространстве, то каждый оператор РЛС увидит на своем индикаторе только одну шу-
мовую помеху. Если они попытаются осуществить наведение по этим шумовым поло-
сам, то пуск ракеты произойдет по угловым координатам ложной цели, соответствую-
щей точке пересечения этих полос, в результате чего оба самолета-постановщика по-
мех окажутся непораженными.
Рассмотренные виды помех относятся к помехам, создание которых основано на
принципе сопровождения цели по направлению и потому требуют соответствующей
информации при постановке таких помех. Что касается универсальных видов помех,
рассмотренных применительно к противодействию моноимпульсным угломерным ко-
ординатам, то они действуют и на РЛС сопровождения "на проходе". Существенных
отличий по механизму действия таких помех и принципам их реализации не существу-
ет, имеются лишь незначительные отличия, связанные с использованием в РЛС с со-
провождением "на проходе" независимых каналов пеленгации в азимутальной и угло-
местной плоскостях. Так, например, при создании помехи на кроссполяризации для
подавления помехой обоих каналов пеленгации РЛС требуется два передатчика помех,
267
работающих на различных частотах и излучающих помеховые сигналы на ортогональ-
ных поляризациях, соответствующих кроссполяризации каждого из каналов пеленга-
ции. Поскольку помеха на кроссполяризации приводит к деформации однолепестковой
ДН приемной антенны РЛС в двухлепестковую, при действии шумовой помехи на
кроссполяризации на экране индикатора "азимут-дальность" (или "угол места-
дальность") следует ожидать появления двух полос засветки шумами, симметрично
расположенных относительно направления на постановщик помех, в азимутальной (уг-
ломестной) плоскости пеленгации. При использовании ответных импульсных помех в
этом случае должно наблюдаться раздвоение метки цели-постановщика помех. Анало-
гичная картина должна наблюдаться и при действии когерентной помехи, поскольку в
этом случае также нарушается структура поля возбуждения приемной антенны, в ре-
зультате чего формируется два противофазных лепестка ДН антенны вместо одного
стандартного лепестка. По-видимому, опытный оператор РЛС по данным признакам
может распознавать действие данных видов помех, и скрытность их, наблюдаемая при
действии на другие типы угломерных следящих систем, нарушается при противодейст-
вии РЛС с сопровождением "на проходе".
ГЛАВА 10. АДАПТИВНЫЕ МЕТОДЫ РЭП РЛС СОПРОВОЖДЕНИЯ
ПО НАПРАВЛЕНИЮ
10.1. Необходимость адаптации при РЭП
Обычно система РЭП рассматривалась как элемент разомкнутого контура, со-
стоящего из подавляемой РЛС, защищаемого объекта и передатчика помех (рис. 10.1).
В такой упрощенной форме
РЭП можно рассматривать как
применение определенного вида
помехи (например, заградитель-
ной или прицельной шумовой по-
мехи, уводящей помехи по даль-
ности, когерентной помехи, ин-
версной помехи и др.) для воздей-
Рис. 10.1. Структурная схема разомкнутой системы РЭБ ствия на РЛС по определенной
наперед заданной логике. Функ-
ция управления в такой системе РЭП обеспечивала выбор параметров сигнала помехи
(несущей частоты, мощности и ширины спектра помехи, синхронизацию) и вида поме-
хового воздействия. При этом в процессе управления не учитывалась реакция РЛС на
воздействие помехи. Примером такого подхода является передатчик заградительных
помех, в котором функция управления сведена только к включению передатчика по-
мех. В разомкнутой системе РЛС следит за целью, в то время как передатчик помех ра-
ботает в установленном порядке на основе априорной информации об угрозе. Однако
современная автоматизированная система управляемого оружия располагает возмож-
ностью адаптироваться в реальном масштабе времени к воздействию помех и условиям
тактической обстановки. Так, современные системы управляемого оружия могут гибко
изменять свои режимы работы, располагать несколькими способами наведения ракет,
или же ракеты могут наводиться, несмотря на срывы автосопровождения, используя в
РЛС системы управления
оружием
Сумматор
Объект защиты
Передатчик помех с жесткой
логикой управления
268
эти моменты для наведения информацию из памяти бортового процессора. В результа-
те этого эффективность передатчиков помех с жесткой логикой управления своими ре-
сурсами оказывается недостаточной. Для повышения эффективности помех необходи-
ма адаптация, т. е. введение в процесс создания помех обратной связи почти в реаль-
ном масштабе времени, учитывающей состояние подавляемой РЛС при воздействии
помех. В идеальном случае современный комплекс РЭБ представляет собой весьма
точный инструмент, автоматически контролирующий излучение РЛС при воздействии
помех. При этом, наблюдая за эффектом помехи, такой комплекс РЭБ адаптивно
управляет постановкой как активных, так и пассивных помех. При этом анализируется
излучение подавляемой РЛС для ее идентификации, оценки состояния и динамики ра-
боты. Априорная информация состояний РЛС и тактическая информация вместе с те-
кущими данными о "поведении" РЛС подвергаются обработке в ЭВМ и, таким обра-
зом, реализуется адаптивное взаимодействие между комплексом РЭБ и подавляемой
РЛС. В этом случае комплекс РЭБ является элементом замкнутого контура (рис. 10.2).
Процессор сигналов обрабатывает информацию о сигналах подавляемой РЛС, которая
поступает в устройство оценивания переменных величин, характеризующих состояние
угрозы. Оно также может располагать способностью определять, в какой степени реа-
гирование РЛС на воздействие помех приближается к желаемому, т. е. производить
оценку эффективности выбранной стратегии постановки помех. Контроллер на основе
этой информации управляет работой передатчика помех в реальном масштабе времени.
При этом РЛС рассматривается как управляемый объект, определенным образом реаги-
рующий на входное воздействие - сигнал передатчика помех, который в данном случае
выступает как управляющий элемент. Задача заключается в установлении оптимального
контроля сигнала помехи с целью воздействия на поведение РЛС в желаемом направле-
нии [63-65].
Рис. 10.2. Структурная схема замкнутой системы РЭБ
10.2. Принципы адаптации при радиоподавлении РЛС и структура
адаптивной системы РЭП
В качестве примера адаптивного РЭП рассмотрим случай подавления РЛС сопро-
вождения с открытым коническим сканированием. При этом передатчик помех излуча-
ет синхронно с радиоимпульсами РЛС последовательность AM радиоимпульсов, кото-
рая, воздействуя на следящую систему РЛС по направлению, формирует ложный сиг-
269
нал ошибки. Предположим, что амплитуда импульсов сигнала помехи описывается вы-
ражением:
КО = Л[1 + га cos(2л FJ + ф)] , (10.1)
где Fc - частота конического сканирования антенны РЛС; ф - относительная фаза оги-
бающей амплитудной модуляции сигнала помехи и сигнала РЛС; т - глубина ампли-
тудной модуляции; А - амплитуда сигнала.
Как показано в гл. 9, сигналы ошибки, вызванные действием помехи в каналах сопро-
вождения по азимуту и углу места, определяются как: £/аз = ^гавтф, £/VM = А2гасо8ф, где
к\ и к2 - постоянные.
Для упрощения положим ф = 0 и сосредоточим внимание только на сигнале
ошибки в азимутальном канале. Сигнал ошибки Eai вызовет отклонение антенны РЛС
на угол у. Приближение первого порядка позволяет линейно связать величину откло-
нения антенны и глубину амплитудной модуляции т. В общем виде связь у и т имеет
сложный характер из-за различных нелинейностей, например, связанных с ДНА, сис-
темой АРУ и т. д. Поэтому удобной формой представления этой связи может быть сле-
дующее выражение:
Ук +ахУк-\ +- + апиУк-па =h\mk-i +- + Ьптк_пь , (10.2)
где {«,,&,} - постоянные, но неизвестные коэффициенты.
Структура адаптивного управления обусловлена тем фактом, что априори неиз-
вестна передаточная функция, позволяющая связать управляющий входной сигнал иг с
величиной отклонения антенны у. Для того чтобы реализовать управление РЛС в замк-
нутом контуре, необходимо знать ее выходной параметр у, который нельзя измерить
непосредственно, а можно оценить только по уровню мощности радиолокационных
сигналов. Когда РЛС направлена на объект с приемником, уровень принимаемых сиг-
налов будет постоянным. Если отклонение антенны РЛС увеличивается, то также воз-
растает глубина AM принимаемого сигнала. Структура управления РЛС сопровожде-
ния показана на рис. 10.3.
Рис. 10.3. Структура замкнутой системы управления автономной РЛС
адаптивным передатчиком помех
Элементом контура управления, непосредственно воздействующим на РЛС, явля-
ется передатчик помех, излучающий импульсные сигналы, модулированные по ампли-
туде частотой конического сканирования антенны РЛС. Глубина AM сигнала помехи
регулируется входной последовательностью тк. Управляющий сигнал тк корректиру-
ется в интервале каждого периода сканирования или нескольких таких периодов. В
общем случае может быть осуществлено управление другими параметрами помехи, на-
пример, фазой, длительностью импульса, моментом излучения и др.
270
Исследования проблемы управления системой с неизвестными параметрами при-
вели к разработке адаптивных контроллеров двух классов: контроллера прямого регу-
лирования, осуществляющего управление по известному закону, и самонастраивающе-
гося контроллера, когда измеренные параметры управляемого объекта используются
для определения закона управления. Основной особенностью самонастраивающегося
контроллера в рассматриваемом случае является реализация в реальном масштабе вре-
мени закона управления с помощью алгоритма оценки. Структурная схема такого кон-
троллера показана на рис. 10.4.
Закон управления . Рк- ®к Алгоритм опенки
I
mk С пстема —
Рис. 10.4. С груктурная схема самонастраивающегося контроллера
Выбор алгоритма рекуррентной опенки обусловлен требованием управления в реаль-
ном масштабе времени. Среди выбранных алгоритмов можно отметить алгоритм ре-
куррентной оценки по измеренным значениям, алгоритм рекуррентной оценки по ме-
тоду наименьших квадратов, алгоритм рекуррентной оценки по методу максимально-
го правдоподобия и алгоритм рекуррентной оценки по методу обобщенных наимень-
ших квадратов.
В алгоритмы обычно вводятся некоторые изменения, учитывающие нелинейность
системы и другие явления.
Оценки параметров системы 0к и ковариационная матрица ошибок
тк = ~0к ),(# ~0к )| используется для построения закона управления, согласно
которому вычисляется очередной сигнал управления тк по предыдущим сигналам
управления {иг,,/ < fc-l} и по результатам предыдущего и настоящего измерений па-
раметров {^,z </<}. Структура закона управления зависит от характера требуемой ре-
акции РЛС.
Возможно два вида реакции РЛС на адаптивное воздействие помехи. Первый вид
- обеспечение сопровождения РЛС, но с определенной ошибкой по направлению, т. с.
такое управление, при котором выходной параметр ук доводится до некоторого задан-
ного уровня У|ПОр и затем он поддерживается на этом уровне. Для этой цели наиболее
подходят контроллеры наименьшей дисперсии, один из которых реализует замену ис-
тинных выходных параметров системы {a^.jnx оценками (контроллер одно-
значного преобразования), а другой учитывает неопределенность оценок параметров
("осторожный контроллер"). Второй вид реакции заключается в применении такого за-
кона управления, при котором наступает срыв coi [ровождения при минимальной затра-
те ресурсов управления.
271
Кроме самонастраивающихся регуляторов также применялись адаптивные кон-
троллеры прямого действия, структура закона управления которых задается и произво-
дится оценка неизвестных параметров этой структуры с точки зрения достижения по-
ставленной цели управления. В этом случае упомянутая структура выражается соот-
ношением:
П° ПЬ Пс ЛНП1
+ Se„oA-t + l^nb+iy^
«-I i-i «-I
(10.3)
Рис. 10.5. Зависимость выходного параметра у
от времени при обеспечения заданной
ошибки сопровождения РЛС на частоте
сканирования для регулятора
однозначного преобразования (а)
и "осторожного" (б)
где /пор - опорная величина ошибки, которую система должна отслеживать.
Были испытаны контроллеры прямого действия, согласованные по входу, и кон-
троллеры, согласованные по выходу, отличающиеся только уравнениями для вектора
неизвестных параметров 6. Возможности адаптивного РЭП испытывались на моделях
РЛС сопровождения. При этом использовались различные алгоритмы оценки и законы
управления. Для примера на рис. 10.5 приведены графики изменения угла отклонения
антенны РЛС от направления на цель в
процессе адаптивного управления пара-
метрами помехи для двух типов контролле-
ров с целью достижения определенного
значения ошибки сопровождения уиорн. Ре-
куррентная оценка определялась по методу
наименьших квадратов.
Такой же алгоритм оценки параметров
был использован для обеспечения эффекта
срыва сопровождения (рис. 10.6). Такая ме-
тодика применима к другим типам РЛС со-
провождения, например, к РЛС сопровож-
дения со сканированием на "прием", т. е. со
скрытым коническим сканированием.
Неадаптивная система РЭП в данном
случае могла бы создавать AM помеху с
частотой модуляции, линейно перестраи-
ваемой в диапазоне возможных частот ска-
нирования РЛС. В приемном устройстве
адаптивной системы РЭП в этом случае бу-
дут наблюдаться резкие изменения ампли-
туды радиолокационного сигнала. Эти ам-
плитудные изменения используются для
настройки помехи на частоту сканирования
РЛС. В начальный момент воздействия по-
мехи производится слежение за "поведени-
ем" РЛС с целью определения параметров
помехи, при которых можно достичь срыва
сопровождения. При принятии решения о
срыве сопровождения сигнал помехи наде-
ляется этими параметрами в нужный момент
времени [66]. На рис. 10.7 приведена зави-
симость частоты АМ помехи от времени.
Рис. 10.6. Зависимость выходного параметра
у от времени в случае обеспечения срыва
сопровождения РЛС с помощью адаптивной
помехи на частоте сканирования
272
Рис. 10.7. Зависимость частоты AM помехи
от времени при адаптивном создании помехи
РЛС со скрытым коническим сканированием
Рис. 10.8. Траектории движения РСН в плоско-
сти азимут-угол места при адаптивном
воздействии помехи на РЛС со скрытым
коническим сканированием
Сначала частота ДМ сигнала помехи
изменяется линейно до тех пор, пока не
будет обнаружено изменение уровня мощ-
ности радиолокационного сигнала, после
чего включается контролируемая помеха
на частоте сканирования, которая заставля-
ет антенну РЛС совершать движение по
круговым траекториям относительно на-
правления на цель (рис. 10.8).
Передатчик помех РЛС с кониче-
ским сканированием на "прием" в режиме
адаптации по "жесткой" логике может
функционировать следующим образом
[65]. В начальный момент передатчик
помех излучает радиосигнал на несущей
частоте подавляемой РЛС, модулирован-
ный по амплитуде меандром, частота ко-
торого попеременно с низкой и высокой
скоростью одновременно перестраивается
в диапазоне. возможных частот сканиро-
вания, например, от 80 до 25 Гц и от 130
до 80 Гц. Длительность циклов пере-
стройки частоты ДМ составляет примерно
5 и 1 с соответственно. В момент, когда
частота ДМ сигнала помехи проходит
значение частоты сканирования подав-
ляемой РЛС, действие помехи приводит к
небольшому отклонению передающего антенного луча РЛС от направления на защи-
щаемый объект, которое обнаруживается приемником станции помех по уменьшению
уровня радиолокационного сигнала, облучающего объект. Формируется управляющий
сигнал реакции РЛС на воздействие помехи. С этой целью видеоимпульсы с выхода
приемника детектируются, и полученное напряжение подается на вход триггера Шми-
та. Когда уровень видеоимпульсов в результате отклонения передающей антенны РЛС
от направления на цель уменьшается и становится ниже уровня нижнего порога сраба-
тывание триггера Шмита, его выходное напряжение резко падает до своего нижнего
предела. Этот перепад выходного напряжения дифференцируется, и из него формиру-
ется короткий отрицательный видеоимпульс, запускающий ждущий мультивибратор,
формирующий двухсекундный импульс, управляющий режимом перестройки частоты
AM. В результате перестройка частоты останавливается, мгновенное напряжение пи-
лообразной формы управляющего частотой генератора прямоугольного напряжения
запоминается, и затем меняется направление изменения частоты и начинается очень
медленное качание около запомненного значения частоты в течение определенного
интервала времени, достаточного для срыва сопровождения РЛС (около 2с). После это-
го полный цикл перестройки частоты AM сигнала помехи восстанавливается. Если эта
или другая РЛС захватывает на автосопровождение объект снова, то уровень облу-
чающего радиолокационного сигнала возрастает, и перестройка частоты AM будет
продолжаться до следующего момента совпадения с частотой сканирования РЛС. Если
273
Рис. 10.9. Изменение положения РСН РЛС
при адаптивном создании мерцающих помех
из двух разнесенных источников помех
система управляемого оружия применяет ракету с радиолокационной ГСН, то для за-
щиты объекта можно использовать постановку облаков дипольных отражателей, что
вынуждает систему наведения ракеты осуществлять выбор между несколькими равно-
значными целями. Когда угломерная следящая система ракеты вынуждена поперемен-
но реагировать на один из двух разнесенных по углу источников помех, например, в
случае мерцающих помех, создаваемых двумя постановщиками помех или источника-
ми помех, расположенными на противоположных концах одного носителя, то можно
заставить антенну РЛС совершать колебательные движения по азимуту с нарастающей
амплитудой. При этом можно использовать прерывистую адаптивную помеху с
изменяемым коэффициентом заполнения
(помеха, действующая на систему АРУ
РЛС). Таким образом, антенна РЛС может
быть перенацелена с защищаемого объекта
на облако диполей или, если это возможно,
переведена следящая система на захват бо-
ковыми лепестками ДНА. Кроме того, в ре-
зультате адаптации помехи ракета может
быть перенацелена в определенном направ-
лении. На рис. 10.9 приведен график коле-
бания антенны РЛС при создании адаптив-
ной мерцающей помехи, создаваемой двумя
пространственно разнесенными передатчи-
ками помех.
Эффективность воздействия помех при использовании обратной связи, учиты-
вающей состояние подавляемой РЛС, во многом зависит от того, насколько полно про-
изводится измерение поля излучения передающей антенны РЛС и насколько полно ре-
зультаты этих измерений характеризуют состояние угловой следящей системы РЛС.
При этом, если измерение поля производится в одной точке пространства (один поста-
новщик помех), то существует неоднозначность в определении состояния угломерной
следящей системы, связанная с немонотонным характером ДН передающей антенны
РЛС. Однако при измерении поля в двух точках пространства (два разнесенных поста-
новщика помех) можно построить функцию, характеризующую состояние угловой сле-
дящей системы в зависимости от результатов измерения суммарного поля, которая бы-
ла бы монотонной и однородной вдоль линии, соединяющей постановщики помех.
Этого будет достаточно для организации оптимального воздействия помех на угломер-
ную следящую систему и решения более общей задачи выбора оптимального закона
воздействия помех, чем просто выбор оптимальной частоты мерцания помехи из двух
точек пространства.
С учетом нормировки за счет АРУ приемника РЛС класс возможных воздействий
на угловую следящую систему может быть записан таким образом:
U = (1 -а)/(х,-у) + а/(х2-у), 0<а<1,
(Ю.4)
где fix) - пеленгационная характеристика угловой следящей системы; хь х2 - угловое
положение постановщиков помех; у - угловое положение равносигнального направле-
ния приемной антенны подавляемой РЛС (выход системы слежения); ос - безразмерный
параметр, характеризующий соотношение мощностей постановщиков помех. При этом
274
a = 0 соответствует тому, что включен только первый постановщик помех, а ос = 1 -
только второй.
За критерий оптимальности можно принять срыв сопровождения по угловым ко-
ординатам, так как для ряда систем ошибка сопровождения РЛС до определенного
предела слабо влияет на вероятность поражения, например, в случае ЗРК с полуактив-
ным наведением за минимальное время. Если размах пеленгационной характеристики
угломера и угловая база постановщиков помех относительно него известна, то можно
искать управление, которое обеспечивает отклонение следящей системы за пределы
пеленгационной характеристики за минимальное время.
Для неизвестной величины необходимого отклонения, с целью обеспечения срыва
сопровождения пеленгатора, оптимальным в смысле указанной выше цели воздействия
необходимо такое управление, которое обеспечивает наибольшее значение каждого
экстремального отклонения угловой следящей системы:
t/=max"'(|vA|), (10.5)
и
где ук - значение отклонения угловой следящей системы в момент А-го экстремума,
У к ~ У'((к ) ' тах-1(л) - такое в классе U, которое обеспечивает максимальное значение х.
При таком управлении стремятся максимизировать каждый очередной экстремум
отклонения, надеясь, что цель выйдет за пределы дискриминационной характеристики,
не заботясь о дальнейшем. Такая "близорукость" управления связана с предположени-
ем об отсутствии сведений о ПХ и невозможности ее текущей оценки.
Для охвата практически всего класса радиолокационных систем углового сопро-
вождения представим данную системы как последовательное соединение нелинейного
безынерционного элемента (ПХ) и линейного инерционного с передаточной функцией
общего вида:
В(р)
т
i=0
i ojPJ
7=0
m < n.
(Ю.6)
Выбор управления для принятого критерия оптимальности можно осуществить,
начиная с момента времени, когда система достигла очередного экстремума отклоне-
ния. При этом управление должно заставить систему достичь наибольшего из возмож-
ных по величине и, очевидно, противоположного по знаку отклонения системы.
Это означает, что
шах,
и
min,
. и
(Ю.7)
т. е. управление должно быть максимальным из возможных в те моменты времени, ко-
гда скорость системы положительна, и минимальным, когда скорость системы отрица-
тельна. Обратимся к выражению (10.4) для класса воздействий U и проиллюстрируем
его рис. 10.10.
275
Рис. 10.10. Графическое представление класса возможных управлений для помехи,
создаваемой двумя постановщиками помех
Классу возможных управлений соответствует заштрихованная область. Верхняя и
нижняя границы области представляют собой функции шах и и min и соответственно.
и и
Но это будут управления, соответствующие включению только одного из постановщи-
ков помех. Таким образом, оптимальное, в смысле выполнения принятого выше крите-
рия, воздействие на следящую систему оказывают мерцающие помехи. Закон переклю-
чения постановщиков помех определяется положением точки, характеризующей со-
Эу
стояние системы и управления. При — >0 (движение системы вправо) точка должна
Э/
Эу
находиться на верхней границе области при любом у. Для — <0 (движение влево)
Э/
точка должна при всех у находиться на нижней границе графика. Учитывая наличие
неопределенности в значении пеленгационной характеристики системы сопровождения
и собственной угловой базы постановщиков помех относительно РЛС, можно упро-
стить закон управления, естественно, несколько ухудшив его.
Положим, что max соответствует ос = 1 (работает только второй правый поста-
o'
новщик), a min — ос — 0 (работает только первый левый постановщик помехи). При
о
этом закон переключения постановщиков помех весьма прост:
включен правый постановщик помех, если
Эу
т~>0,
Э/
включен левый постановщик помех, если
^<0.
Эг
Таким образом, требуемая для оптимизации воздействия помехи на угловую сис-
тему сопровождения информация сводится лишь к необходимости знания направления
текущего перемещения системы. Это обстоятельство оправдывает приведенное выше ут-
276
ней связи. В результате облу
всрждение о достаточности информации от измерений поля излучения РЛС в точках на-
хождения источников помех.
Возможным вариантом
реализации описанного выше
метода взаимной защиты мо-
жет быть распределенная
ретрансляционная система,
размещенная на двух про-
странственно разнесенных ЛА
(рис. 10.11).
В данном случае осуще-
ствляется взаимная перекрест-
ная ретрансляция радиолока-
ционных сигналов, принимае-
мых одним ЛА, и излучение
сигнала помехи другим ЛА.
Ретрансляторы ЛА распреде-
ленной системы связаны меж-
ду собой каналом двухсторон- Рис- 10П- Структурная схема системы взаимной защиты
двух летательных аппаратов с помощью распределенной
ретрансляционной системы
чения такой системы на боль-
ших расстояниях РЛС будет отслеживать и наводить ракету на энергетический центр,
лежащий между ЛА. По мере приближения ЛА к подавляемой РЛС, вследствие увели-
чения угла видимости ЛА и направленных свойств антенны РЛС, интенсивность облу-
чения ЛА будет неодинаковой и равносигнальная зона РЛС будет смещаться в сторону
ЛА, излучающего сигнал большей интенсивности [67]. Однако по мере смещения к не-
му интенсивность излучения от него будет уменьшаться, а от другого будет возрастать, т.
е наведение на этот ЛА не обеспечивается. Аналогичная ситуация будет возникать при
попытке наведения на другой ЛА. Недостатком такой двухканальной системы перекре-
стной ретрансляции является трудность обеспечения идентичности параметров каналов
взаимной ретрансляции. Устранение этого недостатка возможно путем применения од-
ного распределенного ретранслятора, работающего в режиме временного разделения
(рис. 10.12). В течение одного временного интервала радиолокационный сигнал приня-
тый, например, ЛА1 через канал связи, усиливается и излучается антенной ЛА2. В сле-
дующий интервал времени радиолокационный сигнал принимается, усиливается на
ЛА2 и через канал связи принимается на ЛАЬ усиливается и излучается в направлении
подавляемой РЛС. Все переключатели работают синхронно и таким образом, чтобы
обеспечить режим временного разделения ретрансляции сигнала. Обмен информацией
между ЛА может происходить непосредственно на несущей частоте с мерами экрани-
ровки антенн или на другой частоте вне рабочего диапазона подавляемой РЛС для ис-
ключения эффекта самоподсвета, с помощью модулятора и демодулятора.
Частота коммутации переключателей выбирается такой, чтобы, используя эффект
интегрирования в узкополосных элементах, т. е. наложение откликов в следящей сис-
теме подавляемой РЛС, обеспечить наведение на энергетический центр, находящийся
между взаимодействующими ЛА. Метод адаптации может быть использован при наве-
277
ла2
Рис. 10.12. Структурная схема распределенной ретрансляционной системы
взаимной защиты с временным разделением
дснии помехи на кроссполяризацию, если положение ее не может быть установлено по
зондирующим сигналам РЛС. В этом случае производится качание поляризации в уг-
ловом секторе ±90° относительно ожидаемого положения кроссполяризации и опреде-
ление момента реакции подавляемой РЛС на воздействие поляризационной помехи по
отклонению ее антенны, после чего сектор качания поляризации сужается до размеров,
обеспечивающих высокую эффективность действия помехи. Как и в ранее рассмотрен-
ных случаях, метод основан на поиске и "захвате" параметра РЛС, по которому может
быть организована помеха. В данном случае таким параметром является поляризация,
ортогональная рабочей поляризации приемной антенны РЛС слежения. Следует иметь
в виду, что этот метод не может использоваться против систем с незамкнутыми конту-
рами управления, таких как самонаводящисся ракеты с полуактивным наведением, по-
скольку нарушения в работе ГСН этих ракет не отражаются на ориентации луча стан-
ции подсвета цели. Адаптивный метод может использоваться при создании помех РЛС
с сопровождением "на проходе" и скрытым сканированием. В этом случае передающая
антенна РЛС не сканирует и должна иметь широкую ДНА, перекрывающую полностью
угловой сектор сканирования приемной антенны, что невыгодно с энергетической точ-
ки зрения, дальности действия и помехозащищенности РЛС. Поэтому при сканирова-
нии только на прием часто используют узконаправленную ДН передающей антенны,
наводимую по направлению на цель.
Это обстоятельство открывает возможность создания прицельных по частоте ска-
нирования помех по реакции РЛС на их воздействие. В этом случае задача системы
РЭП состоит в том, чтобы вызвать отклонение луча передающей антенны РЛС, облу-
чающего цель, зафиксировать это отклонение как реакцию РЛС на совпадение частоты
модуляции помехи с частотой сканирования приемной антенны РЛС. После того, как
система РЭП определит таким образом частоту сканирования, она продолжает созда-
вать помеху с этой частотой, вызывая угловые ошибки. При использовании описанного
метода предполагается, что диапазон частот сканирования антенного луча приемной
антенны РЛС известен.
278
В системе РЭП производится амплитудная модуляция ретранслируемой импульс-
ной последовательности сигналом прямоугольной формы, частота которого медленно
меняется в пределах диапазона возможных частот сканирования. Когда частота моду-
лирующего сигнала и частота сканирования антенного луча РЛС совпадут, произойдет
небольшое отклонение луча передающей антенны РЛС. Чем быстрее изменяется часто-
та модулирующего прямоугольного сигнала, тем меньше отклонится антенный луч и
наоборот. При заметном отклонении антенного луча перестройка частоты модулирую-
щего по амплитуде сигнала замедляется и производится в дальнейшем гораздо медлен-
нее и в более узкой полосе частот с центром, соответствующим обнаруженному откло-
нению луча. Процесс продолжается до тех пор, пока имеет место отклонение антенного
луча. По этой реакции можно судить об эффективности воздействия угловой помехи.
Таким образом, система РЭБ с адаптивной подстройкой параметров помехового
сигнала работает в рекурсивном режиме с обратной связью. При этом оператору долж-
на быть предоставлена возможность определять аномалии и производить оценку эф-
фективности постановки помех, а также устанавливать приоритет угроз, особенно в ус-
ловиях отражения залповой атаки, с автоматизированной оптимизацией режима поста-
новки помех для каждой угрозы. Основными элементами адаптивной системы РЭБ яв-
ляется датчик информации, процессор сигналов, устройство оценки данных и состоя-
ния угрозы, контроллер и передатчик помех.
Датчик информации осуществляет корреляцию данных, поступающих от источ-
ников информации, находящихся на борту защищаемого объекта (приемник предупре-
ждения о радиолокационном облучении, РЛС, бистатические РЛС обнаружения, ИК
системы обнаружения и сопровождения) и от внешних источников морского, воздуш-
ного и космического базирования. Разнообразие средств обнаружения обусловлено
тем, что можно ожидать любой комбинации методов наведения ракеты—
радиолокационного, ИК, оптического и наведения на источник излучения. Использова-
ние противником методов маскировки работы или режимов работы военного времени
может нейтрализовать любое из этих средств.
Процессор сигналов выполняет классическую операцию разделения определенных
типов РЛС, используя для этого информацию о направлении прихода и несущей часто-
те радиоимпульсов. Точная информация, необходимая для оценки и предсказания па-
раметров модуляции сигнала при постановке адаптивных помех, получается путем
фильтрации данных отдельных датчиков информации или корреляции данных различ-
ных датчиков информации. Может оказаться необходимым введение в процессор ин-
формации об ожидаемых характеристиках сигналов от контроллера (особенно в случае
обработки слабых сигналов). Например, может оказаться невозможным отличить изме-
нение уровня продетектированного сигнала в условиях помех многолучевого распро-
странения из-за отражения радиоволн от морской поверхности, если не ввести в про-
цессор информацию о том, какую скорость изменения амплитуды следует ожидать. Ре-
зультаты обработки данных процессором выводятся на индикаторное устройство и
также поступают в устройство оценивания, которое является ключевым элементом
адаптивной системы. Оно объединяет всю текущую и хранимую в ЗУ информацию,
поступающую от процессора, оператора и библиотеки априорных данных, составляя
непрерывно обновляющийся дескриптор обстановки, включающий характеристики уг-
рожающих объектов. Другая функция процессора - это определение показателя эффек-
279
тивности или степени точности дескриптора. Оператор может вести наблюдение за
процессом обновления дескриптора в удобном для него темпе. Он может вводить весо-
вые коэффициенты, воздействуя в нужном направлении на процедуру объединения
различных типов данных. Весовые коэффициенты вводятся для корректировки мони-
тора с учетом дополнительной информации, которой может располагать оператор. Еще
одна функция блока оценивания данных - это оценка эффективности выбранной стра-
тегии постановки помех. Если монитор определил, что данная ракета не представляет
больше угрозы для корабля (перенацелена на облако диполей), то ресурсы РЭП могут
быть высвобождены для противодействия следующей по приоритету угрозе. Он также
должен осуществить обмен информацией с корабельными РЛС целеуказания, чтобы
точнее определить траекторию ракеты и оказывать помощь в распределении боевых
корабельных ресурсов. Если перенацеленная ракета вдруг захватит снова корабль, мо-
нитор своевременно предупредит об этом, используя всю накопленную информацию.
Контроллер эффективно следит за распределением ресурсов РЭП, точно настраи-
вая параметры передатчика помех. Такая настройка производится с невысокой скоро-
стью с тем, чтобы за процессором мог следить оператор. Например, для дезориентации
ГСН с коническим сканированием по угловым координатам передатчиком ответных
помех может производиться постановка прерывистых помех, воздействующих на сис-
тему АРУ. Контроллер может производить точную настройку коэффициента заполне-
ния и периода повторения прерывистой помехи, используя для этого текущие данные
от блока оценивания данных. Зная состояние контроллера и следя за реакцией ГСН, он
может оценить ее уязвимость. Если достоверность текущих данных от блока оценки
низка, то контроллер может задать передатчику помех режим проверки характеристик
подавляемой угрозы, не стремясь быстро нейтрализовать ее, и возможно выполнить
сначала роль маяка с целью быстрейшей адаптации режима создания помех. Контрол-
лер производит точную настройку формирователя помеховых воздействий передатчика
помех, формирующего импульсную последовательность помехового сигнала. Напри-
мер, в режиме создания ответных помех системе АРУ этот формирователь генерирует
прерывистую помеху, а контроллер обеспечивает медленную перестройку периода и
коэффициента заполнения сигнала помехи. ЭВМ контроллера получает информацию о
курсе и скорости как защищаемого объекта, так и ракеты, а также информацию о ра-
диоэлектронной обстановке и местоположении других "своих" объектов. В ЭВМ хра-
нится предыстория каждого случая перенацеливания ракеты, которая может быть ис-
пользована для быстрого определения режима работы ГСН, оптимизации создания по-
мех на любой дальности и в любой момент времени. Таким образом, ЭВМ определяет
интервалы и направления выстреливания дипольных отражателей, распознает признаки
захвата ложной цели по углу и дальности, а также может давать указания о действиях
или тактике подавления другим объектам. Таким образом, в ответ на появление адап-
тивных систем управляемого оружия появляются адаптивные системы РЭП, функцио-
нирующие в реальном масштабе времени и способные использовать для этого инфор-
мацию различных датчиков. В настоящее время использование разнообразных высоко-
чувствительных датчиков и разработка теории контролируемой и адаптивной фильтра-
ции позволили решить многие проблемы реализации адаптивных средств РЭП, кото-
рые могут быть использованы для нейтрализации систем оружия с РЛС ФАР.
280
ГЛАВА 11. ПЕРЕНАЦЕЛИВАЮЩИЕ ПОМЕХИ
11.1. Принцип создания перенацеливающих помех
Принцип создания перенацеливающих помех заключается в создании условий,
при которых угрожаемая РЛС с высокой вероятностью перенацеливается с защищае-
мого объекта на ложные цели, пространственно не совпадающие с положением защи-
щаемого объекта. В настоящее время известно много способов перенацеливания. К ним
относится перенацеливание на облако дипольных отражателей, на буксируемые актив-
ные и пассивные ловушки, на передатчики помех одноразового действия (ПОД), на
земную и водную поверхности. Поскольку при создании перенацеливания в большин-
стве случаев используются внебортовые средства, выбрасываемые в момент опасности
и не подсвечивающие помехой защищаемый объект, данный вид защиты можно отне-
сти к перспективным для различных объектов, в том числе объектов с малой радиоло-
кационной видимостью, выполненных по технологии "Стеле". Другим преимуществом
перенацеливающих средств является то, что их применение в меньшей степени зависит
от знания особенностей подавляемой техники противника, чем применение бортовых
средств РЭП. Так, например, применение в РЛС скачкообразной перестройки частоты
и особенно перестройки частоты от импульса к импульсу, ослабляет эффективность
многих бортовых средств РЭП. Для внебортовых средств РЭП структура сигнала РЛС
почти не играет роли.
В соответствии с изложенным, перенацеливанию при защите различных объектов
уделяется большое внимание, в том числе при защите боеголовок баллистических ра-
кет при преодолении ими системы ПРО [68]. Учитывая специфику движения боеголо-
вок, на средних участках траектории полета обычно предусматривается применение
легких ложных целей (надувные шары, баллоны), а на конечном участке траектории
при вхождении боеголовки в плотные слои атмосферы - более тяжелых ложных целей,
способных двигаться в атмосфере не сгорая.
Рассмотрим кратко характеристики и тактические возможности каждого из из-
вестных способов перенацеливания.
11.2. Перенацеливание на облака дипольных отражателей
При защите самолета дипольные отражатели выбрасываются устройствами-
автоматами и в ряде случаев, подсвечиваются специальными сигналами. Выброс авто-
матами позволяет эффективно рассеивать диполи в атмосфере, а подсвет сигналами
устраняет возможность их селекции по скорости. В результате отмеченных действий
облака дипольных отражателей имитируют реальные движущиеся цели и создают эф-
фективную дезориентирующую помеху, способную вызвать перенацеливание радиоло-
каторов с защищаемой цели на облако пассивных отражателей. Эффективность пере-
нацеливания во многом определяется выбором момента применения данного вида по-
мех, что при наличии комплексной системы зашиты может быть обеспечено на базе
бортовых вычислительных устройств, современных средств радиотехнической развед-
ки и быстродействующих устройств выброса диполей. Необходимо отметить, что об-
лака диполей, имеющие большие угловые размеры, при расположении их вблизи ра-
диолокаторов представляют серьезную проблему для РЛС углового сопровождения. В
281
этом случае при работе в режиме автосопровождения цели направление оси антенны
РЛС будет блуждать по облаку диполей и терять цель.
Методы применения дипольных отражателей в целях создания перенацеливания в
определенной мере зависит от типа подавляемой РЛС. Рассмотрим наиболее типичные
ситуации [1,3, 49, 69, 70].
Применение дипольных отражателей для подавления радиолокаторов со-
провождения. В этом случае с борта защищаемого самолета выбрасывают в переднюю
или заднюю полусферу большое количество пачек диполей. Пачки диполей образуют
облако, которое быстро увеличивается в объеме за счет турбулентного потока воздуха
вокруг и позади самолета. При этом быстро меняется величина ЭПР облака дипольных
отражателей (ДО) и за очень короткое время увеличивается на 30 дБ и более. После
выхода из этого следа облако ДО продолжает расти, но более медленно и преимущест-
венно в вертикальной плоскости и в основном совпадает с направлением ветра [1 ].
При постановке ДО в передней полусфере обычно используется выстреливаемая
вперед ракета с диполями на борту, которая во время своего полета непрерывно или в
определенные моменты времени создает по пути следования самолета дипольные об-
лака. Если при этом в элементе разрешения РЛС обеспечивается ЭПР облака ДО, в 10
раз превышающая ЭПР самолета, то РЛС с импульсным излучением устойчиво пере-
нацеливается на облако ДО. Однако, если радиолокатор доплеровского типа, то отра-
женный от диполей сигнал с близкими к нулю доплеровским скоростями сильно ос-
лабляется и перенацеливания не произойдет. В этом случае необходимо выброс ДО со-
четать с их подсветом сигналами, наделяющими ДО свойствами быстродвижущихся
целей. Рассмотрим это несколько подробнее применительно к различным типам РЛС.
Создание дипольных помех радиолокаторам сопровождения с импульсным
некогерентпым излучением. Действие дипольных отражателей на импульсные РЛС
сопровождения в зависимости от количества выброшенных ДО и способов их приме-
нения может привести к эффектам маскировки и имитации (дезинформирования). Так,
плотная полоса диполей на маршруте полета цели может исключить ее обнаружение и
захват на автоматическое сопровождение. Но при этом требуется повышенный расход
ДО, поскольку РЛС сопровождения имеет более узкий антенный луч и лучшую разре-
шающую способность по дальности, чем РЛС обнаружения. Дискретное по времени
выбрасывание пачек ДО позволяет имитировать в пределах ДН антенны подавляемой
РЛС ложные цели, что вызывает угловые ошибки сопровождения и перенацеливание на
дипольные ложные цели систем автоматического сопровождения РЛС по дальности и
направлению. Темп сброса пачек ДО в этом случае выбирается таким, чтобы защищае-
мая цель и ближайшее к ней облако ДО находились в пределах разрешаемого объема
РЛС. Для срыва автоматического сопровождения защищаемого объекта по направлению
необходимо обеспечить переход системы автоматического сопровождения по дальности
на сопровождение облака диполей, поскольку в импульсных РЛС применяется селекция
целей по дальности, обеспечивающая поступление сигналов в угломерный канал только с
выбранной стробированием дальности.
Когда самолет и облако ДО попадают одновременно в пространственный элемент
радиолокационного разрешения, РЛС будет сопровождать энергетический центр их со-
вокупности, который будет находиться между самолетом и облаком. При отсутствии
облака ДО центр элемента разрешения будет совмещен с самолетом. Для эффективного
перенацеливания необходимо, чтобы ЭПР облака ДО доминировала в элементе разре-
282
шения. Однако эта ЭПР зависит от скорости развертывания, которая, в свою очередь,
зависит от скорости полета самолета и характеристик турбулентности развития облака
ДО. Если ДО попадают в нетурбулентный поток, то развертывание облака происходит
медленно, и для того, чтобы получить требуемое для перенацеливания отношение ЭПР
облака и самолета, следует увеличивать число одновременно выбрасываемых пачек ДО и
улучшать их распределение по пространству. Поэтому сильное влияние на развертыва-
ние облака ДО оказывает место установки на защищаемом самолете автомата сброса ДО.
Обычно в сбрасываемой пачке упаковывается достаточное количество диполей,
чтобы сформировать облако, ЭПР которого может энергетически обеспечить перенаце-
ливание. Однако помимо этого для перенацеливания необходимо выполнить также ус-
ловие, чтобы время развертывания облака было достаточно мало и требуемое энерге-
тическое превышение достигалось бы в пределах элемента радиолокационного разре-
шения. Если это условие не выполняется, то перенацеливания не произойдет, даже ес-
ли ЭПР облака будет намного превышать ЭПР защищаемого самолета. Наличие в эле-
менте разрешения помимо сопровождаемого самолета облака диполей приводит к
смещению энергетического центра сопровождаемой совокупности сигналов от самоле-
та и ДО. Если РЛС сопровождает энергетический центр, то его смещение приводит к
смещению элемента разрешения относительно координат самолета. В результате после
короткого интервала времени энергетический центр смещается к положению облака
ДО, а самолет - к краю элемента разрешения. В дальнейшем следящая система по на-
правлению переходит на сопровождение облака ДО. При неизменных параметрах про-
цесса формирования облака ДО увеличение скорости самолета или сужение элемента
разрешения может снизить вероятность перенацеливания из-за недостатка времени для
формирования облака ДО с достаточной ЭПР. Поэтому важным параметром является
темп сброса пачек ДО. Оптимальным интервалом дискретного сброса диполей будет
время, в течение которого расстояние между энергетическим центром совокупности
ЭПР "самолет-облако" и самолетом, достигает такой величины, что самолет оказывает-
ся на границе элемента радиолокационного разрешения. Наибольшая эффективность
применения ДО ожидается в момент, когда РЛС после срыва режима сопровождения
переходит в режим повторного поиска цели, поэтому важно при постановке дипольных
помех контролировать режим работы подавляемой РЛС. На защищаемом самолете пе-
реход РЛС в режим поиска можно определить с помощью специального приемника по
характерному изменению амплитуды принимаемых радиолокационных сигналов или
изменению структуры зондирующего сигнала (частоты повторения и длительности им-
пульса, внутриимпульсной модуляции). Как только переход в режим поиска обнаружи-
вается, на автомат сброса диполей поступает специальная команда и за самолетом соз-
дается серия дискретных дипольных облаков. Темп сброса пачек ДО определяется ско-
ростью полета самолета и размером элемента разрешения по дальности подавляемой
РЛС (шириной строба дальности). Продолжительность сброса программируется по
времени в зависимости от обстановки. Эффект действия ДО в данном случае заключа-
ется в создании многих ложных целей, затрудняющих захват на сопровождение истин-
ной цели, и может быть усилен при сочетании с маневром самолета. При наличии на
борту защищаемого самолета аппаратуры активных помех постановку ДО можно соче-
тать с уводящей помехой по дальности, излучаемой в направлении подавляемой РЛС.
Длительность цикла увода и его параметры согласуются с расстоянием до эффективно-
го центра отражения от облака диполей. В начальный момент помеховые радиоим-
283
пульсы излучаются с уровнем мощности, обеспечивающим необходимое отношение
помеха-сигнал (обычно равное 6 дБ) для надежного увода строба дальности РЛС сиг-
налом помехи. После выхода сигнала цели из строба дальности мощность сигнала уво-
дящей по дальности помехи уменьшается по определенной программе таким образом,
чтобы к моменту времени, когда импульс достигает местоположения облака диполей,
сигнал от этого облака был бы на порядок больше сигнала уводящей помехи по даль-
ности, в результате строб дальности РЛС перехватывает более мощный сигнал от обла-
ка ДО, система АСН РЛС переходит на сопровождение диполей и наведение ракеты
производится на эту ложную цель. При этом сигнал уводящей помехи по дальности по-
сле момента выхода сигнала цели из строба дальности РЛС можно наделить дополни-
тельной помеховой модуляцией для воздействия непосредственно на систему АСН, что
еще более усилит эффект действия комбинированных помех. При сочетании диполь-
ных помех с уводящими помехами по дальности можно обеспечить перенацеливание
на облака ДО с ЭПР, меньшей ЭПР защищаемой цели. Это позволяет экономнее расхо-
довать ДО и обеспечивает благоприятные энергетические условия для срыва сопрово-
ждения цели по угловым координатам [1].
Существенный недостаток рассмотренного способа перенацеливания состоит в
том, что диполи отстают от сбрасывающего их самолета. Поэтому применение в РЛС
сопровождения по переднему фронту отраженного импульса позволяет исключить
срыв автоматического сопровождения по дальности и направлению с помощью ди-
польных отражателей. Указанного недостатка можно избежать, если при самозащите
самолета диполи выстреливать вперед, например, с помощью специальной ракеты. В
этом случае дипольные помехи эффективны против РЛС сопровождения любого типа,
включая РЛС с перестройкой несущей частоты от импульса к импульсу.
Создание дипольных помех радиолокаторам с когерентно-импульсным и не-
прерывным излучением. Когерентно-импульсные и непрерывные РЛС обладают спо-
собностью селекции целей по скорости. Это основано на сдвиге частоты отраженного
от движущего объекта сигнала, порождаемого известным доплеровским эффектом. Ди-
польные отражатели малоподвижны в атмосфере по сравнению с объектами, для защи-
ты которых они предназначаются, и их доплеровская частота близка к нулю, так как
после выброса они приобретают ту же скорость, что и окружающий воздух. Это об-
стоятельство используется для выделения сигналов движущихся целей на фоне пассив-
ных помех.
В РЛС непрерывного излучения для подавления сигналов от облаков дипольных
отражателей применяется узкополосная доплеровская фильтрация сигналов подвижных
объектов и режскция сигналов от неподвижных объектов, в том числе от местных пред-
метов, на 80 дБ и более. Это означает, что нарушить функционирование таких РЛС с по-
мощью толькр рассеяния даже очень большого количества диполей практически не уда-
ется. Для этой цели требуются специальные методы перенацеливания. Аналогично об-
стоит дело с подавлением дипольными помехами РЛС с квазинепрерывным излучением.
Однако при рассеянии больших количеств диполей наблюдается экранирующий
эффект, снижающий дальность действия радиолокатора за счет затухания радиолока-
ционных сигналов при прохождении ими облака дипольных отражателей в прямом и
обратном направлениях. Если при этом использовать диполи с поглощением, то дан-
ный экранирующий эффект можно еще более усилить. В этом случае облако диполей
может стать "невидимым" для РЛС. Это весьма важный фактор, поскольку позволяет
уменьшить дальность обнаружения защищаемых объектов. Например, поглощающие
284
диполи могут быть рассеяны впереди межконтинентальных баллистических ракет для
самозащиты. Конечно, поглощающие материалы не могут быть совершенными и обла-
ко поглощающих диполей будет производить отражение электромагнитной энергии, но
значительно меньше, чем облако из обычных дипольных отражателей.
В импульсных РЛС для подавления дипольных помех применяются схемы селек-
ции движущихся целей (СДЦ). Наличие у импульсного радиолокатора "слепых" скоро-
стей в режиме СДЦ позволяет снизить дальность обнаружения самолета путем его по-
лета к РЛС со скоростью, равной "слепой" скорости. С этой целью атакующий самолет
должен приближаться к РЛС через предварительно поставленную полосу дипольных
отражателей или выстреливать ракеты с диполями в переднюю полусферу. Это вынуж-
дает импульсную РЛС перейти в режим СДЦ. В этом случае в бортовой аппаратуре
атакующего самолета радиолокационный сигнал принимается и измеряется его несу-
щая частота и частота повторения радиоимпульсов. С помощью вычислителя осущест-
вляется расчет скорости полета самолета, соответствующей доплеровской частоте от-
раженного сигнала и кратной частоте повторения радиоимпульсов. Если радиальная ско-
рость самолета относительно РЛС при полете его через облака диполей поддерживается
равной этой величине, то отраженный от самолета сигнал будет в области "слепых" ско-
ростей СДЦ, и самолет будет трудно обнаружить. Для реализации указанного способа
противодействия атакующий самолет должен знать приблизительно местоположение по-
давляемой РЛС для расчета своей радиальной скорости полета относительно РЛС. Одна-
ко эффективность такого способа РЭП может быть снижена, если радиолокатор будет
изменять частоту повторения импульсов скачкообразно или вобулировать ее.
При противодействии системам ЗУР, использующим радиолокаторы или ГСН с
непрерывным или когерентно-импульсным излучением, перенацеливание может быть
осуществлено путем увода строба селекции по скорости РЛС (ГСН) на сбрасываемые
диполи с помощью соответствующего маневра самолета или воздействия на РЛС уво-
дящей помехи, создаваемой защищаемым самолетом. Перенацеливание ГСН на сбра-
сываемые диполи может быть осуществлено также с помощью их облучения радиоло-
кационными сигналами с борта защищаемого самолета.
При совершении самолетом маневра в сторону от направления на атакующую ра-
кету автоматическая следящая система (АСС) ГСН будет перестраиваться в область
доплеровских частот, соответствующих отраженным от медленно движущихся дипо-
лей сигналам. В этом случае на вход системы АСС будут поступать два сигнала разной
интенсивности: отраженные от диполей и самолета. Если сигнал, отраженный от дипо-
лей, будет превосходить по мощности сигнал, отраженный от самолета, то система
АСС ГСН перейдет на сопровождение облака диполей и ракета будет перенацелена на
облако диполей. Величина образующегося при этом промаха ракеты относительно це-
ли определяется удалением облака диполей от самолета и может достигать сотни мет-
ров. Начало сброса диполей и маневр самолета осуществляется по информации, полу-
чаемой летчиком от специальной аппаратуры предупреждения об облучении сигналами
РЛС и пуске ракеты. Темп сбрасывания пачек дипольных отражателей выбирается с
учетом скорости прикрываемого самолета (примерно 0,3...0,5 с при скорости самолета
250...300 м/с). Количество одновременно выбрасываемых пачек диполей зависит от
величины ЭПР защищаемого самолета.
Эффекта перенацеливания можно также достигнуть путем излучения с самолета в
направлении РЛС или ГСН уводящей помехи по скорости, приводящей к смешению
285
строба скорости ГСН в область доплеровских частот сигналов, отраженных непосред-
ственно от диполей. Если отраженный от диполей сигнал превосходит сигнал уводя-
щий помехи по скорости, то система АСС и соответственно система автоматического
сопровождения по направлению (АСН) радиолокатора (ГСН) переводится на сопрово-
ждение облака диполей. При этом уводящую по скорости помеху следует создавать с
защищаемого самолета периодически и достаточно часто, поскольку РЛС (ГСН) может
сбрасывать с сопровождения диполи и перезахватывать сигнал цели. Перенацеливание
на облако дипольных отражателей с применением уводящей по скорости помехи может
осуществляться и с помощью нескольких самолетов. В этом случае один самолет рас-
сеивает диполи на пути следования другого самолета, излучающего в направлении по-
давляемой РЛС (ГСН) уводящую в область нулевых доплеровских частот помеху. Об-
ласть нулевых доплеровских частот оценивается на основе априорной информации о
типе подавляемой ракетной системы и собственной скорости самолета.
Время цикла увода по скорости определяется требуемым диапазоном увода сле-
дящей системы по скорости с доплеровского сигнала, отраженного от самолета. Диапа-
зон увода определяется в основном относительной скоростью самолета и ракеты и мо-
жет достигать нескольких десятков килогерц. Максимальная скорость отслеживания
системой АСС доплеровского сигнала обычно ограничена малой величиной порядка
4...6 кГц/с. Поэтому длительность цикла увода при отсутствии такого перенацеливания
может составить около 5... 10 с и может оказаться соизмеримой с полетным временем
атакующей ракеты.
Другой способ перенацеливания РЛС (ГСН), использующих непрерывное излуче-
ние, на облако ДО состоит в облучении только облака сигналами самолетного передат-
чика помех и в приеме РЛС (ГСН) псрсотраженных от диполей сигналов помех. При
этом несущая частота должна быть такой, чтобы увести строб скорости ГСН на сигна-
лы помех, переотраженныс диполями. Для эффективности данного способа защиты са-
молетов необходимо обеспечить выполнение ряда условий. Во-первых, мощность сиг-
нала помехи от облака ДО на входе подавляемого приемника должна превышать мощ-
ность сигнала, отраженного непосредственно от защищаемого самолета. Из этого усло-
вия для силового перенацеливания следует, что отношение помеха-сигнал в стробе се-
лекции по скорости можно определить из следующего выражения:
Р& адо (Г Yf * У
PG ° [ г° J I L J ’
(П.1)
где P„Gn, PG - энергетические потенциалы передатчика подсвета дипольных образова-
ний и РЛС подсвета цели; <5 - ЭПР самолета; (Удо - ЭПР дипольного образования; гс,
го - расстояния от самолета до ГСН и от ГСН до дипольного образования; L - расстоя-
ние от самолета до дипольных образований; R - расстояние от РЛС подсвета цели до
самолета.
