/


























































































































































































































Text
В. Н. КУДРЯВЦЕВ
Заслуженный деятель науки и техники РСФСР, д-р техн, наук профессор
JEWMI Л/МШИН
Chipmaker.ru
Допущено Министерством высшего и среднего специального образования СССР в качестве учебника для студентов машиностроительных специальностей вузов
ЛЕНИНГРАД «МАШИНОСТРОЕНИЕ» ЛЕНИНГРАДСКОЕ ОТДЕЛЕНИЕ 1980
ББК 34.44я7
К88
УДК 621.81(085)
Научный редактор А. М. Волженская
Рецензенты: д-р техн, наук преф. Б. А. Пронин; кафедра теории механизмов и машин и деталей машин Ленинградского института инженеров водного транспорта; зав. кафедрой д-р техн. Наук проф. Ю. Н. Кирдяшев
Кудрявцев В. Н.
К88 Детали машин: Учебник для студентов машиностроительных специальностей вузов. — Л.: Машиностроение. Ленингр. отд-ние, 1980. — 464 с., ил.
В пер.: 1 р. 30 к.
ЕБКЗ“Й
© Издательство «Машиностроение», 1980 г,
Chipmaker.ru
Предисловие
Содержание учебника, написанного по программе курса «Детали машин» для машиностроительных специальностей высших учебных заведений СССР, соответствует лекциям, читаемым автором в Ленинградском механическом институте.
При работе с этой книгой надо учитывать, что основные исходные предпосылки расчетов и конструирования объединены в первой части курса (главы 1—7). Такое построение позволило одни и те же положения и зависимости использовать при конструировании и расчете не схожих по назначению деталей и узлов. Здесь даны критерии, характеризующие загруженность сопряженных поверхностей, приведены расчеты на долговечность по критерию усталостной прочности и указаны факторы, влияющие на прочность; дано определение запасов прочности с использованием вероятностных и детерминированных подходов; приведены данные о маслах и способах подачи их к трущимся парам, сведения о защите узлов трения от перегрева, загрязнения и вытекания масла.
В первой части рассмотоено также влияние погрешностей и деформаций на распределите нагрузок в зонах взаимодействия звеньев; приведены сведения о материалах, наиболее характерных для деталей машин общего назначения, и указания к их выбору исходя из требований, предъявляемых к массе и габаритам проектируемого объекта с учетом особенностей работы в зоне контакта и возможных видов повреждений. При этом использованы зависимости, связывающие массу детали (узла) с допускаемыми напряжениями (с механическими характеристиками), и отношение скорости скольжения к алгебраической сумме скоростей контактирующих точек относительно зоны контакта.
Перечисленные вопросы не рассматриваются в других частях учебника, но изучение изложенного в них материала связано с необходимостью обращения к материалу первой части. Так, вопросы усталостного изнашивания имеют много общего для передач зацеплением, фрикционных передач, подшипников качения, и поэтому их оказалось целесообразным сосредоточить в одном месте. То же относится к изнашиванию сопряженных поверхностей
неусталостного характера. Критерии, характеризующие загруженность сопряженных поверхностей, рассмотрены в первой части, а затем многократно используются в других частях книги. Распределение удельных нагрузок по длине резьбовых, зубчатых (шлицевых) и сварных соединений, а также по ширине зубчатого венца описывается общей для этих случаев математической моделью, приведенной в первой части. Эта модель позволяет найти параметры модификации сопряженных поверхностей, обеспечивающих наиболее благоприятное распределение давлений (повышение несущей способности). Общими зависимостями описываются распределение нагрузки между телами качения в подшипниках, распределение давлений на поверхностях круглых шпонок и болтов, поставленных без зазора, а также в соединениях с цилиндрическими сопряженными поверхностями, загруженных силами и моментом, вектор которого перпендикулярен к оси. Общие зависимости из первой части используются и для определения вероятностных зазоров, натягов, твердостей и коэффициентов запаса прочности.
Ряд глав учебника просмотрели и дали много полезных указаний В. Л. Вейц, К. М. Горелов, Г. Б. Иосилевич, Ю. В. Левитан, М. Е. Подольский и В. Л. Файншмидт. Автор приносит им свою искреннюю благодарность. Автор выражает также благодарность А. Д. Игнатовскому за помощь при работе над рукописью.
Chipmaker.ru
Введение
Производственные процессы в большинстве отраслей народного хозяйства выполняют машины, и дальнейший прогресс и рост материального благосостояния тесно связаны с развитием машиностроения. Вот почему машиностроению принадлежит ведущая роль среди других отраслей народного хозяйства. За годы советской власти машиностроение в нашей стране развивается бурными темпами, и в настоящее время по объему выпускаемой продукции СССР занимает второе место в мире.
Машина состоит из деталей — изделий, полученных без применения сборочных операций (болт, вал, зубчатое колесо и т. д.). Совокупность деталей, объединенных общим назначением, называется сборочной единицей (узлом). Характерными примерами узлов являются редуктор, коробка скоростей, подшипник, муфта и т. д.
При внимательном ознакомлении с механизмами самых разнообразных машин и приборов, например металлорежущего станка, автомобиля, вертолета, прокатного стана, лунохода, часов и т. д., нетрудно обнаружить, что у этих разнородных устройств имеется много похожих по назначению деталей и узлов: крепежные изделия (винты, гайки и др.), передачи (зубчатые, червячные, гибкой связью и др.), валы и их опоры, всевозможные соединения (зубчатые, шпоночные, резьбовые), пружины, уплотнения, корпусные детали, муфты, передачи и т. д.
Курс «Детали машин» посвящен теории, расчету и конструированию именно таких деталей, их соединений, а также узлов, которые характерны для подавляющего большинства современных машин.
Детали и узлы, характерные для сравнительно ограниченной номенклатуры машин, рассматриваются в специальных дисциплинах. Курс «Детали машин» завершает общетехнический цикл и обязывает студента активно использовать знания из ряда предыдущих дисциплин для решения инженерных задач. Так, для определения усилий, действующих на звенья, потерь на трение, исследования кинематики необходимы сведения из курсов теоретической механики и теории механизмов и машин, расчеты прочности и деформа-
ций базируются на данных из курсов сопротивления материалов и теории упругости. Выбор материалов деталей машин, вида термообработки, способа изготовления, рациональных форм, точности основывается на сведениях из курсов материаловедения, технологии холодной и горячей обработки, сварочного дела и т. д.
Последовательность и характер создания конструкторской документации сформулированы в ГОСТ 2.103—68 и включают следующие основные этапы.
Техническое задание. В этом документе освещается назначение объекта, его особенности, в зависимости от которых устанавливают такие показатели, как производительность, надежность и долговечность, массо-габаритные, энергетические, стоимость и др.
Техническое предложение. На основании анализа технического предложения определяют технические и технико-экономические обоснования целесообразности разработки документации изделия путем сравнительной оценки различных вариантов возможных решений с учетом особенностей разрабатываемого и существующих изделий, а также патентных материалов.
Эскизный проект. На этом этапе разрабатывают варианты общих видов объекта и основных узлов с технико-экономическими обоснованиями, необходимыми для выбора оптимального варианта. Одновременно с этим определяют круг вопросов, относящихся к принципу действия, надежности и прочности, которые подлежат исследованиям и экспериментальной проверке.
Технический проект. При техническом проектировании разрабатывают общие виды и узлы проектируемого объекта, уточняют конструкцию деталей. При этом могут продолжаться и упомянутые выше исследования.
Разработка рабочей документации. В этот этап входит изготовление чертежей общих видов и узлов, подвергшихся уточнению после технического проектирования, чертежей деталей, спецификации, технологической документации на изготовление и сборку, испытания и др.
Таким образом, рабочий проект содержит все то, что необходимо для воплощения в материальную форму технического задания с коррективами, возникшими в процессе конструирования и проведения исследований.
На стадии эскизного проектирования выполняют приближенные расчеты тех элементов конструкции, которые не влияют существенно на конечные основные показатели проектируемого объекта, сформулированные в техническом задании. Отдельные элементы конструкции могут быть взяты без расчета, если имеются опробованные образцы, близкие к проектируемому. Но и при эскизном проектировании для технико-экономических расчетов, связанных с выбором оптимального варианта, нужна достаточно точная оценка параметров, влияющих на конечные результаты. Так, при проектировании механического привода для выбора типа передачи (зубчатой с неподвижными осями, планетарной, червячной и т. д.) 6
необходимо иметь данные, которые позволят найти размеры элементов, определяющих массу и габариты сравниваемых вариантов с погрешностью, не оказывающей существенного влияния на конечный результат.
При техническом проектировании выполняют уточненные расчеты всех элементов проектируемого объекта по основным критериям работоспособности.
К важнейшим требованиям, предъявляемым к проектируемой машине, относятся экономичность в изготовлении и эксплуатации, удобство и безопасность обслуживания, надежность и долговечность. Для обеспечения этих требований детали должны удовлетворять ряду критериев, важнейшие среди которых — прочность, износостойкость, жесткость, виброустойчивость, теплостойкость, технологичность.
Удобство обслуживания существенно влияет на надежность машин и производительность труда, поскольку результаты работы многих объектов определяются показателями системы человек— машина. Недостатки этой системы — повышенные шум, вибрация, усилия на рукоятках, неудобство осмотра, затруднения при переключении скоростей и т. д. — приводят к ускоренной утомляемости, нарушению технических условий с возможными аварийными ситуациями.
Большое значение для создания надежных, экономичных в изготовлении и эксплуатации машин имеет стандартизация —• процесс установления и применения стандартов. В СССР действуют стандарты: общесоюзные (ГОСТы), отраслевые (ОСТы), республиканские (РСТ) и предприятий (СТП). Стандартизация в области деталей и узлов машин охватывает материалы, геометрические параметры (диаметры валов и отверстий, форму и размеры резьб, зубчатых, шпоночных соединений, исходные контуры зацепления и т. д.), нормы точности, правила оформления чертежей и т. д. Стандартизованы многие детали и узлы, например крепежные изделия, приводные ремни и цепи, муфты, подшипники качения и др. Благодаря стандартизации снижается стоимость машин, сокращаются сроки проектирования и повышается надежность.
В последние годы широко развернута стандартизация методов расчета, например зубчатых соединений, зубчатых передач и т. д.
Начиная с 1974 г., развернуты работы по стандартизации в рамках Совета экономической взаимопомощи (СЭВ). Это важное начинание способствует дальнейшему углублению и расширению сотрудничества и интенсификации социалистической экономической интеграции стран — членов СЭВ, повышению производительности труда и качества производства. Стандарты СЭВ получают широкое применение и в области деталей машин.
При проектировании машин в целом, а также их узлов и деталей учитываются требования технической эстетики. Машинам надо придавать красивый вид, сочетающийся с целесообразностью форм. Так, необходимую жесткость и прочность корпусных деталей целе
сообразно получать не за счет ребер, а с помощью плавных переходов, подобных показанным на рис. 14.57. При этом уменьшается затрата материала, облегчается очистка от загрязнения и создается более благоприятное впечатление от внешнего вида.
Курсовой проект по «Деталям машин» является первой самостоятельной творческой инженерной работой студента, охватывающей вопросы расчета на прочность, износостойкость, теплостойкость, выбора материалов и др., идущей с минимальным отрывом от фундаментальных дисциплин и базирующейся, по существу, на всех до этого пройденных предметах. Воплощая в материальную форму выбранную схему механизма, синтезируя знания по сопротивлению материалов, теории механизмов и машин, теоретической механике, материаловедению, технологии и другим предметам, студент приобщается к инженерному творчеству, одновременно закрепляя знания по фундаментальным дисциплинам.
При развитии навыков в проектировании и приложении теоретических знаний предпочтительны объекты, которые не только широко распространены и имеют большое практическое значение, но и не подвержены в обозримом будущем моральному старению. Этими свойствами в полной мере обладают объекты, изучаемые в курсе «Детали машин», присущие всем современным машинам, механизмам, приборам, эксплуатирующимся в любых условиях — от глубин океана до космоса. В связи с этим уместно отметить, что многие детали и узлы, например вращательная пара скольжения, открытая Архимедом винтовая пара, зубчатые колеса, изобретенные Леонардо да Винчи подшипники качения и многое другое известны очень давно, однако совершенствование их является необходимым условием дальнейшего прогресса науки и техники.
При выполнении сложных инженерных решений далеко не все может быть формализовано. На пути к цели много «белых пятен», ликвидация которых требует времени, обычно во много раз большего, чем отпускается на проектирование. Поэтому необходимо развивать инженерные подходы, в том числе умение синтезировать предшествующий опыт, нащупывать новые идеи, моделировать с использованием аналогов. Развитию этих качеств в большой степени способствует курсовой проект по «Деталям машин». Многовариантность решений при проектировании развивает мыслительную деятельность, инициативу. Переход от формальной логики теоретических дисциплин к эвристической деятельности инженера является одной из составляющих того трудного качественного скачка, который предстоит совершить студенту при прохождении курса «Детали машин».
Chipmaker.ru
Основные условные обозначения
С (С<р) — коэффициент (крутильной) жесткости;
CQ (Счц) — коэффициент удельной (контактной) жесткости;
Сн([Сн]) — коэффициент контактных напряжений (Допускаемое значение коэффициента Cw), МПа [см. (14.47), (14.59)];
Е — модуль упругости первого рода, МПа;
F (Fn) — усилие (нормальное), И;
Ff — сила трения, Н; f — коэффициент трения;
G — модуль упругости второго рода, МПа;
Jp — полярный момент инерции;
Ко ([Ко1) — комплексный коэффициент контактных напряжений (допускаемое значение коэффициента Z(o), МПа;
ККр — коэффициент, учитывающий неравномерность распределения нагрузки в зоне взаимодействия звеньев (см. стр. 83);
Кса, Кст — коэффициенты, учитывающие число циклов перемен напряжений (см. стр. 62);
Khl> Kfl — коэффициенты, учитывающие число циклов перемен напряжений (коэффициенты долговечности) при расчете зубьев по контактным
и изгибным напряжениям (см. стр. 270, 278);
К На. — коэффициент, учитывающий распределение нагрузки между зубьям» (см. стр. 254);
— коэффициенты, учитывающие неравномерность распределения нагрузки по ши-рййе зубчатого венца при расчете на контактную и изгибную прочность (см. стр. 256, 258, рис. 14.24, 14.25); Knv> Kfv — коэффициенты, учитывающие динамические нагрузки в зацеплении при расчете на контактную прочность и на изгиб (см. стр. 262 и 323);
Мс, — эффективные коэффициенты концентрации напряжений;
k — коэффициент теплопередачи;
М — изгибающий момент, Н-м;
Л'вщ. КЕМ — мощности ведущего и ведомого звеньев;
No — базовое число циклов перемен напряжений (см. стр. 61);
Nc — число циклов перемен напряжений;
Кцо> Kfo — базовые числа перемен контактных и изгиб-ных напряжений для зубьев [см. (14.48) и стр. 270, 278];
R — коэффициент асимметрии цикла (см. стр. 58) s — коэффициент запаса прочности;
Т — крутящий момент, Нм;
Т[ — момент трения, Н-м;
rHi, Тп — расчетные моменты на шестерне (см. стр. 267, 276), Н-м;
I — время;
th — продолжительность работы; ч;
ь'т1 (г'тг) — проекция скорости контактирующей точки относительно зоны контакта (при начальном касании по линии) на нормаль к линйи контакта (см, стр. 26);
— абсолютная величина алгебраической суммы г'т1 и цт2;
Wp — полярный момент сопротивления;
Yp — коэффициент формы зуба (см. рис. 14.35);
ZM — упругая постоянная материалов соприка-
сающихся тел (см. стр. 23);
аа, «т — теоретические коэффициенты концентрации напряжений;
еа, ет — коэффициенты влияния абсолютных размеров при циклических нагрузках;
еа — коэффициент торцового перекрытия (см. стр. 246);
т] — к. п. д. передачи;
О — температура; удельная скорость ^скольжения;
Л, Хд, — коэффициенты податливости;
|Л — динамическая вязкость; МПа/с;
v — кинематическая вязкость, м2/с;
рт — плотность, кг/м3;
ов, тв — временное сопротивление, МПа;
<т„ — максимальное контакт-п
ное напряжение, МПа;
о 1, Г-д — пределы выносливости, МПа.
Часть первая
ОСНОВЫ РАСЧЕТА
И ПРОЕКТИРОВАНИЯ ДЕТАЛЕЙ
И УЗЛОВ МАШИН
Важнейшими показателями деталей и узлов машин являются надежность и экономичность. При оценке экономичности учитывают затраты на материалы, изготовление и эксплуатацию.
Надежность и работоспособность характеризуются рядом критериев, важнейшие из которых — износостойкость (главы 2 и 3), прочность (гл. 4), жесткость (гл. 5 и др.), виброустойчивость и теплостойкость (главы 3 и 6).
Экономические аспекты при проектировании проявляются при выборе материала, термообработки, упрочняющей технологии (главы 4 и 6), формы и способа изготовления (гл. 1). Среди важнейших показателей при оценке экономичности деталей и узлов машин можно назвать их массо-габаритные характеристики. Существенным показателем экономичности при эксплуатации является к. п. д. механических передач, изучаемых в курсе «Детали машин».
Действующие нагрузки обычно являются случайными функциями времени. Механические характеристики материалов, отклонения от заданных размеров деталей машин (возникшие при изготовлении или в процессе эксплуатации) также являются случайными величинами, и им свойственно значительное рассеивание. В связи с этим использование методов теории вероятностей и математической статистики является важным условием совершенствования расчетов и проектирования деталей и узлов машин (гл. 7).
Chipmaker.ru
Глава 1. ДОПУСКИ И ПОСАДКИ, ШЕРОХОВАТОСТЬ ПОВЕРХНОСТИ И ТЕХНОЛОГИЧНОСТЬ ДЕТАЛЕЙ МАШИН
§1.1. ДОПУСКИ И ПОСАДКИ
Размеры деталей машин не могут быть выполнены идеально точно, но вместе с тем основной предпосылкой массового производства является взаимозаменяембсть — возможность заменить одну деталь другой без дополнительной обработки при удовлетворении техническим требованиям, предъявляемым к дйнйбму узлу (к машине). Взаимозаменяемость обеспечивается ставдартйзован-
11
I I
I I I
I I I
ними системами допусков и посадок на резьбовые, зубчатые (шлицевые), шпоночные соединения, зубчатые передачи и др.
Ниже даны краткие сведения о допусках и посадках для цилиндрических поверхностей охватывающей (отверстие диаметром О) и охватываемой (вал диаметром d) сопряженных деталей (рис. 1.1).
Для удовлетворения техническим требованиям необходимо, чтобы размеры выдерживались между двумя допустимыми предельными размерами, разность между которыми называется допуском и обозначается TD и Td соответственно для отверстия и
I
I
I
Рис. 1.1. Посадки: а — с зазором; б—переходная; в — с натягом; Pjnax — наибольший диаметр отверстия; — номинальный диаметр отверстия; — наименьший диаметр вала; ES и EI — соответственно верх_ нее и нижнее отклонения диаметра отверстия; es и ei — соответственно верхнее н нижнее отклонения диаметра вала; Sj^x « ^min — соответственно наибольший и наименьший зазоры; ЛгП]ах и N min“ соответственно наиболь-* ший н наименьший натяги; Тр и Тд — допуски для отверстия и вала соответственно
вала (рис. 1.1). Для удобства указывают номинальный размер детали d, который служит началом отсчета отклонений. Размер d выбирают из установленных в ГОСТ 6636—69 линейных размеров, представляющих собой геометрическую прогрессию со знаменателями Ra5 = у10 1,6; RalO = v^lO 1,25 и др., при-
нятыми в соответствии с рядами 5; 10; 20; 40 предпочтительных чисел по ГОСТ 8032—56* с некоторыми округлениями \
В зависимости от взаимного расположения полей допусков посадки могут быть с зазором S, переходные и с натягом N (рис. 1.1). Посадки с зазором применяют в подвижных соединениях (например, в подшипниках скольжения) и в неподвижных, если надо обеспечить легкую сборку и разборку и не предъявляются жесткие требования к соосности сопряженных деталей. Переходные посадки в зависимости от сочетания размеров Dud могут быть как с зазором, так и с натягом. Используются они в неподвижных соединениях, требующих хорошего центрирования, и при возмож-
1 С рядами предпочтительных чисел согласуются не только линейные размеры, но и некоторые параметры машин, например передаточные отношения стандартных редукторов, допускаемые моменты электродвигателей, стандартных редукторов и муфт и т. п.
пости повторных сборок и разборок с применением дополнительных креплений шпонками, штифтами, резьбовыми деталями и т. д.
Посадки с натягом применяют в неподвижных соединениях (см. рис. 1.1, в и гл. 11).
Допуски и отклонения от номинала для соединений цилиндрических и плоских по параллельным плоскостям приводятся в стандартах СЭВ: СТ СЭВ 144—75 и СТ СЭВ 145—75, базирующихся на международной системе допусков и посадок ИСО. В этих стандартах даны формулы и числовые значения допусков, установленные в 19 рядах точности, называемых квалитетами и обозначаемых порядковыми номерами. Наибольшее распространение в машино-
Рис. 1.2. Примеры посадок в системе отверстия
строении имеют точности, соответствующие квалитетам 5—12. Квалитеты 4 и 5 применяют для особо точных деталей. Квалитеты 6—8 используют для наиболее распространенных ответственных деталей машин. Детали, работающие со средними скоростями, к точности которых не предъявляют высоких требований, выполняются по квалитетам 8 и 9. Для деталей низкой точности, допускающих, в частности, обработку без снятия стружки, применяют квалитеты 10—12.
Положение поля допуска относительно нулевой линии определяется отклонениями (или одним из отклонений и величиной поля допуска). Поля допусков отверстия обозначают прописными латинскими буквами, вала — строчными с добавлением числа — номера квалитета (например, F7, /8).
Различают две системы посадок: отверстия и вала. В системе отверстия поле допуска отверстия Н имеет нижнее отклонение, равное нулю, и различный характер посадок осуществляется варьированием полей допусков вала (рис. 1.2). В системе вала при неизменном поле допуска вала h различный характер посадок осуществляется изменением поля допуска отверстия.
Посадки назначают из расчета (см. главы 11 и 19) или из опыта, имеющегося в данной отрасли.
Наиболее распространенной является система отверстия, поскольку при этом сокращается номенклатура дорогих инструмен
тов для отверстий. Систему вала применяют при технологической целесообразности использования гладких валов (например, если окончательной обработкой является калибровка), сопряженных с деталями с различными посадками, при применении стандартных деталей с охватываемой поверхностью (внешние кольца подшипников качения и др.).
Посадки выбирают в соответствии с условиями работы и сборки сопряжения, а также требованиями к точности (см. главы 7, 11, 19). При этом учитывают опыт применения посадок в механизмах, близких к проектируемому по основным параметрам и условиям эксплуатации.
§ 1.2. ШЕРОХОВАТОСТЬ ПОВЕРХНОСТЕЙ
Поверхности деталей машин, заданные технической документацией без учета допускаемых отклонений, называются номинальными поверхностями. Реальные поверхности отклоняются от номинальных. Одной из причин этого является их шероховатость — совокупность неровностей, высота которых может изменяться примерно от 0,1 до 300 мкм соответственно дтя 14-го и 1-го классов шероховатостей.
Линия выступов
P.ic. 1.3. Некоторые параметры, характеризующие шероховатость поверхности
Состояние поверхности после обработки оказывает большое влияние на эксплуатационные свойства деталей. Возникающие при механической обработке трещины и надрывы с возможными остаточными напряжениями растяжения способствуют развитию усталостных трещин и коррозии, снижающих контактную и объемную прочность деталей (см. стр. 73 и 270).
С увеличением шероховатости уменьшается площадь фактического контакта (см. стр. 21), увеличиваются местные давления, возрастают интенсивность изнашивания и опасность появления задира (см. стр. 35).
Сопутствующее росту шероховатости снижение жесткости в контакте ведет к ослаблению соединений деталей машин с натягом (см. стр. 193) и снижению несущей способности болтов при циклической нагрузке (см. гл. 8).
Таким образом, уменьшение шероховатости (повышение «гладкости» поверхности) способствует увеличению износостойкости, коррозионной стойкости, объемной прочности и позволяет повысить нагрузочную способность напряженных соединений и их герметичность.
Повышение износостойкости достигается при уменьшении шероховатости до определенного предела. Для удержания масла в контакте и уменьшения изнашивания на сопряженных поверхностях создается в ряде случаев упорядоченная (оптимальная) шер охов атость 1901.
Таблица 1.1. Классы шероховатости поверхности *
Класс шероховатости Разряд Параметры шероховатости, мкм Базовая длина 1, мм
Ra Rz
1 2 3 — — 320—160 160—80 80—40 8,0
4 5 — — 40—20 20-10 2,5
6 а б в 2,5—2,0 2,0—1,6 1,6—1,25 10—8,0 8,0—6,3 0,8
7 а б в 1,25—1,00 1,00—0,80 0,80—0,63 6,3—5,0 5,0—4,0 4,0—3,2
8 а б в 0,63—0,50 0,50—0,40 0,40—0,32 3,2—2,5 2,5—2,0 2,0—1,6
9 а б в 0,32—0,25 0,25—0,20 0,20—0,16 1,60—1,25 1,25—1,00 1,0—0,80 0,25
10 * в классы ше а б в 1астоящую таб эоховатости 11 0,160—0,125 0,125—0,100 0,100—0,080 лицу ие включены пр — 14. 0,80—0,63 0,63—0,50 0,50—0,40 едусмотрениые в ГОС 0,25 Т 2789 — 73
В соответствии с ГОСТ 2789—73 основными параметрами для оценки шероховатости поверхностей являются;высота Rz неровностей профиля по десяти точкам и среднее арифметическое отклонение профиля Ra на базовой длине I (рис. 1.3 и табл. 1.1). Величины Rz и Ra определяются по формулам:
(5 5 ч I
У, I /Л-max |+ I//< mln I h Лй = -J- j | IJ (х) | dx, 1=1 1=1 / О
где Н L тах и т1п — отклонения соответственно пяти наибольших максимумов и наибольших минимумов профиля (рис. 1.3, а). Отсчет величин Himm, Himin и у (х) производится от базовой линии т—т, имеющей форму номинального профиля и проведенной так, что в пределах базовой длины I среднее квадратическое отклонение профиля от этой линии минимально.
Помимо параметров, характеризующих высоту неровностей, большое влияние на эксплуатационные свойства оказывают их однородность и величины S, rBn/S, rBCJS и ['• (рис. 1.3, б). В частности, при некотором оптимальном значении Р (желательно иметь Р < 6°), увеличение отношений rBn/S и rBCT/S способствует повышению объемной прочности и износостойкости. Высокая однородность микронеровностей при рациональной геометрии их достигается, в частности, методом виброобкатки [90].
При выборе шероховатости поверхности учитывают требования к точности детали. Обычно значения Rz и Ra снижают с уменьшением величины допуска.
§ 1.3. ТЕХНОЛОГИЧНОСТЬ ДЕТАЛЕЙ МАШИН
Технологичным называется изделие, удовлетворяющее заданным техническим требованиям и изготовленное по наиболее эффективной для данного вида производства технологии, обеспечивающей минимальные затраты средств, времени и труда. Технологичность деталей и узлов является одним из важнейших условий создания машин с оптимальными технико-экономическими показателями.
При выборе формы учитывают не только условия работы и назначение детали, но и способы изготовления. Так, при обработке резанием и шлифованием более технологичными являются поверхности, получаемые при наиболее просто осуществимом относительном движении детали и инструмента. С этим связано преобладающее при упомянутых способах обработки применение плоских, эвольвентных и очерченных круговыми цилиндрами и конусами поверхностей.
При серийном и массовом производстве наиболее экономичным является формообразование деталей (частичное или окончательное) методом литья или пластического деформирования (обработкой давлением). В отличие от формообразования снятием стружки при 16
этом ускоряется процесс производства, уменьшается расход материала и снижаются затраты на электроэнергию и инструмент.
Методом литья изготовляют приблизительно 40% (по массе) всех деталей машин. На долю СССР приходится 25% всего мирового производства отливок.
При проектировании литых деталей надо стремиться к обеспечению простейшей формовки, избегать местных скоплений металла, стремиться к одинаковой толщине стенок или осуществлять плавные переходы между стенками различных толщин, предусматривать литейные уклоны.
Основными видами обработки металлов давлением являются свободная ковка и штамповка, прокатка и волочение. Для получения заготовок деталей машин наибольшее распространение получила штамповка. Для многих изделий обработка давлением является окончательной операцией (болты и винты с накатной резьбой, листовые штамповки и т. д.). Расширяется область применения обработки давлением в качестве отделочной операции после обработки резанием для уменьшения шероховатостей, получения точных размеров, создания остаточных напряжений сжатия с целью повышения усталостной прочности. Благодаря малым потерям материала, высокому уровню механизации и автоматизации технологического процесса область применения обработки давлением увеличивается за счет других видов формообразования. Так, в самолетах и автомобилях около 85% всех деталей (по массе) — штампованные.
При проектировании штампованных деталей учитывают особенности заполнения штампа металлом, зависящие, в свою очередь, от температуры заготовки, предусматривают уклоны, облегчающие отделение детали от штампа. При проектировании литых и штампованных деталей следует стремиться обеспечить минимальный объем последующей механической обработки резанием и предусматривать наиболее благоприятное расположение баз для установки на станках.
Методом литья получают детали практически неограниченной сложности. С помощью штамповки изготовляют детали сравнительно простой конфигурации, но с применением сварки из штампованных элементов можно получить изделия весьма сложной формы.
Из многочисленных возможных способов формообразования деталей надо выбрать на основании технико-экономического расчета оптимальный. Важным параметром при этом является масштаб производства. Приближенно себестоимость детали S, определяют по формуле
St- = М,- + Z; + O-Jtlt,
где М( — стоимость материала детали с учетом отходов; Z, — затраты в цехах, приходящиеся на одну деталь, и накладные расходы; О, — стоимость специальной оснастки для проектируемой детали (режущий и мерительный инструмент, штампы^ модели,
специализированные станки, автоматические линии и др.); п, — число деталей в партии (масштаб производства).
Из этой формулы ясно, что при серийном и массовом производствах (при большом п,) оправдано увеличение О( (например, применением штамповки, а при сложной конфигурации изделия — литья или сварки штампованных частей), поскольку при этом, как следует из предыдущего, снижается Mit резко падает Zt и на долю одного изделия приходится незначительная часть 0{. С уменьшением щ снижается эффект от затрат на специальную оснастку. При малых значениях п:, особенно при единичном производстве, механическая обработка выполняется на универсальных станках. При этом заготовкой, например, для валов служит круглый прокатили поковка. Для повышения технологичности следует стремиться к уменьшению отношения Узаг/Пизд объемов заготовки и изделия. При малом числе изделий корпусные детали выполняют в виде сварных конструкций, заготовками для которых являются обычно элементы излистового, полосового и круглого проката.
Но и при проектировании объектов, выпускаемых малыми партиями, следует использовать преимущества, характерные для массового производства, при котором применяют специальную оснастку. Важнейшими условиями для этого являются стандартизация и унификация, ограничивающие число типоразмеров тех или иных изделий, геометрических параметров, марок материалов и так далее. Это способствует организации массового производства отдельных деталей, узлов, инструмента, различных материалов. Так, стандартизованы крепежные изделия, подшипники качения, некоторые виды соединительных муфт, различные уплотнения и многие другие детали и узлы, поставляемые заводами, освоившими их массовое производство. Использование стандартных деталей и узлов повышает технологичность машин, сокращает сроки их проектирования и изготовления. Эффективной также является ориентация при проектировании на использование деталей и узлов машин массового производства. В качестве примера можно привести использование шарнирных муфт автомобильных трансмиссий в самых разнообразных машинах. Применение в широком масштабе унифицированных узлов при проектировании машин различного типа (агрегатирование) способствует увеличению серийности и снижению стоимости машин благодаря возможности использования более высокой степени механизации и автоматизации.
Приблизительно до 50% общей трудоемкости изготовления машин падает на сборочные операции. От качества сборки в большой степени зависит надежность машин. Отсюда следует, что при проектировании надо уделять большое внимание осуществлению удобной сборки и разборки, исключать ручные пригоночные операции, неправильное взаимное положение сопряженных узлов (например, с помощью штифтов, болтов, устанавливаемых без зазора, и т. д.), стремиться к уменьшению числа деталей и удобной компоновке узлов с легко доступными местами крепления.
Глава 2. СОПРЯЖЕННЫЕ ПОВЕРХНОСТИ, УСЛОВИЯ ИХ РАБОТЫ И ВИДЫ ИЗНАШИВАНИЯ
§ 2.1. ОБЩИЕ СВЕДЕНИЯ
Сопряженными или контактирующими называются соприкасающиеся непосредственно или через слой смазки поверхности взаимодействующих деталей. Поминальные сопряженные поверхности (стр. 14) бывают совпадающими и несовпадающими, а сами детали могут двигаться одна относительно другой или быть неподвижными. В последнем варианте две смежные детали образуют
Рис. 2.1. Примеры совпадающих сопряженных поверхностей
звено, однако и в этом случае возможны относительные перемещения (микроперемещения) сопряженных поверхностей, обусловленные деформациями и люфтами (стр. 33).
Номинальные сопряженные поверхности совпадают в резьбовых парах скольжения винт—гайка (рис. 2.1, а), фрикционных муфтах (см. ниже) с плоскими и коническими поверхностями (рис. 2.1, б и 2.1, в), в простейших пятах, направляющих, осуществляющих взаимное поступательное движение звеньев (рис. 2.1,г), и др. Номинальные сопряженные поверхности двух деталей, образующих звено (неподвижное соединение), как правило, являются совпадающими. Это имеет место в соединениях с гарантированным натягом (см. рис. 11.8), зубчатых, шпоночных и в других случаях.
Примерами несовпадающих сопряженных поверхностей являются взаимодействующие поверхности колеса и рельса (рис. 2.2, а), зубьев зубчатых колес (рис. 2.2, б), поверхности тел качения (шариков, роликов) и дорожек качения в подшипниках качения (рис. 2.2, в), в винтовых парах качения (рис. 2.2, г) и т. д.
Надежность, долговечность, к. п. д., виброактивность и интенсивность шума и другие показатели машин, механизмов и приборов в большой степени зависят от изнашивания рабочих поверхностей, т. е. от процесса постепенного изменения размеров деталей и формы сопряженных поверхностей в результате отделения частиц материала или пластического деформирования.
Трение и изнашивание наносят огромный ущерб народному хозяйству. Установлено, что 85—90% машин выходят из строя в результате изнашивания деталей и только 10—15% — по другим причинам, например из-за поломок, которые, в свою очередь, часто являются следствием изменений условий работы, вызванных износом сопряженных поверхностей. Так, износ зубьев зубчатых передач (на рис. 2.2, б изношенные профили показаны штриховыми линиями) снижает их изгибную прочность и способствует увеличению динамических нагрузок. Изучение процессов, происходящих в зоне взаимодействия контактирующих поверхностей при их относительном перемещении, и изыскание путей снижения
Рис. 2.2. Примеры несовпадающих сопряженных поверхностей
их изнашивания и трения являются одним из важнейших условий интенсификации дальнейшего прогресса народного хозяйства. Вопросам, связанным с этой проблемой, посвящен раздел науки о машинах, получивший название трибоники (от греческого слова tribos — тереть).
§ 2.2. ПАРАМЕТРЫ, ХАРАКТЕРИЗУЮЩИЕ УСЛОВИЯ РАБОТЫ СОПРЯЖЕННЫХ ПОВЕРХНОСТЕЙ.
ИНТЕНСИВНОСТЬ ИЗНАШИВАНИЯ
Параметры, характеризующие загруженность сопряженных поверхностей. При совпадающих номинальных сопряженных поверхностях интенсивность нормальных к ним сил характеризуется давлением р, приходящимся на единицу площади. При отсутствии предусмотренных в конструкции относительных перемещений сопряженных поверхностей интенсивность нормальных к поверхности сил называют также напряжением смятия осм.
В примере, показанном на рис. 2.3, детали I и 2 касаются по общей номинальной поверхности с площадью А — ab. При равномерном распределении нагрузки F по поверхности А давление р = F/A.
Величина р не должна превышать допускаемого значения [р 1, найденного из обработки данных экспериментов в условиях, аналогичных имеющимся в проектируемой паре (по материалам, скоростям, смазке и т. д.):
р = ^Л<(р]. (2.1)
Рис. 2.3. К определению давления
Рис. 2.4. Касание сопряженных поверхностей деталей 1 и 2
На рис. 2.4, а показано сечение деталей 1 и 2 плоскостью, нормальной к сопряженным поверхностям этих деталей. Вследствие шероховатости и волнистости реальных поверхностей контакт
твердых тел дискретен, и фактическая площадь контакта Лф резко отличается от номинальной А. В результате приработки неровности сглаживаются (рис. 2.4, 6) и величина Лф увеличивается по сравнению с той, которая имела место сразу после механической обработки (см. рис. 2.4, б, где в плане показаны отдельные площадки касания деталей 1
Рис. 2.5. Подшипник скольжения
и 2). Но при этом обычно Лф/Л 1- Поэтому величина р, найденная по формуле (2.1), носит условный характер. Однако
такое построение расчетов широко используется, поскольку величина р сравнивается со значением [р], найденным при аналогичных условиях.
Примечание. Во вращательных парах с цилиндрическими сопряженными поверхностями, например в подшипниках трения скольжения (см. гл. 19), предусматривают зазор Д (рис. 2.5), т. е. номинальные сопряженные поверхности не совпадают. Но и в этом случае условно используют зависимость (2.1), в которой при этом А = Id.
Начальное касание, т. е. касание при отсутствии деформирующего усилия несовпадающих номинальных поверхностей, происходит в точке (рис. 2.6, а, б) или по линии (рис. 2.6, в). После приложения усилия в результате деформирования касание цилиндров происходит не по линии, а по некоторой площадке шириной 2ЬН (рис. 2.6, г). Интенсивность сил, нормальных к сопряженным поверхностям, характеризуется максимальным контактным напряжением в зоне контакта деталей. Напряжения в зоне контакта,
Рис. 2.6. К определению контактных напряжений деталей при начальном касании по линии:
1,2 — соприкасающиеся детали
найденные при указанных на стр. 25 условиях, распределены по эллиптическому закону (рис. 2.6, г). Максимальная величина ан используется в качестве одного из важнейших критериев для суждения о работоспособности несовпадающих сопряженных поверхностей. При этом величина не должна превышать допускаемое значение I<уи ], полученное из экспериментов или опыта эксплуатации при аналогичных условиях в зоне контакта.
При начальном касании по линии, характерном для зубчатых передач, роликовых подшипников и т. д., величина ан, определяется по формуле Герца, полученной из решения контактной задачи 22
теории упругости для зоны касания двух цилиндров по общей образующей (см. рис. 2.6, в):
°н — <7и/(2рпр) < 1°7/],
(2.2)
где Z.., — упругая постоянная материалов соприкасающихся тел, определяемая по формуле
Zm = V ' (2-3)
В этих формулх qH = FпНк — удельная контактная нагрузка; Fn — нормальное усилие между цилиндрами; /к — рабочая длина контактной линии; Elt Ег и рх, р2 — модули упругости первого рода и коэффициенты Пуассона материалов цилиндров 1 и 2; рпр — приведенный радиус кривизны, определяемый по формуле
Рпр = Р1Р2/(Р2 ± Р1)> (2-4)
где pi и р2 — радиусы цилиндров; знак плюс принимают при центрах кривизны, расположенных по разные стороны от точки контакта (внешнее касание, рис. 2.6, в), знак минус — при центрах, расположенных по одну сторону (внутреннее касание, рис. 2.6, д).
Для металлов р = 0,25-ь0,35. Приняв р = 0,3, получим:
ZM= 0,591 (2.5)
Он = 0,418Г?н£пР/р„Р. (2-6)
где
Епр = 2£‘1£'г/(£'1-ф Е2).
Из формулы (2.2) имеем (oH/ZM)2 = <7н/(2рпр). Величину Cfl — (стhIZ^2 называют коэффициентом контактных напряжений (см. ГОСТ 21354—75), а величину [Сп 1 = ( 1ст/; ]/ZM)2 — допускаемым значением этого коэффициента. Введение коэффициента [Сн 1 упрощает расчеты и облегчает поиск оптимальных вариантов конструкций, поскольку с величиной [Сн ] допускаемая нагрузка и масса деталей связаны соответственно прямо и обратно пропорциональными зависимостями (см. гл. 14).
Как уже указывалось, благодаря деформациям касание происходит по площадке шириной 2ЬН, показанной на рис. 2.6, г, где дана эпюра изменения нормальных напряжений. Максимального значения величина он достигает в середине этой площадки, размер которой при р = 0,3 определяют по формуле
2ЬН = 3,04 Г ЯнРпр/Епр = 7,Зонрпр/Епр. (2.7)
Формулы (2.2) и (2.5) используют и для определения он в зоне контакта конических поверхностей (имеющихся в некоторых подшипниках и зубчатых передачах) с начальным касанием по общей образующей К'К" (рис. 2.6, е). Для заданной точки К приведенный радиус кривизны определяют в сечении п—п, нормальном к общей образующей К'К". Радиус кривизны р„ в нормальном сечении
с помощью зависимости х, вытекающей из теоремы Менье, выражают через радиус pz в сечении t—t, перпендикулярном к оси конуса, и угол р между сечениями t—t и п—п:
pn = pz/cos₽. (2.8)
Для случая, приведенного на рис. 2.6, е, имеем:
p„i = Р/1/cos р; pn2 = pZ2/cos р. (2.9)
I
I
I I
I I
I I
I I
I I I I I I I I I
I I
I I
I
На рис. 2.7, а показаны криволинейные поверхности / и 2, касающиеся в точке О. Эти поверхности представлены отдельно на
Рис. 2.7. К определению контактных напряжений деталей при начальном касании в точке
рис. 2.7, б, там же показаны нормали к ним п—п в точках Ог и 02, совпадающих в точке О на рис. 2.7, а. Любое сечение плоскостью, проходящей через линию п—п, называется нормальным сечением. Нормальные сечения, в которых радиусы кривизны имеют максимальное ртах и минимальное рт1п значения, называются главными нормальными сечениями.
Рассмотрим случай, когда у поверхностей 1 и 2 главные нормальные сечения совпадают. Это имеет место, в частности, в радиальных шарикоподшипниках (рис. 2.8). Больший из приведенных радиусов кривизны в главных плоскостях обозначают рлрЛ, а меньший — рпрВ. В плоскости с большим значением рпр имеет место более тесный контакт сопряженных кривых. Так, для точки контакта шарика (рис. 2.8) с внутренним кольцом имеем
Рпр А = б,5Оа1Гж/(г;к 0,6Dw) в плоскости, проходящей через центр шарика и ось подшипника, и
Рпр в = 0,5Dwra/(0,5Dw + га)
1 Зависимость (2.8) используется ниже для определения радиуса кривизны поверхности дорожки качения радиально-упорных шарикоподшипников.
24
в плоскости, перпендикулярной к оси подшипника. Здесь, как и в формуле (2.4), при определении приведенного радиуса кривизны знаменатель состоит из суммы радиусов при внешнем и разности —
при внутреннем касании.
Максимальное нормальное контактное напряжение при начальном точечном касании определяется по формуле, полученной Герцем:
он = ос jZFn£7pnp л, (2.10) где а — коэффициент, зависящий от отношения
Рис. 2.8. Подшипник качения
Рпрл/Рпрв (рис. 2.9).
Зависимости (2.2) и (2.10) найдены в предположении идеально гладких поверхностей, однородности и изотропности материала,
малого отношения размера площадки контакта (величины 2ЬН в случае цилиндров, касающихся по общей образующей) к минимальному радиусу кривизны в зоне касания, отсутствия остаточных деформаций и нормального направления к поверхностям усилия между ними.
Рис. 2.10. К вопросам кинематики в зоне контакта роликов
Ни одно из этих условий полностью не удовлетворяется в реальных конструкциях, и поэтому величины он, найденные при упомянутых предположениях, носят в известной степени условный характер. Однако это обстоятельство не ставит под сомнение возможность практического применения формул (2.2) и (2.10), если использовать допускаемые напряжения [о// ], найденные для условий, близких к имеющимся в проектируемой конструкции.
Кинематические параметры, характеризующие условия работы в зоне контакта сопряженных поверхностей. Одним из важнейших среди кинематических параметров является скорость скольжения vs, т. е. скорость движения точки одной из сопряженных поверхностей относительно совпадающей с ней точки другой поверхности.
На рис. 2.10 показаны ролики, касающиеся по общей образующей. Обозначим через
ъКп систему координат в плоскости, перпендикулярной к линии контакта, ось которой т является касательной к поверхностям 1 и 2. Относительно этой системы (относительно зоны контакта) составляющие скоростей контактирующих точек поверхностей 1 и 2, направленные по оси т (нормальные к линии контакта), обозначим через ог1 и vt2. Для круглых роликов с неподвижными осями величины tirl и ис2 являются окружными скоростями.
Проекции скоростей скольжения на ось т:
Vsri = — Щт2 = UU — Vr2.
(2.И)
При отсутствии относительных перемещений роликов в направлении осей имеем vsxi = usl; vst2 = os2. Абсолютная величина алгебраической суммы vT1 и t\2 обозначается и называется суммарной скоростью контактирующих точек относительно зоны контакта:
1. (2.12)
Отношение величины uST к скорости vt данного ролика называется удельной скоростью скольжения и обозначается О. Для роликов 7 и 2 (рис. 2.10):
01 = Vst/Vtl,
02 = Vsz/Vr2.
Величина & характеризует теплонапряженность контактирующей поверхности. И, действительно, если Fn — нормальное усилие между роликами, a f — коэффициент трения, то работа сил трения за время dt составит
dW = Fnfvsidt.
За время dt линии контакта переместятся по поверхностям роликов 1 и 2 на расстояния:
ds1 = Cxi dt', ds2 = dt.
Отношения
dS] cT1
d\V ds2
характеризуют работу сил трения, приходящуюся на единицу длины дуги каждого из роликов. С увеличением $ растет количество теплоты, приходящейся на единицу длины дуги, и увеличиваются теплонапряженность и возможность изнашивания.
Приведенные данные о <yST, и О относятся и к зубчатым передачам, но в этом случае вместо цилиндрических роликов имеем профили с переменными радиусами кривизны (см. стр. 252).
Рабочая поверхность, по которой точка контакта перемещается с большей скоростью, называется опережающей. В рассматриваемом случае ит1 > иг2, поэтому поверхность 1 — опережающая, а поверхность 2 — отстающая.
Важным кинематическим параметром, характеризующим условия работы в зоне контакта, является отношение vjv% (см. главы 3, 6 и 7).
Интенсивность изнашивания. Отношение толщины слоя hL, снятого в результате изнашивания, к пути трения L (пути перемещения точки, в которой фиксируется износ, относительно сопряженной поверхности) называют интенсивностью изнашивания и обозначают Jh:
Jh = hLlL. (2.13)
В случае несовпадающих сопряженных поверхностей изнашивание в каждой данной точке (например, в точке А на рис, 2.2, а, б) зависит от числа Nc вхождений ее в зону контакта. В этом случае интенсивность изнашивания
Jnc = hNjNс,
где hNc — толщина слоя, снятого в результате изнашивания при числе вхождений в зону контакта, равном Nc.
Величина, обратная интенсивности изнашивания, называется износостойкостью.
Для расчета на долговечность при изнашивании используют эмпирические зависимости следующего типа!
F"L = C; o£(Ve = 0> (2.14)
где tn = 1-ьЗ; при несмазанных поверхностях т <=& 1; при работе со смазкой т 3.
Величина С — постоянная для данного вида изнашивания; она зависит от материалов сопряженных поверхностей, конструкции соединения, качества и способа подачи смазки, допускаемой толщины изношенного слоя [hL ] и других факторов.
§ 2.3. ВИДЫ ИЗНАШИВАНИЯ1
В зависимости от характера происходящих процессов выделяют следующие виды изнашивания: механическое, молекулярно-меха-
Рис. 2.11. Виды изнашивания
ническое и коррозийно-механическое. Классификация наиболее характерных для деталей машин видов изнашивания дана на рис. 2.11.
Механическое изнашивание. Этот вид изнашивания является результатом механических процессов — таких, как срезание и пластическое деформирование микронеровностей (шероховатостей) при относительном перемещении сопряженных поверхностей, объемное пластическое деформирование, повреждение поверхностей абразивными частицами, повреждение в результате развития усталостных трещин и др.
Абразивное изнашивание является результатом царапающих и режущих воздействий на сопряженные поверхности твердых частиц, попадающих в зону контакта. С поверхностей снимается слой металла в виде мелкой стружки, появляются забоины и вмятины. Абразивные частицы могут быть минерального происхож-
1 Терминология по вопросам изнашивания установлена в ГОСТ 16429—70.
дения и металлическими, появляющимися, например, вследствие пластического деформирования и срезания неровностей. Твердость этих частиц в результате наклепа выше, а пластические свойства ниже, чем у основного материала. Абразивом могут служить и частицы контактирующих поверхностей, отделяющиеся в результате усталостного выкрашивания (см. ниже).
С помощью зависимостей типа (2.14) можно рассчитать на долговечность сопряжения, подверженные абразивному изнашиванию, но для этого необходимы данные опыта эксплуатации или экспериментов по сопряжениям, близким по основным показателям (конструкции, материалам, смазке, условиям работы и др.) к проектируемому.
Износостойкость при абразивном изнашивании растет с увеличением твердости поверхностей, поэтому поверхностное упрочнение (поверхностная закалка, цементация и др.) позволяет существенно повысить долговечность.
Для снижения интенсивности абразивного изнашивания или полного его устранения предусматривают защитные устройства, предупреждающие попадание абразивных частиц в зону контакта: всевозможные уплотнения (см. стр. 52), фильтры для очистки масла и т. д.
Пластическое деформирование, возникающее в пределах шероховатостей, способствует выглаживанию поверхности и снижению высоты неровностей (сравните рельеф поверхностей на рис. 2.4, а и б). Но при высоких нагрузках действующие напряжения могут превысить предел текучести на значительной глубине. При этом возникает пластическое деформирование макрообъемов, вызывающее искажение (обминание) сопряженных поверхностей и нарушение заданного относительного движения сопряженных деталей. В результате возникают дополнительные динамические нагрузки, вибрации, шум, нарушение условий смазки и т. д.
Пластическое деформирование макрообъемов предотвращается правильным определением действующих нагрузок, учетом свойств материала, влияния погрешностей и деформаций на распределение давлений в зоне контакта (см. гл. 5). Нагрузочная способность, лимитируемая возникновением недопустимых пластических деформаций, увеличивается с повышением твердости.
Усталостное изнашивание заключается в следующем. При попадании какого-либо участка сопряженной поверхности (например, точки А на рис. 2.2, а, б) в зону контакта в нем возникает контактное напряжение он. В результате повторного действия циклов контактных напряжений (повторного деформирования микрообъемов материала) в поверхностном слое толщиной 10— 20 мкм возникают усталостные трещины, развитие и слияние которых приводит к отделению частиц металла. В результате появляются ямки, едва заметные сначала и достигающие значительных размеров (например, 2—3 мм в поперечнике или даже больше) в процессе развития. Этот вид разрушения сопряженных поверх-
।
поверхности (например, зуба)
Рис. 2.12. Контактирующие поверхности со следами разрушения от выкрашивания и задира
нктей называют усталостным вь крашиванием. В иностранной литературе он известен под названием pitting от английского слова pit — яма, углубление.
На рис. 2.12, а показан зуб зубчатой передачи, на ножке которого имеются ямки усталостного выкрашивания, а на рис. 2.12, б—подшипник с дорожкой качения внутреннего кольца, пораженной усталостным выкрашиванием.
Появление ямок (выкрашивания) не всегда является признаком опасного разрушения сопряженных поверхностей. Возможно, что после непродолжительной работы в отдельных местах сопряженной шляются следы выкрашивания, не получающие в дальнейшем развития даже при весьма продолжительной работе. Такое выкрашивание, называемое ограниченным, появляется в тех случаях, когда нагрузка первоначально сосредоточивается только на отдельных участках теоретически возможных мест соприкосновения. На этих участках, принимающих на себя всю нагрузку, возникают высокие напряжения, вызыва-
ющие интенсивное развитие выкрашивания, пластическое деформирование и другие повреждения (см. ниже). В результате нагрузка перераспределяется, т. е. включаются ранее не работающие участки. Вызванная этим разгрузка участков, первыми вступивших в работу, обусловливает прекращение развития выкрашивания. Выкрашивание, развивающееся при полном прилегании сопряженных поверхностей, обычно не прекращается, и его называют прогрессирующим. При этом сопряженные поверхности уменьшаются на величину суммарной площади ямок и на участках, воспринимающих нагрузку, увеличиваются напряжения. Это способствует дальнейшему ускорению разрушений от усталости и других видов повреждений: пластического деформирования, заедания (см. ниже).
Опыт эксплуатации и эксперименты показывают, что сопротивление выкрашиванию у опережающих поверхностей выше, чем у отстающих (см. стр. 27), т. е. несущая способность выше у опережающей поверхности. Направления силы трения Ff = Fnf и скорости vx относительно зоны контакта у отстающей поверхности совпадают, а у опережающей противоположны (см. от1 и Ffl па рис. 2.10).
В условиях высоких контактных напряжений наблюдаются пластические перемещения поверхностных слоев, образовавшиеся усталостные трещины располагаются наклонно к поверхностям в соответствии с направлением Ff (см. рис. 2.10). На отстающей 30
поверхности трещина при приближении к зоне контакта закрывается, а находящееся в ней масло под действием высокого давления стремится увеличить трещину. При приближении к зоне контакта масло из трещин опережающей поверхности выжимается и поэтому не способствует дальнейшему развитию ее в той мере, в какой это имеется у отстающей поверхности. В этом, по Трубину, заключается причина повышенного сопротивления выкрашиванию опережающих поверхностей [77 ].
Обозначим через ин ]im предельную величину контактного напряжения из условия сопротивления выкрашиванию. Величина он пт увеличивается с уменьшением коэффициента трения скольжения [. Величина f снижается с ростом поскольку при этом растет толщина масляного слоя, разделяющего сопряженные поверхности. Предельные контактные напряжения для отстающей и опережающей поверхностей (соответственно индексы от и оп):
Он lim = НцВ> Он’lim = Соп^Х ^НВ> (2.15)
где Ннв — твердость рабочих поверхностей зубьев; сот и соп — коэффициенты, зависящие от вида термообработки (ссп > сот); п' и п" — показатели степени [55, 65]. Так как п' > п", то отношение он iim/онпт уменьшается с ростом
Из формул (2.15) следует, что несущая способность из условия сопротивления выкрашиванию увеличивается с ростом и Ннв.
Наряду с гидростатическим давлением масла развитию трещин на поверхности металла способствуют адсорбционное и адсорбционно-химическое воздействия поверхностно-активных составляющих смазки (эффект Ребиндера).
При определенных условиях усталостные трещины возникают на некоторой глубине от площадки контакта. Развитие глубинных усталостных трещин приводит к отделению крупных частиц металла. Этот процесс разрушения называют отслаиванием. Усталостное изнашивание, сопровождающееся отслаиванием, представляет значительную опасность при поверхностном упрочнении (азотировании, цементации и др.), поскольку в результате развития трещин под упрочненным слоем с поверхности трения отделяются крупные частицы металла. При этом резко увеличиваются напряжения на неповрежденных участках и, следовательно, интенсивность дальнейшего изнашивания быстро возрастает.
Несущая способность, лимитируемая развитием отслаивания, увеличивается с ростом толщины упрочненного слоя 6у, твердости металла под упрочненным слоем (твердости сердцевины) и отношения бу/рпр [651. В работах [40, 55, 651 дан расчет зубчатых передач, направленный на предотвращение усталостного изнашивания в результате развития подслойных усталостных трещин.
Рассмотренные виды усталостного изнашивания относятся к несовпадающим номинальным сопряженным поверхностям. Но и при совпадающих поверхностях в результате повторных соприкос-
новений под нагрузкой отдельных микронеровностей возможно возникновение усталостных трещин, вызывающих выкрашивание микрообъемов металла.
В подшипниках трения скольжения загруженная зона, т. е. зона наибольшего сближения поверхностей 1 и 2 (см. рис. 2.5), неподвижна относительно вектора передаваемого усилия F. Поэтому при F = const любая точка сопряженной поверхности, вращающаяся относительно F, за каждый оборот вала испытывает один цикл изменения напряжения. Повторение этих циклов может вызвать появление и развитие усталостных трещин. При тех же условиях в загруженных участках невращающейся поверхности действует постоянное напряжение, не способствующее развитию усталостных трещин. Как было отмечено выше, сопротивление выкрашиванию увеличивается с ростом твердости. Вместе с тем в рассматриваемой паре одна из поверхностей твердая, а другая для повышения сопротивления заеданию выполняется из материала со сравнительно низкой твердостью (см. ниже). В связи с этим твердой (как правило, стальной) выполняют поверхность, вращающуюся относительно вектора F. В подавляющем большинстве случаев это шейка вала. Но находят применение и опоры скольжения, в которых неподвижной относительно F является охватываемая поверхность, и в этом случае для повышения несу-, щей способности, лимитируемой развитием усталостных трещин, охватывающую поверхность выполняют из стали.
При пульсации нагрузки F усталостные трещины могут развиться и на поверхности, не вращающейся относительно F.
Коррозийно-механическое изнашивание. В процессе работы сопряженных поверхностей помимо изменения геометрии шероховатости (см. рис. 2.4) происходят изменения в тонких поверхностных слоях, вызывающие повышение их твердости и стимулирующие химическое взаимодействие металла с компонентами окружающей среды. В результате появляются пленки (так называемые вторичные структуры), которые истираются под действием нормальных сил и сил трения и снова возобновляются. Этот вид повреждения сопряженных поверхностей называется коррозийно-механическим изнашиванием.
Разновидностью этого повреждения является окислительное изнашивание — разрушение непрерывно возобновляющихся окисных пленок. Если скорость образования окисных пленок превышает скорость их разрушения (т. е. имеются стабильные условия существования окислительного изнашивания), то сопряженные поверхности полностью разделены пленками вторичных структур, препятствующими касанию ювенильных (незащищенных пленками) металлических поверхностей и возникновению в связи с этим опасных видов разрушений (см. ниже). Интенсивность окислительного изнашивания очень мала.
Коррозийно-механическое изнашивание возникает также при использовании смазок с поверхностно-активными присадками: 32
органическими соединениями серы, хлора и фосфора. В условиях высоких местных давлений, а также высоких локальных температур в контакте, вызванных работой сил трения, продукты реакции поверхностно-активных присадок с материалом рабочих поверхностей образуют твердые пленки с более низким сопротивлением сдвигу, чем сам материал. При относительном движении эти пленки разрушаются и снова возобновляются. При этом виде повреждения сопряженных поверхностей интенсивность изнашивания значительно выше, чем при окислительном изнашивании. Но в данном случае образующиеся пленки гораздо надежнее, чем
окисные, предупреждают возможность контакта ювенильных поверхностей и образования в связи с этим опасных повреждений (см. ниже).
Коррозийно-механическое изнашивание, возникающее при очень малых колебательных относительных перемещениях сопряженных поверхностей, обусловленных деформациями и люфтами, называется фрет-тинг-коррозией.
На рис. 2.13, а показан вал 1 с насаженной с гарантированным натягом деталью 2. На вал действует изгибающий момент М, вектор которого
Рис. 2.13. Распределение давлений в сопряжении деталей с гарантированным натягом
неподвижен по отношению к системе координат, относительно которой вал вращается. Если в зоне В напряжение изгиба о > 0, то после поворота на угол л в той же зоне о < 0. Переход от растяжения к сжатию вызывает относительные перемещения сопряженных поверхностей деталей 1 и 2. При относительных перемещениях, вызванных деформациями или люфтами,
вследствие контактного трения происходит разрушение пассивирующих металл окисных пленок с последующим их возобновлением под действием агрессивных составляющих окружающей среды. Таким образом, происходит разрушение сопряженных поверхностей, нарушающее прочность соединения и правильность взаимного расположения деталей.
Относительные осциллирующие перемещения в рассматриваемом случае очень малы: амплитуда их составляет примерно 1—150 мкм, а скорость незначительна. Например, при перемещениях по гармоническому закону с частотой 50 Гц и амплитудой а = 10 мкм максимальная скорость v = аы — 0,00314 м/с. Такие перемещения характерны для шлицевых и шпоночных соединений, соединений с гарантированным натягом, зубчатых муфт, рессор; возникают они также при перевозке листового и полосового проката и т. д.
Разрушение от фреттинг-коррозии происходит медленно. Толщина снимаемого слоя пропорциональна числу перемещений (угловой частоте в случае соединения, показанного на рис. 2.13, а). В связи с этим в механизмах кратковременного действия (при относительно малом суммарном числе перемещений) разрушения от контактной коррозии незначительны. В механизмах продолжительного действия во многих случаях контактная коррозия является основной причиной выхода из строя сопряжений деталей.
Пока еще нет методов, позволяющих хотя бы ориентировочно оценить несущую способность, лимитируемую разрушением от фреттинг-коррозии, но известны пути снижения или даже устранения повреждений от этого вида изнашивания. Среди них следует назвать повышение твердости рабочих поверхностей (особенно эффективно с помощью азотирования). Весьма положительные результаты дает покрытие фосфатированных рабочих поверхностей дисульфидом молибдена. Применение этого покрытия, в частности, позволяет резко увеличить долговечность зубчатых муфт (см. стр. 430). Уменьшение относительных перемещений рабочих поверхностей, вызванных люфтами и деформациями, способствует снижению развития контактной коррозии. В случае соединения с гарантированным натягом (рис. 2.13, а) уменьшения относительных перемещений А/ сопряженных поверхностей, как следует из зависимости
А/ = la/Е == 10/Л1/ (d3E), отражающей в данном случае лишь качественную сторону процесса, можно достигнуть увеличением диаметра вала d и уменьшением длины детали I. Такой пример показан на рис. 2.13, б. Диаметр вала под ступицей 2 увеличен до размера D только на длине меньшей I. Благодаря этому снимается концентрация давлений р у краев ступицы (сравните эпюру давлений на рис. 2.13, а и эпюру б на рис. 2.13, г) и значительно уменьшаются напряжения изгиба в поверхностных слоях участка вала вблизи торцов А н В. Добавление кольцевых проточек в ступице (рис. 2.13, в) увеличивает податливость детали 2, благодаря чему снижаются давления у торцов А и В (кривая в на рис. 2.13, а).
Увеличение р полезно, если повышение сил трения сопряженных поверхностей может устранить относительные перемещения. В качестве возможного примера на рис. 2.13, б представлен вариант с проточками L, показанными штриховыми линиями. В этом случае при больших силах сцепления благодаря повышенной податливости участки К поверхности детали 2 могут перемещаться вместе с сопряженными с ними участками поверхности детали /.
Молекулярно-механическое изнашивание. При больших значениях он (или р) в результате разрушения защитных пленок и пластического деформирования отдельные участки сопряженных поверхностей могут вступить в такой тесный контакт, при котором приходят в действие силы молекулярного сцепления. Это явление
называют схватыванием. Последующее относительное перемещение поверхностей вызывает разрушение мест соединения (узлов схватывания) и возникновение новых.
Повреждение поверхностей в результате действия молекулярных сил и механического воздействия называется молекулярномеханическим изнашиванием. Процесс возникновения и развитья повреждений поверхностей трения вследствие схватывания называется заеданием.
Наиболее слабым проявлением заедания является малоинтенсивный перенос материала с одной поверхности на другую (намазывание), обнаруживаемый с помощью чувствительной аппаратуры. Интенсивность изнашивания при этой неопасной форме схватывания очень мала.
Интенсивность заедания увеличивается с ростом ан (или р), скорости скольжения vb и температуры в зоне контакта. При особо неблагоприятных сочетаниях отмеченных факторов возможно появление большого числа локально расположенных очагов схватывания, приводящее к значительным повреждениям рабочих поверхностей.
Опасной формой рассматриваемого изнашивания является задир — повреждение поверхностей трения в виде борозд, глубин з которых может достигать 100—200 мкм и более, направленных одинаково с вектором скорости относительного движения (см. рис. 2.12, а). Борозды эти — результат интенсивного схватывания и вырывания из более мягкой поверхности частиц металла. Последние, двигаясь с более твердой поверхностью, оставляют борозды на поверхности с меньшей твердостью.
При эксплуатации машин приходится сталкиваться с задиром, возникшим из-за прекращения (или недостаточности) подачи смазки к трущимся поверхностям. Склонность к схватыванию стальных поверхностей в большой степени зависит от содержания углерода, твердости и вида термохимической обработки. С повышением твердости и уменьшением пластичности растет сопротивление схватыванию.
Защитные пленки (вторичные структуры), разделяющие сопряженные металлические поверхности, способствуют предупреждению схватывания. Этим свойством обладают оксидные и масляные пленки. Но при больших значениях он и vs, характерных, например, для гипоидных передач, надежную защиту от заедания эти пленки не обеспечивают. Наилучшие результаты достигаются при использовании смазок с поверхностно-активными присадками (см стр. 32).
Заедание возможно при достаточной смазке и отсутствии пластических деформаций в результате резкого местного повышения температуры в зоне контакта (вызванного работой сил трения) до значения, при котором смазка теряет защитные свойства и возникает контакт ювенильных поверхностей. В таких случаях, характерных для высоких скоростей скольжения, одним из критериев
I
для суждения о возможности возникновения задира является температура в зоне контакта сравниваемая с допускаемым значением ], найденным из экспериментов:
^ = Як.п + ОмгнС[<М, (2.16)
где йк. п — температура контактирующей поверхности (например, ролика или зуба) до вступления в зону контакта (до вхождения в зацепление); ймги — повышение (мгновенное) температуры кон-
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
I
тактирующих поверхностей за время прохождения через зону контакта.
Для несовпадающих цилиндрических поверхностей деталей из одинаковых материалов, по данным голландского ученого Блока,
Ммгн
v O0-75fn-°-25 'Рпр
l’H + У ГТ2
(2.17)
где Q — коэффициент, зависящий от теплопроводности, теплоемкости, плотности и модуля упругости Е ма-
_ „ , „ териала контактирующих поверх-
Рис. 2.14. Изменение темпера- ностей туры в зоне контакта деталей ,, п , .
На рис. 2.14 показаны зона контакта (см. также рис. 2.6, а) и график изменения температуры в точке поверхности при прохожде-
нии ее через зону контакта, относительно которой система координат хОй неподвижна. Работа сил трения пропорциональна ско-
рости скольжения, коэффициенту трения, давлению (или контактному напряжению). Все это находит отражение в формуле (2.17). Знаменатель пропорционален величине vs, и, следовательно, увеличение о2 способствует уменьшению ймгн.
Формула (2.17) получена для случая, когда скорость vs перпен-
дикулярна к линии контакта, т. е. в данном случае vsx = vs (см. стр. 26). С увеличением uST/v2 растет ймгн и снижается несущая способность, лимитируемая заеданием.
Взаимосвязь различных видов изнашивания. Рассмотренные виды изнашивания могут действовать одновременно и последова-
тельно, один из них или задерживает, или стимулирует другие виды изнашивания
При высоких давлениях одновременно с пластическим деформированием возможно и схватывание, приводящее к задирам.
Повышение трения в контакте способствует развитию усталостных трещин (см. стр. 31). Если имеется схватывание с весьма незначительной интенсивностью изнашивания, то вызванное им повышение силы трения может послужить причиной развития усталостных трещин. Таким образом, молекулярно-механическое изнашивание может стимулировать усталостное изнашивание.
Изнашивание рабочих поверхностей неусталостного характера (например, абразивное, молекулярно-механическое) может задержать или даже предотвратить развитие усталостных трещин и сопутствующего выкрашивания: слои металла с поверхности снимается еще до того, как успевают развиться (или возникнуть) в нем усталостные повреждения. Так, в открытых зубчатых передачах, как правило, не наблюдается усталостного выкрашивания, поскольку обычно имеется абразивное и молекулярно-механическое изнашивание.
Интенсивное развитие выкрашивания (особенно отслаивание) приводит к повышению давлений на неповрежденных поверхностях. В результате наряду с повышением интенсивности усталостных повреждений возникают задиры и пластические деформации.
Твердые пленки, образовавшиеся на рабочих поверхностях в результате химического взаимодействия металла и окружающей среды, являясь причиной коррозийно-механического изнашивания, одновременно служат защитой от молекулярно-механического изнашивания, препятствуя сближению металлических поверхностей до расстояния, при котором возможно схватывание.
Обозначим через JM. м и JK. м интенсивности изнашивания соответственно при молекулярно-механическом и коррозийномеханическом изнашивании. Возможность замены одного вида изнашивания другим с существенно меньшей интенсивностью имеет важное практическое значение. Для некоторых зубчатых передач, например гипоидных (см. стр. 327), со стальными зубчатыми колесами с высокими скоростями скольжения при обычных смазках характерно молекулярно-механическое изнашивание высокой интенсивности JM. м (задир). Применение в этом случае масел с поверхностно-активными присадками (см. стр. 32) позволяет избежать схватывания, но зато вместо молекулярно-механического возникает коррозийно-механическое изнашивание. Однако в этом случае </к. м на несколько порядков меньше, чем JM. м.
В процессе работы интенсивность изнашивания рабочих поверхностей (зубчатой пары, подшипника, шарнира, винтовой пары и т. д.) может существенно изменяться В начальный период работы из-за неизбежных погрешностей изготовления и деформаций возможны значительные неравномерности распределения нагрузки в зоне касания. Участки с наибольшими значениями (или р) подвержены более интенсивному изнашиванию, чем менее загруженные. Это может вызвать благоприятное для дальнейшей работы перераспределение давлений с резким снижением интенсивности изнашивания или даже полным прекращением его.
Повышенное изнашивание в начальный период работы, обусловленное перегрузками, вызванными погрешностями изготовления и деформациями, а также выглаживанием шероховатостей, называется приработанным изнашиванием.
На рис. 2.15 нанесены кривые изменения толщины изношенного слоя hL и интенсивности изнашивания Jh в зависимости от времени t. На участке I, соответствующем времени приработки 4,рир, интенсивность Jfl = Jh„pKp значительна и величина hL быстро растет. Затем интенсивность Jh снижается и наступает так называемое установившееся изнашивание (участок //), причем *^уст Л|рир-
Если между сопряженными поверхностями обеспечивается непрерывный масляный слой, то изнашивание может отсутствовать (см. штриховые линии на рис. 2.15).
Повышение давления в зоне контакта и интенсивность истирания поверхностей в период приработки обусловливают высокую теплонапряженность в зоне контакта, снижающую защитные
свойства смазки. Во избежание опасных форм повреждения (например, задира или интенсивных усталостных процессов) в период приработки предусматривают облегченный режим, т. е. работу на стендах или в эксплуатации с пониженными нагрузкой и скоростью. При этом сглаживаются неровности и происхо-
Рис. 2.15. Зависимость интенсивности изнашивания сопряженных поверхностей от времени
дит истирание поверхностей, например за счет медленно протекающих неопасных форм молекулярно-механического изнашивания, а иногда уста-
лостного.
Для ускорения периода при работочного изнашивания (при одновременном снижении вероятности опасных форм повреждения рабочих поверхностей) применяют поверхностно-активные присадки, ускоряющие приработку за счет коррозийно-механического изнашивания и предупреждающие появление задира. В некоторых случаях эффективным является ускорение процесса приработки за счет создания условий для абразивного изнашивания введением в зону контакта специальных паст. Подобные мероприятия снижают или даже предотвращают накопление усталостных повреждений в период приработки.
Изменение формы рабочих поверхностей в период /уст может оказаться причиной повышения давлений или нарушения условий смазки. Это может вызвать увеличение интенсивности изнашивания (см. участок /// на рис. 2.15). Примером является вращательная пара (см. рис. 2.5): с увеличением износа растет зазор, увеличиваются нагрузки в зоне контакта, падает несущая способность масляного слоя (см. ниже).
[лава 3. СМАЗКА
СОПРЯЖЕННЫХ ПОВЕРХНОСТЕЙ И ТЕПЛОВОЙ РАСЧЕТ
§ 3.1. ОБЩИЕ СВЕДЕНИЯ
Смазку сопряженных поверхностей применяют для снижения потерь на трение, уменьшение интенсивности изнашивания, отвода тепла из зоны контакта, удаления продуктов изнашивания и предохранения от коррозии. Смазка снижает колебания величины сил сопротивления относительным перемещениям сопряженных деталей, что способствует повышению плавности и точности работы механизмов. Загущенные (пластичные) масла наряду со смазывающим действием выполняют в ряде случаев и функции уплотнения.
Потери мощности на преодоление сил трения благодаря смазке снижаются в десятки и даже сотни раз. Соответствующим подбором сорта масла и способа подачи его в зону взаимодействия сопряженных поверхностей можно существенно увеличить нагрузочную способность этих поверхностей, мйогократно повысить их долговечность и снизить размеры и массу узлов машин и механизмов. Совершенствование смазки относится к числу наиболее эффективных и экономичных мер, направленных на повышение несущей способности и долговечности кинематических пар.
Важнейшими свойствами масла являются вязкость и маслянистость, или липкость. Маслянистость — это способность в результате адсорбции образовывать на сопряженных поверхностях тонкие (пристенные) пленки, называемые граничными слоями, препятствующие появлению контакта чистых (ювенильных) поверхностей. Свойства масла в граничном слое резко отличаются от его свойства в объеме. Это объясняется тем, что граничный слой находится в зоне действия молекулярных сил твердого тела и адсорбированные молекулы масла имеют ориентированное расположение в отличие от хаотического в остальном объеме жидкости вне граничного слоя. Благодаря упорядоченному расположению молекул граничный слой напоминает твердое кристаллическое тело и поэтому может быть назван квазикристаллическим образоеи-нием. Этот слой обладает высокой прочностью и может выдерживать давления до 3000 МПа и более.
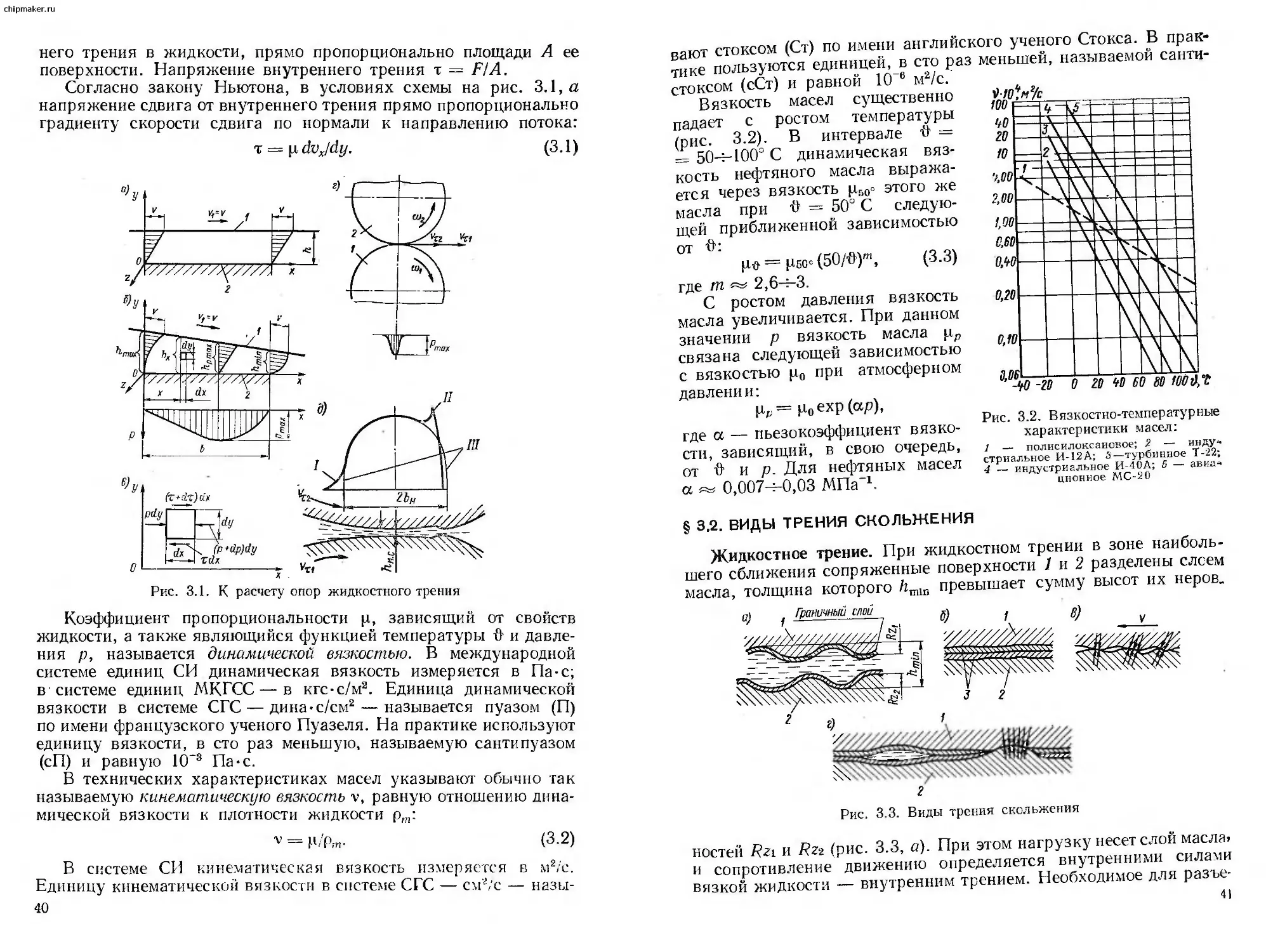
Вязкость, или внутреннее трение, — это объемное свойство жидкости, характеризуемое сопротивлением относительному смещению (сдвигу) слоев этой жидкости. Представим себе пространство между двумя параллельными плоскими пластинами 1 и 2 (рис. 3.1, а), заполненное жидкостью. Пластина 2 неподвижна, а пластина 1 перемещается со скоростью Vi = v. Скорости граничных слоев те же, что и у пластин. В направлении, перпендикулярном к пластинам, скорость жидкости возрастает от V2 = 0 до щ = v со средней интенсивностью v/h. Опыт показывает, что усилие F, которое надо приложить к пластине 1 для преодоления внутрен-
него трения в жидкости, прямо пропорционально площади А ее поверхности. Напряжение внутреннего трения т = F/A.
Согласно закону Ньютона, в условиях схемы на рис. 3.1, а напряжение сдвига от внутреннего трения прямо пропорционально градиенту скорости сдвига по нормали к направлению потока: т = ц dvx/dy. (3.1)
Рис. 3.1. К расчету опор жидкостного трения
Коэффициент пропорциональности р, зависящий от свойств жидкости, а также являющийся функцией температуры й и давления р, называется динамической вязкостью. В международной системе единиц СИ динамическая вязкость измеряется в Па-с; в системе единиц МКГСС — в кгс-с/м2. Единица динамической вязкости в системе СГС — дина-с/см2 — называется пуазом (П) по имени французского ученого Пуазеля. На практике используют единицу вязкости, в сто раз меньшую, называемую сантипуазом (сП) и равную 1СГ3 Па-с.
В технических характеристиках масел указывают обычно так называемую кинематическую вязкость v, равную отношению динамической вязкости к плотности жидкости р,„:
v = р/рт. (3.2)
В системе СИ кинематическая вязкость измеряется в м2;'с. Единицу кинематической вязкости в системе СГС — см2/с — назы-40
вают стоксом (Ст) по имени английского ученого Стокса. В практике пользуются единицей, в сто раз меньшей, называемой сантистоксом (сСт) и равной 10"6 м2/с.'
Вязкость масел существенно падает с ростом температуры (рис. 3.2). В интервале й = = 50-ь-100° С динамическая вязкость нефтяного масла выражается через вязкость р50° этого же масла при & = 50° С следующей приближенной зависимостью от О’:
ро = рво» (50/'&)т, (3.3)
где т <=> 2,6-4-3.
С ростом давления вязкость масла увеличивается. При данном значении р вязкость масла рр связана следующей зависимостью с вязкостью р0 при атмосферном давлении:
рр= цоехр(ар), где а — пьезокоэффициент вязкости, зависящий, в свою очередь, от # и р. Для нефтяных масел а 0,007-4-0,03 МПа’1.
Рис. 3.2. Вязкостно-температурные характеристики масел:
1 — полисилоксаиовое; 2 — инду* стриальное И-12А; 3—турбинное Т-22;
4 — индустриальное И-40А; 5 — авиа* цнонное МС-20
§ 3.2. ВИДЫ ТРЕНИЯ СКОЛЬЖЕНИЯ
Жидкостное трение. При жидкостном трении в зоне наибольшего сближения сопряженные поверхности 1 и 2 разделены елеем масла, толщина которого превышает сумму высот их неров.
Рис. 3.3. Виды трения скольжения
ностей 7?zi и Rzz (рис. 3.3, а). При этом нагрузку несет слой масла» и сопротивление движению определяется внутренними силами вязкой жидкости — внутренним трением. Необходимое для разье-
?.r. ru
динения сопряженных поверхностей давление в смазке создается за счет гидродинамического или гидростатического эффекта (см. ниже).
Граничное трение. При граничном трении нагрузка передается при непосредственном касании граничных пленок 3 сопряженных поверхостей 1 и 2 (рис. 3.3, б). Роль смазки при граничном трении могут выполнять не только граничные пленки, образованные упорядоченно расположенными активными молекулами смазки, но также и пленки химических соединений. Это могут быть окисные пленки и пленки, являющиеся результатом химических реакций с металлом поверхностно-активных присадок к смазке (сульфидов, хлоридов и др.).
Трение без смазки. При трении без смазки сопряженные поверхности взаимодействуют при отсутствии сколь-либо заметных следов смазки и загрязнений, но эти поверхности покрыты адсорбированными молекулами газов или жидкостей. Таким образом, трение без смазки отличается от ювенильного трения, имеющего место при абсолютно чистых поверхностях. Ювенильное трение наблюдается в глубоком вакууме. В обычных условиях оно возникает при касании неровностей, освободившихся от защитных пленок под действием высоких давлений при относительном перемещении. На рис. 3.3, в стрелками отмечены участки, где в результате появления ювенильного контакта действуют силы молекулярного сцепления, т. е. возникает схватывание.
Смешанное трение. Во многих случаях в зоне касания сопряженных поверхностей наблюдается сочетание различных видов трения. Так, на рис. 3.3, г часть нагрузки между сопряженными поверхностями 1 и 2 передается через слой жидкости, часть — в зоне касания граничных слоев и часть — на участке, на котором из-за высоких давлений разрушены защитные пленки и возник контакт ювенильных поверхностей. В подшипниках скольжения, нормально работающих при жидкостном трении, при пусках и остановках, как правило, возникают другие виды трения.
На участках с ftmln <• -j- /?га часть нагрузки передается
через соприкасающиеся граничные пленки, покрывающие шероховатости, а часть—через слои масла, т. е имеет место смешанное состояние жидкостного и граничного трения, называемое полу-жидкостным трением. При этом на некоторой части касающихся неровностей, величина которой зависит от напряженности контакта. возможно разрушение граничных пленок и возникновение ювенильного контакта, сопровождаемого схватыванием.
Гидродинамический эффект. Основы гидродинамической теории трения заложены в 80-е годы прошлого века Н. П. Петровым. Большой вклад в развитие этой теории внес английский физик Рейнольдс; значительные результаты получены также Зоммер-фельдом, Н. Е. Жуковским, С. А. Чаплыгиным и рядом советских и зарубежных ученых. Основы контактно-гидродинамической теории смазки впервые в мире созданы советскими учеными А. И. Пет-русевичем, А. М. Эртелем и А. Н. Трубиным.
Давление в масляном слое, необходимое для разъединения рабочих поверхностей и уравновешивания нормального усилия между ними, может создаваться подводом масла от насоса в загруженную зону. Этот способ используют в так называемых гидростатических опорах (см. стр. 387). Но в большинстве случаев избыточное давление в масляном слое между сопряженными поверхностями создается за счет гидродинамического эффекта, возникающего при клиновидной форме зазора между сопряженными поверхностями. Сущность этого явления рассматривается на примере относительного перемещения плоских пластин, зазор между ними имеет клиновидную форму и изменяется от /imax до Л,.11п (см. рис. 3.1, б). Благодаря маслянистости и вязкости масло увлекается движущейся пластиной / и нагнетается в клиновидный зазор, но внутреннее трение затрудняет истечение жидкости через зазор /imln. В результате в слое масла возникает избыточное давление, увеличивающееся с ростом скорости v и вязкости.
Ограничиваясь рассмотрением плоской задачи, пренебрегаем истечением жидкости в направлении оси z. Объем масла, протекающего через сечение с зазором /гЛ, прямо пропорционален произведению hxvmx, где vmx — средняя скорость в этом сечении. При условии неразрывности потока и пренебрежимо малой для данного рассмотрения сжимаемости жидкости можно считать, что в любом сечении, перпендикулярном к оси х, в единицу времени протекает один и тот же объем масла, т. е. hxvmx = const. Отсюда следует, что с уменьшением hx увеличивается vmx и площадь эпюры скоростей остается постоянной. В связи с этим, в отличие от случая на рис. 3.1, а, при сужающемся зазоре у входа профиль эпюры скоростей вогнутый, а у выхода — выпуклый (см. рис. 3.1, б) и может принимать различные очертания в зависимости от v и соотношения геометрических параметров.
Избыточное давление жидкости равно нулю при х — 0 и х = b (см. рис. 3.1,6). Максимальное давление /?П1ах будет в сечении hf max. смещенном от середины участка b в сторону минимального зазора. Здесь градиент давления dp/dx = 0 и скорость потока жидкости изменяется по линейному закону.
Изменение давления масла в направлении оси х определяется по уравнению Рейнольдса
dp/dx = брц (!ix — hp max)/hx, (3.4)
с помощью которого рассчитывается нагрузочная способность масляного слоя при жидкостном трении. Уравнение (3.4) получено из условия равновесия dpdij = didx элемента dx, dy, dz = 1 (см. рис. 3.1, в), зависимости (3.1) и равенства объемов жидкости, протекающих в единицу времени через сечения hx и hpwax. При этом постоянные интегрирования определяют из граничных условий: vx — v и vx = 0 соответственно при у = hx и у = 0.
При обеих подвижных сопряженных поверхностях 1 и 2 относительно системы координат, связанной с контурами этих поверх-
вестей (см., например, рис. 3.1, г, на котором показана эпюра давлении), уравнение Рейнольдса имеет следующий вид:
dp/dX = 6[W2 (llx — hp гаах).'Йх, (3.5)
где cz определяется по (2.12).
Условия получения избыточного давления в слое смазки, показанные на рис. 3.1, б, реализуются в подпятниках трения скольжения (см. гл. 19).
Коэффициент трения скольжения. Коэффициент трения скольжения / равен отношению касательной силы Ff, необходимой для смещения одной из сопряженных поверхностей относительно другой. к нормальному усилию между ними. Величина f зависит от
вида трения, состояния сопряженных поверхностей, их материала и других факторов и колеблется в очень широких пределах. Так, при жидкостном трении f = = 0,014-0,001. Значения f для различных сопряжений приведены ниже, а здесь даны лишь некоторые общие положения, относящиеся к смазанным поверхностям.
Величина f при клиновидном зазоре в общем случае является функцией характеристики режима трения X = pv^/q, где q —
Рис. 3.4. Зависимость коэффициента трения от характеристики режима X
нагрузка, приходящаяся на единицу длины сопряженных поверхностей в направлении оси z (см. рис. 3.1, б). В случае подшипников трения скольжения (см. гл. 19) X = рсо/р. Зависимость f от X представлена на рис. 3.4 кривой Херси—Штрибека для изотермических условий. Падение f на участке 1 связано с повышением
давления в масляном слое, вызванным ростом и увеличением роли жидкостного трения. Величина f достигает минимума при выходе на режим жидкостного трения (участок 2), а затем по мере роста А постепенно возрастает (участок 5), хотя режим жидкостного трения при этом благодаря росту толщины масляного слоя становится более устойчивым. Это связано с ростом трения внутри жидкости вследствие увеличения градиента dvx/dy [см. (3.1)1, поскольку рост скорости опережает рост толщины смазочного слоя.
3.3. ТЯЖЕЛОНАГРУЖЕННЫЙ КОНТАКТ
При небольших давлениях в зоне силового взаимодействия сопряженных поверхностей, характерного, например, для подшипников трения скольжения, во многих случаях можно пренебречь изменениями формы сопряженных поверхностей, вызванными деформациями. При этом давление в масляном слое определяют с помощью уравнения Рейнольдса исходя обычно из формы неде. 44
формированных поверхностей и без учета влияния давления на вязкость масла.
В отличие от легконагруженного в тяжелонагруженном контакте (зубчатые и червячные передачи, подшипники трения качения и т. д.) деформации сопряженных поверхностей оказывают большое влияние на форму зазора между ними, а вязкость масла
в зоне контакта может на несколько порядков превышать исходную вязкость. Все это учитывается в упомянутой выше контактногидродинамической теории смазки, основанной на совместном решении уравнения Рейнольдса и уравнений теории упругости, описывающих деформации в зоне контакта с учетом влияния давления и температуры на вязкость масла. На основании этой теории
в зоне максимального давления толщина масляного слоя между цилиндрическими поверхностями с начальным касанием по линии определяется по формуле (см. рис. 3.1, д)
1 / \0.7 0.6 0,4—0,12 /о
йм. с = К (рс^х) a PnpQn , (3.6)
Рис. 3.5. Ориентировочные значения коэффициента трения для тя-желонагр уженного контакта, по данным Р. Р. Гальпера
различных исследователей не
где К — постоянный коэффициент; р0—динамическая вязкость смазки при атмосферном давлении и температуре у входа в зону контакта; показатели степеней у
одинаковы, и здесь даны некоторые усредненные значения.
Зависимость (3.6) характеризует влияние ряда параметров, определяющих условия работы в зоне контакта, на величину /д..с. Так, существенно влияние величин р0, и а и незначительно— удельной контактной нагрузки ди.
Компонентами приведенных напряжений, способствующих развитию усталостных трещин на поверхности контактирующих поверхностей, являются нормальные а и касательные т напряжения. С увеличением растет толщина масляного слоя, уменьшаются усилие взаимодействия между неровностями и число соприкосновений их. В конечном итоге уменьшается роль касательных напряжений в развитии усталостных трещин и увеличивается нагрузочная способность, лимитируемая сопротивлением выкрашиванию. В связи с этим отношение Хо = йм. c/(7?ci 4- Raz)° ” (здесь Rai и Raz — средние арифметические отклонения профилей шероховатостей сопряженных поверхностей) является важным показателем надежности работы сопряженных поверхностей.
Коэффициент трения / в тяжелонагруженном контакте повышается с увеличением Rz (см. стр. 16) и понижается с увеличением vb, Рпр и вязкости масла у входа в зону контакта [24, 34, 71 1. Ориентировочные значения f при начальном касании по линии Даны на рис. 3.5 [65 J.
В случае цилиндрических поверхностей с начальным контактом по общей образующей при условиях, отмеченных на стр. 25, давление по ширине площадки смятия 2ЬН (см. рис. 2.6, г и кривую III на рис. 3.1, д) распределяется по эллиптическому закону. При взаимном перекатывании (со скольжением или без скольжения) в результате возникновения гидродинамического эффекта распределение давления изменяется. Оно увеличивается со стороны входа в зону контакта (участок / на рис. 3.1, д), а вблизи выхода из этой зоны возникает обнаруженный А. И. Петрусевичем пик напряжений // (см. рис. 3.1, д). В конце пика имеется местное сужение зазора, что связано с уменьшением деформаций сжатия («разжатием») поверхностных слоев, вызванным падением в этой зоне давления в смазочном слое.
§ 3.4. СМАЗОЧНЫЕ МАТЕРИАЛЫ И ВЫБОР ВЯЗКОСТИ МАСЛА ДЛЯ ТЯЖЕЛОНАГРУЖЕННОГО КОНТАКТА
Смазочные материалы. Смазочные материалы делятся на конструкционные и технологические. Конструкционные масла являются элементом конструкции машины и входят в спецификацию изделия. Используемые при обработке металлов технологические смазочные материалы здесь не рассматриваются.
В машиностроении используют жидкие, пластичные, твердые и газообразные смазки. Наибольшее распространение имеют жидкие нефтяные масла.
Помимо маслянистости и вязкости (см. выше) масла характеризуются температурой вспышки, температурой застывания, содержанием примесей, зависимостью вязкости от температуры и другими свойствами.
Эксплуатационные свойства масел могут быть значительно улучшены легированием — введением в нефтяную основу различных присадок и их композиций. Присадки используют для повышения маслянистости (противоизносных свойств), повышения антизадирных свойств (см. стр. 33), предупреждения коррозии, снижения температуры застывания, получения более пологой зависимости вязкости от температуры и для других целей. С помощью присадок можно значительно повысить несущую способность рабочих поверхностей и их долговечность, и в этом отношении легирование масел можно сравнить с легированием сталей.
Нефтяные масла классифицируют по вязкости и назначению. Широко используют в машиностроении индустриальные масла и масла, полученные для определенных объектов и носящие их названия (турбинные, трансмиссионные, авиационные, автомобильные и т. д.), применение которых, однако, далеко не ограничивается этими объектами. В табл. 3.1 приведены некоторые марки нефтяных масел и их вязкость.
Существенное значение имеют синтетические жидкие масла (например, сложные эфиры, полигликоли, фтороуглеродные и 46
Таблица 3.1. Кинематическая вязкость некоторых сортов масел
Марка масел гост *600, сСт (или 10е м2/с) Марка масел * гост V80o, сСт (или 106 м£/с)
Индустриальные масла общего назначения: И-5А И-8А И-12А И-20А И-25А И-ЗОА И-40А И-50А И-70А И-100А * Для авиат 20799—75 дойных мае 4—5 6—8 10—14 17—23 24—27 28—33 35—45 47—55 65—75 90—118 ел указана Турбинные: Т-22 Т-30 Т-46 Т-57 9972—74 22—23 28—32 44—48 55—59
Авиационные *: МС-14 МС-20 МК-22 МС-20С кинематическая вязк 21743—76 ость при 1 14 20,5 22 20 00° с.
др.). Область применения этих масел из-за сравнительно высокой стоимости ограничивается в основном условиями, в которых они не могут быть заменены нефтяными маслами. Имеются синтетические масла с хорошей маслянистостью, высокой стабильностью и. значительно более низкой температурой застывания и болеё высокой температурой вспышки, чем у нефтяных масел. Так, у нефтяных масел самая низкая температура застывания — 40° G, а самая высокая температура вспышки около 240° С. Те же показатели у синтетических масел достигают соответственно —80 и 300° С. Синтетические масла имеют более пологую вязкостно-температурную характеристику, чем нефтяные масла. Например, с изменением температуры от 0 до 110° С вязкость синтетического силиконового масла изменяется от 180 до 25 сСт, а индустриального масла И-40А — от 1100 до 5 сСт (см. рис. 3.2). Имеются экспериментальные данные, показывающие, что с переходом от нефтяных масел к синтетическим увеличивается несущая способность, лимитируемая сопротивлением развитию усталостного выкрашивания.
В узлах трения со сравнительно небольшим тепловыделением и при отсутствии необходимости отвода тепла с помощью масла большое распространение получили пластические (консистентные) смазки, являющиеся результатом загущения жидких смазок средней вязкости специальными загустителями. Большое распространение при сравнительно невысоких температурах (до 70° С) получили солидолы. При более высоких температурах (до 110° С) применяют консталины и другие пластические смазки. С помощью специальных присадок добиваются возможности использования пластических смазок в широком диапазоне температур, например
от —60 до 160гС. Способность этих смазок удерживаться на вертикальной плоскости имеет важное значение для надежной смазки сравнительно тихоходных механизмов и герметизации узлов трения.
С развитием ядерной и космической техники возникают условия, в которых обычно жидкие и пластические масла не работоспособны. При высоких или низких температурах, в агрессивных средах, при глубоком вакууме используют твердые смазки. Наибольшее применение получили коллоидный графит и дисульфид молибдена M0S2 Но твердые смазки эффективны также и в обыч.
Рис. 3.6. Вязкость нелегированных нефтяных масел для стальных зубчатых передач
Рис. 3.7. Сопряженные поверхности с начальным касанием по линии КК
ных условиях в качестве добавки к жидким маслам для увеличения противозадирной стойкости При использовании со связующими дисульфид молибдена может образовывать прочные пленки на металлических поверхностях, защищающие от схватывания и фреттинг-коррозии. При очень больших скоростях и малых нагрузках применяют газовую и, в частности, воздушную смазку.
Выбор вязкости масла для тяжелонагруженного контакта. С повышением вязкости масла v и скорости увеличивается толщина масляного слоя, снижается коэффициент трения между сопряженными поверхностями [см. формулу (3.6) и стр. 45 I и увеличивается сопротивление изнашиванию Но при этом растет расход мощности на преодоление гидравлических сопротивлений (особенно при смазке окунанием) и ухудшается теплоотвод от поверхностей зубьев. При высоковязких смазках отрицательное влияние термического фактора в контакте может перевесить положительное от гидродинамического эффекта, что нужно учитывать при выборе способа подачи смазки (см. ниже). Ориентировочные значения вязкости нефтяных масел для смазки передач со стальными зубчатыми колесами определяются по рис. 3.6 в зависимости от величины [71]
Хз. П = 10"БНнгОи/Ц = 0,75HhvCh/v,
где gh — в МПа; v — окружная скорость, м/с; Сн — коэффициент контактных напряжений (см. стр. 23 и 272); HHV — твердость по Виккерсу.
Нижний предел (меньшая вязкость) принимается для передач высокой точности, а также при температуре окружающего воздуха менее 10; С. Верхний предел назначается при сцепляющихся зубчатых колесах из стали одной марки, а также в том случае, если хотя бы одно из зубчатых колес выполнено из никелевой или хромоникелевой стали.
Для многоступенчатых редукторов с общей масляной ванной вяз-
кость масла принимают промежуточной между требующейся для ти-
хоходной и быстроходной ступеней.
Для многих сопряженных поверхностей характерна модель, в которой смазанные сопряженные поверхности деталей 1 и 2 имеют начальный контакт по линии КК (рис. 3.7). Деталь 1 перемещается поступательно относительно детали 2, и вектор скорости 012 = о3 образует угол ф с линией КК- Применительно к червячным передачам (см. стр. 111 и 345) приближенно можно принять: vx2 = 0; t'T1 = vs sin ф;
= vTi + vt2 vs sin ф. При
Рис. 3.8. Вязкость нелегированных нефтяных масел для червячных передач
ф = 0 имеем = О (зазор в направлении скорости не имеет клиновидной формы) и, следовательно, гидродинамического эффекта нет. С приближением ф к 0,5 л увеличивается и улучшаются условия образования масляного клина. На многих участках зоны зацепления червячных передач углы ф неблагоприятны: составляют малую часть от л/2 или даже равны нулю (см. гл. 15). Помимо этого в червячных передачах значительно отношение vs/v^ (см. главы 2 и 6). Это является причиной больших потерь на трение, высокой теплонапряженности в контакте и нагрева масла в объеме. Сопутствующее этому снижение вязкости масла способствует воз-
никновению интенсивного изнашивания, поэтому в червячных передачах для предупреждения заедания и его опасной формы — задира рекомендуется применять нефтяные масла повышенной вязкости с добавлением растительного масла для улучшения противозадирных свойств. Лучшие результаты дают синтетические масла, например полигликолевые, эфирные и др.
Ориентировочные значения вязкости масла определяют по рис. 3.8 в зависимости от величины
Хч, п —' 16 * Gf^/vsi
где он — в МПа (см. стр. 346); vs — скорость скольжения, м/с (см. стр. 340).
На выбор вязкости оказывает влияние режим работы червячной передачи: с уменьшением продолжительности включения и отношения этой величины к времени остановки падает температура передачи и, следовательно, снижается требуемая вязкость масла.
Для подшипников качения средних размеров, смазываемых жидкими маслами, рекомендуют следующие ориентировочные значения кинематической вязкости: 12 сСт для шариковых подшипников и роликоподшипников с цилиндрическими роликами; 20 и 30 сСт соответственно для сферических и конических роликоподшипников Как и для зубчатых передач, для подшипников качения с увеличением загруженности рекомендуют повышать вязкость масла, поскольку при этом увеличивается несущая способность масляной пленки.
§ 3.5. СМАЗОЧНЫЕ И УПЛОТНЯЮЩИЕ УСТРОЙСТВА
Подача масла к трущимся поверхностям может быть индивидуальной и централизованной, без давления и под давлением, периодической и непрерывной. В каждом из названных способов существуют различные конструктивные решения устройств, выбор которых связан с особенностями и ответственностью проектируемой машины, режимом работы, размерами трущейся пары, условиями эксплуатации и т. д
При централизованной смазке одно питающее устройство обслуживает несколько трущихся пар, тогда как при индивидуальной — только одну.
Масло подается под давлением при необходимости интенсивного теплоотвода, для улучшения условий образования масляного клина, создания гидростатической разгрузки и т. д.
В ответственных напряженных узлах с продолжительной работой под нагрузкой масло к трущимся парам обычно подают непрерывно. Периодическую подачу применяют при небольшом количестве потребляемого масла, например в кратковременно работающих механизмах, тихоходных устройствах, в парах, работающих при малых удельных нагрузках и т. д
Смазочные устройства. Из большого многообразия смазочных устройств [18, 42, 47, 66] ниже дано описание только наиболее характерных для узлов, рассматриваемых в курсе «Детали машин».
К простейшим устройствам для индивидуальной периодической подачи жидкого масла относятся масленки с поворотной крышкой (рис. 3.9, а) и шариковые (рис. 3.9, б). Для подачи пластичной смазки применяют колпачковые масленки (рис. 3.9, в), давление в которых создается завинчиванием крышки. При использовании специального шприца для смазки под давлением устанавливают пресс-масленки (рис. 3.9, г).
Среди способов непрерывной подачи масла без избыточного давления большое распространение получила картерная смазка. При этом в закрытый картер (корпус подшипника, редуктора, 50
цепной передачи и т. д.) наливают масло (ориентировочно 0,30— 0,7 л на 1 кВт передаваемой мощности), в которое погружаются зубчатое колесо (рис. 3.10, а, б), звездочки цепной передачи (рис. 3.10, в), червяк или колесо червячной передачи (см. рис. 15.4) и т. п. Кроме того, в картер погружают вспомогательные
Рис. 3.9. Масленки для периодической смазки: а, б — жидкими маслами; в, г — пластичной смазкой
устройства, предназначенные для доставки масла к трущимся поверхностям, если они не могут быть погружены в масло: узкие зубчатые колеса, сцепляющиеся с рабочими колесами, не погруженными в масло (колесо К на рис. 3.10, б), а также кольца, навешенные на вал (рис. 3.10, г) и приводимые в движение силами
Рис. 3.10. Примеры осуществления непрерывной подачи смазки к трущимся поверхностям: а—г — картерная смазка; д — струйная смазка
трения, для подачи масла из картера в зазоры между цапфой и подшипником скольжения и т. д. На трущиеся поверхности деталей, не погруженных в масляную ванну, масло может попадать в результате разбрызгивания.
С ростом скорости деталей, погруженных в масло, увеличиваются гидравлические потери, интенсивность перемешивания масла с воздухом, усиливается окисление масла и происходит снижение смазочных свойств. В связи с этим смазку окунанием применяют
для деталей с окружной скоростью не более 10—15 м/с, отклоняясь от этого интервала в большую сторону только при кратковременной работе привода. При v > 5ч-7 м/с глубина погружения в масло не должна превышать 0,8—1,5 шага зацепления (шага цепи).
Подшипники качения при картерной смазке смазываются в результате разбрызгивания масла или образования масляного тумана. Могут быть использованы скребки, снимающие масло с торцовых поверхностей колес и направляющие его по специальным канавкам к подшипникам. При скорости, недостаточной для забрасывания масла в подшипники, используют пластичные смазки, удерживаемые в камере подшипника с помощью уплотняющих устройств, например маслоудерживающих колец (см. рис. 3.11, а).
Уровень масла в масляной ванне контролируют с помощью различного типа маслоуказателей. Так, в редукторе (см. рис. 14.57) это осуществляют маслоуказателем из органического стекла с экраном.
При окружной скорости зубчатой или цепной передачи (для червячной передачи — скорости скольжения гу), превышающей 10—15 м/с, применяют устройства для струйной смазки под давлением 0,05—0,3 МПа. Масло может подаваться через сопла с отверстиями (рис. 3.10, д) или со щелью, создающей веерообразную струю [18, 47, 551. Струйную смазку под давлением применяют и при меньших скоростях для агрегатов, имеющих устройства с непрерывной (циркуляционной) смазкой. В систему непрерывной подачи масла под давлением входят насосы (плунжерные, лопастные, шестеренные и др.), отстойники, фильтры, охладители, регулируемые и нерегулируемые маслораспределители, трубопроводы, сопла и т. д.
Уплотняющие устройства. Уплотняющими называются устройства для предотвращения самопроизвольного перетекания рабочей среды (жидкой или газообразной) из одной полости в другую и для защиты механизмов от возможного вредного влияния окружающей среды, например от абразивных частиц или химически агрессивных составляющих. Уплотняющие устройства применяют для неподвижных и подвижных соединений.
Из всего многообразия существующих уплотняющих устройств здесь кратко рассматриваются только те, которые предназначены для предупреждения вытекания масла из корпусов подшипников и механических передач и попадания в них абразивных частиц из окружающей среды.
Если необходимо обеспечить точное расстояние между деталями, касающимися по плоскости, что, например, характерно для корпусов редукторов с разъемом по плоскости осей зубчатых колес (рис. 3.10, а, б и см. 14.57), то для герметизации соединения (помимо обеспечения необходимой точности поверхностей) применяют герметики (материалы на основе полимеров), лаки и др. Для герметизации неподвижных (а также подвижных при 52
малых скоростях) соединений широко используют резиновые кольца, обычно круглого сечення. При.этом предусматривают фаски (рис. 3.11, а) или канавки (рис. 3.11, б, <?) с размерами,
Рис. 3.11. Уплотняющие устройства валов
обеспечивающими необходимое для уплотнения деформирование колец. Размеры резиновых колец даны в ГОСТ 9833—73.
Для предупреждения утечки масла и проникновения абразива В трущиеся пары в местах выхода валов и осей из корпусов подшипников, редукторов и других узлов применяют контактные (радиальные и осевые, или торцовые) и бесконтактные подвижные уплотняющие устройства.
Благодаря плотному касанию элементов контактного уплотнения с сопряженными поверхностями создается необходимая герметизация (рис. 3.11,0—е).
Среди контактных радиальных уплотнений наибольшее распространение получили манжетные. Вариант такого уплотнения (из маслостойкой резины, армированной стальным каркасом), установленного с натягом в посадочное отверстие, показан на рис. 3.11, о, б. Контактирующий поясок манжеты под действием сил упругих деформаций браслетной пружины и материала манжеты образует уплотняющую цилиндрическую поверхнссть. Эти манжеты при отсутствии избыточного давления применяют до скоростей скольжения 10—15 м/с. Скорость может быть увеличена до 25 м/с для манжет из силиконовой резины.
Уплотнения разрезными металлическими кольцами (рис. 3.11, в) применяют при вращательном и поступательном движении, они обладают хорошими уплотняющими свойствами в широком диапазоне перепадов давления. В частности, их применяют при подаче смазки под давлением к подшипникам водила планетарных передач (см. гл. 14). Кольца изготовляют в основном из чугунов перлитной структуры, обладающих необходимой для создания плотного контакта упругостью и хорошими антифрикционными свойствами. Применяют также неметаллические уплотнительные кольца из текстолита ПТК и других марок (ГОСТ 5—72), фторо-пласта-4 (ГОСТ 10007—72) и др. Благодаря хорошим антифрикционным свойствам (см. стр. 106) срок службы неметаллических колец больше, чем чугунных.
Среди контактных радиальных уплотнений простейшими являются уплотнения войлочными, а также фетровыми кольцами (рис. 3.11, е), применяемыми обычно до скоростей v — 4 4-5 м/с. Плотность касания достигается силами упругих деформаций кольца, пропитанного маслом. Область применения этих уплотнений как самостоятельных единиц сужается за счет более совершенных манжетных уплотнений, но их успешно используют в сочетании с другими видами уплотнений — контактными и бесконтактными (рис. 3.11,d).
Во избежание интенсивного изнашивания участок поверхности вала, взаимодействующий с контактным уплотнением, выполняют с твердостью не менее HRC 30; класс шероховатости должен быть не ниже 8-го по ГОСТ 2789—73. Для увеличения долговечности контактных уплотнений целесообразно добиваться однородности щероховатостей при наиболее благоприятной геометрии микрорельефа (см. стр. 16).
Осевые контактные уплотняющие устройства, одни из вариантов которых показан на рис. 3.11, е, обладают хорошими уплотняющими свойствами, высокой долговечностью, отсутствием изнашивания вала, допускают высокие скорости скольжения (до 35—40 м/с) и значительные перепады давления. Деталь 1 из антифрикционного материала контактирует с деталью 2 и удерживается Б4
от вращения относительно корпуса 3 трением, создаваемым силами упругих деформаций уплотняющего резинового кольца 4. Деталь 2 вращается с валом. Необходимое для герметичности давление между деталями 1 и 2 создает пружина 5.
Разновидностью бесконтактных уплотнений являются лабиринтные уплотнения: простые (рис. 3.11, д)', гребенчатые одинарные (рис. 3.11, ж); гребенчатые двойные (рис. 3.11, з). Скорость валов в лабиринтных уплотнениях не ограничена. Эффективность их растет с повышением частоты вращения и уменьшением зазоров, которые доводят до 0,2—0,3 мм. Важным достоинством лабиринтных уплотнений является отсутствие износа.
Гребенчатые лабиринтные уплотнения сравнительно дороги вследствие сложности конфигурации деталей и высокой точности, связанной с необходимостью иметь малые зазоры, но отмеченные положительные качества обеспечивают этим уплотнениям широкое применение.
Для получения наилучших уплотняющих свойств применяют комбинированные устройства из однотипных и разнотипных уплотнений. Так, устанавливают два манжетных уплотнения; два, три и большее число разрезных уплотняющих колец (рис. 3.11, в); сочетают контактные уплотнения манжетами и войлочными кольцами с лабиринтными (рис. 3.11, д) и т. д.
§ 3.6. КРАТКИЕ СВЕДЕНИЯ ПО РАСЧЕТАМ НА НАГРЕВ
Механическая энергия, затрачиваемая на преодоление сил трения в кинематических парах (подшипниках, фрикционных, зубчатых и червячных передачах, муфтах и т. д.), превращается в тепловую. Сопутствующее повышение температуры вызывает изменение условий работы сопряженных поверхностей, главным образом из-за снижения защитных свойств масляного слоя, связанных с падением вязкости и маслянистости. При этом увеличивается вероятность схватывания и его опасной формы — задира. В связи с этим температура масла не должна превышать предельного допускаемого значения К^тах!. при котором масло еще сохраняет необходимые свойства, т. е. надо выполнить условия
1^мтах1 ИЛИ тах < [^мтах]- (3.7)
Обычно принимают 10нп,ах] = 80 ч- 95° С. Для некоторых авиационных масел [й'мшах! = 100 ч- 110° С.
В дальнейшем рассматриваются расчеты на нагрев, относящиеся в основном к механическим передачам и подшипникам.
Обозначим через Nf и №™ мощности тепловых потоков, соответственно выделяемого в результате работы сил трения в рассчитываемом узле и отводимого от него, например, окружающим воздухом (iV°Tb), циркулирующим маслом (Л^цТВм), водой или каким-либо другим способом.
Для зубчатых и червячных передач, передач гибкой связью и других имеем
Л7 = АМ1--п). (3.8)
где 7УВЩ — мощность ведущего звена; т) — к. п. д. передачи.
При расчете подшипников
Nf — Тf(£>, (3.9)
где Nf — в Вт; Tf — момент трения в подшипнике, Н-м.
На рис. 3.12, а дан график зависимости температуры О' передачи (подшипника) от времени t при постоянном значении Nf
и достаточно продолжительной работе, при которой в установившемся режиме имеет место равенство Nf = /VOTB (горизонтальный участок кривой).
Если тепло отводится только окружающим воздухом, то
/V“T: = QHrp(^M-0o,D). (3.10)
Здесь •0'о. в — температура окружающего воздуха, °C; йнгр = == kaAK + /г„6дЛо6д, где kn — коэффициент теплопередачи с по-поверхности корпуса, не подвергаемой принудительному обдуву, Вт/(м2-°С); Аобд — коэффициент теплопередачи при использовании искусственного обдува корпуса, например центробежным вентилятором (см. рис. 15.4), Вт/(м2-°С); А„ и Ао6д — площади поверхностей, омываемых изнутри маслом или его брызгами (включая 50% поверхности ребер, предназначенных для охлаждения), соответственно необдуваемой и обдуваемой частей корпуса, м2.
