/































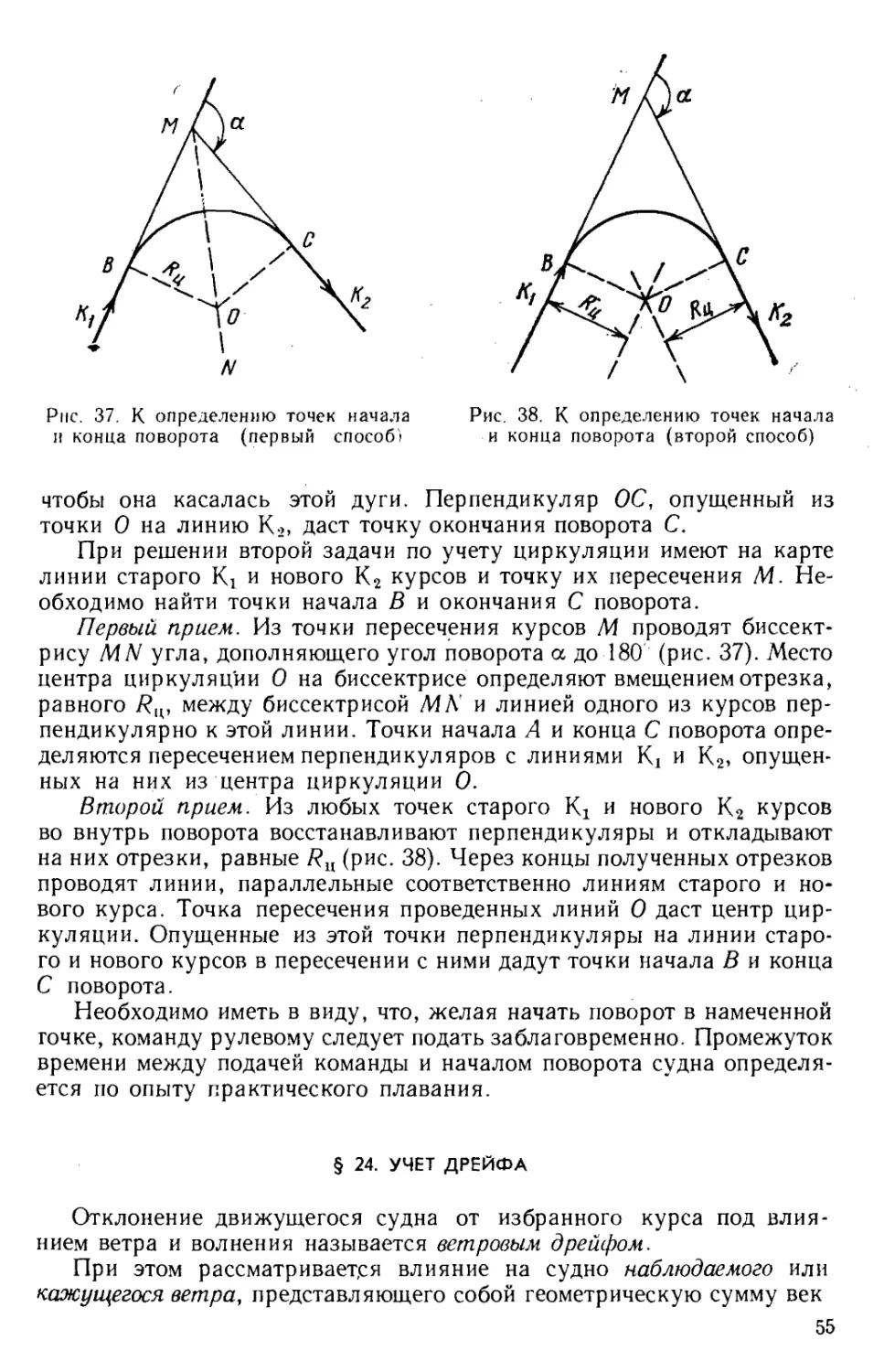


































































































































































































Text
основы
МОРСКОГО
СУДОВОЖДЕНИЯ
основы
МОРСКОГО
СУДОВОЖДЕНИЯ
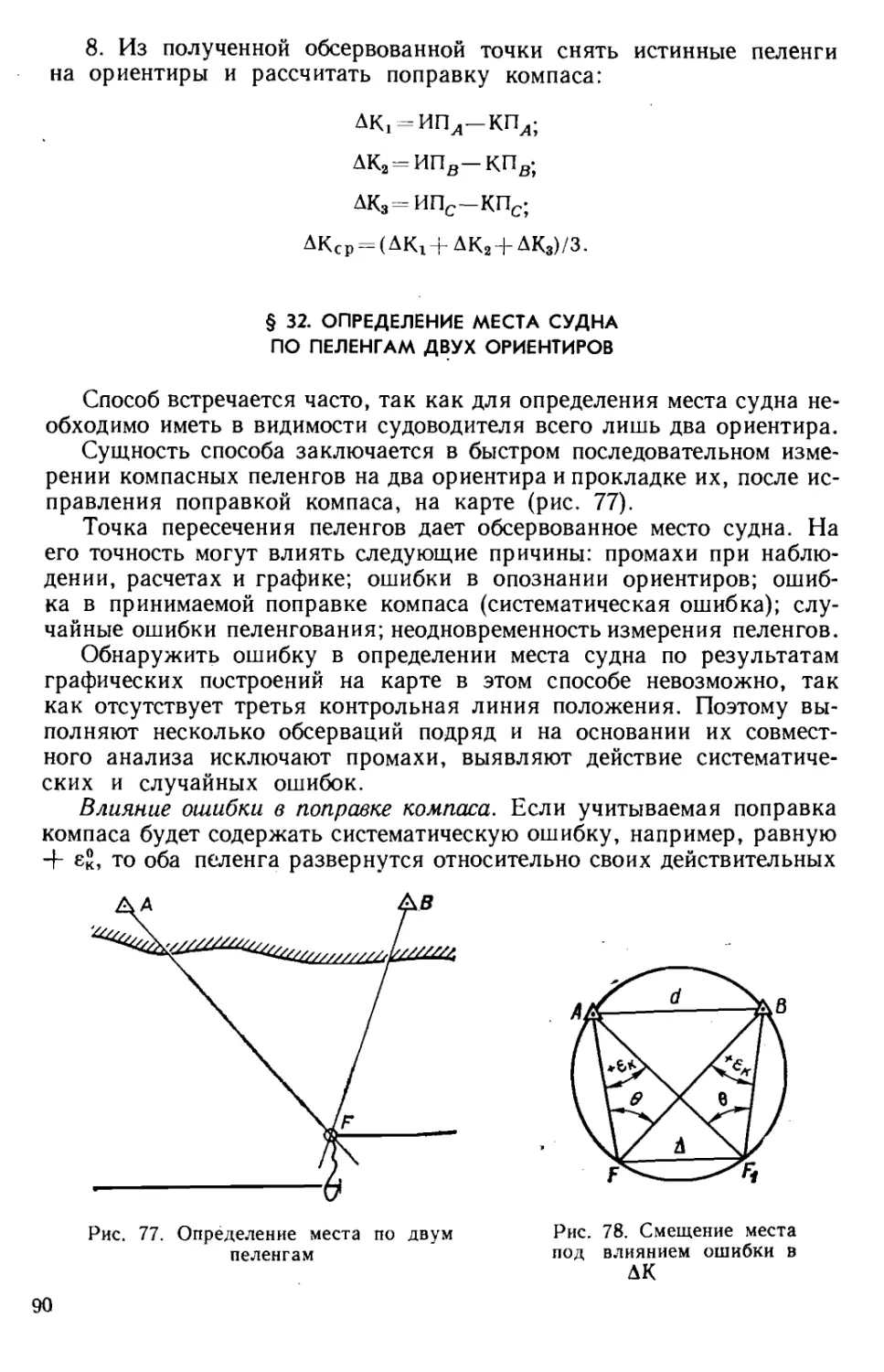
ИЗДАНИЕ ВТОРОЕ, ПЕРЕРАБОТАННОЕ
И ДОПОЛНЕННОЕ
Допущено
Главным управлением кадров
и учебных заведений Минречфлота РСФСР
в качестве учебника для студентов институтов
водного транспорта
ММУ гм F п УТссяцева
1 f
ипг. ‘
МОСКВА «ТРАНСПОРТ» 1985
УДК 656.61.052.4(075.8)
Основы морского судовождения. Учебник для вузов / Фатья-
нов Р. Н., Семенов Ю. К., Костюков Б. Н., Милославская Е. П.—
2-е изд., перераб. и доп. — М.: Транспорт, 1985. 344 с.
Изложены основные сведения по навигации и лоции, особенно-
сти управления судами в прибрежно-морских районах, правила пре-
дупреждения столкновения судов в море и комментарии к ним. Рас-
смотрены вопросы счисления пути судна, использования радиотехни-
ческих средств, приведены сведения по морскому праву.
1-е издание вышло в 1973 г.
Учебник предназначен для студентов судоводительских факуль-
тетов институтов водного транспорта. Может быть рекомендован для
судоводителей в их практической работе.
Йл. 166, табл. 8, библиогр. 16 назв.
Часть третья и гл. 1—III написаны капитаном дальнего плава-
ния, канд. техн, наук, доцентом Р. Н. Фатьяновым, часть вторая и
гл. VIII, XII — штурманом дальнего плавания Ю. К- Семеновым,
гл. IV—VII, IX—XI — Б. Н. Костюковым, часть четвертая—штурма-
ном дальнего плавания Е. П. Милославской.
Рецензенты: С. П. Булгаков, Г. И. Москвин, И. Я. Осипов
Заведующий редакцией В. А. Галкин
Редактор В. Н. Бряицев
Роберт Николаевич Фатьянов, Юрий Константинович Семенов,
Боян Николаевич Костюков, Екатерина Петровна Милославская
ОСНОВЫ МОРСКОГО СУДОВОЖДЕНИЯ
Предметный указатель составлен В. Н. Брянцевым
Переплет художника А. Е. Смирнова. Технический редактор Н. Б. Масалова
Корректор-вычитчик Е. И. Белукова. Корректор Л. Б. Мельникова
ИБ № 2423
Сдано в набор 27.09.84. Подписано в печать 20.04.85. Т-09833.
Формат бОХЭО’Лв. ’ Бум. оФс. № 2. Гарнитура литературная. Офсетная печать.
Усл. печ. л. 20,5+ 1 вкл. Усл. кр.-отт. 25,5. Уч.-изд. л. 24,48 + 1,12 Тираж 14 500 экз.
Заказ 483. Цена 1 р. 30 к. Изд. № 1-1-1/12 № 1507
Ордена «Знак Почета» издательство «ТРАНСПОРТ», 103064, Москва, Басманный туп. 6а
Московская типография № 4 Союзполиграфпрома
при Государственном комитете СССР
по делам издательств, полиграфии и книжной торговли,
129041, Москва, Б. Переяславская ул., 46
3605040000-203
° 049(01)-85
174-85
© Издательство «Транспорт». 1985
Часть первая
НАВИГАЦИЯ
Г лава I
СВЕДЕНИЯ О ЗЕМЛЕ
§ 1. ФОРМА И РАЗМЕРЫ ЗЕМЛИ
При решении задач геодезии, навигации и картографии необходимо
знать форму и размеры Земли. Земля имеет сложную форму неправиль-
ного геометрического тела — геоида. Поверхность геоида, называе-
мая уровенной поверхностью, в любой точке перпендикулярна на-
правлению силы тяжести.
Наиболее близким по форме к геоиду является эллипсоид вращения—
фигура, поверхность которой образована вращением эллипса вокруг
малой оси. Эллипсоид, форма которого наиболее близка к форме геои-
да, называется земным сфероидом. Ось вращения сфероида совпа-
дает с осью вращения Земли, а его экваториальная плоскость — с
земным экватором.
Сфероид определенных размеров, к поверхности которого относят
результаты всех геодезических измерений, топографических съемок
и составляемые по ним карты, называют референц-эллипсоидом.
В СССР с 1946 г. в качестве обязательных для всех геодезических и
картографических работ приняты следующие размеры референц-эл-
липсоида:
большая полуось а = 6 378 245 м;
малая полуось Ь = 6 356 863 м;
квадрат эксцентриситета е2 = (а2, — Ь2)/а2 = 0,006693;
полярное сжатие а = (а — b)/a = 1 : 298,3.
Эти размеры были определены Центральным научно-исследовательс-
ким институтом геодезии, картографии и аэрофотосъемки под руко-
водством Ф. Н. Красовского, поэтому референц-эллипсоид с указанны-
ми параметрами носит название эллипсоида Красовского.
В других странах (кроме НРБ, ВНР, ПНР, СРР) приняты размеры
земного сфероида, отличающиеся от размеров эллипсоида Красовского.
Поэтому координаты одних и тех же точек на иностранных и советских
картах могут отличаться, а при переходе с карты на карту по коорди-
натам могут появиться ошибки. Особенно чувствительны эти расхож-
3
дения при использовании радионавигационных и спутниковых нави-
гационных систем.
Для решения некоторых задач навигации, требующих высокой
точности, а также в картографии за основу принимают размеры и
форму референц-эллипсоида. В практической навигации для решения
большинства задач Землю принимают за шар. Если рассматриваются
малые участки поверхности Земли, то форму поверхности принимают
за плоскость.
§ 2. ОСНОВНЫЕ ТОЧКИ, ЛИНИИ
И ПЛОСКОСТИ ЗЕМНОГО СФЕРОИДА
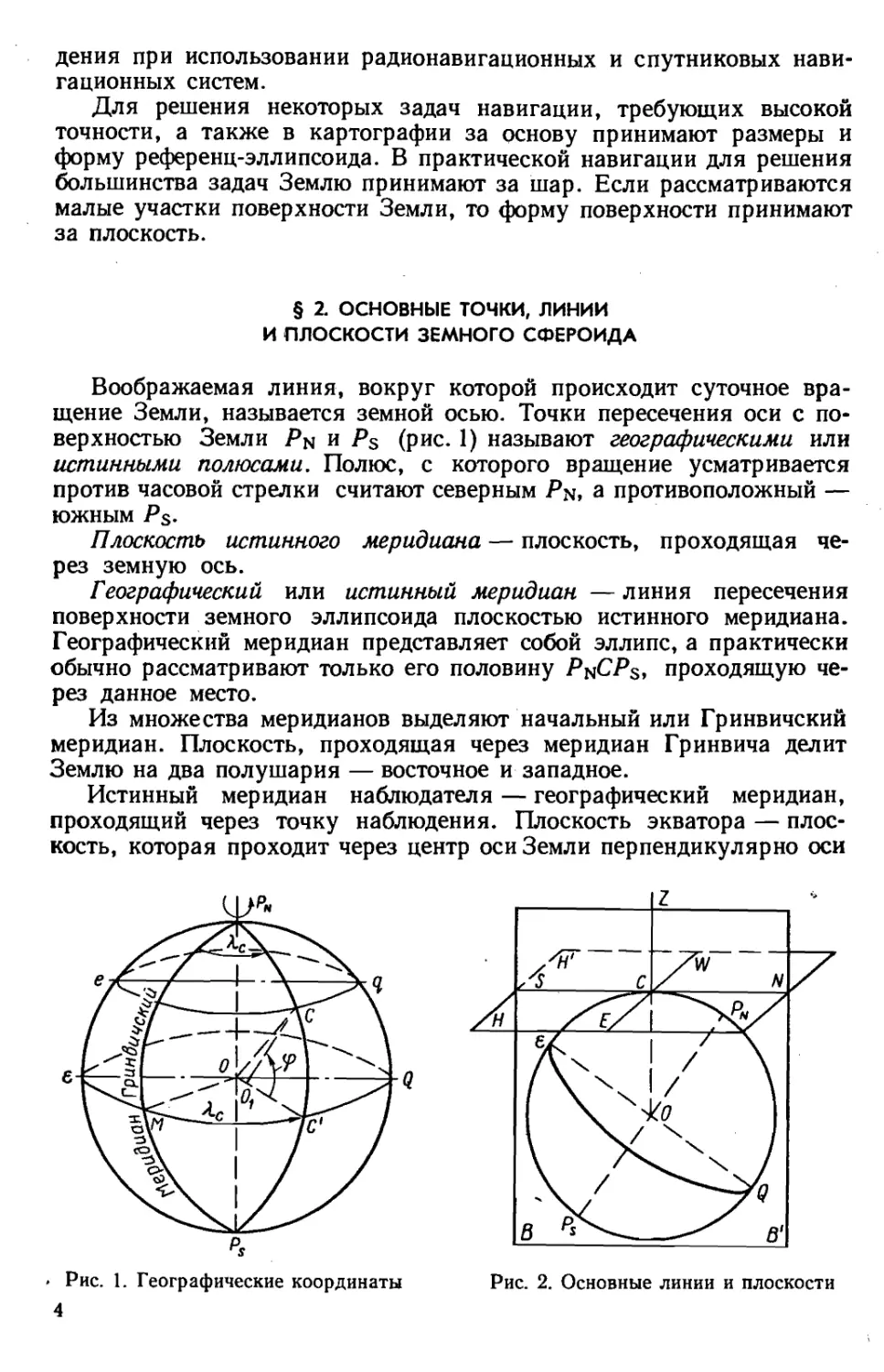
Воображаемая линия, вокруг которой происходит суточное вра-
щение Земли, называется земной осью. Точки пересечения оси с по-
верхностью Земли Pn и Ps (рис. 1) называют географическими или
истинными полюсами. Полюс, с которого вращение усматривается
против часовой стрелки считают северным Pn, а противоположный —
южным Ps.
Плоскость истинного меридиана — плоскость, проходящая че-
рез земную ось.
Географический или истинный меридиан — линия пересечения
поверхности земного эллипсоида плоскостью истинного меридиана.
Географический меридиан представляет собой эллипс, а практически
обычно рассматривают только его половину PnCPs, проходящую че-
рез данное место.
Из множества меридианов выделяют начальный или Гринвичский
меридиан. Плоскость, проходящая через меридиан Гринвича делит
Землю на два полушария — восточное и западное.
Истинный меридиан наблюдателя — географический меридиан,
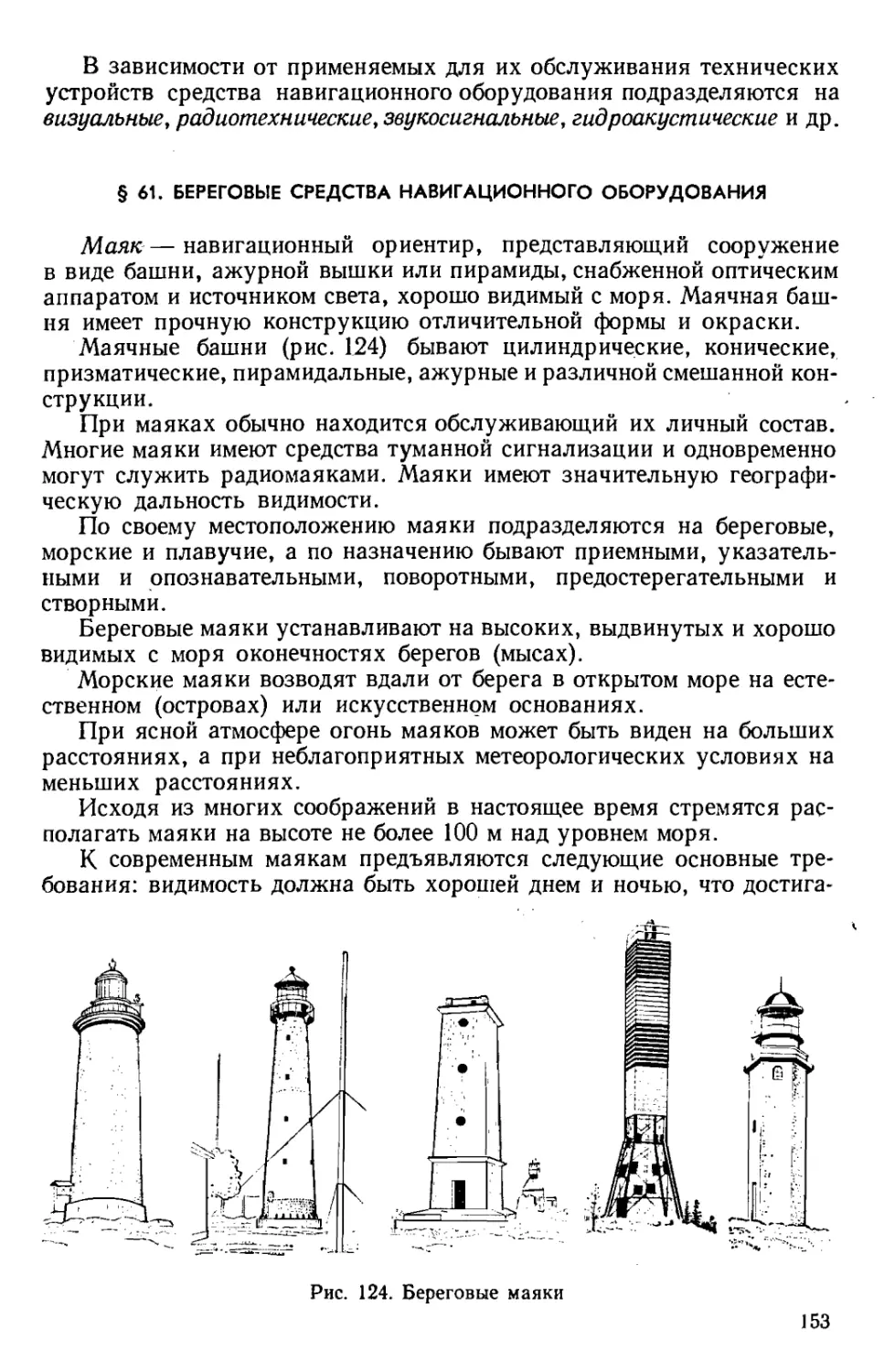
проходящий через точку наблюдения. Плоскость экватора — плос-
кость, которая проходит через центр оси Земли перпендикулярно оси
• Рис. 1. Географические координаты
4
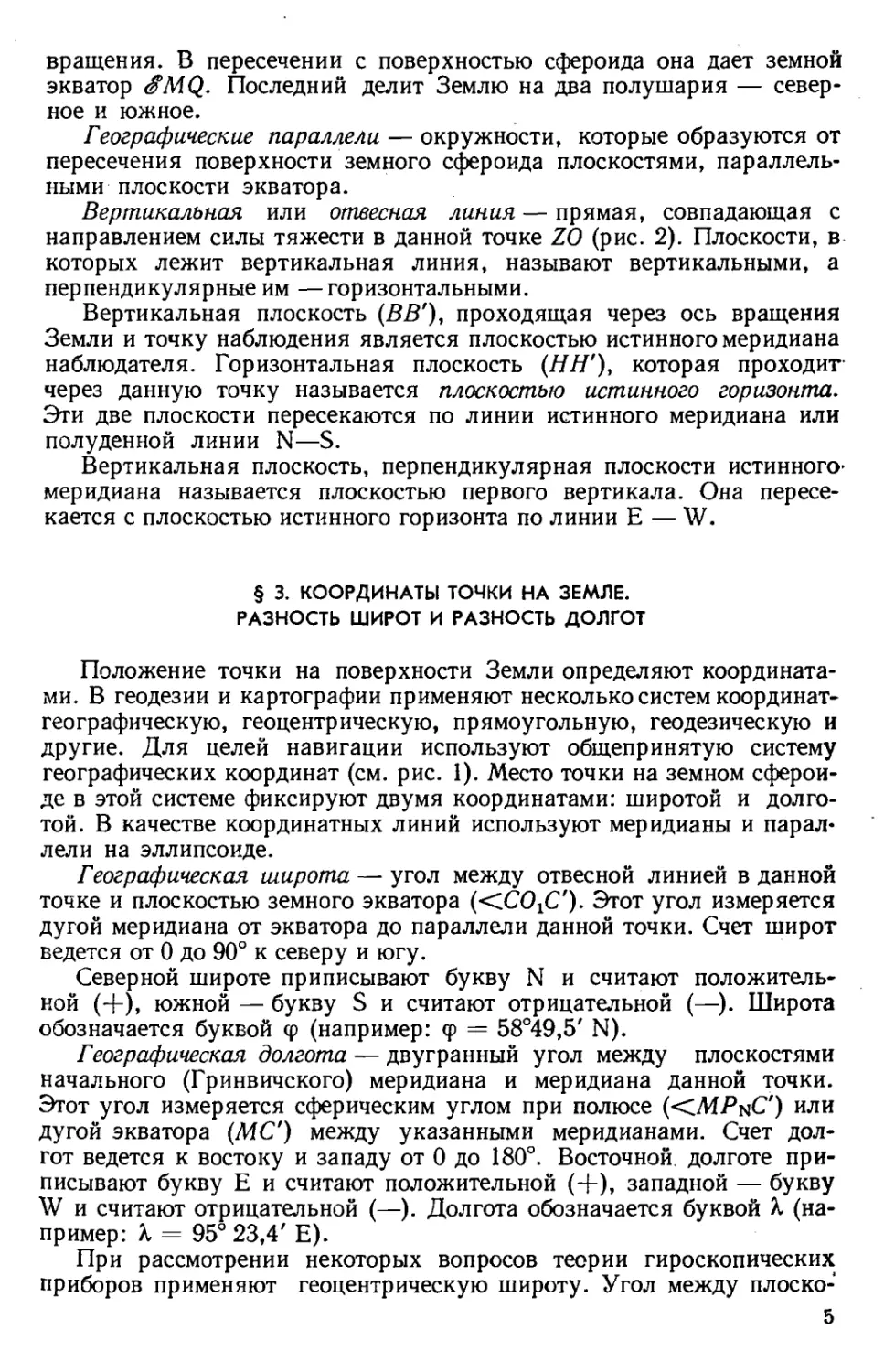
Рис. 2. Основные линии и плоскости
вращения. В пересечении с поверхностью сфероида она дает земной
экватор <TMQ. Последний делит Землю на два полушария — север-
ное и южное.
Географические параллели — окружности, которые образуются от
пересечения поверхности земного сфероида плоскостями, параллель-
ными плоскости экватора.
Вертикальная или отвесная линия — прямая, совпадающая с
направлением силы тяжести в данной точке Z0 (рис. 2). Плоскости, в
которых лежит вертикальная линия, называют вертикальными, а
перпендикулярные им —горизонтальными.
Вертикальная плоскость (ВВ'), проходящая через ось вращения
Земли и точку наблюдения является плоскостью истинного меридиана
наблюдателя. Горизонтальная плоскость (НН1), которая проходит*
через данную точку называется плоскостью истинного горизонта.
Эти две плоскости пересекаются по линии истинного меридиана или
полуденной линии N—S.
Вертикальная плоскость, перпендикулярная плоскости истинного'
меридиана называется плоскостью первого вертикала. Она пересе-
кается с плоскостью истинного горизонта по линии Е — W.
§ 3. КООРДИНАТЫ ТОЧКИ НА ЗЕМЛЕ.
РАЗНОСТЬ ШИРОТ И РАЗНОСТЬ долгот
Положение точки на поверхности Земли определяют координата-
ми. В геодезии и картографии применяют несколько систем координат-
географическую, геоцентрическую, прямоугольную, геодезическую и
другие. Для целей навигации используют общепринятую систему
географических координат (см. рис. 1). Место точки на земном сферои-
де в этой системе фиксируют двумя координатами: широтой и долго-
той. В качестве координатных линий используют меридианы и парал-
лели на эллипсоиде.
Географическая широта — угол между отвесной линией в данной
точке и плоскостью земного экватора (CCOjC')- Этот угол измеряется
дугой меридиана от экватора до параллели данной точки. Счет широт
ведется от 0 до 90° к северу и югу.
Северной широте приписывают букву N и считают положитель-
ной (+), южной — букву S и считают отрицательной (—). Широта
обозначается буквой <р (например: <р = 58°49,5' N).
Географическая долгота — двугранный угол между плоскостями
начального (Гринвичского) меридиана и меридиана данной точки.
Этот угол измеряется сферическим углом при полюсе (CMPnC') или
дугой экватора (Л4С') между указанными меридианами. Счет дол-
гот ведется к востоку и западу от 0 до 180°. Восточной, долготе при-
писывают букву Е и считают положительной (+), западной — букву
W и считают отрицательной (—). Долгота обозначается буквой X (на-
пример: X = 95° 23,4' Е).
При рассмотрении некоторых вопросов теории гироскопических
приборов применяют геоцентрическую широту. Угол между плоско-
5
Рис. 3. Разность широт и разность
долгот
стью экватора и прямой, соединяю-
щей центр земного сфероида с дан-
ной точкой (ССОС'), называют
геоцентрической широтой и обозна-
чают буквой ф'. Разность между
географической и геоцентрической
широтой называется редукцией и
достигает максимального значения
11'27" в широте 45°. На полюсе и
экваторе редукция равна нулю.
Прямоугольная система коор-
динат используется на топографи-
ческих картах и при численной
обработке геодезических измере-
ний. В прямоугольных координатах
дают положение опорных точек.
Судно при движении по поверх-
ности Земли меняет свои координа-
ты. Изменение координат характе-
ризуют две величины — разность
широт и разность долгот.
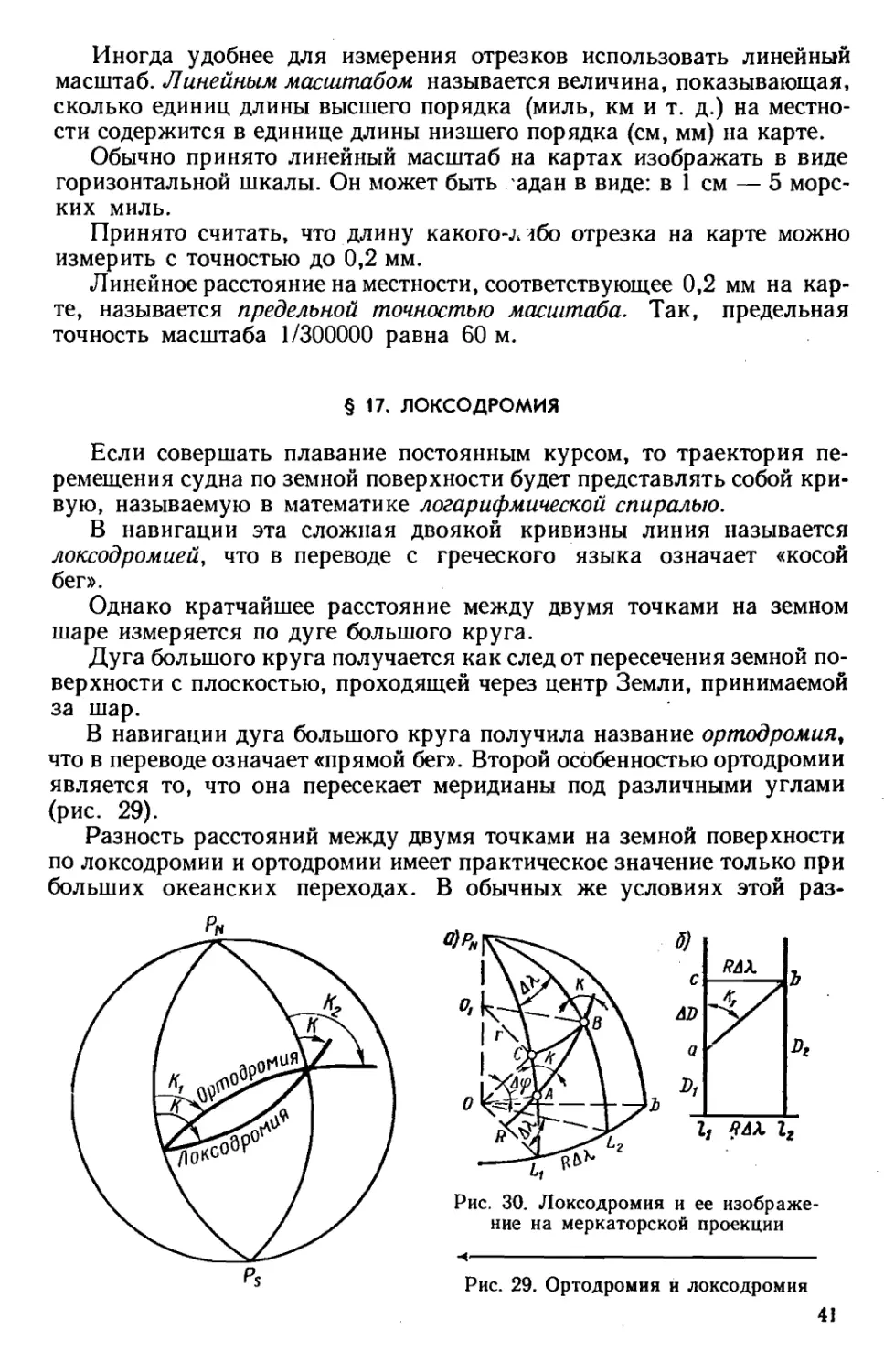
Разностью широт (РШ) двух заданных точек С± и С2 (рис. 3) на-
зывается дуга меридиана (ab), заключенная между параллелями этих
точек.
Наименование разности широт определяется положением парал-
лели конечной точки относительно параллели начальной точки. Если
параллель конечной точки расположена к северу от параллели на-
чальной, то разность широт считается сделанной к северу ( к N) и по-
ложительной, а в тех случаях, когда параллель конечной точки рас-
положена южнее — сделанной к югу (к S) и отрицательной. Разность
широт вычисляют по алгебраической формуле
РИ1 = ф2 —ф1э
(О
РШ изменяется в пределах от 0 до 180°.
Разностью долгот (РД) двух заданных точек называется меньшая
из дуг экватора (CJC^) между меридианами этих точек. Если мериди-
ан конечной точки расположен к востоку от меридиана начальной
точки, то разность долгот считается сделанной к востоку (к Е) и по-
ложительной, а в случаях, когда меридиан конечной точки распо-
ложен западнее — сделанной к западу (к W) и отрицательной. Разность
долгот определяют по формуле
РД —Х2—Xj, (2)
РД изменяется в пределах от 0 до 180°.
Зная РШ и РД и координаты одной точки, можно из формул (1) и
*(2) получить координаты другой.
6
§ 4. ДЛИНА ОДНОЙ МИНУТЫ ЗЕМНОГО МЕРИДИАНА.
МОРСКИЕ ЕДИНИЦЫ ДЛИНЫ И СКОРОСТИ
Длина Г дуги меридиана земного сфероида может быть найдена
из выражения
АГ аге Г , (3)
где М — радиус кривизны эллипсоида. Его величина определяется известной
из геодезии формулой.
а (1 —е2)
(4)
(5)
(1 —е2 sin2 <р)3/2
Подставляя (4) в (3), получим
. а(1—е2) аге Г
А1' -----------------
(1 — е2 sin2 <р)3/2
Формула (5) используется для расчета таблиц и при вычислениях
в картографии, требующих высокой точности.
Если разложить знаменатель выражения (5) в ряд, ограничиться
членами, содержащими е во второй степени и сделать пребразования,
то
е2
(6)
з \
АГ = а аге Г I 1—--— —e2cos2<p|-
\ 4 4 /
Подставляя в полученное выражение параметры референц-эллипсо-
ида, имеем
Д1' = 1852,25 — 9,31 cos 2(р. (7)
Из этой формулы видно, что длина одной минуты меридиана на
поверхности земного сфероида — величина переменная и колеблет-
ся в пределах 1842,9—1861,9 м.
Вместе с тем для упрощения расчетов и графических построений
при решении многих задач морского судовождения за единицу изме-
рения расстояния принимают длину одной минуты дуги земного ме-
ридиана — морскую милю. Она является одновременно и мерой дли-
ны и угловой мерой.
Ввиду того что длина Г меридиана сфероида непостоянна, морс-
кую милю считают равной условной постоянной величине. Междуна-
родным Гидрографическим бюро в 1928 г. принята стандартная длина
морской мили, равная 1852 м. В СССР с 1931 г. морская миля также
считается равной стандартной миле. Длина стандратной морской мили
соответствует длине Г меридиана земного сфероида в широте, близкой
Отклонение длины морской мили от длины Г меридиана не превы-
шает 0,5%, однако иногда при работах высокой точности эту разницу
надо учитывать.
Для измерения небольших расстояний применяется кабельтов —
одна десятая морской мили (185,2 м). Кабельтов принимают прибли-
женно равным 185 м.
7
Скорость на море измеряют в узлах. Узел — единица скорости
равная одной морской миле в час. Название сохранилось со времен,
парусного флота, когда скорость судна определялась с помощью
ручного (секторного) лага по количеству узлов на лаглине, вытравлен-
ных за корму на ходу судна за полминуты времени. Длина отрезков
лаглиня между узлами равнялась 14,6 м (48 футов).
На английских картах можно встретить следующие единицы дли-
ны: фут — 0,3048 м, ярд — 3 фута (0,9144 м), морская сажень — 6 фу-
тов (1,8288 м). ' .
В США и Англии для измерения береговых расстояний и при пла-
вании по рекам и озерам используют также статутную или береговую
милю, равную 1609,344 м.
Глава II
ОРИЕНТИРОВАНИЕ В МОРЕ
§ 5. ВИДИМЫЙ ГОРИЗОНТ И ЕГО ДАЛЬНОСТЬ
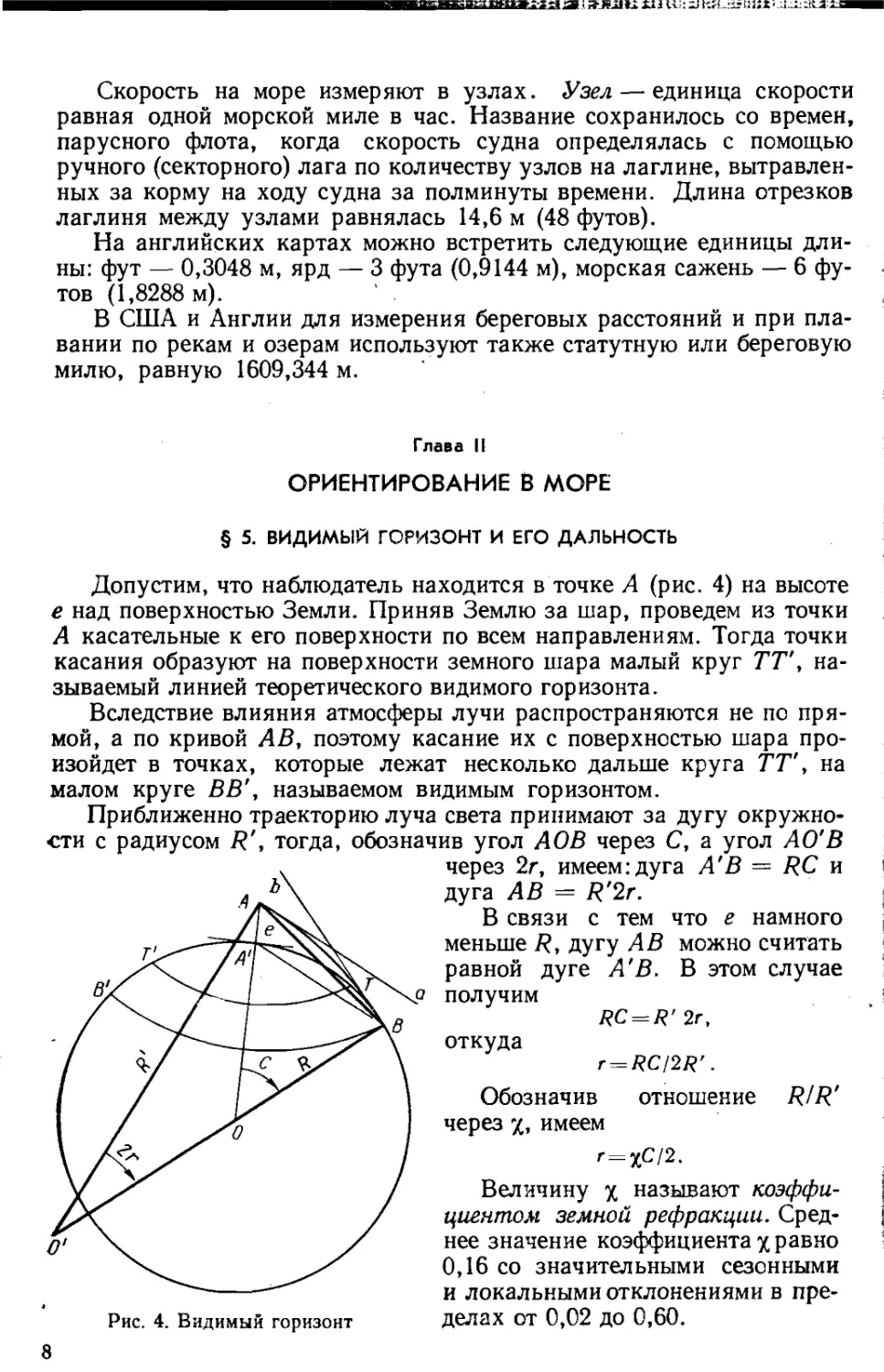
Допустим, что наблюдатель находится в точке А (рис. 4) на высоте
е над поверхностью Земли. Приняв Землю за шар, проведем из точки
А касательные к его поверхности по всем направлениям. Тогда точки
касания образуют на поверхности земного шара малый круг ГТ", на-
зываемый линией теоретического видимого горизонта.
Вследствие влияния атмосферы лучи распространяются не по пря-
мой, а по кривой АВ, поэтому касание их с поверхностью шара про-
изойдет в точках, которые лежат несколько дальше круга ТТ', на
малом круге ВВ', называемом видимым горизонтом.
Приближенно траекторию луча света принимают за дугу окружно-
сти с радиусом R’, тогда, обозначив угол АОВ через С, а угол АО'В
Рис. 4. Видимый горизонт
через 2г, имеем: дуга А В = RC и
дуга АВ = R,(2r.
В связи с тем что е намного
меньше R, дугу АВ можно считать
равной дуге А’В. В этом случае
получим
RC = R' 2г,
откуда
r = RC!2R’.
Обозначив отношение R/R'
через х, имеем
Величину х называют коэффи-
циентом земной рефракции. Сред-
нее значение коэффициента х равно
0,16 со значительными сезонными
и локальными отклонениями в пре-
делах от 0,02 до 0,60.
8
Из треугольника А А 'В имеем, угол В — С/2 — г и угол А’ = 90° +
+ С/2.
Применяя теорему синусов, запишем
Де/t’ -sin (90° —- C/2)/sin (C/2 —г) -Cos (С/2)/sin (C/2 — г),
где Де — дальность видимого горизонта, равная длине дуги АВ.
Ввиду того что углы С/2 и г — величины малые, принимаем
cosC/2 1, a sin(C/2 — г) » С/2 — г, тогда Де = е/(С/2 — л), под-
ставляя значение г в последнее выражение, имеем Де = е/(С/2 —
— /С/2) = е/[С/2( 1 — x)L но угол С/2 равен отношению ДД2/?, тогда
Л2^2/?с/(1-Х).
Заменим /? и х их числовыми величинами и выразив дальность
в милях, получим
Де=^2,08]/7. (8)
Дальности видимого горизонта для е от 0,25 до 5100 м приведены
в таблице 22 Мореходных таблиц ЛГГ — 75.
Действительные значения дальности видимого горизонта могут
значительно отличаться от табличных, особенно при плавании в вы-
соких широтах, в зависимости от состояния атмосферы и подстилающей
поверхности.
§ 6. ДАЛЬНОСТЬ ВИДИМОСТИ ПРЕДМЕТА И ОГНЕЙ
Дальность видимости предмета Дп складывается из дальности
видимого горизонта с высоты глаза наблюдателя Де и дальности ви-
димого горизонта с высоты предмета ДДрис. 5), т.е.
Дц — Де “Г Дн -
Применяя формулу (8) для Д, и Дп в милях, получим
Дп=2,08(УГ+Уй), (9)
где h — высота предмета, м.
Формула (9) не учитывает разрешающей способности человечес-
кого глаза и поэтому дает достоверные результаты при расчете даль-
ности видимости (дальности открытия или закрытия) огней в темное
время суток.
Днем предмет становится видимым на меньшем расстоянии, когда
его угловая высота над видимым горизонтом превысит разрешающую
способность глаза наблюдателя в данных условиях. Разрешающая спо-
собность зависит от условий видимости, контрастности фона с пред-
метом, кратности бинокля или оптического пеленгатора и прочих t
условий наблюдения.
9
Рис. 5. Дальность видимости предмета
На морских навигационных картах и в пособиях для плавания
дальность видимости огней и маяков (Дк) показана с учетом высоты
глаза наблюдателя е - 5 м
Дк-2,08(1/54 Д/h) - 2,08 У Л 4-4,7. (10)
Обычно высота глаза наблюдателя отличается от указанной вели-
чины, поэтому для вычисления дальности видимости маяков и огней
Дк необходимо исправить поправкой (см. рис. 5):
ДДК---ДП—Дк--2.08(1/7+ Уй)-(2.081/й-. 4,7)^2,081/7-4,7,
а
Дп -- Дк -у АДн -
Дальность видимости предметов, вычисленная по формуле (9),
называется географической или геометрической дальностью видимости.
Ночью видимость огня зависит также от силы источника света, устрой-
ства маячного аппарата, цвета огня и прозрачности атмосферы. Такая
дальность видимости называется оптической и рассчитывается для
определенной прозрачности атмосферы. На отечественных картах и в
навигационных пособиях оптическая видимость вычислена для коэф-
фициента прозрачности атмосферы т 0,8.
Иногда оптическая дальность отличается от географической.
Поэтому на картах и в навигационных пособиях показывают меньшую
из двух рассмотренных дальностей. Оптическая дальность обычно
бывает меньше географической у портовых огней, а также у маяков,
расположенных высоко над уровнем моря.
Чтобы не ошибиться в расчетах времени открытия или закрытия
маяка, следует сравнить дальность видимости, показанную на карте
с географической высоты е = 5 м. Если окажется, что
Дк<2,081/Л+ 4,7,
то это означает, что на карте показана оптическая дальность видимо-
сти. Ее не исправляют поправкой АДК на высоту глаза наблюдателя.
Для вычисления географической дальности видимости предметов
можно использовать номограмму (приложение 6 к Мореходным табли-
« цам МТ — 75). Кроме этого, Дп можно получить, выбрав Де и Д* из
таблицы 22 МТ — 75.
10
§ 7. СЧЕТ НАПРАВЛЕНИЙ В МОРЕ
За основное направление в навигации принимают линию N — Sb
плоскости истинного горизонта.
При счете направлений главным образом применяется круговая
система счета. В ней все направления указываются числом от 0 до 360°
по часовой стрелке от северной части истинного меридиана.
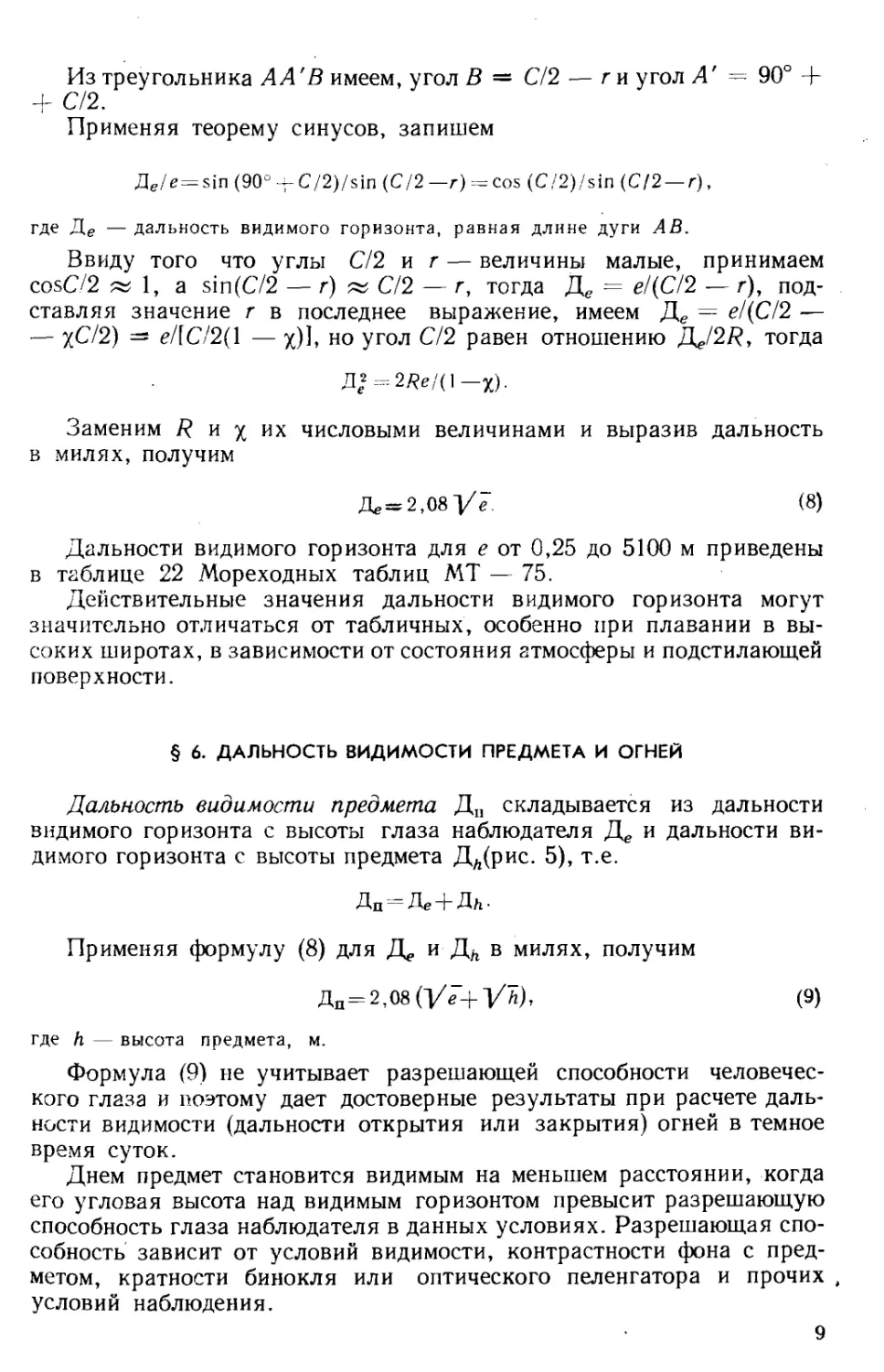
Для указания приближенных направлений используют сохранив-
шуюся со времен парусного флота румбовую систему счета направле-
ний. В ней весь горизонт разбит на 32 румба по 11|°. Направления N,
Е, S, W являются главными румбами и делят горизонт на четыре чет-
верти: NE — северо-восточную, SE — юго-восточную, SW — юго-
западную и NW — северо-западную. Каждая четверть делится по-
полам четвертными румбами'. NE, SE, SW, NW. Румбы, расположен-
ные посередине между главными и четвертными, имеют название, со-
стоящее из букв главного и четвертного румба (NNE, ENE, ESE,
SSE, SSW, WSW, WNW, NNW) и называются трехбуквенными.