Отсюда требуемый энергетический потенциал данного способа защиты определя-
ется как
(П.2)
286
Данные энергетические соотношения справедливы для передатчика подсвета ди-
польных образований не только генераторного типа, но и ретрансляционного, рабо-
тающего в режиме постоянного уровня выходной мощности.
Отношение помеха-сигнал на входе подавляемого приемника для ретранслятора с
постоянным коэффициентом усиления будет равно:
а-к М4Ы2 по»
ип *уполн.регр . т ’
где /Спслн ретр - полный коэффициент усиления ретранслятора подсвета дипольных обра-
зований. Отсюда
полн. ретр
(П.4)
Если принять, что о ~ ало и г0 - гс, то полный коэффициент усиления ретранслятора
в основном определяется потерями сигнала подсвета ДО на трассе "самолет-ДО" протя-
женностью L. Так как величина L пропорциональна промаху ракеты, то она определяет
требуемую максимальную величину полного коэффициента усиления ретранслятора.
Другим условием эффективности перенацеливания на ДО будет отсутствие само-
подсвста защищаемого самолета из-за возможности приема спектральной составляю-
щей сигнала подсвета диполей, совпадающей с доплеровской частотой защищаемого
самолета и принимаемой непосредственно РЛС(ГСН) от передающей антенны
ретранслятора. Уровень мощности этого сигнала должен быть меньше уровня мощно-
сти отраженного от самолета сигнала РЛС подсвета. Если обозначить уровень подавле-
ния паразитного сигнала через N, то можно получить следующее соотношение:
A PG
N 4л/?2 Д°‘
Отсюда
РА 4л/?-
PG ало
а для ретранслятора в режиме постоянной мощности
(U.5)
(И.6)
(П-7)
Расчеты показывают, что требуемый уровень подавления паразитного сигнала са-
моподсвета составляет40...50 дБ. Реализация этих требований возможна, во-первых, за
счет снижения уровня паразитного излучения передающей антенны ретранслятора пу-
тем применения специальных экранов и рационального размещения антенны на защи-
щаемом самолете, а во-вторых, за счет подавления в сигнале подсвета диполей спек-
тральной составляющей на доплеровской частоте сигнала, отраженного от самолета,
при осуществлении сдвига частоты.
Сигнал подсвета диполей формируется путем приема радиолокационного сигнала
подсвета ретранслятором, размещенным на борту защищаемого самолета, усиления и
287
сдвига частоты этого сигнала на величину Д/\ В результате в диапазоне доплеровских
частот возможны составляющие:
с доплеровской частотой сигнала цели (2 ГД/Л);
с доплеровской частотой вносимого частотного сдвига ДР, принимаемого от ди-
полей;
с доплеровской частотой 2К1/Х + ДР сигнала, принимаемого непосредственно от
передающей антенны ретранслятора;
с доплеровской частотой сигнала цели (2Г]/Х), образованного в результате неиде-
ального сдвига частоты в ретрансляторе при формировании сигнала подсвета ди-
полей. Уровень мощности этого сигнала (паразитного) зависит только от уровня
боковых лепестков ДН антенны подсвета.
При силовом способе перенацеливания необходимо выполнить условие ДР = 2Г]/Х.
В этом случае доплеровская частота сигнала цели и сигнала помехи, переотраженного
дипольными образованиями, оказываются равными и сигнал помехи находится в стро-
бе селекции по скорости РЛС (ГСН). Основная трудность в реализации этого режима
заключается в определении частотной поправки ДР с высокой точностью (до сотни
герц). Дня этого необходимо знать скорость защищаемого самолета в направлении ГСН
и частоту сигнала подсвета. Для снижения точности определения частотной поправки
дипольные образования могут подсвечиваться сигналами в виде гребенки доплеров-
ских частот, перемещающейся по частоте таким образом, чтобы осуществить перена-
целивание на "проходе".
Для увеличения надежности перенацеливания на подсвечиваемые дипольные обра-
зования можно вместо силового способа перенацеливания применить комбинированный
путем излучения в переднюю полусферу выключаемых или плавно изменяемых по ам-
плитуде помех нарушения в ГСН скоростной селекции. При этом диполи облучаются не-
прерывно сигналом помехи, например, с фиксированным частотным сдвигом в сторону
положительных доплеровских частот так, чтобы псреотраженный диполями сигнал был в
определенном участке доплеровского диапазона в ГСН. Излучение уводящей по скоро-
сти помехи будет перенацеливать строб скорости ГСН на сигнал от диполей либо на про-
ходе, либо путем перевода следящей системы скорости в поиск. При этом можно ожи-
дать снижения энергетического потенциала передатчика подсвета диполей.
Доплеровская имитация с помощью
облучаемых диполей движущихся объектов
оказывается недостаточной, если РЛС
(ГСН) селектирует цели не только по скоро-
сти, но и по дальности. В этом случае лож-
ные цели, формируемые с помощью подсве-
та диполей, могут быть определены путем
сопоставления информации о скорости це-
ли, измеренной по доплеровской частоте, со
скоростью, полученной путем дифференци-
рования текущей дальности до цели, изме-
ренной в канале автосопровождения по
Рис. 11.1. Структурная схема обработки дальности (рис. 11.1).
результатов независимых измерений Для того чтобы показать принципи-
дальности и скорости альную возможность имитации ложных це-
288
Рис. 11.2. Взаимное расположение объектов
при перенацеливании на подсвечиваемые
диполи с сохранением функциональной
связи между доплеровской скоростью
и измерением дальности
лей с помощью подсвечиваемых диполей с
сохранением функциональной связи между
доплеровской скоростью и скоростью, по-
лученной на основе непосредственного из-
мерения дальности, рассмотрим следующий
способ РЭП (рис. 11.2).
Дипольные отражатели выбрасывают-
ся в заднюю полусферу пакетами из автома-
та постановщика ПП, который движется по
траектории, параллельной траектории дви-
жения цели Ц, маскируемой ложными от-
раженными от диполей сигналами. Выбра-
сываемые пакетами ДО быстро затормажи-
ваются атмосферой. Поэтому в дальнейших
расчетах ДО считаются неподвижными относительно наземного радиолокатора. Путь
распространения сигналов следующий: радиолокатор —> ДО —> ретранслятор —> ДО —э
радиолокатор. В этом случае имитируется группа ложных целей, движущихся прямо на
радиолокатор со скоростями, сравнимыми со скоростью реального объекта. Наземный
радиолокатор облучает ДО, и отраженные от ДО сигналы принимаются ре транслято-
ром на постановщике ПП со сдвигом частоты А/ = -Е1Д. Любой излученный
ретранслятором сигнал, отраженный ДО и принятый радиолокатором, будет сдвинут
по частоте на эту величину.
Это означает, что сигналы ретранслятора, мгновенно реагирующего на частоту
сигнала, которым он запускается, создают на радиолокаторе впечатление цели, уда-
ляющейся от радиолокатора вдоль линии, соединяющей радиолокатор и ДО, со скоро-
стью, точно равной скорости постановщика ПП. Дальность до этой цели будет равна
сумме расстояний радиолокатора до ДО и от них до постановщика помех ПП, т. с.
R + L(f). Скорость этой ложной цели, измеренная в канале дальности радиолокатора,
будет равна -Иц В данном случае имитируется как бы реальная цель, но удаляющаяся,
т. е. не опасная.
Если при переизлучении сигнала в ретрансляторе сдвинуть его частоту на вели-
чину 'ivj'k, то на радиолокаторе будет имитироваться ложная цель с нулевой допле-
ровской частотой (неподвижная цель), расстояние до которой изменяется со скоростью
- Vx при измерении скорости в канале дальности. Сопоставление информации каналов
радиолокатора показывает, что имитируемая цель - ложная.
Для получения доплеровского сдвига, который создавал бы впечатление объекта,
движущегося непосредственно на радиолокатор со скоростью Г2, необходимо осущест-
вить сдвиг несущей частоты последовательности радиоимпульсов ретранслятора на ве-
личину А / = 2(Е[ + С2)Д . Однако при этом еще больше увеличится расхождение ме-
жду скоростью, измеренной по величине доплеровского эффекта, и скоростью, изме-
ренной непосредственно по изменению дальности. В первом случае ложная цель будет
казаться приближающейся со скоростью Е2, а во втором - удаляющейся от радиолока-
тора со скоростью И- Таким образом, имитированная цель - ложная. Это несоответст-
вие можно устранить, введя переменную величину запаздывания между принимаемым
и излучаемым сигналами ретранслятора. Если величина запаздывания равна АД/), то
кажущаяся дальность, измеренная радиолокатором,
Ю—1777
289
!\:^ = R+l/\( + ^^c^ (11-8)
г»аЖ ^2 V Z
где t - время, измеренное с момента выброса ДО; с - скорость света.
Кажущаяся дальность должна изменяться таким образом, чтобы имитировать
скорость ложной цели, равную скорости И2, имитируемой искусственно введенным
сдвигом по частоте. При этом кажущееся направление движения ложной цели должно
совпадать с направлением движения реальной цели, т. е.
э, , 1 э[дг(/)1
= = (П9)
dt 2 dt
Отсюда
Э[Д7(/)] 2(К]+К2)
_L---\<J =—U-------U. (11.10)
Э/ с
и
/ч 2(^1+К?)
ДТ(/) = —-------—t. (11.11)
с
При таком законе изменения запаздывания кажущееся расстояние до имитируе-
мой цели будет равно:
2(К + Г2)с
Rk. + --—------—/ = R-V7f, (11.12)
2.С
и дальномерный канал радиолокатора будет измерять эту дальность и скорость имити-
руемого объекта. В данном случае доплеровский и дальномерный каналы радиолокато-
ра дают одно и тоже значение скорости и одинаковое направление движения имити-
руемой цели. Как можно видеть, в данном случае радиолокатор не может отличить
имитируемую цель от реальной.
Помимо способов перенацеливания на диполи, сбрасываемые непосредственно с
самолета в переднюю или заднюю полусферы, возможно использование предваритель-
но поставленных до начала атаки дипольных облаков. В этом случае атакующий само-
лет летит через это облако диполей и подсвечивает его сигналами бортовой системы
РЭП. На экране индикатора создаются широкие засветки, затрудняющие оператору
РЛС обнаружить атакующий самолет. Пирсдаз чи к помех в этом случае излучает сигна-
лы с узкополосным спектром, накрывающим частотный диапазон доплеровских частот
РЛС с непрерывным или импульсным излучением. В результате создается множество
отражений, имеющих различные доплеровские частоты и маскирующих доплеровскую
частоту отраженных от самолета сигналов. Простота применения дипольных отражате-
лей дает им ряд преимуществ перед другими средствами РЭП. Они являются единст-
венным эффективным средством РЭП на той дальности, на которой активные передат-
чики помех уже не обеспечивают зашиты самолета. Кроме того, благодаря свойству
широкополосности и резонансным явлениям на гармониках частоты, облака диполей
обеспечивают надежную защиту при облучении сигналами нестандартных частот и со
сложной модуляцией. Выброс дипольных отражателей производится специальными
пусковыми установками. При этом в соответствии с обстановкой осуществляется вы-
290
бор состава диполей, числа зарядов на один залп, интервалов между зарядами, числа
залпов согласно программе и интервалов между залпами. Привод пусковой установки в
действие может осуществляться автоматически или вручную. Обычно диполи изготав-
ливаются из алюминиевой фольги или из стекловолокна с покрытием алюминием. В
небольших легких системах, подобных американским системам AN/ALE-29, AN/ALE-
39, AN/ALE-40, предназначенным для индивидуальной защиты современных самоле-
тов путем создания дипольных ложных целей, диполи укладываются в патронах. В
других системах, таких как, например, AN'ALE-38, дипольные отражатели укладыва-
ются между майларовыми пленками длиной 30 м, шириной 32 см и толщиной 0,05 мм,
свернутыми в рулон. В контейнере укладывается шесть рулонов с диполями общим ве-
сом более 100 кг, что составляет около 70 % общего веса контейнера. Диапазон частот,
перекрываемый набором диполей, простирается от 0,1 до 10 ГГц [3].
Принципы построения адаптивной системы постановки дипольных помех.
Дипольные помехи относятся к расходуемым средствам одноразового действия. По-
скольку запас их на борту защищаемого объекта ограничен, расход их должен быть
экономным и обусловлен необходимостью. В соответствии с этим приобретает боль-
шое значение адаптивное применение дипольных отражателей, согласованное с боевой
обстановкой. Пример адаптивной системы постановки дипольных помех - американ-
ская система AN/ALE-40, разработанная для защиты самолетов. Основой ес является
быстродействующее устройство выброса диполей, управляемое по программе, выраба-
тываемой на основании оценки электронной обстановки и анализа угрозы.
На вход программирующего устройства данной системы поступает информация
от различных датчиков, включая приемник предупреждения об облучении, датчик пус-
ка противником ракеты, навигационные устройства, обеспечивающие данными о лет-
ных параметрах самолета, и выходные данные от пульта управления летчика, опреде-
ляющие режим работы (автоматический, ручной или полуавтоматический). Одновре-
менно на пункт сбора информации поступают с устройств памяти сведения о типовых
средствах угрозы. Все это совместно обрабатывается с помощью бортовой ЭВМ само-
лета. В результате оцениваются угрозы, определяется их приоритет, вырабатывается
программа выброса дипольных отражателей с учетом их наличия на защищаемом объ-
екте. В автоматическом режиме все эти операции выполняются без вмешательства пи-
лота. В полуавтоматическом режиме оптимальная программа использования диполей
определяется автоматически, но ввод ее в действие производится по команде пилота. В
ручном режиме выбор программы и ее запуск производятся по усмотрению пилота пу-
тем нажатия соответствующих кнопок на пульте управления. Кодированные команды,
вырабатываемые программирующим устройством и определяющие последователь-
ность приведения в действие диспенсеров, позволяют управлять выбросом средств од-
норазового действия до семи типов. Программное обеспечение построено на восьми-
разрядной структуре. В условиях максимальной угрозы пропускная способность уст-
ройства 180 тыс. бит в секунду и объем памяти 12 кбайт. При увеличении мощности на
25 % пропускную способность можно увеличить до 250 тыс. бит в секунду и объем па-
мяти до 16 кбайт. Программа выброса диполей включает выбор типа диполя (одинар-
ный, двойной), интервала выброса, счет выбросов, выбор интервала залпов и их счет.
Наряду с пассивными могут применяться полуактивные дипольные отражатели, в ко-
торых активный элемент (возможно схема усиления с одним туннельным диодом) уси-
ливает и переизлучаст сигнал противника в том же направлении, откуда он принят.
291
Защита надводных кораблей от противокорабельных ракет с помощью ди-
польных отражателей. На вооружении ВМС всех развитых стран состоят противоко-
рабельные ракеты (ПКР). Используя радиолокационное наведение и полет на малых
высотах, эти ракеты превратились в эффективное оружие, создающее серьезную угрозу
кораблям. В связи с этим уделяется большое внимание вопросам защиты кораблей от
таких ракет, исследованию различных средств борьбы с ними, в том числе и электрон-
ных. Из электронных средств наиболее дешевым средством зашиты кораблей от ракет
с радиолокационным наведением считаются дипольные отражатели. Как и в случае за-
щиты самолетов, методы защиты кораблей с применением ДО, имитирующих ложные
цели, могут быть различными в зависимости от этапа применения противокорабельных
ракет. Так, на этапе поиска и обнаружения целей перед комплексом обороны корабля
или соединения ставится задача воспрепятствовать обнаружению целей противником
и, соответственно, предотвратить пуск ракет в направлении истинных целей. В этом
случае дезориентирование РЛС поиска и обнаружения осуществляется путем развер-
тывания облаков ДО (ложных целей) либо вблизи корабля, либо на более значительных
расстояниях (30... 1000 км) с целью имитации большого количества кораблей в зоне
поиска. Эффективная площадь рассеяния ложных целей меньше или соизмерима с ЭПР
корабля. Необходимо учитывать, что использование средств дезориентации РЛС может
дать временное преимущество, поскольку рано или поздно реальные цели опознаются,
а ловушки селектируются. Поэтому систему дезориентирования с помощью ДО нельзя
рассматривать как основную систему защиты кораблей от ракетного удара.
На этапе целеуказания и наведения ПКР система корабельной защиты формирует
в пространстве несколько дипольных облаков, наделенных свойствами целей. Эти
ложные цели (ЛЦ) располагаются таким образом, чтобы ракета независимо от метода
поиска вначале обнаруживала бы ложную цель и брала ее на сопровождение. Даль-
ность постановки ложных целей 1...5 км. Располагаемое время реагирования менее
2 мин. Так как точное время начала поиска системой ГСН ракеты неизвестно, а ско-
рость корабля может быть весьма значительной, ложные цели следует располагать на
больших расстояниях от корабля, создавая иллюзию, по крайней мере на некоторое
время, относительной неподвижности целей.
На этапе самонаведения ГСН ракеты необходимо осуществить срыв сопровожде-
ния уже захваченных целей путем развертывания вблизи корабля облака ДО с ЭПР ко-
рабля. В результате смещения энергетического центра отраженного сигнала от корабля
и ловушки происходит срыв сопровождения корабля и захват ложной цели. Далее ко-
рабль выполняет маневры на отделение от ловушки с учетом направления, скорости
ветра и других тактических параметров.
Определяющим при выборе метода защиты кораблей от ПКР является ожидаемое
время предупреждения об атаке ракеты. От него зависит момент развертывания лож-
ных целей. Если интервал времени с момента предупреждения об атаке достаточно
большой, то можно использовать различные методы дезориентирования. Для этого
нужно заблаговременно обнаружить установку пуска ПКР, что не всегда возможно, по-
скольку ракеты могут, например, быть запущены с труднообнаруживаемых береговых
позиций, подводных лодок, пользующихся пассивными средствами сбора информации.
В большинстве случаев первым указанием на наличие угрозы является обнаружение
атакующей ракеты с помощью корабельных обзорных РЛС. Такие РЛС, установленные
на быстроходных сторожевых катерах, способны обнаружить ракету на дальности око-
ло 10 км при состоянии моря 3...4 балла и ЭПР ракеты 0,1 м2. Если РЛС подвергается
292
воздействию активных помех, то дальность обнаружения может значительно умень-
шиться.
Во многих случаях ПКР может обнаруживаться пассивными средствами после то-
го, как начинает излучать ГСН, когда дальность до цели составляет 5 км. При скорости
ракеты, равной скорости звука, время реагирования составляет 15с. В этих условиях
методы дезориентирования РЛС или перенацеливания ГСН на ложные цели практиче-
ски малоэффективны, потому что ложные цели должны быть развернуты задолго до
того, как ГСН обнаружит истинную цель. Методы срыва сопровождения наиболее эф-
фективны, поскольку могут реализоваться при минимальных интервалах времени по-
сле предупреждения об угрозе. Однако для этого требуется выполнить определенные
условия, например, обеспечить малое время реагирования. Это означает, что на приня-
тие решения, подачу команды на постановку ложных целей и выполнение необходи-
мых действий отводится очень мало времени, меньше 1с. Кроме того, если система по-
становки ловушек с помощью ДО использует поворотные устройства, то для наводки
по расчетному азимуту потребуется дополнительно несколько секунд. Другое условие
состоит в том, что корабль и ловушка должны появиться в элементе радиолокационно-
го разрешения одновременно. Так как разрешающая способность ГСН ПКР по дально-
сти может составлять всего 40 м, то развертывание ловушек на расстоянии свыше
20...30 м от корабля будет неэффективно, если нет возможности выполнить маневр.
Важным является обеспечение быстрого развертывания ловушки из ДО, чтобы за ко-
роткий интервал времени отраженный от ловушки сигнал стал сравним по параметрам
с сигналом, отраженным от корабля. Время на развертывание облака ДО не должно
превышать З...4с, тогда общее время реагирования (пуск носителя ДО и развертывание
облака) составит 4...5 с. Реализация такого быстрого развертывания облака ДО потре-
бовало разработки специального рассеивателя ДО. Это позволило увеличить скорость
развертывания облака ДО почти на порядок. За 3,5 с ЭПР рассеиваемых ДО (зарядов)
достигает 2000 м2. Для образования ловушки требуется достаточное количество заря-
дов, распределенных в пространстве. Это связано с тем, что процесс развертывания об-
лака ДО зависит от ряда неуправляемых факторов (скорости и направления ветра,
"гнездования" и т. д.). При этом необходимо распределять некоторое количество заря-
дов по высоте, учитывая возможные провалы в ДН ГСН и вероятность попадания лож-
ной цели в провал ДН, что может ослабить воздействие помехи.
Таким образом, при защите кораблей в момент установления угрозы в простран-
ство выстреливаются с помощью многоствольных установок диполи и пиропатроны. В
результате вокруг корабля или вдоль траектории полета атакующей ракеты образуются
ложные цели. Облака ДО создаются на высоте менее 30 м над уровнем моря на время
не менее 10 мин и в максимуме могут достигать ЭПР 20000 м2. Для дезориентирования
системы наведения ракеты ПК-диапазона создаются ИК-ловушки примерно на 30с,
представляющие образования с ЭПР около 300 м~.
Для наделения облака ДО свойствами движущихся примерно со скоростью за-
щищаемого корабля объектов оно облучается усиленным радиолокационным сигна-
лом, имеющим соответствующую связь с частотой и фазой сигнала, принимаемого от
радиолокатора. Это затрудняет доплеровскую селекцию ложных целей и приводит, как
следствие, к перенацеливанию ракеты на диполи. При наличии нескольких облаков
ДО, разбросанных в пространстве, облучение их может осуществляться попеременно с
заданной программой, что будет эквивалентно воздействию на систему сопровождения
293
ГСН мерцающих помех, разнесенных в пространстве. Так как в апертуре антенной сис-
темы ГСН находится много целей, то ракета будет отвлекаться с траектории наведения
на защищаемый корабль. Недостаток ложных целей, создаваемых с помощью ДО, за-
ключается в том, что они не способны вызвать подрыв боевой части ракеты. Большин-
ство современных ракет может быть оснащено логическими устройствами, обеспечи-
вающими повторный захват цели или поиск новой цели, которая может появиться по-
сле пролета облака ДО.
Усовершенствование ГСН ПКР в части селекции неподвижных целей на фоне по-
мех от ДО, а также введение режима наведения на источник активных помех, излучае-
мых с корабля, привело к возрастанию роли передатчиков активных помех одноразово-
го действия, запускаемых с различных носителей: ракет, ДПЛА, буев и т.д. Обычно по-
сле запуска ЛЦ может спускаться на парашюте. Однако такие способы защиты с по-
мощью активных ЛЦ обеспечивают малое время действия (до 1 мин). Поэтому необхо-
димы средства радиоэлектронной защиты кораблей длительного действия (до несколь-
ких часов). Такие ЛЦ могут быть выполнены в виде буксируемого или самоходного ка-
тера с аппаратурой активных помех, включаемой дистанционно оператором с защи-
щаемого корабля при наличии угрозы.
11.3. Перенацеливание на пассивные ловушки
В зоне своей ответственности ПВО может одновременно эффективно бороться с
ограниченным числом целей. Поэтому РЭП в подсистеме обнаружения и целераспре-
деления может осуществляться с помощью ложных целей, которые имитируют на эк-
ранах индикаторов РЛС отметки, подобные отметкам от реальных целей. Это в значи-
тельной мерс затрудняет оператору опознавание реальных целей и перегружает систе-
мы автоматизированной обработки данных. При ограниченности времени радиолока-
ционного наблюдения за целями в зоне ответственности выделение истинных целей
среди ложных оказывается весьма затруднительным. В результате ПВО должна либо
обстреливать все наблюдаемые цели, что приводит к неоправданному отвлечению ог-
невых средств ПВО на поражение ЛЦ, или при обстреле ложных целей к пропуску ис-
тинных целей при ограниченности боевых возможностей ПВО. Особо эффективным
может оказаться массовое применение ловушек, когда может наступить перенасыще-
ние системы ПВО целями и, как результат, снижение перехвата ударных самолетов
противника. Поскольку каждая ловушка требует внимания, достаточно большое их
число может истощить систему защиты, боезапас которой ограничен. Такие характери-
стики ловушки, как амплитуда и спектр отраженного от нее радиолокационного сигна-
ла, а также скорость и ускорение должны как можно точнее соответствовать аналогич-
ным характеристикам реальных целей. Воспроизведение амплитудных и спектральных
признаков обеспечивается с помощью активных ретрансляторов (ответчиков) или пас-
сивных модулируемых переизлучателей (решетки Ван-Атта). В подсистеме наведения
и самонаведения для противодействия РЭС ЗУР используются ловушки, которые пере-
нацеливают огневые средства поражения на себя. Время перенацеливания должно быть
соизмеримо со средним временем наведения (самонаведения) средств поражения. С
целью уменьшения расхода ловушек при преодолении ПВО пуск их целесообразно
производить после обнаружения реальной угрозы для защищаемого объекта. Успешное
применение ловушки приводит к срыву атаки ЗУР (истребителя-перехватчика) или к
достижению промаха, безопасного для защищаемого объекта. Характеристики переиз-
294
лученного ловушкой радиолокационного сигнала должны обеспечивать захват его на
сопровождение системой АСН зенитной ракеты и устойчивое сопровождение ловушки
следящими системами дальности и/или скорости, а также угловым координатам.
По способу боевого применения ловушки могут быть управляемые и буксируемые.
Современные радиолокационные ловушки имеют сравнительно малые габарит-
ные размеры и массу, что позволяет использовать их тактической авиацией. Малогаба-
ритная ЛЦ одноразового применения может быть эффективна против самых разнооб-
разных РЛС, в том числе и моноимпульсного типа, а также РЛС, работающих в ИК
диапазоне. Поэтому наряду с радиолокационными ловушками защищаемый объект
должен иметь также ИК ловушки, сбрасываемые с объекта при ракетной атаке с ИК
ГСН. Следует отметить, что рассматриваемые ловушки не обеспечивают защиты от
системы ПВО в целом, они нейтрализуют только индивидуальные средства поражения
этой системы [1, 70-72].
Перенацеливание на управляемые ловушки. Управляемые ловушки представ-
ляют собой ракеты с пассивными и/или активными переизлучателями электромагнит-
ной энергии. На них могут устанавливаться как стартовые, так и маршевые двигатели,
которые обеспечивают управляемый полет по программе в течение времени от не-
скольких секунд до нескольких минут. Такие ловушки обеспечивают срыв наведения
ракеты за счет перенацеливания на себя атакующей ракеты. Направление пуска ловуш-
ки определяется направлением атаки и соотношением скорости защищаемого самолета,
ловушки и ракеты. Начальная скорость отделения ловушки ограничивается динамиче-
скими характеристиками следящих систем (по углу, скорости, дальности) контура на-
ведения управляемого оружия. В первый момент после сброса ловушки относительная
скорость ее удаления от самолета должна быть такой, чтобы обеспечить надежный
увод следящих стробов систем РЛС (ГСН) на ложную цель, в противном случае, при-
менение ловушки окажется безрезультатным. Ориентировочно начальная скорость от-
деления ловушки от защищаемого самолета должна выбираться из условия неразреше-
ния РЛС (ГСН) в начальный момент времени прикрываемого самолета и ловушки по
углу, дальности и/или скорости, а также ускорению. Для обеспечения этих условий к
траектории полета предъявляются весьма жесткие требования, обусловленные сравни-
тельно малыми размерами элемента радиолокационного разрешения РЛС сопровожде-
ния и наведения управляемого оружия по угловым координатам, дальности и/или ско-
рости. Поэтому ловушка, удаляясь от самолета, должна находиться в плоскости, пер-
пендикулярной направлению на РЛС и проходящей через самолет и ловушку. Если эти
условия не выдерживаются, то самолет и ловушка могут восприниматься как две цели,
и при наличии ресурса времени, а также устройств распознавания ловушек в РЛС, воз-
можно перенацеливание ракеты с наведения ракеты на ловушку на наведение ее на за-
щищаемый самолет путем сброса АС ловушки и последующего перезахвата самолета
на АС и ввода информации в контур управления ракеты.
Возможность распознавания ловушек основана на том, что полного подобия ло-
вушки реальному объекту осуществить практически трудно. Например, сигнал, отра-
женный от турбореактивного самолета, имеет физические особенности в амплитудном
и доплеровском спектре из-за модуляции отраженного радиолокационного сигнала
вращающимися лопатками роторов воздухозаборников и турбин двигателей. Сигнал,
отраженный от ловушки с линзой Люнеберга или с простым ретранслятором, не имеет
таких особенностей, а является в случае РЛС НИ монохроматическим сигналом. В этом
295
случае целесообразно в ретрансляторе осуществлять специальную модуляцию. Требо-
вания к подобию характеристик сигналов управляемой ловушки могут быть значитель-
но снижены путем излучения с ловушки радиопомех. Например, шумовая помеха, из-
лучаемая с ловушки, нарушит селекцию по дальности и/или скорости и при достаточ-
ном уровне воспрепятствует распознаванию истиной цели среди ловушек.
Активные ловушки являются устройствами одноразового действия и, следова-
тельно, должны иметь невысокую стоимость. Разработки по комплексированным уси-
лителям, состоящим из ЛБВ и блока питания, скомпанованных на одной панели, сис-
темы охлаждения и батарейного блока питания, лучше всего могут удовлетворить тре-
бованиям невысокой стоимости. Хотя усилитель ловушки должен работать короткое
время, однако срок использования их должен быть около 10... 15 лет. Поэтому к конст-
рукции предъявляются жесткие требования. Для того чтобы ловушка смогла оказа гься
на требуемом расстоянии от защищаемого объекта, необходима ракета с взрывным ти-
пом топлива либо устройства запуска ловушки, обеспечивающие ускорение до 80 g и
более. Для ловушек разработаны сверхминиатюрные ЛБВ, обеспечивающие уровень
выходной мощности 100...200 Вт и полосу частот ЗГГц и при этом имеющие значи-
тельно малые массу и размеры. Они имеют простую конструкцию, невысокое напря-
жение питания, некритичны к изменениям питающего напряжения в широких преде-
лах, что снижает требования к источнику питания. Другое важное требование - это
скорость включения ЛБВ ловушки, поскольку после обнаружения цели имеется всего
несколько секунд. В аппаратуре используется замкнутая система охлаждения испа-
ряющимся потоком, которая обеспечивает необходимое охлаждение всех компонент
ловушки в течение всего времени ее работы и используется в тех случаях, когда недос-
таточно воздушного охлаждения. Возможным источником питания ловушки служит
батарея термоэлементов, способных обеспечить мощность 1 кВт в течение 5 мин.
Помимо автономного режима работы ловушек, когда они должны самостоятельно
принимать, осуществлять обработку и выявлять “опасные” сигналы в своем рабочем
диапазоне, возможно использование режима подсвета ловушек специальным сигналом,
который предварительно сформирован бортовой аппаратурой. Для исключения само-
подсвета защищаемого самолета, подсвет ловушек осуществляется не на частоте ра-
диолокационного сигнала, а на отличающейся от него частоте. В ловушке сигнал под-
света восстанавливается по частоте до требуемой величины с помощью умножителей
или преобразователей частоты, усиливается и излучается. Ловушка может имитировать
также множество других ЛЦ.
Ложным целям уделяется большое внимание в системах защиты боеголовок при
преодолении ими систем ПРО; обычно на средних участках траектории предусматри-
вается применение легких ложных целей (надувные шары, баллоны), а на конечном
участке траектории при вхождении боеголовки в плотные слои атмосферы - более тя-
желых ложных целей, способных двигаться в атмосфере, не сгорая.
Перенацеливание на буксируемые ловушки. Цель буксируемой ловушки - соз-
дание излучения сигналов, аналогичных по структуре сигналам, отраженным от защи-
щаемого самолета, и превосходящих их по мощности. В этих условиях ГСН атакующей
ракеты, принимая оба указанных сигнала, наводится на энергетический центр. По-
скольку мощность сигнала ловушки существенно превосходит мощность отраженного
от самолета сигнала, атакующая ракета практически наводится на ловушку, в результа-
те чего происходит перенацеливание ракеты с самолета на ловушку и поражение само-
лета ракетой исключается.
296
Основными элементами такой системы защиты являются пусковое устройство,
размещенное на борту самолета и содержащее готовую к запуску ловушку, сама ло-
вушка и трос-буксир, удерживающий ловушку на определенном расстоянии от самоле-
та. После использования трос обычно обрезается и ловушка сбрасывается. В отдельных
случаях может предусматриваться ее возврат на борт самолета специальным механиз-
мом для повторного использования. В качестве ловушек могут применяться как пас-
сивные, так и активные ловушки. Отличительная особенность пассивной ловушки со-
стоит в отсутствии в ней активных элементов, формирующих ее сигнал. Формирование
сигнала происходит за счет отражения от нее сигнала РЛС (ГСН). Обеспечение необ-
ходимого уровня мощности отраженного сигнала в этом случае определяется ЭПР ло-
вушки, для чего предусматриваются соответствующие конструкции. В качестве пас-
сивной ловушки могут использоваться надувные баллоны, покрытые отражающим ра-
диоволны материалом, линзы Люнеберга, уголковые отражатели, диэлектрические ан-
тенны, решетки Ван-Атта и др.
В активных ловушках излучаемый сигнал определенной мощности формируется с
помощью внутренних энергетических устройств. Таким устройством может быть
ретранслятор, псреизлучающий и усиливающий зондирующие сигналы РЛС (ГСН),
или ответчик. В этом случае ЭПР ловушки не играет существенной роли и может быть
сколь угодно малой. С целью упрощения конструкции активной ловушки на ней могут
размещаться только передающая антенна и высокочастотный усилитель, а задающий
высокочастотный сигнал и питание поступают по кабелю с защищаемого самолета.
Бортовые источники высокочастотной мощности позволяют не только переизлучать
радиолокационные сигналы ловушкой, но и модулировать их для повышения эффек-
тивности.
Для передачи с борта защищаемого сигнала на ловушку задающего сигнала воз-
можно использование оптоволоконного кабеля, проложенного совместно с буксирным
тросом. Работы по созданию оптоволоконного кабеля интенсивно ведутся и приведут к
дальнейшему повышению эффективности использования буксируемых ловушек. Опто-
волоконная линия передачи сигналов в совокупности с самолетной аппаратурой анали-
за угрозы и формирования сигнала, излучаемого ловушкой, расширит функциональные
возможности защиты и позволит автоматизировать все процессы, связанные с исполь-
зованием буксируемых ловушек в целях эффективной самозащиты самолетов.
Промах ракеты по защищаемому самолету пропорционален удалению ловушки от
самолета. Однако это не означает, что чем больше длина буксирного троса, тем больше
эффективность защиты. Максимальное удаление буксируемой ловушки от самолета, а
следовательно, и максимальная длина буксирного троса в основном лимитируются раз-
решающей способностью перенацеливаемой РЛС (ГСН) по дальности, скорости и уг-
ловым координатам, т. е. зависят от вида зондирующего сигнала РЛС (ГСН), диаграм-
мы направленности РЛС (ГСН), параметров взаимного движения ракеты и самолета.
При длине буксира, превышающей максимально допустимую, может наступить разре-
шение ловушки по какому-либо параметру ее движения. В этом случае самолет и ло-
вушка могут быть раздельно атакованы ракетами и защита самолета окажется неэф-
фективной. Такая ситуация особенно недопустима при использовании пассивной ло-
вушки, когда отсутствуют возможности влияния на разрешение целей РЛС (ГСН).
При использовании активной ловушки в рассматриваемом случае могут быть
приняты некоторые меры по нарушению разрешения самолета и ловушки. К таким ме-
297
рам можно отнести излучение с борта самолета уводящей помехи по дальности и/или
скорости, а также излучение ловушкой накрывающей помехи, маскирующей сигнал от
самолета. В обоих случаях будет обеспечиваться наведение ракеты только на ловушку.
Необходимо отметить, что интерес к буксируемым ловушкам, как средству защи-
ты самолета, неуклонно возрастает. Это обусловлено отчасти результатами их боевого
применения в операции НАТО против Югославии и расширением использования тех-
нологии “стеле” при обеспечении малой заметности летающих объектов. В боевых
операциях НАТО в Югославии буксируемые ловушки применялись для самозащиты
самолетов F-16 и В-1В и показали очень высокую эффективность. Отмечались нс толь-
ко промахи зенитных ракет за счет их перенацеливания на ловушки, но и случаи пря-
мых попаданий ракеты в ловушку, после чего от ловушки оставался лишь буксирный
трос. Использовавшаяся при этом ловушка AN/ALE-50 была разработана американской
фирмой Raytheon System Со и представляла собой первое поколение активных букси-
руемых ловушек. В состав ловушек входил приемопередатчик, состоявший из высоко-
частотного усилителя на ЛБВ и модулятора, с помощью которого ретранслируемый и
усиленный сигнал РЛС (ГСН) наделялся модуляцией, имитирующий реакцию на излу-
чаемый сигнал работы двигателей защищаемых самолетов в целях исключения дис-
криминации сигнала ловушки по этому признаку. Питание аппаратуры ловушки осу-
ществлялось с борта самолета по трос-кабелю. Сейчас фирмой Sunders разрабатывается
более совершенная активная ловушка ALE-55 с волоконно-оптическим буксиром, ко-
торая должна стать частью интегральной оборонительной системы электронного про-
тиводействия. Помимо США, интенсивные работы по созданию буксируемых ловушек
проводятся в Швеции, Великобритании и Германии [73-75]. Поскольку буксируемые
ловушки при их размещении на борту самолета нс меняют характеристик, определяю-
щих возможности его радиообнаружения, они могут быть перспективными и для защи-
ты самолетов-“невидимок”, сконструированных с использованием технологии “стеле”.
В соответствии с изложенным предполагается, что если существующие тенден-
ции сохранятся, то буксируемые активные ловушки могут стать чуть ли не единствен-
ным методом самозащиты самолетов от современных и перспективных средств пора-
жения, заслуживающим внимания [75].
11.4. Перенацеливание на передатчик помех одноразового действия
Передатчики одноразового действия (ПОД) составляют обширный класс средств
РЭП, применяемых как для самозащиты объектов, так и для поддержки боевых опера-
ций авиации. Будучи доставленными в зону непосредственных боевых-действий, они
способны отвлечь на себя огонь противника и тем самым снизить возможность пора-
жения противником ударных средств. В этом случае ПОД выполняют роль маяка для
оружия противника с самонаведением на источник радиоизлучения и средств ПВО,
управляемых с помощью радиолокационной техники. Кроме обеспечения перенасыще-
ния, они также могут создавать эффективные маскирующие и дезинформирующие по-
мехи на рабочих частотах РЛС и нарушать нормальную работу системы ПВО. Возмож-
ность доставки ПОД на близкие расстояния к подавляемым радиолокационным систе-
мам обеспечивает высокую их эффективность при сравнительно низкой энергетике и
простоте конструкции. Передатчики одноразового действия проектируются только для
одноразового использования и после выброса нс предполагается их возвращение для
298
повторного использования. Поэтому их габариты, масса и потребляемая мощность яв-
ляются важнейшими характеристиками, в соответствии с чем при их создании широко
используется полупроводниковая техника [1, 70, 71,76].
Различают три типа ПОД. Первый тип является наиболее распространенным и
может состоять из источника шумового сигнала на частоте подавляемого радиолокато-
ра, спускаемого на парашюте в непосредственной близости от радиолокатора. Такой
ПОД может быть небольшим по мощности, массе и размерам. Выходной сигнал его
может модулироваться импульсами или сигналами другой формы, при этом когерент-
ность сигнала не обеспечивается. Второй тип всегда излучает усиленный и запомнен-
ный сигнал, принятый от радиолокатора. При этом может формироваться сигнал поме-
хи, уводящей строб дальности, или создаваться много импульсов в ответ на каждый
принятый радиолокационный импульс. Сигнал может быть когерентным. Чисто пас-
сивный ПОД третьего типа всегда повторяет радиолокационный сигнал (импульсный
или непрерывный) с усилением, определяемым пассивным переотражателем, и его
сигнал всегда является когерентным, но может быть модулированным в зависимости от
типа используемого переотражателя или антенной решетки. Рассмотренная классифи-
кация ПОД не связана с типом используемой в нем антенной системы, способа на-
стройки на частоту РЛС, системы выброса и доставки. Любой из перечисленных пара-
метров может использоваться в ПОД любого класса. Ниже рассматриваются более
подробно ПОД каждого типа.
Передатчик одноразового действия первого типа может настраиваться на несу-
щую частоту подавляемого радиолокатора перед его выбросом. В этом случае требует-
ся априорное знание несущей частоты подавляемого радиолокатора в условиях боевых
действий. Он может также наводиться по частоте автоматически после его выброса.
Тогда не требуется предварительной установки частоты ПОД перед его использовани-
ем. При использовании этого типа ПОД и наличии многих РЛС необходимо обеспечить
его настройку на частоту “своего” радиолокатора и исключить возможность настройки
многих ПОД на частоту одной и той же РЛС. При этом также необходимо учитывать
способность перестройки по частоте подавляемого радиолокатора. Радиолокаторы,
входящие в состав ЗРК, обычно работают на разных частотах по соображениям элек-
тромагнитной совместимости. Если вес применяемые ПОД используют идентичные
программы по обнаружению и захвату сигналов РЛС, то многие ПОД будут создавать
помехи на одних и тех же частотах (возможно на одной частоте) и не реагировать на
остальные радиолокаторы. Поэтому в ПОД должны применяться технические средства,
позволяющие им вести поиск в определенных участках заданного частотного диапазо-
на. В этом случае такая система частотно распределенных ПОД будет обеспечивать
максимальную эффективность подавления РЭС. В ЗРК могут применяться радиолока-
торы с перестройкой несущей частоты от импульса к импульсу в относительном диапа-
зоне от 5 до 20%. В этой ситуации ПОД должен захватывать частоту радиолокационно-
го сигнала каждого импульса радиолокатора, в результате зона подавления помехой
радиолокатора противника, высвечиваемая на ИКО, будет охватывать только дально-
сти, превышающие дальность от РЛС до ПОД. Цели, расположенные между ПОД и ра-
диолокатором не будут маскироваться помехой, если только спектр шумов не перекры-
вает пределы диапазона перестройки частоты РЛС от импульса к импульсу. Для этого
типа передатчика помех могут использоваться различные антенные системы, включая
антенны переизлучающего типа. Добавление способности наведения по направлению к
299
способности наведения по частоте может быть как преимуществом, так и недостатком
в зависимости от характера применения ПОД. Например, ЗРК с бистатической радио-
локационной системой, какой является система полуактивного наведения, не будет по-
давляться помехой, если помеховый сигнал направляется только к источнику излуче-
ния, поскольку сигнал подсвета и ракеты находятся в различных направлениях. Про-
стой передатчик помех с всенаправленной антенной в горизонтальной плоскости имеет
в этом отношении преимущество, так как может подавлять одновременно многие РЭС,
в том числе со скачкообразной перестройкой частоты и бистатические радиолокацион-
ные системы. Однако это требует соответствующей мощности и информации от
средств радиотехнической разведки по интересуемой зоне боевых действий.
В особых случаях может оказаться выгодным применение передатчиков помех,
способных подавлять одновременно большое число РЛС. В таких передатчиках ис-
пользуется многоканальный приемник для установки каждого из высокочастотных
шумовых источников на разные радиолокационные частоты. Высокая спектральная
плотность мощности помехи в этом случае достигается благодаря узкой ширине поло-
сы частот каждого из шумовых источников и соответствующим усилением на высокой
частоте. Возможны варианты этого типа передатчика помех. Так, один из шумовых ис-
точников может быть широкополосным, генерирующим заградительный спектр поме-
хи, перекрывающий все частоты подавляемых радиолокаторов. Он будет создавать бо-
лее низкую плотность и осуществлять РЭП в случае, если один из узкополосных высо-
кочастотных источников не будет оказывать действия или будет неправильно установ-
лен на частоту радиолокатора. Этот помеховый шумовой фон также снизит эффектив-
ность работы радиолокатора путем маскировки малогабаритных или удаленных целей
на всех его рабочих частотах.
Вместо узкополосных прицельных или заградительных шумов часто в ПОД пер-
вого типа применяется свипирование частоты помехи. Сигнал с быстрой периодиче-
ской перестройкой частоты вызывает в радиолокационном приемнике эффекты, отли-
чающиеся от большинства обычных AM- и ЧМ-шумовых сигналов. Повторяющееся
ЧМ свипирование будет создавать сложный частотный спектр. Составляющие спектра
сигнала помехи можно расположить в узких частотных полосах по всему рабочему
диапазону подавляемого радиолокатора. Каждая составляющая этого спектра действу-
ет как помеховый сигнал, который может быть более эффективным против некоторых
электронных систем с высокочастотными ограничителями, подобных радиолокаторам
с ЛЧМ и непрерывным доплеровским РЛС.
Второго типа ПОД может быть очень простым и состоять из усилителя на ЛБВ с
приемной антенной, соединенной с его входом, и передающей антенной, соединенной с
его выходом, подобно обычной системе для увеличения ЭПР цели, используемой на
борту ДПЛА при испытаниях и оценках своих систем вооружения. Эти усилители
обычно имеют усиление 50 дБ и более, могут усиливать импульсные и непрерывные
сигналы и делать малую телеуправляемую мишень для радиолокатора эквивалентной
большой цели с ЭПР около 50 кв. м. Усиление принятого радиолокационного сигнала
может производиться на частоте, отличной от частоты радиолокатора, используя для
этого двойное преобразование частоты. Существует много методов РЭП, пригодных
для реализации таких ПОД. Использование в них ретрансляторов на ЛБВ позволяет
обеспечивать формирование когерентных сигналов, которые могут подвергаться кор-
реляционной обработке в приемниках подавляемых когерентных радиолокаторов. С их
300
помощью могут реализовываться также уводящие помехи по дальности и скорости,
принцип создания которых рассматривался ранее, и другие типы помех.
Третьего типа ПОД не имеет активных элементов. Наилучшим примером такого
передатчика помех является уголковый отражатель. I азонаполненный шар, снабжен-
ный внутренним уголковым отражателем, представляет очень большую цель для ата-
кующей ракетной системы с радиолокационным наведением и при использовании его
вблизи защищаемого объекта действует как ловушка для вражеской ракеты. Другим
примером является решетка Ван-Атта. Она представляет собой систему фазированной
решетки, элементы которой соединены таким образом, что сигнал, пришедший с опре-
деленного направления, будет направлен с усиленным уровнем обратно в том же на-
правлении. Результирующая ЭПР пропорциональна квадрату апертуры отражателя или
решетки, поскольку радиочастотная энергия принимается и передается с усилением,
соответствующим этой апертуре. Принятый сигнал перед излучением может быть мо-
дулирован по амплитуде, частоте, фазе и поляризации, причем решетка Ван-Атта осо-
бенно подходит для непосредственного наложения этих модуляций. Отсутствие гене-
раторов высокочастотной мощности, усилительных устройств и первичных источников
их питания делает этот тип ПОД наименее дорогим из рассмотренных трех типов. Пач-
ка дипольных отражателей также попадает в эту категорию средств противодействия.
При использовании ПОД могут применяться: парашют, самолетный буксир, вы-
стреливаемая вперед ракета, бомба, сбрасываемая с большой высоты, выбрасываемые
устройства, планер, удерживаемый тросом, или в свободном полете воздушный шар,
аэростат, сбрасываемое с самолета и втыкаемое в землю устройство, автожир, парашю-
тирующее крыло, БПЛА, платформа с вертолетным винтом, снаряды и мины, вертолет,
тактическая и стратегическая ракеты, противоракеты, подъемные средства, промежу-
точные между воздушным змеем и воздушным шаром. Конкретный выбор носителя за-
висит от конкретной обстановки и стоимости. Буксируемые ПОД могут быть более до-
рогими по сравнению с другими типами ПОД, поскольку они, если не разрушены при
выполнении боевой операции, могут использоваться многократно. При выстреливании
с самолета ловушку можно выбрасывать как на значительное расстояние (не более ки-
лометра), так и на близкое расстояние (сотни метров). Удаленную ловушку можно ис-
пользовать для создания полосы дипольных помех или ложных целей радиолокацион-
ному комплексу. Близкорасположенную ловушку можно применять для самозащиты
путем создания уводящих помех по углу, дальности и скорости радиолокаторам сопро-
вождения. Комбинирование одноразовых ловушек с дипольными помехами эффектив-
но при самозащите кораблей. Быстро формируемые дипольные облака больших разме-
ров в этом случае могут стать объектом слежения для ракеты с радиолокационной
ГСН, если предусмотреть в ПОД ловушки режим уводящей на себя помехи. При раз-
мещении ПОД в непосредственной близости от РЛС можно обеспечить защиту от атак
противорадиолокационных ракет путем перенацеливания ракеты на ПОД. Если в каче-
стве носителя ПОД используется аэростат, наполненный водородом, гелием или дру-
гим более легким чем воздух газом, то его привязывают непосредственно вблизи за-
щищаемого объекта. Увеличение ЭПР аэростата обеспечивается путем установки внут-
ри него металлических перегородок, формирующих уголковые отражатели. Преимуще-
ство состоит в том, что аэростат может обеспечить длительное излучение активных
помех в защищаемом районе.
301
При защите большой тактической или стратегической ракеты ПОД можно уста-
навливать в ее носовой части с обзором в передней полусфере. При этом могут приме-
няться различные виды шумовых помех, а также ответчик, создающий большое коли-
чество ложных целей на частоте подавляемого радиолокатора. Кроме того ПОД может
запускаться с помощью специальной ракеты вперед и прикрывать помехами
движущуюся к цели ударную ракету, снижая вероятность и дальность ее обнаружения.
В ряде случаев применение ПОД может носить массовый характер. Тогда целесо-
образно предусматривать управление работой ПОД с борта защищаемой ракеты через
линии радиосвязи. Путем программного переключения их на излучение можно достичь
эффекта действия мерцающей помехи. Это - эффективный путь подавления радиоло-
кационных комплексов, хотя и дорогой. Работа ПОД при массовом применении может
синхронизироваться за счет облучения их главным лучом ДНА подавляемого радиоло-
катора и продолжаться столько времени, сколько времени РЛС облучает его главным
лучом, что заставит противника верить в существование угрозы с ложных направле-
ний. Если применяются простые ПОД типа ответчиков на ЛБВ с всенаправленными
антеннами, то можно осуществить последовательное включение ПОД, когда после
прохода лучом РЛС первого НОД наряду с ответом РЛС происходит включение друго-
го ПОД и т. д. Поскольку время прохождения сигнала от первого ПОД к другому зна-
чительно короче времени прохождения сканирования лучом РЛС от первого ПОД до
любого другого, все ПОД будут давать ответные сигналы, даже если некоторые из них
еще не приняли сигнала РЛС по его главному лучу. В результате некоторые ложные
цели будут казаться на ИКО впереди сканирующей линии визирования.
Доставка ПОД в зону цели может осуществляться с помощью БПЛА, защищае-
мых с помощью собственных средств РЭП. Выбрасывание ПОД с борта БПЛА в этом
случае осуществляется по программе через определенные промежутки времени. Про-
грамма рассчитывается таким образом, чтобы в воздухе постоянно находилось 4-5
ПОД, поддерживаемых специальными парашютами. Для доставки ПОД можно исполь-
зовать противорадиолокационные ракеты. Известно, что одним из методов борьбы с
прозиворадиолокационными ракетами является выключение радиолокатора на время,
достаточное для достижения ракетой поверхности земли. Очевидно, в этом случае ра-
кета может входить в зону цели нс обнаруженной и выбрасываемые с се борта ПОД
также не будут обнаруживаться. В результате противорадиолокационная ракета, ли-
шенная возможности наведения по выключенному радиолокатору, будет ударяться о
землю, не причиняя вреда, а выброшенные ею ПОД будут опускаться к поверхности
земли, излучая помехи. Поэтому когда радиолокатор повторно включится, ближайший
объем пространства окажется заполненным плывущими по воздуху ПОД, что создает
сложную помеховую обстановку. Конечно, оператор РЛС в такой обстановке будет
применять различные методы помехозашиты, однако при одновременном применении
многих ПОД эффективность помехозашиты не будет высокой. Так, когерентный ком-
пенсатор боковых лепестков РЛС обнаружения может использоваться при боевых опе-
рациях с применением ПОД. При этом должен быть предусмотрен отдельный контур
компенсации боковых лепестков для каждого разрешаемого по азимуту ПОД. В зави-
симости от типа радиолокатора и стоимостных факторов может использоваться от еди-
ниц до многих десятков контуров. В целом, однако, радиолокаторы ограничены как по
стоимости, так и по габаритам в отношении допускаемого числа контуров компенсации
боковых лепестков. Таким образом, вероятно, что полная способность компенсатора
302
боковых лепестков будет использоваться только против части применяемых ПОД, а ос-
тальная их часть не будет компенсироваться в радиолокационном приемнике и будет
представлять для радиолокатора трудно преодолимую угрозу радиопротиводействия.
Другим применяемым методом помеховой защиты от импульсных ПОД является блан-
кирование по боковым лепесткам, но использование этого метода опасно, если в зоне
действия находятся ПОД, создающие непрерывную шумовую помеху, а не импульсные
ПОД, поскольку сигналы целей, поступающие по главному лучу, будут бланкировать-
ся. Однако этот метод очень эффективен против импульсных ответчиков одноразового
действия второго типа. Бланкирующее по боковым лепесткам устройство может одно-
временно обрабатывать сигналы многих ответчиков, принимаемые по боковым лепест-
кам, поэтому нс возникает больших проблем по устранению действия помеховых ПОД
через область боковых лепестков ДНА РЛС. Однако совокупность различных типов
ПОД будет создавать большие трудности по управлению бланкирующим устройством
по боковым лепесткам. Во многих случаях средства, затрачиваемые на устройства по-
давления боковых лепестков ДНА, такие как компенсаторы и бланкирующие устройст-
ва, могут оказаться более дорогими, чем стоимость разработки улучшенной антенны со
сниженным уровнем боковых лепестков ее диаграммы.
