








































































































































Author: Ряховский О.А. Клыпин А.В.
Tags: детали машин передачи (механические) подъемно-транспортное оборудование крепежные средства смазка общее машиностроение машиноведение машиностроение детали автомобиля автомобили
ISBN: 5-7107-5232-0
Year: 2002




Я
П РОФЕССИОНАЛЬНОЕ ОБРАЗОВАНИЕ
ДЕТАЛИ МАШИН
О А. Ряховский, А.В. Клыпин
О.А. Ряховский, А.В. Клыпин
ДЕТАЛИ
МАШИН
Допущено
Министерством образования Российской Федерации в качестве учебника для студентов образовательных учреждений среднего профессионального образования, обучающихся по специальностям технического профиля
СРЕДНЕЕ
ПРОФЕССИОНАЛЬНОЕ
ОБРАЗОВАНИЕ
ррофо.
Москва • 2002
УДК 621.81(075.8)
ББК 34.44я73
Р99
Рецензенты:
кафедра «Машиноведение и детали машин» Московского авиационного института (зав. кафедрой д-р техн, наук, проф. А. И. Станкевич);
д-р техн, наук, проф. В. П. Николаев (зав. кафедрой «Основы проектирования машин» Московского энергетического института)
Ряховский О. А.
Р99 Детали машин: Учеб, для ссузов / О. А. Ряховский, А. В. Клыпин. — М.: Дрофа, 2002. — 288 с.: ил.
ISBN 5—7107—5232—0
В книге рассмотрены вопросы создания современных конструкций машин, обеспечивающих материале-, трудо- и энергосбережение. Особое внимание уделено расчетам отдельных деталей машин, а также наиболее перспективным соединениям и передачам.
Для студентов образовательных учреждений среднего профессионального образования, обучающихся по специальностям технического профиля.
УДК 621.81(075.8)
ББК 34.44я73
ISBN 5—7107—5232—0
© ООО «Дрофа», 2002
Оглавление
Предисловие............................................. 8
Основные обозначения.................................... 9
ГлаваЦ Общие вопросы проектирования................11
1.1. Критерии работоспособности и расчет деталей машин. 12
1.2. Надежность машин..............................14
1.3. Стандартизация................................15
1.4. Машиностроительные материалы..................16
1.5. Пути экономии материалов при конструировании.
Технологичность конструкции. Точность. Взаимозаменяемость...........................19
1.6. Конструирование машин и их оптимизация........20
главаВ Сопряжения деталей машин и контактные напряжения............................23
глава и Основы триботехники.......................26
3.1. Трение.......................................26
3.2. Смазочные материалы..........................29
глава И Фрикционные передачи и вариаторы..........31
4.1. Общие сведения...............................31
4.2. Общие вопросы конструирования................33
4.3. Расчет фрикционных передач...................35
4.4. Передачи с постоянным и переменным передаточным отношением...........................35
г л а в а В Зубчатые передачи.....................40
5.1. Общие сведения...............................40
5.2. Геометрия и кинематика цилиндрических зубчатых передач..................................42
5.3. Основные параметры цилиндрических зубчатых передач..................................48
3
5.4. Точность зубчатых передач..................... 51
5.5. Силы в зацеплении цилиндрических передач...... 52
5.6. Виды разрушения зубьев. Критерии
работоспособности и расчета зубчатых передач.. 54
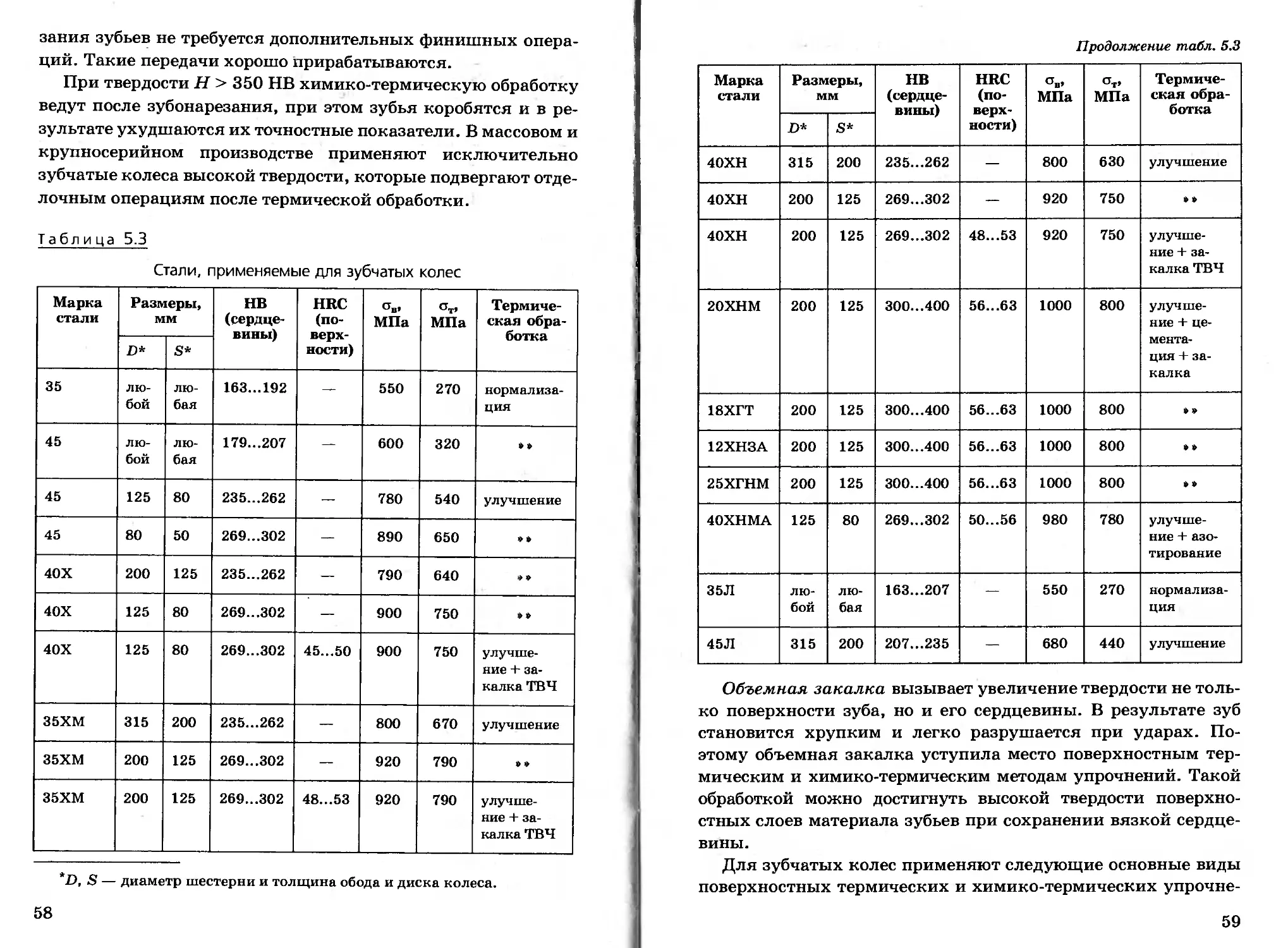
5.7. Материалы для изготовления зубчатых колес..... 57
5.8 Расчетная нагрузка............................ 62
5.9. Расчет зубьев цилиндрических передач
на контактную прочность....................... 67
5.10. Расчет зубьев цилиндрической передачи
на прочность при изгибе....................... 71
5.11. Допускаемые напряжения........................ 74
5.12. Конические зубчатые передачи.................. 81
5.13. КПД зубчатых передач.......................... 88
глава@ Планетарные передачи......................... 90
6.1. Общие сведения................................ 90
6.2. Кинематика планетарных передач................ 92
6.3. Силы и моменты в передаче..................... 93
6.4. Особенности расчета планетарных передач....... 95
главай Волновые зубчатые передачи................... 98
7.1. Общие сведения............................... 98
7.2. Основные параметры волновых передач..........100
г л а в a R Червячные передачи......................юз
8.1. Общие сведения...............................103
8.2. Типы червяков................................103
8.3. Причины выхода из строя червячных передач....105
8.4. Материалы для изготовления червяков
и червячных колес............................106
8.5. Основные параметры, геометрия червячных
передач......................................107
8.6. Скольжение в червячной передаче. КПД передачи . . . 111
8.7. Силы, действующие в зацеплении...............112
8.8. Расчетная нагрузка. Коэффициент нагрузки.....113
8.9. Допускаемые напряжения.......................114
8.10. Расчет червячной передачи по контактным
напряжениям..................................116
8.11. Расчет червячной передачи по напряжениям
изгиба зуба колеса...........................118
8.12. Тепловой расчет и охлаждение передач.........119
4
ГлаваН Ременные передачи............................121
9.1. Общие сведения. Классификация передач..........121
9.2. Материалы и конструкция ремней.................122
9.3. Основные геометрические соотношения............124
9.4. Взаимодействие ремня со шкивами, критерии
расчета ременных передач......................125
9.5. Кинематика ременных передач....................126
9.6. Силы и напряжения в ремне. Расчет
долговечности ремня...........................127
9.7. Расчет ременной передачи по тяговой способности.
КПД передачи..................................129
9.8. Зубчато-ременная передача......................132
Глава
10
Цепные передачи.....................135
10.1. Общие сведения.................................135
10.2. Типы цепей.....................................136
10.3. Причины выхода из строя цепных передач.
Материалы и термическая обработка деталей цепей..........................................138
10.4. Основные параметры цепных передач..............139
10.5. Расчет цепных передач..........................141
10.6. Переменность скорости движения цепи............143
ПЗ..Ш Сварные соединения.............................146
11.1. Общие сведения................................146
11.2. Сварные соединения стыковыми швами............148
11.3. Сварные соединения угловыми швами.............150
11.4. Соединения контактной сваркой.................153
11.5. Допускаемые напряжения сварных швов...........155
Глава
Соединения деталей с натягом.......158
12.1. Общие сведения................................158
12.2. Соединения с натягом по цилиндрическим
поверхностям..................................158
12.3. Конусные соединения...........................168
12.4. Соединения коническими стяжными кольцами......170
Глава
13
Шпоночные и шлицевые соединения .... 174
13.1. Шпоночные соединения...........................174
13.2. Шлицевые соединения............................177
5
14
Резьбовые соединения
183
14.1. Общие сведения.................................183
14.2. Основные типы и параметры резьб................184
14.3. Материалы, классы прочности резьбовых деталей,
допускаемые напряжения.........................186
14.4. Момент завинчивания............................187
14.5. Стопорение резьбовых соединений................191
14.6. Распределение силы между витками резьбы........193
14.7. Прочность винтов при постоянных нагрузках......195
14.8. Расчет групповых резьбовых соединений..........197
14.9. Расчет винтов при переменной нагрузке..........203
14.10. Способы повышения несущей способности
резьбовых соединений...........................204
Глава
15
15.1.
15.2.
Передача винт—гайка ... Передача винт—гайка скольжения Передача винт—гайка качения . . .
207
207
211
Глав
16
Валы И ОСИ
216
а
16.1. Общие сведения..................................216
16.2. Конструкции и материалы валов и осей............217
16.3. Критерии работоспособности, этапы конструирования валов и осей..........................218
16.4. Расчет валов и осей на статическую прочность....220
16.5. Расчет на сопротивление усталости...............221
16.6. Расчет валов и осей на жесткость................224
Глава
17
Подшипники качения..............227
17.1. Общие сведения ,..............................227
17.2. Классификация и обозначения подшипников.......228
17.3. Характеристика основных типов подшипников.....230
17.4. Причины выхода из строя, виды расчета
подшипников качения, материалы деталей подшипников...................................232
17.5. Расчет подшипников по статической грузоподъемности...................................233
17.6. Расчет подшипников качения по динамической грузоподъемности...................................235
17.7. Зазоры и предварительные натяги в подшипниках качения............................................239
6
17.8. Определение осевых реакций в радиально-упорных
подшипниках.................................239
17.9. Определение эквивалентной динамической нагрузки
при переменных режимах нагружения...........241
17.10. Быстроходность подшипников. Посадки колец
подшипников.................................242
17.11. Смазывание подшипников....................243
Подшипники скольжения...................245
18.1. Общие сведения...............................245
18.2. Области применения, достоинства и недостатки.246
18.3. Причины выхода из строя подшипников
скольжения...................................247
18.4. Подшипниковые материалы......................247
18.5. Виды расчетов подшипников скольжения.........248
18.6. Устойчивость работы подшипников скольжения.
Гидростатические подшипники..................252
Глав
19
19.1.
19.2.
19.3.
19.4.
Муфты приводов..................
Назначение муфт, применяемых в машинах Муфты, постоянно соединяющие валы..
Муфты сцепные управляемые..........
Муфты сцепные самоуправляемые......
255
255
256
271
274
а
Литература..........................282
Предметный указатель..............283
J Предисловие
Учебник «Детали машин» написан в соответствии с примерной программой Научно-методического центра среднего профессионального образования (1997).
В книге рассмотрены важнейшие вопросы расчетов и конструирования механизмов современной техники, а также физические основы процессов, протекающих в соединениях, передачах и механизмах.
Даны основы расчета и конструирования наиболее распространенных механических передач (зубчатых, червячных, ременных, цепных, винт—гайка), соединений (сварных, с натягом, резьбовых, шлицевых, шпоночных), валов и осей, подшипников качения и скольжения, муфт приводов. Особое внимание уделено наиболее перспективным соединениям и передачам: соединениям ступицы с валом упругими коническими кольцами, конусным соединениям с натягом; зубчатым планетарным и волновым передачам, а также червячным с вогнутым профилем витков червяка, фрикционным планетарным, зубчато-ременным, цепным с открытыми шарнирами цепи. Одна из глав посвящена основам триботехники — новой дисциплины о практической реализации науки о трении, износе и смазке.
Для лучшего усвоения материала в конце каждой главы приведены контрольные вопросы.
Книга предназначена для студентов среднего профессионального образования, обучающихся по специальностям машиностроительного профиля.
Авторы считают своим долгом выразить благодарность рецензентам за ценные советы и рекомендации при подготовке учебника к изданию.
Авторы
Основные обозначения
А — площадь, мм2
а — межосевое расстояние, мм b — длина линии контакта, мм С — динамическая грузоподъемность, Н
Q) — статическая грузоподъемность, Н d — диаметр делительной окружности, мм da — диаметр окружности вершин, мм db — основная окружность, мм df — диаметр окружности впадин, мм dw — диаметр начальной окружности, мм
Е — модуль упругости материала, МПа
F — сила, Н
FKp — критическая сила, Н f — коэффициент трения
Jp — полярный момент инерции, мм4
<JX, Jy — осевые моменты инерции, мм4
К — коэффициент нагрузки
Kd — коэффициент влияния абсолютных размеров (масштабный фактор)
Ка — эффективный коэффициент концентрации напряжений k — катет углового шва, мм
L — ресурс, млн об
Lh — время работы (ресурс), ч
М — изгибающий момент, Н • м т — модуль зацепления, мм N — расчетный натяг, мкм
NG — базовое число циклов п — частота вращения, мин-1 р — шаг, мм
Ро — эквивалентная статическая нагрузка, Н
Ph — ход резьбы, мм
Рг, Ра — эквивалентная динамическая нагрузка, Н р — давление МПа
[р] — допускаемое давление, МПа q — коэффициент диаметра червяка R — конусное расстояние, мм
Ra — среднее арифметическое отклонение профиля микронеровностей от базовой линии, мкм
9
R2 — высота профилей микронеровностей, мкм
S — коэффициент безопасности
s — коэффициент запаса сцепления
Т — вращающий момент, Н • м
tM — температура масла, °C
и — передаточное отношение
и -— окружная скорость, м/с
W — осевой момент сопротивления изгибу, мм3
Wo — максимальная радиальная деформация, мм
W\ — мощность теплообразования, Вт
w — распределенная нагрузка, Н/мм
х — коэффициент смещения исходного контура
YFS — коэффициент формы зуба
ZN — коэффициент долговечности
z — число зубьев
Д — диапазон регулирования скоростей
а — угол профиля, град
а(Ц1 — угол зацепления, град
Р — делительный угол наклона зуба, град
у — угол подъема витка червяка, град
5 — прогиб, мм
е — относительное удлинение
т] — коэффициент полезного действия
О — угол поворота сечения на опоре, град
р — динамическая вязкость, Па • с
v — коэффициент Пуассона материала
р — приведенный радиус кривизны, мм
— предел выносливости при симметричном цикле, МПа оа — амплитуда напряжений, МПа
сЕ — эквивалентное напряжение, МПа
— напряжение изгиба, МПа
[o]f — допускаемое напряжение изгиба, МПа
оИп1 — предел выносливости, МПа
cfm — среднее напряжение, МПа
он — расчетное контактное напряжение, МПа
[о]„ — допускаемое контактное напряжение, МПа
ов — предел прочности, МПа
°см — напряжение смятия, МПа
[ст]см — допускаемое напряжение смятия, МПа
стт — предел текучести, МПа
т — касательное напряжение, МПа
[т] — допускаемое касательное напряжение, МПа
<р — угол трения, град
V — коэффициент относительных потерь
со — угловая скорость, с-1
10
П Общие вопросы проектирования
Конструирование — это процесс создания машин в виде сборочных и рабочих чертежей на основе расчетов на прочность, износостойкость и др., конструкторского, технологического и эксплуатационного опыта. Все детали в машинах делятся на две группы: общемашиностроительного применения (валы, подшипники, зубчатые колеса и др.) и специальные, используемые, например, в поршневых двигателях и компрессорах, грузозахватных устройствах подъемно-транспортных машин. В учебнике рассматриваются детали первой группы: соединения, передачи, валы, подшипники, муфты, смазочные и уплотнительные устройства, упругие элементы и корпусные детали.
Простые детали машин: оси с металлическими цапфами, примитивные зубчатые колеса, винты, кривошипы, полиспасты были известны до Архимеда. В эпоху Возрождения итальянский живописец, ученый, инженер Леонардо да Винчи создал новые механизмы: зубчатые колеса с перекрещивающимися осями, шарнирные цепи, подшипники качения. Тогда же стали применять канатные и ременные передачи, грузовые винты, шарнирные муфты. Теория эвольвентного зубчатого зацепления была создана Л. Эйлером в середине XVIII в., но широкое применение зубчатых передач началось только в конце XIX в., когда их научились изготавливать методом обката. Первые патенты на шарикоподшипники были выданы в Англии в 1772 и 1778 гг., но централизованное их производство началось в Германии в 1883 г., в США в 1889 г.
Важный вклад в создание механических конструкций внесли Н. Н. Бенардос (1882) и Н. Г. Славянов (1888), разработавшие дуговую электрическую сварку, а также профессор Военно-воздушной инженерной академии им. Н. Е. Жуковского М. Л. Новиков, предложивший эффективные передачи зацеплением.
11
1.1. Критерии работоспособности и расчет деталей машин
Работоспособность — это способность изделия выполнять заданные функции с параметрами, установленными техническим заданием. Она характеризуется рядом критериев, которые применяют с учетом условий работы деталей механизмов и характера их нагружения. Основными критериями работоспособности являются:
Прочность — способность детали выдерживать нагрузки без разрушения. В зависимости от характера нагрузок рассматриваются прочности статическая, усталостная и ударная.
Различают 3 вида нагрузок:
_ постоянные во времени (статические) нагрузки, дейст-
вующие в машинах, например, силы начальной затяжки винтов, весовые нагрузки, давление жидкости или газа в стационарно работающих машинах (рис. 1.1, а);
_ переменные нагрузки рассматривают в трех вариан-
тах: с постоянными амплитудами в стационарно работающих
Рис. 1.1. Виды нагрузок деталей машин: а — статическая; б—г — переменные
12
машинах (рис. 1.1, б, в, г); с переменными амплитудами — внестационарно работающих машинах (рис. 1.2, а, б, в); со случайными амплитудами, вызываемыми ударами волн, случайными колебаниями оснований, случайными неровностями дороги, неоднородностями обрабатываемой поверхности, воздействием рабочих процессов, в том числе тяговой силы реактивных летательных аппаратов (рис. 1.2, г);
— ударные нагрузки в машинах ударного действия или других машинах вследствие погрешностей изготовления.
Нагрузки, представленные на рис. 1.1, называют стационарными (амплитуда постоянна во времени), а представленные на рис. 1.2, —нестационарными (амплитуда переменна во времени). Соответствующие расчеты деталей отражают характер изменения напряжений, концентрацию напряжений, влияние абсолютных размеров, шероховатости и упрочнения поверхности.
Жесткость — способность деталей, сборочных единиц сопротивляться изменению формы под действием нагрузок. Жесткость вызвана собственными упругими деформациями деталей, приближенно вычисляемыми по формулам сопротив
Рис. 1.2. Схемы нестационарного нагружения деталей: а, в — систематическое ступенчатое нагружение: б — систематическое непрерывное нагружение; г — нагружение циклическими случайными напряжениями
13
ления материалов и контактными деформациями (перемещениями), определяемыми при начальном контакте деталей по линии или в точке по формулам Герца, а при начальном контакте по площади — с помощью экспериментальных зависимостей.
Износостойкость — способность материала рабочих поверхностей деталей сопротивляться изнашиванию. Она определяется видом трения (скольжения или качения), наличием смазочного материала, режимом трения (жидкостным, полу-жидкостным, граничным и сухим), уровнем защиты от загрязнений, материалом и твердостью трущихся поверхностей. Износостойкость — важный критерий работоспособности, так как около 90% деталей, имеющих подвижные сопряжения, выходят из строя именно из-за износа.
Виброустойчивость — способность машины сопротивляться появлению вредных вынужденных колебаний и автоколебаний, т. е. колебаний, вызываемых ими самими. Колебания вызывают дополнительные деформации деталей, снижая их циклическую прочность.
Теплостойкость — способность машины работать при повышенных температурах — особо актуальна в машинах с большим тепловыделением в рабочем процессе (тепловые и электрические машины, машины для горячей обработки металлов). Теплостойкость ограничивает работоспособность машин, поскольку снижаются несущая способность масляного слоя в трущихся парах и точность деталей из-за температурных деформаций. Так, температурные деформации лопаток турбин могут вызвать выборку зазоров и аварию машины.
Коррозионная стойкость — сопротивление металлов химическому или электрохимическому разрушению поверхностных слоев и коррозионной усталости. Средства борьбы — специальное легирование или покрытия.
1.2. Надежность машин
Надежность — способность машины выполнять в течение заданного времени или наработки свои функции, сохраняя в определенных пределах эксплуатационные показатели. Надежность определяется как для всей машины, так и для ее отдельных деталей.
14
Основными критериями надежности являются: безотказность, долговечность, ремонтопригодность и сохраняемость. Безотказность — свойство объекта сохранять работоспособность в течение заданного времени. Долговечность — свойство машины (отдельной детали) сохранять работоспособность до наступления предельного состояния при установленной системе технического обслуживания. Долговечность характеризуется ресурсами (техническим или назначенным). Ремонтопригодность — пригодность машины к предупреждению, обнаружению и устранению отказов проведением ремонта. Сохраняемость — свойство машины сохранять требуемые эксплуатационные показатели в течение установленного срока хранения. В зависимости от вида изделия надежность может определяться всеми заданными свойствами или только частью их.
1.3. Стандартизация
Стандартизация играет большую роль в развитии машиностроения. Распространение стандартизации на группы машин потребовало разработки типажа машин с взаимной увязкой их основных параметров (в частности, мощности электродвигателей, грузоподъемности грузовых автомобилей и т. п.). Стандарты разделяются на международные (ИСО), государственные (ГОСТ) и ведомственные. На продукцию общемашиностроительного применения разработано много сотен стандартов.
Принципиальным положением стандартизации является использование предпочтительных чисел и рядов. Они сокращают число оригинальных деталей. Ряд предпочтительных чисел — это числа геометрической прогрессии со знаменателем ф = 'К/10 . Для п = 5; 10; 20; 40 величина <р принимает значения 1,6; 1,25; 1,12; 1,06. Соответственно обозначают ряды чисел R5, RIO, R20, R40.
Агрегатирование в машиностроении — это возможность конструирования машин из нормализованных агрегатов, узлов и деталей, связанных в единую систему и изготовляемых централизованно. Агрегатирование имеет широкое распространение в станкостроении, особенно при создании многошпиндельных сверлильных и расточных станков.
Сертификация машин — это проверка и удостоверение их показателей, гарантирующих качество. Обязательная серти-
15
фи нация млшин производится в соответствии с требованиями стандартов. Так, при изготовлении металлорежущих станков должны быть соблюдены следующие требования: безопасность конструкций, электробезопасность, электромагнитная совместимость, уровень шума и вибраций, содержание вредных веществ в воздухе рабочей зоны, эргономические параметры и энергоэффективность.
1.4. Машиностроительные материалы
Материалы деталей выбирают в соответствии с основными критериями работоспособности, технологичности и экономичности.
Металлы и их сплавы. Если основным критерием работоспособности является прочность, преимущественно применяют закаливаемые и улучшаемые стали, по критерию жесткости — нормализуемые и улучшаемые стали. Если основным критерием является контактная прочность, то используют стали, закаливаемые по поверхности до высокой твердости 57—62 HRC3. При средних значениях номинальных напряжений в деталях и сложных геометрических формах последних применяют литейные сплавы (чугуны, сплавы на основе алюминия и магния), как правило, без термообработки. При скольжении под нагрузкой применяют материалы возможно более высокой твердости в паре с антифрикционными (в подшипниках и направляющих) или в паре с фрикционными материалами, имеющими повышенное трение (в фрикционных муфтах и тормозах).
Стали— сплавы железа с углеродом (до 2%), плотность стали 7,85 • 103 кг/м3. Стали обладают высокой прочностью, способностью воспринимать легирование, термическую и химико-термическую обработку. Стальные детали изготовляют всеми технологическими методами: давлением (прокаткой, ковкой, прессованием), отливкой, резанием, шлифованием и свариванием. Применяют углеродистые стали обыкновенного качества, обозначаемые буквами Ст и номером, определяющим ее прочность (например, СтЗ; Ст5); стали углеродистые качественные, обозначаемые сотыми долями процента содержания углерода (например, Сталь 30, Сталь 50); стали легированные, дополнительно обозначаемые первыми буквами названия легирующего элемента и процентом его содержания
16
(если он больше 1%), например 12ХНЗ означает сталь 0,12% углерода, до 1% хрома и 3% никеля. Обозначения основных легирующих элементов: В — вольфрам, Г — марганец, Д — медь, М — молибден, Н — никель, Р — бор, С — кремний, Т — титан, X — хром, Ф — ванадий, Ю — алюминий.
В качестве примера в таблице 1.1 приведены механические свойства некоторых сталей (ств — предел прочности, стт — предел текучести, O-j — предел выносливости при симметричном цикле, МПа) в зависимости от марки стали и вида термообработки.
Таблица 1.1
Механические свойства сталей
Марка стали Термообработка <4 ^-1
15 Нормализация 370 225 175
45 Нормализация Закалка ТВЧ 590 880 315 635 255 390
65Г Закалка, отпуск 1470 1270 580
12ХНЗА Цементация с закалкой и низким отпуском 930 735 490
ЗОХГСА Улучшение Закалка, низкий отпуск 910 1660 765 1560 440 570
Детали машин изготовляют преимущественно из легированных и среднеуглеродистых сталей.
Чугуны — сплавы железа с углеродом (более 2,2%). Выплавляют серые чугуны СЧ 10, 15, 20, 25, 30, 35 и чугуны повышенной прочности с шаровидным графитом ВЧ 35, 40, 45, 50, 60, 70. Числа в обозначениях марок — это временное сопротивление на растяжение в декопаскалях. Применяют также белые и отбеленные чугуны, обладающие повышенной твердостью, износостойкостью и коррозионной стойкостью. Чугун преимущественно используют для отливки корпусных деталей, станин, стоек, плит.
Легкие сплавы на основе алюминия, магния, титана имеют плотность не более (2,8...4,5) • 103 кг/м3 (плотность стали 7,85 • 103 кг/м3), высокую удельную прочность, делятся на литейные и деформируемые. Алюминиевые сплавы делятся на
17
силумины (алюминий с кремнием, например АЛ4) и дюралю-мины (алюминий с медью и марганцем, например Д-16). Алюминиевые сплавы применяют для быстровращающихся и движущихся с большими ускорениями деталей в быстроходных транспортных машинах, для корпусных деталей, а в самолетах — для несущих элементов конструкций. Наибольшей прочностью среди легких сплавов обладают титановые сплавы.
Сплавы цветных металлов. К такого рода сплавам относятся:
Бронзы — сплавы на основе меди, обладающие высокими антифрикционными свойствами, сопротивлением коррозии и технологичностью. Наилучшие антифрикционные свойства у оловянистых бронз, например БрОЮНФ. Свинцовистые бронзы вследствие своей низкой твердости применяют только в виде покрытий при закаленных сопряженных поверхностях. Алюминиевые бронзы с добавкой железа применяют при малых скоростях скольжения и повышенных давлениях при стальных закаленных сопряженных поверхностях.
Латуни — сплавы меди с цинком, обладающие хорошим сопротивлением коррозии, хорошей электропроводностью, высокой технологичностью. Применяются для изготовления арматуры, труб, гильз патронов.
Баббиты — высококачественные, хорошо прирабатывающиеся антифрикционные сплавы меди с мягкими металлами (оловом, свинцом).
Пластические массы. Это материалы на основе высокомолекулярных органических соединений, обладающие при некоторых температурах пластичностью, позволяющей легко формовать изделия. Кроме основы, служащей связующим компонентом, многие пластмассы имеют наполнитель (специальную добавку для повышения механических свойств).
Пластмассы широко применяют в промышленности благодаря многообразию их физико-технических свойств. По назначению пластмассы делятся на: конструкционные, электро- и радиотехнические, звуко- и теплоизоляционные, антикоррозийные. Пластмассы бывают термореактивные и термопластичные. Термореактивные пластмассы в процессе изготовления при высокой температуре меняют свойства, становятся неплавкими (текстолит, гетинакс, асботекстолит, древеснослоистые пластики, стеклопласты). Термопластичные пласт
18
массы размягчаются при высоких температурах, их можно повторно формовать (полиэтилен, полипропилен, винипласт, фторопласты, полиамиды, полиформальдегиды, полиуретаны, эпоксидные полимеры, поликарбонаты).
Металлокерамические материалы. Их получают методами порошковой металлургии из заранее составленной смеси порошков металлов и неметаллических материалов путем их прессования и последующего спекания в пресс-формах. В этом случае детали сложной формы (например, мелкомодульные конические колеса) не требуют обработки резанием. Комбинируя компоненты смеси, можно получать детали с заданными свойствами (например, с повышенным или пониженным коэффициентом трения). В машиностроении наибольшее распространение получили детали на основе железного порошка (втулки, шайбы, зубчатые колеса и др.). Железографитовые керамические материалы (графита 2...3%) успешно применяют для изготовления вкладышей подшипников скольжения. Методами порошковой металлургии изготовляют фрикционные накладки муфт сцепления и тормозов.
Композиционные волокнистые материалы. Металлические и неметаллические материалы представляют собой сочетание матрицы, являющейся основой, и упрочняющего волокнистого наполнителя. Варьируя состав и объемное соотношение композитов, получают материалы с уникальными свойствами (жаропрочность, высокие механические характеристики в заданном направлении и др.).
1.5. Пути экономии материалов
при конструировании. Технологичность конструкции. Точность. Взаимозаменяемость
Экономия материалов достигается: выбором рациональных схем механизмов (например, замена многоступенчатых зубчатых передач на планетарную или волновую позволяет существенно уменьшить массу механизма), а также оптимальных форм деталей, уменьшением или исключением концентраторов напряжений, применением ребер в сочетании с тонкими стенками, упрочнением деталей (например, повышение твердости зубьев колес с НВ 200 до HRC365 позволяет уменьшить массу редуктора почти в 8 раз). Совершенствование заготови
19
тельных операций позволяет сократить количество отходов (тогда в несколько раз меньше материала идет в стружку).
Конструкция детали должна быть технологичной, т. е. удобной для изготовления. Поверхности деталей должны быть удобны для обработки на существующих станках. Если детали получают методом литья, они должны иметь равномерную толщину стенок, плавные переходы, возможность свободной усадки и обеспечивать удобство формовки.
Взаимозаменяемость — это условие, при котором сборка изделия из деталей, изготовляемых по чертежам, должна осуществляться без непроизводительной и дорогой пригонки (дополнительной обработки). Детали невозможно изготовить абсолютно точно. Взаимозаменяемость обеспечивается системой допусков и посадок. Допуск размера — это разность между наибольшим и наименьшим его значением. Посадка определяется взаимным расположением полей допусков сопрягаемых деталей.
Допуски установлены в соответствии с 19 квалитетами, обозначаемыми в порядке понижения точности. Детали общемашиностроительного применения обычно выполняют по ква-литетам 4—11. Квалитеты 4—5 используют, если требуется высокая точность. Квалитеты 6—8 считают основными в современном производстве. Квалитет 9 применяют для деталей низкоскоростных машин. Квалитеты 10—13 — по мере понижения требований к точности деталей с включением деталей, обрабатываемых без снятия стружки, квалитеты 14—17 для свободных поверхностей деталей. С повышением точности деталей существенно возрастает их стоимость.
1.6. Конструирование машин и их оптимизация
При конструировании машин последовательно разрабатывают следующие технические документы (обычно в виде чертежей): техническое задание, техническое предложение, эскизный проект, технический проект, рабочий проект.
Техническое задание составляют на проект машин серийного и массового выпуска, техническое предложение — для проектов специальных машин. Эти документы содержат основные параметры и схемы машины. Эскизный проект включает в себя разработку основных узлов. Технический проект содержит чертежи общего вида машины и ее узлов. Рабочий проект
20
представляет собой комплекс общих видов, чертежей узлов и деталей, спецификаций и других документов, достаточных для изготовления машины.
В настоящее время успешно развиваются и совершенствуются системы автоматизированного проектирования (САПР).
Оптимизация. Деятельность отдельных конструкторов, целых проектных коллективов должна быть связана с выбором таких решений, которые позволяют получить некоторые оптимальные результаты: затратить минимум средств на создание детали, узла, машины в целом; достичь максимальной производительности, минимальной материалоемкости, а также минимальных затрат на эксплуатацию машины и т. д.
При решении каждой конкретной задачи необходимо считаться с реальными условиями. Так, для достижения максимальной прибыли предприятия необходимо учитывать наличие сырья и возможности его доставки, его стоимость и другие факторы. Для количественного решения задачи ее надо формализовать, т. е. создать математическую модель, адекватную исследуемому объекту.
Создание модели позволяет выделить цель и сформулировать целевую функцию (критерий оптимальности): минимум затрат и материалоемкости; максимум производительности и ограничивающие условия: необходимые запасы материалов и их стоимость; пределы изменения рабочих параметров машины; размер партии деталей, узлов, машин и др. Задача состоит в отыскании экстремума некоторой функции, т. е. оптимального значения целевой функции. Процесс создания математической модели обычно включает:
1) изучение объекта оптимизации. Анализ особенностей работы детали, узла, машины; выделение основных факторов, влияющих на исследуемый объект; изучение свойств объекта в различных условиях эксплуатации; выбор критерия оптимальности. Например, для механизмов авиационной и космической техники типичным критерием является минимум массы;
2) описательное моделирование. Установление основных зависимостей между характеристиками объекта с точки зрения оптимальности (например, анализ факторов, влияющих на статическую и усталостную прочность, жесткость конструкции);
21
3) математическое моделирование является следующим шагом перевода описательной модели на формальный математический язык в виде системы равенств и уравнений, а критерия оптимальности — в виде функции;
4) выбор и создание метода решения. Исходя из вида полученной математической записи выбирают тот или иной метод решения. Задача будет решена, если целевая функция достигнет своего экстремального (наибольшего или наименьшего) значения при соблюдении ограничений задачи;
5) выбор или написание программы для решения задачи на компьютере. Программа реализует выбранный метод решения задачи;
6) анализ полученного решения бывает формальным и содержательным. При формальном (математическом) анализе проверяют соответствие полученного решения реальному объекту, который моделировали. При содержательном анализе в модель могут быть внесены изменения и решение повторено. Разработкой методов решения задач, содержащих целевую функцию при определенных ограничениях, занимается раздел математики — математическое программирование. Это математическая дисциплина, посвященная теории и методам решения задач о нахождении экстремумов функций на множествах, определяемых ограничениями того или иного вида.
Д Контрольные вопросы__________________________________________
1. Как определить понятие «конструирование»?
2. Что понимают под термином «работоспособность»?
3. Каковы основные критерии работоспособности?
4. Как определить понятие «надежность»?
5. Почему необходима стандартизация изделий машиностроения?
6. Чем можно объяснить широкое применение сталей в машиностроении?
7. Какие материалы можно отнести к антифрикционным?
8. Каковы достоинства металлокерамических материалов?
9. В чем состоит условие взаимозаменяемости деталей?
10. Какие основные технические документы разрабатывают при конструировании?
11. Что включает в себя понятие «оптимизация»? Перечислить некоторые параметры оптимизации машин.
2
Сопряжения деталей машин и контактные напряжения
Передача сил от одной детали к другой в машинах осуществляется по сопряженным поверхностям контакта. Первоначальный контакт (контакт без нагрузки) в сопряжениях деталей машин происходит по поверхности, в точке (рис. 2.1) или по линии (рис. 2.2). В зависимости от характера взаимного перемещения контактирующих поверхностей под нагрузкой различают неподвижные и подвижные сопряжения деталей.
Задачей расчета сопряжений является определение напряжений и деформаций. Они нужны для расчета деталей на прочность, износостойкость и для определения жесткости (или обратной величины — податливости) соединения. Расчет напряжений и деформаций в сопрягаемых деталях называют решением контактной задачи, а напряжения — контактными. В точной общей постановке ее решение связано со значительными трудностями, обусловленными сложной формой деталей. Поэтому обычно задачу решают приближенно для частных форм деталей и условий нагружения.
Особый класс задач составляют задачи с первоначальным контактом деталей в точке или по линии. Решения этих задач обычно выполнены для неподвижного контакта и используются при расчете на прочность подшипников качения, зубчатых и фрикционных передач. Учитывая, что в подшипниках качения и передачах контакт подвижный (действуют силы трения) и часто присутствует смазочный материал в сопряжениях, условие прочности имеет вид
°н < Ын-
Расчетное контактное напряжение сн сравнивают с допускаемым [о]я, полученным экспериментально на реальных образцах в реальных условиях работы.
23
Рис. 2.1. Первона-чальи ый контакт деталей в точке
Решение задачи о контакте двух неподвижных шаров было получено известным немецким механиком Г. Герцем в 1881 г. при следующих допущениях: материал шаров изотропный и подчиняется закону Гука, поверхности без смазочного материала и абсолютно гладкие (шероховатость отсутствует), размеры площадки контакта малы по сравнению с радиусами кривизны шаров, площадка контакта плоская.
В результате решения задачи была получена формула для определения максимальных контактных напряжений в центре площадки контакта (рис. 2.1), обо
значаемых в литературе <зн в честь автора решения задачи (Hertz):
где F — сила сжатия шаров; - = — ± — — приведенная кри-Р Pi Р2
визна, знак минут ставят при внутреннем контакте (рис. 2.1);
и р2 — радиусы кривизны (рис. 2.1); vx и v2 — коэффициенты Пуассона материала шаров; Ег и Е2 — модули упругости материалов шаров.
При контакте двух цилиндров с параллельными осями первоначальный контакт происходит по линии (рис. 2.2). При сжатии цилиндров распределенной нагрузкой ivn в результате упругих деформаций образуется площадка контакта в виде полоски шириной 2Ь. Решение этой контактной задачи получено при перечисленных выше допущениях.
Максимальное напряжение на поверхности площадки контакта для стальных цилиндров при Е} = Е2 = Е и vx = v2 = 0,3:
пн-0,418Д£,
где ivп — распределенная нагрузка по длине образующей ци-
Р1Р2 линдров; р = ——-----приведенный радиус кривизны.
Р2 ± Р1
24
Рис. 2.2. Первоначальный контакт деталей по линии
Наибольшие контактные напряжения возникают в тонком поверхностном слое материала. Поэтому для повышения контактной прочности достаточно упрочнить только поверхностный слой детали. Для зубчатых передач толщина этого слоя составляет 0,2...0,3 модуля. На практике это достигается различными методами термической и химико-термической обработки материала (см. § 5.7).
, । Контрольные вопросы
1. В чем состоит решение контактной задачи?
2. Какие виды первоначального контакта деталей вам известны?
3. Каковы допущения при решении контактной задачи?
3
Глава
Основы триботехники
Триботехника изучает вопросы трения, износа и смазки.
3.1. Трение
В машинах часто встречаются подвижные сопряжения деталей (узлы трения), например опоры валов, пары винт—гайка и т. п. Узлы трения во многом определяют надежность и ресурс машин. Известно, что большинство узлов трения выходят из строя из-за изнашивания трущихся поверхностей. В связи с изнашиванием затраты на техническое обслуживание и ремонт в 3...10 раз превышают первоначальную стоимость машины. В некоторых машинах имеют место существенные потери энергии на преодоление трения (в автомобилях -50%, в текстильных машинах -80%).
Знание основ триботехники помогает оптимально конструировать машины. Одним из радикальных средств обеспечения надежности узлов трения является научно обоснованный выбор смазочного материала, зависящий от условий эксплуатации, вида ожидаемого режима смазки и состояния трущихся поверхностей. Известно, что реальный контакт плоских поверхностей деталей носит дискретный (в виде пятен) характер, обусловленный неровностями поверхностей, состоящими из отклонения формы 1, волнистости 2 и шероховатости 3 (рис. 3.1). Поэтому реальная площадь плоского контакта в 10... 10 000 раз меньше номинальной (ограниченной контуром площади контакта).
Реальная поверхность
Идеальная поверхность
Рис. 3.1. Схема неровностей поверхности: 1 — отклонение формы; 2 — волнистость; 3 — шероховатость
26
Внешнее трение скольжения наиболее часто имеет место в подвижном контакте деталей. Современное представление о трении основывается на адгезионно-молекулярно-деформационной механической теории, сформулированной Ф. П. Боуденом и И. В. Крагельским (1939). Полная сила трения складывается из силы молекулярного притяжения на пятнах касания CFM0JI) и силы сопротивления перемещению от внедрения микронеровностей одной трущейся поверхности в другую мех)- Для металлических поверхностей Гмол/Гмех ~ 00 FM0JI сильно снижается после введения смазочного материала между трущимися поверхностями.
В зависимости от режима смазывания различают виды трения:
трение без смазочного материала (рис. 3.2, а, б) редко встречается в машинах, лишь при работе в условиях вакуума, весьма низких или высоких температурах;
трение со смазочным материалом: граничное (рис. 3.2, в), полужидкостное (рис. 3.2, г), жидкостное (рис. 3.2, д).
Трение со смазочным материалом характеризуется относительной толщиной X смазывающего слоя между контактирую
Молекулярное сцепление
в) Масляные пленки
б) Поверхностные пленки
д) Масляный слой
Рис. 3.2. Виды трения в зоне контакта: без смазочного материала (а — ювенильное трение, б — сухое трение); трение со смазочным материалом (в — граничное, г — полужидкостное, д — жидкостное)
27
щими поверхностями, находящимися в относительном движении:
(3.1)
Х = --------,
Rax + Ra2
где h — толщина смазывающего слоя (см. рис. 3.2, д); Rar и Ra2 — средние арифметические отклонения профилей микронеровностей от базовой линии.
Классификация видов трения проводится по величине X: граничное при X < 1, полужидкостное при X = 1...5, жидкостное при X = 5... 100.
Граничное трение происходит по тончайшим масляным пленкам, образовавшимся в результате адсорбции. Удлиненные молекулы смазывающего вещества прикрепляются к поверхности твердого тела и образуют ориентированный слой толщиной не более 0,1 мкм. Эти пленки повторяют микрорельеф поверхности трения и обладают высокой прочностью на сжатие и малым сопротивлением скольжению при относительном перемещении поверхностей.
Полужидкостное трение — смешанное трение, при котором трущиеся поверхности не полностью разделены слоем жидкого смазочного материала и происходит касание отдельных микронеровностей. Отношение силы трения FTp к нормальной силе Fn называют коэффициентом трения f, величина которого в основном зависит от вида смазки.
Трение поверхностей деталей сопровождается изнашиванием — разрушением контактирующих поверхностей с изменением их размеров. Износостойкость — способность трущихся поверхностей сопротивляться изнашиванию. Оценкой износостойкости служит интенсивность изнашивания
т _ h Jh~S’
где h — износ, мкм; S — путь трения, м.
Жидкостное трение возникает между слоями смазочного материала, находящегося между трущимися поверхностями. При этом отсутствует износ, потери энергии на трение малы. Полное разделение трущихся поверхностей обеспечивает слой жидкости (масла), минимальная толщина (ftmin) которого с определенный запасом К > 1 превышает сумму высот микронеровностей: <
ftmin
.Rzj + Rz2 ’
(3.2)
28
где Rzl и Rz2 — высота профилей микронеровностей трущихся поверхностей.
Типичное развитие изнашивания узла трения представлено на рис. 3.3: I — приработка (интенсивное изнашивание в местах концентрации нагрузки), II — установившееся изнашивание малой интенсивности, III — ускоренное (катастрофическое) изнашивание. Период II характерен для штатной эксплуатации при полных нагрузках. По мере увеличения износа обычно
Рис. 3.3. Изменение интенсивности механического изнашивания
снижаются качественные показатели: уменьшается точность и КПД; растут динамические силы, вибрации, шум.
3.2. Смазочные материалы
По физическому состоянию смазочные материалы разделяют на жидкие (смазочные масла), пластичные, твердые и газообразные (масляный туман, очищенный воздух).
Смазочные масла являются основным смазочным материалом для машин. В зависимости от исходного продукта различают нефтяные (минеральные), синтетические и жировые масла. В условиях жидкостного трения основной характеристикой смазочного масла является вязкость, которая характеризуется внутренним трением между слоями жидкости под действием сдвигающей силы. Различают динамическую и кинематическую вязкость. Динамическую вязкость ц, Па • с, используют в расчетах, а кинематическую v, м2/с, — при производстве масел. В литературе обычно приводят значение кинематической вязкости масла при 40 °C (v40), при 50 °C (v50), при 100 °C (v100). Связь вязкостей масла: ц = pv, где р — плотность смазочного масла (820^-960 кг/м3).
Смазочные масла обеспечивают снижение трения и изнашивания, а также температуры трущихся поверхностей путем усиленного теплоотвода. Различают группы масел: моторные, индустриальные, трансмиссионные, специализированные, гидравлические. Моторные масла предназначены для смазывания двигателей внутреннего сгорания. Трансмиссионные масла используют для смазывания агрегатов трансмиссий различной техники, включая механические передачи. Индустриальные масла применяют для смазывания промышленного
29
оборудования и технологических машин. Названия специализированных масел свидетельствуют об их особом назначении (энергетические, авиационные и др. масла). Гидравлические масла применяют в качестве рабочих жидкостей в гидросистемах.
Пластичные смазочные материалы (ПСМ) состоят из жидкой основы (смазочное масло) и загустителя (обычно мыла жирных кислот). Загуститель образует жесткий полимерный каркас, в ячейках которого удерживается жидкое масло. При небольших нагрузках ПСМ ведет себя как твердое тело — не растекается, удерживается на наклонных и даже вертикальных плоскостях. Наиболее распространенными ПСМ являются солидол жировой, литол-24, ЦИАТИМ-201.
Твердые смазочные материалы (ТСМ) обеспечивают смазывание трущихся поверхностей при трении в экстремальных условиях (низкие или высокие температуры, вакуум), когда применение других смазывающих материалов невозможно. В качестве ТСМ используют коллоидальный графит, дисульфид молибдена.
Контрольные вопросы
1. Какие вопросы изучает триботехника?
2. Какие виды трения вы знаете?
3. На какие группы разделяют смазочные материалы?
4. Какие смазочные материалы используют в экстремальных условиях?
4
Глава
Фрикционные передачи и вариаторы
4.1. Общие сведения
Во фрикционных передачах движение передается силами трения. Простейшая фрикционная передача состоит из двух цилиндрических рабочих тел (колес), прижимаемых друг к другу с силой Fr (рис. 4.1, а). При вращении ведущего колеса (Вщ) в зоне контакта возникают силы трения, которые приводят во вращение ведомое колесо (Вм). Для передачи движения между валами с пересекающимися осями (рис. 4.1, б) используют конические колеса. Передачу с переменным передаточным отношением (вариатор) выполняют за счет переменного радиуса одного или обоих рабочих тел. Простейшим вариатором является лобовой (рис. 4.2), состоящий из ролика 2 и диска 1. При перемещении ролика 2 вдоль вала меняется радиус контакта на диске 1 и, следовательно, передаточное отношение.
Окружную силу Ft2, которую способна передать фрикцион-
ная передача, определяют из условия ?t2s = Frf,
Рис. 4.1. Простые фрикционные передачи с цилиндрическими (а) и коническими (б) колесами
31
Рис. 4.2. Лобовая фрикционная передача (вариатор)
где Fr — сила прижатия колес; f — коэффициент трения в контакте; s — коэффициент запаса сцепления, учитывающий возможность перегрузок и нестабильность сил трения. В силовых передачах принимают s = 1, 2...2, 0, в кинематических передачах s увеличивают до 3.
Из выражения (4.1) видно, что сила прижатия рабочих колес в 1/f раз больше силы трения. Значение коэффициента трения f в зависимости от материала рабочих тел и условий смазывания может изменяться от 0,04 до 0,4. Следовательно, сила прижатия превышает окружную силу в 2,5...25 раз. С учетом необходимого запаса сцепления сила прижатия будет еще больше. Данное обстоятельство предопределяет высокие нагрузки на валы и подшипники, на которых установлены рабочие тела.
32
Особенностью работы фрикционной передачи является обязательное наличие упругого скольжения (скольжения, вызванного упругими деформациями в зоне контакта рабочих тел). Во фрикционных передачах возможно также геометрическое скольжение. Оно возникает из-за различной скорости рабочих тел на площадке контакта. Например, в лобовой передаче (рис. 4.2) окружная скорость vp на внешнем диаметре ролика постоянна, а скорость ид на торце диска — пропорциональна радиусу. В точке О линии контакта окружные скорости ролика и диска равны и здесь наблюдается чистое качение. В остальных точках линии контакта — качение со скольжением. Точку О называют полюсом качения. Если момент сопротивления на ведомом рабочем теле превышает момент, создаваемый силами трения в передаче, то наступает буксование. При этом рабочие поверхности тел повреждаются.
Достоинства фрикционных передач: возможность бесступенчатого регулирования скорости вращения ведомого вала; простота формы тел качения; равномерность вращения, что позволяет применять фрикционные передачи при высоких скоростях, а также в приборах.
Недостатки фрикционных передач: значительные нагрузки на рабочие тела, валы и подшипники; необходимость в специальных нажимных устройствах; опасность повреждения рабочих поверхностей тел при проскальзывании при перегрузках.
4.2. Общие вопросы конструирования
Фрикционные передачи и вариаторы применяют в широком диапазоне мощностей — от ничтожно малых (в приборах) до сотен киловатт. Для больших мощностей конструируют фрикционные передачи с большим числом областей контакта.
Необходимое сжатие рабочих тел осуществляют различными способами, большинство современных вариаторов и передач выполняют с автоматическим прижатием. Однако в этом случае при изменении передаваемого момента передача некоторое время пробуксовывает, пока сила прижатия не достигнет значения, достаточного для передачи вращающего момента. Это приводит к значительному скольжению и нагреву рабочих тел. Форму рабочих тел передач с постоянным передаточным отношением выбирают такой, чтобы было обеспечено
2 Детали машин
33
чистое качение на всей площадке контакта. Поэтому передачи с коническими роликами должны иметь общую вершину конусов в точке О (см. рис. 4.1, б).
Фрикционные передачи могут работать как при наличии смазочного материала, так и без него. При работе без смазочного материала передача обладает большей нагрузочной способностью (коэффициент трения больше), но при проскальзывании возможен значительный нагрев в области контакта и повреждение рабочих поверхностей при перегрузках. Наличие смазочного материала стабилизирует работу передачи, но снижает коэффициент трения. Для таких передач характерна большая долговечность и надежность.
Рабочие тела фрикционной передачи должны обладать: а) высоким коэффициентом трения; б) высоким модулем упругости для возможности создания значительных сил прижатия и уменьшения гистерезисных потерь; в) высоким сопротивлением контактной усталости; г) высокой износостойкостью.