Остальные румбы называют нечетными промежуточными. Их назва-
ние складывается из наименования ближайшего главного или четверт-
ного румба, буквы t («ten»— предлог «к» на голландском языке) и наи-
менования главного румба, в сторону которого расположен данный
румб. Например: N£E, NE/N, NE£E, E£N, и т.д. В каждой четверти
румбы имеют номера от 0 до 8, причем счет ведется от направления N в
NE и NW четвертях и от точки S в SE и SW четвертях. На рис. 6 по-
казана румбовая система счета совместно с круговой. Румбовая сис-
тема применяется для указания направления ветра, волнения, а иног-
да и течения.
В мореходной астрономии применяют удобные при вычислениях
полу круговую и четвертную системы счета направлений (азимутов).
В полукруговой системе счета направления отсчитываются от точки
N или S в сторону Е или W от 0 до
180°. Например: S 120°Е, N95' W,
N 30° Е и т.д.
В четвертной системе направ-
ления отсчитываются аналогично
полукруговой, но от 0 до 90°, по-
этому указанные в примере направ-
ления обозначатся следующим об-
разом: NE60°, SW85°, NE30°.
На рис. 7 показана для срав-
нения круговая, полукруговая и
четвертная системы счета направ-
лений.
При решении задач навигации в
основном имеют дело с направле-
нием движения судна и направле-
нием на ориентиры и суда.
Истинный курс (ИК) — угол в
плоскости истинного горизонта
Рис. 6. Круговая и румбовая системы
счета направлений 1
11
Рис. 7. Соотношение круговой, полукру-
говой и четвертной систем счета
между северной частью истинного меридиана (полуденной линией NS)
и диаметральной плоскостью судна по направлению его движения.
Диаметральная плоскость в пересечении с плоскостью истинного
горизонта дает линию курса. Поэтому истинный курс измеряется углом
между линией истинного меридиана и линией курса в круговой систе-
ме счета (рис. 8).
Истинный пеленг (ИП) — угол в плоскости истинного горизонта
между северной частью истинного меридиана (полуденной линии NS)
и направлением из точки наблюдения на предмет. Вертикальная плос-
кость, проходящая через направление на предмет в пересечении с
плоскостью истинного горизонта дает линию пеленга. Истинный пе-
ленг измеряется углом между линией истинного меридиана и линией
пеленга в круговой системе счета.
Направление, отличающееся на 180° от истинного пеленга, называ-
ют обратным истинным пеленгом (ОИП).
В практике судовождения часто определяют направления относи-
тельно диаметральной плоскости судна.
Курсовой угол (КУ) — угол между носовой частью диаметральной
плоскости и направлением из точки наблюдения на предмет. Курсовой
угол измеряется в полукруговом счете от 0 до 180° правого и левого
бортов. При вычислениях курсовые углы правого борта (КУ пр/б)
считают положительными, а левого (КУл/б) — отрицательными.
Наряду с полукруговой системой для измерения курсового угла
применяют и круговую систему от 0 до 360° по часовой стрелке.
В круговой системе даны курсовые углы на шкалах радиолокатора,
радиопеленгатора и на азимутальном круге магнитного компаса. При
вычислениях курсовой угол в круговой системе счета считают всегда
положительным.
Из рис. 8 видно, что ИК, ИП и КУ связаны следующей зависимостью
ИП^ИК+КУ. (11)
12
Если предмет расположен на курсовом угле 90° правого или левого
борта, то говорят, что он расположен на траверзе соответствующего
борта.
Направления в море определяют с помощью компасов. В настоящее
время на судах используются магнитные и гироскопические компасы.
Глава III
ОПРЕДЕЛЕНИЕ НАПРАВЛЕНИЙ В МОРЕ
§ 8. ЗЕМНОЙ МАГНЕТИЗМ И ЕГО ЭЛЕМЕНТЫ.
МАГНИТНЫЕ НАПРАВЛЕНИЯ
Принцип работы магнитного компаса основан на свойстве магнит-
ной стрелки устанавливаться по направлению вектора напряженности
магнитного поля, в котором она находится.
Землю и околоземное пространство окружает магнитное поле, си-
ловые линии которого выходят из южного магнитного полюса, огиба-
ют земной шар и сходятся в северном магнитном полюсе. Магнитные
полюса Земли не совпадают с географическими, их положение на
1970 г. определялось приближенно координатами: Северный — ср =
= 75°N, X - 99°W; Южный — ср = 66,5°S; X - 140°Е. Принято счи-
тать, что на Южном магнитном полюсе сосредоточен положительный
магнетизм, а на Северном — отрицательный.
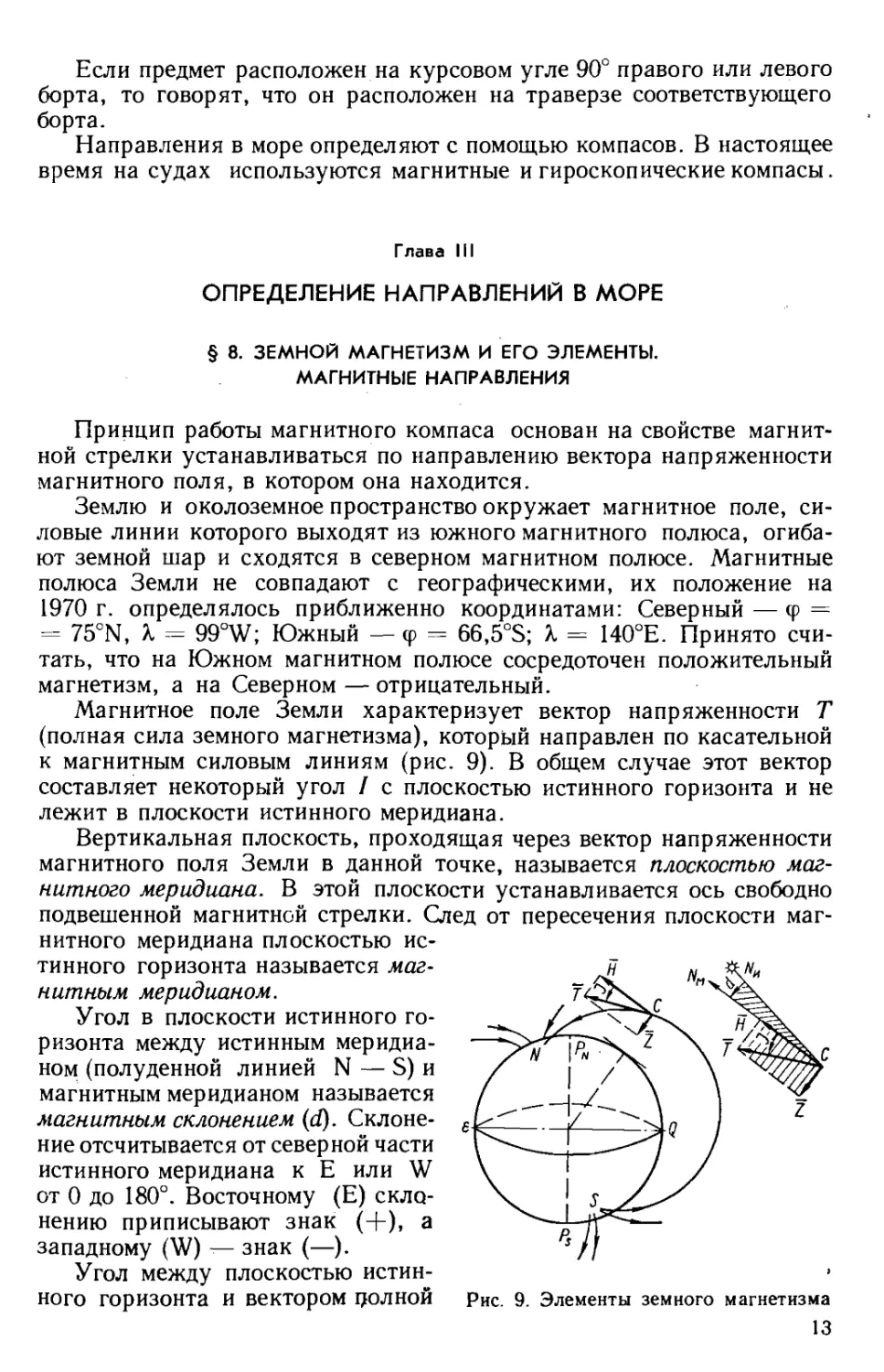
Магнитное поле Земли характеризует вектор напряженности Т
(полная сила земного магнетизма), который направлен по касательной
к магнитным силовым линиям (рис. 9). В общем случае этот вектор
составляет некоторый угол 1 с плоскостью истинного горизонта и не
лежит в плоскости истинного меридиана.
Вертикальная плоскость, проходящая через вектор напряженности
магнитного поля Земли в данной точке, называется плоскостью маг-
нитного меридиана. В этой плоскости устанавливается ось свободно
подвешенной магнитной стрелки. След от пересечения плоскости маг-
нитного меридиана плоскостью ис-
тинного горизонта называется маг-
нитным меридианом.
Угол в плоскости истинного го-
ризонта между истинным меридиа-
ном (полуденной линией N — S) и
магнитным меридианом называется
магнитным склонением (d). Склоне-
ние отсчитывается от северной части
истинного меридиана к Е или W
от 0 до 180°. Восточному (Е) скло-
нению приписывают знак (+), а
западному (W) — знак (—).
Угол между плоскостью истин-
ного горизонта и вектором цолной
Рис. 9. Элементы земного магнетизма
13
силы земного магнетизма называется магнитным наклонением (/).
На магнитных полюсах наклонение максимально и равно 90°, а по ме-
ре удаления от полюсов уменьшается до нулю. Кривая на земной по-
верхности, образованная точками, в которых магнитное наклонение
равно нулю, называется магнитным экватором.
Вектор напряженности магнитного поля Земли можно разложить
на горизонтальную (Я) и вертикальную (Z) составляющие (см. рис. 9).
Величины Г, Н, Z и I связаны соотношениями
Н-Т cos 1, 1
2 = Т sin I. J
(12)
Горизонтальная составляющая Н направлена по магнитному мери-
диану и удерживает в нем чувствительный элемент (стрелку, картушку)
магнитного компаса. Как видно из (12), максимальное значение Н
принимает при / 0, т.е. на магнитном экваторе, и становится равным
нулю на магнитных полюсах. Поэтому в близкополярных районах
показания магнитного компаса не надежны, а на магнитных полюсах
компас вообще не работает.
Величины d, /, Н, Z называются элементами земного магнетизма.
Из всех элементов наибольшее значение для судовождения имеет
магнитное склонение. Распределение магнетизма на земной поверх-
ности показывают на специальных картах элементов земного магне-
тизма. Кривыми линиями на карте соединены'точки с одинаковыми
значениями того или иного элемента. Линия, соединяющая точки
с одинаковым значением склонения, называется изогоной. Изолиния
нулевого склонения — агона разделяет районы с восточным и за-
падным склонением. Величина магнитного склонения приводится так-
же на морских навигационных картах.
Все элементы земного магнетизма подвержены изменениям по вре-
мени — вариациям. Вариации склонения различают вековые, суточные
и апериодические.
Вековое изменение — это изменение среднегодовой величины скло-
нения из года в год. Годовое изменение склонения (годовое увеличение
или уменьшение) не превышает 15' и показывается на морских картах.
Суточные или солнечносуточные вариации склонения имеют период,
равный солнечным суткам, по величине незначительны и в судовожде-
нии не учитываются. Апериодические изменения или магнитные воз-
мущения происходят без определенного периода.
Магнитные возмущения большой интенсивности, когда в течение
нескольких часов все элементы земного магнетизма резко изменяются,
называются магнитными бурями. Возникновение магнитных бурь
связано с солнечной активностью и наблюдается по всей земной по-
верхности. Показания компаса во время магнитных бурь ненадежны—
склонение может изменяться на несколько десятков градусов.
В некоторых районах поверхности Земли величины элементов маг-
нетизма, в том числе и склонение, резко отличаются от их значений в
окружающей местности. Такое изменение связано со скоплением маг-
нитных пород под поверхностью и называется магнитной аномалией.
Районы магнитных аномалий и пределы изменения склонения в них
И
указываются на морских навига-
ционных картах и в лоциях. При-
мером аномалий являются маг-
нитные аномалии в Повенецкой
бухте Онежского озера и в юж-
ной части Ладожского озера. По-
казания магнитного компаса в
районе аномалий использовать
затруднительно, а иногда даже
опасно.
Для использования в практике
данные с карты о величине скло-
нения должны быть приведены к
году плавания. С этой целью умно-
жают годовое изменение склоне-
ния на число лет, прошедших от
года к которому отнесено склоне-
ние. Полученной поправкой ис-
правляют склонение, снятое с
карты. Необходимо учитывать, что
или «годовое увеличение» относится
нения.
Рис. 10. Магнитные направления
термин «годовое уменьшение»
< абсолютной величине скло-
Если плавание происходит между точками, для которых указано
склонение на карте, то производят интерполяцию склонения на глаз,
разбивая район плавания на участки, в которых склонение принимают
постоянным.
Направления в море, определенные относительно магнитного ме-
ридиана, называются магнитными (рис. 10).
Магнитный курс (МК) — угол в плоскости истинного горизонта
между северной частью магнитного меридиана и диаметральной плос-
костью судна по направлению его движения.
Магнитный пеленг (МП) —угол в плоскости истинного горизонта
между северной частью магнитного меридиана и направлением из точ-
ки наблюдения на предмет.
Направление, отличающееся на 180е от магнитного пеленга называ-
ют обратным магнитным пеленгом (ОМП). Магнитные курсы, и пе-
ленги отсчитываются в круговом счете от 0 до 360°.
Зная величину склонения, можно перейти от магнитных направле-
ний к истинным и обратно. Из рис. 10 видно, что истинные и магнит-
ные направления связаны зависимостями:
HK = MK + J, )
ип = мп+а, Г
(13)
МК-ИК—d, |
МП — ИП —J. ]
(14)
Формулы (13), (14) — алгебраические, где склонение d может быть
величиной положительной и отрицательной.
15
§ 9. ДЕВИАЦИЯ МАГНИТНОГО КОМПАСА.
КОМПАСНЫЕ НАПРАВЛЕНИЯ
Корпус современного водоизмещающего судна, его двигатели,
вспомогательные механизмы и устройства в основном изготовлены из
специальных сталей, которые в значительной степени обладают маг-
нитными свойствами, т.е. свойствами ферромагнитных материалов.
Судостроительная сталь обладает свойствами как «твердого», так и
«мягкого» в магнитном отношении железа. А это значит, что во время
постройки судно приобретает остаточную намагниченность, которая
сохраняется постоянной определенное время. С другой стороны, суд-
но имеет способность намагничиваться (или размагничиваться) в
магнитном поле, которое действует на судно в данный момент.
Постоянный судовой магнетизм и временная намагниченность мяг-
кого железа создают в окружающем пространстве судовое магнитное
поле. На любой магнитный прибор, помещенный на судно, действует
не только магнитное поле Земли, но и магнитное поле судна, т.е. при-
бор находится под действием суммарного магнитного поля.
Таким образом, магнитная стрелка на судне устанавливается не в
плоскости магнитного меридиана, а в плоскости действия вектора на-
пряженности суммарного магнитного поля.
Вертикальная плоскость — проходящая через магнитную ось N —
S картушки (чувствительного элемента) компаса, установленного на
судне, называется плоскостью компасного меридиана. След от пересе-
чения этой плоскостью плоскости истинного горизонта называется
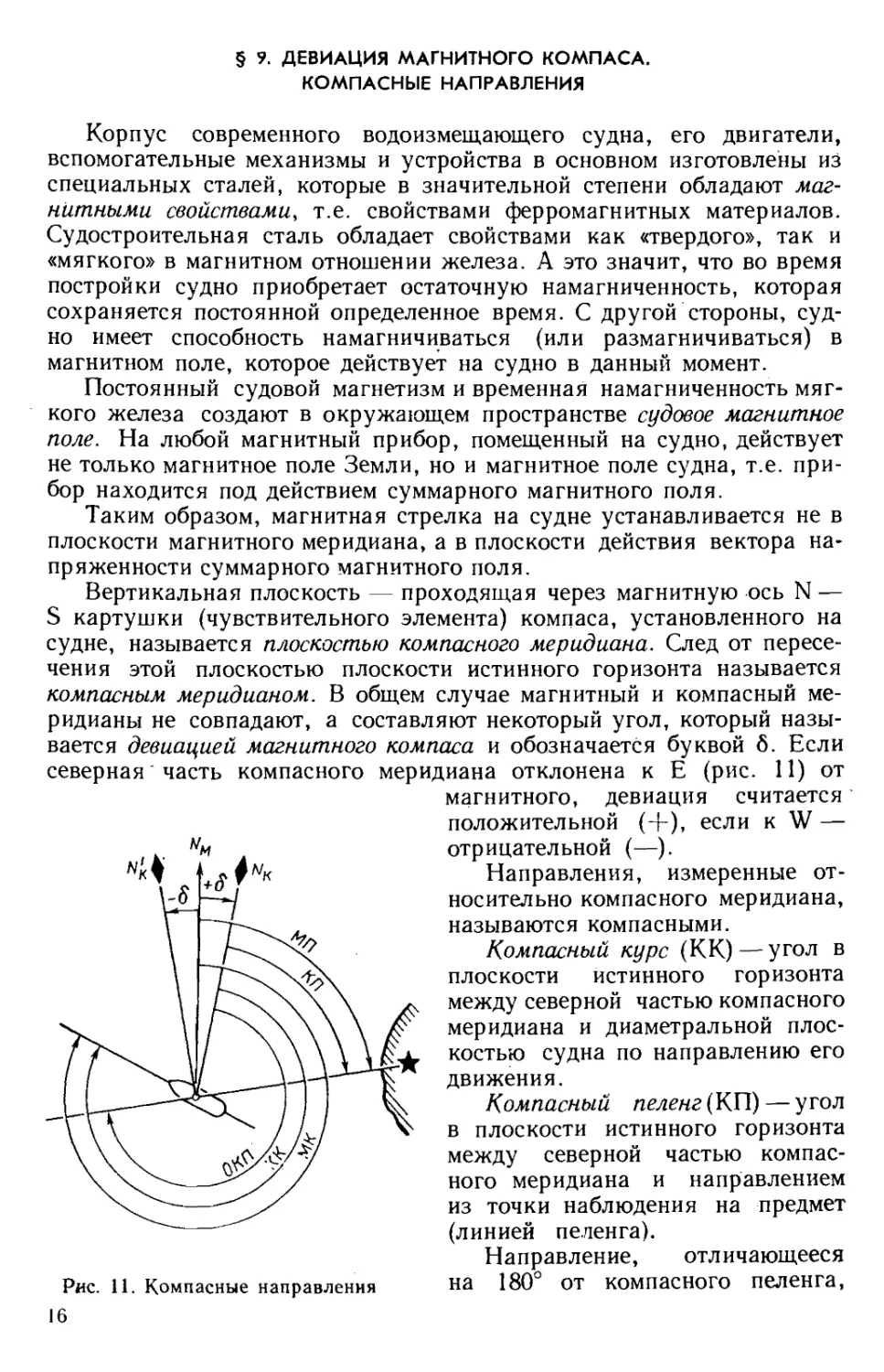
компасным меридианом. В общем случае магнитный и компасный ме-
ридианы не совпадают, а составляют некоторый угол, который назы-
вается девиацией магнитного компаса и обозначается буквой б. Если
меридиана отклонена к Е (рис. 11) от
магнитного, девиация считается
положительной (+), если к W —
отрицательной (—).
Направления, измеренные от-
носительно компасного меридиана,
называются компасными.
Компасный курс (КК)— угол в
плоскости истинного горизонта
между северной частью компасного
меридиана и диаметральной плос-
костью судна по направлению его
Ъ* движения.
Компасный пеленг (КП) — угол
V в плоскости истинного горизонта
между северной частью компас-
ного меридиана и направлением
из точки наблюдения на предмет
(линией пеленга).
Направление, отличающееся
Рис. 11. Компасные направления на 180° от компасного пеленга,
северная часть компасного
16
называют обратным компасным пеленгом (ОКП). При пеленговании
с помощью магнитного компаса снимают величину обратного компас-
ного пеленга.
Компасные курсы и пеленги отсчитываются в круговом счете.
Зная величину девиации, можно перейти от компасных направле-
ний к магнитным и обратно. Компасные и магнитные направления свя-
заны следующими формулами:
МК = КК + 6, \
МП=КП+6, f
КК-МК-», J
КП = МП —6. J
Формулы (15), (16) алгебраические, где девиация 6 может быть ве-
личиной положительной и отрицательной.
Величина девиации зависит от нескольких факторов и прежде все-
го от расположения магнитных масс относительно компаса, т.е. от
места установки компаса. В наилучших условиях находятся главные
компасы, которые наиболее удалены от основных магнитных масс
судна.
Девиация магнитного компаса зависит от курса судна, так как
напряженность судового магнитного поля является функцией курса.
Приближенная формула для вычисления девиации имеет вид
6 = А -f-B sin k' -f-С cos kf -\D sin 2k' -[-f cos 2Л', (17)
где k' — компасный курс;
А, В, C, D, E — приближенные коэффициенты девиации, град.
Приближенные коэффициенты девиации вычисляют по данным на-
турных наблюдений девиации.
Твердое и мягкое судовое железо создают девиации, отличающие-
ся по характеру. Твердое железо создает полукруговую девиацию,
которая при.изменении курса на 360° дважды меняет знак. В уравне-
нии (17) она представлена членами с коэффициентами В и С, которые
называются коэффициентами полукруговой девиации. Мягкое железо
производит четвертную и постоянную девиации. Четвертная девиация
при повороте на 360° четыре раза меняет знак и представлена в уравне-
нии (17) членами с коэффициентами D и Е, которые называются ко-
эффициентами четвертной девиации. Постоянная девиация представ-
лена в уравнении коэффициентом А и не зависит от курса судна.
Из всех коэффициентов наибольшими являются В и С и несколько
меньше их коэффициент/). Коэффициенты А и Е при установке компа-
са в диаметральной плоскости незначительны по величине.
При крене судна появляется дополнительная девиация — креновая,
знак которой зависит от стороны накренивания судна. На волнении
креповая девиация раскачивает картушку в такт накрениваний судна.
Девиация магнитного компаса не остается постоянной при эксплуа-
тации судна. Все виды девиации изменяются при перевозке грузов,
обладающих собственным магнетизмом, а также после перемещения
магнитных масс относительно компаса (после перестройки корпуса,
надстроек и изменения положения оборудования). Полукруговая де*
17
виация, кроме этого, зависит от состояния намагниченности судна и
поэтому может измениться от перемагничивания судна при длительной
стоянке в одном положении (в ремонте, на отстое и т.п.), при воздей-
ствии на судно сильных магнитных и электромагнитных полей (при
электросварке, ударах молнии и т.д.), при сильных сотрясениях кор-
пуса (во время плавания во льдах, при слеминге в штормовую погоду,
при столкновениях и т. п.).
Величина девиации зависит от района плавания в связи с измене-
нием составляющих Н и Z земного магнетизма при перемене широты.
Особенно заметно изменяется полукруговая девиация (коэффициенты
В и С).
Девиация компасов на стальном судне может достигать значи-
тельных величин—до нескольких десятков градусов. Суммарная
магнитная сила (магнитного поля судна и поля Земли) в этом случае
может оказаться недостаточной для надежной работы компаса. Кроме
этого, угловые перемещения судна (изменение МК) не будут соответ-
ствовать изменениям курса по компасу, а выборка величины девиации
из таблиц на промежуточные курсы значительно осложнится.
Указанные обстоятельства вызывают необходимость уменьшения
величины девиации или, как принято называть, уничтожения девиа-
ции.
Уничтожение четвертной и полукруговой девиации выполняют как
отдельные виды работ, а постоянную девиацию не уничтожают вслед-
ствие ее малости. Принцип уничтожения девиации заключается в со-
здании с помощью специальных компенсаторов (постоянных магнитов,
брусков мягкого железа) магнитного поля, равного по величине и
такого же характера, как судовое поле, но обратного по направле-
нию.
Четвертную девиацию чаще всего уничтожают с помощью продоль-
ных брусков мягкого железа, которое устанавливается в верхней части
нактоуза компаса. Компенсация четвертной девиации производится
редко , так как этот вид девиации не подвержен частым изменениям.
Обычно эту работу выполняют после установки компаса на судно.
Из всех видов девиации наиболее часто приходится уничтожать
полукруговую, так как она, во-первых, превосходит другие по величи-
не и, во-вторых, может часто и заметно изменяться. Поэтому когда
на практике говорят об уничтожении девиации, то имеют в виду унич-
тожение полукруговой девиации. Полукруговуюдевиацию компенси-
руют с помощью специальных постоянных магнитов-уничтожителей.
Магниты устанавливаются внутри нактоуза компаса в специальных
каретках, закрепляемых на трубе девиационного прибора. Часть маг-
нитов устанавливается параллельно диаметральной плоскости судна
(продольные магниты), а часть — перпендикулярно (поперечные маг-
ниты).
Креновая девиация обычно уничтожается совместно с полукруговой
при помощи вертикального магнита.
Существует несколько способов уничтожения полукруговой девиа-
ции. Наибольшее распространение получил способ Эри, который вы-
полняется на четырех главных магнитных курсах. Сущность способа
18
заключается в доведении до среднего значения величины девиации на
главных противоположных магнитных курсах (N — S и Е — W). Прак-
тически на одном из главных румбов (например, на N) девиацию с по-
мощью поперечных магнитов доводят до нуля, а на противоположном
(S) — до половины. Затем выполняют такую же работу на курсах
Е и W, передвигая продольные магниты.
Уничтожение девиации производят на полигонах, имеющих необ-
ходимое оборудование (ориентиры, створы, палы). На судне все долж-
но быть установлено и закреплено в походном положении. Особое вни-
мание необходимо обратить на предметы и оборудование, расположен-
ные недалеко от компасов. Положение подвижных конструкций и обо-
рудования (например, мачт) должно быть оговорено в таблице девиа-
ции. Уничтожение девиации производят не реже 1 раза в год, а также
по усмотрению капитана, например, в тех случаях, когда обнаружено
несоответствие табличной девиации ее наблюдаемым величинам.
По целому ряду причин уничтожение девиации не может быть вы-
полнено абсолютно точно. Такими причинами являются: случайные
и систематические ошибки измерений, несовершенство применяемых
приборов, а также методические неточности способов уничтожения
девиации. Девиация, наблюдаемая у компасов после уничтожения
всех видов девиации, называется остаточной. Ее величина не долж-
на превышать у главных компасов — 3°, а у путевых — 5°. После
уничтожения полукруговой девиации определяют остаточную и со-
ставляют таблицу девиации.
§ 10. ОПРЕДЕЛЕНИЕ ОСТАТОЧНОЙ ДЕВИАЦИИ
Обычно остаточную девиацию определяют после ее уничтожения,
но иногда определение девиации может выполняться как самостоя-
тельная работа. Такая необходимость появляется, если обнаружено
заметное расхождение наблюдаемой девиации на отдельных курсах
с ее табличными значениями, а также при перевозке металлических
грузов, после плавания во льдах, при существенном изменении судном
широты.
Различают полное определение девиации для составления таблицы
девиации и частичное, на отдельных курсах, с целью контроля работы
магнитного компаса.
Для составления таблицы девиацию чаще всего определяют на вось-
ми главных и четвертных компасных курсах, затем по наблюдае-
мым величинам девиации вычисляют коэффициенты девиации Л, В,
С, D и £. Далее по известным коэффициентам рассчитывают таблицу
девиации на любое количество курсов, используя формулу (17). В за-
висимости от величины коэффициентов таблицу девиации вычисляют
на 24 или 36 курсов. Если какой-либо коэффициент превышает 3°,
таблицу составляют через 10°, а при меньших коэффициентах — че-
рез 15°. Аргументом входа в таблицу является компасный курс.
Таблица девиации подписывается лицом, производившим ее опре-
деление. В таблицу также заносятся рассчитанные значения коэффи-
циентов девиации.
19
Определение девиации выполняют на пале или на малом ходу суд-
на, причем прежде, чем приступить к определению девиации на но-
вом курсе, необходимо выждать 3—5 мин, необходимых для перемаг-
ничивания судна. На каждом курсе следует по возможности определить
девиацию из 3—5 наблюдений, а результат осреднить. Точность сня-
тия отсчета пеленга или курса должна быть не ниже 0,2°.
Все основные способы определения девиации сводятся к сравнению
магнитных направлений (пеленгов, курсов) с направлениями, изме-
ренными по компасу. Для вычисления девиации применяют следую-
щие формулы:
6 = МП^КП,
6 = ОМП—окп,
6 = МК —КК.
Все способы определения девиации различаются только методом по-
лучения величины магнитного пеленга или курса. Основные способы
определения девиации рассмотрены ниже.
Определение девиации по створу или по вееру створов является
наиболее точным способом. Сущность способа заключается в том, что
в момент пересечения створа замечают пеленг по компасу.
Магнитное направление створа рассчитывают по истинному направ-
лению и величине склонения (14). Истинное направление снимают с
карты или получают из навигационных пособий. Веер створов (рис. 12)
позволяет определить девиацию несколько раз на одном курсе. Маг-
нитные направления веера створов даются в лоциях или в описаниях
девиационных полигонов. Если в районе определения девиации не имеет-
ся створов, нанесенных на карту, то можно использовать створ любых
предметов (приметных башен, зданий, мачт, мысов и т.п.). Магнитное
направление такого створа приближенно рассчитывают как среднее
из восьми направлений, измеренных по компасу на главных и четверт-
ных курсах,
(8 \ /
2 кп) /8- <18)
1 / /
Определение девиации по пеленгу отдаленного предмета производят»
когда отсутствуют створы в районе работ.
Чаще этот способ выполняют, когда место судна не меняется или
меняется незначительно, т.е. при стоянке судна на девиационном пале,
бочках и т.п. Величина магнитного пеленга может быть получена с
карты, если место судна известно с высокой точностью. Если же такой
возможности нет, опять рассчитывают магнитный пеленг как средний
из восьми измеренных компасных на главных и четвертных румбах по
формуле (18).
При развороте судна на новый курс место его на местности не оста-
ется постоянным, и при этом изменяется величина МП. Очевидно,
что способ можно применять только тогда, когда изменение пеленга Д
отхреднего значения не превысит определенной допустимой величины.
Из рис. 13 видно, что между расстоянием до ориентира £), радиусом
20
Рис. 12. Определение девиации по ве- Рис. 13. Определение девиации по пелен-
еру створов гу отдаленного предмета
окружности, внутри которой изменяется положение судна (компаса),
г и углом А существует соотношение
D =----------
А ° arc 1 °
57, Зг 60г
А° ~ А° ’
(19)
если задать А = 0,2°, то
D = 300r.
(20)
Таким образом, например, при г = 100 м расстояние до ориентира
должно быть не менее 16,2 мили.
Способ может применяться и на ходу судна, но при этом пеленг
на отдаленный предмет берут в тот момент, когда судно проходит в
непосредственной близости от заранее установленного буйка или веш-
ки. Примерная схема маневрирования при
определении девиации указанным способом
приведена на рис. 14.
Определение девиации по сличению с
главным магнитным компасом обычно произ-
водят у путевого компаса, так как возмож-
ности измерения пеленга с него не имеется.
На восемь главных и четвертных курсов ло-
жатся по путевому компасу, а магнитный
курс рассчитывают по КК главного компаса.
Девиацию путевого компаса бц получают по
следующим формулам:
МК-ККгл+5гл»
5п-МК-ККп
Рис. 14. Схема маневри-
рования при определении
девиации по пеленгу от-
даленного предмета
или по рабочей формуле, полученной после
подстановки первого уравнения во второе,
бп-ККгл-ККп+бгл. (21)
21
Сличение показаний компасов, т. е. одновременное фиксирование
курса производят 3—5 раз и выводят среднее значение.
Определение девиации по взаимным пеленгам можно выполнять,
когда на видимости не имеется створов и отдаленных предметов, а пред-
ставляется возможность свезти на берег компас и установить его на
треноге. Место установки компаса должно обеспечивать взаимную
видимость компаса и судна.
При определении девиации по какому-нибудь сигналу (спуск обус-
.ловленного сигнального флага, команда по радио и т.п.) измеряют
одновременно пеленг с берега и судна. Пеленг с берегового компаса
представляет собой МП + 180°, поэтому легко рассчитать и величину
.девиации.
Определение девиации по сличению с гирокомпасом — распростра-
ненный способ на судах, имеющих гирокомпас. Сущность способа за-
ключается в том, что магнитный курс получают, определив истинный
из показаний гирокомпаса, а склонение выбирают с карты. В процессе
•определения девиации судно последовательно ложится на восемь глав-
ных и четвертных курсов по магнитному компасу. На каждом курсе
•одновременно замечают (сличают) курсы по гирокомпасу и магнитному
компасу.
Расчет девиации производят последовательно по следующим фор-
мулам:
ИК = ГКК4- ДГК,
МК=ИК—dt
6=МК—КК
или по рабочей формуле, полученной из них,
6 = ГКК-КК+(ДГК-d), (22)
где ГК К н ДГК — курс по гирокомпасу и поправка компаса соответственно.
Сличение выполняют 3—5 раз, а полученные девиации осредняют.
Способ следует выполнять на самом малом ходу, избегая поворо-
тов на большой угол, так как при этом сводятся к минимуму погрешно-
ности в поправке гирокомпаса от влияния ускорений.
Кроме рассмотренных способов, применяют способ определения
девиации по пеленгам небесных светил, если имеется возможность
измерить пеленг на светило (Солнце, Луну, звезду) и рассчитать его
азимут.
Во время плавания необходимо использовать любую возможность
для регулярного определения девиации на отдельных курсах с целью
контроля достоверности таблицы девиации. Для этого чаще всего ис-
пользуют определения поправки компаса по створам, по пеленгам не-
бесных светил и по сличению с гирокомпасом.
§ 11. ИСПРАВЛЕНИЕ И ПЕРЕВОД КУРСОВ И ПЕЛЕНГОВ.
ПОПРАВКА КОМПАСА
В практике судовождения, применяя магнитный компас, чаще всего
решают одну из двух задач: по известному направлению находят
истинное или по известному истинному — компасное.
22
Расчет истинных направлений по известным
компасным называется исправлением направле-
ний (румбов). Исправление румбов необходимо
для прокладки на карте линии курса или пе-
ленга. Выбрав 6 из таблицы по известному
КК, можно сначала найти магнитные направле-
ния по зависимости (15), а затем истинные по
соотношению (1'3). Подставляя (15) в (13), полу-
чим формулы для исправления румбов
ИК=КК+^ + б, 1
ИП=КП+</ + 6. J * ’
Расчет компасных направлений по извест-
ным истинным называется переводом направле-
ний (румбов). Перевод румбов необходим, на-
Рис. 15. Поправка ком-
паса
пример, для определения курса судна по ком-
пасу с целью перехода из одной точки в другую. Сначала по (14)
вычисляют магнитный курс
МК=ИК—d,
а затем по (16) находят компасный курс
КК=МК-6.
Девиацию выбирают из таблицы по магнитному курсу, учитывая,
чтоМК и КК отличаются на небольшую величину. В случаях, если
величина девиации превышает 4°, а табличный интервал Г, целесо-
образно сделать второе приближение. Для этого после расчета КК сно-
ва входят в таблицу девиации уже с полученным значением компасного-
курса, находят S и рассчитывают компасный курс второй раз.
Подставляя (14) в (16), получим зависимости прямого перевода рум-
бов
КК-ИК—а—6, |
КП=ИП — d — 6. J
(24}
Алгебраическая сумма склонения и девиации геометрически пред-
ставляет собой (рис. 15) угол в плоскости горизонта между северной
частью истинного и компасного меридианов, называемый поправкой
компаса (ДМК),
AMK = d+6. (25}
Если северная часть компасного меридиана отклонена к Е от ис-
тинного, поправка компаса положительна, если к W — отрицательна.
С учетом зависимости (25) из (23) и (24) получаем формулы для
исправления и перевода румбов при известной поправке компаса:
ИК=КК + ДМК, |
ИП=КП + ДМК, J
кк=ик—ДМК, |
кп=ип—дмк. J
(26)
(27)
23
Рис. 16. Исправление и перевод рум-
бов
Все задачи исправления и пе-
ревода румбов могут быть прове-
рены графически (рис. 16).
Для этого, например, сначала
строят истинный меридиан, затем
по известным величинам (ДМК, d
или ИК) проводят другие линии
(компасного, магнитного меридиа-
на или курса) и определяют неиз-
вестные величины. Расположение
меридианов относительно друг
друга определяют логическим рас-
суждением с учетом знака и вели-
чины 6, d или ДМК. Графический
контроль проводят с целью исклю-
чения ошибок в знаках.
Исправление и перевод румбов
чаще всего производят, рассчиты-
вая поправку компаса по формулам (26) и (27), для чего снимают с
карты величину склонения, а девиацию выбирают из таблицы.
Достоверность поправки компаса обусловливает точность опреде-
ления истинных направлений, а следовательно, и точность проводки
судна. Отсюда вытекает необходимость систематического контроля
поправки. Поправку компаса определяют сравнением истинных и ком-
пасных направлений. С этой целью необходимо знать значение истин-
ного курса или пеленга
компасное направление.
Из (26) имеем, что
и одновременно измерить соответствующее
ДМК = ИП —КП, |
дмк=ик—кк. J
(28)
Для определения ДМК могут быть использованы способы, анало-
гичные способам определения девиации: по пеленгам створа, истинное
направление которого дано на карте или может быть снято с карты;
по пеленгу отдаленного предмета, когда место судна известно с высокой
точностью, а предмет нанесен на карту, по пеленгам небесных светил.
На некоторых речных судах, где не имеется возможности измерить
пеленг с магнитного компаса, поправка может быть определена срав-
нением ИК и КК при плавании по створам, направление которых из-
вестно. Для этого, находясь на линии створа, приводят судно носом
точно на створные знаки и замечают компасный курс.
Поправка магнитного компаса может быть получена также сличе-
нием с гирокомпасом, если его поправка известна:
ДМК-ГКК—КК+ ДГК. (29)
При каждом определении поправки магнитного компаса следует
вычислять девиацию по формуле
6 = ДМК— d (30)
для' контроля достоверности таблицы.
24
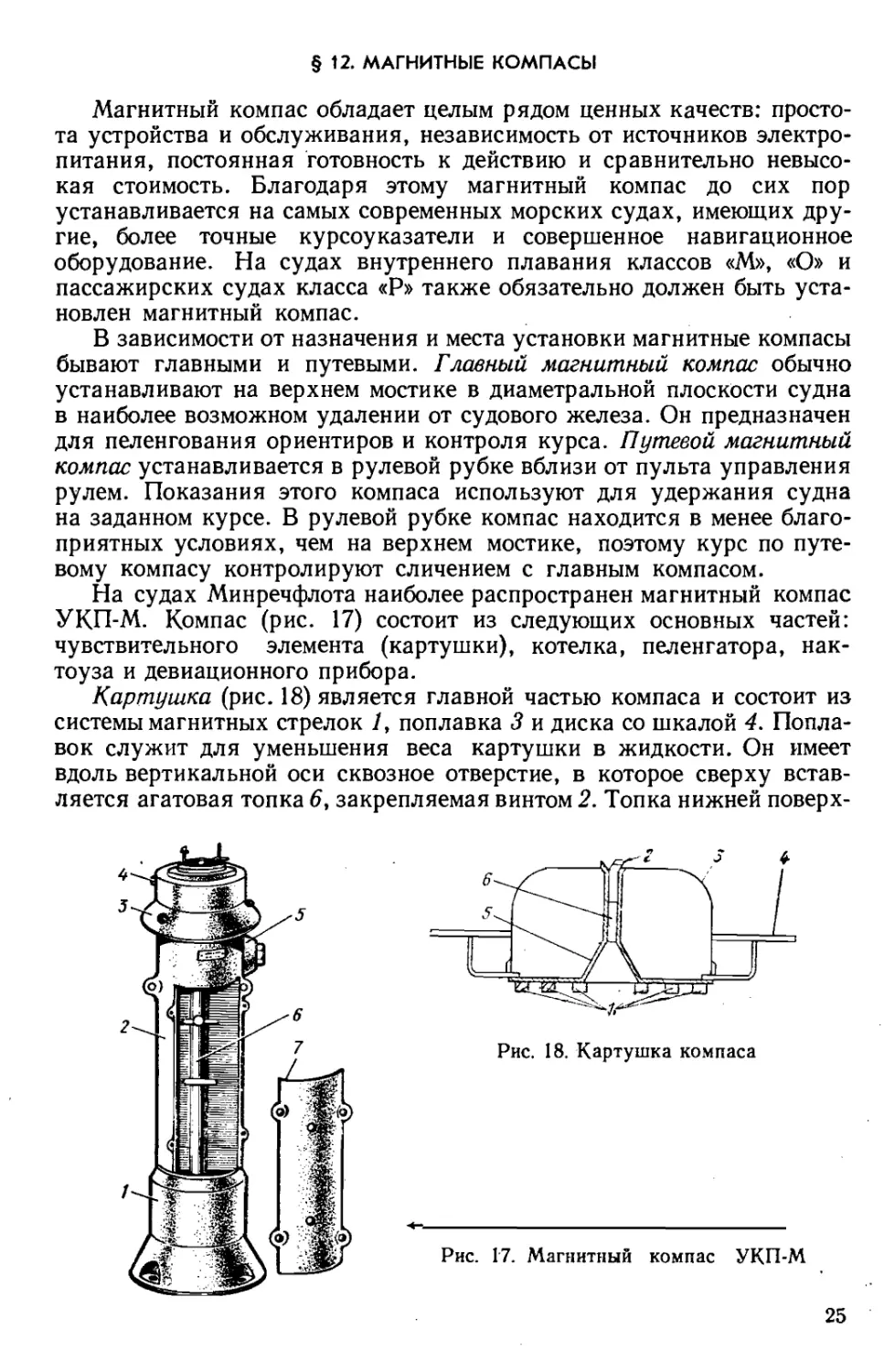
§ 12. МАГНИТНЫЕ КОМПАСЫ
Магнитный компас обладает целым рядом ценных качеств: просто-
та устройства и обслуживания, независимость от источников электро-
питания, постоянная готовность к действию и сравнительно невысо-
кая стоимость. Благодаря этому магнитный компас до сих пор
устанавливается на самых современных морских судах, имеющих дру-
гие, более точные курсоуказатели и совершенное навигационное
оборудование. На судах внутреннего плавания классов «М», «О» и
пассажирских судах класса «Р» также обязательно должен быть уста-
новлен магнитный компас.
В зависимости от назначения и места установки магнитные компасы
бывают главными и путевыми. Главный магнитный компас обычно
устанавливают на верхнем мостике в диаметральной плоскости судна
в наиболее возможном удалении от судового железа. Он предназначен
для пеленгования ориентиров и контроля курса. Путевой магнитный
компас устанавливается в рулевой рубке вблизи от пульта управления
рулем. Показания этого компаса используют для удержания судна
на заданном курсе. В рулевой рубке компас находится в менее благо-
приятных условиях, чем на верхнем мостике, поэтому курс по путе-
вому компасу контролируют сличением с главным компасом.
На судах Минречфлота наиболее распространен магнитный компас
УКП-М. Компас (рис. 17) состоит из следующих основных частей:
чувствительного элемента (картушки), котелка, пеленгатора, нак-
тоуза и девиационного прибора.
Картушка (рис. 18) является главной частью компаса и состоит из
системы магнитных стрелок /, поплавка 3 и диска со шкалой 4. Попла-
вок служит для уменьшения веса картушки в жидкости. Он имеет
вдоль вертикальной оси сквозное отверстие, в которое сверху встав-
ляется агатовая топка 6, закрепляемая винтом 2. Топка нижней поверх-
Рис. 17. Магнитный компас УКП-М
25
ностью опирается на острие шпильки котелка компаса. В нижней части
отверстие переходит в конус 5, который ограничивает угол наклона
картушки относительно котелка до 10°.
Котелок (рис. 19) представляет собой резервуар, состоящий из двух
заполненных компасной жидкостью камер; верхней — основной и
нижней — дополнительной. В верхнюю камеру 9 помещена картушка,
а нижняя 10 служит для компенсации температурных изменений
объема компасной жидкости. В центре дна верхней камеры имеется
колонка 5, в которую ввинчивается шпилька 4. Шпилька на конце име-
ет заточенный на конус иридиевый напай, на который опирается топка
картушки. Кроме этого, в верхней камере установлены две курсовые
нити 2 из черненой латунной проволоки. Дополнительная камера сое-
динена с основной широким отверстием, закрытым козырьком 6. Дно
дополнительной камеры гофрировано и называется диафрагмой. Диаф-
рагма 1 позволяет изменять объем камеры при увеличении или умень-
шении объема жидкости. Установленный в дополнительной камере
рефлектор 3 не позволяет пузырькам воздуха попадать в основную ка-
меру и направляет вверх лучи от лампочки освещения 14. В среднюю
часть диафрагмы вставлено стекло 12 (0 = 44,5 мм), по центру кото-
рого имеется втулка 13 с герметической пробкой. Через эту втулку с
помощью специального ключа может быть вывинчена шпилька 4 для ос-
мотра или замены.
Сверху котелок закрывается стеклом 7, которое прижимается ази-
мутальным кольцом 8 к резиновой прокладке. На азимутальном коль-
це нанесена шкала курсовых углов от 0 до 360°. Снизу к корпусу ко-
телка привинчена латунная чашка со свинцовым грузом 11 для пониже-
ния центра тяжести котелка. В чашку вмонтирован патрон с электри-
ческой лампочкой для освещения картушки.
/4 /5 12
Рис. 19. Котелок компаса
26
Компасная жидкость
представляет собой водный
раствор этилового спирта
(43 %), который замерзает
при температуре —26°С.
Для доливки компасной
жидкости в боковой стенке
котелка имеется отверстие
на уровне дополнительной
камеры.
Для сохранения гори-
зонтального положения
азимутального круга во
время качки котелок помещен в карданное кольцо. С помощью
двух цапф (шипов) карданное кольцо подвешивается в нактоузе.
Пеленгатор предназначен для измерения пеленгов и курсовых уг-
лов на ориентиры. Пеленгатор (рис. 20) состоит из основания /, пред-
метной мишени 3 и глазной мишени 6.
Основание выполнено в виде кольца, которое устанавливается на
азимутальном круге котелка и фиксируется на котелке с помощью
двух планок: одной — неподвижной, а другой — подвижной в виде
защелки. При установке и снятии пеленгатора защелку необходимо
оттянуть.
На основании с помощью шарниров крепятся глазная и предмет-
ная мишени. Предметная мишень представляет собой прямоугольную
рамку с натянутой посередине визирной нитью из тонкой ( 0-- 0,4 мм)
луженой медной проволоки. Для пеленгования небесных светил пред-
метная мишень имеет откидное зеркало 2.
Глазная мишень имеет вид планки с прорезью. При пеленговании
хорошо видимых и ярких предметов прорезь закрывается латунной
шторкой с узкой щелью.
Визирная плоскость пеленгатора проходит через середину прорези
глазной мишени и нить предметной. Для снятия отсчетов пеленга на
глазной мишени установлена в латунной оправе призма 5, закреплен-
ная на передвижной каретке. Призма несколько увеличивает изобра-
жение шкалы картушки, поэтому отсчет пеленга снимается с точностью
до 0,2°. Для пеленгования Солнца глазная мишень имеет два откид-
ных светофильтра 4.
При измерении магнитных сил на пеленгатор устанавливают вхо-
дящую в комплект компаса съемную планку 7 с чашкой для крепления
дефлектора.
Нактоуз (см. рис. 17) — силуминовая тумба, в которой устанавли-
ваются все основные части компаса. Нактоуз состоит из верхнего
основания 3, корпуса 2 и нижнего основания 1. В верхнем основании
на карданном кольце устанавливается котелок, крепятся специальные
индукционные пластины и компенсаторы 4 из мягкого железа (про-
дольные бруски) для уничтожения четвертной девиации.
Корпус имеет форму трубы с прямоугольным вырезом. Внутри
корпуса установлен девиационный прибор 6. Вырез закрывается крыш-
27
система компаса
кмо-т
кой 7, закрепляемой шпильками. Нижнее ос-
нование выполнено в виде фланца и предназна-
чено для крепления компаса на судне. К нак-
тоузу крепится блок питания 5 освещения, где
установлены переключатель источников пита-
ния, реостат регулировки яркости освещения и
предохранители.
Девиационный прибор предназначен для унич-
тожения полукруговой и креповой девиации и
состоит из латунной трубы и двух передвижных
кареток для крепления магнитов-уничтожите-
лей. Внутри’ трубы на медном тросике подве-
шен вертикальный магнит. Конец тросика за-
креплен на валике, установленном над трубой.
При- вращении валика изменяется положение
вертикального магнита.
Компасы марки УКП-М выпускаются про-
мышленностью на высоком нактоузе для исполь-
зования в качестве главных и на низком — в
качестве путевых.
