/


























































































































































































































































































































































Author: Мизерницкий А.И.
Tags: транспорт военно-морское дело водный транспорт навигация морская навигация
Year: 1963




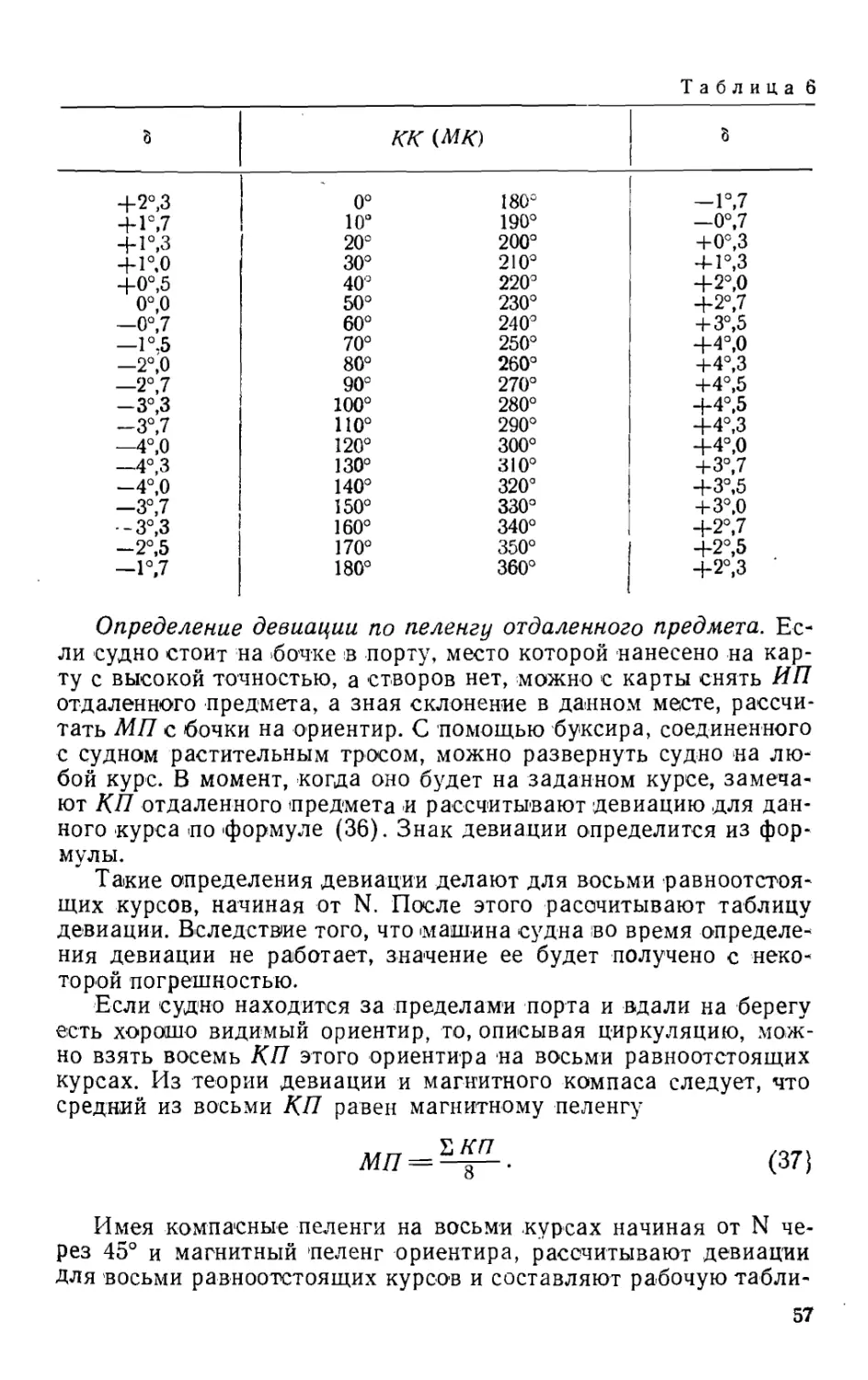
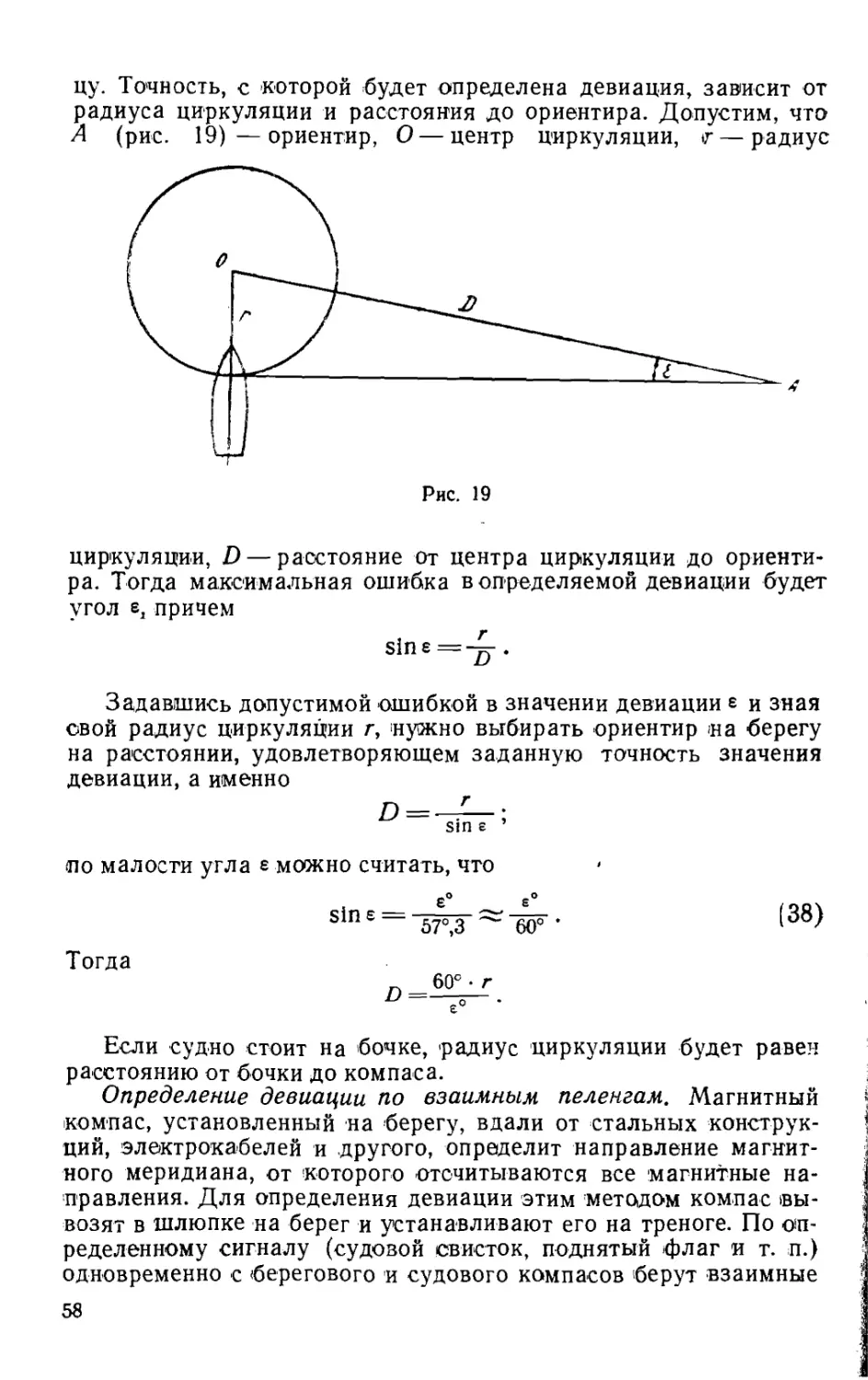
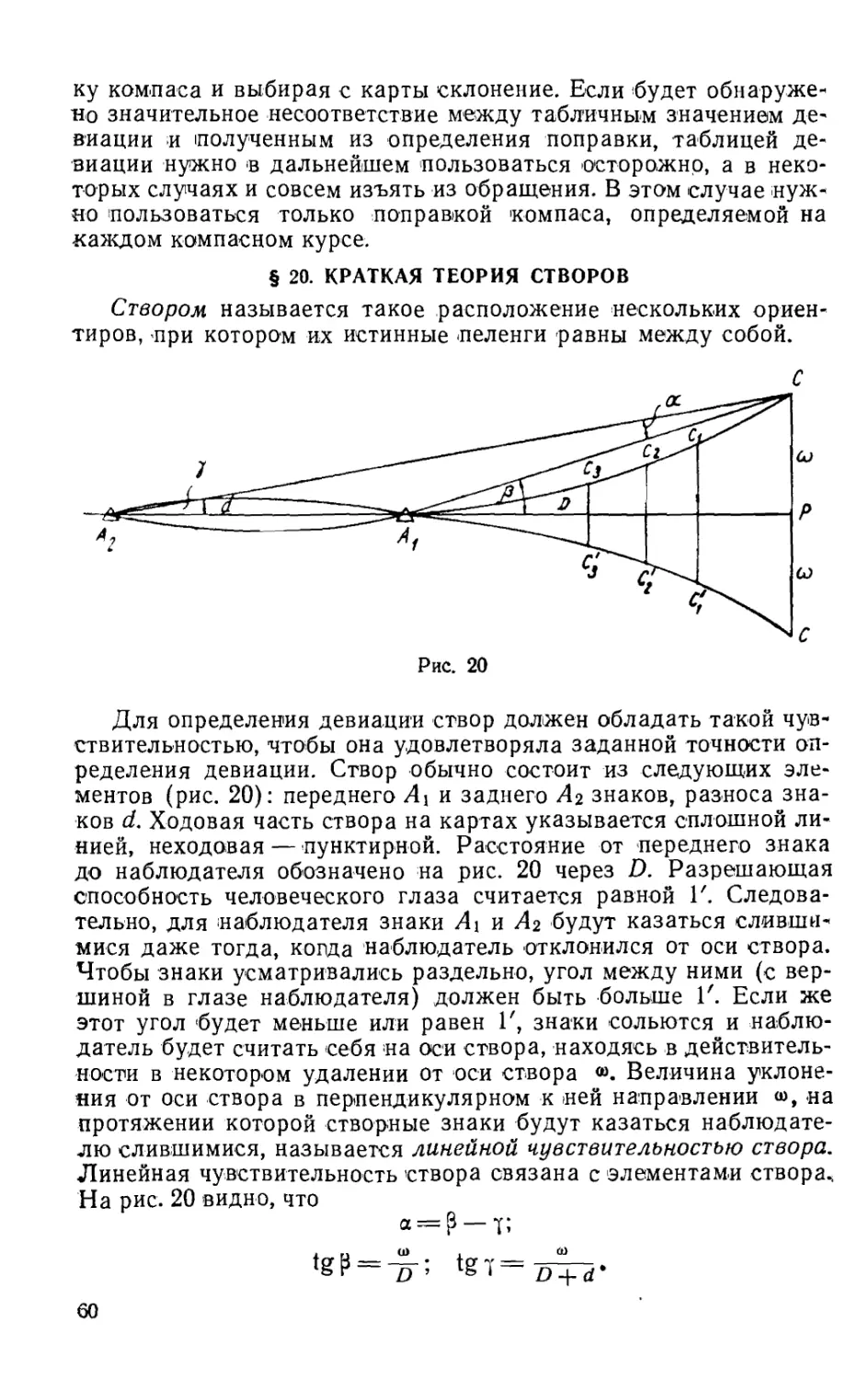
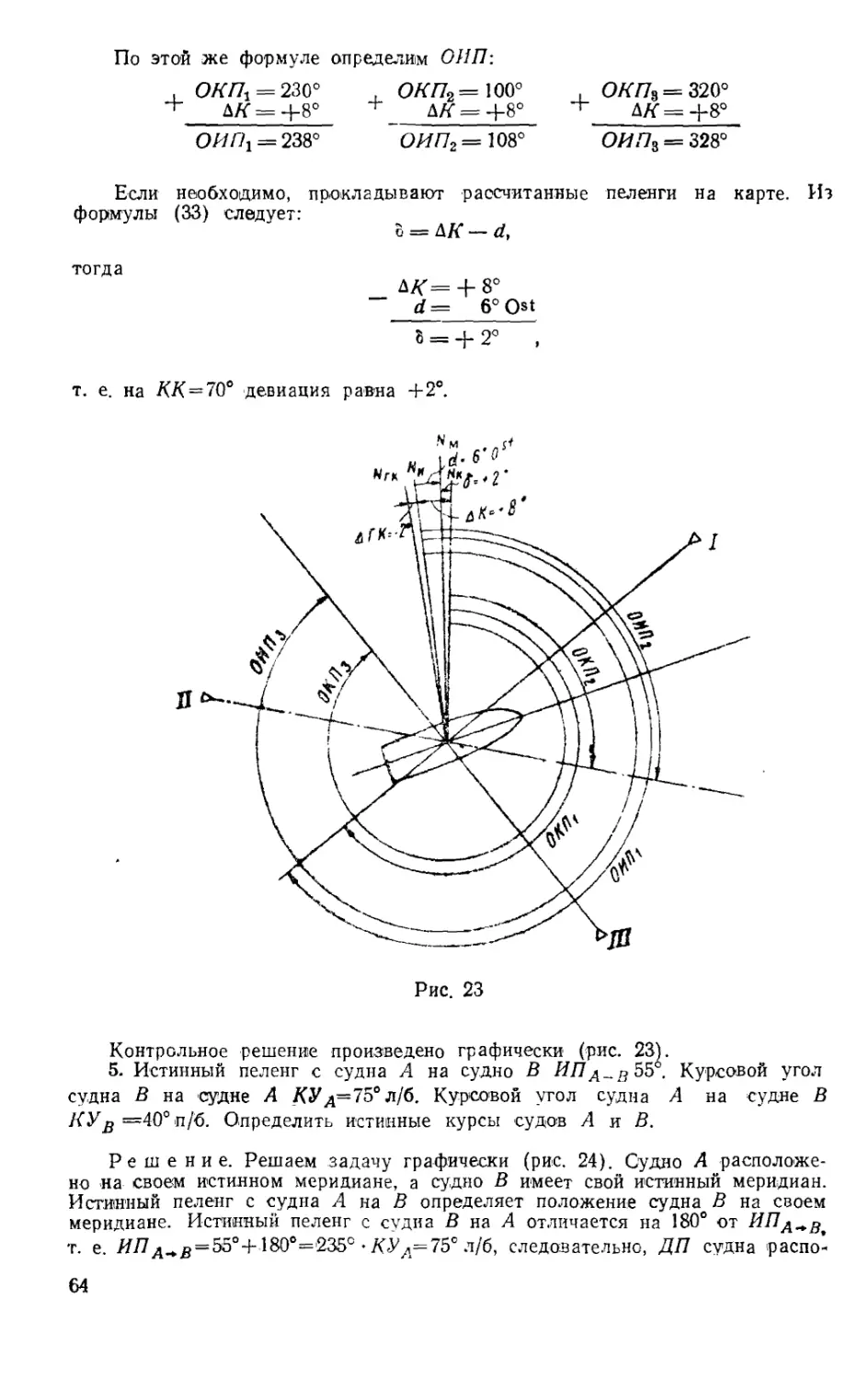
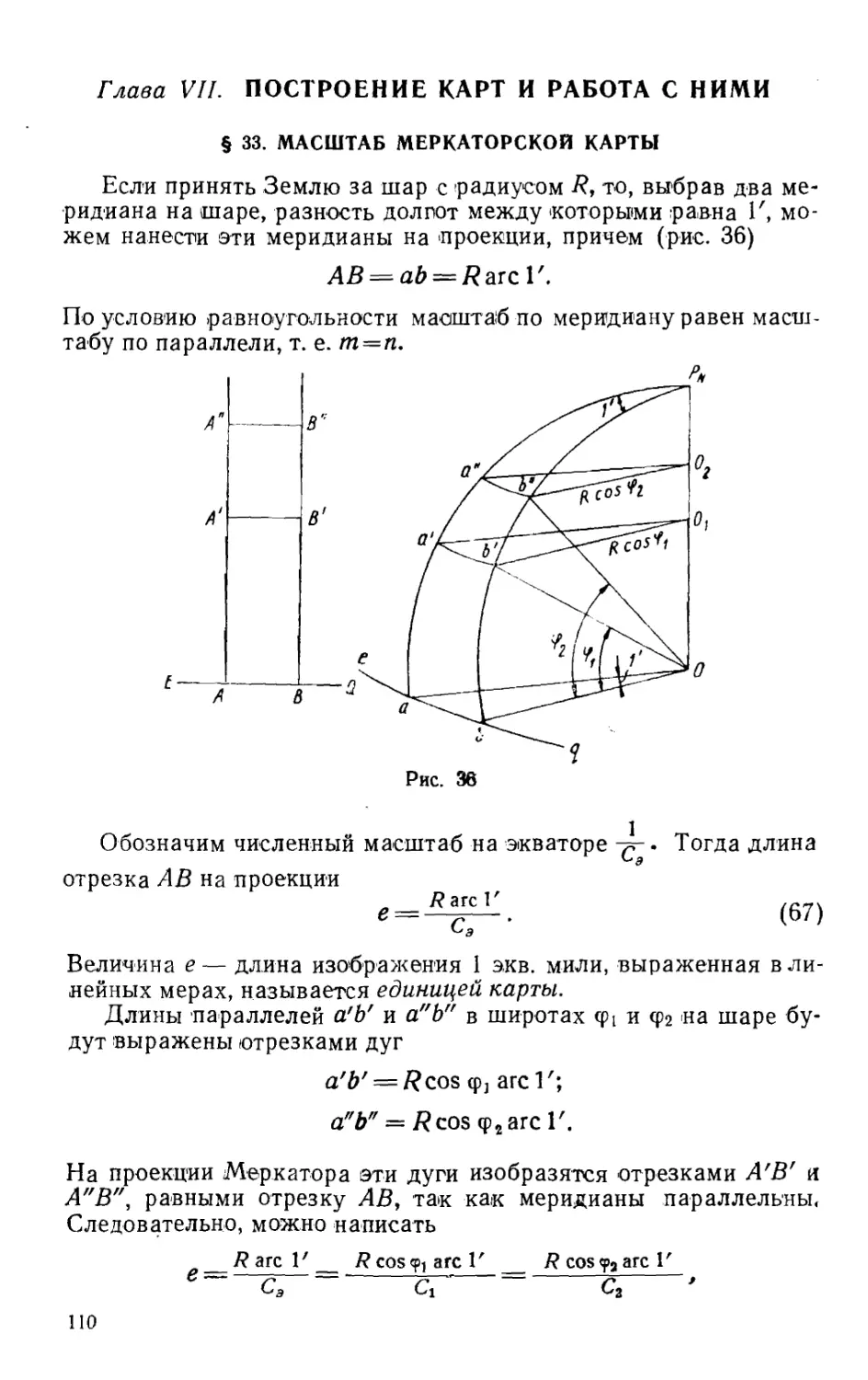
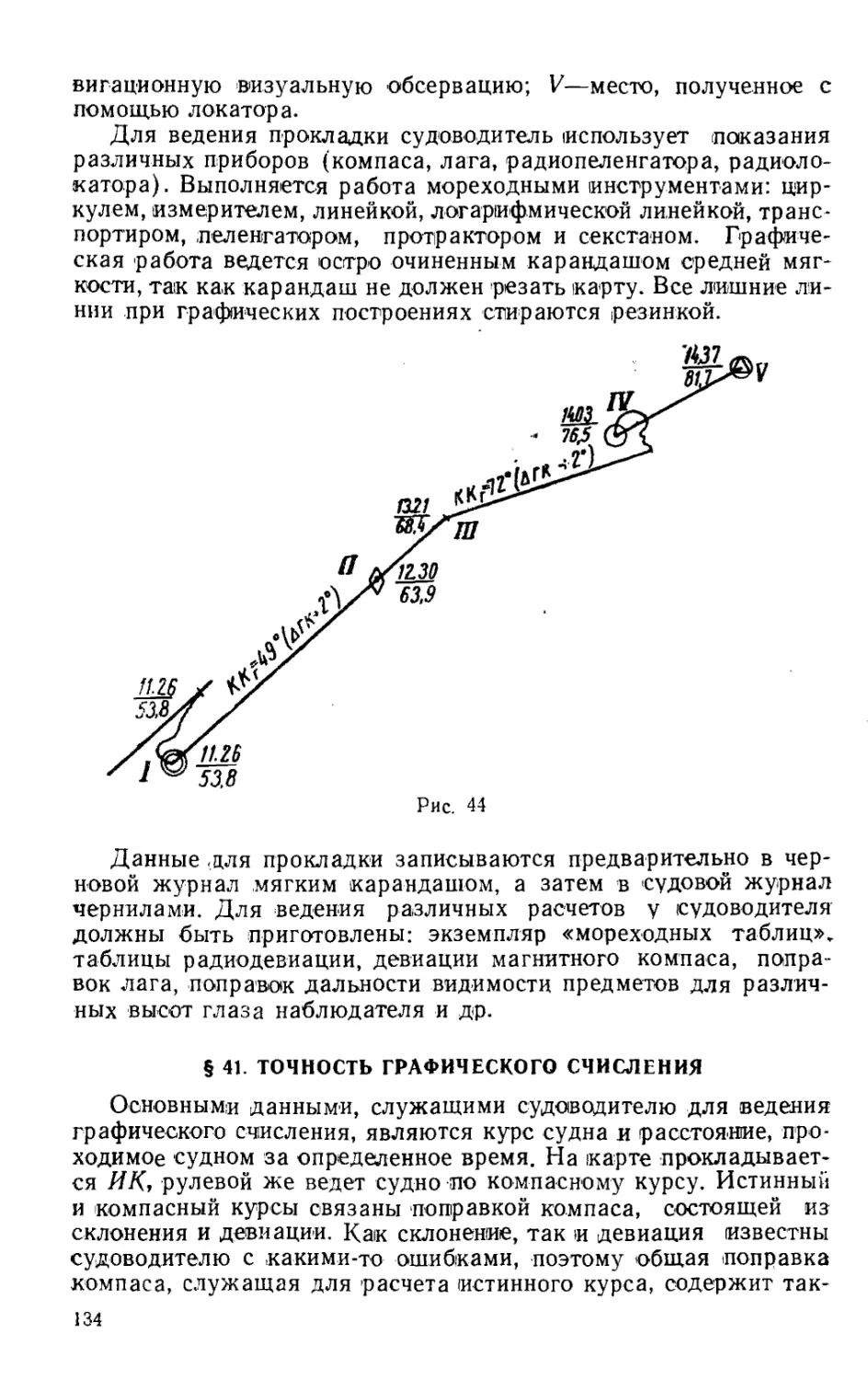
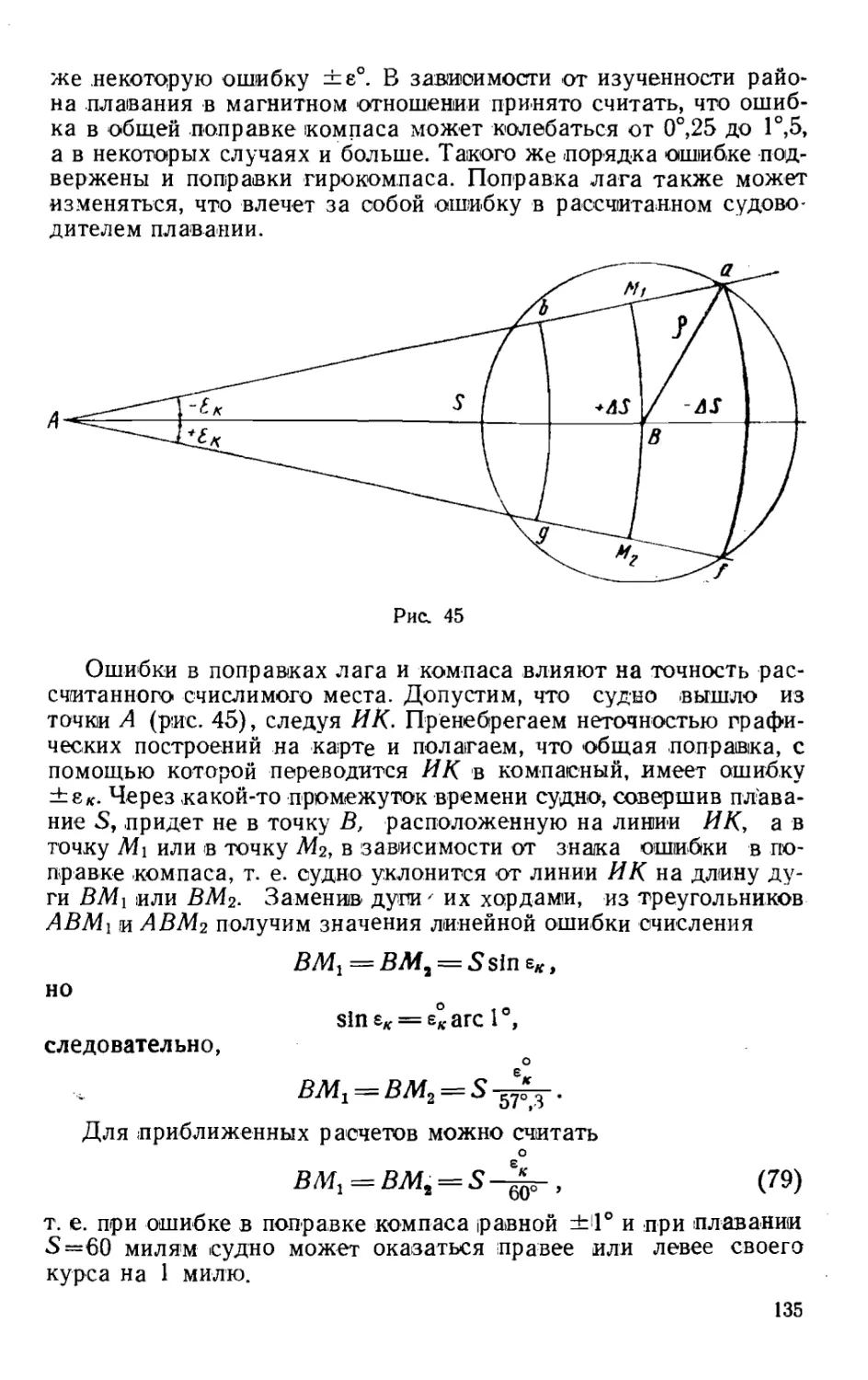
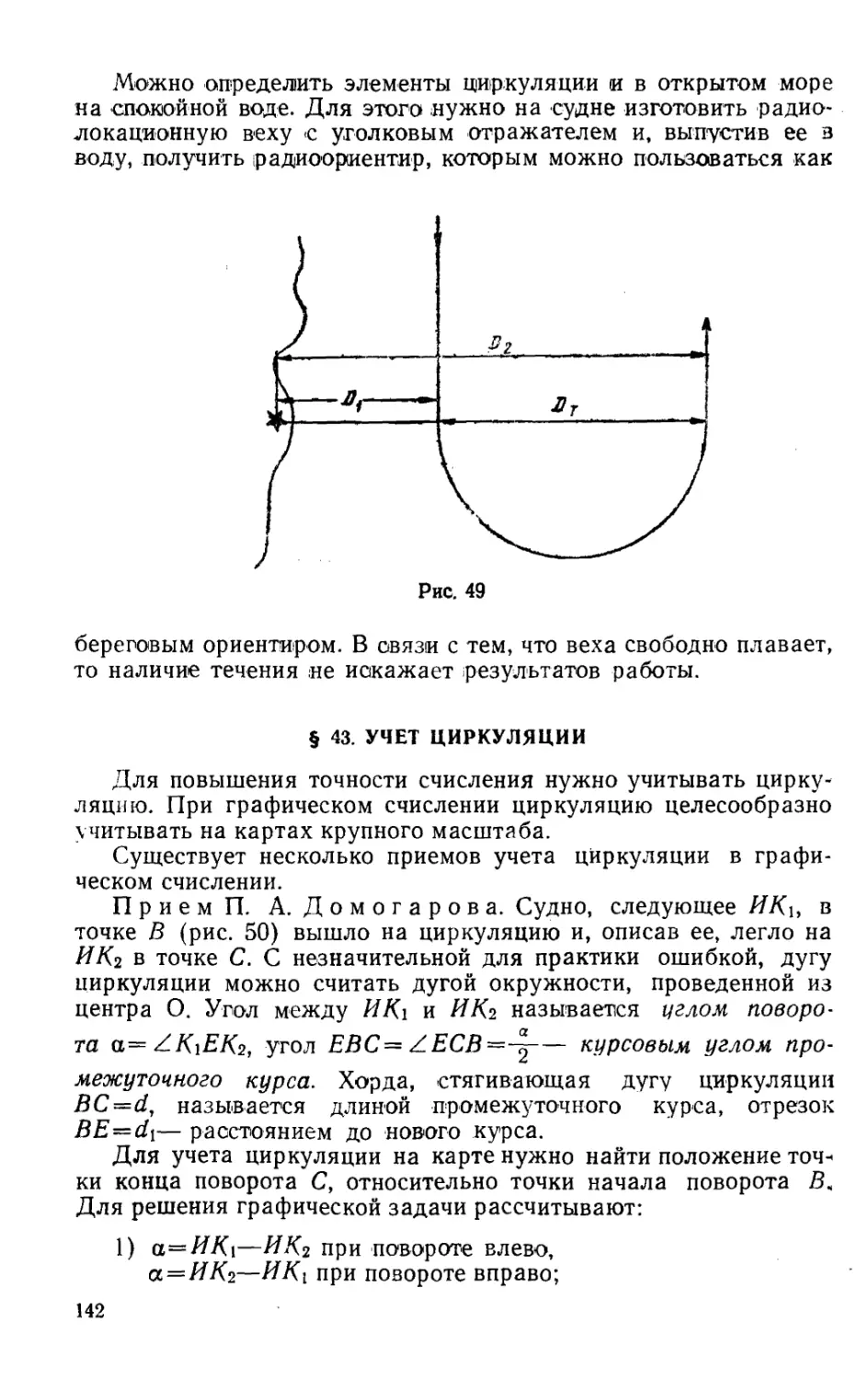
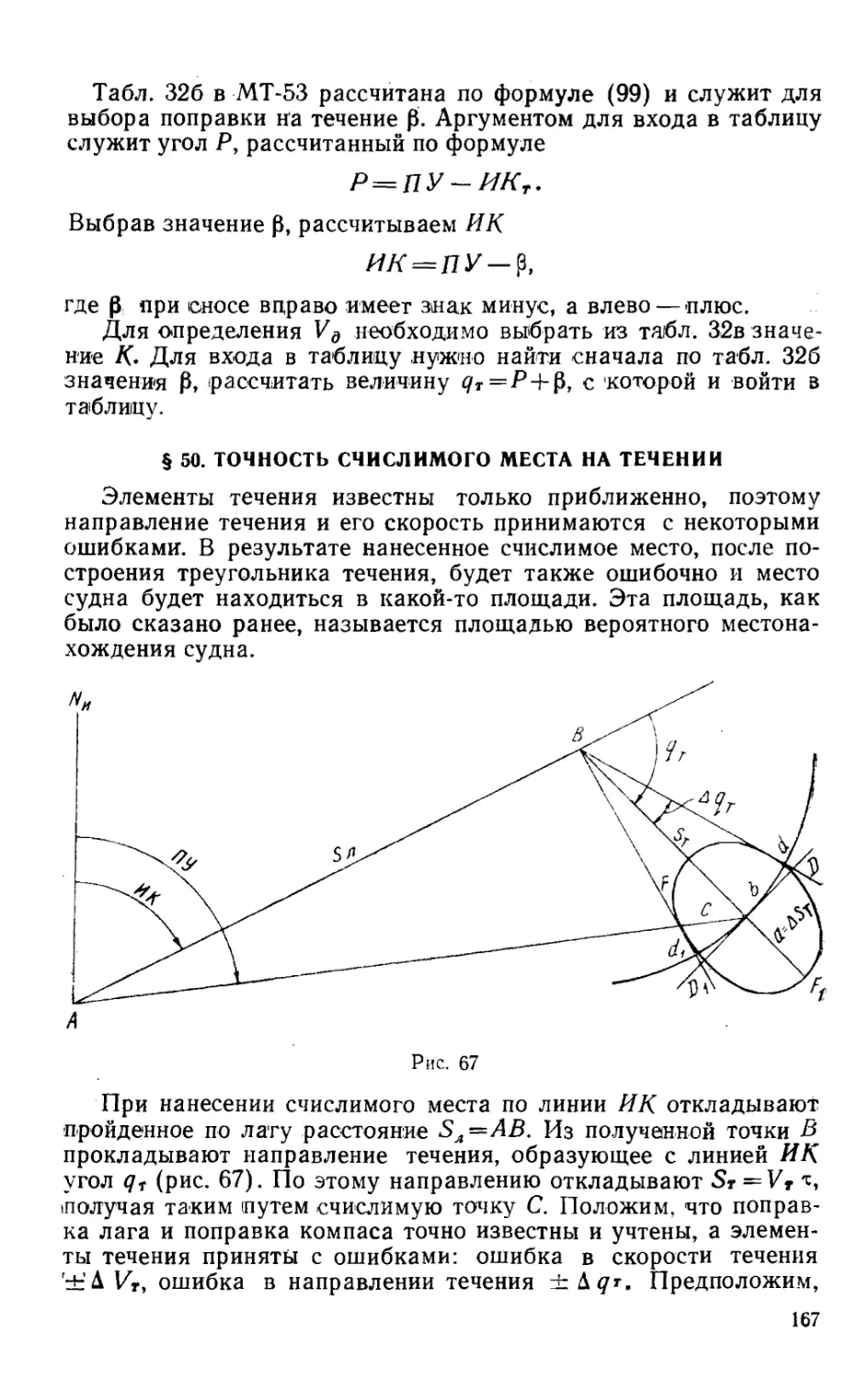
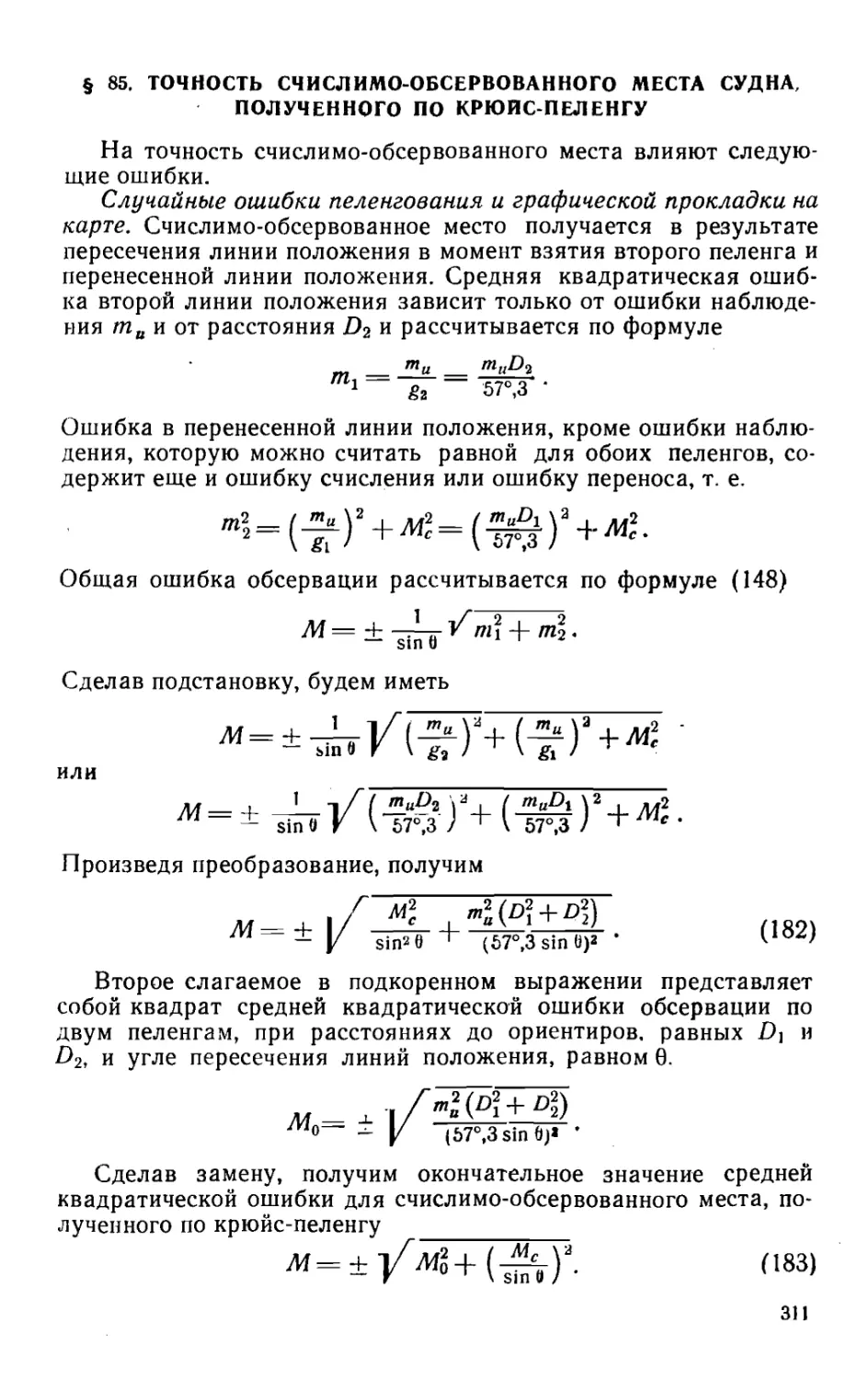
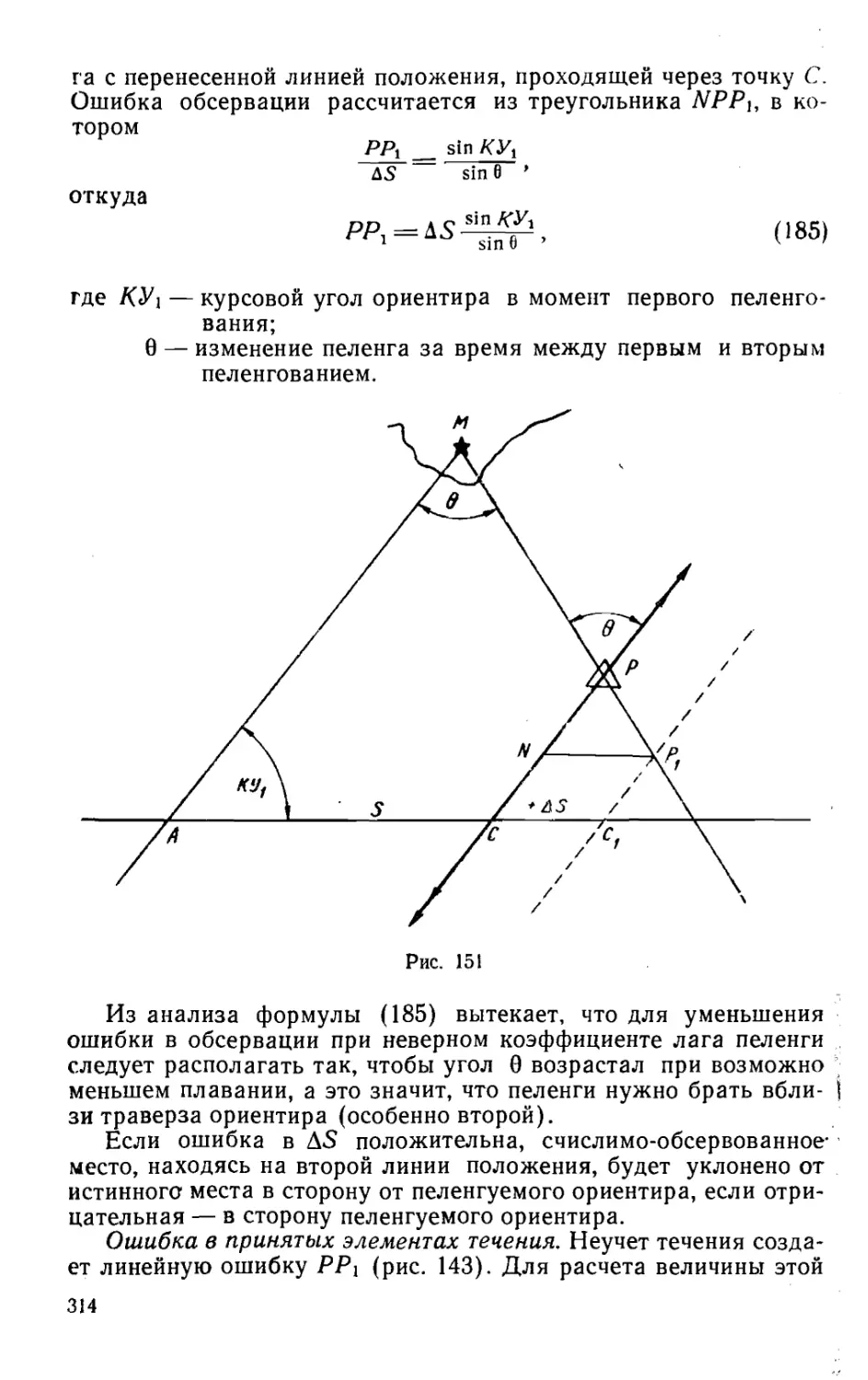
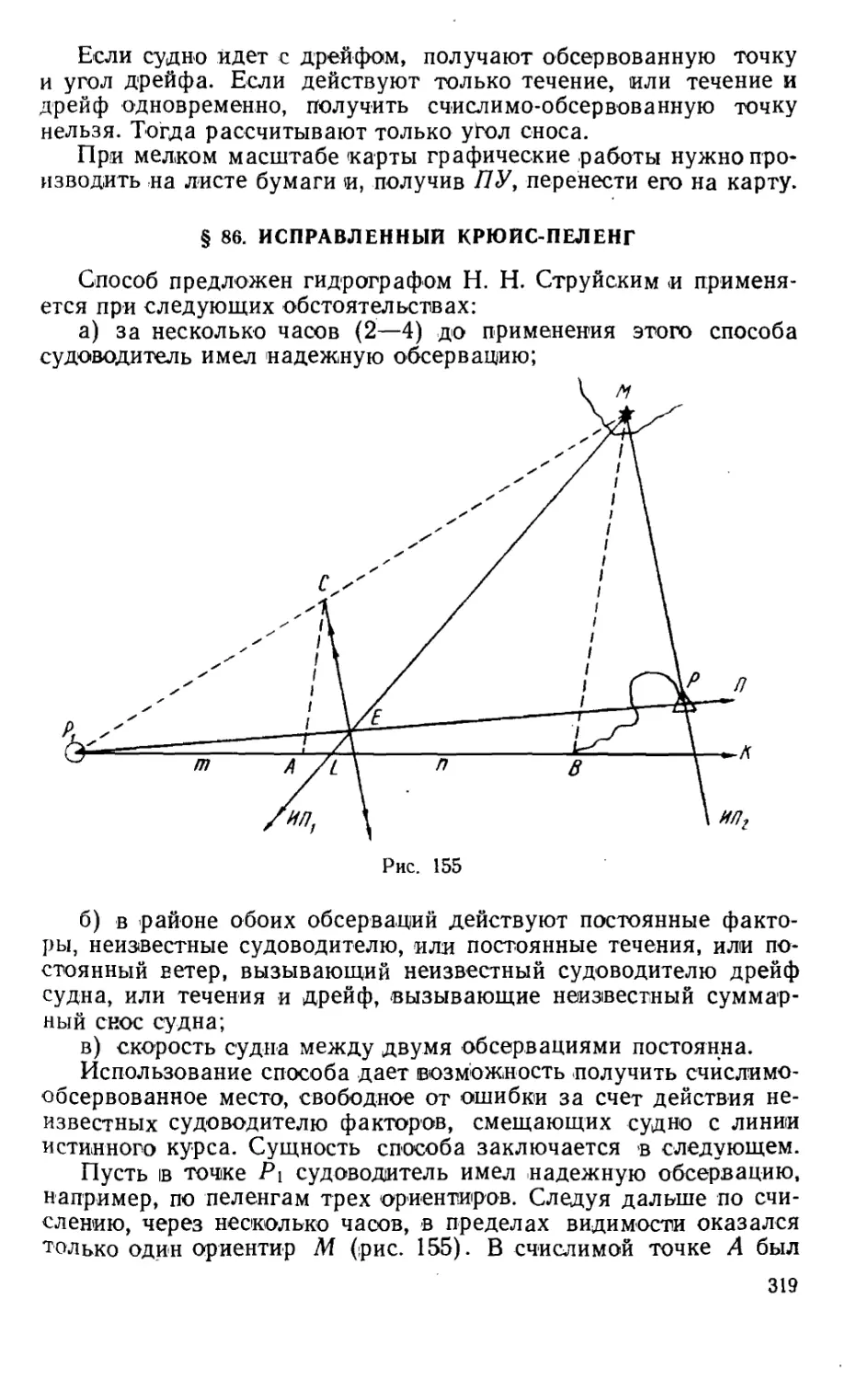
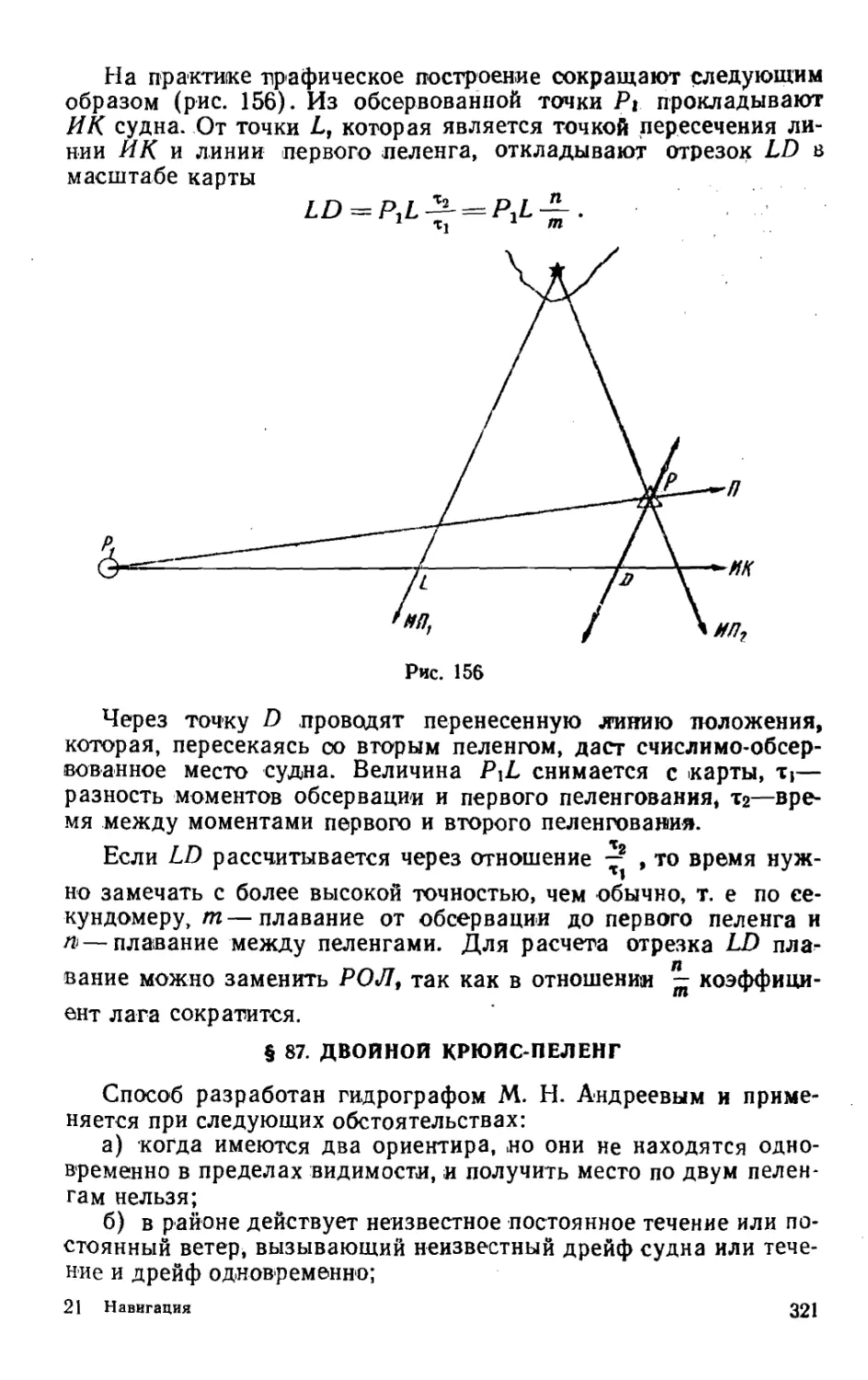
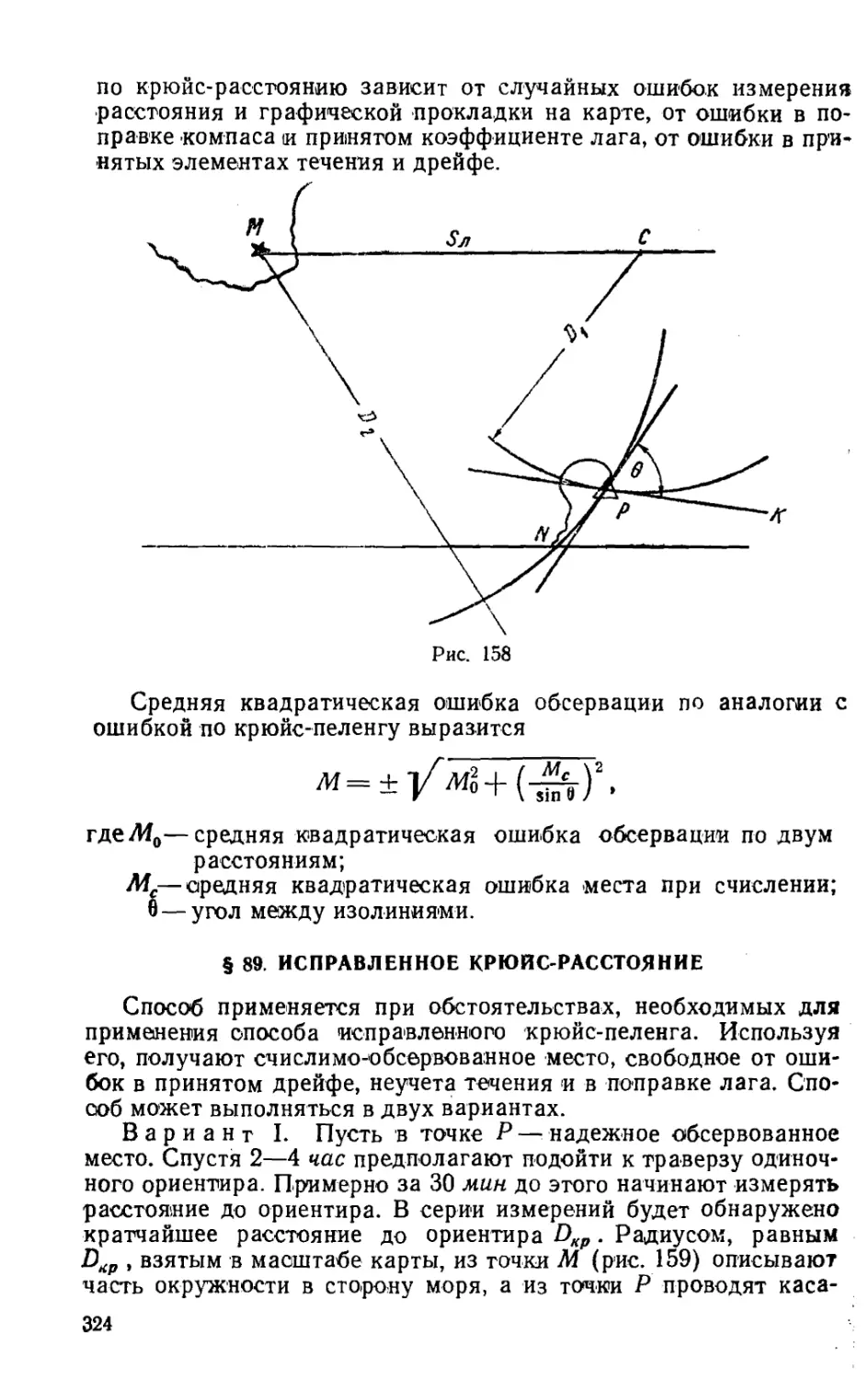
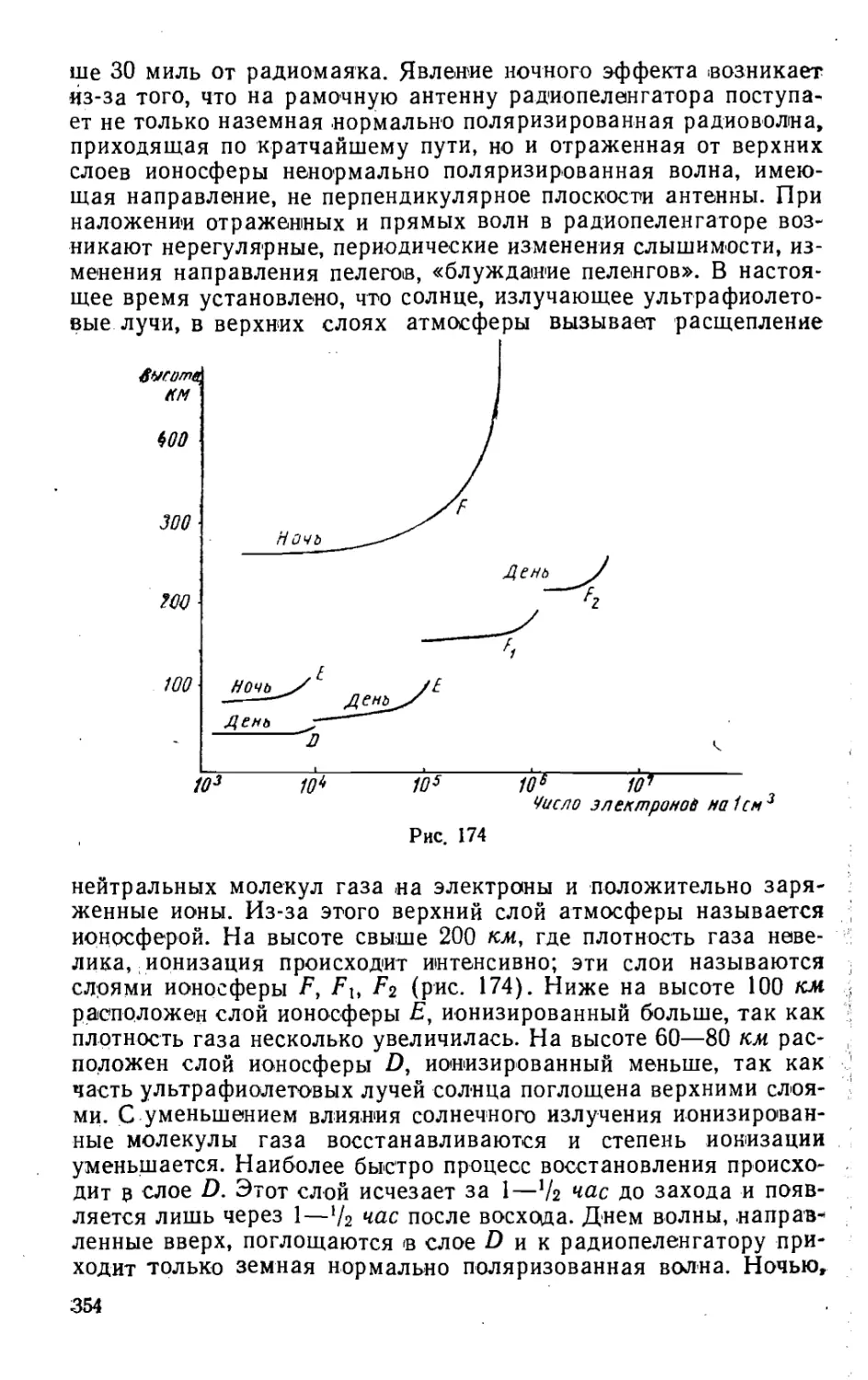
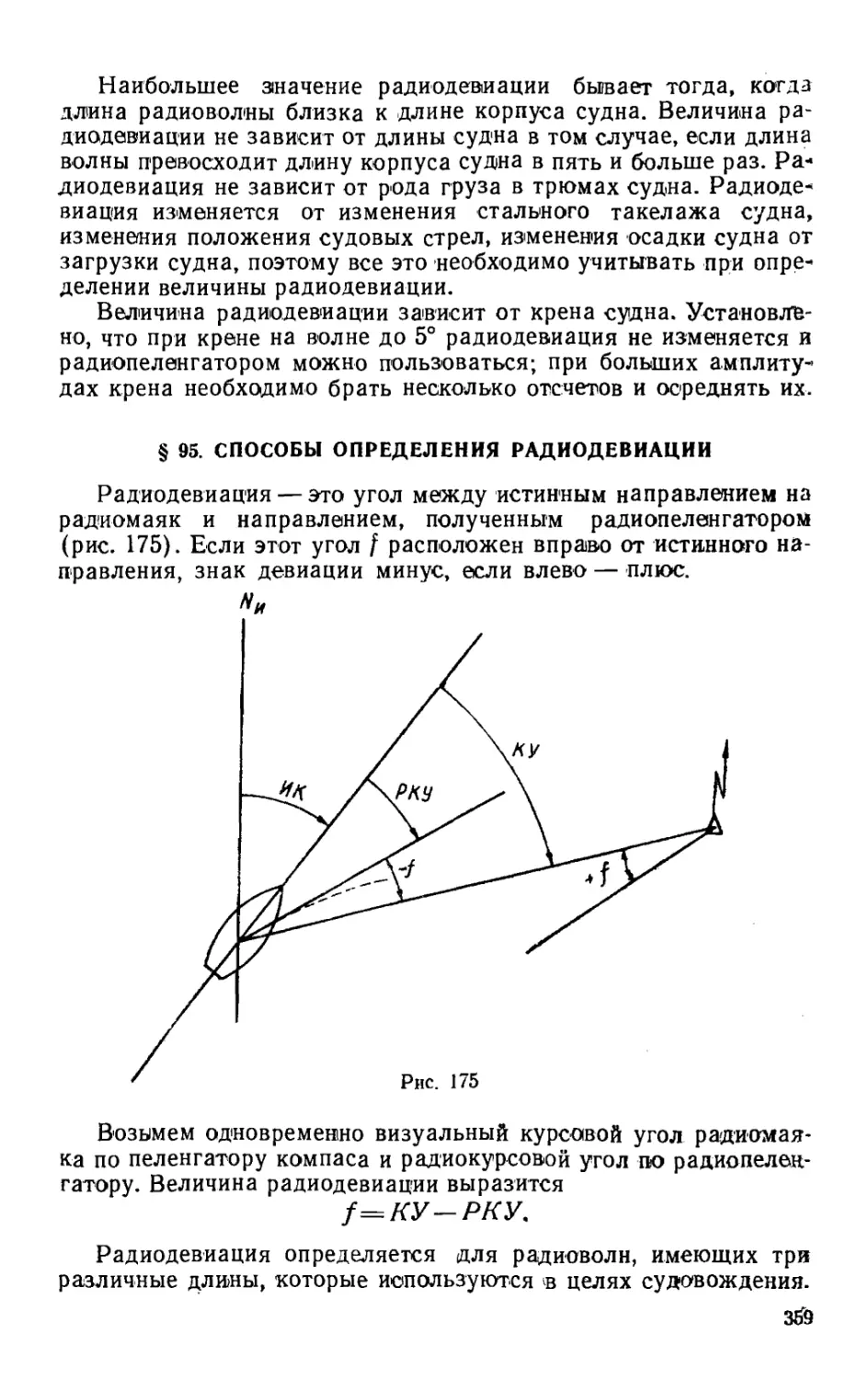
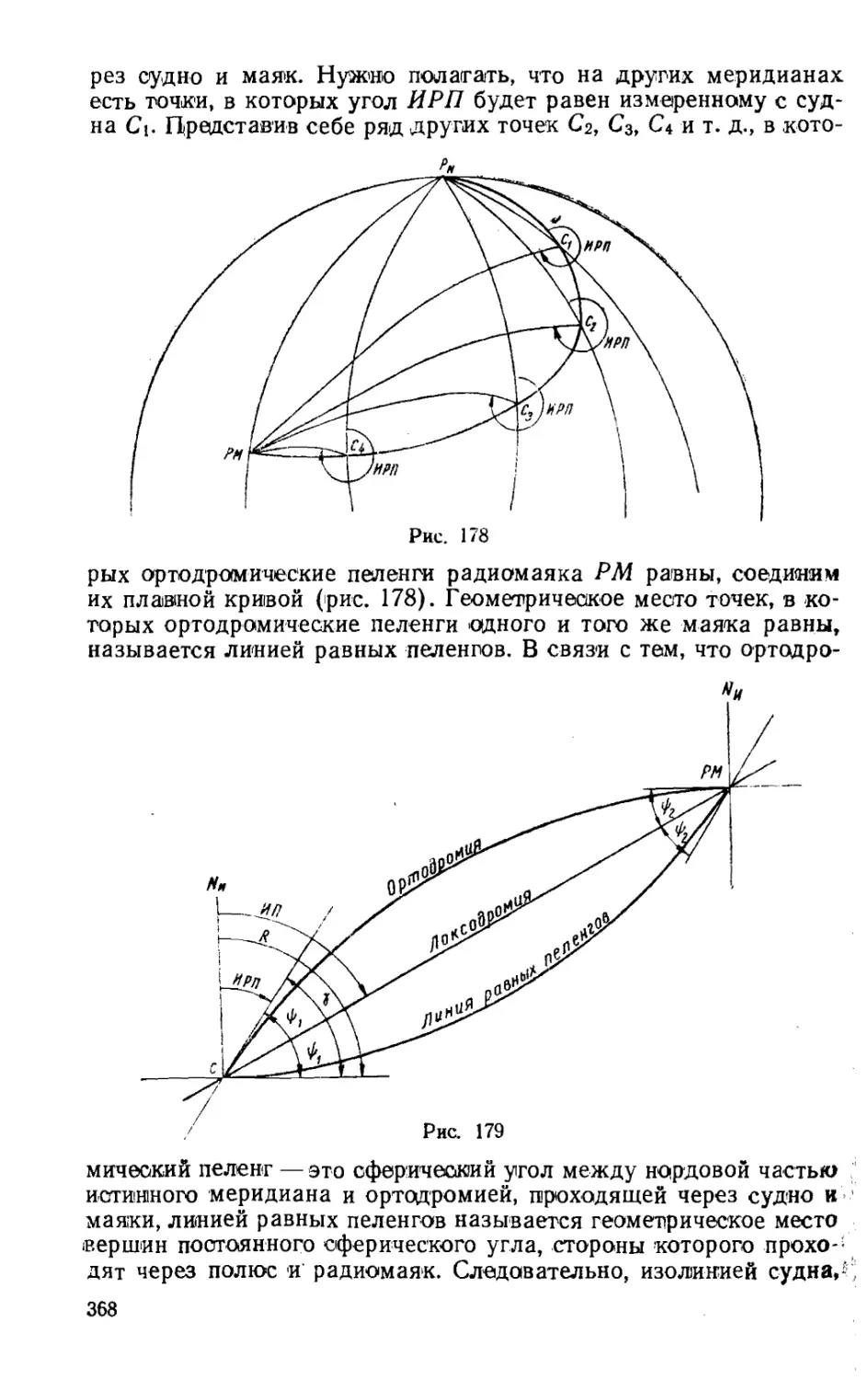
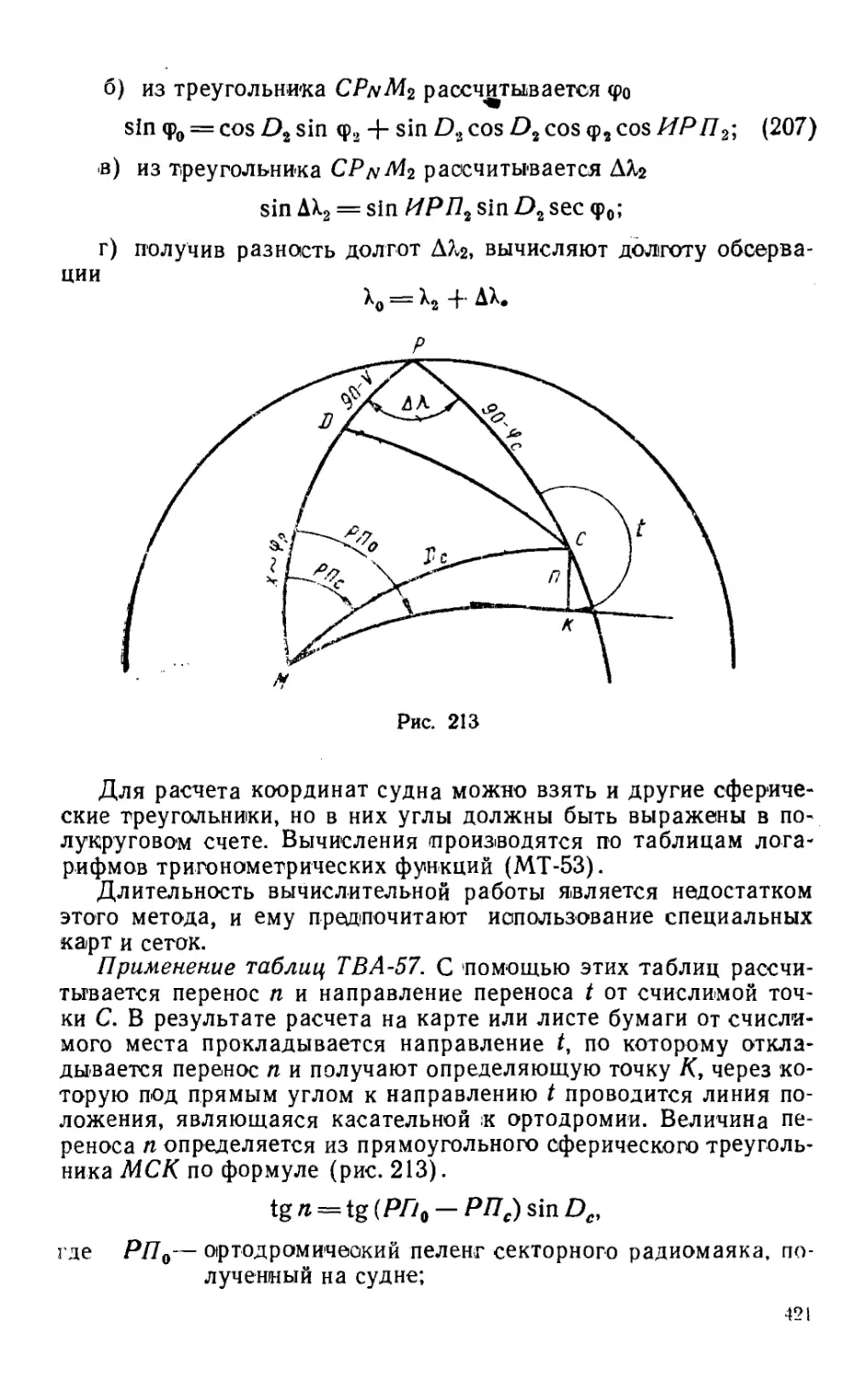
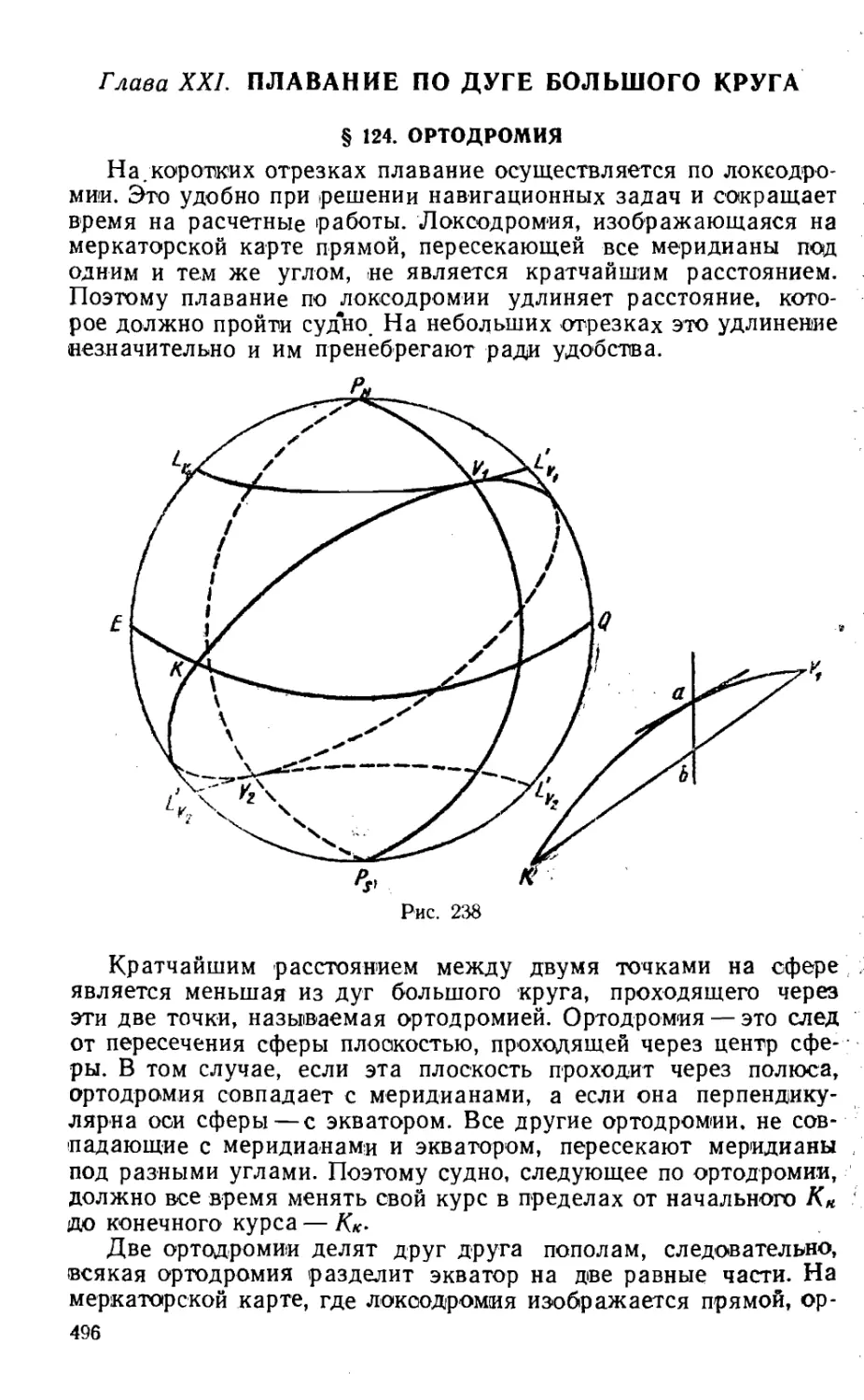
Text
ОТ АВТОРА
С каждым годом все увеличивается число обучающихся за-
очно в морских учебных заведениях. Специфика работы моряков-
заочников требует создания специальных пособий, по которым
можно было бы изучить предмет без помощи преподавателя. На-
стоящий учебник по навигации является одним из таких пособий.
Учебник составлен по программе курса «Навигация», изучае-
мого на судоводительских факультетах высших инженерных мор-
ских училищ. В нем, основываясь на новейших достижениях на-
уки и техники, применяемых в судовождении, описываются спо-
собы счисления пути судна, методы определения места судна,
применение радиотехнических средств в навигации, способы пла-
вания при особых обстоятельствах и др.
В отличие от ранее вышедших учебников по навигации, в нем
в каждой главе дается решение задач по излагаемой теме. Это
поможет учащимся закрепить материал, самостоятельно решить
задачи и ответить на контрольные вопросы, которыми снабжена
каждая глава книги. Для усвоения материала заочник должен,
помимо учебника, иметь другие учебные пособия, в частности,
«Сборник задач и упражнений по навигации» В. В. Александров-
ского и А. Ф. Мацюто, а также ряд навигационных пособий
и карт.
Автор приносит глубокую благодарность инженерам-судово-
дителям Р. Н. Шевалину и И. С. Дмитркжу, капитану дальнего
плавания, доценту А. И. Щетининой, рецензентам доктору воен-
но-морских наук, профессору А. П. Ющенко, капитану дальнего
плавания, канд. техн, наук, доценту М. М. Лескову, доценту
з
Г' Г. Ермолаеву, капитану дальнего плавания, канд. техн, наук,
доценту В. И. Удалову, которые сделали много замечаний и дали
ряд полезных советов автору в процессе подготовки рукописи к
печати. Много ценных советов дал автору покойный капитан
дальнего плавания, канд. географических наук М. В. Готский.
Автор будет признателен за все замечания, поправки и поже-
лания, высказанные по этому изданию.
< I
РАЗДЕЛ ПЕРВЫЙ
ОСНОВНЫЕ понятия
Глава 1. НАУКА НАВИГАЦИЯ
$ I. НАВИГАЦИЯ И ЕЕ РОЛЬ В ЦИКЛЕ НАУК
О СУДОВОЖДЕНИИ
Слово «Навигация» происходит от латинского «navigare»,
что означает «ездить по 1морю», «ходить по морю».
Хождение по морю с точки зрения судовождения—переход
судна наивыгоднейшим путем, без отклонения от него, из одной
точки в другую.
В русский язык понятие слова «навигация» вошло при Пет-
ре I, и люди, умеющие «ходить по морю», стали называться на-
вигаторами. В эту эпоху понятие навигация отождествлялось с
понятием судовождения вообще. Затем навигация как наука вы-
делилась в отдельную отрасль из цикла наук по судовождению,
включающего также лоцию, мореходную астрономию, девиацию
магнитных компасов, метеорологию, океанографию и технические
средства судовождения.
Современная навигация — это наука, разрабатывающая тео-
ретические обоснования и практические методы вождения судов
наивыгоднейшими путями в любое время и при различных гидро-
метеорологических условиях, используя современные мореход-
ные инструменты и приборы, а также морские навигационные
карты и пособия.
Навигация занимает ведущее место в цикле наук по судо-
вождению. В нее входит следующий комплекс вопросов:
основные понятия о Земле, определение направлений в море
и измерение по этим направлениям расстояний;
методы определения поправок навигационных приборов н
инструментов и использование этих поправок во время плава-
ния;
изучейие и выбор наиболее удобных для судовождения кар-
тографических проекций и решение на них аналитическим и гра-
фическим способами различных навигационных задач-,
влияние внешних факторов, вызывающих отклонение судна
5
с выбранного пути; методические приемы учета их влияния в
различных условиях плавания;
определение места судна по береговым 1преицметам при помо-
щи навигационных приборов и инструментов, а также оценка
точности результата определения этими приемами.
$ 2. РОЛЬ ОТЕЧЕСТВЕННЫХ УЧЕНЫХ И МОРЯКОВ
В РАЗВИТИИ НАВИГАЦИИ
История развития судовождения, а следовательно, и навига-
ции, тесно связана с ростом производительных сил общества и
шла параллельно с освоением морей и океанов, а также с гео-
графическими открытиями.
В сокровищницу науки о судовождении народы России внес-
ли большой вклад. В начале нашей эры побережье Черного мо-
ря населяли анты (одна из ветвей юго-восточных славян) — от-
личные мореплаватели, имеющие хороший для того времени
флот. На своих судах они доходили до о. Сицилия.
В V в. и. э. ант Лоброгаст командовал византийской эскад-
рой. Флот антов ходил к берегам Южной Италии, в 615 г. со-
стоялся их поход в Византию, а через 8 лет—на о. Крит и т. д.
Морское искусство антов перешло и в Киевскую Русь. Рус-
ский флот к этому времени достиг большой численности. Так,
в неоднократных походах на Византию принимали участие в
860 г.— 200 судов, при князе Олеге (907 г.) уже 2000 судов, при
Игоре (941 г.) —1500. В этот период русский флот господство-
вал на Черном море. Летописец Нестор и арабские историки то-
го времени называли Черное море «Русским морем».
В 913 г. русские совершили небывалый для того времени по
длительности, дальности и сложности поход из Днепра через
Черное и Азовское моря, Дон и Волгу в Каспийское море, к бе-'
репам Табаристана и обратно. В походе участвовало 500 судов.
В 1068 г. впервые на Черном море была измерена ширина
Керченского пролива.
Нашествие кочевников затормозило дальнейшее развитие
мореплавания на Киевской' Руси, вплоть до XVI в., т. е. до по-
явления на Днепре Запорожской Сечи.
В это же время начинает развиваться мореходство и на Бал-
тийском море. Через него проходил путь «из варяг в греки».
Купцы Великого Новгорода уже в ИЗО г. совершали плавания
на о. Гогланд и имели там свой Гостиный двор. В первой поло-
вине XIII в. шведы захватили Финляндию. Это приостановило
развитие мореплавания на Балтийском море вплоть до эпохи
Петра I.
Жители русского Севера поморы также были искусными мо-
реплавателями'. В XII в. русские поморы плавали на о. Грумант.
Они пользовались солнечными часами и компасом в костяной
оправе, имели рукописные лоции и глазомерные карты. На
6
о. Фаддея найдены уникальные навигационные приборы, отно-
сящиеся к началу XVII в.:, медный компас, картушки компаса,
солнечные часы, изготовленные, видимо, мастерами-поморами.
К XV в. относятся карты России, на которых обозначены во-
сточные и северные берега Сибири. В 1633 г. Илья Порфирьев
открыл с моря реки Оленек, Индигирку и Яну, а через шесть лет
казак Василий Поярков прошел по Амуру и вышел в Охотское
море. В 1639 г. в Охотском море побывал Иван Москви-
тян. Вскоре / на побережье это^р моря был основан порт
Охоток. Отсюда началось освоение русскими огромного бассейна
дальневосточных морей. В 1648—1649 гг. Семен Дежнев первым
на семи кочах прошел проливом между Азией и Америкой, опе-
редив этим открытие Беринга на 80 лет. Дежнев описал свой
путь. Описание сопровождалось картой, не имеющей градусной
сетки. Расстояния на карте указаны в днях пути. По исследова-
ниям Дежнева в 1667—1676 гг. в г. Тобольске были отпечатаны
карты; на которых был нанесен пролив между Азией и Америкой,
омываемое морем побережье Сибири, указан путь из устья Ле-
ны в Амур, нанесена Камчатка. Освоение Северного морского
пути, начатое Дежневым, продолжалось несколько столетий и
успешно завершилось в годы Советской власти. В 1648 г. Алек-
сей Филиппов создал первую лоцию Охотского моря.
Таким образом, задолго до царствования Петра I русские
моряки достигли значительного искусства в судовождении. К
сожалению, сведения о способах и технических средствах судо-
вождения, которыми тогда пользовались, весьма малочисленны,
но и они подтверждают высокий уровень судовождения русских
мореходов.
Петр I понимал, что без выхода в южные и балтийские моря
расцвет государства невозможен, а это требовало наличия хо-
рошо оснащенного флота. Чтобы выйти к Черному морю, необ-
ходимо было завладеть устьем Дона и крепостью Азов. Первый
поход к Азову (1695 г.) окончился неудачей. Не было флота.
Началась постройка судов в Воронеже. Уже к 1696 г. были по-
строены корабль, два бряндера, 23 галеры. С этим флотом со-
стоялся второй поход на Азов, окончившийся успешно. При-
знавая заслуги моряков в этой победе, Петр I решил создать
постоянный военный флот и организовать подготовку судоводи-
телей. 14 января 1701 г. в Москве открылась школа математиче-
ских и «навигацких» наук. В 1711 г. в ней обучалось уже 500 че-
ловек.
В школе изучалась навигация по учебнику русского учителя
Леонтия Филипповича Магницкого—одного из образованнейших
людей того времени, который был ведущим преподавателем на-
вигации, мореходной астрономии и математики.
Библиотекарем школы Куприяновым были созданы первые
навигационные таблицы «Разности широт и ртшествий», а также
таблица «Меридиональных частей».
7
В 1715 г. была основана в Санкт-Петербурге Морская ака-
демия.
При Петре I было напечатано более 20 морских книг. В
1714 г. был издан Атлас Балтийского моря и карты походов в
Швецию на основании морских съемок.
Создав флот, искусно управляемый образованными моряка-
ми, Петр I возвратил России те земли и выходы к морю,
которые были необходимы для нормального развития
страны.
Организованная в 1725 г. Петром I Первая Камчатская экс-
педиция под командованием Витуса Беринга изучила пролив,
названный именем Беринга, и послужила началом ряда экспе-
диций в Дальневосточном бассейне. С 1732 по 1741 г. В. Беринг
и А. И. Чириков возглавляли Вторую экспедицию, известную
под названием Великой северной экспедиции. Это было гран-
диозное для своего времени по масштабам, организации и ре
зультатам работы научное морское предприятие. Отряды экспе-
диции вели съемки одновременно на протяжении 8000 миль.
Экспедицией были открыты и описаны северо-западные берега
Америки и много островов.
Навеки вошли в историю имена русских моряков-исследова-
телей С. Г. Малыгина, Алексея Скуратова, Д. Л. Овцына, Ва-
силия Прончищева, Никифора Чекина, Михаила Щербинина,
А. И. Петрова, П. А. Чаплина и других питомцев Петра, и вы-
пускников Навигационной школы. Эти моряки своим бескорыст-
ным трудом создавали славу Родине и развивали науку о судо-
вождении. В 1733 г. вышла >в свет книга С. Г. Малыгина «Со-
кращенная навигация по карте де-редукцион». Карты и лоции
А. И. Чирикова и А. Н. Нагаева свыше 60 лет служили русским
морякам.
В 1748 г. С. Мордвиновым был издан капитальный труд —
«Книги полного собрания о навигации», в котором освещены во-
просы геометрии и тригонометрии, космографии, географии, море-
ходной астрономии, приливо-отливных явлений (где дан расчет
прилива по прикладному часу порта), мореходных инструментов
и навигации. По полноте, с которой рассматриваются отдельные
вопросы в книге, можно судить о высоком уровне судоводитель-
ской науки того времени.
В 1759 г. М. В. Ломоносов опубликовал книгу «Рассуждения
о большой точности морского пути», в которой изложил основы
судовождения. В этом труде впервые было установлено, что
ошибка в счислении складывается из суммы ошибок в определе-
нии дрейфа судна, рыскания его на волне и точности держания
руля на курсе. Он предложил конструкцию некоторых приборов,
опередив мировую морскую науку на 100 лет. По мнению Ломо-
носова, суда должны снабжаться самопишущим компасом (в
Западной Европе этот прибор появился через 91 год), т. е. кур-
сографом, который, по словам Ломоносова, «покажет стоящего
8
у правления прошибки и оплошность»; дронометром (механиче-
ским лагом, который появился на судах в начале XX в.); клизе-
ометром, или дрейфометром, определяющем дрейф судна, и са-
лометром — прибором для определения направления и скорости!
течения.
Заботясь о безопасности мореплавания, Ломоносов настаиг
вал на создании Мореплавательской академии, а также на
учреждении службы по составлению прогнозов погоды и др. Он
был одним из первых инициаторов освоения Северного морского-
пути. В 1763 г. Ломоносов написал трактат «Краткое описание
разных путешествий по Северным морям и показания возмож-
ности прохода Сибирским океаном в Восточную Индию». В трак-
тате научно обоснованы государственные интересы России на
Севере. Ломоносов полагал, что в июне между Шпицбергеном и
Новой Землей океан очищается ото льдов и на 80-й параллели на
расстоянии около 600 верст от берегов Сибири тянется на 1000
верст открытая вода. Он утверждал, основываясь на направле-
нии течений, северных сияниях и других данных, что можно прой-
ти северным путем до Берингова пролива. В следующем году
была организована экспедиция В. Я. Чичагова, который дважды*
(в 1764 и 1766 гг.) доходил до 80-й параллели, но встречал там
непроходимый лед. Идеи Ломоносова были осуществлены лишь
советскими моряками, на советских судах.
Своими трудами в области мореходных наук М. В. Ломоно-
сов опровергает утвердившееся в Западной Европе мнение, что
Россия в XVIII в. не имела своей морской науки и своих ученых
моряков. Это мнение было также опровергнуто организацией
многочисленных кругосветных путешествий. В 1803—1849 гг.,
т. е. за 46 лет, было проведено 36 кругосветных экспедиций. Это-
в 2 раза больше, чем сделали флоты Англии и США вместе взя-
тые.
В 1803 г. была организована научная кругосветная экспеди-
ция на шлюпах «Нева» под командованием Ю. Ф. Лися некого-
и «Надежда», которой руководил И. Ф. Крузенштерн. В этой экс-
педиции шлюп «Нева» установил небывалый для своего времени
рекорд автономного плавания. На обратном пути в Кронштадт
судно не заходило в порт 167 суток. Участники экспедиции со-
ставили описания островов Киу-Сиу, Цусима, Тото, Курильских,
восточного берега Сахалина. Ими были открыты новые острова
в Тихом океане, один из которых носит имя Лисянского. Труды
экспедиции по наблюдениям, систематизации температуры и
плотности воды на различных глубинах, течений, приливов и от-
ливов были первыми работами в области океанографии. Был
составлен атлас Тихого океана. Экспедиция блестяще закончи-
лась в 1806 г.
В 1806 г. вышел в свет капитальный труд П. Я. Гамалея «Те-
ория и практика кораблевождения», в котором были описаны во-
просы навигации, лоции, мореходной астрономии, навигационные '
9»
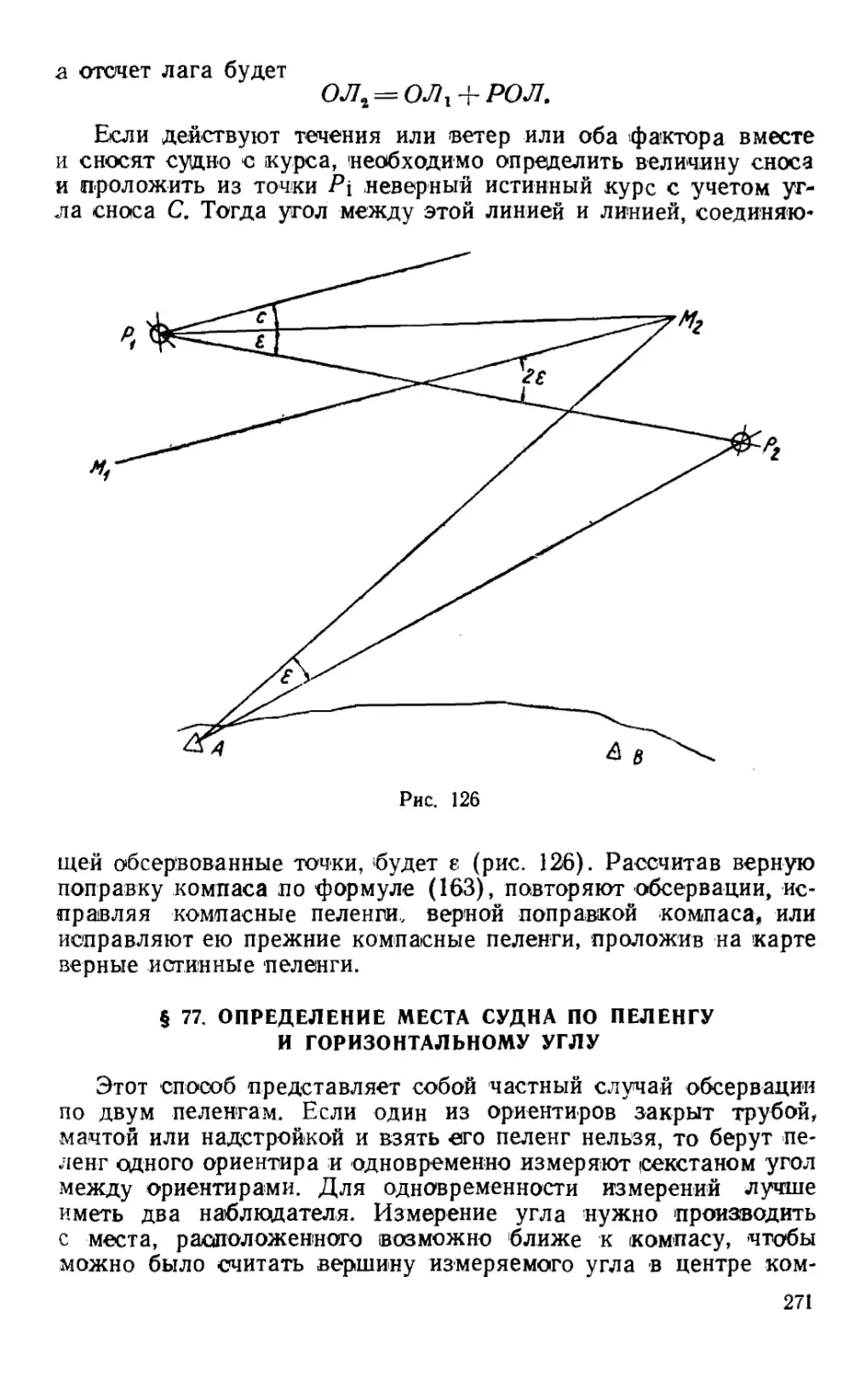
приборы и инструменты, включены различные таблицы, небхо-
.димые для судовождения. За четверть века книга переиздавалась
3 раза.
Через год после выхода книги Гамалея экспедиционное суд-
но «Диана» под командованием И. М. Головнина совершило пла-
вание из Кронштадта в Петропавловск.
В 1815 г. О. Е. Коцебу на бриге «Рюрик» открыл и исследо-
вал залив, названный его именем. На переходе был ис-
пытан сконструированный Коцебу глубоководный лот. Лишь
спустя 47 лет лот был вторично предложен англичанином Томп-
соном.
В 1819 г. русское морское министерство снарядило «для от-
крытия» экспедицию в составе шлюпа «Восток» и «Мирный» под
командованием Ф. Ф. Беллинсгаузена и М. П. Лазарева. Экспе-
диция пробыла в плавании 751 день, открыла 22 новых острова,
первой достигла материка Антарктиды и в 1821 г. вернулась в
Кронштадт. Плавание в 92 тыс. миль в том числе в условиях Ан-
тарктики, при плюхой видимости во льдах и почти полном отсут-
ствии пособий, могло быть выполнено только людьми высокой
морской культуры.
Открытие Антарктиды русскими мореплавателями опровергло
вывод английского капитана Кука, который заявил после своих
путешествий, что на юге Тихого океана материка нет.
В этот же период (1821—1824 гг.) Ф. П. Литке, возглавляя
экспедицию в Арктику на бриге «Новая Земля», нанес на карты
берега Мурмана, Новой Земли, островов Вайгач, Колгуев и со-
ставил карты Белого и Баренцева морей.
Экспедиции начала XVIII в., их научные труды, их географи-
ческие открытия способствовали дальнейшему развитию мореход,
ных наук.
Русский моряк Г. И. Невельской в 1849 г. исследовал побе-
режье Охотского моря. Он первый установил, что Сахалин яв-
ляется островом, а не полуостровом, как это считалось до
него.
Труды Ф. П. Врангеля, Г. Я. Седова, А. И. Вилькицкого,
Г. А. Сарычева и других наших соотечественников позволили
создать карты и пособия русских вод и берегов с высокой точно-
стью. С появлением паровых судов, увеличением их скорости
флота такая точность карт и пособий стала особенно важной для
судовождения.
Строительство стальных судов поставило перед моряками но-
вую проблему: нужно было исследовать работу магнитного ком-
паса в магнитном поле судна. В 1865 г. вышла книга И. П. Бе-
лавенца «О девиации компасов и о диаграммах». Работы Бела-
венца и его ученика И. П. Колонга создали новую науку — деви-
ацию магнитных компасов и вывели ее на первое место в мире.
Последователи И. П. Колонга — А. Н. Крылов, Н. Н. Оглоблен-
ский и В. Я. Павлинов —продолжали развивать эту науку.
чо
В этот же период выходят книги Зыбина «Руководство к ко-
раблевождению» и Лукина «Навигация», совершенствующие ме-
тоды определения места судна в море.
4 24 марта 1896 г. А. С. Попов выступил перед физико-химиче-
ским обществом с докладом и демонстрацией своих радиоприбо-
ров. В этот исторический день Попов передал на расстояние
250 м по беспроволочному телеграфу два слова «Генрих Герц»,
Величайшее изобретение было осуществлено Поповым, на свои
средства, без всяких 'правительственных ассигнований. Поэтому
лишь в 1898 г. удалось построить две полные радиопередаточные
и приемный станции, при помощи которых на кораблях «Европа»
и «Африка» был призведен обмен телеграммами на расстояние
8 км. В 1899 г. Попов установил беспроволочную связь между
городом Котка и островом Готланд на расстоянии 40 км. Нача-
тые Поповым работы, связанные с отражением радиоволн от
предметов и возвращением их к приемнику, не были закончены
из-за е^о смерти (в 1906 г.).
Русские моряки пронесли через века благородную традицию
служения науке и Родине. На картах мира запечатлено 566 рус-
ских имен. Их именами названы моря, острова, мысы, заливы,
проливы и др.
После Великой Октябрьской социалистической революции на-
ша страна в области изучения морских путей, организации экс-
педиций, походов и исследования морей сделала во много раз
больше любой капиталистической страны. Советские моряки и
ученые полностью восприняли и творчески развили славную тра-
дицию русских моряков-исследователей: повседневно обогащать
и развивать науку на благо своей Родины.
Только в годы Советской власти удалось освоить Арктику.
В 1932 г. ледокол «Сибиряков» впервые в истории совершил
сквозное плавание из Архангельска в Тихий океан в течение од-
ной навигации. В 1940 г. Центральным научно-исследователь-
ским институтом геодезии, аэросъемки и картографии под руко-
водством профессора Ф. Н. Красовского была закончена работа
по определению размеров земного сфероида.
Работы академиков Н. Д. Папалекси, Л. И. Мандельштама,
А. И. Берга, проф. Е. Я. Щеголева и других дали возможность
создать новую радионавигационную аппаратуру. Советские уче-
ные Ю. Б. Кобзарев, А. А. Погорелко, Н. Я. Чернецов внесли
большой вклад в развитие радиолокации.
Новые электрорадионавигационные приборы позволили усо-
вершенствовать способы определения места судна и методы пла-
вания в узкостях.
Получили небывалый в истории размах и съемочные работы..
Советскому ученому-моряку П. А. Демину присуждена премия
имени Литке за огромную работу по составлению описи дальне-
восточных морей. Созданы совершенные навигационные посо-
бия. Первый советский учебник по навигации был составлен уче-
11
ным-моряком Н. А. Сакеллари. Совершенствуется магнитный
компас. Профессор В. В. Каврайский создал новый прибор на-
клономер, увеличивающий точность астрономических обсерва-
ций. Много работ посвятил Каврайский развитию навигации. Им
созданы работы «Обобщенный способ линий положения», «Тео-
рия определения точки на поверхности», работы по математиче-
ской картографии и др.
Широко известны работы преф. Н. Н. Матусевича по навига-
ции: «Определение места корабля по радиопеленгам», «О пла-
вании на течении», «Прямоугольные координаты и их примене-
ние в гидрографии, -картографии и навигации» и др. Профессор
А. П. Ющенко посвятил ряд работ вопросу точности навигацион-
ных определений. В области навигации следует также отметить
труды М. Н. Андреева, Н. Н. Струйского, А. В. Забелло,
М. М. Лескова, И. Л. Бухановского, М. В. Готского и др. Основ-
ным учебником по навигации в течение многих лет является
учебник профессора К. С. Ухова, выдержавший 4 издания.
Контрольные вопросы
I. Как изменялось понятие навигации?
2. Что собой представляет наука «Навигация»?
3. Какие вопросы изучает наука «Навигация»?
4. Роль антов в развитии судовождения.
5. Какие морские походы были совершены русскими в эпоху Киевской
Руси?
6. Как развивалось судовождение в XVI в. в различных бассейнах?
7. Роль Петра I в развитии судовождения.
8. Роль М. В. Ломоносова в совершенствовании судовождения.
9. Перечислите кругосветные плавания русских моряков в XIX в.
10. Назовите научные труды по судовождению, созданные в XIX в.
11. Роль А. С. Попова в развитии судовождения.
12. Как совершенствовалась навигация после Октябрьской революции?
Глава II. СВЕДЕНИЯ О ЗЕМЛЕ
§ 3. ФОРМА И РАЗМЕРЫ ЗЕМЛИ
Земля представляет собой неправильное геометрическое тело,
называемое геоидом. В первом приближении принимают Землю
за шар, во втором — за сфероид, представляющий собой эллип-
соид вращения, который получается при вращении эллипса
P^QPsE ©округ малой оси PnPs (рис. 1).
’ Исследованиями геодезистов установлено, что разность меж-
ду уровенной поверхностью геоида и поверхностью эллипсоида
вращения по высоте не превышает 150 м. Во всех вопросах прак-
тической геодезии, астрономии и картографии Землю принима-
ют за сфероид. Определение размеров земного сфероида состав-
ляет содержание одной из основных задач высшей геодезии.
Предположения, что Земля имеет фигуру эллипсоида враще-
ния, сплюснутого у полюсов, были высказаны давно. Теоретиче-
12
аки верность этих предположений доказали Ньютон и Гюйгенс.
Практическое подтверждение этих выводов было осуществлено в
1735 г. Парижской Академией наук, которая произвела большие
градусные измерения трех дуг меридиана в разных широтах: во
Франции (<р—49°), в Лапландии (ф=66°,5) и в Перу (ф=
=—Г,5). Измерения показали, что длина 1° меридиана умень-
шалась с уменьшением широты, а это является подтверждением
теоретических обоснований Ньютона.
Рис. 1
Более точные размеры земного сфероида удалось установить
лишь в XIX в., когда было измерено большое количество дуг ме-
ридианов и параллелей в разных широтах.
Сечение земного сфероида плоскостью, проходящей через ма-
лую ось, даст на поверхности сфероида меридианный эллипс
(рис. 1). Вид земного сфероида характеризуется сжатием, пред-
ставляющим собой отношения разности полуосей а—b к боль-
шой полуоси а, т. е.
Меридианный эллипс характеризуется эксцентриситетом е
13
Связывая сжатие и эксцентриситет подстановкой выражения
(1) в выражение (2), получим
е2 = 2а + а2.
Пренебрегая квадратом сжатия а2 из-за малости (a
получим
е2 = 2а или а = -^-, (3)
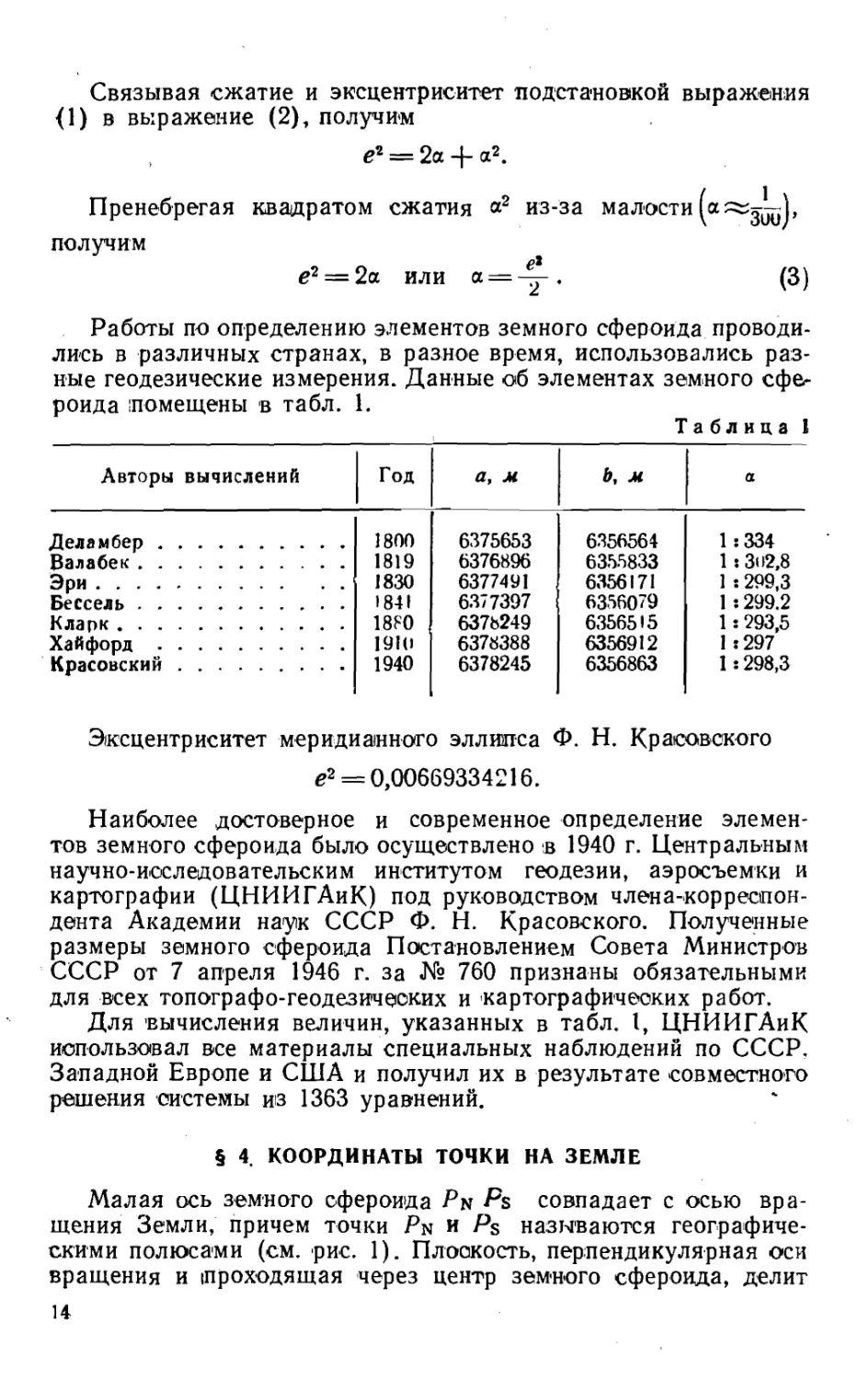
Работы по определению элементов земного сфероида проводи-
лись в различных странах, в разное время, использовались раз-
ные геодезические измерения. Данные об элементах земного сфе-
роида помещены в табл. 1.
Таблица 1
Авторы вычислений Год а, м Ь, м а
Деламбер 1800 6375653 6356564 1 :334
Валабек 1819 6376896 6355833 1 • 302,8
Эри 1830 6377491 6356171 1 :299,3
Бессель . 1841 6377397 6356079 1 s 299.2
Кларк 18F0 6378249 6356515 1 s 293,5
Хайфорд 1910 6378388 6356912 I :297
Красовский 1940 6378245 6356863 1 :298,3
Эксцентриситет меридианного эллипса Ф. Н. Красовского
е2 = 0,00669334216.
Наиболее достоверное и современное определение элемен-
тов земного сфероида было осуществлено в 1940 г. Центральным
научно-исследовательским институтом геодезии, аэросъемки и
картографии (ЦНИИГАиК) под руководством члена-корреспон-
дента Академии наук СССР Ф. Н. Красовского. Полученные
размеры земного сфероида Постановлением Совета Министров
СССР от 7 апреля 1946 г. за № 760 признаны обязательными
для всех топографо-геодезических и картографических работ.
Для вычисления величин, указанных в табл. I, ЦНИИГАиК
использовал все материалы специальных наблюдений по СССР,
Западной Европе и США и получил их в результате совместного
решения системы из 1363 уравнений.
§ 4. КООРДИНАТЫ ТОЧКИ НА ЗЕМЛЕ
Малая ось земного сфероида Pn Ps совпадает с осью вра-
щения Земли, причем точки Pn и Ps называются географиче-
скими полюсами (см. рис. 1). Плоскость, перпендикулярная оси
вращения и проходящая через центр земного сфероида, делит
14
его на две равные половины — северную и южную, образуя на
земном сфероиде след в виде окружности, который называется
земным экватором.
Окружности, получающиеся на поверхности земного сфероида
при пересечении его плоскостями, параллельными плоскости
земного экватора, называются географическими параллелями.
Половина меридианного эллипса, образуемого сечением земно-'
го сфероида плоскостью, проходящей через ось вращения, назы-
вается географическим меридианом. Меридианов и параллелей
можно провести бесчисленное множество, поэтому они прово-
V дятся там, где требуется при решении задачи.
В 1884 г. на Международной Вашингтонской конференции
было принято меридиан, проходящий через Гринвичскую обсер-
ваторию (вблизи Лондона), считать начальным, или нулевым.
Двугранный угол между плоскостью начального меридиана и
плоскостью меридиана, проходящего через данную точку, назы-
вается географической долготой дайной точки. Этот угол измеря-
ется сферическим углом при полюсах между начальным мери-
дианом и меридианом точки, или дугой экватора, заключенной
между теми же меридианами. Географическая долгота обозна-
чается греческой буквой А и отсчитывается от начального мери-
диана к востоку и западу от 0 до 180°. Восточная долгота обо-
значается буквой Ost , ей приписывается знак плюс, западная—
буквой W и ей приписывается знак минус.
Если в любой точке С на поверхности земного сфероида про-
вести отвесную линию к ней, она будет являться нормалью к
поверхности сфероида. Продолжим отвесную линию до пересече-
ния с осью вращения. Эта линия пересечет плоскость экватора
в точке N. Угол, составляемый отвесной линией с плоскостью эк-
ватора, называется географической широтой данной точки. Ге-
ографическая широта обозначается греческой буквой ср и отсчи-
тывается по меридиану от экватора до параллели данной точки.
Если параллель точки расположена в северном полушарии, ши-
рота обозначается буквой *N и ей приписывается знак плюс, если
в южном, то через S и ей приписывается знак минус. Изменяется
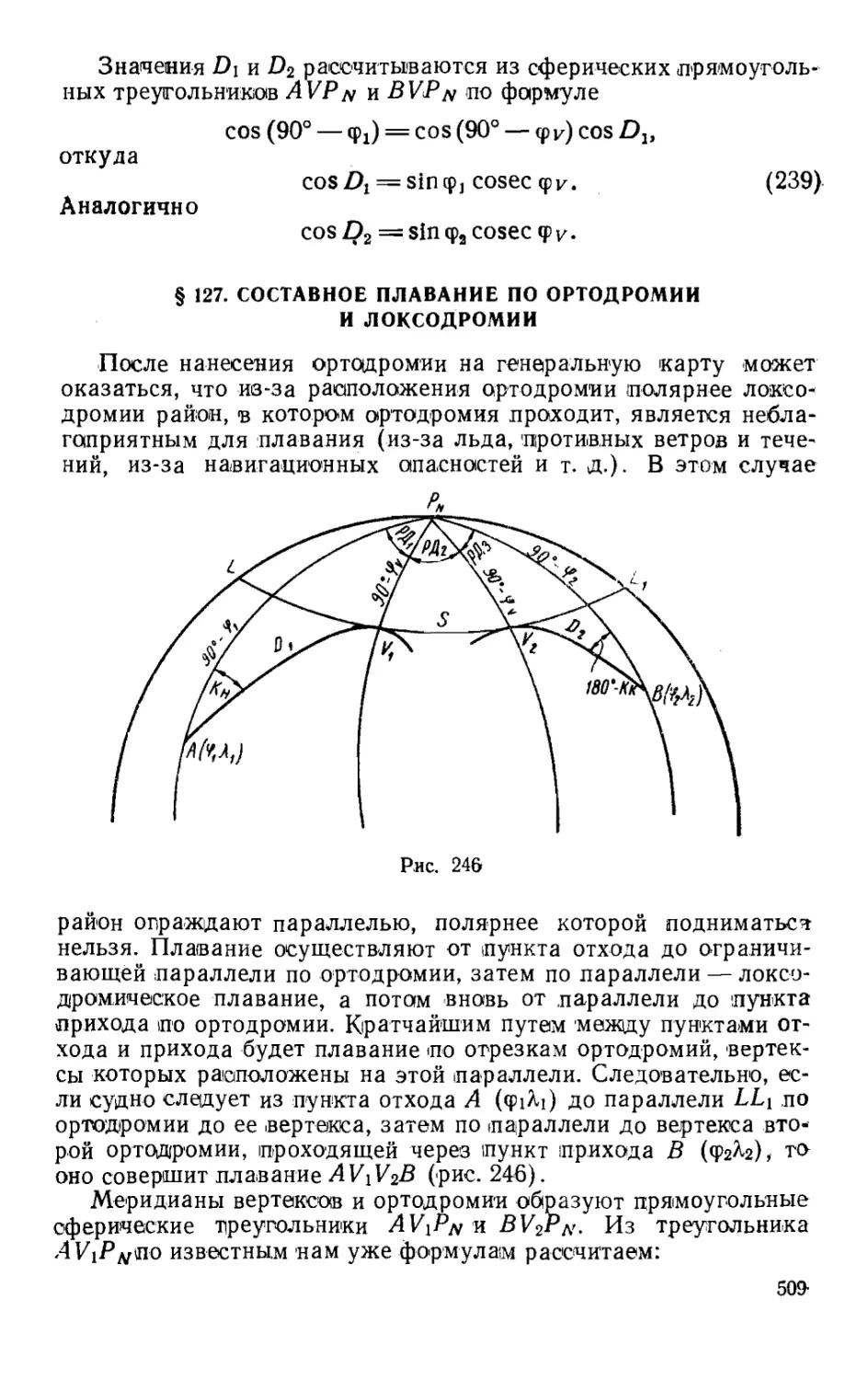
широта от 0 до 90° к »N и S. Если через точку С провести парал-
лель, то все точки этой параллели будут иметь одинаковую гео-
графическую широту, так как отвесные Линии, проведенные в
любой точке параллели, пересекут ось вращения Земли в одной,
точке G. Эти определения ничем, по существу, не отличаются от
определений, которые даны для Земли—шара (в первом при-
ближении).
В том случае, если мы принимаем Землю за эллипсоид вра-
щения, то следует сказать еще о понятиях геоцентрической широ-
ты и широты приведенной. Если точку на земном сфероиде сое-
динить с центром Земли О, то угол COD, образованный радиу-
сом-вектором ОС и плоскостью экватора, называется геоцентри-
ческой широтой и обозначается буквой ф'. Если из центра ме-
15
радианного сечения эллипсоида вращения проведем окружность
радиусом, равным а, то, продолжив линию DC до пересечения
ое с окружностью, получим точку С' на окружности. Соединим
точку С' с центром эллипса радиусом-вектором ОС'. Угол, со-
ставленный радиусом ОС' с плоскостью экватора, называется
приведенной широтой и обозначается буквой U.
Между географической, геоцентрической и приведенной ши-
ротой существуют следующие соотношения.
При координатных осях х и у, совпадающих с полуосями ме-
ридианного эллипса, имеем согласно рис. 1
= (4)
Используя уравнение меридианного эллипса в параметриче-
ской форме
x = acos U\
y=bs\nU>
находим
tgt/= " .JL.
® b x
Подставляя значение -у- из уравнения (4), получим
Тангенс угла, составленного касательной СТ с осью х, будет
равен
tg(90"-T) = -ctgT = -g-. (5)
Продифференцируем уравнение эллипса в параметрической
форме
dx = — a sin U du;
dy = b cos U du.
Подставляя эти значения в формулу (5), получим
или
tg<p = -|-tg£/. (6)
В результате
tg? = -y tg£7 = tg?' (7)
и с учетом формул (1, 2) ______
tg^ = tg<pFl — «а;
tg<?' = tg<p(l — е2). (8)
16
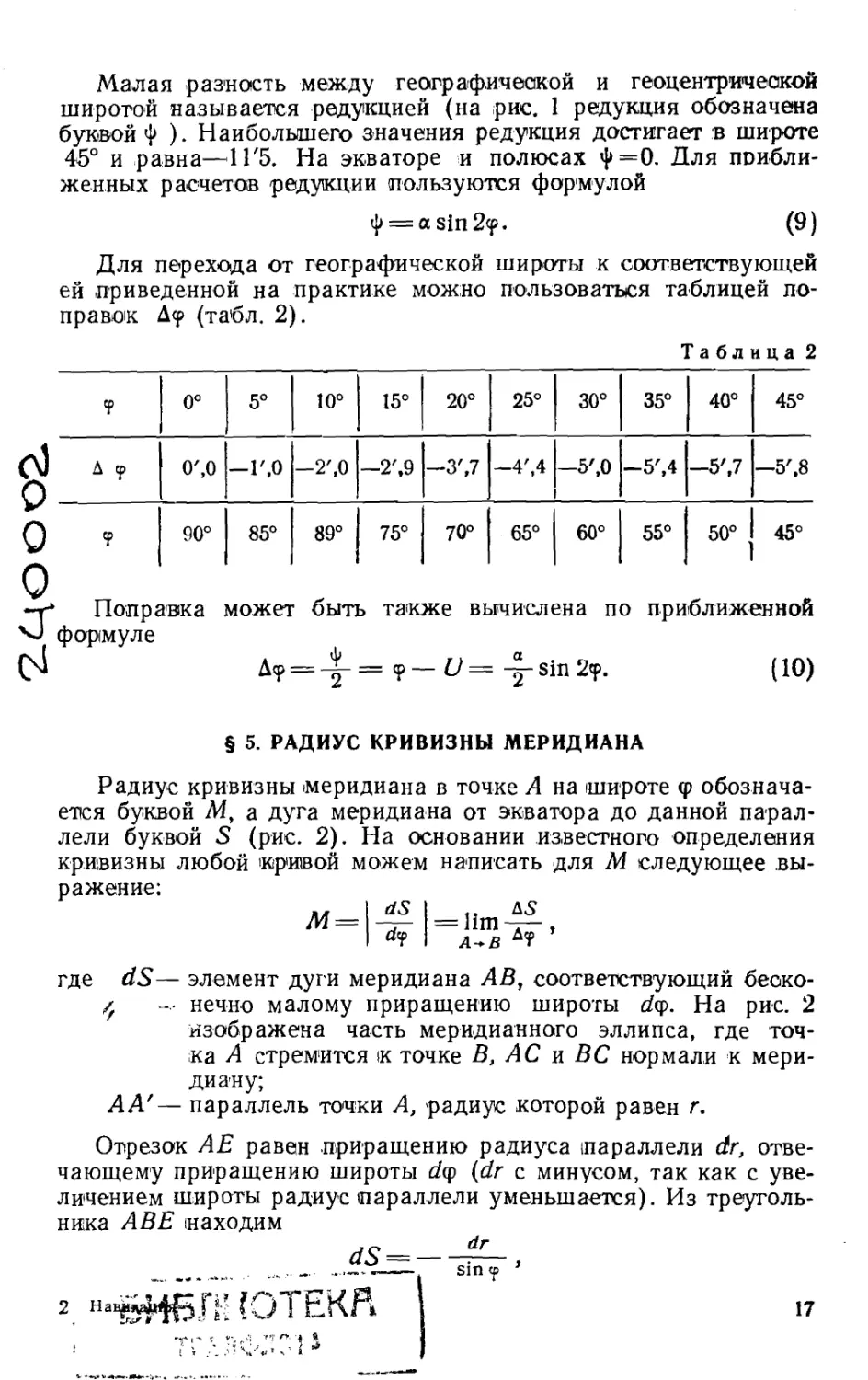
Малая разность между географической и геоцентрической
широтой называется редукцией (на рис. 1 редукция обозначена
буквой ф ). Наибольшего значения редукция достигает в широте
45° и равна—1Г5. На экваторе и полюсах ф=0. Для прибли-
женных расчетов редукции пользуются формулой
ф = аз1п2<?. (9)
Для перехода от географической широты к соответствующей
ей приведенной на практике можно пользоваться таблицей по-
правок Д<р (табл. 2).
Таблица 2
0° 5° 10° 15° 20° 25° 30° 35° 40° 45°
$ д у О',О —1',0 —2',0 —2',9 —3',7 -4',4 —5',0 - 5',4 —5',7 —5\8
0 90° 85° 89° 75° 70° 65° 60° 55° 50° 45°
0 Поправка : формуле может быть также вычислена по приближенной А? = -|- = ?— -5-sin 2<р. (10)
§ 5. РАДИУС КРИВИЗНЫ МЕРИДИАНА
Радиус кривизны меридиана в точке А на широте (р обознача-
ется буквой Mt а дуга меридиана от экватора до данной парал-
лели буквой S (рис. 2). На основании известного определения
кривизны любой кривой можем написать для М следующее вы-
ражение:
I I
где dS— элемент дуги меридиана АВ, соответствующий беско-
- нечно малому приращению широты На рис. 2
изображена часть меридианного эллипса, где точ-
ка А стремится к точке В, АС и ВС нормали к мери-
диану;
А А'— параллель точки А, радиус которой равен г.
Отрезок АЕ равен приращению радиуса параллели dr, отве-
чающему приращению широты dq> (dr с минусом, так как с уве-
личением широты радиус параллели уменьшается). Из треуголь-
ника АВЕ находим
2 (01 hKA
17
следовательно,
dr 1 _____ dr 1
t/cp sin <p I dy sin tp ’
(H)
Радиус параллели г равен абсциссе точки Л, т. е.
г = х.
Абсцисса меридианного эллипса в параметрической форме
r = x = acosU.
На основании формулы (6)
г г 1 1 COS V
cos U = г - = —г - = —= _ _ ,
/14-tg* и -pZ1+^.tg2T у cos2<p + -^-sin2®
но ' cos3 tp = 1 — sin2 <p,
„ b2 , я
a -s-=l — e2,
a2
18
тогда
VVQ KJ - — — —~ ,
у 1 — e2 sin3 ?
Следовательно,
a
Г = Х — - _= • COS ф.
у 1 — г3 sin2 ср
Дифференцируя по широте, получим
dr ____________л [ sin ф е' sin <р cos2 ср ' _
а / J_ J -
[ (1 — е2 sin2 <р) 2 (1 — е2 sin2 ср) 3 j
=------—S1P ?—з-[Н —е* sin2 <р — eacos3<p)] =---—1П -—g-fl—е3).
(1 — £2 sin2 ср) 2 (1 — e2sin2?)2
Подставляя найденное значение производной в формулу (11),
находим
Ж= а(1~еа)—. (12)
(1 — г2 sin2 ср) 2
На полюсе, где (р=90°, радиус кривизны называется поляр-
ным и является наибольшим.
На экваторе, где <р = 0,
V1 —e2sinJ ср = 1,
радиус кривизны минимальный
Л1о=й(1-в2)=4-
§ 6. ДЛИНА ДУГИ МЕРИДИАНА
Из определения кривизны любой кривой
М=|-?|
I I
можем написать
dS = Md ср
или
dS = - а(1~е>) -d®.
(1 — & sin2?) 2
Следовательно, дуга меридиана от ф] до ф2,
S = a (1 - е2)’$--т
9, (1 — е2 sin2 ср) 2
2*
19
или
- 3.
S = a(l — е2) J (1 — е2 sin2 ср) 2 d<p. (13)
<pi
Этот интеграл,; являясь эллиптическим, не выражается в эле-
ментарных функциях и для вычисления его, подынтегральную
функцию можно разложить в ряд при условии, если
1—е2 sin2 ф< 1, что имеет место в нашем случае
(1 — е2 sin2 ср) 2 = 1 + Л- sln2 ? + "У^4 sin4 ? + е*si п6<р + •••
Заменяя степени sin ф с помощью гониометрических рядов вида
sin2 л = -1----------------------l~cos2x - • •
sin4z = -g-----2“ cos 2х + -g- cos 4x-• • и т. д.,
оюлучим более быстро сходящиеся ряды
_ 2.
(1—е- sin2 <р) 2=Д— В cos 2<р + С cos 4<р — Z)cos6<p + - • •, (14)
где
^=i+4*2+lk+iP+---
в=+4^+^в<+^+...
л I 15 t * 105 д ।
С= + Тбе4 + 25бе +•••
и т. д.
(15)
Подставляя эти значения в формулу (13) и выполняя инте-
грирование, получим
S = а (1 — е2) [ А (<р, — <Pi) — В (sin 2?, — sin 2<рх) +
+ -J- (sin 4?2 — sin 4^) — (sin 6<р2 — sin 6?1) Н-------]. (16)
Чтобы судить о степени сходимости ряда (14, 16), приведем
значения входящих в него постоянных величин для эллипсоида
Красовского, м:
е3) Л =63 680 275
а (1 -е3) 5 = 32073
а (1-е2) 4 = 16036,5
а (1-е2)-£-=16,8
(17)
20
Для вычисления дуги меридиана от экватора <pi = 0 до полю*
са ф2 = 90° формула (16) примет вид:
S90o = а (1 - е2) A arc 1° X 90° = 63 680 275агс 1° X 90° =
= 111 134.861 X 90° = 10 002 137,5 м.
При детальном рассмотрении элементов земного сфероида,
приведенных в табл. 1, можно сделать вывод, что без ущерба
для точности решаемых в нави-
гации задач Землю можно при-
нимать за шар. Такое допущение
позволит более просто решать
задачи при помощи формул сфе-
рической тригонометрии, не при-
меняя формул сфероидической
тригонометрии. Действительно,
разность между длиной большой
и малой полуосей земного сфе-
роида равна 21,5 км, что состав-
ляет 0,3% длины экваториально-
го радиуса Земли. Если принять
длину дуги меридиана от эква-
тора до полюса на шаре равной
длине дуги меридиана от эква-
тора до полюса на земном сфе-
роиде, то средняя длина Г мери-
диана будет равна (ри^ 3)
90°-6и' —
= -^°4007,5 = 1852'3
До 1946 г. в СССР для расчета Г .меридиана принимались
элементы эллипсоида вращения, полученные Бесселем. По этим
элементам длина Г меридиана была равна
т= 1852,01 м.
На основании изложенного в навигации принято Землю счи-
тать шаром, у которого длина Г меридиана равна округленному
до целых значению величины т
т = 1852 м.
Если на земном сфероиде выбрать две точки, широты которых
отличаются на Г, то длина дуги меридиана между этими точка-
ми будет равна
/п = ЛГагс1' = —(18)
таге Г
(1 — е2 sin2 ср) 2
21
или
_ з
т= 7И аге Г = [а(1 — £2)(1 — е2 sin2 <р) 2 ] аге Г.
_ з
Но (1—е1 sin2 <р) 2=А— 2? cos 2<р + С cos 4<р + • • •
Если взять только два первых члена ряда, получим
т = а (1 — е2) А аге 1' — а (1 — е3) Bare Г cos2<p.
Используя значения вычисленных величин (17), получим
т = 63 680 275 arc 1' — 32 073 arc 1' cos 2<р
или
т = 1852,3 — 9,3cos 2?. (18а)
Таким образом, длина 1' меридиана на земном сфероиде—
величина переменная и меняется в зависимости от широты места
в пределах 1843 м на экваторе и 1861,6 м — на полюсе.
Вследствие того, что для вывода формулы (18а) взято только
два члена ряда, она является приближенной, причем ошибка в
значении т по теореме Лейбница не превышает величины
ет = а (1 — е2) С arc 1' cos 2<р = 67,2 arc 1' cos 2<р = 0,02.cos 2?.
§ 7. МОРСКИЕ ЕДИНИЦЫ ДЛИНЫ
Единица длины метрической системы мер—негр, представ-
ляет собой расстояние между двумя штрихами, нанесенными на
эталоне длины. В СССР эталоном длины является метр-прототип
№ 28, который хранится в Ленинграде во Всесоюзном научно-ис-
следовательском институте метрологии. Эталон представляет со-
бой жезл из сплава платины (90%) и иридия (10%) с попереч-
ным сечением в виде буквы X. В 1889 г. был изготовлен 31 эта-
лон для 16 государств, заключивших специальную конвенцию.
Декретом Совета Народных Комиссаров от 14 сентября 1918 г.
в нашей стране была введена метрическая система мер, где метр
устанавливался как единица длины. Метрами обозначаются
глубины и высоты ориентиров на картах. В метрах наносится
осадка судна на штевнях.
Морская миля — единица длины для измерения расстояний в
море. Морская миля принимается равной длине 1' меридиана «а
земном шаре. Международное гидрографическое бюро в Монако
в 1928 г. установило длину морской мили, равной 1852 м.
Гидрографическое управление ВМС 8 июня 1931 г. издало
циркуляр № 317, в котором подтверждалось решение этого бюро.
Морская миля на английских картах (Nautical mile) принята
равной 6080 футов или 1853,18 м, что соответствует длине 1' дуги
эллиптического меридиана в широте Английского канала.
22
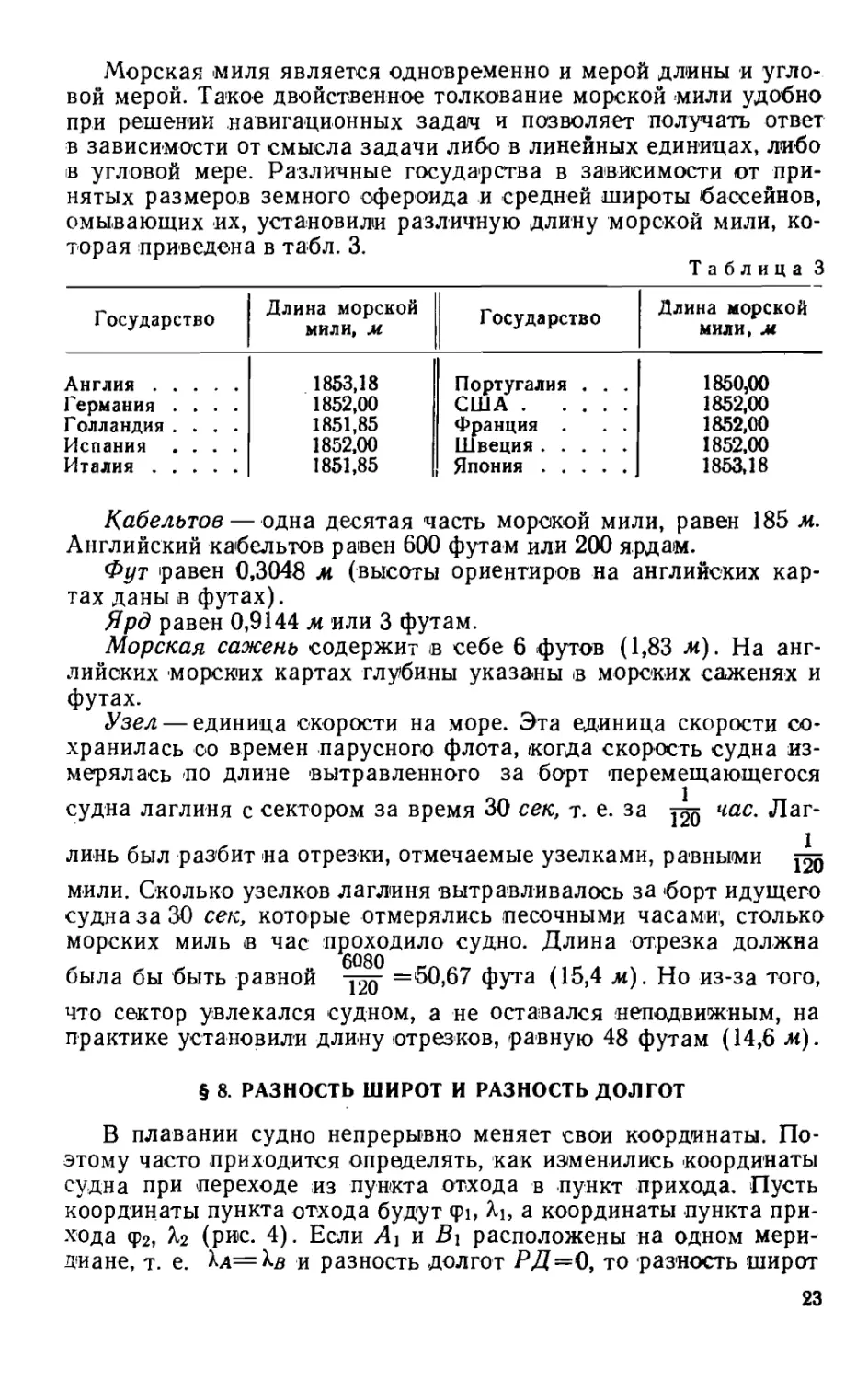
Морская миля является одновременно и мерой длины и угло-
вой мерой. Такое двойственное толкование морской мили удобно
при решении навигационных задач и позволяет получать ответ
в зависимости от смысла задачи либо в линейных единицах, либо
в угловой мере. Различные государства в зависимости от при-
нятых размеров земного сфероида и средней широты бассейнов,
омывающих их, установили различную длину морской мили, ко-
торая приведена в табл. 3.
Таблица 3
Государство Длина морской мили, м Государство Длина морской мили, м
Англия 1853,18 Португалия . . . 1850,00
Германия .... 1852,00 США 1852,00
Голландия .... 1851,85 Франция . . . 1852,00
Испания .... 1852,00 Швеция 1852,00
Италия 1851,85 Япония 1853,18
Кабельтов—одна десятая часть морской мили, равен 185 м.
Английский кабельтов равен 600 футам или 200 ярда)М.
Фут равен 0,3048 м (высоты ориентиров на английских кар-
тах даны в футах).
Ярд равен 0,9144 м или 3 футам.
Морская сажень содержит в себе 6 футов (1,83 jh). На анг-
лийских морских картах глубины указаны в морских саженях и
футах.
Узел — единица скорости на море. Эта единица скорости со-
хранилась со времен парусного флота, когда скорость судна из-
мерялась по длине вытравленного за борт 'перемещающегося
судна лаглиня с сектором за время 30 сек, т. е. за час, Лаг-
линь был разбит на отрезки, отмечаемые узелками, равными
мили. Сколько узелков лаглиня вытравливалось за борт идущего
судна за 30 сек, которые отмерялись песочными часами, столько
морских миль в час проходило судно. Длина отрезка должна
была бы быть равной -j^o- =60,67 фута (15,4 лс). Но из-за того,
что сектор увлекался судном, а не оставался неподвижным, на
практике установили длину отрезков, равную 48 футам (14,6 л).