11.5. Перенацеливание на подстилающую поверхность
При рассмотрении тактики боевого применения авиации значительное место от-
водится отработке методов прорыва системы ПВО на малых и предельно малых высо-
тах. Такая тактика использования авиации при прорыве системы ПВО противника по-
зволяет добиться скрытности подхода к атакующим целям и тем самым снизить потери
самолетов [1,77].
Полет самолета на малой высоте сам по себе снижает точность радиолокационно-
го сопровождения из-за мешающих отражений и влияния многолучевого распростра-
нения сигналов. Интенсивность мешающих отражений зависит от многих факторов: от
длины волны, поляризации сигнала, структуры, физических и химических свойств от-
ражающей поверхности, угла визирования, Отражение радиоволн от поверхности мо-
жет быть зеркальным и диффузным. Чисто зеркальное отражение имеет место лишь
для идеально гладких (зеркальных) поверхностей, например, бетонных дорожек и ас-
фальтированных шоссе. Реальные земные поверхности (трава, лее, пашня) создают как
зеркальное, так и диффузное отражение. Диаграмма направленности зеркальной со-
ставляющей переотражсиного сигнала имеет ту же форму, что и при отражении от
идеализированной поверхности. Диаграмма направленности диффузной составляющей
псрсотраженного сигнала имеет форму, близкую к сфере, касательной к поверхности.
Доля рассеянного диффузионного излучения зависит в основном от степени неровно-
сти поверхности. Если же при этом применять подсвечивание подстилающей поверх-
ности помеховыми сигналами через узконаправленную антенну, то можно еще более
затруднить работу радиолокатора. В этом случае подсвечиваемая поверхность стано-
вится источником отраженных помеховых сигналов, воздействующих на РЛС через
область боковых лепестков ее ДНА. Направление на данный источник относительно
радиолокатора отличается от направления на носитель передатчика помех, что эквива-
лентно вынесенному передатчику помех, зеркально расположенному относительно
подсвечиваемой поверхности (рис. 11.3).
303
Рис. 11.3. Принцип перенацеливания на подстилающую
поверхность
В ряде случаев мощ-
ность помехи от фиктивно-
го источника может пре-
вышать мощность отражен-
ного от цели сигнала. Тогда
радиолокатор будет отсле-
живать преимущественно
направление на фиктивный
источник. Это приведет к
перенацеливанию ракет с
полуактивными и активны-
ми головками самонаведе-
ния, а также к перенацели-
ванию бортовых РЛС само-
летов-перехватчиков.
При создании ложной цели в направлении, не совпадающем с направлением на
цель, следует обеспечивать условия, при которых сигнал помехи, переотраженный по-
верхностью, превосходил бы по мощности сигнал, принимаемый непосредственно от
самолетного передатчика помех. При этом переотраженный сигнал помехи должен
примерно совпадать по задержке и частоте с непосредственно принимаемым сигналом.
В передатчик помех ретрансляционного типа для перенацеливания, например, ГСН
ЗРК с полуактивным самонаведением и непрерывным излучением, на подстилающую
поверхность входят приемник РЛС подсвета, усилитель и передающая антенная систе-
ма для излучения усиленных радиолокационных сигналов в направлении подстилаю-
щей поверхности. Антенная система состоит из группы передающих антенн, каждая из
которых формирует антенный луч в определенном направлении на подстилающую по-
верхность в заданном азимутальном и угломестном секторах. Приемник определяет
азимутальное направление на источник радиолокационного излучения и подключает ту
передающую антенну, ДН которой по азимуту ориентирована в направлении приема
этих сигналов. Это необходимо для того, чтобы помеховое "пятно" находилось на под-
стилающей поверхности между защищаемым самолетом и ракетой. Через эту антенну
псреизлучаются усиленные сигналы радиолокатора подсвета цели. В результате того,
что переотраженный подстилающей поверхностью сигнал превышает на входе прием-
ника ГСН ракеты радиолокационный сигнал, отраженный непосредственно от самоле-
та, ракета вместо того, чтобы наводиться на самолет, пикирует на земную или водную
поверхность.
Рассмотрим основные требования к параметрам ретрансляционного передатчика
перенацеливающих на подстилающую поверхность помех применительно к случаю
подавления полуактивного ЗРК. Для этого необходимо выполнить, по крайней мере,
два условия. Первое состоит в том, что на входе подавляемого приемника ГСН уровень
сигнала помехи непосредственно от передатчика помех должен быть меньше уровня
сигнала помехи, переотраженного подстилающей поверхностью. Второе требует, что-
бы уровень сигнала помехи, переотраженного подстилающей поверхностью, превосхо-
дил уровень радиолокационного сигнала, непосредственно отраженного от самолета.
304
Из первого условия можно получить требование к уровню паразитного излучения
передающей антенны станции помех в направлении на подавляемый приемник относи-
тельно уровня сигнала помехи, излучаемого в направлении подстилающей поверхности:
(11.13)
GnR; 1
-> —!------/у
~ 2 jx зап’
Gu г ^отр
где С?п и G*n- коэффициенты усиления антенны передатчика помех в направлении под-
стилающей поверхности и ГСН; г - дальность между ракетой и защищаемым самоле-
том; R\ - дальность между ракетой и антиподом; Аотр- коэффициент потерь при отра-
жении сигнала от подстилающей поверхности; осзап - коэффициент, определяющий до-
пустимую величину превышения помехой уровня проникающего сигнала на входе по-
давляемого приемника.
На величину коэффициента потерь сигнала помехи при его псреотражении под-
стилающей поверхностью влияет размер переотражающей площадки и ее физико-
химические характеристики. Размеры переотражающей площадки на подстилающей
поверхности зависят от ширины в азимутальной и угломестной плоскостях ДНА, облу-
чающей подстилающую поверхность. В свою очередь, мощность перенацеливающей
помехи на входе приемника подавляемого пеленгатора будет определяться размерами
совместной области, образуемой наложением ДНА пеленгатора и ДНА передатчика
помех на эту площадку. Эта область для конкретных значений ширины этих ДНА зави-
сит от дальности между отражающей площадкой и пеленгатором.Сигнал от подсвечен-
ного участка земной поверхности, определяемого совместным наложением ДНА ГСН и
передатчика помех, может быть представлен некоторой совокупностью блестящих то-
чек, которые в процессе полета защищаемого самолета случайным образом перемеща-
ются, образуя “сверкающее пятно”.
Коэффициент отражения зависит не только от характера местности, но и от вре-
мени года и погодных условий. Минимальные потери переотраженного сигнала на-
блюдаются зимой из-за снежного покрова. Уменьшение толщины снежного покрова и
особенно его таяние, приводят к существенному ослаблению переотраженного сигнала,
которое продолжает расти по мере потепления и роста травяного покрова (рис. 11.4).
Рис. 11.4. Результаты сезонных изменений коэффициента отражения сигнала
сантиметрового диапазона от участка сельской местности при условии:
земля покрыта снегом (У), остатками прошлогодней травы (2) и травяным покровом (3)
305
Отраженный от реальной земной поверхности сигнал будет модулирован по ам-
плитуде, фазе и направлению угла прихода, характер которой зависит от неровности
подстилающей поверхности и скорости полета защищаемого самолета. Хотя быстро
изменяемые флуктуации пере отраженного “пятном” сигнала из-за усреднения могут не
оказать существенного влияния на процесс- наведения на “пятно”, но сопровождение
будет с повышенными флуктуационными угловыми ошибками. Если рельеф местно-
сти сильно изрезан, то возможны длительные замирания персотраженного сигнала по-
мехи, эффект которых может оказаться существенным.
Когда ГСН устойчиво наводится на “пятно”, то кратковременное, но длительное
его исчезновение может привести к перенацеливанию ракеты на сопровождение цели,
если она к этому моменту находилась в главном луче ДНА ГСН. При достаточной рас-
полагаемой ракетой перегрузке цель будет поражена. В противном случае поражение
цели не произойдет. При меньшей длительности перерывов в сигнале помехи ГСН бу-
дет сопровождать энергетический центр совокупности ” цель-пятно” и результат будет
зависеть от критического угла разрешения одного из источников и располагаемой ра-
кетной перегрузки.
Максимальная излучаемая мощность передатчика помех определяется с помощью
второго условия для минимальной дальности между радиолокатором подсвета и защи-
щаемым самолетом и составляет:
PnG„>a„PG
4тг/?0 Хотр (
(Н.14)
где PG - излучаемая мощность радиолокатора подсвета; - минимальная дальность
между радиолокатором подсвета и самолетом.
Рассмотрим характер изменения на входе приемника ГСН уровней сигналов, пе-
реотраженных поверхностью и принятых непосредственно от ретрансляционного пере-
датчика помех в режиме постоянной выходной мощности, от дальности между радио-
локатором подсвета и самолетом до и после пуска ракеты. До пуска ракеты отражен-
ный от самолета сигнал подсвета на входе приемника ГСН возрастает обратно пропор-
ционально четвертой степени дальности между радиолокатором подсвета и самолетом.
При этом уровень проникающего сигнала возрастает обратно пропорционально второй
степени этого расстояния. После пуска ракеты уровень мощности проникающего сиг-
нала на входе приемника ГСН сначала резко уменьшается из-за набора высоты ракетой
при сравнительно малом изменении дальности (увеличивается угол Д), а затем меняет-
ся обратно пропорционально квадрату дальности между самолетом и ракетой, если
угол Д остается постоянным. При этом в зависимости от располагаемой передатчиком
помех мощности и крутизны спада ДН в угломестной плоскости с учетом размещения
антенны на самолете уровень проникающего сигнала может быть ниже или выше
уровня сигнала подсвета, отраженного от самолета. Уровень сигнала помехи, персот-
раженного подстилающей поверхностью, также меняется обратно пропорционально
квадрату расстояния от ракеты до самолета. Здесь предполагается, что за время полета
ракеты дальность между самолетом и радиолокатором подсвета меняется мало. Для
эффективности перенацеливания уровень этого сигнала должен превышать в ап раз
наибольший уровень проникающего сигнала помехи или отраженного от самолета сиг-
нала подсвета.
306
Выше предполагалось, что защищаемый самолет и подсвечиваемое "пятно" на
поверхности находятся в ДНА ГСН. Границы зоны перенацеливания ГСН по дальности
и углам подхода ракеты к цели [3 определяются шириной ДНА станции помехи 0П, ее
наклоном в угломестной плоскости к горизонту ос, а также разрешающей способностью
подавляемого пеленгатора по угловым координатам 0Р. Поэтому угол ос между направ-
лением максимума ДН передающей антенны и горизонтальной плоскостью, проходя-
щей через линию полета самолета, устанавливается в зависимости от высоты полета и
расстояния, на котором необходимо обеспечить перенацеливание ГСН ракеты на сиг-
налы помехи, персотраженные подстилающей поверхностью. Для ослабления уровня
сигнала, непосредственно принимаемого приемником ГСН от передающей антенны
станции помех, конструкция и размещение антенны на защищаемом самолете выпол-
няются такими, чтобы реализовать требуемую крутизну спада ДН в угломестной плос-
кости. Антенна с малым уровнем боковых лепестков ДН и использование экранирующе-
го действия фюзеляжа самолета позволяют удовлетворить необходимым требованиям.
Из второго условия можно получить требование к полному коэффициенту
ретранслятора, работающего в режиме постоянного коэффициента усиления:
4газ I (Y
^полн.рстр — I I ’ (11-15)
X2 Аотр ( г )
где (5 ~ ЭПР защищаемого самолета; X - длина волны; ап - требуемое превышение по-
мехи для обеспечения перенацеливания ГСН.
Так как расстояние ~ г, то по сравнению со случаем самозащиты, полный ко-
эффициент усиления ретранслятора для создания перенацеливающих на подстилаю-
щую поверхность помех увеличивается для компенсации потерь сигнала помехи при
переотражении его подстилающей поверхностью. При полете самолета на значитель-
ных высотах может оказаться, что цель сопровождается главным лучом антенны ГСН,
а переотраженный сигнал помехи действует через область се боковых лепестков. В
этом случае потребуется дополнительное увеличение мощности переотраженного сиг-
нала помехи за счет увеличения мощности передатчика помех и направленности пере-
дающей антенны, через которую излучаются сигналы помехи в сторону подстилающей
поверхности, а также за счет принятия соответствующих мер уменьшения прямого
сигнала помехи на входе антенны подавляемого радиолокатора путем, например, ис-
пользования когерентного излучения сигналов из двух точек или излучение сигналов
на ортогональной поляризации. Как известно, оба указанные способа обеспечивают
формирование нулевого (или близкого к нулю) уровня сигнала на равносигнальном на-
правлении ДНА.
ГЛАВА 12. ПЕРЕДАТЧИКИ РЕТРАНСЛЯЦИОННЫХ ПОМЕХ
12.1. Идеология создания передатчиков ретрансляционных помех
Передатчики ретрансляционных помех находят наиболее широкое применение в
системах РЭП в силу их быстродействия при создании прицельных по параметрам по-
мех. В соответствии с этим рассмотрим их несколько подробнее.
307
Принцип действия передатчика ретрансляционных помех состоит в приеме импульсно-
го или непрерывного сигнала подавляемой РЭС, усилении и модуляции его по ампли-
туде, фазе, частоте и/или задержке и последующею однократного или многократного
излучения сформированного сигнала помехи в направлении подавляемой РЭС Суще-
ствует много разных типов передатчиков ретрансляционных помех. Наиболее широко
применяются: простой ретранслятор импульсных сигналов с амплитудной модуляцией,
ретранслятор непрерывных СВЧ-сигналов с частотной модуляцией, ретранслятор с ре-
циркулятором радиоимпульсов и амплитудной и частотной модуляцией, а также
ретранслятор-имитатор радиолокационных целей на основе системы запоминания сигна-
лов. Во многих случаях тип ретранслятора, предназначенного для выполнения постав-
ленной задачи, определяется состоянием технологических разработок основных компо-
нентов, входящих в его состав. Современные достижения в разработке когерентных сис-
тем запоминания сигналов и стремительный прогресс в области цифровой техники по-
зволяют значительно усовершенствовать передатчики ретрансляционных помех, снизить
их стоимость и повысить тактико-технические характеристики ретрансляторов.
В простейшем виде передатчик ретрансляционных помех состоит из приемной и
передающей антенн, усилительного тракта и модуляторов. Основными его техниче-
скими характеристиками, помимо модуляционных, являются его полный коэффициент
усиления и максимальная излучаемая мощность передатчика.
Полный коэффициент усиления ретрансляционного передатчика для случая само-
защиты, равный произведению коэффициентов усиления антенн и усилительного трак-
та, определяется выражением
Максимальная излучаемая мощность передатчика
/ i V
(PnGn) = PG ----- ^П01НПСТО=^-------—ап> (12.2)
V п п/тах J „олнретр ^2." п>
где PG - излучаемая мощность передатчика РЛС; минимальная дальность подав-
ления.
Максимальная величина полного коэффициента усиления ретранслятора ограни-
чивается достижимой развязкой между приемной и передающей антеннами, которая
определяется их ДНА и особенностями размещения аппаратуры помех на борту ЛА.
12.2. Основные характеристики усилительного тракта ретранслятора
Усилительный тракт ретранслятора состоит из последовательно соединенных ши-
рокополосных СВЧ-усилительных приборов: ЛБВ и/или полупроводниковых усилите-
лей. Широкое распространение в ретрансляторах получили ЛБВ, особенно в качестве
выходных усилителей. Соединение двух и более ЛБВ образует многокаскадный усили-
тель. Такой усилитель обладает следующими преимуществами, обусловливающими его
широкое применение в РЭП: высокое значение произведения коэффициента усиления
на ширину рабочей полосы частот, очень высокое быстродействие, широкий динами-
ческий диапазон, широкополосность и удобство в наделении усиливаемых сигналов
помеховой модуляцией. С целью повышения мощности при работе на общую нагрузку
ЛБВ могут включаться в параллель. Двухрежимная Л БВ способна выполнять функции
308
двух ЛБВ - импульсной и непрерывного режима усиления. В усилительных каскадах
применяются также приборы со скрещенными полями, но реже, чем ЛБВ. Многокас-
кадные усилители применяются в передатчиках помех трех типов: прикрытия, индиви-
дуальной защиты, одноразового применения.
Для передатчиков помех прикрытия необходимо обеспечить максимальную вы-
ходную мощность, так как он прикрывает группу ударных самолетов на большом рас-
стоянии от РЛС ПВО противника. Задача получения высокой мощности излучения при
использовании ЛБВ средней мощности может быть решена путем построения фазиро-
ванной антенной решетки с ЛБВ в канале каждого излучающего элемента.
Для индивидуальной радиотехнической защиты широко применяются дезориен-
тирующие помехи, в том числе комбинация импульсной и непрерывной шумовой по-
мехи. Фазированные антенные решетки с ЛБВ в каждом излучающем элементе могут
быть использованы, например, в передатчиках помех одноразового действия. Иногда в
таких передатчиках ЛБВ заменяют твердотельными усилителями.
Условия, в которых работают передатчики помех одноразового действия, могут
быть очень тяжелыми, например, как у передатчиков, устанавливаемых в орудийном
снаряде, но при разработке таких передатчиков помех может быть с выгодой использо-
вана их кратковременная работа. В них могут устанавливаться магнетроны, которые
хотя и крупногабаритные, но относительно недорогие.
Каждый каскад в усилителе должен быть согласован с каскадами усиления
ретранслятора в целом. Только при таком условии будут обеспечиваться следующие
результирующие характеристики многокаскадного усилителя:
широкий динамический диапазон;
малая неравномерность коэффициента усиления от частоты;
относительно слабая зависимость выходной мощности усилителя от частоты;
минимальный коэффициент усиления слабых сигналов и требуемое усиление
ретранслятора;
максимальный коэффициент усиления сильных сигналов в диапазоне частот, оп-
ределяющий самовозбуждение за счет внешней паразитной связи. Коэффициент
усиления многокаскадного усилителя обязательно должен регулироваться;
высокое значение отношения коэффициентов передачи усилителя во время излу-
чения сигнала и в паузе при формировании дезориентирующих помех;
минимальный коэффициент шума, обеспечивающий скрытность станции помех
при отсутствии радиолокационного сигнала на входе, не позволяющий осуществ-
лять наведение оружия по излучению или пассивно сопровождать ЛА со станцией
помех при излучении ею только собственных тепловых шумов;
достаточно высокая устойчивость к непреднамеренным помехам;
низкий уровень гармоник и комбинационных составляющих на выходе;
способность осуществлять необходимые для формирования помех опсрарш, на-
пример, такие как сдвиг частоты, запоминание, фазовую, амплитудную или час-
тотную модуляции.
Как уже отмечалось, большое значение для чувствительности и скрытности стан-
ций ретрансляционных помех имеет коэффициент шума усилителя и уровень мощно-
сти собственных шумов на выходе мощного усилителя. Очевидно, что чем меньше
мощность шумов на выходе оконечного усилителя, тем лучше усилитель. Для каскад-
ного соединения нескольких усилителей общий коэффициент шума
309
fo=F,+^+^l
G. G,G,
(12.3)
где F{, F2, Fy... - коэффициенты шума первого, второго, третьего и т. д. каскадов уси-
ления, входящих в усилительную цепочку ретранслятора; G], G2, Gy... - коэффициенты
усиления первого, второго, третьего и т. д. каскадов усиления.
Учитывая, что коэффициент усиления ЛБВ достаточно велик (30 дБ и более), ре-
зультирующий коэффициент шума усилителя, в основном определяется коэффициен-
том шума первого каскада усиления.
Результирующая (интегральная) мощность шума на выходе усилителя определя-
ется его полным коэффициентом усиления, полосой пропускания и коэффициентом
шума:
(12.4)
В данном случае ретранслятор выступает как передатчик прямо-шумовых помех
со спектральной плотностью S = FoKTGnom и эффект его воздействия зависит от полосы
пропускания приемника подавляемой РЛС. Интегральная выходная мощность шума
усилительного тракта ретранслятора не может превосходить максимальную выходную
мощность оконечного каскада. Для широкополосных ретрансляторов, используемых в
станциях помех индивидуальной защиты, интегральный уровень мощности выходного
шума обычно на 20...30 дБ ниже уровня максимальной выходной мощности оконечно-
го каскада. В станциях помех прикрытия ретрансляционного типа это соотношение
хуже и требуется тщательное согласование усилительных каскадов между собой по
амплитудным и шумовым характеристикам с тем, чтобы обеспечить оптимальное со-
отношение между полосой пропускания, выходной мощностью и коэффициентом уси-
ления ретранслятора. Интегральный шум ретранслятора ограничивает предельный дос-
тижимый коэффициент усиления ретранслятора для слабых сигналов, так как увеличе-
ние его приводит к тому, что шумы оказываются в области амплитудного насыщения
отдельных каскадов усиления, вызывая уменьшение коэффициента усиления в целом.
Основными методами снижения выходного уровня собственных шумов ретранслятора
является частотная фильтрация (с использованием узкополосных фильтров, фиксиро-
ванных или перестраиваемых), введение дополнительного затухания и специальных
подавителей шума, существенно снижающих уровень собственных шумов на выходе
усилительной цепочки ретранслятора.
С целью повышения выходной мощности станции помех можно включать в парал-
лель как ЛБВ, работающие в импульсном режиме, так и ЛБВ, работающие в непрерыв-
ном режиме. Входной сигнал подается по двум или более параллельным каналам. Сигна-
лы в параллельных каналах должны быть одинаковой частоты и амплитуды и иметь со-
ответствующие фазы. Сами каналы должны иметь малые потери и низкий КСВН. Сло-
жение мощности параллельных каналов осуществляется с помощью мостовых схем.
По мере совершенствования радиолокационных ракетных комплексов возникает
необходимость совершенствования существующих систем РЭП с целью повышения
мощности помехи, не дожидаясь поступления на вооружение новых систем РЭП. На
рис. 12.1 показано, как можно, не затрагивая коммутирующего устройства и антенной
системы, повысить на 6дБ (или более, если ввести дополнительные СВЧ-компоненты)
излучаемую мощность существующей системы РЭП.
310
Рис. 12.1. Структурные схемы существующей системы
РЭ1I (а) и ее модификация (б) с повышенной выходной
мощностью
На рис. 12.1,а показана
структурная схема существую-
щей системы РЭП, которая под-
вергается модернизации. Пере-
датчик этой системы подключа-
ется к коммутирующему уст-
ройству, соединяющему его вы-
ход с одной из четырех направ-
ленных антенн. Для того чтобы
повысить мощность этой систе-
мы, в линии, соединяющей ком-
мутирующее устройство с антен-
нами, включаются две диаграм-
мообразующие схемы и ЛБВ, как
показано на рис. 12.1,6. Структу-
ра обеих диаграммообразующих
схем одинакова, но схема № 2
рассчитана на более высокую
выходную мощность. Каждая из этих схем может представлять собой, например, мат-
ричную схему Батлера. Сигнал, поступивший на вход 1 диаграммообразующей мат-
ричной схемы № 1, делится поровну между четырьмя каналами с ЛБВ, но в каждом ка-
нале фазы сигналов будут различными. Это различие фаз обусловливает то, что после
усиления ЛБВ все сигналы поступят на выход 1 диаграммообразующей матричной
схемы № 2. Подобным образом все номера входов схемы № 1 совпадают с номерами
выходов схемы № 2. Выходная мощность системы в целом при этом возрастает в 4 раза
за вычетом потерь в диаграммообразующих схемах и дополнительных фидерных лини-
ях. Применение этого метода увеличения выходной мощности приводит к повышению
коэффициента усиления системы в целом. Чтобы в этих условиях получить развязку,
возможно потребуется компенсация усиления или принятие мер по улучшению развяз-
ки между антеннами. Также должна быть обеспечена в известных пределах идентич-
ность фазовых характеристик ЛБВ. Выходная мощность существующей системы РЭП
также может быть повышена, если поставить ЛБВ в каждый антенный тракт системы.
В этом случае, однако, будет использоваться усиление только одной ЛБВ, питающей
один излучающий элемент решетки, в то время как описанная выше модификация по-
зволяет использовать для запитки этого излучающего элемента все ЛБВ.
Основной тип современных ЛБВ использует спиральную замедляющую систему,
позволяющую обеспечить работу в очень широкой полосе (1...2 октавы). Возможности
по охлаждению спирали ЛБВ обычно ограничивают ее мощностные характеристики
ЛБВ, особенно на частотах выше 10 ГГц. Лампы бегущей волны, использующие свя-
занные резонаторы, более узкополосны (до 40 %), но позволяют получить более высо-
кие уровни мощности, чем ЛБВ со спиралью (примерно на порядок). Такие ЛБВ более
подходящие в качестве оконечных каскадов станций помех прикрытия, где более кри-
тична максимальная мощность, чем рабочая полоса частоты. Технологические успехи в
разработке ЛБВ с замедляющей системой в виде спирали позволили существенно рас-
ширить рабочий диапазон частот, повысить КПД и выходную мощность.
311
Достигнутое перекрытие по частоте 3:1 дало возможность перекрыть диапазон
частоты 2,5... 18 ГГц двумя ЛБВ, что значительно снизило стоимость передатчиков по-
мех, в которых стоимость ЛБВ и соответствующих элементов достигает 47 % стоимо-
сти системы РЭП.
Обычно ЛБВ разрабатываются для непрерывного режима работы или импульсно-
го, так как требования к условиям работы спирали оказываются несовместимыми. Воз-
можным решением может быть применение отдельных ЛБВ для каждого режима. Же-
лательный уровень мощности для ЛБВ этого типа составляет 200 Вт в непрерывном
режиме и 2 кВт - в импульсном в рабочей полосе 3:1. Идеальная ЛБВ для станции по-
мех индивидуальной защиты должна располагать возможностью работать в двух ре-
жимах, чтобы заменить две параллельно работающие ЛБВ одной. Такая ЛБВ была раз-
работана и обеспечила увеличение импульсной мощности над уровнем непрерывной
мощности почти на порядок в октавной полосе. Двухрежимная ЛБВ может работать в
трех различных режимах: непрерывном, импульсном и в комбинированном, когда не-
прерывный и импульсный существуют одновременно. ЛБВ с соленоидной магнитной
фокусирующей системой позволяют достичь мощности в непрерывном режиме 2 кВт в
диапазоне 2...4 ГГц, 1,5 кВт в диапазоне 4...8 ГГц и 1 кВт в диапазоне 8... 12 ГГц.
Масса такой типовой ЛБВ составляет 9 кг, тогда как масса ЛБВ с периодической маг-
нитной фокусировкой - всего лишь 2,5 кг. Кроме того, эти ЛБВ требуют жидкостного
охлаждения, тогда как для ЛБВ с периодической магнитной фокусировкой достаточно
использовать обычный контактный теплоотвод. ЛБВ с замедляющей структурой на
связанных резонаторах имеют полосу 25 %, но позволяют достичь мощности 10 кВт в
непрерывном режиме и 1 МВт в импульсном режиме. Такие приборы в основном ис-
пользуются в системах создания помех прикрытия.
Импульсная мощность ЛБВ с замедляющей системой в виде спирали ограничивает-
ся явлением возникновения паразитного возбуждения за счет появления обратной волны
до уровня 2,5 кВт для диапазона 1...2 ГГц, 2,5 кВт для диапазона 2...4 ГГц, 2 кВт для
диапазона 4...8 ГГц и 1,5 кВт для диапазона 8... 16 ГГц. В будущем за счет улучшения
охлаждения может быть достигнута импульсная мощность 10 кВт. Для старых типов
ЛБВ допустимый коэффициент заполнения составлял 2 %, а для новых - (5... 10) %.
Амплитудная характеристика ЛБВ обычно имеет линейную часть и область на-
сыщения, где выходная мощность относительно слабо меняется от входного сигнала, и
область перенасыщения, где выходная мощность уменьшается с увеличением мощно-
сти входного сигнала. В системах РЭП мощные ЛБВ обычно работают в области на-
сыщения при максимальном КПД. Лампы, которые используются для раскачки мощ-
ных ЛБВ, обычно работают в линейном режиме с максимальным коэффициентом уси-
ления. При изменении уровня входного сигнала от линейной области к насыщению,
фаза усиленного сигнала в мощной ЛБВ меняется от 60 до 100° и типовая величина ко-
эффициента преобразования AM в ФМ составляет 6°/дБ. Работа ЛБВ в режиме насы-
щения уменьшает глубину AM входного сигнала. При наличии двух и более сигналов
на входе мощной ЛБВ происходит существенное обогащение спектра выходного сиг-
нала продуктами на комбинационных частотах. Уровни компонент этого спектра зави-
сят не только от мощности сигналов на входе и нелинейности амплитудной характери-
стики ЛБВ, но и от коэффициента усиления на частоте спектральных составляющих. Ко-
гда на вход ЛБВ поступает мощный сигнал, то он уменьшает усиление для слабых
312
Рис, 12.2, Эффект подавления типовых ЛБВ при
одновременном усилении нескольких сигналов
сигналов, существующих одновременно с
ним. В случаях усиления двух мощных
сигналов, усиление каждого из них
уменьшается. На рис. 12.2 показана зави-
симость изменения коэффициента усиле-
ния для типовой ЛБВ большой мощности
при наличии на ее входе двух входных
сигналов равной амплитуды. Сигнал час-
тоты f соответствует середине частотного
диапазона ЛБВ, тогда как сигнал частоты
С изменяется на ± 500 МГц относительно
несущей частоты f. Разность между
мощностями этих двух сигналов на выходе
ЛБВ показывает, что сигнал с меньшей
частотой уменьшает коэффициент усиле-
ния усилителя и может подавлять сигнал более высокой частоты на 8... 10 дБ. В связи с
невозможностью прогнозирования уровней выходных сигналов при заданных уровнях
мощности этих сигналов на входе усилителя в режиме одновременного усиления сигна-
лов используется режим разделения во времени сигналов разных частот путем быстро-
действующего переключения несущей частоты входного сигнала. Временная коммута-
ция приводит к расширению спектра выходного сигнала в зависимости от скорости пере-
ключения и энергетическим потерям из-за скважности в излучении сигнала помехи на
его частоте.
Другим перспективным направлением увеличения излучаемой мощности является
применение в станциях помех активных ФАР, использующих ЛБВ в каждом излучаю-
щем элементе. В этом случае применяются миниатюрные ЛБВ с выходной мощностью
40 Вт, которые могут быть непосредственно соединены с излучателями решетки. Ха-
рактеристики этих ЛБВ согласованы по фазе не хуже 10° и по коэффициенту усиления
не более 2 дБ. Срок службы миниатюрных ЛЕВ составляет 10000 ч. Дальнейший про-
гресс в разработке АФАР для систем РЭП связан с достижениями в арсснид-галлиевой
технологии. Разработаны сверхширокополосные усилители, работающие на средней и
верхней частях диапазона частот 2...20 ГГц. В настоящее время они широко использу-
ются в ФАР с большим числом элементов, так как излучаемая мощность ФАР пропор-
циональна квадрату числа элементов решетки. Выходная мощность одного такого уси-
лителя падает обратно пропорционально частоте в диапазоне 2...30 ГГц. В [33] сооб-
щается, что выходная мощность усилителя в диапазоне 2... 10 ГГц достигает несколь-
ких ватт в более узкой октавной полосе (табл. 12.1).
Таблица 12.1. Характеристики широкополосных гибридных арсенид-галлиевых
усилителей
Полоса, ГГц Число каскадов • Коэффициент усиления, дБ Мощность, Вт КПД, %
2...10 13 50 0,5...2 -
7...15 3 11...22 0,8... 1,3 12,5
8...17 10 38±3 0,8...1,3 3,5
313
Основным недостатком полупроводниковых усилителей по сравнени ю с ЛБВ яв-
ляется то, что они не могут обеспечить те же уровни мощности, что и ЛБВ. Если в диа-
пазоне ниже 20 ГГц требуется обеспечить более 5 Вт непрерывной мощности в октав-
ной полосе частот или более 2 Вт в многооктавной полосе, то единственным решением
может быть только применение ЛБВ. Кроме того, полупроводниковые усилители хо-
рошо работают в непрерывном режиме и хуже в импульсном (увеличение мощности
всего на 3...6 дБ). В импульсном режиме получены пиковые мощности 120 Вт в 16 %
полосе на частоте 3 ГГц при коэффициенте заполнения 1 %. Полупроводниковые уси-
лители на арсенидс-галлия обладают существенными преимуществами над ЛБВ в час-
ти надежности, линейности, малых питающих напряжений, меньших размеров и массы
в широкой рабочей полосе частот и меньшего коэффициента шума. Эти достоинства
постоянно стимулируют исследования и разработки в области дальнейшего повышения
выходной мощности и широкополосности этих приборов. В частности, использование
монолитной технологии изготовления таких усилителей уже позволило разработать
усилители на арсениде-галлия для систем РЭП с достаточно высокими характеристи-
ками (табл. 12.2).
Таблица 12.2. Основные параметры широкополосных монолитных усилителей
на арсениде-галлия
Рабочая полоса, ГГц Усиление, ДБ Выходная мощность, Вт кпд, %
1...L3 9 0.3 -
2. ..8 5 1 9,5
2...8 10 2 20
6...18 10 0,5...! 18,8
2...20 30 1 -
Эти приборы замещают маломощные ЛБВ в широкодиапазонных передатчиках
систем РЭП для раскачки его мощных оконечных каскадов. Они также могут широко
использоваться в активных ФАР и МЛАР.
12.3. Задержка переизлучаемого сигнала в ретрансляторе
Задержка сигнала в ретрансляторе представляет время, которое требуется на
ретрансляцию сигнала, и соответствует интервалу между поступлением радиолокаци-
онного сигнала на приемную антенну ретранслятора и излучением или передачей
ретранслируемого сигнала. Общая задержка включает задержку в приемной и пере-
дающей антенных системах, в усилителе и импульсном модуляторе ЛБВ, если таковой
имеется, и задержку в логическом и обрабатывающем устройстве. Импульсный моду-
лятор усиливает каждый продетектированный входной радиолокационный импульс и
включает на время длительности этого импульса мощный импульсный усилитель на
выходе ретранслятора. Задержка в ретрансляторе приводит к тому, что ретранслируе-
мый сигнал помехи будет задержан относительно отраженного радиолокационного
сигнала от цели, на которой установлен ретранслятор. Если задержка будет значитель-
ной, то оператор РЛС может обнаружить помеховый импульс и принять соответст-
вующие меры по защите от помехи. Поэтому задержка в ретрансляторе должна быть
минимальной.
314
Рассмотрим структурную схему обычного двухкаскадного импульсного ретранс-
ляторафис. 12.3).
Рис. 12.3. Структурная схема ретранслятора
Принятый радиолокационный импульс усиливается входной ЛБВ, работающей в
непрерывном режиме. Затем усиленный сигнал проходит через модулятор на выход-
ную ЛБВ, работающую в импульсном режиме, и передающую антенну. Сигнал с выхо-
да первой ЛБВ поступает также в другой канал, где он детектируется и используется
для импульсной модуляции выходной ЛБВ. В точке А снимается входной радиолока-
ционный импульс. В точке В этот импульс задерживается по двум причинам: из-за рас-
пространения в линии передачи и из-за задержки при прохождении через первый уси-
литель. Задержка в коаксиальных кабелях в пределах их рабочего диапазона не зависит
от частоты. Она прямо пропорциональна квадратному корню из диэлектрической про-
ницаемости материала-наполнителя кабеля и может быть определена как
t3 = 106- fc(e)0'5, (12 5)
где /3 - задержка, мкс; с - скорость света (3 108 м/с); е - относительная диэлектрическая
проницаемость материала; / - длина в метрах.
В табл. 12.3 приведены характеристики наиболее часто употребляемых материа-
лов-наполнителей коаксиальных кабелей.
Таблица 12.3. Характеристики материалов-наполнителей коаксиальных кабелей
Материал Относительная диэлек грическая проницаемость г Задержка г,, мкс/100м
Воздух 1,00 0,335
Тефлон 2,00 0,485
Полиэтилен 2,26 0,502
Обычная керамика 5,80 0,804
Параметры типового теплостойкого коаксиального кабеля KG - 211 A/D,
рассчитанного на высокую пропускаемую мощность
Внутренний проводник медь, мм в диаметре........................5
Наполнитель - тефлон,KG - 211 A/U..............................16
Диаметр кабеля, мм.............................................19
Затухание на частоте 400 МГц, дБ/м..........................0,073
Затухание на частоте 3000 МГц, дБ/м...........................0,33
315
Волновое сопротивление, Ом......................................50
Пропускаемая мощность на частоте 400 МГц, кВт (средняя).........10
Пропускаемая мощность на частоте 3000 МГц, кВт (средняя)........10
Задержка, мкс/100м............................................0,48
Данный коаксиальный кабель по своим характеристикам может быть применен во
входном или выходном тракте мощного ретрансляционного передатчика помех.
Задержка в волноводных линиях передачи, которые также могут быть использо-
ваны в ретрансляторах, зависит от рабочей длины волны (в свободном пространстве) и
от длины волны в волноводе. Расчет задержки в волноводе более сложен, чем расчет
для коаксиальных кабелей. Задержка может быть получена по формуле
Л.в=(Ад)1/с, ' (12.6)
где Ад - длина волны в волноводе, м; с - скорость света в вакууме, м/с; I - длина волно-
вода, м. Длину волны в волноводе можно рассчитать по формуле:
Ал= А/[е-(А/Ас)2]1/2, (12.7)
где £ - относительная диэлектрическая проницаемость материала-заполнителя волно-
вода; А - длина волны в свободном пространстве, м; \ - критическая длина волны в
волноводе, м.
Отметим, что в пределах типового рабочего диапазона задержка изменяется от
0,12 до 0,17мкс/(30,5 м), что является очень существенным. Соответственно для
ретранслятора предпочтительны высокие значения отношения рабочей частоты к кри-
тической. Для увеличение рабочей полосы частот, но за счет более высоких потерь, в
системах РЭП также применяются как обычные, так и гребневые волноводы, задержки
которых одинаковые. Характеристики обычных и гребневых волноводов могут быть
взяты из таблиц.
Рис. 12.4. Электрическая схема подачи
модулирующего видеоимпульса
на управляющую сетку
Задержка в усилителе на ЛБВ
(рис. 12.4) может быть определена по
формуле:
',лбв = (1,7/)/<Ё^, (12.8)
где I - длина спирали, м; размерности
других параметров остаются теми же.
Задержка в точке В (см. рис. 12.3)
является суммарной и определяется за-
держками во входной линии передачи
и ЛБВ. Продетсктированный видеоим-
пульс снимается в точке С. Сущест-
венной задержки в процессе детекти-
рования нет. Задержка видеоимпульса,
поступающего на управляющую сетку импульсной ЛБВ, определяется в точке D. За-
держка в импульсном модуляторе определяется по половинному уровню амплитуды
видеоимпульсов. Видеоимпульсы, снимаемые в точках С и D, имеют примерно одина-
ковую длительность. Так как задержка в импульсном модуляторе составляет часть об-
щей задержки ретранслятора, то се невысокое значение является обязател ьным требо-
ванием. Одной из важных характеристик импульсных ЛБВ, благодаря которой их
удобно применять в ретрансляторах с малой задержкой, является малая емкость управ-
316
ляющей сетки ЛБВ. Однако ввиду того, что время нарастания импульса, подаваемого
на управляющую сетку ЛБВ, составляет всего лишь несколько десятков наносекунд,
зарядный ток для этой емкости (в дополнение к сеточному току) должен быть значи-
тельным. Чем больше зарядный ток, тем сложнее выходной каскад импульсного моду-
лятора и тем больше задержка. Чтобы свести к минимуму задержку в импульсном мо-
дуляторе, разработчиками было затрачено немало усилий. Так как на выходе ЛБВ в
точке Е СВЧ-сигнал не появится до тех пор, пока она не будет открыта запускающим
импульсом модулятора, выходной радиоимпульс ЛБВ не только будет задержан, но
будет также укорочен, потому что длительности входного радиоимпульса и задержан-
ного относительно него модулирующего импульса одинаковы. В точке F снимается пе-
редаваемый СВЧ-импульс. Полная задержка в ретрансляторе учитывает задержку в
выходной линии передачи. При ее определении принимаются во внимание тс же сооб-
ражения, которыми руководствовались при определении задержки во входной пере-
дающей линии. Задержка в ретрансляторе играет особо важную роль, когда он исполь-
зуется для создания помех РЛС сопровождения по дальности. Отношение помеха-
сигнал уменьшается прямо пропорционально укорочению ретранслируемого импульса
и прямо пропорционально длительности той части ретранслируемого импульса, кото-
рая не попадает в радиолокационный строб сопровождения по дальности.
12.4. Время восстановления импульсного ретранслятора
Время восстановления ретранслятора, в состав которого входит один или не-
сколько усилительных импульсных каскадов на ЛБВ, коммутируемых продетектиро-
ванными и усиленными входными импульсами, представляет временной интервал,
следуемый непосредственно после момента окончания открывающего ЛБВ импульса, в
пределах которого она не может снова быть включена из-за переходных процессов в
цепях подачи модулирующего импульса на управляющую сетку ЛБВ. На рис. 12.4 по-
казана электрическая схема, обеспечивающая подачу открывающего видеоимпульса на
управляющую сетку однокиловаттной импульсной ЛБВ.
Открывающий видеоимпульс подается через высоковольтный разделительный
конденсатор С на схему параллельно включенных резистора и импеданса между сеткой
и катодом ЛБВ. Источник питания сеточного смещения £с и напряжения спирали £сп
имеют низкий импеданс для переменного тока и, следовательно, закорочены по отно-
шению к входному импульсу. Импеданс между этой сеткой и катодом ЛБВ можно рас-
сматривать как импеданс диода, на который подается напряжение смещения. Для того,
чтобы ЛБВ полностью открылась, необходимо подать на ее управляющую сетку поло-
жительное напряжение, приводящее к появлению сеточного тока. Этот ток быстро за-
ряжает конденсатор С. Когда прекращается подача входного импульса, конденсатор С
разряжается через весьма большое сопротивление, так что восстановление уровня сме-
щения на управляющей сетке ЛБВ после отрицательного выброса происходит медлен-
но. В интервале времени восстановления ЛБВ не может быть полностью открыта мо-
дулирующим импульсом, и таким образом, непосредственно, после прохождения ра-
диоимпульса имеет место как бы время парализации. Цепочка С является одним из
многих возможных вариантов. В некоторых случаях более эффективным может быть
использование трансформаторной связи или твердотельного модулятора, отключающе-
гося при большом отрицательном напряжении на катоде. Важную роль играют также
317
характеристики самой ЛБВ, особенно по сеточному току. В типовом случае время вос-
становления составляет суммарную длительность нескольких входных импульсов.
12.5. Временное стробирование ретранслятора для обеспечения
развязки
Попеременный режим приема и передачи в ретрансляторе применяется с целью
повысить коэффициент усиления ретранслятора до значения, превышающего развязку
между приемной и передающей антеннами ретранслятора [78]. Осуществляется этот
режим путем стробирования по входу ретранслятора посредством маломощного быст-
родействующего переключателя (например, диодного) и выходу ретранслятора путем
подачи синхронизирующего импульса на управляющую сетку выходной ЛБВ. Для
обеспечения разновременности приема и передачи, кроме стробирования, предусмат-
ривается включение в тракт СВЧ-ретранслятора соответствующей линии задержки по
времени. Поскольку дополнительная задержка персизлучасмого сигнала сама по себе
Рис. 12.5. Эпюры и спектры сигналов при внутри-
импульсном стробировании ретранслируемой помехи:
продетектированные выходные сигналы нестробируемого
(без внутриимпульсного стробирования) (а)
и стробируемого (с внутриимпульсным
стробированием) (б) ретрансляторов, спектр
выходных сигналов ретранслятора (в)
представляет недостаток, то стремятся свести се к минимуму, для чего производится
внутриимпульсное стробирование, разбивающее принимаемый импульс на десятые до-
ли его длительности. На рис. 12.5 представлены эпюры, поясняющие принцип строби-
рования и происходящие при
этом изменения в спектре сиг-
нала, где т„ - длительность по-
ступающих на вход ретрансля-
тора импульсов с периодом
повторения ГГ1, тс - длитель-
ность излучаемых импульсов с
периодом повторения Тс. Пе-
риод стробирования выбирает-
ся несколько больше, чем уд-
военная задержка в целях ком-
пенсации переходных процес-
сов в стробируемых устройст-
вах. Из рисунка видно, что
спектр стробируемого сигнала
расширен, в результате чего
эффективная мощность сигна-
ла помехи в полосе пропуска-
ния радиолокационного при-
емника будет уменьшена. В
случае импульсного радиоло-
кационного сигнала частота
стробирования должна в не-
сколько раз превышать полосу
пропускания УПЧ приемника
подавляемой РЛС. Вследствие
столь высокой частоты комму-
318
тации приемник РЛС будет усреднять принимаемые стробированные импульсы сигна-
ла помехи и радиолокационный приемник нс будет в состоянии обнаруживать высоко-
частотное стробирование в интервале длительности импульса помехи, так как ширина
полосы пропускания приемника рассчитана на оптимальный прием собственного ра-
диолокационного импульса. Импульсно-доплеровские РЛС имеют более узкие полосы
пропускания приемников, и процесс усреднения будет происходить качественнее, чем
в обычном импульсном приемнике. Частота стробирования в этом случае может быть
понижена, но для этого необходимо применение систем запоминания сигналов, напри-
мер, цифровых.
В результате внутриимпульсного стробирования энергетические потери мощно-
сти могут быть оценены в децибелах как Ло= 20 lg(Tc/Tc). Например, если тсили Тс рав-
ны 0,10 и 0,30 мкс соответственно, то энергетические потери мощности помехи соста-
вят приблизительно 10 дБ. Эти потери могут быть скомпенсированы путем повышения
коэффициента усиления ретранслятора, поскольку передача и прием в ретрансляторе
происходят в разнос время. Верхний предел коэффициента усиления ретранслятора оп-
ределяется параметрами тракта ретранслятора и уровнями помеховых сигналов, обра-
зующих обратную связь, таких как сигналы помехи, отраженные от местных предме-
тов, и сигналы от передающей антенны в двухпозиционных станциях помех.
Коэффициент усиления ретранслятора может быть доведен до более чем 100 дБ,
так что потери в результате расширения спектра помехи можно считать незначитель-
ными. Хотя режим стробирования рассматривался применительно к импульсному
ретранслятору, этот метод может быть использован в ретрансляторах, работающих в
непрерывном режиме. Однако в них требуемое время задержки обычно выше, чем у
импульсных ретрансляторов, и для ее реализации может потребоваться применение
длительного запоминания, например, с помощью систем цифрового запоминания сиг-
налов для режима поочередного приема и передачи.
12.6. Упреждающий синхронизирующий импульс
Синхронизация с упреждением применяется в импульсном ретрансляционном пе-
редатчике помех для устранения задержки, которая имеет место при отпирании им-
пульсной ЛБВ оконечного усилителя мощности. На рис. 12.6 представлена структурная
схема двухкаскадного ретранслятора, у которого входная ЛБВ работает в непрерывном
режиме, а выходная - в импульсном (нормально заперта).
Рис. 12.6. Структурная схема ретранслятора с упреждающей синхронизацией
В ретрансляторах входной радиосигнал детектируется, усиливается и использует-
ся для отпирания выходной ЛБВ. Синхронизация с упреждением предполагает замену
319
формирователя модулирующего импульса блоком сопровождения импульсов по часто-
те повторения и формирователем упреждающих синхроимпульсов. В блоке сопровож-
дения происходит разделение последовательностей входных импульсов. Формирова-
тель обрабатывает каждую импульсную последовательность отдельно. Он предсказы-
вает приход каждого импульса (по положению и частоте повторения предыдущих им-
пульсов данной последовательности) и формирует синхронизирующие импульсы, на-
чинающиеся несколько раньше и длящиеся несколько дольше, чем входные радиоим-
пульсы. Такие синхронизирующие импульсы отпирают ЛБВ перед тем, как каждый ра-
диолокационный импульс поступит на вход ретранслятора. Таким образом, здесь нет
задержки, как в обычном ретрансляторе. Метод синхронизации с упреждением хорошо
оправдывает себя, когда частота повторения входных импульсных радиосигналов ста-
бильна. Если имеет место вобуляция частоты повторения входных сигналов, то син-
хроимпульс должен быть достаточно широким по длительности, чтобы перекрыть ин-
тервал изменения частоты повторения. В этом случае коэффициент заполнения выход-
ной ЛБВ должен быть увеличен, что является недостатком. Для контроля изменения
частоты повторения импульсов могут быть использованы микропроцессоры, которые
могут зафиксировать периодичность псевдослучайного или скачкообразного измене-
ния периода частоты повторения импульсов и на основании этого предсказывать время
прихода следующего радиоимпульса. Однако время прихода радиоимпульса в после-
довательности с действительно случайно меняющейся частотой повторения не может
быть предсказано. Для ретранслирования таких сигналов нужно либо отпирать выход-
ную ЛБВ с учетом всего времени изменения периода, либо использовать дополнитель-
ный параллельный канал. Следует отметить, что другая функция блока сопровождения
импульсов по частоте повторения состоит в разделении импульсных последовательно-
стей входных радиосигналов для их последовательной обработки логическим устрой-
ством станции помех для определения параметров модуляции и опознавания РЛС. Это
устройство управляет модуляцией ретранслируемых сигналов, последовательно пере-
ходя от одной импульсной последовательности к другой.
12.7. Канал защиты импульсного ретранслятора от перегрузки
Канал защиты импульсного ретранслятора - это фактически второй ретранслятор,
работающий в непрерывном режиме, который при наличии многих излучающих РЛС
служит для создания ретрансляционных помех в условиях перегрузки основного им-
пульсного канала. Для мощных импульсных усилителей на ЛБВ характерно ограниче-
ние по коэффициентам заполнения, т. е. они могут быть отперты только в течение не-
большого, в процентном отношении, интервала времени (обычно 2...5%), иначе они
выйдут из строя. Требуемый коэффициент заполнения ретранслятора можно опреде-
лить по коэффициентам заполнения сигналов каждой РЛС, которые предположительно
будут работать одновременно, с учетом некоторого увеличения коэффициента запол-
нения импульсов помехи по сравнению с радиолокационными импульсами для того,
чтобы помеха была более эффективной. В условиях насыщения радиоэлектронными
средствами ПВО требуемый коэффициент заполнения ретранслятора может значитель-
но превысить возможности импульсной ЛБВ. В результате, канал защиты может также
быть импульсным каналом (это зависит от степени сложности радиоэлектронной об-
становки). На рис. 12.7 показан принцип действия канала защиты импульсного
ретранслятора от перегрузки, работающего в непрерывном режиме.
320
Приемная
антенна
Входной
разделитель —
сигналов
Пороговый
детектор
ЛБВ
непрерывного —
режима
Основной импульсный
канал ретрансляции с
импульсной выходной
ЛБВ
Генератор
модулирующего
сигнала
Модулятор —
Передающая
антенна
Передающая
антенна
ЛБВ
непрерывного
режима
Дополнительный канал ретрансляции
Рис. 12.7. Структурная схема рстрансля гора помех
с дополнительным каналом защиты импульсного
канала от перегрузки
Принимаемые радиолокацион-
ные сигналы подаются на вход раз-
делителя сигналов. Каждая последо-
вательность импульсных сигналов
выделяется из составного входного
сигнала (это может быть сделано
устройствами сопровождения им-
пульсов по частоте повторения) и
индивидуально обрабатывается в
основном канале. Этот канал
ретрансляции может пропускать 10
и более отдельных импульсных по-
следовательностей. Индивидуальная
их обработка заключается в том, что
каждый из этих импульсных сигна-
лов наделяется соответствующей
помеховой модуляцией. Суммарный
коэффициент заполнения для всех входных сигналов измеряется соответствующим
устройством. Если коэффициент заполнения суммарного сигнала на входе превышает
допустимое значение коэффициента заполнения основного канала ретранслятора, то
срабатывает детектор превышения порогового значения коэффициента заполнения, и
"лишние" импульсные последовательности (обычно те, которые превысили пропуск-
ную способность устройства разделения сигналов) направляются в дополнительный
канал ретрансляции. Определяется приоритет каждой импульсной последовательности,
и сигналы, занимающие наиболее высокое положение в приоритетном ’’списке", на-
правляются в основной канал импульсной ретрансляции. Дополнительный канал при-
нимает все остающиеся сигналы, которые одинаково наделяются помеховой модуляци-
ей, например, для создания комбинированной помехи, воздействующей на систему
АРУ (формирование прерывистой помехи с понижением частоты повторения импуль-
сов и быстрым изменением коэффициента заполнения импульса) с амплитудной моду-
ляцией сигналом скользящей частоты (низкая частота модулирующего сигнала свипи-
рует, т. е. периодически линейно перестраивается). Так как дополнительный канал
ретрансляции работает в непрерывном режиме, то все поступившие на его вход сигна-
лы, за исключением отобранных для обработки в основном канале ретрансляции, наде-
ляются одинаковой помеховой модуляцией. Однако ввиду того, что максимальная
мощность усилителя непрерывного режима на ЛБВ ниже, чем у импульсного усилите-
ля основного канала (если бы это было нс так, то дополнительный канал можно было
бы использовать в роли основного канала), уровень выходного сигнала помехи в до-
полнительном канале ниже.
Эффективность воздействия помех, формируемых дополнительным каналом, ни-
же эффективности воздействия помех, сформированных основным каналом, по двум
причинам: 1) усиление и пиковая выходная мощность в дополнительном канале ниже,
чем в основном; 2) индивидуальная обработка сигналов и наделение их помеховой мо-
дуляцией в основном канале предпочтительней одинаковой помеховой модуляции всех
сигналов в дополнительном канале.