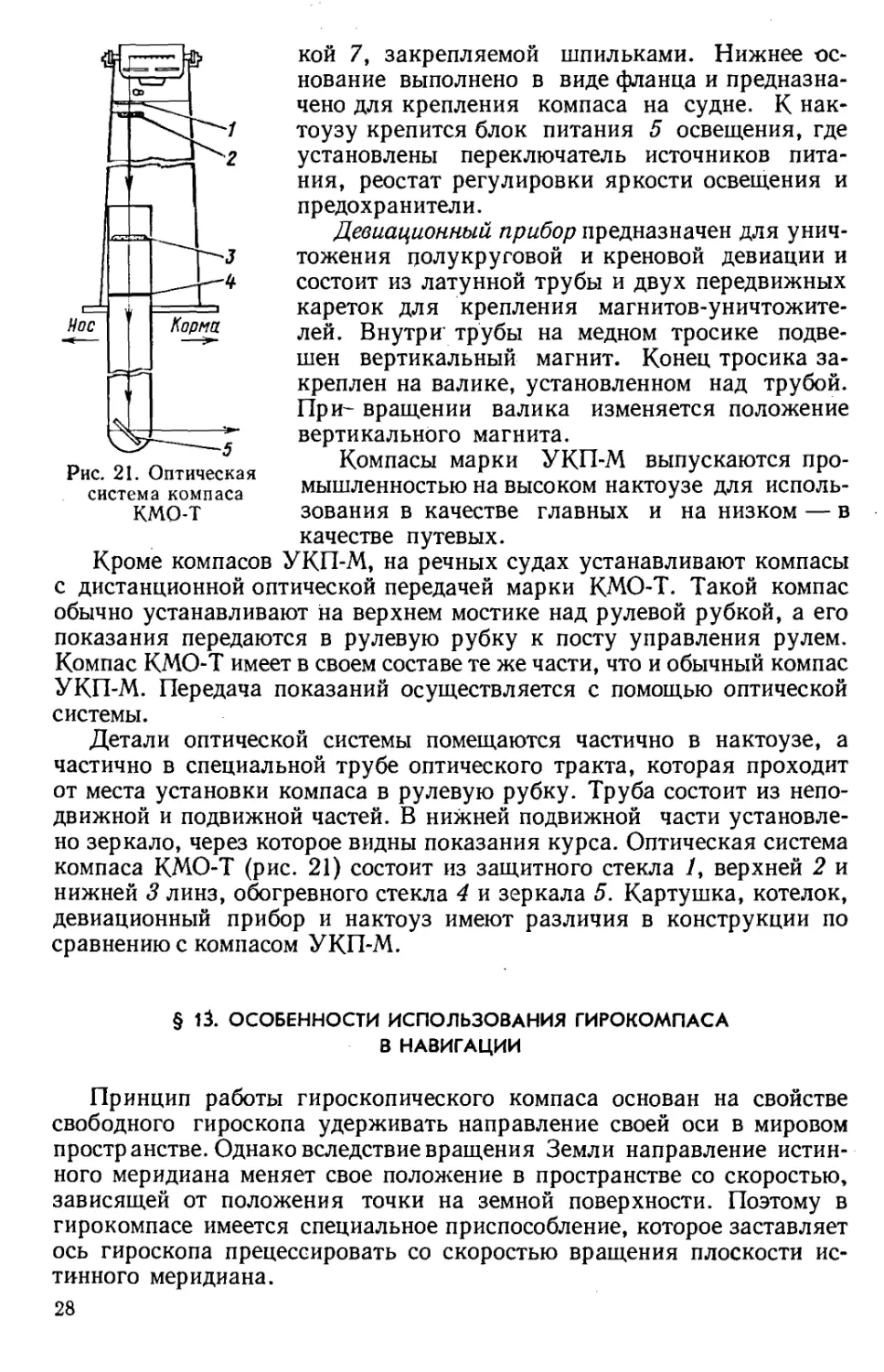
Кроме компасов УКП-М, на речных судах устанавливают компасы
с дистанционной оптической передачей марки КМО-Т. Такой компас
обычно устанавливают на верхнем мостике над рулевой рубкой, а его
показания передаются в рулевую рубку к посту управления рулем.
Компас КМО-Т имеет в своем составе те же части, что и обычный компас
УКП-М. Передача показаний осуществляется с помощью оптической
системы.
Детали оптической системы помещаются частично в нактоузе, а
частично в специальной трубе оптического тракта, которая проходит
от места установки компаса в рулевую рубку. Труба состоит из непо-
движной и подвижной частей. В нижней подвижной части установле-
но зеркало, через которое видны показания курса. Оптическая система
компаса КМО-Т (рис. 21) состоит из защитного стекла /, верхней 2 и
нижней 3 линз, обогревного стекла 4 и зеркала 5. Картушка, котелок,
девиационный прибор и нактоуз имеют различия в конструкции по
сравнению с компасом УКП-М.
§ 11 ОСОБЕННОСТИ ИСПОЛЬЗОВАНИЯ ГИРОКОМПАСА
В НАВИГАЦИИ
Принцип работы гироскопического компаса основан на свойстве
свободного гироскопа удерживать направление своей оси в мировом
пространстве. Однако вследствие вращения Земли направление истин-
ного меридиана меняет свое положение в пространстве со скоростью,
зависящей от положения точки на земной поверхности. Поэтому в
гирокомпасе имеется специальное приспособление, которое заставляет
ось гироскопа прецессировать со скоростью вращения плоскости ис-
тинного меридиана.
28
На движущемся судне ось чувствительного элемента гирокомпаса
стремится занять положение не в истинном меридиане, а в гироскопи-
ческим под некоторым углом к истинному меридиану бу, называемым
скоростной девиацией (погрешностью). В силу ряда механических и
технических причин ось чувствительного элемента гирокомпаса зани-
мает это положение не точно, а находится под некоторым углом Д
к гироскопическому меридиану.
Вертикальная плоскость, проходящая через главную ось (0—180°)
чувствительного элемента гирокомпаса, называется плоскостью гиро-
компасного меридиана. В пересечении с плоскостью истинного гори-
зонта эта плоскость дает гирокомпасный меридиан. Угол между плос-
костью истинного меридиана и гирокомпасным меридианом называется
поправкой гирокомпаса (ДГК).
Как видно из вышеуказанных рассуждений, поправка гирокомпа-
са складывается из двух величин: скоростной девиации бу и постоян-
ной на всех курсах поправки Д
ДГК = бу+ Д (31)
Скоростная девиация, зависящая от истинного курса, скорости
судна и широты места, определяется по выражению
е VcosHK
tg 6 v , (32^
v cos <p + V sin И К
где V — скорость судна;
R — радиус земного шара;
со — угловая скорость вращения Земли.
Если в (32) выразить V в узлах и подставить значение R и со, то с
учетом малости величины бу получим, что
УсозИК
v 900 cos ф +V sin И К
Во многих типах гирокомпасов скоростная девиация автоматичес-
ки исключается из показаний с помощью специального устройства —
корректора. В этом случае поправка гирокомпаса остается постоян-
ной на всех курсах и равна Д.
У гирокомпасов типа «Амур», используемых на судах Минречфлота,
в комплекте не предусмотрен корректор, поэтому величину бу нахо-
дят с помощью специальной линейки или выбирают из таблиц по
Ф, ИК и V. В табл. 1 приведены величины скоростной девиации
для скорости 10 узлов и диапазона широт от 30 до 70° в зависимости
от гирокомпасного курса.
Для других значений скорости судна выбранную из таблицы ве-
личину необходимо умножить на 0,11/.
Все направления, измеренные относительно гирокомпасного мери-
диана, называют гирокомпасными (гирокомпасный курс ГКК, гиро-
компасный пеленг ГКП). Соотношения между истинными и гирокомпас-
ными направлениями (рис. 22) определяются по алгебраическим фор-
29
Рис. 22. Гирокомпасные направления
мулам, аналогичным формулам (26)
и (27), при использовании магнит-
ного компаса:
• ик=гкк+дгк. у 3
ИП = ГКП + ДГК, ( '
ГКК=ИК-ЛГК, \
ГКП = ИП-ЛГК. I (35)
Поправку гирокомпаса опреде-
ляют такими же способами, что и
АМК (см. § 10), сравнивая истин-
ные и гирокомпасные направле-
ния,
дгк=ип—гкп,
(36)
ДГК = ИК-ГКК.
После определения АГК необходимо вычислить ее постоянную часть.
Для этого выбирают из таблиц бу на данный курс и вычисляют
А по формуле
Д=ДГК—бу. (37)
В дальнейшем для других курсов АГК рассчитывают по выражению
(31), предварительно определив бу по линейке или таблице.
При маневрировании судна под воздействием ускорений гирокомпас
выходит из гироскопического меридиана на некоторый угол, появля-
ются так называемые инерционные погрешности первого и второго рода.
После маневра эти погрешности постепенно уменьшаются и гироком-
пас снова приходит в меридиан.
Для уменьшения влияния инерционных погрешностей на точность
судовождения рекомендуется определять место с использованием гиро-
компаса и поправку компаса не ранее 10—15 мин после поворота.
Гирокомпас на судах смешанного плавания является основным
Таблица 1
Курс по гирокомпасу ГКК Широта <р°
- 1 1 + 1 1 + 1 30 40 | 50 | 55 | 60 | 65 | 70
0 180° 180° 360° 0,7° 0,8° 1,0° 1,1° 1,3° 1,5° 1,9°
10 170 190 350 0,7 0,8 1,0 1,1 1,2 1,5 1,8
20 160 200 340 0,7 0,8 0,9 1,0 1,2 1,4 1,8
30 150 210 330 0,6 0,7 0,9 1,0 1,1 1,3 1,6
40 140 220 320 0,6 0,6 0,8 0,8 1,0 1,2 1,4
50 130 230 310 0,5 0,5 0,6 0,7 0,8 1,0 1,2
60 120 240 300 0,4 0,4 0,5 0,6 0,6 0,8 0,9
70 ПО 250 290 0,2 0,3 0,3 0,4 0,4 0,5 0,6
80 100 260 280 0,1 0,2 0,2 0,2 0,2 0,3 0,3
90 90 270 270 0,0 0,0 0.0 0,0 0,0 0,0 0,0
30
курсоуказателем. Точность его показаний несколько выше, чем у
магнитного компаса, особенно на качке. Главное же преимущество
гирокомпаса в том, что его поправка в процессе эксплуатации более
стабильна, чем девиация магнитного компаса. Надежность работы ги-
рокомпаса как сложного электромеханического устройства во многом
зависит от уровня технического обслуживания. В процессе эксплуа-
тации у гирокомпаса могут возникать различные неисправности, вслед-
ствие которых иногда показания его становятся ошибочными. Обнару-
жить подобные неисправности обычно нелегко, поэтому необходимо
систематически определять ДГК и производить сличение показаний ги-
рокомпаса с магнитным компасом.
Глава IV
ОПРЕДЕЛЕНИЕ ПРОЙДЕННОГО РАССТОЯНИЯ В МОРЕ
§ 14. ИЗМЕРЕНИЕ СКОРОСТИ
И ПРОЙДЕННОГО СУДНОМ РАССТОЯНИЯ
Постоянное знание судоводителем достоверной скорости своего
судна является одним из важнейших условий безаварийного плавания.
Движение судна относительно дна со скоростью, называемой аб-
солютной, рассматривается в навигации как результат сложения век-
тора скорости судна относительно воды и вектора течения, действую-
щего в районе плавания.
В свою очередь вектор скорости судна относительно воды (относи-
тельная скорость) является результатом работы судовых движителей
и действия на судно ветра и волнения.
В условиях отсутствия ветра и волнения она наиболее просто оп-
ределяется по частоте вращения винтов.
Знание скорости дает возможность определить пройденное судном
расстояние So6 в милях:
= (38)
где Гоб — скорость судна, определенная по частоте вращения винтов, уз;
t — время плавания судна, ч.
Однако этот способ неточен, так как не учитывает изменение со-
стояния судна (обрастание корпуса, изменение осадки), влияние ветра
и волнения. На скорость судна относительно воды оказывают влияние
следующие факторы.
1. Степень загрузки, крен и дифферент судна. Скорость судна из-
меняется с изменением осадки. Обычно в условиях хорошей погоды
судно в балласте имеет несколько большую скорость, чем в полном
грузу. Однако с усилением ветра и волнения потери в скорости судна
в балласте становятся намного больше, чем судна в полном грузу.
Значительное влияние на изменение скорости оказывает дифферент.
Как правило, дифферент на нос снижает скорость. К таким же резуль-
татам приводит значительный дифферент на корму. Оптимальный ва-
риант дифферента выбирается на основании опытных данных.
31
Наличие крена судна вызывает его систематический уход с задан-
ного курса в сторону повышенного борта, что является следствием на-
рушения симметрии обводов погруженной в воду части корпуса. По
этой причине приходится чаще прибегать к перекладке руля для удер-
жания судна на курсе, а это в свою очередь ведет к уменьшению ско-
рости судна.
2. Ветер и волнение обычно действуют на судно одновременно и,
как правило, вызывают потери в скорости. Встречные ветер и волнение
создают значительное по силе сопротивление движению судна и ухуд-
шают его управляемость. Потери в скорости в этом случае могут быть
значительны.
Ветры и волнение попутного направления снижают скорость суд-
на в основном за счет резкого ухудшения его управляемости. Лишь при
слабом попутном ветре и незначительном волнении у отдельных ти-
пов судов наблюдается небольшое увеличение скорости.
3. Обрастание корпуса наблюдается при плавании судов в любых
условиях как в пресной, так и в соленой воде. Наиболее интенсивно
обрастание происходит в теплых морях. Следствием обрастания явля-
ется увеличение сопротивления воды движению судна, т.е. снижение
скорости. В средних широтах через шесть месяцев уменьшение скорости
может достигать 5—10%. Борьба с обрастанием ведется путем систе-
матической очистки корпуса судна и его окраски специальными не-
обрастающими красками.
4. Мелководье. Влияние мелководья на уменьшение скорости судна
начинает сказываться при глубинах в районе плавания
tf^4Tcp + 3V2/g,
где Н — глубина, м.
ТСр — средняя осадка судна, м;
V — скорость судна, м/с;
g — ускорение силы тяжести, м/с2.
Таким образом, определенная для конкретных условий плавания
зависимость скорости судна от частоты вращения винтов под влиянием
перечисленных факторов будет нарушена. В этом случае расчеты прой-
денного судном расстояния, выполненные по формуле (38), будут
содержать значительные ошибки.
В практике судовождения скорость судна иногда рассчитывают, ис-
пользуя известную зависимость
V—S/t,
где V — скорость судна относительно грунта, уз;
S — расстояние, пройденное с постоянной скоростью, мили;
/ — время, ч.
Учет скорости и пройденного судном расстояния осуществляется
наиболее точно с использованием специального прибора — лага.
Для определения скорости судна оборудуются мерные линии, к рай-
онам расположения которых предъявляются следующие требования:
32
отсутствие влияния мелководья,
что обеспечивается при минимальной
глубине, определяемой из соотноше-
ния
hit > 6,
где Н — глубина района мерной линии, м;
Т — осадка судна, м;
защищенность от господствующих
ветров и волнения;
отсутствие течений или наличие
слабых постоянных течений совпадаю-
щих с направлениями пробегов;
возможность свободного маневра
Рис. 23. Мерная линия
судов.
Оборудование мерной линии (рис. 23), как правило, состоит из не-
скольких параллельных секущих створов и одного ведущего, перпен-
дикулярного к ним. Расстояния между секущими створами вычисля-
ются с высокой точностью. В большинстве же случаев линия пробега
судов обозначается не ведущим створом, а выставленными вдоль нее
буями или вехами.
Обычно замеры делаются при полной загрузке и в балласте для
основных режимов работы двигателей. В период выполнения замеров
на мерной линии ветер не должен превышать 3 баллов, а волнение —
2 баллов. Судно не должно иметь крена, а дифферент должен быть в
оптимальных пределах.
Для определения скорости судну необходимо лечь по компасу на
курс, перпендикулярный линиям секущих створов, и развить заданную
частоту вращения движителей. Измерение продолжительности про-
бега обычно производится по показаниям трех секундомеров. В мо-
мент пересечения первого секущего створа пускают секундомеры и
через каждую минуту замечают показания тахометров. Секундо-
меры останавливаются с пересечением второго секущего створа.
Рассчитав среднее время продолжительности пробега по показа-
ниям секундомеров, определяют скорость по формуле
7 = 36005/С (39)
где 5 — длина пробега между секущими створами, мили;
t — средняя продолжительность пробега между секущими створами, с;
V — скорость суДна относительно грунта, уз.
Частота вращения движителей определяется как среднее арифме-
тическое значение из показаний тахометров за время пробега.
Если в районе мерной линии отсутствует течение, то скорости от-
носительно грунта и воды равны. В этом случае достаточно сделать
всего один пробег. При наличии в районе маневрирования постоянного
по направлению и скорости течения необходимо делать два пробега в
противоположные стороны. Относительная скорость судна 1/0 и часто-
та вращения движителей п в этом случае будут определяться по форму-
лам:
Vo = (Vx4-V2)/2, (40)
п=(п1 + ла)/2, (41)
2 Зак. 483 33
Рис. 24. График зависимости скоро-
сти от частоты вращения движителей
где Vp V2 — скорости судна относитель-
но дна на первом и втором
пробегах;
л1 и п2 — частота вращения движи-
телей на первом и втором
пробегах.
При действии в районе мерной
линии равномерно меняющегося
течения рекомендуется делать тре-
тий пробег в том же направлении,
что и первый, а скорость, свобод-
ная от влияния течения, рассчиты-
вается по приближенной формуле
-(V, ч 2У2+У3)/4. (42)
Если же характер изменения течения неизвестен или желают по-
лучить более точный результат, то делают четыре пробега и скорость
рассчитывают по формуле
Vo-(V1 + 3I/243Vb + V4)/8. (43)
Средняя частота вращения движителей в этих случаях рассчиты-
вается для трех и четырех пробегов соответственно:
n = (nj -|- 2п24л3)/4; (44)
и — (и- —|- Зи2 —I- Зн3 -р л4) / 8. (45)
Таким образом определяют скорость и частоту вращения движите-
лей для нескольких режимов работы главных двигателей в грузу и
в балласте. По полученным данным строят графики зависимости ско-
рости от частоты вращения движителей при различной загрузке судна
(рис. 24).
На основании данных графиков составляется таблица соответствия
скорости хода частоте вращения гребных винтов или таблица соответст-
вия частоты вращения винтов скорости судна.
Если по результатам прохождения мерной линии известна какая-
либо скорость и соответствующая ей частота вращения винтов, то
можно рассчитать значение скорости для любого промежуточного зна-
чения частоты вращения винтов по формуле Афанасьева
Vo^/no)^», (46)
где Vo — известная скорость при частоте вращения движителя л0;
Vn — искомая скорость для частоты вращения движителя пг.
Таким образом, определив скорость своего судна по графику за-
висимости ее от частоты вращения винтов, можно рассчитать прой-
денное расстояние в морских милях по формуле
S-Vo//60,
где Vo — скорость судна, уз;
t — время плавания, мин.
Если же известно пройденное расстояние, то расчет времени пла-
вания выполняется:
/ = 60S/v0.
34
По этим формулам составлены таблицы «Расстояние по времени и
скорости» и «Время по расстоянию и скорости» в МТ—75 приложения
2 и 3 соответственно.
Расчеты пройденного расстояния с использованием скорости, оп-
ределенной по частоте вращения винтов Уоб, выполняются лишь при
отсутствии лага или для контроля его работы.
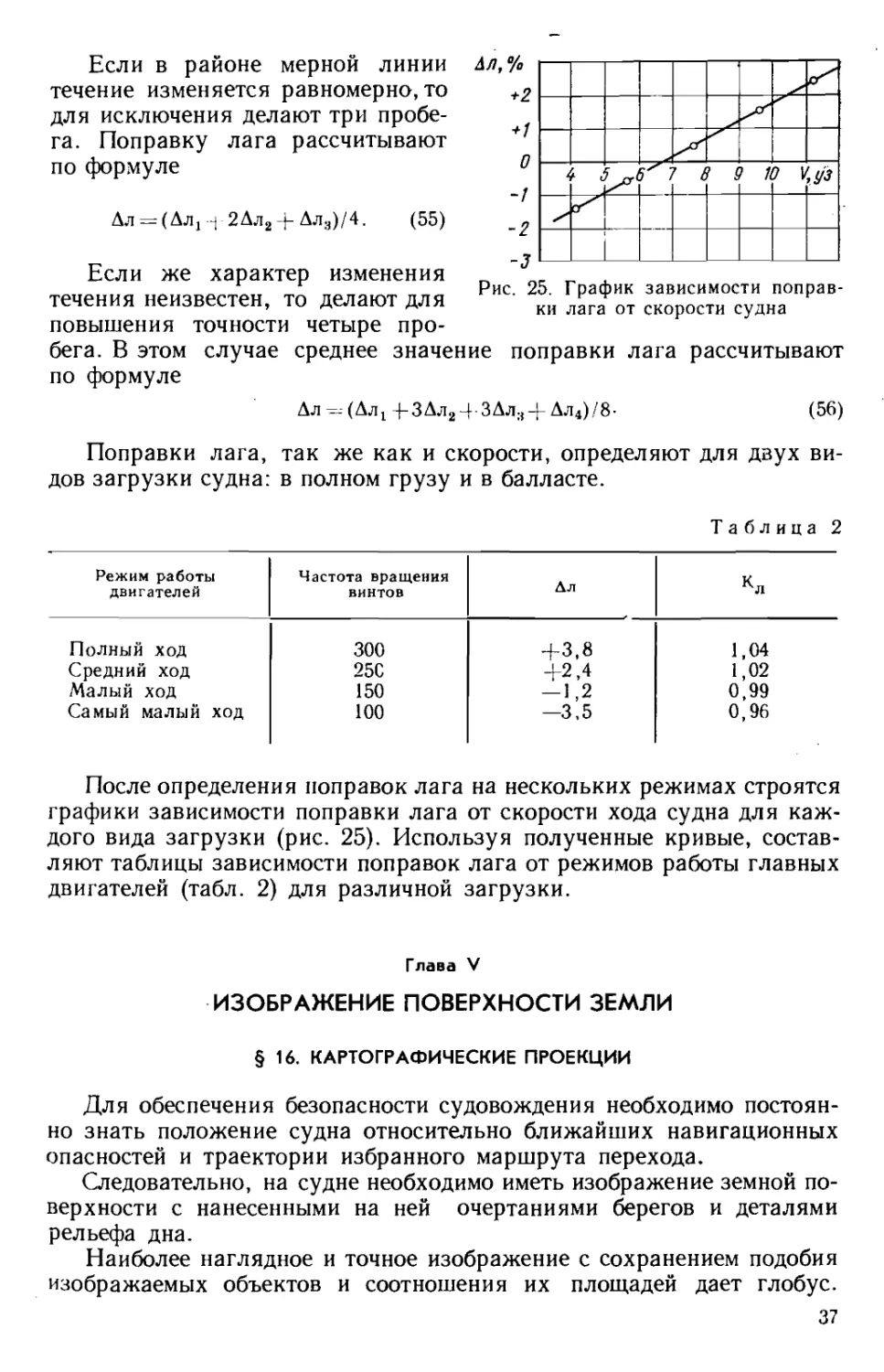
§ 15. ПОПРАВКА ЛАГА И КОЭФФИЦИЕНТ ЛАГА
Лаги, учитывая влияние ветра, волнения, загрузки и состояния
корпуса на скорость судна, значительно повышают точность учета
его движения.
В настоящее время на судах в эксплуатации находятся преимущест-
венно гидродинамические лаги отечественного производства ЛГ-2 и
Л Г-25. Они не обладают достаточной стабильностью и надежностью в
работе, сложны в эксплуатации. Более совершенными в этих отноше-
ниях являются индукционные лаги. Так, хорошо зарекомендовал се-
бя индукционный лаг ИЭЛ-2, устанавливаемый на судах новой по-
стройки. Этот лаг обладает высокой чувствительностью и стабильно-
стью своих показаний.
Гидродинамические и индукционные лаги относятся к числу от-
носительных лагов, так как измеряют скорость и пройденное судном
расстояние относительно воды.
Созданы и абсолютные лаги, которые измеряют скорость судна и
пройденное расстояние относительно грунта. Из-за высокой стоимо-
сти и сложности схемы они пока не нашли широкого распространения
на транспортных судах.
Лаги всех систем работают с некоторыми ошибками и требуют пе-
риодической выверки и регулировки. Та часть ошибки в показаниях
лага, которая не может быть скомпенсирована, определяется и затем
учитывается в виде поправки или коэффициента лага.
Поправка лага представляет собой относительную ошибку, взятую
с обратным знаком и выраженную в процентах,
S— рол
Ал~---------100, (47)
рол
где S — действительное расстояние, пройденное судном;
рол — разность отсчетов лага.
Знак поправки лага определяется знаком разности (S — рол).
Бели поправка положительна, то это означает, что лаг показывает рас-
стояние менее фактического.
Зная разность двух последовательных отсчетов лага и его поправ-
ку, можно определить пройденное судном расстояние относительно
воды
- рол (1 4 Ал/100).
(48)
35
2*
В МТ—75 (приложение 4) по этой формуле составлена таблица
«Пройденное расстояние по лагу», которая позволяет по аргументам
рол и Ал выбрать значение 5Л.
Однако для расчетов пройденного по лагу расстояния удобнее
использовать не поправку, а коэффициент лага
Кл = 5л/рол. (49)
Рассчитывается он с точностью до 0,01. Из выражения (49) получим
Зл~рол Кл- (50)
Если теперь сопоставить формулы (48) и (50), то легко можно прий-
ти к следующим зависимостям между Ал и Лл:
Кл = Ч-Ал/100; (51)
Ал — (Кл— 1) 100. (52)
При положительной поправке лага коэффициент его будет больше
единицы.
Регулировка лага и определение его поправок обычно совмещаются
с определением скорости судна и чаще всего выполняются на мерной
линии.
При отсутствии течения в районе мерной линии для определения
Ал и достаточно сделать один пробег. Однако, если в районе дей-
ствует постоянное течение, то для исключения его влияния делают
два пробега в противоположных направлениях. Расчеты поправки и
коэффициента лага производят по формулам:
Ал _ (Алх4- Ал2)/2; (53)
Кл-(КЛ1+Кл2)/2, (54)
где Алп Ал2, К КЛа — условные поправки и коэффициенты лага (без исклю-
1 а чения влияния течения) на первом и втором пробегах.
Иногда удобнее поправку лага определять через скорости, т.е.
Ал =-------- 100,
где Уо — скорость судна относительно воды на данном пробеге;
Ул — скорость судна относительно воды на данном пробеге по показаниям
лага.
Для определения замечают отсчет лага ол! и запускают секундо-
мер, в момент фиксирования произвольного отсчета лага ол2 секундо-
мер останавливают. По полученной разности отсчетов лага и времени
в секундах рассчитывают
1/^ 3600 рол//.
Для повышения точности наблюдения и расчеты на данном пробеге
можно повторить несколько раз, а результаты осреднить.
36
Если в районе мерной линии
течение изменяется равномерно,то
для исключения делают три пробе-
га. Поправку лага рассчитывают
по формуле
Ал = (Дл! j 2Дл2 + Дла)/4. (55)
Рис. 25. График зависимости поправ-
ки лага от скорости судна
Если же характер изменения
течения неизвестен, то делают для
повышения точности четыре про-
бега. В этом случае среднее значение поправки лага рассчитывают
по формуле
Дл — (Дл! -|-ЗДл24-ЗДлз + Дл4)/8-
(56)
Поправки лага, так же как и скорости, определяют для двух ви-
дов загрузки судна: в полном грузу и в балласте.
Таблица 2
Режим работы двигателей Частота вращения винтов Дл Кл
Полный ХОД 300 +3,8 1,04
Средний ход 25С +2,4 1,02
Малый ход 150 — 1,2 0,99
Самый малый ход 100 —3,5 0,96
После определения поправок лага на нескольких режимах строятся
графики зависимости поправки лага от скорости хода судна для каж-
дого вида загрузки (рис. 25). Используя полученные кривые, состав-
ляют таблицы зависимости поправок лага от режимов работы главных
двигателей (табл. 2) для различной загрузки.
Глава V
ИЗОБРАЖЕНИЕ ПОВЕРХНОСТИ ЗЕМЛИ
§ 16. КАРТОГРАФИЧЕСКИЕ ПРОЕКЦИИ
Для обеспечения безопасности судовождения необходимо постоян-
но знать положение судна относительно ближайших навигационных
опасностей и траектории избранного маршрута перехода.
Следовательно, на судне необходимо иметь изображение земной по-
верхности с нанесенными на ней очертаниями берегов и деталями
рельефа дна.
Наиболее наглядное и точное изображение с сохранением подобия
изображаемых объектов и соотношения их площадей дает глобус.
37
Однако от его использования отказались, так как даже при недостаточ-
ной навигационной информации он имеет недопустимо большие габа-
риты. Кроме того, вести учет плавания судна на сферической поверх-
ности намного сложнее, чем на плоскости.
Поэтому в практике мореплавания с древних времен было принято
изображать участки земной поверхности на плоскости, т.е. использо-
вать карты.
Наука, занимающаяся составлением, производством и использо-
ванием карт, называется картографией.
Развернуть сферическую поверхность Земли в плоскость без раз-
рывов и складок невозможно. Поэтому приходится прибегать к растя-
жениям и сжатиям, что приводит к искажениям изображаемых участ-
ков.
Математически выраженный способ изображения поверхности зем-
ного эллипсоида или шара на плоскости называется картографичес-
кой проекцией.
Суть всякой картографической проекции определяется функцио-
нальной зависимостью между географическими координатами точки
на Земле и ее же координатами на проекции:
х-Л (ф; X), у- f2 (ф2; X).
Другими словами, можно сказать, что картографическая проекция—
это способ условного изображения на плоскости совокупности коор-
динатных линий, называемой картографической сеткой.
Общим требованием для всех картографических проекций являет-
ся непрерывность и однозначность функциональных зависимостей
географических и картографических координат точек. В этом случае
изображение земной поверхности будет сплошным, без разрывов.
Картографические проекции по характеру искажений делятся на
следующие классы:
равноугольные или конформные;
равновеликие или эквивалентные;
произвольные.
Равноугольные проекции сохраняют равенство углов между какими-
либо направлениями на карте углам между теми же направлениями
на местности. В этих проекциях сохраняется подобие фигур, а част-
ный масштаб в любой точке одинаков по всем направлениям.
Равновеликие проекции сохраняют пропорциональность между пло-
щадями фигур на карте и на местности.
К произвольным проекциям относят все остальные, которые не удов-
летворяют условиям равноугольности и равновеликости.
Кроме того, картографические проекции делятся по способу по-
строения картографической сетки. Из- числа этих проекций кратко
рассмотрим только азимутальные, конические и цилиндрические.
Азимутальная проекция (рис. 26) получается проектированием
по тому или иному закону сетки географических меридианов и парал-
лелей на плоскость, касательную к поверхности Земли в какой-либо
точке.
38
Если за точку касания этой
плоскости принять один из геогра-
фических полюсов Земли, то полу-
чим параллели в виде концентриче-
ских кругов, а меридианы в виде
радиальных линий, исходящих из
точки касания.
Коническая проекция (рис. 27)
получается проектированием сетки
географических меридианов и па-
раллелей на поверхность конуса,
касающегося или рассекающего по-
верхность Земли, с последующим
развертыванием конуса в плос-
кость. В этой проекции меридианы
изображаются прямыми, исходя-
щими из одной точки, а паралле-
Рис. 26. Азимутальная проекция
ли — концентрическими окружно-
стями с общим центром в этой же точке. Многие географические
карты выполнены в этой проекции.
Цилиндрическая проекция получается проектированием сетки гео-
графических меридианов и параллелей на поверхность цилиндра,
касающегося по большому кругу или секущего по малым кругам по-
верхность Земли. В этом случае меридианы и параллели на проекции
представляют собой взаимно перпендикулярные прямые линии.
Уравнение цилиндрических проекций имеет следующий вид:
*-7(ф); y~-=cl,
(57)
где х — удаление заданной параллели от экватора;
ф — широта заданной параллели;
у — расстояние между начальным и заданным меридианами по экватору;
с — коэффициент пропорциональности;
X — долгота заданного меридиана.
Рис. 27. Коническая проекция
39
Рис. 28. Нормальная цилиндрическая
проекция
Если ось Земли и ось цилиндра
совпадают, то проекция назы-
вается нормальной цилиндрической
(рис. 28).
В этой проекции все меридианы
и параллели изображаются прямы-
ми параллельными линиями, при-
чем меридианы и параллели взаим-
но перпендикулярны. Нормальная
цилиндрическая проекция может
обладать свойствами равноуголь-
ности, равновеликости или быть
произвольной в зависимости от
избранного закона проектирова-
ния. Равноугольная нормальная
цилиндрическая проекция являет-
ся основной для построения мор-
ских карт.
Если ось цилиндра лежит в плоскости экватора Земли, то проекцию
называют поперечной цилиндрической.
Равноугольная поперечная цилиндрическая проекция является
основной для построения многих речных карт и атласов.
При использовании любой картографической проекции земная
поверхность на карте изображается в уменьшенном виде. Степень
уменьшения отрезков на карте относительно соответствующих отрез-
ков на местности называется масштабом.
Так как нет картографических проекций, свободных от искажений,
то масштаб карты является величиной переменной. Он меняется с из-
менением направления и с переходом от одной точки к другой.
Поэтому масштабом карты в какой-либо точке по заданному направ-
лению называется отношение бесконечно малого отрезка на карте к
соответствующему бесконечно малому отрезку на местности, т.е.
O-dS0/dS,
где dS0 — бесконечно малый отрезок на карте в данной точке по заданному на -
правлению;
dS — бесконечно малый отрезок на местности, соответствующий отрезку
на карте.
Этот масштаб называется частным масштабом карты.
При составлении карты используются так называемый главный
масштаб, который сохраняет свое постоянство по определенной
линии (например, параллели), называемой главной, или в определен-
ных точках карты.
Масштаб может выражаться в виде дроби, числитель которой —
единица, а знаменатель — число, показывающее степень уменьшения
изображения на карте. Такой масштаб называется числовым или чис-
ленным, Например, числовой масштаб 1/250000 означает, что единице
длины на карте соответствуют 250 тыс. таких же единиц длины на
местности. Этот масштаб может быть записан и в таком виде: 1 : 250000
или 0,000004.
40
Иногда удобнее для измерения отрезков использовать линейный
масштаб. Линейным масштабом называется величина, показывающая,
сколько единиц длины высшего порядка (миль, км и т. д.) на местно-
сти содержится в единице длины низшего порядка (см, мм) на карте.
Обычно принято линейный масштаб на картах изображать в виде
горизонтальной шкалы. Он может быть адан в виде: в 1 см — 5 морс-
ких миль.
Принято считать, что длину какого-л ^бо отрезка на карте можно
измерить с точностью до 0,2 мм.
Линейное расстояние на местности, соответствующее 0,2 мм на кар-
те, называется предельной точностью масштаба. Так, предельная
точность масштаба 1/300000 равна 60 м.
§ 17. ЛОКСОДРОМИЯ
Если совершать плавание постоянным курсом, то траектория пе-
ремещения судна по земной поверхности будет представлять собой кри-
вую, называемую в математике логарифмической спиралью,
В навигации эта сложная двоякой кривизны линия называется
локсодромией, что в переводе с греческого языка означает «косой
бег».
Однако кратчайшее расстояние между двумя точками на земном
шаре измеряется по дуге большого круга.
Дуга большого круга получается как след от пересечения земной по-
верхности с плоскостью, проходящей через центр Земли, принимаемой
за шар.
В навигации дуга большого круга получила название ортодромия,
что в переводе означает «прямой бег». Второй особенностью ортодромии
является то, что она пересекает меридианы под различными углами
(рис. 29).
Разность расстояний между двумя точками на земной поверхности
по локсодромии и ортодромии имеет практическое значение только при
больших океанских переходах. В обычных же условиях этой раз-
Рис. 30. Локсодромия и ее изображе-
ние на меркаторской проекции
Рис. 29. Ортодромия и локсодромия
41
ностью пренебрегают и плавание совершают на постоянном курсе,
т.е. по локсодромии.
Для вывода уравнения возьмем на локсодромии (рис. 30, а) две
точки А и В, расстояние между которыми элементарно мало. Проведя
через них меридианы и параллель, получим элементарный прямо-
угольный сферический треугольник АВС. В этом треугольнике угол,
образованный пересечением меридиана и параллели, прямой, а угол,
Р^АВ равен курсу судна К. Катет АС представляет отрезок дуги мери-
диана и его можно выразить
4С = /?Дф,
где В — радиус Земли, принятой за шар;
Дф — элементарное приращение широты (разность широт).
Катет СВ представляет отрезок дуги параллели
СВ = гДЛ,
где г — радиус параллели;
ДЛ — элементарная разность долгот.
Из треуголника ОО±С можно найти, что
Г— cos ф.
Тогда в окончательном виде катет СВ можно выразить так:
СВ = /?ДХ cos <р.
Принимая элементарный сферический треугольник АВС за плоский,
напишем
7?ДЛ cos <р
tgK=—•
/?Дф
После сокращения Р и замены элементарно малых приращений
координат бесконечно малыми будем иметь
dX — tg К^ф/cos <р.
Проинтегрируем полученное выражение в пределах от фт, до <р2, Л2,
считая значение tgK величиной постоянной:
fp2
J г/ф/соэф.
М <Р1
В правой части имеем табличный интеграл. После подстановки его
значения получим уравнение локсодромии на шаре
Л2—Zi = tg К [In tg (45° Ь ф2/2) —In tg (45е -Н <рл/2)]. (58).
Анализ этого уравнения позволяет сделать следующие выводы:
при курсах 0 и 180° локсодромия превращается в дугу большого
круга — меридиан;
при курсах 90 и 270е локсодромия совпадает с параллелью;
локсодромия пересекает каждую параллель только один раз, а
каждый меридиан бесчисленное количество раз. т.е. спиралеобразно
приближаясь к полюсу она его не достигает.
42
Плавание постоянным курсом, т. е. по локсодромии, хотя она и не
является кратчайшим расстоянием между двумя точками на Земле,
представляет для судоводителя значительные удобства.
Требования, предъявляемые к морской навигационной карте, мож-
но сформулировать, основываясь на преимуществе плавания по локсо-
дромии и результатах анализа ее уравнения следующим образом.
1. Локсодромия, пересекая меридианы под постоянным углом,
должна изображаться прямой линией.
2. Картографическая проекция, используемая для построения
карт, должна быть равноугольной, чтобы курсы, пеленги и углы на
ней соответствовали своему значению на местности.
3. Меридианы и параллели, как линии курсов 0, 90, 180° и 270°,
должны быть взаимно перпендикулярными прямыми линиями.
Картографическая проекция, удовлетворяющая перечисленным
требованиям, была предложена голландским картографом Герардом
Крамером (Меркатором) в 1569 г. В честь ее создателя проекция полу-
чила название меркаторской.
§ 18. НОРМАЛЬНАЯ РАВНОУГОЛЬНАЯ ЦИЛИНДРИЧЕСКАЯ
ПРОЕКЦИЯ МЕРКАТОРА
Рассмотрим, при каком условии обеспечивается равноугольность
меркаторской проекции. Для этого, принимая Землю за шар радиусом
возьмем на ней элементарно малый отрезок локсодромии АВ. Че-
рез начальную и конечную точки проведем меридианы PnALx и PnBL%,
а через точку В — отрезок параллели СВ (см. рис. 30,а).
В результате построения получили элементарно малый сферический
треугольник АВС, который можно принять за плоский и прямоуголь-
ный.
В этом треугольнике угол Р^АВ определяет направление локсодро-
мии, т.е. курс судна К для перехода из точки А в точку В.
Рассуждая аналогично, как и при выводе уравнения локсодромии,
можем написать
ctgK = HC/CZ?= -т •
/?Дл cos <р
Спроектируем участок земной поверхности, ограниченный мери-
дианами PjvALi и PjvBL2, на плоскость. Меридианы изобразятся в виде
двух параллельных прямых, перпендикулярных проекциям отрезков
экватора и параллели (рис. 30, б). В полученном на плоскости треуголь-
нике abc катет cb будет равен длине отрезка экватора 1Х12, т.е. cb =
— = Катет ас обозначим AD, а угол cab — К,.
Из треугольника авс имеем
ДО
ctg Ki = ac/cb = •
А?Дл
Так как мы хотим определить условие равноугольности меркаторс-
кой проекции, то примем, что углы на местности и на проекции равны
К = Кг
43
Следовательно: ctgK = ctgKi и
AZ) /?Аф
~RAX cos ф ’
AD — R Acp/cos (p.
Перейдем от элементарно малых приращений к бесконечно малым
dZ) = АМф/cos ф.
Проинтегрируем выражение от 0 до ср, получим
ф
Z) = 7?j <fcp/cos ф — R In tg (45° + ф/2). (59)
о
Величина D представляет собой расстояние по меридиану от эк-
ватора до заданной параллели в меркаторской проекции и называется
меридиональной частью (МЧ).
Таким образом, только потому, что каждая параллель, вытяну-
тая до длины экватора, отстоит от него на соответствующее ей расстоя-
ние D, проекция Меркатора равноугольна.
Меридиональная часть — величина линейная и, с точки зрения
картографии, ее удобнее выражать в экваториальных милях, т.е.
через длину Г дуги экватора.
1 экв. миля = /? arc 1'—/?/3437,7468.
Отсюда R = 3437,7468 экв. мили.
Подставим в найденное выражение D значение R в экваториальных
милях, а также введем в формулу модуль т = 0,4342945 для перехо-
да от натуральных к десятичным логарифмам:
3437,7468
0,4342945
In tg(45° + <p/2),
окончательно имеем D = 7 915,705' 1g tg (45° + <р/2).
Однако в картографии форма Земли принимается за эллипсоид.
Поэтому при составлении таблицы 26 МТ—75 использована формула
меридиональной части, в которую введен дополнительный член, учи-
тывающий сжатие Земли. По аргументу широты, которая дана с ин-
тервалом в одну минуту, можно выбрать из этой таблицы значение
меридиональной части с точностью до одной десятой экваториальной
мили.
Анализ формулы (59) показывает, что при <р = 90°
tg(45°+90°/2) = co и D—оо,
т.е. построить карту в меркаторской проекции для районов, охваты-
вающих полюса, невозможно. Кроме того, для высоких широт проек-
ция дает большое искажение площадей.
По этим двум причинам проекция Меркатора используется для по-
строения морских карт только до параллели 85°.
Расстояние по меридиану между двумя параллелями на меркатор-
ской карте, выраженное в экваториальных милях, называется разно-
стью меридиональных частей и обозначается AZ) или РМЧ.
44
Для доказательства того, что локсодромия на меркаторской проек-
ции изображается прямой линией из треугольника abc (см. рис. 30, 6),
напишем RMJ&D = tgKi или с учетом К = Кг
= — tgKAZX
R
Переходя к бесконечно малым приращениям и интегрируя выра-
жение от до Х2, будем иметь
Х2 d2
R"V,gK J “°
М Di
или Х2—Xl = -^-tgK(D2 —Dj).
Л
Подставив в полученное равенство значения D± и О2, получим вы-
ражение
х2-Xx = tg к [In tg (45° + <р2/2)-In tg(45°4-<p1/2)J,
которое является уравнением локсодромии.
Отсюда можно сделать вывод, что локсодромия в проекции Мерка-
тора действительно изображается прямой линией (в нашем примере —
прямая ab). Таким образом, мы доказали, что карта в меркаторской
проекции удовлетворяет ранее рассмотренным нами требованиям.
На основании общего уравнения цилиндрических проекций (57)
уравнение для проекции Меркатора можно представить в следующем
виде:
х = D=R In tg (45° + <р/2);
y = RA'k.
§ 19. МАСШТАБ МЕРКАТОРСКОЙ КАРТЫ
Графическое изображение одной минуты дуги меридиана (морской
мили) в данной широте на карте меркаторской проекции называется
меркаторской милей.
Если на карте указанной проекции провести две параллели через
одну минуту широты, то разность меридиональных частей этих па-
раллелей будет представлять собой меркаторскую милю в экваториаль-
ных минутах. Она может выражаться и в миллиметрах.
Особенностью меркаторской проекции является то, что масштаб
карты, сохраняя свое постоянство по всем направлениям, изменяется
с широтой. Следовательно, и линейные размеры меркаторской мили
также будут зависеть от широты. По этой причине, графическое изо-
бражение меркаторских миль дается в виде линейного масштаба, на-
несенного на боковых рамках карты. Используя указанный масштаб,
необходимо помнить, что все измерения проводятся в той его части, в
широте которой совершает плавание судно.
45
При расчетах и построении
карт в меркаторской проекции
применяется постоянная величи-
на, получившая название едини-
цы карты (е). Она представляет
собой графическое изображение
длины экваториальной минуты
земного сфероида на карте проек-
Рис. 31. Масштаб и единица мерка- ЦИИ Меркатора.
торской карты Для вывода выражения едини-
цы карты, принимая Землю за шар
радиусом 7?, берут два меридиана с разностью долгот Г и две парал-
лели для <рх и ф2 (рис. 31). Длина полученных отрезков дуг будет
определяться равенствами:
АВ = R arc 1
А' В' = гг аге Г = R cos (pt arc 1';
A" A" — r2 arc 1' =R cos ф2 arc 1',
где = R cos (pi и r2 = /?cos(p2 — радиусы соответствующих параллелей.
Дуга АВ. представляющая собой длину экваториальной минуты,
может быть изображена на карте только в уменьшенном виде.
Используя проекцию Меркатора, избранный участок земной по-
верхности переносят на плоскость в масштабе по экватору 1/Сэ, где
Сэ — знаменатель числового масштаба.
На проекции отрезок ab будет представлять собой графическое изо-
бражение единицы карты, а ее величина будет выражена
e — ab~^ ABjCd = R arc Г/Сэ.
При различной длине отрезков параллелей А'В' и А”В" на земном
шаре на проекции получим е = ab = a'bf = ab”.
Такое равенство свидетельствует о том, что для каждой параллели
использован свой масштаб уменьшения.
Следовательно,
е = R arc 1'/Cd = R cos (pt arc 1' /Сг~ R cos <p2 arc 1'/C2. (60)
где и C2 знаменатели числовых масштабов для параллелей в широте (рх и ф2.
Из равенства (60) можно вывести следующие зависимости:
Сэ;: sec (pi*,
Cg — ^2 sec (jp2»
т.е. знаменатель числового масштаба на экваторе в sec <р раз больше
знаменателя числового масштаба на параллели в широте <р данной
карты, а также
C-j Cg COS (PlI
С2 —1 Cq cos ф2,
Ci/C2 = cos фх/cos ф2.
Знаменатели числовых масштабов относятся друг к другу, как
косинусы широт соответствующих параллелей.
46
Для построения карты в меркаторской проекции задаются грани-
цы будущей карты в виде крайних параллелей (q?N, <ps) и меридианов-
(1Е, lw), масштаб по главной параллели (1/С0) и ее широта (<р0).
Так как в картографии Земля принимается за эллипсоид вращения,
то в формулу единицы карты вместо 7? подставляется значение боль-
шой полуоси а или же радиуса главной параллели, учитывающей в-
своем выражении сжатие Земли. Обычно е выбирают из картографи-
ческих таблиц по аргументам 1/С0 и <р0.
Длину горизонтальных рамок карты рассчитывают по формуле
а = е (ЛЕ
где (ХЕ — Xw)' — разность долгот восточной и западной рамок;
е — единица карты, мм.
Размеры боковых рамок определяются из выражения
b = e (D^
где (DN — Ds) — разность меридиональных частей для широт северной и юж-
ной рамок.
Положение промежуточных меридианов и параллелей рассчиты-
вается, как их удаление от соответствующих рамок карты, с исполь-
зованием аналогичных формул. Такие же расчеты выполняются при
нанесении на карту основных опорных пунктов. Все остальные карто-
графические материалы наносятся с использованием географических
координат.
Если построение меркаторской карты выполнить относительно
какой-то главной параллели, то она на проекции будет изображать-
ся без искажений. Параллели, находящиеся севернее главной, вытя-
нутся до ее размеров, и масштаб их увеличится. Параллели, располо-
женные южнее главной, укоротятся до ее размеров, и масштаб их
уменьшится.
Составление карт какого-либо моря в одном масштабе, отнесенном
к единой главной параллели, позволяет склеивать их друг с другом,
так как частные масштабы в одних и тех же широтах будут равны.
§ 20. КЛАССИФИКАЦИЯ МОРСКИХ КАРТ ПО НАЗНАЧЕНИЮ
Изданием морских карт в Советском Союзе занимается Главное
управление навигации и океанографии Министерства обороны СССР
(ГУНиО). Суда снабжаются картами через базовые радионавигацион-
ные камеры пароходств.
По своему назначению морские карты делятся на навигационные,
специальные справочные и вспомогательные.
Навигационные карты используются для ведения счисления пути
судна в различных условиях плавания и делятся на подгруппы: морс-
кие навигационные, радионавигационные, навигационно-промысловые
и речные карты.
Морские навигационные карты представляют основную подгруппу
навигационных карт. Они составляются в меркаторской проекции и
47
содержат подробную информацию о рельефе дна, о характере берего-
вой черты и о средствах навигационного оборудования. На них непо-
средственно ведется счисление пути судна.
В зависимости от назначения морские навигационные карты со-
ставляются в различных масштабах. Чем крупнее масштаб, тем боль-
ше навигационной информации содержит карта. Следовательно, плавая
вблизи берега, в узкости, необходимо использовать карты самого круп-
ного масштаба.
Морские навигационные карты делятся по масштабам на генераль-
ные, путевые, частные и планы.
Генералъные карты — составляются в масштабе от 1 : 1 000 000
до 1:5 000 000 и служат для общего изучения условий плавания,
общих навигационных расчетов, предварительной прокладки перехо-
да и для обеспечения плавания на большом удалении от берега. На
картах этих масштабов изображаются значительные части водной ак-
ватории мирового океана: целые моря или их части, заливы и т.п.
На них наносятся навигационные опасности, расположенные только
на большом удалении от берега, и их ограждения, маяки, имеющие
большую дальность действия.
Путевые карты — составляются в масштабах от 1 : 100 000 до
1 : 500 000. Подробность нанесения навигационной обстановки на этих
картах обеспечивает безопасное плавание судов вдоль побережья.
Небольшие прибрежные опасности на путевых картах обобщены, а не-
видимые с моря огни и знаки, как правило, не показаны.
Карты одного моря составляются с использованием единой (стандарт-
ной) главной параллели.
Такими главными параллелями являются: для Баренцева моря —
69°, Белого — 66°, Балтийского — 60°, Охотского — 52°, Черного и
Азовского морей—44°, Каспийского моря—42°.
Частные карты — составляются в масштабах от 1 : 25 000 до
1 : 50 000 и предназначаются для плавания судов в непосредственной
близости от берегов, в стесненных навигационных условиях. На част-
ных картах показываются все навигационные опасности и их ограж-
дение, все огни и знаки, включая рейдовые и портовые.