На основании эмпирических данных для передач зацеплением принимают kH 12 — 19 Вт/(м2-сС) в зависимости от интенсивности циркуляции воздуха и йобд 16|/ vo. „ 1Вт/(м2-°C) 1, где v0. в — скорость потока воздуха относительно охлаждаемой поверхности, м/с (ориентировочно принимают ио.в = 3s-5 м/с). 66
При установившемся режиме надо обеспечить условие
Л> с
(З.Н)
где max — значение Л'о™ при 0м = [0мтах1.
Учтя зависимости (3.7), (3.8) и (3.10), получим:
Nf = УБЩ(1 - П) < ЧгР (Рм maxi - <>о. в)'. ем=Nf/QHrP + ео. в < рм тах].
Если условия (3.12) не выполнены, то прибегают к одному или совокупности следующих способов: изыскивают пути снижения потерь на трение; увеличивают площадь поверхности охлаждения оребрением корпуса; применяют обдув или повышают его интенсивность; создают водяное охлаждение масляной ванны.
При интенсивном теплообразовании используют охлаждение циркулирующей смазкой, подаваемой под давлением к поверхности трения. При этом
N ц. м = Cf/lPniQ ('Э'вых Йвх), (3.13)
где сн = (1,7 4- 1,9) Ю3 Дж/(кг-°С) — удельная теплоемкость масла; рт ₽» 890 кг/м3 — плотность масла; Q — объем прокачиваемого масла, м3/с; '&БЬ!Х и йвх — температура масла на выходе из сопряженных поверхностей и на входе в них, °C.
Для многих механизмов характерен режим, при котором рабочие циклы (время tpc) чередуются с остановками (время /ост) (рис. 3.12, б), достаточными для охлаждения до температуры й0 в. В этом случае надо определить температуру масла '&„tnax и сравнить ее с 1ймгаах]. Если за время Л температура рассчитываемого узла увеличивается на йй, то из условия теплового баланса имеем
Nfdt = 1Ш + A&t (3.14)
Здесь
П = GmMcM-bS(C/Gm/), (3.15)
где Gmv—масса масла в корпусе; с, и Gm/—соответственно удельная теплоемкость и масса /-Й детали рассчитываемого агрегата. Далее находим
f fl
pt мтах
{ dt — П I _____________—__________
J J ^-QHrp (Ом-Йо.в)’
° ®о.в
Обозначив ехр (О,,гр/р£/Д) = х„гр, получим
Йм щах — Л / (1 Хпгр)/Онгр Йо Б
[Йы тах].
(3.16)
57
Если за время 7ОСТ температура не снижается до (рис. 3.12, в), то надо выполнить условие
Л — ^Хохл Хнгр—1 д,
имтах — о л, -/ 1 1 о-в 1^мгпахЬ
Ь‘нгр лнгрдохл 1
(3-17)
где х9хЛ == ехр (РокЛ1зст/П); величина ПохЛ определяется так же, как и QHrp, но с учетом условий, имеющихся при охлаждении (отсутствие обдува и др.).
Глава 4- ФАКТОРЫ,
ВЛИЯЮЩИЕ НА ПРОЧНОСТЬ ДЕТАЛЕЙ, И РАСЧЕТ НА ВЫНОСЛИВОСТЬ
ПРИ ПЕРЕМЕННЫХ нагрузках
§ 4.1. ВЛИЯНИЕ ЧИСЛА ЦИКЛОВ ИЗМЕНЕНИЯ НАПРЯЖЕНИЙ
НА ПРОЧНОСТЬ ДЕТАЛЕЙ
Общие сведения. Детали машин обычно подвергаются действию напряжений, циклически меняющихся во времени. При этом возможны необратимые механические изменения, приводящие к возникновению микроскопических трещин, развитие которых вызывает поломки — разрушения усталостного характера.
На рис. 4.1 показаны кривые, иллюстрирующие установившиеся законы изменения напряжений. Каждый из них характеризуется какими-либо двумя из следующих параметров: omax, omin, ста, о.п и коэффициентом асимметрии цикла А = omin/omax. Амплитуда о,, и среднее напряжение цикла от связаны следующими ЗаВИСИМОСТЯМИ С О1пах и
— 0,5 (Одеах OmJn) z== ^тах» 1
om = 0,5(omax4-omin)==0,5(14-7?)omax. J (41)
Характерными для деталей машин являются (рис. 4.1) циклы асимметричные знакопостоянные (Д > 0) и знакопеременные (/? < 0), симметричные (Д = —1) и отнулевые (Д = 0 и Д — = н=оо). При оа = 0 имеем 7? = 1.
Если /, (рис. 4.1) — продолжительность одного цикла (периода изменения напряжений), то за промежуток времени th общее число циклов
2VC = th!tp.
Примеры определения величин R и Nc- Для точки А сечения вала (рис. 4.2) диаметром 4 вращающегося относительно системы координат х, у с угловой Б8
скоростью co, изгибаемого моментом М = const, вектор которого направлен по оси х, имеем:
Са = ~2j— d sin cot = Ртах sin w/j R = ОпИп/Ощах =* — h tp= 2л/(3600со) = l/(60n),
Если th — время работы вала под нагрузкой за полный срок службы, то
Nс •— hi/tp — бОл/д.
(4.2)
При вхождении в зацепление зуба зубчатого колеса под нагрузкой на рабочей стороне его у основания (рис. 4.3, с) в результате изгиба возникают напряжения растяжения отах (рис. 4.3, б), ве- „
личина которых падает до нуля при выходе зуба из зацепления, и, следовательно, R— — 0. При каждом вхождении данного зуба в зацепление с последующей разгрузкой его возникает один цикл изменения напряжения. Если за один оборот зубчатого колеса каждый данный зуб входит в зацепление один раз, то величина Л'с определяется по формуле (4.2). Если же рассчитываемое зубчатое колесо входит в зацепление с несколькими зубчатыми колесами, число которых обозначается nw (на рис. 4.3, а имеем nw= 3), то число циклов за время работы /д (в ч) составит
Nc =60nnwth- (4.3)
На рис. 4.4, а в системе координат Nlt omax нанесены экспери-
Рис. 4.2. Вал, вращающийся относительно вектора изгибающего момента
ментальные точки, соответствующие предельным числам циклов нт, при которых произошло разрушение на различных уровнях напряжении (и,—<т4) стальных образцов. При напряжении о6 59
I
I
разрушение не возникло, и это отмечено стрелкой. В предельных значениях Л7С lira неизбежен большой разброс, и поэтому для большей достоверности результатов на каждом уровне нагружения
Рис. 4.3. Зубчатое колесо о, сцепляющееся с зубчатыми колесами I, [{ и Iff
I
испытаниям подвергают несколько образцов. Полученную совокупность экспериментальных точек обрабатывают методами математической статистики. На основании расчетов строят кривую выносливости (усталости) АВ с заданной вероятностью неразру-шения (на рис. 4.4, б кривая усталости АВ показана без эксперн-
ментальных точек). Эту кривую называют также кривой Велера по фамилии баварского инженера, получившего первые кривые усталости.
Испытания показывают, что с ростом Nc уменьшается абсолютная величина doldNc и обычно кривая выносливости имеет горизонтальную асимптоту.
Наибольшее напряжение цикла, которое с заданной вероятностью неразрушения может выдержать деталь или образец при практически неограниченном числе циклов Nc, называется пределом выносливости и обозначается gr для образца и grd для детали. Для образцов и деталей при коэффициенте асимметрии цикла R — —1 пределы выносливости при нормальных напряжениях обозначаются и о_1о, а при касательных напряжениях — и т_1О.
Начиная с некоторого значения Nc падение предельного напряжения незначительно, и практически оказалось возможным при испытаниях определить величину gr исходя из принятого, достаточно большого числа циклов, называемого базовым и обозначаемого No. Величина No зависит от материала, термообработки и вида напряженного состояния.
Наибольшее напряжение цикла, которое с заданной вероятностью неразрушения может выдержать деталь или образец при данном значении /V, < NBr называется пределом ограниченной выносливости и обозначается ол, для образца и gnd для детали (рис. 4.4, б).
С удовлетворительной точностью наклонный участок АВ кривой выносливости аппроксимируется зависимостью
const, (4.4)
или
Пт == const, (4.4а)
где g — заданный уровень напряжения; т — показатель степени.
При заданном значении Nc по кривой выносливости АВ определяют gnd, а при заданном уровне напряжения о определяют предельное значение числа циклов Nclim (рис. 4.4, б), поэтому наклонный участок АВ представлен двумя уравнениями: (4.4) и (4.4а). Величина т зависит от вида напряженного состояния, формы детали, механических характеристик, термообработки и колеблется обычно в пределах 6—9 (см. стр. 270, 278). При таких значениях т снижение о связано с резким увеличением Л\.. Для получения компактного графика используют логарифмическую шкалу для оси абсцисс. Широко применяют логарифмические шкалы для обеих осей координат, при этом наклонный участок кривой усталости является прямой линией (рис. 4.4, е).
Подставив координаты точки В в равенства (4.4) и (4.4а), получим:
Отсюда предельное нормальное напряжение при Nc < No aND — gRD c = ^RD^ca- (4-6)
Аналогично при действии касательных напряжений t.vo = Тдд у/Л'0/Л'с = "XroKct- (4.6а)
Б этих формулах (4,7)
Если Nc > Л'о, то F,n — 1 и /(„ = 1.
Расчет деталей машин при действии переменных нагрузок *.
Детали машин обычно работают пон различных нагрузках и
Рпс. 4.5, Рабочие циклы изменения нагрузки
скоростях. На рис. 4.5 показан закон изменения нагрузки Q и частоты вращения п (об/мин) рассчитываемой детали (вала, оси, зубчатого колеса и т. д.) за некоторый повторяющийся период времени tc (называемый иногда блоком нагружения). Число таких периодов за полный срок службы обозначают |ЛС. Нагрузкой Q может быть усилие F, изгибающий М и крутящий Т моменты и т. д. Для
каждого из этих случаев имеем соответственно Q = F, Q — М, Q = Т и т. д. Плавное изменение Q и п обычно заменяют ступенчатым (гистограммой) путем вписывания прямоугольников со сторонами Qi> Д Q-г, •••> Qk> Д и пк ”2. t*', ...; nk, tk- Максимальную нагрузку и соответствующую ей частоту вращения отмечают индексом 1, а последующие нагрузки в порядке убывания обозначают 2, 3 и т. д.
Рассматриваемый закон изменения нагрузки можно представить в виде, показанном на рис. 4.6, на котором по горизонтальной оси отложены значения чисел циклов изменения напряжений Nc, а по вертикальной — значения нагрузок в порядке убывания. На рис. 4.6, а показаны три нагрузки, но рассматриваемый метод относится к любому числу нагрузок.
Числа циклов изменения напряжений при действии нагрузок Qi, Q-2. Фз. Qk 1СМ- формулу (4.3)]:
ЛД = бО/г^ли Nc2 = 6(Jn2nJh„; ...; Nh = 60nAnu//lft, где • рД], //,2 рДй» //ife РсД*
1 Основы расчетов на выносливость при действии переменных нагрузок даны в работах [32, 66, 68 и др.].
Заданную переменную нагрузку заменяют постоянной, равноценной по влиянию на усталостную прочность детали, используя
при этом два варианта расчета:
1) задаются произвольной постоянной нагрузкой Qpac4, приравниваемой обычно к максимальной нагрузке, и находят эквивалентное число циклов изменения напряжений МЕ (рис. 4.6, б), при котором нагрузка <2расч оказывается равноценной по влиянию на усталостную прочность с заданной переменной нагрузкой;
2) задаются расчетным числом циклов изменения напряжений Л'грасч и находят эквивалентную нагрузку QE (рис. 4.6, б), которая при числе циклов Мс расч оказывает то же влияние на усталост-
ную прочность детали, чю и заданная переменная нагрузка.
При определении величин МЕ и Qe используют равенство (4.4а), в котором напряжение о выражают через нагрузку Q с помощью зависимости
Q = Qcrv. (4.8)
Здесь для контактных на- Рис- 46- К РасчетУ при временных нагруз-пряжений v = 2 и v = 3 соответственно при на-
чальном касании по линии и в точке [см. формулы (2.2) и (2.10), из которых следует, что нагрузка прямо пропорциональна напряжению соответственно во второй и третьей степени J; v = 1 для напряжений в опасной точке во всех других случаях (при расчете на изгиб, кручение, растяжение, сжатие). Коэффициент Q является постоянной величиной при данной схеме нагружения (например, Q = 0,1с/3 для наиболее напряженной точки сечения вала с диаметром d, изгибаемого моментом М, т. е. при Q = Л1).
Из равенств (4.4а) и (4.8) находим, что при некоторой i-й нагрузке
Qi1 Nclimi = const, (4.9)
где ni — mlv.
На рис. 4 7 дана описываемая уравнением (4.9) кривая выносливости (ломаная линия АВС в логарифмических координатах) ра считываемой детали, соответствующая некоторому заданному значению вероятности неразрушения. Точки NE, Qpac4 и ACcpaL4, Q/. лежат на кривой выносливости, и поэтому для 1-го варианта расчета имеем
W'NcVmi = Q%mNE,
ности принять за единицу,
Рис. 4.7. Кривая выносливости рассчитываемой детали
В предельном случае
k
а для 2-го варианта расчета
Qil'Nc iim i = Qe 'Nc расч, (4.11)
где Nc iim i — предельное число циклов изменения напряжений при нагрузке Q,.
Для определения NE и QE используют Линейную зависимость (с последующей поправкой) между числом циклов Ncl при действии некоторой нагрузки Qz (напряжения О/) и потерей работоспособности. Это значит, что если полный ресурс работоспособ-то под действием нагрузки Q, при числе циклов 1\[с. (рис. 4.7), меньшем Nciimt, величина Ncl/Nc\imi равна долговечности, утраченной деталью. Отсюда следует, что если на деталь действуют нагрузки Qlt Q2, ..., Qk, которым соответствуют предельные значения чисел циклов изменения напряжений Nc2, ..., Nck, то для предупреждения разрушения надо выполнить условие
*ei/Nc Iim 1 4~ Nc2jNc Пт 2
Ч-" *" Ч- Nck/Nc ит k = k
Wci/Nc limt)< 1.
= (4.12)
1 k
Из экспериментов следует, что величина (Nci/Nc lim z) за-i
висит от характера изменения нагрузки и может существенно отличаться от единицы [32, 68]. В связи с :Этим предложена уточненная зависимость
k
^(Nci/NcVml) = a, (4.13)
в которой коэффициент а зависит от характера изменения нагрузки. Он может быть значительно меньше единицы, если в спектре нагружения наряду с малыми продолжительными нагрузками имеются резкие перегрузки, при которых число циклов изменения напряжений составляет малую часть суммарного числа всех циклов.
Из равенств (4.10) и (4.13) получим k
NE = 4 S JVceJ. (4.14)
На основании формулы (4.3) имеем
Nci = бОпщ^-. (4.15)
Здесь и в последующих формулах thl — продолжительность работы в часах под нагрузкой Qz.
Коэффициенты и Ксх [см. (4.6), (4.7)] при действии переменной нагрузки определяют по формуле
л^ = кс^кс0. (4.16)
При Ne > No принимают NE = No.
Из равенств (4.11) и (4.13) находим т' / ’ k
Qe = У 4- ? (^-Жрасч)!. (4.17)
Из зависимости (4.8), в которой v = mlm', имеем QE = О,ат1т' и Qt = £2оГ/т . Подставив эти значения в формулу 4.17, получим т /~ j k
а£ = 1/ -i-Е [^(^Жрасч)]- (4.17а)
Есам у кривом выносливости имеется тормзонталвнвзи участок (см. рис. 4.4 и 4.7), то в формуле (4.17) принимают Nc расч = No:
Qe=]/ (4.18)
Значения m' указаны в главах 14, 15 и 19. По аналогии с (4.17а) находим m /------&--------
= F (^Л8а)
Расчет на долговечность деталей механического привода существенно упрощается при определении NE по формуле
N£ = 60npac4n^ftE, (4.19)
где ihE — эквивалентное время (ч), при котором постоянная расчетная нагрузка Qpac4 при частоте вращения прасч (об/мин) оказывает то же влияние на усталостную прочность, что и заданная переменная нагрузка. Из формул (4.14), (4.15) и (4.19) находим k
1
(4.20)
tfrp z
£ ЙПрасч
Рассмотрим случай, когда заданы функциональные зависимости нагрузки и частоты вращения от времени. Полагаем, что известны зависимости Q — Q (/) и п = п (/) для рабочего цикла tc (рис. 4.8), и число таких циклов за полный срок службы рассчитываемой детали равно цс. На основании формулы (4.3) находим, что за время dt число циклов изменения напряжений
dNc = 60nwn (t) dt. Из (4.14) следует, что эквивалентное число циклов N’e за время tc определяется по формуле
Ж]т'п(/)Л. (4.21)
Чрасч J
Рис. 4.8. К определению Nr при .известаих Q (i) я п (t)
dN,
о
Эквивалентное число циклов за весь срок службы
АД = А^рс. (4.22)
Для 2-го варианта расчета (рис. 4.6, б) из формулы (4.17) имеем
-|M[Q(01n'ri (0 dt, aNc расч J
о
(4.23) где Л'грасч — расчетное число циклов за время tc.
Из формулы (4.20) находим эквивалентное время t't,E для одного цикла < (рис. 4.8)
1
(4.24)
thE = О/7рзсч
тогда эквивалентное время за полный срок службы, ч thE = thEPc- (4.25)
Пример. Воспользуемся формулами (4.21)—(4.24) для следующего примера.
При постоянной частоте вращения п, т. е. п (/) = п, за время tc нагрузка линейно изменяется от Omin ДО Ощах (рис. 4.9).
Если Qniln/Omax = Г), то Q (0 = Qmaxl*l+ 0 —„9)Х X///J н в формулах (4.21)— (4.24) имеем
tc
f [Q (i)]m'n(i)^ =
О
(1-Чт,И).
= (1 — л) («' + l)
Рис. 4.9. Цикл с линейно изменяющейся нагрузкой
Из (4.21)—(4.24). приняв QpaC4=Qmax, А'срасч = 60падг и Прасч = П, получим! 1 _.
‘V р = 60 —”7 ~ 7 ; ГТ
£ а(1 — т|) (т + 1) с’
Q£=Qmaxp а(1 _ _р J) ; thE=
1 — T]1
_______________t (4.26) o(l-7])(m' + l) c'
',4.2. ВЛИЯНИЕ РАЗМЕРОВ, ФОРМЫ И СОСТОЯНИЯ (ОВЕРХНООТИ ДЕТАЛЕЙ НА ПРОЧНОСТЬ ДЕТАЛЕЙ
Влияние размеров. С увеличением абсолютных размеров сечений деталей в большей степени проявляется негативное влияние неоднородности механических свойств металла и структурных дефектов, способствующих развитию усталостных трещин. На
ряду с этим с увеличением размеров сечения снижаются градиент напряжений (см. ниже) и положительный эффект возможного
упрочняющего воздействия от обработки. Поэтому с увеличением абсолютных размеров сечений деталей происходит снижение их прочностных механических характеристик, получаемых при статических (ов, о,, тв, тт) и усталостных испытаниях, учитываемое коэффициентами влияния абсолют-
Рис. 4.10. Коэффициенты влияния абсолютных размеров еВ) ет и (кривая ет — для валов из любых сталей): — — — для валов из углеродистых сталей;--------дЯя валов йй Легиро-
ванных сталей
ных размеров — масштабными факторами. Снижение временного сопротивления разрыву и предела текучести учитывается коэффициентами еБ = = OBd/oB и 8Т = GTrf/oT (рис.
4.10). Здесь cBd и oTd—соответственно временное сопротивление и предел текучести образца заданного диаметра й, а ов и от — те же характеристики, но для образцов с d = 7 -~ 10 мм.
Коэффициенты влияния абсолютных размеров при циклических нагрузках 1 (рис. 4.10):
(4.27)
где o_ld (или r_ld) — предел выносливости образца заданного диаметра d; о_х (или т_х) — предел выносливости подобного образца с d = 7 •? 10 мм.
Влияние формы. В местах изменения формы деталей (у галтелей, отверстий, шпоночных пазов, в резьбе и т. д.), а также в зонах сопряжений с натягом (см. рис. 2.13) возникают повышенные напряжения. Это явление называется концентрацией напряжений
Максимальное напряжение в зоне концентратора обозначается Ощахк (рис. 4.11, а).
Напряжения в сечениях в зоне концентраторов, найденные по формулам из курса сопротивления материалов (базирующихся на гипотезе плоских сечений), называются номинальными и обозначаются онОм. На рис. 4.11, а дана кривая а изменения напря-
1 При отсутствии экспериментальных данных допускается принимать ех =
жений в сечении I—I детали, загруженной изгибающим моментом /И, и показана прямая о = MzIJ х, характеризующая изменение номинальных напряжений и справедливая при отсутствии концентратора (например, для сечения 11—II).
Рис. 4.11. Напряжения в зоне концентратора: а — эпюры напряже-жений сп1ах к и оНОм; б — теоретический коэффициент концентраций
Отношение максимального местного напряжения к номинальному называется теоретическим коэффициентом концентрации и обозначается ао и ах соответственно при нормальном и касательном напряжениях:
Рис. 4.12. Образцы с концентратором и практически без кон« центратора и соответствующие им кривые выносливости
Величина отахк определяется методами теории упругости или экспериментально. Чем резче изменяется форма, тем больше ао. Например, для концентратора, показанного на рис. 4.11, а, ао возрастает с увеличением H/h и уменьшением р/Л (рис. 4.11,6).
Градиент изменения напряжения da/dz в сечении вне зоны концентратора — величина постоянная, равная, например, M!JX при изгибе. В сечении в зоне концентратора daldz const и увеличивается с ростом z (рис. 4.11, а).
Величина ао не всегда определяет фактическое снижение прочности. Так, при достаточной пластичности и неизменной (по величине и положению относительно детали) нагрузке после дости-68
жения в зоне концентрации предела текучести деформации увеличиваются без изменения напряжений в этой зоне. В результате напряжения перераспределяются по сечению, происходит их
выравнивание, и разрушающая от концентрации.
При циклически изменяющихся напряжениях влияние концентрации существенно, но снижение прочности далеко не всегда соответствует величине ао. Если, например, ао=2, т. е.
нагрузка практически не зависит
Рис. 4.13. Эффективные коэффициенты концентрации для валов с резьбой и прорезями
Отах к = 2оном, то это не значит, что нагрузку надо снизить в два раза по сравнению с допускаемой для детали без концентратора. При данной величине ао снижение прочности, вызванное концентратором, зависит от материала, термообработки, технологических способов упрочнения и других факторов. При R — —1 это снижение оценивается эффективным коэффициентом концентрации, равным отношению предела выносливости о_х гладкого полированного образца (рис. 4.12, а) к пределу выносливости а_1к (подсчитанному по номинальным напряжениям) образца или детали того же диаметра, но с тем или иным концентратором (рис. 4.12, б):
Ко = Oj/a.iK- (4.28)
На рис. 4.12, в даны кривые выносливости а и б, соответствующие вариантам образцов на рис. 4.12, а и б. Под гладким
Таблица 4.1. Коэффициенты Ка и Кт для участков валов, предназначенных для зубчатых (шлицевых) соединений вала со ступицей
полированным образцом понимается образец с таким значением p/d, при котором практически аа 1.
Значения приводятся в справочных данных [4, 18, 72 ].
Рис. 4.16. Влияние градиента первого главного напряжения а на чувствительность к концентрации напряжений
Рис. 4.15. Зависимость коэффициента дв от <тв и радиуса выкружки р
В практических расчетах применяют приближенную зависимость между Ка и ао
/<о= 1-Ь?о(а<г-1), (4-29)
в которой qa — коэффициент чувствительности материала к концентрации напряжений, характеризующий степень реализации
Таблица 4.2. Отношения Кст/ест и K-Je-t для участков вала в месте посадки деталей
Диаметр, мм Посадка * °в*
600 700 800 900 1000 1200
Ка!ед (изгиб)
] 2,75 3,0 3,25 3,5 3,75 4,25
30 11 2,06 2,25 2,44 2,63 2,82 3,19
III 1,70 1,95 2,11 2,28 2,44 2,76
I 3,36 3,66 3,96 4,28 4,60 5,20
50 п 2,52 2,75 2,97 3.20 3,45 3,90
III 2,18 2,38 2,78 5,0 3,40
I 3,60 3,94 4,25 4,§0 4,90 5,6
100 II 2,70 2,96 3,20 3,46 8,98 4,20
и белее III 2,34 2,56 2,76 3,0 3,18 3,64
(кручение)
I 2,05 2,20 2,35 2,50 2,65 2,95
30 II 1,64 1,75 1,& 1,98 2.09 2,31
in 1,47 1,57 1,ё7 1,77 1,86 2,06
I 2,52 2,60 2,78 3,07 3,26 3,62
50 It 2,03 2,15 2,20 2,42 2,57 2,74
III 1,71 1,83 1,95 2,07 2,20 2,42
100 I 2,56 2,76 2,95 3,16 3,34 3,76
и более II 2,04 2,18 2,32 §Л8 2,80 2,92
III 1,83 1,94 2,бВ 2,20 2,31 2,58
При меча н и я:
1. в месте посадки колец подшипников качения значения К /е выбирают
по строке, соответствующей посадке I.
2. Величина Кг/ег определяется по формуле Кт/ет -1 + 0,6 (Ко/ео - 1).
* Обозначения посадок : I — посадки с гарантированным натягом (напри-
мер, H7/s6); 11 — посадки переходные (Н7/я6) и др.; III — посадки типа сколь-
зящей (H/h).
влияния теоретического коэффициента концентрации на прочность детали. Так как<7о < 1, то с ао. Ориентировочные значения да даны на рис. 4.15, из которого следует, что чувствительность к концентратору падает с уменьшением ав и радиуса выкружки р. Следовательно, величина да зависит от аа и снижается с увеличением аа.
Влияние градиента da‘dz первого главного напряжения на чувствительнбсть к концентрации напряжений рассмотрим на примере деталей / и II из одинаковых материалов с одинаковыми диаметрами d и D, но различными радиусами pi и рл (рис. 4.16).
Детали / и II загружены изгибающими моментами, при этом (o™xk)i = (OmaxJn = °тахк- Кривые изменения первого глав-ного напряжения также обозначены I и II. Из рис. 4.16 следует, что Р! < Рп, И поэтому
tg0i = (-4r-) »tg е„ =
& 1 \ dz /z=0,5d" ь “ \ dz /z=0,5d
Пусть o' максимальное значение циклически изменяющегося напряжения, при котором в материале деталей / и II не развиваются усталостные повреждения. Зоны сечения деталей / и II, в которых возникают повреждающие напряжения, характеризуются размерами 1Л и /п (рис. 4.16). В данном случае lt < 1ц и, следовательно, с ростом градиента напряжений уменьшается число кристаллитов в зоне повышенной напряженности, поэтому (в связи со статистической природой усталостных повреждений) снижается вероятность развития усталостных разрушений. Этим объясняется снижение коэффициента qG с уменьшением р (см. рис. 4.15).
Если, сохраняя неизменными огааХк и ст', увеличить все размеры, например детали I в k раз, то во столько же раз уменьшится tg 0j и возрастет Ц и, следовательно, увеличится зона повышенной напряженности и повысится вероятность развития усталостных разрушений. Этот пример указывает на связь масштабного фактора с градиентом напряжений.
Помимо градиента изменения напряжения на число кристаллитов, находящихся в зоне повышенной напряженности, влияет периметр L рабочего сечения, проходящего через зону максимальных напряжений. В рассматриваемом примере L~tnd. Таким образом, размеры зоны повышенной напряженности характеризуются параметрами ds/dz и L. Это послужило основанием для получения зависимости между отношением Ка1га и значениями а„, do/dz и L. В расчетных зависимостях используют относительный градиент первого главного напряжения [32]
т? 1 da и =---------з—.
атах к
При заданном значении <ттах к с увеличением G и уменьшением L снижается число кристаллитов в зоне повышенной напряженности. То же имеет место с увеличением отношения G/L.
Таким образом, параметр G/L зависит от формы концентратора и от размеров детали. Это позволило получить корреляционную зависимость между Ка/еа и величинами ао и G/L [32]:
Кд __ 2ct0
е° 1 +(88,3G/L)V°’
где 88,3 — коэффициент с размерностью мм2; va = 0,1 4-0,14 для углеродистых сталей и va = 0,04 4-0,08 для легированных сталей; значения G приведены в работах [32, 68].
Влияние состояния поверхности. При статических нагрузках состояние рабочих поверхностей оказывает незначительное влияние на их прочность. При циклических нагрузках разрушение детален связано с развитием усталостных трещин, возникающих обычно в поверхностном слое. Этому способствует повышение напряжений у поверхности от концентраторов, а также и без концентраторов — при кручении и изгибе. Развитию усталостных трещин способствуют возникшие в результате механической обработки шероховатости, являющиеся также концентраторами напряжений. Влияние их учитывается коэффициентами шероховатости:
№=о_1/о_1П; К? == 1-1/т_1П, (4.30)
где а_х и т_х — пределы выносливости гладких полированных образцов; о_1п и т_1п — пределы выносливости образцов с заданным состоянием поверхности.
Ориентировочные значения К™ и Л? для некоторых видов обработки даны в табл. 4.3. Снижение предела выносливости, вызванное шероховатостями, увеличивается с ростом ов.
Т а б л и ц а 4.3. Коэффициенты шероховатости га Д'" (при изгибе и кручении)
Состояние поверхности (ГОСТ 2789—73) ов, МПа
Высота неровности профиля Rz по десяти точкам, мкм Среднее арифметическое отклонение профиля Ra 600 800 1200
1,6—0,4 6,3—1,6 40—10 0,32—0,08 1,25—0,32 10—2,5 1,00 1,06 1,20 1,00 1,10 1,2$ 1,00 1,25 1,50
Необработанная поверхность (окалина и т. д.) 1,35 1,50 2,20
Наиболее значительное снижение предела выносливости в сравнении с гладким полированным образцом (в три-четыре раза и более) наблюдается при развитии коррозии в процессе работы [68].
Для повышения несущей способности деталей широко используют различного вида упрочнение их поверхностей. Повышение прочности поверхностного слоя и появление в нем остаточных напряжений сжатия достигается наклепом при дробеструйной обработке или накаткой роликами, поверхностной закалкой и химико-термической обработкой (цементацией, нитроцементацией, азотированием и др.). Влияние этих факторов учитывается коэффициентом упрочнения
(4-31)
73
Лу — О_1у/О_1,
где o_iy — предел выносливости образца, подвергнутого упрочнению. Эффект от поверхностного упрочнения увеличивается с ростом d<j/dz, и это обстоятельство находит отражение в табл. 4.4, поскольку коэффициент Ку. увеличивается с ростом К„.
Таблица 4.4. Коэффициент упрочнения /<у валов при различных видах поверхностной обработки
Поверхностная обработка Временное сопротивление разрыву сердцевины ов, МПа Коэффициент упрочнения лу
Гладкие валы Валы с малой концентрацией напряжения (Ко< 1,5) Валы с большой концентрацией напряжения <к0 = = 1.8-г-2,0)
Закалка с нагревом т. в. ч.* 600—800 800—1000 1.5—1,7 1,3—1,5 1,6—1,7 2,4—2,8
Азотирование ** 900—1200 1,1—1,25 1,5—1,7 1,7—2,1
Цементация 700—800 1000—1200 1,4—1,5 1,2—1,3 —
Дробеструйный наклеп *** 600—1500 1,1—1,25 1,5—1,6 1,7—2,1
Накатка роликом**** — 1,1—1,3 1,3—1,5 1,6—2,0
* Данные получены на лабораторных образцах диаметром 10—20 мм при глубине закаленного слоя (0,05-г-0,20) d. Для валов больших размеров упрочнение несколько меньше. * * Меньшие значения — при глубине азотированного слоя 0,01 d, большие — при глубине азотированного слоя (0,03-i-0,04) d. * ** Данные получены на образцах диаметром 8—40 мм; меиьшие значения — при менылнх скоростях обдува, бблылне — при больших. * *** Данные получены на образцах 17—130 мм.
14з табл. 4.4 следует, что /(у > Лс, т. е. деталь с концентратором, подвергнутая упрочняющей технологии, имеет приблизительно ту же усталостную прочность, что и неупрочненная деталь без концентратора.
§ 4.3. ЗАВИСИМОСТЬ МЕЖДУ ПРЕДЕЛАМИ ВЫНОСЛИВОСТИ ДЕТАЛИ И ОБРАЗЦА И ПРЕДЕЛЬНЫЕ НАПРЯЖЕНИЯ ПРИ РАЗЛИЧНЫХ ЗНАЧЕНИЯХ КОЭФФИЦИЕНТА АСИММЕТРИИ ЦИКЛА
Пределы выносливости образца (о_ъ T_t) и детали (п_1£), t_w) связаны зависимостями:
О_1/О_1О — KtyD> Ч-т/Г-Ю — H.TD-
(4.32)
Коэффициенты Коо и определяют с использованием приведенных выше данных по формулам:
= 1)/кУ; Kw=(-^ + k?-i)/>у.
(4.33)
В одном и том же сечении (или в близко расположенных сечениях с мало отличающимися нормальными напряжениями) могут действовать различные концентраторы напряжений. Так, при определении коэффициента запаса прочности вала, показанного на рис. 18.7, в сечении I—I (или близко расположенном к нему
Рис. 4.17. Диаграмма предельных напряжений: I — образец; 2 — деталь
сечении) надо учесть значения Ко и Кт, вызванные посадкой с гарантированным натягом, шпоночной канавкой и резким изменением диаметра вала. Расчет выполняют по максимальным значениям Коо и Кхо (см. пример на стр. 381).
В соответствии с формулами (4.6) и (4.6а) ограниченный предел выносливости данного сечения детали при R = —1 и числа циклов Nc:
°-lND — G-1D^co'< = T_!£)KCT. (4.34)
Предельные напряжения при различных значениях R определяют следующим образом. В прямоугольной системе координат о,л, оа (рис. 4.17) все возможные значения оо, соответствующие данному R, лежат на луче, проходящем через начало координат!
= от tg ₽, (4.35)
где tg р = (1 — К)/(1 + R) 1см. формулы (4.1)].
В соответствии с этой зависимостью на рис. 4.17 отмечены лучй со значениями R, равными 1, 0,—1 и др. Все они лежат в интервале р = 0-ня. Штрихами показана кривая АВ предельных значений амплитуд оа lim для образца. Получение таких кривых представляет известные трудности, и поэтому экспериментальную
кривую заменяют прямой 1, проходящей через точки Л и В с координатами 0; и О,5о0; О,бо0, где о0—предел выносливости при R = 0. Уравнение этой прямой
Ой —г О-i tg О^обр»
где tg аобр «= —ACIBC = —(2o_i — о0)/а0-
Введем обозначение (2о_х — о0)-/ао — Фо- Это отношение зависит от свойств материала. Таким образом, для прямой 1 имеем
*Та == 'l <№т'
При ао =« 0 находим от = о_1/фо (рис. 4.17).
Предельные амплитуды caD детали показаны прямой 2. Из экспериментов известно, что отношение ординат точек прямых 1 и 2 приданном значении от равно K.0D. Отсюда следует, что прямая 2 пересекает ось ат в точке ат = Далее имеем
caD °-1О + Gm Ш «О-
Здесь
tg «О = -
поэтому
®aD — °-ID — (tyo/KoD) °п‘ (4.36)
Из (4.35) находим, что при данном R
от = ooD (1 + В)/(1 — R).
Подставив это выражение в (4.36), получим
п__________ч-i (1 - R)
aD~RaD(l-R) + %(l+R)'
Предельное напряжение детали [см. формулы (4.1)]
— __п __ %СаР_______________2<j_[________.
(1-/?)Дад + Ц;о (1 +/?)
Если МЕ <2 No, то вместо o_1D в формулы (4.36) и при определении tg ад подставляют o_iWp, при этом предельное напряжение
OfiND = (1-В)<о/^ + %(1 + В) ’ (4,38)
Аналогично для касательных напряжений
<rAvo = (1-/?) Кго/Ксг + ^в +R) * (4,39)
те
Формулами (4.38) и (4.39) можно пользоваться при R — — —2. -т- 0. Этот интервал значений R является наиболее характерным для большинства деталей машин.
Величины фо и фт зависят от материала и термообработки. Для нормализованных и улучшенных легированных сталей при ов £> 800 Л1Па принимают фо = 0,3 -г- 0,4; фт = 0,15-4- 0,2. Для деталей, подвергнутых цементации и азотированию, имеем соответственно фо = 0,6; = 0,4 и = 0,8; = 0,5. При NE > No
в (4.38) и (4.39) имеем Rca = 1 и RCT = 1; oWD = oRD; trnd = -rRD.
При отсутствии экспериментальных данных для определения пределов выносливости стали применяют ориентировочные зависимости: при изгибе o_j (0,40 -4- 0,46) ов; при сдвиге т_г ~ ₽« 0,6о_1; при знакопеременном симметричном растяжении— сжатии р. с 0,75о_!; при R = 0 пределы выносливости на изгиб о0^1,6о_1 и на сдвиг т0 1,9^.
§ 4.4. ДОПУСКАЕМЫЕ НАПРЯЖЕНИЯ
И КОЭФФИЦИЕНТЫ ЗАПАСА ПРОЧНОСТИ
Допускаемые напряжения [о 1, [т] и расчетные коэффициенты запаса прочности sa и sx определяются по формулам:
[о] = W = тПт/[вт]; (4.40)
«а = ^Iim/О' [sj;
«т = Tlim/T [St],
(4.41)
где °пт и тнт — предельные напряжения; опт — действующие напряжения; Isa] и [srJ—допускаемые значения коэффициентов запаса прочности.
Номинальные напряжения а = ат + оа — сТтах; т = тт -р + ха = ттах определяют по формулам, базирующимся на гипотезе плоских сечений.
При R = 1, а также при действии нагрузок, которым соответствует малое число циклов (например, Nc <3 103), для хрупких материалов принимают <тИт = ов; тИт — тв. Для пластичных материалов crlim = от; т11т = тт.
При совместном действии нормальных и касательных напряжений запас прочности по пределу текучести определяют по формуле
sT = sCTTsTT/(/sjrT -J- sXt, (4.42)
где sOT = Oj/a; s^. = tt/t.
При действии переменных напряжений в (4.41) имеем trlim = = °rnd и тИт = trnd. Тогда, учтя (4.38) и (4 39), получим
sa = O-l/l(JKaD/f<ea) + №т1; St — Т-ДКЛ^то/ТСст) Tfl -f- фтТт].
(4.43)
(4.44)
77
При совместном действии переменных нормальных (изгиб, растяжение—сжатие) и касательных (кручение, срез) напряжений при любом R общий коэффициент запаса прочности
s = scsxlV Sa + S? > [s], (4.45)
где s0 и sT определяются по формулам (4.43) и (4.44).
При определении величин so за предельное напряжение можно принять <7Iim = oRD [см. формулу (4.37) 1. При этом в формуле (4.41) о = оа£ -у ога. Здесь оаЕ — эквивалентная амплитуда, определяемая на основании формулы (4.18а):
m / ’ И
oa£ = ]/ (4.46)
Аналогично поступают и при определении величины sx. В результате имеем:
so = ^-i/(KoD<yaE + фост); (4.47)
St = x-l/{KtDxaE 4"ггт). (4.48)
Масса детали обратно пропорциональна [ст ] и, следовательно, пропорциональна [s] (см. гл. 6). Отсюда следует, что величина [s] оказывает большое влияние на габариты и массу проектируемых изделий и, следовательно, на их стоимость и эксплуатационные расходы. С уменьшением [s] снижается масса изделий, но увеличивается возможность отказов — снижается надежность (см. гл. 7).
Таким образом, выбор величины [s] является очень ответственной задачей, поскольку надо обеспечить требуемую надежность без завышения массы и габаритов изделия
При циклически изменяющихся напряжениях (при расчете по пределу выносливости) в качестве ориентировочных можно рекомендовать следующие значения [si: при высокой достоверности расчета и сведений о действующих нагрузках и механических характеристиках материалов [si = 1,3-г- 1,5; при менее точной расчетной схеме, отсутствии надежных статистических данных о действующих нагрузках и тщательного контроля механических свойств деталей [s] = 1,5 н-2,1 для стали и [si = = 2,0 ч- 2,4 для серого и модифицированного чугуна.
При расчете по временному сопротивлению (olim = ов) принимают повышенные значения [si: для стали, например, не менее 2,0—2,5, поскольку даже одноразовое повышение нагрузки до значений, соответствующих ов, влечет разрушение. Значительно меньшие значения [s ] назначают при расчете по пределу текучести, например 1,3—1,6. При неоднородном напряженном состоянии (кручении, изгибе) даже при расчетном напряжении несколько превышающем предел текучести, остаточные деформации обычно настолько малы, что не оказывают влияния на эксплуатационные свойства детали.
При расчете по контактным напряжениям, направленном на предупреждение преждевременных отказов из-за усталостного выкрашивания, принимают [so I = 1,1 ~ 1,2 и |so ] = 1.2-5—1,3 соответственно при неупрочненных и упрочненных контактирующих поверхностях.
Зависимость между нагрузкой и контактным напряжением не является прямо пропорциональной [см. формулу (2.6) 1, и поэтому правильнее в данном случае исходить не из отношения предельного и действующего напряжений, а руководствоваться отношением соответствующих им нагрузок. Приведенным выше значениям [so 1 при начальном линейном касании соответствуют допускаемые коэффициенты запаса прочности по нагрузкам [si = ls0 Г2 = = 1,21 -г- 1,44 и [si = [soI2 = 1,44 -=- 1,69.
Полученные значения [si несколько меньше используемых обычно при расчете деталей на объемную прочность Это объясняется тем, что при контактном нагружении разрушения носят локальный характер, развиваются медленно и сравнительно легко фиксируются до появления последствий, опасных для дальнейшей работы.
При расчете по контактным напряжениям с целью предотвращения развития глубинных усталостных трещин, приводящих к отслаиванию (см. стр 31), коэффициент запаса прочности назначают повышенным — не менее двух по нагрузке [65 ]. Эта связано с высокой интенсивностью развития отслаивания, отсутствием методов, позволяющих фиксировать начало этого процесса. Известная осторожность в данном случае оправдывается и тем, что процесс отслаивания изучен значительно слабее, чем процесс выкрашивания.
В справочных данных в ряде случаев приводят некоторые средние значения коэффициентов запаса прочности (см., например, значения [$н] и [sFl в табл. 14.4 и 14.6), от которых возможны отклонения в сторону увеличения или снижения в зависимости от точности расчетной схемы и значений коэффициентов вариации случайных величин, условий эксплуатации и других факторов. Если эти факторы в сравниваемых передачах одинаковы, но различны последствия возможных отказов, то в более ответственной передаче назначают и большее зачение коэффициента запаса прочности (например, величины [sH ]2 и [sF I в зависимости от последствий отказов увеличивают на 20—40% против указанных в табл. 14.4 и 14.6). Но при жестких требованиях к массе и габаритам нецелесообразно увеличивать надежность за счет повышения коэффициента запаса прочности. В этом случае уточняют расчетную схему, снижают разброс случайных величин, используют статистические данные из опыта эксплуатации объектов, аналогичных проектируемым. Последнее мероприятие имеет особенно большое значение, так как многие факторы, влияющие на прочность, находятся в стадии изучения и учитываются приближенно.
Глава б. ВЛИЯНИЕ ДЕФОРМАЦИЙ И ПОГРЕШНОСТЕЙ ИЗГОТОВЛЕНИЯ НА РАСПРЕДЕЛЕНИЕ НАГРУЗКИ В ЗОНЕ СОПРЯЖЕНИЯ ЗВЕНЬЕВ
§ 6.1. ОБЩИЕ СВЕДЕНИЯ
В зонах сопряжения звеньев усилие передается через совпадающие и несовпадающие поверхности. В последнем случае начальное касание происходит в точке (см. рис. 2.7) или по линии (см. рис. 2.5, 2.6, в и др.). Касание в кинематической паре может происходить в нескольких точках или по нескольким линиям, что, например, характерно для зубчатых передач и подшипников качения (см. рис. 2.8).
Распределение нагрузки по отдельным участкам соприкосновения сопряженных поверхностей и по длине контактных линий, зависящее от конструкции кинематической пары, упругих свойств материалов деталей, точности изготовления и условий работы, оказывает большое влияние на долговечность сопряженных поверхностей и виброакустические свойства машины. В связи с этим для снижения массы и габаритов проектируемых объектов и повышения их надежности необходимо знать распределение нагрузки в зоне взаимодействия звеньев и добиваться наиболее благоприятного распределения воздействием на форму сопряженных поверхностей.
Обозначение q, использованное ранее для удельной контактной нагрузки, применяется в дальнейшем для нагрузок, отнесенных к единице длины различных соединений (например, резьбовых и зубчатых, фланговых сварных швов), а также для нагрузок, отнесенных к единице ширины зубчатых венцов шестерни и колеса.
Для исследования распределения нагрузок в зоне касания сопряженных поверхностей используют зависимости между деформациями и вызвавшими их нагрузками. Производную от силового фактора (Г, Т и др.) по соответствующему перемещению 6 или <р, вызванному деформациями, называют коэффициентом жесткости (С, Cv и др.), а обратную величину — коэффициентом податливости (А, А^> и др.):
C=l/A = dF/d6; Сф = l/K^dT/dq. (5.1)
При прямо пропорциональной зависимости между силовым фактором и вызванной им деформацией имеем С = const; при этом (рис. 5.1)
С = 1/А = F/б; Сф = 1/Аф = 77<р. (5.2)
В формулах (5.2), например, для участка вала длиной I постоянного сечения, загруженного крутящим моментом Т, имеем Сф = = GJр/1, а при изгибе балки постоянного сечения, загруженной 80
Рис. 6.1. Зависимость между силовым фактором и деформацией
коэффициент удельной
сосредоточенной силой, С “ 1/Л = kEJр/Р, где k — коэффициент, зависящий от схемы нагружения и способов заделки; Е — модуль упругости первого рода; G — модуль упругости второго рода.
Детали с начальным касанием в точке или по линии сближаются под действием нормального усилия Fn за счет деформаций в зоне контакта. При начальном касании по линии (см. рис. 2 6, в) сближение контактирующих тел с большой точностью можно принять равным уменьшению расстояния между любыми двумя точками G и L на нормали I—I, удаленными от линии начального касания на расстояние не менее \ЪЬИ. Обычно величина 1 &ЬН составляет малую часть меньшего из радиусов кривизны сопряженных поверхностей, что свидетельствует о быстром затухании деформаций по мере удаления от зоны контакта.
Из решения контактной задачи теории упругости следует, что зависимость между нормальной нагрузкой Fn и деформацией при начальном касании по линии близка к прямо пропорциональной. Поэтому в расчетной практике допустима линеаризация зависимости между Fn и деформацией б. При этом используется
жесткости СчН, т. е. жесткости, Отнесенной к единице длины контактной линии:
СчН = 1 = Fп/(/кб) — q/8. (5.3)
Для стальных зубчатых колес и подшипников качения принимают СдН <=& 30 000 МПа.
При начальном касании сопряженных поверхностей в точке сближение контактирующих тел за счет деформации в зоне контакта прямо пропорционально нормальному усилию в степени 2/3. Объединяя варианты с начальным касанием по линии и в точке, получим
б = ^, (5.4)
где х = 1 и х = 2/3 соответственно; коэффициент k зависит от свойств материала деталей и геометрии в зоне контакта.
Относительные перемещения сопряженных деталей, связанные с их деформированием, находят экспериментально или с использованием методов теории упругости. Во многих случаях представляется удобным эти перемещения представить как результат деформаций различного вида (растяжения, сжатия, изгиба, кручения и др.) для возможности приближенного решения с использованием зависимостей из курса сопротивления материалов. Так, в случае модели на рис. 5.2, а под действием силы F детали / и 2 смещаются одна относительно другой в направлении оси х
за счет дефсрмаций изгиба, сдвига и в контакте выступов А:
6 =-- (jiCq = ^qQ = (Aq взг Д- ^q сдв Ч- hq конт) (^-б)
где Сч и — соответственно коэффициенты удельной жесткости и гсдатливссти, отнесенные к единице длины соединения в направлении, перпендикулярном к плоскости чертежа.
Для пары зубчатых колес величина б равна относительному поступательному смещению зубчатых колес 1 и 2 за счет упомянутых деформаций выступов (зубьев) в направлении, параллельном нормали п—п к профилям в точке касания (рис. 5.2, б).
Рис. 5.2. К расчету деформаций выступов деталей
При неподвижных колесе 2 и оси От шестерни 1 имеем б = 0,5 dblq>, где <р — угол поворота шестерни за счет деформаций зубьев при приложении к ней момента Ti = 0,5F„ dbl. Если в зацеплении имеется только одна пара стальных зубьев, касающихся в середине профиля (рис. 5.2, б), то = q/S 14 000 МПа. Если же один из зубьев касается в вершине или а2), то Сч «=< 10 000 МПа. Для пары зубьев величина = \!Cqfj составляет около 30% от Х„.
На рис. 5.2, б показаны сечения зубьев плоскостью п—п и эпюра распределения q по длине зубьев (ширине зубчатого венца bw). Вблизи торцов податливость зубьев несколько больше, чем на остальных участках, и поэтому наблюдается небольшое снижение удельных нагрузок.
На рис. 5.2, в длина зуба & значительно меньше, чем bi. Вследствие поддерживающего эффекта участков К и L зуба 1, примыкающих к зоне контакта, возникает концентрация д у торцов зуба 2 (см. показанное штрихами на рис. 5.2, в сечение деформированных зубьев плоскостью п—п).
Некоторые вопросы, связанные с распределением q, рассмотрим на модели, в которой деталь 1 взаимодействует с опорами 2 и 3 с постоянной по длинам 1А и 1В жесткостью Cq (рис. 5.3, а). Деталью 1 может быть, например, вал, а опорами — подшипники качения или скольжения (рис. 5.3, б). Сопряжения А и В могут 82
также символизировать касания сопряженных зубчатых колес. При приложении нагрузок Fi и Fa вследствие деформирования детали 1 сечения ее под опорами А и В поворачиваются на некоторые углы ул и ув, и удельная контактная нагрузка по длинам 1А и 1В распределяется неравномерно (см. кривую / на рис. 5.3, а). При возможности приработки толщина снимаемого с поверхностей слоя пропорциональна q, и поэтому возникает перераспределение удельных нагрузок (см. кривую II на рис. 5.3, а). Макси-
Рис. 5.3. К распределению удельных нагрузок в зоне сопряжения деталей
мальные значения q до и после приработки обозначаются соответственно 6/,'пах и г/гг-ах- Удельная нагрузка, найденная в предположении равномерного распределения q, называется средней удельной нагрузкой и обозначается qm.
Отношение qr:iey.lqm называется коэффициентом, учитывающим неравномерность распределения q, и обозначается Анр- В начальный момент работы и после приработки имеем соответственно:
Анр = Qmax Л?т> Анр = йта^/йт' (5.6)
Очевидно, ЧТО </max > Qmax И Анр > Анр.
Применительно к зубчатым передачам коэффициенты, учитывающие неравномерность распределения q по ширине зубчатого венца, обозначаются соответственно Анр и Анр при расчете на контактную прочность и Акр и Акр при расчете зубьев на изгиб (см. гл. 14).
Рис. 5.4- Болтовое соединение с непараллельными опорными поверхностями
При отсутствии износа, что характерно для поверхностей, разделенных непрерывным слоем жидкости или газа, Днр = Кир-В расчетной практике величину qmsK принято выражать через Л„р и qm:
9тах = КнрУт, 9тах 13 КпрУт'
Расчеты на прочность и долговечность выполняют по величине Уты, и поэтому для снижения размеров и массы проектируемого изделия надо стремиться к снижению 7(нр. Рассмотрим некоторые пути к достижению этой цели, выбор которых зависит от конкретных условий, характерных для проектируемого узла.
Уменьшение угла у ведет к снижению Утах и /(пр. Для этого надо увеличить момент инерции Д сечения детали 1 по возможности без увеличения массы. Так, эффективным является переход от сплошного вала (4ПЛ) к полому (dnoJI, 4эН)> отношение моментов инерции которых при равных площадях сечения
41ад/ЛсПЛ=(1+w - m
где 0= dBH/dno.i (рис. 5.3, в).
При [j = 0,7 имеем Д-пол/*Д спл ==я = 2,92, и, следовательно, без увеличения массы существенно увеличивается жесткость и снижаются углы ул и ув.
Повышение изгибной податливости детали 1 ведет к увеличению Кнр. Что же ка-
сается опор, то повышение их податливости (снижение способствует выравниванию q. Так, замена в подшипнике металлического вкладыша резиновым (см. стр. 389) приводит к резкому снижению /Снр.
Для снижения Кнр используют модификацию — преднамеренное отклонение от формы сопряженных поверхностей, обеспечивающей их прилегание при отсутствии деформаций. Осуществив, например, сопряженную поверхность опоры 2 с наклоном к оси г под углом ул, обеспечим эффективное выравнивание q при данном уровне нагрузки (рис. 5.2, г). При действии переменных нагрузок и неизбежности значительных углов у прибегают к бочкообразной форме одной из сопряженных поверхностей (см. рис. 5.3, д и стр. 87).
Во многих случаях эффективной мерой выравнивания q является использование самоустанавливающихся опор (см. рис. 5.3,е и 19.7).
На распределение q оказывают влияние отклонения от теоретической формы сопряженных поверхностей, вызванные погрешностями изготовления. Так, отклонение сопряженной поверх-84
ности опоры 2 от положения, обеспечивающего прилегание в не-деформированном состоянии, показанном на рис. 5.3, ж, способствует увеличению Qmax и К'нр. В случае зубчатых колес такие погрешности наряду с увеличением контактных напряжений повышают и напряжения изгиба у основания зубьев. Аналогичное положение характерно, в частности, и для болтовых соединений с непараллельными опорными поверхностями (рис. 5.4). При загруженном соединении эпюра распределения удельных нагрузок на сопряженных поверхностях неравномерна, и на болт действует изгибающий момент F6e, где е — смещение результирующей Аб удельных нагрузок.
Линейные и угловые перемещения 6 балки с п участками, вызванные деформациями изгиба и кручения, определяются по зависимостям, известным из курса сопротивления материалов:
6
ур f Мх dz дМх , “ Д J "Ж" ~д0~’
1 I
е __ Г dZ дТ
Д J GJp dQ ’
1 l
(5-7)
где Q — силовой фактор (сжимающая или растягивающая сила, изгибающий или крутящий момент).
При определении перемещения участка деформируемого тела, к которому не приложена нагрузка, используют прием введения добавочной (фиктивной) силы. Так, при вычислении угла уд (см. рис. 5.3, о) к детали 1 против опоры А прикладывается пара сил с моментом МА, и в этом случае в формуле (5.7) имеем Q — = МА.
§ 5.2. РАСПРЕДЕЛЕНИЕ УДЕЛЬНЫХ НАГРУЗОК И УСИЛИЙ В ЗОНЕ СОПРЯЖЕНИЯ ЗВЕНЬЕВ
Определение коэффициента Анр, характеризующего неравномерность распределения удельных контактных нагрузок, рассмотрим на примере модели с двумя роликами 1 и 2 (рис. 5.5, а). Ролик 1 установлен в несимметрично расположенных относительно него неподвижных опорах 3 и 4, а ролик 2 — в вилке 5, имеющей возможность перемещаться поступательно. Объемными деформациями роликов пренебрегаем, что допустимо при небольших значениях отношений b/di и b/dz (где di и dz — диаметры роликов; b — ширина роликов).
Приводимый вывод относится и к тем зубчатым передачам, в которых влияние деформаций тел зубчатых колес незначительно. При этом в расчет вводят приведенные выше значения Cq (см. также рис. 14.20).
Полагаем, что при отсутствии деформирующего усилия ролики касаются по общей образующей. При приложении усилия F оси роликов в результате деформирования располагаются под углом
На рис. 5.5, б ролики 1 и 2 показаны в увеличенном виде. Касание в точке возможно только при абсолютно жестких деталях. В действительности в результате деформирования в зоне контакта, в зависимости от характеристик жесткости конструкции, прилегание возможно по всей длине Ъ общей образующей или по некоторой части ее Ь'. Максимальные деформация <5ПИК и удельная на.
Рис. 5.5. Влияние перекосов осей роликов на распределение удельных нагрузок в зоне касания
грузка Цтах — СчЬгтх возникают у торца А (рис. 5.5, б, линия /). На расстоянии х от торца А имеем:
Ъ ' ®тах
Ух — Cq (бщах
Из условия равновесия получим:
d/*' (%) = ух dx = Cq (бтах ТХ'О
ь
F = j dF (х) = — О.бС^й2;
О
^тах F/(Cqb) + 0,5dTz;
<7тах = F/b +
Заметив, что qm = Fib, находим
Кнр — Утах lym = 1 Н- 0,^ЬСдУх!Ут' (5-8)
Если Л°р > 2, то касание происходит не по всей длине Ь, а по некоторой части ее — Ь'. Эпюра q для этого случая показана на рис. 5.5,6 линией 77, тогда
Кнр = 6 ZCg^lF = V 2bCgy^lqm. (5.8а)
При определении величины у2 можно пренебречь смещением равнодействующей усилия между роликами (между зубьями в случае зубчатых передач) от середины общей образующей Ь. Это смещение незначительно (не превышает обычно 0,16), поскольку, как правило, во избежание завышения массы и размеров должно выполняться условие Кнр<СЕ5.
С помощью преднамеренных отклонений от формы сопряженных поверхностей (при которой имеется полное прилегание без деформирующих усилий) можно получить более благоприятное распределение q. Так, выполнив один из роликов в виде конуса с углом ум = у2 между образующей и осью (рис. 5.5, а), получим равномерное распределение удельных давлений, но только при заданном значении F. Если нагрузка переменная и не представляется возможным обеспечить малые значения уЕ за счет повышения жесткостей или симметричного расположения роликов (зубчатых колес) относительно опор, то одной из сопряженных поверхностей целесообразно придать выпуклую (бочкообразную) форму (рис. 5.5, в). Эпюра распределения q для этого случая представлена кривой III (см. рис. 5.5, б). С переходом от эпюры II к эпюре III снижается Qmax и, следовательно, увеличивается несущая способность, причем эффективность бочкообразной формы возрастает с ростом угла перекоса уЕ.
При расчете деталей машин возникает необходимость учитывать совместное влияние погрешностей изготовления и деформаций. Рассмотрим вопрос на нескольких примерах, характерных для многих узлов машин.
В примере, показанном на рис. 5.5, а, возможны отклонения от цилиндрической формы роликов. Если эти отклонения сводятся к конусности и найденный с заданной вероятностью появления угол между образующими роликов в осевом сечении равен уПогр» то в формулы (5 8) и (5.8а) вместо угла перекоса yz, вызванного деформациями, подставляют угол у2 -f- упогр. В результате из формулы (5.8) имеем
КнР = 1 + 0,5bC„ (ys/qm 4- Упогр/^т)- (5-9)
При линейной зависимости между нагрузкой и деформацией имеем yzlqm = const. Но с изменением дт изменяются величины Тг.огр/^т и ^нР, снижаясь с увеличением qm. Следовательно, с повышением степени нагруженности (допускаемых напряжений) снижается неравномерность распределения q, вызванная погрешностями изготовления.
Переходим к рассмотрению распределения нагрузки среди нескольких сопряженных поверхностей с учетом погрешностей.
Модель на рис. 5.6, в отличие от показанной на рис. 5 2, а, состоит из двух пар выступов А и В, коэффициенты жесткости которых СА и Св. Аналогичные модели, но с вращательным относительным движением звеньев 1 и 2 показаны на рис. 5.6, б (с двумя выступами) и на рис. 5.6, в (с тремя выступами). При касании
выступов А без деформирующего усилия между выступами В имеется зазор Д, вызванный погрешностями изготовления. Зазор Д может быть, например, результатом неравенства шагов Pi и А (рис. 5.6, а).
F Под нагрузкой F вследствие деформации выступов деталь 1 смещается
Рис. 5.6. К распределению нагрузки между выступами деталей при малом числе выступов
на расстояние 6 (рис. 5.6, а) При этом суммарные деформации пар выступов А и В равны соответственно 6Л — 6 и 6В = 6 — — Д. Далее имеем:
F = F А FB = СаЬ + Св (6 — Д);
6 = (А 4- Св Ь)/(СА + Св) = (F + Св Д) /S С;
^ = Сл(А + СвД)/ЕС; Fb = Cb(F-Ca^C. (5.10) Эти зависимости справедливы при FB > 0 (при F > СЛД) Если длина выступов А и В в направлении, перпендикулярном плоскости чертежа, одинакова и равна Ь, то формулы (5.10) можно представить в следующем виде:
Qa = CqA (q + СчВ Д)/У Cq; qB = CqB (q — CqA &)/ Cq, (5.11)
где
Я— F/b; Яа— FA/b; qB = FBlb; CqA = CA!b\ CqB— CB!b.
Формулы (5.11) используют при расчете зубчатых передач (см. стр. 277).
При СА = Св = С из формулы (5.10) имеем:
Ел = 0,5 (F + С Д); FB = 0.5 (F - С Д). (5.12)
Для модели на рис. 5.6, б в формулах (5 12) имеем F = 2Ti/dbr, где dbl — диаметр окружности, касающейся нормалей к сопряженным профилям выступов в точке их контакта.
Коэффициент неравномерности в данном случае равен отношению усилия Fmf,x наиболее загруженных выступов к Fm = Finw, где nw — число выступов, т. е.
FHp = Fmax nw/F.
Для примеров на рис. 5.6, а, б имеем F^ax = FA; nw = 2. Тогда
К°„ р = 1 + С &/F. (5.13)
Формула (5.13) справедлива при любом значении п^, если зазор Д имеется только между одной парой выступов. Если же между nw — 1 парой выступов имеются одинаковые зазоры, то КНр - 1 + (««, - 1) ед/F.
В рассматриваемом случае, как и в варианте, характеризуемом зависимостью (5.9), неравномерность, вызванная погрешностями изготовления, зависит от жесткости элементов конструкции и степени загруженности. Зависимости типа (5.13) описывают распределение нагрузки между сателлитами планетарных передач (см. стр. 307). В этом случае коэффициент податливости X = 1/С является суммой коэффициентов податливости, определяющих перемещения, вызванные деформациями зубьев, опор сателлитов, тела зубчатых колес, выполненных в виде обода, и т. д.
Переходим к модели на рис. 5.7, а, вскрывающей некоторые особенности резьбовых соединений (рис. 5.7, б). Выступы А и В выполняют функции, аналогичные виткам резьбы. В отличие от модели на рис. 5.6, а в данном случае учитываются перемещения, вызванные деформациями растяжения и сжатия деталей 1 и 2. Разность шагов Р2 и Р1г равная Д, может быть результатом погрешностей или преднамеренных отклонений от исходной формы, при которой обеспечивается прилегание выступов (витков) прй отсутствии деформаций.
При определении деформаций 6Р1 и 6Р2 участков ab и cd (рис. 5.7, а) принимаем Pi = Рг = Р:
6/>, = F^P/(EMi); 6Р! = ЕлР/(Е2А), где Ei и Ег; Ai и Аг — соответственно модули упругости и площади сечения деталей 1 и 2.
В результате деформаций точки а и Ъ смещаются в направлении оси х относительно точек с и d соответственно на расстояния 6Л и 6В. Далее имеем
6в = 6л + 6р1 + 6рг-Д==6д +FzPQ- Д, (5.14)
Приняв СА = Св — С, по аналогии с решением для модели на рис. 5.6, а получим:
F F+c^ • F F + FCPQ-C& ,
А 2-FCPQ' в 2~\-СР£1 ’ (о-io)
В сечениях детали 1 (рис. 5.7, а), нормальных к оси х и проходящих через зоны концентрации напряжений а и Ь, суммируются местные напряжения от усилия, растягивающего эту деталь (усилия Fa в сечении а и усилия Fb = F в сечении Ь), и местные напряжения, вызванные деформациями выступов усилиями FA и FB соответственно для зон а и Ь. При Д = 0 опасным является сечение детали 1 у зоны Ь, поскольку здесь больше усилие, растягивающее деталь и загружающее выступы.
С увеличением А растет FA и падает FB, и, следовательно, можно найти оптимальное значение А, обеспечивающее максимальную нагрузочную способность, лимитируемую сопротивлением разрыва стержня 1.
Имеются и другие способы воздействия на распределение нагрузки между выступами А и В. Например, можно снизить величину изменив в формуле (5.14) знак при 6Р>. Это возможно, если деталь 2 работает на рас-
а) ________Ь_______
тяжение (рис 5.7, в).
Таким образом, нагрузочную способность рассматриваемого соединения можно увеличить с помощью конструктивных приемов, изменяющих направление деформаций, а также преднамеренных отклонений от исходной формы, обеспечивающей прилегание сопряженных поверхностей при отсутствии деформирующего усилия.
При числе выступов между деталями 1 и 2 больше трех-четырех (рис. 5.8) целесообразно воспользоваться моделью, в которой выступы заменены упругим слоем 3 (см. рис. 5.9, а)
Предварительно решение линейного дифференциального уравнения второго порядка
d2F (x)/dx2 — p.aF (х) = а, (5.16) описывающего приближенно рассмот-
Рис. 5.8. К распределению нагрузки между выступами деталей при большом числе выступов
ренные ниже законы распределения q, представим в виде, удобном для дальнейших приложений. Граничные условия: Fх = 0 при х = 0; Fx = F при х = b (рис. 5,8, а и 5.9, а). Обозначив
v = —а/р2,
найдем
F (х) = [ (F — v) sh (fix) — v sh (рб — px)]/sh (рб) -f- v.
Обозначив через qx первую производную от F по х, получим
(5.17)
(5.18)
Чх == = ch щм — ch (й*) + v ch (й* — ИЬ (5 19>
С1Л oli
Для применения этого решения к дискретным задачам, как, например, для модели на рис. 5.8, надо воспользоваться следующим замечанием. Если у Пары сопряженных выступов жесткость равна С и на единицу длины соединения приходится п таких пар, то удельная жесткость Сч = Сп, где п = 1/Р.
Сечения 1Х и 2Х деталей 1 и 2 (рис. 5.8, а) плоскостью, перпендикулярной к оси х( отстоящей от торца L на расстояние х), после приложения нагрузки F в результате деформаций деталей 1 и 2 смещаются одна относительно Другой на величину 6Х. Удельная нагрузка, приходящаяся на единицу длины соединения, составляет qx = С^>х.
Если шаги выступов деталей 1 и 2 одинаковы (Рх = Р2), то все выступы одновременно вступают в работу (рис. 5.8, а). Если же Р2 = Рх + Д (рис. 5.8, б),
ТО при отсутствии деформирующего усилия зазор му-жду выступами на расстоянии х от торца L
63 (х) = х = 4- (5.20)
Рассмотрим пример соединения, в котором нагрузка между деталями 1 и 2 постоянного Сечения передается через упругий слой з (рис. 5.9, с), символизи-
Рис. 5.9. Распределение удельных нагрузок по ^лине соединения деталей
рушений, например, резьбу сварные фланговые швц и т. д. Нагрузку, приходящуюся на единицу длины соединения, обозначим q, а удельную жесткость упругого слоя — Сд. Возьмем систему координат xq, осд ординат которой совпадает с торцом L.
Сечения с абсциссой х, принадлежащие деталям / и 2, обозначены 1хи2х (рис. 5.9, а). Пусть и 6Х2 — смещения сечений 1Х и 2Х относительно торца L. Обозначим через F (х) усилие, воспринимаемое упругим слоем 3 на участке х. 92
На рис. 5.9, б показано в деформированном виде сечение с абсциссой х. Взаимное осевое смещение сечений 1Х и 2Х будет Ьх = 6А1 — 6А2.
Удельная нагрузка, приходящаяся на единицу длины соединения, на участке с координатой х:
Qx ~ Cq&x = Cq (6xi — 6А2); dqx — Cq (ddxi —d6l2), (5.21)
где (с учетом знаков деформаций)
d6xi = F (х) dx/(EjAj); ddx2 — —F (х) dxj(E2A2),
Далее находим
dqxldx = р2 F (х), (5.22)
где р2 = C9[1/(EMi) + 1/(^2)]-
Заметив, что dqx/dx > 0 и cPqx/dx‘- > 0. через точку с координатами х и qx проводим кривую 1, отражающую характер изменения qx.
Далее имеем:
dF (х) = qxdx-, dqx/dx = d2F (х)/ dxz. (5.23)
Из равенств (5.22) и (5.23) получим
d2F (x)/dx2 — p2F (х) = 0. (5.24)
При х — 0 и х = Ь (рис. 5.9, а) имеем соответственно F (х) = 0 и F (х) = F. Из сравнения зависимостей (5.16), (5.17) и (5.24) следует, что v = 0, а из формул /5.1ф и (5А9) находим:
F (х) = F sh (px)/sh (pF); qx = pF ch (px)/sh (pF);
<7nlax = <7x=b = FH cth (В*) • (5.25)
Далее имеем:
Чт = F/b; F°Kp = qmaxb/F = pF cth (pF). (5.26)
Эти результаты относятся также к соединению деталей 1 и 2 фланговыми швами (рис. 5.9, в) и к зубчатому соединению вала 1 со ступицей 2 (рис. 5,9, г). Окружность, касающаяся нормалей к сопряженным профилям зубьев, обозначена dt>, а число пар зубьев — г. Угол относительного смещения сечений 1Х и 2Х деталей 1 и 2 обозначим <рх = <рх1—<pX2, где (рА1 и <рх2—углы поворота сечений /х и 2Х относительно торца L детали 2. Момент, передаваемый соединением на участке х, обозначим Тх.
В рассматриваемом случае в формуле (5.21):
5x1= 0>5йбфх1; 5x2 = 0,5rf6<pA2;
поэтому
qx= ®>5Cqdb (<pxi фхг)> dqx = OfP>Cqd^ (dipxi d<pX2)- (5-27)
На основании формул, известных из курса сопротивления материалов,
. Txdx F (х) dhZ dx , —F (х) dhZ dx
Тогда
dqx _ / 1 .
dx 4 \ G^pi *~
(5.28)
и, следовательно, в формулах (5.22)—(5.25) имеем
(5.29)
В данном случае qm = F/b — 2Tl(b d^z). С переходом от распределения qt по кривой I к распределению, характеризуемому кривой II (рис. 5.9, а), умен,, (лаются значения dqx!dx и и> следовательно, увеличивается несущая способность соединения. Уменьшению dqxldx способствует снижение Сд [см. формулы (5.21) и (5.27)] и увеличение At и Л2 (или и Jpj. Но первое связано с изменением параметров упругого слоя (с отказом, например, от стандартных резьбы или зубчатых соединений), а второе ведет к увеличению массы и размеров соединения.
Из зависимостей (5.21) и (5.27) следует, что величину dqx/dx можно снизить, применив конструкции, в которых 6Х| и (или cpjd и <рх2) имеют одинаковые знаки, т. е. сечения 1Х и 2Х при приложении F (или Т) смещаются относительно торца L в одну сторону. Такие конструкции показаны на рис. 5.9, д—м.
Для варианта на рис. 5.9, д в формуле (5.21) имеем:
= F (х) dx/tEiAj); d^— [F — F (x)] dx/(E2A2), тогда
dqx/dx = p2F (x) — CqF!(E2A2).
Учтя равенство (5.23), получим
d2F (x)/dx* - |i2F (x) = — CqF/(E2A2).
Заметив, что F (x) — 0 при x = 0 и F (x) = F при x = b [см. формулы (5.16), (5.17), (5.19) и (5.22)], находим:
— CqF — E1A1 F=kF
V E2A2p2 F1A + E2A2
qx = Fp [(1 — x) ch (px) + /. ch (pb — px)]/sh (pZ?). (5.30)
У кривой qx седловидная форма (рис. 5.9, 5), поскольку при х= 0 и х «= Ь имеем соответственно dqx/dx<Z 0 и dqx/dx > 0.
Поступая аналогично предыдущему, найдем, что для соединения, показанного на рис. 5.9, ж, в формуле (5.30)
X •= GiJPi/(GiJpl -J-G2Jp2), при этом р определяется по формуле (5.29).
Для варианта на рис. 5.8, б имеем [см. зависимости (5.20)—(5.23)]:
<7* — Gq (бхд 5x2 — £*)>
dqx!dx = p2F (х) — d*F (x)/dx2 — p»F (x) = — C&.
Заметив, что v = C^/p2, из зависимости (5.19) получим
qx = p [(F — C^/P2) ch (px) + (C^/p2) ch (pfe — px)]/sh (p6). (5.31)
При циклических напряжениях наибольшая несущая способность рассматриваемого соединения имеет место при разгруженных выступах (витках) у опорной поверхности, т. е. при qx=b~ 0. В этом случае из формулы (5.31) имеем (см. также формулу (5.20)]:
p2Fch(pfe)
6 C9ch(pZ>)-1 ’
§ б.З. РАСПРЕДЕЛЕНИЕ ДАВЛЕНИЙ
НА ЦИЛИНДРИЧЕСКИХ СОПРЯЖЕННЫХ ПОВЕРХНОСТЯХ
На рис. 5.10, а показаны детали 1 и 2 с цилиндрическими сопряженными поверхностями. Сначала рассмотрим вариант, в котором у деталей 1 и 2 диаметры d сопряженных поверхностей равны.
2 1.
Рис. 5.10. Распределение давлений в зоне касания цилиндрических поверхностей
При приложении усилия Fr к детали 1 ось последней за счет деформаций смещается на величину 60 в направлении вектора Fr. Давления на сопряженных поверхностях пропорциональны деформациям в зоне контакта, которые в приближенном решении предполагаются прямо пропорциональными расстоянию между центрами окружностей Л и В. В соответствии с этим деформация на участке, расположенном под углом tp к оси у,
\ = 60 cos tp.
В рассматриваемом случае деформации и давления связывают следующей зависимостью 1см. также (5.4)]:
b = kpx, или р = (6/Р)1/* — сб1/А, (5.32)
где k, с, х — постоянные коэффициенты.
Давление на элементе KL (рис. 5.10, а)
Ptp — с$х = с (бо cos <р)1/л . (5.33)
При <р = 0 имеем р^=о = ртах = с8о/х, поэтому
Р<₽ = Ртах (COSip)1/*. (5.34)
На элемент KL действует нагрузка
dF = (0,5bd) dtp = 0,5b dpmax (cos <p)1/x dtp, (5.35)
где b — ширина детали 2 (рис. 5.10, a).
Из условия равновесия имеем:
0,5л
Fr — 0,5b dpm^ J (cos tp)O+*)/* dtp = 0;
-0,5л
Ртах==2Рг/(ЬК/), (5.36)
где
0,5л
Kr = J (cos tp^1**)/* dtp.
-0,5л
При расчете на смятие болтов, круглых шпонок и других деталей принимают х = 1. При этом Кг — 0,5л и
Осм = Ртах = сбо = 4Fr/(nbd) = 1,28Fr/(bd). (5.37)
При х = 2/3 [см. (5.4)] имеем Кг ~ 1,45, тогда
Pmax=l,38Pr/(bd). (5.38)
Усилие F<pV, действующее на участок EG (рис. 5.10, б), при малых значениях у (например, при у с 0,2л) с незначительной погрешностью можно определить по формуле [см. формулу (5.34)1
РФГ = O.Sp^bdy = 0,5bdypmax (cos tp)1/*.
Учтя формулы (5.37) и (5.38), найдем:
F<pv = (2Ргу/л) cos tp при х = 1; | F^ = 0,69F/y (cos tp)3/2 при х = 2/3. J
Эти зависимости используют при определении нагрузок, действующих на тела качения в подшипниках (см. гл. 19).
На рис. 5.10, в показано осевое сечение, проходящее через вектор Fr (см. рис. 5.10, а), для варианта сопряжения деталей 1 и 5 по конической поверхности с углом конуса а. В данном случае от радиальной нагрузки возникает осевое усилие Sr. Без учета влияния сил трения на основании (5.35) и (5.36) имеем
dF tg а = lr^’ а (cos ф)1/х
и
0,5л
^=^tga f (cosq))i/Mq)> (5.40)
Ar J
-0,5л
При x = 1 и x = 2/3 имеем соответственно: Sr — l,27Fr tg а; S, = l,21Fr tg а. Эти результаты относятся к радиально-упорным подшипникам (см. гл. 19), один из вариантов которого показан на рис. 5.10, г.
Рассмотрим соединение двух деталей 1 и 2 при di > di. После сборки, например, прессованием (см. гл. 9) получается напряженное соединение с равномерной эпюрой давлений р (см. рис. 5.10, д). Если при приложении нагрузки Fr ось детали 1 сместится на величину 60 относительно детали 2, то давление на участке K.L, расположенном под углом <р [см. формулу (5.34), в которой в данном случае ограничиваемся рассмотрением варианта с х — II,
Рч> = Р + Р<р = Р + Ртах COS ф, где рф — приращение давления, вызванное радиальной нагрузкой Fr. При ф = (0,5 -н 1,5) л имеем рф < 0. При ф = 0 и ф = л имеем соответственно: = ртак — с60; = —рП1ах- (см. эпюру
давлений, показанную па рис. 5.10, д штрихпунктирной линией).
Усилие на участке KL
dF = 0,5p'^bddff = Q,5bd(p -ф c60cos ф) dtp. (5.41)
Если ртах < р, то касание сопряженных поверхностей при приложении Fr не нарушается, т. е. не возникает раскрытия стыка. При этом из условия равновесия
2л
Fr — 0,5bd J (р -ф с60 cos ф) cos (pd<p = 0 о
находим максимальное давление
Ртах = сбо = 2Fr/(nbd). (5.42)
Таким образом, соединения с натягом отличаются от соединений без натяга большей жесткостью. Так, из сравнения зависи-97
местей (5.37) и (5.42) следует, что при действии радиальной нагрузки жесткость у соединения с натягом при /?тах с р в два раза больше, чем у соединения с di = di = d.
Переходим к рассмотрению распределения давлений в напряженном соединении деталей 1 и 2, которое, в отличие от показанного на рис. 5.10, д, загружено не усилием Fr, а моментом М, вектор которого перпендикулярен к оси сопряжения (рис. 5.11).
Рис. 5.11. Сопряжения с натягом, загруженные моментом, вектор которого перпендикулярен к оси сопряжения
При М = 0 сопряженные поверхности находятся под действием равномерно распределенного давления р. При приложении момента М давления на сопряженных поверхностях перераспределяются. Если детали 1 и 2 достаточно массивны и отношение bld невелико (например, не превышает 1,2), то объемными деформациями деталей пренебрегают и исходят из линейного распределения р в осевых сечениях. Вызванный деформациями угол поворота детали / относительно 2 обозначим у. На элемент поверхности KL с размером dz в направлении оси г действует усилие dF, которое определяют по формуле (5.41) с подстановкой dz и у г вместо b и б0:
dF = 0,5d (р + cyz cos <р) dz dtp.
Момент этой силы относительно оси х
dMx — (dF cos <р) z — 0,5d (pz cos <p -ф- cyz2 cos2 <p) dz dtp.
Из условия равновесия имеем 0.5ft 2л
—М. -J- 0,5d J dz J (pz cos <p cyz1 2 * * cos2 <p) dtp = 0.
-0,5ft о
Из этого уравнения находим
у = 24M/(nbscd). (5.43)
Из формул (5.32), в которой в данном случае х = 1, и (5.43) находим давление рм, вызванное моментом М (рис. 5.11):
рм = cb = 0,5cby = 12M/(nb2d). (5.44)
Эти зависимости используют при расчетах соединений с натягом (см. гл. 11)
Глава 6. МАТЕРИАЛЫ В МАШИНОСТРОЕНИИ И УКАЗАНИЯ К ИХ ПРИМЕНЕНИЮ’
§ 6.1. КРАТКИЕ СВЕДЕНИЯ О МАТЕРИАЛАХ ДЛЯ ДЕТАЛЕЙ МАШИН
Конструкционные стали — сплавы Fe и С (до 2%), содержащие естественные примеси и во многих случаях специально вводимые легирующие элементы (Cr, Ni, Mo, V, W, Ti и др.), являются наиболее широко используемыми материалами для деталей машин. В табл. 6.1 даны осредненные значения механических характеристик и виды термообработки некоторых распространенных марок конструкционных сталей (углеродистых качественных — ГОСТ 1050—74* и легированных — ГОСТ 4543—71*), используемых для зубчатых колес, осей, валов, деталей муфт, звездочек цепных передач, червяков, винтов винтовых механизмов и др. (см. также табл. 14.6). Как следует из этой таблицы, механические характеристики сталей помимо химического состава и вида термообработки зависят также от размера сечения.
Механические характеристики отливок из некоторых марок углеродистой стали в отожженном или нормализованном состоянии (по ГОСТ 977—75) имеют следующие значения:
Марка стали........................15Л 20Л 25Л ЗОЛ 40Л 50Л
ав, МПа .......................... 400 420 450 480 530 580
от. МПа........................... 200 220 240 260 300 340
Относительное удлинение 6, % . . 24 22 19 17 14 11
1 При изложении настоящей главы предполагается, что читатель знаком
с основными сведениями о материалах из курсов сопротивления материалов
и материаловедения
4'
99
Таблица 6.1. Механические характеристики некоторых марок сталей, используемых для деталей машин
С Й 1
* 1<S
s=D/2
1 Марка стали Размер сечения S, мм Механические свойства после термообработки Твердость поверхности после закалки и низкого отпуска HRC Термообработка *
Твердость, НВ Временное сопротивление разрыву Ов, МПа Предел текучести ат,МПа
45 <80 170—217 192—240 241—285 600 750 850 340 450 580 — н У У
40Х 60—100 <60 230—260 260—280 750 1000 520 800 — У
40ХН <100 100—300 230—280 163—269 850 800 600 580 — У
35ХГСА 60—150 40—60 30—40 <30 <235 270 310 <760 980 1100 1700— 1950 <500 880 960 1350— 1600 46—53 У
20Х <60 197 650 400 56—63 Ц; 3; НО
12ХНЗА 40—60 <40 250 300 920 1000 700 800 56—63 Ц; 3; НО
18ХГТ <40 40—80 300 270 1000 950 800 750 56—63 Ц; 3; НО
38Х2МЮА — — 63—65 А
• Приняты следующие обозначения: А — азотирование; 3 — закалка; Н — нормализация; НО — ннзкнй отпуск; У — улучшение; Ц — цементация.
Для получения отливок с более высокими механическими характеристиками используют конструкционные низколегированные стали, например марок ЗОХГСЛ, ЗОХНМЛ, 35ХМЛ, 40ХЛ, 50ГЛ и др.
Чугуны — сплавы Fe и С (свыше 2%), содержащие естественные примеси, а также и специально вводимые легирующие элементы для получения заданных свойств. Благодаря хорошим литейным свойствам, относительно низкой стоимости и достаточной прочности чугуны широко применяются для деталей сложной конфигурации и, в первую очередь, для корпусных деталей и станин. Наибольшее распространение для деталей машин получили серый и высокопрочный чугуны.
В ГОСТ 1412—70 имеются следующиз марки серых чугунов: СЧ 12-28, СЧ 15-32, СЧ 18-36, СЧ 21-40, СЧ 22-44, СЧ 28-48, СЧ 32-52, СЧ 35-56 и СЧ 40-60. В этих обозначениях за буквами СЧ следует значение пределов прочности при растяжении и изгибе в кгс/мма.
Модуль упругости Е серых чугунов зависит от временного сопротивления разрыву и изменяется примерно от 10® до 1,5 X X 10® МПа при изменении ов от 120 до 400 МПа.
В обозначениях марок высокопрочных чугунов (ГОСТ 7293—70), например ВЧ 45-5, ВЧ 50-2, ВЧ 60-2, ВЧ 70-3, ВЧ 80-3 и др., за буквами ВЧ (высокопрочный чугун) следуют минимальное значение временного сопротивления разрыву в кгс/мм2 и значение относительного удлинения 6 в %. Для высокопрочных чугунов о, «« 0,7ов и £ = (1,6 ч- 1,9) 10® МПа.
Медные сплаеы — бронзы и латуни обладают высокими антикоррозийными свойствами, а пары, сочетающие бронзовые поверхности со стальными или чугунными, отличаются хорошими антифрикционными свойствами (см. стр. 106). Из медных сплавов для деталей машин наиболее широко используют бронзы. Названия им дают по легирующим элементам (Sn, Р, Al, Fe, Мп, Sb, Zn и др.) Маркируют бронзы буквами Бр, за которыми следуют заглавные буквы легирующих элементов и их процентное содержание. Например, БрОФЮ-1 — бронза, содержащая 10% олова,
Т а б л и ц а 6.2 Механические характеристики некоторых марок броиз
Марка бронзы Способ отливки Временное сопротивление разрыву ов, МПа Предел текучести о, МПа т
БрОФЮ-1 В песок В кокиль 200 260 120 150
БрОФН БрОЦС6-6-3 БрАЖ9-4 Центробежный » » 210 150—200 400—500 170 80—100
1 % фосфора и остальное — медь. В табл. 6.2 даны механические характеристики некоторых марок бронз.
Баббиты — сплавы обычно на основе олова и свинца, используемые в подшипниках скольжения и обладающие высокими антифрикционными свойствами (см. стр. 106). Химический состав, временное сопротивление на сжатие <тп. сж и твердость некотор ых марок баббитов даны в табл. 6.3.
Таблица 6.3. Химический состав и механические характеристики некоторых марок баббитов
Марка сплава Ориентировочные данные с содержании элементов, % °в.сж. МПа НВ
Б83 Sb — 11; Си — 6; Sn — 83 115 30
Б16 Sb — 16; Си — 1,75; Sn — 16; Pb — остальное 120 30
ЦАМ10-5 Al — 10; Su — 5;Mg — 0,04;Zn — остальное 700 100
А09-2 Sn — 9; Си — 2; Sb — 2; Ni — 1 Al — остальное — 50—60
Легкие сплавы — конструкционные сплавы с плотностью рт <5 < 4500 кг/м3 на основе алюминия, магния, титана и других элементов с присадками Си, Mg, Мп, Si и др., обладающие высокой удельной прочностью ов/рт и используемые в основном там, где снижение массы особенно эффективно, например для корпусных и других деталей транспортных машин, для снижения инерционности быстроходных деталей, совершающих возвратно-поступательное движение, и т. д.
Из легких сплавов в машиностроении широкое распространение получил литейный алюминиевый сплав — силумин, содержащий кремний (4—13%). Этот сплав сочетает прочность (табл. 6.4) с высокими антикоррозийными свойствами.
Среди деформируемых сплавов на основе А1 и Mg распространены конструкционные сплавы типа дюралюминия, обладающие высокими механическими свойствами и удельной прочностью. Так, у листов из сплава Д-16, нагартованных после закалки и искусственно состаренных, ов 460 МПа (табл. 6.4).
Наибольшей прочностью из легких сплавов обладают титановые сплавы (табл. 6.4).
Композиционные волокнистые металлические материалы представляют собой сочетание основы (матрицы) и упрочняющего наполнителя — волокон. Варьируя компоненты и их объемное сочетание, получают материалы с высокими механическими характеристиками, жаропрочностью и другими свойствами. Так, механические свойства композиционного материала с алюминиевой матрицей и борным волокном существенно выше, чем алюминиевых сплавов (табл. 6.4).
Таблица 6.4. Ориентировочные значения (W <ув и других характеристик некоторых конструкционных металлических и неметаллических материалов
Спеченные (металлокерамические) материалы изготовляют методами порошковой металлургии, сущность которой состоит в получении порошков металлов (а также их смесей с неметаллическими порошками), прессовании и последующем спекании в пресс-формах деталей из них. Полученные таким способом детали не требуют обработки резанием. В связи с этим при достаточной массовости производства рассматриваемый процесс отличается высокой экономичностью.
Механические и физические свойства у беспористых спеченных материалов те же, что и у литых материалов, но они падают с увеличением пористости. В машиностроении наибольшее распространение получили детали на основе железного порошка — втулки, шайбы, ролики, малозагруженные зубчатые колеса и др.
Железографитовые спеченные материалы (2—3% графита и остальное железо) используют для изготовления вкладышей подшипников скольжения. При этом хорошие антифрикционные свойства обеспечиваются благодаря включению графита и заполнению пор минеральным маслом.
Спеченные материалы успешно применяют для фрикционных элементов в виде дисков (см. стр. 446) и тормозных колодок. Основой при этом являются железные и медные порошки с добавлением компонентов для предупреждения схватывания (графит, свинец, нитрид бора и др.) и повышения трения (асбест, карбиды, окислы и др.). Так, фрикционный материал марки МКВ-50А содержит 10% меди, 8% графита, 3% асбеста, 5% карбида кремния, 5% карбида бора и остальное железо.
Пластические массы (пластмассы) — материалы на основе синтетических или (значительно реже) природных высокомолекулярных смол — полимеров. Пластмасса может состоять из смолы или представлять собой композиционный материал из полимерной основы (матрица) и наполнителя (асбест, молотый кварц, древесная мука), или из связующего и армирующих волокон (стекло, углерод и др.). Выбором наполнителя и связующего добиваются тех или иных физических и механических свойств материала. В пластмассы добавляют пластификаторы, облегчающие формообразование благодаря повышению пластичности.
Пластмассы делят на термопластические (термопласты) и термореактивные (реактопласты). Термопласты при нагревании переходят в вязкотекучее состояние без химических превращении и поэтому могут быть повторно переработаны. Получение изделий из реактопластов сопровождается необратимым переходом в неплавкое состояние.
Достоинствами пластмасс являются малая плотность (табл. 6.4), возможность получения высоких фрикционных, антифрикционных, диэлектрических и демпфирующих свойств, сравнительная простота формообразования многих изделий при минимальных отходах, хорошая обрабатываемость резанием. При замене деталей из черных металлов литьевыми из пластмасс трудоемкость 104
и число технологических операций снижаются не менее чем в пять раз. Благодаря малому значению рт некоторые пластмассы по удельной прочности конкурируют с высокопрочными сталями (табл. 6.4). В связи с этим по массе и другим показателям некоторые детали оболочковой формы, выполненные из пластмасс, имеют преимущества перед стальными.
Наряду с указанными достоинствами изделий из пластмасс, обеспечивающими им все возрастающее распространение, необходимо учитывать особенности, ограничивающие возможность гх использования для подавляющего большинства деталей машин: низкая в сравнении с металлами прочность, малые твердость и жесткость [модуль упругости при растяжении Е приблизительно на один-два порядка меньше, чем у сталей (см. табл. 6.4) ], низк: я теплопроводность и обычно невысокая теплостойкость (60—250° С). К исключениям по последнему показателю относятся пластмассы на основе кремнийорганических смол с асбестостеклянными н ь полнителями. При проектировании необходимо учитывать ползучесть под нагрузкой и старение, существенно снижающее свойства деталей из пластмасс.
В области машиностроения пластмассы находят широкое распространение как фрикционные и антифрикционные (см. стр. 106) материалы, для малозагруженных деталей (например, крыльчаток центробежных вентиляторов, зубчатых колес), размеры которых по условиям компоновки существенно превышают полученные из расчета при использовании стали, для деталей оболочковой формы, для смотровых люков и т. д.
Резина — материал, получаемый вулканизацией смеси натурального или синтетического каучука с серой и другими добавками. Резина имеет высокие эластические свойства, сохраняющиеся в широком диапазоне температур, воспринимает очень большие, почти полностью обратимые деформации, отличается низким модулем упругости. При повторном деформировании часть энергии поглощается на внутреннее трение, т. е. резиновые изделия имеют хорошие демпфирующие свойства. Помимо этого резина обладает высокой износостойкостью, хорошими диэлектрическими свойствами и сопротивлением действию многих агрессивных сред.
В машиностроении резину используют для изготовления ремней, амортизаторов, упругих элементов муфт, уплотнительных устройств, для защиты деталей от агрессивных сред и действия абразива. Широко используют для получения заданных свойств армирование резиновых изделий текстильными и стальными элементами (ремни, транспортерные ленты, покрышки транспортных машин и т. д.).
§ 6.2. УКАЗАНИЯ Н ВЫБОРУ МАТЕРИАЛОВ
Важнейшими критериями при выборе материалов для загруженных деталей общего назначения являются объемная прочность, износостойкость и жесткость. Наряду с этим во многих
случаях решающее значение имеют теплостойкость, теплопроводность и такие свойства, как противокоррозийные, диссипативные, электроизоляционные и др. Необходимо учитывать также стоимость и дефицитность материала и умело использовать конструктивно-технологические мероприятия, направленные на повышение несущей способности за счет выбора рациональных форм детали и применения различных видов упрочнения.
Для многих трущихся пар большое значение имеют антифрикционные и фрикционные свойства материалов сопряженных поверхностей.
Антифрикционными называются материалы, обладающие в определенных условиях малыми и достаточно стабильными значениями коэффициентов трения, высокой износостойкостью и хорошей прирабатываемостью. Свойства материал^ сопряженных поверхностей не оказывают влияния на трение, если эти поверхности полностью разделены слоем смазки (см. стр. 41). Антифрикционные свойства проявляются при отсутствии жидкостного трения или даже без смазки. К антифрикционным свойствам относятся несклонность (или слабо выраженная склонность) к схватыванию с материалом сопряженной поверхности, способность к образованию защитных граничных пленок, уменьшающих трение (см. стр. 35), высокие теплоемкость и теплопроводность. Важным показателем антифрикционных свойств является способность к перераспределению давлений в зоне контакта, что компенсирует влияние погрешностей и деформаций (см. гл. 5). Этому способствует прирабатываемость поверхностей (без патологических форм изнашивания) и сравнительно малые значения предела текучести и модуля упругости. Разнородные материалы менее склонны к схватыванию. Так, сочетания сталь—бронза, сталь—баббит обладают высокими антифрикционными свойствами (см. ниже).
Трение широко используется для передачи рабочих усилий между сопряженными поверхностями и для поглощения энергии. Характерными примерами являются фрикционные муфты (сцепные и предохранительные), тормоза и т. д. В таких случаях материалы трущихся поверхностей должны обладать хорошими фрикционными свойствами, под которыми понимают достаточно высокий коэффициент трения, износостойкость и теплостойкость с сохранением стабильности этих показателей (в широком диапазоне значений давления, скорости скольжения, температуры), а также хорошее сопротивление тепловой усталости.
Затраты на материалы составляют значительную часть стоимости машины. Эта часть достигает 85% в редукторах общего назначения, 75% в дорожных машинах, 70% в автомобилях и т. д. Отсюда следует актуальность мероприятий, направленных на снижение массы деталей. В связи с этим при выборе материала и термообработки имеет значение анализ зависимостей, связывающих допускаемые напряжения (или значения механических характеристик) с массой Gm рассчитываемой детали или узла.
При расчете на объемную прочность (изгиб, кручение, растяжение, сжатие) в зависимости от вида напряжения, лимитирующего нагрузочную способность (<т или т), имеем:
Gmo = QCTf)m/ [cr]v; Gmx = £2TPm/[T]v, (6.1)
где Pm — плотность материала, кг/м3; у — показатель степени-, равный 1 и 2/3 соответственно при деформациях растяжения (сжатия) и изгиба (кручения); Qo и QT — коэффициенты, зависящие от конструкции детали и вида нагружения. Так, для вала 106
постоянного диаметра длиной I, загруженного изгибающим М или крутящим Т моментом, имеем соответственно
Qa = 3,69-10-7/Л42/3; QT = 2,32-Ю-ДТ273, (6.2)
где Т и М — в Н-м; линейные размеры — в мм.
При заданной потенциальной энергии деформаций П масса деформируемой детали из материала, подчиняющегося закону Гука, связана следующей зависимостью с допускаемым напряжением [<т! или [т], модулем упругости Е или G и плотностью материала рт:
Gma = fian£/7pm/[o]2; GmT = fiTnG/7Pm/[-c]2. (6.3)
Для стержней круглого сечения [например, для торсионных валов (см. рис. 20.1, ж)], а также для цилиндрических винтовых пружин круглого сечения Отп = 4- Ю'6, если П — в Дж.
При начальном касании (см. рис. 2.6, а, б) в точке пли по линии (характерном для подшипников качения, передач зацеплением, для некоторых типов фрикционных передач и т. д ) и заданном нормальном усилии Fn масса Gm соприкасающихся деталей (при сохранении их геометрического подобия) связана следующей зависимостью с допускаемым контактным напряжением и другими параметрами
GmH = QHpm(F„£)3/2/[owlv. (6.4)
Коэффициент Qfl зависит от формы соприкасающихся тел. Показатель степени v равен 3 и 4,5 соответственно при начальном касании по линии и в точке. Отсюда следует, что масса деталей резко снижается с увеличением допускаемых контактных напряжений [он]. Величина |ан) связана с твердостью контактирующих поверхностей зависимостью, близкой к прямо пропорциональной. В связи с этим для снижения массы и габаритов деталей в рассматриваемом случае следует назначать по возможности более высокие твердости сопряженных поверхностей.
Допускаемое напряжение при расчете на объемную прочность принимается прямо пропорциональным пределу текучести при действии постоянного напряжения и пределу выносливости при действии циклических напряжений. Но для сталей предел выносливости и временное сопротивление разрыву в широком диапазоне связаны зависимостью, близкой к прямо пропорциональной. В связи с этим при сравнении масс из различных материалов за исходный параметр можно принять в первом приближении временное сопротивление разрыву.
При выборе материалов сопряженных трущихся поверхностей учитывают отношение (см. стр. 26). При = const с ростом us увеличиваются работа сил трения, теплонапряженность в контакте и опасность задира. Опасность задира падает с ростом п2 при vs = const, поскольку при этом увеличивается толщина масляного слоя [см. формулу (3.6) J и снижаются потери на трение.
С ростом отношения vs/vz уменьшается толщина масляного слоя, увеличиваются теплонапряженность в контакте [см. (2.17)] и опасность задира.
В тяжелонагруженном контакте, характерном, например, для подшипников качения, зубчатых и многих фрикционных передач, величина vslvs или пренебрежимо мала, или существенно меньше единицы. При этом важнейшим критерием работоспособности сопряженных поверхностей является сопротивление разрушению в результате развития усталостного выкрашивания. Величина [он] при этом, как следует из формулы (2.15) и табл. 14.4, связана с твердостью поверхности зависимостью, близкой к прямо пропорциональной. В связи с этим [см. формулы (6.4) и (6.5)1 повышение твердости сопряженных поверхностей при vs/vs 1 является эффективной мерой увеличения нагрузочной способности, снижения размеров и массы узлов, критерием работоспособности которых является усталостная прочность сопряженных поверхностей входящих в них деталей. Так, с увеличением твердости сопряженных поверхностей от НВ 300 до НВ 600 масса деталей может быть снижена в три-шесть и даже большее число раз [см. формулу (6.4)1.
Во многих сопряженных деталях машин vs/vs >1. В подшипниках скольжения, передачах вннт—гайка и в направляющих прямолинейного движения vs/v% = I1. В червячных передачах с неблагоприятным взаимным расположением вектора относительной скорости и линии контакта (см. гл. 15) vs/vs 1.
При vs/v% 1 актуальным является предупреждение изнашивания неусталостного характера, в первую очередь задира, и поэтому сопряженные поверхности должны обладать хорошими антифри кционными свойствами.
При = 1 и малых относительных осциллирующих перемещениях сопряженных поверхностей (см. стр. 33), характерных для многих номинально неподвижных соединений деталей машин (зубчатых, шпоночных, по цилиндрическим поверхностям, с натягом и без натяга и т. д.), может возникнуть фреттинг-коррозия. Одним из эффективных способов снижения интенсивности этого вида изнашивания является повышение твердости сопряженных поверхностей.
На основании рассмотренных общих замечаний ниже даны краткие рекомендации по выбору материалов наиболее характерных деталей общего назначения.
Детали с тяжелонагруженным контактом подшипников качения, винтовых пар качения, фрикционных вариаторов, роликовых обгонных муфт и др. Критерием работоспособности этих деталей является износостойкость. Нагрузочная способность ли-
1 При совпадающих сопряженных трущихся поверхностях для оценки отношения в связи с обратимостью пары можно воспользоваться любой точкой каждой из этих поверхностей. При этом очевидно, что v- = v&.
цитируется сопротивлением выкрашиванию, а при возможных перегрузках — пластическим деформациям. При этом надо обеспечить высокую твердость сопряженных поверхностей. Твердость HRC 61—65 имеют детали из специально разработанных для подшипников качения сталей марок ШХ6, ШХ9, ШХ15 и ШХ15ГС с содержанием примерно 1% С. Число в обозначении марки соответствует содержанию хрома в десятых долях процента. Эти стали используют также для тел качения фрикционных передач, гаек передач винт — гайка качения и роликовых обгонных муфт. Для деталей с тяжелонагруженным контактом и, в частности, для крупноразмерных подшипников качения широко используют цементуемые стали марок 18ХГТ, 12ХНЗА, 20Х2Н4А и другие с твердостью сопояженных поверхностей не ниже HRC 59—60.
Зубчатые колеса. Важнейшими критериями работоспособности зубчатых колес являются объемная прочность зубьев и износостойкость их активных поверхностей. Нагрузочная способность хорошо смазанных активных поверхностей лимитируется в основном сопротивлением выкрашиванию. Поэтому, чтобы исключить перерасход материала и завышение размеров, следует назначать высокую твердость активных поверхностей. При выборе материала и термообработки надо учитывать необходимость высокой объемной прочности, так как при использовании нагрузочной способности, лимитируемой сопротивлением выкрашиванию (при высокой твердости активных поверхностей), у основания зубьев возникают большие напряжения, вызванные изгибающим моментом (см. гл. 14).
Этим требованиям наиболее полно удовлетворяют легированные стали, подвергаемые термическому (закалка т. в. ч.) и химикотермическому упрочнению (цементация и нитроцементация с последующей закалкой и низким отпуском, азотирование и др.). — см. табл. 6.1. и 14.6.
Для наиболее ответственных высокозагруженных передач обычно используют цементацию и нитроцементацию высоколегированных сталей. Несколько ниже нагрузочная способность у передач с азотированными зубчатыми колесами, во многих случаях она лимитируется развитием подслойных усталостных трещин [65]. Нагрузочная способность при закалке т. в. ч. ниже, чем при цементации и нитроцементации (см. табл. 14.5 и 14.6), за исключением зубчатых колес из сталей пониженной прокалп-ваемости Уб и 55ПП.
Использование для зубчатых колес сталей, подвергаемых нормализации или улучшению, может быть оправдано в основном только в индивидуальном производстве, так как при этом мала твердость активных поверхностей (обычно не более НВ 350) и масса больше, чем у передачи, например, с цементованными зубчатыми колесами обычно не менее чем в три-четыре раза [см. формулы (2.15) и (6.4)1.
Вместо сталей, подвергаемых термическому улучшению, можно рспользовать высокопрочные чугуны (ГОСТ 7293—70). Высокая Прочность (величина ов достигает 1200 МПа), хорошие литейные свойства, пониженная чувствительность к концентрации напряжений, низкая стоимость материала при минимальных отходах в стружку обусловливают рациональность применения этого материала для зубчатых колес передач, к массе и габаритам которых не предъявляют жестких требований.
Нагрузочная способность зубчатых колес из неметаллических материалов по крайней мере в 10 раз ниже, чем стальных с высокой твердостью активных поверхностей зубьев. При замене металлических зубчатых колес неметаллическими сильно увеличиваются не только размеры, но и масса передачи, несмотря на низкое значение плотности рт неметаллических материалов.
Зубчатые колеса из капрона, капролона, текстолита и других неметаллических материалов применяют при высоких требованиях к снижению шума и вибраций. Применение их также целесообразно там, где по условиям компоновки механизмов размеры передачи существенно превышают те, которые получаются в случае применения стальных зубчатых колес. В связи с низкими теплопроводностью и теплостойкостью неметаллических материалов, обладающих хорошими антифрикционными свойствами, пластмассовые зубчатые колеса обычно применяют в паре со стальным или чугунным зубчатым колесом.
Валы и оси. Критериями работоспособности валов и осей являются жесткость, объемная прочность и износостойкость.
Требования к материалам осей и валов наиболее полно удовлетворяются при использовании стали (см. табл. 6.1). Выбор марки стали и термообработки зависит от требований, предъявляемых к массе проектируемой детали и износостойкости участков вала или оси, взаимодействующих с сопряженными деталями. Распространены валы, выполненные заодно с зубчатыми венцами: валы-шестерни (см. рис. 14.57), валы, снабженные зубьями для соединения со ступицей сопряженной детали. Показанный, например, на рис. 14.23 вал с конической шестерней снабжен также зубчатым венцом, предназначенным для передачи момента от ступицы соединительной муфты. В таких случаях выбор материала вала подчиняется требованиям, предъявляемым к износостойкости И объемной прочности зубьев. Если, например, вал-шестерня принадлежит выпускаемому серийно агрегату, то активные поверхности зубьев должны иметь высокую твердость, и марка стали назначается в зависимости от выбранной термообработки (см. Табл. 14.6).
Во многих случаях по конструктивно-технологическим соображениям, условиям сборки, требованиям к жесткости и другим требованиям диаметр вала может оказаться таким, что объемная прочность удовлетворяется, например, при использовании нор-110
мализованной стали марки 40 или 45 или даже обыкновенной углеродистой стали марок Ст4, Ст5. Однако во избежание фреттинг-коррозии в местах сопряжения с другими деталями бывает необходимо обеспечить высокую твердость, и назначение марки стали должно быть согласовано с выбранным способом получения требуемой твердости, например при азотировании может быть назначена сталь марки 38Х2МЮА (см. табл. 6.1). Аналогичное положение наблюдается и для опор скольжения. Антифрикционные свойства пары цапфа-вкладыш улучшаются с ростом твердости поверхности цапфы. В быстроходных опорах наилучшие результаты достигаются при цементации и азотировании.
Для валов сложной формы, например коленчатых (см. рис. 18.1, б), выполненных заодно с фланцем присоединительной муфты или с водилом планетарной передачи (см. рис. 14.60), во многих случаях может оказаться целесообразным использование высокопрочного чугуна в связи с отмеченными его достоинствами (см. стр. 101).
Червячные пары, подшипники, винт-гайка и направляющие поступательного движения скольжения. В этих кинематических парах vjvz > 1 (см. стр. 108), и поэтому при выборе материалов руководствуются необходимостью получения хороших антифрикционных свойств. Наилучшие результаты достигаются сочетанием высокотвердой стальной поверхности с антифрикционным материалом.
В малоответственных передачах находят применение червяки и винты с твердостью сопряженных поверхностей не более НВ 320, например из сталей марок 45, 40Х и др., подвергнутых улучшению или нормализации. Для повышения нагрузочной способности назначается твердость сопряженных поверхностей витков червяков не менее НРС 50. Для этого используют закалку т. в. ч. (стали марок 45, 45Х, 40ХН, 35ХГСА и др.). Наилучшие результаты достигаются при цементации с последующей закалкой (стали марок 20Х, 12ХНЗА, 18ХГТ и др.) и азотировании.
Для подшипниковых материалов важнейшим требованием является обеспечение хороших антифрикционных свойств (см. стр. 106 и 388).
Материалы червячных колес и гаек передач винт — гайка скольжения помимо хороших антифрикционных свойств должны обладать необходимой объемной прочностью. Нагрузочная способность этих деталей и особенно при значительном износе (и связанной с ним неравномерностью распределения давлений) может лимитироваться изломной прочностью зубьев (витков). В малоответственных тихоходных передачах (vs < 2 м/с) для червячных колес и гаек применяют антифрикционный чугун. В остальных случаях используют бронзы.
Для наиболее ответственных передач без ограничения по скорости применяют оловянные бронзы марок БрОФЮ-1, БрОФН, БрОЦС6-6-3 и др. Детали из этих бронз стойки против задира,
но вследствие невысокой твердости (при малых значениях <тв — см. табл. 6.2) нагрузочная способность червячных передач при использовании этих бронз во многих случаях лимитируется усталостным выкрашиванием. Нагрузочная способность трущихся деталей из бронз с более высокими механическими характеристиками (например, из БрА>К9-4), обладающих повышенным сопротивлением выкрашиванию, лимитируется существенно меньшим в сравнении с оловянными бронзами сопротивлением схватыванию. При использовании таких деталей ограничивают скорость скольжения (обычно vs < 6 м/с) и с ростом vs снижают допускаемую нагрузку (см. гл. 15).
Выбор материалов сопряженных поверхностей направляющих скольжения в основном определяется предупреждением схватывания. Используют, например, пары чугун или сталь и антифрикционный материал (бронза, баббит, текстолит, капрон, ка-пролон и др.).
Корпусные детали. Станины, плиты, корпуса механических передач и другие корпусные детали воспринимают значительные усилия от рабочих органов машин, нагрузок в зацеплениях, винтовых парах и т. д. Наряду с этим корпусные детали должны обеспечить правильное взаимное расположение установленных в них деталей и узлов, например различного рода передач. В связи с этим при выборе материалов для этих деталей учитывают необходимость обеспечения объемной прочности и жесткости при наиболее рациональном способе получения тех сложных форм, которые характерны для большинства корпусных деталей (см., например, рис. 14.57 и 14.58).
При серийном и массовом производстве наиболее рационально изготовление корпусных деталей методом литья.
Относительно большие размеры сечений корпусных деталей являются следствием их конструктивных особенностей, например необходимости размещения внутри корпуса элементов механического привода. В связи с этим во многих случаях напряженность корпусных деталей обычно невелика даже при минимальных толщинах стенок, обеспечиваемых условиями литейного производства. Это позволяет широко использовать для них серый чугун марок СЧ 15-32, СЧ 18-36 и др. При повышенной загруженности, особенно в условиях вибраций и ударных нагрузок, применяют высокопрочный чугун, а также стальное литье. При повышенных требованиях к снижению массы (в основном для транспортных машин) применяют алюминиевые сплавы (силумин и др.). Повышенная теплопроводность этих сплавов (см. табл. 6.4) весьма полезна для многих теплонапряженных узлов — таких, как, например, червячные передачи. Однако надо учитывать, что модуль упругости у алюминиевых сплавов меньше, чем у стали и чугуна соответственно в 3 и 2—2,5 раза. Это обстоятельство может повлиять на выбор материала или формы детали с учетом упругих перемещений.
В индивидуальном производстве применяют сварные корпусные детали. В этом случае основным материалом является листовой прокат из сталей марок Ст2, СтЗ, 14Г и др.
Для некоторых корпусных деталей повышенная податливость и пониженная теплопроводность вполне допустимы или полезны. В таких случаях используют пластмассы. Высокая удельная прочность некоторых пластмасс (см. табл. 6.4) и антикоррозийная стойкость явились причиной успешного использования их для корпусных деталей транспортных машин (кузова легковых машин, кабины грузовых машин и др.)
§ 6.3. НЕКОТОРЫЕ ПУТИ ЭКОНОМИИ МАТЕРИАЛОВ ПРИ КОНСТРУИРОВАНИИ ДЕТАЛЕЙ И УЗЛОВ МАШИН
Затраты на материалы составляют существенную часть стоимости машин (см. стр. 17), и масса их является одним из важнейших показателей расходов, связанных с изготовлением и эксплуатацией. В связи с этим большое значение для оптимизации конструкций на стадии проектирования имеют функциональные зависимости между массой детали или узла и механическими характеристиками материалов, геометрическими параметрами элементов конструкции и др.
В этой связи весьма полезны зависимости (6.1)—(6.2), связывающие массу деталей и узлов с допускаемыми напряжениями (с механическими характеристиками), позволяющие выбрать материалы и термообработку, при которых обеспечивается минимальная материалоемкость. В гл. 14 (см. стр. 314) приведены зависимости, связывающие массу зубчатых колес с их механическими характеристиками и кинематическими параметрами, позволяющие на стадии схемного проектирования выбрать вариант с минимальной материалоемкостью. Эти данные полезны для проведения технико-экономических расчетов, необходимых для выбора оптимального варианта конструкции.
Эффективными мерами для снижения массы изделий является выравнивание напряжений в сечениях деталей, давлений на сопряженных поверхностях, удельных нагрузок по длине контактных линий и между одновременно воспринимающими нагрузку поверхностями зубьев, витков резьбы, тел качения и т. д. Но и при использовании всех этих возможностей все же неизбежны существенные отличия в условиях работы различных участков деталей. Поэтому эффективны приемы, направленные на повышение прочности не во всем объеме детали, а в местах наибольшей напряженности, например в зонах концентрации напряжений и силового контакта. С этой целью используют такие методы поверхностного упрочнения, как наклеп, поверхностная закалка и химико-термическая обработка (цементация, нитроцементация, азотирование и др.). При использовании упрочнения в зоне кон-
центрации существенно уменьшается К„ (см. табл. 4.5) и, следовательно, повышается допускаемое напряжение и снижается масса детали [см. формулы (6.1)—(6.3)].
Повышение твердости за счет поверхностного упрочнения, обеспечивающего достаточную толщину упрочненного слоя, особенно эффективно для тяжелонагруженного контакта (см. стр. 45). Это следует, в частности, из анализа рис. 14.65, где даны допускаемые значения коэффициента контактных напряжений, связанного прямо пропорциональной зависимостью с допускаемой нагрузкой и обратно пропорциональной с массой деталей.