321
11—1777
В некоторых ретрансляционных системах создания помех максимальный коэф-
фициент заполнения импульсного передатчика не определяется суммарным коэффици-
ентом заполнения составного входного сигнала, обрабатываемого разделительным уст-
ройством. В этом случае сигналы, нс попавшие в основной канал ретрансляции, также
распределяются по дополнительным каналам, где они подвергаются соответствующей
модуляции, но передаются они через импульсную ЛБВ, а не через отдельную ЛБВ не-
прерывного режима. При использовании этого метода не происходит уменьшения вы-
ходной мощности сигнала помехи, как в канале с ЛБВ непрерывного режима, До того
как в ретрансляторах стали использоваться дополнительные каналы, избыточные сиг-
налы обычно просто отбрасывались. Таким образом, основным достоинством дополни-
тельных каналов является то, что без соответствующей реакции не остаются никакие
входные сигналы.
12.8. Ретранслятор с ФАР и двумя диаграммообразующими схемами
На рис. 12.8 представлена структурная схема ретранслятора с двумя ФАР, предна-
значенными для приема, передачи и создания импульсной или непрерывной помехи.
Конструкции решеток и диаграммообразуюших устройств похожи, но выходная ре-
шетка рассчитана на более высокую мощность и в канал каждого ее элемента включа-
ются ЛБВ [79], которые служат для усиления мощности ретранслируемой помехи.
Так как в формировании луча принимают участие все элементы антенной решет-
ки, все ЛБВ усиливают сигнал, поступающий на любой вход (или входы) диаграммо-
образующего устройства. Приемная и передающая антенные решетки установлены так,
что их оси параллельны. Радиолокационный сигнал, поступающий по направлению,
соответствующему каналу 1 приемной антенной решетки, проходит через маломощный
тракт 1 ретранслятора, поступает на вход 1 диаграммообразующего устройства и излу-
чается через элемент 1 передающей решетки. Таким образом, автоматически сохраня-
ется направление для всех сигналов. Здесь предполагается наличие большого количе-
ства маломощных ретрансляционных каналов для формирования помехи, но модуля-
ция при формировании сигналов помех различных типов во многих случаях может
реализовываться общими для всех
них устройствами. Так, например,
эти тракты могут быть подключе-
ны в параллель к модуляторам при
формировании помех следующих
типов: уводящей помехи по скоро-
сти, помехи системе АРУ, помехи
РЛС с коническим сканированием
путем амплитудной модуляции
прямоугольной волной с пере-
страиваемой частотой и фазовой
модуляцией. На практике в таких
ретрансляторах устанавливаются
пороговые схемы и/или схемы
Рис. 12.8. Структурная схема ретранслятора с ФАР стробирования приема по боковым
и диаграммообразующими схемами лепесткам ДН приемной антенны.
322
12.9. Ретранслятор с автоматическим переизлучением сигналов в на-
правлении подавляемой РЛС
На рис. 12.9 показана структурная схема ретранслятора с автоматическим переиз-
лучением помехи в направлении подавляемой РЛС. С этой целью передающая антенна
заменяется антенной решеткой с переключением антенного луча. Быстродействие пе-
реключения луча антенной решетки исчисляется долями микросекунды, так что излу-
чение сигнала помехи в соответствующем направлении осуществляется в интервале
времени, лишь незначительно превышающем нормальную задержку в ретрансляторе.
Выходная ЛБВ остается в роли единственного усилителя мощности, хотя, в принципе,
усилители могут быть поставлены в каждый канал (на рис. 12.9 не показано).
Рис. 12.9. Структурная схема ретранслятора с автоматическим переизлучением
сигналов в направлении РЛС
Для простоты объяснения была выбрана четырехэлементная (по четырем направ-
лениям) ФАР с диаграммообразуюшей матричной схемой, хотя могут быть добавлены
элементы как в азимутальной, так и в угломерной плоскостях. Выход канала ретранс-
лятора подключается к мощному быстродействующему переключателю, который явля-
ется основным элементом системы. Он должен быть рассчитан на передачу 1...2 кВт
импульсной мощности и обладать быстродействием, исчисляемым долями микросе-
кунды, чтобы процесс переключения не приводил к существенному укорачиванию из-
лучаемого импульса по сравнению с тем, которое и так уже имеет место в ретранслято-
ре. Каждый из четырех выходов четырехпозиционного одноканального переключателя
через циркулятор подключен к передающему диаграммообразующему устройству и
элементам антенной решетки. Сигналы, принятые передающей антенной решеткой, че-
рез выходы диаграммообразующего устройства подаются на детекторы и усилители
через те же самые циркуляторы. Амплитуды одного и того же импульса на входах де-
текторов могут, в зависимости от мощности сигнала и ориентирования диаграммы на-
правленности, быть различными. Выходные сигналы детекторов обрабатываются
управляющей схемой, которая определяет направление прихода каждого радиоимпуль-
са и обеспечивает переключение четырехпозиционного переключателя на соответст-
323
вующий выход диаграммообразующего устройства. Импульсный радиолокационный
сигнал принимается одновременно приемной антенной первоначальной конструкции и
диаграммообразующим устройством. В канале ретранслятора помех обработка сигнала
производится как обычно. Время этой обработки, как правило, составляет 100...200 нс.
Это значит, что мощный импульс помехи может быть передан через 100...200 нс после
поступления соответствующего импульса на приемную антенну. В идеальном случае, в
этом интервале должны выполнять свои функции детекторы-усилители, управляющая
схема и четырех позиционный переключатель, т. е. должно быть определено и выбрано
направление излучения помехи. Если это обеспечить не удается, то приходится увели-
чивать задержку передаваемого импульса. Вот почему быстродействие чстырехпози-
ционного переключателя, управляющей схемы и детекторов-усилителей должно быть
высоким. Чтобы предотвратить поступление выходного импульса на детекторы-
усилители, они должны запираться перед поступлением мощного импульса на пере-
ключатель и оставаться запертыми во время передачи. Коммутация производится от
импульса к импульсу, но только при условии, что импульсы не совпадают. Это условие
не оказывает отрицательного воздействия при постановке помех импульсным РЛС, по-
скольку вероятность одновременного поступления двух импульсов в большинстве слу-
чаев очень мала. Таким образом, передатчик помех может успешно работать против
нескольких РЛС, поочередно ретранслируя импульсы помехи в направлении каждой из
них, причем ограничивающим фактором в данном случае будет его коэффициент за-
полнения.
12.10. Ретранслятор направленного действия с решеткой Ван Атта
На рис. 12.10 показано, как используется решетка Ван Атта в системе РЭП на-
правленного действия.
324
Наклон фазового фронта принимаемого сигнала по отношению к линейной при-
емной решетке, как показано на рисунке, равен 6. Каждый элемент этой решетки под-
ключается к отдельному модулятору. Модулирующий сигнал на все восемь модулято-
ров поступает от одного генератора, следовательно, параметры модуляции СВЧ-
сигнала в каждом из восьми каналов будут одинаковыми. В простейшем случае моду-
лирующим сигналом может являться прямоугольный импульс. Таким образом, все ка-
налы будут периодически отпираться и запираться, создавая прерывистую помеху. Вы-
ходные сигналы модуляторов усиливаются ЛБВ и излучаются соответствующими эле-
ментами передающей решетки (которых тоже восемь). Если электрическая длина (и,
соответственно, задержка СВЧ-сигнала) каждого канала от приемного до передающего
элемента будет одинакова, то излучение будет производиться в том же направлении,
откуда пришел сигнал. На рисунке это видно из того, что наклон фазового фронта пе-
редаваемого сигнала по отношению к решетке равен тому же самому углу 0.
12.11. Сравнение характеристик передатчиков генераторного
и ретрансляционного типов
Под передатчиком помех генераторного типа понимается такой передатчик, в ко-
тором принимается импульсный или непрерывный радиосигнал, измеряется его несу-
щая частота (непосредственно на несущей частоте или преобразованной) и генератор
колебаний настраивается на несущую частоту принятого радиосигнала. В передатчике
ретрансляционного типа радиосигнал принимается, усиливается, запоминается и может
быть излучен без задержки (модуляции) или с задержкой (с модуляцией). Максималь-
ная задержка принятого сигнала определяется длительностью запоминания, например,
с помощью системы с запаздывающей обратной связью для формирования уводящих
помех по дальности. Достоинство передатчика ретрансляционного типа определяется
тем, что в нем не требуется измерять несущую частоту принимаемого сигнала, а время
реакции зависит только от детектирования входного радиоимпульса и задержки видео-
импульса при импульсной модуляции выходной ЛБВ. Практика показывает, что время
реакции таких передатчиков может составить 100 нс. Достоинство передатчика генера-
торного типа связано с тем, что результаты измерения несущей частоты могут быть за-
помнены и генератор может быть настроен в любой момент времени для создания по-
мехи широкому классу РЭС. Оба типа передатчиков можно сравнивать по тому, как
точно, быстро и длительно они могут формировать отве гный сигнал помехи. Кроме то-
го, важным являются виды формируемых ими помех.
Основным и определяющим устройством ретрансляционного передатчика помех
является устройство кратковременного запоминания частоты. Обычно это устройство
использует линию задержки (коаксиальную, волноводную или акустическую), широ-
кополосный усилитель и управляемые СВЧ-переключатели. Основное ограничение та-
ких аналоговых устройств запоминания сигналов связано с тем, что наряду с циркуля-
цией выборки входного сигнала, происходит возрастание уровня шумов с каждой цир-
куляцией, а наличие скачков фазы между соседними циркуляциями приводит к расши-
рению спектра запомненного сигнала. Эти факторы ограничивают рабочую частотную
полосу устройств кратковременного запоминания частоты. Для ее расширения в них
используется две петли частотно-избирательной обратной связи (рис. 12.11).
325
Рис. 12.11. Структурная схема усовершенствованного варианта СВЧ-устройства
запоминания частоты аналогового типа с повышенной длительностью запоминания
Увеличением запаздывания в рециркуляторе в 2 раза и, соответственно, длитель-
ности выборки можно повысить точность запоминания частоты и увеличить длитель-
ность запоминания этой выборки в 2 раза. Управление фазовращателем позволяет
уменьшить скачки фазы между соседними рециркуляциями и сконцентрировать энер-
гию помехи на частоте радиолокационного сигнала. При соответствующем построении
аппаратуры становится возможным создавать помехи многим РЛС, в том числе ис-
пользующим вобуляцию периода повторения. При этом число подавляемых РЛС огра-
ничивается допустимым коэффициентом заполнения оконечной импульсной ЛБВ. На-
ряду с применением аналоговых устройств непосредственного запоминания частоты,
могут применяться цифровые системы запоминания и воспроизведения радиосигналов,
которые более сложны, но имеют практически неограниченное время запоминания и
большую гибкость при изменении параметров формируемых помех.
Ключевым элементом передатчика помех генераторного типа является СВЧ гене-
ратор, управляемый напряжением. Основные факторы, ограничиваюше рабочие харак-
теристики этого передатчика, - время реакции и точность наведения помехи по часто-
те, которые определяются процессом измерения частоты, параметрами генератора и за-
держками в системе АПЧ. Обычный генератор с варакторной перестройкой частоты
обеспечивает работу в диапазоне 8... 16 ГГц с ограниченной скоростью перестройки из-
за применения устройств линеаризации. Дополнительно он имеет значительный после-
настроечный дрейф из-за природы варактора и диода Ганна. Транзисторный пере-
страиваемый варактором генератор может обеспечить перестройку частоты во всем
диапазоне за 100 нс и обеспечить точность установки частоты в несколько мегагерц.
На рис. 12.12 приведен фрагмент структурной схемы передатчика помех генера-
торного типа, осуществляющего измерение частоты и автоподстройку генератора,
управляемого напряжением с использованием цифровых методов.
326
Рис. 12.12. Структурная схема передатчика прицельных помех генераторного типа
Цифровой мгновенный измеритель частоты с октавной полосой, использующий
линию задержки 140 нс, может осуществлять измерение частоты в очень широком диа-
пазоне частот с использованием систем транспонирования диапазонов. Цифровые
фильтры и накопители позволяют обрабатывать много сигналов и сформировать сиг-
нал помехи в одном диапазоне, тогда как в других диапазонах одновременно накапли-
вается информация о других сигналах. С помощью цифровой фильтрации можно изби-
рательно выбирать любое число радиолокационных сигналов (от импульсных с
длительностью от 40 нс до непрерывного), которым необходимо создать последова-
тельно помехи на основе приоритезации угроз. При этом возможно создание "опере-
жающих” помех, так как генератор может быть настроен по частоте до приема импуль-
сов РЛС, используя методы предсказания прихода импульсов. Нелинейности в системе
АПЧ могут быть учтены путем коррекции ошибок с применением быстродействующих
ЗУ с произвольной выборкой. Это позволяет уменьшить неопределенность измерений
и повысить точность, которая ограничивается процессами оцифровки и характеристи-
ками генератора управляемого напряжением. Соединение достижений в разработке
МИЧ и улучшенных генераторов, управляемых напряжением с новейшей цифровой
обработкой, позволило создать передатчик помех с временем реакции 250 нс при точ-
ности наведения 2 МГц по частоте [80]. Для противодействия РЛС с быстрой пере-
стройкой частоты необходимо достичь еще меньшего времени реакции. Можно ис-
пользовать более широкие спектры помех, но это приведет к уменьшению спектраль-
ной плотности помехи. В перспективе возможно с помощью анализа в реальном мас-
штабе времени реализовать системы с предсказанием времени прихода импульсного
сигнала РЛС с использованием этой информации для настройки генератора по частоте
до приема следующего импульса последовательности. При этом, возможно обеспечить
точное по частоте создание помех с минимальной шириной спектра почти для всех
РЛС с перестройкой частоты.
Сравнение достоинств и недостатков ретрансляционных и генераторных помех
показывает, что если определяющим является требование высокого быстродействия
для создания помех РЛС с перестройкой частоты, то с некоторыми ограничениями са-
мым подходящим является ретрансляционный передатчик. Также он незаменим в си-
туациях, требующих для наведения помехи по частоте весьма сложной аппаратуры
разведки, анализа и обработки информации.
327
Рис. 12.13. Структурные схемы передатчиков
шумовых и ретрансляционных помех
Оптимальным решением является
-построение передатчика помех ретранс-
ляпионно- генераторного типа. Передат-
чик шумовых и ретрансляционных по-
мех способен создавать шумовую и
ретранслируемую помеху одновременно
или поочередно. Структурная схема та-
кого передатчика показана на рис.
12.13,а. Если переключатель находится в
положении, как показано на рисунке, то
система работает в качестве ретрансля-
тора. На рис. 12.13,6 приведена струк-
турная схема передатчика помех, вклю-
чающего три ЛБВ, одну приемную и две
передающие антенны. Одна передающая
антенна предназначена для передачи не-
прерывных, другая - импульсных сигна-
лов. Когда передатчик находится в по-
ложении, показанном на рисунке, систе-
ма может одновременно ретранслиро-
вать как непрерывные, так и импульсные
сигналы. Если переключатель находится
в другом положении, то система рабо-
тает как передатчик непрерывной шу-
мовой помехи. В этом режиме канал пе-
редачи импульсного сигнала, по всей вероятности, должен отключаться. Для подавле-
ния источников непрерывного излучения система одновременно может работать в ре-
жимах ретрансляции и передачи шумового сигнала, однако в этом случае для того,
чтобы сохранялась способность ретранслировать импульсные сигналы, необходимо
обеспечить условия сохранения работоспособности.
Импульсное стробирование применяется для коммутации канала непрерывного
сигнала с тем, чтобы ретранслятор не являлся маяком для всех импульсных РЛС, спо-
собных осуществлять пассивное угловое сопровождение. На рис. 12.13,в показана
функциональная схема передатчика помех, способного излучать как непрерывную, так
и импульсную помеху, что обеспечивается в результате применения в выходном уси-
лителе мощности специально сконструированной двухрежимной ЛБВ. Если на вход
станции помех импульсный сигнал не поступает, то двухрежимная ЛБВ работает в не-
прерывном режиме с небольшим усилением. Когда на вход системы поступает импульс-
ный сигнал, эта ЛБВ переводится в импульсный режим со значительным усилением. При
постановке шумовой или комбинированной помехи (ретранслируемый сигнал плюс шу-
мовая помеха одновременно) лампа работает только в непрерывном режиме.
328
Литература к ЧАСТИ ТРЕТЬЕЙ
1. Сергиевский Б.Д., Юдин Л.М. Опыт создания импульсных ответных помех каналу автоматиче-
ского сопровождения самолета по дальности наземных радиолокационных станций. - Воен-
ная радиоэлектроника, 1959, вып. 26 (124).
2. Van Brunt. Applied ECM/E.W. - Engineering, USA, 1978, v. 1.
3. Лохвитская И.Б., Фомичев К.И., Юдин Л.М. Пассивные средства радиоэлектронной борьбы:
Обзор. - Радиоэлектроника (состояние и тенденции развития ). - НИИЭИР, 1984, т. 3, с. 1-38.
4. Патент 2943318 (США).
5. Юдин Л.М. Циркуляция высокочастотного импульсного сигнала в системе с ЗОС. - Сб. науч-
ных трудов ЦНИИ-108, 1959, вып. 67.
6. Юдин Л.М. Экспериментальные результаты изучения возможности запоминания несущей час-
тоты в сантиметровом диапазоне. - Радиоэлектроника (БИТ МО), 1959, № 4.
7. Юдин Л.М. Воздействие двух радиосигналов на автогенератор с запаздывающей обратной свя-
зью. - Военная радиоэлектроника, 1959, № 27.
8. Юдин Л.М. Усиление двух сигналов в ЛБВ. - Военная радиоэлектроника, 1959, № 27.
9. Юдин Л.М. Взаимодействие двух сигналов в узкополосном нелинейном усилителе. - Вопросы
радиоэлектроники. Сер. XII. Общетехническая, 1961, вып. 8, с. 65-78.
10. Юдин Л.М. Исследование когерентности ответных сигналов. - Сборник научных трудов
ЦНИИ-108, 1959, вып. 69.
11. Юдин Л.М. Спектр выходного сигнала рециркулятора радиоимпульсов. - Вопросы радио-
электроники. Сер. XII. Общетехническая, 1963, вып. 27, с. 38-46.
12. Using frequency memory loops for ECM. - Microwaves and RF, 1983, v. 22, N 9, p. 160.
13. Патент 3971021 (США).
14. Патент 2186174 (Франция).
15. Butler, W.J. Charge transfer analog memories for radar and ECM systems. - IEEE Transactions on
ED, 1976, v. ED-23, N 2, p. 161-167.
16. Egbert, H.F. Octave band with acoustic M/W Frequency memory loop. - Microwave Journal, Sept.
1973.
17. Проспект фирмы RCA. - Microwaves, 1969, v. 8, N 11, p. 2-15.
18. Grant, P.M. Electronic Warfare: Playing the complex chess game. - MSN, 1982,v. 12,N9,p. 87-127.
19. Spector, S. A coherent microwave memory using digital storage: the loopless memory loop. - Elec-
tronic Warfare, 1975, January / February, p. 108-140.
20. Lowenschuss, I.O. Coherent digital RF - memory - new signal processing. -IEEE Jnt. Conference,
1980.
21. Юдин Л.М., Фомичев К.И. Системы радиоэлектронного противодействия. Запоминание
высокочастотных сигналов. — Электроника, НТБ, 1999, № 1, с. 48-51.
22. Патент 4.223.404 (США).
23. Патент 4.380.816 (США).
24. Dragin, Е.М. The digital future of EW. — Defense Electronics, 1986, v. 18. N 12, p. 61, 62, 64.
25. Патент 3.947.827 (США).
26. Патент 3.991.409 (США).
27. Hoffman, В., Apts, D. Gallium Arsenide enhances digital signal pocessing in EW. - Defense Elec-
tronic, 1986, v. 18, N 2, p. 48, 49, 51, 53, 54, 56.
28. Moore, R.A., Marinaccio, R.E. Advanced EW system strategies and supporting technologies. -
Microwave J., 1986, v. 29, N 2, p. 26-41.
29. Stott, G.F. DRFM Requirements for airborne EW - Military Microwaves’90 Conference Proceed-
ings. - 11-13 July 1990: London.
329
30. Schneider. W.J. Digital counteiTneasures memories: new techniques possible. - The International
Countermeasures Hand book, 1988, p. 367-373.
31. Italians develop R.F. memory for deception jammer system. - Aviation Week and Space Tech-
nolody, 1987, Feb. 16, p. 73.
32. Патент 4.280.219 (США).
33. Lewis, G., Bahl, J. Ga As MMIC’S for digital radio frequency memory subsystems. - IEEE
Transactions on Electron Devices, 1987, ED-34, p. 2586-2594.
34. Sundaram, G.S. Modern airborne electronic warfare. New concepts, programs and products proliter-
ate. - International Defense Review, 1985, v. 18, N 2, p. 169-177.
35. Norten, E. Strategic ECM. - Journal of Electronic Defense, 1989, v. 12, N 6, p. 34, 36-38, 72.
36. Chrzanowski. E.J. Active Radar Electronic Counter measures. - USA. Artech House, inc., 1990.
37. Johnson, G.R. Jamming CW Radar. - Electronic Warfare, 1977, v. 9, N 3, p. 95-105.
38. Bovd, J.A. Electronic countermeasures. USA: Peninsular Publishing, 1978.
39. Sundaram, G., Hewish, M. Airborne electronic warfare in Europe. Parti: gearing-up for the 1990’s.
- International Review, 1988, v. 21, N 10, p. 1315-1321.
40. Патент 3.774.208 (США).
41. Юдин Л.М. Спектры модулированных но фазе высокочастотных колебаний. - Вопросы ра-
диоэлектроники. Сер. XII. Общетехническая, 1963, вып. 27.
42. Юдин Л.М. Экспериментальное исследование ФМ на ЛБВ. - Сб. научных трудов ЦНИ-108,
1959, вып. 65.
43. Юдин Л.М. Фазовая модуляция высокочастотного сигнала ступенчатой формы. - Вопросы
радиоэлектроники. Сер. XII. Общетехническая, 1967, вып. 24.
44. Юдин Л.М. Флуктуационная модуляция сигналов с помощью ЛБВ. - Военная радиоэлектро-
ника, 1964, № 6.
45. Kownacki. S. Simulation of radar range and of doppler effect by means of stationary target. - IEEE
Trans., 1967, v. AES, N 1, p. 148-149.
46. Леонов А.И., Фомичев К.И. Моноимпульсная радиолокация. - М.: Радио и связь, 1984.
47. Вакин С.А., Шустов Л.Н. Основы радиопротиводействия и радиотехнической разведки. - М.:
Сов. радио, 1968.
48. Вакин С.А., Шустов Л.Н. Основы радиоэлектронной борьбы. Учебное пособие, ч. 1. - ВВИА
им. проф. Н.Е. Жуковского, 1998.
49. Фомичев К.И., Юдин Л.М. Основные методы и техника радиоэлектронного подавления угло-
мерных радиолокационных систем, работающих в режиме автоматического сопровождения
цели: Обзор. - Радиоэлектроника (состояние и тенденции развития), НИИЭИР, 1988, г. 3, с. 1-50.
50. Italy’s Electronic seizing market leadership. - Electronic warfare, 1978, N 6. p. 69-71.
51. Technology of Electronics Attack (EA) against modern Radar System. - AT&T Bell Laboratory
Merry Hill Laboratory. - N.Y., 2000, July.
52. Andrews, A. IV., Gorondo, D.L. Georgin Tech cogcrcnt jammer feight test. - 1st Flight Testing Con-
ference, 1981, 11-13 Nov.
53. Tsipouras, D. ct al. ECM technique generation. Dual coherent source and offboard expendable tech-
niques. - Microwave J., 1984, v. 27, N 9, p. 38-73.
54. Pantuso, F.P. Technology requirements in electronic combat. - Journal of Electronic Defense, 1987,
v. 10, N 12, p. 43-46.
55. Патент 6297762 Bl (США).
56. Патент №5583594 (США).
57. Патент 4.006.478 (США).
58. Johnson. G.R. Jamming passive lobbing radars. - Electronic Warfare, 1977, v. 9, N 2, p. 75-78, 80,
82, 84, 86.
330
59. Сергиевский БД., Спиридонов Е.К., Фомичев К.И., Юдин Л.М. Опыт создания однократных
ответных помех наземной станции орудийной наводки с коническим сканированием. — Сб.
научных трудов ЦНИИ-108, вып. 54, 1957.
60. Сергиевский Б.Д., Фомичев К.И. Опыт создания ответных помех по угломерному каналу ра-
диолокационным станциям орудийной наводки с автоматически изменяемой частотой скани-
рования. - Военная радиоэлектроника, 1959, вып. 26 (124).
61. Фомичев К.И., Юдин Л.М. Балансная модуляция ответных сигналов. - Сб. научных трудов
ЦНИИ-108, 1959, вып. 67.
62. Airborne jammers get smarter over years. - Electronic Warfare, 1977, v. 9, N 1, p. 47, 51, 52, 54,
56, 58.
63. Astrom, K.J., Wittnerk, B. On self-tuning regulators. - Automatica, 1978, v. 9, p. 185-199.
64. Theory and applications of self-tuning regulators. - Automatica, 1977, v. 13, p. 457-476.
65. The International Countermeasures Handbook, 1986, p. 389-392.
66. Патент 4126862 (США).
67. Патент 1539832 (США).
68. Сергиевский Б.Д. Методы и средства противодействия противоракетной обороне. - Зарубеж-
ная радиоэлектроника, 1966, № 1, с. 3-31.
69. The International Countermeasures Handbook, 1985, p. 335-341.
70. Патент 3909828 (США).
71. Палий А. И. Радиоэлектронная борьба. - М.: Воениздат, 1981.
72. Леонов С., Богачев В. Американские авиационные средства радиоэлектронной борьбы. - За-
рубежное военное обозрение, 1987, № 6, с. 40-46.
73. Dornhem, М.А. Order for ALE-50 doubles after success in Kosovo. - Aviation week and Space
Tech., 1999, November 15, p. 48,49.
74. Klass, P.J. Towed decoy tether key issue for IDECM. - Aviation week and Space Technology,
1999, N 15, November 15, p. 43, 44.
75. Rivers, B.P. Towed decoys come out of the black. - Journal of Electronic Defense, 1999, November,
p. 37-42.
76. Liebman, M. Expendable decoys counter missiles with new technology. -Defense Electronics, 1986,
v. 18, № 10, p. 69, 70, 72.
77. Loomis, R. Threats and ECM techniques. - International Defense Rev., 1976, № 1, p. 55-58.
78. Jamming Equations. — The International Counter-measures Handbook, 1979, p. 356-358.
79. Phased Arrays for ECM. - The International Countermeasures Handbook. Third Edition, 1977,
June, p. 333-341.
80. M.C.D. PETT. System performance trade-offs-responsive and repeater Jammers. - Military Micro-
waves, 1980, 22-24 October, p. 19-27.
331
ЧАСТЬ ЧЕТВЕРТАЯ
Методы и техника создания помех
радиолокационным системам,
работающим со сложными сигналами
ГЛАВА 13. ПРИНЦИП РАБОТЫ РЛС СО СЛОЖНЫМИ СИГНАЛАМИ
13.1. Причины появления и широкого использования РЛС
со сложными сигналами
Основной причиной появления РЛС со сложными сигналами явилось стремление
увеличить дальность действия РЛС. Как известно, дальность действия РЛС при реали-
зации оптимального приема отраженных сигналов от цели зависит не от импульсной, а
от средней мощности излучаемых сигналов. Простейшим методом увеличения средней
мощности при ограниченной величине импульсной мощное ги явилось увеличение дли-
тельности излучаемых высокочастотных импульсов. Но при этом ухудшается разре-
шающая способность по дальности, поскольку она определяется длительностью, хотя и
улучшается разрешающая способность по скорости. Найти приемлемое техническое
решение в данной ситуации помог принцип неопределенности в радиолокации, разра-
ботанный в начале 50-х годов и впервые описанный Вудвортом в 1953г [1]. Смысл его
заключается в том, что для любого сигнала существуют определенные пределы разре-
шающей способности по дальности и скорости, обусловленные его структурой. Стрем-
ление увеличить разрешающую способность по любому указанному параметру неиз-
бежно приводит к ухудшению разрешающей способности по другому параметру. Вы-
ход из этого был найден благодаря применению радиоимпульсов с внутриимпульсной
модуляцией по частоте или манипуляции по фазе. В этом случае спектр сигнала рас-
ширяется и открывается возможность за счет увеличения длительности импульса су-
щественно увеличить дальность действия радиолокатора, не ухудшая разрешающей
способности по дальности и скорости. В результате появился новый тип радиолокато-
ров со сжатием радиоимпульсов.
Широкому распространению таких радиолокаторов также способствовала повы-
шенная скрытность их работы и высокая помехозащищенность. Увеличение скрытно-
сти работы РЛС со сложными сигналами связано главным образом со снижением веро-
ятности перехвата их сигналов, обусловленным в основном их широкополосностью и
сравнительно низким уровнем спектральной плотности зондирующих сигналов таких
РЛС. Современные РЛС, работающие с простыми сигналами, обладают высокими
спектральными плотностями излучаемой мощности в силу их сравнительной узкопо-
лосности. Это обеспечивает их обнаружение по излучению с помощью приемников
РТР как по главному лепестку, так и по боковым лепесткам диаграммы направленности
их антенн. В результате такие РЛС подвержены действию организованных помех и
противорадиолокационных ракет, наводимых по их излучению. Использование широ-
кополосных сигналов с высоким коэффициентом заполнения в сочетании с антеннами
332
с низким уровнем боковых лепестков ДН позволяет существенно снизить возможность
перехвата сигналов и защитить РЛС со сложными сигналами от большинства извест-
ных угроз. При этом в таких РЛС может применяться программное управление мощно-
стью с целью обеспечения излучения только в необходимые для измерения характери-
стик цели моменты времени и с такими уровнями мощности, которые соответствуют
обнаруживаемой цели. Снижение возможности обнаружения широкополосных РЛС по
их излучению также обусловливается применением в них сигналов со сложной струк-
турой, требующей при их приеме согласованных фильтров. Важным при этом является
то, что согласованный фильтр строится на основе знания тонкой структуры сигнала и
только при этом обеспечивает оптимальную обработку принимаемого сигнала. Любое
несоответствие структур согласованного фильтра и сигнала приводит к энергетическим
потерям. Вскрытие тонкой структуры сложного сигнала с помощью приемника РТР
маловероятно, поэтому прием сложных сигналов преимущественно будет проходить с
существенным их ослаблением по сравнению с оптимальным приемом, что приведет к
снижению вероятности обнаружения таких сигналов. Исключением могут быть сигна-
лы с ЛЧМ, формируемые с помощью дисперсионной линии задержки, так как такая
линия может быть использована в приемнике РТР. Повторяемость структуры сигнала
позволяет в этом случае реализовать в приемнике РТР согласованный фильтр, пере-
страиваемый адаптивно или по априорной информации о наклоне ЛЧМ. Другим типом
сигнала, который также может обеспечить повышенную скрытность работы РЛС, явля-
ется псевдослучайный импульсный сигнал с частотной перестройкой. Для приема та-
кого сигнала приемник РТР должен расширять полосу пропускания до диапазона пере-
стройки частоты РЛС, что неизбежно приведет к снижению его чувствительности и,
как следствие, к снижению возможности перехвата сигналов такой РЛС. Высокая по-
мехозащищенность РЛС со сложными сигналами связана не только с повышенной
скрытностью работы, но и с возрастанием трудностей по формированию им помехи. В
последнем случае, как будет показано ниже, приходится согласовывать помеху по
структуре с сигналом РЛС и значительно увеличивать уровень мощности помехи, а
также возрастают требования к быстродействию помеховой аппаратуры при формиро-
вании помехи [2].
13.2. Принципы работы РЛС с ЛЧМ- и ФКМ-сигналами
В настоящее время РЛС с ЛЧМ-сигналами, как и с ФКМ-сигналами, получили
наиболее широкое распространение [1, 3, 4 ]. В РЛС с ЛЧМ-сигналами излучается по-
следовательность достаточно длинных импульсов с внутриимпульсной линейной час-
тотной модуляцией. Первичным источником широкополосного сигнала является ко-
роткоимпульсный генератор. Генерируемый им сигнал подается на дисперсионный
фильтр, где преобразуется в ЧМ-импульс большой длительности благодаря более дли-
тельной задержке на верхних частотах спектра короткого импульса, чем на нижних
частотах. После усиления в широкополосном СВЧ-усилителе сформированный ЧМ-
импульс излучается через переключатель приемо-персдачи и антенну. Отраженный от
цели сигнал через ту же антенну и переключатель приемо-передачи поступает на вход
приемного устройства, состоящего из широкополосного СВЧ-усилитсля, фильтра сжа-
тия и устройства обработки. Фильтр сжатия осуществляет более длительную задержку
на нижних частотах, чем на верхних, в результате на его выходе формируется импульс
333
пульсным СВЧ-генератором РЛС.
Г енератор
непрерывных
СВЧ-сигналов
Стробир.
X—
Генератор
импульсов
Фа юный
модулятор |
<ый |[Ь’ирокопо-
___I ’ ЛОСНЫЙ
। л лосный
I СВЧ-усил.
Формирователь
I j управляющего
напряжения
Сннхронн-
гатор
Фильтр
сжатия
j Переключатель I
Гш ирокоиолосный] j
1 СВЧ-усилитель
Рис. 13.1. Упрощенная структурная схема РЛС
с ФКМ-сигналом и сжатием импульсов
длительностью, равной длительности исходного импульса, формируемого короткоим-
На рис. 13.1 представлена упрощен-
ная структурная схема РЛС с фазокодо-
манипулированным (ФКМ) сигналом.
Как видно из рисунка, первичным
источником ФКМ-сигналов является ге-
нератор непрерывного сигнала. Этот
сигнал подается на стробирующую схе-
му и преобразуется в широкие СВЧ-
импульсы длительностью тн, которые
далее поступают на фазовый модулятор
и кодируются по фазе с определенным
дискретом. С этой целью формируется
специальный управляющий код, обычно
бинарный, обеспечивающий ступенчатое
изменение фазы СВЧ-сигнала на 180°. Отраженный от цели сигнал после усиления в
приемнике подвергается сжатию по длительности, осуществляемому, как правило, с
помощью линии с отводами, фазовая характеристика которых соответствует обратному
коду фазовой манипуляции рабочего импульса РЛС. Например, если код фазовой ма-
нипуляции импульса соответствует структуре 11001, где условно под 1 подразумевает-
ся значение фазы 0, а под 0 - значение фазы 180°, то фазовая характеристика отводов
линии задержки фильтра должна соответствовать структуре 10011. В результате осу-
ществляется когерентное сложение и формирование узкого импульса с длительностью,
равной длительности дискрета кода. Образующиеся в процессе сжатия боковые лепе-
стки имеют малую величину, если при фазовой манипуляции применяются оптималь-
ные коды.
13.3. Общие принципы организации РЭП РЛС со сложными сигналами
Следует отметить, что РЛС со сложными сигналами нс обладают специфически-
ми, только им присущими функциями. В зависимости от назначения они могут решать
задачи дальнего и ближнего обнаружения целей, опознавания, целеуказания, сопрово-
ждения, наведения ракет и управления артиллерийским огнем. В соответствии с этим
сохраняются общие принципы организации РЭП таких РЛС, присущие РЛС с просты-
ми сигналами, меняются только энергетические требования и техника создания помех.
Например, для того чтобы осложнить решение задачи обнаружения цели и определе-
ния ее местоположения, можно применять маскирующие и имитирующие помехи. В
качестве маскирующих помех можно использовать шумовые помехи и дипольные от-
ражатели. Передатчик шумовой помехи при этом должен обладать высокой мощно-
стью, что вытекает непосредственно из принципа сжатия радиоимпульса.
Известно, если дисперсионная линия задержи не имеет потерь, то в соответствии
с принципом сохранения энергии справедливо равенство
•^с.вх'^и — -^с.вых’^сж,
где Рсвк и Рс.вых ~ импульсная мощность входного и выходного сигналов; ти и тсж- дли-
тельность входного и выходного (сжатого) импульса.
334
Отсюда мощность входного сигнала при прохождении через дисперсионную ли-
нию задержки без потерь увеличивается в значение коэффициента сжатия раз. Если на
вход приемника со сжатием поступает шумовой сигнал, частота и амплитуда которого
меняются по случайному закону, то его мощность при прохождении через дисперсион-
ную линию задержки не изменяется (сжатия не происходит). В результате при одновре-
менном воздействии на РЛС со сжатием импульса отраженного сигнала от цели и шумо-
вой помехи отношение мощностей сигнала и помехи при прохождении приемника со
сжатием длительности импульса будет возрастать в значение коэффициента сжатия раз.
Поэтому для создания одинакового эффекта подавления мощность шумовой по-
мехи в случае РЛС со сжатием должна быть в значение коэффициента сжатия раз
больше, чем при воздействии на РЛС простым импульсным сигналом и той же величи-
ной импульсной мощности. С энергетической точки зрения более предпочтительным
может оказаться не маскировка, а имитация ложной обстановки путем создания лож-
ных целей, что обычно достигается использованием многократных ответных помех,
БПЛА и вынесенных за пределы защищаемого объекта передатчиков помех. Но при
создании имитационных помех возникает потребность анализа или сохранения в ЗУ тон-
кой структуры сигнала РЛС и соответствующего согласования структуры помехи или
воспроизведения запомненной копии сигнала. Помеха, образующаяся за счет отражений
от местных предметов, также не будет подвергаться сжатию, что уменьшает ее влияние
на работу РЛС со сжатием импульса по сравнению с обычной импульсной РЛС.
В последующих разделах рассматриваются более подробно возможности перехва-
та сигналов РЛС с повышенной скрытностью и во шожности создания им помех.
ГЛАВА 14. ВОЗМОЖНОСТИ ПЕРЕХВАТА СЛОЖНЫХ СИГНАЛОВ РЛС
14.1. Сравнение дальности действия РЛС со сложными сигналами
и систем РТР
Отношение дальности, на которой приемник системы РТР обнаруживает радио-
локационный сигнал (7?ртр), к дальности обнаружения цели РЛС (7?рлс) определяется как
^ртр
— 7?
рлс
^-'пер.рлс ^пр.ртр ^"ртр
(14.1)
R
А^С^ер рЛС
L
пр.рлс рлс
где А — отношение минимальной мощности на входе приемника РТР, требуемой для
обнаружения радиолокационного сигнала, к минимальной мощности на входе прием-
ника РЛС, требуемой для обнаружения цели; а - ЭПР цели; Спер.рлс - коэффициент
усиления передающей антенны РЛС в направлении на приемник РТР; СпррТр - коэффи-
циент усиления антенны РТР в направлении на передатчик РЛС; Спер рлс - коэффициент
усиления передающей антенны РЛС в направлении на цель; Спррлс - коэффициент уси-
ления приемной антенны РЛС в направлении на цель; Тртр, /_,рлс - потери в каналах
приемника РТР и РЛС.
Из (14.1) следует, что чем больше дальность действия РЛС, тем больше отноше-
ние дальности действия системы РТР к дальности действия РЛС, а другие параметры
приводят к изменению этого отношения дальностей действия системы РТР и РЛС про-
порционально квадратному корню этих параметров.
335
Для обеспечения высокой степени скрытности работы РЛС желательно добиться,
чтобы дальность обнаружения цели главным лепестком ДНА РЛС была примерно рав-
на дальности перехвата сигналов РЛС, излучаемых в направлении главного лепестка
ДНА, установленной на цели системой РТР, т. е. Артр//?рлс = 1 • При таком условии даль-
ность действия РЛС
/грлс = [(ДаС„ррлс)/4л]1'2. (14.2)
Если положить (У = 1 м2, G пр.рлс = 40 дБ, R рлс =10 км, то А = 50 дБ. Это означает, что
для достижения дальности действия РЛС 10 км необходимо, чтобы чувствительность ра-
диолокационного приемника была на 50 дБ выше чувствительности приемника РТР.
Радиолокационная станция имеет наилучшие технические показатели, если в ней
используется когерентное накопление всей отраженной от цели энергии за один период
ее облучения. В этом случае эффективная полоса собственных шумов приемника РЛС
примерно равна обратному значению времени накопления Т. Если предположить, что
это отношение сигнал-шум на выходе приемника РЛС, требуемое для надежного обна-
ружения цели, равно отношению сигнал-шум на выходе приемника РТР, необходимо-
му для надежного обнаружения радиолокационного сигнала, и коэффициенты шума
обоих приемников примерно равны, то
Д = А/пр .ртр /АЛР .рлс» (U.3)
где А/ пр.ртр, А/" Пр.рлс - шумовая полоса пропускания приемника РТР и РЛС соответст-
венно.
Последетекторная полоса пропускания приемников РТР равна половине ширины
преддетекторной полосы пропускания входного высокочастотного тракта ^р.рТр. Од-
нако в широкодиапазонных приемниках РТР видеополоса приемника много меньше,
чем половина полосы пропускания по высокой частоте, что можно интерпретировать,
как некогерентное накопление (А/Jip.p-rp/ 2A/?np.pTp) выборок, в результате чего эффектив-
ная шумовая полоса
Д/Ч-РР-эФФ ~ (2AFnp.pTp)Y(A/;ip.pTp)1’Y, (14-4)
где у- показатель эффективности накопления, который обычно равен 0,7...0,8 и не бы-
вает меньше 0,5.
При у = 0,5
АСпр ртр эфф — (2АТ'пр рурД/цр ,ртр) (14.5)
и параметр
Д = 7Ь(2ДГпрртр^Р.р1р)'й. (14.6)
где То - длительность накопления в приемнике.
Для увеличения параметра А в РЛС могут быть применены широкополосные сиг-
налы с длительным накоплением. Однако последетекторная полоса пропускания при-
емника РТР может быть согласована. В этом случае, если в приемнике РТР некогерент-
ное накопление будет производиться за то же время, что и в РЛС, т. е. 2AFnp pTp ~ 1 /То, то
АЧД/'ччярЛ.)1'2 (14.7)
Если принять Ау^р.ртр = 1 Ггц и То = 1 мс, то А = 1000 мс, и при Спр.рлс = 40 дБ,
а = 1 м2 и усилении приемной антенны РТР составляющем 0 дБ, максимальная даль-
ность, при которой обеспечивается скрытность РЛС, будет около 1 км.
336
Следует отметить, что для приемника РТР с фиксированной полосой пропускания
вероятность обнаружения радиолокационного сигнала уменьшается пропорционально
увеличению времени когерентного накопления или произведению длительности им-
пульса на его полосу. При некогерентном накоплении в приемнике РТР она будет
уменьшаться примерно пропорционально корню квадратному из увеличения произве-
дения длительности сигнала на его полосу. Но даже увеличение А от 1000 до 10000
приведет к увеличению дальности всего до 3 км. Среди современных РЛС с повышен-
ной скрытностью преобладают РЛС малой дальности действия. Для того чтобы обна-
ружить сигналы РЛС по главному лепестку ДНА, достаточна чувствительность прием-
ника РТР равная -110 дБ- Вт, а при чувствительности -116 дБ- Вт приемник РТР обна-
ружит РЛС на расстоянии, в 2 раза превышающем дальность обнаружения РЛС.
Основной проблемой при перехвате сигналов РЛС со сложными сигналами явля-
ется обеспечение достаточной чувствительности приемника РТР при обнаружении
сигналов большой длительности или с высоким коэффициентом заполнения и хаотиче-
ской перестройкой несущей частоты в широких пределах при наличии в этом же диа-
пазоне частот большого числа мощных короткоимпульсных сигналов обычных РЛС.
14.2. Приемная аппаратура системы РЭП РЛС со сложными сигналами
Как отмечалось, РЛС с широкополосными сигналами обладают повышенной
скрытностью [5]. Поэтому при реализации РЭП таких РЛС требуется специальная при-
емная аппаратура, способная не только обнаружить такие сигналы, но и провести ана-
лиз их тонкой структуры.
Известные супергетеродинные приемники имеют высокую чувствительность и
могут обнаруживать РЛС с ЛЧМ-сигналом. При этом возникают энергетические
затруднения, поскольку полоса пропускания таких приемников намного уже диапазона
перестройки частот радиолокационного сигнала, и в ряде случаев мощность ЧМ-
сигнала в пределах этой полосы может оказаться ниже порога чувствительности при-
емника. В результате дальность обнаружения ЛЧМ-сигналов снизится. При этом, ведя
поиск сигналов путем сканирования частоты настройки в заданной полосе частот, су-
пергетеродинный приемник при приеме ЛЧМ-сигналов будет давать различную ин-
формацию о частоте сигнала, поскольку будет каждый раз давать те значения частоты,
на которую он настроен в рассматриваемый момент времени. Приемник с мгновенным
измерением частоты (МИЧ) имеет очень широкую входную полосу частот и обеспечи-
вает мгновенное перекрытие очень большой части частотного спектра. Но его чувстви-
тельность ниже чувствительности супергетеродинного приемника. Поэтому дальность
обнаружения в этом случае будет меньше дальности обнаружения супергетеродинного
приемника. Сортировку сигналов и идентификацию излучателей в первом случае мож-
но вести только по периоду следования импульсов, если он стабильный, а во втором
такая сортировка возможна как по периоду следования импульсов, так и по информа-
ции о частоте, так как приемник с МИЧ будет определять в качестве частоты сигнала
начальную частоту каждого перехваченного сигнала. Поэтому приемник МИЧ обеспе-
чивает получение лучших результатов, чем супергетеродинный приемник. Радиолока-
ционные сигналы со скачкообразным изменением частоты также могут обнаруживать-
ся супергетеродинными приемниками и приемниками с МИЧ. Однако вследствие узкой
полосы супергетеродинного приемника импульсные сигналы на его выходе будут воз-
никать в случайные моменты времени, определяемые моментами попадания радиоло-
337
кационного сигнала в полосу приемника. Поскольку постоянные во времени параметры
сигналов в этом случае будут отсутствовать, сортировка и идентификация сигналов с
помощью современных процессоров не обеспечивается. При использовании приемника
с МИЧ на его выходе в рассматриваемом случае будет регистрироваться частота каж-
дого импульса, если он по времени будет находиться в пределах чувствительности
приемника. Если период следования импульсов будет стабильным, то процессор обес-
печит сортировку импульсов, используя этот параметр,
Обработка сигналов с ФКМ в супергетеродинном приемнике близка к обработке
ЧМ-сигналов. Если приемник настроен на фиксированную частоту и уровень ФКМ-
сигнала достаточен для его приема, то он может обеспечить определение длительности
импульсов и периода их повторения. Однако, если он работает в режиме перестройки
частоты, то измерение частоты каждого импульса всякий раз будет давать различные
значения. При этом, как и в случае с ЛЧМ-сигналами, будут иметь место энергетиче-
ские потери, обусловленные приемом только части спектра сигнала, и, как следствие,
снижение дальности обнаружения источников с ФКМ-сигналами в (Д/^р/Д4) количест-
во раз, где Д/пр - полоса пропускания приемника, - ширина спектра частот ФКМ-
сигнала. Приемник с МИЧ будет способен обнаруживать сигнал с ФКМ, но при этом
может давать ошибочную информацию о частоте [6].
Таким образом, проблема подавления РЛС с широкополосными сигналами нс ог-
раничивается выбором эффективных методов создания помех, а включает в себя еще
оперативный анализ структуры сигналов, требующий разработки новых методов прие-
ма и обработки сигналов. Обычно используемые в системах РЭП приемники становят-
ся неэффективными при приеме широкополосных сигналов, требуются приемники, ос-
нованные на новых принципах. К таким приемникам, способным осуществлять прием
и обработку широкополосных сигналов в интересах РЭП, в настоящее время можно
отнести четыре типа приемников: радиометрический, с согласованным фильтром, с уд-
воением частоты и комбинированный [7]. Радиометрический метод обеспечивает наи-
лучшую чувствительность при приеме широкополосных сигналов особенно в милли-
метровом диапазоне частот. Теоретически с помощью этого метода можно улучшить
чувствительность на 30 дБ относительно чувствительности обычных супергетеродин-
ных приемников (равной -140 дБ- Вт в полосе частот 1 МГц) [4]. Использование пере-
ключения частот гетеродина позволяет скомпенсировать флуктуации коэффициента
усиления приемника путем его калибровки по уровню внутренних шумов на частоте,
где нет приема сигналов. Такая калибровка может также происходить путем переклю-
чения по высокочастотному входу приемника. В этом случае предусматривается гене-
ратор шума, который периодически подключается ко входу приемника и обеспечивает
стабилизацию усиления. Приемник с согласованным фильтром также обладает доста-
точно высокой чувствительностью, но для его работы требуется полная информация о
типе модуляции и кодирования радиолокационного сигнала [7, 8]. Приемник с удвое-
нием частоты предназначен для обнаружения псевдослучайных сигналов и ФКМ-
сигналов, использующих бинарные фазовые коды. В приемнике данного типа приня-
тый сигнал после преобразования в промежуточную частоту ограничивается и умножа-
ется по частоте на 2. В результате удвоения частоты широкополосный сигнал автома-
тически преобразуется в узкополосный, что упрощает существенно его дальнейшую
обработку. Это также позволяет разрешать большое число широкополосных сигналов,
модулированных по фазе бинарным кодом со сдвигом по фазе на 180°, и вести их раз-
дельную обработку [9]. С помощью делителя частоты сигнал с удвоенной частотой
338
восстанавливается в первоначальный вид и используется как когерентный опорный
сигнал для декодирования ФКМ-сигнала. В случае применения РЛС с N-фазными ко-
дами формирование сигналов производится соответственно с использованием умноже-
ния и деления на N. Описанный метод приема и обработки применим к непрерывным и
импульсным ФКМ-сигналам.
Комбинированный приемник более сложен по устройству, способен определять и
отслеживать код и тип модуляции. При обработке импульсных сигналов с ЛЧМ в этом
случае требуется отдельный генератор, управляемый напряжением. Контур системы
АПЧ каждого генератора отслеживает линейное изменение частоты приходящих ЛЧМ-
сигналов. Значения частоты генератора в процессе его перестройки могут быть запом-
нены в цифровой форме и использованы для управления другим маломощным генера-
тором с целью формирования сигнала помехи. Если направление перестройки частоты
в импульсе периодически меняется, то каждый импульс должен обрабатываться от-
дельно. Направление перестройки частоты в импульсе может использоваться для точ-
ного определения величины частотного сдвига сигнала помехи относительно частоты
отраженного сигнала цели. При дискретной перестройке частоты РЛС данный прием-
ник не может быть применен для разрешения сигналов, поскольку в этом случае один
генератор, управляемый напряжением, не обеспечит непрерывности поступления не-
обходимой информации для формирования помехи. Можно нормальную обработку ис-
пользовать с помощью нескольких генераторов, каждый из которых настраивается на
определенную частоту, а их выходные сигналы складываются. Но приемник в этом
случае становится очень сложным. При приеме сигналов с ФКМ в комбинированном
приемнике существует канал с удвоением частоты, что делает приемник еще более
сложным. При этом приемник справляется только с бинарным типом фазового кодиро-
вания принимаемого сигнала.
Типовым требованием к приемнику РТР является большое перекрытие по диапа-
зону частот 1...2 ГГц и широкая мгновенная полоса 5... 10 МГц для обнаружения сиг-
налов РЛС с внутриимпульсным кодированием и некогерентным накоплением порядка
нескольких миллисекунд и более. Возможным решением в этом случае может быть су-
пергетеродинный приемник с некогерентным накоплением и периодической очень бы-
строй частотной перестройкой (рис. 14.1) [9].
Рис. 14.1. Структурная схема быстроперенастраимового по частоте супергетеродинного
приемника для обнаружения длинноимпульсного сигнала РЛС с повышенной скрытностью
339
Рис. 14.2. Частотно-временная диаграмма
распределения сигналов короткоимпульсных
РЛС и одной длинноимпульсной РЛС,
а также частотной перестройки приемника РТР
На рис. 14.2 показана временная диа-
грамма зависимости несущей частоты ко-
роткоимпульсных РЛС и одной длинно-
импульсной с ФКМ РЛС (один импульс
длительностью т), а также частотная пере-
стройка в полосе 300 МГц супергетеро-
динного приемника через каждые 5 мкс
(Гск). Очевидно, что сигнал длинноим-
пульсной РЛС можно считать обнаружен-
ным, если выполняется условие приема на
определенной частоте сигнала за восемь
последовательных периодов перестройки
частоты приемника. В то же самое время
все короткоимпульсные сигналы, как не
удовлетворяющие этому условию, не бу-
дут приняты. Полоса пропускания супер-
гетеродинного приемника 5...20 МГц достаючна для того, чтобы обеспечить согласо-
вание по полосе пропускания из-за расширения спектра, вызванного применением ко-
дированного сигнала. Можно отметить, что увеличение скорости частотной перестрой-
ки приемника до 200 МГц/мкс при полосе пропускания его УПЧ 10 МГц приведет к
потере чувствительности приемника менее чем на 1 дБ. Критерием обнаружения сигна-
лов с высоким коэффициентом заполнения с помощью быстро перестраиваемого супер-
гетеродинного приемника будет регистрация превышения порога на некоторой частоте
по меньшей мере в М случаях при N перестройках частоты, т. е. критерий “М из №.
Рассмотрение различных типов приемников, способных в той или иной мерс вес-
ти обработку широкополосных сигналов, свидетельствует о том, что радиоэлектронное
подавление РЛС со сложными сигналами представляет довольно сложную проблему,
решение которой зависит прежде всего от наличия приемников в системе РЭБ, способ-
ных вести сбор необходимой информации о структуре сигналов подавляемых РЛС.
В связи с этим представляют интерес появившиеся новые приборы, известные как
анализаторы модуляционного пространства [9]. Иногда их называют анализаторами
частотных и временных параметров, поскольку они способны измерять и индицировать
частоту, фазу и временные интервалы в функции времени. Они также позволяют про-
водить статистический анализ, облегчающий установление ключевых характеристик
сложных сигналов.