§ 8. РАЗНОСТЬ ШИРОТ И РАЗНОСТЬ ДОЛГОТ
В плавании судно непрерывно меняет свои координаты. По-
этому часто приходится определять, как изменились координаты
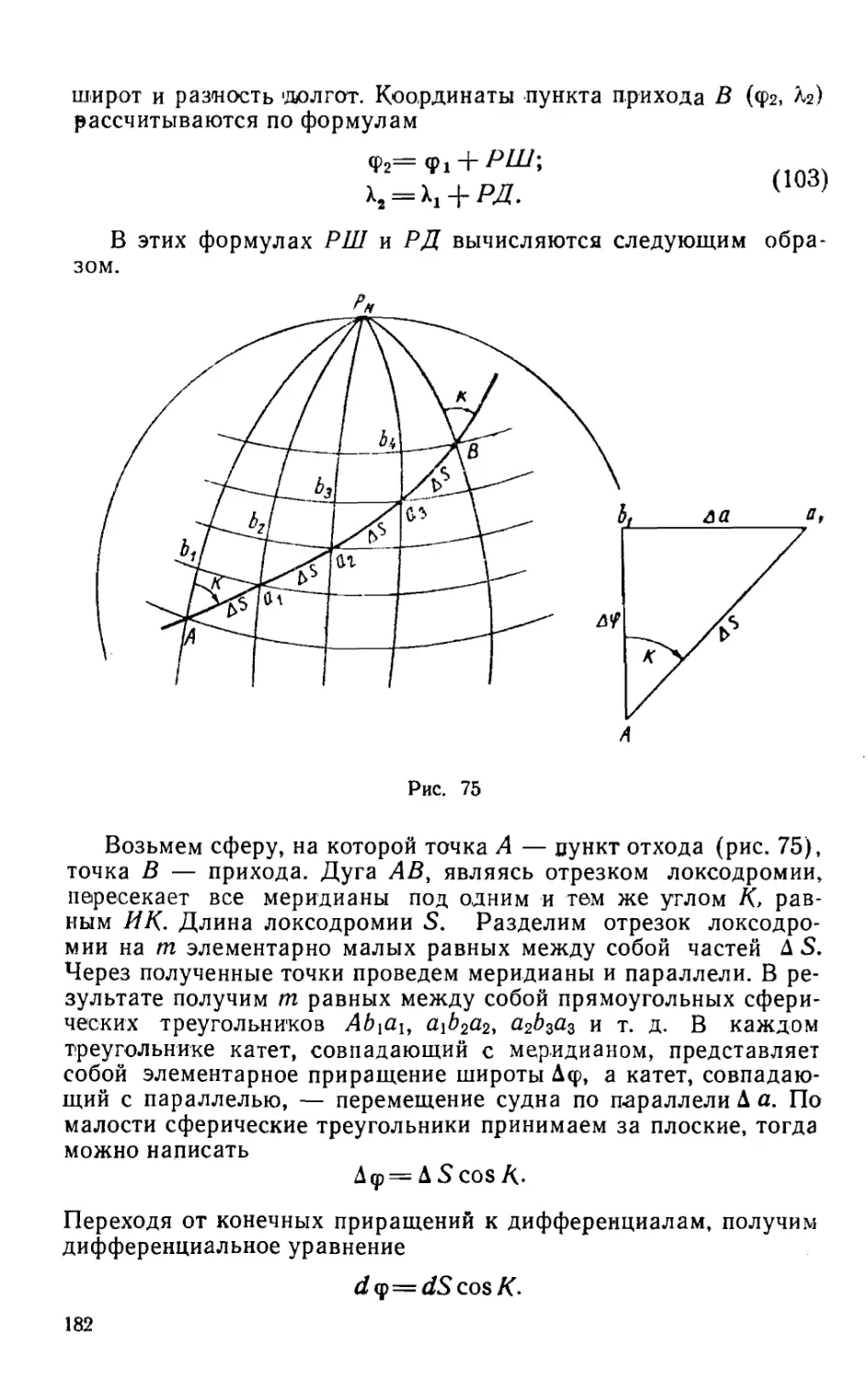
судна при переходе из пункта отхода в пункт прихода. Пусть
координаты пункта отхода будут Фь М, а координаты пункта при-
хода ф2, ^2 (рис. 4). Если А] и В\ расположены на одном мери-
диане, т. е. Хд=кд и разность долгот РД=0, то разность широт
23
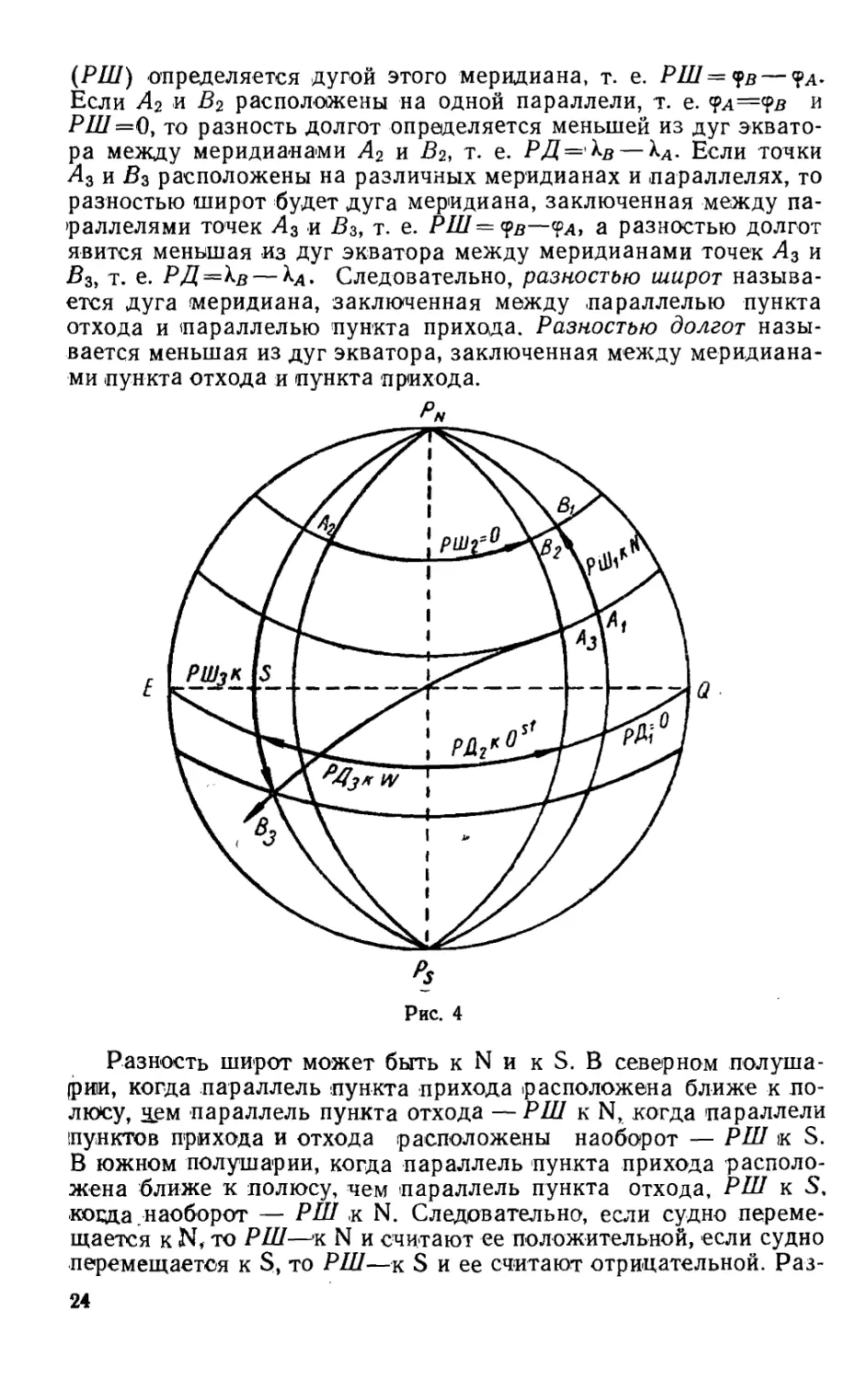
(РШ) определяется дугой этого меридиана, т. е. РШ=ув — <?д.
Если Л2 и В2 расположены на одной параллели, т. е. <рд=?в и
РШ=О, то разность долгот определяется меньшей из дуг эквато-
ра между меридианами Л2 и В2, т. е. РД= ^в — Если точки
А3 и Вз расположены на различных меридианах и параллелях, то
разностью широт будет дуга меридиана, заключенная между па-
раллелями точек А3 и В3, т. е. РШ=<?в—УА) а разностью долгот
явится меньшая из дуг экватора между меридианами точек А3 и
В3, т. е. РД=^в — Следовательно, разностью широт называ-
ется дуга меридиана, заключенная между параллелью пункта
отхода и параллелью пункта прихода. Разностью долгот назы-
вается меньшая из дуг экватора, заключенная между меридиана-
ми пункта отхода и пункта прихода.
PN
Рз
Рис. 4
Разность широт может быть к N и к S. В северном полуша-
рии, когда параллель пункта прихода расположена ближе к по-
люсу, нем параллель пункта отхода — РШ к N, когда параллели
пунктов прихода и отхода расположены наоборот — РШ к S.
В южном полушарии, когда параллель пункта прихода располо-
жена ближе к полюсу, чем параллель пункта отхода, РШ к S,
когда,наоборот — РШ к N. Следовательно, если судно переме-
щается к N, то РШ—к N и считают ее положительной, если судно
перемещается к S, то РШ—к S и ее считают отрицательной. Раз-
24
ность широт — это алгебраическая разность широты пункта при-
хода и широты пункта отхода, т. е.
РШ = ъв-ъА. (19)
Разность долгот может быть к Ost и к W.
Если судно перемещается к Ost, то РД также к Ost и счи-
тается положительной. Если судно перемещается к W, то РД к W
и считается отрицательной. Разность долгот — это алгебраиче-
ская разность долготы пункта прихода и долготы пункта отхода
РЛ = Хв-Хл. (20)
Разности широт и долгот изменяются от 0 до 180°. Широты
по абсолютной величине не превышают 90°, и в любой комбина-
ции широт и знаков их разность не получится больше 180°. Дол-
готы же пунктов изменяются от 0 до 180°, и их алгебраическая
разность может быть больше 180°. Но РД — это меньшая из дуг
экватора и не может быть больше 180°. Поэтому, если разность
долгот, полученная по формуле (20), больше 180°, нужно взять
дополнение до 360° и изменить 'наименование на обратное:
если РД к Ost >180°, то 360°— РД к 0st=P4 к W:
если РД к W> 180°, то 360° — РД к W =РД к Ost.
ПРИМЕРЫ
1. Рассчитать радиус шара, если его объем равен объему земного сфероида.
Решение. Объем эллипсоида вращения вокруг оси 2Ь.
Va = ~r.a*b.
О
4
Объем шара = — тс/?з,
3
так как = Иш, то
4 4
о о
3 ___
Откуда /? = /а?Ь.
Подставляем в формулу значение а и b
з ___________
R = /6378» • 6357 .
Вычислить значение R легче, пользуясь логарифмами
2 1
1g/? = -4- 1g 6378 + Ц- lg6357
о о
2
1g 6378 = 3,80468; 1g 6378 = 2,53645
О
lg 6357 = 3,80325; 4" 6357 = 1>26775
О
lg R = 3,80420
R = 6371 км
R = 3440,3 миль
25
2. Каковы геоцентрическая и приведенная широта в географической ши-
роте ?=43°.
Решение. Вначале по формуле (9)
найдем значение -редукции. Из табл. 1 определим величину'
_ 1
298,3 ’
^“’29b’Sin86° РаДИа"'
Для того чтобы получить угол в минутах, подставляем в формулу (9) ве-
личину 3438 (1 радиан«57°,3«3438').
_ 3438sin 86° _ 3438-0,9976 _ .
т— 298,3 — 298,3 ’ 11 ’4б‘
По формуле (10) определяем поправку широты
Л Ч',5
Л'Р = -2—= 5 ,7.
Из рассматриваемых нами широт географическая широта больше геоцент-
рической и приведенной, поэтому величину поправок и Д<р для получения
геоцентрической и приведенной широты, нужно вычесть из географической:
? — ф = 43° — 11 ',5 = 42°48',5;
U = <? — Д? = 43° — 5',7 = 42°52',3.
3. Рассчитать длину Г меридиана в ^=10°.
Решение. Используя приближенную формулу (18а), получим
т = 1852,3 — 9,3 cos 20° = 1843,6 м.
4. Из точки А с координатами <pi==30°16'N и Ai=03c14'Ost судно пришло
в точку В с координатами <р2 = 10°15'S, A2=42o50zW. Найти РШ и РД.
Решение. Разность широт и разность долгот рассчитываются по фор-
мулам (19) и (20)
<?2 = 10°15' S
?1 = 30o16zN
РЯ/ = 40°31' к S
А2 = 42°50' W
— X, = 03°14',00 st
РД = 46°04' к W
Разность широт получилась к S (отрицательная) из-за того, что из отри-
цательной величины ?2 (S) вычли положительную величину (N). На том
же основании РД получена к W.
Чтобы не возникали ошибки со знаками, решения задач можно
сопровождать схематическим чертежом (рис. 5,а). Наносим на чертеж мери-
дианы и параллели пунктов отхода А и прихода В. Увидим, что параллель
пункта прихода В расположена к S от параллели пункта отхода А, следова-
тельно, РШ также к S. Меридиан же пункта прихода расположен к W от ме-
ридиана пункта отхода, следовательно, РД к W.
5. Из точки А с координатами <p1=56°30'N, A1=10°28/O8t судно вышло в
точку В. Во время перехода судно переместилось к югу на 24°05', к востоку
на 35°35'. Найти координаты точки В (рис. 5,6).
26
Решение. Из формул (19 и 20)
= 56°30' N
РШ= 24°05z к S
?а = 32°25' N
получим
Х,= 10°28' Ost
РД = 35°35/ к Ost
Х2 = 46°03' Ost
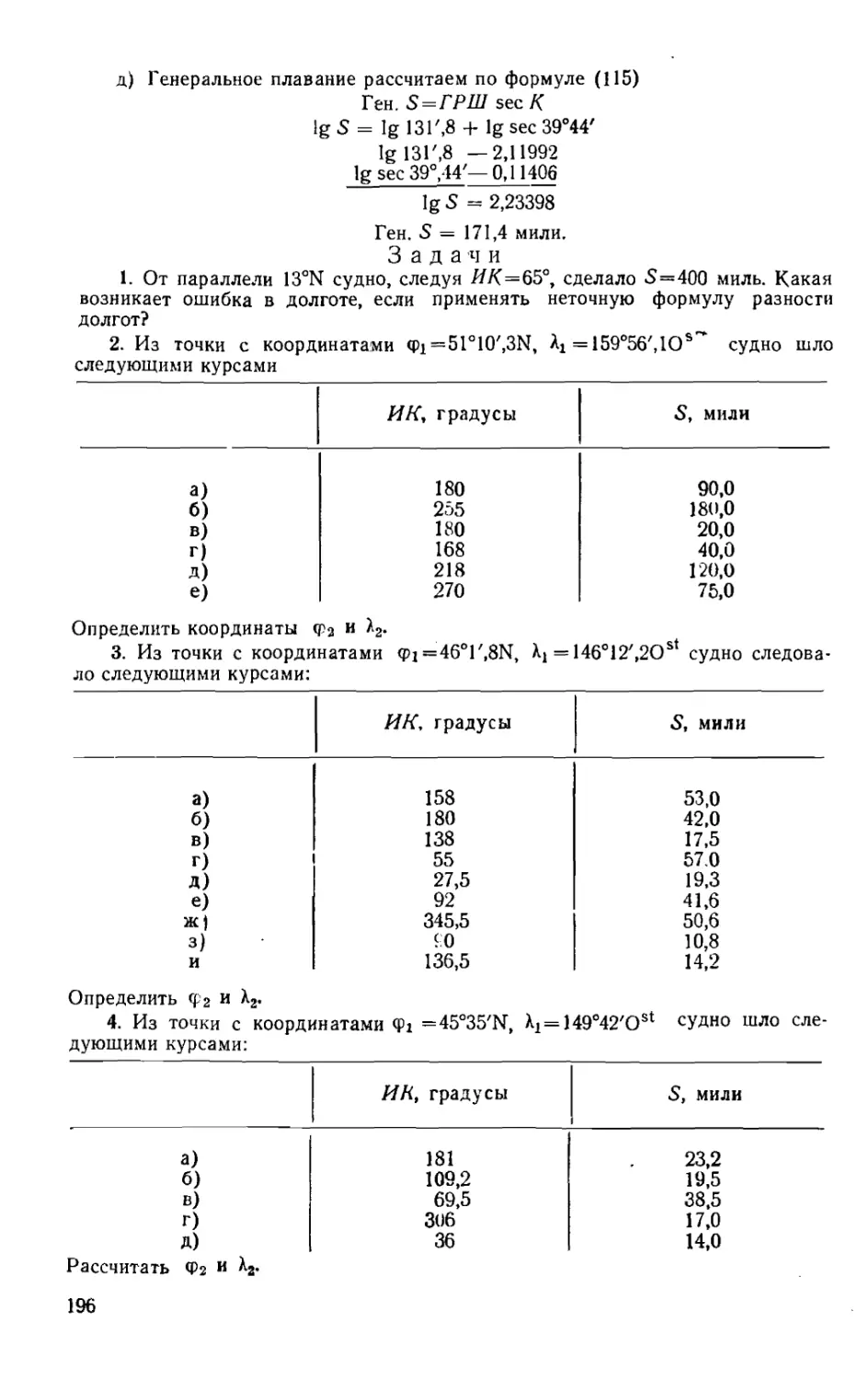
Задачи.
1. Рассчитать длину 1'меридиана в широте ф= 20°; ср —25°; ® = 35;с
= 45°; <р = 55°; ? = 65°.
2. Рассчитать радиус шара, длина большого круга которого равна длине
эллиптического меридиана эллипсоида Красовского?
3. Рассчитать радиус шара, поверхность которого равна поверхности
земного сфероида?
4. Каковы геоцентрическая и приведенная широты в географической ши-
роте 10°; 20; 38; 40; 55 и 58°?
5. На карте в пункте А указана глубина 9 сажен. Когда ее измерили ло-
том, то оказалось, что глубина равна 17 м.
Рассчитать несоответствие глубин.
6. Сколько метров лаглиня вытравится и а ручном лаге, если скорость суд-
на 9 узлов?
7. Осадка судна 21 фут. Какими должны быть глубины, чтобы под килем
судна был запас воды в 1 м.
8. Рассчитать РШ и РД, если судно вышло из точки А и пришло в
точку В?
Координаты точки А
a) ф1=75°07'К
Xj = 18°02'W
б) ф1 = 18°10'S
Xj =76°10zW
в) Ф1=15°15'5
Xi = 118°21'Ost
г) <pi-75°07zN
X) = 18°02'W
Координаты точки В
ф2 =68°03'N
Х2 =38°52'Ost
<p2 = I8°I0'N
Х2 = 111°12'W
ф2 =37°03'S
X2<=20°17zOst
Фа = 69°03zN
Xa=39°52'Ost
27
д) <pi =00°00'
I^IWWW
е) <pi=57°50'N
Ai =4°Ю'О st
ж) epi = 50°20'N
М =160°30'Ost
<P2=40°15'S
^2 = 170p10'W
<P2 =4°10'N
A2=:3°04'W
<P2 =30°10'N
A.2 = 120°40'W
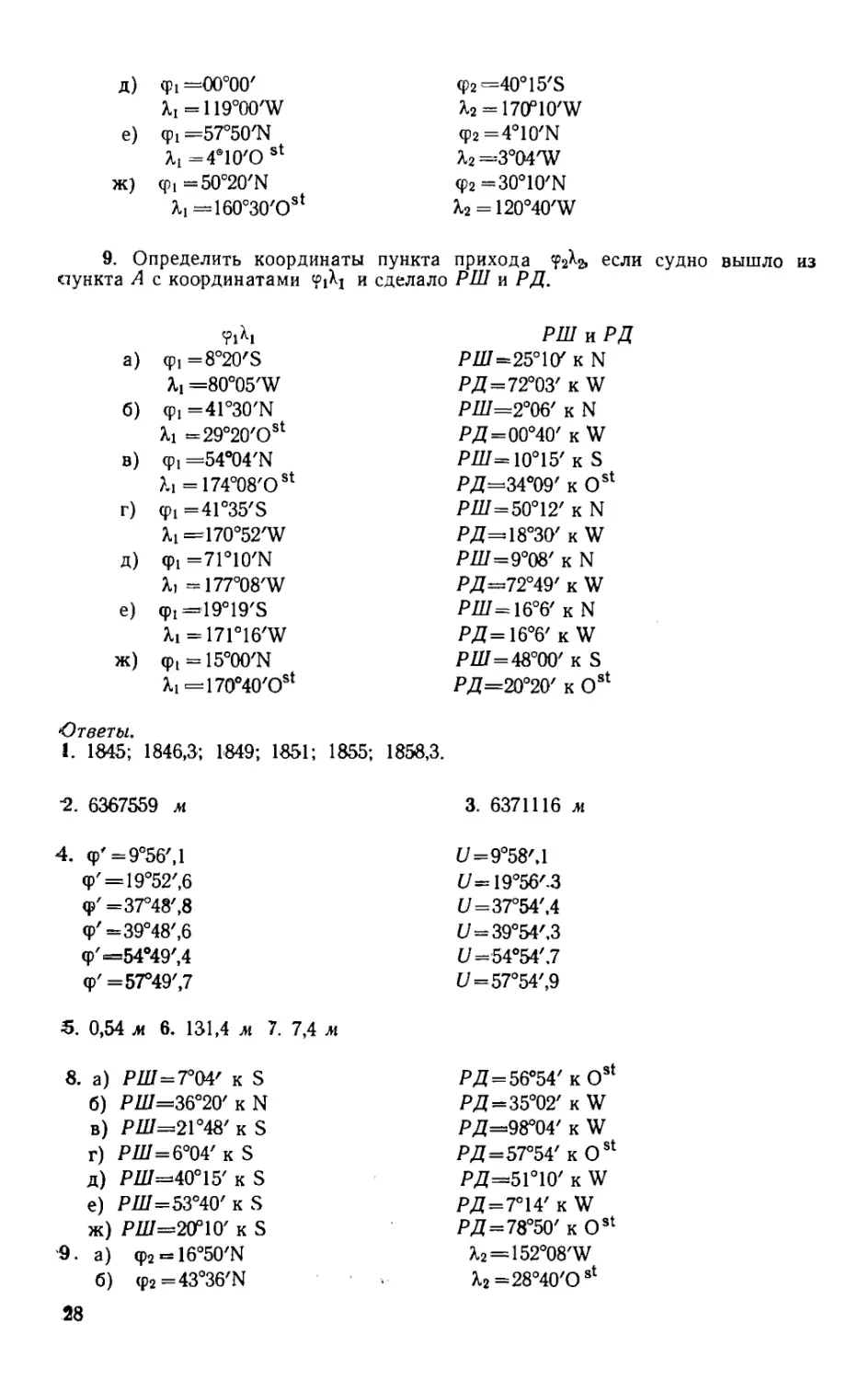
9. Определить координаты пункта прихода если судно вышло из
пункта А с координатами 'рД1 и сделало РШ и РД.
РШпРД
a) cpi=8°20'S РШ=25°Ю к N
М =80°05'W РД=72°03' к W
б) ф! =41°30'N РШ=2°0б' к N
М =29°20'Ost РД=00°40' к W
в) Ф1 -54°04'N РД/=10°15' к S
Xi =174°08'Ost РД=34в09' к Ost
г) (p1=41°35'S РШ=50°12' к N
М ^170°52'W РД=18°30' к W
д) (pi =71°10'N РД/=9°08' к N
Xi -177WW РД=72°49' к W
е) ф^ЭЧЭ'З Р7Д=16°6' к N
Xi=171°16'W РД= 16°6' к W
ж) ф^^ОО'М РШ=48°(ХУ к S
M=170o40'Ost РД=20°20' к Ost
•Ответы. 1. 1845; 1846,3; 1849; 1851; 1855; 1858,3.
2. 6367559 м 3. 6371116 м
4. <р'=9°56',1
<р'=19°52',б
<₽' =37°48/,8
<р'=39°48',6
<р'=54°49',4
<р'=57°49/,7
5. 0,54 м 6. 131,4 м 7. 7,4 м
8. а) РШ=7°04' к S
б) РД/=36°20' к N
в) РД/=21°48' к S
г) РШ=&°04' к S
д) РД/=40°15' к S
е) РЛ/=53°40' к S
ж) РД7=20р10' к S
9. a) <p2 = 16°50'N
б) q>2=43°36'N
U=9°58',l
t/=19°56'3
U=37°54',4
и=39°54'.3
£7=54°54'.7
t/=57°54',9
РД=56°54' к О*‘
РД=35°02' к W
РД=98°04' к W
РД=57°54' к Ost
РД=51°10' к W
РД=7°14' к W
РД=78°50' к O8t
k2=152°08'W
X2=28o40'O3t
28
в) (p2=43°49'N A, = 151°43'W
г) ф2 =8°37'N A,=170°38'O st
д) <p2=80o18'N A., = 110°03'Ost
е) (p2=3°13'S A.2 = 172°38'Ost
ж) ф2 =33°00'N X2=169°OO/W
Контрольные вопросы
1. Какова форма Земли?
2. Кто первый доказал, что Земля яе шар?
3. С какого времени размеры эллипсоида Красовского приняты обяза-
тельными для картографических работ в СССР?
4. Что такое географическая широта и долгота?
5. Какие наименования широты вы знаете, кроме географической, и как
они связаны с географической широтой?
6. Как изменяется радиус кривизны меридианного эллипса?
7. Как изменяется длина Г меридиана в зависимости от широты?
8. Что такое морской узел?
9. Что такое РШ и РД?
Глава III. ДАННЫЕ ДЛЯ ОРИЕНТИРОВАНИЯ В МОРЕ
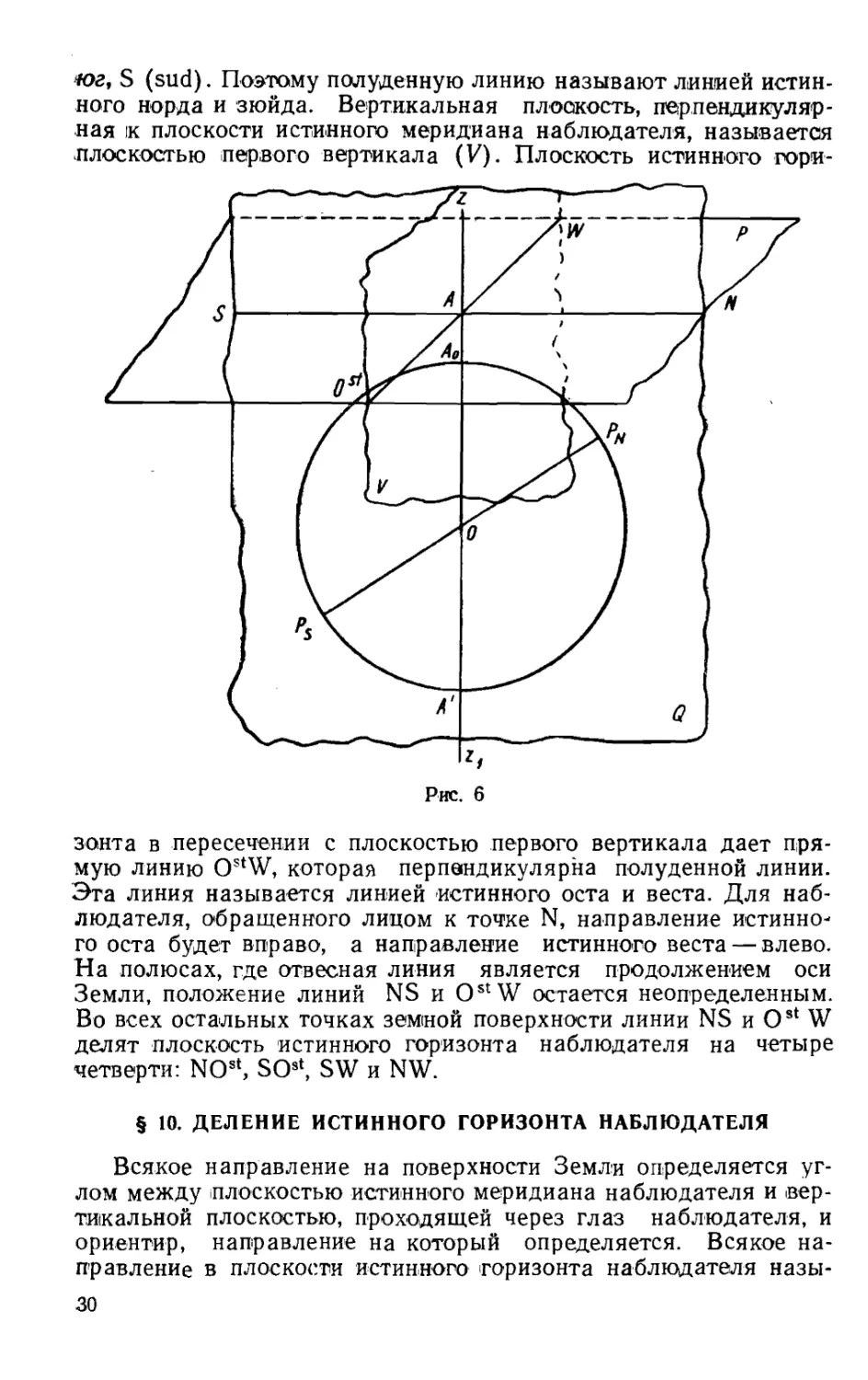
§ 9. ОСНОВНЫЕ ПЛОСКОСТИ и линии
Наблюдатель Л, находящийся на поверхности земного шара
в точке Ло, при помощи отвеса всегда может легко определить
направление отвесной линии (рис. 6). Отвесная линия в любой
точке на поверхности земного щара указывает направление
вверх на зенит наблюдателя Z, и направление вниз на надир—
точку, противоположную зениту наблюдателя Zb Точка пересе-
чения отвесной линии с поверхностью земного шара с противо-
положной наблюдателю стороны называется антиподом наблю-
дателя Л'.
Через отвесную линию можно провести сколько угодно верти-
кальных плоскостей, но одна из этих плоскостей Q проходит че-
рез земную ось PnPs- Эта вертикальная плоскость, проходящая
через глаз наблюдателя и земную ось, называется плоскостью
истинного меридиана наблюдателя. След от пересечения поверх-
ности земного шара этой плоскостью называется истинным мери-
дианом наблюдателя. На рис. 6 меридианом наблюдателя будет
меридиан Л0РмA'Ps. Горизонтальная плоскость, проходящая
через глаз наблюдателя, называется плоскостью истинного го-
ризонта наблюдателя (на рис. 6 обозначена буквой Р).
Плоскость истинного горизонта наблюдателя пересекает плос-
кость истинного меридиана наблюдателя, образуя полуденную
линию AS, или линию истинного меридиана. Луч AN, направлен-
ный из глаза наблюдателя вдоль полуденной линии в сторону
Северного полюса, указывает на точку истинного горизонта, на-
зываемую север, N (nord). Луч направленный в обратную
сторону, указывает на точку истинного горизонта, называемую
29
юг, S (sud). Поэтому полуденную линию называют линией истин-
ного норда и зюйда. Вертикальная плоскость, перпендикуляр-
ная к плоскости истинного меридиана наблюдателя, называется
плоскостью первого вертикала (V). Плоскость истинного гори-
зонта в пересечении с плоскостью первого вертикала дает пря-
мую линию OstW, которая перпендикулярна полуденной линии.
Эта линия называется линией истинного оста и веста. Для наб-
людателя, обращенного лицом к точке N, направление истинно-
го оста будет вправо, а направление истинного веста — влево.
На полюсах, где отвесная линия является продолжением оси
Земли, положение линий NS и OstW остается неопределенным.
Во всех остальных точках земной поверхности линии NS и Ost W
делят плоскость истинного горизонта наблюдателя на четыре
четверти: NOst, SOst, SW и NW.
§ 10. ДЕЛЕНИЕ ИСТИННОГО ГОРИЗОНТА НАБЛЮДАТЕЛЯ
Всякое направление на поверхности Земли определяется уг-
лом между плоскостью истинного меридиана наблюдателя и вер-
тикальной плоскостью, проходящей через глаз наблюдателя, и
ориентир, направление на который определяется. Всякое на-
правление в плоскости истинного горизонта наблюдателя назы-
30
вается в навигации румбом и определяется углом между полу-
денной линией и направлением на ориентир. Количество румбов,
как и количество направлений, неограниченно. Некоторые из них
имеют определенные названия. Так, главные румбы — это на-
правление на точки N, Ost, S, W, которые были определены в
плоскости истинного горизонта. Четвертные румбы — направле-
ния, делящие каждую* четверть истинного горизонта пополам
(NO, SO, SW и NW). Трехбуквенные рубмы — средние направ-
ления между главными и четвертными, имеют названия:
средний между N и NO называется NNO
» NO и Ost » ONO
» Ost и SO » OSO
» SO hS » sso
» S hSW » ssw
» SWh W » wsw
» NW и N » WNW
» W и NW » NNW
Промежуточные румбы имеют среднее направление между
выше приведенными. Названия их составляются из букв ближай-
шего главного или четвертного румба с прибавлением слова
«тень» (голландский предлог «к»), обозначаемого буквой t, и
буквы главного румба, в сторону которого данный промежуточ-
ный румб уклонен:
между N и NNO румб называется NtO
» NNO и NO » » NOtN
» NO и CkNO » » NOtO
» ONO и Ost » » OtN
» ost и OSO » » ots
» OSO и SO » » soto
и так далее, как указано на рис. 7. Всего именных румбов 32, 360° , . о,,
по 8 в каждой четверти. Величина одного румба /? = -дту- = 1101А.
В каждой четверти румбы пронумерованы от 0 до 8, причем
нулевые (румбы N и S, а. восьмые —Ost и W. Указанная систе-
ма деления горизонта называется румбовой. Эта система удов-
летворяла судоводителя в эпоху парусного флота, в настоящее
время сохраняется только для определения приближенных на-
правлений, например, для указания направления ветра или те-
чения. Появление на флоте судов с паровыми машинами, со-
вершенствование методов судовождения потребовало повыше-
ния точности в определении направлений. Поэтому была введе-
на четвертная система деления истинного горизонта: каждая
четверть горизонта была разделена на 90°, и счет градусов на-
чинался от направлений N и S к направлениям O8t и W. На-
правление при такой системе деления горизонта указывается
числом градусов и наименованием четверти, например: NO 10°,
31
SW 35°, NW 42°, SW 57°. В четвертях NO и SW счет градусов
идет вправо, по часовой стрелке, а в SO и NW—влево, против
часовой стрелки.
Рис. 7
Четвертная система деления горизонта усложняла решение
навигационных задач. Поэтому в начале нашего века весь го-
ризонт разделили на 360°, от 0, совпадающего с нордовой
частью истинного меридиана вправо, по часовой стрелке. Такая
система деления горизонта называется круговой. Она имеет
много преимуществ перед четвертной и румбовой системами. В
настоящее время четвертная система деления горизонта исполь-
зуется для решения некоторых задач мореходной астрономии,
которые тесно переплетаются с навигационными задачами,
поэтому нужно уметь переходить от направлений в чет-
вертном счете к направлениям в круговом счете и наоборот.
В табл. 4 дано сравнение трех систем определения направ-
лений.
32
Таблица 4
I № румба 1 Именной румб Система № румба Именной румб Система
четвертная круговая четвертная круговая
0 N NO 0°=NWO° 0=360° 0 S sw o=soo° 1SO°
1 NtO NO 11°Я 11°и 1 StW SW ири 191°И
2 NNO NO 22° И 22° 2 ssw SW 22° ц 202° И
3 NOtN NO 33° % 33°% 3 swts SW33°^ 213° 3A
4 NO NO 45° 45° 4 SW SW 45° 225°
5 NOtO NO 56° И 56° И 5 swtw SW56°H 236° И
6 ONO NO 67° И 67° И 6 wsw SW67*H 247° И
7 OtN N 78° H 78°% 7 Wts SW78°?4 258° &
8 Ost NO90=SO 90 90° 8 w SW90°=NW90° 270°
7 ots SO 78° % 101°^ 7 WtN NW 78° % 281° И
6 OSO SO 67° И 112° И 6 WNW NW 67° 4 292° И
5 soto SO 56° И 123°% 5 NWtW NW 56° И 303° %
4 so SO 45° 135° 4 NW NW 45° 315°
3 sots SO 33° И 146° И 3 NWtN NW 33° % 326° И
2 sso SO 22° И 157° ^2 2 NNW NW 22°^ 337° И
1 sto SO 11°И 168°% 1 NtW NW1I°H 348°
Для перехода от четвертного счета в круговой следует:
а) в NO четверти оставить число градусов без изменений
NO 32°=32°;
б) в SO четверти данное число градусов вычесть из 180°
SO 40°= 140°;
в) в SW четверти к данному числу градусов прибавить 180°
SW 52°=232°;
г) в NW четверти данное число градусов вычесть из 360°
N,W58°=302°.
Для перехода от кругового счета к четвертному следует:
а) для румбов от 0 до 90° к числу градусов приписать наи-
менования NO четверти
35° — NO 35°;
б) для румбов от 90 до 180° число градусов вычесть из 180
и приписать наименования SO четверти
151° = SO 29°;
в) для румбов от 180 до 270° из числа градусов вычесть 180
и приписать SW
230° = SW50°;
г) для румбов от 270 до 360° число градусов вычесть из 360
и приписать N.W
292° = NW68°.
При решении навигационных задач часто требуется опре-
делить обратные и перпендикулярные румбы. Обратным рум-
3 Навигация 33
бом называется румб, направление которого отличается от за-
данного на 180°. Для того чтобы получить обратный румб в
круговом счете, следует к заданному прибавить 180°, если он
меньше 180°, и вычесть 180°, если он больше 180°. Для по-
лучения обратного «румба в четвертном счете число1 градусов
остается без изменения, ио изменяются обе буквы наименова-
ния четверти. Для получения обратного румба в румбовом
счете «меняются все буквы заданного, например,
заданный румб обратный
39°..................................... 219°
228°...................................48°
SW 42°.................................NO 42°
SWtW...................................NOtO
Перпендикулярным румбом называется румб, который со-
ставляет с заданным угол 90°. Перпендикулярный заданному
румб бывает вправолежащим и влеволежащим. Для получения
вправолежащего румба к заданному прибавляется 90°, если
сумма больше 360°, из нее вычитают 360°. Для получения вле-
волежащего румба из заданного вычитают 90°. Если заданный
меньше 90°, его можно увеличить на 360°.
§ 1L ВИДИМЫЙ ГОРИЗОНТ И ЕГО ДАЛЬНОСТЬ
Истинный горизонт наблюдателя—это воображаемая плос-
кость, проходящая через глаз наблюдателя перпендикулярно
отвесной линии. При решении навигационных задач мы долж-
ны также знать видимый горизонт. Предположим, что глаз на-
блюдателя находится в точке Aj на некоторой высоте е над
точкой А поверхности Земли (рис. 8). Луч света от точки В, на-
ходящейся у самой воды, попадает в глаз наблюдателя, прой-
дя отделяющее точку А} и В расстояние по кривой линии BfA{.
Следовательно, наблюдатель увидит точку В по направлению
касательной к этой дуге в точке Ai, т. е. по направлению AiB..
Если из точки Alf как из центра, провести окружность сфери-
ческим радиусом Л/В, получим видимый горизонт, т. е. окруж-
ность, по которой небо как бы соприкасается с водой.
Распространение светового луча в атмосфере по кривой
объясняется различной плотностью атмосферы, а следователь-
но, и различной способностью преломлять световой луч. Пре-
ломление луча света, проходящего через земную атмосферу,
называется земной рефракцией. Кривую, по которой распрост-
раняется световой луч, можно считать дугой окружности с ра-
диусом /?р если допустить, что плотность атмосферы изменяет-
ся равномерно с возвышением над уровнем моря. Отношение
радиуса Земли R к радиусу большему в 5—6 раз, называет-
ся коэффициентом земной рефракции К. Этот коэффициент
определяется практически. Многочисленные определения коэф-
34
фициента земной рефракции, проводимые в различных стра-
нах в разное время года и суток, указывают, что величина К
непостоянна и изменяется в течение суток в зависимости от
атмосферного давления и температуры. В табл. 5 приведены
различные средние значения коэффициентов К по определе-
ниям ученых разных стран.
О,
Рис. 8
В мореходных таблицах среднее
земной рефракции принято ________
равным 0,16. Следует пом-
нить, что при восходе солнца К
достигает наибольшей величи- ----
значение
коэффициента
Таблица 5
По определению
ны и быстро уменьшается к по-
лудню. От 11.00 до 14.00
значение К равно среднему
значению 0,16, затем оно непре-
рывно увеличивается и к захо-
ду солнца достигает наиболь-
шего значения.
Деламбра ...............
Кларка .................
Бесселя ................
Байера .................
Струве .................
Савича .................
Лебедева........... . .
0,168
0,158
0,137
0,145
0,124
0,176
0,174
К
3*
35
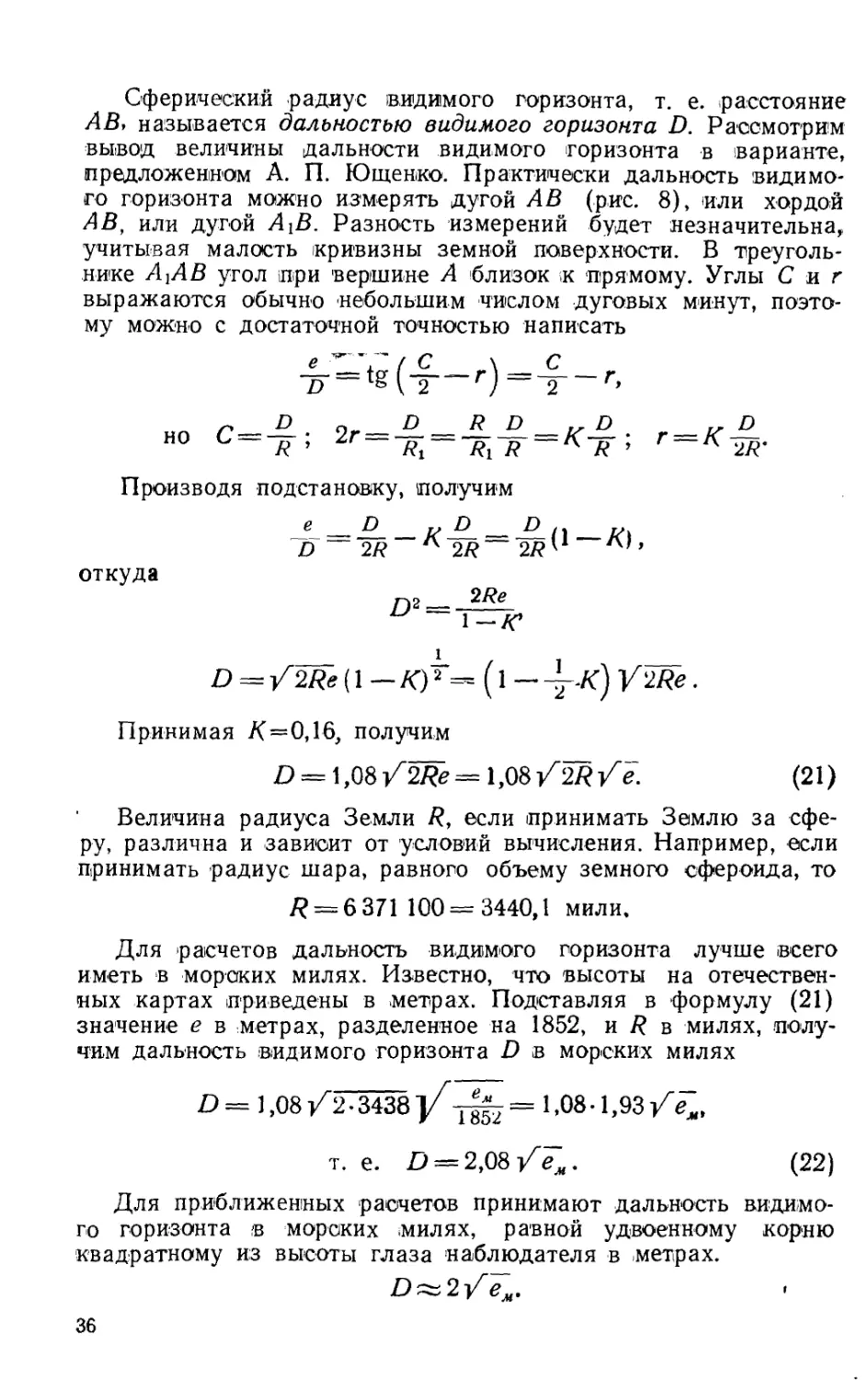
Сферический радиус видимого горизонта, т. е. расстояние
АВ, называется дальностью видимого горизонта D. Рассмотрим
вывод величины дальности видимого горизонта в варианте,
предложенном А. П. Ющенко. Практически дальность видимо-
го горизонта можно измерять дугой АВ (рис. 8), или хордой
А В, или дугой AiB. Разность измерений будет незначительна,
учитывая малость кривизны земной поверхности. В треуголь-
нике AiAB угол при вершине А близок к прямому. Углы Сиг
выражаются обычно небольшим числом дуговых минут, поэто-
му можно с достаточной точностью написать
е ’ 7’ (С \ С
TD 2 Г) ~ ~2 Г>
п D п_ D R D .. D ,, D
Н0 С~ R ’ 2г— Ri R ~~К R ; г —к 2R.
Производя подстановку, получим
6 _. _а* & __ & Н__R\
D ~ 2R Л 2R~
откуда
Г)2_
~ 1-/Г
£ = /2^(1 — КУ = (1—'T.K)V2Re.
Принимая Х=0,16, получим
D = 1,08/2^=!,08/2^/ё. (21)
Величина радиуса Земли R, если принимать Землю за сфе-
ру, различна и зависит от условий вычисления. Например, если
принимать радиус шара, равного объему земного сфероида, то
R = 6 371 100=3440,1 мили.
Для расчетов дальность видимого горизонта лучше всего
иметь в морских милях. Известно, что высоты на отечествен-
ных картах приведены в «метрах. Подставляя в формулу (21)
значение е в метрах, разделенное на 1852, и R в милях, полу-
чим дальность видимого горизонта D в морских милях
D= 1,08 /2-3438]/ -^=1,08-1,93/^,
т. е. Р = 2,08/ё;. (22)
Для приближенных расчетов принимают дальность видимо-
го горизонта в морских милях, равной удвоенному корню
квадратному из высоты глаза наблюдателя в метрах.
£)~2//.
36
В мореходных таблицах 1953 г. (МТ-53) табл. 22 доставле-
на для высот глаза наблюдателя в метрах. Чтобы найти даль-
ность видимого горизонта в таблицу входят с высотой глаза
наблюдателя в метрах и в среднем столбце находят значение
D, выраженное в .морских милях .
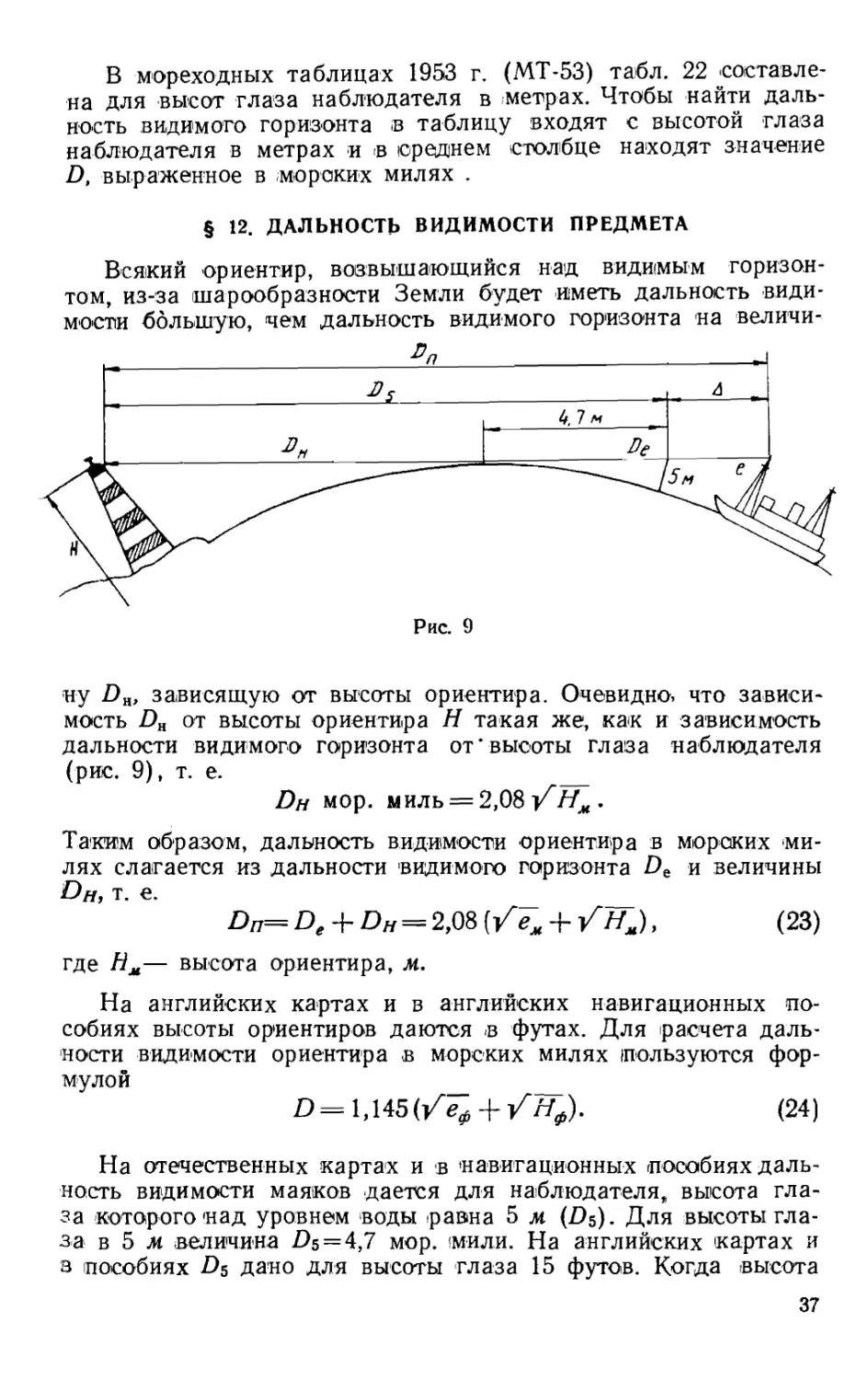
§ 12. ДАЛЬНОСТЬ ВИДИМОСТИ ПРЕДМЕТА
Всякий ориентир, возвышающийся над видимым горизон-
том, из-за шарообразности Земли будет иметь дальность види-
мости большую, чем дальность видимого горизонта на величи-
ну £>н, зависящую от высоты ориентира. Очевидно, что зависи-
мость от высоты ориентира Н такая же, как и зависимость
дальности видимого горизонта от‘ высоты глаза наблюдателя
(рис. 9), т. е.
Dm мор. миль = 2,08 Нм •
Таким образом, дальность видимости ориентира в морских ми-
лях слагается из дальности видимою горизонта De и величины
Он, т. е. _ ___
Dn= De + DH = 2,08 (/<?,, + / Нм), (23)
где Нм— высота ориентира, м.
На английских картах и в английских навигационных по-
собиях высоты ориентиров даются в футах. Для расчета даль-
ности видимости ориентира в морских милях пользуются фор-
мулой
D = 1,145 (/^ + /^). (24)
На отечественных картах и в навигационных пособиях даль-
ность видимости маяков дается для наблюдателя, высота гла-
за которого над уровнем воды равна 5 м (£>5). Для высоты гла-
за в 5 м величина £>5 = 4,7 мор. мили. На английских картах и
в пособиях £>5 дано для высоты глаза 15 футов. Когда высота
37
глаза наблюдателя больше или меньше 5 ж, то указанную
дальность D5 «на карте нужно исправить поправкой
Л = 2,08(/<и — /б) =2,08/^-4,7. (25)
Если высота глаза наблюдателя (меньше 5 м, знак поправ-
ки отрицательный, если больше — положительный. Имея по-
правку на высоту своего глаза» судоводитель может быстро
рассчитать дальность видимости маяка по формуле
Dn = D6 + А.
Наблюдения на судне могут вестись с различных мест и при
различной осадке судна. Поэтому целесообразно иметь заранее
вычисленную таблицу поправок для различных мест на судне
и различных осадок судна.
Дальность видимости маяка, рассчитанная для высоты гла-
за наблюдателя 5 м, называется географической дальностью
видимости маяка. Ночью дальность видимости огня зависит
еще и от силы источника света, цвета огня, системы маячного
аппарата. Дальность видимости огня, зависящая от этих при-
чин, называется оптической дальностью видимости, или ночной
дальностью видимости. Ее величина определяется из наблюде-
ний и может быть больше или меньше географической даль-
ности. Но чаще они равны. Если же они различны, то на карте
и навигационных пособиях указывается меньшая из них. Сле-
дует учесть, что в ясные ночи зарево маяка может быть обна-
ружено задолго до подхода судна к границе дальности види-
мости маяка. Иногда зарево маячного огня обнаруживается на
расстоянии, вдвое (большем + В условиях пасмурной пого-
ды или дымки дальность видимости уменьшается и будет мень-
ше £>5-НА.
ПРИМЕРЫ
1. Направление течения SWtW. Какое направление течения в четвертном
и круговом счете?
Решение. Данное направление расположено в SW четверти. Следова-
тельно, в четвертном счете его буквенное обозначение будет SW. SW румб
в четвертном счете — SW 45°, один румб к W.
От SW румба увеличит число градусов на 1101/4, т. е. искомое направле-
ние в четвертном счете SW 56о,/4.
В круговом счете S румб равен 180°. SWtW — пятый румб в SW четвер-
ти, следовательно, в круговом счете SWtW будет: 5Х11О1/ч+ 180°==236О1/4*
2. Дальность видимости маяка, указанная на карте, равна 22 милям.
Высота глаза наблюдателя, находящегося на верхнем мостике, 16 м. С ка-
кого расстояния наблюдатель увидит маяк?
Решен и е. На карте указана величина D5. Дальность видимости маяка
для наблюдателя с высоты 16 м будет
ол = d5 + д.
Поправка вычисляется по формуле (25).
Д =s2,08 у^16 — 4,7 = 3,6 мор. мили,
тогда Dn = 22 + 3,6 « 25,6 мор. мили.
38
В тех случаях, когда извлечь корень квадратный из числа, находящегося
под корнем, трудно, следует использовать табл. 22 МТ-53, где можно найти
значение первого члена поправки А, если войти в таблицу со значением вы-
соты глаза ем и выбрать дальность видимого горизонта De. Тогда поправка
будет равна
А = De — 4,7 = 8,3 - 4,7 = 3,6.
3. Рассчитать поправку Д для высоты глаза наблюдателя:
£j = 3^, с2 = 6л/, г3=10.м, = 15 л, еб = 20 м, ев = 25л.
Решение. Для решения задачи используем табл. 22 МТ-53, из
которой вы берем* значения 2,08 Эти значения будут равны
для £i=3,6 м, £2 = 5,1 м, £з=6,6 м, £4=18,1 м, е6=9,3 м, ев—10,4 м._
Подставляя выбранные из таблицы значения поправки 2,08^£ в фор-
мулу (25), получим .ряд поправок, которые сводим в таблицу
£Л Д, мор. мили ем А, мор. мили
3 — 15 i +3,4
6 +0,4 20 +4,6
10 + 139 25 +5,7
Такую таблицу можно вывесить в штурманской рубке.
Задачи
1. Выразить в четвертном счете направление в румбах для:
OtN; OtSJ/2O; SOtO; NNO>/2O; NO3/4O; SSW]/2W; NWtW]/;2W.
2. Выразить в круговом счете направление, указанное в задаче 4.
3. Написать направления, обратные ниже перечисленным: 212°, 127°,
SW30°, OtS, WtN.
4. Написать направления, перпендикулярные и вправолежащие, указанным
б задаче 3.
5. Какова дальность видимости горы высотою 120 м идя наблюдателя,
находящегося над уровнем моря на высоте 20 -и?
6. Дальность видимости маяка с высоты глаза наблюдателя 30 мор. миль.
Высота глаза наблюдателя 15 м. Определить дальность видимости маяка,
указанную на карте.
7. Маяк скрылся на расстоянии 15 м. Дальность видимости, указанная
на карте 12 миль. Определить высоту глаза наблюдателя.
8. На карте указана дальность видимости маяка 27 миль. С какого рас-
стояния открылся маяк, если высота глаза наблюдателя 21 л?
Ответы.
1. NO78°,7; SO 84°,3; SO 56°,3; NO 27е, 1; NO53°,4; SW28°,I; NW 61°,9.
2. 78°,7; 95°,7; 123°,7; 27°,I; 53°,4; 208°,I; 298°, 1.
3. 32°; 307°; NO 30°: WtS; OtS.
4. 292°; 217°; NW 30°; StW; NtO.
5. 32,1 мили.
6. 26,6 мили.
7. 13,7 м.
8. 31,8 мили.
39
Контрольные вопросы
1. Какие плоскости позволяют получить направления на поверхности
Земли?
2. Как делится истинный горизонт?
3. Какие существуют правила для перехода от четвертной системы де-
ления горизонта к круговой?
4. Что такое обратный румб?
5. Как изменяется величина коэффициента рефракции в течение дня?
6. В чем заключается приближенность вывода величины дальности ви-
димого горизонта?
7. Для какой высоты глаза наблюдателя на отечественных картах указы-
вается дальность видимости маяков?
8. Каково соотношение географической и оптической дальности види-
мости?
9. Какая из дальностей видимости указывается на карте?
Глава IV. ОПРЕДЕЛЕНИЕ НАПРАВЛЕНИЙ В МОРЕ
§ 13. ИСТИННЫЙ КУРС, ИСТИННЫЙ ПЕЛЕНГ И КУРСОВОЙ УГОЛ
Плоскость ,истинного меридиана наблюдателя принимают за
исходную при отсчете направлений. Положение диаметральной
плоскости судна относительно плоскости истинного меридиана
наблюдателя определяет направление движения судна. Дву-
гранный угол между плоскостью истинного меридиана наблю-
дателя и диаметральной плоскостью судна называется истин-
ным курсом судна (ИК).
Плоскость истинного меридиана наблюдателя и диаметраль-
ная плоскость судна, пересекая поверхность Земли, образуют
дуги больших кругов, которые в свою очередь образуют сфер и
ческий угол, представляющий собой ИК судна. На плоскости
истинного горизонта наблюдателя ИК представится в виде
плоского угла между полуденной линией и следом от пересече-
ния плоскости истинного горизонта диаметральной плоскостью
судна. Этот след называется линией истинного курса. Отсчиты-
вается ИК от нордовой части истинного меридиана наблюдате-
ля до носовой части диаметральной плоскости судна по часо-
вой стрелке от 0 до 360°.
Направление на предмет определяется двугранным углом
между плоскостью истинного мервдиана наблюдателя и верти-
кальной плоскостью, проходящей через предмет и глаз наблюда-
теля, который называется истинным пеленгом (ИП). На по-
верхности Земли истинный пеленг представится сферическим
углом между истинным меридианом наблюдателя и большим
кругом, образованным пересечением земной поверхности верти-
кальной плоскостью, проходящей через глаз наблюдателя и
предмет. На плоскости истинного горизонта ИП представится
плоским углом между полуденной линией и линией пересече-
ния плоскости истинного горизонта вертикальной плоскостью,
проходящей через глаз наблюдателя и предмет, которая назы-
40
вается линией истинного пеленга. Отсчитывается ИП от нордо-
вой части истинного меридиана наблюдателя до направления
на предмет, по часовой стрелке от 0 до 360°. Направление от
предмета на судно отличается от ИП на 180° и называется об-
ратным истинным пеленгом (ОИП).
Рис. 10.
Направление на предметы может определяться также отно-
сительно носовой части диаметральной плоскости судна. Дву-
гранный угол между диаметральной плоскостью судна и верти-
кальной плоскостью, проходящей через предмет и наблюдателя,
называется курсовым углом (КУ). Курсовой угол отсчитывает-
ся от носовой части диаметральной плоскости судна вправо и
влево от 0 до 180°. Курсовые углы бывают правого борта КУ п/б
(положительные) и левого борта КУ л/б (отрицательные).
При радиопеленговании считают КУ только правого борта и они
отсчитываются от 0 до 360°, по часовой стрелке. Когда КУ пред-
мета равен 90° правого или левого борта, предмет находится
на траверзе. Когда КУ предмета равен 45° п/б или л/б, говорят,
что предмет находится на крамболе. Когда КУ предмета ра-
вен 135° п/б или л/б, говорят, что предмет находится на рако-
вине.
Истинные курсы, пеленги и курсовые углы связаны между
собой зависимостью (рис. 10)
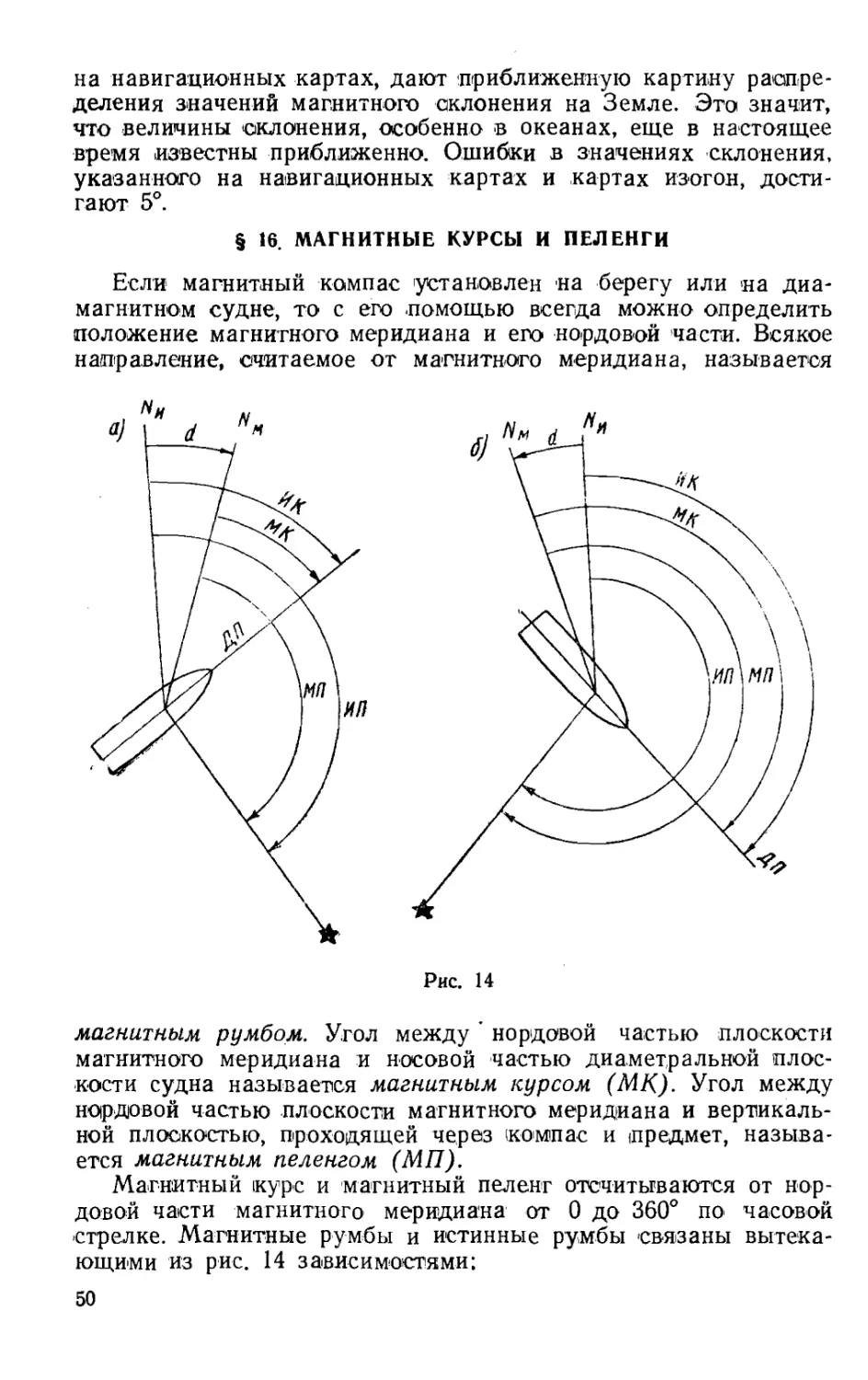
ИП = ИК + КУ. (26)
Эта формула—алгебраическая, где КУ п/б имеет знак плюс ( + ),
КУ л/б—знак минус (—).
41
Из формулы (26) можно получить^
КУ = ИП — КГ
ИК = ИП —КУ.
Если разность ИП и И К получится положительной, то и
курсовой угол будет положительным, т. е. это будет КУ п/б,
если отрицательная, то КУ также будет отрицательным, т. е
это будет КУ л/б.
Если на основании расчетов по формуле ИП или ИК полу-
чатся больше 360°, нужно из (полученной суммы 'вычесть 360°.
Если уменьшаемое меньше вычитаемого, к вычитаемому
нужно прибавить 360°. Если КУ получится больше 180°, нужно
взять дополнение до 360° и сменить наименования КУ.
§ 14. КОМПАСЫ
Важнейшей задачей судовождения является определение
направлений в море. Ее можно решить с помощью навигацион-
ного прибора, называемого компасам. Существуют два основ
ных вида компасов: гироскопические и магнитные.
Гироскопические компасы — сложное электромеханическое
устройство, основанное на свойствах гироскопа. Остановимся
кратко на его устройстве (подробно гирокомпас изучается в
специальном курсе «Электронавигационные приборы»).
Одна из главных частей гирокомпаса—чувствительный эле-
мент, имеющий геометрическую ось. Теоретически ось чувстви-
тельного элемента должна совпадать при постоянном режиме
движения судна с полуденной линией, указывая судоводителю
направление нордовой части истинного меридиана, от которого
производится отсчет всех направлений. Но как и во всяком ме-
ханическом приборе, ось чувствительного элемента, а с ней и
ось следящей системы, могут не устанавливаться в плоскости
истинного меридиана, а в какой-то другой плоскости.
Вертикальная плоскость, проходящая через ось чувствитель-
ного элемента гирокомпаса, находящегося в положении равно-
весия, называется плоскостью г и р о скоп ич еск о го
меридиана. Двугранный угол между плоскостью
истинного меридиана наблюдателя и плоскостью гироскопиче-
ского меридиана называется поправкой гирокомпа-
с а &ГК.
На плоскости истинного горизонта наблюдателя указанные
плоскости образуют линии истинного меридиана наблюдателя
(полуденная линия) и линии гироскопического меридиана, а по-
правка гирокомпаса представится плоским углом на плоскости
истинного горизонта между истинным и гироскопическим мери-
дианами.
Величина поправки отсчитывается от нордовой части истин-
ного меридиана вправо и влево. Если гироскопический мериди-
42
ан уклонился вправо от истинного меридиана, поправка назы-
вается остовой и имеет знак плюс ( + ), если влево— ве-
стовой и имеет знак минус (—). Если ось гироко»мпаса на-
ходится на линии истинного меридиана, поправка равна нулю*
и гирокомпас указывает истинные направления. Поправка ги-
рокомпаса для постоянных режимов движения судна и режи-
ма работы гирокомпаса — величина постоянная, не зависящая
от курса судна. Но существуют причины (например, ускоре-
ния, обусловленные маневрированием и качкой судна), которые
изменяют поправку гирокомпаса. Изменения величины поправ-
ки на качке незначительны, а при маневрировании могут до-
стигать 2—3° в течение некоторого времени, после чего гиро-
компас приходит в свой меридиан, и поправка принимает
прежнее значение.
Поправка гирокомпаса изменяется также от различных ме-
ханических и электротехнических причин. Поэтому необходимо
контролировать величину поправки и при любой возможности
ее определять.
Показания гирокомпаса передаются репитерам, установлен-
ным на ходовом и главном мостиках, курсографу, постоянно
фиксирующему курс, гирорулевому, удерживающему судно на
заданном курсе, и автопрокладчику — прибору, ведущему счи-
сление судна на карте. Репитер гирокомпаса имеет картушку,
которая представляет собой миниатюрное изображение плос-
кости истинного горизонта, разделенного на 360°. Нуль картуш-
ки лежит в плоскости гироскопического меридиана. Диамет-
ральная плоскость судна проходит через индекс — курсовую
черту. Угол между нордовой частью плоскости гироскопическо-
го меридиана и диаметральной плоскостью судна называется
г и р о ко мп а с н ы м курсом (ККг)- Для взятия пеленгов
на репитер гирокомпаса устанавливается пеленгатор, который
дает возможность глазную и предметную мишень установить
в вертикальной плоскости, проходящей через центр компаса и
предмет, а также взять отсчет по картушке. Угол между нордо-
вой частью плоскости гироскопического меридиана и плоскости,
проходящей через центр компаса и предмет, называется г и-
рокомпасным пеленгом (Д77г). Следовательно, что-
бы найти гирокомпасный курс, нужно прочитать отсчет на кар-
тушке репитера, совпадающий с курсовой чертой» а гироком-
пасный пеленг — отсчет на картушке через глазную мишень
пеленгатора, после того, как пеленгатор будет установлен в
плоскости, проходящей через компас и предмет.
Репитер гирокомпаса имеет азимутальный круг, разбитый
от 0 до 180° вправо и влево. Репитер гирокомпаса устанавли-
вают в плоскости, параллельной диаметральной плоскости ДП
судна так, чтобы О совпадал с носовой частью ДП. На пелен-
гаторе на предметной мишени имеется индекс. Когда пеленга-
тор установлен в направлении на предмет, по этому индексу
43
снимают отсчет КУ предмета по азимутальному кругу. Наиме-
нование борта КУ определяется по тому борту, на котором на-
ходится предметная мишень пеленгатора.
Имея значение ККг или КПг и поправку гирокомпаса АГК,
всегда можно получить ИК или ИП по формулам, вытекающим
из рис. 11.
ип = кпг + ьгк. ( п
Если нужно вычислить по ИК или ИП гирокомпасный курс
или гирокомпасный пеленг, зная поправку гирокомпаса, из
-формул (27) получают формулы
КК.-ИК-ЫК;
кп, = ип-ьгк. ' '
Формулы (27 и 28)—алгебраические, в них поправка &ГК мо-
жет быть положительной или отрицательной.
Кроме гирокомпаса на судах установлены магнитные ком-
пасы.
Устройство магнитного компаса основано на свойстве маг-
нитной стрелки устанавливаться в каждой точке Земли парал-
лельно направлению магнитных силовых линий.
44
Известно, что земную (поверхность окружает магнитное по-
ле Земли. В каждой точке оно характеризуется напряжен-
ностью Т (рис. 12), которая называется полной магнит-
ной силой. Вертикальная плоскость, проходящая через гео-
метрическую ось магнитной стрелки, подвешенной за центр
тяжести на берегу или на диамагнитном судне, называется
плоскостью магнитного меридиана. Эта плос-
кость составляет двугранный угол с плоскостью истинного ме-
ридиана наблюдателя, который называется магнитным
склонением (обозначается буквой d). Склонение называ-
ется остовым и считается положительным, когда северная часть
магнитного меридиана уклонилась от истинного меридиана к
Ost, и вестовым и отрицательным, если к W. Сила Т действует
в плоскости магнитного меридиана от южного магнитного по-
чюса к северному магнитному полюсу и в общем случае на-
правлена под некоторым углом / к плоскости истинного гори-
зонта, который называется наклонением. Вектор силы Т, спро-
ектированный на плоскость истинного горизонта, называется
горизонтальной составляющей земного магне-
тизма (обозначается буквой И)
H=Tcos I.
Вектор силы Г, спроектированный на вертикаль, называет-
ся вертикальной составляющей земного магне-
тизма (обозначается буквой Z).
45
Магнитное склонение является результатом действия на
магнитную стрелку горизонтальной составляющей земного маг-
нетизма Н. Наклонение—это результат действия на магнитную
стрелку вертикальной составляющей Z. Величины rf, /, Н и Z
называются элементами земного магнетизма.
Земное магнитное толе однородно в небольших районах по-
верхности Земли, но в целом оно неоднородно. Поэтому в раз-
личных пунктах земной ’поверхности свободно' (подвешенная
стрелка занимает различное положение. Следовательно, вели-
чины элементов земного магнетизма не постоянны на всей зем-
ной поверхности.
На основании большого количества измерений элементов
земного магнетизма в различных точках на Земле составлены
карты распределения величин элементов земного магнетизма и
получено представление о магнитном поле Земли. На магнит-
ных картах магнитное поле Земли изображается методом изо-
линий, т. е. линий равных величин. Кривые, соединяющие точ-
ки с одинаковым склонением, называются и зогонами.
Кривые, соединяющие точки, где магнитное склонение равно
нулю, называются агонами. Кривые, соединяющие точки с
одинаковым наклонением, называются изоклинами. В со-
ответствии с этим издаются карты изогон и карты изоклин.
Линиями магнитных меридианов являются кривые, направ-
ление которых в каждой точке на карте определяется направ-
лением горизонтальной составляющей Н в этой точке. Магнит-
ные меридианы сходятся в двух магнитных полюсах Земли.
Приближенное положение земных магнитных полюсов в 1950 г.
было: Северный полюс — cp^72°N, Z~96°W; Южный полюс —
(p-76°S, A^150°Ost.
' Изоклины представляют собой ряд приблизительно парал-
лельных кривых, идущих примерно по земным параллелям. Ну-
левая изоклина называется магнитным э к в а т о р о м,
который проходит вблизи географического экватора и пересе-
кает последний в двух точках.
Изогоны представляют собой систему кривых, которые схо-
дятся в четырех точках: в двух географических полюсах и в
двух магнитных полюсах Земли. На Земле две основные аго-
ны: одна проходит через Северную и Южную Америку, вто-
рая — через Скандинавию, Европу, Восточную Африку, затем
делает петлю, огибая Азию, и проходит через Австралию. В
Атлантическом океане склонения W, в Тихом океане O9t. Из-
меняется величина магнитного склонения от 0 до 180° к осту и
к весту в зависимости от места на Земле и отсчитывается от
нордовой части истинного меридиана. Горизонтальная состав-
ляющая земного магнетизма Н играет главную (роль в работе
магнитного компаса. На магнитных полюсах горизонтальная
составляющая будет равна нулю, тогда как на экваторе она
будет наибольшей. Вследствие этого в полярных плаваниях
46
пользоваться только магнитным компасам нельзя и суда обяза-
тельно снабжаются гирокомпасами.
§ 15. МАГНИТНЫЕ АНОМАЛИИ И ВАРИАЦИИ
При детальном рассмотрении магнитной карты, где магнит-
ное поле изображается плавными кривыми, представляющими
определенную закономерность в распределении земного магне-
тизма, можно обнаружить ряд небольших районов, в которых
магнитные кривые резко уклоняются от плавного хода. Причи-
нами таких искажений являются магнитные породы, залегаю-
щие под поверхностью Земли. Эти искажения называются ано-
малиями. На карте изогон в районах магнитных аномалии
плавный ход изотон резко изменяется, образуя изменения ве-
личины склонения и его знака. Границы районов .магнитных
аномалий указаны на морских картах жирной линией. В этом
районе судоводитель обязан особенно тщательно следить за ра-
ботой магнитного компаса и больше полагаться на гирокомпас,
контролируя возможно чаще свое счисление. В морях, омыва-
ющих СССР, наибольшие магнитные аномалии расположены з
Балтийском, Баренцевом, Белом, Черном и Охотском морях.
Крупная магнитная аномалия находится у западных берегов
Австралии, где на расстоянии 1 кбт. склонение изменяется
от 4-56 до — 26°.
Магнитное поле Земли не остается постоянным. Оно непре-
рывно изменяется, из-за чего изменяются и элементы земного
магнетизма. Причины изменения магнитного поля Земли еще
недостаточно изучены.
Изменения элементов земного магнитного поля во времени
называются магнитными вариациями. Изменения магнитного
склонения во времени называется вариацией магнитного скло-
нения. Вариации магнитного склонения делятся на периодиче-
ские, из которых существенными являются вековые и суточные,
и апериодические, называемые магнитными бурями.
Суточные вариации, или как их называют солнечносуточные
вариации, имеют период солнечных суток и протекают по мест-
ному времени. В Ленинграде суточные вариации имеют ампли-
туду 16'. В судовых условиях солнечносуточные вариации по
их малости не учитываются.
Период вековых вариаций достигает нескольких сотен лет,
и амплитуда магнитного склонения доходит до 30—35°, причем
в различных пунктах Земли она бывает различной. Наблюде-
ния над изменением склонения в Лондоне ведутся с 1540 г.
Склонение в этом пункте с 1540 до 1600 г. увеличивалось, с
1600 по 1840 г. уменьшалось. С 1840 г. оно вновь увеличива-
ется до настоящего времени. В результате изучения вековых
вариаций для различных районов Земли устанавливается вели-
чина годового изменения склонения — вековой ход—годовое
47
увеличение, или годовое уменьшение, выраженное в дуговых
минутах. Вековой ход склонения в зависимости от районов
Земли колеблете^ в пределах от 0 до ±15'. Значения векового
хода склонения для различных районов Земли наносятся на
карты. Точки, имеющие одинаковое значение векового хода, со-
единяются плавными кривыми, которые называются изопо-
ра м и.
Вековые вариации склонения учитываются в судовождении,
поэтому на морских картах всегда указывается величина и на-
именование склонения, к какой эпохе оно приведено, и величи-
на векового хода, т. е. годовое увеличение или уменьшение
склонения за год. Величина склонения указывается в несколь-
ких местах на карте с точностью до 1/4°.
Поэтому прежде чем приступить к работе на карте, необхо-
димо привести склонение к году плавания, т. е. рассчитать ве-
личину склонения для года плавания. Для расчета нужно раз-
ность между годом плавания и годом, к которому отнесено
склонение на карте, умножить на величину годового изменения
склонения. Результат умножения даст поправку со знаком. Ес-
ли на карте указано годовое уменьшение, то знак поправки бу-
дет минус, если увеличение — знак плюс. Эту поправку с ее зна-
ком нужно придать к абсолютной величине магнитного скло-
нения, указанного на карте в данном районе плавания. Если
плавание проходит между местами, где указано склонение, нуж-
но на глаз проинтерполировать величину склонения между
ближайшими надписями на навигационной карте и затем при-
вести полученное склонение к эпохе плавания.
Кроме указаний о магнитном склонении на навигационных
картах, составляются справочные карты изогон для какого-ли-
бо определенного года. Нанесенные на этих картах кривые по-
казывают величину магнитного склонения в различных районах
и дают возможность судить, как изменяется магнитное склоне-
ние с перемещением судна (рис. 13). Картой изогон пользуют-
ся для определения величины склонения в данном месте. Если
судно находится между изогонами, производят интерполяцию
на глаз, если на изогоне, берут то значение склонения, которо-
му соответствует данная изогона. В том случае, если плавание
совершается не в тот год, к которому приведены изогоны, нуж-
но выбранное магнитное склонение привести к данной эпохе
плавания.
По карте изогон можно судить о том, как изменяется вели-
чина склонения в зависимости от перемещения судна. Если суд-
но перемещается вдоль изогоны, склонение не меняется, если
пересекает изогоны под углом около 90°, то склонение меняется
наиболее быстро. Материалы, послужившие для составления
карт изогон,— результат наблюдений, выполненных в разное
время всевозможными методами и с различной точностью. По-
этому карта изогон, а также магнитные склонения, указанные
48
Рис. 13
на навигационных картах, дают приближенную картину распре-
деления значений магнитного склонения на Земле. Это значит,
что величины склонения, особенно в океанах, еще в настоящее
время известны приближенно. Ошибки в значениях склонения,
указанного на навигационных картах и картах изогон, дости-
гают 5°.
§ 16. МАГНИТНЫЕ КУРСЫ И ПЕЛЕНГИ
Если магнитный компас установлен на берегу или на диа-
магнитном судне, то с его помощью всегда можно определить
положение магнитного меридиана и его нордовой части. Всякое
направление, считаемое от магнитного меридиана, называется
Рис. 14
магнитным румбом. Угол между ’ нордовой частью плоскости
магнитного меридиана и носовой частью диаметральной плос-
кости судна называется магнитным курсом (МК). Угол между
нордовой частью плоскости магнитного меридиана и вертикаль-
ной плоскостью, проходящей через (компас и предмет, называ-
ется магнитным пеленгом (МП),
Магнитный курс и магнитный пеленг отсчитываются от нор-
довой части магнитного меридиана от 0 до 360° по часовой
стрелке. Магнитные румбы и истинные румбы связаны вытека-
ющими из рис. 14 зависимостями:
50
HK = MK^d
ИП = МП^<1
. (29)
МК=ИК— d
Mn = Hn—d
Формулы (29) алгебраические, где склонение d может быть
величиной отрицательной и положительной. На рис. 14,а пред-
ставлен случай, когда склонение остовое и положительное, а
на рис. 14,6.— вестовое и отрицательное. Переход от магнитных
направлений к истинным и наоборот осуществляется с по-
мощью формул (29) и для контроля схематическим чертежом
на бумаге.
§ 17. ДЕВИАЦИЯ МАГНИТНОГО КОМПАСА
Современные морские суда строятся из судостроительной
стали. Находясь в магнитном поле Земли, судовая сталь намагни-
чивается и судно становится большим магнитом, вокруг которого
создается собственное магнитное поле. Кроме того, на судах ра-
ботают различные электроустановки, приведено много кабелей,
по которым проходит электрический ток. В результате этого на
судне создается магнитное поле, которое также намагничивает
судовую сталь.
Магнитное поле и электромагнитное поле судна накладывают-
ся на магнитное поле Земли, из-за чего создаются сложные ус-
ловия работы магнитного компаса. Система стрелок судового
магнитного компаса, под действием всех магнитных полей не ус-
танавливается в плоскости магнитного меридиана, а отклоняется
от нее на какой-то угол. Стрелки приходят в равновесие под сум-
марным воздействием магнитного поля Земли и судна и как пра-
вило устанавливаются в данной плоскости.
Вертикальная плоскость, проходящая через геометрическую
ось стрелки магнитного компаса, установленного на стальном
судне, называется плоскостью компасного меридиана. След от
пересечения плоскости истинного горизонта наблюдателя плос-
костью компасного меридиана называется компасным меридиа-
ном. Угол между магнитным меридианом и компасным меридиа-
ном называется девиацией магнитного компаса и обозначается
буквой 6. Девиация отсчитывается от нордовой части магнитного
меридиана к осту или к весту от 0 до 180°. Если норд компасный
уклонился от норда магнитного к осту, девиация положительна,
если к весту — отрицательна.
Чтобы создать условия для надежной работы магнитного ком-
паса на судне, необходимо устранить влияние на него магнитно-
го поля судна. Для этого искусственным путем создают систему
компенсирующих сил, которая уменьшает влияние сил магнитно-
го поля судна; магниты и мягкое железо размещают на таком
г
с
расстоянии от картушки <и такой силы, чтобы влияние их на ком-
пас было равно, а по напряжению противоположно действию су-
довой стали. Этот процесс называется уничтожением девиации.
После уничтожения девиации магнитное поле судна влияет на
компас значительно меньше.
Вызванная у компаса девиация после ее уничтожения назы-
вается остаточной. При поворотах на различные курсы изменяет-
ся взаимное расположение аил земного магнитного поля и собст-
венного магнитного поля судна, а поэтому изменяется и направ-
ление силы результирующего магнитного поля относительно
корпуса судна. Это явление вызывает изменение девиации при
изменении курсов судна. Следовательно, на каждом курсе девиа-
ция различна.
Как было указано выше, горизонтальная составляющая зем-
ного магнетизма изменяется с широтой. В связи с этим при боль-
шой перемене судном широты изменяется и сила результирующе-
го магнитного поля, в котором находится компас, а следователь-
но, изменится и девиация компаса. Изменения девиации проис-
ходят й при загрузке судна металлическим грузом, при измене-
нии линии электропроводки, проходящей вблизи магнитного ком-
паса, после проведения электросварочных работ, а также в том
случае, если подойти к магнитному компасу со стальными пред-
метами (нож, свайка и пр.).
§ 18. КОМПАСНЫЕ КУРСЫ И ПЕЛЕНГИ
Если магнитный компас установлен на стальном судне и де-
виация уничтожена, то с его помощью всегда можно определить
направление компасного меридиана и его нордовой части. Всякое
направление, считаемое от нордовой части компасного меридиа-
на, называется компасным румбом. Угол между нордовой частью
плоскости компасного меридиана и носовой частью диаметраль-
ной плоскости судна называется компасным курсом (КК). Угол
между нордовой частью плоскости компасного меридиана и вер-
тикальной плоскостью, проходящей через компас и предмет, на-
зывается компасным пеленгом (КП). КК и КП отсчитываются
от нордовой части компасного меридиана от 0 до 360° по часовой
стрелке.
Компасные и магнитные румбы связаны вытекающими из
рис. 15 алгебраическими формулами, в которых девиация может
быть положительной и отрицательной.
МП = КП + И
кк =мк—^ j
КП = МП —%]
(30)
52
На рис. 15,а представлен случай, когда девиация положительна,
а на рис. 15,6—отрицательна.
В практической работе необходимо знать истинные направле-
ния. Поэтому на навигационных картах нанесены истинные ме-
ридианы, от которых судоводитель отсчитывает ИК и ИП.
Рис. 15
При помощи магнитного компаса на стальном судне можно
отсчитать только компасные направления, курсы и пеленги. Для
того чтобы получить из компасных направлений истинные, нужно
компасные направления исправить склонением и девиацией. Ре-
шение такой задачи называется исправлением румбов.
Из формул (29) и (30) вытекает, что
ИП= КП + d + Z г (31)
На практике часто приходится находить компасные направле-
ния, зная истинные. Решение такой задачи называется переводом
румбов. Из формул (31) получим:
KK=HK-d->\
кп = ип -d—s г ' '
Формулы (31) и (32) — алгебраические. В них значение d может
быть вестовым, или отрицательным, и остовым, или положитель-
ным, а б положительной и отрицательной.
Когда нужно перейти непосредственно от компасных направ-
лений к истинным и наоборот, склонения и девиация суммируют-
53
ся алгебраически. Алгебраическая сумма склонения и девиации
называется общей поправкой компаса &К
Д/У=Л + 8. (33)
В зависимости от знаков и величин девиации и склонения
общая поправка компаса может быть положительна и отрица-
Рис. 17
тельна. Формулы (31) и
(32) в этом случае прини-
мают такой вид:
И К = КК + д/с
/7/7 = КП + ДК
КК = ИК- ДА*
КП =ИП — ЬК
В геометрическом смысле
общая поправка компаса
есть угол между нордовы-
ми частями плоскостей ис-
тинного и компасного мери-
дианов (рис. 16). Если норд
к омп асный уклонился от
(34)
54
норда истинного вправо (к осту), поправка компаса положитель-
на, если влево (к весту) —отрицательна. Изменяется поправка
компаса от 0 до 180°.
В связи с тем, что на судах обычно устанавливаются магнит-
ные и гироскопические компасы, судоводитель должен знать их
поправки. Связывая эти поправки для одного истинного курса,
получим (рис. 17).
_ д гк=ик - ККг
ьк=ик-кк
А ГК=КК - ККг + ДА* 635)
ЬК = КК-КК+ЬГК
Для исправления и переводов румбов пользуются приведен-
ными выше формулами. Вычисления проверяются построением
чертежа.
§ 19. ОПРЕДЕЛЕНИЕ ДЕВИАЦИИ
Остаточная девиация определяется на восьми равноотстоящих
курсах (-N, NO, Ost, SO, S, SW, W, NW). Затем рассчитывается
девиация для курсов через 10—15° по правилам, излагаемым в
курсе «Девиация 'магнитного компаса». По результатам расчета
составляется таблица девиации, для входа >в которую служит
компасный или магнитный курсы. Последний отличается от АТС
на небольшую величину остаточной девиации.
Если остаточная девиация по абсолютной величине превышает
5°, значит уничтожение ее произведено неудовлетворительно. Тог-
да вновь следует операцию повторить. Уничтожением и опреде-
лением остаточной девиации необходимо заниматься после дли-
тельной стоянки в порту, погрузки и выгрузки груза стали или
изделий из стали, при значительном изменении магнитной широ-
ты, после электросварочных работ и др. Перед определением де-
виации судно должно -быть приведено в такое состояние, в кото-
ром будет осуществляться плавание.
Сущность определения девиации заключается в сравнении из-
меренного компасного пеленга ориентира с известным 'магнитным
пеленгом того же ориентира на заданном курсе
Ъ=МП — КП. (36;
Для того чтобы затратить на определение девиации мини-
мальное количество эксплуатационного времени, составляется
схема маневрирования. В ней предусматривается время, необхо-
димое для того, чтобы картушка компаса пришла в равновесное
состояние. Для уменьшения влияния случайных ошибок на каж-
дом курсе берут 3—5 компасных пеленга. Из них для расчета бе-
рут средний.
55
Девиацию главного компаса можно определить различными
навигационными методами. Рассмотрим каждый из этих методов.
Определение девиации по створам. Обычно в крупных портах,
вблизи их акваторий устраиваются девиационные полигоны
(рис. 18), служащие для уничтожения и определения девиации, а
иногда и радиодевиации. Истинное направление створов (их бы-
вает различное количество) полигона точно известно. Известно
также с высокой точностью склонение в районе полигона. В мо-
мент пересечения створа на заданном курсе берут КП створа.
Зная истинный пеленг створа и склонение в данном районе, рас-
считывают магнитный пеленг
МП =ИП—с1)
после чего рассчитывают девиацию для данного -курса по форму-
ле (36). В момент пересечения створа рулевой должен точно дер-
жать на заданном курсе. Пересекая различные створы на курсах
N, NO, Ost, SO, S, SW, W и NW и, получив значения девиации
на этих курсах, рассчитывается рабочая таблица девиации, ко-
торая должна быть вывешена в штурманской рубке. Рабочая
таблица девиации, с помощью которой решены все задачи, по-
мещенные в учебнике, приведена ниже (табл. 6).
В зависимости от чувствительности створов (о чем будет ука-
зано ниже) определение девиации имеет различную точность.
56
Таблица 6
8 КК (МК) 8
+2°,3 0° 180° —Г,7
4-1 °,7 10° 190° —0°,7
4-1°, 3 20° 200° +0°,3
+1°,0 30° 210° 4-1°,3
4-0°,5 40° 220° 4-2°,0
0°,0 50° 230° 4- 2°, 7
—0°,7 60° 240° + 3°,5
—1°,5 70° 250° 4-4°,0
—2°,0 80° 260° +4°,3
—2°,7 90° 270° +4°,5
—3°,3 100° 280° 4-4°,5
—3°,7 110° 290° 4-4°,3
—4°,0 120° 300° 4-4°,0
—4°,3 130° 310° +3°,7
—4°,0 140° 320° 4-3°,5
—3°,7 150° 330° +з°,о
-3°,3 160° 340° 4-2°,7
-2°,5 170° 350° 4-2°,5
—1°,7 180° 360° 4-2°,3 ’
Определение девиации по пеленгу отдаленного предмета. Ес-
ли судно стоит на бочке в порту, место которой нанесено на кар-
ту с высокой точностью, а створов нет, можно с карты снять ИП
отдаленного предмета, а зная склонение в данном месте, рассчи-
тать МП с бочки на ориентир. С помощью буксира, соединенного
с судном растительным тросом, можно развернуть судно на лю-
бой курс. В момент, когда оно будет на заданном курсе, замеча-
ют КП отдаленного предмета и рассчитывают девиацию для дан-
ного курса по формуле (36). Знак девиации определится из фор-
мулы.
Такие определения девиации делают для восьми равноотстоя-
щих курсов, начиная от N. После этого рассчитывают таблицу
девиации. Вследствие того, что 'машина судна во время определе-
ния девиации не работает, значение ее будет получено с неко-
торой погрешностью.
Если судно находится за пределами порта и вдали на берегу
есть хорошо видимый ориентир, то, описывая циркуляцию, мож-
но взять восемь КП этого ориентира на восьми равноотстоящих
курсах. Из теории девиации и магнитного компаса следует, что
средний из восьми КП равен магнитному пеленгу
ЛАП КП ZQ7)
МП = ^—. (37)
Имея компасные пеленги на восьми курсах начиная от N че-
рез 45° и магнитный пеленг ориентира, рассчитывают девиации
Для восьми равноотстоящих курсов и составляют рабочую табли-
57
цу. Точность, с которой будет определена девиация, зависит от
радиуса циркуляции и расстояния до ориентира. Допустим, что
А (рис. 19)—ориентир, О — центр циркуляции, г— радиус
циркуляции, D — расстояние от центра циркуляции до ориенти-
ра. Тогда максимальная ошибка в определяемой девиации будет
угол в, причем
Slne=-£-.
Задавшись допустимой ошибкой в значении девиации е и зная
©вой радиус циркуляции г, нужно выбирать ориентир «а берегу
на расстоянии, удовлетворяющем заданную точность значения
девиации, а именно
D=- —;
sin е ’
(по малости угла е можно считать, что
sin е = 57°,3 ~ ТЙГ ’ (38)
Тогда
Если судно стоит на бочке, радиус циркуляции будет равен
расстоянию от бочки до компаса.
Определение девиации по взаимным пеленгам. Магнитный
компас, установленный на берегу, вдали от стальных конструк-
ций, электрокабелей и другого, определит направление магнит-
ного меридиана, от которого отсчитываются все магнитные на-
правления. Для определения девиации этим методом компас >вы-
возят в шлюпке на берег и устанавливают его на треноге. По оп-
ределенному сигналу (судовой свисток, поднятый флаг и т. п.)
одновременно с берегового и судового компасов берут взаимные
58
пеленги. На берегу будет получен магнитный пеленг, на судне —
компасный. При этом учитывается, что МП будет отличаться от
КП, кроме девиации, еще на 180°.
Определив девиацию на восьми равноотстоящих курсах, рас-
считывают рабочую таблицу.
Определение девиации с помощью вехи и ориентира. Вблизи
берегов, если нет течения и ветра, девиацию можно определить,
выпустив с судна самодельную плавучую веху. Проходя мимо нее
на различных курсах, можно взять пеленги приметного берегово-
го ориентира. В тех случаях, если наблюдается ветер или тече-
ние, а в районе маневрирования доступные глубины, веху можно
поставить на якорь. Веха указывает момент, когда нужно брать,
пеленг ориентира. Сравнивая компасный пеленг с магнитным, ко-
торый рассчитывается по формуле (37), получают значение 8.
Определение девиации по сличению с гирокомпасом. Зная точ-
но величину поправки гирокомпаса на восьми равноотстоящих
Л7С, замечают гирокомпасные курсы. Для каждого компасного
курса рассчитывается поправка компаса по формуле (35)
^К=ККг-КК+^ГК.
Выбрав с карты значения склонения и приведя его к году пла-
вания, рассчитывают девиацию для восьми курсов
после чего рассчитывают рабочую таблицу девиации.
Используя этот метод, нужно изменять курс при переходе с
одного курса на другой постепенно, а не резко, и сличать компас-
ный и гирокомпасный курсы через 5—10 мин, т. е. когда компа-
сы придут в свой меридиан.
На судне, кроме главного компаса, в рулевой рубке и у кор-
мового штурвала устанавливаются путевые компасы. Девиация
для этих компасов определяется путем сличения с главным ком-
пасом. Для того чтобы сличить их, у главного компаса встает
один наблюдатель, у путевого — второй, и по сигналу замечают
КК на обоих компасах.
При сличении для более точных результатов нужно взять
3—5 отсчетов по обоим компасам, после чего рассчитывают сред-
ние значения курсов.
Остаточная девиация путевого компаса рассчитывается по
формуле
= Я + 82Л,
где R — результат сличения на данном курсе.
Результаты сводятся в рабочую таблицу девиации.
Эту таблицу, составленную перед выходом в море, в рейсе
нужно возможно чаще контролировать, определяя общую поправ-
59
ку компаса и выбирая с карты склонение. Если будет обнаруже-
но значительное несоответствие между табличным значением де-
виации и полученным из определения поправки, таблицей де-
виации нужно в дальнейшем пользоваться осторожно, а в неко-
торых случаях и совсем изъять из обращения. В этом случае нуж-
но пользоваться только поправкой компаса, определяемой на
каждом компасном курсе.
§ 20. КРАТКАЯ ТЕОРИЯ СТВОРОВ
Створом называется такое расположение нескольких ориен-
тиров, при котором их истинные пеленги равны между собой.
Для определения девиации створ должен обладать такой чув-
ствительностью, чтобы она удовлетворяла заданной точности оп-
ределения девиации. Створ обычно состоит из следующих эле-
ментов (рис. 20): переднего Л] и заднего Лг знаков, разноса зна-
ков d. Ходовая часть створа на картах указывается сплошной ли-
нией, неходовая — пунктирной. Расстояние от переднего знака
до наблюдателя обозначено на рис. 20 через D, Разрешающая
способность человеческого глаза считается равной 1'. Следова-
тельно, для наблюдателя знаки Л1 и Лг будут казаться сливши-
мися даже тогда, когда наблюдатель отклонился от оси створа.
Чтобы знаки усматривались раздельно, угол между ними (с вер-
шиной в глазе наблюдателя) должен быть больше 1'. Если же
этот угол будет меньше или равен 1', знаки сольются и наблю-
датель будет считать себя на оси створа, находясь в действитель-
ности в некотором удалении от оси створа <». Величина уклоне-
ния от оси створа в перпендикулярном к ней направлении <*>, на
протяжении которой створные знаки будут казаться наблюдате-
лю слившимися, называется линейной чувствительностью створа.
Линейная чувствительность створа связана с элементами створа^
На рис. 20 видно, что
— т;
4. u (О , СО
60
Углы а, ₽ и т малы и tg этих углов можно заменить их дуга-
ми, т. е.
О) Ш ___ О) d
а = 75 7> + </ = D(D + d) ’
где а—разрешающая способность глаза равная Г.
Следовательно,
a = az arc 1' = arc Г.
Тогда линейная чувствительность створа to выразится соотноше-
нием
D(D + d) «f /ол\
<о = ———-arcl'. (39)
Из формулы вытекает, что с возрастанием расстояния наблю-
дателя до переднего знака увеличивается *>, т. е. на увеличиваю-
щихся расстояниях чувствительность створа понижается. При
том же расстоянии D створ будет тем чувствительнее, чем боль-
ше разнос створов d. Для каждого створа можно рассчитать ве-
личину линейной чувствительности для наблюдателей, находя-
щихся на различных расстояниях D от переднего знака, и полу-
чить ряд точек С, являющихся вершинами угла d=V. Соединив
точки С, получим дуги визирной окружности.
Поверхность, ограниченная дугами визирных окружностей,,
называется створным промежутком. Наблюдатель, находящийся
в створном промежутке, будет считать себя в створе, так как зна-
ки он будет усматривать слившимися. Направление створа на
карте пишется на линии створа в градусах и относится к середи-
не ходовой части створа. Обозначается направление двумя чис-
лами: первое означает истинный пеленг створа, считаемый с бе-
рега в море, а второе — с моря на берег, т. е. обратный истинный-
пеленг.
Створы выполняют различные функции в судовождении и в
зависимости от этого бывают:
специальные створы — девиационные, которые устанавлива-
ются на девиационном полигоне;
ведущие служат для плавания по ним судов среди навигаци-
онных опасностей. К ведущим створам относятся входные ство-
ры, устанавливаемые для входа в порт по узкому фарватеру или
каналу;
секущие створы служат для того, чтобы указать судоводите-
лям место поворота на другой створ, или отмечают пройденное
по ведущему створу точно измеренное расстояние. Комбинация
ведущих и секущих створов, установленных вблизи акватории
порта, образует мерную милю, на которой определяется скорость
хода судна, поправка лага и др.
Иногда на мерной линии ведущих створов нет. В этом случае
курсы судна располагают так, чтобы секущий створ пересекался
под прямым углом. Длина мерной линии между крайними секу-
6$
щи'ми створами берется 3—10 миль. Мерные линии описаны в ло-
циях тех районов, где они устроены.
ПРИМЕРЫ
1. Следуя ///(=162°, измерили курсовой угол ориентира КУ=121°л/б.
Найти И И ориентира?
Решение. Задачу можно решить по формуле (26) или по чертежу.
Решение по формуле рекомендуется производить столбцом:
, И К = 162°
= 121° л/б (—)
ИГ/ = 41°
Решение по чертежу более наглядно и может служить для контроля над
решением по формуле. От прямой, проведенной вертикально ДМи (рис. 21),
откладываем вправо угол #К=162° и проводим прямую ДП (диаметраль-
ная плоскость судна). Курсовой угол левого борта указывает, что ориентир
находится с левого борта. От носовой части ДП откладываем влево угол
КУ=121° л/(б. Направление ДА представляет собой направление с судна
на оредмет. Угол между нордовой частью истинного меридиана ДА7 м и пря-
мой, соединяющей судно и предмет ДЛ, является истинным пеленгом. Его
величина
162° —121° = 41°.
2. Следуя ГКК=82° (&ГК=—3°), измерили КПг =178°. Проложить на
карте курс и пеленг и рассчитать КУ.
Решение. На карте прокладываются только истинные направления,
следовательно, нужно рассчитать ИК и ИП. По формулам (27) получим
ККг == 82° , КПг = 178°
+ ДГК = —3° ДГК=—3°
ИК= 79° ИП=\1&
62
Курсовой угол рассчитываем по формуле (26)
КУ = КПг — НКг = ИП — ИК
КПг = 178°
~ ККг = 82°
КУ = £6° п/б
Решая по чертежу, проводим отправное направление — вертикальную
прямую Д^гк (рис. 22) и от нее откладываем /СКг=82° и К/7г=178° (пря-
мые ДП и ДА). Зная величину и знак &ГК, проведем направление на норд
истинный. В связи с тем, что знак поправки отрицательный и норд гиро-
компасный уклонился от норда истинного к весту (влево), следовательно,
прямая ДПи расположится вправо от N гк под углом к ней, равным 3°. Истин-
ные направления отсчитываются от норда истинного, следовательно, ИК=
= 79°, а /777=175°. Курсовой угол, отсчитываемый от носовой 'части диамет-
ральной плоскости до направления на ориентир, представляет собой угол
ПДА, равный 178°—82°=96° п/б или 175°—79°=96° п/б.
3. Склонение на карте приведено к 1940 г. и равно 9°W.
Годовое увеличение склонения 10'; судно следует /7К=200° в 1960 г.
Имея таблицу девиации; рассчитать КК судна.
Р е ш е ни е. Для входа в таблицу девиации необходимо иметь КК или
МК. В данной задаче КК — искомое. Магнитный курс рассчитывается, если
известна величина склонения. Указанное на карте склонение нужно привести
к 1960 г. Увеличение в 1 год — 10'.
Увеличение за 20 лет — 20Х 10,=200'=3°,3. Следовательно, абсолютная
величина склонения увеличится на 3°,3. Склонение в 1960 г. будет:
9° W + 3°,3= 12°,3W.
Магнитный курс рассчитываем1 по формуле (29)
И К =200°
d = 12°,3W
/ИЯ = 212°,3
Входим в рабочую таблицу девиации (табл. 6) с рассчитанным МК=
=212°,3, выбираем девиацию для ближайших табличных значений и произ-
водим интерполяцию. Получим для МК=212°,3 5= + Г,5.
Компасный курс рассчитываем по формуле (30):
Л4Я = 212°,3
К 8
4. По главному магнитному компасу взяты 3 пеленга: ОД771 = 230Э,
ОКП2—100°, 320°. Одновременно был замечен курс по магнитному
компасу и гирокомпасам /СК=70°, /СК? = 80°. Поправка гирокомпаса &ГК=
=—2°. Склонение указано на карте d=6Ost. Найти ОИП\, ОИП2> ОИП$ и
девиацию на /СК=70°.
По формуле (27) рассчитываем ИК
, ККг= 80°
+ Д/7С = —2°
ИК= 78°
Из формулы (34) следует:
ИК= 78°
~ К К = —70°
ДЯ = +8°
63
По этой же формуле определим ОИП:
0*7?! = 230° , ОАГ772= 100°
д/<=+80 + Д/f = +8°
ОНП* = 320°
= -|-8о
ОИГ\ = 238° ОИП 2 = 108°
ОИП% = 328°
Если необходимо, прокладывают рассчитанные пеленги на карте. Из
формулы (33) следует:
6 = ДА* — d,
тогда
дд-= 8°
d = 6° Ost
а = + 2° ,
т. е. на КК = 70° девиация рав-на +2°.
Рис. 23
Контрольное решение произведено графически (рис. 23).
5. Истинный пеленг с судна А на судно В ИПд_в55°. Курсовой угол
судна В на судне А КУ д= 75° л/б. Курсовой угол судна А на судне В
КУ Я =40° п/б. Определить истинные курсы судов А и В.
Решение. Решаем задачу графически (рис. 24). Судно А расположе-
но на своем истинном меридиане, а судно В имеет свой истинный меридиан.
Истинный пеленг с судна А на В определяет положение судна В на своем
меридиане. Истинный пеленг с судна В на А отличается на 180° от ИПА^В^
т. е. Я77д^в = 55о+180°=235с • Ол=75° л/б, следовательно, ДП судна распо-
64
ложена вправо от линии пеленга на угол 75°. Отсчитывая от этот угол
составляет сумму ИП и КУд, т. е. ЯКд=55°4-75°= 130°. КУв==40° ц/б, сле-
довательно, ДП судна В расположена влево от линии пеленга на угол 40°.
Этот угол составляет разность ИП и ДУв> т. е. /7^=235°—40°= 195°. Реше-
ние задачи можно проверить до формуле (26).
6. На девиационном полигоне створы установлены по направлениям
ОИП^Ы0#, ОИП2=179°,8, ОИП^ЗГА, ОИП^27\°3. Пересекая после-
довательно на восьми равноотстоящих КК эти створы и взяв на каждом
створе ОКП, определить девиацию на восьми курсах, если d—5°Osl«
Решение. На каждом КК определим &К по формуле
ЬК = ОИП — ОКП.
Затем по формуле (33) Ь= Д —d рассчитаем значение девиации на каж-
дом курсе. Все имеющиеся и рассчитанные данные сведем в таблицу
5 Навигация 55
хя ОИП ОКИ ДХ d 6
0° 151°,2 151°,7 — 0е,5 5°Ost -5°,5
45° 179°,8 176°,6 + 3°,2 5°Ost —1°,8
90° 231°,4 223°,5 + 7°,9 5°OS‘ +2°,9
135° 271°,6 261 °,2 +10°,4 5°Ost +5°, 4
180° 151°,2 141°,3 9°,9 5°Ost +4°,9
225° 179°,8 172°,0 + 7°,8 5°Ost +2°,8
270° 231 °,4 227°,7 + 3°,7 5°Ost —1°,3
315° 271°,6 271°,7 — 0°,1 5°Ost —5°,1
7. На берегу установлен котелок судового компаса. Судно в пределах
видимости прошло на восьми 'равноотстоящих курсах. Пеленгование произво-
дилось по сигналу одновременно с берега на судно и с судна на береговую
установку. При этом замечался курс по путевому компасу. Определить де-
виацию на восьми курсах для главного и путевого компасов.
Решение. Полученные сведения сводятся в таблицу, и девиация
главного компаса рассчитывается по формуле Ъ—ОМП—0X77+180°.
ккгл ОМП ОКП Огл KKn |
0° 271 °,5 85°,4 + 6°,1 6°,6 —0°,5
45° 274°,3 92°, 1 +2°,2 49°, 2 —2°,0
90° 273°,2 96°,5 —3°,3 82°,9 +3°,3
135° 280°,0 106°,4 i —6°, 4 121°,8 +6°,8
180° 272°,4 97°,4 —5°,0 170°,0 5°,0
225° 273°,8 96°,7 ' —2°, 9 218°,6 +3°,5
270° 279°,4 97°, 1 1 +2°,3 275°, I —2°, 8
315° 277°,2 | | 91°,0 1 +6°,2 325°,4 —4°,2
Девиацию путевого компаса рассчитываем по формуле
= ККгл — КНП + Ъгл
и результаты внесем в ту же таблицу.
8- Допускаемая ошибка в определяемой девиации £ =±0,5°. На каком
расстоянии до ориентира можно определить Ь по отдаленному предмету, ес-
ли радиус циркуляции равен 9 кбт.?
Решение. По формуле (38) получим:
60-0,9 1ЛО
D = —т-р.— = 10,8 мор. мили.
Задачи
1. Определить ИП, если
а) ЯК=10°; КУ=40° п/б;
б) ИК=2(Г, КУ=60° л/б;
в) #Л=100°, КУ=100°п/б;
г) ЯК=340°, КУ=160° п/б;
д) ЯК=48°, КУ=112°л/б;
е) ЯК=356°, КУ=144°л/б;
ж) ЯК=0°, КУ=96°л/б.
2. Определить КУ, если
а) #77=203°, ИК=300°;
б) КП=27°, КК=290°;
в) МП =62?, МК=268°;
г) КПг =298°, ККг=201°; !
66
д) ИП = 325°, И К=23°;
е) ИП=268°, ЯК=15°;
ж) /(/7 = 303°, /(/( = 106°.
3. Определить ИК или КК, если
а) ИП =106°, КУ=65° л/б;
б) /(/7=167°, КУ=22° п/б;
в) КП=284°, КУ=167°л/б;
г) 7/77=321°, 7(У=98°л/б;
д) 7(77 = 83°, ЛУ=121°п/б;
е) 777=68°, КУ=137°л/б;
ж) 7(77=277°, ЛУ=92°л/б.
4. Рассчитать ИК судов, если
а) ИПА^В = 235°, КУА = 65° П/б, КУ в = 120° л/б;
б) ИПА^В = 68°, КУА = 39° П/б, КУВ = 78° п/б;
в) ИПА+в= 182°> КУА =47° л/б, КУВ= 122° л/б;
г) ИПА^В = 129°, КУк = 140’ л/б, КУВ = 57° п/б.
5. Рассчитать И К или ИП, если
а) ККг= 127°, Д/К = + 2°;
б) КПг = 239°,3, д ГК = — 1,2°;
в) КК2 = 359°,2, Д ГК = + 2°,2;
г) КПг = 2°,\, ЬГК = — 3О&
6. Плавание судна происходило в 1960 г. Рассчитать магнитные склонения
по картам, в которых склонение приведено к 1950 г; если:
a) 6/ = 28°Ost, годовое увеличение 10';
б) 6/=21°W, годовое уменьшение 8';
в) d = 31°W, годовое увеличение 6';
г) d=13°,5W, годовое увеличение 7';
д) d — 25cOst, годовое уменьшение 8';
е) d = 12°,5Ost , годовое увеличение 4';
ж) t/=l°W, годовое уменьшение 12'.
7. ИК=90°. rf=10°Ost - 8=—4°, ИП=Ъ9°.
Найти Д/С КК, МК, КП, МП, КУ.
8. ИП=222°, d=10°W, КЛ=48°, Ж=55°
Найти ДК,8 , МП, КП, МК, КУ.
9. ДК=+6°, ЯК=85°, МХ=80°, ЯЛ=200°.
Найти d, 8 , КК, КП, МП, КУ.
Ю. На /СК=145° взяли с судна на береговой компас пеленг О КП=89°,5. Од-
новременно взяли пеленг с берега на судно ОЛ//7=265°,2. Определить б
для /(К =145°.
11. Поправка гирокомпаса &ГК=—2°,0, магнитное склонение d=7°Ost. Опре-
делить1; каким курсом нужно следовать по гирокомпасу, чтобы судно шло
по МК= 180°.
12. Д/7(=4-1о,9, rf=4°W. Определить, какой курс соответствует МК=135°.
13. Определить девиацию 6 по пеленгам створа 077/7=276°,2—96°,2 на восьми
равноотстоящих курсах. ОКП створа приведено в таблице. Склонение
d=+6°.
КК ОКП В кк ОКП В
0° 90°,5 180° 90°,7
45° 91°,7 225° 88°,9
90° 92°,5 270° 87°,7
135° 91°,7 315° 91°,0
5!
67
14. При определении девиации по отдаленному предмету компас нахо-
дился от бочки на расстоянии г =120 м. Каким должно быть минимальное
расстояние до ориентира, чтобы ошибка девиации не превышала 0°,25?
Ответы,
1. а) 50°; б) 320°; в) 200°; г) 140°; д) 296°; е) 212°; ж) 264°.
2. а) 97° л/б; б) 97° п/б; -в) 154° п/б; г) 97° п/б; д) 58° л/б; е) 107° л/б ,
ж) 163° л/б.
3. а) 171°; б) 145°; в) 91°; г) 59°; д) 322°; е) 205°; ж) 9°.
4. а) ^д₽170°, Wfi=175°; б) ИКА = 29°, ИКВ == 170°; в)#Кл==229с
ИКв = 124°; г)ИКА = 269°, ИКВ = 252°.
5. а) 129°; б) 238°,1; в) 1°,4; г) 358°,8.
6. а) 29°,7cst; б) 19° ,7 W; в) 32° W; г) 14°,7 W; д) 2b°,3Ost
e)13°,2Ost; ж) l°Ost-
7. ДК=+6', КК=84°, Л4К=80°, Л77=24°, МП=20°, /<У=60ол/б.
8. Л1Я=65°, Д/(=+7°, 8=+ 17°, МП=232°, #77=215°, ХУ=167°п/б.
9. d=+5°, 8=+1°, ##=79°, #77=194°, Л477=195°, #У=115° п/б.
10. 8=—4°,3.
11. ##г=189°.
12 #Лг = 129°,1
13. ##=0° 8=—0°,3. ##=45° 8=—Г,5,
##=90° 8=— 2°,3. ##=135° 8=—1°,5.
##=180° 6=—0°,5, ##=225° 8 = + 1°,3,
##=270° 6=+2°,5. ##=315° 6=+0°,8.
14. 15,6 мм.
Контрольные вопросы
1. Какой угол определяет направление движения судна?
2. Что такое КП??
3. На к«ком свойстве основан магнитный компас?
4. Где расположены крупные магнитные аномалии?
5. Какие вы знаете магнитные вариации?
6. Что такое остаточная девиация?
7. Что такое компасный меридиан?
8. Как определяется остаточная девиация?
9 В каких единицах выражается линейная чувствительность створов?
10. Что такое створный промежуток?
Глава V, ОПРЕДЕЛЕНИЕ ПРОЙДЕННОГО РАССТОЯНИЯ
В МОРЕ
§ 21. ПРИНЦИП ОПРЕДЕЛЕНИЯ ПРОЙДЕННОГО РАССТОЯНИЯ
Пройденное расстояние и скорость судна в море определяется
при помощи навигационного прибора — лага, а иногда по числу
оборотов винта. В зависимости от принципа действия и конст-
рукции лаги подразделяются на ручные, применявшиеся в парус
ном флоте, вертушечные механические, вертушечные электроме-
ханические и гидравлические. Современные лаги измеряют ско-
рость судна и пройденное расстояние не относительно поверхно-
сти Земли, или, как говорят, грунта, а относительно воды, кото-
рая может перемещаться, т. е. эти приборы дают относительное
расстояние. Идея создания абсолютного лага существует давно,
68
но создать -прибор, дающий пройденное расстояние относительно
поверхности Земли, пока не удалось.
Наиболее распространены механические вертушечные и гид-
равлические лаги. Пройденное расстояние вертушечным лагом
определяется по количеству оборотов специальной вертушки, на-
ходящейся в воде. Вертушка представляет собой часть бесконеч-
ного винта строго определенного шага. Если вертушка имеет шаг
т и свободно вращается в воде, являющейся несжимаемой сре-
дой, то на расстоянии S она сделает п оборотов
Если регистрировать с помощью счетчика количество оборотов
за определенный промежуток времени, то пройденное расстояние
будет
$=тп,
а скорость судна
v=4.
Вертушка механического лага буксируется за бортом судна
на лаглине, а количество ее оборотов по лаглиню передается на
счетчик, который указывает пройденное расстояние.
Более совершенным является электромеханический лаг. Вер-
тушка такого лага выстреливается под днище судна. Количество
ее оборотов электрическим путем передается на счетчик лага,
который градуируется на морские мили.
Гидравлические лаги появились на флоте в 30-х годах XX з.
Это наиболее точные и совершенные приборы.
Погрешность лага зависит от скорости судна. Ее определяют
для различных скоростей и используют как поправку к показа-
ниям лага. Качество показаний лага характеризуется не величи-
ной поправки, а, главным образом, ее постоянством.
§ 22. ОПРЕДЕЛЕНИЕ СКОРОСТИ СУДНА
Соответствие между скоростью судна и количеством оборо-
тов винта определяется практическим путем на мерной линии
или на более длинных пробегах, когда нет течения и ветра.
Транспортные суда имеют неодинаковую осадку, поэтому зависи-
мость между скоростью судна и количеством оборотов винта у
них различна. В плавании суда находятся в самых разнообраз-
ных гидрометеорологических условиях, влияющих на зависи-
мость скорости судна от оборотов винта. Изменяется зависи-
мость между скоростью судна и оборотами винта также от об-
растания судна. При одинаковых оборотах винта скорость судна
на мелководье меньше, чем на глубокой воде. Все это создает
трудности для определения скорости хода по числу оборотов
винта. Но это не значит, что не нужно применять этот способ, так
69
'как при потере лага или его неисправности, наличие рабочих
таблиц, где указана зависимость скорости судна от оборотов вин-
та, окажется необходимым. Кроме того, с помощью таблиц мож-
но контролировать показания лага. Поэтому на каждом судне
составляется таблица соответствия оборотов винта и скорости
судна для различных условий. Скоростные испытания судна
должны быть организованы так, чтобы оно до пересечения пер-
вого секущего створа уже лежало на ведущем створе и имело за-
данное число оборотов при установившейся инерции. Дифферент
должен быть самым выгодным для данного судна, и крена не
должно быть. На мерной линии нельзя перекладывать руль на
большие углы. Проводить испытания лучше всего в то время,
когда сила ветра не больше 3—4 баллов, а волнение 2 балла. Су-
доводителю следует также учитывать влияние течения на опреде-
ление скорости судна. При этом могут быть следующие случаи.
1. Если на мерной линии нет течения, то скорости судна от-
носительно воды и грунта будут равны и определятся по формуле
у — t 9
где ИЛ—скорость относительно воды, узлы;
V—скорость относительного грунта, узлы;
S— расстояние между секущими створами, мили;
t— время пробега, сек.
Число оборотов в минуту замечают по тахометру.
2. В том случае, если на мерной линии действует постоянное
течение V? и направление его совпадает с направлением веду-
щего створа, времени на попутном пробеге будет затрачено
t\<t, а в обратном t2>t. Причем ни при попутном, ни при обрат-
ном пробегах скорость относительно грунта не будет равна скоро-
сти относительно воды
Для определения скорости относительно воды, развиваемой дви-
гателем при данном числе оборотов, необходимо сделать два
пробега в противоположных направлениях и составить два урав-
нения:
для попутного пробега
для обратного пробега
Умножив первое уравнение на t2, а второе на tb получим
70
Складывая и вычитая преобразованные уравнения, получим
+ =
S(f2-^) = 2VT^,
откуда получим скорость судна относительно воды при данном
среднем количестве оборотов в минуту
Если Vл нужно получить в узлах, a S дано в милях, t в секун-
дах, формула примет вид
_ 3600(^4-Л) о
Попутно можем определить скорость течения на мерной миле
Т/ __ С ^2 . I/ ___3600 (tj A.) q
2^2 ’ 2^2 d*
Среднее количество оборотов, соответствующее скорости судна,
получим как среднее на двух пробегах
/V 2 ,
где —замеченное по тахометру число оборотов на попутном
пробеге;
TV2— на обратном пробеге.
3. Если течение постоянное и направление его не совпадает
с направлением ведущего створа, а составляет угол р, то для
удержания судна на створе судоводитель должен брать поправ-
ку на снос от течения р. Значение величины сноса легко опреде-
лится по компасу (рис. 25)
Ъ=кпетюро-кк.
Из рис. 25 видно, что снос от течения Р будет на пробеге на створ
и на обратном пробеге одинаков. Спроектируем показанные на
чертеже вектора на направление ведущего створа и составим
уравнения:
S = cos р ST cos р (Ул cos р + Vr cos р)
$ = cos Р — ST cos р = (Ул cosP — Ут cos р)
Умножим первое уравнение на t2 и второе на затем, скла-
дывая и вычитая преобразованные уравнения, получим:
5(^ + Л) = 2Улсо8^14;
S (?г — i,) = 2У, cos ptxt^,
71
откуда скорость судна по лагу будет
v‘= (,'tv,MI”ssel:^
Скорость течения определится по формуле
(41)
В связи с тем, что неизвестно ни направление течения (угол
р), ни его скорость Vr, последнее уравнение решается совместно
с выражением, вытекающим из рис. 25,
sin 3_ Vr
sinp FT'
4. В том случае, когда течение непостоянно, но скорость его
меняется равномерно, а направление близко к направлению ве-
дущего створа, делают три пробега, два в одном направлении и
один в обратном. Скорость в попутном пробеге
v 36005'
в обратном
v 36005
г h ’
72
a jbo втором попутном направлении
I7 _ 3600S
из~ h •
Скорость судна по лагу определится как среднее из трех про-
бегов, придавая двойное значение скорости среднего пробега, а
именно:
Ул 4
Аналогично для оборотов будем иметь
— 4
5. При приливо-отливных течениях рекомендуется делать
шесть пробегов. Три из них—до наступления полной воды и три
после. По трем пробегам определяют средневзвешенную скорость
до полной воды и после полной воды. Затем рассчитывают сред-
нее из двух полученных.
Испытание обычно проводят на трех режимах работы: пол-
ном, среднем и малом ходах для судна в грузу и отдельно для
судна в балласте. В зависимости от осадки судна глубина на
мерной линии должна быть не менее Zimin, которая рассчитыва-
ется по эмпирической формуле
Amin-^ + 4r, (42)
где Лпип—глубина, м\
V— скорость, м!сек\
g— ускорение силы тяжести, равное 9,8 м/сек2-,
Т— осадка судна, м.
Экспериментальные исследования позволили составить табл. 7
минимальных глубин на мерной линии, при которых скорость
судна не уменьшается (табл. 7).
Таблица 7
У, узлы Осадка, м
3 4 5 6 . 7 8 9 10
10 10 20 30 40 50 60 70 80
15 20 30 40 50 65 75 90 105
20 35 45 55 70 80 95 115 125
25 50 65 75 90 100 115 135 150
Результаты испытаний на мерной линии заносятся в таблицу,
имеющую такую форму (табл. 8):
73
Таблица 8
Осадка Полный ход Средний ход Малый ход
нос корма узлы об/мин узлы об/мин узлы об/мин
Про! им скор лежуточ! ости рас ше реж считыва имы раб ются по V / f V- П )0ТЫ MHI формул! г \о,9 V ) ’ пин и о е Афана' оответст сьева вующие (43)
где V— скорость при заданном числе оборотов я;
V—максимальная скорость при наибольшем числе оборо-
тов N, определенная на мерной миле.
При использовании табл. 8 необходимо учитывать следующие
факторы, изменяющие скорость судна:
а) ветер и возникшая волна вызывают добавочное сопротив-
ление и снижают скорость судна для некоторых судов до 20—
30%. При 'попутном ветре и слабой волне до 3 баллов скорость
судна несколько увеличивается. Волнение, даже если оно попут-
ное, снижает скорость судна, а при встречном волнении скорость
судна может падать на 30%;
б) на мелководье скорость судна -понижается на 10—15%;
в) при значительном обрастании подводной части судна по-
теря скорости может достигать 20—30% . Если подводная часть
судна не окрашена патентованной краской, предохраняющей от
обрастания, то по практическим выводам сопротивление воды
движению судна повышается, ориентировочно, за каждый день
после выхода судна из дока на Уз %;
г) изменение осадки вызывает изменение скорости при том
же числе оборотов. При увеличении водоизмещения на 5% про-
тив нормы скорость понижается на 1 %;
д) дифферент на нос уменьшает скорость судна. Значитель-
ный дифферент на корму также снижает скорость, в особенности
в полном грузу. В балласте или с недогрузом дифферент на кор-
му погружает винт глубже в воду, и скорость -судна повы-
шается;
е) крен вызывает стремление судна уклоняться в сторону -по-
вышенного борта, это вызывает частое перекладывание руля для
удержания судна на курсе, что также уменьшает скорость судна.
Кроме того, нарушение симметрии обводов судна, его обтекаемо-
сти, приводит к уменьшению скорости, и судно, имеющее зна-
чительный крен, теряет 10—15%! скорости.
74
Зная по оборотам винта свою скорость, всегда можно рассчи-
тать пройденное расстояние по формуле
S=Vt.
В МТ-53 составлена табл. 27а «Расстояние по времени и ско-
рости», при помощи ’которой можно быстро подсчитать пройден-
ное расстояние. Табл. 276 служит для решения обратной зада-
чи — по расстоянию и скорости рассчитывается время.
§ 23. ПОПРАВКА ЛАГА, КОЭФФИЦИЕНТ ЛАГА
И ОПРЕДЕЛЕНИЕ ИХ ЗНАЧЕНИЯ
Как указывалось, лаг не дает показаний пройденного расстоя-
ния относительно воды абсолютно точно. Его показания содержат
ошибку. Эта ошибка зависит от типа лага и скорости судна и мо-
жет быть определена для данного лага и заданной скорости суд-
на. Ошибка в показаниях лага вводится в его показания как по-
правка или коэффициент лага. Следовательно, поправка лага —
это выраженная в процентах ошибка лага с обратным знаком, от-
несенная к разности отсчетов лага. Исправить показания лага
можно и коэффициентом лага, представляющим собой отношение
истинного плавания к разности отсчетов лага.
Вследствие того, что ошибка в показаниях лага зависит от
скорости судна, поправки лага определяются для различных ско-
ростей опытным путем.
Поправка лага не остается постоянной и изменяется с тече-
нием времени работы лага. В связи с этим определять ее значе-
ние нужно как можно чаще. Наиболее точно поправка лага опре-
деляется на мерной линии. Для этого судно ложится на ведущий
створ, а если его нет, на курс, перпендикулярный секущим ство-
рам, и развивает заданную скорость, чтобы к моменту достиже-
ния первого секущего створа установилась заданная скорость.
В момент пересечения каждого из секущих створов замечают по
счетчику пройденного расстояния отсчеты лага ОЛ. Разность от-
счетов лага РОЛ=ОЛ%—ОЛГ в моменты пересечения судном
двух крайних секущих створов, служит для расчета поправки ла-
га и коэффициента лага. Действительное расстояние между се-
кущими створами S находят в лоциях или же снимают с карты
крупного масштаба.
Если на мерной миле нет течения, действительное расстояние
равно расстоянию между секущими створами и пройденному суд-
ном относительно воды (S = S^...). Имея РОЛ и S=SA, рассчиты-
вают поправку лага в процентах Д<77% или коэффициент лага Кл
по формулам. Формула поправки лага в процентах представляет
собой относительную ошибку показаний лага и имеет вид
ДЛо/0=^=^ЮО, (44)
75
где £л —истинное плавание между секущими ство-
рами;
РОЛ = ОЛ2 — ОЛХ — разность отсчетов лага при пересечении
створов конечного ОЛ% и начального ОЛ^
&Л\—поправка лага, которой в дальнейшем
можно исправлять каждую разность от-
счетов лага при ведении счисления и полу-
чать пройденное .по лагу расстояние.
Поправка лага в результате расчетов получится со знаком
плюс или минус. Если РОЛ меньше 5Л? тс ДЛ% имеет знак плюс,
если РОЛ бышше то Л % имеет знак минус. Расстояние,
пройденное по лагу, т. е. расстояние относительно воды, SA рас-
считывается по формуле
$л = РОЛ(ц-^), (45)
ИЛИ
S,t = РОЛ 4- РОЛ . (46)
Знак поправки покажет, что больше: 5Л или РОЛ, так как
сумма в формуле (46) алгебраическая.
В МТ-53 помещены табл. 28а и 286 «Пройденное по лагу рас-
стояние» для положительных и отрицательных поправок лага.
В таблицы входят с величиной РОЛ=ОЛ2—ОЛ{ н получают 5Л,
зная величину и знак ДЛ%. Если РОЛ> 100 миль, то (таблица
составлена для значений РОЛ до 100 миль), величину РОЛ де-
лят на части меньше 100. Выбрав для каждой части значение 5Л,
суммируют их. Если поправка лага больше 10%, то, так как таб-
лица составлена для ДЛ%! не более 10%, поправку лага разби-
вают на две поправки, меньшие 10% и для каждой из них выби-
рают 5Л. Затем суммируют их и из суммы плаваний вычитают
РОЛ.
Если необходимо рассчитать РОЛ,.то из формулы (45) выте-
кает:
100
Имея РОЛ и начальный отсчет лага ОЛ, всегда можно полу-
пить ОЛ2
ОЛ2 = ОЛг + РОЛ.
‘Судоводители очень часто предпочитают учитывать ошибку по-
казаний лага -с помощью коэффициента лага, который рассчиты-
вается по формуле
^ = 7^Г. (47)
Плавание по лагу можно найти по формуле
S., = РОЛ-КЛ = (ОЛ, - ОЛ.) Кл . (48)
76
Разность отсчета лага получится
РОЛ = ^~. (49)
•>Л
Использовать для расчетов значения Кл очень удобно, так
как:
а) не нужно учитывать знаки;
б) легко производить вычисления при переходе от РОЛ к 5ли
от SA к РОЛ, тем более, что это выполняется на логарифмической
линейке;
в) просто с точностью до 0,01 рассчитывать Кл (также линей-
кой).
Из формул (44) и (47) вытекает зависимость между ДЛ% и
л •
Ы1%=(КЛ-1)100; |
Кл= \ + 0,01 Д Л%. (50)
Если /Сл = 1,08, то ДЛ%;=+8%, если /^=0,95, то Д Л% =
= —5% и для обратного перехода, если Д</7% = +4%',то Кл = 1,04.
а если ДЛ% =—7%, то Хл=0,93. В зависимости от наличия те-
чения на мерной линии поправку лага определяют следующими
путями:
а) если на мерной линии нет течения, то ДЛ% или Кл опре-
деляется на одном пробеге по мерной линии (5 = 5Л);
б) если течение постоянно и направление его совпадает с на-
правлением ведущего створа, поправку лага и коэффициент лага
определяют, делая два пробега в противоположных направлени-
ях, соблюдая при этом следующий порядок расчета:
отмечают РОЛ\ и РОЛ2 за время каждого пробега;
рассчитывают скорости судна относительно грунта при пря-
мом Vi и обратном пробеге V2
Т7 _ 36005
_ 3600$
V 2 — 7 >
*2
где I/j, V.—скорость судна относительно грунта, узлы;
S — длина участка мерной мили, мили;
^1» ^2— время пробега в прямом 6 и обратном t2 направле-
ниях, сек:
рассчитывают скорость относительно воды Ул по формуле
(40)
^ = 5(Л+;г)3600 или
полученные по обеим формулам величины должны быть одина-
ковыми;
77'
рассчитывают пройденное по лагу расстояние за оба про-
бега
о _ УаИ1 + Ы .
~ 3600 ’
рассчитывают РОЛ за оба пробега
РОЛ = РОЛi {-РОЛ^
вычисляют Кл и АЛ %'
Ь»____^А .