Напряжения изгиба и кручения в сечениях распределены неравномерно; концентраторы, в свою очередь, способствуют увеличению этой неравномерности. Для снижения массы материал следует переместить из малонапряженных участков в более напряженные, использовав при этом по возможности методы формообразования без снятия стружки (прокат, литье, штамповку, экструзию и др.). В гл. 5 была отмечена целесообразность перехода от сплошного вала к полому при неизменной массе для увеличения жесткости. Использование полых валов эффективно также для снижения массы и тогда, когда критерием работоспособности является прочность. Так, при равных площадях сечения отношение полярных моментов сопротивления полого и сплошного валов (см. стр. 84)
№рпоЛспл = (1-Р4)2/3/(1 -Р2).
ГДе Р - ^ви^пол*
Например, при р ₽« 0,93 (такие значения р встречаются, в частности, в карданных валах транспортных машин) ^рпол/^рспл 3, и, следовательно, с переходом от сплошного вала к полому несущая способность возрастает в три раза.
Неравномерность распределения удельных нагрузок по длине контактных линий и между соприкасающимися поверхностями характеризуется коэффициентом неравномерности /Снр (см. гл. 5). Масса деталей пропорциональна /<нр (или /<нр в случае зубчатых передач), и поэтому использование описанных в главах 5, 14 и других приемов, направленных на выравнивание удельных нагрузок и уменьшение /<нр, является эффективной мерой для снижения материалоемкости машин. То же относится и к выравниванию местных напряжений в зонах их концентрации воздействием на форму переходных участков деталей.
Для экономии дорогостоящих цветных сплавов используют биметаллы — материалы, состоящие из двух слоев разнородных металлов или сплавов. При этом дешевый материал (сталь, чугун и др.) с помощью различных методов (совместной прокатки, прессования, наплавки) покрывается слоем антифрикционного сплава (см. стр. 389)
В червячных и зубчатых колесах высоконапряженными элементами являются зубья, а загруженность других частей этих 114
деталей прн размерах, обусловленных жесткостью и технологией изготовления, обычно мала. В связи с этим, как правило, червячные колеса выполняют с бронзовыми венцами, установленными на чугунной ступице (см. гл. 15). С целью экономии дорогих легированных сталей применяют зубчатые колеса с зубчатыми венцами, закрепленными на чугунные центры (см. рис. 11.8, б).
Глава 7. КРАТКИЕ СВЕДЕНИЯ О ВЕРОЯТНОСТНЫХ РАСЧЕТАХ Й ВОПРОСАХ НАДЕЖНОСТИ ДЕТАЛЕЙ МАШИН
6 7.1. ОСНОВНЫЕ ПОНЯТИЯ
Случайные и детерминированные величины. Случайными называют величины, которые в результате опыта принимают то или иное заранее неизвестное значение. Характерными для деталей и узлов машин примерами случайных величин являются время работы с сохранением параметров, установленных техническими условиями, эксплуатационные нагрузки, механические характеристики, отклонения размеров от номинала, значения коэффициента трения и т. д. Общие закономерности, свойственные случайным величинам, изучают в курсах теории вероятностей и математической статистики. Развитие этих методов применительно к расчетам деталей и узлов машин, являющееся важным условием повышения надежности машин, отражено в работах В. В. Болотина, В. Л. Когаева, Д. Н. Решетова, А. Р. Ржаницына, С. В. Се-ренсена и др.
Случайные величины принято противопоставлять детерминированным, т. е. таким величинам, для определения значений которых заранее имеются все необходимые данные.
Деление величин на случайные и детерминированные условно и во многом определяется требуемой точностью результата расчета. Так, перемещение какой-либо точки звена механизма с одной степенью свободы при заданном законе движения можно отнести к величине детерминированной, если не предъявляются жесткие требования к точности этих перемещений. Это характерно, например, для механизмов землеройных машин, тестомешалок, кривошипно-шатунных механизмов двигателей и т. д. Но если перемещения надо найти с высокой точностью, то необходимо учитывать погрешности изготовления, а также погрешности, возникающие в процессе изнашивания, являющиеся случайными величинами. В этом случае надо знать законы распределения случайных величин, и расчет носит вероятностный характер. Рассмотрим еще один пример. Для значений коэффициента трения f характерно значительное рассеивание, влияние кото-
рого на к. п. д. различных механических передач не одинаково. Так, рассеивание f мало отражается на величине усилия F, прикладываемого к винтовому домкрату трения качения для подъема заданного груза. Следовательно, в данном случае усилие F можно считать величиной детерминированной. Другое положение наблюдается в винтовых домкратах трения скольжения. В этом случае рассеивание f приводит к большим колебаниям величины усилия F (отношение экстремумов достигает двух и больших значений), и, следовательно, его нельзя считать величиной детерминированной.
Характеристики распределения случайных величин и нормальный закон распределения. Если X — случайная величина, х — какое-нибудь число, то вероятность того, что эта случайная величина удовлетворяет условию X < х, принято обозначать Р (X < х). Очевидно, что Р (X < х) является функцией х (рис. 7.1), т. е.
Р (X х) = F (х).
Неубывающая функция F (х), называется законом распределения случайной величины X.
Функция f (х) - F' (х) называется плотностью распределения вероятностей случайной величины X (рис. 7.1). Ясно, что f (х) t> 0 и
X
F (х) = J f (х) dx.
-оо
Вероятность попадания случайной величины X в любой промежуток от Xi до хг (рис. 7.1)
Х2 Xi
Р^^Х < х2) = F (х2) — F (xj = | f (х)dx — j f (х) dx =
Xt
= f/(x)dx. (7.1)
Очевидно, что
©о
J f (x) dx = F (oo) = 1, — co
t. e. площадь фигуры, ограниченной осью абсцисс и кривой f (х), равна единице.
Закон распределения случайной величины приближенно можно получить из эксперимента или опыта эксплуатации. Проиллюстрируем это на примере, в котором случайной величиной является временное сопротивление ов некоторых образцов. Вся область возможных значений ов разбита на k интервалов. Пусть Шу — число образцов, величина ов которых попадает в /-й интер-116
вал, an — число всех образцов. Отношение Р, = m.jln называется частотой или статистической вероятностью попадания ов в /-й интервал. На рис. 7.2, а отложены значения Р; для каждого интервала.. Построенный таким образом график называется гистограммой частот случайной величины.
Складывая последовательно величины P]t получаем в виде гистограммы статистическую функцию распределения случайной величины (рис. 7.2, б).
Р*(х) = Д Ру,
где v = 1,2, .... k.
Рис. 7.1. Функция распределения F (х) и плотность распределения вероятностей f (х) случайной величины X
Рис. 7.2. Статистические вероятности Pj интервалов случайной величины X и функция распределения ее
F * (х)
С уменьшением длины интервала и увеличением п статистическая функция распределения F* (х) приближается к закону распределения F (х), а гистограмма значений Ру — к графику плотности вероятностей f (х).
Важнейшими числовыми характеристиками случайной величины являются ее среднее значение (математическое ожидание) тх и параметры, характеризующие степень разброса относительно среднего значения: дисперсия Dx, среднее квадратическое отклонение ах и коэффициент вариации ох.
со со
тх = | xf (х) dx; Dx = J (х — тх)2 f (х) dx;
—со —со
<тд = v Dx;
vx = ох/тх.
В приведенных ниже примерах (см. п. 7.2) математическое ожидание обозначается той же буквой, что и случайная величина, с добавлением над ней черточки. Так, Н, d и D (см. рис. 7.8 и 7.9) являются математическими ожиданиями соответственно случайных величин Н, d и D.
На практике для описания реальных случайных величин успешно используют математическое моделирование законов распределения. Среди модельных законов особое Место занимает нормальный закон распределения (часто называемый законом Гаусса):
f (х) = |!/({/2ло)] ехр | — (х — т)2/(2о2)]; (7.2)
F (х) = [1/(|/2ло)] [ехр[—(х — m)2/(2o2)] dx. (7.3)
У случайной величины X, подчиненной этому закону, тх = = т; сх = о; Dx = о2.
Нормальный закон чаще других встречается на практике, причем он тем точнее описывает реальную случайную величину, чем больше независимых факторов оказывают на нее влияние и чем меньше удельный вес каждого из них в конечном результате.
Величина F (х) для нормального закона при m = 0 и о = 1 обозначается Ф (х) или Ф* (х). В справочных руководствах приводятся таблицы значений
Ф*(х) = (1//2л) jехр(—t2/2)dt. (7.4)
— со
Функция Ф* (х) называется нормальной функцией распределения. Значения F (х) при любых значениях пг и о связаны с нормальной функцией распределения следующей зависимостью:
F (х) = Ф* (7.5)
\ о /
В соответствии с этим [см. равенство (7.1)1
В справочной литературе приводятся также таблицы нормальной функции распределения
Ф (х) = (1/|/2л) J ехр (—/2/2) dt — Ф* (х) — 0,5.
о
В этом случае
Рис. 7.3. Функции F (х) и f (х) для нормального закона распределения вероятностей (S — о — среднее значение)
Р(х) = 0>5 4-ф[^\| \ о )
Р(хх<Х< х2)^фМ2Тт \_фрЦ1 \ в ) \ G
причем Ф (—х) = —Ф (х).
На рис. 7.3 даны кривые F (х) и f (х) для нормального закона распределения случайной величины X с математическим ожиданием х и средним квадратическим отклонением о. Для ряда значений х указаны величины F (х), найденные с помощью таблиц по формуле (7.5).
Вероятность попадания значений X в промежуток от х — За до х + За
Р (х — За < Х< х + За) =
= F (х + За) — F (х — За) = = 0,9986 — 0,00014 = 0,9972.
Отсюда следует, что вероятность отклонения случайной величины X отсвоего среднегозначения более чем на За составляет 0,28%, т. е. очень мала. В связи
с этим на практике обычно считают, что отклонения нормально распределенной величины от среднего значения не превышают За. Эта оценка возможного диапазона случайной величины известна под названием «правила трех сигм», так как часто среднее квадратическое отклонение обозначают а.
Таким образом, при известных из опыта максимального хтах и минимального хт1п значений случайной величины X можно принять
°= (,xtnax (7-6)
Обозначим через хР (рис. 7.4) значение случайной величины X, при котором условие
Х<хР выполняется с заданной вероятностью Р. Величина отношения (хР — х)/о называется квантилем и обозначается иР [см. формулу (7.5)]. Таким образом,
(Хр — х)/ох = иР\ Хр = х иРох. (7.7)
119
Величина uP равна значению x, выбираемому из таблиц нормального закона распределения, т. е. Ф* (х) = Ф* (иР) — Р.
Вероятностные минимальное и максимальное значения X обозначаются xPmin и Хртах, при этом вероятность каждого из неравенств X < xPm!n и X > Хршах равна некоторой заданной (малой) величине Р. На основании формулы (7.7) имеем:
Рис. 7.4. Плотность распределения вероятностей f (х) случайной величины X
*Ptnin = хПри/, (7.8)
-^Pinax ~ х + и^Рох. (7.9)
Если каждая из случайных величин Xi и Хг (рис. 7.5, о) подчинена нормальному закону распределения, то, как известно из теории вероятностей, их разность Д = Xi — Х2 тоже является нормально распределенной величиной математическим ожиданием Д =
= лэ — х-2 и среднеквадратическим отклонением
Од = ]Л& + <&- (7.10)
На основании формулы (7.7) имеем
Др= Д4-ЦрОд. (7.11)
Минимальная и максимальная вероятностные разности [см. (7.8) и (7.9)1:
Д₽ min = Д “Г ИрО\. (7.12)
Др max = Д 4 Wl-P Од- (7-13)
При Л < 3 (оЛ1 + ох2) (рис. 7.5, б) во многих случаях возникает необходимость оценить вероятность неравенства
Д = Xj — ха с 0.
Из (7.12) при ДР = 0 имеем
«р = —Д/Од. (7.14)
Термины и определения, относящиеся к надежности. Терминология, относящаяся к вопросам надежности, установлена в ГОСТ 13377—75. Ниже приведены только некоторые основные определения.
Надежность — свойство объекта выполнять заданные функции, сохраняя во времени значения установленных эксплуатационных показателей в заданных пределах, соответствующих заданным режимам и условиям использования, технического обслуживания, ремонтов, хранения и транспортирования. Ремонтопригодность — приспособленность объекта к предупреждению и обнаружению причин его отказов, повреждений и устранению их 120
последствий путем проведения ремонтов и технического обслуживания . Наработка — продолжительность или объем работы объекта. Работоспособность — состояние объекта, при котором он способен выполнять заданные функции, сохраняя значения заданных параметров в пределах, установленных нормативно-технической документацией. Предельное состояние — состояние, при котором дальнейшая эксплуатация должна быть прекращена из-за неустранимого нарушения требований безопасности или неустранимого ухода заданных параметров за установленные пределы.
Рис. 7.5. Плотности распределения вероятностей f (xj и f (х2) случайных ве« личин Xj и Х2
Отказ — событие, заключающееся в нарушении работоспособности объекта. Безотказность — свойство объекта непрерывно сохранять работоспособность в течение некоторого времени, или некоторой наработки. Долговечность — свойство объекта сохранять работоспособность до наступления предельного состояния при установленной системе технического обслуживания и ремонта.
Показатели надежности и долговечности. Основными показателями надежности являются: вероятность безотказной работы Р (/), т. е. вероятность того, что в пределах заданной наработки отказ объекта не возникает; средняя наработка до отказа т (/) — математическое ожидание наработки объекта до первого отказа; интенсивность отказов X (t) — условная плотность вероятности возникновения отказа невосстанавливаемого объекта, определяемая для рассматриваемого момента времени при условии, что до этого отказ не возникал. .
Если No — число испытанных объектов, N™K — число объектов, отказавших за время наработки Л No— Nt™ = Nt и F (t) — вероятность отказа, то
Р (/) = (No - NT1)/No = Nt/No == 1 - F (t). (7.15)
На рис. 7.6 даны кривые Р (/) (так называемая кривая убыли) и F (t) = 1 — Р (/). На том же рисунке дана кривая плотности распределения наработки до отказа
f(t) = dF(t)/dt = —dP(t)/dt. (7.16)
7(0
Если ДЛ/°ТК — число отказавших объектов в интервале времени от t до t + Л/, то (рис. 7.6)
дЕ (0 = ДЛ7ТКЖ-
Рис. 7.7. Зависимость интенсивности отказов от времени эксплуатации
При Д/ -> 0 имеем
dF (t)/dt = bN ^K/(N0Nt).
(7-17)
Таким образом, плотность распределения f (/) может быть приближенно определена статистически как отношение числа отказавших объектов в единицу времени к числу испытанных объектов.
Интенсивность отказов для рассматриваемого момента времени t
Д^?тк/(Nt Nt)-
(7-18)
Интенсивность отказов "k (t) приближенно может быть определена статистически как отношение числа отказов в единицу времени к Nt, а не к No, что имело место в случае плотности распределения f (t).
Из равенств (7.15)—(7.18) имеем
а /а_ 7(0 _ dP(t)__________________
dt р (0
Из этого выражения после интегрирования в пределах от О
до t получим
Р (t) = exp
t
— J о
(7-19)
Зависимость Z. (/) от t, характерная для машин и их узлов, представлена на рис. 7.7. Период приработки /пр характеризуется повышенными значениями X (/) (см. стр. 37). Далее следует период нормальной эксплуатации t„. Интенсивность отказов при этом значительно меньше, и они носят случайный, внезапный характер. Величина X (/) в период t„ изменяется незначительно. Затем вследствие износа, накопления усталостных повреждений, старения и других факторов наступает период быстрого увеличения X (/).
Если сложный объект можно рассматривать в виде последовательного соединения отдельных элементов 1, 2, 3, ..., п, что, например, характерно для большинства механических передач, то в соответствии с теоремой умножения вероятностей Р (/) безотказность работы объекта равна произведению безотказности работы отдельных его элементов:
Р (t) = Л (П Р2 (t)... Рп (t) = п pt (t). (7.20)
i=i
Из формулы (7.20) следует, что надежность сложного объекта при последовательном соединении отдельных элементов всегда меньше надежности любого из его элементов и падает с увеличением числа элементов. Так, при числе элементов п — 10 с одинаковой вероятностью безотказной работы, равной 0,97, имеем Р (/) = 0,9710 «=> 0,74.
К важнейшим показателям долговечности относятся следующие характеристики: ресурс (или технический ресурс) — наработка объекта от начала эксплуатации или ее возобновления после среднего или капитального ремонта до наступления предельного состояния; средний ресурс — математическое ожидание ресурса; гамма-процентный ресурс — наработка, в течение которой объект не достигает предельного состояния с заданной вероятностью у процентов. Очевидно, что у = 100Р (Z). Для многих изделий массового производства принимают у =90%, т. е. используют девяностопроцентный ресурс, характерный, в частности, для подшипников качения. Для особо ответственных подшипников принимают у > 95%.
§ 7.2. ПРИМЕРЫ ПРИМЕНЕНИЯ ВЕРОЯТНОСТНЫХ МЕТОДОВ К РАСЧЕТАМ ДЕТАЛЕЙ МАШИН
Определение твердости детали с заданной вероятностью. Полагаем, что твердость материала детали задана интервалом значений Нт\п — Яшах (например, НВ 260—320) и подчиняется нормальному закону распределения (рис. 7.8).
Рис. 7.8. Плотность распределения вероятностей f (Н) случайной величины Н
Определим твердость Нр Kin, при которой вероятность неравенства Н <4 Нр тХп равна некоторому заданному значению Р. Из формул (7.6) и (7.8) имеем
Нр mln ~ + иР°Н ~ (^tnax + ^tnln) + Up (7/max — ТУ min)/6-
Если Р те 0,07, то Ф* (х) те 0,07; из таблиц находим ир~ х = —1,5, тогда НР mln = "mln + °-25 ("maximin)-
Таким образом, Р (Н > Н , ) = 1 — 0,07 = 0,93. 1 ' р mln7
Расчет максимальных и минимальных вероятностных зазоров и натягов в сопряжениях с охватывающей и охватываемой цилиндрическими поверхностями.
Минимальный и максимальный Р min
Sprnax вероятностные зазоры, очевидно, удовлетворяют требованиям Spmln^^min И SРтах^^тах (см‘ рис. 1.1 и 7.9) Если диаметры отверстия D и вала d распределены нормально, то средние квадратические отклонения [см. формулу (7.6) и рис. 7.9]:
°d = td/6'' °d = TdlQ-
На основании (7.11), (7.13) и (7.14) имеем:
°д = (1/6) 7^; min = 5 + иР°Д: SP max ~ $ + и1-ра&'
где S = 0,5 (Smin ~Ь Smax) (см. рис. 7.9).
На основании этих зависимостей формулу для определения вероятностных зазоров можно представить в следующем виде:
Рис. 7.9. Плотности распределения вероятностей / (£>) и f (d) случайных величин D и d
(7.21)
Аналогично для вероятностных натягов имеем
lVpmin = N + С У Nl + N$, (7.22)
max
где N = 0,5 (Nmin + Nmax)-
В этих формулах верхний и нижний знаки относятся соответственно к минимальному и максимальному зазору (натягу).
Коэффициент С в зависимости от вероятности Р обеспечения условий S <
<5 Sprnax и S > SP min (а такЖе /VPmax и N > N P mJ имеет Значения:
p c
0,9986 0,99 0,98 0,97
0,50 0,39 0,34 0,31
Вероятностный расчет на прочность. На рис. 7.10 даны нормально распределенные плотности вероятностей / (оПт) и f (о) предельного напряжения оцт материала детали и действующего в расчетном сечении этой дет/ли
Рис. 7.10. Плотности распределения вероятностей f (оцт) и f (о) случайных величин оцт и о
напряжения о. Средние напряжения и средние квадратические равны соответственно: оПт и о; о и оо. Значение квантиля ир формуле (7.14), в которой од = ]/" аог + и Д ™ оВт —о:
отклонения
находим по
ир= — (оНт
CMpmaker.ru
Рис. 7.11. График для определения ир и вероятности разрушения Р при заданных значениях s, vn,. и
а также для определения s по величинам Р, vnt. и о„: °!in? с
Up
-5
-2
-1
0
По значению х=ир, пользуясь таблицами нормального распределения, определяем вероятность разрушения Р (о > O|im) — Ф* (х).
Выразив средние квадратические отклонения через коэффициенты вариации (о = ollrnt,o ; <то= осо) и заметив, что U|im/u= s — запас прочности, из (7.23) получим
np = (l-s)^|As2^IIn]+^. (7.24)
По известным значениям ^Ст|1гп и vo с помощью зависимости (7.24) можно определить запас прочности s, соответствующий заданной вероятности разрушения Р Можно также найти вероятность разрушения по заданным значениям s, vo|im и va.
Для определения Р по заданному значению s или наоборот можно воспользоваться графиком на рис. 7.11, построенным по уравнению (7.24).
§ 7.3. ПУТИ ПОВЫШЕНИЯ НАДЕЖНОСТИ ДЕТАЛЕЙ И УЗЛОВ МАШИН
Обеспечение высокой надежности изделий является одним из важнейших условий интенсивности дальнейшего прогресса. С повышением надежности снижаются затраты на запасные детали и простои, повышается производительность труда, увеличивается наработка, снижаются затраты в сфере ремонта. С повышением надежности и долговечности может быть снижен выпуск машин или увеличена полезная отдача оборудования.
Надежность объектов зависит от уровня проектирования, технологии изготовления, условий эксплуатации и т. д. Из многочисленных факторов, определяющих надежность изделий, здесь рассматриваются в основном те, которые закладываются в процессе расчета и конструирования деталей и узлов машин.
Важное значение для обеспечения надежности имеет выбор материалов, способов их обработки и упрочнения. Материалы многих кинематических пар должны обладать хорошей прирабаты-ваемостью, обеспечивающей минимальный риск отказов из-за патологических видов изнашивания (см. главы 2 и 6).
При проектировании следует предусматривать меры, снижающие или предупреждающие отрицательные последствия недостаточно квалифицированного обслуживания. С этой целью надо стремиться к устранению или сведению к минимуму таких операций, как регулировка узлов, подтяжка, периодическая индивидуальная смазка кинематических пар и т. д. Примерами исключения субъективных факторов и обеспечения высокой надежности являются автоматизированная смазка с устройствами, не допускающими запуск машины при неисправностях в системе смазки, использование предохранительных устройств, ограничивающих возможные случайные перегрузки, дублирующих тормозных систем и т. д.
Важным условием для снижения отказов является своевременное обнаружение неисправностей. С этой целью, в частности, предусматривают возможность легкодоступного осмотра сопряженных поверхностей. Например, у редукторов выполняют крышки (см. рис. 14.57 и 14.58), позволяющие своевременно обнаружить повреждения активных поверхностей зубьев. Неисправности кинематических пар вызывают изменения их температуры и виброактивности. По отклонениям этих показателей судят о состоянии сопряженных поверхностей, не прибегая к разборке машины, и принимают необходимые меры для своевременного устра-126
нения неисправностей. Так, для предупреждения аварий, связанных с отказами подшипников железнодорожных скатов, используют путевой автоматический контроль нагрева букс по интенсивности инфракрасного излучения.
Напряженность в сечениях деталей и зонах силового взаимодействия, обусловливающая поломки и изнашивание сопряженных поверхностей, определяется внешними рабочими нагрузками, колебательными процессами в системе и распределением давлений по длине контактных линий и среди одновременно работающих сопряженных поверхностей (см. гл. 5). Выявление наиболее загруженных элементов конструкции и научно обоснованное назначение коэффициентов запаса прочности Is] является необходимым условием обеспечения требуемой долговечности деталей. Таким образом, совершенствование методов расчета относится к числу важнейших мероприятий, направленных на повышение надежности машин.
Вопросы, связанные с выявлением наиболее загруженных участков в зонах взаимодействия сопряженных деталей с учетом погрешностей и деформаций, освещены в главах 5, 14 и др. Там же рассмотрены пути обеспечения более благоприятного распределения нагрузок, способствующего повышению несущей способности и надежности.
Выбор коэффициента запаса прочности [s] (см. гл. 4 и п. 7.2) оказывает большое влияние на надежность и экономичность конструкции. С увеличением [s ] повышается надежность при одновременном увеличении массы, стоимости и во многих случаях и эксплуатационных расходов (транспортные и другие машины). Оптимальные значения [s] могут быть получены только в том случае, если известны вероятностные характеристики действующих и предельных напряжений (см. стр. 125).
Деформации и погрешности оказывают большое влияние па распределение нагрузок в зоне силового взаимодействия сопряженных деталей. Учет этих факторов нередко представляет значительные трудности. В некоторых случаях для снижения или даже исключения отрицательного влияния погрешностей и деформаций эффективно использование статически определимых систем. В частности, применение самоустанавливающихся систем (см. рис. 5.3, е и 19.7) способствует выравниванию удельных нагрузок q, предупреждению кромочного контакта и, следовательно, повышению надежности. Но подавляющее большинство узлов, изучаемых в курсе «Детали машин», представляет собой статически неопределимые системы, и из-за погрешностей и деформаций неизбежно значительное рассеивание значений нагрузок в зоне силового взаимодействия звеньев, причем далеко не всегда имеются достаточные данные об их вероятностных характеристиках. Одним из важнейших путей увеличения надежности в связи с этим является повышение точности. Это, в частности, можно обнаружить при анализе зависимостей (5.9)—(5.11), из которых
следует, что с уменьшением упогр и Д уменьшаются значения К°р, (а следовательно, и <7max), FA и qA. При высокой точности изготовления и значительной податливости взаимодействующих элементов деталей влияние погрешностей на величину К2Р может быть незначительным [см. формулу (5.9)].
В расчетах влияние погрешностей обычно оценивается приближенно или даже не учитывается из-за отсутствия достаточных экспериментальных данных. Последнее, в частности, относится к обычно используемым рекомендациям по выбору подшипников качения, не учитывающим влияние погрешностей на долговечность, которое в действительности значительно.
Выше было отмечено, что коэффициент трения является случайной величиной с большим рассеиванием. В связи с этим рассеивание значений усилия затяжки болта также велико. При контроле усилия затяжки по величине деформации стержня болта резко снижается влияние случайных факторов и существенно повышается надежность соединения. Если пренебречь погрешностями измерения деформаций и колебаниями значений модуля упругости Е материала и диаметра болта, то в рассматриваемом случае усилие затяжки можно рассматривать как величину детерминированную.
Для посадок с гарантированным натягом характерен значительный разброс значений вероятностных натягов. Так, для посадки НыиЬ отношение NP max/Np min при Р =0,99 достигает значения 1,5 и более. Использование в соединениях с гарантированным натягом конических сопряженных поверхностей вместо цилиндрических (см. стр. 198) позволяет резко уменьшить отношение NPmsxINpmin и увеличить надежность соединения.
Для многих машин характерны кратковременные случайные перегрузки, возникающие, например, в результате возможных отклонений от заданного технологического процесса. В таких случаях, не прибегая к повышению прочности механизма, связанной с увеличением его массы и удорожанием конструкции, применяют предохранительные устройства (см. гл. 21). При этом механизм рассчитывают по нагрузкам, рассеивание которых может быть сведено к минимуму.
Размеры деталей машин определяют из расчетов. Поэтому напряженность в объеме и контакте, а следовательно, их долговечность и безотказность в большой степени определяются научной и экспериментальной обоснованностью расчетных норм. Однако в расчетных методиках имеются спорные положения, требующие уточнений, и поэтому результаты многих рекомендаций ориентировочны. Проиллюстрируем это на нескольких примерах.
1. Расчеты на контактную прочность зубчатых передач, подшипников качения и других узлов выполняют в основном с целью предотвращения отказов из-за усталостного выкрашивания. Но с уменьшением скорости и при постоянном числе циклов перемен напряжений роль усталостных разрушений в общем балансе по-128
вреждении падает, а молекулярно-механического изнашивания — растет. Это обстоятельство не учитывается в широко используемых методах.
2. С увеличением растет толщина масляного слоя и увеличивается нагрузочная способность, зависящая от сопротивления выкрашиванию (см. гл. 2). Влияние этого фактора обычно не находит отражения при подборе подшипников качения. Существенная часть отказов этих подшипников связана с разрушением сепараторов. Однако в справочных данных оценка долговеч
ности по этому виду повреждении отсутствует.
3. Выход из строя многих деталей машин связан с развитием фреттинг-коррозии. Известны пути повышения несущей способности, лимитируемой этим видом повреждений (см. гл. 2), но нет данных, позволяющих произвести количественную оценку несущей способности и долговечности.
4. Обычно детали подвержены действию переменных нагрузок, при этом расчет базируется на гипотетической завнси-
Рис. 7.12. Шестерни: а — надетая на вал; б — изготовленная заодно с валом
мости (4.13), в которой коэффициент а для различных спектров нагружений, материалов и форм деталей колеблется в широких пределах. Однако в методиках расчета передач зацеплением, валов и подшипников качения принимают а — 1. Помимо этого при действии переменных нагрузок исходят из прямо пропорциональной зависимости между удельными нагрузками в зоне контакта и внешними нагрузками. В действительности из-за погрешностей изготовления эта связь не является прямо пропорциональной [см. формулу (5.9) и др.], и величина /<£р с уменьшением нагрузки увеличивается.
Из изложенного следует, что совершенствование методов оценки несущей способности деталей и узлов машин является одним из важнейших условий для создания надежных и экономичных конструкций. Кроме того, знание слабых мест расчетов является важным условием для создания надежных конструкций. При этом уже на ранней стадии проектирования предусматривают необходимость экспериментальной проверки деталей и узлов и резервируют возможность внесения корректив в конструкцию с минимальными затратами времени и средств. Эффективно моделирование эксплуатационных условий на стендах, позволяющих проводить ускоренные испытания. Для снижения интенсивности отказов в первый период работы (см. стр. 37 и 122) существенное значение имеют испытания объектов по специально отработанной программе, позволяющей выявить и устранить возможные де
фекты до сдачи машины в эксплуатацию. Важное значение имеет использование опытных данных по эксплуатации объектов, близких по тем или иным показателям к проектируемому.
Все эти мероприятия связаны с определенными затратами или даже с удлинением срока выпуска объекта. Но за попытки экономить на этих затратах обычно приходится расплачиваться ненадежностью со всеми вытекающими отсюда последствиями.
Из-за отсутствия или недостоверности количественных показателей надежности в практике конструирования деталей и узлов машин бытуют качественные показатели для сравнения надежности различных возможных вариантов. Например, известно, что микроперемещения и неравномерности распределения удельных нагрузок в зонах сопряжения, вызванные погрешностями и деформациями, часто являются причинами отказов. В главах 2, 5, 6, 14 и других рассмотрены мероприятия, снижающие вредные последствия От этих причин и, следовательно, повышающие надежность. Но при этом во многих случаях не представляется возможным дать количественную оценку полученных результатов.
К числу эффективных способов повышения надежности относятся меры, направленные на предупреждение патологических видов изнашивания (подбором смазок и материалов), исключение контакта поверхностей (за счет обеспечения жидкостного трения, использования бесконтактных уплотнений), замены сил трения электроиндукционными силами (см. гл. 21) и т. д.
В ряде случаев для повышения надежности эффективны пути изменения конструкции, направленные на снижение числа источников отказов. Известно, что в соединениях деталей машин (резьбовых, зубчатых, шпоночных, с гарантированным натягом и др.) обычно возникают микроперемещения, вызывающие фреттинг-коррозию, способствующую разрушениям в контакте и поломкам, На рис. 7.12, а показана шестерня, закрепленная на валу с помощью шпонки и посадки с гарантированным натягом. Аналогичная по назначению конструкция, показанная на рис. 7.12, б, не имеет соединения и благодаря этому является более надежной,
Часть вторая
СОЕДИНЕНИЯ ДЕТАЛЕЙ МАШИН
Взаимодействующие детали машин могут быть подвижными одна относительно другой или неподвижными.
Взаимная неподвижность деталей обеспечивается с помощью различных конструктивных и технологических средств, называемых соединениями, которые могут быть разъемными и неразъемными.
Разъемные соединения допускают разборку соединяемых деталей без повреждений. К ним относятся соединения резьбовые, зубчатые (шлицевые), шпоночные, профильные, клеммовые, с упорными пружинными кольцами и др.
Разборка неразъемных соединений (сварных, паяных, клеевых, заклепочных и др.) связана с повреждением одного из элементов соединения.
Промежуточное положение между разъемными и неразъемными занимают соединения с гарантированным натягом. Во многих случаях эти соединения проектируются как неразъемные, а разборка их может вызвать повреждение поверхностей и ослабление посадки. Но при малых натягах, характерных, например, для колец подшипников качения, повреждения эти незначительны, даже при многократных заменах подшипников. Кроме того, для облегчения сборки и разборки ответственных соединений с гарантированным натягом (и, в первую очередь, при значительных диаметрах) используют масло, вводимое под большим давлением в зону контакта. При этом повреждения сопряженных поверхностей не наблюдается.
В разъемных соединениях деталей с плоскими сопряженными поверхностями применяют резьбовые детали (винты, болты, шпильки), а также штифты и др. Для той же цели в неразъемном Соединении используют сварку, клепку, склеивание.
Разъемные соединения деталей с соосными охватываемой и охватывающей поверхностями (типа вал—ступица—см. гл. 11) — это соединения шпоночные, штифтовые, зубчатые, профильные, клеммовые и др. Неразъемные соединения тех же деталей осуществляются сваркой, посадками с гарантированным натягом и другими способами.
Критериями работоспособности соединений деталей являются прочность (статическая и циклическая) и износостойкость (см. tn. 2).
Важным критерием работоспособности для многих соедине-Гий является герметичность. В ряде случаев существенным пока-ателем является жесткость соединения.
Глава 8. РЕЗЬБОВЫЕ СОЕДИНЕНИЯ
§ 8.1. ОБЩИЕ СВЕДЕНИЯ, КЛАССИО-ИКАЦИЯ РЕЗЬБ И ИХ ОСНОВНЫЕ ПАРАМЕТРЫ
Резьбовыми являются разъемные соединения, в которых сопряженные детали соединяются с помощью резьбы или резьбовыми крепежными деталями (болты, обычные и специальные гайки, винты, шпильки и др.).
В зависимости от формы поверхности, на которой образована
резьба, различают цилиндрические и конические резьбы.
На рис. 8.1 в качестве примера показана правая винтовая линия с постоянным шагом Ph на цилиндре диаметром dr.
Если некоторую фигуру С в плоскости, проходящей через ось 00, перемещать по винтовой линии, то ее контур опишет поверхность, называемую резьбой. В зависимости от формы фигуры С различают треугольную цилиндрическую (рис. 8.1 и 8.2, а) и коническую (рис. 8.2, г), трапецеидальную симметричную (рис. 8.2, б) и несимметричную — упорную (рис. 8.2, в) и другие резбы.
Основные формы профилей резьбы и ее параметры (диаметры наружный d и D, средний d2 и О2 и внутренний dr и Dlf шаг резьбы Р, радиус впадины Р и углы профиля) регламентированы
государственными стандартами.
В машиностроении наиболее распространены резьбы с треугольным профилем — метрические, используемые в основном в качестве крепежных резьб.
В зависимости от числа фигур С, умещающихся в шаге Ph, резьбы бывают однозаходные, двухзаходные (рис. 8.1) и т. д. Число заходов обозначается п.
Расстояние между одноименными точками смежных витков резьбы, измеренное вдоль оси, называется шагом резьбы и обозначается Р (см. рис. 8.1). Шаги Ph и Р связаны зависимостью Л, = Рп.
Угол подъема винтовой линии на среднем цилиндре d2 обозначается ф и определяется из зависимости
tg ф = Ph/(n d2) = РпЦп d2). (8.1)
При неизменном значении Ph с увеличением диаметра резьбы уменьшается угол подъема, 132
Кинематической характеристикой резьбы является величина dh/dq> — отношение осевого перемещения dh одного из элементов резьбовой пары относительно другого к углу поворота dtp.
Н= 0.86603Р; H.-O.BWZSPi
Рис. 8.2. Основные типы резьб: а — треугольная метрическая (СТ СЭВ 180—75 и СТ СЭВ 182—75); б — трапецеидальная однозаходная (ГОСТ 9484—73); в — упорная (ГОСТ 10177—62); г—коническая дюймовая (ГОСТ 6111—52*)
Для резьбы постоянного шага
dh/dq = /эЛ/(2зт) = Рп/(2л). (8.2)
По назначению резьбы разделяют на следующие виды: крепежные (метрические); ходовые (трапецеидальные и упорные); крепежно-уплотнительные (конические) и специальные (круглые и др.).
133
В винтовых механизмах используют трапецеидальную и (при нереверсивной нагрузке) упорную резьбу. В этих механизмах износ и потери на трение желательно иметь по возможности минимальными. Поэтому в упорной и трапецеидальной резьбах преду-
Рнс. 8.3. Резьбовые сливные пробки
сматривают значительные зазоры для смазки и существенно меньшие углы наклона боковых сторон профиля, чем в крепежной резьбе.
Отношение толщины витка резьбы болта у внутреннего цилиндра dt (рис. 8.2) к шагу Р в треугольной резьбе значительно больше, чем в других резьбах, что является причиной большей прочности ее из условия срезания витков. Это обстоятельство, существенное для крепежных резьб, не имеет значения для резьб винтовых механизмов, несущая способность витков которых лимитируется допускаемым давлением [р ] рабочих поверхностей витков резьбы.
Коническую резьбу используют в тех случаях, когда необходимо обеспечить герметичность соединения.
На рис. 8.3 показаны сливные пробки в корпусе, выполненные с цилиндрической (рис. 8.3, а) и конической (рис. 8.3, б) резьбой, В последнем случае значительно упрощается конструкция со-
единения.
Рис. 8.4. Влияние шага резьбы на ее диаметр: а — d = const; d1 = var; б — d-L = const; d = var
Резьбы бывают с крупным и мелким шагом. Так, для треугольной резьбы при наружном диаметре болта d = 20 мм по СТ СЭВ 182—75 помимо резьбы с крупным шагом Р »= 2,5 мм предусмотрены резьбы с шагами 2; 1,5; 1; 0,75 и 0,5 мм. Для таких крепежных изделий, как болты, винты и шпильки, в основном используют треугольную резьбу с крупным шагом как наиболее технологичную.
С уменьшением Р при данном d увеличивается d± (рис. 8.4, а) и, следовательно, увеличиваются площадь сечения и прочность нарезанного стержня, 134
В ряде отраслей машиностроения (авиа- и автомобилестроении и др.) больше распространены резьбы с мелким шагом, так как в этом случае при заданном d± можно уменьшить наружный диаметр резьбы (рис. 8.4, б), сохранив такую же площадь сечения болта, как и в резьбе большого диаметра с крупным шагом. За счет этого уменьшается размер фланца и снижается масса конструкции. Так, если при заданном диаметре da диаметр dh является функцией только d, то с переходом от резьбы с крупным шагом к резьбе с мелким шагом можно снизить массу участка вала длиной L (рис. 8.5).
С уменьшением Р снижаются затраты энергии на накатывание резьбы, но повышаются требования к точности изготовления.
Резьбы с мелким шагом находят широкое применение при необходимости тонкой регулировки осевого положения той или иной
Рис. 8.5. Влияние шага резьбы на диаметр df, участка вала при заданном диаметре da
детали, т. е. для получения минимального перемещения при заданном угле поворота. Из формулы (8.2) имеем dh = Рп d<p/(2n).
Отсюда следует, что для уменьшения dh при заданном dtp надо взять п = 1 и по возможности меньшее значение Р.
Треугольные резьбы с мелким шагом находят применение в точных малозагруженных винтовых парах, например в микрометрах, а также используются для соединения полых тонкостенных деталей.
Широкое применение для соединения труб и арматуры готу-чила резьба с мелким шагом, называемая трубной, выполняемая для лучшего уплотнения соединения без зазоров по скругленным
выступам и впадинам.
§ 8.2. МОМЕНТЫ ПРИ ЗАВИНЧИВАНИИ И ОТВИНЧИВАНИИ РЕЗЬБОВЫХ СОЕДИНЕНИЙ
При завинчивании гайки (винта) затрачиваемая работа расходуется на преодоление крутящего момента Тп трения между гайкой и соединяемой деталью (рис. 8.6, а) и на преодоление момента 73. р, обусловленного трением в резьбе и деформированием деталей соединения.
При отвинчивании гайки (винта) прикладывается момент Тотв, равный сумме момента Тп и момента То, р, необходимого для преодоления сил трения в резьбе при демонтаже.
Таким образом, моменты, прикладываемые к гайке или головке винта при завинчивании и отвинчивании, определяются по формулам:
ГзаВ = 7,п + Т3.р; (8.3)
То» = Та + То.р. (8.4)
Рис, 8.6, Реаьбовые соединения .и дшнстр/.кт.шии^ формы головок вни-тов: а — болт; б — винт; в — шпилька; а — голс>вка болта с внутренним шестигранником; д и е — головки винтов с крестообразными шлицами
ш9=0
Рис. 8.7. Силы, действующие в резьбовое соединении
На рис. 8.6, а показана часть опорной поверхности гайки, среднее давление на которой
' л (D'l — d'g) ’
где F6 — усилие, растягивающее болт.
Момент от сил трения на поверхности кольца радиусом р и толщиной dp определяют следующим образом:
dTn = (2л,о dp) pfp = ;
о,so,
f • <8J3>
O,5tZo
где f — коэффициент трения скольжения.
В расчетной практике для определения Тп используют и упрощенную зависимость
Т'а = 0,5F6fdm *= 0,25F6f (Dr + d0), (8.6)
где dm — средний диаметр опорной поверхности гайки (рис. 8.6, а). Если dJDi = k, то из формул (8.5) и (8.6) получим
Т'п 3 (1 +^)2
Тп 4 l-pfe + fe2 •
Как правило, k > 0,55 и поэтому [(Т'п — Тп)/ТП1 100 < 3%, Вследствие деформации гайки действительная эпюра распределения р неравномерна (рис. 8.6, а). Уменьшению р с ростом (> способствует также износ, поскольку толщина снимаемого слон в данном случае пропорциональна пути относительного скольжения. Отсюда следует, что и формула (8.6) не только проще зависимости (8.5), но и правильнее отражает сущность происходящих процессов.
Определение моментов Т3. р и 7О. р упрощается, если воспользоваться моделью, в которой гайка заменена элементом Г, перемещающимся под действием усилия затяжки F3. р по поверхности витка резьбы, загруженным силой F6, параллельной оси 00, и вращающимся вокруг нее с угловой скоростью (>>г = сц (рис. 8.7, а). Перемещение элемента Г в указанном направлении (при неподвижном винте) соответствует завинчиванию гайки (сравните рис. 8.6, а и 8.7, а). Гайка представляет собой совокупность элементов F, удерживаемых внутренними силами от смещений в радиальном направлении.
Нормальное усилие Fn между элементом Г и витком в пло-. скости, нормальной к витку резьбы, раскладываем на состав-, ляющие Fr, направленную перпендикулярно к оси соединении (радиальное усилие), и Fn cos (а,/2), касательную к цилиндру диаметром d2. Результирующую сил Fn cos (а„/2) и Ftlf (где f —-
коэффициент трения фрикционной пары) обозначим R, а угол между ними — <р', Из треугольника сил (рис. 8.7, б) имеем
F3.p = F6tg^ + <₽')• (8.7)
Далее имеем
tgtp'^ —_________=_____L_.
L l Fn cos (a„/2) cos (a„/2)
Углы a„/2 и a/2 (рис. 8.7, а) связаны зависимостью
tg(a„/2) = tg (а/2)созф. (8.8)
Величина ф обычно мала, и поэтому можно принять ап а, тогда
tg <₽' = f/cos (a/2) = f'. (8.9)
Величина f называется приведенным коэффициентом трения или коэффициентом трения в резьбе. Величина f изменяется от 0,12 до 0,20. Для снижения f и для защиты резьбы от коррозии применяют металлические покрытия, наносимые электролитическим способом (кадмий, цинк, медь, серебро), и окисные пленки, В этом случае [ = 0,08н-0,15.
При отвинчивании гайки (чему на рис. 8.7, а соответствует перемещение элемента Г в направлении по часовой стрелке) в случае, если имеется самоторможение (<р' > ф), усилие, необходимое для преодоления сопротивления трения (рис. 8.7, в), составляет
Fo.p==F0tg(<p' —ф). (8.Ю)
Моменты Т3. р и То. р определяют по формулам:
Т3. р = 0,5F3. pd2 = 0,5F6d2 tg (ф -ф tp'); (8.11)
То. р = 0,5Fo. pd2 = 0,5F6d2 tg (<p' - ф). (8.12)
Примечания. 1. На практике затяжку резьбовых соединений осуществляют обычными ключами без измерения крутящего момента (неконтролируемая затяжка) и с измерением крутящего момента на ключе. Следует отметить, что все ответственные резьбовые соединения затягивают тарированными ключами, а контроль особо ответственных соединении (например, в ядерных реакторах и др.) осуществляют с помощью тензодатчиков измерения удлинения болтов и т. п.
2 . В крепежных изделиях обычно n= 1; ф<С 0,05; tg <р' <: 0,2, и поэтому формулы (8.11) и (8.12) можно представить в виде:
Т’з.р ~ 0,5F6d2 (tg ф -ф tg <р') = 0,5F6rf2 [P/(nd2) -ф //cos (a/2)]; (8.13)
To. p «= 0,5F6d2 (tg <p' — tg ф) = 0,5F6rf2 [//cos (a/2) — P/(nd2)]. (8.14)
§ 8.3. КРЕПЕЖНЫЕ ДЕТАЛИ,
ИХ КОНСТРУКЦИЯ И МАТЕРИАЛЫ
Формы и размеры крепежных деталей. Здесь приводятся только краткие сведения о важнейших конструктивных особенностях крепежных изделий, так как подробно они представлены в справочниках и стандартах, 138
Для соединения деталей применяют болты, винты и шпильки (см. рис. 8.6, а — в). При выборе одного из этих трех вариантов учитывают прочность материала соединяемых деталей, частоту сборки и разборки, величину отношения l/d (см. рис. 8.6, б) и други е факторы. При многократной сборке и разборке во избежание повреждения резьбы детали I (см. рис. 8.6. б) предпочтительны варианты по рис. 8.6, а и 8.6, в. Вариант на рис. 8.6, а необходим при малом значении l/d или малой! прочности материала детали /. Если величина l/d достаточно велика (например, превышает 1,5) и резьба в детали / имеет необходимую прочность, то переход от варианта на рис. 8.6, а к варианту на рис. 8.6, б наряду с уменьшением числа деталей позволяет снизить массу, Это положение характерно для крепежных изделий, расположенных в бобышках вблизи расточек, соединяющих крышку и корпус редуктора.
Головки крепежных винтов имеют ряд модификаций. Наибольшее распространение Гюлучили шестигранные головки с наружным захватом (см. рис. 8.6, б). Все больше находят применение болты с головкой, имеющей внутренний шестигранник (см. рис. 8.6, г). Возможность установки таких головок в углублениях с диаметром, незначительно большим диаметра головки, позволяет улучшить внешний вид конструкции при некотором уменьшении габаритов. Ключом для этих винтов является изогнутый под прямым углом шестигранный стержень, прочность которого соответствует прочности винта для предупреждения разрушения последнего при затяжке. Головки винтов с поперечным шлицем под обычную отвертку вытесняются более совершенными головками с крестообразным шлицем (см. рис. 8.6, д, е).
Стопорение резьбовых соединений. В крепежных резьбах угол трения значительно превышает угол подъема винтовой линии, т. е. в резьбе обеспечивается самоторможение. Помимо этого самоотвинчиванию препятствуют силы сцепления между деталями и опорными поверхностями гайки и головки болта. Таким образом, в резьбовых соединениях как бы имеется большой запас по самоторможению. Но самоторможение надежно реализуется только при статической нагрузке. При действии переменных (вибрационных и ударных) нагрузок резко снижается коэффициент трения в резьбе, условия самоторможения нарушаются и наблюдается самоотвинчивание резьбовых соединений, которое может привести к разрушению соединения и даже вызвать аварию.
Для предупреждения самоотвинчивания используют стопорные устройства, основанные или на создании дополнительного трения, или на использовании специальных запирающих уст* ройств, исключающих возможность самоотвинчивания.
Устройства первой группы представлены на рис. 8.8, а — яс. Увеличенное трение в варианте на рис. 8.8, а создается дополни* тельной гайкой, причем и при F6 = 0 сила трения в резьбе со* храняется благодаря взаимной затяжке гаек.
На рис. 8.8, б показана гайка с завальцованным стопорным кольцом из полиамида, резьба в котором образуется при навинчивании гайки. При деформировании кольца создаются силы сцеп-
Рис. 8.8. Стопорные устройства: а—ж — с созданием дополнительного трения; з—м — с использованием специальных запирающих устройств; н — с использованием сварки; о — с использованием пластического деформирования
ления, препятствующие самоотвинчиванию. Аналогичный принцип использован для стопорения винтов с помощью глухой или сквозной пробки из полиамида (рис. 8.8, в).
В последние годы широкое распространение получают само-контрящиеся гайки, дополнительное трение в которых создается 140
натягом в верхней части гайки, сдеформированной на эллипс пссле нарезания резьбы (рис. 8.8, г).
Простейшим стопорным устройством является пружинная шайба (рис. 8.8, д), острые кромки которой, врезаясь в гайку и деталь, противодействуют самоотвинчиванию (ГОСТ 6402—70*). Аналогичный принцип положен в основу работы шайб с внутренними (рис. 8.8, е) и наружными (рис. 8.8, ж) зубьями.
В запирающих устройствах, предупреждающих самоотвинчи-вание, используют стопорение шплинтами (ГОСТ 397—66*, рис. 8.8, в), стопорными шайбами (ГОСТ 13463—77 и 13464—77; рис. 8.8, и, к), проволокой (рис. 8.8, л), Деформирование этих элементов предупреждает относительные перемещения детали и головки винта или гайки.
Недостатком стопорения шплинтом является ступенчатость регулировки затяжки, особенно нежелательная при коротких болтах. Ступенчатая регулировка имеется и в варианте с отгибной шайбой (рис. 8.8, м), но благодаря различию угловых шагов впадин гайки и выступов шайбы регулировку в этом случае можно считать достаточно тонкой.
В неразборных соединениях для стопорения используют сварку (рис. 8.8, н) и пластическое деформирование с повреждением резьбы (рис. 8.8, о).
Материалы резьбовых деталей. Для резьбовых деталей используют стали углеродистые обыкновенного качества (ГОСТ 380—71*), качественные конструкционные (ГОСТ 1050—74*) и легированные конструкционные (ГОСТ 4543—71*). ГОСТ 1759—70* для стальных болтов, винтов и шпилек предусматривает 12 классов прочности, некоторые из которых даны в табл. 8.1.
Выбор материала определяется особенностями условий работы, способом изготовления, требованиями, предъявляемыми к габаритам и массе.
Т а б л и ц а 8.1. Механические характеристики материалов резьбовых деталей (ГОСТ 175S—70*)
i Класс прочности болтов ов» МПа °т, МПа Марки стали
min max Болт Гайка
3.6 300 490 200 СтЗ; 10 СтЗ
4.6 400 550 240 20 СтЗ
5.6 500 700 300 30; 35 10
6.6 600 800 360 35; 45; 40Г 15
8.8 800 1000 640 35Х; 38ХА 20; 35; 45
10.9 1000 1200 900 40Г2; 40Х; ЗОХГСА 35Х; 38ХА
При м е ч а н и е. Класс прочности болтов обозначается двумя числами.
Первое число, умноженное на 100, определяет минимальное значение ов в МПа»
второе, деленное на 10. соответствует примерному значению
Для стандартных крепежных изделий обезличенного назначения применяют сталь СтЗ и сталь марок 10, 20, 30 и др., хорошая деформируемость которых позволяет изготовлять болты методом холодной высадки с последующей накаткой резьбы. Применение сталей марок 35, 45 позволяет воспользоваться термообработкой для получения более высоких механических характеристик с целью снижения габаритов и массы конструкции. Более существенное снижение этих показателей можно получить при использовании легированных сталей. При этом предел прочности может быть доведен до 1800 МПа и более.
При особенно жестких требованиях к снижению массы болты изготовляют из титановых сплавов. При этом их прочность близка к изготовленным из высоколегированных сталей при массе, приблизительно в два раза меньшей (см. стр. 103). Другим достоинством болтов из титановых сплавов является их высокая антикоррозийная стойкость.
§ 8.4. РАСЧЕТ УСИЛИЙ В БОЛТОВЫХ СОЕДИНЕНИЯХ
Внешние нагрузки, действующие на резьбовые соединения в зависимости от условий нагружения, могут быть осевыми, поперечными или комбинированными, а сами силы могут быть постоянными и циклически изменяющимися.
В зависимости от назначения и условий сборки резьбовые соединения бывают ненапряженными (не затянутыми в процессе сборки) и напряженными, загруженными осевой нагрузкой в процессе сборки до приложения внешней нагрузки.
Кроме основных внешних нагрузок резьбовые соединения могут воспринимать дополнительные нагрузки от действия повышенных температур и от внецен-тренного нагружения.
Определение осевых усилий, действующих на детали затянутого болтового соединения. Приводимый ниже вывод, рассмотренный на конкретном примере, носит общий характер. В качестве примера взято крепление крышки резервуара с помощью г болтов, равномерно распределенных по окружности диаметром D, загруженной избыточным давлением (рис. 8.9). Усилие Q/z, приходящееся на один болт, называется внешней силой и обозначается FBli; усилие затяжки болта — Гзат, осевое усилие болта — F6.
На рис. 8.10 показана расчетная модель болтового соединения деталей Ф1 и Ф2, прокладки Пр и шайбы Ш. Усилие, приходящееся на прокладку (на стык) от одного болта, обозначено ГсТ. 142
Рис. 8.9. Крепление крышки резервуара С помощью болтов
На рис. 8.10, а (слева) показано соединение при FBH = 0. В этом случае, очевидно, F6 = Fст = F3aT.
При приложении внешней нагрузки (FBH > 0) в направлении, указанном на рис. 8.10, а (справа), уменьшается деформация сжатия прокладки и зоны фланцев, расположенных у прокладки (в этом случае сила FEH считается положительной), и поэтому имеем
^ст<Дзйт- (8.15)
Из рис. 8.10, а следует, что при FBH >> 0
= ^ст + ^ВЦ-
Рис. 8.10. К определению осевого усилия болта
Учтя неравенство (8.15), получим
р Г I р
1 б \ зат ч z вн> следовательно, только часть внешнего усилия FBa, которую обо- * значим FBH, прибавляется к усилию затяжки:
f6 = F3aT ф- f;h.
Отношение FBH/FBH == х называется коэффициентом внешней нагрузки.
Далее имеем:
= F зат + хЛ,,; (8.16)
Лт = F6 — Лш = ^заг — (1 - X) РВН- (8.17)
При приложении FBH в указанном направлении (FBB £> 0) размер I увеличивается на величину б (см. рис. 8.10, а), и поэтому сумма абсолютных значений деформаций деталей Фх, Ф2 и Пр (называемых деталями системы фланцев) уменьшается, а деталей Б и Ш (деталей системы болта) увеличивается.
Коэффициент податливости X = 6/F — отношение величины деформации к вызвавшему ее усилию — для болта постоянного сечения с размером /' между опорными торцами головки и гайки определяется по формуле
Ьб==(1/£б)(/'Мб + 0,9/<1); (8.18)
для болта с переменным сечением
^-б — (1/^яз)
t (Ц/АА + 0,9/d
1—1
(8.19)
где Аб — площадь сечения болта постоянного сечения; /, и А( — соответственно длина и площадь сечения i-ro участка болта переменного сечения; d — диаметр болта. Эмпирическим слагаемым 0,9/d учитываются перемещения, вызванные деформациями гайки, головки болта и резьбы в сопряжении болт—гайка.
Рис. 8.11. Конусы давления
Суммы коэффициентов податливостей деталей систем болга и фланца:
У X = Хб ф- Хш; У X = Хф1 ф- Хф2 ф- Хпр. б ф
Сумма деформаций деталей системы болта при приложении ГВн, т. е. при увеличении нагрузки болта на %FBH, возрастает на величину б:
6 = Х^И£Ь. (8.20)
б
Аналогично для деталей системы фланцев, разгружающихся в этом случае (со стороны стыка) на величину (1 — у) FBH, имеем
6 = (1 - хИвн S (8.21)
ф
Из равенств (8.20) и (8.21) находим
Х = У = 1 1(1 + S MS М. (8.22)
Ф/\Ф б/ /\ б/ф/
При определении коэффициента податливости деталей системы фланцев У X используют гипотезу, в соответствии с которой пред-ф
полагают, что величина X к равна коэффициенту податливости Ф
детали, имеющей форму усеченного конуса в случае соединения шпилькой и винтом (рис. 8.П, а, штриховка клеткой) и двух усеченных конусов при соединении болтом (рис. 8.11, б). Размер а равен диаметру опорной поверхности гайки (обычно около l,6d), значение tg а принимается равным 0,4—0,5, остальные размеры ясны из рис. 8.11.
Податливость одного усеченного конуса
i
. ё 1 г dx
0,25л [(с + 2х tg a)2— dg] ""
• о
- 1 In (c + 2/ tgc/. —dp) (a-pdo) _
“ n£*dotga (а2/tg а + d0) (а — d0) ’
В среднем для соединения стальных и чугунных деталей без прокладок или с металлическими плоскими прокладками % = = 0,24-0,3.
Для предупреждения раскрытия стыка надо выполнить условие F£T г> 0, т. е. [см. формулу (8.17) ]
^Зат>(1 — ХИвн-
В расчетной практике принимают
F3^v(\-y)FBHi (8.24)
где v — коэффициент затяжки, значительно больший единицы (см. стр. 155).
Примечание. На рис. 8.10, б показана эпюра нагрузок деталей системы фланцев. Очевидно, что переход от FCT к F$ не дискретный, а происходит по некоторым плавным кривым 1 и 2. Отсюда следует, что определение деформации деталей системы фланцев исходя из постоянного усилия (1 — %) FBH является условным. Такое предположение могло бы быть справедливым в идеальном случае, когда нагрузка FBH прикладывается к абсолютно жестким пластинам А и В (рис. 8.10, в).
Определение усилий в групповых болтовых соединениях, загруженных отрывающими нагрузками. Детали обычно соединяются несколькими болтами, усилия между которыми могут распределяться равномерно и неравномерно. В последнем случае надо найти наиболее загруженный болт и принять меры, гарантирующие нераскрытие стыка.
Общие положения приближенного расчета группового соединения рассмотрим на примере крепления корпуса некоторого агрегата А (например, корпуса редуктора) к основанию В (рис. 8.12, а) с помощью г болтов (обозначенных 1, 2, ..., 8 на
рис. 8.12, б), равномерно распределенных по поверхности стыка фигуры, образованной местами соприкосновения деталей А и В. Центр тяжести этой фигуры (в данном случае составленной из четырех прямоугольников) принимаем за начало системы коор-
Рис. 8.12. Соединение с помощью группы болтов
динат с осями х, у и за центр приведения сил, действующих на корпус А (рис. 8.12, б). Проекции главного вектора и главного
момента на оси координат
Рис. 8.13. Расчетная модель группового болтового соединения:
1 — жесткие диафрагмы; 2 — втулки
ций. В рассматриваемой
обозначены Fv, FtJ, Fz, Мх, Му, Мг.
В приближенных расчетах групповых болтовых соединений стягиваемые детали заменяют эквивалентными по жесткости (на растяжение-сжатие) втулками, аналогичными показанным на рис. 8.11, соединенными между собой абсолютно жесткими диафрагмами. Фрагмент такой модели показан на рис. 8.13. Эта замена, как показывают исследования и опыт, оправдана для большинства вариантов соединений, за исключением тонкостенных конструк-модели нагрузка между болтами
и по поверхности стыка изменяется по линейному закону, поэтому в дальнейшем будем использовать зависимости из курса сопро-
тивления материалов, которые базируются на гипотезе плоских сечений.
На рис. 8.12, в показаны усилия, приложенные к выступам g со стороны болтов (Fpf2), и эпюра давлений на эти выступы
со стороны стыка (равнодействующая которой равна FCtf2), если на корпус А действует только усилие Fz:
= + (8.25)
fcTFz = ^aT-(l -1)F2:z. (8.26)
Усилия, приложенные ко всем болтам и стыку при действии только усилия F-'.
F6fzz = F33tz-\-7.F/, FctFzz = F3„z—(1 — ^)Fz. (8.27)
Напряжение в стыке с площадью Лст (в данном примере Аст =
*=4аЬ— см. рис. 8.12, б)
°ст FZ = [^зат? — (1 — X) F21/Лст. (8.28)
При приложении момента Му нагрузка на болты (Аблт;/) и напряжения в стыке (сТетЛ!^) перераспределяются (см. рис. 8.12, в). Момент между болтами и в стыке распределяется так же, как и сила F2 [см. формулы (8.25) и 8.26 ], т. е. часть его, равная уМу, воспринимается болтами, а другая часть — (1 — х) Му воспринимается стыком. В соответствии с этим дополнительное усилие от момента Му на наиболее загруженный болт
1 6МУ — j у тах71б>
где Аб = л б2/4 — расчетная площадь сечения болта; /л тах — расстояние от оси у до наиболее удаленного болта (на рис. 8.12, б F шах ^2х) •
Аналогично от момента Мх р ------------------------- ХМх . .
6МХ jx 'г/тах'щ.
Здесь Jx и Jy — моменты инерции фигур, образованных сечениями болтов плоскостью стыка. При одинаковых диаметрах болтов получим:
2 9 2
Fx = Аб liyi Fy'=== Ag Fx*
i i
При указанных направлениях Mx и Му наибольшую нагрузку несет болт 4 (см. рис. 8.12, б, в):
Fg щах — FgFz Fgi^[y Fgj^x Fзат Х^вн,
где
п Fz । Mylx max , М. 'у max
' ЕН = ~г Г " z I z •
1=1 1=1
Аналогично для стыка имеем:
(1-Х)^£х , (1-Х)Л1х^
tfcTMf,- jcTy 5 <Атмх- /стл.
(8.29)
(8.30)
(8.31)
Максимальное напряжение в стыке — в зоне действия болта 8, а минимальное — в зоне болта 4 (см. рис. 8.12, б, в):
^CTmax Ост р (ОстЛ1// + остмх). (8-32)
min
Рис. 8.14. Соединение с помощью группы болтов, воспринимающих силы, действующие в плоскости стыка
Во избежание понижения жесткости стыка и раскрытия его (вызывающего микроперемещения, стимулирующие развитие фреттинг-коррозии) следует обеспечить условие
Ост min [Ост mln]- (8.33)
Для металлических сопряженных поверхностей [ост mm 1 = 1 -J-1,5 МПа.
Силы Fx, Fy и момент Л42 (см. рис. 8.12, б) могут восприниматься силами сцепления, возникающими в плоскости стыка от затяжки болтов, работающими на срез болтами (см. рис. 8.15, а) или специально предусмотренными для этой цели штифтами.
Расчет группы болтов, воспринимающих силы, действующие в плоскости стыка. В качестве примера рассмотрим крепление деталей I и II (рис. 8.14). Задача сводится к отысканию усилия, действующего на наиболее нагруженные болты. За центр приведе
Рис. 8.15. Соединения, передающие усилия, параллельные плоскости стыка с болтами: а — болты установлены без зазора:б — болты установлены с зазором
ния действующих сил принимаем центр тяжести О фигуры, образованной сечениями болтов (на рис. 8.14 F — главный вектор; Т — главный момент).
Рассматриваемый вопрос представляет значительные трудности, но задача резко упрощается, если детали / и II весьма жесткие и можно пренебречь перемещениями, вызванными их де-148
формациями в плоскостях, параллельных плоскости стыка. Этот случай рассматривается при установке болтов без зазоров и с зазорами.
Если болты поставлены без зазоров (рис. 8.15, а), то взаимное смещение деталей / и II под действием сил является результатом деформирования болтов и прилегающих к ним участков соединяемых деталей. Если 6, — смещение детали I относительно детали II у i-ro болта, то напряжение сдвига в последнем
г, = /?6Z, где k — коэффициент пропорциональности, принимаемый постоянным.
Полагаем, что при приложении момента Т в результате упомянутых выше деформаций деталь I повернется относительно детали // на угол <р вокруг центра жесткости (точки стыка, неподвижной при этом перемещении относительно деталей I и //).
При прямо пропорциональной зависимости между бит центр жесткости совпадает с центром тяжести О фигуры, образованной сечениями болтов.
Для i-ro болта (см. рис. 8.14) имеем:
6,-=/£ф; т1- = Лф/(-. (8.34)
Зависимость (8.34) совпадает с условием, положенным в основу элементарной теории кручения круглых валов, и поэтому
= (77Jp) Zi(
где Jp — полярный момент инерции фигуры, образованной сечениями болтов относительно точки О.
Площади Аб = л d2/4 малы в сравнении с площадью фигуры в стыке деталей / и II, поэтому при одинаковых диаметрах болтов
JP = Ac £ It
I
Усилие от момента Т на i-й болт
= т,Дб = П( /2 it
I 1=]
Усилие на i-й болт от приложенной силы F QlF = F/z.
Полное усилие на i-й болт (см. рис. 8.14)
Qi — V QsT + QiT + ^QirQiF COS Pi.
(8.35)
(8.36)
(8.37)
Далее проверочный расчет выполняют по приведенной ниже формуле (8.50).
При усилиях, действующих в плоскости стыка, полученные из расчета размеры болтов, установленных с зазгром, намного больше, чем болтов, установленных без зазора (см. стр. 157).
Но все же возможны варианты, продиктованные конструктивнотехнологическими соображениями и условиями сборки, в которых целесообразна установка болтов с зазором (рис. 8.15, б). И в этом случае предполагается возможность пренебречь деформациями деталей I и II в плоскостях, параллельных стыку, за исключением участков в непосредственной близости от плоскости стыка. За счет деформаций сдвига этих участков детали I и II смещаются одна относительно другой, причем усилия и смещения, как и в предыдущем варианте, связаны прямо пропорциональной зависимостью.
От момента Т касательное напряжение в точке, отстоящей от центра тяжести на расстояние Z, составляет
т = Tl/(JP)CT,
где ЙР)ст — полярный момент инерции площади стыка деталей I и II относительно центра О (см. рис. 8.14).
Во избежание неупругих взаимных смещений деталей I и II надо выполнить условие
pf =
где р — давление; f — коэффициент трения (для сухих металлических поверхностей обычно f = 0,15 н-0,20)| Дсц — коэффициент запаса сцепления (обычно 1,3—1,5).
Отсюда находим
р = ^цП/[(/р)стЛ
и из равенства рЛст = F6z (где Дст — площадь стыка деталей I и II) определяем F6 и затем F6. расч = 1,ЗГб (см. стр. 153).
Рассмотренная расчетная схема справедлива при равномерном распределении удельных нагрузок по поверхности стыка, что в известной степени выполняется при возможности пренебречь деформациями сопряженных деталей в направлении, перпендикулярном к стыку, и высокой точности сопряженных поверхностей.
Для повышения надежности расчета и предупреждения в отдельных случаях неоправданного утяжеления конструкции рекомендуется Исходить из предположения, что нагрузка в стыке локализуется в непосредственной близости от отверстий по кольцевым поверхностям, одинаковым для всех болтов. Размеры этих поверхностей малы в сравнении с площадью касания деталей / и II, поэтому можно воспользоваться формулами (8.35) и (8.36) и найденное по формуле (8.37) значение Q,- подставить в приведенную ниже формулу (8.53). Далее расчет выполняют по формуле (8.41) или (8.41а).
§ 8.5. РАСЧЕТ БОЛТОВ НА ПРОЧНОСТЬ!
Распределение осевой нагрузки по виткам резьбы и виды повреждения резьбовых деталей, нагруженных осевой сйЛой. В 1902 г. Н. Е. Жуковский дал теоретическое решение задачи о распределении нагрузки среди витков резьбового соедййения.
Рис. 8.16. Распределение нагрузок и напряжений в резьбе
Наибольшая нагрузка приходится на виток у опорной поверхности, наименьшая — на виток у противоположного торца соединения (см. на рис. 8.16, в кривую а распределения удельных нагрузок q, приходящихся на единицу длины резьбового соединения, показанного на рис. 8.16, а). В расчетах Н. Е. Жуковского в гайке с десятью витками на наиболее и наименее загруженные витки приходится соответственно 34 и 0,9% от всей нагрузки F6 соединения. Причины этого рассмотрены выше (см. стр. 91 и 93).
Болты, подверженные действию переменных нагрузок, могут выходить из строя в результате развития усталостных трещин, возникающих в местах концентрации напряжений. Обрывы бол-
1 Приведенный расчет справедлив не только для белтов, но также для винтов, шпилек и других резьбовых деталей.
Рис. 8.17. Гайки, тело которых подвергается деформациям растяжения в зоне резьбы: а — частично; б — по всей длине
тов в таких случаях обычно происходят в сечениях по первому или второму витку, считая от опорного торца гайки. В отличие от сечения 1—1 (рис. 8.16, а) в сечении 2—2 местные деформации, вызванные силой F6, суммируются с деформациями от усилий, приложенных к витку резьбы болта со стороны гайки (сравните эпюры местных напряжений Oj и о2 вблизи сечений 1—1 и 2—2 на рис. 8.16, г). Эти усилия достигают наибольших значений у витков, ближайших к опорному торцу гайки, чем и объясняется разрушение в результате развития усталостных трещин по сечению 2—2, в котором СТ 2 max > max-
Перераспределением удельных нагрузок q по высоте гайки с целью разгрузки витков, ближайших к опорному торцу, можно снизить величину а,П|Я, и, следовательно, повысить несущую способность соединения при переменных нагрузках. Для этого используют гайки, тело которых в зоне резьбы частично (рис. 8.16, б и 8.17, с) или по всей длине (рис. 8.17, б) подвергается деформациям растяжения. Высокая податливость работающего на растяжение участка гайки g (см. рис. 8.16, б) способствует разгрузке витков, ближайших к опорному торцу (см. на рис. 8.16, в кривую б значений q для этого случая).
Использование резьбовых соединений с различными шагами Рх и Р2 у винта и гайки позволяет
существенно повлиять на распределение q по длине соединения. При Р2 > Рх (см. стр. 91 и 94), варьируя величину Р21РХ, можно получить наиболее благоприятное распределение q.
При постоянной нагрузке выход из строя болтов связан с обрывом стержня и разрушением резьбы. Вероятность последнего отказа увеличивается с уменьшением отношения Hid (рис. 8.17, а), ростом зазоров в резьбе и частоты разборок.
Расчет болтов, загруженных осевой силой. При расчете на статическую нагрузку учитывают влияние касательного напряжения т, вызванного моментом Т3. р затягивания резьбы. Эквивалентное номинальное напряжение в нарезной части болта
оэкв = Ко2 + (от/тг)2т2, (8.38)
где о = F6/A6; т = T3.plWp.
Условно за расчетный диаметр болта принимают внутренний диаметр резьбы dt, поэтому:
Аб = ndl/4; Wp = nd?/16.
Действительное сечение болта (см. рис. 8.16, д) существенно отличается от принятого. Но условное построение расчетов не 152
вносит весомых отклонений в конечные результаты, поскольку та же условность вводится и при обработке экспериментальных данных.
Приняв в соответствии с четвертой теорией прочности (о./т,)2 = 3 и f = 0,15, заметив, что для стандартной крепежной метрической резьбы а = 60е и можно принять в среднем P!(nd^ 0,04 и d2 = l,ld1( на основании формулы (8.38) с учетом (8.11) получим
Оэкв = [4F6/(ndi)] 1,3 = 1,3а. (8.39)
Из формулы (8.39) следует, что при расчете на статическую нагрузку влияние касательных напряжений, вызванных моментом Т3.р, можно учесть повышением осевой нагрузки на 30%. В связи с этим на основании формулы (8.16) расчетная нагрузка болта
F&. расч ~ 1 >3^3ат “Ь Ли (8.40)
или [см. формулу (8.24)]
f б. расч = П ,3v (1 — %) + X] FBH.
Значения v даны на стр. 155; значения х — на стр. 145.
При статической нагрузке болты рассчитывают по номинальным напряжениям
о = Fe. расчМб = 4F6. расч/Udi) < [а], (8.41)
откуда
dj > У4F6. расч/(л [о]). (8.41а)
При Fnil = const допускаемое напряжение
[o] = oT/[s], (8.42)
При затяжке, контролируемой динамометрическими ключами или замером удлинения болта, коэффициент запаса прочности принимается соответственно [s] — 1,6 ч-2 и [s] — 1,3 ч-1,5.
При неконтролируемой затяжке коэффициенты запасов прочности значительно выше и растут с уменьшением диаметра болта, поскольку в этом случае увеличивается возможность обрыва стержня из-за перетяжки. При неконтролируемой затяжке эти положения учтены в формуле
[s] 2200ЭД900 - (70 000 - F6. расч)210 7], (8.43)
где k = 1 для болтов из нелегированных сталей и k — 1,25 для болтов из легированных сталей.
При F6.pac4 j> 70 000 Н в формуле (8.43) принимают F6. расч = = 70 000 Н.
Если гЕИ const, то определяют коэффициент запаса прочности, представляющий собой отношение предельной и действующей амплитуд напряжений в сечении нарезанного участка стержня болта:
Sa = <*a llm/^a [So]. (8.44)
Величину cralim приравнивают к пределу выносливости болта при R = — 1 [2]:
°a lim = еОО-1р. Лу₽/(8.45)
где е0 — коэффициент влияния (рис. 8.18); /Са — эффективный пряжений, определяемый по формуле (4.11), в которой ао определяют по рис. 8.19, qG^ «-0,55 для углеродистых сталей, ^0,75 для легированных сталей и qc= 1 для титановых спла-
абсолютных размеров болта коэффициент концентрации на-
Рис. 8.18. Коэффициент ес для болта в зависимости от его диаметра d
Рис. 8.19. Коэффициент а0 для резьбы в зависимости от отношения радиуса впадины Ri к шагу Р:
1 — для рабочего участка резьбы; 2 —-для Свободного участка резьбы
bob; К.у — коэффициент, учитывающий технологическое упрочнение (7(у = 1 при нарезанной резьбе и Ку = 1,25 при накатанной резьбе); р — коэффициент конструктивного упрочнения [р = 1, если гайка работает на деформацию сжатия, и р = 1,354-1,6, если тело гайки в зоне резьбы частично (см. рис. 8.16, б и 8.17, а) или по всей длине (см. рис. 8.17, б) работает на растяжение]; о_1р. с — предел выносливости при растяжении — сжатии, приведенный на стр. 77.
Рекомендуется принимать [sa ] — 2,54-4. Некоторая приближенность этого предложения (расчет по предельным амплитудам) компенсируется выбором повышенных значений [sa].
Если ГЕИ > 0 минимальная и максимальная нагрузки, действующие на болт ]см. формулы (8.24) и (8.16)]:
^tnln ^*зат == (1 X) ^вн> ^"rnax === Fзат “Ь Х^вн»
поэтому
®min == v (1 X) EBH/y4g, пп1ах = [v (1 х) "I- X] ^вн/^б’
коэффициент асимметрии цикла
р __ Hmin __ v (1 X.) _ ________1_______ zo
o.nax “v(l-x)4-x 1X/[v (1 — х)1 * k ’
Учтя формулу (4.1), получим
oo = XFBH/(24). (8.47)
Примечание. Формула (8.47) справедлива при внешней нагрузке, изменяющейся от нуля до некоторого значения FEH > 0. Если же внешняя нагрузка изменяется от FB1I mln до FEI, гаах, то
Оа = X (7вн шах — 7Вц т1п)/(2Лб). (8.47а)
В формулах (8.24), (8.40) и (8.46) коэффициент затяжки v имеет следующие значения:
1) в соединениях, не требующих герметичности, v = 1,5 4-2 при FBH = const и v = 2,54-4 при FBH =F const (см. стр. 153);
2) в герметичных соединениях v = 1,34-2,5 при мягких прокладках (резина, паронит и др.), v = 2 4-3,5 при металлических фасонных прокладках и v = 3,5 4-5 при металлических плоских проклакдах \
Из формул (8.44), (8.45) и (8.47а) находим формулу проектировочного расчета
j > "| / (рей max 7BII mln) [sa] zg ^g\
1 V леао_1р. cF'yp ’ ' '
В формуле (8.48) рекомендуется принимать 8; [sa]
2,9—3,5; % 0,25. Приняв необходимые меры по увеличе-
нию величину % можно снизить до 0,1—0,15 (см. стр. 158).
б
После округления найденного значения dt до ближайшего в стандартном ряду, выполняют проверочный расчет на статическую прочность по формулам (8.40)—(8.42).
Из формул (8.44)—(8.48) следует, что для снижения dx и, следовательно, уменьшения размеров и массы фланцев и повышения нагрузочной способности надо изыскивать пути к снижению величины х.
Наиболее опасным повреждением крепежной резьбы является срезание ее по цилиндрической поверхности диаметром d1 для болта и D для гайки. Ориентировочная проверка резьбы на срез сводится к сравнению осевой нагрузки с допускаемой из условия срезания резьбы соответственно для болта и гайки!
Fc ср. б! 11 d1kHr [тср. б]//Сир, |
Fr < [Fcp. г] = nDkHT [тср. г]/^р, )
1 При температуре, превышающей 300° С, вследствие ползучести возникает ослабление напряжений от затяжки (релаксация). Для предупреждения падения напряжений ниже требуемой величины предусматривают соответствующее увеличение силы затяжки в зависимости от температуры и промежутка времени между подтяжками [2].
где Нг — высота гайки; k — Scp/P — коэффициент полноты резьбы (отношение толщины срезаемой части витка к шагу, см. рис. 8.2), равный 0,87 для метрической и 0,65 для трапецеидальной резьбы; /<нг — коэффициент, учитывающий неравномерность распределения нагрузки среди витков в условиях из пластического деформирования; Л„р = 1,3 4-1,5 при отношении временных сопротивлений разрыву материалов болта и гайки ов.б/ов.г > 1,3 и Днр = 1,65 ч-1,8 при ов.с/ов.г < 1,3; ]тср] = = (0,2 4-0,3) от.
Расчет болтов, загруженных поперечной силой. При нагрузках, действующих в плоскости стыка, болты устанавливают в отверстия без зазора или с зазором (см. рис. 8.15). В первом случае используют болты по ГОСТ 7817—72* и проверяют их на срез по формуле
т = 4Q/(ndcHcp) < [т], (8.50)
где пср — число плоскостей среза; диаметр d0 показан на рис. 8.15, а.
Проектировочный расчет выполняют по формуле
d0 > |/ 4Q/(n [т| иср). (8.51)
Как правило, нагрузка соединений без зазора лимитируется допускаемыми напряжениями среза. При сравнительно малых значениях или 4М» (см. рис. 8.15, а), а также если прочность на сжатие деталей меньше, чем у болта, возможны ограничения по напряжениям смятия. Последние определяют в предположении, что зазор равен нулю (см. стр. 96):
осм = 4Q/(n/d0) <[<тсм]. (8.52)
При одинаковых материалах деталей 1 и II в формуле (8.52) Величина I равна меньшему из двух значений /1 и /2. Формула (8.52) не учитывает влияния деформаций изгиба, вызывающих концентрацию напряжений осм в направлении плоскости разъема (см. эпюры осм на рис. 8.15, а), увеличивающуюся с ростом отношения lld0. В связи с этим, если l/d0 > 1, то в формуле (8.52) надо принять / — d^.
При переменной нагрузке [т] = (0,24-0,25) от, при постоянной нагрузке 1т] = 0,4от. Для стали 1осм] = (0,84-1,0) от, для чугуна 1оеМ] = 0,8ов.р.
В варианте с зазором (см. рис. 8.15, б) усилие Q воспринимается силами сцепления между сопряженными поверхностями деталей / и II, вызванными затяжгрй болта. Поэтому, если Q — усилие, приходящееся на один болт, то расчетное усилие болта в формулах (8.41) и (8.41а)
F6.Pac4=1.3KcttQ/A (8.53)
где Ксц и f приведены на стр. 150.
§ 8.6. СПОСОБЫ ПОВЫШЕНИЯ НЕСУЩЕЙ СПОСОБНОСТИ РЕЗЬБОВЫХ СОЕДИНЕНИЙ
Рис. 8.20. Сравнение соединений с разной затяжкой: а — контролируемая; б — неконтро лируемая
Повышение несущей способности болтов при уменьшении диаметра резьбы позволяет снизить размеры и массу участков деталей (обычно фланцев), предназначенных для резьбовых соединений. Результаты могут быть особенно значительными, если повышение несущей способности сочетается с увеличением числа болтов.
Из расчета на статическую нагрузку при заданном значении F(, расч диаметр t/i, как следует из формул (8.41а) и (8.42), определяется величинами ат и [si. При заданном значении от с переходом от неконтролируемой затяжки болтов к контролируемой величина [s] снижается от значений, определяемых по формуле (8.43), до Is] 1,5. При этом величина [о ] увеличивается в среднем в 1,9 раза, а диаметр d снижается примерно на 28%. О возможном при этом уменьшении габаритов соединения дает представление рис. 8.20.
Важным ресурсом для снижения d при расчете
на статическую нагрузку является повышение стт. Например, с переходом от класса прочности 3.6 к классу 8.8 величина от возрастает примерно в три раза. Выигрыш в габаритах в этом случае намного значительнее, чем с переходом от неконтролируемой затяжки к контролируемой. Отмеченные пути снижения d актуальны и для соединений, работающих при переменных нагрузках. Это связано с тем, что у болтов из углеродистых сталей при х С 0,25—5— -г- 0,3 и у болтов из легированных сталей при х < 0,25, выпол-
пенных с накатанной резьбой и имеющих гайки с улучшенным распределением нагрузки среди витков резьбы, несущая способность лимитируетя обычно не усталостной, а статической прочностью.
При действии поперечной нагрузки значительное снижение массы и размеров некоторых деталей достигается с переходом от установки болтов с зазором к варианту, показанному на (рис. 8.15, а). У болтов, поставленных с зазором, расчетный диаметр равен di, а у болтов, поставленных без зазора, расчетный диаметр равен d0 и несколько превышает d. С учетом этого замечания на основании формул (8.41), (8.50), (8.53) получена формула для определения отношения диаметров болтов, установленных с зазором (индекс заз) и без зазора (индекс б.заз):
= 1,151/ ЦКсн [т] . (8 54)
“б. заз Г / 1а] ' '
При f — 0,175 и /<сп = 1,4 из приведенных выше данных и формулы (8.54) следует, что при постоянной и переменной нагрузках величина d^Jd^ яя, принимает соответственно значения 2,87 и 2,28 при контролируемой затяжке и 3,87 и 3,04 при неконтролируемой затяжке.
Возможные пути повышения несущей способности (снижения di) болтов при действии переменных нагрузок можно выявить из анализа формулы (8.48). Для этого надо увеличить Ку, т. е. воспользоваться технологическим упрочнением: применить нака-
Рис. 8.21. Влияние коэффициента внешней нагрузки % на осевое усилие болта Ff, и на амплитуду цикла нагрузки Fa
тайную резьбу; увеличить [3, т. е. улучшить распределение нагрузки по длине резьбового соединения (см. стр. 94 и 152); снизить Ко, например с помощью увеличения отношения RdP (см. рис. 8.2 и 8.19); повысить величину o_Jp. с (см. стр. 77).
Весьма эффективно снижение величины у. Для этого надо увеличить и снизить 1см. формулу (8.22)]. Первое дости-б ф
гается увеличением длины болта и высоты шайбы, снижением диаметра ненарезанного участка стержня болта, например, до значения dCT = (0,85-Н) di (см. рис. 8.17, а), снижением d за счет увеличения, где это целесообразно, числа болтов г. При снижении d повышение несущей способности возможно за счет увеличения е0 (см. рис. 8.18). Существенное увеличение
б достигается с использованием для болтов вместо стали титановых сплавов, поскольку модуль упругости их Е = (1-т-1,1) 10Б МПа в два раза меньше, чем у стали.
Значительная шероховатость поверхности стыка и волнистость ее увеличивает контактную податливость стыка и, следовательно, 158
увеличивает значение Контактная податливость снижается Ф
с увеличением номинального давления р между сопряженными поверхностями, и поэтому с увеличением F3ar снижается доля переменной нагрузки х^„н, воспринимаемой болтом.
Некачественное изготовление поверхностей стыка, а также изгибные деформации фланцев могут вызвать появление зазоров, способствующих увеличению JjX. Увеличение затяжки может Ф
устранить неприлегание поверхностей и понизить величину 2^-Ф
Таким образом, важным условием для повышения несущей! способности болтов при действии циклических нагрузок является уменьшение шероховатости и повышение точности сопряженных поверхностей, повышение жесткости фланцев и силы F3;,r.
На рис. 8.21, а в системе координат FBH, F6 нанесены прямые значений F61 и F62 соответственно при у.г = 0,3 и уг — 0,1 [см. формулу (8.16)1, а на рис. 8.21, б — кривые изменения F6t и Кб2 при коэффициенте асимметрии цикла внешней нагрузки RF = 0. С переходом от Хг = 0,3 к Хг = 0,1 амплитуда цикла нагрузки Fa = 0,5xFeh [см. формулу (8.47) ] уменьшается в три раза. Это достигается за счет перечисленных выше мер, направленных к увеличению 2 F. На рис. 8.21, б показаны конструкции с жест-б
ким болтом (х! = 0,3) и с высокой податливостью деталей системы болта (х2 = 0,1).
Примечания. 1. Усилие, действующее на болт, описывается уравнением (8.16) только при ЛЕН С (6ви)р. ст, где (FBH)p. ст—внешнее усилие, при котором возникает раскрытие стыка, т. е. 6СТ = 0. Из уравнения (8.17) следует, что (7'В1Н)р. ст — 7зат/(1—X)- При дальнейшем увеличении внешней нагрузки [при 7Вк > (6вн)р.ст1 имеем Лб = FBK (см. рис. 8.21, а).
2. При F3aT~ 0 имеем F<s = FBH (см. рис. 8.21, б), В этом случае амплитуда Fa — 0,5FBH в 1'у раз превышает амплитуду затянутого соединения при F(Fnn)p. ст-
§ 8.7. ПРИМЕР РАСЧЕТА
ГРУППОВОГО БОЛТОВОГО СОЕДИНЕНИЯ
Определить диаметры болтов, крепящих корпус редуктора (см. рис. 14.67). Нагрузки, действующие на редуктор; Fz — 0; Мх = Мг = 0; /Чу——4,6 X X 10й Н • мм (в отличие от примера расчета зубчатых колес, выполненного в гл. 14, крутящий момент на тихоходном валу редуктора принят реверсивным). Направление координатных осей и обозначение размеров опорной поверхности редуктора принять в соответствии с рис. 8.12. Число болтов, крепящих корпус редуктора, г = 4; координаты расположения осей болтов: /1Х = 0; Z2X = 310 мм; 1у= 115 мм; размеры опорной поверхности основания редуктора: о == 85 мм; b = 140 мм; Lx = 350 мм; Ly — 280 мм (см. рис. 8.12). Материал болтов соответствует классу прочности 4.6. Материал корпуса редуктора А И основания В (см. рис. 8.12) —серый чугун марки СЧ 21-40.
Внешняя нагрузка, действующая на наиболее нагруженный болт, определяется на основании зависимости (8.30). При Мх = 0, Рг = 0, lxmax = 1гх и реверсивной нагрузке имеем
Лвн = + 4,6.10с/(5• 310) = ± 3700 Н.
Принимая % = 0,25 и v = 3,0 (для FBH =/-. const), по формуле (8.24) находим усилие затяжки болта
£зат = 3,0 (1 — 0,25) 3700 = 8300 Н.
Площадь опорной поверхности редуктора (стыка)
Лст = 4аЬ = 4-85-140 = 47 500 мм2.
Момент инерции площади опорной поверхности стыка относительно оси у
Г ab3 т
J„y = 4 | ~ ad (Lx - 0,5d)2 =
= 4 8—i1-4— -I- 85 140 (350 — 70)2 j = 3740- 10s мм4.
Проверяем условие нераскрытая стыка. С учетом формул (8.28) и (8.31)— (8.33) имеем
„ £зат2
Ост min — л — Лст
(I —0,25) 4,6-10«-350 3740-1 О'5
(1—Х)Л4И£Л _ 8300-4
JCTy 47 500
= 0,3/ -С 1<гст min] = 1 -г- 1,5 МПа.
Так как, согласно (8.33). условие нераскрытая стыка не удовлетворяется, то, исходя из последней формулы, определяем необходимое усилие затяжки болта. Принимая [аст mln ] = 1,2 МПа, найдем
р _ ^ст с зат — г
47500 Г „
4 L
Га 1 4- f)MvLx "I
И'с г mini п Т ------- —
(1 —0,25) 4,6-106-350 т
374+106------- J - 18 200 Н.
Используя зависимость (8.40), находим расчетное усилие, действующее на болт,
F6. расч = 1,3-18 200 + 0,25-3700 = 24 600 Н.
Диаметр болта определяем исходя из статической прочности. При неконтролируемой затяжке болта величина [s] определяется по формуле (8.43):
[s] « 2200/ [900 — (70 000 — 24 600)2 10"’]= 3,2.
Допускаемое напряжение при расчете на статическую прочность
[а] = ат/ [s] = 240/3,2 = 75 МПа.
Внутренний диаметр резьбы болта определяем по формуле (8.41а)
dj = К4-24600/(л75) = 20,4 мм.
В соответствии со СТ СЭВ 182—75 ближайший больший внутренний диаметр резьбы d, = 20,752 мм, что соответствует болту М24. В соответствии с табл. 8.1 для класса прочности 4.6 материалом для болта принимаем сталь 20.
Проверяем на усталостную прочность резьбовой участок болта. Толщина фланцев у редуктора А и основания В (см. рис. 8.12) принята одинаковой и равной l,5d = 36 мм. В соответствии с зависимостью (8.23) и рис. 8.11, б определяем податливость деталей системы фланцев
у, 2 2 (1,6-24 + 2-36-0,45 — 26) (1,6-24 4-26)
л£ф26-0,45 g (1,6-24 + 2-36-0,45 + 26) (1,6-24 —26) “
0,048
= —------ мм/Н;
Сф
при этом в формуле (8.23) принято: а = 1,6d; d0 = 26 мм; tg а = 0,45.
160
В соответствии с зависимостью (8.18) находим податливость болта
V , , _ 1 / 4-72 0,9 \ 0,196
1 я242 + 24 ) - Еб мм/Н.
Принимая для чугуна СЧ 21-40значение £ф = 1,5-105 МПа и для стали Е(. — — 2,2-108 МПа, на основании формулы (8.22) получим
%= 1/[1 +0,196-1,5/(0.048-2,2)) = 0,265.
На основании формулы (8.47а) находим амплитудное напряжение
оа = 0,265-3700- 4/[л (20,752)2] = 2,92 МПа-
По ряс. 8.19 для RilP = 0,12 находим ао = 7,0. Для углеродистых сталей qa 0,6. Эффективный коэффициент концентрации напряжений найдем из зависимости (4.11):
Кб= 1 +0.6 (7,0— 1) = 4,6.
Для болта М24 в соответствии с рис. 8.18 находим ео = 0,65.
Так как конструктивное и технологическое упрочнение отсутствует, то (3 = 1 и Ку = 1,0. Для стали 20 имеем ав = 400 МПа. В соответствии с зависимостями, приведенными на стр. 77, получим а_1р.с ~ 0,750-!, где o_j » (0,4-:-0,46) ов. Принимая а_х « 0,43ов, получим п_1Р. с = 130 МПа.
Предельное амплитудное напряжение определяем по формуле (8.45):
ао Пт = 0.65-130/4,6 = 18,3 МПа.
Запас прочности по амплитудным напряжениям, согласно формуле (8.44), sa = оа Vm/oa = 18,3/2,92 = 6,25 > [sa] = 2,5-=-4.
Глава 9. СВАРНЫЕ, ПАЯНЫЕ
И КЛЕЕВЫЕ СОЕДИНЕНИЯ
§ 9.1. ОБЩИЕ СВЕДЕНИЯ О СВАРНЫХ СОЕДИНЕНИЯХ1
В сварных соединениях сопряженные детали связаны межатомными силами, которые проявляются в результате местного нагрева стыка до расплавления или до пластичного состояния с последующим взаимным деформированием.
Высокая производительность сварочного процесса, часто легко поддающегося автоматизации, и хорошее качество соединений обеспечили широкое распространение сварки в технике. Во многих случаях прочность сварного соединения не лимитирует несущую способность детали и разрушение ее наступает вне соединения.
Среди способов сварки плавлением наиболее распространенной является дуговая сварка, при которой источником тепла для местного расплавления материалов соединяемых элементов является электрическая дуга, образующаяся между электродом и деталями. Сварной шов формируется не только за счет плавления материалов деталей, но в некоторых случаях и за счет плавления
1 В этой главе, написанной совместно с И. С. Кузьминым, терминология
видов сварки и сварных соединений соответствует ГОСТ 2601—74.
электрода. Для предохранения материалов от вредного влияния окружающего воздуха в зоне сварки создается защитная среда, образующаяся в результате плавления обмазки электродов, флюса или подачи инертных газов.
В конструкциях со швами значительной длины наиболее производительной является автоматическая сварка под флюсом. Менее производительна, но широко распространена дуговая сварка й углекислом газе, используя которую, можно накладывать сварные швы во всех пространственных положениях. Этими видами сварки соединяют детали из углеродистых и низколегированных сталей.
Для соединений деталей из высоколегированных сталей, различных сплавов со специальными свойствами и цветных металлов успешно применяют сварку в среде инертных газов аргона и гелия плавящимся или вольфрамовым электродами.
Большое распространение получила электрошлаковая сварка, при которой основным источником тепла является расплавленный шлак, разогретый сварочным током, проходящим от электрода к изделию. Электрошлаковой сваркой соединяют детали практически неограниченной толщины.
Легированные стали, алюминиевые и медные сплавы, тугоплавкие металлы и неметаллические материалы (графиты, керамика и др.) достаточно хорошо свариваются в вакуумных камерах электронным лучом, а также диффузионной сваркой. В вакуумных камерах возможно соединение при помощи дуговой сварки непла-вящимся электродом (молибденовым и др.) в парах металла.
Сварка, при которой материал соединяемых деталей не расплавляется, а лишь размягчается, называется контактной. Разогрев соединяемых деталей может происходить за счет пропускания тока через стык (контактная стыковая сварка), за счет пропускания тока через электроды, между которыми зажимаются соединяемые детали (точечная и роликовая электросварка), или за счет тепла, выделяемого при трении деталей друг о друга (контактная сварка трением). Контактную сварку применяют в крупносерийном и массовом производстве для соединений деталей из углеродистых и легированных сталей, алюминиевых и других сплавов.
В меньшей степени распространены такие способы сварки, как холодная при помощи сжатия, диффузионная сварка в вакууме, сварка ультразвуком и т. п.
На рис. 9.1 показаны примеры сварных валов, полученных с помощью различных способов сварки. Масса заготовок сварнокованых коленчатых валов (рис. 9.1, б) составляет 35—45% от массы кованых. При сварке можно добиться достаточной точности взаимного расположения соединяемых деталей. Например, при изготовлении карданных валов (рис. 9.1, в, г) механическая обработка шлицев и вилки кардана производится до сварки вала. При этом механическая прочность соединения с помощью сварки трением (рис. 9.1, г) оказывается выше прочности основного металла вилки.
$ 3373 Зв 3373
10040
Рис. 9.1. Примеры сварных валов; а — вал шахтной подъемной машины, выполненный электрошлаковой сваркой; б — коленчатый вал гидронасосной установки, выполненный электрошлаковой сваркой; в — карданный вал, выполненный автоматической сваркой в углекислом газе; г — карданный вал, выполненный сваркой трением; д—промежуточный полый вал с зубчатыми муфтами, выполненный дуговой сваркой
Благодаря сварке оказался возможным переход от сплошных валов к полым с заготовками, полученными методами пластического деформирования или экструзии. Это обеспечивает существенное снижение массы заготовок и окончательного изделия (см. стр. 84). Например, масса узла, показанного на рис. 9.1, д, почти на 35% меньше по сравнению с конструкцией, в которой промежуточный вал сплошной, а связь его с зубчатыми полумуфтами осуществляется с помощью посадок с гарантированным натягом.
Рис. 9.2. Примеры сварных зубчатых колес и шкивов: а — крупногабаритное зубчатое колесо; б — зубчатое колесо оболочковой конструкции с использованием штампованных элементов; в — шкив клиноремениой передачи, выполненный ИЗ штампованных элементов точечной сваркой
Сварку широко используют для получения изделий сложных форм из штампованных заготовок (или сочетания штампованных и кованых или литых). Примеры таких конструкций приведены на рис. 9.2. Кроме того, сварными выполняют такие ответственные детали, как маховики и барабаны больших размеров, картеры ведущих мостов автомобилей, различные корпуса, станины, рамы и т. п. Современная технология позволяет получать сварные соединения достаточной прочности практически для всех материалов, используемых в технике.
9.2. ВИДЫ СВАРНЫХ СОЕДИНЕНИЙ РАСЧЕТ ИХ НА ПРОЧНОСТЬ
Наиболее рациональным видом сварных соединений являются стыковые соединения (рис. 9.3, а—г), получаемые дуговой или контактной сваркой. Подготовка кромок в стыковых соединениях для дуговой сварки зависит от толщины соединяемых деталей (рис. 9.3, <9). При расчете прочности все виды подготовки кромок считаются равноценными.
Рис. 9.3. Сварные стыковые соединения и виды разделки кромок для дуговой сварки: а — прямой шов; б — косой шов; в, г — кольцевой шов; д — виды разделки кромок
Детали вблизи стыка должны иметь равную толщину 6 для обеспечения их одинакового нагрева (рис. 9.3). При неодинаковей толщине свариваемых элементов необходимо обеспечить у них плавные переходы к месту стыка.
При статическом нагружении стыковые соединения низкоуглеродистых и многих легированных сталей обеспечивают равнопроч-ность с основным металлом. При сварке закаленных сталей и некоторых алюминиевых сплавов стыковые швы уступают по прочности основному металлу. Для повышения прочности таких соединений в зоне расположения стыковых швов предусматривают местные утолщения (рис. 9.3, г) или используют косые швы (рис. 9.3, б).
Стыковые соединения рассчитывают по номинальным напряжениям без учета усиления швов (рис. 9.3, д) по тем же формулам, что и для целых элементов. Концентрация напряжений, вызываемая качественно выполненными стыковыми швами, невелика (Л'о< < 1,6). Для швов со снятыми механическим путем усилениями Ка = 1. Концентрацию напряжений и характер нагрузки учитывают при назначении допускаемых напряжений. Допускаемые
напряжения в сварных швах [o'] и [т'] выбирают по табл. 9.1 (см. ниже). При совместном действии в стыке нормальных и касательных напряжений расчет производят по приведенным напряжениям, найденным по третьей теории прочности. Приведенные напряжения сравнивают с допускаемыми [dp 1.
Рис. 9.4. Сварные нахлесточные соединения: а — лобовые швы; б — фланговые швы; в — косой шов; г — комбинированные швы; д — кольцевой шов; е — фланговые швы при сварке деталей с несимметричным профилем
Нахлесточные соединения (рис. 9.4) выполняют с помощью угловых (валиковых) швов. В зависимости от положения шва относительно линии действия силы F угловые швы называются лобовыми, фланговыми, косыми, комбинированными и кольцевыми.
Форма поперечного сечения углового шва может быть нормальной (рис. 9.5, а), выпуклой (рис. 9.5, б) или улучшенной (рис. 9.5, в, г). Форма швов по рис. 9.5, а, в, г достигается механической обработкой их после сварки. Выпуклые швы вызывают повышенную концентрацию напряжений. Минимальная концентрация имеет место при швах по рис. 9.5, в, г с отношением 16£?
катетов 1 : 1,5 или 1 : 2. Катет шва к < 6 (см. рис. 9.4, а), но не менее 3 мм при 6 > 3 мм. Длина лобовых и косых швов в нахлесточных соединениях не ограничивается. Длину фланговых швов принимают не более 50 к с целью ограничения неравномерности распределения удельных нагрузок q (см. стр. 91 и рис. 5.9).
При статическом нагружении концентрация напряжений в угловых швах не оказывает заметного влияния на снижение несущей
Рис. 9.5. Поперечные сечения сварных угловых швов
способности соединения. Поэтому нахлесточные соединения в условиях статических нагружений обеспечивают равнопрочность соединения с металлом свариваемых деталей.
Угловые швы всех видов рассчитывают на срез по опасному сечению 1—1 (рис. 9.5, а, б). Расчетная высота углового шва т — — к sin 45° 0,7 к. Усилением угловых швов, показанным на
рис. 9.5, б, пренебрегают.
Примечание. Размер опасного сечения условен, так как в процессе сварки расплавляются частично и прилегающие участки соединяемых элементов (см. штриховую линию на рис. 9.5, б); в результате этого фактически т > 0,7 к. Во многом условен и расчет угловых швов всех типов на срез. Например, в опасном сечении лобовых швов действуют не только касательные, но и нормальные напряжения.
°)
Рис. 9.6. Комбинированные угловые швы, загруженные силами и моментами в плоскости стыка детлеп
находят:
F2 = Fe2/e;
^фЛ 2 == ^2^’
небрегают податливостью деталей / и
Напряжение в опасном сечении углового шва t = F/(0,7#)<[t'], (9.1)
где [т' 1 — допускаемые напряжения на срез для сварного шва, выбираемые по табл. 9.1 (см. ниже); I — длина шва.
Для соединений с несколькими швами под размером I понимают суммарную длину швов, например, 2/л и 2/фл для соединений по рис. 9.4, а, б, I — 1К для соединения по рис. 9.4, в, Z1 = 0,28/л 4*
+ 1,5/фЛ для соединения по рис. 9.4, г.
При расчете сварных соединений с несимметричным сечением одного из элементов (см. рис. 9.4, е) суммарную длину швов определяют из формулы (9.1) и далее из условия равновесия
Fx = Fex/e; фл 1 — 1^1/ где Fi и Га — усилия, передаваемые швами /фЛХ и ^фла*
Нахлесточные соединения, загруженные моментом М в плоскости стыка (рис. 9.6, а) рассчитывают в предположениях, приведенных на стр. 149: пре-[ II и полагают, что относительный поворот их происходит вокруг центра тяжести Ц. т. фигуры, образованной сечениями швов, только за счет деформаций швов. В этом случае
^тах == Л^Ртах/7р С [т ]. (9.2)
Полярный момент инерции равен сумме осевых моментов: JP = Jy + Jг- При подсчете Jy и Jz опасные сечения швов представляют в виде прямоугольников, одна сторона которых равна длине шва, а вторая — 0,7«. Если в рассматриваемом соединении помимо момента М в плоскости стыка действует сила F (рис. 9.6, б), то результирующие напряжения т^ах получают геометрическим сложением напряжений т{? и т'м, найденных соответственно по формулам (9.1) и (9.2).
1 Рекомендуемая международным институтом сварки расчетная длина в СО’ единении с комбинированными швами.
Угловой кольцевой шов (см. рис. 9.4, д'), загруженный осевой силой F, рассчитывают по формуле (9.1), при этом I = nd. При загружении этого соединения крутящим моментом Т, напряжения в опасном сечении шва вызываются силой F — 2Tld, тогда в соответствии с зависимостью (9.1)
1т = 277(0,7кга(г) [г']. (9.3)
При совместном действии усилия F и момента Т напряжения <rj? и суммируются геометрически.
Расчетные зависимости (9.1)—(9.3) используют как для проверочных, так и для проектировочных расчетов. В последнем случае
Рис. 9.7. Примеры сварных тавровых соединений
обычно задается катет к и определяется суммарная длина швов-Для соединений комбинированными швами, загруженными силами и моментами в плоскости стыка, приходится задаваться размерами швов из конструктивных соображений с последующим проверочным расчетом.
Тавровые соединения показаны на рис. 9.7. Они выполняются без подготовки кромок (рис. 9.7, а) и с подготовкой кромок (рис. 9.7, б, в). При статическом нагружении подготовка кромок не производится. В этих случаях накладывают угловые швы (рис. 9.7, а), катет к которых не должен превышать 1,26, где 6 — наименьшая толщина свариваемых элементов. Угловые швы и в этом случае рассчитывают на срез по опасному сечению I—I (см. рис. 9.5, а, б).
Для расчета напряжений в угловых швах тавровых соединений (например, рис. 9.7, г) следует внешние усилия привести к центру тяжести фигуры, образованной сечениями швов, разложить главный вектор и главный момент на составляющие по координатным осям и вычислить напряжения в швах от этих составляющих.
Напряжения от составляющих главного вектора определяют по формуле (9.1), а от моментов, действующих в плоскости, перпендикулярной к плоскости стыка, находят из зависимости
т = с [т ], (9-4)
где Jc — момент инерции фигуры, образованной опасными сечениями швов, равный 0,7 от момента инерции сечения швов; z/max — расстояние от нейтральной оси сечения швов до крайней точки сварного шва.
Рис. 9.8. Примеры угловых соединений: а, б — без предварительной обработки кромок; в—д — с предварительной обработкой кромок
Например, для кольцевого шва (рис. 9.7, 5):
1 _ О 7 Г л +2к)4 nDi 1 • ,, _ D I к
Jc — L 64 j > Утах — 2 T'1'
Для соединения по рис. 9.7, г моменты инерции и'расстояния от нейтральной оси сечения швов до их крайних точек соответственно равны:
, п |~ (2к + 6)Ч 63/!.
J х — 12 I’ 2 •
Jу = 1,4к/3/12; хгаах = 1/2.
Результирующие напряжения находят путем алгебраического или геометрического сложения составляющих и сравнивают с допускаемыми значениями из табл. 9.1.
При сварке тавровых соединений с предварительной разделкой кромок напряжения в швах находят так же, как и для целых деталей. Допускаемые напряжения и в этом случае определяют по табл. 9.1.
Угловые соединения выполняют в соответствии с рис. 9.8. Они обычно мало загружены и на прочность не рассчитываются.
Прорезные соединения (рис. 9.9, а) допускаются лишь в тех случаях, когда недостаточно одних угловых швов. Прорезь располагается вдоль линии действия силы F и имеет размеры а = 26; / = (Юч-25) 6, где 6 — толщина привариваемого элемента. Допускаемая нагрузка на одну прорезь [Гпр ] = 2 |т' ] /6.
Разновидностью прорезного соединения является проплавкой нахлесточный шов (рис. 9.9, б), который выполняется автоматической сваркой под флюсом.
Пробочные соединения (соединения электрозаклепками) образуют путем проплавления более тонкого листа (рис. 9.9, в). Такие соединения рациональны при небольших толщинах металла (до 170
Рис. 9.9. Прорезное, проплавнов и пробочное сварные соединения
Рис. 9.10. Примеры точечных соединений: а, б—расположение точек; в — односрезные точки; г, д — двухсрезпые точки; е — групповое точечное соединение
5 мм). Обычно электрозаклепки выполняют роль связующих элементов и рабочей нагрузки не передают. При передаче усилия расчет электрозаклепок аналогичен расчету точечных соединений при контактной сварке (см. ниже).
Точечной сваркой соединяют между собой детали обычно с пло-
скими поверхностями (рис. 9.10). Суммарная толщина свариваемых элементов не превышает, как правило, 8—10 мм.
При толщине 6 > 2 мм наименее тонкого из соединяемых
стальных элементов диаметр сварной точки d (мм) должен удовлетворять условию [45 ] 1,26 + 4 < d •< 1,56 ф- 5.
Шаг сварных точек t (рис. 9.10, а), как правило, не превышает 3d. Расстояние от сварной точки до края детали в направлении действия внешней силы Q составляет h > 2d, а в направлении, перпендикулярном к линии действия силы, — h > 1,5й.
Напряжения в сварных точках
т = 4F/(nd2ncp) < [Т('],
где F — усилие, передаваемое одной сварной точкой; псг, — число плоскостей среза; [то 1 — допускаемое напряжение в сварной точке при срезе (см. стр. 173).
Напряжения в соединениях, образованных рядом сварных точек (рис. 9.10, а, б), определяют
Рис. 9.11. Соединение роликовой сваркой
в предположении равномерного их участия в работе, т. е. при числе сварных точек z на каждую точку действует сила F = Q/z. Неравномерность распределения усилий между точками учитывают снижением допускаемых напряжений [тб 1 на 10—20% [58]. При этом число сварных точек, расположенных вдоль линии действия силы, не должно превышать пяти. Напряжения в сварных точках соединения, показанного на рис. 9.10, е, рассчитывают аналогичным образом; при этом величину F в зависимости от внешней силы Q определяют по тем же формулам, что и для групповых болтовых соединений (см. гл. 8). Роликовую сварку применяют для соединения элементов малых толщин (6 с 2н-3мм). Напряжения в швах (рис. 9.11) при роликовой сварке т = F/(el) < [т' ].
§ 9.3. ДОПУСКАЕМЫЕ НАПРЯЖЕНИЯ
В СВАРНЫХ СОЕДИНЕНИЯХ
Допускаемые напряжения в сварных швах, полученных дуговой или стыковой контактной сваркой при статической внешней нагрузке, назначают в долях от допускаемых напряжений растяжения [Ор] для основного металла (табл. 9.1). В некоторых случаях 172
более слабым оказывается не сварной шов, а основной металл вблизи шва, испытавший при сварке термическое влияние.
Допускаемые напряжения для соединений, выполненных точечной контактной сваркой, устанавливают с учетом концентрации напряжений в основном металле вокруг точки. При расчете точечных соединений для статического нагружения допускаемые напряжения принимают равными:
[то! = (0,3 ч- 0,5) [ор1; [об] = (0,25 ~ 0,3) [ор],
где [<тр ] определяют в соответствии с примечанием к табл. 9.1.
Т аблица 9.1. Допускаемые напряжения в сварных швах при статическом нагружении [45]
Вид швов Характеристика напряженного состояния Сварка автоматическая, полу автоматическая, ручная, эл$к$фЬд£ми марок Э42А, Э50А Сварка ручная электродами 342, 350
Стыковые Сжатие Растяжение Срез [п'ж] = [<тр] ^1= frpl [т' 1 = 0,65 [ар ] Кж1= frpl 1^1 =0,9 [ор1 [т'1=0,6 [ор]
Угловые Срез [т'] = 0,65 [<тр] В'] = 0,6 [ар]
Примечание. Допускаемые напряжения растяжения для основного металла 1ор] == oT/[s], где [s] == 1,354-1,6 для углеродистых и Ы = 1,54*1,7 для легированных сталей.
Допускаемые напряжения при циклическом нагружении определяют по формулам [о^ 1 = [o' ] у и [Д> ] = |т' ] у, в которых [o'] и [т'] находят по табл. 9.1. Коэффициент у « 1 учитывает характеристику цикла R, эффективные коэффициенты концентрации в сварных швах Ка, число циклов нагружения и другие факторы. Значение его подсчитывают по формуле
V = {аКо ± ъГ— (аКа +b)R L <9-5)
Верхние знаки в знаменателе этой формулы принимают, если наибольшими по абсолютной величине являются напряжения растяжения, а нижние — если напряжения сжатия. В случае равенства абсолютных величин напряжений можно принимать как верхние, так и нижние знаки. Для углеродистых сталей назначают а = 0,58 и b = 0,26; для низколегированных сталей а = = 0,65 и b — 0,30. Значения эффективных коэффициентов концентрации приведены в табл. 9.2 и 9.3.
Для сварных соединений характеристика цикла R — omln/oraax в формуле (9.5) определяется как отношение наименьшего и наибольшего по абсолютной величине напряжений, но взятых со своими знаками.
Коэффициент Кс — Кси = Kct определяют по формуле (4.7), в которой т = П/Да! No = 3*10® [72], величину NE определяют по формуле (4.15) при а = 1.
Таблица 9.2. Эффективные коэффициенты концентрации напряжений для сварных швов [78]
Вид сварного шва Коэффициент Ко для стали
углеродистой низколегированной
Стыковые швы с полным проваром корня шва: при автоматической и ручной сварке и при контроле швов просвечиванием при ручной сварке без просвечивания при автоматической сварке без просвечивания Угловые лобовые швы: при ручной сварке при автоматической сварке Угловые фланговые швы, работающие на срез от осевой силы 1,0 1,2 1,1 2,3 1,7 3,4 1,о 1,4 1,2 3,2 2,4 4,4
Таблица 9.3. Эффективные коэффициенты концентрации для сварных точечных и роликовых соединений [45]
Материал Состояние материала Толщина соединяемых элементов, мм Коэффициент для сварных соединений
точечных роликовых
Сталь 10 Сталь 1Х18Н9Т Т итановый сплав ВТ1 Алюминиевый сплав Д16Т Сталь ЗОХГСА Нормализованная Нагартованная Состояние по- ставки То же » 3—3 1,5—1,5 1,5—1,5 1,5—1,5 1,5—1,5 7,5 12,0 10,0 5,0 12 5,0 7,5 5,0 2,25
Сваркой трением соединяют элементы не только из однородных металлов, но и из разнородных (например, стальные и медные, медные и алюминиевые и т. п.). Допускаемые напряжения в этом случае устанавливают экспериментальным путем.
Приведенные указания по назначению допускаемых напряжений в сварных швах подразумевают качественное выполнение сварки и ее контроль. Любые дефекты в сварных швах (непровары, подрезы, пористость, трещины и т. п.) приводят к резкому снижению нагрузочной способности, особенно при циклическом нагружении.