Метод модуляционного пространства особенно полезен при изучении сигналов с
ФКМ, поскольку измерение фазы в функции времени является основой данного мето-
да, а сама фазово-кодовая манипуляция, представляющая цифровую технику, хорошо
согласуется с различными процессорами. Измерение модуляционного пространства
основывается на новом типе АЦП, работающем на основе счета числа пересечений
входным сигналом нулевых значений амплитуды и регистрации времени, в которое это
событие произошло. При этом процесс счета идет без внешней синхронизации (как в
обычных АЦП). Частота выборок формируется самим сигналом. Это означает, что вы-
ходной сигнал преобразователя необязательно одинаково распределен во времени. На
рис. 14.3 представлен график, иллюстрирующий преобразование методом модуляци-
онного пространства синусоидального сигнала. Как можно видеть, выходной сигнал
340
преобразователя содержит два вида ин-
формации: информацию о числе пересе-
чений нулевого уровня входным сигна-
лом, рассматриваемых как два события, и
информацию о точном времени, когда
происходит данное событие. В приведен-
ном на рисунке примере рассмотрен сиг-
нал с неизменной несущей частотой, по-
этому каждое зафиксированное событие
означает, что сигнал достиг значения фа-
зы 360°. Вертикальная ось соответствует
Рис. 14.3. Диаграмма фазовой прогрессии для
синусоидального сигнала неизменной частоты
пропорциональным фазовым значениям и
весь график называется диаграммой фа-
зовой прогрессии, представляющей ос-
новной принцип метода модуляционного
пространства. Любой сигнал, независимо
от сложности, может быть изображен на
диаграмме фазовой прогрессии. Если не-
сущая частота сигнала неизменна, наклон
линии, проведенной через точки фазовых
значений, соответствует частоте сигнала.
График, представленный на рис. 14.4, со-
ответствует диаграмме фазовой прогрес-
сии для случая синусоидальной частотной
Рис. 14.4. Диаграмма фазовой прогрессии для
сигнала с синусоидальной частотной модуляцией
модуляции несущей. Отклонение по верти-
кали от линии, наклон которой определяет значение несущей частоты, соответствует
девиации фазы, а отклонения по горизонтали - отклонениям по времени. Локальные от-
клонения крутизны диаграммы представляют отклонения по частоте от несущей. Изме-
ряя такие отклонения, фазу, частоту и временные интервалы, можно получить полную
информацию о любом сигнале, в том числе и широкополосных сигналах со сложной
структурой.
Получаемые с помощью диаграммы фазовой прогрессии данные позволяют также
проводить статистический анализ параметров сигналов и на основании его результатов
программировать режимы РЭП [9].
ГЛАВА 15. МЕТОДЫ И ТЕХНИКА СОЗДАНИЯ ПОМЕХ РЛС
С ШИРОКОПОЛОСНЫМИ СИГНАЛАМИ
15.1. Метод РЭП РЛС со сжатием импульса, основанный
на формировании накрывающих помеховых импульсов
При данном методе РЭП в передатчике помех формируется прицельная шумовая
импульсная помеха, синхронная с зондирующим импульсом, но превышающая его по
мощности и длительности. В отличие от случая воздействия непрерывной шумовой
помехи, накрывающая помеха маскирует не всю дальность, а только ее часть, совпа-
дающую с местоположением цели. В результате ухудшается разрешающая способность
РЛС по дальности до величины, обратно пропорциональной длительности не сжатого
341
импульса. Спектр его может располагаться симметрично относительно несущей часто-
ты РЛС, быть сдвинутым на величину (fc-f0) или состоять из двух частей, отстоящих
друг от друга на величину промежуточной частоты РЛС (при создании двухчастотной
помехи). Следует отметить, что маскирующий эффект на РЛС со сжатием импульса
можно создать только в случае, когда мощность помехи на несколько порядков превос-
ходит по величине мощность отраженного от цели сигнала. Это превышение должно
превосходить коэффициент сжатия импульса в РЛС. Импульсный характер накрываю-
щей помехи позволяет создавать помехи одним передатчиком помех нескольким РЛС с
максимальной мощностью, а также использовать импульсный режим работы оконеч-
ных усилителей передатчика помех, что позволяет повысить излучаемую мощность
помехи. Однако следует учитывать возможность работы РЛС непосредственно по по-
мехе. Сущность этого мстодоа помехозашиты от действия накрывающего помехового
импульса состоит в обеспечении режима работы РЛС по помеховому импульсу. С этой
целью в РЛС сопровождения со сжатием импульса предусматривается дополнительный
приемный канал. В нормальной ситуации задействован обычный приемный канал со
сжатием импульса. При появлении помехи в виде накрывающего импульса с внутри-
импульсной модуляцией по частоте или фазе ситуация меняется. В этом случае при от-
ношении помеха-сигнал 15 дБ и выше (в зависимости от характеристик РЛС) нормаль-
ный канал оказывается подавленным, и логическая схема помехозашиты покажет, что
уровень сигнала в этом канале ниже порогового уровня, а в дополнительном канале
имеет место большой сигнал. Логическая схема на основании указанной информации
переводит переключатель с выхода нормального приемного канала на выход дополни-
тельного канала, и с этого момента начинается сопровождение постановщика помех по
дальности по переднему фронту излучаемого им помехового импульса, обработка сиг-
нала импульсной помехи и измерение как угловых координат, так и дальности [10].
Фактически этот способ помехозашиты превращает РЛС в широкополосную без пре-
имуществ, которые дает сжатие импульса. Но в таком режиме значительно снижается
разрешающая способность РЛС и точность сопровождения по дальности. Однако это
снижение на качестве работы ракетной системы в целом сказывается незначительно,
особенно при полуактивном наведении ракеты. Наиболее сильно указанные факторы
сказываются при стрельбе по низколетящим целям, когда увеличивается интенсивность
помех от местных предметов.
Введение в РЛС со сжатием импульса дополнительного приемного канала поме-
хозащиты вынуждает разработчика средств РЭП принимать необходимые меры для его
подавления. В настоящее время известно три метода снижения эффективности данной
помехозашиты:
1. Путем излучения накрывающего импульса помехи с намеренно растянутым пе-
редним фронтом, чтобы нарушить работу дифференцирующей цепи в канале помсхо-
защиты РЛС;
2. Путем излучение накрывающего импульса помехи с хаотической модуляцией в
некоторых пределах положения переднего фронта в целях вызвать потерю сигнала в
стробе дальности схемы сопровождения по переднему фронту импульса и создать ус-
ловия для срыва сопровождения;
3. Путем излучения накрывающего импульса помехи с постоянным (или хаотиче-
ским) уменьшением длительности импульса. В этом случае при достаточно высоком
отношении помеха-сигнал строб сопровождения по фронту импульса переместится
342
вправо, что будет эквивалентно действию уводящей по дальности помехи. Предполага-
ется, что в процессе увода строб дальности может выйти по инерции вообще за преде-
лы импульса. С точки зрения энергетики более выгодно создавать имитационные (де-
зинформирующие) помехи, обеспечивающие ложную информацию.
15.2. Передатчик ложных целей для РЛС с ЛЧМ
Цель имитационных помех - создать ложную информацию путем внутриим-
пульсной амплитудной и частотной модуляции ретранслируемого сигнала, приводяще-
го к созданию ложных целей по дальности. Подверженность РЛС с ЛЧМ воздействию
ретрансляционной помехи связана с тем, что отраженный сигнал от цели должен при-
ниматься до того момента, как сформировался сжатый импульс. Добавление в ретранс-
лируемый сигнал, например, частотного сдвига вызывает» появление ложного импульса
до или после отраженного (сжатого) от цели. Достижимый при этом диапазон ошибок
по дальности ограничивается пространственной протяженностью рабочего импульса
РЛС (до сжатия). Радиолокационный сигнал РЛС с ЛЧМ принимается приемной ан-
тенной передатчика, усиливается в СВЧ-усилителе, модулируется в нем по фазе с це-
лью обеспечения сдвига по частоте на определенную величину, проходит амплитудный
модулятор, где превращается из широкого импульса в серию узких импульсов, усили-
вается в усилителе мощности и излучается через передающую антенну. Синхронизация
фазовой и амплитудной модуляции обеспечивается с помощью управляющих импуль-
сов, формируемых специальным генератором, работа которого синхронизуется продс-
тектированными импульсами РЛС. Управляющие импульсы представляют собой сиг-
налы пилообразной формы, подаваемые на фазовый модулятор, и сигналы прямо-
угольной формы - для амплитудной модуляции. За счет изменения частоты амплитуд-
ной модуляции, полярности и преобразования частоты с помощью фазовой модуляции
можно сформировать ложную цель, расположенную на большей или меньшей дально-
сти относительно дальности до постановщика помех. Если отношение помеха-сигнал
при этом достаточно велико, то истинная цель может подавляться в приемнике РЛС, и
оператор РЛС будет наблюдать только ложную цель. Поскольку обработка сигналов в
приемниках РЛС может быть различной, выбор параметров помеховой модуляции при
формировании ложных целей должен осуществляться на основании эксперименталь-
ных исследований на аналогах РЛС противника или посредством моделирования. В ря-
де случаев представляется целесообразным излучать ложные сигналы описанной
структуры одновременно с непрерывным шумом в пределах всей рабочей полосы час-
тот. Если мощность шума достаточна, чтобы замаскировать действительный отражен-
ный сигнал от цели, то в этом случае исключается возможность повторного захвата це-
ли после срыва захвата, вызванного действием ложной частотной информации.
Известно [3], что создание одиночных ложных целей на расстоянии порядка 1,5
км от прикрываемой цели, как правило, не препятствует запуску ракеты. Поэтому це-
лесообразно создавать не менее двух ложных целей на различных дальностях и осуще-
ствлять по программе уводы строба дальности на эти ложные цели. В этом случае РЛС
будет лишена возможности сопровождать по дальности движущуюся в пространстве
цель, возникнут большие ошибки слежения по дальности. Один из методов защиты
РЛС от имитационных помех рассмотренной структуры сводится к изменению закона
модуляции частоты от импульса к импульсу. В этом случае передатчик ложных целей
будет поочередно излучать помеховые импульсы, создающие то опережающие, то за-
343
паздывающие ложные цели. В результате на индикаторе РЛС будут наблюдаться им-
пульсы, расположенные по обе стороны от полезного сигнала. При симметричном за-
коне ЧМ-сигнала РЛС ложные цели будут равноотстоящими по временной оси от им-
пульса цели. Это позволяет определять местоположение истинной цели как середины
между положениями ложных целей и выставлять следящий строб дальности точно на
место, где находится сигнал реальной цели.
Против описанной помехозащиты можно применить помеху с одинаковым изме-
нением частоты от импульса к импульсу, тогда на экране индикатора РЛС будет созда-
ваться только одна ложная цель (не парная) или с двойным изменением частоты в каж-
дом импульсе с использованием, например, балансного модулятора. В этом случае
возможно совмещение импульсной помехи с отраженным от цели импульсом, и при
достаточной мощности помехи может происходить подавление полезного сигнала в
схеме АРУ или ограничителе [10].
Имитирующие помехи РЛС с ЛЧМ сигналами могут создаваться путем ретранс-
ляции сигналов РЛС с задержкой по времени. Такая помеха проходит фильтр сжатия
точно также, как и полезный сигнал. Если передатчик помех расположен на прикры-
ваемом самолете, то вначале на выходе фильтра сжатия появится сжатый по длитель-
ности отраженный сигнал, а затем помеховый сигнал. Время задержки сжатого поме-
хового сигнала относительно сжатого отраженного сигнала будет равно времени за-
держки помехового сигнала в ретрансляторе.
Имитационная помеха может быть создана также путем амплитудной модуляции
гармоническим колебанием и шумом. При амплитудной модуляции по гармоническому
закону с частотой FM и глубиной m помеха состоит из составляющей на несущей часто-
те и двух боковых частот, отстоящих от несущей на величину +FM с амплитудой mH.
Составляющая на несущей частоте будет ослаблять или усиливать действие отражен-
ного сигнала в зависимости от фазового сдвига, поэтому ее стараются подавлять при
формировании помехи, две другие составляющие будут оказывать мешающее дейст-
вие, аналогичное смещению частоты на величину ±FM. Если при модуляции использу-
ется одновременно несколько гармонических составляющих, например п, то на выходе
фильтра сжатия будет создаваться 2п дополнительных сигналов. Но в этом случае от-
раженный сигнал будет иметь амплитуду, превышающую амплитуду помеховых со-
ставляющих, и помеховый эффект при большом п будет незначительным. Амплитудная
модуляция шумом приводит к образованию большого числа ложных отметок, воздей-
ствие такой помехи будет эквивалентно действию маскирующей шумовой помехи.
15.3. Передатчик уводящих помех по дальности импульсной РЛС
с ЛЧМ
Для создания уводящих помех по дальности обычным импульсным РЛС широкое
распространение, как указывалось ранее, получил способ, основанный на применении
устройства кратковременного запоминания частоты на основе рециркулятора радиоим-
пульсов [11]. Однако применительно к подавлению РЛС с ЛЧМ этот способ не обеспе-
чивает увод строба дальности РЛС с внутриимпульсной частотной модуляцией, потому
что в рециркуляторе запоминается мгновенная частота передней части радиолокацион-
ного импульса выборки, которая не совпадает с частотой остальной части ЛЧМ-
импульса. В результате этого в запомненном (рециркулированном) радиоимпульсе от-
сутствует главное изменение частоты. Другой недостаток этого способа при его ис-
344
пользовании для создания уводящей помехи по дальности РЛС с ЛЧМ связан с несо-
гласованностью длительности радиолокационного импульса (десятки микросекунд) с
величиной задержки в рециркуляторе. В настоящее время в диапазоне СВЧ имеются
линии задержки на 0,5 мкс с приемлемой величиной затухания для аппаратурной реа-
лизации.
В [12] описаны способ и устройство для создания уводящей помехи по дальности
РЛС, в которой используется сжатие импульса, случайная частота повторения, скачко-
образная поимпульсная перестройка несущей частоты и моноимпульсная техника уг-
лового сопровождения. Структурная схема устройства приведена на рис. 15.1. Это уст-
ройство позволяет обеспечить захват и увод строба дальности РЛС с ЛЧМ за пределы
сигнала, отраженного от носителя передатчика помех и, тем самым, обеспечить рассо-
гласование строба дальности с отраженным сигналом, исключающим его поступление
в угломерную следящую систему.
Рис. 15.1. Структурная схема передатчика уводящих помех РЛС с ЛЧМ
Передатчик помех состоит из ретрансляционно-коммутируемого тракта, исполь-
зующего четыре усилителя, рециркулятор радиоимпульсов на усилителе и линии за-
держки 0,3 мкс, подсистемы синхронизации и формирования уводящего импульса для
управления коммутаторами 1, 2 и 3, подсистемы формирования пилообразных напря-
жений (генераторы ПК-1 и ПК-2) для сдвига частоты рециркулированных сигналов
(ЛБВ-3 и ЛБВ-4), а также подсистемы определения знака наклона изменения частоты
внутри импульса (возрастание или уменьшение), состоящей из смесителя с гетероди-
ном, усилителя промежуточной частоты, частотного дискриминатора и детектора по-
лярности. Передатчик помех должен обеспечить плавно регулируемую задержку каж-
дого радиоимпульса в пределах 0...50 мкс. Усиленный радиолокационный радиоим-
пульс через ответвитель -1 и делитель мощности поступает на диодный детектор и сме-
ситель, сигнал с выхода детектора запускает мультивибратор, генерирующий импульс
0,3 мкс, который открывает на это время коммутатор-1, а также мультивибратор, кото-
рый генерирует импульс длительностью 50 мкс, открывающий коммутатор-3 рецир-
345
кулятора радиоимпульсов, состоящего из ответвителя-2, ЛБВ-2, ответвителя-3, СВЧ-
линий задержки на 0,3 мкс, В результате рециркулятор обеспечивает формирование из
выборки входного сигнала длительностью 0,3 мкс протяженного радиосигнала дли-
тельностью 50 мкс (167 циркуляций выборки входного сигнала). Одновременно видео-
импульс с детектора поступает на формирователь уводящего импульса, который обес-
печивает поимпульсную задержку входной импульсной последовательности от 0 до
50 мкс по параболическому' закону. С этого формирователя видеосигнал подастся на
коммутатор-2 и управляющий вход свип-генератора. В результате открывания комму-
татора-2 на входе ЛБВ-3 появляется зондирующий импульсный сигнал РЛС с постоян-
ной несущей частотой, равной несущей частоте сигнальной выборки, т. е. начальной
части радиолокационного импульса. При поступлении с формирователя уводящего ви-
деоимпульса свип-генсратор изменяет частоту генератора пилообразных колебаний
ПК-1 в интервале длительности зондирующего импульса по линейному закону от 500
до 1500 кГц, что обеспечивает генерацию около 20 пилообразных колебаний в интер-
вале длительности импульса. Этот сигнал подается либо непосредственно на спираль
ЛБВ-3 для сдвига частоты, либо через усилитель-инвертор. На спираль ЛБВ-4 подают-
ся пилообразные колебания постоянной частоты 500 кГц от генератора ПК-2. Поляр-
ность пилообразных колебаний, поступающих на спирали ЛБВ-3 и ЛБВ-4, всегда про-
тивоположна. Это означает, что несущая частота на выходе ЛБВ-3, изменяющаяся в
пределах от значения частоты входного сигнала (выборки) до ес значения плюс
1500 кГц, после прохождения ЛБВ-4 будет изменяться от значения частоты входного
сигнала до значения частоты входного сигнала плюс 1000 кГц. Определение знака
внутриимпульсного изменения частоты в ЛЧМ сигнале производится частотным дис-
криминатором с полосой 200 МГц, на вход которого поступают радиоимпульсы про-
межуточной частоты в диапазоне 100...300 МГц от смесителя. Частотный дискримина-
тор имеет выход со связью по постоянному току, что позволяет преобразовывать уве-
личение частоты в нарастающее пилообразное колебание, а уменьшение частоты - в
падающее пилообразное колебание, что регистрируется детектором полярности (на-
клона пилообразного колебания), управляющим полярностью пилообразных колебаний
генераторов ПК-1 и ПК-2. В результате этого частота сигнала уводящей помехи отсле-
живает изменение (знак наклона) частоты ЛЧМ-сигнала.
15.4. Принципы создания помех РЛС с ФКМ-сигналами
Как указано выше, в РЛС с ФКМ, как и в РЛС с ЛЧМ, отраженные сигналы от це-
ли проходят в приемнике сжатие с помощью фильтра сжатия, фазовая характеристика
которого согласована с характеристикой используемого в РЛС кода фазовой манипу-
ляции зондирующих сигналов. Поэтому при организации РЭП таким РЛС также воз-
можны два пути: создания маскирующей помехи и создания имитационной помехи.
Первый путь рассчитан на отсутствие информации об используемом в РЛС коде
фазовой манипуляции и требует высоких уровней мощности помехи. Последнее обу-
словлено тем, что помеха в этом случае не согласована по фазе с фазовой структурой
рабочего импульса РЛС и потому не сжимается в приемнике РЛС. Эффект действия
такой помехи рассчитан на силовое подавление полезной информации. В соответствии
с этим при создании такой помехи необходимо обеспечить отношение помеха-сигнал
346
на выходе приемника больше, чем величина коэффициента сжатия. При этом помехо-
вые импульсы будут перегружать приемник и нарушать реализуемую обработку сигна-
лов. При создании маскирующих помех РЛС с ФКМ-сигналом можно использовать пе-
реизлучение когерентных импульсов, имеющих ту же длительность и несущую часто-
ту, что и радиолокационные импульсы, но содержащие ложный код фазовой манипу-
ляции на базе псевдослучайной последовательности [13]. При формировании помехи
РЛС с ФКМ-сигналом псевдослучайная последовательность используется для выра-
ботки модулирующего напряжения для фазового модулятора передатчика помех. При
этом, кроме градации фазы 0 и 180° могут применяться и другие градации. Огибающая
этого спектра сигнала помехи соответствует приблизительно функции (sinx / х)2. Несу-
щая частота обычно подавлена, первый нулевой провал огибающей спектра отстоит от
несущей частоты сигнала по обе стороны на величину, соответствующую частоте так-
товых импульсов. Интервал между спектральными линиями равен частному от деления
частоты тактовых импульсов на длину (число элементов) последовательности. По ана-
логии с РЛС, использующими ЛЧМ-сигналы, имитационная помеха РЛС с ФКМ-
сигналами может создаваться путем ретрансляции ФКМ-сигнала РЛС с задержкой по
времени. В этом случае на выходе фильтра сжатия также будет создаваться помеховый
импульс, задержанный от отраженного сигнала на время задержки в ретрансляторе.
Изменение несущей частоты на величину, значительно большую максимальной допле-
ровской частоты целей, приводит к созданию помех каналу измерения дальности. Эф-
фективными также являются AM ретранслированные помеховые сигналы, поскольку
создают отметки ложных целей, расположенные по обе стороны от отметки реальной
цели. При этом во избежание подсветки цели-постановшика помех необходимо подав-
лять несущую частоту помехового сигнала. Также можно создать однократные и мно-
гократные ответные помехи.
Однако для создания опере-
жающих помеховых сигна-
лов необходимо знание кода
сигнала РЛС. Например, в
случае ФКМ радиолокаци-
онного сигнала, использую-
щего две градации манипу-
ляции фазы (0, л), с помо-
щью устройства, работаю-
щего на промежуточной час-
тоте (рис. 15.2), возможно
выделить как внутрисиг-
нальную модулирующую
функцию, так и немодулиро-
ванный входной сигнал.
В данном случае для демодуляции ФКМ-сигнала используется способ смешива-
ния этого сигнала с когерентным опорным немодулированным сигналом, который
сформирован из него с помощью удвоителя частоты, генератора с ФАПЧ и делителя
частоты. Полученные с его помощью структуры внутрисигнальной манипуляции и не-
модулированный сигнал на несущей частоте исходного радиолокационного сигнала
могут использоваться для формирования широкого класса имитационных и маски-
Умножитель
частоты на 2
21оггч
f»ll4
Генератор с
ФАПЧ
Ф ~
к индикатору
захвата
Входной
сигнал
с ФКУ
на ПЧ
Амплитудный
ограничитель
Делитель
частоты на 2
Немоду .тированный
сигнал с несущей
дастотой
Смеситель
Сигнал
ФКМ
Видео-
усилитель
Фильтр
низких
частот
Рис. 15.2. Структурная схема устройства выделения
внутрисигнальной функции ФКМ-сигнала
347
рующих помех. Данный метод демодуляции ФКМ-сигнала может быть применен как
для непрерывных, так и для импульсных сигналов. Однако в последнем случае необхо-
димо существенное повышение быстродействия системы ФАПЧ с тем, чтобы обеспе-
чить настройку генератора за время, составляющее малую часть длительности радио-
импульса [14].
15.5. Передатчик ложных целей для РЛС с ФКМ-сигналами и быстрой
перестройкой по частоте
Если РЛС со сжатием импульса в процессе работы будет менять несущую частоту
и внутримпульсные фазовые коды по случайному закону, то формирование помехи та-
кой РЛС будет зависеть либо от наличия априорных данных, полученных заранее с по-
мощью средств РТР, либо от способности помеховой аппаратуры измерять в реальном
масштабе времени несущую частоту и полный фазовый код и использовать результаты
измерения непосредственно при постановке помехи [13, 15]. Следует отметить, что
средства измерения тонкой структуры сигнала в реальном масштабе времени и синтеза
сигнала помехи соответствующей формы существенно усложняют аппаратуру РЭП и
повышают ее стоимость. Метод формирования помехи, основанный на использовании
Рис. 15.3. Структурная схема передатчика
ложных целей, создаваемых радиолокатором
с частотной перестройкой и фазово-кодовой
манипуляцией сигналов
априорных данных, проще и дешевле.
Вариант передатчика ложных целей, реализующий этот метод, представлен на
рис. 15.3.
Основой передатчика является набор генераторов помеховых сигналов с кварце-
вой стабилизацией, настраиваемых на
каждую рабочую частоту РЛС с точно-
стью ожидаемой полосы пропускания
по доплеровской частоте подавляемого
радиолокатора. Поэтому количество
помеховых генераторов должно соот-
ветствовать количеству рабочих частот
РЛС. Сигналы этих генераторов после
суммирования подаются на раздельные
помеховые каналы, число которых со-
ответствует числу рабочих фазовых
кодов РЛС. Каждый канал содержит
фазовый модулятор (для фазового ко-
дирования), амплитудный модулятор,
СВЧ-усилитель и передающую антен-
ну. Зондирующий сигнал РЛС через
приемную антенну поступает на детек-
тор и детектируется. При этом полного
измерения внутриимпульсного фазово-
го кода не производится. Поскольку
чередование априорно известных фазо-
вых кодов случайное и не может оыть
предсказано, для идентификации фазо-
вого кода принимаемого сигнала долж-
на измеряться начальная последова-
348
тельность за время, составляющее малую долю длительности принимаемого импульса.
Эта операция осуществляется фазово-кодовым детектором и измерителем и позволяет
выбрать такой фазовый код формируемой помехи, который бы соответствовал фазово-
му коду сигнала подавляемого радиолокатора в данный момент времени. Без э^ой опе-
рации сигнал помехи пришлось бы манипулировать по фазе одновременно всеми рабо-
чими фазовыми кодами РЛС, что привело бы к формированию некоторого сложного
кода, при котором не будет происходить сжатия помехового импульса в приемнике по-
давляемой РЛС и, как следствие, будет отрицательно сказываться на эффективности
помехи. Продстектированный импульс на видеочастоте обеспечивает синхронизацию
при формировании в ответ на каждый принятый импульс РЛС нескольких ложных им-
пульсов, которые используются для управления фазово-кодовыми генераторами. Вы-
ходные сигналы генератора ложных целей также поступают на амплитудные модуля-
торы и обеспечивают формирование ложных импульсов в требуемые моменты време-
ни. Каждый фазово-кодовый генератор генерирует только один из фазовых кодов, на-
чинающийся в соответствующей последовательности, используемой РЛС. В связи с
этим число фазово-кодовых генераторов должно соответствовать числу используемых
радиолокатором фазовых кодов. Формируемые каждым каналом помеховые сигналы
усиливаются с помощью мощных непрерывных усилителей и излучаются через соот-
ветствующие передающие антенны в пространство. Формирование сигналов происхо-
дит на всех известных частотах радиолокатора, причем каждый сигнал промодулиро-
ван по фазе соответствующим образом. Недостатком данной схемы передатчика явля-
ется неполное использование излучаемой мощности. Обусловлено это тем, что в каж-
дый момент времени все излучаемые- сигналы модулируются одним и тем же фазовым
кодом, и эффективным будет только сигнал на принятой частоте, все остальные -
неэффективны. Так, например, если передатчик рассчитан на подавление пяти частот-
ных каналов, то эффективная мощность помехи будет равна одной пятой эффективной
мощности излучения передатчика.
Рассмотренный передатчик обладает возможностью одновременного подавления
многих частотно-псрестраиваемых фазово-кодовых радиолокаторов, если имеются
достоверные данные по всем подавляемым радиолокаторам. Если фазово-кодовый де-
тектор и измеритель способны детектировать и измерять достаточное число бит приня-
того импульсного кода, то передатчик ложных целей конструктивно упрощается, по-
скольку в этом случае становится ненужным генерирование и модулирование со всеми
кодами, и достаточно иметь один канал в передатчике помех.
15.6. Создание помех РЛС с ФКМ-сигналами путем разрушения
фазовой структуры кода
Создание данного вида помех основано на детектировании изменения фазы в
ФКМ-импульсе и переизлучении в направлении РЛС ФКМ помехи с изменением фазы
каждого дискрета кода ФКМ-сигнала подавляемой РЛС на величину ±90° с
коэффициентом заполнения 50 %. При приеме помеховых импульсов указанной
структуры фазовый детектор приемника РЛС будет регистрировать два значения фазы
в пределах каждого дискрета, и усредненное значение фазы в пределах каждого
дискрета будет равно нулю. Отраженный сигнал от цели с нормальной фазовой
структурой также будет приниматься радиолокатором, но в силу высокого отношения
349
помеха-сигнал он оудст подавляться помеховым сигналом в приемнике еще до
фазового детектора [13].
Другой метод создания помех РЛС со сложным сигналом состоит в осуществле-
нии фазовой и/или амплитудной молуляции отражаемых сигналов одним или несколь-
кими модулируемыми отражающими элементами, установленными на защищаемом
объекте. При этом модуляция может быть осуществлена посредством изменения фор-
мы объекта, поглощающих свойств материалов объекта или посредством введения но-
вых рассеивателей, в том числе резонансных. Модулирующие элементы могут быть
самых различных типов, включая диоды и ферриты. Приборы с отрицательным сопро-
тивлением могут использоваться для усиления модулированного отраженного сигнала
или компенсации потерь в элементах задержки, сопутствующих имитации ложных це-
лей. В качестве варианта реализации метода может быть предложена рупорная антенна,
соединенная волноводом с согласованной нагрузкой. Между антенной и нагрузкой рас-
положен диод, отражательная способность которого модулируется путем изменения
напряжения смещения. В результате часть электромагнитной энергии отражается об-
ратно и излучается антенной. Кроме диода в волноводе может быть установлен управ-
ляемый фазовращатель. Отражательная способность его может быть больше, чем от
защищаемого объекта. Принимаемый РЛС сигнал будет представлять собой векторную
сумму сигналов, отраженных объектом и антенной. Наилучшее расположение антенны
- возможно ближе к "блестящей" точке объекта. Модуляция может быть синусоидаль-
ной, и в этом случае в доплеровских приемниках РЛС быстролетящий объект может
имитироваться как медленно движущийся. Рассматриваемый метод может использо-
ваться также для затруднения опознавания объекта с помощью РЛС, использующей
сигналы с большой базой.
15.7. Помеха в виде накрывающего импульса с ложной доплеровской
частотой
При реализации данного вида помех радиолокационный сигнал ретранслируется с
большим отношением помеха-сигнал и со сдвигом частоты, создаваемым с помощью
пилообразной фазовой модуляции. Сдвиг частоты может производиться как в сторону
повышения, так и в сторону понижения относительно несущей частоты РЛС [13]. В
этом случае действие помехи приводит к большим потерям в сжатом радиолокацион-
ном сигнале, в результате чего отраженный от цели сигнал подавляется и становится
ниже порогового уровня в приемнике РЛС.
Радиолокационные станции с ФКМ обладают способностью принимать и обраба-
тывать сигналы, несущие доплеровскую информацию. Если сигнал помехи ретрансли-
руется с доплеровским сдвигом частоты, величина которого точно равна обратной ве-
личине длительности радиолокационного импульса, то половина дискретов кода изме-
нит фазу на противоположную, и на выходе приемника будет отсутствовать сигнал.
Однако сложно формировать ретранслируемый сигнал, доплеровская частота которого
точно равнялась бы обратной величине длительности импульса РЛС, поскольку точная
скорость сближения носителя и РЛС обычно неизвестна. Но этого и не требуется.
Функция неопределенности сигнала РЛС с ФКМ свидетельствует о том, что доплеров-
ские частоты, в 2 и 3 раза, превышающие обратную ширину импульса, также будут
достаточно эффективны с точки зрения постановки помех. Это обусловливается тем,
что по оси доплеровских частот функция неопределенности имеет боковые лепестки
350
как в сторону увеличения, так и в сторону уменьшения доплеровской частоты. Обычно
доперовские частоты помехи находятся вблизи центрального максимума функции не-
определенности на оси доплеровских частот. Если принимается мощный сигнал поме-
хи, доплеровская частота которого далеко выходит за пределы двойного интервала до-
плеровских частот, то он воздействует на фазовые детекторы кода, и в результате в
приемнике РЛС не обнаруживаются ни полезные, ни помеховые сигналы. Таким обра-
зом, если не будут предусмотрены меры помехозашиты, этот тип помехи очень эффек-
тивен против импульсных РЛС с ФКМ. Формирование сигнала помехи не представляет
никаких сложностей, он отличается от полезного сигнала в основном только уровнем
мощности и модуляцией фазы элементов кода.
Эффективность имитационных помех РЛС с широкополосными сигналами во мно-
гом зависит от точности воспроизведения их фазовых, частотных и временных характе-
ристик. В связи с этим большое значение получил метод цифрового запоминания сигна-
лов [3, 16-19]. Как показано в главе 6, принцип работы цифровых систем запоминания
сигналов заключается в следующем. СВЧ-сигнал РЛС принимается и преобразуется по
частоте в более низкочастотный сигнал базового диапазона с помощью фиксированного
или перестраиваемого по частоте местного гетеродина. Сигнал базового частотного диа-
пазона квантуется. Получающиеся в результате квантования выборки преобразуются из
аналоговой формы в цифровую и запоминаются с помощью быстродействующего циф-
рового ЗУ с произвольной выборкой. Затем запомненный сигнал выводится из ЗУ и пре-
образуется сначала в аналоговую форму в базовом диапазоне с помощью цифроаналого-
вого преобразователя. Далее этот сигнал в аналоговой форме повышается по частоте с
помощью того же местного гетеродина, который используется при понижении частоты
принимаемого сигнала до частоты базового диапазона.
Цифровые запоминающие системы обеспечивают когерентное и длительное за-
поминание радиосигнала и открывают хорошие перспективы для повышения эффек-
тивности РЭП [20]. С помощью этих систем можно синтезировать частоты СВЧ-
сигналов с ЛЧМ и ФКМ, создавать уводящие помехи и генерировать многочисленные
ложные цели. Они могут применятся также в качестве источника шумовых помех [21].
ГЛАВА 16. СОЗДАНИЕ ПОМЕХ РЛС С БЫСТРОЙ ПЕРЕСТРОЙКОЙ
РАБОЧЕЙ ЧАСТОТЫ
16.1. Общие положения
Возможности повышения помехозащищенности РЛС путем перестройки рабочей
частоты известны давно и широко используются в современных РЛС, в том числе со
сложными сигналами. Перестройка рабочей частоты обычно осуществляется случай-
ным образом и преследует цель заставить противника при создании маскирующих и
имитирующих помех рассредоточить мощность передатчика помех в полосе частот,
превышающей во много раз ширину полосы частот приемника подавляемой РЛС. В ре-
зультате плотность мощности заградительной помехи снижается обратно пропорцио-
нально ширине полосы перестройки РЛС и, как следствие, снижается эффективность
помехи [14, 15]. Наряду с этим быстрая перестройка несущей частоты от импульса к
импульсу, в том числе по случайному закону, позволяет существенно повысить веро-
351
ятность радиолокационного обнаружения цели, снизить ошибки измерения ее коорди-
нат, обусловленные влиянием углового шума, улучшить подпомеховую видимость при
наличии мешающих отражений от распределенных в пространстве объектов, устранить
возможность появления многократного отражения сигналов, запаздывающих более чем
на период повторения радиолокационных импульсов. К тому же перестройка несущей
частоты РЛС является давним и всегда эффективным средством защиты РЛС от воз-
действия маскирующих помех, например, прицельных по частоте. Так, если на рабочей
частоте РЛС обнаруживалась помеха, то оператор осуществлял перестройку несущей
частоты передатчика на новую литерную частоту, на которой воздействие помех отсут-
ствует. Эффективность защиты от воздействия на РЛС прицельной помехи зависела от
того, насколько быстро передатчик помех мог отслеживать изменение несущей часто-
ты подавляемой РЛС. Если время настройки передатчика прицельных помех превыша-
ет длительность цикла перестройки несущей частоты РЛС, то воздействие помехи будет
отсутствовать. Минимальная длительность цикла перестройки несущей частоты РЛС ог-
раничивается допустимым временем когерентной обработки радиолокационного сигна-
ла. Так, для РЛС с СДЦ длительность цикла перестройки не может быть меньше двух пе-
риодов повторения радиоимпульсов и обычно составляет 3,...,4 периода, а для импульс-
но-доплеровской РЛС - от 8 до 16 периодов повторения. В этих случаях перестройка не-
сущей частоты РЛС осуществляется от пачки импульсов к пачке импульсов.
Для простой импульсной РЛС перестройка несущей частоты может осуществ-
ляться на поимпульсной основе, т. е. каждый радиоимпульс излучается на новой несу-
щей частоте. Такое скачкообразное изменение несущей частоты РЛС позволяет даже
при мгновенном формировании прицельной помехи на каждый излученный радиоло-
кационный импульс вскрыть дальность до постановщика прицельной помехи. В дан-
ном случае помеха закрывает от радиолокационного наблюдения пространство за по-
становщиком помех, а пространство перед постановщиком помех принципиально не
может быть закрыто прицельной помехой. Дальность до постановщика помех при по-
импульсной перестройке частоты может быть определена по переднему фронту им-
пульса прицельной помехи. Поэтому для обеспечения эффективности станция помех
должна либо заблаговременно перекрывать все возможные частоты РЛС, либо распо-
лагать возможностью предсказания частоты, на которой будет излучен каждый радио-
импульс. В первом случае потребуется перейти от прицельной помехи к созданию за-
градительной помехи во всем диапазоне поимпульсной перестройки частоты. Во вто-
ром случае структура станции помех должна усложняться, так как потребуется ввести в
нее системы анализа и предсказания закона перестройки РЛС.
Передатчики РЛС со скачкообразным изменением несущей частоты могут быть
различной структуры. Основными элементами простейшего такого передатчика явля-
ются блок генераторов и усилитель мощности. Другой способ скачкообразного изме-
нения частоты РЛС - это использование в них магнетронов с быстрой механической
перестройкой [22, 23]. Механизм частотной перестройки магнетрона бывает двух типов
- вращающийся и возвратно-поступательный. Устройства вращающегося типа, благо-
даря малой потребляемой мощности, могут обеспечивать перестройку несущей часто-
ты магнетрона с очень высокой скоростью. Другим фактором, также способствующим
обеспечению высокой скорости перестройки, является способность вращающихся уст-
ройств перестройки осуществлять многократную перестройку в пределах полной поло-
сы лишь за один поворот вращающегося механизма. Так, 200 кВт магнетрон такого ти-
па может обеспечить перестройку несущей частоты с частотой 1000 Гц в полосе пере-
352
стройки до 450 МГц. Магнетроны с возвратно-поступательным механизмом пере-
стройки частоты характеризуются значительно более низкими скоростями перестройки
частоты (до 25 1 ц), но для них проще обеспечить регулировку центральной частоты ге-
нерируемых колебаний. Оба типа этих устройств нормально обеспечивают генерацию
сигналов с периодическим изменением частоты.
Для того, чтобы в полной мере реализовать в РЛС преимущество скачкообразной
перестройки, нужно обеспечить быструю точную настройку узкополосного радиолока-
ционного приемника на выбранную несущую частоту радиолокационного импульса.
Точное сопряжение гетеродина с частотой передатчика является сложной проблемой,
так как нужно определить до генерирования каждого радиоимпульса резонансную час-
тоту магнетрона. Для этого необходимо использовать свипирование частоты, ЧМ-
дискриминатор с петлей обратной связи. Можно также определить линейное положе-
ние и скорость вращения вала перестройки частоты магнетрона и согласовать эту ин-
формацию с частотой гетеродина. В таких магнетронах обеспечивается одновременно
как механическая перестройка во всей рабочей полосе РЛС, так и скачки частоты. Эле-
менты быстрой перестройки частоты магнетрона должны помещаться вне вакуумной
колбы. В противном случае они будут подвержены повреждениям большими токами,
протекающими по их поверхности при возникновении высоковольтных токовых разря-
дов, что укорачивает срок службы и надежность магнетрона.
Как уже отмечалось, помимо РЛС с магнетронными передатчиками, возможно
использование мощного оконечного усилителя и формирователя сигнала, несущая час-
тота и частота повторения которого могут изменяться по скачкообразному случайному
закону. Такие формирователи сигналов стали возможными в результате значительных
технологических успехов в разработке цифровых синтезаторов частоты, таких как син-
тезатор на основе ФАПЧ и на основе прямого цифрового синтеза. Так, синтезатор пря-
мого цифрового синтеза может обеспечить в диапазоне 1...6 ГГц с минимальным дис-
кретом скачка частоты 5 МГц перестройку в любом участке частотного диапазона ши-
риной 1 ГГц со скоростью переключения 250 нс, а в диапазоне 6... 18 ГГц - со скоро-
стью 150 нс с дискретностью 25 МГц. Синтезаторы с ФАПЧ обладают меньшим быст-
родействием перестройки частоты. Например, в диапазоне 0,1... 1 ГГц они обеспечи-
вают перестройку в любом участке шириной 50 МГц со скоростью 30 мкс при шаге
1 МГц, а в диапазоне 0,5... 18 ГГц - с минимальным шагом от 5 до 10 МГц со скоро-
стью перестройки 100 мкс.
В условиях воздействия на РЛС со скачкообразной перестройкой частоты, при-
цельной по частоте помехи, минимальная величина скачка по частоте должна быть не
менее ширины спектра прицельной помехи. Ширина спекгра прицельной маскирую-
щей помехи согласована с длительностью зондирующего импульса и может в несколь-
ко раз превышать полосу пропускания приемника РЛС. Поэтому в зависимости от ши-
рины диапазона перестройки частоты и длительности импульса диапазон перестройки
разбит на некоторое число сопряженных каналов, на которые возможен перескок час-
тоты РЛС. Таких каналов в РЛС может быть десятки сотен.
16.2. Способы создания помех РЛС с быстрой перестройкой рабочей
частоты
Наиболее простым способом создания маскирующих помех РЛС с перестройкой
несущей частоты от импульса к импульсу является создание широкополосной загради-
12—1777
353
тельной помехи в диапазоне, равном диапазону перестройки несущей частоты передат-
чика РЛС с некоторым запасом, компенсирующим погрешность в оценке диапазона
перестройки частоты. Этот способ создания"помех характеризуется низкой энергетиче-
ской эффективностью, так как в каждый частотный канал будет попадать лишь малая
часть интегральной мощности передатчика помех. Если же при перестройке частоты во
всем диапазоне фактически используется только некоторое число фиксированных ка-
налов, то можно значительно повысить спектральную плотность маскирующей помехи,
создавая одновременно помеху только на этих каналах. Однако при этом передатчик
помех придется существенно усложнить, так как потребуется приемное устройство для
того, чтобы формировать помеху одновременно на всех фактически используемых ка-
налах РЛС. Чем больше фактически используемых каналов, тем меньше может быть
получен энергетический выигрыш этого способа создания помех по сравнению с загра-
дительной помехой во всем диапазоне перестройки частоты РЛС [10].
Узкополосную помеху можно применять во всех случаях, когда защищаемые це-
ли удалены от РЛС на большие расстояния, чем передатчик помех. В этом случае про-
изводится измерение мгновенного значения частоты перехваченного радиолокацион-
ного сигнала и настройка передатчика помех для излучения максимальной мощности
помехи на этой частоте. Настройка передатчика прицельной помехи не может быть
произведена до прихода радиолокационного импульса, и, таким образом, цели, нахо-
дящиеся на более близком расстоянии к РЛС, чем постановщик помех, не могут быть
прикрыты помехой. Даже сигнал, отраженный от постановщика помех, не может быть
замаскирован прицельной помехой, потому что передатчик помех нс успевает настро-
иться на него. Приблизить передатчик помех к РЛС не всегда возможно по соображе-
ниям его безопасности.
Кроме быстро перестраиваемого передатчика станция помех должна располагать
приемником, способным мгновенно измерить несущую частоту радиоимпульсов по-
давляемой РЛС или запомнить радиолокационный сигнал на необходимое время в ус-
ловиях достаточно непростой электромагнитной обстановки.
Таким образом, для увеличения спектральной плотности мощности заградитель-
ной помехи РЛС со скачкообразной перестройкой частоты необходима априорная ин-
формация о параметрах перестройки частоты РЛС. Возможны два метода формирова-
ния прицельно-заградительных маскирующих помех. Один метод основан на исполь-
зовании знания распределения несущих частот РЛС и согласовании энергетического
спектра передатчика помех с энергетическим спектром перестройки сигналов передат-
чика РЛС. Другой метод - это предсказание несущей частоты на основании информа-
ции, полученной от ранее принятых радиолокационных импульсов, и условии, что из-
менение несущей частоты РЛС производится не по случайному закону.
Если в РЛС используется магнетрон с механической перестройкой частоты, то
обычно реализуется синусоидальный закон перестройки частоты. При таком законе пе-
рестройки распределение частот соответствует закону арксинуса. Поэтому вместо рав-
номерного распределения спектральной плотности мощности помехи по диапазону пе-
рестройки можно использовать неравномерное распределение путем концентрации
мощности помехи на краях диапазона перестройки, что позволит увеличить спектраль-
ную плотность мощности помехи в областях, где наблюдается большое число радио-
импульсов. Однако при этом часть радиоимпульсов не будет подвергаться воздействию
помехи и необходимо будет найти компромисс между увеличением спектральной
плотности помехи в частотных областях наибольшей плотности импульсов РЛС и ми-
354
нимально допустимым количеством импульсов, не подавляемых помехой, В данном
случае в станции помех процедура обработки сигналов предусматривает только опре-
деление диапазона перестройки и распределения частотных каналов по диапазону пе-
рестройки. Если перестройка частоты РЛС осуществляется по случайному закону с
равновероятным законом распределения частот, то огибающая интенсивности прини-
маемых сигналов РЛС также будет равномерной. В остальных случаях распределение
будет неравномерным и спектр непрерывной широкополосной помехи должен повто-
рять это распределение с соответствующим превышением по мощности.
Процедуру обработки в станции помех можно усложнить предсказанием излу-
чаемой РЛС частоты путем их экстраполяции по результатам измерения частоты за не-
сколько последовательных периодов облучения. Так, в результате инерционности ме-
ханических устройств перестройки магнетронов прослеживается зависимость частоты
от времени и закон перестройки частоты может быть обнаружен. По полученным дан-
ным на основе теории линейной экстраполяции или характеристик систем ФАПЧ воз-
можно построение алгоритма смещения оценки по результатам расчета скорости пере-
стройки частоты. Если известно удаление станции помех от РЛС и закон перестройки
частоты передатчика РЛС, а задачей является защита ЛА, находящихся от РЛС на бо-
лее близком расстоянии, чем станция помех, то передатчик помех должен начинать
свою работу на частоте У(/О, в момент /1-/0 , где t\ - первый возможный момент излуче-
ния сигнала РЛС, /0 ~ время прохождения радиоимпульсом расстояния между РЛС и
станцией помех. Станция помех в момент Zj+Zo может определить, действительно ли
была выбрана именно частота Если в момент импульс РЛС не поступает, то
передача помехи на этой частоте может быть приостановлена. Непосредственно перед
моментом /1+Д) станция помех должна перекрывать все возможные частоты, излучае-
мые РЛС в интервале времени между б и Zi+Zo. Поэтому минимальная ширина спектра
помехи перед приемом импульса РЛС определяется в момент времени t соотношением:
Д ^ШП -'Углах Jmm.
гдеУтах иУтт - равны максимальному - [t~to<t+to] и минимальному [t<ti+/0] значениям/w).
Точное предсказание времени излучения возможно, если частота повторения им-
пульсов РЛС фиксирована. Если момент передачи импульса РЛС невозможно оценить,
то рабочая полоса передатчика помех должна устанавливаться равной полосе пере-
стройки частоты РЛС за время, соответствующее интервалу прохождения импульса от
РЛС до станции помех. Следует отмстить, что предсказатель и его алгоритм значи-
тельно упрощаются, если величина частотных скачков между последовательными ра-
диолокационными импульсами мала по сравнению с полным диапазоном перестройки.
Как уже отмечалось, возможное число частотных каналов перестройки в РЛС оп-
ределяется диапазоном частотной перестройки и возможной шириной спектра помехи.
Минимальная ширина ЧМ шумовой помехи обычно в 2...3 раза шире полосы пропус-
кания подавляемого приемника. Следовательно, ширина одного частотного канала РЛС
должна быть не уже полосы прицельной помехи. Обычно весь диапазон частотной пе-
рестройки разбивается на частотные каналы одинаковой ширины. В РЛС, использую-
щей для формирования радиолокационного сигнала синтезаторы частоты, скачки час-
тоты могут осуществляться на целое число частотных каналов. Поэтому вместо
сплошного спектра помехи возможно использовать сетку узкополосных помех, совме-
щенных с разбивкой частотных каналов, которая как бы накладывается на область час-
тотных каналов ожидаемого очередного скачка частоты. Такая сетка частот может ге-
355
нерироваться с помощью специальных устройств на основе диодов с накоплением за-
ряда, запускаемых с помощью высокочастотного синусоидального сигнала и генери-
рующих очень узкие импульсы. В частотной-области эти импульсы генерируют сетку
частот, которые являются гармониками входной частоты.
Таким образом, для создания маскирующей помехи РЛС со скачкообразной пере-
стройкой несущей частоты возможны следующие типы передатчиков помех [2, 15]:
передатчики заградительных помех с равномерно или неравномерно распреде-
ленной мощностью в пределах диапазона перестройки в соответствии с распреде-
лением в РЛС используемых частотных каналов;
передатчики прицельно-заградительных помех с приемником мгновенного изме-
рения несущей частоты, способного настраивать центральную частоту спектра
помехи на частоту последнего принятого радиолокационного импульса и адапти-
ровать ширину полосы помехи в соответствии с ожидаемой величиной скачка
частоты РЛС от импульса к импульсу;
передатчики прицельных помех с предсказателем, способным точно оценивать
частоту РЛС в любой момент времени.
Следует отметить существенное влияние скачкообразной перестройки в РЛС не-
сущей частоты на эффективность помех по угловым координатам. Это связано со сни-
жением эффективности прицельной маскирующей помехи по дальности как в случае
самозащиты, так и для прикрытия. В основном это вызвано тем, что дальность до по-
становщика прицельных помех при поимпульсной перестройке частоты РЛС может
быть определена точно. Поэтому снижается эффективность помех прикрытия из зоны
барражирования вне досягаемости огневых средств ПВО, если прикрываемые ЛА на-
ходятся ближе к РЛС, чем сам постановщик помех. Учитывая, что помехи прикрытия в
основном воздействуют через боковые лепестки ДНА РЛС, использование загради-
тельных помех вместо прицельной помехи в данном случае может оказаться трудно
реализуемым на практике. В такой ситуации прицельные помехи прикрытия со скачко-
образной перестройкой частоты могут создаваться или с забрасываемых в район по-
давляемой РЛС передатчиков помех одноразового действия, или с вынесенных вперед
ЛА, например БПЛА. В случае взаимной защиты с помощью мерцающих помех (МП),
создаваемых из двух разнесенных в пространстве ЛА, эффективность которой основана
на отсутствии разрешения ЛА по дальности и угловым координатам, работа РЛС в ре-
жиме скачкообразной перестройки частоты позволяет определить ближайший к РЛС
ЛА. В результате МП из двух точек пространства становится прерывистой помехой из
одной точки пространства, эффективность которой существенно ниже эффективности
МП. При использовании заградительной по частоте помехи, ширина спектра которой
не менее полосы перестройки частоты РЛС, помеха закрывает весь диапазон дально-
стей и разрешение ЛА по дальности становится невозможным, МП будет эффективной,
но для этого потребуется очень существенное увеличение энергетического потенциала
передатчика заградительных помех по сравнению с передатчиком прицельной помехи.
Что касается помех самозащиты, то свою эффективность сохраняют виды угловых
помех, для формирования которых достаточно ретранслировать радиолокационные сиг-
налы без существенной их задержки. К ним можно отнести: инверсные помехи, помехи
на частоте сканирования, поляризационные, а также когерентные помехи. Свою эффек-
тивность сохраняют перенацеливающие помехи, такие как выстреливаемые вперед пас-
сивные и активные ловушки, перенацеливание ракет на подстилающую поверхность.
356
Снизили свою эффективность комбинированные помехи, которые используют уводящие
помехи по дальности для перенацеливания строба сопровождения на удаленные ложные
цели или объекты. При создании имитационных помех РЛС с быстрой перестройкой час-
тоты требуется аппаратура с быстрым наведением помехи по частоте. Ниже представле-
ны некоторые из возможных в этом случае технических решений.
16.3. Генератор ложных целей с использованием набора
узкополосных шумов
В данном случае производится генерирование ложных целей с шумовым спек-
тром, используя набор полосовых фильтров, для того, чтобы определить приблизи-
тельно частоту подавляемого радиолокатора и сформировать шумовой сигнал на соот-
ветствующей частоте [13, 10].
В случае, когда в зондирующих сигналах РЛС содержится информация о частоте
каждого последующего импульса, например, в сигналах командных систем наведения
ракет, ложные цели можно создать рассмотренным методом на всех дальностях. Для
этого достаточно иметь на борту постановщика помех подсистему разведки, способ-
ную расшифровать частотный код в зондируемом сигнале РЛС [10]. Структурная схема
рассматриваемого генератора ложных целей показана на рис. 16.1. В этом генераторе
сигнал подавляемой РЛС принимается и передается на разделитель каналов, ко второ-
му входу которого подсоединяется источник широкополосных шумов во всем частот-
ном диапазоне перестройки частоты подавляемого радиолокатора.