Для передач, работающих со смазочным материалом, наиболее часто применяют рабочие тела из закаленной стали (шарикоподшипниковой стали ШХ-15, стали 18Х2Н4МА и др.). При работе без смазочного материала широко применяют текстолит, обладающий высоким коэффициентом трения и малым модулем упругости. Наиболее преспективными являются специальные фрикционные пластмассы с целлюлозным наполнителем (ФК-16Л, ФК-24А, КФ-3), у которых коэффициент трения f может достигать 0,5. Средние значения коэффициентов трения для различных пар материалов, работающих без смазочного материала, приведены в табл. 4.1.
Таблица 4.1
Коэффициенты трения фрикционных пар при работе без смазочного материала
Материал Коэффициент трения
Закаленная сталь — закаленная сталь 0,10...0,18
Текстолит — сталь 0,20...0,25
Фрикционная пластмасса — сталь 0,35...0,45
34
4.3. Расчет фрикционных передач
Тела качения выполняют с начальным касанием по линии или в точке. При начальном касании по линии необходимо обеспечить высокую точность изготовления и сборки передачи, исключающую возможность нарушения линейного контакта.
Под действием силы прижатия контакт рабочих тел распространяется по площадке, на которой действуют контактные напряжения. При работе передач каждая точка поверхности рабочего тела испытывает периодическое воздействие нормальных и касательных напряжений, вследствие чего основной причиной выхода из строя фрикционных передач, работающих в масле, является выкрашивание поверхностей. Поэтому фрикционные передачи следует рассчитывать по контактным напряжениям на сопротивление усталости.
При начальном контакте по линии максимальные контактные нормальные напряжения определяют по формуле Герца для случая сжатия двух цилиндров:
IF е
<ун = 0,418 U- <[<%, (4.2)
ч op
где Fr — радиальная сила; Е = 2E1E2/(Ei 4- Е2) — приведенный модуль упругости рабочих тел (Ег и Е2 — модули упругости рабочих тел); Ъ — длина линии контакта; р = RlR2/(Rl -I- R2) — приведенный радиус кривизны. Для рабочих тел из закаленной стали допускаемые напряжения можно принимать [о]я = 1800...2000 МПа.
Если условие прочности он < [о]н не выполнено, то следует использовать более прочные материалы для изготовления рабочих тел или увеличить размеры передачи.
4.4. Передачи с постоянным и переменным передаточным отношением
Примерами фрикционных передач с постоянным передаточным отношением, получившими широчайшее распространение, являются передачи колесо—рельс (в железнодорожном транспорте) и колесо—дорожное полотно (в автодорожном транспорте).
35
Рис. 4.3. Фрикционная планетарная передача
Рис. 4.4. Передача с раздвижными конусными шкивами и промежуточным рабочим телом
Рис. 4.5. Торовый вариатор
Рис. 4.6. Дисковый вариатор
36
В машиностроении применяют фрикционные передачи с постоянным передаточным отношением и разгруженными опорами по схеме планетарных механизмов (рис. 4.3). Здесь вращающий момент передается от центрального ролика 1 к водилу h через промежуточные ролики (сателлиты) 3. Ролики 3 и 1 сжимаются силами со стороны неподвижного кольцевого звена 2. Водило h вращается вместе с роликами 3, имеющими свободу перемещения в радиальном направлении, и соединено с выходным валом.
Фрикционные передачи с плавным изменением передаточного отношения (вариаторы) разделяют на простые (см. рис. 4.2) и с промежуточными телами (рис. 4.4 и 4.5). По форме рабочих тел различают дисковые (рис. 4.6), конусные, шаровые и торовые (рис. 4.5) вариаторы. По числу потоков мощности вариаторы делят на однопоточные (см. рис. 4.2, 4.4) и многопоточные (на рис. 4.5 двухпоточный).
Важнейшей кинематической характеристикой вариаторов является диапазон регулирования скоростей Д. Так, для лобового вариатора (см. рис. 4.2) Д = n2max/n2min « -Rmax//?min, где n2max и n2min — максимальная и минимальная частота вращения на выходе.
Вариаторы, как правило, выполняют сдвоенными (см. рис. 4.4 и 4.5), в которых радиус каждого колеса может изменяться от минимального значения до максимального. При этом диапазон регулирования определяют по формуле
Д ~~ ^2тах/^2min ~ ^2max/^2min •
Наибольший диапазон регулирования частот вращения простого вариатора равен 4, сдвоенного вариатора — 12. При больших диапазонах регулирования значительно понижается КПД.
Лобовые вариаторы вследствие значительного геометрического скольжения на площадке касания и возможности изменения радиуса только одного рабочего тела уступают вариаторам других конструкций по величине диапазона регулирования, КПД и износостойкости.
В вариаторах с раздвижными конусными шкивами (см. рис. 4.4) и кольцевым промежуточным телом регулирование скорости достигается изменением радиусов (с^/2 и d2/2) контакта с промежуточным телом 4 конусных дисков 1 и 2 путем их раздвижения и сближения двумя рычагами 3 с резьбо-
37
в)
передвижные
Рис. 4.7. Виды промежуточных рабочих тел в передачах с раздвижными конусными шкивами: а — широкий клиновой ремень; б — стальное кольцо; в — специальная цепь
выми парами 5. В качестве промежуточных тел применяют широкие клиновые ремни (рис. 4.7, а), нормальные клиновые ремни, стальные кольца (рис. 4.7, б), специальные цепи (рис. 4.7, в).
Цепные вариаторы имеют по две пары раздвижных конусных дисков с прямыми радиальными зубьями на поверхности конусов и сложную цепь с передвижными пластинками (рис. 4.7, в), образующими зубья при набегании на диски. Зубья на парных конусных дисках смещены на полшага по окружности. Регулирование скорости вращения осуществляется сближением пары дисков на одном валу и синхронным раздвижением пары дисков на другом валу.
Многодисковые вариаторы основаны на регулировании скорости сближением и раздвижением осей конических дисков 1 и 2 (см. рис. 4.6), силы трения между дисками создаются за счет прижатия дисков пружинами. Эти вариаторы делают многопоточными для передачи больших мощностей.
Торовый вариатор (см. рис. 4.5) несет на входном и выходном валах торовые чашки 1 и 2, между которыми вращаются два или три ролика 3. Рабочий профиль чашек очерчен дугами окружности с общим центром кривизны О. Частота вращения регулируется изменением угла наклона осей вращения роликов 3. Преимущественно применяемые материалы тел ка
38
чения — сталь по текстолиту (из текстолита изготавливают обод ролика 3). Вариатор имеет начальное касание по линии и работает без смазывания. Диапазон регулирования вариатора 4...6.
Контрольные вопросы
1. Какую передачу называют вариатором?
2. Какие виды скольжения возникают во фрикционных передачах?
3. Какие требования предъявляют к рабочим телам фрикционных передач?
4. По какому условию рассчитывают фрикционные передачи?
5. Как определяют диапазон регулирования вариатора?
6. В каком вариаторе нагрузка передается за счет зацепления, а не трения?
5
Глава
Зубчатые передачи
5.1. Общие сведения
Зубчатая передача — это механизм, который с помощью зубчатого зацепления передает или преобразует движение с изменением скоростей и моментов.
Цилиндрические зубчатые передачи между параллельными валами выполняют с помощью колес с прямыми, косыми и шевронными зубьями (рис. 5.1, а—г). Конические передачи между валами с пересекающимися осями осуществляют колесами с прямыми и круговыми зубьями (рис. 5.1, е, з), реже косыми (тангенциальными) зубьями (рис. 5.1, ж). Преобразование вращательного движения в поступательное и наоборот осуществляют цилиндрическим колесом и рейкой (рис. 5.1, д).
Зубчатые передачи — самые распространенные среди механических передач. Годовой выпуск зубчатых колес составляет несколько миллионов. Диапазон их применения широк: от часов и приборов до самых тяжелых машин.
Достоинства зубчатых передач: малые габариты; высокий КПД; постоянство передаточного отношения из-за отсутствия проскальзывания; возможность применения в широком диапазоне вращающих моментов, скоростей и передаточных отношений; надежность в работе и простота обслуживания.
Недостатки зубчатых передач: высокие требования к точности изготовления; шум при работе со значительными скоростями.
Обычно зубчатая передача состоит из двух колес с числами зубьев Zy и z2. Меньшее из колес, находящихся в зацеплении, называют шестерней, большее — колесом. Основными характеристиками передачи являются мощности на валах шестерни и колеса Pt и Р2 в кВт, угловые скорости (Dj и (i)2 в с1 (или частоты вращения пх и п2 в мин-1), окружная скорость на делительном цилиндре и в м/с, вращающие моменты Тг и Т2 в Н«м, передаточное отношение и = nr/n2 = z2/zr, коэффициент полезного действия ц.
40
Рис. 5.1. Основные виды зубчатых передач: а — цилиндрическая прямозубая; б — цилиндрическая косозубая; в — шевронная; г — цилиндрическая с внутренним зацеплением; д — реечная; е — коническая прямозубая; ж — коническая косозубая; з — коническая с круговыми зубьями
41
Понижающие передачи, в которых частота вращения шестерни больше частоты вращения колеса, а передаточное отношение и > 1, называют редукторами. Повышающие передачи, имеющие передаточное отношение и < 1, называют мультипликаторами. Пропорционально изменению частоты вращения зубчатых колес меняются вращающие моменты
Т2 = TiUT).
где Тг, Т2 — вращающие моменты на ведущем и ведомом зубчатых колесах соответственно; т] — КПД передачи.
В редукторах вращающий момент на ведомом колесе больше, чем на ведущем, такие механизмы используют в силовых передачах, предназначенных для получения больших значений моментов на выходе. В мультипликаторах частота на выходе возрастает, а вращающий момент уменьшается, такие передачи применяют в основном в приборных (кинематических) передачах. Зубчатые передачи, в которых передаточное отношение изменяется ступенчато, называют коробками передач.
5.2. Геометрия и кинематика цилиндрических зубчатых передач
Зацепление зубчатых колес эквивалентно качению без скольжения окружностей с диаметрами dwl и dw2 (рис. 5.2). Эти окружности называются начальными. Точка их касания П называется полюсом зацепления. Полюс лежит на линии, соединяющей оси колес Ог и О2. Расстояние между осями колес aw называется межосевым расстоянием.
Диаметры начальных окружностей можно представить в виде:
dwl = 2aJ(u + Yp,dw2 = dwXu, (5.1)
где и = (Oj/coa — передаточное отношение, так как окружная скорость в полюсе зацепления v = —-— = —-— , то
& &
aw= dwi - (5.2)
awl Z
межосевое расстояние.
Здесь и далее знак минус — для внутреннего зацепления.
42
Основным кинематическим условием, которому должны удовлетворять профили зубьев, является постоянство передаточного отношения. Этому условию удовлетворяют многие виды кривых, которыми очерчены зубья колес. Однако эвольвентное зацепление получило наибольшее распространение из-за ряда преимуществ перед другими. Эвольвентные зубчатые колеса нарезают инструментом с прямолинейной режущей кромкой, что упрощает заточку инструмента; при этом используется один и тот же инструмент независимо от числа зубь-
Рис. 5.2. Зацепление эвольвентных зубчатых колес
ев колеса. Эвольвента окружности образуется точкой К на пря-
мых NrK или N2K при качении их без скольжения по окружностям с диаметрами dbl или db2 (рис. 5.2). Эти окружности
называют основными.
Линия по которой перемещается общая точка контакта К профилей зубьев при вращении колес, называется линией зацепления. Угол atlv называют углом зацепления (угол между линией зацепления и прямой, перпендикулярной к межосевой линии). Линия зацепления всегда касательная к основным окружностям d61 = d^jcos atlv и db2 — dw2cos atu>.
При увеличении диаметров основных окружностей радиусы кривизны эвольвент NXK и N2K увеличиваются. В пределе эвольвента превращается в прямую линию, а зубчатый венец — в рейку с трапециевидным профилем зубьев. Такая рейка называется исходной.
Исходный контур (ИК) — контур зубчатой рейки с трапециевидным профилем зубьев. Он характеризует параметры любого эвольвентного зубчатого венца (рис. 5.3, а).
Исходный производящий контур (ИПК) — контур зубьев зубчатой рейки, характеризующий параметры зуборезного инструмента и отличающийся от ИК только увеличением высоты зубьев на величину радиального зазора С*т (рис. 5.3, б), где С* — коэффициент радиального зазора. В результате в зацеплении двух колес также образуется радиальный зазор С = С*т (см. рис. 5.2).
43
Рис. 5.3. Исходные контуры: а — исходный; б — исходный производящий; в — исходный контур фланкированных колес
Исходный контур имеет линию f — впадин зубьев, линию а — вершин зубьев, d — делительную линию. Высоту головки зуба обозначают ha, высоту ножки — hf. Шаг зубьев р — расстояние между точками одноименных профилей соседних зубьев. На делительной линии исходного контура толщина зуба равна половине шага (толщина зуба равна ширине впадины). Зубчатое колесо имеет окружность впадин (df), окружность вершин (da), делительную окружность (d) (рис. 5.4, а) по аналогии с линиями впадин, вершин и делительной окружности.
Окружной делительный шаг зубьев колеса р измеряют по дуге делительной окружности, он равен шагу исходного контура. Диаметр делительной окружности d = pz/n. Так как шаг неудобен для стандартизации, то используют модуль зацепления т = р/п. Тогда диаметр делительной окружности прямозубого колеса
d = mz. (5.3)
Различают шаг на делительной окружности р = пт и основной шаг pb = nmcos a.
Для уменьшения номенклатуры режущего инструмента и в целях унификации модули стандартизованы в диапазоне 0,05...100 мм. Параметры исходного контура также стандартизованы и задаются в долях модуля. Для передач с модулем т = 1...100 мм по ГОСТу 13755-81 угол профиля a = 20°. Коэффициенты высоты головки зуба А* = 1, радиального зазора С* = 0,25, радиуса скругления рр = 0,38 (рис. 5.3). В высоконапряженных зубчатых передачах применяют ИПК с a = 25°
44
Рис. 5.4. Станочное зацепление реечного инструмента с нарезаемым зубчатым колесом: а — без смещения ИПК; б — со смещением ИПК
и 28°. При этом увеличивается толщина зуба у основания и его прочность при изгибе.
Исходный контур фланкированных колес применяют для ответственных быстроходных зубчатых передач в целях уменьшения силы удара при входе зубьев в зацепление (см. рис. 5.3, в). Фланкирование состоит в срезании части профиля у вершины зуба под углом а + Да. Зубья колес, как правило, нарезают реечным инструментом (червячной фрезой) или долбяком методом обкатывания. При нарезании зубьев начальная прямая рейки катится без скольжения по делительной окружности нарезаемого колеса. В мелкосерийном производстве иногда зубчатые колеса нарезают методом копирования, при котором профиль инструмента (дисковой модульной фрезы) соответствует форме впадины между зубьями. В этом случае точность нарезания зубьев зависит от тщательности наладки фрезерного станка, производительность процесса ниже, чем при нарезании зубьев методом обкатывания.
Начальной прямой может быть делительная прямая d — d ИПК (рис. 5.4, а) или параллельная ей линия, отстоящая на
45
расстоянии хт, где х — коэффициент смещения исходного контура (рис. 5.4, б). Положительным считают смещение от центра колеса (+хт), отрицательным — к центру (-хт). При положительном смещении рейки увеличиваются диаметры вершин зубьев da и впадин d, на величину 2xm: da = d + + 2m(h* + х); df = d - 2m(na + С* - x). Диаметры делительной d = mz и основной окружности db = dcos a = mzcos a остаются без изменения. При х > О толщина зуба по делительной окружности увеличивается на величину 2xmtg а (см. рис. 5.4, б).
Колеса с положительным смещением имеют более толстые основания зубьев и больше радиусы кривизны эвольвент профиля NB2 > NBX (рис. 5.5). Это увеличивает несущую способность передачи, позволяет исключить подрезание зубьев у основания при малом их числе. Однако толщина по вершинам зубьев Sa уменьшается. При больших величинах смещения возможно нежелательное заострение. Рекомендуют Sa > 0,25th. При отрицательном смещении х < 0 при малом числе зубьев возможно подрезание зубьев, т. е. срезание части эвольвенты вблизи основной окружности.
Боковые поверхности зубьев колес образуются точками прямой, расположенной на плоскости зацепления Пз, которая катится без скольжения по основному цилиндру db (рис. 5.6, а). В прямозубом колесе линия КгКг параллельна оси цилиндра, К2К2 расположена под углом наклона р6 на основной окружности (основной угол). Косозубые зубчатые передачи по сравнению с прямозубыми характеризуются большей нагрузочной способностью, плавностью работы, меньшим шумом, но наклон зубьев приводит к возникновению осевой силы, нагружающей опоры и валы передачи.
Делительный угол наклона зуба Р определяется на делительном цилиндре, он является исходным при проектировании передачи, а основной угол наклона определяется в зависимости от р и а:
Pfc = arcsin (sin р cos а). (5.4)
Рис. 5.5. Форма зуба в зависимости от ИК
46
При нарезании косозубого колеса червячная фреза (ее исходный производящий контур модуля т) движется вдоль линии наклона зубьев р (рис. 5.6, б). В торцовой плоскости окружной шаг, модуль, диаметры делительной и основной окружностей определяются по зависимостям:
pt = p/cos Р; mt = m/cos Р;
dt = mtz = mz/cos P; db = d(cos a,. (5.5)
В торцовой плоскости зуб косозубого колеса, как и прямозубого, имеет эвольвентный профиль, но с другими модулем (нестандартным) и углом зацепления на делительной окружности
at = arctg (tg a/cos Р). (5.6)
Расчетным является сечение N — Nнормальное к направлению зуба (см. рис. 5.6, б). В этом сечении определяют параметры эквивалентного колеса, которые используются при расчете на прочность. Профиль зуба косозубого колеса соответствует профилю эквивалентного прямозубого колеса с радиусом, равным радиусу кривизны эллипса по малой оси dv/2. Большая полуось эллипса а = dt/(2 cos Р), малая — b = dt/2, радиус кривизны dv/2 = а2/Ъ = dt/(2 cos2 Р). Так как диаметр эквива
Рис. 5.6. Особенности косозубых и шевронных передач: а — зубья в плоскости зацепления; б — эквивалентное колесо;
1 — торцовая плоскость; 2 — ИПК
47
лентного прямозубого колеса dv — mzv, то эквивалентное число зубьев
z = = d* = m‘z = mz = 2 (5 7)
v т т cos2 Р т cos2 Р т cos3 р cos3 Р
где z — число зубьев косозубого колеса. При расчете на прочность косозубые колеса заменяют эквивалентными прямозубыми с числом зубьев zv.
Межосевое расстояние косозубой передачи
aw = 0,5(dt2 ± dtl) = 0,5(z2 ± zj/cos р. (5.8)
Основные зависимости для геометрического расчета цилиндрических передач приведены в табл. 5.1.
5.3. Основные параметры цилиндрических зубчатых передач
Косозубые передачи выполняют в большинстве случаев без смещения, так как межосевое расстояние можно изменять за счет угла наклона зубьев (при этом изменяется торцевой модуль mt, а с ним и диаметры колес). С целью уменьшения номенклатуры корпусов стандартных редукторов межосевые расстояния стандартизованы в диапазоне 40...2500 мм.
Максимальные значения передаточного отношения принимают и =? z2/z1 = 5...8, в кинематических передачах и достигает 15. Числа зубьев шестерни следует выбирать большими из возможных значений с целью уменьшения стоимости зубона-резания и потерь на трение; гг = 20...24 при НВ < 300;
= 17...20 при 35 < НИСЭ < 52, = 11...17 при НИСЭ > 52.
Число зубьев колеса z2 = zxu. Минимальное число зубьев при отсутствии подрезания
z > 2(Л* - x)cos p/sin2a. (5.9)
Для прямозубых колес, нарезанных без смещения, zmin = 17 при a = 20°, для косозубых zmln ® 17/cos3p. Для колес, нарезанных со смещением, zmin = 10... 12.
Модуль в нормальном сечении зуба колеса при твердости Н< 350 НВ принимают т = (0,01...0,02)0^, при твердости Н > 45 HRC3- т = (0,016...0,0315)0^ и округляют до стандартного значения. Ширину зубчатых колес b выражают через
48
коэффициент ширины зубчатого венца = b/aw. Для зубчатых колес из улучшенных сталей с Н < 350 НВ рекомендуют принимать \|/Ьа = 0,315...0,5 для колес с Н > 350 НВ - фЬа = = 0,2...0,315. Передвижные прямозубые шестерни коробок скоростей делают узкими (уЬа = 0,1...0,2). Для шевронных передач уЬа = 0,63...1,25. Стандартные значения для редукторов: 0,1; 0,125; 0,16; 0,2; 0,25; 0,315; 0,4; 0,5; 0,63; 0,8; 1; 1,25.
Таблица 5.1
Расчет геометрических и кинематических параметров
Наименование параметра Обозначение Метод расчета
Основной угол наклона ₽<, Рь = arcsin (sin p • cos a)
Делительные диаметры шестерни dl _ mzx 1 COS P
колеса d2 _ mz2 d? ~ 1 COS P
Основные диаметры шестерни dbi dbl = djcos a
колеса ^Ь2 db2 — d2cos a
Диаметры вершин зубьев шестерни dai dal — dj + 2m(l + xt)
колеса daz da2 “ d2 + 2п1(1 + «2)
Коэффициент торцового перекрытия Ea £a = £al + £a2
Составляющие коэффициента торцового пе-рекрытия, определяемые начальными головками зубьев шестерни Eal _ z1(tgaol - tga(u,) Eal 2л
колеса Ea2 z2(tgaa2 ~ tgafw) Ea2 2л d.ll21 где aal(2) = arccos —i-'. “<11(2) Примечание. Для передач без смещения при р < 20° еа » [1,88 - 3,2 (1/2] + 1/22)]cos р
49
Продолжение табл. 5.1
Наименование параметра Обозначение Метод расчета
Коэффициент осевого перекрытия Е₽ bw t»wsin р Ед р рх пт
Осевой шаг Рх == пт sin Р
Суммарный коэффициент перекрытия Ev Ev = Еа + Ер
Толщина зуба на окружности dy SP „ .( л . 2xtg а . . Sy~d^2Z+ г +lnva~ - inv ак) а.у - arccos (db/dy)-, inv ay - tg ay - ay
Эквивалентные числа зубьев шестерни Zul = 21/cos3 p
колеса 2p2 = Z2/COS3 P
Окружные скорости, м/с V nd.n. V = t—* 60000
Угол наклона зубьев косозубых колес выбирают по усло-
..... b
вию, при котором осевой коэффициент перекрытия ев = — р Рх
(обычно Ер = 1,1...1,2), здесь рх = nm/sin 0— осевой шаг; в большинстве конструкций 0 = 8...20°. В тяжелых редукторах применяют шевронные колеса, не передающие на подшипники осевые нагрузки. У шевронных колес 0 = 25...45°.
Косозубые колеса применяют для ответственных передач при средних и высоких окружных скоростях колес. В косозубых передачах обычно принимают для шестерни левое направление зуба, для колес — правое. Прямозубые колеса применяют преимущественно при невысоких и средних окружных скоростях, в планетарных передачах, в открытых передачах, а также при необходимости осевого перемещения колес для изменения скорости (коробки передач).
50
5.4. Точность зубчатых передач
Погрешности изготовления зубчатых колес приводят к повышению динамических нагрузок, вибрации, шуму передач. Нарушается постоянство мгновенного передаточного отношения и согласованность угловых скоростей ведущего (Oj и ведомого ©2 валов.
Точность зубчатых колес регламентируется ГОСТом. Предусмотрены 12 степеней точности от 1 до 12 в порядке ее убывания. Наиболее распространенные в машиностроении степени точности в быстроходных передачах (при окружной скорости на начальном диаметре v > 10 м/с) — 5, 6, 7, в тихоходных — 8, 9. С ростом точности зубчатых колес существенно возрастает стоимость их изготовления.
Различают следующие основные показатели точности:
— Кинематическая точность характеризуется суммарной погрешностью углов поворота сцепляющихся колес за один оборот. Она существенно важна для передач станков, систем управления и быстроходных силовых передач из-за опасности появления резонансных колебаний и шума.
_ Боковой зазор между неработающими поверхностями соседних зубьев определяется видом сопряжения. Он предотвращает заклинивание (в частности, при разогреве) и обеспечивает свободное вращение колес. Виды сопряжений для всех степеней точности — Н, Е, Д, С, В, А (рис. 5.7). Сопряжения Н, Е с нулевым и малым боковым зазором /„min используют в передачах систем управления, точных приборов. Для избежа-
Рис. 5.7. Виды сопряжений
51
ния заклинивания в конструкции предусматривают регулирование межосевого расстояния при сборке.
— Плавность работы передач характеризуется повторяющимися колебаниями скорости за период работы каждого зуба. Она существенно влияет на высокочастотную составляющую динамической нагрузки быстроходных передач.
_ Пятно контакта зубьев характеризует концентрацию нагрузки на зубьях, которая существенно влияет на работоспособность силовых передач.
Таблица 5.2
Ориентировочные допустимые окружные скорости передач в зависимости от степени точности
Степень точности Окружная скорость, м/с
прямозубые косозубые
6 20 30
7 12 20
8 6 10
9 3 5
В общем машиностроении рекомендуют вид сопряжения В. Например, на чертежах обозначают 7-7-6-В (7 — кинематическая точность, 7 — плавность работы, 6 — пятно контакта, В — вид сопряжения) или 7-В — когда совпадают три первых показателя точности. Динамические нагрузки зависят от степени точности передачи и возрастают с ростом окружной скорости. В табл. 5.2 приведены ориентировочные допустимые окружные скорости на начальных диаметрах колес в зависимости от степени точности.
5.5. Силы в зацеплении цилиндрических передач
При работе зубчатых передач возникают силы, знание которых необходимо для расчета на прочность зубьев колес, валов и их опор. Силы определяют при статическом нагружении, без учета ошибок изготовления и деформаций деталей.
52
Рис. 5.8. Силы, действующие в зацеплении цилиндрической зубчатой передачи: а — силы в торцовой плоскости;
б — сила в нормальной плоскости; в — определение окружной и осевой сил; г — силы в шевронной передаче
Эти явления учитываются соответствующими коэффициентами при определении расчетной нагрузки на передачу. Силами трения также пренебрегают вследствие их малости. Силы в зацеплении определяют в полюсе зацепления П (см. рис. 5.2, 5.4), предполагая, что вся нагрузка передается одной парой зубьев.
Распределенную нагрузку по линии контакта К2К2 заменим результирующим вектором Fn (рис. 5.8, б). Вектор Fn раскладывается по осям координат в окружном Ft, в радиальном Fr и в осевом Fa направлениях (рис. 5.8, а, в). На рис. 5.8, а представлены силы в торцовом сечении косозубого колеса.
Окружную силу определяют через заданный вращающий момент на шестерне ТДН • м)
27\ • 103
(5.10)
53
Радиальную Fr, осевую Fa, результирующую Fn силы находят через окружную Ft:
Fr = Ft tg at; Fa = Ft tg 0;
F = = F<
n cos a cos a cos 0 ’
(5.11)
(5.12)
где a( — угол зацепления в торцовой плоскости, определяется по зависимости (5.6). У прямозубой передачи 0 = 0, осевая си-ла Fa = 0, at = а = 20°. У шевронной передачи осевые силы уравновешиваются (рис. 5.8, г) на колесе и не передаются на подшипники.
5.6. Виды разрушения зубьев.
Критерии работоспособности и расчета зубчатых передач
При передаче вращающего момента на линии контакта возникают упругие деформации профилей зубьев, вызывающие контактные напряжения сн, распределенные на площадке контакта. У основания зуба от силы Fn возникают напряжения изгиба of, характер распределения которых показан на рис. 5.9, а. Контактные и изгибные напряжения изменяются
Рис. 5.9. Напряжения, возникающие в зубьях ( а), и характер их нагружения (б)
54
во времени по прерывистому отнулевому циклу (рис. 5.9, б). Переменные напряжения являются причиной усталостного разрушения зубьев: поломки, выкрашивания поверхностного слоя, износа, заедания.
Усталостное выкрашивание поверхностных слоев зубьев (рис. 5.10, а) является наиболее распространенным видом повреждений зубьев для большинства хорошо смазываемых и защищенных от загрязнений зубчатых колес. Выкрашивание заключается в отслоении частичек материала с поверхности и появлении на рабочих поверхностях небольших углублений, напоминающих оспинки, которые потом растут и превращаются в раковины.
Выкрашивание начинается на ножках зубьев вблизи полюсной линии. Затем оно распространяется на всю поверхность ножек. Со временем зоны выкрашивания сливаются и начинается прогрессивное выкрашивание. Оно носит усталостный характер, так как в процессе зацепления зубьев при вращении колес контактные напряжения в каждой точке рабочей поверхности зубьев переменны (см. рис. 5.9, б). В косозубых передачах при невысокой твердости поверхности зубьев колеса и высокой твердости шестерни выкрашивание является затухающим, так как после удаления в результате выкрашивания материала с поверхности ножек зубьев колеса нагрузка перераспределяется на головки зубьев, имеющие большую прочность.
Усталостные трещины обычно зарождаются на поверхности, где имеет место концентрация напряжений из-за микронеровностей. В отдельных случаях трещины могут зарождаться под поверхностью зуба. При увеличении твердости поверхности зуба значение глубинных напряжений возрастает. У поверхностно-упрочненных колес переменные напряжения под поверхностью зуба могут вызывать отслаивание материала с поверхности. В передачах, работающих со значительным износом (открытые передачи и с абразивным материалом на поверхности зубьев), выкрашивание наблюдается очень редко, так как поверхностные слои истираются раньше, чем в них появляются усталостные трещины. Для предотвращения усталостного выкрашивания зубья рассчитывают на контактную выносливость рабочих поверхностей.
Поломка зубьев является наиболее опасным видом разрушения, приводящим к выходу из строя передачи и часто к по-
55
Рис. 5.10. Виды разрушения зубьев: а — выкрашивание; б — абразивный износ; в — заедание
вреждению других деталей (валов, подшипников). Зубья могут сломаться в результате больших перегрузок ударного характера или от усталости материала в результате многократно повторяющихся рабочих нагрузок.
Трещины появляются у основания зубьев на стороне растянутых волокон. Зубья шевронных и широких косозубых колес обычно выламываются по косому сечению (от основания зуба на одном торце к вершине зуба на противоположном торце). Для предотвращения поломок зубья рассчитывают на изгиб.
Абразивный износ (рис. 5.10, б) является основной причиной выхода из строя открытых передач и части закрытых передач машин с плохими уплотнениями, работающих в среде, засоренной абразивами: горных, дорожных, строительных, сельскохозяйственных, транспортных и некоторых других.
Заедание зубьев (рис. 5.10, в) заключается в местном молекулярном сцеплении контактирующих поверхностей в условиях разрушения смазочной пленки. Разрушение происходит вследствие высоких контактных давлений или понижения вязкости смазочного материала вследствие нагрева, вызванного высокими скоростями скольжения.
Основными критериями работоспособности зубчатых передач являются контактная прочность рабочих поверхностей зубьев и прочность зубьев при изги-б е. Расчеты по этим критериям наиболее полно разработаны для стальных закрытых хорошо смазываемых эвольвентных зубчатых передач. Согласно ГОСТу 21354-87 выполняют следующие расчеты.
56
1. Расчет на контактную прочность рабочих поверхностей зубьев:
расчет на сопротивление усталости для предотвращения прогрессивного выкрашивания;
расчет для предотвращения остаточных деформаций или хрупкого разрушения поверхностного слоя при действии кратковременной максимальной нагрузки.
2. Расчет зубьев на прочность при изгибе: расчет зубьев на сопротивление усталости при изгибе; расчет зубьев на предотвращение остаточных деформаций или поломки при действии кратковременной максимальной нагрузки.
Важными показателями качества зубчатых передач являются уровни вибраций и шума, которые связаны с пересопря-жением (входом в зацепление) зубьев, периодически повторяющейся ошибкой шага зубьев, искажением (огранкой) профилей зубьев. Основные средства борьбы с шумом в зубчатых передачах: совершенствование зубоотделочных операций (повышение точности), переход на косозубые передачи, фланкирование. В механизмах, к которым предъявляют высокие требования по уровню шума (системы жизнеобеспечения космонавтов, бытовая техника и др.), одно из зубчатых колес изготавливают из полимерных материалов.
5.7. Материалы для изготовления зубчатых колес
При выборе материалов для зубчатых колес необходимо обеспечить сопротивление контактной усталости поверхностных слоев зубьев, прочность зубьев на изгиб, сопротивление заеданию и износу. Основными материалами являются термически обрабатываемые стали (табл. 5.3). Допускаемые контактные напряжения примерно пропорциональны твердости материалов. Это указывает на целесообразность широкого применения для зубчатых колес сталей, закаливаемых до значительной твердости.
Твердость Н материала измеряют по Бриннелю, когда Н < 350 НВ или по Роквеллу HRC3 при Н > 350 НВ. Приближенно 10 НВ ~ 1 HRC3. При твердости Н < 350 НВ шестерню выполняют с несколько большей твердостью, чем колесо, на (20...30) НВ. Термическую обработку заготовки (нормализацию, улучшение) выполняют до нарезания зубьев. После наре
57
зания зубьев не требуется дополнительных финишных операций. Такие передачи хорошо прирабатываются.
При твердости Н > 350 НВ химико-термическую обработку ведут после зубонарезания, при этом зубья коробятся и в результате ухудшаются их точностные показатели. В массовом и крупносерийном производстве применяют исключительно зубчатые колеса высокой твердости, которые подвергают отделочным операциям после термической обработки.
Таблица 5.3
Стали, применяемые для зубчатых колес
Марка стали Размеры, мм НВ (сердцевины) HRC (поверхности) ав. МПа <гт, МПа Термическая обработка
D* S*
35 любой любая 163...192 — 550 270 нормализация
45 любой любая 179...207 — 600 320 ft
45 125 80 235...262 — 780 540 улучшение
45 80 50 269...302 — 890 650 » ft
40Х 200 125 235...262 — 790 640 ft»
40Х 125 80 269...302 — 900 750 » »
40Х 125 80 269...302 45...50 900 750 улучшение + закалка ТВЧ
35ХМ 315 200 235...262 — 800 670 улучшение
35ХМ 200 125 269...302 — 920 790 ft »
35ХМ 200 125 269...302 48...53 920 790 улучшение + закалка ТВЧ
D, S — диаметр шестерни и толщина обода и диска колеса.
58
Продолжение табл. 5.3
Марка стали Размеры, мм НВ (сердцевины) HRC (поверхности) °в. МПа МПа Термическая обработка
D* S*
40ХН 315 200 235...262 — 800 630 улучшение
40ХН 200 125 269...302 — 920 750
40ХН 200 125 269...302 48...53 920 750 улучшение + закалка ТВЧ
20ХНМ 200 125 300...400 56...63 1000 800 улучшение + цементация + закалка
18ХГТ 200 125 300...400 56...63 1000 800 * »
12ХНЗА 200 125 300...400 56...63 1000 800
25ХГНМ 200 125 300...400 56...63 1000 800
40ХНМА 125 80 269...302 50...56 980 780 улучшение + азо- тирование
35Л любой любая 163...207 — 550 270 нормализация
45Л 315 200 207...235 — 680 440 улучшение
Объемная закалка вызывает увеличение твердости не только поверхности зуба, но и его сердцевины. В результате зуб становится хрупким и легко разрушается при ударах. Поэтому объемная закалка уступила место поверхностным термическим и химико-термическим методам упрочнений. Такой обработкой можно достигнуть высокой твердости поверхностных слоев материала зубьев при сохранении вязкой сердцевины.
Для зубчатых колес применяют следующие основные виды поверхностных термических и химико-термических упрочне
59
ний: поверхностная закалка, цементация и нитроцементация с закалкой, азотирование.
Поверхностную закалку в основном обеспечивают за счет нагрева токами высокой частоты (ТВЧ). В связи с тем, что нагреваются поверхностные слои в течение 20...50 с, толщина закаливаемого слоя мала и деформации при закалке невелики. Поэтому можно обойтись без последующего шлифования зубьев (однако это понижает точность на одну-полторы степени). Материалы в этом случае — среднеуглеродистые легированные стали 40Х, 40ХН, 35ХМ и др. Обычно твердость на поверхности зубьев (50...55) HRC3.
Поверхностная закалка зубьев без охвата переходной поверхности (с обрывом твердого слоя у впадины зубьев) повышает износостойкость и сопротивление выкрашиванию, но понижает прочность при изгибе, так как создает концентратор напряжений у корня зуба. Желательно, чтобы закаленный слой повторял очертание впадин.
Цементация — поверхностное насыщение углеродом сталей, содержащих углерода менее 0,3%, с последующей закалкой. Цементация обеспечивает большую твердость (56...63) HRC3, несущую способность поверхностных слоев зубьев и высокую прочность на изгиб. Целесообразно применять газовую цементацию как более производительную. Применяют цементируемые стали: 20Х, а для ответственных зубчатых колес, работающих с ударными нагрузками, хромоникелевые стали 12ХНЗА, 20ХНМ, безникелевые стали 18ХГТ, 25ХГТ и др. Толщина цементированного слоя примерно 0,3 модуля. Время цементации на глубину 1 мм примерно 3 часа — процесс длительный. При цементации рабочие поверхности зубьев искажаются и требуется их шлифование.
Азотирование — насыщение поверхностных слоев азотом, обеспечивает высокую твердость (58...65) HRC3 и износостойкость поверхностных слоев. Азотируют готовые детали без последующей закалки. Для азотируемых колес применяют молибденовую сталь 38Х2МЮА, безалюминиевые стали типа 40ХФА, 40ХНА, 40Х. Зубья после азотирования в связи с малой толщиной слоя насыщения и малым короблением не шлифуют. Поэтому азотирование применяют для колес с внутренними зубьями и других, шлифование которых трудно осуществимо. Недостатком азотированных колес является малая
60
толщина упрочненного слоя (0,2...0,5 мм), не позволяющая применять их при ударных нагрузках из-за опасности растрескивания упрочненного слоя и при работе с интенсивным изнашиванием (при загрязненной смазке).
Нитроцементация — насыщение поверхностных слоев углеродом и азотом с последующей закалкой — обеспечивает им высокую прочность, износостойкость и сопротивление заеданию. Нитроцементация идет с достаточно высокой скоростью и в связи с малыми толщиной упрочняемого слоя и его деформациями позволяет обойтись без последующего шлифования.
Улучшаемые стали применяют для зубчатых колес, преимущественно изготовляемых в условиях мелкосерийного и единичного производства при отсутствии жестких требований к габаритам. Чистовое нарезание зубьев улучшаемых колес производят после термической обработки заготовки, что исключает необходимость шлифования и позволяет обеспечить высокую точность. Применяют качественные углеродистые стали 40, 45 и легированные 35ХГС, 40Х и др.
Стали в нормализованном состоянии для обоих сопряженных зубчатых колес применяют только во вспомогательных механизмах, например в механизмах с ручным приводом. Основные материалы — среднеуглеродистые стали 40, 45, 50. Для повышения стойкости против заедания шестерни и колеса изготовляют из разных материалов.
Стальное литье применяют для колес больших диаметров. Основные материалы — литейные среднеуглеродистые стали 35Л, 50Л и др. Литые колеса подвергают преимущественно нормализации.
Чугуны используют для изготовления тихоходных, крупногабаритных и открытых передач. Кроме того, из чугуна изготовляют сменные колеса (поочередно работающие). Применяют чугуны СЧ20...СЧ35, а также высокопрочные магниевые чугуны с шаровидным графитом.
Пластмассовые зубчатые колеса в паре с металлическими применяют в слабонагруженных передачах для обеспечения бесшумности, самосмазываемости или химической стойкости. Используют текстолит (рекомендуемые марки ПТ и ПТК) и древесно-слоистые пластики. Наиболее перспективными следует считать капролон, полиформальдегид и фе-нилон.
51
5.8. Расчетная нагрузка
При работе передачи возникают дополнительные нагрузки из-за ошибок изготовления деталей, их деформаций, погрешностей при сборке и условий эксплуатации. Расчетная нагрузка определяется умножением номинальной нагрузки на коэффициент нагрузки К > 1.
Коэффициенты нагрузки при расчете контактных напряжений обозначают Кн, при расчете напряжений изгиба — KF и определяют по зависимостям:
Кн = КНАКНрКНиКНа; KF = KFAK^KFvKFa, (5.13) где КНА, KFA — коэффициенты, учитывающие внешнюю динамическую нагрузку. Значения этих коэффициентов выбирают в зависимости от характера работы механизма (равномерно или с периодическим изменением нагрузки).
КНр, KFp — коэффициенты концентрации нагрузки, учитывающие неравномерность распределения нагрузки по длине контактных линий;
KHv, KFv — коэффициенты, учитывающие внутреннюю динамическую нагрузку передачи;
КНа, KFa — коэффициенты, учитывающие характер распределения нагрузки между зубьями.
Концентрация нагрузки по длине контактных линий возникает из-за погрешностей расположения зубьев, упругих деформаций зубьев, валов и их опор. Вследствие перечисленных факторов сопряженные профили зубьев без нагрузки контактируют не по всей длине (рис. 5.11, а). При нагружении зубья деформируются и контактируют по всей длине (рис. 5.11, б). Однако нагрузка распределится по контактной линии неравномерно, так как перемещения сечений зуба неодинаковы (рис. 5.11, в). Аналогичная картина возникает при закрутке шестерни, когда она выполнена заодно с валом.
Коэффициент концентрации нагрузки определяется отношением wmeix/wcp. Он зависит от угла перекоса и от ширины колеса Ь (или отношения = b/d^, а также от расположения колес относительно опор (рис. 5.11, д, е, ж). Приближенно коэффициент концентрации при симметричном расположении шестерни относительно опор принимают 1,05 (см. рис. 5.11, д), при расположении вблизи опоры — 1,1 (см. рис. 5.11, е), при консольном расположении — 1,2...1,4 (рис. 5.11, ж). В целях уменьшения концентрации нагрузки повышают точность из-
62
Рис. 5.11. Концентрация нагрузки в зависимости от расположения колес относительно опор: а — контакт зубьев без нагрузки; б — контакт под нагрузкой; в — распределение нагрузки по контактной линии; г — «бочкообразные» зубья; д — симметричное расположение колес; е — несимметричное; ж — консольное
готовления колес, жесткость валов и опор (используют конические роликовые подшипники вместо шариковых), выполняют продольную модификацию зубьев («бочкообразные» зубья, рис. 5.11, г).
При проектировочном расчете передачи коэффициенты концентрации нагрузки Кн$ и KF^ определяют по графикам (рис. 5.12) в зависимости от относительной ширины колеса \ibd, твердости материала и расположения колес относительно опор (варианты 1...7, рис. 5.12, б). С увеличением относительной ширины колес (v/m) коэффициенты концентрации растут. Особенно это заметно для колес из материалов с высокой твердостью поверхности из-за их плохой прирабатываемое ти.
63
Рис. 5.12. Приближенные значения коэффициентов концентрации нагрузки: а — коэффициенты концентрации нагрузки при расчете по контактным напряжениям; б — схемы расположения колес; в — коэффициенты концентрации нагрузки при расчете по напряжениям изгиба
64
На величину внутренней динамической нагрузки оказывают влияние ошибки шага зубьев, деформации изгиба зубьев под нагрузкой, переменная изгибная жесткость зубьев и опор, окружная скорость. Погрешности по шагу зубьев и деформации зубьев при изгибе вызывают ударные нагрузки на входе зубьев в зацепление (рис. 5.13). Удары отсутствуют, если контакт зубьев происходит на линии зацепления NN, а их основные шаги на торце равны ptbl = ptb2. Если шаг зубьев шестерни меньше шага зубьев колеса, то контакт возникнет в точке В. Для возможности контакта на линии зацепления шаги должны выровняться в результате мгновенного деформирования зубьев. При этом возникает удар. Сила удара зависит от величины погрешности по шагу, жесткости зубьев, окружной скорости и присоединенных к колесам инерционных масс. Поэтому для каждой степени точности передачи ограничивают окружную скорость (см. табл. 5.2). Аналогичная картина возникает на выходе зубьев из зацепления.
Переменная жесткость зубьев обусловлена тем, что в зоне двухпарного зацепления нагрузка распределяется между двумя парами зубьев, а в зоне однопарного зацепления вся нагрузка воспринимается одной парой зубьев. Переменная жесткость подшипников качения связана с тем, что из-за погрешностей изготовления изменяется количество тел качения, воспринимающих нагрузку. Для приближенных расчетов значения KHv и KFv даны в табл. 5.4.
Для уменьшения динамических нагрузок необходимо: повышать точность изготовления колес (уменьшать погрешности шага); выполнять зубья фланкированными для снижения удара при входе зубьев в зацепление (см. рис. 5.3, в); увеличивать коэффициент перекрытия, что позволит распре-
Рис. 5.13. Кромочный удар при входе зубьев в зацепление
3 Детали машин
65
Коэффициент динамической нагрузки (числитель — прямозубые, знаменатель — косозубые передачи)
а fa. V, м/с 20 1,5 о сч ^ч | 1,64 1,60 1,24 1 1,77 1,70 1,21 1 1
15 1,37 ; 1,15.. 1 1,48 1,45 1,18 1 1,58 1,52 1,14‘ 1 1,67
10 1,25 О f4 о 00 »-ч сч со ^ч О со т-Ч 1,12 96*1 00 со 1-4 1,35 1,14 1 1,45
1О 1,12 1,05 О ^ч 1,16 1,15 1,06 1,48 1,19 1,17 О т-Ч 1,56 1,22
гЧ сч о »-ч 1,01 00 о »-Ч со о »-ч 1,03 »-ч О »-Ч 1,10 О »"Ч 1,03 1,01 1,11 1,04
аия 20 1,5 О ^ч О оо ^ч 1,32 1,60 1,24 1,96 00 со ^ч 1,70 1,28 1 1,45
15 1,37 1,15 1,60 1,24 1,45 1,18 1,72 1,29 1,52 1,21 1,84 1,34
ОТ 1,25 О »-ч »*ч о »*ч 1,16 1,30 1,12 1,48 1,19 1,35 т-Ч 1,56 1,22
1,12 1,05 . 1,20 00 о т-ч 1,15 1,06 1,24 О ^ч ^ч т-Ч ^Ч 1,07 1,28 1,11
^ч 1,02 гЧ О гЧ О т-4 1,02 СО о ^ч ^Ч О »“Ч 1,05 сч О ^ч со о ^ч ^Ч О ^ч 1,06 (N О ^ч
Твердость поверхностей зубьев, НВ О ю со Л сч ЕЧ Я] или Н2 С 350 Н]ИН2>350 Hj или Н2 С 350 Я, иН2>350 Hi или Н2 С 350
Степень точности по ГОСТу 1643-81 ь- 00 О
66
делить динамическую силу на несколько зубьев и уменьшить ее влияние. Это достигается применением специальных зацеплений с исходным контуром а < 20° и увеличенной высотой зубьев.
Распределение нагрузки между парами зубьев зависит от суммарной погрешности шагов зубьев шестерни и колеса, суммарной податливости пары зацепляющихся зубьев и их склонности к приработке. Для прямозубых передач КНа = = KFa = 1, для косозубых и шевронных передач КНа = KFa — = 1 + 0,06 (пст- 5), где пст — число, соответствующее степени точности (пст = 6...9).
5.9. Расчет зубьев цилиндрических передач на контактную прочность
Расчет на контактную прочность включает расчеты на сопротивление усталости и на предотвращение разрушения рабочих поверхностей зубьев при максимальной однократной нагрузке.
Расчет на сопротивление усталости. Разрушение от переменных контактных напряжений начинается вблизи полюса. Поэтому расчетные напряжения определяют на линии контакта, проходящей через полюс П (рис. 5.14, а).
Рис. 5.14. Схема к расчету зубчатой передачи на контактную прочность: радиусы кривизны для внешнего (а) и внутреннего (б) зацеплений, поле зацепления прямозубой (в) и косозубой (г) передач
67
Цель расчета — определение размеров передачи при выбранном материале и заданной твердости поверхности зубьев колес, при которых не будет прогрессивного выкрашивания. Условие контактной прочности записывают в виде
< [о]н.
где сн — расчетное напряжение, зависящее от геометрических параметров передачи и нагрузки; [ст]н — допускаемое напряжение, зависящее от материала, термообработки колес и характера нагрузки.
Контакт двух зубьев можно рассматривать как контакт двух цилиндров с радиусами кривизны pj = Nrn и р2 = N2H в полюсе зацепления П. В качестве исходной принимают формулу Герца для наибольших контактных напряжений на площадке контакта двух стальных цилиндров при их сжатии
= 0,418/^, (5.14)
N Р
где wn = F/ls — распределенная нагрузка; F — нормальная к контактирующим поверхностям сила сжатия; ls — суммарная длина контактных линий; Е — модуль упругости; р — приведенный радиус кривизны.
Для получения расчетной зависимости в удобной форме заменим величины, входящие в формулу Герца через параметры зацепления. Для прямозубой передачи нормальная результирующая сила определяется через окружную силу Ft
F = Fn = KHFt/cos a.
Суммарная длина контактных линий KlKl (рис. 5.14, в) в прямозубой передаче переменна. В зоне однопарного зацепления она равна Ь, в зоне двухпарного зацепления — 2Ь. Для расчетов принимают
где ZE ~ 0,9 — коэффициент, учитывающий суммарную длину контактных линий. Для стальных колес модуль упругости Е = 2,1 • 105 МПа, тогда коэффициент, учитывающий механические свойства материала колес, ZE = 191,6 МПа0,5.
Приведенный радиус кривизны
_ Р1Р2
Pi ± р2’
знак минус для внутреннего зацепления (рис. 5.14, б).
68
Радиусы кривизны эвольвент и IJN2 в полюсе зацепления определим из треугольников O1IIN1 и O2nN2 (см. рис. 5.14, а) р
Pi = dbltgatw/2 = dicos а t£atu>/2;
р2 = d2cos a tgatlv/2;
1/р = 2(d2 ± d1)/(d142cos а tgatu).
Принимая во внимание, что d2 = dxu, получим
1 = 2(п ± 1)
р djucos a tg atw'
Подставим полученные величины в формулу Герца
аН ~ ^Е^е
I^HFt 2(и ± 1) cos a cos a tg atwdjU
где дополнительно обозначим
2
cos2 a tg atw
ZH — коэффициент, учитывающий форму сопряженных поверхностей зубьев. Для передач, изготовленных без смещения режущего инструмента, atU) — о = 20°, ZH = 2,5.
С учетом выполненных преобразований формула проверочного расчета контактных напряжений для прямозубых передач имеет вид
~ ^Е^е^Н
fKHFt(u ± 1) d.bu
< Мн-
(5.15)
Выразим окружную силу Ft на делительной окружности через вращающий момент на шестерне Ft = 2Тг • 103/d1 и заменим ZEZtZH = Kz.
csH = Kz^2 • 103
КяТ^и ±1)
(5.16)
Для передач без смещения режущего инструмента Кг = ZEZzZH = 190 • 0,9 • 2,5 = 431.
На рис. 5.14, в, г показаны плоскости зацепления (сечения вдоль линии зацепления) прямозубой и косозубой передач. В косозубой передаче линии контакта зубьев (К2К2) наклонены к оси вращения на угол р6 (см. рис. 5.6).
69
В отличие от прямозубых передач, в косозубых и шевронных передачах зубья входят в зацепление постепенно. Контактная линия (см. рис. 5.14, г) перемещается у ведомого колеса от вершины зуба к основанию (у ведущего — в обратном направлении). Изгибная жесткость зубьев при контакте вершиной зуба меньше, чем серединой. Поэтому коэффициент динамической нагрузки косозубых колес меньше, чем у прямозубой передачи. Расчет ведут по параметрам в сечении, нормальном к направлению зуба. Результирующая сила в нормальной плоскости на делительной окружности равна
F
F = F = ------- по зависимости (5.12).
” cos a cos р
Суммарная длина контактных линий косозубой передачи больше по сравнению с прямозубой за счет наклона контактной линии
I = bEa = ь
s COS Р6 Z% COS Pfc ’
где ZE2 = l/£a.
Приведенный радиус кривизны в нормальной плоскости Pni = Pi/cos р6 (см. рис. 5.14, г). По аналогии с прямозубой передачей
Pi = djcos aftgafU)/cos Р&; р2 = d2cos a(tgafU)/cos р&;
1 _ 2(u ± l)cos рь р djucos at tg atw'
Коэффициент, учитывающий форму сопряженных поверхностей,
_ / 2cos pfc
~ I---5--7----•
^cosz a tg atu,
Структура формулы проверочного расчета (5.16) остается прежней, но коэффициент Кг для косозубых колес меньше. При среднем значении pfc ~ р = 16° Кг = 363, т. е. на 16% меньше, чем у прямозубых.
Проектный расчет цилиндрических передач. В проектном расчете ведется определение межосевого расстояния aw. Выразим в формуле (5.16) ширину
Ъ = Vbaau>’
где хуЬа — коэффициент относительной ширины колеса,
70
dx ~ dwi = 2аш/(и ± 1) — диаметр делительной окружности,
I ~К Т
aw = К(и ± 1) 3 я 1 , (5.17)
^иуЬа[о]2
где Ка = 450 — для прямозубых, Ка = 410 — для косозубых передач.