§ 9.4. ПАЯНЫЕ СОЕДИНЕНИЯХ
Пайка в отличие от сварки осуществляется без расплавления соединяемых деталей. Связь между элементами при пайке обеспечивается силами молекулярного взаимодействия поверхностей деталей с присадочным материалом, называемым припоем. Температура плавления припоя ниже температуры плавления соединяемых элементов. В расплавленном состоянии припой смачивает паяемые поверхности, заполняет капиллярные зазоры между ними и при затвердении образует паяный сплав, свойства которого существенно отличаются от свойств припоя. Это связано с тем, что расплавленный припой растворяет основной материал.
Пайку используют для соединений как однородных, так и разнородных материалов. С помощью пайки соединяют черные и цветные металлы и сплавы, стекло, керамику, графит. Область применения пайки в технике все более расширяется. До недавнего времени ее использовали в основном при изготовлении различных радиаторов и для соединения проводов. В настоящее время пайку широко применяют в авиастроении. Например, с ее помощью удалось заменить малопрочные алюминиевые сплавы высокопрочными нержавеющими сталями. При этом прочность паяных конструкций самолетов оказалась выше клепаных. Пайку применяют при изготовлении современных камер сгорания жидкостных реактивных двигателей, ядерных реакторов и других конструкций из тугоплавких металлов, керамики и графита. Паяные соединения могут работать при высоких давлениях, температурах, в кислотах и вакууме.
Процесс пайки легко поддается механизации и автоматизации. Применение ее во многих случаях повышает производительность труда, снижает массу и стоимость конструкций.
При пайке применяют главным образом стыковые и нахлесточные соединения. Нахлесточные соединения (рис. 9.12, а) наиболее распространены, так как позволяют изменением величины нахлестки достигать равнопрочности паяного соединения. Соединения ступенчатые, гребенчатые и косостыковые (рис. 9.12, б) обеспечивают высокую прочность, но требуют сложной подготовки кромок. Поэтому их применяют только в ответственных конструкциях. Косой стык следует выполнять под углом не более 30°, иначе прочность соединения будет мала. Стыковыесоединения (рис. 9.12, в) в паяных изделиях применяют редко из-за невысокой прочности.
Соединения стержней и труб между собой и с плоскими дета» лями показаны на рис. 9.12, г—е. Стыковые соединения стержней и труб для повышения прочности дополняются охватывающей или охватываемой втулкой.
Соединения криволинейных поверхностей с плоскими находят применение при изготовлении сотовых конструкций (рис. 9.12, з), широко используемых в авиастроении.
1 Терминология паяных соединений соответствует ГОСТ 17325—71.
Для проникновения припоя между соединяемыми деталями необходимо оставлять зазоры, величина которых в зависимости от вида припоя колеблется от нескольких сотых до десятых долей миллиметра. Для уменьшения вредного влияния окисления поверхностей при пайке применяют различные флюсы. Наиболее
Рис. 9.12. Примеры паяных соединений: а — нахлесточное; б — ступенчатое; гребенчатое и косостыковоё; в — стыковое; а — соединение стержней; д — соединение труб; е — соединение труб с плоскими деталями; ж, з — сотовые конструкции
производительна пайка погружением в металлическую (с расплавленным припоем) или соляную ванну. Расплавленные соли выполняют роль источника тепла и флюса, из которого образуется припой. Высокой производительностью обладает пайка в печах с восстановительной газовой атмосферой, токами высокой частоты и газовым пламенем.
В качестве припоев чаще всего используют оловянно-свинцовые (ПОС 30, ПОС 40, ПОС 50, ПОС 61 по ГОСТ 21930—76) и серебряные (ПСр 40, ПСр 45, ПСр 72 по ГОСТ 19738—74). Цифры в обозначениях соответствуют процентному содержанию соответственно олова и серебра.
Расчет прочности паяных стыковых соединений аналогичен расчету сварных соединений. При расчете нахлесточных соединений следует иметь в виду, что площадь припоя, передающего нагрузку с одной детали на другую, равна площади стыка, т. е., например, для соединения по рис. 9.12, а площадь опасного сечения паяного стыка равна Ы.
В настоящее время сведения о допускаемых напряжениях паяных соединений ограничены. При расчетах на прочность можно ориентироваться на данные табл. 9.4.
Таблица 9.4. Временное сопротивление паяных соединений при температуре 20° С [791
Припой Материал тв» МПа (?в, МПа {
ПОС 30 Сталь 20 Сталь Х18Н9Т Медь М3 Латунь Л62 36 32 25 23 —
ПОС 40 Сталь 20 Сталь Х18Н9Т Медь М3 Латунь Л62 28 32 27 22 —
ПСр 40 Сталь 30 ХГСА Сталь Х18Н9Т Сталь 40ХНМА 350—460 240—290 330—460 490—600 520—600 510—570
ПСр 45 Сталь СтЗ Сталь 45 Сталь ЗОХГСА Сталь Х18Н9Т 350—400 450—500 350—410 180—260 490—580 430—570
§ 9.6. КЛЕЕВЫЕ СОЕДИНЕНИЯ
Клеевые соединения применяют для соединений металлических и неметаллических материалов и, в частности, разнородных материалов.
Конструкция соединений склеиванием подобна паяным соединениям (см. рис. 9.12). Вместо припоя в этом случае наносится слой клея. При затвердевании клея проявляются силы адгезии, за счет которых осуществляется передача нагрузки соединением. Процесс склеивания происходит без нагрева или при сравнительно небольшом подогреве соединяемых деталей. Имеется тенденция к более широкому применению клеевых соединений. В частности, в настоящее время склеивание применяют в таких ответственных конструкциях, как мосты и самолеты.
Нагрузочная способность клеевых соединений зависит от толщины слоя клея (оптимальные значения 0,05—0,15 мм). Перед склеиванием соединяемые поверхности подвергают обработке'абра-зивной шкуркой или пескоструйной обработке, так как шероховатость увеличивает поверхность склеивания.
Существует большое разнообразие клеев. Основное применение находят клеи на основе органических полимерных смол (фенольные, полиуретановые, эпоксидные, полиэфирные и др.) и на основе кремнийорганических соединений и неорганических полимеров. Клеи второй группы обладают повышенной теплостойкостью (до 1000° С).
Наиболее распространены клеевые соединения, работающие на срез. На растяжение клеевой слой работает значительно хуже.
Клеевые соединения рассчитывают на прочность аналогично паяным соединениям. Временное сопротивление срезу тв для клеев на основе органических полимерных смол при нормальной температуре составляет 18—20 МПа (достигнутые предельные значения 40—50 МПа), для клеев на основе кремнийорганических соединений и неорганических полимеров — 7—8 МПа.
Для повышения нагрузочной способности клеевые соединения часто применяют в комбинации с резьбовыми, заклепочными и сварными.
Глава 10. ЗАКЛЕПОЧНЫЕ СОЕДИНЕНИЯ1
§ 10.1. ОБЩИЕ СВЕДЕНИЯ
В заклепочных соединениях детали 1 и 2 скрепляются заклепками-стержнями круглого сечения с закладными головками, установленными в совмещенные отверстия (рис. 10.1) с последующим формообразованием замыкающих головок (см. штрихпунктир). В процессе клепки деформируется и стержень заклепки между головками. В результате зазор между заклепкой и стенками отверстия полностью или частично выбирается. Заклепки стягивают соединяемые детали, благодаря чему часть, а иногда и вся внешняя действующая в плоскости стыка нагрузка передается за счет сил трения.
С развитием сварки область применения заклепочных соединений резко сократилась и ограничивается случаями, когда нельзя использовать сварку (например, при недопустимости нагрева из-за коробления или нарушения термообработки, применении для соединения несвариваемых материалов и т. д.).
Заклепочные соединения подразделяются на прочные, плотнопрочные и плотные. Плотнопрочные и плотные соединения пред
назначены для соединения элементов котлов, резервуаров и трубопроводов соответственно высокого и низкого давления. Помимо достаточной прочности к подобным соединениям предъявляются требования обеспечения герметичности. В настоящее время такие конструкции выполняются сварными и поэтому потребность в подобных заклепочных соединениях отпала. Прочные, или силовые, соединения используются главным образом в различных металлических конструкциях. В настоящее время заклепочные соединения относятся в большей степени к узлам машин специального назначения (например, они широко используются в самолетостроении).
Некоторые типы заклепочных соединений деталей представлены на рис. 10.2.
//MU.
Рис. 10.2. Примеры заклепочных соединений: а — нахлесточное; б и в — с одной и двумя накладками
Рис. 10.1. Заклепка с полукруглой головкой
Основным недостатком заклепочных соединений по сравнению со сварными является завышение массы конструкции, поскольку прочность сечений, ослабленных отверстиями под заклепки, существенно ниже (на 15—20%) прочности соединяемых деталей. Помимо этого заклепочные соединения менее технологичны, так как требуют дополнительных операций, связанных с получением отверстий, и сам процесс клепки менее производителен.
Существует большое многообразие типов заклепок, отличающихся формой головок (с полукруглыми, потайными, полупотай-ными и т. п. головками). Для соединения тонких листов и неметаллических материалов применяют пустотелые заклепки (рис. 10.3, а—в). При отсутствии доступа к месту формирования замыкающей головки применяют специальные, например взрывные, заклепки (рис. 10.3, г). В стержень такой заклепки (см. штриховые линии) закладывают взрывчатое вещество, которое при нагревании закладной головки взрывается, образуя замыкающую головку.
Заклепки изготовляют из высокопластичных материалов, к числу которых относятся стали СтО, Ст2, СтЗ, цветные металлы (медь, алюминий) или их сплавы (латунь).
Клепка стальных заклепок диаметром до 8—10 мм и заклепок из цветных и легких металлов и сплавов производится в холодном состоянии; в остальных случаях конец заклепки разогревают до температуры 1000—1100° С. За счет тепловых деформаций при горячей клепке соединяемые элементы прижимаются с большей силой, чем в соединениях, образованных холодной клепкой. В то же время в первом случае после охлаждения между заклепкой и отверстием появляется зазор. Во избежание температурных
Рис. 10.3. Заклепки: а—в — пустотелые; г — взрывные
напряжений в соединении коэффициенты линейного расширения материалов соединяемых элементов и заклепок должны быть примерно равны друг другу.
§ 10.2. РАСЧЕТ ЗАКЛЕПОЧНЫХ СОЕДИНЕНИЙ
Обычно заклепочные соединения загружены силами, действующими в плоскости стыка. Заклепку рассчитывают на срез и смятие аналогично болту, поставленному без зазора (см. гл. 8). При этом допускаемые напряжения 1тсР] и [о'м] для заклепок условны, так как в таком соединении нагрузка в основном передается за счет сил трения. Помимо расчета на прочность заклепки проверяют напряжения в соединяемых элементах с учетом ослабления их отверстиями.
Усилия на одну заклепку в заклепочном соединении определяют при допущениях, принятых для групповых болтовых соединений. При этом используют те же самые расчетные зависимости (см. стр. 148—149). Число заклепок, располагаемых вдоль линии действия силы, не должно превышать шести. При большем числе заклепок крайние из них оказываются перегруженными по сравнению с находящимися в середине. Причины этой неравномерности пояснены в гл. 5. Диаметр заклепок при минимальной толщине б детали в соединении принимается равным (см. рис. 10.1) d >=> 26 при б < 5 мм и d ==» (1,1н-1,6) б при б = 6-1-20. Меньшее значение сомножителя при б соответствует большей толщине детали.
Для соединения стальных деталей заклепками из стали СтО, Ст2, СтЗ при статическом нагружении допускаемые напряжения 180
кер 1 = 140 МПа и [Осм ] = 280 МПа [66]. Для знакопеременных нагрузок допускаемые напряжения [т'р к ] = Кр] у и [ОсМд] — — [Осм I Т, где коэффициент у определяется по формуле
Т — 1/(0 ^tnln/^max) < 1-
Здесь Fmln и Fmax — наименьшая и наибольшая по абсолютной величине силы, взятые со своими знаками; а = 1 и b = 0,3 — для соединения элементов из малоуглеродистых сталей; а = 1,2 и b = 0,8 — для соединения элементов из среднеуглеродистых сталей.
Глава 11. СОЕДИНЕНИЯ ВАЛ (ОСЬ)-СТУПИЦА1
§ 11.1. ШПОНОЧНЫЕ СОЕДИНЕНИЯ
Шпоночные соединения служат в основном для закрепления деталей на валах с помощью шпонок, устанавливаемых в пазах вала и ступицы. Соединения делятся на ненапряженные, осуществляемые призматическими (рис-: 11.1, а) и сегментными (рис. 11.1, б) шпонками, и напряженные, в которых используют клиновые (рис. 11.1, в) и круглые (рис. 11.1, г) шпонки (штифты), устанавливаемые с натягом.
Наиболее распространены ненапряженные шпоночные соединения, сочетающиеся с посадкой ступицы на вал с гарантированным натягом. При этом обеспечиваются хорошее центрирование и высокая надежность соединения. Ненапряженные шпоночные соединения в сочетании с посадкой ступицы, не гарантирующей натяг, подвержены разрушению от фреттинг-коррозии и схватывания (см. гл. 2); их можно использовать в малонагруженных узлах или там, где продолжительность работы под действием расчетной нагрузки составляет малую часть общего срока службы.
Направляющие и скользящие шпонки, используемые в подвижных шпоночных соединениях для передачи крутящего момента, служат также для направления ступицы при ее перемещении вдоль вала. По несущей способности подвижные шпоночные соединения уступают подвижным зубчатым соединениям (см. п. 11.2) и поэтому в новом проектировании практически не применяются.
По ГОСТ 23360—78 (СТ СЭВ 189—75) ширину b и высоту h призматических шпонок (рис. 11.1, а) выбирают в зависимости от диаметра вала d. Боковые грани призматических шпонок являются рабочими. Ширину шпонки b и паза в ступице выполняют с отклонениями соответственно йб и Н7. Ширина b паза вала имеет поле допуска ts6. Концы шпонок могут быть плоскими или скругленными. Для ступиц из чугуна и других материалов более низкой
1 Глава написана совместно с А. Л. Филипенковым.
прочности, чем материал вала, применяют исполнение с более глубоким врезанием шпонки в ступицу, в остальных случаях — с примерно одинаковым врезанием в ступицу и вал.
Глубокий паз на валу, обеспечивающий устойчивость сегментной шпонки (рис. 11.1, б), снижает усталостную прочность вала.
Рис. 11.1. Соединения вала и ступицы с помощью шпонок
Размеры сегментных шпонок стандартизованы (см. ГОСТ 8795 — 68**). Шпоночные пазы являются концентраторами напряжений (см. рис. 4.13). Это обстоятельство учитывается при расчете валов на прочность.
Критерием работоспособности ненапряженных шпоночных соединений является сопротивление смятию боковых поверхностей шпонок, воспринимающих нагрузку. Проверочный расчет на смятие призматических и сегментных шпонок выполняют по формуле
осн = 2TW/[dlp(h - 4)] с [осм] = oT/[s], (ИЛ)
где Т — крутящий момент, Н-м; размеры шпоночных соединений d, h, /р, 4 пояснены на рис. 11.1, а, б. 182
При нереверсивной мало изменяющейся по величине нагрузке [s] = 1,9 4-2,3; при нереверсивной нагрузке с частыми пусками и остановками [s ] = 2,94-3,5. При реверсивной нагрузке значения [s] повышаются против приведенных на 30%. Для шПонок из чистотянутой стали 45 имеем от 350 МПа. Прй чугунных ступицах [осм ] = 704-100 МПа.
Если осм > [осм], то проверяют условие [Тг. н] > Т— [Т ], Где [Тг. н] = 0,5л d2bfplKCVi — допускаемая величина момента, передаваемого за счет сил сцепления при посадке с гарантированным натягом [см. формулы (11.17) и (11.20)]; [Г] — момент, найденный ИЗ формулы (11.1) ПрИ Осм = [Осм1-
Формула (11.1) носит условный характер, поскольку неравномерность распределения осм по длине и высоте Шпонки, вызванная погрешностями и деформациями, а также перекосом шпонки, обусловленным условием ее равновесия, учитывается назначением повышенных коэффициентов запаса. Высота рабочего участка призматической шпонки может быть условно принята h — =
= 0,4/i при одинаковых материалах вала и ступицы.
Условие прочности на срез учтено при стандартизации призматических и сегментных шпонок, поэтому при проектировании соединений проверка на срез не обязательна.
Напряженное соединение клиновой шпонкой (рис. 11.1, в) обеспечивает передачу крутящего момента силами трения. В тяжелом машиностроении при значительных диаметрах соединения применяют тангенциальные клиновые шпонки (см. [18, 20, 22, 66 и др. ]).
Вследствие зазоров и деформаций в сопряжении вал—ступица соединение клиновыми шпонками не обеспечивает соосного положения вала и ступицы, поэтому область применения этого типа соединений в новом проектировании ограничивается тихоходными приводами при необходимости частых разборок соединения.
В конструкциях с общим торцом у ступицы и буртика вала с относительно малой длиной выступающей части (не препятствующей изготовлению отверстия в собранном соединении) возможна установка круглых шпонок (цилиндрических штифтов). Шпонки устанавливают в отверстия, параллельные оси соединения, по посадке с натягом, например Hllrb (рис. 11.1, г). Во избежание увода инструмента при изготовлении отверстия в стыке соединяемых деталей рекомендуется не допускать значительного перепада твердости ступицы и вала и принимать /p/dm = 34-4, где — диаметр шпонки. Для выхода воздуха из замкнутого объема при запрессовке на поверхности круглой шпонки предусматривают канавку или лыску.
Размеры цилиндрических шпонок (штифтов) стандартизованы (ГОСТ 3128—70; ГОСТ 12207—66); обычно принимают dm — = (0,134-0,16) d. Необходимое число шпонок гш определяют из условия прочности рабочих поверхностей на смятие с учетом
неравномерности распределения напряжений по цилиндрической поверхности [см. формулу (5.37)]:
гш = 16П03/(л d djr [асм]). (11.2)
В связи с более точной расчетной схемой цилиндрических шпонок значение [осм ] можно увеличить против допускаемых для призматических шпонок на 25%.
§ 11.2. ЗУБЧАТЫЕ (ШЛИЦЕВЫЕ) СОЕДИНЕНИЯ
В зубчатых соединениях вал—ступица зубья вала входят во впадины 1 между зубьями ступицы. Зубья выполняют с прямо-бочным, эвольвентным или треугольным профилем (рис. 11.2).
Рис. 11.2. Типы зубчатых (шлицевых) соединений: а — в — с прямобочным профилем и центрированием соответственно по внутреннему d, наружному D диаметрам и боковым поверхностям; г, д — с эвольвентным профилем и центрированием соответственно по боковым сторонам и наружному диаметру (размеры фаски а :> 0,1m + 0,05; Ъ 0,1m, где m — модуль соединения); е — с треугольным профилем и центрированием по боковым сторонам зубьев
Преимуществом зубчатых соединений по сравнению со шпоночными является большая площадь рабочих поверхностей и меньшее число деталей. Концентрация напряжений в пазах зубчатых соединений меньше, чем в пазах шпоночных соединений.
1 Впадины между зубьями называют шлицами (от немецкого слова Schlitz — прорезь, паз), и поэтому зубчатые соединения часто называют шлицевыми.
Зубчатые соединения могут быть выполнены неподвижными и подвижными. Последний вариант используют, например, в кулачковых муфтах сцепления (см. гл. 21).
Наиболее распространены соединения с прямобочным профилем, которые применяют для насадки на валы зубчатых колес, полумуфт, шкивов и др. Однако для этих же целей все более широкое распространение получают соединения с эвольвентным профилем, отличающиеся технологичностью и высокой нагрузочной способностью. Треугольные профили имеют ограниченную область применения, например для соединения торсионных валов или тонкостенных валов и ступиц.
Рис. 11.3. Центрирование соединения по вспомогательным поверхностям: а — по конической и цилиндрическим поверхностям; б — по двум цилиндрическим поверхностям с помощью нормализованных втулок
Характеристики соединений. В соединениях с прямобочным. профилем (рис. 11.2, а—в) соосное положение соединяемых деталей обеспечивается центрированием по боковым поверхностям зубьев или по одному из диаметров соединения — внутреннему d или наружному D. Последний вариант обеспечивает более высокую точность центрирования. Для снижения интенсивности изнашивания в результате фреттинг-коррозии при действии больших радиальных нагрузок или опрокидывающих моментов центрирование может осуществляться по цилиндрическим или коническим поверхностям, вынесенным за пределы соединения (рис. 11.3).
При твердости ступицы менее НВ 350 центрирование зубчатого соединения по наружному диаметру D наиболее экономично, так как точность поверхности D у отверстия обеспечивается протягиванием, выполняемым после окончательной термообработки, а у вала — шлифованием. Центрирование соединения по внутреннему диаметру d применяют при высокой твердости ступицы (более НВ 350), протягивание которой после термообработки затруднено.
Прямобочные зубья применяют при наружных диаметрах вала от 14 до 125 мм; число зубьев от 6 до 20. Стандарт СТ СЭВ 188—75 предусматривает соединения трех серий: легкой, средней и тяжелой. С переходом от легкой к средней и тяжелой сериям для одного и того же диаметра d возрастает диаметр D и увеличивается число зубьев, поэтому соединения средней и тяжелой серий отличаются повышенной нагрузочной способностью.
Допуски для соединений с лрямобочным профилем устанавливаются по стандартам СТ СЭВ 187—75 и СТ СЭВ 145—75. Условное обозначение соединения с прямобочными зубьями в соответствии со стандартом СТ СЭВ 187—75 должно содержать: букву, обозначающую поверхность центрирования; число зубьев z и номинальные размеры d, D, b (см. рис. 11.2, а—в) соединения; обозначения посадок диаметров и размера Ь, помещенные после соответствующих размеров. Допускается не указывать в обозначении допуски нецентрирующих диаметров. Например, при г = 8; d = 42 мм; D = 48 мм; b = 8 мм обозначение соединения с прямобочными зубьями с центрированием по наружному диаметру, с посадкой по диаметру центрирования H8!hl и по размеру b FlQ/h9 имеет следующий вид:
D8 X 42 X 48^- X 8-^-. п7 /г9
Зазоры по нецентрирующим диаметрам выполняют значительными, чтобы гарантировать сопряжение по центрирующим поверхностям. Назначение посадок с зазором по центрирующим поверхностям определяется требованием удобства сборки или необходимостью перемещений ступицы относительно вала в процессе работы соединений. Для повышения износостойкости соединений, нагруженных крутящим и изгибающим моментами и поперечной силой, целесообразно иметь минимальные зазоры по центрирующим диаметрам.
Для соединений с эвольвентным профилем в стандарте СТ СЭВ 259—76 предусмотрено центрирование по боковым сторонам, внутреннему и наружному диаметрам (см. рис. 11.2, г, д). Последний вариант центрирования возможен при сравнительно невысокой твердости ступицы, допускающей обработку ее эвольвентными протяжками или долбяками.
Эвольвентные зубья применяют при диаметрах от 4 до 500 мм при z — 64-82. В соответствии со стандартом СТ СЭВ 268—76 угол профиля исходного контура а = 30°, за номинальный диаметр соединения принимают его наружный диаметр
D = m(z + 1,0 + 2х),
где т — модуль соединения; х — коэффициент смещения.
Обозначение соединения с эвольвентным профилем должно содержать: номинальный диаметр соединения D; модуль т; обозначение посадки соединения, помещаемое после размеров центрирующих элементов; номер стандарта СТ СЭВ 259—76. Например, обозначение соединения при D = 50 мм; т = 2 мм с центрированием по боковым сторонам зубьев и посадкой по боковым поверхностям зубьев 9HI9g имеет следующий вид:
0 х 2 X -у- СТ СЭВ 259 - 76.
В условном обозначении посадки по нецентрирующим поверхностям не указывают.
Соединения с треугольным профилем центрируются только по боковым сторонам (см. рис. 11.2, е). Эти соединения не стандартизованы. По действующим нормалям за номинальный диаметр принимают наружный или делительный диаметр, модуль т = = 0,21,6 мм, число зубьев г = 204-70, угол профиля зуба ступицы Р составляет 60, 72 или 90° (рис. 11.2, е). В отдельных случаях, когда требуется беззазорное соединение, но не обязательно точное центрирование (например, в приводах управления, следящих системах), применяют конические соединения с треугольными зубьями с конусностью 1 : 16 по впадине вала.
Наружный диаметр D зубчатого соединения обычно определяется жесткостью и прочностью вала, а также условиями компоновки узла и технологическими соображениями. При назначении длины I соединения в большинстве случаев руководствуются отношением 1/D < 1,5.
Расчет зубчатых соединений на смятие и изнашивание. Основными критериями работоспособности зубчатых (шлицевых) соединений являются сопротивления рабочих поверхностей смятию и изнашиванию в результате относительных перемещений, обусловленных деформациями и зазорами. Для обеспечения необходимой работоспособности выполняют проверочный расчет на смятие и изнашивание по условным напряжениям о:
на смятие
о = 2Л03/(/Л4!г)<[осм]; (11.3)
на изнашивание
О « [сИЗн1 Яр, (11.4)
где Т — крутящий момент, передаваемый соединением, Н«м; ft— высота поверхности контакта зубьев, мм (см. рис. 11.2, б)\ I, dm — длина и средний диаметр зубчатого соединения, мм (см. рис. 11.2, а)-, [оизн ]—условные допускаемые напряжения при расчете соединения на изнашивание, МПа (табл. 11.1).
Коэффициент Лр = (108/Л/),/3 учитывает число циклов нагружений зубьев соединения, т. е. суммарное число оборотов соединения N относительно вектора внешней нагрузки.
Допускаемое напряжение в подвижных зубчатых соединениях с термообработанными валом и ступицей принимают: при хороших условиях эксплуатации [осм ] = 10 4-20 МПа, при тяжелых — [осм ] = 54-10 МПа.
Допускаемое напряжение при расчете на смятие неподвижных зубчатых соединений в соответствии с ГОСТ 21425—75 определяют по формуле
[асм] = М1«]КЛЛ3Кпр), (П.5)
где от — предел текучести материала зубьев детали меньшей твердости (для материалов с поверхностным упрочнением прини-
Таблица 11.1. Средние допускаемые напряжения [оизн ] (МПа) при расчете неподвижных зубчатых соединений на изнашивание в соответствии с ГОСТ 21425—75
Относительные параметры внешней нагрузки Термическая обработка и твердость вала (ступицы)
2Т _ А1опр г/ Без обработки, HRC 20 Улучшение, HRC 28 Закалка Цементация или азотирование, HRC 60
HRC 40 HRC 45 HRC52
0 38 42 55 69 75 83
0,59 0,25 21 23 29 36 39 44
0,50 18 21 25 32 35 39
0 47 55 67 85 92 100
0,50 0,25 32 37 47 60 66 72
0,50 22 26 34 42 45 50
0 65 76 92 116 127 141
0,42 0,25 42 49 60 75 82 91
0,50 35 41 50 63 68 76
0 73 85 105 130 142 158
0,35 0,25 52 60 77 97 105 117
0,50 38 45 60 75 80 90
Примечание. При работе с частыми реверсами средине допускаемые напряжения рекомендуется снижать на 25%.
мают предел текучести поверхностного слоя); [s] — 1,25 — 1,4— коэффициент запаса (нижние значения — для незакаленных поверхностей, верхние — для закаленных); = TmsxIT — коэффициент динамичности нагрузки; Ттах — максимальный момент, действующий на соединение (например, при пусках или торможениях); Кп — коэффициент, учитывающий погрешности изготовления соединения; /<3 — коэффициент, учитывающий неравномерность распределения нагрузки между зубьями при действии на соединение поперечной силы F [см. формулу (11.15) или рис. 11.6]; /<пр — коэффициент, учитывающий влияние продольной концентрации нагрузки.
Если до приработки соединения имеются погрешности шагов зубьев и непараллельность их осям вала и ступицы на длине I не более 0,02 мм, то Ап = 1,1 -т-1,2. В противном случае = = 1,3-1,6
Величину Кпр определяют по формуле
Апр = АкР + Ае-1, (11.6)
в которой коэффициент Ккр учитывает неравномерность распределения удельной нагрузки по длине соединения, вызванную кру-188
чением вала. Величину Ккр определяют по формуле (5.26), в которую для рассматриваемого случая вместо b подставляют I:
KKp = p/cth(p/), (11.7)
где р, = 0,5 dm [Cz/(GJP)]1/2; G — модуль упругости второго рода; j — полярный момент инерции шлицевого вала (см., например, [10]); С — удельная жесткость зубьев, зависящая от контактной жесткости, жесткости заделки (основания) зубьев, а также изгиб-
Таблица 11.2. Коэффициент /Скр для прямобочных зубчатых соединений в соответствии с ГОСТ 21425—75
Серия Наружный диаметр соединения D, мм ^кр
1/D = == 1,0 1/D = = 1,5
Легкая До 26 30—50 58—120 1,3 1,5 1,8 1,7 2,0 2,6
Средняя До 19 20—30 32—50 54—112 Св. 112 1,6 1,7 1,9 2,4 2,8 2,1 2,3 2,8 3,5 4,1
Тяжелая До 23 23—32 35—65 72—102 Св. 102 2,0 -,4 2,7 2,9 3,1 3,0 3,5 4,1 4,3 4,7
нои жесткости и жесткости на сдвиг. Для прямобочных зубчатых соединений величина С существенно изменяется в зависимости от h и может быть принята равной 4600—8600; 4700— 17 000; 5200—11 000 МПа соответственно для легкой, средней и тяжелой серий [10] Ке .. //< .
Рис. 11.4. Зависимость коэффициента Ке от параметров ф и в
(меньшие значения — для малых h). Для эвольвентных зубьев можно принять С — 17 000 ~26 000 МПа. Для прямобочных соединений значения коэффициента Мкр даны в табл. 11.2.
Коэффициент Ке учитывает концентрацию удельной нагрузки, связанную со смещением внешней нагрузки от середины ступицы, и определяется в соответствии с ГОСТ 21425—75 по рис. 11.4 в зависимости от параметров ф = Q,bdmF/T и е = AJonp/(F/), где F и А4Опр — соответственно поперечная сила и опрокидывающий момент, действующие на соединение. На рис. 11.4, где показано соединение прямозубой шестерни с валом, опрокидывающий момент Л4опр появляется вследствие смещения поперечной силы относительно середины зубчатого венца и равен Л4о11р = Fe. Для соединения прямозубого зубчатого колеса с валом ф = = dm/(dw cos ate); е = е/1.
Формулу (11.6) используют только при смещении поперечной силы от середины соединения на величину е в сторону места 189
приложения крутящего момента, как это показано на рис. 11.4. При этом отмечается концентрация удельной нагрузки, вызванная кручением вала и действием момента Л1опр и сосредоточенная у одного и того же торца соединения. При смещении е в сторону, противоположную месту приложения крутящего момента, коэффициент выбирают равным большему из значений Дкр и Дс.
Рис. 11.5. Расчетная схема соединения, нагруженного поперечной силой
К расчету соединений, нагруженных поперечной силой. Для пояснения причины появления неравномерности распределения нагрузки и повышенного изнашивания соединений, нагруженных поперечной силой F, рассмотрим расчетную схему соединения на рис. 11.5.
При действии силы F вследствие деформации соединения ступица смещается относит гльно вала в радиальном направлении на величину Л. Направление смещения Д совпадает с направлением действия силы F, если пренебречь влиянием сил трения на рабочих поверхностях соединения.
Проекции относительного смещения Д на нормаль п—п и касательную т—т к рабочим профилям зубьев соответственно равны (рис. 11.5):
S„ = Д cos £; St = Д sin t,.
При вращении соединения относительно вектора F с угловой скоростью со имеем С = at, и скорость относительного скольжения зубьев соединения равна
v = dSr/dt — Ди cos £.
Обычно зависимость нормальной нагрузки Fn, действующей на зубьях, от деформации б считают линейной:
Fn = С/б.
Для вычисления относительных смещений вала и ступицы удобно заменить конечное число зубьев соединения непрерывным упругим слоем с распределенной реакцией
с/=-СЪ, (11.8)
где С — коэффициент, характеризующий жесткость упругого слоя в направлении касательной к среднему диаметру.
Усилие FCv, действующее на участок упругого слоя EG (рис. 11.5), по аналогии с расчетом реакций тел качения (см. гл. 5 и стр. 96, 402) можно определить по формуле
Ftv = 0,5 dmyq = л dmq/z.
Принимая усилие Fgv равным нормальной нагрузке F„, действующей на зубья в точке с координатой £, найдем коэффициент жесткости упругого слоя
С = zCl/(ndm). (11.9)
Полную деформацию зубьев соединения определяют как сумму деформаций от действия крутящего момента и силы:
б = б0 4-Д cos £, (11.10)
где б0 — деформация зубьев, связанная с действием крутящего момента.
Распределенную нагрузку q, действующую со стороны вала на ступицу, находят в соответствии с формулами (11.8)—(11.10):
<7 — С(б0Д cosg). (11.11)
Для вычисления смещений б0 и Д рассмотрим условия равновесия ступицы в проекциях на координатные оси:
ф d2
\q-^d£ = T-, \q-^Cos£d^F, (11.12) -ч> -ч>
где <р — половина угла, в пределах которого существует деформация зубьев (рис. 11.5), т. е. б>0и<?>0 при —<р < £ < <р.
Угол <р определим из условия, что q = 0 при £ = <р, т. е. б0 + Д ccs <р = 0, поэтому
cos <р = —б0/Д.
Из уравнений (11.12) найдем: Д = 2я
F .
Ф — sin <р cos <р гС1 ’
g ___ ncoscp 2Т .
0 <р cos <р — sin <р zCldm ’ . ___ ф — sin <р cos <р
~~ 2 (sin <р — ф cos ф)
(11.13)
Угол ф определяют из рис. 11.6 в зависимости от параметра гр. Если гр < 0,5, то ф = 180° и в передаче внешней нагрузки участвуют все зубья соединения. При этом формулы (11.13) упрощаются:
Рис. 11.6. Зависимость угла <р и коэффициента К3 от параметра гр = = 0,5dtnF/T для соединения,нагруженного поперечной силон
А = 2F/(zCl)',
b0 = 2T/(zCldm). (11.14)
Относительное перемещение зубьев соединения под нагрузкой на величину
St max ST mln =
= A [sin ф — sin (—ф)] = 2 A sin ф
вызывает изнашивание активных поверхностей зубьев. Как следует
из формул (11.14), относительное перемещение снижается при уменьшении поперечной силы F (например, при F — 0 имеем А = 0).
Неравномерность распределения нагрузки между зубьями соединения равна отношению удельной нагрузки при t. = 0 к средней удельной нагрузке qm —2T/(nd2m), вычисляемой по формуле (11.12) при условии F = 0 и равномерном распределении нагрузки между всеми зубьями соединения (ф = л):
К3
_ ?шах __ Л (1 COS ф) gCp Sin ф — ф COS ф
при гр > 0,5;
К3 = 1 ф- 2ф при
ф с 0,5.
(11.15)
Зависимость коэффициента К3 от параметра гр представлена на рис. 11.6, из которого следует, что при гр > 0,7 неравномерность распределения нагрузки между зубьями резко возрастает.
При выводе расчетных зависимостей (11.13)—(11.15) принималось, что центрирующие поверхности наружного или внутреннего диаметра соединения не участвуют в работе. Детальный анализ показывает, что это допущение справедливо при выборе посадок, обеспечивающих удобную сборку соединения. При назначении переходных посадок по центрирующим диаметрам боковые поверхности зубьев частично разгружаются от действия поперечной силы F или момента Л4опр, а изнашивание зубьев уменьшается в связи с уменьшением относительного перемещения зубьев.
§11.3. ПРОФИЛЬНЫЕ (БЕСШПОНОЧНЫЕ) СОЕДИНЕНИЯ
Профильными называются соединения, в которых контакт ступицы и вала осуществляется по гладкой некруглой поверхности (рис. 11.7). При недопустимости люфтов и повышенных требованиях к надежности применяют конические некруглые поверхности.
Достоинством профильных соединений является отсутствие концентраторов напряжений, обусловленных формой поперечного сечения вала и ступицы, а также возможность точной обработки обеих сопряженных поверхностей с высокой твердостью. Однако в профильных соединениях действуют значительные распорные силы, что необходимо учитывать при выборе толщины стенок
Рис. 11.7. Профильные соединения ступицы и вала
ступицы. Помимо этого напряжения смятия в профильных соединениях значительно выше, чем в зубчатых, и, следовательно, несущая способность их ниже.
При нечетном числе z циклически повторяющихся участков контурной кривой (как правило, z = 3) профиль сопряжения обычно выполняют равноосным. Равноосный контур отличается свойством неизменности расстояний между двумя параллельными касательными к контуру, что обусловливает их технологичность.
§11.4. СОЕДИНЕНИЯ С НАТЯГОМ
Общие сведения. Ниже рассматриваются фрикционные соединения с натягом, т. е. соединения, передающие рабочие нагрузки за счет сил трения между сопряженными поверхностями. Необходимое нормальное давление между этими поверхностями создается силами упругих деформаций соединяемых деталей. Во фрикционных соединениях вал—ступица или ось-—ступица сопряженными являются поверхности цилиндров или конусов.
Для получения необходимой прочности соединения с цилиндрическими поверхностями используют посадки с гарантированным натягом (см. гл. 1). Примерами являются соединения железнодорожного ската с осью и бандажом (рис. 11.8, а), соединения ступицы зубчатого колеса с валом и зубчатым венцом (рис. 11.8, б), соединения водила планетарной передачи с осями сателлитов и валом (рис. 11.8, в).
Разновидностью соединения вал—ступица с натягом являются клеммовые соединения с разъемной (рис. 11.8, е) и разрезной (рис. 11.8, 5) ступицами. Давление на сопряженных поверхностях в этом случае создается затяжкой винтов. Достоинством клеммовых соединений является возможность изменения углового и осевого относительных положений соединяемых деталей и простота сборки и разборки варианта соединения с разъемной ступицей. Но по несущей способности при одинаковых массах ступиц клеммовые соединения резко уступают соединениям, в которых используются посадки с гарантированным натягом. В связи с этим клеммовые соединения применяют там, где к габаритам и массе не предъявляют жесткие требования, и область применения их при проектировании высокозагруженных узлов весьма ограничена.
Цилиндрические соединения с посадками, гарантирующими натяг. Сборка таких соединений осуществляется запрессовкой или с использованием температурного деформирова
ния! (нагревания охватывающей или охлаждения охватываемой детали). Последний способ обеспечивает не менее чем в полтора раза большее сопротивление смещению сопряженных деталей, так как при запрессовке сглаживаются шероховатости и уменьшается натяг. Сопротивление относительному смещению соединяемых деталей прямо пропорционально давлению р на сопряженных поверхностях. По величине р подбирают необходимый натяг. С увеличением натяга растут напряжения в деталях соединения, поэтому величина натяга ограничивается прочностью этих деталей. Ниже приведены зависимости для определения минимального значения р, необходимого для предотвращения относительного смещения деталей 1 и 2 при различных видах нагружения (рис. 11.9).
При действии осевой силы Fx (вариант нагружения /) сила трения ndbpf должна превышать силу Fx. С учетом коэффициента запаса сцепления /<сЦ имеем
л dbpf FcliF
или
Р > dbf).
(HI6)
Аналогично находим, что при действии момента Т, Н-м (вариант нагружения Z/)
р > ХсцП03/(0,5л d2bf). (11.17)
При совместном действии Т и Fx (вариант нагружения ///) р > /<Сц]ЛР + (2П0М)2/& dbf). (Ц.18)
При действии момента М, вектор которого перпендикулярен к оси (вариант нагружения IV), для предупреждения раскрытия
Рис. 11.9. К расчету соединений с гарантированным натягом
стыка принимают (см. рис. 5.11) р,11|п > 0,25р, но рга1п = р — — рм, и поэтому, учтя формулу (5.44), получим
р> 16Л4103/(лй^). (11.19)
По найденному значению р из приведенных выше зависимостей определяют натяг и подбирают посадку.
Для стальных и чугунных- деталей принимают f 0,08 при сборке прессованием, f 0,14 при сборке с помощью температурного деформирования и f 0,12 при сборке гидропрессовапием.
В зависимости от ответственности соединения принимают Кса = 1,5—3.
Удельное давление на сопряженных поверхностях р (МПа) с расчетным натягом Арасч (мкм) связано зависимостью, вытекающей из решения Ляме для расчета толстостенных сосудов:
Р = (С,/£1+С2/£2) ’ 1 -20)
где C^^ + d^d2-dl)~pp, c^(d22 + d2)/(dl-d2) + p2-Elt px и E2, p2 — модуль упругости первого рода и коэффициент Пуассона материалов соответственно охватываемой и охватывающей деталей; для стали р = 0,3, для чугуна р — 0,25.
Если выполняют замеры диаметров вала и отверстия, то расчетный натяг
^pac4==^B3M-t7, (11.21)
где Na3M — измеренный натяг; U = 1,2 + T?z2) — поправоч-
ный коэффициент, вводимый в связи с тем, что измерения производятся по вершинам шероховатостей. Значения и J?z2 выбирают по табл. 1.1. Обычно шероховатость поверхностей с гарантированным натягом назначают в пределах 2—8 мкм, что соответствует классам шероховатости 8—6 (см. табл. 1.1).
Если фактические диаметры вала и отверстия неизвестны, то при расчете прочности соединения в формуле (11.20) принимают
^pac4 = ^pmin-t/. (11-22)
При необходимости подобрать посадку, обеспечивающую найденное по формулам (11.16)—(11.20) значение р, руководствуются величиной натяга, определяемого по формуле
NP mln = 108d (Сх/Ех + С2/Е2) р + U, (11.23)
а при расчете прочности деталей —
^pac4 = ^raax-t/. (11.24)
Величины 2VPmln и NPmax определяют по формулам (7.22). Для охватывающей детали главные напряжения у внутренней поверх ности (рис. 11.9):
О1 = 0/2 = р (df Ц- d2)/(^2 — d2); 02 = 0; Оз = Ог — —р.
По теории наибольших касательных напряжений
Ч’гпах == 0,5 (oi — о3) = pdh{dl — d2) < тт2 0,5от2, следовательно,
р < 0,5отг (1 - d2/d^). (11.25)
Наибольшие напряжения, вызванные давлением р, в охватываемой детали возникают на ее внутренней поверхности:
Oi = 0; о2 = 0; о3 = оп = —2pd2/(d2 — d2);
Tmax = 0.5 (Oi — о3) = pd2/(d — d%) < Тт1 = 0,5oTij следовательно,
p < 0,5oTi (1 - d2/d2). (11.26)
После сборки соединения в результате деформирования деталей 1 и 2 (рис. 11.9) диаметр d2 увеличивается, а диаметр dx уменьшается соответственно на величины Ad2 и Adx. При упругих деформациях:
Ad2 = 2pd2/[E (di/d2 — 1) ]; Adi = 2pdi/[E (1 - dj/d2)]. (11.27)
196
Контактные давления между сопряженными поверхностями и их относительные микроперемещения, вызванные деформациями деталей, способствуют развитию фреттинг-коррозии и снижению усталостной прочности вала (см. табл. 4.2). При различных длинах сопрягаемых поверхностей (см. рис. 2.13, а) давления на них распределяются неравномерно. Выступающие из-под втулки участки вала затрудняют его деформирование (оказывают поддерживающий эффект), и в результате возникает значительное увеличение давлений у краев ступицы. Концентрация давлений интенсифицирует разрушение от фреттинг-коррозии и снижает усталостную прочность вала. Снижение или устранение этой концентрации достигается уменьшением диаметра вала вне зоны сопряжения со ступицей, а также с помощью кольцевых проточек в ступице (см. рис. 2.13, б, в). .
Деформация изгиба и кручения вала, а следовательно, и микро-перемещения уменьшаются с увеличением d и снижением отношения b/d-, рекомендуется принимать b/d < 1,0 ~ 1,2.
Усталостная прочность вала в зоне посадки значительно увеличивается при использовании таких способов упрочнения, как, например, наклеп обкаткой роликами, поверхностная закалка, цементация с последующей закалкой, азотирование и др. (см. табл. 4.4).
Соединения с гарантированным натягом условно относят к неразъемным, однако они допускают повторные разборки, причем риск повреждения поверхностей увеличивается с увеличением их твердости. Для облегчения демонтажа и предупреждения повреждений поверхностей применяют систему гидросъема. При этом масло под давлением, превышающим величину р при максимальном вероятностном натяге, подводят через отверстие в валу или ступице в кольцевую канавку между сопряженными поверхностями [47 ].
Если О — температура деталей 1 и 2 перед сборкой, то при использовании температурного деформирования надо обеспечить условие
103d [а2 («у — &) — «! («у — &)[ > 2Vniax + S', где fly — температура нагрева детали 2; fly — температура охлаждения детали /; оу и а2 — коэффициенты линейного расширения деталей 1 и 2 (равные в среднем 12-10-6, 10-10-6 и 22-10-61/°C соответственно для стали, чугуна и алюминиевого сплава); Атах — максимальный натяг (см. рис. 1.1), мкм; S'—дополнительный зазор для облегчения монтажа, приравниваемый минимальному зазору в посадке Hl/gb, мкм.
Если используется только нагрев детали 2 или только охлаждение детали 1, то fly и 'fly определяют по формулам:
О2 > 10-s(7Vmax + S')/(a2d) + &; > -КГ3 (2Vmax + S'^d) -|- О.
(11.28)
Для соединений с гарантированным натягом характерны такие посадки, как, например, НИрЪ, HHz&, HUsb, HUtl, Hl/ul и т. п.
Конические соединения. В отличие от цилиндрических при конических сопряженных поверхностях (рис. 11.10) с большей точностью обеспечивается заданное удельное давление и существенно упрощается демонтаж. Благодаря этому область применения конических соединений расширяется за счет соединений с цилиндрическими поверхностями.
Рис. 11.10. Конические и цилиндро-конические соединения с гарантированным натягом
В соединениях, затягиваемых с помощью гайки (рис. 11.10, о), осевое усилие Fx, необходимое для создания заданного давления р [см. формулу (11.17)],
Fx ndmbp (sin а 4~ / cos а) = 2КСЦТ 103 (sin а -f- f cos a)/(d,„f). (11.29)
Разброс в значениях коэффициента трения f приводит или к завышенным напряжениям в деталях, или к заниженной несущей способности соединения. Во избежание последнего конические соединения, затягиваемые гайкой, обычно применяют в сочетании со шпонкой (рис. 11.10, а). Такие соединения широко используют в электродвигателях и для концевых участков валов редукторов. При этом в соответствии с ГОСТ 12081—-72* конусность К = = (d — d')/L = 2 tg а = 0,1 (рис. 11.10, б).
Конические соединения без шпонок выполняются с конусностью К = 0,02 (tg а = 0,01).
Величину р для конических соединений определяют с использованием зависимостей (11.16)—(11.19), но при этом надо учесть, 198
что для перемещения детали 1 относительно 2 надо приложить осевое усилие (рис. 11.10, б)
Fx — ndmbp (f cos a ± sin a) «=? ndmbp (f ± tg a). (11.30)
Здесь верхний и нижний знаки относятся к перемещению детали 2 относительно 1 соответственно в направлении стрелок А и В. В связи с этим в формуле (11.16) вместо / надо подставить /±tg а.
На основании (11.23) натяг в конических соединениях
N = 103dm (Cj/fj + С2/Е2) р + U.
При сборке прессованием для создания натяга А детали 1 и 2, предварительно прижатые друг к другу, смещают одна относительно другой на величину А/ = O,57V/sin а.
Если сборка осуществляется с использованием температурного деформирования, то при нагреве детали 2 [см. (11.28)]
02= 10-W/(a2dm) + f), (11.31)
а при охлаждении детали 1
= -10-3W(aidm) + 6. (11.32)
Соединения с цилиндро-коническими затяжными кольцами. Соединение осуществляется с помощью цилиндро-конических колец, размещенных попарно между валом и ступицей (рис. 11.10, в). При затяжке гайки диаметр D наружных колец увеличивается, а диаметр d внутренних — уменьшается и, таким образом, создается напряженное соединение, обеспечивающее передачу крутящего момента и осевых сил. Кольца изготовляют из пружинной стали (55ГС, 60С2А и др.) с твердостью после термообработки HRC 45—55.
Рассматриваемое соединение обеспечивает передачу значительных усилий, хорошее центрирование, возможность угловой и осевой регулировки взаимного положения вала и ступицы и отличается простотой монтажа и демонтажа. Вместе с тем деформации колец невелики, поэтому диаметры как самих колец, так и вала d и отверстия D изготовляют с высокой точностью.
Применяют также разрезные конические кольца, стягиваемые крепежными винтами (рис. 11.10, г), число которых в зависимости от диаметра d колеблется от 12 до 44 [47, 74].
Часть третья
МЕХАНИЧЕСКИЕ ПЕРЕДАЧИ
Механические передачи предназначены для передачи энергии на расстояние, как правило, с преобразованием скоростей, моментов и усилий.
В курсе «Детали машин» рассматриваются механические передачи для преобразования вращательного движения, а также вращательного в поступательное (передачи реечные и винт—гайка).
Для передачи усилия в механических передачах используются различные виды зацеплений и силы трения. Зацеплением передается усилие в передачах зубчатых (цилиндрических и конических), червячных, винтовых, гипоидных, цепных, зубчаторемен-ных, в передачах винт — гайка. Трением передается усилие в передачах с непосредственным контактом тел качения, называемых фрикционными, и в передачах с гибкой связью (ременных).
Угловые скорости содв и <вр. о двигателя и рабочего органа машины (суппорта токарного станка, валов прокатного стана, ведущих колес транспортных машин, винтов самолетов и т. д.), как правило, не равны. Необходимое при этом согласование скоростей и моментов осуществляется обычно с помощью механических передач.
В большинстве случаев о)дв > сор. 0, при этом используют передачи, понижающие скорость, — редукторы. При к»дв <<ор. 0 применяют повышающие передачи — мультипликаторы.
Основными характеристиками передач являются передаточное отношение, к. п. д. и передаваемый момент. При выборе типа передачи наряду с другими показателями важное значение имеет представление о сравнительных габаритах различных вариантов.
Передачи выполняются с постоянным и переменным передаточным отношением. При <вдв/(ор. о const, что характерно для транспортных и многих технологических машин, применяют ступенчатое (коробки скоростей) и бесступенчатое регулирование передаточного отношения, осуществляемое передачами гидравлическими, электрическими, пневматическими и механическими. В курсе «Детали машин» рассматриваются только механические передачи с плавно изменяющимся передаточным отношением — вариаторы (гл. 12).
Заданное передаточное отношение нерегулируемой передачи или ряд передаточных отношений (а также диапазон изменения скорости) регулируемой передачи может быть реализован множеством вариантов различных передач и их сочетаний. Отбор оптимальных вариантов по массе, габаритам, надежности, долговечности, технико-экономическим показателям в изготовлении и 200
эксплуатации и другим параметрам представляет значительны^ трудности и связан с выполнением большого объема математиче» ских операций, решение которых возможно только с примене-нием ЭВМ.
На основании данных, приводимых в главах 12—15, можно выполнить сравнительный анализ различных типов передач по таким параметрам, как масса, габариты, к. п. д. и др.
Глава 12. ФРИКЦИОННЫЕ ПЕРЕДАЧИ И ВАРИАТОРЫ1
§12.1, ОБЩИЕ ПОЛОЖЕНИЯ
Фрикционными называются передачи, в которых ведомый элемент приводится в движение силами трения. Ниже рассматри-ваются фрикционные передачи вращательного типа с нерегу-лируемым и регулируемым передаточными отношениями — вариаторы.
Простейшие передачи с нерегулируемым передаточным отношением состоят из двух цилиндрических (рис. 12.1, а) или конических (рис. 12.1, б) тел качения. Передаточные отношения этих передач: ,
i = (Dj/fBg = d^d-fc); i = sin 62/(E sin 6J, где | 0,97 4-0,99 — коэффициент, учитывающий скольжение;
большие значения относятся к телам качения, работающим в масляной среде.
Одним из простейших типов фрикционных передач с регулируемым передаточным отношением является лобовой вариатор (рис. 12.1, в), в котором d2 = var, а следовательно, i — d2l(U^ =. = var. Величина imax/imin = Д называется диапазоном регулирования вариатора; при постоянной частоте вращения ведущего Вала t Д — <й2 max/®2 mln’
При заданном значении передаваемого окружного усилия Ft нормальное усилие прижатия тел качения, необходимое для создания сил трения,
= (12.0
где f — коэффициент трения; /<сц — коэффициент запаса сцепления, обычно Ксц 1,34-1,4.
В конструкциях с постоянным усилием прижатия, осуществляемым, например, упругим элементом (рис. 12.1, в), при определении величины Fn по формуле (12.1) принимают Ft = Ft max. В таких случаях работа с недогрузками (Ft < Ft max) связана с завышен*
* Глава написана совместно с Е. С. Кисточкиным.
ними потерями на трение и перегрузкой тел качения и подшипников, поскольку при этом нормальное усилие превышает величину, необходимую для создания требуемых сил трения. Для повышения долговечности и снижения потерь на трение используют нажимные устройства, в которых усилие прижатия Fn изменяется пропорционально передаваемой нагрузке (рис. 12.1, б). Конструкции и расчет нажимных устройств приведены в [61 ].
а)
Рис. 12.1. Схемы фрикционных передач: 1 — ведущий вал; 2 — ведомый вал
Достоинством фрикционной передачи является простота формы тел качения и бесшумность работы; передаточное отношение в ней при постоянной нагрузке на протяжении оборота изменяется меньше, чем в зубчатой, что обусловило широкое ее применение в механизмах точных приборов. Недостатком их в сравнении с зубчатыми передачами является в несколько раз меньшая несущая способность. В то Же время способность фрикционных передач плавно (бесступенчато) изменять передаточное отношение широко используют в силовых приводах, мощность которых измеряется десятками, а иногда и сотнями киловатт [61, 66].
§ 12.2. СКОЛЬЖЕНИЕ В КОНТАКТЕ И РАСЧЕТ НА ВЫНОСЛИВОСТЬ АКТИВНЫХ ПОВЕРХНОСТЕЙ ТЕЛ КАЧЕНИЯ ФРИКЦИОННЫХ ПЕРЕДАЧ
Виды скольжения. Различают три вида скольжения: упругое скольжение, буксование, геометрическое скольжение.
Упругое скольжение связано с ций на площадке контакта 2ЬН трения, возникающих при перекатывании сопряженных поверхностей фрикционной пары. Ограничимся упрощенным описанием причин этого явления. При входе в зону контакта под действием сил трения Ft в поверхностных слоях ведущего и ведомого роликов возникают деформации сдвига. Разность деформаций контактирующих тел приводит к упругому скольжению, величина которого зависит от модуля упругости материалов и нормальной нагрузки и обычно бывает невелика: для стальных пар 0,2%, для фрикционной пары текстолит — сталь 1 % .
Буксование является опасным видом скольжения, возникающим в тех случаях, когда движущего момента, создаваемого силами трения в контакте, недостаточно для преодоления внешней нагрузки. Из-за образования лысок и задиров на сопряженных поверхностях буксование нельзя использовать как средство самопредохране-
особенностями упругих деформа-(см. рис. 2.6, г) в условиях сил
Рис. 12.2. Геометрическое скольжение в линейчатом контакте (ск, — окружная скорость в полюсе w, vb — максимальная окружная скорость ролика 2 на участке 62; vsbi и vsi,2 — максимальные скорости скольжения соответственно на участках Г и Ь2; остальные обозначения рассмотрены в тексте)
ния от перегрузки.
Геометрическое скольжение характерно для фрикционных пар как с линейчатым, так и с первоначальным точечным контактом и
вызвано несовпадением по величине, а иногда и по направлению скоростей контактирующих точек ведущего и ведомого роликов. В передачах с цилиндрическими роликами, оси которых параллельны, и коническими с совпадающими вершинами конусов геометрическое скольжение отсутствует.
Рассмотрим геометрическое скольжение на примере фрикционной пары с прямолинейными образующими (рис. 12.2). Передаточ
ное отношение изменяется перемещением ведущего ролика / вдоль образующей ведомого конуса 2. Чистое качение имеется только в одной точке линии контакта (оу), называемой полюсом. На участке контактной линии поверхность ведущего ролика является опережающей, на участке Ь2 — отстающей. Возникающие по разные стороны от полюса силы трения Ft и F2 вследствие этого противоположно направлены, а их разность уравновешена окружной силой, зависящей от крутящего момента на ведомом звене.
Принимая удельную нагрузку равнораспределенной по длине контакта, а силы трения независящими от скорости скольжения, получим
Ft = Л — F2 = Fnfb^/b — Fnfb2!b = 2Fnf Д/6,
где Д = 0,5 (bx — Ь2) — смещение полюса w от середины т участка b (рис. 12.2), причем
Д = FtbH2Fnf) = l\b/(Fnf dx). (12.2)
Используя рис. 12.2, для передаточного отношения I получим формулу
i = d^/d-! = (dm2 ± 2 Д sin 6)/dx. (12.3)
Здесь знак плюс относится к случаю, когда ролик 1 — ведущий, а минус — когда он является ведомым звеном.
Из формул (12.2) и (12.3) следует, что при 7\ = var и Fn = = const изменяется величина Д, что и приводит к изменению передаточного отношения.
При неизменном усилии нажатия Fn с ростом нагрузки Ft полюс w перемещается к краю участка Ь, а при выходе за его пределы наступает буксование.
Допускаемый момент, передаваемый роликом 1, может быть найден на основе формулы (12.1):
1Л1 = 0,5 [FJ 4 = 0,5 (FJ dJ/K^ (12.4)
где
Расчет на выносливость. Критерием работоспособности тел качения является сопротивление их усталостному изнашиванию, вызываемому переменными контактными напряжениями. Из формулы (2.2) следует, что
[Qh] = 2рпр Юн] /ZM = 2[С;у] рпр.
Заметив, что [Кп ] = [<?н] Ь, из формулы (12.4) получим
[T1] = fed1pnp[K0]/, (12.5)
[Ко]/ = [Сн] f/Ксц = Юн]2 f/(Z2„Kcu).
В формуле (2.4) для цилиндрических роликов имеем рх = 0,5 dt и р2 = 0,5 d2 = 0,5 d^, поэтому:
bfii [°n]2f
1Л1 =
(12.6)
Аналогично для передачи с коническими телами качения, для которых (см. рис. 12.1, 6):
Pi = 0,5dml/cos 6^ р2 = 0,5dm2/cos 62 = 0,5dmli/cos 62; рпр = O,5tdml/(i cos 6Х ± cos 62),
на основе (12.5) имеем
[7’1] =
2 (i cos 6Х ± cos 62)
(12-7)
4Лц ’
В формулах (12.6) и (12.7) знак плюс относится к внешнему контакту, знак минус — к внутреннему контакту роликов. Зависимость (12.5) является общей для тел качения любой формы, имеющих линейчатый контакт. Форма роликов и их взаимное расположение будут изменять вид функции рпр = f (dlt i, бх, б2) в формуле (12.5).
Из (12.6) и (12.7) получим формулы проектировочного расчета! а) для цилиндрических роликов
з г -л v
.> 1 / 2ТХ (t ± 1) _£ьЛсц_
1 У W 1СТЛ/]2/ ’
где фх = fc/dx;
б) для конических роликов 3 . — 2 ~ '
< ___ "I / 2Т1 (i COS ± COS д2) ^мЛСц
ml = У 4K ’
(12.8)
(12.9)
где фх = b/dml.
Для фрикционных пар (см. рис. 12.1, в) диаметр ведущего ролика рассчитывается по формуле (12.8), в которой (i ± l)/i — 1.
Аналогично, с использованием (2.10) могут быть найдены соответствующие формулы и для передач с точечным контактом тел качения.
Из (12.5) следует, что несущая способность фрикционных передач при заданных габаритах может быть увеличена за счет повышения допускаемых контактных напряжений (т. е. твердости рабочих поверхностей), коэффициента трения и снижения коэффициента запаса сцепления Ксц.
Влияние запаса сцепления может быть сведено к минимуму, если прижимное усилие автоматически изменять при изменениях внешней нагрузки, оставляя запас по сцеплению все время постоянным в пределах Ксц = 1,3-? 1,4.
Коэффициент трения f зависит от смазки, материалов тел качения, окружных скоростей и т. п. При расчете фрикционных передач пользуются значениями f, полученными экспериментально. Некоторые наиболее распространенные сочетания материалов, применяемых в силовых передачах, приведены в табл. 12.1, а их механические свойства — в гл. 6.
Таблица 12.1. Коэффициенты трения фрикционных пар
I Материалы Условия работы 1
Закаленная сталь по закаленной стали То же Чугун по чугуну Текстолит по стали илн чугуну В масле Всухую В масле Всухую 0,04—0,05 0,15—0,18 0,04—0,05 0,20—0,25
Примечания; 1. Коэффициенты трения при работе в масле соответствуют условиям граничного трения и справедливы для диапазона окружных скоростей v =» 25 5 м/с, а при v < 5 м/с, указанные значения f надо увеличивать в 1,3—2 раза. 2. Для’ пластмасс с асбестовым наполнителем коэффициент трения может достигать значения 0,5 [66J.
При разных материалах тел качения ведущее звено делают из менее прочного материала во избежание образования задиров и лысок на ведомом звене при его пробуксовке.
Используя формулы (12.5), а также данные табл. 12.1 и значения допускаемых напряжений (см. гл. 6), можно провести сравнение несущей способности фрикционных и зубчатых передач [см. формулы (14.58), (14.61)1.
В зубчатых передачах при угле наклона зубьев р = О [Ко] ~ 4,2 [CH]/(KHfiKHv) 3,2 [Сн].
В случае фрикционных передач при f 0,045 (закаленная сталь по закаленной стали) имеем f/KCI1 ~ 0,045/1,4 = 0,032; по данным [61], при NE >- No имеем [ан] < (13,3-?-20) НЕнс. В зубчатых передачах [o/y] ЮНнкс (цементация и нитроцементация), т. е. [/<o]/[/<olf Ю при р —0 и [/CnVl/Colf > Ю при р 0.
Таким образом, фрикционные передачи имеют в 10 и более раз меньшую несущую способность по сравнению с зубчатыми; кроме того, радиальная нагрузка на опоры во фрикционной передаче примерно в 30 раз превышает окружное усилие, чем и объясняется ограниченное применение фрикционных передач в силовых приводах, отмеченное в п. 12.1.
Несущая способность фрикционных передач прямо пропорциональна силовому фактору [Ко1^. Поэтому оценка несущей способности фрикционных передач при различных сочетаниях материалов тел качения сводится к сравнению соответствующих значений [/<0 ]f. Воспользуемся этим для сравнения значений [KJ^ и IKoifc. 1 соответственно смазываемых стальных тел качения с твердостью сопряженных поверхностей HRC 60 и сочетания тел качения сталь—текстолит, работающих всухую. Усталостное изнашивание как критерий долговечности для пары сталь—текстолит при непрерывной работе с максимальной нагрузкой в извест-206
ной степени условен, так как выход ее из строя может быть связан с разрушениями в результате перегрева рабочих поверхностей [61J. Для стальных тел качения ZM = 270,85 Н1/2/мм (см. стр. 23); для ,пары сталь—текстолит при модуле упругости текстолита Е *=» & 8000 МПа (см. табл. 6.4) имеем ZM 67,4 Н1/2/мм. Приняв для пары сталь по стали f = 0,045, а для пары текстолит по стали /= 0,22, получим (МПа)
[Л 0]f с. с
[°н]2 f __ 12002-0,045 _ „ 1 .
Z2 Ксц “ 270,852/Ссц ~ V>0D0 Ксц ’
[^0]f с, т
602-0,22 „ . I
67,42/<сц ~ Ксц •
Отсюда следует, что [/<« lfc. 1ц.. т 5. Таким образом, из приведенных выше примеров следует, что стальные с высокой твердостью тела качения обеспечивают максимальную несущую способность фрикционной передачи.
Расчет фрикционных пар вариаторов на контактную прочность ведется так же, как и для нерегулируемых фрикционных передач, но имеет следующие особенности: 1) расчет проводится при таком взаимном расположении контактирующих деталей, когда отношение F„/prip — максимальное; 2) приведенные в гл. 6 значения допустимых контактных напряжений получены для NE > Л'о при постоянных угловой скорости, передаточном отношении и нагрузке, поэтому при расчете эквивалентного числа циклов должно быть учтено изменение не только угловой скорости и нагрузки, но и приведенного радиуса кривизны. По аналогии с (4.21) получим
/с 60ию f [ Т (0 Рпр. расч l’"' ,» ,,
tw?„,ot 1
где рпр (f), рпр. расч — текущее и расчетное значения приведенных радиусов кривизны; Т (/), 7paC4 — текущее и расчетное значения крутящего момента.
Текущее значение приведенного радиуса кривизны выражается в функции от передаточного отношения, закон изменения которого во времени должен быть задан.
§ 12.3. КРАТКИЕ СВЕДЕНИЯ О НЕКОТОРЫХ ТИПАХ ФРИКЦИОННЫХ ВАРИАТОРОВ
На рис. 12.3 показаны некоторые наиболее распространенные схемы вариаторов, которые можно разделить на три типа: 1) с непосредственным контактом ведущего и ведомого звеньев (рис. 12.3, а—г), 2) с промежуточными элементами (рис. 12.3, д—з), 3) планетарные (рис. 12.3, и).
Как видно из рисунков, в вариаторах первого типа регулирование передаточного отношения осуществляется относительным перемещением ведомого (радиусом г2) и ведущего (радиусом гг)
ввеньев. В вариаторах этого типа с ростом диапазона регулирования возрастают геометрическое скольжение и размеры передачи, поэтому обычно диапазон регулирования ограничивают величиной 2,5-3.
В вариаторах второго типа имеется принципиальная возможность увеличения диапазона регулирования или за счет одновременного изменения радиусов ведущего и ведомого г2 звеньев
Рис. 12.3. Схемы взаимодействия фрикционных пар в вариаторах
(рис. 12.3, д, ж, з), или за счет изменения радиусов гг и г2 промежуточного элемента (рис. 12.3, ё). Изменение радиусов в последних схемах достигается поворотом оси LL в пределах угла у. В вариаторе на рис. 12.3, ж в качестве промежуточного элемента могут быть использованы стальное кольцо, ремень (см. гл. 13) или специальная цепь [61, 66]. Регулирование передаточного отношения осуществляется за счет изменения диаметров ведущего и ведомого шкивов.
Аналогичные способы регулирования используют и в вариаторах третьего типа (рис. 12.3, и), которые выполняют по схемам зубчатых планетарных передач (см. гл. 14), но в отличие от последних допускают изменение радиусов как основных звеньев (ra, rh), так и сателлитов (rf, ге), что и приводит к изменению передаточного отношения.
Одним из способов повышения несущей способности фрикционных вариаторов является использование принципа многопоточности, т. е. передачи мощности от ведущего звена к ведомому несколькими потоками. Можно выделить два способа разветвления мощности: 1) внутреннее, или использование миогоконтактности, в том числе и на основе планетарных схем вариаторов (рис. 12.3, ы); 2) внешнее, т. е. использование вариаторов в составе замкнутых планетарных передач [53].
Наиболее характерной реализацией внутреннего разветвления являются многодисковые вариаторы (рис. 12.4). На ведомом валу вариатора размещен пакет отбуртованных дисков. В проме-
Рис. 12.5. Замкнутый вариатор (Na, к'ь, — мощности, передаваемые звеньями а, Ь, h): а — кинематическая схема; б — потоки мощности
жутки между ними входят пакеты конических дисков с переменным радиусом гх. Количество конических дисков в пакете зависит от передаваемой мощности и выбирается в пределах от 3 до 16, а количество пакетов принимается от 3 до 6. Таким образом, мощность от ведущего вала к ведомому может передаваться одновременно большим количеством контактов (100 и более). Это позволяет снизить контактные напряжения и в сочетании с малой кривизной рабочих поверхностей |р„р (5-4-2,5) рп, рис. 12.4, в] обеспечить образование масляного слоя между ними. Тогда значительное геометрическое скольжение, характерное для этого типа вариаторов, становится неопасным в отношении изнашивания и потерь на трение. Регулирование передаточного отношения осуществляется за счет изменения межосевого расстояния между дисками.
Внешнее разветвление основано на свойствах трехзвенного зубчатого дифференциала суммировать мощность от двух источников или разделять ее на два потока (рис. 12.5). Такие передачи называют двухпоточными, поскольку мощность от двигателя к потреблению передается двумя потоками: через вариатор и звено дифференциала. С помощью замкнутых вариаторов, выполненных по двухпоточным схемам, можно или улучшить массогабаритные показатели и повысить к. п. д. (за счет уменьшения общего диапазона регулирования передачи по сравнению с диапазоном регулирования вариатора), или увеличить диапазон регулирования, 210
включая реверсирование вращения выходного вала. Это, однако, может повлечь за собой увеличение размеров и ухудшение к. п. д. передачи в целом, так как на некоторых режимах вариатор нагружается мощностью, большей мощности двигателя 153].
Глава 13. РЕМЕННЫЕ ПЕРЕДАЧИ1
§13.1. ОБЩИЕ ПОЛОЖЕНИЯ
Ременная передача состоит из двух шкивов и охватывающего их ремня (рис. 13.1, а). Применяют передачи и с большим числом шкивов. Так, у ременной передачи автомобильных двигателей два ведомых шкива.
Рис. 13.1. Ременные передачи: а — схема передачи гибкой связью (аг, а2 — углы обхвата соответственно малого и большого шкивов); б—е — типы ременных передач (б — плоскоременная; в — клиноремеиная; г — поликлиноременная; д — круглоременная; е — зубчатоременная)
Усилия трения, необходимые для передачи рабочей нагрузки, создаются обычно предварительным натяжением ремня за счет регулирования межосевого расстояния а. Распространенным способом изменения а является перемещение электродвигателя по салазкам (рис. 13.2, а). Используют также автоматически под-
* Глава написана совместно с И. 3. Томсинским.
держиваемое натяжение, например за счет силы веса, усилия упругого элемента или усилия натяжного ролика, взаимодействующего с холостой ветвью. На рис. 13.2, б показано совместное действие веса и усилия F упругого элемента. Более подробно различные схемы ременных передач и способы их натяжения рассмотрены в работах [60, 751.
Достоинствами ременных передач в сравнении с имеющими наибольшее распространение зубчатыми являются: плавность и бесшумность работы; возможность передачи энергии на значительнее расстояние при простейшей структурной схеме механизма; малые нагрузки на валы н их опоры; пониженные требования к точ-
Рис. 13-2- Способы натяжения ремней
ностн взаимного расположения осей валов и смягчение толчков и ударов, поскольку податливость ремня приблизительно на три порядка выше, чем зубьев; предохранение от резких перегрузок благодаря возможности проскальзывания (буксования) ремня. Последнее свойство не относится к зубчатоременным передачам. Простота конструкции ременной передачи обеспечивается благодаря использованию подшипниковых узлов соединяемых агрегатов (шкивы ременной передачи, как правило, устанавливают на валы двигателя и редуктора), отсутствию специального корпуса и необходимости в смазке.
К недостаткам ременных передач в сравнении с зубчатыми относятся значительно большие габариты (а нередко и масса) и эксплуатационные расходы, связанные со сравнительно большими потерями на трение и низкой долговечностью ремней, составляющей приблизительно 1000—5000 ч. Непостоянство передаточного отношения, вызванное упругим скольжением, накладывает ограничения на использование ременных передач, за исключением зубчатоременных.
В связи с отмеченными особенностями ременные передачи применяют при невысоких мощностях (обычно не выше 40—50 кВт) и, как правило, для быстроходной ступени передачи, так как в этом случае их важнейший недостаток — большие габариты —• 212
Таблица 13.1. Толщина плоских прорезиненных ремней и минимальные диаметры шкивов
1 6р» мм ^min" мм
Ь S ф is о 60 Ч о Чоо о Ф . о, ИШ Е Бельтинг Б-820 с прослойками Рекомендуемое значение Допускаемое значе- I ние
2 3 4 5 2,5 3,75 5 6,25 3 4,5 6 7,5 100 160 224 280 80 125 180 250
оказывает наименьшее влияние на габариты и массу привода в целом (см. стр. 317). В связи с этим наиболее характерным является установка ведущего шкива на валу электродвигателя (рис. 13.2).
В зависимости от профиля сечения ремня различают плоскоременную, клиноременную, поликлиноременную и круглоременную передачи (см. рис. 13.1, б—д). Разновидностью ременной передачи является зубчатоременная (см. рис. 13.1, е), передающая усилие за счет зацепления со шкивами.
Среди плоских ремней наибольшей тяговой способностью обладают кожаные ремни (ГОСТ 18679—73*), однако из-за высокой стой мости область применения их крайне ограничена. Текстильные ремни (хлопчатобумажные по ГОСТ 6982—75 и шерстяные по ОСТ/НКТП 3157) обладают сравнительно низкой тяговой способностью. Наибольшее распространение получили плоские ремни из прорезиненного материала, используемые при скоростях v < 30 м/с и передаточных отношениях и < 5 (при автоматическом натяжении и < 8). Основная нагрузка воспринимается хлопчатобумажной тканью (бельтингом), имеющей существенно больший
модуль упругости, чем резина. Резина, обеспечивающая работу ремня как единого целого, обладает повышенными коэффициентом трения и износостойкостью. Значения ширины ремня b и числа прокладок i стандартизованы. В табл. 13.1 приведены стандартизованные значения i, толщина ремня Sp и минимальные диаметры шкивов dmln. Из-за больших габаритов область применения прорезиненных плоских ремней сужается за счет использования клиновых и зубчатых ремней.
Весьма перспективны плоские ремни из синтетических материалов (МРТУ 17-645—67), обладающие высокой статической прочностью и долговечностью; временное сопротивление их ов = 804-100 МПа, модуль упругости при растяжении Е = 1750 МПа. Армированные пленочные многослойные ремни на основе синтетических полиамидных материалов могут работать при v < 60 м/с и передавать мощность до 3000 кВт. Для повышения, несущей способности синтетических ремней используют специальные фрикционные покрытия.
Рекомендуемые толщина и минимальный диаметр малого шкива для синтетических ремней:
6р, мм . . . . 0,4 0,5 0,6 0,7 0,8 0,9 1,0 1,1 1,2
dinin, мм ... 28 36 45 56 63 75 80 90 100
Клиновые ремни выполняются прорезинениями и имеют сечение трапецеидальной формы (см. рис. 13.1, в). Нагрузку воспринимает корд из химических волокон, изготовляемый в виде нескольких слоев кордткани или шнура, завулканизийованных в специальную резину, обернутую слоями прорезинений ткани (табл. 13.2). Более гибкими и долговечными являются кордошнуровые ремни.
Т а б л и и а 13.2. Размеры приводных клиновых ремней
Тип ремня Обо-значение сечения Размеры сечения, ММ Ьло- >дь сече- „ния см2 Предельная длина £, мм Масса I м длины Ут, кг/м
ьр ь 1 h Уй
о 8,5 10 6 2,1 4,47 400—2 500 0,06
А И 13 8 2,8 4,81 560—4 000 0,105
Нормаль- Б 14 17 10,5 4,0 4,38 800—6 300 0,18
ного В 19 22 13,5 4,8 2,30 1 800—10 600 0,30
сечения Г 27 32 19 6,9 4,76 3 150—15 000 0,62
д 32 38 23,5 8.3 4,92 4 500—18 000 0,90
Узкого УО 8,5 10 8 2,0 <1,56 630—3 550 0,07
сечения, УА 11 13 10 2,8 <1,95 800—4 500 0,12
РТМ УБ 14 17 13 3,5 4,58 1 250—8 000 0.20
51-15-15—70 УВ 19 22 18 4,8 2,78 2 000—8 000 0,37
В зависимости от величины отношения расчетной ширины b по нейтральной линии к высоте сечения ремня h (табл. 13.2) клиновые ремни изготовляют трех видов: нормального сечения (bv/h 1,4), узкого (bplh = 1,05-4-1,1) и широкого (Ьр/й = 2-=-4-4,5), применяемого в основном в бесступенчатых передачах (вариаторах).
Стандартизованы ремни нормального сечения, применяемые при v < 30 м/с.
Узкие ремни обладают повышенной тяговой способностью вследствие лучшего распределения нагрузки по ширине несущего слоя. Они обеспечивают возможность в два и более раза снизцть затраты материалов на ремни и шкивы, допускают скороети v < 40 м/с.
Клиновые ремни применяют при передаточных отношениях до и = 7 — 10.
Благодаря повышенному сцеплению со шкивами, обусловленному эффектом клина, тяговая способность клиновых ременных передач выше, чем плоскоременных. По этой причине минимальный угол обхвата (см. рис. 13.1, а) у них меньше и составляет amm 90 — 120°, тогда как у плоскоременных amln 150°. В результате габариты клиноременных передач значительно меньше, чем плоскоременных (см. рис. 14.64).
К недостаткам клиновых ремней по сравнению с плоскими следует отнести большие потери на трение и напряжения Изгиба,а также возникающие в таких ремнях в результате переменности ширины ремня по его длине крутильные и изгибные колебания.
Клиновые ремни изготовляют бесконечными; площади их поперечных сечении А и предельные длины Z приведены в табл. 132.
Поликлиновые ремни (см. рис. 13.1, г) имеют продольные kjjh-новые выступы на внутренней стороне и выполняются бесконьч. ными. В плоской части ремня размещается кордшнур, восприци. мающий передаваемую нагрузку. Эти ремни сочетают достоинства клиновых ремней (повышенное сцепление со шкивами) и гибкосуь> характерную для плоских ремней, вследствие чего минимальней диаметр малого шкива можно назначить меньшим и увеличить передаточное отношение до и < 15. Основные размеры поликлияо-вых ремней представлены в табл. 13.3.
Таблица 13.3. Размеры поликлиновых ремней и параметры переда1, по РТМ 38-40528—74
t t
Обозначение сечения Размеры сечения, мм Предельная длина, мм Число ребер Масса 1 длины рем!1я с 10 ребра л1н «тЮ’ К1А1
t Я h рекомендуемое допускаемое
к 2,4 4,0 2,35 400—2000 2—36 36 0,09
л 4,8 9,5 4,85 1250—4000 4—20 50 0,45
м 9,5 16,7 10,35 2000—4000 2—20 50 1,60
Выбор типа клиновых и поликлиновых ремней и диаметров малого шкива dx в зависимости от крутящего момента на быстроходном валу Т1 производится в соответствии с рекомендациями табл. 13.4.
Т а б л н ц а 13.4. Выбор типа клиновых и поликлиновых ремней и минимального диаметра малого шкива
Тип ремня Обо- • значение сече- ИИЯ Момент на быстроходном валу Tt, Н-м ММ Тип ремня Обозначение сечения Момент на быстроходном валу Н-м <4 min» мм
Клиновой нормального сечения О А Б В Г д <30 15—60 45—150 120—600 420—2400 1600—6000 63 90 125 200 315 500 Клиновой узкий УС УА УБ УВ <150 90—400 300—2000 >1500 63 90 140 224
Полн-клино-вые К Л м <40 18—40 >130 40 80 180
Примечания: 1. Для повышения срока службы и к. п. д. из возможных (при заданном значении Тt) сечений ремня рекомендуется брать меныпее. 2. С увеличением di при заданном сечении ремня повышаются к. п. д. (возрастает тяговая способность) и долговечность.
Зубчатые ремни (см. рис. 13.1, е) имеют тянущий элемент в виде металлического троса 1, находящегося в резиновой или пластмассовой основе 2. Для повышения износостойкости зубья покрывают нейлоновой или другой тканью.
Зубчатоременные передачи применяют при скоростях v о < 50 м/с, передаточных отношениях и < 12 (в некоторых случаях и < 20) и мощностях до 100 кВт.
§ 13.2. ГЕОМЕТРИЧЕСКИЕ ЗАВИСИМОСТИ
Основными геометрическими параметрами ременной передачи являются угол обхвата на малом шкиве ах, длина ремня L и межосевое расстояние а (см. рис. 13.1, а). За расчетные диаметры малого dt и большого d2 шкивов принимают наружные диаметры плоских шкивов или диаметр расположения нейтральной линии ремня для клинового и поликлинового шкивов.
Угол обхвата (см. рис. 13.1, с)
«!=== 180°-180= - 57,3°(^-dj/tz, (13.1)
где у — угол между касательными к окружностям dx и d2.
Длина ремня
L = 2а cos (у/2) Ц- 0,5л (d2 Ц- dx) + 0,5у (d2 — dx). (13.2)
Обычно у < 35°, и поэтому, ограничиваясь двумя первыми членами разложения в ряд, можно принять cos (у/2) л* 1 — у2/8 и у «к (d2 — dj а. Учтя это замечание, после преобразования (13.2) получим формулы для определения L и а:
L = 2а + Лх + Д2/щ (13.3)
а •= 0,25 [L - Дг 4- |/(L-Д1)2- 8Дг 1, (13.4)
где
Ах = 0,5л (dx + d2); Д2 = 0,25 (d2 - dx)2. (13.5)
В плоскоременных передачах, где натяжение ремня происходит за счет сил упругости, с целью повышения стабильности усилия натяжения за счет увеличения податливости ремня принимают
a>-2(d2-(-d1). (13.6)
В клиноременных передачах:
°mtn = °.55 (dl + da) + h> атпах = 2 (dx d2). (13.7)
Обычно для увеличения долговечнссти принимают а •> amin и руководствуются следующими данными:
и ........................ 1 2 3 4 5 6—9
a/d2 ..................... 1,5 1,2 1,0 0,95 0,90 0,85
Поскольку клиновые и поликлиновые ремни выполняют бесконечными, межосевое расстояние их уточняют по формуле (13.4) после подбора ремня.
На выбор а может оказать влияние число пробегов в секунду v/L, с увеличением которого падает долговечность. Рекомендуемые значения (v/L): для плоских ремней 3—5; для клиновых и поликлиновых ремней 20—30.
§ 13.3. УПРУГОЕ СКОЛЬЖЕНИЕ
Й КИНЕМАТИКА РЕМЕННОЙ ПЕРЕДАЧИ
В неподвижной ременной передаче, шкивы которой не воспринимают крутящие моменты (7, = Т2 = 0), ремень нагружен предварительным натяжением Fo, необходимым для создания требуемой силы трения (см. показанную штриховой линией эпюру усилий в ремне на рис. 13.3). Обозначим через и F2 усилия в ведущей и ведомой ветвях, возникающие при приложении к ведомому валу рабочего момента Т2. Очевидно, что Fx j> F2 и
Fl-F2^2T2/d2 = Ft. (13.8)
Здесь Ft — окружная сила (полезная нагрузка), передаваемая гибкой связью, Н:
F^lOW/v, (13.9)
где /V — передаваемая мощность, кВт; v — окружная скорость, м/с.
Эпюра сил работающей под нагрузкой передачи показана на рис. 13.3 сплошной линией. При обегании ведущего шкива натяжение и, следовательно, относительное удлинение ремня падают. В результате возникает упругое скольжение ремня по шкиву, направленное против движения, т. е. ремень отстает от ведущего шкива.
При обегании ведомого шкива относительное удлинение ремня растет, и в результате упругого скольжения ремень обгоняет шкив. Упругое скольжение наблюдается не на всей дуге обхвата
Рис. 13.3. К определению упругого скольжения в ременной передаче
04 (или а2), а на части ее а1ск (или а2ск), называемой дугой скольжения. Со стороны набегающей ветви на каждом из шкивов имеются дуги покоя а1п и а21, (рис. 13.3), величины которых уменьшаются с ростом нагрузки. Силы трения между ремнем и шкивом развиваются в основном на дуге скольжения.
Обозначим через AF и pmF площадь сечения и плотность ремня, находящегося под действием растягивающей силы F.
Из условия постоянства массы ремня, пробегающего в единицу времени через неподвижные сечения ведущей и ведомой ветвей, имеем
AptVi pmF , = Арг1>2ртГг (13.10)
Для нагруженного ремня:
Ар = А (1 - цеД2; pmF = pm/[(l + Ef) (1 - peF)2], (13.11) где p — коэффициент Пуассона; eF — относительное удлинение ремня под нагрузкой; рт и А — плотность и площадь сечения ненагруженного ремня.
Из равенств (13.10) и (13.11) находим
U1 == V2 (1 + EF1)/(1 + Ef2) (1 + Efl — EF2)u2,
ИЛИ
V2 = (1 —
(13.12)
где £ = eF1 — zf2 = (Fr — F2)/(EA) — коэффициент скольжения; обычно Е = 0,01 -?-0,02.
Передаточное отношение ременной передачи [см. формулу
(13.12)]
.. _ wi _ dz
ы2 ~ 2v2ld2 di(l-g)
(13.13)
откуда d2 = di«/(l — 5).
§ 13.4. СИЛЫ И НАПРЯЖЕНИЯ В РЕМЕННОЙ ПЕРЕДАЧЕ
Считая, что материал ремня подчиняется закону Гука, приближенно можно принять, что при приложении рабочей нагрузки относительные удлинения ведущей и ведомой ветвей равны. При этом, пренебрегая влиянием центробежных сил, имеем: Fr = = Fo + 0,5Fz; F2 = Fo — 0,5Ft. Тогда
F1 + F2 = 2F0. (13.14)
Для определения и F2 воспользуемся известным решением Эйлера1 для нерастяжимой нити, скользящей по цилиндру.
Из условия равновесия элемента ремня KL, соответствующего центральному углу da (рис. 13.4), суммы проекций сил на оси х и у:
х = F da/2 (Г dF) da/2 — dFn sin (<p/2) — dFц
^F da — dFn sin (cp/2) — dF^ = 0; (13.15)
Zy = F + f dFn-—(F-]~dF) = fdFn — clF = O. (13.16)
Здесь dFlx — центробежная сила, действующая на элемент ремня КЕ:
dFn = qinv2 da, (13.17)
где qm — масса 1 м длины ремня шириной 1 см.
Если //sin (ср/2) = /', то из (13.15)—(13.17) получим
/' da = dF/(F — FJ. (13.18)
1 Решение Эйлера в данном случае является приближенным, поскольку ремень податлив и коэффициент трения изменяется по дуге обхвата шкива. Воз-
викающие при этом погрешности компенсируются экспериментальными поправочными коэффициентами.
После интегрирования (13.18) в пределах от 0 до а1ск (по дуге Скольжения) и от F2 до Fx получим
(Fi — f Ц)/(Р2 — Рц) = ехр (f'a1CK) = т0. (13.19)
Из (13.8) и (13.19) имеем:
= ^0^//(/И0 — 1) Fцг (13.20)
F2 = Fz/(m0-1) + FU. (13.21)
Рис. 13.4. К определению усилий в ременной передаче: а — схема нагружения; б— сечение плоского ремня; в — сечение клинового ремня
Усилие, действующее на вал шкива (рис. 13.4, а),
Fr = + F22 + 2F1F2 cos (180° - а) 2Fo sin (а/2). (13.22)
Максимальное напряжение возникает на участке ремня, набегающем на малый шкив, так как здесь напряжения растяжения суммируются с максимальными напряжениями изгиба ои1:
атах = + °и1 = Шо ° 1 + °ц °И1. (13.23)
где оц = 10'6pmu2, МПа — напряжение от центробежных сил; рт — плотность материала ремня, кг/м3; для прорезиненных плоских, клиновых и поликлиновых рт = 1250-4-1400 кг/м3.
Напряжение от усилия Ft с учетом (13.23)
°Ft = (tfmax ~ Оц - Ои1). (13.24)
Напряжения изгиба ремня на шкивах передачи:
ои1 = 2Eygl(i-^t ои2 = 2Еуд/с12,
где Е — модуль упругости; у0— расстояние от нейтральной линии до наиболее напряженных волокон (в плоскоременных передачах Уо = 0,5бр).
Эпюра распределения суммарных напряжений в ремне показана на рис. 13.5 (ор и о2 — напряжения на прямолинейных участках соответственно ведущей и ведомой ветвей).
“г
Рис. 13.5. Эпюра суммарных напряжений в ремне
Если в (13.24) опих = [о], то Ft/A = [oF/] — условное допускаемое напряжение при расчете ремня по нагрузке
[oF<] = lFt/A] = ([о] - Оц - ои1). (13.25)
Величина ] зависит от [о], рт, Е, v, 6р/<4 и величины т0, являющейся функцией а1ск и
§ 13.6. КРИТЕРИИ РАБОТОСПОСОБНОСТИ
И РАСЧЕТ РЕМЕННЫХ ПЕРЕДАЧ
Критерии работоспособности. Основными критериями работоспособности ременных передач являются тяговая способность и долговечность.
Тяговая способность обеспечивается силами сцепления между ремнем и шкивами. Из (13,14), (13.20) и (13.21), пренебрегая влиянием центробежных сил и считая, что натяжение осуществляется автоматически (2F0 = const), находим:
Ft = 2 '° 1 Fo, или Of =2 т°1. о0, (13.26)
где о0 — напряжение от предварительного натяжения.
Отсюда следует, что с увеличением силы предварительного натяжения Fo растет усилие Ft, которое может передаваться из условия обеспечения необходимого сцепления. Но при этом растет усилие
Л = Fo + 0.5F, [см. (13.8) и (13.14)] и, следовательно, утяжеляются условия работы ремня, падает его долговечность.
Оптимальное значение Fo устанавливают на основании анализа зависимостей, связывающих относительное скольжение § с коэффициентом тяги
ф = Г//(2Г0) = о/?</(2о0). (13.27)
Связь между £ и ф представлена на рис. 13.6. Эта зависимость
получена экспериментально замером
Рис. 13.6. Кривые скольжения и к. п. д. ременных передач
верхности касания ремня и шкива
относительного скольжения £ при постепенном увеличении полезной нагрузки Ft и постоянном значении Fo.
До некоторого значения коэффициента тяги ф = фк, называемого критическим, наблюдается упругое скольжение ремня и зависимость между £ и ф близка к пропорциональной. Дальнейшее увеличение ф (нагрузки Ft) характеризуется быстрым нарастанием величины dtjdty и возникновением скольжения по всей по-(буксования). На этом же
графике представлена зависимость к. п. д. т] от нагрузки, который растет (за счет уменьшения влияния потерь холостого хода), достигает максимума в зоне критического значения коэффициента тяги фк, а потом резко падает в связи с дополнительными потерями на буксование1.
В основе создаваемых в настоящее время методов расчета ремней на долговечность лежит уравнение кривой усталости (4.4),
которое в данном случае записывается в виде
« = С',
(13.28)
или
о„ s = (C'),/m/^/m = cM/m.
(13.29)
1 По вопросу о кривых скольжения проводятся дальнейшие исследования (см., например. Вестник машиностроения, 1970, № 3, с. 43—47).
Подставляя это значение в формулу (13.24), получим
Ft/А = (C/N'c,m - оц - ои1), (13.30)
/п0
где для плоских ремней т = 6; для клиновых ремней т — 11. Число циклов изменения напряжений за полный срок службы
th (ч) ПРИ одинаковых диаметрах шкивов и числе шкивов 2Ш
1VC = 3600 (v/L) гш4, (13.31)
где v/L — частота пробегов ремня в секунду (см. стр. 217).
При и 4= 1 вводится коэффициент v„, учитывающий разную степень влияния напряжений изгиба на малом и большом шкивах:
Nc = 3600 (v/L) zMvn. (13.32)
Рис. 13.7. Коэффициент а — для плоских ремней; б — для клиновых и поли* клиновых ремней
Значения vH приведены на рис. 13.7. При этом величину стр для плоских ремней определяют по формуле
ор = о0 + <7о/(26г) 4- 10“6pmv2.
Для клиновых и поликлиновых ремней используют эту же формулу, но вместо 6Р подставляют h.
Расчет плоскоременной передачи. Анализируя формулы (13.14) и (13.27), можно сделать вывод, что допускаемое по условию отсут* ствия буксования полезное натяжение возрастает с увеличением напряжения от предварительного натяжения о0:
[oFj = 2o0-g~}- = 2фко0. (13.33)
Для плоских ремней экспериментально установлены следующие средние значения коэффициента тяги фк: для прорезиненных и кожаных ремней 0,6; для ремней из синтетических мате* риалов фк «« 0,4-^0,5.
Величина о0 принимается в качестве характеристики несущей способности кожаных и текстильных ремней 129, 60). Для синте-
223
1Йческих ремней а0 = 4 -j-5 МПа при 'dp/bp < 80 и периодически регулируемом межосевом расстоянии, <т0 = 7,5 МПа при dp/bp > ► 80 и автоматически регулируемом постоянном натяжении, Uo = 10 МПа при djbp £> 100 и автоматически регулируемом переменном натяжении.
Для прорезиненных ремней, у которых основную нагрузку несут тканевые прокладки, в качестве этой характеристики принимается удельная сила предварительного натяжения (приходящаяся на единицу ширины одной прокладки)
s0 = F0/(bi). (13.34)
Рекомендуются следующие значения s0: 2,0 Н/мм — для передач с натяжением за счет упругости ремня при малом межосевом расстоянии и угле наклона передачи более 60°; 2,25 Н/мм — при том же виде натяжения, но большом межосевом расстоянии и угле наклона менее 60°; 2,5 Н/мм — при автоматическом натяжении.
Таблица 13.5. Удельное окружное усилие для прорезиненных ремней из бельтинга БКНЛ-65 и бельтинга Б-820
Число слоев i Диаметр малого шкива di мм Удельное окружное усилие q0, । Н/мм, при натяжении s0, Н/мм
2 2,25 2,5 3
80 5,0 5,4 5,8 6,6
2 100 5,2 5,6 6,0 6,8
2s 125 5,3 5,7 6,1 6,9
125 7,1 8,3 8,8 10,0
3 160 7,3 8,5 9,1 10,3
Ss200 7,5 8,7 9,3 10,5
180 10,2 11,1 12,0 13,4
4 224 10,5 11,4 12,3 13,8
2а 280 10,7 11,6 12,5 14,1
250 12,7 14,0 15,1 17,0
5 315 13,0 14,4 15,5 17,4
2^400 13,2 14,6 15,8 17,7
Примечание. Значения q0 приведены для односменной работы. При двух- и трехсменной работе табличные значения снижаются соответственно на 13% и 20%.
В зависимости от величины s0 для прорезиненных ремней различной толщины (с различным числом слоев) в табл. 13.5 приведены значения допускаемых номинальных удельных окружных усилий q0, передаваемых единицей ширины ремня при а 180, V = 10 м/с и нормальных условиях работы.
Для синтетических ремней величина q0 принимается в зависимости от толщины ремня 6Р и начального натяжения сг0:
бр, мм <7о фри а0 = 4 МПа),' 0,4 0,6 0,8 1,0 1,2
Н/мм % (при а0 = 5 МПа), 1,92 2,96 3,99 5,0 6,07
Н/мм (при о0 = 7,5 МПа), 2,33 3,58 4,82 6,05 7,35
Н/мм <?о (при а0 = 10 МПа), 3,25 5,02 6,77 8,48 10,32
Н/мм 3,97 6,15 8,3 10,41 12,62
Допускаемое удельное окружное усилие определяется с помощью корректирующих коэффициентов:
ВД = q0C0CaCvCp. (13.35)
Коэффициент Со учитывает способ натяжения и угол наклона линии центров к горизонту. В передачах с автоматически поддерживаемым постоянным натяжением Со = 1. В передачах с натяжением за счет упругости ремня Со принимает значения: I; 0,9 и 0,8 при углах наклона, соответственно равных 0—60, 60—80 и 80—90°.
Коэффициент Са учитывает влияние угла обхвата на малом шкиве:
<*1, ...°.......... 100 120 140 160 180
Са................. 0,76 0,82 0,88 0,94 1,0
Коэффициент Cv учитывает влияние центробежных сил:
v, м/с 1 5 10 15 20 25 30
Cv (для прорезиненных рем-
ней) 1,04 1,03 1,0 0,95 0,88 0,79 0,68
Cs (для синтетических рем-
ней) 1,03 1,01 1,0 0,99 0,97 0,95 0,92
Коэффициент Ср учитывает режим работы передачи. При
односменной работе этот коэффициент имеет следующие значения:
Характер нагрузки ....
Cpi................. • •
Спо- Умеренные Значительной- колебания ные
на я колебания
1 0,98—0,8 0,8—0,7
Ударная или резко-Переменная
0,7—0.6
При двух- и трехсменной работе коэффициенты режима соответственно принимаются: Ср2 = 0,87Ср1; Ср3 = 0,72Cpi (более подробно см. [75 I).
Зная передаваемое окружное усилие Ft и допускаемое [<?], можно определить необходимую ширину ремня
b = Fti[q]. (13.36)
При проектировочном расчете диаметр малого шкива рекомендуется определять по формуле М. А. Саверина, мм:
(52 -н 64) Vl\ . (13.37)
Для синтетических ремней зависимость (13.37) дает несколько завышенные результаты.
Причиной выхода из строя ремней является усталостное разрушение от действия переменных напряжений (см. рис. 13.5).
Приведенный расчет плоских ремней из условий тяговой способности (по кривым скольжения) не позволяет непосредственно
оценить количественно их долговечность, однако при выборе расчетных параметров учитывается их влияние
Таблица 13.6. Коэффициент CL
LAL,. Тип ремня
Клиновой нормального сечения 1 Клиновой узкий н поли клиновой
0,3 0,79 0,80
0,4 0,82 0,85
0,5 0,86 0,89
0,6 0,89 0,91
0,8 0,95 0,96
1 1 1
1,2 1,04 1,03
1,4 1,07 1,06
1,6 1,10 1,08
2,0 1,15 1,12
2,4 1,20 1,15
на долговечность передачи, хотя, конечно, весьма приближенно.
Расчет передач с клиновыми и поликлиновыми ремнями. Расчет клиновых ремней производят из условий тяговой способности и долговечности.
Подставив в формулу (13.30) значение окружной силы из формулы (13.9), можно получить допускаемую мощность, которую может передать один клиновой ремень данного сечения:
W = (N0CaCL + ДАГИ) Ср, (13.38) где Д’о — мощность, передаваемая одним ремнем при 2Ш = 2, и = 1, а = 180°, v„ = 1, длине Lo, долго-
вечности th и спокойной работе (рис. 13.8); Са — коэффициент, учитывающий влияние на тяговую способность угла обхвата:
СС1, ...°.................................... 70 80 90
Со .......................................... 0,56 0,62 0,68
аь ...°................................... 130 140 150
Са........................................... 0,86 0,89 0,92
100 НО 120
0,74 0,78 0,83
160 170 180
0.95 0,98 1,0
CL— коэффициент, учитывающий влияние на долговечность длины ремня (табл. 13.6) в зависимости от отношения данной длины ремня L к исходной Lo (см. рис. 13.8); Ср — коэффициент режима (см. стр. 225); — поправка, учитывающая уменьшение вли-
яния на долговечность изгиба ремня и диаметра большого шкива с увеличением передаточного отношения:
ДА(И = 10'7 ДТл. (13.39)
Здесь Д7И— поправка к моменту на быстроходном валу в зависимости от передаточного отношения (табл. 13.7); при и = 1 -4-1,02 Д7И = 0.
При проектировочном расчете по заданной мощности N определяют необходимое число ремней
СечениеСечениеМ(Ц‘251Юмн)
Рис. 13.8. Значения Л'с для mi новых ремней с сечениями: а — А и О; б —
Б и В; в — УА и УО
Т а б л и ц а 13.7. Поправка ДТИ-10~2, Н-м
Передаточное отношение и Тип ремня
Клиновой нормального сечения Клиновой узкий
о А Б В УО У А
1,03—1,07 8 15 5 15 3 7
1,08—1,13 1,5 4 11 29 6 14
1,14—1,20 2,3 6 16 44 9 21
1,21—1,30 3 8 21 58 12 28
1,31—1,40 3,5 9 23 66 14 31
1,41—1,60 3,8 10 26 73 15 35
1,61—2,39 4 11 29 80 17 38
2,40 и более 5 12 31 90 18 42
Для поликлинового ремня число ребер z=\0N/[N], (13.41)
Усилие предварительного натяжения одного клинового ремня
Fo = 780iV/(uCaCpz) -J- qmv2\ (13.42)
для поликлинового ремня с числом ребер z
Fo = 78(W/(vCaCp) + 0, lqml0zv2, (13.43)
где qml0 — масса 1 м длины ремня с 10 ребрами.
Усилие, действующее на вал,
Fr = 2Foz sin (а/2) (13.44)
(для поликлинового ремня z = 1).
Пример расчета клиноременной передачи. Рассчитать клиноременную передачу от асинхронного двигателя мощностью N — 7 кВт при пг = 1440 об/мин (cot = 151 рад/с) и передаточном отношении ЦтеЗ. Работа односменная, нагрузка спокойная. Передача горизонтальная. Допускается отклонение передаточного отношения it 5%.
Расчет ведем в следующем порядке.
1. Момент на быстроходном валу
Tt = 1000/V/(o1 = 7-10s/151 =46,35 Н-м.
2. При данном моменте по табл. 13.4 рекомендуются сечения А, УО и Б. Проведенный расчет показал, что типы А и УО обеспечивают передачу при числе ремней соответственно г = 8 и г = 6. Принимаем сечение Б с целью получения минимального количества ремней.
3. Диаметр малого шкива в соответствии с рекомендациями табл. 13.4 принимаем di= 125 мм.
4. Диаметр большого шкива d2= d1u (1 — |) — 125-3-0,985 = 369,37 мм. Стандартный диаметр по ГОСТ 17383—73 d2= 400 мм.
5. Скорость ремня
v — ndtnt/60 = л0,125.1440/60= 9,4 м/с.
6. Частота вращения ведомого вала
ns = (1 — §)/d2 = 125-1440-0,985/400 = 443,25 об/мин;
коэффициент скольжения принят g = 0,015.
7. Ориентировочное межосевое расстояние [формула (13.7)] 0mm = 0,55 (dx + d2) + h = 0,55-525 + 10,5 = 299,25 мм.
Для увеличения долговечности ремня, согласно рекомендациям на стр. 217, принимаем а0 = d2 = 400 мм.
8. Длина ремня [формулы (13.3) и (13.5)]
/. = 2go + 0,5л (Дх 4 d2) + 0,25 (d2 — Дх)‘ So “ = 800 4-824,25 + 47,26 = 1671,5 мм.
По ГОСТ 1284—68 принимаем L — 1700 мм.
9. Окончательное межосевое расстояние [формула (13.4)] а = 0,25 [L — Дх + /(£ —Дх)2 — 8Д2] = = 0,25 (875,75 + 784,65) = 415,1 мм.
10. Угол обхвата на малом шкиве [формула (13.1)]
ах = 180° — 57,3е (rf2 — rfj/a = 180° — 57,3° (400 — 125)/415,1 = 142,04°.
11. Коэффициент режима при указанной нагрузке (см. стр. 225) Ср — 1.
12. Коэффициент угла обхвата (см. стр. 225) Са — 0,9.
13. Исходная длина ремня (см. рис. 13.8, 6) Le = 2240 мм. Относительная длина L/La = 1700/2240= 0,758.
14. Коэффициент длины (см. табл. 13.6) Сд = 0,94.
15. Исходная мощность при Л = 125 мм и v = 9,4 м/с (см. рис. 13.8, б) No = 2,2 кВт.
16. Поправка к моменту на передаточное отношение (см. табл. 13.7) ДГИ =
17. Поправка к мощности [формула (13.39)]
Д/Уи = 10-7 ДТ+пх = 10-7-ЗЮО-1440 = 0,45 кВт.
18. Допускаемая мощность на один ремень [формула (13.38)]
[N] = (NaCaCL + ДУД Ср = (2,2-0,9.0,94 + 0,45) 1 = 2,31 кВт.
19. Число ремней [формула (13.40)]
z' =N/[N] =7/2,31 =3,03.
Принимаем г = 3.
20. Сила предварительного натяжения ремня [формула (13.42)] Го = 780Л7(гСС!Срг) + qm^ = 215,1 + 15,9 = 231 Н, где qm = 0,18 кг/м.
21. Усилие на вал
Q = 2Р0г sin (ах/2) = 2-231-3-0,94 = 1303 Н.
Расчет зубчатоременной передачи. Основными геометрическими характеристиками зубчатоременной передачи являются модуль т, число зубьев ремня zp и длина ремня L.
Модуль ремня определяется отношением т = pjn, где ра — окружной шаг, и выбирается из нормального ряда в зависимости от крутящего момента на быстроходном валу Тг (табл. 13.8).
Диаметры шкивов:
di — mzi, d2 — mz2, (13.45)
где zx и z2 — число зубьев шкивов.
Т а б л и ц а 13.8. Параметры зубчатых ремней по нормали ОН 6-07-5—63 ниирп—энимс
Параметр /Модуль т, мм
2 3 4 О 7 10
Момент на малом шкиве 1\, Н • мм Удельное 102 50 sg24-102 100 sg22- 10е 150 * 5=49 • 10s 350 <C19-104 450 19-10ь 600
окружное усилие qK, Н/мм Частота вращения быстроходного вала «j, об/мин Число зубьев 1 000— 10 000 12—20 1000— 8000 14—20 250 ** 1000— 6000 16—22 * 1000— 5000 18—24 1000— 4000 22—36 1000— 3000 22—36
на малом шкиве Ч Число зубьев ремня zp Ширина зубчатого ремня Ь, мм 32—125 8—16 36—160 12,5—25 18—24 ** 40—160 20—40 45—140 25—50 О 2л 1 1 OO — О 60 СЛ 50—100 50—80
* При диаметре троса ** При диаметре троса ремня 0,35 мм. ремня 0,65 мм
Число зубьев малого шкива выбирается из табл. 13.8 в зависимости от модуля. Число зубьев большого шкива
z2 — Ziii. (13.46)
Длину ремня L' предварительно определяют по формуле (13.3). По величине L' находят ориентировочное значение числа зубьев ремня
?р = Л7(л/и), (13.47)
после чего его округляют до нормализованных значений: 32; 40; 50; 63; 80; 100; 125; 160. Окончательная длина ремня
L = nmzp. (13.48)
/Межосевое расстояние предварительно принимают
c=(0,5<-2,0)’(rf2 + ^). (13.49)
Окончательное значение а определяют по формуле (13.4).
Число зубьев ремня, находящихся в зацеплении с малым шкивом,
zr.o = z1al/36O°, (13.50)
где а, — угол обхвата на малом шкиве 1см. формулу (13.1)1.
230
Рекомендуется принимать zp0 > 6. При zp0 < 6 необходимо увеличить межосевое расстояние а.
В результате расчета на прочность определяют ширину ремня Ь, необходимую для передачи полезного окружного усилия Ft. При этом допускаемое удельное окружное усилие, передаваемое зубчатым ремнем,
|<71 = <7оСрСА. (13.51)
где Яо — допускаемое номинальное удельное окружное усилие при н > 1,гш = 2и Zj)0 > 6 (выбирается в зависимости от модуля ремня по табл. 13.8); Ср — коэффициент режима (см. стр. 225); С,, — коэффициент, вводимый только для ускоряющих передач [75]: Сг — коэффициент числа зубьев, находящихся в зацеплении:
2па.......................................... 6 5
Сг .......................................... 1 0,8
4 0,6
Рабочее удельное окружное усилие
F;/b = 2T1/(d16) + gmo2<|Ff],
где qm — масса 1 м длины ремня шириной 1 см: т, мм............... 2 3 4 5 7
<7т, кг/(см м) . . . 0,0032 0,004 0,005 0,0075 0,009
(13.52)
10 0,011
Требуемую ширину ремня
19] —
(13.53)
необходимо округлять до нормализованного ряда (мм): 8; 10; 12,5; 16; 20; 25; 32; 40; 50; 63; 80.
Предварительное натяжение в зубчатоременной передаче необходимо только для устранения зазоров в зацеплении и правильного набегания ремня на шкивы. Оно должно быть несколько больше значения натяжения от центробежной силы:
Fo = (1,1-н 1,3)F„ = (1,1 1,3)<7,>2. (13.54)
Усилие, действующее на валы (при относительно небольших скоростях), может быть принято равным
Fr = (1,0-4-1,2) Fz. (13.55)
Коэффициент полезного действия ременных передач. К. п. д. ременных передач зависит от потерь, вызванных скольжением ремня, внутренним трением в ремне, сопротивлением воздуха, и потерь в опорах шкивов. На к. п. д. также влияют степень загруженности передачи и величина отношения 6p/di (или h/d^.
Приближенно для нормальных условий работы можно рекомендовать: для плоскоременных передач т; = 0,93-4-0,98; для клиноременных кордшнуровых передач т] = 0,92-?0,97 и кордткане-вых г) — 0,87—0,93; для зубчатоременных передач у] = 0,88-4-0,96.
§ 13.6. ШКИВЫ РЕМЕННЫХ ПЕРЕДАЧ
Шкив ременной передачи (рис. 13.9) состоит из обода, ступицы и соединяющих их диска или спиц.
Для предупреждения спадания плоского ремня со шкивов один из них (чаще больший) выполняют выпуклым, описанным в осевом сечении дугой окружности (рис. 13.9, о). Применяют также шкивы с цилиндрической поверхностью в середине и коническими по краям (рис. 13.9, б).
Найденные из расчета диаметры шкивов dr и d2 округляют до ближайших значений по ГОСТ 17383—73 (см. также [751).
Там же приведены стандартные значения ширины ремня. Для снижения изнашивания ремня, вызванного упругим скольжением, шероховатость поверхности обода не должна превышать Rz = 10 мкм.
При v i> 40 м/с из-за воздушного клина, образующегося между шкивом и набегающей ветвью ремня, снижается сцепление между взаимодействующими поверхностями и падает несущая способность передачи. Для предупреждения этого явления на шкивах предусматривают кольцевые канавки.
Основные размеры профиля канавок шкивов для клиновых ремней (рис. 13.9, в) даны в табл. 13.9, для поликлиновых (рис. 13.9, г) — в табл. 13.10. Угол профиля канавок шкива <р зависит от его диаметра. С уменьшением d увеличиваются напряжения растяжения и изгиба и уменьшается <р [75].
Зубья шкивов зубчатоременной передачи выполняют с прямобочным профилем и углом впадины 2ф = 50±2° (см. рис. 13.1, е).
Наружный диаметр шкива (см. рис. 13.1, е)
da = d — 2Д k, где d — расчетный диаметр; Д — расстояние от впадины зуба ремня до оси ремня (Д = 0,6 мм при m = 2 -г 4 мм; Д = 1,3 мм 232
при т = 5 4-10 мм); k — поправка к диаметру шкива для увеличения его шага с целью более равномерного распределения окружного усилия по зубьям, находящимся в зацеплении, k — 0,08 •* 0,18 при da — 50 4- 500 мм. Внутренний диаметр шкива
df = d„ — 1,8m.
Шаг шкива по наружной окружности
ра = Tida/z.
Шкивы изготовляют из чугуна, стали, легких сплавов и не-
металлических материалов. Чугун СЧ 15-32 и других марок при-
меняют при v с 30 м/с. Модифицированные чугуны и стальное литье применяют при и с 45 м/с. При d > 500 мм находят применение
Т а б л и ц а 13.9. Основные размеры (мм) профиля канавок литых и точеных шкивов для клиновых ремней (см. рис. 13.9, в)
Сечение ремня С е t S
о А Б В УО УА 2,5 3,5 4,2 5,7 2,5 3,3 7,5 9 Н 14,5 10 13 12 15 19 25,5 12 15 8 10 12,5 17 8 10
Таблица 13.10. Основные размеры (мм) профиля канавок шкивов для поликлиновых ремней по РТМ 38-40528—74 (см. рнс. 13.9, г)
Сечение рем ня t S 9 е А
к 2,4 3,5 3,30 2,35-1-0,1 1,0
л 4,8 5,6 6,60 4,85-1-0,15 2,4
м 9,5 10,0 13,05 10,35-]-0,2 3,5
сварные шкивы, используемые при и < 60 м/с. Шкивы из алюминиевых сплавов, а также сварно-штампованные шкивы (см. рис. 9.2, в) обладают минимальной массой и могут быть использованы при v с 804-100 м/с. Шкивы из неметаллических материалов отличаются повышенным трением.
Глава 14. ЗУБЧАТЫЕ ПЕРЕДАЧИ
§14.1. ОБЩИЕ СВЕДЕНИЯ
Зубчатые передачи предназначены для передачи движения с соответствующим изменением угловой скорости (момента) по величине и направлению. Усилие от одного элемента сцепляющейся пары к другому передается посредством зубьев, последовательно вступающих в зацепление.
При параллельных валах используют передачи с цилиндрическими зубчатыми колесами (рис. 14.1, а), которые могут иметь прямые (рис. 14.1, б), косые (рис. 14.1, в) и шевронные (рис. 14.1, г) зубья.
Рис. 14.1. Цилиндрические зубчатые колеса
Рис. 14.2. Конические зубчатые колеса
Рис. 14.3. Винтовая передача
Рис. 14.4. Гипоидная пере-
дача
При пересекающихся осях применяют передачи с коническими зубчатыми колесами, которые могут иметь прямые (рис. 14.2, а), тангенциальные (рис. 14.2. 6) и круговые (рис. 14.2, в) зубья. При скрещивающихся осях применяют винтовые (рис. 14.3) и гипоидные (рис. 14.4) передачи.
Меньшее из зубчатых колес сцепляющейся пары называется шестерней, а большее — колесом. Термин зубчатое колесо относится как к шестерне, так й к колесу.
Буквенные обозначения, общие для обоих зубчатых колес сцепляющейся пары, отмечаются индексом 1 для шестерни и индексом 2 для колеса (например, число зубьев zx и z2).
Цилиндрические передачи выполняют с внешним (рис. 14.5, а) и внутренним (рис. 14.5, б) зацеплением.