Рис. 16.1. Структурная схема генератора, предназначенного для создания ложных
целей РЛС с быстрой перестройкой частоты (а) и эпюры, поясняющие его работу (б)
357
Поступив на разделитель каналов, входной сигнал затем проходит полосовой
фильтр, настроенный на его частоту, и детектируется. Продетектированный импульс
используется для открывания последовательно включенного высокочастотного стро-
бирующего устройства, в результате чего шумовой сигнал, находящийся в пределах
полосы пропускания фильтра, проходит на импульсный модулятор. Детекторы предна-
значены для детектирования импульсных сигналов и не реагируют на шумы, постоянно
заполняющие фильтры. Высокочастотное стробирующее устройство остается откры-
тым в течение определенного промежутка времени, предшествующего приходу зонди-
рующего импульса радиолокатора и определяемого путем анализа данных радиотехни-
ческой разведки, полученных по радиолокатору, подлежащему подавлению. Этот про-
межуток времени выбирается таким образом, чтобы обеспечивалась высокая вероят-
ность встречи первоначально определенной частоты радиолокационного сигнала (с
точностью до ширины полосы фильтра) при последующем приеме зондирующего сиг-
нала радиолокатора. Верхний предел этого промежутка времени устанавливается так,
чтобы скачкообразная перестройка частоты не вызывала в передатчике помех запоми-
нания и излучения на частотах, которые более не встречаются в программе перестрой-
ки частоты РЛС. Если сигналы радиолокатора повторно заполняют все фильтры, пере-
крывающие диапазон его перестройки частоты, то это не дает выигрыша многоканаль-
ному передатчику помех, поскольку большинство или все частотные полосы фильтров
будут задействованы. В этом случае оказывается более эффективным широкополосный
передатчик помех с фиксированной настройкой, перекрывающий полностью диапазон
перестройки частоты радиолокатора. Однако, если эта частота повторно оказывается
только в пределах отдельных фильтров, перекрывающих диапазон его перестройки, и в
любой момент только часть фильтров будет задействована, то обеспечивается более
высокая мощность помехи по сравнению с мощностью, обеспечиваемой широкополос-
ным передатчиком помех. Детектор на выходе приемной антенны выделяет импульсы
подавляемого радиолокатора и синхронизирует генератор ложных целей по видеочас-
тоте. При желании можно генерировать много ложных целей, при этом каждый лож-
ный импульс используется для модуляции выходного сигнала, снимаемого с выхода
сумматора. В каждый момент формирования ложной цели все фильтры, чьи выходы
находятся в открытом состоянии, будут подавать на выходной сумматор свои шумы с
шириной спектра, равной полосе пропускания фильтра. Иными словами, одновременно
генерируется много ложных целей, похожих на истинные, на всех частотах принятых
сигналов. Выходная мощность усилителя будет делиться между этими сигналами. Та-
ким образом, рассмотренный генератор ложных целей формирует шумовые импульсы,
перекрывающие все рабочие частоты подавляемого радиолокатора без сплошного пе-
рекрытия его частотного диапазона, что является более эффективным энергетически по
сравнению с обычным широкополосным шумовым передатчиком. За счет дискретно-
сти перекрытия рабочего диапазона частот плотность мощности помехи может быть
увеличена в активных участках частотного диапазона подавляемой РЛС [2].
16.4. Генератор ложных целей с устройством запоминания на основе
широкополосного источника радиошума
Для создания имитационных помех необходимы устройства определения несущей
частоты и длительности радиолокационных импульсов, а также устройства настройки
передатчика на несущую частоту подавляемой РЛС. Однако такие устройства опреде-
358
ления и воспроизведения частоты являются достаточно сложными и, главное, не обес-
печивают создание помех РЛС с быстрой перестройкой несущей частоты, например, с
поимпульсной перестройкой. Для исключения необходимости определения несущей
частоты подавляемой РЛС и последующего наведения передатчика помех по частоте
можно применить запоминающее устройство на основе источника широкополосных
шумов в диапазоне СВЧ. Ширина полосы таких шумов должна, по крайней мере, охва-
тывать возможный диапазон перестройки частоты РЛС [14].
На рис. 16.2 приведена структурная схема передатчика имитационных помех с
использованием источника радиошума в качестве устройства запоминания частоты.
Радиолокационный сигнал принимается антенной системой и через антенный пере-
ключатель поступает на вход полосового фильтра, который перекрывает требуемый
диапазон частот.
Рис. 16.2. Структурная схема передатчика имитационных помех
с устройством запоминания на основе широкополосного источника радиошума
Широкополосный приемник, обычно детекторный, служит для приема радиосиг-
налов, прошедших через полосовой фильтр. Видеосигналы с выхода приемника пода-
ются на видеоусилитель и устройство задержки для формирования дезориентирующих
помех РЛС по дальности. С выхода устройства задержки модулирующие видеоимпуль-
сы поступают на модулирующий электрод мощной импульсной ЛБВ, а на ее вход по-
ступает непрерывный шумовой сигнал, спектр которого охватывает всю полосу про-
пускания фильтра преселектора. В результате амплитудной модуляции импульсной
ЛБВ на ее выходе формируются радиоимпульсы широкополосного шума, которые че-
рез антенный переключатель и антенную систему излучаются в направлении на подав-
ляемую РЛС.
16.5. Передатчик имитационных ответных помех
Имитационные помехи являются эффективным средством противодействия одно-
временно многим РЛС на этапе поиска и сопровождения, особенно если они создаются
по боковым лепесткам ДНА подавляемой РЛС. В этом случае даже моноимпульсные
РЛС могут быть эффективно дезориентированы. Воздействие помех через боковые ле-
пестки ДНА РЛС требует существенного повышения энергетического потенциала пе-
редатчиков помех Поэтому наиболее целесообразным, с точки зрения обеспечения
минимальных энергетических потерь, видом помехового сигнала будет сигнал
ретрансляционного типа, сформированный из запомненных копий радиолокационного
сигнала путем соответствующего изменения положения ответного сигнала по задерж-
359
ке, частоте и фазе относительно принимаемого сигнала РЛС. В результате имитируется
ложная цель, имеющая большую или меньшую дальность, которая может перемещать-
ся с заданной скоростью путем введения соответствующих переменных задержек и до-
плеровских сдвигов частоты для согласования ее с параметрами реальной цели.
Передатчик осуществляет создание ретрансляционных помех РЛС с импульсным
или непрерывным излучением в режимах как поиска, так и сопровождения ими цели.
Подавляемые РЛС могут работать на разнесенных несущих частотах, со скачкообраз-
ным по программе или хаотическим изменением несущей частоты, а также с изменени-
ем частоты повторения радиоимпульсов как по случайному, так и по определенному
законам. При этом имитируются ложные цели с большей или меньшей дальностью.
Для различных имитируемых целей осуществляется коррекция их доплеровских частот
для согласования с параметрами движения реальной цели. Точный контроль времен-
ных, частотных и фазовых параметров ретранслируемых сигналов реализуется с помо-
щью преобразования частоты, используя при этом многоспектральный источник гете-
родинирующего сигнала, управляемого ЭВМ [24].
При выполнении тактической операции бортовой приемник анализирует частоту
повторения и длительности импульсов РЛС. направление их прихода (азимут и угол
места), частоту сканирования диаграммы направленности РЛС, излучаемую мощность
передатчика РЛС, наклонную дальность до РЛС, относительный уровень сигналов,
принимаемых по главным и боковым лепесткам ДНА РЛС, скорость и высоту полета
носителя. Эта информация сопоставляется в соответствующем масштабе времени с
информацией, хранящейся в долговременном ЗУ для идентификации и выбора соот-
ветствующей программы ее радиоэлектронного подавления. С учетом ЭПР постанов-
щика помех передатчик помех ретранслирует сигналы подавляемой РЛС, имитируя на
экране ее индикатора отметку цели такую же по интенсивности, как и отметка реаль-
ной цели. Если сигнал помехи представляет собой ретранслированный ранее сигнал
РЛС, то ложная цель появится на меньшем расстоянии, чем расстояние до постанов-
щика помех. Кроме того, можно имитировать движение ложной цели со скоростью,
превышающей скорость постановщика помех. Помеха по угловым координатам созда-
ется за счет воздействия ретранслированного помехового сигнала по боковым лепест-
кам ДНА РЛС (как в режиме поиска, так и сопровождения). В зависимости от произво-
дительности ЭВМ. скважности и параметров РЛС данная система РЭП может автома-
тически ретранслировать импульсные и непрерывные сигналы многих РЛС. Эти воз-
можности реализуются посредством автоматической обработки частотных компонен-
тов радиолокационного сигнала. Для этого применяются уникальные методы мгновен-
ного и автоматического управления несущей частотой излучаемого помехового им-
пульса. *
На рис. 16.3 приведена структурная схема передатчика дезинформируемых помех,
работающего в широком диапазоне частот (от 2 до 9 ГГц).
В передатчике используется широкодиапазонная приемопередающая антенная
система с электронным сканированием, управляемым ЭВМ в пределах широкого те-
лесного угла (до 180°), позволяющего осуществлять прием сигналов РЛС и излучение в
выбранном направлении сигналов помех в режиме разделения во времени. В режиме
приема радиолокационный сигнал пропускается через усилитель со скрещенными по-
лями (как через пассивный прибор) с относительно малыми потерями (0,5 дБ) и по-
дается на многоканальный, в данном случае двухканальный, часто гно-избирательный
360
Рис. 16.3. Структурная схема передатчика дезинформирующих помех
разветвитель для разделения всего частотного диапазона на два диапазона (2...4) ГГц и
(4...9) ГГц. Каждый канал работает на многоканальный переключаемый частотно-
избирательный смеситель на направленных фильтрах, управляемый от ЭВМ. Гетеродин,
управляемый от ЭВМ, генерирует широкополосный сигнал в диапазоне 1...2 ГГц, кото-
рый через переключающую матрицу поступает на частотно-избирательные смесители
обоих каналов преобразования частоты. В качестве генератора сигналов гетеродина мо-
жет служить лампа обратной волны с обратной связью, модулируемая смесью белого
шума и периодического напряжения. Такой метод модуляции позволяет обеспечить луч-
шую равномерность спектра, чем в случае модуляции только шумом. Переключающая
матрица на десять направлений служит для подачи широкополосного сигнала гетеродина
на соответствующие смесители в интервалы времени приема и передачи.
В интервале времени приема одновременно на все смесители приемных каналов
подается сигнал гетеродина, а на смесители восстановления частоты сигнала гетероди-
на не подаются. В интервал времени передачи быстродействующие коммутаторы при-
емных каналов запираются строб-импульсом. Просуммированные выходные сигналы
смесителей приемных каналов в частотном диапазоне 4...7 ГГц поступают на вход
СВЧ-усилителя с коэффициентом усиления 25 дБ, а затем на балансный смеситель,
СВЧ-усилитель. Усилитель целесообразно охватить мгновенной АРУ для нормировки
сигнала на входе балансного смесителя и подавления самовозбуждения. В балансном
смесителе усиленный сигнал диапазона 4...7 ГГц преобразуется с помощью гетероди-
нирующего сигнала диапазона 4,1 ...7,1 ГГц в широкополосный сигнал промежуточной
частоты 100±60 МГц, который после усиления в УПЧ задерживается в линии задержки
с фиксированным запаздыванием (несколько сотен микросекунд) и линии задержки с
переменной величиной запаздывания. Функции обоих гетеродинов может выполнять
один гетеродин, работающий в режиме разделения во времени в соответствии с про-
граммой, задаваемой ЭВМ. Линия задержки с постоянным запаздыванием содержит
361
одну или более секций, которые соответствуют предполагаемому диапазону изменения
частоты повторения радиолокационных импульсов. Линия задержки с переменным за-
паздыванием служит для точной настройки полной задержки и регулировки скорости
изменения задержки ретранслируемого сигнала помехи. Помимо описываемого в дан-
ном случае аналогового типа реализации фиксированной и регулируемой задержек для
формирования задержанного радиоимпульса на промежуточной частоте может быть
использована цифровая система запоминания и воспроизведения радиосигнала, кото-
рая была описана в предыдущем разделе. Информация о частоте повторения радиоло-
кационных импульсов выдается ЭВМ, где интервалы между последовательными им-
пульсами автоматически используются ЭВМ для целей синхронизации и регулировки
запаздывания. ЭВМ выполняет три различные функции. Во-первых, она запоминает
частоту повторения импульсов; во-вторых, синхронизирует все функции приемопере-
датчика; в-третьих, обрабатывает данные о частоте повторения импульсов, поступаю-
щих как регулярно, так и не регулярно, для определения длительности селектирующего
импульса, позволяющего осуществить ретрансляцию определенного числа импульсов
таким образом, что подавляемая РЛС примет по крайней мере хотя бы один из них как
отраженный от реальной цели. Эти импульсы модулируют усилитель со скрещенными
полями, формируя помеховые радиоимпульсы, из которых приемник подавляемой РЛС
отбирает свой, отбрасывая остальные. Это позволяет создавать ответные помехи даже
РЛС, использующим нерегулярные частоты повторения. Регулирование скорости из-
менения запаздывания осуществляется таким образом, чтобы имитировать реальную
скорость сближения цели с РЛС. При этом несущая частота ретранслируемого сигнала
соответственно корректируется путем введения доплеровской поправки, используя
сдвиг частоты с помощью пилообразной фазовой модуляции, осуществляемой в СВЧ-
усилителе по спирали ЛБВ. Период пилообразного колебания регулируется так, чтобы
изменения фазы задержанного СВЧ-сигнала были всегда скорректированы с имити-
руемой скоростью ЛА. Задержанный сигнал ПЧ (100+60 МГц) смешивается в баланс-
ном смесителе с сигналом гетеродина диапазона 4,1...7,1 ГГц, образуя спектральные
компоненты в диапазоне 4...7 ГГц. Этот сигнал подается через направленные частот-
ные фильтры к смесителям восстановления исходной несущей частоты соответствую-
щих каналов. Для восстановления частоты по командам от ЭВМ на соответствующие
гетеродинные входы этих смесителей подаются от переключающей матрицы сигналы
гетеродина диапазона 1...2 ГГц. В результате высокочастотный сигнал на выходе соот-
ветствующего смесителя будет представлять запомненную копию сигнала РЛС, задер-
жанного и скорректированного в соответствии с задаваемым доплеровским сдвигом.
Этот сигнал усиливается в выходном СВЧ-усилителе, модулируемым синхронными
импульсами от ЭВМ, и излучается антенной в направлении на источник излучения.
Для формирования таких помех необходимо в ходе радиоэлектронного конфликта
на борту постановщика помех осуществлять непрерывный анализ радиоэлектронной
обстановки. Анализируются, например, такие параметры, как частота повторения и
длительность радиоимпульсов, частота сканирования антенны, излучаемая мощность
РЛС, наклонная дальность до РЛС. Оценивается величина ЭПР защищаемого самолета
в направлении РЛС, относительная величина уровня мощности сигналов, принятых по
главному и боковым лепесткам ДНА РЛС, направления на РЛС (азимут и угол места).
После сравнения полученной информации о радиоэлектронной обстановке и ее сопос-
тавления с информацией, хранящейся в библиотеке данных о РЭС, выбирается та или
иная программа реагирования на возникшую угрозу.
362
ГЛАВА 17. МЕТОДЫ СОЗДАНИЯ ПОМЕХ РАДИОВЗРЫВАТЕЛЯМ
17.1. Общие сведения о радиовзрывателях
Обычно полагают, что передатчики помех РЛС достаточно эффективны для пре-
дотвращения прицельного пуска зенитных ракет или для создания таких ошибок ра-
диолокационного измерения координат цели, которые достаточны для того, чтобы пе-
рехват цели не состоялся. В этом случае радиоэлектронный конфликт с огневыми сред-
ствами ПВО не достигает такого состояния, когда зенитная ракета сближается непо-
средственно с защищаемым объектом. Тем не менее для полноты картины этого кон-
фликта целесообразно рассмотреть конечную фазу перехвата, когда начинает функ-
ционировать РВ. В связи с этим ниже рассматривается процесс подрыва боевой части
(БЧ) ракеты, основные принципы построения РВ, а также возможные методы создания
им помех с целью их нейтрализации или преждевременного подрыва. Однако это не
означает, что зенитные ракеты обязательно используют РВ, принципы которых описы-
ваются в этом разделе. В данном случае высказывается предположение о возможном
построении РВ, которое может быть использовано, чтобы дать общее представление о
мерах противодействия при их использовании. Тем не менее реалистично полагать, что
РВ содержат некоторые одинаковые элементы функционирования, а основное различие
состоит в конкретных параметрах используемых РВ.
Подрыв БЧ зенитной ракеты в районе точки встречи с целью может быть осуще-
ствлен путем выдачи, например, команды на подрыв БЧ с наземного пункта наведения
ракеты в момент, когда она приблизится к цели на минимальное расстояние, находясь в
пределах области возможного поражения цели. Этот метод подрыва находит широкое
применение в ЗРК с командным методом наведения ракет. Недостаток этого способа
подрыва состоит в том, что при выборе момента подрыва БЧ затруднительно учесть
условия встречи ракеты с целью. Кроме того, применение этого способа возможно при
использовании ненаправленных боевых частей ракеты.
Другой способ подрыва БЧ ЗУР предполагает применение неконтактного взрыва-
теля, автономно осуществляющего подрыв БЧ ракеты у цели. Особенно широкое рас-
пространение в ЗУР получили радиовзрыватели. Если РВ содержит передатчик, облу-
чающий цель, и приемник отраженных от цели сигналов, то такой РВ называется ак-
тивным. Когда передатчик в РВ отсутствует, но есть приемник переотраженных целью
сигналов, создаваемых передатчиком подсвета цели, находящимся на позиции ЗРК, то
такой РВ называется полуактивным. Возможен пассивный режим работы РВ, когда
принимаются радиосигналы, излучаемые аппаратурой, установленной на обстреливае-
мой цели. В качестве такой аппаратуры может быть передатчик помех.
Важной характеристикой РВ является область срабатывания, под которой пони-
мается пространственная область около ракеты, определяемая геометрическим местом
условных центров цели в момент срабатывания РВ. Область срабатывания РВ должна
быть согласована с областью разлета осколков боевой части ракеты, т. е. с областью
возможного поражения цели.
Если излучаемый передатчиком РВ сигнал можно записать следующим образом:
U\ = Л(/) cos[av + ф(/)],
где соо - круговая несущая частота, то возможны следующие типы одноканальных ра-
диовзрывателей:
363
с непрерывным излучением, если A(f) = const и <р(/) = const;
с ЧМ, если = const, а ф(/) = Дсп sin(wmf+<p0) для случая синусоидальной моду-
лирующей функции;
импульсно-доплеровский, если A(f) - импульсная функция, а <p(Z) = const в преде-
лах импульса или коррелирована от импульса к импульсу;
с шумовым сигналом, если A(f) и ф(/) случайные функции.
Некоторые типы активных РВ с указанием режимов их работы приведены в табл. 17.1.
Таблица 17.1. Активные РВ
Тип РВ Режим работы РВ
Сверхрегенеративный Измерение амплитуды отраженного сигнала
Импульсный Измерение дальности
Непрерывного излучения Измерение скорости
Непрерывного излучения с ЧМ Измерение дальности и/или скорости
Импульсно-доплеровский Измерение дальности и/или скорости
Шумовой (включая псевдослучайную фазовую манипуляцию Измерение дальности и/или скорости
В общем виде РВ должен измерять дальность и/или скорость сближения с целью,
а также угловое положение цели для оптимального его срабатывания. Однако из-за
большой сложности аппаратурной реализации всех этих функций обычно ограничива-
ются измерением дальности и/или скорости, а угловое положение области срабатыва-
ния РВ определяется ориентацией и формой ДНА РВ.
Радиовзрыватель самой старой конструкции оснащался сверхрегенератором,
представляющим собой генератор, колебания которого периодически гасятся. Если
принимаемого сигнала нет, то нарастание колебаний происходит от уровня тепловых
шумов, а если сигнал есть, то нарастание амплитуды колебаний происходит быстрее и
среднее значение тока в устройстве возрастает. Поэтому сигналы, отраженные от близ-
ко расположенного объекта, вызовут увеличение среднего значения этого тока, которое
указывает на то, что ракета приближается к отражающему объекту. Основным недос-
татком РВ такого типа является неопределенность дальности подрыва: крупноразмер-
ные объекты вызывают подрыв РВ на больших расстояниях, чем малоразмерные. Это
же справедливо для объектов с большой ЭПР по сравнению с объектами с малой ЭПР.
Импульсные РВ представляют собой миниатюрные импульсные РЛС ближнего
действия, измеряющие дальность до ближайшего объекта, попавшего в главный луч
ДНА РВ. В таком РВ для уменьшения мертвой зоны до минимальной дальности ис-
пользуются радиоимпульсы очень короткой длительности. Принцип действия им-
пульсного РВ заключается в сравнении задержки отраженного от цели сигнала относи-
тельно излучаемого с заранее выставленной задержкой строб-импульсов приемника.
Поэтому положение цели относительно ракеты в момент срабатывания РВ определяет-
ся величиной задержки и длительностью строб-импульсов приемного устройства, а
также формой ДНА РВ. Подрыв БЧ ракеты происходит при вхождении цели в область
ДНА РВ и совпадении по времени импульсов, отраженных от цели со строб-
импульсами, определяющими установленную дальность до цели. В силу конечной дли-
тельности строб-импульсов срабатывание РВ происходит в некотором диапазоне даль-
ностей.
364
Для получения максимальной эффективности боевого снаряжения ракеты необ-
ходимо согласование РВ и БЧ ракеты. Особенно это важно в случае применения БЧ,
разлет осколков которой концентрируется в сравнительно узком секторе, ориентиро-
ванном в перпендикулярной плоскости ракеты в сторону цели. В данном случае необ-
ходимо подрыв БЧ осуществить так, чтобы цель оказалась в этом секторе направленно-
го разлета осколков.
Известно несколько способов такого согласования:
выбор угла наклона ДНА к продольной оси ракеты;
изменение угла наклона статической области разлета осколков в зависимости от
скорости цели и условий стрельбы;
выбор времени задержки между обнаружением цели и подачей команды на под-
рыв БЧ;
выбор момента срабатывания РВ с помощью доплеровских измерителей скорости.
При первом способе угол наклона пространственной ДНА РВ относительно про-
дольной оси должен обеспечивать совпадение зоны возможного поражения цели с об-
ластью срабатывания РВ с точностью, соответствующей задержке подрыва БЧ ракеты
относительно момента поступления на вход приемника сигнала от цели. Учитывая, что
условия стрельбы могут быть различными, угол наклона ДНА РВ должен определяться
конкретной величиной и направлением вектора относительной скорости ракеты, т.е.
скорости цели, скорости ракеты и угла встречи ракеты с целью. Поэтому обычно пре-
дусматривается несколько фиксированных значений углов наклона ДНА, позволяющих
охватить весь возможный диапазон изменений условий стрельбы, например, скоростей
полета перехватываемых целей.
При втором способе изменение угла наклона статической области разлета оскол-
ков БЧ осуществляется путем выбора соответствующей точки инициирования БЧ, по-
зволяющей совместить области возможного поражения цели с заданной областью сра-
батывания РВ.
При третьем способе оп-
тимальное согласование РВ и
БЧ осуществляется путем вы-
бора задержки между момен-
том обнаружения цели в ДНА
РВ и моментом инициирова-
ния БЧ [25]. Необходимая за-
держка между обнаружением
БЧ ракеты
определен-
учитываю-
перехвата
В простейшем виде эта задержка может быть определена как:
Рис. 17.1. Согласование боевого снаряжения ракеты
с областью срабатывания РВ в процессе перехвата
цели и подрывом
рассчитывается по
ному алгоритму,
щему параметры
цели (рис. 17.1).
С = mlVx [tg(a+0)-tg0],
где т - величина промаха; V\ - скорость цели относительно ракеты; а - угол между
осью сектора разлета осколков БЧ и направлением ДНА РВ; 0 - угол между направле-
нием полета ракеты и цели.
365
Рис. 17.2. Изменение уровня мощности (б)
и доплеровской частоты (в) отраженного от цели
сигнала РВ при сближении ракеты с целью
Более точный алгоритм расчета точки перехвата цели может быть получен, если
параметры перехвата вводятся от ГСН ракеты.
При четвертом способе согласования используется тот факт, что в районе точки
встречи можно полагать скорость сближения ракеты с целью постоянной и доплеров-
ская частота отраженного сигнала зависит только от величины угла между вектором
относительной скорости и линией ракета-цель. В результате момент срабатывания РВ
зависит от величины угла между вектором относительной скорости и линией ракета-
цель, т. е. срабатывание РВ осуществляется при напряжении, пропорциональном доп-
Доплеровские взрыватели с не-
прерывным излучением производят
измерение доплеровской скорости
сближения ракеты с целью. В точке
максимального сближения ракеты с
целью доплеровский сдвиг равен нулю.
На рис. 17.2 показана ситуация, кото-
рая складывается для РВ ракеты при ее
сближении с целью.
Показанная ДНА РВ является се-
чением полной ДН, представляющей
тело вращения этого сечения вокруг
продольной оси ракеты. Обычно ДНА
РВ согласована с зоной поражения БЧ
ракеты. Как правило, при подрыве БЧ
ракеты осколки рассеиваются в пределах некоторого конуса по направлению движе-
ния. Такое концентрированное рассеивание осколочного материала увеличивает пора-
жающее действие ракеты при попадании цели в конус рассеивания. Передатчик и при-
емник РВ соединены с этой антенной. Когда отраженный от цели сигнал передатчика
РВ обнаруживается в пределах главного луча ДНА, то подрыв БЧ будет приводить к
поражению цели. В приемнике РВ устанавливается определенный порог срабатывания.
Когда ракета приближается к местоположению цели, амплитуда сигнала на выходе
приемника РВ отображает диаграмму отраженного сигнала, которая соответствует
ДНА ракеты. Как показано на рис. 17.2, отраженный сигнал только тогда превышает
установленный порог, когда цель находится в пределах главного луча ДНА РВ. Таким
образом, подрыв БЧ имеет место только тогда, когда цель находится в главном луче
ДНА РВ, как это и требуется. Так как цель также находится в зоне поражения БЧ раке-
ты, то может произойти ес разрушение.
Для более надежного подрыва БЧ ракеты, кроме установки в приемнике порога
срабатывания при излучении передатчиком когерентных колебаний можно использо-
вать эффект резкого уменьшения доплеровской частоты при пролете цели ракетой.
Как показано на рис. 17.2, доплеровская частота сигнала имеет положительный
знак, а после пролета цели - отрицательный, т. е. проходит через нуль в момент проле-
та цели. Нуль доплеровской частоты соответствует моменту наибольшего приближе-
ния ракеты к цели. Таким образом, доплеровская частота отраженного от цели сигнала
может служить надежным критерием близости ракеты к цели. Характер изменения до-
плеровской частоты зависит от величины промаха ракеты относительно цели. Если ве-
366
личина промаха велика, то по мере сближения с целью доплеровская частота уменьша-
ется постепенно. Когда величина промаха мала, доплеровская частота резко уменьша-
ется до нуля. Если выбрано определенное значение доплеровской частоты, при кото-
ром происходит срабатывание РВ, то угол между траекторией полета ракеты и направ-
лением на цель при заданной относительной скорости не зависит от величины промаха.
Однако этот угол возрастает при увеличении относительной скорости сближения и при
заданной величине доплеровской частоты. Таким образом, БЧ подорвется на большем
удалении (малый угол) от удаляющейся цели (невысокая относительная скорость) и на
близком расстоянии (большой угол) от приближающейся цели (высокая относительная
скорость). Если скорость ракеты значительно превышает скорость цели, то относи-
тельная скорость ракеты и цели влияет на дальность срабатывания РВ в меньшей сте-
пени. Для повышения эффективности РВ в его логику работы может вводиться началь-
ная информация о параметрах сближения. Информация о доплеровской частоте сбли-
жения ракеты с целью может быть использована самостоятельно для подрыва БЧ или
комбинироваться с информацией об амплитуде отраженного сигнала для повышения
надежности срабатывания РВ, когда цель находится в зоне поражения БЧ.
Радиовзрыватель непрерывного излучения с ЧМ, импульсно-доплеровские и
шумовые РВ могут работать в режиме измерения дальности, скорости или дальности и
скорости одновременно. В РВ с ЧМ закон частотной модуляции может быть линейным
(пилообразным) или синусоидальным, также возможны более сложные виды ЧМ и
ФМ. Вследствие запаздывания отраженного сигнала от цели его частота отличается от
частоты излученного сигнала. Дальность до цели связана с мгновенной разностью час-
тот излученного и принятого сигналов. Принцип действия РВ такого типа основан на
сравнении измеренных мгновенных значений разностной частоты с заранее заданной
частотой, характеризующей дальность срабатывания РВ.
Радиовзрыватель должен срабатывать только вблизи цели. Для обеспечения этих
условий в нем предусматривается несколько ступеней предохранения и РВ не взводит-
ся до тех пор, пока он не приблизится к цели. Эта мера необходима для предотвраще-
ния срабатывания РВ от объектов, расположенных поблизости от пусковой установки в
момент пуска или от перегрузки при старте. Снятие последней ступени предохранения
РВ может быть произведено через установленный промежуток времени после пуска
или по команде, передаваемой по радиолинии. Но для этого необходима информация о
дальности до цели. Если такой информации нет, то снятие ступени предохранения мо-
жет осуществляться после пуска и набора высоты. Поэтому помехи до снятия послед-
ней ступени предохранения не будут оказывать на РВ никакого действия. Эти меры
также ограничивают время, предусматриваемое для формирования помехи. Разведка
параметров сигнала РВ затрудняется не только их коротким временем работы и малы-
ми дальностями действия, но и малой выходной мощностью передатчика РВ.
В США предпринимались серьезные усилия для определения частотного диапа-
зона и вида сигнала РВ, использующихся в ЗА Советской Армии. Для этой цели в на-
чале 1960-х годов была разработана сложная многосенсорная система мониторинга из-
лучений от подрываемых снарядов ЗА на основе быстросканируемых приемников
TLR-9 и TLR-10, акустических и ПК датчиков, а также регистрирующей аппаратуры.
Система мониторинга была размещена около города ДаМе на Балтийском побережье и
вела день за днем наблюдение за полигоном Советской Армии в Вустроу для сбора
информации о РВ ЗА. Путем корреляции моментов появления и исчезновения излуче-
367
ния от РВ при подрыве зенитных снарядов удалось определить частотный диапазон и
вид сигнала РВ, используемого в снарядах ЗА
Уничтожение двух самолетов-шпионов У-2 над территориями СССР и Кубы при-
вело к резкому увеличению в США активности в области поиска путей противодейст-
вия РВ, используемых в ЗРК СА-2, путем преждевременного подрыва БЧ ракеты на
безопасном расстоянии от самолета. Однако прежде чем разработать передатчик помех
нужно было вскрыть частотный диапазон и характеристики сигнала подрыва. В отли-
чие от рассмотренного выше случая разведки параметров РВ ЗА решение этой пробле-
мы оказалось более сложным из-за скоротечности процесса пуска и подрыва ракеты.
Практически оставалась одна возможность - это разместить разведприемник внутри
зоны поражения. Для решения этой проблемы было предложено применить модерни-
зированный беспилотник Firebee с аппаратурой приема и ретрансляции радиосигналов,
а также радиоимитации крупноразмерного ЛА для того, чтобы спровоцировать пуск
ЗРК Беспилотник наводился на Кубинскую позицию ЗРК с помошью радиолинии
управления. Ожидалось, что после пуска ракеты по мерс приближения ракеты к беспи-
лотнику, приемная система будет принимать сигналы подрыва и ретранслировать их на
приемные пункты кораблей ВМС и авиации США. Внезапное прекращение приема
ретранслированных сигналов должно указывать на то, что это были сигналы подрыва
БЧ ракеты. Однако Кубинский кризис завершился раньше, чем беспилотники были го-
товы к оперативному применению [26].
17.2. Основные способы РЭП радиовзрывателей
Целью создания помех РВ является обеспечение условий, при которых происхо-
дит либо преждевременный подрыв РВ на расстояниях, превышающих дальность по-
ражения цели осколками БЧ ракеты, либо срабатывания РВ вообще не происходит при
пролете ракетой цели (нейтрализация РВ) [27]. Способы, которые могут быть исполь-
зованы для создания помех активным РВ и вызывать его преждевременный подрыв,
Цель
а)
6)
показаны на рис. 17.3. Для создания таких условий необходимо ретранслировать сиг-
нал или создавать шумы на несущей частоте передатчика РВ или переизлучать сигнал с
амплитудой, которая компенсирует
потери из-за воздействия через боко-
вые лепестки ДНА, когда ракета еще
удалена от цели. При этом передат-
чик помех может находиться как на
защищаемой цели, так и на другом
ЛА, пространственно не совмещен-
ном с ним. Последний случай пред-
почтителен, так как в этом случае
весьма вероятна ситуация, когда
сигнал помехи с вынесенного объек-
та попадет в главный луч ДНА РВ и
Сближение
Помеха у лданщ
Рис. 17.3. Изменение уровня сигнала помехи
на входе приемника РВ (б) и доплеровской частоты
(в) при сближении ракеты с целью
вызовет превышение установленно-
го амплитудного порога срабатыва-
ния РВ.
368
В то же время, наряду с переизлученисм сигнала передатчика РВ, в ретрансли-
руемый сигнал можно вносить дополнительный сдвиг частоты в сторону уменьшения
доплеровской частоты до нулевой с целью имитации пролета цели ракетой, вызывая
тем самым преждевременный подрыв БЧ.
Таким образом, если РВ использует оба признака для своего срабатывания (ам-
плитудный и доплеровский), то с помощью ретранслятора, обеспечивающего необхо-
димое усиление принимаемого сигнала передатчика РВ и внесение соответствующего
доплеровского сдвига, возможно вызвать его преждевременное срабатывание. Если
сдвигать частоту ретранслируемого сигнала таким образом, чтобы пересечение нуле-
вой доплеровской частоты не происходило при пролете ракетой цели, то можно пре-
дотвратить срабатывание РВ, т. е. вызвать его нейтрализацию. Однако при этом нужно
обеспечить условия для необнаружения истинной доплеровской частоты.
Имитирование доплеровского сдвига может быть осуществлено, например, по-
средством модуляции переизлучаемого ретранслятором сигнала одной меняющейся
или несколькими фиксированными частотами. Каждая модулирующая частота соответ-
ствующих амплитудных модуляций образует от двух (верхняя и нижняя) до несколь-
ких пар боковых полос, соответствующих широкополосной ЧМ. Другой метод - пило-
образная ФМ применяется для сдвига частоты выходного сигнала ретранслятора на за-
данную величину вверх или вниз. В результате на выходе такого модулятора можно
получить спектр с одной доминирующей составляющей и сравнительно малого уровня
составляющими на несущей и боковых частотах. Количество составляющих спектра,
которое нужно использовать для создания наиболее эффективной помехи доплеров-
скому РВ, зависит от особенностей построения РВ.
Исследование траектории полета зенитных ракет показывает, что эффективная
постановка помех РВ имеет место при поступлении сигнала помехи по боковым лепе-
сткам ДН антенны РВ. В связи с этим уровень мощности передатчика помех, необхо-
димый для преждевременного подрыва РВ за пределами зоны эффективного действия
боевой части ракеты, должен достигать 100 Вт и более, а коэффициент усиления
ретранслятора должен превышать 100 дБ. При недостаточной величине развязки между
передающей и приемной антеннами ретранслятора, когда коэффициент усиления
ретранслятора превышает ее, образуется положительная обратная связь и возникает ге-
нерация, блокирующая псреизлучение непрерывного сигнала РВ. Для предотвращения
обратной связи применяется метод коммутации коэффициента усиления ретранслято-
ра, в основе которого лежит задержка СВЧ-сигнала в цепи ретранслятора, которая мо-
жет быть естественной, например, при применении в тракте ретрансляции ЛБВ, или
специально вводимой.
Если длительность открытого состояния коммутатора на выходе приемной антенны
не превышает задержку в
ретрансляторе, а интервал за-
крытого состояния равен или
превышает задержку, то гене-
рация в ретрансляторе не воз-
никает.
На рис. 17.4 показана
структурная схема псредатчи-
Рис. 17.4. Структурная схема передатчика помех
доплеровским радиовзрывателям
ка помех РВ.
369
В данном случае ЛБВ используется не только для усиления сигналов, но и для
ФМ пилообразным сигналом с целью имитации изменения доплеровской частоты, ха-
рактерного для пролета ракеты на минимальном расстоянии от самолета.
Потенциально наиболее эффективным средством против РВ всех типов являются
ловушки (активные или пассивные). Радиовзрыватель будет реагировать на такую ло-
вушку, имитирующую ЭПР цели, как на реальную цель. Располагая ловушки между
целью и атакующей ракетой можно обеспечить надежную защиту ЛА. В качестве ак-
тивных ловушек могут использоваться выстреливаемые в направлении приближаю-
щейся ракеты передатчики помех одноразового действия, например, ретрансляционно-
го типа. Полный коэффициент усиления выходной мощности ретранслятора ловушки
определяется имитируемой ЭПР, энергопотенциалом передатчика РВ, чувствительно-
стью его приемника, уровнем боковых лепестков ДН антенны РВ, через которые на ло-
вушке принимается сигнал РВ и через которые сигнал помехи воздействует на РВ.
Для случая РЭП активного РВ полный коэффициент усиления ретранслятора ло-
вушек равен
Д-полн.ретр.—(47Ю/А-) Аопер Л^пр,
где пер и Nq rip - уровень боковых лепестков ДН передающей и приемной антенн РВ;
ап- пороговое отношение помеха-сигнал на входе приемника РВ; о - ЭПР защищаемо-
го ЛА; А - длина волны.
Так как ловушка с ретранслятором на борту находится между защищаемым ЛА и
приближающейся зенитной ракетой, то уровень сигнала ретрансляционной помехи на
входе его приемника РВ по мере сближения возрастает, достигая максимума, когда до-
плеровская частота сигнала помехи приближается к нулю. Если РВ к этому моменту
был взведен, то произойдет его срабатывание.
Несмотря на кажущуюся простоту ретрансляционного способа РЭП активным РВ,
его реализация наталкивается на необходимость решения таких проблем, как построе-
ние многокаскадных усилителей с очень высоким коэффициентом усиления и обеспе-
чения их устойчивости при недостаточной развязке между приемной и передающей ан-
теннами на ловушке.
Активные ловушки могут успешно применяться также для преждевременного
срабатывания полуактивных РВ, работающих по отраженному от цели сигналу РЛС
подсвета. Если выполняется условие, что ловушка находится одновременно в главном
луче ДНА РЛС подсвета и ГСН ракеты, то существенно снижаются требования к ко-
эффициенту усиления ретранслятора, так как АОПер= 1.
Наряду с ловушками ретрансляционного типа могут использоваться также ло-
вушки с передатчиками помех генераторного типа, нарушающими селекцию цели по
дальности и/или скорости, в результате чего РВ (ГСН) переходят в режим работы по
сигналу маскирующей помехи.
370
Литература к ЧАСТИ ЧЕТВЕРТОЙ
\. Диксон Р.К. Широкополосные сигналы. - М.: Связь, 1975.
2. Фомичев К.И., Юдин Л.М. Электронное подавление радиолокационных систем со сложными сиг-
налами. - Радиоэлектроника (состояние и тенденции развития). В III т. - НИИЭИР, 1992, с. 5-55.
3. Van Brunt, L.B. Pulse-compression radar: ECM and ECCM. - Defense Electronics, 1984, v. 16, N 10,
pp. 170-185.
4. Exotic signal detection and processing. - MSN, 1979, v. 9, N 8, p. 122.
5. Тузов Г.И. и др. Помехозащищенность радиосистем со сложными сигналами. - М.: Радио и
связь. 1985.
6. Kenneth, К. Hanning the Prowler. — Defense Electronics, 1986, v. 18, N 10, pp. 165, 166, 168, 170,172.
7. Electronic Warfare, 1975, v. 7, N 4, pp. 69-73.
8. Johnson, G.R. Jamming Low Power Spread Spectrum Radar. - Electronic Warfare, 1977, v. 9, N 5,
pp. 103, 104, 106.
9. Douglas. A. Hill. Laboratory Performance of Spread Spectrum Detectors. - Milcom 94. USA, 1994,
pp. 785-789.
10. Van Brunt, L.B. Applied ECM: Encyclopedia of ECCM Tactics. - E.W. Engineering Inc. USA,
1982, v. 2.
11. Deisenroth, C. W. Analid Countenncasures Memories: Key to Delay and replication. — The Interna-
tional Countermeasures Handbook, 1986, pp. 297-302.
12. Патент 4072949 (США).
13. Van Brunt, L.NR. Applied ECM. - E.W. Engineering Inc. USA, 1978, v. 1.
14. Патент 325 877 (США).
15. Bergkvist. В. Jamming frequency agile radars. - Defense Electronics, 1980, v. 12, N 1, pp. 75-78, 81-83.
16. Sundaran, G.S. Modern Airborne Electronic Warfare. New Concepts, Programs and Products pro-
literate. - International Defense Review, 1985, v. 18, N 2, pp. 169-177.
17. Grant, P.M. Electronic Warfare: Playing the Complex Chessgame. - Microwave System News,
1982, v. 12, N 9, pp. 87-127.
18. Патент 3947827 (США).
19. Патент 3991409 (США).
20. Moore, R.A., Marinaccio, R.E. Advanced EW System Strategies and Supporting Technologies. -
Microwave J., 1986, v. 29, N 2, pp. 26, 28, 30, 32-34, 38, 41.
21. Hoffman, B., Apts, D. Gallium Arsenide Enhances Digital Signal processing in EW. - Defense Elec-
tronic, 1986, v. 18, N 2, pp. 48, 49, 51, 53, 54, 56.
22. New frequency agile magnetron approaches 495-2 electronic tuning performance. - Microwave J.
Feb., 1985, pp. 178-179.
23. Harrigan, John, Martin. John R. A dithevable frequency coaxial magnetron having supervior fre-
quency tracking capabilities. - Microwave J., 1967, v. 10, N 4, pp. 16-17.
24. Патент 3720952 (США).
25. Missile Proximity Fuzes from Tomson - CSF. - International Defense Review, 1984, v. 1, N 17,
pp. 85-87.
27. Патент 4121214 (США).
26. Price, A. The histoiy of US Electronic Warfare, 1989, v. 2, p. 286, 287, 295.
371
ЧАСТЬ ПЯТАЯ
Тенденции и перспективы развития средств
радиоэлектронного подавления
ГЛАВА 18. РАДИОЭЛЕКТРОННОЕ ПОДАВЛЕНИЕ СИСТЕМ
ВОЕННОГО НАЗНАЧЕНИЯ С ПОМОЩЬЮ КОМПЬЮТЕРНЫХ
ВИРУСОВ И ЭЛЕКТРОМАГНИТНОГО ОРУЖИЯ
18.1. Общие понятия о компьютерных вирусах и их основные
свойства
Широкое внедрение в военные электронные системы компьютерной техники, в том
числе в системы ПВО, привело к появлению нового типа РЭП, основанного на использо-
вании компьютерных вирусов, которые можно назвать компьютерным РЭП (КРЭП).
Сущностью данного типа РЭП являются разработки и введение радиоэлектронным спо-
собом в подавляемые системы таких программ (вирусов), которые бы нарушали работу
компьютерных систем, искажали рабочие программы таким образом, что получаемые
при этом результаты носили бы ложную информацию или приводили к разрушению уже
верной информации. События последних лет убедительно показали, что преднамеренное
использование компьютерных вирусов не только возможно в принципе, но и может при-
вести к полному нарушению работы вычислительных сетей и систем [1, 2]. Например,
имеются сообщения, что путем использования вирусной технологии удалось вывести из
строя комплексы ПВО Ирака во время операции “Буря в пустыне”. Заражение компью-
терным вирусом привело к блокировке нормальной работы системы ПВО, что позволило
американской авиации практически беспрепятственно проникать в воздушное простран-
ство Ирака и успешно выполнять боевые операции [3,4].
В соответствии с этим Управление НИОКР в области связи и радиоэлектроники
Армии США планирует проведение ряда исследований возможностей использования
компьютерного вируса как боевого средства, способного нарушить работу в системе
связи, а также исследование методов дистанционной имплантации компьютерного ви-
руса с помощью аппаратуры тактической радиосвязи [5].
Основными характеристиками программ-вирусов являются: компактность, уни-
версальность, способность к распространению, эффективность, многофункциональ-
ность и устойчивость [1].
Компактность программ-вирусов способствует их распространению на другие
программы и усложняет их обнаружение.
Универсальность программ-вирусов заключается в том, что они способны воздей-
ствовать на различные прикладные программы. Во многих случаях при этом даже не
требуется информация об инфицируемой программе.
Способность к распространению является неотъемлемой особенностью программ-
вирусов. С помощью инфицированной им программы он может распространяться на
другие программы и файлы, составляющие информационную систему. В этом смысле
компьютерный вирус ведет себя подобно биологическому вирусу.
372
Эффективность программ-вирусов во многих случаях оказалась чрезвычайно вы-
сокой. В результате их действия наступала полная потеря информации, выход из строя
программ и даже операционных систем.
Многофункциональность проявляется в разнообразии функциональных особенно-
стей программ-вирусов. Некоторые компьютерные вирусы просто поражают приклад-
ные программы, не затрагивая файлов данных и функций операционных систем. Дру-
гие могут быть нацелены на нанесение ущерба или уничтожение файлов. Эффектив-
ность программ-вирусов повышается вследствие того, что они могут себя не проявлять
до определенного момента времени (наступления определенного события). Это позво-
ляет вирусу выиграть время для распространения, пока пользователь пораженной сис-
темы не обнаружит его присутствия.
Устойчивость программы-вируса состоит в том, что даже после обнаружения уст-
ранение его является сложной проблемой, поскольку он способен повторно распро-
страняться по системе от единственной инфицированной копии.
Основное различие между традиционным РЭП и КРЭП в том, что РЭП воздейст-
вует на элементы приемника подавляемой системы, а КРЭП - на процессоры данной
системы. По своей специфике КРЭП больше всего подходит для дезорганизации такти-
ческих операций и в отличие от РЭП обладает свойством продолжения воздействия на
подавляемую систему после передачи сигнала помехи. При этом принципы создания
КРЭП открывают возможность воздействовать на объекты заблаговременно, тем самым
устраняя элемент неопределенности при разработке оперативно-тактических планов.
Компьютерный вирус обладает свойством инфекционности и способен распро-
страняться от системы к системе. После первоначальной имплантации эффект действия
КРЭП распространяется на широкий круг пользователей, что позволяет осушествля гь
непрямое воздействие на интересующие объекты, т. е. посредством воздействия на
другие более доступные и менее защищенные объекты, входящие в единую информа-
ционную систему. Программа-вирус может быть сориентирована на поиск конкретных
систем, в которых она может находиться в пассивном состоянии до момента приведе-
ния в действие. Воздействие вируса может проявляться в различных формах: незамет-
ном изменении функций пораженной системы, полном выходе системы из строя или в
уничтожении файлов данных и программ.
Реализация КРЭП может быть скрытной. Вирусы могут распространяться и пора-
жать систему незаметно для пользователей. Нс зная о воздействии помехи, объект по-
давления не может принять своевременные меры по защите, т. е. внести изменения в
программу работы или оказать противодействие.
18.2. Реализуемость компьютерных РЭП
Для того чтобы являться эффективным средством РЭБ, КРЭП должно быть на-
дежным и целенаправленным. При наличии априорной информации об объекте подав-
ления программа-вирус может вводиться в него заранее. Вирус воздействует на цифро-
вые процессоры, распространяется и ожидает команды, чтобы стать активным. При
этом важное значение приобретает получение информации о том, что вирус достиг
места назначения и готов к действию. Такую информацию можно получить на основа-
нии наблюдения за работой линий передачи или по получении запрограммированных
сообщений, предусмотренных в программе-вирусе.
Реализуемость КРЭП облегчается благодаря тенденциям развития радиоэлек-
тронных систем, связанных с возрастающим использованием’: распределенной цифро-
373
вой обработки сигналов и данных; встроенных ЭВМ с изменяемой программой; сете-
вых систем связи; стандартных ЭВМ; стандартного программного обеспечения; стан-
дартных линий передачи данных и форматов сообщений.
Все это диктуется снижением стоимости и упрощением техобслуживания слож-
ных систем, повышением их быстродействия и информативности. В то же время воз-
растают возможности КРЭП, упрощается ввод программы-вируса.
Эффективность КРЭП зависит от способности вируса распространяться и инфи-
цировать систему. В большинстве случаев в современных системах боевого управле-
ния, связи и разведки предусмотрены меры зашиты от вмешательства противника. Од-
нако специфика КРЭП позволяет во многих случаях обойти эти меры.
Существует четыре типа ввода вируса в подавляемую систему: непосредствен-
ный, ©посредственный, прямой и непрямой.
Непосредственный ввод предполагает использование среды, определяющей
функционирование подавляемой системы. Например, если подавляемой системой яв-
ляется радиостанция тактического назначения, то при вводе вируса используются ра-
диосигналы, поступающие непосредственно в антенну и приемное устройство. В сис-
теме боевого управления, связи и разведки вирус вводится непосредственно в прием-
ное устройство по линии управления и передачи данных в надежде, что приемник от-
работает и, следовательно, имплантирует его. В результате распространения он будет
инфицировать все системы, связанные с пораженной системой. При этом достаточно
один раз преодолеть помехозащищенность системы в какой-то момент времени, чтобы
потом действовать в ней независимо от дальнейших изменений режимов работы, уве-
личивающих помехозащищенность. Как известно, при реализации традиционного РЭП
эффективность обеспечивается только в момент преодоления помехозащищенности
приемника. Учитывая изложенное, КРЭП следует нацеливать на самое слабое звено в
системе помехозащищенности поражаемого объекта.
Опосредственный ввод вируса в систему предполагает использование иной сре-
ды, чем та, которая определяет ее назначение. Так, например, для ввода вируса могут
быть использованы системы питания, стабилизации, терморегулирования РЭА, двига-
тельные системы, прямо или косвенно электрически связанные с системой-объектом
подавления.
Прямой ввод вируса предусматривает непосредственное воздействие на интере-
сующий процессор. Он может быть осуществлен, например, путем непрерывной пере-
дачи программы-вируса во время приема подавляемым объектом нормальной переда-
чи. Но при этом можно столкнуться с эффективной помехозащитой объекта.
Непрямой ввод может оказаться более предпочтительным. Он рассчитан на свой-
ства инерционности вируса и предполагает использование для ввода программы-
вируса наиболее уязвимого объекта, от которого вирус должен распространяться к це-
левому объекту. При этом можно применять инструменты материально-технического
обслуживания и диагностики состояния интересуемой системы. Инфицируя контроль-
ный процессор вирусом, можно поразить другие процессоры, входящие в данную сис-
тему, и тем самым достичь цели противодействия. Этот метод отличается простотой и
высокой эффективностью, поскольку очень трудно предусмотреть меры, препятст-
вующие распространению инфицированного вируса.
Существуют различные варианты применения КРЭП: "троянского коня"; вынуж-
денного карантина; перегрузки (насыщения); зондирования; целевого поражения.
374
Вариант "троянского коня" предусматривает ввод вируса в пораженную систему и
обеспечение пассивного его состояния до наступления установленного события или
момента времени. Достоинство состоит в том, что вирус бездействует определенное
время, не вызывая никаких подозрений.
Вариант вынужденного карантина предусматривает открытое внедрение в систе-
му. В результате пораженный узел (устройство) отключается оператором из опасения
распространения инфекции на другие узлы, что приводит к снижению эффективности
работы подавляемой системы.
Вариант перегрузки предусматривает многократное дублирование программы-
вируса в целях снижения пропускной способности и быстродействия системы.
Вариант зондирования предусматривает ввод компьютерного вируса в есть с це-
лью вывода из строя определенного файла, системы или другого объекта, В этом слу-
чае вирус распространяется и самоуничтожается во всех пунктах, пока не найдет целе-
вой объект. После вывода из строя последнего программа-вирус самоуничтожается
окончательно, не оставляя следов.
18.3. Защита от компьютерных РЭП
Проблема зашиты от КРЭП более серьезная, чем защита от РЭБ, поскольку связа-
на не только с зашитой самого объекта, но и с защитой всех связанных с ним объектов
Последнее обусловливается способностью вируса распространяться от узла к узлу и от
объекта к объекту. Стратегия защиты от КРЭП предусматривает:
воспрещение доступа, включающее в себя ряд мер, препятствующих проникнове-
нию вируса в систему;
обнаружение вируса, если вирус проник в систему;
локализацию вируса, сводящуюся к принятию мер для предотвращения его рас-
пространения;
уничтожение (удаление) вируса до того, как он сможет нанести ущерб;
восстановление файлов данных, если вирусу удалось нанести им значительный
ущерб, используя для этого резервные копии файлов;
оперативное резервирование, предусматривающее варианты операций без вывода
из строя системы.
Реализация данной стратегии защиты, естественно, требует принятия соответст-
вующих мер в отношении аппаратурного и программного обеспечения, а также выпол-
нения условий строгого соблюдения правил эксплуатации и режимов работы.
В качестве аппаратурных мер защиты от КРЭП можно рекомендовать компакт-
диски и другие типы ЗУ, воспрещающие доступ к выполняемым программам; электри-
ческую изоляцию систем для предотвращения распространения вируса; использование
в комплексе процессоров различных типов.
В качестве программных мер защиты от КРЭП рекомендуется:
запрет доступа к центральным процессорным устройствам и программам, выпол-
няющим несанкционированные функции;
слежение за выполнением программ с целью обнаружения вируса;
объединение операционных систем для предотвращения распространения виру-
сов. В этом случае вирус должен быть согласован с языком каждой системы;
использование антивирусных программ для ликвидации вирусов в инфицирован-
ных программах;
375
перегрузка программного обеспечения с целью дезинфекции. Инфицированные
программы и файлы стираются и восстанавливаются по чистым копиям.
При эксплуатации в целях защиты от КРЭП необходимо:
обеспечение строгого режима радиомаскировки;
наблюдение за работой системы с целью обнаружения вируса;
разработка и соблюдение правил эксплуатации системы, имеющих целью огра-
ничить распространение вирусов в том случае, если им удалось проникнуть в
систему;
постановка в карантин инфицированных объектов для предотвращения распро-
странения вирусов;
разработка резервных планов на случай, если вирус нанесет серьезный ущерб.
Поскольку вирусы могут затаиваться среди миллионов строк рабочей программы
и проявлять себя в решающие моменты, меры защиты от них должны приниматься до
того, как противник получит возможность их использовать [1].