Условие контактной прочности при действии максимальной однократной нагрузки
стНтах [°]//max’ (5.18)
где [о]Нтах — максимальное допускаемое напряжение (см. §5.11).
Максимальное расчетное напряжение определяют по формуле
стНтах = /Т1 ’
где csH, Т1п — напряжения и момент на шестерне при расчете на сопротивление усталости рабочих поверхностей зубьев; Т1п — максимальный момент на шестерне.
Если хотя бы одно из условий прочности по контактным напряжениям (5.16 или 5.18) не выполнено, то следует выбрать более прочный материал для зубчатых колес или увеличить размеры передачи.
5.10. Расчет зубьев цилиндрической передачи на прочность при изгибе
Расчет зубьев на сопротивление усталости при изгибе основан на сопоставлении расчетного местного напряжения csF и допускаемого напряжения [o]F. Расчетом определяют напряжения в опасном сечении на переходной поверхности зуба для шестерни и колеса раздельно.
Зуб прямозубой передачи рассматривают как консольную балку с нагрузкой, распределенной по линии контакта зубьев. Силы трения малы, и их не учитывают. Нагрузку заменяют силой F, направленной по линии зацепления, касательной к основным окружностям. В расчетах рассматривают наиболее опасный случай, при котором полная нагрузка приложена к вершине зуба. Это возможно из-за ошибок изготовления или при коэффициенте перекрытия, близком к единице. Результирующая сила, приложенная к вершине, переносится на
71
ось зуба и раскладывается на окружную и радиальную силы (рис. 5.15).
Находим напряжения от изгиба и сжатия в опасном сечении зуба:
6F cos yhx _ F sin у ; °сж ь
(5.19)
bs%
где sx — толщина зуба в опасном сечении; Ъ — ширина зубчатого колеса.
На стороне сжатия результирующие напряжения больше, чем на стороне растяжения зуба. Однако образование трещин усталости и разрушение начинается на стороне растяжения. Поэтому расчет ведут по напряжениям
°F — сти стсж-
(5.20)
Выразив в зависимостях (5.19) значения hx, sx в долях модуля и силу F = КfFJcos а (см. 5.12), где KF — коэффициент нагрузки, получим из зависимости (5.20)
KFFt mb
6hxmcos у s?
m sin y^ aCT ~| sx / cos aj ’
где ao — теоретический коэффициент концентрации напряжений в корне зуба, зависящий от радиуса выкружки.
Выражение в квадратных скобках обозначим через YFS и назовем коэффициентом формы зуба. Зависимость для определения расчетных напряжений в прямых зубьях при изгибе имеет вид
Рис. 5.15. Схема к расчету зубьев на изгиб
„ _ KPFtYFS
(5.21)
Коэффициент формы зуба YFS (рис. 5.16) не зависит от размеров зубьев, уменьшается с увеличением коэффициента смещения исходного контура х и с увеличением эквивалентного числа зубьев zv (5.7).
Для косозубых и шевронных
передач, по сравнению с прямозубыми, характерно повышенное со
72
противление усталости при изгибе. Для этих передач условие прочности дополняется коэффициентами УЕ, Ув.
(5-22)
Здесь KF — коэффициент нагрузки (см. 5.13). Коэффициенты, учитывающие динамическую нагрузку KFv и концентрацию нагрузки вдоль длины контактных линий KF^, в косозубой передаче меньше, чем в прямозубой (см. табл. 5.4), так как зубья входят в зацепление постепенно (не всей длиной) и лучше компенсируются погрешности шага зубьев.
Yfs — коэффициент формы зуба выбирают по эквивалентному числу зубьев (см. § 5.2) zv = z/cos3 р.
YE — коэффициент, учитывающий перекрытие зубьев
Г6=1/£а,
где 8а — коэффициент торцового перекрытия (см. табл. 5.1).
Коэффициент, учитывающий наклон зуба, получен экспериментально:
Ур = 1 - 8р р°/120 > 0,7, где 8р — коэффициент осевого перекрытия (см. табл. 5.1).
Рис. 5.16. Коэффициенты формы зуба
73
Формула (5.22) является общей для косозубых и прямозубых передач. Для прямозубых УЕ = 1, Ур = 1. Прочность зубьев на изгиб является определяющей для колес с высокой твердостью поверхности зуба Н > 59 HRC3. При такой твердости зубьев колес геометрические размеры передачи, рассчитанные по контактным напряжениям, получаются меньше, чем по напряжениям изгиба зубьев.
Прочность зубьев при однократной перегрузке при изгибе оценивают критерием
nFmax ЫЛпах. (5-23)
где [ст]Гтах — максимально допускаемое напряжение (см. § 5.11).
Максимальные расчетные напряжения определяют по формуле
гг — гг ^1п
CTFmax “ cF~r~ >
где csF, 7\ — напряжения и момент на шестерне при расчете на сопротивление усталости при изгибе; Т1п — максимальный момент на шестерне. Если хотя бы одно из условий прочности по напряжениям изгиба (5.22 или 5.23) не выполнено, то следует выбрать более прочный материал для зубчатых колес или увеличить размеры передачи.
5.11. Допускаемые напряжения
Зубья входят в зацепление поочередно и нагружаются по отну-левому циклу (см. рис. 5.9, б). Выбор допускаемых напряже-
ний базируется на кривых усталости, полученных при испы-
тании образцов — аналогов зубчатых колес.
Рис. 5.17. Кривая усталости
На рис. 5.17 показана кривая усталости, построенная в логарифмической системе координат ст — N (амплитуда напряжений цикла — число циклов нагружения до разрушения образца). Число циклов NG, соответствующее точке G (точке перелома), называют базовым числом циклов. Напряжение стЦп1, соответствующее базовому числу циклов,
74
называют пределом выносливости (для контактных напряжений csHhm, для напряжений изгиба oflim).
При напряжении ст < CTlim передача может работать практически неограниченное время, при ст > стНт — ограниченное время. Если при расчете суммарное число циклов Nt будет меньше Ng, то напряжение можно повысить до ст, (см. рис. 5.17 — штриховые линии). Наклонный участок кривой усталости описывают степенной функцией. Для точек и G
= aftmNG = C,
где т — показатель степени уравнения кривой усталости; С — константа, зависящая от свойств материала.
Приравнивая правые части уравнений, получают зависимость
= (5-24)
Эту зависимость используют для определения допускаемых контактных напряжений [ст]н и напряжений изгиба [ст]г. Разделив обе части уравнения (5.24) на коэффициент безопасности SH, получают допускаемое контактное напряжение для числа циклов Величину zN = GH/Nt называют коэффициентом долговечности. Экспериментами установлено, что предел выносливости также зависит от шероховатости поверхностей и окружной скорости, учитываемых коэффициентами ZR, Zv. Формула для определения допускаемых контактных напряжений имеет вид
[o1h=^=Wv (5.25)
ан
Предел выносливости стННт, соответствующий базовому числу циклов Ngh, зависит от средней твердости поверхности зуба (табл. 5.5). Коэффициент безопасности SH = 1,1 — для зубчатых колес с однородной структурой (улучшение, объемная закалка), SH —1,2 — для колес с поверхностным упрочнением. Коэффициент долговечности для контактных напряжений (при т = 6)
ZN = ^ngh/ni ПРИ условии 1 С ZN < ZNmBX,
где ZNmax = 2,6 — для материала колес с однородной структурой (нормализация, улучшение, объемная закалка), ^щах = 1,8 — при поверхностном упрочнении.
75
Таблица 5.5
Пределы контактной выносливости стЯЦт
Термическая или химико-термическая обработка Твердость поверхностей Группа материалов МПа
Улучшение, нормализация < 350 НВ У глеродистые и легированные стали 2^НВ ^0
Объемная закалка (30...50) HRC., 17ЯНКСэ + 100
Поверхностная закалка (40...56) HRC3 17ЯНКСз + 200
Цементация, нитроцементация и закалка (56...65) HRC3 Легированные стали
Азотирование (58...65) HRC3 1050
Без термической обработки — Чугун 277нв
Базовое число циклов для контактных напряжений
Ngh = ЗО(НВ)2,4.
При Н 560 НВ (HRC356) базовое число циклов принимают Ngh = 12 • 107. Число циклов нагружения NK за весь срок службы при работе нереверсивной передачи с постоянной нагрузкой:
NK = 60nncLh, (5.26)
где п — частота вращения (шестерни или колеса), мин-1; пс — число зацеплений шестерни или колеса за один их оборот; Lh — время работы передачи, ч. Если передача реверсивная, то при определении числа циклов NK учитывают нагружение только одной стороной зуба. При работе передачи с переменной нагрузкой подставляют вместо N к эквивалентное NЕ число циклов перемен напряжений (см. ниже). При определении коэффициента долговечности принимают Nt = NK.
Коэффициент ZR, учитывающий влияние шероховатости сопряженных поверхностей зубьев: ZR = 1 для Ra = 0,63... 1,25 мкм (шлифование), ZR = 0,95 для Ra = = 1,25...2,5 мкм (чистовое фрезерование), ZR = 0,9 для Ra = 2,5... 10 мкм (грубое фрезерование). Коэффициент Zv, учитывающий влияние окружной скорости, для Н < 350 НВ Zv = 0,85ц0’1 > 1, для Н > 350 НВ Zv = O,925p0,05 > 1. Повыше
76
ние скорости улучшает образование масляного слоя между зубьями и уменьшает силу трения.
Напряжения рассчитывают для шестерни [сг]#! и колеса [о]Н2. Допускаемые напряжения для передачи принимают для прямозубых передач меньшими из двух
[ст]н = min([o]H1, (ст]Н2);
для косозубых, шевронных и конических передач с круговым зубом
Мн = 0,45([ст]Н1 + (о]н2) > [o]Hmin
при выполнении условия:
[о]н < l,25[o]Hmin — для цилиндрических передач; [о]н < l,15[o]Hmin — для конических передач.
Здесь [o]Hmin — меньшее значение допускаемого напряжения из двух возможных (шестерня, колесо).
Максимальные допускаемые контактные напряжения (при однократной перегрузке) назначают по условиям отсутствия остаточных (пластических) деформаций или хрупкого разрушения упрочненного поверхностного слоя. Допускаемые напряжения для улучшенных сталей [о]Нтах = = 2,8стт, где стт — предел текучести, МПа; для зубьев, подвергнутых цементации или закалке ТВЧ [сг]Нтах = 44 HRC3.
Допускаемые напряжения изгиба на переходной поверхности зуба, не вызывающие усталостного разрушения материала, вычисляют раздельно для колеса и шестерни по зависимостям, аналогичным допускаемым контактным напряжениям
[o]F=^YNYfiYAYz. (5.27)
°F
Предел выносливости зубьев при изгибе oflim соответствует базовому числу циклов изменения напряжений NGF и зависит от химико-термической обработки материала и технологии изготовления (табл. 5.6). Испытания показали, что в среднем базовое число циклов для сталей NGF = 4 • 106. Коэффициент долговечности равен
Yn = 1O6)/2VK при условии 1 < YN < YWmax, (5.28)
где т = 9, YNm&x = 2,5 — для колес азотированных, цементированных и нитроцементированных с нешлифованной переходной поверхностью; во всех остальных случаях т — 6, Y^ax = 4. При переменном режиме нагружения NK заменяют эквивалентным числом циклов NE (см. ниже).
77
Таблица 5.6
Пределы выносливости aF lim и коэффициенты безопасности SF для зубьев стальных зубчатых колес при работе одной стороной*
Термине-ская обработка Твердость зубьев Марки сталей °F lim, МПа
на поверхности в сердцевине
Нормализация, улучшение 180...350 НВ 40, 45, 40X, 40XH, 45Ц, 35XM 1,75 1,7
Объемная закалка 45...55 HRC3 40X.40XH, 40ХФА 500...580* 1,7
Закалка ТВЧ сквозная с охватом впадин 48...52 HRC3 40X, 35XM, 40XH 500.„600 1,7
Закалка ТВЧ повто-ряет контур впадины 56...62 HRC3 27...35 HRC3 60X, Уб 700 1,7
48...52 HRC3 40X.40XH, 35XM 600... 700
Азотирование 700...960 HV 24.„40 HRC3 38Х2Ю, 38Х2МЮА 12Hhrs“ +90 1,7
550... 750 HV 40X, 40ХФА, 40X2HMA
Цементация с автоматическим регулированием процесса 57...63 HRC3 30...40 HRC3 18ХГТ, 20ХГР, 20XH, 12XH3A 850...950 1,55
Цементация 57...62 HRC3 Легированные 700...800 1,65
Нитроцементация с автоматическим регулированием процесса 57...63 HRC3 25ХГМ 1000 1,55
25ХГТ, ЗОХГТ, 35Х 750
*Более подробно см. в ГОСТе 21354-87, табл. 14...17.
78
Коэффициент Ул учитывает влияние шероховатости переходной поверхности зуба (выкружки). Принимают YI{ = 1 при зубофрезеровании и шлифовании. Для полированной поверхности впадины Уд = 1,05...1,2 (меньшие значения для цементованной и азотированной, большие — для улучшенной и закаленной без обрыва упрочненного слоя у выкружки).
Коэффициент УА учитывает влияние двустороннего приложения нагрузки. При одностороннем приложении нагрузки УА = 1. При реверсивном нагружении цикл нагружения — знакопеременный и предел выносливости меньше, чем при от-нулевом (пульсирующем) цикле. Это учитывается коэффициентом УА = 0,65 — для улучшенных сталей, УА = 0,75 — для цементированных, закаленных ТВЧ, УА = 0,9 — для азотированных сталей.
Коэффициент Yz учитывает способ получения заготовки колеса: для поковки и штамповки Yz = 1, для проката Yz = 0,9, для литых заготовок Yz = 0,8.
При однократной перегрузке максимальные допускаемые напряжения изгиба, не вызывающие остаточных деформаций или хрупкого излома, определяются раздельно для колеса и шестерни:
Ы? max — CTFlim^Nmex^St/'Sf'St>
где aflim определяют по табл. 5.6; YNmRX = 2,5..А (см. 5.28); KSt — коэффициент, учитывающий повышение предельных напряжений при однократном ударе (KSt = 1,2 при т = 9, KSt = 1,3 при т = 6); SFSt = 1,75 — коэффициент безопасности.
Закон нагружения передачи задают графиком в координатах нагрузка — число циклов нагружения или время работы. На рис. 5.18, а показан график или циклограмма при работе с постоянной внешней нагрузкой, на рис. 5.18, б — с перемен-
Рис. 5.18. Циклограмма вращающих моментов, действующих на передачу: а — при постоянной; б — при переменной нагрузке
79
ной внешней нагрузкой. В качестве нагрузки принят вращающий момент Т. При переменном режиме нагрузка периодически или случайным образом меняется во времени. Циклограмму составляют путем упорядочения нагрузок, начиная с максимальной.
Кратковременно действующие максимальные моменты Тп используют в расчетах для проверки отсутствия остаточных деформаций или хрупкого разрушения зубьев. К этим моментам приближенно относят такие, которые за срок службы действуют при расчете по контактным напряжениям 0,03 Ngh, для напряжений изгиба Nfmin < Ю3 циклов нагружения.
Расчет зубьев на сопротивление усталости ведут по максимальному длительно действующему вращающему моменту Tmax = 71] Переменный режим нагружения заменяют постоянным, эквивалентным по усталостному воздействию. Эквивалентное число циклов вычисляется для контактных напряжений и напряжений при изгибе по зависимостям:
^не = Nfe = HfNk, (5.29)
где NK — см. формулу (5.26); цн, pf — коэффициенты, зависящие от типового режима нагружения (табл. 5.7).
Таблица 5.7
Коэффициенты для вычисления эквивалентного числа циклов
Номер режима (рис. 5.19) Ин Иг
0 1 1
1 0,500 0,300/0,200
2 0,250 0,143/0,100
3 0,180 0,065/0,036
4 0,125 0,038/0,016
5 0,063 0,013/0,004
*Числитель для зубчатых колес с однородной структурой, включая ТВЧ со сквозной закалкой; знаменатель для зубчатых колес азотированных, цементированных и нитроцементированных с нешлифованной переходной поверхностью.
80
Рис. 5.19. Типовые режимы нагружения: О — постоянный; 1 — тяжелый; 2 — средний равновероятный; 3 — средний нормальный;
4 — легкий; 5 — особо легкий
Типовые режимы нагружения (рис. 5.19) построены в относительных координатах и Nt/NK (Tmax — момент, при-
нятый при расчете на сопротивление усталости). Ступенчатые циклограммы заменены кривыми линиями. В приложении к ГОСТу 21354-87 принято 6 типовых режимов нагружения.
5.12. Конические зубчатые передачи
Конические зубчатые передачи передают механическую энергию между валами с пересекающимися осями (см. рис. 5.1, е, ж, з, 5.20). Несмотря на сложность изготовления и монтажа,
конические передачи получили широкое распространение в редукторах общего назначения, в металлообрабатывающих станках, вертолетах, автомобилях.
Зацепление двух конических колес можно представить как качение без скольжения конусов с углами при вершинах 25q и 252- Эти конусы называют начальными. Линию касания этих конусов ОЕ называют полюсной линией или мгновенной осью в относительном вращении колес. Основное
Рис. 5.20. Схема конической передачи
81
Рис. 5.21. Формы зубьев конического колеса: а — прямые; б — круговые применение получили передачи ортогональные с суммарным углом между осями + б2 = 90°. Конические зубчатые передачи выполняют без смещения исходного контура (хх = 0, х2 = 0) или равносмещенными (х2 = -хх). Поэтому начальные конусы совпадают с делительными.
Конические колеса обычно выполняют прямозубыми или с круговыми зубьями (см. рис. 5.1, е, з, 5.21). Прямозубые передачи в основном применяют при окружных скоростях до 3 м/с, при более высоких скоростях применяют передачи с круговыми зубьями. Конические колеса с косыми зубьями применяют весьма редко из-за сложности изготовления и контроля.
Основные геометрические параметры. К основным относятся следующие геометрические параметры кони1 теских зубчатых колес.
Углы делительных конусов связаны с их диаметрами (и числами зубьев г). Согласно рис. 5.20,
tgSi = del/de2 = z-Jz2 = 1/и, (5.30)
б2 = 90°-5Х.
Модуль конического колеса меняется по длине зуба. За основной принимают окружной модуль на внешнем торце mte, который удобно измерять. Внешние делительные диаметры колес равны (см. рис. 5.20)
del = mtezli de2 = (5.31)
Внешнее конусное расстояние Re равно
Re = 0,5 + de22 = 0,5mteJzf + z%. (5.32)
82
Рис. 5.22. Геометрические параметры конического зубчатого колеса
Конусное расстояние до середины зуба равно (рис. 5.22)
Rm = Re~ 0,5b = .Re(l - 0,5b/Re) = _Re(l - 0,5Kbe), (5.33) где Kbe = b/Re — коэффициент ширины зубчатого венца. Значение КЬе < 0,35 (обычно 0,285).
Средний делительный диаметр и модуль находят из соотношения dm/de = (Re - 0,5b)/_Re для подобных треугольников:
dm = de(l - 0,5Kbe), (5.34)
= mte(l - 0,5Kbe).
Диаметр вершин зубьев (см. рис. 5.22) dae = de + 27zU(,cos 5.
При расчете на прочность конические колеса заменяют равнопрочными им цилиндрическими колесами. Диаметр эквивалентного зубчатого колеса равен (см. рис. 5.22)
dv = 2ОгЕ = de/cos 5. (5.35)
Эквивалентное число зубьев из зависимости mzv = = mz/cos 5 равно
zv = z/cos 5.
83
Для передач с круговыми зубьями по аналогии с цилиндрическими косозубыми передачами
V 3
cos 8 cos 0
Конические колеса с прямыми зубьями выполняют с теми же параметрами, что и цилиндрические (см. рис. 5.3) а = 20°, й* = 1, С* = 0,2, =0,2 (угол профиля, коэффициенты высо-
ты головки и ножки зуба, радиального зазора и радиуса скругления). Для колес с круговыми зубьями параметры принимают: ап = 20°, й* = 1, С* = 0,25, pf = 0,25. Расчетное сечение принимают по середине длины зуба колеса, где определяют и угол наклона зуба fSm (см. рис. 5.21, б).
Нарезание зубьев прямозубых колес осуществляют двумя резцами, движущимися возвратно-поступательно в зоне зуба и представляющими профиль впадины исходного контура. Каждый резец обрабатывает одну сторону зуба и движется в противофазе с другим резцом.
Нарезание круговых зубьев осуществляют резцовой головкой 1 с диаметром планшайбы d0 (см. рис. 5.21, б). На планшайбе резцы установлены неподвижно. Резание осуществляется вращением головки вокруг своей оси О. При нарезании происходит обкатка заготовки с воображаемым плоским колесом (производящим колесом), форму которого воспроизводит режущий инструмент. Радиус плоского колеса равен Re с числом зубьев
гс = 7г1 + г2 •
(5.36)
Рис. 5.23. Осевая форма зубьев конического колеса
Число зубьев плоского колеса гс может быть дробным. Специфика зубонарезания требует выполнения условия гс > 20. Это необходимо учитывать при выборе чисел зубьев колес. Режущие зубья инструмента не могут менять высоту при движении от торца к вершине конуса, зубья могут двигаться параллельно какой-либо образующей конуса зубчатого колеса. При этом получится разная осевая форма зуба конического колеса. Например, на рис. 5.23 представлены пропорционально понижающиеся зубья, в этом случае вершины конусов делительного и
84
впадин совпадают. Эту форму применяют для прямых и круговых зубьев с тт <2,5 мм. Угол наклона зубьев назначают на середине длины зуба (см. рис. 5.21, б). Увеличение угла наклона круговых зубьев Рт повышает плавность работы, но увеличивает осевую нагрузку на опоры валов. Преимущественно применяют Рт = 35°.
Понижающие конические передачи можно выполнять с передаточным отношением и = 1...10. Обычно и < 6. Повышающие передачи имеют и не более 3. Большие передаточные отношения усложняют конструирование шестерни и ее опор. Число зубьев шестерни следует выбирать больше zmln по графикам рис. 5.24. Число зубьев колеса z2 = zxu. Для достижения рав-нопрочности по изгибу увеличивают расчетную толщину зуба шестерни, а у колеса на такую же величину толщину зуба уменьшают. Для шестерни принимают положительное смещение
Xi = 2(1 - 1/U2)7COs3Pm/21 ’
а для колеса — отрицательное х2 = -хг.
При определении сил, действующих в зацеплении, результирующую силу Fn, нормальную к поверхности зуба, раскладывают на составляющие: окружную Ft, радиальную Fr, осевую Fa. При известном вращающем моменте Тх определяют окружную силу на среднем делительном диаметре шестерни, затем другие составляющие (рис. 5.25, сечение ОгОО:
2ГС.103 ._ .. . (5.37)
41 dml del(l - 0,5КЬе)
Рис. 5.24. Графики для определения чисел зубьев шестерни: а — с круговым зубом; б — прямозубой
85
Для шестерни прямозубой передачи
Frl = FyCos 5г = Ftltgacos 5Х, FO1 = F^sin 5Х = Futgasin бр Ffl = Ftl/cos a.
Для шестерни с круговыми зубьями радиальную и осевую силы определяют по зависимостям:
Frl = Ffl(tganCOS 81 ± sin ₽msin Sx)/cos pm,
Fa! = Ftl(tgansin 5X ± sin pmcos 8x)/cos pm.
Верхние знаки принимают при совпадении направления винтовой линии зуба шестерни и ее вращения при взгляде со стороны вершины конуса. Направление линии зуба шестерни выбирают таким, при котором сила Fal направлена к основанию конуса.
Для колеса Ff2 = -F(1; F^ = -Fol; Fa2 = -Frl.
Расчет на прочность конических зубчатых передач строят как расчет цилиндрической зубчатой передачи с эквивалентными зубчатыми колесами dvl, dv2 в среднем сечении ОгО2 длины зуба (рис. 5.25).
В формуле (5.15) для контактных напряжений цилиндрических передач заменяют Ft через выражение (5.37), b = KbeRe = 0,5FbffZj/sin б1т значение dx заменяют через
Рис. 5.25. Силы, действующие в зацеплении прямозубой конической зубчатой передачи
86
dvi = dei d - 0,5Kfce)/cos 5j; и = uv = zv2/zvl = (cos 8x/cos 82)2, а также принимают (1 - 0,5КЬе)2 ~ 1,04 (1 - КЬе). Вводят в знаменатель коэффициент Эн = 0,85, найденный экспериментально для учета понижения нагрузочной способности прямозубых конических передач по сравнению с цилиндрическими. Тогда
= 3104 —
Н Aid
л-н11_____
Kbe)Kbed^Hu
(5.38)
где Кн = KHpKHv— коэффициент нагрузки. Для передач с круговым зубом определяют по формулам:
при твердости Ну < 350 НВ, Н2 < 350 НВ Эя = 1,22 + 0,21и;
Нг > 45 HRC3, Н2 < 350 НВ = 1,13 + 0,13п;
/Д = Н2 > 45 HRC., = 0,81 + 0,15u.
При проектном расчете определяют внешний делительный
диаметр шестерни из выражения (5.38) для КЬе = 0,285:
del = 1650
кнтх
N[°]h^hu
(5.39)
Затем определяют основные геометрические параметры передачи из зависимостей (5.30)—(5.34).
Формулы проверочного расчета по напряжениям изгиба имеют следующий вид:
_ _ 2,7^7^ • 103
°" - М„т„Э, * [°1и
°F2 — aFlv^ [°]г2 1 F1
(5.40)
где KF = Крр • KFv — коэффициент нагрузки; YF — коэффициент формы зуба для zv — по формулам цилиндрических передач; = 0,85 — для прямозубых передач; для передач с круговым зубом:
= 0,94 + 0,08u
>% = 0,85 + 0,043u 9F = 0,65 + 0,llu
при Ну = H2 < 350 НВ;
при Ну > 45 HRC3, Н2 < 350 НВ;
при Ну = Н2 > 45 HRC3.
Если условия прочности (5.40) не выполняются, выбирают более прочный материал для зубчатых колес или увеличивают размеры передачи.
87
5.13. КПД зубчатых передач
КПД передачи определяют как отношение полезной работы к затраченной.
Л = (Р - Ртр)/Р = 1 - Ртр/Р = 1 - V, (5.41) где Р, Ртр — полная мощность и мощность, затраченная на трение; v ~ Р-гр/Р — коэффициент относительных потерь.
Потери мощности в зубчатых передачах в основном складываются из потерь: а) на трение в зацеплении; б) гидравлических на разбрызгивание масла; в) в подшипниках. В особо быстроходных передачах могут быть значительными вентиляционные потери. Общий КПД передачи
П = 1 - Va - Vr - Vn> (5.42)
где Va’Vr» Vn — коэффициенты относительных потерь мощности в зацеплении, гидравлических и в подшипниках. Средние значения КПД зубчатых передач на подшипниках качения при расчетном моменте приведены в табл. 5.8. При передаче неполной мощности КПД значительно ниже вследствие влияния постоянных потерь, т. е. потерь, не зависящих от передаваемой мощности.
Специфические виды зубчатых передач: планетарные и волновые — рассматриваются в двух последующих главах.
Таблица 5.8
Средние значения КПД зубчатых передач на подшипниках качения
Конструкция Передача
цилиндрическая коническая
Закрытая среднескоростная с жидкой смазкой 0,98 0,97
Закрытая высокой точности с жидкой смазкой быстроходная 0,99 0,98
Открытая с пластичной смазкой 0,96 0,95
И Контрольные вопросы________________________________________
1. Чем можно объяснить широкое распространение зубчатых передач?
2. Какое зубчатое колесо называют шестерней?
88
3. В чем различие между редуктором и мультипликатором?
4. Как связаны между собой вращающие моменты на ведущем и ведомом зубчатых колесах?
5. Какие окружности называют начальными?
6. Какому кинематическому условию должны удовлетворять профили зубьев?
7. Как образуется эвольвентный профиль зубьев?
8. Что называют линией зацепления?
9. В чем различие между исходным и исходным производящим контурами?
10. Как определяют модуль зацепления?
11. В чем состоит фланкирование зубьев?
12. Как за счет смещения инструмента можно увеличить несущую способность зубчатой передачи?
13. Каковы основные параметры цилиндрических зубчатых передач?
14. Какими показателями определяется точность зубчатых передач?
15. Как выбирают вид сопряжения зубьев?
16. Какие допущения делают при определении сил в зацеплении?
17. Какая из сил в зацеплении является наибольшей?
18. Каковы основные виды разрушения зубчатых передач?
19. Каковы причины выкрашивания поверхностей зубьев?
20. По каким критериям рассчитывают зубчатые передачи?
21. Какие требования предъявляют к материалам зубчатых колес?
22. Каковы основные виды поверхностных упрочнений зубьев?
23. Как определяют расчетную нагрузку зубчатых передач?
24. Чем объясняется концентрация нагрузки по длине зуба?
25. От каких факторов зависит внутренняя динамическая нагрузка?
26. Каковы пути уменьшения динамических нагрузок?
27. Как определяют приведенный радиус кривизны зубьев?
28. Какой параметр определяют проектным расчетом цилиндрической зубчатой передачи?
29. Какие напряжения возникают на поверхности зубьев?
30. Какие напряжения возникают в опасном сечении зуба?
31. От каких параметров зависит коэффициент формы зуба?
32. Чем можно объяснить более высокую прочность косозубых передач по сравнению с прямозубыми?
33. От каких параметров зависят допускаемые контактные напряжения?
34. Какова связь между углами делительных конусов конической зубчатой передачи и ее передаточным отношением?
35. Чем вызваны потери мощности в зубчатых передачах?
б
Глава
Планетарные передачи
6.1. Общие сведения
Планетарным называют зубчатый механизм, в котором геометрическая ось хотя бы одного из колес подвижна. Простая планетарная передача (рис. 6.1, а) состоит из: центральной шестерни с га внешними зубьями, центрального колеса с гь внутренними зубьями, сателлитов с zq внешними зубьями и водила h, на котором расположены оси сателлитов. Сателлиты входят в зацепление одновременно с шестерней га и колесом гъ. Сателлит может быть один или несколько, на данной схеме число сателлитов nw = 3.
При закрепленном центральном колесе (<оь = 0) вращение центральной шестерни с угловой скоростью ыа вызывает вращение сателлита относительно собственной оси с угловой скоростью a>g. Качение сателлита по центральному колесу перемещает его ось и вращает водило с угловой скоростью &>й. Сателлит совершает движение относительно водила с угловой скоростью со* = &)? - &)й и вращается вместе с водилом. Его движения напоминают движения планет, поэтому передача называется планетарной.
Основными звеньями планетарной передачи называют такие, которые воспринимают внешние моменты. На рис. 6.1, а основные звенья — a, Ъ, h, т. е. 2 центральных колеса (2К) и водило (й); такую передачу обозначают 2К-й. Внешние моменты Та — на ведущем вале, Th — на ведомом (тихоходном) вале, Ть — на колесе Ъ (на корпусе). Любое основное звено планетарной передачи может быть остановлено. Дифференциальной называют передачу, в которой все основные звенья подвижны. При этом можно суммировать движение двух звеньев на одном или раскладывать движение одного звена на двух остальных.
90
На рис. 6.1, б показано суммирование движений звена а от двигателя Дх и звена Ъ от двигателя Д2 на водиле h. Между двигателем Д2 и колесом Ь предусмотрена дополнительная передача zx, z2. Такая схема применяется в системах автоматического управления.
На рис. 6.1, в показан дифференциал заднего моста автомобиля, выполненный по схеме рис. 6.1, а, но с коническими колесами (а и 6 — два центральных колеса, h — водило, в котором размещены оси сателлитов g). Водило получает вращение от конической передачи zlt z2. Здесь вращение водила h раскладывается между колесами а и 6 обратно пропорционально моментам сопротивлений, например при повороте автомобиля. Это облегчает управление машиной и уменьшает износ шин. При одинаковых моментах сопротивления на колесах
Рис. 6.1. Планетарные передачи: а —схема передачи; б — суммирование движений от двух двигателей; в — дифференциальная передача
91
автомобиля все зубчатые колеса дифференциала вместе с водилом вращаются как одно целое.
Планетарные передачи по сравнению с обычными имеют преимущества: меньшие габариты и массу, так как вращающий момент параллельно передается по нескольким потокам (сателлитам). В некоторых схемах можно получить большие передаточные отношения при малом количестве колес. Нужно помнить, что с увеличением передаточного отношения КПД передачи падает.
К недостаткам передач можно отнести: требование повышенной точности изготовления и монтажа, большое количество подшипников качения, относительную сложность нарезания колес с внутренними зубьями, снижение КПД с ростом передаточного отношения.
6.2. Кинематика планетарных передач
Для определения передаточного отношения рассмотрим дифференциальный механизм, у которого основные звенья имеют положительные угловые скорости со„, cofc, сой (рис. 6.1, а). Сообщим мысленно механизму скорость —- сой. Тогда звенья будут иметь следующие скорости: центральная шестерня (»а - сой; центральное колесо сой - сой; водило — неподвижно. Такой механизм называют обращенным. Для него передаточное отношение записывают по формуле Виллиса
„й _ ft)a юй _ па nh иаЬ--------------------------------’
шй ~ wh пЪ nh
(6-1)
где па, пь, nh — частоты вращения основных звеньев.
_ • . СО- со„
Передаточное отношение u,lh = - — • — имеет различные СОе соь
знаки: знак минус для внешнего зацепления, так как направление вращения ведущего и ведомого звеньев различно, и плюс — для внутреннего зацепления
При остановленном центральном колесе b (сой — 0) из формулы (6.1) определяем
=Э=1"^=1 + г- <6-3>
“й га
92
(6.4)
При закрепленной центральной шестерне а (ыа = 0):
иа = Ю|> = 1 — 1 — 1 + 2“ ubh — 1 ~~iT ~~ 1 ' — ®Л U*b 2Ь
Частоту вращения основных звеньев находят из уравнений (6.3; 6.4). При расчете на прочность зацеплений и подшипников сателлитов частоту вращения принимают при остановленном водиле, т. е. = nq - nh. Уравнение Виллиса можно написать для любых трех звеньев механизма. Для определения относительной частоты вращения сателлита g напишем
ng-nh = ~^(na-nh). (6.5)
na nh Zg Zg
Здесь па задано, nh — определяют по зависимости (6.5).
6.3. Силы и моменты в передаче
Вращающие моменты на основных звеньях (Та, Ть, Th) необходимо знать для расчета передач и сил в зацеплении. Любую планетарную передачу можно разбить на простые, состоящие из трех основных звеньев.
При установившемся движении система находится в равновесии. Для нее можно написать два уравнения: уравнение статики и уравнение баланса энергии между ведущим и ведомым звеньями (на основании закона сохранения энергии):
Та + Th + Ть = 0; (6.6)
ТаЫа + Th^h + ТЪЫЬ = °-
Один из моментов (на ведущем или ведомом валу) задан. Два других находят из совместного решения двух уравнений (6.6). Момент на водиле при ыь = 0 равен Th = ~Tau^h , где Пал — КПД. Принято на ведущем звене принимать момент со знаком плюс, а на ведомом — минус. Знаки моментов используют при определении направления сил в зацеплениях. Момент на колесе b
Ть = -Ta(ubah - 1).
Потери мощности складываются из потерь на трение в зацеплениях и подшипниках сателлитов, на размешивание мас
93
ла (гидравлические). При больших скоростях водила учитывают аэродинамические потери
Пр = ПаПгПа. (6.7)
где т]р — КПД редуктора; г]3 — потери в зацеплении и в опорах сателлитов; цг — гидравлические потери; т]а — аэродинамические потери.
Особенности определения сил в зацеплении планетарной передачи связаны с распределением нагрузки между сателлитами (рис. 6.2, а). В передаче с тремя сателлитами момент на центральной шестерне Та уравновешивается силами в зацеплениях сателлитов
Т’а = 6,5du,a(/’tl + Ft2 + Ft3),
где dwa — диаметр начальной окружности центральной шестерни; Ftl, Ft2, Ft3 — окружные силы в зацеплениях сателлитов.
В идеальной передаче эти силы равны (на рис. 6.2, б — тонкие линии многоугольника сил). В реальной передаче из-за погрешностей изготовления силы распределяются неравномерно (на рис. 6.2, б — толстые линии). Из условия равновесия находят реакцию Fotl в опоре центрального колеса, направленную в сторону менее нагруженных сателлитов. Частичное выравнивание нагрузки между сателлитами можно осуществить удалением опоры центрального колеса. Для этого выполняют цент
«)
Рис. 6.2. Силы в зацеплениях сателлитов и методы их выравнивания: а — силы в зацеплениях; б — многоугольник сил для центральных колес; в — шарнирная установка центральных колес
94
ральные колеса «плавающими», соединяя их с валом или корпусом шарнирными (зубчатыми) муфтами (рис. 6.2, в). Полному выравниванию нагрузки препятствуют силы трения и инерции. Неравномерность распределения нагрузки между сателлитами учитывают с помощью коэффициента Kw.
Значения окружных и радиальных сил на основных звеньях определяют по зависимостям:
_2Та‘1О3 Кш^ _27\*108 Kw.
*ta d-------’ 7Г ’ *tb d------" ’
Uiva nw awb niv
Fr = Fta tg a; Ftfl = Fta + Ff6, (6.8)
где Ta, Tb, Te — значения моментов на звеньях; Fta, Ftb, Fth — окружные силы; Fr — радиальная сила; dwa, dwb — диаметры начальных окружностей колес; nw — количество сателлитов. Kw = 1,1...1,2 — при наличии механизма выравнивания нагрузки (см. рис. 6.2, в); Kw = 1,5...2 — при отсутствии механизма выравнивания нагрузки.
6.4. Особенности расчета планетарных передач
В отличие от расчета обычных зубчатых передач расчет планетарных передач начинают не с определения размеров передачи, а с выбора чисел зубьев колес. Для схемы на рис. 6.1 по заданному передаточному отношению ubh находят zb/za — = ubah - 1. Задавшись za, находим zb. Рекомендуют выбирать za = 21...24 для колес с твердостью зубьев Н < 350 НВ; za= 18...21 при Я = (35...52)НИСЭ; za < 18 — при
Н > 52 HRC3.
Так как колеса планетарных передач взаимосвязаны, то кроме обеспечения заданного передаточного отношения необходимо выполнение дополнительных условий: соосности, симметричного расположения сателлитов, соседства.
Условие соосности требует равенства межосевых расстояний различных пар зацепляющихся колес. Например, на _ dа dh di. dn
рис. 6.1, а необходимо awag = awgb, — = — - dg или _?=_?+ Л Л L Lt
+ dg. Если колеса изготовлены без смещения исходного контура и прямозубые, то
95
m(za + zg) _ m(zb - zg) _ zb - za 2 2 ’ 8 2
(6.9)
Чтобы получить zg целым, принимают числа зубьев za и гь нечетными или оба четными.
Рассмотрим условие симметричного расположения сателлитов. Каждое зубчатое колесо представляют в виде многоугольника с гранью, равной окружному шагу. Чтобы многоугольники собирались по граням, число зубьев (граней) центральных колес должно быть кратно числу сателлитов:
= ц; h. = ц или Z° +--ь = Ц, w Пи> Пи>
(6.10)
где nw — число сателлитов; Ц — любое целое число.
Условие соседства требует, чтобы сателлиты не задевали друг друга:
откуда
(za + z^sin (n/nw) > zg+ 2.
Расчеты на прочность ведут для обращенного механизма (при остановленном водиле) по зависимостям для цилиндрических зубчатых передач (см. § 5.8...5.11). Межосевое расстояние для прямозубых стальных передач
| г т aw = 450(н ± 1)3 1 -.
Передаточное число и = ze/za — для внешнего зацепления, и = zb/Zg — для внутреннего. Вращающий момент 7\ = _TaKw — для внешнего зацепления, Т, = Те ~ TaZ^w — ДЛя
внутреннего. При одинаковой твердости центральных шестерни и колеса расчет ведут только для внешнего зацепления как заведомо менее прочного.
Допускаемые контактные напряжения [ст]н рассчитывают как для цилиндрических передач, но при вычислении эквивалентного числа циклов по зависимостям (5.29, 5.26), частоту вращения определяют относительно водила /1 = 1/1!- пл| по абсолютной величине, nc = nw — для центральной шестерни, для сателлитов пс = 1, так как с колесами сателлиты контактируют разными боковыми сторонами.
96
Расчет зубьев на сопротивление усталости при изгибе ведут по зависимости (5.21) — см. § 5.10. Допускаемые напряжения для сателлитов определяют с учетом двухстороннего приложения нагрузки на зуб.
Контрольные вопросы
1. Какой механизм называют планетарным?
2. Каковы основные части планетарной передачи?
3. Какую передачу называют дифференциальной?
4. Чем можно объяснить меньшие габариты и массу планетарной передачи по сравнению с обычной зубчатой?
5. Какой механизм называют обращенным?
6. Из каких условий находят значения вращающих моментов на основных звеньях?
7. Какие условия необходимо соблюдать при расчете планетарной передачи?
4 Детали машин
7
Глава
Волновые зубчатые передачи
7.1. Общие сведения
Волновая передана — это механизм, в котором движение от входного звена к выходному передается за счет деформации гибкого звена. Основными частями волновой зубчатой передачи (ВЗП) (рис. 7.1, а) являются: гибкое колесо с внешними зубьями (число зубьев Zj), имеющее форму тонкостенного цилиндра, соединенного с тихоходным валом; жесткое колесо с внутренними зубьями (число зубьев z2), соединенное с корпусом; генератор волн h, деформирующий гибкое колесо.
Генератор волн h (рис. 7.1, б) выполняют в форме овала таким образом, что по оси У диаметр гибкого колеса увеличивается на величину 2т0, а по оси X — уменьшается. При деформации гибкого колеса его зубья по большой оси генератора входят в зацепление на полную глубину захода зуба hd. По малой оси зубья перемещаются на расстояние W к центру и в зацеплении с зубьями жесткого колеса не входят. Между этими крайними положениями зубья гибкого колеса погружены во впадины зубьев жесткого колеса на разную глубину. Максимальная радиальная деформация Wo равна полуразности диаметров делительных окружностей колес
IVo = O,5(d2- dJ = 0,5m(22- zj. (7.1)
При разности чисел зубьев z2 - Zj = 2 радиальная деформация Wo = т. При нарезании колес со смещением инструмента величина радиальной деформации меняется в пределах 0,94m <W0<l,lm.
График перемещений W точек обода гибкого колеса от угла поворота <р приведен на рис. 7.1, в. График имеет форму волны, что и обусловило название передачи. За время одного оборота деформация каждой точки обода дважды достигает максимума, такую передачу называют двухволновой. При боль
98
ших передаточных отношениях применяют трехволновые передачи. Их недостаток — большие циклические напряжения изгиба в гибком колесе, снижающие усталостную прочность колеса.
Большое число одновременно зацепляющихся зубьев обусловливает высокую нагрузочную способность передачи. Для обеспечения многопарного зацепления создают особую форму гибкого колеса под нагрузкой, необходимую величину его радиальной деформации и соответствующую геометрию зубьев.
Рис. 7.1. Волновая зубчатая передача: а — конструктивная схема; б — деформированное состояние гибкого колеса; в — деформация зубьев
99
Рассмотрим силовое взаимодействие звеньев ВЗП (рис. 7.2). После сборки передачи появляется сила Fh, действующая на гибкое колесо по большей оси генератора волн. При повороте генератора волн по часовой стрелке на бесконечно малый угол Дер результирующая сила поворачивается в ту же сторону, увеличиваясь до значения . Зубья гибкого колеса действуют на зубья жесткого колеса с силой Fn по нормали к их профилю. Эту силу раскладывают на окружную Ft2 и радиальную Fr2. При закреп
ленном жестком колесе под действием силы Ftl гибкое колесо вращается в сторону, обратную вращению генератора.
Преимущества ВЗП по сравнению с другими зубчатыми передачами определяет многопарность зацепления: малые масса и габариты; большое передаточное отношение; высокая кинематическая точность, малый мертвый ход; плавность и мало-шумность в работе.
Недостатки ВЗП: мелкие модули зацепления (0,15...2 мм) снижают прочность и износостойкость зубьев; сложность изготовления гибких колес; ограниченные частоты вращения генератора волн из-за возникновения вибраций в передаче и снижения ресурса подшипников генератора.
7.2. Основные параметры волновых передач
Передаточное отношение и одной ступени может составлять 70...320. Минимальное передаточное отношение umin = 70 ограничивается изгибной прочностью гибкого колеса; umax = 320 определяется минимально допустимым значением модуля зацепления 0,15 мм. КПД ц = 0,76...0,85, как и в планетарных передачах при тех же передаточных отношениях. Передаточное отношение волновых передач определяется по уравнению Виллиса. В обращенном движении
ni ~ nh = Z2 = h ------ — *4 2’ п2 ~ nh Z1
(7.2)
100
где пг, п2, nh — частоты вращения гибкого колеса, жесткого колеса и генератора волн. При неподвижном .жестком колесе (п2 = 0) из выражения (7.2) находим
(2) _ nh _ Zj 1 ~ —
' ПХ г2 - гх
(7.3)
знак минус указывает на разное направление вращения генератора волн и гибкого колеса при закрепленном жестком колесе.
Максимальная радиальная деформация и передаточное отношение взаимосвязаны. Умножив и разделив на модуль выражение (7.3), получим
(2) 2Х т
uh , = ---------- • -
пл z2 - Zj т
_Г1_ • W,, = 1
2W0 ’ 0 2u<2) '
h ,1
С уменьшением передаточного отношения возрастает величина радиальной деформации гибкого колеса и напряжения изгиба в нем.
В передаче (рис. 7.3, а) закреплено жесткое колесо, вращение передается от генератора волн к гибкому колесу. Передаточное отношение определяется по зависимости (7.3). На схеме по рис. 7.3, б ведущее звено — генератор волн Л, ведомое — жесткое колесо г2, гибкое колесо — неподвижно:
и(1) = ^ =
Uh-2 п2
г2
Z2 “ Zj
(7.4)
По условию сборки разность чисел зубьев колес должна быть кратной числу волн nw~.
(z2 - Zj)/nw = k2,
где nw — число волн; kz = 1 или 2 — коэффициент кратности.
Рис. 7.3. Кинематические схемы ВЗП: а — неподвижно жесткое колесо; О' — неподвижно гибкое колесо
101
Подставив в выражении (7.3) значение разности зубьев z2 - zx = kznw, получим зависимости для определения чисел зубьев колес
(2) , , ,
Z1 = Uh,l nwkz’ 22 = 21 + nwkz-
Для двухволновых передач nw = 2, kz = 1
I (2)1
zi = 2 JИйд| > z2 = 2i + 2- (7.5)
Увеличение коэффициента kz нецелесообразно, так как при этом увеличиваются числа зубьев колес и уменьшается модуль зацепления тп при неизменном делительном диаметре гибкого колеса dx.
Основными причинами выхода из строя ВЗП являются: поломка гибкого колеса от усталостных трещин, возникающих во впадинах зубьев; разрушение подшипников качения генератора волн; проскок генератора волн при больших крутящих моментах. Проскок связан с изменением формы генератора волн, гибкого и жесткого колес под нагрузкой. При этом зубья на входе в зацепление контактируют вершинами, жесткое колесо распирается, генератор сжимается и происходит его проскок.
При расчете ВЗП предварительно определяют размер гибкого колеса по сопротивлению усталости и по условию размещения подшипника генератора волн, обеспечивающего заданный ресурс. Из двух полученных значений берут наибольшее. Затем выполняют проверочные расчеты на прочность и геометрические расчеты. Расчет ВЗП довольно сложен и обычно выполняется на ЭВМ по соответствующим программам.
И Контрольные вопросы_______________________________________
1. Каковы основные части волновой зубчатой передачи?
2. Чем можно объяснить название волновой передачи?
3. Какие факторы ограничивают передаточное отношение волновой передачи?
4. Каковы причины выхода из строя волновой передачи?
Глава
Червячные передачи
8.1. Общие сведения
Червячные передачи (рис. 8.1) — это передачи за счет зацепления витков червяка и зубьев червячного колеса. Червяк 1 — это винт с трапецеидальной или близкой к ней по форме резьбой. Червячное колесо 2 является цилиндрическим косозубым с вогнутым зубчатым венцом для охвата им червяка. По своей геометрии и кинематике червячная передача близка к паре винт—гайка.
Червячные передачи применяют для передачи движения между перекрещивающимися валами. При вращении червяка его витки входят в зацепление с зубьями червячного колеса. Передачи используют в станках, автомобилях, подъемно-транспортных и других машинах.
Достоинства передачи: возмож-
Рис. 8.1. Схема червячной передачи
ность получения большого передаточного числа в одной ступе-
ни и эффекта самоторможения; плавность и малошумность работы; повышенная кинематическая точность.
Недостатки червячной передачи: низкий КПД; применение для изготовления зубьев червячного колеса дорогих антифрикционных материалов; повышенные требования к точности сборки, необходимость регулировки и принятия специальных мер по интенсификации теплоотвода.
8.2. Типы червяков
По форме внешней поверхности червяки разделяют на цилиндрические, глобоидные и тороидные. Наибольшее применение находят цилиндрические как более простые
103
в изготовлении и обеспечивающие достаточно высокую нагрузочную способность. Поэтому далее будем изучать передачи только с цилиндрическими червяками.
Червячные колеса изготовляют инструментом, являющимся в основном копией червяка. По форме боковой поверхности витка червяки разделяют на архимедовы (обозначение ZA), конволютные (ZN), эволъвентные (ZJ), с поверхностью витка, образованной конусом (ZK), и с вогну тым профилем витка (ZT).
В условиях мелкосерийного производства применяют архимедовы и конволютные червяки. Витки архимедовых червяков имеют прямолинейный профиль в осевом сечении, в торцовом сечении витки очерчены архимедовой спиралью (рис. 8.2, а, г). Витки конволютных червяков имеют прямоли-
Рис. 8.2. Основные типы червяков: а, г — архимедов; б, д — конволютный; в, е — эвольвентный
104
нейный профиль в сечении, нормальном к направлению витка, что очень важно при шлифовании червяка. В торцовом сечении витки очерчены удлиненной эвольвентой (рис. 8.2, б, д). Нарезание архимедовых и конволютных червяков выполняют на универсальных токарно-винторезных станках. Для шлифования архимедовых червяков требуется круг, очерченный сложной кривой в осевом сечении, что ограничивает их применение. Шлифование конволютных
Рис. 8.3. Схема обработки
червяка с вогнутым профилем витка
червяков конусными кругами с прямолинейными образующими на обычных резьбошлифовальных станках приводит к небольшому искривлению прямолинейного профиля витка, поэтому такие червяки называют «нелинейчатыми». Червячные фрезы для нарезания червячных колес шлифуют тем же способом, поэтому получают
правильное зацепление.
Эволъвентные червяки представляют собой косозубые колеса с малым числом зубьев и очень большим углом наклона зубьев (рис. 8.2, в, е). Профиль зуба в торцовом сечении очерчен эвольвентой. Эволъвентные червяки шлифуют плоской стороной шлифовального круга, что существенно упрощает их изготовление. Червяки с вогнутым профилем витка шлифуют кругом с торовой рабочей поверхностью (рис. 8.3).
8.3. Причины выхода из строя
червячных передач
Основными причинами выхода из строя передач (в порядке убывания частоты проявления отказов) являются:
_ Износ зубьев колеса, который ограничивает срок службы большинства передач. Интенсивность износа увеличивается при некачественном или загрязненном смазочном материале, при неточном монтаже зацепления, при повышенной шероховатости рабочей поверхности червяка.
105
Заедание при твердых материалах колес, вызывающее
значительные повреждения поверхностей и последующее быстрое изнашивание зубьев частицами колеса, приварившимися к червяку. При мягких материалах колес заедание проявляется в менее опасной форме, возникает перенос («намазывание») материала колеса на рабочую поверхность червяка.
Усталостное выкрашивание, происходящее только на
поверхности зубьев колес, изготовленных из материалов, стойких против заедания.
Пластическая деформация рабочих поверхностей зубь-
ев колеса, возникающая под воздействием больших перегрузок.
Усталостная поломка зубьев колеса возможна только
после значительного их износа.
8.4. Материалы для изготовления червяков и червячных колес
Так как червячная передача склонна к заеданию и износу, одну из деталей передачи выполняют из антифрикционного материала, другую — из твердой стали.
Для червяка характерны относительно малый диаметр и значительное расстояние между опорами, жесткость и прочность обеспечиваются за счет изготовления его из стали. В основном для червяков используется сталь 18ХГТ (твердость поверхности после цементации и закалки (56...63) HRC3), а также стали 40Х, 40ХН, 35ХГСА с поверхностной закалкой до твердости (45...55) HRC3. Во всех этих случаях необходимы шлифование и полирование червяка. Применение азотируемых сталей 38Х2МЮА, 38Х2Ю позволяет исключить шлифование червяка после термохимической обработки.