Из всех видов передач зубчатые передачи имеют наименьшие габариты, массу, стоимость и потери на трение. Коэффициент потерь одной зубчатой пары при тщательном выполнении и надлежащей смазке не превышает обычно 0,01. Эти свойства обеспечили большое распространение зубчатых передач; они применяются для мощностей, начиная от ничтожно малых (в приборах) до измеряемых десятками тысяч киловатт. Передаваемые моменты достигают 5-106 Н-м. Диаметры колес, например в передачах на гребной винт судовых установок, доходят до 6 м.
$ 14.2. ЦИЛИНДРИЧЕСКИЕ ЗУБЧАТЫЕ ПЕРЕДАЧИ
С ЭВОЛЬВЕНТНЫМ ЗАЦЕПЛЕНИЕМ
Геометрия эвольвентного зацепления 1. Цилиндры диаметрами dI£,1 и dw2, являющиеся аксоидами в относительном движении сцепляющихся зубчатых колес 1 и 2, называются начальными цилиндрами, а окружности диаметрами и dw2 — начальными окружностями (см. рис. 14.1, а и 14.5). Ограничивающие зубчатые венцы шестерни и колеса цилиндры диаметрами dal, da2 и dfl, df2 называются соответственно цилиндрами вершин и впадин. Линия касания цилиндров dwl и dw2 (мгновенная ось относительного движения) называется полюсной линией, а точка пересечения ее с плоскостью, перпендикулярной к осям, — полюсом зацепления w.
Если при взаимном качении начальных окружностей профили зубьев находятся в непрерывном касании — зацеплении (между моментами входа и выхода их из зацепления), то такие профили называются сопряженными. Среди многочисленных кривых, позволяющих получить сопряженные профили, исключительно широкое применение получила эвольвента круга.
Окружности dbl и дь2, развертками (эвольвентами) которых являются профили зубьев шестерни и колеса, называются основными окружностями (см. рис. 14.5). Линия, являющаяся геометрическим местом точек касания сопряженных профилей, называется линией зацепления. В передачах с эвольвентным зацеплением линией зацепления является прямая Ьф2, касательная к основным окружностям dbi и db2 (см. рис. 14.5). Угол aZa между bibz и нормалью к линии центров ОгО2 называется углом зацепления. Расстояние pbt между одноименными эвольвентами соседних
* Расчет геометрии реечных передач приведен в работе 15]. 236
зубьев называется основным окружным шагом. Отношение pbt к л называется основным модулем и обозначается mbt. Число зубьев зубчатого колеса
z = ndb/pbt « db/mbt. (14.1)
Радиус кривизны в какой-либо точке эвольвенты равен отрезку нормали к эвольвенте, заключенному между данной точкой и точ-
кой касания нормали с основной окружностью; например,радиус кривизны профиля зуба колеса в точке k (см. рис, 14.5, о) равен отрезку b2k.
В основу получения зубьев на заготовке положен метод обкатки, сущность которого в следующем. Имеем окружность d и катящуюся по ней без скольжения начальную
Рис. 14.6. Получение зуба методом обкатки, или огибания
прямую вместе с неподвижной
относительно нее прямой /, расположенной под углом л/2 — at (рис. 14.6). Из теории зацепления известно, что в движении относительно d огибающей к различным положениям прямой I
является эвольвента окружности db = d cos az, В любом положении начальной прямой эвольвента касается прямой I в точке пересечения этой прямой с нормалью к ней, проведенной через полюс w, т. е. через точку касания начальной прямой и d. Если вместе с начальной прямой перемещается еще одна прямая II (рис. 14.6), то при указанном движении огибающей к линии II будет также эвольвента окружности db = d cos az, но с дру-
гим направлением: прямой II соответствует правый, а прямой I — левый профиль. Представим, что имеется цилиндрическая заготовка диаметром da, а линии / и II являются режущими кромками, неподвижными в изображенной проекции относительно начальной прямой, но совершающие возвратно-поступательное движение в направлении,
перпендикулярном к плоскости чертежа. В результате рассмотренного движения и строгания режущие кромки вырежут на заготовке зуб с боковыми сторонами, очерченными по эвольвентам окружности db. В этом и заключается сущность получения зубьев (эвольвентных при прямолинейных режущих кромках I и II) методом обкатки, или огибания.
Рассмотрим следующую модель. Имеем весьма твердую зубчатую рейку и заготовку зубчатого колеса из абсолютно неупругого материала (рис. 14.7). Отметим на рейке плоскость, называемую делительной, на которой толщина зубьев равна ширине впадин. На заготовке отметим цилиндр d, а на рейке — касательную к нему
Рис. 14.8. Производящие рейки, воспроизводимые режущими кромками: а — червячной фрезы; б — зуборезной рейки
плоскость {начальную плоскость), параллельную делительной плоскости. Сообщим заготовке и рейке такое движение, при котором цилиндр d катится без скольжения по начальной плоскости рейки. В результате пластического деформирования на заготовке образуются зубья, причем при плоских боковых сторонах зубьев рейки зубья изделия, как следует из предыдущего, имеют эволь-вентный профиль.
Рейка, предназначенная для получения зубьев на заготовке, называется производящей, или инструментальной рейкой, геометрическими параметрами которой и расстоянием между начальной и делительной плоскостями определяется геометрия изделия (зубчатого колеса) при данном d.
При нарезании зубчатых колес режущие кромки инструмента в движении относительно делительной плоскости рейки описывают поверхности зубьев производящей рейки. Это имеет место, например, при нарезании зубьев червячными фрезами (рис. 14.8, а) и зуборезной рейкой (рис. 14.8, б). Последняя наряду с движением обкатки (см. рис. 14.6) совершает возвратно-поступательное движение в направлении зубьев производящей рейки, показанной тонкими линиями.
Цилиндр d, являющийся аксоидом (начальным цилиндром) в движении рейки относительно зубчатого колеса, называется 238
делительным цилиндром., а окружность d — делительной окружностью.
Угол между осью зубчатого колеса и линией пересечения поверхности зуба рейки делительной плоскостью (или плоскостью, параллельной делительной плоскости) называется углом наклона линии зуба рейки и обозначается р. У зубчатого колеса угол наклона зуба на делительном цилиндре равен р (см. рис. 14.7).
Рис. 14.9. Зацепление косозубого зубчатого колеса, с производящей рейкой
Шаги производящей рейки pt и рп, измеренные параллельно делительной плоскости соответственно в торцовом сечении (перпендикулярном к оси зубчатого колеса) и в сечении п — п, нормальном к направлению зубьев, связаны зависимостью (см. рис. 14.7 и 14.9)
pt = pn/cos^. (14.2)
Шаг на окружности d равен, очевидно, pt, т. е.
d = ptz/n.
Отношение шага рп = р к л называется модулем зацепления и обозначается т, т. е. pin = т.
Для прямозубых передач, где pt = рп = р, имеем
d — mz. (14.3)
233
ным числом и обозначается и. Из рис. дует, что
и — c0j/ci>2 du^dtvi d/.
Сечение производящей рейки плос к линиям пересечения ее зубьев
Рис. 14.10. Исходный контур цилиндрических зубчатых колес (по ГОСТ 13755—68 h*= 1; с* = 0,25; pf = 0,38)
Для косозубых передач, обозначив pt/n — mt, имеем d = mtz = mnzlcos p. (14.4)
Отношение угловых скоростей шестерни и колеса относительно системы координат, связанной с их осями, называется передаточ-14.5 и формулы (14.1) сле-
Jd^^zjz^. (14.5)
юстью, перпендикулярной делительной плоскостью, называется нормальным сечением рейки (сечение п— п на рис. 14.9). Параметры нормального сечения выбираются в соответствии с исходным контуром зубчатых колес по ГОСТ 13755—68 и СТ СЭВ 308—76 (рис. 14.10), распространяющимся на цилиндрические зубчатые колеса с m > 1 мм. Заштрихованная часть контура на рис. 14.10 соответствует впадинам производящей рейки (см. рис. 14.9). Прямая, на которой толщина зуба равна ширине впадины, назы-
вается делительной прямой (см. рис. 14.10) и соответствует делительной плоскости производящей рейки (см. рис. 14.9). Для цилиндрических зубчатых колес с внешним зацеплением, начиная с некоторых значений окружных скоростей (см. ГОСТ 13755—68 и СТ СЭВ 308—76), применяют исходный контур со срезами (см. штриховые линии на рис. 14.10). При этом профиль зуба головки изделия отклоняется от эвольвенты в тело (имеется модификация профиля головки). Это отклонение способствует снижению динамических нагрузок, вызванных погрешностями зацепления и деформациями, и повышению несущей способности передачи (см. стр. 265).
В СТ СЭВ 310—76 даны ряды значений т — тп, начиная от 0,05 до 100 мм. Приводим из этого стандарта значения т от 1 до 12 мм:
1-й ряд (предпочтительный): 1; 1,25; 1,5; 2; 2,5; 3; 4; 5; 6; 8; 10; 12;
2-й ряд: 1,125; 1,375; 1,75; 2,25; 2,75; 3,5; 4,5; 5,5; 7; 9; 11.
Профильный угол исходного контура обозначается а. В соответствии с ГОСТ 13755—68 и СТ СЭВ 308—76 имеем а = 20°,
Угол at профиля производящей рейки в торцовом сечении определяется по формуле (см. рис. 14.9)
tg at = tg a/cos p. (14.6)
Начальная и делительная плоскости рейки могут совпадать (см. рис. 14.9 и 14.11, о) и не совпадать (см. рис. 14.7 и 14.11, б). Если эти плоскости совпадают, то расстояние от оси зубчатого колеса до делительной плоскости рейки
Е = 0,56 = 0,5mtz.
Расстояние между начальной и делительной плоскостями (разность между Е и 0,56) называется смещением исходного контура. Отношение этого смещения к тп = т называется коэффициентом смещения и обозначается х, т. е.
х = (Е — 0,5mtz)/m.
Таким образом, смещения рейки шестерни и колеса равны соответственно хгт и х2т (см. рис. 14.7 и 14.11, б).
С ростом х толщина зуба sa уменьшается по дуге окружности da и увеличивается у основания (рис. 14.11); активный участок профиля зуба удаляется от основной окружности db и, следовательно, увеличиваются его радиусы кривизны. С увеличением х до значения h*am (см. рис. 14.10) у основания зубьев уменьшаются радиусы кривизны (см. эпюры этих радиусов на рис. 14.11, а, б, отложенные на нормалях к контуру зуба у основания) и увеличивается концентрация напряжений. Таким образом, варьирование величин хг и х2 оказывает существенное влияние на геометрию зацепления и его несущую способность (см. стр. 320).
Из рис. 14.11, б (см. также рис. 14.10) находим-
da = d-]-2m-\-2xrrr, (14.7)
df = d — 2,5m + 2хт. (14.8)
На рис. 14.5, б показана цилиндрическая передача с внутренним зацеплением. Эвольвентные профили впадин зубчатого колеса (пространства между соседними зубьями) с внутренними зубьями совпадают с эвольвентными профилями зубчатого колеса с внешними зубьями, если у обоих этих зубчатых колес одинаковые г, т, р и х. Поэтому мысленно можно представить зацепление рейки и колеса с внутренними зубьями. Геометрия зубчатого колеса с внутренними зубьями характеризуется смещением х2т исходного контура, находящегося в беззазорном зацеплении с зубчатым колесом с внешними зубьями, профили которого совпадают с профилями внутренних зубьев данного колеса. Введение для колес с внутренними зубьями понятия о смещении исходного контура упрощает расчеты и способствует общности геометрических зависимостей для передач с внешним и внутренним зацеплениями.
Таблица 14.1. Формулы для определения основных размеров передач с цилиндрическими зубчатыми колесами
Параметры зацепления ! Формулы
Делительное межосевое расстояние а а = 0,5 (d2 — dt) = 0,5m (г2 — zx)/cos р
Л(ежосевое расстояние аш (см. рис. 14.1; 14 5) aw = a cos ccz/cos atw или Qw ~ a + Ут ~ G + (Х2-^ X1 &У) m
Делительный диаметр d (см. рис. 14.7) d, = mzx/cos P; d2 — mz2/cos P
Начальный диаметр dw (см. рис. 14.5) = 2a J (u 1) или dwi == 4- \2yl(z2 — гх)] dr; ^W2 ИЛИ ^u'2 = dg 4~ [(2y/(z2 — ?i) J dg
Диаметр вершин зубьев da (см. рис. 14 5) Внешнее зацепление: dal = dx 4~ 2 (1 4- xx — At/) m; d02 = d2 + 2 (1 4- x2 — At/) m Внутреннее зацепление: = di 4~ 2 (1 4~ xx) m; da? ~ d2 — 2 (. — x2 4~ Ai/ — k2) m, где k2 = 0,25—0,125x2 при x2 < 2; k2 = 0 при x2^ 2
Диаметр впадин df зубчатых колес с внешними зубьями (см. рис. 14.5, а) dfi = di — (2,5 — 2xx) m; d/-2 = d2 — (2,5 — 2x2) m
Ориентировочное значение диаметра впадин df колес с внутренними зубьями (см. рис. 14.5, б) dfz Ц- 4-0,5m
Модуль т Значения m даны на стр. 240
Коэффициент смещения х Значения х даны на стр. 319
Сумма (разность) коэффициентов смещения х2 — хх = j/ 4- Aj/
Коэффициент воспринимаемого смещения у У — {aw — dj/m = х2 ± хх — Aj/
Продолжение табл. 14.1
! Параметры зацепления Формулы
Коэффициент уравнительного смещения Др При заданной величине х2 — хг Др = (-1 у\ ± у к 1СОО / cos р ’ где Г определяется по номограмме на рис. 14.12; v = 0 при [3=0; при Р =/= 0 значения v см. в ГОСТ 16532—70 и ГОСТ 19274—73 и в справочнике [53]
Угол профиля исходного контура а По ГОСТ 13755—68 а = 20°
Угол профиля cq производящей рейки в сечении, перпендикулярном к оси сцепляющегося с ней зубчатого колеса а/ = arctg (tg а/cos Р)
Угол зацепления а<ю atw = arccos [(а cosa/)/a№]
Угол наклона [5 Обычно Р ~ 74-20° в косозубых передачах и Р к 28ч-40° в шевронных передачах
Основной угол наклона (3fc Pt — arcsin (sin Р cos а)
Коэффициент торцового перекрытия еа Значения еа даны на стр. 246
Примечание. В приведенных формулах верхний знак относится к внешнему, а нижний — к внутреннему зацеплению.
Существенное значение при расчете геометрии имеют параметры xz и xd, равные соответственно сумме коэффициентов х2 и хг при внешнем зацеплении и разности их при внутреннем зацеплении;
xE = x2-]-Xj; xd = х2— хг.
Объединяя эти выражения, получим
х% (d> = х% ± Xi. (14 9)
Здесь верхний знак — для внешнего, а нижний — для внутреннего зацепления.
Формула (14.7) справедлива для зубчатых колес с внешними зубьями при хг + х2 = 0. В табл. 14.1 даны формулы для определения основных размеров зацепления цилиндрических передач и, в частности, приведена зависимость для da при х2 + Xj + 0. 244
21,(н 12,30 31,0-. 14,50 41,0- 17,10 3f,o^ -10,00
— — — 14,40 — 17,00 -9,90
10,6$ f 2 12,20 г 2,10 30,01 14,30 1-4,20 40,01 t6’90 '16,80 50,01 — 9,80 9,70
1 — 2 — I =- . 16,70 '15,60
ггртттт Ci Z-P,5$ 19,о! 12,00 1-190 29,01 г 4,10 i4,00 39,01 16,60 1б,50 49,01 'г 9,50 [9,40
— — 13,90 16,40 '9,30
-OfiQ "i"1 11,80 28,0~ 13,80 16,30 48,01 19,20 19,10
— — - ц l|HI - 13,70 - 16,20 — \s,oo
- - - — - - - 16,10 -
S.M -0,3$ 17,0-. 27,01 13,BO 37,01 16,00 47,01 [8,30
-2 — =- ►2 13,50 ’ ►I 15,90 18,80
- - Ё-7,50 — - [8,70
— 16,01 — 26,01 |-J,40 36,01 15,80 46,01 18,60
- If,40 - гЗЗО 15,70 [8,50
02$ — E- - 15160 \8,40
111IIII11 1 са -0,18 -0,16 '-0,14 .15,01 ll,30 11,20 25,01 13,20 13,10 13,00 35,01 ; § § Г Uj- irT i"l'tllhinliiiilimli 45,01 \8,30 18,20 8,10
ггргггт о> -0,12 '-0,10 14,01 11,10 24,11 12,90 34,01 S’ s» г**) cm Irf Uj Ullniihmlii 44,01 [8,00 17,90
3}о1 -0,08 -0,07 -0,06' 1з,о1 TTTTjnrrpTI Q 23,01 12,80 12,70 33,01 S § IrT iiiimililllillllitii 43,01 I 7,80 r7,70
— -0,05 — — -- — 14,90 - [7,60
- -0,04 - -0,90 - 12,60 =- - 17,50
е*- -0,03 -0,02 -0,01 0,008 12,01 11,01 10,80 r; i ш 111 it] C\j VJ4 cm CM Ci ca o? CM ihi iiliLii b i uh nb 32,0-. 31,01 cs S Й co Ьч Co ullllilnillllllllUiillllll i|jiiqiui| ca 1J,4O 17^0 Г 7,20
в Г В Г в г В r в Г
Рис. 14.12. Номограмма для определения величины Г в зависимости от параметра В
Необходимая для определения коэффициентов уравнительного смещения At/ величина Г зависит от параметра
& 1000 (х2 ± хД cos р
г2 ± г1
и определяется по номограмме на рис. 14.12.
Пример пользования номограммой (рис. 14.12). Дано: za + г( = 64; х2+ Ч- х< = 1,75; т = 10 мм; 0=0. Определить Г, Az/ и aw (см. табл. 14.1). Величине
В = 1000-1,75/64 =27,3 соответствует Г= 3,67. Отсюда (см. табл. 14.1): Ly = (3,67/1000) 64 = 0,235; aw = 0,5-10-64 (1,75 — 0,235) 10 = 235,15 мм.
Коэффициент торцового перекрытия. При вращении ведущего колеса против часовой стрелки (рис. 14.13, а) пара зубьев А вступает в зацепление в точке Р2 и выходит из зацепления в точке Рг.
Отношение угла поворота зубчатого колеса передачи от положения входа пары зубьев в зацепление до выхода их из зацепления к угловому шагу 2л/г называется коэффициентом торцового перекрытия и обозначается еа. Для эвольвентного зацепления величина еа равна отношению длины активного участка линии зацепления Р^Р2 к основному окружному шагу pbt — nmbt — = пт cos a/cos 0 (см. рис. 14.5 и 14.13, о, б)'-
ta = PJ\/pbt. (14-10)
Для определения еа используют зависимость
ea = EQi + e„2, (И 11)
где еа1 и efl2 — составляющие еа, соответствующие участкам I и II (см. рис. 14.5 и 14.13, а, б) и определяемые по формулам1: eai = P2w/pbt = zx (tg ас1 — tg ato)/(2n); (14.12)
eo2 = P-lW/ры = z2( ± tg aa2 + tg aZu,)/(2n). (14.13)
Здесь верхние знаки — для внешнего, а нижние — для внутреннего зацепления.
Величины ел и еа2 определяют с помощью рис. 14.14 в зависимости от величины djhwa, где hwa = 0,5 (da — dw) — высота начальной головки зуба (см. рис. 14.5, а). Для колес с внутрен-
Рис. 14.15. Образование поверхностей зубьев: а — прямозубое колесо; б — косозубое колесо
ними зубьями величину ео2 из этого графика определяют при z2 > О 60; при любых значениях z2 можно воспользоваться формулой еь2 — hwt&/{pbl sin atw), где pbt = 2,95m при p = 0 и a = 20°.
Пример пользования графиком на рис. 14.14. Дано: zx = 16; z2 = 72; [5 =0; atw= 20°36'; dwl!hwal = 18,3; dw2jhwa2 = 81. Определить ea.
Величинам dwi/hwal = 18,3 и с1Ш2//гюа2 — 81 на Рис- 14.14 соответствуют значения еа1/гх = 0,0415 и еО2/г2 = 0,0108 Тогда
еа — еа1 + еа2 = (еа1/г1) г1 + (еа2/гг) г2 — 1,44.
Радиусы кривизны зубьев. Образование рабочих поверхностей зубьев передач с эвольвентным зацеплением можно представить так. Имеем неподвижный основной цилиндр db, по поверхности которого катится без скольжения плоскость Е (рис. 14.15). Лежащая в этой плоскости линия k'k", образующая угол р6 с осью цилиндра, описывает поверхность S; для прямозубого зубчатого колеса рь = 0; для косозубого — рь + 0.
Через точку k, лежащую на линии k'k", проводим плоскость, перпендикулярную к оси цилиндра. Радиус кривизны сечения этой плоскостью поверхности S в точке k
Ptw — bk = 0,5dw sin aXte).
1 Формулы (14.12) и (14.13) справедливы при отсутствии подрезания активных профилей зубьев. При х2 + хх = 0 используют приближенную формулу еа = [1,88 — 3,2 (l/zx l/z2)] cos p.
При расчете на контактную прочность используют радиус кривизны рга в сечении, перпендикулярном к линии контакта (см. гл. 2).
На рис. 14.16, а показана зубчатая пара, плоскость осей OjOa которой образует угол а/№ с вертикальной плоскостью, параллельной осям. В плане показаны активные участки Р^Р'^РгРх плоскости зацепления при рь = 0 и рь =/= 0. Между линиями g±g{ и gzgz, отстоящими на расстояние ры соответственно от линий PiP\ и P2P:i, находится зона однопарного зацепления. Здесь вся нагрузка воспринимается одной парой зубьев (см. также рис. 14.13, 14.16, б, в).
Определим приведенный радиус кривизны рпр [см. формулу (2.4) ], необходимый для расчета передач на контактную прочность. Величина рпр непрерывно изменяется (см. рис. 14.5, а); так, для точки, лежащей на расстоянии £ от точки Ьъ имеем Рн = Р/2 = ЬгЬ2 — Е, тогда
Здесь верхний знак — для внешнего, а нижний — для внутреннего зацепления.
В расчетах на выносливость поверхностей зубьев используют приведенный радиус кривизны pn₽£t в полюсе зацепления (см. стр. 266).
При р = 0 в полюсе зацепления имеем (рис. 14.16, а):
ptw 1 = b1w = 0,5dwl sin alw;
Ptw 2 = b2w = 0,5d№2 sin a.tw = 0,5^1 u sin
n ______ sjn o-tw /14 144
Рпр/ю— 2(u± 1) • (14.14)
2 cos pb
При p 0 (сравните рис. 14.16, а с рис. 14.15, 6):
Prt^i sin ci/tj . p?u>2 d-wiP sin сс/да e
cos Pt 2 cos Pt ’ P”2 cos Pt
„ _ sin
Рпр nw ~ 2 (и ± 1) cos Pt ’
(14.15)
Суммарная длина линий контакта. При Р = 0 в зацеплении находится одна (зона однопарного зацепления) или две пары зубьев и суммарная длина линий контакта 1К составляет bw или 2bw (рис. 14.16, а). Это справедливо при условии 1 <еа <2, выполняемом, как правило, в передачах с зубчатыми колесами, соответствующими исходному контуру по ГОСТ 13755—68 и СТ СЭВ 308—76.
При р + 0 линии касания рабочих поверхностей зубьев образуют угол р6 с осями зубчатых колес (сравните рис. 14.15 и 14.16). Пары касающихся зубьев обозначены /, //, III (рис. 14.16, а).
При вращении шестерни по часовой стрелке длина рабочего участка линии контакта в паре / увеличивается, начиная с нуля, в паре III убывает, а в паре II некоторое время [соответствующее перемещению по дугам основных окружностей, равному PiSi = Ры (е«— 1)1 остается постоянной.
В случае, показанном на рис. 14.16, а, рабочая ширина зубчатого венца Ью равна осевому шагу рх = лги/sin р. При этом 1К = = const и определяется по формуле
!к = Р1Р2;$1П рь = ea/Wsin рь = Eapx/cos pfc.
При bw = прх (и — целое число)
1К = eX/cospb. (14.16)
Если каждая из величин bjpx = ер и еа не равна целому числу, то величина 1К не остается постоянной и формула (14.16) в этом случае дает среднее значение /к, которое и используют в расчетах. Рекомендуется принимать
^ = bw/px > 1,1.
Скорости в зоне контакта зубьев. Выше было отмечено влияние кинематики в зоне контакта двух роликов на сопротивление разрушениям их рабочих поверхностей (см. стр. 26). Аналогичные условия имеются и в зоне касания двух зубьев. Найдем для этой зоны величины vr, vz, vs и О.
На рис. 14.17, а показана пара зубчатых колес, касающихся в точке k. Скорости точки k, принадлежащие шестерне и колесу, обозначены и vk2. Составляющие этих скоростей ст1 и ит2, направленные по общей касательной к профилям, являются скоростями контактирующих течек относительно зоны контакта:
оТ1 = игри; ит2 = о)2рЛ2. (14.17)
Из плана скоростей в координатах £, v (рис. 14.17, б) следует, что в любом положении точки контакта величина головки больше, чем у сопряженной с ней ножки, т. е. поверхность головки является опережающей и поэтому сопротивление головок выкрашиванию существенно выше, чем ножек (см. стр. 31). Этим объясняется появление раковин выкрашивания, как правило, на ножках (см. рис. 2.12, а), и они могут быть разбросаны по всей активной поверхности ножки при отсутствии видимых усталостных повреждений на головках.
Одной из характеристик условий работы зубьев в зоне контакта (см. стр. 26) является сумма скоростей контактирующих точек относительно зоны контакта
В полюсе зацепления w имеем:
Vjlw = vT2w = п>1Рю1 = O,5to,d№1 sin aZtt);
vSw = coieU sin aZK, = 2c sin alw,
где v — окружная скорость.
Из формул (2.11) и (14.17) после преобразований имеем (рис. 14.17)
vst = I 1 = kw (®i ± ®2). (14.18)
Здесь и ниже верхний знак — для внешнего зацепления, нижний — для внутреннего.
Показателем, характеризующим теплонапряженность в зоне контакта и интенсивность возможного изнашивания, является удельное скольжение (см. стр. 26)
$ = vST/fT.
Максимальные значения удельных скольжений й'Р1 и йР2 имеют место в нижних точках Рг и Р2 активных профилей соответственно для шестерни и колеса (рис. 14.17):
_ Ргш (со, ± со2) _ Ptw (и ± 1) , •
П (Рш1 — PiW) О)! (рад— PiW)u '
ф P2W (о»! ± соа) P2w (U ± 1) ' '
₽2 ~ (Рае + Т’аШ) ы2 ~ рк,2 =Р P2w
Величины P2w и PjW определяют по формулам (14.12) и (14.13). Е52
§ 14.3. силы, ДЕЙСТВУЮЩИЕ в зацеплении ЦИЛИНДРИЧЕСКИХ ПЕРЕДАЧ
При определении усилий в зацеплении пренебрегают силами трения, возникающими в результате скольжения профилей, поскольку величина f в зоне контакта мала (см. рис. 3.6), и поэтому
допущение это практически не влияет
на конечный результат.
Усилия между зубьями действуют в плоскости зацепления (рис. 14.15; 14.16; 14.18). Полное нормальное усилие между зубьями Fn равно сумме всех нагрузок, распределенных среди линий контакта, т. е.
Fn = L <7,- М.
i
где qi—удельная нагрузка на t-м участке длиной A/f.
Рис. 14.18. Усилия в зацеплении цилиндрической передачи (в скобках указаны значения, относящиеся к передачам с х2 — Xj = 0)
При определении реакций опор и усилий, изгибающих вал, распределенную нагрузку заменяем сосредоточенной силой, приложенной в середине зубчатого венца. Силу Fn в плоскости зацепления раскладываем на осевую Fx и нормальную к полюсной линии w’w" силу Fn cos р6, которую, в свою очередь, раскладываем на составляющие Fr — радиальную и Fiw — окружную, отнесенную к окружности dw (рис. 14.18).
Из рис. 14.18 имеем:
9Т
Ftw = ’ F< = Ffe' F' = F^
Ff 2T <14'20)
‘ tw____ , _____________
n cos atw cos ~ dw cos atw cos рь * >'
При x, ± %] = 0 имеем Ри. = P; dw = d; Flw = Ft\ cos a/ta cos pfc = cos at cos рь, поэтому
Fn = 277(d cos at cospb). (14.20a)
Величина Fn не зависит от значений х2 ± хх.
§ 14.4. ВЛИЯНИЕ ПОГРЕШНОСТЕЙ ИЗГОТОВЛЕНИЯ И ДЕФОРМАЦИЙ ДЕТАЛЕЙ НА РАБОТУ ЗУБЧАТЫХ ПЕРЕДАЧ
При расчете зубьев на прочность надо выявить участки зацепления с максимальными значениями удельных контактных нагрузок q. В гл. 5 было показано влияние погрешностей изготовления и деформаций на распределение q и нагрузок среди одновременно работающих поверхностей. Рассмотрим эти факторы применительно к зацеплению зубчатых передач.
Точность зубчатых передач. В идеально точной цилиндрической передаче с эвольвентным зацеплением при отсутствии де
Рис. 14.19. Коэффициенты, учитывающие неравномерность распределения q для зубчатых передач с непрямыми зубьями (v — окружная скорость; цифры на кривых — степень точности по ГОСТ 1643—72, СТ СЭВ 641—77 и СТ СЭВ 186—75); а — Кна.', б — Кга
формирующего усилия в любой момент зацепления передаточное число постоянно (и = Zg/zJ и в поле зацепления обеспечивается реализация теоретических линий контакта.
В реальных передачах эти условия не выполняются. Вследствие неизбежных погрешностей изготовления профиль зуба отличается от теоретического, неодинаковы шаги сцепляющихся зубчатых колес, действительное направление зубьев отклоняется от теоретического, оси отклоняются от параллельности и т. д. В результате действительное значение мгновенного передаточного числа (at/a>2 отклоняется в обе стороны от значения и = zjz,, которое при этом можно назвать средним значением. Это вызывает дополнительные динамические нагрузки в зацеплении, вибрации и способствует повышенной интенсивности шума. Из-за погрешностей изготовления при отсутствии деформирующего усилия длина контактных линий составляет лишь часть теоретической величины. В показанной на рис. 14.16, г зоне зацепления вследствие погрешностей шагов и направления зубьев при касании пары зубьев III в паре II имеется зазор. При приложении нагрузки благодаря деформациям зазор может быть выбран, но при этом неизбежна неравномерность распределения q: наибольшее увеличение q против имеющегося при идеальной точности будет там, где зубья касаются при отсутствии деформирующего усилия (в паре ///); 254
наибольшее снижение q будет там, где максимальный зазор. Эту неравномерность распределения q учитывают приведенными на рис. 14.19 коэффициентами К на и Кра-
Для обеспечения нормальной работы установлены нормы кинематической точности, плавности работы, контакта зубьев и бокового зазора.
Нормы точности эвольвентных цилиндрических передач регламентированы в СТ СЭВ 641—77. При этом установлены 12 степеней точности зубчатых колес и передач, обозначаемых в порядке убывания точности цифрами 1, 2, 3, ..., 12. Для степеней точности 1 и 2 допуски и предельные отклонения не регламентируются.
Нормы точности на зубчатые передачи с пересекающимися осями и коническими зубчатыми колесами установлены в стандарте СТ СЭВ 186—75.
Наибольшее распространение имеют степени точности 6, 7 и 8. С ростом скорости повышаются требования к точности силовых передач (табл. 14.2), поскольку динамические нагрузки, вызванные погрешностями, пропорциональны скорости. Помимо этого с ростом скорости увеличивается толщина слоя масла между зубьями и снижается коэффициент трения (см. стр. 45) и, следовательно, снижается интенсивность приработки, способствующей более благоприятному распределению нагрузки среди зубьев и компенсирующей в известной степени вредное влияние погрешностей изготовления.
Таблица 14.2. Ориентировочные значения предельных окружных скоростей (м/с) для силовых передач
Степень точности (ГОСТ 1643 — 72; СТ СЭВ 641—77; СТ СЭВ 186—7 5) Прямые зубья Непрямые зубья
Цилиндрическая передача Коническая передача Цилиндрическая передача Коническая передача
5 и более точные 6 7 8 9 ^15 До 15 » 10 » 6 » 2 ^12 До 12 » 8 » 4 » 1,5 2s 30 До 30 » 15 » 10 » 4 ^20 До 20 » 10 » 7 » 3
Влияние погрешностей и деформаций. Влияние погрешностей шагов на распределение нагрузки среди двух пар выступов (зубьев прямозубых передач) рассмотрено в гл. 5. Применение этого решения к оценке несущей способности, лимитируемой изгибной прочностью зубьев, дано ниже (см. стр. 277).
Рассмотрим влияние перекоса осей зубчатых колес на распределение нагрузки по ширине зубчатого венца. Подобный вопрос применительно к двум касающимся роликам рассмотрен 255
выше (см. стр. 86), и полученные результаты относятся с некоторыми поправками к паре зубчатых колес.
На рис. 14.20, а угол перекоса осей зубчатых колес вызван деформациями валов нормальными силами в зацеплении Fn. На рис. 14.20, б, в показаны сечения касающихся зубьев плоскостью зацепления. Абсолютно жесткие зу’бья касались бы в точке (рис. 14.20, б). Благодаря податливости зубья могут касаться и по
Рис. 14.20. Неравномерность распределения удельных нагрузок по ширине зубчатого венца, вызванная перекосом осей зубчатых колес
всей ширине зубчатого венца bw, но нагрузка при этом распределяется по ширине зубчатого венца неравномерно (рис. 14.20, в). Коэффициенты, которыми учитывается эта неравномерность соответственно до и после компенсирующей приработки, определяются по формулам (см. стр. 83):
Л'н₽ = Qman.iclm\ Кн$ = qraan^m-
При расчете зубьев на изгиб влияние рассматриваемой неравномерности учитывают коэффициентом Л7р. равным отношению наибольших напряжений у основания зуба в случае, когда нагрузка q концентрируется к краю зубчатого венца, и при отсутствии этой концентрации.
При определении уг надо учитывать не только угол перекоса уд. в, вызванный деформациями валов, но и углы перекоса 256
п и 7л. п, вызванные деформациями опор и люфтами в них. Нетрудно убедиться, что для случая, показанного на рис. 14.20. а, при одинаковых подшипниках углы уд. в и удп направлены в противоположные стороны и, следовательно, деформации подшипников в какой-то степени компенсируют влияние деформаций валов.
В случае консольного расположения шестерни (рис. 14.21)
направления перечисленных выше
между теоретическим положением оси шестерни и действительным
углов одинаковы, т. е. угол
—- Тд. В1 “Г Тд. п! “Г* Т.п. п1-
Суммирование углов может оказаться причиной значительной неравномерности нагрузки по ширине зубчатого венца.
Для снижения надо предусмотреть достаточную жесткость вала и
опор и, в первую очередь, наиболее за- Рис. 14 21. к определению груженной опоры, предпочитая шарико- угла ух консольной шестерни вым подшипникам более жесткие роли-
ковые. Люфты в подшипниках должны быть минимальными, осо-
бенно целесообразны подшипники с регулируемыми при монтаже люфтами (см. гл. 19). Этим требованиям полностью удовлетворяет конструкция установки консольной конической шестерни, показанная на рис. 14.22, и частично -— конструкция на рис. 14.23. В последнем случае отсутствует возможность регулировки люфтов
в опорах при монтаже.
Рис. 14.22. Узел коническо-цилиндрического редуктора
Рис. 14.23. Конструкция узла с консольной шестерней
Расчет величин /Сир и K'if, представляет значительные трудности. В связи с этим находят применение ориентировочные значения Кн$, назначаемые в зависимости от расположения зубчатых колес и величины = bw/dwl для цилиндрических передач (рис. 14.24) и КЬеи!(2 — К.Ье) — для конических (рис. 14.25 и см. § 14.8). При этом, учитывая более благоприятное влияние приработки на контактную прочность, чем на изгибную, и более тяжелые последствия, связанные с неточностями при определении 257
напряжений изгиба, принимают KPfl > Кн$, например используют зависимость КР$ « 1 + — 1) 1.5.
В приведенных в§ 14.13 примерах использованы значения К г?, из рис. 14.24 в предположении, что они найдены с учетом влияния погрешностей и деформаций. При этом, допуская незначительное отклонение в сторону увеличения коэффициента запаса прочности (см. рис. 14.28), можно принять Крц = К°н$-
Рис. 14.24. Ориентировочные значения /<//р для цилиндрических передач: а — виды передач; б — Л'//р при твердости рабочих поверхностей зубьев Нг с НВ 350 и //2 «: НВ 350 (или Н, > НВ 350 и Н2 с НВ 350); е — /<//р при Ht > НВ 350 и Н2> НВ 350;
I—VI — кривые, соответствующие видам передач на рис. 14.24, а (7Щ и /р — для передач соответственно на шарике- и роликоподшипниках)
Для цилиндрических передач с < 1,25 величина Кн$ может быть найдена по приведенной ниже формуле (14.21), базирующейся на зависимости (5.8) со следующими поправками. Исследования показали, что вблизи торцов зубчатого венца податливость зубьев выше, чем на других участках, Влияние этого благоприятного фактора учитывают снижением до 0,4 сомножителя 0,5 во втором слагаемом формулы (5.8). Помимо этого принимают b — bw и добавляют третье слагаемое в правой части, учитывающее деформации тела шестерни (кручения и изгиба):
К°не= l + k (-^У, (14.21)
Чт \ /
где qm — средняя удельная окружная сила от составляющей Fn cos рь = 27\/(dtC)1 cos а/№) [см. формулу (14.20)1:
Qfti = 24*COS CC^)«
В формуле (14.21) k = 0,14, если максимальная ордината эпюры распределения удельных нагрузок г/гпах (рис. 14.26) по ширине зубчатого венца bw (обусловленного перекосом осей
Рис. 14.25. Ориентировочные значения Кн$ для конических передач с межосевым углом 2 = 90°: а —виды передач; б — Кир при твердости рабочих поверхностей зубьев Н^НВ 350 и Н2 <£.НВ 350 (или //х > НВ 350 и Н2 <сНВ 350); в — /<//р при Н, > НВ 350 и Н2 > НВ 350;
7, 7/ — кривые, соответствующие видам передач иа рис. 14.25, а (1Ш и — для передач соответственно и а шарико- и роликоподшипниках);
--------для передач с прямыми зубьями; —— — для передаче круговыми зубьями (для этих передач при Н2 НВ 350, а также при Ht НВ 350 и Н2 НВ 350 принимают К/ур == 1)
сцепляющихся зубчатых колес) расположена со стороны подвода крутящего момента к шестерне (со стороны Е на рнс. 14.26), и k = -—0,08 — с противоположной стороны (со стороны В на рис. 14.26). Замечания, относящиеся к знаку коэффициента k, вытекают из приведенного ниже решения для зубчатого колеса, тело которого работает на деформацию кручения (см. рис. 14.29). Для прямозубых передач удельная жесткость Сч = 14 000 МПа; для косозубых передач С9 равны 20 000, 18 000 и
15 000 МПа соответственно при р < 12°, Р = 20° и р = 30°.
Рис. 14.26. К определению знака коэффициента k в формуле (14.21)
В расчеты на прочность вводятся значения Кн$ < Кнр и Kf$ < А'/р, отражающие распределение удельных нагрузок после приработки зубьев и связанные следующими зависимостями с Анр, и Кгр:
А//р = 1(Анр — 1) А/щ’, 1 + (Агр — 1)Afw. (14.22)
Рис. 14.27. Коэффициенты Khw и K-Fw (цифры на кривых — значения твердости НВ зубчатого колеса; vm — окружная скорость в конической передаче на диаметре </)
где Khw и Kfw '— коэффициенты, зависящие от твердости рабочих поверхностей и окружной скорости (рис. 14.27). С ростом v снижается интенсивность приработки (см. § 3.3) и величина приближается к Анр. При больших v (например, более 20 м/с) следы финишной обработки зубьев могут сохраняться и после продолжительной работы передачи.
Величина K'rf, определяется по рис. 14.28 в зависимости от значений Анр [см. формулу (14.21)] и bjm.
Рассмотрим вопрос о распределении нагрузки по ширине зубчатого венца колеса а, сцепляющегося с несколькими одинаковыми зубчатыми колесами I, II (на рис. 14.29, а число их nw = 3) с центрами, равномерно расположенными по окружности г = 0®. Для упрощения задачи, допуская отклонение в сторону увеличения запаса прочности, принимаем Cq = const.
Если можно пренебречь деформациямг зуб. чатых колес /, II, ...них опор, то при Fni = — Fn л = ... — Fn неравномерность распределения нагрузки по ширине зубчатого венца вы-зывается деформациями кручения тела зубча-
Рис. 14.28. Коэффициент Л'^р
того колеса а.
Если зубчатые колеса I, II, ... неподвижны, то при приложении момента Та за счет деформаций зубьев и тела колеса а линия ЬЬг основного цилиндра (<Д)а перемещается в положение b'b\ (рис. 14.29, б). Вследствие деформаций круче* ния тела колеса а имеем ЬЬ' > Л1А- В системе координат х, q показан закон изменения q (х), соответствующий перемещениям (деформациям зубьев) 6Х. Угол поворота сечения х
<1>х = 2&x/(db)a.
Если Fn (х) — нормальное усилие, передаваемое частью х зубчатого венца, то момент в сечении х составляет Т (х) = 0,5Fn (х) (г/ь)оИи>.
Далее имеем:
<7 W = Счдх = 0,5Сч (db)a <px; dq (х) = 0,5С9 (db)a Т (х) dx _ F„ (х) (db)a nw dx, Чх ~~ CJP ~ 2GJP
dq(x) C(db^nwFtt(x)
~1F =---------4GTP----- = M Fn W-
a)
Рис. 14.29. Распределение удельных нагрузок по ширине Зубчатого венца, обусловленное деформацией кручения тела зубчатого колеса
Заметив, что dFn (х) = q (х) dx, получим
d2Fn (х) „ . .
-^A2--^F„(x)=0.
При х = 0 и х — bw имеем соответственно Fn (х) = 0 и Fn (х) = Fn. За" метив, что в данном случае v — 0 [см. зависимости (5.19), (5.25) и (5.26)], полу" чим
= 4mej4m = Vbw cth (p/Q.
При bw/(d^a = 1,3; Сч= 14 000 МПа; nw = 3 и Jp 0,1 (dw)a найдем,
что 1,6. При отсутствии компенсирующей приработки это значит, что несущая способность передачи примерно в 1,6 раз меньше той, которая имеется при ~ 1. Значительно более благоприятное распределение q получают с помощью преднамеренных отклонений (модификации) от геометрии зубьев, обеспечивающей прилегание по всей ширине зубчатого венца при отсутствии деформирующего усилия. На рис. 14.29, б справа показаны сечения плоскостью п—п сцепляющихся зубьев с продольной линией модификации. Вариант Б, очевидно, приводит к еще большему увеличению q у торца Е. Вариант А способствует разгрузке зубьев у этого торца. Заметив, что в данном случае q (х) = Cq (6Х — ух), Ji выполнив расчеты, аналогичные приведенным в гл. 5, получим
= F sh(ub ) [ (f,‘----(ИХ) +Ch "
Чш гп sn (рОщ) L \ р / Р J
Минимальное значение получается при выполнении условия <7Д.=О = q , приводящего к зависимости х Dw
К0 ntb Bbw
лнр - —cw 2 •
Для приведенного числового примера имеем = 1,15. Следовательно, с помощью рассмотренной продольной линейной модификации несущая способность в данном случае может быть повышена примерно на 40%.
Динамические нагрузки в зацеплении. Действительное значение мгновенного передаточного отношения Wj/wj из-за погрешностей зацепления и деформаций зубьев отличается от среднего значения и = zjzl (см. стр. 254), и это вызывает динамические нагрузки в зацеплении.
Если Uq — удельная (приходящаяся на единицу ширины зубчатого венца) динамическая нагрузка, вызванная погрешностями и деформациями зубьев, a Wq — удельная нагрузка, полученная без учета динамических нагрузок, то полная удельная нагрузка + C7q. Отношение + Uq)lW'q называется коэффициентом. учитывающим динамические нагрузки в зацеплении, и обозначается KHv 11 Kfv соответственно при расчете зубьев на контактную и изгибную прочность:
Дно = 1 + (14.23)
(14.24) Здесь
vH = 0,475.\^bwdwlWHjTm-, vF = 0,475- F.JTF1, (14.25)
где
WHu = 108 H (nc. T — 2) v (aw/u)1'2; WFv= 108F (nc. T — 2) о (aw/u)^2.
(14.26)
В этих формулах ТИ1 — момент на шестерне, Н-м; бн и 8F — коэффициенты, зависящие от твердости активных поверхностей зубьев и вида их (табл. 14.3); ис. т —числовое обозначение сте-
Таблица 14.3. Коэффициенты Л// и 6/.-
Твердость поверхностей сопрягаемых зубьев Hi и И 2 Вид зубьев бн бд
Н2 SZ НВ 350 (или //tНВ 350 и Яг НВ 350) Прямые Непрямые 0,006*; 0,004** 0,002 0,016*; 0,011** 0,006
Нл > НВ 350 и Н2 > НВ 350 * Без модификации го *♦ С модификацией гол Прямые Непрямые повки овки. 0,014*; 0.010** 0,004 0,016*; 0,011** 0,006
пени точности СТ СЭВ 641—77 для цилиндрических передач и по СТ СЭВ 186—75 — для конических; v — окружная скорость, м/с; де’№, — в Н/мм.
В случае конических передач в формулах (14.25) и (14.26) v — окружная скорость на среднем диаметре d и вместо (ои,/п)1'/2, Ьц, и dwl следует подставить соответственно [d (и -ф 1)/и]1/2, b и <^i-
При небольших значениях v и значительных нагрузках возможны неусталостные виды изнашивания сопряженных поверхностей зубьев, отрицательно отражающихся на плавности работы передачи. В связи с этим, если по формулам (14.25) получается vH < 0,06 и vF < 0,08, то следует принять vH = 0,06 и vF = = 0,08.
При значительных пх (например, превышающих 2000— 3000 об/мин) величины vH и vF, найденные по формулам (14.25) и (14.26), могут превысить максимальное значение vmax. Поэтому на-о обеспечить условия vH < vmax и vF < vmax, где
Т’ц’ах = ^max/(2-1087m).
Здесь U7max — максимальная удельная динамическая сила, Н/мм: ^шах = С9(Лв.р-Лк),
где Cq = 12 000 МПа — удельная жесткость; Лв. р — вероятная разность шагов зацепления шестерни и колеса, приравниваемая обычно к среднему квадратическому предельных отклонений этих шагов fpbl и fpb2; Лк — ошибка, компенсируемая масляным слоем и приработкой при малых значениях v (рекомендуется принимать Лк «ь 0,005 мм).
Рассмотрим причины появления кромочного удара в прямозубых передачах (рис. 14.30). Полагаем, что разность основных окружных шагов колеса 2 и шестерни 1
& — РЫ 2 — РЫ 1-
При рмъ = Pbti эвольвентный профиль зуба колеса пары зубьев В занимает положение Вт. При отсутствии деформирующего усилия расстояние между действительной Вд и теоретической Вт эвольвентами равно Д, т. е. %= А (рис. 14.30, а). При приложении нагрузки, воспринимаемой только парой А, деформируемой на величину 6д, имеем
Х = Д + 6Л = Pbt2~ Рьц + ^а-
При вращении в направлении стрелок 1 из-за погрешностей шагов и деформаций пара зубьв В вступает в зацепление не в точке Plt а в точке k, т. е. вне линии зацепления.
Нормаль b^k к эвольвентному профилю зуба шестерни касается окружностей dbl и d'b2. При cuj/Wj = d^l dwi скопости на окружностях dbl и d’b2 (т. е. скорости в направлении нормали b\k) = 0,5 и vL, = 0,5 d^2w2 неодинаковы (рис. 14.30, б). Поэтому момент входа в зацепление профилей в точке k сопровождается ударом со скоростью
vv = vki~vk2- О4-27)
263
Для определения vy заметим, что в движении относительно шестерни 1 колесо 2 вращается вокруг мгновенного центра w с угловой скоростью оц + ы2 (рис. 14.30, а). Скорость сближения профилей в момент соприкосновения в точке k (скорость удара)
vy = cw (Ы1 + <о2). (14.28)
Отрезок сш прямо пропорционален ek, а величина ek пропорциональна % (это легко обнаружить, учтя допустимость на малом участке замены эвольвент дугами окружностей радиусов Ьге и Ь2е), поэтому
Vy = К (Wj + ы2) Их. (14.28а)
где К. — коэффициент пропорциональности.
Рис. 14.30. Соударение зубьев при ры2 > р^ц (кромочный удар при ведущей шестерне 1 и срединный удар при ведущем колесе 2)
Определим силу удара Uq, отнесенную к единице ширины зубчатого венца (удельную силу удара), опираясь на решение, известное из курса теоретической механики. После соприкосновения профилей в точке k величина v'kl падает, а растет. В момент, когда = v'k<2 — г'общ. деформация пары зубьев В достигает максимального значения 6В п1ах, при этом Uq = тах.
Удельная потенциальная энергия деформаций
Пусть Jт1 и Jm2 — моменты инерции шестерни и колеса. Полагаем, что благодаря податливости валов и соединительных элементов можно пренебречь влиянием масс, вращающихся вместе с зубчатыми колесами. Заменяем зубчатые колеса поступательно движущимися массами т1 и т2, приведенными к основным окружностям dfei и и отнесенными к единице ширины зубчатого венца;
__mi .
— 9 >
bwdbl
m2 =
4J ГП2 bwdb2
На основании законов сохранения энергии и количества движения имеем:
mi(uli)2 М1^)2 (ml + ™2ho6m .
2 + 2 2 2С9 ’
miv'k\ + m2vk2 = (ml + ™2) уобщ-
Из равенств (14.27), (14.29) и (14.30) находим = Vy VCqtnnp , где mnp = rn1m2'(m1 + т2).
Заметив, что
из формул (14.28а) и (14.31) получим
,, 2К иф1 1/7-------------
— -j -— v V Cqm-пру* •
Величина % принимается равной среднему квадратическому отклонений fphi и fp(,2 шагов зацепления шестерни и колеса:
(14.29)
(14.30)
(14.31)
(14.32)
предельных
X — fpbl + fpb2 •
Динамическая нагрузка пропорциональна окружной скорости v и параметру у, характеризующему погрешности шагов. Во избежание чрезмерно больших значений Uq и, следовательно, завышенных массы и габаритов передач с ростом v надо назначать более высокую степень точности передачи. Это обстоятельство отражено в табл. 14.2.
Скорость Vy, а следовательно, и Uq можно значительно снизить с помощью модификации профиля — преднамеренного отклонения у вершины в тело (см. штриховую линию на зубе колеса в паре В на рис. 14.30, а). При этом точка k встречи профилей пары В приближается к линии 6ife2, уменьшается длина отрезка cw и, как следует из формул (14.28) и (14.31), падают величины vy и Uq.
Мы рассмотрели так называемый кромочный удар (вступление в зацепление пары В вне плоскости hth2 полиции пересечения профиля зуба Вд и цилиндра dfl2), возникающий в том случае, если у ведомого зубчатого колеса (на рис. 14.30, а — у колеса 2) шаг больше, чем у ведущего. Если же шаг у ведомого зубчатого колеса меньше, чем у ведущего, то возникает так называемый срединный удар. При вращении зубчатых колес в направлении стрелок II (рис. 14.30, а) меньший шаг у ведомого звена — шестерни. При касании зубьев В на линии 6162 в паре А имеется зазор (конечно, в том случае, если Л > од). При смещении точки касания зубьев пары В с линии Ь±Ь2 зазор в паре А уменьшается и зубья входят в зацепление с ударом, называемым срединным ударом.
Зависимость (14.32) дана в простейших предположениях и позволяет вскрыть лишь качественную сторону рассматриваемого вопроса. В ней не учитываются предыстория, связанная с колебательными процессами, влияние податливости элементов конструкции (за исключением зубьев), прирабатываемость, распределение погрешностей и другие факторы.
§ 14.6. РАСЧЕТ НА КОНТАКТНУЮ ПРОЧНОСТЬ
АКТИВНЫХ ПОВЕРХНОСТЕЙ ЗУБЬЕВ1
Из расчета на контактную прочность зубьев устанавливают размеры и массу зубчатой пары, при которых предупреждается ее преждевременный выход из строя из-за разрушения рабочих поверхностей зубьев.
1 Сведения о материалах зубчатых колес даны в гл. 6 (см. стр. 109). Указания к проектировочному расчету см. в § 14.12 (см. стр. 317).
Из рассмотренных видов разрушения рабочих поверхностен (см. § 2.3) применительно к зубьям наиболее полно изучено разрушение в результате развития усталостных трещин, вызывающее выкрашивание. Основной целью приводимого ниже расчета является предупреждение преждевременных отказов из-за развития усталостного изнашивания. Но этот же расчет используется и для передач, в которых наряду с усталостными имеются и другие виды повреждений, например медленно протекающее молекулярномеханическое изнашивание. В основу расчета положена формула Герца (2.2). При проверочном расчете действующее напряжение он сравнивается с допускаемым [он].
Прямозубые цилиндрические передачи. В формуле (2.2) величина р„р приравнивается к приведенному радиусу кривизны рпр/ш в полюсе зацепления, определяемому по формуле (14.14). Это объясняется возникновением усталостного выкрашивания на ножках зубьев вблизи полюсной линии, а также и тем, что обычно в передачах, соответствующих исходному контуру по ГОСТ 13755—68 и СТ СЭВ 229—75, полюсная линия w находится в зоне однопарного зацепления (см. рис. 14.16, а).
В формулу (2.2) вместо q подставляют расчетную удельную нагрузку </раСЧ, найденную с учетом неравномерности распределения нагрузок по ширине зубчатого венца и динамических нагрузок, вызванных погрешностями зацепления (см. стр. 260, 262):
9расч — = (14.33)
Суммарная длина контактных линий в каждый данный момент равна bw или 2bw (см. стр. 249). Эксперименты показывают, что несущая способность прямозубых передач, лимитируемая контактной прочностью, зависит от величины е,а, увеличиваясь с ее ростом. Приближенно это учитывается тем, что величина /к в формуле (14.33) приравнивается не к минимальному значению bw, а определяется по эмпирической формуле
/к = 3bw/(4 - еа) = bw/Zl (14.34)
где
Z6 =/(4 - ей)/3. (14.35)
На основании сделанных замечаний и формул (2.2), (14.14), (14.20), (14.33)—(14.35) получим зависимость для проверочного расчета цилиндрических передач
(14.эд
где ТН1 — в Н-м; величина ZH определяется по формуле
ZH = j/2/sin2aztB.
(14.37)
При х.. ± xt = 0 имеем = 20° и ZH = 1,76. Для стальных шестерни и колеса ZM = 271 Н^/мм, тогда
2120ZHZg /~Th1Kh?,Khv(ii± 1) г л 'н ~ dwl У ‘ Ь~й < L°«l-
(14.37а)
В этих формулах ТИ1 приравнивается к максимальному из
длительно действующих чета при действии кратковременных нагрузок см. на стр. 272.
Особенности расчета косозубых цилиндрических передач. На рис. 14.31, а показаны находящиеся в зацеплении зуб шестерни 1 и зуб колеса 2. Эти же зубья показаны отдельно на рис. 14.31, б. Наклонное расположение линии контакта PJ\ на поверхности зубьев, характерное только для косозубых передач, является причиной возникновения неравномерности распределения удельных контактных нагрузок q.
При идеальной точности изготовления и
на шестерню моментов. Особенности рас-
Рис. 14.31. Распределение удельных контактных нагрузок в зацеплении косозубой передачи
возможности пренебречь
влиянием деформаций тела зубчатого колеса деформация зубьев одинакова по всей длине контактной линии. Но удельная
жесткость зубьев Cq изменяется, достигая максимума при касании зубьев приблизительно в середине их высоты (см. стр. 82) и минимума в конечных точках зацепления и Рг. В связи с этим величина q = Cq$b изменяется так, как показано на эпюре рис. 14.31, а. При высоких окружных скоростях и малых шероховатостях рабочих поверхностей зубьев последние разделены масляным слоем
и повреждения их неусталостного характера практически отсутствуют. Но в большинстве передач в процессе работы наблюдается отклонение в тело от первоначальной поверхности зуба. При этом даже самые незначительные отклонения, например 5—10 мкм, оказывают большое влияние на распределение q.
Значительная неравномерность распределения q по длине контактных линий может возникнуть из-за неодинаковой нагру-
зочной способности поверхностей зубьев шестерни и колеса, а также головок и ножек. Поверхности головок зубьев являются опережающими, а ножек — отстающими, поэтому несущая способность головок значительно выше, чем ножек см. стр. 31 и 251).
Отношение рк допускаемых контактных напряжений головок [он) = [о?/п 1 и ножек 1о’н 1 = 1он) определяется по эмпирической зависимости
Рк = [он]/[он] = 6/V Нив • (14.38)
Удельная контактная нагрузка прямо пропорциональна квадрату контактного напряжения [см. (2.2)], поэтому отношение допускаемых удельных контактных нагрузок [^г] и k?" 1 головок и ножек равно
р2к = W1 = 36/1/Н^. (14.39)
Например, при твердости рабочих поверхностей зубьев шестерни НВ 600 и колеса НВ 300 имеем соответственно р^г = = 1,47и рЬ = 2,08. Применительно к указанным твердостям на рис. 14.31, б в масштабе нанесены эпюры значений [ft] и [ft] для шестерни и колеса.
Полагаем, что моменту на шестерне Т1А соответствует эпюра распределения q, обозначенная А, с максимальным значением qA. При этом удельные давления на ножках колеса равны допускаемому значению Опыт показывает, что в случаях, подобных рассматриваемому,"допускаемый момент на шестерне может значительно превышать Т1А. Нагрузим передачу моментом Т1В, которому соответствует эпюра q, обозначенная В, с максимальным значением qB 0,5 ([<;£] + 1^'1).
При этом на участке I зуб 2 перегружен. В результате появляются усталостное выкрашивание и другие виды повреждений, вызывающие перераспределение q: разгрузку участка I за счет участка II. При этом характер распределения q приближается к распределению, представленному линией [q2 ] (рис. 14.31,6). После завершения процесса перераспределения q разрушение ножек колеса прекращается и передача может работать неограниченно долго.
Повысить нагрузку с момента Т1А до 7\в удалось благодаря тому, что несущая способность головок выше, чем ножек ([^] > [q£ ]), и твердость зубьев шестерни выше, чем колеса, и поэтому (<??] > 1<7В].
В приведенном анализе не учитывалось влияние изменения приведенного радиуса кривизны р11рп в сечении, нормальном к линии контакта на участке Р2Р1г т. е. предполагалось, что этим влиянием можно пренебречь. При значительном изменении величины р„рл на участке P2Pi (см. эпюру рпр„ на рис. 14.31, а) существенно изменяется и величина он по длине контактной линии, достигающая, как следует из формулы Герца, максимального зна-268
чения там, где рпр„ — Рпр «mm- В связи с этим на участках с малыми значениями рпрп может возникнуть изнашивание рабочих поверхностей, вызывающее перераспределение q.
Отмеченные особенности распределения q в косозубых передачах учитывают при определении 1о/7] (см. стр. 271) и при определении 9расч введением коэффициента Кр. Подставив в (14.33) Лр и Кна (см. стр. 254), получим:
<7₽асЧ = %- KH^HvKHaW. (14.40)
Рис. 14.32. Коэффициент #ц для цилиндрических передач с = 0 и л'2 =0: а - р = 12°; б —Р = 22°; в — Р = 30° (при Р «: 14° значения Ьн надо принимать по рис. 14.32, а; при значениях р> 14°, но отличающихся от 22° и 30°, значения Он определяют линейным интерполированием)
Подставив в формулу (2.2) вместо q величину <7расч и учтя формулы (14.15) и (14.20), получим (МПа)
w, * >. < 1Оя1, (14.41)
где ________________ _
ZH = l/2cosp6/sin(2ato); Ze=l/]/ea. (14.42)
Обозначив
= 1/(Z2Z2K₽), (14.43)
получим (МПа)
(14.44)
При стальных зубчатых колесах (ZM = 271 Н1/2/мм) имеем 12 120 , Г THiKHaKn^,KHv(U ± 1)
°« = -^У --------------М5Й----------(14.45)
Величину определяют по рис. 14.32; /<₽ = еа/(Еа1дт + + s^Sh), где 6j и 6ц — коэффициенты, зависящие от характера изменения приведенного радиуса кривизны (см. стр. 92 в справоч-нике (53] и ГОСТ 21354—75).
Таблица 14.4 Значения о/у пт Л> (при ® =$ 5 м/с) и [S//] (при классе шероховатости не ниже 7-го по ГОСТ 2789—73)
j Термическая ' обработка Твердость поверхностей зубьев aHlim b* МПа
Нормализация или улучшение И НВ ==£ В В 350 2Ннв + 70 1.1
Объемная закалка Нн«с= HRC 40—50 \1Hhrc + 100 1.1
Поверхностная закалка Инке = HRC 40—56 17 И HRC + 200 1.2
Цементация или нитроцементация HHRC = В ВС 54—64 22>Hhrc 1.2
Азотирование * См. стр. 79. HHV = HV 550—750 1050 1.2
Рис. 14.33. Коэффициент Zo-:
1 — при твердости активных поверхностей зубьев Н < НВ 350; 2 — при Н > НВ 350
Примечание. С погрешностью в сторону повышения надежности величину дн можно определять по рис. 14.32 для передач с одинаковыми твердостями активных поверхностей зубьев шестерни и колеса (Нг = Н2) при х2 — х1= 0, если >1 > 0.
Допускаемое контактное напряжение. Допускаемое контактное напряжение ([ош ] для шестерни и [о№ ] для колеса) определяют по формуле
[°н1 = (°П lim ь/1%]) (14.46)
где Он Iim&— предел контактной выносливости, соответствующий базовому числу циклов перемен напряжений (табл. 14.4); [sH] — допускаемое значение коэффициента запаса прочности (табл. 14.4); ZR —коэффициент, учитывающий шероховатость рабочих поверхностей зубьев; при 7-м классе шероховатости (Ra 1,25—0,63) и выше ZR = 1, при 6-м классе (Ra 2,5—1,25) имеем ZR = 0,95; Zv — коэффициент, учитывающий влияние окружной скорости (см. стр. 31 и рис. 14.33); при твердости активных поверхностей зубьев менее НВ 350 Zv = О,85под, а при твердости более НВ 350 Zv — О,925и0,05; при v < 5 м/с (или при vm < 5 м/с для конических передач) принимать Zv — 1; K/IL — коэффициент
долговечности, определяемый на основании формулы (4.16), в которой в данном случае т = 6; No = NH0; NE = N/Ii::
(14.47)
Величину NHo определяют по рис. 14.34 или по формуле
Л^по —307/^в, (14.48)
где Ннв — твердость активных поверхностей зубьев рассчитываемого зубчатого колеса.
270
Если найденное по этой формуле значение Нно > 12-107, то следует принять NH0 — 12-107. При N НЕ £> ИИ() е формуле (14.47) следует принять Nhj. = NHq. Исходные предпосылки к определению NHE даны в Ёд. 4.
При постоянной нагрузке NHE = Nc и из формулы (4.3) для
шестерни и колеса имеем:
NнЕ1 ~ NC1 — 14.49)
N & — 60п2/гк2^. (14.50)
В зубчатой паре, состоящей из шестерни и колеса, nwl — nw2 = 1.
При действии переменных нагрузок величины Мны и NHE2 определяют по формуле (4.14), в которой принимают а = 1, т' = 3, Q = Т и расчетный момент приравнивают обычно к максимальному из длительно действующих.
Таким образом, на основании формулы (4.14) получим
п
NHE=li(Tl/THl)aNcl. (14.51) 1
Nho
Если, например, гистограмма, показанная на рис. 4.6, а, относится к шестерне зубчатой пары, т. е. Qi — Tlt то при Тт = Ту имеем:
NhE ! = Nc (Г) + (7V/7Y)8 Nc (2') + (Т3'/Ту)3 Nc (8Э + (Т^Л')3(4'>;
(14.52)
Nhe 2 = N не 1/и. (14.53^
Цифровые индексы при Т и Nc отмечены вверху штрихом во избежание ошибок, связанных с использованием индексов 1 и 2 при буквенных обозначениях, относящихся соответственно к шестерне и колесу.
Число циклов Nci (число вхождений в зацепление каждого данного зуба при действии момента Т,) определяют по формуле
Nci = 60/i,н^,-, (14.54)
где и,- -— частота вращения (об/мин) при действии момента 7\;
— продолжительность действия нагрузки Tt за полный срок службы, ч.
При расчете прямозубых передач в (14.36) и (14.38) величина low] приравнивается к меньшему из двух значений [ат] и |оЛ/2].
Нагрузочная способность косозубых передач зависит от [оН11 и [оН21 (см. стр. 268). Это обстоятельство при твердости одного или обоих сцепляющихся зубчатых колес // < НВ 350 и хг = == х2 = 0 учитывают зависимостью
[он] = |/ 0,5(1о/п]2 4- [Онг12). (14.55)
Величина [оя], найденная по формуле (14.55), не должна превышать более чем на 18% меньшее из двух значений {о/я) и 1о№ J-
При Нг > НВ 350 и Нг > НВ 350 на использование формулы (14.55) накладываются дополнительные ограничения, зависящие от скорости. Приближенно (с отклонениями в сторону увеличения надежности) для косозубых передач по аналогии с прямозубыми можно принять значение 1сги] равным меньшему из двух значений [оН1] и ГсгН2 ].
Примечание. При приложении наибольшей кратковременно и редко действующей нагрузки Ti{asx (возможно, Даже одноразового действия) проверка передачи Выполняется по формуле
аН шах = СН V ^1 шахДгд [°Н шах]’ (14.56)
Для зубчатых колес, подвергнутых улучшению, нормализации пли объемной закалке с низким отпуском, [ортаХ ] = 2,8от. Для зубчатых колес, подвергнутых цементации, нитроцементации Й контурной закалке после нагрева т. в. ч., [онгаах ] iOHHRC.
Зависимости с коэффициентами С,ч и Ко \ Решая зависимость (14.36) относительно момента при он = [он], получим
г'г 1______ba,du’iu (/ lq/y] \ ____1____ 1 z>4 гу\
Uml — 2.ЩЗ {и± 1) zM / KHf,KHv(ZaZEy\‘
Сомножитель, заключенный в фигурные скобки, называется комплексным коэффициентом контактных напряжений и обозначается 1/<0 । при он — [ан ] и Ко при некотором действующем напряжении Оц- Таким образом,
h (ft
[^]=2710тС'1Т[Ло1- (Н-58)
При заданном значении Тт (Н-м) из (14.58) получим формулу проверочного расчета
Ко = 2 • 10%1 (п ± 1 )/(bXi«) < [Ао1- (14.59)
Заметив, что ([oH]/ZM)1 2 = [Сн] (см. стр. 23), из (14.35), (14.37), (14.51) для прямозубых передач имеем
„ 1,5 [Си] sin 2«/и
' (14-60)
С погрешностью, обычно не превышающей 6%, можно принять
Ко! = 0,4 [CH\/(KHpKHv). (14.61)
Аналогично с учетом (14.44) для косозубых передач получим [K0] = [CH\^Hl(KHaKHf,KHvY (14.62)
1 Наряду с рассмотренными выше зависимостями в ГОСТ 213§4—75 допускается применение зависимостей с коэффициентами Си и Ко- б достоинствах ©тих зависимостей см. на стр. 323.
£72
Таблица 14.5. Значения [Снь! (МПа) для передач Со стальными шестерней и колесом при и ^5 м/с
Твердость рабочих поверхностей НВ Термообработка: нормализация или улучшение Твердость рабочих поверхностей Термическая или термохимическая обработка
Цементация или нитроцементация Поверхностная закалка Объемная закалка
230 3,16 40 - 7,32 6,85
240 3,40 42 7,90 7,46
250 3,66 44 8,50 8,09
260 3,92 46 9,12 8,75
270 4,19 48 9,76 9,44
280 4,47 50 .1- " 10,43 10,16
290 4,75 52 - " 11,11 —
300 5,05 54 14,59 11,82 —
310 5,36 56 15.69 12,55 —
320 5,67 58 16,83 — —
330 6,00 60 18,01 —. —
340 6,33 62 19,23 — —
Примечания: 1. Значения 1С///1 получены по формуле (14.64). 2. Для азотированных зубчатых колес [С/у/1 = 10,5 МПа.
С учетом (14.46) имеем
Ю/] = [Снь]
где (табл. 14.5)
[Сщ>] = [анПтЬ/(Рн]Хм)]а.
(14.63)
(14.64)
По (14.63) определяют величины [Сш] и [0^1 соответственно для шестерни и колеса.
При расчете прямозубых передач в (14.60) и (14.61) величина 10/, J приравнивается к меньшему из двух значений 1С//11 и [0Н2]. То же относится и к косозубым передачам 1см. (14.62)], если Нг НВ 350 и Н2 ►> НВ 350.
При твердости активных поверхностей зубьев одного или обоих зубчатых колес косозубой передачи Н с НВ 350 и xL = х2 ~ 0 в (14.62) имеем
[Сн] = 0,5([С/Л] + [С//2]).
(14.65)
Величина [Си] из (14.65) не должна превышать более чем на 40% меньшее из двух значений ]Cm 1 и [СН2].
Указания к нахождению величин, входящих в приведенные формулы, даны в списке обозначений (см. стр. 9) и в примерах расчета (см. стр. 323).
§ 14.6. РАСЧЕТ НА ИЗГИБ ЗУБЬЕВ ЦИЛИНДРИЧЕСКИХ ПЕРЕДАЧ
Прямозубые передачи. Зуб прямозубой передачи является консольной балкой, загруженной изгибающим усилием, приложенным по линии (точнее, площадке) контакта, параллельной его основанию. С перемещением этой линии по активной поверхности зуба изменяется плечо изгиба, достигая максимума при приложении нагрузки в вершине зуба шестерни пары зубьев А (см. рис. 14.13). Но в этом случае в работе должна участвовать вторая пара зубьев (пара В), так как еа > 1, и, следовательно, в вершине в зависимости от погрешностей основных окружных шагов может восприниматься только часть передаваемой зацеплением нагрузки. Пара зубьев А воспринимает всю нагрузку, если деформация ее меньше или равна разности основных шагов А = Рьп — Рыч (см. рис. 14.13, б). В зоне однопарного зацепления (см. рис. 14.16) вся нагрузка воспринимается одной парей зубьев. При повороте шестерни против часовой стрелки (см. рис. 14.13, а) на угол, достаточный для выхода из зацепления пары А, всю передаваемую нагрузку воспринимает пара В. При этом к зубу колеса нагрузка приложена по линии зоны однопарного зацепления, наиболее удаленной от его основания.
Расчетная нагрузка, отнесенная к единице ширины зубчатого венца [см. формулу (14.33)1,
*7расч = Q^Fa^F^Fv ~ Vn/lK) ^Fa^F^Fvt (14.66) где KFf> и Kfv — коэффициенты, о которых говорилось выше (см. стр. 260 и 262); KFa— коэффициент, учитывающий распределение нагрузки между зубьями.
Точку приложения qpaC4 переносим в точку с на линии симметрии зуба и раскладываем драсч на составляющие: изгибающую <7р2СЧ cos у и сжимающую ^расч sin у (см. рис. 14.13, в). Развитие усталостных трещин, приводящих к поломке зубьев, начинается обычно на стороне растяжения (на рабочей стороне зуба). Отношения к модулю т размера опасного сечения АВ и расстояния от него до точки с обозначим соответственно g и е. Номинальное напряжение у точки А при ширине зуба b = 1 мм (в направлении, перпендикулярном к плоскости чертежа)
п п расч eastern flpacqSiny
Оном —Осж— (gm)2 - —• (14.0/)
На рис. 14.13, в даны эпюры первых главных напряжений на контуре у основания зуба. При нереверсивной нагрузке на стороне растяжения (зона Л) и сжатия (зона В) имеем соответственно R = 0 и R = —оо. При реверсивной симметричной нагрузке в обеих зонах R —1,25. Если зубчатое колесо представляет собой сравнительно тонкий обод, что нередко наблюдается в планетарных передачах (см. § 14.10), то в связи с деформированием обода возможны значения R = (—2)4-(—3) [53].
Максимальное местное напряжение у опасного сечения (см. стр. 68)
^шах к ““ °номКо-
Умножив и разделив правую часть равенства (14.67) на cos а, получим
<|4в8>
Выражение в квадратных скобках, зависящее от формы зуба, от величин г и х при данном исходном контуре (см. стр. 241 и рис. 14.11) и положения линии приложения нагрузки, называется коэффициентом формы зуба. При приложении нагрузки по линии пересечения поверхности зуба с цилиндром выступов dQ = d + + 2 (1 + х) т [или, короче, при приложении нагрузки в вершине на цилиндре da •= d + 2 (1 + х) /п] коэффициент формы зуба обозначается YP.
Таким образом, при приложении всей нагрузки в вершине на окружности da =• d 4- 2 (1 + х) tn
Отахк--^0—^- (14.69)
С помощью коэффициентов YP определяют максимальные местные напряжения у основания зубьев, и их можно называть поэтому коэффициентами формы местных напряжений. Приведенные ниже значения YP получены методами теории упругости [801.
Заметив, что /к “ р™, и отбросив индекс max к, из формул (14.20а), (14.66) и (14.69) получим
о> = 2 • mnKp^Kp^YpUbjlyn) < [<М- (14.70)
Косозубые передачи. Расчетную нагрузку и в этом случае определяют по формуле (14.66). Введя коэффициент Yp, учитывающий влияние наклонного расположения линии контакта на поверхности зуба на напряжения у его основания (см. рис. 14.31), из (14.16), (14.20а), (14.66) и (14.69) получим
оР = 2- iCPTF1KpaKF(lKFt>YpYp/(bwd1mEa) с [aF]. (14.71)
У шестерни и колеса значения YP1 и YPi не одинаковы. То же нередко относится к допускаемым напряжениям [оп] и [о^]. В связи с этим проверке на изгиб подлежат зубья шестерни и колеса.
Проверочный расчет зубьев на изгиб. Прямозубые передачи рассчитывают по формулам:
°fi = 2- 10371F1/6f(Z1A’FpKFt,yF1/(&K,d1m) с [OfJ;
Gpi — ° Fl Yci^Fai/Y Floral)] < (Одг!-
Расчет косозубых передач выполняют по формулам [см. (14.71)]:
°>i = 2- lQ>TP1KPaKFp^PvYF1Ypl(bwdimea) <: [ор^];
°F2 — ° Fl Y FiYFl) < [°7-'21 •
(14.72)
(14.73)
В формулах (14.72) можно принять KFai. = Кгаг — 1 с последующим уточнением в случае, если не обеспечено условие прочности (см. стр. 277). В формулах (14.73) значения KFa выбирают из рис. 14.19, б.
В формулах (14.72) и (14.73) исходный расчетный момент Тп приравнивают к максимальному из длительно действующих на шестерню моментов (например, моменту, соответствующему на-
Рис. 14.35. Коэффициент YF для зубчатых колес с внешними эволь-вентными зубьями при приложении нагрузки в вершине зуба
грузке Qj в случае гистограммы на рис. 4.6, а)1 *: значения /<Fp определяют по данным на стр. 260; Kpv — по (14.24) (см. также стр. 323); значения [oF] даны на стр. 278; коэффициент Ур находят по формуле
Ур=1- р/140. (14.74)
Значения Y Fl и YF2 определяют по рис. 14.35 в зависимости от гх и z2 при |3 = 0 и по эквивалентным числам зубьев zvl и zv2 при р =h 0, определяемых по формулам:
ztl = z1/cos3P; zo2 = z2/cos3p. (14.75)
1 При нагрузках, которым соответствует число циклов перемен напряжений
менее 5-104, расчет выполняют в соответствии с приложением к ГОСТ 21354—75
или приближенно по формулам (14.72), (14.73) и (14.78). При этом, если найден-
ные по (14.79) значения Kfl Э* 2,7, то следует принять Kfl — 2,7.
форма зуба косозубого зубчатого колеса в нормальном сечении очень близка к форме зуба прямозубого колеса с числом зубьев, равным zv.
Для зубчатых колес с внутренними зубьями ориентировочно можно принять YР2 = 3,5 4. Более точные значения Y F2,
базирующиеся на данных работы [80], приведены в справочнике [53].
Если найденное по формулам (14.72) для внешнего зацепления действующее напряжение oF превышает [о>], то выполняют
уточненный расчет.
Уточненный расчет на изгиб зубьев прямозубых передач. Напряжения, найденные по формулам (14.72) при Krai ~ = Kfo.2 = 1> соответствуют приложению всей нагрузки в вершине зуба, что возможно при Д > (см. рис. 14.13, б), где — деформация пары зубьев А.
Действительная нагрузка, воспринимаемая зубчатой парой А, определяется по формуле (5.11), в которой применительно к зубчатой передаче CqA = 10 000 МПа; CqB = 14 000 МПа;
= CqA + CqB = 24 000 МПа (см. = <7расч. ПОЛУЧИМ
Рис. 14.36. Значения и в зависимости от величины И
стр. 82). Приняв q =
qA = 0,416<7расч -j- 5,84Д,
(14.76)
где Д — в мкм.
Учтя формулы (14.20а) и (14.66), найдем, что доля нагрузки, передаваемая парой А, равна
Ча
<7расч
0,416 +
2,756ц, djA 106TfiKf^Kfv '
(14.77)
Величина Д приравнивается к среднему квадратическому % предельных отклонений шагов зацепления шестерни и колеса (см. стр. 265).
Если % > 1, то вся нагрузка воспринимается в вершине зуба и напряжения, полученные по формулам (14.72), не подлежат уточнению.
Величины oF (°fi Для шестерни и aF2 для колеса) прямо пропорциональны XYF при приложении нагрузки в вершине и ОУр при приложении нагрузки в зоне однопарного зацепления. Здесь величину О’ (0i для шестерни и 02 для колеса) выбирают по рис. 14.36 в зависимости от величины Н, равной отношению минимального расстояния от окружности da = d + 2 (1 + х) т До зоны однопарного зацепления (см. рис. 14.13, а, на котором показано расстояние Н2т) к модулю. Приближенно для передач с х2 ± Xj = 0 можно принять О 0,7.
Таблица 14.6. Пределы выносливости <ф ]jm и значения [sfJ
Вид термообработки и марки стали Твердость зубьев HRC об F lim b МПа Is/? 1 *
иа поверхности в сердце-вине
Цементация легированных сталей: содержание Ni более 57—63 32—45 950 1,7
1% и хрома 1% и менее (например, 20ХН2М, 12ХН2, 12ХНЗА) стали марок 18ХГТ, 57—63 32—45 800 1,7
ЗОХГТ, 12Х2Н4А и др. Нитроцементация легированных сталей: 25ХГМ 57—63 32—45 1000 1,7
25ХГТ, ЗОХГТ и др. 57—63 32—45 750 1,7
Закалка при нагреве т. в. ч. по всему контуру: стали пониженной про- 58—62 28—35 900 1,7
каливаемости (например, 55ПП) стали марок 60ХВ, 60Х, 54—60 25—35 700 1,7
60ХН и др. стали марок 35ХМА, 48—60 25—35 600 1,7
40Х, 40ХН и др. Нормализация или улучше- НВ 11 ЗД—350 1,3577 В + 100 1,65
ние Азотирование легирован- — 24—40 18// А?Ссердц 50 2
ных сталей * См. стр. 79.
При расчете надо выявить максимальное напряжение, и поэтому в формуле (14.72) принимают KFa (KFal для шестерни и KFfli Для колеса) равным большему из двух значений Хи#.
Допускаемое напряжение при расчете зубьев на изгиб. Допускаемое напряжение определяют по формуле
[Of] = (u° lim b/[SFl) KfcKfl, (14.78)
о XX
где <tf iim * — предел выносливости зубьев на изгиб, соответствуй ющий базовому числу циклов перемен напряжений при R = О (табл. 14.6); KFL — коэффициент долговечности [см. (4.16), где в данном случае No = NFo = 4 10й и т = 9 при твердости активных поверхностей зубьев Н > НВ 350 и т — 6 при их твердости Н < НВ 350]:
К fl = 1^4 • 10r/Nfe.
(14.79)
Величину NFE определяют по формулам (14.49) и (14.53), в которых индекс Н заменяют индексом F и вместо т' = 3 принимают т’ = 6. Если N FE > 4-Ю6, то принимают KFI_ — 1.
Коэффициент KFc учитывает влияние двустороннего приложения (реверсирования) нагрузки на зубья. При одностороннем приложении, т. е. при нереверсивной нагрузке, ДД = 1. Если нагрузка реверсивная, причем в одну сторону действует Т', а в другую Т" (при этом Т' i> Т" и NFE > NFE), то 1
KFc=\-yFcT"IT'. (14.80)
Здесь yFc = 0,35 при твердости рабочих поверхностей Н < < НВ 350. Для зубьев с поверхностным упрочнением уРс = 0,25, за исключением азотированных, для которых yFc = 0,1.
§ 14.7. ЦИЛИНДРИЧЕСКИЕ ПЕРЕДАЧИ
С ВНЕШНИМ ЗАЦЕПЛЕНИЕМ НОВИКОВА 2
Наряду с совершенствованием эвольвентного зацепления и поисками путей повышения его несущей способности выполняют исследования, направленные на создание зацеплений, принципиально отличающихся от эвольвентного.
Важным этапом в этом направлении является разработанное в 1954 г. М. Л. Новиковым зацепление с круговыми профилями с начальным точечным контактом, отличающееся высокой несущей способностью. Некоторые особенности геометрии и кинематики точечного зацепления пояснены на следующем примере.
На рис. 14.37, а сплошными линиями показаны сопряженные эвольвентные профили. В положении 1 профили касаются в полюсе w. Заменим профиль 1 шестерни профилем Г, показанным штриховой линией и соприкасающимся в положении I в точке w с профилем колеса 2.
После поворота шестерни на некоторый угол «pj и колеса на угол <р2 = d^/d2 (положение 11) сопряженные профили касаются
в точке k, тогда как между профилями Г и 2 образуется зазор.
При угле наклона зубьев р = 0 профиль Г, очевидно, не обеспечивает непрерывности зацепления при взаимном качении окружностей dj и d2. Если же зубья косые и углы наклона их Pj и р2 на начальных цилиндрах dx и d2 равны, то получим непрерывность зацепления при касании в точке. Покажем это на примере рис. 14.37, б, в, где даны два косых зуба с рг = р2 = Р и с профилями, отклоняющимися «в тело» от сопряженных профилей (рис. 14.37, б). На рис. 14.37, ев косоугольной проекции нанесены начальные цилиндры dt и d2 и показаны винтовые линии wkx и wk2, являющиеся линиями пересечения поверхностей зубьев цилиндрами dj и d2.
1 Более точные данные о коэффициенте KFc даны в работе [53].
2 Настоящий параграф написан совместно с И. И. Арефьевым и В. И. Смирновым.
При указанных направлениях Oj и и взаимном качении цилиндров dt и d2 точка касания винтовых линий (а следовательно, и точка касания поверхностей пары зубьев /) переме
щается по полюсной линии ttwlf являющейся в данном случае и линией зацепления.
Для обеспечения непрерывности зацепления при начальном точечном касании необходимо выполнить условие bw > рх, т. е. осевой коэффициент перекрытия
Скорость перемещения точки контакта по полюсной линии
vx = uctg р, где v — окружная скорость.
Рис. 14.37. Передачи с точечным зацеплением
Передачи, показанные на рис. 14.37, поясняют сущность точечного зацепления и позволяют получить характерные для него зависимости. Но эти передачи не представляют практического интереса из-за низкой несущей способности. Однако касание 280
несопряженных профилей при точечном зацеплении не обязательно должно быть в полюсе. М. Л. Новиков предложил точечное зацепление, зубья которого в торцовом сечении очерчены дугами окружности с центром на начальной окружности у выпуклого зуба. У вогнутого зуба 2 радиус профиля несколько больше, чем v выпуклого 1 (рис. 14.38, о), что необходимо для предупреждения
кромочного касания, неизбежного из-за отклонений от теоретически правильного зацепления, вызванных погрешностями и деформациями. Отношение /ВОГн-//'оып назначают близким к единице Для получения более плотного прилегания (меньших значений функции зазора). Точка контакта (при одинаковых углах наклона зубьев на начальных цилиндрах) перемещается по линии (проектирующейся в точку k), параллельной осям и отстоящей от полюсной линии на расстояние гЕЫП (рис. 14.38, а).
На рис. 14.38, б показан получивший наибольшее распространение вариант зацепления Новикова, в котором выпуклые головки шестерни 1 и колеса 2 взаимодействуют с вогнутыми ножками соответственно колеса и шестерни. В этом случае имеем две линии зацепления, проекциями которых на плоскость, перпендикулярную к осям, являются точки kv и k2-
Несущая способность передач с двумя линиями зацепления больше, чем с одной линией, так как число точек начального касания при двух линиях зацепления больше, чем при одной.
При твердостях активных поверхностей зубьев Н < НВ 350 за счет их приработки величина гВОГ1ЛВып приближается к единице и зацепление в сечении, нормальном к направлению зубьев, становится близким к линейному, очерченному дугой окружности г, причем гвып < г < гвогн. В сечении плоскостью, перпендикулярной к этой контактной линии (рис. 14.38, в), радиусы кривизны р,п и рп2 профилей зубьев шестерни и колеса достигают больших значений. Приведенный радиус кривизны в указанном сечении
нов d^u 1 . ]
Рпр п = 2 (и -J- 1) sin2 р sin ’ (14.81J
Таблица 14.7. Формулы для определения основных размеров цилиндрических передач Новикова (см. рис. 14.38, б и 14.39)
Обозначение Передачи с двумя линиями зацепления
di d2 tn Рх а bi ь2 dal da2 dfl dfz 6 dx = mzj/cos р d2 = mz2/cos р Выбирается из ГОСТ 14186—69 рЛ = этт/sin Р 1—1,2; 2—2,2; 3-3,3; 4—4,4 а = 0,5m (zx -|- z2)/cos р bi — bw -j- (0,4 1,5) т b2 ==Ьц) dai = dj -j- 2hatn daz — d2 4~ 2/?q m dfi = dL — 2 (ha -f- c*) m dfz ~ d2 — 2 (ha 4- c*)m P= 104-22° в косозубых передачах; P = 204-30° в шевронных передачах
* При указанных отношениях bw/px обеспечивается максимальная удельная нагрузочная способность передач.
Обозначив приведенный радиус кривизны эвольвентного зацепления р*рна, и заметив, что sin afw = sin a/cos 0b и cos2
cos2 P, из формул (14.15) и (14.81) при du.1= dy получим
p"pBn/pnp nw Ctg2 P/(sin a sin u„). (14.82)
Из анализа зависимости (14.82) следует, что р"рВп Рпр пи>’ Так, при р = 15° и ап = 27° имеем рВрВп/рпРли> «=« 90. Большие значения Рпр л являются причиной высокой нагрузочной способности зацепления Новикова, лимитируемой прочностью активных поверхностей зубьев (см. гл. 2).
В табл. 14.7 даны формулы (см. также ГОСТ 17744—72) для определения основных размеров цилиндрических передач t Новикова, соответствующих исходному контуру по ГОСТ 15023—76 (рис. 14.39), область применения Н < НВ 320; т < 16 мм; v < 20 м/с. Нагрузочная способность зацепления Новикова из условия контактной выносливости активных поверхностей зубьев приблизительно в два раза выше, чем у передач с эвольвентным зацеплением. Изломная прочность зубьев у передач с зацеплением Новикова, соответствующих исходному контуру по ГОСТ 15023—76, ниже, чем у передач с эвольвентным зацеплением, не подверженных значительным разрушениям активных поверхностей зубьев.
Проверочный расчет зацепления Новикова на и изломную прочность выполняют по формулам х:
К. = Tlffi VW * 5,52/n ’ Z] ' а1и
[Ко! = KZKE [Сн\!{КцрКц1;)\ \,7&\CPTyKF^KF-eKF!nYFi —
Рис. 14.39. Исходный контур зубчатых колес по ГОСТ 15023—76:
Л* = 0,9; с* = 0,15; ап = 27°; р* = 1,1<7-S-
--1,150; (>/= 1,307-5-1,250
которого ограничена значениями
контактную
где
(14.83)
(14.83а)
(14.84)
Г F2 г 1
°F2 = ° Fl lGF21-
Здесь Ту — момент на шестерне, Н м; <4, и т— в мм; ориенти» ровочные значения Кт Даны на рис. 14.24; KF$ — см. в § 14.4|
1 Особенности учета влияния характера переменных нагрузок на контакт» ную прочность приведены в работе [32].
[С//1 приравнивается к меньшему из двух значений [С/л ] и [Cft2], определяемых по формуле (14.63) 1 для зубчатых колес с твердостью активных поверхностей НВ < 350; значения
Kfv и Kf выбирают по рис. 14.40 и 14.41; значение определяют по формуле
К, — 0,5 (Кг1М22),
(14.65)
в которой 1\г1 (Мг2) выбирают по величинам гл и zv2 [см. формулы (14.75)]:
zv ... 10 12 15 20 25 30 40 60 80 120
Кг . . . 0,78 0,81 0,85 0,89 0,92 0,93 0,95 0,97 0,98 0,99
Значения коэффициента К(, для стальных зубчатых колес выбирают в зависимости от величины l,25pJ[DBn//n:
75 100 150 200 300 400 500 600 800
Кр........... 1,5 2,0 2,4 2,9 3,4 4,1 4,5 4,8 5,1 5,5
Величину Р”рВ„/т определяют по формуле
пр п ________________Q
т (u1) sin2 Р COS Р 11
где Q — коэффициент, выбираемый по рис. 14.42.
Коэффициенты YF1 и Y F2, учитывающие форму зубьев, находят в зависимости от эквивалентного числа зубьев zB = z/cos3 * * |3:
z0 . . . 10 12 15 18 20 25 30 35 40 50 75 100
Yf . . 2,32 2,25 2,17 2,10 2,06 2,02 1,97 1,94 1,91 1,89 1,85 1,84
Масштабный фактор KFm зависит от модуля:
т, мм .... 2,0 2,5 3,15 4,0 5,0 6,3 8,0 10 12,5
KFm.......... 0,87 0,91 0,95 1,00 1,05 1,08 1,15 1,20 1,24
Допускаемые напряжения изгиба lcrF1 ] и [crf2] (МПа) назначают так же, как и в передачах с эвольвентным зацеплением (см. стр. 278).
1 При определении величин [Ст ] и [Си2 1по формуле (14.63) значения KjiLl
и K/jF2 находят соответственно по и К ИЕ2, определяемым по формуле (14.51).
Если NИЕ 107, то K'F£ определяют по формуле К^щ,— 1,45-р^ 107/Л-'££ :>0,8{
при 107 < KJfE 4-107 принимают K'jjL = -)/ 4- 1O’/1VW£; если КНЕ > 4 • Ю7,
то KJ/L = ^4.107/lV//£>0,8.
Рис. 14.40. Коэффициенты Khv 11 Kfv- ° ~ Khv', б — Kfv (цифры 6, 7 и 8 обозначают степени точности по нормам плавности по ГОСТ 1643—72)
§ 14.8. КОНИЧЕСКИЕ ЗУБЧАТЫЕ ПЕРЕДАЧИ1
Общие сведения. Конические передачи применяют при пересекающихся осях зубчатых колес. Межосевой угол 2 (рис. 14.43) может изменяться в широком диапазоне значений (10° < 2 < < 180е), но наибольшее распространение получили рассматриваемые ниже передачи с 2 = 90°, называемые ортогональными.
В сравнении с цилиндрическими конические передачи имеют большие массу и габариты, сложнее в изготовлении, а также и в монтаже из-за необходимости точной фиксации осевого положения зубчатых колес. Однако эти передачи широко используют в машинах и приборах, поскольку по условиям компоновки механизмов очень часто возникает необходимость в передаче движения между валами с пересекающимися осями.
Наиболее распространены конические передачи с прямыми (см. рис. 14.2, а и 14.43, б) и круговыми (см. рис. 14.2, в и 14.43, г) зубьями. Область применения конических передач с тангенциальными зубьями (см. рис. 14.2, б) сужается за счет передач с круговыми зубьями благодаря меньшей чувствительности последних к погрешностям изготовления и монтажа, более производительным способам нарезания и повышенной несущей способности.
Конические передачи с непрямыми зубьями, как и цилиндрические, отличаются от прямозубых большей несущей способностью и меньшими динамическими нагрузками, вызванными погрешностями зацепления, виброактивностью и шумом. В связи с этим предельные окружные скорости у непрямозубых передач больше, чем у прямозубых (см. табл. 14.2).
Расчет геометрии 2. Функции начальных и делительных цилиндров цилиндрических передач в конических передачах выполняют начальные и делительные конусы. Обычно поверхности этих конусов совпадают, и только этот вариант рассматривается ниже.
Углы делительного конуса обозначаются 6 (62 для шестерни и 62 для колеса — рис. 14.43, а, в). Соосная с делительным конусом коническая поверхность, образующая которой перпендикулярна к образующей делительной поверхности, называется делительным дополнительным конусом. Различают внешний, внутренний, средний и другие делительные дополнительные конусы (рис. 14.43, а).
Сечение конического зубчатого колеса делительным дополнительным конусом называется торцовым сечением. Расстояние между внешним и внутренним торцовыми сечениями конического зубчатого колеса, измеренное по образующей делительного конуса, называется шириной зубчатого венца и обозначается b
1 Настоящий параграф написан при участии И. С. Кузьмина.
2 Термины и обозначения, относящиеся к геометрическим параметрам конических передач, даны в ГОСТ 16530—70 и ГОСТ 19325—73. Расчет геометрии конических передач с прямыми зубьями приведен в ГОСТ 19624 -74, а с круговыми — в ГОСТ 19326—73.
(рис. 14.43, о). Зубья ограничиваются также конусами вершин п впадин зубьев, углы между образующими которых и осью обозначаются соответственно 6а и df. Углы в осевом сечении между
образующими делительного конуса и конусов вершин и впадин обозначаются соответственно 6О и
Окружность, полученная пересечением поверхности делительного и дополнительного конусов, называется делительной окружностью. В пересечении с внешним и средним дополнительными 287
конусами имеем соответственно внешнюю de и среднюю d делительные окружности.
Длины отрезков образующей делительного конуса от его вершины до окружностей de и d называются соответственно внешним Re и средним R делительными конусными расстояниями (см. рис. 14.43, а и табл. 14.8).
Шаги на окружностях de и d называются соответственно внешним р1е и средним pt окружными шагами, а отношение их к л называется внешним mie (или те в случае прямозубых передач) и средним т окружными модулями. Для передач с непрямыми зубьями в среднем сечении расчетным является средний нормальный модуль тп. Аналогично с цилиндрическими для конических передач имеем de = mlez (или de= — tnez для прямозубых передач) и d = тг, где г — число зубьев зубчатого колеса.
Отношение b к Re называется коэффициентом ширины зубчатого венца и обозначается Rbe, т. е. Kbe = b/Re.
Выше было рассмотрено образование зубьев цилиндрических зубчатых колес с помощью производящей рейки. Аналогичные
функции в случае конических зубчатых колес выполняет производящее колесо, которое может быть плоским с диаметром 2Re (рис. 14.44, а), плосковершинным (рис. 14.44, б) и других типов. Зубчатое колесо, сцепляющееся с производящим колесом, показано тонкими линиями.
Обычно в нормальном сечении боковые поверхности зубьев производящего колеса прямолинейны. Среди исключений — производящее колесо для конических зубчатых передач с зацеплением Новикова.
При S = 90° (см. рис. 14.43, а)
2Re = dei -j- de2 = ГП/е jAZi 22 .
Число зубьев плоского колеса
zc = 2Relmte = zl 4- zi. (14.86)
Величина zc, как правило, — дробное число.
Передаточное число конической передачи
и = coj/Юг = d^/da = Zg/Zp
В прямозубых передачах в качестве расчетного принят внешний окружной модуль те, который рекомендуется устанавливать по СТ СЭВ 310—76. В передачах с круговыми зубьями из стан-288
°) 00° $ 30°
Рис. 14.44. Производящие колеса: а — плоское; б — плосковершинное
дартного ряда назначают тп или т1е. Допускается применение нестандартных модулей, если это не связано с применением специального инструмента.
Угол наклона зуба в середине ширины зубчатого венца обозначается рп (см. рис. 14.43, г, на котором дано сечение кругового зуба с правым направлением винтовой линии на развертке делительного конуса). С ростом |3,, увеличивается плавность работы передачи. Рекомендуется принимать 0,; = 35°.
Средний нормальный модуль [см. табл. 14.8 и формулу (14.86)1 тп = т cos р„ = (mte — b/zc) cos р„ = (mieRlRe) cos P„.
В конических передачах с и •> 1 для выравнивания удельных скольжений в зацеплении (см. гл. 2) и, следовательно, для повышения сопротивления заеданию шестерню рекомендуется выполнять с положительным смещением (%! > 0), а колесо — с равным ему по абсолютной величине отрицательным смещением (х2 = —хх). Значения ху для прямозубых и хп1 для передач с круговыми зубьями определяются по ГОСТ 19624—74 и ГОСТ 19326—73 или по формуле ЭНИМС
Х1 = хп1 = 2 (1 — 1 ,/и1 2) V cos3 p„/zr
В конических передачах с и > 2,5 применяют зубчатые колеса с тангенциальным смещением \ за счет которого изменением толщин зубьев шестерни и колеса выравнивается их изгибная прочность. Коэффициент тангенциального смещения
'— Хт2=== “4“ й (и — 2,5),
где а = 0,03 и b = 0,008 для прямозубых передач; а — 0,11 и b = 0,010 для передач с круговыми зубьями при рп = 29 -н 40°.
Прямозубые конические передачи общего назначения при те^> £> 1 выполняют в соответствии с исходным контуром по ГОСТ 13754—68 *, согласно которому а = 20°; ha = 1; с* = = 0,2; р/ = 0,2. В исходном контуре для передач с круговыми зубьями по ГОСТ 16202—70 ап = 20°; ha = 1; с* = 0,25; р; = = 0,25.
Применяют три формы зуба, характеризуемые различным взаимным положением в осевом сечении образующих делительного конуса и конуса впадин [15]. Если эти образующие пересекаются в одной точке (см. рис. 14.43, а), то имеем пропорционально-понижающиеся зубья, форма которых называется формой I. Такую форму имеют зубья прямозубых конических передач, а также передач с круговыми зубьями при > 2 мм и ze = = 20 ~ 100. В табл. 14.8 даны зависимости для определения
1 В отличие от цилиндрических при изготовлении конических зубчатых колес тангенциальное смещение широко используют, так как оно обеспечивается стандартным инструментом за счет соответствующего разведения резцов, обра-
батывающих противоположные стороны зубьев.
10 в. Н Кудрявцев 289
g Т а б л ица 14.8. Расчет основных геометрических параметров конических передач с прямыми и круговыми ° пропорционально-понижающимися зубьями (форма I) при межосевом угле S — 90° (см. рис. 14.43, а)
Параметры Формулы
для прямозубых передач для передач с круговыми зубьями (форма I)
Внешний делительный диаметр de2 = mez2 del ~ ^2 = ^te^2
Внешнее конусное расстояние Re = 0,5/иегс Re = 0,5m^zc
Ширина зубчатого веица К be Re', lOmte (или b d 10me при 0)
Среднее конусное расстояние R = Re — 0,5b
Коэффициент ширины зубчатого венца Kbe = b/Re = 2/[(u/Km) + Km] < 0,3 *
Средний окружной (/и) и нормальный (/ип) модули m = meR/Re = me (1 — 0,5/Q,e) mn = (mteR/Rf,) cos Рл = (mte — biz^ccs Pn
Средний угол наклона зуба — Pn = 35°
Средний делительный диаметр di = mzx\ d2 = mz2 d^ = trinZ-^lcos P/j, d2 tTifiZ^Jcos Pn
Угол делительного конуса 6t = arctg (z1/z2y, 62 = 90° — 6^ —* - 1 - ,
Высота ножки зуба в среднем сечении hf и внешняя высота ножки зуба hfe hfei = (ha 4- С*— Xj) ту, hfe2 = (ha + С* + Xj) те hfi — (ha 4-е — Хщ) /if2 = 4“
Высота головки зуба в среднем сечении ha и внешняя высота головки зуба hae haei == (ha + *1) ~ (ha — hai — (ha + Хщ) /Ип; ha2 ~ (ha — Xni) Шп
Угол ножки зуба 6fi = arctg (hfel/Re); 6f2 = arctg (hfe2IRe} 0f! = arctg (hfJRy, 0f2 = arctg (hf2/R)
Угол головки зуба 0ai = 0f2i 002 = 0fi
Угол конуса вершин ^ai — 4" Oai? 6a2 62 4" 0Q2
Угол конуса впадин Sfi = Si — 0fi 6f2 — 62 0f2
Увеличение высоты головки зуба при переходе от среднего сечения на внешний торец — ^ae\ = tg 0G1; " 0,5b tg 0д2
Внешний диаметр вершин зубьев daei = del + 2/i^j cos dae2 ~ 4" ^ae2 ^®s 62 daei — del H- (hai &hael) cos бр does = de2 + 2 (hai 4" Abae2) cos 62
Расстояние <от вершины до плоскости внешней окружности вершин зубьев • Коэффициент Кт = 0,6 при кол шестерни в непосредственной близости B-^ == 0,5de2 — hapi sin 6^; 52 == 0,5d^j ““ sin <52 СОЛЬНОЙ установке шестерни и Кт = 0,8 npi от зубчатого венцаw Bi — 0,5df2 — (hai 4" sin = 0>5dei — (ha2 4“ ^2 опорах, расположенных по обе стороны от |
основных размеров конических зубчатых колес, выполненных по форме I.
Б конических передачах с круговыми и тангенциальными зубьями, имеющими форму II, вершины делительного и внутреннего конусов не совпадают (см. рис. 14.43, в). Положение вершины внутреннего конуса при круговых зубьях выбирается так, чтобы обеспечить одинаковую ширину дна впадины, а толщину зуба по делительному конусу — увеличивающейся пропорционально расстоянию от вершины.
Форма III круговых зубьев характеризуется равенством углов делительного конуса и конуса впадин, т. е. образующие этих конусов параллельны.
Области использования отмеченных форм зубьев указаны в ГОСТ 19326—73. Следует отметить, что зубья по форме II могут быть получены обработкой впадин за один проход. Благодаря этому повышается производительность при нарезании зубчатых колес, что обеспечило широкое применение зубьев по форме II при массовом производстве конических передач.
В геометрии передач с круговыми зубьями предусматривается локализация контакта к середине ширины зубчатого венца, предупреждающая концентрацию нагрузки у краев зубьев. Для предупреждения концентрации нагрузки к краям зубьев в прямозубых конических передачах используют продольную модификацию зубьев. При этом в сечении конической поверхностью, проходящей через вершину О (см. рис. 14.43, а), профиль зуба плавно отклоняется от прямолинейной образующей на некоторую расчетную величину А у торцов (см. рис. 14. 3, д).
В торцовых сечениях профиль зубьев конических передач очень близок к эвольвентному. Так, в сечении средними делительными дополнительными конусами профили зубьев незначительно отличаются от эвольвент основных окружностей (см. рис. 14.43, а):
dbl = d01 cos az; db2 = dv2 cos a t,
где tg at = tg a/cos P„.
Цилиндрическая передача с делительными диаметрами = = dvl и d2 = имеющая ту же ширину зубчатого венца, что и данная коническая, называется эквивалентной передачей (см. рис. 14.43, а и 14.45). Для этой передачи:
dvi = ^i/cos 6j; dv2 = 4/cos 62.
Числа зубьев колес прямозубой цилиндрической эквивалентной передачи (см. табл. 14.8):
zB1 = dvl/m = Zj/cos б1; zM = ?2/cos б2. (14.87)
В нормальном сечении профили зубьев шестерни и колеса с круговыми зубьями близки к профилям зубьев прямозубых передач с числами зубьев [(см. формулы (14.87) и (14.75)]:
2v,a = Mcos cos3 р._); zw2 = z2/(cos 62 cos3 Р„). (14.88)
Передаточное число эквивалентной передачи при S — 90е (см. рис. 14.43)
^vntt^vnl — (cos дд/COS 62) (^2/^1) — n2. (14.89)
Усилия, действующие в зацеплении конической передачи. Коническую передачу заменяем эквивалентной цилиндрической (рис. 14.45) с углом наклона зуба, равным углу р„ конической передачи. При этом используем формулы (14.20) для цилиндри-
ческих передач и усилия, относящиеся к эквивалентной передаче, отмечаем индексом V. Заметив, что в конической передаче tg ato=tg a,=tg a/cos p„, получим (рис. 14.45)
Fz = 2T/d; F«, = ^tgp„;
Prv = Pt tg a, = Pt tg a/cos pn.
Направление вращения конического зубчатого колеса по часовой стрелке (если смотреть на него от вершины) называют правым, противоположное — левым.
Проектируя усилия Fxv и Frv на направления, параллельное и перпендикулярное к оси зубчатого колеса, получим осевую F
Рис. 14.45. К определению усилий в конических передачах*
и радиальную Fr составляющие усилия в зацеплении
конической передачи:
для ведущего зубчатого колеса
Fx = Ft (tg a sin 6 ± sin pn cos 6)/cos p„; | Fr = Ft (tg a cos 6 + sin p„ sin 6)/cos Pn; j
(14.90)
для ведомого зубчатого колеса
Рх = Pt (tg a Sin 6 + sin P„ cos 6)/cos pj 1
Fr = Fz(tgacos6 ± sinpnsin6)/cospn. J * ' ’
В формулах (14.90) и (14.91) надо брать верхний знак, если направления вращения и винтовой линии совпадают, нижний — в противном случае.
Расчет на прочность зацеплений конических передач \ На основании опытных данных известно, что отнесенное к окружности d допускаемое усилие конической передачи (Fz] = 0,85 [F/o],
1 Указания к проектировочному расчету см. в § 14.12.
где [Fftl]—допускаемое окружное усилие эквивалентной цилиндрической передачи. Тогда
[Л1 = 0,5 [FJ = 0,425 [Ffo] (1 - 0,5/C6e)da.
Заметив, что ТН1 = 0,5• 10-sFHzdwl, из формулы (14.58) получим
[Рщ] = bwdwiU Ю(и + 1).
Для получения [FHtv ] в эту формулу вместо dwl, bw и и надо подставить соответственно (см. табл. 14.8):
dvl = dr cos 6, = dcl (1 — 0,5Kto)/cos b; uv=(cos 61/cos 6.2)2.
Заметив, что b = K,ltRe = G,§Kbtdtllsm 1>ъ и приняв (1 — 0,5/<fe)2 1,04 (1 — /</Д, получим
[7\i] = 0,222-10-3(1 - Kbe) Kbedeiti [До]. (14.92)
Аналогично получены и приведенные ниже формулы для расчета зубьев на изгиб.
Проверочный расчет конических передач на контактную прочность рабочих поверхностей зубьев выполняют по формуле [см. (14.92)1
Ко
4,5-1037н1
0 ~ КЬе) КЬеаэе1и
< Ко].
(14.93)
Для прямозубых конических передач величину [До1 определяют по формуле (14.61), в которой вместо 0,4 подставляют 0,35 и величину [Сн ] приравнивают к меньшему из двух значений [CW1 ] и [СН2 ], рассчитываемых по формуле (14.63) для шестерни и колеса.
Для передач с круговыми зубьями
[К0] = [С„[<МД/Л), (14.94)
где О// находят по рис. 14.46; 1СН ] при хя1 = хгЛ = 0 определяют по формуле (14.65), в которой [С/л ] и [С//2] рассчитывают по (14.63). При этом для v с 20 м/с на окружности d величина [С/Д не Должна превышать меньшее из двух значений [СН11 и [С//21 более чем на 30%. При Нг > НВ 350 и Н2 > НВ 350 значения [Сн] определяют так же, как указано на стр. 273.
Значения в формулах (14.61) и (14.94) приведены на рис. 14.25, величину KHv определяют по формуле (14.23).
Проверочный расчет зубьев конической передачи на изгиб выполняют по формулам:
для прямозубых передач
2,26- Y
bdelme (1 - Kbe) °F2 = < [PfzIJ (14.95)
для передач с круговыми зубьями
l,5-103TFlKF₽KFDyF1 , 1
°F1 “ bdelmte (1 — Kbe) cos ₽« °F1 ’
Yp2 г 1
°F2 — CF1 у— c [o>2J •
(14.96)
Рис. 14.46. Коэффициент 0^ для конических передач с с круговыми зубьями с Р = = 30-ь 40° и 2 = 90°
Значения /<Ff! и KFv находят соответственно по указаниям на стр. 260 и по формуле (14.24), а допускаемые напряжения [oF] даны на стр. 278.
Коэффициенты формы YFl и YF2 конических зубчатых колес принимают увеличенными на 20% против значений, найденных из рис. 14.35 в зависимости от zvl, zc2 и zv.a^ zon2< определяемых соответственно по формулам (14.87) или (14.88).
Примечание. В гл. 7 отмечена приближенность оценки ряда факторов, оказывающих влияние на несущую способность цилиндрических зубчатых передач. Этс в большей степени относится к коническим передачам в связи с особенностями их геометрии, значительным влиянием на работу осевых смещений зубчатых колес, неизбежным изменением степени прилегания в процессе работы при начальном точечном контакте в условиях отсутствия жидкостного трения и других факторов. Поэтому при проектировании высокоответственных конических передач следует учитывать опыт работы аналогичных передач или предусматривать соответствующие эксперименты и возможность вносить коррективы в выполненную конструкцию. В практике проектирования в СССР и за рубежом находит применение метод фирмы «Глиссон», имеющей большой опыт в проектировании и изготовлении конических передач. Некоторые особенности исходных позиций и приближенность этого метода отмечены в работе [86].
§ 14.9. ПОТЕРИ НА ТРЕНИЕ В ЗУБЧАТЫХ ПЕРЕДАЧАХ
И ПОНЯТИЕ О МОЩНОСТИ В ЗАЦЕПЛЕНИИ
К- п. д. 1] зубчатой передачи, коэффициент потерь ф = 1 — т] и мощности (Увщ, NaM и Nt (соответственно ведущего и ведомого звеньев и теряемая в передаче на трение) связаны зависимостями:
Л = 1 - Ф = ^вм/Мвщ = 1 - Nf/NBai; (14.97)
= А^ВЩ(1 — 1])==^вщф = (^вн/1])ф. (14.98)
Мощность Nf зависит от потерь на трение в зацеплении, в подшипниках и энергии, затрачиваемой на размешивание и разбрызгивание масла. В соответствии с этим
Л = ПзПпЛр. м,
или
(Г] = 1 — Ф = (1 — ф3)(1 — фп)(1 — %..м),
где т]3, т;п и г]р. м — к. п. д., которые учитывают указанные потери; ф3, фп и фр. м — соответствующие им коэффициенты потерь.
Каждое из значений ф3, ф„ и фр. м очень мало (как правило, менее 0,03), поэтому
5'1=1 — (ф3 + фп + Фр. м).
ИЛИ
ф^фз + фп4-фр.м.
Для цилиндрических передач
4>.~2.3/,(i±^-)=2.3A
(14.99)
где верхний знак — для внешнего, а нижний — для внутреннего зацепления; fa && 1,25/ — коэффициент трения в зацеплении; величину / находят из рис. 3.5.
Более точно значение ф3 определяют по формулам
= 2л/(-^-±-^-')(1 — еа + 0,5еа)А прир== \ z2 /
2 2
Ji) /1 . 1 \ ео1 + еа2 о ,
— cos Р (. ?i — г2 / еа1 + еа2 П^Н
0,
где k— отношение большего из значений ео1 и ео2 к еа (см. стр. 246). Величину фп определяют по формуле
k
фп=Е(Гм/Т1), (14.101)
1=1
где Tfni — суммарный момент трения подшипников i-ro вала;
7\ — момент, передаваемый t-м валом.
Для передачи, показанной на рис. 14.56, а,
фп = ^+^+^-. (14.102)
* 1 1 2 1 fl
Здесь:
Tfui = fnA + Т fnB<
тfna ^fnc + ТfnD>
Tfn3 = T fnE + fnF,
где TfnA,..., TfnF — моменты трения в подшипниках А, ..., F (см. рис. 14.56, а): 7\, Т2, Т9 — моменты, передаваемые валами /, 2 и 3.
Коэффициент фр. м определяют по формуле
^p.m = Vo (14.103)
где Ft — 2Ti/dwl — окружное усилие передачи; Fp — окружное усилие, затрачиваемое на разбрызгивание и размешивание масла.
Для цилиндрических передач с внешним зацеплением, смазываемых окунанием при погружении зубчатого колеса на глубину 296
(2 4- 3) т, приближенное значение Fp определяют по эмпирической формуле (Н) ___________
Fp = 80b w V2nv/(z1 + z2),
(14.104)
где bw — ширина зубчатого венца, мм; v — окружная скорость, м/с; v — кинематическая вязкость масла при рабочей температуре, м2/с.
При струйной смазке значение Fp, найденное по формуле (14.104), надо умножить на коэффициент 0,7.