Планы имеют масштаб в пределах от 1 : 1 000 до 1 : 25 000; состав-
ляются для бухт, гаваней, рейдов, якорных мест. На них наносят
всю без исключения обстановку, имеющую какое-либо отношение к
судовождению. Внешне план отличается от карты отсутствием мери-
дианов и параллелей, а также координатной разбивки рамок. Под за-
головком плана даются точные координаты какого-либо опорного
пункта, расположенного в его пределах, и линейные масштабы рас-
стояний (широты и долготы).
Радионавигационные карты составляются в меркаторской проек-
ции преимущественно в масштабах генеральных и путевых карт. На
них наносятся сетки изолиний, которые позволяют определять на карте
место судна с использованием радионавигационных систем.
Предназначение справочных карт понятно из их названия. Они
обычно содержат информацию, необходимую судоводителю как при
подготовке, так и в ходе самого плавания. К справочным картам от-
48
носятся карты элементов земного магнетизма, карта часовых поясов,
карты рекомендованных путей, карта звездного неба, карты грунтов,
течений и др. Как правило, эти карты составляются в меркаторской
проекции и в мелком масштабе.
Вспомогательные морские карты используются при решении неко-
торых навигационных и других специальных задач. Примером таких
карт могут служить карты для прокладки дуги большого круга.
§ 21. СТЕПЕНЬ ДОВЕРИЯ
К МОРСКИМ НАВИГАЦИОННЫМ КАРТАМ
Основанием для оценки достоинства карты и степени доверия к
ней служит следующая информация.
’1. Сроки проведения картографической описи и составления карты.
Чем позже составлена карта, тем большего доверия он заслуживает.
Необходимо иметь в виду, что карта с течением времени теряет свое
сходство с местностью как по естественным, так и по искусственным
причинам. Примерами воздействия естественных причин является
изменение рельефа дна в результате вулканической деятельности,
изменение глубины в районах впадения рек за счет выноса и подвижки
грунта течением. К примерам воздействия искусственных причин
можно отнести проведение дноуглубительных работ, свалку грунта в
отведенном районе, строительство гидротехнических сооружений,
каналов и т.п.
2. Масштаб составления описи и карты. Чем крупнее масштаб, тем
больше информации можно вместить на карте. Следовательно, исполь-
зование карт крупного масштаба предпочтительнее.
3. Подробность промера глубин. Частое и равномерное указание
глубин на карте с заметно выраженным направлением промерных гал-
сов, наличие и непрерывность изобат на карте свидетельствует о про-
ведений подробного промера. Такая карта, с этой точки зрения, заслу-
живает доверия.
4. Характер грунта и рельефа морского дна. Плавный рельеф дна
характеризуется равномерным изменением глубин, отсутствием банок
и островов. При данном рельефе дна в точке, где не измерялась
глубина, можно уверенно определить ее по рядом нанесенным глуби-
нам. Однако необходимо иметь в виду, что песчаные и илистые грунты
под воздействием течений могут перемещаться, поэтому вблизи устьев
рек и лагун можно наблюдать неравномерное изменение глубин и
несоответствие их карте.
Сложный рельеф дна образуется каменистым грунтом и характе-
ризуется скачкообразным изменением глубин, наличием банок и ост-
ровов. В этом случае в точке, где не измерялась глубина, даже при под-
робном промере можно ожидать какую угодно малую глубину. Следо-
вательно, при плавании в таком районе необходимо критически от-
носиться к показанным на карте глубинам и соблюдать осторожность.
Используя впервые морскую навигационную карту, необходимо
тщательно ознакомиться со всеми надписями на ней, начиная с заголов-
49
ка. Это дает возможность уяснить масштаб карты, в каких единицах и
над каким уровнем даны глубины и высоты, к какому году приведено
магнитное склонение и характер его изменения. Здесь же приводятся
различного рода предупреждения и примечания, знание которых не-
обходимо судоводителю при плавании в данном районе или при ис-
пользовании данной карты.
Зарамочные надписи дают информацию о сроках составления пер-
вого и нового издания карты, большой и малой ее корректурах.
После этого переходят к рассмотрению элементов содержания кар-
ты, для чего необходимо хорошо знать основные условные обозначения,
применяемые на картах и планах.
Практика мореплавания на основании многолетнего опыта выра-
ботала следующие рекомендации для судоводителей.
1. Необходимо пользоваться картой наибольшего масштаба, в осо-
бенности при плавании в прибрежных районах.
2. При расхождении навигационных данных лоции с картой при-
нимать за основу данные, показанные на карте Самого крупного мас-
штаба с учетом последней корректуры.
3. При наличии «белых пятен» на карте необходимо иметь в виду,
что в этих местах глубины никогда не измерялись и поэтому здесь мож-
но встретить любую малую глубину, особенно при сложном рельефе
дна.
4. Отсутствие на карте изобат говорит о недостаточной подробности
промера. К таким картам необходимо относиться с предосторожностью.
5. Изобату 20 м следует считать предостерегательной для судов с
большой осадкой, а изобату Юм — для судов с малой осадкой.
В глубоководных районах при сложном рельефе дна предостерега-
тельными изобатами могут служить изобаты 100—200 м. За предо-
стерегательные изобаты рекомендуется заходить, только придержи-
ваясь огражденных фарватеров.
При плавании вне фарватеров принимать все меры предосторож-
ности (уменьшение хода, непрерывное измерение глубин и т.д.\
6. При оценке грунта для выбора якорной стоянки необходимо иметь
в виду, что показанные на карте грунты могут соответствовать только
тонкому поверхностному слою грунта морского дна.
Информация на морских навигационных картах устаревает очень
быстро. После получения откорректированных карт в базовой радио-
навигационной камере пароходства дальнейшая их корректура вы-
полняется штурманским составом судна.
Поддержание на уровне современности судового комплекта карт
должно являться постоянной заботой судоводителя.
Г лава VI
СЧИСЛЕНИЕ ПУТИ СУДНА
§ 22. ГРАФИЧЕСКОЕ СЧИСЛЕНИЕ И ЕГО ТОЧНОСТЬ
Учет движения судна с целью определения его текущих координат
или нанесения места на карту называется счислением пути судна.
Посредством несложных расчетов или графических построений
счисление должно в любой момент отображать место судна относи-
тельно окружающей обстановки с точностью, обеспечивающей нави-
гационную безопасность, т.е. оно должно быть непрерывным, нагляд-
ным и точным.
Различают два вида счисления: графическое, при котором оно вы-
полняется в виде графических построений на морских навигационных
картах, и аналитическое, или письменное, при котором координаты
судна вычисляются по формулам.
Оба вида счисления могут выполняться автоматически и вручную.
В навигации наибольшее распространение получило графическое
счисление, как отвечающее всем предъявляемым требованиям и осо-
бенно в части наглядности.
Автоматическое графическое счисление осуществляется с помощью
специальных приборов — автосчислителей.
Графическое счисление вручную выполняется штурманом судна с
использованием прокладочного инструмента. При этом приходится
решать прямую и обратную задачи.
Прямая задача сводится к учету уже совершившегося перемеще-
ния судна, когда рулевому задан курс и известны показания лага в
исходной и данной на момент расчета точках.
В этом случае решаются формулы (26), (34) для расчета ИК-
Если отсутствует дрейф от ветра и снос течением, то, проложив
от исходной точки линию истинного курса, будем иметь на карте на-
правление фактического перемещения судна. Это справедливо в том
случае, если поправка курсоуказателя известна безошибочно, а рыс-
кание рулевого незначительно и симметрично относительно заданно-
го КК.
Линия курса на карте проводится простым карандашом мягкости
«ТМ», толщиной, равной толщине меридианов и параллелей. Над
ней указывается значение компасного курса и поправки компаса
(рис. 32).
Далее рассчитывают пройденное по лагу или частоте вращения
винтов расстояние с использованием известных формул (38) и (48).
От исходной точки по направ-
лению истинного курса отклады-
вают найденное расстояние.
Полученная таким образом с
помощью счисления точка назы-
вается счислимой и обозначается
на карте в виде перпендикуляр-
IJ3J5
. ГКК81,0°(+1,5°) /27,4
12J0 С*
15,3
Рис. 32. К оформлению курса судна
на карте
51
ного и симметричного к линии движения судна штриха длиной 5 мм.
Точка подписывается в виде дроби: в числителе судовое время —
часы и минуты, в знаменателе — соответствующее значение отсчета
лага с точностью до 0,1. Черточка дроби проводится по линейке го-
ризонтально.
Если в районе плавания действует течение и ветер, то выполняются
соответствующие расчеты и построения для их учета.
Часто судоводителю приходится решать обратную задачу. Она воз-
никает каждый раз, когда на карте намечается направление предстоя-
щего движения судна или выполняются расчеты прибытия в заданную
точку.
В этом случае от исходной точки на карте намечается линия пред-
стоящего плавания судна и снимается ее направление. При отсутствии
дрейфа от ветра и течения полученное направление является истинным
курсом судна. Исходя из этого рассчитывают компасный курс для
рулевого по формулам (27) и (35).
Далее измеряют расстояние по намеченному курсу до заданной точ-
ки и рассчитывают время и отсчет лага прибытия в нее:
ДТ = В/У;
рол = з/Кл;
ОЛ2 ол^ —j— рол ,
где Т1У олг — время и отсчет лага в исходной точке;
Т2> ол2 — время и отсчет лага прибытия в заданную точку.
Рассмотрим, какова точность счислимого места при условии от-
сутствия внешних факторов (ветра и течения).
Предположим, что судну необходимо перейти одним и тем же курсом
из точки А в удаленную от нее на расстояние S точку В (рис. 33).
В связи с тем что поправка компаса известна судоводителю с какой-
то ошибкой ± гпдк, то судно, пройдя расстояние S, в зависимости
от знака ошибки может оказаться либо в точке В', либо в точке В".
Таким образом, ошибка места судна от ошибки в поправке компа-
са изобразится дугой ВВ' = ВВ", величина которой легко определя-
ется из выражения
ВВ' =BB" = Sm<>K/57,3Q
или для приближенных расчетов
В В' = BB" = Sm »к/60°.
Ошибка в учете пройденного судном расстояния AS из-за ошибки
в поправке лага ±/пДл, выраженной в процентах, или коэффициента
лага ±т^т{1 выраженной в долях Лл, может быть определена по фор-
мулам
Д3=±тдл В/100;
ДВ = ± тк S.
При положительном значении AS судно с учетом ошибки в его кур-
се окажется на дуге D'D", при отрицательном — на дуге С'С".
Отсюда можно сделать вывод, что при одновременном действии
ошибок в показаниях компаса и лага место судна будет находиться в
пределах так называемой фигуры погрешности C”D’D"C".
Заменяя полученную фигуру погрешности кругом с радиусом Л4С,
получим
BD' D')*.
или Мс = ± (т"к S/57,3°)2 + (тДл S/100)2
= ± К('”ак5/57-3°)2 + ('"кл5)2- (61)
Круг радиуса Мс принято называть кругом погрешности, а радиус
Мс — круговой (радиальной) ошибкой счисления.
В связи с неодинаковым влиянием на точность счисления ошибок
в курсе судна и в пройденном расстоянии вероятное местонахождение
судна лучше характеризует эллипс с полуосями (рис. 34):
u AS- тДл S/100 - S;
6 = S/57,3° zn«KS/60°.
Значение ошибок в поправках приборов судоводителю неизвестно,
так как они имеют случайный характер. Для расчетов их значения
принимаются на основе опыта практического плавания.
Анализ формулы (61) показывает, что ошибка знания места судна
увеличивается пропорционально пройденному расстоянию. По этой
причине периодически возникает необходимость исключать нако-
пившуюся ошибку счисления с помощью обсерваций (обсервованных
мест), т.е. определений места судна визуальными, радиотехническими
и астрономическими способами. Расхождение между счислимым и
обсервованным местом на один и тот же момент называется невязкой.
Невязка выражается направлением из счислимой точки в обсервованную
и расстоянием между ними в милях. Записывается в следующем виде:
С = 305° — 2,8 мили. Знак невязки на карте представляет собой вол-
нистую линию, соединяющую обе точки (см. рис. 32). Графическое
изображение на морской карте пройденного судном маршрута, выпол-
ненное автоматически или вручную на основе измерений и вычислений,
называется навигационной прокладкой.
Навигационная прокладка маршрута судна, выполненная предва-
рительно исходя из намеченного маршрута судна, отвечающего тре-
5з
бованиям безопасного плавания, поставленным задачам и экономи-
ческой целесообразности, называется предварительной прокладкой.
Навигационная прокладка ведется с выходом судна непрерывно
до его прибытия в порт или постановки на якорь. За исходную точку
начала ведения прокладки принимается проход входных молов порта,
боновых ворот, входного буя или обсервованное место судна.
На переходе задача судоводителя сводится к тому, чтобы фактичес-
кое движение судна как можно ближе совпадало с намеченным ранее
маршрутом. Это даст возможность использовать расчеты, выполненные
в процессе предварительной прокладки и, следовательно, облегчит
работу судоводителя в море.
§ 23. ГРАФИЧЕСКИЙ УЧЕТ ЦИРКУЛЯЦИИ
Движение судна с отклоненным на постоянный угол рулевым орга-
ном, а также криволинейная траектория центра тяжести судна при
таком движении называются циркуляцией (рис. 35).
. При поворотах судна переход с одного курса на другой происхо-
дит по плавной кривой линии, которая является частью циркуляции.
Плавая вдали от опасностей по мелкомасштабным картам, учетом
циркуляции пренебрегают: линию нового курса судна на карте про-
кладывают из точки начала поворота.
Однако совершая плавание вблизи берегов, особенно в узкости,
когда требуется повышенная точность знания места судна, учет цирку-
ляции необходим. Выполняют его чаще всего графическим путем, при-
нимая циркуляцию за дугу окружности, что не вносит заметной ошиб-
ки в счисление судов малого и среднего водоизмещения.
В процессе учета циркуляции приходится решать две задачи, но
в обоих случаях необходимо знать радиус циркуляции А?ц.
Рассмотрим решение первой задачи, которая предполагает, что на
карте имеется линия первоначального курса Кх и точка начала поворота
В (рис. 36). Необходимо определить точку окончания поворота. Для
этого из точки В в сторону поворота восстанавливают перпендикуляр
и откладывают отрезок ВО = 7?ц. Из точки О описывают дугу окружно-
сти радиусом /?ц. Линию нового курса К2 проводят таким образом,
Рис. 36. К определению точки оконча-
ния поворота
Рис. 35. Циркуляция
54
Рис. 37. К определению точек начала
и конца поворота (первый способ)
Рис. 38. К определению точек начала
и конца поворота (второй способ)
чтобы она касалась этой дуги. Перпендикуляр ОС, опущенный из
точки 0 на линию К*,, даст точку окончания поворота С.
При решении второй задачи по учету циркуляции имеют на карте
линии старого К] и нового К2 курсов и точку их пересечения М. Не-
обходимо найти точки начала В и окончания С поворота.
Первый прием. Из точки пересечения курсов М проводят биссект-
рису МП угла, дополняющего угол поворота а до 180 (рис. 37). Место
центра циркуляции 0 на биссектрисе определяют вмещением отрезка,
равного 7?ц, между биссектрисой МН и линией одного из курсов пер-
пендикулярно к этой линии. Точки начала А и конца С поворота опре-
деляются пересечением перпендикуляров с линиями Ki и К2, опущен-
ных на них из центра циркуляции О.
Второй прием. Из любых точек старого Ki и нового К2 курсов
во внутрь поворота восстанавливают перпендикуляры и откладывают
на них отрезки, равные /?1( (рис. 38). Через концы полученных отрезков
проводят линии, параллельные соответственно линиям старого и но-
вого курса. Точка пересечения проведенных линий О даст центр цир-
куляции. Опущенные из этой точки перпендикуляры на линии старо-
го и нового курсов в пересечении с ними дадут точки начала В и конца
С поворота.
Необходимо иметь в виду, что, желая начать поворот в намеченной
точке, команду рулевому следует подать заблаговременно. Промежуток
времени между подачей команды и началом поворота судна определя-
ется по опыту практического плавания.
§ 24. УЧЕТ ДРЕЙФА
Отклонение движущегося судна от избранного курса под влия-
нием ветра и волнения называется ветровым дрейфом.
При этом рассматривается влияние на судно наблюдаемого или
кажущегося ветра, представляющего собой геометрическую сумму век
55
торов истинного ветра и ветра от движения судна (рис. 39):
где W — вектор скорости кажущегося ветра;
U — вектор скорости истинного ветра;
V — вектор скорости ветра от движения судна.
В результате действия кажущегося ветра на судно возникает пол-
ная сила давления ветра Л, приложенная к центру парусности надвод-
ной части судна (рис. 40). Направление этой силы не совпадает с на-
правлением кажущегося ветра.
Разложим силу А на две составляющие:
X - силу, направленную по диаметральной плоскости судна и
Y — силу, направленную по нормали к диаметральной плоскости.
Сила X в зависимости от курсового угла кажущегося ветра будет
увеличивать или уменьшать скорость судна на величину ДУ. Это из-
менение скорости зафиксирует лаг. Так как волнение моря, сопровож-
дающее действие ветра, приводит к потере в скорости, то увеличение
ее наблюдается крайне редко.
Составляющая У, действуя по нормали к диаметральной плоскости,
вызовет смещение судна с линии истинного курса со скоростью идр.
В итоге судно будет двигаться по направлению суммарного вектора
скорости относительно воды Уо, равного сумме векторов скорости по
лагу Ул и скорости дрейфа идр:
У О У л идр»
сохраняя диаметральную плоскость параллельной направлению ис-
тинного курса.
При учете влияния ветра необходимо иметь в виду, что его направ-
ление определяется по той точке горизонта, откуда он дует «ветер
дует в компас».
Рис. 39. Построение вектора кажуще- Рис. 40. Действие кажущегося
гося ветра ветра на корпус судна
56
Рис. 41. Ветровой дрейф судна Рис. 42. К определению угла дрейфа по обсер-
вациям
Влияние волнения на движущееся судно проявляется в увеличе-
нии рыскливости и в ухудшении условий работы гребных винтов,
что сказывается на снижении его скорости.
Кроме этого, наблюдается явление зарыскивания, физический
смысл которого заключается в том, что при ударах волн в носовую
скулу или кормовой подзор корпуса судно резко отклоняется от за-
данного курса, а возвращается обратно на курс под действием руля
медленно. Следствием зарыскивания является уход судна с линии на-
меченного курса.
Линия, по которой перемещается центр массы судна относительно
дна моря, обусловленная влиянием ветра, называется линией пути при
дрейфе.
Угол, заключенный между северной частью истинного меридиана
и линией пути при дрейфе, отсчитываемый по часовой стрелке от О
до 360°, называется путевым углом при дрейфе (ПУа) (рис. 41).
Угол между линией истинного курса и линией пути судна, обуслов-
ленной влиянием ветра, называется углом дрейфа (а).
Если судно следует левым галсом (ветер дует в левый борт) и ли-
ния пути располагается правее линии истинного курса, то угол дрей-
фа имеет знак плюс.
Дрейф судна зависит от его конструктивных особенностей, осадки,
а также от силы и курсового угла кажущегося ветра.
Истинные курс судна и путевой угол при дрейфе связаны между со-
бой следующими алгебраическими формулами
ПУа--ИК-Ьа, (62)
ИК-ПУа —а, (63)
а -ПУГ/ —ИК. (64)
Учет дрейфа судна является одной из наиболее трудных задач
судовождения, так как все навигационные способы определения угла
дрейфа несовершенны.
Определение угла дрейфа по обсервациям. Этот способ может быть
применен только в том случае, когда имеется возможность, получить
несколько точных обсерваций. Кроме того, в районе плавания отсут-
ствует течение или же оно известно с высокой точностью, и его влия-
ние может быть исключено.
57
Например, следуя заданным
курсом с постоянной скоростью,
определяют наиболее точными спо-
собами места судна в точках Кь К2,
К3 и К4 и наносят их на карту наи-
более крупного масштаба (рис. 42).
Через полученные точки прово-
дят осредненную прямую линию,
которую принимают за линию пу-
ти при дрейфе. Сняв с карты зна-
чение ПУа, определяют величину
и знак угла дрейфа по форму-
ле (64).
Линия пути при дрейфе и зна-
чение угла дрейфа могут быть оп-
ределены всего лишь по двум об-
сервациям, но в этом случае на точность результата окажут боль-
шое влияние ошибки определения места судна.
Определение угла дрейфа по кильватерной струе. Для определения
угла дрейфа берут компасный пеленг на отдаленную точку кильватер-
ной струи, лежащую на ее оси симметрии (рис. 43). Повторив наблю-
дения несколько раз и осреднив их, рассчитывают угол дрейфа по фор-
муле
а -(КП ± 180°) —К К -ОКП-КК.
На рисунке буквами К и Па обозначены линии курса и пути при
дрейфе.
Данный способ дает удовлетворительные результаты при значи-
тельных величинах угла дрейфа. Достоинство его в том, что он свободен
от влияния течения, так как кильватерная струя подвержена сносу
тем же течением, что и судно.
Определение угла дрейфа по створу. При плавании по створу, на-
правление которого известно, можно практическим путем подобрать
такой курс, при котором судно будет следовать точно по линии створа.
В этом случае линия пути судна при дрейфе буд совпадать с направ-
лением створа, и угол дрейфа определится как разность направле-
ния створа и истинного курса, удерживаемого рулевым. Способ при-
меним только при отсутствии течения.
Помимо определения углов дрейфа из наблюдений в навигации,
используются способы, позволяющие вычислить их значения по фор-
мулам.
Способ И. Н. Матусевича. Базируется на формуле, выражающей
зависимость угла дрейфа от скорости судна, направления и скорости
кажущегося ветра
а - - К (IF/V)2 sin qw , (65)
где а — угол дрейфа, град;
UZ — скорость кажущегося ветра, м/с;
V — скорость судна, м/с;
g — курсовой угол кажущегося ветра, град;
К — коэффициент дрейфа, град.
58
Значения U7, V и qw на судне определяются без особого труда.
Сложность использования данной формулы состоит в том, что необхо-
димо знать коэффициент дрейфа, который может быть получен из на-
блюдений. Для этого в ходе плавания определяют с высокой точно-
стью значения углов дрейфа для различных соотношений V, W и q/(,.
Далее по формуле
X ~ а (У / UZ)2 cosec q w,
применяя способ наименьших квадратов, рассчитывают коэффициент
дрейфа. Исследования показали, что коэффициент дрейфа в значитель-
ной степени зависит от отношения проекций на диаметральную плос-
кость площадей надводной и подводной частей судна.
Способ Н. Н. Матусевича дает удовлетворительный результат при
расчетах дрейфа судов со слаборазвитыми надстройками, незначитель-
но изменяющими свою осадку и при отношении VIW, не превышающем
3—3,5.
У большинства транспортных судов осадка меняется в значитель-
ных пределах, поэтому для них необходимо определять коэффициент
дрейфа как минимум для двух вариантов загрузки: в грузу и в ба лласте.
Способ С. И. Демина, Для расчета углов дрейфа С. И. Деминым
была предложена формула, не требующая предварительных трудоемких
наблюдений:
а - arc tg
1/ S U/ l/sin g„,
/ ------- ’ --- Г/ '
0,26, (66)
где X — относительное удлинение подводной части корпуса: X - 2'F2/S0;
Т — осадка судна, м;
S — боковая площадь парусности, м2;
5’п — проекция подводной части корпуса на диаметральную плоскость, м2,
W — скорость кажущегося ветра, м/с;
Рл — скорость судна, м/с;
qw — курсовой угол кажущегося ветра, град;
6 — угол отклонения руля для удержания судна на курсе, град.
Значения площади парусности S и площади проекции подводной
части на диаметральную плоскость So для различных осадок Т опре-
деляются по чертежу бокового вида судна.
Для обоих способов нахождения угла дрейфа могут быть составле-
ны таблицы, облегчающие расчеты. На судне необходимо постоянно
сопоставлять соответствие рассчитанных и определенных из наблю-
дений углов дрейфа.
При ведении графического счисления с учетом дрейфа от исходной
точки на карте прокладывается линия Па, над которой указывается
значение КК, А К и угла дрейфа а со своим знаком (рис. 44). Иногда,
для наглядности, проводят отрезок линии К длиной 3—4 см, который
позволяет судить о положении диаметральной плоскости судна. Все
расчеты времени и расстояния выполняются так же, как изложено
в § 22, но только по линии Па. Если необходимо рассчитать время и
показание лага прихода судна на траверз какого-либо ориентира, то
59
Рис. 44. Определение траверза ориентира при учете дрейфа
положение точки траверза определяется пересечением линии Па с ли-
нией траверзного истинного пеленга, рассчитываемого по формуле
пр. б
ИП , = ИК ± 90° —— • (67)
л. б
При больших углах дрейфа (а> 10°) днищевые (штевневые) от-
носительные лаги измеряют только составляющую Уо, направленную
по диаметральной плоскости судна. В этих случаях пройденное по
лагу расстояние рассчитывается по формуле
<$лрол Кл sec а.
При учете дрейфа различают прямую и обратную задачу. Решение
прямой задачи заключается в расчетах ПУа по формуле (62), если
известны значения ИК и а. В случае решения обратной задачи направ-
ление Па снимается с карты и по формуле (63) рассчитывают значе-
ние ИК.
§ 25. УЧЕТ ТЕЧЕНИЯ
Горизонтальные перемещения водных масс в морях и океанах на-
зываются морскими течениями.
К элементам, характеризующим течение, относятся направление
Кт и скорость ит. Направление течения определяется в градусах по
той точке горизонта, куда оно направлено («течение идет из компаса»).
Скорость течения измеряется в узлах.
По характеру изменения элементов течений принята следующая
их навигационная классификация:
постоянные течения;
периодические течения;
временные течения.
Постоянные течения вызываются длительно действующими причи-
нами и характеризуются тем, что их направления и скорости значи-
тельное время остаются постоянными. Причинами возникновения
таких течений могут служить, например, постоянно дующие ветры.
60
Периодические течения вызываются действием периодических сил
и характеризуются непрерывным изменением своих элементов, перио-
дически повторяющих их прежние значения. К ним относятся прилив-
но-отливные течения, вызываемые действием периодических прили-
вообразующих сил Луны и Солнца.
Временные течения вызываются различными преходящими факто-
рами: действием ветра, дующего продолжительное время в одном
направлении; изменением плотности воды из-за большого испарения
ее или притока пресной воды. Такие течения наиболее трудно поддают-
ся учету.
Наличие морских течений в значительной степени усложняет счис-
ление пути судна.
Под действием гребных винтов судно перемещается относительно
воды по направлению истинного курса. Это перемещение фиксируется
лагом. Одновременно вся масса воды перемещается по направлению
и со скоростью действующего течения, увлекая с собой движущееся
судно. Это перемещение относительными лагами отмечено не будет.
Следовательно, судно будет участвовать в двух движениях: в движе-
нии относительно воды со скоростью Ул (или Уоб) по направлению
истинного курса; в движении вместе с массой воды со скоростью и по
направлению течения.
Таким образом, особенность плавания судна при действии течения
заключается в том, что: перемещение его происходит по направлению
суммарного вектора скоростей; диаметральная плоскость при движе-
нии сохраняет направление, параллельное истинному курсу; относи-
тельный лаг не учитывает перемещения, вызванного течением.
Для сложения векторов на карте от исходной точки С (рис. 45)
прокладывают по направлению истинного курса вектор относительной
скорости судна Ул, из конца которого А в том же масштабе проводят
вектор течения г/т. Отрезок прямой СВ, соединяющий исходную точ-
ку с концом вектора течения, даст направление и величину суммарного
вектора скорости судна V относительно дна (вектор абсолютной ско-
рости).
Линия, по которой перемещается центр массы судна относительно
дна, обусловленная влиянием течения, называется линией пути на
течении.
Угол, заключенный между северной частью истинного меридиана
и линией пути на течении, отсчитываемый в круговой системе счета,
называется путевым углом на течении ПУр(ПУт).
Угол, заключенный между линией истинного курса и линией пути
на течении, называется углом сноса 0.
Истинный курс и путевой угол на течении связаны между собой
следующими формулами:
(68)
(69)
(70)
61
ПУр-ИК+0;
ИК-ПУр-ф;
₽ = ПУр-ИК.
Формулы алгебраические, так как угол сноса входит в них со
своим знаком. Если течение сносит судно вправо, т.е. линия пути рас-
полагается правее линии истинного курса, то 0 имеет знак плюс.
При учете течения также приходится решать прямую и обратную
задачи.
Прямая задача. В этом случае по известным ИК, относительной ско-
рости судна и элементам течения необходимо определить 0, ПУр и V.
Графические построения, выполняемые при решении прямой задачи,
которые сводятся к определению направления и величины вектора
абсолютной скорости судна, рассмотрены нами на примере (см. рис. 45).
Таким образом, графическое решение формулы (68) позволяет
определить направление пути судна и его абсолютную скорость.
Треугольник САВ принято называть скоростным, так как все его
стороны представляют собой векторы скоростей.
Необходимо иметь в виду, что изменение любого вектора скорост-
ного треугольника влечет за собой изменение других векторов, кро-
ме vT.
При построении треугольника в зависимости от масштаба карты
длину всех векторов можно одновременно увеличить или уменьшить в
несколько раз (например, взять не скорости, а расстояния за 2 ч или
30 мин и т.п.).
Решение обратной задачи. В этом случае по известным ПУР, ско-
рости судна и элементам течения необходимо определить 0, ИК и V.
На карте от исходной точки С прокладывают линию пути судна н
вектор течения CD (рис. 46). Из конца вектора течения D радиусом,
равным относительной скорости судна, проводят циркулем отрезок ду-
ги окружности так, чтобы он пересек линию пути (точка В). С помо-
щью параллельной линейки направление DB переносят в исходную
точку, так как оно соответствует направлению линии ИК судна.
Указанным графическим построением решается формула (69). Для
определения величины и знака угла сноса 0 используют формулу
(70).
Длина отрезка линии пути СВ представляет собой в масштабе
карты абсолютную скорость судна.
Данные о течениях помещаются в специальных атласах и таблицах
течений, в лоциях и на морских навигационных картах. Часто судо-
водителю приходится определять элементы течения по обсервациям.
Рис. 46. К нахождению линии ИК
Пусть судно в момент 1\, олх находилось в обсервованной точке
и следовало по линии ИК с постоянной скоростью (рис. 47). В мо-
мент 7\, ол2 вновь определили место судна по береговым ориентирам и
рассчитали его счислимое место. Под действием собственных движи-
телей судно, пройдя отрезок --• Зл, должно было находиться в
точке /G- Полученная при отсутствии ветра в момент Т2 невязка
является следствием действия неизвестного течения и представляет
собой снос за время (Г2— 7\).
Направление течения определяется по направлению невязки
а его скорость рассчитывается по формуле
К2/(Т2-Л).
Рассмотрим решения основных навигационных задач, так как при
учете течения они имеют свои особенности.
Нахождение счислимой точки на линии пути. По разности отсчетов
лага для начальной и искомой точки определяют по формуле (50) прой-
денное расстояние, которое откладывают в масштабе карты по линии
ИК (рис. 48). Полученную точку сносят но направлению течения
на линию пути судна. Искомое счислимое место судна будет находить-
ся на линии пути в точке С2. У точки С? указывается отсчет лага, а
у точки С2 — дробью в числителе — время, в знаменателе — отсчет
лага.
Треугольник получил название путевого или навигацион-
ного, так как все три стороны характеризуют плавание судна: СХС2 —
плавание по направлению ИК под действием.движителей (Зл); СгС2 —
снос судна течением (ST); СХС2 — плавание по линии пути (3).
При графическом счислении на карте показываются как линия ис-
тинного курса, так и линия пути судна.
В случае попутного или встречного течения угол сноса равен со-
ответственно 0 или 180°. Абсолютная скорость судна и пройденное рас-
стояние рассчитываются:
I/ |/л + ит; S Зл + ST — при попутном течении;
V 1/л — vT; 3 =- 5Л — Зт — при встречном течении, где Зл - опре-
деляется по формуле (50), а Зт - (Т2 —
Расчет времени и отсчета лага прихода судна в заданную точку.
Предположим, что необходимо рассчитать время Т2 и отсчет лага ол2
прибытия судна в точку С2 (рис. 49). Для этого переносят заданную
точку по направлению, обратному вектору течения, на линию ИК.
63
Рис. 49. Расчеты прибытия в задан-
ную на линии П точку
Полученный отрезок С\С?
представляет собой в мас-
штабе карты расстояние прой-
денное судном по лагу.
Зная 5Л, Лл, Ул, расчеты
Т2 и ол2 выполняют так, как
указано в § 22.
Частным случаем этой за-
дачи является расчет Т2 и ол2
прихода судна на траверз
какого-либо ориентира.
В этом случае рассчитывают траверзный истинный пеленг по
формуле (67).
Место судна в момент траверза С2 будет находиться в пересечении
линии пути судна и проведенной от ориентира М линии траверзного
пеленга (рис. 50).
Далее действия и расчеты выполняют аналогично предыдущей
задаче.
Учет приливно-отливных течений. Особенность приливно-отливных
течений заключается в том, что их направления и скорости меняются
как с течением времени, так и с изменением места. Учитывать такие
течения известными нам приемами невозможно. Поэтому приливно-
отливные течения рассматривают за короткий промежуток времени
(обычно за 1 ч) как постоянные, имеющие осредненные значения их
элементов.
В этих условиях прямая и обратная задачи по учету течения реша-
ются в той же последовательности, как мы рассматривали ранее.
Данные по приливно-отливным течениям помещаются в специаль-
ных атласах, таблицах йли на морских навигационных картах.
Для определения осредненных элементов течения рассчитывают
время 7\ прибытия в точку начала его учета. По координатам этой точ-
ки и времени 7\ из соответствующего пособия выбирают элементы те-
чения. Далее находят счислимые координаты судна на время Т2 =
Рис. 50. Расчеты прихода на траверз ориентира
= 7\ + 1ч. Вновь выбирают из пособия, но уже по новым координа-
там и времени Т2 элементы течения для второй точки.
Осреднив найденные элементы приливно-отливного течения, учи-
тывают его в период плавания с 7\ до Т2 как постоянное течение. Та-
кие расчеты выполняют для каждого часа плавания.
Точность счисления при учете приливно-отливных течений пони-
жается, поэтому необходимо чаще контролировать место судна по об-
сервациям.
§ 26. СОВМЕСТНЫЙ УЧЕТ ТЕЧЕНИЯ И ДРЕЙФА СУДНА
В практике судовождения довольно часто встречаются случаи,
когда одновременно с учетом дрейфа судна от ветра приходится учи-
тывать и снос течением.
Чтобы не ошибаться в последовательности действия при совмест-
ном учете течения и дрейфа, необходимо помнить, что в скоростном тре-
угольнике одна из сторон всегда представляет собой вектор относитель-
ной скорости судна. В данном случае этот вектор направлен по линии
пути при дрейфе. Рассмотрим решение прямой и обратной задач.
Прямая задача. Содержание ее заключается в том, что по известным
ПК, относительной скорости (по лагу или частоте вращения), углу
дрейфа и элементам течения необходимо определить путевой угол ПУС
и абсолютную скорость судна.
Исходя из ранее изложенной рекомендации определяют направле-
ние вектора относительной скорости судна по формуле (62). От точки
начала совместного учета течения и дрейфа С проводят линию Па и
откладывают на ней длину вектора относительной скорости судна
(рис. 51). Из конца этого вектора А прокладывают вектор скорости
течения. Соединив начальную точку С с концом вектора течения В,
получают линию пути судна.
Угол, заключенный между линией пути судна при дрейфе и линией
пути, будет являться углом сноса судна течением 0.
Угол, заключенный между линией истинного курса и линией пути
судна, называется углом суммарного сноса с.
Величина и знак угла суммарного сноса определяются алгебраи-
ческой суммой
с а р. (71)
Путевой угол судна будет получен из выражения
ПУс-ИК + с. (72)
Значение абсолютной скорости находят измерением длины отрезка
СВ.
При ведении графической прокладки на карте проводят от исход-
ной точки линию Па и линию Пс. Линию истинного курса показывают
коротким (3—4 см) отрезком, чтобы дать представление о положении
диаметральной плоскости судна.
3 Зак. 483 65
Счисление ведется таким же образом, как и при учете одного тече-
ния, только пройденное расстояние по лагу (по частоте вращения)
откладывается не по линии истинного курса, а по линии Па.
Обратная задача. В этом случае по известным ПУС, относительной
скорости (по лагу или частоте вращения), углу дрейфа и элементам те-
чения определяют ИК судна и его абсолютную скорость.
От исходной точки С прокладывают линию избранного пути и век-
тор течения (рис. 52). Из конца вектора течения Z), как из центра, ра-
диусом, равным относительной скорости судна, проводят дугу окруж-
ности так, чтобы она пересекала линию Пс (точка В).
Направление отрезка DB, соответствующее направлению Па, пе-
реносят в исходную точку С.
Величину и знак угла сноса от течения определяют из выражения
р = ПУс-ПУа. (73)
Определив по формуле (71) суммарный снос, рассчитывают значе-
ние истинного курса
ИК ПУС — с.
(74)
Абсолютная скорость судна находится из скоростного треуголь-
ника измерением длины отрезка СВ в масштабе карты.
Совместный учет течения и дрейфа судна может дать хорошие ре-
зультаты лишь в случае точного знания элементов течения, угла дрейфа
и изменения скорости судна под влиянием ветра и волнения. Такие
возможности в практике плавания встречаются нечасто. Поэтому воз-
никает необходимость в определении пути судна другими способами.
Наиболее достоверно он определяется по ряду обсерваций, но для это-
го в видимости судоводителя должно находиться одновременно несколь-
ко ориентиров.
Ориентиром для определения пути судна может служить любой
неподвижный предмет, даже не обозначенный на карте. Способы при-
менимы лишь в том случае, если за весь период наблюдений действую-
щие в районе плавания факторы сноса судна остаются неизменными.
Определение пути судна по трем пеленгам одного ориентира и
времени.
Рис. 52. Определение ИК при уче-
те суммарного сноса
Рис. 51. Определение линии пути при учете
суммарного сноса
66
Частный случай способа. Следуя постоянным курсом
и скоростью, измеряют через равные промежутки времени три компас-
ных пеленга ориентира М (рис. 53). Интервалы времени между пелен-
гованиями ориентира выдерживают с высокой точностью по секундо-
меру. Следовательно, расстояния, проходимые судном за эти проме-
жутки времени, будут равны.
После исправления пеленгов поправкой компаса их обратные на-
правления прокладываются от ориентира М.
Задача сводится к построению такой прямой линии, на которой пе-
ленги отсекали бы равные между собой отрезки. В этом случае на-
правление прямой будет параллельно искомой линии пути судна.
Наиболее простой прием построения заключается в следующем.
Через произвольную точку среднего пеленга ОИП2 (например D) про-
водят прямые линии, параллельные крайним пеленгам, до пересечения
с ними в точках Р и L,
Направление прямой, соединяющей точки Р и Л,будет параллель-
но линии пути судна, так как отсекаемые пеленгами отрезки будут
равны между собой. С помощью параллельной линейки направление
пути судна переносится в счислимую точку.
Общий случай способа. Сохраняя постоянство курса
и скорости, измеряют три пеленга на ориентир М через произвольные
промежутки времени (рис. 54). Моменты пеленгования 7\, Т2 и Т3
замечают с высокой точностью по секундомеру. Следовательно, рас-
стояния, проходимые судном между пеленгами, будут пропорциональ-
ны промежуткам времени Д7\ ~ Т2— 7\ и ДТ2 — Т3— Т2, После
исправления пеленгов поправкой компаса их обратные направления
проводят от ориентира М.
Задача по определению линии пути судна сводится к построению
такой прямой линии, на которой пеленги отсекли бы отрезки тип,
пропорциональные Д7\ и &Т2. Поступают следующим образом. Рас-
считывают отрезки
m --kAT1 , п — 6ДТ2,
где k — произвольно выбранный коэффициент пропорциональности, которым
может быть и скорость судна.
3*
67
Далее откладывают по линии ИК (счислимого пути) от точки А
пересечения ее с первым пеленгом два смежных отрезка АВ = т и
ВС п.
Через точки В и С проводят линии, параллельные первому пеленгу,
до их пересечения со вторым и третьим пеленгом (точки Е и F).
Прямая DF, проведенная через точки Е и F, будет удовлетворять
условию
DE /EF ~ т/п ~ Д7\ / ДГ2.
Следовательно, она параллельна линии пути судна.
Назначение коэффициента пропорциональности k легко можно по-
нять, если учесть, что графическое построение может выполняться
не от ориентира, а от произвольной точки на свободном месте карты
или же на обычном листе бумаги.
Если в условиях действия постоянного течения и ветра в качестве
ориентира использовать свободно плавающую вешку с малой парусно-
стью, то в результате наблюдений будет определено направление пути
судна при дрейфе.
Объясняется это тем, что течение сносит в равной степени и судно,
и вешку, в то время как ветер воздействует только на судно.
Способ симметричных наблюдений. Применяется в том случае, если
планируется проходить траверз ориентира, до которого можно изме-
рить расстояние или его вертикальный угол. При этом ориентир
может быть не нанесен на карту, а его высота неизвестна судоводителю.
Сущность способа заключается в следующем. В точке А на остром кур-
совом угле ориентира М (рис. 55) измеряют пеленг на него, а также
расстояние или его вертикальный угол. После прохода траверза ори-
ентира, в момент когда расстояние до него или его вертикальный угол
Рис. 55. Определение пути по сим-
метричным наблюдениям
вновь станут равными первым наблю-
дениям, измеряют второй пеленг на
ориентир.
Исходя из условий наших наблю-
дений можно утверждать, что полу-
ченный треугольник АВМ является
равнобедренным, а его основание А В
соответствует направлению факти-
ческого перемещения судна, т. е. ли-
нии пути. Значение ПУ может быть
определено из треугольника АВМ
по элементарной формуле
ПУ^ИГЦ + ИГУ/З ± 90°.
Рассмотренные способы позво-
ляют определить в зависимости от
действующих на судно внешних фак-
торов угол дрейфа, угол сноса тече-
нием или угол суммарного сноса.
68
Точность графического счисления с учетом внешних факторов.
В § 22 был рассмотрен вопрос точности графического счисления в
зависимости от ошибок в показаниях курсопоказателей и лагов.
Однако на точность счислимого места судна значительное влияние
оказывают ошибки в учете течения и дрейфа. Результатом действия
всех указанных факторов является возникновение векторальных оши-
бок, которые складываются квадратически, так как имеют случайный
характер:
Л1С = ± Vll + llril-rlb
где Мс — радиус круговой ошибки (круга погрешности);
^2’ U — векториальные ошибки.
Рассмотрим значения векториальных ошибок:
1± — результат действия ошибки в пути при дрейфе тПуа, по ана-
логии с выводом в § 22 можем написать
Ч -^пуа^л 57,3 --=m{c-iy^ Ул //57,3е,
1/ 2 , 2
где /пПУа - > /пдк -и /па;
тлк — ошибка в поправке компаса, для гирокомпаса может составить
±1,0°;
1
та — ошибка в учете угла дрейфа, может достигать -у а;
/2 — результат действия ошибки в поправке лага /пДл,
,пДл/100 = УлтДл//100,
где тд — у хорошо выверенного лага принимается в пределах 2—3 %;
/3 — результат действия ошибки в направлении учитываемого те-
чения ;пкт,
ST/57,3° ит//57,3°,
где — в хорошо изученных районах принимается равной 20—30°;
т
/4 — результат ошибки в скорости учитываемого течения тг-т,
Л
1
где /Прт — принимается равной -j- скорости выбираемого из пособия течения .
После подстановки значений векториальных ошибок получим фор-
мулу радиальной (круговой) ошибки счисления
ис ±/ у Гл/57,3°)2 + (тДл Гл/100)2 + Ут/57 Зо)2 + ^2 (75)
Данная формула находит практическое применение в том, что на
ее основании делают вывод о возможности дальнейшего плавания по
счислению.
69
При плавании несколькими
курсами ошибка счисления в кон-
це последнего курса будет опре-
деляться выражением
Л1С=±1/Л1?+Л12 4-... I-M2. (76)
где Л42, Мп — ошибки счисле-
ния на каждом курсе.
Рис. 56. Зависимость точности счис- Недостатком данного способа
ления от продолжительности плавания является то, что выполняемые рас-
четы базируются на субъективных
оценках случайных ошибок в элементах, характеризующих движе-
ние судна.
В настоящее время широко используется статистический способ
оценки точности счисления, основанный на выводах теории случайных
функций. Он позволяет более объективно учесть влияние внешних
факторов (действие ветра и течения) и неточность в работе приборов.
В соответствии с выводами этой теории ошибка счисления за пер-
вые 2—3 ч плавания подчинена линейному закону, т.е. увеличивается
прямо пропорционально продолжительности плавания. В дальнейшем
она растет пропорционально квадратному корню из продолжительно-
сти плавания, т.е. по параболическому закону.
Если на основании данных систематического плавания в одном и
том же районе составить график зависимости ошибки счисления Л4С
от продолжительности плавания судна без обсерваций то получен-
ная кривая (рис. 56) подтвердит эти выводы.
Для расчета средней квадратичной радиальной ошибки счисления
используют формулы:
при / < 2 ч Л1с 0,7КС /, (77)
при t > 2 ч Л4С Кс УЛ (78)
где Кс — коэффициент, точности счисления, который характеризует нараста-
ние радиальной средней квадратичной ошибки счисления по времени.
Коэффициент точности счисления рассчитывается по невязкам Ch
которые выбираются из судового журнала. Используя их, составля-
ют ряд уравнений:
С2-Кс1/^;
С/=КсУ'ь
Для получения нормальных уравнений обе части равенств умно-
жают на У^:
Ci Д//1 = Кс
С2 ~/Сс ^2:
Vti~ Ke it-
70
После суммирования решают полученное уравнение относительно
Кс:
1.13[С Vz ]/р].
Коэффициент 1,13 введен в формулу, чтобы результат был получен
с вероятностью 68,3%.
§ 27. АНАЛИТИЧЕСКОЕ СЧИСЛЕНИЕ
Учет перемещения судна можно осуществлять не только графичес-
кими построениями на карте, но и путем выполнения расчетов по фор-
мулам аналитическим методом.
Аналитическое, или письменное, счисление применяется: при океан-
ских переходах, когда отсутствуют крупномасштабные карты; при ре-
шении астрономических задач по определению места судна по Солнцу;
во всех случаях, когда по какой-либо причине ведение графического
счисления затруднено. Формулы аналитического счисления нашли
широкое применение и во многих других вопросах навигации.
Сущность способа заключается в определении конечных координат
судна по известным начальным координатам и их приращениям,
рассчитанным по формулам
<Н ; РШ;
а2 РД.
Выведем зависимость РШ и РД от истинного курса судна и плава-
ния по нему.
Предположим, судно совершило переход из пункта отхода А (ф1}
в пункт прихода В(ф2» М постоянным курсом К, пройдя расстояние S
(рис. 57).
Разделим расстояние между пунктами А и В на большое число рав-
ных элементарных отрезков AS. Через полученные точки проведем
меридианы и отрезки параллелей. В результате построения получим
равные элементарные прямоугольные треугольники, которые по мало-
сти их можем рассматривать как плоские. Для удобства вывода формул
Землю примем за шар.
Рассмотрим элементарный прямоугольный треугольник Abe. Ги-
потенуза тругольника АЬ представляет собой отрезок локсодромии
AS. Катет Ас является отрезком
меридиана и представляет собой
элементарную разность широт А<р.
Катет cb представляет собой эле-
ментарное расстояние по параллели
между меридианами точек А и Ь,
называемое элементарным отшест-
вием Aw.
На основании формул плоской
Рис. 57. К выводу формул аналитиче-
ского счисления
тригонометрии из треугольника
Abe можно выразить катет Ас\
Аф = AS cos К-
71
Перейдя к бесконечно малым величинам, напишем дифференциаль-
ное уравнение
dtp dS cos К.
Проинтегрируем данное уравнение с учетом того, что К — величина
постоянная
<р2 s
f dtp cos К [ dS;
b
Ф2 —Фг * S cos К.
или в окончательном виде
РШ Seos К. (79)
В этой формуле РШ получается в морских милях, но так как 1 морская
миля равна Г дуги меридиана, то, следовательно, и РШ можно счи-
тать выраженной в угловых минутах.
Катет Ьс из треугольника Abe выразим:
AS sin К-
Перейдем к бесконечно малым величинам и проинтегрируем полу-
ченное дифференциальное уравнение
dw dS sin К.
f dw - sin К f dS,
о b
w SsinK или ОТШ -SsinK- (80)
Для расчета долготы точки прихода нам необходимо получить
значение РД. Из элементарного треугольника Abe можем написать
Аш/ Аф ~ tg К-
Выразим длину элементарного отшествия через элементарный от-
резок дуги экватора АХ: = AXcoscp и подставим его в приведенное
выше выражение
АХ cos ф/ A(f = tg к,
отсюда
АХ tg КАф/созф.
Перейдем к бесконечно малым величинам и проинтегрируем полу-
ченное дифференциальное уравнение
Х2
J dX^tgKj dcp/costp.
Х1 <Pi
Это выражение нам уже знакомо (см. § 17), следовательно,
А2—X^(D2-Dt)tgK
или
рд=рмч tgK.
(81)
72
Формула (81) широко используется в навигации. Однако для расчета
долготы конечной точки необходима формула, связывающая отшест- >
вие с разностью долгот.
Напишем ряд равенств, выражающих длины элементарных от-
резков дуг экватора через элементарные отшествия:
ДА,2 ~ Да» sec (фг 4 Дф);
Д^2= До/ sec (<р1 + 2Д(р);
ДА,3 Дш sec (фг + 3 Дф);
ДХт Доу sec (ф\ -4- m Дф) — Дцу sec <р2.
Просуммировав обе части равенств, получим
т
РД •— Лш 2 sec Фг •
1
Правую часть равенства умножим и разделим на т
1
РД — т Дш — т sec фг.
т
I
Произведение mAw = ОТШ, т.е. представляет собой отшествие,
tn
У sec<pf — средний арифметический секанс, который
1
выражение
т
соответствует вполне определенной широте, называемой промежуточ-
ной широтой <рп. После подстановки получим
РД — ОТШ sec ф\.
(82)
Формула (82) точная, но не удобна для применения, так как необхо-
димо знать фи.
После деления формулы (80) на формулу (79) получим
tgK = OTHI/PHI.