Червячное колесо обычно выполняют из антифрикционных, относительно дорогих и малопрочных материалов, которые разделяют на группы (в порядке снижения сопротивляемости заеданию и износу): 1) оловянистые бронзы (БрОЮФ1, БрО5Ц5С6 и др.); 2) безоловянистые бронзы (БрА9ЖЗЛ и др.); 3) чугуны (СЧ15, СЧ20 и др.). Чем выше содержание олова в бронзе, тем она дороже, и тем больше сопротивление заеданию.
106
8.5. Основные параметры, геометрия червячных передач
Мощность Рг на червяке обычно составляет не более 30 кВт. Передаточное число и принимают от 8 до 80, в кинематических передачах — до 1000.
Основные геометрические размеры архимедова червяка представлены на рис. 8.4. В червячных передачах угол профиля а обычно 20°. Расстояние между одноименными точками боковых сторон смежных витков червяка, измеренное параллельно оси, называют шагом червяка р. Осевой модуль передачи т = р/п.
Червячные колеса нарезают фрезами, режущие кромки которых при вращении образуют поверхности, идентичные с поверхностью витков червяка. В целях сокращения номенклатуры зуборезного инструмента стандартизованы модули и коэффициенты диаметра червяка т
Делительный диаметр червяка дг = qm. Число заходов червяка zr выбирают из установленных ГОСТом значений 1, 2 или 4. Передачи большой мощности не выполняют с одноза-ходными червяками из-за низкого КПД. Угол у подъема витка червяка на делительном диаметре находят из выражения
(8.1)
t _ Рп _ Pzi _ mzi _ zi ' nd1 Kd1 dj q
где pzl — ход витка червяка. Тогда
Рис. 8.4. Геометрические параметры червяка
y = arctg(^). (8.2)
Высота головки Ла1 и ножки Лд витков (рис. 8.4)
hal = ha\
hfl = m, (8.3)
где Л*! =1 — коэффициент высоты головки; ЛД =1,2 — коэффициент высоты ножки; = 1 + + 0,2 cos у для эвольвентных червяков.
107
Диаметры вершин и впадин: dai = di + 2hal, dfi = di~ Zhfi- (8.4)
Длину нарезанной части червяка Ьх (рис. 8.4) определяют из условия нахождения в зацеплении максимально возможного числа зубьев колеса.
Минимальное число зубьев червячных колес z2min принимают для кинематических передач равным 17, в силовых передачах z2mln = 28. Для силовых передач предпочтительно иметь z2 = 30...90. Передаточное число и = z2/zx.
Делительный диаметр колеса (рис. 8.5)
d2 = mz2. (8.5)
Диаметры вершин da2 и впадин df2 определяют в среднем сечении колеса; для колес, нарезанных без смещения режущего инструмента, они равны:
da2 = d2 + 2Ла1 т; df2 = d2 — 2hfX т. (8.6)
Наибольший диаметр колеса определяют по эмпирической формуле
dam2
da2 +
6т
Zj + k
(8.7)
где k = 4 для передач ZT, k = 2 — для остальных.
Ширина колеса Ъ2 < 0,75dal (при zx = 1 или zx = 2), Ь2 < 0,67dal (при zx = 4). Увеличивать ширину червячного ко
Рис. 8.5. Геометрические параметры червячного колеса
108
леса нецелесообразно, так как длина контактных линий и передаваемая нагрузка увеличиваются при этом незначительно.
Межосевое расстояние передачи в общем случае обозначают через aw, для передачи, нарезанной без смещения режущего инструмента, — через а. Можно выразить а через диаметры червяка и червячного колеса d2
а = = 0,5,^^ -|- Z2). (8.8)
Значения межосевых расстояний стандартизованы с целью унификации корпусных деталей.
Большинство передач выполняют со смещением режущего инструмента (рис. 8.6). Передачи со смещением выполняют
t dfi
di = dwi dal
Рис. 8.6. Червячные передачи, изготовленные без смещения и со смещением инструмента
109
для получения ближайшего стандартного межосевого расстояния или изменения числа зубьев колеса (на 1—2 зуба). Положительное смещение приводит к увеличению межосевого расстояния:
aw = а + тх,
aw = 0,5/n(g + z2 + 2х). . (8.9)
При этом коэффициент смещения инструмента
х = -0,5(g + z2). (8.10)
Рекомендуется 0 < х < 1 (допускается х в пределах ±1). Предпочтительно использовать положительные смещения, при которых несколько повышается нагрузочная способность передачи. Для передач с вогнутым профилем витка червяка (ZT) назначают большие коэффициенты смещения (1,0 < х < 1,4), предпочтительно х = 1,1...1,2.
Нарезание колес для передач со смещением выполняют тем же инструментом, что и для передач без смещения. В передачах со смещением изменяется диаметр заготовки червячного колеса при неизменном диаметре заготовки червяка. В червячной передаче, нарезанной со смещением, основные размеры червяка остаются без изменений, изменяются только начальный диаметр
dwi = m(q + 2x) (8.11)
и длина нарезанной части. Угол подъема витка червяка на начальном диаметре иной, чем на делительном, и составляет
Уи> = arctg ( Z\ ) . (8.12)
ч? + 2ху
В отличие от червяка у червячного колеса, нарезанного со смещением инструмента, все размеры, кроме делительного диаметра, отличаются от размеров колеса, нарезанного без смещения. Диаметры вершин и впадин в среднем сечении составляют
da2 = т (z2 + 2 + 2Х)> (8.13)
df2 = т (г2 - 2,4 + 2х); (8.14)
для передач с эвольвентным червяком
df2 = я* (z2 “ 2 - 0,4 cos у -I- 2х). (8.15)
110
8.6. Скольжение в червячной передаче. КПД передачи
Для червячных передач характерна большая скорость скольжения иск витков червяка по зубьям червячного колеса и неблагоприятное направление вектора скорости скольжения относительно линии контакта (рис. 8.7):
I’ck = (8.16)
ndu,lnl
6-104
червяка; v2 =
где I?! =
— окружная скорость на начальном диаметре
nd2n2
6 • 104
— окружная скорость на делительном
диаметре колеса. Скорость скольжения направлена вдоль вит-
ка червяка
Гск
Г1 cos
(8.17)
Условием отсутствия заедания и интенсивного износа является существование режима жидкостного трения между витками червяка и зубьями колеса. Это условие выполняется при существовании в зоне контакта клиновидного зазора в направлении вектора скорости скольжения (взаимного перемещения трущихся поверхностей). При скольжении поверхностей вдоль линии контакта масляный клин образоваться не может.
В отличие от зубчатых передач в червячных передачах часть поверхности зуба колеса имеет зону, в которой скольжение происходит вдоль контактных линий. На рис. 8.8 цифрами 1, 2 и 3 отмечены последовательные положения контактных линий в процессе зацепления и направления скорости скольжения иск в некоторых точках. Зона, в которой направле
Зуб колеса Виток червяка
Рис. 8.7. Определение скорости скольжения
Рис. 8.8. Расположение контактных линий и скорости скольжения на зубе колеса
111
ние иск почти совпадает с направлением контактных линии, заштрихована.
Неблагоприятное направление вектора скорости скольжения является причиной низкого КПД червячного зацепления г]3. КПД червячного зацепления определяют аналогично КПД резьбовой пары, которая по кинематическим свойствам аналогична червячной передаче:
tg (yw + <pi)
где фх — приведенный угол трения, уменьшающийся с увеличением скорости скольжения, так как при этом улучшаются условия образования масляного слоя и режима жидкостного трения. С увеличением числа заходов червяка Zj возрастает угол и, как следствие, КПД передачи, но уменьшается передаточное число.
(8.18)
8.7. Силы, действующие в зацеплении
Силы в зацеплении определяют для случая контакта рабочих поверхностей в полюсе зацепления и раскладывают по трем взаимно перпендикулярным осям (рис. 8.9).
Окружная сила на колесе равна по модулю осевой силе на червяке:
2Т2 • 103
(8.19)
Ff2 ~ Fal ~
Рис. 8.9. Силы в червячном зацеплении
Окружная сила на червяке равна осевой силе на колесе:
2Т} • 103
(8.20)
Ftl ~ Ра2 ~
Радиальная сила, раздвигающая червяк и колесо:
Frl = Fr2 = F(2tga. (8.21)
В этих зависимостях Т2 и Тг — вращающие моменты на валах колеса и червяка, Н* м; a — угол профиля витка червяка; d2 — делительный диаметр колеса, мм; dwl — начальный диаметр червяка, мм.
112
8.8. Расчетная нагрузка.
Коэффициент нагрузки
В реальной червячной передаче нагрузки, действующие в зацеплении, превышают теоретические значения из-за неизбежных ошибок изготовления червяков и червячных колес, а также из-за прогибов валов червяка и колеса под нагрузкой. Для учета указанных факторов вводят понятие расчетной нагрузки, получаемой умножением номинальной нагрузки (без учета указанных отклонений) на коэффициент нагрузки К (К > 1):
К = КрКи, (8.22)
где Кр — коэффициент концентрации нагрузки по длине зубьев колеса; Kv — коэффициент динамической нагрузки.
Концентрация нагрузки в основном вызывается прогибом вала червяка, так как у него значительное расстояние между опорами, а диаметр относительно небольшой. Вследствие прогиба вала червяка нарушается правильное зацепление между витками червяка и зубьями колеса, при этом увеличивается начальный диаметр червяка и, следовательно, уменьшается угол подъема витков червяка. Это приводит к заклиниванию витков червяка между зубьями колеса.
Начальный коэффициент концентрации (до приработки):
= 1 + , (8-23)
где 0 — коэффициент деформации червяка, он зависит от q и Zj, влияющих на диаметр червяка.
Зубья червячного колеса, изготовленные из антифрикционных материалов, хорошо прирабатываются. Приработка — это износ наиболее нагруженных участков зубьев, после чего нагрузка перераспределяется по зубу и становится более равномерной. При постоянной внешней нагрузке происходит полная приработка и концентрация нагрузки исчезает, при переменной нагрузке имеет место частичная приработка и зубья приобретают характерную бочкообразную форму. Коэффициент концентрации нагрузки после приработки описывают выражением
Кр=1 + (§)3(1-Х). (8.24)
113
Здесь X — коэффициент, учитывающий режим нагружения передачи (см. рис. 5.19):
k
Z т,^п1
Х=-^—к------, (8.25)
«Л (=1
где Tt, n^tj — вращающий момент на колесе, частота вращения колеса и время работы при режиме i; Tmax — максимальный длительно действующий вращающий момент; k — число ступеней на графике нагрузки. При постоянной нагрузке Х = 1 и-ЙГр = 1.
Коэффициент динамической нагрузки Kv учитывает ошибки изготовления червяка и червячного колеса по шагу, поэтому он зависит от окружной скорости колеса и2. В связи с плавностью работы червячной передачи и невысокой окружной скоростью колеса (обычно и2 < 3 м/с) принимают Kv = 1. При большей окружной скорости колеса Kv определяют как для косозубых цилиндрических колес с твердостью поверхности НВ < 350.
8.9. Допускаемые напряжения
При определении допускаемых контактных и изгибных напряжений по условию сопротивления усталости для червячных колес из бронзы следует учитывать, что кривые усталости для бронз имеют очень длинные наклонные участки — до 25’ 107 циклов нагружения (рис. 8.10). Поэтому за исходные
Рис. 8.10. Кривые усталости для материалов червячного колеса
принимают допускаемые напряжения при 107 циклов для расчета по контактным напряжениям и при 106 циклов для расчета по напряжениям изгиба.
Допускаемые контактные напряжения при длительной работе передачи определяют для червячных колес в зависимости от основной причины выхода из строя. Для материалов колеса первой группы — оловянистых
114
бронз — определяющим условием является сопротивление контактной усталости. В этом случае при шлифованных червяках с твердостью поверхности более 45HRC3
MH = 0,9QBCu8/12i, (8.26)
где 0,9ов — допускаемое напряжение при 107 циклов; ств — предел прочности для бронзы при растяжении; Cv — коэффициент, учитывающий интенсивность износа, зависит от скорости скольжения в зацеплении t>CK.
Эквивалентное число циклов нагружения вычисляют по формуле:
где Tt, t; — вращающий момент на колесе, частота вращения колеса в минуту и время работы в часах при режиме i; ^шах — максимальный длительно действующий вращающий момент; k — число ступеней на графике нагрузки. Если Nhe > 25 • 107, то принимают NHE = 25 • 107.
Для материалов колеса второй и третьей групп (соответственно безоловянистых бронз и чугунов) допускаемые контактные напряжения определяют по результатам эксперимента из условия сопротивления заеданию и усиленному износу в зависимости от скорости скольжения пск.
Для безоловянистых бронз
[о]я = 300 - 25пск, (8.28)
для чугунов
[о]н= 175- 35пск. (8.29)
Из зависимостей (8.28) и (8.29) следует, что материалы венца колеса второй и третьей групп невозможно применять при высоких скоростях скольжения.
Предельные допускаемые контактные напряжения при проверке на пиковую нагрузку: для оло-вянистых бронз — [°]нтах = 4ит, Для безоловянистных бронз — [о]Нтах = 2от, для чугунов — [о]Ятах = 1,65ств.
115
Допускаемые напряжения изгиба при длительной работе для бронзовых колес нереверсив-
ных передач:
[ct]f = (0,25от + 0,08ав)
(1Q6
(8.30)
где от и ов — пределы текучести и прочности бронзы при растяжении; Nfe — эквивалентное число циклов нагружения при расчете на изгиб:
* z Т
Nfe = 60X (——J tini. (8.31)
i— 1 * max
Смысл параметров, входящих в зависимости (8.31) и (8.27), аналогичен.
Допускаемые напряжения для чугунных колес при нереверсивной работе
[o]F=0,4uB. (8.32)
При реверсивной работе передачи допускаемые напряжения снижают на 20%.
Предельные допускаемые напряжения изгиба при проверке на пиковую нагрузку принимают для бронз [cr]Fmax = 0,8ов, для чугунов [o]Fmax = 0,6ов.
8.10. Расчет червячной передачи по контактным напряжениям
Основное значение для червячных передач имеют расчеты на сопротивление контактной усталости, износу и заеданию. Расчет передачи проводят по контактным напряжениям, причину выхода из строя (усталостное выкрашивание или заедание) учитывают при выборе допускаемых напряжений.
Несущая способность передач с цилиндрическими червяками основных типов весьма близка (кроме передач с вогнутым профилем витка червяка). Поэтому расчеты для передач с архимедовым червяком распространяют на передачи с другими цилиндрическими червяками. В качестве исходной принимают формулу Герца для начального линейного контакта двух цилиндров по их образующим (см. гл. 2). Коэффициент Пуассона считают равным 0,3, тогда:
ия = 0,418^^3, (8.33)
116
где wn — нормальная погонная нагрузка; р — приведенный радиус кривизны; Е — приведенный модуль упругости материала
Е=_^£1£г_ (8.34)
£1 + Е2
где Ev Е2 — модули упругости материалов червяка и венца колеса.
После подстановки в зависимость (8.33) входящих в нее параметров, получают формулу для проверочного расчета червячной передачи по контактным напряжениям:
= 5400(q + 2х) 1рг_+ д + 2;~|3л-Г2 <[ст]ямПа, (8.35) г2 + 2x)aw]
где Т2 — вращающий момент на колесе, Н • м.
В проектном расчете выражают из (8.35) межосевое расстояние передачи с упрощающим предположением х = 0:
На этапе проектного расчета коэффициент диаметра червяка q и число зубьев колеса z2 обычно неизвестны, поэтому как первое приближение принимают q = 0,25z2 и получают
aw«610-3 —(8.36)
Это межосевое расстояние aw округляют до ближайшего стандартного значения. Для принятого межосевого расстояния и заданного передаточного отношения в соответствии с ГОСТом выбирают модуль m и коэффициент диаметра червяка q, определяют коэффициент смещения инструмента х по выражению (8.10) и проводят проверочный расчет по (8.35).
При действии пиковой нагрузки проверяют статическую прочность рабочих поверхностей зубьев колеса. Максимальные контактные напряжения:
/т
aHmax = СТН I< [°]//тах> (8.37)
q 12
где Т12тах — максимальный (пиковый) вращающий момент на валу колеса.
117
В передачах с вогнутым профилем витков червяка ZT контактные линии располагаются под большими углами к вектору скорости скольжения, чем для передач с другими видами цилиндрических червяков. Это обеспечивает лучшие условия для образования масляного клина. Для передач ZT характерны также большие приведенные радиусы кривизны и расположение линии зацепления ближе к основанию зуба колеса. Несущая способность таких передач значительно выше, чем обычных с цилиндрическим червяком. Расчет передач с вогнутым профилем витков червяка выполняют по общим для червячных передач зависимостям, уменьшая вращающий момент на колесе делением его на коэффициент 9ZT, равный
9ZT = 1 + 0,06рск < 1,6,
где пск — скорость скольжения в зацеплении, м/с.
8.11. Расчет червячной передачи по напряжениям изгиба зуба колеса
В большинстве случаев напряжения изгиба не определяют размеров передачи и являются значимыми только при числах зубьев колес z2 > 90. Поэтому расчет выполняют в форме проверочного и ведут для зубьев колеса, так как витки червяка значительно прочнее. За основу принят расчет косозубых цилиндрических колес, повышенная прочность зубьев червячных колес связана с их дуговой формой и естественным смещением, имеющим место во всех сечениях, кроме среднего (см. рис. 8.5, сечениеА—А).
Напряжение изгиба у основания зубьев
F,2Kcos yuYF l,3m2(q + 2х)
< [°1f>
(8.38)
где Yf — коэффициент формы зубьев, определяется (как и для косозубых цилиндрических колес) по эквивалентному числу зубьев zv = z2/cos3 yw; К — коэффициент нагрузки (остальные обозначения приводились ранее).
Максимальные напряжения изгиба при действии пиковой нагрузки Т2тах
т
°Fmax = < [<Фтах- (8-39)
* 2
118
Если хотя бы одно из условий прочности передачи (8.35), (8.37), (8.38) или (8.39) не выполнено, то следует выбрать более прочный материал для венца червячного колеса или увеличить межосевое расстояние, определив заново зависящие от него геометрические параметры передачи.
8.12. Тепловой расчет и охлаждение передач
Значительное тепловыделение при работе червячной передачи вследствие трения скольжения и из-за плохих условий смазывания вызывает нагрев масла. Превышение предельной температуры масла [t]max приводит к снижению его вязкости и к опасности заедания в передаче. Современные смазочные материалы сохраняют свои свойства до [i]max ® 110° С. Расчет проводят на основании уравнения теплового баланса для стационарного теплового режима:
W = Wlt (8.40)
где W — количество теплоты (Вт), выделяющейся при непрерывной работе передачи в единицу времени:
W= 103(1 -п)Л, (8.41)
здесь г] — КПД передачи; Рг — мощность на червяке, кВт; W1 — количество теплоты, отводимой с поверхности корпуса передачи и через основание в единицу времени:
W. = K.r(tM - t0}A(l + V), (8.42)
где Кт — коэффициент теплоотдачи с поверхности корпуса, Вт/(м2 • °C); tM и to — соответственно температура масла и окружающего воздуха, °C; А — поверхность теплоотдачи корпуса передачи (без учета площади основания), м2; у — коэффициент, учитывающий теплоотвод через основание; при установке корпуса на металлическом основании у = 0,3, при бетонном основании ц/ ® 0.
Из выражений (8.40), (8.41) и (8.42) определяют температуру масла:
103(1 - ц)Р1 1Q4(1 + у) '
(8.43)
119
Если tM > [f]max’ то предусматривают отвод избыточной теплоты. Этого достигают: оребрением корпуса (увеличивается А), искусственной вентиляцией (возрастает Кт), водяным охлаждением масла (снижается tM). Расположение ребер выбирают из условия лучшего их обтекания воздухом; при естественном охлаждении ребра располагают вертикально, при искусственном — вдоль направления потока воздуха от вентилятора. Вентилятор устанавливают на валу червяка, так как его частота вращения выше, чем частота вращения вала колеса. Водяное охлаждение обеспечивает отвод большого количества тепла, но усложняет конструкцию.
Контрольные вопросы
1. Из каких деталей состоит червячная передача?
2. Какие типы червяков наиболее перспективны?
3. Какие материалы применяют для изготовления червяка и червячного колеса?
4. Каковы основные параметры червячной передачи?
5. С какой целью используют смещение инструмента?
6. Какова основная причина низкого КПД червячной передачи?
7. Какая из сил, действующих в зацеплении, является наибольшей?
8. От каких параметров зависит коэффициент нагрузки?
9. Как влияет приработка на концентрацию нагрузки по длине зубьев колеса?
10. От каких факторов зависят допускаемые напряжения для червячной передачи?
11. Какая зависимость является исходной при расчете червячной передачи по контактным напряжениям?
12. Какие параметры определяют при проектном расчете червячной передачи?
13. Чем объясняется повышенная нагрузочная способность передачи с вогнутым профилем витков червяка?
14. Какое условие является основным при тепловом расчете передач?
9
Глава
Ременные передачи
9.1. Общие сведения. Классификация передач
Ременная передача — это передача гибкой связью (рис. 9.1), состоящая из ведущего 1 и ведомого 2 шкивов и надетого на них ремня 3. В состав передачи могут также входить натяжные устройства и ограждения. Возможно применение нескольких ремней и нескольких ведомых шкивов. Основное назначение — передача механической энергии от двигателя передаточным и исполнительным механизмам, как правило, с понижением частоты вращения.
По принципу работы различаются передачи трением (большинство передач) и зацеплением (зубчато-ременные). Передачи зубчатыми ремнями по своим свойствам существенно отличаются от ременных передач трением и рассматриваются в § 9.8.
Условием работы ременных передач трением является наличие натяжения ремня. Ремни передач трением по форме поперечного сечения разделяются на плоские, клиновые, поликлиновые, круглые, квадратные. Клиновые, поли-клиновые, зубчатые и быстроходные плоские изготовляют бесконечными замкнутыми. Плоские ремни преимущественно выпускают конечными в виде длинных лент. Концы таких
Рис. 9.1. Схема ременной передачи
121
ремней склеивают, сшивают или соединяют металлическими скобами. Места соединения ремней вызывают динамические нагрузки, что ограничивает скорость ремня. Разрушение этих ремней происходит, как правило, по месту соединения.
Достоинства ременных передач трением: возможность передачи движения на значительные расстояния; возможность работы с высокими скоростями; плавность и малошумность работы; предохранение механизмов от резких колебаний нагрузки и ударов; защита от перегрузки за счет проскальзывания ремня по шкиву; простота конструкции; отсутствие смазочной системы; малая стоимость.
Недостатки: значительные габариты; значительные силы, действующие на валы и опоры; непостоянство передаточного отношения; малая долговечность ремней в быстроходных передачах; необходимость защиты ремня от попадания масла.
9.2. Материалы и конструкция ремней
Ремни должны обладать высокой прочностью при переменных напряжениях, износостойкостью, максимальным коэффициентом трения па рабочих поверхностях, минимальной изгиб-ной жесткостью. Конструкцию ремней отличает наличие высокопрочного несущего слоя, расположенного вблизи нейтральной линии сечения. Повышенный коэффициент трения обеспечивается пропиткой ремня или применением обкладок.
Плоские ремни (рис. 9.2, а) отличаются большой гибкостью из-за малого отношения толщины ремня к его ширине. Наиболее перспективны синтетические ремни, поскольку они обладают высокой прочностью и долговечностью. Несущий слой этих ремней выполняется из капроновых тканей, полиэфирных нитей. Материал фрикционного слоя — полиамид или каучук. Синтетические ремни изготовляют бесконечными и используют, как правило, при скорости более 30 м/с. При
Рис. 9.2. Сечения ремней: а — плоский ремень; б — клиновой; в — поликлиновой; г — круглый; д — квадратный
122
меньших скоростях могут использоваться конечные прорезиненные или бесконечные кордшнуровые и корд-тканевые ремни.
Клиновые ремни (рис. 9.2, б) имеют трапециевидное сечение с боковыми рабочими сторонами, соприкасающимися с канавками на шкивах. Благодаря клиновому действию ремни этого типа обладают повышенным сцеплением со шкивами. Рассмотрим малый участок ремня длиной dl, для этого участка силу натяжения можно
Рис. 9.3. Силы, действующие на участок клинового ремня
приближенно принять
постоянной. Из рис. 9.3 следует, что сила dFn, нормальная к поверхности канавки шкива, значительно больше силы натя
жения dF-.
dFn = , тогда сила трения FTp = 2dFnf =
2sin sm 20
2
Таким образом, клиновые ремни при том же натяжении обеспечивают примерно втрое большую силу трения по сравнению с плоскими ремнями. Однако из-за большой высоты сечения в клиновых ремнях возникают значительные напряжения при изгибе ремня на шкивах. Эти напряжения являются переменными и вызывают усталостное разрушение ремня.
Клиновые ремни выпускаются трех типов: нормального сечения, узкие и широкие (для вариаторов). Узкие ремни допускают большее натяжение и более высокие скорости (до 40 м/с), передают в 1,5—2 раза большую мощность по сравнению с ремнями нормального сечения. В настоящее время узкие ремни становятся преобладающими. Ремни выпускают различными по площади поперечного сечения и по несколько штук в одном комплекте. Это позволяет уменьшить диаметральные размеры передачи. Число ремней в комплекте обычно от 2 до 8 и ограничивается неравномерностью распределения передаваемой нагрузки между ремнями.
Поликлиновые ремни (см. рис. 9.2, е) — бесконечные плоские ремни с продольными клиновыми ребрами на внутренней поверхности. Эти ремни сочетают гибкость плоских ремней и повышенное сцепление со шкивами, характерное для клиновых ремней.
123
Многопрофильные ремни состоят из 2—4 клиновых, соединенных тканевым слоем, и применяются вместо комплектов клиновых ремней.
Круглые ремни (обычно резиновые диаметром от 3 до 12 мм) используются для передачи небольших мощностей в приборах и бытовой технике. Ремни квадратного сечения используют для передачи небольших мощностей в приборах.
9.3. Основные геометрические соотношения
При проектировании ременных передач определяют (рис. 9.4): угол у между ветвями ремня, угол 04 охвата ремнем малого шкива, длину ремня L и при использовании бесконечных ремней — межосевое расстояние а. Расчетные диаметры шкивов и длины ремней определяют по нейтральному слою поперечного сечения ремня.
Угол между ветвями ремня находят из треугольника С^АО^ sin 5 = - , где Д = (d2 - d^/2. Тогда угол между ветвями ремня в радианах
у - 2arcsin - ~ . (9-1)
а а
Угол охвата ремнем малого шкива в градусах
«! = 180°-у°~ 180 - -57,3°. (9.2)
Минимальный угол охвата almin должен быть для плоскоременной передачи — 150°, для клиноременной — 120°. Длина ремня (без учета его деформации на шкивах) определяется как
Рис. 9.4. Геометрические параметры ременной передачи
124
сумма длин прямолинейных участков и длин дуг охвата ремнем малого и большого шкивов
L - 2acos I + t *> + . (9.3)
Используя приближенное соотношение: cos
I
2
и
c?i Ч" dn , принимая ------- = аср, получаем зависимость для определе-
ния длины ремня
д2
L « 2а + ndcp + 2- . (9.4)
Для бесконечных ремней следует уточнить предварительно заданное межосевое расстояние, определяя его как
а = - - + I - "dcp)2 - 8Д2 • (9.5)
9.4. Взаимодействие ремня со шкивами, критерии расчета ременных передач
Передача работает с неизбежным упругим скольжением ремня по шкивам, так как силы натяжения ведущей и ведомой F2 ветвей ремня при передаче полезной нагрузки различны (рис. 9.5). Тогда по закону Гука различно и относительное удлинение ветвей Ej и е2. Натяжение ремня по ведущему шкиву падает, ремень укорачивается и проскальзывает по шкиву.
Рис. 9.5. Скольжение в ременной передаче
125
На ведомом шкиве ремень удлиняется и вновь проскальзывает. Скольжение происходит не по всей дуге охвата а, а на ее части Р, называемой дугой скольжения. Сила трения между ремнем и шкивами передается в основном на дугах скольжения.
Со стороны набегания ремня находится дуга сцепления, на которой ремень движется совместно со шкивом, без проскальзывания. Окружная скорость каждого шкива равна скорости набегающей ветви ремня. По мере роста нагрузки на передачу дуга скольжения растет, когда она достигает всей дуги охвата, начинается буксование передачи. Упругое скольжение ремня равно разности относительных удлинений ведущей и ведомой ветвей ремня:
= £1 - £2- (9-6)
Выразив ех и а2 по закону Гука для участка ремня единичной длины через силы FxuF2, площадь сечения А и модуль упругости ремня Е, получаем значение упругого скольжения ремня, используемого при определении передаточного отношения:
<97>
Основными критериями расчета ременной передачи являются тяговая способность или сцепление ремня со шкивом и его долговечность. Если сцепление недостаточно, возникает буксование передачи, если долговечность ремня мала, требуется частая его замена. Для проведения расчета передачи необходимо определить скорость ремня, силы и напряжения в нем.
9.5. Кинематика ременных передач
Окружные скорости на шкивах (см. рис. 9.1), м/с:
р. = —-—- и v9 = ——- , (9.8)
1 60000 2 60000 ’ 1
где dx и d2 — диаметры ведущего и ведомого шкивов, мм; пх и л2 — частоты вращения шкивов, мин-1. Окружная скорость на ведомом шкиве v2 меньше скорости на ведущем вследствие скольжения:
v2 = (1 “ ^>1-
(9.9)
126
Передаточное отношение:
и =
п1 _ ^2
П2 ~ dx(l -
(9.10)
Обычно упругое скольжение находится в пределах 0,01...0,02 и растет с увеличением нагрузки, что обусловливает непостоянство передаточного отношения ременной передачи.
9.6. Силы и напряжения в ремне.
Расчет долговечности ремня
Окружная сила на шкивах:
_ глло. _
где Тх — вращающий момент, Н-м, на ведущем шкиве диаметром d^, Рг — мощность на ведущем шкиве, кВт.
С другой стороны, Ft = F1 - F2, где Fx и F2 — силы натяжения ведущей и ведомой ветвей ремня под нагрузкой. Сумма натяжений ветвей при передаче полезной нагрузки не меняется по сравнению с начальной: Fx + F2 — 2F0. Решая систему двух уравнений, получаем:
F1=F0 + Ft/2;F2 = F0-Ft/2. (9.12)
Сила начального натяжения ремня Fo должна обеспечивать передачу полезной нагрузки за счет сил трения между ремнем и шкивом. С ростом силы Fo несущая способность ременной передачи возрастает, однако срок службы уменьшается. Соотношение сил натяжения ведущей и ведомой ветвей ремня без учета центробежных сил определяют по уравнению Эйлера:
(9.13)
где е — основание натурального логарифма; f — коэффициент трения между ремнем и шкивом; р — угол, на котором происходит упругое скольжение.
Видно, что отношение Fx/F2 сильно зависит от коэффициента трения ремня на шкиве и угла р. Но эти величины в условиях эксплуатации могут принимать различные значения, по-
127
этому силы натяжения ветвей обычно уточняют экспериментально. Обозначая q ~ efV и учитывая, что F± - F2 = Ft, имеем
Fi = Ft-3— uF2 = Ft-±— . (9.14)
q-i 9-1
Ремни обычно неоднородны по сечению. Условно их рассчитывают по номинальным (средним) напряжениям, относя силы ко всей площади поперечного сечения ремня и принимая справедливым закон Гука.
Нормальное напряжение от окружной силы Ft
-р
(9.15)
где Л — площадь сечения ремня.
Нормальное напряжение от предварительного натяжения ремня
00=5- (9.16)
Нормальные напряжения в ведущей и ведомой ветвях
°1 = §ист2=5- (9Л7)
2л 2л.
Центробежная сила вызывает нормальные напряжения в ремне, как во вращающемся кольце
оц=1(Г6-У1-о*, (9.18)
где оц — нормальные напряжения от центробежной силы в ремне; иг — скорость ремня, м/с; У1 — плотность материала ремня, кг/м3.
При изгибе ремня на шкиве диаметром d относительное удлинение наружных волокон ремня как изогнутого бруса равно 2y/d, где у — расстояние от нейтральной линии в нормальном сечении ремня до наиболее удаленных от него растянутых волокон. Обычно толщина ремня 6 = 2у. Наибольшие напряжения изгиба возникают на малом шкиве и равны
пи = £^, (9.19)
где Е — модуль упругости материала ремня.
Максимальные суммарные напряжения возникают на дуге сцепления ремня с малым (ведущим) шкивом:
сттах = СТ1 + + стц- (9-20)
128
Рис. 9.6. Напряжения в ремне
Эти напряжения (рис. 9.6) используют в расчетах ремня на долговечность. Ремень испытывает переменные циклические напряжения ои, о2, приводящие к усталостным повреждениям ремня и выходу его из строя. Кривые усталости для ремней имеют вид
= (9.21)
где т и С — постоянные, определяемые экспериментально; °тах — максимальные нормальные напряжения в ремне; Ne — эквивалентное число циклов нагружения за срок службы ремня
- g600Jy^ . (9.22)
Здесь щ — окружная скорость ремня, м/с; гш — число шкивов в передаче; Lh — ресурс ремня, ч; Е,, — коэффициент, учитывающий разную деформацию изгиба ремня на меньшем и большем шкивах; L — длина ремня. При передаточном отношении и = 1 = 1, с увеличением передаточного отношения
влияние изгиба на большем шкиве уменьшается, а Е,, увеличивается, приближаясь к значению гш.
9.7. Расчет ременной передачи по тяговой способности. КПД передачи
Тяговая способность повышается с увеличением угла охвата аг, коэффициента трения f между ремнем и шкивом, силы начального натяжения Fo, и уменьшается с ростом скорости ремня vY из-за действия центробежных сил, отрывающих
5 Детали машин
129
ремень от шкива. Однако с ростом силы Fo нагрузка на валы возрастает, а долговечность ремня уменьшается. Это ограничивает предельное значение силы Fo.
Расчет на тяговую способность основан на использовании кривых скольжения (рис. 9.7), которые строят в координатах коэффициент тяги ср — относительное скольжение Е,. Коэффициент тяги
<р = ——— = — = — (9.23)
V F1 + F2 2Fo 2g0 1 ’
характеризует уровень нагрузки на передачу и не зависит от ее размеров. Отсюда можно определить напряжения в ремне от окружной силы о( = 2о0ф.
Относительное скольжение выражают из (9.9):
<9-24>
Кривые скольжения получают экспериментально: при постоянных Fo и I?! постепенно повышают полезную нагрузку — окружную силу на шкивах Ft и измеряют относительное скольжение. Испытания ременных передач проводят при типовых условиях: = 10 м/с, cij = 180°. До некоторого критического значения коэффициента тяги фк кривая скольжения имеет прямолинейный характер, так как скольжение вызывается упругими деформациями ремня, пропорциональными коэффициенту тяги. При дальнейшем росте нагрузки, кроме упругого скольжения, возникает дополнительное проскальзывание, и суммарное скольжение возрастает быстрее, чем нагрузка. Затем кривая скольжения резко поднимается вверх и при предельном значении коэффициента тяги фтах наступает
130
Рис. 9.8. Силы, действующие на вал передачи
полное буксование (т. е. шкив вращается при неподвижном ремне).
Потери при изгибе ремня и на преодоление аэродинамических сопротивлений не зависят от нагрузки на передачу, поэтому КПД передачи при малых нагрузках низок. КПД достигает максимума при критическом коэффициенте тяги <рк (рис. 9.7), затем начинает падать в связи с потерями на буксование. Кривую изменения КПД получают экспериментально.
Кривые скольжения и КПД показывают, что оптимальная нагрузка ременной передачи лежит в зоне критического коэффициента тяги, где наибольший КПД. При меньших нагрузках передача недоиспользуется. Переход за критическое значение коэффициента тяги допустим только при кратковременных перегрузках. Работа в этой области связана с повышенным износом ремня, потерями энергии в передаче и снижением скорости на ведомом шкиве. Средние значения <рк, полученные из испытаний при типовых режимах, для клиновых ремней ~0,7, для плсских синтетических ~0,5, для прорезиненных ~0,6. Оптимальные значения окружной силы и передаваемой мощности:
Fto = 2фк^о5
р _ _ 2<pfcFoui
0 1000 1000 ’
(9.25)
Сила, действующая на валы, = 2F0, если ветви ремней параллельны. В общем случае, если ветви ремня не параллельны, силу на вал определяют из треугольника ОАВ (рис. 9.8):
= z jFl + Fl + 27^2008 у « 2F0zcos (y/2), (9.26)
где z — число ремней в комплекте. В передачах без регулирования натяжения его обычно устанавливают без точного контроля, с запасом, поэтому силу F% рекомендуют увеличивать в 1,5 раза.
131
9.8. Зубчато-ременная передача
Зубчатые ремни выполняют бесконечными плоскими с выступами на внутренней поверхности, которые входят в зацепление с зубьями на шкивах (рис. 9.9).
Достоинства передач: относительно малые габариты; постоянство передаточного отношения; высокий КПД; малые силы, действующие на валы. Их применяют при высоких скоростях (до 50 м/с), передаточных числах (до 12), мощностях до 100 кВт.
Недостаток передачи — незащищенность привода от перегрузок за счет проскальзывания ремня.
Ремни бывают двух видов: литьевые (длиной до 800 мм) и сборочные — из армированного металлотросом или стекло-кордом неопрена или полиуретана. Зубья ремня выполняют с трапецеидальным (рис. 9.9) или полукруглым профилем (рис. 9.10). Полукруглый профиль обеспечивает более равномерное распределение напряжений в ремне, возможность повышения нагрузок на 40%, более плавный вход зубьев в зацепление.
Основной геометрический параметр передачи — модуль т = р/п, где р — шаг ремня. Основной критерий расчета передачи — усталостная прочность зубьев ремня. Из этого условия определяют модуль
ip р
m = k'3-iS, (9.27)
Ч ni
где Pi — мощность на ведущем шкиве; лц — частота вращения ведущего шкива; Ср — коэффициент режима работы, зависящий от внешней динамики, его принимают в диапазоне 1,3...2,4 (большие значения для оборудования, работающего с ударами и имеющего приводные двигатели с большими кратковременными перегрузками); k — коэффициент, учитывающий профиль ремня, k = 35 для ремней с трапецеидальной
Рис. 9.9. Зубчатый ремень трапецеидального профиля
Рис. 9.10. Зубчатый ремень полукруглого профиля
132
формой зубьев, k = 25 — для ремней с полукруглой формой зубьев. Полученное значение модуля округляют до нормализованного. Число зубьев меньшего шкива принимают от 10 до 26 в зависимости от частоты вращения шкива и модуля. Число зубьев большего шкива
г2 = z1u,
(9.28)
где и = п1/п2 — передаточное отношение.
Предварительное значение длины ремня при заданном межосевом расстоянии а определяют по зависимости (9.4). Число зубьев ремня zp — L/p. Полученное значение гр округляют до ближайшего нормализованного и определяют окончательное значение длины ремня
L = Zpp. (9.29)
Межосевое расстояние уточняют по формуле (9.5). Ширину ремня определяют из выражения:
ь= ГрчСц г0Л[р] ’
(9.30)
Р С • 103
Здесь Fp = * 1 Р-- — расчетная сила, передаваемая ремнем,
ЛС/.П! Ctj
Н; v = 60000 “ СК°Р°СТЬ Ремня’ м/с; 20 = 21да
— число зубь-
ев ремня, находящихся в зацеплении с малым шкивом; 04 — угол охвата ремнем малого шкива, град; h — высота зуба ремня; Сн — коэффициент, учитывающий наличие натяжного или направляющего ролика; у — коэффициент неравномерности распределения окружной силы на зубья из-за ошибок изготовления по шагу, обычно у = 1,1... 1,2; [р] — допустимое среднее давление на зубьях ремня, МПа.
Контрольные вопросы
1. Из каких основных частей состоит ременная передача?
2. Почему необходимо натяжение ремня?
3. Чем объясняется повышенная нагрузочная способность клиновых ремней по сравнению с плоскими?
4. Ремни какого типа сочетают положительные качества плоских и клиновых ремней?
133
5. Как определяют длину ремня при известных расчетных диаметрах шкивов и межосевом расстоянии?
6. Чем объясняется возникновение упругого скольжения при работе ременной передачи?
7. Чем объясняется непостоянство передаточного отношения ременной передачи?
8. Какие напряжения возникают в ремне?
9. Каковы основные виды расчета ременной передачи?
10. Для чего используют кривые скольжения?
11. В чем принципиальное отличие зубчато-ременной передачи от ременных передач других типов?
12. Каков основной критерий расчета зубчато-ременной передачи?
Глава
10
Цепные передачи
10.1. Общие сведения
Цепные передачи— это передачи (рис. 10.1), состоящие из ведущей 1 и ведомой 2 звездочек и охватывающей их цепи 3. В состав передачи также часто входят натяжные и смазочные устройства, ограждения. Цепь состоит из шарнирно соединенных звеньев, за счет чего обеспечивается гибкость цепи. Передачи используют в сельскохозяйственных, подъемно-транспортных, текстильных и полиграфических машинах, мотоциклах, велосипедах, автомобилях, нефтебуровом оборудовании.
Достоинства цепных передач: возможность применения в значительном диапазоне межосевых расстояний; меньшие, чем у ременных передач, габариты; отсутствие проскальзывания; высокий КПД; относительно малые силы, действующие на валы; возможность легкой замены цепи.
Недостатки: неизбежность износа шарниров цепи из-за отсутствия условий для жидкостного трения; непостоянство скорости движения цепи, особенно при малых числах зубьев звездочек; необходимость более точной установки валов, чем для ременной передачи; необходимость смазывания и регулирования.
Рис. 10.1. Схема цепной передачи
135
10.2. Типы цепей
Цепи по назначению разделяют на три группы: грузовые — используют для закрепления грузов; тяговые — применяют для перемещения грузов в машинах непрерывного транспорта (конвейерах, подъемниках, эскалаторах и др.); приводные — используют для передачи движения.
Рассмотрим основные типы цепей (рис. 10.2): грузовые — круглозвенная (а), пластинчатая шарнирная (б), тяговая пластинчатая (в); приводные — роликовая однорядная, втулочная (г), роликовая двухрядная (д'), роликовая с изогнутыми пластинами (е), зубчатая с внутренними направляющими пластинами (ж), зубчатая с боковыми направляющими пластинами (з), фасоннозвенная крючковая (и), фасоннозвенная втулочно-штыревая (к). Грузовые и тяговые цепи подробно рассматриваются в курсе подъемно-транспортных машин, в курсе «Детали машин» основное внимание уделяется приводным цепям. Основным геометрическим параметром цепи является шаг Р — расстояние между осями соседних шарни
Рис. 10.2. Основные типы цепей
136
ров. Большинство стандартных цепей имеют шаг, кратный 1 дюйму (25,4 мм).
Наиболее широко применяют приводные роликовые цепи (рис. 10.3), которые образуются из последовательно чередующихся внутренних и наружных звеньев. Внутренние звенья состоят из внутренних пластин 1 и запрессованных в их отверстия гладких втулок 2, на которых свободно вращаются ролики 3. Наружные звенья состоят из наружных пластин 4 и запрессованных в их отверстия валиков 5. Концы валиков после сборки расклепывают. Благодаря натягу в соединениях наружных пластин с валиками и внутренних пластин со втулками и зазору между валиком и втулкой образуется шарнирное соединение. Многорядные цепи с числом рядов от двух до восьми (см. рис. 10.2, д) собирают из деталей с такими же размерами, что и однорядные, кроме валиков, имеющих соответственно большую длину. Нагрузочная способность цепей почти прямо пропорциональна числу рядов, что позволяет в передачах с многорядными цепями уменьшить шаг, радиальные габариты звездочек и динамические нагрузки.
При больших динамических, в частности ударных, нагрузках, частых реверсах применяют роликовые цепи с изогнутыми пластинами (см. рис. 10.2, е). В связи с тем, что пластины работают на изгиб, они обладают повышенной податливостью на растяжение. При работе цепных передач в условиях, вызывающих возрастание трения в шарнирах (запыленные и химически активные среды), используют открыто шарнирные пластинчатые цепи (рис. 10.4). Будучи открытым, шарнир такой цепи самоочищается от попадающих в него абразивных
Рис. 10.3. Конструкция приводной роликовой цепи
Рис. 10.4. Конструкция открытошарнирной цепи
137
частиц. Наружные звенья 1 такой цепи не отличаются от аналогичных звеньев роликовой цепи. Внутренние звенья образуются из пластин 2, имеющих отверстия в форме восьмерки, и фасонных валиков 3, заменяющих втулку. Валик 4 свободно проходит через отверстие в пластине 2 и взаимодействует с фасонным валиком 3. Замена тонкостенных втулки и ролика не только удешевляет цепь, но и резко повышает сопротивление усталости деталей цепи. Зубчатые цепи (см. рис. 10.2, ж, з) в настоящее время вытеснены более дешевыми и технологичными прецизионными роликовыми цепями, которые не уступают зубчатым по кинематической точности и шумовым характеристикам .
Соединение концов роликовых, втулочных и открытошарнирных цепей в замкнутый контур осуществляют с помощью соединительных и переходных звеньев.
10.3. Причины выхода из строя цепных передач. Материалы и термическая обработка деталей цепей
Цепные передачи выходят из строя по следующим причинам: износ шарниров, приводящий к удлинению цепи, увеличению шага цепи и, как следствие, к нарушению ее зацепления с зубьями звездочек; усталостное разрушение пластин по проушинам, характерное для закрытых быстроходных передач, работающих при хорошем смазывании, когда износ шарниров не является определяющим; проворачивание валиков и втулок в пластинах в местах запрессовки, связанное с низким качеством изготовления; усталостное выкрашивание и разрушение роликов; износ зубьев звездочек. Ресурс цепных передач в стационарных машинах должен составлять 10... 15 тыс. ч, он чаще всего ограничивается долговечностью цепи.
Пластины цепей должны обладать высоким сопротивлением усталости, поэтому их изготовляют из среднеуглеродистых качественных сталей 40, 45, 50 или легированных сталей 40Х, ЗОХНЗА с объемной закалкой и низким отпуском, твердость пластин обычно (40...50) HRC3. Основное требование к деталям шарниров — валикам и втулкам — износостойкость рабочих поверхностей. Валики и втулки преимущественно выполняют из цементуемых сталей 15, 20, 12ХНЗ, 18ХГТ и др., после цементации или газового цианирования детали закаливают
138
до твердости поверхности (56...65) HRC3. Термодиффузионное хромирование деталей шарниров повышает ресурс цепи по износу в 3...12 раз. Твердость поверхности роликов должна быть не ниже 43,5 HRC3, этого достигают закалкой с низким отпуском.
10.4. Основные параметры цепных передач
Цепные передачи используют в широком диапазоне мощностей от долей до сотен киловатт, обычно до 100 кВт. Размеры передачи также изменяются в широком диапазоне, межосевые расстояния достигают 8 м. Частоты вращения звездочек и скорость цепи ограничиваются величиной силы удара в зацеплении, износом шарниров и шумом передачи. Скорость цепи обычно до 15 м/с, но в передачах высокого качества при эффективном смазывании достигает 35 м/с. Средняя скорость цепи, м/с,
(10.1)
(10.2)
*1П1Р v = —-—-— .
60000 ’
где zx — число зубьев малой звездочки; пг — частота ее вращения, мин-1; Р — шаг цепи, мм.
Передаточное отношение определяют из условия равенства средней скорости цепи на звездочках (см. рис. 10.1):
г^п^Р = z2n2P.
Отсюда передаточное отношение
П, Zn и = — = — П2 Zj
Здесь г2 — число зубьев большой (ведомой) звездочки; п2 — частота ее вращения. Передаточное отношение ограничивается габаритами передачи, диаметром большой звездочки, обычно и < 7. Минимальные числа зубьев звездочек ограничиваются износом шарниров, динамическими нагрузками и шумом передачи. Чем меньше число зубьев звездочки, тем больше износ, так как угол поворота звена при набегании цепи на звездочку и сбегании с нее равен 360°/z. Минимальное число зубьев малой звездочки для силовых передач общего назначения выбирают по эмпирической зависимости
3lmin = 29-2u. (10.3)
При низких частотах вращения zlmin может быть уменьшено до 13.
139
Рис. 10.5. Схема малой звездочки
Число зубьев большой (ведомой) звездочки
z2=ZjU. (10-4)
По мере износа шаг цепи увеличивается и ее шарниры поднимаются по профилю зуба звездочки на больший диаметр, что может привести в конечном счете к выходу цепи из зацепления со звездочкой. При этом предельно допустимое увеличение шага цепи тем меньше, чем больше число зубьев звездочки. Поэтому максимальное число зубьев большой звездочки
z2max — 120-
(10.5)
Предпочтительно принимать нечетное число зубьев звездочек (особенно малой), что в сочетании с четным числом звеньев цепи способствует равномерному износу шарниров цепи и зубьев звездочек. По этой же причине желательно выбирать число зубьев малой звездочки из ряда простых чисел.
Делительные диаметры звездочек определяют по расположению центров шарниров цепи на зубьях звездочек. Из рассмотрения треугольника АОВ на схеме малой звездочки цепной передачи (рис. 10.5) следует:
где <р t = 360е/2] — угловой шаг; Zj — число зубьев малой звездочки.
Тогда делительные диаметры малой и большой звездочек:
sin (180°/z1) ’ sin(180°/z2) (Ю.6)
Минимальное межосевое расстояние цепной передачи определяют из условия размещения звездочек
amin > + De2),
где Del и De2 — наружные диаметры звездочек. Оптимальное межосевое расстояние
а = (ЗО...5О)Р. (Ю.7)
При а < ЗОР наблюдается ускоренный износ шарниров цепи в связи с повышенной частотой входа каждого шарнира в зацепление. При а > 50Р даже небольшой износ каждого
140
шарнира цепи вызывает значительное удлинение цепи, что приводит к нарушению зацепления цепи с зубьями звездочек. Обычно межосевое расстояние ограничивают величиной
птах = 80Р. (10.8)
Формула для определения длины цепи получена по аналогии с формулой для длины ремня [см. (9.4)], число звеньев получают делением длины цепи на шаг. Число звеньев цепи W зависит от межосевого расстояния а, шага Р и чисел зубьев звездочек и z2
zt + z2 2а (z2 ~ z^p
2 Р < 2л > а ’
(10.9)
Полученное значение W округляют до ближайшего большего четного числа. Четное число звеньев цепи позволяет избежать применения переходных звеньев при соединении концов цепи. Межосевое расстояние (без учета провисания цепи) определяют из выражения (10.9) как больший корень квадратного уравнения:
а = - W -4
+ Z2
' Z, + Zo’ W ~ 1 _ 2
*2 ~ Z1
2л
2"
(10.10)
2
2
Цепь должна иметь некоторое провисание во избежание повышенной нагрузки на нее и валы от силы натяжения и радиального биения звездочек. Для этого межосевое расстояние уменьшают на (0,002...0,004)п.
Окружная сила на звездочках
т, 2Л-103
Р. • 103
(10.11)
где Т1— вращающий момент на ведущей звездочке, Н*м; d1 — делительный диаметр ведущей звездочки, мм; Pj — мощность на ведущей звездочке, кВт; — скорость движения цепи, м/с.
10.5. Расчет цепных передач
Расчет цепной передачи начинают с определения величины статической силы, при которой происходит разрушение цепи
Pp=PtS, (Ю.12)
141
где S — коэффициент безопасности, зависящий от степени ответственности передачи, точности определения действующих нагрузок и коррозионного воздействия на передачу. Минимальные значения коэффициента безопасности принимают S = 6... 10. По найденному значению F'p по стандартам на приводные цепи находят несколько вариантов цепи, для которых разрушающая сила несколько больше требуемой (Fp > F'p ). Найденные варианты различаются шагом и числом рядов цепи. Предварительный расчет, как правило, не позволяет выбрать единственный наиболее целесообразный вариант, а лишь очерчивает область возможных решений.
Основной расчет передачи проводят по условию износостойкости шарниров цепи. Условное давление в шарнирах цепи в предположении нулевого зазора между валиком и втулкой и равномерного распределения давления в шарнире
(10.13) .г!
где Кэ — коэффициент эксплуатации; Ft — окружная сила на звездочках; А — площадь проекции шарнира; [р] — допустимое давление для средних эксплуатационных условий.