~ РОЛ ’
дл% =(КЛ- 1)100;
в) если течение непостоянно, но скорость его меняется равно-
мерно, а направление близко к направлению ведущего створа,
делают три пробега, первый и третий в одном направлении, вто-
рой— в обратном. Для каждого пробега рассчитывают
(АЛ%). Для расчета SA, Sa и Sa определяют скорость относи-
тельно воды по формуле
v^KHL2^±Vij (51)
тогда
о' __ УУ1 . С7_ ^А^З , Cw__ Ил^8
3600 ’ 3600 ’ — 3600 ’
где t\, t2, t3 — время пробега, сек.
Рассчитав коэффициенты лага в трех пробегах
с' с* с'"
г/ _ t ___ ° л
Лл~ РОЛХ 9 Лл— РОЛ2’ Ал — РОЛЪ>
определяют Кл по формуле
Кл = ^л + ^ + К:- (52)
и рассчитывают поправку лага
(Кл — 1)100 = ДЛ%;
г) если течение постоянно, но направление его не совпадает
с направлением ведущего створа и составляет с ним угол, то де-
лают два пробега, замечая при этом РОЛ\, РОЛ2, Л, t2 и Р (угол
сноса). Рассчитывают скорость относительно воды по формуле
= $ sec
после чего определяют пройденное по лагу расстояние за оба
пробега
О _ Ул(*1 + 'г)
— 3600
78
Зная значение Sx и РОЛ= РОЛх + РОЛ2, определяют
TS _ S л .
~ РОЛ ’
д) на приливо-отливном течении для определения Кл или
АЛ %! нужно сделать шесть пробегов. Затем рассчитывается ско-
рость по лагу для первых трех пробегов до полной воды и для
повторных трех пробегов после полной воды по формуле (51).
Полученные аналогично случаю, описанному в пункте «в» КА
и Лл, осредняют
2
Современные лаги, жестко связанные с корпусом, фиксируют
скорость по направлению диаметральной плоскости судна. Если
судно идет с дрейфом а°, то его скорость будет
V = Vlseca°,
где VA — фиксированная лагом скорость;
а° —угол дрейфа.
Вследствие этого
SA = Si sec a0,
где St — пройденное по лагу расстояние;
5Л — расстояние, которое нужно откладывать по линии пути.
Эту особенность электромеханических и гидравлических лагов
следует учитывать при плавании с дрейфом. Поэтому при плава-
нии с дрейфом разность отсчетов лага исправляют поправкой ла-
га, рассчитанной по следующей формуле:
ЬЛ%' = + 0,1а°), (53)
где ДЛ°/0— поправка лага, определенная на мерной линии;
а°— угол дрейфа.
Формула (53) справедлива для а° не больше 10°. Точность опре-
деления АЛ %; на мерной линии равна ±0,5%.
Определить коэффициент лага можно также на переходе меж-
ду двумя точно определенными пунктами. Для этого нужно за-
метить ОЛ1 у пункта отхода и ОЛ% у пункта прихода.
РОЛ = ОЛ2 — ОЛХ,
значение SA снимается с карты. Тогда
TS _ $л
^л~ РОЛ*
Если между пунктами не было течения и судно шло с посто-
янной скоростью, Кл определяется с достаточной точностью и ис-
пользуется для дальнейшего плавания. Таким образом, для того
чтобы определить Кл, судно должно в ряде случаев затратить
эксплуатационное время. Поэтому для определения коэффициен-
та лага часто используется судовой радиолокатор. Определение
Кл локатором можно производить при любой видимости. Для
этого нужно:
79
а) привести ориентир, хорошо видимый на экране, или точно
по курсу, или точно за корму;
б) измерить расстояние до ориентира Slt заметить отсчет ла-
га и пустить секундомер;
в) следуя точно на ориентир или от него, через некоторое вре-
мя вторично измерить расстояние до ориентира, заметить отсчет
лага и остановить секундомер;
г) разность показаний радиолокатора даст плавание 5Л =
= 51—S2) если ориентир по носу; РОЛ — ОЛ2—ОЛ{ и КА будет
IS .
РОЛ ’
ДЛ%=(Кд-1)100.
Если ориентир расположен по корме, то
5Л = S2 5j.
Одновременно с определением поправки лага, обычно опре-
деляется и скорость судна по лагу
у £л3600
где t— время между измерениями первого и второго расстоя-
ний, сек.
Расстояние с помощью РЛС определяется с высокой точ-
ностью, следовательно, значение КА будет также определено
точно.
Вследствие того, что поправка лага зависит от скорости суд-
на, рекомендуется определять ее для малого, среднего и полного
хода судна. Данные об определении КА и ДЛ%! заносятся в спе-
циальный журнал. По этим записям можно выводить и коррек-
тировать поправки своих лагов, добиваясь, чтобы величины по-
правок максимально приближались к их истинному значению.
(54)
ПРИМЕРЫ
1. На мерной миле определяли скорость судна по оборотам винта. Ре-
зультаты пробегов и наблюдения сведены в таблицу. Вычислить скорости суд-
на для полного, среднего и малого хода
№ пробега ИК° Количество об!ман на пробеге Время пробега, мин Расстояние между секу- щими ство- рами, мили Скорость на пробеге узлы
1 2 3 4 5 6
1 45 88 16,3 3 11
(туда)
2 225 92 14,1 3 12,7
(обратно)
80
Графа 2 берется с карты (направление створа), графа 3 заполняется по
сведениям из машины, 4-—по отсчетам секундомера, 5 — с карты или лоции.
Графа 6 заполняется после вычисления пропорции:
3 мили за 16,3 мин _ * = 360 =J j
х миль за 60 мин io,о
3 мили за 14,1 мин ~ 360 1О-„ _
гтк *в — 1 л । 147 узла
х миль за 60 мин 14,1
Средняя максимальная скорость, соответствующая полному ходу судна,
определится
17 11 + 12,7 1пО
l^max —----2 — 11*® узла.
Соответствующее этой скорости число оборотов будет
88 + 92 180 пп ..
Мпах = ----2---= ~2~ = 90 об1мин-
Не имея возможности провести испытания на самом малом, малом и сред-
нем ходах, скорости, соответствующие заданному количеству оборотов, можно
рассчитать по формуле Афанасьева [формула (43)].
Считая, что самый малый ход будет при 20 об/мин, малый ход при
30 об/мин и средний при 50 об/мин, подставим соответствующие значения в
формулу (43) и получим
/ 20к°,9
/ 30 X 0.9
*30= (£ 11.9;
Дальше решаем с помощью таблиц логарифмов
lg = 0,91g2 - 0,91g9 -h Igl 1,9;
lg Vg» = 0.91g3 - 0,Slg9 + Igl 1,9;
lg v№ = 0,91g5 - 0,91g9 + lg 11,9.
Для удобства вычислений воспользуемся схемой
1g 2 I 0,30103 I 0,91g 2 lg9 | 0,95424 | 0,91g 9 0,270927 0,858816
0,9 lg 2 - 0,9 lg 9 lg 11.9 .9,412111 1,07555
1g Vm = <>,487661
V,o= 3,076 я 3,1 узла
lg 3 I 0,47712 I 0,91g 3 lg 9 | 0,95424 | 0,91w 9 0,429408 0,858816
0,91g 3-0,9 lg 9 lg '1,9 , 9,570592 1,07555
1g =0,646142
Vjo= 4,416 ~ 4,41 узла
6 Навигация
81
lg 5 I 0,69807 I
lg 9 I 0,95424 |
0,9 1g 5 0,91g 9 0,626663 0,858816
0,91g 5 — 0,91g 9 lgll,9 -, 9.767847 + 1,07555
lg V60 = 0,843397
1^50=6,966 ~ 7 узлам
Составим таблицу соответствия v и N.
Ход об/лшн | Скорость, узлы
Самый малый 20 3,1
Малый 30 4,4
Средний 50 7,0
Полный 90 11,9
2. На мерной линии на секущих створах, расстояние между которыми
5 миль, замечены отсчеты лага ОЛ1 = 12,2, ОЛ2=17,7. Рассчитать ДЛ% и Кл-
Решение. Рассчитаем разность отсчетов лага
РОЛ = ОЛ2 — ОЛГ = 17,7 — 12,2 = 5,5.
По формуле (44) определим ДЛ%, а по формуле (47) коэффициент лага
ДЛ% - 5Г?’5 100 =-9%; агл = А = о,91.
0,0 0,0
По формулам (50) проверим правильность расчетов
— 9% = (0,91 — 1) 100 = 9
или
0,91 = 1 +(—0,01-9) = 0,91.
3. Расстояния между обсервациями сняты с карты и равны 5Л=22 милям,
разность отсчетов лага РОЛ---20. Определить КА и ДЛ%,-
Решение. По формуле (47) определим Кл
22
^-25=130.
По формуле (50) получим ДЛ%.
ДЛ% = (АГЛ—1) 100 = (1,10— 1) 100 = + 10%.
Зная поправку лага в процентах можно рассчитать в уме, пользуясь
следующим правилом: если Л”л>1, то ДЛ% имеет знак плюс, а величина ее
равна количеству сотых коэффициента лага. Если Кл<1, тоДЛ% имеет знак
минус и равна количеству сотых, не достающих в Кл до единицы.
4. На мерной линии с тремя секущими створами, расстояние между ко-
торыми 6,5 и 4,5 мор. мили, для определения поправки лага прошли с посто-
янной скоростью в прямом и обратном направлениях, замечая отсчеты лага
на створах. В прямом направлении замечены ОЛ\ = 10,2, ОЛ2= 17,0, ОЛ3 —21,7,
в обратном направлении ОЛ1 = 24,8, ОЛ2—29,6, ОЛ3 = 36,5. Рассчитать поправ-
ку и коэффициент лага
82
Решение. Рассчитаем разность отсчетов лага между створами.
РОЛ^ ОЛ2—ОЛХ=17,0—10,2=6,8
РО Л2=О Ль— ОЛ2=21,7— 17,0=4,7
РОЛ3=ОЛ2—ОЛ1=29,6—24,8=4,8
РОЛ4 -- ОЛь—ОЛ2 36,5—29,6=6,9
РОЛ= 23,2
Действительное расстояние 8Л получим
St = (6,5 + 4,5) 2 = 22 мор. милям.
По формуле (44) определим ДЛ%
ЬЛ% = 100 » - 5%.
По формуле (50)
кл = 1 + 0,01 Д Л% = 1 + (— 0,01.5) = 0,95.
Зная поправку лага в процентах, коэффициент лага можно рассчитать в уме,
пользуясь следующим правилом: если &Л% положительна, коэффициент лага
будет больше единицы на количество сотых, равное &Л%, если &Л% отрица-
тельна, коэффициент лага будет меньше единицы на количество сотых, равное
Д Л%.
5. На мерной линии протяжением 3 мор. мили предполагается наличие те-
чения, приблизительно совпадающего с направлением ведущего створа 250—70°.
Для определения коэффициента лага сделано два пробега и получены следую-
щие данные. На #К=250° время пробега 6 = 1740 сек, а разность отсчетов лага
РОЛ i—3,6, на ИК = 70°—6=1080 сек, а РОЛ2=2,3. Рассчитать К л и ДЛ%.
Решение. Рассчитаем скорость Vi относительно грунта на HK = 2§Q°.
3,0-3600
У1 = -Т74б- = 6’2 У3ла>
Скорость V2 на ИК—1й°.
.. 3,0-3600
V* = 1080 ~ = ’° УЗЛ°В-
Рассчитаем скорость относительно воды
6,2 + 10 16,2 о ,
---2— = _2“ = 8-1 Узла
V = Г1~
¥ л — 2
или
v о '1 + '2 , (1740 + 1080) 36С0
^Л = 5^Г=3—2Л740И080--------811 уЗЛа’
Рассчитаем пройденное относительно воды расстояние
С + М 8,1 X2820
=----ойНп-------зёоо- “ 6,34 и015, мили’
3600
Суммарная разность отсчетов лага
РОЛ = РОЛ1 + РОЛ2 = 3,6 Ч- 2,3 = 5,9.
Рассчитаем К л
-^ = ^34= 107-
РОЛ 5,9
ДЛ% = + 7W.
6:
83
Задачи.
1. На мерной линии судно сделало 3 пробега. Результаты наблюдений сле-
дующие: при 95 об/мин U] = ll,8 узла, при 98 об/мин 02=12,1 узла, при
93 об/мин оз=11,2 узла. Рассчитать скорость н соответствующее ей число обо-
ротов, которые будут занесены в рабочую таблицу.
2. На мерной линии получены данные: при наибольшем среднем количестве
оборотов 2V=110, скорость судна и = 14 /узлам. Какая скорость будет при 30, 40,
60 об/мин>
3. Рассчитать КА и АЛ % на пробегах постоянными курсами между обсер-
вациями, если:
а) •$4=14,9, РОЛ =14,1;
б) •$4 = 8,9, РОЛ =12,0;
в) •$4 = 71,0, РОЛ=75,0;
г) •$4=3,6, РОЛ=4,0;
д) •$4=6,8, РОЛ=7,0;
е) •$4=20,5, РОЛ= 19,1;
ж) •$4 = 27,8, РОЛ=30,5.
4. Следуя по створу, на мерной линий, отсчет лага в момент прихода на
первый секущий створ ОЛ 1=24,5 и в момент прихода на второй секущий створ
28,8. Расстояние между секущими створами, выбранное из лоции, 5 миль. Рас-
считать КА и ДЛ % ?
5. Между двумя обсервациями 5=26 миль. Разность отсчетов лага на пе-
реходе постоянным курсом РОЛ=24,5. Рассчитать КА и АЛ %?
6. Определить, какое расстояние прошло судно за вахту, если разность от-
счетов лага за вахту РОЛ=50,0, а Кл=1,05?
7. Кл=0,92. Определить расстояние между буями, если судно, следуя по-
стоянным курсом от одного буя к другому, имело на траверзе первого буя
ОЛ]=52,2, а на траверзе второго ОЛ2=62,8.
8. Кл = 1,08. Какое расстояние прошло судно за сутки, если отсчет лага на
начало суток ОЛ1=25,0, а в конце ОЛ2=340?
9. Кл=0,91. В момент обсервации отсчет лага ОЛ)=31,8. Каков будет от-*
счет лага иа траверзе мыса, если расстояние от обсервации до траверза мыса
28,3 мили?
10. Судно, следуя при попутном течении 1,5 узла, за 4 час прошло по обсер-
вациям 45 миль. Рассчитать отсчет лага прн второй обсервации, если отсчет
лага при первой обсервации ОЛХ= 16,2, а /<л=1,17.
11. Судно за вахту, имея встречное течение 2 узла, прошло по обсервации
50 миль. Рассчитать отсчет лага при второй обсервации, если отсчет лага при
первой ОЛ 1=26,7, а Кл=0,93.
Ответы,
1. *7р = 11,8 узла прн 96 об/мин.
2. Для 30 об/мин €4=4,5 узла,
для 40 об/мин и2=5,6 узла,
для 60 об/мин из=8,1 узла.
3. а) Кл=1,06, ДЛ%=+ 6%;
б) Кл=0,83, ЬЛ %==—17 %;
в) 7G=0,95,
4.
5.
6-
7.
8.
9.
10.
11.
г) Кл=0,95,
д) Кл=0,97,
е) Кл=К07,
ж) Кл=0,91,
Ял= 1,16,
5Л= 52,5 мор.
5Л= 9,8 мор.
5Л= 640,2 мор.
ОЛг =62,9.
ал %=— 5 %;
ал %=—10 %;
ал %=— 3 %;
ал % = + 7 %;
ал %= — 9 %;
ДЛ %= 4-16 и.
ДЛ %=+ 6 %,
мили.
мили,
мили.
ОЛ2 =49,5.
ОЛа =89,1.
84
Контрольные вопросы
1. Каким путем определяется скорость судна?
2. Как влияет течение на определение скорости?
3. Что положено в основу для выбора количества пробегов при определе-
нии скорости?
4. Как связаны ДЛ% и КЛ?
5. Как используется радиолокатор для определения КЛ?
6. В чем заключается использование КЛ?
7. Что такое 5Л?
8. Как влияет крен на скорость судна?
9. Как влияет мелководье на скорость судна?
РАЗДЕЛ ВТОРОЙ
КАРТЫ
Глава VI. КАРТОГРАФИЧЕСКИЕ ПРОЕКЦИИ
§ 24. КЛАССИФИКАЦИЯ КАРТОГРАФИЧЕСКИХ ПРОЕКЦИЙ
Для выбора путей, по которым судно может безопасно перехо-
дить из одного пункта в другой, суда снабжаются различными по-
собиями, изображающими земную поверхность со всеми очерта-
ниями материков, островов, заливов, проливов и др.
Как указывалось, Землю мы принимаем за сфероид, имеющий
небольшую величину сжатия. Если на поверхности сфероида изо-
бразить все детали земной поверхности, то получится глобус —
изображении земной поверхности, называется условием равно-
бусе изображена без искажений. На нем сохраняется подобие
фигур, соответствующих фигурам на Земле. Неизменным остает-
ся также соотношение между площадями различных фигур. Ус-
ловие, при котором сохраняется подобие фигур на Земле и на
изображении земной поверхности называется условием равно-
угольности или конформности. Условие, при котором остается
неизменным соотношение между площадями фигур на Земле и на
изображении земной поверхности, называется условием равнове-
ликости или эквивалентности.
Несмотря на то, что глобус отвечает условиям равноугольно-
сти и равновеликости, в судовых условиях он не применяется, так
как, если принять изображение 1 мор. мили равным 5 мм на гло-
бусе, радиус его выразится из соотношения
q _____ 2К Г
о мм 36QO.60’
откуда
г= 5.360-6_0
2л
Следовательно, пользоваться глобусом, диаметр которого ра-
вен почти 35 м, на судне невозможно. -Поэтому в судовых усло-
виях пользуются плоским изображением земной поверхности. Но
сферическую поверхность нельзя развернуть в плоскость без
складок или разрывов. Поэтому на изображениях всегда будут
86
получаться некоторые искажения. Плоское, искаженное изобра-
жение поверхности Земли или ее частей, на котором искажения
подчинены определенному математическому закону, называется
картой. Наука, занимающаяся рассматриванием различных спо-
собов построения карт, называется картографией. Способ, при-
мененный для условного изображения параллелей и меридиа-
нов, подчиненный определенному математическому закону, на-
зывается картографической проекцией. Совокупность линий, изо-
бражающих меридианы и параллели на карте, называется карто-
графической сеткой.
Сущность всякой картографической проекции состоит в том,
что положение каждой точки (<₽//), перенесенной с земной по-
верхности на плоскость, определяется картографическими коор-
динатами at и Ch которые функционально связаны с географи-
ческими координатами q>z X,
ИСПРАВЛЕНИЯ
Стр. Строка Напечатано | Следует читать
86 12, сверху « изображении земной по- верхности, называется ус- ловием равно- известное всем изображе- ние Земли. Поверхность Земли на гло-
Заказ Эй 826
бо не удовлетворяет ни первому, ни второму условию. Однако
небольшие участки земной поверхности можно изобразить на
плоскости, выполняя условия и равноугольности и равновелико-
сти, пренебрегая искажениями. Плоское изображение небольшо-
го участка земной поверхности, на котором искажениями можно
пренебречь, называется планом. Разработано большое количест-
во разнообразных проекций. Все существующие проекции можно
классифицировать по характеру искажений и способу построе-
ния следующим образом.
Классификация по характеру искажений
Равноугольные проекции. Основное свойство этих проекций —
сохранение подобия бесконечно малых фигур на проекции соот-
ветствующим фигурам на поверхности Земли. Для сохранения
подобия фигур проекция не должна искажать углы, т. е. углы на
проекции должны быть равны углам на местности. В равноуголь-
ной проекции искажаются линейные размеры фигуры.
Равновеликие проекции. На равновеликих или равноплощад-
ных проекциях сохраняется пропорциональность площадей фи-
гур, изображающих участки на Земле. Если остров на поверхно-
сти Земли имеет площадь в два раза большую, чем площадь
87
другого острова, то на проекции площадь изображения этого
острова будет также в два раза больше площади изображения
другого острова. В равновеликой проекции не сохраняется подо-
бие фигур. Остров, имеющий круглую форму на поверхности
Земли, на проекции может изобразиться эллипсом. Сохранение
пропорциональности на проекции не зависит от размеров участка
на Земле.
Произвольные проекции обладают каким-либо специальным
свойством (простота построения, удобство решения каких-либо
частных задач и др.), не сохраняют ни равенства углов, ни про-
порциональности площадей.
Равнопромежуточные проекции. Если в произвольной проек-
ции масштаб по одному из главных направлений всюду равен
единице, т. е. главному масштабу, проекции называются равно-
промежуточными (проекции Птоломея, Эйлера, Каврайского,
Красовского и др.).
Классификация проекций по способу построения
Азимутальные проекции бывают перспективные и неперспек-
тивные. Перспективные получаются в том случае, если меридианы
и параллели сферы проектируют на касательную к сфере кар-
тинную плоскость лучами, выходящими из точки зрения О, кото-
рая находится на основном диаметре или его продолжении, пер-
пендикулярном картинной плоскости (рис. 26). Параллель и ме-
ридиан точки М. будут спроектированы лучами из точки О на
плоскость К и образуют перспективную проекцию параллели и
меридиана точки М. Точка зрения О может находиться в любой
точке основного диаметра или его продолжения. Если точка зре-
ния удалена от центра сферы на расстояние Д = оо, образуется
перспективная ортографическая проекция, если она расположена
за пределами сферы на конечном удалении — перспективная
внешняя проекция. В том случае, если точка зрения расположена
на антиподе точки касания картинной плоскости, где Д=/?, об-
разуется стереографическая проекция, а если в центре сфероида,
т. е. Д=О, образуется центральная перспективная, или гномони-
ческая проекция. Положение основного диаметра определяется
углом наклона его к плоскости экватора Если Фо =90°, точка
касания картинной плоскости будет в полюсе и перспективная
проекция называется полярной или нормальной. Если фо=0°, точ-
ка касания будет на экваторе и проекция называется поперечной
или экваториальной. Если 0°<фо<90°, образуется косая или го-
ризонтальная перспективная проекция.
В азимутальных неперспективных проекциях построение ме-
ридианов и параллелей сферы ведется не проектированием; для
получения их изображения устанавливают определенные прави-
ла, исходя из условий, которым должна удовлетворять проекция.
Неперспективные проекции применяются для изображения полу-
88
Рис. 26
шарий Земли. Наиболее распространены неперспективные про-
екции Постели и Ламберта.
Коническая проекция. Если взять воображаемый конус, ось
которого совпадает с осью вращения сферы, а поверхность его
касается сферы по одной из параллелей, или сечет сферу по двум
Рис. 27
рядом расположенным параллелям, то на поверхность такого ко-
нуса можно каким-либо приемом перенести параллели и мери-
дианы (рис. 27). Разрезав конус по одной из образующих и раз-
вернув конус в плоскость, получают нормальную коническую про-
екцию. Меридианы такой проекции представляют собой прямые
линии, а параллели—концентрические дуги окружностей, радиус
которых зависит от широты данной параллели. Угол между ме-
ридианами равен
8 = С л,
где С — коэффициент пропорциональности.
Если ось конуса составляет с осью вращения сфероида угол
90°, то образуется поперечная коническая проекция. Если ось ко-
90
нуса составляет с осью вращения сфероида угол 0с<ф/.<90°, об-
разуется косая коническая проекция. Полученные таким образом
проекции не удовлетворяют ни условиям равноугольности, ни ус-
ловиям равновеликости. Но можно найти такую функцию широ-
ты для радиуса параллелей, при которой получилась бы или рав-
ноугольная, или равновеликая проекция. В некоторых случаях
выгоднее вести проектирование не на один, а на несколько кону-
сов, касательных к поверхности сфероида по разным паралле-
лям. Такие проекции называются поликоническими.
Цилиндрические проекции. Вокруг сфероида можно предста-
вить воображаемый цилиндр, на поверхность которого проекти-
руются параллели и меридианы (рис. 28). Если сфероид вписать
в цилиндр таким образом, чтобы ось его вращения совпадала с
осью цилиндра, т. е. цилиндр касался бы сфероида по экватору,
и на поверхность цилиндра каким-либо путем спроектировать па-
раллели и меридианы, то получится нормальная цилиндрическая
проекция. В ней все меридианы—прямые линии, параллельные
между собой, все параллели перпендикулярны меридиану и па-
раллельны экватору. В зависимости от выбранного закона про-
ектирования нормальная цилиндрическая проекция может быть
91
равноугольной, равновеликой или произвольной. Равноугольная
нормальная цилиндрическая проекция применяется для построе-
ния морских карт.
Если ось цилиндра образует с осью вращения сфероида угол,
равный 90°, получается поперечная цилиндрическая проекция, а
если произвольный угол, то — косая цилиндрическая проекция.
Условная проекция. К этой группе относятся все остальные
картографические проекции, удовлетворяющие каким-либо по-
ставленным условиям, в зависимости от тех целей, для которых
требуется карта (проекция Бонна, Эккерта, Гринтена и др.).
Из перечисленных выше проекций в судовождении применя-
ются равноугольная нормальная цилиндрическая проекция, ази-
мутальные перспективные гномонические проекции, азимуталь-
ные перспективные стереографические проекции и др.
§ 25. МАСШТАБ
Части земной поверхности изображаются на картах в извест-
ном уменьшении. Степень уменьшения изображенных на карте
размеров земной поверхности называется масштабом. Масштаб
характеризуется отношением длины прямой между двумя точка-
ми на карте к действительному расстоянию между теми же точ-
ками на Земле. Существует несколько видов масштаба.
Численный масштаб — это дробь, числитель которой
единица, а знаменатель—число, показывающее скольким еди-
ницам длины в натуре равна одна единица на плане или карте.
Например, 1 :50000 означает, что одной единице на карте соот-
ветствует 50000 таких -же единиц на поверхности Земли. Числен-
ный масштаб, у которого знаменатель меньше, называют более
крупным, а тот, у которого знаменатель больше, — более мелким.
Линейный масштаб указывает, сколько более круп-
ных единиц длины в натуре содержится в одной более мелкой
единице на карте, например, 3 мили в 1 см. Линейный масштаб
изображается в виде прямой, разделенной на мелкие единицы,
которые соответствуют определенному количеству крупных еди-
ниц на земной поверхности. Для перехода от числового масшта-
ба к линейному необходимо знаменатель, выраженный в мел-
ких единицах длины, перевести в крупные единицы длины. На-
пример, если числовой масштаб 1 : 200 000, то нужно 200 000 см
разделить на 185 200, получим после этого линейный масштаб,
равный 1,08 мили в 1 см. Для перехода от линейного масштаба
к числовому поступают наоборот.
Масштаб сохраняет свое постоянство только на планах — изо-
бражениях небольших участков земной поверхности, где можно
пренебречь искажениями. На картах масштаб — величина пере-
менная, вследствие того, что значительный участок сфероида
нельзя развернуть в плоскость без искажений и степень уменьше-
ния изображения в различных местах проекции будет неодина-
92
кова. Масштаб на карте непрерывно изменяется при переходе от
одной точки карты к другой. Масштабом карты в какой-либо точ-
ке А называется предел отношения бесконечно малого отрезка
ab, взятого на карте по определенному направлению к длине
соответствующего отрезка АВ на земной поверхности, т. е.
С = цт^.
АВ-0
В связи с этим на карте различают главный масштаб и частный.
Главным называется масштаб, указанный в заголовке карты. В
зависимости от характера ее проекции, главный масштаб сохра-
няется лишь вдоль некоторых определенных линий и направле-
ний. На остальных частях карты значения масштабов будут или.
крупнее или мельче главного, т. е. это будут частные масштабы.
Изменяемость частного масштаба на данной проекции служит ха-
рактеристикой искажений, получающихся на этой картографи-
ческой проекции. Главный масштаб близок к среднему значению*
частных масштабов точек на данной карте.
На равноугольной нормальной цилиндрической проекции част-
ные масштабы сохраняются постоянными вдоль параллелей и из-
меняются при переходе с одной параллели на другую. Причем та
параллель, на которой соблюдается главный масштаб, называет-
ся главной параллелью. Частные масштабы по мере удаления от
главной параллели к полюсу увеличиваются, а к экватору —
уменьшаются. От масштабов карт и планов зависит точность ре-
шения графических задач. Предельной точностью масштаба на-
зывается наименьшая длина на местности, которая может быть,
измерена по карте. Точка, нанесенная на карту остро очиненным,
карандашом, или укол циркуля имеет диаметр, равный 0,2 мм,.
Следовательно, на карте измерить расстояние меньше 0,2 мм не-
возможно. Наименьшая длина на местности, соответствующая
расстоянию 0,2 мм на карте, будет зависеть от масштаба карты.
Если масштаб карты 1 :200 000, то предельная точность этого*
масштаба будет
200000X0,2 = 40 м.
§ 26. ТРЕБОВАНИЯ, ПРЕДЪЯВЛЯЕМЫЕ К МОРСКОЙ
НАВИГАЦИОННОЙ КАРТЕ
На навигационной карте судоводитель прокладывает линии
курсов и по ним откладывает пройденное расстояние, т. е. ведет
графический учет движения судна. Кроме того, на карте прокла-
дываются пеленги ориентиров, т. е. строятся углы между истин-
ным меридианом и направлениями на эти ориентиры. Следова-
тельно, углы на местности должны быть равны углам на карто-
графической проекции. Все работы судоводитель выполняет на
карте простыми навигационными инструментами, которые долж-
ны обеспечить быстроту и точность работы. Очень удобно прэ-
93
кладывать линию ИК прямой линией, которая должна пересе-
кать каждый меридиан под углом, равным ИК- Поэтому морская
навигационная карта должна отвечать следующим требованиям:
а) углы, измеренные на местности, должны быть равны углам,
нанесенным на карту, т. е. она должна быть равноугольной или
конформной;
б) линия ИК судна на карте должна быть прямой линией.
Удовлетворяющая этим требованиям картографическая про-
екция впервые была предложена в 1569 г. голландским матема-
тиком и географом Герардом Кремером, известным более под
именем Меркатор. Поэтому проекция, предложенная им, называ-
ется меркаторской. Меркаторская проекция является равноуголь-
ной нормальной цилиндрической проекцией. На ней земные ме-
ридианы и параллели изображаются прямыми, взаимно перпен-
дикулярными линиями. Линейная величина каждого градуса ме-
ридиана постепенно увеличивается по мере удаления от экватора
к полюсам. Линейная величина градуса каждой параллели рав-
на линейной величине градуса экватора, т. е. все параллели вы-
тянуты до длины экватора и соответственно растянуты мери-
дианы.
§ 27. УСЛОВИЯ РАВНОУГОЛЬНОСТИ МЕРКАТОРСКОЙ ПРОЕКЦИИ
Предположим, что Земля — шар. Возьмем на ее поверхности
элемент шара, ограниченный плоскостью экватора АОВ и дуга-
ми меридианов PnA и PnB (рис. 29). Радиус шара — R. Раз-
ность долгот между меридианами элементарно мала и равна АХ.
На 'меридиане XPn в широте ф£ — <LOA расположена точка L.
Дуга ВМ изображает элемент параллели точки L, имеющей ра-
диус г. Из треугольника OLO{ найдем
r = /?coscp. (55)
На меридиане ВРм в широте <N'OB, расположена точка N.
Для перехода из точки L в точку N нужно следовать курсом
К= <РnPN, Считая, что треугольник LMN — элементарный, во-
образим, что при проектировании его на поверхность цилиндра,
касающегося шара по экватору, он изобразится на плоскости
элементарным треугольником Imn. Линия экватора на плоскости
развернутого цилиндра сохранит свою длину, поэтому
= AB = RM.
Меридианы АР^ и ВР^ на цилиндрической проекции изобразят-
ся параллельными прямыми, перпендикулярными линии эквато-
ра, а параллели—прямыми, параллельными экватору. По ма-
лости треугольника LMN можно рассматривать как плоский и
прямоугольный. Разность широт точки L и Добудет
Дер = флг —Фа,
94
тогда один из катетов треугольника LMN будет равен
vMN=R^,
а второй о LM = r =/?cos<pAX.
Рис, 29
На проекции в элементарном треугольнике 1тп катет
lm = ab. Катет тп неизвестен, обозначим его через &D.
Отношение катетов /\L'M№
MN _ /?Д<р
LM R cos ©Да
cig К-
На проекции, обозначив угол между изображением меридиана и
прямой через получим
тп _ &D
= ctgKv
Условием для морской навигационной проекции является ра-
венство углов на местности и на проекции, следовательно, долж-
но быть
а если углы равны, равны и их функции
ctg/С= ctg Д',,
95
следовательно,
откуда
Д£> ___ 7? Дер
R ДА R cos срДХ *
COS 9
Переходя от конечных приращений к дифференциалам, получим:
(56)
COS <р v '
Из формулы (56) видно, что на проекции элемент изображения
меридиана зависит только от широты места. Проинтегрировав
выражение (56) в пределах от 0° до ф, получим
(57)
Величина D называется меридиональной частью и представ-
ляет собой расстояние по меридиану от экватора до заданной па-
раллели на меркаторской проекции. Следовательно, меркатор-
ская проекция равноугольна потому, что каждая параллель, вы-
тянутая до длины экватора, располагается на расстоянии от эк-
ватора, равном величине ZZ Карты в меркаторской проекции из-
готовляются только до параллели 85°, так как приполярные райо-
ны на проекциях имеют очень большое искажение площадей, а
полюса и вовсе не могут !быть изображены. В самом деле, если
в формулу (57) подставить ф = 90°, то
tg (45°4- =оо,
следовательно,
D = oo.
§ 28. МЕРИДИОНАЛЬНЫЕ ЧАСТИ
Меридиональная часть может быть выражена в любых линей-
ных единицах, в зависимости от того, в каких единицах выражен
радиус Земли. Для навигации меридиональные части удобнее
всего выражать через длину 1' дуги экватора, т. е. в экваториаль-
ных милях. 1 экв. миля равна R arc 1'.
Откуда
R = —= 3437,747 экв. миль.
Для перехода от натуральных логарифмов к десятичным, введем
96
модуль логарифмов — mod=0,434294, тогда уравнение (57) при-
мет вид:
mod
D' = 7915,7051g tg (45°+ -J) . (58)
ПЪ этой формуле можно составить таблицу меридиональных
частей, принимая Землю за шар. В мореходных таблицах, изда-
ваемых до 1943 г., помещены таблицы меридиональных частей,
составленные по формуле (58). В более поздних изданиях и в
МТ-53 (табл. 26) таблицы меридиональных частей составлены с
учетом сжатия Земли по формуле
D' = 7915,704471g tg (45-+ .
Эта таблица (табл. 26 МТ-53) составлена для широт от 0 до
89°59/ через V широты. С помощью этих таблиц решаются нави-
гационные и картографические задачи. Значения меридиональ-
ных частей даны с точностью до 0,1 экв. мили.
Таким образом, меридиональной частью называется расстоя-
ние на меркаторской проекции от экватора до параллели задан-
ной широты, выраженное в экваториальных милях. Расстояние по
меридиану на меркаторской проекции между двумя параллеля-
ми, выраженное в экваториальных минутах, называется разно-
стью меридиональных частей (РМЧ). Для расчета РМЧ нужно
выбрать для каждой параллели по табл. 26 МТ-53 меридиональ-
ную часть (МЧ) и произвести вычитание
PM4 = D2-DX.
Единицей линейного масштаба, для измерения разности ши-
рот и расстояний на меркаторской карте, является меркаторская
миля. Меркаторской милей называется изображение одной мину-
ты дуги меридиана в данной широте на меркаторской карте. Эк-
ваториальная миля на меркаторской карте изображается отрез-
ком параллели, который соответствует Г дуги экватора. Вели-
чина меркаторской мили рассчитывается как разность меридио-
нальных частей двух параллелей, отстоящих друг от друга на
одну минуту и является величиной переменной. По мере удале-
ния от экватора величина меркаторской мили увеличивается. По-
этому, измеряя расстояние на меркаторской карте, необходимо
брать меркаторские мили, которые соответствовали бы той широ-
те, в которой расположено измеряемое расстояние.
7 Навигация 97
§ 29. ЛОКСОДРОМИЯ
Считая Землю сферой, выберем на ней два меридиана, раз-
ность долгот между которыми элементарно мала и равна АХ.
На меридианах возьмем две точки и М2. Разность широт меж-
ду ними также элементарно мала и равна А<р. Для того чтобы
перейти из точки Л4ь расположенной на меридиане АРя, в точку
M2f расположенную на меридиане £Рли не меняя курса, нужно
следовать постоянным курсом К, т. е. углы между меридианом
APn и диаметральной плоскостью судна и меридианом BPn и
ДП должны быть равны (рис. 30)
ZP/vM1G = ZP^G.
Проведя через точку М2 параллель, получим прямоугольный
треугольник М}СМ2 с прямым углом в точке С, так как меридиа-
ны и параллели пересекаются под прямыми углами. Этот треу-
гольник элементарно мал, и его можно считать плоским. Длину
отрезка параллели СМ2 (обозначим его Ада) рассчитываем сле-
дующим образом. Умножив каждую часть уравнения (55) на
2л, получим
2тс г — 2тг R cos ф,
т. е. длина любой параллели равна длине экватора, умноженной
на косинус широты параллели. Следовательно, отрезок парал-
лели между двумя меридианами равен отрезку экватора между
98
этими же меридианами, умноженному на косинус широты этой
параллели, т. е. отрезок параллели СМ2 выразится:
СЛ12 = Д^ = Akcos <р.
Из прямоугольного треугольника MiCM2
СМ2 = Д w = Дф tg К,
откуда ДХ cos ф = Дф tg К
А, Д<р tg к
или ДХ = —г—.
COS ср
Переходя от конечных приращений к дифференциалам, получим
COS Ср
Взяв интеграл этого выражения в пределах от qpiXi до ф2^2, полу-
чим уравнение кривой на сфере, называемой локсодромией.
ф9
5 dX = tgK
J ь J cos о ’
>1 ¥1 Г
Ч - Ч = tg АЙln tg (45°+ -f-) - In tg (45° + -^) ] • (59)
Локсодромия — греческое слово, его дословный перевод «ко-
сой бег». Это линия двойной кривизны, образующая со всеми
Рис. 31
меридианами одинаковые углы и расположенная на поверхности
земного шара в виде спирали (рис. 31).
7* 99
Для эллипсоида уравнение локсодромии примет следующий
вид:
е
(ад
где е — эксцентриситет меридианного эллипса.
Уравнение (59) показывает, что при курсах /С=0, ^= 180°,
л2—Ai = 0 или Х2 = Хг, локсодромия совпадает с меридианом и
превращается в дугу большого круга, который проходит через
оба полюса. Если уравнение (59) написать в виде
tg /<=----_ t
In tg (45° + -J-) - In tg (45O +
то при ^ = 90o и /( = 270°, tg/C = oo, так как в правой части ра-
венства разность А2—Л1 не может быть бесконечно большой, то
знаменатель должен быть равен нулю, т. е.
lntg(45°+^-)-ln tg (45°+ -J-) =0,
что может быть только при ф1=ф2. Следовательно, локсодромия
совпадает с параллелью, превращаясь в малый круг. Если одна
из точек расположена на экваторе и ее координаты Ф1 = О и
11==Хо, то формулу (59) можно представить в таком виде:
X2 = tgKlntg(45°+^-) 4-Х0. (60)
Из этого выражения локсодромии видно, что каждому значению
Ф соответствует только одно значение к и, следовательно, локсо-
дромия пересекает каждую параллель только один раз. Выра-
жение (60) может иметь вид:
tg(45°+^r) ==^-х'>с,г", (61)
где е— основание натуральных логарифмов.
Если в уравнении (61) давать долготе Х2 значения к; Л+2л;
и т. д., то для широты ф2 будут получаться каждый раз
другие, непрерывно возрастающие значения, в то время как дол-
гота будет соответствовать тому же самому меридиану. Следова-
тельно, локсодромия пересекает каждый меридиан бесконечное
число раз и каждый раз в другой широте. Если в выражение (61)
подставить ф2 = 90°, то получается, что при курсах, отличных о г
0 и 180°, Х2 — Хо = оо, следовательно, локсодромия, стремясь к
полюсу, достичь его не может, приближаясь к нему асимптоти-
чески.
Требование при выборе картографической проекции для мор-
ской навигационной карты заключается в том, чтобы линия ис-
100
тинного курса судна, следующего постоянным курсом, изобра-
жалась бы на карте прямой линией. Возьмем оба меридиана, ука-
занные на сфере ЛРлг и ВР^, и нанесем их на меркаторской про-
екции в виде параллельных прямых аРм и bPN. Разность долгот
между ними АХ. Точки М\ и М2 должна соединить прямая линия
пересекающая изображение меридианов под углом К.
Длина отрезка экватора между меридианами выразится
ab = RM.
Из прямоугольного треугольника МгСМ2 (рис. 30)
СМ2 = ~Eb = (D2 — DJ tg К.
Следовательно,
RKk=[D2-DJtgK.
Подставив значения меридиональных частей
D2 = /?lntg(45°+^) и D1=/?lntg(45°+^-),
получим:
ДХ = Х2 - X, = tg К [ In lg (45°+ - In tg (45°+ .
Выведенное выражение такое же, как и полученное ранее в
формуле (59). Значит, прямая на меркаторской карте, пересе-
кающая все меридианы под одинаковым углом, является изобра-
жением локсодромии на меркаторской проекции. Следовательно,
меркаторская проекция удовлетворяет условию, по которому ли-
ния ИК судна, следующего постоянным курсом, была бы прямой
линией.
Плавание по локсодромии упрощает работу судоводителя.
Недостатком его является то, что локсодромия не представляет
собой кратчайшего расстояния между двумя пунктами на Земле.
Кратчайшим расстоянием между двумя пунктами на сфере яв-
ляется меньшая из дуг большого круга, проходящего через эти
пункты. Большой круг называется ортодромией (греческое слово,
обозначающее «прямой бег»). Следуя по локсодромии, судно
всегда проходит лишнее расстояние. Однако на малых переходах
разность между локсодромией и ортодромией настолько незна-
чительна, что ею пренебрегают и совершают плавание по локсо-
дромии из-за удобства. В тех же случаях, когда расстояние меж-
ду пунктами большое, предпочитают ради сокращения пути со-
вершать плавание по ортодромии.
§ 30. АЗИМУТАЛЬНЫЕ ПЕРСПЕКТИВНЫЕ ГНОМОНИЧЕСКИЕ
ПРОЕКЦИИ
В гномонических проекциях точка зрения помещается в цент-
ре сферы, а картинная плоскость располагается касательной к
сфере. Как и во всех перспективных проекциях в гномонических
101
проекциях, в частности, в зависимости от угла наклона основного
диаметра к плоскости экватора <ро, образуются нормальная, попе-
речная и косая проекции. Гномонические проекции не конформны
и не эквивалентны. Частные масштабы по направлению от точки
касания картинной плоскости т и перпендикулярному ему п, из-
меняются неодинаково, причем, масштаб т меняется больше,
чем масштаб п. Выберем на сфере точку М (рис. 32), положение
которой определим дугой вертикали Z$M=Z и азимутом А, от-
считываемым от нордовой части меридиана, проходящего через
точку касания. Частный масштаб по направлению от точки каса-
ния т является пределом отношения соответствующих отрезков
на изображении и на сфере
/W j 1 Hl , Q ,
0
где p = /?tgZ =ZQMX—проекция дуги Z$M на картинную
плоскость;
So = RZ = ZQM—сферическое расстояние от точки ка-
сания до точки М, выраженное через
центральный угол Z.
Тогда
m=~D^7— 9 7D^7- = Z. 62} RdZ cos2 ZRdZ cos2Z v 7
Частный масштаб по направлению, перпендикулярному вертика-
лу сферы п является пределом отношения соответствующих от-
резков на проекции и на сфере
Р\МХ day
п = hm —Ли- = .
Л4Р UO)q
Величину отрезка дуги соо в направлении, перпендикулярном вер-
тикали, от меридиана P^Z0 на сфере можем выразить как произ-
ведение угла А на радиус малого круга г, проходящего через
точку М
<ь$ — гА,
где r=R sin Z.
Из прямоугольного треугольника ОВМ после подстановки по-
лучим:
(оо = гА = /? sin ZA.
Величина отрезка дуги со на проекции от меридиана P/v ZQ до
точки М будет
<о = р A = RtgZA,
тогда
R tg ZdA 1 л v
л = -г- = в = —7 = sec Z. (63)
R sm ZdA cos Z v 7
Следовательно, фигуры на гномонической проекции будут вытя-
гиваться в направлении от точки -касания картинной плоскости.
Только в точке касания, где Z = 0, масштабы равны между собой.
Гномоническая проекция обладает тем свойством, что на ней все
большие круги изображаются прямыми линиями. Поэтому такие
проекции применяются в судовождении для прокладки на них
ортодромии. Действительно, большой круг на сфере—это след
от пересечения сферы плоскостью, проходящей через центр сфе-
ры. Точка зрения также располагается в центре сферы, а проек-
тирующие лучи — в секущей плоскости. Пересечение секущей
плоскости и картинной плоскости дает прямую линию.
Искажение углов гномонической проекции неодинаково на
различных расстояниях от точки касания. Выведем зависимость
искажения углов от расстояния до точки касания. На сфере
(рис. 33) возьмем два вертикала, расстояние между которыми
элементарно мало и равно dA. На одном вертикале возьмем точ-
ку М на расстоянии от точки касания ZA4=Zb а на другом—точ-
ку N на расстоянии от точки касания картинной плоскости ZN=
Z2. Разница расстояний Z2—Zx=dZ. Через точку проведем малый
круг, составляющий с вертикалами прямой угол (этот круг в аст-
рономии и геодезии носит название альмукантарата). Таким об-
разом, на сфере образовался в точке С элементарный прямо-
угольный треугольник MCN, который из-за малости углов можно
принять за плоский.
Его стороны
СМ = RdZ, CN=R sin ZdA,
тогда
, CN RstnZdA sin ZdA
103
На проекции треугольник MCN изобразится треугольником men
со сторонами ст = р2 — pi = rfp и сп = р^Л.
Тогда
. сп pdA
Решая оба уравнения относительно dA, получим
dA = tg М -^7 = tg т .
ь sin Z & р
tg/7l = tg/W-^-.
ь & sin Zd р
Подставим в полученное выражение значения р и dp
p = /?tgZ;
. RdZ
cos2 Z '
получим
или
tg m =tg M.
R tg ZdZ cos2Z
RdZ sin Z
(64)
104
Выражение (64) показывает, что с удалением от точки каса-
ния искажение углов увеличивается. Но так как функция коси-
нуса от 0° изменяется незначительно, искажение вблизи точки ка-
сания также незначительно. Это свойство используется в навига-
ции. Гномоническими картами можно пользоваться для проклад-
ки радиопеленгов вблизи точки касания.
§ 31. АЗИМУТАЛЬНАЯ
ПЕРСПЕКТИВНАЯ СТЕРЕОГРАФИЧЕСКАЯ ПРОЕКЦИЯ
Точка зрения О помещается на противоположной точке каса-
ния картинной тлоскости поверхности шара (рис. 34). В зависи-
мости от угла наклона основного диаметра к плоскости экватора
образуются: а) нормальная фо = 90°; б) поперечная ф0 = 0° и
в) косая 90°>фо>0 проекции. Рассмотрим косую проекцию. Из
рис. 34 видно, что
P = 2/?tg -f . (65)
105
Частный масштаб по направлению от точки касания Zo (по вер-
тикалу):
//X — 11111 . Л у
z^M . 0
So = ZGM = /?z,
тогда
d p 1 9 z
m=dr0=—z=sec2ir
° cos2 —
Частный масшаб по направлению, перпендикулярному вертикалу
сферы,
Величину отрезка дуги соо от меридиана P^Z0 до точки М на сфе-
ре выразим как произведение угла А на радиус малого круга г»
проходящего через точку М
<»о = гА.
Величину г определим из ACQM:
г = /?sin Z,
тогда
<о0 = Л/? sin Z.
Величина отрезка дуги ю от меридиана PnZq до точки Л/, опре-
делится
со = р А = 2R tg А,
тогда
d 2 1 2 Z
n ~ = 1 + cos Z = Tz~ sec T*
cosS 2
Следовательно, масштабы стереографической косой проекции по
взаимно перпендикулярным направлениям равны между собой,
т. е.
т = п = sec2 , (66)
а это указывает на то, что данная проекция равноугольна. Для
нормальной стереографической проекции, учитывая, что точка ка-
сания Zo совпадает с полюсом Рдч можно написать
P = 2/?tg(45°-^);
т = п = sec3 (45О— .
106
Для поперечной стереографической проекции точка зрения и точ-
ка касания расположены на экваторе
P = 2/?tg4;
т = п = secd -у.
Равноугольность стереографической проекции, а также незна-
чительное изменение масштабов от точки касания к краям про-
екции (масштабы изменяются от единицы у точки касания до
двух на краях проекции) дает возможность использовать эту про-
екцию как вспомогательную для построения на ней стадиометри-
ческих и гиперболических сеток.
$ 32. ПРОЕКЦИЯ ЛИТТРОВА
Проекция Литтрова — это нормальная коническая проекция в
виде софокусных конических сечений. Меридианы проекции пред-
ставляют собой софокусные гиперболы с полуосями sin Хи cos
а параллели—софокусные между собой и меридианами эллипсы
(рис. 35) с полуосями tg(p и sec<p. Проекция Литтрова представ-
ляет ценность для судоводителя, так как на ней изоазимута изоб-
ражается прямой линией. Для построения проекции используют-
107
<я прямоугольные координаты, которые рассчитываются по фор-
мулам
X = tg ф cos X; Y — sec ф sin X.
Ось ОХ представляет собой обе половины начального меридиана,
ось OY—ьесъ экватор. Проекция Литтрова используется для (по-
строения азимут-диаграмм.
ПРИМЕРЫ
1. Численный масштаб карты по главной параллели 1:300 000. Опреде-
лить линейный масштаб карты (количество морских миль в 1 см) и предель-
ную точность масштаба такой карты?
Решение. 300 000 см переведем в морские мили
300 000:185 200 = 1,62 мор. мили.
Следовательно, линейный масштаб карты будет: 1,62 мор. мили в 1 см. Полу-
чим предельную точность масштаба
300 000 х 0,2 ММ = 60 м.
2. Определить предельный численный масштаб карты, на которой можно
было бы производить измерения с точностью до 25 м?
Решение. Разделим заданную точность на 0,2 мм.
25 м: 0,2 мм = 25:0,0002 = 125 000.
Полученная величина — знаменатель численного масштаба карты, следова-
тельно, на карте 1 : 125000 можно измерения производить с точностью до 25 м.
3. Из табл. 26 МТ-53 выбрать меридиональную часть для параллели
50°19',5.
Решение. В табл. 26 МТ-53 выбираем
для?=50°19' МЧ = 3486,4;
для <р =50°20' М7=3488,0.
Интерполируя, получим для <р = 50°19\5; Л47=3487,2 экв. мили.
4. Во сколько раз меркаторская миля в широте = 70°30/ больше мерка-
торской мили в <Р2=25°25'?
Решение. Рассчитаем величину меркаторской мили в широте (pi. Из
таблиц выберем МЧ для
<Р = 7(ГЗГ, М Ч — 6036,0;
?1=70°30/, М <7=6033,0.
имеет PM7i = 3,0 экв. мили. Для широтымеркаторская миля вы-
числится аналогично
<?=25°26', = 1568,8.
ср2 = 25°25', МЧ = 1567,7____________
Р77/0°01\ РМЧ2 = 1.1 экв. мили.
Вычислим, во сколько раз меркаторская миля в широте больше меркатор-
ской мили в широте ф2- Для этого возьмем отношение
РМЧ{ 3,0 О7О
_1 = _ = Л72 раза.
Задачи.
1. Определить линейные масштабы карт, если численный масштаб по глав-
ной параллели а) 1:5000; б) 1:10 000; в) 1:20000; г) 1:50 000;
д) 1 : 100 000?
2. Определить численные масштабы карт, если линейные масштабы этих
карт равны:
а) 1,5 мор. мили в 1 см;
108
б) 2,5 мор. мили в 1 см;
в) 0,5 мор. мили в 1 см;
г) 1 км в 1 см;
д) 2 км в 1 см.
3. По боковой рамке карты измерена длина изображения 1 мор. мили, рав-
ная 1 см. Определить численный масштаб карты, если измерение произведено-
в районе главной параллели карты?
4. Определить предельную точность масштаба карт, если их масштабы
а) 1 : 10 000;
б) 1:50 000;
в) 1 : 500 000;
г) 0,5 мили в 1 см;
д) 1 миля в 1 см.
5. Какие масштабы должны иметь карты, если на них нужно измерять
расстояние с точностью:
а) до 1 At; б) до 100 м; в) до 1 мили; г) до 1 кбт.; д) до 5 кбт.?
6. Пользуясь таблицами, определить меридиональные части для парал-
лелей:
а) ф-8°31'; б) ф =45°127; в) ф =72°51',5; г) ф =15°58',5; д) ф=19°40',3.
7. Рассчитать РМЧ между параллелями:
a) 60°15'N и 60°48'N;
б) 32°12'S и 34°51'S;
в) 8°10'К и 12°15'S;
г) 15°12'S и 10°12'N;
д) 20°15'К и 20°15'S.
8. Сколько экваториальных миль содержится в меркаторской миле в ши-
ротах:
а) 30°; б) 60°; в) 70°; г) 82°; д) 10°?
9. Длина изображения меркаторской мили на карте в ф = 30° равна 11 мм\
Сколько миллиметров будет в меркаторской миле вф = 40°?
10. Длина изображения экваториальной минуты на карте равна 5 мм.
Сколько миллиметров будет в меркаторской миле в ф=70°?
Ответы.
1. а) 0,027 мор. мили в 1 см; б) 0,054 мор. мили в 1 см;
в) 0,108 мор.мили в 1 см; г) 0,269 мор. мили в 1 см;
д) 0,539 мор. мили в 1 см.
2. а) 1 : 277800; б) 1 : 463000; в) 1 : 92600;
г) 1:100000; д) 1:200000.
3. 1 : 185200.
4. а) 2 м; б) 10 м; в) 100 м; г) 1 кбт., д) 2 кбт.
5. а) 1 : 5000; б) 1 : 500000; в) 1 : 9260000; г) 1 : 926000; д) 1 : 4630000.
6. а) 509,5; б) 3030,6; в) 6483,4; г) 964,9; д) 1196,4.
7. а) 66,9; б) 189,9; в) 1224,2; г) 1528,1; д) 2466,2.
8. а) 1,1 экв. мили; б) 2,0 экв. мили; в) 2,9 экв. мили; г) 7,2 экв. мили;
д) 1,0 экв. мили.
9. 13 мм.
10. 14,6 мм.
Задачи 8, 9, 10 решены с точностью до 0,1.
Контрольные вопросы
1. Почему нельзя использовать глобус для навигационных целей?
2. Что такое картографическая сетка?
3. Какие проекции применяются в судовождении?
4. В чем различие главного и частного масштабов?
5. Какой должна быть морская навигационная карта?
6. Что такое меридиональная часть?
7. Что такое локсодромия и как она выглядит на сфере?
8. Какие свойства локсодромии?
9. Для какой цели нужна проекция Литтрова?
109
Глава VII. ПОСТРОЕНИЕ КАРТ И РАБОТА С НИМИ
§ 33. МАСШТАБ МЕРКАТОРСКОЙ КАРТЫ
Если принять Землю за шар с радиусом R, то, выбрав два ме-
ридиана на шаре, разность долгот между которыми равна 1', мо-
жем нанести эти меридианы на проекции, причем (рис. 36)
АВ = ab = Rarc Г.
По условию равноугольности масштаб по меридиану равен масш-
табу по параллели, т. е. т=п.
Рис. 36
(67)
Обозначим численный масштаб на экваторе 4-. Тогда длина
''Э
отрезка АВ на проекции
R аге Г
Величина е — длина изображения 1 экв. мили, выраженная в ли-
нейных мерах, называется единицей карты.
Длины параллелей а'Ь' и а"Ь" в широтах и <₽2 на шаре бу-
дут выражены отрезками дуг
а'Ь' = Z?cos <рj arc 1
a"b" = R cos <р4 аге Г.
На проекции Меркатора эти дуги изобразятся отрезками А'В' я
А"В", равными отрезку АВ, так как меридианы параллельны.
Следовательно, можно написать
л___/? arc 1'_ R cos cpi arc Г _ /?cos^aarcl'
~ ’ СТ •
ПО
где Ci и С2— знаменатели численного масштаба в широтах Ф1 и
<Р2. Параллель в широте q>i или Ф2 считают главной параллелью.
Взяв отношение знаменателей
“IV 1 __ ЛГЧ •
С, R cos <pi arc Г
Сэ R&xzY __________
С R cos а> аге 1Л sec ф2 >
Од СОЪ (jpg *
получим
Сэ = С1зесф1 и Сэ = С28есф2 (68)
или
С^С^СОБф! И С2 = СэС03ф2-
Следовательно, знаменатель численного масштаба на меркатор-
ской карте, считаемого вдоль экватора, в зесф раз больше знаме-
нателя численного масштаба, получающегося на такой же карте
для главной параллели в широте ф. Задавшись величиной знаме-
нателя численного масштаба на главной параллели, всегда мож-
но получить значения знаменателя численного масштаба на эк-
ваторе, а затем получить значения масштаба и на любой парал-
лели той же карты.
Экваториальные мили
Рис. 37
В СССР для навигационных карт каждого моря установлена
стандартная главная параллель данного моря, вдоль которой
соблюдается масштаб карты. Например, главные параллели Бал-
тийского моря — 60°, Черного и Азовского — 44, Белого —66,
Японского — 40 и т. д. Главная параллель может и не находить-
ся на данной карте. Из-за того, что на картах данного моря глав-
ный масштаб отнесен к единой для всего моря главной паралле-
ли, можно карты смежных районов склеивать друг с другом.
111
Свойство масштаба меркаторской карты увеличиваться с уда-
лением от экватора пропорционально sec <р позволяет находить
величину меркаторской мили в любом районе, широта которого
известна, графическим путем. Для этого из точки А по горизон-
тальной линии AL (рис. 37) откладываются отрезки АВ. ВС, CD
и т. д., равные изображению одной экваториальной «мили, т. е.
единице карты. В точке А строится угол, равный широте <р, и из
точек В, С. D восстанавливают перпендикуляры до пересечения
со стороной угла AM. На прямой AM спроектируются точки Вь
Сь Dx и т. д. Из треугольников АВВХ, АССХ и т. д. получим
АВХ = АВ sec<p, XCi=XCsec<p и т. д., т. е. отрезки ДВь AClf ADj
являются изображениями одной меркаторской мили в широте <р.
Для построения навигационных карт Землю считают не сфе-
рой, а эллипсоидом вращения. В этом случае формулы, связы-
вающие знаменатели численных масштабов на экваторе и глав-
ных параллелях, будут иметь следующий вид:
Сэ = Ci sec t/; Сэ = С2 sec tZ;
C1 = C3cosU; C2 = CdcostZ,
где U — приведенная широта.
Практически от географической широты переходят к приведеь
ной, пользуясь табл. 2, для чего из географической широты вы-
читают выбранную из табл. 2 поправку Д<р.
Единица карты рассчитывается по видоизмененной формуле
(67), где радиус земли R заменен большой полуосью земного
сфероида а
a arc 1'
§ 34. ПОСТРОЕНИЕ КАРТОГРАФИЧЕСКОЙ СЕТКИ
МЕРКАТОРСКОЙ КАРТЫ
Для построения сетки необходимо установить широту главной
параллели карты в соответствии с географическим районом, изо-
браженным на карте, и численный масштаб по экватору ("£—) •
Затем по формуле (69) рассчитывается единица карты в. Едини-
цей карты пользуются для расчета размеров горизонтальной
рамки b и вертикальной рамки с\
Ъ = (70)
где (Х2 — kJ—разность долгот между меридианами, ограничи-
вающими географический район, выраженная в
дуговых минутах.
В связи с тем, что расстояние между параллелями выражает-
ся разностью меридиональных частей, можно написать
с = e^PM4 = e(D^Dx). (71)
112
где D2 — меридиональная часть, соответствующая широте север-
ной рамки карты;
Dx — меридиональная часть, соответствующая широте юж-
ной рамки карты.
Для контроля вычисляется диагональ карты
d = V'b* + г2.
Эти же формулы применяются для нанесения промежуточных
параллелей и меридианов, которые обычно наносятся через 15—
30 см друг от друга в зависимости от поставленной задачи. На
флоте для решения практических задач пользуются МТ-53.
Таблица 9
?° Р Р <р° 1 р 1
0 1855356 31 1591764 62 873319
1 1855076 32 1574912 63 844561
2 1854234 33 1557580 64 815542
3 1852831 34 1539772 65 786272
4 1850867 35 1521495 66 756658
5 1848343 36 1502753 67 727010
6 1845260 37 1483553 68 697031
7 1841618 38 1463899 69 666848
8 1837419 39 1443798 70 636453
9 1832664 40 1423255 71 605860
10 1827354 41 1402277 72 575080
И 1821490 42 1380869 73 544122
12 1815075 43 1359039 74 512994
13 1808110 44 1336792 75 481708
14 1800597 45 1314136 76 450272
15 1792538 46 1291077 77 418697
16 1783937 47 1267621 78 386166
17 1774794 48 1243777 79 355166
18 1765113 49 1219550 80 323230
19 1754896 50 1194949 81 291194
20 1744148 51 1169981 82 259067
21 1732869 52 1144653 83 226860
22 1721065 53 1118972 84 194583
23 1708738 54 1092948 85 162245
24 1695831 55 1066587 86 129856
25 1682530 56 1039897 87 97427
26 1668657 57 1012887 88 64969
27 1654276 58 985564 89 32489
28 1639392 59 957938 90 0
29 1624009 60 930015
30 1608132 61 901806
Когда сетка построена, на нее наносятся по своим широтам и
долготам опорные пункты. По опорным пунктам на карту нано-
сится весь имеющийся картографический материал, полученный в
результате съемки и промера. Гидрографическое управление
8 Навигация
113
ВМС в 1949 г. издало Картографические таблицы, по которым
расчетные работы ведутся упрощенным путем и с повышенной
точностью. На флоте этими таблицами обычно не пользуются, а
их используют гидрографы для составления морских навигацион-
ных карт. В этих таблицах дана величина Р — длина одной ми-
нуты параллели в миллиметрах в различных широтах (табл. 9).
Эта таблица используется для проверки рассчитанной единицы
карты. Для этого выбирают из таблицы значение Ро — длину 1'
главной параллели и умножают это значение на масштаб глав-
ной параллели, т. е.
Пользуясь этой таблицей, можно рассчитать и частный масштаб
для любой параллели по формуле
1____Рп_
С РС0 •
1 „ -
где -g- — частный масштаб карты;
— масштаб по главной параллели;
— данные таблицы для главной параллели;
Р— данные таблицы для данной параллели.
§ 35. ПОСТРОЕНИЕ КОСОЙ ГНОМОНИЧЕСКОЙ КАРТЫ
На меридиане наблюдателя в широте <pz расположена точка
касания картинной плоскости Z и произвольная точка А, имею-
щая широту фд (рис. 38). Разность широт точек Z и А будет вы-
ражена: РШ=уА—уг- Через точки Z и А проведены большие
круги ZDZy и ADB перпендикулярно меридиану точки касания.
На большом круге ADB обозначена точка А ь через которую про-
веден меридиан, пересекающий большой круг ZDZit в точке А2.
Разность долгот точек А и At = Ха,— = <ЛРЛ1 = РД. Проек-
ции точек Л, Л1 и Лг на картинной плоскости соответственно бу-
дут а, О| и а2. При этом проекции всех точек, лежащих на мери-
диане точки касания, расположатся на прямой pZ, представляю-
щей собой меридиан точки касания на проекции, а проекции то-
чек, лежащих на меридиане РЛ2, расположатся на прямой ра2,
представляющей собой изображение меридиана РЛ2 на картин-
ной плоскости. Отрезки дуг больших кругов AAt и ZA2 на кар-
тинной плоскости изобразятся прямыми aat и Za2. Угол ZPA2
изобразится на картинной плоскости углом Zpa2=P^. На осно-
вании формулы (64)
tg РД = tg РД cos PZ,
но
PZ = 90°-?z,
114
следовательно,
tgX' = tgXsin фг.
(72)
По этой формуле рассчитывается угол наклона любого меридиа-
на к меридиану точки касания на гномонической 'проекции. Для
нормальной проекции <pz=90°, sin 90°= 1, следовательно, V = Л.
Для экваториальной проекции qpz =0, sin0°=0, следовательно,
все меридианы будут параллельны меридиану точки касания. В
связи с тем, что большой круг ААХВ перпендикулярен меридиану
точки касания, отрезок изображения этого круга на проекции аау
будет также перпендикулярен pZ — изображению меридиана
точки касания. Расстояние на проекции от точки касания картин-
ной плоскости Z до точки а на проекции определится из прямо-
угольного треугольника OZa:
aZ = /?tg(<p4i—<pz), (73)
где фд —широта точки А{ на земной поверхности, проекция
которой определяет точку а на карте.
Величина ф А рассчитывается по следующей формуле, «вытека-
ющей из треугольника PAAt
^Фа, = ^ Фа sec дк-
Длина отрезка большого круга на проекции аах выразится из
подобных треугольников PazZ и ра\а
— Ра ,
где
Za2 = R tg ZA2; ZP=R ctg qpz.
8*
115
Из прямоугольного сферического треугольника A^ZP видно, что
tg Z42 = tg РД cos qpz
отрезок изображения меридиана точки касания
Pa=PZ— aZ = — /? tg (<рЛ1 — <pz) =
= /?cos фд cosecsec(ф.—ф2 ).
После подстановки значение величины отрезка на проекции аах
примет вид
aav = /?cos фЛ_ 1%РДsec(фЛ — фг). (74)
Следовательно, чтобы построить сетку карты в косой гномо-
нической проекции, имея координаты точки касания, в середине
листа вертикально проводят прямую, отметив на ней точку каса-
ния Z (рис. 39). На нижней и верхней рамках надписывается
долгота точки Z (л7)- Задаваясь разностью долгот, по формуле
(72) рассчитывают углы наклона меридианов к меридиану точки
касания, которые являются контролем для построения. Затем
рассчитывается величина aZ по формуле (73). Полученное рас-
стояние в соответствующем масштабе откладывается от точки Z
по меридиану точки касания, если РШ kN — вверх, если РШ
к S — вниз.
Рис. 39
Через точку а проводится вспомогательная прямая, перпен-
дикулярная меридиану точки касания, на которой вправо и вле-
во откладывается величина аа^ (точки at и а/), рассчитываемая
по формуле (74). Таким же путем наносятся на карту соответст-
вующие точки bi, ct и &/, с/ и др. Соединяют эти точки плавной
кривой, получив таким образом соответствующие параллели.
116
Через полученные на параллелях точки проводятся меридианы,
причем углы X' между меридианом точки касания и проводимым
меридианом должны соответствовать величинам, рассчитанным
по формуле (72). В случае несовпадения необходимо проверить
расчеты.
§ 36. ПОСТРОЕНИЕ ПОПЕРЕЧНОЙ
И НОРМАЛЬНОЙ ГНОМОНИЧЕСКИХ КАРТ
На поперечной проекции меридиан точки касания перпенди-
кулярен экватору. На картинной плоскости они также пересекут-
ся под прямым углом. Все остальные меридианы изобразятся
прямыми линиями, параллельными меридиану точки касания.
Расстояние меридиана точки от меридиана точки касания опре-
делится из прямоугольного треугольника OZa (рис. 40)
Za-RtgPM,
(75)
где РД — разность долгот между меридианом точки касания и
заданным меридианом, равная /.д— Хг.
117
160
Рис. 41
Параллели изобразятся на проекции в виде гипербол, верши-
ны которых расположены на меридиане точки касания на рас-
стоянии от точки касания Zb
Zb = Rtgqb. (76)
Точки пересечения меридианов и параллелей вычисляют по
формуле
abf = R tgsec РД. (77)
Проведя меридианы и наметив на них ряд точек, эти точки сое-
диняют плавной кривой, получив таким путем изображение па-
раллелей.
Для построения сетки нормальной гномонической проекции
меридианы проводятся под углом друг к другу, равным разности
долгот между соседними меридианами. Параллели представляют
собой окружности, описанные из точки касания как из центра
радиусом р, который рассчитывается из треугольника ОРА
(рис. 41)
P=-/?ctgcp. (78)
Можно использовать графический метод нанесения паралле-
лей, для чего четвертую часть меридиана делят на равные части,
выбираемые в зависимости от требования к сетке. В точке каса-
ния Р проводят касательную к окружности и проводят лучи из
центра окружности, через нанесенные на меридиане точки. На
касательной лучи отметят отрезки р = R ctgcp в масштабе, выб-
ранном для нанесения меридиана на карту. Карты нормальной
проекции обычно составляются от 45 до 90°.
§ 37. КЛАССИФИКАЦИЯ МОРСКИХ КАРТ ПО НАЗНАЧЕНИЮ
По своему назначению морские карты делятся на справочные,
навигационные и вспомогательные. В СССР морские карты из-
даются Гидрографическим управлением ВМС. Справочные кар-
ты издаются, как правило, в меркаторской проекции. На них
изображаются большие пространства—океаны, полушария зем-
ли, или почти весь земной шар между параллелями 85° северной
и южной широт, навигационные опасности и другие навигацион-
ные подробности не наносятся. На справочные карты нанесены
те сведения, для которых данная карта составлена. Служат они
для различных справок, связанных с плаванием судна. Примером
справочных карт могут служить сборные листы, карты течений,
ветров, рекомендованных путей, магнитные карты, карты поясов
времени и др. Составляются карты в мелких масштабах от
1 : 500 000 до 1 : 5 000 000.
Навигационные карты являются основными в плавании. Они
составляются в меркаторской проекции и по назначению, содер-
119
жанию и масштабу делятся ла генеральные, путевые частные кар-
ты и карты-планы.
Генеральные карты служат для общего изучения райо-
на рейса, предварительной прокладки рейса и различных расче-
тов, связанных с рейсом. На генеральных картах изображены
моря, заливы, части океанов, нанесены важнейшие маяки, имею-
щие большую дальность видимости, навигационные опасности,
расположенные на значительном удалении от берега, плавучие
средства ограждения опасностей, выставленные у навигационных
опасностей, лежащих вдали от берегов, изобаты по глубинам 20,
50, 100 и 200 м. Масштаб генеральных карт бывает от 1 : 500 000
и мельче, в зависимости от величины изображаемого района; при-
чем масштаб относится к главной параллели моря.
Путевые карты служат для обеспечения плавания вдоль
побережий, иногда вне видимости берегов. На путевых картах су-
доводитель ведет исполнительную прокладку и наносит получен-
ные обсервации.
На путевые карты нанесены огни, маяки и знаки, обслуживаю-
щие плавание вдоль побережья, все навигационные опасности
(мелкие банки или камни обобщены), плавучие средства ограж-
дения, буи, вехи фарватеров, каналов, банок, затопленных судов
и других навигационных опасностей, изобаты глубин 5, 10, 20, 50
и 100 м.
Масштаб путевых карт от 1 : 100 000 до 1 -.300 000. Он также
отнесен к главной параллели моря, несмотря на то, что на дан-
ной карте этой параллели нет. В заголовке карты дается указа-
ние, к какой параллели относится масштаб.
Частные карты служат для обеспечения плавания в не-
посредственной близости от берегов и представляют собой более
подробные путевые карты, на которых также ведется прокладка
и наносятся обсервации. На частные карты наносятся все огни,
маяки и знаки, включая внутренние рейдовые и портовые огни,
навигационные опасности и плавучие средства ограждения. Изо-
баты наносятся по глубинам 2, 5, 10, 20 и 50 м. Масштабы част-
ных карт от 1 : 5000 до 1 :50 000 отнесены к главной параллели
моря.
Планы — это изображения бухт, рейдов, якорных мест и др.
Они используются при входах на рейд, перемещениях по аквато-
рии порта, выборе якорной стоянки и пр. На планах, как, и на
частных картах, наносятся все без исключения навигационные
опасности и их ограждения, изобаты глубин 2, 5, 10, 20, 50 м.
Масштабы планов от 1 :5000 до 1 :25 000. Рамки планов обычно
не разбиваются на градусы и минуты, но в заголовке плана всег-
да указываются точные географические координаты отмеченного
на плане основного пункта и даются два масштаба: для расстоя-
ний и широт—в милях и частях мили и для долгот—в эквато-
риальных милях. Масштабом широт пользуются по меридиану,
масштабом долгот—по параллели. Иногда на плане помещают
120
лишь масштаб широт. Тогда масштаб долгот получают постро-
ением на масштабе широт угла <р, равному широте основного
пункта. Опустив на вновь полученную сторону угла перпендику-
ляры от каждого деления масштаба широт, получают масштаб
долгот.
Морские вспомогательные карты строятся обычно в перспек-
тивной стереографической или гномонической проекции и служат
для вспомогательных работ. Судоводитель, выполнив на такой
карте работу, переносит ее результат на меркаторскую карту.
При решении задач используется основное свойство гномониче-
ской проекции — изображение дуги большого круга (ортодро-
мии) прямой линией.
§ 38. СТЕПЕНЬ ДОВЕРИЯ
К МОРСКИМ НАВИГАЦИОННЫМ КАРТАМ
Морские навигационные карты — основное пособие для пла-
вания, но степень доверия к каждой из них различна и зависит от
нескольких причин.
1. От даты проведения описи: чем позже составлена карта,
тем большего доверия она заслуживает. Сведения о дате прове-
дения описи помещаются на карте справа, под ее нижней рамкой.
Если карта составлена по иностранным источникам, это указание
записано там же.
2. От масштаба карты: чем крупнее масштаб, тем больше под-
робностей на ней может быть нанесено, тем легче судоводителю
ориентироваться.
3. От подробности примера: если глубины разбросаны по кар-
те, редки и неровны, это показывает, что промер не был подроб-
ным и поэтому в этих местах можно ожидать наличия опасностей;
наоборот, если на карте часто и равномерно нанесены глубины,
по которым можно проследить направление промерных галсов,
значит промерные работы произведены качественно и карта за-
служивает высокого доверия. Если на карте имеются белые пят-
на, то это означает, что промеров в этом месте не делали. Если на
карте отсутствуют изобаты или они прерываются, значит промер
был недостаточно подробен, а следовательно, такие карты заслу-
живают меньшего доверия.
4. От рельефа дна: плавный рельеф характерен равномерным
изменением глубин, отсутствием банок и отличительных глубин и
является наиболее благоприятным для судовождения. Сложный
рельеф характерен неравномерностью изменения глубин, нали-
чием банок, отличительных глубин и требует особой осторож-
ности, так как в этом районе могут встретиться опасные глубины,
не обнаруженные промером.
5. От характера грунта: наиболее опасный и сложный рельеф
дна обычно образуется каменистым грунтом. Поэтому на сравни-
тельно небольших глубинах, где не проводилось гидрографиче-
ское траление, можно ожидать повышения грунта в виде отдель-
121
ных каменных глыб или скал. Резкие скачки глубин в 10 м могут
свидетельствовать о наличии валунов на дне, а следовательно,
должны предостеречь судоводителя от возможности встретить
такой валун. У устья рек песчаный грунт имеет свойство переме-
щаться, поэтому глубины могут не совпадать с указанными на
карте, в особенности, если карта старая.
Практика плавания выработала ряд рекомендаций для судо-
водителя по использованию карт. Вкратце они сводятся к следую-
щему:
а) нужно пользоваться картой данного района самого круп-
ного масштаба, составленной по самым современным данным;
б) если белые пятна на карте расположены среди больших
глубин, можно ожидать, 'что и в этом непромеренном пятне глу-
бины достаточные; если вокруг белого пятна малые глубины, сле-
дует ожидать на белом пятне опасных глубин;
в) если в сведениях, приведенных на карте и в лоции, имеют-
ся расхождения, следует принимать во внимание сведения, полу-
ченные с карты самого крупного масштаба;
г) заходить за изобату 20 м без особой надобности не реко-
мендуется, а при каменистом грунте, если в данном районе не
производилось гидрографическое траление жестким тралом, вооб-
ще нельзя; в районах со сложным рельефом дна, в особенности в
глубоководных районах, предостерегательные изобаты 20 и 50 м
не могут предостеречь от опасности, так как глубины в 100—200 м
проходят в непосредственной близости к опасностям. Это обстоя-
тельство следует учитывать при плавании в плохую видимость;
д) перед тем как пользоваться картой, необходимо прочитать
все надписи, имеющиеся на ней;
е) необходимо подготовить карту для рейса или произвести
подъем карты.
§ 39. ПОДЪЕМ КАРТЫ
Подобранные на рейс карты, генеральные и путевые, а также
лоции, «Огни и знаки», «Технические средства судовождения» и
другие пособия служат для составления предварительной про-
кладки. Путь судна заранее известен. Подъем карты производит-
ся следующим образом:
а) наносят дуги дальности видимости маяков для высоты гла-
за наблюдателя. На дугах надписывают черным карандашом ха-
рактеристику огня маяка. Опасные секторы маяков заштриховы-
вают красным карандашом;
б) красным карандашом наносят те изобаты, которые судо-
водитель не хотел бы пересекать;
в) наносят опасный угол и опасный пеленг, ограждающие
опасности, сделав соответственно надписи их значения;
г) намечают кружком искусственные створы, которыми нуж-
но пользоваться в рейсе; если нет искусственных, проводят на
карте естественные с соответствующими надписями;
122
д) у радиомаяков производят запись их позывных и рабочую
дальность, ненадежные секторы помечают красным карандашом;
е) намечают ориентиры на карте, которыми в рейсе можно
пользоваться;
ж) вблизи проложенной линии ИК предварительной проклад-
ки намечают красным карандашом опасные для плавания судна
районы;
з) намечают радиолокационные ориентиры, удобные для ра-
диолокационных наблюдений;
и) направление и скорость постоянных течений, указанных на
карте, очерчивают карандашом;
к) при наличии приливных явлений в данном районе на сво-
бодной поверхности карты составляют табличку с основными эле-
ментами прилива.
ПРИМЕРЫ
1. Главный масштаб карты по параллели 40°N равен gr = 2qQ1 qq. Опреде-
лить частный масштаб этой карты по параллели 35°15'N, учитывая сфероидич-
ность Земли?
Решение. Рассчитаем приведенную широту С/. Из табл. 2 выберем
А ?4'° = — 5',7 и Д Тз5°15' = — 5',5
?= 35° 15'
+ Д Т = — 5',5
(/=35°9\5
То = 40°
4- Д ср = — 5',7
£/0=39°54'3
Рассчитаем знаменатель масштаба по экватору
Сэ = Со sec UQ = 200000 sec 39°54',3
lgC0 = 5,30103
lg sec 39°54',3= 0,11514
lg = 5,41617
Сэ = 260700
Рассчитаем частный масштаб для параллели
С=СЭ cos U =260700 cos 35°9',5
lgCa = 5,41618
lg cos 39°9'.5 = 9,91253
lg С = 5,32871
С = 213200
1 1
С 2132G0
Используя табл. 9, проверим по формуле
С СаР ’ тогда С Ро •
Выберем значения из таблицы
Р= 1516810 Ро= 1423255
200000 15’6810
G ' 1423255
123
lg с = lg Co + lgP-lgP0
lg 200000—5,30103
IgP —6,18093
— lgp0 — 6,15327
lg C = 5,32869
C = 213200
1 _ 1
C 213200'
Правильность решения подтвердилась.
2. Вычислить рамку меркаторской карты в границах <pi=31°00'S.
?2 = 41°00'S, Xi = 20°00'Ost, Х2 = 10°00'W
в масштабе 1 : 7 000 000 по главной параллели 45°S и нанести параллели через
2°30' и меридианы через 3°.
Решение, а) Рассчитываем единицу карты по формуле (69). Величи-
ну а выберем из табл. 1.
а = 6 378 245 м.
Сэ рассчитаем по формуле
Сэ = Co-sec U.
U вычислим, выбрав из табл. 2 величину А? =—5',8,
?о = 45°ОО'
+ Ду»—5\8
U = 44°54',2
lg Сэ = lg Со + lg sec U
lg Со = 6,84510
lg sec U = 0,14978
1g Сэ = 6,99488
lge = lga + lg arc 1' — 1g Сэ
lg a = 9,80470
’’’ lg arc Г = 6,46373
lg Сэ = 6,99488
lg e= 1,27355 e = 0,1877 мм
Произведем проверку, используя табл. 9, откуда выбираем
PQ = 1314136
e = —•
Co’
lge= Ig^o —!gQ
lgP0 = 6,11865
lgC0 = 6,84510
lg e= 1,27355
e= 0,1877 мм
б) Рассчитаем размеры карты по формулам (70 и 71), b^eQ^—K)
Х2 = 20°00'Ost
At = 10°00'W______________
РД = 30°00'К Ost = 1800'jV Ost
124
lg b = lg e + lg PH
lg e= 9,27355
\%РД = 3,25527
lg b = 2,52882
b = 337,9 мм
lgC = lge + lgPA4V
для ?2 = 41°C0'S — Z)j —2686,5
для q>! = 31°00'S — £>! — 1946,2
PM4= 740,3
, lg<> = 9,27355
^\gPM4= 2,86941
lg <7 = 2,14296 C- 139 мм.
в) Рассчитаем положение промежуточных параллелей через 2с30', т. е. рас-
стояние между соседними параллелями С/
N <P PM4i lg PM4L lg Ct С/, мм
1 2 31°00'S 33°30'S 1946,2 2122,7 176,5 2,24674 1,52029 33,14
3 36°00'S 2304,5 181,8 2,25959 1,53314 34,13
4 38°30'S 2492,1 187,6 2,27323 1,54678 35,22
5 41°00'S 2686,5 194,4 2,28870 1,56225 36,50
г) Рассчитаем расстояние между меридианами Ь'.
РД = Ъ°=\№ к O8t
lgd' = lge.+ lgP^
lg£ = 9,27355
\%РД = 2,25527
1g У = 1,52882
b' = 33,79 мм
По рассчитанным данным наносим верхнюю, нижнюю и боковые рамки
карты. Меридианы проведем на расстоянии, равном д', и на верхней и нижней
рамках подпишем значения долгот через 3°, параллели нанесем от верхней
рамки через расстояние С/ и сделаем соответствующие подписи у боковых
рамок карты.
3. В масштабе 1:100 000 000 построить картографическую сетку в цент-
ральной косой проекции, если точка касания картинной плоскости к сфере рас-
положена в фо=40°5и Xo=13O°W, а границы района: ф1=0°00'; ф2=60°00'8;
Х,= 170°00'03t - X2=70°W.
Меридианы и параллели провести через 20°.
Решение.
а) Рассчитаем углы наклона меридианов к меридиану точки касания по
формуле (72).
tg х' e tg РДsin w
tg tg х' = tg tg РД + lg sin <p0.
lg tg 20° lg tg 40° lg tg60°
lg sin 40° 9,56107 9,80807 9,92381 9,80807 0,23856 9,80807
Igtgx' x' 9,36914 13°10' 9,73188 28’2 Г 0,04663 48°05'
125
б) На меридиане точки касания найдем положение точек пересечения ме-
ридиана с параллелями (Л и В) относительно точки касания (Фг=40°5). Раз-
ность широт согласно условию
РП1А =20° к S и РШв=20° к N.
Величину R принимаем R=6 371 110 м.
lg Я=6,80421
lg tg 20°=9,56107
lg ZA ==-6,36528
ZB=ZA =2319000 м.
В масштабе 1 : 100 000000 получим
ZA=ZB = 23\ 900 000: 100 000 000 = 2,32 см
По меридиану точки касания от Z вниз и вверх откладываем ZA=ZB=2,32 см
и наносим точки А и В, Через эти точки, согласно условию, пройдут паралле-
ли 60°S и 20°S (рис. 42).
в) Определим широты точек на земной поверхности, проекции которых оп-
ределят точки на карте, по формуле
tg <fA' = tg sec РД = tg <РД ses 20°.
lg tg60* lg tg 40’ lgtg?O°
lg sec 20° 0,23856 0,02701 9.92381 0,02701 9,56107 0,02701
Igtg^' 0,26557 1?л ,=61’31'5 9,95082 (pz,=41046'S 9,58808 =21’10'5 S
г) Рассчитаем по формуле (73) положение точек, через которые пройдут
первые перпендикуляры к меридиану точки касания.
126
Za= Rtg 21°ЗГ
Zz=Rtg 1°46'
Z5=/?tg 18°49',5
lgtg21°31' lg tg 1°46' Igtg (18°49',5)
lg R 9,59577 6,80421 8,48917 6,80421 9,53265 6,80421
lg Za Za = 6,39998 = 2512o00j« 5,29338 Zz = 196500 6,33686 Zb =2172000 м
В масштабе Za « 2,51 см; Zz = 0,2 см; Zb = 2,17 см.
д) Определим широты точек на земной поверхности, проекции которых оп-
ределят положение вторых перпендикуляров к меридиану точки касания
Ч Фл,=18Фл -sec PR
lg tg 60° Igtg 40° Igtg 20°
lg sec 40° 0,23856 0.1'575 9,92381 0,11575 9,56107 0.11575
*gtg4^, Фл, = 0,35431 = 66°08',5 S 0,03956 (pZi=47°36' S 9,67682 <pB = 25°25' S
е) Рассчитаем положение точек, через которые пройдут вторые перпенди-
куляры к меридиану точки касания
Zat = Rtg (66°8',5 — 40°) = R tg 26° 8',5;
Zzj = R tg 7°36'; Zbi = R tg 14°35'
Igtg 26°8'',5 Igtg 7°36' lg tg 14°35'
9,69090 lg R 6,80421 9,12525 6,80421 9,41526 6,80421
IgZe, 6,49511 Zax 3127000 м 5,92946 Zzt = 850100 6,21947 Zbx = 1658000
в выбранном масштабе
Za1 = 3t13 см; Zzx =0,85 cm; Zby = 1,66 cm
ж) Рассчитаем широты точек, определяющих прохождение третьих пер-
пендикуляров
Фл» = ФA SeC 600
lg tg 60° lg tg 40° lg tg 20°
0,23856 lg sec 60° 0,30103 9,92381 0,30103 9,56107 0,30103
lg tg <рл = 053959 ФЛ;=73°54'5, 0,22484 <p 2a= 59’13'S 9,86210 <pB| = 36°03'S
з) Рассчитаем положение точек, через которые пройдут третьи перпен-
дикуляры
Za2 = Rig (73°54' - 40°) - R tg 33°54';
Zzz = Rig 19°13'; Zb2 = Rtg 3°57'
lg tg 33°54' Igtg 19°13' lg tg 3°57'
9,82735 9,54228 8,83916
lg/? 6,8i >421 6,80421 6,80421
lg Zaa6,63156 6,34649 5,64337
127
Za2 = 4281000 м; Zz2= 2221000 м; Zb2=tiW№ л.
В выбранном масштабе
Za2 = 4,28 см; Zz2 = 2,22 см; Zb2 = 0,44 см.
и) Рассчитаем длины отрезков перпендикуляров: аа', zz', bb', aia[,
zxzv bxb^ а2а2, ^2z2, b2b2 по формуле
Ясозфл, sec(qp4,— <р2) tg РД
lg lg cos lg sec lg ‘g R 61°31' 21°ЗГ 20° 6,80421 9,67843 0,03137 9,56107 R 41°46' 1°46' 20° 6,80421 9,87266 0,00021 9,56107 R 21°10' 18°49',5 20° 6,80421 9,96966 0,02388 9,56107
Igaa' aa' 6,07508 1189000 л 1,19 см Igzz' zz' 6,23815 1730000 1,73 cm lg bb’ bb' 6,35882 2285000 2,28 cm
lg lg cos lg sec lg tg R 66° 8',5 26° 8',5 40° 6,80421 9,60690 0,04687 9,92381 R 47°36' 7°36' 40° 6,80421 9,82885 0,00383 9,92381 R 25°25' 14°35' 40° 6,80421 9,95579 0,01422 9,92381
Ig^ 6,38179 2409000 lg 2121 6,56070 3637000 lg Mi' 6,69803 4989000
2,41 cm ./ 21 Z, 3,64 cm 4,99 cm
lg R 6,80421 R 6,80421 R 6,80421
Igcos 73°54' 9,44297 59°13' 9,70909 36° 3' 9,90768
lg sec 33°54' 0,08092 19°13' 0,02490 3°57' 0,00103
lg‘g 60° 0,23856 60° 0,23856 60° 0,23856
lg “2 *2 6,56666 3687000 м lgZ2Z2 6,77676 5981000 м lg bt b'2 6,95148 8943000 л
3,69 cm z2z' 5,98 cm Ьг b2 8,94 см
На листе бумаги (рис. 42) нанесем меридиан точки касания, а также точку
касания Z. Затем нанесем точки Л и В, после чего последовательно нанесем
на меридиане точки касания, точки а, а\, а2, z, zlt z2, b, b\, b2 и к ним прове-
дем перпендикуляры, на которых отложим рассчитанные величины аа', aia/,
bib/t а2а2' и т. д. вправо и влево от меридиана 130°. Получим таким образом
точки а', а/, а2, а", at", а2" и т. д., которые соединим с помощью лекала плав-
ной кривой, получая параллели. Через эти точки пройдут и меридианы
в виде прямых линий. Для контроля проверим углы, образованные меридиана-
ми, с меридианом точки касания. В нашем примере они соответствуют рассчи-
танным величинам.
4. В масштабе 1 : 20 000 000 построить в экваториальной гномонической
проекции картографическую сетку для района с границами <Pi=15° S,
Ф2 = 15°N, X1 = 8u°O9t, X2=100°Ost, принимая за меридиан точки касания
90°Ost- Параллели и меридианы нанести через 5°.
Решение, а) Рассчитаем расстояние между меридианом точки касания
и заданными меридианами 95, 100° по формуле (63)
Za = R tg (95°—90°) = /?tg 5°;
Zai-=/?tg 10°
128
Igtg 5° Igtg 10°
8,94195 9,24632
lg/? 6,80421 6,80421
lg Za 5,74616 lg Ze, 6,05053
Za =557400 м Za, = 1123000 л
В масштабе 1 : 20 000 000
Za—2,56 см; Zax=5,62 см.
Очевидно, от меридиана точки касания вправо и влево, отстояние мери-
дианов с одной и той же РД будет одинаково. Нанесем меридианы в виде па-
раллельных прямых (рис. 43).
б) Рассчитаем расстояние от вершин параллелей (гипербол)
Zb tg 5°;
Zbx tg 10°;
Zb2=JRtgl5°.
! Igtg 5° igtg io° Igtg 15°
lg# 8,94195 6,80421 9,24632 6,80421 9,42805 6,80421
lg Z&, 5,744616 | lg Z&, 6,05023 lg Z&2 6,23226
Zb = 5574000 m\ Zbt = 112300© Zb2 = 1207000 m.
9 Навигация
129
В выбранном масштабе
Zb = 2,56 см; Zbi = 5,62 см; Zb2— 8,53 см.
в) Рассчитаем отстояние точек пересечения меридианов с параллелями
• ab'=Rtg 5° sec 5°
a*"--=/?tg 5° sec 10°
10° sec 5°
^l=/?tglO° sec 10°
ab2=Rtg 15°sec 5°
ab^—R tg 15°sec 10°
ab' atb" abr a^2
lg# 6,80421 6,80421 6,80421 6,80421 6,80421 6,80421
Igtg <р 8,94195 8,94195 9,24632 9,24632 9,42805 9,42805
lg sec РД 0,00166 I _0,00665 0,00166 0,00665 0,00166 0,00665
lg aV 5,74782 5,75281 I 6,05219 6,05718 6,23392 6,23891
ab' 559500 566000 1128000 1141000 1714000 173300
ab' 2,80 cm 2,83 cm | 5,64 cm 5,75 cm 8,57 cm 8,67 cm
В середине листа бумаги наметим точку касания картинной плоскости Z;
проведем экватор и меридиан точки касания. После этого наметим точки вер-
шин гипербол и нанесем точки пересечений меридианов и параллелей. На карте
будет четыре четверти, которые строятся по одним и тем же расчетным
данным.
Задачи
1. Масштаб карты по главной параллели 52° равен 1 : 10 000. Определить
частный масштаб в <?i=40°, учитывая сфероидичность Земли.
2. Масштаб по главной параллели c?o’“44°N равен 1 : 2 000 000, рассчитать
единицу карты.
3. Масштаб по главной параллели <р0~52° I : 3 000 000. Какова длина эк-
ваториальной минуты на этой карте?
4. Рассчитать рамку меркаторской карты для границ района: <pi=0°, с2=
=5’ N, XI = 10°20'Ost, X2=20°20'Ost .
Масштаб по экватору 1:10 000 000.
5. Рассчитать рамку мер^торской карты для границ района:
<P,=20eN, <p2=30°N, X,-125° Ost, Xs=145°Ost.
Масштаб по главной параллели 45°N равен 1 : 6 000 000.
6. Построить сетку в меркаторской проекции для района в границах
<P1 = 25°00,N, <Р2=35°ОО'N, Xj = 120°00' Oet, Xa-130°Ost в масштабе
1 : 4 000 000 по главной параллели 45°. Параллели и меридианы нанести че-
рез 4°.
7. Построить сетку в меркаторской проекции для района в границах
<pi=0°, <?2=5°00' N, k3 = 20°00' O8t, Х2= 10°20' Ost в масштабе по экватору
1 : 5 000 000.
Параллели нанести через 1°, меридианы через 2°.
8. Построить в масштабе 1:10 000 000 картографическую сетку в цент-
ральной косой проекции, если точка касания картинной плоскости к сфере рас-
положена: <ро=45° N, Х0=120°О и район имеет границы: <p1=35°N, <р2=60° N,
Xj= 90° О9\ Х2= 150° Оst. Меридианы и параллели провести через 10°.
9. Построить в масштабе 1 : 10 000 000 картографическую сетку в цент-
ральной проекции, если точка касания Фо=0*, Xq=306w и район имеет границы:
<p3=30°S, ср2=30° N, *1=0°, X2=60°W.
Меридианы и параллели провести через 10°.
130
10. Построить в масштабе 1 : 10 000 000 картографическую сетку в цент-
ральной нормальной проекции для широты <рг = 50°, <ра=90в.
Параллели нанести через 10°, меридианы через 20'.
Ответы:
1. 1 : 12 430. 2. 0,6684 мм. 3. 0,3815 мм. 4. £ = 111,3 мм; С=55,36 мм.
5. £ = 262,82 мм; С= 144,5 мм. 6. е = 0,3285 мм; £=197,1 мм; С = 226,95 мм;
С[~88,05 мм; С2 = 91,6 мм; £/=78,8 мм. 7. е=0,37 аш; £ = 222,6 мм;
= 110,7 мм; С]=22,1; С2 = 22,2; С3 = 22,2; С4=22,2; С5=22,2 мм; £/=44,53 мм.
8. Л'=7°06'; Х' = 14°26'; Х' = 22°12< Размеры в см: Z4=Z5= 11,23;
Za=ll,71; Zz=O,48; Z£=10,76; Zai = 13,14; Zz! = l,98; Z£j=9,31;
Za2=15,61; Zz2=4,57; Z£2=6,75; aa' = 6,48; Zz'=7,88; ££' = 9,28;
13,02; 15,89; bxb\= 18,79; a2a'2= 19,64; Z2z2= 24,12; b2b2 = 28,72.
9. Размеры в см: Za—11,23; Zaj = 23,19; Za2=36,78; Z£==ll,23;
Z£i = 23,19; Z£2=36,78; a£'=ll,41; a'£"=ll,95; a2£"=12,97; a b{ =23,55;
a'b\= 24,68; = 26.78 aZ>;=37,35; 39,14; atb^‘ =42,47.
10. Poo =11,23; p?o = 23,19; peo=36,78; p50 = 53,46.
Контрольные вопросы
1. Что такое главная параллель моря?
2. Что такое единица карты?
3. Что такое меркаторская миля?
4. Как используется табл. 9 для построения меркаторской карты?
5. Под каким углом наклона проходит меридиан точки к меридиану точки
касания в косой нормальной и экваториальных проекциях?
6. Как классифицируются карты по назначению?
7. Почему на путевых картах всегда наносят двадцатиметровую изобату?
8. В чем сущность подъема карты?
9
РАЗДЕЛ ТРЕТИЙ
СЧИСЛЕНИЕ ПУТИ СУДНА
Глава VIII. ГРАФИЧЕСКОЕ СЧИСЛЕНИЕ — ПРОКЛАДКА
§ 40. СУЩНОСТЬ ГРАФИЧЕСКОГО СЧИСЛЕНИЯ
Для безаварийного плавания судоводитель обязан вести учет
движения судна или, как принято называть в навигации, счисле-
ние пути судна. Счисление пути судна, в зависимости от условий
плавания, производят двумя способами:
а) путем графических построений на карте, на основании ко-
торых можно в любой момент указать предполагаемое место суд-
на; такое счисление называется графическим]
б) путем вычислительной работы по таблицам; такое счисле-
ние называется письменным.
При графическом счислении пути судна контроль за его пере-
мещением ведется с помощью обсерваций, производимых навига-
ционным, радионавигационным и астрономическим путями. Об-
сервованные места, т. е. истинные места судна, наносятся на кар-
ту также с помощью графических построений, а дальнейшее
счисление ведется от этого .места. Совокупность всей графической
работы по учету и контролю движения судна, производимой на
навигационной карте для обеспечения безопасности судовожде-
ния, называется прокладкой.
Различают два вида прокладки: предварительная и испол-
нительная. При предварительной прокладке:
а) изучается предстоящий переход;
б) выбирается наивыгоднейший путь следования к пункту наз-
начения;
в) прокладывается на карте путь судна;
г) обеспечивается площадь для возможного отклонения от на-
меченного пути судна, которое может произойти из-за недостаточ-
но точного учета гидрометеорологических факторов и поправок
приборов;
д) производится предварительный расчет продолжительности
рейса, необходимый для того, чтобы знать какие нужны запасы
топлива, воды и другого снабжения;
132
е) проверяется наличие всех необходимых для рейса карт,
планов и навигационных пособий.
Прежде чем приступить к выполнению предварительной про-
перехода, лоции
(«Огни и знаки»,
«Таблицы прили-
кладки, судоводитель должен изучить карты
района плавания и навигационные пособия
«Радиотехнические средства судовождения»,
вов», справочные карты по данному району и др.). Это позволит
нанести на карту расстояния до опасностей и приметных мест,
на которые будут удалены курсы судна, наметить ориентиры, на
которые нужно выйти, а также точки поворотов с таким расчетом,
чтобы после поворота можно было бы проконтролировать свое
место обсервацией. Далее следует рассчитать время, когда нуж-
но проходить особо опасные места, требующие прохода их в свет-
лое время суток, и соответственно с этим определить время выхо-
да из порта.
На навигационные карты наносятся истинные курсы, а на
них, исходя из средней скорости судна, — промежуточные точки
так называемого оперативного времени, по которому выход из
порта обозначается 00 час 00 мин без обозначения даты.
Одновременно с предварительной прокладкой производится
подъем карты, во многих деталях дополняющий предваритель-
ную прокладку.
На подходах к якорной стоянке наносятся пеленги ориенти-
ров, определяющие место отдачи якоря. В некоторых случаях,
если переход несложный, нанесение истинных курсов предвари-
тельной прокладки можно производить на генеральных картах,
но и в этом случае истинные курсы на подходах к узкостям, а
также в узкостях и портах наносятся на картах самого крупного
масштаба.
Ведение исполнительной прокладки во время перехода обя-
зательно на всех судах независимо от их тоннажа. Прокладка
должна вестись:
а) на карте самого крупного масштаба откорректированной
на дату выхода в море; б) непрерывно с момента выхода судна
из порта до прихода в другой порт; в) тщательно, с учетом всех
возможных отклонений судна от курса; г) последовательно с пе-
реходом от одной точки к другой, не упуская любой возможно-
сти проконтролировать счислимое место обсервацией; д) акку-
ратно и чисто.
При ведении прокладки над линиями истинных курсов надпи-
сывается КК и Д/С У каждой счислимой точки в числителе запи-
сывается время по судовым часам с точностью до 1 мин, а в зна-
менателе отсчет лага о точностью до 0,1 деления. Линия между
числителем и знаменателем проводится параллельно параллели
карты. На карте должны быть указаны невязки между счисли-
мыми и обсервованными местами. На рис. 44 изображен вид про-
кладки. На нем позиция I обозначает астрономическую обсерва-
цию; II—место по радиопеленгам; III—счислимое место; IV—на-
133
вигационную визуальную обсервацию; V—место, полученное с
помощью локатора.
Для ведения прокладки судоводитель использует показания
различных приборов (компаса, лага, радиопеленгатора, радиоло-
катора). Выполняется работа мореходными инструментами: цир-
кулем, измерителем, линейкой, логарифмической линейкой, транс-
портиром, пеленгатором, протрактором и секстаном. Графиче-
ская работа ведется остро очиненным карандашом средней мяг-
кости, так как карандаш не должен резать карту. Все лишние ли-
нии при графических построениях стираются резинкой.
Данные для прокладки записываются предварительно в чер-
новой журнал мягким карандашом, а затем в судовой журнал
чернилами. Для ведения различных расчетов у судоводителя
должны быть приготовлены: экземпляр «мореходных таблиц»,
таблицы радиодевиации, девиации магнитного компаса, попра-
вок лага, поправок дальности видимости предметов для различ-
ных высот глаза наблюдателя и др.
§ 41. ТОЧНОСТЬ ГРАФИЧЕСКОГО СЧИСЛЕНИЯ
Основными данными, служащими судоводителю для ведения
графического счисления, являются курс судна и расстояние, про-
ходимое судном за определенное время. На карте прокладывает-
ся ЯК, рулевой же ведет судно по компасному курсу. Истинный
и компасный курсы связаны поправкой компаса, состоящей из
склонения и девиации. Как склонение, так и девиация известны
судоводителю с какими-то ошибками, поэтому общая поправка
компаса, служащая для расчета истинного курса, содержит так-
134
же некоторую ошибку ±е°. В зависимости от изученности райо-
на плавания в магнитном отношении принято считать, что ошиб-
ка в общей поправке компаса может колебаться от 0°,25 до 1°,5,
а в некоторых случаях и больше. Такого же порядка ошибке под-
вержены и поправки гирокомпаса. Поправка лага также может
изменяться, что влечет за собой ошибку в рассчитанном судово-
дителем плавании.
Ошибки в поправках лага и компаса влияют на точность рас-
считанного счислимого места. Допустим, что судно вышло из
точки А (рис. 45), следуя ИК. Пренебрегаем неточностью графи-
ческих построений на карте и полагаем, что общая поправка, с
помощью которой переводится ИК в компасный, имеет ошибку
±ек. Через какой-то промежуток времени судно, совершив плава-
ние 5, придет не в точку В, расположенную на линии ИК, а в
точку 7И1 или в точку M2f в зависимости от знака ошибки в по-
правке компаса, т. е. судно уклонится от линии ИК на длину ду-
ги ВАН или ВМ2. Заменив дуги' их хордами, из треугольников
ЛВ7И1 и получим значения линейной ошибки счисления
ВМг = ВМ2 = S sin E/f,
но
sin s* = £°агс 1°,
следовательно,
о
BM1 = BM2 = S-^-.
1 J 57 ,3
Для приближенных расчетов можно считать
О
е
ВМг = ВМ2 = S—^—, (79)
т. е. при ошибке в поправке компаса равной ±1° и при плавании
5=60 милям судно может оказаться правее или левее своего
курса на 1 милю.
135
Если поправка лага имеет ошибку ±ел, то плавание S будет
рассчитано с ошибкой ±AS, которую можно определить по
формуле
если ел выражена в %,
и AS= ± £^S>
если ел — в сотых долях коэффициента лага.
При наличии ошибок ±еЛи ±вл одновременно, что всегда
бывает в практике, нужно от точки Mi отложить отрезки М\а и
М1в, а от точки М2 отрезки ЛУ и M2g, т. е. +AS—AS и полагать,
что судно находится в одной из точек a, b, f, g в зависимости от
сочетания знаков ошибок гк и ел. Считая, что предполагаемые
ошибки ед- и имеют максимальное значение, истинное место
судна будет внутри площади a b f g.
Учитывая,что приведенные нами расчеты^являются прибли-
женными, можно вычислить длину отрезка В а = р как гипотену-
зу прямоугольного треугольника BMia, катет которого BMX =
S —
= а катет Mia= или А11а = еЛ5 в зависимости от
того, в чем выражена
Тогда
— 570,3 ) + (ел S)a .
Величину р можно считать радиусом вероятного круга местона-
хождения судна, который называется кругом погрешности. Для
приближенных расчетов считают BAfi=S —6^> тогда
или
Г о2 -«2
Р = 600 У Ю0еЛ4"36ел
(80)
или, выражая ошибку коэффициента лага в сотых долях коэффи-
циента, ____________
Р = .? + 3600.;. (81)
На современных судах ошибка в поправке компаса часто
меньше ошибки в коэффициенте лага, поэтому образуется эллипс
погрешности, ориентированный так, что большая ось его совпа-
136
дает с направлением движения судна, а малая перпендикулярна
ему:
величина большой полуоси
а = AS = sj,S = e',T^,
» малой »
Таким образом, при переходе из точки А в точку В, если не
контролировать счисление обсервациями, судно должно считать
себя не в точке В, а внутри эллипса, построенного на полуосях
а и в. Величины ошибок в« и судоводителю неизвестны, так
как они носят случайный характер, но он может предполагать
пределы ошибок в поправках компаса и лага на основании прак-
тических наблюдений. Если из точки В судно следует дальше, то
прокладывать курс нужно от трех точек эллипса, от точки В, яв-
ляющейся серединой эллипса, и от крайних точек, находящихся
на нем. На подходе к узкости в плохую видимость, если площадь
вероятного местонахождения проходит свободно в узкость, мож-
но вести судно в нее выбранным курсом, в противном случае не-
обходимо уточнить свое место каким-либо другим способом и
только после этого входить в узкость. Нетрудно заметить, что
величина площади вероятного местонахождения судна пропор-
циональна плаванию S. На судно воздействуют ветер и течение,
которые сносят его вправо или влево, вперед или назад по курсу.
Снос этот судоводитель учитывает, но также с некоторыми по-
грешностями, которые вызывают ошибку в счислимом месте. Пои
этом ошибка, выраженная площадью фигуры, пропорциональна
времени воздействия гидрометеорологических факторов на судно.
§ 42 ЦИРКУЛЯЦИЯ
Для изменения курса судна руль перекладывается в сторону
поворота на определенное число градусов, и судно, постепенно
меняя курс, описывает кривую (рис. 46). Кривая, описываемая
центром тяжести судна, движущегося при выведенном из прямо-
го положения руле, называется циркуляцией. На судне при нор-
мальной загрузке точка, вокруг которой поворачивается судно,
(центр поворотливости) расположена впереди центра тяжести
примерно на расстоянии 1/3 длины судна от форштевня. Установ-
лено, что после того, как руль переложен, судно какое-то время
продолжает следовать по первоначальному курсу. И лишь в не-
которой точке А оно начинает уклоняться в сторону, противопо-
ложную той, куда положен руль. Только достигнув точки В, суд-
но начинает катиться в сторону перекладки руля. Время от мо-
мента перекладки руля до момента поворота судна в сторону пе-
137
рекладки руля называется предварительным периодом циркуля-
ции. Расстояние, на которое центр тяжести судна сместился в
противоположную повороту сторону Вв называется обратным
смещением судна. Оно равно около Vs ширины судна В,
Величина предварительного периода циркуляции зависит от ти-
па судна, его инерции и наличия ветра и волнения. На крупных
судах предварительный период циркуляции доходит до 1 мин.
Следовательно, необходимо заранее предусматривать расстояние,
которое может быть пройдено судном в предварительный период
циркуляции, чтобы начало поворота совпадало с выбранной точ-
кой поворота на карте. От точки В до момента, когда курс судна
изменится на 120—180°, центр тяжести судна описывает спираль-
ную кривую, называемую неустановившейся циркуляцией. Рас-
стояние между линией первоначального курса и диаметральной
плоскостью судна в момент поворота на первые 180° называется
тактическим диаметром циркуляции . Время, за которое судно
совершает неустановившуюся циркуляцию, называется эволю-
ционным периодом циркуляции Лео-После поворота на 120—180°
центр тяжести судна описывает кривую, близкую к окружности,
138
&
«которая называется установившейся циркуляцией, а отрезок B}F
называется диаметром установившейся циркуляции Dy.
Во время циркуляции нос судна направлен внутрь описывае-
мой циркуляции и угол р, образованный диаметральной плос-
костью судна и касательной к циркуляции, называется углом
дрейфа. Обычно' величина угла дрейфа не превышает 5—10°.
Для навигации имеет значение тактический диаметр цирку-
ляции. Половина тактического диаметра называется радиусом
циркуляции
— ~2~ .
Величина тактического диаметра циркуляции зависит от обводов
и размеров судна и пера руля, от осадки и скорости судна, от по-
ложения лера руля на повороте. Определяется эта величина при
прогрессивных испытаниях судна в грузу и балласте на полном,
среднем и малом ходах для различных положений руля через
5—10°,
Тактический диаметр циркуляции определяется следующими
способами.
По створу и ориентиру. Имея в пределах видимо-
сти на берегу створ и отдельный ориентир (рис. 47,а), располо-
женный на расстоянии S от линии створа, ложатся на курс, пер-
пендикулярный линии створа. Учитывая предварительный пе-
риод циркуляции, перекладывают руль. К моменту, когда судно
пошло на циркуляцию и вышло на створ, измеряют секстаном
горизонтальный угол ъ, образованный створом и направлен-
ный на ориентир. Одновременно пускают секундомер. Изменив
курс на 180°, судно вновь выходит на створ. В этот момент оста-
навливают секундомер и измеряют угол • Затем, сняв с кар-
ты расстояние S от ориентира до створной линии, рассчитывают
величину £>] и D2
D^Sctg^;
D2^S ctg ъ.
Тактический диаметр циркуляции определится по формуле
Dr — D2
В момент выхода судна на створ можно взять пеленги ориен-
тира по компасу и, исправив их поправкой компаса, рассчитать
углы 7! И 72:
Ъ = ИПст — ИПи
Т2 = ИП ст — ИП2,
а затем вычислить DT.
Чтобы избежать вычислительной работы, можно проложить
ИП\, ИП2 на карте крупного масштаба и определить последова-
тельно два места судна на створе и М2 (рис. 47,5). Величину
DT снимают в этом случае с карты измерителем. Эволюционный
период циркуляции Т ]8о даст отсчет секундомера.
Способ М. Н. Андреева. Этим способом можно опре-
делить элементы циркуляции в открытом море,во время измене-
ния курса судна. Следуя компасным (курсом и выйдя на
циркуляцию в точке В (рис. 48), пускают секундомер и замечают
отсчет лага ОЛ\. После того как судно изменило курс на 60—100°,
замечают курс по компасу, останавливают секундомер и замеча-
ют отсчет лага ОЛ2. Разность компасных курсов даст угол а в
центре циркуляции, а пройденное расстояние S=(CMZ2—ОЛХ)
Кл будет дугой циркуляции, поэтому
5 _ 57°,35
а а°
Эволюционный период циркуляции рассчитается по отсчету се-
кундомера Та
Точность определенного таким образом диаметра циркуляции
зависит от системы лага. Забортные вертушечные лаги дают
очень низкую точность в связи с изменением коэффициента ла-
га, который изменяется с изменением скорости судна на цирку-
ляции и уменьшается на 25—50%. Кроме того, на счетчиках
этих лагов точность отсчета лага равна 1 кбт., что вызывает не-
точность измерения дуги циркуляции, а следовательно, и такта-
140
ческого диаметра. Гидравлические лаги имеют коэффициент ла-
га, не изменяющийся с изменением скорости, из-за применения
устройств, автоматически исключающих погрешности за переме-
ну скорости. Точность отсчета пройденного расстояния у гидрав-
лических лагов 0,1 кбт. Поэтому при определении способом
Андреева следует пользоваться показаниями гидравлических
дагов.
Радиолокационный способ. Для определения DT в.
условиях различной видимости используют дальномер судовой
РЛС. Для выполнения этой работы не нужно выходить на ство-
ры, а достаточно иметь один хорошо видимый на экране РЛС
ориентир. Следуя вдоль берега, на котором расположен ориен-
тир, выходят на траверз его, измеряют радиолокационное рас-
стояние -Di, пускают секундомер и, переложив предварительно
руль, выходят на циркуляцию (рис. 49). Изменив курс на 180°,
приходят вновь на траверз ориентира, вторично измеряют радио-
локационное расстояние D2 и стопорят секундомер. Разность
измеренных расстояний дает тактический диаметр циркуля-
ции
dt=d2-Z)p
Отсчет секундомера даст период Т 18о.
14Г
Можно определить элементы циркуляции и в открытом море
на спокойной воде. Для этого нужно на судне изготовить радио-
локационную веху с уголковым отражателем и, выпустив ее в
воду, получить радиоориентир, которым можно пользоваться как
береговым ориентиром. В связи с тем, что веха свободно плавает,
то наличие течения не искажает результатов работы.
§ 43. УЧЕТ ЦИРКУЛЯЦИИ
Для повышения точности счисления нужно учитывать цирку-
ляцию. При графическом счислении циркуляцию целесообразно
учитывать на картах крупного масштаба.
Существует несколько приемов учета циркуляции в графи-
ческом счислении.
Прием П. А. Домогарова. Судно, следующее ИК\, в
точке В (рис. 50) вышло на циркуляцию и, описав ее, легло на
ИК2 в точке С. С незначительной для практики ошибкой, дугу
циркуляции можно считать дугой окружности, проведенной из
центра О. Угол между ИК.\ и ИКъ называется углом поворо-
та a=ZKi^2, угол ЕВС= ЛЕСВ=-^--------курсовым углом про-
межуточного курса. Хорда, стягивающая дугу циркуляции
BC=d, называется длиной промежуточного курса, отрезок
BE—d\— расстоянием до нового курса.
Для учета циркуляции на карте нужно найти положение точ^
ки конца поворота С, относительно точки начала поворота
Для решения графической задачи рассчитывают:
1) —ИК2 при повороте влево,
а = ИК2—HKi при повороте вправо;
142
2) длину промежуточного курса d=2BE= 2/?ц sin
3) расстояние до нового курса di = ВЕ=7?Ц tg-^-'.
Из точки В под углом к ИК\ проводят прямую, на которой
откладывают рассчитанное значение d , и получают точку С.
От этой точки прокладывают ЯК2. Можно также отточки В по ли-
нии ИК\ отложить расстояние d\. А затем из полученной точки Е
проложить ЯА2. На линии ИК откладывают тоже пройденное
расстояние rfi, получив точку С, в которой замечают время и от-
счет лага для дальнейшего счисления.
Время поворота рассчитывается по формуле
—"180 *
Для того 'чтобы при каждом повороте не вычислять ве-
личины d и 6?i, заранее рассчитывают таблицу циркуляции по
приведенным выше формулам или графическим путем. Графи-
ческим путем это производится следующим образом: на милли-
метровой бумаге в произвольном масштабе строят график
(рис. 51). Наносят дугу полуокружности радиусом, равным ра-
диусу циркуляции и отмечают на ней точки через 10°. Точку А
считают началом поворота и соединяют ее с каждой точкой на
дуге окружности. Расстояние, снятое с графика в том же вы-
бранном масштабе от этой точки до каждой точки на дуге окруж-
ности, является промежуточным расстоянием для каждого из уг-
лов поворота, отсчитываемых по дуге окружности от точки А.
Для определения величины d в точке А восстанавливают пер-
пендикуляр и из центра полуокружности О проводят, через де-
ления на дуге окружности, прямые до пересечения с перпенди-
143
куляром. На полученных делениях перпендикуляра надписыва-
ют значения соответствующие значениям делений на полу-
окружности. Расстояния от точки А до этих делений, в том же
1 \
А Кц О
Рис. 51
масштабе, что и являются расстояниями до новых курсов, т. е.
d^R^g^-, Снятые с графика значения d и dh а также рас-
считанные величины времени поворота, сводятся в таблицу.
Предположим, что V —10 узлам. £>т = 6 кбт., 7'iso = 5 мин, руль
20°. Получим следующие значения:
Промежуточный курс Расстояние
Угол Время пово- а0 до нового
поворота, а° рота ,Та мин /<у= у- dt кбт. курса dy кбт.
10 0.3 5 1 0,5 0,5
30 0.8 15 1,6 0,8
50 1.4 25 2,5 1,4
70 1.9 35 3,4 2,1
90 2.5 . 45 4,3 3,0
ПО 3.1 55 4,9 4,3
130 3.6 65 5,5 6,4
150 4.2 75 5,8 11,2
170 4.7 85 6,0 —
180 5.0 90 6,0 —
144
Аналогичные таблицы составляются для различных углов
перекладки руля 5°, 10°, 15°, 20°, 25°, 30°.
Прием М. Н. Андреева. Этот способ используется в тех
случаях, когда неизвестен радиус циркуляции. Для его примене-
ния необходимо иметь на судне хорошо отрегулированный гид-
равлический лаг.
Допустим, что судно следует ИКГ (рис. 52); в точке В оно
пошло на циркуляцию и, описав ее, в точке С легло на новый
курс И/С2. Центр циркуляции находился в точке О. Тогда
ОВ—ОС = ЯЦ, Из точки С опустим перпендикуляр на линию
и второй перпендикуляр CL к радиусу ОВ. Угол поворота а об-
разуется радиусами ОВ и ОС. Из прямоугольного треугольни-
ка OLC получим
OL =. /?цсо8я; LC = /?qsina.
Обозначив LC = BM = m и LB = CM— п3
получим т = sin a; п = /?ц — /?ц cos а =/?ц (1 — cos a),
но ^4= Г’
где S — длина пути поворота, вычисленная по формуле (48)
Подставив значения , получим
57°,3 с .
т = —5 sin a;
a ’
с?о о
n = - gO~ S(1 — COS a). (84)
10 Навигация
145
Для практических целей по формулам (84) составлена
табл. 10, из которой по значениям 5 и а выбирают величины
т и п. Угол поворота рассчитывается по формуле а = ИК\—ИК2
(при повороте влево) и а = ИК2—ИК\ (при повороте вправо). По
линии ИКг от точки начала поворота откладывается величина т,
а по перпендикуляру, восстановленному к ИК\ в точке М, от-
кладывается величина п. Из точки С на карте прокладывается
ИК2. У точки С записывается время Т2 и отсчет лага ОЛ2.
Таблица 10
a'J 5. кбт.
1 2 3 4 5 6 7 8 9 10
10 т 1,0 2,0 3,0 4,0 5,0 6,0 7,0 8,0 I 9,0 10,0
п 0,0 0,0 0,5 0,5 0,5 0,5 0,5 1.0 1 1.0 1,0
30 т 1,0 2,0 3,0 4,0 5,0 5,5 6,5 7,5 8,5 9,5
п 0,5 0,5 1,0 1,0 1,5 1.5 2,0 2,0 2,5 2,5
50 т 1.0 2,0 2,5 3,5 4.5 5,5 6,0 7,0 8,0 9,0
п 0.5 1,0 1,0 1.5 2,0 2.5 3,0 3,5 3,5 4.0
70 т 1,0 1.5 2.5 3,0 4,0 4,5 5.5 6,0 7,0 7,5
п 0,5 1.0 1,5 2,0 2,5 3,0 3,5 4,5 5,0 5,5
1 т 0,5 1,5 2,0 2,5 3,0 4,0 4,5 5,0 5,5 6,5
1 п 0,5 1,5 2.0 2,5 3,0 4,0 4.5 5,0 5,5 6,5
т 0,5 1,0 1.5 2,0 2,5 3,0 3,5 4,0 4,5 5,0
п 0,5 | । 1 1,5 । 2,0 3,0 3,5 4,0 5,0 5,5 6,5 7.0
130 т 0,5 0,5 1,0 1,5 1,5 2,0 2,5 2,5 3.0 3,5
п 0,5 1.5 2,0 3,0 3,5 4,5 5,0 5,5 6,5 7,0
150 т 0,0 0,5 0,5 1.0 1,0 1.5 1.5 1.5 1.5 2,0
п 0,5 1,5 2,0 3,0 3,5 4,5 5,0 5,5 6,5 7,0
170 т 0,0 0,0 0,0 I 0,0 0,5 I 0,5 0,5 0,5 0,5 0,5
п 0,5 1,5 2.0 ] 2,5 3,5 4,0 4,5 5,5 6,0 6,5
Как видно из формул (84), таблица пригодна для различных
радиусов циркуляции и, следовательно, для различных скоростей
судна при различных положениях руля.
Графический прием. Этот способ можно применять в
том случае, если известен радиус циркуляции. Если на карте про-
ложен старый и новый истинные курсы, нужно параллельно ли-
ниям ИК провести прямые на расстоянии, равном радиусу цир-
куляции, взятом в масштабе карты. Точка пересечения этих пря-
мых О явится центром циркуляции (рис. 53). Перпендикуляры,
опущенные из точки О на линии ИК, дадут начальную точку по-
146
ворота В и конечную точку поворота С. Этот способ определения
радиуса циркуляции более прост, но и менее точен, чем осталь-
ные.
ПРИМЕРЫ.
1. При плавании судна постоянным курсом S = 260 миль предполагаемые
ошибки в поправке компаса ек=+1°Д а лага ел = ±5%. Определить радиус
круга погрешности и полуоси эллипса ошибок.
Решение. Для решения используем формулу (81). Для этого значение
переведем в Получим
5% =0,05.
По формуле (81) -
Р = /(1,5; 4-3600-0,0025 ,
Р = 4.5 /1125" = 4,5lg 11,25,
1g 11.25= 1,05115,
lg 11,25 = 0,52557,
/ 11,25 = 3,3545,
р —4,5X3,3545= 15,1 мили.
Определим большую полуось а и малую Ь.
а=ел5 = 0,05 • 260—13,0 милям.
, с 260-1,5 _7_
b = S = ——— = 6,75 мили.
оО 60
Как видно из рис. 54, площадь вероятного местонахождения судна, опре-
деленная в виде эллипса ошибок, меньше круга погрешности.
2. В 10ч10Л с судна, вышедшего на створную линию 40—220° ИК=130°,
измерили секстаном угол между створной линией и отдельно стоящим ориен-
тиром 71=80°2л. Одновременно положили руль право 15°. В 10*22Л вто-
10* 147
рично на ИК=310° вышли на створ и измерили угол между створом и ориен-
тиром 73—55°58/. Длина перпендикуляра, опущенного из точки ориентира на
створную линию, снята с карты и равна 12 кбт. Определить тактический диа-
метр циркуляции и эволюционный период циркуляции.
Решение. Расстояние от судна до основания перпендикуляра D\ и D2
рассчитаем по формуле
D = Sctg у.
Прологарифмируем выражение
lg D = 1g 5 + lg ctg 7.
lg ctg 80o2z
9,24484
lg 12 1,07918
lg = 0,32402
Dt =2,1 кбт.
lg ctg 55°58z
9,82953
________1,07918
lgZ)2 =0,90871
Dz — 8,1 кбт.
Dr =8,1 — 2,1 =6 кбт.
Эволюционный период циркуляции будет
Т180= 10ч22л — 10ч 10* = 12 мин.
3. При повороте вправо с KKi=48° на КК2=162°,6 было замечено время
на циркуляции Га=4,2 мин, и отсчеты лага в момент выхода на циркуляцию
и выхода из нее: ОЛ1 = 68,7; ОЛ2=70,2; Кл=4,05. Рассчитать радиус и эволю-
ционный период циркуляции.
Решение а) Рассчитаем угол поворота «
а =КК2-КК1 = 162°,6—48°= 114°,6;
148
б) Рассчитаем плавание на циркуляции по формуле (48)
5= (70,2—68,7) 1,05= 1,57;
в) Рассчитаем радиус циркуляции по формуле (82)
п 57°,35 '57,3-1,57 _ й_ .
114°,6~ = 7’85 кбт;
г) Рассчитаем эволюционный период циркуляции по формуле (83)
_ 4,20-180 „„
?180 = ~ П46 = 6,6 мин.
4. Судно шло ЯК1 = 68д, Положив руль влево, оно легло на ИК2=318а. На
циркуляции судно прошло по лагу 10 кбт. Определить величины тип для
прокладки на карте.
Решение. Рассчитаем угол поворота о-
а = 68° — 318° = 110°.
В табл. 10 по углу поворота и 5 находим
т = Ь кбт; п = 7 кбт.
Если таблицы нет, следует использовать формулы (84).
Задачи.
1. 5=160 миль. Предполагаемые ошибки в поправке компаса = ±0,°5,
в коэффициенте лага ел = ±0,08. Определить радиус круга погрешности.
2. 5=90 миль. Предполагаемые ошибки в Д К—еЛ = ±Г, а в К л— £л —
= ±0,04. Определить полуоси эллипса ошибок.
3. 5=300 миль. Предполагаемые ошибки вАК — вк = ±0°,2, а в КА—гл=
— ±0,06. Определить радиус круговой ошибки и полуоси эллипса ошибок.
4. Пересекая створную линию под углом 90°, с судна измерены углы меж-
ду створом и ориентиром в момент створа и начала поворота и в момент
створа и конца поворота:
7 = 75°33', 72~ 68°5'. Определить DT, если расстояние ориентира до створ-
ной линии 20 кбт.
5. При повороте влево с KKi = 140° на КК2=44° были замечены время на
циркуляции Та= 3,3 мин и отсчеты лага в момент входа на циркуляцию
ОЛ] = 12,7 и выхода из нее ОЛ2= 13,3; Кл=0,96. Рассчитать тактический диа-
метр и эволюционный период Циркуляции.
6. При повороте вправо с KKi=250° на КК2^328О замечено по секундо-
меру время на циркуляции Та =3,9 мин и отсчеты лага в начале циркуляции
ОЛ1 = 21,4 и в конце ОЛ2 = 22,2; Кл =0,98. Рассчитать тактический диаметр и
эволюционный период циркуляции.
7. Судно, следуя /Мл = 210°, изменило курс влево и легло на WC2—130;
DT =6 кбт., Т18!; =4 мин. Рассчитать курсовой угол, длину промежуточного
курса и время поворота.
8. Судно, следуя =350°, изменило курс вправо и легло на ЯК2=90°;
£>г=4 кбт; Т180 = 5 мин- Рассчитать расстояние до нового курса и время по-
ворота.
9. Судно следовало HKi=322°. Положив руль вправо, оно легло на
ЯК2=72°. На начало поворота ОЛ1 = 20,8, на конец поворота ОЛ2=21,7. Опре-
делить величины тили проложить на карте.
10. Судно следовало ЯАл = 80°. Положив руль влево, оно легло на
WC2 = 210°. На циркуляции пройдено 5=6 кбт. Какова будет линейная ошибка
в сторону от курса, если не учитывать циркуляцию и считать начало нового
курса в точке начала поворота?
149
Ответы.
1- /3 = 13 милям,
2. а —3,6 мили, 6 = 1,5 мили.
3. р= 18,3 мили, а = 18 милям, Ь=1 мили,
4. 5 кбт.
5. £>т=б,8 кбт., Т 180=6,1 мин.
6. Dt = 11,5 кбт,, 7180 =9 мин.
7. ~2 =40°, </=3,86 кбт., Та =1,8 мин.
8. di = 2,38 кбт., Та =2,8 мин,
9. m = 4,5 кбт., п=6,5 кбт.
10. Влево от курса 3,2 кбт.
Контрольные вопросы
1. Чем отличается предварительная прокладка от исполнительной?
2. Для чего необходим подъем карты?
3. При каких условиях увеличивается площадь вероятного местонахожде-
ния судна?
4. В каких случаях учитывается циркуляция судна?
5. Какое различие между Dy и Dr?
6. Чем объяснить явление бокового смещения?
7. Что такое эволюционный период циркуляции?
8. Какие вы знаете приемы для учета циркуляции?
Глава IX. ПРОКЛАДКА С УЧЕТОМ ВНЕШНИХ ФАКТОРОВ
§ 44. ДРЕЙФ СУДНА
Дрейфом судна называется отклонение движущегося судна
с линии намеченного курса под влиянием действия на него ветра.
(Кроме приведенного навигационного определения дрейфа суд-
на, этот термин применяется и в другом смысле. Так, например,
говорят о судне, стоящем на якоре, что оно дрейфует под дейст-
вием ветра из-за того, что якорь не держит; о судне, не имеющем
хода, — что оно лежит в дрейфе; зажатое во льдах судно — на-
ходится в ледовом дрейфе).
Направление ветра считают по той точке горизонта, откуда
дует ветер, т. е. «ветер дует в компас». В зависимости от курсо-
вого угла ветра, движение судна относительно ветра носит соот-
ветствующее название. Если КУ ветра находится в пределах о г
10° правого борта до 10° левого борта, значит «судно идет со
встречным ветром» (рис. 55, направление Л). При КУ правого и
левого борта от 10 до 80° «судно идет в бейдевинд» (5). Если
ветер с правого борта, то «судно идет в бейдевинд правого гал-
са». Если ветер с левого борта, «то судно идет в бейдевинд лево-
го галса». При курсовых углах правого и левого борта от 80 до
100° «судно идет в галфинд» правого или левого галса (С). При
КУ от 100 до 170° правого и левого борта «судно идет в бакштаг»
правого и левого галса (D). При КУ ветра от 170° правого борта
150
Рис. 56
до 170° левого — «судно идет на фордевинд» (Е). Эта термино-
логия осталась на флоте со времен парусного флота.
Ветер (перемещение воздуха со скоростью и) при движении
судна со скоростью V воспринимается на судне со скоростью W и
называется наблюдаемым ветром. Наблюдаемый ветер представ-
ляет собой геометрическую разность векторов (рис. 56).
Дрейф судна вызывается наблюдаемым ветром. При одной и
той же скорости ветра максимальный дрейф судна будет при
галфипде, минимальный при бакштаге, а при бейдевинде величи-
на дрейфа принимает среднее значение. Дрейф судна зависит от
типа судна, его осадки и скорости. Так, например, суда с разви-
тыми надстройками больше сносит с истинного курса, чем суда,
у которых надстройки неразвиты. В балласте судно имеет боль-
ший дрейф, чем в грузу; быстроходные суда имеют меньший
дрейф, чем тихоходные.
Если судно следует истинным курсом (рис. 57), то под воздей-
ствием ветра оно перемещается не по линии ИК, а по какой-то
другой линии несмотря на то, что диаметральная плоскость суд-
на все время образует с Nu угол, равный ИК, Угол между нор-
довой частью истинного меридиана и линией действительного пе-
ремещения судна называется путевым углом, или путем судна.
Линия же действительного перемещения судна при наличии дрей-
фа называется линией пути. На основании сказанного вытекает
геометрический смысл дрейфа: углом дрейфа судна называется
угол <х, заключенный между диаметральной плоскостью судна и
направлением действительного его перемещения (рис. 57).
Если судно следует правым галсом, линия пути будет распо-
лагаться левее линии истинного курса и углу дрейфа правого
галса приписывается знак минус (—). Если судно следует левым
152
галсом, то линия пути будет расположена правее линии истинно-
го курса и углу дрейфа левого галса приписывается знак
плюс (+).
Истинный курс и путевой угол связаны алгебраическими фор-
мулами, вытекающими из рис. 57.
ПУ = ИК + ч
ИК=ПУ—ъ\
а = ПУ- И К.