18.4. Общие понятия об электромагнитном оружии
Сущность электромагнитного оружия (ЭМО) заключается в создании кратковре-
менных электромагнитных излучений большой мощности с целью воздействия на ра-
диоэлектронные устройства и выведенид их из строя. Эффект действия такого оружия
обусловливается тем, что современные радиоэлектронные устройства насыщены полу-
проводниковыми приборами и элементами, весьма чувствительными к энергетическим
перегрузкам. Поток электромагнитной энергии достаточно высокой плотности мощно-
сти способен выжечь полупроводниковые переходы таких приборов, полностью или
частично нарушив их нормальное функционирование [6-14].
Наиболее легко повреждаются смесительные диоды радиолокационных и связных
приемников, маломощные МОП-структуры логических элементов и даже полупровод-
никовые приборы электронных систем зажигания двигателей внутреннего сгорания.
Выход из строя полупроводниковых приборов вызывается обычно их перегревом
электромагнитной энергией из-за малых размеров полупроводниковых переходов.
Напряжение пробоя переходов невысокое и составляет величину от единиц до де-
сятков вольт в зависимости от типа прибора. Так, для кремниевых высокоточных бипо-
лярных транзисторов, обладающих повышенной прочностью к перегревам, напряжение
пробоя меняется от 15 до 65 В. У арсенид-галлиевых полупроводниковых приборов этот
порог составляет 10 В. Устройства памяти с произвольным доступом, составляющие су-
щественную часть любого компьютера, обычно имеют пороговые напряжения примерно
7 В. Типовые логические ИС на МОП-структурах - от 7 до 15 В, а микропроцессоры
обычно прекращают свою работу при напряжениях 3,3...5 В [6, 8-10].
Помимо разрушения полупроводниковых элементов электромагнитный импульс
при среднем уровне плотности мощности может вызвать парализацию электронного
устройства, сущность которой заключается в потере работоспособности на определен-
ный интервал времени. Это может происходить от перегрузок приемоусилительных
устройств, приводящих к потере их чувствительности, и от процессов восстановления
нормального состояния функционирования. При этом разрушения (необратимого вы-
хода из строя) полупроводниковых элементов не происходит.
Электромагнитное оружие в настоящее время рассматривается как одно из наибо-
лее эффективных средств ведения информационной борьбы. Это обусловливается зна-
376
чимостью информационных потоков в различных сферах деятельности, включая
управление экономикой, производством, обороной страны. Информационная система
предусматривает постоянный обмен управленческими решениями и сообщениями о их
выполнении. В се состав практически включается множество радиоэлектронных уст-
ройств сбора и обработки информации, нарушение функционирования которых разру-
шает систему со всеми вытекающими из этого последствиями.
Так, при ведении боевых операций первостепенное значение приобретают средст-
ва связи и целеуказания. Для сбора необходимой информации и ее использования при-
меняют радиолокационные станции различного назначения, системы командования,,
управления и связи, радио и радиотехническую разведку. Все эти средства представ-
ляют собой объекты воздействия электромагнитного оружия, поражение которых при-
ведет к дезинформации информационной системы, к снижению эффективности или
полному нарушению работы системы ПВО и ПРО.
По характеру действия электромагнитное оружие может рассматриваться как
оружие массового поражения радиоэлектронных средств. В соответствии с этим при
планировании боевых операций уделяется большое внимание его применению на на-
чальном этапе боевых операций, предшествующем широкомасштабному наступлению.
18.5. Пути проникновения электромагнитного импульса
в радиоэлектронную аппаратуру
По спекграпьпым характеристикам ЭМО можно разделить на два вида: низкочас-
тотное, создающее электромагнитный импульс (ЭМИ) со спектром на частотах ниже
1 MI ц, и высокочастотное (микроволновое), обеспечивающее электромагнитное воз-
действие в СВЧ-диапазоне. Оба эти вида также различаются по технике реализации и в
какой-то мере механизму воздействия на радиоэлектронные устройства.
Проникновение низкочастотного электромагнитного импульса на элементы ра-
диоэлектронного устройства обусловливается в основном наводками на элементы уст-
ройства и особенно на каналы внешнего питания, подачи и съема информации. Пути
проникновения электромагнитного поля СВЧ-диапазона более обширные, они вклю-
чают не только элементы наводки электромагнитного поля, но и прямое проникнове-
ние в радиоэлектронную аппаратуру через антенную систему, поскольку спектр СВЧ-
пбля охватывает рабочую частоту подавпяемой аппаратуры. Энергия СВЧ также может
проникать через отверстия и стыки в корпусах аппаратуры. В первом случае величина
проникающей энергии будет максимальной в рабочем диапазоне антенны. Проникно-
вение энергии через отверстия и стыки зависит от их размеров и длины волны элек-
тромагнитного импульса. В этом случае существуют сильные резонансные явления на
различных частотах. Очевидно, наиболее сильная связь наблюдается на резонансных
частотах отверстий корпуса, т. с. в том случае, когда длина волны соизмерима с разме-
рами отверстий. Связь резко уменьшается на волне длиннее резонансной волны отвер-
стий. Поэтому воздействие низкочастотного электромагнитного оружия в значительно
меньшей степени связано с наводками через отверстия и стыки в корпусе аппаратуры.
На частотах выше резонансной частоты наблюдается более медленный спад степени
связи. Но за счет множества типов колебаний в объеме корпуса аппаратуры возникают
острые резонансы.
Если поток СВЧ-энергии достаточно интенсивен, то воздух в отверстиях и стыках
ионизируется и становится хорошим проводником, экранирующим от проникновения
377
электромагнитной энергии. Учитывая это, увеличение падающей на объект энергии
может привести к уменьшению электромагнитной энергии, воздействующей на аппа-
ратуру и, как следствие, к снижению эффективности воздействия ЭМИ.
18.6. Реализация электромагнитного оружия
Техника реализации низкочастотного электромагнитного оружия. Генерация
электромагнитного импульса и его действие наблюдались при первом высокоатмо-
сферном ядерном взрыве. Эффект характеризовался возникновением очень короткого
(сотни наносекунд), но интенсивного электромагнитного импульса, порождавшего
мощное электромагнитное поле, действовавшее на электромагнитные устройства раз-
личных типов. Наносимые при этом повреждения были схожи с повреждениями от уда-
ров в непосредственной близости к аппаратуре электрических молний.
Экранирование электронных устройств при этом обеспечивает только частичную
защиту, так как любой кабель (провод), идущий к аппаратуре или выходящий из нее,
уподобляется антенне и передает кратковременные воздействия на аппаратуру. Ком-
пьютеры, использующиеся в системах обработки данных, системах связи, дисплеях.
Рис. 18.1. Схема устройства генератора
с взрывным сжатием магнитного поля
управляющих производственных системах,
включая шоссейную и железнодорожную
сигнализации, РЛС, электронное военное
оборудование, спутники, аппаратура связи
УВЧ, ОВЧ, ВЧ и низких диапазонов и теле-
визионная аппаратура - все является потен-
циально уязвимым по отношению к элек-
тромагнитному импульсу.
Основным техническим средством
реализации мощных электромагнитных им-
пульсов, составляющих основу низкочас-
тотного электромагнитного оружия, в на-
стоящее время является генератор с взрыв-
ным сжатием магнитного поля. Впервые та-
кой генератор демонстрировался в конце 50-х
годов в Лос-Аламосской национальной ла-
боратории США [6]. Позднее было разрабо-
тано и испытано много модификаций такого
генератора в США и СССР, обеспечивав-
ших создание электрической энергии в де-
сятки мегаджоулей в промежутки времени
от десятков до сотен микросекунд. При этом
уровень развиваемой пиковой мощности
достигал единиц и десятков тераватт, а про-
изводимый генератором ток в 10... 1000 раз
превышал ток, порождаемый типовым раз-
рядом молнии.
Устройство и принцип действия гене-
ратора иллюстрируется рис. 18.1. Генератор
состоит из ротора и статора. В представлен-
ном варианте генератора коаксиального ти-
378
па в качестве ротора используется цилиндрическая медная трубка, заполненная взрыв-
чатым веществом. Статор генератора формируется спиралью из прочного (обычно
медного) провода, окружающей ротор. В целях оптимизации электромагнитной индук-
ции в роторе статорная обмотка иногда делится на секции.
Первоначальное магнитное поле в генераторе, предшествующее взрыву, форми-
руется стартовым током статора. При это-м может использоваться любой внешний ис-
точник, способный обеспечить импульс электрического тока силой от единиц килоам-
пер до мегаампер.
Во избежание преждевременного разрушения генератора поверх статорной об-
мотки устанавливается кожух из немагнитного материала (обычно цемента или стекло-
волокна совместно в эпоксидной смолой).
Подрыв взрывчатого вещества происходит с помощью специального генератора в
момент, когда ток в статорной обмотке достигает максимума. Образующийся при этом
плоский однородный фронт взрывной волны распространяется вдоль взрывчатого ве-
щества, деформируя структуру ротора, превращая се из цилиндрической в коническую
форму. В момент расширения трубки ротора до размеров статора происходит короткое
замыкание статорной обмотки, приводящее к эффекту сжатия магнитного поля генера-
тора и возникновению мощного импульса тока величиной порядка нескольких десят-
ков мегампер. Степень возрастания выходного тока по сравнению со стартовым током
зависит от конструкции генератора и может достигать нескольких десятков.
Другим типом источника низкочастотной электромагнитной энергии большой
мощности является магнитогидродинамический генератор (МГД), приводимый в дей-
ствие с помощью ракетного топлива или взрывчатки. Основой работы данного генера-
тора является возникновение тока в проводнике, движущемся в магнитном поле. Толь-
ко в качестве проводника используется плазма, состоящая из ионизированного взрыв-
чатого вещества или газообразного топлива, движущаяся сквозь магнитное поле.
Однако данный тип генератора к настоящему времени меньше проработан, чем
генератор с взрывным сжатием магнитного поля, и потому имеет пока меньшие пер-
спективы широкого применения в боевых электромагнитных средствах.
Реализация низкочастотного электромагнитного оружия в эффективном варианте
требует больших антенн, поскольку ее максимальная излучаемая мощность лежит в
диапазоне частот ниже 1 МГц. Решением этой проблемы может быть применение ка-
тушек с намотанными на них кабелями, выбрасываемыми в момент взрыва электро-
магнитной бомбы, или достаточно точная доставка боевого средства к месту располо-
жения подавляемого объекта. В последнем случае наводка электромагнитного импуль-
са на радиоэлектронные устройства объекта может осуществляться непосредственно за
счет обмотки электромагнитного генератора и будет тем сильней, чем ближе к объекту
располагается этот генератор.
Техника реализации СВЧ-энергии высокой мощности. В качестве генератора
СВЧ-излучения могут использоваться различные электронные приборы, начиная от
широко известных магнетронов и клистронов и кончая новыми приборами-
генератором с виртуальным катодом (виркатором), гиротроном, лазером на свободных
электронах и плазменным лучевым генератором. Все эти приборы обладают способно-
стью преобразовывать кинетическую энергию электронного пучка в электромагнитную
энергию СВЧ-диапазона.
379
Существующие лабораторные источники мощности СВЧ-излучения способны ра-
ботать как в импульсном (длительностью 10 нс и более), так и в непрерывном режимах
и перекрывать диапазон от 500 МГц до десятков ГГц при частотах повторения от еди-
ниц до тысяч импульсов в секунду. Максимальная генерируемая при этом мощность
достигает уровня нескольких мегаватт (при непрерывном режиме) и нескольких гига-
ватт (при импульсном режиме). Разумеется, различные типы генераторов в пределах
указанных параметров не являются одинаковыми. Так, гиротроны работают в милли-
метровом диапазоне волн с высоким КПД, а варакторы - в сантиметровом диапазоне и
имеют меньший КПД. Для тактического СВЧ-оружия крайне важно, чтобы генераторы
были или достаточно широкополосными, или перестраивались в пределах декады.
Наибольшей широкополосностью обладают плазменно-лучевые приборы, а легче всего
На рис. 18.2 приведена схема
виркатора с соосным виртуальным ка-
тодом. По своей конструкции этот
виркатор представляет собой круглый
волновод, переходящий в конус. Ка-
тод представляет собой металличе-
ский цилиндрический стержень диа-
метром несколько сантиметров, ано-
дом является натянутая на обод ме-
Рис. 18.2. Схема виркатора с соосным таллическая сетка. При подаче на
виртуальным катодом анод положительного потенциала по-
рядка 105... 106 В вследствие взрывной
эмиссии с катода поток электронов устремляется к аноду и проходит через него в про-
странство за анодом, где тормозится собственным кулоновым полем и отражается об-
ратно к аноду, образуя виртуальный катод на расстоянии от анода, примерно равном
расстоянию от него до реального катода. Отраженные электроны проходят сквозь сетку
анода и вновь тормозятся у поверхности реального катода. В результате формируется
облако электронов, осциллирующее у анода в потенциальной яме между виртуальным
и реальным катодами. На частоте колебаний облака электронов возбуждается СВЧ-
поле, которое излучается в пространство через диэлектрическое окно.
Стартовые токи в виркаторах, при которых возникает генерация, составляют
1... 10 кА, а выводимая СВЧ-мощность достигает единиц гигаватт.
Особенности физических процессов, возникающих в виркаторах, делают их наи-
более приемлемыми для генерации импульсов наносскундной длительности в длинно-
волновой части сантиметрового диапазона. Экспериментально от виркаторов получены
уровни мощности от 170 кВт до 40 ГВт в сантиметровом и дециметровом диапазонах [6].
Недостатком виркаторов является низкий КПД, составляющий примерно 1 %, что
обусловливается многомодовым характером генерируемого в них электромагнитного
поля и интерференцией между модами. Преимущество высокочастотных устройств пе-
ред низкочастотными - возможность фокусирования генерируемой ими энергии в на-
правлении цели с помощью достаточно компактных антенных систем с механическим
или электронным управлением.
380
При необходимости поражения одновременно нескольких целей можно использо-
вать ФАР, позволяющие быстро менять положение луча и формировать одновременно
несколько лучей. Но при этом следует учитывать допустимые уровни электромагнит-
ного излучения, на которых сказываются эффекты, связанные с электрическими про-
боями в атмосфере. Ограниченная электрическая прочность воздуха устанавливает
границу плотности потока СВЧ-энергии. Экспериментально установлено, что значение
плотности потока СВЧ-энергии, при котором наступает диэлектрический пробой в воз-
духе, меняется с частотой, длительностью импульса, давлением воздуха и плотностью
свободных электронов, с которой начинается лавинный процесс пробоя. При их нали-
чии и нормальном атмосферном давлении пробой начинается при плотностях мощно-
сти 1(Г... 106 Вт/см2, если длительность импульса СВЧ-излучения больше наносекунды.
Но для наступления пробоя, требуется время, необходимое для того, чтобы свободные
электроны успели поглотить достаточное для начального пробоя количество СВЧ-
энергии. В соответствии с этим фактором пробой наступает лишь в конце мощного
СВЧ-импульса.
При выборе рабочей частоты СВЧ-излучения учитываются также условия распро-
странения электромагнитных волн в атмосфере. Известно, что СВЧ-излучение погло-
щается в атмосфере водяным паром, молекулами кислорода и осадками. Пики резо-
нансного поглощения водяным паром приходятся на частоты 22 и 185 ГГц, а для моле-
кул кислорода - на частоты 60 и 118 ГГц. В пределах дальности действия тактического
оружия (1...100 км) и на малых высотах поглощение в диапазоне нескольких гигагерц
на этих резонансных частотах может быть недопустимо большим. Поглощение осадка-
ми возрастает с частотой. Так, на частоте 3 ГГц излучение ослабляется на расстоянии
10 км при умеренном дожде на 0,01 дБ, но на частоте 30 ГГц при тех же условиях оно
уже возрастает до 10 дБ [6].
Таким образом, выбор рабочей частоты излучения СВЧ-оружия зависит от требо-
ваний дальности действия и всепогодности его применения.
18.7. Тактика применения электромагнитного оружия
Электромагнитное оружие может применяться как в стационарном, так и в мо-
бильном вариантах.
При стационарном варианте облегчается выполнение массогабаритных и энергети-
ческих требований к аппаратуре, упрощается ее обслуживание. Но при этом требуется
обеспечение высокой направленности электромагнитного излучения только в сторону
цели во избежание поражения собственных радиоэлектронных устройств этим излучени-
ем. Это можно обеспечить только применением остронаправленных антенных систем. В
случае реализации СВЧ-излучения использование остронаправленных антенн не состав-
ляет проблемы, чего нельзя сказать при реализации низкочастотного ЭМО.
В этом отношении мобильный вариант реализации ЭМО имеет ряд преимуществ.
Прежде всего, легче решается проблема защиты собственных радиоэлектронных
средств от воздействия ЭМО, поскольку боевое средство может быть доставлено непо-
средственно к месту расположения объекта, подлежащего воздействию, и только там
приведено в действие. Удаленность цели от места расположения собственных радио-
электронных средств будет гарантировать безопасность последних от губительного
действия ЭМО.
381
Упрощаются проблемы с излучением электромагнитной энергии, поскольку в
этом случае отпадает необходимость применения направленных антенных систем, а в
ряде случаев вообще можно обойтись без них, ограничившись непосредственной элек-
тромагнитной связью, возникающей между генератором ЭМО и электронными устрой-
ствами противника в связи с их близким расположением друг к другу. Но при мобиль-
ном варианте, конечно, возникают и некоторые затруднения в удовлетворении массо-
габаритных и энергетических требований к аппаратуре, но они вполне преодолеваются.
Средствами доставки ЭМО в мобильном варианте могут быть самолеты, вертоле-
ты, ракеты, корабли. При этом предполагается наличие соответствующей информации
о целях, подлежащих электромагнитному воздействию. В сборе такой информации
важная роль отводится средствам РТР. Подавляющее большинство интересующих це-
лей в процессе функционирования излучают радиоволны, обладающие определенными
характеристиками, позволяющими не только их идентифицировать, но и устанавливать
их местоположения с достаточной точностью. Это позволяет разрабатывать системы
обнаружения, опознавания и пеленгации таких источников излучения в целях выведе-
ния на них боевых средств ЭМО.
При использовании самолетов (вертолетов) эффективным средством доставки
ЭМО к цели является планирующая бомба. Ее можно запустить с дальности, превы-
шающей дальность действия системы ПВО противника, что минимизирует риск пора-
жения самолета средствами ПВО противника и риск повреждения бортовых радио-
электронных устройств электромагнитным воздействием бомбы при ее взрыве.
При этом автопилот планирующей бомбы может быть запрограммирован так, что
профиль полета бомбы к цели и высота ее подрыва будут оптимальными с точки зре-
ния достигаемого эффекта применения ЭМО.
В настоящее время разработано снаряжение по точному наведению обычных и
планирующих бомб с применением глобальной спутниковой навигационной системы.
Для доставки средств ЭМО могут быть использованы также БПЛА, оснащенные соот-
ветствующей аппаратурой обнаружения источников излучения и наведения на них
средств ЭМО.
Электромагнитные боеголовки могут также доставляться к цели с помощью кры-
латых ракет, оснащенных аккумуляторными устройствами электроэнергии для обеспе-
чения приведения в действие ЭМО. Момент срабатывания ЭМО тесно связан с опреде-
ленными датчиками носителей. При размещении на крылатой ракете - с датчиком на-
вигационной системы, при размещении в противокорабельной ракете - с радиолокаци-
онной головкой наведения, а при размещении на ракете “воздух-воздух” - непосредст-
венно с системой взрывателя. Подрыв бомбы в воздухе может быть осуществлен о по-
мощью радиолокационного высотомера, барометрического устройства или глобальной
навигационной системы.
Эффективность ЭМО была подтверждена в военной операции “Буря в пустыне”,
когда действия осуществлялись преимущественно с использованием только самолетов
и ракет и основным акцентом стратегии боевых действий было воздействие на элек-
тронные устройства сбора и обработки информации, целеуказания и элементы связи с
целью парализации и дезориентации системы ПВО [6, 14].
Имеется достаточно оснований полагать, что все значимые боевые операции в бу-
дущем будут начинаться с массированного применения электромагнитного оружия,
способного нанести существенный ущерб электронным средствам противника, в том
382
числе радиолокационным, составляющим основу любой системы ПВО, и облегчить по-
следующие операции.
Следует отметить, что современная стратегия воздушного наступления при нача-
ле военных действий базируется на пятиуровневой модели, определяющей способность
ведения войны.
Первым уровнем по важности является национальное руководство с поддержи-
вающей его системой командования, управления и связи. Далее следует основная и
космическая инфраструктуры страны, транспортная сеть, население и вооруженные
силы. Электромагнитное оружие может продуктивно использоваться против всех эле-
ментов этой модели. В отличие от ядерного оружия ЭМО губительно только для ра-
диоэлектроники. Физических разрушений целей оно не производит, влияние на людей
в подавляющем большинстве — ничтожно малое.
18.8. Защита от электромагнитного оружия
Наиболее эффективной защитой от ЭМО конечно является предотвращение его
доставки путем физического уничтожения носителей, как и при защите от ядерного
оружия. Однако это нс всегда достижимо и всегда будет иметь место прорыв отдель-
ных носителей ЭМО через систему ПВО и ПРО, особенно при массовом применении
средств ЭМО. Поэтому наряду со средствами перехвата и уничтожения носителей
ЭМО следует прибегать к мерам электромагнитной зашиты непосредственно самой ра-
диоэлектронной аппаратуры. К таким мерам прежде всего следует отнести полную эк-
ранировку самой аппаратуры, а также экранировку помещений, где эта аппаратура
размещается. Это неизбежно приведет к снижению электромагнитных наводок и их
поражающего действия на полупроводниковые элементы аппаратуры. Если помещение
уподобится известной клетке Фарадея, предотвращающей проникновение внешнего
электромагнитного поля, то защита аппаратуры от ЭМО будет полностью обеспечена.
Однако реально такая защита не может быть обеспечена, поскольку аппаратура
нуждается в подводке питания извне и должна иметь каналы связи, по которым должна
поступать информация и результаты обработки этой информации. Иными словами, за-
щищаемая аппаратура не может по своим функциональным характеристикам полно-
стью изолироваться от внешнего мира, и это усугубляет проблему ее защиты от ЭМО.
Наряду с экранировкой помещений и самой аппаратуры необходимо обеспечивать
также защиту всех внешних связей аппаратуры от проникновения через них к. аппара-
туре электромагнитного воздействий. Такой защитой являются фильтры. Но они обыч-
но защищают только в определенной полосе частот и соответствующим образом на-
страиваются. Учитывая широкополосность электромагнитных излучений, создаваемых
ЭМО, обеспечить полную и надежную защиту с помощью фильтров вряд ли возможно.
Хорошей защитой от электромагнитных наводок по проводам, идущим к аппаратуре,
является замена их на волоконно-оптические каналы. Но это неприменимо к цепям
электропитания.
Проблема защиты от ЭМО усугубляется и тем, что развитие современной инфор-
мационной системы идет по пути дезинтеграции. Вместо больших центров по приему и
обработке информации предпочитают иметь в каждом учреждении свои компьютерные
системы, которые в целях оперативного взаимообмена информацией соединяются со-
ответствующими каналами связи, используя при этом часто глобальную информацион-
ную систему Интернет. Такая децентрализация радиоэлектронной аппаратуры и взаи-
383
мосвязи являются основным фактором уязвимости радиоэлектронных средств по от-
ношению к ЭМО, в результате чего применение ЭМО в военных конфликтах становит-
ся еще более перспективном.
ГЛАВА 19. УПРАВЛЕНИЕ РЕСУРСАМИ В СИСТЕМАХ РЭП
19.1. Необходимость управления ресурсами РЭП
Использование широкополосных шумовых передатчиков помех на начальном
этапе применения РЛС в военных целях явилось весьма эффективным в силу ряда при-
чин. Прежде всего, такие передатчики обеспечивали возможность действия одновре-
менно против многих РЛС, рабочие частоты которых перекрывались спектром шумо-
вой помехи и располагались в пределах широкой ДН помеховой антенны. Исключалась
необходимость перехвата сигналов РЛС, измерения их частоты, управления передаю-
щей антенной. Такие передатчики помех обладали иммунитетом к быстрой перестрой-
ке несущей частоты и частоты следования импульсов. Но они обладали и существен-
ными недостатками. Широкополосность сопровождалась большими потерями мощно-
сти сигнала помехи, поскольку использовалась только часть его энергетического спек-
тра, остальная часть, перекрывающая участки частотного диапазона, в которых РЛС не
работали, рассеивалась впустую. Бесполезная трата мощности сигнала помехи обу-
словливалась также тем, что излучение велось в широком секторе пространства, в то
время как РЛС противника, представлявшие угрозу, располагались в дискретных на-
правлениях. Потеря мощности происходила также и за счет непрерывного излучения
помехи. Так, при воздействии помехи РЛС обнаружения с круговым обзором излуче-
ние помехи ведется даже тогда, когда приемная антенна РЛС направлена далеко в сто-
рону от постановщика помех, и эффективность передатчика минимальная. Неоправ-
данный перерасход энергии помехи происходит также за счет создания помехи в тече-
ние всего периода следования импульсов подавляемой РЛС. В типовом случае дли-
тельность излучения помехи каждой РЛС может составлять 10 % от длительности пе-
риода повторения импульсов РЛС. При этом помеховый импульс должен накрывать
сигнал цели. В ряде случаев достаточно интервала воздействия помехи, равного сум-
марной длительности около десяти импульсов в каждом периоде повторения радиоло-
кационных импульсов. Очень серьезный недостаток силового подавления РЛС заклю-
чается в применении определенного вида модуляции излучаемого сигнала, в то время
как не существует помеховой модуляции, эффективной против всех режимов работы
РЛС, например, против различных РЛС обнаружения и угломерных следящих систем
РЛС сопровождения. Все это потребовало нового подхода к организации работы сис-
темы РЭП, нацеленной на разумное распределение ее ресурсов в соответствии с радио-
электронной обстановкой и, в первую очередь, на управление мощностью во избежа-
ние неоправданных потерь и обеспечения эффективности воздействия на многие РЛС
одновременно. Распределение мощности помехи при ограниченном энергетическом
потенциале диктуется необходимостью работы системы РЭП в сильно насыщенной ра-
диолокационной обстановке и может быть осуществлено по частоте (спектру), време-
ни, мощности, пространству или совокупности перечисленных параметров. Концепция
управления ресурсами системы РЭП в наибольшей степени подходит к условиям при-
менения авиации, где накладываются существенные ограничения на мощность первич-
384
Рис. 19.1. Структурная схема многорежимного
передатчика помех
ного электропитания, массу, габаритные размеры и охлаждение бортовой аппаратуры.
Но одного распределения мощности помехи недостаточно. Для обеспечения эффектив-
ности требуется еще и соответствующая помеховая модуляция, для чего необходимы
анализ всех обнаруживаемых системой РЭП сигналов, оценка угрозы, представляемой
каждым облучающим постановщик помех радиолокатором, и определение нужных па-
раметров модуляции помеховых сигналов (рис.1 9.1). __ _______
Следует иметь ввиду, что
положительный эффект распреде-
ления мощности проявляется
только в том случае, когда систе-
ма РЭП функционирует в режиме
постоянной максимальной мощ-
ности. Если система РЭП работает
с постоянным коэффициентом
усиления (ретранслятор) и макси-
мальный уровень мощности око-
нечного усилителя станции помех
не достигается, то деление мощ-
ности в процессе не происходит
даже при работе по многим РЛС с
непрерывным излучением или ма-
лой скважностью, что исключает
необходимость управления мощ-
ностью системы РЭП. Для им-
пульсных РЛС или РЛС, антенны которых сканируют и время прихода их сигналов та-
ково, что существует возможность неодновременного излучения им сигналов помех,
энергетические потери располагаемой мощности передатчика помех практически от-
сутствуют, так как оконечный усилитель мощности усиливает сигналы помех в разные
моменты времени с максимальной мощностью.
Распреде lenue ресурсов по частоте. При распределении ресурсов на базе несу-
щей частоты система РЭП должна обнаруживать, селектировать и идентифицировать
все принимаемые сигналы, чго представляет трудно решаемую проблему из-за множе-
ства ожидаемых сигналов при проведении реальных операций и требуемых точностей
наведения помехи по частоте. Несущие частоты двух и более РЛС могут отличаться
друг от друга на величину нс менее нескольких мегагерц. В этом случае система РЭП.
при необходимости, может быть так спроектирована, чтобы разделить сигналы по час-
тоте и наделить каждый из них специфической помеховой модуляцией. Если эти сиг-
налы одновременно усиливаются общим оконечным усилителем, то происходит пере-
распределение мощности между сигналами помех каждой РЛС обратно пропорцио-
нально числу усиливаемых сигналов. Если подавляемые РЛС используют быструю пе-
рестройку несущей частоты, то измерение частоты и наведение частоты генератора
сигналов помехи должно осуществляться с минимальной задержкой по времени, не
превышающей доли длительности импульса. В противном случае придется переходить
в режим создания широкополосной помехи с присущим ему снижением эффективности
использования мощности. Энергетические потери сигнала помехи возможно сделать
минимальными путем согласования спектра помехи со спектром зондирующего сигна-
ла. В связи с этим управление спектром помехи обычно осуществляется на основе ин-
13—1777
385
формации о спектре и длительности зондирующего сигнала, полученной в результате
перехвата, а для конкретных РЛС эта информация может содержаться в библиотеке уг-
роз системы РЭП. Создание помех РЛС, использующих когерентную обработку (сжа-
тие, импульсно-доплеровскую или псевдослучайную), требует применения в системе
РЭП когерентных систем запоминания и формирования из копий помеховых сигналов.
В качестве таких устройств используются цифровые системы запоминания сигналов.
Распределение ресурсов во времени связано обычно с переключением цифровым
методом частот, на которых формируется помеха. При этом режим переключения вы-
бирается таким, чтобы продолжительность нахождения помехи в пределах полосы
пропускания приемника была соизмерима с длительностью импульса РЛС и, следова-
тельно, достаточной для обеспечения требуемого эффекта. Анализ показывает, что эф-
фективность шумовой помехи существенно не снижается, если при этом время нахож-
дения помехи вне полосы пропускания приемника не более чем в 3 раза превосходит
время нахождения помехи в пределах полосы пропускания приемника РЛС (скваж-
ность помехи составляет 4). Отсюда следует, что одновременное создание шумовой
помехи четырем РЛС достигается почти без снижения эффективности. Необходимо
отметить, что при разнесении во времени излучаемых помеховых сигналов импульсная
мощность помехи не меняется, но ослабляется средняя мощность, что может быть важ-
ным особенно при воздействии на РЛС с непрерывным и квазинепрсрывным излучени-
ем. Управление излучаемой мощностью передатчика помех состоит в обеспечении тре-
буемого отношения помеха-сигнал на входе подавляемого приемника РЛС. Для осуще-
ствления этого необходима определенная информация. Например, для случая маски-
ровки самолета сигналом помехи следует определить направление на РЛС и рассчитать
величину ЭПР самолета в этом направлении на частоте РЛС, что позволит, в свою оче-
редь, определить на входе приемника уровень сигнала РЛС, отраженного от самолета.
По информации о направлении на РЛС также определяются коэффициенты усиления
приемной и передающей антенн и рассчитывается необходимый уровень мощности пе-
редатчика помех для обеспечения на входе приемника РЛС требуемого отношения по-
меха-сигнал. Для этого с помощью калиброванного ответвителя часть мощности пере-
датчика помех поступает на вход приемника. Путем сравнения измеренной амплитуды
принимаемого сигнала РЛС с измеренной выборкой выходной мощности передатчика
помех и управления аттенюатором устанавливается требуемая выходная мощность пе-
редатчика помех. Регулировка мощности помехи в процессе полета продолжается до
тех пор, пока нс будет достигнута дальность вскрытия цели на РЛС. В результате этого
большую часть времени излучается помеха низкого уровня, что благоприятно сказыва-
ется на обеспечении развязки приемника и передатчика помех на борту самолета. Такая
процедура управления мощностью и чувствительностью позволяет также определить
реальную развязку на объекте с учетом влияния отражений от подстилающей поверх-
ности. Регулировка чувствительности приемника позволяет принимать сигналы РЛС
без ложных срабатываний в процессе излучения помеховых импульсов. Если развязка
между приемником и передатчиком недостаточна для эффективного противодействия,
то обычно используют прерывание излучения сигнала помехи для приема сигналов
РЛС. Так как в паузе излучения помехи РЛС может наблюдать самолет, то длитель-
ность паузы должна быть минимальной. Современные передатчики шумовых помех
обычно используют паузы в излучении помехи длительностью менее миллисекунды
при коэффициенте заполнения около 10 %. При этом длительность паузы может варьи-
роваться в широких пределах. В импульсных передатчиках помех прием зондирующих
386
сигналов можно производить в промежутках между импульсами помех. Много усилий
прилагается для реализации и разработки методов и техники "незабивасмого" приема,
т. е. приема сигналов РЛС при одновременном излучении помехи.
Распределение ресурсов в пространстве осуществляется путем переключения
узких ДН в направлении на подавляемые РЛС, что наиболее легко выполняется с по-
мощью ФАР.
Переход от широкой ДН, охватывающей все пространство, в котором располага-
ются подавляемые РЛС, к узкой приводит к энергетическому выигрышу. Однако и
здесь процесс распределения ресурсов связан с уменьшением средней мощности за
счет перерывов в излучении помехи, из-за создания помех другим РЛС и соответст-
вующим перебросом луча антенны в пространстве.
Очевидно, для того чтобы осуществлять управление излучением помехи в про-
странстве, приемник системы РЭП должен обладать способностью пеленгации РЛС и
селекции их сигналов. Требования к режиму переключения положения луча в про-
странстве такие же, как и к режиму переключения частот, т. е. продолжительность об-
лучения выбранной РЛС должна быть соизмерима с длительностью импульса.
Распределение ресурсов по поляризации теоретически возможно, поскольку РЛС
работают на различных поляризациях. Однако из-за трудностей измерения этого пара-
метра (особенно, когда приемная антенна РЛС имеет поляризацию, отличающуюся от
поляризации передающей антенны) распределение ресурсов по поляризации обычно не
производится, и система РЭП, работающая на фиксированной поляризации, испытыва-
ет ослабление мощности за счет рассогласования по поляризации. Однако при рассо-
гласовании поляризации до 45° это ослабление мощности несущественно. Исключение
составляет случай, когда поляризация помехи близка к ортогональной (в пределах еди-
ниц градусов). При этом ослабление мощности может достигать 30...35 дБ и более.
Однако в этом случае при достаточной мощности помехи достигается эффективное на-
рушение функционирования моноимпульсных систем углового сопровождения.
19.2. Организация управления ресурсами РЭП
При управлении ресурсами предъявляются высокие требования к приемникам
систем РЭП. Для того чтобы система РЭП могла формировать прицельные по парамет-
рам помехи различным РЛС, приемник должен быть способен селектировать, иденти-
фицировать и рассортировывать сигналы таким образом, чтобы на каждый интере-
сующий сигнал можно было наложить соответствующую модуляцию. Выполнение
этих функций должно происходить в условиях сложной сигнальной обстановки, когда
наряду с сигналами, принадлежащими угрожаемым радиолокационным средствам,
имеется большое количество сигналов, принадлежащих не опасным средствам, в том
числе своим РЛС.
Приемник также должен определять приоритет угрозы и выдавать рекомендации
по параметрам эффективной помехи. Указанные требования к приемнику системы РЭП
и обработке принимаемых им сигналов усугубляются рядом факторов, в том числе
очень плотной сигнальной обстановкой в зоне боевых действий, широким диапазоном
рабочих частот, разнообразием излучающих средств, умышленным изменением пара-
метров РЛС (несущей частоты, частоты следования импульсов и др.), наличием своих,
в том числе не военных источников радиоизлучения.
387
Выполнение всех требований с учетом перечисленных факторов возможно только
при использовании в приемнике быстродействующей обработки. На рис. 19.2 пред-
ставлена функциональная схема обработки в многорежимной системе РЭП.
Оружие Процессор сигналов
Рис. 19.2. Схема обработки в многорежимной системе РЭП
Процессор сигналов принимает измеренные различными приемниками параметры и
идентифицирует каждый излучающий источник путем сравнения измеренных пара-
метров с параметрами, хранящимися в библиотеке угроз. Угрожаемая ситуация опре-
деляется и сравнивается с данными библиотеки реагирования, которая содержит дан-
ные помеховой доктрины. Помеховая доктрина определяет наилучший режим реагиро-
вания на установленную угрозу. Библиотеки угроз и реагирования поддерживаются и
обновляются через входы в, с,due.
Цифровые процессоры сигналов обладают высокой скоростью обработки благо-
даря использованию в них сверхскоростных цифровых интегральных схем. Характер-
ные данные импульсных дескрипторных слов, их размеры в битах и точность разреше-
ния приведены в табл. 19.1.
Таблица 19.1
Параметр Биты Разрешение
Время поступления сигнала 25 50 нс
Частота 18 1 МГц
1 Голяризация 16 1 град
Амплитуда 7 1 дБ
Направление прихода сигнала 9 1 град
Длительность импульса 13 50 нс
“Флаги" 8 ""1 -
Итог 96
Специальные слова - "флаги" используются для идентификации специальных
сигналов, таких как непрерывные сигналы и др.
Перечисленные параметры могут быть измерены почти мгновенно в момент при-
хода сигнала и за время действия импульса, если обрабатываемый сигнал импульсный.
388
Данные сортируются по индивидуальным хранилищам по какому-либо одному или
всем импульсным дескрипторным словам. Поскольку направление прихода перехваты-
ваемого сигнала является параметром, трудно изменяемым противником, этот пара-
метр обычно используется при первичном разделении сигналов. Временная корреляция
направления прихода сигнала, несущей частоты и частоты следования импульсов ис-
пользуется при идентификации источников излучения, после чего проводится сравне-
ние с данными библиотеки угроз.
Типовая последовательность операций организации РЭП следующая:
измерение параметров источников излучения с помощью различных приемников
системы РЭП;
распределение измеренных параметров в цифровой форме по хранилищам. Вели-
чина разрешения каждого хранилища обычно достаточно большая, чтобы исклю-
чить попадание параметра одной РЛС в два или более хранилища;
разделение параметров сигналов по времени их поступления и периоду следова-
ния импульсов. Эта операция производится применительно к хранилищам, со-
держащим параметры двух и более излучателей. При использовании излучателя-
ми быстрой перестройки частоты следования импульсов данный процесс разделе-
ния становится спорным;
сортировка излучателей по времени прихода сигналов и частоте следования им-
пульсов;
идентификация излучателей и сравнение их с данными библиотеки угроз для оп-
ределения приоритетов угрозы;
принятие решения на реагирование. В этом случае угрожаемая ситуация сравни-
вается с данными библиотеки реагирования и определяется режим оптимального
реагирования в данной обстановке;
генерирование параметров реагирования, включая параметры модуляций помехи
и выработку следящего импульса, синхронного с импульсами угрожаемой РЛС;
формирование помехи. Выработанный следящий импульс стробирует приемо-
передающий тракт системы РЭП, в результате чего выделяется только сигнал уг-
рожаемой РЛС и обеспечивается возможность его модуляции соответствующими
сигналами. Стробирование исключает одновременное поступление на вход вы-
ходного усилителя сигналов разных РЛС и связанное с этим ослабление мощно-
сти помехи.
Сложность алгоритма управления ресурсами определяется структурой зонди-
рующих сигналов РЛС. Чем сложнее структура зондирующих сигналов, чем она ближе
к случайной величине, тем труднее процессору управления ресурсами системы РЭП
предвидеть эту структуру и тем труднее на нее реагировать. Однако большинство су-
ществующих РЛС применяет относительно хорошо определяемые виды сигналов. Тем
нс менее с учетом перспективы развития радиолокационной техники можно ожидать,
что радиоэлектронная обстановка будет состоять из смеси сигналов РЛС как с детер-
минированной структурой, так и со случайной. В этих условиях управление ресурсами
РЭП позволит оптимально использовать располагаемые возможности системы РЭП по
различным РЭС ПВО.
389
ГЛАВА 20. ОЦЕНКА СРЕДСТВ РЭП ПО КРИТЕРИЮ "ЭФФЕКТИВНОСТЬ-
СТОИМОСТЬ"
20.1. Целесообразность оценки средств РЭП по критерию
"эффективность-стоимость"
Конец 70-х и начало 80-х годов характеризуется переходом от разработки и ис-
пользования отдельных РЭС разведки и управления оружием к объединению их в еди-
ные системы с централизованной обработкой информации, получаемой от множества
РЭС, что позволило в целом повысить эффективность боевых действий .В этих услови-
ях актуальной становится проблема системного подхода к организации РЭП, обеспечи-
вающей подавление поля сигналов с заданной эффективностью. Эффективность подав-
ления РЭС определяется мерой разрушения полезной информации, поступаюшей на
вход обнаружителя РЭС путем формирования энергетической суммы полезного сигна-
ла и помехи. Реализация определенных энергетических соотношений помехи и сигнала
на входе подавляемого РЭС требует решения сложнейших технических и тактических
вопросов, связанных с созданием высокоэффективных станций помех и их управлени-
ем в системе РЭП. Сложность решения проблемы эффективности системы РЭП опре-
деляется тем, что в конкретных условиях достижение требуемого значения эффектив-
ности может быть осуществлено множеством вариантов. Очевидно в этом множестве
вариантов имеет место оптимальный вариант, соответствующий минимуму затрат на
его реализацию. В соответствии с этим перед разработчиками средств РЭП возникает
актуальная проблема, связанная с выбором системы РЭП, которая при заданном (тре-
буемом) значении эффективности имела бы наименьшую стоимость, т. с. возникает не-
обходимость оценки средств РЭП по критерию "эффективность-стоимость". Ниже рас-
сматриваются энергетические характеристики системы РЭП, определяющие эффектив-
ность радиопротиводействия, и методика использования критерия "эффективность-
стоимость" на примере подавления самолетной РЛС обзора земной поверхности и
управления оружием (ОЗП ОУ) с помощью наземных станций помех (СП).
20.2. Энергетический потенциал станции помех
Ранее указывалось, что основным условием подавления РЭС является создание на
входе обнаружителя (приемника) подавляемого
средства суммы полезного и помехового сигналов
в таких соотношениях, при которых обеспечивает-
ся разрушение полезной информации о заданной
вероятностью.
Количественным показателем эффективно-
сти разрушения полезной информации является
коэффициент подавления, равный отношению по-
меха-сигнал на входе обнаружителя, что для рас-
сматриваемого случая (рис. 20.1) определяется
выражением:
Рис. 20.1. Схема подавления РЛС
ОЗП УО с помощью наземной
станции помех
=W.G.W ехр[0,238(2Я-Д„Д, (20.1)
PG ckfR^
390
где PnGn, PG - энергетические потенциалы станции помех и самолетной РЛС обзора
земной поверхности; G - коэффициент усиления бокового лепестка ДН приемной ан-
тенны самолетной РЛС управления оружием, по которому идет подавление; о - ЭПР
цели; у - коэффициент поляризационных потерь; q - скважность помехи; kf- коэффи-
циент энергетических потерь помехи из-за несоответствия ширины спектра помехи Д/п
и полосы пропускания приемного устройства РЛС А/пр (коэффициент сопряжения спек-
тров помехи и сигнала); т)к - коэффициент качества помехи; R - расстояние самолет-
объект (цель); 7?п = R2 + d2 - 2Rcl cos ср - расстояние самолет-станция помех, завися-
щее от удаления СП от прикрываемого объекта d и угла <р между направлениями само-
лет-объект и объект-СП; § - затухание радиоволны в атмосфере в дБ на км расстояния.
Как видно из (20.1), коэффициент подавления определяется: как характеристика-
ми РЛС, объекта и СП, так и взаимным расположением их относительно друг друга.
Очевидно, разработчик средств РЭП может влиять на эффективность подавления
РЛС посредством изменения параметров PuGn, q, у, Г]к, kf и взаимного расположения
СП-объект-РЛС. Другие составляющие не зависят от разработчика средств РЭП, и
только степень достоверности знания их значений позволяет минимизировать ошибки
при оценки эффективности помех как при конструировании, так и в процессе боевого
использования средств РЭП. Отсюда требуемый энергетический потенциал СП
РЛ (20.2)
qG
PG~<3kfR г
где у =------2-i-exp[0,238(/г„ -2Я)|.
Величина энергетического потенциала СП, определяемая (20.2), соответствует ус-
ловиям подавления одной РЛС одной СП.
В реальных условиях боевых действий средства воздушного нападения (СВН)
имеют некоторое множество п РЛС, которое образует поле сигналов.
В соответствии с этим перед РЭП ставится задача формирования поля помех, об-
разованного также некоторым множеством СП по прикрытию N объектов, располо-
женных на местности 50.
Если принять априори, что СП и РЛС на указанной местности размещены равно-
вероятно, то на z-ю РЛС будет воздействовать одновременно некоторое среднее число
п0 СП и на каждую у-ю СП будет воздействовать соответственно среднее число и РЛС
обзора земной поверхности.
Коэффициент подавления на входе обнаружителя /-й РЛС оту-й СП будет равен
При этом энергетический потенциал у-й СП
(ЛЧ),
уп
Gq
(20.4)
391
Таким образом, при фиксированном значении коэффициента подавления можно
определить необходимую величину энергетического потенциала СП в зависимости от
числа одновременно подавленных РЛС, образующих поле сигналов, и количества СП
системы РЭП, образующих поле помех.
20.3. Коэффициент подавления
В условиях прикрытия объектов от обнаружения их РЛС обзора земной поверх-
ности не имеет значения, принята ли в обнаружителе РЛС за объект отметка от помехи
(ложная тревога) или объект нс был обнаружен (пропуск цели), поскольку в обоих слу-
чаях РЭП выполняет свою задачу.
В соответствии с этим, в качестве меры эффективности шумовой маскирующей
помехи можно принять сумму вероятностей ложной тревоги F и пропуска D цели
Эш.п = F + Ь .
Практически оценка эффективности шумовых маскирующих помех состоит в том,
что задается некоторый критерий обнаружения объекта в подавляемой РЛС (например,
оптимальный критерий Неймана-Пирсона, Зигсрта, Вальда или Байеса) и определяют-
ся характеристики обнаружения в зависимости от отношения помеха-сигнал на входе
подавляемой РЛС. Поскольку организаторам РЭП практически не известна структура
алгоритма (критерия) обнаружения в подавляемой РЭС, оценку эффективности с целью
минимизации значения требуемого коэффициента подавления и, следовательно, мини-
мизации затрат на организацию РЭП с помощью маскирующей помехи можно провес-
ти известным вариационным методом.
20.4. Качество помех
Качество помех оценивается коэффициентом полезного действия, определяющим
использование мощности помех для разрушения полезной информации при примене-
нии различных способов и систем помехозащиты в РЛС, в том числе использующих
наличие корреляционных связей в структуре помехового сигнала.
Теоретические и экспериментальные исследования показывают, что в качестве
критерия качества помех целесообразно брать отношение мощности реального шума к
его средней мощности.
Под энтропийной мощностью реального шума понимается мощность белого гаус-
совского шума с той же полосой и длительностью, энтропия которого равняется энтро-
пии рассматриваемого шума. Таким образом, качество помех в этом случае определя-
ется коэффициентом качества
11К=^Ш/Ли ,
где Рш - энтропийная мощность помехи, эквивалентная прямошумовой помехе с эн-
тропией, равной энтропии реальных помех; Рш - средняя мощность помех.
По существу коэффициент качества помех характеризует долю мощности поме-
хового сигнала, не поддающуюся исключению из аддитивной смеси с сигналом путем
использования возможных способов помехозащиты в приемных устройствах подав-
ляемых РЛС и обеспечивающую разрушение полезной информации.
392
Для белого гауссовского шума коэффициент качества равен единице, для всех
других помех, отличных от белого шума, т]к меньше единицы.
Исследования показывают, что квазинепрерывные прямошумовые помехи по ка-
честву приближаются к белому гауссовскому шуму.
20.5. Скважность помех
Рассмотренные выше энергетические характеристики помехового сигнала, вклю-
чающие в себя качество помех, оценивающее приближение структуры помехового сиг-
нала к структуре нормального гауссовского шума и эффективность помехи как функ-
ции отношения помеха-сигнал на входе обнаружителя подавляемой самолетной РЛС,
будут действительно эффективными при выполнении определенных временных харак-
теристик излучения помехи.
Характер принимаемых полезных сигналов самолетной РЛС, возможность ис-
пользования в РЛС управления оружием и бокового обзора корреляции при обнаруже-
нии и опознавании объектов фона и рельефа местности, а также работа по рельефу ме-
стности РЛС обеспечения полетов на малой высоте требуют от системы РЭП создания
непрерывных или квазинепрерывных шумовых помех.
Количественной оценкой "непрерывности" помехи является значение скважности
помехи, определяемое отношением реального времени воздействия помехи Тд на по-
давляемую РЛС к общему времени Тк контакта СП и РЛС
ч = т„1к •
Учитывая, что TQ- Тк - АТ0, где ЛТ0 - время выключения помехи, скважность по-
мехи определяется как
Исследования показывают, что для индикаторов кругового обзора с яркостной
отметкой допустимым значением скважности в случае несинхронной помехи является
q - 0,8, а для индикаторов с амплитудной отметкой (тип A) q - 0,97.
Выключение помехи на время А То определяется объективной необходимостью
боевой работы СП, обусловленной невозможностью получить требуемую развязку ме-
жду приемными и передающими устройствами СП. Величина развязки определяется
двумя факторами:
прямой развязкой между приемной и передающей антеннами, волноводно-
фидерными трактами, а также блоками приемного и передающего устройств;
воздействием помехового сигнала на приемное устройство СП за счет переотра-
жения электромагнитной энергии от поверхности Земли и местных предметов.
Все это должно определяться с учетом конкретной обстановки и возможностей
системы РЭП.
20.6. Поляризационные характеристики помех
Использование поляризационных свойств сигнала является одним из методов
снижения влияния мешающих сигналов и помехи.
393
С этой целью в РЛС применяются устройства, позволяющие изменять поляриза-
ционные характеристики антенны. При этом энергетические потери помехи определя-
ются коэффициентом поляризационных потерь Кп, равным отношению мощностей по-
мехи при несовпадающей и совпадающей поляризациях на входе обнаружителя РЛС.
Исследования показывают, что в главном лепестке ДНА потери помехи на орто-
гональной поляризации достигают 20...25 дБ. ‘
При воздействии через боковые лепестки эффективность помехи слабо зависит от
поляризации, поскольку распределение уровня боковых лепестков ДНА РЛС практиче-
ски не зависит от поляризации из-за присущей антеннам кроссполярнзации. В этом
случае потери помехи на ортогональной поляризации не превышают 2...5 дБ или пол-
ностью отсутствуют, так как в ряде случаев уровень лепестков ДНА РЛС на кросспо-
ляризации выше их уровня на рабочей поляризации.
Распределение боковых лепестков на основной поляризации и кроссполяризации
нс совпадают друг с другом. Это позволяет получить определенный выигрыш в эффек-
тивности помехи, если ее создавать на двух ортогональных поляризациях одновремен-
но с помощью некоррелированных между собой источников помехи. При этом значи-
тельно уменьшается влияние провалов в распределении уровня боковых лепестков
ДНА подавляемой РЛС и практически исключается возможность поляризационной се-
лекции помехи.
20.7. Методика применения критерия "эффективность-стоимость"
для минимизации затрат на создание системы РЭП
Прикрытие наземных объектов и зоны местности от наблюдения их бортовыми
РЛС противника - одна из важнейших задач системы ПВО. Примем априори, что на
некоторой местности площадью 5 имеется N объектов для поражения и имеет место
налет п СВН, оснащенных РЛС обзора земной поверхности, излучение которых обра-
зует поле сигналов, информация которого используется противником для выполнения
поставленных перед СВН боевых задач.
Перед организаторами РЭП ставится задача создания поля помех, обеспечиваю-
щего с заданной вероятностью разрушение поля сигналов путем подавления информа-
ционного канала РЛС ОЗП и, как следствие, невыполнение боевых задач СВН .
Ранее были предложены и получены выражения для определения количественных
значений эффективности системы РЭП. Очевидно, что число СП, образующих систему
РЭП, обеспечивающих подавление конкретного множества РЛС с заданной эффектив-
ностью, определяется ТТХ СП, реализация которых, в свою очередь, определяет схем-
но-конструктивную сложность СП и, следовательно, ее стоимость, и стоимость систе-
мы в целом.
В этой ситуации критерий эффективность-стоимость является универсальной ме-
рой оптимальности системы. Он позволяет разработчикам систем РЭП и тем, кто их
эксплуатирует, решить актуальную задачу получения эффективности не ниже заданной
при минимальных затратах на создание и эксплуатацию этих систем.
Очевидно, реализация системы РЭП будет оптимальной при условии максимиза-
ции отношения эффективность-стоимость
Э
'У — — max .
С
394
Для принятой модели прикрытия N объектов от поражения их п средствами воз-
душного нападения, создание поля помех, как уже указывалось, можно представить
множеством способов. Каждому способу будет соответствовать свое значение крите-
рия Т и, очевидно, значение Т = ТП1ах множества вариантов будет соответствовать оп-
тимальному.
Множество способов создания поля помех определяется:
типами применяемых помех (имитирующие однократные, многократно-импульс-
ные, шумовые, ответные, квазинспрерывные, прицельные, заградительные и др.);
энергетическими характеристиками СП;
пропускной способностью СП;
пределами работы СП по направлению в полярной системе координат;
быстродействием наведения помех по направлению и частоте;
количеством п0 СП, участвующих в создании поля помех;
принципами управления СП при их работе в комплексе поля помех.
Реализация совокупности способов создания поля сигналов с заданной эффектив-
ностью определяется техническими характеристиками СП, конкретными схемно-
конструктивными решениями отдельных устройств и систем аппаратуры, которые, в
конечном итоге, определяют стоимость системы РЭП в целом.
Таким образом, эффективность поля помех через схемно-конструктивные реше-
ния аппаратуры корреллирована со стоимостью затрат на их реализацию. Путем пере-
бора вариантов с использованием критерия эффективность-стоимость можно выбрать
оптимальный вариант, соответствующий условию максимального значения этого кри-
терия. При этом можно определить оптимальные технические характеристики кон-
кретной СП и их число «о в системе РЭП, обеспечивающие максимальное значение
критерия оценки эффективность-стоимость.