Площадь проекции шарнира
А = db, (10.14)
где d — диаметр валика; b — длина втулки (см. рис. 10.3). Для стандартных цепей А определяется по таблицам в зависимости от шага Р. Коэффициент эксплуатации Кэ представляют в виде
Кэ = К.КаКпКтгКсмК^Кт. (10.15)
Коэффициент KR учитывает динамичность нагрузки: при спокойной нагрузке = 1; при нагрузке с толчками 1,2... 1,5; при сильных ударах 1,8. Коэффициент Ка учитывает влияние длины цепи (межосевого расстояния): чем длиннее цепь, тем реже каждое звено входит в зацепление со звездочкой и тем меньше износ в шарнирах; при а = (ЗО...5О)Р принимают Ka = 1; в других случаях Ка — sJb0/L , где Lo — длина цепи при a = 40Р, L — длина рассчитываемой цепи. Коэффициент Кп зависит от влияния наклона линии центров звездочек передачи к горизонту; чем больше наклон передачи, тем меньше допустимый суммарный износ цепи; при угле наклона у < 45° Ки = 1 при у > 45° Ки = 0,15 . Коэффициент учитывает
142
влияние регулировки цепи; для передач с регулировкой положения оси одной из звездочек Крег = 1, для передач с нерегулируемым положением звездочек Крег = 1,25. Коэффициент Ксы учитывает характер смазывания; при непрерывном смазывании в масляной ванне или от насоса Ксм = 0,8; при регулярном капельном или внутришарнирном смазывании Ксы = 1, при нерегулярном смазывании 1,5. Коэффициент Креж учитывает режим работы передачи, Креж = зрусм, где NCM — число смен работы передачи в сутки. Коэффициент Кт учитывает температуру окружающей среды, при -25 °C < Т < 150 °C принимают Кт = 1. Если по расчету значение коэффициента Кэ > 3, следует принять меры по улучшению условий работы.
Сила Flt действующая в ведущей ветви цепи, состоит из окружной силы Ft и силы натяжения ведомой ветви F2:
Рг = Р( + Р2. (10.16)
Сила натяжения ведомой ветви
Е2 = ЕО + ЕЦ, (10.17)
где Fo — натяжение цепи от силы тяжести; Ец — натяжение от центробежных сил.
Если ветви ремней параллельны, сила, действующая на валы, F± = Fx + F2. В общем случае, если ветви цепи не параллельны, силу на вал определяют, как и для ременной передачи, из треугольника ОАВ (см. рис. 9.8). Приближенно сила, действующая на валы передачи,
= (Ю.18)
где kB — коэффициент, учитывающий вес цепи: для горизонтальной передачи принимают kB = 1,15, для вертикальной kB= 1,05.
10.6. Переменность скорости движения цепи
При работе цепной передачи движение цепи определяется движением шарнира звена, вошедшего последним в зацепление с ведущей звездочкой. Скорость шарнира иш, м/с, при постоянной угловой скорости ведущей звездочки colf с"1 (рис. 10.6)
иш = бООсо^, (10.19)
143
V,
V,
Рис. 10.6. Схема скоростей шарнира и цепи
где — делительный диаметр малой (ведущей) звездочки, мм.
В произвольном угловом положении звездочки, когда ведущий шарнир повернут относительно перпендикуляра к ведущей ветви цепи под углом а, скорость цепи
v = ^mcos а- (10.20)
Так как угол а изменяется в пределах от 0 до <рх/2 = скорость цепи изменяется от иш до vmcos (л/гх). Поперечная составляющая скорости цепи
ип = umsin а- (10.21)
Мгновенная угловая скорость ведомой звездочки
<в9 = ----------,
г 500d2cos р
(10.22)
где d2 — делительный диаметр большой (ведомой) звездочки; Р — угол поворота шарнира на ведомой звездочке (по отношению к перпендикуляру на ведущую ветвь цепи), угол р изменяется в пределах от 0 до л/г2. Мгновенное передаточное отношение
Wj _ d2cos р (о2 djcos а ’
(10.23)
Из зависимости (10.23) следует: передаточное отношение цепной передачи не постоянно; равномерность движения тем выше, чем больше числа зубьев звездочек, так как тогда cos а и cos р ближе к единице, основное влияние оказывает увеличение числа зубьев малой звездочки. Непостоянство скорости це
144
пи вызывает динамические нагрузки и удары, не позволяет использовать цепные передачи в приводах с высокими требованиями к точности вращения валов.
Контрольные вопросы
1. Из каких основных частей состоит цепная передача?
2. Какие типы цепей используют для передачи движения?
3. Каковы причины выхода из строя цепных передач?
4. Какие требования предъявляют к материалам различных деталей цепи?
5. Какими факторами ограничивается число зубьев звездочек и межосевое расстояние?
6. Как определяют число звеньев цепи?
7. Каковы виды расчета цепных передач?
8. От каких факторов зависит коэффициент эксплуатации?
9. Чем объясняется непостоянство передаточного отношения цепной передачи?
Глава
Сварные соединения
11.1. Общие сведения
Сварные соединения — наиболее распространенный и совершенный вид неразъемных соединений. Они образуются путем местного нагревания сопрягаемых участков свариваемых деталей до расплавленного (сварка плавлением) или до пластического состояния с последующим сдавливанием (контактная сварка). При этом используются силы межмолекулярного взаимодействия. Сварку широко применяют в машиностроении.
Наиболее распространенной из всех сварок плавления является дуговая сварка плавящимся электродом, изобретенная и примененная в России еще в конце XIX в. Н. Н. Бенардосом и Н. Г. Славяновым. Источником теплоты является электрическая дуга, образующаяся между электродом и поверхностью свариваемых деталей. Оплавившиеся кромки и расплавившийся электрод образуют сварной шов.
При ручной сварке в качестве электрода используют стальной стержень. Покрытие (обмазка) электродов обеспечивает защиту материала шва от вредного воздействия воздуха (кислород, азот). Обычно сваривание углеродистых и низколегированных сталей выполняют электродами (ГОСТ 9467-73): Э38; Э42; Э46; Э50. При повышенных требованиях к пластичности и ударной вязкости сварного шва используют электроды марок Э42А, Э46А, Э50А. (Числа после буквы Э, умноженные на 10, означают среднее значение предела прочности металла шва в МПа.) Качество сварного шва при ручной сварке зависит от квалификации сварщика.
Высокое качество шва и производительность обеспечивает автоматическая сварка под слоем флюса, которую выполняют на специальных машинах и применяют в серийном производстве при выполнении длинных непрерывных швов. В качестве электрода используют стальную омедненную проволоку. Технология сварки других материалов (например, алюминиевых и титановых сплавов) значительно сложнее. В этих случаях
146
применяют аргоно-дуговую или электронно-лучевую сварку в вакуумной камере и др.
При электрической контактной сварке используют теплоту, выделяющуюся в контакте свариваемых деталей при пропускании через него электрического тока. Эту сварку применяют для сваривания тонких деталей из углеродистых и легированных сталей, алюминиевых и других сплавов.
Достоинства сварных соединений: возможность получения изделий больших размеров (корпуса судов, железнодорожные вагоны, кузова автомобилей, трубопроводы, резервуары, мосты и др.); снижение массы по сравнению с литыми деталями до 30...50% и с клепаными — до 20% благодаря в основном уменьшению толщины стенок и припусков на механическую обработку, а также отсутствию ослабляющих отверстий и накладок как в заклепочном соединении; снижение стоимости изготовления сложных деталей в условиях единичного или мелкосерийного производства; малая трудоемкость, невысокая стоимость оборудования, возможность автоматизации; возможность достижения равнопрочности сварного изделия и свариваемых деталей.
Недостатки сварных соединений: возникновение при сварке дефектов швов, снижающих их прочность (особенно при переменном нагружении). На рис. 11.1 изображены дефекты швов: а) непровар шва; б) подрез шва; в) смещение деталей в стыке; г) шлаковые 2 и газовые 3 включения (последние устраняются механической обработкой поверхностной зоны шва); возникновение остаточных напряжений (вследствие локальных термических деформаций от неравномерного нагрева соединяемых деталей) снижает прочность и вызывает необходимость проведения старения; сложность проведения контроля ответственных сварных изделий; местное оплавление участков деталей вблизи шва вызывает изменение химической структуры металла.
Сварной шов является концентратором напряжений. Снижение циклической прочности сварного соединения оценивают эффективным коэффициентом концентрации напряжений
= о_14/о_1д, (11.1)
Рис. 11.1. Дефекты сварных швов
147
где <r_ld — предел выносливости детали без концентрации напряжений (сварной шов отсутствует); ст_1д — предел выносливости сварной детали (имеется сварной шов). Так, наличие «подреза» (рис. 11.1, б) снижает циклическую прочность сварного соединения до 20 раз [5]. Эффективный коэффициент концентрации напряжений для необработанных механическим путем стыковых швов при ручной сварке углеродистых сталей в среднем составляет Ка = 1,2. После механической обработки стыковых швов Кс ~ 1.
11.2. Сварные соединения стыковыми швами
Сварные изделия, выполненные стыковыми швами, являются наиболее рациональными и образуются при полной проварке стыка торцов соединяемых деталей с помощью дуговой (рис. 11.2, а—е) или контактной (рис. 11.2, д) электросварки.
Полный и бездефектный провар стыка обеспечивает рав-нопрочность сварного шва и соединяемых деталей. Для получения шва без дефектов кромки деталей механически обрабатывают (разделывают). Однако при толщине деталей б = (1...4) мм скоса кромок (рис. 11.2, а) не делают, так как в этом случае происходит проплавление деталей на полную толщину; при б > 4 мм выполняют скосы различной формы (рис. 11.2, б, в); кромку одной детали таврового соединения с полным проваром также разделывают со скосом (рис. 11.2, г). Торцы деталей под стыковую контактную электросварку выполняют плоскими с хорошим прилеганием (рис. 11.2, д). При малой толщине деталей б < 1 мм выполняют отбортовку (рис. 11.2, е).
Стыковые сварные соединения при статическом нагружении преимущественно разрушаются по шву. На рис. 11.3 изо-
Рис. 11.2. Сварные соединения стыковыми швами: а—г, е — дуговая сварка; д — контактная сварка
148
Рис. 11.3. Расчетная схема сварного соединения стыковыми гавами
бражены возможные виды внешних нагрузок на сварное соединение: F — центральная растягивающая сила, М — изгибающий момент, Т — крутящий момент. В этом случае расчет сварных стыковых швов на статическую прочность приближенно проводят по эквивалентным напряжениям <уэкв в опасном сечении ___________-
<7ЭКВ = J(ap + си)2 + 3?2 > [СУ' Ь (Ц.2)
где сгр = 4F/[л(Л2 - d2)] — нормальные напряжения растяжения; сти = M/W = M/[O,1Z)3(1 - d4/Z)4)]— наибольшие нормальные напряжения изгиба (в зоне А); т = Т/Жр = = Т/[0,2Р3(1 - с/4/Л)4)]— наибольшие касательные напряжения кручения, если 8 « D, то приведенные выше выражения упрощаются ор = F/(nd6); <уп = 47W/(nd28); т = 2T/(nd25); [сур] — допускаемое напряжение для сварного шва (табл. 11.1).
Таблица 11.1
Допускаемые напряжения сварных швов при статическом нагружении
Вид сварки Вид шва Характер напряженного состояния Сварка ручная электродом Э42 А или Э50А; автоматическая Сварка ручная электродом Э38; Э42; Э50 Сварка автоматическая
Дуге-вая плавящимся электродом стыковой сжатие [ ^СЖ ] fcpl [ ^СЖ ] [^р]
растяжение [<Тр] = [ар] [<тр ] = 0,9[ор]
срез [т'] = 0,65[чр] [т'] = 0,6[СТр]
угловой срез [т'] = 0,65[ср] [т'] = 0,6[ср]
149
Продолжение табл. 11.1
Вид сварки Вид шва Характер напряженного состояния Сварка ручная электродом Э42 А или Э50А; автоматическая Сварка ручная электродом Э38; Э42; Э50 Сварка автоматическая
Контактная электрическая сты- ковой сжатие [ ^СЖ ] 1Рр]
растяжение [Чр ] = [Ср]
срез [т'] = 0,6[<тр]
точечный, шовный срез [т'] = 0,4[<тр]
Примечание. Допускаемые напряжения растяжения основного металла [ор] = oT/S, где стт — предел текучести; S — коэффициент безопасности, S = 1,2...1,8 для низкоуглеродистых и S = = 1,5...2,2 для низколегированных сталей; если разрушение сопряжено с тяжелыми последствиями, то значение S повышают еще в 1,5...2 раза.
11.3. Сварные соединения угловыми швами
Угловые швы дуговой сварки применяют в нахлесточных (рис. 11.4, а), тавровых (рис. 11.4, б) и угловых (рис. 11.4, в) соединениях, свариваемые кромки деталей которых не имеют скосов. В зависимости от расположения сварных швов относи-
Рис. 11.4. Сварные соединения угловыми швами: а — нахлесточные; б — тавровые; в — угловые; г — специальный шов
150
тельно действующих сил, в нахлесточном соединении различают лобовые (№ 1), фланговые (№ 2) и комбинированные, являющиеся сочетанием лобовых и фланговых, швы (рис. 11.5, б). При статическом нагружении применяют угловые швы, имеющие в поперечном сечении прямоугольный треугольник с соотношением катетов 1:1 (см. рис. 11.4, а), как более простые в изготовлении. Для таких швов расчетная высота опасного сечения составляет р = Asin 45° ~ 0,7Л. Катет углового шва определяют расчетом и затем округляют до целого значения
ftmin>3MM. (11-3)
Минимальное значение катета силового сварного шва рекомендуют принимать > 3 мм из-за возможного значительного уменьшения площади поперечного сечения шва вдоль его длины, вызванного непостоянством параметров сварочного процесса при ручной сварке.
Для повышения усталостной прочности сварного соединения, выполненного лобовыми швами, следует применять швы с соотношением катетов 1:2 (см. рис. 11.4, г). Такое отношение катетов швов обусловливает более плавный характер изменения силовых линий в области расположения сварного шва (снижается концентрация напряжений). Механическое удаление поверхностной части сварного шва с газовыми и шлаковыми включениями также повышает циклическую прочность сварного соединения.
При действии центральной растягивающей силы F на сварное соединение, выполненное фланговыми швами (рис. 11.5, а), сила F передается с детали 1 на деталь 2 сварными швами, работающими на сдвиг. В результате в поперечных сечениях от А к В детали 1 на длине I сила F плавно убывает, а вместе с ней убывают и неравномерные деформации растяжения детали 1.
Рис. 11.5. Сварочные нахлесточные соединения: а — фланговыми швами; б — комбинированными швами
151
В связи с этим ограничивают максимальную длину фланговых швов. Кроме того, из-за неизбежного изменения размеров поперечного сечения шва на его концах вследствие нестабильного горения дуги, не следует делать их короче 30 мм. Таким образом, рекомендуемая длина I фланговых швов
50/г > Z > 30 мм. (11.4)
Разрушение угловых швов при статическом нагружении происходит по наименьшей площади (по опасному сечению), проходящей по биссектрисе прямого угла (см. рис. 11.4, а). В опасном сечении лобовых швов имеет место сложное напряженное состояние, а во фланговых швах в опасном сечении действуют касательные напряжения. В целях унификации расчет всех угловых швов при любом способе нагружения приближенно ведут по касательным напряжениям, равномерно распределенным по высоте опасного сечения. При действии силы F (см. рис. 11.5, б) условие статической прочности для соединения комбинированными швами
tf = F/A<[t'], (11.5)
где [т'] — допускаемое касательное напряжение для угловых швов, принимаемое по табл. 11.1; А = pL — площадь опасного сечения; р — расчетная высота опасного сечения углового шва (обычно р = 0,7Л); L = 21 + Ь — длина швов соединения.
При нагружении нахлесточных сварных соединений постоянным моментом Т (рис. 11.6, а), действующим в плоскости стыка деталей, напряженное состояние угловых швов приближенно оценивают по максимальным касательным напряжени-
Рие. 11.6. Расчетные схемы нахлесточных сварных соединений, нагруженных в плоскости стыка: а — схема нагружения; б — опасное сечение швов
152
ям т в опасном сечении шва. При приближенном решении этой задачи принимают следующие условия:
1) свариваемые детали абсолютно жесткие, а деформируются под нагрузкой только швы;
2) под действием момента Т деталь 1 поворачивается относительно детали 2 вокруг центра тяжести фигуры, образованной опасным сечением швов.
Поверхность опасного сечения швов разворачивают на плоскость стыка (рис. 11.6, б). По аналогии с кручением круглого стержня рассмотрим площадку dA с напряжением т на радиусе р, и площадку dA с ттахна радиусе ртах. Принимаем, что напряжения т пропорциональны радиусу р. На площадке dA действует сдвигающая сила dF — xdA. В результате элементарный момент от действия силы dF на радиусе р равен dT — pxdA.
Для всего сварного шва имеем Т = J dT = J pxdA. С учетом отношения —= —— (из рассмотрения кручения круглого ^тах Ртах
стержня) получим Т = TmaxJp/pmax, где Jp =f р2 • dA — полярный момент инерции фигуры, образованной сечением шва.
Как известно из курса сопромата, Jp = Jx + Jy, где Jx = = + ^r) + + "°-
менты инерции фигуры на рис. 11.6, б.
Таким образом, можно определить величину наибольшего касательного напряжения в опасном сечении сварного шва:
Дпах = Т’РтахМр < М- (И.6)
При нагружении сварного нахлесточного соединения постоянными силой F и моментом Т напряжения от них суммируются геометрически.
11.4. Соединения контактной сваркой
Контактную стыковую сварку выполняют по торцам деталей (см. рис. 11.2, д), точечную (рис. 11.7) и шовную — по боковой поверхности тонкостенных конструкций (рис. 11.8). С помощью контактной стыковой сварки можно соединять детали с высокой точностью и обеспечить равнопрочность деталей и
153
Рис. 11.7. Сварные соединения с точечными швами
стыкового шва. Расчет стыковых швов был рассмотрен в § 11.2. Точечную сварку широко применяют при изготовлении тонкостенных корпусных конструкций (кузова автомобилей, цельнометаллические железнодорожные вагоны и т. п.) из углеродистых и низколегированных сталей, алюминиевых и др.сплавов.
Суммарная толщина бх стальных соединяемых деталей обычно не превышает 10 мм (см. рис. 11.7). Диаметр сварной точки dT (мм) принимают в зависимости от толщины (Smin > 2 мм) соединяемых стальных деталей
l,25min + 4<dT<l,58min + 5.
(11-7)
Обычно определяют величину dT из условия статической прочности сварного точечного шва, а по ней принимают диаметр электрода (для стальных деталей da ~ с/т) и все параметры сварочного процесса. Шаг сварных точек по условию отсутствия шунтирования тока при сварке двух деталей составляет Ро > 3dT; расстояния от кромок Р, > 2dT иР2 > l,5dT. Соединение точечной сваркой обычно нагружено сдвигающей силой F; при этом полагают ее равномерное распределение между всеми точками, число которых по линии действия силы не должно превышать пяти. Условие статической прочности на срез сварной точки
т = < 1Т'Ь
(И.8)
где I — число плоскостей среза (на рис. 11.7 i = 2); г — число точек; [т'] — допускаемое напряжение для контактной элек-
154
тросварки (см. табл. 11.1). При нагружении сварного точечного шва циклической нагрузкой эффективный коэффициент концентрации напряжений для точечных швов низкоуглеродистых сталей составляет в среднем 7,5.
Шовную сварку применяют для герметичного соединения тонкостенных деталей 8 < 3 мм. Условие статической прочности шва на срез для шовной сварки
Рис. 11.8. Соединение шовной сваркой
F т = — 1а
(11-9)
где I — длина шва; а — ширина шва (обычно а ® 28), см. рис. 11.8.
11.5. Допускаемые напряжения сварных швов
Допускаемые напряжения при статическом нагружении сварных швов определяют на основании опытных данных в долях от допускаемых напряжений основного металла (см. табл. 11.1).
Сварные детали машин часто испытывают действие переменных (циклических) нагрузок. При соблюдении равнопроч-ности основного металла и сварного шва при статической нагрузке усталостное разрушение происходит по основному металлу вблизи сварного шва в зоне 1 термического влияния (см. рис. 11.1, г).
Применение стыковых швов предпочтительнее, так как они обладают невысокой концентрацией напряжений по сравнению с угловыми швами и особенно с точечной сваркой. Циклическую прочность сварных соединений можно повышать также технологическими методами — проводить старение или отжиг (для снятия остаточных напряжений); удалять механической обработкой утолщение стыкового шва, поскольку в утолщении в основном находятся газовые и шлаковые включения, являющиеся концентраторами напряжений; создавать наклеп (например, обдувом дробью). Эти мероприятия в значительной мере снижают концентрацию напряжений, а для стыковых швов она практически исчезает.
155
На основании опытных данных в табл. 11.2 приведены значения показателей циклической прочности сварных соединений без механической обработки швов.
Таблица 11.2
Показатели циклической прочности основных сварных соединений
Группа сварных соединений оа,„ МПа т
Стыковые 74,0 9,0
Стыковые с накладками (подкладками) 26,0 3,0
Тавровые с разделкой кромок и полным проваром 57,5 4,0
Тавровые с угловыми швами (без разделки кромок) 26,0 3,0
Нахлесточные с лобовыми, косыми швами 37,5 3,5
Нахлесточные с фланговыми, комбинированными швами 26,0 3,0
С точечными швами 13,0 3,0
Здесь оап — предельное амплитудное напряжение;
т — показатель степени уравнения усталости.
Примечание. Величина оап снижается при наличии: окалины — на 20%; коррозии — на 50%; дефектов (непровары, подрезы и ДР-) — в 20 раз; остаточных напряжений на 30%. Величина стап повышается после: механической обработки швов — на 40%; отжига в защитной атмосфере — на 70%; наклепа (чеканки пневмомолотком, обдува дробью) — на 100%.
Расчет сварных соединений при переменном нагружении проводят как проверочный путем определения коэффициентов безопасности по текучести ST и по амплитудным напряжениям SB и сравнения полученных значений с допускаемыми
•ST = nT/omax>[ST], (11.10)
Sa = oanmJ^/ue>[Sa], (11.11)
где стт — предел текучести основного металла, принимаемый для низкоуглеродистой стали от = 240...260 МПа, низколегированной сгт = 420...480 МПа, высокопрочной — сгт = = 600...680 МПа; сгтах — максимальное напряжение цикла в
156
расчетном сечении сварного соединения; оаи — предельное амплитудное напряжение для сварного соединения (см. табл. 11.2), соответствующее числу циклов TVG — абсциссе точки перегиба кривой усталости, принимают NG = 2 • 106; ста — амплитуда напряжений цикла нагружения в расчетном сечении; N — число циклов нагружения; [S] — допускаемое (минимальное) значение коэффициентов безопасности: по пределу текучести [ST] = 1,2...2,5 и по амплитудным напряжениям [Sa] = 1,5...3,0. Для ответственных сварных соединений, разрушение которых может привести к тяжелым последствиям, коэффициенты безопасности повышают в 1,5...2 раза.
Д Контрольные вопросы________________________________________
1. Почему сварные соединения считают наиболее совершенными из неразъемных соединений?
2. Какой вид сварки наиболее распространен?
3. Каковы достоинства и недостатки сварных соединений?
4. По каким напряжениям рассчитывают соединения стыковыми швами?
5. Как определяют опасное сечение углового шва?
6. Какими факторами ограничивается длина фланговых швов?
7. Какие сварные швы называют комбинированными?
8. Как определяют наибольшие напряжения в нахлесточном сварном соединении, нагруженном моментом, действующим в плоскости стыка?
9. По какому условию рассчитывают соединения точечной контактной сваркой?
10. От каких факторов зависят допускаемые напряжения для сварных швов при статическом нагружении?
11. По каким условиям рассчитывают сварные соединения при переменных нагрузках?
12
Соединения деталей с натягом
12.1. Общие сведения
Соединения деталей с натягом — это соединения, в которых детали удерживаются силами трения. Силы трения обусловлены созданием распределенной нормальной нагрузки (давления) на сопряженных поверхностях соединяемых деталей. Величина нормальной нагрузки зависит от величины натяга. Натяг — это разность размеров охватываемой и охватывающей деталей. Посадочный размер охватываемой детали делают несколько больше посадочного размера охватывающей детали. После сборки посадочный размер деталей становится общим, при этом посадочный размер охватывающей детали в результате упругих деформаций увеличивается, а охватываемой — уменьшается.
Передача соединением нагрузок (сил, моментов) осуществляется за счет сил трения (сцепления), действующих на поверхности контакта деталей. Наиболее часто встречаются соединения деталей по цилиндрическим или коническим поверхностям.
12.2.Соединения с натягом по цилиндрическим поверхностям
Эти соединения применяют для установки на валы зубчатых колес, колец подшипников качения и других деталей. Соединения с натягом также применяют для изготовления сложных составных деталей (коленчатые валы, составные зубчатые и червячные колеса и др.). Соединяемые детали могут быть изготовлены из одинаковых или разных материалов.
Достоинства соединений: достаточно простая технология получения соединения; хорошее центрирование соединяемых деталей; способность воспринимать значительные динамические нагрузки, удары, колебания.
158
Недостатки: большое рассеяние прочности соединения среди одной партии в связи с разбросом действительных размеров сопрягаемых поверхностей деталей в пределах их полей допусков и значений коэффициента трения; снижение усталостной прочности валов в зоне посадки вследствие концентрации напряжений; трудности неразрушающего контроля прочности соединения; сложность сборки и разборки при больших натягах и размерах соединяемых деталей; возможность повреждения посадочных поверхностей при разборке.
Различают следующие способы получения соединения с натягом:
Запрессовка — простейший способ, при наличии необходимого оборудования обеспечивающий возможность контроля за нагрузкой отдельного соединения путем измерения силы запрессовки. Однако при запрессовке существует опасность повреждения посадочных поверхностей, кроме того, снижается коэффициент трения (сцепления) из-за сглаживания микронеровностей на поверхности контакта.
Нагрев охватывающей детали — технологически отработанный способ, обеспечивающий высокий коэффициент трения (сцепления) и, как следствие, повышение нагрузочной способности соединения в 1,5 раза по сравнению с запрессовкой, так как отсутствует сглаживание микронеровностей на поверхности контакта. Однако контроль нагрузочной способности такого соединения затруднен.
Охлаждение охватываемой детали применяют для установки с натягом небольших деталей в крупные детали (корпуса машин, станины); по свойствам этот способ аналогичен нагреву охватывающей детали.
Гидрозапрессовка — нагнетание масла под давлением в зону контакта через сверления в валу, что значительно (в 10— 15 раз) снижает необходимую силу запрессовки и распрессов-ки и уменьшает опасность задира посадочных поверхностей; наиболее эффективен этот способ при больших диаметрах посадки и в соединениях по конической поверхности.
Натяг определяет величину нормальной распределенной нагрузки (давления) на сопрягаемых поверхностях деталей. Следует иметь в виду, что после сборки расчетный (действительный) натяг N, определяющий давление р на поверхности контакта деталей, будет меньше измеренного до сборки натяга
так как в результате сборки происходит обмятие и сглаживание микронеровностей поверхностей контакта.
159
При определении нагрузочной способности и необходимого давления предполагают, что при сборке соединения на всей поверхности контакта действует равномерно распределенное нормальное давление р, возникшее в результате упругой деформации материала соединяемых деталей. Это допущение приемлемо при l/d < 0,8 - 1. Давление р вызывает появление сил трения (сцепления) на поверхностях контакта. Основным условием работоспособности соединения является отсутствие взаимного смещения деталей соединения под действием приложенной нагрузки.
При нагружении соединения осевой силой Fa (рис. 12.1, а) условие несдвигаемости деталей соединения запишем в виде
Fa < ndlpf,
Рис. 12.1. Расчетные схемы цилиндрических соединений с натягом: а — при действии осевой силы; б — при действии вращающего момента; в — при действии изгибающего момента
160
откуда, вводя запас сцепления s (для учета возможного рассеивания величины давления р, коэффициента трения f и силы Fa), получим формулу для расчета давления на поверхностях контакта
Р =
sFa ndlf’
где Fa — осевая сила; f — коэффициент трения; d и I — соответственно диаметр и длина посадочной поверхности; s — коэффициент запаса сцепления; рекомендации по выбору fas (табл. 12.1). При нагружении соединения вращающим моментом Т (рис. 12.1, б) условие несдвигаемости деталей
Т < ndlpfd/2,
откуда необходимое давление для передачи вращающего момента Т
р-™-.
r nd2lf
Таблица 12.1
Коэффициенты трения f в соединениях с натягом при стальной охватываемой детали
Материал охватывающей детали Состояние поверхностей Способ сборки f
Сталь Без покрытий Тепловой Гидрозапрессовка Запрессовка 0,14 0,12 0,08
Сталь Вал цементирован или азотирован Тепловой Гидрозапрессовка 0,28 0,25
Сталь С порошком корунда Тепловой 0,45
Чугун Без покрытий Запрессовкой со смазочным материалом Запрессовкой без смазочного материала Тепловой 0,08 0,09 0,13
Латунь, бронза Без покрытий Запрессовкой Тепловой 0,05 0,05
Алюминиевые сплавы Без покрытий Запрессовкой без смазочного материала Тепловой 0,03 0,045
6 Детали машин
161
При одновременном нагружении соединения вращающим моментом Т и осевой Fa расчет приближенно ведут по равно-
2Т
действующей силе от окружной силы — и осевой силы Fa,
тогда потребное давление
Эти формулы
применимы для соединений при l/d < < 0,8...1, так как в этом случае можно говорить о приблизительно равномерном распределении давления р вдоль образующей. В действительности давление р распределено по поверхности контакта неравномерно и это сказывается на усталостной прочности вала.
Для обычных условий нагружения соединения коэффициент трения f выбирают по табл. 12.1 (при вибрационной нагрузке коэффициент трения f уменьшают на 30%).
Следует подчеркнуть, что коэффициент трения зависит от материалов соединяемых деталей и от способа получения соединения. При тепловой сборке или сборке гидрозапрессовкой гребешки микронеровностей посадочных поверхностей не срезаются и коэффициент трения больше. Еще больше повышается коэффициент трения (до 0,45...0,7) при осаждении в процессе химического никелирования на поверхности вала тонкого слоя из твердых частиц карбида бора или карбида кремния.
При нагружении соединения изгибающим моментом М (рис. 12.1, в) приближенно полагают, что на равномерную эпюру давлений р от посадки накладывается эпюра давлений рх, вызванная моментом (одна половина момента воспринимается верхней, а другая половина момента — нижней поверхностью соединения). Приближенно максимальное значение давления pmax = Pi от момента М определяют по формуле:
_ 4 М 12М
P1 п 2W ndl2 ’
4
где - — множитель, учитывающий серпообразный характер
Л
распределения по окружности давления рх [7] от момента М
162
dl2
(рис. 12.1, e); W = —- — осевой момент сопротивления изгибу 6
прямоугольного сечения d х I. В качестве критерия работоспособности соединения принимают условие нераскрытия стыка р > р,. Откуда р > или М < O,25pdl2, тогда давление при ndl2
коэффициенте запаса сцепления s
р = А™ . (12.2)
F 0,25d/2
При одновременном нагружении соединения осевой силой Fa, вращающим моментом Т и изгибающим моментом М потребным давлением является большее значение из двух, полученных по формулам (12.1) и (12.2).
Для определения напряжений и деформаций толстостенных труб, нагруженных внутренним и внешним давлением, в курсе «Сопротивление материалов» [10] рассмотрено решение задачи Ламе. Это решение получено с допущениями: длина трубы существенно больше ее радиуса (рассмотрена плоская задача), материал трубы однороден, поверхности контакта идеально гладкие. Однако наличие шероховатостей на поверхностях реальных деталей оказывает существенное влияние на величину расчетного натяга N. Используя решение Ламе для расчета соединений с натягом, получают связь натяга N с давлением р на поверхности стыка деталей
W=103pdgl + g), (12.3)
где N — расчетный натяг, мкм; Сг и Охватывающая
С2 — коэффициенты охватываемой (вала) и детали (ступицы)
где d — посадочный диаметр соединения, мм; dj — диаметр отверстия в охватываемой детали (вале), мм; d2 — наружный диаметр охватывающей детали
Рис. 12.2. Схема соединения с натягом по цилиндрической поверхности
163
(ступицы), мм (рис. 12.2); р — давление на поверхности контакта деталей соединения, МПа; Elt Е2, щ, Иг — соответственно модули упругости и коэффициенты Пуассона материалов охватываемой (индекс 1) и охватывающей (индекс 2) деталей. Модули упругости и коэффициенты Пуассона материалов, часто применяемых в машинах, приведены в табл. 12.2.
Таблица 12.2
Значения модулей упругости Е (МПа) и коэффициентов Пуассона ц
Материал Е, МПа Р
Сталь 2,1-105 0,3
Серый чугун 1,4-105 0,25
Бронза 1,1-10» 0,33
Алюминиевые сплавы 0,78 • 105 0.32
Титановые сплавы 1,0-105 0,33
Если в формулу Ламе (12.3) подставить давление р, найденное по формулам (12.1) и (12.2), получим минимально допустимый расчетный натяг Nmin, необходимый для передачи внешней нагрузки. Различают измеряемый по вершинам микронеровностей натяг Arlimin и расчетный натяг Nmin, которые связаны зависимостью:
= (12.4)
Поправка U учитывает обмятие (сглаживание) микронеровностей при сборке
U = l,2(Ral + Ra2) « 5,5(Rzt + Rz2) мкм,
где Rar и Ra2 — среднее арифметическое отклонение профилей, мкм; Rzx и Rz2 — высоты микронеровностей, мкм [7].
Размеры, проставляемые на чертежах деталей в мм, называют номинальными. Действительный размер готовой детали, измеряемый после изготовления (точения, шлифования и т. п.), отличается от номинального и является случайной величиной. У партии идентичных соединений каждая деталь имеет некоторое рассеяние (отклонение, разброс) действительных размеров относительно номинальных значений. Однако при
164
этом соединение должно работать нормально (надежно передавать действующую на него нагрузку). Экономически целесообразные предельные отклонения размеров деталей (максимальные и минимальные) определены единой системой допусков и посадок, установленной ГОСТами 25347-89 и 25346-89. Разницу между наибольшим и наименьшим предельными размерами деталей называют допуском (полем допуска). Характер сопряжения (посадки) деталей с цилиндрической посадочной поверхностью зависит от действительных размеров диаметров сопрягаемых поверхностей охватываемой и охватывающей деталей. Таким образом, характер посадки (натяг, зазор, переходная) определяется сочетанием расположения полей допусков размеров диаметра вала и диаметра отверстия в ступице. Если размер диаметра отверстия ступицы меньше, чем у вала, то после сборки получится соединение с натягом (рис. 12.3).
Существует две системы образования посадок — система отверстия и система вала. Система отверстия более распространена в машиностроении, так как при ее использовании меньше ассортимент инструментов для точной обработки отверстий в ступицах и расходы на изготовление деталей. В основе системы отверстия лежит неизменность величины поля допуска для данного номинального диаметра отверстия при достижении различных видов посадок, т. е. установленные стандартами предельные отклонения (поле допуска) для некоторого диаметра отверстия одинаковы для всех посадок. Различные посадки при данном номинальном размере создаются путем
Рис. 12.3. Поля допусков в системе отверстия для деталей соединения с натягом
165
изменения предельных отклонений (поля допуска) размера диаметра вала. Отверстие в этой системе называют основным, его поле допуска обозначают TD. Нижнее отклонение EI размера основного отверстия равно нулю, а поле допуска TD основного отверстия располагается выше номинального диаметра посадки, причем верхнее отклонение основного отверстия ES = TD (рис. 12.3). В соответствии с ГОСТом величина допуска TD увеличивается с ростом диаметра и квалитета (характеристики степени точности размера детали). С ростом квалитета от 0 до 17 снижается степень точности. В общем машиностроении используют квалитеты от 5 до 11.
Для посадок с натягом поля допусков валов Td располагаются выше поля допуска отверстия TD (рис. 12.3). Таким образом, в зависимости от действительных размеров, изменяющихся случайным образом в пределах поля допуска, для каждой пары соединяемых деталей имеет место свой случайный натяг. При данном номинальном диаметре d каждой стандартной посадке с натягом в системе отверстия соответствуют определенные значения минимального NC1, min и максимального NCT max стандартных натягов.
Nст min ^'^’’•^сттах
где ES и es — верхнее отклонение соответственно отверстия и вала; ei — нижнее отклонение размера вала.
После сборки соединения на посадочной поверхности деталей возникает нормальное к поверхности контакта давление,
Рис. 12.4. Эпюры распределения напряжений в деталях соединения с натягом
которое равномерно распределено по поверхности сопряжения и является внешней нагрузкой. Приближенно детали соединения (валы и ступицы) относят к толстостенным трубам, нагруженным внешним и внутренним давлением. Торцы труб свободны от нагрузок, поэтому поперечные сечения остаются плоскими. При таких допущениях напряжения в деталях соединений с натягом можно определять по формулам Ламе [10]. Эпюры распределения в поперечном сечении деталей соединения нор
166
мальных окружных напряжений о, и нормальных радиальных напряжений сг согласно решению Ламе имеют вид, показанный на рис. 12.4. Наибольшие напряжения ог действуют на поверхности сопряжения деталей, а наибольшие напряжения ot действуют на внутренней поверхности охватывающей детали (ступицы):
d2 + d2
<125>
Если детали изготовлены из одинаковых материалов, обычно более слабым элементом оказывается охватывающая деталь. Ее рассчитывают на прочность. Для стандартной посадки, подобранной по нагрузочной способности соединения, находят Анеттах- Вводя поправку U, находят максимальный расчетный натяг
N = N -U
11 max 2 т сттах "
Используя формулу Ламе (12.3), определяют соответствующее максимальное давление на поверхности контакта при максимальном натяге
N • 103 „ _ 1 ’ шах *u
Ртах /zi с \ '
Далее по формулам (12.5) находят соответствующие макси-
мальные напряжения
^rmax ~ ~Ртах< ^imax ~ Ртах
dl + d2 dl~ d2'
Наибольшие эквивалентные напряжения по теории прочности максимальных касательных напряжений
<-\экв max
2Ртпах
Напряжения оэкв тах и о/тах не должны превышать предел текучести ат материала охватывающей детали. Давление на поверхности контакта, соответствующее началу пластических деформаций на внутренней поверхности ступицы
л2 - И2
где стт2 — предел текучести материала охватывающей детали (ступицы).
167
Сила, необходимая при сборке запрессовкой, определяется по зависимости
Fn KdlpmeLXfп’
где ртах — давление, соответствующее возможному максимальному натягу NCT max выбранной посадки; fn — коэффициент трения при прессовании, т. е. при сборке запрессовкой. Среднее значение fn принимают для сочетаний материалов: сталь — сталь /п = 0,22, сталь — чугун fn = 0,14, сталь — бронза или латунь fn = 0,1.
Температура нагрева, °C, охватывающей детали при тепловой сборке
> = 20 + + Аз,
2 a2d • 103
температура охлаждения, °C, охватываемой детали при сборке охлаждением
t, = 20 - + А;
a.d • 103
где Д3 — зазор, мкм, необходимый для обеспечения легкости сборки, который принимают равным основному отклонению вала т6 (Д3 » 5...25 мкм) (ГОСТ 25346-89, 25347-89); ах и а2, 1/°С — коэффициенты линейного расширения охватываемой и охватывающей детали (в среднем для стали a = 12 • 10-6, 1/°С, для чугуна a = 10,5-10-6, 1/°С, для бронз a = 17 • 10-6,1/°С, для алюминиевых сплавов a = 23 • 10“6, 1/°С). Температура нагрева для закаленных деталей не должна быть выше температуры отпуска, при которой твердость и прочность детали снижается (например, для цементованных с последующей закалкой сталей эта температура примерно +230° С). Охватываемую деталь охлаждают сухим льдом (углекислотой), у которой температура испарения -79 °C или жидким азотом с температурой испарения -196 °C.
12.3. Конусные соединения
В этих соединениях вал и ступица контактируют по конической поверхности. Обычно такие соединения применяют для закрепления деталей (полумуфты, зубчатые колеса, шкивы и др.) на концевых участках валов. Вращающий момент между валом 1 и ступицей 2 (рис. 12.5) передается трением, возникающим в ре-
168
Рис. 12.5. Конусное соединение
Рис. 12.6. Расчетная схема конусного соединения
зультате приложения осевой силы. При затяжке гайки 3 ступица 2 перемещается вдоль вала 1 и прижимается к валу.
Достоинства конусных соединений: простота конструкции; вал и ступица не ослабляются шпоночными пазами или шлицами; несущую способность соединения можно изменять в определенных пределах, варьируя силу затяжки; конусные соединения собирают при любом угловом положении ступицы относительно вала.
Недостатки: конусные посадочные поверхности требуют высокой точности изготовления; с течением времени осевая сила уменьшается из-за обмятия контактирующих поверхностей.
Конусные соединения являются соединениями с натягом по коническим поверхностям. Конусностью называют отношение
К = = 2tga,
где dA и d2 — большой и малый диаметры усеченного конуса; I — длина конуса вдоль оси; a — угол наклона образующей конуса к оси. Для редко разбираемых соединений применяют К = 1/50... 1/30, для часто разбираемых соединений применяют К = 1/20... 1/10. С увеличением угла а при действии одинаковой осевой силы снижается давление р на посадочной поверхности и, следовательно, нагрузочная способность, но уменьшается склонность к самозаклиниванию.
Расчет проводят в предположении, что на конусной поверхности контакта действует равномерно распределенное давле
169
ние р и поэтому силы трения fp (f — коэффициент трения) распределены по поверхности сопряжения также равномерно.
Давлениер связано с силой затяжки выражением (рис. 12.6)
F р =---------, (12.6)
ndmZ(sin а + fcos а)
где F3aT — осевая сила (сила напрессовки ступицы на вал);
d± + с?2 „ , ,
ат = ---------средний диаметр; I — длина соединения (дли-
(О
на конусной посадочной поверхности); а — угол конуса; f — коэффициент трения.
Вращающий момент Т, которым можно нагрузить соединение, определяют из условия Т < 71тр, где момент трения
Ттр = 0,5^2 If.
Отсюда
sT = pnd^ If/2,
где s — запас сцепления; или с учетом выражения (12.6)
F d f
Т =-----J зат^т/--- (12.7)
2s(sin а + fcos а)
Таким образом, для передачи соединением вращающего момента Т на поверхности контакта необходимо создать давление
p=^L, Р nd2mlf'
при этом осевая сила затяжки
г _ 2sT(sin а + fcos а) aaT dj ‘
В расчетах назначают s = 1,3...1,5 (большее значение — для ответственных соединений).
12.4. Соединения коническими стяжными кольцами
Соединения, выполненные коническими стяжными кольцами, применяют для передачи вращающего момента и осевой силы в соединениях типа вал — ступица. Соединение обеспечивается за счет осевой силы затяжки гайки 1 (рис. 12.7, а)
170
a)
Рис. 12.7. Соединение коническими кольцами: а — затяжка гайкой; б — затяжка винтом
или винтов 4 и 5 (рис. 12.7, б). Во время затяжки кольца надвигаются одно на другое, при этом диаметр наружных колец 2 и 6 увеличивается и кольца прижимаются к ступице, а диаметр внутренних колец 3 и 7 уменьшается и они прижимаются к валу. На поверхностях контакта колец с валом и со ступицей возникает давлениер и, как следствие, силы трения. Кольца выполняют неразрезными.
Достоинства этих соединений: вал и ступица не ослабляются шпоночными канавками или шлицами; обеспечивается надежная передача ударной и реверсивной нагрузки; сборку соединения можно осуществить при любом взаимном положении соединяемых деталей; детали соединения хорошо центрируются.
Недостатки: детали соединения должны быть точно изготовлены; соединения имеют увеличенный размер в радиальном направлении; с течением времени затяжка, а следовательно, и несущая способность соединений могут снижаться из-за самоотвинчивания гаек и винтов, а также из-за обмятия контактирующих поверхностей, поэтому необходимо периодически подтягивать винты (гайки) соединения.
171
Для соединений на рис. 12.7, а кольцевой зазор Ъ между валом и ступицей принимают Ъ = (0,08...0,12)d, а длину колец I = (0,2...0,4)d; угол наклона образующей конусной поверхности колец а = 16°42' (tga = 0,3), так как при углах a < 16°42' возможно самозаклинивание колец, а при больших углах а потребуется слишком большая осевая сила. Кольца изготавливают из пружинных сталей типа 55ГС, 60С2А и др. с твердостью поверхности (45...50) НКСЭ; твердость рабочих поверхностей валов и ступиц рекомендуется назначать не ниже (35...40) нксэ.
В табл. 12.3 приведены размеры конусных колец (рис. 12.7, а) и осевые силы F13aT для их деформирования до выборки зазоров и F2aaT для создания на поверхности контакта давления р = 100 МПа, также передаваемые при таком давлении одной парой колец вращающие моменты Т и осевые силы Fa.
Таблица 12.3
Параметры соединений с одной парой конических стяжных колец
d, мм D, мм 1, мм * 1зат* кН ^2зат’ кН т. Нм кН
20 25 6,3 8,5 28 40 4
30 35 6,3 12 27 90 6
40 45 8 14 45 199 10
50 57 10 24 73 405 16
60 68 12 27 106 705 24
80 91 17 48 203 1810 45
100 114 21 61 317 3520 70
140 158 28 89 600 9350 134
180 201 33 111 916 18 300 204
При одновременном нагружении соединения вращающим моментом Т и осевой силой Fa определение нагрузочной спо
172
собности соединения приближенно можно проводить по равнодействующей силе
Если в соединении установлены две пары колец, а затяжку производят с одной стороны (рис. 12.7, а), то вторая пара колец из-за сил трения будет затянута примерно половиной силы затяжки Езат. Поэтому вторая пара колец передает вращающий момент и осевую силу примерно в два раза меньше, чем первая.
Контрольные вопросы
1. За счет каких факторов обеспечивается относительная неподвижность деталей в соединении с натягом?
2. Как определяют натяг соединяемых деталей?
3. Каковы способы получения соединения с натягом?
4. В чем различие между расчетным и измеренным натягами?
5. Какой закон распределения давления на поверхности контакта предполагается при расчете соединения с натягом?
6. От каких факторов зависит коэффициент трения в соединении?
7. Какой критерий работоспособности принимают при расчете соединения, нагруженного изгибающим моментом?
8. От каких факторов зависит характер посадки?
9. Чем объясняется широкое распространение системы отверстия?
10. Как определяют силу, необходимую при сборке запрессовкой?
11. Каковы достоинства и недостатки конусных соединений с натягом по сравнению с цилиндрическими?
12. Как определяется конусность?
13. Из каких деталей состоит соединение коническими стяжными кольцами?
13
Шпоночные и шлицевые соединения
13.1. Шпоночные соединения
Шпоночные соединения применяют для передачи вращающего момента между валом и ступицей (например, ступицей зубчатого колеса, шкива, маховика и т. п.) с помощью специальной детали— шпонки (рис. 13.1). Шпоночные соединения подразделяют на ненапряженные, осуществляемые призматическими (рис. 13.1) или сегментными шпонками, и напряженные, осуществляемые клиновыми (рис. 13.2) шпонками.
Различают неподвижные и подвижные шпоночные соединения. В неподвижных соединениях ступица не может перемещаться по валу в осевом направлении, у подвижных соединений ступица может перемещаться по валу во время работы. Длинные направляющие шпонки крепят к валу винтами. В машиностроении основное распространение имеют ненапряженные неподвижные шпоночные соединения как более простые в изготовлении. В напряженных шпоночных соединениях используют клиновые шпонки, вызывающие небольшое радиальное смещение ступицы относительно вала. Клиновые шпонки в настоящее время применяют редко и поэтому они здесь не рассматриваются.
шпонка
Рис. 13.1. Шпоночное соединение призматической шпонкой
174
Рис. 13.2. Шпоночное соединение клиновой шпонкой
Соединения призматическими шпонками наиболее широко применяют в машиностроении. Призматические шпонки стандартизированы (ГОСТ 23360-78).
Достоинства соединений: простота конструкции и низкая стоимость.
Недостатки: вал и ступица ослаблены шпоночными пазами, в зоне которых возникает концентрация напряжений, что снижает усталостную прочность деталей соединений; трудно обеспечить взаимозаменяемость соединения из-за необходимости ручной подгонки шпонки по пазу; ненадежная работа соединения при ударных, реверсивных и циклических нагрузках.
Ширину b и высоту h обыкновенных призматических шпонок выбирают в зависимости от посадочного диаметра вала. Концы шпонок могут быть плоскими (рис. 13.3, а) или скруг
Рис. 13.3. Шпоночные пазы в валу, изготовленные дисковой (а) и пальцевой (б) фрезами
175
ленными (рис. 13.3, б). Глубина врезания шпонки в ступицу k ~ 0,4й. Призматические шпонки вставляют в паз вала по посадке с натягом, а в паз ступицы по посадке с зазором.
Предпочтительно изготовление шпоночного паза в валу дисковой фрезой (см. рис. 13.3, а), при этом достигается высокая точность выполнения шпоночного паза, концентрация напряжения меньше; менее точно и дольше изготавливают паз в валу концевой (пальцевой) фрезой. Пазы в ступице выполняют долблением (строганием) или протягиванием одношлицевой протяжкой.
Действующий на соединение вращающий момент Т вызывает напряжения среза тср в шпонке по сечению А—А (рис. 13.4) и напряжения смятия <тсм на боковых гранях шпонки и паза. При разработке стандарта размеры поперечного сечения шпонок (Ь и й), а также глубина врезания шпонок в ступицу и в вал назначены таким образом, чтобы соединение было равнопрочно. Поэтому при расчетах определяют только напряжения смятия.
При расчете приближенно принимают, что напряжения смятия распределены равномерно по поверхности контакта боковых граней шпонок и шпоночных пазов, а плечо равнодействующей этих напряжений приближенно принимают равным 0,5d (d — диаметр вала). Давлением на рабочих поверхностях, возникающим при посадке шпонок в паз вала с натягом, пренебрегают. При этих упрощениях напряжения смятия на рабочих гранях шпонки или паза
Рис. 13.4. Расчетная схема соединения с призматической шпонкой
2Т- 103 < г ,
°см dZpfc " [ 1см’
где Т — вращающий момент, Н • м; d — посадочный диаметр вала, мм; 1р — рабочая длина шпонки, мм; k — глубина врезания шпонки в ступицу, мм; [о]сы = oT/S — допускаемые напряжения смятия, МПа; стт — предел текучести; S — коэффициент безопасности. При нереверсивной плавной нагрузке принимают S = 1,9...2,3, а при частых пусках и остановках S = 2,9...3,5 (при реверсивной нагрузке коэффициент безопасности повышают на 30% ). Если вал и ступица выполнены из стали,
176
а шпонка — из часто применяемой чистотянутой стали 45, то принимают сгт = 350 МПа. Если ступица выполнена из серого чугуна СЧ20, а вал и шпонка стальные, то принимают <гт = 130 МПа.
13.2. Шлицевые соединения
Шлицевые соединения (рис. 13.5) валов со ступицами (зубчатых колес, шкивов и т. п.) применяют для передачи вращающего момента. На валу изготовляют выступы (зубья), входящие во впадины (шлицы) ступицы.
Достоинства шлицевых соединений: высокая несущая способность благодаря значительно большей рабочей поверхности шлицев; высокая усталостная прочность вала вследствие незначительной концентрации напряжений; возможность применения точных и производительных методов обработки шлицев в ступицах (протягиванием) и зубьев на валах (фрезерованием червячными фрезами, шлифованием, как при нарезании зубьев зубчатых колес). Этим достигается высокая точность центрирования шлицевых соединений.
Недостатки: высокая стоимость соединений из-за сложности технологического оборудования (зубофрезерные, протяжные и шлифовальные станки); изготовление шлицевых соединений становится экономически целесообразным лишь при крупносерийном и серийном производствах.
Различают шлицевые соединения неподвижные и подвижные с возможностью перемещения деталей вдоль оси под нагрузкой или без нагрузки. (Например, шлицевые соединения
Рис. 13.5. Шлицевое соединение (а) и его детали (б): 1 — вал шлицевой, 2 — ступица со шлицами
177
сверлильных шпинделей станков, карданных валов автомобилей и др.) Шлицевые (зубчатые) соединения стандартизованы. При данном диаметре соединения стандартами установлено число и размеры шлицев (зубьев), а также допуски на их размеры.
В машиностроении применяют прямобочные, эвольвентные и треугольные шлицы.
В настоящее время наиболее распространены давно применяемые прямобочные шлицевые соединения (около 80%) по ГОСТу 1139-80. В поперечном сечении профиль прямобочных шлицев (рис. 13.6) очерчивается окружностью выступов зубьев D, окружностью впадин d и прямыми, определяющими постоянную толщину зубьев Ь. Стандартом предусмотрены три серии соединений: легкая, средняя и тяжелая. С переходом от легкой к средней и тяжелой сериям при одном и том же внутреннем диаметре d увеличивают наружный диаметр D и число зубьев г, что повышает несущую способность соединений. Соединения с прямобочными шлицами выполняют с центрированием по наружному диаметру D (рис. 13.6, а), по внутреннему диаметру d (рис. 13.6, б) и по боковым граням b (рис. 13.6, в).
Рис. 13.6. Виды центрирования прямобочных шлицевых соединений: а — по наружному диаметру; б — по внутреннему диаметру; в — по боковым сторонам шлицев; г — форма прямобочного шлица
178
При выборе способа центрирования руководствуются величиной и характером нагрузки на соединение, требованиями по точности центрирования деталей соединения. Несущую способность шлицевых соединений и износостойкость шлицев можно значительно увеличить повышением твердости рабочей поверхности (боковых граней) шлицев путем закалки их до высокой твердости. Однако после закалки происходит искажение сопрягаемых поверхностей, которое можно устранить лишь последующим шлифованием, которое не всегда можно выполнить. Наружное шлифование шлицевых валов по диаметру D выполняется легко; сложнее шлифовать отверстия в ступицах по диаметру d и боковые грани зубьев шлицевых валов; невозможно шлифовать боковые грани шлицев и впадины между шлицами по диаметру D у ступиц.