Зная величину дрейфа, можно получить по ИК путевой угол.
Обычно ветер, превышающий по силе 3—4 балла, создает
волну и поверхностное течение. Причем и волна, и течение не сов-
падают по направлению с ветром. Волны, ударяя в скулу или <ра-
ковину судна, сбивают его с курса. Перекладкой руля возвращают
судно на курс. Возвращение на курс происходит медленнее, чем
уход с него, и судно уклоняется от намеченного направления. Это
явление называется зарыскиванием судна. У некоторых типов су-
дов зарыскивание судна совершается на ветер, у некоторых под
ветер. Величину зарыскивания определить невозможно, поэтому
зарыскивание включают в поправку — угол дрейфа. Также по-
ступают с ветровым поверхностным течением, величина и на-
правление которого в большинстве случаев судоводителю неиз-
вестны.
§ 45. ОПРЕДЕЛЕНИЕ ВЕЛИЧИНЫ УГЛА ДРЕЙФА
Применяемые способы определения дрейфа не совершенны,
хотя известны очень давно.
Определение угла дрейфа по обсервации. Если в районе пла-
вания нет постоянного или приливо-отливного течения, а дейст-
вует ветер, вызывающий поверхностное дрейфовое течение и вол-
ну, сбивающую судно с курса, то при наличии двух или несколь-
ких обсерваций, полученных через некоторые промежутки вре-
мени, рассчитывают величину угла дрейфа. Действительно, если
судно, следуя истинным курсом, в момент времени имея от-
счет лага ОЛЬ получило свое первое обсервованное место и,
далее, продолжая следовать с дрейфом тем же ИК, спустя не-
сколько часов, в момент Т2 и при отсчете лага ОЛ2 получило вто-
рое обсервованное место, то поскольку судно было подвержена
воздействию ветра, какого-то поверхностного течения, ударам
волн, вторая обсервация ^-будет расположена не на линии ис-
тинного курса и не в счислимой точке, рассчитываемой по курсу
и плаванию, а в стороне от них (рис. 58). Счислимую точку нано-
сят на линии ИК, отложив на ней 5= (ОЛ2—ОЛ}) Кл* Соединив
обе обсервованные точки прямой, получим линию пути, направ-
ление которого определяется ПУ. Величину ПУ снимают с карты
транспортиром и линейкой. Угол дрейфа представляет собой
153
угол между линией пути и линией ИК. и рассчитывается по фор
муле
а? = ПУ—ИК.
(85
Если в дальнейшем плавании обстановка не меняется, для
счисления принимают полученную ранее величину угла дрейфа,
но при этом нужно учитывать следующие обстоятельства. На-
правление дрейфового поверхностного течения отклоняется от
направления, вызвавшего его ветра на 45° вправо в северных
широтах и на столько же градусов влево в южных. Скорость это-
го течения составляет 1,5—2,5% скорости, вызвавшего его ветра
в средних широтах (30—60°). Образованное ветром дрейфовое
течение сносит судно с выбранного им курса. Вследствие этого
дополнительного сноса угол дрейфа, при одной и той же силе
ветра и величине курсового угла наблюдаемого ветра, будет
различным на разных галсах. Поэтому определенный для всех
одинаковых условий (скорость ветра, скорость судна, КУ и др.)
угол дрейфа на одном галсе не может применяться при плавании
на другом галсе.
Определение угла дрейфа по буксируемому буйку. На лине,
длина которого равна 3—4 длинам судна, выпускают с кормы бу-
ек. С кормового компаса берут несколько пеленгов буйка и рас-
считывают среднеарифметическое значение ОКП (рис. 59). Зная
КК, рассчитывают угол дрейфа
а? = ОКП — КК. (86)
В ночное время на буйке можно установить самодельный факел,
который будет виден в темноте. Если на судне имеются пустые
бочки, то их можно также использовать для определения угла
дрейфа. В бочке зажигают факел и опускают ее на воду. После
154
того, как судно удалится на достаточное расстояние, берут серик>
пеленгов факела и рассчитывают величину а. При этом определе-
нии, в отличие от первого способа, в величину а не войдет снос от
дрейфового течения, так как бочка и судно будут подвержены
этому сносу.
Определение угла дрейфа по кильватерной струе. При ветре
кильватерная струя за кормой судна почти не смещается. Поэто-
му можно, взяв несколько пеленгов самой отдаленной точки
кильватерной струи и осреднив их, рассчитать величину угла
дрейфа
а = ОКП - Л7С
Пеленгование лучше всего производить с кормового компаса или
репитера гирокомпаса.
Определение угла дрейфа по формуле. Государственный оке-
анографический институт предложил для определения угла
дрейфа следующую формулу
а = /Са (-^)asin^.B, (87}
где U7— скорость наблюдаемого ветра, м/сек;
V — скорость судна, м/сек;
ун.в — курсовой угол наблюдаемого ветра, градусы;
Кд — коэффициент дрейфа, градусы.
Коэффициент дрейфа зависит от отношения площади надвод-
ной части диаметральной плоскости судна к площади его подвод-
ной части. Для судов, не меняющих значительно свою осадку и
155
•сохраняющих отношение площадей, Кд считают постоянным.
Транспортные суда постоянного коэффициента иметь не могут
вследствие резкой изменяемости осадки. Для вновь строящихся
судов, которые не будут резко менять осадку, величина К& выво-
дится на специальных полигонах.
Определение угла дрейфа с помощью РЛС. Если в районе
плавания Действует только ветер и есть хороший радиолокацион-
ный ориентир, величину угла дрейфа можно определить, изме-
рив серию расстояний и пеленгов ориентира.
Рис. 60
У судна, следующего с дрейфом, кратчайшим расстоянием до
ориентира будет перпендикуляр, опущенный на линию пути, а не
траверзное расстояние. Следовательно, когда судно находится на
кратчайшем расстоянии от ориентира, оно находится на перпен-
дикуляре к линии пути. Зная ИК, на траверзе (перпендикуляр к
ИК) измеряют траверзное расстояние. Так как судно перемеща-
ется по неизвестной линии пути, то из серии .расстояний и пелен-
гов, измеряемых с помощью РЛС, выбирается тот пеленг, рас-
стояние по которому до ориентира наименьшее. Имея два пер-
пендикуляра, один к линии ИК, другой — к линии пути (рис. 60),
156
можем рассчитать величину утла дрейфа а как разность направ-
лений этих перпендикуляров, т. е. разность радиолокационных
пеленгов ориентира в момент кратчайшего расстояния и в момент
траверза
^ = РЛПкр — РЛПт . (88)
Действительно, угол дрейфа представляет собой угол между
линией пути и линией И К (<КТП), который равен углу между
перпендикулярами к этим линиям, т. е. Z РМТ.
При определении угла дрейфа для практических целей реко-
мендуется измерять расстояние и пеленговать ориентир до тра-
верза, если дрейф того же галса, с которого находится ориен-
тир Л4, в противном случае — после траверза. В связи с тем, что
визуальное пеленгование точнее радиолокационного, то, при на-
личии видимости, лучше пеленговать ориентир с помощью компа-
са, одновременно измеряя расстояние радиолокатором. Способ
применим в условиях плохой видимости и ночное время, но точ-
ность определения угла дрейфа невелика и равна ±1,5—2°.
Определение угла дрейфа на основании изученных качеств*
судна и опыта. Опытный судоводитель, хорошо знающий море-
ходные качества судна, определяет угол дрейфа на глаз. При
этом чем он опытнее, тем точнее может выполнить эту работу.
Для того чтобы быстрее приобрести этот опыт, необходимо все
наблюдения определения угла дрейфа записывать, систематизи-
ровать и анализировать полученные сведения о дрейфе. Для луч-
шей систематизации рекомендуется использовать формулу (87).
Определив величину дрейфа а каким-либо более точным путем
(по обсервациям, по РЛС), измеряют W, V ylQh.b и. по этим дан-
ным. вычисляют значение Кд
Кэ = а° (тг)3 cosec ^н в- (89)
Все измеренные и рассчитанные величины систематизируются в
таблице.
Дата Район плавания ар Способ опреде- ления а V W ?н.в кд° Состояние судна
п/г л/г
15.10. 1962 г. Охотское море 8 По об- серваци- ям 7 12 45° 3°,8 Осадка: нос 6,5 мг корма 7,5 м. На но- совой палубе тяже- ловесный груз. Кре- на нет.
Подобные определения, сведенные в таблицу, позволят систе-
матически уточнять и выводить средние величины Кд для раз-
личных состояний судна. Через некоторое время можно будет
составить таблицу Кд для основных состояний загрузки судна.
157
Полученные опытным путем значения Кд Для данного судна и
загрузки нужно в дальнейшем проверять и корректировать.
Задаваясь углом дрейфа на глаз, нужно проверять его по
•формуле, в которую подставляются значения измеренных вели-
чин W, V, Qh.b и рассчитанного ранее и проверенного значе-
ния Кд-
§ 46. УЧЕТ ДРЕЙФА ПРИ ГРАФИЧЕСКОМ СЧИСЛЕНИИ
Путь судна, как и истинный курс, отсчитывается от нордовой
части истинного меридиана от 0 до 360° по часовой стрелке. При
плавании без дрейфа на карте прокладываются только линии
ИК судна. Если же судно идет с дрейфом, величина которого из-
вестна, нужно рассчитать ПУ по формуле
ПУ = ИК-\-ъ
и проложить, помимо линии ИК, линию пути. При обратной за-
даче, т. е. когда требуется из одного пункта перейти в другой,
первой прокладывается линия пути, направление которой равно
путевому углу. Зная величину угла дрейфа, по формуле
ИК = Г1У — ъ
рассчитывают истинный курс, а затем прокладывают его на кар-
те. Над линией пути подписываются значения КК, &К, а с ука-
занием того, какого галса дрейф. Пройденное по лагу расстояние
S= (ОЛ2—ОЛ{) Кл откладывается по линии пути судна, так как
лаг учитывает действие ветра. Из-за того, что гидравлические
лаги, жестко связанные с корпусом судна, показывают скорость
по направлению диаметрально плоскости судна, при следовании
с дрейфом а°, пройденное по лагу расстояние увеличится в sec а0.
Формула (48) для расчета плавания, примет вид
5=(ОЛ2 —ОЛД/^sec а.
Формула действительна для углов дрейфа до 10° • sec а большого
изменения величины S не дает, но на больших переходах это из-
менение может приобрести достаточное значение и его нужно
учитывать.
Счислимые точки, с указанием времени и отсчета лага, нано-
сятся на линии пути.
При графическом счислении с учетом дрейфа следует помнить
о некоторых особенностях. На практике часто к моментам дости-
жения траверзов маяков приурочивают повороты судна, из-за
этого возникает навигационная задача: нанести счислимое место
судна в момент траверза ориентира. Для этого
а) рассчитывают ОКД предмета в момент траверза: если ма-
як слева, то О КП = КК+90°; если справа, то ОКП = КК—90°;
б) устанавливают пеленгатор компаса на отсчет ОКП, или
КП по репитеру гирокомпаса, и ожидают момента, когда предмет
158
придет на нить пеленгатора, после чего замечают время и отсчет
лага, а также, если нужно, меняют курс (рис. 61);
в) наносят место судна в момент траверза одним из следую*
щих способов:
с помощью линейки и транспортира опускают на линию ИК
перпендикуляр из точки ориентира и продолжают его до
линии пути;
рассчитывают ОИП = ИК±№° и продолжают до пересече-
ния с линией пути;
рассчитывают ОИП и продолжают до пересечения с линией
При плавании с дрейфом иногда нужно рассчитать время и
отсчет лага прихода судна на траверз маяка. Для решения ее с
карты снимают расстояние ЛР=5и, зная скорость судна V, рас-
считывают время, необходимое для прохождения АР
S
Тогда время прихода на траверз в точку Р выразится
Тр — Тд + Т.
159
Отсчет лага в точке Р рассчитывается также по снятому с карты
расстоянию S = POJIоткуда РОЛ и ОЛР—ОЛА -{-РОЛ.
Кратчайшим расстоянием до маяка будет расстояние -по перпен-
дикуляру, опущенному из точки ориентира на линию пути, от
маяка до судна. Поэтому, имея линию пути на карте, подбирают
радиус окружности с центром в точке маяка (рис. 61) и каса-
тельной к линии пути. Этот радиус представляет собой кратчай-
шее расстояние до маяка и величину его можно снять с карты.
§ 47. МОРСКИЕ ТЕЧЕНИЯ
Массы морской воды под влиянием различных факторов по-
стоянно перемещаются в различных направлениях. Горизонталь-
ное перемещение водных масс называется морским течением.
Течения определяются направлением и -скоростью, которые на-
зывают элементами течения. Направление течения дается в кру-
говом счете, а иногда в румбовом, в сторону, куда оно идет
(«течение идет из компаса»). Скорость течения измеряет-
ся в узлах. Морские течения достигают значительной скорости.
Так, например, течение Гольфстрим у Флориды имеет скорость
до 5 узлов. В некоторых узкостях течение достигает 7—8 узлов.
В зависимости от причин, вызывающих течение, встречаются
следующие разновидности течений:
а) градиентные — это течения, которые вызваны силами,
стремящимися восстановить равновесие, нарушенное неравно-
мерным распределением температуры и солености воды;
б) компенсационные возникают от перемещения водных масс
для компенсации убыли воды в каком-либо районе;
в) сточные появляются в результате усиленного стока прес-
ных вод с материка;
г) ветровые вызываются перемещением воздушных масс,
увлекающих также и воду; при этом направление течения не сов-
падает с направлением ветра; скорость таких течений, по иссле-
дованиям Н. Н. Струйского, проведенным в Каспийском море,
достигает при ветрах 4—5 баллов—0,25 узла, 6—7 баллов—0,5
узла;
д) бароградиентные течения возникают из-за неравномер-
ности распределения атмосферного давления, в результате чего
водные массы из районов с повышенным давлением устремляют
ся в районы с пониженным давлением;
е) приливо-отливные — это течения, которые вызываются
приливообразующими силами Луны и Солнца. В открытом море
эти течения, носящие периодический характер, не достигают 0,1
узла, но в узкостях, проливах и заливах их скорости значи-
тельны.
Морские течения в большинстве случаев — результат воздей-
ствия на водную массу нескольких причин. В чистом виде пере-
численные выше течения в природе почти не встречаются.
160
Под действием винта судно перемещается относительно вод-
ной среды. Это перемещение фиксирует лаг. Если водная среда
сама перемещается под влиянием течения, то судно подвергает-
ся действию винта, перемещающего его по выбранному курсу со
скоростью, указываемой лагом, и течения, перемещающего суд-
но и лаг, по направлению течения, со скоростью, равной скорости
течения, т. е. судно будет перемещаться по равнодействующей
двух скоростей с действительной скоростью, равной этой равно-
действующей. В связи с тем, что перемещение судна под дейст-
Рис. 62
вием течения приборы не учитывают, то и суммарное перемеще-
ние по равнодействующей можно определить только графиче-
ским или аналитическим путем, если известны направление и
скорость течения. Их можно определить по обсервациям или вы-
брать из различных навигационных пособий (лоций, атласов те-
чений, справочных карт и т. д.)-
Элементы течения по обсервациям можно определить, если
судно не дрейфует. Предположим, что судно идет истинным кур-
сом. Имея обсервацию в точке А (рис. 62), заметили время и
отсчет лага ОЛХ. Через некоторое время, следуя тем же курсом,
получили обсервацию в точке В в момент времени Т% и при отсче-
те лага ОЛ%. Обсервация расположилась вдали от курса. Так
как поправки приборов компаса и лага известны, а дрейфа судна
по условиям плавания не было, нужно полагать, что судно было
снесено с курса в точку В течением. Если бы не было течения,
судно под действием винта попало бы в точку С, расположенную
на линии ИК\ на расстоянии 5лот точки А. Следовательно, суд-
но переместилось из точки С в точку В под влиянием течения,
действовавшего на судно за время Скорость этого те-
чения можно рассчитать. Для этого необходимо расстояние Sz
между точкой С и В разделить на т. е.
11 Навигация
161
Направление течения (ИКТ) снимается с карты транспорти-
ром и линейкой. Линия, соединяющая точки А и В, т. е. линия
действительного перемещения судна называется линией пути, а
угол, определяющий направление этой линии (NUAB),—путе-
вым углом ПУ, или путем. Путь так же как и истинный курс, от-
считывается от нордовой части истинного меридиана до линии
пути от 0 до 360° по часовой стрелке. Угол между линиями ис-
тинного курса и пути (САВ) называется углом сноса судна от
течения и обозначается буквой р. Его величина может быть сня-
та с карты или рассчитана. Путь, истинный курс и снос от тече-
ния связаны между собой алгебраической формулой, вытекаю-
щей из рис. 62
ПУ = ИК + Г^
ИК=ПУ — $
$ = ПУ-ИК
(90)
где р имеет знак плюс, если течение слева, а судно будет сно-
ситься вправо и путь будет больше, чем И К, и знак минус, — ес-
ли течение справа, а судно будет сноситься влево от курса и путь
будет меньше И К.
Полученные элементы течения в дальнейшем плавании долж-
ны учитываться судоводителем.
§ 48. УЧЕТ ТЕЧЕНИЯ ПРИ ГРАФИЧЕСКОМ СЧИСЛЕНИИ
Если известны направление и скорость, то при учете влияния
течения приходится решать навигационные задачи двух основ-
ных видов.
1. Зная И К судна, скорость его по лагу, определить путь и
действительную скорость судна. Решение этой задачи сводится к
гюстроению параллелограмма скоростей. Допустим, что судно
162
идет И К £NUAK со скоростью а течение, действующее на
сдано, сносит его по направлению СВ со скоростью VT (рис. 63).
Очевидно, суммарное перемещение судна произойдет по направ-
лению пути £NUAB со скоростью > представляющей собой
геометрическую сумму двух векторов VA и Ут. Если масштаб
карты, на которой ведется прокладка, мелкий, то можно отло-
жить на истинном курсе двухчасовую скорость и из точки Ci —
по направлению течения, двухчасовую скорость течения. Направ-
ление пути будет прежнее, но на линии пути отрезок ЛВ1 опреде-
лит двухчасовую действительную скорость.
2. Зная путь судна, скорость судна по лагу, определить ис-
тинный курс и действительную скорость судна. Допустим, что в
начальной точке А проложен заданный путь судна NttAn
(рис. 64). В точке А прокладываем направление течения_NUAC.
От точки А по прямой АС откладываем скорость течения VT и из
полученной точки Е радиусом, равным скорости судна по лагу
ED=Vделаем засечку на линии пути. Из точки А проводим
линию АК, параллельную отрезку ED. Эта прямая является ли-
нией ИК судна, направление которой снимается с карты. Снятое с
карты расстояние AD по линии пути, представляет собой дейст-
вительную скорость судна Vд. Если масштаб карты мелкий, для
увеличения точности графической работы на карте оперируют с
Н* 163
отрезками, представляющими собой скорости за 2 или 3 час. Be
личина сноса от течения рассчитывается по формуле
р = /7У — ИК.
§ 49. АНАЛИТИЧЕСКИЙ УЧЕТ ТЕЧЕНИЯ
Приведенные выше задачи, выполненные графическим путем,
могут быть решены также аналитически, при помощи формул и
таблиц, предложенных Н. Н. Матусевичем.
При аналитическом учете течения решаются также две зада-
чи: при известном ИК находится ПУ и наоборот. Рассмотрим их.
1. Дан И К, следует найти ПУ. На линии_истинного курса от-
ложим вектор скорости судна по лагу АВ = УЛ. От точки В от-
ложим вектор скорости течения BC=VT (рис. 65). Замыкающая
АС является действительной скоростью судна и рассчитывается
как геометрическая сумма векторов:
AC=Vd = VA+VT.
Обозначим курсовой угол течения qT и спроектируем стороны
навигационного треугольника течения на линию ИК и линию,
перпендикулярную линии ИК
164
Получим
VdcosP= Ул+ VT cos qT;
Vdsinp = VTsin7T. (91
Разделив обе части выражений (91) на VAi получим:
-p£-cosp = l + -^cos qt;
y Л y л
V V <92>
-rAsinP= -r^sin^r .
ИЛ У Л '
Обозначим
£=/»; (93)
У Л У Л
Тогда выражения (92) примут вид
К cos р = 1 4- т cos qr ;
К sin р = т sin qT ,
откуда вычислим величины 0 и К. Чтобы получить 0, разделим
первое выражение на второе.
Получим
14-mcos<7T
ctg В = --:----т- ;
ь г m sin qT ’
л cosec q /Л .
cig ? = —-— Ctg q r. (94)
Для получения К оба выражения возведем в квадрат и сложим
Л3 cos2 р = 1 + 2m cos qt 4- /п2 cos3 qt
К2 sin2P = /?zasin2yr______
fC2= 1 4- 2m cos qr + m2
откуда ________________
K = y^ 1 + 2m cos qT + m3. (95)
В МТ-53 по формуле (94) составлена табл. 32-a, при помощи
которой, войдя со значениями m u qr, определяют величину сно-
са течения 0 и, получив 0, рассчитывают путевой угол
ПУ = ИК+$,
где 0 — со знаком плюс получится при сносе вправо, а со зна-
ком минус — влево.
Действительная скорость судна вычисляется по формуле
Vd = KVA. (96)
Коэффициент скорости судна относительно грунта выбирает-
ся из МТ-53, табл. 32в, которая вычислена по формуле (95).
165
Для выбора значения нужно войти в таблицу с аргументами
т и q^HK—ИК.
2. В этом случае известны ПУ судна и направление течения,
а следовательно, известен угол между направлением течения и
линией пути судна Р, Рассчитать ИК.
Обозначим (рис. 66) Р = ПУ—ИК?, <?т=Р + р, где ИК?—на-
правление течения относительно Nu .
В этом случае угол сноса на течении называют поправкой на
течение. Спроектировав стороны навигационного треугольника
на линию пути и на перпендикуляр к ней, получим
V& = VA cos р + Vt cos P;
V^sin p = VT sinP.
Обе части уравнений разделим на Ули, приняв ранее рассчитан-
ные обозначения (93), получим
К = cos р + m cos Р;
sin p = /nsinP,
откуда
К= cos р + т cos (д г — Р)
и
о cosec Р
cosec р = —-—
* т
(97)
(98)
(99)
166
Табл. 326 в МТ-53 рассчитана по формуле (99) и служит для
выбора поправки на течение 0. Аргументом для входа в таблицу
служит угол Р, рассчитанный по формуле
Р=ПУ-икт.
Выбрав значение 0, рассчитываем ИК
ИК = ПУ — ^
где 0 при сносе вправо имеет знак минус, а влево — -плюс.
Для определения V& необходимо выбрать из табл. 32в значе-
ние К. Для входа в таблицу нужно найти сначала по табл. 326
значения 0, рассчитать величину <?т=Р4-0, с которой и войти в
таблицу.
§ 50. ТОЧНОСТЬ СЧИСЛИМОГО МЕСТА НА ТЕЧЕНИИ
Элементы течения известны только приближенно, поэтому
направление течения и его скорость принимаются с некоторыми
ошибками. В результате нанесенное счислимое место, после по-
строения треугольника течения, будет также ошибочно и место
судна будет находиться в какой-то площади. Эта площадь, как
было сказано ранее, называется площадью вероятного местона-
хождения судна.
А
Рис. 67
При нанесении счислимого места по линии ИК откладывают
пройденное по лату расстояние Sa=AB. Из полученной точки В
прокладывают направление течения, образующее с линией И К
угол q? (рис. 67). По этому направлению откладывают Sr = VT *4
получая таким путем счислимую точку С. Положим, что поправ-
ка лага и поправка компаса точно известны и учтены, а элемен-
ты течения приняты с ошибками: ошибка в скорости течения
Г±’Д 1/т, ошибка в направлении течения ±Д<?г, Предположим,
167
что ошибочно принята величина скорости течения, тогда счисли-
мая точка будет в точке F или Fb в удалении от счислимой точки
на величину а по направлению течения, причем
д Рггт = Д5т, (100)
где — время плавания.
Если предположить, что скорость течения выбрана верно, а
направления с ошибкой ± A q*, то счислимые точки расположат-
ся на касательной в точке С к окружности, проведенной из точ-
ки В радиусом ST ,т. е. в точках D или Dx на расстоянии от точ-
ки С, равном 6, и в направлении, перпендикулярном направле-
нию течения. Причем величину Ь определим с погрешностью как
дугу окружности, т. е.
b = A q* = V7 тД q т.
Принимая угол Д^г в градусах, получим
<101>
Если неверны направление течения на величину ± A qT и его ско-
рость на величину ± A VT , то вероятное местонахождение судна
будет в площади, ограниченной эллипсом, построенным на полу-
осях а и Ь. Эллипс может быть вытянут или по направлению те-
чения, или в направлении, перпендикулярном ему, в зависимости
от величин а и 6, рассчитанных по формулам (100) и 101).
§ 51. ТИПОВЫЕ ЗАДАЧИ ГРАФИЧЕСКОГО СЧИСЛЕНИЯ
ПРИ ПЛАВАНИИ НА ТЕЧЕНИИ
Графическое построение на карте и ведение расчетов при пла-
вании на течении имеют свои особенности. Основные из них сле-
дующие:
а) на карте всегда прокладывается и линия курса и линия
пути;
б) над счислимыми точками линии пути записывается время
и отсчет лага, а над соответствующими им точками линии истин-
ного курса — отсчет лага;
в) каждой точке на линии пути соответствует определенная
точка на линии курса; эти точки связаны между собой вектором
течения;
г) при построении треугольника течения нужно брать ско-
рость судна и течения в одинаковой мере и за одно и то же
время;
д) судно всегда находится на линии пути, но его диамет-
ральная плоскость всегда параллельна линии истинного курса;
е) лаг течения не учитывает, поэтому плавание SA =РОЛ Кл
откладывается только по линии истинного курса и, следователь-
168
но, все расчеты времени производятся по отрезкам, измерен-
ным или отложенным на линии ИК:
ж) действительная скорость судна рассчитывается по вели-
чине отрезков линии пути;
з) выражения «скорость судна по лагу», «скорость судна от-
носительно воды», «скорость судна» означают одно и то же —
скорость судна, определяемая лагом, поправка которого рав-
на 0 % или коэффициент которого равен 1;
и) пройденное расстояние по лагу — это расстояние, опреде-
ляемое как разность отсчетов лага, поправка которого равна 0%;
к) над линией пути записывается компасный курс, поправка
компаса и снос судна р с его знаком;
л) если получена обсервация в стороне от линии пути, то не-
вязкой связываются счислимая точка на линии пути и обсерво-
ванная точка;
м) если в плавании изменяется один из элементов треуголь-
ника течения, изменяются также и другие, в связи с этим нужно
строить новый треугольник течений.
Рассмотрим решение некоторых задач.
1. Найти счислимую точку на линии пути.
Для решения этой задачи должны быть известны ИК, ПУ, ско-
рость судна по лагу направление и скорость течения, время и
отсчет лага в начальной точке Див выбранной точке В, а также
коэффициент лага.
От начальной точки А (обсервованной или счислимой) по ли-
нии истинного курса откладывается SA (рис. 68), величина кото-
рого рассчитывается по формуле (48).
ню
От полученной на линии ИК точки С проводят прямую, парал-
лельную направлению течения, которая пересекает линию пути в
точке В. Точка В и является счислимой точкой в момент Т2 при
отсчете лага ОЛ2.
2. Рассчитать время и отсчет лага в точке, выбранной на ли-
нии пути. Для решения задачи должны быть известны ИК, ПУ,
1/7,направление и скорость течения, время и отсчет лага началь-
ной точки Д, а также коэффициент лага.
От выбранной на линии пути точки В проводят прямую, па-
раллельную направлению течения, которая пересечет линию ИК
в точке С (рис. 68). Измерителем снимают с карты расстоя-
ние ДВ=Вли рассчитывают РОЛ по формуле
POJ1 = 4
S л
и -г — по формуле т =77-.
v Л
Зная время и отсчет лага точки А, время и отсчет лага в точ-
ке В, рассчитывается
72 = Л + т; ОЛ2 = ОЛг + РОЛ.
Для нахождения т можно использовать табл. 276 МТ-53.
3. Рассчитать время и отсчет лага прихода судна на траверз
маяка. Для решения задачи должны быть известны ИК, ПУ, Vл,
направление и скорость течения, время и отсчет лага начальной
точки А, а также коэффициент лага.
Точку, в которой будет находиться судно на траверзе, на кар-
те можно получить двумя путями:
а) с помощью транспортира и линейки восстанавливают пер-
пендикуляр к линии ИК и, продолжив его до линии пути/ полу-
чают точку В; здесь будет находиться судно в момент траверза.
Точку В направлением течения переносят на линию ИК, получив
точку Вг, пройденное по лагу расстояние SA =АВХ снимают с
карты;
б) рассчитывают ОИП маяка в момент траверза (рис. 69)
ОИП = ИК± 90°
и прокладывают рассчитанный румб на карте до пересечения его
с линией пути. Точка В на пути и будет счислимым местом судна
в момент траверза маяка. Время и отсчет лага точки В рассчи-
тывают так же, как указано выше.
4. Счисление при строго попутном и противном течении. Для
решения задачи должны быть известны ИК, скорость тече-
ния, время и отсчет лага начальной точки А и время и отсчет ла-
га в момент, когда судно достигнет точки В, т. е. Т2, ОЛ2ь а так-
же Кл- Угол сноса в этом случае будет равен нулю и линия пути
совпадает с линией ИК. От начальной точки А (счислимой или
обсервованной) откладывают значение (рис. 70) по прямой
170
Рис. 70
АВ и получают точку С. От точки С откладывают отрезок, рав-
ный ST
Sr=
где х = Т2—
При попутном течении ST откладывается по курсу, при встреч-
ном—наоборот. Действительная скорость судна рассчитывается
как сумма
Vd=VA+ 1/г—для попутного;
Vd = VA—VT—для встречного течения.
5. Продолжить счисление после обсервации. Получив обсер-
вованную точку В, наносят счислимую точку Bi на линии пути и
показывают невязку (рис. 71). От обсервованной точки вновь
прокладывают линии ИК и ПУ и в дальнейшем счислении началь-
ной точкой считают обсервованную точку В.
Рис. 71
6. Счисление на приливо-отливном течении. Приливо-отлив-
ные течения непрерывно меняются по направлению и скорости»
поэтому для счисления на таком течении необходимо составить
таблицу направлений и скоростей течений через час, на все вре-
мя, которое судно затратит на прохождение района.
Для составления такой таблицы используются атласы прили-
ве -от л и в ных течени й, ежегод -
ник приливов и приливо-отлиз-
ных течений и сведения о при-
ливо-отливных течениях, поме-
щаемых на навигационных кар-
тах. По этим источникам, рас-
считав время подхода к данно-
му району, составляется табли-
ца, форма которой указана ни-
же.
Имея такую таблицу, каждый час нужно строить новый тре-
угольник течения, так как постоянно изменяется или скорость
172
Течение
час
мин
направле- скорость,
ние, гоадусы
узлы
течения или его направление. Следует помнить, что выбранные
из навигационных пособий сведения о течениях могут быть оши-
бочны, например, из-за шторма перед приходом судна в этот
район. Шторм создает поверхностное ветровое течение, изменив-
шее элементы течения, указанные в навигационном источнике.
Поэтому, несмотря на тщательное счисление, всегда необходимо
использовать возможность контроля, т. е. получать обсервован-
ное место.
§ 52. СУММАРНЫЙ СНОС СУДНА
На судно могут одновременно воздействовать и ветер и тече-
ние. В результате оно получает суммарный снос с линии ИК, оп-
ределяемый углом между ПУ и ЯК.
С=а4- 0.
Суммарный снос может быть определен, если имеется две или
более обсерваций.Линия, соединяющая обсервованные точки,
будет линией пути, следовательно, с карты может быть снят ПУ,.
а зная И К, можно рассчитать С
С = ПУ-ИК.
Если ПУ > ИК, то С — положительно, если ПУ < ИК, — отри-
цательно.
Суммарный снос можно определить и с помощью РЛС, анало-
гично определению дрейфа, а также и другими путями, когда
судоводитель может получить, с помощью наблюдений, линию
пути и ПУ. Способы определения линии пути рассматриваются
ниже.
В тех случаях, когда известны отдельно элементы течения и
дрейф — графическое счисление нужно выполнять следующим
образом.
1. Если известен ИК, а нужно нанести путь, рассчитывают
вначале ПУх = ИК+& и прокладывают линию пути, учитывая
только дрейф. Получив линию пути, на ней от начальной точки
А (рис. 72), откладывают скорость судна по лагу Vл за один или
два часа, в зависимости от масштаба карты, так как лаг учиты-
вает ветер. Из точки С по направлению течения откладывается
скорость течения за один или два часа соответственно. Через по-
лученную точку В и начальную А проводим прямую, которая яв-
ляется линией пути судна, подверженного суммарному сносу.
Угол сноса ₽ и угол сноса С можно рассчитать по формулам
0 = 77У — ПУГ
(Ю2)
С = а+?
или С = ПУ-ИК
Следовательно, на карте нужно прокладывать три линии —
истинного курса, пути от дрейфа и пути от суммарного сноса.
173
Рис 73
2. Если выбран путь, а нужно определить ИК, из начальной
точки А по направлению течения, откладываем скорость течения
за один или два часа (рис. 73). Радиусом, равным скорости
судна по лагу, из точки С делаем засечку на линии пути в точ-
ке В. Параллельно линии СВ проводим прямую которая яв-
ляется линией пути только от воздействия ветра. Сняв с карты
направление этой прямой — ПУ, по формуле (102) рассчитыва-
ют ИК
ИК=ПУ1 — а,
Над линией пути от суммарного сноса делают запись значений
КК, Д /<, С. Когда известны а и 0, то раздельно записываются
значения а и 0.
ПРИМЕРЫ
1. Судно следует ККгл =252°; Д Кгл = +Ь°. С кормы судна выпущена
бочка с факелом. ОКП бочки с кормового компаса 249°. Рассчитать дрейф
судна, если известно, что поправка кормового компаса Д/Сс=4-3°.
Решение, а) Рассчитаем ИК
ик=ккгл + ькгл
ИК=<2ЬТ
б) Рассчитаем КК по кормовому компасу
ККк = ИК- Д/</с
_/7/f=257°
^Кк—
ККк = 254°
в) Рассчитаем дрейф по формуле (86)
ОКП = 249°
- =254°
Получаем дрейф 5° правого галса.
2. На судне, имеющем ход 10 узлов, по двум обсервациям определен угол
дрейфа в=4-60. Наблюдаемый ветер qHe =80° л/б.
Скорость наблюдаемого ветра замерена анемометром и равна W— 16 м/сек.
Определить коэффициент дрейфа.
Решение. Находим Кд- Для этого значения a, q, W, V—10 узлов —
= 5,14 м/сек., подставим в формулу (89).
/<^ = 6 (-^р) 2 cosec 80°.
Логарифмируя, получим
1g 7^ = 1g 6° 4- lg cosec 80° (2 lg 5,14 — 2 lg 16)
lg5,14 21g 5,14 lgl6 21g 16
0,071096 1,42192 1,20412 2,40824
175
Разность
21g 5,14= 1,42192
~ 2 lg 16 = 2,40824
lgP = 9,01368
lg 6 = 0,77815
lg cosec 80° = 0,00665
lgP = 9,01368
lg = 9,79848
Kd = 0°,6288
3. С судна, следующего 110°, с помощью радиолокатора были взяты
радиолокационные пеленги и измерены радиолокационные расстояния до
ориентира
ип° D, мили
55 9,35
42 8,61
29 8,41
20 8,50
9 8,95
0 9,62
Определить величину дрейфа.
Решение.
Когда судно было на траверзе ИП=%Р (ПО—90°), расстояние до ориен-
тира было 8,5 мили. Кратчайшим же расстоянием из серии наблюдений явля-
ется расстояние 8,41 -и, когда ИП=29°. Следовательно,
а-ИПкр-ИПт =29 — 20 = 4-9°,
т. е. дрейф левого галса 9°.
4. Карта 704. Скорость судна 10 узлов, коэффициент лага КЛ=0,92. Судно
следует КК=110°,5, ДК=—10°, дрейф 5° п/г. В 10ч 15*“ отсчет лага O«/Zi = 12,6.
Обсервованное место судна <?o=42°4O/N, Ао= 132°18'Ost . Рассчитать время и
отсчет лага в момент, когда судно придет на траверз маяка Поворотный.
Решение, а) От обсервованной точки А в 10ч 15м прокладываем ИК
КК=110°,5
ДК = —10°
ЯК= 100°,5
а также линию пути
П=ИК+«
И К =100°, 5
—5°
/7—95°,5
б) От маяка Поворотный на карте опускаем перпендикуляр на линию ЯК.
Точку пересечения линии пути и перпендикуляра обозначим через Р, По линии
пути снимаем с карты расстояние XP=S=32,4 мили и рассчитываем
т = р- = = 3,24 час = Зч14-«.
Время прихода на траверз
Т2 = 10*15* + 3*14* = 13*29*
176
в) Рассчитаем РОЛ
и отсчет лага на траверзе
ОЛ2 = ОЛ± + РОЛ = 12,6 + 35,2 = 47,8.
5. Карта 2588. Из точки с координатами <f=53°31'N иХ =3°5073Ost в Т\ =
= 10*00*, Ш7=21,5 судно следует ИК=74°$, имея течение 335°,ИТ=1,1 узла с
предполагаемой ошибкой ДИт = +0,3 узла и Д^т=±15°. Определить счисли-
мые координаты судна в 13ч 00* при отсчете лага ОЛг=51,8, если Кл=1,05,
а также снос судна; рассчитать полуоси эллипса вероятного местонахождения
судна.
Решение, а) Рассчитаем и отложим от нанесенной точки по ли-
нии И К.
5л=30.3*1,05=31,8;
б) Из полученной точки на линии ИК проложим направление течения
(из компаса) и по нему отложим ST. Это и будет счислимая точка
St= ИТ(Г3- Л)= 1,1 >3 = 3,3 мили;
в) Снимаем координаты полученной точки
? = 53°43'N, К = 4°39',2 СМ
и соединяем прямой с начальной точкой, затем транспортиром определяем ПУ
/7У = 68°,5;
г) Рассчитаем ₽
ПУ=68°, 5
— и к=74°,5
₽ = - 6°,0
д) По формуле (100) рассчитаем полуось эллипса а
t2=0,3 • 3= ±0,9 мор. мили;
е) По формуле (101) рассчитаем полуось эллипса b
. 1,13*15
b = r-о о =0,86 мили.
О/ ,о
6. Карта 2588. Скорость судна по лагу 12 узлов. Из точки с координатами
=53°5',5N; Xi =.2°34',5Ostнужно придти в точку с координатами <р2*=53°24',3№,
X2=3°15/Ost при наличии течения; направление течения 143°, VT = l,0 узел. Ка-
ким И К необходимо следовать и какова величина угла сноса?
Решение, а) Нанесенные иа карту точки соединим прямой. Это будет
линия пути. Снимем с помощью транспортира ПУ
/?У = 52°,8;
б) Из начальной точки проложим направление течения 143°. По этому на-
правлению отложим VT = 1 узлу;
в) Из полученной точки радиусом, равным 12 мор. милям, на линии пути
сделаем засечку и соединим обе точки прямой. Снимем транспортиром ИК
г) Рассчитаем угол сноса
р = 52°,8 — 48р = + 4°,8.
12 Навигация
177
7. /7/С=300°, скорость судна по лагу 15 узлов, направление течения 260°,
^т=4,5 узла. Рассчитать ПУ и действительную скорость судна, пользуясь
МТ-53.
Решение, а) Рассчитаем курсовой угол течения qr и иг.
qT= Направление течения — И К
Направление течения = 260°
#К=300°____________________
Чт =—40°
по формуле (93)
4 5
= 0,3;
15
б) С величинами = — 40° и /п=0,3 входим в табл. 32 а и выбираем зна-
чение Р
Р =. — 8°,9.
С этими же величинами входим в табл. 32в и выбираем значение К
К= 1,24;
в) Рассчитаем ПУ
ПУ=ИК + ?
+ ₽=-8°,9
ЛУ=291°,1
г) По формуле (96) определим действительную скорость судна
Ид = 15* 1,24=18,6 узла.
8. 77У=110°, скорость судна по лагу 12 узлов, направление течения 160е,
=3,6 узла. Рассчитать ПК и действительную скорость судна.
Решение, а) Рассчитаем угол между линией пути и направлением те-
чения и tn.
Р=160°—П0°=+50°;
3.6 _ , •
,л = _ = о,з:
б) С полученными величинами входим в табл. 326 и выбираем поправку
на течение Р
р = + 13°3;
в) Рассчитаем курсовой угол течения
?Т=Р+ р=50° п/б + 13°,3=63°,3;
и с этим аргументом войдем в табл. 32в, чтобы найти значение
Я=1,17;
г) Рассчитаем И К и действительную скорость
ЛУ=110°
“ Р = + 13°,3
' ЯЯ=96°, 7;
Ид= УлК= 12X1,17=14 узлам.
Задачи
I. Рассчитать угол дрейфа судна, если дано
а) Ш(=245О, ПУ=251°;
б) ЯЯ=310°, ПУ=305°;
17*
В) ЯК =168°, /7У=160°;
г) ИК= 95°, /УЛ7—102°;
д) ИК = 45°, ПУ= 41°.
2. С кормового компаса на различных курсах взяты пеленги выпущенного
буйка и замечены КК по кормовому компасу. Рассчитать угол дрейфа, если
а) КК = 110°, б) КК = 42°, в) КК = 358°, г) КК = 275°, д) КК=168°, ОК/7=Ю4°; ОКП= 48°; ОКП= 5°; ОК/7 = 268°; ОК/7 = 176°.
3. Рассчитать путь судна, если
а) ИК= 36°, а =5° п/г;
б) И К — 78°, а=—7°;
в) /7К=132°, а =6° л/г;
г) И К =189°, а = 4-8°;
д) /7К=356°, а = +4°.
4. Рассчитать ИК, если
а) /7У—121°, а = 8° л/г;
б) /7У=238°, а =6° п/г;
в) ПУ=296°, а =7° п/г;
г) /7У= 28°, а= — 4°;
д) /7У=350°, а=—9°.
5. Определить величину угла дрейфа, если скорость судна 16 узлов, ветра—
20 м/сек, курсовой угол наблюдаемого ветра 60° и Ко=0°,65.
6. Др?йф 10° п/г. Скорость судна 6 узлов, ветра —20 м1сек* курсовой угол
наблюдаемого ветра 70° п/б. Определить коэффициент дрейфа для данного
состояния судна.
7. На судне получены с помощью РЛС радиолокационные пеленги при
кратчайшем расстоянии до ориентира РЛПкР и радиолокационные пеленги
в момент траверза РЛПТ. Определить угол дрейфа, если
а) РЛПкр = 168°,
б) РЛПкр = 92°,
в) РЛПкр=\Ь7\
г) РЛПкр=3\&\
Д) РЛПкр=28Г>,
РЛ/7Т=161°;
РЛП, = 100°;
РЛ/7т=181°
РЛ/7Г=323°;
РЛПТ=21$\
8. Карта 704. Из обсервованной точки фо=43°00'N", Хо = 132°00'Ost в 15ч12ж
ОЛ) = 03,2 судно следует ИК —158°,5, имея дрейф 10° п/г. Определить время и
отсчет лага в момент, когда маяк на мысе Елагина будет на траверзе судна,
если скорость судна 9 узлов, а Кл=1,05.
9. Карта 704. Из обсервованной точки фо =42°14',2NT, Хо= 131°00'O?t в
21ч38* ОЛ1=82,2, судно следовало #К=50°. В 16ч 00* ОЛг=17,5 была полу-
чена вторая обсервованная точка фо=42°ЗО'М, Хо= 131°40'Ost . Определить
элементы течения и угол сноса 3, если Кл==Ъ08.
10. Определить путь судна, если
а) ЯК=21°,
б) ИК=58°,
в) ИК—72°Г
г) И К=357°,
д) #К=264°,
Р = + 12°;
?=— 6°;
0 = + 8°;
? = + 10°;
?=- 7°.
12*
179
11. Карта 2588. Из точки с координатами <p=52°45'N, Л =2e32',2Ost в
7’1 = 19*20*, ОЛ1=86,7, судно следует ИК—45°, имея течение 170°, Уг = 1,2 узла.
В выбранных элементах течения предполагаются ошибки A Ут =±0,5 узла,
Адт =±10°. В Т2=22*40* ОЛ2=14,1, Кл=0,96.
Определить координаты судна в 22 40*,угол сноса ?и полуоси эллипса ве-
роятного местонахождения судна.
12. Карта 2588. Скорость судна по лагу 18 узлов. Из точки с координатами
(pi — 52°45'N, ==3°00'Ost судно пришло в точку с координатами (p2=53°00'N,
X2=4°00'O8t ПРИ наличии течения 176°, Уг=£2. Каким ИК шло судно и каков
угол сноса Р?
13. Карта 2588. ИК = 230°. Скорость судна Ул= 16 узлов, Кл=0,92, тече-
ние 6°, Уг=2,1 узла. Судно вышло из точки <pi =52°56',7N, Ai =3°30'G8t в
12*35*, ОЛ1=Ю,8.
Определить время и отсчет лага прихода судна на параллель 52°30'N.
14. Карта 2588. Скорость судна Vj=9 узлов. Кл = 1,09, течение 15е,
^=2 узлам. В 11*30-*ОЛ1 = 12,3. Из точки <₽-53°0',7N, A = 3°00'Ost судно
следует И К = 225°.
Определить время и отсчет лага на траверзе маяка Смите Нолл.
15. Карта 2588. ИК =180°. Скорость V А =11 узлам. Течение попутное,
Ут = 2 узлам, /Сл=0,97. В 10*‘0*ОЛ1=25,6,<Pi =53°00'N, A=3°27'Ost . Опреде-
лить координаты судна в Т2 12*30* ОЛ2=53Д
16. И К=340°, скорость судна по лагу 9 узлов. Направление течения 230°,
Ут =2,5 узла. Рассчитать по МТ-53 путевой угол и действительную скорость
судна.
17. ПУ=232°, скорость судна по лагу 16 узлов, течение 135°. Уг=4 узла.
Рассчитать ИК и действительную скорость.
Ответы.
1. а)а= + 6°; б)а = —5°; в) з = - 8°; г) а = + 7°; д)а = -4°.
2. а) а = — 6°; б) а— 4-6°; в) а = 4~ 7°; г) а = — 7°; д) а = + 8°.
3. а) /7У = ЗГ; б)/7У=71°; в) ПУ =138°; г) ПУ=\97°: д) /7У=0°.
4. з) ИК=Ш°; б) ИК = 244°; в) //^=289°; г) WC=32°; д) ///(=359°.
5. <х= 3°3.
6 Кд = 025.
7. а) а= 4-7°; б) at = — 8°; в) а =+6°; г) а= — 7°; д) at= + 6’.
8. Г^17*32* ОЛ2=23,2.
9. Направление течения 173°,5, V т =25 узлам, р = + 12°.
10. а) 77У=35°; б) ПУ=52°; в) ЛУ=80°; г) /7У=7°; д) /7У=257°.
11, (p2=52°59',5N, A2=3°4'Ost, р=+8°, a=l,65 мор. мили, в=0,7 мор. мили.
12 77У=67°,5,ЯК=61°, р = +6,5.
13. ОЛ2=67,3, Т2= 15*47*
14. ОЛ2=46,7, 7'2=15*20*
15. (p2=52°28',3N, Х.,=3°27'СЧ
16. ПУ=324°, Vd =8,5 узла.
17. 7/К=246°,3, Уд =15.8 узла.
Контрольные вопросы
1. Какой угол называется путевым?
2. Что такое дрейф?
3. В каких единицах выражается К?
4. Какого направления ветер вызывает максимальный дрейф транспорт-
ного судна?
180
5. Какие течения вам известны?
6. Что такое <скорость судна по лагу»?
7. Какие линии нужно прокладывать на карте при прокладке с учетом
течения и дрейфа?
8. В каком случае расстояние, пройденное по лагу (5Л), откладывается на
линии пути, в каком на линии ЯК?
Глава X. ПИСЬМЕННОЕ СЧИСЛЕНИЕ
§ 53. ФОРМУЛЫ ПИСЬМЕННОГО СЧИСЛЕНИЯ
Кроме графического счисления, учет движения судна может
производиться с помощью письменного или аналитического счис-
ления. Вычисление географических координат судна по его кур-
су и плаванию называется письменным счислением. Оно приме-
няется:
а) в плаваниях вдали от берегов, если нет путевых карт;
б) при решении астрономических и радиотехнических задач;
в) в ледовом плавании;
г) при отсутствии путевых карт, когда плавание осуществля-
ется в местах, по которым имеются карты лишь мелкого масш-
таба, и для контроля плавания раз в сутки вычисляют координа-
ты судна.
Сущность письменного счисления заключается в следующем.
Пусть (рис. 74) на меркаторской карте даны координаты пункта
отхода A (?i и А1), а также известны сделанные судном разность
181
широт и разность долгот. Координаты пункта прихода В (фг, ta)
рассчитываются по формулам
ф2=
\ = \ + РД.
(103)
В этих формулах РШ и РД вычисляются следующим обра-
зом.
Рис. 75
Возьмем сферу, на которой точка А — пункт отхода (рис. 75),
точка В — прихода. Дуга ДВ, являясь отрезком локсодромии,
пересекает все меридианы под одним и тем же углом К, рав-
ным ИК, Длина локсодромии S. Разделим отрезок локсодро-
мии на т элементарно малых равных между собой частей Д S.
Через полученные точки проведем меридианы и параллели. В ре-
зультате получим т равных между собой прямоугольных сфери-
ческих треугольников Дб^ь а2Ьзаг и т. д. В каждом
треугольнике катет, совпадающий с меридианом, представляет
собой элементарное приращение широты Дф, а катет, совпадаю-
щий с параллелью, — перемещение судна по параллели Д а. По
малости сферические треугольники принимаем за плоские, тогда
можно написать
Дф = AScosA.
Переходя от конечных приращений к дифференциалам, получим
дифференциальное уравнение
rf9=dScos А.
182
Проинтегрировав его в пределах от epi до $2 и от 0 до S, полу-
чим
’Ра S
J rf<p = cos К J dS
<Pi о
или
<р2—<p1 = PZZ/ = ScosAr. (104)
В формуле РШ выражается в морских милях, если S дано также
в морских милях.
Наименование РШ (ее знак) определяется первой буквой чет-
верти, в которой расположен курс. При курсах, расположенных
в NOst и NW четвертях, РШ к N, при курсах в SOst и SW чет-
вертях— РШ к S. Определим величину перемещения судна по
параллели, которое называется элементарным отшествием
Да = ASsin/<;
da = dS sin /С
Интегрируя, получим суммарное перемещение судна по парал-
лели, выраженное в морских милях, которое называется отшест-
вием (ОТШ)
ct S
\da = s\nK\dS\
О и
a = Ssin/C. (105)
Полученная по формуле (104) разность широт дает возмож-
ность вычислить широту пункта прихода по формуле (103), так
как одна морская миля равна длине одной минуты меридиана.
Отшествие является суммой элементарных отшествий, сделан-
ных в различных широтах, причем каждое из них равно
Д а = ДХ,- cos ф/,
откуда
ДХг- = Д a sec <рг-.
На основании этого установим зависимость между отшествием и
разностью долгот. Для чего напишем равенства
ДХ1 = Да 8ес(ф! Дф);
ДХ2 = Д a sec (ф j + 2Дф );
ДХ3 = Д а sec (ф! + ЗД ф);
ДХот=Да8ес (ф; + /пДф) = Да8есф2.
Просуммируем и получим
РД — Ьа 2 sec <pz •
183
Умножим и разделим на т правую часть равенства и получим
1 т
РД = тЛа - S sec ф/,
/Л !
где /и А а = & и
1 т
—2 sec —средний арифметический секанс, соответствующий
т 1
определенной широте, которая называется промежуточной широ-
той. Обозначим ее ?я.
1 т
secV/I = —Ssec<pz, . (106)
тогда
РД = а$есу„. (107)
Умножим на Д<р числитель и знаменатель правой части выраже-
ния (106). Получим
m
2 sec Д<р
sec<₽«:----------• (,08>
где числитель
m <P,
lim 2sec<pz-A<p=J sec<pd<p =
m *» 1 <p,
- In tg (45°+ -J-) - In tg (45°+ ,
а знаменатель
m Лср= ф4 — cpj=РШ
в отвлеченной мере.
Умножим на радиус Земли R числитель и знаменатель правой
части выражения (108) и получим
/?1п tg (45°+^-) —/? In tg (45’+ -^-)
sec<p„ = pmt^
Числитель этого выражения равен разности меридиональных ча-
стей на сфере, соответствующей широтам q>i и ф£, а знаменатель
равен разности широт, выраженной в минутах дуги меридиана.
Тогда
_ (РМЧ)Ш
secq>„— — (РШ}'
(109)
Подставив значение secq>п в формулу (107), получим
РД = а
(РМЧ)Ш
(РШУ
(110)
Формула (109) точна, если меридиональные части (Z>2, 7>i) вы-
браны из таблиц, составленных без учета сжатия Земли.
184
Для вычисления разности долгот для эллипсоида воспользу-
емся уравнением локсодромии с учетом сжатия Земли (59а)
x,-K.=teK[tatB
В этом уравнении РД выражена в отвлеченной мере. Для пере-
хода к экваториальным минутам обе части уравнения умножим
на большую ось эллипсоида а
Но произведение
a Intg (45°+ D
& \ 1 2 ) \ 1 + esincp2/ 2
И
а in tg (45° 4- ) (]7esln?1) D..
Тогда формула для разности долгот с учетом сжатия Земли бу-
дет
(P4)' = tg/f(D2-D1)>
где£>1 и £>2 — меридиональные части, выбранные из МТ-53 с уче-
том сжатия Земли.
При решении задач на письменное счисление крайне редко
возникает необходимость применения точных формул, так как
плавания S одним курсом в большинстве случаев невелики, а
это дает возможность пользоваться приближенными формулами
для вычисления РД.
Для вывода приближенной формулы РД по отшествию мож-
но приближенно принять, что среднему арифметическому значе-
нию секанса широты между точками А и В (sec <ря) соответст-
вует секанс средней широты (sec<pm), т. е.
т
У sec
i Ф14- Фа
sec = —-— ~ sec = sec .
При небольших разностях широт ошибка будет незначительна.
Тогда формула для разности долгот примет вид
РД = asec«pOT. (Ill
185
§ 54. ТАБЛИЦЫ ПИСЬМЕННОГО СЧИСЛЕНИЯ
Для ведения письменного счисления по формулам (104) и
(105) составлены таблицы «Разность широт и отшествия», по-
мещенные в МТ-53 (табл. 24). Аргументами для входа в таблицу
являются плавание S -и ИК. Плавание дано от 0 до 100 миль в
вертикальном столбце, И К—вверху и внизу страниц от 0 до 359°.
Курсы в первой четверти выделены и напечатаны жирным шриф-
том, а рядом даны три курса остальных четвертей, которым
соответствуют синусы и косинусы первой четверти. В столбцах,
имеющих в заголовке курсы от 0 до 45°, искомые РШ и ОТШ на-
ходятся на пересечении со строкой, отвечающей плаванию, кур-
сы от 45 до 90° даны внизу страницы, при этом РШ и ОТШ меня-
ют свои места в таблице. Величины РШ и ОТШ даны в таблице
с точностью до 0,01 мили. При плаваниях больше 100 миль его
разбивают на части меньшие 100 миль и затем суммируют вы-
бранные табличные значения РШ и ОТШ. Плавания, превышаю-
щие 100 миль, можно рассматривать как произведение плавания
меньшего 100 миль на коэффициент 10 или 100. Например, пла-
вание 420 миль можно разделить на 10X42. В этом случае РШ и
ОТШ, выбранные для 42 миль, умножаются на 10.
Для контроля полезно помнить, что при ИК<^Ь°—РШ>ОТШ
и при ИК>45°-РШ<ОТШ.
Кроме этого, PHI + OTH1>S, а РШ—ОТШ<3.
По формуле (111) составлены табл. 25 МТ-53 «Разность дол-
гот по отшествию и средней широте». Аргументами для входа в
таблицы является отшествие от 1 до 100 миль и средняя широта
от 0 до 81°. В соответствии с изменением секанса широты даны:
от 0 до 30° — через 1°, от 30 до 60°— через 0°,5, от 60 до 70° —
через 0°,2 и от 70 до 81°— через 0°,1. Пользоваться таблицей эле-
ментарно просто, и РД по заданному отшествию получается сум-
мированием РД на целые сотни, десятки, единицы и деся-
тые доли отшествия. Для контроля необходимо помнить, что РД
всегда больше отшествия.
Формула (111) приближенная, и неточность расчета РД из-за
неравномерности изменения секанса, сказывается в широтах вы-
ше 70°, особенно, когда плавание одним курсом превышает
100—200 миль. В таких случаях необходимо' рассчитывать проме-
жуточную широту фя по формуле (109)
<рл = arc sec —.
Для расчета РМЧ используются таблицы меридиональных ча-
стей, составленные для шара. Среднюю широту можно также ис-
править поправкой и получить промежуточную широту
186
Т а б лица 11
PUP
0 Ъп 2 4 6 8 10 11 12 13 14 15 16 17 18 19 20
10 -143 —139 — 131 -122 -по —103 —96 -87 — 80 — 70 - 62 — 52 - 41 - 31 — 20
15 - 83 - 81 - 77 — 71 — 63 - 59 -54 —49 - 44 — 38 — 32 - 26 - 19 - 12 — 5
20 — 57 - 54 - 52 — 47 — 42 — 38 -34 *30 - 26 - 21 — 16 - 12 — 6 0 + 6
25 — 40 - 39 — 36 - 32 — 27 - 24 -21 -18 — 14 - 10 - 6 — 1 + 4 + 8 + 14
30 — 30 - 28 — 26 - 22 - 17 - 14 -12 — 8 — 5 — 1 + з + 7 + 12 + 16 + 21
35 - 22 - 20 — 18 — 14 — 10 - 7 — 4 — 1 + 2 + 6 + ю + И + 19 + 23 + 28
40 - 16 — 14 — 12 - 8 — 4 — 1 + 2 + 5 + 9 + 12 + 16 + 20 + 25 + 30 + 35
45 — 11 — 10 — 7 — 3 + 2 + 4 + 8 + П + 14 + 18 + 22 + 27 + 31 + 36 + 42
50 — 8 — 6 — 3 + 1 + 6 + 9 + 12 + 16 + 20 + 24 + 29 + 33 + 39 + 44 + 49
55 — 5 — 3 0 + 5 + 10 + 14 +17 +21 + 26 + 30 + 35 + 40 + 46 + 52 + 58
60 - 3 0 + 3 + 8 + 14 + 18 +22 +27 + 32 + 37 + 43 + 49 + 55 + 62 + 69
65 - 1 + 2 + 6 + 12 ’ + 19 + 24 +28 +34 + 40 + 46 + 57 + 60 + 68 + 76 + 85
70 0 + з 4- 8 + 16 + 25 + 31 +37 +44 + 51 4’ 59 + 67 + 77 + 87 + 97 + 109
75 + 1 + 5 + 12 + 22 + 34 + 42 +50 +60 + 70 + 81 + 94 + 107 +122 + 138 + 155
80 + 2 + 8 + 18 + 34 4- 54 + 66 +81 +97 +116 + 138 + 163 + 194 +234 +289 —
откуда
*=?«—?« = arc sec
(РМЧ)Ш
РШ'
2
По этой формуле составлена табл. 11, из которой по аргумен-
там и РШ выбирают поправку X для эллипсоида Красовско-
го. Рассчитав <р„, с ней входят в табл. 25 МТ-53 и выбирают РД
с высокой точностью. Точность письменного счисления по табли-
цам не зависит от графических построений, а зависит от ошибок
в курсе и плавании, по которым из таблиц выбирается РШ и
ОТШ. Обозначим ошибку в РШ через Д<р, в ОТШ — Да, в
РД — ДХ. Затем основные формулы (104) и (105) продифферен-
цируем по S и К
dy — dS cos К — S sin KdK\
da = dSsinK-\- S cos KdK.
Переходя к конечным приращениям, получим
Д? = Д5соз/С— 5sin АД/С;
(Н2)
Aa = ASsinA + Scos АДА.
Для РД
РД = a sec ; ДХ = Д a sec <?п.
Подставив значения Д а, получим .
ДХ = (Д 5 sin К + S cos К Д К) sec (ИЗ)
Задавшись возможной ошибкой в курсе и плавании, рассчиты-
вают ошибку в широте и долготе пункта прихода.
§ 55. ВИДЫ ПИСЬМЕННОГО СЧИСЛЕНИЯ
Письменное счисление в практическом судовождении приме-
няется в виде счисления по таблицам. Исходной точкой, от кото-
рой его начинают, обычно является обсервованная точка. В про-
цессе счисления по таблицам получают счислимые точки. Полу-
чив обсервованное место, письменное счисление продолжают ог
него.
Счисление по таблицам бывает трех видов: простое, состав-
ное и сложное. Простым счислением называется счисление при
плавании одним постоянным курсом. По этому заданному ИК
и S выбирают из табл. 24 и 25 МТ-53 разность широт и разность
долгот. Зная координаты пункта отхода <pi и Xi, рассчитывают
координаты пункта прихода <р2 и Х2. Расчеты производят по оп-
ределенной схеме.
Составным счислением называется счисление при плавании
несколькими курсами, когда путем вычисления получают коорди-
наты пункта прихода. В составном счислении по табл. 24 МТ-53
188
находят РШ и ОТШ для каждого ИК и плавания и затем вы-
числяют алгебраическую сумму РШ и ОТШ, получая при этом
генеральную разность широт (ГРШ) и генеральное отшествие
(ГОТШ). ГРШ и ГОТШ представляют собой разность широт и
отшествия между пунктом отхода и пунктом прихода.
Пусть судно из точки А совершило переход в точку В несколь*
кими истинными курсами ИКъ ИК2, ИКз, сделав при этом пла-
вание Si, S2, S3 (рис. 76) Генеральная разность широт представ-
ляет собой алгебраическую сумму отрезков, определяющих РШ
между точками поворотов
ГРШ=(-аЬ) = ас + (—cd) + (-db).
Генеральное отшествие—сумма отрезков, определяющих ОТШ
между точками поворотов, равно
ГОТШ = ( —MN) = ( —mri) 4- (—шгпу) + /пап2.
Для вычисления генеральной разности долгот (ГРД) нужно
войти в табл. 25 МТ-53 с аргументом <рт> который рассчитывает-
ся по формуле
При этом считают, что судно перешло из точки А в точку В од-
ним генеральным курсом ИКген, по линии генерального курса
189
АВ. При таком вычислении допускается ошибка в ГРД. так как
средние широты на каждом курсе не равны qpm, а также и секан-
сы этих широт не равны, следовательно, и сумма разностей дол-
гот будет отливаться от ГРД. В широтах до 60° и при плавании
отдельными курсами до 100 миль этой ошибкой пренебрегают,
а при плавании в широтах более 60° и при переходах с S, превы-
шающих 100 миль, используется другой вид счисления.
Сложным счислением называется счисление при плавании не-
сколькими курсами, когда для нахождения ГРД, с высокой точ-
ностью ее вычисляют суммированием РД на каждом курсе. Сле-
довательно, при сложном счислении по известным курсам и пла-
ваниям выбирают из таблиц значение РШ и ОТШ. затем вычис-
ляют широты промежуточных точек и рассчитывают на каждом
курсе среднюю широту. По средним широтам и соответствую-
щим отшествиям, выбранным из табл. 25 МТ-53, находят разно-
сти долгот. Выбранные РД алгебраически суммируют и получа-
ют ГРД.
Сложное счисление часто заменяют несколькими простыми
счислениями, когда последовательно вычисляют широту и долго-
ту промежуточных точек, гак как сложное счисление не дает
экономии времени и не повышает точности счисления.
Дрейф судна в письменном счислении учитывается путем вхо-
да в табл. 24 МТ-53, для нахождения РШ и ОТШ, не с И К и пла-
ванием, а с ПУ и плаванием. Если в районе плавания действует
постоянное течение, элементы которого известны, то оно учиты-
вается, как дополнительный курс и плавание, по которым выби-
рается РШ и ОТШ, Курс представляет собой направление тече-
ния в градусах, а плавание рассчитывается по формуле
где Ут — скорость течения, узлы;
Т2 и — моменты времени, между которыми действовало тече-
ние.
При плавании на приливо-отливном течении, используется
вспомогательная таблица, составленная судоводителем по атла-
су течений или из информаций, помещенных на карте. Данные
из таблицы, направление и скорость используются или на каж-
дый час плавания в общем расчете ГРШ и ГОТШ, или отдельно
вычисляется величина результативного линейного сноса судна за
время плавания в районе действия приливо-отливного течения.
В этом случае выбирают из табл. 24 МТ-53 РШ и ОТШ на каж-
дый час по направлению (ПК) и скорости (плавание) и затем
рассчитывают ГРШТ и ГРДТ. которые характеризуют линейный
снос от приливо-отливного течения. Полученными ГРШТ и ГРДТ
исправляют рассчитанные без учета течения и
Если судоводитель вынужден часто менять курсы судна, то
для повышения точности письменного счисления необходимо учи-
тывать циркуляцию. Для этого составляют таблицу циркуляции
190
и из нее берут данные для входа в табл. 24 МТ-53: для получе-
ния курса выбирают КУ, который прибавляется алгебраически
к ИК судна до поворота, и d, как плавание. Выбранные РШ и
ОТШ для каждой циркуляции суммируются с РШ и ОТШ, вы-
бранными для всех курсов'И плаваний, и получают ГРШ и ГОТШ.
При этом плавание по основным курсам считается от момента
прихода на новый курс до момента начала циркуляции.
В некоторых случаях, при плавании по локсодромии, необ-
ходимо рассчитывать курс и плавание, зная координаты пункта
отхода <рь Xi и координаты пункта прихода <р2,
Из основных формул письменного счисления
PZZ/ = Scos/< и а = 5 sin Д'
получим
S =PZZ/sec/C=acosec/iC.
Отшествие можно рассчитать по приближенной формуле
a = P4cos<pm,
где РД = Х, —Хй =
а также по точной формуле
а = РД соэ<ря;
где ?я= Ф Если э m + а X выбирается из табл. 11. той таблицы нет, используют формулу 077 РШ а — РД РМЧ >
где РМЧ= Таким =Dz—D\. образом, курс судна рассчитывается приближенно: (Х2 — Xi) cos ° tgtf= ~ &
или точно (Х2- х,) COS (*>±*?+х) =: Ь — fl
Имея отш ествие и РШ, можно сразу получить курс, так как 1 г.> отш ,.1д, tgA— р/// • (И4)
Получив * :урс, можно рассчитать плавание S = ((p2 —Ф1) secAT (115)
191
или
S = (к, — к,) cos ?1 cosec А,
или
5= cosec/c
Входя в табл. 24 МТ-53, обратным входом можно получить К и S.
В высоких широтах, а также при большой разности широт, не
рекомендуется пользоваться приближенными формулами, так
как ошибка может достичь значительной величины.
ПРИМЕРЫ
1. Из точки с координатами <pi — 62°28'N и = 175°30'Ost судно следует
ЯК=44°, S=600 миль. Определить поправку в рассчитанной по таблицам
долготе, возникающей от применения неточной формулы долготы.
Решение.
а) По И К и S выбираем из табл. 24 МТ-53 РШ и ОТШ. В связи с тем,
что плавание больше 100 миль, возьмем произведение 6X100, для чего, выбрав
РШ и ОТШ на 100 миль, умножим результат на 6.
РШ
100— 71',93
600—431',58 к N
ОТШ
69',47
416',82 к Ost
б) Рассчитаем <рз для чего РШ 431',58 переведем в градусы
PZ£Z= 7°H',6kN
<Pi=62°28'N
<р2 =69°39',6N
в) Рассчитаем среднюю широту
или =62°28'4-3°35',8—66°3',8N.
г) По средней широте <рот и ОТШ из табл. 25 МТ-53 выберем РД
ОТШ РД
100' 246',3
400' 985',2
10' 24',6
6' 14',8
О',82 Г,9
416',82 1026',5
д) Табл. 25 МТ-53 составлена по формуле РД—ОТШ. эесФт, из-за чего
полученный результат считать точным нельзя. Точную РД можно получить,
если в табл. 25 войти с промежуточной широтой фл, тогда табл. 25 МТ-53 даст
более точные результаты. Зная, чтофл—из табл. 11 выберем значения
Х= + 1О'; тогда
Ф п = 66°3',8+10'=66°13',8N.
192
Войдем в таблицу и выберем РД.
ОТШ РД
100' 247',8
400' 991',6
10' 24',9
6' 14',9
О',82 Г,9
416',82 1033',2
е) Рассчитаем поправку в вычисленной ранее разности долгот
ДХ = 1033',2—1026',5= +6',8.
2. Из точки с координатами гр = 10°40'S и X=60°22')5Ost , следуя
судно совершило плавание 5=220 миль. Определить счислимые координаты
в конце плавания.
Решение.
а) По И К и S выберем РШ и ОТШ
РШ__________ОТШ
22 19',05 11',00
220 190',52 к N H0',0kOsi
б) Рассчитаем <р2 и Фт
ср, = 10°40' S Фот = ¥1+ ~2~РШ
РШ=3°1‘2',(М ф1»10»40'5
-!-РЦ/=1о36',0И
<рг=6°28', S <j)m=9c>4',0S
в) По ОТШ и фт из табл. 25 МТ-53 выберем РД и рассчитаем
ОТШ РД
100' 101',2
10' 10', 1
110' 111',3kOs‘
\г=^ + рд
X, = 60°22',5 G8t
Pli = l°52',0KQst
A2 = 62°14',5Ost
3. Из точки с координатами fi=44°18',9N и X, = 157°18',8Ost; судно следо-
вало переменными курсами, причем плавание совершалось так: .
Время плавания, час, мин ИК° 5, мили
7.00-11.00 180 68,0
11.00—19.00 256 140,0
19.00— 0.00 0 90,0
0.00— 7.00 270 130,0
7.00-11.00 32 70,0
11.00-13.00 340 40,0
Определить координаты пункта прихода.
13 Навигация
193
Решение.
а) Решение задачи необходимо проводить по схеме, в которую вносят все
данные, выбранные из таблиц
ИК 5 РШ ОТШ
к N | к S к Ost к W
180 68 68,0
256 140 — 33,9 — 135,8
0 90 90,00 — — —
270 130 — — — 130,0
32 70 59,36 — 37,09 —
340 40 37,59 — — 13,68
186,95
~ 101.9
/ = 85'= 1°25' к N,
б) Рассчитаем и
?2 ~ гРШ
101,9 37,09 279,48
~ 37,09
ГОТШ=2А2'Д kW
= <Р1+ .]
о. = 44’18',9 N
4- oI = 44“18',9N 1 т
ГРШ- 1’25' kN у ГРШ= 0°42',5к N
у, = 45’43',9 N ^m = 48°l'.4N
в) Из табл. 25 МТ-53 выберем ГРД и рассчитаем к3
ОТШ РД
200' 282',80
40' 56',60
2' 2',83
0',3 О',42
О',09 О', 12
242',39 342',77 к W
5°42',8 к W
Х2 = kj + ГРД
Х1= 157°18',8 Ost
ГРД == 5°42',8 к W
Х2 = 151°36',0
4. Из точки с координатами — 30°00'N и =170°00'0st судно следовало
переменными курсами и было подвержено дрейфу и течению. Поправка гиро-
компаса &ГК=—2°. Определить <р2 и Х2, генеральный курс и генеральное пла-
вание.
Время плавания, час, мин гкк, ° S, мили Примечание
1.30— 6.08 260 65,0
6.08— 8.16 2 30,0
8.16—12.11 25 55,0 Учитывали дрейф 3° п/г
12.11—21.08 272 125,0
21.08- 2.27 352 72,0 Учитывали течегие SW—2 узла
2.27- 8.00 92 80,0
194
Решение.
а) Как и в предыдущей задаче, составим схему и из табл. 24 МТ-53 внесем
в нее выбранные РШ и ОТШ, при этом в пяти случаях в таблицу будем вхо-
дить с И К, а для плавания с 8 час 16 мин до 12 час 11 мин с путевым углом.
Течение, действовавшее с 21 час 08 мин до 2 час 27 мин, учтем отдель-
ной строчкой:
ЯК=255°, Sr =2X5,15= 10,3 мили.
гкк ДГЛ ИК а ПУ S РШ ОТШ
к N к S к O8t к W
260° -2° 258° 65 13,51 63,58
2° —2° 0° — — 30 30 — — —
25° -2° 23° —3° 20° 55 51,68 — 18,81 —
272° -2° 270° — —— 125 — — — 125,0
352° —2° 350° . - 1 — 72 70,91 — — 12,50
92° —2° 90° — — 80 — — 80,0 —
течение 255° — — 10,3 — 7,28 — 7,28
152,59 20,79 98,81 208,36
20.79 98,81
/7W=131',8 к N ГО 77//= 109',55 к W
б) Определим фг и Vm
— 30°00'N Ф1 = 30°00'N
ГРШ =2°1Г,8 kN ГРШ = 1°05',9kN
q>2 =32°ir,8N фот =31°5',9=31e,lN
в) Определим А2
ОТШ РД
100' 116',82
9' 10',51
0'5 О',58
О',05 О',06______________
ГРД = 127',97 к W=2°08' к W
Х2 = М + ГРД
X, = 170°00'0st
ГРД =2°08'к W
X, =167°52'Ost
г) Для расчета генерального курса используем формулу (114)
IgtgК = lgl09',55 к W — 1g 13Г,8 к N
1g 109',55 — 2,03961
1g 131',8 —2,11992
lg tg К = 9,91969
Ген. 39°44'=39°,7NW=320°,3.
13’
195
д) Генеральное плавание рассчитаем по формуле (115)
Ген. 3=ГРШ sec
lg S = 1g 131',8 + lg sec 39°44'
lg 131',8 —2,11992
Igsec 39°,44'— 0,11406
lg S = 2,23398
Ген. S = 171,4 мили.
Задачи
1. От параллели 13°N судно, следуя ИК=§5°, сделало 5=400 миль. Какая
возникает ошибка в долготе, если применять неточную формулу разности
долгот?
2. Из точки с координатами cpi =51°10',3N, = 159°56',1OS^ судно шло
следующими курсами
И К, градусы 5, мили
а) б) в) Г) д) е) Определить координаты i 3. Из точки с коорди ло следующими курсами: 180 255 180 168 218 270 ЧРа и натами <pi=46°l',8N, Xj=l 90,0 180,0 20,0 40,0 120,0 75,0 !46°12',2Ost судно следова-
И К, градусы 5, мили
а) б) в) г) Д) е) ж) з) И Определить <р2 и Х2. 4. Из точки с коорди дующими курсами: 158 180 138 55 27,5 92 345,5 <0 136,5 :натами Ф: =45°35'N, X1 = b 53,0 42,0 17,5 57.0 19,3 41,6 50,6 10,8 14,2 19°42'Ost судно шло еле-
ИК градусы S, мили
а) 181 23,2
б) 109,2 19,5
в) 69,5 38,5
г) 306 17,0
д) 36 14,0
Рассчитать <Рг и
196
5. Из точки с координатами <pi =34°54,,4N, Хг = 130°30',8Ost судно следо-
вало следующими курсами:
ККг, градусы Д ГК, градусы а S, мили
33 +2 120.0
322 +2 +5° 120,0
295 + 1 90,0
39 +2 — 200,0
33 +2 — 70,0
Определить ?2 и
6. Из точки с координатами =71°10'N, Xj =166°15'Ost судно при ветре
от NO 7 баллов, следовало следующими курсами:
КК, градусы Д Д’, градусы а S, мили
50 +3 65,0
81 +5 4° 98,0
345 +4 2° 90,0
215 +6 — 48,0
170 +4 6° 45,0
Определить <?2 и Х2, генеральный курс и генеральное плавание.
7. В 02ч00Л судно из точки ?! =50°15',2N, Х^ 178°56',5W следовало до
24ч00Л при ветре N 7 баллов и течении 257°—1,1 узла. При этом курсы и
плавание следующие:
К К, градусы ДЯ, градусы а, градусы S, мили
194 +6 5 ! 55
269 +6 5 55
300 4*5 8 60
356 +4 — 18
233 +7 6 48
Определить ген. 7/Х, ген. S, <р2 и Х2.
Ответы.
1. ДХ=—2',1.
2. <р2 =46°20'N, ^ = 151’59',7Ost
3. =45’4',6N, Aa = 149’25'O8t
4. <fг = 45’50'N, Х2 = 150’51 ',60 st
5. <р2 = 42°24',7N, = 132’36',6O8t
6. <?2 =71°55',6N, К2= 171’25',IO8t Ген. ИК=65°, 1,
Ген. <$=108,5 мили.
7. уг =49’33',7N, Х2 = 176’16',40st, Ген. W=257°,4, S= 189,7.
197
Контрольные вопросы
I. В каких случаях применяется письменное счисление?
2. В чем различие между промежуточной и средней широтой?
3. Какие виды письменного счисления вы знаете?
4. Для чего нужна табл. 11?
5. Как учитывается при письменном счислении течение и дрейф?
6. Как учитывается приливо-отливное течение при письменном счислении?
7. Что такое генеральный курс?
8. Как рассчитать генеральное плавание?
РАЗДЕЛ ЧЕТВЕРТЫЙ
ОПРЕДЕЛЕНИЕ МЕСТА СУДНА
ПО БЕРЕГОВЫМ ОРИЕНТИРАМ
Глава XL ОБЩИЕ ПОЛОЖЕНИЯ ДЛЯ ПРОВЕДЕНИЯ
НАВИГАЦИОННЫХ ОБСЕРВАЦИЙ
§ 56. ОБСЕРВАЦИИ И ИХ СУЩНОСТЬ
Ведение счисления в плавании не дает судоводителю полной
уверенности в счислимом месте. Счислимое место нужно считать
приближенным и оценивать его площадью вероятного место-
нахождения судна. Степень приближенности зависит от того, на-
сколько правилен учет факторов, влияющих на перемещение
судна, от величины плавания и времени следования по счисле-
нию. Недостаточно точно определенный дрейф судна, неточно
учитываемые течения и отклонение рулевого с курса, неверная
поправка компаса и лага, рыскание судна на волне и другие
причины уклоняют судно от намеченного пути, одновременно из-
меняя его действительную скорость. Одни из этих причин смеща-
ют судно .в сторону от намеченного пути, другие—вдоль линии пу-
ти. Поэтому как бы тщательно ни велось счисление, оно всегда
расходится с действительным местом судна. В районах плавания,
где нет ветра и течения, или из наблюдений точно известны эле-
менты течения, а также поправки компаса и лага, расхождение
счислимого места с действительностью будет невелико. При пла-
вании в более сложной обстановке расхождение истинного места
судна со счислимым, или, как говорят, невязка, будет значитель-
ным. При этом если поправка ‘компаса и лага неверны, то невяз-
ка будет увеличиваться пропорционально плаванию. Если же в
прокладку приняты ошибочные элементы течения, невязка уве-
личивается пропорционально времени. Неверно выбранный
дрейф увеличивает невязку пропорционально плаванию. Судово-
дитель должен уметь оценить точность своего счислимого места,
т. е. знать пределы площади вероятного местонахождения судна.
В некоторых условиях плавания этого достаточно, в большинстве
же случаев необходимо знать свое истинное место. Для того что-
бы знать свое истинное место, необходимы обсервации, с по-
мощью которых судоводитель контролирует свое счисление.
Если плавание совершается вблизи опасностей, обсервации
нужно производить часто. Наличие обсерваций дает возмож-
199
пость судоводителю исправить допущенные им ошибки в по-
правках компаса и лага, в принятых элементах течения или ве-
личине дрейфа.
Плавая в пределах видимости берегов, судоводитель одним
из навигационных способов определяет истинное место судна по
береговым ориентирам, которые нанесены на навигационных кар-
тах. В том случае, когда плавание происходит за пределами ви-
зуальной видимости или при плохой видимости, судоводитель
производит навигационные обсервации радиолокатором или ра-
диопеленгатором.
Вдали от берегов место судна определяется астрономически-
ми способами по небесным светилам или способами дальней на-
вигации с использованием радиотехнических систем.
Сущность определений места судна навигационным способом
заключается в том, что измеряют направление на береговые
предметы, т. е. пеленгуют их или измеряют расстояния до них
или углы между ними. Взятие пеленга производится компасом и
пеленгаторам. Радиопеленгатором можно запеленговать нужную
радиостанцию. Судовой радиостанцией также берут пеленги
специальных радиоустановок, работающих в определенном ре-
жиме.
Углы между предметами измеряются секстаном. Расстояния
до них также измеряются секстаном или дальномером или ра-
диолокатором, если это расстояние не больше радиолокационно-
го обнаружения. С помощью радиолокатора определяют также
направления на береговые ориентиры.
Астрономическими способами определяют свое место в откры-
том море по небесным светилам, измеряя высоту светила и за-
мечая момент по хронометру. Вопросами обоснования и прове-
дения астрономических обсерваций занимается мореходная аст-
рономия.
§ 57. УГОЛ СХОЖДЕНИЯ МЕРИДИАНОВ
Графическое решение задач по определению места судна тре-
бует в некоторых способах нанесения ортодромий или других
кривых на рабочую меркаторскую карту. Это представляет неко-
торую трудность в условиях плавания. Значительно проще опе-
рировать с прямыми, которые на меркаторских картах являют-
ся локсодромиями. Рассмотрим рис. 77, где на сфере нанесена
ортодромия между точками С и М. Меридиан точки С пересека-
ет ортодромию под сферическим углом а меридиан точки М—
под углом А2, при это-м А1У= А2. Разность этих сферических углов
называется углом схождения меридианов и обозначается бук-
вой у
Т — ^2 •
Величина угла схождения меридианов у может*быть выведена из
сферического треугольника СР^М. Заменив внешний угол А2
200
внутренним Л1!=180°—А2 и применяя аналогию Непера, полу-
чим
Л, 4- C°S 2
2 — PNC + PNM^ 2 ’
COS --5----
где P/v С — сторона сферического треугольника, равная 90—фс;
Р/уМ — сторона сферического треугольника, равная 90 —фл;
<CPNM — разность долгот точек С и М;
РД =Км—.
Подставив значения, получим
или
?c
A A C0S------------2---
Ctor
. Туи + Тс &
sin
^м~^с
2
tg4-=tg^
Is — Л1 _ sin <pm . РД
PIU1^ 2 ’
cos —
(116)
2
л Тс + fju
где <fm - -
средняя широта;
2
РШ = ум — <?С'
Формула (116) точна для сферы. Если входящие в формулу РД
и РШ невелики, а высокая точность не нужна, формулу (116)
можно упростить, произведя замену
tg4- = -y; cos —= 1; tg-g-
РД,
201
тогда формула (116) примет вид
7 = Р-7 sin <pm .
(117)
Эта формула обычно применяется на практике.
§ 58. ОРТОДРОМИЧЕСКАЯ ПОПРАВКА
На меркаторской карте ортодромия изображается кривой,
обращенной своей выпуклостью к полюсу. При этом кривизна ее
такова, что углы и ф2 (рис. 78) между касательными к орто-
дромии в точках С и М и локсодромией, проходящей через те же
точки, неодинаковы. Эти углы называются ортодромическими по-
правками и обозначаются буквой ф. Если принять кривизну по-
стоянной и радиус кривизны M=Rt т. е. считать изображения
ортодромии дугой окружности с радиусом R, то ф] будет рав-
но ф2. Угол между касательными к ортодромии в точках С и М
будет, как внешний не смежный с двумя внутренними, равен их
сумме, а также разности углов А2 и Alt Следовательно,
А — Ai = 7 = Ф1 + фа =
откуда
ф=1-
Но по формуле {117)
7 = P4sin<pOT,
202
тогда
Ф =sin <pm . (118)
Формула эта приближенная, и по ней составлена табл. 23
МТ-53. Из этой таблицы выбирается ортодромическая поправка
по аргументам: средняя широта и разность долгот точек С и М.
Для более точного раздельного определения гр] и необходимо
по координатам С и М рассчитать углы Д1 и Д2, а затем направ-
ление локсодромии — угол К- Углы Д1 и А2 вычисляются по ана-
логиям Непера
cos “Г (срл + ?с) Лж - хс
—г~-----------tg—2—;
sin — ?с)
sin 4- Cta + ?с) Х„ - V
—-------------is л,2 с.
cos — — <рс)
Введем обозначения
А2— А1 = -(; Кл1— ^с = РД\
4“(фл1 + фс) = фт; фл< — ус = РШ‘,
tg4-H2 + ^) =
tg±(H2-H,)
~(Л2 + Лд) = Лт —средний азимут.
Тогда формулы примут следующий вид
= cosig-.tg±j.
1ь puj 2 ’
sin —
t„J_= sin^m, [all
Lb 2 PLU^ 2 •
cos
Зная средний азимут Am и значение половины угла схождения
меридиана-^рассчитывают Д1 и А2
А __ А____!_•
2 ’
A2 = Am + ±.
Из рис. 78 можем написать
Ф1 =К— Л>;
ф2 = А2 К
203
С учетом значений А2.
ф1 = К - (Ат - -Ь) = - (Ат - К)-
Ъ = (Ат + ±)-К=± + (Ат-К).
Сложим последние равенства и получим
Ф1 + Ф2 = Ъ
т. е. сумма ортодромических поправок двух заданных точек
С и М равна углу схождения меридианов. Знак ортодромической
поправки зависит от взаимного расположения точек С и М и оп-
ределяется согласно правилу: в северной широте угол ф имеет
знак плюс ( + ) при значении А<180° и знак минус (—) при
А >180°. В южном полушарии наоборот.
С помощью ортодромических поправок переходят от ортодро-
мий к локсодромиям, что при некоторых обсервациях значи-
тельно упрощает работу судоводителя.
§ 59. ИЗОЛИНИИ И ЛИНИИ ПОЛОЖЕНИЯ
Для определения места судна измеряют определенные вели-
чины: углы, расстояния, пеленги и т. д., которые зависят от вза-
имного расположения судна и ориентиров, т. е. являются функ-
циями координат места судна. Геометрическое место точек, отве-
чающих постоянному значению величины, измеренной для обсер-
вации, называется изолинией. Всякая обсервация сводится к на-
хождению точки пересечения не менее двух изолиний. Любое на-
блюдение береговых предметов, небесных светил, взятие пелен-
га, измерение угла между предметами и расстояния до предме-
тов, измерение разности расстояний до двух станций, высоты
светила и др., дают изолинию какого-либо вида. В зависимости от
вида наблюдений изолиния может быть прямой линией, окруж-
ностью, гиперболой и т. д. Для обсерваций нам необходимы лишь
небольшие отрезки изолиний в точке пересечения их под углом
друг к другу. Поэтому отрезки изолинии можно без особой по-
грешности заменить отрезками прямых, касательных к изолини-
ям. Касательная к изолинии называется линией положения.
Изолинии, встречающиеся в деятельности судоводителя, сле-
дующие: изобаты — линии равных глубин, изогоны — ли-
нии равного склонения, изотермы — линии равной температу-
ры, изобары — линии равного давления, изогипсы — линии J
равных высот, изоазимуты — линии равных пеленгов и др. 4
В навигации, при определении места судна различными способа-
ми, оассматриваются следующие изолинии. I
Горизонтальный угол — между двумя ориентирами; измеря-
ется секстаном или рассчитывается как разность двух компасных j
пеленгов. В связи с тем, что горизонтальный угол в практике
204 -
измеряется визуально, район, где производится обсервация, при-
нимаем за плоскость, а изолинией будет окружность. Все точки
этой окружности представляют собой геометрическое место вер-
шин измеренных углов а, опирающихся на одну и ту же хорду
(рис. 79). Линией положения будет касательная к окружности
вблизи точки пересечения двух окружностей или вблизи счисли-
мого места.
Рис. 79
Локсодромический пеленг. Визуальный пеленг ориентира с
судна, считая, что район обсерваций является горизонтальной
плоскостью, дает изолинию на меркаторской карте в виде пря-
мой, т. е. изолиния совпадает с линией пеленга. Все наблюдатели,
находящиеся на этой линии, будут иметь одинаковые истинные
пеленги ориентира (рис. 80). В этом случае изолиния, линия ис-
тинного пеленга и линия положения представляются одной пря-
мой, проходящей через ориентир и судно.
Радиопеленг. Если с судна взят радиопеленг А радиомаяка,
то изолинией будет кривая — изоазимута, или, как принято на-
зывать ее в навигации, линия равных пеленгов. Линией равных
пеленгов называется геометрическое место точек, из которых ра-
диопеленг на радиомаяк равен измеренному А (рис. 81). Лини-
ей положения в этом случае будет касательная к линии равных
пеленгов, проведенная в точке, ближайшей к счислимому месту.
Ортодромический пеленг. Если береговая радиопеленгатор-
ная станция взяла пеленг судна Л, изолинией будет ортодромия,
пересекающая меридиан береговой радиопеленгаторной станции
под углом, равным радиопеленгу (рис. 82). Все суда, находящие-
205
Рис. 82
ся на этой ортодромии и запросившие у радиопеленгаторной
станции пеленг, получат его одинаковым, равным А.
Расстояния. При измерении расстояний с судна до ориентира
с помощью секстана, дальномера, радиолокатора получают изо-
линию в виде окружности, проведенной радиусом 7?, равным из-
меренному расстоянию (рис. 83). Линией положения будет каса-
тельная к окружности в точке пересечения ее другой изолинией.
207
Разность расстояний. При наличии гиперболической радиона-
вигационной системы, измеренная с судна разность расстояний
до двух береговых станций дает изолинию — гиперболу, пред-
ставляющую собой геометрическое место точек, соответствующих
постоянной разности расстояний до двух фокусов. Линией поло-
жения в этом случае будет касательная к гиперболе в точке,
близкой к обсервованной (рис. 84).
Основоположником современной теории линий положения яв-
ляется профессор В. В. Каврайский. Созданные им труды «Ли-
нии положения и их применение» и «Обобщенный способ линий
положения» легли в основу последующих работ профессора
А. П. Ющенко, Н. Г. Келля, А. Д. Козлова и др. Теория обобщен-
ного способа линий положения разрешает простыми приемами
производить анализ точности любой обсервации. Для получения
обсервованного места судна необходимо произвести измерения и
по этим измерениям провести не менее двух изолиний, выражен-
ных так
Ц = /1 (*, у) ; =/г (*, у).
Судоводителю всегда известно счислимое место. Для обсер-
вации и анализа ее точности, его интересует не вся изолиния, а
р лишь небольшой ее участок вбли-
зи счислимого места. Пересече-
уйЭ ние этих отрезков изолиний дает
/ ------обсервованное место, точность
____которого зависит от точности про-
\ изведенных измерений. Однако
не всегда удобно в условиях пла-
/ ( вания наносить отрезки изоли-
Z ний. В этих случаях отрезок изо-
\ \ А. линии заменяется касательной
) S'' X прямой к изолинии, в точке, бли-
\ \ s'' жайшей к счислимому месту суд-
на, т. е. линией положения. Эта
замена внесет некоторую ошибку
рис g5 в обсервованное место. Величина
ее будет тем больше, чем больше
невязка (на рис. 85 Р\ —точка пересечения изолиний, Р— точка
пересечения положения). Для уточнения обсервации можно при-
нять полученную обсервованную точку за счислимое место и ре-
шить задачу еще раз.
Уравнение линии положения в общем виде можно вывести
следующим образом.
Между истинными и счислимыми координатами судна суще-
ствует соотношение
х = хс + Дх;
У = Ус + ДУ-
208
Величины Дх и Ду малы, и они будут уменьшаться с уменьше-
нием невязки. Уравнение изолинии примет вид
U=f(xe + Дх, ус + Ду).
Разложим его в ряд Тейлора, причем, учитывая малость вели-
чин Дх и Ду, отбросим члены ряда, где Дх и Ду в степенях вы-
ше первой
и=f (Хс, ус) + -g-Дх + Ду • • •
Обозначим
f Ус) =
так как Ус) соответствует функции для счислимого
места судна. Обозначим
д*С ’ иус
так как для данного счислимого места это будут ве-
личины постоянные. Составим уравнение с новыми обозначе-
ниями:
аДх + bky - (U - Uc} = 0. (119)
Это уравнение представляет собой уравнение прямой в прямо-
угольной системе координат с началом в счислимой точке. При-
ведем его к нормальному виду, для чего разделим все члены
уравнения на V а2, + Ьл
г . д%+ Ду-----------------4^Uc.. = 0.
у а2 + д2 о2 £2 )/ а2 Ь2
209
14 Навигация
Произведем подстановку
z- = cos т; , _= = sin т; = q.
у а3 + Ь* + д3 /а* + *з
В результате получим уравнение линии положения в нормаль-
ном виде
cos тДх + slnxAjy — q = 0, (120)
где q — кратчайшее расстояние от счислимой точки до опреде-
ляющей точки на линии положения;
т — угол между осью ОХ и направлением из счислимой точ-
ки С на определяющую точку К (рис. 86);
q -параметры линии положения, определяющие ее положе-
ние относительно счислимого места судна.
$ 60. ГРАДИЕНТЫ
Анализируя уравнение линии положения, можно сделать за-
ключения, что если счислимые координаты неизменны, a U будет
принимать различные значения, в уравнении изменится только
свободный член. Угол т будет постоянным, так как
df
, b дхс .
а =T=const-
дус
Следовательно, все линии положения, определяемые различны-
ми значениями
и-ис
4 -/а? — №,
параллельны между собой (рис. 87).
210
Предполагается, что изменение функции U будет невелико, так
как в противном случае величины Дх и Ду будут большими и
ряд Тейлора усложнится введением в него этих величин в степе-
нях выше первой. Изменение свободного члена уравнения линии
положения при изменении значения функции U, приводит к па-
раллельному смещению линии положения на величину Дя, кото-
рая находится в пропорциональной зависимости от приращения
функции ДЕ/.
Если - __ E/j—
41 /"а2 + ’
4 2 /а» + Z»’ ’
. и2-и,
то Дп = ^-?1 = ?^=.
Обозначив ___________
/а2 + ft2 = g1; U2~ иг = ^.U,
получим
Величина g называется градиентом и представляет собой коэф-
фициент пропорциональности, показывающий зависимость меж-
ду приращением функции At/ и линейным смещением линии по-
14* 211
ложения Ап. Градиент—величина векторная и направлен по нор-
мали к линии положения в сторону возрастания функции U
(рис. 88). Модуль градиента строго математически имеет выра-
жение
Д£/ dU
* dn
т. е. модуль градиента есть производная функции U по нормали
к изолинии. Для целей навигации модуль градиента может быть
выражен так:
ДСГ
£ Дп
Смещение линии положения определяется величиной ошибки
измеряемой величины, деленной на градиент
функции.
(122)
соответствующей
А №
Рассмотрим значения модулей градиентов
при различных измерениях, необходимых для
ний. Но вначале ознакомимся с теоремой о сложении градиентов,
которая читается так: градиент суммы (разности) функций равен
геометрической сумме (разности) градиентов этих функций
и их направление
получения изоли-
£иг±ил ~ ± ёиг
Градиент локсодромического пеленга. Наб-
люденный визуальный пеленг отличается от пеленга счислимого
места на величину AJ7
Uc-U = MJ.
Направление градиента перпендикулярно линиям положения и
обращено в сторону возрастания пеленгов, т. е. по часовой стрел-
ке x=Uc +90°. Можно считать, что расстояние CC\=Dc равно
расстоянию CK=D (рис. 89), т. е. DC=D.
Модуль градиента
g = —
° Ап ’
а из А АСК
An=DAU.
Подставив значение Ап в выражение модуля градиента, получим
_____________________ да ____ 1 радиан
& DkU D 9 единица длины*
(123)
Градиент пеленга— величина, обратная расстоянию. Для
практических расчетов формула (123) примет вид:
__ 57°,3 градусы
& D ’ единица длины
(124)
212
Рис. 89
или
3438'
g~ D
минуты
единица длины "
Градиент расстояния. Рассматривая рис. 90, произ-
ведем расчет модуля градиента расстояния. Из рисунка видно,
(125)
что величина, смешения линии положения от изменения расстоя-
ния Дп, равна приращению расстояния ДО. Тогда
At/=D2 —О1 = ДО;
Дп = D, — Dt = ДО,
подставив в выражение модуля градиента
___ ДО___ ДО _। единица длины (126)
S bn &D ’ единица длины' '
Направление градиента совпадает с направлением от ориентира.
Градиент горизонтального угла между
ориентирами. Горизонтальный угол между двумя ориенти-
рами измеряется секстаном или рассчитывается как разность
двух компасных пеленгов (рис. 91). Зная счислимое место судна,
можно измерить расстояния АС=Ьа и BC=Db и применить тео-
рему о сложении градиентов
Sa = Sa — Sb*
214
При счислимой точке С строим градиенты направлений (пелен-
гов /(/7а и КВ в)- Модули градиентов направлений будут
57°,3 _ 57°,3
Sa~ da ’ db ‘
По направлениям, перпендикулярным счислимым пеленгам,
откладываем в выбранном масштабе значения модулей градиен-
тов Sa и gB* Геометрическая разность этих двух векторов будет
градиентом угла, модуль которого снимается с чертежа в том же
масштабе. Обычно для сокращения графических работ каждый
из градиентов поворачивают по часовой стрелке на 90°. В этом
случае gA расположится на прямой СА, g& по прямой СВ, а
ga —параллельно линии положения. Такие градиенты называют-
ся повернутыми (рис. 92).
Модуль градиента угла можно рассчитать и аналитически.
Треугольник градиентов подобен треугольнику АВС, Из их подо-
бия получим
Sa. ~
но
57°,3
ЯА- da •
215
Подставив это значение, будем иметь
g* __ 57°,3
яв dadb
или
_ 57°,ЗАВ градусы . _
Dai>b ’ единица расстояния ’ ' '
__ 3438 АВ минуты
ЬАЬВ ’ единица расстояния '
Направление градиента горизонтального угла совпадает с на-
правлением на центр, вмещающий угол окружности.
Рис. 92
Градиент разности расстояний. Функция — раз-
ность расстояний до двух станций
U=D2 — £>х = const.
Воспользуемся теоремой о сложении градиентов
Su = Sz Si'
Так как для градиентов расстояния модуль градиента
gl = g2= h
то в счислимой точке строят два равных вектора—с направлением
от станций и вектор их геометрической разности, который и будет
216
искомым градиентом. В связи с тем, что треугольник градиентов
будет равнобедренным (рис. 93), модуль градиента будет равен
gcz = 2sin-^, (128)
а линия положения расположится по биссектрисе угла, состав-
ленного одинаковыми векторами градиентов расстояний. Гради-
ент будет перпендикулярен линии положения* имея направление
в сторону ближайшей станции.
Градиент ортодромического пеленга. Если
радиопеленгаторная станция взяла пеленг судна, равный U, но
при этом расстояние до судна значительно, а значит нельзя пре-
небрегать кривизной земной поверхности, модуль градиента орто-
дромического пеленга рассчитывается следующим образом
(рис. 94). Зная, что
ьи
& кп 5
из элементарного сферического треугольника АСК найдем
An = AZ7sin D.
Тогда
_ 1 /19qx
& &U sin D sin D * ' '
Линия положения имеет направление
ис + ъ
где 7 = РД sin и
представляет собой угол схождения меридианов.
Направление градиента т= Uc +т+90°.
217
Градиент линии равных пеленгов. Измерив ра-
диопеленг U с судна на радиомаяк, получим изолинию — линию
равных пеленгов, расположенную симметрично ортодромии по
другую сторону локсодромии. Из сферического треугольника СКА
(рис. 95) имеем
A£/ = t)COsD;
Ал = 7] sin D.
Подставив значение в выражения градиента, получим модуль.
градиента направления на радиомаяк
__ &U igcosD
Дл 1) sin D
g
= ctg D,
218
В таком виде градиент направления, с учетом сферичности
Земли, в навигации используется мало. Линия равных пеленгов
представляет геометрическое место вершин сферического угла,
образованного меридианом судна и направлением на радиомаяк.
Градиент сферического угла определяется, как геометрическая
разность градиентов направлений. Приняв направление меридиа-
на за направление на полюс, выразим градиент этого направле-
ния через широту места судна, зная, что
А = 90°-
градиент этого направления gi = ctg(90°—<рс) = tg(pc. Модуль гра-
диента второго направления g2=tctg£)2. Модуль градиента уг-
ла U, образованного направлениями на полюс и на радиомаяк,
из треугольника градиентов (рис. 96), будет равен
gu = Vtg2 <fc + ctg2 D, — 2tg ctg”D2 cos U.
Величина градиента и направление линии положения получают-
ся также построением треугольника повернутых градиентов, где
все градиенты поворачиваются по часовой стрелке на 90°. В этом
случае (рис. 97) по линии меридиана нужно отложить в произволь-
ном масштабе величину tg ср, а по азимуту U — величину ctg£>s-
Величина градиента угла U берется с чертежа в том же масшта-
бе. Направление g и параллельно линии положения. Проведем из
точки С перпендикуляр к повернутому на 90° градиенту угла gu*
Угол U делится перпендикуляром на два угла и\ и По рис. 97
219
величину градиента можно выразить как сумму отрезков
В/С + /СВЬ Тогда;
gu = tgcp sin Uz + ctg О2 sin (130)
Преобразуем правую часть. Для этого обратимся к сферическо-
му треугольнику СРуА (рис. 96), разделенному на два прямо-
угольных сферических треугольника сферическим перпендикуля-
ром С/С. Из прямоугольного сферического треугольника CKPn.
Ctg = tg(90° — t/1) = tgP4sinq). (131)
Приближенно можно считать
90° — Ux ~ РД sin ф.
Следовательно, угол 90—U\ представляет собой угол схождения
меридианов, т. е. угол у между линией равных пеленгов и орто-
дромией. Из этого же треугольника получим
ctg(90o-<p) = tg<p=^,
в из сферического треугольника СКА получим
= (132)
220
Подставив полученные выражения в формулу (130), получим
cos Ux sin U2 + sin Ux cos U2 sin (Ux + U2} sin U
tgd tgd tgd ' ' '
При изменении сферического угла U на АС/ смещение линии по-
ложения будет равно
. Д<7 ДС/tgd /1ОЛХ
Ддг=----= —г-уг , (134)
gfr sm С/ ’ v '
где d — длина сферического перпендикуляра, которую можно рас-
считать по формуле, вытекающей из рис. 96:
sin d = sin РД• cos .
Направление смещения линии положения относительно счис-
лимого меридиана будет
U2 = U— Ux = U— 90° + 7 = U + RD sin — 90°.
§ 61. ОШИБКИ НАВИГАЦИОННЫХ ОБСЕРВАЦИЙ
Для навигационной обсервации необходимо измерить пелен-
ги, углы, расстояния и т. д. Это позволит получить изолинии или
линии положения. Измерения производятся навигационными ин-
струментами или приборами. Всякое измерение вследствие несо-
вершенства приборов, влияния на измерения посторонних неизу-
ченных факторов, несовершенства органов чувств человека, не-
достатка в методе измерения неизбежно сопровождается ошиб-
ками. Обсервации являются контролем счисления, поэтому судо-
водитель должен уметь оценить полученную им обсервацию, так
как иначе вместо контроля это приведет к ошибочным выводам.
Для изучения ошибок необходимо знать их причины и характер,
возможные и допустимые пределы численных значений ошибок,
а также пути выявления их и уменьшения влияния на полученный
результат. Все ошибки измерений по характеру своего действия
на измеряемую величину разделятся на систематические, случай-
ные и промахи.
Систематические ошибки — это ошибки, характер
и причины возникновения которых могут быть известны. Обычно
они меняются медленно и при данных наблюдениях приближенно
сохраняют величину и знак. Эти ошибки могут быть изучены и оп-
ределены по величине и знаку и, следовательно, исключены из из-
мерений введением соответствующих поправок, имеющих знак,
обратный ошибке. Систематические ошибки происходят от какой-
либо не принятой в расчет причины, которая может быть постоян-
ной или меняющейся по определенному закону или меняющейся
незакономерно. В зависимости от характера причин, вызывающих
ошибку, систематические ошибки подразделяются на:
а) постоянные — ошибки, изменяющие результаты измерений
на одну и ту же величину, не зависящую от значения измеряемой
221
величины (ошибка в поправке гирокомпаса создает ошибку в ис-
тинных пеленгах вне зависимости от значения компасного пелен-
га);
б) односторонне действующие ошибки, влияние которых ме-
няется в зависимости от значения измеряемой величины (пеленг
хорошо освещенного ориентира будет иметь ошибку, отличаю-
щуюся от пеленга слабо освещенного ориентира); вывести какую-
либо закономерность для односторонне действующих ошибок
нельзя;
в) закономерные ошибки, оказывающие влияние на резуль-
тат измерения в определенной закономерности (ошибка в поправ-
ке лага искажает рассчитанное плавание, пропорционально само-
му плаванию).
В ряде наблюдений систематические ошибки получают-
ся одного знака. Для исключения систематических ошибок из
наблюдений нужно:
а) изучить и выверить прибор или инструмент;
б) вывести для каждого прибора поправку и ее знак, если
нельзя скорректировать сам прибор или инструмент передвиж-
кой шкалы или указателя;
в) огранизовать наблюдения таким образом, чтобы не возни-
кала ошибка из-за разновременности измерений, например, пер-
вый пеленг берут ближе к диаметральной плоскости судна, а по-
следний — ближе к траверзу; выбрать для наблюдений удачные
ориентиры и др.;
г) обрабатывать наблюдения так, чтобы исключилась систе-
матическая ошибка, например, если есть ошибка в поправке ком-
паса при обсервации по трем пеленгам, получим треугольник по-
грешности; из трех компасных пеленгов рассчитать два горизон-
тальных угла и нанести место судна без влияния на него ошибки
в поправке компаса; имея компасные пеленги и сняв с карты ис-
тинные, определить верную поправку компаса;
д) проверять имеющиеся на судне таблицы поправок, девиа-
ции, радиодевиации, соотношения скорости и оборотов машин
и т. д.
Во всех измерениях бывают как систематические, так и случай-
ные ошибки. После исключения влияния систематических оши-
бок в измерении останутся только ошибки случайные.
Случайные о ш и б к и — это ошибки, вызванные многооб-
разными и противоречивыми причинами, существенно не связан-
ными с проведением данных измерений. Величины и знаки их в
каждом наблюдении могут изменяться. Появление случайных
ошибок обусловлено множеством причин, их нельзя учесть и уст-
ранить. В каждом измерении они проявляются различно. Они не-
избежны в измерениях.
Грубая ошибка называется промахом. Появление про-
маха не закономерно и легко обнаруживается повторным измере-
нием. Промах может иметь знак плюс или минус.
222
Случайные ошибки обладают следующими свойствами, изуче-
ние которых дает возможность анализировать обсервации, полу-
ченные с помощью измерений:
а) в большинстве измерений появление ошибок численно ма-
лых более вероятно, чем численно больших;
б) положительные ошибки появляются также часто, как рав-
ные им отрицательные;
Г №
Рис. 98
в) вероятность появления ошибки, превышающей предел ряда
измерений, равна нулю.
Случайные ошибки, встречающиеся в штурманской практике,
обычно подчиняются нормальному закону распределения, сфор-
мулированному Гауссом. Закон Гаусса проявляется при следую-
щих условиях:
а) источников случайных ошибок много, причем каждый из
них дает свою ошибку;
б) ошибки принимают с одинаковой вероятностью как поло-
жительные, так и отрицательные значения.
Нормальный закон распределения ошибок выражен уравне-
нием Гаусса
/(A) = -^e-ft34\ (135)
у It
где h— мера точности;
е— основания натуральных логарифмов;
А— ошибка измерения.
Графическое изображение закона Гаусса представлено сим-
метричной кривой, называемой палаткой Эйлера (рис. 98). По
223
оси абсцисс откладываются величины +Д, —А, по оси ординат
/•(А). Эта формула служит основанием теории случайных ошибок
и показывает, в частности, что f(A) является четной функцией.
Рассматривая палатку Эйлера, можно сделать выводы:
а) вследствие симметричности палатки Эйлера относительно
оси ординат площадь, ограниченная кривой, делится пополам,
следовательно, положительные и отрицательные ошибки равно-
вероятны;
б) по той же причине ошибки, одинаковые по абсолютной ве-
личине и разные по знаку, равновероятны;
в) малые ошибки более вероятны, чем большие;
г) кривая приближается асимптотически к оси абсцисс, следо-
вательно, с увеличением случайных ошибок вероятность их при-
ближается к 0;
д) не исключена возможность получения бесконечно больших
ошибок.
Величину h в уравнении Гаусса называют мерой точности.
Чем больше й, тем круче поднимается кривая, тем меньше вели-
чина ошибок, тем лучше метод измерений, следовательно, h ха-
рактеризует 'метод измерений.
§ 62. СРЕДНЯЯ КВАДРАТИЧЕСКАЯ ОШИБКА
Обозначим истинное значение измеряемой величины через а,
полученное значение через X, ошибку измерения через А. Тогда
' Д = а — X.
Произведем п измерений одной и той же величины и получим п
различных значений измеряемой величины и п истинных ошибок
Ai, Аг, Аз, . . . , Дя.
Имея ряд измеренной величины Хь Х2, Х3, . . . , Хп, можно
рассчитать среднее арифметическое или арифметическую середи-
ну а0-
а0 = ^- (136)
Сложим абсолютные величины полученных ошибок и разделим
сумму на число измерений п
= (137)
Величина 0 представляет собой среднее значение ошибок из ряда
наблюдений и называется средней арифметической ошибкой. Так
как истинное значение измеряемой величины а нам неизвестно,
мерой точности измерений принята условная величина, называе-
мая средней квадратической ошибкой /гг.
224
В таком виде средняя квадратическая ошибка в судовождении не
применяется, так как истинное значение измеряемой величины
также неизвестно. Выведем формулу средней квадратической
ошибки, введя известные судоводителю величины.
Арифметическая середина
^0— п
отличается от измерения X/ на величину уклонения Vt. Следо-
вательно,
Vi = a0-Xit
а ошибка любого измерения
Вычтя из второго уравнения первое, получим
Д/ — Vj = а — а0 = 8;
Az=Vz + 8.
Величина 6 называется ошибкой арифметической середины.
При п измерениях таких равенств будет п:
^=^+8;
A,= V2-F8;
Дл = V, + 5.
Возведем эти равенства в квадрат и сложим
5Д/ = 2 И + л82 + 285 Vi.
"" i; / :i
Разделим левую и правую части уравнения на п л г .
S Д? ~ £ У? га S F,
л л * п
По свойству случайных ошибок положительные ошибки появ-
ляются так же часто, как равные им отрицательные, Поэтому,
можно считать, что сумма уклонений равна 0, следовательно,
26Е ^0
п
Тогда уравнение примет вид
15 Навигация
225
По формуле (138) величина средней квадратической ошибки
т2
п '
Это выражение подставим в уравнение (139). Получим
,/д2=Е^< + 83 (140)
Арифметическая середина, являясь вероятнейшим значением
Искомой величины из-за того, что производится конечное число
измерений, содержит в себе некоторую ошибку, которая оценива-
ется средней квадратической ошибкой арифметической середины
тао. Для вывода этой ошибки напишем формулу (136) в следую-
щем виде:
а0 = — ‘=-Х,4- — — X, + • • • 4- — Х„.
о п п 1 ' п * ' п 3 1 1 п п
Учитывая, что величина До является суммой величин с одинако-
выми ошибками т и с одними и теми же коэффициентами —
можно написать
/л/n2 т и - v
«=/?’ ,14|)
где т— средняя квадратическая ошибка измерения.
В уравнении (140) заменим ошибку арифметической середи-
ны б=д—До средней квадратической ошибкой Ша0. Получим
2 Е
т2 =------
п
т*
п ’
откуда
или
(14?)
т. е. средняя квадратическая ошибка единичного измерения равна
корню квадратному из суммы квадратов уклонений единичных
измерений от их арифметической середины, деленной на число
измерений без единицы.
226
§ 63. ВЕРОЯТНОСТЬ СРЕДНЕЙ КВАДРАТИЧЕСКОЙ
ОШИБКИ
Закономерность действия случайных ошибок проявляется в
виде определенной зависимости между величиной ошибки и веро-
ятностью ее появления. Случайная ошибка может принимать бес-
численное множество значений, а потому является величиной не-
прерывной. Следовательно, можно говорить лишь о вероятности
иметь ошибку в определенных пределах. Вероятность иметь
ошибку в пределах бесконечно малого промежутка измерений,
которая выражается формулой
d& =f\ А | rfA.
Согласно нормальному закону распределения ошибок Гаусса
[формула (135)]нам известна величина f (А).
Тогда
dp = ^=e~^dH. (143)
у тс
Геометрический смысл этого выражения заключается в том,
что вероятность иметь ошибку в пределах от А до А+^А числен-
но равна площади, ограниченной частью кривой палатки Эйлера,
осью X и ординатами, соответствующими абсциссам А и A+rfA.
(На рис. 98 эта площадь заштрихована). В уравнении (143) ве-
роятность выражена мерой точности Л. Для того чтобы вероят-
ность выразить через среднюю квадратическую ошибку, т произ-
ведем в уравнении (143) замену h на /п. Средняя квадратическая
ошибка т связана с мерой точности И соотношением
т у/ 2
Отношение случайной ошибки к средней квадратической обозна-
чим через t
Тогда уравнение (143) примет вид:
1 --
dp = —7 -в 2 dt. (144)
т у
Проинтегрируем выражение (144) в пределах от —t до +t и
представим правую часть выражения в виде суммы двух интегра-
лов с пределами от —t до 0 и от 0 до +/.
4-t р 0 р +1 р
Р = —( e~^dt =—f e~^dt + —* dt,
myXnj m у 2тс J ту 2тс J
-t -t b
15
227
но так как в правой части оба интеграла равны между собой,
получим
t
р = —f е~ *dt
о
ИЛИ
/— с _ **
<145>
о
Это выражение называется интегралом вероятности средней
квадратической ошибки. Приближенное решение интеграла ве-
роятности производится разложением подинтегральной функции
е 2 в ряд
Интегрируя сокращенный ряд в пределах от 0 до t, получим
('-4)- (1*6,
Давая различные значения t в долях т, Т а б лица 12
найдем по формуле (146) соответству- ющие вероятности, которые сведены в табл. 12. Из таблицы следует: а) вероятность средней квадратиче- ской ошибки равна 68,3%; б) вероятность удвоенной средней квадратической ошибки равна 95,4%; в) вероятность утроенной ошибки рав- на 99,7%, поэтому утроенная средняя квадратическая ошибка принимается за данного ряда измерений. t= — т Р
0,67 0,84 1,00 1,50 2,00 2,50 3,00 |цредельнуь 0,500 0,576 0,683 0,866 0,954 0,988 0,997 о ошибку
§ 64. ОЦЕНКА ОШИБОК СУДОВОДИТЕЛЯ
В работе судоводителя ошибки оцениваются средней квадра-
тической ошибкой следующим образом.
1. Прокладка пеленга или курса. Ведя прокладку на карте,
мы делаем две ошибки:
ошибку а отсчете по транспортиру ei = ±0°,2 и ® проведе-
нии линии через заданную точку ег = ±0,25 мм, что в угловой ме-
ре рассчитается на длину Е‘= 150 мм
arc I-=^3438 = У.7 » ± 0»,1;
т= ± /(0°,2)2 + (0°,1)2^ + 0°,2.
228
2. Измерение расстояния по курсу или пеленгу. Средняя квад-
ратическая ошибка измерения расстояния от точки до точки
±0,3 мм. В зависимости от масштаба карты средняя квадра-
тическая ошибка прокладки расстояний на карте представлена
в табл. 13.
Таблица 13
Масштаб карты 1 10 000 1 25 000 1 50000 1 100 000 1 200 000 1 500 000
т. кбт. 0 ± 0,05 ±0,1 ±0,2 ±0,3 ±0,8
3. Нанесение углов на карте протрактором:
а) нанесение на карту ориентиров ± 2';
б) установка среза линейки на точку ± 2';
в) изгиб линейки ± 3';
г) эксцентриситет ± 3'
т = ± /22 + 22 + З2 + З2 = 5' ± 0°, 1.
Нанесение угла с помощью кальки дает/и = ±0°, 14.
4. Пеленг, взятый с помощью магнитного компаса:
а) ошибка наведения и отсчета ei = ±0°,3;
б) ошибка в склонении e2 = ±0°,25;
в) ошибка в девиации е3 = ±0°,5.
Средняя квадратическая ошибка проложенного на карте пеленга
т = /(0.3)2 + (0,25)2 + (0,5)2 = ± 0°,7.
5. Пеленг, взятый с помощью гирокомпаса. По данным акаде-
мика Крылова точность современных компасов /п=±0°,6—0°,9.
С учетом прокладки на карте т= ±0°,8—0°,9.
6. При измерении угла секстаном и прокладке его на карте
т=±0°,1.
7. Средняя квадратическая ошибка в пройденном по лагу рас-
стоянии:
а) ошибка определения поправки лага
тх = ± 0,5%;
б) ошибка в определении пройденного расстояния аи2 = ±0,3—
0,4%:
т = 0,6 — 0,7%.
8. Радиолокационный пеленг РЛС «Нептун»:
а) растягивание отметки эхосигнала по окружности т{=± 1°,0;
б) ошибки в неточности центровки
/п2=±0°,5;
в) ошибки от неточного совмещения визира т3= ±0°,5;
г) ошибка в курсе судна
/п4 = ± 0°,5.
Общая т— ±2°,5.
229
9. Радиолокационное расстояние РЛС «Нептун»:
а) ошибка калибровки
пг1 = ± 0,1 кбт.;
6) ошибка искажения объекта
т2 — + 0,3 кбт,;
в) ошибка измерения
mz = ± 0,1 — 0,2 кбт.
Суммарная ошибка для т:
для шкал 1,5 мили — 5 миль
т= ±0,3—0,6 кбт.
Для шкал 15—30 миль
т=±0,6—1,0% от измеренного расстояния;
10. Радиопеленг. В зависимости от напряженности электро-
магнитного поля Е в точке приема сигнала радиомаяка и рас-
стояния до радиомаяка, диаграмма приема будет иметь различ-
ный угол молчания, являющийся основным фактором, влияющим
на величину средней квадратической ошибки. Зависимость меж-
ду расстоянием Д, напряженностью поля Е и средней квадрати-
ческой ошибкой т дана в табл. 14.
Таблица 14
D, мили Е, мкв/м т
25 230,0 0°,26
35 159,0 0°,36
50 92,0 0°,65
75 66,6 0°,90
100 47,0 1°,25
125 35,1 1°,68
150 27,7 2°,10
§ 65. СРЕДНЯЯ КВАДРАТИЧЕСКАЯ ОШИБКА ОБСЕРВАЦИИ
Как установлено, приращению функции соответствует парал-
лельное смещение линии положения. При этом существует про-
порциональная зависимость
где g — коэффициент пропорциональности, или градиент.
Если средняя квадратическая ошибка измерения функции
230
(пеленга, угла, расстояния и т. д.) равна то смещение ли-
нии положения т, соответствующее этой ошибке, будет равно
(147)
Анализ формулы показывает, что это смещение будет тем
меньше, чем больше градиент.
Рис. 99
Получить обсервованную точку можно лишь при наличии не
менее двух линий положения, пересекающихся под каким-то уг-
лом. На рис. 99 две линии положения аах и bbx пересекаются
под углом 6. В точке пересечения их получается обсервованное
место F. Если бы в наблюдениях (измерениях углов, пеленгов,
расстояний и т. д.) не было ошибок, истинное место можно было
бы считать в точке F, но наличие неизбежных случайных ошибок
в измерениях функций приводит к тому, что место определено с
ошибкой
23J
Расстояние между верными и неверными линиями положения
FB = Ap и F\C = &q являются случайными ошибками линий по-
ложения. Из треугольников ABF и ACF{ находим:
= AF^^.
sin и ’ * 1 sin и
Из треугольника AFFi
9 Др2 . Д?3 о Д л Д а д
р2 = 1ет + ^т-2-етСО86:
Р2 = (д Р2 + д я2 — 2Д р д 7 cos 0).
Сделав п измерений функции, рассчитаем среднюю квадрати-
ческую ошибку.
Pi= (д Р? + д 71 — 2Д р! Д 7i cos 0);
Р2= (ДР2 + д я1 7г cos 0);
Р2= £П?г(дР«+ Дрл-2Д/>„Д<7„со8в)
2 Р* = -^9- (2д Pi + 2Д 73 — 21]Д р д 7 cos 0).
Разделим уравнения на п
Ер2_ 1 /ЕД р2 । ЕД 72 __ 2 ЕДрД ?cosfl\
п sin3 0 \ п * п п /
и введем обозначения
Е р2 л ЕД р2 2 ЕД q2 2
п п п
Величина 2еА Р Л q cos 6 = 0, так как в большом коли-
честве измерений величины Др и Д(? будут с разными знаками и
2ДрД<?=0.
Произведем подстановку и получим
Окончательно
м=+ + . (148)
Величина Л1 представляет собой радиус круга погрешности. Из
формулы (148) видно, что угол пересечения линий положения
оказывает на среднюю квадратическую ошибку обсервации су-
щественное влияние. Например,
0 = 90°; + //ni + mi
232
и _______
6 = 30°; М = ± 2~/т1 + т22,
т. е. средняя квадратическая ошибка обсервации увеличилась в
2 раза при тех же ошибках в измерении функций.
Преимущества оценки точности определения места судна ме-
тодом средней квадратической ошибки заключаются в следую-
щем:
а) расчет для различных обсерваций средних квадратических
ошибок весьма прост и занимает мало времени;
б) формула (148) универсальна для расчета средней квадра-
тической ошибки обсервации, полученной по двум линиям поло-
жения.
Недостатки метода заключаются в том, что:
а) вероятность истинного местонахождения судна, в круге с
радиусом М, непостоянна и зависит от угла 6;
б) вероятность получить ошибку М по разным направлени-
ям от обсервованной точки различна;
в) площадь вероятного местонахождения судна завышена.
Эти недостатки в оценке точности определения места судна уст-
раняются при пользовании методом эллипса ошибок.
§ 66. ЭЛЛИПС ОШИБОК
Средняя квадратическая ошибка может сместить линию по-
ложения на величину — в сторону, отвечающую положи-
тельному + т, а также его отрицательному значению. Причем
вероятность смещения линии положения как в одну, так и в дру-
гую сторону одинакова. Систему возможных ошибок, действую-
щих по определенному направлению, принято обозначить двумя
равными и противоположно направленными стрелками, числен-
ная величина каждой из которых равна средней квадратической
ошибке. Такую систему называют векториальной ошибкой. Она
характеризуется не только величиной, но и направлением, по ко-
торому она действует и обозначается
т.
Две векториальные ошибки, действующие по одному направ-
лению, складываются квадратически, в отличие от векторов, ко-
торые складываются геометрически
М2="/и? + т2 . (149)
Сложенные векториальные ошибки дадут средний квадрати-
ческий эллипс вероятного местонахождения судна.
233
На рис. 100 истинное место судна Р — точка пересечения ли-
ний положения /-/ и //-// под углом 0. Из-за средних квадрати-
ческих ошибок т\ и m2 линии положения смещены по обе стороны
от верных линий положения, т. е. место судна подвержено влия-
нию двух векториальных ошибок тх и т2. Средний квадрати-
ческий эллипс вероятного местонахождения судна вписан в па-
раллелограмм ABCD. Вероятность того, что действительное ме-
сто судна находится внутри среднего квадратического эллипса
равна 39,3%. Эллипс, построенный для удвоенной средней квад-
ратической ошибки, имеет вероятность 86,5%. Эллипс, соответст-
вующий утроенной средней квадратической ошибке, называется
предельным и имеет вероятность нахождения места судна внут-
Рис. 100
Полуоси среднего квадратического эллипса а и Ь по двум век-
ториальным ошибкам mi и т2 рассчитываются по теоремам Апол-
лония, считая, что mi и т2 совпадают с сопряженными диаметра-
ми эллипса:
а) сумма квадратов главных полуосей равна сумме квадратов
сопряженных полудиаметров
дЗ £2 _ (Ц
б) площадь параллелограмма, построенного на двух сопря-
женных полудиаметрах эллипса, равна площади прямоугольни-
ка, построенного на двух полуосях
sin 0 = ab.
(И)
234
Умножив равенство II на 2, сложим и (вычтем результат из ра-
венства I
/П1 + /п3 + 2/71^2 sin 6 = (a -f- Ь)2;
тпх — 2тхт2 sin 6 = (а — Ь)2
или а + b =^/ 4" ^2 + 2^72^2sin9;
а — b = у + ml — т* sin 0.
Из рис. 100 видно, что величина векториальной ошибки
/и, =—-4; —
1 sin 0 * 2 sin О
но
где ти — средняя квадратическая ошибка в измерении функ-
ции, которая во всех измерениях может быть принята равноточ-
ной. Тогда
т11
тх = —: т~ = —44 .
1 gi sin 6 ’ 2 g2 sin 0
Подставив в уравнение значения тх и т2, получим
___ ти Г 1 1 । 2sin 6
gtgt ’
___ mu Г 1 । I 2sin 6
|/ ^2- + ^-- glg2
(150)
По этим формулам можно рассчитать полуоси среднего квадрати-
ческого эллипса. Для того чтобы ориентировать эллипс ошибок
с линиями положения, рассчитывают угол а, составленный боль-
шой полуосью а с направлением линии положения /-/, по фор-
муле
tg2a =
sin 20
— ) *4- cos 26
£1/
(151)
Если градиенты линии положения будут равны gi=g2=g, то
ffij = /п2 = т
и формулы (150) упростятся:
а + b = ^-й / 2(1 + sin 0);
1 £sin6 r v 1
a — b = V2(1 - sin 6). (152)
£Sin0 r v f v 7
235 <
'Складывая и вычитая уравнения (152), после преобразований
получим i
a = ^cose<4; 6 = 053)
При mi = m2 оси эллипса совпадут с диагоналями параллело-
грамма, который в данном случае будет ромбом (рис. 101). Сле-
довательно,
а =4“- (154)
Полуоси совпадут с диагоналями ромба. Когда формула (148)
будет иметь вид
АР + -^ГТГ = = а2 +
sin2 0 1 sin2 0 1 1 i
получим ошибку точки, которую используют для оценки точ-
н осгги о бее рв а дим _______
М^= ± V а2 + Ь2.
Большая ось эллипса ошибок располагается между биссек-
трисой острого угла пересечения линий положения и той из линий
положения, точность которой выше. Наиболее полное представ-
ление о расположении эллипса ошибок в зависимости от поло-
жения судна от ориентиров дает поле ошибок. При обсервации
по двум пеленгам поле ошибок будет иметь вид, представленный
на рис. 102, цри обсервации по двум расстояниям—на рис. 103, по
пеленгу и расстоянию — на рис. 104. Если обсервация получена
236
- - 0 о о о о
0
0
CM
Рио, 104
по разности расстояний, поле ошибок будет иметь вид, изобра-
женный на рис. 105. С помощью поля ошибок судоводитель все-
Рис. 105
гда безошибочно может ориентировать полученный эллипс оши-
бок.
§ 67, ЭЛЛИПС ОШИБОК для ЧИСЛА ЛИНИЙ
положения более двух
Если произвести несколько однородных измерений, с одина-
ковой точностью используя три, четыре, пять и т. д. ориентиров,
получим серию линий положения, пересекающихся под различ-
ными углами, которые образуют К точек пересечения. При этом
К= С2п = п ~ 11
Для каждой пары линий положения можно построить эллипс
ошибок, а затем из нескольких эллипсов создать один суммар-
ный. Таких эллипсов можно построить в количестве N.
,v=ri=
Производить построение нескольких эллипсов нет надобности,
если имеющиеся линии положения заменить эквивалентными.
Это — такие две взаимно перпендикулярные линии положения,
для которых эллипс ошибок будет одинаковых размеров и оди-
238
наково ориентирован с эллипсом ошибок для и, имеющихся ли-
ний положения. Эквивалентные линии положения совпадают с
главными осями эллипса и, следовательно, обладают при дан-
ных ошибках измерения функций наибольшим и наименьшим
градиентами из всех возможных для данного эллипса.
На основании этого по формуле (147) полуоси эллипса будут
выражены
ти
а = b = f^. (155)
smin smax
Градиенты эквивалентных линий положения могут быть вычисле-
ны решением системы двух уравнений
gmax + £min = g\ + gl + * * • gn *,
gmax--grain = |gl + g2 + * * * + gn |, (156)
г де gi, g2, . • • >gn— градиенты действующих линий положения;
g2j + Si "Н - • — алгебраическая сумма квадратов всех
градиентов;
gi + ~g\ + • * • + gn | — модуль вектора геометрической суммы
квадратов градиентов, проведенных по удвоенным их направле-
ниям.
Для расчета этого модуля составляют следующую таблицу.
Линии положения Градиенты линий положения Удвоенное направление Квадраты градиентов
направление ] модуль
I- I -4] 2 А £1
II- II ^3 gl 2 А2 gl
ИМИ Л & 2 А3 «3
Ап gn | 2 Аа
Eg2
Произведем построение квадратического полигона. На листе
бумаги по удвоенному направлению 2Ai (рис. 106), отсчитыва-
емому от N части меридиана, в выбранном масштабе откладьн
вают значение gl , а с конца вектора ото направлению 2А2 — gi
и т. д. Конец последнего вектора.соединим с началом первого.
Величина модуля в том же масштабе снимается с чертежа. Под-
ставив полученные значения в систему уравнений (156), полу-
чаем
gL.=-|-(2ga + 2?);
239
4-<2«’-2?);
^„,=/4(2 ^-2?)
и рассчитывают полуоси эллипса
а = — -----; b = у_ т“ _ .
В связи с тем, что замыкающий вектор квадратического по-
лигона составляет с Nu также 'двойной угол, то, проведя биссект-
рису этого угла, определяют направление большой полуоси. Ес-
ли обсервация производится по разнородным и разноточным из-
мерениям, то вместо квадратов градиентов для расчета эллипса
ошибок используют веса линий положения Р
р=-^-
т2а ’
с которыми поступают так же, как изложено выше.
240
§ 68 ОПОЗНАВАНИЕ БЕРЕГА И ОРИЕНТИРОВ
ДЛЯ ОБСЕРВАЦИИ
На подходе к незнакомому берегу, имея счислимое место
судна, судоводитель должен изучить по лоции возможные в
этом районе возвышенности, их вид по рисункам, помещенным
в лоциях, высоту и отметить их на карте. Когда возвышенности
откроются, нужно их запеленговать. Необходимо иметь не менее
трех пеленгов, так как неверно опознанная возвышенность даст
большой треугольник погрешности.
После нанесения на карту первой обсервации необходимо че-
рез определенные промежутки времени ее повторять по тем же
ориентирам, ведя счисление между обсервованными точками и
сличая результаты счисления с полученными точками. Одновре-
менно с визуальными обсервациями измеряют эхолотом глуби-
ну, сопоставляя результаты с картой, а в пределах радиолока-
ционной видимости производят также радиолокационные об-
сервации.
Приблизившись к берегу на расстояние, позволяющее видеть
рекомендуемые лоцией ориентиры, уточняют свое место. Судово-
дитель должен уметь сличать местность с картой. Этому помо-
гают собственные зарисовки приметных мест и ориентиров. Осо-
бенную ценность такие зарисовки представляют при посещении
слабо изученных и мало освещенных в лоции районов.