Ориентировочные значения ф одноступенчатых зубчатых передач приведены в табл. 14.9, эти данные не относятся к передачам, у которых передаваемая нагрузка значительно меньше расчетной. С уменьшением нагрузки растет ф, поскольку потери холостого хода (затраты энергии на размешивание масла, преодоление сил трения в подшипниках, обусловленных массой зубчатых колес и валов, потери в уплотнениях и др.) при этом остаются приблизительно постоянными.
Таблица 14.9. Ориентировочные значения коэффициента потерь одноступенчатых передач на подшипниках качения
Вид передачи Ф
Цилиндрическая передача Коническая передача
Закрытая (жидкая смазка) обычного изготовления с окружной скоростью и 12 мс/с тщательного изготовления быстроходная Открытая с пластической смазкой 0.015—0,02 0,01 0,03—0,04 0,02—0,03 0,02 0,03—0,05
Формулу (14.98) можно представить в следующем виде:
N; = (Тю)вщф==(7ю)вмфЛ]. (14.105)
В формуле (14.105) произведение Та» не всегда равно мощности, передаваемой зубчатой парой, и оно даже может превышать мощность, затрачиваемую двигателем. Рассмотрим это на примере устройств, показанных на рис. 14.47. Установка для подъема груза Q приводится в движение от двигателя через одинаковые зубчатые передачи I и II с za ~ гь и zg = zf (рис. 14.47, а). На зубчатое колесо а действует момент Та = Qd/2. Из таких же зубчатых пар I и // составлен и другой механизм (рис. 14.47, б), но вместо барабана диаметром d между зубчатыми колесами а и b помещены вал 3 и присоединительные муфты 1 и 2. И в этом случае на зубчатое колесо а действует момент Та ~ Qd/2, вызванный силами упругих деформаций. Для создания последних до скрепления полумуфт е
и с при удерживаемом от вращения зубчатом колесе Ъ (с полу-муфтий е), полумуфта с нагружается моментом Та = (W/2, направленным по часовой стрелке. При этом за счет деформаций, в основном вызванных кручением валов, полумуфта с повернется на некоторый угол относительно полумуфты е. После скрепления полумуфт сие удаляется загружающее устройство. За счет сил упругих деформаций на валы зубчатых колес а и b действуют моменты Та. При одинаковых угловых скоростях у обеих установок, показанных на рис. 14.47, условия работы зубчатых пар идентичны, поскольку равны усилия в зацеплениях, опорах и относи-
Рис. 14.47. К вопросу о мощности в зацеплении
тельные скорости. Одинаковы, следовательно, и мощности ./V/, затрачиваемые на трение в передачах I и II:
= ^2ф,
где 1] — 1 — ф — к. п. д. каждой из передач I и II.
Но имеется существенное различие. В установке на рис. 14.47, а величина Тасйа равна мощности, затрачиваемой на подъем груза, а в установке на рис. 14.47, б — это произведение момента Та от уравновешенных внутренних сил на оу,. Если т] — 0,99, то мощность на валу двигателя (рис. 14.47, б) N№ = = 0,0204Т0соа
и величина в 49 раз превышает мощность, затрачиваемую двигателем. Поскольку Таыа > ДГда, то, строго говоря, это произведение нельзя называть мощностью. Однако размерность Тасла та же, что и у N№, поэтому термин мощность сохраняется и за этой величиной. Но для того чтобы не смешивать с энергетическим понятием, его называют не просто мощностью, а мощностью в зацеплении.
Таким образом, условия работы зубчатой передачи (потери на трение, напряженность зацепления, изнашивание зубьев и т. д.) не зависят от того, будет или не будет мощность в зацеплении характеризовать передаваемую энергию. Эти условия также не зависят и от того, будет ли корпус передачи h неподвижен или 298
(при сохранении угловых скоростей относительно h и крутящих моментов) он будет вращаться, например, около оси зубчатых колес а и Ь.
В связи с этим мощность в зацеплении целесообразно определять как произведение момента зубчатого колеса на угловую скорость со — coft относительно системы координат, связанней с осями зубчатых колес и обозначаемой h. В передачах с неподвижными осями зубчатых колес системой координат h является корпус, а в планетарных передачах — водило, т. е. звено, на которс м установлены сателлиты.
В дальнейшем мощность в зацеплении обозначается /Vй. В соответствии с этим мощности в зацеплениях зубчатых колес а и Ь соответственно при ведущем и ведомом центральном колесе а:
Na = Ta(0ia — сол); Nb = Tb (со6 — <ой);
мощности, теряемые на трение:
Nf = Nha^h\ = (14.106)
Индексом h вверху отмечены к. п. д. и коэффициент потерь, относящиеся к передачам с неподвижными осями. Эти значения приводятся в справочных данных, например в табл. 14.9, или определяются по приведенным выше формулам.
§ 14.10. ПЛАНЕТАРНЫЕ ПЕРЕДАЧИ
Планетарными называют передачи, имеющие зубчатые колеса с подвижными осями, называемые сателлитами. Звено, на котором установлены опоры сателлитов, называется водилом и обозна-
Рис. 14.48. Планетарные механизмы 2k — h при ih <Z 0 (варианты А, В, Е) и Iй > 0 (вариант С)
чается h. Ось вращения водила называется основной осью. Зубчатые колеса, вращающиеся вокруг основной оси и сцепляющиеся с сателлитами, называют центральными колесами (а и другие на рис. 14.48). Число сателлитов обозначается nw. Обычно nw = = 3 4- 6, но встречаются передачи с nw > 6. Наибольшее распространение получили передачи с nw = 3. Звенья, вращающиеся вокруг основной оси и воспринимающие нагрузки от внешних моментов, называются основными звеньями (звенья а, Ь, с, е и h
в передачах, показанных на рис. 14.48). Неподвижным может быть любое из основных звеньев. Если, например, аь = 0, то при ведущем звене а ведомым является h и наоборот. При = 0 оси всех зубчатых колес неподвижны. Если подвижны все три основных звена, то передача называется дифференциалом.
Планетарные механизмы с двумя центральными колесами (в общем случае этим колесам присваивается буква k) и водилом h обозначаются 2k — h. Вариан
Таблица 14.10. Ориентировочные интервалы передаточных отношений и к. п. д. некоторых планетарных передач
Передача Передаточные отношения К. п. д.
Ah ЛЬа Aha Ahb bha $k)bea (-8) - (-2) 9—3 1,13—1,50 7—16 20—200 0,960—0,985 0,97—0,99 0,990—0,996 0,97—0,99 0,7-09
Примечание. Планетарная передача обозначается символом, закрепленным за соответствующим вариантом планетарного механизма, с добавлением трех индексов: вверху — индекс невраща-ющегося основного звена; внизу — индексы двух остальных вращающихся основных звеньев, начиная с того звена, к которому приложен наибольший крутящий момент.
ты А, В, С, Е этих механизмов показаны на рис. 14.48.
Самым простым в изготовлении является механизм А, имеющий сателлит с одним зубчатым венцом g, обладающий к тому же компактностью, высоким к. и. д. и малой инерционностью. Благодаря этим качествам вариант А имеет самое широкое распространение из всех многочисленных типов планетарных передач. В механизме В в отличие от А сателлит состоит из двух зубчатых венцов. Это усложняет конструкцию и сборку, но зато увеличивается абсолютная величина максимального передаточного отношения: до 15 при соЛ = 0 и до 16 при со6 = 0 (табл. 14.10).
Механизм 2k — he коническими зубчатыми колесами (вариант Е) при za = гс получил
широкое применение в качестве дифференциала в трансмиссиях транспортных машин, в металлорежущих станках, приборах и в других случаях. Механизм 2k—h с двумя внутренними или внешними зацеплениями (вариант С) позволяет получить очень большие по абсолютной величине пере-
даточные отношения.
В передачах, показанных на рис. 14.49, а (с двухвенцовым сателлитом) и 14.49, б (с одновенцовым сателлитом), основными звеньями являются три центральных колеса, поэтому они обозначаются 3k. Водило h в этой передаче не воспринимает нагрузку от внешних моментов и служит только для поддержки сателлитов.
Приведенные на рис. 14.48 и 14.49 примеры охватывают подавляющее большинство планетарных передач, получивших широкое практическое применение.
Мощность, передаваемая центральным колесом, распределяется между сателлитами, т. е. имеет место разделение ее на несколько
потоков, число которых равно nw. Сочетание многопоточности с рациональным использованием внутреннего зацепления является причиной малых габаритов и массы планетарных передач в сравнении с передачами других типов.
Кинематика планетарных передач. При буквенном обозначении передаточного отношения i, связывающего относительные угловые скорости двух звеньев, проставляются три индекса: два внизу, соответствующие обозначениям этих звеньев (первый
из них относится к звену, угловая скорость которого находится в числителе),
Рнс. 14.49. Передачи ЗА
Рис. 14.50. Передача с основными звеньями р, v и т
и один вверху, соответствующий звену, относительно которого взяты угловые скорости. В соответствии с этим имеем:
Ид — <0fe __ , <0g — __ j-д
1 ab и т. д.
Величина (в общем случае записывается без нижних индексов ih) является передаточным отношением передачи с неподвижными осями, полученной из планетарной остановкой водила.
Значение ih определяют на основании соотношений для передач с неподвижными осями зубчатых колес. Передаточное отношение планетарной передачи 1ПЛ выражают зависимостью через ih\
(14.107)
При параллельных осях передаточному отношению приписывается знак плюс при одинаковом направлении связываемых им угловых скоростей и знак минус при противоположном. В соответствии с этим в передачах А,ВпЕ имеем ih < 0, а в передаче С имеем i'elb ►> 0.
На рис. 14.50 показана передача с тремя основными звеньями р, v и т. Это может быть, например, передача 2k — h, в которой звеньями р, v и т являются а, b и /г, причем порядок замены звеньев не имеет значения. Проверкой можно установить справедливость равенства
^=1-^, (14.108)
связывающего передаточные отношения для основного звена р относительно двух других основных звеньев (в данном случае т
и v). Для получения порядка расположения индексов при i в правой части равенства надо поменять местами верхний и второй нижний индексы в левой части. Равенство (14.108) полезно для расшифровки зависимости (14.107). Если, например, надо найти передаточное отношение передачи 2k— h (рис. 14.51) при <в6 = 0, то на основании равенства (14.108) имеем
• ft ___ 1 ______ .h
I ah lab*
(14.109)
где значения ih даны на рис. 14.48.
Если индекс h стоит впереди, то
4= 1/4= 1/(1-4)- (14.110)
В механизмах А, В и Е имеем ih < 0, поэтому 4 — 1 + I'abb
(14.111)
т. е. передаточное отношение у планетарной передачи на единицу больше, чем у полученной из нее передачи с соЛ = 0.
Из формулы (14.110) следует, что при ih >0 (передача С) е приближением 4 к единице величина | ibha | неограниченно растет. Таким образом, передачу С можно осуществить с очень большим передаточным числом. Например, при ze = 66; zf = 63; zb = 65; zg = 62 имеем ibb = 1365.
Для передачи А вводим обозначение zb/za = р, поэтому:
iab = — Pi iah=lA~Pt 4 = 1/(1+P)j 4 = (P+l)/P>
l'/ib = p/( 1 + p).
Для передачи 3k (см. рис. 14.49, a)
/де:= (г*)д <o^)/(coc C^b)'
После умножения и деления правой части на <оЛ — получим 1 _____________ :h
‘b 'b :b ab _ zb za /14 119^
lae = lahihe _ —— _ -r-I—(14.112)
Для передачи 3k с одновепцовым сателлитом (см. рис. 14.49, б)
Ь _ 1 + Zg
\—гьге •
(14.1 13)
При расчете зацеплений и подшипников планетарных передач на прочность и долговечность необходимо знать угловые скорости зубчатых колес относительно водила. Угловые скорости относительно водила сателлита <аст — ий и центрального колеса сок — юЛ связаны зависимостью
(сост ®й)/(®К С)й) = /ст к» (14.1 14)
из которой, например, для сателлита g передач А, В и 3k имеем
(ft)g - — 4>h)l(g)a—COft) = iga = ^'a/^’g'
Условия сборки планетарных передач. Для предупреждения пересечения окружностей выступов (с/а)ст соседних сателлитов надо выполнить условие (см. рис. 14.48)
I = 2o№sin (л/Пц.) > (4)ст (14.115)
Из условия соосности для зацеплений а — g и b — g в передачах А и 3k имеем (щ.)а = (tzu.)fc, или
cos а/ _ , . cosat
(G)a COS (a»)o '•Cl'b cos(a;u>)6* (14.116)
Здесь индексами а и b отмечены величины, относящиеся соответственно к зацеплениям центральных колес а и Ь.
При (atw)a — (alw)b из предыдущего равенства имеем
za-\~2zg== zb. (14.117)
Для возможности сборки передачи А и зацеплений а — g и b — g передачи 3k надо выполнить условие, зависящее от числа сателлитов nw:
(га + 2b)/nw = целому числу. (14.118)
Для передач с раздвоенным сателлитом условия сборки, зависящие от па, выполняются, например, при числах зубьев центральных колес кратных nw. В остальных случаях необходимо воспользоваться справочными данными [31, 53].
Определение отношений моментов, действующих на основные звенья планетарных передач. Пренебрегая потерями на трение и приписывая знак плюс мощностям ведущих основных звеньев и знак минус мощностям ведомых, для передачи с тремя основными
503
звеньями р, v и т (см. рис. 14.50) при постоянных угловых скоростях имеем
Т+ Тvcov + Т= 0.
Если cot = 0, то отсюда находим:
Т и(сом — <от) + Т v(iov — (от) = 0;
Тц/Тч = — (“v — ®г)/((0м — ®т) = — 1/t‘Jiv (14.119)
Таким образом, отношение моментов основных звеньев обратно пропорционально отношению угловых скоростей этих звеньев относительно третьего основного звена с обратным знаком. Например, отношение моментов основных звеньев а и h передачи А
Ta/Th^-l/ibah^ - 1/(1 - &) = - 1/(1+ р).
К. п. д. планетарных передач. Искомое значение к. п. д. т)пЛ плайетарной передачи выражается через к. п. д. rjh (или коэффициент потерь фл) передачи, полученной из планетарной остановкой водила: .
Ппл = /(й'‘) или 1]пл = <р(фл). " (14.120)
Величина + определяется в соответствии с данными § 14.9. Так, для передачи А при — 0 (см. рис. 14.48) = 1 —ф'1,
где
+ ’fe + 'ft
Zq 1
где коэффициенты в правой части — коэффициенты потерь в зацеплении центральных колес а и b и в подшипниках сателлитов.
Потерями в опорах основной оси на подшипниках качения можно пренебречь. Коэффициент фп учитывает только потери в подцшпниках сателлитов.
Для передачи А имеем:
^ = +7; =
где Tfn— сумма моментов трения в подшипниках одного сателлита.
При буквенном обозначении к. п. д. проставляют три индекса: два внизу, соответствующие обозначениям ведущего (первый индекс) и ведомого звеньев, и один вверху, соответствующий обозначению неподвижного звена. При ведущем звене а, ведомом b и неподвижном h имеем т]аь.
В основу определения к. п. д. планетарных передач положено равенство потерь на трение в планетарной передаче и в передаче, полученной из нее остановкой водила с сохранением нагрузок (включая центробежные силы, действующие на подшипники сателлитов) и относительных скоростей.
Полагаем, что в передаче А центральное колесо а имеет угловую скорость а а и действующий на него момент равен Та (рис. 14.51, а). Сохраняя неизменными Та и усилия на опоры сателлитов, сообщим всем звеньям угловую скорость с обратным знаком. В полученной передаче с неподвижными осями зубчатых колес (рис. 14.51, б) мощность Nf, теряемая на трение, та же, что и в планетарной, поскольку при рассмотренной инверсии усилия в опорах и зацеплениях и относительные скорости остались неизменными. В рассматриваемом случае мощность в зацеплении (см. стр. 299)
Л^=|7Ж-с< (14.121)
При определении к. п. д. мощности фигурируют как положительные величины, поэтому в ряде случаев вводят абсолютные значения выражений, содержащих кинематические параметры.
Отношение мощности в зацеплении к мощности, передаваемой центральным колесом, обозначают <р. Для центрального колеса а имеем
Kha Na
Та(®а ~~ Oft) I I । I
7fltOG l| Wa | ’
(14.122)
Если (£>ь = 0, то в передачах 2k—h добавляя индекс b вверху, получим
ИМееМ Wft/C0Q = iha и,
ч4=р —i-
lah
1
1 — th ba
(14.123)
Мощность, теряемая на трение \
(14.124)
При ведущем центральном колесе и ведомом водиле к. п. д. передачи 2k — /г
*&=1 - = 1 - = 1 - 11 - '11^ • (14-125)
При ведущем водиле и ведомом центральном колесе а имеем:
— Na/X\ha", = 1 — Nffah/Na'
Учтя формулу (14.124), получим
1 ___________________1___________
11/10 “ 1 + <PG4’/I “ 1 + I 1 — ibh0 I
(14.126)
1 Если центральное колесо а в передаче с остановленным водилом является ведомым, то Nj = | TV* |'фЛ/'П/'. Допуская незначительную погрешность, принимаем Nf = | /VG|<p/' как при ведущем, так и при ведомом центральном колесе а.
Для передач 2k — h с ih < 0 (передачи А, В и Е) формулы (14.125) и (14.126) можно представить в более удобном виде:
. , 1
1 + |»ьа |5 ==1+'l,h/(1+l‘'LI) ,<14-127)
Величина фЛ/(1 + 11ьа |), как правило, не превышает 0,04, и поэтому предыдущие формулы можно объединить:
^ah^ha = 1 -4h/(l +Ю« (14.128)
В передаче А имеем 11ьа | = Up, поэтому
T]bah~-rfla= 1 -pqhl(p+ 1). (14.129)
Из формул (14.127) и (14.128) следует, что к. п. д. передачи 2k — h с ih < 0 выше, чем к. п. д. передачи, полученной из нее остановкой водила. Это связано с тем, что мощность в зацеплении таких передач меньше передаваемой мощности, т. е. <Ра < 1 [(см. формулу (14.123)].
В передачах с ih Е> Ос увеличением | ibhe | растет <р£ и, следовательно, падает к. п. д. (рис.
Рис. 14.52. Ориентировочные значения передачи С с двумя внутренними зацеплениями при малой разности г2—г, и опорах на подшипниках качения
ь 4]he
14.52).
Приемлемый к. п. д. в пере-дачах с большим значением <ре может быть достигнут только при внутреннем зацеплении с достаточно большим гг и значением и — zjzx, близким к единице [см. формулы (14.99) и (14.100) ]. Однако и при этом потери на трение значительно больше, чем в передаче, составленной из передач А. Например, при передаточном отношении 125 у передачи С имеем
0,6 (рис. 14.52), а у трехступенчатой передачи, составленной из передач А при р = 4 и = 0,03, имеем к. п. д. г]пл = = 0]ал)3 0,91.
К. п. д. передач 3k при |iL| > 50 определяют по формулам:
ь _________0, 98___________________.
1+ |^|(ФАЬ +4£ +^)/(1+гь/го) ’
(14.130)
^еа 1 ~ °’98I I I + С + Фп)/(1 + ZJZa)}- (14.131)
Здесь трзе и ipn — коэффициенты потерь зацеплений с сателлитом соответственно центральных колес b и е и коэффициент потерь подшипников сателлитов, определяемый по формуле
> <14-1з2>
где Tfn — сумма моментов трения подшипников одного сателлита.
Указания к расчетам зубьев планетарных передач на контактную и изгибную прочность. Расчет зубьев планетарных передач
выполняется с использованием приведенной в § 14.5 и 14.6 методики. Для возможности непосредственного поименения формул (14.36) — (14.45) ’и (14.72)—(14.77), в которые входят Тъ dwl, d1 ни, в каждом из зацеплений центрального колеса с сателлитом надо выделить меньший и больший элементы сцепляющейся пары, т. е. шестерню и колесо (пару 1—2), и определить 7\ с учетом числа сателлитов пш и не
Рис. 14.53. К расчету на прочность зубьев планетарных передач:
1 — колесо; 2 — шестерня; к — центральное колесо; ст — сателлит
равномерности распре-
деления нагрузки между сателлитами, учитываемой коэффициентом Q. Все возможные варианты зацеплений таких пар для рассмотренных схем передач (см. рис. 14.48 и 14.49) представлены на рис. 14.53, и для каждого из них показана соответствующая пара 1—2 и значение и.
Для вариантов, показанных на рис. 14.53, а, б (гк > гст), имеющих место для внутреннего зацепления всех планетарных передач и для внешнего зацепления передач А, В и ЗА> в случае
Л = TKQ/(nwu). (14.133)
Для варианта, показанного на рис. 14.53, в и характерного для внешнего зацепления большинства планетарных передач (для зацепления а—g в передачах А, В и Зй), имеем
T^KQ/n^ (14.134)
В формулах (14.133) и (14.134) коэффициент неравномерности £2 = F tnax/Fm,
где — окружное усилие наиболее загруженного сателлита; Fm = — окружное усилие, найденное в предположе-
нии равномерного распределения нагрузки между сателлитами.
Коэффициент Q зависит от точности изготовления и степени загруженности передачи (см. стр. 89 и [53]).
Для получения более благоприятного распределения нагрузки между сателлитами широко используют планетарные передачи
Рис. 14.54. Планетарная передача А с плавающим центральным колесом а
с так называемыми плавающими центральными колесами, т. е. с центральными колесами, не имеющими радиальных опор. Крутящий момент к ним подводится с помощью муфт, допускающих радиальные смещения. Возможно использование шарнирных муфт (рис. 14.54, а), но для получения минимальных диаметральных и осевых габаритов в практике обычно используют зубчатые муфты (см. рис. 21.4). Наилучшее выравнивание нагрузки при плавающем центральном колесе обеспечивается при nw = 3 (рис. 14.54, б); в этом случае можно принять Q = 1,1-=-1,15.
§ 14.11. ЗУБЧАТЫЕ РЕДУКТОРЫ
Агрегаты, состоящие из передач зацеплением (цилиндрических, конических, червячных и др.) с постоянным передаточным числом, предназначенные для понижения угловой скорости и повышения 308
крутящего момента, называются редукторами. Подобные агрегаты, но используемые для повышения угловой скорости и понижения момента, называются мультипликаторами.
Рис. 14.55. Редукторы: а, в — одноступенчатые (Б — быстроходный вал; Т — тихоходный вал); б — двухступенчатые
Рис. 14.56. Схемы двух- и трехступенчатых редукторов
В зависимости от общего передаточного отношения 10б редукторы выполняют одно- и многоступенчатыми. Схемы одно-, двух-и трехступенчатых редукторов с неподвижными и подвижными осями зубчатых колес показаны на рис. 14.55 и 14.56. В одной паре шестерня — колесо можно осуществить передаточное число и,
достигающее нескольких десятков. Но это целесообразно только в специальных случаях. Обычно в одноступенчатых редукторах назначают п«7-г8. При больших и габариты и масса одноступенчатых редукторов больше, чем двухступенчатых. Об этом, в частности, свидетельствует сравнение размеров передач, показанных на рис. 14.55, а, б с передаточным отношением 10.
Широко распространены двух- и трехступенчатые цилиндрические редукторы, выполненные по развернутой схеме (рис. 14.56, а, б). На рис. 14.57 дана конструкция редуктора соответствующая схеме на рис. 14.56, а. Недостатком этого редуктора является несимметричное расположение опор относительно зубчатых колес, вызывающее неравномерное распределение нагрузки по ширине зубчатых венцов.
В редукторах с раздвоенной быстроходной (см. рис. 14.56, в) и промежуточной (см. рис. 14.56, е) ступенями опоры расположены симметрично относительно зубчатых колес тихоходной ступени (а также и быстроходной в трехступенчатом редукторе). Благодаря этому достигаются равномерная загруженность опор и благоприятное распределение нагрузки по ширине зубчатого венца тихоходной
ЗЮ
Ы0*82х32Ш
OLS
ступени. Это особенно актуально в связи с тем, что масса наиболее загруженной тихоходной ступени существенно превышает суммарную массу остальных ступеней [53}, и поэтому надо стремиться
Рис. 14.58. Двухступенчатый цилиндрический редуктор с раздвоенной быстроходной ступенью, выполненный по схеме на рис. 14.56, в
к возможно меньшим значениям Л'Пр и Kpf, для тихоходной ступени. Для обеспечения наиболее равномерного распределения нагрузки между зубчатыми колесами раздвоенной ступени последние выполняют косозубыми с большими углами наклона ((i > 30°) противоположного направления (см. рис. 14.56, в и г) и предусматривают опоры, допускающие самоустанавливаемость в осевом 312
направлении. На рис. 14.58 показан цилиндрический редуктор, выполненный по схеме на рис. 14.56, в.
Из условия компоновки агрегатов возникает необходимость выполнять оси ведущих и ведомых валов редукторов совпадающими (см. рис. 14.56, д, е) или расположенными под прямым углом (см. рис. 14.55, в и 14.56, да).
Двухступенчатые соосные редукторы выполняют однопоточными (см. рис. 14.56, д) и многопоточными. На рис. 14.56, сдана схема двухпоточного редуктора. Для выравнивания нагрузки среди передач acdb и ас'd'b между колесами cd, а также c'd' устанавливают упругие элементы, например торсионные валы.
По схемам на рис. 14.55, а и 14.56, а—в, да и другим выпускают серийные редукторы общего назначения (ГОСТ 20758—75*, ГОСТ 21351—75, ГОСТ 21426—75 и т. д.), для которых в ГОСТ 2185—66 установлены ряды важнейших параметров. При этом в одном и том же корпусе подбором зубчатых пар в широком диапазоне можно осуществлять различные передаточные отношения; предусмотрена возможность варьировать положение выходных валов. Естественно, что при этом отдельные варианты, оправданные массовостью производства деталей, не могут быть оптимальными по массе, габаритам, распределению нагрузок по ширине зубчатых венцов и между опорами и т. д. В связи с этим рекомендации, относящиеся к редукторам общего назначения, далеко не всегда приемлемы. Это относится к редукторам, к габаритам и массе которых предъявляют жесткие требования, в первую очередь к передачам транспортных машин.
Указания к выбору материалов основных деталей редукторов даны в гл. 6; вопросы смазки освещены в гл. 3.
Для снижения массы и габаритов передачи выполняют многопоточными (см., например, рис. 14.56, е). Наименьшие массу и габариты имеют планетарные передачи (см. § 14.10). Это связано не только с использованием многопоточности, но и с подвижностью осей сателлитов.
Одноступенчатый планетарный редуктор Л (см.§ 14.10) показан на рис. 14.59. На рис. 14.60 дан двухступенчатый планетарный редуктор, составленный из передач А и выполненный по схеме на рис. 14.56, з.
Расширяющееся распространение получают мотор-редукторы — агрегаты, состоящие из зубчатого редуктора (с неподвижными осями зубчатых колес или планетарного) и электродвигателя. При этом корпус редуктора скрепляется с корпусом фланцевого электродвигателя. Масса и габариты мотор-редуктора значительно меньше, чем предназначенной для той же цели установки, составленной из редуктора и электродвигателя, представляющих собой самостоятельные агрегаты с муфтой для передачи вращательного движения.
Компактностью отличаются установки с так называемыми навесными редукторами. Примером является мотор-редуктор, схема 313
которого дана на рис. 14.56, и. Тихоходный вал выполняют полым для установки редуктора на выходном валу приводимого в движение агрегата. Реактивный момент от корпуса редуктора передается на корпус агрегата.
Для оптимизации механического привода на стадии выбора схемы передачи и разбивки передаточного отношения среди ступеней редуктора (мультипликатора) полезны зависимости, позволяющие определить массу сравниваемых вариантов без определения размеров передач.
Рис. 14.59. Одноступенчатый планетарный редуктор А
Объем цилиндрического зубчатого колеса
V = 0,25л5ит/щ/<3, где К3 — коэффициент заполнения, равный отношению объема зубчатого колес: к объему цилиндра диаметром dw и высотой bw.
Ориентировочная масса шестерни и колеса
Gm = 0,25n&w (<Дт/\з1 -J- би>2/<з2) Pm = 0,25.1/^//^! (К31 -j- U2/\32) pm-
(14.135)
Подставив в эту формулу bwdw\ из (14.58), приняв для стали рт = 7,8 X X 10"6 кг/мм3 и учтя, что Тцг= получим
Gm = 12,2* Ю'ЗТнг (x/l^ol). (14.136)
где
Z = (и ± 1) (7<з1 + (14.137)
Если передача многоступенчатая, то тихоходную ступень обозначают I, следующую за ней — Пит. д. (см. рис. 14.55, б), момент на колесе II ступени Т’/Гап = 7/711= T//2i/m, массы зубчатых колес 1 и II ступеней:
Gmi = 12,2- 10^3Tfj2i Xi/[7<oil;
Gmii = 12,2- IO’3 (7’h2i/«i)
Рис. 14.60. Двухступенчатый планетарии! редуктор
Рис. 14.61. Зависимость % от и для одноступенчатой цилиндрической передачи
Рис. 14.62. Зависимость х 01 “I и 'об Для двухступенчатой цилиндрической передачи при Аз] = К3ц = 1 н l^oi 1= №ц]
Рис. 14.63. Зависимость /зст от U[ и для трехступенчатой цилиндрической передачи при Л'31 = = Кэп = Кзш и №1 1 = IA'oii 1 = №ш 1
Масса зубчатых колес обеих ступеней
От 2ст “ 12,2*10 2ТН 2IX2 cr/^olL где
У.2СТ = XI + хп I^oll/(«I
Аналогично для цилиндрического редуктора с п ступенями
Отп ст = 12,2» 10 3Т*/7 slXn ст/lKol], тде
„ = V, -L X» tKfll] 1 XIII [A'ol] I ... I Xn [Koi]
XncT X T UJ lKeIl] T ajUn [Koin] ' «1«П” “n-1 [Acre] "
(14.138)
Величины Xi> xn, ... определяют по формуле (14.137), в которую при и подставляют соответственно индексы I, II и т. д.
Рис. 14.64. Габариты различных типов передач с передаваемой мощностью 50 кВт при и = 5 и частоте вращения тихоходного вала 200 об/мин:
1 — плоскоременная передача; 2 — клиноременная передача; 3 — передача с трехрядной цепью ПРУ; 4 — редуктор одноступенчатый цилиндрический; 5 — планетарный редуктор
Найденные по формуле (14.138) значения Хкт.Хаст и Хзст Даны на рис. 14.61— 14.63. При использовании рис. 14.63 величина иц промежуточной ступени II равна величине «j2CT ступени I двухступенчатого редуктора с «об2СТ = «обзст^йзст при минимальном значении Хгст-
Из рис. 14.61 и 14.62 находим, что при /об = Ю имеем %1СТ/%2СТ = 11/6 = = 1,84, т. е. масса зубчатых колес одноступенчатого редуктора на 84% больше, чем двухступенчатого (см. рис. 14.55). Аналогично из рис. 14.62 и 14.63 следует, что при «об = 63 масса зубчатых колес двухступенчатого редуктора на 34% больше, чем трехступенчагого.
При выборе типа передачи полезны ориентировочные данные, относящиеся к сравнительным габаритам различных передач (рис. 14.64).
§ 14.12. УКАЗАНИЯ К ПРОЕКТИРОВОЧНОМУ РАСЧЕТУ
ЗУБЧАТЫХ ПЕРЕДАЧ
Общие замечания. Обычно размеры зубчатых передач определяют из расчета на контактную прочность активных поверхностей зубьев. В большинстве случаев необходимую прочность зубьев па изгиб удается обеспечить варьированием модуля (числа гг) при 317
rfK,i и полученных из расчета на контактную прочность зубьев. Исключением являются передачи с высокими твердостями активных поверхностей зубьев при NHe^ NHe (т. е. К HL 1) и особенно при реверсивной симметричной нагрузке.
Выбор материалов высокозагруженных зубчатых колес. Краткие сведения о материалах зубчатых колес даны в гл. 6. Из формул (6.3), (2.15) и табл. 14.4 следует, что масса деталей, размеры которых определяются величиной [он], резко падает с увеличением
твердости контактирующих поверхностей.
Для сравнения несущей способности передач со стальными зубчатыми колесами при различных видах термообработки полезен график зависимости величин ICZ/ J (связанных прямо пропорциональной зависимостью с допускаемыми нагрузками и близкой к обратно пропорциональной зависимостью с массой зубчатой пары) от Nhe (рис. 14.65). Так, при NHE > 108 несущая способность це-
Рис. 14.65. Зависимость [С/у] от КцЕ при Zv = = ZR= 1
ментованных передач больше, чем закаленных т. в. ч. при HRC 54 и термоулучшенных до твердости НВ 250, приблизительно в 1,5 и 5 раз соответственно. Следовательно, ориентировочные значения отношений масс зубчатых пар в сравниваемых вариантах равны 0,67 и 0,2 соответственно. Из этого же рисунка следует, что преимущества передач с высокими твердостями возрастают с уменьшением Nhe. Так, при Ннь = 107 для рассмотренного примера вместо 1,5 и 5 имеем соответственно 1,66 и 9,5. Снижение массы и габаритов является одним из важнейших условий совершенствования машин. В связи с этим при новом проектировании, как правило, для зубчатых колес силовых передач назначают стали с высокими твердостями активных поверхностей зубьев (обычно HRC > 50-г-55) (см. табл. 14.4 и 14.5). При использовании поверхностной закалки предпочтительны стали с пониженной прока-ливаемостью, например марки 55ПП (см. табл. 14.6). При указанных видах поверхностного упрочнения и достаточно высоких механических характеристиках сердцевины достигается наибольшая несущая способность, лимитируемая изгибной прочностью зубьев.
Применение зубчатых колес с твердостью активных поверхностей НВ « 350 может быть оправдано только в специальных 318
случаях (например, в крупногабаритных судовых передачах), а также в единичном производстве, когда снижение массы и габаритов не имеет большого значения.
Выбор числа зубьев шестерни zv С увеличением zt при задан
ном dx уменьшается интенсивность шума, повышается плавность работы. С ростом z1 уменьшаются длина отрезка PtP2 и скорость скольжения vsx (см. рис. 14.17), повышается несущая способность, лимитируемая заеданием (см. стр. 35), снижаются потери на тре-
ние. При этом также уменьшается объем металла, переводимого в стружку при фрезеровании зубьев, и в ряде случаев снижается масса зубчатых колес. Но при увеличении zx при данном dt снижается т и падает несущая способность, лимитируемая изломной прочностью зубьев. Это накладывает ограничения при назначении Zv
Величина zx в передачах с эвольвент-ным зацеплением изменяется в широких пределах, начиная обычно с 10 (но встречаются передачи и с zr — 5) и кончая приблизительно 70. Для цилиндрических передач при твердостях активных поверхностей зубьев Н > НВ 350 и Н С с НВ 350 характерные интервалы значений Zj составляют соответственно 15—30 и 18—35.
Ориентировочные значения zlmax из условия равнопрочности по напряжениям изгиба и контактным напряжениям для
Рис. 14.66. Значения г1п1ах для нереверсивных цилиндрических передач при Nhe > Nho-
1 прямозубые зубчатые колеса 6-й и более высоких степеней точности; 2
то же при 7-й и более низких степенях точности; 3 — косозубые зубчатые колеса; --------- — термическое улучшение или нормализация; — — — — нитроце-
ментация и цементация
нереверсивных цилиндрических передач
даны на рис. 14.66. Эти значения
при реверсивной симметричной нагрузке следует умножить на 0,75. Если в формуле (14.46) КHl 1 ICM- (4.58)], то значения г1 шах из рис. 14.66 следует уменьшить в Кнь раз. При Н < НВ 350
значения zx обычно назначают значительно меньшими, чем полу-
чаемые из рис. 14.66.
Для цементованных конических передач при del с 120 мм числа зубьев шестерни в зависимости от передаточного числа в соответствии с ГОСТ 19624—74 и ГОСТ 19326—73 ориентировочно можно принять равными: 18—20 (14—16) при и 2,5; 16—18 (11—14) при и !=« 4; 15—16 (9—11) при и 6. Значения в скобках относятся к передачам с круговыми зубьями. Для передач с термоулучшенными зубчатыми колесами значения гх можно увеличить на 10—20% против указанных значений.
Выбор значений лу и х2 для цилиндрических передач и х,а и хп2 для конических. В практике проектирования при zx > 18 20
все еще широко применяют цилиндрические передачи с хг = х2 —
t= 0. Вместе с тем варьирование величин лу и х2 существенно влияет на геометрию зацепления (см. стр. 241), а также на несущую способность. При значительных и (например, больше трех) находит применение система смещений с х2 ± лу = 0 при хг > 0. При подборе величин хг и х2 можно обеспечить, например, равенство i')P1 = йР2 (см. стр. 252) или осуществить равнопрочность зубьев по изгибу. Так, легко обнаружить, что при [ofl] = [aF2] в передаче с Zj = 13 и г2 = 70 при хг + х2 = 0, приняв х1 0,35, получим Yп YЕ2 3,75 (см. рис. 14.35).
При любых значениях и в соответствии с ГОСТ 16532—70 можно принять хг = х2 = 0,5. При подборе величин хг и х2 с целью повышения, например, изгибной прочности зубьев, выравнивания удельных скольжений, предупреждения получения малых значений sa (например, меньших 0,35—0,4 при поверхностном упрочнении) рекомендуется пользоваться блокирующими контурами (см. [84] и ГОСТ 16352—70), позволяющими с минимальной затратой времени получить передачу, в которой отсутствуют подрезание эвольвентного участка и интерференция профилей, обеспечено значение еа не менее некоторого минимального значения и т. д.
Для косозубых передач при хг — —х2 и [Сщ 1 < [С№ 1 рекомендуется принимать
лу = (0,015гу- 0,04)УйЗЛ. (14.139)
Если > 18, то в эту формулу подставляют г, = 18; при и ?> 6 принимают и = 6. Если ха окажется меньше значения xmin, при котором отсутствует подрезание, то рекомендуется принимать лу = Хщщ, где
xmln = (l — Z!Sin2az)/(2cosp). (14.140)
Значения лу и хп1 для конических передач даны на стр. 289.
Порядок выполнения проектировочного расчета. При проектировочном расчете цилиндрических передач задаются величиной отношения = bjdwl или фа = bjaw. В ГОСТ 2185—66 установлен ряд значений фо, используемых в редукторах общего назначения, поставляемых специализированными заводами. В остальных случаях обычно задаются величиной = bjdwl (табл. 14.11) \ Подставив bw = в формулу (14.37а) и приняв ZH = 1,76 и ea 1,6, получим формулу проектировочного расчета для прямозубых цилиндрических передач со стальными шестерней и колесом
.< 71R (и ± О ЛЛ1ДП
^716г—’ (14Л41)
1 С увеличением твердости активных поверхностей зубьев снижают величину Это способствует разгрузке опор, получению более рациональных конструкций узлов с подшипниками качения. Имеющее место при этом уменьшение и Крр, в свою очередь, способствует повышению надежности передач н снижению их массы.
Таблица 14.11. Ориентировочные значения tya max
Вариант Расположение опор относительно зубчатого венца Нагрузка max ПРИ твердости рабочих поверхностей зубьев
Нг^НВ 3S0 или НХ<НВ 350 и Н,(НВ 350 Ht>HB 350 и Нг>НВ 350
1 Симметричное или вблизи зубчатого венца (передача V на рис. 14.24, а); несимметричное при высокой жесткости конструкции (передача /V в паре IV—II на рис. 14.24, я) А 1,6 1
В 1,2 0,9
2 Несимметричное (передача II в паре IV—II и передача III на рис. 14.24, а) А 1,25 0,8
В 1 0,65
3 По одну сторону зубчатого венца (передача I на рис. 14.24, а) А 0,7 0,55
В 0,6 0,45
При^ечциця:
1. Буквой А обозначена ндгрузка, изменяющаяся по величине; буквой В — нагрузка, существенно изменяющаяся по величине.
2. Обычно принимают =- (0>7 0>9) При заданном межосевом
расстоянии значения могут бмь значительно меньше указанных величин.
Аналогично из (14.45) для мосозубых цилиндрических передач имеем . __________________
d'wl 528?/Л Ти^^н^К'н-с te .sfe~i)~ (14.141а) Г W4<bl2
При использовании коэффициента ЬА01 Для цилиндрических Передач из (14.58) и конических из (14.93) находим соответственно:
4^1 = 10 F2Tm(u ± D/^wlKjj); (14.142)
(I4J42a)
При проектировочном расчете некоторые коэффициенты неизвестны и ими приходится задаваться (например, принимают 1,1 4-1,3, Кна 1,1). Поэтому размеры, получаемые по
формулам (14.141)—(14.142а), приблизительны. Это обстоятельство отмечается штрихом при соответствующих буквенных обозначениях. После уточнения коэффициентов с использованием d'w\ или d'ei производят перерасчет размера dwi или dci.
(14.143)
(14.143а)
(14.144) определяется
При проектирова-нни используют и другой вариант. После назначения Zj (с последующим возможным уточнением) и выбора т уточняют коэффициенты, принятые ориентировочно (KHv, КНа и др.) и определяют величину bw по одной из следующих формул.
Для цилиндрических передач при р = О
4,5-НМ/д/О/рК/д.(ZbZe)2(n ± 1) &W j2 ,, г„ 12 ’
dwlU LaHj
при р + О
4,5- WTfii^HaKHfiKHv 9' ± •)
ш= 4a«W
Для конических передач при Р = 0 и р + О bw = 2- IOVhi(и ± IfCol)-
В формулах (14.141)—(14.144) величина Tf в соответствии с указаниями на стр. 267.
Как при проектировочном, так и при проверочном расчете [см. (14.59) ] в первую очередь надо найти комплексный коэффициент L/Q) 1.
В настоящее время опыт использования коэффициентов Zv весьма ограничен (исключение — передачи турбозубчатых агрегатов судовых установок), особенно при твердости активных поверхностей зубьев более НВ 350 и частых пусках и остановках под нагрузкой. Поэтому в дальнейшем при твердости активных поверхностей более НВ 350 принимаем Zo= 1.
Пример. Рассмотрим простейший случай: нагрузка постоянная или мало изменяющаяся по величине. Передача предназначена для продолжительной ежедневной работы, например не менее трех часов в сутки. При этом, как правило, Nнеъ> NНо и Л7/е2 > Л'/70, за исключением передач с очень малыми частотами вращения, поэтому К.ны = Khla = 1 1СМ- (14.47)]. Назначив достаточно высокий класс шероховатости, принимают Zp = 1 [см. (14.46) и (14.63)].
Величину Кнв в (14.60)—(14.62) выбираем по рис. 14.24. Приняв в среднем 1,15 и Kpf,~ 1.2, из (14.61) и (14.63) находим |Д01 = 0,297 [Свд].
Если, например, зубья шестерни и колеса цементованные или нитроцементо-ванныеи//1= = HRC 58, то = 16,83 МПа [(см. табл. 14.5)] и [До]= = 0,297-16,83 = 5 МПа. Полагая, что Тщ — 500 Н-м, и = 3 и г]^ = 0,7 (см. табл. 14.11), из (14.142) получим:
<41 = 10 ' = 72,5 ММ: Ь'*> = V41 = 50175 MM1
При известных dwi = 72,5 мм, и = 3, Thi « 500 Н-м; bw = 50,75 mmj [Ко ] = 5 МПа из (14.59) находим
Кв =
2-103-500 (3+ 1)
50,75-72,52-3
= 5 МПа.
Этот пример показывает исключительную простоту и наглядность расчетов с использованием коэффициента 17<()].
Указания к проектировочному расчету передач с твердостями активных поверхностен зубьев более HRC55 при мощности С 125 кВт, частоте вращения п <, 3500 об/мин и точности зацепления, выбираемой в соответствии с указаниями в табл, 14.2S 322
Обоснования целесообразности назначения высоких твердостей активных поверхностей зубьев даны в гл. 6. При указанных твердости, точности и ограничениях Кип допускается принять следующие значения /СНс, Кне и КИа при проектировочном расчете (а также при проверочном, если размеры dwl, и и bw найдены из проектировочного расчета): для прямозубых передач KHv = 1,1 и K.fv = 1,12 при Hj < 2000 об/мин и KHv = 1,14 и KFv = 1,16 при пг = 2000—3500 об/мин; для непрямозубых передач Kfju — = 1,1, Khv = 1,06, KFv = 1,09.
Величину 1Ло] определяют по одной из формул (14.60) — (14.62); остальные величины находят следующим образом: [Си ] — по (L4.63); /(яр — по (14.22) или по рис. 14.24 и L4.25; 2Д — по рис. 14.66 (см. § 14.13).
Достоинства зависимостей с коэффициентами Сн и KQ, рекомендованными в ГОСТ 21354 — 75. Каждый из коэффициентов [Cw] и [/Со] связан прямо пропорциональной зависимостью с допускаемой нагрузкой и близкой к обратно пропорциональной — с массой зубчатой пары. Это вносит большое удобство в сравнение несущей способности при различных параметрах, что, в частности, отражено в комментариях к рис. 14.65.
При заданных bw и и, т. е. при известных габаритах зубчатой пары и в известной степени — массы ее, комплексный коэффициент [До] содержит полную информацию .о несущей способности, поскольку в него входят все параметры, влияющие на этот показатель. В связи с этим для сравнения несущей способности при различных материалах, режимах работы, геометрии зацепления (при варьировании величин р, z, xlt х2), точности и других показателях достаточно сопоставить соответствующие значения [/Со ]. Естественно, что для таких сравнений можно пользоваться любыми зависимостями, однако для этого их следует привести к виду, наиболее полно удовлетворяющему поставленной задаче, что и имеет место в зависимостях с коэффициентами
и Ко-
Накопленные сведения о значениях (/Со1 в различных машинах (так, в передачах на винт самолета или вертолета [Ко1 4,6 4-4-5,4 МПа; в судовых турбо-зубчатых агрегатах с термоулучшенными зубчатыми колесами [/Со] 0,6 4-0,8 МПа) позволяют с не-
значительной затратой времени осуществлять ггрикидочные оценки на стадии схемного или эскизного проектирования.
§ 14.13. ПРИМЕРЫ РАСЧЕТА ЗУБЧАТЫХ ПЕРЕДАЧ
Пример 1. Рассчитать прямозубую цилиндрическую передачу (передача V на рис. 14.24, а): максимальный момент на тихоходном валу Тт — 5,2-103 Н-м; = 967,5 об/мин; и — 4,5; зубчатые колеса из стали марки 20ХН2М (см. табл. 14.6) цементованные, твердость активных поверхностей HRC 58—61; шероховатость рабочих поверхностей по 7-му классу (ГОСТ 2789—73); степень точности 7-я (СТ СЭВ 641—77) по нормам плавности; нагрузка нереверсивная; Гистограмма нагрузки тихоходного вала дана на рис. 14.67.
^гЗОООч^г'вОООч
Рис. 14.67. Гистограмма нагрузки к примерам в § 14.13
tM-120'004
ih
Расчетный момент на шестерне (см. стр. 267)
Ти-i =Т\1и = 5,2-108/4,5 = 1,16 10е Н-м.
Эквивалентное число циклов.— см. стр. 271 и (14.51):
^£1 = 60-967,5 [3000+ 8000(TT(2,)ZTT(r))3 +
+ 12 000(7’т(3,)/7’т(1,))3]=4)2.108;
NHE2 = NHEi/u = 4,2.Ю8/4,5 = 9,3-10’-
Из рис. 14.34 имеем Ино = 120-103. При Nhei> Who имеем Khli = 1 (см. стр. 271). Из (14.47)
Кне2 = \/Г N Но! N НЕ2 = 120-106/(9,3-107) = 1,04.
Заметив, что Zr = 1 (см. стр. 270) и ZB = 1 (см. стр. 270, 322), из (14.46) и табл. 14.4 получим:
[от| =23-58/1,2= 1111,6 МПа;
|о„,1= 1111,6-1,04 = 1156 МПа.
В табл. 14.11 варианту 1 при Н > НВ 350 соответствует iprf = 0,4= 0,9. Принимаем = 0,7. Из рис. 14.24 имеем Кн(\ — 1,07. Принимаем Khv~ 1,1 (см. стр. 323). Приняв [0^]= [owi] = 1111,6 МПа (см. стр. 271) , по (14.141) находим
/ . Т.п 1,07.1,1 (4,5 + 1)
dwl~716 V o.7:iiii,62-4,5--------------~
= 89,13 мм.
Из рис. 14.66 (штриховая кривая 2) г1гпах ~ 21. Приняв гг ~ 19, находим (см. табл. 14.1) m = dwi/zj = 89,23/19 = 4,69, принимаем m = 5 мм (см. стр. 240). Число зубьев колеса z2 = гли = 19-4,5 = 85,5. Приняв г2 = 86, имеем по (14.5) и = г2/гг = 4,53. Диаметры делительной окружности по (14.3): d± = = dwr = mzj = 95 мм; d2 = dW2 = m?2 = 430 мм.
Межосевое расстояние (см. табл. 14.1)
вц, = a = 0,5m (z2 + zj = 262,5 мм.
Поскольку dwi + dwi, уточняем bw по (14.143). По приближенной формуле (см. стр. 248) находим еа = 1,674. Из (14.35) и (14.37) имеем Ze = 0,874 и ZH = = 1,764. Из (14.143)
151-106-1,16-108-1,07-1,1 (1,764-0,894)2 (4,53 + 1) „
----------------952-4,53-1111,62-----------------= 55112 ММ-
Приняв bw = 55 мм, имеем j = bw/dwl = 0,58.
Повторим расчет на контактную прочность с использованием коэффициентов Сн и До и ряда найденных ранее величин.
Из (14.63) и табл. 14.5 имеем:
[CW1] = 16,83 МПа; [Сн2] = 16,83-1,042 = 18,3 МПа.
Приняв [СнJ — [СД1] (см. стр. 273), из (14.61) и (14.142) находим:
[До] = 0,4-16,83/(1,07-1,1) = 5,72 МПа; d^ =89,23 мм.
Приняв du,- = 95 мм (см. выше), уточняем bw по (14.144):
t 2-108-1,16-103 (4,53 + 1)
hW = ------ОИАМСТ = 55>06 ММ’
952-4,53-5,7
Проверка зубьев на изгибную прочность. Эквивалентное число циклов при расчете на изгиб (см. стр. 278):
NFEl =. 60-967,5 [3000 + 8000 (Ут (2,)/Т’т (V))9 +
+ 12 000 (Тт(3,,/Тт(1,,)®]= 1,9-108;
Л'>£2 = Nfei/U = 1 >9- io8/4,53 = 4,2-10’.
При Nfe? > A'fo = 4-10“ принимаем Kfl = "VNfo/Nfe~ 1 (см. стр. 279). Из табл. 14.6 oj, Итг,= 950 МПа; [sF] = 1,7.
Заметив, что Крс = 1 (см. условия задания и стр. 276), из (14.78) и табл. 14.6 имеем: [of] = [oF1] = [<у2 1 = 950/1,7 = 559 МПа. В соответствии с указанием на стр. 323 можно принять Kfv~ 1,12. Однако для ознакомления с методикой приведем расчет величины Kfv-
Из табл. 14.3 ор = 0,016. По формуле (14.26)
WFv= 106г(пст— 2) v(aw/u)l/2 = 10-0,016(7 — 2) 4,8 (262,5/4,53)1/2=
= 32,1 Н/мм,
где v = 3,14-95-967,5/(60-1000) = 4,8 м/с.
По (14.25)
vF= 0,475-55-95.32,1/(103-1,16-108) =0,066.
Приняв vp = 0,08 (см. стр. 263), имеем по (14.24) KFv = 1 + vF = 1 + + 0,08 = 1,08. Принимаем Млр = К/ур = 1,07 (см. стр. 258). По найденным zs и г2 из рис. 14.35 находим Ур1 — 4,1; Ург ~ 360. Приняв KFa.1 — Л'гаг = 1 (см. стр. 276), из (14.72) получим:
2-108-1,16-Ю8-1,07-1,08-4,1 , ,ГПИ1,
оГ1 =----------—g_ ос к------—— = 420>7 мПа < Го 1 = 559 МПа;
ci 55-95-5 1 FJ
°Р2 = ап (YF2/YF1) = 420’75 (3.6/4,1) = 370 МПа < [oF],
Пример 2. Рассчитать косозубую цилиндрическую передачу при данных, приведенных в примере 1.
В соответствии с указаниями на стр. 272 и 273 при Нг НВ 350 и Нг > > НВ 350 величина [Суу I приравнивается к меньшему из двух значений [Сщ J и [Суу2]. Поэтому (см. пример 1) [Суу] = [Сууу] = 16,83 МПа. Из рис. 14.66 при Р =/= 0 (штриховая кривая 3) имеем Zj №х 31. Принимаем г, = 29; Р « 9° (см. табл. 14.1). Из рис. 14.32, а Оуу = 0,55. Принимаем = 0,7 и Кир ~ 1,07 (см, пример 1). Принимаем Khv = 1,06 и Кна. = 1,1 (см- СТР- 321). Из (14.62) и (14.142):
r/z,, _ lC/vl
16,83-0,55
1,1-1,07-1,06
=.7,42 МПа;
У ш 7/ 2-1,16-108 (4,5 + 1) „. _ ,
= Ю ]/ ------'С.7.1,5.^42------= 81’7 ММ-
Из табл. 4.1
т = (d^ cos P)/zj = (81,7cos9c)/29 = 2,78 мм.
Из стандартного ряда (см. стр. 240) ближайшее значение т = 3 мм. Поэтому е, = (d'.^ cos p)/m = (81,7 cos 9С)/3 = 26,9. Принимаем Zj = 27. Тогда z2 = E- z,u = 27-4,5 = 121,5. Принимая z2 = 122, имеем и = z^lz^ = 122/27 = 4,52. з рис. 14.32, а для zx = 27 имеем -Он = 0,54. Уточняем
[Ло] = 16,83-0,54/(1,1-1,07-1,06) =7,28 МПа.
Межосевое расстояние (см. табл. 14.1)
ci = 0,5m (z2 + zj/cos Р = 0,5-3 (27 + 122)/cos 9° = 226,28 мм.
Принимаем aw — 226 мм. Тогда
р = arccos [0,5-3 (27 + 122)]/228 = 1 Iе 25'.
Осевой шаг (см. стр. 251)
Рх = лт/ sin р = лЗ, sin 11° 25 = 47,58 мм.
Диаметры делительных окружностей по (14.4):
= dwl = mzj/cos Р = 3-27/cos 11° 25' = 82,6 мм;
rf2 = rfm2 = mz2/cos p = 3- 122/cos 11° 25 = 373,4 мм.
Диаметры окружностей выступов по (14.7):
dai — dj + 2m = 88,6 мм; da2 = d2-j- 2m = 379,4 мм.
Рабочая ширина зубчатых колес по (14.144) 2-10s-1,16-103 (4,52 + 1) &W — - ----
82,62- 4,52 -7,28 ~ 57,04 ММ‘
Принимаем bw = 58 мм. При этом (см. стр. 251) ₽р = bw!pxi — 58/47,58 = == 1,22, а также = bwldwl = 0,70. Высота головок зубьев; йш01 = 3 мм) hwa2 = 3 мм. С помощью рис. 14.14 при
o-tw = at = aictg (tg 20°/cos 11° 25')=21° 48'
(см. табл. 14.1), согласно (14.11), получим
e<x = -f- ea2 ~ 0,71 0,85 = 1,63.
По приближенной зависимости (см. стр. 248) имеем
еа= [1,88-3,2(^ + 4-)! cosp==
= [ !,88 _ 3,2 (А- + ) ]cos (Г 25' = 1,70.
Проверка зубьев на изгибную прочность. Из примера 1 имеем [cf ] = [of ] = = [of2] = 558,9 МПа. Из табл. 14,3 найдем 6F = 0,006. По (14.26)
WFv = 10-0,006 (7 — 2) 4,2(228/4,52)1/2 = 8,94 Н/мм,
где
3,14-82,6-967,5 , „ ,
60-1000 -4.2 М/С-
По (14.25)
vF = 0,475-58-82,6-8,94/(103-1,16-103) = 0,018.
Приняв vF = 0,08 (см. стр. 263), по (14.24) найдем KFv = 1 + 0,08 = 1,08, Принимаем KF$ = Днр = 1,07 (см. стр. 258). Из рис. 14.35, используя (14.75), имеем:
У F1 = 3,81 при zvl — z1/cos3 р = 28,7;
YF2 = 3,6 при zv2 = 28/cos3 Р = 129,6.
По (14.74) Ир = 1 _ р/140 = 0,998. Из рис. 14.19 KFa = 1,15. По (14,73) имеем:
2-103-1,16-103-1,15-1,07-1,08-3,81-0,998
0/1 ~ 58-82,6-3-1,63 ~
= 500,3 МПа < [of] = 559 МПа;
<TF2 = 500,3 (3,6/3,81) = 472,7 МПа < [of] = 559 МПа,
§ 14.14. КРАТКИЕ СВЕДЕНИЯ О ПЕРЕДАЧАХ
МЕЖДУ ВАЛАМИ С ПЕРЕКРЕЩИВАЮЩИМИСЯ ОСЯМИ
Винтовая зубчатая передача. Винтовая зубчатая передача состоит из двух цилиндрических косозубых колес 1 и 2 с перекрещивающимися (обычно под углом 90е) осями (см. рис. 14.3 и 14.68). Эти передачи отличаются низкой несущей способностью, поскольку начальное касание имеет место в точке при малых приведенных радиусах кривизны, значительных скоростях скольжения и неблагоприятных условиях для образования масляного клина.
Рис. 14.68. Винтовая передача
В связи с этим винтовые передачи используют в малозагруженных приводах, главным образом, в приборах.
Для повышения сопротивления схватыванию для зубчатых колес используют сочетания материалов с хорошими антифрикционными свойствами, например сталь с Н £> HRC 50 по бронзе, текстолиту, полиамидам и др.
Межосевое расстояние при dwl = dt и da,2 = d2
aw = a = 0,5 (d1 + d2) = 0,5m (zj/cos px z2/cos p2).
Передаточное отношение
и == COj/COg — Z2/Zi-
Заметив, что z2 = (d2cos p2)/m и zx = (dxcos p^/m, при Pj + 4- p2 = л/2 получим
и = (d2/4) tg Рь
При d2/d1 = const варьируя величину plt можно изменять и. Скорость скольжения зубьев (см. гл. 15) vs = z^/sin Pj.
Гипоидная передача. Одной из разновидностей винтовых передач является гипоидная передача с коническими зубчатыми колесами с перекрещивающимися осями обычно под углом 90° (см. рис. 14.4). Передаточное отношение и = z2/zx в большинстве случаев не превышает 10, но может достигать и существенно больших значений. В отличие от винтовых гипоидные передачи имеют Не точечный, а линейчатый контакт. Расстояние между осями 327
называется гипоидным смещением и обозначается £; при и > 2,5 принимают Е = 0,2dfi₽2. В транспортных машинах величину Е выбирают в зависимости от величин mte, гг и z2 [52]. Как правило, угол наклона зубьев у шестерни больше, чем у колеса. Поэтому при одинаковых значениях de2, z± и z2 модуль mte, а следовательно, и диаметр шестерни у гипоидной передачи больше, чем у конической. То же относится и к ширине зубчатого венца шестерни. В связи с этим в гипоидной передаче приведенный радиус кривизны и число одновременно работающих пар зубьев больше, чем в конической. В результате нагрузочная способность гипоидных передач выше, чем конических.
Повышенный размер шестерни позволяет увеличить диаметр вала, осуществить более жесткую конструкцию, применить подшипники качения больших размеров и, следовательно, с более высокой долговечностью. Смещение осей в ряде случаев дает преимущества в компоновке механизмов. Например, от одного вала можно привести в движение несколько неконсольных зубчатых колес.
В гипоидных передачах угол гр между вектором vs относительной скорости и линией ЕЕ контакта (см. рис. 3.7) существенно меньше 90°, поэтому скорость скольжения вдоль линии контакта t's cos гр значительна. При этом ухудшаются условия образования масляного клина, снижается толщина масляной пленки (см. гл. 3). Для повышения несущей способности из условия сопротивления задиру зубья гипоидных передач выполняют с высокой поверхностной твердостью и применяют масла с противозадирными присадками (гипоидные). При удовлетворении этих требований скольжение вдоль линии контакта выполняет в известной степени и позитивные функции, обеспечивая хорошую прирабатываемость, способствующую компенсации погрешностей изготовления. Отмеченное обстоятельство (наряду с малыми колебаниями скоростей скольжения в зацеплении и большим числом пар зубьев, одновременно воспринимающих нагрузку) является причиной повышенной плавности работы и меньшей интенсивности шума в гипоидных передачах, чем в конических.
Гипоидные передачи широко используют в автомобильных трансмиссиях, тракторах, машинах текстильной промышленности, металлорежущих станках и т. д. Применяют их также взамен червячных передач в прецизионных станках. Расчеты геометрии и прочности зацепления гипоидных передач приведены в работе [52 ].
§ 14.15. ВОЛНОВЫЕ ПЕРЕДАЧИ 1
Волновая передача (рис. 14.69) является разновидностью планетарной зубчатой и отличается от нее тем, что в ее состав входит так называемое гибкое колесо g, соединенное с тихоходным валом.
1 Настоящий параграф написан Ю. А, Державцем и А. Л. Филипенковым*
форму этому колесу придает профильный кулачок h, соединенный с быстроходным валом передачи. Между кулачком и ободом колеса g размещен шариковый подшипник с податливыми кольцами. Для снижения напряжений изгиба обода колеса g кулачку обычно
Рис. 14.69. Конструкция волновой передачи с кулачковым генератором волн
придают овальную форму, при которой обод деформируется по эллипсу. Гибкое колесо в двух зонах (вблизи большой оси эллипса) входит в зацепление с жестким колесом Ь, закрепленным в корпусе передачи. При вращении кулачок перемещает волны деформации
и зоны зацепления, поэтому образно его называют генератором волн, а сами передачи — волновыми.
Уподобим волновую передачу фрикционной (рис. 14.70), состоящей из жесткого круглого кольца b и гибкого кольца g, деформированного генератором волн h, обеспечивающим плотный контакт сопряженных поверхностей. Начальное (недеформированное) состояние кольца g есть круг с диаметром dg < db. Примем, что из-гибная деформация гибкого
Рис. 14.70. Кинематическая схема фрикционной волновой передачи
кольца происходит без мест-
ных сжатий или удлинений, поэтому длина его окружности сохраняется равной Lg = ndg. Обозначим через В и G точки в контакте, принадлежащие соответственно кольцам b и g, и vb — скорость точки контакта при неподвижном кольце Ь.
За один оборот генератора волн h при отсутствии скольжения точка контакта пройдет одинаковый путь по окружностям с диа
метрами dg и db. При этом в контакте с точкой В, принадлежащей кольцу Ь, окажется точка кольца g, находящаяся на расстоянии л (dh — dg) от точки G. Таким образом, за один оборот генератора волн yh = 2л при неподвижном кольце b кольцо g повернется на угол = 2л (db — dg)/dg в направлении, противоположном вращению генератора. Тогда передаточное отношение составит
== ~ g ' dg[(db
Подставляя dg = tnzg и dh = mzh, выразим передаточное число от быстроходного вала к тихоходному через числа зубьев:
«ftg=—zg/(z6 —zg). (14.145)
Ниже будет показано, что формула (14.145) может быть получена из более общих зависимостей, приведенных в § 14.10 для планетарных передач.
Условие сборки зубчатой волновой передачи соблюдается, если
knw = zh—zg, (14.146)
где k = 1, 2, 3, ... — коэффициент кратности (для снижения напряжений при деформации гибкого колеса принимают k = 1); и№ — число волн деформации (чицло зон зацепления).
Каждая схема волновой передачи может быть сопоставлена со схемой планетарной или дифференциальной передачи. Например, передача на рис. 14.69 по своей кинематике эквивалентна передаче типа k — h — v (рис. 14.71, а), в которой роль механизма w, соединенного с валом v, выполняет упругая оболочка гибкого колеса g, а водила h — генератор волн (рис. 14.71, б). Эта глубокая аналогия позволяет использовать для анализа кинематики волновых передач все многообразие схем известных планетарных передач. В частности, определим передаточное число волновой передачи, представленной на рис. 14.69, при неподвижном жестком колесе b по формуле (14.108) с учетом выражения (14.146) и замены обозначения звеньев:
tftg= 1/(1 — igb) = 1/(1 - zb/Zg) = — ze/(knw). (14.147)
Знак величины ibg указывает, что вращение входного и выходного валов в этой схеме передачи происходит в противоположные стороны.
При увеличении числа зубьев zg > 600—800 возрастают требования к точности изготовления колес, а при zg < 140-4-160 снижается прочность обода гибкого колеса. В связи с этими ограничениями в передаче по схеме на рис. 14.71 можно осуществить в одной ступени 70 < | ibg | < 400.
Благодаря многопарности зацепления (зоны зацепления весьма протяженны) волновые передачи обеспечивают высокую кинематическую точность, плавность вращения, низкий уровень шума. Пространство внутри гибкого колеса можно эффективно исполь-330
зовать для размещения двигателя, предварительной ступени планетарного типа или опор тихоходного вала. В итоге волновые передачи отличаются малой массой и габаритами. Разработаны конструкции волновых передач, обеспечивающие передачу вращения в герметизированное пространство [91]. Однако относительно низкий к. п. д. волновых передач (0,8—0,9) ограничивает область их применения преимущественно приводами кратковременного действия.
Выбор формы деформации гибкого колеса связан с условиями его прочности и требованием обеспечения технологичности изготовления генератора волн. Известны следующие основные конструкции механических генераторов волн х.
Рис. 14.71. Кинематические схемы Рис. 14.72. Схемы генераторов волн передач: а — планетарной k — h —v;
б — волновой
Генераторы свободной деформации (рис. 14.72, а) при действии нагрузки на зубья гибкого колеса не обеспечивают сохранения его первоначально заданной формы. За каждым из роликов возникает зона увеличенной радиальной деформации гибкого колеса и образуются участки полного по всей высоте контакта зубьев. Однако перед катящимся роликом происходит резкое изменение первоначальной кривизны упругой линии и даже возможно изменение ее знака, отрицательно влияющее на прочность гибкого колеса. В меньшей степени указанное явление имеет место при использовании дисковых генераторов волн (рис. 14.72, б), так как в этом случае возможность искажения первоначальной деформации гибкого колеса существенно ограничена.
Наиболее стабильной является форма деформации гибкого колеса, создаваемая кулачковым генератором волн (рис. 14.72, «), который является генератором принудительной деформации. Искажение заданной формы возможно только за счет зазоров в гибком подшипнике, контактных деформаций тел качения и колец, а также растяжения гибкого колеса. Эти конструкции генераторов просты (см. рис. 14.69), хорошо соответствуют требованиям технологичности и взаимозаменяемости.
Технологичными являются профили кулачков в форме эпитрохоиды (при f — 2 эпитрохоида обращается в эллипс) или экви-
1 Известны также электромагнитные, пневмо- или гидромеханические генераторы волн.
дистанты к ней. Эти профили кулачков можно получить методом долбления с обкаткой круглым чашечным резцом на зубодолбежном станке (резец устанавливается с эксцентриситетом по отношению к оси вращения) или методом шлифования с планетарным движением обрабатываемого кулачка.
Точное зацепление для технологических профилей кулачков осуществляется при нарезании колес специальным режущим инструментом, изготовление которого для относительно малых модулей затруднено. Получили распространение волновые передачи с эвольвентными профилями зубьев, которые находятся в приближенном зацеплении с весьма малой несопряженностью.
Для стандартных исходных контуров по ГОСТ 13755—68 (модуль т > 1 мм) и ГОСТ 9587—68 (модуль tn < 1 мм) при а = 20е в диапазоне чисел зубьев 100 < zg < 700 приемлемая форма зубьев получается при следующих коэффициентах смещения исходного контура [53]:
для гибкого колеса с внешними зубьями
xg^ 3 4-0,01zg; (14.148)
для жесткого колеса с внутренними зубьями
хь = хй-1 + -^- + 5.10-%(-^-)2 , (14.149)
где AmaJi — максимальная радиальная деформация гибкого колеса.
Высота зубьев гибкого колеса
lig=m(/r: + c’ + /Cg), (14.150)
где принимают Kg = 0,4 для обеспечения глубины захода зубьев 1,4 т в силовых относительно нагруженных передачах и = 0 для обеспечения глубины захода зубьев 1,0 m в кинематических и слабонагруженных передачах.
Диаметр вершин зубьев гибкого колеса с внешними зубьями
dag = + 2 (xg + Kg) m; (14.151)
диаметр впадин гибкого колеса
dfg = de + 2 (xg — h*a — c*) tn; (14.152)
диаметр вершин зубьев жесткого колеса с внутренними зубьями
dab = db 4- 2 (хь — h*a) т. (14.153)
При использовании приближенного зацепления целесообразно проводить проверку на отсутствие взаимного внедрения (интерференцию) зубьев жесткого и гибкого колес. Интерференция головок зубьев недопустима, так как при действии рабочей нагрузки зубья упираются друг в друга поверхностями вершин. При этом генератор волн сжимается, а жесткое колесо деформируется в радиальном направлении, что приводит к проскакиванию зубьев. 332
Проскакивание сопровождается повышенным шумом и вибрацией, остановкой ведомого вала и может привести к разрушению деталей передачи.
В результате экспериментальных исследований установлено, что основными причинами потери работоспособности волновых передач при | | > 100 являются усталостные разрушения под-
шипников качения генераторов волн, а при | i?ig | < 1G0 — усталостные разрушения гибких колес. Износ и пластическая деформация зубьев на активных профилях остаются в допускаемых пределах при значениях крутящего момента на валу гибкого колеса, выбираемых по эмпирической зависимости
Tg с 0,064 - Ю'Чосм] Mg, (14.154)
где bw — рабочая ширина зубчатого венца, мм [обычно принимают bw — (0,15-гО,25) dg]; [осм] — 15-ь20 МПа —допускаемое удельное давление для зубьев волновых передач; Tg — крутящий момент на гибком колесе g, Н-м.
В формуле (14.154) критерием расчета являются напряжения смятия, так как при большом числе зубьев (zg > 100) кривизна их мала и под нагрузкой контакт осуществляется по всей глубине захода. В связи с приближенным характером зависимость (14.154) может быть использована только при проектировочном расчете. При выполнении проверочных расчетов можно рекомендовать зависимости из работы [53].
При увеличении толщины гибкого колеса 6 снижаются напряжения кручения т, однако возрастают нормальные напряжения сг при его деформации генератором волн. На практике стремятся обеспечить равнопрочность как по касательным, так и по нормальным напряжениям.
Место действия наибольших нормальных местных напряжений изгиба не совпадает с местом действия наибольших напряжений кручения, поэтому условия обеспечения прочности рассчитывают не для приведенных напряжений, а раздельно для нормальных и касательных напряжений.
Условия равнопрочности по касательным и нормальным напряжениям обычно обеспечиваются при
6 = 0,01010, (14.155)
где D — наружный диаметр гибкого подшипника.
Значения 6/zn < 1 применять не рекомендуется.
Поломка гибких колес может происходить или при значительных перегрузках, когда действующие статические напряжения превосходят предельные, или вследствие усталостных явлений, когда действующие местные переменные напряжения превосходят пределы выносливости гибкого колеса.
Долговечность шарикоподшипников генераторов принудительной деформации можно определить по формулам (см. [53]):
т 7-10’3
f D1,8 d г*13 ' c^w ugm
3
при Dw < 25,4 мм;
Т = ?.38'10'2 ( fcDw4 dgzL/3 \3
Л ~ « \ Tg tg agK&Kr )
при Пш>25,4 мм,
(14.156)
где fc — коэффициент, зависящий от геометрии деталей подшипника, точности их изготовления и качества материала; гш, Da — число и диаметр шаров; ag — профильный угол зубьев (ориентировочно ag >=« а); п = \ nh — лй| — частота вращения генератора волн относительно гибкого колеса, об/мин; /(б — коэффициент безопасности; Хт—температурный коэффициент (см. гл. 19).
Значения fc выбирают, как для обычных шарикоподшипников (см. 11], стр. 105); момент Tg — в Н м.
Для подшипников качения дисковых генераторов волн расчет на долговечность выполняют по формулам в § 19.8, в которых в качестве внешней нагрузки принимают радиальные усилия в зацеплениях волновой передачи.
При использовании нормализованных подшипников генераторов волн определение размеров волновых передач проводят в следующей последовательности. По формуле (14.147) определяют предварительное число зубьев гибкого колеса z’g, а по формуле (14.154) — диаметр делительной окружности, который можно считать приближенно равным наружному диаметру нормализованного гибкого подшипника D. Предварительное значение модуля определяют по формуле
m = D/[z'g Н- 6 — 2 (ha + с*)]
и округляют до ближайшего значения по ГОСТ 9563—60 или СТ СЭВ 310—76. Если при этом величине т' не будут соответствовать предварительно принятые h*a и с‘, то следует уточнить по ГОСТу или СТ СЭВ значения ha и с* и вновь вычислить т'. Окончательно принимают ближайшее большее стандартное значение модуля (в виде исключения можно принять ближайшее меньшее значение, если оно отличается от вычисленного не более чем на 10%). После этого корректируют число зубьев гибкого колеса, соответствующее принятому модулю, по формуле
zg = Dftn — 6 2 (ha -j- c ).
Окончательно принимают ближайшее меньшее целое число зубьев Zg и уточняют передаточное отношение по формуле (14.147). На этом заканчивается предварительный подбор параметров волновой передачи, после чего находят всё размеры зубчатых колес, выполняют проверочные расчеты на прочность и выносливость гибкого колеса, а также определяют долговечность подшипника генератора волн с использованием формул (14.156) и зависимостей в работах [9, 91 ].
Глава 16. ЧЕРВЯЧНЫЕ ПЕРЕДАЧИ
§ 15.1. ОБЩИЕ СВЕДЕНИЯ
Сцепляющимися элементами червячной передачи являются червяк 1 и червячное колесо 2 (рис. 15.1), вращающиеся около скрещивающихся осей (обычно под утлом 90е, и только этот вариант рассматривается ниже). Неподвижный в осевом направлении червяк при вращении как бы ввинчивается в частично охватывающее его колесо, сообщая ему вращательное движение.
Рис. 15.1. Червячная пара
Поверхности зубьев колеса являются огибающими к рабочим поверхностям витков червяка при движении последнего относительно колеса. В связи с этим в данном случае, в отличие от рассмотренных выше винтовых передач, касание зубьев колеса и витков червяка происходит не в точках, а по линиям, благодаря чему обеспечивается сравнительно высокая несущая способность.
Ведущим звеном обычно является червяк, но встречаются передачи с ведущим колесом, например в центрифугах, в приводе к нагнетателю двигателя внутреннего сгорания и др. Во многих случаях при торможении за счет сил инерции червяк становится ведомым.
Преимуществами червячных передач по сравнению с зубчатыми являются меньшие интенсивность шума и виброактивность, повышенная плавность работы, возможность получения очень большого передаточного числа и в одной сцепляющейся паре. Величина и может изменяться от 1 до, например, 1000, но обычно
она колеблется от 7 до 100, а чаще всего и = 10 <-80. Передача движения между скрещивающимися валами во многих местах оказывается существенным достоинством червячных передач, обеспечивающим более рациональную компоновку механизмов. При отсутствии вибраций с помощью червячной передачи с малыми углами подъема винтовой линии можно обеспечить самоторможение, но при этом к. п. д. ее очень мал.
В сравнении с зубчатыми червячные передачи имеют следующие недостатки: повышенную стоимость; большие потери на трение (в три-четыре раза и более); большие эксплуатационные расходы; необходимость использования дорогостоящих бронз (за исключением тихоходных малоответственных передач). В связи с отмеченными особенностями червячные передачи применяют при ограниченных мощностях (обычно до 60 кВт) в тех случаях, когда предъявляются повышенные требования к плавности и бесшумности привода, а также при необходимости осуществить передачу энергии между скрещивающимися осями. Червячные передачи незаменимы там, где требуется высокая кинематическая точность, например в приводах делительных устройств металлорежущих станков, механизмах наведения телескопов и др.
Наибольшее распространение получили червячные передачи с цилиндрическими червяками (см. рис. 15.1 и 15.4).
§ 15,2. ГЕОМЕТРИЯ, КИНЕМАТИКА
И ТОЧНОСТЬ ЧЕРВЯЧНЫХ ЦИЛИНДРИЧЕСКИХ ПЕРЕДАЧ
Геометрия. Цилиндрические червяки выполняют с линейчатыми и нелинейчатыми боковыми поверхностями витков. Боковые поверхности линейчатых червяков являются следом прямой линии, совершающей винтовое движение постоянного шага. Если прямая проходит через ось (торцовое сечение очерчено спиралью Архимеда), то червяк называется архимедовым. В этом случае боковые поверхности витков червяка в осевом сечении очерчены прямыми линиями с углом профиля ах (рис. 15.2, а). Если же сечения боковых поверхностей витков плоскостью, перпендикулярной к впадине или (витку), прямолинейны, то червяк называется конволютным. Существенным недостатком этих видов червяков с линейчатой поверхностью является необходимость шлифования их кругом, очерченным сложной кривой в осевом сечении. На практике для шлифования номинально архимедовых или конволютных червяков используют конические шлифовальные круги: червяк при этом близок к архимедову или конволютному, но поверхность его не будет линейчатой.
Линейчатую винтовую поверхность имеют эвольвентные червяки. Профиль витка этих червяков в сечении, перпендикулярном к оси, очерчен по эвольвенте круга, поэтому червяк можно рассматривать как эвольвентное косозубое зубчатое колесо с малым числом зубьев и большим углом наклона. Так же, как и косо-336
n-n
Рис. 15.2. К расчетам червячных передач
зубое зубчатое колесо, эвольвентный червяк может сцепляться с косозубой прямобсчной рейкой, поэтому боковые стороны витков можно рассматривать как огибающие к различным положениям плоских боковых сторон рейки. Отсюда вытекает важное достоинство эвольвентных червяков — возможность шлифования их плоской стороной шлифовального круга.
В действующих стандартах (ГОСТ 19036—73, СТ СЭВ 266—76, ГОСТ 18498—73, ГОСТ 19650—74 и др.) червячным передачам с архимедовым червяком приписывается обозначение ZA, с эвольвентным — Zl\ с конволютными червяками — ZN1 и ZN2 соответственно при прямолинейном очертании боковых сторон в нормальном сечении витка и в нормальном сечении впадины.
Расстояние между соответствующими боковыми сторонами двух смежных витков, измеренное параллельно оси, называется расчетным шагом червяка и обозначается р (рис. 15.2, с); отношение р/л — т называется модулем. В СТ СЭВ 267—76 в числе других приведены следующие модули, мм: 2,0; 2,5; 3,15; 4,0; 5,0; 6,3; 8,0; 10,0; 12,5; 16,0; 20,0; 25,0. Допускается использовать модули 3,0; 3,5; 6,0; 7,0 и 12,0. Модули меньше 2,0 мм здесь не указаны.
Режущие кромки червячной фрезы, предназначенные для нарезания червячных колес, располагаются на винтовых поверхностях, близких к винтовым поверхностям червяка (отклонения могут быть предусмотрены для получения более благоприятных условий работы в зоне контакта; они неизбежны и в связи с переточками фрез). Таким образом, червячная фреза является в известной степени аналогом червяка. В связи с этим для унификации режущего инструмента помимо стандартизации модулей установлен также и ряд значений коэффициента диаметра червяка q = djm, где dx — диаметр делительной окружности червяка. Значения q в ГОСТ 2144—76 выбираются в зависимости от т и zx, где zx — число витков червяка. В СТ СЭВ 267—76 установлено два ряда значений ?: 6,3; 8; 10; 12,5; 16; 20; 25 и 7,1; 9; 11,2; 14; 18 и 22,4. Первый ряд следует предпочитать второму. В ГОСТ 2144—76 установлены значения zp 1; 2; 4. Делительный угол подъема винтовой линии у (рис. 15.2, б) на цилиндре d1 = mq определяется из зависимости
tg у = pZiKnd,) = nmzi/indi) = zr/q. (15.1)
С увеличением у растет к. п. д. передачи (см. стр. 341), поэтому для снижения потерь на трение надо брать большие zx и меньшие q. Но при снижении q падает изгибная жесткость червяка и снижается несущая способность передачи. С увеличением гг при данном и растут габариты червячной передачи. При выборе q учитывают ориентировочную рекомендацию: q > 0,25za, где z2 — число зубьев червячного колеса.
В силовых червячных передачах рекомендуется принимать z2 > 22 при zt = 1 и z2 > 26 при zx > 1. Значения z2 могут быть 338
меньше указанных (например, 16), но при этом снижается несущая способность против получаемой по приведенным ниже зависимостям. Диаметр делительной окружности червячного колеса (рис. 15.2, а, б)
d2 = mz2. (15.2)
Поскольку червячная фреза является аналогом червяка, то межосевое расстояние в червячной передаче равно расстоянию между осями червячного колеса и фрезы при окончательном нарезании.
В общем случае межосевое расстояние обозначается аш (см. рис. 15.1). При касании делительных окружностей dj и d2 в плоскости, проходящей через ось червяка и перпендикулярной оси колеса (в средней торцовой плоскости колеса), межосевое расстояние обозначается а (рис.. 15.2, б)
а = 0,5 (dx + d2) = 0,5m (q + z2). (15.3)
Разность aw — a = mx называется смещением червяка, ax — коэффициентом смещения. Отсюда с учетом (15.3) имеем:
aw = 0,5m (q z2-\- 2х); (15.4)
z2 = 2aw/m — q — 2x. (15.4a)
В передачах co смещением неизменным за исключением
и без смещения червяк остается длины by нарезанной части
Таблица 15.1. Длина нарезанной части червяка Ьу (ГОСТ 19650—74)
—1 —0,5 0 ф-0,5
Н-1
(10,5 Ц- г у) т (8 ф- 0,06г2) т (11 -р 0,06г2) т (11 -|- 0,1г2) т (12 -р 0,1г2) т
(10,5 ~р Zj) т (9,5 -|- 0,09г2) т (12,5 -|- 0,09г2) т
(12,5 -)- 0,1г2) т (13 -|- 0,1г2) т
Примечания:
1. При промежуточном значении- коэффициента х длина выбирается соответственно тому из двух ближайших значений х, которое дает большее bi-
2. Для шлифуемых и фрезеруемых червяков полученную по таблице длину bi следует увеличить при т < 10 мм на 25 мм; при т $s 10-~ 16 мм — на 35—40 мм й при т > 16 мм — на 50 мм.
(рис. 15.2, б и табл. 15.1). Но смещение оказывает большое влияние на форму зубьев колеса и геометрию зацепления. Из (15.4а) следует, что, варьируя величину х при заданных aw, т и q, можно получить различные z2 и и. Это позволяет увеличить число промежуточных значений и и осуществить заданный ряд значений и
в одном корпусе. Остальные размеры червяка и колеса (рис. 15.2, б) определяют по формулам (ГОСТ 19650—74):
dal = di + 2т; da2 = d2 + 2т 2хт;
dCM2 < + Gm/fa + 2); /ix == 2,2т;
b2 = 0,75dQ1 при21==1 и z1 — 2; b2 = 0,67dal при г1 = 4.
Кинематика. В плане па рис. 15.2, б условно показан разрез одного зуба червячного колеса. Векторы скоростей и v2 касающихся точек, принадлежащих червяку и колесу, связаны зависимостью Vj = v2 + v12. Скорость скольжения
Ц, = Ifu I yi/cosT- (15.5)
Заметив, что и2/щ = tg у, найдем передаточное отношение
и =» = ^1/di = -Ь-
и>2 iv2/d2 zt
(15.6)
Точность. Распределение давлений в зоне взаимодействия зацеплений червячной пары в большой степени зависит от отклонения межосевого расстояния и осевого смещения средней плоскости червячного колеса. В связи с этим предусматривают возможность точной регулировки осевого положения червячного колеса. Погрешности геометрии зубьев колеса и витков червяка существенно влияют на распределение давлений в зоне зацепления и, следовательно, на несущую способность передачи. В СТ СЭВ 311—76 для червячных передач установлены 12 степеней точности. Степени точности 3, 4, 5 предназначены для передач с высокой кинематической точностью. Для силовых червячных передач наибольшее применение находят степени точности 7 (при ve < 10 м/с) и 8 (при vs < 5). По 6-й степени изготовляют силовые червячные передачи при больших скоростях скольжения, к которым предъявляются повышенные требования по точности и шуму.
§ 16.3. СИЛЫ В ЗАЦЕПЛЕНИИ И К.П.Д.
ЧЕРВЯЧНЫХ ЦИЛИНДРИЧЕСКИХ ПЕРЕДАЧ
Силы в зацеплении. На рис. 15.2, в показано нормальное к направлению витка сечение п—п. Нормальное усилие Fn в этом сечении разложено на составляющие: радиальную Frl и нормальную к ней Fn cos а,'„ где а'п — угол в нормальном сечении. Сила трения Frf при ведущем червяке показана сплошной линией, а при ведомом — штриховой. В приведенных ниже зависимостях верхний знак относится к передаче с ведущим, а нижний — с ведомым червяком. Окружные усилия обозначены Ftl и Ft2, а осевые —• и Гх2.
Из рис. 15.2, б, в при моменте Т2, действующем на колесо, имеем (см. также стр. 138):
^2 = ^i = 2T2/4; (15.7)
^1==Л2 = ^2^(т±«р'); О5-8)
tg<p' = f/cosa„ = r. (15.9)
Далее имеем:
Гл cos к'
_r-cos(v±lp) = Fxl = F<25
р _ 8*2 cos ф'
" cos а'п cos (у ±ф')
Обычно <р' < 3°, поэтому при определении Fn с незначительной погрешностью можно пренебречь влиянием трения:
F ___________= .____Ел----. (15.10)
" io§ а'п Cosy d2 Cos atl coSy
Радиальная составляющая '
Fr = Fn sin a'„ •== Pt2 tg a'ti/cos y. (15.11)
Заметив, что tg ah •= tg червяком получим
F, = F,2tgar (15.12)
К. п. д. Потери в червячных редукторах (как и в других передачах зацеплением) складываются из потерь в зацеплении, в подшипниках и на разбрызгивание и размешивание масла, учитываемых соответственно к. п Д. 1%, Т)п и Т]р,м.
к. п. д. червячной передачи
П = ПзЛпПр.м- (15.13)
В правильно спроектированных передачах потери в подшипниках качения (на которых, как правило, устанавливают червяк и червячное колесо) и на разбрызгивание и размешивание масла составляют незначитель-
ах cos у, для передач
с архимедовым
Таблица 15.2. Коэффициент трения f и угол трения <р' в зацеплении колеса из оловянной бронзы со стальным червяком
os. м/с Г <рг
0,01 0,11—0,12 6° 17'—6° 51'
0,1 0,08—0,09 4° 34'—5° 09'
0,25 0,063—0,075 3°43'— 4° 17'
0,5 0,055—0,065 3° 09'—3° 43'
1 0,045—0,055 2° 35'—3ff09'
1,5 0,040—0,050 2° 17 —2° 52'
2 0,035—0,045 2° 00'—2° 35'
2,5 0,030—0,040 1° 43'_2° 17'
3 0,028—0,035 1°36'—2° 00'
4 0,023—0,030 1° 19'—1°43'
7 0,018—0,026 1° 02'—1°29'
10 0,016—0,024 0° 55'—Г 22'
15 0,014—6,020 0° 48'—1° 09'
ную часть от потерь в зацеплении, и ими можно пренебречь. При ведущем червяке [см. формулы (15.1), (15.7), (15.8)]
.. _ Тa<og _________41У
<1э *112 - Ft^ “tg (у + фт
(15.14)
Аналогично при ведомом червяке
„ __ м _ М? (Т — <₽ ) 115 151
Значения <р' = arctg f и f при бронзовом червячном колесе и стальном червяке даны в табл. 15.2. Меньшие значения /' и <р' соответствуют передачам со шлифованным червяком при твердости рабочих поверхностей витков HRC > 45. Величина /' падает с ростом скорости скольжения vs, поскольку при этом создаются более благоприятные условия для образования непрерывного масляного слоя, разделяющего поверхности зубьев колеса и витков червяка. На рис. 15.3 дана зависимость т]12 и т]21 от у и
Рис. 15.3. К- п. д. червячных передач
Fla потери оказывают влияние сорт масла и шероховатость рабочих поверхностей витков червяка, которая не должна быть ниже 7—8-го класса шероховатости по ГОСТ 2789—73.
Из равенства dx]l2/dy = 0 находим, что т]12 = Нктах при у = л/4 — (р'/2. Учтя данные табл. 15.2, находим, что максимальный к. п. д. будет при у 44°. Практически, как правило, у < 30°, и это связано с тем, что с переходом от^ « 44° к у 342
(«26 ~ 30° при незначительном снижении к. п. д. (см. {.и:. 15.3) существенно упрощается изготовление колеса и червяка. При этом также уменьшаются габариты червячной передачи в средней торцовой плоскости колеса, что легко обнаруживается при подстановке значения q из (15.1) в (15.17).
Рис. 15.4. Червячный редуктор с воздушным охлаждением
Приведенные в табл. 15.2 значения f найдены из формулы (15.14) по экспериментальным данным для червячных передач на опорах с подшипниками качения, т. е. в этих значениях f учтены потери на размешивание и разбрызгивание масла и в подшипниках. Но при неудачном выборе подшипников потери в них могут оказаться значительными, и в этом случае нельзя принять т] = •= 1]12илиг] — т]21 [см. формулы (15.14) и (15.15)]. Так, при нсполь-
зовании для опор червяка конических роликоподшипников с малым углом а (см. рис. 19.14, д) величина т]п может иметь значение 0,90 и меньше. Потери на разбрызгивание и размешивание масла могут также оказаться значительными, если при большой Частоте вращения п± и нижнем расположении червяка (особенно при больших у) велико погружение последнего в масло. Поэтому при указанных условиях не рекомендуется погружать червяк в масло больше, чем на высоту витка. Если при очень больших щ и указанном погружении потери оказываются значительными, то следует предпочесть верхнее расположение червяка или предусмотреть специальные кольца (кольца к в передаче, показанной на рис. 15.4). Эти кольца обеспечивают разбрызгивание масла, достаточное для проникновения его к трущимся поверхностям, но не вызывают значительных потерь. Удельный вес потерь на размешивание и разбрызгивание масла увеличивается с уменьшением aw.
Тепловой расчет червячных передач и указания к выбору масла и способов подачи его рассмотрены в гл. 3 (см. стр. 49 и 55). Смазка окунанием при нижнем расположении червяка не рекомендуется при щ > 10 м/с. При этом следует применять струйную смазку.
Из формулы (15.15) следует, что при <р' > у получим ц21 < 0, т. е. передача движения от колеса к червяку невозможна, так как имеет место самоторможение. Использование возможности самоторможения неизбежно ведет к низкому значению т)13. Действительно, при <р' = у из (15.14) имеем
П12 = tg T/tg (2у) = 0,5 — 0,5 tg2 у < 0,5.
Необходимо учитывать, что в условиях вибраций возможны значительные колебания величины и самоторможение практически не обеспечивается даже при таких малых значениях у, как 3° 30'.
§ 16.4. РАСЧЕТ НА ПРОЧНОСТЬ ЧЕРВЯЧНОЙ ПАРЫ
Критерии работоспособности. Основными причинами выхода из строя червячных пар являются изнашивание зубьев червячного колеса и их поломки. Износостойкость и изломная прочность витков стальных червяков с высокими твердостями активных поверхностей, как правило, не лимитируют несущую способность червячных передач. Таким образом, основными критериями работоспособности червячных пар являются износостойкость и изломная прочность зубьев червячного колеса.
К параметрам, оказывающим большое влияние на износостойкость сопряженных поверхностей, относятся угол ф между линией контакта и вектором относительной скорости (см. стр. 49 и рис. 3.7) и отношение us/uz (см. главы 2, 3 и 6). На рис. 15.5, а показаны проекция на плоскость, перпендикулярную к оси червяка, линий контакта колеса с червяком, витки которого имеют линейчатую 344
винтовую поверхность. Для точки /<х показан угол ф между вектором vs и линией контакта. Нетрудно заметить, что для многих других точек (например, для точки Д2) этот угол очень мал или даже равен нулю. При больших значениях vjv% и малых ф снижается несущая способность, лимитируемая молекулярно-механическим изнашиванием и его опасной формой — задиром. В связи с этим необходимо подобрать материалы, обеспечивающие хорошие антифрикционные свойства. Поэтому червяки выполняют стальными с высокой твердостью активных поверхностей витков, а червячные колеса ответственных передач — из бронз, в зависимости от твердости которых несущая способность ограничивается заеда-
нием или выкрашиванием (см. стр. 111).
Расчет на контактную прочность зубьев колеса. Несущая способность червячных передач с конволютными, эвольвентными и архимедовыми червяками в приведенном ниже приближенном расчете, базирующемся на предложениях А. И. Петрусевича,
принимается одинаковой. Рис. 15.5. Проекции контактных линий на В основу расчета по- плоскость, перпендикулярную к оси чер-ложена формула (2.2). вяка
При этом вместо qH под-
ставляют <7расч из формулы (14.33), в которой в случае червячных передач коэффициент Клр учитывает неравномерность нагрузки в зоне контакта, вызванную деформациями червяка. Величину Fn определяют по (15.10), а /к— по (14.16), где еа— коэффициент перекрытия реечного зацепления, полученного сечением червячной пары средней торцовой плоскостью колеса (см. рис. 15.2, а); угол приравнивается к углу у, a bw — к длине дуги АВ окружности dlt соответствующей центральному углу 6 (см. рис. 15.2, г), который зависит от параметров передачи (среднее значение 6 близко к 0,55л). Таким образом, /к = О.б^бе^ссз у, тогда
Qpacn — 4 • 103Тн2^Снр^Снг/(^1^2^еа/^ч COS СС/;), где Кч — коэффициент (близкий к 0,75), уточняющий суммарную длину контактных линий.
Величину рпр в (2.2) приравнивают к приведенному радиусу кривизны Рпр „и в полюсе зацепления косозубой реечной передачи с цилиндрической шестерней с эвольвентными зубьями, геометрия которой в плоскости, перпендикулярной к оси шестерни, такая же, как и в упомянутом реечном зацеплении в сечении средней торцовой плоскостью колеса. В рассматриваемой реечной передаче
угол наклона р = у; a(w — ах (см. рис. 15.2, а); и = оо. Заметив, что параметры колеса червячной передачи имеют индекс 2, из (14; 15) найдем
Рпр 0,5d2 sin ajcos у.
Подставив найденные значения в (2.2), после осреднения некоторых переменных величин получим
— (23/„/£12) J/с [о/й!- (15.16)
Заметив, что d} = qm = qd2lz2, и учтя (15.3), получим формулы для проектировочного расчета:
V (ы/хм)2<] ;
(15.17)
а > 0,5d2(<//z? + 1).
В (15.16) и (15.17) расчетный момент приравнивают к максимальному из длительно действующих на колесо моментов.
Для бронзовых червячных колес принимают усредненное1 значение £2 = 0,9-105 ЛШа. При fj = 2,1 -105 МПа имеем ZM = = 210 Н^г/мм.
При качественно изготовленных передачах принимают К liv = = 1, если окружная скорость колеса v2 < 3 м/с; при и2 > 3 м/с назначают 1,04-1,3.
Коэффициент Л/ув определяют по формуле
^н₽ = 1 + (г2/0)3(1 -mp). (15.18)
Здесь 0 — коэффициент деформации червяка (табл. 15.3); тр — отношение среднего по времени момента к расчетному:
! У (Tidhi)
i
где У thi — продолжительность работы за полный срок службы; i
thi — продолжительность работы под нагрузкой Т21.
Таблица 15.3. Коэффициент деформации червяка 6
Q
7,1 8 9 10 11.2 12,5 14
1 57 72 89 108 127 157 190
2 45 57 71 86 102 125 152
4 37 47 58 70 82 101 123
1 Имеющие место отклонения в известной степени компенсируются значениями допускаемых напряжений, рассчитанных также при Еа= 0,9-10^ МПа. 346
Ориентировочное значение q выбирают в соответствии с указаниями на стр. 338. После согласования значений q и т со стандартами (СТ СЭВ 267—76 и ГОСТ 2144—76) необходимо выполнить проверочный расчет по формулам (15.16) и (15.20).
Примечание. Среди многих факторов, определяющих несущую способность контактирующих поверхностей, большое значение имеют параметры ф, v^, vs (см. рис. 3.7 и 15.5, а) и рпр. Отмеченные величины существенно отличаются на различных участках зоны зацепления червячных передач, и поэтому несущая способность этих участков и интенсивность их изнашивания неодинаковы. Связанное с этим перераспределение давлений в зоне зацепления существенно влияет и на несущую способность, лимитируемую изломной прочностью зубьев колеса. Значения перечисленных параметров зависят также и от коэффициента смещения х. Отмеченные положения не находят отражения в рассмотренной расчетной схеме. Приведенный метод расчета в связи с этим является приближенным. Опыт применения его позволяет считать, что отклонение результатов от действительных в основном направлено в сторону увеличения запаса прочности тщательно изготовленных передач.
Допускаемые контактные напряжения для колес из оловянной бронзы при шлифованных и полированных червяках с твердостью поверхности витков Н > HRC 45
1ПМ21 = 0,9сгв2 у^107^Н£-2) (15.19)
где 1см. формулу (4.14), в которой в данном случае а = 1 и т' = 4 и (4.15)1
AHf2 = S [(T2[/TH2fNcl] < 25-10’.
Для червячных передач в формуле (4.15) имеем nw = 1.
Для колес из БрАЖ9-4 при шлифованных и полированных червяках с твердостью активных поверхностей витков Н > HRC 45 при vs < 6 м/с принимают [сть-21 = 300—25ns (МПа), где vs — скорость скольжения, м/с. Напряжение [оЬ2] не должно превышать значения [оН21шах, равного 4от и 2от соответственно для оловянных бронз и бронзы БрАЖ9-4 (см. табл. 6.2).
Расчет на изгиб зубьев колеса. Расчет выполняют по формуле
Ops = 1,57/г2У f-iRf^Rfv cos у/(d1d2m) с [о^г], (15.20)
где и К Fv —Khv (см. стр. 346); Y F2— коэффициент
формы зуба червячного колеса, зависящий от эквивалентного числа зубьев колеса zc2 = z2cos3y [66 ]:
zC2 ............... 20 24 26 28 30 32 35 37
YF2.............. 1,98 1,88 1,85 1,80 1,76 1,71 1,64 1,61
zl2 ............. 40 45 50 60 80 100 150 300
YF2 ............. 1,55 1,48 1,45 1,40 1,34 1,30 1,27 1,24
Допускаемые напряжения изгиба для зубьев бронзовых червячных колес при нереверсивной нагрузке
[oF2l = (0,25от2 + 0,08ов2) / 10«//VFF2;
при реверсивной симметричной нагрузке
[°т.-г] = 0,16ов2 у 10e/I\i ЕЕ2.
Величину Nfe.2 определяют по формуле (4.14), где т' = 9 пй= 1. Если A7f£2 < Юб, то принимают NEE2 = 10s; при NEE2 > > 25-107 принимают NFE2 = 25-107.
При проверке на статическую прочность при действии пиковой нагрузки [oF2 ] «» 0,8от. Механические характеристики материалов см. в табл. 6.2.
§ 15.6. ЧЕРВЯЧНЫЕ ЦИЛИНДРИЧЕСКИЕ ПЕРЕДАЧИ С ВОГНУТЫМ ПРОФИЛЕМ ЧЕРВЯКА
И ЧЕРВЯЧНЫЕ ГЛОБОИДНЫЕ ПЕРЕДАЧИ
Весьма благоприятную геометрию зацепления имеют червячные передачи с цилиндрическим червяком, имеющим вогнутый профиль витков (см. рис. 15.2, д). В зоне зацепления этих передач превалируют участки с благоприятными значениями ф (рис. 15.5, б) и значительными приведенными радиусами кривизны 139]. Благодаря этому нагрузочная способность червячных передач с вогнутым профилем червяка в 1,3—1,5 раза выше, чем передач с рассмотренными цилиндрическими червяками.
Рис. 15.6. Глобоидное червячное зацепление
В червячных глобоидных передачах не только колесо, но и червяк имеет форму глобоида (рис. 15.6). Благодаря этому увеличиваетсй по сравнению с цилиндрическим червяком число одновременно работающих зубьев. Угол ф в глобоидных передачах близок к л/2 (см. рис. 15.5, в). Кроме того, форма зазора в плоскостях, перпендикулярных к контактным линиям, весьма благоприятна для образования масляного клина с высокой несущей способностью. В результате несущая способность червячных глобоидных передач приблизительно в 1,5 раза выше, чем червячных передач с цилиндрическими червяками, витки которых очерчены линейчатыми поверхностями.
Технология изготовления червячных глобоидных передач значительно сложнее, чем передач с цилиндрическими червяками. То же относится и к сборке червячных глобоидных передач, поскольку необходимо обеспечить точное осевое положение не только колеса, но и червяка. Эти передачи очень чувствительны к осевым смещениям червяка, вызванным изнашиванием подшипников и деформациями. Из-за отмеченных особенностей область применения червячных глобоидных передач сужается за счет применения более простых в изготовлении и эксплуатации червячных цилиндрических передач с вогнутым профилем червяка.
Основные геометрические параметры и расчет геометрии червячных глобоидных передач приведены в ГОСТ 9369—77 и ГОСТ 17696—72. Вопросы теории и расчета см. в работе [281.
Глава 16. ЦЕПНЫЕ ПЕРЕДАЧИ1
§ 16.1. ОБЩИЕ СВЕДЕНИЯ
Цепные передачи относятся к механическим передачам с гибкой связью. На ведущем и ведомом валах передачи устанавливаются звездочки с числом зубьев и z2 (рис. 16.1, а), которые входят в зацепление с охватывающей их цепью.
Цепные передачи выполняют как понижающими, так и повышающими (хорошо известна повышающая передача к заднему колесу велосипеда).
Скорость движения цепи в передачах общего машиностроения достигает 15 м/с при мощности до 100 кВт, а в специальных приводах — до 35 м/с при мощности в несколько тысяч кВт. Цепные передачи широко применяются в транспортных и исполнительных механизмах разного рода, где возникает необходимость осуществления передачи между параллельными валами при сравнительно большом расстоянии между ними. Передачи с регулируемым натяжением цепи могут работать при некотором изменении межосевого расстояния в процессе работы. С помощью цепных передач можно от одного двигателя (вал 1) приводить несколько агрегатов (рис. 16.1, б). Применение в этих случаях цепных передач часто более оправдано, чем зубчатых с промежуточными колесами и опорами, которые усложняют конструкцию привода. К- п. д. цепных передач, однако, несколько ниже, чем зубчатых. По сравнению с ременными цепные передачи имеют значительно меньшие габариты (см. рис. 14.64), потери на трение и эксплуатационные расходы. Отсутствие проскальзывания, свойственного ременным передачам (за исключением зубчатоременных), во
1 Глава написана совместно с Ю. А. Державцем.
многих случаях также является преимуществом цепных передач. Цепные передачи отличаются несколько повышенной виброактивностью и интенсивностью шума (см. § 16.3).
Рис. 16.1. Схемы цепных передач
§ 16.2. ПРИВОДНЫЕ ЦЕПИ И ЗВЕЗДОЧКИ.
ГЕОМЕТРИЧЕСКИЙ РАСЧЕТ
В качестве приводных наиболее широкое применение нашли роликовые (ГОСТ 13568—75) и зубчатые (ГОСТ 13552—68) цепи.
Однорядная роликовая цепь (рис. 16.2, а) состоит из звеньев двух типов: с наружными пластинами 1, напрессованными на концы осей 2, и с внутренними 5, напрессованными на втулки 3. Оси, вставленные в отверстия втулок, образуют шарнир. Ролик 4 входит в зацепление с зубьями звездочки. В подвижных сопряже-350
ннях втулки с осью и роликом реализуется трение скольжения, а в сопряжениях ролика с зубьями звездочки преобладает трение качения. Наружные и внутренние пластины имеют форму, близкую к телу равного сопротивления при растяжении. Звенья цепи
Рис. 16.2. Роликовая цепь
неразъемны, за исключением соединительного звена (рис. 16.2, б), ось которого стопорится шплинтом или разрезной шайбой. Как правило, число звеньев цепи выбирают четным. При нечетном числе звеньев цепи соединительное звено имеет особую форму (рис. 16.2, в).
Применение многорядных цепей позволяет значительно снизить габариты передачи в плоскости, перпендикулярной к осям. При заданных диаметрах звездочек с переходом к многорядной цепи 351
уменьшается шаг и тем самым увеличивается плавность работы передачи.
Некоторые сведения о роликовых цепях с шагом Р = 12,70 + +31,75 мм приведены в табл. 16.1 (шаг является исходной характеристикой, через которую выражают все геометрические параметры цепной передачи). Диаметр d0 и рабочая длина оси Ьо определяют проекцию спорной площади шарнира А = dobo, которая учитывается при расчете звена на износостойкость. Диаметр втулки ds и ширина проушины Ьпл обусловливают прочность проушины внутренней пластины (рис. 16.2, а).
Таблица 16.1. Приводные однорядные роликовые цепи типа ПР и ПРУ по ГОСТ 135S8—75 (выборка)
Шаг цепи Р, мм Диаметр ролика £), мм Масса 1 м цепи <7т. кг Расстояние между внутренними пластинами &вН, мм Проекция площади шарнира А, мм2 Ширина внутренней пластины ьпл> ым Разрушающая нагрузка Fpa3p, Н
ПР ПРУ
12,70 8,51 0,71 7,75 50 11,81 18 000
15,875 16,16 0,96 9.65 71 14,73 23 000 —
19,05 11,91 1,52 12,70 105 18,08 25 000 32 000
25,40 15,88 2,57 15,88 180 24,13 50 000 60 000
31,75 19,05 3,73 19,05 260 30,18 70 000 89 000
Примечание, Размеры элементов цепи показаны на рис. 16.2 В ГОСТ 13568—75 указаны также размеры многорядных цепей.
Зубья звездочек для роликовых цепей с отношением Р/D < 2 профилируют по ГОСТ 591—69. ДиЭмётр делительной окружности звездочки (рис. 16.3, а)
d = P/sin (п/г). (16.1)
Ножка зуба очерчена дугой окружности радиусом г 0,5D, обеспечивающим гарантированный боковой зазор для ролика диаметром D во впадине зйездочки. Благодаря сочетанию выпукло-вогнутых поверхностей этих деталей уровень контактных напряжений сравнительно невысок. Головка зуба очерчена по радиусу г2 и сопряжена со впадиной рабочей дугой радиусом г1 и коротким прямолинейным участком. Этот профиль допускает работу передачи с изношенной до известного предела цепью, т. е. с увеличенным шагом Р + ДР. Радиус г2 подобран из условия, чтобы головка зуба не участвовала в контакте с роликом; назначение головки — служить направляющей для внутренних пластин цепи. Во избежание защемления цепи при перекосе головка зуба в торцовых сечениях закруглена по радиусу г8 на высоте h. Для нереверснв-352
них передач рекомендуется профиль звездочки со смещением центров впадин соседних зубьев на величину е (рис. 16.3, б).
Зубчатые цепи (рис. 16.4, а) состоят из набора пластин двух типов. Основные пластины 1 имеют внешние боковые плоские поверхности, которыми они сопрягаются с двумя зубьями звездочки. Направляющие пластины 2 служат для предотвращения бокового смещения цепи относительно звездочки, и для них предусмотрена кайавка посредине ее зубчатого венца (см. рис. 16.5). В фасонные
отверстия пластин вставлены призмы с цилиндрическими поверхностями, воспринимающими передаваемое усилие практически без проскальзывания (рис. 16.4, б). Зубчатые цепи обладают большей несущей способностью, чем роликовые, способны работать при высоких скоростях с меньшим шумом и вибрацией, но сложнее в изготовлении.
Некоторые сведения о зубчатых цепях приведены в табл. 16.2. В общем машиностроении звездочки этих передач по ГОСТ 13576—68 имеют плоские активные поверхности зубьев, соответствующие прямым поверхностям зубчатых пластин (рис. 16.5). В высокоскоростных передачах активным поверхностям зубьев звездочек придают незначительную выпуклость. Пластины неизношенной цепи контактируют со звездочкой одновременно двумя активными поверхностями, но по мере изнашивания шарниров и увеличения шага они вступают в зацепление только одной поверхностью.
Отношение чисел зубьев большей и меньшей звездочек принимают в качестве расчетного передаточного числа цепной передачи: и — > 1. В понижающих передачах общего машиностроения
обычно птах < 7. Для тихоходных передач (и < 2 м/с) при спокойной работе без толчков допускается «тах < Ю.
Рис. 16.4. Зубчатая цепь
Для снижения габаритов цепной передачи числа зубьев принимают минимально допустимыми. Минимальное число зубьев меньшей звездочки для роликовых цепей выбирают по эмпирической зависимости
zlmln = 29-2«. (16.2)
Таблица 16.2. Приводные зубчатые цепи с шарнирами качения по ГОСТ 13552—68
Шаг цепи Р, мм Масса 1 м цепи на 1 см шири-НЫ qm, КГ Ширина цепи В, мм Ширина пластины Ь, мм Расстояние от оси шарнира до вершины зуба Ь^, мм Толщина пластины S, мм Удельная разрушающая нагрузка (на I мм ширины пластины) ^разр/^» Н/мм
12,7 0,58 22,5—52,5 (через 6 мм) 13,4 7,0 1,5 10 000
15,875 0,72 30—70 (через 8 мм) 16,7 8,7 2,0 12 500
19,05 0,86 45—93 (через 12 мм) 20,1 10,5 3,0 15 000
25,4 1,14 57—105 (через 12 мм) 26,7 14,0 3,0 20 000
31,75 1,45 69—117 (через 12 мм) 33,4 17,5 3,0 25 000
П р и м е ч а н и < Размеры элементов цени представлены на ри< и, 4
1______________________________________________________________________________________
При v < 2 м/с эта величина может быть уменьшена до zJmIn > 13-J-15, при v > 2 м/с zlmln > 19, а в приводах с ударными нагрузками следует принять г, mIn > 23. С уменьшением увеличиваются углы относительного перемещения звеньев цепи, что способствует изнашиванию. Ограничение величины связано также с возможностью появления чрезмерных динамических нагрузок (см. § 16.3).
В передачах с зубчатыми цепями величина mln принимается на 20—30% выше по сравнению с указанными значениями для роликовых цепей.
Рис. 16.5. Звездочка зубчатой цепи
Расчетное число зубьев большей звездочки z£ но
оно не должно превосходить предельной величины z2 niax < 100-?-120 для передач с роликовыми цепями и z2max = = 120-4-140 для передач с зубчатыми цепями. Это ограничение связано с увеличением шага Р при изнашивании, в результате которого звено не может занимать свое номинальное положение во впадине зуба звездочки и под нагрузкой смещается в сторону окружности вершин. Этот процесс резче проявляется на звездочках с большим числом зубьев. Увеличение шага цепи звеньев приводит к соскакиванию или разрыву цепи, если звено выходит из впадины между зубьями и натягивается по окружности вершин звездочки.
Расчетное число зубьев й следует округлить до ближайшего нечетного числа z2. При нечетных числах зубьев г, и z2 и четном числе звеньев цепи изнашивание звездочек и шарниров будет протекать более равномерно.
Межосевое расстояние цепной передачи с и от 1—2 до 6—7 выбирают в пределах а = (304-50) Р (см. рис. 16.1, а). Минимальное межосевое расстояние ограничивается условием обеспечения угла охвата меньшей звездочки ах > 120°. Это условие, направленное на повышение прочности и износостойкости элементов передачи, обычно удовлетворяется при и с 5 и указанных выше значениях zi mm- В остальных случаях следует выполнять проверку по двум неравенствам:
amln £> <4 — °mln 5s 0,5 (dal 4" ^02)- (16.3)
Одновременно ограничивают и максимальное межосевое расстояние (атах с 80Р) во избежание чрезмерного натяжения цепи силой собственного веса.
Длина цепи L == LPP, где LP — число звеньев. При заданном а предварительное значение Lp определяют с использованием формулы (13.3), в которой в данном случае Дх «=» 0,5Р (za 4- zx) и Л а 0,25 [Р (za — zx)/ л ]2, поэтому
Lp = 2а/Р + 0,5 (Z2 + zx) + 0,25 (za - zj2 Р/(л2а). (16.4)
После округления L'P до целого числа Lp (предпочтительно четного) определяют величину а [см. (13.4)1:
а = 0,25Р [Lp — 0,5 (za 4- zx) +
+ K[Lp - 0,5 (z2 + zj]2 - 2 [(za - zx)/nj2]. (16.5)
Для передач с нерегулируемым межосевым расстоянием устанавливают монтажное расстояние ам = а—Да, гдеДа== = (0,0024-0,004) а — поправка на межосевое расстояние для обеспечения необходимого провисания ветвей цепи; при наклоне линии центров к горизонту под углом ф > 70° (см. рис. 16.1, а) принимают Д а = 0.
В передачах с регулируемым межосевым расстоянием подвижная звездочка смещается на величину Да при монтаже.
Предварительное натяжение цепи (при отсутствии передаваемой нагрузки и вращения) обычно обеспечивается силой веса ветвей цепи и контролируется при монтаже или эксплуатации по стреле провеса /, измеряемой в середине пролета по перпендикуляру к общей касательной к звездочкам (см. рис. 16.1, а). Ориентировочно принимают f = 0,02а при ф < 45° и f = (0,0104-4-0,015) а при ф > 45°.