Полученное выражение tgK подставим в формулу (81). В резуль-
тате будем иметь
РД = ОТШ.РМЧ/РШ.
Эта формула так же относится к числу точных формул.
Сравнивая выражения РД (82) и (83), можно сделать вывод
sec фп-РМЧ/РШ
или
Фп = arc sec РМЧ/РШ.
(83)
(84)
Следовательно, ОТШ представляет собой расстояние между мери-
дианами начальной и конечной точек в милях по промежуточной па-
раллели, широта которой определяется выражением (84).
При плавании на короткие расстояние можно считать, что в интер-
вале широт от фг до ф2 sec изменяется линейно и, следовательно,
Фп~(ф1 + ф2)/2 = фт.
73
Тогда формула (82) примет вид
РД OTIIIsecq;m. (85)
Формула является приближенной.
По формулам (79) и (80) составлена таблица 24 «Разность широт и
отшествие» в МТ—75. Аргументами для входа в таблицу служат
ИК и плавание S, выбираются — РШ и ОТШ.
Таблица 25а МТ—75 составлена по формуле (85) и служит для вы-
бора разности долгот по отшествию и средней широте. Аналитическое
счисление подразделяется на простое, составное и сложное
Если судно совершает плавание из одного пункта в другой одним
курсом, то аналитическое счисление будет простым. В этом случае
рассчитываются по формулам (79), (80) и (85) или выбираются из таб-
лиц 24 и 25а РШ и РД. Координаты пункта прихода определяются:
<₽2 Ф1 + РШ; ^-2 — “Ь РД-
Если при переходе из одного пункта в другой судно совершает
плавание несколькими курсами и при этом координаты конечного
пункта рассчитываются через генеральную разность широт и генераль-
ное отшествие, то аналитическое счисление называется составным.
Последовательность действий в этом случае такова: рассчитав по
формулам или выбрав из таблиц для каждого курса РШ и ОТШ со свои-
ми знаками, находят их алгебраические суммы, которые называются
генеральной разностью широт (Ген РШ) и генеральным отшествием
(Ген ОТШ) (рис. 58). При этом необходимо иметь в виду, что знак
отшествия определяется следующим образом: если составляющая дви-
жения судна по параллели направлена к востоку, то знак отшествия
«+», и наоборот «—».
Расчеты ведутся по формулам
ГенРШ УрШ;;
I
Ген ОТШ У ОТШ,; ф2 — <fjГен РШ;
1
<Рт - (Ф1 ! <Ря)/2;
РД Ген ОТШ sec ;
^-2 - ^1 + РД •
Если при плавании учитывается дрейф судна от ветра, то в формулы
(79) и (80) вместо ИК надо подставлять ПУа. Это же касается и исполь-
зования таблицы 24 МТ—75.
Если же в районе плавания действует постоянное течение, то его
учитывают как еще один дополнительный курс. При этом за курс при-
нимается направление течения, а за плавание — снос течением ST за
время его действия t, т.е.
ST_ит t.
Формулы аналитического счисления позволяют не только находить
координаты конечного пункта, но и решать различные другие задачи.
74
Рис. 58. К расчетам составного
литического счисления
Рис. 59. К расчетам простого
аналитического счисления
Так, зная координаты начального и конечного пунктов, можно
вычислить расстояние между ними и курс для перехода в конечный
пункт. Формулы легко можно вывести из треугольника АВС (рис. 59)
S РШ sec К; (86)
S - ОТШ cosec К; (87)
tg К РЛ/РМЧ. (88)
При плавании в высоких широтах для получения более точных
результатов используют сложное аналитическое счисление.
В отличие от составного счисления, при сложном счислении не ис-
пользуют Ген ОТШ. В этом случае определяют генеральную разность
долгот (Ген РД) как алгебраическую сумму РД на каждом курсе, т.е.
Ген РД - f РД.
Глава VII
ВИЗУАЛЬНЫЕ МЕТОДЫ ОПРЕДЕЛЕНИЯ МЕСТА СУДНА
§ 28. НЕОБХОДИМОСТЬ ОБСЕРВАЦИЙ И ИХ СУЩНОСТЬ
Рассматривая точность графического счисления, мы пришли к вы-
воду, что ошибка счислимого места судна в основном зависит от несо-
вершенства навигационных приборов, методов учета дрейфа и недо-
стоверности знания элементов течения.
Благодаря зависимости этой ошибки от продолжительности плава-
ния по счислению, она может достигнуть величины, при которой обес-
печить безопасность дальнейшего перехода судна будет невозможно.
По этой причине периодически контролируют счисление пути судна с
помощью обсерваций.
Место судна определяют по визуальным наблюдениям береговых
ориентиров, а также с использованием радиотехнических средств су-
довождения и астрономических способов.
75
Измеряемые судовыми техническими средствами навигации физи-
ческие величины, определяющие положение судна в море, называются
навигационными параметрами. К ним можно отнести следующие: рас-
стояния до береговых ориентиров, вертикальные углы ориентиров,
горизонтальные углы между ориентирами, визуальные пеленги, радио-
пеленги, разности расстояний до двух ориентиров и т.п.
Каждому навигационному параметру соответствует определенного
вида изолиния.
Изолинией называется линия, отвечающая постоянному значению
некоторой геометрической величины, являющейся функцией от ко-
ординат наблюдателя, т.е. геометрическим местом точек, в которых
эта величина имеет постоянное значение.
Следовательно, измерив какой-либо навигационный параметр, мы
можем нанести на карту одну изолинию, на которой находится наше
судно. Для определения места судна необходимо измерить одновремен-
но, как минимум, два навигационных параметра, изолинии которых
пересекались бы между собой. Одна из точек пересечения изолиний
определит положение места судна.
Часто из-за сложности нанесения на карту изолинии заменяются
касательными к ним отрезками прямых.
Отрезок прямой, которым заменен ограниченный по длине отрезок
изолинии, ввиду малости его кривизны называется линией положения
(лп).
Место судна, координаты которого получены пересечением двух
и более линий положения, называется обсервованным.
Рассмотрим изолинии, соответствующие основным навигационным
параметрам.
Расстояние. При измерении расстояния D до ориентира М с помо-
щью какого-либо прибора или инструмента получают изолинию в виде
окружности радиусом D, центром которой является ориентир М. Эта
изолиния называется изостадией (рис. 60). Линия положения будет
представлять собой касательную к этой окружности.
При измерении вертикального угла ориентира, высота которого
известна, в результате расчетов получают также расстояние. Следо-
вательно, измеренному вертикальному углу ориентира будет соответ-
ствовать изолиния также в виде окружности.
Горизонтальный угол. Измерение горизонтального угла между
двумя ориентирами производится с помощью секстана или же его по-
Рис. 60. Изостадия
лучают как разность между ком-
пасными пеленгами на ориентиры.
В обоих случаях наблюдения вы-
полняются на незначительных уда-
лениях, ограниченных дальностью
видимости ориентиров. В этих пре-
делах земную поверхность можно
принять за плоскость. Тогда изоли-
ния будет представлять собой ок-
ружность (рис. 61), проходящую
через оба ориентира и М 2 и впи-
76
Рис. 61. Изолиния — окружность
сывающую измеренный между ними угол а. Линия положения будет
касательной к этой окружности.
Радиопеленг с судна. Сигнал от радиомаяка распространяется по
ортодромии на расстояния, при которых нельзя пренебрегать кривиз-
ной земной поверхности. Поэтому истинный радиопеленг (ИРП) пред-
ставляет собой сферический угол между северной частью истинного
меридиана и ортодромией, проходящей через места судна и радиомая-
ка. Измеряется ИРП в круговом счете.
Радиопеленг на какой-либо радиомаяк можно рассматривать как
горизонтальный угол между направлениями на географический полюс
и радиомаяк.
По аналогии с изолинией горизонтального угла на плоскости
изолиния ИРП представляет собой линию двоякой кривизны на сфере
(рис. 62), проходящую через географический полюс, место судна и
место радиомаяка.
Эта изолиния, отвечающая постоянству ИРП, получила название
изоазимуты или изопеленги.
Локсодромический пеленг. Визуальный пеленг, измеренный на ка-
кой-либо ориентир, дает на морской навигационной карте изолинию
в виде прямой (рис. 63), пересекающей все меридианы под постоянным
углом, равным измеренному пеленгу, и проходящей через место судна
и ориентира.
Рис. 63. Изолиния — прямая Рис. 64. Гипербола
77
Разность расстояний. При измерении разности расстояний до двух
ориентиров (радиостанций) изолинией является гипербола. Она пред-
ставляет собой кривую линию, все точки которой имеют постоянную
разность расстояний до точек А и В, называемых фокусами гиперболы.
В этих фокусах и размещаются ориентиры, разность расстояний до
которых измеряется (рис. 64).
§ 29. ОШИБКИ НАБЛЮДЕНИЙ И ТОЧНОСТЬ ОБСЕРВАЦИЙ
Измерения навигационных параметров так же, как и любые наблю-
дения, сопровождаются ошибками. Причинами возникновения этих
ошибок являются несовершенство используемых для наблюдений при-
боров и инструментов, влияние внешней среды, недостатки принятого
способа измерений, а также ограниченные возможности органов чувств
и восприятий человека.
Для оценки точности обсерваций в навигации пользуются вывода-
ми теории ошибок. Согласно этой теории все ошибки подразделяются
на случайные, систематические и промахи.
Случайные ошибки — это ошибки наблюдений, причины возникно-
вения которых неизвестны, а их индивидуальные значения не подчи-
нены какой-либо закономерности, в данном ряду наблюдений их вели-
чины и знаки могут непрерывно меняться. Свойства этих ошибок про-
являются только при большом числе измерений одной и той же величи-
ны, в одинаковых условиях и с одинаковой точностью.
Мерой оценки точности при действии случайных ошибок принята
средняя квадратичная ошибка ±т. Вероятность того, что при изме-
рении ошибка будет находиться в пределах средней квадратичной,
составляет 68,3%.
Часто для оценки точности измерений используют так называемую
предельную ошибку, которая равна ч^З/п. Вероятность такой ошибки
99,7%. Однако в штурманской практике используется предельная
ошибка, равная ±2т с вероятностью 95,4%.
Наиболее просто значение средней квадратичной ошибки может
быть рассчитано по методу размаха. Для этого рассчитывают размах
R как разность абсолютных значений наибольшего и наименьшего
результатов из выполненной серии измерений.
Значение средней квадратичной ошибки одного измерения полу-
чают по формуле
tn = R!K,
где К — коэффициент, который выбирается по числу измерений в серии л. Со-
ответственно он равен для л : 5 — 2,32; 6—2,53; 7—2,70; 8—2,85; 9—2,97;
10—3,08; 11—3,16.
Из свойств случайных ошибок можно сделать следующий практи-
ческий вывод: для уменьшения влияния случайных ошибок необходи-
мо выполнить серию из 3—5 измерений навигационного параметра и
результаты осреднить.
Систематические ошибки — ошибки, которые остаются постоян-
ными в данной серии измерений или изменяются по определенному
78
закону при изменении условий наблюдений.
В большинстве случаев систематические ошиб-
ки могут быть определены и в виде поправок
приборов и инструментов внесены в резуль-
таты измерений.
Систематические ошибки, зависящие от не-
совершенства инструмента, называются инст-
рументальными.
Кроме того, установлено, что разные на-
блюдатели производят измерения неодинако-
во. Подобные систематические ошибки, зави-
сящие от индивидуальных свойств наблюда-
теля, называются личными ошибками наблю-
дателя.
Рис. 65. К действию слу-
чайных ошибок
Чаще всего систематические ошибки действуют на результат на-
блюдений в одном направлении, т.е. имеют определенный знак, а по-
этому не могут быть обнаружены и исключены из наблюдений много-
кратными измерениями. По этой причине судоводитель должен всегда
уделять большое внимание выверке приборов и инструментов и тща-
тельному определению их поправок.
Промахами называются грубые ошибки, превышающие по абсо-
лютной величине пределы точности для данного вида наблюдений и
являющиеся следствием невнимательности и небрежности наблюдате-
ля. Промах может быть обнаружен повторными наблюдениями или вы-
числениями и их контролем.
На практике для выявления промахов часто прибегают к расчету
предельной ошибки. Если в ряду измерений имеются ошибки, превос-
ходящие по своей величине предельные, то они исключаются как про-
махи, так как вероятность их появления менее 0,3%.
В реальных условиях систематические и случайные ошибки дейст-
вуют всегда совместо, и, складываясь алгебраически, образуют полную
ошибку.
Определение места судна сводится к построению на карте двух
или более линий положения, которые связаны определенной зависи-
мостью с измеренными навигационными параметрами. Изменение вели-
чины навигационного параметра, равное А £7, приводит к тому, что
линия положения на карте сдвигается параллельно себе на величину,
называемую смещением Ап.
Если вместо приращения навигационного параметра AU рассмат-
ривать ошибку его измерения mvt то смещение будет представлять со-
бой ошибку линии положения тлп.
При определении места судна по измерению двух навигационных
параметров в результате действия случайных ошибок обе линии по-
ложения окажутся смещенными параллельно себе на величины ±/плщ
и ±/пЛПа. Вероятность смещения в ту или иную сторону одинакова.
Поэтому на рис. 65 построены линии, соответствующие смещению
+тЛП1, +/плп2 и —шлпр —тлП1- Пересечение крайних смещенных
линий положения дает нам теперь не точку, а фигуру погрешности в
виде параллелограмма abed, площадь которого будет характеризовать
79
точность места судна. Если для построения фигуры погрешности
приняты средние квадратичные ошибки в измерении навигационных
параметров и mV2, то вероятность нахождения места судна в ее
пределах будет менее 50%.
Если принять предельные ошибки измерения навигационных па-
раметров 4=2mt?1, ±2/иР2.или ±3mP1, ±3mD2, то вероятность повы-
сится соответственно до 91 и 99%.
Часто при оценке точности места судна удобнее оперировать не
площадью вероятного местонахождения его, ачислом, характеризующим
эту точность. Для этого используют формулу, выражающую точность
определения места MOf полученного по двум линиям положения:
1 г-----------
Мо- ± ------1Лгп? , (8)
° sin 0 у лп* ЛП2’
где /пЛП1, гплп — средние квадратичные ошибки первой и второй линий положе-
1 2 ния;
0 — угол пересечения линий положения.
Средняя квадратичная ошибка определения места по двум линиям
положения Мо представляет собой радиус круга, в пределах кото-
рого вероятность нахождения места судна равна 63,2—68,3%.
Анализ формулы показывает, что, помимо всего прочего, точность
определения места зависит от угла пересечения линий положения 0.
Чем ближе угол 0 к 90°, тем точность определения места выше.
Как видно из изложенного, для оценки точности определения места
судна графическим построением или расчетами по формуле (89) необ-
ходимо знать зависимость величины смещения (ошибки) линии положе-
ния от ошибки в измерении навигационного параметра.
Эту зависимость принято выражать с помощью градиента навига-
ционного параметра.
В общем случае градиентом функции называется ее изменение на
единицу расстояния по нормали в сторону возрастающих значений
функции. Следовательно, градиент навигационного параметра
являясь вектором, определяет изменение величины навигационного
параметра при смещении линии положения на одну единицу длины.
Математическое выражение модуля градиента имеет вид:
Af7
g — lim ----=dU!dn. (90)
Дп->О Ал
Направлен градиент по нормали к линии положения в сторону уве-
личения значения навигационного параметра.
На основании формулы (90) можем написать
bn=MJ/g (91)
или, переходя к ошибкам,
= (92)
Задаваясь значением ошибки измерения навигационного параметра
ту и зная для него выражение градиента, можно рассчитать ошибку
линии положения /илп.
80
Рис. 66. К действию систематических
ошибок
Рис. 67. К совместному действию си-
стематических и случайных ошибок
Для оценки точности обсервации на практике поступают так. Про-
ведя пересекающиеся линии положения на карте (см. рис. 65), опреде-
ляют их ошибки ±тЛП1 и ±тЛП1 в зависимости от случайных оши-
бок в измерении навигационных параметров. При этом, если ошибки
измерения навигационных параметров невозможно рассчитать из на-
блюдений, то ими задаются исходя из опыта плавания в подобных
условиях. Далее, откладывают по нормали от линий положения в обе
стороны, соответствующие ±тл111 и ±тЛП2. Через полученные точки
проводят прямые, параллельные линиям положения. Пересечение
этих прямых образует фигуру вероятного нахождения места судна
abed.
Влияние систематических ошибок на место судна проявляется по-
иному. В этом случае обе линии положения сместятся в одну сторону
и величина их смещения может быть определена по формуле (91).
Рассчитав значения Дгц и Дп2, выполняют такое же построение,
как и при случайных ошибках, так как знак систематической ошиб-
ки неизвестен. В результате построения получают не площадь веро-
ятного местонахождения судна, а линейное смещение обсервованной
точки Д = FqF} =- FqF2 (рис. 66).
При совместном действии случайных и систематических ошибок
систематическая ошибка смещает место судна на величину Д, в ту или
иную сторону в зависимости от ее знака, а случайные ошибки образуют
площадь вероятного местонахождения судна около этих точек. Сум-
марная площадь будет образована ломаной линией, охватывающей
площади вероятного местонахождения судна при различных знаках
систематической ошибки (рис. 67).
§ 30. ОПРЕДЕЛЕНИЕ МЕСТА СУДНА
ПО ДВУМ ГОРИЗОНТАЛЬНЫМ УГЛАМ
При определении места судна по двум горизонтальным углам не-
обходимо иметь в видимости наблюдателя три ориентира, нанесенных
на карту.
81
Рис. 68. Определение места по
двум углам, рассчитанным по
пеленгам на ориентиры
Рис. 69. Определение места по двум углам
Измерение горизонтальных углов между ориентирами выполняется
с помощью секстана или они рассчитываются как разность между ком-
пасными пеленгами на соответствующие ориентиры А, В и С (рис. 68)
а- КПВ-КПЛ;
р- кпс- кпЛ.
Место судна определяется пересечением двух окружностей, вписы-
вающих измеренные углы а и 0 и проходящих соответственно через
ориентиры Л, В и В, С.
Получение места на карте может быть выполнено несколькими
способами.
Графический способ. Заключается в построении окружностей,
вмещающих измеренные углы между ориентирами.
Для построения окружности, вмещающей угол а, проводят перпен-
дикуляр к середине линии АВ (рис. 69). Далее, из точки А под углом
(90°—а) к отрезку АВ проводят прямую до пересечения с перпендику-
ляром в точке 0т. Радиусом, равным ОгА или 0тВ, проводят первую
окружность. Таким же образом строят вторую окружность, вписываю-
щую угол Р, измеренный между ориентирами В и С. Если разность, на-
пример (90°—а), будет отрицательна, то и угол из точки А откладыва-
ется в противоположную сторону, т.е. от судна (рис. 70).
Способ с использованием кальки. По середине листа кальки проводят
прямую линию, которую принимают за общую сторону измеренных
углов. Из произвольной точки этой прямой F (рис. 71), как из общей
вершины, строят правый и левый углы. Кальку накладывают на карту
и, перемещая ее, добиваются совмещения сторон нанесенных углов
с соответствующими ориентирами на карте. Накол циркулем в общей
точке F даст место судна на карте.
Способ с использованием протрактора. Протрактор представляет
особой инструмент, позволяющий построить два смежных горизонталь-
ных угла с общей вершиной в его центре. Он имеет неподвижную сред-
нюю и две подвижных крайних линейки. Углы между средней и крайни-
82
Рис. 70. Построение окружности,
вписывающей угбл
Рис. 71. Нанесение места судна на
карту с помощью кальки
ми линейками устанавливаются с высокой точностью по азимуталь-
ному кругу.
Установив измеренные углы на протракторе, перемещают его на
карте до тех пор, пока рабочие гранки линеек не будут проходить через
обозначения соответствующих ориентиров. Накол иглой протрактора,
помещенной в общей вершние углов, даст место судна на карте.
Случай неопределенности. При определении места судна по двум
горизонтальным углам может встретиться случай, когда все три ори-
ентирах, В, С и судно будут находиться на одной окружности (рис. 72).
В этом частном случае, измеряя углы а и 0, получают одну и ту же
окружность, которая одновременно вписывает оба угла. Из любой
точки данной окружности левый угол между ориентирами А и В будет
равен а, а правый — между ориентирами В и С — углу 0.
Таким образом, в результате
измерения двух горизонтальных
углов получим всего лишь одну
изолинию. Следовательно, по этим
наблюдениям определить место суд-
на невозможно. Из рис. 72 видно,
что в этом случае В + (а + 0) --
- 180°.
Угол при среднем предмете В
снимается с карты, а два других а
и 0 судоводитель измеряет секста-
ном. Если сумма углов близка к
180°, то определять место судна в
данный момент не рекомендуется.
Избежать случая неопределен-
ности можно выбором ориентиров,
имеющих следующее взаимное
расположение.
1. Все три ориентира располо-
жены на одной прямой.
Рис. 72. Случай неопределенности
83
2. Средний ориентир расположен ближе к судну, чем два крайних.
3. Три ориентира расположены в вершинах треугольника, внутри
которого находится судно.
4. Все три ориентира находятся на одинаковом расстоянии от судна.
Практическое выполнение способа. 1. Подобрать на местности хо-
рошо видимые, нанесенные на карту три ориентира, предварительно
убедившись в отсутствии случая неопределенности.
2. Подготовить к наблюдениям секстан и определить поправку ин-
декса (/).
3. Измерить углы, соблюдая следующую очередность:
в благоприятных условиях наблюдения первым измерить угол,
который изменяется медленнее (углы, близкие к траверзу);
в условиях сильной качки, ночью и днем при плохой видимости
первым измерять угол, наиболее трудный для наблюдения.
4. Привести углы к одному моменту, если скорость судна более
12 уз и прокладка ведется на крупномасштабных картах. Для этого
после измерения второго угла заметить время и отсчет лага и вновь
повторить измерение первого угла. В этом случае отсчет секстана
(ос) первого угла рассчитывается
осср = (oCi + ocaJ/S.
5. Выбрать из формуляра секстана по значениям измеренных углов
инструментальные поправки s и исправить отсчеты секстанов суммар-
ной поправкой (i + s).
6. Полученные значения горизонтальных углов установить на про-
тракторе или построить их на кальке. Совмещением сторон построен-
ных углов с соответствующими ориентирами на карте получить место
судна.
Точность способа. Способ относится к числу наиболее точных,
так как средняя квадратичная ошибка измерения горизонтальных уг-
лов секстаном составляет 1—2,2'.
^Ja (93)
где dAB — расстояние между ориентирами;
£>л, DB — расстояния от судна до ориентиров, между которыми измеряется
угол.
Используя формулы (89) и (92), можно написать
м°= ± / (тМ2+ (mp/£e)2,
где та, — ошибки измерения горизонтальных углов, рад;
ga, gp — градиенты горизонтальных углов аир, рад/мин.
Приняв, что та = т$ и подставив значения градиентов, получим
формулу точности способа
т' DB _____________________
+(«с/W, >
84
где та — ошибка измерения горизонтальных углов;
Da, Dc — расстояния от судна до крайних ориентиров;
— расстояние от судна до среднего ориентира;
dAB — расстояние между ориентирами А и В;
dBC — расстояние между ориентирами В и С;
0 — угол пересечения линий положения.
Из рис. 69 можно вывести, что угол 0, заключенный между ка-
сательными, проведенными к окружностям в точке нахождения судна,
будет определяться выражением
0 = 360° — В+а -Ьр).
На основании-анализа формулы (94) можно сделать вывод, что
для получения места судна с достаточной точностью необходимо иметь
30° < 0 < 150°.
Достоинства способа: высокая точность определения места; неза-
висимость определения места от поправки компаса.
Недостатки: необходимость наличия в видимости судоводителя
трех ориентиров; сложность измерения горизонтальных углов в ус-
ловиях сильной качки и различной видимости ориентиров ночью;
отсутствие третьей контрольной линии положения, что затрудняет
обнаружение промахов в опознании ориентиров или в снятии углов;
наличие случая неопределенности; сравнительная громоздкость ис-
полнения способа.
Способ целесообразно применять при необходимости иметь точное
место в условиях, не благоприятных для пеленгования, например в
штормовую погоду, а также в случае отсутствия уверенности в зна-
нии поправки компаса. В последнем случае, измерив компасные пе-
ленги на три ориентира, рассчитывают из них два горизонтальных угла
и по ним определяют место судна. Далее, снимают с карты истинные
пеленги на эти же ориентиры из обсервованной точки. По формуле
(28) рассчитывают три значения поправки компаса и их осредняют.
§ 31. ОПРЕДЕЛЕНИЕ МЕСТА ПО ПЕЛЕНГАМ ТРЕХ ОРИЕНТИРОВ
Способ получил широкое распространение, так как наряду с вы-
сокой точностью и надежностью требует минимальных по объему вы-
числительных и графических работ.
Для определения места судна необходимо иметь в видимости на-
блюдателя три нанесенных на карту ориентира.
Сущность способа заключается в том, что в быстрой последователь-
ности измеряют компасные пеленги на три ориентира и после исправ-
ления их поправкой компаса прокладывают на карте. Точка пересе-
чения истинных пеленгов является обсервованным местом судна
(рис. 73).
Однако, как правило, пеленги не пересекаются в одной точке, а
образуют так называемый треугольник погрешности.
85
Рис. 74. К доказательству свойств вершин тре-
угольника погрешности
Рис. 73. Определение места по
трем пеленгам
Причинами появления этих треугольников могут быть: промахи в
наблюдениях, расчетах й графическом построении на карте; ошибки
опознания ориентиров; ошибки в принимаемой поправке компаса;
случайные ошибки пеленгования; неодновременность измерения пе-
ленгов.
В результате влияния двух первых причин треугольник погрешно-
сти обычно имеет большие размеры. Наличие промаха легко обнаружи-
вается повторными наблюдениями. Поэтому, получив треугольник
значительных размеров, необходимо проверить расчеты и пеленгова-
ние ориентиров повторить. Если повторные наблюдения дают такой же
результат, то нужно проверить правильность опознания ориентиров.
Влияние систематических ошибок. При отсутствии промахов и
ошибок в опознании ориентиров наличие значительного по размерам
треугольника погрешности является следствием влияния ошибки в
принимаемой поправке компаса.
Пусть в результате пеленгования ориентиров А, В и С получены
точные значения компасных пеленгов. После исправления безошибоч-
ной поправкой компаса истинные пеленги, проведенные на карте от
соответствующих ориентиров, пересекутся в точке нахождения судна
F (рис. 74). Если поправка компаса будет иметь положительную сис-
тематическую ошибку, то исправленные пеленги на карте образуют
в пересечении треугольник abc. Однако, если систематическая ошибка
в поправке компаса будет отрицательной, то пересечение пеленгов
дает треугольник а'Ь'с.
Во всех рассмотренных случаях углы между пеленгами, равные
аир, остаются неизменными, так как под действием систематичес-
кой ошибки все пеленги разворачиваются в одну сторону на величину
ошибки.
Постоянство горизонтальных углов между двумя ориентирами
дает основание сделать выводы, что вершина каждого угла треуголь-
ника погрешности всегда располагается на окружности, вписывающей
угол, образованный пеленгами на соответствующие ориентиры.
Например, вершины треугольников погрешности а и а! находятся на
86
окружности Ааа'В, вписывающей угол а, вершины b и Ь’ — на ок-
ружности BbbfCy вписывающей угол р, и вершины с и с' — на ок-
ружности Асс'С, вписывающей угол (а + Р). Это очень важное свойст-
во вершин треугольников погрешности используется для отыскания
обсервоваиного места судна в случае недостоверной поправки ком-
паса.
На рис. 74 видно, что место судна F лежит на пересечении дуг, сое-
диняющих сходственные вершины углов треугольников погрешности.
Под сходственными вершинами понимают вершины углов, образо-
ванных пеленгами на одни и те же ориентиры. Следовательно, если мы
будем иметь два треугольника погрешности и проведем через сход-
ственные вершины дуги окружностей, вписывающих углы между пе-
ленгами, то они пересекутся в точке, являющейся обсервованным мес-
том судна.
Если ошибка в поправке компаса не превышает 10е, то с точностью,
достаточной для практики судовождения, дуги окружностей можно
заменить прямыми, т.е. хордами.
При определении места судна поступают следующим образом.
Получив треугольник погрешности abc (рис. 75), сторона которого
более 5 мм на путевой карте, считают, что он является результатом
наличия систематической ошибки в поправке компаса. Поэтому учиты-
ваемую поправку компаса изменяют на 2—4° в любую сторону и исправ-
ляют ей измеренные компасные пеленги на ориентиры. Вторичная
прокладка от ориентиров новых значений исправленных пеленгов дает
на карте второй треугольник погрешности а’Ь'с. Соединяют сходст-
венные вершины треугольников прямыми линиями и в их пересечении
F получают уточненное место судна.
Действия по отысканию места судна этим способом получили
название разгона треугольника погрешности.
При определении места по пеленгам трех ориентиров может встре-
титься случай неопределенности, когда все ориентиры и судно будут
находиться на одной окружности. В этих условиях независимо от
величины и знака систематической ошибки все пеленги будут пересе-
каться в одной точке. Следовательно, выявить наличие систематичес-
кой ошибки и получить место судна, свободное от ее влияния, невоз-
можно.
Влияние случайных ошибок. Исходя из свойств случайных ошибок
можно сделать вывод, что их влияние на определение места судна будет
проявляться в образовании небольших по размерам треугольников
погрешности. Поэтому, получив треугольник со стороной менее 5 мм
или 0,5 мили на путевой карте, считают его результатом действия слу-
чайных ошибок. Место судна в этом случае принимается в центре тре-
угольника, если он равносторонний. Если же треугольник вытянутый,
то место намечают внутри него ближе к малой стороне.
Влияние неодновременности измерения пеленгов. При плавании
на путевых картах со скоростью менее 12 уз влияние неодновременно-
сти наблюдений уменьшают соблюдением очередности пеленгования:
первыми пеленгуют ориентиры, расположенные на более острых
и тупых курсовых углах;
87
Рис. 75. Определение места при на-
личии треугольника погрешности
в последнюю очередь пеленгуют ориентиры, расположенные бли-
же к траверзу судна;
днем в плохую видимость и ночью первыми измеряют пеленги на
ориентиры, наблюдение которых наиболее затруднено.
Если скорость судна более 12 уз или же плавание совершается на
незначительных удалениях (2—3 мили) от ориентиров, то пеленги
приводят к одному моменту. С этой целью измеряют пеленги, напри-
мер, в следующей последовательности: КП^, КПв2, КПс3, и да-
лее вновь повторяют пеленгование первых двух ориентиров, но в
обратном порядке, т. е. КПв4 и КПл5 (рис. 76). Считая, что за корот-
кий промежуток времени пеленги изменяются линейно, рассчитывают
их средние значения:
КПЛз^(КПЛ1 + КПЛ)/2;
КПВп = (КПВг + КПВ4)/2.
Время и отсчет лага замечаются при измерении третьего пеленга
на ориентир, в нашем примере КПс3.
Оценка точности. Рассмотренная ранее общая формула точности
определения места судна (89) справедлива только для двух линий по-
ложения. Для оценки точности места судна, полученного по пеленгам
трех ориентиров, используется формула
/Ио- ± Е7^ЛПср/[5Ш2 0], (95)
где ^лпср — среднее арифметическое значение из ошибок трех линий положения;
[sin2 0] = sin2 0! + sin2 02 + sin2 (0Х + 02),
0! - ос; 02 = р — углы между пеленгами.
Градиент пеленга имеет выражение
g = 57,3°/Z>.
88
Используя формулу (92) и выражение градиента пеленга, получим
ошибку линии положения
m°D/57.3", <96)
где гпн — ошибка измерения пеленга;
D — расстояние до ориентира.
На основании выражения (96) будем иметь
^лпср = /пи •
где Dcp - (Da + Db + Dc)/3.
Из формулы (95) видно, что ошибка определения места будет ми-
нимальной при углах 0, равных 60 или 120°. При определении места
судна ориентиры выбирают так, чтобы углы 0 находились в> пределах
30—150°. Если углы между пеленгами будут составлять 120 , то неза-
висимо от того, действуют ли случайные или систематические ошибки,
место судна всегда будет внутри треугольника погрешности.
Порядок выполнения способа. 1. Подобрать на местности три ориенти-
ра, нанесенных на карту так, чтобы углы между пеленгами находи-
лись в пределах 30—150°.
2. Определить очередность пеленгования исходя из условии види-
мости и расположения ориентиров относительно диаметральной плос-
кости судна.
3. В порядке очередности быстро измерить компасные пеленги на
ориентиры. При скорости судна более 12 уз или незначительных рас-
стояний до ориентиров измерить пять пеленгов и первые два привести
к моменту наблюдений третьего ориентира. Время и лаг заметить в мо-
мент третьих наблюдений.
- 4. Исправить компасные пеленги поправкой компаса и проло-
жить на карте в порядке их измерения.
5. При получении большого треугольника погрешности прове-
рить записи пеленгов, их исправление и прокладку на карте, если
ошибка не обнаружена, то повторить наблюдения. В случае сохране-
ния треугольником своих размеров после повторных наблюдении про-
верить опознание ориентиров на местности.
6. При получении треугольника погрешности со стороной менее
5 мм или 0,5 мили на путевой карте принять место в центре его, если
он равносторонний. В других случаях место намечать ближе к малой
стороне треугольника. м г
7. Если получен треугольник погрешности со стороной более о мм
(0,5 мили), который при повторных наблюдениях сохраняет свою ори-
ентировку на карте, поступить одним из двух способов.
а) рассчитать два горизонтальных угла между измеренными ком
пасными пеленгами и определить место судна с помощью протрактора
или кальки;
б) изменить поправку компаса на 2—4° в любую сторону и по
исправления пеленгов проложить их новые значения. Прямыми ли
ниями соединить сходственные вершины треугольников погрешности
и в пересечении их обозначить обсервованное место судна.
89
8. Из полученной обсервованной точки снять истинные пеленги
на ориентиры и рассчитать поправку компаса:
ДК!-ИПЛ—КПл;
ДК2 = ИПВ-КПВ;
ДК3=ИПС-КПС;
ДКср-(ДКг+ДК2 + ДК3)/3.
§ 32. ОПРЕДЕЛЕНИЕ МЕСТА СУДНА
ПО ПЕЛЕНГАМ ДВУХ ОРИЕНТИРОВ
Способ встречается часто, так как для определения места судна не-
обходимо иметь в видимости судоводителя всего лишь два ориентира.
Сущность способа заключается в быстром последовательном изме-
рении компасных пеленгов на два ориентира и прокладке их, после ис-
правления поправкой компаса, на карте (рис. 77).
Точка пересечения пеленгов дает обсервованное место судна. На
его точность могут влиять следующие причины: промахи при наблю-
дении, расчетах и графике; ошибки в опознании ориентиров; ошиб-
ка в принимаемой поправке компаса (систематическая ошибка); слу-
чайные ошибки пеленгования; неодновременность измерения пеленгов.
Обнаружить ошибку в определении места судна по результатам
графических построений на карте в этом способе невозможно, так
как отсутствует третья контрольная линия положения. Поэтому вы-
полняют несколько обсерваций подряд и на основании их совмест-
ного анализа исключают промахи, выявляют действие систематиче-
ских и случайных ошибок.
Влияние ошибки в поправке компаса. Если учитываемая поправка
компаса будет содержать систематическую ошибку, например, равную
+ Ек, то оба пеленга развернутся относительно своих действительных
Рис. 77. Определение места по двум
пеленгам
Рис. 78. Смещение места
под влиянием ошибки в
ДК
90
Рис. 80. К влиянию ошибки в ДК на
обсервации по двум пеленгам
направлений по часовой стрелке на величину При этом точка пе-
ресечения пеленгов сместится по окружности, вписывающей угол меж-
ду пеленгами 0 (рис. 78). Хорда FF± - А будет представлять собой
величину смещения места судна в результате действия систематиче-
ской ошибки в ДК.
Для определения значения А обозначим: R — радиус окружности,
d — расстояние между ориентирами А и В. Отношение хорды к ра-
диусу круга равно удвоенному синусу вписанного угла, вершина ко-
торого лежит на окружности, а сам он опирается на данную хорду.
Следовательно, будем иметь
0;
FFX//? Л sin ек.
После подстановки обозначений и деления первого выражения на
второе получим:
d sin
а/A = sin 0/sin 8К или Д .
sin 0
Окончательно можно написать
Д —----------. (97)
57.3° sin 0
Из рис. 79 видно, что при определенных условиях неизвестная си-
стематическая ошибка в А К может привести к навигационной ава-
рии. В связи с этим к месту судна, полученному по двум пеленгам,
необходимо относиться с большой осторожностью. Ошибка в прини-
маемой поправке компаса может быть обнаружена только при наличии
серии обсерваций по одним и тем же ориентирам.
Признаками наличия систематической ошибки является то, что
обсервованные точки располагаются не на прямой линии, а на слож-
ной кривой (гипербола, переходящая в частных случаях через пря-
мую в параболу) (рис. 80). Кроме того, расстояния между точками не бу-
дут пропорциональны времени или показаниям лага. Особенно замет-
ны оба признака при очень острых или очень тупых углах между
пеленгами.
91
Рис. 81. К влиянию не-
одновременности пелен-
гования
Необходимо иметь в виду, что при невер-
ном опознании одного из ориентиров обсерво-
ванные точки будут располагаться подобным
же образом.
Влияние случайных ошибок. Определив по
формуле (96) ошибки линий положения в ре-
зультате действия случайных ошибок пеленго-
вания, можно построить фигуру погрешности,
которая будет характеризовать точность оп-
ределения места судна. Однако проще рас-
считать радиальную ошибку места, используя
формулы (89) и (96), на основании которых
получим
__________________________________
° 57,3° sin О V А в 7
Из анализа формулы (98) можно сделать вывод, что для уменьшения
ошибки определения места судна необходимо подбирать ориентиры,
наиболее близко расположенные к судну при 0 « 90°. Однако осу-
ществить последнее условие на практике сложно. Поэтому считают
допустимым иметь угол 0 в пределах 30—150°.
Влияние неодновременного измерения пеленгов. Пересечение
последовательно измеренных пеленгов не соответствует действитель-
ному месту судна. Это видно из рис. 81, на котором показаны точные
места судна Fr и f 2 в момент пеленгования ориентиров А и В. Место
судна, принятое в точке пересечения пеленгов F', будет ошибочным
на величину отрезка F2F'. Для уменьшения влияния неодновремен-
ное™ измерения пеленгов устанавливают уже известную нам по §31
очередность пеленгования или выполняют приведение пеленгов к
одному моменту.
Практическое выполнение способа. 1. Подобрать на местности два
наиболее близко расположенных к судну ориентира с таким расчетом,
чтобы угол пересечения их пеленгов был близок к 90° или, в крайнем
случае, находился в пределах 30—150°.
2. Определив очередность пеленгования, измерить в быстрой по-
следовательности пеленги на оба ориентира. При скорости более 12 уз
или малом удалении ориентиров измерить три пеленга на два ориенти-
ра в последовательности КПл^ КПв2, КПл3 и наблюдения первого
ориентира осреднить КПл2 = (КПлг + КПЛз)/2. Время и отсчет ла-
га заметить в момент измерения второго пеленга.
3. Исправить компасные пеленги поправкой компаса и проложить
их от места обозначения ориентиров на карте.
4. На основании предыдущих данных о месте и элементах движе-
ния судна проанализировать полученную обсервацию.
§ 33. ИЗМЕРЕНИЕ РАССТОЯНИЙ В МОРЕ
Расстояние до ориентиров в море может быть измерено с помощью
радиолокационной станции, дальномера или секстана. Наиболее про-
сто и точно измерение дистанции выполняется радиолокатором, исполь-
зование которого в навигационных целях будет рассмотрено в главе
IX. Дальномеры, обладающие достаточной точностью измерения рас-
стояний, широкого применения на морских судах не получили. Сек-
стан является простым по устройству угломерным прибором, который
используют для визуального определения расстояний.
Имея в видимости ориентир, высота которого ВС = h известна,
измеряют секстаном вертикальный угол ВАС — а между его основа-
нием и вершиной (рис. 82). Дистанция до ориентира АВ = D в милях
может быть рассчитана из Д АВС
D= -^-ctga. (99)
1852 6
Навигационные ориентиры обычно имеют незначительную вы-
соту, вследствие чего измеренные вертикальные углы находятся
в пределах до 5°. Это позволяет произвести замену
tg a' ~ a' аге 1'.
В результате подстановки получим
D 3438 h
~ 1852 a'
или окончательно
D=l,86/iM/a'. (100)
Если высота ориентира дана в футах, то формула примет вид
£>-0,57Аф/сс'. (101)
Формулы (99), (100) и (101) не учитывают кривизны земной поверх-
ности и земной рефракции, что допустимо на малых расстояниях.
В МТ —75 имеется табл. 29, из которой по аргументам (h — е) в
метрах, а — в градусах и минутах находят расстояние в милях.
Здесь е— высота глаза.
Иногда измерить вертикальный угол между вершиной и основа-
нием ориентира невозможно, так как основание скрыто от наблюдате-
ля постройками или растительностью. В этих случаях при известной
высоте ориентира над уровнем моря
между его вершиной и береговой чер-
той. Ошибка определения расстояния
будет незначительна, если ориентир
будет удален от берега на расстояние
меньше, чем его высота.
В приливных морях выбранную из
пособия высоту ориентира над уров-
нем моря необходимо исправлять по-
правкой на высоту уровня в момент
измерения вертикального угла.
измеряют вертикальный угол
Рис. 82. Определение расстояния
по вертикальному углу
93
Для вывода формулы ошибки расстояния, полученного по верти-
кальному углу ориентира, продифференцируем выражение (100) по
переменным Лиа
[dha' — hda' 1
------------ .
(а')2 J
Переходя к ошибкам, которые складываются квадратически, по-
лучим:
mD= ± 1,86 + (102)
Вынесем из-под корня Л/а' и окончательно получим
± Р|/ш£/Л2 + ш2/(а')2, (103)
где mh — ошибка знания высоты ориентира, м;
та — ошибка измерения вертикального угла;
mD — ошибка расстояния, мили.
Анализ формул (102) и (103) показывает, что точность определения
расстояния с помощью секстана уменьшается с увеличением самого
расстояния и ошибок измерения вертикального угла и знания высоты
ориентира.
Следовательно, для наблюдений необходимо выбирать ориентиры:
имеющие четкий силуэт и расположенные на контрастном фоне; рас-
положенные ближе к береговой черте и к судну; при равном удалении
от судна те ориентиры, вертикальные углы которых больше.
§ 34. ОПРЕДЕЛЕНИЕ МЕСТА ПО РАССТОЯНИЯМ
По двум расстояниям. Если в видимости судоводителя находятся
два ориентира А и В, высота которых известна, то, определив с помо-
щью секстана расстояния до них Da uDb, можно получить обсервован-
ное место судна (рис. 83).
Дуги окружностей, проведенные радиусами Da и Db от соот-
ветствующих ориентиров, пересекутся на карте в точках F и F', в
одной из которых будет находиться судно. В этом случае обсервован-
ная точка распознается либо по счислимому месту судна, либо по при-
ближенному пеленгу на один из ориентиров.
Для того чтобы исключить влияние на место судна разновременно-
сти наблюдений, первым измеряют вертикальный угол на ориентир,
находящийся ближе к траверзу. Если этого недостаточно, то прибе-
гают к приведению наблюдений к одному моменту. Выполняется это
аналогично приведению к одному моменту двух пеленгов.
Измерения расстояний сопровождаются влиянием случайных и си-
стематических ошибок. Отсутствие третьей контрольной линии положе-
ния не позволяет обнаружить ошибок и промахов в измерениях.
По этой причине к определениям места судна по двум расстояниям
необходимо относиться с большой осторожностью. Рекомендуется вы-
полнить несколько обсерваций с небольшими интервалами по времени
и проанализировать их соответствие курсу и скорости судна.
94
С учетом того, что градиент расстояния g = 1, радиальная ошибка
определения места этим способом может быть рассчитана по формуле
1_______________
Мо= ±—— р (104)
sin 0 ’’
где mD и mD — ошибки измерения расстояний до ориентиров;
0 — угол между линиями положений.
На рис. 83 видно, что угол 0 равен углу между пеленгами на ори-
ентиры.
Следовательно, точность определения места зависит от точности
измерения расстояний и угла пересечений линий положения. Ошибка
будет минимальной при 0 = 90°.
Практическое выполнение способа. 1. Подготовить секстан к на-
блюдениям. Определить поправку индекса.
2. Подобрать ориентиры для наблюдений согласно приведенным
рекомендациям.
3. Измерить вертикальные углы, начиная с ориентира, располо-
женного ближе к траверзу судна. В случае задержки с измерением вто-
рого вертикального угла повторить наблюдения по первому ориенти-
ру и отсчеты секстана (ос) привести к одному моменту
oc = (ocl -hoc2)/2.
Рис. 83. Определение места по двум
расстояниям
Время и лаг заметить после вторых наблюдений.
4. Исправить отсчеты секстана вертикальных углов суммарной по-
правкой (/ + s) и рассчитать расстояния до ориентиров.
5. Провести на карте от соответствующих ориентиров, как из цент-
ров, отрезки пересекающихся дуг радиусами, равными рассчитанным
расстояниям.
6. Обозначить обсервованное место судна в точке пересечения дуг,
ориентируясь на счислимое место или приблизительный пеленг.
По трем расстояниям. Способ имеет высокую точность и получил
широкое распространение с появлением радиолокации на судах. Для
применения его необходимо иметь
три ориентира, нанесенных на кар-
ту, до которых возможно измерить
расстояния. При отсутствии оши-
бок все три изолинии, являющиеся
дугами окружностей, пересекутся
в одной точке F (рис. 84). Однако
чаще всего пересечения изолиний
образуют треугольник погрешно-
сти.
В данном способе образование
фигуры погрешности и ее размеры
являются следствием влияния тех
же причин, что и в способе трех пе-
ленгов. Поэтому порядок анализа и
действий при получении треуголь-
ника погрешности аналогичны рас-
95
Рис. 84. Определение места по трем Рис. 85. Определение места при нали-
расстояниям чии систематической ошибки
смотренным в § 31. В случае необходимости разгона треугольника
все измеренные расстояния изменяют в одну сторону на одну и ту же
произвольную величину и вторично прокладывают на карте. Соединив
прямыми сходственные вершины треугольников погрешности, полу-
чают в их пересечении обсервованное место судна (рис. 85).
Влияние неодновременности наблюдений на точность определения
места уменьшают соблюдением порядка измерений расстояний и при-
ведением их к одному моменту. С этой целью, закончив наблюдения,
повторяют измерения расстояний до второго и первого ориентиров и
результаты осредняют. Время и отсчет лага замечают в момент изме-
рения расстояния до третьего ориентира. Порядок практического вы-
полнения способа отличается от способа по двум расстояниям только
увеличением количества наблюдений.
Для оценки точности места судна, определенного данным способом, '
можно использовать формулу (95). При выборе ориентиров для наблю-
дений желательно, чтобы углы 0 были равны 60 или 120°. Допустимы-
ми пределами углов являются 30—150°.
§ 35. КОМБИНИРОВАННЫЕ СПОСОБЫ ОПРЕДЕЛЕНИЯ МЕСТА СУДНА
Комбинированными способами называют такие способы определе-
ния места судна, при которых измеряются разнородные навигацион-
ные параметры: визуальный пеленг и расстояние, пеленг и горизон-
тальный угол, пеленг и глубина, астрономическая линия положения и
радиопеленг и т. п. Рассмотрим некоторые из визуальных комбиниро-
ванных способов определения места судна.
По пеленгу и расстоянию. Для определения места этим способом
необходимо иметь в видимости ориентир, нанесенный на карту, до ко-
торого имеется возможность измерить расстояние и компасный пе-
ленг.
96
Измерив одновременно оба навигационных
параметра КПл и Da, прокладывают на кар-
те от ориентира А линию обратного истин-
ного пеленга и отрезок дуги радиусом, рав-
ным измеренному расстоянию Da- В пересе-
чении пеленга и дуги получают обсервованное
место судна в точке F (рис. 86).
Однако одновременное измерение двух на-
вигационных параметров одним наблюдателем
невозможно. Поэтому для уменьшения ошиб-
ки места судна из-за разновременности на-
блюдений измерения необходимо начать с
навигационного параметра, который меняется
медленнее. Кроме того, рекомендуется наблю-
Рис. 86. Определение ме-
ста по расстоянию и пе-
ленгу
дение привести к одному моменту, для чего
повторно измерить первый навигационный параметр и значения его
осреднить. В этом случае время и отсчет лага заметить в момент из-
мерения второго параметра.
Используя формулу (89) и известные нам значения градиентов рас-
стояния и локсодромического пеленга, можем получить для данного
способа значение радиальной ошибки определения места
мо= ± —J^"'b + (m2D/57’3°)2, (Ю5)
sin 0
но так как наблюдения проводятся с использованием одного ориенти-
ра, то 0 = 90°.
Окончательно получим
мо - ± У(106)
Практическое выполнение способа. 1. Подобрать ориентир с учетом
возможности измерения до него расстояния.
2. Измерить навигационные параметры, начиная с пеленга, если
курсовой угол на ориентир острый или тупой; с расстояния, если кур-
совой угол на ориентир близок к траверзному; с вертикального угла,
если по его значению определяется расстояние до ориентира.
3. Заметить время и отсчет лага.
4. Повторить наблюдения первого параметра и его значения осред-
нить.
5. Исправить результаты наблюдений соответствующими поправ-
ками.
6. Проложить истинный пеленг от места ориентира на карте и ду-
гу окружности радиусом, равным измеренному расстоянию до него.
В пересечении пеленга и окружности обозначить обсервованное место
судна.
По пеленгу и горизонтальному углу. Способ применяется в том слу-
чае, когда в видимости судоводителя находятся два нанесенных на кар-
ту ориентира, но пеленгование одного из них невозможно (закрыт от
наблюдателя у компаса надстройками).
4 Зак. 483 97
Рис. 87. Определение места по гори-
зонтальному углу и пеленгу
Рис. 88. Определение места
по глубине и пеленгу
Для получения обсервоваиного места судна необходимо измерить
секстаном горизонтальный угол а между ориентирами А и В и компас-
ный пеленг КПд на видимый от компаса ориентир А (рис. 87). Как
правило, первым измеряется горизонтальный угол, так как в этом слу-
чае влияние неодновременности наблюдений на место судна будет
меньше. Далее рассчитывают истинные пеленги на ориентиры
ИПЛ-КПЛ4 ЛК;
ИПЯ— ИП^ ± а.