Значительные трудности при подходе к берегу возникают
в районах с однообразным ландшафтом, не имеющим приметных
ориентиров, а также к берегу, покрытому снегом. В таких случа-
ях для опознания места судна пользуются эхолотом, лотом и ра-
диолокатором и, если есть радиомаяки — радиопеленгатором.
Рекомендуется также брать образцы грунта и сопоставлять их
с указаниями на карте. Указания в лоции о цвете воды, наличии
водорослей, мусора часто помогают опознать место.
При подходе к берегу в ночное в»ремя, в районе где есть ма-
яки, пользуются пособием «Огни и знаки», в котором указаны
характеристики огней. Если же в данном районе нет маяка, ис-
пользуется эхолот, лот и радиолокатор.
ПРИМЕРЫ
1. На судне взят пеленг маяка в момент, когда счислимая точка от маяка
находится на расстоянии 25 миль. Рассчитать модуль градиента пеленга.
Решение. По формуле (124)
ЛИ = 2,29г-Р™^
25 миля ’
т. е. если судно переместится перпендикулярно пеленгу на 1 милю, то пеленг
изменится на 2°,3.
2. С судна измерен горизонтальный угол « между двумя ориентирами.
Он оказался равным 90°. На карте расстояние между ориентирами 14,5 миль,
расстояние до правого ориентира 12, до левого 8 миль.
Рассчитать модуль градиента угла а.
Задачу можно решить двумя методами.
16 Навигация 241
Графоаналитический метод. На листе бумаги строится угол
=90°, по правой стороне его откладывается величина модуля градиента пе-
ленга правого ориентира, по левой — левого в определенном масштабе. Модули
градиентов рассчитываются по формуле (124).
57,3 _ п градусы
= _а-=7’2-мйля- ’
„ -- 57-3 л О градусы
12 ’ миля
„ „ градусы
В этом масштабе измеряют их геометрическую разность равную 8,6- .
миля
Аналитический метод. По формуле (127) модуль градиента
угла будет
_ 57,3 X 14,5 __ градусы
8 X 12 ’ миля *
3. С радиопеленгаторной станции получен ортодромический пеленг РП ~45Р
Возможная ошибка в пеленге +1°* Разность долгот станции и судна РД = 4°.
Средняя широта 60°. Счисли мое расстояние 200 миль. Определить возможное
смещение линии положения и ее направление.
Решение. По формуле (129)
Градиент ортодромического пеленга g = —:—
SIH о
Дп = Д(7sin S;
ДU = 1° = 60'; 5 = 200 миль = 3°20';
Д/т —60°; sin3°20';
Ди = 60 X 0,0581 = ± 4 мили.
Направление линии положения РП + 7 = РП + 2ф.
Из МТ-53 (табл. 23) ф = + 1 °,7; 2ф == + 3°,4;
45° + 3°,4 = 48°,4.
4. Из счислимой точки судна взят радиопеленг радиомаяка ИРП — 3^'3.
Расстояние от счислимого места до радиомаяка 180 миль. Возможная ошибка
в пеленге ±2°. Угол схождения меридианов 7 =4°. Рассчитать возможное сме-
щение линии положения, направление градиенту и направление линии поло-
жения.
Решение. Задача может быть решена с помощью логарифмической ли-
нейки или таблиц логарифмов.
Смещение линии положения Д Л =-=— .
Градиент линии равных пеленгов g=ctgD,
тогда tg D = 12и X 0,0524;
Ди = 6,3 мили.
Направление градиента
т = 36 - 90 + 4 = 310°.
Направление линии положения
310 — 90 — 220°.
242
Смещение линии положения можно рассчитать также по формуле (134)
g sin U ’
где MJ = 120''
tgd определится из формулы (132)
tg d = cos tg Dt
HO
U2 = - 90° 4- 7 = 310°,
тогда
' tg d = cos 50° tg 3.
Перенос линии положения или смещение
Дч = 120' cos 50° tg 3° cosec 36° = 120' X 0,6428 + 0,0524 X 1,7013 = 6,9 мили.
5. Секстаном измерен горизонтальный угол между двумя маяками 5
раз. Результаты измерений:
^1 = 48°ЗГ,5;
Х2 = 48°33',1;
Л3 = 48°34',5;
Х4 = 48°30',1;
Х5 = 48°32',5.
Рассчитать среднюю квадратическую ошибку измерений и предельную ошибку
измерений.
Решение. Среднее арифметическое измерение рассчитаем по формуле
а0 = = 48’32',2.
и п
Для каждого измерения рассчитаем величину уклонения и возведем в квадрат
Vi = 48°32',2 - 48°31',5 = + 0°,7; V? =0,49;
У = 32',2 — 33',1 = — О',9; V| =0,81;
V3 = 32',2 - 34',5 = ‘ - 2',3; VI =5,29;
и4 = 32°,2 — 30',4 = + Г.8; V*t =3,24;
VB = 32',2 — 32',5 = — О',3; Vl =0,09.
Сумма квадратов уклонений
S 1/2= 9',92.
Средняя квадратическая ошибка измерения из данного ряда измерений рас-
считывается по Формуле
п [ S 1/2
16’
243
Предельная ошибка измерений выражается через среднюю квадратическую
ошибку
Мпр = Зт = 3 X Г.6 == 4',8.
6. Взят пеленг маяка, расположенного на расстоянии 15 миль. Средняя
квадратическая ошибка измерения тн=+0°,5.
Какое смещение линии положения следует ожидать.
Решение. По формуле (147) смещение линии положения в зависимости
от средней квадратической ошибки измерения
Градиент пеленга
57°,3 57°,3
8~ S ~ 15 •
Следовательно, ошибка в линии положения
7. Обсервация получена по двум пеленгам ориентиров. Расстояние до
ориентиров Si=9 миль и «$2=11 миль. Угол между пеленгами 6=60°.
Ошибка измерения та = +0°,5. Рассчитать среднюю квадратическую
ошибку обсервации.
Решение. По формуле (148)
т1+т2 •
Ошибка первой линии положения
0,5*9 , по к
л»1 = 57»3 = ± 0,8 кбт.
Ошибка второй линии положения
т» = ° 57^3 1 = ± 0,9 кбт’
Подставив в формулу, получим
М = ± ogee /0,64 + 0,81 = ± 1.4 кбт.
т. е. обсервованное место находится в окружности, описанной вокруг полу-
ченной точки радиусом, равным /?=ЛТ=1,4 кбт.
8. Рассчитать полуоси эллипса ошибок и построить эллипс ошибок при
определении места по трем расстояниям. Средняя квадратическая ошибка из-
мерения расстояний ти=±4,5 кбт. Направление от ориентиров на обсервован-
ное место 15, 50 и 85°.
Решение, а) Для удобства решения сведем все данные в таблицу
Расстояния Градиент Удвоенное направление 1 Квадраты 1 градиентов
модуль | направление
1 1,0 15° 30° 1,0
2 1,0 50° 100° 1,0
3 1.0 85° 170° 1,0
2^ 3,0
244
б) Построим квадратический полигон, с которого снимем направление и
величину вектора геометрической суммы квадратов градиентов (рис. 107).
В масштабе чертежа сумма квадратов градиентов по направлению 280е = 1,7.
в) Решим систему уравнений (156)
I £тах "Ь £mfn=3,0
„2 _ —2 _-J у
ботах femln 1,f___________
24„“V ^„ = /^=1.5
24ln“t3 £min = /07 = 0,8
г) Рассчитаем полуоси эллипса по формуле (155)
д) Снятое с квадратического полигона направление замыкающего вектора
280° разделим на 2 и получим направление большой оси эллипса.
^=140°
Направление малой оси перпендикулярно большой
140 ± 90 = 230° или 50°.
ж) От Nu проведем направление большой и малой оси эллипса (рис. 108)
и по этим направлениям отложим значения а и Ь, после чего построим эллипс
ошибок.
245
Задачи
1. Карта 704. Между огнями островов Верховского и Скрыплева измерен
угол а. Счислимая точка cpc = 42°52'N, Ac= 132°00'0st и ИК судна 0°. Скорость
10 узлов. Рассчитать градиент угла а, через каждые 15 мин хода судна в те-
чение 1 час.
2. Из счислимой точки фазоиндикатором измерена разность расстояний
до двух станций. С карты снято направление на станции от счислимого места
/7/71 = 128°, /7/72 = 240о. Определить модуль градиента разности расстояний, на-
правление линии положения и направление градиента.
3. Радиопеленгаторная станция передала судну его ортодромический пе-
ленг /7 = 38°. Возможная ошибка в пеленге 2°. Угол схождения меридианов
7 =4°,2. Счислимое расстояние 220 миль. Определить смещение линии положе-
ния и ее направление
4. Расстояние между маяками 15 миль. Расстояние до первого маяка 8, до
второго 17 миль. Судно следует параллельно линии, соединяющей маяки со
скоростью 10 узлов. Как изменится модуль градиента угла, измеренного между
маяками через 10, 15, 20, 25, 30 мин>
5. С судна взят радиопеленг радиомаяка //=40°. Расстояние до радио-
маяка 180 миль. Угол схождения меридианов 5°. Каково будет смещение линий
положения, если ошибка в пеленге +3°; определить также направление этого
смещения.
6. Как изменится градиент расстояния с изменением расстояния между
наблюдателем и ориентиром?
7. На судне измерена разность расстояний до двух станций. Счислимые
пеленги станций /7/71 = 160°, /7/72=260°. Рассчитать смещение линии положе-
ния Ап, учитывая возможную ошибку в разности расстояний, равную 3 кбт ?
246
8. Измерен горизонтальный угол между ориентирами И раз.
№ Измерения ^Измерения
1 66°43' ' 7 66°45'
2 66°42' ’ 8 66°45'
3 66°44' 9 66°44'
4 66°47' 10 66°45'
5 66°40' 11 66°43'
6 66°13'
Определить среднюю квадратическую ошибку, предельную ошибку, выя-
вить промахи и исключить их из ряда наблюдений, после чего вновь рас-
считать среднюю арифметическую и среднюю квадратическую ошибку.
9. С какой точностью будет измерено расстояние между двумя точками на
карте, если масштаб карты 1 : 150 000?
10. Взят пеленг маяка, расположенного на расстоянии 10 миль от счисли-
мой точки. Средняя квадратическая ошибка измерения ти =±Г. Какое сме-
щение линии положения следует ожидать?
11. Измеренное расстояние до ориентира равно 15 миль. Средняя квадра-
тическая ошибка измерения ти = ±2%. Какое смещение линии положения сле-
дует ожидать?
12. Измерена разность расстояний до двух ориентиров с помощью фазо-
вого зонда. Средняя квадратическая ошибка измерения ти =±11 кбт. Угол
между ориентирами 105°,7. Рассчитать смещения линии положения.
13. На судне с радиопеленгаторной станции получен радиопеленг. Рас-
стояние от счислимой точки до радиопеленгаторной станции 160 миль. Средняя
квадратическая ошибка измерения ти = +2°. Рассчитать смещение линии по-
ложения.
14. С двух радиопеленгаторных станций получены радиопеленги. Расстоя-
ние от счислимого места до станции Л = 190, до станции В — 150 миль. Угол
между радиопеленгами 0=30°. Средняя квадратическая ошибка измерения
±1°,5. Рассчитать среднюю квадратическую ошибку обсервации и полуоси
эллипса ошибок.
Ответы.
1. 7,3; 9,6; 12,7; 19,3; 24,7 градусы/миля.
2. 1,66 кбт./кбт.; 184°; 184°±90°.
3. 7,7 мили; 42,2.
4. 6,31; 6,68; 6,87; 6,91; 7,00; 7,11.
5. 9,4 мили ;315°.
6. Градиент остается постоянным.
7. Около 2 кбт.
8. /П1 = +9',5; Мпр=28'75; промах — шестое измерение, т2=±2\0; а=±1<4.
9. т — ±0,25 кбт.
10. т = ± 1,7 кбт.
11. т — ±3 кбт.
12. т =±6,9 кбт.
13. т = ±5,6 кбт.
14. М = ± 12,7 мили; а=17,7 мили; 6=2,9 мили.
Контрольные вопросы
1. В каком случае изолиния является и линией положения?
2. Что такое угол схождения меридианов?
3. Как определить знак ортодромической поправки.
4. Какие градиенты называются повернутыми?
247
5. Что характеризует Л в уравнении Гаусса?
6. Чем удобна средняя квадратическая ошибка?
7. Какова вероятность средней квадратической ошибки?
8. Чему равна средняя квадратическая ошибка обсервации, полученной по
двум линиям положения?
9. Чем удобнее и чем лучше оценивать обсервации эллипсом ошибок или
средней квадратической ошибкой?
10. Как строится квадратический полигон?
Глава XII. ОПРЕДЕЛЕНИЕ МЕСТА СУДНА
ПО ГОРИЗОНТАЛЬНЫМ УГЛАМ И ПЕЛЕНГАМ
§ 69. ОПРЕДЕЛЕНИЕ МЕСТА СУДНА
ПО ДВУМ ГОРИЗОНТАЛЬНЫМ УГЛАМ
Следуя вдоль берегов в пределах их визуальной видимости,
судоводитель может выбрать три ориентира, хорошо видимые с
судна и нанесенные на карте. Измерив углы между предметами
А и В и между В и Ct можно получить обсервованное место с
высокой навигационной точностью. Углы можно измерить сек-
станом или рассчитать их, взяв пеленги трех ориентиров. Эти
измерения нужно производить быстро, одно за другим.
Пусть мы выбрали три предмета Л, В, С, расположенные
примерно в одной горизонтальной плоскости (рис. 109) и одно-
временно измерили углы между А и В (а) и В и С (£). Для
каждого измерения изолинией будет вмещающая угол окруж-
ность, а пересечение двух изолиний даст обсервованное место.
Для построения вмещающих окружностей точки А и В, В и С
нужно соединить прямыми и разделить эти прямые пополам.
Получим точки К\ и Кг. Через эти точки проведем прямые, пер-
пендикулярные линиям АВ и ВС. На этих прямых при точках
248
Л и В построим соответственно углы 90°—а и 90°—(3. Стороны
построенных углов Аа{ и Bbi в пересечении с перпендикулярами
на АВ и ВС дадут центры вмещающих окружностей Oi и О2. Из
геометрии известно,, что всякий вписанный угол измеряется по-
ловиной центрального угла, опирающегося на ту же дугу. Сле-
довательно, углы AOiB=2a и ВО2С = 2р, углы а и 0 будут впи-
санными, а окружности, проведенные радиусами OiA и О2В бу-
дут окружностями, вмещающими углы а и 0 соответственно, т. е.
это изолинии (a = const и 0 = const). В связи с тем, что углы а
и 0 измерялись одновременно, судно находится одновременно
на двух окружностях с центрами Oi и О2, т. е. в точке пересе-
чения двух изолиний. Две окружности пересекаются всегда в
двух точках, но одна из них совпадает со средним предметом В,
где не может находиться судно. Следовательно, обсервованным
местом судна является вторая точка А
Если угол а или 0 равен 90°, то центр вмещающей окружно-
сти совпадает с точкой или /<2. Если угол а>90° или угол
0>9О°, то центр вмещающей окружности будет лежать по другую
сторону линии АВ или ВС. Для отыскания центров в этом слу-
чае при точках Л и В строятся углы а—90° и 0—90°. Если обе
изолинии пересекаются под острым углом и есть сомнение в оп-
ределении точки Р, то для увеличения точности построения мож-
но опустить перпендикуляр из точки В на прямую О]О2 и отло-
жить на продолжении его отрезок FP = BF. Полученная точка
должна совпадать с точкой пересечения окружностей.
Если один из береговых предметов удален настолько, что
центр вмещающей окружности выходит за пределы карты, то
для получения обсервованного места поступают следующим об-
разом. Через точки А и В проводим окружность, вмещающую
угол а (рис. ПО), как было указано выше. При центре О по-
249
строим угол BON = 2р. Полученную вспомогательную точку 2V
соединим прямой с точкой С, изображающей отдаленный пред-
мет С. Точка Р — пересечение прямой NC с окружностью, даст
обсервованное место судна. Действительно, £BPN= 72(360°—
2р) = 180—р как вписанный, равный половине центрального
угла, •опирающегося на ту же дугу. Следовательно, смежный
угол ВРС = р.
В условиях плавания такое длительное отыскание обсерво-
ванного места мало пригодно. В море поступают следующим об-
разом. Измерив секстаном углы аир, .место судна наносят на
карту при помощи кальки или протрактора. Для этого, устано-
вив подвижные линейки на необходимые отсчеты измеренных
углов, накладывают протрактор на карту так, чтобы скошенный
срез линейки проходил через средний обозначенный на карте
ориентир. Перемещая протрактор на карте, добиваются того,
чтобы все три линейки проходили через обозначенные на карте
ориентиры. В этом случае общая вершина углов а и 0, т. е.
центр протрактора, представит собой обсервованное место
судна.
Вместо протрактора можно использовать лист чистой кальки.
На листе кальки (прокладывают произвольную прямую и в ка-
кой-то точке строят измеренные углы а и 0. Затем, положив
лист на карту, перемещением его по карте добиваются совме-
щения всех трех линий с точками, обозначающими на карте
наблюдаемые ориентиры.
Обсервация по двум углам обладает высокой точностью в тех
случаях, когда точка наносится путем построения; нанесенные
точки протрактором или с помощью кальки несколько уменьша-
ют точность. Точность обсервации проверяется расчетом средней
квадратической ошибки измерения горизонтальных углов т* и
угол пересечения двух изолиний 0. Тогда средние квадра-
тические ошибки линии положении т{ =— и = —,а средняя
квадратическая ошибка обсерваций М рассчитается по форму-
ле (148)
Произведя подстановку, получим
/И = + ’ 1/ (157)
- sm е у \ ga J \ g? / f
Величина 0 рассчитается следующим образом. Имея счислимое
место в момент измерения углов С, соединим эту точку с А и D
(крайние ориентиры). Точки А, В, D соединим прямыми, про-
ведем касательные к окружности в точке С аах и ЬЬ\ и обозна-
чим ZS4C = X, ^BDC=Y (рис. 111). Угол между касательной
250
D
Рис. 1J2
и хордой измеряется половиной дуги, стягиваемой хордой. По-
этому ХаСВ^Х и Z6CB = y. Сумма углов четырехугольника
ABDC равна 360°, т. е.
/В + а + Р+ Х+Г= 360°.
Откуда
6 = Х + Г = 360° — (а + р + В), т. е
6 = 360°-(а + р + В). (158)
Угол В измеряется транспортиром на карте, а и р—измеренные
функции. Угол пересечения линий положения 0 для надежности
обсерваций должен удовлетворять неравенству 30°<0<90°. Мо-
дуль градиента угла рассчитывается (рис. 112) по форму-
ле (127)
_ 57°,ЗЛВ . _57°,ЗВС
ОС » <? <?
Подставим в формулу (157) рассчитанные значения градиентов
и принимая для одинаковых условий наблюдений та=т$=ти,
произведем преобразования. Получим:
М~± 57°,3sine|/^(лв) +(вс) (159)
ИЛИ
Л = зТ5ет/(М+(М <|6(»
где М—средняя квадратическая ошибка определения места
по двум углам в размерности, одинаковой с размер-
ностью величин Sa, Sb, Sc;
Sa— расстояние от обсервации до левого ориентира;
Sb—расстояние до среднего ориентира;
Sc— расстояние до правого ориентира;
АВ— расстояние между средним и левым ориентирами;
ВС— расстояние между средним и правым ориентирами;
6—угол пересечения изолиний, рассчитанный по форму-
ле (143);
та—средняя квадратическая ошибка измерения горизон-
тальных углов в градусах, принимаемая в практике
равной 0°,1 = 6\
Расчет средней квадратической ошибки обсервации можно
произвести графоаналитическим путем. Рассчитав градиенты
направлений gA, gB, gc на листе бумаги, по направлениям на
ориентиры, из точки К откладывают значения градиентов
(рис. 113) в принятом масштабе. Концы векторов—градиентов
Аь Bj и Ci образуют так называемый инверсионный треуголь-
ник. В этом треугольнике AiBi=ga, BjCi=g^ снимаются с чер-
тежа в том же масштабе. В точке К проводят прямую, парал-
252
лельную Л1ВЬ это и будет линия положения угла а. Прямая,
проведенная в точке К параллельно BiCi, будет линией положе-
ния угла р. Угол пересечения В снимают с чертежа. Вектори-
альные ошибки выразятся
Рис. 113
Подставляя в формулу (149) векториальные ошибки, получим
Проведя перпендикуляры в инверсионном треугольнике из вер-
шин Ai и Ci на противоположные стороны hi и h3, произведем
замену
__ Й| в ______ Йд
sin в ’_______sin в
и получим формулу В. В. Каврайского
(161)
Величины й] и йз снимаются с чертежа, при этом предполагается
что ошибки измерения угла а и ₽ одинаковы.
253
§ 70. СЛУЧАЙ НЕОПРЕДЕЛЕННОСТИ
Способ обсервации по двум горизонтальным углам — самый
точный навигационный способ. Однако, применяя его, следует
остерегаться случая неопределенности.
Рис. 114
Когда судно и три ориентира А, В, С расположены на одной
окружности, определить -место судна нельзя, так как из любой
точки этой окружности ориентиры А, В, С будут усматриваться
под одними и теми же углами аир (рис. 114). Действительно,
все вписанные углы, опирающиеся на дугу АВ, будут равны
а, а их вершины могут расположиться в любой точке окружно-
сти. Точно так же все углы р, опирающиеся на дугу ВС, могут
своими вершинами лежать в любой точке окружности. В этом
случае место судна можно считать в любой точке окружности
(Рь Р2 и в других точках). В случае неопределенности три
ориентира образуют четырехугольник, вписанный в окружность.
Сумма же его противоположных углов равна 180°, т. е.
а + р+В = 180°. Следовательно, признаком того, что судно нахо-
дится на круге неопределенности, является сумма измеренных
углов и снятого с карты угла при среднем предмете, равная
180°. В случае неопределенности и протрактор и калька могут
быть положены на карту и дать любую точку на круге неопре-
254
деленности, поэтому для обсервации по двум углам нужно тща-
тельно выбирать ориентиры.
При выборе ориентиров для обсервации, чтобы избежать не-
определенного случая, нужно руководствоваться следующими
р екомен д а ци я м и:
Рис, 115
а) ориентиры должны быть расположены на одной прямой,
гак как через три точки, лежащие на прямой, провести окруж-
ность нельзя (рис. 115,а);
б) когда ориентиры образуют треугольник, внутри которого
находится судно, они могут находиться на одной окружности,
но судно будет внутри этой окружности (рис. 115,6);
в) если средний ориентир расположен ближе к судну, чем
крайние, они могут быть размещены на одной окружности,' но
эта окружность будет проходить по берегу, а судна на ней мо-
жет не быть (рис. 115,в);
г) если все три ориентира расположены на одинаковом рас-
стоянии от судна, они будут на одной окружности, но судно бу-
дет находиться в центре окружности (рис. 115,г).
§ 71. ПРАКТИЧЕСКОЕ ВЫПОЛНЕНИЕ ОБСЕРВАЦИИ
Если углы измеряются секстаном, следует выбирать ориен-
тиры четкой формы, хорошо освещенные, чтобы легче было сов-
255
мещать прямовидимое и отраженное изображение. При этом
прямовидимым ориентиром выбирают toi, который виден хуже.
Поправку индекса определяют по поямовидимому предмету.
Одновременность измерения двух углов достигается двумя
наблюдателями. Если наблюдения ведет один человек, быстро
можно пренебречь ошибкой, происходящей от неодновременного
измерения. На больших скоростях пренебрегать этой ошибкой
нельзя, а измерения следует привести к одному моменту. Для
этого нужно один из углов измерить первым и последним. Для
прокладки на карте берется среднее значение первого угла
а —а2 и измеренное значение второго угла ₽. В
момент измерения угла р замечают время и отсчет лага. Затем
измеренные углы исправляют поправкой индекса и протракто-
ром или калькой наносят место на карту. Первым в этом случае
нужно измерять угол, величина которого изменяется медленнее.
На рис. 116 изображено приведение углов к одному моменту
измерения. Допуская, что за небольшой промежуток времени
углы изменяются пропорционально времени, можем полагать,
что изолиния аср = 2 °2 = const пройдет по изолинии а=
=const или где-то рядом. Это значит, что момент измерения уг-
ла а приведен к моменту измерения угла р. Иногда измерения
углов секстаном заменяют пеленгованием ориентиров по компа-
су. Для этого в быстрой последовательности берут пеленги ори-
ентиров и замечают время и отсчет лага. После этого рассчиты-
256
вают углы а между средним и правым ориентирами и 0 между
средним и левым. Имея значения аир, поступают обычным об-
разом. При этом для обсервации не важно, верна или неверна
поправка компаса.
Углы рассчитываются между компасными пеленгами, так
как углы между истинными и компасными пеленгами будут оди-
наковыми, в связи с тем, что каждый компасный пеленг отлича-
ется от истинного на одну и ту же величину поправки компаса..
§ 72. ОПРЕДЕЛЕНИЕ МЕСТА ПО ТРЕМ ПЕЛЕНГАМ
Обсервованное место получится, если пересекаются две изо-
линии, или линии положения. Но в этом случае нельзя осущест-
вить контроль. Предположим, что судоводитель при подходе к
берегу не опознал ориентир, или неверно снял отсчет на прибо-
ре, т. е. совершил грубую ошибку или промах. Имея две линии
положения, обнаружить этот промах сразу не удастся. Если же
имеется третья контрольная линия положения, то она ука-
жет на совершенный промах. Поэтому при всех условиях плава-
ния, если есть три ориентира на берегу и они нанесены на карте,
необходимо производить обсервацию по трем линиям положения.
Для выполнения этого способа нужно в быстрой последователь-
ности взять пеленги трех ориентиров, записать их, заметить
время, отсчет лага и компасный курс. После этого исправляют
компасные пеленги поправкой компаса и истинные пеленги про-
водят на карте от тех ориентиров, которые пеленговались. При
этом пеленги могут пересечься в одной точке или в пересечении
образовать треугольник погрешности различных размеров. Ма-
лым треугольником погрешности называется треугольник, близ-
кий к равностороннему, стороны которого на путевой карте
равны не более 5 мм и обсервованным местом можно считать
точку центра этого треугольника. При больших размерах сто-
рон треугольник считается большим. Треугольник погрешности
может возникнуть от систематических, случайных ошибок и от
промахов. Причины возникновения треугольника погрешности
следующие.
Случайные ошибки пеленгования. Треуголь-
ник погрешности, полученный вследствие случайных ошибок»
будет невелик по размерам. Обсервованное место принимается
в центре треугольника погрешности. При этом средняя квадра-
тическая ошибка обсервации, полученная по трем пеленгам от
наличия случайных ошибок, рассчитается по формуле
М = + v^a2 + b2,,
где а и b — полуоси эллипса ошибок, рассчитываемые по фор-
мулам
£>min £max
7 Навигация
257
Величины gmin и Яшах получают, решая уравнения
2 i „2 2.2. 2
Яшах + Ят1п = gl + g2 + ga ,
Яшах — Яш1п = | gl + g2 + Яз • I
Модуль градиентов рассчитывается по формулам
____57°,3________57°,3 ______57°,3
~ Di ’ S2~ D2 ’______________D3 •'
Для решения уравнения составляется таблица.
Пеленги Гради нт Удвоенное направление Квадрат моду- ля' градиента
модуль | направление
I Я1 А 2 41 S1
II Яа А 2 Аг gl
III Яз ^3 2 А3 &
Ея2
Геометрическая разность Яшах—Ятш получается, если построить
квадратичный полигон (см. рис. 106).
Ошибки от разновременного взятия пе-
ленгов. От этой ошибки можно избавиться путем приведения
пеленгов к одному моменту. Для этого берут в быстрой последо-
вательности пеленги ориентиров А, В и С, которые соответ-
ственно обозначим через КЩ, К.П2, КП$. Затем вновь берут пе-
ленги предметов А и В — КП& Считая, что время между
моментами взятия пеленгов одинаково и они изменяются про-
порционально времени, рассчитывают среднее значение пелен-
гов ориентира В и Л. В момент взятия пеленга КП$. замечают
время и отсчет лага. Тогда
КПс = КП,; КПв = К"> + 1(П‘ ,
КПа = -^±^.
Если скорость судна велика и нет возможности быстро взять
пеленги один за другим, в этом случае после-взятия каждого
пеленга, замечают время и отсчет лага. Пеленгуя ориентиры А,
В и С, заметим 1\, ОЛЬ Т2, ОЛ2, Т3, ОЛ3.
Рассчитаем
Д S1 = (ОЛ3 — ОЛ,) кл\ Д S2 = (О//3 - ОЛ,) кл
и, от ориентиров В и А, по направлению курса судна, отложим
расстояние ASi и AS2. Пеленги будем прокладывать от ориен-
258
тира С и от полученных точек Ki и К2 (рис. 117). Обсервован-
ное место Р отличается от точки Pi, полученной без приведения
пеленгов к одному моменту.
Ошибки от неверно нанесенных на карту
пеленгуемых ориентиров. Эти ошибки не зависят
от наблюдателя и поэтому очень серьезны. Избежать их можно
только подбором ориентиров для наблюдений. Необходимо под-
бирать ориентиры, которые расположены ближе к береговой
черте, так как они более точно нанесены на карту. Ориентиры,
расположенные на разных берегах, могут быть не увязаны меж-
ду собой, поэтому нужно стараться пользоваться ориентирами,
размещенными на одном берегу. Также могут быть плохо увя-
заны ориентиры, расположенные на разных островах. Поэтому,
плавая вдоль гряды островов, следует выбирать ориентиры, рас-
положенные на одном острове; при подходе к другому острову
нужно заранее переходить к обсервациям по его ориентирам.
Для обсервации в первую очередь следует использовать ис-
кусственные ориентиры: маяки, знаки и другие предметы, во
вторую — естественные ориентиры береговой черты, мысы, ри-
фы, островки, выступающие из воды, камни, скалы и др., в тре-
тью — плавучие ориентиры, плавучие маяки, стоящие на штат-
ном месте, а также пеленговать освещаемые буи. В последнюю
17*
259
очередь используют ориентиры, отнесенные далеко от береговой
черты.
Если при повторных наблюдениях треугольник погрешности
не исчезает и есть подозрения, что он возник из-за неверного
нанесения на карту, ориентиров, нужно сменить объекты наб-
людений-
Ошибки, возникающие вследствие невер-
ной поправки компаса. Поправка магнитного компасг!
состоит из склонения и девиации. Поскольку склонение и девиа-
ция могут быть выбраны неточно, то судоводитель исправит ком-
пасные пеленги неверной поправкой компаса и получит неверные
истинные пеленги. При этом углы между верными и неверными
истинными пеленгами одинаковы для всех трех измерений и рас-
положены по одну сторону от верных истинных пеленгов. Следо-
вательно, это ошибки систематические и от их влияния на об-
сервацию можно избавиться. В случае, если судоводитель по-
лучил очень большой треугольник погрешности, очевидно, в из-
мерениях сделан промах, а потому необходимо повторить изме-
рения.
§ 73. СВОЙСТВО ТРЕУГОЛЬНИКА ПОГРЕШНОСТИ
В случаях, когда обсервация наносится на точную карту с
точно нанесенными ориентирами, пеленги приведены к одному
моменту и все же треугольник погрешности получается большой,
т. е. основание отнести причину его возникновения за счет не-
верной поправки компаса, принятой для исправления компасных
пеленгов. Положим, что линии пеленгов ориентиров А, В и С
образуют из-за ошибки в поправке компаса, равной +е, тре-
угольник погрешности. Причем истинное место судна находится в
точке Р (рис. 118). Угол между пеленгами ориентиров А и В
обозначим через а, между Ви С— р, а между А и С— у. В
связи с тем, что верные и неверные пеленги отличаются на оди-
наковую величину +8, углы между ними одинаковы. Следова-
тельно, неверные пеленги ориентиров А и В образуют угол тре-
угольника погрешности а = а, пеленги В и С 6 = Р. Пеленги А и
С образуют угол С, равный у. Таким образом, если углы оди-
наковы и опираются на те же дуги, они расположены на одних
и тех же окружностях. Из этого следует свойство треугольника
погрешности: истинное место судна Р и соответствующие вер-
шины треугольника погрешности расположены на окружностях,
вмещающих углы между пеленгами. Это свойство треугольника
погрешности используется для нахождения истинного места
судна. Получив треугольник погрешности и считая поправку ком-
паса неверной, изменяют произвольно поправку компаса в лю-
бую сторону или меняют знак поправки на обратный. Затем
исправляют компасные пеленги новой поправкой и прокладыва-
ют новые истинные пеленги. При этом получают также тре-
угольник погрешности^ вершины которого расположены на тех
260
же вмещающих окружностях, что и место судна, и соответству-
ющие вершины прежнего треугольника погрешности.
Если через соответствующие вершины обоих треугольников
погрешности провести дуги вмещающих 'окружностей, то в точ-
ке их пересечения будет истинное место судна, так как оно од-
новременно находится На всех трех изолиниях. Небольшие ду-
ги окружностей можно заменить хордами, тогда истинное место
будет на пересечении прямых, соединяющих соответствующие
вершины обоих треугольников погрешности.
Имея истинное место судна на карте, нетрудно снять истин-
ные пеленги ориентиров А, В и С. Зная истинные и компасные
пеленги, рассчитывают истинную поправку компаса:
ИПа-КПа^К^
ИПв-КПв = ЬКъ'\
ИПс^КПс = ^
Но не во всех случаях при неверной поправке компаса пе-;
ленги пересекаются не в одной точке и образуют треугольник
погрешности. Если все три ориентира и судно расположены на
круге неопределенности при неверной поправке компаса, пелен-
ги пересекутся в одной точке, но обсервованное место судна бу-
261
дет неверным. На рис. 119 в точках Р\ и Рг все три неверных
пеленга пересекаются в одной точке, а истинное место распо-
ложено в точке Р. Наличие случайных ошибок пеленгования
дает малый треугольник погрешности и обсервованное место,
как было сказано выше, считают его в центре. Это положение
нельзя переносить во всех случаях на большой треугольник по-
грешности, возникающий в результате ошибки в поправке ком-
паса.
Р
Рис. 119
Рассматривая возможные случаи, можем убедиться, что
истинное место судна только в одном случае будет находиться
в треугольнике погрешности:
а) когда ориентиры расположены вокруг судна, образуя тре-
угольник АВС, истинное место судна находится внутри треуголь-
ника погрешности (рис. 120,а);
б) когда ориентиры расположены с одной стороны судна и
оно находится внутри окружности, проходящей через ориентиры,
тогда истинное место судна — вне треугольника погрешности
против стороны, образованной пеленгом на средний предмет
(рис. 120,6);
в) когда судно находится вне окружности, проходящей через
ориентиры, и против вершины треугольника АВС, истинное ме-
262
Рис. 121
сто расположено вне треугольника погрешности, против сторо-
ны, являющейся пеленгом на средний предмет (рис. 121,а);
г) когда судно находится вне окружности, проходящей через
ориентиры и против стороны треугольника ЛВС, истинное ме-
сто расположено вне треугольника погрешности, против верши-
ны его, образованной пеленгами на крайние ориентиры
(рис. 121,6).
Если расстояния до трех ориентиров приблизительно равны
между собой, то можно считать, что и градиенты этих линий
положения равны, т. е. если
d1=d2=d3=d,
то модули градиентов
1
£1 Si S3 £> •
Имея треугольник погрешностей, образованный линиями по-
ложения с равными градиентами, для нахождения истинного ме-
ста судна в вершинах треугольника погрешности проводят гра-
диенты линий положения. Биссектрисы углов, составленных гра-
диентами, в пересечении дадут обсервованное место Р
(рис. 122) .
264
Когда судоводитель знает, что поправка компаса неверна,
тогда, не прокладывая, нового треугольника погрешности, но
имея компасные пеленги ориентирова АВ и Ct можно рассчитать
два угла
а = КП в — КПа I
Р = А77с —А77в.
Отложив их на протракторе или нанеся на кальку, наносят
обсервацию, свободную от ошибки в поправке компаса. Получив
истинное место и сняв с карты истинные пеленги, рассчитываю г
поправку компаса для данного курса.
§ 74. ПРАКТИЧЕСКОЕ ВЫПОЛНЕНИЕ ОБСЕРВАЦИИ
Практическое выполнение обсервации по трем пеленгам осу-
ществляется следующим образом.
1. Имея счислимую точку, выбирают ориентиры, расположен-
ные на карте так, чтобы через них не прошел круг неопределен-
ности и углы между пеленгами были больше 30°. Точнее всего
обсервация получится, если углы будут близкими к 120 или 60°.
При этом у судоводителя должна быть уверенность, что ориен^
тиры нанесены на карту точно.
2. Перед пеленгованием нужно протереть стекло компаса и
призму пеленгатора мягкой чистой ветошью, проверить освеще-
ние компаса, если пеленгование происходит ночью, прицелиться
к ориентирам, подготовить записную книжку и карандаш для
записи отсчетов.
3. Предупредив рулевого, чтобы точно держал на курсе, в
быстрой последовательности берут три пеленга, начиная пелен-
говать тот ориентир, который расположен ближе к диаметраль-
ной плоскости. Отсчет лага и время замечают после взятия тре-
тьего пеленга. В той же последовательности записывают пеленги
в записную книжку, записав также компасный курс, отсчет ла-
га и время. Отсчет лага замечают с точностью до 0,1 деления,
а время по судовым часам с точностью до 1 мин.
4. По компасному курсу выбирают девиацию из таблицы
девиации, с карты берут склонение и рассчитывают поправку
компаса. Если на этом курсе недавно определялась поправка
компасах то пользуются ею как более достоверной. Компасные
пеленги исправляют ДК и получают истинные.
5. Если пеленги необходимо приводить к одному моменту, то
берут пять пеленгов трех ориентиров и поступают так, как бы-
ло указано выше.
6. Прокладывают истинные пеленги на карте в такой же по-
следовательности, в какой была произведена запись в штурман-
ской книжке. Истинный пеленг больше 15° или меньше 195°
прокладывают не от нордовой части истинного меридиана, а
от остовой части параллели, т. е. прокладывают направления
265
90°+Я/7. При этом линию пеленга не нужно вести от ориенти-
ра до пересечения с другим пеленгом. Нужно провести два ко-
ротких отрезка пеленга, один на ориентире, второй—вблизи
счислимого места судна.
7. Если пеленги пересекутся, образуя большой треугольник
погрешности, необходимо снова повторить обсервацию; если тре-
угольник погрешности не уменьшится и не исчезнет, проанали-
зировать причины его возникновения или выбрать другие ориен-
тиры, или изменить поправку компаса, или применить способ
обсервации по двум углам.
§ 75. ОПРЕДЕЛЕНИЕ МЕСТА СУДНА ПО ДВУМ ПЕЛЕНГАМ
Когда с судна видны только два нанесенных на карту ори-
ентира, можно получить две изолинии и пересечение их при-
нять за обсервованную точку. На точность обсервации будут
влиять ошибки как систематические, так и случайные. Промах
во взятии даже одного из пеленгов даст грубую ошибку в об-
сервации, которую сразу заметить нельзя.
Если ориентир нанесен на карту неверно, обсервованное ме-
сто будет получено также неверно. При этом обнаружить эту
ошибку сразу также нельзя. Если скорость судна велика и нель-
зя быстро, один за другим, взять пеленги ориентиров, то нужно
для повышения точности обсервации приводить пеленги к одно-
му моменту. Для этого берут первый пеленг, затем второй, при
этом замечают отсчет лага и время и вновь берут компасный пе-
ленг первого ориентира. Компасный пеленг первого ориентира
рассчитывают как среднее из двух пеленгов.
Случайные ошибки, как было уже сказано ранее, могут дать
общую ошибку пеленгования, равную ±0°,6.
Средняя квадратическая ошибка обсервации вычисляется по
формуле
^=± +
где 6— угол пересечения линий положения;
и т2 — средние квадратические ошибки линий положе-
ния, которые рассчитываются по формуле
В этих формулах та—средняя квадратическая ошибка пе-
ленгования.
Предположим, что один и тот же наблюдатель, в одних и
тех же условиях, одним пеленгатором, с одного компаса возь-
266
мет оба пеленга с одинаковой точностью. Тогда можем полагать»
что тИ1 = /пИа = /пд.
Градиенты направлений первого и второго пеленгов будут:
_ 57°,3 _ 57°,3
Di ’ ^2— Dt •
(где Di и D2— расстояния от судна до ориентиров).
Сделав подстановку, получим
S7W/D? + D’- <162>
Анализ формулы показывает, что угол между пеленгами должен
быть ближе к 90° и, чем меньше D\ и D2, т. е. чем меньше рас-
стояние до ориентиров, тем
меньше ошибка. Поэтому ори-
ентиры для обсервации нужно
выбирать ближе к береговой
черте, учитывая, что эти ориен-
тиры наносятся на морских на-
вигационных картах с высокой
точностью.
Расчеты показывают, что
большого значения средняя
квадратическая ошибка обсер-
вации по двум пеленгам при
визуальном пеленговании не
принимает. Ошибка в поправке
компаса полностью входит в
ошибку обсервации. Действи-
тельно, если ошибка в поправ-
ке компаса +е, то вместо вер-
Рис. 123
ных пеленгов получим не-
верные и вместо верного места Р получим неверное Pi и
ошибочно можем принять его за верное, так как контроля об-
сервации нет. Тогда ошибка обсервации выразится хордой РРг
(рис. 123). Рассмотрим, при каких условиях она будет меньше.
Угол ’6 между верными и неверными пеленгами будет одинаков,
так как пеленги отличаются друг от друга на одну и ту же ошиб-
ку в поправке компаса 8. Поэтому Р и Pi лежат на одной вме-
щающей угол 0 окружности, проходящей через ориентиры А и
В. Обозначим через d—расстояние между ориентирами, через
г —: радиус окружности. Отношение хорды к радиусу круга рав-
но удвоенному синусу вписанного угла, вершина которого лежит
на окружности, а сам он опирается на данную хорду. Следова-
тельно,
1В о . й РР1 о .
— == 2sin 0; - 2sm е,
267
отсюда
РР\ __ Sin е
АВ ~ sin 6 ’
ИЛИ
ppr = d sin е cosec 6.
Анализ формулы показывает, что чем ближе будут ориентиры
к судну, тем ошибка в обсервации будет меньше, и чем ближе
угол между пеленгами к 90°, тем меньше будет ошибка. На
практике углы могут быть различные, но когда 9 меньше 30°
или больше 150°, обоервованное место будет ненадежным.
Обсервация по двум пеленгам широко применяется на флоте
из-за простоты и доступности. Около 50% цсех обсерваций бе-
рется этим способом, хотя он обладает существенными недо-
статками. В настоящее время М. М. Лесков провел значитель-
ную работу по устранению отдельных недостатков. Так, напри-
мер, в условиях моря судоводителю не всегда удается опреде-
лить поправку компаса перед обсервацией и он пользуется рас-
четной величиной ее, не зная, верна она или нет. Знать же это
очень важно, так как неверная поправка компаса может приве-
сти к аварии. Для своевременного обнаружения ошибки в по-
правке компаса, при обсервации по двум пеленгам, необходимо
получить несколько обсервованных точек и проанализировать
их расположение.
1. М. М. Лесков вывел уравнение кривой обсервованных мест
судна, которое применимо в случаях, когда в обсервациях уча-
ствует поправка компаса с ошибкой е. Кривая обсервованных
мест представляет собой гиперболу, поэтому если полученные об-
сервованные точки расположатся по кривой, можно предполо-
жить, что поправка компаса ошибочна.
2. Если поправка компаса верна, то независимо от дрейфа
и течения, если они постоянны, расстояния на карте между об-
сервациями будут пропорциональны соответствующим проме-
жуткам времени. Если такой пропорциональности нет, то можно
предположить, что поправка компаса ошибочна.
3. Если произведено две серии обсерваций, сначала на од-
ной паре ориентиров, потом через небольшой промежуток вре-
мени на второй и между сериями обсерваций наблюдают скач-
ки, можно полагать, что поправка компаса неверна.
Выяснив, что поправка компаса неверна, судоводитель при-
нимает меры к ее уточнению или находит свое место другим
способом.
§ 76. ОПРЕДЕЛЕНИЕ ПОПРАВКИ КОМПАСА ПО ПЕЛЕНГАМ
ДВУХ ОРИЕНТИРОВ (МЕТОД М. М. ЛЕСКОВА)
Имея только два ориентира, можно определить поправку
компаса, используя обсервации по двум пеленгам. Для того
чтобы определить верную поправку компаса, достаточно найти
268
величину ее ошибки и затем вычесть эту ошибку из неверной
поправки компаса
ДК = Д^-е, (163}
где Д/< — верная (поправка компаса;
ДА^— неверная поправка компаса, которой пользуемся для
данной обсервации;
в—ошибка с ее знаком.
Рис. 124
Ошибка поправки компаса 8 может быть определена, когда
две обсервации по пеленгам двух предметов получены так, что
углы между двумя одновременно взятыми пеленгами в первом,
и втором случае равны друг другу. Рассмотрим рис. 124, на ко-
тором точки Л4Ь М2 — верные места судна в моменты пеленго-
вания, Pi, Р2—неверные обсервации, полученные по неверным
пеленгам с ошибкой в поправке компаса 8. в те же моменты.
Угол, вершина которого лежит внутри круга, измеряется по-
лусуммой дуг, заключенных между его сторонами
Z Р1еМ1 = z = 2е>
т. е. угол между линией пути судна и линией, соединяющей две
точки, полученные по пеленгам двух предметов, когда углы
между пеленгами одинаковы, равен двойной ошибке в поправке
компаса.
В случае, если нет течения и дрейфа, линия пути будет лини-
ей И К, которая составляет с линией, соединяющей две обсер-
вованные точки Pi и Р2, угол 2е. Проложенный на (карте курс,
содержит в себе ошибку поправки компаса, поэтому угол между
ним и линией, соединяющей обсервованные точки, равен вели-
чине ошибки в поправке компаса е. В этом случае поступают
так (рис. 125). Получив две обсервации Р\ и Р2, соединяют их
прямой, из первой обсервации Pj прокладывают неверный истин-
ный курс; угол при точке Pj между этими линиями — ошибка в
поправке компаса е, значение которой снимают с карты. Знак
ошибки определяют так: если вторая обсервация Р2 лежит в
сторону движения часовой стрелки от линии неверного курса,
е имеет знак плюс, если против часовой — минус.
Для того чтобы наметить на линии ИК точку, в которой не-
обходимо взять вторично пеленги маяков, нужно через ориенти-
ры и первую обсервацию, вмещающую угол 0, провести окруж-
ность. Для построения окружности, соединяют ориентиры пря-
мой и через середину ее проводят перпендикуляр. У одного из
ориентиров строят угол 90°—0 или 0'—90°. Точка пересечения
стороны угла с перпендикуляром даст центр вмещающей окруж-
ности О, из которого радиусом, равным расстоянию до первой
обсервации, делают засечку на линии ИК. Измерителем снима-
ют с карты величину Зл и ’рассчитывают
РОЛ=^.
Ал
Время, когда нужно брать вторую пару пеленгов
Т'2=Л + ^,
270
а отсчет лага будет
ОЛ^ = ОЛХ + РОЛ.
Если действуют течения или ветер или оба фактора вместе
и сносят судно с курса, необходимо определить величину сноса
и проложить из точки Р[ неверный истинный курс с учетом уг-
ла сноса С. Тогда угол между этой линией и линией, соединяю-
щей обсервованные точки, будет 8 (рис. 126). Рассчитав верную
поправку компаса по формуле (163), повторяют обсервации, ис-
правляя компасные пеленги., верной поправкой компаса, или
исправляют ею прежние компасные пеленги, проложив на карте
верные истинные пеленги.
$ 77. ОПРЕДЕЛЕНИЕ МЕСТА СУДНА ПО ПЕЛЕНГУ
И ГОРИЗОНТАЛЬНОМУ УГЛУ
Этот способ представляет собой частный случай обсервации
по двум пеленгам. Если один из ориентиров закрыт трубой,
мачтой или надстройкой и взять его пеленг нельзя, то берут пе-
ленг одного ориентира и одновременно измеряют секстаном угол
между ориентирами. Для одновременности измерений лучше
иметь два наблюдателя. Измерение угла нужно производить
с места, расположенного возможно ближе к компасу, чтобы
можно было считать вершину измеряемого угла в центре ком-
271
паса. В случае, если наблюдатель один и скорость судна велика,
необходимо измерение привести к одному моменту. Для этого
нужно взять пеленг ориентира, затем измерить горизонтальный
угол, заметить время и отсчет лага и снова взять пеленг. Ис-
правлять поправкой компаса нужно средний из двух пеленгов
АП1= кп'-^кп", ип^КПх + ^К.
Второй пеленг рассчитывается по формуле
ИПъ = ИПх ± а,
где +а — угол, расположенный вправо от пеленга;
—а — угол, расположенный влево от пеленга.
Обсервованное место будет в точке пересечения двух линий
положения—пеленга и окружности, вмещающей измеренный
угол а. Точность измерения угла выше, чем пеленга, поэтому
точность обсервации этим способом выше, чем точность обсер-
вации по двум пеленгам. Вывод формулы для расчета средней
квадратической ошибки обсервации производится из формулы
(148). Из ДЛВР (рис. 127) следует
sin о = -Lab~‘ (164)
Но вписанный угол АВР измеряется V2 дуги, на которую он
опирается; половиной этой же дуги измеряется угол между ка-
сательной м' и хордой АР. Поэтому ZABP = ZAPa= Z0. Под-
272
ставив в формулу (148) значение sin 0 из формулы (164) и
произведя преобразования, получим выражение средней квадро
тической ошибки обсервации
М = ± 57’,3sina / (т* 5г)2 + (тп АВ)2> 0 65)
где та — средняя квадратическая ошибка измерения угла,
градусы;
тп —средняя квадратическая ошибка пеленгования, гра-
дусы;
а— измеренный угол;
АВ— расстояние между ориентирами;
S2 — расстояние до ориентира, выбранного для измерения
горизонтального угла.
В случае, если поправка компаса имеет ошибку е, эта ошиб-
ка войдет полностью в обсервацию, так как второй пеленг будет
ошибочен на величину е, несмотря на то, что угол измерен с вы-
сокой точностью.
ПРИМЕРЫ
1. Обсервация получена по двум углам между тремя ориентирами. Рас-
стояния до ориентиров 704 = 10 миль, КВ=8 миль, КС=1 миль. Истинные
направления на ориентиры Я77д=325°, Я/7Д=353°, ИПс=^5<>, Ошибка изме-
рения углов tou=+6'. Используя инверсионный треугольник, рассчитать
среднюю квадратическую ошибку обсервации.
Решение. Рассчитаем градиенты направлений
3438 . jhu« 3438
= Ю0 - 3414 кбт ; ^=-8й-=4219 кбГ;
Sc
3438 . мин
= ^(Г = 49-’йГ-
На листе бумаги, по направлениям на ориентиры, отложим в выбранном
масштабе значения градиентов (рис. 128). Получим точки Ait Bj, Ci. Сое-
динив точки прямыми, получим инверсионный треугольник. Из точек Ai и Й|
на противолежащие стороны, или их продолжения, опустим перпендикуляры.
Измерим их в том же масштабе
Л 17 *UH- h
Ac = 16S6T
Рассчитаем Af
+- -rU- = 0,48 кбт.
1OJ
При решении аналогичных задач градиенты должны быть выражены .в
соответствующей размерности. Если ти дано в минутах, градиенты нужно
брать также в лшн/кбт.
2. Карта ГУ 2341. В счислимой точке ¥=37°1CKN, Xj =27°01',7Ost в Г^=р=
=Юч30* ОЛ=12,6 измерили углы между ориентирами: маяком на Mbfce
Теапори и маяком на о. Дгия-Кириаки угол а=25°3б/; между маяком йа
18 Навигация 27Я
Й Агия-Кириаки и островом Стронгили р=27°24'. Поправка секстана (ХД
внести обсервованное место, снять координаты и указать невязку.
Решение, а) По координатам наносим счнслимую точку;
б) На протракторе устанавливаем: левую линейку на отсчет 25°36', пра-
вую на 27°24*;
Рис. 128
в) Совмещаем скошенные срезы линеек с ориентирами В связи с тем.
что все три ориентира расположены на одной окружности, проходящей в
Противоположной от счислимой точки стороне, случая неопределенности быть
не может. Делаем через отверстие в центре протрактора отметку, отмечаем
карандашом обсервованное место (кружок вокруг точки), надписываем вре-
мя и отсчет лага и снимаем координаты
<p0 = 37°9',5N, k0 = 26°58'Ost;
г) Счнслимую и обсервованную точки соединим прямой, измерим ее
направление, получим 252ь,0. Измерителем снимаем расстояние между точ-
ками, -оно будет равно 1,5 мили. Следовательно, невязка 1,5 мили — 252е.
3. Кйрта ГУ 2341. На подходе к проливу Икария взяли трн компасных
пеленга в быстрой последовательности:
— , - -маяк о. Андрос ОХ/7=2493;
маяк о. Темина 0X77=191°:
маяк мыса Понас 0X77=121°;
АХ=+5°.
Определить координаты обсервованного места.
Решение, а) Исправим пеленги
оип=окп+&к
0X77=249° , 0КП= 191° , 0X77=121°
г ДХ=+53 ДХ=+5° ДХ=+5°
077771=254° 077/72=196° О/7Л3=126С
Проложив их на карте, получим большой треугольник погрешности:
б) Произвольно выберем А л=0° и проложим ОИП'1, 0ИП'2, ОИПз' на
карте. Получаем* второй треугольник. Соединим прямой соответствующие вер-
шины, получим обсервованное место <рв=37°2Г,5М, X=26°22',3Ost.
274
в) Определим истинную &К, для чего на карте снимем ОИП\, ОИПь
ОИП3 и рассчитаем ДК для трех пеленгов, из которых возьмем среднюю.
&К=ОИП—ОКП.
_ ОИП^243° ОЯ772=186° ОИП3=П7°
0X7^=249° , ОХ772=191° ОК773=121°
Д К'1 =—6° О ДК'2=—5° ДК'з--4°
Д/(',=—6°0
4. Карта ГУ 2341. Следуя ХХ=250°, ДК=+4°, взяли пеленги маяков:
о. Левита ОКПi =203°;
о. Лиади 0X772=116°;
мыса Флуда ОХ/73=345°.
Определить координаты судна.
Решение, а) Исправим ОКП
оип=окп+ьк
. 0X77=203° ОХ772=116г ОК77з=345°
ДХ=+4° ДХ=+4° ДХ=+4°
07/771=207° 077772=120°
О77773=349°
Проложив их на карте убеждаемся, что поправка компаса неверна, так
как получился большой треугольник погрешности;
б) Определим место судна, используя способ двух горизонтальных углов,
для чего рассчитаем углы
а=203—116=87°; 0=345—116 = 229°= 131°.
На протракторе сдвинем правую линейку на угол 87°, а левую на 131°.
Наложив протрактор на карту, подведем скошенные срезы линеек к ориенти-
рам и отметим точку, координаты которой снимем
<Po=36°48',7N, Хо =26°21'7Ost;
в) Определим ДХ, для чего с карты снимем обратные истинные пелен-
ги и вычтем из них ОКП
0ИП1=21\°$
0X771=203°,О
ОЯ772= 124° О
ОЯ773=353°,0
ОХ773=345°,0
ДХ1=+8°,0
ДХг= +8°,О
ДХ3=+8°,0
В дальнейшем плавании эту поправку компаса можно принимать для
исправления румбов.
5. Карта ГУ 737 ХК=305°, склонение с карты для плавания в 1962 г.,
девиация из табл. 6. В быстрой последовательности взяты пеленги: маяк Ва-
сильева 0X77=221°,3, мыс Капустный 0X77=170°,4. Определить координаты
судна и среднюю квадратическую ошибку обсервации, если ошибка измере-
ния m« = il°,5.
Решение, а) По компасному курсу 305° в табл. 6 выбираем значения
девиации
3 = + 3°,8;
18*
275
б) Рассчитываем значения склонения для 1960 г. Склонение для 1950 г.
d=6°,7W, годовое увеличение 4', значит за 10 лет абсолютная величина скло-
нения увеличится на 12х4,=48/=0°,8 и станет равной 6o,7+0o,8=7°,5W.
в) Рассчитаем ДК
ДХ=</+ Ь
+ rf=7°,5N
b = +3°,8
д/<=_з°,Г~
г) Исправим румбы
, КК=305° ОКП1 = 221° 3 ОКП2= 170°4
Д/<=—3°,7 ДЛ=—3°,7 3°,7
И К=301 °,3 ОИ П1=217°,6 ОИПъ = 166°,7
д) Проложим ОИП\ и ОИП2 на карте и снимем координаты точки пе-
ресечения
Фо = 49’54',7 N; Ао = 155’16',6 Ost;
е) Рассчитаем среднюю квадратическую ошибку обсервации по формул
ле (162)
М = + •_____Г)2 । Г)2 .
± 57°,3sinOy ^1 + ^2
Для расчета снимем с карты расстояние до мыса Капустный Di=8,8 ми-
ли и до маяка Васильева D2=7,3 мили, а также рассчитаем угол между пе-
ленгами
ОКПг =221°,3
ОКГк= 170°.4
О = 50°,9
Подставим величины в формулы (162) и подсчитаем
М = ± / (8,4)2-f-(7 р = ± 0,39 мили = ± 3,9 кбт.
О/ ,О 'U, lit
6. Карта ГУ 737. КК=230°, склонение с карты для плавания в I960 г.
девиация из табл. 6. В быстрой последовательности взяты пеленги мысов
Океанского 07(77= 172°,1 и Васильева 0X77=83°,8. Определить координаты
места и рассчитать линейную ошибку обсервации, полагая, что ошибка в
Д Л= + 1°.
Решение, а) Определим Д/(
Д К =d+&
+ rf-7°,5W
5 = 4-2°,7
ДК=—4°,8
б) Исправим румбы
оип=окп+&к
. ХХ=230° OK/7i=l 72°, 1 ОКП2= 83°,8
Д Х=^°,8 ДХ=^°,8 ДК=^°,8
ИК=22Ь°, 2 0/7771 = 167° 3 О/7772= 79°
в) Проложим на карте ОИП1 и ОИП2 и снимем координаты места
Фо = 50’03',3 N, ко = 155’47',9 Ost;
276
г) Рассчитаем линейную ошибку обсервации, для чего снимем с карты
расстояние между ориентирами d=17,5 мили и рассчитаем угол между ли-
ниями положения 0 = 172°,1 — 83°,8 = 88°,3. Тогда
PPi = 17,5 sin 1° cosec 88°,3
lg 17,5 = 1,24304
lg sin 1° = 8,24186
lg cosec 88°,3 = 0,00018
lg ppx = 9,48508
РРг = 0,3055 = 0,3 мили=3 кбт.
Величину линейной ошибки можно получить также в том случае, если
нанести место судна по исправленным пеленгам.
Задачи
1. Карта ГУ 2341. Используя компас, измерили углы между ориенти-
рами: между маяками о. Бююккермит и о. Караада <*=56°, между маяками
о. Караада и о. Калимнос ^=49°.
Точность измерения углов ±0°,3. Найти обсервованиую точку и рассчи-
тать среднюю квадратическую ошибку обсервации.
2. Карта ГУ 2341. Измерили углы секстаном. Оказалось, что угол между
маяком Калимнос и Русса равен <* = 81°,36', между маяком Калимнос и ог-
нем на о. Агинос—Николаос ^=43°48'.
Точность измерения углов /им=±6'. Определить координаты обсервоваи-
ной точки и рассчитать среднюю квадратическую ошибку обсервации.
3. Карта ГУ 2341. Плавание в 1960 г. XX=320°, склонение с карты, де-
виация из табл. 6. Взяли пеленги трех ориентиров: северный маяк бухты
Лаки 0X77=272°,7, маяк мыса Илиас 0X77= 159° ,9, маяк о. Левита ОКП=
=29°,4. Определить координаты места.
4. Карта ГУ 2341. ХХ=340°, ^Х=+6°. Определились по трем пелен-
гам: мыс Крикенос 0X77=221 °,5, маяк на мысе Пулари 0X77= 116°,5, маяк
о. Панделеуса 0X77=263°. После исправления и прокладки пеленгов получи-
ли большой треугольник погрешности. Изменить поправку и определить ко-
ординаты места и истинную ДХ.
5. Карта ГУ 2341. Следуя в проливе Гайдарос ХХ=315°, ДХ=—3°, оп-
ределились по трем пеленгам маяков о. Фрамакописи 0X77=107° о. Гай-
дарос 0X77=188° и мыса Мокодендро ОКП=13°.
Получив большой треугольник погрешности, определить координаты ме-
ста и, учитывая почти одинаковые расстояния до ориентиров, определить
ДХ, используя градиенты направления.
6. Карта ГУ 2341. ХХ=180°, Х=+3°. Определились по трем пелен-
гам маяков скалы Меланди 0X77=285°,3 мыса Колота 0X77=340°,6, мы-
са Ставрос 0X77=56°. Получив большой {треугольник погрешности, рассчи-
тать горизонтальные углы и определить координаты места. Определить ДХ.
7. Карта ГУ 2341. XX =125°, Х=+5°. Определились по трем пеленгам
мысов Крикелос 0X77=276°,3, Пулари 0X77=211°,3 и Спано 0X77= 156°,2.
Определить координаты места, полуоси эллипса ошибок и направление боль-
шой полуоси
8. Карта' ГУ 2341. ХХ=290°, ДХ=+4°. В 10чЮ-« (ОЛ = 20,5) был
взят пеленг маяка на мысе Илиас 0X77=248°; в 12‘*00л* (ОЛ=40,0) Хл=0.92
были взяты пеленги: скалы Меланди 0X77=219° и мыса Панос 0X77=153°.
Привести пеленги к моменту 12ч00ж и определить координаты места.
9. Карта ГУ 737. ХХ=215°, склонение с карты, для плавания в 1960 г.,
девиация из табл. 6. Взяты пеленги маяков Лопатка 0X77= 176°,6 и Курба-
това ОКП= 134°,6.
277
Определить координаты судна и среднюю квадратическую ошибку об-
сервации, если ошибка пеленгования mu=±2°.
10. Карта ГУ 737. XX=0°. Склонение с карты для плавания в 1962 г.,
девиация из табл. 6. Взяты пеленги маяка. Лопатка 0X77=327°,2 и мыса
Камбальный ОКП=250°,2. Определить координаты судна и среднюю квадра-
тическую ошибку обсервации, если ошибка пеленгования m« =+lo.
11. Рассчитать в задачах 1 и 2 линейную ошибку обсервации, если
имеет ошибку е = ±2°.
12. Карта ГУ 737. Следуя ХХ=231°, ДХ=+7°, в 12*00-* (ОЛ1=24,8| оп-
ределились по двум пеленгам: мыса Курбатова 0X77=305° и мыса Чибуй-
ного 0X77=26°. В 13*00* (ОЛ2=33,5) вторично взяли пеленги мыса Кур-
батова ОКП—267°, Чибунного 0X77=345°. Определить истинную АХ.
Ответы.
1. To — 37°1O',2N ; \ = 27°08',2 Ost; М = ± 0,6 кбт.
2. То - 36°51',2 N ; А0 = 2Г02,,ЗО®‘; М= ±0,18 кбт.
3. То = 37°08',2 N ; Ао -26°37'Ost ; А Х= — 2°,8.
4. To = 3b°28,,5N; Хо = 26°46'08‘ ; А Я= + 3°,4.
5. To = 37°19,,7N ; А, = 26°56'O8t; А Х= +13,9.
6. То - 37°17',2 N ; А0 = 25°48',9 O9t; а = 2,5 кбт.;
7. То - 36°44' N ; Ao = 26°36',7 08t; Ъ =1,8 кбт.; а = 29°.
8. To = 37°21'N ; А, = 26°03',8 08t ;
9. То = 50°45',2 ; *0 = 156°41',5 O8t; М = ± 6,7 кбт.
10. 11. То — б^Д'; 3,1 кбт; 5,7 кбт. Ао= 156°30',5 O8t. Af = 2,4 кбт.
12. Д/(= —3°,5.
Контрольные вопросы
1. В каком случае центр вмещающей окружности расположен на прямой,
соединяющей ориентиры?
2. Как строится инверсионный треугольник?
3. При каких обстоятельствах возможен случай неопределенности?
4. Как приводятся измеренные углы к одному моменту?
5. Как используется в навигации свойство треугольника погрешности?
6. Что представляет собой кривая обсервованных по двум пеленгам мест,
если АХ неверна?
7. Как определить АХ при обсервации по двум пеленгам?
8. В чем особенность обсервации по пеленгу и горизонтальному углу?
Глава XIII. ОПРЕДЕЛЕНИЕ МЕСТА СУДНА
ПО РАССТОЯНИЯМ
| 78. ИЗМЕРЕНИЕ РАССТОЯНИИ В МОРЕ ДАЛЬНОМЕРОМ,
СЕКСТАНОМ И РАДИОЛОКАТОРОМ
Измерение расстояний в море производится дальномером,
секстаном и радиолокатором.
На современных транспортных судах дальномер не распро-
странен и применяется главным образом на военных кораблях.
Точность измерения расстояний дальномерами зависит от рас-
278
стояния до ориентира. При расстоянии до 50 кбт. /п=±1% от
D, от 50 до 100 кбт. /п=±2% от D. Для навигационных целей
дальномеры дают достаточную точность и могут применяться
для обсервации в светлое время суток по ориентирам,, находя-
щимся на расстояниях до 10 миль.
Использование секстана
Для определения расстояния секстаном нужно измерить вер-
тикальный угол ориентира, высота которого известна. Пусть
(рис.. 129) высота ориентира ВМ=Н. Вертикальный угол, йз-
Рис. 129
меренный секстаном из точки А, равен 7- Расстояние до точки А
от ориентира равно D. Из прямоугольного треугольника АМВ,
получим
D = Hdgr (166)
Чтобы получить D в морских милях, имея высоту предмета в
метрах или футах (на отечественных картах высоты предме-
тов даны в метрах, на английских в футах), формулу (166) пе-
репишем так:
1852 ctST = бода (167)
При плавании вдоль побережий с судна бывают видны мая-
ки, вершины гор, отвесные скалы и т. п. На расстоянии 5—:
8 миль их вертикальные углы будут малыми до 5°, (поэтому, вы-
ражая вертикальный угол 7 в дуговых минутах, можно принять^
что
tg7 = T'arcl' = 3^g.
Тогда формула (167) примет вид
п —3438 Нм '
имиа J852 Y ’
Л _3438
имили дада у •
279
Приближенно получим для Н в метрах
^ = 7-^» (>68)
для Я в футах
D = _ -Ф
'-'мили 7 7* "
Средняя квадратическая ошибка расстояния, полученного по
формуле (168), зависящая от случайных ошибок измерения вер-
тикального угла тти ошибки в высоте ориентира тн, выводится
так;
формулу (168) продифференцируем по D, Ни Получим
13 dHY — di'H
dD=r---------ст----
Переходя к конечным приращениям, получим
л г> 13 ДН/-Д/Н
7 (/)’
Переходя к средним квадратическим ошибкам в измеряемом
угле и в высоте предмета irH, получим
Исходная формула (166) предусматривает, что наблюдаемый
ориентир находится непосредственно над береговой чертой и его
основание видно наблюдателю. Кроме того, в формуле предпо-
лагается, что высота глаза наблюдателя равна нулю. При вы-
воде этой формулы мы пренебрегаем земной рефракцией и
кривизной земной поверхности, что допустимо на небольших
расстояниях.
/Рассмотрим влияние высоты глаза наблюдателя на измерен-
ное расстояние.
На рис. 130 высота глаза наблюдателя ОА=е и глаз наблю-
дателя находится в точке О. Точка В — основание ориентира,
высота которого МВ = Н. Из точки О измерен вертикальный
угрл Д4ОВ = -(. Вмещающая угол 7 окружность, пересекая ли-
нию уровня моря, даст точку С. Полагая, что глаз наблюдателя
Находится на уровне моря, ориентир МВ будет усматриваться
йод углом т из этой точки С, так как углы МОВ и МСВ оди-
наковы. Продолжим линию АО и отложим на ней отрезок
АЕ=Н, а также отметим на ней точку пересечения этой линии
с окружностью F. Расстояние от наблюдателя до основания
предмета
D=^AB=*AC + CB.
Используя свойство секущих, проведенных из точки вне кру-
га, можно написать:
ACAB = AOAF.
280
Тогда
АС =
AO-AF
АВ
Величина измеренного вертикального угла у соответствует
расстоянию СВ=Н ctg 7.
Рис. 130
Зная, что АО = е; AF—H—е: AB=D, окончательно получим
(170)
Если H<ZD, то е —<^g.
Следовательно, если расстояние до ориентира больше его
высоты, ошибка от неучета высоты глаза наблюдателя, в рассчи-
танном по формуле (166) расстоянии будет меньше высоты гла-
за наблюдателя.
Высота мостика современного судна в балласте достигает
15 м. Очевидно, что ошибкой меньше 15 м для навигационной
обсервации можно пренебречь.
Кроме случая, когда основание ориентира видно и он нахо-
дится над береговой чертой, в практике судоводителя встреча-
ются также описанные ниже случаи.
Рассмотрим, какие изменения они внесут в формулу (166).
1. Наблюдаемый ориентир удален от береговой черты, а его
основание скрыто; угол измеряется между береговой чертой и
вершиной ориентира.
281
На рис. 131 высота ориентира над уровнем моря ВМ = Н, вы-
сота глаза наблюдателя АО = е, вертикальный угол, измерен-
ный над точкой береговой черты NZ.MON='f. Опишем окруж-
ность около треугольника OMN и проведем вертикальные секу-
щие через точки О и М. Отметим точки пересечения проведенной
окружности с этими прямыми. Получим точки С, F, G. Расстоя-
ние до предмета
D = AB = AC+CB = Hctgi + AC.
Используя свойство секущих AN и AF, можем написать
ACAN = AOOF.
Отложим по линии АЕ отрезок FE=e и, проведя параллель-
но АВ прямые FK и EL, получим
AF=BK = BG + GK=BG + Н- е.
Произведя подстановку, получим
но так как BG • H=BN • СВ, то
BG = CBBN = BNIAN—AC+BN)
282
В результате
В — Н&ЯЧ + е AN (1 длг + дл^)-
На основании выражения (171) видим, что в том случае, ес-
ли для расчета расстояния использовать формулу (166), то де-
лаем ошибку, которая выражается двумя последними членами.
Если H<AN, то е Н< е, т. е. второй член выражения мень-
ше высоты глаза. Если BN<H, т. е. расстояние от береговой
черты до вершины ориентира меньше высоты ориентира, то
AN>H>BN, а это значит, что максимальное значение третье-
го члена меньше 2е. Следовательно, измерив вертикальный угол
Рис. 132
над береговой чертой с высоты глаза наблюдателя е и, рассчи-
тав расстояние до ориентира по формуле (166), сделаем ошиб-
ку в расстоянии не больше Зе, т. е. около 45 м. В тех случаях
когда ориентир находится далеко от береговой черты, т. е.
NB>H,
расстояние от береговой черты до вершины ориентира NB, а
также расстояние от счислимой точки до береговой черты сни-
мают с карты и, рассчитав третий член выражения (171), при-
бавляют его к выражению (166).
2. Наблюдаемый ориентир находится настолько близко к
наблюдателю, что его основание наблюдается ниже черты види-
мого горизонта.
Этот случай возможен, если высота глаза наблюдателя ве-
лика, а расстояние до ориентира мало. Определить расстояние
до ориентира можно по углу снижения, измеренному между ви-
димым горизонтом и основанием ориентира. На рис. 132 глаз
наблюдателя в точке О на высоте е над уровнем моря, АВ —
уровень моря, ОН — истинный горизонт, ON — направление на
видимый горизонт наблюдателя. Угол HON будет наклонением
видимого горизонта d.
Угол NOB=-( измеряется секстаном; угол снижения между
видимым горизонтом и основанием ориентира В будет равен
1АВО= ZNOB + Z HON = i + d,
283
следовательно,
D = АВ = е ctg (i + d). (172)
Наклонение видимого горизонта d определяется наклономе-
ром Каврайского или выбирается из МТ-53, по табл. 116, на вы-
соту глаза е.
3. Наблюдаемый ориентир находится настолько далеко от
наблюдателя, что его основание скрыто чертой видимого гори-
зонта.
Этот случай возможен при очень больших расстояниях D до
ориентира, когда нельзя пренебречь кривизной земной поверхно-
сти и земной рефракцией. В связи с тем, что расстояние до ори-
ентира больше радиолокационной дальности обнаружения, этот
случай часто встречается и полезен на подходах к берегу, так
как, имея пеленг этого же ориентира, можно получить довольно
надежную обсервацию.
На рис. 133 точка М — вершина ориентира, основание кото-
рого В скрыто за чертой видимого горизонта наблюдателя СЕ.
Высота ориентира над уровнем моря ВМ = Н, глаз наблюдателя в
точке С на высоте е над уровнем моря. Расстояние до ориенти-
ра (дуга ЛВ) равно углу при центре земли АОВ. Наблюдатель
для обсервации измерил секстаном угол ZC£'=Y Угол КСЕ =
=а— наклонение горизонта. Угол LCM=r — земная рефрак-
ция, приподнимающая вершину М так, что наблюдатель видит
ее по направлению CL. Высота ориентира, исправленная рефрак-
284
цией и наклонением видимого горизонта, т. е. угол Л1С/( = р, бу-
дет Р = 1—г—d,
Z ОСМ = 90° + Р; Z ОМС = 180° — D — Z ОСМ\
/.OMC = W — (D + $
sin ОМС____ОС
sin ОСМ ОМ
или
sin [90— (Д -4- р)] = cos(£) +Р) = /?+_£
sin (90+ р) cos^ /? + Н9
откуда
cos(D + P) = ^±^cosP, (173)
где R — радиус Земли.
По этой формуле можно было бы рассчитать расстояние D,
определив по наклономеру Каврайского значение наклонения
d и рефракции Но в этой формуле величина R велика
по сравнению с величинами Н и е, поэтому удобнее привести
формулу к виду, независимому от R. Для этого прологарифми-
руем обе части уравнения
1 1 + J
lg cos (D + p) = lg cos ₽ + lg-ту.
1 + 7?
„ e H л
Величины и — малые дроби, (поэтому, разложив
lg(! + ^-) и lg(l + 4)
в логарифмический ряд, можем ограничиться первыми членами
разложения.
Получим
1г(' + у)=Л14-
где М =0,43429448...— модуль системы обыкновенных логариф-
мов. Произведя подстановку, получим
lg cos (D + р) = lg cos р — (Н— е).
Обозначим
—е) через X.
Тогда
lg* = lg(//-e) + lg^-,
1 Af
где 1g — величина постоянная.
285
Принимая землю за шар, будем считать радиус ее равным
R = 3437,7468 X1852 = 6 366 707 м.
Далее получим
lg X = 1g (//—#?)+ 9,6377843 — 6,8039149 = lg (Н— е)+2,8388694.
В результате будет
lg cos (£> + Р) = lg cos ₽ — X, (174)
где lg X = lg (H - e) + 2,8338694.
Вычисление по формуле (174) из-за малости угла р, требу-
ет семизначных логарифмов. Чтобы избежать вычисления по ло-
гарифмам, в МТ-53 помещена таблица 296, вычисленная по пре-
образованной формуле
— 10elncos(D-l-₽) = — 10elncos₽+ 108-^-е.
В .первой части таблицы по аргументу (Н—е) в м, получают ве-
личину 103 -р—- Во второй части таблицы даны натуральные
К КМ
логарифмы косинусов для углов от 0 до 9°,50', умноженные на
10®. Следовательно, чтобы получить расстояния до ориентира
поступают так:
а) рассчитывают г
г = 13 Dc '
б) из табл. 116 выбирают наклонение, входя в нее с высо-
той глаза наблюдателя, или d определяют наклономером Каи-
ра йского;
в) рассчитывают Р
Р = ос -|- ci 4- s — d — г;
г) рассчитывают Н—е и по этому аргументу из табл. 296
МТ-53 выбирают величину I, равную 103—(первое слагае-
мое);
д) по аргументу ₽, из второй части табл. 296, выбирают ве-
личину II, равную 10® In cos Р;
е) с суммой I + II входят, обратным входом, во вторую
часть табл. 296 и выбирают значения величины De + P;
ж) зная Р, рассчитывают Da
£>u = (De + P)-p;
з) в связи с тем, что величина ir рассчитывалась по Dc, ко-
торое может сильно отличаться от Dui получив DU1 вторично
рассчитывают ч, = -^ Du и вновь решают задачу.
286
На практике при измерении расстояний секстаном, рекомен-
дуется выбирать ориентиры:
а) имеющие четкую форму и выделяющуюся на фоне берега
окраску;
б) расположенные ближе к береговой черте и судну;
в) при наличии ориентиров, расположенных на одном рас-
стоянии от судна, выбрать те из них, которые имеют большую
высоту;
г) если расстояние и высоты ориентиров различны, выб-
рать те из них, которые имеют больший вертикальный угол;
д) при выборе учитывать, что линии положения должны пе-
ресекаться под углом не менее 30°.
В связи с тем, что высоты ориентиров на картах и пособиях
даются на уровень сизигийной полной воды, необходимо вы-
бранную высоту исправить поправкой глубины «а момент изме-
рений.
Радиолокационные измерения расстояний
Возможность производить радиолокационные определения в
условиях плохой видимости, а также высокая точность и просто-
та измерений, сделали радиолокатор основным навигационным
прибором для измерения расстояний на море. Ошибки радиоло-
кационного измерения расстояний зависят от физических про-
цессов, происходящих в узлах РЛС, свойств распространения
радиоволн сантиметрового диапазона, отражающей способности
ориентиров, техники измерения расстояний и других факторов.
В ошибки измерения расстояния с помощью РЛС входят:
а) ошибка калибровки, среднее .квадратическое значение ко-
торой принимают равным
/п*=±0,1 кбт.;
6) ошибка в искажении объекта. Эта ошибка проявляется
в том, что передний край изображения ориентира на экране
расплывается и не имеет резко очерченных границ. Ошибка, воз-
никающая вследствие этого, зависит от длительности импульса,
отражающих свойств ориентира и степени усиления. Среднюю
квадратическую ошибку в искажении объекта принимают
ш0= ± 0,3 кбт.;
в) ошибка измерения. Для измерения пользуются подвиж-
ным кругом дальности (ПК.Д). При этом наблюдатель должен
совместить подвижной круг дальности с эхосигналом. Величина
ошибки зависит от натренированности наблюдателя, четкости
эхосигнала, масштаба изображения и др. Средняя квадратиче-
ская ошибка измерения будет
тпи= + 0,1 кбт.
287
Суммарная средняя квадратическая ошибка измерения расстоя-
ния для РЛС «Нептун» принимается
для 1,5- и 5-мильных шкал /иа = ±0,5 кбт.;
для 15- и 30-мильных шкал тд = ±0,6—1,0% от предельной
дальности по данной шкале.
При выборе ориентиров для радиолокационного измерения
расстояний необходимо следующее:
а) пользоваться эхосигналами только тех ориентиров, ме
сто которых на карте опознано достаточно уверенно;
б) предпочитать всем остальным точечные ориентиры, искус-
ственные сооружения с отвесными стенками, обрывистые вы-
ступающие мысы и острова;
в) в связи с тем, что контуры берегов наносятся на карту
для уровня самой малой сизигийной воды, низкий берег может
быть не обнаружен в полную воду, поэтому необходимо всегда
знать «поправку глубины в момент измерений.
§ 79. ОПРЕДЕЛЕНИЕ МЕСТА СУДНА ПО ДВУМ РАССТОЯНИЯМ
Если на судне измерены расстояния до двух нанесенных на
карту ориентиров, судоводитель может нанести две изолинии,
которые будут представлять собой окружности с радиусами.
Рис. 134
равными измеренному расстоянию. Имея счислимую точку, нет
надобности проводить полностью эти окружности, а достаточно
(Сделать лишь засечки вблизи счислим ого места. Точка пересече-
ния засечек (рис. 134) ааг и bbr будет обсервованным местом
288
Выполнение обсерваций дальномером сводится к следующе-
му: вначале производят два измерения расстояния и наносят на
карту засечки радиусами, равными этим расстояниям. Для это-
го в быстрой последовательности производят измерения, причем
первые измерения расстояния производятся до ориентира, кото-
рый расположен ближе к траверзу, и второе — до ориентира,
расположенного ближе к диаметральной плоскости судна; при
втором измерении замечают время и отсчет лага. Такая очеред-
ность измерений уменьшает ошибку за разновременность изме-
рений. Отсчеты, снятые со шкалы дальномера, исправляют ин-
струментальной поправкой. Градуировка шкалы дальномера
производится в артиллерийских кабельтовых. Разница артил-
лерийского и морского кабельтовых составляет 1,3%, т. е. на
10 миль 1,3 кбт. В том случае, если необходима высокая
точность в обсервации, делается пересчет артиллерийских ка-
бельтовых в морские. Измеренные расстояния снимают с верти-
кальной рамки карты и ими, как радиусами, делают засечки
вблизи счислимого места.
Если обсервация производится секстаном двумя наблюдате-
лями, то, определив погрешность индексов обоих секстанов, по
команде одного из наблюдателей, одновременно, измеряют оба
вертикальных угла и замечают время и отсчет лага. Если из-
мерения производит один наблюдатель, то первым измеряется
вертикальный угол ориентира, расположенного ближе к травер-
зу, затем угол ориентира, расположенного ближе к диаметраль-
ной плоскости, сразу замечая время и отсчет лага, затем вторич-
но измеряют угол первого ориентира и из двух измерений вы-
водят среднее значение.
Отсчеты секстана исправляют погрешностью индекса и пс
полученным значениям вертикальных углов рассчитывают, поль-
зуясь одной из формул (167, 168, 171) или таблицей 29а МТ-53,
искомые расстояния. В случае, когда основания ориентиров ни-
же видимого горизонта, необходимо измерить наклономером
Каврайского или выбрать из табл. 116 ЛАТ-53 наклонение види-
мого горизонта d и использовать формулу (172) или таблицу
29а МТ-53, входить в которую нужно с (высотой глаза наблюда-
теля и углом, представляющим собой сумму измеренного верти-
кального угла и величины наклонения видимого горизонта
y + d. Если же обсервация осуществляется по ориентирам, ос-
нования которых скрыты видимым горизонтом, необходимо из-
меренные вертикальные углы исправить погрешностью индек-
са, наклонением видимого горизонта d и величиной земной ре-
фракции г. Для получения'г измеряют по карте расстояние от
счислимой точки до ориентира и берут VI3 этого расстояния.
Расстояниями D\ и £>2 делают засечки вблизи счислимого ме-
ста. Для повышения точности, если невязка велика, повторяют
расчет, принимая значение г=тЛз расстояния от обсервованной
точки до ориентира.
19 Навигация 389
Если расстояния измерены до двух опознанных на карте ори-
ентиров радиолокатором, то засечки производятся радиусами,
снятыми со счетчика радиодальномера, без каких-либо попра-
вок. Так поступают, если ориентир дает четкий эхосигнал и ори-
ентир точно опознан.
Обсервации по двум расстояниям нельзя проконтролировать
и, если ориентир не опознан или нанесен на карту неверно, об-
сервация будет ошибочна. Для того чтобы убедиться в безоши-
бочности обсервации, нужно повторить ее несколько раз, ведя
счисление между обсервованными точками. Уточнить обсерва-
цию можно, измерив третье расстояние и проложив третью изо-
линию.
Обсервация по расстояниям не имеет ошибки в поправке
компаса. Расчет средней квадратической ошибкй обсервации по
двум расстояниям облегчается тем обстоятельством, что гради-
енты линий положения равны единице. Линии положения пере-
секаются под углом б, равным разности пеленгов ориентиров,
так как линии положения и линии пеленгов перпендикулярны
между собой. Согласно формулам (147) и (148)
— sin 0 11 ’
но Й'1=^2=1,
тогда
/п, = —L = /Пп ; = —- — .
1 gi 1 “ gz
Подставив в формулу значения т\ и ги2, получим
М = ± Vm2Di + m\, (175)
где mDx и тр9 — средние квадратические ошибки измерения
расстояний.
Анализируя формулу (175), можно сделать следующие вы-
воды.
Ошибка обсервации:
а) зависит от угла пересечения линий положения 6 и мини-
мальна при угле 6=90°;
б) прямо пропорциональна ошибкам измерения расстояний;
в) не зависит от расстояний до ориентиров.
Следовательно, для повышения точности обсервации нужно
выбирать ориентиры, расположенные так, чтобы их пеленги со-
ставляли угол ближе к 90°, и пользоваться наиболее точными
способами измерения расстояний. Если расстояния отличаются
друг от друга незначительно и условия измерения одинаковы, а
измерения производятся одним и тем же наблюдателем, то мож-
290
но считать, что ошибки измерений обоих расстояний равны меж-
ду собой, т. е.
и заменить mDi и mDa средней величиной ошибки mD, + mD, >nD— 2
тогда 1,41т п * = sine • <176>
§ 80. ОПРЕДЕЛЕНИЕ МЕСТА СУДНА ПО ТРЕМ РАССТОЯНИЯМ
С введением на флоте РЛС этот способ обсервации получил
широкое распространение. Третья изолиния дает контроль обсер-
вации, указывает на возможные промахи в измерениях или на
неверно опознанные ориентиры, или на то, что эти ориентиры
нанесены неверно на карту. Во всех этих случаях изолинии пере-
секутся, образуя большой треугольник погрешности. Наличие же
случайных ошибок измерения расстояния обычно дает малый
треугольник погрешности, и истинное место можно считать в
центре этого треугольника. При наличии систематической ошиб-
ки измерения расстояния треугольник погрешности может быть
большим. Считая, что ошибка измерения одинакова для всех
трех измерений, изолинии и линии положения будут смещены по
направлению градиента или по направлению, обратному направ-
лению градиента. При этом направление градиента совпадает с
радиусом окружности и направлен он в сторону увеличения
функции.
Имея какую-то систематическую ошибку (рис. 135), получили
треугольник погрешности tZi Изменив величину ошибки на
произвольную, получили новый треугольник погрешности по раз-
мерам больший прежнего. В точках a, b, с, fli, 6b Cj проведем
градиенты расстояний, которые образуют неравные углы в точ-
ках а, Ь, с, аь 6Ь с\. Проведя биссектрисы этих углов, видим, что
биссектриса угла а совпадает с биссектрисой угла ai, а биссек-
триса Ь представляет прямую, которая является биссектрисой
угла 61. Отсюда следует, что и истинное место судна также нахо-
дится на биссектрисах углов между градиентами. Следовательно,
истинное обсервованное место находится в точке пересечения
биссектрис углов, образуемых градиентами расстояний. На
рис. 136 изображено другое расположение ориентиров и судна. В
этом случае истинное место судна находится также на пересече-
нии биссектрис углов градиентов, построенных в углах треуголь-
ника погрешности. При этом ориентиры расположены вокруг суд*
на, истинное место находится внутри треугольника погрешностей.
Если же ориентиры расположены на одной стороне судна, истин-
ное место находится вне треугольника погрешностей. Средняя
19*
291
Рис. 136
квадратическая ошибка обсервации по трем расстояниям рассчи-
тывается следующим образом. Как известно
±./я24-62,
где а и b—полуоси эллипса, рассчитываемые по уравнениям
(156), для решения которых строится квадратический полигон.
Для этого составим таблицу.
Линии положения Градиенты Удвоенное направление Квадраты градиентов
модуль | направ- ление
Окружность с центром А . . 1 2 А, 1
Окружность с центром В . . 1 ^2 2 Л2 1
Окружность с центром С . . 1 А 2Л3 1
££2=3
Направление градиента совпадает с направлением от ориен-
тиров к обсервованному месту, которое снимается с карты.
На листе бумаги построим квадратичный полигон, с него сни-
мем значение геометрической суммы градиентов в масштабе
чертежа. Обозначим его К.
Решаем систему уравнений (156)
л.2 । 2 q
ашах I — О
S m а х jfmln == К
Рассчитываем значение полуосей
Рассчитываем среднюю квадратическую ошибку обсервации
М= + /а2-Ь&г=±/лвтД-Ц^. (177)
т J Л *
§ 81. ОПРЕДЕЛЕНИЕ МЕСТА СУДНА ПО ПЕЛЕНГУ И РАССТОЯНИЮ
Взяв пеленг ориентира, судоводитель имеет линию положе-
ния в виде линии пеленга. Измерив одновременно с измерением
пеленга по компасу расстояние до ориентира, судоводитель полу-
чит вторую изолинию в виде окружности и линию положения в
виде касательной в точке пересечения окружности и линии пелен-
293
га. Обе линии положения пересекаются под углом 6 = 90°. В
практической работе судоводителя этот способ применяется при
следующих обстоятельствах.
1. На подходе к берегам в хорошую видимость, когда верши-
ла горы открывается на расстоянии более радиолокационного (в
некоторых случаях вершины гор открываются за 100—120 миль).
В этом случае измеренный пеленг будет ортодромическим и для
прокладки линии пеленга на меркаторской карте необходимо его
перевести в локсодромический, выбрав для этого из табл. 23
МТ-53 ортодромическую поправку. Для получения второй изоли-
нии секстаном измеряют вертикальный угол ориентира. При этом
основание ориентира скрыто под горизонтом. Пользуясь табл.
296 МТ-53, рассчитывают расстояние до ориентира. На проло-
женной линии пеленга делают засечку от ориентира радиусом,
равным рассчитанному расстоянию, взятому в масштабе карты.
2. Следуя вблизи видимости берегов и имея один ориентир,
хорошо видимый и нанесенный на карту, берут пеленг этого
ориентира по компасу, исправляют поправкой компаса и про-
кладывают на карте. Одновременно с этим измеряют расстояние
локатором, на линии пеленга делают засечку от ориентира ради-
усом, равным измеренному расстоянию (рис. 137).
3. В плохую видимость при помощи судовой РЛС измеряют
пеленг и расстояние до опознанного ориентира и прокладывают4
294
на карте. В этом случае точность обсервованного места будет
меньше, чем в описанном выше случае 2, так как радиолокацион-
ный пеленг менее точен, чем визуальный.
4. Если ориентир, по которому измерен пеленг, расположен
так, что не дает эхосигнала на экране РЛС (например, если маяк
расположен на фоне лесистой местности), то при наличии види-
мости, взяв пеленг ориентира по компасу, измеряют расстояние с
помощью РЛС до ближайшей части берега.
Проложив линию пеленга, на нем подбирают точку, из кото-
рой можно радиусом, равным измеренному расстоянию, провести
касательную к береговой черте. В этом случае линии положения
пересекутся под углом, не равным 90° (рис. 138). Если РЛС на
судне нет или находится в нерабочем состоянии, а высота ориен-
тира известна, расстояние можно определить секстаном или
дальномером. Средняя квадратическая ошибка обсервации рас-
считывается по формуле (148), при этом, если ориентир один, ли-
нии положения пересекаются под углом 0=90° и sin 6= 1. Следо-
вательно, формула примет вид
7И = + У тл -р ^2 ,
295
где тх— ошибка линии положения, полученная пеленгованием
т __Dmut .
1 g 57°,3 ’
mul—средняя квадратическая ошибка пеленгования;
/п2—ошибка линии положения, полученной по расстоянию
та
т2==~- = та,, так как g=l;
—средняя квадратическая ошибка измерения расстоя-
ния.
Подставив значения Ш\ и /п2, получим
Г(D>mn V о ,
тИ=±|/ Ч-/ПИ1. (178)
В том случае, если расстояние измерено до береговой черты, а
взят пеленг ориентира и угол 0 =#90°, формула примет вид
^=-~sinTj/ ( 57°,3/ +/и“»" (179)
§ 82. ОПРЕДЕЛЕНИЕ МЕСТА СУДНА
ПО ГОРИЗОНТАЛЬНОМУ УГЛУ И РАССТОЯНИЮ
Когда в пределах видимости находятся два ориентира и нет
уверенности в поправке компаса, получить надежную обсерва-
цию нельзя. Если при этом измерить расстояние только до одно-
го из ориентиров, или если неизвестна его высота (при использо-
вании секстана) или второй ориентир не дает на экране РЛС эхо-
сигнала, то можно получить надежное место, измерив угол меж-
ду ориентирами и расстояние до одного из них. Угол между
ориентирами можно измерить секстаном или рассчитать как раз-
ность компасных пеленгов. Изолинией в этом случае будет ок-
ружность, вмещающая этот угол.
Измерив расстояние до одного из ориентиров, получим вто-
рую изолинию, также имеющую вид окружности (рис. 139). Ли-
ниями положения будут касательные к окружностям в точке их
пересечения. Измерив угол между А и В, равный а, построим
изолинию по этому углу. Для этого разделим АВ пополам и че-
рез точку С проведем перпендикуляр. У точки А построим угол
90°—а. Точка пересечения перпендикуляра со стороной этого уг-
ла будет центром изолинии.
Если мы знаем, что расстояние до ориентира В равно D, то
радиусом, равным этому расстоянию, из точки В делаем засечку
на окружности. Точка Р явится обсервованным местом. Если из-
меренное расстояние будет равно диаметру нанесенной окруж-
ности, обсервации не получится, так как угол между линиями по-
ложения 0 = 0—180°.
296
В связи с тем, что засечку радиусом равным D можно сделать
в двух местах окружности, счислимая точка дает возможность
выбрать обсервованную точку.
В условиях плавания построений на карте не делают, а на
листе кальки строят угол а. На стороне, расположенной к ориен-
тиру, до которого измерено расстояние, от вершины угла откла-
дывают измеренное расстояние D. Наложив на карту кальку так,
чтобы точка В на кальке совпала с ориентиром В на карте, нож-
кой измерителя прокалывают кальку в этой точке и далее доби-
ваются, чтобы вторая сторона угла прошла через ориентир Л.
Перенеся вершину угла уколом измерителя на карту, получают
обсервованное место Р. Средняя квадратическая ошибка обсер-
вации по формуле (148) будет равна
М= ± + /П2
где
57°,3 АВ
ga~ dads
После подстановки получим
matDADB
т^т“-
и далее
м= + -X-
— sin 6
mu,DA DB
57°,3 А В
ml,,
(180)
297
где 6— угол пересечения линий положения;
mUi—средняя квадратическая ошибка измерений угла;
Da и Db—расстояния до ориентиров, снятые с карты;
АВ—расстояния между ориентирами, снятые с карты;
/пИэ—средняя квадратическая ошибка измерения рас-
стояния.
ПРИМЕРЫ
1. Указанная на карте высота ориентира равна 84 м. Во время малой
воды измерили секстаном вертикальный угол 7=27'. Величина прилива 6 м.
Определить расстояние до ориентира и среднюю квадратическую ошибку из-
мерения расстояния, если ошибка измерения вертикального угла ига. =+1'.
Решение, а) В табл. 29а МТ-53 входим с величиной угла 27' и вы-
сотой маяка над существующим в момент измерения угла уровнем. В связи
с тем, что высоты даны над уровнем в полную воду, к указанной величине
(84 м) прибавляем величину прилива (6 jh). Следовательно, в таблицу вхо-
дим с высотой ориентира 90 м.
Угол 22'— расстояние 7,6 мили
Угол 30'— расстояние 5,6 мили
На 8' 2,0 мили
, 2
На Г -g-МИЛИ
/ 10
На 5 -у = 1,2 мили о
На 27' будет 7,6—1,2=6,4 мили.
Средняя квадратическая ошибка измерения рассчитается по формуле
(169).
13 90 ОО X
' w= ± 2,2 кбт.
2. На подходе к проливу Екатерина в Охотском море измерили секста-
ном угол между вершиной вулкана Тятя и видимым горизонтом. Отсчет сек-
стана равен ЗГ,2, ci+s=+O',2. Расстояние от счислимой точки до вершины
снято с карты £>с = 70 миль. Высота вулкана выбрана из лоции и равна
1822 лц высота глаза наблюдателя 15 ли Определить истинное расстояние
до ориентира.
Решение, а) Рассчитаем истинный угол 0. Для чего из таблицы 116
МТ-53 по аргументу е глаза, равному 15, выберем наклонение горизонта
</ =—6',8 и рассчитаем земную рефракцию г= 7)с = — 5',4. Тогда
«г-31-,2
ci+s— +0',2
d=—6',8
г=—5',4
0 = 19', 2
б) Рассчитаем Н—е
_ //=1822
е= 15
//—£>=1807
в) Из табл. 296 (первой части), по аргументу Н—е=1807, выберем ве-
личину 103 -р— =282 (I). Из второй части табл. 296 по аргументу 0 = 19',2
к км
выберем 106 cos 0=16,0 (II). Сумма выбранных величин
(1) = 282
(II) = + 16,0
2 = 298,0
298
г) По сумме 2 = 298,0 из второй части табл. 29в обратным входом вы-
бираем значение угла Da + р = 1°24',0.
д) Рассчитаем Du
0„ + Р=1°24',О
______________19,2
Du = 1°04',8=64,8 мили.
Расстояние в первом приближении
Du =64,8 мили.
Для уточнения нужно рассчитать рефракцию, считая, что Dc =64,8 мили
и решить заново.
е) Отсчет секстана = 31',2
ci'+s=+ О',2
d=— 6,8
₽> 19',7
1=282 £>ы+Р=1°24',0
11= 16,5__________________3=19',7
2=298,5 Da= Г4',3=64,3 мили •
3. Карта ГУ 1225. Следуя ГКК=87°, ДГК= + 1°, локатором измерили
расстояния. Оказалось, что расстояние до мыса Хаммеродде 01 = 11,2 мили,
маяка на о. Кристмансе 02=13,3 мили. Определить координаты места судна
и рассчитать среднюю квадратическую ошибку обсервации, если ошибка из-
мерений Щ« = ±3 кбт.
Решение, а) Раздвинув ножки циркуля делаем засечки из точек-ори-
ентиров на измеренную локатором величину 0i и 021
б) Точка пересечения засечек и будет обсервованным местом. Снимаем
его координаты
Фо <= 55°28',3 N; Хо = 14°54',5 O8t;
в) В связи с тем, что ошибка обеих измерений /пк=±3 кбт., для расчета
средней квадратической ошибки обсервации воспользуемся формулой (176);
На карте с помощью транспортира снимем угол между направлениями на
ориентиры
6 = 72°,
тогда
1.41/и„_ 1,41 ХЗ , 4,32
” * sin 0 ± sin 72° ± sin 72°'
lg М = 1g 4,23 — lg sin 72°
lg 4,23 = 0,62634
Igsin, 72° = 9,97823
lgAf = 0,64811
Л4 = 4,4 кбт.
4. Карта ГУ 1225. Следуя ККг~ 225°, —1°, локатором измерили
расстояние. Оказалось, что расстояние до маяка Симрисхами 01 = 13 милям,
до мыса Хаммеродде 02=11 миль, Сандхаммарена 0з=И миль. Опреде-
лить координаты судна.
299
Решение, а) Нанесем на карту отрезки изолиний. Получим большой
треугольник погрешности;
б) увеличим каждое из измеренных расстояний на 1 милю и вторично
проведем засечки; получим второй треугольник погрешности, больший пер-
вого. Соединим соответствующие вершины прямыми. Точка пересечения пря-
мых и будет обсервованным местам. Снимем координаты точки пересечения
<Ро = 55°22'N ; = 14°29',7 Ost-
5. Карта ГУ 1225. Следуя ХХг = 180°, Д77С=4-2°, измерили радиолока-
тором расстояние до маяка на о. Кристиансе. Оно было равно 14 милям.
Одновременно измерили горизонтальный угол между маяком Кристиансе и
Хаммеродде «=55°. Определить координаты судна и рассчитать ошибку об-
сервации, если ошибка измерения угла тм = 0°,1, а расстояние ти =3 кбт.
Решение, а) На листе кальки построим угол а = 55°. На одной из
сторон отложим расстояние £>=14 милям в масштабе карты. Наложив каль-
ку на карту, получим обсервацию (Po=55°32'N, Хо = 15°0r5Ost-
б) Для расчета ошибки обсервации нужно с карты снять расстояние
между маяками ЛВ = 14,3 мили и расстояние до маяка Хаммеродде £>£-"
= 16,3 мили;
в) Для определения угла 0 нужно построить линии положения. Соеди-
нив обсервованную точку с маяком Кристиансе прямой, проведем в обсер-
вованной точке перпендикулярную к прямой первую линию положения. Для
получения второй линии соединим оба маяка прямой и в середине ее прове-
дем перпендикуляр. У одного из маяков, на соединяющей прямой, построим
угол а =90—55 = 35°. Точка пересечения стороны угла и перпендикуляра
будет центром вмещающей окружности, касательная к которой и будет
второй линией положения. Транспортиром измерим угол между линиями по-
ложения 6= 36°;
г) По формуле (180) рассчитаем ошибку обсервации
,1 п/0°,1 х 140 х 163 , о,
—sin3b°r 57,3X14.3 +3 ~ ±5,1 кт’
Задачи
1. Определить расстояние до ориентира, если даны измеренный верти-
-кальныи угол и высота ориентира:
а) а =45', // = 40 ле;
б) а =10', Н=55 ле;
в) а = 12', Н = 75 ле;
г) а=1°00', //=90 ле;
Д) а =5', 5, Н = 70 ле.
2. Карта ГУ 737. Следуя 7(Л=68°, ДК=—6° со скоростью 11,2 узла в
12*00-**, 0</7i = 72,3, Хл=О,92, взяли пеленги маяка Васильева 0X77= 109°,5,
мыса Океанского 0X77=223°. В какое время и при каком отсчете лага нужно
вторично взять пеленги ориентира, чтобы проверить поправку компаса?
3. Счислимая точка удалена от горы Шишалдина (77=2861 -и, о. Унимак)
на 81 милю. Измерили секстаном вертикальный угол между вершиной горы и
видимым горизонтом, отсчет секстана 0°49',1, ci4-5=0',2. Высота глаза 13 ле.
Определить истинное расстояние до горы.
4. В Тихом океане на подходе к о. Кунашир измерили секстаном угол
между вершиной вулкана Докучаева и видимым горизонтом. Получили от-
счет секстана 0°,25',3, ci4-5=0',5, £>с=60 миль. Высота вулкана 1486 ле, высо-
та глаза наблюдателя 15 ле. Рассчитать истинное расстояние.
5. Карта ГУ 1225. На подходе к Силвесборгу определились по двум
расстояниям; оказалось, что расстояние до мыса Стенехувид £>i = 13,9 мили,
до маяка Легеркальмен £>2=11,1 мили. Определить координаты судна, рас-
считать ошибку обсервации, если ошибка измерения расстояний mtt=+2 кбт.
300
6. Карта ГУ 1225. Следуя ККг=330°, ДК=+2°, определили расстояние
до маяков о. Хане £>1=13,5 мили, о. Терне £>2=135 миль, Госфетена £>з =
= 13 миль. Получив большой треугольник погрешности, определить обсер-
вованные координаты судна.
7. Карта ГУ 1225. Следуя ЯХг=90°, ДГК=+2°, взяли пеленг маяка
Кристиансе ОК/7=222°,5 и измерили радиолокатором расстояние до него
£>=16 миль. Определить координаты судна и рассчитать ошибку обсервации,
если ошибка в пеленге = кбт.
8. Карта ГУ 1225. Следуя ККг=210°, ДГК=+2°, измерили радиолокаци-
онное расстояние до маяка Хаммерен £>i = 15,0 мили до мыса Ренне £>2=
= 15,0 мили. Определить координаты судна и ошибку обсервации, если ошиб-
ка измерения щи = ±5кбт.
Ответы.
I. а) £> = 1,7 мили; б) £>=10,2 мили; в) £>=11,6 мили; г) £>=2,8 мили;
д) £>=23,8 мили.
2. В 13ч 24л, ОЛ=89,1.
3. В первом приближении £>и = 72,5 мили, во втором—£>и=72,1 мили,
4. £)и=60°5 мили
5. Фо = 55°48'N; Хо= 14°37',2Ost м = ± 2,8 кбт.
6. Фо = 55°57'7N; Хо = 15’08',3Ost Af = ± 9,7 кбт.
7. 8. Фо Фо = 55°30'7Ы; = 55°15'2N; = 15°31',5Os‘
Хо = 14°20',5Os Af = ± 9 кбт.
Контрольные вопросы
1. В чем неточность формулы (168)?
2. Какие случаи измерения расстояния с помощью секстана наиболее
распространены на флоте?
3. Как нужно выбирать ориентиры для измерения до них расстояния е
помощью секстана?
4. Как получить истинное место судна при обсервации по трем расстоя-
ниям, имея неизвестную систематическую ошибку?
5. В чем преимущество обсервации по пеленгу и расстоянию?
6. Как используется дальномер на флоте?
7. Преимущества и недостатки радиолокатора для измерения расстояний.
Глава XIV. ИСПОЛЬЗОВАНИЕ РАЗНОВРЕМЕННЫХ
НАБЛЮДЕНИЙ В НАВИГАЦИИ
§ 83. КРЮЙС-ПЕЛЕНГ
Всякая изолиния, а следовательно, и линия положения, полу-
ченная в результате измерения, может быть перенесена парал-
лельно самой себе по курсу и плаванию. Такие изолинии и линии
положения называются перенесенными или сопутствующими. С
помощью перенесенных линий положения можно использовать
разновременные наблюдения для обсерваций. Если на берегу на-
ходится один ориентир, обозначенный на карте, то взяв пеленг
этого ориентира, обсервованного места не получим, так как одна
линия положения не дает такового. Если же через некоторый
промежуток времени вторично запеленговать тот же ориентир и
использовать перенесенную линию положения, место судна 'будет
определено. Этот способ обсервации называется крюйс-пеленгом.
301
Действительно, предположим (рис. 140), что в момент 7'1, при
отсчете лага ОЛ\, взят пеленг маяка ИП\ (линия МА). Через ка-
кой-то промежуток времени т, в момент Т2, имея отсчет лага ОЛ2
вторично взят пеленг того же ориентира ИП2. Проведя перене-
сенную линию положения через точку С, соответствующую пла-
ванию за время т, получим точку пересечения линии положения
ИП2 (линия МВ) и перенесенной линии положения Р. Плавание
за время т рассчитывается по формуле (48).
Точка пересечения перенесенной линии положения и линии
положения называется счислимо-обсервованным местом, так как
перенесенная линия положения проведена с учетом счисления
между моментами 7\ и Т2. На карте счислимо-обсервованное
место обозначается треугольником с точкой внутри (например,
/\ У которого записывается время и отсчет лага в момент
вторичного пеленгования. Проведение перенесенной линии по-
ложения может быть осуществлено следующим образом.
1. Из точки пересечения линии курса с первым пеленгом L’, по
линии курса, откладывают отрезок равный плаванию 5 (рис.
140). Через точку С проводят перенесенную линию положения.
Точка Р будет счислимо-обсервованным местом.
2. От ориентира (рис. 141), в сторону перемещения судна,
прокладывают линию, параллельную истинному курсу (МС). На
пей от ориентира откладывают плавание S. Через точку С про-
водят перенесенную линию положения, которая, пересекаясь со
вторым пеленгом, даст счислимо-обсервованное место Р.
302
3. На карте проводят линии пеленгов, взятых в моменты 7\ и
Г2. Рассчитывают плавание между моментами 5 = Р0Л К7. Из-
меритель, раздвинутый так, чтобы расстояние между остриями
его ножек равнялось S, прикладывают к параллельной линейке,
которую перемещают параллельно курсу, пока обе иглы измери-
теля не будут на линиях положения. Убрав линейку, уколом из-
мерителя на второй линии пеленга намечают точку Р, через кото-
рую пройдет перенесенная линия положения. Точка Р — счисли-
мо-обсервованное место судна в момент взятия второго пелен-
Ведя счисление между пеленгами, необходимо выдерживать
постоянную скорость и точно придерживаться курса. Иногда пос-
ле взятия первого пеленга судно вынуждено изменить курс. Тог-
да поступают следующим образом.
Случай крюйс-пеленга с поворотом. Взяв первый пеленг, заме-
чают время Т\ и отсчет лага ОЛ\. Через некоторое время, в мо-
мент Т2 при отсчете лага ОЛ2, судно вынуждено выйти на новый
курс. Пройдя этим курсом до момента Тз, при отсчете лага ОЛ$
вновь ложатся на другой курс. Пройдя этим курсом до мо-
мента дуц , берут вторично пеленг ориентира. От точки X на
первом пеленге тщательно ведут прокладку, нанося точки пово-
рота Xi и Х2 по курсам и плаваниям Si, S2, S3. На последнем кур-
се наносят счнслимую точку Хз, через которую проводят перене-
сенную линию положения. Эта линия, пересекаясь со вторым пе-
ленгом, даст счислимо-обсервованное место судна (рис. 142).
зоз
Рис. 143
Этот случай носит название крюйс-пеленга с поворотом. Из ри-
сунков видно, что линия положения в момент взятия второго пе-
ленга пересекается с перенесенной линией положения под раз-
личными углами 0. Чтобы графическая ошибка была меньше,,
считают наиболее подходящим угол 0=30°.
Определение места судна по крюйс-пеленгу на течении. Если
Пусть судно находится в точке К. Судоводителю известны
элементы течения, т. е. скорость и направление, следовательно,
на карте нанесены линии истинного курса KKi и линия пути КП,
(рис. 143). В связи с тем, что лаг течения не учитывает, пройден-
ное по лагу расстояние S—POJ1 Кл откладывается на линии кур-
са от точки пересечения первого пеленга с линией истинного кур-
са Ki. При отсутствии течения перенесенная линия положения
прошла бы через точку С и пересеклась со вторым пеленгом в
точке Р\. Но за время между взятием пеленгов Т2—Tt =т судно
будет снесено по направлению течения на расстояние UTt. Сле-
довательно, из точки С нужно проложить направление течения и
по нему отложить отрезок CC\ = Ur%. Через точку Ci проводится
перенесенная линия положения, которая, пересекаясь со вторым
пеленгом, даст счислимо-обсервованное место судна Р с учетом
течения. Отрезок второго пеленга РР\ представляет собой линей-
ную ошибку от непринимаемого во внимание течения.
20 Навигация олг
Случай определения места судна по крюйс-пеленгу при дрей-
фе. Судно, находясь в точке К, идет с дрейфом а, известным су-
доводителю. Следовательно, на карте будут нанесены линия ИК
и линия пути КП (рис. 144). Так как лаг учитывает действие вет-
ра на судно, пройденное по лагу за время между моментами взя-
тия пеленгов, расстояние S = POJI• Кл откладывается на линии
пути от точки пересечения первого пеленга с линией пути П, по
направлению движения судна. Через полученную на линии пути
точку С проводят перенесенную линию положения, которая, пе-
ресекая второй пеленг, даст счис'лимо-обсервованное место суд-
на Р.
§ 84. ЧАСТНЫЕ СЛУЧАИ КРЮЙС-ПЕЛЕНГА
Частные случаи крюйс-пеленга дают возможность судоводи-
телю сократить графическую работу на карте.
Способ траверзного расстояния. Когда угол между курсом и
вторым пеленгом ориентира М будет равен 90°, ориентир будет
на траверзе судна. Треугольник, образованный двумя пеленгами
и курсом, будет прямоугольным (рис. 145). Из треугольника
МРА получим ___ ____
где а — угол между курсом и первым пеленгом, т. е. курсовой
угол ориентира в момент взятия первого пеленга. Обозначив тра-
306
верзное расстояние MP = DTp и рассчитав плавание ЛР=5—
= РОЛ*Кл> найдем
OTp = Stga. (181)
Подобрав угол а так, чтобы тангенс его был целым числом,
получим соотношение, где траверзное расстояние DTp будет крат-
но плаванию S:
tg45° = l; DTP = S\
tg63°,5 = 2; £>TP = 2S;
tg71°,6 = 3; DTP = 3S;
tg76°,0 —4; DTP = 4S.
Следовательно, взяв первый пеленг на КУ, равном 45° или
63°,5 и т. д., и, заметив время и отсчет лага ОЛ\, с приходом
на траверз ориентира замечают время Т2 и отсчет лага СЛ//2. Рас-
считав S = O</72—ОЛ\ • Кл, эту величину умножают на 1,2,3,4
соответственно. На карте нужно только провести перпендикуляр
к курсу от ориентира и на нем отложить величину DTP=S или
Dtp = 2S и т. д.
Таким образом, желая получить счислимо-обсервованное мес-
то по траверзному расстоянию, заранее рассчитывают компасные
пеленги КП} и КП2. При этом, если ориентир находится с право-
го борта, то
КП.=КК^ «;
КП2 = W+ 90°,
если с левого, то
КПг=КК~ а;
/<П2 = ЛХ—90°,
где а — угол, тангенс которого целое число (1, 2, 3, 4).
Эту же задачу можно решать с помощью табл. 31 МТ-53.
Взяв любой пеленг КП и заметив Т\ и ОЛ\, рассчитывают ДУ
ориентира
Ку=КП1_ (!)
который служит первым аргументом для входа в таблицу.
Рассчитав компасный пеленг на траверзе ориентира КП2 =
—ДД±90°, вычисляют вторую величину для входа в табл. 31 —
изменение пеленга
0 = А772-Л771. (II)
По данным (I) и (II) выбирают из таблицы величину М.
Придя на траверз ориентира, замечают вторично время 7’2 и
отсчет лага ОЛ2 и рассчитывают 8=Р0Л* Кл. Величина ум-
ноженная на плавание S, даст траверзное расстояние
/ DTP = M-S.
20*
307
На перпендикуляре к курсу, проведенному от ориентира, от-
кладывают величину Dtp и получают счислимо-обсервов анное
место.
Способ двойного угла. Пусть первый пеленг ИП\ (рис. 146)
соответствует курсовому углу ориентира /СУь а второй ИП2—
курсовому углу ХУ2, равному удвоенному КУь т. е.
АГУ, = 2КУ,.
Так как внешний угол равен сумме двух внутренних с ним
несмежных, то треугольник, образованный двумя пеленгами и
курсом, будет равнобедренным с равными сторонами АР и МР.
Следовательно, плавание S будет равно расстоянию от ориенти-
ра до счислимо-обсервованного места Р. Практически обсерва-
цию выполняют так: взяв первый пеленг и заметив время и от-
счет лага ОЛЪ рассчитывают /<Уь /(У2 и КП%
КУ^КП^-КК}
КУг=2КУх\
КПг = КК+КУг.
Напомним, что КУ правого борта имеет знак плюс, а левого
— минус. Пеленгатор устанавливают на отсчет KJIz и ждут,;
308
когда судно придет на установленный пеленг ориентира. Когда
пеленг ориентира равен КП2, замечают время Т2 и отсчет лага
ОЛ2. Вычисляют плавание S'=POJT • Кл, рассчитывают ИП2=
— КП2-\-&К и на линии пеленга откладывают отрезок 5' в мас-
штабе карты. Точка Р будет обсервованным местом.
Способ прямого угла при предмете. Если курсовой угол при
взятии первого пеленга КУь а при взятии второго пеленга КУ2=
= 90°+КУ1, то угол при ориентире между пеленгами 0 = 9Ои. Из
прямоугольного треугольника АМР (рис. 147) получаем
или
МР = АР-ЫпКУ1
D = Sslntfy1.
В случае, когда ЛУ1 = 30°, sin 30=1/2
»-4-
т. е. расстояние до ориентира при втором пеленге равно полови-
не плавания между пеленгами.
На практике поступают следующим образом: на подходе к
ориентиру, когда курсовой угол его меньше 30°, рассчитывают
величины KIJi и КП2
КП2 = КК± 120°.
309
При этом знак плюс берется тогда, когда ориентир находит-
ся с правого борта, минус — с левого борта.
Установив пеленгатор на отсчет КПi по картушке, с приходом
судна на пеленг, замечают время Т\ и отсчет лага ОЛ\. Далее
пеленгатор устанавливают на отсчет КП2. Придя на пеленг Д//2»
замечают время Т2 и отсчет лага ОЛ2. Рассчитав 5 = (ОЛ2—
—ОЛ\) -Кл по линии второго истинного пеленга откладывают
D = Полученная точка будет счислимо-обсервованным мес-
том судна Р в момент взятия второго пеленга.
Рис. 148
Способ разновременных пеленгов двух ориентиров. Следуя
вдоль побережья, на котором имеются ориентиры для обсерва-
ции, расположенные так, что одновременно их наблюдать нельзя,
можно взять пеленг ориентира перед тем, как он скроется из ви-
ду, заметив время 7\ и отсчет лага ОЛЬ При открытии второго
ориентира взять его пеленг, заметив время Т2 и отсчет лага СМ/2.
Рассчитав плавание между моментами взятия пеленгов S , нуж-
но его вместить между пеленгами (рис. 148). Это проще всего
выполнить так. От точки пересечения линии первого пеленга с
линией курса А по курсу откладывается S в масштабе карты.
Через полученную точку С проводят перенесенную линию поло-
жения, которая, пересекаясь со второй линией положения, даст
счислимо-обсервованное место. Из-за того, что между первым и
вторым пеленгами велось счисление, имеющее ошибки, точность
такой обсервации меньше точности обсервации по двум одновре-
менно взятым пеленгам двух ориентиров.
310
§ 85. ТОЧНОСТЬ СЧИСЛИМО-ОБСЕРВОВАННОГО МЕСТА СУДНА,
ПОЛУЧЕННОГО ПО КРЮИС-ПЕЛЕНГУ
На точность счислимо-обсервованного места влияют следую-
щие ошибки.
Случайные ошибки пеленгования и графической прокладки на
карте. Счислимо-обсервованное место получается в результате
пересечения линии положения в момент взятия второго пеленга и
перенесенной линии положения. Средняя квадратическая ошиб-
ка второй линии положения зависит только от ошибки наблюде-
ния пги и от расстояния Z)2 и рассчитывается по формуле
m — muDt*
gz ~ 57°,3 •
Ошибка в перенесенной линии положения, кроме ошибки наблю-
дения, которую можно считать равной для обоих пеленгов, со-
держит еще и ошибку счисления или ошибку переноса, т. е.
Общая ошибка обсервации рассчитывается по формуле (148)
Сделав подстановку, будем иметь
м = ± -Л-/(^)’+(^)а + лй
sin 0 г \ g? / ’ \ gt / * г
ИЛИ
м = ± да / +
Произведя преобразование, получим
7 1 - У sin2 О (57°,3 sin О)2 •
(182)
Второе слагаемое в подкоренном выражении представляет
собой квадрат средней квадратической ошибки обсервации по
двум пеленгам, при расстояниях до ориентиров, равных D] и
D2, и угле пересечения линий положения, равном 0.
- |/ (67°,3sin0)» •
Сделав замену, получим окончательное значение средней
квадратической ошибки для счислимо-обсервованного места, по-
лученного по крюйс-пеленгу ___
^=±/^+(да)‘- 083)
311
На рис. 149 перенесенная линия положения пройдет не через
точку G, а по касательной к окружности, описанной из этой точ-
ки радиусом, равным средней квадратической ошибке счисления
за время между моментами взятия пеленгов Мс- Ошибка пе-
ленгования ±ти также содержится в перенесенной линии поло-
жения, как и во втором пеленге. При этом она накладывается
на ошибку счисления Мс. В параллелограмм abed вписывается
эллипс ошибок счислимо-обсервованного места судна.
Рис. 149
Анализ формулы (182) показывает, что наилучшими условия-
ми для более точной обсервации по крюйс-пеленгу будут: а) ма-
лые расстояния до ориентира Du D2\ б) близость угла пересече-
ния пеленгов 0к 90°; в) точное счисление между моментами взя-
тия пеленгов. Удовлетворить эти три условия можно лишь в том
случае, если судно находится близко от ориентиров. В условиях
плавания не ждут, когда угол между линиями положения до-
стигает 90°, что требует длительного плавания и увеличивает
ошибки счисления, а удовлетворяются изменениями пеленга на
30—40°. Второй пеленг берут тогда, когда ориентир находится
на траверзе или вблизи него.
Ошибка в поправке компаса. Характер этой ошибки при по-
стоянном курсе и на сравнительно небольшом отрезке пути мож-
но считать постоянным или систематическим. На рис. 150 М—
ориентир, МА и МРг—истинные пеленги ориентира — линии по-
ложения судна. Плавание между пеленгами S=AP. Место судна
в момент взятия второго пеленга — в точке Р. Если поправка
компаса ошибочна на величину -be, то пеленги и курс располо-
жатся по пунктирным линиям, смещенным на одну и ту же вели-
чину е относительно соответствующих сплошных линий. Пеленги
312
расположатся по линиям МАг и МР^ истинный курс по прямой
Л1Р1 и место судна в Рь т. е. треугольник АМР повернется на
угол е около точки Л4, при этом МР=МР{. Следовательно, точки
Р и Pi лежат на одной окружности и ошибка в счислимо-обсерво-
ванном месте судна, принимая расстояние до ориентира D, вы-
разится:
PPi==eD = SO_^_. (184)
Анализируя выражение (184), приходим к следующему выво-
ду: ошибка в обсервации, при наличии ошибки в поправке ком-
паса, будет тем меньше, чем меньше расстояние D, а из этого
следует, что для уменьшения ошибки в обсервации второй пеленг
следует брать тогда, когда ориентир находится на траверзе
судна.
Ошибка в коэффициенте лага. Эта ошибка даст ошибку в пла-
вании за время между моментами взятия пеленгов. Пусть коэф-
фициент лага ошибочен на величину + ел. Ошибка в плавании
&S = POJIzA (рис. 151). Вместив между пеленгами неверное пла-
вание S+AS, получим точку Сь через которую пройдет перене-
сенная линия положения. Эта линия, пересекая второй пеленг,
даст неверное место Рь Счислимо-обсервованное место Р, полу-
ченное при верном будет в точке пересечения второго пелен-
313
га с перенесенной линией положения, проходящей через точку С.
Ошибка обсервации рассчитается из треугольника NPP^, в ко-
тором
PPi _ sin КУГ
AS sin 0 *
откуда
PP' = bS?^, (185)
где КУ\ — курсовой угол ориентира в момент первого пеленго-
вания;
0 — изменение пеленга за время между первым и вторым
пеленгованием.
Из анализа формулы (185) вытекает, что для уменьшения
ошибки в обсервации при неверном коэффициенте лага пеленги
следует располагать так, чтобы угол 0 возрастал при возможно
меньшем плавании, а это значит, что пеленги нужно брать вбли- |
зи траверза ориентира (особенно второй).
Если ошибка в AS положительна, счислимо-обсервованное-
место, находясь на второй линии положения, будет уклонено от
истинного места в сторону от пеленгуемого ориентира, если отри-
цательная — в сторону пеленгуемого ориентира.
Ошибка в принятых элементах течения, Неучет течения созда-
ет линейную ошибку РРу (рис. 143). Для расчета величины этой
314
ошибки из точки Р проведем линию, параллельную направлению
течения PN. Из полученного треугольника PNPi найдем
РРУ Sin а
NP sin 0 ’
где а—угол между направлением течения и первым пеленгом;
6— угол между перенесенной линией положения и вторым
пеленгом.
В связи с тем, что NP = CCi = VT т,
РРХ = Итт sin a cosec 6. (186)
Анализ выражения (186) показывает, что линейная ошибка в
счислимо-обсервованном месте будет тем меньше, чем меньше
скорость течения V», меньше промежуток времени между момен-
тами взятия пеленгов т, ближе угол между направлением течения
и первым пеленгом к 0° или 180° и чем угол между пеленгами 9
ближе к 90°.
Первая часть равенства (186) обращается в 0 при значении
а = 0= 180°. Следовательно, если линию первого пеленга распо-
ложить по направлению течения, ошибка от неучета течения бу-
дет равна нулю. Увеличение промежутка времени т, в течение ко-
торого растет ошибка от неучета течения, увеличивает угол 0 и,
следовательно, уменьшает ошибку от неучета течения. Однако на
практике не ждут, чтобы пеленг изменился на 90° и ограничива-
ются изменением пеленга на 30—40°. В противном случае ошиб-
ка PPi увеличится за счет увеличения т.
Анализ рис. 143 показывает, что при наличии неучтенного
прижимного течения, счислимо-обсервованное место уклоняется
от истинного в сторону пеленгуемого ориентира, а при отжимном
течении наоборот. При этом, если сделать ряд обсерваций, то не-
верные счислимо-обсервованные места расположатся уступом. В
том случае, если течение прижимное, этот уступ приближается к
ориентиру, если отжимное — наоборот.
Следовательно, при серии обсерваций по крюйс-пеленгу, су-
доводитель, имея в наличии уклонение линии, соединяющей счи-
слимо-обсервованные места (наличие уступа), ориентировочна
может судить о направлении течения и даже о его скорости.
Ошибка в принятом дрейфе. Если судно следует с дрейфом
а, неучет этого дрейфа приведет к тому, что плавание S отклады-
вается не на линии пути, а на линии истинного курса. Поэтому
перенесенная линия положения пройдет через точку а не че-
рез точку С. Пересекаясь с линией второго пеленга в точке Рь
она создает линейную ошибку РР\ (рис. 152). Для расчета вели-
чины этой ошибки проведем вспомогательные линии PN и С
Из треугольника PNP{ можем написать:
РРХ = AT3 cosec 6.
Из треугольника СКСХ также можем выразить величину смеще-
31f>
ния линии положения считая, что СС^Дп является смеще-
нием линии курса под воздействием дрейфа а, т. е.
СС1 = Дл----
где g — градиент курса равный [см. формулу (124)].
Рис. 152
Следовательно, ;
С.к = ССг sin ₽ = sin ₽,
«о
р = 90°- КУг.
Сделав подстановку, получим
С.К = -^3 COS КУ
Из рис. 152 следует, что
CJ(=PN.
•Следовательно,
РРг = cos К Уг cosec 6, (187)
О/ ,о
где ао— не принятый во внимание дрейф;
S — РОЛ КА—плавание за время между моментами взя-
тия пеленгов;
КУ^—курсовой угол ориентира в момент перво-
го пеленгования;
О—изменение пеленга между моментами пер-
вого и второго пеленгования.
316
Анализ формулы (187) показывает, что для уменьшения
ошибки в счислимо-обсервованном месте при наличии дрейфа^
определить величину которого затруднительно, плавание S дол-
жно быть меньше, курсовой угол ориентира в момент первого*
пеленга и угол 6 должны быть ближе к 90°. Следовательно, пе-
ленги нужно брать вблизи траверза. Изменение пеленга прини-
мать равным 30—40°.
Для исключения ошибки в счислимо-обсервованном месте
судна от дрейфа нужно определить направление пути ПУ и отло-
жить плавание S на линии пути. Этот способ применим при на-
личии только ветрового дрейфа и отсутствии течения.
Для определения пути есть два способа, выполняя которые,
необходимо брать дополнительный пеленг ориентира.
1 способ. Следуя в пределах видимости одного ориентира,
берут три пеленга через равные промежутки времени т, имея по-
стоянную скорость. Исправив компасные пеленги поправкой
компаса, прокладывают их от ориентира (рис. 153). На линии
среднего пеленга, выбирают произвольную точку О, через кото-
рую проводят линии, параллельные линии первого и третьего пе-
ленгов ОА и ОВ. Соединив точки А и В прямой, получают ли-
нию, параллельную линии пути, которую переносят в точку пере-
сечения линии первого пеленга и линии истинного курса. При на-
личии только дрейфа от постоянного ветра, на линии пути от
точки К откладывают плавание 5Л, которое рассчитывается по
формуле (48).
Через точку С пройдет перенесенная линия положения, кото-
317
рая, пересекая линию третьего пеленга, даст счислимо-обсерво-
ванное место, свободное от ошибки из-за неучета дрейфа а.
Кроме того, ПУ дает возможность рассчитать угол сноса при на-
личии течения или дрейфа и течения
С = ПУ-ИК.
Способ Глазкова. Если по каким-либо причинам нельзя
взять пеленги через равные промежутки времени, используют
способ, предложенный П. П. Глазковым. Имея только один ори-
ентир М, через произвольные промежутки, времени берут три пе-
ленга. Обозначим промежутки времени между моментами взя-
тия первого и второго пеленгов через ti второго и третьего —т2.
Компасные пеленги исправляют поправкой компаса и получен-
ные ИП прокладывают на карте крупного масштаба (рис. 154).
Выбрав произвольный коэффициент пропорциональности, рас-
считывают отрезки Р = К\ и г=Лл2- Эти отрезки откладывают-
ся на линии ИК последовательно, от точки пересечения линии
первого пеленга с линией курса. Через полученные на линии
курса точки b и d проводят линии, параллельные линии перво-
го пеленга, которые, пересекаясь с линиями второго и третьего
пеленгов, дадут точки В и £. Соединив эти точки, получают ли-
нию, параллельную линии пути, которую переносят в точку пе-
ресечения линии первого пеленга с линией истинного курса Д.
:318
Если судно идет с дрейфом, получают обсервованную точку
и угол дрейфа. Если действуют только течение, или течение и
дрейф одновременно, получить счислимо-обсервованную точку
нельзя. Тогда рассчитывают только угол сноса.
При мелком масштабе карты графические работы нужно про-
изводить на листе бумаги и, получив ПУ, перенести его на карту.
§ 86. ИСПРАВЛЕННЫЙ КРЮЙС-ПЕЛЕНГ
Способ предложен гидрографом Н. Н. Струйским и применя-
ется при следующих обстоятельствах:
а) за несколько часов (2—4) до применения этого способа
судоводитель имел надежную обсервацию;
б) в районе обоих обсерваций действуют постоянные факто-
ры, неизвестные судоводителю, или постоянные течения, или по-
стоянный ветер, вызывающий неизвестный судоводителю дрейф
судна, или течения и дрейф, вызывающие неизвестный суммар-
ный снос судна;
в) скорость судна между двумя обсервациями постоянна.
Использование способа дает возможность получить счислимо-
обсервованное место, свободное от ошибки за счет действия не-
известных судоводителю факторов, смещающих судно с линии
истинного курса. Сущность способа заключается в следующем.
Пусть 1в точке Р\ судоводитель имел надежную обсервацию,
например, по пеленгам трех ориентиров. Следуя дальше по счи-
слению, через несколько часов, в пределах видимости оказался
только один ориентир М (рис. 155). В счислимой точке А был
319
взят первый пеленг ориентира, в точке В — второй. От обсерво-
ванной точки до первого пеленга судно затратило время ti и со-
вершило плавание РхА = т. Промежуток времени между мо-
ментами взятия пеленгов т2, а плавание за это время АВ = п. Счи-
тая, что за время ti+t2 на судно действовали постоянные факто-
ры и скорость его была постоянной, перемещение судна будет
прямолинейным и равномерным. Поэтому можно определить на-
правление пути судна. Линию пути Р\Р нужно провести так, что-
бы отрезки ее, заключенные между обсервацией Pi и линией
первого пеленга и линиями первого и второго пеленгов, относи-
лись между собой, как промежутки времени ~, затраченные на
прохождение этих отрезков пути, или как расстояния —> прой-
денные по счислению. Практически для нахождения линии пути
нужно соединить точку Pi с ориентиром М и разделить линию
Р\М в отношении = Для этого счнслимую точку В на ли-
нии курса соединяют с точкой М. Через точку А проводят линию,
параллельную ВМ, которая пересекает Р\М в точке С. Тогда
Рг С т т1
СМ п т2
Перенеся вторую линию положения Я772 в точку С, получим
в пересечении первой линии положения ИП\ с перенесенной И772
точку £. Затем, соединив прямой точку Pi с точкой Е и продол-
жив ее до пересечения со второй линией положения ИП2, полу-
чим линию пути судна РРь Из чертежа видно, что точка Е де-
лит путь Р\Р на отрезки, отношение которых равно — , т. е.