В некоторых цепных передачах с большим межосевым расстоянием, особенно при повышенном изнашивании шарниров, может возникнуть необходимость в специальных устройствах для компенсации вытягивания цепи с помощью регулирующих звездочек или роликов. Такие звездочки и ролики располагают на периодически смещаемых опорах или на опорах с постоянным прижимом с помощью пружин или груза. Диапазон смещения опор выбирают исходя из возможности укорочения изношенной цепи путем удаления двух звеньев. Предварительное натяжение необходимо лишь в передачах с ф > 70°.
Ведущая ветвь цепи может располагаться над ведомой или под нею. Исключением являются передачи с малым межосевым расстоянием (а < ЗОР) при и •> 2, передачи с большим межосевым расстоянием {а ►> 60Р) при малом значении и и расположении осей звездочек в горизонтальной плоскости, а также передачи с углом ip, близким к 90°. В этих случаях ведущая ветвь должна находиться над ведомой во избежание захлестывания провисающей ведомой ветвью лишних зубьев вне правильной линии зацепления или соприкосновения ведомой ветви с ведущей ветвью.
§ 16.3. НЕРАВНОМЕРНОСТЬ ДВИЖЕНИЯ И УСИЛИЯ В ЦЕПНОЙ ПЕРЕДАЧЕ
Приведенный ниже анализ неравномерности движения цепи и непостоянства передаточного числа позволяет вскрыть лишь качественную сторону рассматриваемых вопросов, поскольку он
Рис. 16.6- Скорости и ускорения цепи
выполнен на основе простейших предположений без учета податливости цепи и других элементов, погрешностей изготовления и колебаний.
Пусть положение впадины некоторой звездочки 1 определяется углом = (Hjt, отсчитываемым от оси х, параллельной ведущей ветви (рис. 16.6, а) и проходящей через центр звездочки Oi. Шарнир ttiL входит во впадину звездочки в тот момент, когда
<рт = f₽oi = 0,5л — л/гг. Тогда проекция окружной скорости vt =< = O.SdjWj на вертикальную ось является скоростью удара шар* нира и впадины:
— O.SdjiOi sin (л/гг) «=г O.Sad^Oj/Zp (16.6)
Скорость ведущей ветви в направлении линии х
Vti — O.SdjiOj sin <fv
При q>r = <р01 и = <р01 + 2л/гх имеем минимальную скорость ftimm = 0,5rf1W1 cos (л/гх) & 0,5^ {1 — [л/(2гх)12}j максимальное значение скорости
Vi imax = O.Sd^Op
Изменение скорости цепи (рис. 16.6, б) характеризуется коэффициентом неравномерности
е = (Ут1тах — Vti minMlmax = [n/(2?i)]2. (16.7)
Ускорение цепи (рис. 16.6, в)
dv-tJdt = O,5dico? cos(fi.
Экстремальные значения ускорения достигаются при фх = <р01 и Ф1 = Toi + 2n/zlt т. е. при <рх = 0,5л ± л/гх:
(dvT1/dt)max< raln — ± 0,5diWiSin (л/zi) ± O,5raiiwi/zi. (16.8)
За один пробег цепи с числом звеньев LP звездочки 1 и 2 (рис. 16.6, о) поворачиваются на углы фх = 2tiLp/z1 и<р2 = 2nLPlz2. Отсюда среднее значение передаточного числа
« = Ф1/<Рг = z2/zv
Проекции векторов окружных скоростей ц и v2 шарниров шг и ш2, находящихся в зацеплении со звездочками I и 2, на направление ведущей ветви:
оГ1 == О,5т?гсо1 sin <pr; щ2 = О,5т/2со2 sin <р2.
Пренебрегая деформациями цепи, можно приравнять = = Пг2, тогда мгновенное передаточное число
«мгн = (4 sin Фа)/(^1 sin <fi)- (16.9)
Если длина ведущей ветви Lu = (k 4- 0,5) Р, где k — целое число, то максимальное и минимальное значения мгновенного передаточного числа имеют место соответственно при <р2 = 0,5л; Ф1 = Фо1 — 0,5л — л/Zj и ф2 = <р„2 = 0,5л — л/г2; = 0,5л:
«мгн max d.^/ld^ COS (Я/Zj)], Имгн mtn = 1^2 *"OS (Jl/Z2)]/d1.
Колебание передаточного числа характеризуется коэффициентом неравномерности
Еи = ^тзх-.Чмгн mtn ^ ^ ( j J /w2) /(2z2). (! 6 ! 0)
Если LBIP — целое число, то максимальное и минимальное значения мгновенного передаточного числа будут соответственно при <рг = <р02 = 0,5л — л/хг; <рг = <р01 — 0,5л — л/гг и = <рг = = 0,5л. Аналогично предыдущему
еи^л2(1 — 1/ы2)/(2г?). (16.11)
В этом случае при и — 1 справедливо равенство «МГН = и.
Из приведенных зависимостей следует, что с уменьшением zr увеличивается сила удара шарниров цепи и впадин звездочек, возрастает колебание скорости цепи и передаточного числа и, следовательно, увеличиваются динамические нагрузки. В связи с этим величину г1га1п рекомендуется назначать в зависимости от v (см. стр. 355).
В цепной передаче в отличие от ременной предварительное натяжение гибкого элемента при ч|- < 70° (в данном случае цепи) обычно не требуется. При этом условии усилия, действующие на ведущую звездочку (см. рис. 16.1, в), равны:
F1 = Fr-|-F2; F2 = F9 + Fu.
Здесь Ft — полезное усилие, Ft — Fq и Fn — натяжения
от силы тяжести холостой ветви и действия центробежных сил (см. стр. 219):
F0 = o^m(l + 5 cos2 г););
^ = 0,1 qmv2,
где ip — угол, показанный на рис. 16.1, a: qm — масса 1 м цепи.
§ 16.4. КРИТЕРИИ РАБОТОСПОСОБНОСТИ ЦЕПНЫХ ПЕРЕДАЧ, МАТЕРИАЛЫ ИХ ДЕТАЛЕЙ
И РАСЧЕТ НА ИЗНОСОСТОЙКОСТЬ
Относительное перемещение сопряженных звеньев цепи представляет собой качательное движение с очень малой скоростью скольжения. При этих условиях жидкостное трение невозможно, п становится неизбежным изнашивание сопряженных поверхностей втулки с осью и роликом, сопровождаемое увеличением шага Р на некоторую величину ДР. Это явление вызывает нарушение правильной работы цепной передачи (отрицательное влияние удлинения цепи, как было показано выше, увеличивается с ростом числа г). Обычно величину ДР.Р ограничивают значением 0,02— 0,03. Изнашивание шарниров служит основной причиной отказов цепных передач, и, следовательно, повышение их износостойкости является важнейшим условием увеличения несущей способности и снижения габаритов и массы. С этой целью оси втулки и ролики выполняют из цементованных сталей (20Х, 20ХНЗА и др.) с закалкой до твердости HRC 55—65.
Наряду с отмеченной наиболее распространенной причиной отказов выход из строя цепной передачи может быть вызван разры-359
chipmaker.ru
вом звеньев по проушине в результате развития усталостных тре-щин, изнашивания звездочек, а также (при некачественном изготовлении) проворачиванием осей или втулок роликовой цепи относительно пластин.
Необходимая прочность пластин обеспечивается проверочным расчетом их размеров. Для получения минимальной массы пластины выполняют из качественных сталей (40Х, 40ХН и др.) с закалкой до твердости HRC 40—50.
Для достижения требуемой долговечности звездочек предусматривают термообработку, обеспечивающую высокую твердость активных поверхностей зубьев (см. гл. 6).
Для получения необходимой долговечности цепной передачи из условия изнашивания шарниров давление р, приходящееся на единицу опорной поверхности А — dobo (см. рис. 16.2, а), не должно превышать допускаемого значения [р ]:
Р =^/расчКЛнрМ < [р]. (16.12)
Здесь F/расч = 27’1pacq/d1; Гррасч — максимальный из длительно действующих моментов на звездочке 1 (момент Tv в случае гистограммы нагрузок, показанных на рис. 4.5); Кэ — коэффициент, учитывающий условия эксплуатации:
Кэ = КдКЛрКс, (16.13)
где Кд— коэффициент динамичности нагрузки (в приводах с электродвигателями принимают Кя = 1 при спокойной нагрузке, Кя = 1,2-е—1,5 при нагрузке с толчками, Кя— 1,8 при сильных ударах); Кн — коэффициент, учитывающий наклон линии центров звездочек к горизонту = 1 при ф < 45°; Кн — 0,15 J/ф при ф > 45°); Кр — коэффициент, учитывающий способ регулировки натяжения цепи (Кр = 0,8 для передач с оттяжными звездочками или нажимными роликами; Кр — 1 для передач с регулировкой положения одной из звездочек; Кр — 1,25 для передач с нерегулируемым межосевым расстоянием); Кс — коэффициент, зависящий от способа смазки передачи (Кс — 0,8 при смазке в масляной ванне при циркуляционной смазке; = 1 при непрерывной капельной или внутришарнирной смазке; Кс — 1,5 при периодической смазке).
Коэффициент К1)р учитывает неравномерность распределения нагрузки среди пряя рядов многорядной цепи:
Ирид •«•••••••••••« 1 2 3 4
Кнр.................. 1 1,15 1,25 1.35
Величина [/?] при допущении удлинения цепи, характеризуемого величиной Ь.Р/Р — 0,03, определяется по формуле
[р] =
510 000г]''6
( иа
\ расч
)1/3 «40 МПа,
(16.14)
Здесь Пхрасч — расчетная частота вращения звездочки 1, об/мин| Р — шаг, мм; а — межосевое расстояние, мм; /л£ — эквивалентное время работы цепной передачи за полный срок службы, ч:
STuthi / пи у/з
Т1 расч \П1 расч / ’
(16.15)
где thi — продолжительность работы, ч; пи — частота вращения, об/мин, при действии нагрузки Ти.
При постоянных нагрузке и частоте вращения имеем 4е = 4» где th — продолжительность работы цепной передачи за полный срок службы, ч.
Заметив, что F, расч 2л7’1расч/(г1/э); А из
зависимостей (16.12) и (16.14) получим формулу для проектировочного расчета при среднем значении а 40Р
р >. 1 расчКэКир<ЬЕ / «1 расч \ '/З Л 3/8
78z?/6n \ « / ’ ' 4 I
'“l 'ряд I
где Т1расч—в Н-м. Расчетное значение шага округляют до ближайшего стандартного значения Р по табл. 16.1. При полученном значении Р заданная частота вращения п1гаах не должна превосходить наибольших рекомендуемых значений П1рек (табл. 16.3).
Т а б л и ц а 16.3. Наибольшая рекомендуемая частота вращения л1рек (об/мил) малой звездочки при zx^ 15
Цепь Шаг Р, мм
12,7 15,875 19,05 25,4 31,75
Роликовая ПР 1250 1000 900 800 630
Роликовая ПРУ 3100 2300 1800 1200 1000
Зубчатая 3300 2650 2200 1650 1320
Примечание. Превышение указанных значений рек возможно при увеличении числа зубьев > 19 наряду с высокой точностью изготовления звездочек и монтажа и обильной смазкой.
Передачи с зубчатыми цепями проектируют с использованием фирменных данных, представленных в табличной или графической форме, а также по ориентировочным зависимостям. Обычно, исходя из критерия износостойкости рабочих поверхностей шарнира звена зубчатой цепи, по известным /V (кВт), v (м/с) и Р (мм) рассчитывают требуемую ширину В' (мм):
В' > 250K3KvN/(Pv^), (16.17)
где Ро — коэффициент скорости; Kv = 1 при v < 10 м/с; = = 1 + 0,lqmv/N при v > 10 м/с (q,n — масса 1 м цепи в кг, см. табл. 16.2).
Расчетную величину В' округляют до стандартного значения В по табл. 16.2.
Цепи, подвергающиеся большим перегрузкам при пуске передачи или при действии рабочих ударных усилий, должны проверяться на разрушающую нагрузку по формуле
ад + ^ц<^азр/5разр. (16.18)
где /<уд — коэффициент ударной нагрузки, примерно равный 1,2; 1,7 и 2,0 при нормальном, тяжелом и особо тяжелом режимах работы с пусковыми нагрузками соответственно до 150, 200 и 300% Fpa3p— разрушающая нагрузка (для роликовых цепей Гразр выбирают по табл. 16.1; для зубчатых цепей по табл. 16.2 находят удельную разрушающую нагрузку FpS3p/B и при заданной ширине В определяют Fpa3p); 5разр — коэффициент запаса (обычно принимают З’разр = 8-^-15).
§ 16.5. ПОТЕРИ В ЦЕПНЫХ ПЕРЕДАЧАХ И СПОСОБЫ СМАЗКИ
Основная доля потерь в цепных передачах обусловлена потерями на трение в шарнирах и между пластинами, а также в опорах звездочек. Потери в зацеплении цепи со звездочками играют в общем балансе потерь менее значительную роль. Потери на размешивание масла существенны в быстроходных (о > 10 м/с) передачах, смазываемых окунанием цепи в масляную ванну.
Известны аналитические зависимости для оценки указанных компонентов потерь, однако значения коэффициентов трения в сопряжениях элементов цепной передачи, работающих в различных и постоянно изменяющихся условиях, остаются весьма приближенными. На этом основании на практике пользуются ориентировочными значениями общего к. п. д. цепной передачи, тем более, что сами потери оказываются дсстаточно умеренными, если в передаче обеспечены рекомендуемые условия смазки. Для хорошо смазываемых передач общего назначения с валами на опорах качения г] 0,96; для высокоточных передач с циркуляционной смазкой г] е* 0,98 при номинальной загрузке. При периодической смазке можно принять г] 0,94ч-0,95.
При скоростях цепи v >> 10 м/с цепные передачи выполняют обычно в закрытом корпусе и снабжают системой смазки. Из числа этих передач наименее быстроходные смазываются окунанием цепи в масляную ванну (на глубину, примерно равную ширине пластины). При увеличении скорости рекомендуется смазка разбрызгиванием с помощью- маслоподъемных щитков или колец (цепь в ванну не погружена). В наиболее быстроходных передачах примэняют циркуляционную систему с подачей масла от насоса через форсунки или по системе каналов на внутреннюю поверхность цепи (поддон корпуса остается не заполненным маслом). 362
В тихоходных передачах, не имеющих закрытого корпуса, практикуют автоматическую или ручную капельную смазку (при v < 10 м/с) или периодическое погружение цепи через 120—180 ч работы в ванну е подогретой пластической смазкой (при v < < 8 м/с).
Для высокоскоростных передач используют минеральные масла с кинематической вязкостью v50 = ЗОч-бО сСт. В качестве пластических смазок выбирают солидолы и консталины, в которые при необходимости вводят легирующие присадки.
Глава 17. ПЕРЕДАЧИ ВИНТ-ГАЙКА1
§17.1. ОБЩИЕ СВЕДЕНИЯ
Передачи винт—гайка, предназначенные для преобразования вращательного движения в поступательное с помощью винтового механизма скольжения (рис. 17.1) или качения (см. рис. 2.2, г),
находят широкое применение в различных отраслях техники: от точного приборостроения до тяжелонагру-женных приводов нажимных устройств прокатных станов и подъемных механизмов кранов. Этому способствуют простота конструкции, компактность, технологичность, высокая степень редукции. Ведущим звеном, совершающим вращательное движение, может быть как винт, так и гайка. В домкратах иногда применяют конструкции, в которых винт одновременно совершает вращательное и поступательное движения при неподвижной гайке. Известны конструк-
Рис. 17.1. Домкрат с винтовой парой скольжения
ции, в которых ведущее зве-
но совершает поступательное движение, в этом случае резьбу выполняют с большим углом подъема (см. формулу (8.1)1. Выбор кинематической схемы передачи определяется главным
образом требованиями компоновки и условиями ее применения.
1 Глава написана совместно с Е. С. Кисточкиным.
Основным узлом передачи является винтовой механизм, наибольшая простота и технологичность которого достигаются в передачах скольжения. Конструктивные разновидности узла определяются характером нагружения и требованиями, предъявляемыми к величине зазора и точности перемещения. На рис. 17.2 показана
конструктивная схема винтового механизма скольжения с двусторонним приложением нагрузки, в котором компенсация зазоров в резьбе достигается осевым относительным смещением дв^х гаек.
В передачах винт—гайка применяют резьбы с малым углом профиля: главным образом трапецеидальную и упорную (см. рис. 8.2).
В силовых передачах при реверсивной нагрузке чаще
Рис. 17.2, Винтовая пара скольжения с компенсацией зазоров в резьбе
всего применяют трапецеидальную резьбу, обладающую высокой прочностью витков и технологичностью. При нереверсивной нагрузке (у домкратов) предпочтение отдается упорной резьбе, имеющей более высокий к. п. д., благодаря меньшему профильному углу [см. формулу (8.9)1.
Резьба с шагом Р,
Рис. 17.3. Схема передачи винт—гайка дифференциального типа: / — корпус; 2 » впит; 3 гайка; 4 ~ паз
Треугольную резьбу малого шага применяют для получения точных перемещений в механизмах приборов, где вопросы к. п. д. не являются актуальными. Особо точные перемещения могут быть получены с помощью передач винт—гайка, в которых винты имеют так называемую дифференциальную резьбу, состоящую из двух резьбовых участков, имеющих разные шаги при одинаковом направлении винтовой линии. В этом случае повороту винта на один оборот соответствует перемещение гайки, равное разности 364
шагов резьб на этих участках (рис. 17.3). Скорость гайки относительно корпуса Ог является алгебраической суммой двух составляющих: vB •= пвРг/60 — скорость винта; и® = пЕР2/60 — скорость гайки относительно винта. Тогда
Ог — vB — Or = «В (Л — А)/60.
Недостатков передач скольжения (повышенная интенсивность изнашивания и сравнительно низкий к. п. д.) лишены шариковые винтовые механизмы качения (см. рис. 2.2, г). Особенность их
Рис. 17.4. Несоосная передача винт—гайка скольжения
усилие между винтом и гайкой
Рис. 17.5. Развертки винтовых линий винта и гайки несоосной передачи
передается через стальные шарики, которые перемещаются в винтовых дорожках качения, выполненных в винте и гайке. На рис. 2.8 показан полукруглый профиль дорожек качения, получивший наибольшее распространение. В качестве тел качения используют шарики, применяемые в подшипниках качения. Разно-размерность шариков по диаметру не должна превышать 5—10 мкм. С высокой точностью выполняют дорожки качения. Область применения передач качения — приводы, в которых высокая нагрузочная способность и малые потери на трение должны сочетаться с требованиями кинематической точности, беззазорности и осевой жесткости. Последнее достигается путем создания осевого натяга аналогично тому, как это делается в механизмах скольжения. Шарики совершают циркулирующие движения по замкнутому каналу, соединяющему первый и последний витки винтовой канавки гайки.
Разновидностью передач винт — гайка является несоосная резьбовая передача (рис. 17.4). Гайка в этой конструкции выполнена свободно вращающейся в подшипниках, наружные кольца которых установлены в корпусе, перемещающемся в осевом направлении. При одинаковых шагах резьбы средний диаметр винта d2o 365
меньше, а следовательно, угол подъема резьбы фв больше, чем у гайки (соответственно d2r и фг). При повороте винта на один оборот точка, взятая на линии контакта, переместится по винтовой линии гайки из положения О в положение А (рис. 17.5), т. е. пройдет путь, равный длине винтовой линии винта. При этом гайка повернется на угол <pr = tpEd2B cos фг/(^2г cos фв), а относительное осевое перемещение винта и гайки составит
/ = /гв — /гг = 0,5<рв4в tg фв (1 — sin фг/й1п фв).
Основной недостаток несоосных резьбовых передач — зависимость кинематических параметров от нагрузки, как это имеет место во
Рис. 17.6. Конструктивная схема волновой передачи винт—гайка
фрикционных передачах (см. гл. 12). Этот недостаток отсутствует в волновых передачах винт—гайка (рис. 17.6), в которых, так же как и в несоосных, средний диаметр резьбы гайки больше среднего диаметра резьбы винта, но гайка и винт соосны. Гайку 1 выполняют тонкостенной (гибкой), а ее резьба вводится в контакт с резьбой винта 2 за счет радиальных деформаций, осуществляемых генератором волн 3. Если гайку закрепить, то при вращении генератора винт получает осевые перемещения.
§ 17,2. РАСЧЕТ ПЕРЕДАЧ СКОЛЬЖЕНИЯ
Параметры резьбы рассчитывают исходя из заданных скоростей и нагрузок на выходном звене. На основании формулы (8.2) имеем
(dh/dt)/(d^/dt) = Рп/(2п), или
Ри = 60о/нЕ, (17.1)
где v — скорость перемещения выходного звена, мм/с; пв — частота вращения входного звена, об/мин; Рп — произведение числа заходов на шаг резьбы, мм.
Формула (17.1) может быть использована как для расчета Р и п, так и для определения пв при выбранных п и Р.
366
Поскольку основным видом разрушения в передачах винт—« гайка является изнашивание сопряженных винтовых поверхностей, средний диаметр резьбы обычно выбирают исходя из критерия работоспособности для совпадающих поверхностей (см. гл. 2)
Ртах ~ FfiKiif/Д (PL
где Fn — нормальное усилие в резьбе; А — площадь поверхности смятия; Кщ, — коэффициент распределения давлений по высоте гайки.
Учитывая, что в процессе изнашивания происходит частичное выравнивание давлений, расчет ведут по средним давлениям (Лнр = 1). Неравномерность распределения нагрузки компенсируется соответствующим выбором допускаемого давления, полученного экспериментально. Нормальное усилие в резьбе, как следует из рис. 8.7,
р _ Fn cos ф'____
п cos (ip + ф') cos (а„/2) ’
где Fx — осевая нагрузка на выходном звене.
Поскольку отношение косинусов в этой формуле мало отличается от единицы, то обычно принимают Fn Fx, тогда формула для средних давлений 6}дет иметь вид
р = /7Л/(лс!2Н1гв), (17.2)
где — рабочая высота профиля резьбы; zB = HJP — число витков резьбы в гайке высотой Нх.
Рабочая высота профиля резьбы, отнесенная к шагу (£ = = Н^Р, см. рис. 8.2), зависит только от типа резьбы и не зависит от ее размеров. Высота гайки Нг ограничивается с целью уменьшения неравномерности распределения нагрузки между витками. Отношением Н = HJd2 обычно задаются и принимают его равным 1,2—2,5. Тогда, используя (17.2), можно записать формулу для проектировочного расчета среднего диаметра резьбы
= (17.3)
Допускаемые давления выбирают исходя из условий работы и материалов винта и гайки, которые должны составлять износостойкую антифрикционную пару. В связи с этим винты изготавливают из легированных сталей с последующей закалкой, точные тяжелонагруженные винты подвергают азотированию, что обеспечивает минимальное коробление после термообработки и повышенную износостойкость в эксплуатации. Гайки изготавливают из оловянных бронз, иногда при малых скоростях и нагрузках используют антифрикционный чугун (см. гл. 6).
Для пары закаленная сталь — бронза принимают (р 1 = = 12 МПа. а при малых скоростях скольжения в различного рода I ажимных устройствах значение |р| может достигать 20 МПа. Вели изнашивание резьбы в процессе работы передачи винт — гайка
/Таблица 17.1. Коэффициент р, при различных способах закрепления винта
Схема в Схема ц
1 1 2
а s* 0,7 0,5
Примечания: 1. Опоры скольжения при l/d± <2 и опоры качения с одним подшипником эквивалентны цгарнирной опоре, 2. Гайка с Опорой рассматривается как заделка.
необходимо уменьшить, допускаемые давления принимают в пределах 4—6 МПа.
После определения d2 выбирают параметры стандартной резьбы и производят проверочные расчеты резьбы гайки на срез [см. формулу (8.49)], а стержня винта — на прочность при действии осевой силы и крутящего момента [см. формулу (8.38)]. В последнем случае _________________________
°- = ]/ (^-У+^^ШМ+ФЭ+г.]’<М.
где То — момент трения в опорах винта, определяемый в зависимости от его конструкции и схемы нагружения; Лв— площадь се-
Рис. 17.7. Зависимость — f (X) для винтов из легированных сталей
чения винта.
Допускаемые напряжения приведены в гл. 4. Участок винта, нагруженный сжимающей силой Fx, проверяют на устойчивость. При этом запас устойчивости определяют как отношение критической силы по Эйлеру к действующей осевой нагрузке.
При расчете винтов удобно
пользоваться так называемым объединенным условием прочности и устойчивости, которое применимо для винтовых стержней любой гибкости. Под гибкостью подразумевается величина
где р — коэффициент приведения длины I сжатого участка винта, зависящий от условий закрепления винта, определяющих характер его упругой линии (табл. 17.1); Jo — момент инерции сечения винта.
При объединенном методе расчета на прочность и устойчивость влиянием ужесточающего действия резьбы можно пренебречь, поэтому di/16; тогда X = 4р.//б7г.
Условие прочности и устойчивости имеет вид
4Fx/(mfi) < [осж]
где % — коэффициент понижения допускаемых напряжений на сжатие (рис. 17.7).
К. п. д. передач винт—гайка рассчитывают по формулам, полученным в гл. 15 для червячных передач. При ведущем винте используют зависимость (15.14), при ведомом винте — (15.15). В указанных формулах вместо угла подъема у необходимо подставить угол подъема винтовой линии ф.
При расчете <р' (см. стр. 138) принимают f = 0,08-ъ0,10.
§ 17.3. ОСОБЕННОСТИ РАСЧЕТА ПЕРЕДАЧ КАЧЕНИЯ
Произведение числа заходов на шаг резьбы определяют из кинематических условий и требований самоторможения, так же как и в передачах скольжения. Средний диаметр резьбы d2 = = dx + Dw, где Dw >=& 84-10 мм — диаметр шарика. Наружный диаметр винта d = d2 — 0,04Dw. Число рабочих шариков
гр = F cos ф/([Г] cos а),
где ф = arctg PA/(nd2) — угол подъема винтовой линии по среднему диаметру; а — угол давления; [F ] — допускаемая нагрузка на один шарик, которую находят из условия контактной прочности при 1он ] = 25004-3000 МПа?
Величина (Г] зависит от диаметра шарика и радиуса профильной канавки. При гж = 0,52£>ю (см. рис. 2.8) из формулы Герца следует, что [FJ = 0,33• 10-5 1сг//12 D'w, или при [owl = 2500 МПа получим [F] 20 Dw, Н.
Расчетное число рабочих витков по высоте гайки не должно превышать 2—2,5 из-за неравномерного распределения нагрузки между витками.
Винты и гайки передач качения изготавливают из высокопрочных легированных сталей с последующей термообработкой (см. гл. 6).
При расчете к. п. д. передач винт—гайка качения угол трения определяют по формуле
, . k
Ф = arctS D cos а ’
t-'UD vus со
где k = 0,014-0,015 мм — коэффициент трения качения.
Часть четвертая
ВАЛЫ, ОСИ, ПОДШИПНИКИ, УПРУГИЕ ЭЛЕМЕНТЫ И МУФТЫ
Глава 18. ВАЛЫ И ОСИ
§ 18.1. ОБЩИЕ СВЕДЕНИЯ
Валы, как правило, предназначены для передачи крутящего момента и поддержания установленных на них деталей, вращающихся вокруг сси вала *. Опорами валов служат подшипники и подпятники. Помимо крутящих моментов валы загружены поперечными силами и изгибающими моментами от усилий в зацеплениях, опорах, муфтах и рабочих органов машин-двигателей и орудий.
Валы бывают прямыми (обычно ступенчатыми и очень редко гладкими) и коленчатыми (рис. 18.1). Ступенчатость диктуют функциональные особенности отдельных участков вала: сопряжение с опорами; ограничивающие осевые перемещения буртики; изготовленные заодно с валом зубчатые венцы передач и соединений и т. д. Все это легко проследить на примерах валов редукторов (см. рис. 14.57, 14.58, 18.1, а, 18.7 и др.).
Оси обеспечивают вращательное движение звеньев, загружены поперечными силами и изгибающими моментами и не передают полезных крутящих моментов. Оси бывают вращающимися относительно векторов радиальных усилий, например сси железнодорожного подвижного состава (см. рис. 11.8, а), и невращающимися. Примерами последнего варианта являются оси передних колес автомобиля (рис. 18.2) и сателлитов планетарных передач с подшипниками, установленными внутри сателлита (см. рис. 14.59).
Основными критериями работоспособности валов и осей являются объемная прочность, износостойкость сопряженных поверхностей и жесткость. Наиболее полно всем этим требованиям удовлетворяют стали и в ряде случаев высокопрочные чугуны (см. гл. 6). После токарной обработки валов и осей поверхности их, сопрягаемые с другими деталями, шлифуют. С целью снижения концентрации, вызванной шероховатостью поверхностей (см. табл. 4.3), отделочным операциям могут быть подвергнуты и не-
1 К валам, не поддерживающим другие детали и предназначенным только для передачи крутящих моментов, относятся не рассматриваемые здесь валы: гибкие проволочные, промежуточные между шарнирными муфтами, торсионные и др. Торсионные валы на концах имеют зубчатые венцы для соединения с сопряженными с ними деталями (см. рис. 20.1, к).
сопряженные поверхности. Для поверхностей валов и осей под Подшипники качения и скольжения обычно назначают соответственно 7—8-й и 7—9-й классы шероховатости по ГОСТ 2789—73.
°)
§ 18.2. РАСЧЕТ ВАЛОВ НА ПРОЧНОСТЬ
Предварительный расчет. На ранней стадии проектирования при отсутствии данных об изгибающих моментах весьма приближенно диаметр вала (мм) может быть найден по величине крутящего момента Т (Н-м):
d = 10 ^77(0,2 [т]). (18.1)
Здесь для компенсации влияния неучтенных напряжений изгиба принимают резко заниженные значения [т]. Так, для выходных участков валов редукторов [т ] «=< (0,025-7-0,030) ов.
Имеются и другие пути получения ориентировочных значений диаметров валов. Например, при определении диаметра выходного участка вала, присоединяемого с помощью муфты к электродвигателю, некоторым ориентиром является диаметр вала последнего. В многоступенчатых редукторах диаметр (см. рис. 14.57) подступичной части тихоходного вала t-й ступени с межосевым расстоянием a^i можно найти по приближенной формуле di = = (0,33-ьО,45)
Если в предполагаемом опасном сечении вала помимо Т известен и изгибающий момент М, то пользуются формулой проектировочного расчета (см. ниже), базирующейся на известной зависимости, вытекающей из третьей теории прочности:
аэ = ко2 -1 - 4т2 < [ст] - (18.2)
Формула (18.2) приемлема при равенстве коэффициентов асимметрии циклов Ra и для нормальных и касательных напряжений. Но обычно Ra =4= Rx, поэтому вводят поправочный коэффициент а:
оэ = ]/ о2 + 4 (ат)2 с [о], (18.2а)
где а = 1 при Ra <==> Rx —1 и а = 0,6 при Ra —1 и Rx > 0.
Для полого вала с наружным диаметром d и внутренним dBB момент сопротивления W = 0, lds (1 — 04), где р = dBJd. Заметив, что Wp — 2W, из формулы (18.2а) получим
d > 1013 / Юп о ~ —м (“р4)—’ (1Ь‘3)
При определении [о ] в этом приближенном расчете принимают Кса = 1 (см. гл. 4). Из формул (4.38) и (4.40) при характерном для валов значении R = —1 имеем
[о] = а_^(Ко13 [s]).
Обычно назначают [si 2 и KoD =« З-т-5. Большее значение принимают при определении диаметра под ступицей, устанавливаемой с гарантированным натягом.
Исходные предпосылки и расчетные схемы. Расчеты валов на прочность базируются на общих зависимостях, приведенных в гл. 4.
Прежде чем перейти к расчетной схеме, рассмотрим усилия, действующие на вал С, установленный на подшипниках скольжения А и В и загруженный через ступицу D зубчатого колеса усилием F (рис. 18.3, а). Вследствие деформирования вала результирующие нагрузок на опоры, равные 0,5Е, смещаются с середины участка /п, а удельные нагрузки, действующие на вал со стороны ступицы, концентрируются у торцов. Концентрация усиливается 372
с увеличением отношения bld. Надо обратить внимание и на то, что результирующая усилий, действующих в зацеплении зубчатых передач, вследствие неизбежности неравномерности распределения этих нагрузок также смещена с середины зубчатого венца (см. рис. 14.20). Смещения эти при рациональном проектировании составляют малую часть от I и bw (см. стр. 87). Поэтому при составлении расчетной схемы, допуская незначительную погрешность, увеличивающую обычно запас прочности, валы и оси рассчитывают на изгиб, как балки на шарнирных опорах, расположенных
Рис. 18.3. Вал и его расчетная схема
в середине ширины подшипника (рис. 18.3, б), а нагрузки, действующие в зацеплении, заменяют сосредоточенной силой, приложенной в середине ширины зубчатого венца. Нагрузки, передаваемые валам и осям со стороны насаженных на них деталей, в первом приближении принимают приложенными в середине ширины ступицы (см. рис. 18.3, б и 18.7).
Проверочный расчет валов и осей. Расчет выполняют по формуле (4.45). При расчете на выносливость величины яа и sT определяют по формулам (4.43) и (4.44) с использованием зависимостей (4.33) и (4.16), в которых NE = Nc при постоянной нагрузке (см. стр. 62), а при пере1менной нагрузке МЕ определяют по формуле (4.14) или (4.22). В этих формулах1 т^9и No 4 10е. ЕслиЛс0 < 1 (или К„ < 1), то следует принять /<сО = 1 (Дст = = 1).
1 Более подробные сведения о выборе значений т и No см. в работах [4,
В формулах (4.43) и (4.44) напряжения <та, та и от определяются по расчетной нагрузке 7Ирасч или Трасч, приравниваемой к максимальной из длительно действующих нагрузок.
При расчете валов и осей, вращающихся относительно векторов радиальных нагрузок, средним напряжением <тт = FJA (где Fa — осевое усилие; А — площадь расчетного сечения вала) как очень малой величиной можно пренебречь, поэтому коэффициент асимметрии цикла R = —1. В этом случае
од = А1расч/Й^нетто.
Значения М7„етто для сечений валов со шпоночной канавкой и с зубьями зубчатых соединений приводятся в справочных данных [4, 10, 74].
Для осей, не вращающихся относительно вектора радиальной нагрузки, при отнулевом цикле изменения напряжений (R = 0) от = Од = Af/(2U7HeTTO) и при R = •—1 имеем оа = /И/И7нетто.
Для валов т0 = T/Wphctto при реверсивной симметричной нагрузке и Ta = Т/(2Wрнстто) при отнулевом цикле.
Определение величины во многих случаях представляет значительные трудности, поэтому за счет возможного увеличения коэффициента запаса прочности можно принять Ксх = 1.
При действии очень редких перегрузок для предупреждения пластических деформаций выполняют проверочный расчет по формулам (4.41) и (4.42), в которых в этом случае
Ojim = От И T|jm Тт.
Замечания, касающиеся использования вероятностных методов расчета на прочность, даны в гл. 7.
§ 18.3. ЖЕСТКОСТЬ И КОЛЕБАНИЯ ВАЛОВ И ОСЕЙ
Расчеты на жесткость. Расчеты на жесткость, рассмотренные в главах 5 и 14, в значительной степени относятся к валам и осям. В результате деформаций валов изменяется взаимное положение зубчатых венцов передач и элементов подшипников, что вызывает неравномерность распределения нагрузок по ширине зубчатых венцов (см. рис. 14.20), по длине роликов, роликоподшипников и несамоустанавливающихся подшипников скольжения (см. рис. 5.2).
Изменение межосевого расстояния, вызванное прогибами валов, обычно не влияет на работу цилиндрических передач с эвольвентным зацеплением, но вызывает неблагоприятное перераспределение давлений в зацеплении Новикова и червячных передачах. В некоторых случаях регламентируется величина прогиба. Так, в электродвигателях прогиб не должен превышать установленной доли воздушного зазора.
Деформации кручения валов вызывают неравномерность распределения удельных нагрузок по длине зубчатых соединений 374
(см. рис. 5.8) и изготовленных заодно с валом венцов зубчатых колес (см. рис. 14.29).
Крутильные и поперечные деформации валов влияют на точность привода. При расчете точности необходимо также учитывать относительные угловые перемещения в зубчатых и шпоночных соединениях, деформации опор и люфты в подшипниках и зацеплениях.
Колебания валов и осей. Вопросы колебаний упругих систем рассматриваются в курсах сопротивления материалов и теоретической механики и в специальных трудах (см., например, 15, 6, 62]). Здесь приводятся краткие сведения о колебаниях валов и некоторые простейшие зависимости, используемые также при рассмотрении упругих элементов и муфт. При этом предполагается, что читателю известны основные сведения о теории колебаний механических систем. Колебания валов связаны с периодическими изменениями передаваемой нагрузки, неуравновешенностью вращающихся масс, неравномерностью распределения нагрузок в зоне сопряжения валов с другими деталями и т. д. Периодическое изменение жесткости опор и зацеплений также является источником колебаний. Наиболее характерными колебаниями валов и осей являются поперечные от изгиба и сдвига, крутильные (угловые) и изгибно-крутильные.
Круговые частоты собственных (свободных) и вынужденных колебаний обозначаются соответственно а>с и сов.
Важнейшей задачей при создании новых машин является предупреждение нарастания амплитуд (явления резонанса), являющегося результатом совпадения или кратности ©с и сов.
Круговая частота сов обычно известна. Так, в случае насаженной на вал неуравновешенной детали, вращающейся с угловой скоростью со (рис. 18.4, о), имеем сов = со. При передаче момента от одного вала к другому с помощью муфты в результате неравномерного распределения нагрузки среди взаимодействующих элементов полумуфт (см. гл. 21) между соединяемыми валами может возникнуть радиальное усилие, вектор которого Fo вращается с угловой скоростью валов со, т. е. <ов = со. Этот случай иллюстрирует модель на рис. 18.4, б. Здесь момент Т от полого вала I к валу 2 передается посредством втулки 3 и пальца 4, закрепленных соответственно на валу 1 и диске 5. Аналогичное положение наблюдается в планетарных передачах с одним сателлитом, а также н с несколькими сателлитами, нагрузка среди которых распределяется неравномерно. В этом случае сов = сол, где coft — угловая скорость водила (см. гл. 14). Периодически изменяющийся момент, связанный с колебаниями угловой скорости и инерционными массами, характерен для трансмиссий с асинхронными шарнирными муфтами при пересекающихся осях соединяемых валов (см. гл. 21).
Полагаем, что проекции на ось х действующих на одномассовую систему (см., например, рис. 18.4, б) возмущающей силы, 375
восстанавливающей силы и силы сопротивления, пропорциональной скорости, равны соответственно sin (юв/ 4- 6), —Сх и —ах, где 6 — начальная фаза вынужденных колебаний; С — коэффициент жесткости вала; а —- коэффициент пропорциональности. При этих данных, как известно из курса теоретической механики,
пренебрегая массой вала, посДе затухания собственных колебаний амплитуду вынужденных колебаний определяют по формуле
йв = (F0/m) I У (сое — col)2 + 4n2wl,
(18.4)
где т — масса колеблющегося тела; п — а/(2т) — коэффициент затухания.
Круговая частота свободных колебаний
<ос х= VCjm.
(18.5)
Аналогично в случае крутильных колебаний одномассовой системы с диском (рис. 18.4, в), имеющем момент инерции Jт, закрепленном на валу (массой которого пренебрегаем) с коэффициентом крутильной жесткости (см. стр. 80) при воз-376
мущающем крутящем моменте То sin (a>Bt 4- 6), амплитуда вынужденных колебаний ___________________
<ра ,Б = ('Го/Лп) / J/”(«с — ®в)2 4“ 4/2 (Ов> (18.6)
п a/(2Jт)', <ос = |/Су!<1т. (1^.7)
При статическом приложении нагрузки Fo к одномассовой системе т и момента То к диску Jm (рис. 18.4, в) возникают следующие перемещения Р результате деформаций вала:
>'ст = Fo/C = FoUfsfjny, (18.8)
<pfT = T0/Cq, = T0/(«cJm). (18.9)
Отношения ав1х„ и фа. в/фст обозначаются р и называются коэффициентом динамичности. Из формул (18.4) и (18.8), (18.6) и (18.9) имеем
__ ав _ *Ра. в ,_ 1 _
/[‘-(-ш+опг)2'
(18.10)
С увеличением р растут нагрузки, действующие на вал (ось), и поэтому с целью снижения массы изделий следует использовать
пути, направленные к уменьшению р. На рис. 18.5 показана зависимость р от <ов/<ос и 2п/о)с. При п = 0 и угловой скорости со = <ов = <1)с, называемой критической и обозначаемой <окР, имеем р = °°. Таким образом, юкр = юс> где ыс определяется формулами (18.5) и (18.7),
В результате действия сил сопротивления (демпфирования) величин# Р конечна и снижается с ростом п (рис. 18.5). Влияние демпфирования па-
Рис. 18.5. Зависимость коэффициента р от величин <ов/<ос и 2п/ю0
дает по мере удаления величины <ов/стс от единйны, поэтому при ®в/<1)с < 0,7 и
о)в/ис > 1,3 погрешность
расчета амплитуд без учета затухания мала. При п=0 и <oB/toc <] 2 имеем р 1. В этом диапазоне значений <ив/юс для снижения р при заданном значении wB надо увеличить сос, т. е. повысить жесткость вала (см. формулы (18.5) и (18.8)]. Величину р можно получить очень малой в зарезонансной зоне, приняв wB/coc 1.
Это достигается снижением жесткости вала. Но во избежание опас
ного нарастания амплитуд при прохождении через резонансную зону надо обеспечить интенсивное увеличение угловой скорости или предусмотреть специальные демпфирующие устройства. Следующие два примера иллюстрируют рассмотренные положения.
Пример 1. Полагаем, что центр тяжести диска массой т, расположенного в середине пролета I и вращающегося вместе с валом с угловой скоростью <ов> смещен с оси вала на расстояние е. Центробежная сила вызывает прогиб у (см. рис. 18.4, а), при этом восстанавливающая сила Аист = Су (для вала постоянного диаметра С = 48EJ/P). В рассматриваемом случае <ов = <о. Из условия равновесия имеем:
т (у + е) со2 = Су, у = т——-----г *= ---------г--
™ и С/(ты2)— 1 (wc/wB)2 —1
С увеличением <ов от 0 до ©кр = wc = V С/т величина у изменяется от О дооо. При дальнейшем увеличений сов величина у меняет знак (сдвиг фаз вынужденных колебаний и возмущающей силы е = л), и абсолютная величина ее падает до е при сов = оо. При этом имеет место самоцентрирование, т. е. диск вращается около центра тяжести. Таким образом, малый коэффициент динамичности можно получить при высокой податливости вала при очень больших значениях (о (быстроходные турбины, центрифуги и др.).
Пример 2. На рис. 18.4, г показана двухмассовая система, состоящая из двух дисков 1 и 2 с моментами инерции J mt и Jт2, соединенных валом 3 с крутильной жесткостью С . На диски 1 и 2 действуют крутящие моменты Tt = Т и Т2 = — Т + Тв sin <ов/, где То — амплитуда возмущающего момента.
Полагаем, что Т — const и Тв = const. Углы поворота дисков 1 и 2 вокруг оси вала обозначим ф| и ф2. При фг = ф2 вал 3 не загружен крутящим моментом. Момент, действующий на вал, Т3 = Су (<р, — ф2). Система дифференциальных уравнений дисков имеет вид:
Jт1ф1 = ?! Cq — ф2); Jтгфг = Т2 + Cq (фс — ф2)-
На основании решения, известного из теории колебаний, после отбрасывания слагаемых, характеризующих свободные колебания (затухающие со временем под действием сопротивлений, свойственных реальным системам), находим
Т3 = т + т0
J ml
J ml “Г Jm2
sin toBi 1 — сг
(18.il)
где
(Ос = VCq/J mnpi Jm пр—JmiJmil(Jmi 4- Jinth
Абсолютная величина отношения амплитуды переменной составляющей момента Tg к амплитуде То равна
В = -г V i— г?----------(18.12)
J ml + J m2 | 1 — СО^/СЩ
Из (18.12) следует, что при заданных сов, Jml и Jm2, варьируя <ос (величину С„), можно получить малые значения и. Так, при со /со = 2 и J, = J
J * * В С /П2
имеем р = 1/6 (см. рис. 18.4, д).
Для определения основной частоты собственных поперечных колебаний вала с несколькими насаженными деталями (рис. 18.6) при учете его массы применяют приближенные методы Рэлея й Донкерлея.
Формула Рэлея для определения приблизительной величины первой частоты собственных колебаний получена приравниванием амплитуд кинетической и потенциальной энергии вала, совершающего свободные колебания в данной главной форме.
Первую главную форму свободных колебаний можно приближенно задать, рассматривая статическую деформацию вала, выз
ванную силами, численно равными силам тяжести масс (сосредоточенных и распределенных). В многопролетных балйах эти силы в соседних пролетах должны быть направлены в противо-
положные Стороны. В част- Рис. 18.6. Схема вала с несколькими (?, ности, если на валу, уста- 2, я) насаженными деталями новленном на двух опорах,
закреплены детали / и 2 с массами tnt и т2, одна из которых расположена между опорами, а другая — на консоли, то при нахождении формы упругой линии оси вала силы ntjg и m2g прини-
мают направленными в противоположные стороны.
Формулу Рэлея можно представить в следующем виде [5]:
j pmAxyxdx-]- tniyXj
L____________u_____
j РтАХУхах+
L n
(18.13)
где g — ускорение свободного падения; Ax — площадь поперечного сечения с координатой х\ ух— поперечная деформация вала в точке с координатой х; ух1 — поперечная деформация вала в точке с координатой х(-, соответствующей сосредоточенной массе щ,- (на рис. 18.6 имеем i = 1, 2, ..., п).
Для приближенного определения первой (низшей) частоты свободных колебаний используется формула. Донкерлея
1 / S (1/<оы).
/ 1
(18.14)
где wcz = VС Jmi — частота колебаний массы m,; Ct — жесткость вала, соответствующая положению массы т,.
Значения ые, найденные по формуле Рэлея, превышают действительные, тогда как формула Донкерлея дает заниженные значения. Таким образом, истинное значение находится между результатами, полученными по формулам (18.13) и (18.14).
Пример. Проверочный расчет сечения 1—1 (см. рис. 18.7, б) промежуточного вала двухступенчатого редуктора (см. рис. 14.57). Материал—сталь '40Х; ов = 800 МПа; ат = 600 МПа; тт = 360 МПа; шероховатость поверхности Rz = = 3,0 мкм. Частота вращений п = 647,5 об/мин. Режим работы представлен на
Рис. 18.7. Промежуточный вал редуктора (см. рис. 14.57)
рис. 14.67. Усилия, действующие в зацеплениях, показаны на рис. 18,7, а. Для галтели (см. рис. 4.14) имеем p/d = 0,02 (значение р на чертеже не показано); приблия енно считаем D = dx, при этом Did яг d-Jd' = 88,5/75 « 1,3. Крутящий момент изменяется от 0 до 7| = 1,31-10° Н-мм (Rx = 0).
Из рис. 18.7, а, в имеем:
Л4л1 = Frtrfi/2 = 4500.88,5/2 = 200 000 Н мм;
/Их2 = Fa2d2/2 = 2750-270,24/2 = 370000 Н-мм.
Радиальные нагрузки, действующие иа опоры подшипников К и ft
FKy = [fn (/i + /2) - fn/2 + Afn + MX3\/L = 9360 H;
FEy = [Fri (L - /2) - Frl (L - h - I2) + MX1 + MX2]/L = 2110 Hj
Fkz = If<1 (h + Is) + Ft2l2]IL = 21 830 H;
Fez = [fh (.L-h-lt) + Ft2 (£ -l2)]/L = 17420 H;
fe = /f^ +4г- 17 550 H;
Fk = + = 23 850 H-
Изгибающий момент в сечеиии вала 1—1 в соответствующих плоскостях и результирующий:
Aflz = FKz (£ — /г — 12 + /8) - fa/3 = 10,15-10» Н-мм;
Aljу = FКу (L - 4 - 12 + /8) - Fп13 - Мл = 3,16 10* Н • мм;
Л4,= У М2г+М2у = 10,63-105 Н-мм.
Далее имеем (см. стр. 374):
от = 0; оа = M[/W = Л4/(га13/32) = 27 МПа;
тт = та= 7’i/(2W'p) = Ti/(2nd3/16) =8,3 МПа;
о_1= 0,43ое= 344 МПа (см. стр. 77); о0 = l,6o_i =550 МПа;
т_1 = 0.6O.J, = 204 МПа; т0 = 1,9т_г = 388 МПа.
Эквивалентное число циклов для заданного режима нагрузки (см. рис. 14.67) при п — 647,5 об/мин по формуле (4.14) NE > 4-Ю6 (см. nprfMep иа стр. 323), поэтому (см. стр. 65) Кс0 = Ксх = 1. Из рис. 4.14 находим: = 2,4; =
= 1,85.
Из рис. 4.10 для d = 75 мм получим ест = 0,66. Согласно указаниям на стр. 67, ет г» еа. Из табл. 4.3 при Rz = 3 мкм имеем К™ = Д" = 1,1.
Для детали без поверхностного упрочнения из (4.33):
FoD = К? - 1 = 2,4/0,66 + 1,1 - 1 = 3,70;
Кт£> = КХК + К? - 1 = 1.85/0,66 + 1,1 -1 = 2,90.
Значения Ко и КТ, вызванные шпоночной канавкой (см. рис. 4.13), во внимание ие принимаем, так как эти величины меньше или равны соответственным значениям, приведенным на рис. 4.14.
Из табл. 4.2 для посадок с гарантированным натягом после интерполирования находим fo/eo=4,l0 и Лт/ег = 2,86. Следовательно, из (4.33) имеем соответственно: KOD = 4,20; Kxd = 2,96. Из двух значений KcD и Kxd выбираем наибольшее (см. стр. 75). При от = 0 из (4.43) имеем
Sa = O-i/KKaD/Kea) ofl] = 344/(4,2-27) = 3,03.
Принимаем фч = 0,2 (см. стр. 77) и по (4.44) определяем
sx = V-i/[(KtD/KcX) та + Фгтт] = 204/(2,96-8,3 + 0,2-8,3) = 7,78.
По (4.45) находим sasT_______________3,03-7,78
|/ s2+ + ~ КЗ,ОЗ2+7,782
2,82 > [sj = 1,5-г- 2,1 (см. стр. 78).
Глава 19. ОПОРНЫЕ УСТРОЙСТВА
ПРИ ОТНОСИТЕЛЬНОМ ВРАЩАТЕЛЬНОМ И ПОСТУПАТЕЛЬНОМ ДВИЖЕНИИ
§19.1. ОБЩИЕ СВЕДЕНИЯ
Опорные устройства для вращающихся деталей (валов, осей и др.) называются подшипниками, а для поступательно движущихся деталей — направляющими.
Рис. 19.1. Подшипник скольжения
Рис. 19.2. Опорно-упорный подшипник скольжения редуктора
Подшипники разделяются на подшипники скольжения (рис. 19.1 и 19.2) и качения (см. рис. 2.8, 2.12 и др.).
В подшипниках скольжения элемент вращающейся детали (цапфа или шейка) через слой смазки или непосредственно взаимодействует с охватывающей его неподвижной поверхностью. Намного реже используется вариант, в котором относительно направления действующего усилия вращается охватывающий элемент (см. стр. 32).
В подшипниках качения в широком диапазоне наиболее употребительных угловых скоростей (начиная с нуля) потери на трение малы и мало зависят от вида смазки. Момент трения при пусках в подшипниках качения в 10—20 раз меньше, чем в подшипниках скольжения (за исключением гидростатических); требования к об-
служиванию подшипников качения значительно менее высокие. Так, даже кратковременный перерыв в подаче смазки в высокозагруженный подшипник скольжения с жидкостным трением связан с увеличением потерь на трение в 50—100 раз, что ведет к выплавлению вкладыша с возможными тяжелыми последствиями.
В подшипниках качения в аналогичном случае вероятность отказа несравненно меньшая, поскольку потери на трение при кратковременном прекращении подачи смазки возрастают не намного.
Весьма существенным достоинством подшипников качения является сравнительно невысокая их стоимость и относительно малые эксплуатационные расходы. Это связано с использованием для их изготовления сталей с недорогими легирующими присадками (см. стр. 109), высокой степенью стандартизации, массовостью производства, сравнительной простотой обслуживания и
W кач
Рис. 19.3. Зависимость величины [Д,]кач/ [FJck от параметра ntfrE
замены. Все это обеспечило
широчайшее применение подшипников качения во всех видах
машин, и они практически незаменимы там, где резко изменяются нагрузки и скорости и часты пуски под нагрузкой (транспортные и грузоподъемные машины, металлорежущие станки, подавляющее большинство механических передач и т. д.).
К недостаткам подшипников качения в сравнении с подшипниками скольжения относятся большие виброактивность и шум, меньшая демпфирующая способность, значительные инерционные силы, действующие на тела качения при больших угловых скоростях, ограничения применения по угловой скорости. Кроме того, при высоких угловых скоростях и больших значениях thE (эквивалентного времени работы под расчетной нагрузкой за полный срок службы) масса и габариты опор с подшипниками качения больше, чем опор с подшипниками скольжения.
Важным показателем при сравнении подшипников качения и скольжения является произведение nthE, где п — частота вращения. На рис. 19.3 дана зависимость отношения [Fr lKa4/IF, 1СК допускаемых радиальных нагрузок опор качения и скольжения, имеющих одинаковую массу, от параметра nthE. Преимущества опор качения в отношении массы и габаритов проявляются в большей степени при снижении параметра nthE. С увеличением nthE
возрастают преимущества опор скольжения. Это связано с тем, что с увеличением nthE растет число циклов перемен напряжений и падает в связи с этим допускаемая нагрузка из условия выносливости контактирующих поверхностей в подшипниках качения. Отмеченное положение в подшипниках скольжения имеет значительно меньшее значение и практически не влияет при постоянной нагрузке. Дело в Том, что нагрузочная способность подшипников скольжения, как правило, ограничивается прочностью сопряженной поверхности, выполненной из антифрикционного материала.
Рис. 19.4. Примеры направляющих скольжения
Эта поверхность обычно не вращается относительно вектора радиальной силы, и поэтому число циклов перемен напряжений при постоянной нагрузке в мйшинах с малым числом пусков и остановок ничтожно мало.
Потери на трение в подшипниках качения и в подшипниках скольжения, в которых обеспечено с помощью гидродинамического эффекта жидкостное трение, отличаются мало.
Достоинства подшипников скольжения проявляются в большей степени с увеличением угловой скорости и срока службы, со снижением колебаний нагрузки и числа пусков и остановок. Помимо этого подшипники скольжения во многих случаях незаменимы при необходимости разъема в осевой плоскости (например, в случае коленчатых валов), при работе в воде и агрессивных средах и т. д.
Направляющие служат для обеспечения относительного поступательного перемещения частей машин и восприятия действующего между ними усилия. Для поступательного движения используют направляющие скольжения и качения.
Примеры направляющих скольжения, широко используемые в металлорежущих станках, кузнечно-прессовых машинах, лабораторных установках и др., представлены на рис. 19.4. Простейшими охватываемыми направляющими являются цилиндрические (рис. 19.4, а), используемые обычно при совпадении направлений усилия и относительного перемещения. На рис. 19.4, б, в даны охватываемые направляющие прямоугольные и в виде ласточкина 384
квоста. На рис. 19.4, г показаны охватывающие направляющие, отличающиеся от охватываемых лучшим удержанием смазки.
Направляющие качения (рис. 19.5) сложнее в изготовлении, чем направляющие скольжения, но отличаются малыми потерями иа трение, незначительным влиянием скорости на сопротивление перемещению, включая скорость v = 0 (трогание с места). Эти свойства позволяют осуществлять точные установочные движения. Телами качения служат шарики (рис. 19.5, а) или ролики (рис. 19.5, б). При больших относительных перемещениях для тел
Рис. 19.5. Примеры направляющих качения
качения предусматривают возможность движения по замкнутому контуру с загруженной и разгруженной зонами (рис. 19.5, а), подобными имеющимся в подшипниках качения.
§ 19.2. КОНСТРУКЦИЯ ПОДШИПНИКОВ СКОЛЬЖЕНИЯ
Подшипники скольжения используют для восприятия радиальных и осевых нагрузок, а иногда и для их сочетания. Опоры, воспринимающие только радиальные нагрузки, называются опорными подшипниками. Опоры для осевых нагрузок называются упорными подшипниками или подпятниками.
Основными элементами подшипников скольжения являются корпус, детали, взаимодействующие с цапфой (шейкой) вала или оси, называемые обычно вкладышем, и смазывающие устройства (см. гл. 3). Подшипник может иметь специально для него предназначенный корпус (см. рис. 19.1). В редукторах, тепловых двигателях, металлорежущих станках и во многих других случаях распространены подшипники, не имеющие специального корпуса, и вкладыш устанавливают в станине или раме машины. Корпуса выполняют разъемными и неразъемными. В неразъемных подшипниках вкладыш обычно представляет собой втулку из антифрикционного материала, запрессовываемую в корпус (рис. 19.6). Разъемный корпус состоит из основания и крышки, соединяемых болтами (см. рис. 19.1), винтами или шпильками. Разъем облегчает 385
монтаж или даже является необходимым условием сборки, позволяет регулировать зазор за счет смены или уменьшения толщины специальных металлических прокладок между крышкой и корпусом (см. рис. 19.2). Плоскость разъема вкладыша и корпуса рекомендуется располагать перпендикулярно к направлению радиальной нагрузки.
Для компенсации непараллельности осей вала и расточки в корпусе, вызванных погрешностями и деформациями (см. стр. 84), используют вкладыши, самоустанавливающиеся благодаря сопряжению с корпусом по сферической поверхности (рис. 19.7, а) или цилиндрической с малой длиной общей образующей (рис. 19.7, б).
Рис. 19.6. Неразъемный подшипник скольжения, выполненный заодно с корпусом
Рис. 19.7. Самоустанавливающиеся вкладыши
Относительно небольшие осевые нагрузки могут восприниматься специальными буртами вала (пятами), взаимодействующими с торцами вкладыша (см. рис. 19.2).
Для обеспечения жидкостного трения зазор между сопряженными поверхностями выполняют клиновидным (см. гл. 3). При внутреннем касании цилиндрических поверхностей для этого достаточно предусмотреть соответствующий зазор. В подпятниках (рис. 19.8, а) клиновидный зазор может быть получен применением односторонних скосов при нереверсивном (рис. 19.8, б) и двусторонних — при реверсивном (рис. 19.8, в) вращении.
Наилучшие результаты достигаются при применении подпятников с самоустанавливающимися подушками — сегментами (рис. 19.9, а). Здесь ось винтовой пары смещена от середины подушки в сторону выходной кромки для получения клиновидного зазора. Равнодействующая гидродинамических давлений проходит через середину опорной поверхности (сравните эпюры давлений на рис. 3.1, би 19.9, о). Равномерное распределение нагрузки между подушками достигается регулировкой осевого положения сферических опор.
Таким образом, в подпятниках с жидкостным трением, обеспеченным гидродинамическим эффектом, имеется несколько масляных клиньев.
Наибольшее распространение получили одноклиновые опорные подшипники скольжения (см. рис. 3.1, д), но при высоких угловых скоростях и относительно небольших нагрузках их работа может сопровождаться вибрациями. Для обеспечения виброустойчивости и повышения точности положения оси вращающегося звена (например, шпинделя металлорежущего станка) используют многоклиновые подшипники. Примером является подшипник с са-моустанавливающимися сегментными вкладышами (рис. 19.9, б). Направленные нормально к оси результирующие давлений в каж-
дом из сегментных вкладышей центрируют вал и обеспечивают стабильную работу подшипника.
Рис. 19.8. Подпятники
Рис. 19.9. Подпятник и подшипник с самоустанавлива-ющимися сегментами
Наряду с безвибрационной работой достоинством сегментных подшипников является самоустанавливаемость, предупреждающая кромочный контакт.
Ранее было отмечено (см. § 3.2), что жидкостное трение обеспечивается при использовании эффектов гидродинамики и гидростатики. В простейшем гидростатическом подпятнике смазка, подаваемая под давлением в камеру А, растекается в радиальном направлении, образуя непрерывный масляный слой, разделяющий сопряженные поверхности пятый подпятника (рис. 19.10, а}. Заданным силе Fa, точности поверхности и вязкости жидкости соответствует некоторое минимальное давление в камере А, обеспечивающее прокачку смазки, предупреждающую касание сопряженных поверхностей.
Гидростатический подшипник обычно выполняют с четырьмя несущими камерами (рис. 19.10, б), в которые с помощью системы
дросселей подают под давлением масло. При указанном направлении вектора Fr давление масла будет максимальным в нижней камере, поскольку здесь минимальные зазоры и, следовательно, наибольшее сопротивление вытеканию смазки.
Коэффициент трения в гидростатических опорах при трогании с места ничтожно мал и может достигать, например, значения
КГ6. Это особенно важно при необходимости обеспечить высокую точность вращения.
Корпуса подшипников обычно выполняют в виде отливки из серого или высокопрочного чугуна (см. стр. 112). При высокой загруженности и возможности толчков и вибрации используют стальное литье.
Вкладыши, представляющие собой, как правило, разъемную (см. рис. 19.1)
Рис. 19.10. Гидростатические подпятник и подшипник
или неразъемную (см. рис. 19.6) втулку, выполняют из чугуна, стали или бронзы. Опирающиеся на подшипники или подпятники детали (валы, оси и др.) обычно выполняют стальными и значительно реже чугунными. Сопряженные поверхности цапфы и вкладыша должны обладать хорошими антифрикционными свойствами, поэтому внутреннюю поверхность чугунных и стальных вкладышей покрывают тонким слоем антифрикционного материала. Для этого используют баббиты, бронзы и неметаллические материалы. Из металлов наилучшими антифрикционными свойствами обладают высокооловянные баббиты (см. табл. 6.3). Недостатком их является высокая стоимость и пониженное (в сравнении, например, с бронзами) сопротивление усталостным разрушениям. Это обстоятельство ограничивает их применение при действии переменных нагрузок. Обладая повышенным сопротив-388
лением усталостным разрушениям, бронзы уступают баббитам в отношении прирабатываемое™. Баббиты и свинцовые бронзы наплавляют тонким слоем на поверхность чугунных или стальных вкладышей. С уменьшением толщины слоя баббита повышается его усталостная прочность.
Высокопроизводительным и экономичным является производство методом штамповки биметаллических тонкостенных вкладышей из стальной ленты с нанесенным на нее слоем баббита или свинцовой бронзы.
При невысоких скоростях скольжения (до 1,5 м/с) и умеренных нагрузках в менее ответственных случаях для вкладышей применяют антифрикционные чугуны. При умеренных скоростях и относительно невысокой загруженности хорошо также зарекомендовали себя вкладыши из спеченных материалов на основе железа и графита (или бронзы и графита) с порами, пропитанными маслом. Важным достоинством их является низкая стоимость при достаточно массовом производстве и самосмазываемость за счет масла, поступающего из пор, занимающих 15—30% объема вкладыша.
Неметаллические материалы (резины, твердые породы дерева и пластмассы) получили значительное распространение в качестве подшипниковых материалов, что связано с хорошими антифрикционными свойствами их в паре со стальной или чугунной цапфами. Но вследствие низкой теплопроводности этих материалов (см. табл. 6.4) применение их в тяжелых условиях связано с необходимостью прокачки значительного количества охлаждающей жидкости. Важным достоинством их является возможность работы при смазке водой. Среди пластмасс для подшипников используют текстолиты, древесно-слоистые пластики, полиамиды (например, капрон, капролон, фторопласт-4) и др. Полиамиды обычно наносят тонким слоем на металлический вкладыш, и благодаря этому в значительной степени устраняются вредные последствия, связанные с низкой теплопроводностью и изменением размеров от влагопоглощения. При граничном трении износостойкость полиамидов выше, чем бронз.
Свойства масел и смазочные устройства рассмотрены в гл. 3. Там же рассмотрено обеспечение жидкостного трения за счет гидродинамического эффекта. Заметим, что с увеличением скорости сверх минимальной, необходимой для возникновения жидкостного трения, увеличиваются потери на трение (см. рис. 3.4), а следовательно, и температура подшипника. В результате падают величины р, характеристики режима трения к и /. Таким образом, подшипники скольжения как бы обладают способностью к саморегулированию. Для подшипников, работающих при малых нагрузках и высоких скоростях, в качестве смазок применяют маловязкие жидкости (например, воду), воздух, инертные газы. При этом силы трения, а следовательно, тепловыделение и температура значительно снижаются [см. (3.1)].
По принципу действия газовые подшипники делят на газодинамические, газостатические (используемые при малых и) и комбинированные.
I
I
I
I I
I I
I I
I I
I I I I I I I I I I I I I I I I I I I I I I I I I I I I I I I I I I I
§ 19.3. РАСЧЕТ ПОДШИПНИКОВ СКОЛЬЖЕНИЯ
Подшипники скольжения подвергаются различным видам изнашивания, наиболее распространенными из которых являются адгезионное, абразивное и усталостное выкрашивание при переменной нагрузке (см. гл. 2).
При жидкостном трении разрушения неусталостного характера практически отсутствуют, однако при пусках и остановках возникает граничное трение и возможно появление задира, если не предусмотрена гидростатическая разгрузка.
Подшипники с жидкостным трением рассчитывают на основе гидродинамической теории смазки. При граничном и полужидко-стном трении применяют условный расчет (по параметрам рт и PmVsY
Условный расчет. Простейшими являются расчеты по условному среднему давлению рт, равному отношению радиальной нагрузки Fr к площади Id проекции цапфы на плоскость, параллельную оси (см- рис. 2.5 и 19.1):
pm = Pr/(ld)<[pm], (19.1)
а также по произведению давления на окружную скорость цапфы (скорость скольжения)
pmvs С [р„А]. (19.2)
В зависимости (19.2) параметром щ учитывается в первом приближении теплонапряженность опбры.
Величины [рт] и lpmvsl приводятся в справочных данных и зависят от материала вкладыша и цапфы, условий работы, точности, смазки и других факторов. В большинстве стационарных машин 1рггД = 2-7-5 МПа и = 2 4-10 МПа-м-с; в авто-
мобильных двигателях [/?,„] = 4=20 МПа и [ртщ| = 25 = =35 МПа - м/с.
Задаваясь величиной Ud из условия (19.1), получим зависимость для определения ориентировочного значения диаметра цапфы ' _______
d> V [Рт] (l/d) • (19 3)
Обычно Ud = 0,54-1,1; в отечественных скоростных подшипниках чаще принимают Ud — 0,64-0,9. При затруднениях, связанных с увеличением d, отношение Ud можно доводить до 1,4— 1,5, но при этом следует использовать самоустанавливающиеся вкладыши (см. рис. 19.7).
По формулам (19.1) и (19.2) обычно рассчитывают опоры с необеспеченным жидкостным трением, теория которых в настоящее 390
время не разработана. В первом приближении, однако, возможно применение их и при проектировании опор жидкостного трения, если известны величины \рт\ и 1ртщ] для подшипников, близких К проектируемому по конструкции, материалам, точности и условиям работы; этот расчет требует уточнения по приведенным ниже данным.
Расчет радиальных подшипников жидкостного трения \ Гидродинамический расчет подшипников скольжения, основы которого даны в гл. 3, выполняется как проверочный. При этом предполагается, что диаметр цапфы найден при расчете и конструировании вала или какого-либо другого изделия. Возможно также использование формулы (19.3), если имеются данные о значениях [рт] для подшипников, аналогичных проектируемым. Рекомендуемые значения Ud даны выше.
Расчетная схема подшипника показана на рис. 19.11, из которого следует, что линия центров OiO2 повернута относительно линии действия силы Fr на некоторый угол q>a в сторону вращения вала. Давление в масляном слое из-за истечения в осевом направ-
1 Расчет подпятников жидкостного трения см. в работе [22].
лении неравномерно по длине подшипника I. Введем следующие обозначения (рис. 19.11): 5 = D—d— диаметральный зазор; 6 = 0,55 = 0,5 (D — d) — радиальный зазор; ip = S/d = 26/d —г относительный зазор; hmln — минимальный зазор (наименьшая толщина масляного слоя); е = 6 — йт1п — абсолютный эксцентриситет; у = е/6 — относительный эксцентриситет.
Для рассматриваемого случая уравнение (3.4) записывается в полярных координатах с началом отсчета от линии центров. Заметив, что:
dx = (0,5d) dtp; hx — == 0,5 (D — d) -f- e cos <p = 6 (1 4- X cos <p)j
hm = 6 (1 + X cos <pm); v = 0,5do>,
из уравнения (3.4) получим
. ___ 6po> % (cos tp — cos cpm) dtp
F ip2 (1 + %cos <p)3
Давление жидкости в сечении, расположенном под углом <р, ф ф
„ —( dn— 6fxw f X(cos<p—cos<pm)dg>
J ip2 J (1 +Xcos <p)3
Ф1 Ф1
При постоянном давлении по ширине подшипника нагрузка на элементарную площадку, которой соответствует центральный угол dtp,
dFtp = Pq>l (0,5с!) dtp.
Вертикальная составляющая сил давлений жидкости, действующих на поверхность вала, ограниченную углами <рх и <р2, уравновешивает нагрузку Fr, поэтому имеем Дгд = Fr, где
Ф2
Frn = ~ J cos (<р + <ро) dF'f; =
<02 Г V -1 '
= _3 [ f Х(^±-^5Р ?) d
J I J (1 + хcos<р)3 Y 1 v|
Ф1 Lvi J )
Сомножитель в фигурных скобках называется коэффициентом погруженности и обозначается С’ег. Таким образом,
f гд = pco/dC^/ф2 = Fr. (19.4)
Значение С'рг получено в предположении отсутствия бокового истечения, т. е. для плоского потока смазки. Значения коэффициентов загруженности Сег, найденные с учетом бокового истечения, с введением эмпирических поправок получены в работе [36J. На рис. 19.12 даны значения Сег для так называемого половинного подшипника (с углом обхвата около 180°).
392
Из формул (19.1) и (19.4) при Срг— Сег имеем СРг = ртф2/(цы).
(19.5)
Среднее значение относительного зазора ф = S/d (см. стр. 392) определяют по эмпирической формуле
ф = 0,8.10Л°’25, (19.6)
где vs — скорость скольжения, м/с.
По известным значениям р, со, /, d, ф = 26/с/ и Fr из (19.1) и (19.5) находят значение Срг и, зная отношение lid, по рис. 19.12 определяют величину х == е/6. Толщина масляного слоя в зоне максимального сближения сопряженных поверхностен
Лтш = б-е = б(1 -Х) = = 0,55 (1-х). (19.7)
Для предупреждения касания сопряженных поверхностей в зоне их наибольшего сближения толщина hmln разделяющего слоя жидкости (см. рис. 19.11) должна превышать сумму высот неровностей Rzr и Rz2 (см. рис. 3.3, а и табл. 1.1). Учитывая погрешности изготовления, неизбежные отклонения значений вязкости масла и другие факторы, предусматривают
Рис. 19.12. Коэффициент Ср
запас надежности по толщине масляного слоя. С этой
целью проверяют условие
+ ^z2) > [хЛ].
(19.8)
Значения Rzx и Rz2 соответственно для цапфы и вкладыша в зависимости от принятого класса шероховатости выбирают по табл. 1.1 или по требуемой величине Rzx + Rz2 с помощью табл. 1.1 назначают необходимый класс шероховатости. Обычно принимают кЛ] > 2; Rz1 < 2,5 мкм; Rz2 < 5 мкм.
Для определения вязкости выбранного сорта масла (см. гл. 3) задаются рабочей температурой сопряженных поверхностей (обычно в интервале 45—70° С) с последующей проверкой после теплового расчета (см. гл. 3). В формуле (3.10) для подшипника принимают
Й11Гр = (20/d + 6d2) k, (19.9)
где lad — в м; второе слагаемое приближенно учитывает теплоотвод через вал; k — коэффициент теплопередачи.
Результирующая Frn давлений, возникающих от действия гидродинамического эффекта, зависит от со [см. формулу (19.4)], и в период пуска и остановки радиальное усилие, действующее на подшипник (подпятник), Fr > Frn. Во избежание повреждений сопряженных поверхностей в тяжелонагруженных ответственных подшипниках в период пусков и остановок используют гидростатическую разгрузку.
Момент трения в радиальном подшипнике жидкостного трения. Предположим, что оси вала и подшипника совпадают (это возможно при Fr = 0). Тогда зазор имеет постоянное значение и при
окружной скорости V. градиент скорости (см. стр. 40) dvjdy — vs/f>— = со di/26 = со/ф. Момент, необходимый для преодоления сил трения в масляном слое,
Tf = (ndlx) 0,5d =
=(рсо/ф)(лсР//2). (19.10)
При действии нагрузки F, возникает эксцентриситет е (см.
3‘
Рис,
19.13. Безразмерная характеристика трения
рис. 19.11), при этом давление в смазочном слое, зазор и градиент скорости изменяются в широких пределах. Интегрированием элементарных касательных сил по поверхности цапфы получена [36] следующая зависимость:
Tf — О.брсосР/Ст^/ф, (19.11)
где CTf — безразмерная характеристика трения (рис. 19.13).
Пример. Подобрать посадку и проверить работоспособность подшипника жидкостного трения при d == 120 мм; I = 130 мм (l/d = 1,08); Fr = 45 000 Н; п = 750 об/мин (о> = 78,5 с"1); vs = 0,5ud = 4,71 м/с; рабочая температура подшипника 0м = 60е С; смазка маслом турбинным-22 (плотность рт — 890 кг/м3).
Расчет произвести для предельных значений зазора из поля рассеивания с вероятностью попадания в него Р = 0,98.
Из (19.6) находим ф — 0,00118. Диаметральный зазор S = ip d = 0,141 мм.
В .-истеме отверстия к этой величине достаточно близко среднее значение зазора посадки Н9/е8. При этом d = 120“®’D = 12О+о,<'ь7. Среднее значение вазора (см. стр. 12)
8 = 0,5 (Smax + Smin) = 0,5 (0,213 -У 0,072) = 0,1425 мм.
При Р = 0,98 в (7.21) имеем:
С = 0,34; 5 = S т 0,34 =
*гпах
•= 0,1425 + 0,34 /0,0872 + 0.0542; Sp ma> = 0,1773 мм; SP mln = 0,1077 мм.
Предельные вероятностные значения относительного зазора;
max --Sp niax/d — 0,001-48; 1|‘р mln = 0,0009.
Из (19.1) имеем
рт =45 000/(0,12-0,13) =2,885.10» Па.
Из рис. 3.2 и формулы (3.2) имеем:
v = 0,16-10-4 м2/с: р =0,16-IO-4-890 = 0,01424 Па-с.
Если Cj? и Ср — значения Ср при фр тах и фр mjn , то из (19.5) получим
С'р = 2,885-106-0,001482 /(0,01424-78,5) = 5,653; —2,09.
Из (19.7) и рис. 19.12 имеем:
/=0,86; хп = 0,71; Л^1П = 0,5SPraax(l-/)= 0,0121 мм{
ftmin = °>0156 мм-
Назначаем шероховатость поверхности вала Rz, =1,6 мкм, отверстия —• /?z2 = 3,2 мкм и из (19.8) находим запасы надежности по толщине масляного слоя1
4 = h = 2,52 > [sft | = 2; s” = 3,25 > [Sft] = 2.
Из (19.11) и рис. 19.13 находим моменты трения:
Т} = 0,5-0,01424-78,5-0,122-0,13-7,2/0,00148 = 4,86 Нм: Т}1 = 5,44 Н-м.
Коэффициенты трения в подшипнике: /' = 27* (Fr d) = 0,0018; /** =» = 0,0020. Из (3.9) имеем /V} = 7}ш = 382 Вт; /V)1 = 427 Вт.
Из (19-9) находим
Пнгр = (20-0,13-0,12 4- 6-0,122) k = 0,398ft.
Из (3.10) получаем нужное значение ftH ПрИ в = 20 °C и A^”B = A'}1 J
^=ATb7[0.398 (0m-/1o в)] =
= 427/(0,398 (60— 20)] = 26,8 Вт/(м2-°С).
Это значение превосходит величину, обеспечиваемую естественной тепло* передачей при ft С 19 Вт/(м2-°С) (см. стр. 56). Необходим принудительный теплоотвод, например обдув поверхности подшипника со скоростью воздуха (см. стр. 56)
vo. в ~ W16)2 = (26.8/16)2 = 2,8 м/с.
§ 19.4. КОНСТРУКЦИЯ И КЛАССИФИКАЦИЯ
ПОДШИПНИКОВ КАЧЕНИЯ
Подшипники качения (рис. 19.14) состоят из двух колец, обычно наружного и внутреннего (исключением являются упорные подшипники), между которыми расположены тела качения, разделенные сепаратором.
Взаимодействующие с телами качения поверхности колец называются дорожками качения, которые в зависимости от типа подшипника могут быть цилиндрическими, коническими, сферическими и др. В" шариковых подшипниках дорожки качения обычно являются поверхностью вращения дуги окружности гж (см. рис. 2.8).
Из анализа зависимости (2.10) следует, что при данном значении Dw с уменьшением отношения dwJDa снижается величина он, а при заданном [сгн ] увеличивается допускаемая нагрузка. Но с уменьшением djDw увеличиваются потери на трение и тепло-напряженность в контакте, снижающая сопротивление развитию усталостных трещин, так как при этом увеличивается в осевом сечении размер искривленной площадки контакта и, следовательно, растет скорость проскальзывания. Практически принимают dJDw = 1,034-1,04. При жестких требованиях к размерам и
Рис. 19.14. Подшипники качения:
D — наружный диаметр; d — внутренний диаметр
массе деталей, характерных для транспортных машин, подшипники качения выполняют без одного или двух колец и дорожки качения предусматривают в охватываемой и охватывающей деталях.
Сепаратор не только разделяет тела качения, но и удерживает их в собранном состоянии, что важно при монтаже, демонтаже и хранении подшипников. Помимо этого в роликовых подшипниках сепаратор направляет тела качения, предупреждая перекосы, вызывающие резкое увеличение потерь на трение, а иногда и заклинивание подшипника.
Простейшие сепараторы выполняют штамповкой из сталей с малым содержанием углерода. Для высокоскоростных подшипников используют массивные сепараторы из бронзы, латуни, дюралюминия, а также из неметаллических материалов (текстолита, полиамидов). Сведения о материалах колец и тел качения см. на стр. 109.
Подшипники качения классифицируют по следующим признакам: по направлению воспринимаемой нагрузки (радиальные, радиально-упорные; упорно-радиальные и упорные), по числу рядов 396
тел качения (однорядные, двухрядные и т. д.), способности само-устанавливаться, форме тел качения, по габаритным размерам.
К радиальным относят подшипники, предназначенные в основном для восприятия радиальных нагрузок (рис. 19.14, а, б, г, е, ж). Самыми распространенными в этой группе являются шариковые однорядные подшипники (рис. 19.14, а). Они могут воспринимать также и осевую нагрузку. При этом за счет деформаций и начальных зазоров между кольцами и телами качения общая нормаль к сопряженным поверхностям шарика и колец в точках контакта располагается под некоторым углом к плоскости, перпендикулярной к оси подшипника.
Представленные на рис. 19.14 г, ж радиальные роликовые подшипники предназначены для восприятия только радиальных нагрузок.
Радиально-упорные подшипники (рис. 19.14, в, д) применяют при комбинированном нагружении радиальной силой Fr и осевой Fa. Используют их также и в тех случаях, когда одна из этих нагрузок отсутствует. Способность к восприятию нагрузки Fa зависит от угла а (угол конуса наружного кольца у роликоподшипников и угол между линией, проходящей через точки контакта шарика с кольцами и плоскостью, перпендикулярной к оси подшипника, у шарикоподшипников). Стандартные радиально-упорные шарикоподшипники выпускают со значениями а, равными 12, 26 и 36°.
У порно-радиальные подшипники (рис. 19.14, з) предназначены для комбинированных нагрузок Fa и Fr причем обычно FrIFa 1.
Упорные подшипники предназначены только для восприятия нагрузки Fa (рис. 19.14, и).
По способности самоустанавливаться подшипники делят на самоустанавливающиеся и несамоустанавливающиеся. К первым относятся сферические подшипники, например показанные на рис. 19.14, б, е, а ко вторым — все остальные. Сферические подшипники допускают углы перекоса между осями внутреннего и наружного колец до 2—3°. Они особенно целесообразны там, где по условиям монтажа или появления значительных деформаций валов не представляется возможным или экономически целесообразным обеспечить малый угол перекоса между осями колец, при котором могут нормально работать несамоустанавливающиеся подшипники.
По форме тел качения подшипники делят на шариковые (рис. 19.14, а—в, з, и) и роликовые. Радиальные роликоподшипники выполняют с короткими (см. рис. 19.14, г, где I = Z)№) и длинными цилиндрическими роликами. Если l/Dw > 2, то подшипники называют игольчатыми. У роликоподшипников конических (рис. 19.14, д) и сферических (рис. 19.14, е) тела качения ймеют форму усеченного конуса и бочки. Получили распространение цилиндрические и конические роликоподшипники с бомбинирОВан-ными, т. е. имеющими бочкообразную форму (см. стр. 86), телами
Рис. 19.15. Сравнительные размеры роликовых подшипников различных серий:
1 — сверхлегкая; 2 — особо-легкая; 3 — легкая; 4 — легкая широкая; 5 — средняя; 6 — средняя широкая; 7 — тяжелая
качения. При этом снижается концентрация удельных нагрузок к одному из торцов тела качения, вызванная перекосами осей колец и другими погрешностями, и увеличивается несущая способность подшипника.
По габаритным размерам при данном внутреннем диаметре d подшипники делятся на серии (рис. 19.15). С увеличением размера растет и нагрузочная способность. При данном d в зависимости от конструкции отношения допускаемых экстремальных нагрузок могут достигать 10—100 и больших значений. Возможность выбора габаритной серии позволяет оптимизировать конструкцию узла. Например, при значительной нагрузке можно, не увеличивая d, взять подшипник средней или средней широкой серии, а если этого мало, то тяжелой серии. В планетарных передачах опоры основных звеньев во многих случаях крайне мало загружены при значительной величине d, обусловленной большими крутящими моментами и условиями компоновки.В таких случаях возможность применения подшипников особолегкой или сверхлегкой серии является важным условием для снижения массы и габаритов механизма. Не одинакова нагрузочная способность при данных диаметре d
и серии у подшипников различных типов. Если, например, принять за единицу грузоподъемность и долговечность радиального однорядного шарикоподшипника, то ориентировочные значения этих показателей у роликоподшипника с короткими цилиндрическими роликами будут соответственно 1,5 и 3,5, у конического однорядного роликоподшипника 1,7 и 5, $ двухрядного 3,3 и 35.
Самыми дешевыми являются радиальные однорядные шарикоподшипники, но из этого не следует, что применение их во всех случаях обеспечивает удешевление конструкции. Об этом, в частности, свидетельствует сравнение показанных в одинаковом масштабе подшипников различных типов, предназначенных для одинаковых условий работы (рис. 19.16).
Замена шариковых более дорогими роликовыми подшипниками позволяет значительно снизить размеры и массу или во много раз увеличить промежуток времени между заменой подшипников.
Для получения высокой нагрузочной способности подшипников качения наряду с большой твердостью контактирующих поверхностей (см. стр. 109) необходима и соответствующая точность для обеспечения наиболее благоприятного распределения нагрузки между телами качения и минимального биения одной из посадочных поверхностей относительно другой. Выпускаемые в СССР 398
подшипники делятся на пять классов точности, обозначаемых О, 6, 5, 4 и 2 и расположенных в порядке повышения точности. С переходом от класса 0, имеющего наибольшее распространение при
умеренных частотах вращения и отсутствии жестких требований к положению оси вращающихся деталей, к классу 2 допуски на боковое и радиальное биение снижаются приблизительно в пять раз, а стоимость увеличивается в десять раз.
Выносливость контактирующих поверхностей подшипников высокой твердости в большой сте-
Рис. 19.16. Сравнение размеров подшипников различных типов с одинаковой радиальной грузоподъемностью
пени зависит от класса шерохо-
ватости (см. гл. 1). Для подшипников качения допускаемая шероховатость тел качения и дорожек качения соответствует 11-му классу шероховатости по ГОСТ 2789—73.
§ 19.5. КИНЕМАТИКА, ДИНАМИКА И ПОТЕРИ НА ТРЕНИЕ
В ПОДШИПНИКАХ КАЧЕНИЯ1
Подшипник качения можно рассматривать как планетарный механизм (см. рис. 14.48), в котором внутреннее и наружное колы-ца, сепаратор и тела качения выполняют функции соответственно
Рис. 19.17. К расчету подшип* ников качения
центральных колес а и Ь, водила h и сателлитов g. Радиальный подшипник является механизмом А, а радиально-упорный и упор-
1 Здесь использованы обозначения, принятые для планетарных передач (см. § 14.10).
ный подшипники — механизмом Е. Из рис. 19.17, а, б следует:
da = dm — Docosa; db = dm -f- Dw cos a; da + db = 2dm. (19.12)
В движении относительно колец b и а имеем соответственно:
<ой —_ ;ь __ 1 _ da I /, C^cosa,,п<оч
Ыа-иь ha \-ihab ~da + db ~ 2 и dm )' (1у-13)
СО/, <0о -a i / 1 t COS O' \ zi rx , r\
• lM> = -o- ( 1 H--d----) • (19.14)
При и,, = 0 и w0 = о из формул (19.13) и (19.14) имеем
coh = coh = 0,5со [1 — (DKcosa)/dm|. (19.15)
При (oa = 0 и (О/, = (о из формул (19.13) и (19.14) находим
со/, = сой = О,5со [ 1 + (DKcosa)/dmJ. (19.16)
Из формул (19.15) и (19.16) следует, что со* > (о£, поэтому при неподвижном внутреннем кольце а тела качения чаще попадают под нагрузку и число циклов перемен напряжений больше.
Угловая скорость (0О[а — со/, тел качения относительно сепаратора определяется из зависимости
I . da
Ыа— 4>h I D^a I Dw '
При со/, = 0, (oa = co и со/, = (Ой из формул (19.12) и (19.15) следует, что
К.-<М = т(-£—$•«*«)• (1917)
Скорость контактирующих точек относительно зоны контакта (см. стр. 26) равна окружной скорости относительно водила (сепаратора) h, поэтому:
Vz= 0,5£>ю| (oD[a-со,,|; y2. = 2ot = Du,|(oDte)-(oh|. (19.18)
На тело качения массой т действуют центробежная сила
Л, = 0,5mdmti)l (19.19)
и гироскопический момент Тг, которые при высоких угловых скоростях могут существенно влиять на работоспособность подшипников. Момент Тг возникает в подшипниках с a =£ 0 (см. рис. 19.14) вследствие изменения направления оси вращения тела качения в пространстве. Величина Тг равна моменту инерции массы шарика Jm относительно его оси, умноженному на векторное произведение (йг х ые, где со, и ые — векторы угловых скоростей соответственно шарика относительно сепаратора h и сепаратора. Модули этих векторов равны соответственно | (оЛ(и — соЛ | и (о, тогда
Тг = 4,1(0^ — (оЛ | (оЛ sin а. (19.20)
Вращению шарика под действием гироскопического момента, вектор которого направлен по касательной к окружности dm, 400
препятствует момент трения Т' = FnfDw, появляющийся под влиянием нормальных усилий Fn (рис. 19.17, б). При Тг > Т' возникает проскальзывание с возможным значительным тепловыделением.
Если вращается внутреннее кольцо, а внешнее неподвижно, то в (19.19) и (19.20) <0h = со£; при неподвижном внутреннем кольце о/i — <0h. С учетом этого из формул (19.15), (19.16) и (19.19) следует, что при неподвижном кольце а значения Ец и Тг больше, чем при неподвижном кольце Ь.
Момент трения Тf в подшипнике качения определяется силами трения качения, скольжения и гидравлическими сопротивлениями. При данных Dw и dw и осевой нагрузке Fa — 0 минимальные потери будут у роликоподшипников с цилиндрическими роликами, так как условия работы в них приближаются к чистому качению. Несколько больше величина Tf в шарикоподшипниках из-за повышенного проскальзывания в зоне контакта (см. стр. 396). Значительно больше величина Tf в радиально-упорных роликоподшипниках, что связано с потерями на трение скольжения между большим торцом роликов и упорным буртом внутреннего кольца (см. рис. 19.14, д).
Трение скольжения возникает между телами качения и сепаратором. По некоторым экспериментальным данным, давление тела качения на сепаратор в точных подшипниках равно приблизительно 0,001 Fr.
Гидравлические потери при данных размерах подшипника зависят от скорости <о и способа подачи смазки. При малых со в общем балансе потерь на трение доля энергии, затрачиваемой на гидравлические сопротивления, незначительна. То же имеет место и при больших со, если смазка осуществляется разбрызгиванием (масляным туманом). При смазке окунанием гидравлические потери зависят от со, глубины погружения в масло и вязкости смазки, и это надо учитывать при определении Тf [11.
В практике применяют эмпирические зависимости для определения Tf. Так, при действии радиальной нагрузки Fr принимают Tf — 0,5Frfrd, где fr — условный коэффициент трения, приведенный к посадочному диаметру внутреннего кольца. В случае радиальных подшипников с цилиндрическими роликами и с шариками имеем соответственно f, — 0,001 и /, = 0,0015. Более подробные сведения по этому вопросу см. в работах [1, 66].
§ 19.6. РАСПРЕДЕЛЕНИЕ НАГРУЗКИ МЕЖДУ ТЕЛАМИ КАЧЕНИЯ. КОНТАКТНЫЕ НАПРЯЖЕНИЯ
И ЖЕСТКОСТЬ ПОДШИПНИКОВ КАЧЕНИЯ
Распределение нагрузки. Нагрузка между телами качения распределяется неравномерно (см. гл. 5).
Для определения нагрузки воспринимаемой телом качения, расположенным под углом ср (рис. 19.18, а), воспользуемся
формулами (5.39), в которых в данном случае у = 2л/х Заметив, что при начальном контакте по линии х ~ 1 и в точке X 2/3 [см. (5.4) ], запишем соответственно для роликовых й шарйкОбых подшипников:
F^ == F^ = (4Fr/z) cos ф; F^ = = (4,34F/g) cos3^p. (19.21)
Если ф = 0, то = F^o — Fmax и, следовательно, == Fraaxcosф при x = 1; Fv = Fmaxcos3/^p при x = 2/3, (19.21a) где Fmax = QF,/z. (19.22)
Как следует из (19.21), Q = Qp = 4 для роликоподшипников и Q = Пш = 4,34 для шарикоподшипников.
Распределение нагрузки между телами качения, характеризуемое зависимостями (19.21а) и конвой I на рис. 19.18, относится к подшипникам без зазора или натяга. Если имеется зазор [т. е. Dw < 0,5 (d2 — dj, что имеет место, например, при окружности dlt показанной на рис. 19,18, а штриховой линией], то нагрузка концентрируется на телах качения вблизи линии действия вектора Fr за счет полной или частичной разгрузки в зонах контакта, удаленных от этой линии. Распределение нагрузки между телами качения в этом случае характеризуется кривой II. Таким образом, с увеличением зазора растет величина Егаах и, следовательно, падает долговечность подшипника. При наиболее характерных зазорах увеличение Fmax составляет 15%, поэтому принимают Qp = 4,6 и Пш = 5. В подшипниках с двумя рядами шариков или роликов значение Q увеличивают еще на 15% для учета неравномерности распределения нагрузки, вызванной погрешностями изготовления и перекосами осей в результате деформаций.
В приведенных выводах учитывались только деформации в зоне контакта в предположении, что детали 1 и 2 (рис. 19.18, о) массивны и поэтому влиянием их объемных деформаций можно пренебречь. Снижая размеры и массы детали 2, необходимо учитывать влияние ее геометрических параметров на жесткость и, следовательно, на распределение нагрузки между телами качения. При этом надо стремиться к такой форме сечений детали, при которой достигается наиболее благоприятное распределение нагрузки и, следовательно, наибольшая несущая способность.
В варианте, показанном на рис. 19.18, б, вследствие малой толщины стенки g детали 2 и, следовательно, большой податливости ее ролики, удаленные от линии действия вектора Fr, разгружены. Распределение нагрузки между телами качения для рассматриваемой конструкции характеризуется кривой II, тогда как при массивной детали 2 — кривой /. Изменив конструкцию так, как показано на рис. 19.18, в, благодаря повышенной податливости участка k получим более благоприятное перераспределение нагрузки между телами качения (кривая III).
Контактные напряжения. В роликовых и шариковых подшипниках контактные напряжения бНа и ань в зоне касания тел качения с дорожками качения колец а и b определяют соответственно по формулам (2.6) и (2.10).
В сечении, перпендикулярном к оси, имеется внутреннее касание тела качения с наружным кольцом и внешнее — с внутренним. В связи с этим иНа > (среди исключений — сферические подшипники), поэтому усталостное выкрашивание, как правило, развивается значительно интенсивнее на внутреннем кольце.
Для радиального роликоподшипника (см. рис. 19.17, о) при Ян = FmsJleff ИЗ (2.6) имеем
ая = 0,418 ]Zfmax£/(/CffPnp) < [он], (19.23)
где leff — фактическая длина контакта ролика с кольцом, мм (длина ролика без фасок или канавок для выхода шлифовального круга).
Для касания ролика с кольцами а и b имеем соответственно 1см. формулу (2.4) ];
Pi = 0,5Dw; р2 = 0,5 (dm — Dw); pnp а = 0,5Dw (dm — Dw)/dm;
Pi — 0,5D№; p2 = 0,5 [dm -j- Dw)‘, pnp b — 0,5Dw (dm D^ldm.
Из формулы (19.23) имеем:
oHo = 0,418 V2dmFmmEl[leffDw[dm - Dw)}-, 1
°нь — 0,418 ]/ 2dmFmmFl{leffDw (dm + A»)ll J
°HalaHb = J/ (^m + D^l(dm — Dw). (19.25)
Величина анЛонь в шариковых подшипниках (при одинаковых гж у колец а и Ь, см. рис. 2.8) близка к найденной по формуле (19.25). В сферических шарикоподшипниках онь > иНа, поэтому нагрузочная способность их лимитируется контактной выносливостью наружного кольца, которая при одинаковых числах тел качения z намного меньше, чем у несферических шарикоподшипников.
При использовании формул (2.6) и (2.10) для радиально-упорных подшипников надо учитывать, что радиусы кривизны колец гпь и гпа (см- рис. 19.17, б) и ролика определяются с использованием зависимости (2.8), в которой в данном случае угол между нормальным и торцовым сечением обозначен а:
rnb — 0,5dfc/cos а; rna = 0,5do/cos а.
Для подшипниковых сталей максимальные допускаемые напряжения равны 5000 МПа и 3000 МПа соответственно для начального контакта в точке и по линии.
Посадки и жесткость подшипников качения. Характер посадки колец подшипников качения на вал и в корпус имеет большое влияние на работоспособность подшипникового узла. Ограничимся очень краткими сведениями по этой теме, подробно рассмотренной в источниках [23, 66].
Кольцо, вращающееся относительно вектора радиальной силы Fr, устанавливают с натягом во избежание обкатывания его по сопряженной поверхности вала (корпуса) и изнашивания последней. Натяг вызывает увеличение (уменьшение) диаметра дорожки качения внутреннего (наружного) кольца. Это ведет к уменьшению зазора или даже к появлению натяга между телами качения и кольцами подшипника. В последнем случае возможно 404
понижение работоспособности подшипника, и это учитывается в рекомендациях к выбору посадок колец.
Посадки для колец, не вращающихся относительно вектора Fr, выбирают с очень малыми зазорами (во избежание неблагоприятного распределения нагрузки между телами качения, вызванного деформациями кольца), но достаточными для возможности осевых перемещений при монтаже и температурных деформациях.
Деформации подшипников качения складываются из деформаций в контакте тел качения с кольцами (см. гл. 5) и колец с посадочными поверхностями вала (оси) и корпуса [21 ]. Первый из этих двух компонентов перемещений имеет превалирующее значение.
В общем балансе перемещений (упругих и за счет зазоров), нарушающих правильное взаимное расположение сцепляющихся элементов передач зацеплением, влияние деформаций опор во многих случаях имеет решающее значение.
Если можно пренебречь объемными деформациями деталей 1 и 2 (см. рис. 19.18, а), то смещение оси подшипника в направлении Fr равно сумме деформаций в двух зонах контакта наиболее загруженного тела качения. Для роликового подшипника из (5.3) имеем б «« 2Ггаах/(/кС9н). При необходимости обеспечить минимальную деформацию подшипники устанавливают с натягом. Если в наименее загруженной зоне не появляется зазор при действии радиальной силы Fr, то при линейной зависимости между нагрузками и деформациями жесткость подшипника увеличивается в два раза (см. гл. 5) в сравнении с вариантом, при котором Dw = 0,5 (d2 — dj.
§ 19.7. РАСЧЕТ ПОДШИПНИКОВ КАЧЕНИЯ НА ДОЛГОВЕЧНОСТЬ И СТАТИЧЕСКУЮ ГРУЗОПОДЪЕМНОСТЬ
Виды разрушения подшипников. Основным видом повреждения контактирующих поверхностей подшипников, хорошо смазанных и защищенных от посторонних частиц, является усталостное выкрашивание (см. гл. 2). При отсутствии надежной защиты от попадания посторонних частиц большое распространение имеет абразивное изнашивание, характерное для многих механизмов дорожных, строительных, сельскохозяйственных и других машин.
При больших перегрузках на поверхностях качения возникают вмятины (бринеллирование), нарушающие правильную работу подшипников. Вмятины могут быть результатом микроперемещений в невращающемся подшипнике, вызванных вибрациями, например при транспортировке машин.
Заедание при недостаточной смазке и перегрузках наблюдается в зонах скольжения торцовых поверхностей роликов и буртиков колец. Возникает оно и в результате скольжения соседних тел качения в подшипниках без сепараторов. Заедание может быть 405
также вызвано проскальзыванием, неизбежным при переходе тела качения из нагруженной зоны в ненагруженную. Проскальзывание с возможным задиром в радиально-упорных и упорных подшипниках возникает под действием гироскопического момента Тг при недостаточной загруженности тел качения.
При больших перегрузках, вызванных, например, отклонениями от технических условий на эксплуатацию, погрешностями монтажа, неправильным учетом действующих нагрузок и другими причинами, тела качения и кольца могут раскалываться.
Распространенной причиной отказов в работе подшипников является поломка сепаратора. Этому способствуют давление со стороны тел качения (из-за различия их диаметров, неодинаковой загруженности и перекосов колец), изнашивание и центробежные силы при высоких скоростях.
В практике конструирования, как правило, ограничиваются расчетами, направленными на предотвращение преждевременных отказов из-за выкрашивания (расчет на долговечность) и предупреждение вмятин. В последнем случае приведенную статическую нагрузку сравнивают со статической грузоподъемностью Со (см. стр. 414).
Основы расчета подшипников качения на долговечность. Поверхности тел качения и дорожек качения колец подшипников подвергаются действию повторных циклов контактных напряжений. Исходным для расчета подшипников на долговечность является уравнение кривой контактной выносливости [см. зависимости (4.4) ]
QhNc = const, (19.26)
которая, как показывают эксперименты с подшипниками качения, в пределах встречающихся на практике значений Nc не имеет горизонтального участка.
Величина Nc прямо пропорциональна числу оборотов п„ вала за полный срок службы, поэтому
анпп — const. (19.27)
В соответствии с ГОСТ 18855—73 долговечность подшипников измеряется числом миллионов оборотов, обозначенным L. Разделив (19.27) на 10е, получим
одЛ = const. (19.27а)
Радиальные и радиально-упорные подшипники могут одновременно воспринимать радиальную Fr и осевую Fa нагрузки, поэтому при расчете этих подшипников вводят приведенную радиальную нагрузку Р, которая, будучи приложена к подшипнику с вращающимся внутренним и неподвижным наружным кольцами, обеспечивает такой же расчетный срок службы, как и при действительных условиях нагружения и вращения.
Учтя зависимость (4.8) между напряжением и нагрузкой, из (19.27а) получим (рис. 19.19)
Рт' L — const. (19.28)
На основании теоретических и экспериментальных исследований установлены зависимости, позволяющие для каждого данного подшипника определить постоянную нагрузку при L — 1. Эта нагрузка при неподвижном наружном кольце называется динамической грузоподъемностью, обозначается через С (рис. 19.19)
и приводится в справочных данных [1, 56]. В соответствии с этим из (19.28) находим, что Рт'L = Ст', откуда:
L = (C/P)"''; C = PL1/m', (19.29)
где Р — в Н; т' = 3 для шарикоподшипников и т — 10/3 для роликоподшипников.
Первую из зависимостей (19.29) используют для определения долговечности в миллионах оборотов при известных С и Р. По значению С, найден
ному из второй зависимости, подбирают ливости
подшипник из справочных данных Г
Формулы (19.29) справедливы при п > 10 об/мин и частоте
вращения, не превышающей предельного значения для данного подшипника. При п — 1-4-10 об/мин расчет следует вести для п = 10 об/мин. При п < 1 об/мин действующую нагрузку рас-
сматривают как статическую и подшипники проверяют только на статическую грузоподъемность 1см. (19.40)].
В ГОСТ 18855—73 приведены зависимости для определения С. В частности, для радиальных и радиально-упорных роликоподшипников
C = fc(i^(Cosa)7/9№9/27,
(19.30)
где ic — число рядов тел качения; fc — функция величины £>ц. cos aldm, материала, твердости и шероховатости контактирующих поверхностей.
Для определения С приняты такие значения контактных напряжений, при которых за расчетный срок службы, измеряемый числом миллионов оборотов, не менее 90% из данной группы подшипников при одинаковых условиях должны отработать без появления признаков усталости металла. Таким образом, для подшипников качения принимают у = 90% (см. стр. 123). При
‘ В источниках [1, 56] значения С даны в кгс, поэтому при подборе подшипников их следует умножить на 9,8 (см. пример на стр. 414).
больших значениях у долговечность уменьшается против найденной по (19.29). Так, при у = 0,95 это снижение составляет 38% 166, 93].
Используя приведенные выше зависимости, можно найти допускаемую на подшипник нагрузку и получить данные для расчета динамической грузоподъемности С.
Пример. Полагаем, что известны геометрические параметры цилиндрического роликоподшипника, величина L и координаты М'с и а'н кривой контактной усталости, соответствующей некоторой заданной вероятности неразрушения. Определим допускаемую радиальную нагрузку Fr при <оа = 0. У кольца наиболее загруженной является точка G (см. рис. 19.17, о). За один оборот сепаратора число циклов изменения напряжений в этой точке равно числу тел качения г. С использованием формулы (19.16) получим число циклов изменения напряжений для точки G за полный срок службы. Далее из уравнения кривой усталости [см., например, (19.26)], в котором для роликовых подшипников т = 6,66, определяем допускаемое контактное напряжение и из (19.2'4) и (19.22) находим
F 1 ' 17,9(1 + Ою/</т)°-3Й£ тЛ3 ’
В дальнейшем показатели степени корректируют на основании экспериментов (например, показатель степени при г принимают равным 0,75 вместо 0,7 и т. д.).
При вращающемся относительно вектора Fr наружном кольце b грузоподъемность подшипника меньше, чем при вращающемся внутреннем кольце а. При неподвижном кольце а (ыа = 0) в точке G дорожки качения (см. рис. 19.17, а) при каждом соприкосновении с телами качения реализуется цикл изменения контактного напряжения под действием нагрузки Fo = Fmax (см. рис. 19.17, в). При неподвижном кольце b (<о6 = 0) точка G контактирует с телами качения под нагрузкой только по одну сторону осевой плоскости, нормальной к Fr, и, следовательно, число циклов изменения напряжений в два раза меньше, чем при coQ = 0. Помимо этого нагрузка Fa достигает максимального значения только при соприкосновении с телом качения в плоскости действия силы Fr Отмеченное отражено на рис. 19.17, в, на котором по горизонтальной оси отложен угол поворота вращающегося кольца, а по вертикали показаны значения FG при соприкосновении точки G кольца а с телами качения для вариантов с о>а = 0 и..<оь = 0.
В приведенных расчетах не учитывается влияние гидродинамического эффекта в зоне контакта тел качения с кольцами на работу подшипника. В работе [34] показано, что с ростом параметра Х.о, характеризующего режим смазки (см. стр. 45), увеличивается долговечность подшипника. При Z.o > 4 обеспечивается жидкостное трение в контакте и долговечность увеличивается не менее чем в два раза в сравнении с получаемой из общепринятого расчета.
§ 19.8. УКАЗАНИЯ К ПРАКТИЧЕСКИМ РАСЧЕТАМ (ПОДБОРУ) ПОДШИПНИКОВ КАЧЕНИЯ
Подбор и проверка подшипников качения по динамической грузен подъемности. При проектировании опор с подшипниками каче* ния последние, как правило, подбирают из числа стандартных. В основу подбора положены зависимости (19.29).
Работоспособность подшипников качения зависит от многих факторов, в том числе от характера приложений нагрузки и закона ее изменения, температуры, угловой скорости вращения ко* лец относительно вектора Fr.
Для радиальных и радиально-упорных подшипников приведенная нагрузка
P = (XVFr + YFa)K6Kv. (19.31)
Приведенная осевая нагрузка для упорных подшипников
P = FaK6Kr. (19.32)
В этих формулах F и Fa — соответственно радиальная и осевая нагрузки, Н; X и Y — коэффициенты радиальной и .осевой нагрузок (указываются в справочных данных и с сокращениями даны в табл. 19.1); V — коэффициент вращения (при вращающемся
Таблица 19.1. Коэффициенты X и У для радиальных и радиально-упорных однорядных шариковых подшипников *
Угол контакта а, ...° Fa/C0 z. Fa/(.VFf) < e FaKVFr) > e e
X У X У
0 0,014 0,028 0,056 0,084 0,110 0,170 0,280 0,56 2,30 1,99 1,71 1,55 1,45 1,31 1,15 0,19 0,22 0,26 0,28 0,30 0,34 0,38
12 0,014 0,029 0,057 0,086 0,110 0,170 0,290 0,430 1 0 0,45 1,81 1,62 1,46 1,34 1,22 1,13 1,04 1,01 0,30 0,34 0,37 0,41 0,45 0,48 0,52 0,54
18—20 24—26 — 0,43 0,41 1,00 0,87 0,57 0,68
♦ Для радиально-упорных однорядных роликовых подшипников е = X = 1 и У = 0 при FaHVFr) X = 0,4 и У = 0,4 etg а при Fa/(VFr) = 1,6 i«a; > e.
Таблица 19.2. Ориентировочные значения коэффициента безопасности Кб
Характер нагрузки на подшипник Кб
Спокойная нагрузка (фрикционные передачи и др.) Легкие толчки, кратковременные перегрузки до 125% от основной нагрузки (подшипники электродвигателей, передач зацеплением при относительной спокойной нагрузке и невысоких скоростях и др.) Умеренные толчки, кратковременные перегрузки до 150% (подшипники редукторов, коробок скоростей и др.) 1 1,1—1,2 1,3—1,8
Примечание. При назначении Kg следует учитывать опыт применения подшипников в машинах и узлах, аналогичных проектируемым.
относительно вектора нагрузки Fr внутреннем кольце V = 1; наружном кольце — V = 1,2); Хб — коэффициент безопасности (табл. 19.2); Лт — температурный коэффициент, Лт = 1 при О < 105° С и К, = (108 + 0,40)/150 при д = 105-^-250° С.
При Fn = 0 в формуле (19.31) принимают X = 1, поэтому
Р= УГДб/<т.
При Fa =/= Q значения X и У определяют в зависимости от соотношения Fal(VFr) и параметра е (см. [1, 56], а также табл. 19.1).
Долговечность подшипника за полный срок службы, выраженная в часах, обозначается Lh (в отличие от обозначения th, принятого в других главах). Заметив, что L = 60nL,,/10e, зависимость (19.29) можно представить в виде
Lh= 106(С/Р)т'/(60м), или С = Р(60п£Л/106)1/т'. (19.33)
Величина L,, зависит от типа машины и особенностей работы узла, для которого рассчитывают подшипник. Эту величину устанавливают из технико-экономических расчетов с учетом затрат, связанных с заменой подшипников, она колеблется в широких пределах: от нескольких десятков часов до 2-104 ч и больше. Минимальные значения относятся к редко включаемым механизмам кратковременного действия, максимальные — к круглосуточно работающим агрегатам, например к машинам бумажной промышленности, энергетическим установкам и т. д.
При действии переменных нагрузок в формулы (19.29) и (19.33) вместо Р подставляют эквивалентную нагрузку РЕ, определяемую по (4.17), в которой в случае подшипников качения принимают о=1; Qe = Р£; Q, = Pt\ отношение чисел циклов заменяют отношением чисел оборотов подшипника, выраженных в миллионах. Учтя это, находим
/72k I k
Л- =|/ S
(19.34)
где L, — число миллионов оборотов подшипника под нагрузкой k
Pt за полный срок службы; Е, — суммарное число миллионов оборотов подшипника за полный срок службы; значения т' даны на стр. 407.
Если при постоянной частоте вращения п нагрузка, действующая на подшипник, изменяется по линейному закону от Ргп|п до Ртт, то при Pmln/Pmax = Л на основании формулы (4.26) для шарикоподшипников {tn' = 3) получим
РЕ = /’max /0,25(1 + I)2) (1 + Г})-
С небольшой погрешностью эта формула может быть исполь» зована и для роликоподшипников.
Расчет механических передач упрощается, если эквивалент* ное время (см. стр. 65) использовать не только для расчета за* цеплений и валов, но и при подборе подшипников качения. Если LhE — эквивалентное время работы подшипника в часах, то эквивалентное число миллионов оборотов подшипника за полный срок службы
L£ = 60.10-enpaC4LA£. (19.35)
Определение величины LhE базируется на формуле (4.20)$ в которой при этом о=1; Q, = Рf; QpaC4 = Ррасч; thi = L/lf;
k
= V—У (19.36)
«расч X-J L \ г расч / J
где Ррасч находят по формуле (19.31) или (19.32) при действии наибольшей из длительно действующих нагрузок; /г4- и Lhl — частота вращения (об/мин) и продолжительность работы (ч) при действии нагрузки Pf.
Величина ирасч может быть выбрана произвольно; ее можно принять равной частоте вращения вала рассчитываемого подшипника при номинальной угловой скорости двигателя. Для подшипника механической передачи при изменениин нагрузки обычно Fr!Fa — const. При этом в формуле (19.36) Pi/Ppac4 = Tt/TpaC4, где 7расч — расчетный момент на валу передачи; Tt — момент на том же валу при действии i-й нагрузки (см. пример на стр. 415).
По найденному значению ЬЕ динамическую грузоподъемность подшипника определяют по формуле
С = РрасчЦ/т'. (19.37)
Некоторые особенности расчета (подбора) радиально-упорных подшипников связаны с возникающей в них осевой составляющей Sr, вызванной радиальной нагрузкой Fr (см. стр. 97). При отсутствии радиального зазора и натяга для шарикоподшипников
Sr = eFr; (19.38)
для роликоподшипников с коническими роликами
S, = 0,83eFz.
(19.39)
Для всех радиально-упорных подшипников, за исключением париковых са = 5-=-15°, значения сданы в табл. 19.1. Для шарико-юдшипников с а = 12° и а = 15° значения е определяют соответ-
Рис. 19.20. К определению усилий, действующих на радиально-упорные подшипники
ственно из уравнений: lge =
=[lg(Fr/C0)- 1,144]/4,73;
lge = =[lg(Fr/C0)- l,766]/7,363, где С0—статическая грузоподъемность (см. стр. 414). С уменьшением зазора в подшипнике снижается
неравномерность распределения нагрузки между телами качения (см. стр. 403). Осевая нагрузка радиальных и радиальноупорных шарикоподшипников способствует снижению зазора, и с увеличением ее до некоторого значения при неизменной величине Fr повышается, долговечность подшипника. Это положение учитывается в теоретических
основах расчета подшипников, результаты которых отражены в приведенных рекомендациях к подбору подшипников с использованием коэффициента е.
Рассмотрим определение входящей в (19.31) величины Fa (необходимой также при выборе е, X и У) для наиболее характерного варианта установки радиально-упорных подшипников (рис. 19.20).
Обозначим через £ 3 сумму осевых усилий, действующих на рассчитываемый радиально-упорный подшипник, включая и усилия Sr в парном подшипнике. Если Sr в рассчитываемом подшипнике удовлетворяет условию £3 < Sr, то для него принимают Fa = Sr. Если же 2)S > Sr, то принимают Fa = £3.
Пример. На рис. 19.20 внешняя осевая нагрузка, приложенная к валу (оси), обозначена через S. На рис. 19.20, а, б сумма осевых усилий, действующих на подшипник /, составляет 2S] == S, л — S = —3000 Н < S, i, поэтому Fa ( = = Sri; для подшипника II имеем = Sri + S = 8000 Н > Sz п и, следовательно, Fa п = SS11-412
Аналогично для подшипника / иа рис. 19.17, в, г имеем SSi = Srn + S = 7000 H>Sri, поэтому Fai = 2Sf, для подшипника II имеем = == Sr j — S = —2000 H < Sr и и Ра и = Sr п.
Определив Fa, из табл. 19.1 или из источников [1, 56] находим е и по соотношению величин Fj(VFr) и е устанавливаем величины X и Y.