Наиболее надежным (но и более сложным в изготовлении) является соединение, в котором вал и ступица закалены до высокой твердости после нарезки зубьев. В этом случае для получения необходимой точности сопряжения ступицу и вал центрируют по диаметру d. Менее надежным, но и более простым в изготовлении является соединение, в котором отверстие ступицы не закалено и поэтому может быть окончательно получено протягиванием, а вал с предварительно нарезанными зубьями закаливается и шлифуется по наружному диаметру D. В этом случае центрирование осуществляют по D. И наконец, самое простое в изготовлении, но и менее надежное центрирование по боковым поверхностям зубьев применяют в тихоходных механизмах при больших вращающих моментах. Вал и ступица в этом случае не закалены и зубья на них окончательно нарезают (протягивают) без шлифования.
Более перспективны соединения с эвольвентными зубьями (шлицами). Их выполняют с центрированием по боковым, рабочим поверхностям (рис. 13.7, а) или по наружному диаметру (рис. 13.7, б); наиболее распространен первый способ центрирования из-за простоты его получения. Профиль эвольвент-ных шлицев очерчивается, как и профиль зубьев эвольвент-ных зубчатых колес, окружностью вершин, окружностью впадин и эвольвентами с углом зацепления 30° (у зубчатых колес 20°) при уменьшенной высоте зуба h = т (у зубчатых колес h = 2,25m). Размеры эвольвентных шлицев определяются по ГОСТу 6033-88.
Достоинства эвольвентных шлицевых соединений по сравнению с прямобочными: выше прочность на изгиб благодаря
179
Рис. 13.7. Виды центрирования эвольвентных шлицевых соединений (а, б), шлицевое соединение треугольного профиля (в)
утолщению зубьев у основания; меньше концентрация напряжений, поэтому выше сопротивление усталости; выше прочность на смятие благодаря увеличенному числу зубьев; при производстве требуется меньшая номенклатура фрез, так как эвольвентные шлицы одинакового модуля можно нарезать одной фрезой или долбяком, в то время как при изготовлении прямобочных шлицев для каждого размера и числа зубьев требуется отдельная фреза; при обработке зубьев (шлицев) могут быть использованы совершенные технологические процессы, применяемые для изготовления зубьев зубчатых колес.
Недостатки: более дорогие эвольвентные протяжки для малых диаметров ступиц, шлифование эвольвентных шлицев более сложно, чем прямобочных.
Шлицевые соединения треугольного профиля (рис. 13.7, в) применяют редко при стесненных габаритах в радиальном направлении. Эти соединения центрируют по боковым сторонам зубьев. Размеры шлицев треугольного профиля установлены отраслевыми стандартами (ОСТ) и нормалями. В основном их применяют в кинематических (приборных) механизмах. При необходимости беззазорного соединения применяют конические соединения треугольного профиля с конусностью 1:16 на валу.
180
Основными видами отказов шлицевых соединений являются смятие и износ рабочих поверхностей. Износ является следствием работы сил трения при взаимных микроперемещениях контактирующих поверхностей в процессе работы. Особенно большой износ в шлицевых соединениях наблюдается при скудной загрязненной смазке, больших напряжениях смятия. Износостойкость соединения повышают с помощью увеличения твердости контактирующих поверхностей закалкой, уменьшения зазоров между зубьями, а также применяя смазочный материал и хорошее уплотнение от загрязнения.
Основным расчетом шлицевых соединений является расчет на смятие. Размеры шлицев выбирают в соответствии с ГОСТом по диаметру вала. При расчете проверяют напряжения смятия на рабочих поверхностях зубьев и сравнивают их с допускаемыми. Напряжения смятия осм находят в предположении равномерного распределения напряжений по рабочей поверхности зубьев. Неравномерность распределения нагрузки между зубьями из-за ошибок изготовления учитывают коэффициентом kPH. Таким образом,
°см
2TkPH‘ 103 dcpzhl
(13.1)
где Т — передаваемый вращающий момент, Н • м; kPH — коэффициент, учитывающий неравномерность распределения нагрузки между парами зубьев из-за ошибок изготовления по шагу (принимают kPH= 1,1...1,5); dcp — средний диаметр; h — рабочая высота зубьев; I — рабочая длина зубьев; [о]см — допускаемые напряжения смятия (табл. 13.1).
Для прямобочного профиля (см. рис. 13.6)
l___-О d of» л __________D + d
где D — наружный диаметр зубьев вала; d — внутренний диаметр ступицы; f — размер фаски (рис. 13.6, г).
Для эвольвентного профиля (см. рис. 13.7, а, б)
й = 0,8m; dcp = D - 1,1m,
где m — модуль зубчатых венцов.
Приближенность расчета компенсируют выбором допускаемых напряжений смятия [о]см, установленных с учетом опыта эксплуатации и экспериментов.
181
Таблица 13 1
Допускаемые напряжения смятия [с]см, МПа
Тип соединения Условия эксплуатации Твердость поверхности зубьев
До 350 НВ свыше 40 HRC
Неподвижное в направлении оси а* 35...50 40...70
б 60... 100 100...140
В 80...120 120... 200
Подвижное без нагрузки а 15...20 20...35
б 20...30 30...60
в 25...40 40...70
Подвижное под нагрузкой а — 3...10
б — 5...15
в 10...20
Примечания:
а — тяжелые условия эксплуатации: нагрузка знакопеременная с ударами, смазка скудная или отсутствует;
б — средние условия эксплуатации: знакопостоянная переменная нагрузка с амплитудой не более 10% от постоянной, смазка присутствует;
в — хорошие условия эксплуатации: статическая (постоянная) нагрузка, смазка хорошая.
г Контрольные вопросы________________________________________
1. В чем различие между напряженными и ненапряженными шпоночными соединениями?
2. Какой вид шпонок применяется наиболее широко?
3. По какому критерию рассчитывают шпоночные соединения?
4. Какая форма зубьев обеспечивает наибольшую их прочность?
5. Какие способы центрирования шлицевых соединений применяют в машиностроении?
6. В каких случаях применяют соединения треугольного профиля?
7. По какому критерию рассчитывают шлицевые соединения?
Резьбовые соединения
14.1. Общие сведения
Резьбовыми соединениями называют соединения деталей с помощью резьбы. В качестве резьбовых элементов используют болты, винты, шпильки и гайки (рис. 14.1). Основным преимуществом болтового соединения (рис. 14.1, а) является то, что оно не требует выполнения резьбы в соединяемых деталях. Применяют болтовые соединения при относительно небольшой толщине соединяемых деталей и когда материал детали не обеспечивает достаточной прочности резьбы. Винты (рис. 14.1, б) применяют, когда корпусная деталь большой
толщины не позволяет выполнить сквозное отверстие для установки болта, или при жестких ограничениях конструкции по весовым параметрам. Шпильки (рис. 14.1, в) применяют вместо винтов, если прочность материала детали с резьбой недостаточна (сплавы на основе алюминия), а также при частых сборках и разборках соединений. В этом случае шпилька
завинчивается в деталь один раз на все время работы соединения, а при сборках и разборках работает более прочная резьба на участке свинчивания с гайкой. Формы головок винта (болта) и гайки могут быть различными в зависимости от условий
конструкции, сборки и т. д.
Широкое применение резьбовых соединений в технике определяется: возможностью создания больших сил сжатия деталей при небольшой силе, приложенной на ключе (выигрыш в силе для крепежных резьб составляет 70—100 раз); малыми габаритами резьбовых деталей; полной взаимозаменяемостью резьбовых деталей в связи со стандартиза
Рис. 14.1. Виды резьбовых соединений: а — болтовое; б — винтовое; в — шпилечное
183
цией резьб; возможностью централизованного изготовления резьбовых деталей на специальных станках, возможностью получения разъемного соединения деталей.
14.2. Основные типы и параметры резьб
Резьба выполняется на цилиндрической поверхности, реже на конической. Различают резьбу правую и левую. В основном используется правая резьба (рис. 14.2). Винтовую линию получают огибанием цилиндра плоскостью с наклонной линией под углом \|/. Если на расстоянии иг на плоскости нанести еще одну наклонную линию, то при огибании цилиндра получают двухзаходную резьбу (рис. 14.2) с ходом резьбы Ph. Угол подъема винтовой линии определяют по формуле
Профиль резьбы образуют заданием фигуры А. Если перемещать фигуру Л. по винтовой линии, то получим резьбу заданного сечения. В зависимости от формы сечения различают резьбы: треугольную метрическую (рис. 14.3, а), трапецеидальную (рис. 14.3, б), упорную (рис. 14.3, в) и др.
В качестве основной крепежной резьбы применяют метрическую резьбу (рис. 14.3, а). Профиль этой резьбы треугольный с теоретической высотой Н. Вершины резьбы по наружному диаметру d винта и внутреннему диаметру гайки срезаны соответственно на Н/8 и Н/4. В результате получают рабочую высоту профиля Н1. Стандартом регламентирован радиус скругления резьбы = Н/6 на внутреннем диаметре винта. Радиус существенно влияет на усталостную прочность винта.
184
Винт
Рис. 14.3. Виды резьб: а — треугольная метрическая (ГОСТ 9150-81); б — трапецеидальная (ГОСТ 9484-81); в — упорная (ГОСТ 10177-82)
Основные размеры профиля резьбы определяют в долях от шага. С изменением шага резьбы изменяются и размеры профиля по геометрическому подобию. Стандартом предусмотрены резьбы с различными шагами при одинаковом наружном
185
Рис, 14.4. Резьба с крупным и мелким шагом
нием, применяют
диаметре d резьбы (рис. 14.4). С уменьшением шага резбы увеличивается внутренний диаметр резьбы d3, что заметно повышает статическую и усталостную прочность стержня винта. Однако витки резьбы с мелким шагом становятся менее прочными. Крепежные резьбы с мелким шагом применяют преимущественно в авиационной и космической технике, при действии значительных переменных нагрузок. Трапецеидальные и упорные резьбы, как обладающие меньшим тре-в передачах винт—гайка (см. гл. 15) для
преобразования вращательного движения в поступательное.
14.3. Материалы, классы прочности резьбовых деталей, допускаемые напряжения
Основной материал резьбовых деталей — конструкционные и легированные стали. При выборе материала учитывают характер нагрузки (статическая или переменная), способ изготовления и объем производства. Например, крепежные детали общего назначения изготавливают из низко- и среднеуглеродистых сталей типа сталь (10...35). Такие стали обладают высокой пластичностью и широко применяются в серийном производстве при холодной высадке или штамповке заготовок для резьбовых изделий с последующей накаткой резьбы. Легированные стали (например, 35Х, ЗОХГСА) применяют для изготовления высоконагруженных винтов, работающих при переменных и ударных нагрузках.
Холодное деформирование материала существенно меняет его механические характеристики (повышается прочность, снижается пластичность). При этом в зависимости от степени наклепа резьбовые детали, выполненные из разных материалов, могут иметь близкие механические характеристики. Это позволило сгруппировать резьбовые детали с учетом механических характеристик по классам прочности (табл. 14.1).
Стальные винты и шпильки в соответствйи с ГОСТом 1759-82 изготавливают различных классов прочности. Класс прочности обозначают двумя цифрами, например 5.6. Первая цифра, умноженная на 100, указывает минимальное значение
186
предела прочности в МПа, а их произведение, умноженное на 10, соответствует приблизительно пределу текучести. В примере ов = 500 МПа, от = 300 МПа. Допускаемые напряжения при действии постоянной нагрузки выбирают в зависимости от предела текучести от материала винта (болта):
где S— коэффициент безопасности, принимаемый 1,5...2,5 в зависимости от способа затяжки. Меньшие значения S используют при контроле силы затяжки с помощью динамометрических ключей или ключей предельного момента. Для винтов малых диаметров (d < 10 мм) при отсутствии контроля силы затяжки коэффициенты безопасности увеличивают, поскольку сила затяжки в этом случае определяется только квалификацией рабочего.
Таблица 14.1
Механические характеристики материалов резьбовых деталей
Класс прочности <тв, МПа стт, МПа Марка стали
Винт Гайка
3.6 4 300...400 200 Ст. 3; 10
4.6 5 400...550 240 20
5.6 6 500... 700 300 30; 35
6.6 8 600...800 360 35; 45; 40Г
8.8 10 800...1000 640 35Х; 38ХА; 45Г
10.9 12 1000...1200 900 40Г2; 40Х; ЗОХГСА
14.4. Момент завинчивания
Резьбовые соединения собирают завинчиванием винтов (гаек) с помощью гаечных ключей. Момент Тзав, который создается гаечным ключом, преодолевает момент трения в резьбе Тр
187
А-А
Рис. 14.5. Соотношение силы затяжки и момента завинчивания
и момент трения Тт на торце гайки (головки винта) о неподвижную поверхность детали (рис. 14.5):
7зав = Тр + Тт. (14.1)
Момент трения в резьбе Тр определяют исходя из взаимодействия элемента витка резьбы гайки с витком резьбы винта. Рассмотрим прямоугольную резьбу. На рис. 14.6, а показана система сил, действующих при завинчивании гайки, F — осевая сила в винте, Ft — окружная сила, приложенная к гайке на среднем диаметре d2 (см. рис. 14.3), Fn — сила, действующая на гайку со стороны опорной поверхности резьбы. Сила трения FTp, пропорциональна нормальной силе Fn и направлена в сторону, противоположную движению гайки.
Сила Ft находится из многоугольника сил (рис. 14.6, б), где \|/ — угол подъема винтовой линии; <р — угол трения, равный arctg (f — коэффициент трения). Стрелка показывает направление движения гайки. Из рисунка следует
Ft = Ftg(\|/ + <р). (14.2)
а) б) в) г)
Рис. 14.6. Силы, действующие на винт и гайку для прямоугольной резьбы: а — расчетная схема; б — система сил при завинчивании;
в, г — система сил при отвинчивании гайки
188
Тогда момент в резьбе Тр при условии приложения силы Ft на среднем диаметре d2
Тр = Ft d2 /2 = 0,5 F d2 tg(v + <p). (14.3)
Окружная сила трения в треугольной резьбе больше, чем в прямоугольной. Если окружная сила трения для витка прямоугольного профиля (рис. 14.7) Ft = Ff, то для витка треугольного профиля
F‘-F^-Fz^7ty-Ff'-
Рис. 14.7. Соотношение нормальной и осевой сил в треугольной резьбе
где FN1 =---- - ; а — угол профиля резьбы; ft =-/ —
cos (а/2) cos (а/2)
приведенный коэффициент трения в резьбе.
Таким образом, силу трения в треугольной резьбе определяют по приведенному коэффициенту трения. Аналогично запишем приближенное соотношение между углами трения: Ф1 = —s — приведенный угол трения. Формулы (14.2) и
(14.3), учитывая влияние профиля резьбы (угол а), запишем в виде
Ft = Ftg(<p! + v), (14.2')
Тр = 0,5Е</21ё(Ф1 + Ф). (14.3-)
Для метрической треугольной резьбы угол а/2 = 30°. Тогда ~ 1,15/ и Ф1 = 1,15Ф. Отсюда момент трения Тр в треугольной резьбе примерно на 15% больше, чем в прямоугольной резьбе, и на 12% больше, чем в трапецеидальной резьбе, у которой а = 30°. Для крепежной резьбы это очень важно, так как снижается вероятность самопроизвольного развинчивания резьбового соединения при эксплуатации машины.
Момент трения Тт на торце гайки вычисляют, принимая, что равнодействующая сил трения приложена по среднему диаметру кольцевой опорной поверхности а + d0
аср = —2— с наРУжным диаметром, равным размеру под ключ а, и внутренним диаметром, равным диаметру отверстия под винт d0 (рис. 14.5):
Тт = F/Tdcp/2 = Fft(a + d0)/4, (14.4)
где ft — коэффициент трения на торце гайки.
189
Подставим выражения (14.3') и (14.4) в формулу (14.1). Имеем
Тзав = F[0,5d2tg(V + Ф1) + /т(а + d0)/4]. (14.5)
Учитывая геометрическое подобие метрической резьбы с крупным шагом, можно приближенно принять: у я 2°30'; d2 ~ 0,9d; а я 1,35d; d0 ~ l,ld; = fT = 0,15 (для резьб без специальных покрытий). Подставляя эти данные в выражение (14.5), получаем
Тзав я 0,2Fd.
Расчетная длина стандартного гаечного ключа LKJl = 14d, поэтому, учитывая, что Гзав = Fpa6LKJI, имеем
F « 70Граб,
где Ераб — сила, приложенная рабочим к концу ключа. Таким образом, в крепежных резьбах отношение силы затяжки к силе, приложенной к концу ключа, может достигать 70 и более (при смазке).
При отвинчивании гайка движется вниз и сила трения в резьбе FTp = FNf меняет направление (см. рис. 14.6, в, г). Величина и направление окружной силы Ft в этом случае зависят от соотношения углов трения <р и подъема винтовой линии ф. Если v с <р, то сила Ft = Ftg(<p - ф) направлена влево (см. рис. 14.6, в) и определяет момент Ftd2/2 отвинчивания гайки. При ф < ф (см. рис. 14.6, г) гайка отвинчивается без приложения внешних сил, a Ft — сила, которую нужно приложить, чтобы удержать гайку от самоотвинчивания.
Условие самоторможения резьбы ф < ф. Для треугольной метрической резьбы это условие имеет вид ф < Ф1, где ф1 — приведенный угол трения. В реальных резьбовых соединениях это условие выполняется, даже если используется резьба с крупным шагом. Для нее угол подъема ф винтовой линии по среднему диаметру резьбы меняется в пределах 2°30'...3°30', а приведенный угол трения Ф1 изменяется в пределах от 6° (при f~ 0,1) до 16° (при f я 0,3). Таким образом, все крепежные резьбы самотормозящиеся.
Однако в конструкциях машин редко используют резьбовые соединения без специальных средств стопорения, что объясняется существенным снижением трения между винтом и гайкой при вибрациях и при колебаниях температуры соединения. В этих условиях между витками резьбы винта и гайки происходят микроперемещения за счет радиальных деформа
190
ций тела винта и гайки, что является одной из основных причин самоотвинчивания резьбового соединения.
КПД резьбовой пары определяют из условия
_ ПОЛ
^затр
где Апол — полезная работа; Азатр — затраченная работа при завинчивании гайки.
Рассмотрим поворот гайки на малый угол dy, при котором силы можно считать постоянными (см. рис. 14.6, а);
_ Fdh
П Tpdy ’
„ ,, d2dytg w
где г — осевая сила на винте; ап = ——----- — перемещение
Ci
гайки вдоль оси винта при повороте гайки на угол dy; Тр — момент трения в резьбе, см. формулу (14.3').
Тогда КПД резьбовой пары
tg (у + yj
14.5. Стопорение резьбовых соединений
Основные средства стопорения можно разделить на две группы: стопорные устройства, в которых создается дополнительное трение и стопорные устройства со специальными запирающими элементами. Наибольшее применение получили пружинные шайбы (рис. 14.8, а), обеспечивающие благо-
Рис. 14.8. Стопорение соединений с использованием дополнительного трения
191
Рис. 14.9. Стопорение соединений запирающими элементами
даря упругости шайбы постоянство сил трения при колебаниях осевой нагрузки; кроме того, эти шайбы повышают сцепление между гайкой и деталью в результате врезания острых краев шайбы в торец гайки и плоскость детали. Аналогичный эффект достигается при использовании стопорных пружинных шайб с несколькими отогнутыми лепестками (рис. 14.8, б). Стопорение пружинными шайбами не всегда надежно.
При малых колебаниях нагрузки или их отсутствии получили распространение самоконтрящиеся гайки с завальцован-ными полиамидными стопорными кольцами (рис. 14.8, в), в которых резьбу не нарезают. Она образуется при навинчивании на винт, при этом возникают силы трения между кольцом и резьбой винта. Известно стопорение резьбы применением контргайки (рис. 14,8, г), которую при монтаже затягивают, удерживая основную, предварительно затянутую гайку, от поворота. После этого контргайка воспринимает основную осевую нагрузку, а сила затяжки и сила трения в резьбе основной гайки несколько ослабляется. Однако суммарная сила трения между гайками и резьбой оказывается больше, чем при одной гайке, что и обеспечивает стопорящий эффект. Способ применяется редко, так как утяжеляется конструкция (дополнительная гайка и более длинный винт).
Вторая группа стопорных устройств основана на использовании деформируемых деталей (рис. 14.9). Наибольшее распространение получили шплинты (рис. 14.9, а), применяемые
192
в сочетании с прорезными гайками, и шайбы с лапками (рис. 14.9, б), отгибаемыми после затяжки гайки на боковые поверхности. Для фиксирования положения гайки относительно винта применяют специальные гайки со шлицами и стопорные шайбы с лапками (рис. 14.9, в). Такие шайбы имеют внутреннюю лапку, входящую в канавку на винте, и несколько наружных лапок, одна из которых отгибается в ближайший шлиц гайки.
В групповых резьбовых соединениях, подверженных большим вибрациям, гайки (головки винтов) стопорят обвязкой проволокой через отверстия с натяжением проволоки в сторону затягивания винта (рис. 14.9, г). В некоторых случаях проблему стопорения удается решить без использования специальных средств. Например, стопорение можно не применять, если в конструкции используются податливые на растяжение болты. Такой вариант встречается в автомобильных двигателях, где головка блока цилиндра или корпус распределительного вала закреплены податливыми винтами (шпильками) и, несмотря на обильную смазку и большие вибрации, проблем с са-моотвинчиванием не возникает. Иногда резьбовые соединения стопорят применением резьб с мелким шагом.
14.6. Распределение силы между витками резьбы
Прочность резьбового соединения существенно зависит от характера распределения нагрузки по виткам резьбы винта. Под действием осевой силы F на винт (см. рис. 14.5) витки резьбы передают эту силу с винта на гайку и далее на деталь. При этом, если в сечении А—А на резьбовой стержень действует вся сила F, то в сечении 2—2 эта сила меньше, так как часть силы уже передана витками резьбы, расположенными ниже. По мере удаления от опорной поверхности гайки сила, действующая на стержень, постепенно уменьшается. В результате распределение осевой силы по виткам резьбы происходит неравномерно. Так как тело винта на участке сопряжения резьбы с гайкой испытывает неодинаковое удлинение, а тело гайки работает на сжатие, расстояние между витками резьбы гайки уменьшается. Эти деформации винта и гайки обусловливают характер распределения нагрузки по виткам резьбы.
7 Детали машин
193
Рис. 14.10. Схема деформаций витков резьбы
На рис. 14.10 схематично показана деформация витков резьбы, изображенных в виде кольцевых плоских пластин до приложения нагрузки (а) и после ее приложения (б, в). Если допустить, что стержень винта абсолютно жесткий, то деформация А первого и последнего витков одинакова (см. рис. 14.10, б). С учетом деформации стержня винта перемещения на первом и последнем витках отличаются на величину удлинения винта АН при высоте гайки Н. Если учесть еще упругость гайки, то при ее сжатии разница удлинения на первом и последнем витках станет еще больше.
Задача о распределении нагрузки по виткам резьбы является статически неопределимой и для ее решения рассматривают условие совместности деформаций тела винта и гайки. На рис. 14.11 представлен результат решения этой задачи
Рис. 14.11. Расчетное распределение нагрузки между витками резьбы
194
проф. Н. Е. Жуковским для случая десяти рабочих витков в предположении точного изготовления резьбы. Как видно, первый виток резьбы передает 34% всей нагрузки, второй — около 23%, а десятый — меньше 1%. Отсюда следует, что нет смысла применять высокие гайки. Поэтому стандартом предусмотрена высота гайки Н = 0,8d. Изменить характер распределения нагрузки по виткам резьбы можно с помощью конструктивных мер (см. § 14.10), что особенно важно в соединениях, работающих при циклических нагрузках.
14.7. Прочность винтов при постоянных нагрузках
При действии на винт постоянной растягивающей силы разрушение может произойти по одной из следующих причин (рис. 14.12):
_ разрыв стержня по внутреннему диаметру резьбы d3;
разрушение резьбы в результате смятия или среза витков;
разрыв стержня у головки;
_ срез головки винта при недостаточной высоте Л.
Заметим, что разрушения стержня винта у головки встречаются редко. Поэтому расчет на прочность винтов в этой зоне не производят. Высоту гайки, определяющую число витков резь
бы, воспринимающих нагрузку, назначают из условия равно-
прочности резьбы и стержня винта.
При расчетах резьбовых деталей в качестве основного выполняют расчет на прочность стержня винта по внутреннему диаметру d3.
При действии на винт осевой силы F:
4F .
(14.6)
где [о]р — допускаемое напряжение (см. § 14-3).
При действии на винт осевой силы от затяжки Еаат и момента трения в резьбе Тр (рис. 14.13), в стержне возникают нормальные и касательные напряжения. В этом
Рис. 14.12. Опас-
ные сечения в винте
195
случае эквивалентные напряжения ст£ определяют по энергетической теории прочности
°е = 7°р + 3x2 < [°1р’
(14.7)
4F
где ст = —— нормальные напряжения; т = Т_/WD — макси-TlCtg
мальные касательные напряжения; Тр = 0,5F3aTd2tg(v|/ + <р1) — момент в резьбе; Wp = ndj/16 — момент сопротивления кручению.
Если в формулу (14.7) подставить приведенные зависимости, то после преобразований получаем
°Е ~ °р
1 + 12[^tg + Ф1)] '
Геометрическое подобие резьб позволяет приближенно принять d2/^3 = 1»1» V = 2°30' и f = 0,15 (что соответствует <Р! » 8°30')- С учетом этих значений
ст£ » 1,3стр.
Иными словами, действие момента 7р учитывают увеличением нормальных напряжений в 1,3 раза. Таким образом, если стержень винта нагружен силой затяжки Гзат, условие прочности его в затянутом соединении можно записать в виде
Рис. 14.13. Схема затянутого резьбового соединения
Рис. 14.14. Схема нагрузки в витках резьбы
196
Из 14.8, при проектном расчете, можно определить диаметр d3:
d3 >
>1,3»4F3OT
*[o]p
(14.9)
а по нему подобрать резьбу (определение Рзат см. § 14.8).
Проверочный расчет витков резьбы на срез и смятие производят только в случаях, когда одна из деталей с резьбой выполнена из материала менее прочного, чем у другой детали. Срез резьбы винта проходит по диаметру dlt резьбы гайки — по диаметру d (рис. 14.14). Таким образом, для резьбы винта
T1 nd1kHkm С ^р1’
для резьбы гайки
*2 ndkHkm <1т1ср2’
где Н — высота гайки; k = Р'/Р — коэффициент полноты резьбы (для метрической резьбы k ~ 0,87); km — коэффициент, учитывающий неравномерность распределения нагрузки по виткам резьбы из-за ошибки шага (для резьб с крупным шагом km = 0,7...0,75, с мелким — km = 0,65...0,7). Напряжение смятия в резьбе
псм
4F n(dz - dl)kmz
< [П1см.
где 2 = Н/Р — число витков резьбы гайки; Р — шаг резьбы; [о]см — допускаемое напряжение смятия для менее прочной детали резьбовой пары. Принимают [о]см = (0,3...0,4)от.
14.8. Расчет групповых резьбовых соединений
Различают два вида соединений по характеру действия нагрузки: в плоскости стыка соединяемых деталей (рис. 14.15 и 14.16) или перпендикулярно плоскости стыка (рис. 14.13).
Расчет групповых резьбовых соединений может выполняться как проектный, когда по заданным нагрузкам и принятым материалам определяют основные размеры винтов (бол
197
тов), или как проверочный, когда при известных нагрузках, размерах и материалах определяют прочность винтов (болтов).
Расчет резьбового соединения, нагруженного силой в плоскости стыка. Этот расчет рассмотрим на примере кронштейна, закрепленного с помощью z винтов и нагруженного силой F (см. рис. 14.15, а). Болты в таком соединении могут быть установлены либо с зазором (рис. 14.16, а), либо без зазора (рис. 14.16, б}. В расчете принимают следующие допущения: а) деформации соединяемых деталей не учитываются, т. е. детали считаются абсолютно жесткими; б) возможный взаимный поворот соединяемых деталей при действии момента происходит относительно центра тяжести (точки О) сечений винтов (болтов); в) внешние нагрузки при z винтов (болтов), поставленных с зазором, передаются с одной детали на другую локально силами трения через зоны, расположенные вокруг винтов; г) силы Fir; F2T; F3T в винтах (болтах) соединения, вызванные действием внешнего момента Т, прямо пропорциональны расстояниям до точки О, т. е.:
Г^т _ 1 2т _ _
(14.10)
С учетом перечисленных допущений расчетная схема имеет вид, представленный на рис. 14.5, б. На схеме равнодействующая внешней нагрузки приложена в точке О и представлена
Рис. 14.15. Соединение, нагруженное силой и моментом в плоскости стыка (а), и его расчетная схема (б)
198
в виде сил Fr и F2 и момента Т. Условия равновесия для соединения могут быть записаны в виде:
F1Ti~xZi + F2Tr222 ••• ~ T*
Fu +f12+ ••• = F1’>
F12 + F22+ ...=F2. (14.11)
Выразив в первом равенстве 14.11 силы F2T ... FiT через F1T из (14.10), получим:
р
Т = Fy^Z^ + Z2rf /гг + 23rj /Гх ... ) = X Z,rf .
Г j £=1
Отсюда сила FlT от момента Т, действующая на наиболее нагруженные винты, расположенные на расстоянии т\ от точки О, определится из соотношения
17’
Fri
где zt — число винтов, расположенных на расстоянии rL от точки О.
Составляющие сил Fx и F2, приведенные к центру тяжести О (рис. 14.15), распределяются равномерно по всем винтам z\
Fix = F2\=" ...=Fir=Fx/z',
F12 = F22 = = Fi2 = F2/Z-
Проведя геометрическое суммирование сил на каждом винте, находят наиболее нагруженные винты соединения. На рис. 14.15, б наиболее нагруженным оказался нижний винт 3,
Рис. 14.16. Соединение с болтами, установленными с зазором (а) и без зазора (б)
199
в котором Fmax = F1T + F31 + F32. Остальные винты нагружены меньше.
Далее для определения диаметра винтов (болтов) рассчитывают соединение, нагруженное сдвигающей силой Fmax. Возможны два варианта установки болтов в соединении: с зазором и без зазора.
Болты поставлены с зазором (рис. 14.16, а).
Нагрузка с одной детали на другую в этом случае передается за счет силы трения на стыке деталей в результате затяжки болта. Критерий работоспособности соединения в этом случае — отсутствие взаимного смещения деталей
F > F тр х max'
Введя коэффициент запаса сцепления по сдвигу /гсд и выразив Ктр через силу затяжки Рзат и коэффициент трения f, получим
F = F f = k F тр зат* сд max'
Отсюда необходимая сила затяжки
k F
Р ___ сдх max
г зат / •
Расчетный диаметр болта определяют по формуле 14.9; коэффициент запаса по сдвигу kcn принимают равным 1,2...2 (меньшие значения при статических, большие — при переменных нагрузках).
Болты поставлены без зазора (рис. 14.16, б).
В этом случае внешняя сила передается стержнем болта, работающим на срез по сечению I—I, а также силами трения в стыке деталей от затяжки болта. Влиянием силы трения в стыке деталей пренебрегают, существенно упрощая этим расчет. Допускаемая при этом малая погрешность идет в запас прочности. Касательные напряжения среза в опасном сечении стержня болта
т=
nd?
где [т] = (0,2...0,3)<тт — допускаемое напряжение среза; от — предел текучести материала винта.
Отсюда диаметр стержня болта
С
4^тах л[т]
200
При малых толщинах соединяемых деталей необходимо выполнить приближенный проверочный расчет на смятие
°см1 [°]см’
Ссм2 ^'тах/Е^сХ^Й — ^)] Е^Исм’
где [ст]см = (0,35...0,45) - от — допускаемое напряжение смятия менее прочной из контактирующих деталей; d,,^ и dc(62 _ с) — условные площади смятия (боковая поверхность цилиндра заменена площадью диаметрального сечения винта (болта)); стт — предел текучести материала рассчитываемой детали.
Расчет резьбового соединения, нагруженного силой, перпендикулярной плоскости стыка. Такие соединения собираются с начальной затяжкой винтов. Начальная затяжка обеспечивает плотность и жесткость стыка, а также препятствует сдвигу при действии сил в плоскости стыка. Такое соединение представлено на рис. 14.13. На крышку, закрепленную болтами (винтами), действует сила FY, вызванная внутренним давлением р. На каждый болт действует сила F = F^jz, где z — число болтов.
Задача о распределении внешней нагрузки между винтом и соединяемыми деталями в затянутом резьбовом соединении является статически неопределимой. Решение ее рассмотрим на примере одноболтового резьбового соединения (рис. 14.17), где последовательно показаны: соединение без нагрузки (а), деформированные состояния болта и деталей после начальной затяжки болта (б), деформированные состояния после прило-
Рис. 14.17. Деформированное состояние резьбового соединения до затяжки (а), после затяжки (б) и после приложения внешней нагрузки (в)
201
жения к затянутому соединению внешней нагрузки F (в). За исходное состояние принят случай, когда затяжка и внешняя сила отсутствуют (Езат = 0; F = 0) (рис. 14.17, а).
Под действием силы затяжки F3aT (рис. 14.17, б) винт удлинится на величину Дв, а детали сожмутся на величину Дд. Величины деформаций Дв и Дд в общем случае не равны и зависят от податливостей винта Хв и деталей Хд
Дв ^'в^зат* Дд ^-д^зат'
После приложения к деталям внешней силы F (рис. 14.17, в) винт дополнительно удлинится на величину Д/в, и на столько же уменьшится сжатие деталей Д/д,
Д/в = Д/д. (14.12)
Так как податливости деформируемой части винта Хв и деталей Лд различны, сила F при одинаковой деформации распределится между ними обратно пропорционально их величинам. Если часть силы, дополнительно нагружающую винт, обозначить через %F, то остальная часть, равная (1 - %)F, идет на разгрузку сжатых деталей. С учетом (14.12) запишем:
ХвХГ = Хд(1-х)Е.
Отсюда получим выражение коэффициента основной нагрузки:
<1413)
Лв + АД
При соединении стальных деталей стальным винтом коэффициент % принимает значения 0,2...0,3. При отсутствии внешней нагрузки F (рис. 14.17, б) сила, растягивающая винт, и сила, сжимающая детали, равны между собой и равны силе затяжки. После приложения внешней нагрузки F сила, растягивающая винт, увеличивается, а сила, сжимающая детали, уменьшается. Если увеличение силы на винте обозначить &F, то
FB = Гзат + &F = ^зат + Х^-
Остаточная сила, сжимающая детали, составит
Ед = Гзат-(1-Х)Е.
Расчетную силу, действующую на винт, находят как сумму сил от затяжки и доли всех внешних сил, определяемую коэффициентом х:
Етах = "X.F,
202
где 1,3 — коэффициент, учитывающий, что при завинчивании гайки стержень винта испытывает сложное напряженное состояние.
Далее определяют внутренний диаметр резьбы винта
(4F т _ / max
~ I г Т“ * N п[о]р
14.9. Расчет винтов при переменной нагрузке
Винты, нагруженные переменной внешней отрывающей силой, испытывают постоянную нагрузку от затяжки винтов и переменную внешнюю нагрузку. Простейший характер изменения нагрузок на винт представлен на рис. 14.18. В опасном сечении стержня винта действуют постоянные напряжения растяжения от силы затяжки
п0 = l,3F3aT/Ap
и переменные напряжения растяжения от внешней силы %F с амплитудой
= 7.F/Ap’
где Ар — расчетная площадь сечения винта.
Опыт эксплуатации резьбовых соединений, подверженных действию переменных нагрузок, а также испытания соединений на усталость показывают целесообразность значительной начальной затяжки соединений для винтов из угле-
родистых сталей (в частности, классов прочности 5.8 и 6.8), равной (0,6...0,7)от, а из легированных сталей (0,5...0,6)gt. Затяжка увеличивает сопротивление усталости винтов, так как, повышая жесткость стыка соединяемых деталей, уменьшает переменную составляющую напряжений в винтах, а также изменяют соотношение между постоянными и переменными напряжениями в лучшую сторону. Расчетом определяют:
Рис. 14.18. Нагружение винта силой затяжки и переменной внешней силой, изменяющейся по пульсационному закону
203
__ коэффициент безопасности по амплитудам
_________ &ап ____ \ псп а_________Ъ г-? L^Ja>
*3 а "<Ра
G-lz^d
где <тап = —- — предельно допустимая амплитуда переменно
пых напряжений; сг_12 — предел усталости материала винта; kd — масштабный фактор; — эффективный коэффициент концентрации напряжений; [S]a = 2,5...4— допустимый коэффициент безопасности;
__ коэффициент безопасности по максимальным напря-
жениям
S ^т/^пгах ^т/С^О + ^о)
где пт — предел текучести материала винта; [S] = 1,25 — допустимый коэффициент безопасности.
14.10. Способы повышения несущей способности резьбовых соединений
Нарушение работоспособности резьбовых соединений, нагруженных постоянной и переменной силой, как правило, происходит из-за разрушения винтов, значительно реже — гаек. Поэтому при конструировании резьбовых соединений особое внимание должно быть обращено на повышение несущей способности винтов. Рассмотрим основные приемы, повышающие прочность резьбовых соединений.
Конструктивные и технологические приемы. При действии на соединение переменных нагрузок разрушается винт на резьбовом участке. Основной причиной пониженного сопротивления усталости винта является высокая концентрация напряжений во впадинах витков резьбы, особенно в зоне первых
Рис. 14.19. Конструктивные способы повышения равномерности распределения по виткам резьбы
204
рабочих витков. Поэтому снижение концентрации нагрузки по виткам резьбы позволяет повысить циклическую прочность резьбовых соединений. На рис. 14.19 приведены варианты выполнения гаек и винта в резьбовой зоне с улучшенным распределением нагрузки по виткам резьбы.
Из технологических мероприятий существенное повышение предела выносливости дает накатка резьбы, при которой волокна материала не перерезываются и кроме этого во впадинах резьбы после накатки создаются остаточные напряжения сжатия, положительно влияющие на характер напряженного состояния во впадинах при действии растягивающих сил. Для крупногабаритных резьбовых деталей повышение циклической прочности (до двух раз) достигается, если после нарезки резьбы и термообработки применяют обкатку впадин резьбы роликом.
Снижение коэффициента основной нагрузки %. Снизить коэффициент основной нагрузки % (14.13) можно путем увеличения податливости винтов в нерезьбовой части (рис. 14.20) за счет увеличения длины винта и уменьшения площади поперечного сечения. Снижения коэффициента '/ достигают также повышением жесткости стыка за счет снижения шероховатости сопрягаемых поверхностей, лучшей их пригонки, увеличения жесткости прокладок в случае необходимости их применения.
Использование винтов более высокого класса прочности. С переходом от класса прочности 4.6 к классу 10.9 предел текучести винта возрастает примерно в 3,5 раза, что в сочетании с контролируемой затяжкой дает значительный выигрыш в
Рис. 14.20. Винты с повышенной податливостью: а — увеличение длины винта; б — уменьшение площади поперечного сечения
205
размерах. Это особенно целесообразно, когда работоспособность соединений лимитирована статической прочностью винтов.
Применение контролируемой затяжки. При сборке резьбовых соединений в зависимости от их назначения и требований к металлоемкости применяют либо контролируемую, либо неконтролируемую затяжки. Контроль силы при затяжке осуществляют чаще всего по величине момента завинчивания, используя для этого специальный динамометрический ключ или ключ предельного момента. Более точно затяжку можно контролировать по величине удлинения стержня винта. Использование контролируемой затяжки позволяет более точно определить нагрузку на винты. При этом коэффициенты безопасности при расчетах на статическую прочность снижают в 1,5...2 раза по сравнению с неконтролируемой затяжкой, что приводит к уменьшению диаметров винтов на 20...30% .
Р Контрольные вопросы________________________________________
1. В каких случаях применяют соединения болтами, винтами, шпильками?
2. Чем объясняется широкое применение резьбовых соединений?
3. В чем различие между шагом и ходом резьбы?
4. Каковы профили наиболее распространенных резьб?
5. В каких случаях применяют резьбы с мелким шагом?
6. Из каких материалов изготавливают резьбовые детали?
7. Как определить предел текучести материала винта при заданном классе прочности?
8. Какие факторы учитывает приведенный коэффициент трения в резьбе?
9. В чем состоит условие самоторможения резьбы?
10. Чем объясняется необходимость стопорения резьбовых соединений?
11. Как определяют КПД резьбовой пары?
12. Почему нецелесообразно применение высоких гаек?
13. В каких случаях проводят расчет витков резьбы по напряжениям среза и смятия?
14. Каковы основные допущения при расчете соединений, нагруженных силами и моментами, действующими в плоскости стыка?
15. По какому критерию рассчитывают болты, поставленные с зазором, при действии сдвигающей силы?
16. От каких факторов зависит коэффициент основной нагрузки?
17. По каким критериям рассчитывают резьбовые соединения при переменных нагрузках?
Глава
15
Передача винт—гайка
Передача винт—гайка предназначена для преобразования вращательного движения в поступательное и наоборот. В ней используют пары винт—гайка скольжения (рис. 15.1, а) или качения (рис. 15.1, б).
15.1. Передача винт—гайка скольжения
Достоинствами передачи винт—гайка скольжения являются большой выигрыш в силе, высокая точность перемещений, малые размеры, возможность обеспечения самоторможения, что позволяет широко использовать ее в грузоподъемных механизмах, например в винтовых домкратах, в механизмах подач станков и приводах роботов, а также в измерительных и регулировочных механизмах. К недостаткам следует отнести низкий КПД в передачах скольжения, невозможность получения больших скоростей поступательного движения.
Передачи скольжения до сих пор находят широкое применение вследствие сравнительной простоты конструкции и отработанной технологии получения резьбы. С целью повышения КПД в передачах винт—гайка скольжения используют резьбы, имеющие пониженный приведенный коэффициент трения (см. гл. 14). К ним относятся трапецеидальные и упорные резьбы (рис. 15.2) с углами рабочего профиля соответственно 15 и 3°. Трапецеидальная резьба в основном диапазоне диаметров бывает мелкая, средняя и крупная. В передачах используют в основном среднюю резьбу. Мелкую резьбу применяют в механизмах, где требуется повышенная
Рис. 15.1. Передача винт—гайка: а — скольжения;
б — качения
207
Рис. 15.2. Виды сечений витка резьбы
точность перемещений, например в микрометрах, крупную — когда передача плохо защищена от пыли и грязи и подвержена износу. Упорные резьбы применяют, когда на передачу действует односторонняя нагрузка, например в нажимных устройствах прокатных станов.
В паре винт—гайка скольжения для повышения износостойкости и снижения склонности к заеданию материал одной из деталей должен быть антифрикционным. Поэтому обычно используют стальные винты в сочетании с бронзовыми, реже чугунными гайками. Для изготовления винтов применяют стали 45, 50 улучшенные, стали 65Г, 40Х с закалкой и последующей шлифовкой, стали 40ХФА, 18ХГТ с азотированием для уменьшения искажения формы и размеров винтов в результате закалки. Гайки выполняют из оловянистых бронз, например БрОЮФ1, в менее ответственных конструкциях из безоловянистого сплава ЦАМ 10-5, а при малых скоростях скольжения и нагрузках используют антифрикционный чугун. Передача винт—гайка может быть выполнена, например, с вращающимся и одновременно поступательно перемещаемым винтом при неподвижной гайке (рис. 15.3). Для очень медленных перемещений применяют винты с дифференциальной резьбой (рис. 15.4), т. е. с двумя резьбами одного направления, но с разными шагами и Р2. При повороте винта на
Рис. 15.3. Винтовой домкрат
Рис. 15.4. Передача винт—гайка дифференциального типа
208
один оборот подвижный узел перемещается на величину, равную разности шагов резьб, которая может быть очень малой. Скорость поступательного перемещения v (м/с) винта (гайки) зависит от частоты вращения п (мин-1)
v= nzP- ,
60000
где z — число заходов винта; Р — шаг резьбы, мм. При числе заходов z больше двух пара винт—гайка может быть также использована для преобразования поступательного движения во вращательное. Важной характеристикой передачи винт—гайка является ее КПД
ц =—tg_v—, (15Л)
tg (V + <Pi)
где \|/ — угол подъема резьбы; <р^ — приведенный угол трения в резьбе (см. также § 14.4). Видно, что г] передачи винт—гайка возрастает при увеличении угла подъема \|/, что обеспечивается при многозаходных резьбах. Обычно КПД г] = 0,2...0,4.
Основной причиной отказа передач винт—гайка является износ витков резьбы. Для обеспечения сопротивления изнашиванию ограничивают давление в резьбе
Р ~ nd2H1z С
где F — осевая сила; d2 — средний диаметр резьбы; Hv — рабочая высота профиля; г = Нт/Р — число витков резьбы на высоте гайки Нт; [р] — допускаемое давление.
Эта формула неудобна для практического использования. Поэтому, учитывая, что размеры резьбы выполнены по геометрическому подобию, вводят обозначения: \|/hi ~ Н^/Р (Vhi ~ ^>5 — для трапецеидальной резьбы, 0,75 — для упорной резьбы, 0,54 — для метрической резьбы); \|/н = Hv/d2, тогда получим:
р «----—ГТ » ---4 И-
Отсюда средний диаметр резьбы:
d2
I F WhiVhEpI
(15.2)
Значения \|/н выбирают обычно в пределах 1,2...2,5. Большие значения выбирают для резьб меньших диаметров.
209
Допускаемое контактное давление [р] зависит от материала 1'айки и винта, их механических свойств, и определяется приближенно в зависимости от термообработки винта (обычно стального) и материала гайки. Для пар: закаленная сталь— бронза [р] = (10... 15) МПа, незакаленная сталь — бронза [р] = = (7...8) МПа, незакаленная сталь — чугун [р] = 5 МПа. При редкой работе передачи, а также при гайках малой высоты, допускаемое давление в резьбе может быть повышено на 20%. После расчета диаметра d2 по формуле (15.2) подбирают ближайшую стандартную резьбу с большим диаметром d2. При проектировании механизмов, в которых обратимое движение должно быть исключено, например, в домкратах, проводят расчет, подтверждающий выполнение условия самоторможения (см. § 14.4). Винты проверяют на прочность по сжатию (растяжению) и кручению по эквивалентным напряжениям
где Т — момент, скручивающий винт; Аг — площадь сечения по внутреннему диаметру резьбы d3; W1 — момент сопротивления кручению сечения винта по внутреннему диаметру резьбы d3; [°] — допускаемое напряжение. Винты, испытывающие сжатие, дополнительно рассчитывают на устойчивость при продольном изгибе. Условие устойчивости винта по Эйлеру проверяют по величине критической силы
р _ Tt2EJ > р F^~S(^ >F'
где Е — модуль упругости материала винта; S — коэффициент запаса, принимаемый обычно 3...4; ц/— приведенная длина (ц — коэффициент приведения, учитывающий способ закрепления винта, I — наибольшая свободная длина винта); J — приведенный осевой момент инерции сечения винта, учитывающий дополнительную жесткость от витков резьбы
J= ^(о,4 + 0,6^1 64 v daJ
где d и d3 — соответственно наружный и внутренний диаметры резьбы винта. Формула Эйлера применима при ц • Z > >100’i, где i = jJ/Ai — радиус инерции сечения винта.
Винты любой длины можно также проверять по объединенному условию прочности и устойчивости по формуле
210
F , o== 7
(15.3)
где [<у]сж — допускаемое напряжение на сжатие; <р — коэффициент понижения допускаемого напряжения, который определяют в зависимости от гибкости стержня pZ/i (табл. 15.1).
Таблица 15.1
Коэффициент понижения допускаемого напряжения
pZ/i 0 30 50 60 70 80 90 100 120 140 160
Ф 1,00 0,91 0,86 0,82 0,76 0,70 0,62 0,51 0,37 0,29 0,24
1,00 0,91 0,83 0,79 0,72 0,65 0,55 0,43 0,30 0,23 0,19
Нижние значения ф относятся к сталям повышенного качества.
15.2. Передача винт—гайка качения
Передачи винт—гайка качения применяют в механизмах точных перемещений, в следящих системах и ответственных силовых передачах.
Достоинства их — сравнительно высокий КПД, высокая жесткость (с предварительным натягом полугаек), малый износ в сравнении с передачами скольжения.
Недостатком является сложность и дороговизна изготовления.
Рис. 15.5. Шариковая пара винт—гайка с пакетом регулировочных прокладок: 1 — полугайка; 2 — винт;
3 — прокладки
Рис. 15.6. Профили резьбы: а — полукруглый;
б — «стрельчатая арка»
211
Рис. 15.7. Устройство возврата шариков
Широко применяют шариковинтовые передачи (ШВП) (рис. 15.5). Эти передачи содержат винт и гайку со специальной резьбой (рис. 15.6, а, б), в которой располагаются шарики. Обычно шарики перемещаются по замкнутой траектории в пределах одного витка резьбы (рис. 15.7). Для возврата шариков в гайке предусматриваются
каналы и специальные вкладыши. Для повышения осевой жесткости передачи и точности позиционирования гайки предусматривают
возможность предварительного натяга путем взаимного смещения полугаек 1 с помощью прокладок 3 (см. рис. 15.5) либо путем взаимного поворота полугаек и последующей их фиксации.
При использовании профиля «стрельчатая арка» (см. рис. 15.6, б) предварительный натяг обеспечивают подбором диаметра шариков. В качестве материалов для винтов и гаек используют легированные стали (18ХГТ, ХВГ и др.), позволяющие после термохимической обработки получить твердость не менее 60HRC3.
Основными критериями работоспособности ШВП являются: сопротивление контактной усталости и контактная статическая прочность рабочих поверхностей; износостойкость резьбы и шариков; осевая жесткость. Для проверки ШВП по критерию контактной выносливости проводят расчет с использованием зависимости, связывающей ресурс L в миллионах оборотов винта с осевой нагрузкой F по аналогии с под
шипниками качения
где Сас = СаКРКаКт — расчетная динамическая грузоподъемность; Са — динамическая грузоподъемность (табл. 15.2); КР — коэффициент вероятности безотказной работы (табл. 15.3); Ка = 0,8...1 — коэффициент точности передачи (возрастает с повышением точности); Кт — коэффициент качества выплавки сталей (обычной Кт = 1, для сталей электрошлаковой Кт= 1,4 и вакуумной выплавки Кт = 1,7). При использовании сталей с твердостью ниже 60 HRC3 расчетная динамическая грузоподъемность значительно снижается, составляя при твердости 50 HRC3 половину, а при 35 HRC3 лишь 20% от значений, приведенных в табл. 15.2.
212
Таблица 15.2
Параметры шариковых передач винт—гайка
Средний диаметр DPw, мм Шаг резьбы Р9 мм Диа-метр шарика Dw, мм Радиальный зазор, мм Грузоподъемность статическая С«о>Н Грузоподъемность динамическая Со, Н
25 5 3 0,067—0,093 28 100 16 580
32 5 3 0,064—0,096 37 500 17 710
40 5 3 0,064—0,096 49 400 19 170
40 6 3,5 0,059—0,101 56 400 23 700
40 10 6 0,119—0,161 85 900 54 700
50 5 3 0,059—0,101 62 800 20 640
50 10 6 0,117—0,163 112 500 57 750
50 12 7 0,137—0,183 119 900 65 400
63 10 6 0,115—0,165 149 700 62 030
80 10 6 0,113—0,167 197 700 66 880
80 20 10 0,193—0,247 297 600 143 400
100 10 6 0,110—0,170 251 100 71840
100 20 10 0,180—0,250 386 400 151 800
Таблица 15.3
Коэффициент вероятности безотказной работы ШВП
Вероятность безотказной работы 90 95 99 99,5 99,9
кР 1,0 0,85 0,57 0,46 0,25
Контактная статическая прочность обеспечивается, если наибольшая осевая нагрузка Fmax не превосходит статическую грузоподъемность Са0, т. е. Fmax < Са0.
213
Рис. 15.8. Общий вид планетарной ролико-винтовой передачи ПРВП
Планетарная роликовинтовая передача (ПРВП) (рис. 15.8) состоит из винта 1, резьбовых роликов 2, совершающих планетарные движения, и гайки 3. Ролики зацепляются резьбой с винтом и гайкой. На каждом конце ролика выполнены зубчатые венцы 4, каждый из которых входит в зацепление с внутренними зубчатыми венцами 5 на обоих торцах гайки. Гайка и винт име
ют многозаходную резьбу, ролики — однозаходную. При этом рабочие (боковые) участки профиля резьбы ролика в осевом сечении очерчены дугами окружности для обеспечения непрерывного контакта рабочих поверхностей резьб ролика, винта и гайки при изменениях (колебаниях) межосевого расстояния. Углы подъема витков резьбы на гайке и на роликах одинаковы по величине и направлению. Для этого резьба гайки имеет число заходов, рав
ное отношению средних диаметров d2 резьбы гайки и роликов. В совокупности с зубчатым зацеплением это исключает осевое
перемещение роликов относительно гайки при их вращении вокруг собственной оси.