Р}А __ РУС__РуЕ ___ т __ тг
~АВ~ ~ ~СМ ~ ~7Гр- ~ ~п~ — V ’
При этом, если тип рассчитаны как РОЛ-Кл ошибка в коэф-
фициенте лага не окажет влияния на конечный результат, а
именно:
т _ (ОЛь-ОЛ^К* _ ОЛ2 — ОЛ1
л (ОЛ^ — ОЛ2 К л олз — ОЛ2
Точка пересечения второй линии положения и линии пути
Р—счислимо-обсервованное место, полученное способом исправ-
ленный крюйс-пеленг Невязка РВ может быть вызвана одним
из факторов, действующих в этом районе, или суммой факторов.
Если поправка лага верна и действовало только течение, из не-
вязки можно получить элементы течения. Соединив точки В и Р
прямой и измерив угол между истинным меридианом и прямой,
получают направление течения. Скорость его рассчитается так:
320
На практике графическое построение сокращают следующим
образом (рис. 156). Из обсервованной точки Pi прокладывают
И К судна. От точки L, которая является точкой пересечения ли-
нии ИК и линии первого пеленга, откладывают отрезок LD в
масштабе карты
LD =~-P.L ^ - PjL^- .
1 1 т
Через точку D проводят перенесенную линию положения,
которая, пересекаясь со вторым пеленгом, даст счислимо-обсер-
вованное место судна. Величина P\L снимается с карты, т(—
разность моментов обсервации и первого пеленгования, тг—вре-
мя между моментами первого и второго пеленгования.
Если LD рассчитывается через отношение — , то время нуж-
но замечать с более высокой точностью, чем обычно, т. е по се-
кундомеру, т—плавание от обсервации до первого пеленга и
п—плавание между пеленгами. Для расчета отрезка LD пла-
вание можно заменить РОЛ, так как в отношении коэффици-
ент лага сократится.
$ 87. ДВОЙНОЙ КРЮЙС-ПЕЛЕНГ
Способ разработан гидрографом М. Н. Андреевым и приме-
няется при следующих обстоятельствах:
а) когда имеются два ориентира, но они не находятся одно-
временно в пределах видимости, и получить место по двум пелен-
гам нельзя;
б) в районе действует неизвестное постоянное течение или по-
стоянный ветер, вызывающий неизвестный дрейф судна или тече-
ние и дрейф одновременно;
21 Навигация 321
й) скорость судйа во время обсервации неизменна.
Использование способа дает возможность получить счислимо-
обсервованное место, свободное от ошибки за счет действия не-
известных судоводителю факторов, смещающих судно с линии
истинного курса. При наличии верной поправки лага и действии
только одного фактора — течения можно рассчитать элементы
течения. Сущность его заключается в следующем. Когда в поле
зрения судоводителя находится только один ориентир М[ и из-
вестно, что спустя некоторое время откроется второй ориентир,
необходимый для изменения пеленга на 30—40°. При этом с точ-
ностью до 0,1 мин замечают время пеленгования и 7V Когда
откроется второй ориентир Л1г, берут также два пеленга этого
ориентира, замечая моменты пеленгования Т3 и Г4, но при этом
должны соблюдать условия КП$=КПХ и Л774 = К772 (рис. 157).
Исправив компасные пеленги поправкой компаса, прокладывают
их на карте. Рассчитав разности моментов
Л Т1 = Т2Ь
Л ^2 ~ Т32!
Л =т4з;
^4 Л = т41>
выбирают произвольный коэффициент пропорциональности К. На
карте по первому пеленгу от точки Л41 откладывается в масштабе
322
карты расстояние Кхн^М^. От точки пересечения второго и
третьего пеленгов L по третьему пеленгу в сторону ориентира М2
откладывается расстояние К. тз2=Ьсь Соединив точки at и Ci пря-
мой, в точке пересечения ее со вторым пеленгом Pi получим счис-
лимо-обсервованное место в момент Т2. Действительно, из-за па-
раллельности сторон Mi, и Lei треугольники Р^М^ и PiCiL
подобны, причем точка Pi — вершина всех возможных треуголь-
ников, подобие которых определяется отношением
1
— , К числу
т3.2
подобных треугольников такого рода относятся треугольники,
образованные линиями трех истинных пеленгов и какой-то ли-
нией пути, которая пока неизвестна. Дальше поступают так: про-
длив >в сторону берега линии первого и четвертого пеленгов до их
пересечения в точке М, от нее по первому пеленгу в сторону моря
откладывают расстояние К т41 = Ж, а от точки М2 в том же на-
правлении отрезок КТ43=М2с2. Через точки а2 и с2 проводят пря-
мую, которая пересекает четвертый пеленг в точке Точка Р2 и
будет счислимо-обсервованное место в момент 7\. В этом случае,
также как и в первом, из-за того, что Ма2 параллельна М2с2у тре-
угольники МР2а2 и М2Р2с2 подобны и точка Р2— их общая вер-
шина. Соединив точки Р\ и Р2 прямой, получают линию пути. Пе-
ренеся в точку пересечения линии первого пеленга и линии пу-
ти Л, линию истинного курса и отложив на нем пройденное по
лагу расстояние за время между моментами Л и Л, получают
невязку за время плавания DP2. Если в данном районе действо-
вало только течение и судоводитель уверен в поправке лага, из
невязки определяют элементы течения. Если поправка компаса
ошибочна, то в счислимо-обсервованном месте, полученном с по-
мощью приведенных выше способов, также будет ошибка.
§ 88. ОПРЕДЕЛЕНИЕ МЕСТА ПО КРЮИС-РАССТОЯНИЮ
Сущность определения места судна способом крюйс-расстоя-
ние заключается в следующем. Следуя вблизи ориентира М, из-
меряют до него расстояние (рис. 158), заметив время 1\ и от-
счет лага ОЛ\, Через промежуток времени, необходимый для из-
менения направления на ориентир градусов на 30, вторично из-
меряют расстояние D2 и вновь замечают время Т2 и отсчет лага
ОЛ2. От ориентира проводят прямую, параллельную линии ис-
тинного курса. На ней откладывают расстояние SA, пройденное
за время между измерениями.
Из точки С, радиусом, равным измеренному расстоянию Di,
проводят часть окружности, являющейся изолинией при первом
измерении. Из точки М радиусом, равным D2, проводят вторую
изолинию. Точка пересечения двух изолиний — Р будет счислимо-
обсервованным местом судна в момент второго измерения рас-
стояния.
Ошибка счмслимо-обсервованного места судна, полученного
21»
323
по крюйс-расстоянию зависит от случайных ошибок измерения
расстояния и графической прокладки на карте, от ошибки в по-
правке -компаса и принятом коэффициенте лага, от ошибки в при-
нятых элементах течения и дрейфе.
Средняя квадратическая ошибка обсервации по аналогии с
ошибкой по крюйс-пеленгу выразится
m=±/m3+(^)2.
где7И0—средняя квадратическая ошибка обсервации по двум
расстояниям;
Мс—средняя квадратическая ошибка места при счислении;
6 — угол между изолиниями.
§ 89. ИСПРАВЛЕННОЕ КРЮЙС-РАССТОЯНИЕ
Способ применяется при обстоятельствах, необходимых для
применения способа исправленного крюйс-пеленга. Используя
его, получают счислимо-обсервованное место, свободное от оши-
бок в принятом дрейфе, неучета течения и в поправке лага. Спо-
соб может выполняться в двух вариантах.
Вариант I. Пусть в точке Р — надежное обсервованное
место. Спустя 2—4 час предполагают подойти к траверзу одиноч-
ного ориентира. Примерно за 30 мин до этого начинают измерять
расстояние до ориентира. В серии измерений будет обнаружено
кратчайшее расстояние до ориентира DKp. Радиусом, равным
, взятым в масштабе карты, из точки М (рис. 159) описывают
часть окружности в сторону моря, а из точки Р проводят каса-
324
тельную к этой окружности. Считая, что судно под воздействием
постоянных факторов и постоянного хода перемещается прямоли-
нейно и равномерно, касательная к окружности будет линией пу-
ти судна — линией положения судна. Когда направление на ори-
ентир изменится примерно на 30—40°, 'вновь измеряют расстоя-
ние до ориентира D. Из точки М радиусом, равным D, на линии
Рис. 160
пути делают засечку. Точка Pi будет счислимо-обсервованным
местом, полученным способом исправленного крюйс-расстояния.
Проложив из точки Р истинный курс и имея верную поправку ла-
га, можно определить невязку. Если в районе действовало только
течение, рассчитывают элементы течения, если действовал только
325
ветер, определяют величину дрейфа, если было суммарное дейст-
вие обоих факторов — рассчитывают величину суммарного сноса
с=а+р.
Вариант II применяется тогда, когда произвести серию
измерений и найти DKP трудно. Сущность его заключается в сле-
дующем (рис. 160). Пусть Р — надежная обсервация. От этой
точки проведена линия пути с учетом всех постоянных факторов,
действующих на судно. D\ и D2— расстояние до ориентира М,
причем промежуток от момента обсервации до момента измере-
ния расстояния Di будет tj, а промежуток между измерениями
расстояний £>2 и D\ будет т2. На линии пути радиусами, равными
измеренным расстояниям, сделаны засечки Р\ и Рг- Обсервован-
ная точка Р соединена прямой с ориентиром М, причем расстоя-
ние PM=D может быть снято с карты. Через точку Pi проведена
линия, параллельная линии МР2, которая пересекает прямую РМ
в точке е. Треугольники РМР2 и РеРг подобные. Следовательно,,
РМ __ РРг
Ре — PPj 1
откуда
Взяв отношения
еРг = МР2
PPi РР2 ’
получим
Считая, что судно движется равномерно, можем написать
PPi _ ч
PPi Ъ + '
Обозначив отношения промежутков времени
-х- = А'
+ т2
а расстояние, снятое с карты от обсервации до ориентира D, и из-
меренное второе расстояние D2 получим:
а) расстояние от обсервации до вспомогательной точки е
Pe = KD\
б) расстояние от вспомогательной точки е до точки, из кото-
рой производились первые измерения
eP1^KDz.
Таким образом, практическое выполнение второго вариант»
способа исправленного крюйс^расстояния заключается в следую-
щем. Получают надежную обсервацию во время Т\. Спустя
326
2—4 час измеряют расстояние до одинокого ориентира Оь При
этом замечают время Т2 и рассчитывают Ti = ?2—Когда на-
правление на ориентир изменится приблизительно на 30—40°, вто-
рично измеряют расстояние до ориентира D2, замечают время Т$
и рассчитывают промежуток времени т2=Т3—Т2. Затем рассчи-
тывают
к=^1-
Обсервоваиную точку Р соединяют с ориентиром прямой и
измеряют на карте D. От обсервованной точки Р по этой прямой
откладывают расстояние Pe = kD. Из точки е радиусом, равным
ePx=kD2, проводят часть окружности, а из ориентира М, как из
центра, радиусом, равным Di, проводят вторую изолинию. Точка
пересечения окружностей Pi будет счислимо-обсервованным ме-
стом в момент измерения расстояния Прямая, соединяющая
точку Pi и обсервоваиную точку Р, является линией пути. Счи-
тая, что движение судна прямолинейно, проложим линию пути.
Из точки М радиусом, равным второму измеренному расстоянию
jD2, на линии пути делают засечку. Получим точку Р2, которая
будет счислимо-обсервованным местом в момент второго изме-
рения.
Если поправка лага верна и в момент второго измерения рас-
стояния замечен отсчет лага, то, проведя от точки Р истинный
курс и отложив на нем плавание Зл, получим невязку NP2. Если
в районе действовало только течение, можно получить из невязки
элементы течения: направление, сориентировав линию NP2 отно-
сительно Nв, и скорость путем деления отрезка ЛГР2 на время
Т1+Т2-
§ 90. ИСПОЛЬЗОВАНИЕ ОДНОЙ ИЗОЛИНИИ В НАВИГАЦИИ
В условиях плавания при ограниченной видимости, недоста-
точной обеспеченности навигационными знаками, при однообраз-
ном ландшафте и других условиях возможны случаи, когда судо-
водитель может иметь только одну изолинию. Эта изолиния мо-
жет быть прямой, если судоводитель получил пеленг ориентира
или взял радиопеленг радиомаяка на малом расстоянии; окруж-
ностью, если измерено расстояние до ориентира или один гори-
зонтальный угол между двумя ориентирами; астрономической
линией положения в виде прямой и т. д. Полученная изолиния и
счислимое место помогут решить не только задачу безопасного
плавания, но и следующие задачи.
1. Уменьшение площади вероятного местонахождения судна
при наличии одной изолинии. Как известно, из-за наличия оши-
бок, сопутствующих счислению, счислимая точка оценивается
площадью вероятного местонахождения, величина 'Которой зави-
327
сит от времени и плавания. Не имея долгое время обсервации и
получив одну изолинию, эта площадь вероятного местонахожде-
ния может быть значительно уменьшена.
Рис. 161
Пуеть судно, имея счислимую точку С, получило изолинию
в виде пеленга ориентира (рис. 161,а). Вероятная площадь ме-
стонахождения, появившаяся в результате ошибок счисления, в
момент измерения пеленга выражена окружностью с радиусом
Мс. Учитывая, что смещение линии положения Дл = ± из-за
ошибок пеленга, а величина 'модуля градиента
57°,3
получим
где /лв—средняя квадратическая ошибка пеленгования, практи-
чески равная ^^б;
D—расстояние от счислимой точки до ориентира.
Следовательно, по обе стороны линии положения нужно про-
вести параллельные ей линии на расстоянии Дл. Расстояние Дл,
как видно яз формулы, зависит от расстояния D. Эти параллель-
323
ные линии пересекут площадь вероятного местонахождения суд-
на, образуя площадь abed, которая, как видно из рисунка, зна-
чительно уменьшилась.
На рис. 161,6 по измеренному расстоянию получена изоли-
ния в виде окружности. Из счислимой точки на изолинию опуска-
ют перпендикуляр. Через точку К проводят касательную к изо-
линии, которая является линией положения. Смещение этой ли-
нии положения из-за ошибки измерения расстояния будет
Дп=±
s
где#— модуль градиента, равный 1;
т. е. Дл = ± тц .
Следовательно, по обе стороны линии положения проводят на
расстоянии Ап параллельные линии, которые, пересекая площадь
вероятного местонахождения, образуют площадь abed, в которой
находилось судно в момент измерения расстояния.
Если вновь полученная площадь вероятного местонахожде-
ния abed расположится вдоль линии истинного курса (пути), это
значит, что судно уклонилось от курса и, следовательно, курс
нужно подправить. Если же площадь abed расположится перпен-
дикулярно курсу, можно подправить счисление по курсу, считая
себя впереди счисления или позади.
2. Проход узкости при наличии одной изолинии. Если полу-
ченная фигура вероятного местонахождения большими сторона-
ми расположена параллельно истинному курсу, по которому
можно пройти узкость, поступают следующим образом. Пусть
MN — узкость, которую необходимо проходить по линии истин-
ного курса, или пути АВ (рис. 162). Изолиния получена измере-
нием радиопеленга радиомаяка N с судна следующего по линии
истинного курса. В момент пеленгования имеем счислимую точ-
ку С с круговой ошибкой Мс, замеченное время и отсчет лага
Jjy-- Стороны фигуры ad и be параллельны необходимой для
прохода линии пути АВ. Считая себя внутри площади вероят-
ного местонахождения abed, меняют свой курс так, чтобы он
был перпендикулярен линии положения. Рассчитывают отсчет
лага ОЛ2, время Т2, когда этим курсом придут на линию АВ.
Выйдя на эту линию, вновь меняют курс на 90°, ложась по на-
правлению АВ.
Время поворота Т2 рассчитывается следующим образам. С
карты снимают расстояние c1c2=S4. Зная свою скорость УЛ9 по-
лучают время, необходимое для перехода из Ci в с2.
Тогда
Т2
_
= л-н.
329
Рис. 163
Отсчет, лага рассчитается таким же путем
рол^ф-;
АЛ
ол,=ол2 + РОЛ.
Если изолинией на подходе к узкости будет окружность, посту-
пают аналогично.
Пусть на подходе к узкости удалось измерить расстояние до
ориентира А (рис. 163). Линия положения — касательная к ок-
ружности в точке, ближайшей к счислимому месту судна С.
Уменьшенная площадь вероятного местонахождения abed, пере-
несенная на линию АВ по перпендикуляру к АВ, свободно прохо-
дит в узкость MN'.
Рис. 164
3. Выход «в точку» при наличии одной изолинии. У низменных
берегов с однообразным ландшафтом, имеющих мало навигаци-
онных ориентиров, перед судоводителем может стоять задача —
подойти к какой-то точке у берега и встать на якорь. Эта точка
может быть ничем не отмечена на берегу и тем более на карте.
Одна изолиния позволяет решить эту задачу. Для этого нужно.
331
чтобы линия положения пересекала береговую черту под углом,
близким к 90°. Пусть точка N' — та точка, к которой должен вый-
ти судоводитель. В этом же районе, на каком-то значительном
удалении, расположен ориентир, обозначенный на карте М
(рис. 164). Следуя ИК (линия АВ), имея счнслимую точку С, по-
лучили одну изолинию — радиопеленг радиомаяка Afi, который
является и линией положения. При этом было замечено время и
отсчет лага ОЛЪ В зависимости от расстояния от ориентира и
ошибки пеленгования, вероятная площадь местонахождения суд-
на уменьшится, став площадью abed. Через точку ЛГ на карте про-
водят линию N'NU параллельную линии пеленга, а из точки Су,
как середины площади abed, восстанавливают перпендикуляр к
линии положения до пересечения его с линией A/’Afi в точке с2.
В точке С] меняют курс с расчетом, чтобы линия С\С2 стала истин-
ным курсом и следуют до точки с2, когда время будет Г2 = Л+
а отсчет лага ОЛ2 = ОЛ\ + РОЛ. В точке с2 меняют курс на 90° в
сторону берега и следуют с осторожностью этим курсом к нему.
Когда судно доходит до глубин, доступных для отдачи якоря,
встают на якорь.
Линией положения может быть не только линия пеленга, а
всякая другая касательная к изолинии в точке, ближайшей к
счислимой.
4. Изолинии, ограждающие опасности. На подходе к берегу
полученная изолиния может указать судоводителю расстояние до
опасности. Но нужно, чтобы направление линии положения было
перпендикулярно линии пути. Тогда уменьшенная площадь ве-
роятного местонахождения расположится большими своими сто-
ронами перпендикулярно линии пути.
Пусть судоводителю в плохую видимость нужно подойти к бе-
регу в район 20-метровой изобаты. Курс с^дна расположен пер-
пендикулярно береговой черте. Получив в -gjj- одну изолинию, ли-
ния положения которой Л1В1 расположена перпендикулярно кур-
су, уменьшают площадь вероятного местонахождения и получа-
ют площадь abed— (рис. 165). Подход к берегу ограничивают
линией А2В2, параллельной линии положения АВь Снимают с
карты расстояние С]С2=5 и (рассчитывают время прихода на огра-
ничивающую опасность линию А2В2:
и отсчет лага
ОЛ2 = ОЛГ + РОЛ.
При следовании к берегу в плохую видимость соблюдают все
меры предосторожности: уменьшают ход, измеряют и сличают
с картой глубин, притравливают якорь метров на пять ниже дни-
ща судна, выставляют на бак впередсмотрящего и пр. Наблюдая
332
за часами и показанием лага определяют, когда судно будет-
вблизи линии АгВ2.
На подходе к опасностям, в особенности таким, которых не-
видно (подводные рифы, подводные камни, мели и др.), судово-
дитель изолиниями может оградить эти опасности и, повторяю-
щимися измерениями функции изолинии, не допускать выхода
судна на ограничивающие изолинии.
Пусть вблизи опасности расположен ориентир Л4 (рис. 166,а).
Из точки Л4, как из центра, описывают окружность — изолинию,
ограничивающую опасность. Радиус этой окружности D снимают
с карты. Если плавание происходит в темное время суток или при
плохой видимости, контроль за тем, чтобы не пересечь нанесен-
ную на карте ограждающую изолинию, осуществляется локато-
ром. При хорошей видимости, а также при наличии сведений о
высоте ориентира, контроль можно осуществить секстаном, на ко-
тором устанавливается максимальный вертикальный угол ориен-
Рис. 165
тира. Величину угла можно рассчитать, зная D в морских милях
нпв метрах:
' —21 я
®тах — у ’ £) •
Если при контроле окажется, что измеренный вертикальный
угол равен айах, значит судно находится на ограждающей опас-
ность изолинии и нужно срочно отворачивать мористее. Если из-
333
меренный угол меньше a^ax, можно быть уверенным, что судно
проходит чисто. Угол «щах носит название «вертикального угла
опасности.
В том случае, если на берегу расположены два ориентира и
высоты их неизвестны, можно также привести ограждающую
опасность изолинию — окружность, вмещающую горизонтальный
угол Ртах (рис. 166,6). Величину угла Р снимают с карты. При
контроле секстаном измеренный между ориентирами угол также
не должен быть больше Ртах. Если измеренный угол окажется
равным Ртах, нужно немедленно изменить курс в сторону от
опасности или привести ориентир на траверз. Угол Ртах назы-
вается горизонтальным углом опасности.
Рис. 166
Если по каким-либо причинам нельзя приближаться к берегу
с плавными очертаниями на расстояние D, то контроль за дви-
жением судна легче всего осуществить с помощью РЛС. Для это-
го подвижной круг дальности устанавливают на отсчет D и пери-
одически контролируют, чтобы ПКД на экране не находил на
изображение береговой черты (рис. 166,в).
В некоторых случаях пеленг ориентира можно использовать
для ограждения опасности. Особое значение такой ограждающий
опасность пеленг приобретает в случае, когда с судна можно на-
блюдать только один ориентир, расположенный близко от направ-
ления его диаметральной плоскости. В этом случае (рис. 166,а)
обсервация по нему будет ненадежна, но один пеленг укажет, с
334
какой стороны от ограждающей линии находится судно — с бе*
зопасной или опасной.
В некоторых случаях при наличии нескольких ориентиров,
когда нет времени прокладывать пеленги на карте, ограждающий
пеленг дает немедленный ответ о безопасности. Ограждающий
опасность пеленг иногда заменяется створом.
В ночное время ограждающими пеленгами служат границы
между секторами огней одного маяка различного цвета или ха-
рактера работы. Эта граница проверяется по компасу. Часто све-
дения об ограждающих пеленгах даются в лоциях. Если таких
указаний в лоции нет, судоводитель может наметить ограждаю-
щие пеленги сам.
ПРИМЕРЫ
1. Карта ГУ 2588. Следуя ХХ=45° (склонение с карты, для плавания в
1960 г., девиация из табл. 6) в 10*30* О Л i = 15,8 взяли пеленг плавучего мая-
ка Гуре 0X77=264°. Продолжая следовать тем же курсом, в 11Ч25*. ОЛз=29,0
вторично взяли пеленг маяка Гуре 0X77= 153°,7. Кл=1,05. Определить коор-
динаты судна и рассчитать среднюю квадратическую ошибку обсервации, ес-
ли средняя квадратическая ошибка пеленгов mw=±l°,5, ошибка в Кл ел=
= ±0,05 и ошибка в ДХгЛ = ± 1°,5.
Решение.
а) Рассчитаем ДХ. Из табл. 6 для КК 45°— В =+0°,3. На карте склонение
равно 7°W, годовое уменьшение указано в заголовке карты. Оно равно 0°,12;
за 5 лет уменьшение 0°,12Х5=0ъ,6. В 1960 г. d = 6,4W;AX=+0°,3+(—6°.4) =
=—6°,1;
б) Исправим румбы
ОИП=ОКП+ ЬК
,КК= 45°,0 , 0X771=264°,0 , ОХ/72=153°,7
+ ДХ=—6°,1 + ДХ=—6°,1 + дх=—6°.1
ИК= 38°,9 ОИ [7^257°,9 0ИПг=\1Г$
в) Рассчитаем пройденное по лагу расстояние между моментами взятия
первого и второго пеленгов
РОЛ= ОЛ2 — ОЛг = 29,0 —15,8 = 13,2;
5Л == РОЛ-Кл = 13,2 X 1,05 = 13,9 мили;
г) На карте проложим 0ИП\ и ОИП2. Вместим плавание Зл между пелен-
гами одним из известных способов. Например, от плавучего маяка Гуре про-
ложим линию, параллельную ИХ=39°,3. На этой линии отложим 5Л=13,9 ми-
ли в масштабе карты. Через полученную точку проведем прямую, параллель-
ную первому пеленгу. Точка пересечения перенесенной линии положения и
второго пеленга будет счислимо-обсервованным местом в 7=11*25*, О«/7=29Д
Снимем координаты точки
<Ро = 52°03',2 N; Хо = 3°32',3 Ost-
д) Рассчитаем ошибку обсервации по формуле (183)
м = j/rAfg+ (-^нт) >
где
2 4(Д1 + ^)а
°” (57’3-slnв)» *
335
Значение £>i и D2 снимем с карты, 0 рассчитаем, как разность пеленгов
Di = 13,0 мили, D2 = 8,7 мили;
О = 148 — 258,3 = 249°,7 — 180° = 69°,7,
тогда
2 1,5413-4-8,7)2
0 — (57°,3 sin 7о°р
Ошибку счисления, учитывая, что отсутствуют дрейф и течение, рассчита-
ем по формуле
л^ = (1й)2 + (£з5л)2 = °.62;
\ О/ ,0 /
тогда
Л1 = ± >А),4 + 0,7 = 1,05 мили.
2. Карта ГУ 2588. Следуя КК= 180°. А +2°, дрейф от вестового ветра 7°
в =52°5r,5N; =2°30', 4Ost в 12'35и, 0<ZZi = 21,4 взяли пеленг плавучего
маяка Смите Нолл, ОКП[=46°5; Кл=0»92. В 13''35*0<Z72=32,7. вторично взяли
пеленг маяка ОК772=111°. Определить координаты счислимо-обсервованного
места судна н показать невязку на 13*'34*.
Решение.
а) Исправим румбы
КК=180° ОК77=46°,5 <W72=111°
Д/О+2° ДК=+2° ДК=+2°
ЯК=182° ОЯ/71=48°,5 ОЯ/72=113°
б) Рассчитаем ПУ. В связи с тем, что ветер дует в правый борт, дрейф
будет 7°, тогда ПУ—ИК+ а . ЯК=182° а = 7° П/Г
77У=175°
в) Рассчитаем плавание между пеленгами
Р ОЛ=32,7^21,4 = 11,3;
SA— 11,3X0,92= 10,3 мили;
г) На карте проложим пеленги ОИП\ и ОИП2. От счислимой точки проло-
жим И К и ПУ.
На линии пути отложим S4 = 10,3 мили. Через полученную на пути точку
проведем перенесенную линию положения. Точка пересечения ее и второго
пеленга даст счислимо-обсервованное место судна. Снимем координаты судна
<ро =52°40',3N и Л(, =2°30'7О4;
д) Для нахождения счислимой точки в 13ч35* по линии пути от счислимого
места в 12*35* нужно отложить S4 = 10,3 мили. Невязка составит 1,2 мили по
аправлению 355°.
3. Карта ГУ 2588. Следуя ККг=30* ДГК=4-2° при ветре NW 8 баллов,
не зная величины дрейфа, для определения места судна, взяли три пеленга
плавучего маяка Смите Нолл. В 13*15* ’pr=52°32/,5N, Xc=2°25',Ost
336
ГКП1—328°\ в 13*45* ГК#2=291°, в 14'15*, ОЛ3 = 24,4, Г#/<з=264,2, #,=0,98.
Определить величину дрейфа а и координаты судна.
Решение.
а) Исправим румбы
ККг=30° ГКП^323°
"Г +2 *°_ ДГК =+2°
ИК=32° ##1=330°
ГКП2=23\°
Д/7<= + 2е
##2=293°
Г/<#3=264°,2
Д/7<= + 2°____
И П 3=266°,2
б) Проложим пеленги от маяка; на линии среднего пеленга ##2=293° вы-
берем произвольную точку и через нее проведем прямые, параллельные пе-
ленгам ИП\ и ИП$. Точки пересечения этих прямых с линиями пеленгом» ИП[
и ИПз соединим прямой и снимем транспортиром ее направление — ПУ =40°;
в) Рассчитаем дрейф судна
а =ПУ—ИК
#У=40°
#/<=32°
а =8° л/г
г) Проложим ПУ от счислимой точки и от точки пересечения первого пе-
ленга с линией пути. Отложим
5Л = (ОЛ3 — ОЛХ) Кл = (24,4 — 12,4) 0,98 = 11,8 мили.
Через полученную точку проведем перенесенную линию, параллельную перво-
му пеленгу. Точка пересечения с третьим пеленгом будет счислнмо-обсерво-
ванным местом, его координаты qp.=52°44'3N, Ао =2°38'2Ost.
4. Карта ГУ 2358. Следуя ККг=268° ДГ/<=—2°, в 22*00*, ОЛ1 = 19,7 по-
лучили обсервацию по двум пеленгам: маяка Типаза К#г=134° маяка Шер-
шель K#2=182O. С открытием маяка Тенес в 00**t8* ОЛ2=51,7 взяли его пе-
ленг /<#3=226°. В 10*08*, ОЛ3=66,7 вторично взяли пеленг маяка Тенес
/<#4=182°. Определить координаты судна в 10ч08и, а также, будучи уверен-
ным в коэффициенте лага, К л =0,95 и, не имея дрейфа, определить элементы
течения.
АГ773 = 226°
Д/7<=—2°
#773 = 224°
Д772 = 182°
ДЛ/С-----2°
7#72 = 180°
пеленги. Обозначим обсервацию
/<#4 = 182°
ДГ/Г=—2°
ИЩ = 180°
22*00*, про-
Д'#: = 134°
Д/7( - — 2°
ИПХ = 132°
в
Решение.
а) Исправим румбы
ККг = 268°
Д/7С=-2°
#/<=266°
б) Проложим истинные
ложим от нее ИК и по нему снимем расстояние от обсервации до точки пере-
сечения И К с ИП3. Оно будет равно 5=29,4 мили;
в) Рассчитаем истинное плавание между пеленгами ИП3 и ##4
с с ОЛ3—ОЛ2 ппл 66,7 — 51,7 „.15,0
51 5 0Л^—0Л^~ 29,4 51.7— 19,7 “ 29,4 32,0 13,8 мили’
г) По линии И К, от точки пересечения его с ИП3, отложим рассчитанное
5] и через эту точку проведем перенесенную линию, параллельную ИП3. Точка
пересечения ее с ИП4 будет счислимо-обсервованным местом, полученным спо-
собом исправленного крюйс-пеленга. Координаты точки сро=36°46',5 N,
Хо=1°2О',5 Ost;
д) На линии И К нанесем счислимую точку на 01*08*, для чего рассчитаем
5Л = (ОЛя— ОЛх)Кл = 47,0 X 0,95 = 44,6 мили;
22 Навигация
337
е) Соединим полученную на ИК точку с обсервацией прямой линией и
снимем ее направление — направление течения 59°. Измерив расстояние меж
ду точками, получим Sr=4,6 мили и рассчитаем VT
„ 4,6 _ 4.6
Vr 01*08-“— 22'00“ 3,1 1,0 уЗЛа’
5. Карта 737. Следуя ККг =220°, ДГЛ'=—1° в 20'00* ОЛ1=17,4 взяли
пеленг маяка Сопочный КП } = 288° и пустили секундомер. В 20ч35*,2 вторично
взяли пеленг маяка, /(/72=346°. В 21415*,5 пеленг маяка Лопатка КП3 = 288°.
В 21 *46*,6, Ш72=38,0 пеленг маяка Лопатка КП4—З460. Определить коорди-
наты судна в 21 Мб*,6. Не имея ветра и имея уверенность в поправке лага
(К л =0,98) определить элементы течения.
Решение.
а) Исправим румбы
, ККг = 220° КП, = 288° Д/7< = —1° КПг = 346° ДГК=-1°
WK = 219° И Пу = 287° ИП9 = 287° ИПг = 345° ИП4 = 345°
б) Рассчитаем промежутки времени между моментами взятия пеленгов
т21 — 20ч30*,2 — 20ч00* =35,2 мин;
= 21413* 5 — 20ч35* 2 = 38,3 мин;
т43 = 21*46*,6 —21*15*5 = 31,1 мин;
т41 — 21*46* 6 — 20*00* = 1 *46*.6 = 106.4 мин.
Выберем произвольный коэффициент 0,3 и рассчитаем отрезки пеленгов
£1=0,ЗХ 35,2=10,6 мили;
£г=0,ЗХ 38,3=11,5 мили;
£з = 0,ЗХ 31,1= 9,3 мили:
£4=0,3X106,6=32,0 мили;
в) Проложим Я771, ИП2, ИП^ ИГЦ; от маяка Сопочный по первому пе-
ленгу в сторону моря отложим £1 = 10,6 мили в масштабе карты, обозначим
точку аь От точки пересечения ИП2 и ИП3 к маяку Лопатка по пеленгу ИП3
отложим £2=11,5 м, обозначим’ точку Ci. Соединим точки ai и Cj прямой. Там,
где эта прямая пересекает линию ИП2, будет обсервованное место в 20*35*,2;
обозначим его через Pi. От точки пересечения НГЦ и ИП4 (точка на берегу)
по линии ИПХ в сторону моря отложим £4=32,0 мили и обозначим ее через а2.
От маяка Лопатка в сторону моря по линии ИП3 отложим £3=9,3 мили
и точку обозначим через с2. Соединим точки а2 и с2 прямой, которая пересечет
ИГЦ в счислимо-обсервованной точке Р2. Прямая, соединяющая точки Р\ и Р2,
будет линией пути. Снимем с карты ее направление ПУ=227,3. Координаты
счислимо-обсервованной точки в 21*46*,6 будут <ро=50°45',9 N>
Хю= 156°42',6 0s1.
г) Проведем прямую Р\Р2 до пересечения с линией ИП\. Из этой точки
проложим ИК=219° и по линии ИК отложим 5л = (ОЛ2—ОЛ\) Кл—
= (38,0—17,4) • 0,98 = 20,2 мили. Полученная точка является счислимой в
21*46*,6. Соединим обсервацию и счислимую точку прямой и снимем ее на-
правление, равное 276°, и расстояние между точками ST) равное 3,7 мили.
Скорость течения
Уг=й = 2-°Узла.
‘ 6. Карта ГУ 513. Следуя ККг=88°5, ЬГК=— 2° в 10'45* 0^=29,2;
Кл = 1,02 измерили радиолокационное расстояние до мыса Меганом £t = 18,3 ми-
338
ли. В 12*15*, ОЛг=46,2 вторично измерили расстояние до мыса Меганом
£>2 = 22 мили. Определить координаты судна.
Решение.
а) От мыса Меганом проложим /7Х=88°,5 + (—2°) =86°,5 и по линии ИК
отложим
8Л = (46,2 — 29,2) 1,02 = 17,3 мили;
б) Из полученной точки радиусом £>i = 18,3 мили делаем засечку. Из точ-
ки мыс Меганом радиусом Ds = 22 мили также делаем засечку. Точка пересе-
чения дуг окружностей будет счислимо-обсервованным местом. Его коорди-
наты
<р0 = 44°30',9 N;
Хо = 35°24',7 Ost.
7. Карта ГУ 704. Следуя ККг =71°, ЬГК=— 2°, в 17*30* ОЛ! =31,5, опре-
делились по двум расстояниям: о. Нандо £>i=8,2 мили и мыс Огаламда
D = 8,0 мили. В 20*°5* измерили расстояние до мыса Гамов £>1 = 16,3 мили.
В 21*40*, OJ72=68,3, вторично измерили расстояние до мыса Гамов
£>2=18,3 мили. Определить координаты судна в 21*40*, а также, не имея ветра
и будучи уверенным в Кл(Кл = L05), рассчитать элементы течения.
Решение.
а) По расстояниям нанесем на карту обсервацию в 17*30* и проложим
ИК = 71°+ (-2°) = 69°;
б) Рассчитаем К
Ti _ 20*05* — 17*30* _ 02*35*
К xj -Ь -г2 21*40* — 17*30* 04*10* ' ’
в) Обсервоваиную точку в 17*30* соединим прямой с мысом Гамов, изме-
рим расстояние на карте от обсервации до него £>=35 мили и от обсервован-
ной точки по прямой отложим расстояние КД=0,62X35=21,7 мили. Обозна-
чим точку буквой е;
г) Из точки е радиусом /(£>2=0,62X18,3=11,3 мили проводим дугу, а из
точки мыс Гамов радиусом £>i делаем засечку на этой дуге;
д) Полученную точку соединим с обсервованной точкой прямой (линия
пути) и на ней радиусом D2 из точки мыс Гамов делаем засечку, это и будет
счислимо-обсервованная точка в 21*40*; ее координаты: (р=42°22',7 N,
Zo=131°33'Ost;
е) По линии ИК от обсервованной в 17*30* точки отложим S л
$л = (68,3 — 31,5) 1,05 = 38,6 мили.
Соединим прямой счнслимую и обсервоваиную точки и снимем направление
течения, равное 84° и Зт =3,2 мили.
Скорость течения
Q О
VT- Л = 0,8 узла.
Задачи
1. Карта ГУ 2588. Следуя ХХ=252°,3 (склонение с карты, для плавания
1960 г., д из табл. 6) в 18*00*, ОЛ\ = 12,8, взяли пеленг плавучего маяка Норд-
Хиндер, 0X771=43°,8, Хл = 1,08. В 19*30*, О772=28,4, вторично взяли пеленг
маяка 0X772=317°,6. Определить координаты судна и рассчитать среднюю
квадратическую ошибку обсервации, если средняя квадратическая ошибка пе-
ленгов mtt = ±3°, ошибка в Кл — ел=±0,05 и ошибка в АХ—е* = ±3°.
2. Карта ГУ 2588. Следуя ХХ=350° (склонение с карты, приведенное к
году плавания 1960, д из табл. 6) в 21*00*, OJ7[ = 18,9, взяли пеленг плаву-
чего маяка Гуре 0X771=251°. В 21*30*, ОЛ2=27,0, Хл=1,05 вторично взяли
пеленг маяка 0X772=301°,2. Определить координаты счислимо-обсервованного
места.
22* 339
3. Карта ГУ 2588. Следуя ККг=97°, Д77(=—2° в 13*20*, 0771=21,5,
>G=0,94, взяли пеленг плавучего маяка Норд-Хиндер ГКЯ1 = 140°,5. В районе.
(Л) в это время действует течение 27°—1,6 узла (см. на карте таблицу сведе-
ний о течениях). В 14*50* О772=35°, вторично взяли пеленг маяка 77(772=219°.
Рассчитать координаты судна в 14н50Л*.
4. Карта ГУ 2588. Следуя ККг=37°, ДГК= + Г, дрейф от нордового ветра
7° в 20*15*, 0771 = 14,6 взяли пеленг маяка порта Гаага /7(771=91°. В 21 *15*
О772=27°,0, КЛ=1,03, вторично взяли пеленг маяка /7(/72=140°. Определить
координаты счислимо-обсервованного места судна.
5. Карта ГУ 2588. Следуя ККг =0°, Д/7(=—1°, Кл=0,93 в 10*20*
0771 = 15,3, взяли пеленг плавучего маяка Норд-Хиндер ГКП\ = 2§8° в 10*40*,
ОЛ2=19,5 изменили курс влево 7(Кг=297 (—1°). В 11 *00*,0773=24,0, вторич-
но взяли пеленг маяка ГК772=225°. Определить координаты счислимо-обсерво-
ванного места судна.
6. Карта ГУ 2588. Следуя ККг=205°,5, ДГК=—1° в 10*20* O77j=21,3, взя-
ли пеленг плавучего маяка Тексель 77(771 = 142°. В 10 *40* О772 = 25,5, /(л=1,04
пришли на траверз ориентира и вторично взяли пеленг маяка. Определить тра-
верзное расстояние до маяка и по нему нанести счислимо-обсервованное место.
7. К/(=56°. В 11 ч05* ОТ/^10,5, ориентир находится на КУ п/б=7 Г,5.
В 12*о0*, О772=20,8; Кл=0,96 пришли на траверз ориентира. По какому пе-
ленгу и на каком расстоянии от ориентира находится судно в 12*00*.
8. /(Кг=75°. В 14*00*, 077=28,6, пеленг ориентира К77., =105°. В 15*00*,
О772=39,7, Кл=0,90, КП=195° На каком расстоянии по второму пеленгу на-
ходится счислимо-обсервованное место судна.
9. Карта ГУ 2588. Следуя К7(г=60, Д/7(=—2° при ветре S — 8 баллов,
не зная величины дрейфа, для определения места судна взяли через равные
промежутки времени три пеленга плавучего маяка Норд-Хиндер: в 12*10*,
ОТ/^81,2, ГКП1 = №& в 12*35* 77(/72= 147°; в 13“00* ОЛ3=92,2,/Гл =
= 1,06, 77(/7з=176о. Определить координаты места и величину угла дрейфа.
10. Карта ГУ 2588. Следуя ККг=128°, &ГК =—Г при ветре 9 баллов, не
зная величины дрейфа, взяли три пеленга плавучего маяка Смите Нолл:
в 23*00* ОТ/^16,7, 77(77! = 198°; в 23**5* 77(/72=219°; в 24*05* ОЛ3=28,7,
/<л=0,93, /7(/73=254° Определить величину угла дрейфа и координаты места
судна.
11. Карта ГУ 737. Следуя ККг=80°,5, Д77(=—1° в 19*30* ОТ/^28,3.
определились по двум пеленгам: по пеленгу мыса Полуденного (о. Маканру-
ши) K/7i=86° и мыса Кимберлей (о. Онекотан) К/72=132°. В 22*06*,
О772 = 54,3 взяли пеленг маяка Васильева /(773 = 26°. В 23*12*, О773=65,8 вто-
рично взяли пеленг маяка К/74=327°3. Определить координаты судна в 23*12*
и элементы течения, если Кл=1,05.
12. Карта ГУ 513. Следуя К7(г=86°,5, Д/7(=0° в 19*00* взяли пеленг
мыса Аю-Даг. КПг=25°,9. В 19*3'»* вторично взяли пеленг мыса К/72=313°.
В 21*10*5 взяли пеленг маяка Меганом К773=25°,9. В 23*22*,5 вторично
взяли пеленг маяка КП4=313°. Определить координаты судна в 23*22*,5.
13. Карта ГУ 704. Следуя /(/(,=266°,7, Д77(=—2° в 20*00* 0771=34,8, из-
мерили радиолокатором расстояние до мыса Елагина (о. Аскольд). Оно было
равно 7)1=20,6 мили. В 21*05*, О772=46,0, К 1,04, вторично измерили рас^
стояние до мыса £>2 = 25,6 мили. Определить координаты судна.
14. Карта ГУ 704. Следуя ККг = 194°,5, ДГ/<=0° в 17*00* определились по
расстояниям: мыс Тобизина А=9,1 мили, маяк Верховского £>=7,4 мили,
о. Карамзина D= 11,1 мили. На подходе к траверзу мыса Гамов измерили ра-
диолокатором серию расстояний до мыса Гамов £>1 = 26,7, £>2=26,1, £>3=25,4*
7)4=25,2, 7)5=25,0, £>6=25,3, 197=26,3. В 19*30* измерили расстояние до мыса
Гамов 19=28,3. Определить координаты судна в 19* ^»* и угол дрейфа.
15. Карта ГУ 1225. Следуя в тумане ККг = 325°, ДГК=—1°, в 14*20*
0771 = 11,3. Получили один надежный радиопеленг радиомаяка Утклиппан
/7/77 =18°,5. Какими курсами нужно следовать, чтобы выйти к месту встреча
лоцмана у маяка Госфетен, Каким будет отсчет лага при изменении курсов,
если Кл = 1,05?
340
Ответы.
1. Vo=51°44',9N,j
2. <p0=52°Ol',ON,
з; ф0=51°48' N,
4. (₽o=52016'N,
'5. ф0 = 51°45',3 N,
6. ф0=53°05',0 N,
; 7. Z>rp=31,7 ми ти,
8. D = 5,2 мили.
‘ 9.“‘<ро=51°5О',8 N,
10/ <₽о=52°47' N,
11. ф0=49°52'ы,
275° — 1,0 узла.
12. <р0 = 44’32'0 N,
13. <p0 = 42°22'lN,
14. <p0 = 42’!2'lN.
15. ККг, = 289°,5
Хо = 2°24',7 Ost, М = ± 1,7 мили.
к, = 3°24',6 Ost-
X0 = 2°45',Ost-
Хо = 4°3',4 Ost.
Хо=2°44', Ost.
Хо = 4°08'.5 Ost £’гр = 8-8 мили-
КП2= 146°.
Хо = 2°32',1 Ost. <х = Ю° п/г.
X, = 2°36',5 Ost. а = 9° л/г.
Хо = 155°32',0 Ost течение
Хо = 35’28',1 Ost.
Хо= 132°2',OOst.
Хо = 131°38',6 Ost а = 5°,5 л. г.
ЯХг,= 19,5 ОЛг = 29,1.
Контрольные вопросы
1. Что такое перенесенная линия положения?
2. Где отложить SA при обсервации по крюйс-пеленгу на течении?
3. Когда используются частные случаи крюйс-пеленга?
4. Какие факторы влияют на точность обсервации по крюйс-пелеигу?
5. Как использовать третий пеленг ориентира?
6. Что общего в исправленном и двойном крюйс-пеленге?
7. Как может быть использована одна изолиния в навигации?
8. Какие факторы влияют на увеличение площади вероятного местонахож*
дения судна?
ПРИМЕНЕНИЕ РАДИОТЕХНИЧЕСКИХ СРЕДСТВ
В НАВИГАЦИИ
Глава XV. ИСПОЛЬЗОВАНИЕ НЕНАПРАВЛЕННЫХ
РАДИОВОЛН В НАВИГАЦИИ
§ 91. РАДИОНАВИГАЦИОННЫЕ СИСТЕМЫ
Контроль за счислением перемещающегося судна — одна из
главных задач судоводителя. Как известно, этот контроль осу-
ществляется обсервациями. Обсервации бывают различными. Ви-
зуальные обсервации берутся при хорошей видимости, астроно-
мические можно осуществить при наличии видимых светил и го-
ризонта. При плохой же видимости и отсутствии горизонта, а
также при затянутом тучами небосводе контроль за счислением
можно вести только с помощью радиотехнических средств судо-
вождения (РТС). РТС обеспечивают судоводителю возможность
обсервации:
а) в пределах радиолокационной дальности обнаружения
берегов;
б) в пределах дальности действия радиомаяков кругового
действия (до 300 миль);
в) в районах работы радиомаяков направленного действия;
г) в районах работы гиперболических РТС. Современные РТС
еще не полностью обеспечивают возможность обсерваций, осо-
бенно .при плавании в океанах, где требуемая точность обсерва-
ций не такая высокая, как в прибрежном плавании. В настоящее
время отечественные и зарубежные ученые стремятся создать:
а) приборы, дающие судоводителю возможность в любое вре-
мя знать его координаты (координатор и абсолютный лаг) и
б) усовершенствованные и новые радионавигационные систе-
мы, с помощью которых можно получить обсервацию с точностью,
необходимой для условий данного плавания.
В развитии и совершенствовании радионавигационных систем
достигнуты большие успехи: созданы системы, при помощи кото-
рых судоводитель может получать обсервации при плохой види-
мости в прибрежных плаваниях и на значительном удалении от
берега.
При помощи радиотехнических средств определяются изоли-
342
нии, которых, как известно, для обсервации нужно не менее двух.
Совокупность береговых и судовых радиотехнических устройств,
служащих для получения изолинии, называется радионавигаци-
онной системой (РНС). Современные РНС позволяют получить
следующие изолинии:
а) изоазимуту, измерив направление на береговое радио-
устройство судовым радиоустройством;
б) ортодромический пеленг, измерив береговым устройством
направление с берега на судовое радиоустройство;
в) получить две изолинии, пересекающиеся под прямым углом
(окружность и пеленг), измерив судовым радиоустройством рас-
стояние с судна до берегового ориентира и пеленг этого ориен-
тира;
г) гиперболу, измерив разность расстояний с судна до двух
береговых радиоустройств судовым устройством;
д) две изолинии, пересекающиеся под прямым углом (эллипс
и гиперболу), измерив судовым устройством сумму и разность
расстояний до двух береговых радиоустройств;
е) окружность, измерив расстояние до радиоориентира су-
довой станцией.
В зависимости от измерений, производимых с помощью РНС,
они классифицируются следующим образом:
а) азимутальные РНС —системы, измеряющие направление;
б) азимутально-дальномерные РНС — системы, дающие на-
правление и расстояние;
в) разностно-дальномерные или гиперболические РНС дают
разность расстояний;
г) суммарно-разностные или эллипсогиперболические РНС,
дающие сумму и разность расстояний до двух радиоориентиров;
д) дальномерные РНС, дающие расстояние до радиоориен-
тира.
Развитие и совершенствование радионавигационных систем
стало возможным с 1895 г., когда А. С. Попов изобрел беспрово-
лочный телеграф. Его исследования в области электромагнит-
ных волн легли -в основу создания и дальнейшего совершенство-
вания РНС. Первые наблюдения, обнаружившие отражение ра-
диоволн от металлических предметов, были произведены также
А. С. Поповым. В 1907 г. были установлены первые радиомаяки
направленного действия, дающие пеленг на расстояние 25 миль
(на возможность этого А. С. Попов указывал в своих работах
еще в 1897 г.). Прототип рамочной антенны был предложен в
1903 г. немецким физиком Брауном, а в 1907 г. появились первые
радиопеленгаторы. На русском флоте они были построены
И. И. Ренгартеном (1912 г.). В дальнейшем радиопеленгаторы со-
вершенствуются М. В. Шулейкиным и Н. Н. Цыклинским, а так-
же акад. А. И. Бергом, проф. В. В. Ширковым, акад. А. Н. Щу^
киным и др., которые опубликовали многочисленные труды по их
конструированию и расчету. :
343
В 1937 г. акад. М. А. Бонч-Бруевич разработал коротковол-
новые направленные антенны и многорезонаторный магнетрон.
Им были (проведены успешные опыты по радиолокации. Первые
радиолокационные станции создали Ю. Б. Кобзарев, П. А. Пого-
релко и Н. Я. Чернецов.
Во время войны (1941—1945 гг.) в США были разработаны
импульсные устройства для определения местоположения на
больших расстояниях до опорных пунктов.
Советские академики Л. И. Мандельштам и Н. Д. Папалекси
в 1930 г. предложили способ измерения расстояния между дву-
мя радиоустановками, основанный на определении фазовых соот-
ношений. Эти способы в настоящее время получили широкое рас-
пространение.
В 1934 г. Л. И. Мандельштам, Н. Д. Папалекси и М. Я- Щего-
лев разработали способы и устройства для получения обсерва-
ций и измерения расстояний. Ими были предложены радиолаг,
радиодальномер и фазовый зонд.
Дальнейшему развитию фазовых методов и применению фа-
зовых, устройств на море содействовали профессора О. Г. Дитц.
Н. И. Евгенов, А. П. Ющенко и др.
Научной основой, на которой базируется вся радионавигаци-
онная техника, является учение о распространении электромаг-
нитных волн. В развитии этой области знаний огромна роль со-
ветских ученых. Л. И. Мандельштам в 1909 г. показал, что ра-
диоволны, распространяющиеся над поверхностью земли, под-
чиняются тем же законам, что и световые волны от источника,
расположенного в непосредственной близости от раздела двух
сред. Совместно с Н. Д. Папалекси им были изучены условия
распространения радиоволн средней длины. А. Н. Щукин в 1920 г.
создал способ расчета прохождения коротких волн на дальние
расстояния. Б. А. Веденский опубликовал ряд работ о распро-
странении ультракоротких волн. М. А. Монтович, В. А. Фок и др.
создали теорию о береговой рефракции или радиосклонении.
Труды советских ученых лежат в основе созданных и вновь раз-
рабатываемых радиотехнических средств не только в СССР, но и
за рубежом.
§ 92. АЗИМУТАЛЬНЫЕ РНС НЕНАПРАВЛЕННОГО
ДЕЙСТВИЯ
Азимутальную РНС составляют радиопередающее и радио-
приемное устройства. Радиопередающим устройством служит
радиомаяк кругового действия или судовая радиостанция. Радио-
приемным устройством служит радиопеленгатор и радиопеленга-
торная станция. Задача получения изолинии разрешается различ-
ными приемами в зависимости от того, где расположены пере-
дающие и принимающие устройства — на берегу или на судне.
Изолиния — изоазимута может быть получена, если радиомаяк
344
кругового действия расположен на берегу, а радиопеленгатор на
судне. Изолиния — ортодромия (получится, если радио1пеленга-
торная станция расположена на берегу, а судовая передающая
радиостанция —на судне.
Принцип работы радиомаяка кругового действия базируется на
известном в физике положении, что при пропускании тока по вер-
тикальному проводнику вокруг него возникает магнитное поле.,
Направление магнитных силовых линий этого поля при токе, на-
правленном вниз по проводнику, будет по часовой стрелке (если
смотреть сверху). Ток, направленный вверх по проводнику, обра-
зует поле с магнитными силовыми линиями, направленными про-
тив часовой стрелки. Следовательно, если в вертикальном про-
воднике в быстрой последовательности пропускать ток попере-
менно то вниз, то вверх, вокруг него возникает магнитное поле
с направлением магнитных силовых линий по часовой стрелке и
против нее. Распространение магнитного поля происходит волна-
ми со скоростью ЗХ108 м/сек. При этом длина волны (расстоя-
ние между магнитными силовыми линиями одного направления)
рассчитается по формуле
, 3J08
f ’
где f—частота — число изменений направления тока в 1 сек.
Вокруг проводника, кроме магнитного, образуется также элек-
трическое поле, из-за чего проводник окружен электромагнитным
переменным полем, где электрические и магнитные силы взаим-
но связаны. Образованная электромагнитная волна распростра-
няется также со скоростью 3 • 108 м/сек. Нормально поляризован-
ная волна имеет силу напряжения электрического поля Е, на-
правленную вертикально, силу напряжения магнитного поля И,
направленную горизонтально под прямым углом к направлению
распространения электромагнитной волны. Если такой проводник
находится в однородной среде, то скорость распространения вол-
ны во всех направлениях одинакова. Поэтому излучающаяся
электромагнитная волна или радиоволна, представляет собой
сферическую волну.
Интенсивность излучения волн проводником различна. Наибо-
лее сильное излучение волн наблюдается в направлениях, совпа-
дающих с экваториальной плоскостью. В направлении проводни-
ка излучение полностью отсутствует(рис. 167). Интенсивность из-
лучения в горизонтальной плоскости изображают графически.
Для этого по различным направлениям откладывают отрезки,
длина которых пропорциональна излучению. Концы отрезков сое-
диняют между собой плавной кривой, которая называется харак-
теристикой или диаграммой излучения антенны.
Радиомаяк кругового действия представляет собой передат-
чик, работающий на антенну, равномерно излучающую волны во
все стороны. Характеристика радиомаяка кругового действия —
345
окружность (рис. 168,6). Передатчик снабжен автоматическим
устройством, включающим маяк в соответствии с программой его
работы. Мощность передатчика радиомаяка определяется даль-
Рис. 167
ностью его действия и качеством антенны. Стандартными антен-
нами, имеющими круговую характеристику излучения, являются
антенны: вертикальная (рис. 168,а), Т-образная (рис. 168,в) и
зонтичная (рис. 168,а). Качество антенны зависит от высоты вер-:
тикальяого провода и сопротивления. Высота антенн береговых,
радиомаяков около 60 м, плавучих — до 25 м. Сведения о про-,
грамме работы, дальности действия, длине волны, расположении
каждого радиомаяка включены в навигационные пособия «Ра-ч
диотехнические средства судовождения».
346 -
Для обсервации нужно две изолинии, а для контроля — три,,
поэтому радиомаяки располагаются группами по три и более ра-
диомаяков с таким расчетом, чтобы в этом районе радиопеленги
пересекались. Обычно маяки, входящие в одну группу, работают
на одной волне. Программа их работы согласована так, что пос-
ле окончания работы одного радиомаяка включается второй, за-
тем третий и т. д. Дальность действия современных радиомаяков
кругового излучения достигает 300 миль.
Рис. 169
Если нормально поляризованная электромагнитная волна на1
пути своего распространения встретит вертикальный провод Л
(рис. 169), в нем возникает электродвижущая сила е А . Характе-
ристика такой антенны — окружность. Встретив два проводника,
расположенных вертикально в плоскости распространения элек-
тромагнитной волны на расстоянии а один от другого, в ближай-
шем проводнике А возникнет э.д. с. еА , а через промежуток в-ре-
, а ~
мени t= — во втором проводнике В также возникнет э.д.с. ев.
При этом в обоих проводниках э. д. с. неодинакова, т. е. еА ев.
Если соединить вертикальные проводники А и В горизонталь-
ными проводниками и подвести к приемнику, на зажимах прием-
ника будет напряжение, равное разности э. д. с. возбуждаемых
электромагнитным полем в обоих проводниках (еА —ев =втах).-
Такая конструкция называется рамочной антенной или рамкой и
является составной частью радиопеленгатора.
При положении рамки в плоскости, перпендикулярной распро-
странению волны, волна будет наводить в вертикальных частях
рамки, равные э.д.с. Следовательно, напряжение на зажимах -при-
емника еА — ев=0. Установив рамку в плоскости, расположен-
347'
ной под углом 0 к -направлению распространения электромагнит*
ной волны, получим разность э. д. с. на зажимах приемника
U = еА — ев = cos 0.
Характеристика рамочной антенны представляет собой коси*
нусоиду в полярных координатах, причем максимум силы приема
лежит в плоскости витков рамки, минимум — в направлении нор*
мали к этой плоскости (рис. 170). Поворачивая рамку в верти*
калькой плоскости, можно получить минимальную или макси-
мальную интенсивность принимаемых сигналов, по которым оп-
ределить направление или пеленг маяка, посылающего эти сиг-
налы. Пеленг лучше определять по минимуму силы приема, исхо-
дя из следующих соображений:
1
i
.Л
Рис. 170
а) напряжение, подаваемое на приемник от рамочной антен-
ны, зависит от косинуса угла, образуемого плоскостью антенны
и направлением приходящей волны. Тригонометрическая функ-
ция косинус особенно чувствительна к изменению угла при малых
ее значениях;
б) физиологическая особенность слуховых восприятий чело-
века такова, что лучше воспринимается переход от молчания к
слабому звуку, чем изменение сильного звука ^ сторону его
уменьшения.
На основании этого большинство радиопеленгаторов, в кото-
рых определение направления производится на слух, работают
по методу определения минимальной интенсивности приема. Ра-
диопеленгаторы, имеющие рамку, которую можно поворачивать в
вертикальной плоскости, называются радиопеленгаторами с по-
воротной рамкой.
Для того чтобы определить направление на радиомаяк, излу-
чающий радиоволны, необходимо настроить радиоприемник на
348
волну, на которой работает радиомаяк, и, вращая рамку с по-
мощью штурвала, определить ее положение, при котором мини-
мальна слышимость сигнала, посылаемого радиомаяком. Угол
поворота рамки определяется по отношению к диаметральной
плоскости судна так, -что нуль отсчета на шкале будет соответ-
ствовать положению плоскости рамки, перпендикулярному к ди-
аметральной плоскости судна. Следовательно, радиопеленгатор
дает радиокурсовой угол на радиомаяк, отсчитываемый от носо-
вой части диаметральной плоскости судна по часовой стрелке от
О до 360°. Следовательно, радиокурсовые углы могут быть толь-
ко правого борта.
На отечественном флоте радиопеленгаторы с поворотными
рамками в настоящее время почти не применяются из-за при-
сущих им недостатков, а используются радиопеленгаторы с не-
подвижными рамками. Рамочная антенна такого радиопеленга-
тора состоит из двух изолированных друг от друга рамок, пересе-
кающихся ‘под прямым углом. Концы витков присоединяются к
устройству, которое называется гониометром. Гониометр пред-
ставляет собой неподвижные рамки в уменьшенном виде, выпол-
ненные в виде катушек. Каждая из взаимно перпендикулярных
катушек соединяется с одной из рамок.
Внутри полевых катушек находится искательная катушка —
ротор гониометра, который может вращаться вокруг вертикаль-
ной оси на 360°. Концы обмотки ротора присоединены к радио-
приемнику. Рамочная антенна устанавливается на палубе мос-
тика неподвижно и ориентирована так, что одна рамка находится
в плоскости, параллельной диаметральной плоскости судна, дру-
гая— перпендикулярно ей. Соответствующие полевые катушки
гониометра расположены также перпендикулярно друг к другу.
Радиоволны приходят к перекрещенным рамкам по направлению,
образующему угол 0 с плоскостью рамки А и угол 90°—0 с
плоскостью рамки В. Под влиянием электромагнитного поля на
концах обмоток рамок возникают напряжения, поступающие на
полевые катушки гониометра. Вокруг полевых катушек создается
магнитное поле, которое индуктирует в обмотке ротора напря-
жения. Напряжение на зажимах ротора зависит от угла поворота
ротора относительно направления на радиомаяк.
Характеристика направленности ротора (рис. 171) так же
ориентирована и такого же вида, как и характеристика поворот-
ной рамки. Следовательно, и получение минимума наблюдается
также дважды, как и с поворотной рамкой. При пеленговании
положение ротора фиксируется указателем на лимбе гониометра,
но получается двойственное решение, которое отличается одно от
другого на 180°, т. е. определить сторону расположения радиомая-
ка нельзя. Обычно для решения этой задачи служит счислимое
место судна, но в некоторых случаях этого недостаточно, напри-
мер, при плавании у островов при ненадежном счислении. Радио-
техническое решение этой задачи сводится к получению характе-
349'
ристики направленности с одним максимумом и одним миниму-
мом слышимости. Для получения такой характеристики, по ко-
торой можно было бы определить сторону, применяется вспомо-
гательная открытая антенна, подсоединенная к приемнику.
Характеристика открытой антенны — окружность, а рамки ро-
тора — косинусоида. Сложение обеих характеристик в одну дает
новую характеристику — кардиоиду (рис. 172). Строится карди-
оида алгебраическим суммированием радиус-векторов, послужив-
ших для создания косинусоиды и окружности. Кардиоида обла-
дает одним минимумом и одним максимумом, причем минимум
кардиоиды расположен на 90° от минимума косинусоиды. В неко-
350
торых случаях ротор гониометра снабжается дополнительной об-
моткой, перпендикулярной к основной. В таком случае для опре-
деления стороны к приемнику подключают при помощи переклю-
чателя вместо основной обмотки дополнительную. Верным на-
правлением считается то, при котором минимум звука соответст-
вует положению переключателя, отмеченному зеленым цветом.
Одним из современных судовых пеленгаторов, устанавливаемых
па судах, является радиопеленгатор СРП-5, сконструированный
по изложенному выше принципу.
Для определения направлений с берега на судно применяются
береговые радиопеленгаторные станции. Такие станции имеют
высокие вертикальные антенны, что позволяет им определять пе-
ленги в ночное время со значительно большей точностью, чем до-
ступно судовым радиопеленгаторам. К услугам береговых радио-
пеленгаторных станций обращаются все суда, независимо от того,
оборудованы они или не оборудованы на борту радиопеленгато-
рами.
Радиопеленгаторная станция обычно устанавливается на
плоском открытом месте, вдали от железных дорог, линий связи
и электропередач, от железных мостов и кранов, крупных зда-
ний, чтобы избежать возникновения радиодевиации и берегового
эффекта. Место выбирается с таким расчетом, чтобы пеленги су-
дов, находящихся в обслуживаемом районе, не образовывали с
береговой чертой углов менее 20°. Это позволяет избежать бере-
говой рефракции.
Пеленгаторные станции бывают одиночными, тогда они дают
судну только радиопеленг, и групповыми — по две-три станции в
различных местах побережья, тогда вся группа станций может
дать судну обсервованное место. Сведения о всех радиопелен-
гаторных станциях даны в навигационном пособии «Радиотехни-
ческие средства навигационного оборудования».
Станции обслуживают суда всех флагов. Для получения пе-
ленга или своего места судоводитель, выбрав позывные станции
и волну, связывается со станцией по радиотелеграфу, и, если
ему нужно получить радиопеленг, подает сигнал QTE, если место
судна — QTF. Получив согласие станции, судовая радиостанция
должна на волне, указанной в справочном пособии, передать в
эфир два длинных тире в течение около 10 сек и свои позывные.
Передача повторяется столько раз, сколько потребует станция.
Если береговые радиопеленгаторные станции работают в
группе и связаны между собой линиями связи, вызывается одна
станция — главная, которая управляет всей группой. Если стан-
ции не связаны между собой, о чем судоводитель может узнать
из навигационного пособия, надлежит связаться со всеми стан-
циями, и они будут пеленговать судно одновременно.
Результаты своих измерений радиопеленгаторная станция со-
общает судну, т. е. если с судна запрошен пеленг, то станция пе-
редает истинный пеленг от станции, время пеленгования, коорди-
351
наты станции, если она подвижна. Если запрошено место, то со-
общаются (координаты полученной обсервации.
Подтвердив получение сведений, судно использует их по свое-
му усмотрению.
Судоводителю следует помнить, что на основании ст. 32 Об-
щих правил Международной телеграфной конвенции 1938 г. ад-
министрация, в ведении которой находится радиопеленгаторная
станция, не отвечает за последствия неточного пеленга, а также
за то, если по каким-либо причинам пеленг не может быть взят.
§ 93. ОШИБКИ РАДИОПЕЛЕНГОВАНИЯ
Как и всякий прибор, радиопеленгатор при измерении пелен-
га или радиокурсового угла радиоориентира имеет ошибки. Зна-
ние причин, вызывающих эти ошибки, поможет судоводителю
обеспечить наиболее эффективную работу прибора и повысить
точность радиообсерваций. К случайным ошибкам радиопелен-
гования относятся следующие.
Ошибка угла молчания. Выше указывалось, что когда плос-
кость ротора гониометра располагается перпендикулярно направ-
лению распространения электромагнитной волны, наступает ми-
нимум, при котором слышимость сигналов прекращается. Прак-
тически из-за наличия в каждом приемнике шорохов и шумов, ;
возникающих от неравномерности эмиссии электронов с поверх-
ности катодов ламп, от тепловых шумов сигнал в шумах ослаб'
ляется и физиологический порог чувствительности человеческого
уха не разрешает расслышать передаваемый сигнал. Слышимость ;
радиосигнала пропадет не только в направлении ON (рис. 173),
352
которое является нормалью к плоскости ротора, но и в секторе,
ограниченном сторонами угла 6, который называется углом мол-
чания.
Порог чувствительности у всех людей примерно одинаков, но
шумы пеленгатора различны в различных условиях его работы.
Поэтому и угол молчания — величина переменная. Угол молча-
ния зависит от величины напряженности электрического поля,
создаваемого радиомаяком в точке приема его сигналов. Следо-
вательно, он зависит от мощности радиомаяка: чем больше его
мощность, тем меньше угол молчания. По этой же причине угол
молчания увеличивается при увеличении расстояния от судна до
радиомаяка, так как напряженность электрического поля Е по
мере удаления от радиомаяка уменьшается.
Произведение Ев называется модулем чувствительности ра-
диопеленгатора, причем пеленгатор тем качественнее, чем мень-
ше Е 0. Для современных радиопеленгаторов модуль чувстви-
тельности лежит в пределах 30—100 мкв)м град. В нормальных
условиях работы средняя квадратическая ошибка измерения пе-
ленга вследствие наличия угла молчания /и® = ±0°,5.
Ошибка отсчета пеленга по лимбу пеленгатора. Эта ошибка
зависит от лимба. Для современных пеленгаторов средняя квад-
ратическая ошибка отс'чета тд =±0,3.
Ошибка установки антенны пеленгатора. Антенна пеленгатора
должна быть установлена вертикально и в диаметральной плоско-
сти судна. При отклонении антенны от вертикали на 15° ошибка
в пеленге достигает 1°. На качке это обстоятельство нужно учи-
тывать. Ошибка ориентирования антенны относительно диамет-
ральной плоскости судна создает постоянную ошибку в радио-
пеленге, которая учитывается при определении радиодевиации.
Антенный эффект радиопеленгаторной антенны. Антенным эф-
фектом рамочной антенны называется ее способность принимать
электромагнитную энергию, подобно открытой антенне. Рамоч-
ная антенна, обладающая антенным эффектом, частично или пол-
ностью теряет свойства направленного приема, так как на харак-
теристику рамочной антенны косинусоиды накладывается харак-
теристика открытой антенны, уничтожающей нормальный угол
молчания, а следовательно, и минимум. Избавиться от антенного
эффекта можно, если в цепь антенна-гониометр ввести открытую
антенну, с помощью которой вариометром в цепи наводится рав-,
ная по (величине, но противоположная по знаку э.д.с. антенного
эффекта, т. е. э. д. с. антенного эффекта компенсируется э. д.с. от-
крытой антенны. Современные радиопеленгаторы снабжены ком-
пенсационным устройством с вариометром.
Основным средством ослабления антенного эффекта служит
экранирование всех частей рамочной антенны и проводов с за-
землением экрана.
Ночной эффект. Под ночным эффектом понимают неустойчи-
вость радиопеленга при наблюдениях ночью на расстоянии свы-
23 Навигация 353
ше 30 миль от радиомаяка. Явление ночного эффекта возникает
из-за того, что на рамочную антенну радиопеленгатора поступа-
ет не только наземная нормально поляризированная радиоволна»
приходящая по кратчайшему пути, но и отраженная от верхних
слоев ионосферы ненормально поляризированная волна, имею-
щая направление, не перпендикулярное плоскости антенны. При
наложении отраженных и прямых волн в радиопеленгаторе воз-
никают нерегулярные, периодические изменения слышимости, из-
менения направления пелегов, «блуждание пеленгов». В настоя-
щее время установлено, что солнце, излучающее ультрафиолето-
вые лучи, в верхних слоях атмосферы вызывает расщепление
нейтральных молекул газа на электроны и положительно заря-
женные ионы. Из-за этого верхний слой атмосферы называется
ионосферой. На высоте свыше 200 км, где плотность газа неве-
лика, ионизация происходит интенсивно; эти слои называются
слоями ионосферы F, Fx, F2 (рис. 174). Ниже на высоте 100 км
расположен слой ионосферы £, ионизированный больше, так как 'I
плотность газа несколько увеличилась. На высоте 60—80 км рас- ,
положен слой ионосферы D, ионизированный меньше, так как J
часть ультрафиолетовых лучей солнца поглощена верхними слоя-
ми. С уменьшением влияния солнечного излучения ионизирован-
ные молекулы газа восстанавливаются и степень ионизации
уменьшается. Наиболее быстро процесс восстановления происхо-
дит в слое D. Этот слой исчезает за 1—7г час до захода и появ-
ляется лишь через 1—7г час после восхода. Днем волны, направ*
ленные вверх, поглощаются в слое D и к радиопеленгатору при-
ходит только земная нормально поляризованная волна. Ночью,
354
когда ионизированного слоя D нет, направленная вверх радио-
волна попадает в слои Е и F, где степень ионизации меняется.
В этих слоях волна частью поглощается, частью преломляется и
отражается, и под различными углами направляется на землю,
попадает на радиопеленгатор сверху и вызывает в горизонталь-
ных частях рамок э. д. с.
Ночной эффект сильно ограничивает дальность надежного ра-
диопеленгования в промежуток времени, начиная за час до захо-
да солонца и через час после его захода. Зона надежного пелен-
гования днем зависит от мощности радиомаяка, так как даль-
ность пеленгования определяется наличием наведения э. д. с. в
вертикальных ветвях рамок пеленгатора. Ночью же дальность
надежного пеленгования, после 25—30 миль, от мощности радио-
маяка не зависит. Это объясняется тем, что с увеличением мощ-
ности растет интенсивность наземной и отраженной волн и «в ре-
зультате интерференция волн не уменьшается.
Береговые радиопеленгаторы с вертикальными антеннами
имеют дальность надежного пеленгования больше судовых,
так как отраженная волна к вертикальной антенне подходит
сверху под острым углом, что значительно ослабляет вредное
влияние ночного эффекта. Если необходимо запеленговать ра-
диомаяк, расположенный от судна на расстоянии, большем 25^
30 миль, следует взять возможно большее число отсчетов пелен-
гов за 10—15 мин и привести их к одному моменту. Полученный
радиопеленг часто оказывается близким к достоверному. В связи
с тем, что в диапазоне волн радиомаяков наблюдаются однознач-
ные отклонения пеленга в течение получаса и более, необходи-
мо пеленгование повторять через некоторые промежутки времени.
Не рекомендуется пеленговать радиомаяк за час до захода солн-
ца и через час после его восхода.
Береговой эффект или радиосклонение. Направление -распро-
странения радиоволн от радиоизлучателя к радиопеленгатору при
некоторых условиях отклоняется от ортодромии, проходящей че-
рез радиоизлучатель и радиопеленгатор, что вызывает ошибку ра-
диопеленга. На отклонения радиоволн влияют подземная метал-
лическая руда, провода различных линий, рельсы, горы и холмы,
металлические конструкции, леса. Поэтому морские радиомаяки,
а также радиопеленгаторные станции устанавливаются ближе к
урезу воды на ровных площадках, вдали от строений, лесов, мо-
стов и пр. Наземная радиоволна отклоняется также при переходе
с суши на море, и с моря на сушу, причем чем острее угол пере-
сечения линии раздела суши и моря радиоволной, тем больше от-
клонение, а следовательно, и ошибка в радиопеленге. Если на-
правление с судна'На радиомаяк или радиопеленгаторную стан-
цию пересекает береговую черту под углом, близким к 90°, влия-
ние радиосклонения на пеленг не проявляется. Наибольшая
ошибка в радиопеленге от радиосклонения возникает тогда, ког-
да направление на радиомаяк или радиопеленгаторную станцию
23*
355
пересекает береговую черту 1под углами, меньшими 20°. Вслед-
ствие этого радиомаяки и радиопеленгаторные станции устанав-
ливаются на выступающих в море мысах и ближе к береговой
черте.
Если-оадиомаяк или радиопеленгаторная станция установле-
ны на берегу, то опытным путем определяют для этого радиоуст-
ройства величину радиооклонения, причем, если обнаружены по
каким-либо направлениям радиосклонения значительной величи-
ны, эти направления указываются в навигационном пособии «Ра-
диотехнические средства навигационного оборудования» как сек-
торы ненадежного пеленгования. Рекомендуется при пеленгова-
нии считать пеленг ненадежным, если угол его к береговой черте
меньше 20°.
С увеличением расстояния D между суднам и берегом ошибка
в радиопеленге из-за берегового эффекта уменьшается обратно
пропорционально /15, Из ряда опытов установлено, что направ-
ление радиоволны, искаженное при пересечении границы двух
различных сред, обладает способностью восстанавливаться на
расстоянии около 10 длин волн от этой границы. Поэтому с явле-
нием радиосклонения считаются при нахождении судна от берега
на расстояниях 5—6 миль и менее.
Ошибка в радиопеленге от ошибки в поправке компаса. Если
компас имеет поправку с ошибкой е«, то полученный радиопе-
ленг, исправленный этой поправкой компаса, будет ошибочен так-
же на величину ошибки в поправке Следовательно, ошибка в
поправке компаса полностью входит в ошибку радиопеленга.
Радиодевиация, Металлический такелаж судна, металличе-
ские надстройки, трубы, корпус и др. вызывают отклонения ра-
диоволн от их истинного направления на величину Д называемую
радиодевиацией. Радиодевиация — это угол между .истинным на-
правлением на радиоориентир и отсчетом направления, получен-
ного на лимбе радиопеленгатора, т. е. это поправка, которую не-
обходимо ввести в отсчет радиокурсового угла по лимбу, чтобы
получить радиокурсовой угол.
Рассмотренные случайные ошибки учитываются при оценке
измерений. Суммируя их по закону сложения случайных ошибок,
получим общую ошибку
= ± niQ -р /По -|- ffllcK 4~ ^Д/с + 4“ ^д » (188)
где пгз—средняя квадратическая ошибка угла молчания (при-
нимается равной ±0°,5);
/п0— ошибка отсчета на лимбе, равная ±0°,3;
ткк—ошибка в компасном курсе за счет рыскания судна
/пДк—ошибка в определении поправки компаса ±0°,5;
/Пу—ошибка в определении радиодевиации ±0°,5;
тп— инструментальная ошибка ±0°,5.
356
Подставив в подкоренное выражение значения средних квад-
ратических ошибок, получим
ти^± 1°,2.
С увеличением расстояния до радиомаяка точность уменьша-
ется. На расстояниях до 100 миль ти =1—1°,5, на расстояниях
до 200 миль ти = 2°.
Указанная ошибка в радиопеленге относится к дневным усло-
виям. Ночью следует ожидать большей ошибки, особенно на рас-
стояниях, больших 25—30 миль.
§ 94. ПРИЧИНЫ, ВЫЗЫВАЮЩИЕ РАДИОДЕВИАЦИЮ
Вблизи радиопеленгаторной антенны, установленной на судне,
всегда расположены металлические сооружения. Электромагнит-
ная волна, проходя через них, создает вокруг вторичные электро-
магнитные поля. Они совместно с первичным полем воздействуют
на антенну радиопеленгатора и в результате суммарного дейст-
вия электромагнитных волн, пришедших к радиопеленгатору с
различных направлений, происходит отклонение направления ра-
диоволны, излучаемой радиомаяком, и отсчет радиопеленга сни-
мается с ошибкой. Все вторичные излучатели на судне по своему
влиянию на прием радиоволны антенной радиопеленгатора, де-
лятся на 2 группы:
1. Открытые, антенноподабные излучатели кругового дейст-
вия: стальные одиночные мачты, трубы, стальные заизолирован-
ные на верхнем конце тросы, стойки шлюпбалки и др.
2. Излучающие открытые и закрытые контуры, образованные
металлическим корпусом судна, металлическими надстройками,
мачтами с соединенными тросом топами, леерные стойки с леера-
ми и др.
Кроме этих пассивных излучателей, на судне есть активные
излучатели в виде передающих круговых антенн. Они, излучая
мощную радиоволну, сильно искажают прием радиопеленгатора.
Поэтому необходимо такую антенну отключать от передатчика во
время пеленгования. В связи с тем, что радиоволна приходит к
судну под различными курсовыми углами, а вторичные излучате-
ли расположены по отношению к антенне радиопеленгаторов на
постоянных местах, отклонение направления радиоволны будет
зависеть от курсового угла радиоориентира, т. е. радиодевиация
зависит от радиокурсового угла радиоориентира. Величина ра-
диодевиации в зависимости от радиокурсового угла на радиомаяк
может быть представлена в виде ряда Фурье:
f=A + В sin q + Ceos q -|- D sin 2q + fcos 2q + Fsin 3q +
+ G cos 3q + H sin 4? -----------------,
где q— радиокурсовой угол;
357
А, В, С, D9 Е9 F9 G, Н— коэффициенты радиодевиации,
выражающие влияние отдельных
групп вторичных излучателей;
А— коэффициент постоянной радио-
девиации, который возникает при
несимметричности расположения
рамки относительно диаметраль-
ной плоскости судна, когда вто-
ричные излучатели расположены
несимметрично рамке, смещен
лимб или указатель гониометра,
система рамок повернута на не-
который угол к диаметральной
плоскости судна;
В и С—коэффициенты полукруговой де-
виации, характеризующие радио-
девиации:
/B=Bsin<7 и fc = C)COS<7, которые порождаются вторичными из-
лучателями первой группы. При Р/СУ=90—270°; /в = тах, fc=O;
при Р/СУ==0—180°; /^=0; ff=max. Коэффициент В возникает
при наличии вторичных излучателей антенного типа в диамет-
ральной плоскости судна. Коэффициент С — при наличии таких
же излучателей, расположенных по траверзу рамочной антенны
вправо и влево. Если же вторичные излучатели этого типа рас-
положены в каком-либо другом месте, они влияют на величину
обоих коэффициентов В и С;
D и Е— коэффициенты четвертной девиа-
ции; характеризуют радиодевиа-
ции, порождаемые вторичными
излучателями второй группы
fn = D sin 2q9 /е = Е cos 2q.
На современных судах fo создается корпусом судна, поэтому ко-
эффициент Z), как правило, бывает большим и вызывает радиоде-
виацию Id *= 15—25°. В подавляющем большинстве случаев коэф-
фициент D оказывается положительным. Он появляется также от
наличия вторичных излучателей второй группы, расположенных
в продольной или поперечной плоскостях, проходящих через ан-
тенну радиопеленгатора. Коэффициент Е появляется от наличия
вторичных излучателей этого типа, расположенных под углом 45
и 135° к диаметральной плоскости судна и не бывает большим.
F и G— коэффициенты шестерной девиации;
Н— коэффициенты восьмерной радиодевиации.
Радиодевиациц F9 G9 Н малы по сравнению с остальными и
существенного значения в общей девиации не имеют.
Радиодевиация f зависит от длины волны: чем длиннее волна
и короче корпус судна, тем радиодевиация меньше.
368
Наибольшее значение радиодевиации бывает тогда, когда
длина радиоволны близка к длине корпуса судна. Величина ра-
диодевмации не зависит от длины судна в том случае, если длина
волны превосходит длину корпуса судна в пять и больше раз. Ра*
диодевиация не зависит от рода груза в трюмах судна. Радиоде*
виация изменяется от изменения стального такелажа судна,
изменения положения судовых стрел, изменения осадки судна от
загрузки судна, поэтому все это необходимо учитывать при опре-
делении величины радиодевиации.
Величина радиодевиации зависит от крена судна. Установле-
но, что при крене на волне до 5° радиодевиация не изменяется и
радиопеленгатором можно пользоваться; при больших амплиту-
дах крена необходимо брать несколько отсчетов и осреднять их.
§ 95. СПОСОБЫ ОПРЕДЕЛЕНИЯ РАДИОДЕВИАЦИИ
Радиодевиация — это угол между истинным направлением на
радиомаяк и направлением, полученным радиопеленгатором
(рис. 175). Если этот угол f расположен вправо от истинного на-
правления, знак девиации минус, если влево —плюс.
Возьмем одновременно визуальный курсовой угол радиомая-
ка по пеленгатору компаса и радиокурсовой угол тю радиопелен-
гатору. Величина радиодевиации выразится
/=КУ-РКУ.
Радиодевиация определяется для радиоволн, имеющих три
различные длины, которые используются в целях судовождения.
зй
В 1947 г. в Атлантик-Сити (США) 1на Международной конфе-
ренции радиосвязи диапазон волн 1050—920 м выделен для ра-
боты радиомаяков, волна длиной 600 м—для аварийных слу-
чаев, 800 м—для работы судовых радиостанций. В соответствии
с этим и определяется радиодевиация для волн длиной 1000 Mt
800 и 600 м.
Для определения величины радиодевнации расстояние между
передающим устройством и радиопеленгатором должно быть не
менее 2—3 длин волн. При определении девиации днем макси-
мальное расстояние между передающим устройством и радиопе-
ленгатором не более 100 миль, ночью — не более 20 миль. Перед
определением девиации судно должно быть приведено в походное
положение и передающие антенны заземлены.
Радиодевиация определяется следующими способами.
1. По плавучему радиомаяку или судну, стоящему на якоре.
Имея в пределах видимости плавучий радиомаяк и приводя его
на различные курсовые углы, одновременно берут курсовые углы
-по азимутальному кругу компаса и радиокурсовые углы по ра-
диопеленгатору, настроенному на волну плавучего радиомаяка.
В связи с тем, что взять радиокурсовой угол (РКУ) труднее, чем
курсовой угол, и это связано с работой радиомаяка, первым берут
РКУ и по сигналу из рубки замечают /<У. Перед определением
радиодевиации должна быть произведена соответствующая под-
готовка и согласование действий участников определения. Сле-
дует договориться о сигналах предварительных и исполнитель-
ных, которые обеспечат одновременность взятия курсовых и ра-
дио'курсовых углов, заранее составить формы для занесения в них
отсчетов. Чтобы избежать влияния случайных ошибок, нужно
наблюдения повторить на каждом курсовом угле 3—5 раз. Ра-
диокурсовые и курсовые углы берут через 10—Г‘5° и, рассчитывая
f=Ky—РКУ, получают ряд значений радио-девиации на различ-
ных курсовых углах (рис. 176). Запись наблюдений ведется по та-
кой форме.
Длина волны .------------- Дата------------ Осадка-------------
№ Время РКУ КУ f Примечание
2. По радиостанции вспомогательного судна. Вспомогатель-
ным судном может быть любое судно, имеющее круговую антен-
ну « радиопередатчик. Оно может или стоять на якоре, или, что
делается чаще, описывать циркуляцию вокруг стоящего на якоре
крупнотоннажного судна, которое определяет девиацию. Для то-
го чтобы легче было брать КУ снижения антенны, вспомогатель-
ное судно может в месте снижения вывесить какой-либо примет-
ный ориентир. По договоренности радиопередатчик и радиопелен-
гатор настраиваются последовательно на разные волны (1000,
800, 600 Затем через 10—15° берут РКУ и КУ, получая ряд
значений радиодевиации.
3. По береговой радиостанции или радиомаяку. Береговая ра-
диостанция должна быть расположена по возможности ближе к
береговой черте.
Район для маневрирования выбирается с расчетом, чтобы ра-
диоволна пересекала береговую черту под углом, близким к 90°.
Это исключит влияние береговой рефракции. Изменяя курсовой
угол радиомаяка через 10—15°, берут радиокурсовой угол и кур-
совые углы радиомаяка и рассчитывают радиодевиацию.
Радиодевиацию можно определить и в том случае, если радио-
маяк или радиостанцию не видно, т. е. если они расположены на
значительном удалении от судна. В этом случае необходимо точ-
но определить свое место и, зная место радиоизлучателя, снять
с карты локсодромический пеленг. Если при этом ортодромиче-
ская поправка превосходит 0°,3, то локсодромический пеленг пе-
реводят в ортодромический
ИРПорт = ИПлок "4“ Ф*
Затем рассчитывается КУ на радиоизлучатель по формуле
КУ=ИПлок—ИК,
а измерив РКУ, получают радиодевиацию на этом курсовом угле.
Запись наблюдений делается по такой форме:
№ Время| к к | 1 ИК ИПдок Ортодро- мическая поправка И И орт КУ РКУ f При- меча- ние
361
Для изменения РКУ на 10—15° можно описывать циркуля-
цию вокруг обсервованного места, которое обозначают плавучей
вехой, или проходить различными курсами возле вехи и брагь
РКУ маяка, или встать на якорь или бочку и с помощью буксира
разворачиваться вокруг бочки (буксирный трос должен быть рас-
тительный). В первом и третьем случае расстояние до радиоиз-
лучателя должно быть не менее рассчитанной величины D
п __ /?-57°,3
£д >
где R — радиус циркуляции или радиус окружности, на котором
находится судно при развороте его вокруг бочки;
s° — точность, с которой необходимо определить радиоде-
виацию.
§ 96. СОСТАВЛЕНИЕ РАБОЧЕЙ ТАБЛИЦЫ РАДИОДЕВИАЦИИ
Результаты наблюдений обрабатываются следующим обра-
зом. Из-за того, что наблюдения производились «а курсовых уг-
лах, которые могли отличаться от нужных для составления рабо-
чей таблицы девиации, по имеющимся данным строится кривая
радиодевиации. На миллиметровой бумаге по оси абсцисс откла-
дывают курсовые углы в произвольном масштабе от 0 до 360°, по
оси ординат значение радиодевиации на каждом радиокурсовом
угле (рис. 177). Полученные точки соединяют плавной кривой. По
графику составляют рабочую таблицу радиодевиации для РКУ
от 0 до 360° через 10°, снимая значение f с графика.
362
Таблица 15
Длина волны----------------- Дата------------- Осадка---------------
f РКУ f
-0°,2 360° 0° —0°,2
—1°,5 345° 15° +2°,8
—2°. 5 330° 30° 4-4°, 5
—3°,5 315° 45° +5°,5
—3°,0 300° 60° +5°,0
—1°.5 285° 75° +2°,8
-H°,5 270° 90' +0°,5
+2°, 5 255° П '5° —1°,2
+ 4°,0 240° 120° -3°.O
+4°,8 225° 135° —4°,5
+3°,8 210° 150° —3°,2
+2°,2 195° 165° —1°,5
+0°,2 180° 180° +0°,2
Табл. 15 служит для решения задач в случаях, когда требуется
использовать радиодевиацию.
§ 97. РАСЧЕТ КОЭФФИЦИЕНТОВ РАДИОДЕВИАЦИИ
Радиодевиация представляет собой сумму радиодевиаций,
возникших от наличия коэффициентов А, В, С, D, Et F, G и Н,
и может быть выражена равенствам:
f=fA fв fc Je fa +
Расчет коэффициентов радиодевиации производится по анало-
гии с расчетом девиации магнитного компаса по формулам. Вы-
числение коэффициентов радиодевиации дает возможность ана-
лизировать влияние различных факторов на величину радиоде-
виации и устранять их, создавая более нормальные условия рабо-
ты радиопеленгатора. Для расчета значений коэффициентов ра-
диодевиаций нужно знать девиацию на восьми курсовых углах:
0°, 45, 90, 135, 180, 225, 270 и 315°. По величинам вычисленных
коэффициентов составляется рабочая таблица девиации.
Формулы для расчета коэффициентов следующие:
Л _ /о + /180 + /45 + /215 + /90 +/270 7135 +/мб
А 8
т. е. коэффициент А равен среднему арифметическому значению
ради одев нации из всех радиодевиаций, полученных на различных
курсовых углах
в (/о —/iso) + (As — 625) sin 45° + (/90 + /270) + (Л35 —/315) s*n 45° я
4
р__ (/о —/ten) 4" (As —/225) sin 45° + (foQ — fm) 4- (/13- — /MR) (— sin 45°) ;
4
363
Г) (Лб +/225) ~~ (/135 +/315) .
4
Р___ (/о + /18(0 — (/во /270) .
П — 4 *
sin// = -^-sin2D.
Индекс у f означает курсовой угол радиодевиации.
Для вычисления величин коэффициентов радиодевиации, все
расчеты приводятся в табл. 16. Рассчитав коэффициенты радио-
дев1иации по величинам измеренных радиодевиаций на восьми ра-
диокурсовых углах (от 0 до 360° через 45°), составляют рабочую
таблицу радиодевиации для РКУ через 10°, которой пользуются
для исправления радиопеленгов (см. пример 3, стр. 393).
Вычисление коэффициентов радиодевиации дает возможность
определить причины, порождающие ее, и уменьшить величину ра-
диодевиации. Если коэффициент А не равен нулю, кривая радио-
девиации сместится относительно оси X на постоянную величину
с постоянным знаком. Следовательно, зная величину коэффи-
циента Л, можно компенсиро1вать постоянную радиодевиацию
поворотом лим|ба радиопеленгатора или стрелки гониометра на
угол, равный коэффициенту Л. Коэффициент Л можно рассчитать
по приближенной формуле
л__/о +/so+fw + /270
Л 4
Если знак коэффициента плюс, стрелку гониометра, связан-
ную с искательной катушкой, нужно повернуть вправо, если ми-
нус — влево. Если есть возможность, то не трогая стрелку пово-
рачивают лимб на угол, равный Л со знаком плюс — влево, со
знаком минус — вправо. Если коэффициент четвертной девиациц
D велик, то девиации на различных РКУ также будут достигать
больших значений, особенно на четвертных РКУ- Причиной появ-
ления четвертной радиодевиации являются замкнутые и разом к-;
нутые вторично излучающие контуры. Сам корпус судна пред- ;
ставляет собой больших размеров замкнутый контур, во внешнем ‘
поле которого находится радиопеленгатор. Учитывая, что напря;.-.|
женность поля пропорциональна квадрату расстояния от контура, ;
коэффициент D можно уменьшить удалением антенны радиоле- S
ленгатора от палубы, т. е. поднять антенну выше над палубой.
Большой замкнутый контур составляют две мачты, штагкарнак;
и палуба судна, причем антенна радиопеленгатора почти всегда;
находится внутри такого контура. В этом случае коэффициент О
принимает большее значение, вызывая также увеличение коэф-
фициента Н. Уменьшение коэффициента D при таком положении
осуществлено разрывом замкнутого контура путем включения вЗ
штагкарнак изоляторов. Если все же коэффициент D остается ве-
лик, его уменьшают автоматическим введением поправок в пока-
зания радиопеленгатора, называемым компенсацией.
364
I II III IV A
РКУ f РКУ f I + Il 2 I - II 2 Множи- тель
0° +2 180 0 + 1 +1 0
45° +8,5 225 +6,5 + 7,5 +1 0,707
90° 0 270 0 0 0 1
135° -5 315 -4 -4,5 -0,5 0,707
2В = + 0,35
В = 4- 0°,17
(0,2)
£
2
Таблица 16
/ VI VII VIII IX X
в IV X vn-+vni VII—VIII
Множи- c IX X Верхняя Нижняя 2 2
множи- тель тель множи- тель половина III половина III Опреде- ление Опреде- ление
А Е и D
0 1 + 1 +1 0 +0,5 +0,5-
+0,7 0,707 +0,7 +7,5 -4,5 + 1.5 +6 =
0 0 0
-0,35 -0,707 + 0,35
2C = 2,05 24 = + 2°
C= + l°,0 А = +!’
sin D =0,104;
sin2 D = 0,0108;
sinaZ) = 0,C05;
H = +0°,3
Компенсация может быть выполнена механическим или элект-
рическим путем. Сущность механической компенсации состоит в
том, что лимб пеленгатора или указатель при помощи механиче-
ской рычажной системы с роликом, передвигающимся по специ-
ально вырезанному шаблону, сдвигается в сторону, обратную
знаку коэффициента D, на величину равную D. Шаблон выре-
зается из листа латуни, после того как установлена величина ко-
эффициента D. Шаблоны изготавливаются для трех различных
длин волн, для трех осадок судна.
Сущность электрического способа компенсации заключается
в нарушении равенства полей, создаваемых полевыми катушка-
ми гониометра. Параллельно продольной рамке, а значит и поле-
вой катушке, включается шунтирующий дроссель, который умень-
шает э.д.с. продольной рамки. Из-за этого суммарный вектор маг-
нитного поля гониометра смещается в сторону, противоположную
знаку коэффициента D. Иными словами, при включении дрос-
селя искусственно вводится коэффициент, противоположный по
знаку и равный по абсолютной величине существующему коэф-
фициенту D. Величину создаваемого дросселем коэффициента
можно менять путем изменения индуктивного сопротивления
дросселя. Коэффициент Е также может быть компенсирован
аналогичным способом, но обычно он бывает невелик.
Коэффициенты В и С по своей величине невелики и их не
уменьшают. При устранении коэффициента А и уменьшении ко-
эффициента D до 1 — Р/20 остаточная радиодевиация получается
2,5—3°.
98. ПРАКТИЧЕСКОЕ ВЫПОЛНЕНИЕ РАДИОПЕЛЕНГОВАНИЯ
При выборе радиомаяков для пеленгования следует, руковод-
ствуясь навигационным пособием, выбирать такие маяки, кото-
рые работают в одной группе. Тогда промежутки времени между
взятием пеленгов будут минимальны, так как все маяки в группе
работают на одной волне и по очереди один за другим. Сведения
о каждом радиомаяке выписывают на отдельный лист бумаги.
Лучше пеленговать радиомаяки, у которых дальность действия
больше, а следовательно, и мощность больше. Во избежание про-
маха, особенно в ночное время, а также для уменьшения ошибки
обсервации нужно брать пеленги трех ориентиров, не ограничи-
ваясь двумя. Перед пеленгованием необходимо проверить:
а) исправность и качество контактов соединительных шлан-
гов от антенны к гониометру;
б) исправность и герметичность экрана рамок;
в) как набиты штаги рамки; если набиты слабо, нужно их
подтянуть, чтобы рамка не вибрировала;
г) заземление;
д) открытую антенну (она не должна касаться частей судна).
366
После проверки настраивают приемник на нужную волну,
предварительно установив ручку регулятора громкости в положе-
ние, близкое к максимуму. Настроив точно пеленгатор на посто-
янную волну, регулятор громкости устанавливают в среднее по-
ложение и пеленгуют радиоориентир. При очень малом усилении
угол молчания искусственно увеличивается, что снижает точность
отсчета РКУ. При очень большом усилении помехи и шумы при-
емника получаются настолько сильными в срав!нении со слабым
сигналом радиомаяка, принимаемым «в положении минимума, что
точно определить границы угла молчания невозможно. Для того,
чтобы получить четкий минимум слышимости или границы угла
молчания, действуют ручкой гониометра и ручкой вариомет-
ра связи, добиваясь ослабления принимаемого сигнала и по-
лучения точного положения минимума. Добившись такого по-
ложения, снимают отсчет по лимбу. Если минимум расплыв-
чив, определяют границы угла молчания, рассчитывают его
величину 0 и у прибавляют к меньшему из отсчетов по лимбу.
Отсчет РКУ min + *7 и будет искомым РКУ- На этот РКУ из таб-
лицы девиации выбирают радиодевиацию и получают истинный
РКУ (ИРКУ)
ИРКУ = РКУ +
Истинный радиопеленг маяка рассчитывается по формуле
ИРП = ИК+ИРКУ
или
ИРП=ИК-\-РКУ/. (189)
Работая радиопеленгатором, в который вмонтирован репитер
гирокомпаса, нужно брать два отсчета в положении минимума
слышимости—по внешнему и по внутреннему лимбу, т. е. сни-
мать отсчеты радиокурсового угла и радиопеленга. В этом случае
также по РКУ выбирают радиодевиацию /, а истинный радиопе-
ленг рассчитывают по формуле ИРП = PIJ+f. Полученный таким
путем ИРП представляет собой угол между плоскостью истинно-
го меридиана и вертикальной плоскостью, проходящей через ан-
тенну радиопеленгатора и радиомаяк. На меркаторской карте
этот угол представляется как угол между изображением мери-
диана судна и ортодромией, проходящей через радиопеленгатор
и радиомаяк. В соответствии с этим полученный ИРП называется
ортодромическим.
§ 99. ЛИНИЯ РАВНЫХ ПЕЛЕНГОВ
Ортодромия пересекает каждый меридиан под различными уг-
лами.
С судна Ci измерен радиопеленг радиомаяка РМ, после ис-
правления радиодевиацией равный ИРП. ИРП — это угол между
мериданом судна и касательной к ортодромии, проходящей че-
367
рез судно и маяк. Нужно полагать, что на других меридианах
есть точки, в которых угол ИРП будет равен измеренному с суд-
на Сь Представив себе ряд других точек С2, С3, С4 и т. д., в кото-
рых ортодромические пеленги радиомаяка РМ равны, соединим
их плавной кривой (рис. 178). Геометрическое место точек, в ко-
торых ортодромические пеленги одного и того же маяка равны,
называется линией равных пеленгов. В связи с тем, что ортодро-
мический пеленг —это сферический угол между нордовой частью
истинного меридиана и ортодромией, проходящей через судно и
маяки, линией равных пеленгов называется геометрическое место
вершин постоянного сферического угла, стороны которого прохо-
дят через полюс и радиомаяк. Следовательно, изолинией судна/'
368
взявшего радиопеленг радиомаяка, будет кривая—линия рав-
ных пеленгов, которую называют также изоазимутой. Для целей
навигации можно считать, что линия равных пеленгов распола-
гается симметрично ортодромии по другую сторону локсодромии
и угол пересечения этих кривых равен углу схождения меридиа-
нов, проходящих через судно и маяк (рис. 179). Можно прибли*
женно считать, что локсодромия делит угол у пополам
^-=^=4'P'27sin<Pm-
Следовательно, имея ортодромический пеленг, можно исправить
его поправкой гр и получить пеленг локсодромический. Приведен-
24 Навигация 369
ная выше формула неточна, так как отрезок ортодромии на мер-
каторской карте принимается за часть дуги окружности. При
больших расстояниях между маяком и судном, в особенности в
высоких широтах, используется более точная формула ортодро-
мической поправки, выведенная Н. Н. Матусевичем в виде сходя-
щегося ряда:
♦ = ^sin ф. + [(ога/у + [ршу +
+ + (190)
Выборку величин ортодромии еских поправок с учетом высших
членов разложения проще производить на номограмме Маурера
(рис. 180). На номограмме по горизонтали вверху выбирается
широта места, с которого взят ортодромический пеленг <рь а по
вертикали — широта пеленгуемого ориентира Ф2- По широтам вы-
бираются в нижней части номограммы величины поправок Аф.
Эти поправки относятся к разностям долгот в 1°. Поэтому вели-
чина ортодромической поправки ф для заданной РД в градусах
рассчитывается по формуле
ф = ДфРД.
По исследованиям Маурера ошибка нахождения ф по номо-
грамме при РД = 25° не превышает 0°,1.
Знак ортодромической поправки зависит от взаимного поло-
жения радиопеленгатора и излучателя радиоволн и, кроме суще-
370
ствующих правил, может быть определен из рис. 181, где С— ра-
диопеленгатор, РМ — радиоизлучатель.
Линия равных пеленгов выражается уравнением кривой. Для
вывода этого уравнения рассмотрим рис. 182. В точке М располо-
жен радиомаяк с координатами <рж X», в точке С (<pc — судно,
взявшее радиопеленг этого маяка. Кривая, проходящая через
маяк, судной полюс — линия равных пеленгов. Линия ортодроми-
ческого пеленга и меридианы, проходящие через С и М, образу-
ют сферический треугольник Pn СМ, стороны которого: 90°— <рс,
90°—'<?„ и D. Угол у полюса равен РД=ЛМ— Хс, а у судна —
ИРП=АС, угол у маяка Дь
Применяя формулу четырех рядом лежащих элементов, полу-
чим уравнение линии равных пеленгов
ctg Ас sin РД = tg <рж cos q>e — sin фс cos РД. (191)
В этом уравнении связаны постоянные величины — параметры
АС=ИРП, ф„ и Хи с переменными величинами — текущими ко-
ординатами фе и Хс. Анализ уравнения показывает, что при
Ас=0= 180° уравнение превращается в уравнение большого кру-
га, т. е. линия равных пеленгов совпадает с меридианом радио-
маяка.
Задаваясь значением фе или и подставляя их в уравнение,
можно соответственно вычислить или фс, а по полученным
координатам нанести кривую равных пеленгов для определенного
радиомаяка. Для получения обсервации по радиопеленгам мож-
но не наносить изолинии, а провести касательные к изолини
ям, т. е. линии положения.
24*
371
Линия равных пеленгов .пересекает (меридиан судна под углом
К = ИРП+у, где y = 2ip —угол между ортодромией и линией рав-
ных пеленгов.
Локсодромию, проходящую через маяк и судно, линия равных
пеленгов .пересекает под углом ip.
§ 100. ПРОКЛАДКА РАДИОПЕЛЕНГОВ НА КАРТЕ
Получив ортодроммческий ИРП, судоводитель прежде всего
обращается к таблице ортодромической поправки (табл.
23 МТ-53). Из анализа этой таблицы следует:
а) в районе экватора ортодромическая поправка ничтожна и,
следовательно, линии ИРП, ИП и линия равных пеленгов сли-
ваются, поэтому полученный ИРП прокладывают как обычный
визуальный пеленг;
б) в средней широте <рт от 4 до 30° ортодромическая поправка
изменяется от 0 до 2°, при расстояниях между судном и радио-
маяком до 500 миль;
в) в средней широте <рт от 30 до 60° ортодроми-ческая поправ-
ка изменяется от 0 до 4° на расстояниях до 300 миль;
г) при средней широте от 60 до 80° поправка изменяется от
0 до 5° на расстояниях до радиомаяка около 100 миль.
Кроме того, чем ближе ИРП к 0 или 180°, тем меньше РД и
ортодромическая поправка. Выбрав поправку i|) и задавшись
ошибкой в линии положения Ал, можно рассчитать расстояние,
в пределах которого можно ИРП использовать как локсодроми-
ческий ИП
где g—модуль градиента направления.
_57°,3_ в д — Dnved .
6 D ’ П~ 57°,2 '
п _ Д л 57°,3
Uпред ф
В тех случаях, когда величина ip значительна, задача сводит-
ся к нанесению на карту линии положения—.касательной к ли-
нии равных пеленгов в какой-то точке К, которую называют оп-
ределяющей точкой. Методов нанесения линий положения в опре-
деляющей точке много. Но их можно разделить на две группы:
а) когда ориентир (радиомаяк) находится на карте;
б) когда радиоориентир за рамкой карты.
Рассмотрим некоторые из методов нанесения линий положе-
ния I группы.
1. Метод нормали к пеленгу. Метод прост и удовлетворяет
требованиям точности при условии, что ошибки счисления срав-
нительно малы. На меркаторской карте от радиомаяка М
372
(рис. 183) прокладывается локсодромический пеленг ИП =
=ИРП+t|>. Из счислимой точки на линию локсодромического пе-
ленга опускают перпендикуляр. Точка пересечения перпендику-
ляра с линией пеленга будет определяющей точкой К. Через эту
точку нужно провести касательную к линии равных пеленгов —
линию положения ааь Так как линию равных пеленгов не нано-
сят на карту, то линию положения проводят под углом хр к линии
локсодромического пеленга. Линию положения можно провести
под углом R к меридиану (АО у
R = HJ7+ $ = ИРП-\-2ty. (192)
Знак ортодромической поправки я|> определяется по величине
ИРП. В северном полушарии, если ИРГКЛЫР ставится знак
плюс, если ИРП>\Ш‘—минус, в южном полушарии наоборот.
2. Метод параллели или меридиана основан на нахождении
определяющей точки на счислимом меридиане или на счислимой
параллели в зависимости от величины ИП. Если ИП в четверт-
ном счете больше 45°, то линия пеленга пересекает счислимый ме-
ридиан под большим углом, чем параллель, поэтому определяю-
щая точка выбирается на счислимом меридиане. Если ИП мень-
ше 45°, определяющая точка выбирается на счислимой парал-
лели. Для построения линии положения применяется следующий
порядок (рис. 184):
а) рассчитывают ИП=ИРП+^ и прокладывают его на карте
через маяк;
373
б) через счислимую точку С «проводят мерэдиан и параллель;
в) выбирают определяющую точку /С в зависимости от вели-
чины ИП\
г) через определяющую точку К проводят линию положения
по направлению R = HIJ+ty.
Рис. 185
3. Метод азимута. Определяющая точка К выбрана на локсо-
дромическом пеленге в точке пересечения его прямой, проведен-
ной из счислимой точки под углом t к счис1Л1И1мому меридиану
/ = ЯР/7+2'ф±90°, что видно из рис. 185. Построение линии поло-
374
жения на меркаторской карте производится в следующем по-
рядке:
а) рассчитывается локсодромический пеленг маяка
ИП = ИРП-]-^
б) через точку радиомаяка прокладывается локсодромиче-
ский пеленг ИП;
в) из счислимого места С откладывается направление t. При
этом, если счислимая точка расположена в направлении по часо-
вой стрелке от проложенного ИП, в формулу подставляется +90°,
если против часовой стрелки — 90°;
г) точка пересечения локсодромического пеленга и проложен-
ной прямой СК является определяющей точкой К. через которую
проводится линия положения аа} по направлению /? = Я77+ф.
Выбрав какой-либо из методов, судоводитель прокладывает
две или три линии положения по одновременно измеренным ра-
диопеленгам и в точке пересечения их считает свое место. Имея
карту мелкого масштаба, построение линий положения произво-
дят на листе бумаги в выбранном масштабе. Если невязка между
счислимым местом и обсервованным велика, принимают обсерво-
ванное место за счислимое и вновь наносят линии положения.
Этим приемом исключается основной недостаток всех методов —
зависимость определяющей точки от точности счислимого места.
При рассмотрении методов нанесения' линии положения за
изолинию принимались линии равных пеленгов, т. е. предполага-
лось, что с судна пеленгуется радиомаяк. Для тех случаев, когда
судовую радиостанцию пеленгует радиопеленгаторная станция,
изолинией будет ортодромия, и линия положения проводится ка-
сательной к ней. При этом линия положения ортодромии соста-
вит угол, равный 2ф с линией положения изоазимуты.
К недостаткам приведенных выше методов следует отнести
то, что нахождение определяющей точки К требует, чтобы радио-
маяк находился на данной карте.
Разобранные методы, а также другие, аналогичные им, при-
меняются на так называемых средних расстояниях до радиомая-
ков, которые считаются от 100 до 200 миль в зависимости от ве-
личины фт.
§ 101. ПРОКЛАДКА ЛИНИИ ПОЛОЖЕНИЯ В СЛУЧАЕ,
КОГДА РАДИОМАЯК НАХОДИТСЯ ЗА РАМКОЙ КАРТЫ
Если радиомаяк находится за рамкой карты, то для нанесения
определяющей точки производятся расчеты координат этой точ-
ки. Методов вычисления много. Рассмотрим некоторые из них.
Метод расчета ср* или Этот метод дает возможность в за-
висимости от величины ИП рассчитать или широту , в которой
пересекается счислимый меридиан с ИП, или долготу Ъс, где пе-
ресекается параллель. Точка пересечения является определяю-
щей точкой К.
375
Допустим, радиомаяк находится в точке М за рамкой карты
и известны его координаты, а в точке С—счислимое место суд-
на. Локсодромический пеленг ИП = ИРП+^ образует треуголь-
ник МКМ{ (рис. 186). Из прямоугольного треугольника
получим
РМЧ = РДс1ёИП9
где
рд = \м-\с.
В зависимости от величины ИП, полученную РМЧ прибавля-
ют или вычитают из меридиональной части радиомаяка, которую
•выбирают из табл. 26 МТ-53, входя в нее с аргументом <?м и по-
лучают меридиональную часть определяющей точки Л. Обрат-
ным входом в табл. 26 МТ-53 выбирают широту определяющей
точки, через которую проводят линию положения.
Если точку К удобнее определить на параллели, то рассчиты-
вают РМЧ = МЧс-МЧм.
Величину МЧС и МЧм по широте маяка и счислимой широте
судна выбирают из таблицы (рис. 187). По формуле
РД = РМЧЛ%ИП
рассчитывают разность долгот между долготой радиомаяка и оп-
ределяющей точкой /С Долготу точки Л вычисляют по формуле
к=^м±рд
и откладывают на счислимой параллели, а через точку Л прово-
дят линию положения. Недостаток этого метода, заключающий-
ся в том, что ортодромическая поправка ф выбирается для счис-
376
лимой точки, может быть устранен, если полученную обсервован-
ную по двум или трем пеленгам точку принять за счислимую и
повторить решение задачи.
Метод, предложенный А. П. Ковалевым, заключается в том,
что на рамку карты наносятся вспомогательные точки, локсодро-
мический пеленг которых бу-
дет равен измеренному. До-
стоинством метода являет-
ся то, что расчетные вспомо-
гательные точки могут быть
нанесены на рамках карт
заблаговременно и судово-
дитель использует карту так
же, как карту с нанесенны-
ми на ней радиомаяками.
Метод имеет два варианта—
смещения и отражения.
Рассмотрим вариант смеще-
ния.
Радиомаяк, координаты
которого выбраны из нави-
гационного пособия, может
находиться за боковой рам-
кой карты, под нижней или
над верхней рамкой карты и
за рамкой карты; когда его
меридиан и параллель не
проходят через карту. В со-
ответствии с расположением
радиомаяка относительно
района карты, наносятся
вспомогательные точки.
а) Ориентир за боковой рамкой карты. Меридиан ближней
к радиомаяку М рамки карты принимается за меридиан услов-
ного места радиомаяка, на котором, зная широту радиомаяка
наносится точка М\ (рис. 188Л). Через точку Мх проводится
параллель маяка и на ней откладывается внутрь карты расстоя-
ние МЛо, равное разности долгот радиомаяка и меридиана точки
РД=КМ— . Через точку Ко проводится вспомогательный
меридиан. Карта подготовлена к прокладке, на ней нанесены
линии локсодромических пеленгов радиомаяка, находящегося за
рамкой карты.
Получив ИРП радиомаяка, ортодромической поправкой пере-
водят его в локсодромический
ИП = ИРП + ^,
который откладывают от точки М1г и линию пеленга проводят до
меридиана точки Ко, в пересечении с ним получают точку К'.
377
Сняв с карты измерителем РШ, на меридиане от точки Ло в том
же направлении откладывают удвоенную разность широт 2РШ,
получая точку Ль Иногда вместо точки К\ на смещенном мери-
диане наносят на рамке карты точку К в расстоянии
М1К=К0К\
Через точку Ki или Л проводят линию ИП, которая пройдет так-
же через радиомаяк М за рамкой карты. Справедливость этого
вытекает из рассмотрения треугольников
ММгК, МуК^К' и МК.Ку.
б) Ориентир за горизонтальной рамкой карты. Параллель
ближней к радиомаяку рамки карты принимается за параллель
условного места радиомаяка, за которой, зная долготу радио-
маяка, наносится точка Afi (рис. 188,В). Через точку Мх прово-
дится меридиан радиомаяка. По табл. 26 МТ-53, по аргументам
<рЖ1 выбираются меридиональные части DM и DMi и рассчи-
тывается разность меридиональных частей
PM4 = DM — DM1.
От точки Mi по меридиану внутрь карты откладывается РМЧ
в масштабе долгот карты. Получив точку Ко, через нее проводим
вспомогательную параллель. Прокладка пеленга производится
аналогично первому случаю с той лишь разницей, что точка Ki
наносится на параллели по расстоянию равному удвоенной
разности долгот между точками Ко и Ль
378
ib) Меридиан ,и параллель радиомаяка не проходят через кар-
ту. Ближайший к радиомаяку М угол карты принимается за ус-
ловное место радиомаяка Mi (рис. 188,С). Зная широту и дол-
готу радиомаяка (из навигационного пособия «Радиотехнические
средства навигационного оборудования»), рассчитывается раз-
ность долгот и разность меридиональных частей точек М и Mi
РД = \-^
PM4 = DM — DMl.
Пользуясь масштабом долгот, по РД и РМЧ на карте наносится
вспомогательная точка До, через которую проводится вспомога-
тельная параллель и меридиан. Получив ИП, откладывают его
от точки Mi. Линия локсодромического пеленга пересечет или
меридиан в точке Д, или параллель в точке Д'. Далее поступают
так, как описано в первых двух случаях. В случае, если радио-
ориентир расположен далеко за рамкой карты, т. е. если РД или
РМЧ велики, то при подготовке карты нужно вспомогательные
построения выполнить в уменьшенном масштабе по сравнению с
масштабом карты. Следовательно, точность решения задачи
уменьшится, так как такое построение равнозначно уменьшению
масштаба карты.
Допустим, что радиомаяк М расположен за боковой рамкой
карты.
По широте радиомаяка наносим на боковую рамку карты
условное место радиомаяка — точку Mi (рис. 189). Разность дол-
гот радиомаяка и боковой рамки карты велика по сравнению с
горизонтальной рамкой карты. Уменьшим рассчитанную РД в
два раза (если нужно, то в три или четыре раза — в зависимости
от соотношения РД и горизонтальной рамки карты). По парал-
379
РД
лели радиомаяка отложим уменьшенную разность долгот -%
и получим точку /Со, через которую проводим линию смещенного
меридиана. Вспомогательный пеленг проведем обычным поряд-
ком и найдем точку К'. Для нахождения определяющей точки ZCi
расстояние КоК увеличим в 2 раза (или 3—4 раза в зависимости
от того, во сколько раз уменьшилась РД) и отложим его от точки
К' по смещенному меридиану.
§ 102. ИСПОЛЬЗОВАНИЕ КАРТ В ГНОМОНИЧЕСКОЙ ПРОЕКЦИИ
ДЛЯ ПРОКЛАДКИ РАДИОПЕЛЕНГОВ
На гномонической карте ортодромия изображается прямой
линией. Это свойство гномонической проекции используется для
нанесения радиопеленгов. Если пеленг взят радиопеленгаторной
станцией на судно, то линия положения на гномонической карте
изобразится прямой. Нахождение места судна сводится к нане-
сению двух-трех ортодромических пеленгов, полученных с радио-
пеленгаторной станции. В гномонической проекции углы иска-
жаются пропорционально косинусу расстояния от точки касания
картинной плоскости до данной точки. Практически поверхность
земного шара изображается без искажения в районе, описанном
вокруг точки касания, окружностью радиусом около 500 миль. За
пределами этого района искажение углов увеличив1ается. Это
должно быть учтено. Поэтому на гномонических картах, в местах
расположения радиопеленгаторных станций, наносятся специ-
альные искаженные картушки с введенной поправкой пеленга за
счет искажения углов на гномонической карте. Ортодромический
пеленг в таком случае прокладывается не по транспортиру, а по
картушке. Если картинная плоскость касается земного шара в
в точке Z, радиопеленгаторная станция — в точке R и запеленго-
ванное судно в точке В, то судно находится на линии положе-
ния — ортодромии RB, изображенной на гномонической карте
прямой rb. Тогда ортодромический пеленг судна PRB=A
(рис. 190). Меридиан радиопеленгаторной станции на гномониче-
ской проекции изобразится прямой рг. Ортодромическому пелен-
гу на сфере А на проекции будет соответствовать угол prb = a.
Обозначим постоянные для данной проекции и радиопеленгатор-
ной станции углы: угол на сфере PRZ через ю, а угол на проек-
ции соответственно prZ через ф. Эти углы связаны уравнением
tg ср = tg ш cos ZR,
где cos RZ вычисляется из сферического треугольника PRZ по
формуле, связывающей три стороны и угол против искомой сто-
роны
cos ZR = 31*Пф/? sin ф^ + cos<PflCOS<p^cos(Xz — X/?). (193)
Угол со рассчитывается из того же треугольника по формуле
четырех рядом лежащих элементов
ctg to = tg фя соэфяcosec (Xz — XR) sinф^ ctg(Xz — X^). (194)
380
Рис. 191
Направление ортодромии на гномонической проекции относитель-
но направления на точку касания определится углом 6rZ = 0, ко-
торый вычисляется по формуле
tg р = tg (<о — А) cos Z/?,
но
р = ф — а,
тогда
tg (Ф — а)= tg (ш — )cos ZR. (195)
Задавая различные значения углу А (1, 2 и т. д.), вычисляют
'Соответствующее значение угла а на гномонической карте, кото-
рые откладывают от меридиана радиопеленгаторной станции от О
Рис. 192
до 360°, получая таким образом искаженную картушку для дан-
ной радиопеленгаторной станции (рис. 191). Если взяты пеленги
с судна на радиомаяки, расположенные не далее чем 500 миль,
прокладка ортодромических пеленгов для получения обсервации
производится так: от нордовой части меридиана счислимой точки
через счислимую точку С (рис. 192) прокладываются ИРП мая-
ков, затем через маяки проводятся линии, параллельные линиям
пеленгов. Проведенные линии будут ортодромиями, проходящи-
ми через судно и'маяки под заданным углом ИРП. Точка пересе-
382
чания даух или трех ортодромий будет обсервованным местом,
координаты которого снимаются с гномонической карты. По ним
наносится обсервация на карте меркаторской проекции. Если не-
вязка счислимого и обсервованного места большая, особенно по
долготе, нужно принять обсервованную точку за счислимую и
повторить прокладку от этой точки и ее (меридиана.
Для навигационных целей издаются гномонические карты-сет-
ки, на которых нанесены (меридианы и параллели. На этих кар-
тах параллели обозначены, а меридианы нет. Поэтому они могут
быть использованы в любых выбранных долготах, но для опреде-
ленной широты в северном и южном полушарии.
Точка касания картинной плоскости такой сетки находится в
точке пересечения центрального меридиана и средней параллели.
Между точками касания двух сеток— 5° по широте. Каждая кар-
та-сетка охватывает по широте пояс в 15°, перекрывая одна дру-
гую. Масштаб сеток 25 миль в дюйме. Для использования сетки
центральный меридиан ее принимается за счислимый, а осталь-
ным меридианам присваиваются соответствующие значения дол-
гот. По счислимой широте на центральном меридиане наносится
счислимая точка С. По координатам радиомаяков наносятся на
сетку маяки Л/г, Л/ь Л/3. Нанесение обсервации производится так,
как было указано выше.
§ 103. ПРОКЛАДКА ЛИНИЙ ПОЛОЖЕНИЯ
ОТ СЧИСЛИМОГО МЕСТА СУДНА
Для прокладки линий положения можно использовать счисли-
мое место судна.
1. В счислимой точке С счислимый ИРПС маяка М (рис. 193 i
отличается от измеренного ИРП$ на величину А П
ЬПИ=РПС — ИРП^
Поэтому линия положения пройдет не через точку С, а через
определяющую точку К. Величина смещения линии положения л
может быть рассчитана из сферического треугольника С КМ
sinn _ sin Д/7
sin De sin (90° — т) '
тогда
sin n = sin Dc sin Д П sec 7.
Величина n — небольшая и можно sin и заменить углом и, кото-
рый практически выражается в минутах; величина Dc на рас-
стоянии 300 миль будет 5° и sin Dc можно заменить Dc. Тогда
sin Д/7 sec 7,
где 7 — угол схождения меридианов также мал и sec у можно
принять равным единице. (Если у = 8°, то sec у= 1,01),
тогда получим приближенную формулу
n = JDcsin Д/7. (196)
383
Считая, что ортодромическая поправка в счислимой точке Сив
точке К одинакова
ИРП с + ^ = ИГ1С\
ИРП0 + $ = ИП0,
тогда
Счислимый истинный пеленг можно вычислить по формуле
1%ИПе= рмч .
Расстояние от счислимой точки до радиомаяка Dc рассчитыва-
ется по формуле
Dе = РШ sec ИПс'
Вычисление величины n=Dc sin А П лучше делать по лога-
рифмам. Из рис. 194 видно, что угол РК.Н, который обозначим че-
рез t, представляет собой направление смещения линии положе-
ния и равен
1 = ИРП0 + 1 ± 90°.
Если ИП0.больше ИПС, то в формуле берется +90°, а если мень-
ше, то —90°. Рассчитав направление t и перенос п, наносят опре-
384
деляющую точку Kt через которую перпендикулярно направле-
нию проводят линию положения.
2. Метод базируется на использовании градиента линии рав-
ных пеленгов. Линия равных пеленгов, проходящая через счи-
слимую точку С, является функцией счислимого пеленга радио-
маяка. Линии положения, касательные к изолиниям, перпенди-
кулярны градиенту. Следовательно, зная направление смещения
Рис. 194
или азимут t и величину смещения линии положения Ап, можно
от счислимой точки проложить направление и, отложив по нему
смещение линии положения Ап, провести линию положения
(рис. 194). Смещение линии положения Ап пропорционально
изменению функции. Изменением пеленга является разность счи-
слимого ИРПе и обсервованного ИРПо, т. е.
ДП= ИРПъ - ИРП€.
Величину ИРПС можно определить из уравнения изоазимуты
(191), представив его в таком виде
ctg Ас = tg<p м cos фе cosec (Х„ — Хе) — sin ctg (Хж - Хе),
или, используя формулы письменного счисления, можем рассчи-
тать ИПе, из которого получим ИРПе
ИРГ1е = ИПе - ф;
t%nne= РмЧ,
где
РД = Х,-Хе;
PM4 = D„ — Dc.
Найденная ИПС получится в четвертном счете.
25 Навигация 385
Итак, вмещение линии положения
где g —градиент линии равных пеленгов
___ $\пИРП в
S’— tgd ’
d—сферический перпендикуляр, вычисленный по формуле
sin d = sin РД cos <р е.
Подставив значение модуля градиента, получим
A/i — sin ИРП •
Направление смещения линии положения
I = ИРПй 4- 2<|» ± 90°
является перпендикуляром к линии положения. Причем, если АП
положительно, в формуле принимается — 90°, а если АП отрица-
тельно, то +90°. Величины Ап и t называются элементами линии
положения.
Элементы линии положения могут быть найдены и другими
способами, в частности с помощью «Таблиц для определения мес-
та корабля по радиопеленгам», «Таблиц письменного счисления»,
табл. 26 и 27 МТ-53 и по табл. ТВА-57.
3. «Таблицы для определения места судна по радиопеленгам»
составлены Б. Д. Яшиным. Для составления таблиц сферический
треугольник РСМ, образованный счислимым меридианом, мери-
дианом наблюдателя и ортодромией, проходящей через счисли-
мое место и радиомаяк, разделен на два прямоугольных сфери-
ческих треугольника.
Решаются треугольники по формулам, вытекающим из
рис. 195.
ctg^ctgq^cosA#;
sin d = cos фс sin РД;
ctgAi = sln<pftgP4;
ig^2- slnrf ,
ЬП = ИРП—ПС-,
t=Ai,
____bntgd
sin/b‘
386
Величина t получается по At, определяемому по второй части
таблиц, а величина п по пропорциональной номограмме, поме-
Аргументами для входа в таблицы служат счислимая широта
<₽<., широта радиомаяка <ржи разность долгот . При
пользовании рекомендуется следующий порядок работы:
а) вычисл ить ДХ=Км — ;
б) по аргументам <рс и ДХ из первой части выбрать значение
у, A, d\
в) вычислить у—фл,;
г) по аргументам d и у—<рл и3 второй части выбрать At=t\
д) рассчитать Пс =Ai+A2 и А.П=ИРП—Пс ;
е) по величинам Д/7, d и Пс, пользуясь номограммой, опреде-
лить л;
ж) из счислимой точки С провести линию под углом t и по
ней от точки С отложить п морских миль, отметив точку К;
з) через точку К провести линию положения, перпендикуляр-
но к прямой СК.
Таблицы можно использовать для расстояний свыше 300 миль
до радиомаяка.
4. Таблицы ТВА-1957 составлены при делении сфери-
ческого треугольника РСМ на два прямоугольных (рис. 196).
25*
387
Для работы с таблицами не требуется интерполяция, что особен-
но ценно, когда судно находится в плавании. Перенос п рассчи-
Прологарифмировав формулу и применив условные обозначения
преобразованных функций tg и sec, принятые в ТВА-57, получим
Т{п)= Т(РС) + Т(ИРП' - Пс)— Т(Пс) + S(n'c),
где Ре—длина сферического перпендикуляра, который делит
треугольник на два прямоугольных;
Ре—рассчитывается по формулам
7'(х)=7'(Фс) + 5(Лк);
T(Pe)=T{&)-S(x).
Углы Oi и аг, составляющие Пе, вычисляются по формулам
5(а1)=7’(90°-Рс)-Г(Фс);
Г(а2) = 5(90°-Ре) + 7(х~фл).
П'с = а-! + а2— если судно находится к W от радиомаяка;
П'е =360° — (о, + о2)— если судно к Ost от радиомаяка, знак •
между Oi и аг берется плюс, если Р(
проходит внутри треугольника РСМ
(х>Фл<), и минус, если вне его (х<фл).
388
Если 77' <180° — направление переноса t=a2i если 77* >180® —
7=180°—аг.
§ 104. ТОЧНОСТЬ ОБСЕРВАЦИИ,
ПОЛУЧЕННОЙ ПО РАДИОПЕЛЕНГАМ
Радиопеленги радиомаяков измеряются не в быстрой после-
довательности один за другим, а со значительными интервалами
между измерениями. Для исключения ошибки в обсервации, все
полученные радиопеленгованием линии положения приводятся к
одному моменту. Поэтому при взятии радиопеленга необходимо
замечать время Т и отсчет лага ОЛ, рассчитывать 5Л =Р0Л Кл
и, зная элементы линии положения ли/, перенести линии поло-
жения в счислимую точку, из которой измерялся последний ра-
диопеленг, соблюдая при этом параллельность. Случайные ошиб-
ки радиопеленгования не зависят друг от друга и, накладываясь
одна на другую, дают среднюю квадратическую ошибку радио-
пеленга.
Средняя квадратическая ошибка обсервации по двум радио-
пеленгам рассчитывается по формуле
М = Ч—4-я- V ml -4- ml,
где
____ mu ,____________ mu
ftl-t— "г* » *
&ИРП, &ИРП*
В этих формулах
sin ИРПХ sin ИРП2
Snpnt= tgdi ; ёирп=—
Подставив их значения в общую формулу, получим
м - ± S(тйл7,)!. <197<
где mtt — средняя квадратическая ошибка пеленгования, равная
для обоих измерений;
<71 и d2 — сферический перпендикуляр, рассчитываемый по фор-
муле
sin d = cos <рс sin РД.
Формула (197) громоздка, для оценки качества обсервации
можно принять
_ 57°,3 _ 57°.3
Dt •
Тогда получим
(198)
Обозначив ______
= * » -^УеИ + Я-м,,
389
получим
М = ± /(/Ир
(199)
Для К и Mi составлены табл. 17 и 18 соответственно дающие
возможность быстро оценить точность обсервации
Для К Таблица 17
9 10° 20° 30° 40° 50° 60° 70° 80* 90°
0°,5 2,9 1.5 1,0 0,8 0,6 0,6 0,5 0,5 0,5
0°,8 4,6 2,3 1,6 1,2 1,0 0,9 0,8 0,8 0,’8
1°,0 5,8 2,9 2,0 1.6 1,3 1,2 1,1 1,0 1,0
1°,5 8,6 4,4 3,0 2,3 2,0 1.7 1,6 1,5 1,5
2°,0 11,5 5,8 4,0 3,1 2,6 2,3 2,1 2,0 2,0
3°,0 17,3 8,7 6,0 4,7 3,9 3,5 3,2 3,0 3,0
Для М 1 Таблица 18
X Ч - X Q Я 10 20 30 40 60 80 1С0| 120 140 160 180 200 250 300 350 400
10 0,2 0,4 0,6 0.7 1,1 1,4 1,8 2,1 2,5 2,8 3,2 3,5 4,4 5,3 6,1 7,0
20 0,4 0,6 0,8 Ml 1,4 1,8 2,1 2,5 2,8 3,2 3,5 4,4 5,3 6,1 7,0
30 0,7 0,9 1,2 1,5 1,8 2,2 2,5 2,8 3,2 3,5 4,4 5,3 6,1 7,0
40 1,0 1,3 1,6 1,9 2,2 2,5 2,9 3,2 3,6 4,4 5,3 6,2 7,0
60 1,4 1,8 2,0 2,3 2,7 3,0 3,3 3,7 4,5 5,3 6,2 7,1
80 2,0 2.2 2,5 2,8 3,1 3,4 3,8 4,6 5,4 6,3 7,2
100 2,5 2,7 3,0 3,3 3,6 3,9 4,7 5,5 6,4 7,2
120 2,8 3,2 3,5 3,8 4,1 4,8 5,7 6.5 7,3
140 3,5 3,7 4,0 4,3 5,0 5,8 6,6 7,3
£)э, мили 160 4,0 4,2 4,5 5,2 5,9 6,7 7,5
180 4,5 4,7 5,4 6,1 6,9 7,7
200 5,0 5,6 6,3 7,0 7,8
250 6,2 6,8 7,5 8,2
300 7,4 8,0 8,7
350 8,6 9,3
400 9,9
Выбрав из таблиц значение К и Мь их значения перемножают
и получают среднюю квадратическую ошибку обсервации М. Ра-
диусам М из точки пересечения радиопеленгов описывают окруж-
ность. Это будет круг вероятного местонахождения судна. Веро-
ятность того, что судно находится в этом круге, равна около
68%. Недостаток такой оценки точности заключается в следую-
щем:
а) б круг вероятного местонахождения входят районы, в ко-
торых нахождение судна .маловероятно, так как в круге одна и та
же ошибка по разным направлениям имеет разную вероятность;
б) получив круг вероятного местонахождения, нельзя судить
о том, в каком направлении совершена большая ошибка, в ка-
ком меньшая.