В последнем выражении ставится знак «+», если пеленгуется ле-
вый ориентир.
Место судна на карте получается в пересечении линий истинных
пеленгов, проведенных от ориентиров. Данный способ является, по
своей сути, частным случаем определения места по двум пеленгам.
Практическое выполнение способа. 1. Приготовить секстан для
наблюдений.
2. Измерить в быстрой последовательности горизонтальный угол
между ориентирами и пеленг на видимый от компаса ориентир. Заме-
тить время и отсчет лага.
3. Исправить компасный пеленг поправкой компаса и рассчитать
истинный пеленг второго ориентира.
4. Проложить направления истинных пеленгов от места ориенти-
ров на карте и в их пересечении обозначить обсервованное место судна.
Пеленг (расстояние) и глубина. Способ может быть использован
в районе, где глубины изменяются заметно, равномерно уменьшаясь
в направлении к берегу или к отмели. В этом случае изобаты могут быть
использованы в качестве изолиний.
Для получения места измеряют в быстрой последовательности
компасный пеленг (расстояние) на ориентир и глубину эхолотом. Ме-
сто судна будет получено в пересечении истинного пеленга (расстоя-
ния), проведенного от ориентира на карте и изобаты, соответствующей
измеренной глубине (рис. 88).
98
При плавании в приливных морях глубину, измеренную эхолотом,
необходимо привести к нулю глубин карты. Для этого рассчитывают
по таблицам приливов высоту уровня воды на момент определения ме-
ста судна и исключают ее из измеренной глубины.
Ориентир для наблюдений необходимо подбирать таким образом,
чтобы изолиния, соответствующая измеренному навигационному пара-
метру (пеленгу, расстоянию), пересекалась с изобатой под углом, близ-
ким к 90°. Точность способа в основном зависит от рельефа дна и до-
стоверности промера.
§ 36. КОНТРОЛЬ СЧИСЛЕНИЯ ПУТИ
И АНАЛИЗ ДОСТОВЕРНОСТИ ОБСЕРВАЦИЙ
Плавание по заданному маршруту с необходимой степенью точно-
сти может выполняться лишь при грамотном сочетании графического
счисления с определениями места судна.
Частота обсерваций, или, как принято называть, частота коррек-
ции счисления, должна соответствовать гидрометеорологическим усло-
виям перехода, навигационно-гидрографическим особенностям района
плавания и заданной точности. Она характеризуется допустимым вре-
менем плавания по счислению, представляющим собой наибольший
промежуток времени, при котором непрерывно увеличивающаяся ошиб-
ка места судна не превысит установленной величины.
Допустимая средняя квадратичная ошибка места судна Мдоп мо-
жет быть выражена
Мдоп= ±ум*+м*.
где Мо — средняя квадратичная ошибка последнего определения места судна;
Л1С — средняя квадратичная ошибка последующего счисления.
При заданном значении Мдоп из последнего выражения можно оп-
ределить среднюю квадратичную ошибку счисления
Подставляя в левую часть равенства значение Мс из формулы (77),
выведем значение допустимого времени плавания по счислению
0,7КС^/^ДОП-М*,
откуда
1,4КМд0П-(107)
Для повышения безопасности, рассчитанный по формуле (107),
наибольший промежуток времени плавания по счислению необходимо
уменьшить в 2 раза и более.
На основе многолетнего опыта практического плавания были вы-
работаны следующие рекомендации по частоте обсерваций:
при нормальных условиях плавания вблизи берегов — не реже чем
через 20—30 мин;
4* 99
в тех же условиях, но при слабом оборудовании побережья нави-
гационными знаками и определении места судна по естественным ори-
ентирам — не реже чем через 15—20 мин; при плавании в стесненных
районах и узкости — не реже чем через 10 мин;
в особо стесненных условиях — через 1—5 мин.
Приведенная частота обсерваций, особенно при плавании вблизи
берегов, может показаться чрезмерной. Однако в условиях системати-
ческого контакта с берегом исключается возможность потери ориенти-
ровки, уверенно распознаются естественные ориентиры, надежно оп-
ределяется путь судна и облегчается анализ полученных невязок.
При плавании в видимости береговых (фиентиров независимо от
времени суток рекомендуется использовать для определения места
судна визуальные способы. Решение на применение какого-либо кон-
кретного способа принимают в зависимости от требуемой точности,
возможности производства наблюдений и времени, необходимого на
их обработку.
При анализе невязок между счислимым и обсервованным местом не-
обходимо учитывать точность как того, так и другого места.
В практике встречаются случаи, когда счислимое место мало ус-
тупает по точности обсервованному. Поэтому при получении большой
невязки обсервацию считают сомнительной. Особенно это относится
к тем определениям места судна, которые выходят за пределы площади
вероятного счислимого места, рассчитанного с учетом максимальных
ошибок счисления.
В случае получения такой обсервации необходимо проверить счис-
ление, обработку результатов наблюдений и прокладку линий поло-
жения на карте. Если не будет обнаружен промах, то после проверки
опознания ориентиров определение места повторить.
Для контроля обсерваций рекомендуется одновременно с опреде-
лением места измерить глубину эхолотом. При этом необходимо иметь
в виду, что глубина может не соответствовать указанной на карте
из-за влияния приливно-отливных явлений или других причин. Сле-
довательно, измеренные глубины должны быть приведены к нулю глу-
бин карты.
Перенос графического счисления в обсервованную точку, как пра-
вило, осуществляется на основании анализа ряда последовательно
выполненных определений места. Получив на карте ряд обсерваций,
сопоставляют расстояния между ними с расстояниями, пройденными
судном по лагу (по оборотам) за соответствующие промежутки времени.
Если наблюдается систематически повторяющееся однозначное не-
соответствие расстояний, то выявляют причину исходя из конкретных
условий плавания (влияние ошибки в поправке лага, несоответствие
скорости частоте вращения винтов, ошибки в учете влияния течения
и ветра и т. п.).
Далее, ориентируясь на полученные обсервации, проводят на кар-
те осредненную линию пути судна и сравнивают ее с направлением
учитываемого истинного курса или пути. Если они непараллельны, то
выявляют причину их расхождения, которыми могут быть ошибки в
поправке компаса, в учете ветрового дрейфа и течения.
100
В заключение необходимо отметить, что при определении места суд-
на причинами грубых ошибок часто являются небрежность при наблю-
дениях, записях и вычислениях, неаккуратность графических пост-
роений на карте. Поэтому необходимо все действия по прокладке и
снятию направлений, расстояний и координат точек повторять не ме-
нее двух раз. Это поможет избежать грубых ошибок, которые часто
являются причинами навигационных аварий.
Глава VIII
ОБСЕРВАЦИИ ПО РАЗНОВРЕМЕННЫМ НАБЛЮДЕНИЯМ
§ 37. КРЮЙС-ПЕЛЕНГ
Иногда в практике судовождения в пределах видимости с судна
наблюдается только один ориентир, положение которого нанесено на
навигационную карту. Если взять пеленг на данный предмет, то ме-
сто судна в момент взятия только одного пеленга получить невозможно.
Линия положения может быть перенесена параллельно самой себе на
некоторое расстояние к какому-либо определенному моменту по курсу
судна и плаванию. Такая линия положения называется перенесенной
или сопутствующей. Перенесенные линии положения дают возможность
использовать разновременные наблюдения одного и того же ориен-
тира для обсерваций.
Если произвести пеленгование одного предмета в разные моменты
времени и отложить по курсу пройденное судном расстояние за про-
межуток между пеленгами, то графическим построением, используя пе-
ренесенную линию положения, можно получить место судна на карте.
Данный способ определения называется крюйс-пеленгом. Определение
места этим способом отличается от рассмотренных выше тем, что опре-
деление получают с учетом не только двукратного пеленгования бере-
гового ориентира, но и данных графического счисления. Поэтому дан-
ное определение называют счислимо-обсервованным.
Сущность определения места судна способом крюйс-пеленга состоит
в следующем.
Допустим, что с судна, следующего ПК (рис. 89) по линии СС±,
наблюдается один береговой предмет А. В какой-то момент времени Т\
при отсчете лага олг взят пеленг предмета А (линия Л/\).
Через некоторый промежуток времени в момент Т2 при отсчете ла-
га ол2 вторично взят пеленг того же предмета (линия ЛР2). Так как
в момент первого пеленгования судно находилось на линии пеленга
АР19 а в момент второго пеленгования — на линии пеленга АР2 и за
время между пеленгами судно прошло истинным курсом ССг расстоя-
ние, равное 5Л, то задача получения счислимо-обсервованного места
сводится к перенесению линии положения, полученной из первого на-
блюдения, к моменту Т2 второго наблюдения.
Пересечение перенесенной линии положения АРХ, обозначенной
линией со стрелками, с линией пеленга АР2 Raw счислимо-обсервован-
101
Рис. 89. Обсервация по крюйс-пеленгу
Рис. 90. Нанесение места по крюйс-
пеленгу
ное место, обозначаемое на карте треугольником, у которого записы-
вается время и отсчет лага второго наблюдения. '
Перенос линии положения может быть выполнен следующими спо-
собами. <
1. Из точки пересечения первого пеленга (см. рис. 89) с линией ис- !
тинного курса ССг откладывается отрезок, равный плаванию 5Л, и ?
через полученную точку К проводится пернесенная первая линия поло-
жения. Точка М пересечения двух линий положения и будет счисли- 5
мо-обсервованным местом.
2. От берегового ориентира А (рис. 90) в сторону движения судна j
прокладывается линия, параллельная истинному курсу СС1Э на кото- 1
рой откладывается плавание Зл, и через полученную точку В проводит- ]
ся перенесенная линия положения, которая, пересекаясь с линией вто-
рого пеленга в точке М, дает счислимо-обсервованное место.
3. После проведения на карте линий пеленгов, взятых в моменты
7\ и 7\, рассчитывается 5Л = рол-/(л. Параллельная линейка при- :
кладывается к линии истинного курса и передвигается параллельно
курсу с таким расчетом, чтобы ножки циркуля-измерителя, раздвину- |
тые на пройденное судном расстояние 5Л, вместилось по кромке ли- !
нейки между пеленгами. Сделав отметку на линии второго пеленга в )
точке М, получаем счислимо-обсервованное место. j
При учете дрейфа на карте, кроме линии истинного курса, должна ]
быть проложена линия пути, на которой откладывается пройденное по
Рис. 91. Определение места способом Рис. 92. Нанесение места по крюйс-
крюйс-пеленга па течении пеленгу с поворотом
102
Рис. 93. Нанесение места по разновре-
менным пеленгам двух ориентиров
лагу расстояние, а точнее — вели-
чина 5Л sec а, где а — угол дрей-
фа. Дальнейшее построение крюйс-
пеленга выполняется вышеуказан-
ными способами.
При наличии течения (рис. 91),
когда известны все его элементы,
плавание судна между пеленгами
нужно прокладывать с учетом тече-
ния. Если судно за время между
наблюдениями первого и второго пе-
ленгов следовало не одним, а нес-
колькими курсами, то по каждому
отдельному курсу откладывается плавание и в последней точке прово-
дится перенесенная линия положения. Построение видно на рис. 92.
Такое определение носит название крюйс-пеленг с поворотом.
Иногда применяются частные случаи определения места судна спо-
собом крюйс-пеленга. К таким способам относятся: способ траверзно-
го расстояния, двойного угла и способ прямого угла при предмете, ко-
торые связаны с вычислением расстояния до ориентира по линии вто-
рого пеленга. Эти приемы несколько повышают точность счислимо-
обсервованного места за счет уменьшения графических работ.
К определению места судна способом крюйс-пеленга можно отне-
сти случаи с разновременным пеленгованием двух ориентиров. Дейст-
вительно, если в видимости с судна имеется один ориентир, который дол-
жен скрыться из видимости, а через некоторый промежуток времени
будет наблюдаться другой ориентир, то, запеленговав первый ориен-
тир до его скрытия, а второй ориентир после его открытия и вместив
плавание между пеленгами, получаем счислимо-обсервованное место
судна. Построение данного способа приведено на рис. 93.
На точность счислимо-обсервованного места влияют случайные
ошибки пеленгования и графической прокладки на карте, ошибка
в принятых элементах течения и в принятом дрейфе. Точность счис-
лимо-обсервованного места рассчитывается по формуле
M^]/M2n4-M24/sin 0. (108)
Для уменьшения ошибок при определении места способом крюйс-
пеленга необходимы минимальные плавание и расстояние до ориенти-
ров, точное счисление между пеленгами; второй пеленг необходимо
брать тогда, когда ориентир находится ближе к траверзу судна и име-
ется точный учет элементов течения и дрейфа.
§ 38. ОПРЕДЕЛЕНИЕ МЕСТА СУДНА
ПО КРЮЙС-РАССТОЯНИЮ
Определение места судна способом крюйс-расстояния производит-
ся при отсутствии на судне средств или возможности для точного из-
мерения пеленгов или когда поправка компаса не надежна, а может
быть измерено расстояние до ориентира с помощью РЛС, дальномера
103
Рис. 94. Обсервация способом крюйс-
расстояния
или секстана по угловой высоте предмета. Определение места судна
данным способом заключается в следующем.
Следуя вблизи берега и имея в видимости с судна один ориентир А
(рис. 94), измеряют расстояние D1 или вертикальный угол данного
предмета и с учетом высоты определяют расстояние до него. В момент
наблюдения замечают время 7\ и отсчет лага олг.
Продолжая плавание данным курсом, через промежуток времени,
достаточный для изменения направления на предмет в пределах от
30° до 150°, вновь определяют расстояние Р2 и замечают время Т2
и отсчет лага ол2. Полагая, что п^ть судна и пройденное расстояние
между наблюдениями известны, место судна можно получить
несколькими способами, а самым простым является геометрическое
решение.
На карте от места ориентира А по направлению пути судна от-
кладывается 5Л. Из полученной точки А± радиусом, равным измерен-
ному расстоянию D19 проводится часть окружности, являющейся изо-
линией при первом измерении, а из точки А — вторую изолинию соот-
ветствующую расстоянию Р2.
Точка М пересечения двух изолиний и будет счислимо-обсервован-
ным местом судна. Точность полученного счислимо-обсервованного
места зависит от ошибок измерения расстояний до ориентиров,
точности счисления пути судна между измерениями расстояния и от
угла пересечения второй изолинии с перенесенной первой изо-
линией.
Глава IX
ИСПОЛЬЗОВАНИЕ РАДИОТЕХНИЧЕСКИХ СРЕДСТВ
В НАВИГАЦИИ
§ 39. ПОНЯТИЕ
О РАДИОТЕХНИЧЕСКИХ СРЕДСТ1 АХ СУДОВОЖДЕНИЯ
Рассмотренные в главе VII способы определения места судна поз-
воляют контролировать счисление только при непосредственном ви-
зуальном контакте с береговыми ориентирами.
При плавании в условиях плохой видимости вблизи берегов и при
сплошной облачности в открытом море исключается возможность полу-
чения визуальных и астрономических обсерваций. При таких обстоя-
тельствах плавания контроль счисления пути осуществляют с помо-
щью радиотехнических средств судовождения.
К числу самых старых и наиболее распространенных радиотехни-
ческих средств судовождения необходимо отнести судовой радиопелен-
гатор, который в комплексе с морскими радиомаяками позволяет опре-
делить место судна на значительном удалении от берега, а также в
условиях плохой видимости.
Однако нестабильность условий радиопеленгования в течение су-
ток и невысокая точность определения места судна значительно огра-
ничивают пределы его использования.
Широкое распространение на судах получили радиолокационные
станции, которые дают возможность при отсутствии видимости опреде-
лять место судна, обнаруживать и определять элементы движения дру-
гих судов.
Применение радиолокационных станций ограничивается незначи-
тельной дальностью действия и спецификой используемого принципа
работы.
За последние годы существенно повысилась роль радионавигацион-
ных систем (РНС) в обеспечении безопасности плавания. Связано
это с тем, что РНС, обладая высокой точностью, позволяют получить
место судна независимо от гидрометеорологических условий плавания.
РНС представляет собой совокупность опорных передающих стан-
ций, синхронно излучающих радиосигналы на определенной частоте,
и судовых радиоприемных устройств, предназначенную для решения
специальных задач судовождения.
Определение места судна с помощью радиотехнических средств
оказалось возможным благодаря тому, что в них используются сле-
дующие основные свойства распространения радиоволн:
скорость их распространения (с) одинакова во всех направлениях
и приблизительно равна 300 000 км/с;
фронт радиоволны имеет сферическую форму, которую на большом
удалении от источника излучения можно принять за плоскость;
радиоволны распространяются нормально к фронту по кратчайше-
му направлению;
условия распространения зависят от диэлектрических свойств под-
стилающей поверхности.
105
С помощью судовых радиоприемных устройств можно измерить
направление прихода радиоволны, время распространения радиосиг-
нала от передающего устройства до приемной антенны судна, разность
моментов или фаз, приходящих от двух радиостанций радиосигналов
и т. п. Измеренные радионавигационные параметры дают возможность
определить значения соответствующих им навигационных параметров
и, следовательно, положения изолиний.
В настоящее время наибольшее распространение получили гипер-
болические РНС.
В зависимости от измеряемого радионавигационного параметра
они подразделяются на:
импульсные (РНС «Лоран-А»), в которых измеряется промежуток
времени АТ между приемами радиоимпульсов от двух радиостанций,
что равносильно измерению разности расстояний
AD - Dj — D2 — AT • с;
фазовые (РНС «Декка»), в которых измеряется разность фаз радио-
сигналов, принятых от двух радиостанций;
импульсно-фазовые (РНС «Лоран-С»), в которых сочетается
измерение разности фаз и промежутка времени между приемом радио-
сигналов от двух радиостанций.
Во всех перечисленных РНС измеренные радионавигационные па-
раметры соответствуют разности расстояний до двух радиостанций,
что позволяет на карте получить изолинию в виде гиперболы.
§ 40. РАДИОПЕЛЕНГОВАНИЕ С СУДНА
Радиопеленгатор представляет собой радиотехническое устрой-
ство, которое позволяет использовать свойства распространения ра-
диоволн для определения направления их прихода.
По методу определения радиопеленга существующие судовые ра-
диопеленгаторы подразделяют на два типа:
слуховые, в которых направление на радиомаяк определяется по
минимуму слышимости радиосигнала;
визуальные, в которых направление определяется по расположе-
нию характерной развертки на электронно-лучевой трубке.
Для определения места судна с помощью судовых радиопеленга-
торов в основном используются морские радиомаяки кругового излу-
чения, расположение которых показано на морских навигационных
картах. Для их работы выделен специальный диапазон частот 285—
320 кГц (X — 1050 920 м). Мощность радиоизлучения морских ра-
диомаяков находится в пределах 50—250 Вт, а эффективная дальность
использования днем до 175 миль. Передача радиосигналов радиомая-
ками осуществляется автоматически.
Для удобства использования они объединяются в навигационные
группы по 2—6 маяков, которые работают на одной частоте по едино-
му расписанию.
106
В слуховых радиопеленгаторах рамочная 4
антенна подключена к специальному гонио- [
метрическому устройству, которое позволяет
Л
по минимуму слышимости радиосигнала оп-
ределить направление на радиомаяк.
РМК
В визуальных радиопеленгаторах приме-
нен двухканальный радиоприемник, подклю-
ченный к двум взаимно перпендикулярным y
рамочным антеннам. В качестве индикатора 1
направления используется электронно-луче- Рис. 95. К расчету РКУ
вая трубка, j-ia две пары отклоняющих пла-
стин которой подаются сигналы от разных рамочных антенн. По ха-
рактеру и расположению развертки определяется направление при-
хода радиоволны.
Слуховой и визуальный радиопеленгаторы позволяют определить
направление на радиомаяк в виде отсчета радиокурсового угла (ОРКУ)
по неподвижной шкале и в виде отсчета радиопеленга (ОРП) по шкале,
соединенной с гирокомпасом.
Счет радиокурсовых углов ведется от диаметральной плоскости
судна по направлению движения часовой стрелки в пределах 0—360°.
Таким образом, определение пеленга на радиомаяк судовым радио-
пеленгатором осуществляется по направлению прихода фронта радио-
волны. Однако радиосигнал воздействует не только на рамочную ан-
тенну пеленгатора, но и на металлические конструкции корпуса суд-
на, которые в результате этого становятся источниками «вторичного»
излучения электромагнитной энергии.
Отклонение фронта электромагнитной волны от истинного направ-
ления под влиянием «вторичных» излучений металлических конструк-
ций корпуса судна называется радиодевиацией.
Расположение всех вторичных излучателей на судне по отношению
к рамочной антенне радиопеленгатора сохраняется неизменным, в то
время как курсовые углы прихода радиоволны могут меняться в пре-
делах 0—360 .
Следовательно, радиодевиация будет зависеть от радиокурсового
угла на радиомаяк.
Уничтожение радиодевиации производится с помощью специаль-
ного компенсирующего устройства — радиопеленгатора. Эта работа
завершается определением остаточной радиодевиации, значение кото-
рой не должно превышать 4°.
В навигации под радиодевиацией принято понимать поправку /,
которую необходимо ввести в снятый отсчет радиокурсового угла или
радиопеленга, чтобы получить их неискаженное значение (рис. 95):
РКУ = ОРКУ+Л
РП-ОРП + f.
Определение радиодевиации основано на сравнении визуального
курсового угла на радиомаяк с ОРКУ
f=КУ—ОРКУ.
107
К работе привлекается два наблюдателя: один на радиопеленга-
торе снимает ОРКУ, второй — по компасу определяет визуальные
курсовые углы на снижение антенны радиомаяка.
Перед выходом на уничтожение и определение радиодевиации необ-
ходимо, чтобы все подвижные металлические конструкции на верхней
палубе были закреплены в положении «по-походному», а все активные
круговые антенны изолированы. Район для маневрирования судна вы-
бирается с расчетом, чтобы расстояние до пеленгуемой радиостанции
было не менее 2—3 длин волн. Радиодевиация может быть определена
несколькими способами.
По радиостанции плавучего маяка или судна, стоящего на якоре.
Находясь в пределах визуальной видимости плавмаяка в стороне от
него, судно описывает плавную циркуляцию на 360°. Через каждые
10-15° изменения курса одновременно по команде наблюдателя у
радиопеленгатора снимаются ОРКУ и КУ.
По радиостанции вспомогательного судна. Способ применяется
судами большого водоизмещения, маневрирование которых затрудне-
но. Судно, определяющее радиодевиацию, становится на якорь, а во-
круг него описывает плавную циркуляцию вспомогательное судно с ра-
ботающим радиопередатчиком. В остальном методика работы остает-
ся такой же, как и в первом способе.
По береговой радиостанции. Маневрирование судна и порядок вы-
полнения наблюдений полностью аналогичны способу определения
радиодевиации по плавмаяку. Однако район маневрирования судна
выбирают с учетом того, чтобы линия «радиостанция—судно» всегда
пересекала береговую черту под углом, близким к 90°.
После завершения работы на миллиметровой бумаге строится гра-
фик зависимости наблюдаемой радиодевиации от радиокурсовых уг-
лов. Для этого по оси абсцисс откладывают в масштабе ОРКУ от 0
до 360°, а по оси ординат — значения радиодевиации.
Полученные точки соединяют плавной кривой, а там, где наблю-
дается их незначительный разброс, производят осреднение радиоде-
виации. Далее, с полученной кривой снимают значения радиодевиации
для ОРКУ, кратных 10°, и данные сводят в рабочую таблицу остаточ-
ной радиодевиации.
Основными причинами изменения радиодевиации являются: изме-
нение осадки судна; наличие крена или дифферента; изменение в рас-
положении или в количестве судовых антенн или металлических масс
вблизи рамочной антенны радиопеленгатора; длительная стоянка
судна в неизменном положении.
Кроме того, радиодевиация не будет соответствовать табличному
значению, если частота пеленгуемого радиомаяка будет отличаться от
частоты, для которой составлялась таблица f.
Остаточную радиодевиацию рекомендуется определять для осадки
судна в грузу и в балласте для радиоволн: 1000 м — основная радио-
маячная волна; 800 м — радиоволна, используемая для связи судов;
600 м — радиоволна для передачи сигналов бедствия.
Судоводитель обязан использовать каждую предоставившуюся воз.
можность для проверки пригодности таблицы остаточной радиодеви.
108
ации. Если расхождения между табличными и полученными в резуль-
тате наблюдений значениями радиодевиации будут равны или более
1,5е, то необходимо повторное ее определение.
§ 41. ОСОБЕННОСТИ ИСПРАВЛЕНИЯ РАДИОПЕЛЕНГОВ
Направление на радиомаяк в точке приема радиосигнала определя-
ется судовым радиопеленгатором относительно диаметральной пло-
кости судна. Однако для определения места необходимо знать направ-
ление относительно истинного меридиана. По аналогии с формулой
(11) значение истинного радиопеленга ИРП определяется (рис. 96):
ИРП-ИКд РКУ или ИРП=ОРКУ + М КК+АМК. (109)
В последнем выражении значение КК соответствует моменту сня-
тия отсчета РКУ.
Если радиопеленгатор подключен к гирокомпасу, то по шкале, свя-
занной с ним, берется отсчет радиопеленга и после исправления полу-
чают ИРП:
ИРП = ОРП 47+ АГК - (НО).
В этом случае необходимо также замечать ОРКУ, чтобы иметь воз-
можность выбрать из таблицы f.
Истинный радиопеленг — это угол в плоскости истинного горизон-
та, заключенный между нордовой частью истинного меридиана и на-
правлением прихода радиоволны, измеряемый в круговом счете от 0
до 360° по направлению движения часовой стрелки.
В связи с тем что распространение радиоволн происходит по дуге
большого круга, ИРП определяет направление касательной к ортодро-
мии в точке приема радиосигнала.
В отличие от локсодромии дуга большого круга пересекает мери-
дианы под различными углами. Разность этих углов К2 и Ki для ка-
ких-либо двух точек ортодромии называется углом схождения мериди-
анов (-у) (см. рис. 29). Значение этого угла может быть определено по
известной из картографии приближенной формуле
у = (Х2— Xi)sin<pm. ("Ill)
где (Х2 — — разность долгот двух заданных на ортодромии точек;
(рт — средняя широта этих точек.
Как известно, ортодромия на карте меркаторской проекции изо-
бражается кривой линией, обращенной своей выпуклостью к ближай-
шему географическому полюсу.
Если на морской навигационной карте от условного изображения
радиомаяка провести направление, обратное истинному радиопелен-
гу, то окажется, что оно не пройдет через точку фактического нахож-
дения судна. Объясняется это тем, что вместо дуги большого круга
была проведена локсодромия. Локсодромический пеленг, проходящий
через место судна и радиомаяк, можно получить, если ИРП исправить
поправкой ф, которая называется ортодромической:
ИП ==ИРП + ф.
109
Следовательно, поправка ф учитывает кривизну изображения ор-
тодромии на карте меркаторской проекции. На рис. 97 дано изображе-
ние ортодромии и локсодромии между точками С и М на проекции
Меркатора. Касательные к ортодромии СТ и МЛ, составляя с локсо-
дромией углы ipj и ф2, характеризуют ее направление в заданных точ-
ках. Обозначим на нашем рисунке углы: Aj —направление ортодромии
в точке С; А2 — направление ортодромии в точке М; у = А2 — —
угол схождения меридианов.
Из рисунка видно, что
V — 414 42.
где и ф2 — значения ортодромических поправок в точках С и М.
Если расстояние между точками С и М невелико, то изображение
ортодромии на меркаторской карте можно принять за дугу окружно-
сти. В этом случае ipi 'Фг* Действительно, если расстояние между
точками не превышает 500 миль, то разность между и фа будет не
более 0,1°. Подставив значение угла у в выражение (111), получим
2ф —РД sin ,
Ф- — РД5|Пфт.
(112)
По формуле (112) являющейся приближенной, рассчитываются ор-
тодромические поправки для малых расстояний. Кроме того, они мо-
гут быть выбраны из табл. 23а МТ—75 по аргументам РД и срш.
В связи с тем что на больших расстояниях и ф2 значительно от-
личны друг от друга, то формулой (112) и табл. 23а пользоваться нель-
зя. Для этих случаев в МТ—75 имеется табл. 236. Аргументами для
входа в нее служат широты начальной и конечной <р2 точек ортодро-
мии и разность долгот между ними.
Знак ортодромической поправки в северном полушарии определя-
ется по следующему правилу: если пеленгуемая радиостанция нахо-
дится к востоку от радиопеленгатора, то знак ф — (+), если к западу,
то знак ф — (—). В южном полушарии знаки ортодромической поправ-
ки будут обратными.
Рис. 97. Ортодром ическа я поправка
110
В § 28 мы отмечали, что при из-
мерении ИРП изолинией будет яв-
ляться изоазимута. При неболь-
ших расстояниях между заданны-
ми точками ортодромии изоазиму-
та на меркаторской карте изобра-
жается кривой линией симметрич-
ной ортодромии. Осью симметрии
в этих случаях служит локсодро-
мия. Угол между направлениями
ортодромии и изоазимуты равен
2ф (рис. 98).
Рис. 98. Определение направления
изоазимуты
Прокладка изоазимуты на карте представляет значительную труд-
ность, поэтому в точке нахождения судна ее заменяют касательной,
т. е. линией положения. Направление касательной к изоазимуте мо-
жет быть рассчитано по формуле
/? = ИРП 4- 2ф - -- ИРП у.
(ИЗ)
§ 42. ОПРЕДЕЛЕНИЕ МЕСТА ПО РАДИОПЕЛЕНГАМ
Дальность действия радиомаяков кругового излучения обычно не
превышает 200 миль. В пределах этого расстояния угол между орто-
дромией и изоазимутой меняется от значения, близкого к нулю, до
максимального в данных условиях. При незначительном удалении суд-
на от радиомаяка значение ф настолько мало, что ортодромия, локсо-
дромия и изоазимута практически сливаются в одну линию. В этих
условиях ортодромическую поправку можно не учитывать. В случае
использования радиомаяка на предельном удалении от судна пренебре-
жение учетом ортодромической поправки приводит к значительным
ошибкам в определении места судна.
В связи с этим при прокладке линий положения на морских нави-
гационных картах принято различать малые, средние и большие рас-
стояния, критерием деления на которые служит величина ортодроми-
ческой поправки.
Малые расстояния. К ним принято относить расстояния, при кото-
рых ортодромическая поправка равна или меньше 0,3°. В этих слу-
чаях учетом ее пренебрегают, так как точность графических построе-
ний на карте составляет 0,3°.
Для получения места судна рассчитывается истинный радиопеленг
по формуле (109) или, если радиопеленгатор подключен к гирокомпа-
су, по формуле (ПО).
От места радиомаяка на карте прокладывается линия ИРП в виде
прямой, которая будет являться линией положения судна. Расчеты
показывают, что при самых неблагоприятных условиях пеленгования
учетом ф можно пренебречь в широтах Баренцева (южная часть), Бе-
лого и Балтийского морей — на расстоянии до 15 миль; в широтах
Черного, Азовского и Каспийского морей— на расстоянии до 35 миль.
111
Средние расстояния. К ним относятся такие расстояния, на которых
учетф по приближенной формуле (112) или табл. 23а МТ—75 не вызы-
вает ошибки в линии положения, превышающей ошибку графики
(± 0,3°). Это соответствует значениям 0,3° < ф < 3,0°. В этих усло-
виях с допустимой для практики точностью можно ограничиться про-
ведением от места радиомаяка на карте взамен изоазимуты линии лок-
содромического пеленга, рассчитываемого по формулам:
ИП^ОРКУ ! /+КК+ АК + Ф; (114)
ИП-ОРП47+ ДГК + Ф- (115)
Средние расстояния охватывают дальности действия почти всех
радиомаяков с круговым излучением.
Большие расстояния. Это такие расстояния, при которых ф имеет
значения, не допускающие замену изоазимуты линией локсодромиче-
ского пеленга (ф>3,0°).
Для определения места рассчитывают направления касательных
к изоазимутам по формулам:
/?-ОРКУф/ + КК+ ДК + 2ф; (116)
/? = ОРПЧ-/+ ЛГК+ 2ф. (117)
Ортодромические поправки в этих случаях выбираются из табл.
236 МТ—75 для больших расстояний.
Сложность получения места на карте состоит в том, что линии поло-
жения должны быть касательными к изоазимутам в точке нахождения
судна, а она нам неизвестна. Поэтому выполняются дополнительные рас-
четы и построения, имеющие своей целью найти положения так назы-
ваемых определяющих точек, через которые проводятся линии положе-
ния.
Известно несколько способов получения на карте определяющих
точек. Наиболее простой и распространенный из них получил назва-
ние способа нормали к пеленгу. Сущность его заключается в том, что от
места радиомаяка на карте проводится обратное направление локсо-
дромического пеленга, на линию которого из счислимого места
судна С (рис. 99) опускается перпендикуляр. Основание перпен-
дикуляра К будет являться определяющей точкой, через которую про-
водят по направлению касательной к изоазимуте отрезок линии поло-
жения аа.
Порядок действия при определении места судна по трем радиопе-
ленгам. 1. Используя карты, подбирают радиомаяки, желательно из
одной навигационной группы. Предпочтение отдают радиомаякам,
имеющим наибольшую мощность излучения или расположенным бли-
же к судну.
2. Выбирают из пособия «Радиотехнические средства навигаци-
онного оборудования» для соответствующего моря длину волны (ча-
стоту), род работы, позывные радиомаяков, расписание и порядок ра-
боты в группе.
3. Включают и настраивают радиопеленгатор на частоту радиомая-
ка, предварительно убедившись в том, что судовые антенны изолиро-
ваны.
112
Рис. 99. Нанесение определяющей Рис. 100. Определение места по трем
точки радиопеленгам
4. Опознав радиомаяк по позывному, определяют направление ми-
нимума слышимости в момент передачи сигнала «тире», снимают зна-
чения ОРП и ОРКУ, замечают время и отсчет лага. Если радиопелен-
гатор не подключен к гирокомпасу, то одновременно с ОРКУ фикси-
руют точное значение КК. Действия повторяют при пеленговании
каждого радиомаяка.
5. Выбирают из таблицы радиодевиацию для каждого ОРКУ.
В зависимости от расстояния до радиомаяков по табл. 23а или 236
МТ—75 находят значения ортодромических поправок.
6. Рассчитывают линии положения, используя формулы (114)—
7. Приводят линии положения к моменту последних наблюдений,
для чего на карте смещают обозначения двух первых радиомаяков
Mi и Al2 (рис. 100) по направлению пути судна на отрезки плавания,
равные
З^СоЛз —олх)/<л или Sj = V(T3 — 7\);
52 — (0Л3 ол2)Лл или S2 = V (Т3 ^2)’
где 7\, Т21 Т3 — моменты времени измерения радиопеленгов на первый,
второй и третий радиомаяки, соответственно;
олъ ол2, ол3 — отсчеты лагов, соответствующие указанным моментам.
8. Проводят через полученные на карте точки Alj, М2 и место
радиомаяка А1 з линии положения, соответствующие направлению
ИРП (Ф 0,3е) или ИП (0,3 < 3,0е), до их взаимного пересече-
ния.
9. Получив на средних дистанциях радиопеленгования треуголь-
ник погрешности со стороной менее 1,5—2,0 мили (10—15 мм на путе-
вых картах), принимают место судна внутри его ближе к малой сто-
роне и углу, более близкому к прямому.
Если при определении места будет получен треугольник погреш-
ности значительно больших размеров, то проверяют, нет ли промаха
в расчетах, в прокладке на карте и в наблюдениях.
ИЗ
§ 43. ОШИБКИ РАДИОПЕЛЕНГОВАНИЯ
И ТОЧНОСТЬ ОПРЕДЕЛЕНИЯ МЕСТА СУДНА
Для расчета истинного радиопеленга используются формулы (109)
и (110). Вполне понятно, что случайная ошибка определения ИРП
будет представлять собой результат влияния случайных ошибок на-
блюдений и величин, входящих в расчеты.
На примере слухового радиопеленгатора рассмотрим случайные
ошибки, влияющие на точность определения ОРКУ.
1. Ошибка угла молчания 0. Минимум слышимости радиосигна-
ла при использовании рамочной антенны должен соответствовать поло-
жению, при котором угол q между плоскостью рамки и направлением
на радиомаяк будет равен 90 или 270°. Однако по ряду причин слыши-
мость его пропадает несколько раньше, чем угол q достигнет указан-
ных значений. В результате возникает так называемый угол молчания
0 (рис. 101), в пределах которого слышимость сигнала отсутствует.
Ошибка ОРКУ находится в прямой зависимости от величины угла
молчания и обычно принимается не более 1/4 0. При благоприятных
условиях радиопеленгования ± 0,5е.
2. Ошибка снятия ОРКУ по шкале гониометрического устройства
т0 принимается равной ± 0,3е.
3. Инструментальная ошибка судового радиопеленгатора со-
ставляет ± 0,5'.
На точность определения ИРП оказывают влияние не только ошиб-
ки наблюдений, рассмотренные нами, но и ошибки обработки этих на-
блюдений. К ним относятся:
Рис. 101. Угол молчания
1. Средняя квадратичная ошибка определения радиодевиации
принимаемая равной + 0,5е.
2. Ошибка поправки компаса ПРИ систематическом контроле
за ДК не превышает + 0,5°.
В случае когда радиопеленгатор не подключен к гирокомпасу, воз-
никает необходимость одновременно со снятием ОРКУ точно фикси-
ровать значение КК. Ошибку зна-
ния КК можно принять равной
— + 0,5е.
Учитывая, что случайные
ошибки складываются квадратиче-
ски, случайную ошибку ИРП мож-
но получить из вырдкения
/?/ИР11 -у
- ±< ти +inf + тДК + ШКК•
После соответствующих подста-
новок и решения можно сделать
вывод: при благоприятных усло-
виях пеленгований и минимальных
значениях действующих ошибок
114
точность ИРП составляет ± 1,2°, т. е. значительно ниже, чем ви-
зуального пеленга.
Однако точность радиопеленгования зависит от целого ряда дру-
гих факторов, влияние которых не поддается количественной оценке.
У судовых радиопеленгаторов из-за емкостной асимметрии цепей рам-
ки и входа приемника возникает антенный эффект, который искажа-
ет направление минимума и делает его расплывчатым. Полностью ком-
пенсировать антенный эффект не удается, что сказывается на точности
радиопеленга.
Днем пеленг на радиомаяк определяется по направлению прихода
поверхностной радиоволны. В ночное время на рамочную антенну
дополнительно действует отраженная от верхних ионизированных сло-
ев атмосферы пространственная радиоволна. Совместное воздействие
на антенну радиопеленгатора поверхностной и пространственной ра-
диоволн получило название ночного эффекта. Он проявляется в уве-
личении угла молчания, в «блуждании» минимума и в колебаниях силы
звука сигнала.
Наиболее интенсивно проявляется ночной эффект за 1 ч до и пос-
ле восхода и захода Солнца. В эти часы использовать радиопеленга-
тор не рекомендуется. В ночные часы надежное использование радио-
пеленгатора для определения места судна возможно лишь на расстоя-
ниях до 25—30 миль от радиомаяка.
При пересечении радиоволной границы между сушей и водой под
острым углом возникает явление берегового эффекта или радиоскло-
нения. Береговой эффект заключается в том, что из-за изменения ди-
электрических свойств подстилающей поверхности искажается на-
правление распространения радиоволн. На удалении свыше ЮА.
(5—6 миль) от берега фронт радиоволны выравнивается, и влияние
берегового эффекта не проявляется. Ошибки радиопеленгования при
углах пересечения радиоволны с береговой чертой, близких к 90°, ми-
нимальны, при углах более 20° — резко возрастают.
На точность радиопеленгования влияет также качка судна: крен в
15° вызывает ошибку в ОРКУ 1°. Поэтому, в условиях сильной качки
стараются снимать отсчет РКУ и РП при положении судна на ровном
киле. Ошибками, возникающими при крене до 5°, можно пренебречь.
Таким образом, помимо ошибок, включенных в расчет тиргь
действуют ошибки, обусловленные влиянием качки и, в какой-то
степени, антенного, ночного или берегового эффектов.
В благоприятных условиях днем на расстояниях до 100 миль при-
нято считать\ ширп = ± 1,5°, на расстояниях до 200 миль ширп =
= ± 2,0°. Нс^чью ошибки радиопеленгования могут достигать из-за
влияния ночнрго эффекта значительных величин.
Точность определения места судна по двум радиопеленгам можно
оценить построением фигуры погрешности на карте или расчетом ра-
диальной ошибки. Для упрощения расчетов используется формула
(98) оценки точности определения места судна по двум локсодромиче-
ским пеленгам.
В случае определения места судна по трем радиопеленгам его точ-
ность может быт$ оценена по известной нам формуле (95).
115
§ 44. ОСОБЕННОСТИ ИСПОЛЬЗОВАНИЯ
СУДОВЫХ РАДИОЛОКАЦИОННЫХ СТАНЦИЙ
Судовые радиолокационные станции (РЛС) позволяют измерять
направления и расстояния до окружающих объектов в условиях пло-
хой видимости. Благодаря этим свойствам РЛС широко используется
для определения места судна, обеспечения плавания в узкости и рас-
хождения с другими судами.
В навигационных РЛС используются радиоволны сантиметрового
диапазона, которые распространяются и отражаются по законам, близ-
ким к законам оптики.
В отличие от световых волн они больше подвержены рефракции и
дифракции. Благодаря этим особенностям радиоволн дальность ра-
диолокационного горизонта при стандартном состоянии атмосферы
примерно на 15 % больше дальности видимого горизонта и рассчиты-
вается по формуле
Г>р = 2,39 У/Г (118)
где £)р — дальность радиолокационного горизонта, мили;
h — высота антенны РЛС над уровнем моря, м.
Максимальная дальность радиолокационного обнаружения объек-
тов определяется по формуле
DPo = 2,39 (Ул- +/7Г), (119)
где Н — высота объекта, м.
Объект будет обнаружен лишь в том случае, если на вход приемни-
ка РЛС поступит отраженный сигнал, превышающий по мощности по-
рог его чувствительности.
Количество энергии, которое в состоянии отразить в направлении
антенны объект, зависит от его размера, формы, электрических свойств
и характера поверхности. По этим причинам часть объектов, находя-
щихся в пределах радиолокационной дальности, рассчитанной по фор-
муле (119), не будет обнаружена на экране радиолокатора.
Особенности распространения и отражения радиоволн, ограничен-
ность разрешающей способности РЛС, воспроизведение окружающей
обстановки на плоскости с незначительной градацией по яркости эхо-
сигналов, приводят к тому, что изображение на экране имеет сущест-
венные различия и с картой, и с местностью.
Необходимый опыт использования РЛС приобретается систематиче-
ским изучением побережья в радиолокационном отношении. С этой це-
лью в условиях хорошей видимости сопоставляют изображение на эк-
ране РЛС с картой и местностью. Детали рельефа берега, дающие чет-
кие эхо-сигналы, выделяют на карте цветными карандашами или спе-
циальной штриховкой. Часто прибегают к фотографированию экрана
РЛС или зарисовкам изображения с него, фиксируя место судна на
карте.
Практика использования радиолокационных станций в судовожде-
нии позволяет привести ряд общих рекомендаций по чтению изобра-
жения на экране.
116
Берег. При подходе к побережью с моря на экране радиолокатора
появляются сначала отдельные отметки эхо-сигналов от деталей рель-
ефа, распознать которые на карте бывает очень трудно. По мере со-
кращения расстояния количество отметок растет и, наконец, образует-
ся слитная протяженная отметка, чередующаяся с затененными участ-
ками. В этих условиях холмистый рельеф образует изображение в виде
световых пятен и затененных участков.
Обрывистые берега дают изображение в виде четкой слитной от-
метки, ближайшая кромка которой довольно точно копирует соответст-
вующий участок карты.
Если берег полого опускается к воде, то береговая черта плохо
различается на экране или же вообще не обнаруживается.
Низкие песчаные берега, песчаные пляжи и острова обнаруживают-
ся на малых расстояниях и дают изображения своих кромок в виде
тонких прерывистых линий или в виде бесформенных отметок от не-
ровностей рельефа.
Искусственные сооружения. Береговые сооружения, как правило,
обладают хорошими отражающими способностями и поэтому первыми
обнаруживаются при подходе к берегу. Четкие ровные кромки эхо-
сигналов на малых расстояниях позволяют распознавать на экране от-
дельные детали сооружений. Хорошо распознаются кварталы строений,
мосты, пирсы, причальные стенки, волноломы, башенные краны, ме-
таллические фермы и нефтебаки. Искусственные каналы и устья рек
обнаруживаются лишь в том случае, если угловая ширина входа пре-
вышает разрешающую способность РЛС по углу.
Небольшие объекты. Форма эхо-сигналов от объектов малой протя-
женности зависит только от характеристик самой РЛС. Объясняется
это тем, что размеры небольших объектов в масштабе изображения
оказываются меньше, чем площадь минимального разрешения. Та-
кие небольшие объекты принято называть точечными. К ним относятся
мелкие плавучие средства, буи, бакены, навигационные знаки, подоб-
ные им сооружения или естественные объекты.
При нахождении точечного объекта на малом удалении от судна
эхо-сигнал будет иметь радиально вытянутую форму. Это является
следствием превышения линейных размеров разрешающей способности
по дистанции (РСД) над линейными размерами разрешающей способ-
ности по углу (РСУ).
При получении эхо-сигнала от точечного объекта на периферии
экрана РЛС он растягивается по дуге, так как в этом случае соотноше-
ние линейных размеров РСД и РСУ обратное.
В случае использования РЛС на шкалах мелкого масштаба суда
средних размеров будут являться точечными объектами. На шкалах
крупного масштаба форма эхо-сигналов от судов зависит от расстоя-
ния до них и углов облучения. Однако во всех случаях определить
размеры и курсовой угол судна по виду эхо-сигнала на экране РЛС
невозможно. О его размерах обычно судят по средней дистанции обна-
ружения.
Объекты, соразмеримые с судами, дают с ними одинаковые по виду
эхо-сигналы на экране РЛС.
117
Для увеличения дальности обнаружения объектов малой протяжен-
ности используются пассивные отражатели. Они представляют собой
легкие конструкции, выполненные из металлического листа или сетки,
обладающие свойством почти полного отражения радиоизлучения в
направлении его источника, т. е. в обратном направлении.
Устанавливаются отражатели на навигационных знаках, буях, ба-
кенах, вехах. Иногда их используют для опознания на экране РЛС
какого-либо важного в навигационном отношении участка берега.
§ 45. ОПРЕДЕЛЕНИЕ МЕСТА СУДНА С ПОМОЩЬЮ РЛС
Радиолокационные определения места судна представляют собой
результат использования в различных комбинациях пеленгов и рас-
стояний до опознанных ориентиров.
Способы определения места остаются те же, что и при визуальных
наблюдениях, но РЛС в большинстве случаев расширяет возможности
по измерению указанных навигационных параметров.
Измерение пеленга. Для определения направления на ориентиры
используются электронные или механические визиры, которые сов-
мещаются с отметками эхо-сигналов на экране РЛС. Если гирокомпас
подключен к радиолокатору и изображение на экране стабилизировано
по норду, то со шкалы снимается радиолокационный пеленг (РЛП).
При стабилизации изображения по курсу со шкалы снимают радиоло-
кационный курсовой угол (РЛКУ).
Расчеты ИП выполняются по соответствующим формулам:
ИП - РЛП 4 АГК;
ИП-РЛКУ4КК4 АК.
На точность радиолокационного пеленгования оказывают влия-
ние ряд причин.
1. Ошибки визирования возникают при совмещении визирной ли-
нии с предполагаемой серединой отметки эхо-сигнала на экране РЛС.
Основной причиной неточности совмещения является растягивание
отметок эхо-сигналов по дуге пропорционально ширине диаграммы на-
правленности (9).
При различных отражающих способностях кромок объекта это рас-
тягивание бывает несимметричным. Ошибки визирования уменьшают-
ся с удалением отметки от центра развертки. Так, средняя квадратич-
ная ошибка визирования точечного объекта при удалении отметки на
1/3 радиуса экрана от центра развертки составляет ±0,6°, при удале-
нии на 2/3 радиуса экрана — ±0,3°.
Особенно возрастают ошибки при пеленговании кромок протяжен-
ных объектов, облучаемых вдоль их водного уреза. В этом случае за
счет ширины диаграммы направленности в горизонтальной плоскости
эхо-сигнал на экране РЛС отмечается даже тогда, когда ее осевая ли-
ния не совмещена с кромкой объекта. Возникает угловая ошибка,
учесть которую невозможно (рис. 102). По этой причине рекомендует-
118
ся пеленговать только те мысы,
которые вытянуты радиально по
отношению к судну, т. е. облу-
чаются «в упор».
2. Ошибки эксцентриситета.
Эти ошибки возникают в резуль-
тате смещения центра развертки
относительно центра вращения ме-
ханического визира и могут дости-
гать значительных величин. Напри-
мер, при эксцентриситете в 1 мм
ошибка в пеленге отметки, нахо-
дящейся на удалении 1/2 радиуса
экрана от центра развертки, со-
ставляет около ±0,7°.
Отсюда видно, насколько точно
Рис. 102. Ошибка радиолокационно-
го пеленгования:
должна ВЫПОЛНЯТЬСЯ регулировка участки удлинения мысов; 2 эхо-сиг-
ппг „ _ „____ нал; 3 — осевые линии диаграммы 0, соот-
ПО СОВМещеНИЮ центров Вра- ветствующие на экране РЛС пеленгам на
щения механического визира И раз- мысы: 4- отметка курса
вертки. В случае использования
электронного визира ошибки эксцентриситета отсутствуют.
Точность радиолокационного пеленга, помимо перечисленных при-
чин, зависит от ошибки в нуле отсчета (±0,Зс), от инструментальной
ошибки (±0,3'°), ошибки в поправке компаса.
Действие всех этих причин приводит к тому, что точность радио-
локационного пеленга значительно ниже точности визуального. При
использовании механического визира средняя квадратичная ошибка
радиолокационного пеленга с учетом ошибки в ДК составляет +1,5°.
Измерение расстояний.. Почти во всех современных РЛС измерение
расстояний выполняется с помощью дальномерного устройства, имею-
щего подвижное кольцо дальности (ПКД). В этом случае точность из-
мерений зависит от инструментальной ошибки (±10— 15 м), масштаб-
ной ошибки и ошибки совмещения ПКД с отметкой эхо-сигнала.