Ролики установлены в двух сепараторах 6, расположенных на торцах гайки. Угол подъема резьбы винта по среднему диаметру должен быть отличным от угла подъема резьбы роликов. При этом направление витков резьбы винта может быть как одинаковым с резьбой роликов в зоне сопряжения резьб, так и противоположным. В обоих случаях витки резьбы роликов беспрепятственно входят во впадины между витками резьбы винта, обеспечивая сопряжение резьб.
К преимуществам ПРВП следует отнести высокую плавность и быстроходность из-за отсутствия канала возврата, как у ШВП, а также более высокую нагрузочную способность и жесткость по сравнению с ШВП. Основным недостатком пере
дачи, затрудняющим ее широкое использование, являются технологические трудности при точном изготовлении резьбовых элементов передачи. В качестве основных расчетных кри
214
териев работоспособности ПРВП принимают грузоподъемность и потерю точности позиционирования гайки из-за износа резьбы.
Контрольные вопросы
1. Каково назначение передачи винт—гайка?
2. Каковы пути повышения КПД передачи винт—гайка?
3. Каков основной критерий расчета передачи винт—гайка скольже-
ния?
4. В каком случае проводят расчет винта на устойчивость?
5. Каковы основные критерии работоспособности шарико-винтовой передачи?
6. Каковы преимущества планетарной ролико-винтовой передачи?
Глава
16
Валы и оси
16.1. Общие сведения
Валы предназначены для установки на них деталей и передачи вращающего момента. Оси обеспечивают установку на них деталей и не передают вращающий момент. Валы обычно нагружены не только вращающим моментом, но и изгибающими моментами, осевыми и поперечными силами. Оси нагружены изгибающими моментами, поперечными и осевыми силами и могут быть неподвижными.
Валы по форме геометрической оси разделяют на прямые (рис. 16.1, а—в) иколенчатые (рис. 16.1, г), преобразующие возвратно-поступательное движение (поршней) во вращательное (коленчатого вала) или наоборот. Также используют гибкие валы с изменяющейся осью вращения.
Рис. 16.1. Основные типы валов и осей: а—в — прямые; г — коленчатый
216
16.2. Конструкции и материалы валов и осей
Форма и размеры валов и осей определяются распределением сил и моментов, технологией изготовления и условиями сборки. Величины изгибающих моментов по длине валов и осей, как правило, не постоянны, вращающий момент передается обычно не по всей длине вала. Поэтому по условию прочности целесообразно конструировать валы и оси близкими по форме к балкам равного сопротивления по изгибу (форма балки равного сопротивления показана штриховой линией на рис. 16.1, а). Применение полых валов и осей существенно снижает их массу при равной прочности со сплошным валом. Однако полые валы сложны в изготовлении.
Опорные участки валов и осей называют цапфами. Цапфы, расположенные на концах валов, называют шипами. Цапфы валов и осей, работающих в опорах скольжени я, в большинстве случаев имеют цилиндрическую форму с заплечиком для фиксации в осевом направлении. Цапфы валов и осей для подшипников качения выполняют цилиндрическими с заплечиком для фиксации в осевом направлении (рис. 16.2, а). Для закрепления внутреннего кольца подшипника на валу (оси) используют гайку (рис. 16.2, б) или стопорное пружинное кольцо, устанавливаемое в кольцевую канавку (рис. 16.2, в).
Большое влияние на сопротивление усталости валов и осей оказывает форма переходных участков между двумя соседними ступенями разных диаметров. Малую концентрацию напряжений вызывают галтели постоянного радиуса (рис. 16.3, а, б); желательно, чтобы R был больше 0, Id (d — диаметр вала). На тяжело нагруженных участках валов применяют галтели переменного радиуса кривизны р (рис. 16.3, в). Оптимальная форма галтели повышает сопротивление уста-
Рис. 16.2. Цапфы валов и осей под подшипники качения: а — цилиндрическая с заплечиком; б — с креплением гайкой; .в — с креплением стопорным кольцом
217
Рис. 16.3. Переходные участки валов и осей: а, б, в — галтели; г — канавка
лости валов и осей на 10%. Технологически простейшей формой перехода является канавка (рис. 16.3, г) шириной 3—5 мм и глубиной 0,25 или 0,5 мм (в зависимости от диаметра вала) для выхода шлифовального круга. Повышение прочности переходных участков обеспечивается также пластическим деформированием поверхности (обкаткой роликами, обдувкой дробью) или посредством термической или химико-термической обработки.
Валы и оси изготавливают из углеродистых или легированных сталей. Для осей и валов, диаметры которых определяются в основном жесткостью, применяют углеродистые конструкционные стали 30, 40, Ст5 без термообработки. В ответственных механизмах применяют среднеуглеродистые и легированные стали 45, 40Х с термообработкой «улучшение» (закалка с высоким отпуском). Для изготовления сильно нагруженных валов ответственных машин применяют легированные стали: 40ХН, 40ХН2МА, ЗОХГТ, ЗОХГСА и др. Валы из этих сталей обычно подвергают улучшению или поверхностной закалке с низким отпуском. Для изготовления коленчатых, полых и тяжелых валов с большими фланцами наряду со сталью применяют высокопрочные и модифицированные чугуны. Стальные валы и оси диаметром до 150 мм обычно изготавливают из проката; валы большего диаметра — из поковок, полые валы — по возможности из стальных труб.
16.3. Критерии работоспособности, этапы конструирования валов и осей
Основными критериями работоспособности валов и осей являются прочность, жесткость и виброустойчивость. Конструирование и расчеты валов и осей обычно неразрывно связаны. Разработку конструкций валов и осей и их расчет выполняют в три этапа:
218
1) проектировочный расчет;
2) конструирование вала (оси), составление расчетной схемы;
3) проверочный расчет вала (оси) на статическую прочность и на сопротивление усталости; уточнение конструкции вала (оси); проведение расчетов на жесткость и виброустойчивость; окончательная оценка пригодности конструкции.
Диаметр концевого участка вала определяют из расчета на кручение: ,----
, Т • 103 d “ V ода мм'
где Т — вращающий момент, Н • м; [т] — допускаемые напряжения при кручении, обычно принимают [т] = 15...30 МПа. После предварительного определения диаметра вала разрабатывают его эскиз, обеспечивая условия технологичности изготовления и сборки [3,6].
Валы испытывают напряжения изгиба и кручения, оси — изгиба. Постоянные по величине и направлению поперечные силы вызывают во вращающихся осях и валах переменные на-
Рис. 16.4. Расчетные схемы валов и осей
219
пряжения. Вращающиеся вместе с осями и валами силы, возникающие, например, от неуравновешенности деталей, вызывают постоянные напряжения.
В приближенных расчетах валы и оси рассматривают как балки на шарнирных опорах. Для радиальных подшипников качения условную шарнирную опору располагают на середине ширины подшипника (рис. 16.4, а). Для радиально-упорных подшипников качения опору размещают на оси вала в точке пересечения с ней нормали, проведенной через середину зоны контакта тел качения с дорожками качения подшипника (рис. 16.4, б, в). При двух подшипниках в одной опоре расположение шарнира определяют так, как показано на рис. 16.4, г.
Для валов и осей на подшипниках скольжения длиной I опору располагают на расстоянии (0,25...0,3)/ от внутреннего торца подшипника (рис. 16.4, д'). Нагрузки от насаженных на валы (оси) деталей заменяют сосредоточенными силами, приложенными в середине ширины ступицы (рис. 16.4, е). В расчетных схемах используют три типа опор: шарнирно-неподвижную, шарнирно-подвижную и заделку (для неподвижных осей).
16.4. Расчет валов и осей на статическую прочность
Валы и оси рассчитывают на статическую прочность по наибольшей кратковременной нагрузке. По составленной расчетной схеме строят эпюры изгибающих и крутящих моментов. Напряжения от осевых и поперечных сил малы и при расчете валов их обычно не учитывают. Эквивалентные напряжения определяют по формуле
°Е= М + 3x2. (16.1)
М т
Здесь сти = —2 и тк = —-соответственно наибольшие напря-
" и ” Р
жения в расчетном сечении вала от изгиба моментом Ми и кручения моментом Т; W„ nWP — соответственно осевой и полярный моменты сопротивления сечения вала (табл. 16.1).
Для сплошных валов круглого сечения
= -^ JM* + 0,75Т2 , (16.2)
220
Таблица 16.1
Моменты сопротивления сечений валов
Форма сечения Эскиз Момент сопротивления
Круглое d_ 7Т /73
Кольцевое do X 1 и и £ о
Со шпоночной канавкой э ь * w = nd3~ bh(2d ~ fe)z и 32 16d w _ nd® _ bh(2d - h)2 p 16 16d
Со шлицами d Wn = -L- [nd* - bz(D - d)(D + d)2]; О Zu U WP=2WU
где d — диаметр вала в расчетном сечении. Коэффициент безопасности по текучести ST = от/оЕ обычно принимают в пределах 1,3... 1,8, значения пределов текучести <тт приведены в таблице 16.2. Расчетное сечение определяют по максимальным эквивалентным напряжениям. Если нагрузки действуют на вал (ось) в разных плоскостях, то эпюры моментов строят в этих плоскостях, а затем производят геометрическое суммирование изгибающих моментов в расчетном сечении.
16.5. Расчет на сопротивление усталости
Расчет на сопротивление усталости не проводят, если
KCS '
(16.3)
где о_х — предел выносливости материала при изгибе с симметричным циклом изменения напряжений (табл. 16.2);
221
Kd — коэффициент влияния абсолютных размеров (масштабный фактор); Ка — эффективный коэффициент концентрации напряжений в расчетном сечении [1, 7, 9]; S = 2,5 — коэффициент безопасности по усталости.
Таблица 16.2
Механические характеристики основных материалов*
Сталь Диаметр заготовки, мм, не более Твердость, НВ, не менее СТв стт П-1 Т-1 'Ра 'Рт
Ст5 Не ограничен 190 520 280 220 130 0 0
45 Не ограничен 200 560 280 250 150 0 0
120 240 800 550 350 210 0,1 0
80 270 900 650 380 230 0,1 0,05
40Х Не ограничен 200 730 500 320 200 0,1 0,05
200 240 800 650 360 210 0,1 0,05
120 270 900 750 410 240 0,1 0,05
20 60 145 400 240 170 100 0 0
20Х 120 197 650 400 300 60 0,05 0
12ХНЗА 120 260 950 700 420 210 0,1 0,05
12Х2Н4А 120 300 1100 850 500 250 0,15 0,1
18ХГТ 60 330 1150 950 520 280 0,15 0,1
Все напряжения указаны в МПа.
Если условие (16.3) не выполняется, необходим расчет на сопротивление усталости. При расчете следует установить характер цикла изменения напряжений, т. е. определить постоянные от и тт и переменные оа и та составляющие напряжений. Постоянные по величине и направлению поперечные си
222
лы вызывают во вращающихся валах и осях переменные напряжения изгиба, изменяющиеся по симметричному циклу с амплитудой оа = MK/WK и средним напряжением от = О. При действии осевых сил в сечении вала возникают постоянные напряжения сжатия или растяжения и цикл изменения нормальных напряжений становится несимметричным (от * 0). В расчетах валов нереверсивных передач условно принимают, что вращающий момент и напряжения от кручения изменяются по отнулевому циклу; при этом амплитуду ха и среднее напряжение хт определяют из формул
Т —— » t
91V ’ Хт Ха'
Для каждого расчетного сечения определяют коэффициент безопасности по сопротивлению усталости
Js* + s?
(16.4)
где Sc и ST — коэффициенты безопасности по нормальным и касательным напряжениям, определяемые по зависимостям:
Здесь о_х и т-х — пределы выносливости материала (табл. 16.2), полученные при испытании гладких стандартных образцов малых диаметров соответственно при изгибе и кручении с симметричным циклом изменения напряжений; KaD и KxD — коэффициенты, учитывающие влияние всех факторов на сопротивление усталости соответственно при изгибе и кручении:
KaD = + KF - 1) /Kv; KxD = & + KF - 1) /Kv,
где Kc и Kx — эффективные коэффициенты концентрации напряжений (отношение предела усталости, полученного в результате испытаний гладких образцов, к пределу усталости для образцов с концентратором напряжений), соответственно при изгибе и при кручении [1, 3, 7, 9]; Kd — коэффициент
223
влияния абсолютных размеров — масштабный фактор (отношение предела усталости деталей реальных размеров к пределу усталости, полученному при испытаниях стандартных образцов малых диаметров); KF — коэффициент влияния шероховатости поверхности [3, 9]; Kv — коэффициент влияния поверхностного упрочнения (закалка ТВЧ, цементация, азотирование и др.); ipn и — коэффициенты чувствительности материала к асимметрии цикла напряжений соответственно при изгибе и кручении (табл. 16.2).
Полученное по формуле (16.4) значение коэффициента безопасности сравнивают с допускаемым значением, которое обычно принимают 1,5...2,5; большее значение коэффициента принимают для ответственных конструкций.
16.6. Расчет валов и осей на жесткость
Упругие деформации валов и осей влияют на работу связанных с ними деталей. Например, при несимметричном расположении зубчатых колес относительно опор повышенные прогибы валов вызывают неравномерное распределение нагрузки в зацеплении (см. рис. 5.11, е). Большие углы поворота сечений в опорах вызывают разрушение подшипников. Кроме того, недостаточная жесткость валов снижает точность функционирования механизмов, повышает изнашивание в опорах скольжения и т. п. Поэтому иногда размеры вала определяют не из условия обеспечения прочности, а из расчета на жесткость.
При конструировании валов (осей) следует проверять прогибы (перемещения) и углы поворота характерных сечений, например, в опорах вала, местах установки зубчатых колес. Их приближенно вычисляют по зависимостям, известным из курса сопромата. В табл. 16.3 приведены формулы для определения углов поворота сечений и прогибов двухопорного вала постоянного сечения от сил в зубчатом зацеплении (Ft и Fa) и от консольной силы FK. Угол поворота сечения на опоре А 6Лги прогиб в точке В 5Вг от радиальной силы Fr определяют по зависимостям:
QAr = eAtFr/Ft-,dBr = 5BtFr/Ft.
Аналогично определяют угол поворота сечения вала на опоре С.
224
Таблица 16.3
Формулы для определения углов поворота сечений и прогибов оси двухопорного вала
I
Вели-чина Действующая сила
Ft F л a FK
®A F,ab ,, 6EJZ(Z+ * -4#n^-&al + 3a^ _FKlc 6EJ
_Ftab ЗЕЛ(b O) --^-(2l2-6al + 6a2) ^Tl(3a2~lZ) u£jJ I
0С 6EJE ’ -X2E^12-^ FKlc 3EJ
_F,a2b2 3EJI ^±(2l2-6al + 4a2) FKac , , ebz'“ 11
6д F,la 3EJ _Fald 6EJ FKlc 6EJ
Е^т(3а + 21> ueJ - (3a+° J _ FJx 6EJ
6c _F,dl 6EJ Fadl 12EJ FKlc 3EJ
bB F,a2 -зЪ(о + /) F„ad 12Е^а~21^ FKalc 6EJ
Примечания. 1. Угол поворота 0 сечения и прогиб от Fr определяют, как от силы Ft, заменой Ft на Fr. 2. EJ— жесткость сечения вала при изгибе.
8 Детали машин
225
Полные углы поворота сечений и прогибы вала получают суммированием соответствующих перемещений от сил в зацеплении и от консольной силы. Допустимые значения углов поворота (в радианах) сечения вала в опорах ориентировочно принимают при установке в опорах подшипников качения:
шариковыходнорядных.....................0,0050
шариковых сферических...................0,0500
роликовых с цилиндрическими роликами....0,0025
конических роликовых....................0,0016
Для подшипников скольжения допустимый угол поворота сечения принимают равным 0,001. Допустимые прогибы валов в месте установки цилиндрических зубчатых колес составляют 0,01m (m — модуль зацепления) и 0,005m — для конических и червячных передач. В том случае, если расчетные значения углов поворота сечений и прогибов превысят допустимые значения, необходимо внести изменения в конструкцию вала. Например, увеличить диаметр вала или изменить расположение опор и повторным расчетом проверить условия жесткости.
Контрольные вопросы
1. В чем различие между валами и осями?
2. Какая форма вала наиболее целесообразна по условию прочности?
3. Какие материалы используют для изготовления валов и осей?
4. Как определяют диаметр вала при проектировочном расчете?
5. По каким условиям проводят проверочные расчеты валов?
6. Какие силы и моменты вызывают во вращающихся валах переменные напряжения?
7. Как определяют коэффициент безопасности по сопротивлению уста-
лости?
8. С чем связана необходимость расчета валов и осей на жесткость?
Глава
Подшипники качения
17.1. Общие сведения
Подшипник — это опора, которая воспринимает нагрузки и допускает вращение вала (оси). Различают подшипники скольжения и качения. Подшипники качения (рис. 17.1, 17.2) обычно состоят из наружного и внутреннего колец, тел качения (шариков или роликов) и сепаратора, удерживающего тела качения на определенном расстоянии друг от друга. Иногда (для уменьшения радиального габарита) под
Рис. 17.1. Шарикоподшипники: а — радиальный;
б — радиально-упорный; в — радиальный двухрядный сферический; г — радиально-упорный однорядный четырехточечный;
д — упорно-радиальный; е — упорный
Рис. 17.2. Роликоподшипники: а—б — радиальные с короткими цилиндрическими роликами; в — радиальный сферический двухрядный; г — конический; д — игольчатый
227
шипник выполняют без одного или обоих колец и тогда тела качения контактируют непосредственно с валом или корпусом. Подшипники качения являются основным видом опор в машинах. Известны миниатюрные подшипники качения с внутренним диаметром d = 0,6 мм, наружным диаметром D = 2 мм, шириной В = 0,8 мм и массой 0,015 г, а также особо крупные, у которых соответственно d = 12 м, D — 14 м, В = 0,45 м и масса 130 т. Подшипники качения изготавливают на специализированных заводах, общий объем их выпуска составляет около 1 млрд штук в год.
Достоинства подшипников качения по сравнению с подшипниками скольжения: малые потери на трение, меньшие пусковые моменты; меньшие осевые размеры; простота обслуживания и малый расход смазочного материала; полная взаимозаменяемость; малая стоимость при массовом производстве.
Недостатки подшипников качения: ограниченный ресурс в связи с высокими контактными напряжениями; большие радиальные размеры; ограниченная быстроходность; повышенный шум, особенно при высоких частотах вращения; низкая работоспособность при ударных нагрузках.
17.2. Классификация и обозначения подшипников
По форме тел качения различают подшипники: шариковые (рис. 17.1);
роликовые (рис. 17.2).
По направлению воспринимаемых сил подшипники делят на:
радиальные (рис. 17.1, а, в; 17.2, а, б, в, д), которые воспринимают только радиальные или преимущественно радиальные силы;
радиально-упорные (рис. 17.1, б, г; 17.2, г), воспринимающие радиальные и осевые силы;
упорно-радиальные (рис. 17.1, д), предназначенные для восприятия осевых или преимущественно осевых сил;
упорные (рис. 17.1, е), предназначенные для восприятия только осевых сил.
По числу рядов тел качения подшипники делят на однорядные, двухрядные и многорядные.
228
а) б) в) г) д) е) ,В
г~Яях1ММ1Х1
Рис. 17.3. Размерные серии подшипников качения: а — особо легкая; б — легкая; в — легкая широкая; г — средняя; д — средняя широкая;
е — тяжелая
По признаку самоустанавливаемости различают подшипники: самоустанавливающиеся (сферические), которые допускают работу с взаимным перекосом колец до 4° (см. рис. 17.1, в; 17.2, в) и несамоустанавливающиеся с допустимым взаимным перекосом колец от 1 до 8'.
По соотношению габаритных размеров подшипники разделяют на размерные серии. При одном и том же внутреннем диаметре d подшипники одного типа имеют различные наружные диаметры D и ширину В (рис. 17.3), что соответствует различным сериям по диаметру (7 серий: 2 сверхлегкие, 2 особо легкие, легкая, средняя и тяжелая) и ширине (узкая, нормальная, широкая и особо широкая). С увеличением размеров D и В растет грузоподъемность подшипников.
По точности (в порядке ее повышения) в настоящее время стандартом установлено 9 классов точности подшипников: 8, 7, О, 6Х, 6, 5, 4, 2 и Т. Наибольшее распространение имеют подшипники нормального класса точности 0. С повышением класса точности существенно возрастает стоимость подшипника. Так, подшипник класса точности 2 примерно в десять раз дороже подшипника класса точности 0.
Кроме подшипников общего применения выпускают специальные подшипники. К ним относят подшипники теплостойкие, высокоскоростные, малошумные, коррозионностойкие, немагнитные, самосмазывающиеся и др. Различают подшипники с нормальным, пониженным и низким уровнем вибрации.
229
Обозначение подшипника наносят на торцовой поверхности колец, как правило, наружных. Основное обозначение содержит до семи цифр, его читают справа налево. Первые две цифры определяют внутренний диаметр подшипника, в диапазоне диаметров d = 20...495 для определения диаметра следует число во второй и первой позициях умножить на 5. Серию по наружному диаметру и ширине характеризуют третья и седьмая цифры обозначения. Четвертая цифра определяет тип, пятая и шестая цифры — конструктивные особенности подшипников.
Слева от основного обозначения указывают класс точности подшипника, если он отличен от нормального. Подшипники, изготовленные в соответствии со специальными техническими требованиями, имеют справа от основного обозначения дополнительные знаки в виде букв и цифр. Буква А, например, обозначает повышенную грузоподъемность подшипника. Обычно обозначение подшипников содержит меньшее число символов, так как нули, расположенные левее значащих цифр, не дают.
17.3. Характеристика основных типов подшипников
Радиальные подшипники. Шариковый радиальный однорядный подшипник (см. рис. 17.1, а) воспринимает в основном радиальную силу и небольшую осевую любого направления, не требует регулировки, фиксирует вал в осевом направлении в обе стороны, является наиболее массовым и дешевым. Допустимый взаимный перекос осей колец до 8'. Сепаратор обычно штампованный, состоящий из двух половин, соединенных заклепками. При повышенных частотах вращения используют более дорогие массивные сепараторы.
Роликовый радиальный подшипник с короткими цилиндрическими роликами (см. рис. 17.2, а) предназначен для восприятия только радиальных сил, имеет более высокую грузоподъемность, чем шариковый радиальный. Такой подшипник очень чувствителен к перекосам колец. Перекосы вызывают на краях роликов концентрацию нагрузки, для уменьшения которой используют подшипники с модифицированным контактом: ролики или дорожки качения делают с небольшой выпуклостью, что приводит к повышению допускаемого угла пе
230
рекоса с 2' до 6', а ресурса в 1,5...2 раза. Подшипник с бортами на обоих кольцах (см. рис. 17.2, б) воспринимает небольшую одностороннюю осевую силу, которая ограничивается силами трения на торцах роликов. Такой подшипник фиксирует вал в осевом направлении.
Игольчатый роликоподшипник (см. рис. 17.2, д) применяют при ограниченных радиальных размерах. Осевые силы эти подшипники не воспринимают.
Шариковый радиальный двухрядный сферический подшипник (см. рис. 17.1, в) является самоустанавливающимся, в нем допускается перекос осей колец до 4°, благодаря сферической поверхности дорожки качения наружного кольца. Подшипник воспринимает, наряду с радиальной, небольшую осевую силу любого направления. Сепараторы обычно штампованные.
Роликовый радиальный сферический двухрядный подшипник (см. рис. 17.2, в) отличается от сферического шарикоподшипника большей грузоподъемностью, но меньшей предельной частотой вращения. Сферические подшипники не требуют регулировки и фиксируют вал в осевом направлении.
Радиально-упорные подшипники. Шарикоподшипник радиально-упорный (см. рис. 17.1, б) воспринимает комбинированную нагрузку: радиальную и одностороннюю осевую. Грузоподъемность этих подшипников выше, чем у радиальных шариковых, из-за большего числа тел качения, которые размещаются в подшипнике благодаря скосу на наружном или внутреннем кольце. Подшипник требует регулировки, фиксирует вал в осевом направлении только в одну сторону. Способность подшипника воспринимать нагрузку зависит от угла контакта а (угол между нормалью к площадке контакта наружного кольца с телом качения и плоскостью вращения под-
Рис. 17.4. Сдвоенные шариковые радиально-упорные подшипники
231
шипника). С ростом а осевая грузоподъемность подшипника растет, а радиальная снижается. Подшипники выполняются с углами а = 12, 26 и 36°. Для восприятия осевых сил обоих направлений радиально-упорные подшипники устанавливают по два в опоре по схемам (рис. 17.4, а, б).
Подшипник с разъемным внутренним кольцом (см. рис. 17.1, г) в зависимости от формы дорожек качения имеет трехточечный или четырехточечный контакт шарика с кольцами и воспринимает радиальную и двухстороннюю осевую силы.
Роликовый радиально-упорный конический подшипник (см. рис. 17.2, г) воспринимает радиальную и одностороннюю осевую силы. Обычно угол конуса наружного кольца а =10...17°. Подшипники с большими углами конуса а = = 25...30° применяют в опоре для восприятия больших осевых сил. Грузоподъемность радиально-упорных роликоподшипников выше, чем у радиально-упорных шариковых подшипников, но предельная частота и точность вращения ниже.
Упорно-радиальные подшипники. Шариковый (см. рис. 17.1, д) и роликовый упорно-радиальные подшипники предназначены для восприятия значительной осевой и небольшой радиальной силы. Этот тип подшипников постепенно приходит на смену упорным подшипникам, прежде всего в быстроходных машинах.
Упорные подшипники. Упорный шариковый одинарный подшипник (см. рис. 17.1, е) воспринимает осевые силы только в одном направлении. Частоты вращения ограничены центробежными силами и гироскопическими моментами, действующими на шарики. Допустимый перекос колец до 2'.
17.4. Причины выхода из строя, виды расчета подшипников качения, материалы деталей подшипников
1. Основной причиной выхода из строя подшипников качения, работающих при хорошем смазывании без загрязнений, является усталостное выкрашивание рабочих поверхностей колец и тел качения. Это связано с циклическим изменением контактных напряжений при вращении колец и тел качения подшипника.
232
2. Износ является причиной отказа подшипников, работающих в абразивной среде (транспортные, дорожные, строительные, горные и многие другие машины).
3. Разрушение сепаратора характерно для быстроходных подшипников, особенно работающих с осевыми нагрузками или с перекосом колец.
4. Вмятины на рабочих поверхностях появляются при ударах и больших перегрузках.
5. Сколы бортов, раскалывание колец и тел качения возникают при недопустимых ударных нагрузках и перекосах колец.
Потеря точности вращения и значительные вибрации, являющиеся следствием износа подшипника и других его повреждений, недопустимы для опор в точных машинах (например, в станках).
В зависимости от условий работы проводят следующие виды расчетов подшипников качения:
по динамической грузоподъемности (по сопротивлению контактной усталости) при частоте вращения кольца подшипника > 1 мин-1;
по статической грузоподъемности (по максимальным контактным напряжениям) при частоте вращения менее 1 мин-1, а также при качательном движении.
Кольца и тела качения работают в условиях высоких контактных напряжений и поэтому должны иметь высокую прочность и твердость. Их изготовляют из специальных подшипниковых сталей марок 1ПХ15, ШХ15СГ и др. Твердость колец и роликов (60...66) HRC3, а шариков (63...67) HRC3. Сепараторы массовых подшипников изготовляют из углеродистой стали. Для быстроходных подшипников применяют массивные (прочные) сепараторы из бронзы, латуни, металлокерамики, пластмассы.
17.5. Расчет подшипников по статической грузоподъемности
Базовая статическая грузоподъемность подшипников — это такая статическая сила, превышение которой вызывает недопустимые остаточные деформации в деталях подшипника, равные 0,0001 диаметра тела качения. Статическую грузо
233
подъемность для радиальных и радиально-упорных подшипников обозначают СОг, для упорных и упорно-радиальных — СОа и указывают в каталогах.
При действии на радиальные и радиально-упорные подшипники одновременно радиальной Fr и осевой Fa сил расчет ведут по эквивалентной радиальной статической нагрузке РОг, которая вызывает такую же остаточную деформацию, как и действительная нагрузка
P0r = X0Fr + Y0Fa, (17.1)
где Хо, Уо — коэффициенты статической радиальной и осевой нагрузки.
Если POr < Fr, то принимают POr = Fr.
Для упорно-радиальных и упорных подшипников эквивалентная осевая статическая нагрузка
РОа = X0Fr + Y0Fa. (17.2)
Значения коэффициентов Хо и Уо приведены в табл. 17.1.
Таблица 17.1
Значения коэффициентов Хо и Уо
Подшипники Однорядные Двухрядные
*0 Уо *0 Уо
Шариковые радиальные 0,6 0,5 0,6 0,5
Шариковые радиально-упорные 0,5 0,55—0,35tg a 1,0 1,1—0,70tg a
Конические радиальноупорные. Шариковые и роликовые самоуста-навливающиеся 0,5 0,33/₽ 1,0 0,66/е
У порно-радиальные 2,3tga 1 — —
Упорные 0 1 — —
При действии статической нагрузки должны выполняться условия: РОг < СОг или РОа < СОа.
234
17.6. Расчет подшипников качения по динамической грузоподъемности
Ресурс подшипника качения — число оборотов одного из колец относительно другого до появления признаков усталости материала колец или тел качения. Ресурс подшипников выражают в миллионах оборотов Ln или в часах Lh:
где п — частота вращения внутреннего или наружного кольца подшипника, мин-1.
Уравнение кривой усталости имеет вид:
cs™N = const,
где — максимальное значение контактного напряжения; N — число циклов нагружения; т = 9 для шариков и т = 20/3 для роликов.
Уравнение кривой усталости можно также представить в виде:
-£п = aia23 (jj) » (17.4)
где Ln — расчетный ресурс в миллионах оборотов, соответствующий надежности подшипника (100 - п)%, индекс п означает вероятность отказа подшипника п%, для подшипников общего применения п = 10; р = 3 для шарикоподшипников и р = 10/3 для роликоподшипников; аг — коэффициент, учитывающий надежность подшипника при п = 10, а, = 1, для ответственных узлов, требующих более высокой надеж-
ности, аг = (например, для надежности 99%
аг = 0,21); а23 — коэффициент, учитывающий условия смазывания подшипника и качество материала деталей подшипника; С — базовая динамическая грузоподъемность подшипника — такая условная постоянная сила, которую подшипник может теоретически воспринимать в течение одного миллиона оборотов при а1 — а23 = 1. Однако при L — 1 контактные напряжения превышают допустимые и значение силы Р соответствует теоретическому участку кривой усталости
235
Рис. 17.5. Кривая уста-
лости подшипника
(рис. 17.5). Зависимость (17.4) справедлива при условии Р < 0,5С.
Значения динамической грузоподъемности для всех типоразмеров стандартных подшипников приведены в каталогах.
Для радиальных и радиальноупорных подшипников под С понимают базовую динамическую радиальную грузоподъемность Сг.
Для упорных и упорно-радиаль
ных подшипников расчет ведут по базовой динамической осе-
вой грузоподъемности Са. Комплект сдвоенных подшипников (см. рис. 17.4) рассчитывают как один двухрядный. В случае
выхода из строя одного подшипника заменяют весь комплект.
Для сдвоенных радиально-упорных шариковых подшипников суммарная базовая динамическая грузоподъемность Сг1 = = 1,62СГ, для конических роликоподшипников Сг1 = 1,71СГ (здесь Сг — базовая динамическая грузоподъемность одного подшипника). Р — эквивалентная динамическая нагрузка, которая учитывает условия нагружения и конструкцию подшипника.
Формула (17.4) справедлива, если частота вращения кольца подшипника п не превышает предельно допустимую частоту для данного подшипника, указываемую в каталоге. При п = (1...10) мин-1 условно принимают п = 10 мин4.
Эквивалентная динамическая нагрузка Р — это такая постоянная сила (радиальная для радиальных и радиально-упорных подшипников; осевая для упорных и упорно-радиальных), при которой обеспечиваются такой же ресурс и надежность, как и при действительных условиях нагружения. Для радиальных и радиально-упорных подшипников эквивалентную динамическую нагрузку обозначают Рг и определяют по формуле:
Pr = (XVFr+YFa)KBK.t.
(17.5)
Здесь Frw.Fa — соответственно радиальная и осевая силы, действующие на подшипник; X и У — соответственно коэффициенты радиальной и осевой динамической нагрузки; V — коэффициент вращения. При вращении внутреннего кольца V = 1, при вращении наружного кольца V = 1,2. Для сферических
236
подшипников в любом случае V = 1. Коэффициент КБ = 1...3 учитывает динамичность нагрузки и зависит от величины кратковременной перегрузки. Температурный коэффициент Кт = 1 при температуре до 100 °C, при большей температуре Кт> 1.
Эквивалентная динамическая нагрузка для упорных подшипников
Ра = ^а^Б^Та’
для упорно-радиальных подшипников
Ра = (XFr + YFa)KBKT.
Коэффициенты X и Y (табл. 17.2, 17.3, 17.4) зависят от типа подшипника и параметра осевого нагружения е. При
Таблица 17.2
Значение е, X и У для радиальных и радиально-упорных шарикоподшипников
а е Подшипники одиорядиые Подшипники двухрядные
Fa/(VFr) > е Fa/(VFr) < е Fa/(VFr) > е
X У X У X У
0° 0,28 < F, ' ^ZD^cosa^ 0.23 0,56 0,44/е 1,0 0 0,56 0,44/е
12° 0,41 г..л ; ^ZD^cosa-' 0,17 0,45 0,55/е 1,0 0,62/е 0,74 0,88/₽
15° 0,46 v ZD^ cosa' 0.11 0,44 0,56/е 1,0 0,63/е 0,72 0,91/₽
18° 0,57 0,43 1,0 1,0 1,09 0,70 1,63
25° 0,68 0,41 0,87 1,0 0,92 0,67 1,41
26° 0,68 0,41 0,87 1,0 0,92 0,67 1,41
36° 0,95 0,37 0,66 1,0 0,66 0,60 1,07
40° 1,14 0,35 0,57 1,0 0,55 0,57 0,93
Примечания:
1. Для однорядных подшипников при Fu/(VFr) е X = 1, У = 0.
2. Dw — диаметр шариков; Z — число шариков в одном ряду.
237
—< е принимают X = 1, Y = 0, осевая сила не уменьшает V г г
ресурс подшипника, так как с ее ростом увеличивается дуга контакта тел качения с кольцами и более равномерно распределяются силы между телами качения. В шарикоподшипниках с малыми углами контакта (а < 18°) под действием осевой силы действительный угол контакта изменяется, для этих подшипников коэффициент осевого нагружения зависит и от Fa.
Таблица 17.3
Значения X, Y для радиально-упорных конических и радиальных сферических роликоподшипников
Подшипники однорядные Подшипники двухрядные
Fa/(VFr) < е Fa/(VFr) > е Fa/(VFr) <е FJ(VFr) > е
X У X У X У X У
1 0 0,4 0,60/е 1 0,68/е 0,67 1,0/е
Таблица 17.4
Значения X, Y для шариковых радиальных сферических подшипников
Подшипники однорядные Подшипники двухрядные
Fa/(VFr) < е Fa/(VF,) > е Fa/(VFr) < е Fa/(VFr) > е
X У X У X У X У
1 0 0,4 0,60/е 1 0,63/е 0,65 0,98/е
Полученное по зависимости (17.3) значение ресурса подшипника Lh сравнивают с заданным ресурсом механизма Lh3. Если условие Lh > Lh3 не выполняется, то следует увеличить размеры подшипника.
238
17.7. Зазоры и предварительные натяги в подшипниках качения
Под зазором понимают величину возможного перемещения одного кольца относительно другого в осевом направлении (осевой зазор) или в радиальном направлении (радиальный зазор). Оптимальные значения радиальных и осевых зазоров являются условием нормальной работы подшипника. При недостаточных зазорах существует опасность их выборки из-за температурных деформаций деталей подшипника и, как следствие, роста момента трения в подшипнике. При завышенных зазорах возрастает неравномерность распределения сил между телами качения и теряется точность вращения подшипника. В нерегулируемых подшипниках стандартами установлены величины начальных (создаваемых при изготовлении) радиальных зазоров.
Осевые зазоры регулируемых подшипников устанавливают при монтаже путем взаимного осевого смещения их колец. Значение требуемого осевого зазора зависит от размеров подшипника, номинального угла контакта, расстояния между подшипниками и разности температур корпуса и вала. В некоторых ответственных узлах, например в опорах шпинделей металлорежущих станков, для обеспечения повышенной жесткости узла и точности вращения подшипников, а также для исключения верчения шариков под действием гироскопического момента, применяют сборку подшипников с предварительным натягом (преднатягом). Преднатяг состоит в сжатии тел качения осевыми силами при сборке подшипникового узла.
17.8. Определение осевых реакций в радиально-упорных подшипниках
При расчете радиально-упорных подшипников учитывают дополнительные осевые силы, возникающие от радиальной силы Fr из-за наклона контактных площадок к оси подшипника (рис. 17.6). При повышенных осевых зазорах между кольцом и телами качения нагрузку может передавать одно тело качения, что недопустимо. При нормальном режиме эксплуатации осевой зазор близок к нулю и под нагрузкой находится при-
239
Рис. 17.6. Расчет минимальной осевой силы для радиально-упорного подшипника
мерно половина тел качения. В этом случае минимальная осевая сила:
F = e'F
Л ошш г’
где е' — коэффициент минимальной осевой нагрузки.
Для нормальной работы подшипника необходимо, чтобы осевая сила Fa, действующая на подшипник, была не меньше минимальной:
F > F = e'F * а 1 amin е х г-
Этого достигают регулировкой подшипника с контролем осевого зазора. Для определения осевых реакций в подшипниковых узлах используют уравнение равновесия осевых сил и условия определения минимальных осевых сил. Например, для схемы на рис. 17.7:
Fal + Ра - Ра2 = где
Fal>e'-Frl-, Fa2>e'-F^ (17.6)
Рис. 17.7. Расчетная схема для определения осевых сил в радиально-упорных подшипниках
240
При определении осевых реакций принимают Fal = e'Frl, из уравнения равновесия находят реакцию во второй опоре Fa2 = Fal + Fa. Если условие (17.6) выполняется, то определение осевых реакций завершено.
17.9. Определение эквивалентной динамической нагрузки
при переменных режимах нагружения
Под эквивалентной динамической нагрузкой РЕ при переменных режимах нагружения понимают постоянную силу (радиальную РгЕ для радиальных и радиально-упорных подшипников, осевую РаЕ для упорных и упорно-радиальных подшипников), которая вызывает такие же повреждения подшипника, как и реально действующие нагрузки. При ступенчатом графике изменения нагрузки (см. рис. 5.18)
ь N L ’
где Lt — эквивалентная нагрузка и наработка подшипника на i-м уровне нагрузки; k — число уровней нагрузки; L = EZ, — требуемый ресурс подшипника.
Таблица 17.5
Коэффициент эквивалентности КЕ
Режим работы 0 I II III IV V
кЕ 1,0 0,80 0,63 0,56 0,50 0,40
При типовых режимах нагружения (см. гл. 5, рис. 5.19) РЕ находят с использованием коэффициента эквивалентности КЕС 1 (табл. 17.5):
РЕ = КЕР,
где Р — наибольшая эквивалентная нагрузка для типового режима нагружения. Для шариковых подшипников с номинальным углом контакта a < 18° значения КЕ являются приближенными, так как значения коэффициентов У, е для этих подшипников зависят от величины действующих на подшипник сил.
241
Зависимость для определения ресурса подшипника (17.4) при переменных режимах нагружения приобретает вид:
17.10. Быстроходность подшипников.
Посадки колец подшипников
Значения предельных частот вращения для каждого типоразмера подшипника класса точности О указаны в каталогах и зависят от смазочного материала (жидкого или пластичного). Частота вращения подшипника ограничена повышением температуры, при которой смазочный материал утрачивает свои свойства, а материалы колец и тел качения испытывают отпуск, в результате которого снижается их твердость. При частотах вращения, близких к предельным, из-за износа сепаратора снижается его прочность и долговечность.
Наибольшие предельные частоты вращения имеют подшипники с малыми потерями на трение — шариковые и роликовые с короткими цилиндрическими роликами. Наименьшую быстроходность имеют упорные подшипники, в которых центробежные силы снижают долговечность сепараторов, а гироскопические моменты, действующие на тела качения, приводят к нагреву подшипников.
При выборе посадок учитывают: условия нагружения кольца (местное, циркуляционное, колебательное); режим работы (легкий, нормальный, тяжелый); тип подшипника; способ регулирования и др. факторы. Режим работы характеризуют отношением эквивалентной динамической нагрузки к базовой динамической грузоподъемности. При Р/С < 0,07 режим считают легким, при 0,07 < Р/С < 0,15 — нормальным, при Р/С > 0,15 — тяжелым. Если кольцо вращается относительно направления радиальной силы, нагружение кольца называют циркуляционным, если оно неподвижно, — местным. Кольцо, испытывающее циркуляционное нагружение, следует устанавливать на вал или в корпус с натягом во избежание обкатывания кольцом сопряженной детали и контактной коррозии. Кольцо, воспринимающее местное нагружение, устанавливают с зазором или небольшим натягом, что важно для облегчения осевых перемещений колец при монтаже и позволяет иск
242
лючить выборку радиальных зазоров при температурных деформациях. При местном нагружении наружного кольца основным полем допуска отверстия в корпусе является Н7. Для вала при циркуляционном нагружении внутреннего кольца подшипника характерны поля допусков А6, js6, пб. Поля допусков посадочных поверхностей колец подшипника смещены в отрицательную сторону от номинальных размеров. При таком расположении полей допусков легче обеспечить посадку с натягом для внутреннего кольца на валу и зазор между наружным кольцом и корпусом. Кольца подшипников имеют малую толщину, при монтаже легко деформируются, поэтому требования к точности посадочных поверхностей под подшипники весьма высоки.
17.11. Смазывание подшипников
Для смазывания подшипников используют жидкие, пластичные и твердые смазочные материалы. Смазывание существенно повышает нагрузочную способность подшипника, уменьшает в нэм трение и шум, способствует отводу тепла, защищает детали подшипника от коррозии.
Жидкие смазочные материалы наиболее существенно снижают момент трения и температуру подшипника, обеспечивают наибольшую предельную частоту вращения и наилучшее удаление продуктов износа. Наличие масляной пленки между телами и дорожками качения значительно увеличивает ресурс подшипников.
В качестве жидких смазочных материалов обычно используют минеральные масла различных марок: индустриальные, трансмиссионные, авиационные и др. Вязкость масла должна быть тем выше, чем больше нагрузка, температура и ниже частота вращения подшипника.
Смазывание окунанием в масляной ванне применяют в основном при низких частотах вращения подшипников. Для смазывания опор передач зацеплением обычно достаточно масляного тумана, который образуется при погружении в масло одного или нескольких зубчатых колес. Для защиты подшипников от избытка масла и продуктов износа используют маслоотражательные кольца.
Пластичные смазочные материалы более экономичны, хорошо защищают подшипник от коррозии, не требуют с лож
243
ных уплотнений и могут работать длительное время без замены. Для подшипников общего назначения рекомендуют использовать ЦИлТИМ-201, Литол 24 или солидолы.
При окружных скоростях колец до 15 м/с применяют как пластичные, так и жидкие смазочные материалы, при более высоких скоростях пластичные смазочные материалы использовать не рекомендуется.
Для подшипников, работающих в экстремальных условиях (вакуум, высокие температуры, агрессивные среды), применяют твердые смазочные материалы (дисульфид молибдена, графит- фторопласт и их композиции).
Контрольные вопросы
1. Из каких деталей состоят подшипники качения?
2. По каким признакам проводят классификацию подшипников качения?
3. С какой целью используют подшипники различных серий?
4. Какой тип подшипников качения является наиболее массовым?
5. Какие подшипники называют самоустанавливающимися?
6. Какие типы подшипников предназначены для восприятия осевых сил?
7. Какова основная причина выхода из строя подшипников?
8. В каких случаях подшипники качения рассчитывают по статической грузоподъемности?
9. Что понимают под базовой статической грузоподъемностью подшипника?
10. Какой параметр определяют при расчете подшипников качения по динамической грузоподъемности?
11. Что понимают под базовой динамической грузоподъемностью?
12. С какой целью применяют предварительный натяг в подшипниках качения?
13. Какова причина возникновения дополнительных осевых сил в радиально-упорных подшипниках?
14. От каких факторов зависит выбор посадок колец подшипников?
Подшипники скольжения
18.1. Общие сведения
Подшипник скольжения — это опора, в которой цапфа вала скользит по поверхности подшипника (рис. 18.1). По направлению воспринимаемой нагрузки подшипники скольжения разделяются на радиальные и упорные. При совместном действии радиальных и осевых сил применяют совмещенные опоры, в которых осевую силу воспринимают торцы вкладышей (рис. 18.2).
Для уменьшения износа и потерь на трение подшипники работают со смазочным материалом, в основном с жидким, для тихоходных опор используют пластичный. Газообразные смазочные материалы (воздух, азот, водород и др.) применяют для малонагруженных высокоскоростных опор. Применение в качестве смазочного материала газа резко снижает коэффициент трения и повышает допустимые частоты вращения, что связано с малой вязкостью газа. Недостатки этих опор: чувствительность к перегрузкам и к погрешностям изготовления, склонность к автоколебаниям. Исключить контакт цапфы
Рис. 18.1. Подшипник
скольжения
Рис. 18.2. Совмещенная опора, воспринимающая радиальную и осевую силы
245
вала и подшипника можно с помощью сил магнитного поля. Магнитные подшипники работают без износа при очень высоких частотах вращения (до 108 мин-1) и температурах от абсолютного нуля до +250° С. Магнитные подшипники дорогие и их применяют в особых случаях. Для подшипников, работающих в экстремальных условиях (при высоких или сверхнизких температурах, в глубоком вакууме), используют самосма-зывающиеся материалы.
Для разделения поверхностей цапфы и подшипника слоем смазочного материала в нем необходимо создать избыточное давление. В зависимости от способа создания этого давления подшипники делят на гидродинамические и гидростатические. В гидродинамических подшипниках давление возникает при относительном движении поверхностей благодаря затягиванию масла в клиновой зазор. В гидростатических подшипниках давление создается насосом. Более распространены гидродинамические подшипники в связи с простотой конструкции и экономичностью.
Подшипник скольжения (см. рис. 18.1) состоит из корпуса 1, вкладыша 2, смазывающих устройств и уплотнений. Обычно корпус подшипника является отдельной деталью, на которую опирается цапфа вала 4. Вкладыш изготовляют из антифрикционных материалов. Часто применяют биметаллические вкладыши, в которых тонкий слой антифрикционного материала наносят на более дешевую металлическую основу. Смазочный материал поступает к рабочей поверхности подшипника из канала 3 через смазочные канавки 5.
18.2. Области применения, достоинства и недостатки
Подшипники скольжения применяют в тех случаях, когда невозможно или нецелесообразно использовать подшипники качения: для разъемных опор; при ударных и вибрационных нагрузках; при высоких частотах вращения.
Подшипники скольжения используют в двигателях внутреннего сгорания, турбинах, насосах, компрессорах, центрифугах, прокатных станах, в тяжелых редукторах и других машинах.
Достоинства подшипников скольжения по сравнению с подшипниками качения: отсутствие износа в режиме жидкостной
246
и газовой смазки; способность работать при весьма высоких частотах вращения; хорошее восприятие ударных нагрузок, демпфирование колебаний; простота и дешевизна изготовления; бесшумность.
Недостатки: повышенные пусковые моменты сопротивления; увеличенные размеры в осевом направлении; сложность системы смазки, обеспечивающей жидкостное трение; необходимость применения дорогостоящих материалов для изготовления вкладышей; ограниченные температуры при работе с обычными смазочными материалами (до 150 °C).
18.3. Причины выхода из строя подшипников скольжения
Выход подшипников из строя главным образом связан с нарушением режима жидкостного трения. Износ рабочих поверхностей — основная причина выхода их из строя. Он связан с попаданием в смазочный материал абразивных частиц и с неблагоприятными режимами трения при пусках и остановках. Схватывание рабочих поверхностей подшипника возникает при больших контактных давлениях и температурах. Усталостные разрушения вкладышей подшипников происходят в результате действия большого числа циклов переменных нагрузок, например в машинах ударного и вибрационного действия. Потеря необходимых свойств смазочных материалов происходит при значительном повышении температуры в подшипнике. Нарушение устойчивости вращения цапфы при автоколебаниях также может вызвать разрушение подшипников.
18.4. Подшипниковые материалы
Материалы вкладышей в паре с цапфой должны обеспечивать малый коэффициент трения, высокую износостойкость, сопротивление усталости и теплопроводность, хорошую прира-батываемость и коррозионную стойкость, малый коэффициент линейного расширения и низкую стоимость. Ни один из известных материалов всем комплексом этих свойств не обладает. Поэтому применяют различные антифрикционные материалы, наилучшим образом отвечающие конкретным условиям
247
работы. Для обеспечения достаточной долговечности валов и вкладышей цапфы должны иметь высокую твердость, шлифованную или полированную поверхность. Материалы вкладышей можно разделить на три группы.
Металлические.
Баббиты (сплавы на основе олова или свинца) обладают высокими антифрикционными свойствами, хорошей прирабаты-ваемостью, но дороги и имеют невысокое сопротивление усталости. Их обычно применяют в виде тонкослойных покрытий. Хорошими антифрикционными свойствами обладают бронзы, латуни, цинковые сплавы. При невысоких скоростях применяют антифрикционные чугуны.
Металлокерамические.
Пористые бронзографитовые или железографитовые материалы пропитывают горячим маслом и применяют при невозможности обеспечения жидкостной смазки. При небольших давлениях и скоростях на поверхности цапфы эти материалы способны достаточно долго работать без подвода смазочного материала.
Неметаллические.
Текстолит, древесно-слоистый пластик и прессованную древесину используют в подшипниках для тяжелого машиностроения. Полимерные самосмазывающиеся материалы используют при температурах от -200 до +280 °C и значительных скоростях скольжения. Фторопласты имеют малый коэффициент трения, но высокий коэффициент линейного расширения и низкую теплопроводность. Подшипники с резиновыми вкладышами применяют с водной смазкой. Графитовые вкладыши обладают низким коэффициентом трения (/ = 0,04...0,05) при температурах от -200 до +1000 °C, хорошей теплопроводностью и коррозионной стойкост ью. Эти материалы применяют в подшипниках с газовой смазкой.
18.5. Виды расчетов подшипников скольжения
Расчет подшипника зависит от вида трения. При граничном трении величина износа определяется свойствами поверхностей и смазочного материала. В этом случае проводят условные (упрощенные) расчеты, так как учет всех закономерностей трения невозможен.
248
Наилучшие условия для работы подшипников создаются при жидкостной смазке, когда поверхности цапфы и вкладыша полностью разделены жидким смазочным материалом. Основной расчет подшипников скольжения — это расчет минимальной толщины масляного слоя, который при установившемся режиме работы должен обеспечивать жидкостную смазку.
Тепловые расчеты проводят с целью определения рабочих температур подшипника и оценки пригодности смазочного материала.
Условные расчеты подшипников позволяют в простейшей форме оценить пригодность материала вкладыша и размеров подшипника для конкретных условий работы на основании опыта конструирования и эксплуатации машин. Проверку пригодности подшипника проводят по двум критериям. Износостойкость вкладыша оценивается по среднему условному давлению в подшипнике:
(18.1)
где Fr— радиальная сила, действующая на подшипник; d — диаметр цапфы, мм; I — длина подшипника, мм; [р] — допускаемое давление в подшипнике.
Работа сил трения в подшипнике преобразуется в тепло и другим критерием расчета является теплостойкость, которая оценивается произведением условного давления на окружную скорость цапфы
pv < [рр]. (18.2)
Различные материалы, из которых изготавливают вкладыши подшипников, обеспечивают нормальную работу в определенном диапазоне окружных скоростей, поэтому необходима проверка условия
v = < [t>], (18.3)
60000 1 J v
где п — частота вращения вала (мин-1); v — окружная скорость цапфы (м/с).
Эти расчеты являются основными при граничной и полу-жидкостной смазке и предварительными для подшипников с жидкостной смазкой. В табл. 18.1 приведены допускаемые значения величин [р], [р], [рр] для некоторых материалов вкладышей.
249
Таблица 18.1
Допускаемые режимы работы для подшипниковых материалов
Материал [р], МПа [г], м/с [рп], МПа м/с
АЧС-5 30 0,4 12
БрО10Ф1 15 10 15
АН-2,5 25 15 100
ЦАМ10-5 20 7 10
Баббит Б88 20 50 75
Текстолит 15 8 25
Расчет подшипников при жидкостной смазке. В криволинейном клиновом зазоре гидродинамического подшипника скольжения (рис. 18.3) при вращении вала возникают избыточное давление и подъемная сила. Радиальная сила, воспринимаемая подшипником, равна
Fr=^dlCF. (18.4)
у/2
Здесь д — динамическая вязкость масла; со — угловая частота вращения вала; у = D d — относительный зазор; D — диа-а
метр отверстия вкладыша; CF — безразмерный коэффициент нагруженности (число Зоммерфельда), приводимый в справоч-
Рис. 18.3. Эпюры давления в гидродинамическом подшипнике
250
эксцентриситет).