390
При оценке точное™ обсервации средним квадратическим эл-
липсом эти недостатки отсутствуют, хотя понижается вероятность
нахождения судна в эллипсе до 39,3%. Эллипс можно построить,
рассчитав смещение линий положения
1 gl 2 gi
gl =
57°,3 .
gt =
Произведя подстановку, получим
57°,3
Da *
ДП]
57°,3 ’
Дп2 =
m„Dt
57°,3 •
На карте или листе бумаги прокладываются линии положения
(рис. 197,а) на расстоянии Д/и и Д^2- Справа и слева от них, про-
кладываются параллельные прямые, которые образуют паралле-
L
Рис. 197
лограмм, в который вписывают эллипс с расчетом, чтобы в точ-
ках ABCD он был касательным. Диагонали параллелограмма
эллипс пересекает в расстояниях от обсервованной точки, рав-
ных 7/10 их длины. Эллипс можно построить, рассчитав векто-
риальные ошибки обсервации по формулам
1 sin О ' sinfl
391
Подставив значения A«i и Лпг, получим
= = ,7omoa°.an й. (200)
1 5/ ,3-sin 0 ’ я 57 ,3*sin □ v '
Отложив на линиях положения значения т\ и /п2, из конца
большей векториальной ошибки Л4 опускают перпендикуляр на
меньшую векториальную ошибку (рис. 197,6). По этому перпен-
дикуляру от точки М откладываются отрезки, равные меньшей
векториальной ошибке. Концы этих отрезков К и L соединяются
с обсервованным местом Р. Тогда отрезок PL=a + b—сумма по-
луосей эллипса, —b — их разность. Направление большой
оси эллипса пройдет по биссектрисе угла LPK. Имея сумму и
разность полуосей, снятую с карты или с чертежа, складывая и
вычитая уравнения, получим а и Ь. Значение а откладывают от
точки Р по биссектрисе угла LPK, а b — по направлению, перпен-
дикулярному биссектрисе. Полуэллипс должен пройти через точ-
ки М, Д, ЛГ, В, В{..
Построив эллипс ошибок, судоводитель видит, в каком на-
правлении положение обсервованной точки определено лучше,
в каком хуже, зная, что по всем направлениям вероятность оди-
накова.
ПРИМЕРЫ
1. 15 мая 1960 г. взяли серию РКУ и КУ через 45°. Средняя осадка суд-
на 9,2 м, оно находилось в пределах видимости плавучего радиомаяка, ра-
ботающего на волне 1000 м. По данным измерений РКУ и КУ составить таб-
лицу радиодевиации через 10°.
Решение, а) Результаты измерений внесем в таблицу
№ Время, час, мин РКУ, ° Визуальный КУ f
1 10.00 0 1° п/б +1°о
2 10.15 45 43° п/б —2°,и
3 10.30 90 91° п/б + 1°,0
4 10.45 135 138° п/б +з°,0
5 11.00 180 179°,2 л/б +0°,8
6 11.15 225 137е л/б —2°,6
7 11.30 270 89°, 1 л/б +0°,9
8 11.45 315 42е л/б 4-3°,0
6J Девиацию f рассчитаем по формуле
/=КУ—РКУ.
результаты внесем в графу /;
в) На миллиметровой бумаге построим кривую девиации. Затем ось
абсцисс делим на отрезки по 10° (приблизительно 5,55 мм). Проведем орди-
наты через точки и снимем с чертежа их значения, которые внесем в рабочую
таблицу радиодевиации (рис. 198)
392
Волна 1000 м 15 мая 1960 г. Осадка средняя 9,2 м
f РЛУ, ° f
+ 1°,о 360 0 4-1°,0
4-1°,6 350 10 —0°.1
+2°,3 340 20 —0°,9
+2°,7 330 30 —Г,6
+2°,9 320 40 —1°,9
+2°,9 310 50 —1°,9
+2°,7 300 60 ' —1°,6
4-2°,4 290 70 —1°,2
+ 1°,6 280 80 —0°,0
4-1°.О 270 90 4-1°.о
—0°,6 260 1С0 4-1 °, 6
—2°,0 250 110 4-2°,2
-2°,4 240 120 4-2°,6
—2°,5 130 130 4-2°,8
—2°,5 220 140 4-2°.6
—2°,4 210 150 4-2°,6
—1°,9 200 160 +2°,2
—С°,9 190 170 4-1°,6
4-0°,9 180 180 +0°,9
2. На различных РКУ определена радиодевиация. Определить коэффи-
циенты радиодевиации, если:
f РКУ, ° f
+2° 0 180 0°
+8°,5 45 225 +6°, 5
о° ; ; 90 270 0°
—5° 135 315 - 4’
Решение этой задачи приведено в табл. 16 стр. 365 и не требует коммен-
тарий и разъяснений.
3. Рассчитать рабочую таблицу радиодевиации через 10°, если даны
коэффициенты радиодевиации:
Я=+0°,3, D=+6°, Е==0°,5, Д= + 1°,0, В=+0°,3, С=+0°,9.
393
0 10 20 30 40 50 60 70 80 90 100 110 120 130 140 150 160 170 РКУ
Illi 1 1 I 1 о о О р о р о о о о о о р о о р р о Ъ b bo w со bo с сл он со оо со со до со сп КЭСлСПЮКООСлКЭ ЮСлОКЭКЭОСлКЭ sin 4 q 1 5: II + О со
1 1 1 1 + + + + 1111 оооооооо ( о о о о р о р р | *Н- к) к) к> к) к- ~гО ко к- к- ГО ГО к- СОС0ООООО«О ООООООСОСО Н sin 4 q
1 1 1 1 1 1 1 1 о р о о о р о о о р р р р о р р о о w О оо "'О «о оо о со w О> оо b Ь оо о са ААСПООООСПАА д^ооооооод^ ГОГООСлСлОГОКЭ КОКЭО>СлСЛОГОКЭ sin 2 q II + О! О ьо
1 1 1 1 1 1 1 1 ю а сл сл сл сл а ю 4» сп сл сл сл a ni 1 О W к СО ОО СО О О СО к- 00 00 к- ко ’о СЛСлСлсОСОСлСлСл СлСлСлсОсОСлСлСл D sin 2 q
++++IIIIIIIII „ „ О О О О О О Р со •—1 Р р р р р р р р — Ъ к сл к к сл к £ о к> сл к к- сд “< 1о О О А А о о S So cos 2 q Гц II + о Си СО
+++IIIIIIIIII++II+ о о о о о о о р g о р р р р р р р р к* СО ко О о ГО со к* к ОО Ю О О ко СО к* Сл ЧООСлООСЛСОЧ ЧСОСлСООСлООЧ E cos 2 q
1 1 1 1 1 1 1 1 l+ + + +^+l+ + Р со 4^ jA >А 4^ СО — g ГО 4А р р р <J Р СО W— Ч к) к к) ОО к к. к Со СП СП О 00 СП О kq Сл -4 СП СП ОО А А А О ОО Д О О> КЗ <— О 1+24-34-A + о 4^
о о о о о о о р *—* р р р р р р р р о к W Сл Ь к ср Ъ <о Ъ Ь ’оо к О) СЛ W к -Ч >А 4^ СП СП 4^ 00 ОО 4А О Со *А 4^ ГО КЗ СП СП о СП СП О <3> СП оо ГО А sin q Ои II + о со Сл
ОООрОрООрррррт-ррр Г о к к к к) ю к) gj со к к) к) к) b к к р | Сл<—‘СлсОСОСПОООООООСПСО СП <—‘ СП В sin q
1 1 1 1 1 1 1 1 р р р р р р р р о р р р р о р р р *— СО ко 00 ко О» СП ср к- к Со Сл Ь к оо <р о ОО А о с: 4^ -4 ЧА 4^- О О •£ Оо СП О СП СП ГО ГО А 4^ ГО ГО СП СП О Сл cos q CJ II + о О СО О
IIIIIIII ++++++ оооооооо | ооооооррр s а а а а £ s s а ’& а '8 a g g ° C cos q
1 । 1 1 1 1 I + I+ + 4- + + + + 4-4- о о о о о о о р о орррррррр 'оо "к) кп ся се к- о к- со кл kj оо оо со ко ср со нА GJ 1Л <O CJ А ОСО1-1" 00 нА СП 4^ Сл + О о
§gggg§sggss§g£o83o 00
1 1 1 1 1 1 1 |+ + + + + + + + -4- + *-» 4А р pi р 4^ р “ р р р р <> р 00 <J 4^ ГО СП О 00 "к* ГО СО Си со 00 00 ГО СО Си О СП О 4*
СОСОСОСОСОСОКЭКЭЮМГОКЭГО^КЭКОЬ- — 8§g§5§SgoSSS88S§gg СО
1 I 1 1 | 1 1 1 + + + + + + + + + + о ко со Фь С0-— рго^ФъСпррсльэр к ъ э А Ь О А Ъ к О к к) о ГО О к- со СП г
Таблица 19
Решение. Эта задача решается по табл. 19, которая заполняется по
ходу решения. Графы 8 н 9 выписывают отдельно и вывешивают в штурман-
ской рубке.
4. Карта ГУ 2553. Следуя ЛЛг=330в, АГЛ=—2° в счислимой точке
<Pc=58°40'N, Ас = 1°08,0 Ost взяли радиопеленг радиомаяков Утвер РКУ=
=82° и Фейестейн РКУ=116°. Определить координаты обсервовэнной точки.
Решение, а) Используем метод азимута. Снимем с карты РД и рас-
считаем среднюю широту
РД = 3°4, к O8t РД = 4°,4 к Ost
_5„. ф„-58"'7 + 58^-58-.8;
б) Из табл. 23 МТ-53 выберем ортодромические поправки
<Pi = +l°,5; ф2= + 1°,8;
в) С РКУ войдем в табл. 15, выберем радиодевиацию fi = +il°,8, —
==—2°,4 и рассчитаем ИРП
ИРП = РКУ + ККг + ЬГК+/
РКУХ = 82° РЛГУ2=116°
ККг= 330° ККг= 330°
ДГК= —2° ЬГК----2°
Л= + 1°,8 /2= -2°,4
ИРП! = 51°,8 ИРП2 = 81°,6
г) Рассчитаем локсодромический пеленг
ИП = ИРП+^
ИРПХ = 51°,8 ИРПъ = 81°,6
Ф1= + 1»5 Фг=с=+ U8
//Z7i=53°,3 Л//72 = 83°,4
Отрезки пеленгов проведем на карте вблизи счислимого места;
д) Рассчитаем угол t
t = HPn+2^ ±90°
ИРПХ = 51°,8 ИРПъ = 81°,6
+ 2 ф2 = 3°,6
—90 +90
Л=324°,8 /3= 174°,2
е) Через точки К\ и Кг проведем отрезки прямых по направлениям
и /?2
/? = ^77+ф
Л7/71 = 53,3 И/7а=83,4
4*1 = + 1*3 ф3= 1»8
/?! = 54,8 /?2= 85,2
Снимем координаты точки пересечения линий положения
?0= 58°23',7 N, Хо = 2°38'W.
В связи с тем, что обсервованная точка находится за пределами карты,
нужно подложить лист белой бумаги под край карты и снять координаты,
при этом долготы отсчитаем от угла карты по нижней рамке к Ost. В при-
395
мере большое расхождение счислимой точки с обсервацией дано для нагляд-
ности построений.
5. Тихий океан. На подходе к Лос-Анжелосу, следуя ЯК=120°, в(рг =
32°25'N, XC = I24°2O'W, взяли радиопеленги радиомаяков Лома РКУ1=335°
и Фаральон РКУ2=249°. Определить координаты судна, если радиомаяки на-
ходятся за рамкой карты.
Решение. Для решения задачи используем метод расчета <р к или
а) Из навигационного пособия «Радиотехнические средства навигационно-
го оборудования Тихого и Индийского океанов» выбираем координаты радио-
маяков
Лома Фаральон
ф_= 32°39',9N 37°41',8N
Хр= 117° 14' ,6 W \>=123°00' W
б) Рассчитаем РД и Из МТ-53
из табл. 15 Л и fe
X =117°14',6W
________Xg=124°20' W
РД= 7°5',4 =425',4 к Ost
ф1= +1°.8
Л = -2°,2
выберем Ф1 и фа • По РКУ выберем
V=123°00W
лс=124°20 W________
РД=1°20'=80' к Ost
32°25'+37°41',8 ,,о ,
------2------=35
ф2= + 0°,4
/2=+з°,0
в) Рассчитаем локсодромические пеленги
ИП = РКУ+ИК+ ф +/
РКУг = 335°
ИК = 120°
Ф1=+1°.8
fy = -2°,2
РКУ3 = 222° ,5
ИК= 120°
Фа- +0М
h= +4°,7
Ш71 = 94°,6
Ш72=347°,6=12°,4 NW.
г) Определяющие точки берем для маяка Лома на счислимом меридиане,
и для маяка Фаральон — иа счислимой параллели
Лома
Рассчитаем РМЧ
РМЧ = РДг ctg^/7i
1g РМЧ = 1g РДг 4- lg ctg ИПг
lg 425',4 = 2,62880
Фаральон
Рассчитаем РД
РП = РМЧ tgnn2
ф^=32°25'Н; МУ = 2045,6
<Pp=37°4r,8N; А1У = 2431,1
РМ Ч = 385,5
lg ctg 94°,6
.lg ctg 85°,240 = 8,90557
IgPAfV = 1,53437
PM4= — 34,2
M 4Ki = м чр + РМЧ
МЧР=ЖЗ
РМЧГ=-342
МЧК = 2028',8
?(С1 = 32°10',7 N
1g 385,5 = 2,58602
lg tg 12°,4 = 9,34215
1g РД = 1,92817
P^ = 84',7=1°24',7kW
Xo = 123M0W
+ РД 1°24'.7 к W
X/fa=124°24,7W
396
Рис. 199
д) Рассчитаем направления линий положения
^-94°,6 Ш72 = 347,6
Ф1 = 4- 1°,8 Фе = + 0,4
96,4 348°,О
е) На листе бумаги проведем параллель и счислимый меридиан и на
них нанесем определяющие точки Ki, Кг в масштабе, построенном по счисли-
мой широте (рис. 199). Для этого рассчитаем РД и РШ от счислимой точки
до определяющих Ki, К?
Хж = 124°24„5W
Хс=124°20' W
РД = 4',5 к W
= 32°10',7 N
~ = 32°25'N
P/Z/=14',3 к S
ж) Через точки К\ и Кг проведем линии положения. Точка их пересе-
чения будет обсервованной точкой. В том же масштабе снимем РД и РШ
и рассчитаем <р0 и
РД = 1,1 к W
4- mr=32°25'N
РШ= 14\1 к S
ср0 = 32°10',9 N
PZZZ=14',1 к S
4- X,= 124°20'W
к W
Хо=124°21',1 W*
б. Охотское море. B(pc=51°36'N и Хс = 149°l(XOst взяты пеленги радио-
маяков Набиль ИРП\ = 275°,5, РМК Терпение ЯРП2=220о,4. Определить ко-
ординаты места и рассчитать полуоси эллипса ошибок, если ошибка изме-
рения радиопеленгов тп=Г,5, а расстояние до ориентиров Di=220 миль,
£>2=200 миль.
Решение. В связи с тем, что маяки расположены за рамкой карты,
произведем расчет координат места судна, используя табл. Б. Д. Яшина.
а) Из пособия «Радиотехнические средства навигационного оборудова-
ния Тихого и Индийского океанов» выбираем координаты радиомаяков
Набиль Терпения
<?р= 51°44',4N ?р= 48°38',7N
kp= 143°18',5 Ost Хр=144°44',4 Ost
б) Рассчитаем ДХ по «== 51°,6 и ДХ из первой части таблиц выберем
7, А и d
Хр=143°18',5
Хс—149°10\0
ДХ1 = -5°51',5 = -5°,9
7=51 °, 8
Л1= =85°,8
d=3
Хр-144°44,4
Х>= 149,10
ДХ2= - 4°25',6= —4°,5
7=51,7
Л=86,5
d = 2,8
в} Рассчитаем <р—и по их разности и d из второй части таблиц вы*
берем Аг=/
7=51,8
= 51,7
4-0,1
7“’?р = 4-0,1
d = 3
t1 = Л2 = — 3°,8
7 = 51,7
?р = 48,7
4-4,0
7 — фр = 4-4,0
о = 2,8
f2 = A2~ -55°,I
398
г) Рассчитаем Пс и Д/7
Л1+Л2 = —86°,7
Лс = 360° — 86°,7 =ж 273°,3
= 273°,3
___________ИРП — 275°,5
Д/7 = — 2°2 = —132'
Лх = — 86°,5
Ла = —55°,1
Л1 + Л2 = - 141°,6
=330—141°,6 = 218°,4
= 218°,4
__________#/У7 = 220°,4
Д/7 = — 2°,0 = 120'
д) По номограмме найдем
Рис. 200
е) На листе бумаги проведем счислимые меридиан и параллель, а так-
же построим масштаб для долгот и плаваний (рис. 200). От счислимой точки
проведем* направления /1=—3°,8 и h——55°,1 и по ним отложим «1=4-7' я
л2=4-8'. Через полученные точки Ki и Кч проведем линии положения, которые
пересекаются, в точке Р. В масштабе чертежа снимем РШ и РД и опреде-
лим ?о и Хо
?о + Т5/// + РД
?,= 53°36' N = 149° 10' Ost
+РШ=6Д к N + Рд = 7'3 к w
<pe = 53°42',7 N х0 = 149°02',7 O9t
ж) Для расчета полуосей эллипса рассчитаем векториальные ошибки
Дй! . _ Дл2
mi ~ sin 0 1 Щ — sin q »
где Дл!=^—5,8 мили, Дл2 = 5,3 мили;
О/,о О/,о
399
6—угол между линиями положения (это угол и между направлениями
h и 4),
равный в=/2—/1=55°,1—3°,8=51°,3.
следовательно,
~ 5>8 7 л "7 513 RR
mi=ojr=7’4’ тг = ё78=6’8-
По первой линии положения от точки Р отложим значения «1=7,4 в
масштабе (1 ся=1 миле). Из полученной точки М (рис. 201) опустим пер-
пендикуляр на вторую линию положения. По этому перпендикуляру в обе
стороны от точки М отложим «2=6,8. Получим точки К и 1. Точку Р сое-
диним с точками К и L прямыми и измерим их в масштабе чертежу
РК=а—Ь= 4,7;
PL=a+Z?= 13,5.
Складывая и вычитая уравнения, получим а=9,1 мили, Ь=4,4 мили.
Для нанесения эллипса ошибок нужно провести биссектрису угла LPK
и на ней отложить а. На перпендикуляре к биссектрисе, проведенной в точ-
ке Р, отложить Ь.
Задачи
1. 26 декабря с судна (осадка 6 я), находящегося в пределах визуальной
видимости плавучего радиомаяка, работающего на волне 800 м, взяли се-
рию КУ и РКУ через 45°. Составить таблицу радиодевиации через 20°. Ре-
зультаты наблюдений сведены в таблицу:
400
№ РКУ Визуальный КУ № РКУ Визуальный КУ
1 0 1°,6 п/б 5 180 186® п/б
2 45 49°,5 п/б 6 225 13С°,8 л/б
3 90 90° п/б 7 ' 270 89°,5 л/б
4 135 129°,3 п/б 8 315 48° л/б
2. На РКУ 0°, 90°, 180°, 270° определили радиодевиацию, соответственно
/1 = + Г; ^2=0°; /з—0°; /4=+0°,8. Рассчитать величину постоянного коэффи-
циента.
3. Рассчитать локсодромические пеленги, если
а) КК—70°, ДК=80°, РКУ—260°, радиодевиация f из табл. 15, орто-
дромическая поправка Ф=—4°;
б) ЯК=110°, РКУ=57°, f из табл 15, РД=8° , Фот =G0°N;
в) ЯР/7=292°, РД=6°. <pm=50°N;
г) ЯРП=260°. РД=8.5° ,qpOT = 50°N;
д) ГКК=130°, &ГК=—2°, РКУ=120°, f из табл. 15, ортодромическая по-
правка Ф=—2°.
4. Допускаемое смещение линии положения Лп=0,5 крили. Выбранная
из табл. 23 МТ-53 ортодромическая поправка фл =—0°,5. Рассчитать предель-
ное расстояние, при котором ИРП можно считать ИП.
5. Карта ГУ 2553. Следуя ИК=5°, в <рс =59°7',5N, X, = l°02',5W взяли ра-
диопеленги радиомаяков Листа РКУ=99° и Утвера РКУ= 46°. Определить
обсервованные координаты, используя метод азимута.
6. Карта ГУ 2553. Следуя ЯК=20°, в Фс = 59°27'N и >с=0°00/ взяли ра-
диопеленги радиомаяков Слоттера РКУ1=60° и Листа РКУг=92°. Опреде-
лить обсервованные координаты судна, используя метод пар аллеей и ме-
ридианов.
7. Карта ГУ 2553. Следуя ЯК=333° в Фс= 58°00N,Xc=3°32'Ost в 10’20*.
ОЛ\ = 29,3, Кл=0,95, взяли радиопеленг РМК Листа РКУ] = 112°. В 10*45*,
ОЛ1=34,0 взяли радиопеленг РМК Фейестейна РКУ2*=81°- В 11*15-*» ОЛ$=
= 39,5 взялн радиопеленг РМК Слоттера РКУз = 5Г. Определить координа-
ты судна в 11*15*.
8. Карта ГУ 2553. Следуя ЯК=200°, в <pc=60°18'N, Х<:=0о00/ взяли радио-
пеленги радиомаяков Фейестейна РП—121° и Утвера РЛ=72°. Определить
обсервованные координаты судна, используя метод параллелей и меридианов.
9. Атлантический океан. В <pc=34°50zN, Xt=9°05z0W. С судна, следующе-
го ЯК=65°, взяли радиопеленги радиомаяков Кап Спартлет (<pn=35°47,,lN,
XP=5°55',6W) отсчет РКУ=6°,2 и Касабланка (q>/l=33036z,8N, Xp = 7°39°,3W)
отсчет РКУ=64°,3. Определить координаты судна, используя метод рас-
чета Фя: и Хх.
10. Карта ГУ 734. Тихий океан. Взяли радиопеленги радиомаяков Ва-
сильева ИП= 314° и Лопатка (<рр=50’52',6N, \р - 156’40',20 st) ИП=35Г.
Определить координаты судна, используя для радиомаяка Лопатка метод
А. П. Ковалева.
11. Карта ГУ 723. В <pc=57°06zN, Хс = 143°33zOst взяли радиопеленги ра-
диомаяков Марекана ИП—2° и Большой Шантар (<рр =55°11Z,5N, Х^ =
= 137°37z,8Ost) ИП=238°. Определить координаты судна, используя для ра-
диомаяка Большой Шантар метод смещения.
12. Карта ГУ 704. В =42°09z, N,<pf = 133°10zOst, взяли радиопеленги ра-
диомаяков Поворотный ИП=350° и Низменный (cp77=43°30z,4N, Хд=
= 135°8z,4Ost) ЯП=45°. Определить координаты места, используя метод
А. П. Ковалева.
13. Карта ГУ 715. В <pc=45°40zN и = 141°OOzOst взяты пеленги радио-
26 Навигация 401
маяков Моннерон ИП=22° и Белкина (срр = 45°49Z,3N, = 137°41 Z,4Ost)
///7 = 275°. Определить координаты судна, используя метод А. П. Ковалева.
14. Японское море. В ср,, = 44°00N, = 138°36zOst взяли радиопеленги ра-
диомаяков Моннерона (фр =46°14Z8N, = 141°15z,4Ost) ИРП=38°Д и Белки-
на ((pp = 45°49z,3N, Лр= 137°41z,4Ost) ИРП=341°,3. Используя «Таблицы для
определения места по радиопеленгам» Б. Д. Яшина, определить координаты
судна и рассчитать среднеквадратическую ошибку обсервации, если D\ =
= 21 мили, />2=175 мили и т« = +2°.
Ответы
1.
f РКУ /
+1° 0° 360° +1°
4-3,8 20 340 —3
4-4,3 40 320 —4
4-3,8 60 300 —3
+0.7 80 280 —1
— 1.2 100 2с0 41,9
-3,4 120 240 43,7
—5,5 140 220 43,8
-3,4 160 200 43
+0 180 180 0
г) ///7 =256°,8;
2. А = +0°,27.
3. a) Z//7 = 336°,0; б) ИП = 175°,5; в) ИП = 289°,7;
д) /7/7 = 243°.
4. Дпред =57,3 мили.
5. (p0=59°18zN, Xo=l°10',5W.
6. q?o = 59°46z,7N, Xo=O°23'W.
7. <Po = 58°4z,7N, Xo=3° 1,5'0 st.
8. <po=6O°22'N, Ao=0°24',00st.
9. cpo = 34°57z,l N, ko=9°lO',8W.
10. <po = 48°5Oz,5N, Zo = 157°06'O st •
11. (po = 57°7zN, k0=l43°20'Ost-
12. fpo = 42°4z,2N, Xo=133°ll'/’st-
13. <Po = 45°37z,3N, Xo= 140°53'Ost-
14. <po = 44°4z,6N, Ao=138°30',50st (M=46,8).
Контрольные вопросы
I. Каковы пути улучшения обеспечения контроля за счислением?
2. Как классифицируются РНС?
3. Каков принцип работы радиомаяка кругового действия?
4. Почему определение пеленга радиопеленгатором производят по мини*
му му силы звука?
5. Как определить сторону, где расположен радиомаяк?
6. Какова степень доверия к данным, полученным с радиопеленга торной
станции?
7. В чем сущность ошибки угла молчания?
8. Что такое ночной эффект и причина его возникновения?
9. Как избавиться от ошибки ночного эффекта?
402
10. Что такое береговой эффект, причина его возникновения и методы
исключения его влияния?
11. Что такое радиодевиация и причины ее возникновения?
12. Какие вы знаете методы прокладки радиопеленгов?
13. Какова особенность гномонической карты в прокладке радиопеленгов?
14. От каких ошибок зависит точность обсервации по радиопеленгам?
Глава XVI. ИСПОЛЬЗОВАНИЕ НАПРАВЛЕННЫХ
РАДИОВОЛН В НАВИГАЦИИ
§ 105. РАДИОМАЯКИ НАПРАВЛЕННОГО ДЕЙСТВИЯ
С ВРАЩАЮЩЕЙСЯ АНТЕННОЙ
Изолинию и линию положения можно получить с помощью
азимутальной РНС, состоящей из установленного на берегу ра-
диомаяка направленного действия с вращающейся антенной и
обычного радиоприемника, установленного на судне. Радиомаяк
направленного действия имеет антенны с характеристикой на-
правленности в виде косинусоиды или в виде кардиоиды.
Для получения характеристики косинусоиды используются
антенны в виде большой рамки (2—3 м) и антенны, состоящей из
двух проводов, для кардиоиды — указанные типы антенн в соче-
тании с открытой круговой антенной. Антенна вращается вокруг
оси и этим достигается изменение направления зоны молчания.
Обычно маяки с рамочной антенной, которая обладает способ-
ностью излучать колебания не только в горизонтальной плоско-
сти, но и вверх, используется на дальность не свыше 25—30 миль,
так как на большем расстоянии ночной эффект вносит большие
искажения в определении направлений.
Принцип работы маяка заключается в следующем: антенна
вращается со скоростью один оборот в минуту Когда нулевая ли-
ния характеристики подходит к меридиану (северной его части),
дается отличительный «северный» сигнал «ЖИ» (. . . — .
Момент начала длительного тире, которое подается сразу после
последней точки северного сигнала, соответствует положению ну-<
левой слышимости точно на север. В этот момент судоводитель
пускает в ход секундомер и слушает длительное тире. Момент
исчезновения слышимости соответствует переходу зоны молчания
маяка через направление на наблюдателя. В этот момент наблю-
датель стопорит секундомер. В связи с тем, что рамка вращается
3^0°
с угловой скоростью = за промежуток времени t сек,
отсчитанный секундомером, рамка повернется на угол, соответ-
ствующий истинному радиопеленгу (рис. 202,а). Тогда
сек. (201)
Когда судно находится на меридиане маяка к северу от него,
подача сигнала «ЖИ» совпадает с прохождением зоны молчания
через направление на судно, и судоводитель не сможет отметить
26*
403
начало счета времени. Поэтому кроме сигнала «ЖИ» дается до-
полнительно «восточный» сигнал «БИ» (—.....). Тогда судово-
дители, находящиеся по счислению вблизи меридиана маяка и
Рис. 202
севернее его, пускают секундомер после восточного сигнала
«БИ». В этом случае ИРП рассчитывают по формуле
#P/7 = 90 4-6t
Характеристика излучения такого маяка представляет собой
косинусоиду (восьмерку). Если к передатчику присоединить от-
крытую антенну, имеющую характеристику излучения — окруж-
ность, результирующая характеристика излучения такого маяка
будет кардиоида (рис. 202,6).
Как было указано выше, маяки такого типа в ночное время
можно использовать на расстояниях не свыше 30 миль, несмотря
на то, что дальность действия маяков может быть 100—150 миль.
Для увеличения дальности действия маяков в ночное время вме-
сто рамок используют антенну, сконструированную из вертикаль-
ных парных антенн по аналогии с радиопеленгаторными станция-
ми (рис. 203). Антенна такого радиомаяка не вращается, а рав-
номерное вращение имеет ротор гониометра. Из рис. 203 виден
принцип действия радиомаяка. К передатчику присоединена кру-
говая антенна Ai и ротор гониометра Р. Полевые катушки А и В
соединены с двумя парами вертикальных антенн А А и ВВ1 соз-
дающих восьмерочные диаграммы излучения. Равномерное вра-
щение ротора Р вызывает соответствующее вращение восьмероч-
кой характеристики излучения, что вместе с излучением цент-
ральной круговой антенны дает вращение результирующей ха-
404
Рис. 203
рактеристики вида кардиоиды. Такие радиомаяки в ночное время
имеют дальность действия в 3—5 раз большую, чем радиомаяки
с вращающейся рамкой. Точность, с которой можно получить пе-
ленг радиомаяка подобного типа, зависит от точности отсчета
секундомера. Ошибка в определении времен секундомером в
среднем составляет 1 сек, что дает ошибку в пеленге 6°. На рас-
стоянии 120 миль до радиомаяка ошибка в линии положения бу-
дет равна
Да = т = = ~ 12 миль.
g Ъ/ ,3 о/
Меньшую ошибку дают радиомаяки, характеристика направ-
ленности которых имеет форму кардиоиды и поворачивается не
на 360°, а на 180°. Повернувшись на 180° по часовой стрелке, диа-
грамма возвращается назад против часовой стрелки. Весь цикл
работы составляет 2 мин. Перед началом цикла подается началь-
ный сигнал «А» (—), а перед началом вращения характеристи-
ки против часовой стрелки сигнал «У» (• —). После подачи этих
сигналов, подаются точки, соответствующие каждым 2° поворота.
Считая слышимые точки от момента начального сигнала «А» до
момента исчезновения слышимости, определяют число точек.
После сигнала «У» счет точек повторяют. Сумма точек должна
быть равной 90. По таблицам, помещенным в пособии «Радиотех-
нические средства навигационного оборудования», после общих
данных о радиомаяке выбирается истинный пеленг с маяка на
судно. Изолинией в этом случае будет дуга большого круга. Для
получения линии положения нужно выбрать из таблицы ортодро-
мическую поправку.
§ 106. СЕКТОРНЫЕ РАДИОМАЯКИ
Направленные радиомаяки, с помощью которых можно полу-
чить радиопеленги в границах определенных секторов, называ-
ются секторными. В СССР секторные радиомаяки носят назва-
ния ВРМ-5, в Англии— «Консол», в ГДР и ФРГ—«Зонне».
Секторные маяки используются с помощью обычного прием-
ника связи, настроенного на рабочую волну радиомаяка.
Секторный маяк имеет три вертикальные антенны (Л, В, С),
.расположенные на одной прямой на расстоянии d одна от другой.
Это расстояние равно около трех длин излучаемой волны
(рис. 204,а). Средняя антенна считается главной. К антеннам
подведено питание от общего передатчика мощностью 2—5 кет,
причем в главной антенне сила тока больше, чем в крайних в Р
раз (Р=3—4). Сила тока в крайних антеннах равна. Передача
сигналов, точек и тире осуществляется переключением фазы то-
ка на 180°, т. е. изменением направления тока. Точки и тире пе-
редаются в устойчивом темпе—по 60 точек и тире в течение
30 сек. Благодаря этому, секундомер бывает не нужен, так как
406
счет времени осуществляется счетом сигналов (точек или тире).
Векторы токов в антеннах в начальный момент расположатся
так, как изображено на рис. 204,6. Так, в средней антенне В —*
вектор ОВ, в антенне А — вектор ОА, в антенне С — вектор ОС.
При таком соотношении амплитуд и фаз характеристика излуче-
ния получает вид, показанный на рис. 205 сплошной линией.
Рис. 204
При изменении направления токов в крайних антеннах
(рис. 204,8) характеристика изменяется и имеет вид, показанный
пунктирной линией на рис. 205, что соответствует новому соотно-
шению амплитуд и фаз и представляет собой зеркальное изобра-
жение характеристики в начальный момент. Фазы в крайних ан-
теннах изменяются с расчетом, чтобы излучение при одном от-
ношении фаз продолжалось 712 сек (передача точки), а при про*
тивоположном 5/12 сек (передача тире). В зависимости от место-
положения судна судоводитель будет слышать или точки (поло-
жения Р, Pi, Р%) или тире (положения Р', Р/, Рг')- На линиях
пересечения секторов точек и тире будет слышен сплошной звук.
Это будут равносигнальные зоны. В начальный момент работы
радиомаяка такая зона всегда проходит вдоль нормали к линии
антенн, которую называют базой радиомаяка. В крайних антен-
нах, кроме указанного переключения токов, во время цикла рабо-
ты маяка фазы токов плавно и равном ернс^изменяются от <р = 0
до Ф = 7Г в антенне А и от ф = 0 до ф = ^ в антенне С. В течение
цикла работы маяка сила тока в крайних антеннах будет ме-
няться. В средней антенне В ток в течение всего цикла работы
остается неизменным и большим в Р раз, чем в антеннах А и С.
В связи с тем, что слышимость сигналов вблизи линии бази-
са слабая или совсем отсутствует, секторные маяки такого типа
имеют нерабочие секторы. В современных секторных маяках
407
(Терпения, Шумшу) (нерабочих секторов нет. Это достигается
тем, что антенное устройство состоит из пяти антенн, причем
средняя составляет с двумя парами крайних излучающую систе-
му. В течение некоторого времени посылка направленных радио-
сигналов производится с помощью одной пары крайних антенн,
и в начале этого периода передаются позывные, присвоенные
данному сектору. Затем начинает работать вторая пара крайних
Рис. 205
антенн, причем предварительно ненаправленно излучаются по-
зывные другого сектора. На рис. 206 приведена схема работы
секторов радиомаяка Терпение. Вначале работают антенны, рас-
положенные по базовой линии 30° (КС), затем начинают работу
антенны, расположенные по (базовой линии 120° (ЦБ). Расписа-
ние работы такого маяка дается в навигационном пособии.
В результате всех изменений фаз токов в крайних антеннах
будет наблюдаться следующее:
а) из-за того, что в крайних антеннах токи сдвинуты по фазе
в одной «а + "2 * а в ДРУГОЙ на —по отношению к средней ан-
408
КС
Рис. 206
Ц6
тенне, образуется многолепесгковая характеристика направлен-
ности радиомаяка;
б) из-за резкого изменения фаз таков крайних антенн на
достигается тире-точечная диаграмма излучения; резкие измене-
ния фазы обозначаются коэффициентом /С, принимающим значе-
ния + 1 при передаче точек и —1 при передаче тире;
в) из-за того, что в крайних антеннах происходит плавное
изменение фаз токов в одной от 0 до +тг , в другой от 0 до — я
обеспечивается вращение характеристики направленности излу-
чения;
г) расстояние D от маяка до судна намного больше расстоя-
ния между антеннами
D » 2d,
поэтому считают, что направление распространения волн от каж-
дой из антенн параллельны между собой.
В курсе «Радионавигационные приборы» выводится расчет-
ная формула для направлений, которая имеет вид:
= (202)
По этой формуле определяется направление а равносигнальной
зоны относительно нормали к базе в любой момент. С изменением
фазы ф угол а меняется, следовательно, равносигнальная зона и
секторы точек и тире, граничащие с ней, будут перемещаться.
При ф = 0 или <р = 7г разносигнальные зоны будут иметь опреде-
ленное направление, которое может быть найдено заранее.
Равносигнальные зоны, вращаясь из-за изменения ф от 0 до я
по часовой стрелке, при ф = к занимают положение, в котором
находилась предшествующая равносигнальная зона при ф = 0.
Углы а и ф связаны через функцию синуса, поэтому на больших
углах а одно и то же изменение фазы ф будет вызывать большее
изменение а, чем при малых. Когда а = 90°, равносигнальная зо-
на направлена вдоль базы и при изменении ф от 0 до не вра-
щается. Поэтому, находясь в направлении базы радиомаяка или
вблизи этого направления, определить пеленг нельзя.
Из формулы (202) видно, что для определения направления
равносигнальной зоны в любой момент нужно знать текущее зна-
чение фазы ф. Оно определится, если сосчитать число точек или
тире (АГ) от момента начала работы маяка до момента прохож-
дения через место судна равносигнальной зоны, т. е. когда будет
слышен однотонный сплошной звук. В связи с тем, что во время
плавного изменения фазы от 0 до подается 60 знаков, то
те N
«Р = “6О“ •
Подставив значение <рвв в формулу (202), получим
. Х + 60К
sin a 120Z
(203)
410
По этой формуле определяется направление равносигнальной
зоны по числу сосчитанных знаков N на судне. В формуле (203):
а) номер сектора К устанавливается на основании знания
счислимого места судна или пеленга, взятого радиопеленгатором
и карты-схемы, помещенной в книге «Радиотехнические средст-
ва навигационного оборудования» (рис. 206). Счет числа К ве-
дется от нормали, причем номер сектора в сторону вращения на-
чинается сектором /( = 0 и имеет знак плюс, в сторону, обратную
вращению от нормали, начинается сектором /С==1 и имеет знак
минус. Рабочие номера секторов, указанные на картах, имеют
круговой или полукруговой счет и для расчета угла не исполь-
зуются, так как отличаются от К. Так, для маяка Канин /С = 0, а
рабочий сектор обозначен К-7 (рис. 207);
б) N— число сосчитанных знаков, причем, если характери-
стика направленности вращается по часовой стрелке, то N —
число знаков, сосчитанных до прохождения равн^ригнальной зо-
ны через судно; если характеристика направленности вращается
против часовой стрелки, то N— число знаков, сосчитанных пос-
ле прохождения равносигнальной зоны через судно:
в) а — угол относительно нормали;
г) Z — расстояние между антеннами, выраженное в длинах
волн; постоянная величина для каждого радиомаяка, которую
можно выбрать из табл. 20 или из справочника.
Характеристика направленности разделена линией базиса
радиомаяка на две половины. Направление вращения равносиг-
нальной зоны в обеих половинах различно: если в верхней поло-
вине по часовой стрелке, то в нижней против часовой стрелки.
Определяется пеленг радиомаяка так. После передачи позыв-
ных радиомаяка подается длинный ненаправленный радиосигнал
маяка для взятия пеленга радиопеленгатором, если это нужно.
Затем, если судно находится в секторе точек, судоводитель услы-
шит через приемник точки, если в секторе тире— будут слышны
тире. Постепенно слышимость сигнала знаков ослабевает, и бу-
дет слышен сплошной однотонный звук. Это значит, через судно
проходит равносигнальная зона. Вслед за этим будут прослуши-
ваться вновь сигналы знаков. Если перед сплошным сигналом
был слышен сигнал точки, то теперь будет слышен сигнал тире и
наоборот.
Равносигнальная зона проходит сектор 10—20° за 60 или
30 сек (в зависимости от радиомаяка). За это время передается
60 пар знаков, в верхней половине характеристики направленно-
сти передаются точки, в нижнем—тире или наоборот. Подсчет то-
чек и тире является средством измерения времени, прошедшего
с момента начала цикла работы радиомаяка до момента прохож-
дения равносигнальной зоны через судно Сразу же после длин-
ного ненаправленного сигнала следует начать счет точек и тире.
В идеальном случае судоводитель сосчитает 60 знаков (точек и
тире в сумме).
411
Рис. 207.
Таблиц а 20
Радиомаяк Позыв- ные кгц Длина половины базы Продолжи- тельность полного цикла, сек Продолжи- тельность передачи знаков, сек Направление нормали Ан
м X
Бушмилс МВН 266 2520 2,2344 40 30 130,2 310,2
Ставангер ЛЕЦ 319 2708 2,8795 60 30 67,0 247,0
Плонейс ТРЩ 257 3045 2,6086 40 30 106,2 286,2
ЛуГ° яг 285 2823 2,8513 60 30 88,5 268,5
Севилья сл 315 2740 2,8503 60 30 83,0 263,0
Рыбачий РБ 363 2360,5 2,86 60 30 25,0 205,0
Канин КН 269 3185,0 2,86 60 30 355,0 175,5
Терпения КС ЦБ 372 2306,4 2,86 60 30 120° —300° 30° — 210°
Шумшу жл ня 340 2523,5 2,86 60 30 129, 3—309.3 39,3-219,3
На практике вблизи оси равносигнальной зоны часть знаков
(потеряется и сосчитанное число знаков будет меньше 60. Поэтому
сосчитанное число знаков нужно откорректировать то такой
формуле
2V = W, + 60~W + ^> г (204)
где —число знаков, сосчитанных до прохождения через судно
равносигнальной зоны (предположим точек);
/V2—число знаков, сосчитанных после прохождения равно*
сигнальной зоны через судно (тире);
N—число знаков, с которым рассчитывается угола.
Такая корректировка основана на том, что характеристика
направленности вблизи равносигнальной зоны, симметрична от*
носительно оси зоны, т. е. считается, что потеряно одинаковое
число знаков с каждой стороны оси зоны.
414
С увеличением расстояния до маяка число потерянных знаков
увеличивается. Возможны следующие случаи (рис. 208). Рабо-
тает радиомаяк Рыбачий. Суда находятся в точках Сь Сг, Сз, С4.
Вначале все суда услышат позывные «РБ» и длинный сигнал, по
которому настраивают приемник. По этому сигналу можно взять
60 тире
Равносигнальная Равносигнальная'
зона зона
60 точек
6)
Равносигнальная
зона
. 30 точек
Равносигнальная
зона
30 тире
Равносигнальная
зола
Равносигнальная
зона
/5 точек
Рис. 209
грубо радиопеленг для того, чтобы установить номер сектора /С
Вслед за длинным сигналом на каи®ом из судов будут услышаны
различные сигналы в разнообразных комбинациях. На судне Cj
(рис. 209,а) отсчитают 60 тире, причем 29-й, 30-й и 31-й сигналы
будут отличаться наибольшей громкостью и четкостью, а 1-й и
60-й — наименьшей. На судне Сг отсчитают 60 точек (рис. 209,6),
и слышимость их будет такая же, как на судне Сь На судне С3
отсчитают 30 точек, затем услышат непрерывный тон, означаю-
щий равносйгнальную зону, а затем 30 тире (рис. 209,в). Лучше
всего будут слышны 1-й и 2-й сигналы точки и 29-й и 30-й сигна-
415
лы тире. На судне С4 отсчитают 15 точек, затем будет идти не-
прерывный сигнал, вслед за этим отсчитают 45 тире. Лучше всего
будет слышен сигнал точек 1-й и сигнал тире 30-й (рис. 209,а).
Имея число знаков, по формуле (203) находят величину угла а,
а затем .рассчитывают ортодромический пеленг судна с -радио-
маяка (рис. 210), по формуле
ИРП = Ан + а, (205)
где Ан—направление нормали, величина которой дается в спра-
вочниках и приведена в табл. 20 для каждого радиомаяка.
Для того чтобы не рассчитывать ИРП по формулам, состав-
лены таблицы ортодромических пеленгов судна для некоторых
секторных радиомаяков. Они помещены в навигационных посо-
биях. Пример такой таблицы для секторного радиомаяка Буш-
миле приведен в табл. 21. Аргументами для входа в таблицу
являются число знаков А/ и сектор, определяемый по счислимому
месту или по ориентировочному радиопеленгу, полученному с по-
мощью радиопеленгатора. Таблицы составлены отдельно для то-
чек и тире.
416
Таблица 21
Отсчет точек Ортолромические пеленги с радиомаяка
Сектор! ы точек
л‘ л2 ^3 Л ^Б ив ^7 ^8 ^0 1 1 1 1
0 13°,8 66°,7 103°,6 130°,2 156°,8 193°,8 246°,7 283°,6 310е,2 336°,8
2 И,7 65,7 103,2 129,8 156,3 192,8 247,6 284,1 310,7 337,3
4 15,7 64,7 102,7 129,4 155,9 191,9 248,6 284,6 311,1 337,8
6 16,8 63,7 102,2 128,9 155,4 191,0 249,4 285,1 311,5 338,3
8 17,9 62,6 101,7 128,5 154,9 190,1 250,3 285,5 311,9 338,7
10 9 19,0 61.4 101,2 128,1 151,4 189,3 ; 251,1 286,0 312,4 339,2
12 20,3 60,2 100,7 127,7 154,0 188,5 252,0 286,5 312,8 339,7
14 21,6 58,9 100,2 127,2 153,5 187,7 252,8 286,9 313,2 340,2
16 22,9 57,5 99,8 126,8 153,0 186,9 253,6 287,3 313,6 340,7
18 24,4 56,0 99,2 126,4 152,6 136,1 254,3 287,9 314,1 341,2
20 26,1 54,3 98,7 125,9 152,1 185,4 255,1 288.3 314,5 341,7
22 28,0 52,5 98,2 125,5 151,7 184,6 255,8 288,8 314,9 342,0
24 30,2 50,3 97,7 125,1 151,2 183,9 256,5 289,2 315,4 342,7
26 33,0 47,4 97,2 124,7 150,7 183,2 257,3 289,7 315,8 343,2
28 33,6 41,8 96,7 124,2 150,3 182,5 258,0 290,2 316,2 343,7
30 — — ' 96,2 123,8 149,8 181,8 258,7 290,6 316,6 344,2
§ 107. МЕТОДЫ НАНЕСЕНИЯ ОБСЕРВОВАННОГО МЕСТА
ПО ПЕЛЕНГАМ СЕКТОРНЫХ РАДИОМАЯКОВ
Полученная с помощью секторного радиомаяка и судового
приемника изолиния, как было указано выше, представляет собой
дугу большого круга, проходящего через секторный радиомаяк и
судно. Для нанесения обсервованного места по двум секторным
радиомаякам нужно проложить отрезки двух ортодромий или ка-
сательных к ним в точках, расположенных вблизи счислимого ме-
ста, и точка пересечения указанных линий даст обсервованное
место. Существует ряд методов нанесения места судна. Разберем
некоторые из них.
Использование гномонических сеток для прокладки радиопе-
ленгов, полученных по секторным радиомаякам. Если на судне
нет гномонической карты, точка касания картинной плоскости ко-
торой расположена вблизи действующей пары секторных радио-
маяков, то такую сетку судоводитель может построить сам, как
было указано в § 35 и 36. Максимальный радиус района сетки не
должен превышать 500 миль. Масштаб сетки берут обычно от
1 : 2 000 000 до 1 :2 500 000, а в некоторых случаях и мельче. На
сетке наносятся радиомаяки по координатам, выбранным из на-
вигационного пособия. Меридиан и параллель точки касания
картинной плоскости должны проходить между радиомаяками.
Получив ортодромические пеленги маяков, их прокладывают
обычным путем от радиомаяков в виде прямых; координаты точ-
ки пересечения прямых снимаются с гномонической карты и пере-
носятся на рабочую путевую карту. Такая сетка заносится в су-
довой каталог и является вспомогательной картой.
Использование специальных карт. В настоящее время для
всех секторных радиомаяков издаются специальные карты в мер-
каторской, гномонической и стереографической проекциях с нане-
сенными изолиниями. Так, для отечественных радиомаяков Ка-
нин и Рыбачий изданы карты разных масштабов в меркаторской
и стереографической проекциях. Если карта издана в меркатор-
ской проекции, изолинии нанесены на ней в виде кривых, если в
гномонической или стереографической — в виде прямых. Изоли-
нии одного маяка наносятся одним цветом, другого — другим
((красный и зеленый цвета). Изолинии каждого секторного мая-
ка обычно оцифрованы значениями счета знаков. Получение мес-
та судна сводится к нахождению точки пересечения двух изоли-
ний, помеченных значениями точек и тире. Получив точку пересе-
чения изолиний, снимают координаты точки и по ним наносят об-
сервацию на путевой рабочей карте.
Графический метод. На меркаторской карте, если секторные
маяки расположены в пределах карты, отрезки ортодромий вбли-
зи счислимого места можно заменить касательными к ортодро-
мии, т. е. линиями положения. Для выбора определяющей точки
К пользуются одним из ранее рассмотренных методов. При пере-
418
воде ортодромического пеленга в локсодромический знак орто-
дромической поправки в северной широте будет плюс, когда суд-
но находится к Ost от секторного радиомаяка, и минус, если суд-
но к W от радиомаяка. В южных широтах наоборот. Рассчитан-
ные локсодромические пеленги (ИП=ИРП+ф) прокладываются
от секторных радиомаяков, и на линиях локсодромических пелен-
гов выбираются определяющие точки, через которые проводятся
линии положения по направлениям и (рис. 211)
= ИПг + фг; /?3 = ИП2 + ф2.
Профессор В. В. Каврайский показал, что в <р>35° величина
ф, определяемая по приближенной формуле, будет получаться с
большей точностью, если пользоваться не средней широтой <рт5
а широтой радиомаяка Учет высших членов разложения ор-
тодромической поправки производится в том случае, если рас-
стояние между радиомаяком и судном не менее 500—600 миль.
Если же секторный радиомаяк находится за рамкой карты, для
нанесения обсервации можно использовать один из рассмотрен-
ных в предыдущей главе методов. Графическое выполнение про-
кладки можно осуществить или непосредственно на карте или на
листе бумаги.
Аналитический метод. Решением полярных сферических треу-
гольников, при измеренных с помощью секторного радиомаяка
ортодромических пеленгах, можно определить координаты точки
27*
419
пересечения ортодромий С, т. е. рассчитать координаты судна,
с которого измерены радиопеленги (рис. 212). Допустим, имеются
два секторных радиомаяка jMi(q>ili) и ЛЫфгМ и судно С
(ФоМ. измерившее ортодромические пеленги ИРП, и ИРП2. Рас-
стояние по ортодромии между маяками D — величина постоян-
ная и может быть вычислена. Ортодромические пеленги с одного
маяка на другой А, и А2 — также могут быть вычислены. Чтобы
не делать вычислений, в табл. 22 приведены величины Д, А, и А2
для существующих секторных радиомаяков, работающих в груп-
пах.
Таблица 22
Наименование радиомаяков । ^2 1 D
Бу шмилс— Ставангер 57°37',8 247°47',3 7°25',3
Бушмилс—Плонейс 168° 5',8 349°51',9 7°19',2
Луго—Плонейс 24°26',3 206°45',9 5°17',3
Луго—Севильян . 168°35',8 349°32',2 5°49',2
Долгота и широта судна, измерившего ортодромические пе-
ленги маяков, может быть найдена из ряда сферических треуголь-
ников. Выполняется это в следующей последовательности:
а) из треугольника M,M2C определяется П2 = СМ2
cos Dt = ctg (ИРП, — Д j) sin (AfP77a — A2) cosec D +
+ cos (/7Р/7г — Д2) ctg £>; (2C6)
420
б) из треугольника CPnM2 рассчитывается фо
sin ф0 = cos £>2 sin ф2 + sin ZX cos D2 cos ф2 cos ИРП2\ (207)
в) из треугольника CP^M2 рассчитывается ДХ>
sin Дк2 = sin ИРП2 sin D2 sec ф0;
г) получив разность долгот A2v2, вычисляют долготу обсерва-
ции
= ^2 +
Для расчета координат судна можно взять и другие сфериче-
ские треугольники, но в них углы должны быть выражены в по-
лукруговом счете. Вычисления производятся по таблицам лога-
рифмов тригонометрических функций (МТ-53).
Длительность вычислительной работы является недостатком
этого метода, и ему предпочитают использование специальных
карт и сеток.
Применение таблиц ТВА-57. С помощью этих таблиц рассчи-
тывается перенос п и направление переноса t от счислимой точ-
ки С. В результате расчета на карте или листе бумаги от счисли-
мого места прокладывается направление /, по которому откла-
дывается перенос п и получают определяющую точку К, через ко-
торую под прямым углом к направлению t проводится линия по-
ложения, являющаяся касательной к ортодромии. Величина пе-
реноса п определяется из прямоугольного сферического треуголь-
ника МСК по формуле (рис. 213).
tg л = tg (Р/7. — РПС) sin De,
где РП9— О(ртодромичеокий пеленг секторного радиомаяка, по-
лученный на судне;
421
РПс— ортодромичеокий пеленг счислимый, рассчитанный из
сферического прямоугольного треугольника MDC\
Dc—счислимое расстояние, рассчитываемое из того же
треугольника.
Величины РПС и Dc вычисляются по таблицам ТВА-57 по
формулам:
Т(х) = T(yc) + S(M);
Т( Пс) = Г(ДХ) - S (х) + S [90° + (х ~ фр)];
Г(90 - Dc) = Т[90 + (х ~ <₽,)] - S(J1C).
Затем с помощью таблиц, легко рассчитывается п по преобразо-
ванной формуле
Г(п) = Т(РПЬ - РПС) - S(90° - Dc).
Направление линии положения отличается от РП$, полученного
на судне ,по числу отсчитанных точек или тире, на ‘величину угла
схождения меридианов
7 = Дк81Пфт = 2ф.
В нордовой широте у имеет знак плюс, если судно находится
к Ost от секторного маяка и знак минус, если к W. В зюйдовой
широте наоборот.
Направление переноса перпендикулярно линии положения.
Следовательно,
^ = РПо+т±9О°,
где + 90° — есл и РП$ > РПС.
—90°—если РПц<РПс, причем РП$ принимаются в круго-
вом счете.
Величину у получают, удвоив ортодромическую поправку ф,
выбранную из табл. 23 МТ-53.
§ 108. ОШИБКИ ОБСЕРВАЦИИ,
ПОЛУЧЕННОЙ ПО СЕКТОРНЫМ РАДИОМАЯКАМ
Среднюю квадратическую ошибку обсервации, полученной по
двум пеленгам секторных радиомаяков, с незначительной по-
грешностью можно рассчитать по несколько видоизмененной фор-
муле (198)
м = ± 57<,35i-flV (208)
где и D2— расстояние от судна до маяков, мили;
6— угол между линиями положения;
и —средние квадратические ошибки пеленгования,
которые зависят от:
а) инструментальных ошибок радиомаяка (эти ошибки у со-
временных радиомаяков не превышают 0°,1);
422
б) ошибок, вызванных условиями распространения радио-
волн (ночные ошибки);
в) ошибок наблюдателя в счете знаков, которые определены
практически в разных условиях, приведенных в табл. 23. Ошибки
уменьшаются в случае записи сигналов на магнитофон при уско-
ренном движении ленты.
Таблица 23
Условия наблюдений £>, мили
днем ночью
до 6и0 до 200 | 200—301 300—450| 450—600| 600—У00
/Ид,—на краю ра- бочей зоны . . 1 1 2 6 3 2
mN —вблизи нор- мали 0,5 0,5 0,5 1 0,5 0,5
Ошибка в счете знаков вызывает ошибку в пеленге. Для рас-
чета ошибки в пеленге формулу (203) продифференцируем по
Л/1 и а. Получим
А„ -
i20Zcosa ’
Наименьшая ошибка будет на нормали к базе. Обозначим ее че-
рез а
а=:Тлг>
тогда
Дал = a sec a . (209)
При дневных наблюдениях т^ = 1, тогда
Aajv = «seca. (210)
Анализ формул позволяет сделать следующие выводы:
а) чем больше базис, тем меньше ошибка в пеленге; в совре-
менных радиомаяках принято Z= — ~3;
б) ошибка возрастает с увеличением угла а, поэтому вблизи
линии направления антенн она достигает громадных величин, и
обсервации здесь вообще невозможны (нерабочие секторы). По-
этому рабочим районом считаются два сектора по 60°, располо-
женные по обе стороны от нормали к базису.
Для того чтобы было удобно пользоваться формулой (208),
составлена табл. 24, в которой член 57« ^s<n 9 рассчитан заранее.
Как видно из табл. 23, ночью ошибки пеленгования больше,
чем днем, особенно на расстоянии 300—400 миль от маяков, так
как здесь сильнее сказывается ночной эффект. Вблизи нормали в
секторе 0—40° ошибка пеленгования достигает ±1°. По мере
423
(приближения к краю рабочего сектора; т. е. в секторе 40—60°,
она увеличивается до ±2°.
г Таблица 24
6°. . 1 6° 1 6° 1
57°,3 sin 6 5 °,3 sin 0 57°,3 sin 6
5 0,2008 30 0,0350 55 0,0214
10 0,1008 35 0,0305 60 0.D202
15 0,0676 40 0,0272 65 0,4193
20 0,0512 45 0,0247 70 0,0 И6
25 0,0414 50 0,0228 80 0,0178
§ 109. РАДИОНАВИГАЦИОННАЯ СИСТЕМА «НАВАГЛОБ»
Секторные маяки позволяют определить пеленг только в опре-
деленных районах. Причем точность в различных секторах и на
разных расстояниях различна. Радионавигационная система «На-
ваглоб»,.состоящая из радиомаяка, установленного на берегу, и
автоматически действующего приемно-индикаторного устройства
на судне, обеспечивает большую, чем секторный маяк, дальность
действия (теоретически 2800 миль) и точность до 0°, 1 по всем
направлениям.
Рис. 214
Радиомаяк «Наватлоб» (от слов «навигация» и «глобус»)
имеет три антенны, расположенные в вершинах равностороннего
треугольника (рис. 214). Расстояние между антеннами равно
424
длины волны, высокочастотные колебания (/=100 кгц) от пере-
датчика подводятся к антеннам в следующем порядке.
Токи равной величины и одинаковой фазы подаются к I и II
антенне, затем ко II и III, а затем к III и I в течение 0,75 сек.
После этого к трем антеннам подается ток меньшей частоты в те-
чение 0,25 сек. Максимум излучаемого сигнала совпадает с на-
правлением нормали к линии пары антенн, а минимум—с ли-
нией антенн. Характеристика направленности имеет форму, близ-
кую к восьмерке. Каждая пара антенн имеет собственную харак-
теристику. Оси характеристик расположены друг к другу под уг-
лам 60°.
Антенны непрерывно излучают повторяющиеся серии сигна-
лов Л, В и С. Относительная сила сигнала различна в различных
направлениях. Четвертый сигнал D излучается одновременно все-
ми тремя антеннами.
Автоматическое приемно-индикаторное устройство, установ-
ленное на судне, представляет собой объединение двух независи-
мых индикаторов направления: автоматического пеленгатора, да-
ющего пеленг на маяк, и указателя пеленга, работающего по
принципу сравнения интенсивности колебаний, получаемых от
разных пар антенн, который дает по показаниям маяка обратный
пеленг. Оба прибора работают независимо, и их показания отли-
чаются на 180°. Сигналы, излучаемые антеннами, принимаются
на прием1ник и разделяются: каждый идет на свою обмотку маг-
нитной системы указателя. В обмотке ротора указателя последо-
вательно индуктируются напряжения, величина которых зависит
от силы сигналов А, В и С и от углового положения роторной об-
мотки относительно статорных обмоток. Интегрирующий квадра-
тичный детектор измеряет алгебраическую сумму напряжений за
ряд циклов передачи. Результат сум(мирования идет в разворачи-
вающее устройство, которое поворачивает ротор до тех пор, пока
выходной сигнал интегратора не будет равным нулю, т. е. угол
ротора не будет равен пеленгу радиомаяка. Этот момент фикси-
руется наблюдателем.
Для обеспечения мореплавания радионавигационными систе-
мами дальней навигации в будущем предполагается совмещать
системы «Наваглоб» с фазовыми дальномерными устройствами.
Эту систему условно называют «Наваро» (от слова «Навигация»
и буквы р, обозначающей в математике радиус — вектор).
ПРИМЕРЫ
1. Карта ГУ 50РА. В =78°40/N, Xf=66°30'Ost приняли сигналы сек-
торных радиомаяков Канина (до ра1вносигнальной зоны #i=28 точек и пос-
ле этой зоны #2=30 тире) и Рыбачьего (#1=22 точки, #2=32 тире). Опре-
делить координаты судна.
Решение.
а) По счислимым координатам определим секторы маяков. Для этого на-
несем счислимое место на карту, используя разбивку меридианов и парал-
лелей. Счислимое место будет находиться в секторах К-9 и Р-7;
425
б) Рассчитаем действительные отсчеты, так как сумма знаков не дзет
60. По формуле (204) имеем:
^_28 + ?2к1<?+^1_23 „,ек;
У, - 22 5 = 25 точек;
в) Находим изолинию 29 точек -между оцифрованными изолиниями 20 и
30 в секторе К-9 и 25 точек в секторе Р-7. Снимем координаты точки пере-
сечения изолиний
Vo = 78°55' N, Хо = 66°40' Ost.
Широту места снимаем по разбивке меридиана 72°Ost измерителем, дол-
готу по разбивке параллелей 76°N и 82°N параллельной линейкой, которую
устанавливаем на отмеченную обсервоваиную точку и соответствующие оди-
наковые деления на обеих параллелях.
2. Карта ГУ 2589. В =74°30/N, Хс =43°00'Osf приняли сигналы сектор-
ных радиомаяков Канина — до равносигнальной зоны 20 точек, после 40 ти-
ре и Рыбачьего — до равносигнальной зоны 25 точек и после 35 тире. Оп-
ределить координаты судна.
Решение, а) По счислимым координатам и карте-схеме, помещенной
в навигационном пособии, определяем К счислимых секторов обоих маяков
(см. рис. 207)
К1{ = 0, = Ъ
б) Из табл. 20 выбираем величины Z и Ан
для Канина Z=2,86, Ан = 355°,5;
для Рыбачьего 2 = 2,86, Лн==25°;
в) По формуле (203) рассчитаем угол между нормалью и направлением
на судно
20
S*n = 120 X 2.В6 = °’0582;
ак = 3’20' = 3°,3;
ар=4°10' = 4°,2;
г) Рассчитаем ортодромические пеленги
РП=АН -f- а
, Ан = 355°,5 Ан = 25°
+ atf = 3°,3 ар 4°,2
РЩ= 358°,8 Р/72 = 29°,2
д) Из табл. 23 МТ-53 выберем ортодромические поправки
+1 = 0 +г = + 4°,7
и рассчитаем локсодромические пеленги
ИП = РП-^
И ^ = 35^,3 РП2 = 29,2
+2 = +4.7
ИП2 = 33,9
426
е) На карте или листе бумаги нанесем счислимое место и через него
проведем1 счислимый меридиан и параллель. От радиомаяка проложим ИПг
и ИПъ до пересечения их со счислимой параллелью (так как ИП\ и ИП2<АУ
в четвертном счете). Через полученные точки проложим линии положения по
направлениям
Д = 358°,8 Р2 = 33°,9 + 4°,7 = 38°,6;
ж) Снимем координаты точки пересечения линий положения
<р0 = 74°,20' N. Хо = 42°,56' Ost.
3. Карта ГУ 2543. В <fc~75°18'N, Л? = 18°50'Ost приняли сигналы сектор-
ных радиомаяков Рыбачьего—20 тире и 40 точек и Канина—55 точек, 5 тире..
Определить координаты судна и рассчитать среднюю квадратическую ошибку
обсервации, если ошибка измерения пеленга пгм = +0°,5.
Решение.
а) Из карты-схемы (рис. 207) по счислимым координатам выбираем но-
мера секторов Д =—5, Кг=—4. Из табл. 20 выбираем величины Z и Ан
Рыбачий Z=2,86, Л«=25°;
Канин Z=2,86, А н=355°,5;
б) Рассчитаем ортодромические пеленги
55 — 60.4 п _
Sin°8= Т20Т2.86 =-°’534’ а> = ~32 ,6.
Ан = 25° Ан= 355°,3
а1 = - 54°,7 g2 д — 32°,6
РИХ = 330°,3 РП2 = 322°,9
в) По РД между счислимым местом и радиомаяком и средней широте
из табл. 23 МТ-53 выберем ортодромическую поправку и рассчитаем локсо-
дромические пеленги
РД = 14 к W, = 73° N Ф1 = - 6°,б
РД = 25°,5 к W, = 71° N ф3 = - Н°.5
РД = 330°,3 РД = 322°,9
ф, = -6°,6 ф2 = 11°,5
ИЩ = 323°,7 И П2 = 3 И °,8
г) РМК. Рыбачий расположен под нижней рамкой карты (^маягка=
=32°,56'Ostj ^pmw = 33°,40/Ost), поэтому, используя метод смещения, нане-
сем меридиан РМК Рыбачий на карту, а на нижней рамке карты условное
место Л4ь По широте РМК и широте условного места Л41 выберем меридио-
нальные части и рассчитаем РМЧ
ср уел = 74° ,00' М Ч = 6723,6
<ЬшякО = 69°.45' 5900,7___________
РМЧ= 822,9= 13°,43' *
По меридиану РМК от условной точки Mi в масштабе долготы карты
отложим PAW=13°,43' и получим точку Ко, через которую проведем смещен-
ную параллель. Через условную точку ЛЬ прокладываем ИП} до пересечения
со смещенной параллелью в точке К'.
427
Or условной точки All по нижней рамке карты отложим отрезок КоК и
получим вспомогательную точку, от которой проложим ИП до пересечения
со счислимой параллелью, получив таким путем определяющую точку. Че-
рез эту точку проводим линию положения по направлению
R\ — ИПг
ИПГ = 323°.7
ф1Д-6°.б_____
/?! = 317°,I
д) Координатные линии РМК Канин не пересекают район карты 2543,
поэтому условным местом РМК выберем точку в правом углу карты. Рас-
считаем РД и РМЧ
Амаяка = 43°23' <?карты= 74°00' - М Ч = 6723,6
^тоы=33°40; ?^g = 68°39' = 5715,0
РД = 9°43' РМ Ч = 1008,6 = I о°48',6
Нанесем точку Ко, через которую проведем вспомогательные меридиан
и параллель. С угла карты (условное место РМК) проложим ИП2=3\ 1°,8 до
пересечения со вспомогательной параллелью в точке К'. Отрезок параллели
КоК отложим от правого угла карты по нижней рамке. Через полученную
точку проведем ИП2 до пересечения со счислимым меридианом, получив, та-
ким образом, вторую определяющую точку, через которую проведем линию
положения по направлению
ф2"= —H°t5
Я2 = 300°,3
ИП-,= 311°8
е) Снимем координаты точки пересечения двух линий положения
<рв = 75° 14' N, Ао = 19°32'О3‘; .
ж) Среднюю квадратическую ошибку обсервации рассчитываем по фор
•муле (208). Нам известно, что
0=/?i—/?2=317°, 1—300°, 3=16°, 9.
Множитель перед радикалом из табл. 24 равен 0,06. В обоих случаях
пеленгования ошибка ти одна и та же, поэтому выиесем ее из-под знака
радикала Тогда ________
М = ±0,06X0,5 +Dl .
Расстояние можно снять грубо с карты-схемы, а также рассчитать по
формулам письменного счисления.
Со схемы:
Тогда
D » 400 мили, D2 ~ 500 миль.
М = ±0,03/"4OU2 + 5jO2 = 19,2 мили.
4. Карта ГУ 696. В 75o40'N и A<, = 51°00/Ost приняли сигналы сек-
торных РМК и рассчитали ортодром ические пеленги:
Канина Р/7=15°,7, Рыбачьего Р/7=34°,8. Определить <ро и ^о*
Решение, а) По РД и средней широте выберем из табл. 23 МТ-53
ортодромические поправки:
РМК Канин РД=8°, <рот = =73°, Ф1 = +3°,8;
РМК Рыбачий РД=18°,5, <?т“==72°, ф2=+8°,7.
428
Рассчитаем локсодромические пеленги и направления линии положения
РПХ = 15°, 7 Р/72 = 34°,8
= 4- 3°,8 = + 8°,7
И ГЦ = 19°,5 ИП2 - 43°,5
ф] = 4- 3°,8 <р2 = 8»7
= 23°,3 /?3 = 52°,2
б) % Координатные линии РМК Канин не пересекают район карты 696. Ус-
ловное место радиомаяка—левый угол карты. Рассчитаем РД и РМЧ ус-
ловного и истинного расположения РМК
Карты = 48°00' ^корты = 69°00' МЧ = 5773
Каяка = 43°23' =68°38' ЛГУ = 5712.2
РД = 4°37' АИУ = 60°,б
По РД и РМЧ нанесем точку Ко- Через нее проведем вспомогательные
меридиан и параллель. Из точки в левом углу карты проложим ИП\ до пе-
ресечения со вспомогательным меридианом в точке Л'. Отрезок меридиана
КоК' отложим от угла карты по боковой левой рамке. Через полученную точ-
ку проведем ИП\ до пересечения со счислимой параллелью. Через точку
пересечения проведем по направлению R\ линию положения.
в) Радиомаяк Рыбачий расположен за боковой рамкой карты, и его па-
раллель пересекает район карты. Проложим на карте параллель маяка, ко-
торая на левой рамке карты наметит условное место маяка. Рассчитаем РД
условного и истинного места РМК
^карты = 48°00'
Каяка = 32°56'
РЛ=15°04'
От условной точки по параллели РМК отложим РД и получим точ-
ку Ко, через которую проведем вспомогательный меридиан. От условного ме-
ста РМК проложим ИП2 до пересечения его с условным меридианом в точ-
ке К'. Отрезок КоК' отложим от условного места РМК по левой рамке кар-
ты. Через конец отрезка проложим ИП2 до пересечения со счислимой парал-
лелью, получив таким путем определяющую точку, через которую по нап-
равлению R2 проведем линию положения. Точка пересечения линий положе-
ния является обсервованной точкой
X0 = 51°22'Ost.
Задачи
1. Рассчитать ортодромические пеленги по числу знаков, если дано:
л сектора Названия РМК Число знаков
до р-внос! гналь- ной ЗОНЫ после равносиг- нальной зоны N?
а) — 3 Канин 32 24
б)- 1 Рыб 1ЧИЙ 16 40
в)+ 2 Бушмилс 22 32
г) — 4 Станан. ер 12 44
Д)+ 4 Л у го 46 10
2. Карта 50 РА. Находясь в секторе РМК Канин К-6, приняли сигна-
лы РМК до равносигнальной зоны 25 тире и после — 35 точек. Находясь в
секторе РМК Рыбачий Р-5, приняли 30 точек и 30 тире.
Определить ?о и V
429
3. Карта 696. В <pc = 71o52'N, Xf *=49°40/O3t в По сигналам секторных мая-
ков были получены ортодромические пеленги: радиомаяка Канин Р/7=34°5.
Рыбачьего Р/7 = 63°. Пользуясь методом меридианов и параллелей, определить
координаты судна.
4. Карта ГУ 696. В = 70620'N, Xf=51°00'Ost приняли сигналы сектор-
ных РМК'. Канина до равносигнальной зоны 45 точек, после — 15 тире, Ры-
бачьего — 30 точек и 30 тире. Используя метод смещения, определить и
5. В счислимой точке <pc=76°50'N, Хс =80°00'0st, приняли сигналы сек-
торного РМК Рыбачий до равносигнальной зоны 24 тире, после равносиг-
нальной зоны 24 точки. По таблицам ТВА-57 рассчитать направление перено-
са и перенос.
6. В счислимой точке <pc=54°25'2N, Xc=4°43'Ost получили ортодромиче-
ские пеленги секторных радиомаяков: Бушмилса P77i = 92°,5. Ставангера
Р/72=187°,3. Используя табл. 22, определить аналитическим путем То и \)-
Ответы.
1. а) Р/7 = 330°,3; б) 17°,9; в) 162°,9; г) 26°,2; д) 152°
2. <р0 = 76°1 У N, Хо = 37°32' Ost.
3. <Ро = 7 i °37',4 N. Хо = 49°46' O8t.
4. <р0= 71’16'N, Ло=50°20' Ost.
5. ф =352°,2', п = 8,9.
6. <р0 = 54°25' N, Ао = 4°4 2', 1 O8t.
Контрольные вопросы
1. Как получить пеленг вращающегося радиомаяка?
2. Из каких источников выбирают значения К, Z, Ан?
3. На основании чего можно использовать гномоническую карту для
прокладки радиопеленгов, полученных по секторным маякам?
4. Какие данные для нанесения линии положения можно получить из
таблиц ТВА-57?
5. В чем особенность пятимачтовых секторных радиомаяков?
6. Как рассчитывается ошибка в пеленге по ошибке в числе отсчитан-
ных знаков?
7. В чем сущность работы маяка «Наваглоб»?
8. В каких проекциях выполняются специальные карты для использова
ния секторных маяков?
Глава XVII. АЗИМУТАЛЬНО-ДАЛЬНОМЕРНЫЕ,
ДАЛЬНОМЕРНЫЕ И ГИПЕРБОЛИЧЕСКИЕ РНС
§ ПО. РАДИОЛОКАТОР
Радиолокатор относится к азимутально-дальномерным РНС.
Слово «радиолокатор» состоит из двух слов: «радио» и латин-
ского слова «locus» — «место». В Америке и Англии радиолока-
тор называют «радар». Слово «радар» состоит из начальных
букв «radio detection and ranging», т. e. «радиообнаружение и оп-
ределение расстояния».
Радиолокатор относится к средствам ближней навигации. Его
работа основана на свойстве сантиметровых волн распростра-
няться во все стороны и отражаться от встречных препятствий.
Передатчик излучает радиоволны. Часть волн, упавших на окру-
430
жающие предметы,'отражается от них и возвращается к излуча-
телю. Отраженные волны слабы и обнаружить их на фоне -мощ-
ных передаваемых сигналов очень трудно. В радиолокационной
станции (РЛС) это затруднение исключается тем, что, заставляя
передатчик работать короткими импульсами, в промежутках
между ними наблюдают за слабыми отраженными сигналами.
При этом передатчики излучают мощные импульсы. Так, напри-
мер, передатчик РЛС «Нептун» излучает импульс мощностью
35 кет, потребляя на всю установку только 4 кет.
В радиолокаторах применяются волны сантиметрового диапа-
зона, так как длинные радиоволны обладают способностью оги-
бать небольшие предметы, не отражаясь от них. От длины волны
зависит точность определения места отражающего предмета. Чем
короче волна, тем выше точность.
В 30-х годах нашего столетия на первой береговой РЛС при-
менялись волны 20-метровой длины. В 1939 г. на английских
крейсерах «Родней» и «Шеффильд», были установлены РЛС, рабо-
тавшие на 10-метровой волне. Подобные РЛС для навигационных
целей не годились из-за малой точности и служили лишь для об-
наружения целей. В навигации же необходимо определить рас-
стояние до объекта и направление на него.
Для определения направления энергию, излучаемую передат-
чиком, собирают в узкий луч, используя для этого антенну на-
правленного действия. Излучение энергии передатчика узким
лучом не только позволяет определить направление на объект,
но и увеличивает дальность действия РЛС из-за того, что энергия
не рассеивается в других направлениях. Для еще большего уве-
личения дальности действия, отраженную от объекта энергию
принимают на антенну, обладающую резкой направленностью.
Отраженная волна во время промежутка между посылкой им-
пульсов поступает на Приемник. Импульсный способ радиолока-
ционного передатчика позволяет определить расстояние до отра^
жающего объекта. Для этого нужно измерить промежуток време-
ни между посылкой импульса и возвращением его после отраже-
ния. Скорость распространения электромагнитных волн практи-
чески равна 1/=300 000 км/сек. Если отраженный сигнал вернул-
ся через -10~с0 сек после посылки импульса, значит луч про-
шел путь
5= ^ = 300000^^ = 30 км.
В связи с тем, что луч прошел одинаковое расстояние до объекта
и обратно, расстояние до объекта
£> = —= ~2-=15 км.
Частота посылок импульсов находится в зависимости от тре-
буемой дальности действия радиолокатора. В связи с тем, что за
431
время от одной посылки импульса до другой сигнал должен ус-
петь дойти до наиболее удаленного отражающего объекта и, от-
разившись, вернуться обратно, наименьший возможный .промежу-
ток времени t определяется
Отсюда частоты посылки импульсов
f_±< v
J— t 2D *
В судовых РЛС используется способ кругового обзора, при
котором на экране электронно-лучевой трубки изображается ра-
диолокационный план окружающей обстановки.
Электронно-лучевая трубка представляет собой стеклянную
колбу с несколько выпуклым дном, из которой выкачан воздух.
На внутренней поверхности дна трубки нанесен флюоресцирую-
щий, полупрозрачный слой состава, обладающего послесвечени-
ем. Электронный луч, попадая на экран, оставляет на нем светя-
щуюся точку, которая остается на экране -в течение нескольких
секунд после того, как луч исчез. Узкий электронный луч создает-
ся электронной пушкой, помещенной в горле колбы. Посылаю-
щая импульсы и принимающая отраженные импульсы комбини-
рованная антенна, вращается в горизонтальной плоскости. При
неподвижной антенне луч на экране будет прочерчивать светлую
линию от центра к периферии — развертку. Развертка имеет пря-
мой и обратный ход. Во время прямого хода луч движется от
центра к периферии, во время обратного—возвращается в ис-
ходное положение. На время обратного хода развертки, длитель-
ность которого намного меньше, чем прямого хода, электронно-
лучевая трубка запирается и обратный ход развертки не виден.
Угловое положение линии развертки на экране не зависит от
угла поворота отклоняющей системы электронно-лучевой трубки,
которая синхронно связана с приводом антенны. Таким образом,
линия развертки на экране в каждый момент времени будет со-
ответствовать повороту антенны РЛС относительно некоторого
начального положения. Таким положением в судовых РЛС счи-
тается направление на норд.
При постоянном вращении антенны на экране наблюдается
непрерывно вращающаяся вокруг центра линия развертки. Ре-
жим работы трубки подбирается такой, чтобы линия развертки
была почти невидима на экране. В момент прихода отраженного
импульса на линии развертки появляется яркое светящееся пят-
но, положение которого соответствует направлению и дальности
до объекта в определенном масштабе. Расстояние светящейся
точки от центра экрана зависит от времени, которое прошло от
начала развертки, т. е. от момента посылки импульса, и пропор-
ционально расстоянию до отражающего объекта.
Вокруг экрана расположено азимутальное кольцо с деления-
432
ми от 0 до 360°. Ноль шкалы ориентирован по ДП судна. Курсо-
вой угол снимается с помощью вращающегося визира, -после чего
можно рассчитать истинный пеленг, зная свой ИК» Кроме того,
вокруг экрана помещен подвижной лимб, связанный с гироком^
пасом. По лимбу снимают с помощью того же визира КПг ори-
ентиров, видимых на экране.
Измерение расстояния до объекта, как было уже сказано,
сводится к измерению времени с момента посылки импульса до
момента возвращения отраженного импульса. Промежутки вре-
мени, а следовательно, и пропорциональные им расстояния, из-
меряются индикатора1М|И дальности с точностью до 0,01 мксек.
Индикатором дальности является также электронно-лучевая
трубка. На экране трубки наносятся электронные масштабные
отметки, которые бывают неподвижными и подвижными. Непод-
вижные создают неподвижные круги дальности (НКД)^ которых
например, на экране РЛС «Нептун» — четыре. Подвижные от-
метки создают подвижной круг дальности (ПКД), с помощью
которого расстояние до отражающего объекта снимается с точ-
ностью до 0,1 кбт. (18,5 м). Таким образом, радиолокатор как
навигационный прибор дает одновременно две изолинии; по рас-
стоянию— окружность и по пеленгу — прямую. Эти две изоли-
нии пересекаются под углом 90°.
Для получения изолиний необходимо опознать место, а для
этого нужно уметь читать радиолокационное изображение* Не-
смотря на большое сходство 1радиолокационного изображения с
картой, нельзя забывать, что это радиолокационный план, кото-
рый имеет ряд следующих особенностей.
1. Яркость радиолокационного изображения на экране про-
порциональна размерам объекта и быстро убывает с увеличением
расстояния. В связи с этим иногда яркость изображения малого
предмета, находящегося близко от РЛС, может быть гораздо
больше, чем яркость большого предмета, находящегося много
дальше. Считают, что на средних дистанциях при увеличении рас-
стояния в 2 раза, яркость изображения уменьшается в 16 раз.
2. Яркость радиолокационного изображения зависит от отра-
жательной способности предметов, которая в свою очередь зави-
сит, во-первых, от формы и размеров предметов и, во-вторых,
от электрических свойств материала объектов. Малой отража-
тельной способностью обладают низкие объекты, имеющие не-
большой наклон облучаемой поверхности относительно горизон-
тальной плоскости (конические буи, крыши, отлогий пляж и др.).
Такие объекты отражают луч под некоторым углом к горизонту,
и отраженные импульсы не возвращаются к антенне РЛС, так
как она ниже границы вторичного излучения электромагнитной
энергии.
Хорошей отражательной способностью обладают искусствен-
ные сооружения и скалы с плоскими отвесными стенами, метал-
лические мачты и резервуары, ажурные сооружения и др. Заме-
28 Навигация
433
чено, что лес летом отражает лучше, чем зимой, лесок мокрый
отражает хуже, чем сухой. Покрытая снегам местность меняет
отражательную способность, которая зависит от рыхлости и
влажности снега. Из-за многообразия особенностей, свойствен-
ных объектам, не всегда видимый простым глазом объект будет
обнаружен радиолокатором. Если радиолуч встречает одинокий
(точечный) объект, то такой объект отражает радиоволны все
время, пока на него падает радиолуч, ширина которого в горизон-
тальной плоскости около 1—2°. Ширина луча в вертикальной
плоскости значительно шире (до 20—30°), так как необходимо
покрыть всю поверхность воды от судна до предельной дально-
сти действия радиолокатора для того диапазона, на который он
настроен, а также давать изображение на экране в качку при кре-
не. Такую ширину луча создают антенны с параболическими от-
ражателями, применяемые в судовых РЛС.
3. При измерении расстояния до береговой черты, особенно,
если берег отлогий, на экране будет изображение не береговой
черты, а горизонтали, расположенной выше береговой черты, т. е.
расстояние, измеренное по отражению, будет больше истинного^
а это может привести к аварии. В некоторых случаях, если у бе-
рега прибой, на экране он изобразится береговой чертой, и изме-
ренное расстояние до берега будет меньше истинного.
4. Изображение одного объекта может быть затемнено дру-
гим объектом.
5. Антенна радиолокатора излучает энергию, имея при этом
характеристику лепестка, но иногда какие-то доли процента энер-
гии образуют боковые лепестки, которые вызывают появление
ложных объектов.
Радиоволны плохо отражаются от предметов, размеры кото-
рых меньше длины волны, и следовало бы ожидать, что дождевые
капли не должны давать изображение на экране. Но дождевое
и снеговые осадки, в связи с их массовостью, дают на экране
устойчивое и четкое изображение, скрывая все, что находится за
пеленой дождя или снега.
Таким образом, пользоваться радиолокатором нужно умело
и опираться только на радиолокационные обсервации рискованно.
Поэтому нужно при всяком удобном случае контролировать по*
лученные радиолокационные обсервации другими. Кроме того,
нужно уметь читать изображение на экране, что дается трениров-
кой. Поэтому параллельно с визуальными обсервациями рекомен-
дуется производить радиолокационные.
§ 111. РЛС «НЕПТУН»
В настоящее в<ремя на транспортном флоте используются РЛС
«Нептун» и «Дон», на промысловом — «Створ» и «Донец». Нави-
гационное качество каждого радиолокатора характеризуется тех-
ническими характеристиками. Рассмотрим технические характе-
ристики РЛС «Нептун».
434
1. Разрешающая способность РЛС по пеленгу, т. е. способ-1
ность раздельно изображать на экране объекты, расположенные
друг от друга на каком-то минимальном удалении, зависит от
ширины луча в горизонтальной плоскости и равна 1°,6. Разре-
шающая способность по пеленгу, в зависимости от расстояния до
объекта, представлена в табл. 25.
Таблица 25
Расстояние до объекта, кбт. Разрешающая способность, м Расстояние до объекта, кбт. Разрешающая способность, м
2 13 40 256
5 32 50 320
10 64 60 384
15 96 80 572
20 128 100 640
25 160 150 960
30 192 200 1280
2. Устойчивость изображения при углах крена на качке за-
висит от ширины луча в вертикальной плоскости, равной 16°.
3. Устойчивость эхосигнала на экране зависит от многократ-
ности облучения объекта импульсами (около 10) и обеспечивает-
ся вращением антенны со скоростью 14 об!мин,
4. Разрешающая способность по расстоянию, т. е. способность
РЛС раздельно обнаружить два точечных объекта, лежащих на
одном пеленге, зависит от длительности импульса. Для малых
расстояний на 1,5- и 5-мильных шкалах длительность импульса
0,25 мксек\ для больших расстояний для шкал 15 и 30 миль —
1,0 мксек. За это время луч проходит расстояние 75 и 300 м. Раз-
решающая способность по расстоянию складывается из V2 длины
импульса и половины диаметра рисующего пятна в соответствую-
щем масштабе и равна соответственно 70 и 270 м.
5. Количество шкал дальности обеспечивает прибрежное пла-
вание, входы в порты, проходы узкостей. Шкал дальности — че-
тыре: первая — 1,5 мили, вторая — 5, третья — 15, четвертая —
30 миль. На каждой шкале свой масштаб изображения. Масшта-
бы приведены в табл. 26.
Таблица 26
Шкалы даль- ности Средний масштаб Расстояние на экране в звисимости от рас- стояния на местности, см Расстояние на местности /кбт.| в зависимости от расстояния на экране, мм
1 миля | 1 кбт. 1 1 5 1 10
1 It 250С0 7,4 0,7 0,14 0,68 1,35
И 1: 78000 2,3 0,2 0J2 2,1 4,24
III It250000 0,7 — 1,35 6,8 13,5
IV 1x470000 0,4 — 2,54 12,7 25,4
28*
435
В РЛС «Нептун» длина радиоволны равна 3,2 см, что обеспе-
чивает прямолинейность распространения радиолуча.
При использовании РЛС «Нептун» следует помнить следую-
щее.
1. Визуальный пеленг точнее радиолокационного, так как раз-
решающая способность по пеленгу пеленгаторов выше радиоло-
катора. Если при визуальном пеленговании средняя квадрати-
ческая ошибка пеленгования т=±0°,2, то средняя квадратиче-
ская ошибка радиолокационного (пеленгования т и = ±2° и
больше.
2. Измерение расстояний радиолокатором «Нептун» весьма
удобно и точность измерения более высока, чем при любом дру-
гом способе, применяемом в настоящее время в судовождении.
По данным ЦНИИЭЭВТ средняя квадратическая ошибка изме-
рения расстояния на первой шкале та = ±6 м, на второй —
ти =±10 м. Для третьей и четвертой шкал ±0,6—1% от пре-
дельной дальности шкалы.
3. В связи с тем, что сантиметровые волны в однородной сре-
де распространяются прямолинейно, луч в заданном ему направ-
лении, подобно световому лучу, движется до тех пор, пока не
встретит препятствие, которое его отражает в противоположном
направлении. Сантиметровые волны, как и световые4 подверже-
ны рефракции, дифракции и интерференции.
Явление рефракции для сантиметровых волн выражено силь-
нее, чем для световых, поэтому дальность радиолокационного
изображения больше видимого горизонта ори одинаковой высоте
антенны радиолокатора и высоты глаза наблюдателя
0^2,2^, (211)
где Dp—дальность радиолокационного горизонта, мили;
h— высота антенны, м.
Соответственно и дальность видимого ориентира (Z)o) будет
выражена _ _
DO = 2,2(/A + /H), (212)
где Н— высота ориентира, м.
Мощность излучаемой РЛС энергии уменьшается с увеличе-
нием расстояния до РЛС. В условиях однородной прозрачной ат-
мосферы уменьшение мощности обратно пропорционально квад-
рату расстояния. Следовательно, в случае отражения волны от
объекта мощность радиосигнала, вернувшегося к РЛС обратно,
пропорциональна четвертой степени расстояния до объекта, а в
зоне предельного радиолокационного обнаружения, с учетом от-
ражения от земли, пропорциональна восьмой степени расстояния
до объекта. Если мощность возвратившегося сигнала будет мень-
ше, чем мощность собственных шумов приемника, объект на эк-
ране не обнаружится. Минимальная мощность радиоволн санти-
436
метрового диапазона, необходимая для надежной работы прием-
ника, равна
10-12 _ ю-i3
Для отражения сигнала большую роль играет эффективная отра-
жающая поверхность облучаемого объекта. Чем она больше, тем
больше дальность обнаружения объекта.
Таким образом, дальность радиолокационного обнаружения
при нормальном состоянии атмосферы будет несколько меньше
рассчитанной по формуле (212).
В табл, 27 приведены значения дальности обнаружения объек-
тов с помощью РЛС «Нептун», высота антенны которой 16 м.
Таблица 27
Объект наблюдений Даль- ность об- наруже- ния, мили Объект наблюдений Даль- ность об- наруже- ния, мили
Камни и скалы на уровне до 1 м ...... . Мелкоосушные балки и осушные рифы .... Плоский песчаный берег . Отвесные скалы, утесы Холмы, горы Пирсы, брекваторы . . . Отдельные маяки .... Доки Мосты через реки .... Гребные шлюпки .... Рыболовные дрифтеры . . Рыболовные тральщики Плавучие маяки .... Суда водоизмещением 1000 т 1 До 2 До 4 1-5 До 20 15-30 5-10 5—10 До 5 До 5 До 2 3— 5 6— 9 6-10 6—10 Суда водоизмещением 3000 т 10000 т 50000 т Малые буи Средние буи (2-го класса) Большие буи (1-го класса) Бун с отражателями . . Отдельные льдины, низкие айсберги Крупные высокие айсберги Прибой на мели .... Легкое волнение моря . Бурное волнение .... Дождевой шквал .... Густой дождевой шквал . Грозовые облака .... Снежные облака .... 10-13 10-16 16—20 0,5—1 2—4,5 4-6 6-8 До 3 3-15 До 2 0,5-1,0 2— 4 3—10 10—20 2- 5 3- 5
Кроме указанных причин, влияющих на дальность обнаруже-
ния объектов, при нормальном состоянии атмосферы существуют
причины, изменяющие дальность обнаружения, возникающие от
ненормального состояния атмосферы, когда сантиметровые вол-
ны распространяются ненормально. К ним относятся субрефрак-
ция— пониженная рефракция, уменьшающая дальность обнару-
жения и суперрефракция—повышенная рефракция, увеличиваю-
щая дальность обнаружения.
Субрефракция возникает:
а) из-за большой разницы температур воды и воздуха, когда
воздух холоднее воды;
б) когда увеличивается влажность воздуха с высотой;
в) при изменении метеорологических условий.
Суперрефракция возникает в случаях:
а) когда теплый воздух движется над холодной водой;
437
б) когда с высотой уменьшается влажность воздуха;
в) при высоком барометрическом давлении и ясной .погоде.
В некоторых случаях наблюдают сверхдальнее обнаружение
до 1000 миль, которое происходит из-за многократного отраже-
ния радиоволн от слоев воздуха с различной плотностью.
4. Минимальная дальность обнаружения называется мерт-
вой зоной и представляет собой немногим больше половины про-
тяженности импульса. Учитывая скорость распространения ра-
диоволн, дальность обнаружения будет:
£>ш1п=о,бт<
и—длительность импульса (0,25—1,0 мксек);
У—скорость распространения сантиметровых волн.
Рассчитать Z>mjn можно также, зная высоту антенны hA и
ширину луча в вертикальной плоскости Р, тогда (рис. 215) ми-
нимальная дальность обнаружения будет:
О..п = А-- (213)
Практическое определение Dmin заключается в следующем..
Весельная шлюпка, имеющая на борту бухту линя, один конец
которого привязан к судну, отходит от борта перпендикулярно
ДП судна. Пока шлюпка находится в мертвой зоне, на экране
радиолокатора сигнала не будет. На расстоянии D min на экра-
не появится эхосигнал шлюпки. При помощи сигнала с судна
438
на шлюпке делают отметку на лине. Пройдя границу мертвой
зоны, шлюпка возвращается к борту. При пересечении границы
мертвой зоны эхосигнал на экране исчезнет, а на шлюпке по
сигналу с судна делают отметку на лине. Z)min будет равно сред-
ней длине линя, вытравленного со шлюпки.
§ 112. НАВИГАЦИОННЫЕ ОСОБЕННОСТИ
ПРИ ВЫПОЛНЕНИИ РАДИОЛОКАЦИОННЫХ ОБСЕРВАЦИИ
Надежную обсервацию при плохой видимости при помощи
радиолокатора можно получить точно, опознав ориентиры, по
которым определяют изолинии. Опознать ориентиры для обсер-
вации судоводителю помогают навигационная карта с нанесен-
ными ориентирами данного района, радиолокационные схемы
района плавания, практическое знание судоводителем рельефа
местности, радиолокационные маяки, пассивные отражатели и,
наконец, умение читать радиолокационное изображение и сопо-
ставлять его с картой. При подходе к берегу с моря в пределах
радиолокационной видимости судоводитель обнаруживает на эк-
ране эхосигналы от объектов, находящихся за береговой чертой,
не обнаруживая береговую черту, нанесенную на карту. Поэтому
иногда довольно трудно даже опытному судоводителю опознать
берег по карте. Только в тех случаях, когда берег обрывист и
высок, получают изображение береговой черты. Для уверенно-
сти в опознанных ориентирах наносят обсервацию следующим
образом: берут три радиолокационных пеленга трех ориентиров-.
Исправляют их ЛК или, если это КУ, то переводят их в ИПУ и
измеряют радиолокационные расстояния до этих ориентиров, за-
метив при этом время и OJI. Если в данном районе есть радио-
маяк, нужно взять радиопеленг. На листе кальки проводят ис-
тинный меридиан, на котором произвольно выбирают точку О
(рис. 216). Через эту точку проводят ИП\> ИП2 и ИП$. По ли-
ниям от точки О откладывают в масштабе карты измеренный
расстояния -Di, D2, D3. Кальку накладывают на карту так, что-
бы проведенный на кальке меридиан был параллелен меридиа-
нам карты, и, перемещая кальку по карте, добиваются, чтобы
точки кальки af Ь, с совпали с ориентирами карты А, В, С. До-
бившись такого совпадения, в точке О делают укол циркулем.
Это и будет обсервованная точка, которая должна лежать н1а
линии радиопеленга, если при этом был получен надежный ра-
диопеленг по радиомаяку. Если радиомаяка в районе плавания
нет или нет уверенности в радиопеленге, рекомендуется одно-
временно измерить глубину эхолотом. Полагаться на получен-
ную обсервацию не следует, а через некоторое время (15—
30 мин) обсервацию повторяют.
При надежной обсервации—счислимое место и обсервован-
ная вторая точка должны совпасть. Если ориентиры опознаны
неверно, они не совпадут.
439
Полученной обсервованной точке доверять все же нельзя и
нужно через некоторое время повторить обсервацию по другим
ориентирам, привязывая их через уже опознанные. При каждой
обсервации необходимо контролировать себя эхолотом или ра-
диопеленгатором или тем и другим, так как появление субреф-
ракции или суперрефракции сделает обсервации невозмож-
ными.
Рис. 216
Вместо кальки можно использовать предложенный
ЦНИИЭЭВТ радиолокационный протрактор.
При выборе и опознании ориентиров следует:
а) выбирать точечные объекты, гидротехнические сооруже-
ния с отвесными стенками, обрывистые выступающие мысы;
б) учитывать высоту прилива. Для этого все высоты ориен-
тиров привести к действующему уровню и контролировать ориен-
тиры по измеренным высотам дальностью обнаружения. Упро-
щая вычислительную работу, предварительно составить таблицу
дальности радиолокационного горизонта (табл. 28).
Если высота антенны 20 м, а приведенная к уровню высота
ориентира 60 м, то измеренное расстояние до только что поя-
вившегося на экране ориентира должно быть 27 миль. Получив
большую разность в измеренном радиолокатором и рассчитан-
ном расстоянии, нужно полагать, что виден на экране не тот ори-
ентир, который принят для обсервации;
в) использовать лот и по возможности радиопеленгатор для
уточнения счислимого места;
440
г) расстояние, на котором изображение береговой черты на
экране начинает быть сходным с береговой линией карты, колеб-
лется от 8 до 15 миль, в зависимости от топографии береговой
черты.
Таблица 28
Высота наблюдателя, м Dp, мили Высота наблюдателя, м Dpt мили
5 5 50 15,5
7 6 60 17
10 7 70 18,5
12 7,5 80 19,5
15 8,0 90 21
20 10 100 22
25 Н 150 27
30 12 200 31
40 14
50 15,5
Огромную помощь судоводителям оказывают активные и
пассивные отражатели.
Активные отражатели, или радиолокационные маяки, или,
как их называют, маяки-ответчики — радиотехнические устрой-
ства релейного действия. Они принимают луч сантиметровых
волн, направленный судовым локатором и посылают ответный
луч на антенну судового локатора. На экране судовой РЛС он
имеет вид одной или нескольких небольших концентрических
дуг. Середина дуги соответствует направлению на маяк. При
пользовании таким маяком-ответчиком, необходимо знать вели-
чину задержки ответа, которая дается в справочниках
( + 300—F 1200 jh) и возникает из-за того, что с момента получе-
ния сигнала маяком до момента ответа проходит какое-то неболь-
шое время. Только учитывая эту поправку, можно получить рас-
стояние до маяка, причем точность полученного расстояния будет
ниже, чем точность расстояния, измеренного до обычного ориен-
тира.
Пассивные отражатели. От мощности возвратившегося отра-
женного импульса зависит яркость эхосигнала на экране. Мощ-
ность отраженного импульса зависит от эффективной площади
отражающего объекта. Если взять три металлических квадрат-
ных листа со стороной а и соединить их так, чтобы они образова-
ли трехгранную пирамиду, то получим уголковый отражатель.
Максимальная площадь отражения такого уголкового отражате*
ля получится в том случае, если луч будет падать на него в на-
правлении оси симметрии отражателя, а пространственная диаг-
рамма отражения будет представлять собой один пространствен-
ный широкий лепесток в центре и три боковых узких лепестка.
441
перпендикулярных трем граням. Эффективная площадь отраже-
ния такого отражателя будет
с _
х» ’
где X — длина волны, увеличение которой сильно снижает эф-
фективную площадь отражателя.
Один уголковый отражатель обеспечивает достаточно сильное
отражение в секторе около 60°. Поэтому группа в 6 разнонаправ-
ленных уголков обеспечит круго-
—~~~^"^fl вое отражение объекта (рис. 217).
jfl Пассивные отражатели, ‘ уста-
\ {_Д fl новленные на берегу с однообраз-
\ | j fl ным ландшафтом и нанесенные
]fl/^ \ на карте (низкий песчаный или
( у ) болотистый берег, гладкий, за-
х. J росший кустарником склон и т. д.),
__ дают возможность опознать ме-
сто и получить обсервацию. Уста-
f л \ новленные на буе уголковые от-
( Хх ) ражатели дают возможность лег-
44—fl\ j V"—S ко опознать буй даже в штормо-
/I / \ вую ПОГ°ДУ» когда экран вблизи
fl X центра засвечивается.
fl \ Большую помощь судоводите-
лю в опознании ориентиров мест-
ис' 2 7 ности могут оказать специаль-
ные радиолокационые характе-
ристики местности, отдельные радиолокационные снимки с экра-
на локатора и целые радиолокационные схемы района, смонтиро-
ванные из серии фотографий экрана радиолокатора. Такие посо-
бия судоводитель может и должен составлять сам, направлять
копии в морские инспекции пароходств и в отделы гидрографиче-
ской службы.
Все радиолокационные обсервации можно разделить на сле-
дующие виды.
1. По трем и более пеленгам и расстояниям. При этом нужно
помнить, что ошибка пеленгования больше ошибки измерения
расстояния. Этот вид обсервации применяется в случаях, когда
судно находится на больших расстояниях от ориентиров (до
30 миль) и нет уверенности в достоверности выбранных ориенти-
ров.
2. Обсервации по двум и трем радиолокационным расстояни-
ям распространены на флоте и в зависимости от характера наблю-
даемых ориентиров выполняются следующими методами:
а) если измерены расстояния до двух или трех точечных ори-
ентиров D\, D2, то радиусами, равными измеренным расстоя-
ниям, из точек, представляющих собой ориентиры, как из центров
окружности проводятся дуги окружностей вблизи счислимого ме-
442
ста. Точка пересечения этих дуг будет обсервованной точкой
(рис. 218,а);
б) если измерены расстояния до выступающих мысов, нанесе-
ние обсервованного места выполняется аналогично случаю, опи-
санному в пункте «а», но измерение расстояния нужно произво-
дить тщательнее, не утапливая ПКД в изображение мыса, а доби-
ваясь его касания с той частью изображения, которая больше
всего выступает по пеленгу;
Рис. 218
в) если измерено расстояние Di до точечного ориентира А или
до ориентира, имеющего характерные выступающие очертания, и
расстояние D2 до плавной береговой черты, то поступают так
(рис. 218,6): радиусом D\ из точки А проводят дугу окружности,
затем подбирают такую точку для острия ножки циркуля на про-
веденной дуге, из которой раствором циркуля D2 можно было бы
провести касательную дугу окружности к плавной черте берега.
Выбранная точка будет обсервованным местом;
г) если измерены расстояния D\, D2 D3 до береговой линии с
плавными очертаниями, то на листе кальки из общего центра
Р проводят дуги окружностей радиусами £>ь D2i D3 (рис. 218,в).
Наложив кальку на карту, перемещают ее, добиваясь одновре-
менного касания дуг окружностей участков, плавной береговой
черты карты. Когда такое касание будет достигнуто уколом цир-
куля в точке Р, переносят обсервованное место на карту.
3. По визуальному пеленгу и радиолокационному расстоянию.
В связи с тем, что визуальный пеленг и измеренное радиолокаци-
онное расстояние являются точными, а изолинии пересекутся
под углом 90°, этот вид обсервации распространен при хоро-
443
шей видимости. О том, как выполнять обсервацию, было сказа-
но выше.
4. Определение места по радиолокационному пеленгу и рас-
стоянию применяется при плохой видимости, когда ориентир точ-
но опознан. Но следует помнить, что радиолокационный пеленг
имеет большую случайную ошибку.
Как правило, по одним радиолокационным пеленгам обсерва-
ции не наносятся из-за малой точности радиолокационных пелен-
гов. Радиолокационные расстояния используются для огражде-
ния судна от сближения с опасностями, расположенными вблизи
берегов. Если судно при плохой видимости следует вдоль побе-
режья, на расстоянии радиолокационной видимости, выбирают по
карте хорошие радиолокационные ориентиры и проводят дуги ок-
ружности радиусами, обеспечивающими безопасность плавания
(рис. 219). Линию пути судна прокладывают несколько мористее
и параллельно линии безопасности, касательной к проведенным
окружностям. Затем плавание по заданному пути контролируют
по траверзным расстояниям до ориентиров, не давая судну захо-
дить за линию безопасности, т. е. чтобы D на траверзе было боль-
ше Dkp.
Ошибки обсерваций, полученных по расстояниям и пеленгам
и расстояниям, рассмотрены нами ранее в § 81, 82, 83. Формулы,
выведенные в этих параграфах, применяются для определения
ошибок обсерваций, полученных по радиолокационным наблюде-
ниям.
Опытный наблюдатель обычно измеряет расстояние с интер-
валом 15—20 сек (максимум 30 сек), поэтому для повышения
точности обсервации рекомендуется:
а) первым измерять расстояния до ориентира, расположенно-
го на курсовых углах, близких к 90°;
б) последним измерять расстояния до ориентира, расположен-
ного на курсовых углах, близких к 0 или 180°, и замечать время
и отсчет лага.
При таком порядке наблюдений можно наблюдения не приво-
дить к одному моменту, в особенности на судах со скоростями до
15 узлов.
444
§ 113. ДАЛЬНОМЕРНЫЕ РАДИОНАВИГАЦИОННЫЕ СИСТЕМЫ
Как было указано, дальномерные РНС дают изолинию—ок-
ружность. В СССР дальномерные РНС созданы советскими уче-
ными Папалекси, Мандельштамом и Щеголевым на основе интер-
ференции радиоволн в точке приема. Рассмотрим два вида даль-
номерных РНС: радиолаг и радиодальномер.
Рис. 220
Радиолаг — самая точная из существующих дальномерных
РНС, представляет-собой радиоинтерферометр от судна до бере-
говой установки. Радиолаг состоит из передатчика, установлен-
ного на судне и излучающего радиоволны определенной частоты,
который называется задающей станцией, и двух радиоустановок
на берегу, называемых отражающими станциями. Последние,
приняв радиоволну задающей станции, посылают ее обратно на
судно. Радиоволна, прошедшая от задающей станции к отража-
ющей и обратно, к приемнику задающей станции будет иметь
сдвиг фаз, величина которого зависит от расстояния между суд-
ном и береговой установкой. Если судно стоит неподвижно, то
этот сдвиг фаз будет величиной постоянной, которая не дает воз-
можности определить расстояние 'между судном и береговой
станцией.
Допустим, что в точках А и В на берегу установлена отража-
ющая станция. Судно с задающей станцией находится в точке М
(рис. 220). Пока судно неподвижно, расстояние между судном и
каждой из станций постоянно, показания фазометров (приборов,
измеряющих сдвиг фаз) остаются одними и теми же. Как только
судно начнет перемещаться, (расстояния AM и ВМ начнут изме-
445
мяться, и фазометры отметят начавшееся изменение разности
фаз. Эти изменения пропорциональны изменениям расстояний.
В связи с тем, что радиолагом измеряются только изменения
расстояния перемещающегося судна, необходимо перед его вклю-
чением определить свое место каким-либо способом и снять с кар-
ты расстояния до станций А и В. При движении судна получае-
мые приращения расстояний, которые могут быть со знаком плюс
(когда расстояние увеличивается) и знаком минус (когда рас-
стояние уменьшается), алгебраически суммируются с расстоя-
ниями, снятыми с карты. В результате на судне постоянно имеют-
ся два радиуса изостадий, с помощью которых получают обсер-
вованное место.
В навигационной практике радиолаг не применяется, так как
а) вся система должна действовать непрерывно в течение
рейса;
б) отражающие береговые станции могут обслуживать только
одно судно;
в) необходимо в начале рейса определять расстояния до бере-
говых станций, а это приводит к тому, что случайная остановка
работы системы не позволит возобновить обсервации без допол-
нительного нанесения места судна другими способами;
г) дороговизна эксплуатации и сложность обслуживания си-
стемы.
Радиодальномер МПЩ (Мандельштам, Папалекси, Щеголев)
основан на принципе изменения частоты радиоволн. Он состоит
из судовой задающей станции и береговых отражающих станций,
которые работают на одной и той же волне. Длина волны опреде-
ляется судовой задающей станцией. Эти станции расположены в
точках на берегу, координаты которых судоводителю известны, с
таким расчетом, чтобы изолинии — окружности пересекались в
районе моря, обслуживаемом ими под углом 30—150°. Вклю-
чаются в работу отражающие санции либо по вызову, либо со-
гласно расписанию их работы. Береговыми станциями могут поль-
зоваться несколько судов, в разное время. Для получения обсер-
вации нужно не менее двух отражающих станций. При измене-
нии расстояний с помощью радиодальномера необходимо соблю-
дать курс и скорость судна постоянными.
§ 114. ГИПЕРБОЛИЧЕСКИЕ РАДИОНАВИГАЦИОННЫЕ СИСТЕМЫ
Гиперболические РНС, или, как их еще называют, разностно-
дальномерные системы, дают возможность измерять раз-
ность расстояний от судна до двух расположенных на берегу ра-
диотехнических устройств. По’ разности расстояний на карту нано-
сится изолиния, которая представляет собой гиперболу. В фоку-
сах гиперболы расположены излучающие устройства. Гиперболи-
ческие РНС по радиотехническим признакам делятся на импульс-
ные и фазовые и призваны обслуживать дальнюю навигацию.
446
Импульсная гиперболическая РНС состоит из
двух мощных передатчиков, установленных на берегу, и приемни-
ка-индикатора с электронной лучевой трубкой, установленного
на судне. Импульсную систему называют системой «Лоран». В
настоящее время во всем мире работает 40 таких станций.
Передатчики излучают импульсы мощностью 150—300 кет на
волне 150—200 м, Продолжительность импульсов 50—100 мксек.
Такие параметры импульсного луча обеспечивают рабочее рас-
пространение его днем на 600 миль и ночью из-за появления от-
раженных волн на 1200 миль. Передающие станции обычно уста-
навливаются по три на обслуживаемый район моря. При этом од-
на средняя управляет работой двух крайних — ведомых и назы-
вается ведущей станцией (рис. 221). Получается две пары стан-
ций, каждая пара дает разность расстояний и, следовательно,
изолинию — гиперболу. Две изолинии в пересечении дают обсер-
вованную точку.
Цикл передачи начинает ведущая станция, которая посылает
импульс, распространяющийся во все стороны. Этот импульс, до-
стигнув одной ведомой станции и заставив сработать электриче-
скую схему через промежуток времени и другой станции че-
рез время ts> является сигналом для посылки сигналов ведомы-
447
ми станциями. Таким образом, ведомые станции посылают свои
сигналы с запаздыванием относительно ведущей. Это запазды-
вание строго определенное, равное 4s для одной станции и ts
для другой, позволит решить, какая из станций расположена
ближе к судну. Разность между моментами приема на судне им-
пульсов, приведенных к одному моменту посылки вычитанием 4s
или ts прямо пропорциональна разности расстояний между суд-
ном и излучающими станциями. Допустим, что промежуток вре-
мени для прохождения сигнала от станции А до судна равен тя,
а от станции В—ив- Тогда
V= Da\ 'Сд V = Db-
Но так как измерить время прохождения сигнала нельзя, а мож-
но измерить только разность моментов, то
(тЛ -тв) У=Дт V = Da — Db = &D.
Гипербола-кривая, симметричная относительно осей. Поэтому для
разности расстояний AD получаются две изолинии. Но так как
ведущая станция посылает сигнал с опережением ts и ts, то ее
импульсы будут приходить на судно раньше на и ts, чем
сигналы ведомой. Тогда
Д£>!= —
аналогично
дп2= у(Дт2-4).
Современные приемники-индикаторы измеряют разность вре-
мен с высокой точностью (до одной микросекунды). В окне авто-
матического счетчика показываются цифры, обозначающие эту
разность.
Для нанесения обсервации на карту издаются специальные
карты, представляющие собой рабочие карты с нанесенными на
них изолиниями — гиперболами, которые обозначены числом мик-
росекунд, равным разности времен Ат. Судоводитель, сняв со
счетчика Atj и Ат2, отыскивает соответствующие изолинии и отме-
чает точку их пересечения.
Для уменьшения графических ошибок обычно береговые
станции размещают с таким расчетом, чтобы изолинии пере-
секались под углом от 30 до 150°.
Ошибка измерения лежит в пределах 0,2—0,9% расстояния
от базиса. Точность ночью и днем на расстоянии до 500 миль
одинакова. На расстояниях 500—1200 миль точность зависит от
угла между нормалью к базису и направлением на судно. Так,
при угле 30° ошибка будет около ±0,9% расстояния, при 60° —
увеличивается вдвое. За пределами угла 60° к нормали произ-
водить измерения нельзя ни днем, ни ночью, так как ошибка
сильно возрастает. Минимальное расстояние, на котором не ре*
448
комендуется пользоваться РНС»— 100 миль от центра базиса,
так как ошибка здесь достигает 1 % и более за счет малой от-
носительной точности измерения Дт.
Аналогичные РНС, работающие на волнах 3,5—15 м, носят
названия «Джи». Дальность действия таких РНС равна визуаль-
ной видимости. Средняя квадратическая ошибка обсервации
±0,5—1 % расстояния от середины базиса.
Недостатком импульсной РНС является сложность берего-
вого устройства и судового оборудования.
Фазовые гиперболические РНС были разра-
ботаны в 30-х годах советскими учеными Мандельштамом и Па-
палекси. Из имеющихся систем этого типа наиболее распростра-
ненной является система «Фазовый зонд». Применяется она для
дальней навигации. В Англии, Дании и других странах эта систе-
ма носит название «Декка—(Навигатор». Во Франции несколько
усовершенствованная РНС называется «Рапа». Известны также
видоизмененные системы «Лоран», «Рейдист», «Пиопиай» и др.
Рассмотрим принцип их работы.
1. РНС типа «Фазовый зонд» состоит из трех или четырех
береговых передающих радиостанций, излучающих волны раз-
ной частоты, и приемного устройства на судне. Береговые стан-
ции работают на разных волнах; ведущая на волне 3500—
3000 м, ведомые — на волнах, находящихся с волной ведущей
станции в рациональном отношении (2/з, 3Л и т. д.) Такие вол-
ны называются когерентными.
Ведомые и ведущая станции создают фазовое поле в районе,
перекрывающемся радиоволнами, в котором в любой точке мож-
но произвести измерение разности фаз между двумя колеба-
ниями.,Разность фаз в точке излучения волны и точке приема,
при наличии однородной среды, в которой скорость распростра-
нения радиоволн одинакова, определяется расстоянием D от
точки излучения до точки приема. Допустим, что излучающие
станции расположены в точках А и В, а судно, имеющее фазо-
метр, в точке (рис. 222).
Разность фаз, приобретенная на пути от А до Л4Ь
Фа = ^Оа.
Разность фаз от В до
Фв = -^ОВ,
где — частоты излучающих станций, находящиеся в
рациональном отношении
29 Навигация
449
Разность фазовых углов в точке приёма Mi после приведём
кия к общему угловому масштабу путем умножения на Р
Фд-Фн = (О^ -Ов)^г,
ДФ1 = -£ ADt.
Разность фаз ДФ! состоит из целого числа, равного сумме чис-
ла циклов N и какой-то части фазы tpi
ДФ1 = ЛГ + ?р
Непосредственному измерению поддается только конечная
часть фазового угла Фь Целые циклы N остаются неизмерен-
ными.
Измерив разность фаз в пределах последнего цикла, можно
установить, что судно находится на одной из многочисленных
изолиний — изофаз, отвечающих полученной разности фаз и раз-
деленных между собой расстоянием, соответствующим одному
полному циклу. Таких изофаз имеется на плоскости столько,
сколько полных циклов помещается на базисе АВ (между фо-
кусами гипербол). Гиперболы — изофазы, которые соответству-
ют нулевой разности фаз, образуют пространство, называемое
дорожкой. Число дорожек равно расстоянию между излучающи-
ми станциями, деленному на половину длины волны ведущей
станции. Следовательно, вопрос решается многозначно, и полу-
чить изолинию нельзя.
450
Если судно переместится в точку М2, то разность фазовых
углов будет по аналогии
ДФ2 =-^-AD2 = N + ф2.
Тогда изменение разности расстояний, зависящее от измене-
ния разности фаз, будет
ДФ2 _ дФ1 = (др, _ ADJ = ф2 - ф1.
Обозначим (АЛ\— через d.
Тогда
</ = (ДФ2 — ДФ1)-^ = Я’(ДФ2 — ,
где К — коэффициент фазового зонда.
Если в точке Mi на судне была произведена обсервация ка-
ким-либо навигационным способом и в момент обсервации заме-
чено показание фазометра, то это показание соответствует изо-
линии, проходящей через точку При перемещении судна фа-
зометр регистрирует изменение разности фаз и отмечает количе-
стве полных циклов. Поэтому, придя в точку М2, будет известна
дорожка, к которой относится отсчет фазометра, показывающий
изменение разности фаз в конечном цикле фг—фь по которому
на карте определяют изолинию — гиперболу точки М2. При
этом разность расстояний между точкой М2 и станциями
А и В
AD2 = А£\ + d.
Вторая изолиния определяется по изменению разности фаз
второй пары излучающих станций. Для упрощения материаль-
ной части РНС обычно одна средняя ведущая станция работа-
ет на две крайние ведомые. Станции излучают незатухающие
волны непрерывно. Измерением изменения разности фаз может
заниматься неограниченное количество судов. Благодаря нали-
чию двух семейств пересекающихся изолиний под углом 30—
150°, что определяется расположением станций, можно в любой
момент определить координаты судна.
Судовое устройство представляет собой приемник с тремя
фазоиндикаторами. С его помощью зондируется фазовое поле,
создаваемое береговыми станциями (поэтому и система назы-
вается фазовый зонд). Судовое устройство не вносит в фазовое
поле искажения, из-за чего обсервации могут получить любое
количество судов. В фазовом зонде принимается колебание и
после усиления подается на фазоиндикаторы и счетчики фазо-
вых циклов.
При перемещении судна из обсервованной точки Mi в точ-
ку М2 необходимо наблюдать все время за показаниями фазо-
29* 451
индикатора, и на основании разности фазовых углов вычислять
соответствующие разности расстояний.
Для того чтобы облегчить нанесение обсервованной точки»
издаются специальные карты с обозначенными гиперболами»
отвечающими значению разности фаз. На картах также нане-
сены и пронумерованы гиперболы, соответствующие нулевой
разности фаз.
Корда получим обсервоваиную точку Afi, включаются фазо-
индикаторы, и стрелки указателей их и счетчики циклов устанав-
ливаются на цифры, соответствующие положению этой обсерво-
ванной точки. В дальнейшем в рейсе фазометры показывают но-
мера изолиний, соответствующие положению судна.
Для определения места по шкалам счетчиков дорожек опреде-
ляют номера дорожек, указанных на карте, и по показаниям раз-
ности фаз определяют гиперболы, проходящие в указанных до-
рожках. Точка пересечения гипербол дает обсервованное место
судна.
Расстояние между излучающими станциями обычно около
100 миль, мощность передатчика станции 1,5—2 кет, высота ан-
тенн— около 100 м, дальность действия днем до 1000, ночью
300 миль. Недостатками рассмотренной РНС следует счи-
тать:
а) необходимость получения обсервации начальной точки
навигационным путем;
б) непрерывная работа судового устройства;
в) требование специальных карт.
2. Французская РНС «Рана» обладает тем преимуществом,
что ненужно получать начальную точку и не требуется постоян-
ная работа судового устройства.
3. Английская РНС «Декка—Навигатор» имеет ширину доро-
жек 12—20°, что позволяет судоводителю, пользуясь счислением,
установить номер дорожки, аналогично тому, как это делалось в
использовании секторных радиомаяков.
4. Английская РНС «Пиопиай» (POPI) имеет расстояние
между антеннами станции, равное V2 длины волны. Антенны ус-
тановлены по углам равностороннего треугольника и работают на
одной волне. Каждая пара антенн обеспечивает получение изо-
линии в углах по 30° от нормали к базису. Из-за малой базы (ма-
лого фокусного расстояния) гиперболы без большой ошибки мо-
гут быть заменены асимптотами, что исключает пользование
специальными картами. С полученными данными поступают как
с радиопеленгами. Изменение пеленга в 1° вызывает изменение
разности фаз в 3°. Приемник-индикатор устроен несколько проще.
Дальность действия днем 1500 миль, при этом ошибка порядка
±2°. Ночью хорошая работа на расстоянии до 1000 миль, а так-
же свыше 500 миль, где принимаются только отраженные лучи.
От 100 до 500 миль ошибка увеличивается в ночное вре-
мя до 4°.
452
Средняя квадратическая ошибка обсервации, полученной по
гиперболическим РНС, дающим две изолинии гиперболы, рассчи-
тывается по формуле
М==± ПНТ1Л/71> + /”22’
где 6— угол между касательными к гиперболам, который
можно снять в полученной точке с помощью транс-
портира и линейки;
тх и /п2—смещение касательных к гиперболе вследствие
ошибок измерения и /пи ;
Градиент разности расстояния
gr1 = 2sin-^1-; g2 = 2sin-^-,
где -у или — угол между касательной к гиперболе в получен-
ной точке и направлением на одну из станций снимается с кар-
ты .при помощи транспортира и линейки.
Произведя подстановку, получим
Допуская, что ошибка измерения одинакова для обеих измере-
ний
Ши — f
получим
м , ти / / 1 \« / 1 \2
^±W1/ ~+ Г ’ (214)
V sin— I sin—Л 4 '
На определение одной изолинии уходит времени 1—3
Если скорость судна выше 15 узлов, то необходимо измерения
приводить к одному моменту, так как в противном случае возни-
кает систематическая ошибка обсервации.
§ 115. КАЧЕСТВО И НАДЕЖНОСТЬ ОБСЕРВАЦИЙ
Рассмотренные способы получения обсервованного места раз-
личны по виду, дальности, надежности и точности. По виду об-
сервации делятся на визуальные, радиолокационные и радиотех-
нические. Надежность обсервации обусловливается наличием
третьей изолинии. Поэтому все способы, требующие три и более
изолиний, относятся к классу Д. Обсервации по двум изолиниям
453
=s 'о 5 о П5 Клзп обсер- ваций Способы обсерваций Предельное расстояние, МИ 'И Вид Градиент
Вид сере днем ночью изолиний Модуль
' Визуальные 1 А А Л Б Б Б В По трем пеленгам По трем расстояниям По двум углам По двум пеленгам По двум расстояниям По пеленгу и расстоя- нию Крюйс-пелс нг 150 150 25 150 150 150 20 25 25 25 20 Прямая Окружность Окружность Прямая Окружность Прямая Окружность Прямая 57°,3 D 1 57°,3 АВ da db 57°,3 D 1 57°,3 D 1 57°,3 D
Радиолокационные По трем пеленгам и трем расстояниям гри опознанных ориентирах По трем расстояниям По двум расстояниям По пеленгу и расстоя- нию Крюйс-расстояния 25 25 25 25 20 25 25 25 25 20 Прямая Окружность Окружность Оь ружнсть Прямая Окружность Окружность 57°.3 ' D 1 1 1 57°,3 D 1 1
Радиотехнические CQ CQb со" ficT to По трем радиопеленгам РМК кругового действия По двум радиопеленгам РМК кругового действия По двум радиопелен- гам секторных РМК По двум радиопелен- гам вращающихся РМК По гиперболическим импульсным РНС По гиперболическим фазовым РНС 300 300 1500 300 600 1000 25 25 500 25 1200 200 Изоазимута Изоазимута Ортодромия Ортодромия Гипербола Гипербола ctg D sin ИРП tg D То же 1 sin D 1 sin D 2 sin T 2 sin —
454
Таблица 29
измерений Направление т„= ± М = ±
ИП-9Ф> От ориен- тира В сторону увеличения угла 77/7—90° От ориен- тира ИП-<№ От ориентира ИП—99е s? It- g|r- 0°,2— Iе /«’+*»
(т'Г+["<Г ом 0°,2—1° / а» + Ь> Г1 1 1/ Л5+”Д или m«De У 57°,3 sing |/ \АВ ) + \ВС J — V D2 4- D2 sin в У "1+^2
0е,2-1* 0°,2-1° НтЛ L 72 1 1,41 ти sin 6 Иж’Г-’Ч /«»+ Ш
ИП-990' От ориентира ИП—№ От ориентира 2-2°,5 ОД кбт. 0,1 кб г. 0,1 кбт. 2-2°,5 0,1 кбт. 0,1 кбт. у/ а* + № у а2+ Ьг 1,41 ти sin 6 1<(йзВ_
ИРП—90+7 ЯР/7-90+7 ^Р/7+90+7 ИР /7+90 +7 Перпенди- кулярен бис- сектрисе yi ла То же 3е 3° 1° 3°—5* 0,6 %—0,9% от D 0°,05 •/ в2 + Z>2 57°,3 sin е1 D1 + ^2— 57°,3 sin 6 ^~(ти2^2) 57°,3 sin fl ^mul + (даИа A) m f ( 1 V ( 1 V 1/1 1 r I I 2 sin 0 J/ sin sin. -y-J .smi]/ ( Sin +) +( sin +)
455
не имеют контроля, а поэтому трудно обнаружить промах. Эти
обсервации в основном составляют класс Б. Из этого класса ис-
ключены некоторые способы из-за ненадежности получения изо-
линии вследствие несовершенства измерительных приборов.
К классу В относятся в основном способы, включающие счи-
сление между измерениями.
В табл. 29 приведены основные способы обсерваций. Необхо-
димо помнить, что в практике судовождения существует ряд ком-
бинированных обсерваций, где смешиваются виды и классы в за-
висимости от количества изолиний и методов их получения. Су-
доводитель должен избрать тот или иной способ, в зависимости
от обстоятельств, но, как правило, рекомендуется получать обсер-
вованное место но трем любым изолиниям.
При наличии только двух изолиний рекомендуется использо-
вать эхолот или лот, чтобы можно было обнаружить промах.
ПРИМЕРЫ
1. Карта ГУ 704. Тс = 15"30Л, ОЛ1 = 12,4, Кл =1,00, =42°23'N,
Хс— 131°38'Ost. Следуя ЯК=37°, при плохой видимости взяли пеленги неопоз-
нанных ориентиров и локатором измерили расстояние до них. Оказалось, что
Я/7]=280ь, £>i=21,2 мили, Я/72=317°, £>2=14,2 мили, Я/73 = 359°, £>3=20,8 мили,
Т^с = 16*30-*» ОЛ2=23,9. Вторично взяли пеленги ориентиров и измерили рас-
стояния ИЯ] = 259°, £>]=28,2 мили, Я/72 = 275°, £>2=16,6 мили, Я/73=ЗЗО°,
£>з=13,7 мили, Я/74=3°,5, £>=18,0 мили. Опознать ориентиры.
Решение, а) На листе кальки проводим прямую, изображающую ис-
тинный меридиан. На ней выбираем произвольную точку, в которой проведем
линии ИП^ ИП$. От нее же по линиям .пеленгов отложим расстояния
£>i, £>2, £>3.
б) Положив кальку на карту в районе счислимого места и перемещая ее,
добиваемся совпадения отметок на линиях пеленгов с неопознанными ориен-
тирами. В точке, от которой прокладывались пеленги, делаем укол циркулем
и отмечаем точку . Читаем названия ориентиров: первый — мыс Гамов,
второй — NO часть о. Большой Пелис, третий — о. Карамзина. Прочитав в
лоции о ландшафте ориентиров, можем предположить, что названия их опре-
делены правильно, но пока считаем обсервованное место условным. От услов-
ного места проводим И К=37°.
в) Вторично на кальке прокладываем результаты наблюдений, произве-
денных в 16*30*,#, наложив кальку на карту, наносим место в (бч30л по че-
тырем ориентирам. Наименование четвертого ориентира, который понадобится
для дальнейших обсерваций — мыс Тобизина.
г) Рассчитав S = РОЛ X К л = 1 (23,9—12,4) = 11,5 мили от условной обсерво-
ванной точки откладываем 11,5 мили по проложенному И К.
Счислимая точка совпадает с точкой вторичных наблюдений, следователь-
но, предположение о наименовании ориентиров оправдалось.
2. Карта ГУ 704. Тс= !0ч20-«. 0.77=11,8; в <pc=42°I3'N, Xc=131°12'Ost'
следуя при плохой видимости, взяли по радиолокатору пеленги и измерили рас-
стояния: мыс Башенный Я771=276°,7, £>|=23,2 мили, южная часть о. Фуругель-
ма Я/72=322°,5, £>2=171 мили, мыс Бабкина ИП3=&,5, £>3=19,5 мили.
Определить координаты обсервованного места.
Решение. Не имея .уверенности в том, что ориентиры опознаны верно,
обсервацию нанесем так:
а) На листе кальки проведем прямую и на ней выберем произвольную
точку. В этой точке проведем линии ИП^ ИП^ и от нее отложим по ли-
ниям пеленгов расстояния £>ь £>2, £>3.
456
б) Положив кальку на карту и перемещая ее параллельно меридиану, до-
биваемся совпадения отметок на линиях пеленгов с выбранными ориентирами.
В выбранной точке делаем укол циркулем и снимаем координаты То =42°14'N,
\) = 131°09',2Оst. Примерно через полчаса обсервацию необходимо повторить,
ведя счисление между обсервованными точками.
3. Карта ГУ 715. На подходе к порту Корсаков при плохой видимости
измерили радиолокатором расстояния: мыс Томари-Анива £6 = 19,8 мили, за-
падный берег — £>2=12,8 мили. Одновременно эхолотом измерили глубину
Л=56 м. Определить координаты судна.
Решение, а) Радиусом, равным £6,—в масштабе карты проводим
дугу окружности из точки на мысе как из центра.
б) Растворив циркуль на расстояние £>2, на дуге окружности подбираем
центр, из которого можно было бы провести касательную дугу к линии берега.
Это и будет обсервованная точка. Координаты tpo=46°18',2N, Хо=142°36',О Ost,
точка расположена на глубине 56 м, что и показали измерения.
4. Карты ГУ 715. Следуя в проливе Лаперуза, взяли по гирокомпасу пе-
ленг скалы Камень Опасности — /7/7=262°,8. Одновременно измерили радио-
локатором расстояние до скалы £>=15,2 мили. Определить координаты судна
и рассчитать среднюю квадратическую ошибку обсервации, если ошибка из-
мерения пеленга ти = ±0°,2, ошибка измерения расстояния mUj=±0,01 мили.
Решение, а) От скалы Камень Опасности прокладываем ИП. По ли-
нии пеленга откладываем в масштабе карты £>=15,2 мили и снимаем коорди-
наты ?0 =46°49',3N, Хо=42°34/,8 Ost.
б) Среднюю квадратическую ошибку обсервации рассчитаем по формуле
Г f \2
"“’У (тт-г) ;
)“ + <0.011>_ ± 0,5кбт.
ЗАДАЧИ
1. Карта ГУ 704. В заливе Петра Великого измерили расстояние до мы-
сов Аскольда (£6 = 12,5), Сысоева (£>2=13,0) и о. Скреплев (£>3=14,5). Опре-
делить координаты судна.
2. Карта ГУ 715. Бухта Лососей. Радиолокатором измерили расстояния до
мыса Тимори — Анива £6=7,5 мили, до северо-западного берега бухты £>2=
=5,6 мили. Определить координаты судна.
3. Карта ГУ 704. Tc=18,*2tP*. 0^=29,4, Кл = 1,01, =42°35'N, \е =
«= 132°00'0 . Следуя /7К=20°, взяли по радиолокатору пеленги неопознан-
ных ориентиров и измерили до них расстояние: ИП\ =83°, £6 = 14,5,
£>2=16,0, ИПъ=ЗЫ2, £>з=16,3. В TQ— 19ч00-*, С>Л2=34,3 вторично взяли пе-
ленги тех же ориентиров и измерили до них расстояние ИП\ = 102°,5, £6 = 13,0,
/7/72=71°,0, £>2=12,5, /7/73 = 322°, £>3=13,0. Определить наименование ориенти-
ров и координаты судна в 19ч<0л.