Остановимся на рассмотрении стоимости основных средств РЭП.
Очевидно, стоимость СП определяется суммой затрат на разработку, куда входит
стоимость схемно-конструктивной разработки аппаратуры, изготовления и испытания
опытного образца, на серийное изготовление и ее эксплуатацию при боевом использо-
вании. Безусловно, прямой расчет стоимости СП является весьма трудоемким и зави-
сит от множества факторов. Приходится прибегать к аналогам СП.
Опыт показывает, что стоимость СП, отличающихся друг от друга основными ха-
рактеристиками, может быть оценена по стоимости известного аналога СП, пересчи-
танной с учетом различий исследуемой СП и СП-аналога по значениям энергетических
потенциалов, полос рабочих частот и количества одновременно подавляемых целей
(пропускным способностям) в соответствии с выражением:
Л г со
+1п-----+1п ----—
;,ан С-р.ан
(20.5)
где Сс,ан - стоимость известного аналога СП; п, пак - число подавляемых целей иссле-
дуемой СП и СП-аналогом, т. с. их пропускная способность; ^iGn/(PnGn)aH - относи-
тельное изменение энергетического потенциала исследуемой СП по сравнению с по-
тенциалом аналога; Кс - коэффициент изменения стоимости, зависящий от схемно-
конструктивно-технологических решений при создании и серийном производстве СП,
от элементной базы, сложившихся цен на комплектующие изделия; AF/AFaH - от-
395
носительное изменение полосы рабочих частот исследуемой СП по сравнению с анало-
гом; Fcp, Асран — средняя рабочая частота исследуемой СП и СП-аналога соответственно.
Если принять, что все исследуемые СП и СП-аналоги имеют равные рабочие диа-
пазоны частот, то стоимость СП по сравнению с аналогом будет определяться как:
— п +ltl--
Сс=СсанАД (Zi,C[JaH '-’"Л (20.6)
Очевидно, стоимость всех СП, входящих в систему РЭП, будет равна сумме
стоимости каждой СП:
/=1
(20.7)
В случае идентичности СП, применяемых в системе РЭП, суммарная стоимость
этих СП
(20.8)
Аналогично оценивается стоимость станций радиотехнической разведки (СРТР),
входящих в систему РЭП или отдельно применяемых в войсках:
1 п—+1п- +1 п КДГ--Р
п Р Р \
1 жв.ан ср.ан /ПЛЧ
р = Ср.анЛс > (2С,-У)
где Дкв, Дкв.ан - эквивалентная чувствительность приемного устройства исследуемой
СРТР и СРТР-аналога соответственно.
Полученные зависимости стоимости СП и СРТР показывают следующее. Стои-
мость СП определяется стоимостью некоторой СП, принятой за аналог, и экспоненци-
альной зависимостью отношений энергетических потенциалов, пропускной способно-
сти и ширины рабочих частот исследуемой СП и СП-аналога. С увеличением этих ха-
рактеристик стоимость СП растет.
Стоимость исследуемой СРТР определяется стоимостью аналога и экспоненци-
альной зависимостью отношений эквивалентных чувствительностей, пропускных спо-
собностей и ширины рабочих частот исследуемой СРТР и аналога.
Данные оценки стоимости позволяют с достаточной степенью точности прогно-
зировать стоимость разработки и эксплуатации средств системы РЭП в зависимости от
технических характеристик и конкретных условий технической реализации СП и сис-
темы управления.
Очевидно, варьирование этих характеристик позволяет изменять стоимость сис-
темы РЭП, отыскивая приемлемый, т.е. оптимальный вариант построения ее с точки
зрения стоимостной оценки. При этом изменения характеристик системы РЭП одно-
значно приведут к изменению ее эффективности при подавлении конкретного поля п
сигналов. Система РЭП, оптимальная по параметру стоимостной оценки, может ока-
заться не оптимальной по своей эффективности или наоборот, оптимальной по эффек-
тивности, но не оптимальной по стоимостной оценке. Поэтому оптимизацию следует
проводить одновременно по эффективности и стоимости.
396
Оценку эффективности подавления поля сигналов полем помех более целесооб-
разно проводить частными методами для конкретных случаев организации РЭП. При
этом эффективность системы РЭП можно определить двумя составляющими: вероят-
ностью (эффективностью) подавления бортовых РЛС Э[ и вероятностью (эффективно-
стью) наведения СП на бортовые РЛС Э2.:
Э = Э] Э2.
Если принять априори, чтоу-я СП поля помех обеспечивает подавление z-й РЛС с
некоторой вероятностью р, то эффективность подавления всех бортовых п РЛС полем
помех «о СП системы РЭП определится как:
(20.10)
В частном случае, когда вероятности подавления /-Й РЛС у-й СП равны, а также
равны количества РЛС и СП, (20.10) преобразуется к следующему виду:
3, =Г1-(1-;0""Т, (20.11)
где и0 и п - число СП и РЛС.
Поскольку наведение у-й СП на z-ю РЛС будет осуществляться с некоторой веро-
ятностью Pjn, эффективность наведения поля помех на поле сигналов РЛС
(20.12)
В частном случае, оговоренном выше и описываемом (20.11), выражение (20.12)
преобразуется в выражение:
(20.13)
Исходя из изложенного, критерий эффективность-стоимость, применительно к
полю помех, образованных СП и подавляющих поле сигналов, как мера оценки опти-
мальности построения системы РЭП будет выражаться в соответствии с (20.7) и (20.10)
Для условий, определяемых (20.8) и (20.11),
(20.14)
(20.15)
397
Учитывая, что у рассматриваемых вариантов построения системы РЭП при кон-
кретных неизменяемых характеристиках поля сигналов в части диапазона рабочих частот
и пропускной способности стоимость системы СРТР будет постоянной, при оценке сис-
темы РЭП по критерию эффективность-стоимость можно не учитывать станцию РТР.
Используя известное математическое равенство = hlno , можно получить окон-
чательное значение критерия эффективность-стоимость для рассматриваемых условий
в виде:
В случае идентичности используемых СП в системах РЭП, а также равенства для
всех СП и подавляемых РЛС вероятностей подавления и наведения, критерий эффек-
тивность-стоимость будет определяться выражением
1-0-рГ
(20.17)
\ I* • « /дн ‘
Практически выражения (20.16) и (20.17) при оценке оптимальности выбора
принципов построения и организации систем РЭП являются неудобными. Анализ пока-
зывает, что наиболее целесообразна сравнительная оценка исследуемых систем при
фиксированных параметрах с некоторой гипотетической системой, состоящей из одной
СП, удовлетворяющей подавлению поля сигналов с заданной эффективностью незави-
симо от числа РЛС.
При вероятности наведения станции помех на РЛС, равной единице, нормирован-
ный критерий будет определяться следующим выражением:
1+1п /С,
где п = 1 + (и -1)/?; /?0 = 1 + (и0 - V)p ; Ку - коэффициент изменения стоимости внешнего
централизованного управления и распределения СП на подавляемые РЛС (если таковое
используется); <7'(д) - значение функции распределения уровня боковых лепестков ан-
тенны РЛС, подавление которой обеспечивается с вероятностью р\ G' - коэффициент
усиления бокового лепестка ДНА, по которому идет подавление РЛС; q - скважность
помехи.
398
Приведенная зависимость критерия 'Р дает возможность, используя оценку эф-
фективность-стоимость и варьируя параметрами и количеством СП в составе системы
РЭП, образующей поле помех, найти оптимальный вариант построения этой системы в
соответствии с требованиями противодействия полю сигналов РЛС.
На рис. 20.2-20.5 представлены расчетные графики зависимости изменения кри-
терия Ч7 от количества СП поля помех при фиксированных значениях вероятности по-
давления и числа РЛС, образующих поле сигналов. При этом средние значения коэф-
фициентов Кс = 1,9 и Ку= 1,35.
Рис. 20.2. Изменение критерия Ч7
от числа СП
Рис. 20.3. Изменение критерия Ч7
от числа СП
Рис. 20.4. Изменение критерия Ч7
от числа СП
Рис. 20.5. Изменение критерия Ч7
от числа СП
399
Как видно из графиков, для всех приведенных значений, определяющих критерий 'К,
имеют место экстремальные значения относительного критерия эффективность-стоимость,
что позволяет выбрать оптимальную конфигурацию, построения комплекса РЭП.
Описанная методика оптимизации системы РЭП по критерию эффективность-
стоимость может быть использована для различных вариантов систем РЭП.
ГЛАВА 21. ТЕНДЕНЦИИ РАЗВИТИЯ СРЕДСТВ РЭП
И БОРТОВОГО РАДИОЭЛЕКТРОННОГО ОБОРУДОВАНИЯ
21.1 . Тенденции развития средств РЭП
Как уже указывалось, развитие средств РЭП идет в тесном взаимодействии с раз-
витием радиолокационной техники и характеризуется постоянной технической и науч-
ной конфронтацией. Любое совершенствование радиолокационной техники, связанное
с повышением ее эффективности, надежности и помехоустойчивости, вызывает ответ-
ную реакцию в области РЭП. Разрабатываются новые методы и технические средства,
нацеленные на компенсацию или полное устранение преимуществ прогрессивной ра-
диолокационной техники. И успех в этом направлении достигается, но он оказывается
временным. Разработчики радиолокационной техники, в свою очередь, предпринимают
соответствующие меры и совершенствуют свою технику таким образом, что эффек-
тивность новых методов и средств РЭП снижается или сводится до нуля, и этот про-
цесс развития идет непрерывно, взаимно обогащая обе области техники. Рассмотрим
кратко развитие радиолокации и средств РЭП в их взаимосвязи.
Развитие радиолокационной техники. С учетом состояния техники в области
РЭП развились следующие методы радиолокации [15].
Моноимпульсный метод углового сопровождения. Хотя этот метод первона-
чально был разработан для улучшения точности и надежности пеленгации цели, интен-
сивное развитие моноимпульсных РЛС с середины 50-х годов было в значительной
степени определено их более высокой помехозащищенностью по сравнению с однока-
нальными угломерными системами, такими как РЛС с коническим сканированием лу-
ча. Моноимпульсный метод потребовал новых методов создания угловых помех.
Когерентный режим работы РЛС. Первоначально данный режим работы был
введен в перспективные РЛС для обеспечения возможности выделения движущихся
целей на фоне отражений от Земли. Этот режим работы привел к тому, что системы
высокочастотного запоминания сигналов, разработанные для созданная помех некоге-
рентным РЛС, оказались устаревшими.
Излучение сигналов с более высоким уровнем мощности. В перспективных РЛС
были введены более мощные передатчики и антенны с более высоким усилением, что
увеличило дальность действия РЛС и их помехозащищенность, поскольку требовали
для своего подавления более мощных передатчиков помех.
Сжатие импульса. Сначала РЛС со сжатием импульса были созданы для увели-
чения дальности обнаружения путем достижения более высоких уровней средней
мощности без увеличения импульсной мощности. Но при этом было достигнуто и уве-
личение помехозащищенности РЛС, поскольку для противодействия РЛС со сжатием
импульса потребовались устройства запоминания когерентных сигналов в системах
РЭП.
400
В целях противодействия системам РЭП и повышения помехозащищенности реа-
лизованы специальные режимы функционирования РЛС, в том числе:
быстрая перестройка частоты следования импульсов, исключавшая возмож-
ность системам РЭП создавать ложные цели РЛС на дальностях, меньших дальности до
защищаемого объекта;
быстрая перестройка несущей частоты, препятствующая созданию шумовых
и многократных ответных помех РЛС на дальностях, меньших дальности до защищае-
мого помехового объекта;
разнесение несущих частот, что вынуждало систему РЭП соответственно рас-
ширять свой рабочий диапазон;
сопровождение по переднему фронту импульса, предназначенное для противо-
действия уводящей помехи по дальности и основанное на естественной задержке поме-
хового сигнала в станции помех относительно сигнала, отраженного от цели;
угловое сопровождение при сканировании луча антенны только на прием, что
препятствует созданию прицельных на частоте сканирования помех, в том числе ин-
версной угловой помехи;
многорежимность и многофункциональность РЛС УО. Особое место здесь за-
нимает режим сопровождения цели по излучаемой ею помехе без излучения радиоло-
катором собственных сигналов. Этот режим находит наиболее широкое применение,
когда помеха - непрерывная шумовая и создается с помощью передатчиков с фиксиро-
ванной настройкой по частоте;
бланкирование и компенсация боковых лепестков диаграммы направленности
антенны РЛС, направленные на снижение возмджностей создания помех через боко-
вые лепестки ДНА РЛС;
излучение с малой вероятностью обнаружения, предусматривающее широко-
полосное излучение, позволяющее создавать радиолокационный сигнал с уровнем ни-
же порогового уровня обнаружения приемника системы РЭП;
дезинформирующие излучения, сводимые к излучению сигналов РЛС с ложными
модуляциями, устраняющими возможность определения истинной модуляции сигналов
и создания эффективной помехи;
защищенность РЛС от противорадиолокационных ракет, которая обеспечи-
вается как наделением каждой РЛС, входящей в систему ПВО, свойствами малой веро-
ятности перехвата ее сигналов, так и переключениями между РЛС. Мерцание радиоло-
кационного сигнала от нескольких пространственно разнесенных РЛС дезориентирует
противорадиолокационные ракеты. Наряду с этими мерами широко используются от-
влекающие ловушки.
При реализации перечисленных выше методов радиолокации и режимов работы
РЛС были разработаны новые технические средства.
Фазированные антенные решетки, обеспечившие гибкость в управлении поло-
жением луча в перспективных РЛС и затруднившие идентификацию РЛС по характеру
сканирования, необходимую при создании помех.
Антенны со сверхнизким уровнем боковых лепестков, достигающим величины
более 60 дБ, что делает практически невозможным создание помехи по боковым лепе-
сткам ДНА РЛС.
Антенны со сканированием только на прием. В этом случае исключается воз-
можность простого создания прицельной по частоте сканирования помехи.
401
Высокочастотные генераторы с быстрой перестройкой частоты, позволив-
шие создать РЛС с быстрой скачкообразной перестройкой частоты, обладающие по-
вышенной помехозащищенностью.
Когерентные генераторы. Будучи высокостабильными по частоте, такие генера-
торы позволили создать РЛС, способные обнаруживать цели в очень низких полосах
частот (менее 1 кГц) и осуществлять селекцию движущихся целей. Это, в свою оче-
редь, потребовало разработки когерентного режима работы системы РЭП при создании
помех таким РЛС.
Передатчики с мощным усилителем. В совокупности с маломощными коге-
рентными генераторами мощные усилители позволили реализовать когерентные РЛС.
Синтезированные дисплеи. Обработка сигналов в когерентных РЛС не сохраняет
видеохарактеристик сигнала для оператора, поэтому приходится прибегать к индика-
ции символами с помощью синтезированных дисплеев.
Развитие средств РЭП. В ответ на совершенствование радиолокационной техни-
ки специалистами систем РЭП были разработаны:
быстродействующее наведение по частоте шумовой помехи, позволившее
создавать помехи перспективным РЛС с быстрой перестройкой несущей частоты;
скользящие по частоте сканирования сигналы прямоугольной формы, что дало
возможность создавать помеху угломерной системе со скрытым коническим сканиро-
ванием. Эффект действия помехи усиливается, если при этом еще использовать реак-
цию антенной системы на действие помехи для сужения диапазона скольжения часто-
ты до пределов полосы пропускания следящей угломерной системы РЛС;
организованное создание помех с двух и более пространственно разнесенных
объектов. Наиболее известными помехами такого рода являются мерцающие помехи;
помеха на кроссполяризации, явившаяся ответом на внедрение моноимпульсного
метода радиолокации. Однако реализация ее имеет свои ограничения. Одно из них за-
ключается в том, что поляризация приемной антенны РЛС может отличаться от поля-
ризации передающей антенны, что приводит к необходимости изменения параметров
поляризации сигнала помехи в пределах, определяемых априорной информацией;
когерентная помеха, излучаемая из двух разнесенных в пространстве точек,
которая может применяться также для противодействия моноимпульсным радиолока-
торам. Реализация се связана с решением ряда проблем, связанных, прежде всего, с
обеспечением определенных амплитудных и фазовых соотношений сигналов помехи
на входе приемной антенны подавляемой РЛС;
помехи из вынесенной точки',
увод строба дальности и/или скорости на ложные цели. Это особенно
эффективно при воздействии на /РЛС, работающие в автоматическом режиме
сопровождения цели по дальности и скорости без вмешательства оператора;
перенацеливающие помехи на подстилающую поверхность ДО, ловушки',
передатчики одноразового действия',
адаптивные РЭП в том числе с устройствами искусственного интеллекта',
помехи, ориентированные на нарушение функционирования систем цифровой
обработки информации в РЭС УО путем введения в них "вирусов".
многократная ответная помеха по дальности и скорости, очень эффективная
против РЛС, работающих в режиме поиска и обнаружения;
402
комбинирование помех нарушения селекции по дальности и/или скорости с по-
мехами угломерным системам;
распределенные системы РЭБ, когда средства РТР и РЭП разнесены в простран-
стве (находятся на разных объектах) и связаны между собой системой обмена инфор-
мации, что помимо повышения эффективности РЭП облегчает проблему ЭМС.
При реализации перечисленных методов были разработаны:
мгновенный измеритель частоты, способный измерять несущую частоту с точ-
ностью в несколько мегагерц по одному импульсу.
генератор с электронным управлением, используемый как возбудитель пере-
датчиков помех с мощными усилителями и обеспечивающий перестройку частоты в
широких диапазонах за очень короткие интервалы времени (порядка наносекунд);
системы с мощным усилителем сигналов задающего генератора, очень полез-
ные там, где требуется быстрое наведение помехи по частоте и различные модуляции
(например, при создании многократной ответной помехи и многих видов помех систе-
мам сопровождения по дальности, скорости и углам);
широкополосные высокочастотные компоненты, разработка которых обуслов-
лена разбросом РЛС по частоте в очень широком диапазоне частот и включает расши-
рение рабочих полос следующих компонентов: ЛБВ, малошумящих усилителей, при-
емных и передающих антенн, широкополосных антенн с электронным сканированием,
ФАР, поляризаторов, банков высокочастотных фильтров, быстродействующих СВЧ-
переключателей на средние и большие мощности;
цифровая высокочастотная память, необходимая для запоминания сигналов
РЛС, использующих как простые, так и когерентные сигналы со сложной частотно-
временной структурой, их воспроизведения с высокой точностью при создании помех,
уводящих по дальности и/или скорости, а также имитационных и прицельных маски-
рующих помех с минимальными энергетическими потерями при обработке в радиоло-
кационном приемнике;
СБИС, в том числе на арсснид-галлиевой технологии.
Среди перечисленных средств РЭП особое положение занимают противорадиоло-
кационные ракеты, наводящиеся по излучению РЛС и нацеленные на физическое унич-
тожение РЛС противника.
Перспективы дальнейшего развития РЛС. Следует ожидать дальнейшего со-
вершенствования радиолокационной техники в целях повышения тактико-технических
характеристик и помехозащищенности. Среди наиболее важных направлений в этом
необходимо отметить следующие [15].
Дальнейшее развитие радиолокационных методов наведения ракет на
перехватываемые цели. В этой облассти доминирующую роль играет активная ГСН,
способная самостоятельно обнаружить цель, осуществить выбор режима излучения,
подавлять помехи от местных предметов, обнаруживать активные помехи, принимать
меры зашиты от них и обеспечивать масимально надежное поражение цели. Дальность
действия активной ГСН ограничена сечением ракеты. Для увеличения дальности
наведения ракеты необходима коррекция траектории на среднем участке ее полета.
Наведение на среднем участке траектории может быть осуществлено с помощью либо
полуактивной системы наведения, работающей с разделением во времени, либо
корректируемой инерциальной системы. В зависимости от тактической ситуации
возможно использование в одной системе различных методов наведения, включая
метод наведения через ракету.
403
Увеличение уровней излучаемой мощности. Основным стимулом наращивания из-
лучаемой мощности является необходимость обеспечения радиолокационного обнаруже-
ния объектов с малыми ЭПР, таких как ракеты и самолеты, изготовленные по технологии
"Стеле". Поскольку требуемые уровни помех пропорциональны уровням мощности подав-
ляемых РЛС, это приведет к необходимости увеличения мощности систем РЭП.
Антенны с электронным управлением. Такие антенны создаются на базе ФАР,
обеспечивающих гибкость формирования ДН в реальном масштабе времени и высоко-
скоростное управление лучом при работе по нескольким целям одновременно. Они
также позволяют формировать провалы в ДН в направлениях на источники помех,
снижая их эффективность. Скоростное управление лучом, особенно по случайному за-
кону, лишает систему РЭП возможности предсказания последующих положений луча
антенны РЛС, необходимых при реализации ряда методов РЭП.
Интеграция датчиков. Это производится в целях повышения надежности систе-
мы ПВО. Используемые совместно с РЛС другие датчики могут быть дополнением и
частью комплекса РЛС. При ухудшении работы РЛС из-за выхода из строя какого-либо
компонента или действия помех дополнительные датчики поддерживают работоспо-
собность системы.
Работа в режиме многопозиционной радиолокации. В этом режиме работы ра-
диолокационные приемники размещаются в удалении от передатчиков. Поскольку при
организации РЭП РЛС приемник является объектом воздействия помехи, а положение
его в данном случае для постановщика помех неизвестно, подавление многопозицион-
ных РЛС представляет проблему для РЭП.
РЛС с низкой вероятностью перехвата ее сигналов (РЛС с повышенной скрыт-
ностью). Характерная особенность таких РЛС сосотоит в режиме излучения широкопо-
лосных сигналов (иногда шумоподобной структуры) со случайной перестройкой пара-
метров (несущей частоты, частоты следования импульсов) и скачкообразным переме-
щением луча ДН в пространстве по случайному закону. Низкий уровень импульсной
мощности и случайная перестройка ряда параметров РЛС серьезнейшим образом за-
трудняет и даже может исключить обнаружение таких РЛС и измерение параметров
сигналов приемными средствами систем РЭП и, как следствие, не позволяет организо-
вать РЭП РЛС.
Использование искусственного интеллекта. Предполагается, что перспектив-
ные радиолокационные системы будут снабжаться устройствами искусственного ин-
теллекта, позволяющими в процессе работы анализировать электронную обстановку и
вырабатывать наиболее оптимальные решения в отношении режимов работы. При РЭП
искусственный интеллект будет автоматически менять алгоритмы работы, включать
средства помехозащиты, менять параметры излучаемых сигналов и прочее. В результа-
те методы РЭП. рассчитанные на определенные уязвимые логические операции в РЛС,
могут оказаться неэффективными.
Многофункциональные антенны. Предполагается использование единых антенн
для выполнения функций многих датчиков (например, бортовых средств навигации,
радиолокации, РТР). Такие антенны могут работать в пассивном режиме, позволяя ра-
диолокатору сопровождать постановщик помех по помехе, нс используя радиолокаци-
онного излучения.
Сверхбыстрая перестройка несущей частоты. В настоящее время такая пере-
стройка используется в основном в некогерентных РЛС. Что касается когерентных
404
РЛС, то там требуется поддержание режима работы с постоянной несущей частотой, по
крайней мере в период когерентного обнаружения цели. Так как быстрая перестройка
частоты РЛС существенно уменьшает возможности РЭП, то следует ожидать реализа-
ции такого режима и в когерентных РЛС, например, путем изменения несущей частоты
от пачки к пачке.
Применение дезинформирующих излучений. Поскольку формирование эффек-
тивной помехи зависит от достоверной информации о режиме работы РЛС, примене-
ние дезинформирующих излучений следует рассматривать перспективным методом
повышения помехозащищенности РЛС.
Внутриимпульсная модуляция. Она усложняет организацию помех РЛС, поэто-
му следует ожидать дальнейшего ее использования в перспективных РЛС.
Использование уникальных характеристик излучений систем РЭП. Наличие в
распоряжении оператора РЛС уникальных характеристик излучений систем РЭП мо-
жет позволить идентифицировать и разделять системы РЭП при одновременном их
действии, что облегчит оценку обстановки в зоне действия.
Антенны со сверхнизкими уровнями боковых лепестков. В настоящее время
много радиолокационных систем, чьи антенны имеют сравнительно высокие уровни
боковых лепестков ДН, позволяющие создавать помеху через боковые лепестки ДНА.
Перспективные РЛС должны исключить такую возможность.
Радиолокаторы миллиметрового диапазона волн. Интерес к таким радиолока-
торам обусловлен их широкополосностью и трудностями создания им помех на данном
уровне развития техники РЭП.
Многофункциональные РЛС. Отличием таких РЛС является сосредоточение
функций, выполняемых в настоящее время различными типами РЛС, в едином радио-
локационном комплексе.
Сущность разработки сверхнадежного многофункционального радиолокато-
ра. Основой многофункциональной РЛС [16-19] является активная ФАР. Применение
АФАР имеет весьма важное значение по ряду причин:
будучи оснащенной твердотельными приемопсрсдающими модулями, АФАР по-
зволяет осуществлять электронное управление положением ДН в азимутальной и уг-
ломестной плоскостях с высокой скоростью. Так, при современных фазовращателях на
арсениде галлия время переключения луча ДН составляет менее 50 нс, в то время как
при механическом сканировании изменение направления обзора производится не бы-
стрее чем за 8 с;
благодаря высокой скорости сканирования луча АФАР открывается возможность
реализации режимов излучения, характеризующихся низкой вероятностью перехвата
сигналов РЛС средствами разведки и предупреждения;
будучи установленной на стратегических и тактических самолетах, АФАР позво-
ляет несколько снизить ЭПР цели по сравнению с антенной с механическим сканиро-
ванием, что особенно важно для самолетов с малой радиозамстностью, разрабатывае-
мых с использованием технологии "Стеле". Это обусловлено тем, что антенна с меха-
ническим сканированием представляет собой поверхность, формирующую сильный от-
раженный сигнал в направлении на облучающую РЛС противника. Активная ФАР явля-
ется неподвижной системой, ее плоскость может быть наклонена на некоторый угол от-
носительно наиболее вероятных направлений облучения самолетов радиолокаторами,
что исключает возникновение мощных отраженных сигналов в этих направлениях;
405
использование АФАР позволяет значительно повысить надежность радиолокаци-
онной системы. Расчеты показывают, что выход из строя до 10% приемопередающих
модулей не приводит к существенному ухудшению характеристик антенны (коэффици-
ента усиления, формы и уровня боковых лепестков ДН) [20];
АФАР может работать как две иНи более антенн и позволяет использовать ее в
пассивном режиме как высокочувствительную систему РТР, а в активном режиме - в
качестве средства противодействия системам РЭП противника. Например, часть прие-
мопередающих модулей может быть перепрограммирована для генерации сигнала,
компенсирующего излучение постановщика помех.
В состав многофункциональной РЛС входят три основные подсистемы: АФАР,
приемное устройство со стабилизированным гетеродином и универсальный процессор
сигналов. Структурная схема такой РЛС приведена на рис. 21.1.
Рис. 21.1. Структурная схема многофункциональной РЛС
406
Режимы работы РЛС
1. При действии по воздушным целям.
Режим поиска:
поиск по скорости;
поиск с измерением дальности: на встречных курсах, всеракурсный, в верхней
полусфере, в полном секторе обзора;
режим воздушного боя;
пассивный прием.
Режим сопровождения:
сопровождение "на проходе" - нормальное, с высокой точностью на больших
дальностях;
сопровождение одиночной цели;
предупреждение о приближении ракет и сопровождение ракет;
сопровождение заданной цели.
Режим опознавания целей:
определение национальных признаков целей по их радиолокационным признакам;
распознавание целей в групповом строю;
опознавание на большой дальности.
2 При действии по наземным целям.
Режим получения изображения земной поверхности:
с помощью обычного луча;
с доплеровским сужением луча;
обнаружение мстеообразований;
режим маяка.
Режим когерентного обзора земной поверхности:
синтезирование апертуры;
селекция движущихся наземных целей;
выделение тактических целей.
Навигационные режимы:
следование рельефу местности;
облет препятствий;
измерение скорости;
определение местоположения самолета.
В рассматриваемом примере активная ФАР состоит из 1980 присмоперсдаюших
модулей и имеет диаметр 81,3 см. Приемопередаюшис модули выполнены на арсенид-
галлиевых пластинах диаметром 7,5 см, содержащих по 16 ИС. В состав каждой ИС
входят усилители, фазовращатели, аттенюатор, переключатели. Для управления фазой
каждого модуля используется пятиразрядное управляющее устройство. Общее управ-
ление формированием луча осуществляется с помощью четырех автономных ЭВМ, ос-
нованных на микропроцессорах, каждая из которых управляет одним квадрантом ФАР.
В состав приемного устройства входят 43 модуля, из них два формируют персключа-
тсль/малошумящий усилитель, 19 модулей - приемник с устройствами дискретизации,
преобразующими синфазный и квадратурный выходные сигнала в цифровую форму,
шесть модулей составляют контроллер, шесть модулей - источники питания. Каждый
модуль предназначен для выполнения определенной функции и содержит в себе схемы
сопряжения и контроля. Основой модулей являются цифровые сверхскоростные инте-
407
гральные схемы и аналоговые СВЧ-интегральные схемы. При выходе из строя любого
модуля производится его замена на резервный или осуществляется перепрограммиро-
вание модулей таким образом, чтобы утраченная функция восстанавливалась, если она
имеет важное значение. В случае, когда нет возможности восстановить все утраченные
функции, производится реконфигурация модулей таким образом, чтобы утрачивалась
наименее важная функция. Все это обусловливает высокую надежность РЛС, превы-
шающую надежность существующих бортовых РЛС в несколько раз.
В приемном устройстве реализовано восемь каналов с тройным согласованным
понижением частоты и два широкополосных приемника. Четыре канала непосредст-
венно связаны с ФАР, а оставшиеся четыре предусмотрены для обеспечения избыточ-
ности и выполнения вспомогательных функций. В случае отказа каждый из четырех
выходных сигналов ФАР может подаваться на любой широкополосный усилитель.
Предусматривается жидкостное охлаждение.
Процессор сигналов рассматриваемой РЛС состоит из ряда стандартных модулей,
в числе которых 32-разрядный процессор с быстродействием 3,85 млн. опер./с, с памя-
тью емкостью 1 Мбайт. Используется волоконно-оптическая линия обмена данными с
быстродействием 50 Мбит/с.
Перспективы дальнейшего развития систем РЭП. Перечисленные выше на-
правления совершенствования радиолокационной техники определяют пути дальней-
шего совершенствования средств РЭП. Некоторые из наиболее важных разработок в
этой области приведены ниже [15].
Совершенствование управления мощностью. Необходимость такого управле-
ния, как уже указывалось, диктуется наличием в системе РЭП ограниченной мощности
и необходимостью обеспечения на входе подавляемого радиолокатора высоких пре-
вышений мощности помехи над сигналом. Несмотря на то, что в этом направлении
сделано немало, еще много предстоит сделать, особенно с учетом новых усовершенст-
вований, вводимых в конструкции РЛС.
Защита объектов, разработанных по технологии "Стеле". Применение тех-
нологии "Стеле" несколько облегчает защиту объектов, поскольку им обеспечиваются
малые уровни ЭПР. Вместе с тем использование активных средств РЭП для защиты
может привести к преждевременному обнаружению таких объектов. В соответствии с
этим может оказаться целесообразным в этой ситуации применять для защиты отде-
ляемые от объекта системы РЭП до того, как они начинают излучать. В эту категорию
попадают и средства одноразового применения, выбрасываемые с борта защищаемого
объекта.
Интеграция датчиков. Как и в случае радиолокации, интеграция данных от дру-
гих датчиков, совмещенных функционально с системой РЭП, может улучшить анализ
угрожаемой обстановки и выбор соответствующих средств реагирования.
Искусственный интеллект. Используемая в современных системах РЭП логика
обычно ограничивается заданными алгоритмами, которые при появлении новых про-
грессивных РЛС частот становятся бесполезными. Поэтому в перспективное оборудо-
вание РЭП желательно включать устройства, которые бы обладали способностью са-
мообучения и подстройки алгоритмов в соответствии с изменяющейся обстановкой.
Такие устройства, очевидно, должны быть на уровне искусственного интеллекта.
Многофункциональные антенны. Применение в системах РЭБ многофункцио-
нальных антенн может дать выигрыш в массе, габаритных размерах и стоимости аппа-
408
ратуры, а также в эффективности РЭП. В качестве такой антенны можно применить
ФАР, но в ограниченной полосе частот. Разработка широкополосных многофункцио-
нальных антенн может помочь преодолеть это ограничение.
Решетки с активными элементами. Ведутся разработки по установке мало-
мощных твердотельных усилителей в каждый элемент ФАР, что обеспечит высокую
гибкость управления ориентацией луча антенны и более высокую излучаемую мощ-
ность.
Математическое перепрограммирование. Несмотря на высокую степень
компьютеризация современных систем РЭП, должна быть реализована еще
возможность полного перепрограммирования системы РЭП в целях выполнения новых
требований, обусловливаемых появлением новых РЛС.
Интегрированное распределение систем РЭП. В настоящее время еще низка
координация в действиях различных систем РЭП. Обычно каждая такая система рабо-
тает автономно, поэтому не исключены ситуации, когда все системы работают по од-
ной PJIG, и ни одна из систем не подавляет РЛС, представляющую непосредственную
угрозу защищаемому объекту. Примером решения проблемы по созданию бортовой
интегрированной системы РЭБ является система INEWS [20-23]. Она рассчитывается
на размещение внутри фюзеляжа, что, по сравнению с контейнерным размещением,
приводит к снижению лобового сопротивления и радиолокационной заметности само-
лета. Предполагается, что она будет эффективной по отношению к непрерывно совер-
шенствующейся системе ПВО потенциального противника, в частности ПВО с высо-
кой интенсивностью использования импульсно-доплеровских бортовых РЛС и приме-
нением лазерных систем наведения ракет на среднем и, возможно, конечном участке
траектории полета.
В состав системы INEWS включено следующее оборудование: приемники преду-
преждения о радиолокационном облучении с точным определением местоположения
излучающей РЛС, передатчики помех, автоматы разбрасывания средств одноразового
пользования, система предупреждения о ракетной атаке, пассивное устройство обна-
ружения пуска ракет, система радиоэлектронной поддержки. Антенные решетки обес-
печивают выполнение многих функций системы по высокой частоте, в том числе пре-
дупреждение о радиолокационном
облучении, радиоэлектронную под-
держку и постановку помех. Антен-
ные решетки сконструированы так,
чтобы была возможность их разме-
щения в обшивке самолета. Полу-
ченные данные в цифровой форме
передаются с помощью волоконно-
оптической информационной шины
на центральный процессор. Про-
граммное обеспечение системы имеет
в общей сложности 700000 кодовых
строк на языке Ada. Упрощенная
функциональная схема комплекса сис-
темы INEWS и ее связей с внешними
системами показана на рис. 21.2.
Рис. 21.2. Упрощенная функциональная схема
комплекса системы INEWS и ее связей
с бортовыми системами
409
Комплект оборудования, проходивший в 1990 г. наземные и летные испытания,
выполнял функции всех датчиков, предусмотренных на самолете ATF, и передавал их
информацию на центральный интегральный процессор, специально разработанный для
этой цели, способный выполнять семь миллиардов операций в секунду и работать со
скоростью 450 млн. команд в секунду. Для обеспечения пропуска до 100 и более алго-
ритмов в реальном масштабе времени в центральном процессоре предусмотрено соот-
ветствующее прерывание расчетов.
Результаты испытаний показали, что система может одновременно обнаруживать
угрозы как в радиолокационном, так и инфракрасном диапазонах в условиях сложной
сигнальной обстановки.
21.2. Тенденции развития авиационного бортового
радиоэлектронного оборудования
Радиоэлектронное оборудование - это важнейшая составная часть, определяющая
эффективность действия тактических и стратегических систем вооружения и состав-
ляющая примерно треть их стоимости. В его состав входят средства обеспечения нави-
гации, основой которых являются радиолокационные системы обнаружения, опознава-
ния, измерения дальности, скорости и высоты; средства радиосвязи, приемники преду-
преждения о радиолокационном облучении; системы активного и пассивного радио-
электронного подавления РЛС противника; системы обеспечения управления самоле-
том; средства эффективного использования вооружения (стрелкового и ракетного). По
мере совершенствования авиационной техники совершенствуются и средства бортово-
го радиоэлектронного оборудования (БРЭО), увеличиваются его состав, масса, габа-
ритные размеры и потребляемые мощности. Этому в значительной степени способст-
вует постоянное совершенствование системы ПВО потенциального противника, воз-
растание сложности сигнальной обстановки в зоне предполагаемых действий, вынуж-
дающее совершенствовать бортовое радиоэлектронное оборудование в части его спо-
собности выполнять быстрый анализ обстановки и вырабатывать правильные решения.
Развитие вычислительной техники позволило упростить использование многих
средств радиоэлектронного оборудования, повысить их эффективность. В соответствии
с этим сложность, масса, габаритные размеры аппаратуры еще более возросли. Возник-
ли трудности с размещением аппаратуры на борту самолета (вертолета), а также труд-
ности с обеспечением ее устойчивости по отношению к взаимным помехам. Большие
проблемы порождались необходимостью размещения большого количества антенн и
обеспечения их развязки. Эти проблемы стали еще более серьезными при разработке
малозаметных объектов по технологии "Стеле", поскольку отражения от многочислен-
ных антенн в значительной степени нейтрализовали достижения в снижении ЭПР объ-
ектов. Все это побудило разработчиков радиоэлектронного оборудования искать более
эффективные пути развития БРЭО. Наиболее эффективным был признан путь интегра-
ции бортовых радиоэлектронных средств в единый комплекс с централизованным
управлением на базе средств вычислительной техники. Этот путь предусматривает от-
каз от классической структуры БРЭО, когда бортовые системы независимы, практиче-
ски не имеют связи между собой и каждую конкретную функцию выполняет отдельная
система, и переход к единой системе, состоящей из функциональных модулей, соеди-
ненных едиными информационными шинами, позволяющими с помощью соответст-
вующих программ выполнять любые функции, которые ранее возлагались на автоном-
ные системы. Построение полностью интегрированной системы БРЭО представляет
410
длительный процесс и он далеко но закончен. В этом процессе можно отметить по
крайней мере три основных этапа.
На первом этапе предусматривалось внедрение цифровой технологии в БРЭО. В
результате была разработана так называемая федеративно-централизованная архитек-
тура. Отличительной особенностью ее являлось объединение автономных систем циф-
ровой мультиплексной шиной информационного обмена, и управление ими осуществля-
лось из единого центра. Тем самым обеспечивалась функциональная интеграция таких
систем, как системы управления самолетом, навигационные системы, средства РЭБ, сис-
темы связи и управления доставкой оружия и т. д. Следует заметить, что существующие
системы БРЭО в основном построены в соответствии с данной архитектурой.
На втором этапе была создана модульная архитектура БРЭО, при которой уже
обеспечивается частичное аппаратурное интегрирование..
И, наконец, на третьем этапе получена полностью интегрированная архитектура
БРЭО.
Из зарубежных программ, нацеленных на интеграцию бортового радиоэлектрон-
ного оборудования, следует указать программы PAVE Pillar. CPS и ICNIA.
Концепция интеграции по программе Pave Pillar [22-26] основана на выделении
во всех бортовых системах общих функций (например, обработка сигналов и данных,
сопряжение, аналого-цифровое и цифроаналоговое преобразования и т. д.) и разработке
малогабаритных модулей, предназначенных для выполнения этих функций. По-
существу обеспечивается распределенная обработка информации с помощью центра-
лизованного процессорного комплекса, заменяющего специализированные процессо-
ры, присущие автономным системам при формировании БРЭО в соответствии с клас-
сической архитектурой. Каждый модуль может программироваться для выполнения
различных функций. При необходимости функции модулей могут меняться.
Основой формирования модулей является стандартный набор цифровых сверхскоро-
стных интегральных микросхем VAS1C, включающий в себя [24]: арифметический блок;
множительное устройство; управляющее устройство общего назначения; ЗУ с произволь-
ной выборкой; вентильную матрицу; блок сопряжения; арифметический расширитель.
На основе указанных функциональных микросхем производится формирование
стандартных модулей, включающих: векторный/матричный процессор; вектор-
ный/скалярный процессор; универсальный процессор с архитектурой, соответствую-
щей стандарту США; мультиплексное устройство сопряжения; ЗУ большого объема;
аналоговый интерфейс; энергонезависимое ЗУ.
Стандартные модули составляют основу формирования систем: многорежимной
РЛС, оборудования РЭБ (комплексной системы INEWS), ПК-системы поиска и сопро-
вождения целей, комплексной системы бортового электронного оборудования связи,
навигации и опознавания объектов (системы ICNIA), инерциальной навигационной
системы 1РА, системы управления оружием. Предполагалось, что локальная вычисли-
тельная система РЛС должна состоять из двух векторных/матричных процессоров, век-
торного/скалярного процессора, двух процессоров 1750А, модуля программируемого
ЗУ, модуля постоянного ЗУ и модуля сопряжения.
Система РЭП должна была иметь в своем составе два векторных/матричных про-
цессора, процессор 1750А, векторный/скалярный процессор, модуль постоянного ЗУ и
модуль сопряжения с мультиплексными каналами.
Функционирование БРЭО, построенного по новым принципам, потребовало более
широкой полосы пропускания информационных шин. В результате были разработаны
411
волоконно-оптические шины со скоростью передачи данных, в 50 раз превышающей
скорость передачи стандартных шин, нечувствительные к воздействию электромагнит-
ных импульсов и известных средств РЭБ.
Предполагалось, что принципы формирования БРЭО, разработанные по програм-
ме Pave Pillar, явятся основой для создания комплекса БРЭО перспективных самолетов
ATF ВВС, АТА ВМС и вертолета LHX СВ США.
Параллельно программе Pave Pillar и на базе ее результатов в течение ряда лет ве-
лись работы по ряду программ, сопутствующих программе разработки самолета ATF, в
том числе программы создания универсального процессора CSP (Common Signal
Processor), высоконадежной многофункциональной РЛС URR (Ultra - reliability Radar),
интегрированной системы РЭБ INEWS, интегрированной системы связи, навигации и
опознавания ICNIA, высокоскоростной цифровой шины HSDB и др.
В рамках программы CPS [27] фирма Hughes разработала универсальный инте-
гральный процессор С1Р, являющийся основным элементом комплекса БРЭО самолета
F-22 (ATF). Центральный элемент процессора - универсальный обрабатывающий эле-
мент выполнен на основе военного варианта 32-разрядного микропроцессора 80960 МС
фирмы Intel. Экспериментальный образец CIP включает 32 стандартных электронных
модуля Е (SEM-E), принятых для ВМС, имеет массу 32 кг, быстродействие 32 млн. опер, /с
при обработке данных и 2,16 млрд, опер./с при обработке сигналов, емкость памяти
24 Мбайт. Программа составлена на языке АДА. Средняя наработка на отказ 1000 ч.
Система ICNIA, как и система INEWS, является подсистемой интегрального ком-
плекса БРЭО, созданного в рамках программы Pave Pillar [20-22]. Основная цель дан-
ной программы - демонстрация технической реализуемости модульной, реконфигури-
руемой интегрированной системы связи, навигации и опознавания, работающей в диа-
пазоне частот 2 МГц...2 ГГц. Основой конструкции является модульный принцип. В
случае выхода из строя любого из модулей приемоперсдающей аппаратуры автомати-
чески осуществляется реконфигурация системы. При этом модули перераспределяются
таким образом, чтобы утраченной оказалась наименее важная функция системы.
Управление системой выполняет центральный процессор. Реконфигурация модулей
системы может осуществляться и тогда, когда в процессе боевой операции меняется
приоритетность функций.
К полностью интегрированной архитектуре БРЭО относится модульная архитек-
тура А3 с высокой степенью аппаратурной и функциональной интеграций. В соответст-
вии с этой архитектурой БРЭО строится как высоко интегрированный цифровой ин-
формационный комплекс, представляющий собой связанные в единую сеть шиной
данных модули процессоров, датчиков /РЛС, РЭБ/, средств связи и другие функцио-
нальные модули. При этом предусмотрена интеграция антенн бортовых систем. В ре-
зультате обеспечивается в реальном времени комплексная обработка и синтез инфор-
мации от различных бортовых датчиков, а также данных о тактической обстановке.
Упрощенная схема данной архитектуры БРЭО представлена на рис. 21.3 [28, 29].
Каждая апертура выполняет несколько функций в своем диапазоне частоты.
Апертуры связаны между собой волоконно-оптической связью и процессорным ком-
плексом, выполняющим дальнейшие вычисления и относящимся к классу супер-ЭВМ с
быстродействием 10 млрд, опер./с. Предполагается использование многофункциональ-
ной широкополосной ФАР, которая будет монтироваться непосредственно в обшивке
самолета и обеспечивать выполнение функций РЛС, РЭП и опознавания, работая
по принципу временного разделения. По выполняемым задачам рассматриваемый ком-
412
Рис. 21.3. Структурная схема БРЭО боевого самолета, выполненного в соответствии
' с перспективной архитектурой AJ
плекс БРЭО можно разделить на три части: центральный процессорный комплекс;
комплекс связи, навигации, опознавания и комплекс управления боевыми задачами
(функции РЛС, РЭП и др.)
На рис. 21.4 представлена структурная схема комплекса БРЭО с активной ФАР,
соответствующего перспективной архитектуре А3.
Модули
антенны
Рис. 21.4. Структурная схема БРЭО боевого самолета с активной ФАР,
выполненного в соо тветствии с перспективной архитектурой А3
413
По оценкам зарубежных специалистов 20 % стоимости истребителя ATF
приходится на программное обеспечение и аппаратуру реализации вычислительных
средств. Стоимость всего БРЭО, включая вычислительные средства, составит 1/3
стоимости самолета. При реализации комплекса БРЭО по архитектуре А3 требуются
вычислительные системы с быстродействием в сотни миллионов операций в секунду.
Следует отметить, что вопросами создания интегрированных БРЭО занимаются и
другие страны.
Существует созданный США, Англией, Францией и ФРГ объединенный комитет
по созданию стандартной архитектуры БРЭО. Хотя на перспективных западноевропей-
ских самолетах EFA и "Рафаэль" предполагается реализовать БРЭО на основе отдель-
ных уникальных подсистем, все же будут использованы прогрессивные информацион-
ные шины, в том числе волоконно-оптические с быстродействием до 20 Мбит/с.
Таким образом, анализ основных направлений развития авиационного бортового
радиоэлектронного оборудования за рубежом позволяет сделать следующие выводы.
1. Развитие БРЭО идет по пути отказа от применения автономных систем и пере-
хода к интегрированным системам. Разработаны принципы построения комплексов
БРЭО с интеграцией на уровне подсистем (архитектура Pave Pillar) и комплексов БРЭО
с полной интеграцией функций БРЭО (архитектура А3).
2. Основой создания интегрированных комплексов БРЭО являются вычислитель-
ные комплексы с быстродействием в сотни миллионов операций в секунду и более
(вплоть до миллиардов операций в секунду), функциональные модули, собранные на
основе цифровых сверхскоростных интегральных схем и аналоговых высокочастотных
интегральных схем, широкополосные волоконно-оптические информационные шины с
быстродействием обмена информации 50 Мбит/с и многофункциональные активные
ФАР конформного типа.
3. Реализация полностью интегрированных комплексов БРЭО прорабатывается
применительно к перспективным боевых самолетам, разрабатываемым с использовани-
ем технологии "Стеле".
4. Переход к интегрированным комплексам БРЭО повышает надежность, снижает
массу, габаритные размеры и потребляемые мощности электронного оборудования са-
молетов и вертолетов, а также снижает ЭПР объекта за счет уменьшения на нем коли-
чества антенн и применения конформных ФАР. Применение ФАР позволяет увеличить
энергетический потенциал систем РЭП и, как правило, повысить их эффективность.
5. Применительно к самолетам и вертолетам, уже стоящим на вооружении, реко-
мендуется модернизация через частичную интеграцию электронных систем, например,
интеграцию средств РЭБ, интеграцию систем связи, навигации и опознавания, инте-
грацию радиолокационного и помехового оборудования, интеграцию приемников пре-
дупреждения о радиолокационном облучении с передатчиками помех и автоматами
сбрасывания средств одноразового применения и т. д.
Литература к ЧАСТИ ПЯТОЙ
1. Gramar, M.L., Pratt, S.R. Computer virus countermeasures - a new type of EW. - Defence Electron-
ics, 1990, v. 22, Oct., pp. 75, 76, 78, 80, 82, 84, 86.
2. Файте Ф., Джонстон И., Критпц М. Компьютерный вирус: проблемы и прогноз: Пер. с англ. -
М.: Мир, 1993.
3. Сообщение ТАСС. - Газета “Правда” от 13 января 1992.
414
4. Можус О.В. Виртуальный терроризм - реальность нашего времени. - Защита информации.
ООО “Конфидент”, Январь-апрель 1999, с. 66-69.
5. Army to award contract for studying potential of computer viruses as electronic countermeasures. -
Aviation Week and Space Technology, 1990, v. 132, N 20, p. 38.
6. Carlo Kopp. The E-bomb — A weapon of electronical mass destruction. - Schwartau W. Information
Warfare. - Thunder’s month press. New York, 1996, pp. 296-333.
7. Фомичев К.И., Юдин Л.М. Электромагнитное оружие. Перспективы применения в информаци-
онной борьбе. - Электроника, 1999, № 6. с. 40-44.
8. Clayborns, D., Teylor and Nicolash Younan. Effect from high power microwave illumination. —
Microwave Journal, 1992, v. 35, N 6, p. 80, 82, 84, 86, 88, 93-96.
9. Антипин В.В., Госвицин В.А. и др. Влияние мощных импульсных микроволновых помех на по-
лупроводниковые приборы и интегральные микросхемы. - Зарубежная радиоэлектроника,
1995, № 10-12, с. 3-9.
10. Панов В.В., Добынин В.Д. и др. Некоторые аспекты проблемы создания СВЧ-средств функ-
ционального поражения. - Зарубежная радиоэлектроника, 1995, № 10-12, с. 3-9.
11. Викулов О.В., Добынин В.Д. и др. Современное состояние и перспективы развития авиацион-
ных средств радиоэлектронной борьбы. - Зарубежная радиоэлектроника. Успехи современной
радиоэлектроники, 1998, № 12, с. 3-16.
12. Florig, Н.К. The future batterfield: a blast of gigawatts? — IEEE Spectrum, 1988, v. 25, N 3, pp. 50-54.
13. Прицепенко А.Б. Электромагнитное оружие в бою будущего. - Морской сборник, 1995, № 3.
14. Schwartau, IK. More about HERE then some. - Information warfare. Thinder’s month press. New
York, 1996, pp. 288-296.
15. Chrzanowski, E.L. Active Radar Electronic Countermeasures. — USA, Artech House inc., 1990.
16. Poceedings of the IEEE National Conference, 1989, March 29-30. Dallas, Texas, pp. 1-6.
17. Sweetman, B. Active array for ATF. - Interavia, 1988, v. 43, N 8, pp. 285-288.
18. Advanced Tactical Fighters ready for first flight. - Interavia. Aerospace review, 1988, v. 44, N 12,
pp. 1188-1191.
19. ATF Radar becomes big military user of GaAs MMICs. - Microwave Journal and RF, 1988, v. 27,
N 6, pp. 53,54.
20. Defence Electronics, 1990, v. 2, N 4, pp. 63-66.
21. Радиоэлектроника. Состояние и тенденции развитию, 1989, т. III, с. 1-12.
22. Ostgard. J.S., Szkody, R. Pave Pillar avionics designed for dependability. - Defence Electronics,
1986, v. 18, N 5, pp. 79, 80, 84, 86, 89.
23. Schultz, J.V. INEWS ignites technology trade-off and competition. - Defence Electronics, 1985,
v. 17, N 9, pp. 136, 137, 139, 140, 142, 144.
24. Journal od Elecronics Defence, 1989, v. 12, N 3, pp. 47, 48, 50, 51.
25. Rawles, J.W. AFT program gathers momentum. — Defence Electronics, 1988, v. 20, N 8, pp. 43, 44,
46,51.
26. Royle, D., Lopez, R. Interacting electronic warfare. - Interavia, 1985, N 8, pp. 865-867.
27. Nashua, N.H. Integrated electronic warfare system hardware tests for YF-22A nearly once. - Avia-
tion Week and Space Technology, 1990, v. 133, N 16, pp. 76-79.
28. Gershanoff, H. The NEW in INEWS. - Journal of Electronic Defence, 1988, v. 11, N 10, pp. 43-51.
29. New concepts emerging for electronic warfare. — Aviation Week and Space Technology, 1989,
v. 131, N ll,pp. 44-47.
415
Научное издание
РАДИОЭЛЕКТРОННОЕ ПОДАВЛЕНИЕ
ИНФОРМАЦИОННЫХ КАНАЛОВ
СИСТЕМ УПРАВЛЕНИЯ ОРУЖИЕМ
Юрий Митрофанович Перунов
Константин Иванович Фомичев
Леонид Михайлович Юдин
Зав. редакцией Л.А. Разум
Редактор-оператор Ю.А. Ковелина
Изд. № 80. Сдано в набор 10.03.2003.
Подписано в печать 21.04.2003. Формат 70 х 100 1/16
Бумага офсетная. Гарнитура Таймс.
Печать офсетная
Псч. л. 26. Тираж I 000 экз. Зак. №1777
ЛР № 065229 от 20.06.97
Издательство «Радиотехника».
107031, Москва, К-31, Кузнецкий мост, д. 20/6.
Тел./факс: 921-48-37; 925- 78-72, 925-92-41.
E-mail: iprzhr@online.ru
www.webcenter.ru /~iprzhr /
Отпечатано в ООО ПФ “Полиграфист”
160001, г. Вологда, ул. Челюскинцев, д. 3.