В радиолокационных станциях, где дальномерное устройство от-
сутствует, измерения расстояний производятся путем глазомерной ин-
терполяции положения отметки эхо-сигнала между неподвижными коль-
цами дальности (НКД). Точность измерений этим способом ниже и за-
висит от ошибок положения колец дальности, нелинейности хода раз-
вертки и величины интервала между НКД-
Суммарная средняя квадратичная ошибка измерения расстояния
помощью ПКД до точечного ориентира составляет ±0,6— 1,0 %, до
береговой линии — 0,6—3,0 % от измеренного расстояния.
При определении места судна необходимо выполнять следующие
практические рекомендации, учитывающие особенности РЛС.
1. Регулировки усиления и яркости не должны вызывать чрезмер-
ного свечения отметок на экране, а само изображение должно иметь
хорошую фокусировку.
2. Пеленговать только точечные или малоразмерные объекты, вы-
дающиеся в море мысы пеленговать только «в упор».
119
3. Пеленгование выполнять на шкалах самого крупного масштаба
и таких объектов, отметки которых удалены от центра развертки на
. 1
расстояние более -у радиуса экрана.
4. Выбирать объекты для измерения расстояний с наиболее четки-
ми краями отметок эхо-сигналов.
5. Измерять расстояния, используя тот способ совмещения ПКД
с отметкой эхо-сигнала, который использовался при калибровке РЛС.
Определение места по измеренным расстояниям до опознанных
ориентиров. Для применения этого способа необходимо иметь в
видимости РЛС не менее двух точечных ориентиров или ориентиров
малой протяженности. Последовательность измерения расстояний,
приведение их к одному моменту и прокладка места на карте анало-
гичны изложенному в § 34. Для оценки точности определения места по
двум или трем расстояниям используются формулы (104) и (95) соот-
ветственно.
Определение места по измерению расстояний до точечного объек-
та и плавной береговой черты. Для определения места судна (рис. 103)
измеряют в быстрой последовательности кратчайшее расстояние до
береговой черты Dx и расстояние до точечного ориентира Р2. Одновре-
менно замечают время и отсчет лага. На карте из точечного ориентира
М как из центра проводят дугу окружности аа радиусом, равным D2-
Далее, находят на дуге аа такую точку F, из которой дуга окружности
bb, описанная радиусом Z\, будет касательной к береговой черте.
Полученная точка F будет являться местом судна.
Определение места по кратчайшим расстояниям до береговой чер-
ты с плавными очертаниями. Способ применяется в том случае, когда
на экране РЛС по различным направлениям видны ртметки опознан-
ной береговой черты, не имеющей приметных ориентиров. С помощью
ПКД (рис. 104) измеряют в быстрой последовательности кратчайшие
расстояния до береговой черты Dx и D2, замечают время и показание
лага. На листе кальки от произвольной точки О прокладывают линию
курса судна и проводят дуги радиусами и £)2 в масштабе карты. На-
Рис. 104. Определение места по бере-
гам с плавными очертаниями
Рис. 103. Определение места
по двум радиолокационным
расстояниям
120
Рис. 106. Опознание места по вееру пелен-
гов и расстояний
Рис. 105. Определение места
по визуальному пеленгу и
дожив кальку на карту в районё счислимого места, находят такое ее
положение, при котором линии курсов на кальке и карте параллельны,
а дуги радиусов D1 и D2 касаются соответствующих участков берего-
вой черты. Накол циркулем в точке О даст положение места судна на
карте.
Определение места по пеленгу и расстоянию. Если в пределах ра-
диолокационной видимости находится опознанный точечный ориентир
или ориентир малой протяженности, то для определения места судна
измеряют радиолокационный пеленг и расстояние до него. Место суд-
на на карте получается путем построений, изложенных в § 35.
Иногда бывает невозможно получить радиолокационный пеленг,
так как ориентир не распознается на экране РЛС. В этом случае из-
меряют кратчайшее расстояние до плавной береговой черты D и берут
визуально пеленг на ориентир М (рис. 105). На карте проводят линию
ИП от ориентира М и с помощью циркуля находят на ней такую точ-
ку F, из которой дуга аа радиусом, равным £>р в масштабе карты, была
бы касательной к береговой черте. Точка F является обсервованным
местом судна.
Точность данного способа может быть оценена по формуле (105).
Применяя этот способ определения, часто радиолокационный пеленг
заменяют визуальным, что значительно повышает точность обсерва-
ции.
Опознание места судна по вееру пеленгов и расстояний. Способ
может быть применен при плавании в районе с обрывистым берегом,
имеющим характерные изгибы. Желательно, чтобы на карте был по-
казан рельеф прилегающей суши и проведены горизонтали.
Для опознания места с помощью РЛС в быстрой последовательно-
сти берут серию пеленгов и расстояний до четких характерных отметок
эхо-сигналов на экране. В основном это будут расстояния, измеренные
до береговой черты, а иногда, в низменных участках, до характерных
складок местности. При скорости судна менее 12 уз время и отсчет ла-
га замечают в момент средних наблюдений.
121.
Далее, на листе кальки проводят линии истинного меридиана и
пути судна. Выбрав на линии пути произвольную точку F, проклады-
вают из нее измеренные истинные пеленги и откладывают по ним в мас-
штабе карты измеренные расстояния (рис. 106). Кальку накладывают
на карту в районе счислимого места и добиваются совпадения боль-
шинства конечных точек пеленгов с характерными изгибами береговой
черты или деталями рельефа берега. При этом необходимо следить,
чтобы линии меридианов и пути судна на кальке и карте оставались
параллельными друг другу. Накол циркулем через кальку в точке
F дает место судна на момент средних наблюдений.
Если скорость судна более 12 уз, то время и лаг замечают при каж-
дом измерении пеленга и расстояния. В этом случае на кальке первые
измерения откладывают от произвольной точки пути судна, а осталь-
ные — от точек, рассчитанных по счислению в масштабе карты. Далее
поступают так же, как и в первом случае. Накол циркулем через каль-
ку в последней точке на линии пути судна дает его опознанное место
на момент последних наблюдений.
Чем больше будет выполнено наблюдений, тем точнее будет опозна-
но место судна. Однако, чтобы исключить возможность случайного
совпадения конечных точек пеленгов, необходимо опознание повторить
несколько раз, сопоставляя его результаты с данными счисления.
§ 46. ФАЗОВЫЕ РНС
Фазовые гиперболические системы обладают большой точностью
определения места судна. В этих системах используются предложен-
ные в 1930—1934 гг. советскими учеными Л. И. Мандельштамом,
Н. Д. Папалекси и Е. Я. Щеголевым способы определения разности
расстояний между судном и береговыми станциями по измерению раз-
ности фаз, принятых радиосигналов.
В настоящее время широко используется в практике морского су-
довождения фазовая разностно-дальномерная РНС «Декка». Цепочка
этой системы состоит из трех ведомых станций, расположенных при-
близительно в вершинах равностороннего треугольника, и ведущей
станции, находящейся в его центре.Такое расположение обеспечивает
создание рабочей зоны в пределах 360° вокруг ведущей станции.
Цепочка РНС «Декка» обеспечивает непрерывную работу в двух
режимах: в режиме создания фазового поля для образования точной
сетки гипербол и в режиме устранения многозначности фазовых отсче-
тов.
В первом режиме все станции излучают непрерывные незатухаю-
щие колебания, которые являются гармониками основной базисной
частоты 14,2 кГц.
Ведущая станция излучает частоту 6/, а ведомые — 5/, 8/, 9/ с
постоянно согласованной фазой относительно фазы ведущей станции.
Сетки гиперболических линий положения каждой пары станций
на специальных навигационных картах показываются красным, зе-
леным и фиолетовым цветами. В соответствии с этим ведомые станции
122
принято называть по цвету создаваемой сетки «красная», «зеленая»
и «фиолетовая».
На судах устанавливаются четырехканальные приемоиндикаторы
отечественного производства «Пирс-1», которые имеют три точных фа-
зоизмерителя и один грубый, используемый для разрешения много-
значности.
Разность фаз принятых сигналов может быть определена, если они
будут иметь одинаковую частоту. Поэтому после усиления принятые
частоты преобразуются в умножителях приемоиндикатора в частоты
сравнения 24/ — для ведущей и красной станций, 19/ — для ведущей
и зеленой и 30/ — для ведущей и фиолетовой.
При нахождении судна на нормали к базе1 разность расстояний
до радиостанций данной пары, а следовательно, и разность фаз будут
равны нулю.
По мере удаления от нормали разность фаз будет увеличиваться и
после изменения на целый цикл, равный 2л, вновь будет равна нулю,
a AZ) 1М. Объясняется это тем, что с помощью точных фазометров
можно измерять только дробную часть разности фаз, а количество со-
вершившихся целых циклов определить невозможно. Следовательно,
система обладает многозначностью фазовых отсчетов, которая увеличи-
вается с увеличением частоты сравнения.
Пространство земной поверхности, заключенное между гипербо-
лами с разностями фаз, равными 2л, называется дорожкой. точной
дорожки называется линией положения.
По счисленному месту судна опознать номер точной дорожки прак-
тически невозможно, так как ширина ее на базе находится в пределах
350—590 м. Поэтому при разрешении многозначности прибегают к
увеличению ширины дорожек в несколько раз путем уменьшения ча-
стоты сравнения.
С этой целью береговые станции периодически переходят на режим
создания грубых дорожек, в ходе которого в приемоиндикаторе от-
ключаются точные фазометры и подключается грубый фазометр.
Образующиеся грубые дорожки называются зонами, обозначаются
буквами латинского алфавита от А до J и имеют ширину на базе
10,5 км.
Такая ширина зоны позволяет распознать ее по счислимому месту
судна.
В каждой зоне количество точных дорожек соответствует номеру
гармоники частоты сравнения. Поэтому красная зона содержит 24,
зеленая — 18, фиолетовая — 30 точных дорожек.
В приемоиндикаторе с помощью грубого фазометра происходит
последовательное определение разности фаз всех трех пар станций на
частоте сравнения / и определяются номера точных дорожек. Отсчеты,
соответствующие линиям положения внутри точных дорожек, полу-
чаются автоматически по точным фазометрам. После разрешения много-
значности номера точных дорожек и наименования зон устанавливают-
1 База — прямая, соединяющая ведущую и ведомую радиостанции.
123
Рис. 107. Определение места по фазовой РНС
ся на точных фазометрах, которые в дальнейшем автоматически следят
за их изменением.
При пересечении судном точной дорожки маленькая стрелка точ-
ного фазометра переместится на одно деление, при пересечении грубой
дорожки (зоны) маленькая стрелка сделает полный оборот по шкале
и в вырезе циферблата фазометра изменится буквенное обозначение
зоны.
Для предупреждения возможной путаницы с отсчетами оцифровка
точных дорожек на карте выполнена от 0 до 23 для красной пары, от
30 до 47 для зеленой пары и от 50 до 79 для фиолетовой пары.
Шкалы точных фазометров приемоиндикатора имеют такую же
оцифровку точных дорожек, как и на карте. Наличие второй большой
стрелки позволяет снимать отсчеты с фазометров до 0,01 точной дорож-
ки. Место судна определяется в пересечении 2—3 гипербол, которые
соответствуют показаниям фазометров (рис. 107). Дальность действия
РНС «Декка» составляет 250—300 миль, предельная точность опреде-
ления места судна 1—4 кбт.
Глава X
ИСПОЛЬЗОВАНИЕ ОДНОЙ ИЗОЛИНИИ В НАВИГАЦИИ
§ 47. УМЕНЬШЕНИЕ ПЛОЩАДИ
ВЕРОЯТНОГО МЕСТОНАХОЖДЕНИЯ СУДНА
Плавание вблизи берегов, в районах, стесненных различными на-
вигационными опасностями, и в узкостях требует постоянного в за-
висимости от обстоятельств контроля места судна. Такое плавание мо-
жет осуществляться в условиях ограниченной видимости, в районах
с недостаточной обеспеченностью навигационными ориентирами, при
однообразном береговом ландшафте и т. п., когда судоводитель при
наблюдениях может иметь только одну линию положения. Получен-
ные изолинии и счисление пути судна дают возможность решать
задачи для обеспечения безопасности плавания.
При наличии одной изолинии можно уменьшить площадь вероят-
ного местоположения судна. Из-за наличия различных ошибок при
ведении счисления счислимая точка на карте оценивается площадью
вероятного местонахождения, величина которой зависит от продолжи-
тельности плавания.
При длительном плавании по счислению без обсерваций, имея
только одну изолинию, площадь вероятного местонахождения судна
можно значительно уменьшить.
Действительно, пусть судно, следуя по линии истинного курса
в счислимой точке К (рис. 108), получило изолинию в виде пеленга на
береговой ориентир Л.
В результате ошибок счисления площадь вероятного местонахожде-
ния судна в момент измерения пеленга будет выражена окружностью
с радиусом
'и'=1// >,2»>
Смещение линии положения из-за ошибок пеленга будет
Дл^ииГ>/57,3°. (121)
где /пи — ошибка пеленгования;
D — расстояние от счислимой точки до наблюдаемого ориентира.
Справа и слева от линии пеленга на расстоянии Дп проводим па-
раллельные ей линии ab и cd, которые пересекут круг вероятного места
судна по счислению, образуя фигуру с площадью вероятного место-
нахождения, но значительно меньших размеров. Если было измерено
расстояние до данного ориентира Л, то изолиния изобразится (рис. 109)
частью окружности радиусом D.
Из счислимой точки К опускают перпендикуляр в точку С на каса-
тельную линию, проведенную к изолинии. Из-за ошибки измерения
расстояния смещение этой линии положения будет
Ап — ±
125
Рис. 108. Уменьшение площади веро-
ятного местонахождения судна при
измерении пеленга
Рис. 109. Уменьшение площади ве-
роятного местонахождения судна
при измерении расстояния
На расстоянии Ап по обе стороны линии положения проводим па-
раллельные линии, которые, пересекая площадь вероятного места судна
по счислению, образуют площадь abed. В этой площади будет нахо-
диться судно в момент измерения расстояния до ориентира и она так-
же значительно меньше вероятной площади счислимого места.
Если полученная вновь и уменьшенная площадь вероятного мес-
тонахождения судна abed располагается вдоль линии истинного
курса или пути, то она позволяет обнаружить уклонение с курса и
при необходимости подправить его.
Площадь вероятного места судна, расположенная перпендикуляр-
но курсу или пути, дает возможность исправить счисление по направ-
лению движения судна.
§ 48. ПРОХОД УЗКОСТИ
ПРИ НАЛИЧИИ ОДНОЙ ЛИНИИ ПОЛОЖЕНИЯ
Не имея возможности иметь надежную обсервацию для безопас-
ного прохода узкости, можно использовать одну линию положения,
если в видимости с судна наблюдается один ориентир.
В данном случае необходимо пеленговать видимый береговой ори-
ентир В (рис. ПО) по направлению, параллельному линии прохода
узкости. Графическое построение на карте и расчет производятся сле-
дующим образом.
Пусть судно подходит к узкости АВ, которую необходимо пройти
по линии NF. В момент пеленгования берегового ориентира В имеем
счислимую точку К с круговой ошибкой Мс, замеченное время 7\
и отсчет лага олг. Стороны ab и cd уменьшенной площади вероятного
местонахождения судна abed параллельны линии курса прохода узко-
сти NF.
126
Считая место судна внутри площади вероятного местонахождения
в точке Xj, изменяют курс так, чтобы он был перпендикулярен линии
пеленга, и проводят его до пересечения с линией NF в точке Л2.
С карты снимают расстояние ~ £л- Зная скорость судна Ул,
рассчитывают ол и время, необходимое для перехода из точки
в Л2. После прихода в точку вновь изменяют курс судна на 90°
и следуют по линии NF для прохода узкости АВ.
Рис. 111. Проход узкости по расстоянию до берегового ориентира
127
Если при подходе к узкости измерено расстояние до какого-либо
ориентира, то изолинией будет окружность. При построении на карте
поступают аналогичным образом.
Имея в счислимой точке К (рис. 111) линию положения после из-
мерения расстояния до ориентира Л, строим площадь вероятного ме-
стонахождения судна с учетом 7ИС и уменьшенную площадь abed,
которую переносим на линию NF, свободно проходящую через уз-
кость.
§ 49. ВЫХОД НА ПОДХОДНОЙ БУЙ
Подходные буи, устанавливаемые при подходе к акваториям пор-
тов, каналам, устьям рек и другим узкостям, очень трудно обнаружить
в условиях неудовлетворительной видимости, что значительно затруд-
няет плавание судна в таких районах.
Задача обнаружения и опознания подходного буя облегчается, если
в этом районе находится береговой радиомаяк или радиостанция, ко-
торые нанесены на карту и их можно запеленговать. Такая задача ре-
шается следующим образом.
На карте через место радиомаяка (радиостанции) и подходного буя
прокладывается прямая линия и курс судна располагается с расче-
том выхода на эту линию мористее буя (рис. 112). Эта линия является
истинным радиопеленгом на работающую радиостанцию или радио-
маяк.
Имея истинный курс судна — ИК и величину радиодевиации —
Д рассчитывают РКУ:
РКУ- ИРП— ИК—Л (122)
Когда судно, следуя ИК, выйдет на рассчитанный РКУ, ложатся на
компасный курс, равный ИРП:
КК-ИРП — АК. (123)
Рис. 112. Выход на подходной буй по радиопеленгу
128
Следуя КК, с помощью радиопеленгатора все время контролируют
и подправляют курс судна. При выходе на приемный буй по радиопе-
ленгу на радиомаяк нужно стараться не попасть между буем и радио-
маяком и чтобы смещение радиопеленга вследствие ошибок в нем было
меньше дальности обнаружения буя с судна
Лл < ^обн » —
(124)
где Дп — смещение радиопеленга из-за ошибок в радиопеленговании;
Робн — дальность обнаружения буя — визуальная или радиолокационная;
Згирп — предельная возможная ошибка в радиопеленге;
d — расстояние от радиомаяка до буя.
Глава XI
ПЛАВАНИЕ В УЗКОСТЯХ
§ 50. ПОДГОТОВКА К ПЛАВАНИЮ В УЗКОСТЯХ
Узкостями называются районы, ограниченные в навигационном
отношении различными опасностями (рифами, мелями, банками, кам-
нями и т. п.), лежащими в непосредственной близости от фарватеров
и рекомендованных курсов.
К узкостям относятся проливы, шхеры, фиорды, каналы, входы в
порт, рейды, гавани, устья рек, районы с минными заграждениями
и т. п.
Выбор маневра и плавание судна в узкостях очень затруднено и ча-
ще осуществляется по единственно безопасным, весьма стесненным
путям.
Эти пути обычно хорошо изучены и оборудованы береговыми и пла-
вучими средствами навигационного оборудования.
Каждый выход судна в море в большей или меньшей степени со-
пряжен с плаванием в узкостях, а поэтому каждый судоводитель для
обеспечения безопасности плавания должен быть к этому тщательно
подготовлен.
При плавании в узкостях штурман ограничен во времени для по-
стоянного контроля за движением судна. Ввиду этого вся подготовка
для предстоящего перехода в данном районе должна быть осуществле-
на заранее.
Навигационные условия в узкостях характеризуются следующи-
ми особенностями: наличием большого количества подводных и надвод-
ных навигационных опасностей, ограничивающих плавание; извили-
стостью участков плавания; резкими изменениями глубин; перемен-
ными течениями и дрейфом судна.
Перечисленные навигационные особенности требуют от судоводи-
теля в узкостях повышенной точности при ведении навигационной про-
кладки, а при обсервациях — использования наиточнейших способов,
быстрой обработки, графического построения и анализа места судна
Зак. 483 129
В настоящее время этим требованиям в наибольшей степени удов-
летворяет автоматизированное судовождение, основанное на исполь-
зовании специальной вычислительной технии и управляющих систем.
Важнейшим условием безопасного плавания судна в узкостях яв-
ляется тщательная подготовка к нему всего штурманского состава.
Изучение районов узкостей производят по лоциям, наставлениям
для плавания, картам и атласам течений, а при плавании на подходах
к порту и в портах — по специальным наставлениям (правилам порта).
Учитывая особенности плавания в узкостях необходимо изучить:
1. Фарватеры и рекомендованные курсы с соответствующими на
них глубинами и колебаниями уровня воды при приливах и отливах,
сопоставляя эти данные с осадкой судна. С наибольшей точностью рас-
считывается время полной воды, если проход узкости лимитирован глу-
бинами.
При несовпадении времени прохода узкости с малыми глубинами с
временем наступления полной воды заранее выбирают места якорной
стоянки для ожидания полной воды.
Если проход узкости возможен при любом уровне воды, то лучше
проходить данный район или участок в малую воду, так как в этом слу-
чае при отливе хорошо видна часть обнаженных навигационных опас-
ностей.
2. Средства берегового и плавучего навигационного оборудования,
обеспечивающие безопасное плавание в узкостях. Для чего: изучить
окраску, топовые фигуры, сектор освещения, период и цвет огней и
различные признаки знаков ограждения, мимо которых будет про-
ходить судно; подобрать створы — ведущие и секущие (для опреде-
ления точек поворота). Для определения места судна в первую оче-
редь необходимо использовать штатное береговое ограждение, во вто-
рую — ориентиры береговой черты и в последнюю очередь — плаву-
чее ограждение.
3. Гидрометеорологические условия района: господствующие вет-
ры, течения, осадки, возможные колебания уровня воды и образования
льда при низких температурах.
Особое внимание уделяется изучению течений в узкостях. Течение
может быть направлено под различными углами к линии истинного кур-
са судна. Встречное течение увеличивает время прохождения узкости
и значительно улучшает управляемость судна, а попутное уменьша-
ет время плавания и ухудшает управляемость.
Если течение -действует под некоторым углом к курсу судна, то
для корректирования курса необходимо точное знание элементов те-
чения. Такое течение усложняет плавание в узкости и требует от судо-
водителя особого внимания.
На карте стрелками наносят направление предполагаемого тече-
ния с указанием его скорости.
Такое всестороннее изучение течения позволяет рассчитать путь
судна на всем протяжении узкости, времени его прохода и использо-
вать эти данные в исполнительной прокладке. При этом необходимо учи-
тывать и такие обстоятельства:
130
а) при плавании против течения необходимо быть уверенным в
том, что скорость судна больше скорости течения, в противном слу-
чае плавание судна невозможно. При расчетах поворотов необходимо
учитывать снос судна от течения и уклонение судна от оси фарватера
или рекомендованного курса с учетом глубин;
б) при плавании на попутном течении необходимо рассчитать
действительную скорость судна. Если поворот с помощью рулей при
таком течении невозможен, то на карте в этом месте делается отметка
о необходимых реверсах машинами или отдаче якоря;
в) для течения, действующего под каким-либо углом к истинному
курсу судна, рассчитывается угол сноса и об этом делается указание
на карте.
Наличие ветра представляет для судна некоторую опасность как
при подходе к узкости, так и в самой узкости. Суда с малой осадкой,
большой парусностью и слабой машиной подвержены значительному
сносу и поэтому при сильном ветре и волне проход узкости для них
весьма затруднителен, а иногда и невозможен.
В таких случаях судно должно стать на якорь или, дрейфуя перед
входом в узкость, ждать улучшения погоды. Иногда для улучшения мо-
реходных качеств судна принимают в танки или трюмы балласт, при
этом не следует забывать о влиянии дифферента и крена на управляе-
мость судна.
Волнение моря, возникающее от воздействия ветра в узкостях, за-
ливах, портах, усложняет удержание судна на курсе и в заданном рас-
стоянии от окружающих опасностей.
Готовясь ко входу в узкость, необходимо учесть все неблагоприят-
ные условия гидрометеорологической обстановки. Если ухудшение
гидрометеорологической обстановки происходит в момент плавания в
узкости и есть опасение, что авария в таких случаях неизбежна^ ре-
комендуется стать на якорь и ждать улучшения обстановки.
Одновременно с детальным изучением района узкости производит-
ся подбор и подъем карт.
На карте отмечают приметные береговые ориентиры, необходимые
для визуальных обсерваций и обсерваций с помощью радиотехниче-
ских средств. Наносят дуги дальности видимости маяков для высоты
глаза наблюдателя, выделяют опасные секторы видимости и освеще-
ния, которые штрихуются. Наносят на свободных местах карт
данные об огнях и ориентирах, изменении приливно-отливных
явлений и глубин. Наносят ограждающие изолинии (пеленги, рас-
стояния, окружности, вмещающие горизонтальные углы), ограничи-
вающие участки акваторий, заходить за которые судну опасно.
Ограждение изолинии должны быть по возможности параллельны
направлению движения судна.
На особо опасные участки плавания в узкостях рекомендуется
заблаговременно нанести сетки изолиний, если нет специальных карт
с на несен ными сетками.
В зависимости от предполагаемых способов определения места суд-
на сетки могут быть:
5* 131
гониометрические — для определения места судна по горизонталь-
ным углам, азимутальные—для определения места по пеленгам,
стадиометрические — для определения места по измеренным рас-
стояниям, азимутально-стад иометр ические — для определения ме-
ста судна комбинированными способами.
Если плавание будет осуществляться по створам, — намечают ес-
тественные и искусственные створы с соответствующими указаниями
их направлений и использования в процессе плавания.
Все эти данные, собранные заранее, дают судоводителю в любой
момент четкую интересующую его информацию о производстве обсерва-
ций, счисления и управления судном при плавании в узкости.
На базе изученного и подобранного материала с особой тщатель-
ностью выполняется предварительная прокладка для данного стес-
ненного района плавания.
Намеченные курсы должны соотвегствовать курсам, рекомендован-
ным лоциями, или совпадать с курсами, которые указываются створа-
ми, расположенными в узкостях.
Истинные курсы заранее переводятся в компасные и записывают-
ся вместе с предполагаемой поправкой компаса над линией курса или
пути.
Если в этом районе возможно воздействие течения и ветра, то на
линии пути указывается возможная величина сноса от течения и вели-
чина дрейфа от ветра.
Точки начала и конца поворотов необходимо наносить с учетом
наличия течения, дрейфа и маневренных элементов судна.
Необходимо установить скорость судна на различных участках,
руководствуясь шириной, глубиной и извилистостью фарватера, а так-
же и местными правилами плавания, рассчитать продолжительность
плавания на каждом курсе.
На берегу выбираются приметные ориентиры, на траверзе которых
начинают и заканчивают повороты с учетом радиуса циркуляции
судна.
Если узкость в местах поворота не позволяет описывать циркуля-
цию, то прибегают к реверсам машин или отдаче якоря для осущест-
вления поворота на новый курс.
При проходе узкости якорное устройство должно быть приведено
к немедленному действию, а машина — к изменению режима работы
или немедленной остановке. В районах, где судну придется следо-
вать уменьшенным ходом, на карте делается пометка с указанием ре-
жима работы машины.
Особой пометкой выделяется плавучее ограждение опасностей,
служащее не для обсерваций, а лишь для общей ориентации.
При перемене курсов на границе секторов освещения цветных
огней не следует полагаться на то, что можно будет легко и быстро
уловить момент перехода освещения огня от одного цвета к другому.
Ввиду этого для таких поворотов нужно заранее проложить пеленги
границ секторов освещения и записать их компасное значение. Поворот
на новый курс необходимо начинать в момент прихода судна на данный
пеленг.
132
В случаях невозможности прохода узкости в ночное время должно
быть заранее предусмотрено место якорной стоянки. Выбор места
ночной якорной стоянки может производиться в соответствии с указа-
ниями лоции и с таким расчетом, чтобы до него можно было подойти до
наступления темного времени суток.
Места якорных стоянок следует отметить пеленгами или расстоя-
ниями до ориентиров и сделать об этом отметку на карте.
При выполнении предварительной прокладки необходимо помнить,
что чем тщательнее и подробнее она выполнена,тем надежнее и безопас-
нее будет осуществлен проход узкости или стесненного участка.
Перед проходом узкости и при плавании в стесненных районах не-
обходимо проверить маневренные элементы судна: радиус циркуля-
ции, инерцию судна на различных режимах работы, машины и ряд
других инерционных характеристик. Проверяется состояние и надеж-
ность работы рулевого устройства, а якорное устройство изготавли-
вается к немедленному действию. Производится проверка надежности
работы всех штурманских и электрорадионавигационных приборов и
проверяются их поправки.
§ 51. ВСПОМОГАТЕЛЬНЫЕ СЕТКИ,
ОГРАЖДАЮЩИЕ ЛИНИИ ПОЛОЖЕНИЯ
При плавании в узкостях для наиболее сложных участков на кар-
тах или планах проводятся сетки навигационных изолиний. Такие
сетки существенно сокращают объем вычислительных и графических
работ при определении места судна.
Если на судне нет готовых карт с напечатанными изолиниями, то
они заранее наносятся на морские навигационные карты района пла-
вания относительно двух или трех ориентиров.
Изолинии выбранных ориентиров на заданном участке маршрута
перехода должны пересекаться по возможности под углами, близкими
к прямым.
Каждое семейство изолиний наносится своим отличительным цве-
том с интервалом, не затеняющим обстановку на карте и обеспечиваю-
щим надежную интерполяцию на глаз.
В зависимости от необходимой точности определения места, наблю-
даемости ориентиров и имеющихся на судне технических средств судо-
вождения строятся, как было перечислено выше, следующие сетки на-
вигационных изолиний: гониометрические, азимутальные, стадио-
метрические, комбинированные и ряд других.
Нахождение места судна по вспомогательным меткам изолиний
заключается в следующем.
По измеренным горизонтальным углам между несколькими берего-
выми предметами на гониометрических сетках находят место судна
между изолиний, соответствующих этим измеренным углам.
На азимутальных сетках по измеренным пеленгам на береговые
ориентиры находят место судна между изолиний пеленгов. По изме-
ренным расстояниям, определенным радиолокатором или рассчитан-
133
ным по измерению секстаном вертикального угла и высоте предмета на
стадиометрических сетках также находят место между изолиний соот-
ветствующих расстояний.
На комбинированных сетках нахождение места судна выполняет-
ся аналогичным образом, используя соответствующие параметры.
Гониометрическая сетка. Такая сетка применяется для производ-
ства прокладки на карте места судна, определенного по двум углам
между тремя ориентирами. Для графического построения гониометри-
ческой сетки соединяют прямыми линиями точки А и В, соответствую-
щие местам одной пары ориентиров на карте, и точки В и С — местам
положения второй пары ориентиров. При этом необходимо условие,
что случая неопределенности не будет.
Через середины (рис. 113) прямых линий, соединяющих три ориен-
тира, проводятся перпендикулярные линии. Задавшись рядом углов
аь а2, а3 и т. д. с разностью между ними, равной постоянной величи-
не, у одного из ориентиров строят углы 90° — 90° — а2, 90° —
—а3 и т. д. Стороны углов, пересекаясь с перпендикулятором, дадут
центры окружностей, вметающие эти углы. Таким же образом стро-
ится и второе семейство окружностей, опирающихся на вторую пару
ориентиров. Дуги изолиний необходимо проводить на карте только
в районах, где возможно определение места судна. На каждой дуге ок-
ружностей делается надпись значения вмещенного в нее угла.
Азимутальная сетка. Если на карте нанесены два или три хорошо
видимые на местности ориентира, то строят сетку из двух или трех се-
мейств лучей, расходящихся от намеченных для пеленгования предме-
Рис. 113. Гониометрическая сетка
134
Рис. 115. Стадиометрическая сетка
для обсерваций по расстояниям, из-
меренным РЛС
Рис. 114. Азимутальная сетка
тов Л, В и С (рис. 114). Эти линии лучей должны соответствовать ис-
тинным направлениям, и в зависимости от масштаба карты проводятся
через 2—3°. Данные линии истинных пеленгов так же, как и изолинии
углов, наносятся разными цветами и у каждой линии пеленга надписы-
вается его значение. Ориентиры нужно выбрать так, чтобы пеленги
пересекались под углом в пределах 30—150°.
Стадиометрическая сетка. Сетка изостадий проводится на карте
в виде дуг двух или трех изолиний, являющихся окружностями. Окруж-
ности проводятся на карте из точек А и В (рис. 115), представляющих
собой места видимых на местности ориентиров, радиусами, равными
измеренным расстояниям до них. Если расстояния до ориентиров из-
меряются с помощью судового радиолокатора, то на изолиниях надпи-
сываются значения соответствую-
щих расстояний. Если расстояния
до видимых ориентиров рассчиты-
ваются по измеренным секстаном
вертикальному углу и высоте пред-
мета, то на изолиниях указывается
значение соответствующего ей угла
(рис. 116).
Кроме рассмотренных сеток, на
карту можно нанести сетки, об-
разованные комбинированными си-
стемами изолиний, например для
обсерваций по пеленгу и расстоя-
нию, по горизонтальному и верти-
кальному углам и т. п.
Ограждающие изолинии. При
прохождении мимо опасностей,
расположенных вблизи берега,
Рис. 116. Стадиометрическая сетка
для обсерваций по расстояниям, рас-
считанным по измеренным углу и вы-
соте предметов
135
Рис., 117. Ограждающие изолинии:
а — ограждающее расстояние; б — ограждающий горизонтальный угол; в — ограждающий
пеленг
когда нет возможности точно определить место судна, в случаях не-
уверенности в поправке компаса, отсутствия приметных мест на бере-
гу, хорошо обозначенных на карте и т. п., очень важно иметь га-
рантию, что судно пройдет мимо какой-либо подводной или надводной
опасности в безопасном расстоянии.
В этом случае могут быть использованы ограждающие изолинии,
положения которых подбирают с учетом ограждения опасных зон.
Навигационный параметр, которому соответствует ограждающая
изолиния, называют ограждающим параметром.
В зависимости от наличия береговых приметных ориентиров та-
кими параметрами являются: ограждающее расстояние, ограждающий
горизонтальный угол и ограждающий пеленг.
Предположим, что судно следует курсом вблизи берега, где имеют-
ся надводные и подводные опасности, а на берегу виден с судна только
один ориентир 4, место которого нанесено на карте (рис. 117, а).
Тогда из точки А, места данного ориентира на карте, проводят ок-
ружность радиусом D с таким расчетом, чтобы все близлежащие к бе-
регу опасности и некоторая часть чистой водной поверхности находи-
лись внутри этой окружности.
Радиус данной окружности D и будет тем расстоянием, ближе кото-
рого нельзя приближаться к ориентиру. Для измерения расстояния до
видимого берегового ориентира используется судовой радиолокатор или
дальномер, а при их отсутствии расстояние может быть рассчитано по
вертикальному углу, измеренному секстаном и высоте наблюдаемого
объекта.
Иногда ограничиваются сравнением расчетного вертикального
угла, определенного по расстоянию D, снятого с карты, и высоте пред-
мета Н с углом, полученным из наблюдений:
^асч-13/7.///П>а'абл. (125)
Вертикальный угол а, полученный из наблюдений, должен быть
всегда меньше расчетного, и в этом случае можно быть уверенным, что
судно безопасно проходит мимо опасностей.
136
Если на берегу в пределах видимости с судна наблюдаются два
ориентира, то можно провести (рис. 117, б) ограждающую изолинию —
окружность, вмещающую вписанный горизонтальный угол между
ориентирами А и В. Следуя по линии курса и периодически измеряя
секстаном горизонтальный угол а между ориентирами, сравнивают его
с расчетным углом, снятым с карты.
Иногда пеленг какого-либо ориентира может ограждать опасности
и непосредственно предупреждать судоводителя о приближении к
опасности.
Такой пеленг называется «ограждающим пеленгом». Ограждающий
пеленг служит хорошим предостережением об опасности при верной
поправке компаса.
Например, необходимо (рис. 117, в) войти в какую-либо бухту или
залив, минуя лежащие у входа навигационные опасности.
В этом случае используют хорошо видимые береговые ориентиры
Л и В, проведя через них линии ограждающих пеленгов. При верной
поправке компаса такие «ограждающие пеленги», заранее рассчитан-
ные и проведенные в достаточном расстоянии от навигационных опас-
ностей, обеспечивают безопасность судна.
В дальнейшем необходимо при всех поворотах судна руководст-
воваться подобными пеленгами и делать повороты тогда, когда
какой-либо предмет придет на определенный пеленг, ограждающий курс
судна от близких к нему опасностей. Ограждающий пеленг имеет осо-
бое значение, когда с судна виден только один ориентир, расположен-
ный к диаметральной плоскости. Такой пеленг укажет — находится
судно с безопасной стороны линии ограждающего пеленга или прибли-
зилось к опасности.
Иногда сведения об ограждающих пеленгах даются в лоциях. Ог-
раждающий пеленг может быть заменен створом двух каких-либо
объектов, нанесенных на карту.
В ночное время ограждающими пеленгами служат границы между
секторными линиями различных огней маяков, отличающихся по харак-
теру или по цвету.
Границы секторов имеют очень низкую точность и поэтому они
должны обязательно проверяться по компасу.
При плавании вблизи берегов и в узкостях, особенно мало иссле-
дованных, большую помощь может оказать ограждающая изолиния —
изобата. При включенном эхолоте необходимо визуально следить за
тем, чтобы судно при следовании заданным курсом не перешло задан-
ную изобату.
В некоторых районах, требующих для безопасности судна точно-
го плавания по фарватерам и рекомендованным курсам, устанавли-
ваются створы. Створы по своему значению подразделяются на ведущие,
секущие, ограждающие и специальные.Ведущие створы используются
для удержания судна во время плавания точно по назначенной линии
положения. Секущие створы дают линию положения, пересекающую
ведущий створ,и указывают точки поворота на другой створ или дают
пройденное расстояние по ведущему створу. Ограждающие створы —
ограждают какую-либо опасность, как и опасные пеленги. Специальные
137
створы устанавливаются для определения девиации компасов, опреде-
ления скорости хода, определения маневренных элементов судна и ре-
шения ряда других задач.
Для обеспечения безопасности плавания в узкостях, особенно
в ночное время и в условиях неудовлетворительной видимости, ис-
пользуются створные радиомаяки, береговые РЛС навигационного
ориентирования, ведущий кабель, а для ограждения навигационных
опасностей и для обозначения линий рекомендованных путей, фарва-
теров, границ каналов и других безопасных проходов в различных
условиях видимости — буи, вехи и бакены.
§ 52. НАВИГАЦИОННЫЕ ОСОБЕННОСТИ ПЛАВАНИЯ
В УЗКОСТЯХ
Наличие и близость навигационных опасностей, а также частое
изменение курсов придают судовождению в узкостях весьма сложный
и напряженный характер.
Плавание в узкостях требует четкого и жесткого контроля за пере-
мещением судна с заранее спланированными обсервациями, которые
должны выполняться наиболее быстрыми способами, обеспечивающими
максимальную точность. Любой маневр в узкости должен выполняться
на основе расчета и измерений.
Плавание в узкостях осуществляется только по фарватерам, кана-
лам и рекомендованным курсам, точно по створам или придерживаясь
правой стороны разрешенной полосы движения, так как любое неболь-
шое отклонение от рекомендованного курса может быть опасным для
судна.Плавание должно проходить в соответствии с предварительной
прокладкой. Счисление пути судна должно вестись особенно тщатель-
но на откорректированных и поднятых картах масштаба 1 : 50 000 и
крупнее.
При плавании в узкостях обычно руководствуются следующим.
1. При подходе к узкостям со стороны моря необходимо распола-
гать курсы перпендикулярно линии, соединяющей наиболее узкие уча-
стки входа в стесненные для Цлавания районы. Вход в узкость начи-
нается с подходного буя, которым обозначается начало рекомендован-
ного пути. Выход судна к бую производится на основе надежной об-
сервации или использования берегового радиомаяка,или работающей
радиостанции, как было описано ранее.
2. Счислимое место судна при подходе к узкости может быть уточ-
нено по измеренным глубинам.
3. Следуя узкостью, необходимо удерживать судно на рекомендо-
ванной линии пути с помощью створа, радиоствора или ведущего кабе-
ля, а курсы судна обязательно рассчитывать с учетом суммарного
сноса.
4. Все проходимые ориентиры отмечаются по времени на линии
пути, а ориентиры плавучего ограждения сличаются с указанными на
карте или в лоциях и пособиях «Огни и знаки», проверяются названия,
окраска, вид топовых фигур, характер и цвет огня. В ночное время
138
ориентиры освещаются прожекто-
ром. При расположении ориентира
на траверзном курсовом угле изме-
ряется пеленг на него, а на острых
курсовых углах — дистанция до
ориентира.
5. Контроль безопасности пла-
вания производится по обсервациям
с использованием всех имеющихся
на судне навигационных и радио-
технических средств с примене-
нием сеток изолиний, ограждаю-
щих линий положения. Обсервации
производятся как можно чаще и
ДЛЯ этого В первую очередь ИС- Рис. 118. Поворот на новый курс по
пользуются ориентиры штатного пеленгу ориентира
берегового ограждения, во вто-
рую — ориентиры береговой черты, а затем — плавучие маяки.
6. Точка и время поворота на новый очередной курс рассчитывает-
ся по обсервации с таким расчетом, чтобы после нанесения ее на карту
последующими определениями можно было уточнить время начала по-
ворота.
При невозможности произвести обсервацию на данном курсе перед
поворотом на новый курс измеряется пеленг (рис. 118) П на ориен-
тир Л, параллельный новому курсу, а счислимое место судна К в
момент взятия пеленга переносится по перпендикуляру в точке
Такое уточнение положения судна обеспечивает выход на новый курс,
минуя опасности, если предельная погрешность места судна по тра-
верзу
т ^оп>
где т — погрешность места судна по траверзу;
ПОп — минимальное расстояние до ближайшей опасности.
Судно точнее выйдет на новую линию курса, если расстояние пути
от измеренного пеленга до поворота будет как можно меньше.
7. При поворотах на новый курс обязательно учитывается цирку-
ляция судна с учетом сноса течением и воздействия ветра с таким рас-
четом, чтобы после поворота судно точно находилось на новой наме-
ченной линии пути или на линии створа.
8. Скорость судна определяется по пройденным расстояниям.
9. При повороте около близлежащих подводных опасностей нель-
зя срезать углов для сокращения расстояний и нельзя заходить за
изолинию, ограждающую опасности.
10. В процессе всего перехода в узкости постоянно следят за из-
менением элементов течения и дрейфа.
11. При прохбждении около стенок каналов, причальных линий,
плавдоков, земснарядов и вблизи стоящих судов и т. д. необходимо
уменьшать ход до минимума, чтобы избежать явления присоса.
12. В районах с малыми глубинами поднимаются все забортные
подъемно-опускные устройства электронавигационных приборов, а
139
глубины непрерывно контролируются постоянно работающими эхо-
лотами.
13. Навигационные РЛС в узкости должны быть включены и на-
ходиться в постоянной работе, а другие — в постоянной готовности.
14. Все резервные посты управления рулем приводятся в готов-
ность к немедленному использованию.
15. При уменьшении видимости и неисправном радиолокаторе
не рекомендуется входить в узкость, а если судно находится в узкости,
необходимо стать на якорь. В плохую видимость не входят в уз-
кость, если ее ширина меньше двойной минимальной рабочей дально-
сти действия радиолокационной станции.
Глава XII
ПЛАВАНИЕ В УСЛОВИЯХ
ОГРАНИЧЕННОЙ ВИДИМОСТИ И ВО ЛЬДАХ
§ 53. ПОДХРД К БЕРЕГУ В ТУМАНЕ
Несмотря на развитие средств и методов судовождения, плавание
в условиях ограниченной видимости до настоящего времени остается
одним из трудных.
Во время тумана работа судоводителя значительно осложняется,
так как контроль пути судна по визуальным наблюдениям береговых
предметов и плавучих предостерегательных знаков становится невоз-
можным. Это обязывает судоводителя тщательно вести счисление пути
судна и принимать все меры предосторожности.
В условиях ограниченной видимости применяются методы судо-
вождения, основанные на использовании радиотехнических и гидро-
акустических средств: радиолокационных станций, радионавигацион-
ных систем, гидроакустических станций, створных и круговых радио-
маяков, эхолотов, ведущих кабелей и звукосигнальных устройств.
При подходе к берегу в тумане для надежного контроля за счис-
лением должны максимально использоваться судовые радиотехниче-
ские средства — РЛС и радиопеленгаторы, а также береговые радио-
технические средства. Так, с помощью радиомаяка можно выйти к
приемному бую, а по радиопеленгу и глубине уточнить и подправить
свое счислимое место.
Основным средством обеспечения безопасности судовождения во
время тумана является РЛС. С ее помощью отображается надводная
обстановка и определяется место судна.
Наблюдения с помощью РЛС следует начинать с расстояния, пре-
вышающего сумму радиолокационной дальности судовой РЛС и даль-
ности самых высоких береговых ориентиров от счислимого места
Рмили — 2, (126)
где — высота антенны РЛС, м;
Н2 — максимальная высота объекта, м.
140
На Экране РЛС раньше всего появляются объекты, имеющие не-
большуюцвысоту, и по ним в некоторых случаях представляется воз-
можность произвести обсервацию. Последующими наблюдениями и ве-
дением счисления получают надежную обсервацию до появления бе-
реговой черты. Береговая черта появляется на экране РЛС несколько
позже в зависимости от конфигурации и рельефа местности и становится
похожей на изображение на карте в расстоянии от 8—15 миль, а иногда
и ближе.
Поэтому, отыскав на карте несколько приметных ориентиров и по-
лучив от них эхо-сигналы, измеряют радиолокационные пеленги и
расстояния до них. По пеленгам и расстояниям или по одним расстоя-
ниям на карте получают обсервованное место.
§ 54. ИСПОЛЬЗОВАНИЕ ИЗМЕРЕННЫХ ГЛУБИН
Несмотря на наличие на судах современных и совершенных радио-
навигационных приборов и применения различных методов определе-
ния места судна в условиях неудовлетворительной видимости, не ис-
ключено и использование приборов для измерения глубины.
Последовательное измерение ряда глубин через определенные про-
межутки времени дает возможность в тех случаях, когда глубины в рай-
оне плавания судна меняются равномерно, проконтролировать счис-
лимое место судна и даже определить его с большей или меньшей сте-
пенью точности.
Знание глубин дает возможность судоводителю: опознать место
нахождения судна; оградить судно от опасного сближения с различ-
ными навигационными опасностями; проконтролировать полученные
обсервации; проверить счисление.
Опознание места судна по курсу и глубинам. Этот способ приме-
няется во время плавания в тумане для уточнения счислимого места,
если погрешности счисления невелики и рельеф дна в районе наблю-
дений достаточно характерен, а глубины достаточно точно нанесены на
карту.
Измеренные глубины при приливно-отливных колебаниях уровня
моря должны быть приведены к нулю глубин карты.
Данный способ опознания места выполняется следующим образом.
Зная скорость судна и исходя из частоты нанесенных на карту при-
метных глубин, рассчитывают промежутки времени,необходимые для
прохождения участков между ними’. Через рассчитанные промежутки
времени с помощью эхолота производят измерения ряда глубин
(около 5—7 измерений, а иногда и более).
В момент измерения глубин записывают время по судовым часам
и отсчеты лага. По данным наблюдений на кальке производят вспомо-
гательное построение:
а) проводят истинный меридиан, параллель и линию истинного
курса (пути), которым следовало судно во время наблюдений;
б) на линии истинного курса (пути) по пройденным расстояниям
в масштабе карты наносят счислимые точки, в которых измерялись
141
Рис. 119. Опознание места судна
по глубинам
Рис. 120. Опознание места судна по
крюйс-изобате
глубины и около них записываются время, отсчет лага и глубины, при-
веденные к нулю карты.
Накладывая кальку на карту в районе счислимого места судна и
сохраняя параллельность линий меридианов и параллелей кальки и
карты, находят место, при котором глубины на кальке близки к глу-
бинам, нанесенным на карту. Место последней глубины даст нам при-
ближенное (рис. 119) место судна в момент ее измерения, которое
обозначают на карте знаком jTj, около которого записывают время
и отсчет лага.
Если истинный курс (путь) судна пересекает несколько изобат
и последние проходят под некоторым углом одна к другой, то они мо-
гут быть использованы как линии положения.
Предположим, что судно перемещается по линии истинного курса
(пути) (рис. 120) и в момент времени 7\ и отсчета лага олг измерена
глубина на изобате 50 м, приведенная к нулю карты. Через некоторый
промежуток времени в момент Т2 и отсчете лага ол2 измерена глубина
на изобате 30 м.
Изобаты 50 и 30 м могут рассматриваться как линии положения
в момент наблюдения.
Задача нанесения на карту опознанного места сводится к графи-
ческому построению на карте, вмещением пройденного расстояния
= рол Кл между изобатами параллельно линии истинного курса
(пути).
Иногда данная задача решается с помощью кальки (см. рис. 120),
на которой наносится линия истинного курса (пути) судна и в счисли-
мой точке Кг с 7\ и олг проводится отрезок изобаты 50 м. Калька пере-
двигается по линии истинного курса (пути), изображенного на карте,
до совмещения счислимой точки кальки с точкой К2 на карте.
Пересечение перенесенной изобаты 50 м с изобатой 30 м и дает
нам опознанное место способом крюйс-изобаты.
К опознанному месту судна нужно всегда относиться критиче-
ски.
Ограждение судна от опасного сближения с различными навигаци-
онными опасностями дает изобата, выбранная на карте так, что она
142
проходку в безопасном расстоянии от навигационных опасностей и
являетсяхограждающей изолинией.
Когда курс (путь) судна проложен около навигационных опасно-
стей, то, исйользуя ограждающую изобату, не допускают очень близ-
кого приближения к ней. И пока измеряемые глубины будут больше
заданной, судно может спокойно продолжать свое плавание.
При уменьшении глубин и приближении их к величине, близкой
на изобате, изменяют курс судна в сторону и вновь выходят на без-
опасное расстояние.
Контроль полученных обсерваций, произведенных в тумане с по-
мощью радиолокатора, радиопеленгатора и других РНС при плава-
нии вблизи берегов, может производиться по измерению глубин. По-
лучив обсервацию одним из способов, всегда рекомендуется измерить
глубину и сопоставить ее с глубиной, указанной на карте. Проверка
верности счисления также производится с помощью измерения глубин
при прохождении вблизи банок небольших размеров с безопасными
глубинами.
§ 55. ОСОБЕННОСТИ ПЛАВАНИЯ В ТУМАНЕ
Туман лишает возможности контролировать путь судна по визу-
альным наблюдениям береговых предметов и плавучих средств ограж-
дения. Резко ограничивается применение наиболее простых и надеж-
ных способов ориентировки и определения места. Оставшаяся в рас-
поряжении судоводителя навигационная прокладка вследствие оши-
бок в поправке компаса — ДК и AS, а также неточный учет дрейфа
и течения не могут дать полной уверенности в безопасности судна.
Счисление при плавании в тумане должно вестись очень тщательно
с анализом получаемых обсерваций и возможным контролем их изме-
рением глубин.