4. Карта ГУ 704. Тс = 22ч00л, ОЛ\ = 11,2 взят пеленг открывшегося маяка
о. Аскольд ИП\ =22° Одновременно измерили радиолокатором расстояние до
мыса Елагин £6 = 19,8 мили. Определить координаты судна и рассчитать по-
луоси эллипса ошибок, если ошибка в пеленге mUi = ±0°,5, а измеренного рас-
стояния =±0,1 мили.
5. Карта ГУ 704. На подходе к маяку Гамова, при плохой видимости, по
радиолокатору взяли пеленг мыса Гамова и измерили до него расстояние.
Определить координаты судна и рассчитать полуоси эллипса ошибок.
6. Карта ГУ 704. B^=42°15/N, Л, = 131°12'Ost по локатору взяли пеленги
неопознанных ориентиров и измерили до них расстояние /7/71=312°, £6 = 12,5,
/7/72=345°, £>2= 18°,6, /7/7з=11°,5( £>3=13,5. Одновременно взяли радиопеленг
радиомаяка Гамова ИП=\А°. Определить наименование ориентиров и коорди-
наты судна.
457
7. Карта ГУ 704. В =42°36'N, Xtf=131°44'Ost взяли радиопеленг радио
маяка Гамова Я/7| = 261° и одновременно по радиолокатору взяли пеленг и
измерили расстояние до северной оконечности о. Фуругельма ///72=287°,5;
£>2=11,5 мили. Определить обсервованные координаты судна.
8. Карта ГУ 704. Радиолокатором измерили расстояния до мысов Де-Лив-
рона — £>1 = 6,4 мили, Развозова — £>2 = 6,5 мили, Пальчатого — £>з=9,8 мили.
Определить координаты судна.
9. Карта ГУ 704. На подходе к Находке взяли по компасу пеленг маяка
Поворотный (И/7 = 31°,5) и по локатору измерили до него расстояние £>=22 ми
ли. Определить координаты судна и рассчитать среднюю квадратическую ошиб-
ку обсервации, если ошибка пеленга тц =±Г, а расстояния tnUa =±0,1 мили
10. Карта ГУ 704. На подходе к о. Аскольд по локатору взяли пеленг мы-
са Елагин ИП=ЗА§° и измерили до него расстояние £>==23 мили.
Определить координаты судна и рассчитать среднюю квадратическую
ошибку обсервации, если ошибки пеленга — ±3°, а расстояние =
= ±1 миля.
Ответы,
1. <Ро = 42°47',5N, Хо' = 132°01',7Ost.
2. ?o=46°36',4N, Хо =142°35',2Ost •
3. Мыс Елагина, мыс Сысоев, мыс Тобизина.
<р0 = 42°46',5N, Хо = 132°03',00st •
4. ?o=42°25',4N, Хо = 132°10',3Ost. а= 1,7 кбт., 6=1,0 кбт.
5. <p0=42°14'N, Х„ = 131°25z,2Ost • а=15,3 кбт., 6 = 5,0 кбт.
6. Северный срез о. Фуругельма, мыс Михельсона и мыс Бабкина
<po=42°2O'N, X0=131°08',5Ost •
7. <р0 = 42°36',8N, Хо = 131°43',2O st '
8. <р0 = 42°43',5, Хо = 132°35',3Ost •
9. 9о=42°21/,6, X0=132°47'Ost. А1=±4,0кбт.
10. <ро=42°21',5, X0 = 132°28',l Ost • М = ± 15,6 кбт.
Контрольные вопросы
1. Какие навигационные недостатки имеет радиолаг?
2. По какому принципу работает радиолаг?
3. Что собой представляет изолиния при определении по радиолагу?
4. Как работает импульсная система типа «Лоран»?
5. Каковы ошибки при измерениях импульсной системой?
6. Недостатки импульсной системы.
7. Принцип работы фазового зонда.
8. Что такое дорожка и как ее найти.
9. Недостатки фазового зонда?
10. В чем сущность работы фазовых РНС?
11. Как рассчитать ошибку обсервации, полученной с помощью гипербо
лической РНС?
12. Что значит надежная обсервация?
РАЗДЕЛ ШЕСТОЙ
ПЛАВАНИЕ ПРИ ОСОБЫХ ОБСТОЯТЕЛЬСТВАХ
Глава XVIII. ПЛАВАНИЕ В УЗКОСТЯХ
§ 116. ПОДГОТОВКА К ПЛАВАНИЮ В УЗКОСТЯХ
Навигационной узкостью называется район, где опасности
расположены в непосредственной близости от фарватеров. Обыч-
но они хорошо изучены гидрографической службой и обставлены
навигационным оборудованием. К узкостям относятся проливы,
каналы, шхеры, входы в порты и портовые акватории, минные
фарватеры и др. Плавание в таких местах осуществляется по ре-
комендованным -путям или по наставлениям лоции. При плава-
нии в портах руководствуются специальными постановлениями.
При плавании в узкостях судоводитель очень ограничен во
времени, необходимом для контроля за перемещением судна. По-
этому вся подготовительная работа по прохождению этого райо-
на должна быть закончена до входа в узкость. Рассмотрим этапы
подготовки к проходу узкости.
Изучение района узкости производят по лоции, наставлениям,
специальным указаниям, картам и атласам течений, постановле-
ниям порта.
1. В первую очередь необходимо тщательно изучить глубины
на фарватере и колебание уровней, сопоставляя данные с осад-
кой судна. Если проход узкости лимитируется глубинами, изме-
няющимися в связи с приливо-отливными явлениями, необходимо-
с наибольшей точностью рассчитать время полной воды и, если
это время не совпадает со временем прохождения мелкого места,
заранее выбрать место якорной стоянки для ожидания полной во-
ды. Если глубины узкости позволяют проходить ее при любой
высоте уровня воды, наиболее опасные участки рекомендуется
проходить в малую воду. Это дает возможность увидеть обнажен-
ную отливом часть навигационных опасностей и в случае посадки
на мель самостоятельно сняться с мели за счет прилива. Карты
района узкости должны быть самого крупного масштаба.
2. Особое внимание нужно уделить изучению гидрометеоро-
логических условий в районе узкости: течений и ветров, сгонно-
45»
нагонных течений, ледовитости района. Течение *в узкости может
быть встречное или попутное, или направленное под углом к ли-
нии ЮС Встречное течение увеличивает время прохождения уз-
кости и улучшает управляемость судна, попутное—наоборот.
Поэтому если в узкости действуют приливо-отливные течения,
лучше приурочить проход ее на встречном течении. Если течение
действует под углом к курсу, требуется точное знание величины
течения для корректировки курса. Такие течения усложняют про-
ход узкости и требуют особого внимания от судоводителя.
На карте узкости следует нанести стрелками направление
предполагаемого во время прохода течения и указать его ско-
рость. Всестороннее изучение течения позволяет судоводителю
рассчитать путь на всем протяжении узкости, время прохода ее
и приблизить предварительную прокладку к пополнительной. При
этом необходимо учитывать следующие обстоятельства:
а) следуя против течения нужно убедиться в том, что течение
не превышает и не приближается к скорости судна, в противном
случае проход узкости невозможен. Придерживаясь, как прави-
ло, фарватера, на поворотах нужно сойти с оси фарватера, чтобы
иметь запас расстояния на возможный снос. При этом необходи-
мо убедиться, что глубины в этом месте таковы, что позволяют
уклониться от фарватера;
б) следуя на попутном течении, необходимо помнить, что уп-
равляемость судна при этом ухудшается, а скорость перемещения
увеличивается. Поэтому нужно заранее рассчитать действитель-
ную скорость. На поворотах следует учитывать пониженную ма-
невренность и боковое смещение, чтобы судно не было выжато
на мель. Если по предварительным расчетам поворот с помощью
руля невозможен, то на карте делается отметка о необходимых
реверсах машины или отдаче якоря;
в) если течение направлено под углом к диаметральной плос-
кости, нужно рассчитать угол сноса и указать его на карте.
Перед проходом узкости судоводитель должен знать о направ-
лении и скорости ветра в этом районе. Сведения о ветрах выби-
раются из лоции, долгосрочного прогноза и суточного прогноза,
которые получают по радио. Суда с малой осадкой и большой па-
русностью, со слабой машиной сильно подвержены сносу и в не-
которых случаях проход узкости при сильном ветре и вызывае-
мой им волне невозможен. В таких случаях, дрейфуя вблизи уз-
кости или стоя на якоре, нужно выждать, когда погода изме-
нится. Иногда перед входом в узкость можно улучшить мореход-
ные качества судна. Если судно в балласте, принимают балласт
в танки или в трюмы. Но необходимо помнить, что большой диф-
ферент на корму не дает возможности разворачиваться судну на
ветер.
Волнение моря, как следствие работы ветра, представляет
опасность для плавания как в самой узкости, так и на подходе
к ней. На подходах к устьям рак наносы реки образуют мелко-
460
водья—бары, на которых возникают крутые базовые волны,
увеличивающиеся при ветре с моря. Проходить бары нужно, имея
запас воды «под килем, равным двум высотам баровой волны, и
курсами, расположенными строго перпендикулярно такой волне.
Иначе можно на волне удариться о дно, а поставив судно под
углом к нормали баровой волны, потерять управляемость.
В узкостях, портах, заливах, проливах от ветров, разводящих
в море волну, возникает толчея и тягун, которые сильно услож-
няют удержание судна на курсе и в выбранном расстоянии до
окружающих опасностей.
Все приведенное выше должно быть известно перед входом
в узкость. И в зависимости от обстоятельств судоводитель дол-
жен решить входить в узкость в данный момент или выждать бо-
лее благоприятных условий. Иначе может произойти авария. Ес-
ли гидрометеорологическая обстановка ухудшается в то время,
когда судно находится уже в узкости и вызывает опасение ава-
рии, лучше встать на якорь и выждать улучшения обста-
новки.
3. Попутно со всесторонним изучением района узкости произ-
водится подъем карты. На карте отмечаются приметные ориен-
тиры для визуальных и радиолокационных обсерваций, намеча-
ются искусственные и естественные створы. На свободных местах
карты или на листке бумаги следует выписать данные об огнях и
ориентирах, изменении приливо-отливных течений и глубин, в за-
висимости от приливо-отливных явлений, и прочие сведения, по-
лученные в ходе изучения района узкости. Они могут в любую
минуту понадобиться судоводителю.
Предварительная прокладка выполняется с особой тщатель-
ностью. Курсы должны совпадать с рекомендованными курсами;
хорошо, если курсы проходят по створам. Истинные курсы зара-
нее переводятся в компасные и записываются карандашом рядом
над линией пути. Тут же указывается предполагаемая величина
угла сноса от течения, направленного под углом к ДП. Точки на-
чала и конца поворотов наносятся с учетом наличия ветра и те-
чения, а также маневренных элементов судна. На берегу выби-
раются места, на траверзе которых начинается и кончается по-
ворот. На карте эти ориентиры отмечаются карандашом. Если
узкость в месте поворота недостаточно широка для описания цир-
куляции, на карте делается отметка о необходимых реверсах
машины, и даже об отдаче якоря. Во время прохода узкости на
баке должен находиться боцман, а в машинном отделении —
старший механик. В районах, где необходимо следовать умень-
шенным ходом, также делаются отметки на карте с указанием
режима работы машины. Выделяется особой отметкой плавучее
ограждение опасностей, которое по возможности не должно слу-
жить ориентиром для обсерваций, а лишь для общей ориентации.
Если перемена курса происходит на границе секторов освещения
цветных огней, нужно проложить пеленги от огня, на которых на-
461
писать их компасное значение. Поворот начинать следует только
тогда, когда судно придет на пеленг, так как секторы цветных ог-
ней не имеют резко выраженных границ при переходе от одного
цвета к другому. Должны быть выделены районы, где плавание
возможно только в светлое время суток, а также должна быть
обозначена якорная стоянка, если нужно будет ожидать светлого
времени.
Якорные стоянки следует отмечать по пеленгам или расстоя-
ниям до ориентиров с указанием на карте этих данных. На карге
выделяются места, где действует боковое течение и где нужно
управлять судном по компасу или по створу, но нельзя исполь-
зовать один ориентир.
Все подводные опасности на карте ограждаются изолиниями
опасности, опасным пеленгом, опасным расстоянием или опасным
углом, в зависимости от расположения ориентиров.
Делая предварительную прокладку, нужно учесть, что чем
тщательнее она выполнена, тем легче будет проходить узкость.
В местах, где требуются особо частые надежные обсервации, сле-
дует нанести вспомогательные сетки.
4. Перед проходом узкости необходимо удостовериться, что
маневренные элементы судна не изменились. Поэтому, зная, что
нужно будет проходить сложную узкость, необходимо проверить
радиус циркуляции, инерцию судна на режимах работы машины
и др. Реверсы машины должны быть немедленными, о чем ста-
вится в известность старший механик судна, который производит
соответствующую подготовку. Необходимо проверить рулевое
устройство, согласовать положение пера руля с аксиометром.
Якоря должны быть готовы к отдаче и выбиранию. Перед входом
в узкость следует проверить поправку компаса, если это гиро-
скопический компас, если это магнитный, то удостовериться в
.верности таблицы девиации. Необходимо приготовить ручной лот,
проверить работу эхолота и РЛС, подготовить пеленгатор, сек-
стан.
§ 117. ВСПОМОГАТЕЛЬНЫЕ СЕТКИ
И ОСОБЕННОСТИ ПЛАВАНИЯ В УЗКОСТЯХ
Вспомогательные сетки наносятся на карту узкости в том
случае, если в распоряжении судоводителя нет специальных карт
с нанесенными сетками. Сетки сокращают время, необходимое
для нанесения обсерваций на карту. Вспомогательные сетки бы-
вают различными.
Гониометрическая сетка служит для определения места по
двум горизонтальным углам и дает высокую точность обсерва-
ции. Это объясняется тем, что метод обсервации по двум углам
при нанесении изолиний построением дает высокую точность, а
сетка представляет собой сетку изолиний, вмещающих угол ок-
ружностей, пересекающихся под углом 30—150°. Для построения
сетки выбирают хорошо видимые и нанесенные на карте три ори-
462
ентираЛ, В и С (рис. 223). Ориентиры лучше выбирать так, что-
бы прямые, соединяющие точки, образовали при среднем пред-
мете угол, близкий к 90°. При этом через три ориентира нужно
провести круг неопределенности. Лучше, если этот круг (проходит
Рис. 223
не по акватории, а по суше. Через середину прямой, соединяющей
два ориентира,проводится перпендикулярная прямая. Задавшись
целым рядом углов си, аг, «з и т. д., с разностью между ними рав-
ной постоянной величине, у одного из ориентиров строят углы
90—ai, 90—аг и т. д. Стороны углов, пересекаясь с перпендику-
ляром, дадут центры вмещающих эти углы окружностей. Таким
же путем строится и вторая серия окружностей, опирающихся на
вторую -пару ориентиров АС. Окружности лучше наносить тушью
разного цвета (красной и зеленой). На каждой из окружностей
делается надпись значения вмещенного в нее угла. Если угол
больше 90°, то строят у ориентира угол a—90°. При этом центр
вмещающей окружности расположится по другую сторону от сое-
диняющей ориентиры прямой. Измерив в быстрой последователь-
ности два горизонтальных угла между ориентирами, на карте с
сеткой отыскивают соответствующие этим углам изолинии. Точка
463
пересечения окружностей дает обсервованное место. Если значе-
ния углов не соответствуют нанесенным изолиниям, производят
интерполяцию глазомерно.
Сетка лучей. Если на карте нанесены два хорошо видимых на
местности ориентира, для ускорения нанесения обсервованного
места по пеленгам этих ориентиров строят сетку лучей. От точек
на карте, обозначающих ориентиры, проводят серию истинных пе-
ленгов через 1—5° в зависимости от масштаба карты (рис. 224).
Ориентиры нужно выбрать так, чтобы пеленги пересекались под
углом 30—150°. На изолиниях, проведенных разными цветами,
надписывают значения истинных пеленгов. Если плавание осу-
ществляется с гирокомпасом, поправка которого точно известна,
на изолиниях можно надписать значения гирокомпасных пелен-
гов. Наносится место также как и на гониометрической
сетке.
Сетка изостадий. Если на карте нанесены два ориентира, вы-
соты которых судоводителю известны, и их можно измерить сек-
станом, для быстрого нанесения места судна по измеренным вер-
тикальным углам строится сетка изостадий. Задаваясь значением
углов «1, аг, аз— и 01, 02, 03*...рассчитывают расстояние Db D2,
464
I
30
D3.^ и DS, D2t D3'„. по формуле или по табл. 29, а МТ-53
(рис. 225). Из точек, обозначающих ориентиры, радиусами, рав-
ными рассчитанным расстояниям, проводятся окружности —
изолинии, на которых подписываются значения соответствующих
им углов. Применяя радиолокатор для определения расстояний,
на этих изолиниях можно надписать значения рассчитанных рас-
стояний £>i, £>2, D3.„ или построить сетку, задаваясь расстояниями
до ориентиров.
Изготовленные сетки не должны быть очень густыми, чтобы
не затемнять нанесенные на карте обозначения, и в то же вре-
мя позволять производить быструю интерполяцию. Сетки могут
быть комбинированными, например, для обсервации и по
пеленгу и расстоянию, по горизонтальному и вертикальному
углу и др.
К особенностям плавания в узкостях следует отнести жесткий
контроль за перемещением судна. Для этого необходимо выпол-
нять следующую работу:
1) все проходимые ориентиры отмечать по времени на линии
пути черточками;
2) как можно чаще определять свое место с наименьшими за-
тратами времени и максимальной точностью. Для обсервации ис-
пользовать в первую очередь в качестве ориентиров штатное бе-
реговое ограждение, а также, при наличии точечных ориентиров,
используя локатор, получать место по расстояниям. Во вторую
очередь следует использовать ориентиры береговой черты (мысы,
скалы и др.). В третью — плавучие маяки. Определять место по
буям и вехам не рекомендуется, так как они могут быть снесены
или течением, или проходящими судами. В случае ухода судна с
намеченной линии пути, возвращать его на эту линию и исправ-
лять курс, изменяя поправки;
3) проходя ориентиры плавучего ограждения, сличать их с
указанными на карте или в пособии «Огни и знаки». Проверять
названия, окраску, вид топовой фигуры, характер и цвет огня. В
ночное время освещать ориентиры прожектором. На карте отме-
чать время их прохождения. Период огня проверять секундоме-
ром;
4) при наличии течения, проходя мимо плавучих средств на-
вигационного оборудования, проверять верность принимаемого
направления течения по струе, образуемой за плавучим средст-
вом (буем) или по наклону вехи. В случае, если выбранное и оп-
ределенное течения не совпадают, вводить соответствующие по-
правки в компасный курс;
5) проходить суда, стоящие на якоре, и плавучие маяки мож-
но только с кормы или по борту, определяя по компасу направ-
ление их диаметральной плоскости и сопоставляя с выбранным
для прохода узкости направлением суммарного сноса;
6) в большинстве случаев при входе в узкость выбирают за-
бортный лаг, так как возможны реверсы, донный лаг убирается
466
при наличии глубин, близких к осадке судна. Вследствие этого
скорость судна определяется по пройденным расстояниям, при
этом нужно учитывать, что это будет действительная ско-
рость, которую следует учитывать при дальнейших вычисле-
ниях;
7) огибая подводные опасности или мысы, ни в коем случае
нельзя заходить за ограждающую опасность изолинию для со-
кращения пути;
8) при прохождении вблизи стоящих судов или расходясь с
судном в узком месте, необходимо учитывать явление присоса
судов, которое особо проявляется на параллельных курсах. Что-
бы избежать явления присоса, рекомендуется:
а) расходясь в узкости на близком расстоянии (меньше од-
ной длины судна) нужно убавить скорость, чтобы судно только
слушало руля; если все же будут обнаружены первые признаки
явления присоса, оба судна должны дать задний ход в том слу-
чае, если мостики судов еще не поравнялись, и самый полный ход
вперед, если мостики судов прошли друг друга;
б) проходя в непосредственной близости от ошвартованных
судов, или стенок каналов, причальных линий, плавдоков и др.,
нужно сбавить ход до минимума и, если все же замечено начало
присоса, дать задний ход, загоняя струю от винта между судном
и препятствием;
9) поворот судна должен выполняться так, чтобы оно после
этого оказалось точно на намеченной линии пути. Поэтому нача-
ло и конец поворота должны начинаться в тех точках, которые
были намечены в предварительной прокладке, на траверзе или на
определенном пеленге отмеченных ориентиров. Совершать пово-
рот «на глаз» в узкостях нельзя. Особенно тщательно должен
быть выполнен поворот при наличии сноса от течения или сум-
марного сноса. Необходимо помнить, что на мелководье поворот-
ливость судна резко ухудшается, поэтому маневр может не
удасться. Тогда необходимо осуществлять поворот с помощью
заднего хода машины или даже отдачи якоря;
10) под действием внешних факторов, недостаточно правиль-
но принятых во внимание, судно может быть снесено с выбран-
ной линии пути. Часто наносимые обсервации укажут на такое
смещение, и судоводитель должен вернуть судно на выбранную
линию. Делается это так:
а) измеряется расстояние между линией выбранного пути и
обсервацией л;
б) принимая рациональный угол поворота пера руля, по нему
из таблицы циркуляции выбирают радиус циркуляции
в) по величинам п и Яц выбирают из табл. 30 угол поворо-
та а;
г) зная угол поворота, переходят на заданную линию пути
описанием коордоната (рис. 226) — так называются две равные
по длине и симметрично расположенные в разные стороны дуги
30*
467
циркуляции. Для описания коордоната кладут руль на выбран-
ное число градусов поворота руля и, несколько не доходя до кур-
са, кладут руль в противоположную сторону на то же число гра-
дусов, выходя на первоначальный курс. Точка смены циркуляции
расположена на середине между первоначальной линией пути и
последующей (точка В). Расстояние между курсами п и величи-
на промежуточного плавания d9 связаны между собой, а именно:
п = 2d sin -|-
и
d= 27?4sin -2-.
После подстановки получим
п = 4/?ц sin2
или
По этой формуле и составлена табл. 30 с округлением а до це-
лых градусов.
468
Таблица 30
л, кбт. /?ц, кбт.
2,0 2,5 3,0 3,5 4,0
0,2 18° 16° 15° 13° 13°
0,3 22 20 18 17 15
0,4 26 23 21 19 18
0,5 29 26 23 22 20
1,0 43 37 33 31 29
1,5 51 45 41 31 36
2,0 60 53 48 45 41
2,5 68 60 54 50 47
3,0 75 66 60 55 51
3,5 83 72 65 60 56
4,0 — 78 71 65 60
4,5 — 84 75 69 64
5,0 — 82 73 67
6,0 — 81 76
7,0 — 82
Если данных в таблице недостаточно, что бывает редко, нуж-
но по приведенной выше формуле подсчитать угол поворота а;
11) при наличии течения судно на циркуляции может быть
прижато к опасности, поэтому необходимо:
а) если течение попутное или встречное, рассчитать начало и
конец поворота с учетом этого течения;
б) если течение боковое и направлено оно со старого курса
на новый, руль нужно перекладывать на угол, соответствующий
радиусу циркуляции, выбранному из таблицы циркуляции плюс
путь течения, т. е.
+1/, гч.
Если течение направлено с нового курса на старый, то
Яц = №абл'-¥ттц;
12) если нет видимости и радиолокатор не в порядке, в уз-
кость входить нельзя. В этом случае, если судно уже вошло в
узкость и видимость испортилась, нужно стать на якорь;
13) в плохую видимость нельзя входить в узкость, если ши-
рина ее меньше, чем двойная минимальная рабочая дальность
действия радиолокатора. Минимальная ширина узкости, кото-
рую можно проходить с локатором, определяется по формуле
^min = (^tnin
где d—запас расстояния, зависящий от управляемости судна,
опыта судоводителя, но не может быть меньше 25 м, что
соответствует зазору между границей мертвой зоны и
изображением берега, (равному 1 мм ib масштабе экрана
на полуторам.'ильной шкале.
469
§ 118. ПЛАВАНИЕ В УЗКОСТЯХ С ПОМОЩЬЮ СУДОВОЙ РЛС
В УСЛОВИЯХ ПЛОХОЙ ВИДИМОСТИ судоводителю огромную (ПО-
МОЩЬ оказывают судовые РЛС. Особенно важную роль играют
они при проходе узкостей. Наличие РЛС на судах позволило со-
кратить их простои в узкостях из-за плохой видимости. По своему
' типу, а следовательно, и по условиям плавания в них, узкости
подразделяются на два вида:
а) узкость имеет приглубые берега, и фарватер совпадает с
конфигурацией берегов;
б) узкость широка, но один или оба берега отмелые, и поло-
жение сравнительно узкого фарватера не повторяет конфигура-
цию берегов и несимметрично относительно их.
В первом случае прибегают к так называемой лоцманской
проводке, когда управляют судном в соответствии с видимой на
экране картине. Имея на экране РЛС изображение берегов, судо-
водитель глазомёрно оценивает положение центра экрана отно-
сительно их. Исследования, проведенные ЦНИИЭЭВТ, говорят
о том, что смещение судна, следующего приблизительно по сере-
дине узкости, вправо или влево улавливается глазом довольно
точно. В результате исследований составлена табл. 31.
Таблица 31
Шкала дальности | Масштаб Расстояние меж- ду берегами, кбт. Улавливание гла- зом смещения, м
I 1:25000 4,5 35- 50
1 1:25)00 9,4 75
II 1:7FOOO 14 120—160
II 1:78000 28 240
Если фарватер проходит ближе к одному из берегов, точность
глазомерной оценки бокового смещения судна с фарватера не-
сколько снижается.
Успех лоцманской проводки зависит от хорошего изображе-
ния берегов на экране, которое в свою очередь зависит от отра-
жающих свойств береговой черты. Поэтому перед входом в уз-
кость нужно заблаговременно знать, что из себя представляют
его берега. Эти сведения даны в лоции.
Успех лоцманской -проводки зависит также и от извилистости
узкости, так как извилистость определяет границы радиолокаци-
онной видимости впереди судна. Поэтому в извилистой узкости
необходимо ориентироваться на предварительную прокладку и
отметки, сделанные заранее на карте (длина участка, значение
компасных курсов, точки, в которых нужно начинать и кончать
поворот, ориентиры, на траверзе которых необходимо перело-
жить руль, угол, на который нужно положить руль и т. д.). В слу-
чае, если ширина узкости значительна и улавливаемое смещени-
470
ем судна с фарватера превышает допустимое, для того чтобы
лучше улавливать боковое смещение судна, включают подвижной
круг дальности ПДД и устанавливают его на расстояние, рав-
ное наименьшему расстоянию между фарватером и береговой
чертой (рис. 227). Затем задача судоводителя заключается в том,
чтобы не допустить сближения ПКД с изображением береговой
черты. Если ширина узкости очень меняется, необходимо менять
положение ПКД на экране. Ориентировать изображение на экра*
не можно по курсу и по норду. Ес-
ли изображение ориентировано по
курсу, то при поворотах оно «раз-
мазывается», ито затрудняет про-
водку судна. При этом чем боль-
ше угловая скорость поворота,
гем размазывание сильнее. Если
изображение ориентировано по
норду, смазывания не будет, ио
читать изображение, сличать его
с картой трудно, поэтому в узкос-
ти изображение экрана обычно
ориентируют по курсу, а крутые
повороты осуществляют рядом
последовательных поворотов на
небольшие углы (если ширина
фарватера достаточна).
Фарватеры обычно обставля-
ются плавучими средствами нави-
гационного оборудования. Успех
прохода такой узкости будет за-
висеть от отражающей способно-
сти знаков плавучего огражде-
ния- Если плавучее ограждение
фарватера представляет собой
парные большие буи с уголковы-
ми пассивными отражателями, на
берегу расположены хорошие ори- Рис. 227
ентиры, проход узкости не соз-
дает больших трудностей для опытного судоводителя^ Если же
плавучее ограждение обычного образца, на берегах нет радиоло-
кационных ориентиров, такую узкость проходить в плохую види-
мость нельзя, и нужно дождаться улучшения видимости, V
В том случае, если берега не имеют радиолокационной обста-
новки, то проходить узкость нужно только по плавучим буям, ог-
раждающим стороны фарватера или указывающим ось фарвате-
ра, в зависимости от принятой системы ограждения. Следует пом-
нить, что дальность обнаружения морских буев 2—4 мили, если
они без пассивных отражателей, если же они с отражателями —
7 миль. Если в узкости установлены буи без отражателей, судо-
471
водителю нужно ориентироваться на состояние моря, так как при
волнении эхосигнал от буя заглушается эхосигналами от волн и
©округ центра экрана видно только засвеченный район. Тогда
судну проходить узкость, ориентируясь на буи, нельзя. Если буи с
отражателями, их сильные эхосигналы на засвеченном районе эк-
рана будут выделяться яркостью.
Фарватер, огражденный парными буями, является лучшим
для проводки судна, если расстояние между буями больше линей-
ного значения разрешающей способности РЛС по пеленгу. В этом
случае необходимо, чтобы отметка курса на экране проходила
между эхосигналами буев.
Бели фарватер огражден буями по осевой системе, для успеш-
ного его прохода нужно, чтобы на экране было видно одновре-
менно не менее двух буев сразу. В этом случае отметка курса
должна пересекать оба эхосигнала буев. При прохождении тра-
верзов буев с помощью прожектора нужно рассмотреть окраску
и обозначения буев, а также определить характер огня, сверяя их
сданными лоции и карты.
При следовании по фарватеру, огражденному буями, необхо-
димо учитывать, что боковое смещение судна с выбранной линии
пути будет обнаружено, когда оно достигнет 1 мм, а также что
судно, как правило, не стоит строго на курсе, а рыскает. Рыска-
ние уклоняет судно с выбранной линии пути. В табл. 32 приведе-
ны величины смещения судна в направлении, перпендикулярном
линии пути, в зависимости от постоянной ошибки, равной ± 1 мм.
ошибки из-за рыскания судна и расстояния до буя.
Таблица 32
Постоянная ошибка, мм Ошибка из за ры- скания, град. Расстояние до буя, мили
0,5 | 1 '-0 I.S 1 2’° 1 | 3,0 5,0
I 1° 95 по 125 140 170 235
1 2° ПО 140 170 200 265 390
Q помощью табл. 32 определяется, можно ли следовать фар-
ватером, ширина которого известна. Радиолокационная проводка
судна по фарватеру, огражденному буями, осложняется, если на
судно действует течение и ветер и оно подвержено суммарному
сносу. В этом случае курсовая черта будет смещена с требуемой
линии пути на угол сноса (рис. 228,о). Для облегчения глазомер-
ного контроля за движением судна по оси фарватера линейку ви-
зира устанавливают по направлению пути. Она в этом случае
должна пройти через буи или, если буи парные, между ними
(рис. 228,6). Снос судна будет замечен, если визирная линейка
сойдет с эхосигналов буев.
При плавании по таким фарватерам в плохую видимость счи-
сление пути судна должно вестись с максимально возможной точ-
ностьюл так как можно перепутать обнаруженные буи. Нужно
472
учитывать, что несмотря на то, что буи на таких фарватерах со-
держатся особенно тщательно, они все же могут быть не на своем
штатном месте. Нужно все >время следить за изменением расстоя-
ния между судном и буем, чтобы не принять впереди идущее или
стоящее на якоре судно за буй. Нужно помнить, что дальность
обнаружения судна больше, чем дальность обнаружения буя.
Рис. 228
Если фарватер, не обставленный буями, имеет строго лими-
тированную ширину, пройти его при плохой видимости трудно
даже в том случае, если работает радиолокатор, так как нельзя
воспользоваться створными знаками, которыми пользуются
при хорошей видимости. В этом случае контроль за смещением
судна с оси фарватера можно осуществить только по радиолока-
ционным обсервациям, проводимым часто и занимающим зна-
чительное время. Поэтому следовать по фарватеру можно на
малых скоростях, с остановками. Ошибка в опознании ориенти-
ров может привести к авариям. Поэтому судно должно идти в
том случае, если ориентиры точно опознаны. Тогда проводку
судна по фарватеру можно осуществлять двояко, в зависимости
от расположения опознанных радиолокационных ориентиров.
Случай 1. Ориентиры расположены по одному, по носу
или по корме судна.
Пооводка осуществляется успешнее, если ориентиры распо-
ложены по носу, так как теневые секторы от трубы на многих
судах не дают возможности обнаружить кормовые ориентиры.
473
По этим ориентирам производятся засечки пройденного расстоя-
ния. По бортам судна расположена неровная береговая черта,
дающая возможность непрерывно измерять траверзные или
почти траверзные расстояния.
Для обсерваций измеряют расстояния до береговой черты
Dx и расстояния до ориентира, расположенного по курсу Z)2.
Радиусом D2 делают засечку на фарватере. Растворив циркуль
на измеренное расстояние D\y на дуге, проведенной радиусом
D2, подбирают точку, из которой окружность касается береговой
черты. Такие обсервации необходимо производить как можно ча-
ще. Если обнаруживают смещение судов с оси фарватера, с по-
мощью руля возвращают его на заданную линию пути. Для ус-
корения определения бокового сноса таким путем, заранее на-
носятся на карте засечки от ориентира, расположенного по кур-
су на расстоянии 2—3 кбт. друг от друга. От этих засечек, пе-
ресекающих линию пути, нужно снять расстояние до береговой
черты и снятые с карты расстояния записать на карте, по обе
стороны соответствующей засечки. При такой предварительной
подготовке, судоводитель, измерив расстояние до береговой чер-
ты, сразу без прокладки может судить о том, сносится ли судно
с курса.
Случай 2. Радиолокационные ориентиры расположены по
обеим сторонам фарватера или по одной стороне и, в отличие от
случая 1, контроль за перемещением судна можно осуществить
только путем частых обсерваций по заранее выбранным ориен-
тирам. Для ускорения нанесения обсерваций на карту нужно
сделать предварительную подготовку, аналогично рассмотренной
в случае 1.
В практике при проходе узкостей чаще всего встречаются
комбинированные случаи. В соответствии с этим необходимо
применять комбинацию из вышеописанных приемов.
Если плавание проходит по фарватеру в хорошую видимость,
рекомендуется включать локатор и параллельно визуальной про-
водке производить радиолокационную, отмечая при этом надеж-
ные ориентиры. Таким путем приобретается опыт в радиолока-
ционной проводке, а также в изучении характеристик отража-
ющей способности радиолокационных ориентиров.
При радиолокационной проводке необходима отличная ра-
бота компаса, эхолота и радиолокатора. В случае неисправности
или неуверенности судоводителя в том, что хотя бы один из этих
приборов дает неправильные показания, входить в узкость
нельзя.
Контрольные вопросы
1. Что такое навигационная узкость?
2. Каковы этапы подготовки для прохода узкостью?
3. Какие вспомогательные сетки Вы знаете, какова их роль и как они
строятся?
4. Каковы действия судоводителя в узкости?
474
5. Как избежать влияния присоса судов?
6. Каковы особенности поворотов в узкостях?
7. Как выйти на заданную линию пути, если обнаружено уклонение судна
с линии пути?
8. Каковы особенности поворота судна в узкости при наличии течения?
9. Какова роль РЛС для прохода узкостей?
10. В чем особенности лоцманской проводки?
11. Как использовать плавучую навигационную обстановку узкости для
плавания с РЛС?
12. Какую узкость нельзя пройти при плохой видимости даже при нали-
чии РЛС?
13. Как подготовиться для обсервации в узкостях?
14. Как нужно подготовиться для прохода узкости с помощью РЛС?
Глава XIX. ПЛАВАНИЕ ВО ЛЬДАХ
§ 119. ОСОБЕННОСТИ ПЛАВАНИЯ ВО ЛЬДАХ
Плавание во льдах осуществляется под проводкой ледокола,
самолета или вертолета, или самостоятельно. Судно, следующее
за ледоколом, подчиняется всем указаниям капитана ледокола,
но тем не менее на нем следует вести счисление и осуществлять
контроль за ним. При следовании за ледоколом суда обязаны
выполнять специальные правила, которые печатаются в лоциях
и объявляются в «Извещениях мореплавателям». В нашей стра-
не накоплен огромный опыт ледового плавания, создано много
трудов. Особенно ценна в этом отношении книга капитана даль-
него плавания М. В. Готского «Опыт ледового плавания», яв-
ляющаяся исключительно полезным (Пособием.
Судоводитель, зная о предстоящем плавании в ледовом райо-
не, обязан получить от управления гидрометеослужбы, руковод-
ства и капитана ледокола, обеспечивающих плавание в данном
районе, полную информацию о его ледовых условиях.
Информация о ледовом режиме представляет собой каргу,
составленную на основании наблюдений береговых станций, су-
дов и самолетов ледовой службы, с учетом влияния гидрометео-
рологических факторов (ветров, течений и т. д.). Если информа-
цию получают по радио, она представляет собой ледовую свод-
ку, на основании которой судоводитель сам наносит на карту ле-
довую обстановку. Такая информация должна содержать сведе-
ния о положении и состоянии кромки льда, общую характери-
стику ледовых условий на курсе и предполагаемое изменение
этой характеристики на ближайшие несколько суток, рекоменду-
емые курсы для судов, самостоятельно следующих в ледовом
районе. Во время плавания судоводитель должен уточнять и
корректировать полученную ранее информацию.
В различных районах и в различное время года могут встре-
чаться льды разной характеристики. При оценке окружающего
льда необходимо очень внимательно относиться к его цвету, и
толщине. Следует помнить, что над водой выступает J/6—l/g
475
часть полной толщины льда, в зависимости от его плотности.
Для следования во льдах обычно выбирают разводья или ме-
ста мелкобитого льда, проходя которыми следует остерегаться
приближения к большим льдинам, имеющим следы значитель-
ного размывания водой. Под водой часто может быть продолже-
ние этой льдины — таран — выступ остроконечной формы, при
ударе о который можно получить пробоину. Проходя сплочен-
ным льдом, не следует входить в места торосообразования, что-
бы избежать зажатия во льду. При следовании в районе айс-
берга не следует к нему подходить близко, так как айсберг мог
жет опрокинуться, а это приведет к аварии.
Сплоченные торошенные льды лучше обходить, стараясь их
не форсировать.
Перед входом в лед следует прежде всего убедиться в том,
что:
а) другого пути, кроме ледового, для достижения пункта на-
значения нет;
б) по данным информации о состоянии ледовой обстановки
район проходим для данного судна;
в) имеющийся прогноз погоды и ледовой обстановки не угро-
жает ухудшением проходимости района.
Перед тем как войти в лед, необходимо получить надежную
обсервацию. Для обзора ледового пространства нужно выста-
вить наблюдателя на марсовой площадке, с которой в 1,5—2 ра-
за увеличивается дальность видимости. На баке необходимо
выставить впередсмотрящего. Входить в лед можно толь-
ко через разреженные слабые места кромки льда, самым малым
ходом, погасив инерцию судна, руль должен находиться в поло-
жении прямо. Нельзя входить в лед при торошении льда в
кромке. Вход должен осуществляться по направлению перпен-
дикулярному к кромке льда. Это правило особенно важно пом-
нить при дрейфе льда и наличии волны, идущей со стороны
чистой воды.
Наветренная кромка льда из-за сжатия льда у кромки и ле-
довой зыби представляет собой бдльшую опасность, чем подвет-
ренная. Поэтому если есть возможность войти в лед не с навет-
ренной стороны, нужно это сделать даже в том случае, если для
этого судно должно пройти значительное расстояние. При входе
с подветренной кромки необходимо учитывать, что с углублени-
ем в ледовое поле разреженность льда будет уменьшаться, а
лед — становиться более труднопроходимым. В этом случае, как
и вообще при входе в лед, нужно учитывать информацию о ле-
довой обстановке.
При дрейфе льда в сторону отмели или других опасностей,
входить в него нельзя, особенно если дрейфующая полоса широ-
ка. Следует помнить, что ледовая обстановка может резко ухуд-
шиться за счет интенсивного уплотнения льда, застопоренного на
мели или у другого препятствия.
476
Не следует входить даже в разреженный мелкобитый лед во
время снегопада, так как снег может способствовать связыва-
нию льдин.
В практике ледового плавания считается, что входить в лед
не ледокольному судну нельзя, если сплоченность льда выше
6 баллов. Для судов, имеющих ледовый класс Регистра СССР,
этот предел может быть повышен до 7 баллов.
Войдя в лед, судно выбирает путь по более разреженному
льду или разводьям. Для выбора цепи разводий судоводитель
руководствуется следующими соображениями:
а) общее направление цепи разводий должно быть возмож-
но ближе к генеральному курсу судна;
б) разводья, составляющие цепь, должны быть соединены
или, в крайнем случае, перемычки, разделяющие разводья,
должны быть нетяжелыми для данного судна.
§ 120. СЧИСЛЕНИЕ ВО ЛЬДАХ
Из-за меняющейся метеорологической обстановки во льдах
судоводитель может не получить обсервации. Поэтому счисле-
ние пути судна во льдах должно производиться особенно тща-
тельно. Следует сказать, что счисление усложняется непостоян-
ством скорости судна и частой переменой курсов. С. О. Макаров
рекомендовал счисление пути производить следующим образом:
в конце каждых пяти минут замечать курс и скорость судна,
затем все записи за 1 час или за 30 мин свести в генеральный
курс и плавание, по которым определяется место судна на дан-
ный момент.
Капитан дальнего плавания М. В. Готский предложил заме-
чать курсы и скорость каждые б мин, что не дает уменьшения
точности, но упрощает вычислительную работу.
Компасный курс судна замечается по главному компасу.
Скорость не может быть определена по лагу, так как забортный
лаг убирается, во избежание потери вертушки лага, а донный
лаг—чтобы избежать смятия его льдиной. Штевень-лаги уста-
новлены не на всех судах, причем при следовании в неполном
грузу их также отключают, чтобы избежать поломки.
Скорость судна во льдах определяют довольно примитивным
способом: на льду замечают какую-либо приметную точку, а
иногда выбрасывают за борт с бака какой-либо предмет. Когда
этот предмет окажется на траверзе форштевня, первый наблю-
датель на баке дает сигнал свистком или отмашкой, а штурман
на мостике включает секундомер. Второй наблюдатель, находя-
щийся на юте, в момент, когда предмет будет на траверзе ах-
терштевня, также подает условный сигнал. По этому сигналу
штурман останавливает секундомер. Отсчет по секундомеру по-
кажет промежуток времени t, в течение которого судно пройдет
расстояние Lt равное длине судна от форштевня до ахтерштев-
477
ня. После этого по формуле вычисляют скорость судна в узлах
3600Z, . олл L
1852^ .
В связи с тем, что длина судна постоянна, можно заранее со-
ставить таблицу, в которой по аргументу t в секундах выбрать’
скорость судна в узлах.
Рекомендуется, при подготовке судна к плаванию во льдах,
заранее на бортах судна разбить базу такой длины, чтобы при
умножении ее на коэффициент 1,944 получать круглое число де-
сятков, что облегчит и ускорит вычисление скорости судна. На-
зо " бе
пример, база 15,5 м... Vv3^ = база 30,9 м... Vv3=r-^; база
I СсК J I СвК
90
46,3 м ^узл = ‘t ceic и т- Д- Эта база наносится по фальшборту
краской, и на концах ее выставляются наблюдатели, сообщаю-*
щие на мостик моменты прохождения ими траверза намеченной
на льду точки. Указанный способ определения скорости судна
во льду имеет следующие недостатки:
а) при выполнении этой работы необходимо иметь двух
наблюдателей, которыми на судах ММФ чаще всего являются
вахтенные матросы. Определять скорость судна во льдах прихо-
дится часто, и в эго время судно остается без впередсмотря-
щих. Это явно недопустимо, так как при плавании во льдах не-
обходимо непрерывно наблюдать за состоянием льдов, чтобы
предостеречь судно от повреждений корпуса, руля, винта и т. д.;
478
б) в вычисленную этим способом скорость войдут ошибки
фиксирования наблюдателями моментов прохождения предме-
том траверза форштевня и ахтерштевня, или концов базиса, так
как траверз предмета, или точки на льду, наблюдателями опре-
деляются на глаз, кроме того, в полученный результат вой-
дет ошибка передачи и приема сигнала на мостик от двух наб-
людателей.
Для сокращения числа участников измерения скорости суд-
на во льдах можно использовать прибор. Его легко изготовить
своими силами. Схема прибора представлена на рис. 229. Из
шестислойной фанеры вырезают сектор в 120—160° с радиусом
0,5 л. Этот сектор крепится наглухо на шток из металлической
трубки с наклоном к вертикали 30—45°. Шток крепится к план-
ширю мостика посредством шарнирного соединения с таким
расчетом, чтобы шток передвигался вверх и вниз в цапфе и
мог быть закреплен в любом положении стопором. Шарнирное
соединение позволяет установить шток в строго вертикальном
положении. Дуга окружности сектора разбита пополам; штрих,
разбивающий окружность на две половины, обозначается 0°;
вправо и влево от 0 через 0°,1 нанесены деления: градусы—круп-
ными штрихами, десятые градуса—мелкими, десятки градусов
надписаны цифрами. Такую разбивку можно произвести на суд-
не протрактором. В центральном углу сектора устанавливается
глазная мишень так, чтобы она могла вращаться вокрус оси,
перпендикулярной плоскости сектора. В этом же углу крепятся
винтом две линейки, имеющие срез на внутренней стороне. На
концах линейки наглухо крепятся предметные мишени с таким
расчетом, чтобы визирная нить проходила по срезу линейки. На
концах линейки установлены стопорные винты, при помощи ко-
торых каждую из линеек можно установить в любом положении
на секторе.
Для установки штока в строго вертикальном положении на
нем должен быть установлен отвес. Лучи, идущие из глаза наб-
людателя по направлениям АВ и АС, т. е. по сторонам сектора,
отобьют на льду две точки, расстояние между которыми будет
постоянным, пока не изменится высота глаза наблюдателя. Рас-
стояние L между точками В и С на льду легко вычислить из
рис. 230,а. Рассмотрим треугольник ADE (рис. 230,6). В точ-
ке А находится глаз наблюдателя (глазная мишень). Сторона
AD = R—расстояние от глаза наблюдателя до точки на льду/).
Сторона DE=d—расстояние от борта судна до точки на льду/).
Угол /L4Z) = a = 30° (или 45° в зависимости от установки). Из
треугольника ADE получим
АВ = R = е sec a; R = —— (I)
’ COS a ' '
Из треугольника ABC (рис. 230,в), разбив его биссектрисой AD
и обозначив угол BAD — р, а угол ВАС=2р, видно, что сторона
АВ равна расстоянию от глаза наблюдателя до точки на льду,
479
а сторона ВС — расстоянию между точками, отбитыми лучами
на льду, сторона же BD = Из треугольника ABD имеем:
Рис. 230
Подставляя значение R из формулы (I), имеем
-^- = esecatgp; L = 2esecatgp. (II)
Если принять значение а = 30° и 0 = 60° и подставить в формулу
(II) величины функции, то получим £=2еХ 1,55Х 1,732=2еХ;
Х2,00046; округляя получим £^4е, т. е. расстояние между дву-
мя точками на льду равно высоте глаза наблюдателя, умножен-
ному на 4.
Если принять значение а=45°, а 0 = 60° и подставить в фор-
мулу (II) величины этих функций sec 45°= 1,414; tg60° = l,732,
то получим
L = 2eX 1.414Х 1,732 = 4,898^4,9*.
Определив расстояние L и зная, что это расстояние будет по-
стоянным, пока не изменится высота глаза наблюдателя, можно
всегда вычислить скорость судна при плавании во льдах. Для
этого штурман, заметив по секундомеру количество секунд, в
течение которых судно проходит известное расстояние, легко мо-
жет вычислить скорость:
L м
V М1сек=т^к.
480
Для определения скорости судна в узлах удобно пользовать-
ся таблицей «Перевод узлов в метры/секунду», приведенной в
Мореходных таблицах. Так жак при этом способе необходимо,
иметь точную величину е, то рекомендуется штурману прежде
всегд Измерить высоту глаза. Это можно сделать с помощью
ручного лота. Для того чтобы не заниматься во время рейса пе-
реводом метров/секунд в узлы, можно получить скорость судна
сразу р узлах, использовав соотношение:
1/^ = 1,9444.
Если рассчитать значение угла р или 2р (в зависимости ют
выбранного базиса), вычислительный процесс на мостике в пла-
вании сильно упростится. Из формулы
L = 2е sec a tg р
можно найти значение tg р
, л С OS Я
te₽=-^r-
и величину угла р для данного базиса и высоты глаза е. Когда
сектор прибора разбит на градусы и десятые градуса, то доста-
точно установить линейку на вычисленный угол р, заметить вре-
мя прохождения судном расстояния и можно получить скорость
судна в узлах. Например, базис равен 15,43, е=10 ж, 20=
=67°30', f=40 сек, то VyM = =0,75. В табл. 33 (Приведена
величина углов р для высоты глаза наблюдателя от 4 до 15 я
с интервалом 0,5 м при угле а=30° для баз 15,43 и 30,87 jh, ко-
торые соответствуют расстоянию, проходимому судном в 1 Мин
прн скоростях в 0,5 и 1,0 узла.
Для изготовления прибора на судах с высокими мостиками
рекомендуется значение угла а принять равным 30°, а для судов
ср средними и низкими мостиками — 45°.
Для определения точности измеренной скорости рассчитаем
величину ошибки в измеренном расстоянии. Для этого про-
дифференцируем формулу L = tg р по переменным a, ej 0.
Переходя от дифференциалов к конечным приращениям, получим
АЛ—.2*gPAz? I 2еАр 2<?tg?-lnO»-
cosa“ ‘"cosacos2? COS2aSI1 '
Задавшись величиной ошибок и подставив их в формулу конеч-
ных приращений, получим ошибку в измеренном расстоянии.
31 НЛвигацвд 431
Т а б л и ц а 33 1
Высота База 15.43 м База 30,87 м
глаза
наблю- tg ₽ ₽ 2? tg₽ ₽ 2₽ '?
дателй, м
4,0 1,6703 59,1 118,2 3.2167 72,7 145,4
4,5 1,4847 56.0 112.0 2,8593 70,7 141,4 1
5,0 1,3362 53,2 106.4 2,5733 68,8 137,6
5,5 1,2148 50.9 101.8 2,3394 66.9 133,8 4
6,0 1,1135 43,1 96,2 2,1445 65,0 130,0 ‘ 7
6,5 1,0279 45,8 91,6 1,9795 63,2 126,4 ,
7,0 0,9545 43,7 87,4 1,8381 60,4 120,8
7,5 0,8908 41,7 83,4 1,7182 59,8 119,6
8,0 0,8352 398 79,6 1,6083 58,1 116,2
8,5 0,7860 38,2 76,4 1,5137 56,5 113,0
9,0 0.7423 36,6 73,2 1,4296 55,0 110,0
9,5 0.7033 35,1 70,2 1.3544 53,6 107,2
10,0 0.6681 33,7 67,4 1,2867 52,1 104.2
10,5 0,6363 35,5 65,0 1,2254 50.8 101,5
11,0 0,6074 31,3 62,5 1,1652 ♦49,3 98,7
11,5 0,5810 30,1 60,2 1,1188 48.2 96.4 г
12,0 0,5568 29,1 58,2 1,0722 47,0 94,0 ' ¥
12,5 0,5345 28,1 56.2 1,0293 45,8 91,6
13,0 0.5139 27,2 54.5 0,9897 44,7 89,4
13,5 0,4949 26,3 52.6 0,9531 43,1 86,2
14,0 0,4772 25,5 51,0 0,9190 42,6 85,2
14,5 0,4608 24,7 49,5 0,8873 41,6 83,2
15,0 0,4454 24,0 48,0 0,8578 40,6 81,2 л
Скорость судна рассчитывается по формуле V= Продиф-
ференцировав эту формулу по L и t, получим
dV = dLt~dt~.
Переходя от дифференциалов к конечным приращениям, полу- :
ним '
... д^д-да д/. l Kt J
Л*
Наличие исправного радиолокатора дает возможность.-доста-
точно точно определить скорость судна. Для этого на льду впе-
реди по курсу выбирают точку (глыбу льда, торос), дающую хо-
роший эхосигнал на экране радиолокатора. Измеряя расстояние |
до этой точки через определенные промежутки времени, рассчи-
тывают разность этих расстояний, которая при делении на про- ; «
межуток времени, замеченный по секундомеру, дает скорость U
судна. Если прямо по курсу нет точки, дающей эхосигнал на эк- • j
ране радиолокатора, или объект расположен в стороне, то необ-
ходимо, измеряя расстояние, одновременно заметит^ курсовые
углы этой точки (рис. 231), затем рассчитать пройденное рас-
482. .х .’’-/Л
стояние d й вычислить скорость К Действительно, из рис. 231
получим '
АС=/?!==£>!cosКУс, ВС = /?,==£>scosКУъ,
A.B^=d=-R\ — /?,;
Скорость судна, следующего во льду, зависит от разряженно-
сти льда и типа судна (табл. 34).
Таблица 34
Деловитость, баллы Скорость движения судна
не имеющие ледовогб класса с ледовым классом
До 3 7—8 10-12
„ 4 4—5 6—7
. 5 3—4 5—6
,6 ЗС 5
' f ' ч , 7 — 3
Для ведения счисления при ледовом плавании обработку наб-
людений и нанесение места на карту нужно делать каждый час,
а иногда, в сложной обстановке, каждые полчаса. Обработка
заключается в следующем; - .
- а) рассчитывают плавание за каждые 5 мин (илй 6);
б) если есть в таблице повторяющиеся курсы; их сводят в
один, а соответствующие плавания суммируют;
31* 483
в) журсы, разнящиеся на 5—10° в обе стороны, сводят в
средние курсы, а соответствующие плавания суммируют;
г) полученные курсы исправляют АЛ;
д) при наличии дрейфа, если он известен, его учитывают
в сводной таблице обработанных наблюдений.
Счислимое место можно получить двумя способами.
Рис. 232
1. На листе бумаги в выбранном масштабе, или на специаль-
ных сетках, прокладываются осредненные курсы и по ним откла-
дываются соответствующие курсам плавания (рис. 232). По ко-
ординатам конечной точки или по генеральному курсу и плава-
нию на рабочую карту наносится счислимая точка.
2. По И К и йлаваниям путем письменного счисления рассчи-
тываются координаты точки на конец часа.
Иногда для ускорения расчетной работы, рассчитывают сред-
ний курс и по нему откладывают суммарное плавание. Следует
иметь в виду, что такое упрощение ведет к увеличению ошибки
счисления, а в некоторых случаях — к полной дезориентировке
судоводителя.
Ошибка в счислимом месте зависит от ошибок в ИК и в оп-
ределении скорости, а следовательно, и в проложенном по кур-
су расстоянии, а также от ошибки в принятом во внимание ле-
довом дрейфе. Ошибка в истинном генеральном курсе содержит,
кроме ошибки в поправке компаса, систематическую ошибку,,
возникающую от самого метода ледового счисления. Округляя
и приводя пятиминутные или шестиминутные курсы к средним»
имеем систематическую ошибку, которая тем больше, чем гру-
бее делается осреднение курсов. Из-за этого счислимое место
всегда будет в стороне от истинного.
484
Суммированное расстояние, (пройденное iiro нескольким кур-
сам, мы принимаем за плавание по среднему курсу. Поэтому
счислимая точка всегда будет впереди истинного места судна.
Расстояние между верной и неверной счисленными точками зави-
сит от угла между объединенными курсами и непропорционально
увеличивается с увеличением угла. Следовательно, систематиче-
ская ошибка всегда имеет знак плюс и в течение плавания она все
время накапливается. Ошибка в счислении увеличивается, если
объединяются курсы с плаваниями по ним различной протяжен-
ности. Так, например, если из-за объединения курсов, разня-
щихся на 20°, при одинаковом плавании ошибка не превышает
2%, то при такой же разнице в курсах, но при соотношении пла-
ваний 1: 2, ошибка возрастает до 6%.
Из-за того, что ледовое плавание является очень ответствен-
ным и тяжелым, ММФ СССР издало «Наставление для плава-
ния судов в осенне-зимний период», которым экипажи судов обя-
заны руководствоваться при плавании во льдах.
§ 121. ОПРЕДЕЛЕНИЕ ДРЕЙФА СУДНА ВО ЛЬДАХ
Определить дрейф судна, плавающего во льдах, можно на-
вигационным путем при наличии обсерваций и с применением
м е х а н и ч еског о л ота.
Способ определения дрейфа с использованием лота приме-
ним на глубинах до 200 м. Для выполнения работ судно уста-
навливают подветренным бортом вплотную к кромке льда, что-
бы с наветренного борта, против выстрела лота, было свободное
ото льда пространство (рис. 233). Стравив гирю лота, опускают
ее на дно и в момент прикосновения гири к грунту пускают се-
кундомер. Из-за перемещения льда судно также будет переме-
щаться по направлению дрейфа и лотлинь нужно постепенно
травить. Когда длина вытравленного лотлиня I будет прибли-
зительно равна (h — глубина плюс высота от воды до вы-
стрела), вьюшку лота стопорят и, дав натянуться лотлиню, сто-
порят секундомер и измеряют угол а между отвесом и направ-
лением лотлиня. (На малых глубинах, до 25 м, длина вытрав-
ленного лотлиня /=2Л). Этот угол можно измерить градуирован-
ным сектором; после этого, имея длину вытравленного лотли-
ня I, снимаемую с указателя механического лота, время дрей-
фа т и измеренный угол а по эмпирической формуле определя-
ют скорость дрейфа
Vd = 1,94 4-sin 2а. (216)
Если нельзя измерить угол а, то поступают так:
а) из прямоугольного треугольника рассчитывают расстоя-
ние, на которое судно сдрейфовало за время т
а = I2 — fi2,
485
или используют табл. 24 МТ-53, приняв I за плавание, h за раз-.
ность широт, получив в графе «отшествие» величину а;
б) имея величину а, рассчитывают скорость дрейфа в узлах
по формуле
|Za=l,85-f-. (217)
Направление дрейфа определяют по отклонению лотлиня от
диаметральной плоскости судна, или на глаз, или используя
градуированный фанерный диск с радиальной прорезью, в кото- :j
рую входит лотлинь. Получив угол между диаметральной пло- У
скостью и направлением лотлиня КУЛ, рассчитывают направле- /
ние дрейфа. . > -
Направление дрейфа Г
а = Я/< + /<-ул~|-180о, '
486
где КУЛ— правого борта имеет знак ( + ),
- КУЛ— левого борта имеет знак (—);
При плавании во льдах, когда нельзя определить дрейф ни
навигационным, ни специальным способом, для приближенных
расчетов дрейфа судна можно использовать существующую за-
висимость между направлением и скоростью ветра и направле-
нием и скоростью дрейфа, -выведенную профессором Н. Н. Зубо-
вым:
а) направление дрейфа льдов отклоняется от направления
вызвавшего его ветра в северных широтах на 30° вправо, в юж-
ных — на 30° влево;
б) ветровой коэффициент для льда равен 0,02, т. е. скорость
ветрового дрейфа льда в 50 раз меньше скорости ветра.
ПРИМЕРЫ
1. Высота глаза наблюдателя £=10 м. Угол «=30°, р=60°, время прохож-
дения базиса /=20 сек. Определить скорость судна и ошибку этого определе-
ния в процентах, если ошибка в угле наклона сектора Ла = ±2°. Ошибка в из-
меренной высоте глаза наблюдателя Де=±0,1 м, в угле т — НН0°Д в отсчете
времени А /=0,5 сек. . > ' .
Решение, а) Рассчитаем пройденное расстояние по формуле
L = 2£ sec a tg 3 = 2,10.1,155-1,73 = 40 ж;
б) Определим скорость судна
V=T = 2- = 2 ж/сек, :
что по таблице 35 МТ-53 соответствует 3,89 узла.
в) Если ошибка в угле т = +0°,5, то А ₽=0°,5—0,0087 радиан.
Рассчитаем ошибку в измеренном расстоянии
= 0,4 + 0,9 — 0,08 = 1,3 м;
г) Рассчитаем ошибку измеренной скорости
или
Д/% 100=1,16%.
2. Радиолокатором измерено расстояние до тороса, дающего эхосигнал на
экране £>i=5 миль, одновременно взят по пеленгатору компаса КУ1=20° л/б.
Спустя некоторое время вторично измерено расстояние £>2=4,1 и /0^2=25° л/б.
Определить скорость судна, если промежуток времени между измерениями
t=4 мин 35 сек.
Решение, а) Рассчитаем Ri, R2 и d по формуле (215)
= 0,9397 Х5 = 47,0 кбт.
~~ /?2 = 0,9( 63 Х4,1 = 38,5 кбт.
d = 8,5 кбт;
487
б) Определим скорость
1/=-^-= ^|j-=l,88 кбт1мин= 11,3 узла.
3. Счетчик механического лота в момент касания гирей грунта показал
120 м. В этот момент был пущен секундомер. Через 5,3 сек, вьюшку лота за-
стопорили. Счетчик лота показывает 160 м. Определить скорость ледового
дрейфа.
Решение, а) Определим расстояние, на которое судно сдрейфовало
за 53 сек,
а = Р — да = /160’ — 1202 =- 105,8 ж;
*
б) Определим скорость дрейфа.
Vo = 1,85 — - 1,85 = 3,7 узла.
т S3
Контрольные вопросы
1. От кого и какого содержания поступают информации о ледовой об-
становке?
2. Как классифицируются льды и ледовая обстановка?
3. Когда можно входить в лед и где нужно входить в него?
4. Как выбирается путь во льдах?
5. Как ведется счисление во льдах?
6. Как измеряется скорость судна во льдах?
7. В чем заключается принцип выбора базы для определения скорости
судна?
8. Каково влияние систематических и случайных ошибок при счислении
методом С. О. Макарова?
9. Какое будет направление дрейфа, если курсовой угол направления лот-
линя КУ=30° п/б, ЯК-220?
10. Как определить скорость н направление дрейфа на больших глубинах?
Глава XX. ПЛАВАНИЕ В ТУМАНЕ
§ 122. ИСПОЛЬЗОВАНИЕ ИЗМЕРЕННЫХ ГЛУБИН В НАВИГАЦИИ
Наличие па современных морских судах совершенных радио-
навигационных приборов не исключает использования эхолота,
дйплота и ручного лота. Эхолотом рекомендуется измерять глу-
бины от 10 до 100 м. Глубины до 10—15 м, а также в тех слу-
чаях, когда нужно получить образец грунта, измерение произ-
водится ручным лотом. Глубины дают возможность: i
а) опознать свое место;
б) уменьшить площадь вероятного местонахождения судна;
в) оградить судно от опасного сближения с различными на- .
вигационными опасностями;
г) проконтролировать полученные обсервации; : <
д) проверить верность счисления.
Рассмотрим подробнее каждую позицию.
Опознание места по глубинам заключается в следующем.
488
Зная свою скорость и имея карту определенного масштаба,, в
зависимости от расстояния между нанесенными на карте глуби-
нами, выбирают величину промежутка времени, через который
измеряют глубины эхолотом и ручным лотом. Производят 5—7
измерений. Одновременно с измерением глубины замечают вре-
мя и отсчет лага. Полученные данные наносят в масштабе кар-
ты на кальку (рис. 234). Для этого на кальке нужно нанести
прямую и на ней наметить точки, в которых измерялись глуби-
ны, откладывая разность отсчетов лага, исправленную поправ-
Рис. 234
кой. Кальку накладывают на карту и, перемещая ее по карте
параллельно проложенному истинному курсу, добиваются совпа-
дения глубин, нанесенных на карте, и глубин, отмеченных на
кальке. Если глубины на карте не совпадают с глубинами на
кальке, можно повернуть кальку на угол возможного сноса
судна. Добившись совпадения глубин, на точке последнего изме-
рения глубины, делают угол циркулем и на карте обозначают
опознанное место | • |, около которого записываютвремя и по-
казания лага в момент последнего измерения.
К опознанному месту необходимо относиться критически.
Степень доверия к нему зависит от точности счисления между
моментами измерений, от точности измерения глубин, подробно-
сти и точности карты, возраста карты и др. Для повышения сте-
пени доверия к опознанному месту существует прием, называе-
мый «предсказание глубины». Суть приема заключается в том,
что, рассчитав время и отсчет лага для места судна над выбран-
ной глубиной, измеряют лотом глубину. Если первый раз место
489
опознано верно, лот укажет 1предсказанную глубину, в против-
ном случае считают* что место опознано 'неверно и повторяют
прием.
В практике возможны случаи, когда все измеренные глубины
отличаются на одинаковую величину от глубин, указанных на
карте, из-за сгонно-нагонных ветров или приливо-отливных яв-
лений. При наличии таблиц приливов района плавания глубины
нужно привести к действующему уровню.
Рис. 235
Если путь судна проходит через изобаты, расположенные под
утлом, близким к 30°, то линии изобат можно использовать как
изолинии и с достаточной точностью опознать свое место.
Допустим, что судно перемещается по линии пути АП
(рис. 235). Линию пересекают изобаты аа = 50 м и bb = 2Q м. Ли-
нии положения, касательные в точке пересечения линии пути и
изобат, составляют угол близкий к 30°. Во время 7\ при отсче-
те лага ОЛ\ измерение глубины дало результат 50 м. Следова-
тельно, можно полагать, что судно находится на изоба-
те 50 м.
Через некоторое время зафиксирована глубина 20 м, следо-
вательно, считают себя на изолинии 20 м и замечают время Гг
и отсчет лага ОЛ2. Рассчитав плавание 8 = РОЛ • 7(л, нужно вме-
стить его между изобатами параллельно линий пути. Для этого
используют способ вмещения с помощью параллельной линейки
и измерителя.
Уменьшение площади вероятного местонахождения судна, ис-
пользуя измерение глубин, применяется в тех случаях, когда из-
за длительного отсутствия обсерваций она возросла до больших
490
размеров и производится в зависимости от различных условии
следующим образом:
1. Если линия пути судна проходит вблизи изобаты отличи-
тельной глубины (рис. 236,а), то площадь вероятного местона-
хождения судна уменьшится в зависимости от того, какие глу-
бины, будут зафиксированы на судне. Для упрощения рисунка' и
большей наглядности площадь вероятного местонахождении
судна изображаем не эллипсом, а четырехугольником, в кото-
рый вписывается эллипс:
а) если эхолот показал глубины более глубины изобаты,
нужно полагать, что судно прошло выше отличительной глуби-
ны и находилось только в (верхней части площади вероятного ме-
стонахождения судна (на рисунке эта площадь заштрихо-
вана);
1 б) когда эхолот покажет глубину изобаты, нужно полагать,,
что судно находится в нижней части площади вероятного место-
нахождения (незаштрихованная часть).
Таким образом, как в первом, так и во втором случае пло-
щадь вероятного местонахождения судна значительно уменьша-
ется.
2. Когда судно, пересекая изобату, определяет момент этого
пересечения измерением глубин, то площадь вероятного место-
нахождения судна уменьшится в зависимости от взаимного рас-
положения курса и изобаты:
а) если курс судна расположен перпендикулярно или почти
перпендикулярно изобате (рис. 236,6), судоводителю, получив-
шему глубину изобаты, нужно заметить время и лаг в этот мо-
мент. Вероятная площадь местонахождения судна уменьшится
и примет вид, заштрихованный двойной штриховкой;
49!
б) если курс судна расположен вдоль изобаты (рис. 236,в),
то судоводитель, измеряя глубину, может оказаться или в верх-
ней части площади, если измеренная глубина больше глубины
изобаты, или в нижней части, если измеренная глубина меньше
глубины изобаты. И в том и в другом случае площадь значитель-
но уменьшается.
3. Если судно пересекает изобату под любым углом
(рис. 236,г) и судоводитель зафиксирует ее глубину, то площадь
вероятного местонахождения уменьшится и примет вид площа-
ди с двойной штриховкой. Обычно, обнаружив измерением глу-
бин изобату, судоводитель меняет курс и ложится на курс, рас- .
положенный вдоль изобаты. Такой прием рекомендуется исполь-
зовать тогда, когда нужно пройти узкость при плохой видимо-
сти (рис. 237,а).
4. При наличии на карте нескольких изобат, имеющих в рай-
оне плавания приблизительно одинаковое направление, пересе-
кают эти изобаты и отмечают моменты их прохождения. Затем
•изменяют курс судна, уменьшая этим ширину площади вероят-
ного местонахождения судна и проверяя уменьшение длины пло- *
щади, произведенное на первой изобате. На рис. 237,6 последо-
вательно пересекаются изобаты и соответственно изменяются
492
курсы. На Я/С=90° уменьшена длина площади вероятного ме-
стонахождения, изменение курса на каждой последующей изоба-
те в конечном счете привело к уменьшению ширины площади, а
следовательно, площадь уменьшена и по длине и по ширине.
Изобата, выбранная на карте так, что она проходит в безо-
пасном расстоянии от навигационных опасностей, является ог-
раждающей изолинией. Задача судоводителя состоит в том, что-
бы обнаружить эту изобату измерением глубин и встать на
якорь, или изменив курс, следовать по направлению этой изоба-
ты, контролируя свой путь показанием лота- или эхолота. И
в том и в другом случае выходить на изобату нужно* имея уме-
ренный ход и курс, составляющий с изобатой угол, близкий к 90°.
Получив обсервацию одним из способов, всегда рекоменду-
ется измерить глубину и сопоставить ее с глубиной, указанной
на карте.
Особенно это необходимо делать в таких случаях:
а) когда обсервация получена по двум изолиниям;
б) когда ориентиры опознаны сквозь рассеявшийся на мгно-
вение туман;
в) когда обсервация получена с помощью радиолокатора, ра-
диопеленгатора и других РНС.
В некоторых случаях, кроме измерения глубины, необходимо
для контроля иметь образец грунта. Тогда глубину измеряют
ручным лотом, диплотом или механическим лотом.
Проверить точность счисления с помощью измерения глубин
можно следующим образом. Если курс судна проходит вблизи
банки небольших размеров, глубина над которой безопасна для
данного судна, выбирают счнслимую точку, от которой прокла-
дывают курс на эту банку и, следуя по этому курсу, измеряюг
глубины.
Если измерения глубин показывают наличие банки, считают
слисление верным и от банки следуют по назначению. Но всегда
необходимо помнить, что измеренная глубина может содержать
ошибку, которая слагается:
а) из систематической ошибки в приведении глубин к дейст-
вующему уровню, зависящей от точности составленных таблиц
приливов;
б) от учета действия сгонно-нагонных ветров;
в) от случайных ошибок измерений.
Систематическую ошибку можно обнаружить при измерении
нескольких глубин, которые будут отличаться от указанных на
нарте на одну и ту же величину. Случайные ошибки измерений
возникают от работы измерительных приборов — эхолота или
лота,
В райбнах с правильными приливо-отливными колебаниями
уровня моря при отсутствии сгона и нагона воды считают, что
при измерении глубин в 100 м ошибка ти будет равна ±3—5 ле,,
при глубинах, достигающих 50 м,—ти = ±2—3 м. В .соответствии
493
с этим и изобату или глубину, указанную на карте, следует счи-
тать площадью, ширина которой зависит от рельефа дна. Совер-
шенно очевидно, что весь район моря с одинаковыми глубинами
является этой площадью.
§ 123. ОСОБЕННОСТИ ПЛАВАНИЯ В ТУМАНЕ
Одним из труднейших является плавание в условиях плохой
видимoqги (туман, мгла, снегопад, дождь и др.). Наличие на
судне современных электрорадионавигационных приборов зна-
чительно упрощает это плавание, но судоводитель должен про-
являть максимум осторожности и бдительности в своей работе.
Счисление должно вестись очень тщательно с глубоким анали-
зом, получаемые обсервации должны быть увязаны со счисле-
нием и проконтролированы измерением глубин (если это воз-
можно). Все приборы и инструменты должны быть в исправном
состоянии, так как работа приборов и умелое пользование ими
обеспечивает безаварийное плавание.
При ухудшении видимости судоводитель должен получить
обсервованную точку с высокой точностью, подготовить звуко-
вые средства сигнализации, выставить на бак или в другое ме-
сто впередсмотрящего, устранить по возможности все шумы, ме-
шающие слушать звуковые воздушные сигналы, посылаемые
другими судами или .береговыми средствами навигационного
оборудования. Услышанный сигнал берегового СНО не может
быть использован даже для примерного определения места суд-
на, так как распространение звука в среде различной плотности
происходит непрямолинейно, и кажущееся направление, по ко-
торому слышен звуковой сигнал, бывает ошибочно на несколь-
ко десятков градусов. Кроме того, замечено, что в некоторых
случаях сигнал может быть услышан в виде эха, которое прихо-
дит к судну совершенно по иному направлению. Это явление
наблюдается в густом тумане у высоких скалистых берегов, айс-
берегов и др. Поэтому услышанный в тумане звуковой сигнал дол-
жен быть использован только как предостерегательный, означа-
ющий, что где-то близко расположена навигационная опасность.
^Предостерегательные воздушные туманные сигналы подаются с
береговых маяков, плавучих маяков, буев или специальных по-
стов.
Дальность слышимости сигналов зависит от температуры и
влажности атмосферы, направления ветра, а также от располо-
жения наблюдателя, слушающего сигнал. Если звук идет с на-
ветренной стороны, его раньше услышит наблюдатель, находя-
щийся ближе к воде, если с подветренной — его раньше услы-
шит наблюдатель, находящийся выше от воды. Поэтому наблю-
дателей выставляют на баке или на марсовой площадке. Часто
приходится выставлять по два наблюдателя.
Подходить к берегу рекомендуется курсами, перпендикуляр-
ными к береговой, черте. Если судно следует вдоль берега, ли-
494
ния пути прокладывается не параллельно береговой черте, а
несколько мористее. Если получена обсервация, нужно постро-
ить эллипс ошибок или круг ошибок и считать себя ближе к
опасности.
Подходя к высоким берегам можно получить изолинию в ви-
де окружности, используя эхо судового свистка. Для этого, да-
вая сигнал, пускают секундомер и внимательно слушают. -Когда
сигнал, отразившись от высокого берега, вернется, останавли-
вают секундомер. Расстояние до берега в морских милях рассчи-
тывают по формуле
Dj^Op. миль 0,09Л (218)
где t— время, отмеченное секундомером, сек.
В некоторых случаях для получения обсервации умышленно
меняют курс к берегу и часто, измеряя глубины, убавив ход
судна и притравив около одной смычки якорного каната в воду,
идут с большой осторожностью, пока сквозь туман не будет об-
наружен берег. Получив обсервацию, следуют дальше по назна-
чению.
Плавая в тумане, нужно обращать внимание на окружающую'
обстановку. Так, уменьшение волны с наветренной стороны оз-
начает, что судно подошло под прикрытие берега. Увеличение
волны говорит о том, что судно вышло из-под этого прикрытия,
а при плавании вдоль гряды островов, что оно проходит пролиз.
Если прозрачность воды уменьшилась, следует считать, что
близко расположен илистый берег. Изменение цвета воды ука-
зывает на то, что близко находится устье реки. Появление пла-
вающего мусора, сухопутных птиц также указывает на бли-
зость берега. *
В открытом море, следуя только по счислению, не рекомен-
дуется менять курс, так как при изменении курса вероятная
площадь местонахождения судна увеличивается, а задача судо-
водителя состоит в том, чтобы уменьшить ее всеми возможны-
ми способами.
Контрольные вопросы
1. Как опознать свое место по глубинам?
2. Как уменьшить площадь вероятного местонахождения судна, используя
изобаты?
3. Какую помощь судоводителю может оказать обнаруженная им изобата?
4. Как нужно подходить к берегу в тумане?
5. Как можно уточнить счисление, имея в стороне от курса банку с прохо-
димой глубиной?
6. Где нужно выставить наблюдателя при плавании в тумане, если ветер
дует с берега?
7. Как использовать эхо в тумане?
8. Как может быть использован звуковой сигнал СНО?
9. От чего зависит степень доверия к опознанному месту?
10. Как увеличить степень доверия к опознанному месту?
11. Какова точность измеренных глубин и из чего слагается ошибка из-
мерений?
495
Глава XXL ПЛАВАНИЕ ПО ДУГЕ БОЛЬШОГО КРУГА
§ 124. ОРТОДРОМИЯ
На.коротких отрезках плавание осуществляется по локсодро-
мии. Это удобно при решении навигационных задач и сокращает
время на расчетные работы. Локсодромия, изображающаяся на
меркаторской карте прямой, пересекающей все меридианы под
одним и тем же углом, не является кратчайшим расстоянием.
Поэтому плавание по локсодромии удлиняет расстояние, кото-
рое должно пройти судно На небольших отрезках это удлинение
незначительно и им пренебрегают ради удобства.
Рис. 238
Кратчайшим расстоянием между двумя точками на сфере
является меньшая из дуг большого круга, проходящего через
эти две точки, называемая ортодромией. Ортодромия — это след
от пересечения сферы плоскостью, проходящей через центр сфе-
ры. В том случае, если эта плоскость проходит через полюса,
ортодромия совпадает с меридианами, а если она перпендику-
лярна оси сферы — с экватором. Все другие ортодромии, не сов-
падающие с меридианами и экватором, пересекают меридианы
под разными углами. Поэтому судно, следующее по ортодромии,
должно все время менять свой курс в пределах от начального Кн
до конечного курса — Кк.
Две ортодромии делят друг друга пополам, следовательно,
всякая ортодромия разделит экватор на две равные части. На
меркаторской карте, где локсодромия изображается прямой, ор-
496
тодромия изобразится кривой, всегда проходящей полярнее лок-
содромии. При этом точки пересечения меридианов будут разъе-
динены по широте. Разность широт между соответствующими
точками ортодромии и локсодромии переменна, и те точки, где
РШ наибольшая, называются точками наибольшего разъедине-
ния по широте. В этих точках курсы судна по ортодромии и лок-
содромии будут одинаковы.
Ортодромия имеет две точи и V2 (рис. 238), занимающие
самое полярное положение на ортодромии. Эти точки называют-
ся вертексами. В точках-вертексах ортодромия касательна па-
раллели вертекса и, следовательно, перпендикулярна меридиану
вертекса.
' Для решения задач при плавании по дуге большого круга не-
обходимо знать ее уравнение на сфере. Развернем сферу так,
чтобы вертексы ортодромии были расположены на истинном ме-
ридиане наблюдателя, в плоскости рисунка (рис. 239). На орто-
дромии выберем точку А с координатами <рд и Ха. Ортодро-
мия пересекает экватор в точке О под углом Ко в долготе
Меридиан точки А пересекает экватор в точке М Образован-
ный сферический треугольник OAN |будет прямоугольным в точ-
ке N. Элементами этого треугольника будут сферический угол
32 Навигация 497
AON=90°—противолежащий катет Л7У=фдл прилежащий
катет ON = Хд — к0.
Из сферической тригонометрии применительно к треугольни-
ку AON, можно написать
tg<PA = tg(9O°— Ко) sin (кд — к0)
или
tg Фа = ctg A'oSin (кд — к0). (219)
Это и будет уравнение ортодромии на сфере. Параметрами
уравнения ортодромии будут угол Ко и долгота точки О—%о. Из
рис. 239 видно, что точка О является полюсом для меридиана
вертекса Vi.
Тогда
Ф у = 90° — Д’о
или
Ко = 90° — фр
и
+ 90°
ИЛИ
Уравнение ортодромии можно написать, используя выведен-
ное выражение для координат вертекса, а именно:
tgФа = ctg (90° — фи) sin [(kA — Хи) ± 90°]
или
{ефд=1ефисо5(кд —хи), (220)
Следовательно, параметрами ортодромии, проходящей через
точку на сфере и вертекс будут географические координаты вер-
текса данной ортодромии — фу и На меркаторской карте
уравнение ортодромии будет иметь другой вид.
498
Допустим, что кривая аа\—ортодромия, на которой располо-
жена точка Л. В декартовой системе координат экватор примем
за ось иксов, гринвичский меридиан—за ось игреков. Координа-
ты точки А—y=AN=МЧд, X=ON=\A (рис. 240).
Меридиональная часть точки А
r=lntg(45° 4-^)
или
/ в 1 +
^=tg 45° + ^ =--------
1 - tg
Сделаем преобразование
1 + tgT
eY=------
i-tg^
6 2
г/ 1 + COS <fA + 1 — cos <?A
1 + COS A + 1 — COS ?д
1 + sin <PA
= со5?д -secq>4+tg<p^.
Следовательно,
_ er = seC(px -J- tgфЛ
<?~r=sec <рд — tgcpA
eY—e~Y= 2tg($u
Подставив значения tgyA из формул (219 и 220), получим
eY — e~Y= 2 ctg Kq sin (Хд — %);
er— e-r=2 tgфгcos(Xд —(221)
общее уравнение ортодромии на меркаторской карте с парамет-
рами /Со, Хо и фг> Хи
Зная координаты вертекса или Ко и Хо и задаваясь долготами
точек ортодромии А, В, С, D..., вычисляют меридиональные час-
ти этих точек, по которым определяются широты точек
А, В, С, D... Точки по широте и долготе наносятся на карту, а
соединив их плавной кривой, получают изображение ортодромии
на меркаторской карте
Долгота точки экватора Хо и курс, под которым ортодромия
пересекает экватор /Со рассчитываются, если известны координа-
ты пункта отхода Фл аа и координаты пункта прихода ФвХд,
расположенные на данной ортодромии. Так, согласно уравнению
ортодромии (219) имеем:
tg Ф д = ctg sin (Хд — k0);
tg фВ = ctg/<0 sin (kB - k0).
32*
499
Разделив второе уравнение на первое, получим
tg?s_ sin (Хв — Хо)
tg?A — sin (Л д — Ло) •
Сделаем следующие преобразования
‘g — tg sin (Хв — Хо) — sin (Xд — Хо) _
tg + tg <?д ~ sin(XB —Хо) 4- sin (Хл — Хв) ~’
_ sin (ув —ул )созул cos yB _sin (?д—<?л) _
— cos ул cos <f Bsia ~ sin (yB + ул j ~
2c°s [|(xB-x0) + !_( M _x0)]sin[^(xB- *о)-4(ха-Ч ]
2 sin + Xo)]cos[j(xB —XoJ __1(ХЛ— Xoj j
тогда
откуда
tg[y(XA + xb) — xo] = tgg/4? — Хл ) sin (фл-{-фв) cosec (фв-Фа) .
(222)
Из выражения (222) определяется долгота точки О.
Угол Ко рассчитывается из уравнений (219)
ctg^o^g Фа cosec (Хл — \)) = tg фв cosec (Хв — Х0). (223)
Для нанесения ортодромии на меркаторскую карту сущест-
вует ряд более простых приемов, применяющихся на практике,
о чем будет сказано в следующем параграфе.
§ 125. СПОСОБЫ НАНЕСЕНИЯ ОРТОДРОМИИ
НА меркаторскую карту
Для того чтобы принять решение о плавании по ортодромии,
необходимо, во-первых, рассчитать разность между плаванием
по локсодромии S и ортодромии D, во-вторых, посмотреть на ге-
неральной карте, как проходит ортодромия, не пересекает ли она
острова, не проходит ли по ледовитым районам, выяснить по ло-
ции, в каких гидрометеорологических условиях будет проходить
плавание. Для этого нужно ортодромию нанести на карту. Лок-
содромическое плавание рассчитывается из формул письменного
счисления. По координатам пункта отхода и прихода рассчиты-
вают РД и РШ, затем
РД = РМЧ^ИК;
^^K = -p^q
S = PLU&ichK. (224)
500
Плавание по ортодромии D рассчитывается по формуле сфери-
ческой тригонометрии, связывающей три стороны и угол против
искомой стороны.
Допустим, что плавание совершается между пунктом отхода
А (флЛл) и пунктом прихода В (ф вХв) (рис. 241). Тогда
cos D = cos (90 — ф А) cos (90 — фв) + sin (90 — фЛ) sin (90 —
— фв) cos (Хв — Хд);
cos £) = sin фл sin фв cosфд cos фвсоэ (Хв — Хл). (225)
Формула (225) дает независимое решение, но решение это
громоздкое.
Если разность D—S сокращает путь и целесообразно совер-
шать плавание по ортодромии, выбирают генеральную карту и
на ней наносят ортодромию. Для этого существует несколько
способов.
Нанесение ортодромии на меркаторскую карту по координа-
там, снятым с гномонической карты. На гномонической карте
ортодромия изображается в виде прямой, соединяющей пункт
отхода и пункт прихода. Проведя такую прямую и разбив ее на
желаемое число отрезков, нумеруют точки и снимают их коорди-
наты. По снятым координатам на (меркаторской карте наносят
точки, обозначая их теми же номерами и соединяют плавной
кривой. Этот способ дает действительное изображение ортодро-
мии и точность его зависит от масштабов гномонической и мер-
каторской карт.
Приближенный способ нанесения ортодромии по соответст-
вующей параллели (способ Эри). На меркаторской карте пунк-
ты отхода и прихода соединяют локсодромией. Из середины лок-
содромии восстанавливают перпендикуляр в сторону экватора до
501
пересечения с соответствующей параллелью (рис. 242). Для то-
го чтобы найти соответствующую параллель, необходимо рас-
считать среднюю широту пунктов отхода и прихода
+
Фш 2 '
а затем со средней широтой войти в табл. 35 и выбрать соответ-
ствующую широту.
Тот Соответствующая парал- лель обратного с <рт знака <Рт Соответствующая парал- лель одного с срт знака
20° 81°,2 48° 21 °,7
22 78°, 1 50 16°,6
24 75°,0 52 11 °,5
26 71°,4 54 6°,4
28 67°,6 56 1°,2
30 63°,6 58 4
32 59°, 4 60 9°,3
34 55°, 1 62 14°,5
36 50°,6 64 19°,8
38 46°,0 66 25°, 1
40 41°,3 68 30°,5
42 36°,5 70 35°,9
44 31°,6 72 41°,2
46 26°,7 74 46°,6
Из точки пересечения соответствующей параллели и перпен-
дикуляра, радиусом, равным расстоянию от этой точки до пунк-
та отхода или прихода, проводят дугу окружности, которая бу-
дет приближенным изображением ортодромии на меркаторской
карте.
502
Расчетный способ нанесения ортодромии на меркатор скую
карту. Для нанесения ортодромии на меркаторскую карту, необ-
ходимо рассчитать начальный и конечный курсы, координаты
вертекса и ряд промежуточных точек. После нанесения на карту
серии точек, их соединяют плавной кривой, являющейся орто-
дромией.
Расчет начального и конечного курсов
производится по известной формуле сферической тригонометрии,
связывающей четыре рядом лежащих элемента. Допустим, что че-
рез пункт отхода А (ф] Xj) и прихода В (ф2 Лг) проходит орто-
дромия, образуя с меридианами точек А и В сферический тре-
угольник APnB (рис. 243,а). Меридиан пункта отхода АРм=
= 90°—фЬ Ортодромия АВ в точке А образует угол —началь-
ный курс. Угол между меридианами пункта отхода и пункта при-
хода /ЛРдг В = К2—Ль
Меридиан пункта прихода BP# =90°—Л2. Ортодромия в точ-
ке В образует угол 180°—Кк- Следовательно, применяя форму-
лу четырех рядом лежащих элементов, можем написать
ctg Кн sin(X2— X J=ctg(90°-^2)sin(90°-- ф^—cos (Х2—X1)cos(90—ф3)
или
ctg Кн sin !Х2 — X],) = tg ф2 cos ф i — sin ф! cos (Х2 — XJ,
откуда
ctg Кя = tgф2 cos ф2 cosec (Х2 — XJ — sin ф 2 ctg (Х2 — Х2). (226)
По аналогии получим формулу для конечного курса
ctg Кк = — tg ф 3 cos ф2 cosec (Х2 — XJ -|- sin ф2 ctg (Х2 — XJ. (227 )
Формулы не логарифмические, и для вычисления Кн и Кк необ-
ходимо применять логарифмы сумм и разностей, а также исследо-
503
вать формулу на знаки, приписывая нордовой широте и остовой
долготе знак плюс, а зюйдовой широте и вестовой долготе знак
минус. Рассчитанные Кн и Кк получают наименование от повы-
шенного полюса (астрономический счет); в северном полушарии
от точки N к Ost или W в зависимости от наименования РД
пунктов прихода и отхода; в южном полушарии от точки S к Ost
или U/ в зависимости от РД. Формула (226) громоздка, но она
дает независимое решение.
Угол равен /_ОАА' (рис. 243). Из прямоугольных сфери-
ческих треугольников ОАА' и ОВВ' можно рассчитать и
по формулам
ctg К* = ctg (*4 — М sin <рл;
ctg Кк = ctg (Хв — k0) sin ф в • (228)
Эти формулы проще, но дают зависимое решение и требуют
расчета долготы, на которой ортодромия пересекает экватор.
Начальный и конечный курсы могут быть вычислены прибли-
женно. Для этого пункты отхода А и прихода В нужно соединить
прямой и измерить транспортиром и линейкой локсодромический
курс. Его величину можно рассчитать также по формуле пись-
менного счисления. По разности долгот РД = ^2—Xi и средней
широте фот= из табл. 23 МТ-53 выбирают ортодроми-
ческую поправку ф. Алгебраическая разность локсодромического
курса и ортодромической поправки даст начальный курс
(рис 243,5)
Кн = ИК— ф (229)
Разность начального и конечного курсов представляет собой
угол схождения меридианов у = 2ф. Следовательно, для получе-
ния конечного курса, имея величину ортодромической поправки,
к начальному курсу прибавляют удвоенную ортодромическую по-
правку
Л\- = /<„ + 2ф. (230)
Расчет координат вертекса. В связи с тем, что ме-
ридиан вертекса образует с ортодромией прямой угол, сфериче-
ский треугольник APn В делится меридианом на два прямоуголь-
ных сферических треугольника (рис. 244) AVPw и BVPjv- Решая
какой-либо треугольник, можем вычислить координаты вертекса.
Возьмем сферический прямоугольный треугольник AVPn .
Зная Кн и широту пункта отхода, вычислим широту вертекса,
используя формулу
sin (90° — cpr) = sin (90° — ф^ sin Кн
или
со5фу = со5 qijSin/Q. (231)
Из треугольника BVP^ аналогично получим
cos ф v = cos ф2 siп Кк. (232)
504
Из этих же треугольников рассчитывается долгота вертекса
по формуле: косинус гипотенузы равен произведению котанген-
сов косвенных углов, т. е.
cos(90° — ср J = ctg /С ctg (>! —
или
ctg (Хх — = sin <р3 tg кн. (233)
Из второго треугольника будем иметь
ctg (Х2 — Ху) = — sin ф2 tg Кк.
Получив X—Ху рассчитывают долготу вертекса, придержи-
ваясь следующих правил:
1) если Кн и Кк лежат в одной и той же четверти и
то разности долгот Xi—нужно дать наименование, обратное
наименованию разности долгот Х2—М;
2) если курсы расположены в одной четверти, но /Сн<Ат<, то
разность долгот Xi—Хи одноименна с разностью долгот Х2—Ху,
3) если Кн и Кк лежат в смежных четвертях, то разности дол-
гот Xi—Хи приписывается то же наименование, что и разности
долгот Х2—Хь
При известных значениях Хо и Ко, координаты вертекса рас-
считываются по формулам
Ху = Хо + 90°;
фу=90° —/<0.
В тех случаях, когда нет рассчитанных начального и конеч-
ного курсов, можно использовать формулы (222 и 223). Произ-
ведя в них замену Хо = Ху±90° и /Со = 9О°—ери получим
tg[*v---^-(<4 =ctg-^-(kB — X4)sin(®B--q>4> X
X cosec (фв+<рд); (234)
Й05
ctg фу= Ctg фд COS (k^ — к у) =ctgq)BCOs(kB — кд). (235)
Расчет промежуточных точек. Имея Кк,
фу и Хи, можно грубо нанести ортодромию на карту, но обыч-
но рассчитывают ряд промежуточных точек от вертекса, зада-
ваясь любой разумной разностью долгот вертекса и выбирае-
мой точки. Так долгота выбранной точки М будет
X = \ у + 9,
т v — ’
где
6 = РД = 5°, 10°, 15°.
Широта промежуточной точки будет зависеть от выбранной
долготы точки и рассчитывается из сферического 'прямоугольного
треугольника MP^V (рис. 244) по формуле: тангенс катета равен
произведению тангенса гипотенузы и косинуса угла между ними,
а именно:
tg (90° — <pv) = tg (90° — фт) cos в
или
ctg?y=(^m cos 6,
откуда
ctg фт = ctg фу sec 9. (236)
Использование таблиц МТ-53. Вычисление коор*
динат точек, лежащих на ортодромии, проходящей через задан-
ные пункты отхода и прихода, производится с использованием
параметров ко и /Со. Зная эти параметры, можно заранее произ-
вольно выбрать меридианы долготы X/, которые ортодромия пе-
ресекает в точках, имеющих широты ср/. Широта каждой точки
пересечения меридиана рассчитывается из уравнения ортодромии
tgфг• = sin (kz — X0)ctg/C0.
Можно также заранее наметить параллели, которые ортодро-
мия пересекает в точках, имеющих долготы X/. Долгота каждой
такой точки рассчитается по формуле
sin (kz —k0) = tg <р/ tg/<0.
Для упрощения расчетов составлены табл. 30,а и 30,6 в МТ-53.
Табл. 30,а применяется при /Со>2О°, табл. 30,6 — при /С0<20°.
§ 126. ИСПОЛЬЗОВАНИЕ ЭЛЕМЕНТОВ ОРТОДРОМИИ
ДЛЯ ВСПОМОГАТЕЛЬНЫХ РАСЧЕТОВ
Для того чтобы держать судно на нанесенной ортодромии
необходимо все время изменять его курс. Но этого не делают, а
разбивают ортодромию на отрезки, по которым осуществляют
плавание по локсодромии, периодически меняя курсы. За основу
деления ортодромии принимают один из двух принципов (в за-
висимости от обстоятельств плавания):
506
а) зная ©вою скорость, выбирают длину участка, равную су-
точному (переходу; точки 'поворотов 'приурочивают к астрономи-
ческому полудню, когда почти на всяком судне получают обсер-
вацию астрономическим путем;
б) зная начальный-и конечный курсы, задаются изменением
курса, равному числу градусов а=1°, 2°, 3° ... и рассчитывают
через сколько миль локсодромического плавания нужно менять
курс, т. е. определяют длину отрезка ортодромии.
При плавании в одном полушарии разность Кн и Кк представ-
ляет величину изменения курса за весь переход. Количество от-
резков, по которым нужно осуществить плавание, изменяя курс
на а градусов, будет
п = к*~к“ . (237)
Зная длину ортодромии, получают приближенно длину отрезка
Если плавание происходит в северном и южном полушарии, нуж-
но .рассчитать курс, по которому ортодромия пересекает экватор
Ло и, считая эту точку начальным или конечным курсом, вычис-
лить длину ортодромии для этих полушарий. В том случае, если
известна (ракурс /Со рассчитается согласно рис. (239)
Ко==90° —
Под действием неучтенных гидрометеорологических факторов,
а также из-за ошибок счисления судно, следующее локсодроми-
ческим курсом, уклоняется от ортодромии. Если это уклонение,,
обнаруженное путем обсервации, незначительно, курс подправ-
ляют с расчетом выйти в ближайшую отмеченную на ортодромии
промежуточную точку (рис.’245,а). Если уклонение велико, то ре-
комендуется, считая свое место пунктом отхода, рассчитать Кн
по приближенной формуле (228).
Допустим, что судно вышло из точки А (фА1) начальным кур-
сом Я/Ci (рис. 245,6) и должно было попасть в промежуточную
точку С, но пришло в точку Ci (фХ), что было обнаружено обсер-
вацией. Зная координаты точки С и пункта прихода В (фгХ2), по
разности долгот и средней широте из табл. 23 МТ-53 выбирают
ортодромическую поправку и рассчитывают начальный курс для
новой ортодромии, проходящей через точку Ci и В. Если при сле-
дующей обсервации вновь будет обнаружено отклонение, повто-
ряют расчет начального курса для следующей ортодромии.
Расчет курсов в любой промежуточной точке ортодромии про-
изводится из прямоугольного сферического треугольника MVP^
(рис. 244) по формуле
cos К = cos (90° — ф v) sin 8,
или
cos К = sin sin в (238)
507.
Зная координаты вертекса, значительно проще — по логариф-
мическим формулам рассчитать длину ортодромии между двумя
точками. Из рис. 244 видно, что дуга ортодромии, вертекс кото-
рой расположен между пунктами отхода и прихода, делится на
две части D =AV и D2 = VB, следовательно, вся ортодромия
будет о
D = AB = D1 + D2.
Вертекс ортодромии может находиться за пределами .пунктов
отхода и прихода, в этом случае
£> = £>! —£>2
или
D = Dt-D
В том случае, если пункты отхода и прихода расположены в
разноименных широтах, длина ортодромии рассчитывается по
формуле
d=M + d2,
.508
Значения Di и D2 рассчитываются из сферических прямоуголь-
ных треугольников AVPn и BVPn по формуле
cos (90° — (Pi) = cos (90° — фи) cos Dlt
откуда
cosZJj = sin cpj cosec фи. (239)
Аналогично
cos D2 = sin ф2 cosec ф v •
§ 127. СОСТАВНОЕ ПЛАВАНИЕ ПО ОРТОДРОМИИ
И ЛОКСОДРОМИИ
После нанесения ортодромии на генеральную карту -может
оказаться, что из-за расположения ортодромии полярнее локсо-
дромии район, в котором ортодромия проходит, является небла-
гоприятным для плавания (из-за льда, противных ветров и тече-
ний, из-за навигационных опасностей и т. д.). В этом случае
район ограждают параллелью, полярнее которой подниматься
нельзя. Плавание осуществляют от пункта отхода до ограничи-
вающей параллели по ортодромии, затем по параллели — локсо-
дромическое плавание, а потом вновь от параллели до пункта
прихода по ортодромии. Кратчайшим путем между пунктами от-
хода и прихода будет плавание по отрезкам ортодромий, вертек-
сы которых расположены на этой параллели. Следовательно, ес-
ли судно следует из пункта отхода A (qpi^ii) до параллели LL{ по
ортодромии до ее вертекса, затем по параллели до вертекса вто-
рой ортодромии, проходящей через пункт прихода В (фгМ, т°-
оно совершит плавание AV\V2B (рис. 246).
Меридианы вертексов и ортодромии образуют прямоугольные
сферические треугольники AV\Pn и BV2P^, Из треугольника
4ViPvaio известным нам уже формулам рассчитаем:
509-
а) начальный курс
sin Кн = cos ф v sec ф 3; (240)
б) долготу ТОЧКИ V]
cos РД1 = ctgqpntg ф!, (241)
тогда
^=\ + РДг\
в) длину ортодромии от пункта отхода до точки Vi
cos Dj = sin Ф1 cosec фи, (242)
Из прямоугольного сферического треугольника BV^Pn аналогич-
но рассчитаем
sin Кк = costp^sec ф2;
созРД3 = ^<р0ёФа;
cos D2 = sin ф2 cosec <? v. (243)
Разность долгот между вертексами ортодромий вычислится по
формуле
РДъ = .
Тогда локсодромическое плавание по параллели будет
S = РД2 cos с? у, (244)
а общая длина пути составного плавания
D^Di + S + D*.
В том случае, если используется гномоническая карта для на-
несения составного плавания на меркаторскую карту, к выбран-
ной ограничивающей параллели нужно провести касательные
прямые из точек А и В. Точки касания будут вертексами соответ-
ствующих ортодромий. Затем поступают так же, как было ука-
зано выше.
§ 128. НАИВЫГОДНЕЙШИЕ ПУТИ
Для успешной работы судна судоводитель должен выбирать
не кратчайший путь, а наивыгоднейший, который не всегда бы-
вает кратчайшим. Наивыгоднейшим путем называется безопас-
ный в навигационном отношении путь судна между двумя пунк-
тами, который может проделать судно в самое короткое время/
Для выбора наивы'годнейшего пути необходимо детально изучить
район плавания. Некоторые районы еще недостаточно изучены в
этом отношении, но судоводителями и советскими учеными прово-
дится большая работа по изысканию наивыгоднейших и наименее
безопасных путей. На основании исследований и сведений, пред-
ставляемых судоводителями, пароходства ММФ разрабатывают
схемы рекомендованных путей, которых судоводительский состав
510
обязан придерживаться. При переменных условиях наивыгодней-
ший путь между двумя пунктами в одном направлении будет от-
личаться от наивыгоднейшего пути в другом направлении. По-
этому плавание по наивыгоднейшим путям решает важнейшую
задачу рассредоточения судов, следующих противоположными
курсами. Это особенно важно при плохой видимости, так как
предотвращает возможность столкновения судов.
Для океанских плаваний созданы справочные карты наивы-
годнейших путей, которые составлены на основании изучения
районов плавания и обобщения опыта судоводителей. Эти карты
составляются для различных времен года, а также для судов с
различной мощностью машин. В них учитывается также и крат-
чайшее расстояние, т. е. ортодромии между основными портами
мира. В современных руководствах, таких как «Океанские пу-
ти мира», «Ocean passages’ for the world», «Pilot-Charts» и др.
даются рекомендации по выбору маршрутов переходов. Осно-
вой этих рекомендаций являются использование ортодромий и
качественная оценка гидрометеорологических условий бассейнов
в различное время года. «Pilot-charts» издаются гидрографиче-
ским департаментом флота США на каждый месяц года. В них
судоводитель может найти сведения о повторяемости и силе
ветров, о вероятных путях штормов и тайфунов, об океанских
течениях, туманах и льдах. На картах нанесены изотермы, изо-
баты, изогоны и рекомендованные пути для данного месяца пла-
вания, которые судоводитель может использовать при выборе
наивыгоднейшего пути.
Однако выбор наивыгоднейшего пути таким образом является
только приближенным качественным учетом гидрометеорологи-
ческих факторов на скорость движения судна. Поэтому в послед-
ние годы в различных странах разрабатывается методика коли-
чественного выбора наивыгоднейших путей. В США эта задача
решается с помощью гидрометеослужбы, которая систематически
передает специальные прогнозы погоды на суда с помощью ра*
511
Рис. 249
512
диофоторекордеров. В прогнозах указывается распределение вол-
нения на трассе перехода: даются изолинии равных высот волн.
Используя зависимость скорости хода данного типа судна от си-
лы и направления волнения, судоводитель на генеральной карте
от пункта отхода прокладывает веер курсов, на -которых откла-
дывает, рассчитанные для каждого курса суточные переходы. По-
лученные точки соединяются плавной кривой, которая является
линией равных суточных переходов Si (рис. 247). Из точек этой
кривой проводятся перпендикулярные курсы для дальнейшего
следования. На них откладываются вновь рассчитанные суточные
переходы. Это дает вторую линию равных переходов S2, затем
таким же способом получают линию S3, S4 и т. д. К последней
ближайшей к пункту прихода кривой нужно провести касатель-
ную дугу наименьшим радиусом из пункта прихода. Точка каса-
ния С линии разных переходов и дуги окружности является точ-
кой, от которой прокладываются обратные курсы параллельно
ближайшим нанесенным ранее до первой изолинии Si. Точка С)
соединяется с пунктом отхода. Прямая АСХ представляет собой
начальную линию кратчайшего пути.
Практика использования этого метода выбора наивыгодней-
ших путей на линиях Европа — США показала, что их примене-
ние позволяет экономить около 10% ходового времени. Поэтому
вся проблема в целом имеет огромное значение для мореплава-
ния.
В Советском Союзе в работах Н М. Тверье, В. И. Удалова,
Г. И. Уханова и др. в основу 'количественного метода расчета
наивытоднейших путей положен принцип Ферма из аптики, опре-
деляющей путь светового луча в разнородной среде. В соот-
ветствии с этим принципом в 'мореплавании маршрут перехода
делится на струй (при наличии течения) и зоны (при отсутствии
течения). Внутри зон и струй условия плавания осредняются и
считаются неизменными в период прохождения судна. В каждой
струе или зоне условия плавания влияют на эксплуатационную
скорость судна V3, изменяя ее до значения расчетной скорости V,
с которой судно будет проходить данную струю или зону. Из-за
постоянства условий плавания в каждой струе или зоне наивы-
годнейший путь в ней совпадает с кратчайшим путем. При пере-
ходе из струи в струю или из зоны в зону в связи с изменением
условий плавания будут меняться курс и скорость судна. Таким
образам, для того чтобы найти наивыгоднейший путь, необходи-
мо знать:
а) начальный курс в первой струе или зоне;
б) закон изменения курсов при переходе из одной струи или
зоны в другую.
На основании принципа Ферма изменение курсов в зонах бу-
дет определяться выражением (рис. 248)
Vi _ V.
sin sin а2
33 Навигация
(245)
5В
а при плавании в струях выражением (рис. 249) .
——к VT, = —— -к U7
Sin cq 1 sin я2 2 ’
На (рис. 248 и 249 и в формулах приняты обозначения;
V2—величины расчетных скоростей судна (относительные);
W2—скорости течения;
an at— углы между нормалью к границе струй или зон и лини-
ей курса;
АВ— кратчайший путь;
ADB— наивыгоднейший путь.
Течение при плавании в струях учитывается обычными нави-
гационными приемами. Что касается первоначального курса, то
он определяется методом последовательного подбора. При этом
задаются рядом курсов в первой струе или зоне, соответственно
им рассчитывают второй курс и (выбирают тот, который приводит
к пункту назначения. Можно рассчитать первоначальный курс
при плавании в зонах по формуле
/ у2 \ / V2 \
4 (1 — уг) tg*«1 — (1 — ) tg3а, +
tg3 а, — 2adi tg «1 4" d1 — 0, (246)
при плавании в струях
di tg «1 4- (1 + tg2 а,)Т+ (d, И2 tg ai +
+-^?[H1(l+tg2a1^4-W'ltgaJ-U72tga1]}X
Л. х Ma+tg^p + w*tg4 +
+ 2H1IF2tgal(l 4-tg4)^-2V1IF2tgaHl+tg'4F-
— 2I₽iWrstg2a1 — V'hg2a1]’T=a. (247)
В формулах (246) и (247)
rfj и ширина зон или струй;
а— расстояние между пунктами отправления и назначения
по направлению струй.
Использовать эти формулы в условиях плавания трудно, но
с помощью счетно-решающих машин в камеральной обстановке
курсы можно рассчитать предварительно.
514
ПРИМЕР
1. Из пункта отхода ?i®=41°30'N и Xj = 141°00'Ost необходимо сделать пе-
реход в пункт прихода <P3=37°42'N и A2=123°00'W. Рассчитать выигрыш в рас-
стоянии, если переход будет совершен по ортодромии.
Решение, а) Рассчитаем локсодромический курс между пунктами по
формуле письменного счисления:
tg«/f =.
рд = х,-х1.
_ = 123° W
Xi = 141° Ost_________________________
РД- 264° к W = 96° к Ost=5760' к O8t
РМЧ = M4i — МЧ.2
МЧг = 2726',2
Л4Уг =2431', 4
РЛ4У = 294',8
lg tg ИК = 1g РД — lg PMЧ
lg5760 — 3,76042
lg 294,8 =Щ953
Igtg ЯК = 1,29089
ИК=87°,1
б) Рассчитаем длину локсодромии по формуле
S = РШ sec ИК
?2 = 37°42'N
<Р1 = 42°30' N __________
PZZZ = 3°48' к S = 228' к S
lg S = lg РШ 4- lg sec ИК
lg 228=з 2,35793
lgsec87°l =1,29095
lg S = 3,64888
$ = 4455 миль
в) Рассчитаем длину ортодромии по формуле (225)
cos D = sin 41°30' N sin 37оЧ42' N -f- cos 41°30' N cos 37°42' N cos 96° к Ost
ZZO Q ОСЧ M го тГ e ТГ co IIII II i-t w f Э- o- sin sin 9,82126 9,78642 cos cos sin 9,87446 9,89830 9,01923
9,60768 9,92795 8,79199 9,60768
cos 9,53563 , АГ 0,81569
D = 69°55',5 = 4195,5 мили
515
г) Вычислим разность между ортодромией и локсодромией
5 = 4455,0
D = 4195,5______
5 — D = 259,5 мили
2. Из точки с координатами <?i=45°00'N, Xt=55°00'W до точки с коорди-
натами <P2=35°00'N, X2 = 10°W решено следовать по ортодромии. Рассчитать
координаты вертекса, если К«=89°,6.
Решение, а) Рассчитаем широту вертекса по формуле (231)
lg cos 44°00'N = 9,Я4949
lg sin 89°,6 = 9,99999
lgcos?v = 9,84948
?y= 45°00'» IN
б) Рассчитаем долготу вертекса по Формуле (233)
lg sin 45° = 9,84949
lg ctg 89°,6 = 2,15606
1gctg(X1-X0 = 2,00555
Xx — Хи=0°34' к Ost
Наименование разности долгот Xi — Х^ к O8t > так как Кц и К к расположены
в смежных четвертях, а разность долгот Х2 — Xi к Ost
Xr=Xi-P2Z
Х2 ==55°C0'W
РЦ « 0°34° к Ost
k|r = 55W
3. Пункты отхода <?i=55°00'S, Xi=74°00'W, а прихода ?2=31o00'S,
X2 =178°00'W.
Рассчитать координаты вертекса, и и координаты десяти проме-
жуточных точек.
Решение, а) Рассчитаем координаты вертекса, используя формулы
(234) и (235). Для этого вычислим величины, входящие в формулу (234), и вы-
числим Хи:
1 178°W —74°W
V 4" (*2 — *1) = - - - = 52°00'W ;
1 178°W 4- 74°W
2) -у (Ха + Xi) = = 126°00'W;
3) ?a - ?i = 31°S — 55°S = 25° к N ;
4) ?1 + ?Jf = 55°S + 3l°S = 86°00'S .
Затем подставим в формулу (234) значение величин
tg (<? v - 126°W) = ctg 52°W sin 24°N cosec 86°S
]g ctg 52° = 9 89281
lg sin 24° = 9,60931
lg cosec 86°= 0,00106
lg tg (X v — 126°W) = 9,503 i 8
Xv - 126W = 17°40'Ost
- Xv= 126°W + 17°40'Ost = 108°20'W .
516
Широта вертекса рассчитается по формуле (235)
ctg?^ ctg 31° cos (178°W — 108’20'W)
lg ctg 31° = 0,22123
lg cos 69°4<>' = 9,54093
lg ctg = 9,76216
<pv = 59°58'S
б) Рассчитаем Кн и Кк, используя формулу (231) и (232), выразив Кн и
Кк через
sin Кн « cos<pvsec<ft;
sin = cos <py-sec <?2;
lg cos 59°=>8'S = 9,69941
lg sec 55°00'S =0,24141
lg sin Kh = 9,94082
KH=* 60°46'SW
KH = 240°,8
lg cos 59*58'5 = 9,69941
lg sec 51 °00'5 = 0,06693
lg sin KK = 9,76634
Л^ = 35°43,5 NW
А^ = 324°3
в) Рассчитаем координаты промежуточных точек, задаваясь углом как
разностью долгот промежуточной точки и вертекса и используя для вычисле-
ния широт промежуточных точек формулу (236):
ctg = Ctg 58° sect!.
Для расчета удобнее составить таблицу.
lg ctg 59°58'— 9,76216
№ точки, м 0 lg sec 6 lg Ctg <fm <Pm
1 84° W 24*20 0,04040 9,80256 57°36 S
2 -94° W 14°20 0,01373 9,77589 59°10 S
3 104° W 4°20 0,00124 9,76340 59°53 S
4 X, Я1=108°20 W <ym^=59°58 S
5 114° W 5°40 0,00213 9,76429 59°50 S
6 124° W 15°40 0,0 644 9,77860 59°01 S
7 134° W 25°40 0,04512 9,80728 57°19 S
8 144° W 35*40 0,09022 9,85238 54°33 S
9 154° W 45°40 0,15563 9,91779 50°24 S
10 164° W 55°40 0,24872 0,01088 44°i7 S
11 174° W 65°40 0,38506 0,14722 35°28 S
517
По координатам 'fm и нанесем точки на карту и соединим их плавной
кривой, получив при этом изображение ортодромии на меркаторской карте;
г) Для расчета экономии расстояния при плавании по ортодромии необхо-
димо рассчитать локсодромическое плавание 5 и ортодромическое D.
tgf//C= РМЧ ‘
РД =sl2 — \i = 104° к W = 6240' к W
?,=3I°S
РШ = М° к N РМ Ч =2002,9
1g 6240 —3>,79518
1g 2002,9 - 3,30168
lg tg ИК =0,46350
W/f=71°NW=289°
8 = РШзесИК
1g РШ = lg 1440 = J, 15816
lg sec 71° = 0,48736
lg S = 3,64572
S = 4423
Для расчета длины ортодромии используем формулу (239)
1g sin 55° 9,91336
lg cosec 59°58' 0,06262
1g cos Dy = 9,97598
Di = 1853'= 1133'
lgsin31° 9,71184
lg cosec 59°58 0,06262
lg cos D2 = 9,77446
£>2=53°30'=3210'
D = Di 4 D2 = 4343
S 4423
D = 4343
5 — D = 80 миль
4. Пункт отхода Vi=41°00'N, X1=145°00'Ost , пункт прихода !r2 = 32c00'Nr
a2 = 120°00'W.
Из-за гидрометеорологических условий судно не могло подняться север-
нее 45°. Параллель 45°N приняли за ограничивающую параллель и осуществи-
ли составное плавание. Рассчитать Кк долготу вертексов 1Л и 14, длину
составного плавания D.
Р ешение. а) и Кк рассчитаем по формулам (240 и 243).
518
sin KH-— cos 45° sec 41
lg cos 45° = 9,84949
lg sec 41° = 0,12222
lg sin KH = 9,97171
KH = 69°,5 NO = 69°,5
sin KK = cos 45° sec 32°
lg cos 45° = 9,84949
lg sec 32° = 0,07158
lg sin Кк =9,92107
/Q «s= 56°,5 SO = 123°,5
6) Рассчитаем долготы вертексов по формулам (241 и 243).
cos PDX = ctg 45° tg 41°
lg ctg 45° = 0,0000
lgtg4l° =9,93916
lg cos PZ)1=9,93916
PZ)1 = 29°38' к O8‘
=145° Ost + 29°38' к O“ =170°38'OS1
I
cos PZ>3= ctg 45° tg 32°
lg ctg45° = 0,000
lg tg 32° = 9,79579
lg cos P£>3=9,79579
Л03=51°20' к W
X„ =120° W + 51°20' к W = 171°20' W
va
в) Рассчитаем длину составного плавания
cos D}= sin 41° cosec 45°
lgsin41°= 9,81694
lg cosec45 °= 0,15051
lg cos = 9,96745
1314'
519
cos D2=sin 32° cosec 45(
lg sin 32°= 0,72421
lg cosec 45°= 0,15051
lg cosD2= 9,87472
D2=41°28'=2488'
5 = РД2 cos <p2
РД^~ XVt
=171°20
— Xv’ =174°38
РЯ2=345о58' к W=14°02' к Ost =842' к Ost
lg РЯ2= 2,92531
lgcos45°= 9,84949
lg S = 2,77480
5= 595',4
Составное плавание D будет:
D -= Dt 4~ 7-^2 ~b 5
£^=1314'
Da=2488'
5=595',4
£>=4397,4 миль
Задачи
1. Через точку Л(<Р1=49°45' N, Х1=6°15' W) и точку В (<р2=37°5' N, Х2=
»=74°50' W) проходит ортодромия. На какой долготе и на каком курсе на
пересекает экватор?
2. Пункт отхода <р1=15°00'N, Xt=70°00'W, пункт прихода <р2=50°00' N,
X2=05°00'W. Определить Кн и Кк и координаты вертекса.
3. Пункт отхода <p1=34°00'S, Х1=26°00' Ost пункт прихода <р2= 39*00' S,
= 144°00'O9t . Рассчитать:
а) разность между локсодромическим плаванием и ортодромией;
б) Кн и Кк\
в) <Ру и х/,
г) широты промежуточных точек, изменяя долготу их на 10° вправо и
влево от вертекса.
4. Пункт отхода <pt=52°N, X1=I60°Ost> пункт прихода <p2=22°N, k2=158°W.
На какой долготе и каким курсом ортодромия пересекает экватор.
Каковы координаты вертекса?
5. Из точки <Pi= 48° S, Х1=169° Ost до точки <р2= 33°S, Х2=7°2 W судно
совершает составное плавание, ограничивая плавание параллелью 50°S. Опре-
делить долготы вертексов ортодромий, по которым судно выйдет на ограни-
чивающую параллель.
520
Ответы.
1. X0=112°4r,5W, Л'0=39°4',3. 2. A>=55O,3, Л'ж=100°.8. <pv=50°57,N
ao=22°54'W. 3. a) S—£>=502 мили; 6) £„=133°,4, ^=47°,I; в) ср^Г^ЗЛ',
>. У=88°,1 O’* г) Xw, Хст, ?m
78° O8t 98° Ost 54°,9 S
68° O8t !08’Ost 53°,6 S
58° Ost 118°Ost 51°,3S
48° O8t 128° O8t 47°,9 S
38° O8t 138° 0 st 42°,8 S
4. Xo=142°3O' W. K0=150°=SO 30°, <? ^=60° N, Xv=127°30' O*‘. 5. Xv= 169°,7W,
Ar1=129°W.
Контрольные вопросы
1. В каких случаях совпадают ортодромия и локсодромия?
2. Как практически использовать уравнение ортодромии?
3. В каких случаях невыгодно плавание по ортодромии?
4. Каким путем приближенно нанести ортодромию на меркаторскую
карту?
5. Как найти долготы вертексов при составном плавании, используя гно-
моническую карту?
6. Чем может быть полезна таблица ортодромических поправок для при-
ближенного расчета элементов ортодромии?
7. Как рассчитывается длина ортодромического плавания, если есть на-
чальный и конечный курсы. Как рассчитать длину отрезка ортодромии, если
нет КЛи Кя?
8. Как рассчитать длину ортодромии, если имеются координаты вертекса?
9. Что такое наивыгоднейший путь?
10. Что ложится в основу при выборе наивыгоднейшего пути?
11. В чем заключается принцип выбора наивыгоднейшего пути, применяе-
мый в США?
12. Какова отечественная методика выбора наивыгоднейших путей?
ЛИТЕРАТУРА
А р а н о в Н. М. Тактическая навигация, Л., Военмориздат. 1939.
Баранов Ю. К. Использование секторных радиомаяков в судовож-
дении, Л., изд-во «Морской транспорт», 1958.
Баранов Ю. К-, Лесков М. М., Ющенко А. ГТ Современные
способы навигации, Л., изд-во «Морской транспорт». 196].
Байрашевский А. М. Судовые радиолокационные станции, Л.,
изд-во «Морской транспорт», 1957.
Благовещенский В. П. Судовая радиолокационная станция и осо-
бенности ее работы, М., изд-во «Морской транспорт», 1955.
Бухановский И. Л. Плавание в стесненных водах с помощью судо-
вого радиолокатора, М., изд-во «Морской транспорт». 1956.
Бухановский И. Л. Навигационные ошибки, М., изд-во «Морской
транспорт», 1956. *
Гамов А. Г., А в ер б а х Н. В. Использование радиолокации в судо-
вождении, М., изд-во «Морской транспорт», 1960.
Бюллетень № 6 Главного Ревизора по безопасности мореплавания. При-
менение радиолокационной станции в судовождению
Готский М. В. Опыт ледового плавания, М., изд-во «Морской транс-
порт», 1957.
Готский М. В. Практическая навигация, М., изд-во «Морской транс-
порт», 1957.
Григорьев В. В., Самохвалов Д. А., Ц у р б а н А. И., Ще-
тинина А. И. Мореходные инструменты, Л., изд-во «Морской транс-
порт», 1960.
Бирюкевич М. М., Букшпун М. Я. Судовая радиолокационная
станция «Нептун». М., изд-во «Морской транспорт», 1957.
Белобров А. П., СакелларяН. А. и др. Курс навигации и ло-
ции. Ч. I. Навигация, Л., Воениздат, 1951ц
Ковалев А. П. Информационный сборник № 18. Новые способы про-
кладки линий пеленгов при нахождении ориентира за рамкой карты.
ЦНИИМФ, Л., изд-во «Морской транспорт», 1957.
Колотов Н. А. Аварии морских судов и их предупреждение, АГ,
изд-во «Морской транспорт», 1959.
Кавр а некий В. В. Математическая картография, М.—Л., Редбаза
Госкартотреста, 1934.
Корнилов Н. А. Навигация, Л., Гострансиздат, 1935.
Лесков М. М. Определение места судна и поправки компаса по двум
предметам, Л., изд-во «Морской транспорт», 1956.
522
Л и о д т Г. Н. Картоведение, М., Учпедгиз, 1948.
МизериицкийА. И. К вопросу измерений скоростей при плавании
во льду. Научные труды ВВМУ. Вып. 2. М., изд-во «Морской транс-
порт», 1957.
Полин Л. Е. Маневрирование в узкостях, М., изд-во «Морской транс-
порт», 1957.
ПаскинА. А. и Захаров В. К. Лоция морского пути, М.—Л.,
изд-во «Морской транспорт», 1950.
Рыбалтовский Н. Ю. Математическая обработка задач судовож-
дения, Л., изд-во «Морской транспорт», 1959.
Сайбель А. Г. Основы теории точности радиотехнических методов
местоопределения, М., Оборонгиз, 1958.
Траскин К. А. Радиолокационная техника и ее применение, М., Воен-
издат, 1956.
Удалов В. И., У х а н о в Г. И. Выбор наивыгоднейших морских пу-
тей. ОУЗ ММФ СССР. Научно-технический сборник «Судовождение». Вып. I,
Л., изд-во «Морской транспорт», 1960.
Ухов К. С. Навигация, Л., Водтрансиздат, 1954,
Ш а н ь к о Б. Д. Вопросы якорной стоянки, М., изд-во «Морской транс-
порт», 1957.
Шумейко Г. К. Составление морских радиолокационных пособий, М.,
изд-во «Морской транспорт», 1959.
Ющенко А. П. Способ наименьших квадратов, Л., изд-во «Морской
транспорт», 1956.
Щеголев Е. Я. Радиотехнические средства морского судовождения,
Л., изд-во «Морской транспорт», 1956.
Под общ. ред. X а б у р Б. П. Справочник капитана дальнего плавайчях
Л., изд-во «Морской транспорт», 1961.
The Journal of the Institute of Navigation. London. 1950—1959.
Admiralty Manual of Navigation 1958. London B. R. 45.
Стр.
оглавление
Ют автора ................................................. ...... 3
Раздел первый. Основные понятия
Глава /. Наука навигация............................- . . 5
§ 1. Навигация и ее (роль в цикле наук о судовождении . . 5
§ 2. Роль отечественных ученых и моряков в развитии навигации 6
Глава II. Сведения о Земле ........................................12
§ 3. Форма и размеры Земиш....................12
§ 4. Координаты точки на Земле...............14
§ 5. Радиус кривизны меридиана................17
§ 6. Длина дуги меридиана...................................19
§ 7. Морские единицы длины ...................22
§ 8. Разность широт и разность долгот.......................23
Глава III. Данные для ориентирования в море 29
§ 9. Основные плоскости и линии.............................29
§ 10. Деление истинного горизонта наблюдателя................30
§ 11. Видимый горизонт и его дальность.......................34
§ 12. Дальность видимости предмета...........................37
Г лава IV. Определение направлений в море..........................40
§ 13. Истинный курс, истинный пеленг и курсовой угол . . . 40
§ 14. Компасы ...............................................42
§ 15. Магнитные аномалии и вариации..........................47
§ 16. Магнитные курсы и пеленги.................50
§ 17. Девиация магнитного компаса............................51
§ 18. Компасные курсы и пеленги................52
§ 19. Определение девиации...................................55
§ 20. Краткая теория створов.................................60
Глава V. Определение пройденного расстояния в море.................68
§ 21. Принцип определения пройденного расстояния .... 68
§ 22. Определение скорости судна.............................69
§ 23. Поправка лага, коэффициент лага и определение их значения 75
Раздел второй. Карты
Глава VI. Картографические проекции................................86
§ 24. Классификация картографических проекций ..... 86
§ 25. Масштаб ...............................................92
§ 26. Требования, предъявляемые к морской навигационной карте 93
524
Стр.
§ 27. Условия равноугольности меркаторской проекции ... 94
§ 28. Меридиональные части .................................96
§ 29. Локсодромия .... 98
§ 30. Азимутальные перспективные гномонические проекции . 101
§ 31. Азимутальная перспективная стереографическая проекция 105
§ 32. Проекция Литтрова....................................107
Глава VII. Построение карт и работа с ними........................110
§ 33. Масштаб меркаторской карты............................ПО
§ 34. Построение картографической сетки меркаторской карты . 112
§ 35. Построение косой гномонической карты.................114
§ 36. Построение поперечной и нормальной гномонических карт . 117
§ 37. Классификация морских карт по назначению . . .110
§ 38. Степень доверия к морским навигационным картам . . 121
§ 39. Подъем карты..................: . . .• 122
Раздел третий. Счисление пути судна
Глава VIII. Графическое счисление — прокладка....................132
§ 40. Сущность графического счисления...132
§ 41. Точность графического счисления...134
§ 42. Циркуляция .................................137
§ 43. Учет циркуляции.........................142
Глава IX. Прокладка с учетом внешних факторов.....................150
§ 44. Дрейф судна ......................................... 150
§ 45. Определение величины угла дрейфа.....................153
§ 46. Учет дрейфа при графическом счислении................158
§ 47. Морские течения......................................160
§ 48. Учет течения при графическом счислении...............162
§ 49. Аналитический учет течения...........................164
§ 50. Точность счислимого места на течении.................167
§ 51. Типовые задачи графического счисления при плавании
на течении..................................................168
§ 52. Суммарный снос судна.................................173
Глава X. Письменное счисление.....................................181
§ 53. Формулы письменного счисления...................... *183
§ 54. Таблицы письменного счисления........................186
§ 55. Виды письменного счисления . . - « 188
Раздел четвертый. Определение места судна
по береговым ориентирам
Глава XI. Общие положения для проведения навигационных обсерваций 19£>
§ 56. Обсервации и их сущность...........................
§ 57. Угол схождения меридианов..........................
§ 58. Ортодромическая поправка...........................
§ 59. Изолинии и линии положения.........................
§ 60. Градиенты..........................................
§ 61. Ошибки навигационных обсерваций....................
§ 62. Средняя квадратическая ошибка......................
§ 63. Вероятность средней квадратической ошибки
§ 64. Оценка ошибок судоводителя.........................
§ 65. Средняя квадратическая ошибка обсервации ....
§ 66. Эллипс ошибок.......................................
§ 67. Эллипс ошибок для числа линий положения больше двух
§ 68. Опознавание берега и ориентиров для обсерваций .
. 200
. 202
. 204
. 210
. 221
. 224
. 227
. 228
. 230
. 233
. 238
. 241
пе-
Глава XII. Определение места судна по горизонтальным углам и
ленгам .....................................................
§ 69. Определение места судна по двум горизонтальным углам . 248
§ 70. Случай неопределенности................................254
§ 71. Практическое, выполнение обсервации....................255
525
Стр.
§ 72. Определение места по трем пеленгам . . . 257
§ 73. Свойство треугольника погрешности ....... 260
§ 74. Практическое выполнение обсервации.......................................265
§ 75. Определение места судна по двум пеленгам .... 266
§ 76. Определение поправки компаса по пеленгам двух ориен-
тиров (метод М. М. Лескова)...................................268
§ 77. Определение места судна по пеленгу и горизонтальному углу 271
Глава XIII, Определение места судна по расстояниям....................................278
§ 78. Измерение расстояний в море дальномером, секстаном и ра-
диолокатором ................................................278
§ 79. Определение места судна по двум расстояниям . 288
§ 80. Определение места судна по трем расстояниям . 291
§ 81. Определение места судна по пеленгу и расстоянию . . . 293
§ 82. Определение места......судна.по горизонтальному углу и рас-
стоянию .............................. j......................296
Глава XIV. Использование разновременных наблюдений в навигации . 301
§ 83. Крюйс-пеленг........................ j 301
§ 84. Частные случаи крюйс-пеленга.............................................306
§ 85. Точность счислимо-обсервованного места судна, полученно-
го по крюйс-пеленгу...........................................311
§ 86. Исправленный крюйс-пеленг ................319
§ 87. Двойной крюйс-пеленг.................................. 321
§ 88. Определение места по крюйс-расстоянию.323
§ 89. Исправленное крюйс-расстояние.................324
§ 90. Использование одной изолинии в навигации .... 327
Раздел пятый. Применение радиотехнических средств
в навигации
Глава XV. Использование ненаправленных радиоволн в навигации . 342
§ 91. Радионавигационные системы...........................................................„ 342
§ 92. Азимутальные РНС ненаправленного действия . 344
§ 93. Ошибки радиопеленгования............................................................. 352
§ 94. Причины, вызывающие радиодевиацию......................................................357
§ 95. Способы определения радиодевиации......................................................359
§ 96. Составление рабочей таблицы радиодевиации .... 362
§ 97. Расчет коэффициентов радиодевиацни . .... 363
§ 98. Практическое выполнение радиопеленгования .... збб
§ 99. Линия равных пеленгов .......... 367
§ 100. Прокладка радиопеленгов на карте * 372
§ 101. Прокладка линии положения в случае, когда радиомаяк
находится за рамкой карты................................375
§ 102. Использование карт в гномонической проекции для проклад-
ки радиопеленгов.........................................380
§ 103. Прокладка линий положения от счислимого места судна . 383
§ 104. Точность обсервации, полученной по радиопеленгам . . 389
Г лава XVI. Использование направленных радиоволн в навигации . . 403
§ 105. Радиомаяки направленного действия с вращающейся ан-
тенной ..................................................403
§ 106. Секторные радиомаяки...................................................................406
§ 107. Методы нанесения обсервованного места по пеленгам сек-
торных радиомаяков ... 4.....................418
§ 108. Ошибки обсервации, полученной по секторным радиомаякам 422
§ 109. Радионавигационная система «Наваглоб»................................................424
Г лава XVII, Азимутально-дальномерные, дальномерные и гиперболиче-
ские РНС.......................................................430
§110. Радиолокатор .................430
§ 111. РЛС «Нептун»...........................................................................434
5 26
Стр.
§ 112. Навигационные особенности при выполнении радполика-
‘ ционных обсерваций..................................... . 439
§ 113. Дальномерные радионавигационные системы ... 445
§ 114. Гиперболические радионавигационные системы .... 446
§ 115. Качество и надежность обсерваций.....................453
Раздел шесто й Плавание при особых обстоятельствах
Глава XVIIL Плавание в узкостях.................................. 459
§ 116. Подготовка к плаванию в узкостях.....................459
§ 117. Вспомогательные сетки и особенности плавания в узкостях 462
§ 118. Плавание в узкостях с помощью судовой РЛС .... 470
Глава XIX. Плавание во льдах......................................475
§ 119. Особенности плавания во льдах........................475
§ 120. Счисление во льдах ..................................477
§ 121. Определение дрейфа судна во льдах....................485
‘Глава XX. Плавание в тумане......................................488
§ 122. Использование измеренных глубин в навигации . , . 488
§ 123. Особенности плавания в тумане........................494
Глава XXI. Плавание по дуге большого круга........................496
§ 124. Ортодромия .............496
§ 125. Способы нанесения ортодромии на меркаторскую карту . 500
§ 126. Использование элементов ортодромии для вспомогательных
расчетов ...................................................506
§ 127. Составное плавание по ортодромии и локсодромии 509
§ 128. Наивыгоднейшие пути................................ 510
Литература ..... ............................... . 522