Радиальная нагрузка Fr принимается приложенной в точке пересечения нормалей, проведенных через центры площадок контакта шариков с Наружным и внутренним кольцами (рис. 19.20, а, в) и через середину площадки контакта с наружным кольцом в случае роликового подшипника (рис. 19.20, б, г). С увеличением I уменьшаются усилия на подшипники при нагрузке моментом, вектор которого перпендикулярен к оси, и снижаются перемещения, вызванные деформациями опор и люфтами в них. Это надо учитывать при сравнении вариантов, показанных на рис. 19.20.
При подборе подшипников величина Fa/C0 неизвестна, поэтому приходится прибегать к методу проб. Можно, например, подобрать подшипник, приняв Fal(VFr) < е, и затем выполнить проверочный расчет.
Оценка предельной частоты вращения. С ростом частоты вращения увеличивается температура вспышки Омги в контакте (см. стр. 36), связанная с микропроскальзыванием и необходимыми потерями энергии на гистерезис и деформирование неровностей. Увеличиваются при этом потери на трение скольжения тел качения о сепаратор, буртики роликов подшипников, а также потери вследствие дополнительных нагрузок, вызванные инерционными силами. Наряду с мгновенной температурой вспышки в зоне контакта повышается объемная температура деталей подшипника, уменьшаются вязкость масла и толщина масляного слоя. Все это снижает сопротивление разрушениям из-за развития усталостных трещин и возникновения схватывания. С ростом частоты вращения увеличивается вероятность отказов, связанных с разрушением сепаратора.
Для обеспечения необходимой надежности в каталогах подшипников указаны предельные частоты вращения.
Предельная быстроходность оценивается условным скоростным параметром — произведением диаметра окружности центров тел качения dm на частоту вращения /?, который зависит от типа подшипника, точности, конструкции сепаратора и вида смазки.
Наибольшие значения ldmnl у шарикоподшипников с текстолитовым и массивным металлическим сепаратором (около 9 • 106 мм • об/мин) [56]. Далее следуют радиальные подшипники с короткими цилиндрическими роликами (около 5- 10б мм-об/мин). Значительно ниже величина [dmn] у конических роликоподшипников (около 3,5 • 10б мм -об/мин), а у бессепараторных значительно меньше, чем у подшипников с сепаратором.
Проверка подшипников на статическую грузоподъемность.: С уменьшением Lh (или LhE) увеличивается допускаемая нагрузка на подшипник, а следовательно, и напряжения в контакте. Во избежание появления опасных для дальнейшей работы остаточных деформаций на контактирующих поверхностях и задиров нагрузку подшипников ограничивают так называемой статической грузоподъемностью. Под действием нагрузки, равной статической
грузоподъемности, суммарная остаточная деформация не должна превышать IO-4 Dw. Ориентировочные значения контактных напряжений при этом равны 3000 хМПа и 5000 МПа соответственно для шариковых и роликовых подшипников.
Проверку на статическую нагрузку производят по условию
Ро < Со, (19.40)
где Ро— приведенная статическая нагрузка, Н; Со — статиче-
ская грузоподъемность, указываемая в каталогах (для радиальных
и радиально-упорных
Т а б л п и а 19.3. Коэффициенты Хй и Fo для однорядных подшипников
роликоподшипников
Типы ПОДШИПНИКОВ Х„
Шариковые радиальные 0,6 0,5
Шариковые сферические Шариковые радиальноупорные: 0,5 0,22 etg а
а= 12° 0,5 0,47
а= 26° 0,5 0,37
а = 36° 0,5 0,28
Роликовые радиальноупорные 0,5 0,22 etga,
Со — /oizDwleff cos а, где /о — коэффициент, зависящий от геометрии деталей подшипника, точности изготовления и материала).
Для радиальных и радиально-упорных подшипников величина Роприравнивается большему из двух значений:
Ро = X0Fr~(-Y0Fa; Pu — Fn
(19.41)
где Хо и У о — соответственно коэффициенты радиальной и осевой нагрузок (табл. 19.3).
При п с 1 об/мин допускается подбор подшипников качения из расчета только на статическую грузоподъемность. До-
пускается нарушение условия (19.40), т. е. превышение суммарной остаточной деформации против 10-4Д№, в тех случаях, когда не предъявляются высокие требования к плавности вращения.
Пример. Расче подшипников качения промежуточного вала двухступенчатого редуктора (см. рис. 14.57).
Расчетная схема и конструктивное выполнение подшипниковых узлов показаны на рис. 18.7. Частота вращения п = 647,5 об/мин. Режим работы представлен на рис. 14.67.
Расчет ведут по зависимостям (19.29) и (19.31), в которых V = 1 (см. стр. 409); Кб = 1,3 (см. табл. 19.2); Кт — 1 (см. стр. 410); т' = 3,33 (см. стр. 407). Для назначения коэффициентов X и У надо определить осевые нагрузки, действующие на подшипники К и Е. Из зависимости (19.39) имеем:
SrK= 0,83tf,K =0,83-0,32-23 850 = 6330 Н;
SrE = 0,83еКг£ = 0,83.0,32-17 550 = 4660 Н, где е = 1,5 tg а = 1,5 tg 12е = 0,32 (см. табл. 19.1).
Осевые усилия, действующие на подшипники (см. стр. 380):
(£s)/< = SrE + Fal — Fo2 = 4660 + 4500 — 2750 = 6410 H > SrK:
(£s)£ = SrK + Fa2 — Fa = 6330 + 2750 — 4500 = 4580 H > SrE.
Учтя указания на стр. 412, получим:
РаЕ = srE — 4660 Hj FaK = (2s)k = 6410 H.
Поскольку
FaE/(VFrE) = 4660/17 550 = 0,27 < е}
FaKl(VFrK) = 6410/23 850 = 0,27 < е,
то (см. табл. 19.1) X = 1 и Y = 0, и из формулы (19.31) находим
Рк = (XVFrK + YFaK) = FrKK6 = 23 850 -1,3=31 000 Н.
Аналогично
Ре = ?геК<5 = 17 550-1,3 = 22 800 Н.
На основании формулы (4.20) и данных на рис. 14.67 (см. также указания на стр. 411) находим
LhE = 3000 + 8000 (Гт (2,,/Тт ^J3’33 + + 12 000 (7-т {3.у/Тг (Г))3-33= 6634 ч.
Поскольку Прдсч = п = 647,5 об/мин, из (19.35) имеем
Le = 60• 10~enpaC4Z,h£ = 60.10-6-647,5-6634 = 257,'7 млн. об.
Для наиболее тяжело нагруженной опоры (X) из (19.29) имеем
C = PL^m' ~ 31 000-257,7°’3 = 31 000-5,3= 164 300 Н.
По справочным данным 11, 56] выбираем роликоподшипник конический однорядный № 7314 с параметрами: d = 70 мм; D = 150 мм; С = 16 800 кгс; Со = 13 700 кгс (см. рис. 18.7, б). Из табл. 19.3:
Хо = 0,5; у0 = 0,22 ctg а = 0,22/tg 12° = 1,035.
По формуле (19.41) проверяем выбранный подшипник на статическую грузоподъемность:
РоК = X0FrK + YbFuk = 0,5-23 850 + 1,035-6410 = 18 560 Н < FrK.
Следовательно, принимаем Роц — F,k = 23 850 Н. В данном случае уело вие (19 40) выполнено, так как Со > Fr^.
Глава 20- УПРУГИЕ ЭЛЕМЕНТЫ
§ 20.1. ОБЩИЕ СВЕДЕНИЯ
Упругими элементами называются детали с высокой податливостью при минимальных массе и габаритах (пружины, рессоры, резиновые изделия и др.), используемые для амортизации толчков и ударов, демпфирования колебаний, выравнивания нагрузки в зоне взаимодействия сопряженных звеньев, аккумулирования энергии за счет сил упругих деформаций (пружинные двигатели), для силового замыкания, измерения усилия по величине упругого перемещения и т. д.
Наиболее распространенными упругими элементами являются пружины. В зависимости от выполняемых функций их делят на 415
пружины растяжения (рис. 20.1, а), сжатия (рис. 20.1, б—з), кручения (рис. 20-1, и, к) и изгиба (рис. 20.1, л, м).
Широко распространены витые пружины растяжения, сжатия и кручения (рис. 20.1, а—г, и), выполненные из проволоки круглого сечения. Для снижения габаритов применяют составные пружины сжатия, состоящие из двух (рис. 20.1, в) и реже из большего числа вложенных одна в другую цилиндрических пружиц. При этом составляющие пружины имеют правую и левую вййтбвые линии с целью снижения закручивания торцовых опор.
Рис. 20.1. Упругие элементы (пружины и рессоры)
Витые пружины в специальных случаях выполняют с прямоугольным сечением (например, рис. 20.1, д). Применяют также многожильные пружины, состоящие из двух, трех и большего числа проволок, свитых в тросы (см. сечения тросов на рис. 20.1, 6).
Одной из важнейших характеристик упругих элементов1 является жесткость С — dF/dk или С<е = dT/dty (см. стр. 80).
На рис. 20.2, а в системе координат К, F (или <р, Т) показаны кривые загрузки (t) и разгрузки (г) упругого элемента. Площадь, расположенная под кривой г, пропорциональна энергии Wy, возвращаемой при снятии деформирующей силы. Площадь, ограниченная кривыми i и г (заштрихована на рис. 20.2, а), пропорциональна энергии Wr, затрачиваемой на трение (на преодо-
1 В расчетах упругих элементов линейное перемещение обозначается X. 416
ление диссипативных сил). Отношение IFr/(lFy + lFr) служит для количественной оценки демпфирующих свойств и называется коэффициентом демпфирования. Демпфирование обусловлено внутренним трением в материале упругого элемента и внешним трением, вызванным взаимодействием перемещающихся одна относительно другой сопряженных поверхностей. У металлических упругих элементов превалируют потери на внешнее трение, у неметаллических — на внутреннее.
Для упругих элементов, показанных на рис. 20.1, а—в, и, к, м, коэффициент жесткости можно принять постоянным. Поэтому, учитывая незначительность потерь в металлах на внутреннее трение (если, конечно, напряжения меньше предела пропорциональ-
Рис. 20.2. Кривые зависимости деформирующих усилий от перемещений упругих элементов
ности), для этих упругих элементов на рис. 20.2, б кривые загрузки и разгрузки можно представить одной прямой линией.
Для амортизации ударов и толчков в транспортных и других машинах применяют рессоры (рис. 20.1, н), составленные из стальных листов одинаковой ширины, но различной длины, что приближает их к брусьям равного сопротивления и способствует при заданных нагрузке F и деформации получению конструкции с минимальной массой.
При деформировании рессор благодаря относительному смещению сопряженных листов возникает внешнее трение, т. е. имеет место конструкционное демпфирование. Но в данном случае отношение энергии, затрачиваемой на гистерезисные потери, к энергии сил упругих деформаций мало (рис. 20.2, в), и при необходимости интенсивного подавления колебаний используют специальные демпферы.
В качестве упругих элементов получили распространение изделия из высокомолекулярных материалов, особенно из резины. Высокая податливость резины (модуль упругости приблизительно в 2 -104 раз меньше, чем стали) и большое внутреннее трение обусловливают хорошие амортизирующие и демпфирующие свойства. Резиновые изделия используют для гашения вибраций, снижения интенсивности шума, толчков, ударов и выравнивания нагрузки среди элементов конструкции (см. гл. 21). Наиболее целесообразно резиновые упругие элементы использовать при напряженном состоянии сдвига.
На рис. 20.3, а показан пример резинометаллического аморти-
затора, предназначенного для a) Aid
Рис. 20.3. Примеры применения резины в амортизирующих устройствах
установки оборудования и работающего на сдвиг и сжатие.
В сложном напряженном состоянии находятся и резинометаллические амортизаторы трамвайных вагонов, обеспечивающие снижение интенсивности шума и толчков (рис 20,3,6) и существенно повышающие комфортабельность этого вида транспорта.
Расширяется область применения пневматических резинокордных амортизаторов в подвесках автомобиля. Изменением
давления воздуха жесткость их может регулироваться во время движения в зависимости от нагрузки и дорожных условий.
§ 20.2. К ВЫБОРУ МАТЕРИАЛОВ
И ДОПУСКАЕМЫХ НАПРЯЖЕНИЙ МЕТАЛЛИЧЕСКИХ ПРУЖИН1
Большим деформациям, характерным для упругих элементов, сопутствует значительная потенциальная энергия Л. Из формул
Рис. 20.4. Допускаемые напряжения кручения при статической нагрузке для проволоки из различных материалов:
1 — вольфрамовая и рояльная; 2 — хро-мованадиевая термообработанная; 3 — углеродистая, закаленная в масле; 4 — углеродистая холоднотянутая и нержавеющая холоднотянутая; 5 — из монель-металла; 6 — из фосфористой бронзы; 7 — из специальной латуни
(6.3) следует, что масса упругого элемента (при сохранении геометрического подобия) обратно пропорциональна допускаемому напряжению во второй степени. Однако допускаемое напряжение про-
1 Более подробные сведения см. в работах |18, 47, 64, 66, 75].
порционально временному сопротивлению, и поэтому повышение механических характеристик материала пружин в большей степени, чем для многих других деталей \ способствует снижению массы и габаритов. В связи с этим основным материалом для стальных упругих элементов является сталь с высокими механическими свойствами. Так, для витых пружин используют проволоку (ГОСТ 9389—75) с временным сопротивлением ов, изменяющимся в зависимости от категории прочности в пределах 1050—-1700 МПа при диаметре d — 6 мм и достигающим 3000 МПа при d = 0,2 мм. Механические характеристики некоторых пружинных сталей даны в табл. 20.1 [75].
Наряду с высокими механическими свойствами после термообработки материал пружин должен иметь устойчивые во времени упругие свойства.
При требовании высокой антикоррозионной стойкости пружин используют, например, бронзу оловянную БрОЦ4-1, кремнемарганцовистую БрКМцЗ-1, монель-металл - марки НМЖМц28-25-1,5, содержащий 27— 29% Си, 2—3% Fe, 1,2—1,8 Мп (остальное Ni.) Допускаемые напряжения при кручении [тст] для витых проволочных пружин из различных материалов при статической нагрузке даны на рис. 20.4 [75]. При коэффициенте асимметрии цикла R =}= 1 допускаемое напряжение определяют по формуле
[т] = Ят(тст], (20.1)
где — коэффициент, выбираемый
по рис. 20.5 в зависимости от R и числа циклов нагружения Nc.
При известных тБ и т0 предельное напряжение tR )im при заданном
1 Среди исключений детали, масса которых определяется из расчета по напряжениям в зоне контакта [см. формулу 6.4)J.
* 500—700 550—600 500—550 ценных при
го
О о Я
С LO ю 1 1 1 й
о о I.C о со Ю Е о
о ООО юоо X X Ф
ООО) — го
1 1 1 к
ООО О О 1С х7ьО0 Я ф
к
7? О' ф
с ООО ООО о — — £ ч X
аХ 1 1 1 ООО X
Ф ей ь ICIClQ ООО го го X
го
X с> о> а
3 О О го
X X о 1 1 ю ю о
X 1 1 со
S СО СО го
* X
О- —' о
Е —. 3
X ф
3 о ООО LQ О О со о ю 3” Ч
1 . О
© X ф X е 1 1 1 Soo О Е S X X
X X — X
X
X ООО о ю о X
е. Ф н X е ш 777 £Х ГО X
гЗ ю о о ’ТГ о о ф 3
S —• —' — X
X
о X ф «=[ ф
X и
Ф 3* X X р С
X
и X о S- стая я вая н и е.
S СЗ Ф Ej EQ Ef го к
—’ о X
ф сх
О "руш ф ^4 S X X
X О Ф q, X
X ОК' •МО МН С го
ю Ф о Ф Е X
сз
:—1
значении Я, изменяющемся от нуля до единицы, определяют в предположении (идущем в сторону увеличения запаса прочности), что значения Нт в системе координат тт, ха (см. рис. 14.16 с системой координат ит, аа) лежат на прямой, проходящей через точки с координатами 0,5 т0, 0,5 т0 и тв, 0. Поступая
аналогично изложенному выше (см. стр. 75), находим предельные напряжения при А3 = 0 ч- 1
_ . __ _____т0тв_____
—тв(1-Я) + т0Я и запас прочности
S = Нт _ Ttnax
ТрТ,, I
(1' Я) -р т0Я тЦ1ах
где ттах — касательное напряжение в пружине при максимальной на
грузке.
В зависимости от ответственности пружины, качества материала и точности расчета нагрузки принимают Is] = 1,5-4-2,4.
§ 20.3. ЦИЛИНДРИЧЕСКИЕ ВИНТОВЫЕ ПРУЖИНЫ
Наибольшее распространение получили цилиндрические винтовые пружины растяжения и сжатия из круглой проволоки в связи с их сравнительной дешевизной. При повышенных требованиях к компактности конструкции используют пружины с квадратным или прямоугольным сечением витков.
Важнейшие параметры цилиндрических пружин (см. рис. 20.1, б): диаметр проволоки d (или размеры сечения прямоугольного витка), средний диаметр D, число рабочих витков п, шаг витков р, угол винтовой линии а = arctg [p/(nD) ] (как правило, не более 12°), индекс пружины с = Did, выбираемый в зависимости от d:
d, мм...................... <2,5 3—5 6—12
с ......................... 5—12 4—10 4—9
В пружинах сжатия крайние витки сближают между собой и навивают без зазора, а торцовые поверхности шлифуют для получения опорной плоскости (см. рис. 20.1, б), обеспечивающей необходимую устойчивость благодаря передаче усилия по возможности с минимальным смещением от оси пружины. Навивка этих пружин осуществляется с зазором между витками р — d, превышающим на 10—20% наибольшую деформацию ?.,11ах/п, приходящуюся на один виток. Это необходимо для предупреждения изменения жесткости пружины в результате касания витков, вызван-420
ного погрешностями шагов. Длина рабочей части пружины Нряб = •= tip. Общая высота пружины сжатия Но во избежание потери продольной устойчивости должна удовлетворять условию Н0/D < < 2,5 -т- 3. При больших значениях НJD пружины устанавливают на оправках или в гильзах [18, 47].
Пружины растяжения обычно изготовляют закрытой навивкой, обеспечивающей начальное натяжение (прижатие соседних витков) F „ = (1/4 ч- 1/3) FHni, где Flim — предельная нагрузка, при которой напряжение близко к пределу упругости. Эти пружины снабжают прицепами, простейший вариант которых показан на рис. 20.1, а. Длина недеформированной пружины вместе с прицепами обозначается Н0. При d > 3 мм рекомендуется применять
Рис. 20.6. К определению напряжений и перемещений цилиндрических пружин
закладные прицепы, вставленные в конические концевые участки цилиндрической пружины, или устанавливать пружины на винтовых пробках с крючками [18, 75].
Определим деформацию и напряжения цилиндрической пружины круглого сечения. На любое поперечное сечение со стороны отброшенной части пружины действуют усилия F и момент, равный 0,5 FD (рис. 20.6). Перемещения в направлении оси пружины, вызванные составляющими усилия F cos a, F sin а и момента 0,5 FD sin а, незначительны в сравнении с деформацией, обусловленной моментом Т — 0,5 FD cos а 0,5 FD, и в дальнейшем не учитываются. Для определения деформации пружины X воспользуемся формулой (5.7). Заметив, что:
получим
I = nDn/cos а <=& nDn; Q == F; dT/dF = 0,5Drr, Jp — nd4/32,
Г F£>2 dz _ SD3Fn F Fn
J 4GJP ~ Gd' ~~C Ci '
где Си Cj — соответственно жесткость всей пружины и жесткость одного витка:
С = Gd4/(8D3n); Сг = Сп = Gd4/(8Z>3). (20.3)
Наибольшее напряжение кручения возникает на внутренних волокнах сечения:
tmax = kT/Wp = 8kFD/(nd3) < [т], (20.4)
где Wp — полярный момент сопротивления сечения проволоки; k — поправочный коэффициент, учитывающий кривизну бруса:
(20.5)
1 + 1,45/с.
Рис. 20.7. К расчету цилиндрических пружин: а — пружина растяжения; б — пружина сжатия
Заметив, что D = cd, из (20.4) получим формулу для определения диаметра проволоки
d = 1,6 )/(с+ 1,45) Fmax/[T] (20.6)
В задании на проектирование пружины указывают упругое перемещение х при изменении нагрузки от начальной Fmln до конечной Fmax (рис. 20.7). Длина пружины при этом изменяется от Дт1п до Нтт. Если этим нагрузкам соответствуют деформации ^пип и ^тах> то на основании формулы (20.2) имеем
X ~~ 7'шах ~ (J max ^ niln) ^/Gj,
отсюда необходимое рабочее число витков
п = xCrKF^ — Fmln). (20.7)
Величину п округляют до целого числа, если п > 20, и до полувитка при п < 20. Длина пружины растяжения:
Н = Но ф- (F — Fo) n/Cf при F > Fo;
77 = Нщах = 7/0 -|- (7 max Fq) HlC\ П рИ А = F max.
Длина пружины сжатия при касании витков
Hd = (n0 — 0,5) d,
где n0 = п ± (1,5 -т- 2) — полное число витков; слагаемым (1,5 ч-2) учитываются поджатые витки (см. стр. 420).
Длина ненагруженной пружины сжатия
+ (р — d) п;
шаг ее при F = 0
p = d+ (1,1ч- 1,2) Zmax/«.
§ 20.4. УПРУГИЕ ЭЛЕМЕНТЫ С ПЕРЕМЕННОЙ ЖЕСТКОСТЬЮ
Рис. 20.S. Модель одномассовой системы
На рис. 20.8 показана модель одномассовой системы с упругим элементом, жесткость которого С (х) является функцией перемещения х. На массу tn действует возмущающая сила F (л:) = Fo sin <ос/. Круговая частота собственных колебаний <dc = [/С (х)/т [см. формулу (18.5) ] в данном случае является функцией х. В связи с этим при &>с = <ов не происходит значительного нарастания амплитуды, поскольку с изменением х изменяется значение С (х), а следовательно, и сос, и система выходит из резонанса. Это обстоятельство является важным достоинством упругих элементов с переменной жесткостью.
Переменной жесткостью обладают неметаллические упругие элементы, а также металлические, в которых с изменением нагрузки изменяются параметры, влияющие на жесткость. Примером является коническая пружина с постоянным шаге 20.1, г). С увеличением сжимающего усилия возникает касание (посадка) более податливых витков с большим радиусом. В результате уменьшения суммарной длины деформируемых витков с ростом F увеличивается значение Сл. Кривая, связывающая величины X и F, показана на рис. 20.2, г. Здесь точка 1 соответствует началу касания смежных витков, а точка 2 — моменту выбора зазоров между всеми витками. Пренебрегая влиянием деформаций в зоне контакта витков, можно считать, что при дальнейшем увеличении нагрузки величина X остается неизменной (см. рис. 20.2, г).
На рис. 20.9, а показана работающая на изгиб плоская пружина, защемленная в детали 1 на участке АВ. Профиль опорных поверхностей К и L подобран так, что при напряжении а < [о] в зависимости от направления F пружина может опираться на поверхность К или L. Благодаря этому плечо изгиба 1Х является величиной переменной (см. положение деформированной пружины, показанное штриховыми линиями). С увеличением F уменьшается /л и растет жесткость пружины С (х). Если опорная поверхность цилиндрическая с радиусом /?, то при Fl < EJ/R имеем lx = I, и жесткость пружины постоянна. При Fl > EJ/R плечо изгиба G < I-
В рассматриваемом случае напряжения во всех сечениях пружины, опирающихся на поверхность К или L, одинаковы. Благодаря этому при одинаковых размерах и допускаемых напряжениях потенциальная энергия пружины в варианте на рис. 20.9, а более чем в три раза превышает потенциальную энергию в варианте на рис. 20.1, м.
Рассмотренный способ осуществления переменной жесткости упругого элемента использован в устройстве (рис. 20.9, б), в котором детали 1 и 2 перемещаются одна относительно другой поступательно в направлении оси у. Нагрузка в данном случае распределяется среди нескольких пружин, что способствует получению
Рис. 20.9. Металлические упругие элементы с переменной жесткостью
компактной конструкции. Этот принцип используют в упругих муфтах (см. гл. 21). Если в каждое гнездо поместить вместо одной несколько плоских пружин, то благодаря интенсивному внешнему трению обеспечиваются хорошие демпфирующие свойства (рис. 20.9, в).
На рис. 20.9, г усилие между деталями 1 и 2, перемещающимися одна относительно другой поступательно в направлении оси у, передается пакетами гильзовых пружин, размещенных в полукруглых выемках. Внутри пакетов помещены сердечники 3. С увеличением нагрузки (начиная от некоторого значения) растет участок сердечника, охватываемого пружиной, и жесткость пакета возрастает. При отсутствии сердечников 3 нагрузка и относительные перемещения связаны с прямо пропорциональной зависимостью.
К упругим элементам с переменной жесткостью относятся также тарельчатые пружины (см. рис. 20.1, е), .краткие сведения о которых даны в § 20.5.
§ 20.Б. ТАРЕЛЬЧАТЫЕ И КОЛЬЦЕВЫЕ ПРУЖИНЫ
Тарельчатые пружины представляют собой кольцевую коническую оболочку, нагрузка на которую передается по наружной и внутренней кромкам. Они обычно состоят из ряда секций по две 424
тарелки в каждой. Пружина на рис. 20.1, е имеет четыре секции. Высота конуса / при приложении нагрузки уменьшается. Максимальная осадка составляет около 0,2 f. Секции монтируют на центрирующей оправке.
Тарельчатые пружины применяют при жестких требованиях к диаметральным габаритам и сравнительно небольших деформациях. Размеры их по заданной нагрузке подбирают из таблиц, приведенных в ГОСТ 3057—54. Число тарелок определяют по требуемой деформации пружины.
Кольцевые пружины состоят из соосных наружных и внутренних колец из высокопрочной стали с коническими сопряженными
Рис. 20.10. К расчету кольцевых пружин
поверхностями (см. рис. 20.1, ж, з). Для снижения жесткости применяют кольца с корытообразным сечением (см. рис. 20.1, з).
При приложении сжимающей нагрузки Fj наружные кольца растягиваются, а внутренние — сжимаются. В результате их сближения происходит осадка пружины. Из условия равновесия имеем (рис. 20.10, а)
Fr = Fn sin ф 4- <₽)/cos <p.
При уменьшении нагрузки из-за действия сил трения осадка начинает снижаться только после того, как сжимающее усилие достигнет значения (рис. 20.10, б)
F2 = Fn sin ф — <p)/cos ф = Л sin ф — ф)/81п ф + ф).
На рис. 20.10, в в системе координат X, F показана линия загрузки 1 и приближенно представлена линия разгрузки 2. У кольцевых пружин велики потери на трение, и для них 1Гг/( W + + Гг) 0,6.
Отличающиеся компактностью, кольцевые пружины используют при действии повторяющихся ударных нагрузок, когда необходимо обеспечить высокие амортизирующие и демпфирующие свойства [18, 47].
Глава 21. МУФТЫ1
§21.1. ОБЩИЕ СВЕДЕНИЯ
Из многочисленных устройств, называемых муфтами, ниже рассматриваются только приводные муфты, предназначенные для передачи крутящего момента между двумя валами или валом
Рис. 21.1. Возможные смещения соединяемых валов: а — соосное положение; б — осевое смещение 1а; в — радиальное смещение 1Г; г — угловое смещение у; д— комбинированное смещение
и установленными на нем деталями (зубчатыми колесами, звездочками, шкивами и др.).
Наряду с передачей крутящего момента муфты выполняют ряд других функций: обеспечение взаимной неподвижности соединяемых деталей (жесткие, или глухие муфты); возможность работы при показанных на рис. 21.1 смещениях относительно заданного размера а (компенсирующие и подвижные муфты); улучшение динамических характеристик привода (упругие муфты); ограничение передаваемого момента (предохранительные муфты); возмож-
ность соединения или разъединения валов и других деталей на ходу или в неподвижном состоянии (сцепные управляемые муфты); регулирование передаваемого момента в зависимости от угловой скорости (муфты центробежные, гидродинами-
ческие и др.); передача момента только в одном направлении (обгонные муфты) и пр. Наиболее распространенные муфты стандартизованы. Среди их важнейших паспортных данных (габариты, размеры посадочных мест, масса, момент инерции и др.) указывают передаваемый крутящий момент Ттабл. Муфты подби-
рают по расчетному моменту
т ______ьт -- т
1 расч —‘ гг1 дл 1 табл»
(21.1)
где ТдЛ — наибольший длительно действующий момент; k — коэффициент, учитывающий режим работы.
Коэффициент k рассчитывают на основании данных о спектре нагружения с учетом влияния различных уровней нагрузки на прочность и износостойкость деталей муфты. При отсутствии таких данных пользуются приближенными рекомендациями, отражающими в известной степени опыт эксплуатации. В соответствии с этим определяют k = k^k^, где kT — коэффициент без-
Гл. 21 написана при участии Ю. А. Державна и И. 3. Томсинского
опасности, учитывающий характер последствий при выходе муфты из строя (kr =1,0-?- 1,8); k2 — коэффициент, учитывающий условия работы муфты: удары, толчки, реверсы и т. д. (k2 = 1,0-4- 1,5; меньшие значения — при спокойной нагрузке, большие — при работе с ударами, а также при реверсивной нагрузке).
§ 21. 2. ГЛУХИЕ МУФТЫ
Рис. 21.2. Втулочная муфта
Рис. 21.3. Фланцевая муфта: а — с цилиндрическими отверстиями для валов; б — с коническими отверстиями для валов
Глухие муфты создают взаимную неподвижность соединяемых деталей. Их применение определяется в основном условиями монтажа и целесообразностью ограничения размеров. Валы, соединенные глухой муфтой, работают как одно целое, поэтому наряду с крутящим муфта может воспринимать изгибающий момент, поперечные и осевые нагрузки.
Простейшую конструкцию при минимальных диаметральных габаритах имеет втулочная муфта. Усилие между валами и муфтой передается работающими на срез штифтами (рис. 21.2), шпонками или зубчатыми (шлицевыми) соединениями. При монтаже и демонтаже обычно возникает необходимость в относительном осевом смещении валов муфты. В связи с этим для втулочных муфт, как правило, не используют посадки с гарантированным натягом. Это накладывает ограничения на использование втулочных муфт при действии изгибающего момента, поскольку не обеспечи
вается необходимая жесткость соединения и возникает опасность появления фреттинг-коррозии из-за неизбежных в этом случае микроперемещений (см. гл. 2). Втулочные муфты применяют обычно для диаметров валов не более 60—70 мм.
Из глухих муфт наибольшее распространение получили фланцевые (поперечно-свертные) муфты, состоящие из двух полумуфт, соединенных болтами, поставленными без зазора (рис. 21.3). При установке болтов с зазором масса муфты намного больше, чем в варианте без зазоров, а несущая способность при одинаковых размерах в пять-шесть раз меньше (см. гл. 8). В случае установки всех болтов с зазором необходимо предусматривать центри-
рующие буртики, обеспечивающие соосность соединяемых валов.
Расчет болтов, установленных без зазора, выполняют по формулам (8.35) и (8.50) —(8.52). Болты, установленные с зазором, рассчитывают по формулам (8.35), (8.41)—(8.43) и (8.53).
На фланцевые муфты имеется ГОСТ 20761—-75 для валов диаметрами 12—220 мм и крутящих моментов 8—45 000 Н-м.
§ 21.3. КОМПЕНСИРУЮЩИЕ МУФТЫ
Вследствие погрешностей изготовления, упругих и температурных деформаций, радиальных зазоров в опорах, неточного монтажа и других причин возникают смещения осей соединяемых валов (см. рис. 21.1). Для обеспечения в этих условиях надежной работы привода с минимальными дополнительными нагрузками на валы и опоры применяют компенсирующие муфты: зубчатые, цепные и др.
Зубчатые муфты. Наиболее распространенной является зубчатая муфта, состоящая из двух втулок 1 с внешними зубьями и скрепленных болтами двух обойм 2 с внутренними зубьями (рис. 21.4, а). За счет зазоров в зубчатых сочленениях каждая из втулок может поворачиваться относительно обоймы на некоторый угол у, обычно не превышающий 0,5°. Сочетание относительных угловых перемещений в двух зубчатых сочленениях с возможностью некоторых осевых смещений обеспечивает получение любых (в определенных пределах) взаимных положений соединяемых валов. При значительных смещениях соединяемых валов для получения больших L применяют соединяемые промежуточным валом муфты, каждая из которых имеет одно зубчатое сочленение (см. рис. 21.5, б).
Для зубчатых муфт используют эвольвентное зацепление с профильным углом а = 20°, числом зубьев z7 = z2 — z и коэффициентом высоты = 0,8 (см. элементы геометрии зацепления в гл. 14). Расчетный диаметр зубчатого сочленения муфты dpacq = = т (z + 2х). Коэффициент смещения х выбирают из условия равнопрочности на изгиб зубьев втулки и обоймы. Центрирование обоймы относительно втулки, как правило, выполняют по диаметру da = т (z + 2ha + 2х), при этом поверхность da обрабатывается по сфере (рис. 21.4, б, в). В малоответственных передачах при малых скоростях иногда применяют центрирование по боковой поверхности зуба. Зубья втулки выполняют с линейчатыми образующими (рис. 21.4, б) или с продольной модификацией — бочкообразные (рис. 21,4, в). Второй вариант предпочтителен, поскольку в этом случае перекос не приводит к кромочному контакту (т. е. нагрузка не сосредоточивается на краю зуба), вызывающему резкое увеличение загруженности сопряженных поверхностей и напряжений изгиба у основания зубьев.
Достоинствами зубчатых муфт, обеспечивающими их большое распространение в транспортных и стационарных машинах, явля-428
ются высокая нагрузочная способность и компактность, обусловленные передачей нагрузки большим числом одновременно работающих пар зубьев, технологичность и возможность использования в практически неограниченных диапазонах угловых скоростей и передаваемых моментов. Малые диаметральные габариты обеспечили успешное применение этих муфт и в планетарных передачах (см. рис. 14.60).
Рис. 21.4. Зубчатая муфта
При повороте вала муфты на угол л сопряженные зубья перемещаются один относительно другого на величину ydpac4 с относительной скоростью скольжения vs = 0,5<x>dpac4 у cos ср, где <о — угловая скорость вращения муфты; <р — угловая координата рассматриваемого зуба.
Осциллирующие относительные перемещения сопряженных элементов зубчатой муфты вызывают скольжение зубьев и циклический характер изменения контактных напряжений. В подобных условиях главным критерием работоспособности зубчатых муфт
служит сопротивление изнашиванию активных поверхностей зубьев. Основными видами изнашивания в этом случае являются молекулярно-механическое и коррозийно-механическое (см. гл. 2), а также абразивное при недостаточной эффективности уплотнительных устройств. При указанных видах изнашивания несущая способность пропорциональна твердости контактирующих поверхностей. В связи с этим для снижения массы и габаритов муфты
твердость активных поверхностей назначают обычно не менее HRC 35—45. Твердость порядка HRC 45—55 достигают поверхностной закалкой, при этом используют стали с содержанием углерода около 0,4% (марок 40, 45, 40Х и др.). Большая нагрузочная способность достигается при цементованных и закаленных или азотированных зубьях (см. гл. 6).
Для зубчатых муфт предпочтительны масла повышенной вязкости с противозадирными присадками.
Для зубчатых муфт общего назначения широко используют данные о передаваемых моментах при некоторых заданных геометрических размерах, приведенные в литературе [57 ].
Нагрузка среди зубьев муфты распределяется неравномерно. При у = 0 это связано с погрешностями изготовления. При у ¥- 0 даже при идеальной точности изготовления нагрузка на зубья 430
неодинакова из-за переменности бокового зазора. Если перекос осей звеньев 1 и 2 (рис. 21.5, а) на угол у произошел в плоскости уОг, то при отсутствии деформирующего усилия минимальный боковой зазор между зубьями имеется в плоскости x'Oz, а максимальный — в плоскости y'Oz. При возрастании нагрузки в результате деформирования зубьев число их пар, участвующих в работе, увеличивается, а неравномерность распределения нагрузки среди них снижается. При этом две зоны максимально, а также две зоны минимально загруженных зубьев располагаются соответственно вблизи осей х’ и у'.
Вследствие перекосов сопряженных зубьев звеньев 1 и 2 результирующая напряжений смятия, действующая на каждый из нагруженных зубьев, смещена от средней плоскости на некоторое расстояние г, (на рис. 21.5, а показано нормальное усилие Аа;, приложенное к Ему зубу звена 2, и сила трения Folf, вызванная относительным скольжением сопряженных зубьев). Проекция главного момента всех сил Fai и Falf на ось х равна Мх = £ЕО1| г,-1. Это выражение можно представить в следующем виде:
Л4ж==фФ7/(<1расчсо8а),
где b — ширина венца (см. рис. 21.4); а — профильный угол (см. рис. 21.5, а); ф— коэффициент, зависящий от формы зубьев в продольном направлении, величины у и степени загруженности; для зубьев с прямолинейной образующей при у = 0,5° и полной загрузке можно принять ф 0,6; при продольной модификации ф 0,3.
Проекция главного момента на ось у равна Му — S 1 Xj |, i
где xt — координата точки приложения усилия FOi. Это выражение можно представить в виде
Му <=» 2fT/(n cos а),
где f — коэффициент трения на активной поверхности зуба; в среднем / = 0,08-нО, 12.
На рис. 21.5, б показаны векторы Мх и Му моментов, действующих на зубчатые венцы 2 и 4 промежуточного вала 3. На каждую из полумуфт 1 и 5 при двух одинаковых зубчатых сочленениях и параллельных валах венцов 1 и 5 помимо момента Т действуют момент М, вектор которого перпендикулярен к оси вращения, и радиальное усилие Fr = 2M/L. Угол между векторами М и F, равен л/2. Момент М и сила Ff учитываются при определении реакций опор и расчете валов на прочность.
Цепные муфты. Цепная муфта (рис. 21.6) состоит из двух полумуфт-звездочек с одинаковым числом зубьев и охватывающей их однорядной или двухрядной роликовой цепи. Цепные муфты позволяют компенсировать угловые смещения валов до 1°. При использовании цепей с бочкообразными роликами угловые смещения могут доходить до 3—5°. Возможное радиальное смещение осей зависит от размеров муфт и шага цепи и может достигать
r.ru
1 мм. Зазоры в зацеплении создают значительный люфт, поэтому не рекомендуется применять муфты при реверсивных нагрузках. На цепные однорядные муфты имеется ГОСТ 20742—75 для валов диаметрами 20—140 мм и крутящих моментов 63—8000 Н -м.
Рис. 21.6. Цепная муфта
§ 21.4. ПОДВИЖНЫЕ МУФТЫ
При значительных смещениях соединяемых валов применяют
подвижные муфты, среди которых наибольшее распространение получили шарнирные муфты. Эти муфты позволяют передавать
б)
Рис. 21.7. Схемы шарнирных муфт
крутящий момент между валами с пересекающимися осями, угол между которыми может быть постоянным и переменным.
Применяют шарнирные муфты с переменным отношением угловых скоростей co2/®j соединяемых валов (асинхронные муфты) и с со2/ш1 = const (синхронные муфты).
Полумуфты А и В шарнирных муфт С W2/(Dj^= =£const (рис. 21.7,а) имеют вилкообразную форму и образуют вращательные пары с промежуточным звеном С, выполняемым обычно в виде крестовины. Оси относительного вращения сопряженных звеньев А—С и В—С пересека-
ются под прямым углом. Простейшая конструкция малогабаритной шарнирной муфты (ГОСТ 5147—69) имеет шарниры трения скольжения и промежуточное звено С в виде параллелепипеда
с отверстиями, оси которых пересекаются под прямым углом (рис. 21.8). В этих муфтах диаметр отверстий для валов колеблется от 8 до 40 мм, а передаваемый крутящий момент — от 12,5 до 1280 Н-м. В трансмиссиях автомобилей, дорожных и других
машин широко используют шарнирные муфты, с промежуточным звеном С в виде крестовины, имеющей шарниры с игольчатыми подшипниками (рис. 21.9).
Шарнирные муфты допускают перекос осей на угол до 40—45°. При использовании сдвоенных шарнирных муфт (рис. 21.7, б) взаимное положение соединяемых валов 1 и 2 может быть любым в пределах, допускаемых размером L и экстремальным значением утах (максимальное параллельное смещение валов 1 и 2 равно Tinax^-)-
Для передачи крутящего момента между ва
Рис. 21.9. Шарнирная муфта с игольчатыми подшип никами
лами с пересекающимися осями применяют также упругие муфты с неметаллическими упругими элементами (см. рис. 21.17).
На рис. 21.7, а показана система координат хОу с осью у, перпендикулярной к оси вала 1 и лежащей в плоскости Е осей соединяемых валов, и осью х, перпендикулярной к этой плоскости. Углы фх и Фг поворота валов 1 и 2 относительно осей хну, связаны зависимостью tg фг = tg ф2 cos Т» из которой находим
(бф2./б/2)/(бф]/б/1) = (й2/СО, = COS у/( 1 — Sin2 у COS2 фх).
Далее имеем:
(фг/^шах = 1/cosy при Фх = 0, л, 2л, ...;
(co2/<Dx)min = cos у при фх = 0,5л, 1,5л, ...
Если СОх = const, то «2min/co2inax = cos 2у.
Неравномерность вращения вала 2 при oij = const характеризуется коэффициентом Кнр = <oa2/<offl2, где гоа2 = 0,5 (<о21пах — — ю2 mm) = 0,5о>х sin У tg у — амплитуда изменения угловой скорости вала 2; com2 = (Oj — средняя скорость. В результате имеем
К„р = °.5 sin Т tg у.
Отсюда следует, что неравномерность вращения резко возрастает с увеличением у. Так,
Рис. 21.10. Синхронная шарнирная
муфта
с изменением у от 10 до 40° величина увеличивается от 0,015 до 0,27.
Переменность передаточного отношения вызывает динамические нагрузки. На основании приведенных зависимостей легко обнаружить, что при использовании сдвоенных шарнирных муфт для соединения валов (см. рис. 21.7, б), оси которых лежат в одной плоскости, имеем ® 2/ш х = const, если уг = у2 и оси шарниров промежуточном валу 3, парал-
полумуфт, закрепленных на
лельны. Если же оси валов 1 и 2 лежат не в одной плоскости, то для получения со2/со1 = const угол между осями шарниров вала 3 должен быть равен углу между плоскостями |Х-з и §2_3, в которых лежат оси валов 1—3 и 2—3. Однако и при сох = <о2 на валы 1 и 2 действуют периодически изменяющиеся возмущающие моменты, связанные с инерционностью и колебаниями угловой скорости вала 3 и насаженных на него полумуфт.
На каждую из полумуфт помимо момента Т действует момент М, вектор которого перпендикулярен к плоскости, проходящей через 431
оси вала и шарниров. Величина М периодически изменяется от нуля при совпадении оси шарниров с плоскостью осей | (см. рис. 21. 7, а) до Л)тгх, когда ось шарнира перпендикулярна к плоскости Е. У ведущей и ведомой полумуфт величина Л4П1ах равна соответственно Т tg у и Т sin у, где Т — момент ведущей полумуфты. Момент М учитывают при определении реакций опор и расчете валов на изгиб.
Рис. 21.10 поясняет принцип действия синхронной шарнирной муфты. В меридианных канавках полумуфт размещены шарики, предназначенные для передачи крутящего момента. С помощью сепаратора и рычажного устройства (на рис. 21.10 не показаны) центры шариков располагаются в биссекторной плоскости А—А угла л—у, благодаря чему обеспечивается постоянство отношения (Ог/юр
§ 21.6. УПРУГИЕ МУФТЫ
В упругих муфтах усилие между полумуфтами передается через упругие элементы (см. гл. 20), и это определяет их основные свойства: способность амортизировать толчки и удары; демпфировать колебания и предупреждать резонанс; разгружать отдельные элементы привода от периодически изменяющихся возмущающих моментов, действующих на вращающиеся массы исследуемого агрегата. Особенно эффективны упругие муфты в приводах с угловыми люфтами при реверсивной нагрузке. Помимо возможности улучшения динамических характеристик привода упругие муфты выполняют в известной степени и функции компенсирующих муфт, допуская некоторые неточности взаимного расположения валов (см. рис. 21.1).
Важнейшей характеристикой упругой муфты является функция Т = f (<р), связывающая передаваемый момент (при загрузке и разгрузке) с углом относительного смещения полумуфт, обусловленного деформациями упругих элементов.
Крутильная жесткость муфты C((i = dTI dtp [см. формулы (5.1) и (5.2)1 в зависимости от конструкции упругих элементов и способа их установки может быть постоянной и переменной.
При совпадении или кратности частот <ос и <ов собственных и вынужденных колебаний увеличиваются, как известно, амплитуда колебаний и момент Т. При С9 =£ const это приводит к изменению сос и выходу системы из резонанса (см. гл. 20).
Демпфирующие свойства муфты зависят от материала и конструкции упругих элементов. Упругие элементы могут быть металлическими (различного вида пружины) и неметаллическими (в основном из резины).
Муфты с неметаллическими упругими элементами отличаются простотой конструкции, технологичностью и хорошими амортизирующими, демпфирующими и электроизолирующими свойствами. Благодаря этим показателям упругие муфты в основном 435
выполняют с неметаллическими упругими элементами, но с ограничениями по величине передаваемого момента.
В качестве материала для неметаллических упругих элементов наибольшее распространение получили различные сорта резины, отличающиеся высокой эластичностью и большим внутренним трением. Этим объясняются хорошие амортизирующие и демпфирующие свойства муфт с резиновыми упругими элементами. Коэффициент демпфирования в них может достигать 0,3—0,4. При допускаемых напряжениях энергия, затрачиваемая на деформирование единицы массы резины, приблизительно в десять раз
Рис. 21.11. Муфты с металлическими упругими элементами, имеющими линейную характеристику
больше, чем у высокопрочной стали. Однако резина подвержена старению (необратимым изменениям свойств под воздействием окружающей среды), приводящему к снижению прочности и эластичности. Долговечность упругих резиновых элементов в связи с этим значительно меньше, чем стальных.
Потенциальная энергия деформированного тела пропорциональна квадрату напряжения. В связи с этим эффективной мерой снижения массы упругих элементов при заданной энергоемкости является использование конструкций, обеспечивающих наиболее равномерное распределение напряжений.
В качестве металлических упругих элементов используют пружины. В муфте, показанной на рис. 21.11, а, крутящий момент между полумуфтами 1 и 2 передается торсионным валом 3. Те же функции в муфте на рис. 21.11, б выполняют витые цилиндрические пружины сжатия. Эти муфты имеют линейную упругую характеристику (см. рис. 20.2, б). Если упругие элементы деформированы при отсутствии рабочей нагрузки (сборка с предварительным натягом) и имеется жесткий упор, ограничивающий относи* 436
тельное угловое перемещение полумуфт, то зависимость между Т и q изобразится ломаной линией (рис. 21.11, в).
В муфте, показанной на рис. 21.12, упругим элементом служит змеевидная ленточная пружина 3 прямоугольного сечения, размещаемая во впадинах зубчатых венцов полумуфт 1 и 2. Упругая характеристика этой муфты зависит от продольной формы зубьев. В варианте на рис. 21.12 эта форма аналогична показанной на рис. 20.9, б, поэтому зависимость между Т и ср соответствует
Рис. 21.12. Муфта со змеевидной пружиной
кривой на рис. 20.2, г и, следовательно, муфта обеспечивает выход из резонанса.
Рассматриваемые муфты выполняют также с пакетами пло-
Рнс. 21.13. Схема двухмассовой системы с упругой муфтой
скпх пружин (см. рис. 20.9, в). В этом случае внешнее трение между смежными пружинами обеспечивает хорошие демпфирующие свойства. Рассмотрим работу упругой муфты на следующем примере. Полагаем, что на одно из вращающихся звеньев агрегата, состоящего из двигателя, передачи и рабочей машины, действует возбуждающий момент То sin сов/, вектор которого параллелен оси вращения. Этим звеном может быть, например, рабочий орган машины или вал двигателя. Рассматриваемый агрегат представлен в виде двухмассовой системы (рис. 21.13) с приведенными моментами инерции 41й Jm2- Между массами Jml и Jma помещена упругая муфта УМ. Полагаем, что момент Т0 sin coBt действует на массу Jm2. Задача заключается в выборе такого значения Сф муфты, при котором на массу 7т1 действует заданная небольшая часть момента То sin <ов/. Пусть эта часть равна р70 sin сов/, где р 1. Воспользуемся решением, приведенным в гл. 18, (см. стр. 378). По заданным значениям Jml, Jm2, сов и р из формул (18.13) и (18.11) находим сос и величину
Сф — Ci)qJml Jmll(Jml~\~ Jmi)-
Следует заметить, что вал, соединяющий массы и Jm2 (см. рис. 18.4, г), при соответствующем подборе жесткости может выполнять функции упругой муфты с Сф = const. Для этой же
цели используют муфты с торсионным валом (см. рис. 21.11, а), однако значительно меньшие осевые габариты обеспечиваются, например, при использовании муфты по схеме на рис. 21.11, б.
На рис. 21.14—21.18 показаны упругие муфты, получившие широкое распространение: с упругими элементами, работающими
Рис. 21.14. Упругая втулочно-пальцевая муфта
Рис. 21.15. Муфта с упругим элементом в виде звездочки
на сжатие (рис. 21.14 и 21.15), изгиб (рис. 21.16), сдвиг (рис. 21.17) и кручение с крутильным сдвигом (рис. 21.18).
Большое распространение в приводе от электродвигателя и в других случаях получили втулочно-пальцевые муфты МУВП (рис. 21.14), передающие усилия через резиновые гофрированные втулки, взаимодействующие с поверхностями отверстий одной из полумуфт и стальными пальцами, установленными в другой полумуфте. Эти муфты допускают смещения валов 1Г = 0,2-4-0,5 мм; 1а = 1 -4- 5 мм и у до 1° (см. рис. 21.1). Следует заметить, что с ростом 1Г и у увеличиваются изнашивание упругих элементов и не-438
равномерность распределения нагрузки среди пальцев муфты. Поперечная сила, вызванная этой неравномерностью, в муфтах МУВП достигает 25% от 2T/Dm (рис. 21.14), и это необходимо
Рис. 21.16 Муфта с упругими элементами, работающими на изгиб
учитывать при расчете валов и опор. Муфты МУВП сравнительно Мало податливы, и распределение напряжений в упругих элементах
Рис. 21.17. Муфта с упругим элементом, работающим на сдвиг
отличается большой неравномерностью. Но достоинством этих муфт является простота конструкции и замены упругих элементов, малые габариты и
Рис. 21.18. Муфта с торообразной упругой оболочкой
масса. Работоспособность их определяется стойкостью втулок, критерием оценки которой является давление между пальцами и упругими элементами, определяемое в предположении равно
мерного распределения нагрузки между пальцами [см. формулу (5.37) и рис. 21.14]:
р = 871/(лг/пСт) « [р], где z — число пальцев.
Величина [р J зависит от режима работы, точности монтажа и материала упругих элементов. Обычно принимают [р ] = 3,5 МПа. При малых угловых скоростях и высокой точности монтажа значение [р ] может быть увеличено на 25—30%. На муфты МУВП имеется ГОСТ 21424—75 * для диаметров валов от 9 до 160 мм и крутящих моментов от 6,3 до 16 000 Н-м.
В муфте, показанной на рис. 21.15, работающий на сжатие упругий элемент 3 выполнен в виде звездочки, размещаемой между торцовыми кулачками полумуфт 1 и 2. В каждую сторону момент передается половиной зубьев звездочки. На муфты этого типа имеется ГОСТ 14084—76 для диаметров валов до 45 мм и крутящих моментов до 450 Н-м. Эти муфты, так же как и муфты Л1УВП, компактны, надежны и технологичны, но мало податливы, и работоспособность их резко снижается с увеличением смещений осей валов.
При проектировании упругих элементов, работающих на сжатие, следует учитывать, что у резины коэффициент Пуассона |.i = 0,5 и, следовательно, объем при деформировании почти не меняется. В связи с этим необходимо предусматривать возможность увеличения размеров сжимаемых элементов в поперечном направлении, так как в противном случае упругий элемент оказывается практически недеформируемым, а муфта не выполняющей свое назначение.
В муфте, показанной на рис. 21.16, работающие на изгиб резиновые упругие элементы 3, армированные кордом, установлены в пазах полумуфты / и взаимодействуют с выступами полумуфты 2. Эта муфта в сравнении с муфтами с упругими элементами, работающими на сжатие, отличается большей податливостью (энергоемкостью) и способна компенсировать большие отклонения 1Г и у.
На рис. 21.17 показана муфта, упругий элемент которой выполнен в виде диска с коническими рабочими поверхностями с общей вершиной. Элемент 3 приклеивается или привулканизируется к металлическим дискам, соединяемым винтами с полумуфтами
Т аблица 21.1. Ориентировочные соотношения размеров для упругих муфт
Соотношение размеров Номер рисунка
21.12 21.14 21.15 21.17 21.18
Did 3-3,5 3,5—4 2,5 1,7—2,3 4—5
Lid 2—2,5 3,5—4 4—4,5 4—4,5 3—4
1 и 2. Эта муфта отличается высокой энергоемкостью при минимальной массе упругого элемента, поскольку напряжения кручения в нем распределены равномерно по всему объему.
Определим относительный угол поворота полумуфт <р и напряжение кручения т в упругом элементе, вызванные моментом Т. Момент, передаваемый кольцевым участком радиусом р, толщиной dp иг длиной /р, составляет dT = 2m: dp, где т = Gp<p//P = = G£><p/(2Z). Поэтому
0,50 т==л№ф J p2rfp;
°-5Dbh
— 2477 ’____________127 <- I
ф ~ jiDG (D3 — D3H) ’ Т-я(оЗ_дЗн)- W-
Принимают [т] 0,2-г-0,3 МПа [57].
На рис. 21.18 показана муфта с упругим элементом 3 в виде торообразной оболочки, прикрепленной к полумуфтам 1 и 2 прижимными кольцами 4. Оболочка выполняется из резины, армированной кордом. Муфта обладает хорошими амортизирующими и демпфирующими свойствами и может компенсировать значительные смещения ъалов: 1а = 2-4-6 мм; 1Г ~ 1-4-5 мм; у = 2-4- 4°. На данные муфты имеется ГОСТ 20884—75 для валов диаметрами 14—240 мм и крутящих моментов 20—40 000 Н-м. Диаметральные габариты этих муфт больше, чем упругих муфт других типов.
Соотношения размеров Did и Lid для упругих муфт различных типов представлены в табл. 21.1.
§ 21.6. СЦЕПНЫЕ УПРАВЛЯЕМЫЕ МУФТЫ
Сцепные управляемые муфты предназначены для соединения или разъединения валов, а также валов и установленных на них деталей, на ходу или в неподвижном состоянии с помощью специальных механизмов управления. Эти муфты широко используют при частых пусках и остановках, при необходимости изменения режима работы с минимальной затратой времени, что характерно для транспортных машин, металлорежущих станков и др.
Передача момента осуществляется зацеплением (сцепные кулачковые и зубчатые муфты) или силами трения (сцепные фрикционные муфты). Сцепные кулачковые и зубчатые муфты имеют значительно меньшие габариты и массу, чем фрикционные, и обеспечивают неизменное относительное положение соединяемых деталей. Однако достаточно плавное включение на ходу при использовании этих муфт возможно только благодаря применению специальных синхронизаторов при ограниченных разгоняемых массах [66]. Фрикционные муфты позволяют осуществить плавное включение без ограничений скорости и передаваемого момента.
Отклонение от соосности ведет к снижению несущей способности сцепных управляемых муфт, поэтому высокая точность установки соединяемых деталей является необходимым условием нормальной работы этих муфт.
Кулачковые и зубчатые сцепные муфты. Полумуфты этих муфт имеют торцовые выступы — кулачки (рис. 21.19, а) или внешние и внутренние эвольвептные зубья (рис. 21.19, б). Включение и выключение осуществляется перемещением одной из полумуфт (как правило, ведомой) в направлении оси. При сближении полумуфт выступы или зубья одной из них входят во впадины другой, и рабочее усилие передается их боковыми поверхностями.
Рис. 21.19. Сцепные муфты: а—кулачковые; б — зубчатые
На рис. 21.19, а показано сечение цилиндрической соосной поверхностью находящихся в зацеплении кулачков с прямоугольными и трапецеидальными профилями. При трапецеидальном профиле обеспечивается беззазорность соединения полумуфт. Профильный угол а принимают небольшим (3—10°) для снижения усилия прижатия полумуфт. Для облегчения включения торцы зубьев зубчатых муфт выполняют округленными.
Основными причинами выхода из строя кулачковых и зубчатых сцепных муфт являются изнашивание сопряженных поверхностей (в том числе и поверхностей в сопряжении подвижной полумуфты с валом) и поломки зубьев или кулачков. Для обеспечения минимальных массы и габаритов особенно целесообразно применять цементацию с последующей закалкой (см. гл. 6).
Динамический момент Тд, возникающий при включении па ходу кулачковой (зубчатой) муфты, приближенно можно определить, базируясь на предпосылках, заложенных при рассмотрении соударения зубьев зубчатых передач [см. формулу (14.27)1:
7"д =: е)у Jm np Сф, где <оу — разность угловых скоростей полумуфт в момент включения (угловая скорость удара); Jmnp = + Л,2) —
приведенный момент инерции двухмассовой системы; — сумма коэффициентов крутильной жесткости деталей, передающих крутящий момент между присоединенными массами.
Фрикционные сцепные муфты. Эти муфты передают крутящий момент за счет сил трения на рабочих поверхностях различной формы: дисковой (рис. 21.20, а, б), конусной (рис. 21.20, в), цилиндрической (рис. 21.20, г). Муфты работают как со смазкой, так и всухую. Давление на трущихся деталях создается с помощью механизмов включения различного вида. Наибольшее распространение получили пружинно-рычажные механизмы; для дистанционного управления муфтой удобны гидравлические, пневматические или электромагнитные устройства [57, 66].
Рис. 21.20. Фрикционные сцепные муфты
Основными критериями работоспособности фрикционных муфт являются надежность сцепления, высокая износостойкость и теплостойкость трущихся деталей.
При выборе фрикционных материалов (табл. 21.2) учитывают частоту вращения, время буксования, число включений в час, место установки муфты в приводе.
Допускаемый крутящий момент, который может передавать фрикционная муфта,
[T] = 0,5[Fn]fclDm2/Kcu, (21.2)
где [F„] = Af [р] — нормальное усилие между сопряженными поверхностями трения; A f — площадь поверхности трения; z — число пар поверхностей трения; Ксц = 1,3-е- 1,5 — коэффициент запаса сцепления; /ст — коэффициент трения покоя; [р 1 — допускаемое давление.
T а блица 21.2. Характеристики основных фрикционных материалов
Материал фрикционной пары Наличие смазки Допускаемое давление [р J. МПа Коэффициент трения покоя после приработки (минимальные значения) fcT Коэффициент трения при скольжении после приработки (средние значе-ния) fCK Допускаемая температура в контакте [О], °C
Сталь—металлокерамика Есть 2,5—3,0 0,15 0,08 *
Сталь—металлокерамика Нет 1,0-1,5 0,25 0,18 600
Сталь—сталь Есть 0,4—0,6 0,12 0,06 *
Сталь—бронза » 0,4—0,5 0,10 0.05 *
Стал ь—рети накс Нет 1,0—1,5 0,35 0,25 600—800
Сталь—чугун Есть 0,4—0,6 0,15 0,08 *
Примечание. При скорости скольжения V > 2,5 м/с, измеряемой
по среднему диаметру £>т давление LpJ рекомендуется понижать: при о 5 м/с —
на 15%; при v & 10 м/с — на 20%; при V => 15 м/с — на 35%.
* Температура в контакте определяется температурой вспышки масла.
Заметив, что Af = nbDm (рис. 21.20), где b— ширина поверхности трения, получим
|Т] = 0,5nbD^ [р] f„zlKca_. (21-3)
Задаваясь величиной ф = b!Dm, из (21.2) получим формулу для проектировочного расчета
Dm > -/2РТ/(л [р]гф). (21.4)
Для дисковых и конусных муфт принимают ф = 0,15 ч- 0,25; для цилиндрических — яр = 0,2 ч- 0,3.
Осевое усилие, необходимое для создания нормального усилия Fn [см. рис. 21.20 и формулу (21.2)],
Ра = Fn sin а = 2Т0 sin a/(fclzDm). (21.5)
Во время включения фрикционной муфты неизбежно проскальзывание трущихся поверхностей, сопровождающееся выделением тепла. Продолжительность включения /вкл зависит от характера изменения во времени момента трения муфты момента
сил сопротивления ведомого вала Тсп (I), момента движущих сил, приведенных к валам ведущей и ведомой полумуфт, приведенных моментов инерции и JmBM и других факторов. При t — ^вкл скорости (овщ (/) и совм (t) ведущей и ведомой полумуфт равны (рис. 21.21)
Работа сил трения, используемая при тепловых расчетах,
*вкл
Wf = f Tf (f) Кщ (/) - <овм (01 dt. (21.6)
о
Расчет по формуле (21.6) представляет значительные трудности, поскольку входящие в нее величины взаимосвязаны и за
висят от таких трудно учитываемых факторов, как закон измене-
ния нормальной нагрузки между поверхностями трения, характер зависимости коэффициента трения скольжения /м от давления и скорости скольжения, закон изменения Тсп (t), частота собственных и вынужденных колебаний и т. д.
При определении приближенных величин /вкл и Wf пренебрегают временем f нарастания момента Тf (t) до величины Тсп (/), составляющими обычно незначительную часть от /вкл (рис. 21.21), далее принимают Тсп (/) = = Tcn = const; Tf (t) = Tf — const и % (0 = ивщ = const. При этих данных
(t)/dt — (Tf Tcn)/-^m ВЫ-
При t — /вкл имеем:
C^BM (t) ~ ®ВЩ> tBKJI = Jm вм®вщ/(^ Лп)
Рис. 21.21. К расчету фрикционных муфт
Подставив найденные значения в формулу (21.6), получим Wf == 0,5ЗДщ/т m/(Tf - Тсп).
Для рассмотренного случая характер изменения скорости и момента, передаваемого муфтой, на рис. 21.21 представлен штриховыми линиями.
§ 21.7. САМОДЕЙСТВУЮЩИЕ МУФТЫ *
Самодействующими и самоуправляющимися называются муфты, автоматически выполняющие одну из следующих функций: а) ограничение передаваемой нагрузки (предохранительные муфты); б) передачу момента только в одном направлении (обгонные муфты); в) включение и выключение при заданной скорости (центробежные муфты).
1 Здесь даны краткие сведения о рассматриваемых муфтах. Более полные данные см. в источниках [57, 66].
Предохранительные муфты срабатывают, когда крутящий момент превышает некоторую установленную величину Тт. Для предупреждения слишком частых срабатываний обычно величину Тт назначают несколько большей Тгаах, например на 25%. При быстронарастающих перегрузках (особенно при ударных нагрузках) предохранительную муфту устанавливают по возможности
Рис. 21.22. Предохранительные муфты: а — фрикционная; б — пружинно-кулачковая; в — пружинно-шариковая
ближе к источнику перегрузок для снижения инерционных усилий от вращающихся масс привода. При плавном нарастании перегрузки место расположения предохранительной муфты не имеет такого большого значения, и во многих случаях с целью снижения массы и габаритов муфты целесообразна установка ее на быстроходном валу.
Основными типами предохранительных муфт являются фрикционные, пружинно-кулачковые, пружинно-шариковые и муфты с разрушающимися элементами.
Фрикционные предохранительные муфты отличаются от фрикционных сцепных отсутствием механизма управления. Нормальное усилие на поверхностях трения осуществляется постоянно замкнутыми пружинами, обычно цилиндрическими витыми или тарельчатыми (см. гл. 20). Наибольшее распространение получили многодисковые предохранительные муфты (рис. 21.22, а).
При срабатывании муфта не полностью прекращает передачу момента и автоматически включается в передачу полезной нагрузки после снятия перегрузки. Фрикционные муфты используют, как правило, только при кратковременных перегрузках, поскольку 446
при продолжительном скольжении мощность Тт (coi — <ог), расходуемая на трение, вызывает интенсивное выделение тепла. Приведенные выше зависимости (21.2)—(21.5) и данные о материалах (см. табл. 21.2) относятся и к фрикционным предохранительным муфтам.
На фрикционные предохранительные муфты, показанные на рис. 21.22, а, имеется ГОСТ 15622—77 для диаметров валов от 9 до 48 мм и крутящих моментов 6,3—400 Н-м.
Пружинно-кулачковые муфты (рис. 21.22, б) подобны кулачковым муфтам сцепления (см. рис. 21.19, а), но
Рис. 21.23. Роликовая муфта свободного хода
в этом случае отсутствует механизм управления и полумуфты замыкаются постоянно действующей пружиной. При перегрузках зацепление кулачков нарушается в результате осевого смещения подвижной полумуфты, вызванного наклонным расположением сопряженных поверхностей. Прощелкивание кулачков, сопровождающее процесс размыкания, сигнализирует о перегрузке. С увеличением профильного угла а (см. рис. 21.19, а) снижается влияние сил трения между кулачками на величину осевого усилия, необходимого для размыкания кулачков, и, следовательно, на величину момента срабатывания. В связи с этим угол а назначают обычно не меньшим 40°.
Пружинно-кулачковые муфты используют при небольших крутящих моментах и малых угловых скоростях. На эти муфты имеется ГОСТ 15620—77 для диаметров валов 8—48 мм и крутящих моментов 4—400 Н-м.
Пружинно-шариковые муфты (рис. 21.22, в) по принципу действия близки к пружинно-кулачковым муфтам. При перегрузках под действием осевых усилий, обусловленных формой впадин в одной из полумуфт, шарики смещаются в осевом направлении и происходит размыкание муфты с последующими прощелкиваниями. В сравнении с кулачковыми эти муфты более технологичны, надежны и имеют меньший разброс момента срабатывания. По ГОСТ 15621—77 для диаметров валов от 8 до 48 мм муфты допускают крутящие моменты 4—400 Н-м.
Рис. 21.24. Схема нагружения ролика в муфте свободного хода
Обгонные муфты (муфты свободного хода) передают крутящий момент только в одном направлении. Если угловая скорость ведомого вала больше, чем ведущего, то происходит автоматическое размыкание кинематической цепи привода.
Одной из разновидностей обгонных муфт являются кулачковые муфты, подобные показанной на рис. 21.22, б, но с формой кулачков, позволяющей передавать момент только в одном направлении (см. рис. 21.19, а). Недостатками кулачковых обгонных муфт (а также храповых муфт [57]) являются интенсивный шум при прощелкивании и значительные люфты, вызывающие включение с ударами, поэтому эти муфты используют при малых угловых скоростях, например при со < 10—=—15 с-1.
Большое распространение получили фрикционные обгонные муфты, передающие крутящий момент в результате заклинивания между полумуфтами промежуточных деталей. Эти муфты бесшумны, могут работать при больших скоростях и имеют очень малый люфт, обусловленный перемещениями, вызванными дефор-448
мациями деталей. В качестве промежуточных тел наибольшее распространение получили ролики.
Роликовая обгонная муфта (рис. 21.23) состоит из звездочки 1, наружного кольца (обоймы) 2, роликов 3 и прижимных устройств 4, обеспечивающих минимальный мертвый ход и способствующих равномерному распределению нагрузки между роликами. Для муфты на рис. 21.23 звездочка может быть ведущим звеном при вращении по часовой стрелке, а обойма — при враще-
Рис. 21.25. Схемы центробежных муфт
нии против часовой стрелки. |1ри этом силами трения ролики увлекаются в сторону сужения зазора между обоймой и звездочкой и заклиниваются.
Условие равновесия ролика показано на рис. 21.24, откуда следует, что равнодействующая FR нормального усилия и силы трения в каждой из зон касания А и В отклоняются от радиуса на угол 0,5 у. Следовательно, угол трения должен удовлетворять условию <р > 0,5 у.
Усилие, действующее на ролик (см. рис. 21.23 и 21.24), F 2Т
R zD sin (у/2)
Максимальное нормальное контактное напряжение между роликом и звездочкой определяют по формуле (2.6), в которой для стали принимают Е = 2,15-105 МПа. Заметив, что qH «« F^lletf (см. рис. 19.15, а) и при плоской поверхности звездочки, сопряженной с роликом, рпр = 0,5 Dw [см. формулу (2.4) ], получим
= 274 zleffDDw sin (т/2)
где Dw — диаметр ролика (рис. 21.24).
Малое плечо действия усилия FR, равное 0,025 D, является причиной высокой степени загруженности роликов, что, в свою очередь, оказывает большое влияние на габариты этих муфт. Снижение массы и габаритов муфт может быть достигнуто за счет повышения твердости сопряженных поверхностей (см. гл. 6). В связи с этим обойму, ролики и звездочку выполняют с твердостью не менее HRC 60.
Центробежные муфты служат для автоматического соединения и разъединения валов при достижении определенной частоты вращения. Они представляют собой сцепные фрикционные муфты (дисковые, колодочные и др.), источником нормального усилия в которых являются центробежные силы.
На рис. 21.25 показаны принципиальные схемы колодочных центробежных муфт. Первоначально рабочие элементы т или разжаты (рис. 21.25, а), или сжаты (рис. 21.25, б) усилиями пружин Fnp. При определенной частоте вращения ведущего вала под действием центробежных сил Fa муфты соответственно включаются или выключаются.
Приложение. Таблица чисел зубьев планетарной передачи 3k при заданном значении 1ьае (см. рис. 14.49, а)
ib 1ае Числа зубьев Числа зубьев
га гь ге гй zf га гь ге гй zf
35,00 9 36 33 14 11 41,55 9 54 48 23 17
35,00 * 9 51 45 21 15 41,60* 15 87 78 36 27
35,00 * 12 72 63 30 21 41,70 21 120 108 49 37
35,00 * 18 102 90 42 30 41,72 12 63 57 26 20
35,10 15 66 60 26 20 41,84 18 111 99 46 34
35,10* 15 93 81 39 27 41,89 * 18 96 87 39 30
35,20 * 15 81 72 33 24 42,17 * 12 78 69 33 24
35,20 * 18 114 99 48 33 42,43 * 21 87 81 33 27
35,28 21 96 87 38 29 42,45 15 54 51 19 16
35,36 * 21 111 99 45 33 42,62 18 81 75 31 25
35,40 18 75 69 28 22 42,63 15 102 90 43 31
35,71 * 21 81 75 30 24 42,67 * 21 105 96 42 33
35,92 * 18 90 81 36 27 43,03 15 72 66 29 23
36,00 * 9 63 54 27 18 43,16 21 120 108 50 38
36,00* 12 84 72 36 24 43,42 18 111 99 47 35
36,00 * 12 60 54 24 18 43,98 15 90 81 37 28
36,73 18 105 93 43 31 44,07 18 99 90 40 31
36,75 18 117 102 49 34 44,33 * 18 60 57 21 18
36,96 21 114 102 46 34 44,38 15 102 90 44 32
37,00 15 96 84 40 28 44,70 21 108 99 43 34
37,14 * 21 99 90 39 30 44,85 12 81 72 34 25
37,40 15 84 75 34 25 44,90 18 81 75 32 26
37,46 12 75 66 31 22 45,00 * 12 48 45 18 15
37,46 18 75 69 29 23 45,00 * 12 66 60 27 21
37,80 * 15 69 63 27 21 45,07 21 9) 84 34 28
38,02 21 84 78 31 25 45,33 9 42 39 16 13
38,03 18 93 84 37 28 45,33 * 9 57 51 24 18
38,06 18 117 102 50 35 45,33 * 18 114 102 48 36
38,20 18 105 93 44 32 45,95 18 99 90 41 32
38,33 21 114 102 47 35 46,00 15 54 51 20 17
38,40 * 15 51 48 18 15 46,00 * 15 75 69 30 24
38,50 9 54 48 22 16 46,04 15 90 81 38 29
38,61 15 96 84 41 29 46,45 21 108 99 44 35
38,72 21 102 93 40 31 47,09 21 90 84 35 29
38,89 9 66 57 28 19 47,17 12 81 72 35 26
39,06 12 63 57 25 19 47,29 18 117 105 49 37
39,28 15 84 75 35 26 47,67 * 18 84 78 33 27
39,56 12 75 66 32 23 48.22 * 18 102 93 42 33
39,67 * 18 120 105 51 36 48,29 18 63 60 22 19
39,76 18 93 84 38 29 48,40 12 69 63 28 22
40,00 1 9 39 36 15 12 48,53 * 15 93 84 39 30
40,00 * 18 78 72 30 24 48,57 * 21 111 102 45 36
40,00 * 18 108 96 45 33 48,97 18 117 105 50 38
40,00 21 84 78 32 26 49,07 15 78 72 31 25
40,00 * 21 117 105 48 36 49,28 9 60 54 25 19
40,60 15 72 66 28 22 49,71 * 21 93 87 36 30
40,60 * 15 99 87 42 30 49,87 12 51 48 16 16
40,68 21 102 93 41 32 50,00 * 12 84 75 36 27
41,37 9 66 57 29 20 50,09 9 42 39 17 14
.ь lae Числа зубьев ib ае Числа зубьев
га гЬ 2 е zfi 2f га 2Ь ге zg zf
50,40 * 15 57 54 21 18 64,00 * 15 63 60 24 21
50,52 18 87 81 34 28 64,29 18 69 66 26 23
50,55 18 105 96 43 34 64,80 * 15 87 81 36 30
50,73 21 114 105 46 37 64,85 18 117 108 49 40
51,00 18 120 108 51 39 65,00 * 18 96 90 39 33
51,09 15 96 87 40 31 65,06 12 57 54 22 19
51,38 12 69 63 29 23 65,31 9 66 60 29 23
51,75 18 63 60 23 20 66,00 * 12 78 72 33 27
51,76 15 78 72 32 26 66,00 21 78 75 28 25
52,41 21 96 90 37 31 66,00 * 21 105 99 42 36
52,57 18 105 96 44 35 67,16 18 117 108 50 41
52,61 21 114 105 47 38 67,86 9 48 45 20 17
52,76 9 60 54 26 20 68,30 18 99 93 40 34
53,00 18 87 81 35 29 68,41 15 90 84 37 31
53,32 15 96 87 41 32 69,00 * 18 72 69 27 24
54,18 21 72 69 25 22 69,09 21 108 102 43 37
54,20 12 51 48 20 17 69,15 15 66 63 25 22
54,73 21 96 90 38 32 69,75 21 78 75 29 26
54,86 * 21 117 108 48 39 69,89 * 18 120 111 51 42
55,00 * 12 72 66 30 24 70,01 12 57 54 23 20
55,00 15 60 57 22 19 70,08 12 81 75 34 28
55,00 * 15 81 75 33 27 71,22 18 99 93 41 35
55,00 * 18 108 99 45 36 71,61 15 90 84 38 32
56,00 * 9 45 42 18 15 71,79 21 108 102 44 38
56,00 * 15 99 90 42 33 73,71 12 8! 75 35 29
56,00 * 18 66 63 24 21 73,71 15 66 63 26 23
56,00 * 18 90 84 36 30 73,87 18 75 72 28 25
57,00 * 9 63 57 27 21 74,28 * 21 81 78 30 27
57,15 21 120 111 49 40 74,67 * 9 51 48 21 18
57,48 18 111 102 46 37 74,67 * 18 102 96 42 36
57,57 21 72 69 26 23 75,00 * 21 111 105 45 39
57,57 * 21 99 93 39 33 75,40 * 15 93 87 39 33
58,34 15 84 78 34 28 76,00 * 12 60 57 24 21
58,74 12 75 69 31 25 78,00 * 12 84 78 36 30
58,74 15 102 93 43 34 78,17 18 75 72 29 26
59,05 15 60 57 23 20 78,20 18 105 99 43 37
59,08 18 93 87 37 31 78,28 21 114 108 46 40
59,15 21 120 111 50 41 78,95 21 84 81 31 28
59,50 * 12 54 51 21 18 79,17 15 96 90 40 34
59,65 18 111 102 47 38 79,20 * 15 69 66 27 24
60,42 18 69 66 25 22 81,17 21 114 108 47 41
60,46 21 102 96 40 34 81,33 18 105 99 44 38
61,14 15 102 93 44 35 81,81 9 54 51 22 19
61,28 15 84 78 35 29 82,24 12 63 60 25 22
61,40 9 66 60 28 22 82,74 15 96 90 41 35
61,71 * 21 75 72 27 24 83,08 21 84 81 32 29
61,78 18 93 87 38 32 83,33 * 18 78 75 30 27
62,05 12 75 69 32 26 84,57 * 21 117 111 48 42
62,22 * 18 114 105 48 39 84,89 15 72 69 28 25
62,24 9 48 45 19 16 85,00 18 108 102 45 39
62,99 21 102 96 41 35 86,80 * 15 99 93 42 36
ае Числа зубьев .6 lae Числа зубьев
гп гь гг zg zf га гь ге гй zf
87,84 12 63 60 26 23 113,16 21 96 93 38 35
88,00 * 21 87 84 33 30 114,40* 15 81 78 33 30
88,04 21 120 114 49 43 115,00 * 12 72 69 30 27
88,29 9 54 51 23 20 116,00 * 18 90 87 36 33
88,66 18 81 78 31 28 118,86* 21 99 96 39 36
88,76 18 111 105 46 40 120,00 * 9 63 60 27 24
89,97 15 72 69 29 26 121,17 15 84 81 34 31
90,95 15 102 96 43 37 122,23 18 93 90 37 34
91,12 21 120 114 50 44 122,59 12 75 72 31 28
92,10 18 111 105 47 41 124,70 21 102 99 40 37
93,07 21 90 87 34 31 127,28 15 84 81 35 32
93,39 18 81 78 32 29 127,82 18 93 90 38 35
94,50 * 12 66 63 27 24 128,95 9 66 63 28 25
94,67 15 102 96 44 38 129,49 12 75 72 32 29
96,00 * 9 57 54 24 21 129,91 21 102 99 41 38
96,00 * 15 75 72 30 27 134,33 * 18 96 93 39 36
96,00 * 18 114 108 48 42 134,40 * 15 87 84 36 33
97,54 21 90 87 35 32 136,00 * 21 105 102 42 39
99,00 * 18 84 81 33 30 137,16 9 66 63 29 26
100,02 18 117 111 49 43 137,50 * 12 78 75 33 30
101,41 12 69 66 28 25 141,02 18 99 96 40 37
102,23 15 78 75 31 28 141,71 15 90 87 37 34
102,86 * 21 93 90 36 33 142,23 21 108 105 43 40
103,54 18 117 111 50 44 145,76 12 81 78 34 31
104,05 9 60 57 25 22 147,03 18 99 96 41 38
104,78 18 87 84 34 31 147,81 21 108 105 44 41
107,66 12 69 66 29 26 148,34 15 90 87 38 35
107,67 * 18 120 114 51 45 153,31 12 81 78 35 32
107,82 15 78 75 32 29 154,00 * 18 102 99 42 39
108,31 21 96 93 37 34 154,28 * 21 111 108 45 42
109,93 18 87 84 35 32 156,00 * 15 93 90 39 36
111,39 9 60 57 26 23 160,90 21 114 111 46 43
Примечания:
1. Таблица составлена для передач с зубчатыми колесами одного модуля: mta ~ mtb ~ mte'
2. Для всех случаев значения га; zb и zg кратны трем (в некоторых случаях также и двум). Следовательно, таблица предназначена для передач с числом сателлитов пи, = 3 (а иногда и nw = 2).
3. Для всех случаев гь — = zg — Zf. Следовательно, (atw)b — (alw)e и
xb - xg = xe ~ xf'
4. Для всех случаев zb > zg: zg > zf, zg > za-
5. Значения только положительные.
6. Значения даны с точностью до второго знака после запятой.
7. Передаточные отношения ibae < 35 и ibQe > 160,9 для передачи ЗЛ даны в^кииге В. Н. Кудрявцева «Планетарные передачи». Изд. 2-е. Л., Машиностроение,
• Передачи, в которых za + zg — zb — zg = ге — Zj и, следовательно, ^atw^a = ^atw^b ~ ^aiw^e и ха xg ~ xb xg ~ хе — xf‘
Список литературы
1. Бейзельман Р. Д., Цыпкин В. В., Перель Л. Я. Подшипники качения. Изд. 6-е. М., Машиностроение, 1975.
2. Биргер И. А., Иосилевич Г. Б. Резьбовые соединения. М., Машиностроение, 1973.
3. Биргер И. А., Шор Б. Ф., Шнейдерович Р. М. Расчеты на прочность деталей машин. М., Машиностроение, 1966.
4. Валы и оси. Изд. 2-е/ С. В. Сервисен, М. В. Громан, В. П. Когаев, Р. М. Шнейдерович. М.. Машиностроение, 1970.
5. Вейц В. Л., Дондошанский В. К., Чиряев В. И. Вынужденные колебания в металлорежущих станках. М.— Л., Машгиз, 1959.
6. Вейц В. Л., Кочура А. Е. Динамика машинных агрегатов с двигателями внутреннего сгорания. Л., Машиностроение, 1976.
7. Волков Д. П., Крайнев А. Ф. Трансмиссии строительных и дорожных машин: Справочное пособие. М., Машиностроение, 1974.
8. Булгаков Э. Б. Зубчатые передачи с улучшенными свойствами. М., Машиностроение, 1974.
9. Гинзбург Е. Г. Волновые зубчатые передачи. Л., Машиностроение, 1969.
10. Глухарев Е. Г., Зубарев Н. И. Зубчатые соединения: Справочное пособие. Л., Машиностроение, 1976.
11. Гнеденко Б. В., Беляев Ю. К., Соловьев А. О. Математические методы в теории надежности. М., Наука, 1965.
12. Готовцев А. А., Столбин Г. Б., Котенок И. П. Проектирование цепных передач: Справочник. М., Машиностроение, 1973.
13. Громан М. Б. Концентрация нагрузки по ширине зубчатого колеса. — В кн.: Расчет и конструирование деталей машин. М., Машиностроение, 1965.
14. Гришко В. А. Повышение износостойкости зубчатых передач. М., Машиностроение, 1977.
15. Громан М. Б., Шлейфер М. А. Конические передачи с круговым зубом. М., Машиностроение, 1964.
16. Грубин А. Н. Основы гидродинамической теории смазки тяжело-нагруженных криволинейных поверхностей. — Труды ЦНИИТмаша, 1949, кн. 30.
17 Гузенков П. Г. Детали машин. М., Высшая школа, 1975.
18. Детали машин: Справочник/Под ред. Н. С. Ачеркана. М., Машино-стооение, т. 1, 1968; т. 2, 1969; т. 3, 1969.
19. Детали машин. Изд. 7-е/В. А. Добровольский, К. И. Заблонский, С. Л. Зак, А. С. Радчик, Л. Б. Эрлих. М., Машиностроение, 1972.
20. Детали машин: Атлас/Под ред. Д. Н. Решетова. М., Машиностроение, 1970.
21. Детали механизмов станков/Под ред. Д. Н. Решетова. М., Машиностроение, 1972.
22. Дмитриев В. А. Детали машин. Л., Судостроение, 1970.
23. Допуски и посадки: Справочник/ Под ред. В. Д. Мягкова. М., Машиностроение, 1978.
24. Дроздов ГО. Н. Уточненный метод расчета на задир пар трения в тяжелонагруженных механизмах. — Вестник машиностроения, 1971, № 4.
25. Дроздов Ю. Н., Смирнов В. И, Противозадирная стойкость высоко
скоростных катящихся со скольжением тел. — Вестник машиностроения, 1978, № 9.
26. Дунаев П. Ф. Конструирование узлов и деталей машин. Изд. 3-е. М., Высшая школа, 1978.
27. Заблонский К. И. Зубчатые передачи. Киев, Техника, 1977.
28. Зак П. С. Глобоидные передачи. М., Машгиз, 1962.
29. Иванов М. Н. Детали машин. М., Высшая школа, 1976.
30. Иосилевич Г. В., Шарлов-ский Ю. В. Затяжка и стопорение резьбовых соединений. М., Машиностроение, 1971.
31. Кирдяшев Ю. Н., Иванов А. Н. Проектирование сложных зубчатых передач механизмов. Л., Машиностроение, 1973.
32. Когаев В. П. Расчеты на прочность при напряжениях, переменных во времени. М., Машиностроение, 1977.
33. Ковалев Н. А. Теория механизмов и деталей машин. Изд. 2-е. М., Высшая школа, 1974.
34. Коднир Д. С. Контактная гидродинамика смазки деталей машин. М., Машиностроение, 1976.
35. Кораблев А. И., Решетов Д. Н. Повышение несущей способности и долговечности зубчатых передач. М., Машиностроение, 1968.
36. Коровчинский М. В. Теоретические основы работы подшипников скольжения. М., Машгиз, 1959.
37. Крагельский И. В. Трение и износ. М., Машиностроение, 1968.
38. Крагельский И. В., Добы-чин М. Н., Комбалов В. С. Основы расчетов на трение и износ. М., Машиностроение, 1977.
39. Кривенко И. С. Новые типы червячных передач на судах. Л., Судостроение, 1967.
40. Кудрявцев В. Н., Державен К). А., Глухарев Е. Г. Конструкции и расчет зубчатых редукторов. Л., Машиностроение, 1971.
41. Левина 3. М., Решетов Д. Н. Контактная жесткость в машиностроении. М., Машиностроение, 1971.
42. Мазырин И. В. Смазочные устройства. М., Машгиз, 1963.
43. Мальцев В. Ф. Роликовые механизмы свободного хода. Москва— Киев, Машгиз, 1960.
44. Надежность и долговечность ма-щин/Под общ. ред. Б. И. Костецкого. Киев, Техника, 1975.
45. Николаев Г. А., Куркин С. А., Винокуров В. А. Расчет, проектирование и изготовление сварных конструкций. М., Высшая школа, 1971.
46. Опоры осей и валов машин и приборов/Н. А. Спицын, М. Н. Машнев и др. Л., Машиностроение, 1970.
47. Орлов П. И. Основы конструирования: Справочно-методическое пособие. В 3-х т. М., Машиностроение, 1977.
48. Петрусевич А. И. Контактная прочность деталей машин. М., Машиностроение, 1970.
49. Петрусевич А. И. Упрощенный метод решения контактно-динамических задач.—Машиноведение, 1971, № 6.
50. Петрусевич А. И., Генкин М. Д., Гринкевич В. К. Динамические нагрузки в прямозубых зубчатых колесах. М., Изд-во АН СССР, 1956.
51. Пииегин С. В. Контактная прочность и сопротивление качению. М., Машиностроение, 1969.
52. Писманик К. М. Гипоидные передачи. М., Машиностроение, 1964.
53. Планетарные передачи: Спра-вочник/Под ред. В. Н. Кудрявцева и Ю. Н. Кирдяшева. Л., Машиностроение, 1977.
54. Повышение износостойкости на основе избирательного переноса/Под ред. Д. Н. Гаркунова. М., Машиностроение, 1977.
55. Повышение несущей способности механического привода/Под ред. В. Н. Кудрявцева. Л., Машиностроение, 1973.
56. Подшипники качения: Каталог-справочник. М., НИИавтоматпром, 1972.
57. Поляков В. С., Барбаш И. Д., Ряховский О. А. Справочник по муфтам. Л., Машиностроение, 1974.
58. Проектирование сварных конструкций в машиностроении/Под ред. С. А. Куркина. М., Машиностроение, 1975.
59. Проииков А. С. Надежность машин. М., Машиностроение, 1978.
60. Пронин Б. А. Клиноременные и фрикционные вариаторы. М., Машгиз, 1960.
61. Пронин Б. А., Ревков Г. А. Бесступенчатые клиноременные передачи (вариаторы). Изд. 2-е. М., Машиностроение, 1967.
62. Прочность, устойчивость, колебания: Справочник. В 3-х т./Под общ.
ред. И. А. Биргера и Я. Г. Пановко. М., Машиностроение, 1968.
63. Райко М. В. Смазка зубчатых передач. Киев, Техника, 1970.
64. Расчеты на прочность. В 3-х т./ С. Д. Пономарев, В. А. Бидерман, К- К- Лихарев, В. М. Макушин, В. И. Феодосьев. М., Машгиз, т. 1, 1956; т. 2, 1958; т. 3, 1959.
65. Редукторы судовых турбоагрегатов: Справочное п собие/О. А. Пыж, Л. М. Гаркави, Ю. А. Державен, Р. Р. Гальпер. Л., Судостроение, 1975.
66. Решетов Д. Н. Детали машин. Изд. 3-е. М., Машиностроение, 1974.
67. Решетов Д. Н. Определение упругих перемещений колец роликоподшипников. — Вестник машиностроения, 1974, № 11.
68. Решетов Д. Н. Работоспособность и надежность машин. М., Высшая школа, 1974.
69. Решетов Д. Н. Расчет деталей станков. М., Машгиз, 1945.
70. Решетов Д. Н. Конструирование рациональных механизмов. М., Машиностроение, 1967.
71. Розенберг Ю. А. Влияние смазочных масел на надежность и долговечность машин. М., Машиностроение, 1970
72. Сервисен С. В., Когаев В. П., Шнейдерович Р. М. Несущая способность и расчет деталей машин на прочность. М., Машиностроение, 1975.
73. Снесарев С. А. Методические основы конструирования редукторов. М., Машиностроение, 1974.
74. Справочник машиностроителя/ Под ред. Н. С. Ачеркана. Т. 4. М., Машиностроение, 1962.
75. Справочник металлиста. М., Машиностроение, т. 1, 1976; т. 2, 1976; т. 3, 1977; т. 4, 1977; т. 5, 1978.
76. Спришевский А. И. Подшипники качения. М., Машиностроение, 1969.
77. Трубин Г. К. Контактная усталость материалов для зубчатых колес. М., Машгиз, 1962.
78. Труфяков В. И. Усталость сварных соединений. Киев, Наукова думка, 1973.
79. Технологичность конструкций: Справочное пособие/Под ред. С. А. Ананьева, В. П. Купревича. М., Машиностроение, 1969.
80. Устиненко В. Л. Напряженное состояние зубьев цилиндрических зубчатых колес. М., Машиностроение, 1972.
81. Феодосьев В. И. Сопротивление материалов. Изд. 7-е. М., Наука, 1974.
82. Хейвуд Р. Б. Проектирование с учетом усталости. М., Машиностроение, 1969.
83. Хрущев М. М., Бабичев М. И. Абразивное изнашивание. М., Наука, 1970.
84. Цилиндрические эвольвентиые зубчатые передачи внешнего зацепле-ния/И. А. Болотовский, Б. И. Гурьев, В. Э. Смирнов, Б. И. Шендерей. М., Машиностроение, 1974.
85. Цилиндрические эвольвентные зубчатые передачи внутреннего зацеп-ления/И. А. Болотовский, Б. И. Гурьев, В. Э. Смирнов, Б. И. Шендерей. М., Машиностроение, 1977.
86. Часовников Л. Д. О расчете конических передач с круговыми зубьями. — Сборник научно-методических статей по деталям машин/Под ред. Д. Н. Решетова, 1977, вып. 2.
87. Часовников Л. Д. Передачи зацеплением. М., Машиностроение, 1969.
88. Чернявский С. А. Подшипники скольжения. М., Машгиз, 1963.
89. Шейнберг С. А., Жедь В. П., Шишеев М. Д. Опоры скольжения с газовой смазкой. М., Машиностроение, 1969.
90. Шнейдер Ю. Г. Образование регулярных микрорельефов на деталях и их эксплуатационные свойства. Л., Машиностроение, 1972.
91. Шувалов С. А. Расчет волновых передач с учетом податливости звеньев. — Вестник машиностроения, 1974, № 6.
92. Nieman G. Maschinenelemente. Berlin, Bd. 1, 1963; Bd. 2, 1965.
93. General catalogue SKF, 1975.
94. Shigley I. E. Mechanical Engi-neeriny. Design. New York, 1977.
Chipmaker.ru
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
А
Агрегатирование 18
Амортизатор 105, 418
Амортизация 415, 417
Амплитуда переменных напряжений 58
— колебаний 375
Антифрикционные свойства 106
Б
Баббит 102
Безотказность 121
Биметаллы 114
Бочкообразная форма 87
Брииелирование 405
Бронза 101
В
Веллера кривая 61
Вероятность безотказной работы 121
Вероятностный расчет на прочность 125
Взаимосвязь различных видов изнаши-
вания 36
Винтовая зубчатая передача 327
Водило 299
Вторичные структуры 35
Вязкостно-температурные характерис-тики 47
Вязкость динамическая 40
кинематическая 40
Г
Гайка растяжения 152
Генератор волн 331
Гибкое колесо волновой передачи 329
Гидродинамический эффект 42
Гидростатические опоры 43, 388
Гипоидная передача 327
Гипотеза плоских сечеиий 68
Главные нормальные сечения 24
Градиент изменения напряжений 71
— скорости 44
.— относительный первого главного напряжения 72
Граничный слой смазки 39
Групповое болтовое соединение 145
Д
Делительная прямая 240
Демпфирование 105, 415, 417, 435
Детерминированная величина 115
Динамическая грузоподъемность подшипников 407
Динамические нагрузки в зацеплении 262
Дисперсия 117
Дисульфид молибдена 48
Долговечность 121
Допуск 11,12 допускаемые напряжения 77» 270, 278
Ж
Жесткость И, 80
3
Зависимости между напряжениями и нагрузкой при различных напряженных состояниях 63
Задир 35
Заедание 35
Зазор вероятностный 124, 394
— наибольший 12
— наименьший 12
Затяжка резьбовых соединений 142
Затяжные кольца цилиидро-коничёткие 199
Звеио 19
И
Изнашивание (определение) 19
!— абразивное 28
— коррозионио-мехаиическое 52
»— механическое 28
!— мол екул яр ио-мех аии чес кое 34
— < при работочное 37
— установившееся 38
Износостойкость 27
Интенсивность изнашивания 27
— отказов 121
Исходный контур зубчатой рейки 240
К
Колебания валов 375
Колесо центральное 299
Композиционные волокнистые материалы 102
Контакт тяжелойагружеины^ 45
Коитактио-гидродинамическйя теория смазки 42
Контактные напряжения в зубчатых передачах 265 —------червячных передачах 345
---— подшипниках качения 403
Концентрация напряжений 67
Корпусные детали 112
Коэффициент асимметрии цикла 58
— безопасности при подборе подшипни-
ков качения 410
— вариации 117
— влияния абсолютных размеров 67
Коэффициент воспринимаемого смеще-
ния 243
— демпфирования 417
диаметра червяка 338
— динамичности 377 жесткости 80
• — запаса прочности 77, 79, 153, 270, 278 запаса сцепления 194, 195
* — заполнения 314
контактных напряжений 23
концентрации напряжений теорети-
ческий 68
— — — эффективный 69, 70, 71
— неравномерности распределения на-
грузки 83
— по ширине зубчатого венца 256
— перекрытия 246
— податливости 80
— радиальной я осевой нагрузки в подшипниках качения 409
— Пуассона 23, 195
— смещения 241
— теплопередачи 56
— трения 36, 44, 150, 195, 206, 296,
342, 444
— торцового перекрытия 246
— удельной жесткости 81
— упрочнения 73
— , учитывающий динамические нагрузки
в зацеплении 262
— , — неравномерность распределения удельных нагрузок 83
— чувствительности материала к концентрации напряжений 70
— шероховатости 73
К п. д. передач винтовых 369
— — зубчатых 296
— — планетарных 304
— — червячных 341
— — цепных 362
Кривая выносливости 60
Критерии работоспособности =* 108, 109,
131, 182, 221, 344, 359
Круговая частота 375
Л
Легкие, сплавы 102
Линия зацепления 236
Логарифмические шкалы осей координат 61
М
Масла авиационные 47
— индустриальные общего назначения 47
г — синтетические 47
с противозадирными присадками 46, 48
* — турбинные 47
Маслянистость 39
Масштабный фактор 67
Материалы валов и осей 110
винтовых пар 111
* — деталей подшипников качения 109, 396
— деталей цепных передач 359
— заклепок 180
— зубчатых колес 109
— корпусных деталей 112
— направляющих скольжения 112
— подшипников скольжения 111
— пружи н 418
— резьбовых деталей 141
— червячных пар 111
Модуль упругости первого рода 23, 159
»— зацепления 239
Момент гироскопический 400
Моиель-металл 419
Мощность в зацеплении 298
Мультипликатор 309
Муфты втулочные 427
,— зубчатые 428
обгонные 448
кулачковые 448
*--роликовые 449
•— предохранительные кулачковые 447
— пружинно-шариковые 447
— фрикционные 446
— - с торообразиой упругой оболочкой 439
•--упругим элементом, работающим иа
изгиб 439
»— сцепные кулачковые 442
— зубчатые 442
* = — фрикционные 442
упругие втулочно-пальцевые 438
фланцевые 427
— центробежные 449
— цепные 432
* — шарнирные 433
• — — синхронные 434
— — с металлическим упругим элементом 436
Н
Надежность 121
Наклеп, осуществляемый дробеструйной обработкой 73
— , — накаткой роликами
Наработка 121
Натяг 12
— вероятностный 124
Начальная прямая 237
Нормы точности зубчатых передач 255
---цилиндрических поверхностей (охватывающей и охватываемой) 11
---червячных передач 340
О
Обработка давлением 17
Окружность делительная 239
— вершин зубьев 243
,— начальная 236
<— впадин 243
— основная 236
Отказ 121
Отношение моментов, действующих на основные звенья планетарных передач 303 Отслаивание 31
Охлаждение водой 55
— окружающим воздухом 55
— циркулирующим маслом 55
П
Передаточное отношение общее 309
— число 240
Плавающее центральное колесо 308
Планетарные передачи (определение) 299
Пластическое деформирование 29
Пластмассы термопластические 104
— термореактивные 104
Плотность различных материалов 103
— распределения вероятностей Случай-
ных величин 116
Поверхности совпадающие 19
— несовпадающие 19
Повышение несущей способности зубча-
тых передач 109, 318
-------резьбовых соединений 157
Подпятник 385
Подшипники качения радиальные 397 ---радиально-упорные 397 ---самоустанавливающиеся и несамо-устаиавливающиеся 397 ------упорные 397 ---упорно-радиальные 397 Показатель степени кривой выносливости 61
Полюс зацепления 236
Полюсная линия 236
Предел выносливости 61
— — образца с заданным состоянием поверхности 73
— ограниченной выносливости 61
Преднамеренное отклонение от формы сопряженных поверхностей, обеспечивающих полное прилегание при отсутствии деформирующих усилий и погрешностей 87, 91, 261, 265
Предпочтительные числа 12
Приведенный радиус кривизны 23
Производящая рейка 238
Профильные (бесшпоночные) соединения 193
Пружины кольцевые 425
— кручения 416
— растяжения 416, 421
— сжатия 416, 420
— тарельчатые 424
Пьезокоэффициент вязкости 41
Р
Работоспособность И, 121
Рабочий цикл изменения нагрузки 62
Рабочая поверхность опережающая 27
— — отстающая 27
Распределение нагрузки по длине резьбового соединения 93, 94, 151 —--------вала со ступицей 93
— — — — флангового сварного шва 93
Расчетная нагрузка 65
— частота вращения 65
Ребиндера эффект 31
Редуктор 309
Резина 105
Резьба (виды) 133
Рейнольдса.уравнение 43
Ремни зубчатые 230
— плоские 213
— клиновые 214
— поликлиновые 215
Ремонтопригодность 121
Ресурс 123
Ресурс гамма-процентиый 123
С
Силумин 102
Скорость скольжения 26
— — в зубчатых передачах 252
-------червячных передачах 340
— контактирующих точек относительно зоны контакта 26
Случайная величина 115
Смазка периодическая 50
— централизованная 50
— индивидуальная 50
— под давлением 50
— передач зубчатых 48
--- червячных 49
--- цепных 362
— подшипников качения 50
---скольжения 51, 387, 389
Смазки пластические 47
— с поверхностно-активными присадками 32
Смещение рейки исходного г контура 241
Соединения неразъемные 131
— разъемные 131
Спеченные материалы 104, 389
Сплавы медные 101
— алюминиевые 102
— легкие 104
Сопряженные профили 236
— поверхности 19
Среднее квадратическое отклонение 117
Сталь (марки, свойства, применение) 99, 109, 111, 141, 177, 278
Стандартизация 7
Статическая грузоподъемность подтип* ников 413
Стопорение резьбовых соединений 139
Суммарная длина линий контакта 249 — скорость контактирующих точек отно* сительно зоны контакта 26
Схватывание 35
Т
Тела качения 397
Тепловой расчет 55
Теплоемкость удельная 57
Техническое задание 6
— предложение 6
Технический проект 6
Технологичность 16
Треиие без смазки 42
— внешнее 42, 417
> — внутреннее 39, 105, 417
— в подшипниках 394, 401
— жидкостное 41
— смешанное 42
Трибоинка 20
Сателлит 299
Сборочные операции 18
Сварка дуговая 162
— контактная 162
— роликовая 172
— треиием 162
— точечная 172
— электрошлаковая 162
Сварные соединения иахлестные 166
---пробочные 170
---прорезные 170
— — стыковые 165
---тавровые 169
Сепаратор подшипника 395
Силы, действующие в зацеплении коии* ческих зубчатых передач 293
—,--------цилиндрических зубчатых пе*
редач 253
— —• — червячных передач 340
У
Удельная скорость скольжения 26
Узел (сборочная единица) $
Уплотняющие устройства 52
----бесконтактные 55
----контактные 54
.— — осевые контактные 54
,---с войлочными кольцами 54
-------манжетами 54
----разрезные с металлическими коль* цами 54
Упругая постоянная материала соприка*
сающихся тел 23
Уравнение кривой усталости 51
Усталостное выкрашивание 30
Условие сборки планетарных передач 303
Ф
Фреттциг-коррозия 33
Фрикционные свойства 106
Функция распределения случайной величины статистическая 117
X
Характеристики режима треиия 44, 389
Херси—Штрибека кривая 44
Ц
Цикл изменения напряжений знакопеременный 58
— — симметричным 58
&-----отыулевой 58
Ч
Червяки архимедовы, конволютные, эвольвентиые 326
Число заходов резьбы 132
— витков червяка 338
Чугун антифрикционный 385
— серый 101
— высокопрочный 101
Ш
Шаг винтовой линии 132
— резьбы 132
— основной окружности 237
— зубьев рейки 239
— червяка расчетный 338
Шероховатость поверхности 14
Э
Эскизный проект 6
Эквивалентная нагрузка 63
Эквивалентное время 65
— число циклов изменения напряжений 63, 66
Ю
Ювенильные поверхности 32
Chipmaker.ru
Оглавление
Предисловие......................................................... §
Введение............................................................ о
Основные условные обозначения ...................................... 9
Часть первая
ОСНОВЫ РАСЧЕТА И ПРОЕКТИРОВАНИЯ ДЕТАЛЕЙ И УЗЛОВ МАШИН
Глава 1. Допуски и посадки, Шероховатость поверхности и технологичность деталей машин........................... <................ 11
§ 1.1. Допуски и посадки............................. . . —
§ 1.2. Шероховатость поверхностей................ ..... > 14
§ 1.3. Технологичность деталей машин . ... , . ... , . 16
Глава 2. Сопряженные поверхности, условия их работы и виды изнашивания ......................................................... 19
§ 2.1. Общие сведения ........................................ —
§ 2.2. Параметры, характеризующие условия работы сопряженных, поверхностей. ИнТеНсйвйость изнашивания ...................... 20
§ 2.3. Виды изнашивания...................................... 28
Глава 3. Смазка сопряженных поверхностей и тепловой расчет 39
§ 3.1. Общие сведения ........................................ —
§ 3.2. Виды трения скольжения............................ 41
§ 3.3. ТяжелонагруженнЫй контакт ........................... 44
§ 3.4. Смазочные материалы и выбор вязкости масла для тяжело-нагруженного контакта......................................... 46
§ 3.5. Смазочные и уплотняющие устройства............ . . . * 50
§ 3.6. Краткие сведения по расчетам на нагрев 55
Глава 4. Факторы, влияющие нв прочность деталей, и рйсчет на выносливость при переменных нагрузках ............................. 58
§ 4.1. Влияние числа циклов изменения напряжений на прочность деталей........................................................ —
§ 4.2. Влияние размеров, формы и состояния поверхности деталей на прочность деталей.......................................... 67
§ 4.3. Зависимость между пределами выносливости детали и образца и предельные напряжения при различных значениях коэффициента асимметрии цикла ........................... 74
§ 4.4. Допускаемые напряжения и коэффициенты запаса прочности 77
Глава 5. Влияние деформаций н погрешностей изготовления на распределение нагрузки в зоне сопряжения звеньев...................... 80
§ 5,1. Общие сведения ........................................ —
§ 5.2. Распределение удельных нагрузок и усилий в зоне сопряжения звеньев................................................. 85
§ 5.3. Распределение давлений на цилиндрических сопряженных поверхностях ................................................ 94
Глава 6. Материалы в машиностроении и указания к их применению 99
§ 6.1. Краткие сведения о материалах для деталей машин ... —
§ 6.2. Указания к выбору материалов.......................... 105
§ 6.3. Некоторые пути экономии материалов при конструировании деталей и узлов машин.................................. 113
Глава 7. Краткие сведения о вероятностных расчетах и вопросах надежности деталей машин............................... 115
§ 7.1. Основные понятия................................. —
§ 7.2. Примеры применения вероятностных методов к расчетам
деталей машин..................................... 123
§ 7.3. Пути повышения надежности деталей и узлов машин ... 126
Часть вторая
СОЕДИНЕНИЯ ДЕТАЛЕЙ МАШИН
Глава 8. Резьбовые соединения ..................................... 132
§ 8.1. Общие сведения, классификация резьб и их основные параметры ......................................................... —
§ 8.2. Моменты при завинчивании и отвинчивании резьбовых соединений .................................................... 135
§ 8.3. Крепежные детали, их конструкция и материалы .... 138
§ 8.4. Расчет усилий в болтовых соединениях........... 142
§ 8.5. Расчет болтов на прочность..................... 151
§ 8.6. Способы повышения несущей способности резьбовых соединений ....................................................... 157
§ 8.7. Пример расчета группового болтового соединения .... 159
Глава 9. Сварные, паяные и клеевые соединения........... 161
§ 9.1. Общие сведения о сварных соединениях............. —
§ 9.2. Виды сварных соединений и расчет их на прочность . . . 165
§ 9.3. Допускаемые напряжения в сварных соединениях .... 172
§ 9.4; Паяные соединения.............................. 175
§ 9.5. Клеевые соединения ................................... 177
Глава 10. Заклепочные соединения................................... 178
§ 10.1. Общие сведения......................................... —
§ 10.2. Расчет заклепочных соединений........................ 180
Глава 11. Соединения вал (ось) — ступица.......................... 181
§ 11.1. Шпоночные соединения .................................. —
§ 11.2. Зубчатые (шлицевые) соединения....................... 184
§ 11.3. Профильные (бесшпоночные) соединения................. 193
§ 11.4. Соединения с натягом................................... —
Часть третья
МЕХАНИЧЕСКИЕ ПЕРЕДАЧИ
Глава 12. Фрикционные передачи и вариаторы ........................ 201
§ 12.1. Общие положения........................................ —
§ 12.2. Скольжение в контакте и расчет на выносливость активных поверхностей тел качения фрикционных передач .... 203
§ 12.3. Краткие сведения о некоторых типах фрикционных вариаторов ...................................................... 207
Глава 13. Ременные передачи ....................................... 211
§ 13.1. Общие положения...................................... —
§ 13.2. Геометрические зависимости........................* 216
§ 13.3. Упругое скольжение и кинематика ременной передачи 217
§ 13.4. Силы и напряжения в ременной передаче ........ 219
§ 13.5. Критерии работоспособности и расчет ременных передач 221
§ 13.6. Шкивы ременных передач............................. 232
Глава 14. Зубчатые передачи........................................ 233
§ 14.1. Общие сведения....................................... —
§ 14.2. Цилиндрические зубчатые передачи с эвольвентным зацеплением ................................................... 236
§ 14.3. Силы, действующие в зацеплении цилиндрических передач ...................................................’ ^3
§ 14.4. Влияние погрешностей изготовления и деформаций деталей на работу зубчатых передач ............................ 254
§ 14.5. Расчет на контактную прочность активных поверхностей зубьев....................................................... 265
§ 14.6. Расчет на изгиб зубьев цилиндрических передач .... 274
§ 14.7. Цилиндрические передачи с внешним зацеплением Новикова ...................................................... 279
§ 14.8. Конические зубчатые передачи......................... 286
§ 14.9. Потери на трение в зубчатых передачах и понятие о мощности в зацеплении ......................................... 295
§ 14.10. Планетарные передачи ............................... 299
§ 14.11. Зубчатые редукторы ................................ 308
§ 14.12. Указания к проектировочному расчету зубчатых передач 317
§ 14.13. Примеры расчета зубчатых передач.................... 323
§ 14.14. Краткие сведения о передачах между валами с перекрещивающимися осями............................................ 327
§ 14.15. Волновые передачи..............................< . » 328
Глава 15. Червячные передачи..................................« ♦ « 335
§ 15.1. Общие сведения.................................., • —
§ 15.2. Геометрия, кинематика и точность червячных цилиндрических передач .............................................. 336
§ 15.3. Силы в зацеплении и к. п. д. червячных цилиндрических передач................................................. • 340
§ 15.4. Расчет на прочность червячной пары................... 344
§ 15.5. Червячные цилиндрические передачи с вогнутым профилем червяка и червячные глобоидные передачи ..................... 348
Глава 16. Цепные передачи .................................. . * 349
§ 16.1. Общие сведения................................,..«•> —
§ 16.2. Приводные цепи и звездочки. Геометрический расчет 350
§ 16.3. Неравномерность движения и усилия в цепной передаче 357
§ 16.4. Критерии работоспособности цепных передач, материалы
их деталей и расчет на износостойкость 359
§ 16.5. Потери в цепных передачах и способы смазки... 362
Глава 17. Передачи виит—гайка................................... 363
§ 17.1. Общие сведения.................................... _—
§ 17.2. Расчет передач скольжения............................ 366
§ 17.3. Особенности расчета передач качения ................. 369
Часть четвертая
ВАЛЫ, ОСИ, ПОДШИПНИКИ, УПРУГИЕ ЭЛЕМЕНТЫ И МУФТЫ
Глава 18. Валы и оси.......................... < , f , , . . . 370
§ 18.1. Общие сведения.....................» t . . —
§ 18.2. Расчет валов на прочность ....................... 371
§ 18.3. Жесткость и колебания валов и осей................. 374
Глава 19. Опорные устройства при относительном вращательном и поступательном движении ........................................ 382
§ 19.1. Общие сведения................... ।........... . *—
§ 19.2. Конструкция подшипников скольжения i , 383
§ 19.3. Расчет подшипников скольжения 390
§ 19.4. Конструкция и классификация подшипников качения , t . 395
§ 19.5. Кинематика, динамика и потери на трепне в подшипниках качения ............................................... 399
§ 19.6. Распределение нагрузки между телами качения. Контакт-
ные напряжения и жесткость подшипников качения . . . 401
§ 19.7. Расчет подшипников качения на долговечность и статическую грузоподъемность ................................... 405
§ 19.8. Указания к практическим расчетам (подбору) подшипников качения ............................................... 409
Глава 20. Упругие элементы................................... 415
§ 20.1. Общие сведения....................................... —
§ 20.2. К выбору материалов и допускаемых напряжений металлических пружин............................................ 418
§ 20.3. Цилиндрические винтовые пружины................... 420
§ 20.4. Упругие элементы с переменной жесткостью........... 423
§ 20.5. Тарельчатые и кольцевые пружины ................... 424
Глава 21. Муфты ............................................. 426
§ 21.1. Общие сведения....................................... —
§ 21.2. Глухие муфты ...................................... 427
§ 21.3. Компенсирующие муфты............................... 428
§ 21.4. Подвижные муфты ................................... 432
§ 21.5. Упругие муфты...................................... 435
§ 21.6. Сцепные управляемые муфты ...................... 441
§ 21.7. Самодействующие муфты.............................. 445
Приложение...................................................... 451
Список литературы............................................... 454
ПреДмётйый указатель ........................................... 457
ИБ № 762
Chipmaker.ru
Владимир Николаевич КУДРЯВЦЕВ
ДЕТАЛИ
МАШИН
Учебник для машиностроительных вузов
Редактор В. М. Рошаль
Художественный редактор С. С. Венедиктов
Технические редакторы: Л. В. Щетинина, Т. П. М а л а шкина
Корректоры: Т. Н. Гриичук, И. Г. Жукова нН. Б. Семенова
Переплет художника Н. И. Абрамова
Сдано в набор 12.10.79.
Подписано в печать 20.03.80.
Формат 60х 90l/ij. Бумага типографская № 2.
Гарнйтурй литературная. Печать высокая.
Усл. печ- л. 29,0- Уч.-изд. л. 39,58. Тираж 100 000 (1-Й з-д 1—4 0 000) экз. Заказ 1531. Цена I р. 30 к.
Ленинградское отделение издательства «МАШИНОСТРОЕНИЕ» 191065, Ленинград, Д-65, ул. Дзержинского, 10
Ленинградская типография № 6 Ленинградского производственного объединения «Техническая книга» Союзполиграфпрома при Государственном комитИ'е СССР по делам издательств, полиграфии и книжной торговли.
193144, Ленинград, С-144, ул. Моисеенко, 10