никах в зависимости от дуги охвата <р2 ~ Ф1» относительной длины подшипника l/d и относительного эксцентриситета
При известной радиальной силе Fr из уравнения (18.4) находят коэффициент нагруженности
с pyf, (18.5)
цсо
F
где р = — . Далее по таблицам находят %, вычисляют мини-al
мальную толщину масляного слоя fttnin = O,5yd(l - х) и сравнивают ее с необходимой толщиной масляного слоя по условию существования жидкостной смазки (см. гл. 3)
^inm = 2(^zl + -^гг)»
где Rzl и Rz2 — высоты профилей микронеровностей поверхностей цапфы и вкладыша.
В условиях граничной и полужидкостной смазки в общем случае определить силы трения и моменты сил трения расчетным путем не удается. В условиях жидкостной смазки сила трения
<18-6>
где Ст — безразмерный коэффициент сопротивления вращению, который вычисляют по приближенной формуле
Ст = ?- + 0,44х • CF71 - X2 •
71 - X2
Используя силу трения fTp, определяют тепловыделение в подшипнике и его КПД.
Тепловой расчет подшипников. Температуру подшипника находят из уравнения теплового баланса между теплообразованием и теплоотдачей при установившемся тепловом режиме. Мощность теплообразования в подшипнике
Wj = FpvvCJCp. (18.7)
Теплоотвод происходит через корпус, вал и смазочный материал. Мощность W2, отводимая через корпус подшипника,
W2 = K^A(tK - Q, (18.8)
251
где 7CT = 15...20Вт/(м2 °C) — коэффициент теплоотдачи; А — площадь поверхности корпуса подшипника, контактирующей с воздухом; tK и to — температура соответственно корпуса и окружающей среды. Теплоотвод через вал приближенно учитывают увеличением площади поверхности корпуса на величину (5...8) d2.
Мощность теплоотвода через смазочный материал
^3 = cVp(tBbIX-tBX), (18.9)
где с — удельная теплоемкость масла; V — объемный расход масла; р — плотность масла; 1ВЫХ и iBX — температура масла соответственно на выходе и входе в подшипник.
Из уравнения теплового баланса
Wi = W2 + VK3 (18.10)
находят температуру масла <вых, которая при длительной работе не должна превышать 80 °C.
18.6. Устойчивость работы подшипников скольжения. Гидростатические подшипники
При малом эксцентриситете в подшипнике движение вала может быть неустойчивым. Вал смещается в плоскости, наклоненной под углом <ра к линии действия радиальной силы (рис. 18.3). С уменьшением эксцентриситета жесткость масляного слоя снижается из-за уменьшения клиновидности зазора, малые изменения радиальной силы приводят к большим перемещениям вала. При наличии неуравновешенной центробеж-
Рис. 18.4. Виброустойчивые подшипники скольжения: а — с вкладышами со смещением центров; б — со смещением половин вкладыша
252
ной силы круговые движения центра вала превращаются в спиральные с возрастающим радиусом, что приводит к ударам вала о вкладыш и разрушению подшипника. Самовозбуждаю-щиеся колебния валов (автоколебания) характерны для быстроходных машин.
Для предотвращения автоколебаний применяют виброус-тойчивые подшипники с вкладышами некруглой формы, в которых создают несколько клиновых зазоров, что повышает жесткость масляного слоя. Этого достигают расточкой вкладышей со смещением центров (рис. 18.4, а) или смещением осей половин вкладыша вдоль плоскости разъема (рис. 18.4, б).
В гидростатическом подшипнике подъемная сила возникает за счет давления в смазочном материале, которое создается насосом. При этом пусковой момент трения цапфы с вкладышем близок к нулю. Гидростатические подшипники применяют в опорах, требующих точного вращения: в испытательных машинах, особо точных станках, телескопах. Масло подают из сети через дроссели 1 (дозирующие отверстия) в карманы 2, выполненные во вкладышах (рис. 18.5). Дроссель снижает давление масла, поступающего в карман, что необходимо для обеспечения устойчивости цапфы в подшипнике. При смещении цапфы под действием силы в сторону какого-либо кармана в нем возрастает давление из-за уменьшения зазоров, через которые вытекает масло. В противолежащем кармане давление падает из-за увеличения зазоров и ограниченной пропускной способности дросселя, подающего масло в карман. В результате цапфа возвращается в исходное положение.
Рис. 18.5. Гидростатический подшипник
253
Контрольные вопросы
1. В чем различие между гидродинамическими и гидростатическими подшипниками?
2. Каковы области применения подшипников скольжения?
3. Из каких материалов изготавливают вкладыши?
4. В каких случаях проводят условные расчеты подшипников скольжения?
5. За счет каких факторов воспринимается радиальная сила в гидродинамическом подшипнике?
6. Какое условие является основным при тепловом расчете подшипников?
7. Какие меры принимают для предотвращения автоколебаний в подшипниках?
8. В каких случаях применяют гидростатические подшипники?
Глава
19
Муфты приводов
19.1. Назначение муфт, применяемых в машинах
Муфтами приводов называют устройства, основное назначение которых — соединение валов и передача вращающего момента. По этому признаку муфты классифицируют на постоянные (нерасцепляемые) муфты, обеспечивающие постоянное, в течение всего времени эксплуатации машины, соединение валов, и муфты сцепления, обеспечивающие соединение (сцепление) агрегатов или их разъединение во время работы машины. В свою очередь муфты сцепления подразделяют на управляемые и самоуправляемые (самодействующие). Управляемые муфты соединяют (разъединяют) агрегаты машин по команде. Самоуправляемые муфты срабатывают автоматически, соединяя или разъединяя валы в зависимости от специфики работы машины и принципа действия муфты.
Основной характеристикой нагруженности муфты является вращающий момент Т, Н • м. Обычно расчетный вращающий момент Т на муфте приближенно определяют в зависимости от динамических свойств машины, характеризуемых степенью неравномерности вращения и величиной разгоняемых масс, т. е. величиной динамической составляющей вращающего момента на муфте:
Т = Тн + Т. = Тн(1 + Т./Тн) = КТН, где Тн — номинальный момент (среднее значение длительно действующего момента) обычно приближенно определяют по потребляемой мощности двигателя и по частоте вращения; Тд — динамический момент (среднее значение переменной составляющей момента в установившемся движении или наибольшее значение момента в переходном процессе при пуске или торможении); К — коэффициент динамичности. При ориентировочных расчетах приближенно принимают:
255
К = — для машин с небольшими разгоняемыми масса-
ми и небольшой переменной нагрузкой (конвейеры, транспортеры, металлорежущие станки); К = 1,5...2 — для машин со средними разгоняемыми массами и средней переменной нагрузкой (поршневые компрессоры, строгальные станки, мельницы); К = 2,5...3 — для машин с большими разгоняемыми массами и значительной переменной нагрузкой в виде ударов (молоты, прокатные станы, шаровые мельницы).
19.2. Муфты, постоянно соединяющие валы
Глухие муфты. Длинные валы по условиям изготовления, сборки и транспортировки иногда делают составными. В этом случае отдельные части вала соединяют глухими муфтами. В некоторых случаях эти муфты применяют и для соединения строго соосных валов агрегатов.
Втулочная муфта (рис. 19.1) представляет собой втулку, надеваемую по посадке с зазором на концы валов. Муфта отличается малыми габаритами по диаметру, но усложняет монтаж из-за необходимости больших осевых смещений соединяемых агрегатов. Материал втулок — конструкционная сталь (Ст5, СтЗ). Втулочные муфты применяют для соединения валов диаметром до 70 мм. Наружный диаметр муфты принимают: D = (1,5...1,6) d, где d— диаметр вала. Длина муфты L = (2,5...4) d (окончательно определяется длиной шпонок или шлицев). На муфты имеется стандарт [8].
Фланцевая муфта (рис. 19.2) состоит из двух полумуфт, выполненных в виде ступицы с фланцем. Фланцы соединяют болтами. Различают два конструктивных исполнения муфты.
В одной конструкции половину болтов устанавливают во фланцах полумуфт без зазора. В этом случае центрирование полумуфт осуществляют эти болты. В результате завинчива-
Рис. 19.1. Втулочная муфта
256
ния гаек фланцы прижимаются силами затяжки болтов и на торцах фланцев возникает момент сил трения. Вращающий момент с одной полумуфты на другую передается стержнями болтов, поставленных без зазора, и силами трения на фланцах. Задача является статически неопределимой. С целью существенного упрощения расчетов приближенно принимают, что весь вращающий момент передается только стержнями болтов, поставленных без зазора и работающих на срез и смятие.
271 • 10s
Сила, действующая на один болт, Ft =-----, где Т — расчет-
Z-Dj
ный вращающий момент; z — число болтов, поставленных без зазора; — диаметр, на котором расположены оси болтов. Диаметр d0 стержня болта, работающего на срез, определяют из условия
где [т] = (0,2...0,3) • сгт — допускаемые касательные напряжения; <хг — предел текучести материала болта. Далее необходимо выполнить проверочный расчет на смятие (см. § 14.8).
В другой конструкции болты во фланцах полумуфт устанавливают с зазором. В этом случае вращающий момент с одной полумуфты на другую передается только силами трения на фланцах. Силу затяжки болтов для передачи вращающего момента Т находят из условия
Рис. 19.2. Фланцевая муфта
9 Детали машин
257
где Trp = — момент силы трения на фланцах; F3aT —
сила затяжки одного болта; z — число болтов; f — коэффициент трения (для сухих металлических поверхностей фланцев f= 0,15...0,2); — диаметр, на котором расположены оси
болтов; S — запас сцепления, принимаемый 1,2...1,5 для учета случайных перегрузок и нестабильности сил трения.
Отсюда необходимая сила затяжки болтов
2Ттр-103 _ 2TS-103
zfD1 zfDl ’
Внутренний диаметр резьбы болта, работающего на растяжение, определяют из условия
°Р
1,ЗГзат4
< Мр;
d3>
1,ЗГзат4 п[о]р
(19.1)
Рис. 19.3. Возможные смещения валов и возникающие при этом дополнительные нагрузки
где [о]р — допускаемые напряжения растяжения в расчетном сечении болта (см. § 14.3). Материал полумуфт — стали 40 и 35Л. Возможно применение чугунов СЧЗО. На фланцевые муфты имеется стандарт. Полумуфты устанавливают на концы валов с натягом.
Компенсирующие муфты. Машины обычно выполняют из отдельных узлов (агрегатов), которые соединяют муфтами. Однако точная установка валов таких агрегатов невозможна из-за ошибок изготовления и монтажа; установки агрегатов на деформируемом (нежестком) основании; расцентровки валов в результате тепловых деформаций корпусов агрегатов при их работе, а также из-за упругих деформаций валов под нагрузкой. Возможные виды смещений валов и возникающие вследствие этого дополнительные нагрузки на концах валов представлены на рис. 19.3.
258
Для соединения валов с несовпадающими осями применяют компенсирующие муфты. Благодаря своей конструкции эти муфты обеспечивают работоспособность машины даже при взаимных смещениях валов. Однако необходимо помнить, что валы и опоры при этом дополнительно нагружаются радиальными и осевыми силами и изгибающими моментами, зависящими от величины и вида расцентровки валов. Следует подчеркнуть, что с ростом смещений валов ресурс самой муфты падает.
Зубчатые муфты. Сдвоенная зубчатая муфта (рис. 19.4, а) состоит из двух одинаковых ступиц 1 (втулок), имеющих внешние зубчатые венцы и двух одинаковых обойм 2 с внутренними зубчатыми венцами. Обоймы стянуты болтами 3, равномерно расположенными по окружности. В крышках 4, закрывающих внутреннюю полость муфты, расположены специальные резиновые уплотнения 6, удерживающие жидкую смазку внутри муфты. Пробка 5 служит для заливки в муфту масла. Число зубьев и их размеры подобраны так, чтобы зубья венца втулки располагались с некоторым зазором между зубьями обоймы, образуя зубчатые соединения. Зубья втулок и обойм имеют эвольвентный профиль с углом профиля а = 20° и коэффициентом высоты головки зуба А* = 0,8. Центрирование обоймы осуществляют по вершинам зубьев втулок.
Рис. 19.4. Зубчатая муфта: а — конструкция муфты; б — бочкообразный зуб; в — прямой зуб
Линия смещения
исходного контура
259
зубьев в зубчатой муфте: а — смещение в плоскости перекоса валов;
б — положение зубьев
Зубья втулок бывают бочкообразные (рис. 19.4, б) и прямолинейные (рис. 19.4, в). Бочкообразные более сложны в изготовлении, чем прямолинейные (нарезание зубьев возможно лишь на специальном станке). Однако муфта с бочкообразными зубьями допускает значительно больший угол поворота у< 1°30', по сравнению с муфтой с прямолинейными зубьями у < 15'.
Относительное смещение зубьев втулки и обоймы обусловливается наличием зазоров между зубьями и бочкообразной формой зубьев втулки. На рис. 19.5, а показан характер смещения зуба втулки в плоскости перекоса валов, на рис. 19.5, б — положение зуба втулки в плоскости, перпендикулярной чертежу. Одинарная муфта допускает угловое и осевое смещение валов. Однако сочетание двух одинарных муфт допускает как угловое, так и радиальное смещение валов (рис. 19.6, б).
Зубчатые муфты обладают большой несущей способностью и надежностью из-за большого числа зубьев, передающих вращающий момент. Эти муфты хорошо работают при значительных частотах вращения. При угловом смещении валов зуб втулки скользит по зубу обоймы по дуге длиной 0,5mzy, занимая крайнее положение через каждую половину оборота. Таким образом, при работе муфты имеет место систематический износ боковой поверхности зубьев, а из-за сил трения между зубьями на валы действует изгибающий момент Ми~ 0,1 Т, где Т — передаваемый вращающий момент.
Заготовки втулок и обойм бывают коваными или литыми (при больших размерах). Кованые заготовки делают из сталей марок 35ХМ, 40, 45, а литые из сталей марок 40Л, 45Л. Для повышения износостойкости твердость поверхностей зубьев втулок и обойм должна быть (42...50) HRC3. Муфты смазывают жидким маслом большой вязкости. Размеры муфт выбира-
260
Рис. 19.6. Шарнирная муфта: а — конструкция полумуфты; б — комбинация двух муфт
ют по таблицам [2; 8] в зависимости от величины вращающего момента и ожидаемого смещения валов.
Шарнирные муфты. В шарнирных муфтах использован принцип действия шарнира Гука. Эти муфты служат для передачи вращающего момента между валами с большими углами перекоса у < 40...45°. Муфта (рис. 19.6, а) состоит из двух одинаковых полумуфт 1 и 2 в виде ступицы с вилкой (вилки полумуфт повернуты на 90°) и крестовины 3, соединяющей полумуфты. Крестовина соединена с вилками полумуфт шарнирами. Это обеспечивает свободу поворота каждой полумуфты относительно крестовины (угловая податливость). Комбинация двух муфт, соединенных промежуточным валом переменной длины, позволяет соединять валы, имеющие радиальные смещения Др и значительные углы перекоса (рис. 19.6, б).
Следует подчеркнуть, что для шарнирной муфты, выполненной по схеме (рис. 19.6, а), при угловом смещении валов ведомая полумуфта 2 вращается неравномерно при равномерном вращении ведущей полумуфты 1. На рис. 19.7‘показаны угловые скорости для двух положений муфты (во втором поло-
со2
Рис. 19.7. Угловые скорости в шарнирной муфте
261
жении муфта повернута вокруг оси вращения на 90°). Учитывая, что при вращении валов крестовина периодически поворачивается относительно вилок полумуфт, из плана угловых скоростей можно написать
®2max = «i/COS у; C02min = C^COS у.
Таким образом, за один оборот муфты угловая скорость ведомой полумуфты дважды ставится больше и дважды меньше угловой скорости ведущей полумуфты. Имеются конструкции «синхронных» шарнирных муфт [8], у которых при угловом взаимном смещении полумуфт обе полумуфты вращаются с одинаковой угловой скоростью.
Пальцевая муфта с металлическими дисками (рис. 19.8, а) состоит из одинаковых полумуфт 1 и 5 и пакета плоских металлических дисков 3, которые присоединяются к полумуфтам пальцами 6, установленными во фланцах полумуфт. Закаленные втулки 4 и гайки 2 (рис. 19.8, б) позволяют надежно зажимать пакеты дисков с торцов. Муфта не требует ухода в процессе эксплуатации. Одна муфта компенсирует только угловое смещение валов. При этом пакет упругих дисков изгибается из своей плоскости. Чем меньше пальцев на полумуфтах, тем больше свободные участки дисков и, следовательно, выше компенсирующая способность муфты. Сочетание двух муфт с промежуточным валом позволяет компенсировать как угловые, так и радиальные смещения валов (см. рис. 19.6, б). При угловом смещении валов вращающийся диск испытывает циклические деформации изгиба. Это может привести к его усталостному разрушению. Муфты находят применение в безлюф-
Рис. 19.8. Пальцевая муфта с металлическими дисками: а — конструкция; б — закрепление дисков
262
Рис. 19.9. Характеристика жесткости упругой муфты
товых приводах высокой крутильной жесткости с неточно установленными агрегатами.
Упругие муфты. Упругие муфты отличаются наличием упругого элемента и являются универсальными: обладая крутильной податливостью, они также являются компенсирующими. Упругие муфты способствуют: смягчению толчков и ударов, вызванных технологическим процессом или выбором зазора при пусках и остановках машины; защите привода машины от вредных крутильных колебаний; соединению валов,
имеющих взаимные смещения. В этом случае деформируется упругий элемент муфты, и муфта функционирует как компенсирующая.
Рассмотрим основные характеристики упругих муфт.
1. Жесткость при кручении с равна отношению вращающего момента Т к величине угла <р поворота полумуфт (рис. 19.9). В зависимости от конструкции муфты эта характеристика может быть линейной (прямая 1) или нелинейной (кривая 2).
Для муфты с линейной характеристикой жесткости имеем Т = с<р. Для муфты с нелинейной характеристикой жесткость различна в каждой точке кривой 2 и определяется как с = dT/dy, т. е. является касательной к кривой жесткости в данной точке характеристики.
2. Демпфирующая способность, т. е. способность необратимо поглощать часть энергии деформации упругими элементами муфты при действии циклически изменяющегося вращающего момента с амплитудой Д7\ наложенного на постоянный вращающий момент Тном (рис. 19.10, а). Количественно демп
Рис. 19.10. Демпфирующая способность упругой муфты: а — закон нагружения; б — работа, поглощенная за один цикл нагружения
263
фирующая способность может оцениваться величиной коэффициента относительного рассеивания у = Ад/Аупр, где Ад — работа, поглощенная за один цикл нагружения муфты переменным моментом (рис. 19.10, б) (площадь петли гистерезиса); Аупр — работа сил упругой деформации муфты за четверть периода полного колебания.
На простейшем примере двухмассовой колебательной системы (рис. 19.11) рассмотрим влияние упругой муфты с линейной жесткостью с и с демпфирующей способностью \|/. Примем, что крутильная податливость валов пренебрежимо мала по сравнению с крутильной податливостью муфты. На массы с моментами инерции Jj и J2 действуют переменные вращающие моменты с одинаковой круговой частотой. Собственная круговая частота рассматриваемой системы без учета демпфирования равна
сос= 7C(1/Jj + 1/J2).
На рис. 19.12 представлены резонансные кривые для муфт одинаковой крутильной жесткости, но различной демпфирующей способности. Видно, что в резонансной зоне крутильных колебаний (ю/юс = 1) амплитуды колебаний <р (угол относительного поворота полумуфт) зависят от демпфирующей способности муфты. С ростом демпфирования амплитуды колебаний снижаются. Следует подчеркнуть, что амплитуда крутильных колебаний зависит от отношения возмущающей частоты к собственной частоте крутильных колебаний системы.
Таким образом, правильно подобранная по крутильной жесткости с и демпфирующей способности у упругая муфта
Рис. 19.11. Схема двухмассовой колебательной системы
Рис. 19.12. Амплитудно-резонансные кривые упругих муфт
264
существенно снижает величину вредных крутильных колебаний в приводах машин. Это обстоятельство в свою очередь снижает уровень переменных нагрузок на детали в приводах, что повышает их ресурс.
Муфты с неметаллическими (резиновыми) упругими элементами. Упругие муфты с резино-кордными и резиновыми упругими элементами получили широкое распространение благодаря простоте конструкций, эксплуатации (не требуют ухода), дешевизне изготовления, высокой податливости при кручении и хорошей демпфирующей способности. Два последних важных свойства определяются свойствами резины, из которой изготовлен упругий элемент муфты. Однако из-за невысокой прочности резины эти муфты имеют большие размеры.
Муфты с упругим элементом в виде резиновой тороидальной оболочки. Эти муфты имеют два исполнения по форме упругого элемента. На рис. 19.13 изображена муфта с упругим элементом в виде внешнего тора. Две одинаковые полумуфты 2 соединены тороидальным упругим элементом 1, края которого прижаты к полумуфтам нажимными полукольцами 3, и винтами 6, равномерно расположенными по окружности. Нажимные кольца 3 разделены на два полукольца, для удобства монтажа, и притянуты винтами 5 к кольцу 4. Тороидальный упругий элемент изготовлен из резины, армированной нитями корда, уложенного слоями. В зависимости от числа слоев корда и угла его наклона по отношению к меридиану торовой оболочки меняется крутильная жесткость муфты. В неответственных машинах с малыми нагрузками упругий элемент делают резиновым (без корда). Он дешевле и проще в изготовлении.
Благодаря особой форме упругого элемента эта муфта обладает также повышенной компенсирующей способностью, т. е. допускает значительные взаимные смещения полумуфт (угловое до 3°, ради-
13 4 6
Рис. 19.13. Муфта с упругим элементом в виде внешнего тора
265
альное 2...5 мм, осевое ±2 мм и их комбинацию). Однако необходимо помнить, что чем больше расцентровка осей полумуфт, тем больше циклические деформации в упругом элементе и ниже его ресурс.
Недостатками муфты являются большой размер по диаметру D и появление осевых сил, сближающих полумуфты при вращении муфты. Причиной появления осевых сил является деформация упругого элемента при его вращении под действием центробежных сил. После выбора габарита муфты [8] выполняют проверочные расчеты в следующей последовательности.
Уточняют толщину h упругого элемента из расчета его по касательным напряжениям в сечении А—А
2Г>1°3 <[Т]; /^2Г>10\
где Т — расчетный вращающий момент, Н • м; [т] — допускаемые напряжения (зависят от марки резины и числа слоев корда), МПа.
Определяют необходимую силу прижатия края упругого элемента к полумуфте из условия Т.гр = sT, где Т.гр = = ^2Т^1оз Р — момент сил трения, Н • м; F3(iT — сила затяжки одного винта; f — коэффициент трения резины по металлу;
+ Dn
—---; s — запас сцепления
z — число винтов; Dnn (1,2...1,5).
Отсюда определяют силу затяжки винта
F _2Ts-103 зат /гЛср •
Далее определяют диаметр винта [см. (19.1)]. Затем проверяют напряжения смятия на кольцевой поверхности контакта края упругого элемента с полумуфтой
ГТ = г -J
см nGDf-Df) 1 JcM’
Допускаемое напряжение смятия [ст]см определяют в зависимости от конструкции края упругого элемента (наличие корда или металлических колец, ужесточающих край при его сжатии) и марки резины.
266
1
3
4
Рис. 19.14. Муфта с упругим элементом в виде внутреннего тора
На рис. 19.14 изображена муфта с упругим элементом в виде внутреннего тора. Две одинаковые полумуфты 1 соединены тороидальным упругим элементом 2, края которого прижаты к полумуфтам нажимными кольцами 3 и винтами 4, равномерно расположенными по окружности. Обладая такими же компенсирующими способностями, эта муфта лишена недостатков муфты на рис. 19.13. При одинаковой несущей способности муфта имеет меньший наружный диаметр, а поэтому меньше подвержена влиянию центробежных сил, т. е. допускает большие частоты вращения. Центробежные силы, действующие на оболочку, воспринимают нажимные кольца. Муфта имеет меньше металлических деталей и проще при установке упругого элемента. После выбора габарита муфты выполняют расчеты в такой последовательности.
Уточняют толщину h упругого элемента в сечении А—А из расчета по касательным напряжениям
т = ?Г-103 <[т]; &>—???103 ,
(Z> - 2г)2лй (D - 2г)2л[т]
где Т — расчетный вращающий момент, Н • м; [т] — допускаемые напряжения (зависят от марки резины, диаметра нитей и числа слоев корда).
Определяют необходимую силу прижатия края упругого элемента к полумуфте из условия Ттр = sT, где Ттр = = FТ^1оз Р — момент сил трения; F3a.r — сила затяжки одного винта; f — коэффициент трения резины по металлу; z — число D, + D
винтов; £>ср =------; з — запас сцепления (1,2...1,5).
267
Отсюда определяют силу затяжки винта F3Sn. = Ю
далее определяют диаметр винта.
Проверяют напряжения смятия на кольцевой поверхности контакта края упругого элемента с полумуфтой (рис. 19.14):
__ < Г -1
см n(Z>? - D2) " 1 JcM‘
Муфта с резиновой конической шайбой изображена на рис. 19.15. Резино-металлический упругий элемент 6 крепят к полумуфтам 1 и 2 винтами 5, равномерно расположенными по окружности. Современные способы привулканизации резины к металлу позволяют получить прочность соединения не ниже прочности самой резины. Привулканизация резины к металлу является предпочтительным способом крепления, так как отсутствует концентрация напряжения из-за сильного (до 30% ) сжатия краев упругого элемента (см. рис. 19.14). По сравнению с муфтами на рис. 19.13и19.14 эта муфта не обладает высокими компенсирующими свойствами. Однако ее с успехом применяют в приводах машин для гашения вредных крутильных колебаний. Меняя угол конуса, можно получить необходимую крутильную жесткость муфты:
с = Т/<р = kGD(D3 - d3)/24H,
Рис. 19.15. Муфта с резиновой конической шайбой
268
где G — модуль упругости резины второго роца; остальные обозначения см. на рис. 19.15. Положительной особенностью муфты является равномерное распределение касательных напряжений т по объему резины при действии вращающего момента Т. На рис. 19.16 изображена схема работы резино-металлического упругого элемента. При действии вращающего момента резиновая коническая шайба испытывает крутильный сдвиг, при этом одно металлическое кольцо повернется относительно другого на угол <р, а точка 2 на радиусе р сместится относительно точки 1 на р<р. Если рассматривать малые деформации, то приближенно можно записать
р<р as уй; у и рф/й.
Тогда в соответствии с законом Гука т = Gy ~ Срф/й. Таким образом, при фиксированном угле ф напряжения т одинаковы на любом радиусе р, так как р/Л = const. В ответственных приводах в муфте применяют кольца 3 и 4 с торцевыми кулачками, которые, зацепляясь, продолжают передавать вращающий момент даже после разрушения резиновой шайбы (см. рис. 19.15).
Муфты с металлическими упругими элементами обладают меньшими габаритами, хорошо работают при изменениях температуры в большом диапазоне. Однако они сложны по конструкции, дороже, требуют ухода при эксплуатации.
На рис. 19.17 изображена муфта с упругими элементами в виде стальных стержней, работающих на изгиб при действии вращающего момента. Полумуфты 1 и 7 соединены цилиндрическими стальными стержнями (пружинами) 5, равномерно расположенными по окружности диаметром £>0. Крышка 3 и кожух 4 удерживают стержни от выпадения и смазку в муфте благодаря уплотнениям 2 и 8. Для уменьшения износа
Рис. 19.16. Схема работы резино-металлического упругого элемента
269
Рис. 19.17. Муфта со стальными стержнями
пружин и их гнезд муфту заполняют маслом с антизадирными присадками через масленку 6. Полумуфты изготавливают из сталей 45, 40Х, стержни — из высоколегированных пружинных сталей, крышку и кожух — из чугуна Сч12.
При действии вращающего момента характеристика муфты на первом этапе линейна (до тех пор пока кривизна оси стержня не станет равной кривизне профиля гнезда) (рис. 19.18). В этом случае крутильная жесткость муфты
Т _ 3EJzDfi
<р 8S3
где Е — модуль упругости материала стержня; J — момент
инерции сечения стержня; z — число стержней; Do и S см. на рис. 19.17 и 19.18.
Рис. 19.18. Схема деформации стального стержня
На втором этапе нагружения муфты (нелинейный участок характеристики муфты) крутильная жесткость
c_dT_ ЗТ3р3
С dtp E2J2z2D0 ’
где р — радиус кривизны профиля гнезда (рис. 19.18).
Минимальный диаметр стержня
d _ 4[о]„Р0^(3 - у3)
3Etp ’
где [п]и — допускаемое напряжение изгиба материала стержня; £, = S/DQ —
270
геометрический параметр; S — размер на рис. 19.18; ц/ = a/S (принимают у = 0,6...0,7 для нелинейных муфт, у = 1,0 для линейных муфт); <р — угол относительного поворота полумуфт; Е — модуль упругости первого рода материала стержня.
Ed
Радиус кривизны профиля гнезда р = -— . Основные разме-21СТ1и
ры муфты в зависимости от величины вращающего момента приведены в [2; 8].
19.3. Муфты сцепные управляемые
Сцепные муфты соединяют и разъединяют валы по команде. Эти муфты делят на муфты с профильным замыканием (кулачковые) и фрикционные. Последние используют при необходимости изменения режима работы машины без остановки двигателя.
Муфты, сцепные кулачковые применяют для передачи больших вращающих моментов при нечастых включениях. Они имеют значительно меньшие габаритные размеры и массу, чем фрикционные муфты сцепления. Однако они соединяют валы, угловые скорости которых равны. При этом требуется точная соосность соединения полумуфт. На рис. 19.19 изображена муфта с торцевыми кулачками и некоторые профили
Рис. 19.19. Муфта с торцевыми кулачками: а — конструкция; б — профили кулачков
271
кулачков. Выбор формы кулачков определяется в основном условиями включения муфты (одинаковые угловые скорости полумуфт или несколько различные) и передаваемой нагрузкой.
Материал кулачковых муфт должен обеспечивать высокую твердость рабочих поверхностей кулачков. Используют стали марок: 20Х, 12ХНЗА с цементацией и закалкой до твердости (54...60) HRC3. При частых включениях используют стали: 40Х, 40ХН, 35ХГСА с закалкой рабочих поверхностей зубьев до твердости (40...45) HRC3. Приближенным расчетом проверяют контактные напряжения на рабочей поверхности кулачка включенной муфты в предположении равномерной работы всех кулачков
_ 2Гр-103 °Н~ dcpzA
где Тр — расчетный вращающий момент, Н • м; dcp — средний диаметр муфты по кулачкам, мм; А — площадь проекции опорной поверхности кулачка на диаметральную плоскость, 9
юг; z — число кулачков.
Муфты сцепные фрикционные передают вращающий момент за счет сил трения на рабочих поверхностях, создаваемых плавным прижатием рабочих (фрикционных) поверхностей. Меняя силу прижатия, можно регулировать момент сил трения. За время включения фрикционной муфты рабочие поверхности проскальзывают. После включения муфты скольжение отсутствует.
На рис. 19.20, а изображена многодисковая муфта сцепления. Она состоит из полумуфт 1 и 2, расположенных строго соосно, и внутренних 3 и наружных 4 дисков, которые сжимают-
Рис. 19.20. Многодисковая муфта сцепления
272
ся силой F, приложенной нормально к трущимся поверхностям. Регулируемая сила F может создаваться механическим путем, гидравлическим, пневматическим или электромагнитным. На рабочие поверхности дисков наносят фрикционный слой или крепят накладки из фрикционного материала, повышающего силу трения. Для улучшения смазывания рабочих поверхностей муфт и отвода продуктов износа на торцах дисков выполняют неглубокие спиральные канавки.
В зависимости от условий эксплуатации, фрикционные муфты разделяют на муфты без смазывания трущихся поверхностей (сухие) и на муфты со смазыванием трущихся поверхностей (масляные). Последние передают меньший вращающий момент (в них ниже коэффициент трения), однако они более долговечны (интенсивность изнашивания рабочих поверхностей меньше, чем у сухих муфт).
Материалы фрикционных дисков. Рабочие поверхности дисков выполняют из фрикционных материалов, которые должны обладать: высоким коэффициентом трения и малой его зависимостью от изменения температуры, давления на рабочей поверхности и скорости скольжения; хорошим сопротивлением изнашиванию; теплостойкостью, т. е. способностью выдерживать высокие температуры без разрушения и с сохранением нужных свойств.
В сухих муфтах в основном применяют фрикционные пары:
1) закаленная сталь по металлокерамике, образованной нанесением и спеканием под давлением смеси порошков меди, железа, графита, свинца и др.;
2) закаленная сталь по фрикционному материалу (накладкам), выполненному на основе термореактивных смол с необходимыми ингредиентами.
В муфтах со смазкой применяют фрикционные пары:
1) закаленная сталь по металлокерамике;
2) закаленная сталь по стали;
3) бронза по закаленной стали или чугуну.
Приближенный расчет муфт ведется следующим образом. Определяют расчетный вращающий момент на муфте
T = p7’c = p^zI?cp/2,
где D = ——= — средний диаметр рабочей поверхности ди-сков, мм; Тс — максимальный вращающий момент, нагру
273
жающий муфту, Н • м; z — число пар поверхностей трения; f — коэффициент трения; F — сила сжатия фрикционных дисков, Н; р — коэффициент запаса сцепления.
Рассчитывают давление р на рабочей поверхности дисков (чем больше давление, тем больший вращающий момент передает муфта, однако тем быстрее изнашивается фрикционное покрытие дисков):
р =----—---- < [р],
где [р] — допускаемое давление.
Находят число пар поверхностей трения
2Т-103 nfV[p]D^Kz'
где у = —1-0- (обычно v = 0,1...0,35); Kz— коэффициент "•^ср
влияния числа дисков на силу включения муфты (учитывает трение выступающих частей диска о направляющие пазы полумуфт). Кроме рассмотренных типов муфт сцепления существует большое количество других муфт сцепления. Фрикционные муфты сцепления можно применять в качестве тормозов.
19.4. Муфты сцепные самоуправляемые
Эти муфты соединяют или разъединяют валы автоматически при наступлении особых условий в работе машины. В зависимости от выполняемых функций эти муфты разделяют на несколько типов.
Муфты предохранительные защищают дорогие детали в машинах (зубчатые колеса, валы и др.) от случайных перегрузок. Перегрузки могут быть вызваны: особенностями рабочих процессов машин (дробильные, землеройные и др.); изменением условий работы машины (прекращение подачи смазочного материала, появление заедания и др.); принципом работы машин (ударного действия).
При расчете предохранительных муфт, во избежание случайных выключений, за расчетный вращающий момент принимают: Т = 1,25Ттах, где Ттпх — максимальный момент, возникающий при работе машины.
274
Рис. 19.21. Предохранительная муфта с разрушающимся элементом
Муфты предохранительные с разрушающимся элементом отличаются малыми габаритами и высокой точностью срабатывания. На рис. 19.21 представлена муфта, у которой полу муфты 2 и 6, соединенные цилиндрическим предохранительным элементом (штифтом) 4, установлены на валу 1. Если полумуфта 2 соединена с валом шпонкой, то полумуфта 6 сидит на валу свободно, вращающий момент с нее снимается с помощью шпонки 8. Стальные втулки 3 и 5, закаленные до высокой твердости, предохраняют края отверстий во фланцах от повреждения при разрушении предохранительного элемента. Резьбовая пробка 7 удерживает предохранительный элемент от выпадения. Канавки шириной f и глубиной g на торцах фланцев полумуфт предохраняют последние от повреждения заусенцем предохранительного элемента после его разрушения.
При перегрузке предохранительный элемент срезается, и полумуфты размыкаются. Для восстановления работоспособности машины ее необходимо остановить и заменить предохранительный элемент. При расчете муфты определяют следующие параметры.
Предельный (разрушающий) момент муфты, Н • м,
= znd2TBZ> пр 8k•103 ’ где d — диаметр штифта, мм; г — число штифтов; D — диаметр окружности расположения осей штифтов, мм; k — коэффициент неравномерности распределения нагрузки на штифт из-за ошибок изготовления (при г = 1, k = 1, при z = 2...3,
275
Рис. 19.22. Предохранительная фрикционная муфта
k = 1,2...1,3); тв = (0,7...0,8)ов — предел прочности материала штифта на срез; ств — предел прочности материала штифта на растяжение, МПа.
Диаметр штифта
/8rnpfe 1Q3 /J nztBD
При одном предохранительном элементе точность срабатывания муфты более высокая, однако концы валов и опоры дополнительно нагружены радиальной консольной силой, которая вращается вместе с муфтой.
Муфты предохранительные фрикционные автоматически восстанавливают работоспособность машины после прекращения действия перегрузки, однако точность срабатывания их невысока из-за непостоянства коэффициента трения на трущихся поверхностях дисков.
На рис. 19.22 представлена муфта, у которой полумуфты 1 и 5, установленные на одном валу, соединены пакетом фрикционных дисков 2, сжатых через витые пружины 3 гайкой 4 строго фиксированной силой. При перегрузке наружные диски проскальзывают относительно внутренних дисков, и муфта передает лишь тот предельный момент, на который она настроена. Варьируя число фрикционных дисков и силу их сжатия с помощью гайки 4, муфту можно настроить на определенный предельный момент.
При расчете муфты определяют следующие параметры. Предельный вращающий момент, передаваемый муфтой, Н • м,
276
т _
пр 2z • 103 ’
где-Dcp
Di + D2
2
— средний диаметр рабочей поверхности ди-
сков (D1 и D2 на рис. 19.22); z — число пар поверхностей трения; f — коэффициент трения; F — сила сжатия фрикционных дисков.
Давление р на рабочей поверхности дисков (чем больше давление, тем больший вращающий момент передает муфта, однако тем быстрее изнашиваются фрикционные поверхности дисков)
4F
Р ~, П2 75Г? [р]’
n(Z>? - £)j)
где [р] — допускаемое давление [8]. К фрикционным материалам рабочих поверхностей дисков применяют те же требования, что и для дисковых фрикционных муфт сцепления. Особое внимание уделяется стабильности коэффициента трения с изменением рабочих условий (температуры, давления, времени пробуксовки).
Рис. 19.23. Роликовая муфта свободного хода
А—А
277
Муфты свободного хода служат для передачи вращающего момента только в одном направлении, когда угловые скорости ведущей и ведомой полумуфт равны. Если угловая скорость ведомой полумуфты превысит угловую скорость ведущей полумуфты, муфта автоматически разъединит агрегаты. По принципу действия эти муфты делят на фрикционные и храповые. Наибольшее распространение получили первые из-за бесшумности, малого «мертвого хода», способности работать при высоких окружных скоростях. Поэтому рассмотрим принцип действия и конструкции только фрикционных муфт.
Роликовая муфта свободного хода (рис. 19.23) состоит из обоймы 1 и звездочки 2, которые являются полумуфтами, роликов 3, расположенных равномерно по окружности, и прижимных устройств, включающих поршень 7 и пружину 6. Ролики удерживают боковые крышки 4, которые фиксируют пружинные кольца. Обойму от поворота удерживает шпонка 5. Ведущим звеном муфты может быть как звездочка, так и обойма. На рис. 19.24 представлены основные размеры и характер взаимодействия обоймы, ролика и звездочки после соединения полумуфт и план сил, действующих на ролик со стороны звездочки и обоймы для случая, когда ведущей является звездочка (w2 > wy) (рис. 19.23). Когда обойма начнет обгонять звездочку (coj > со2), ролик силами трения о звездочку и обойму смещается в более широкую часть клинового зазора (на рис. 19.24, а положение ролика показано штриховой линией) и полумуфты размыкаются.
Основным параметром муфты является угол заклинивания а, обычно а = 6...10°. Для нормальной работы муфты угол заклинивания а должен быть постоянным как в начале заклини-
Рис. 19.24. Взаимодействие обоймы, ролика и звездочки в роликовой муфте свободного хода: а — схема; б — план сил
278
вания ролика (первое касание роликом полумуфт), так и после полного включения муфты. Однако в рассмотренной муфте угол а переменный, что является большим недостатком муфты. В этой муфте сложно изготовить звездочку. Малейшие ошибки в форме и размерах опорной поверхности для ролика влияют на рассеивание угла заклинивания и на надежность работы муфты. Недостатком муфты является также ее низкая несущая способность из-за малого числа роликов.
Основные размеры муфты находят из приближенных соотношений D & 7,73jT/z, где Т— расчетный вращающий момент, Н • м; z — число роликов; D, мм — на рис. 19.24. Диаметр ролика d ~ D/8. Более подробная информация приведена в [8].
Муфта с эксцентриковыми роликами представлена на рис. 19.25. Между концентричными цилиндрическими поверхностями полумуфт расположены эксцентриковые ролики. Преимущества такой конструкции по сравнению с роликовой муфтой свободного хода: простота выполнения рабочих поверхностей полумуфт; повышенная несущая способность из-за существенного увеличения числа роликов; больший радиус кривизны рабочих поверхностей роликов, что уменьшает контактные напряжения. При условии > со2 ролики заклиниваются между полумуфтами, и муфта передает вращающий момент. При со2 > <»! муфта размыкается. На рис. 19.25, б представлен план сил, действующих на ролик во включенной муфте.
Муфты центробежные (пусковые). Для запуска машин с большими разгоняемыми массами (транспортирующие машины, центрифуги, вентиляторы и т. д.) необходимо применять мощные двигатели, развивающие большой
Рис. 19.25. Муфта с эксцентриковыми роликами: а — схема; б — план сил
279
Рис. 19.26. Колодочная пусковая муфта
вращающий момент при запуске и работающие после этого с большой недогрузкой при стационарном рабочем режиме машины. Это существенно удорожает стоимость машины и ее эксплуатацию. В этих случаях весьма целесообразно применять центробежные муфты. По виду рабочего элемента центробежные муфты делят на колодочные и с сыпучим наполнителем. Эти муфты служат для автоматического плавного соединения (или разъединения) агрегатов при достижении ведущей полумуфтой заданной угловой скорости.
На рис. 19.26 представлена схема колодочной нормально-разомкнутой муфты. На ведущей полумуфте (на рисунке не показана) установлены колодки 2 с осью поворота 4 и пружи-
ны растяжения 3, отжимающие с силой Fn колодки от рабочей поверхности ведомой полумуфты 1. По мере разгона ведущей
полумуфты центробежные силы F , преодолевая силу пружин Fn, плавно прижимают колодки к рабочей поверхности ведомой полумуфты, вызывая появление силы трения FTp.
Рис. 19.27. Колодочная центробежная муфта, встроенная в шкив клиноременной передачи
280
На рис. 19.27 представлена колодочная центробежная муфта, встроенная в шкив клиноременной передачи. Ступица 2 является ведущей полумуфтой, с которой подвижно в радиальном направлении соединены три колодки 3 с фрикционными накладками. Ведомая полумуфта 1, являясь шкивом, установлена на ступице 2 на двух подшипниках качения. Если муфта не вращается, полумуфты 1 и 2 разъединены. При вращении ведущей полумуфты 2 колодки также начинают вращаться и под действием центробежных сил плавно прижимаются к цилиндрической поверхности в ведомой полумуфте, со
единяя их.
Передаваемый муфтой вращающий момент равен моменту сил трения, Н • м:
Т = FrfRTpz =
Gn2rn2fRTpz
900g
где G — вес колодки, Н; g — ускорение свободного падения, м/с2; г — расстояние от оси вращения до центра тяжести колодки, м; и — частота вращения муфты, мин-1; f — коэффициент трения; /?тр — радиус трения, м; z — число колодок.
Давление на колодках не должно превышать допустимого, определяемого ресурсом фрикционной накладки р = Fr/A < [р], где Fr — радиальная сила, действующая на колодку; А — площадь рабочей поверхности колодки.
Контрольные вопросы
1. Каково назначение муфт?
2. В чем состоит различие между управляемыми и самоуправляемыми муфтами?
3. Как определяют расчетный вращающий момент для муфт?
4. В каких случаях применяют глухие муфты?
5. Каковы основные свойства компенсирующих муфт?
6. Какие муфты используют для соединения валов с большими углами перекоса?
7. Каковы основные характеристики упругих муфт?
8. Какие виды расчетов проводят для муфт с резиновой тороидальной оболочкой?
9. Для какой муфты характерно равномерное распределение напряжений по объему упругого элемента?
10. Каковы условия эксплуатации сцепных кулачковых муфт?
11. Какие материалы используют для изготовления дисков фрикционных муфт?
12. Каков порядок расчета фрикционных муфт?
13. Какие муфты используют в качестве предохранительных?
14. Для каких целей используют муфты свободного хода?
15. Какова конструкция пусковой центробежной муфты?
Литература
1. Биргер И. А., IIIорр Б. Ф„ Иосилевич Г. Б. Расчет на прочность деталей машин. М., 1993.
2. Детали машин. Атлас конструкций. Ч. 2/Под ред. Д. Н. Решетова. М., 1992.
3. Дунаев П. Ф., Леликов О. П. Конструирование узлов и деталей машин. М., 1998.
4. Иосилевич Г. Б. Детали машин. М., 1988.
5. Когаев В. П., Дроздов Ю. Н. Прочность и износостойкость деталей машин. М., 1991.
6. Орлов П. И. Основы конструирования. Справочно-методическое пособие. В 2 кн. М., 1988.
7. Решетов Д. Н. Детали машин. М., 1989.
8. Ряховский О. А., Иванов С. С. Справочник по муфтам. Л., 1991.
9. Серенсен С. В., Громан М. Б., Когаев В. П. и др. Валы и оси. М., 1970.
10. Феодосьев В. И. Сопротивление материалов. М., 1981.
Предметный указатель
А
Автоколебания 253
Автоматические муфты 274
Агрегатирование 15
Азотирование 60
Б
Баббиты 18
Бронзы 18
В
Валы 216
Вариаторы 31, 37
Виброустойчивость 14
Виды трения 26
Вкладыш 246
Водило 90
Выкрашивание 35, 55
Г
Галтель 217
Генератор волн 98
Гибкое колесо 98
Гидродинамический подшипник 246
Гидростатический подшипник 246
Граничное трение 27
д
Делительная окружность 44
Диапазон регулирования 37
Динамическая грузоподъемность 235
Дифференциальная передача 90
Долговечность 15
Допуски 20
Дуговая сварка 106
лтт*
Лл-
Жесткое колесо 98
Жесткость 13
Жидкостное трение 27
3
Заедание 56
Закон нагружения 79
Звездочки 135
Зубчатые ремни 132
И
Изнашивание 26
Износостойкость 14
Интенсивность изнашивания
28
Исходный контур 43
К
Катет шва 150
Квалитет 20
Кинематическая точность 51
Клиновые ремни 123
Композиционные материалы
19
Конструирование 11, 20
Контактная задача 23
Контактные напряжения 23
Конусное расстояние 83
Концентрация нагрузки 62
Коэффициент диаметра чер-
вяка 107
Коэффициент нагрузки 62,
113
283
Коэффициент основной нагрузки 202
Коэффициент трения 31
Коэффициент тяги 130
Коэффициент формы зуба 72
Коэффициент эксплуатации
142
Коррозионная стойкость 14
Кривая скольжения 130
Кривая усталости 74
Критерии работоспособности
12
Л
Латуни 18
Легкие сплавы 17
Линия зацепления 43
М
Межосевое расстояние 42
Металлокерамические материалы 19
Металлы 16
Метрическая резьба 184
Моделирование 21
Модуль зацепления 44
Момент трения в резьбе 187
Мультипликаторы 42
Муфты 255
Н
Надежность 14
Натяг 158
Начальная окружность 42
Начальный конус 81
Неподвижные сопряжения 23
Непровар шва 147
Нитроцементация 61
Номинальный размер 164
О
Обращенный механизм 92
Объемная закалка 59
Оптимизация 21
П
Первоначальный контакт
в точке 24
Первоначальный контакт
по линии 25
Передаточное отношение 42
Передачи 11
Плавность работы 51
Пластмассы 18
Плоские ремни 122
Поверхностная закалка 60
Подвижные сопряжения 23
Подрез шва 147
Подшипники 11, 227
Поликлиновые ремни 123
Поломка зубьев 55
Полужидкостное трение 27
Полюс зацепления 42
Постоянные муфты 255
Предварительный натяг 239
Предел выносливости 74
Приведенная кривизна 24
Приведенный модуль упру-
гости 116
Призматическая шпонка 174
Приработка 113
Прогиб вала 224
Профиль резьбы 184
Прочность 12
Прямобочные шлицы 178
Р
Работоспособность 12
Рабочий проект 20
Распределенная нагрузка 24
Редукторы 42
Ремень 121
Ремонтопригодность 15
Ряд предпочтительных чисел
15
С
Сателлит 90
Сегментная шпонка 174
284
Сепаратор 227
Сертификация 15
Сила затяжки 196
Скорость скольжения 111
Смазочные материалы 29
Смещение исходного контура
46
Соединения 11
Сопряжения деталей 23
Сохраняемость 15
Стандартизация 15
Стали 16
Статическая грузоподъемность 233
Т
Тела качения 228
Тепловой баланс 119, 252
Теплостойкость 14
Технический проект 20
Техническое задание 20
Технологичность 20
Толщина смазывающего слоя 27
Торцовая плоскость 47
Точечная сварка 152
Точность 20
Трапецеидальная резьба 207
Триботехника 26
Тяговая способность 126
У
Угол делительного конуса 83
Угол зацепления 43
Угол наклона зуба 47
Упорная резьба 208
Управляемые муфты 255
Упругое скольжение 33
Ф
Фланкирование 45
Фрикционные передачи 31
X
Ход резьбы 184
ц
Цапфа 217
Целевая функция 21
Цементация 60
Центральная шестерня 90
Центральное колесо 90
Цепи 136
Ч
Червяк 103
Червячное колесо 103
Число заходов червяка 107
Чугуны 17
Ш
Шаг 44
Шариковинтовые передачи
211
Шестерня 40
Шкив 121
Шовная сварка 152
Э
Эвольвентное зацепление 43
Эвольвентные шлицы 179
Эквивалентная статическая нагрузка 234
Эквивалентная динамическая нагрузка 237
Эквивалентное колесо 47
Электрическая сварка 11
Электрод 146
Эскизный проект 20
Учебное издание
Ряховский Олег Анатольевич Клыпин Александр Владимирович
ДЕТАЛИ МАШИН
Зав. редакцией Б. В. Панкратов Ведущий редактор И. Е. Якушина Художественное оформление М. Г. Мицкевич Технические редакторы Н. И. Герасимова, М. В. Биденко Компьютерная верстка С. Л. Мамедова Компьютерная графика О. И. Колотова Корректор Г. И. Мосякина
Изд. лиц. № 061622 от 07.10.97.
Подписано к печати 23.07.02. Формат 60х90*/1в-Бумага типографская. Гарнитура «Школьная». Печать офсетная. Усл. печ. л. 18,0. Тираж 10 000 экз. Заказ № 4210180.
ООО «Дрофа», 127018, Москва, Сущевский вал, 49. По вопросам приобретения продукции издательства «Дрофа» обращаться по адресу: 127018, Москва, Сущевский вал, 49.
Тел.: (095) 795-05-50, 795-05-51. Факс: (095) 795-05-52. Торговый дом «Школьник».
109172, Москва, ул. Малые Каменщики, д. 6, стр. 1А. Тел.: (095) 911-70-24, 912-15-16, 912-45-76.
Магазин «Переплетные птицы».
127018, Москва, ул. Октябрьская, д. 89, стр. 1.
Тел.: (095) 912-45-76.
Отпечатано с готовых диапозитивов в ФГУИПП «Нижполиграф»
603006, г. Нижний Новгород, ул. Варварская, 32.
ВОВНЕ КНИГИ ИЗДАТЕПЬСГВА «ДРОФА»
Одно из ведущих в России издательств учебной литературы предлагает вашему вниманию литературу для средних специальных учебных заведений.
Комплект учебников по дисциплине «Техническая механика» для студентов учреждений среднего профессионального образования технического профиля
П. Ф. Сабодаш.
• «Теоретическая механика».
В представленном учебнике с помощью простейшего математического аппарата изложены все основные разделы теоретической механики, включая статику, кинематику и динамику.
А. Н. Бородин.
• «Сопротивление материалов», 2-е издание, исправленное.
Теоретический материал изложен в доступной для учащихся форме, а значительное число примеров и контрольных вопросов к каждой главе позволят использовать пособие и для самостоятельного изучения предмета.
О. А. Ряховский, А. В. Клыпин.
• «Детали машин».
Компактная и доступная форма изложения теоретического материала позволит студентам не только усвоить основные положения курса, но и успешно выполнить курсовое проектирование по основным направлениям современного машиностроения.