Звуковые сигналы, подаваемые береговыми СНО, не должны быть .
использованы даже для примерного определения судна. Они исполь-
зуются как предостерегательные, предупреждающие о близости рас-
положения навигационной опасности и источника звука.
Установлено, что слышимость звуковых сигналов наблюдателем,
находящимся на судне, зависит от его высоты над уровнем моря, а
также от метеорологических условий.
Если звук приходит с наветренного борта, то его лучше слышит
наблюдатель, находящийся высоко над палубой, и наоборот, с подвет-
ренного — наблюдатель на палубе.
Поэтому для слухового наблюдения рекомендуется выставлять на-
блюдателей на баке и на верхнем мостике.
Подходить к берегу рекомендуется курсами, перпендикулярными
к береговой черте, а при следовании вдоль берега линию курса
прокладывать не параллельно береговой черте, а несколько мористее,
используя предостерегательные изобаты.
При плавании вдоль высоких берегов на расстоянии 2—3 миль
можно получать изолинии в виде окружностей с радиусом, равным
143
расстоянию услышанного отраженного от берега эхо-сигнал# пода- Я
ваемого судовым гудком или сиреной. / |
Приближенное расстояние D в морских милях до скалистого бере- |
га определится по скорости распространения звука в воздухе, равной |
332 м/с и промежутку времени от момента подачи звукового сигнала до I
момента прихода эхо-сигнала. Тогда / 1
166 /=0,09/, / (127) J
/ ' J
где t — время, отмеченное секундомером, с. ' j
Если судно имеет на вооружении приборы для приема подводных
звуковых сигналов, то применение их увеличивает дальность опреде-
ления расстояния до звукоотправителя. *
Большую помощь в обнаружении опасностей оказывают имею-
щиеся на некоторых судах гидролокационные и гидроакустические
станции.
При ограниченной видимости, кроме используемых видов на-
блюдения, необходимо много внимания уделять на меняющуюся об- /
становку вокруг судна.
Изменение цвета воды, уменьшение ее прозрачности и умень-
шения волнения с наветренной стороны свидетельствуют о том, что
судно подошло под прикрытие берега. При подходе к высоким берегам
ослабляется скорость ветра, а иногда изменяется его направление. j
Шум прибоя, появление плавающей травы, водорослей, мусора
и других предметов могут указывать на близость берега.
Однако не все перечисленные признаки могут быть достоверными.
Выполнение вышеперечисленных мероприятий может обеспечить 1
безаварийное плавание судна в тумане, а при малейшем сомнении
в своем месте рекомендуется стать на якорь или изменить курс, чтобы
отойти от опасности.
§ 56. НАВИГАЦИОННЫЕ ОСОБЕННОСТИ ПЛАВАНИЯ
ВО ЛЬДАХ
Плавание в ледовых условиях является наиболее ответственным,
сложным и напряженным. Оно требует тщательной подготовки судна
в зависимости от поставленной задачи, знания общей характеристики
ледовых условий в районе перехода и состояния погоды.
Судовождение во льдах осложняется следующими факторами.
1. Частая смена курсов и скорости для маневрирования с целью
обхода наиболее тяжелых ледовых препятствий.
2. Отсутствие плавучих средств ограждения навигационных опас-
ностей.
3. Затрудненная ориентировка по береговой черте, даже с исполь-
зованием судовой РЛС.
4. Невозможность во многих случаях использования некоторых
конструкций лагов.
144
5. Несвоевременные навигационные расчеты, связанные с частым
маневрированием, требующим обеспечения безопасности корпуса
судна. '
6. Трудности в определении и учете дрейфа судна при различных
метеорологических условиях и т. п.
Путь следования в ледовых районах выбирают с расчетом плава-
ния по чистой воде или в местах наиболее слабого и разреженного
льда. Лучше выбрать путь более длинный, но свободный от льда. Сле-
дует по возможности избегать форсирования даже на первый взгляд
узких ледовых перемычек. Общее направление цепи разводий должно
быть возможно ближе к генеральному курсу судна. Радиолокацион-
ное наблюдение за горизонтом не всегда дает возможность обнаруже-
ния отдельно плавающих льдин, но является хорошим средством ори-
ентировки для выбора пути во льдах.
Проходя сплоченным льдом, не следует входить в места торошения
во избежание сжатия во льду. Сплоченные торошенные льды лучше об-
ходить, чем их форсировать. Около айсбергов следует проходить на
значительном расстоянии, опасаясь его опрокидывания.
Вход в лед осуществляется по направлению, перпендикулярному
к кромке льда, а при волнении — со стороны чистой воды.
При дрейфе льда в сторону отмели или других опасностей входить
в него нельзя, особенно при широкой дрейфующей полосе. Не следует
входить даже в разреженный мелкобитый лед во время снегопада, так
как в этом случае снеговой покров может способствовать связыванию
льдин.
В практике ледового плавания считается, что неледокольному
судну не рекомендуется осуществлять плавание, если сплоченность
льда превышает 6 баллов. Для судов, имеющих ледовый класс Реги-
стра СССР, этот предел может быть повышен до 7 баллов.
§ 57. СЧИСЛЕНИЕ ВО ЛЬДАХ
Счисление пути судна при плавании в ледовых условиях осущест-
вляется по тем же правилам, что и в обычных случаях. Однако очень
частые изменения курса и скорости, а также совместный учет дрейфа
судна и льда делают графическую прокладку очень громоздкой и
сложной.
Это вынуждает судоводителей применять некоторые особые приемы
счисления.
Если изменение курсов происходит редко, а скорость судна оста-
ется более или менее постоянной на каждом частном курсе, то приме-
няется составное письменное счисление.
При частых изменениях курса и скорости делается графическое'
счисление, выполняемое на миллиметровой бумаге в крупном масштабе.
Генеральный курс, генеральное плавание и счислимая точка на-
носятся на карту каждый час.
Когда изменения направления движения судна незначительны, то
применим метод моментных наблюдений для определения среднего
145
курса и средней скорости за определенный промежуток времени. Запись
курса и скорости производят через 5—6 мин и через эти промежутки
времени откладывают отрезки плавания по замеченному i^ypcy. Эта
работа также выполняется на чистом листе бумаги в крупно^масштабе.
Средний курс, среднее плавание и счислимое место определяются и на-
носятся на карту каждый час. Осреднение резко различающихся кур-
сов за час может привести к значительным ошибкам.
. Для ведения счисления при ледовом плавании обработку наблюде-
ний и нанесение места выполняют в следующем порядке:
а) рассчитывают плавания судна через каждые 5 6 мин и сводят их
в таблицу;
б) если в таблице есть повторяющиеся курсы, их сводят в один, а со-
ответствующие плавания суммируют;
в) курсы, разнящиеся на 5—10° в обе стороны, сводят в средние,
а плавания суммируют;
г) все полученные курсы исправляют А К;
д) в сводной таблице обработанных наблюдений учитывают на-
блюдаемый дрейф.
На листе бумаги в выбранном масштабе или на специальных сет-
ках прокладывают осредненные курсы, а по ним откладывают соот-
ветствующие плавания.
По координатам конечной точки или по генеральному курсу и пла-
ванию на рабочей карте наносится счислимая точка.
Ошибка в счислимом месте зависит от ошибок в истинном курсе и в
определении скорости, а следовательно, и в проложенном по курсу
плавании, и от ошибки при учете ледового дрейфа.
Ошибка в истинном генеральном курсе, кроме перечисленных оши-
бок, содержит систематическую ошибку самого метода счисления пути
при ледовом плавании. Округленные и приведенные к средним 5—6-
минутные курсы имеют систематическую ошибку, которая тем боль-
ше, чем грубее осредняются курсы. Поэтому счислимое место всегда
получается в стороне от истинного.
Суммарное расстояние, пройденное по нескольким курсам и при-
нятое за плавание по среднему курсу всегда дает счислимую точку, ко-
торая будет находиться впереди истинного места судна.
Наиболее простым способом ведения прокладки является исполь-
зование автопрокладчика, в который периодические изменения курса
и скорости вводятся вручную.
Если с судна наблюдаются береговые ориентиры и возможно ис-
пользование радиотехнических средств, то производят счисление, ос-
нованное на обсервациях. Обсервации производят через каждые 5—20
мин, которые соединяют прямыми линиями и находят фактический путь
судна между обсервациями.
При плавании вдали от береговых средств навигационного обору-
дования счисление ведется с помощью судовой РЛС по местам, наноси-
мым на карту относительно наблюдаемых на экране РЛС льдин или
торосов.
Предположим, что на экране РЛС (рис. 121) виден четкий эхо-
сигнал от льдин или тороса. Тогда в момент 7\ соответствующий по-
146
Рис. 121. Счисление с помощью РЛС
относительно наблюдаемых объектов
судна во льдах по относительным оп-
ределениям места
следней надежной обсервации, измеряются пеленг и дистанция до
хорошо различимого на экране РЛС объекта А± и этот ориентир на-
носится на карту от обсервованного места М. В дальнейшем счисление
ведется относительно этого ориентира. Через каждые5—20 мин по из-
меренным пеленгам и расстояниям относительно ориентира А наносятся
точки М19 М2, которые соединяются прямыми линиями. По мере уда-
ления от ориентира Дг на карту от последнего счислимого места М2
по пеленгу и расстоянию наносится новая, хорошо различимая на эк-
ране РЛС льдина или торос Д2 и дальнейшее счисление ведется отно-
сительно этого ориентира. При таком счислении необходимо учитывать
дрейф от ветра и течение, если они известны.
Скорость судна во льдах при невозможности использования лага
может быть определена несколькими нижеперечисленными способами:
с помощью судовой РЛС, по обсервациям, способом «планширного лага»,
глазомерной оценкой и т. п.
При определении скорости с помощью судовой РЛС на экране вы-
бирается хорошо видимый ориентир (торос, стамуха, ропак и т. п.),
расположенный на носу или корме. Через некоторый промежуток вре-
мени последовательно производят измерения двух расстояний до на-
блюдаемых объектов и рассчитывают скорость судна из выражения
7 = 360AD/A/. (128)
Разновидностью данного способа является определение скоро-
сти судна по относительным определениям места судна. Также на экра-
не РЛС выбирается хорошо различимый эхо-сигнал от ориентира на
льду и производятся взятие пеленга и измерение расстояния до него
(рис. 122). Через интервал времени 5—10 мин производится повторное
измерение пеленга и расстояния относительно этого же эхо-сигнала.
Построение и расчет выполняются на карте или планшете, где
относительно точки А по пеленгам и расстояниям наносятся точки и
/С2. По измеренному расстоянию между данными точками и промежут-
ку времени рассчитывается скорость судна в узлах
7 = 65/Г ' (129)
При подвижном ориентире А вычисленная скорость судна будет
относительной и в нее не входят составляющие сноса от воздействия
течения и ветра.
147
Рис. 123. К определению суммарного сноса судна с помощью ручного лота
Точность способа зависит от точности измерения пеленгов и рас-
стояний, измеренных РЛС, а средняя квадратичная погрешность ско-
рости в узлах определяется по формуле
6 ГI mnD \2
т^~]/ (1зо)
где t — интервал между наблюдениями, мин;
тп — средняя квадратичная погрешность измерения пеленга, град;
— средняя квадратичная погрешность измерения расстояния, кбт;
D — среднее расстояние до ориентира, кбт.
При определении скорости судна способом «планширного лага»
измеряется промежуток времени, в течение которого судно прохо-
дит расстояние, равное его длине, мимо выброшенного на лед предме-
та или приметной льдины.
С помощью секундомера замечаются моменты времени прохожде-
ния предмета или льдины траверзов форштевня и ахтерштевня. По
длине судна L в метрах и времени t в секундах определяют скорость
судна по формуле
3600
Г = ^/^1,944L/Z. (131)
1 OUZ
Так как для данного судна величина длины остается постоян-
ной, то можно заранее составить таблицу, из которой по аргументу
времени в секундах выбирать его скорость в узлах.
При плавании в сплошном льду для определения скорости судна
могут быть применимы и другие способы, в том числе и глазомерный.
При этом учитываются скорость изменения направления на льдину,
сила ощущаемого ветрового потока, число оборотов движителей и ха-
рактер льда. Скорость судна, определенная на глаз при определенном
опыте и навыке, часто совпадает с ее действительным значением.
Совершая плавание в сплошном льду, судно, кроме относитель-
ного движения, вместе со льдом имеет переносное движение, которое,
как и течение, необходимо учитывать при счислении.
148
При\невозможности определения места судна вдали от берегов с
помощью РЛС, по радиопеленгам или астрономическими способами
суммарный приближенный снос судна определяется с помощью руч-
ного лота на глубинах до 50 м.
Для этого судно прижимается к дрейфующей льдине подветрен-
ным бортом и стопорит ход.
С наветренного борта выбрасывается лот и до грунта вытравлива-
ется лотлинь (рис. 123). Измеряется глубина Н и включается секундо-
мер.
При дрейфе судна потравливается лотлинь без ослабления его на-
тяжения и через 120—180 с с остановкой секундомера измеряется вы-
травленная за борт длина лотлиня /. Скорость сноса в узлах опреде-
лится из выражения
иДР=1,94// V/2—Я2 , (132)
а направление сноса определится по направлению лотлиня.
Часть вторая
ЛОЦИЯ МОРСКОГО ПУТИ
Глава XIII
МОРСКИЕ ОПАСНОСТИ
И НАВИГАЦИОННОЕ ОБОРУДОВАНИЕ ПУТЕЙ
§ 58. ПРЕДМЕТ И НАЗНАЧЕНИЕ ЛОЦИИ
Перед выходом в морское плавание судоводитель обязан всесторон-
не и тщательно изучить тот район моря или океана, по которому судну
предстоит совершить переход.
Аварии судов в море часто происходят из-за ошибок, которые до-
пускают судоводители вследствие незнания навигационной обстанов-
ки, неумения ориентироваться в изменившейся обстановке, а иногда
и от потери ориентировки.
Это обязывает судоводителя тщательно решать вопросы выбора без-
опасного и наивыгоднейшего пути судна.
Все необходимые судоводителю сведения на предстоящий переход
морем изучаются в курсе лоции — одного из разделов науки судо-
вождения.
Слово «лоция» (по голландски — loodseri) в переводе означает
«проводка судна».
Лоциями также называются всевозможные наставления, где даны
описания отдельных морей или их участков и районов, а также даны
наставления по безопасному плаванию по наивыгоднейшим путям.
В лоции даны описания навигационных пособий, рекомендации по
их использованию. Выбор наивыгоднейших безопасных путей и усло-
вий плавания является одним из основных вопросов изучения лоции
морских путей.
Предмет лоции морского пути предполагает следующую последо-
вательность в изучении отдельных вопросов: навигационные опасности,
их классификация и терминология; ограждение навигационных опас-
ностей, средства навигационного оборудования морских путей, сиг-
налы и сигнальные станции; советские пособия для плавания: лоции
и дополнения к ним, описание огней и знаков, радиотехнические сред-
ства навигационного оборудования, правила плавания, каталоги карт
и книг, корректурные документы, корректура морских навигационных
карт и руководств для плавания; подготовка судна к переходу, про-
работка маршрута перехода, предварительная прокладка.
150
§ 59. НАВИГАЦИОННЫЕ ОПАСНОСТИ,
ИХ КЛАССИФИКАЦИЯ И ТЕРМИНОЛОГИЯ
Все навигационные опасности, затрудняющие плавание судов,
подразделяются на две основные группы — постоянно существую-
щие и временные.
К первой группе относятся опасности морского дна и затонувшие
суда.
Ко второй группе относятся опасности, вызванные гидрометеоро-
логическими факторами — ветром, туманом, волнением, течением
и т. д.
К этой группе также относятся опасности от минных загражде-
ний, сорванные с якорей мины, дрейфующие бочки, буи, рыболовные
сети и т. п.
К опасностям морского дна относятся следующие.
Банка — изолированное и ограниченное по площади резкое подня-
тие морского дна, находящееся на глубине, меньшей, чем окружающие
глубины.
Мель — отделенный от берега участок дна, глубины над которым
малы сравнительно с окружающими.
Отмель — мель, идущая от берега и находящаяся в пределах
десятиметровой изобаты. Глубины постепенно увеличиваются от бере-
га в море.
Риф — отмель или мель с твердым грунтом.
Коралловый риф — осыхающее или подводное известковое образо-
вание из коралловых полипов и других организмов.
Подводная коса — длинная узкая отмель, являющаяся подводным
продолжением полуострова, мыса или подводной косы.
Скала — отдельное, небольшое по площади резкое возвышение дна,
образованное твердыми породами (гранит, базальт, известняк). Ска-
лы бывают подводные, надводные и осыхающие.
Осушка — часть отмели или берега, обнажающаяся в малую воду.
Бар — мель или ряд мелей против устья реки.
Отличительная глубина — глубина, резко отличающаяся от окру-
жающих глубин.
Пятно — совокупность отличительных глубин.
Има — небольшой участок дна с резким увеличением глубины.
Мелководье — часть моря" с малыми или относительно малыми глу-
бинами независимо от того, обеспечивают или не обеспечивают эти
глубины плавание надводных кораблей.
Район свалки грунта — район в море, отведенный для свалки грун-
та, извлеченного дноуглубительными снарядами, а также мусора, вы-
везенного из порта.
Временные навигационные опасности включают в себя тропиче-
ские циклоны, штормы, туманы, дожди, снег, пургу, льды, течения,
плавающие предметы (мины, буи, бочки, прйтопленные деревья и т. д.).
При выборе пути судна судоводитель обязан учитывать гидромете-
орологические факторы и заранее подготовить все необходимые сред-
ства для борьбы с опасностями.
151
Необходимые метеорологические и гидрологические характеристики
района плавания можно найти в гидрометеорологическом очерке ло-
ций. В гидрометеорологическом очерке советских лоций приводятся
данные об атмосферном давлении, ветрах, штормах, температуре воз-
духа и воды, влажности воздуха, облачности, грозах, туманах, мест-
ных признаках погоды, колебаниях уровня воды, волнении, ледовом
режиме и т. п.
Огромную роль для обеспечения безопасности мореплавания игра-
ет гидрометеорологическая служба, дающая судоводителям информа-
цию и прогнозы погоды как перед выходом в море, так и при плавании
в море (по радиотелеграфу).
Сообщения об изменении навигационной обстановки, о различного
рода опасностях передаются мореплавателям, находящимся в море,
в виде радионавигационных извещений.
§ 60. НАВИГАЦИОННОЕ ОБОРУДОВАНИЕ МОРСКИХ ПУТЕЙ
Для обеспечения безопасности судовождения применяются спе-
циальные сооружения и устройства, которые являются средствами на-
вигационного оборудования морей.
Средства навигационного оборудования устанавливаются в за-
висимости от конфигурации береговой черты, рельефа дна, характера
прибрежных районов, наличия опасностей, условий плавания, посе-
щаемости данного района судами, гидрометеорологических условий
плавания и т. д.
Средства навигационного оборудования морских путей классифи-
цируются на береговые и плавучие. Береговые средства (СНО) пред-
ставляют сооружения,устанавливаемые на береговой черте или остро-
вах, и состоят из маяков, огней, навигационных знаков, створов, радио-
маяков, береговых РЛС.
Береговое ограждение дает возможность судоводителю надежно
определить место судна, правильно ориентироваться среди навига-
ционных опасностей — рифов, банок и т. д.
Для обслуживания судов маяки оборудуются мощными оптически-
ми аппаратами, надежными акустическими и радиотехническими сред-
ствами туманной сигнализации. Это дает возможность использовать
их в любую погоду, днем и ночью и в условиях неудовлетворительной
видимости.
Плавучие средства навигационного оборудования представляют
собой сооружения, устанавливаемые на водной поверхности 'и связан-
ные с грунтом.
Плавучее ограждение (плавучие маяки, буи, бакены, вехи) служит
для обеспечения непосредственного предостережения от опасности
и устанавливается на самой опасности или вблизи нее.
Все средства навигационного оборудования по назначению делят-
ся на средства для определения места судна, обеспечения плавания во
время тумана, ограждения навигационных опасностей и специальных
районов, запретных или опасных для плавания.
152
В зависимости от применяемых для их обслуживания технических
устройств средства навигационного оборудования подразделяются на
визуальные, радиотехнические, звукосигнальные, гидроакустические и др.
§ 61. БЕРЕГОВЫЕ СРЕДСТВА НАВИГАЦИОННОГО ОБОРУДОВАНИЯ
Маяк— навигационный ориентир, представляющий сооружение
в виде башни, ажурной вышки или пирамиды, снабженной оптическим
аппаратом и источником света, хорошо видимый с моря. Маячная баш-
ня имеет прочную конструкцию отличительной формы и окраски.
Маячные башни (рис. 124) бывают цилиндрические, конические,
призматические, пирамидальные, ажурные и различной смешанной кон-
струкции.
При маяках обычно находится обслуживающий их личный состав.
Многие маяки имеют средства туманной сигнализации и одновременно
могут служить радиомаяками. Маяки имеют значительную географи-
ческую дальность видимости.
По своему местоположению маяки подразделяются на береговые,
морские и плавучие, а по назначению бывают приемными, указатель-
ными и опознавательными, поворотными, предостерегательными и
створными.
Береговые маяки устанавливают на высоких, выдвинутых и хорошо
видимых с моря оконечностях берегов (мысах).
Морские маяки возводят вдали от берега в открытом море на есте-
ственном (островах) или искусственном основаниях.
При ясной атмосфере огонь маяков может быть виден на больших
расстояниях, а при неблагоприятных метеорологических условиях на
меньших расстояниях.
Исходя из многих соображений в настоящее время стремятся рас-
полагать маяки на высоте не более 100 м над уровнем моря.
К современным маякам предъявляются следующие основные тре-
бования: видимость должна быть хорошей днем и ночью, что достига-
Рис. 124. Береговые маяки
153
ется высотой, формой и окраской башни, светосилой оптического ап-
парата; местонахождение маяка должно быть точно нанесено на карту;
маячный аппарат должен быть таким, чтобы исключалась возможность
принятия огня маяка за случайный береговой огонь; маяки, имеющие
одну и ту же характеристику, не должны устанавливаться друг от дру-
га ближе чем на 80 миль.
На современном этапе к маячным источникам света относятся:
электрические, ацетиленовые, газосветные и лазерные.
В настоящее время ввиду создания новых образцов ламп нака-
ливания, обладающих огромной силой света, электрические источ-
ники света постепенно вытесняют другие.
В световой аппаратуре маяков и знаков обычно используется огонь
белого цвета. Применяется также оранжевый, красный, реже — зеле-
ный и совсем редко — синий цвет огня.
У огней различают географическую и оптическую дальности види-
мости; оптическая дальность видимости зависит от силы света.
Днем маяки и знаки распознаются по внешнему виду и окраске,
а ночью — по характеристике огня.
Огни, начиная с проблескового, являются периодически и поэтому
исключают возможность принятия этих огней за случайные. Период
действия каждого огня можно проверить секундомером.
Периодом освещения называется время, в течение которого систе-
ма проходит весь цикл присущих ей изменений, или промежуток вре-
мени, по истечении которого характер огня повторяется в той же по-
следовательности.
В ночное время секторы (углы) освещения огней служат для ука-
зания фарватеров, а также опасных в навигационном отношении райо-
нов. Секторы создаются специальными щитами или светофильтрами,
которыми оборудуются оптические аппараты маяков и огней.
Огни (светящиеся знаки) — сооружения капитальной конструк-
ции — ажурные металлические или деревянные фермы, снабженные
светотехническим устройством, действующие автоматически без по-
стоянного обслуживания личным составом. Видимость огней ночью
может достигать 15 миль.
Навигационный знак — сооружение более легкой конструкции,
чем маяк, оборудованное светотехническим устройством, действующим
автоматически. Навигационные знаки (рис. 125), как и маяки, бывают
Рис. 125. Навигационные знаки
154
Рис. 126. Створы
а — линейные (светящие и несвстящие);
б — прицельные (светящие и нссветящне);
в — щелевые (светящие и нссветящие); г —
перспективный
или трех знаков (огней), ось
различной формы и сооружаются
из камня, кирпича, бетона, желе-
зобетона, металла и дерева. Иногда
на скалистых берегах, особенно в
шхерных районах, вместо навига-
ционных знаков накрашивают от-
личительные пятна. Пятна наносят
на камни, скалы, отдельные боль-
шие валуны и т. п. белой, черной
или красной краской, которая хо-
рошо приметна на подходе.
Дальность видимости огней на-
вигационных знаков — до 15 миль.
Навигационные знаки могут быть
светящие и несветящие. Створы
навигационные — система несколь-
ких, соответственно расположен-
ных на берегу маяков, навигацион-
ных знаков или огней, предназна-
ченная для обозначения узкой зо-
ны (полосы или сектора), безопас-
ной для плавания.
Створы (рис. 126) подразделяют-
ся на линейные, прицельные, щеле-
вые и перспективные.
Линейный створ — система дву
симметрии которых расположена на одной линии, направление которой
совпадает с заданным направлением (осью фарватера).
Прицельный и щелевой створы — система из трех знаков (огней),
расположенных в вершинах равнобедренного треугольника, так что
высота треугольника совмещается с заданным направлением (осью фар-
ватера). Прицельный створ обеспечивает плавание по заданному на-
правлению в пределах узкой полосы, а щелевой створ — в пределах
узкого сектора, симметричных относительно оси фарватера.
Перспективный створ — система нескольких пар знаков (огней),
расположенных через равные промежутки таким образом, что ось
симметрии всей системы совпадает с заданным направлением (осью фар-
ватера).
Радиомаяки — передающие радиостанции, служащие ориентирами
при определении мёста или отдельной линии положения судна. В со-
ответствии с их назначением передающие устройства, несущие регу-
лярную радиомаячную службу, устанавливаются в пунктах, коорди-
наты которых точно известны.
По характеру устройства излучающей системы (антенны) радиомая-
ки делятся на:
1. Радиомаяки кругового излучения, предназначенные для опре-
деления места судца с помощью судового радиопеленгатора. Радиомая-
ки кругового излучения объединяются в группы и обычно работают на
одной частоте по расписанию.
155
Сведения о работе радиомаяков каждой группы судоводитель может
найти в руководстве «Радиотехнические средства навигационного обо-
рудования».
2. Радиомаяки направленного излучения, служащие для ориенти-
ровки судоводителям на судах, не имеющих радиопеленгатора.
3. Всенаправленные радиомаяки с круговым перемещением диа-
граммы направленности. К таким радиомаякам относятся радиомаяки
ВРМ-5, «Консол». Прием сигналов радиомаяка производится на обыч-
ный судовой приемник с вертикальной антенной. Дальность действия
данных радиомаяков превышает дальность действия радиомаяков на-
правленного излучения.
Береговые РЛС позволяют централизованно осуществлять опера-
тивное управление движением судов в зоне действия станции. С помо-
щью береговых РЛС можно просматривать всю акваторию порта, под-
ходы к нему в любое время суток независимо от условий видимости и
погоды. Отечественная БРС «Раскат», обладающая высокими техни-
ческими характеристиками, уже много лет несет лоцманскую службу
во многих наших портах.
§ 62. ПЛАВУЧИЕ СРЕДСТВА НАВИГАЦИОННОГО ОБОРУДОВАНИЯ
Плавучий маяк — специальное судно, оборудованное маячной све-
товой аппаратурой, радиотехническими, звукосигнальными и другими
устройствами, предназначено для определения места судна в море.
Плавучие маяки, выполняющие функции лоцманских станций, назы-
ваются приемными (рис. 127). Плавучие маяки имеют отличительную
окраску и обычно вдоль всего борта обеих сторон нанесено название
плавучего маяка. Внешний вид плавучих маяков дается в книгах
«Огни и знаки», в лоциях, а иногда и на морских картах.
Плавучие маяки современного типа характеризуются следующими
размерами: длина — около 55 м, ширина — 8 м, осадка —4 м, водо-
измещение — до 750 т. Плавучие маяки бывают самоходные и несамо-
Рис. 127. Плавучий маяк
156
Рис. 128. Морской буй
Рис. 129. Морская веха
ходные. Маячный оптический аппарат установлен на мачте башенной
конструкции.
На мачтах плавучего маяка устанавливают отличительные топовые
фигуры в виде решетчатых шаров. Днем на плавучих маяках подни-
маются установленные для них флаги.
Плавучие маяки снабжаются надежными средствами связи с радио-
технической аппаратурой.
Некоторые плавучие маяки одновременно выполняют функции лоц-
манских и спасательных станций.
Иногда плавучие маяки заменяются малыми маячными судами
или маячными ботами, которые выставляются в тех случаях, когда
нет надобности в использовании дорогостоящих плавучих маяков.
Морские буи — это различной формы, размера и конструкции по-
плавки с надстройкой. Они устанавливаются на якорях, обычно на
мелководьях, и предназначены для ограждения навигационных опас-
ностей и обозначения сторон или осей фарватеров, бровок морских ка-
налов и узкостей, а также границ и зон, мест якорной и карантинных
стоянок.
Общий вид морского буя показан на рис. 128.
Морские буи действуют автоматически. Большие морские буи вы-
ставляются в открытом море на значительных глубинах. В бухтах,
в закрытых районах ставятся малые, а в промежуточных водах — сред-
ние буи. Кроме осветительных аппаратов, на буях устанавливают раз-
личные технические приспособления для подачи звуковых сигналов
(колокол, ревун, сирена). Некоторые буи снабжают пассивными радио-
157
локационными отражателями, что значительно улучшает их видимость
на экранах судовых РЛС.
Баканы применяются на реках, в устьях рек и лиманах. Баканы
имеют коническую форму, различную окраску и не освещаются. Ба-
каны бывают металлические и деревянные. Дальность видимости ба-
канов невелика ввиду их незначительной высоты над уровнем моря
(0,5—2 м).
Вехи применяются в качестве дневных плавучих предостерега-
тельных навигационных знаков (рис. 129). В советских водах приме-
няются вехи: морские, рейдовые, бухтовые и зимние (большие, сред-
ние, малые).
Веха состоит из шеста-поплавка (шпирт-бакан), голика или иного
топового знака и груза с цепью или тросом. В последние годы на вехи
стали устанавливать пассивные уголковые отражатели для лучшего
радиолокационного наблюдения.
Дальность видимости морских вех днем составляет 1,5—2 мили,
а рейдовых — 0,5—1,0 мили.
§ 63. СИСТЕМЫ ОГРАЖДЕНИЯ ОПАСНОСТЕЙ
Кардинальная система ограждения опасностей предусматривает
ограждение навигационных опасностей плавучими предостерегатель-
ными знаками (буями, баканами и вехами) относительно сторон света
(по компасу). К знакам данной системы относятся: северные, южные,
восточные, западные и крестовые вехи, баканы и буи.
Латеральная (двусторонняя, прибрежная) система ограждения
указывает положение опасности по отношению к курсу следования
судна по каналу или фарватеру. Положение сторон отнесено к морепла-
вателю, идущему с моря. Ориентация в сложных условиях уточняется
специальными описаниями в лоциях, в Извещениях мореплавателям
и других руководствах. Иногда ориентация дается стрелками на кар-
тах крупного масштаба.
Плавучими предостерегательными знаками, служащими для ограж-
дения по данной системе, являются вехи, баканы, освещаемые (с оп-
ределенным характером и цветом огня) и неосвещаемые буи специаль-
ной окраски. К указанным знакам относятся:
1. Знаки сторон канала и фарватера:
а) левой стороны,
б) правой стороны.
2. Поворотные знаки канала и фарватера:
а) поворотные — левой стороны,
б) поворотные — правой стороны.
3. Знаки разделения и соединения каналов и фарватеров.
Левой стороне присвоены красный цвет знака, красный огонь и
четные номера.
Правой стороне присвоены черный цвет знака, белый огонь и не-
четные номера.
158
Места поворотов, а также разделения и соединения каналов и фар-
ватеров обозначаются вехами, баканами и буями, отличными по ок-
раске и характеру огня от окраски и характера огня знаков левой
и правой стороны. Отдельно лежащие на канале или фарватере нави-
гационные опасности ограждаются, как и в системе ограждения опас-
ностей относительно стран света (по компасу), крестовыми вехами, ба-
канами и буями.
Кроме вышеперечисленных групп ограждения опасностей, сущест-
вуют следующие, которые входят в общий комплекс системы огражде-
ния морских опасностей плавучими средствами навигационного обо-
рудования на морях и озерах Союза ССР: система обозначения осей
фарватеров и рекомендованных курсов плавучими предостерегатель-
ными знаками, ограждения затонувших судов, ограждение рыболов-
ных снастей, обозначение мест якорных и карантинных стоянок.
В 1976 г. Международная Ассоциация маячных служб (МАМС)
и Международная Морская Консультативная организация (ИМКО)
завершили разработку новой унифицированной комбинированной кар-
динально-латеральной системы навигационного оборудования пла-
вучими предостерегательными знаками. Она получила наименование
«Система А» (красный слева).
В качестве плавучих предостерегательных знаков служат светящие
и несветящие буи и вехи, а также знаки, устанавливаемые на грунте.
Плавучим предостерегательным знакам в зависимости от их на-
значения присваиваются определенные форма, окраска и характер
огня.
«Система А» предусматривает пять типов знаков, которые исполь-
зуются в следующей комбинации.
1. Кардинальные знаки, ограждающие навигационные опасности.
2. Латеральные знаки, ограждающие стороны фарватеров, кана-
лов и проходов и обозначающие места разделения фарватеров.
3. Знаки, ограждающие отдельные опасности незначительных раз-
меров.
4. Знаки, обозначающие начальные точки и ось фарватера (кана-
ла) и середину прохода (осевые).
5. Знаки специального назначения.
Указанная система показана в приложении 1.
В водах СССР в настоящее время применяется старая система ог-
раждения навигационных опасностей и новая «Система А» (красный
слева).
Описание принятых в водах того или иного государства систем ог-
раждения навигационных опасностей помещают в советских руковод-
ствах «Огни и знаки» и лоциях.
Глава XIV
СИГНАЛЫ И СИГНАЛЬНЫЕ СТАНЦИИ
§ 64. СТАНЦИИ, ОБСЛУЖИВАЮЩИЕ МОРЕПЛАВАТЕЛЕЙ
Для передачи различной информации о погоде, ледовой обстанов-
ке, уровне воды, о приливно-отливных течениях, радионавигационных
извещений, предупреждений об опасности и для переговоров с суда-
ми существуют специальные береговые сигнальные станции и сигналь-
ные мачты. Сигнальные станции могут находиться на береговых и пла-
вучих маяках.
Все необходимые сведения о таких станциях и сигналах помещают-
ся в руководствах «Огни и знаки», лоциях, в списках радиосигналов,
в книгах «Радиотехнические средства навигационного оборудования»,
извещениях мореплавателям и др.
Радиостанции, обслуживающие мореплавателей, можно подразде-
. лить на следующие: радиопеленгаторные станции; радиомаяки; стан-
ции, передающие гидрометеорологические сообщения; станции, пере-
дающие радионавигационные извещения; станции, передающие радио-
сигналы времени; станции, передающие медицинские советы; радио-
станции пароходств, различных ведомств, обеспечивающие непрерыв-
ную связь с судами.
Телефонные станции обеспечивают связь маяков с ближайшим
портом, городом, населенным пунктом и организациями гидрографиче-
ской службы.Телефонные станции дают возможность в любой момент
передать на телеграф различные телеграммы, принятые с судов. Све-
дения о телефонных станциях на наших маяках даются в книгах «Ог-
ни и знаки».
Семафор. Для ведения переговоров с судами на некоторых по-
стах, лоцманских вахтах устанавливают механические семафоры. Уст-
ройство и значение сигналов, даваемых с помощью таких семафоров,
дается в международном своде сигналов. В иностранных водах с пла-
вучих маяков при помощи механических семафоров для проходящих
судов передают различные предостережения навигационного характера.
В советских водах семафоры не применяются.
Лоцманские станции обеспечивают проходящие суда лоцманами.
Лоцманские станции обычно находятся в портах, на плавучих маяках,
а также на специальных лоцманских судах, которые несут вахту в оп-
ределенных районах, подлежащих лоцманской проводке.
Вызов лоцмана производится сигналами по Международному сво-
ду. В туманную и пасмурную погоду вызов производится звуковыми
короткими и продолжительными сигналами, а в некоторых случаях —
по радио и радиотелефону. Все сведения о лоцманской службе, о по-
рядке вызова лоцмана на судно даются в лоциях в разделе «Правила
плавания». Если имеются изменения и дополнения, то они публику-
ются в Извещениях мореплавателям.
Спасательные станции оказывают помощь судам, которые терпят
бедствие, проводят работы по спасению людей, потерпевших корабле-
крушение.
160
Спасательные станции или спасательные посты размещают в раз-
личных местах побережий, в портах, на береговых и плавучих маяках.
Спасательные станции имеют в постоянной готовности спасательные
средства и снабжены различными средствами связи.
Спасательную службу по характеру спасательных работ подразде-
ляют на: спасание судов, терпящих бедствие; спасание людей, потер-
певших кораблекрушение.
В СССР спасение терпящих бедствие судов производится средст-
вами пароходств, портов и аварийно-спасательными отрядами. Спасе-
ние людей, потерпевших кораблекрушение, обычно возлагают на близ-
лежащие береговые спасательные станции и посты, располагающие спа-
сательными средствами. Все необходимые сведения о спасательных стан-
циях помещены в лоциях и книгах «Огни и знаки». В некоторых слу-
чаях пункты, где имеются спасательные станции, обозначены на картах.
§ 65. СИГНАЛЫ, ПРАВИЛА И ИНСТРУКЦИИ,
ОТНОСЯЩИЕСЯ К ДВИЖЕНИЮ СУДОВ
Для обеспечения безопасности мореплавания существуют особые
правила и сигналы, которые передаются с помощью визуальной, све-
товой и радиотехнической связи. Такие правила и сигналы даны в ло-
циях в разделе «Правила плавания». К наиболее важным правилам и
сигналам относятся следующие.
Сигналы, предостерегающие от опасности. Такие сигналы пода-
ются любыми судами, маяками, лоцманскими станциями, заметившими
судно, курс которого ведет к опасности.
Для судов, курс которых ведет к опасности, днем поднимается
однофлажный сигнал по Международному своду сигналов U («юни-
форм») — «Вы идете к опасности» и одновременно через каждую ми-
нуту пускаются сигнальные ракеты (с двумя взрывами и светящимися
звездами) до тех пор, пока судно не обратит внимание на подаваемые
сигналы.
Радиосигнал тревоги — сигнал, означающий, что подающее его
судно будет немедленно вслед за этим подавать сигналы бедствия по
радио.
Сигнал безопасности — сигнал, означающий, что вслед за ним бу-
дет передаваться сообщение, имеющее важное значение для безопас-
ности мореплавания, например о надвигающихся штормах, об изме-
нениях в навигационной обстановке и т. п. Этот сигнал передается по
радиотелеграфу в виде группы «ТТТ»; по радиотелефону — троекрат-
ным повторением слова «сэкюрите».
Сигнал срочности передают по радиотелеграфу в виде нескольких
групп «ЬЬЬ» (XXX); по радиотелефону — троекратным повторением
слова «ПАН». Данный сигнал означает, что судно, не находящееся в
серьезной и неминуемой опасности, требует помощи, либо желает по-
слать радиограмму, касающуюся его безопасности.
Предостерегательный сигнал для обозначения присутствия подвод-
ных лодок. Корабли ВМФ СССР, вблизи которых следуют подводные
6 Зак. 483 161
лодки, поднимают по МСС флажный сигнал: NF2 (Новэмбэр Экс Бис-
соту), обозначающий: «Вы должны следователь с особой осторожно-
стью, в этом районе проводят учения подводные лодки». Кроме того,
корабли ВМФ СССР по возможности передают об этом по радио откры-
тым текстом на частоте 500 кГц. Аварийная подводная лодка выпус-
кает на поверхность моря аварийно-спасательный буй определенной
формы, раскраски и с соответствующим характером огня, жидкое топ-
ливо и смазочное масло, воздушные пузыри.
Районы с ограничением пути следования. Плавание или свободный
выбор пути в некоторых прибрежных районах иногда может быть за-
прещено или ограничено. Об этом сообщается в Извещениях морепла-
вателям или в лоциях и даются специальные ограничительные правила.
Если об этом не было заранее сделано оповещение, то в таких случаях
устанавливают службу предупреждения. Служба предупреждения
обычно возлагается на специальные суда, брандвахты или береговые
посты. Суда, брандвахты и береговые посты в таких случаях обяза-
ны нести следующие отличительные знаки:
днем — треугольный синий флаг;
ночью — три синих огня, расположенных вертикально.
На этих судах и постах поднимаются сигналы, регулирующие
движение судов на рейдах.
Лоцманские сигналы — различные сигналы, отвечающие местным
правилам плавания и регулирующие движение судов (об открытом
или закрытом входе, о глубине на фарватере и т. п.). Эти сигналы под-
нимают на мачтах, которые устанавливаются в портах, при входе в ка-
налы, гавани, в устьях рек. В лоциях в разделе «Правила плавания»
публикуются сведения о таких сигналах.
Сигналы в портах о приливе и отливе. Направление изменения уров-
ня прилива и отлива в портах (Мурманском, Архангельском, Владиво-
стокском) сигнализируется специальными сигналами днем и ночью,
поднимаемыми на мачтах, установленных для штормовой сигнализа-
ции по указанию органов гидрометеослужбы или гидрографии.
Подробные данные о приливных сигналах публикуются в лоциях
и Извещениях мореплавателям.
Сигналы о течениях. В наших водах сигналы о течениях показы-
ваются как сигналы о приливах и отливах. В иностранных водах сиг-
налы о течениях поднимаются на специальных мачтах сочетанием фи-
гур и флагов. Такие сигналы показываются по запросу с судов. Дан-
ные о таких сигналах можно найти в соответствующих лоциях.
Извлечения из законов, правил и инструкций, касающихся судо-
ходства. Кроме сигналов в лоциях, в разделе «Правила плавания», в
Извещениях мореплавателям публикуются извлечения из законов, пра-
вил, инструкций. К ним относятся: правила плавания для советских
морских судов, положение о районах с ограничением свободного пути
следования и правила плавания в них, о крепостных зонах и правилах
плавания в них, о запретных для плавания и якорных стоянок райо-
нах, извлечение из Положения об охране государственных границ
Союза ССР, о пограничных полосах, порядок охраны границ, о мерах
охраны морских подводных телеграфных кабелей, о салютующих пор-
162
тах СССР, правила'для судов, проводимых ледоколами через лед,, пра-
вила сигнализации с плавучих маяков, не находящихся на своих по-
стах, выдержки из правил захода судов морского торгового флота за-
граничного плавания в порты СССР и т. п.
Кроме этого, обязательные правила и постановления могут изда-
ваться администрацией портов.
Многие правила и постановления имеют международное значение
и должны соблюдаться иностранными морскими судами при плавании
в наших водах.
§ 66. ШТОРМОВЫЕ И НАВИГАЦИОННЫЕ СИГНАЛЫ
Сигнализация о штормах и сильных ветрах. Для предостережения
судов морского, рыболовного, речного флота и прибрежного населе-
ния о штормах и сильных ветрах в соответствии с главой I Регламента,
приложенного к Международному соглашению о морских сигналах,
подписанному в Лиссабоне 23 октября 1930 г., устанавливаются сиг-
налы, которые поднимают на специальных сигнальных мачтах в
портах, на маяках и различных пунктах побережий морей и озер Сою-
за ССР.
Штормосигнальные мачты в портах находятся в ведении управ-
ления данного порта.
На береговых маяках подъем и спуск сигналов производятся пер-
соналом, ведущим гидрометеорологические наблюдения. В районах
нахождения морских гидрометеорологических станций, имеющих
штормосигнальные мачты, руководство сигнализацией возлагается на
начальника морской гидрометеорологической станции, находящейся
в данном порту, и на инспектора ближайшего управления или отделе-
ния гидрометеорологической службы.
Сведения о советских сигнальных станциях, показывающих штор-
мовые сигналы и предостережения, помещены в книгах «Огни и знаки»
каждого моря, а значение штормовых сигналов приведено в Плавилах
сигналопроизводства о штормах и сильных ветрах на морях и озерах
Союза ССР, дано в лоциях и выпуске № 1 Извещений^ мореплавателям
ТУ ВМС.
Специальные штормовые сигналы о циклонах и тайфунах. В тех
районах, где наблюдаются циклоны и тайфуны, на штормосигнальных
мачтах поднимаются сигналы, показывающие направление движения
тайфуна или циклона, его состояние, местоположение центра и силу,
угрожаемый район и время подъема (сигнала). В соответствующих ло-
циях даются подробные сведения о таких местных штормовых сигна-
лах. Так, например, в лоции Китайского моря даны описания Тайфун-
ной службы, где сообщаются сведения о местах возникновения и дви-
жении тайфунов.
Гидрометеорологические и навигационные радиоизвещения. Сроч-
ная гидрометеорологическая и навигационная информация для море-
плавателей по радио в виде радионавигационных предупреждений осу-
ществляется мировой системой навигационных предупреждений НА-
ВАРЕА (МСНП), НАВИП и НАВИМ.
6* 163
Мировая система навигационных предупреждений НАВАРЕ А
(МСНП), введенная в действие в 1980 г., предусматривает деление
Мирового океана на 16 морских географических районов. В каждом
районе выделен координатор—страна, осуществляющая сбор, анализ
и передачу по радио навигационной информации. СССР является рай-
онным координатором НАВАРЕ А—XIII, одного из географических
районов и национальным координатором советских регионов на Бал-
тийском и Черном морях и обеспечивает советских мореплавателей ра-
дионавигационными предупреждениями НАВИП — на территориаль-
ные воды иностранных государств и воды открытого моря, НАВИМ —
на прибрежные воды СССР и гидрометеорологическими сообщениями
МЕТЕО, а также ПРИП — для прибрежных районов. Подробные све-
дения об организации систем навигационных предупреждений помеще-
ны в расписании передач гидрометеорологических сведений и навига-
ционных Извещениях мореплавателям.
Сигналы времени. Радиосигналы времени передаются специальны-
ми станциями в соответствии с программой, установленной для этих
станций. Передача радиосигналов ведется автоматически от главных
часов соответствующей обсерватории.
В настоящее время широко используются ритмические радиосигна-
лы времени, дающие точность до 0,01 с.
Для приема и обработки таких радиосигналов времени сущест-
вует специальная инструкция. Сигналы времени передают многие
обычные широковещательные радиостанции. Сведения о радиосигна-
лах времени публикуют в Извещениях мореплавателям.
Туманные сигналы. Сигнализация в тумане имеет огромное значе-
ние для безопасности мореплавания.
Существующие в настоящее время туманные сигналы подразде-
ляются на следующие виды: воздушные туманные сигналы; подводные
звуковые сигналы; туманные радиосигналы.
Воздушные туманные сигналы подаются наутофоном, сиреной, гон-
гом, диафоном, колоколом, свистком, горном, выстрелами из пушки
и взрывами и предупреждают мореплавателя о приближении к опасно-
сти во время тумана и в условиях неудовлетворительной видимости.
Источниками отправления подводных звуковых сигналов являют-
ся подводный колокол и осциллятор, а радиосигналы передаются ра-
диомаяками.
Дальность распространения звуковых сигналов колеблется в за-
висимости от условий проводимости звука в атмосфере. К тому же звук
в воздухе распространяется непрямолинейно. Из сказанного следует,
что на воздушные звуковые сигналы полагаться полностью нельзя и не-
обходимо рассматривать их только как средство, служащее предостере-
жением об опасности.
Подводные звуковые сигналы надежнее воздушных и дают воз-
можность определять направление на источник звука.
Туманные радиосигналы подаются обычными радиоустановками,
которые подразделяются на четыре типа: радиомаяк, вращающийся
луч, вращающийся радиомаяк и радиопрожектор.
164
В настоящее время нашла широкое применение тройная радиомаяч-
ная- установка типа «Тритон—ВП-2», состоящая из радиомаяка, под-
водного осциллятора и наутофона. Такая тройная радиоакустическая
установка дает возможность судоводителю определить пеленг и рас-
стояние до пеленгуемого радиомаяка.
Глава XV
ПРИЛИВНО-ОТЛИВНЫЕ ЯВЛЕНИЯ
§ 67. ПОНЯТИЕ О ПРИЛИВАХ И ТЕРМИНОЛОГИЯ
Периодические колебания уровня воды Мирового океана, происхо-
дящие под влиянием силы притяжения Луны и Солнца, называются
приливами и отливами.
Приливообразующая сила Луны в 2,17 раза больше, чем Солнца,
поэтому Луна является основным фактором для приливов и отливов.
Это явление было известно еще в глубокой древности, но правиль-
ное объяснение причин данного явления впервые было дано Ньютоном,
открывшим закон всемирного тяготения.
Сила притяжения каждой точки Земли массой Луны всегда направ-
лена по линии, соединяющей данную точку Земли с центром Луны.
Таким образом, две силы — сила притяжения массой Луны и центро-
бежная сила от вращения системы «Луна—Земля» — одновременно
действуют на каждую точку Земли. Одна из них направлена от Луны,
другая — к Луне. Эти две силы, каждая в отдельности, не уравнове-
шивают друг друга. Разность между ними и образует приливообразую-
щую силу Луны на данную точку Земли.
Колебания уровня воды в морях и океанах достигают больших ве-
личин. Например, в проливе Бристоль колебания уровней достигают
13 м, а в заливе Фунди на западном берегу Атлантического океана —
16,2 м. Приливы и отливы оказывают большое влияние на развитие
судоходства и безопасность плавания.
При плавании вблизи берегов необходимо знать величину прили-
ва в данном месте. Сведения о приливах опубликованы в специальных
навигационных пособиях. Судоводители обязаны хорошо представлять
природу явления и знать терминологию приливов, чтобы, пользуясь
пособиями, использовать даваемые ими сведения для решения различ-
ных навигационных задач.
Характер приливов. Колебания уровня воды в морях и океанах
очень сложны по своей структуре, а поэтому предсказание и расчет
величины и времени их наступления в данном месте являются весьма
сложной задачей. Для облегчения вычисления характеристик приливов
они сгруппированы и классифицированы. В соответствии с этим в на-
вигационных пособиях принято следующее подразделение приливов.
Полусуточные приливы — характеризуются тем, что в каждые сутки
бывают две полные и две малые воды, вследствие чего период явления
составляет половину лунных суток — в среднем 12 ч 25 мин. Высоты
165
следующих друг за другом полных и малых вод почти одинаковы.
Подъем и падение уровня протекают правильно и выражаются сину-
соидальной кривой. Приливы с большими величинами наблюдаются в
дни полнолуния и новолуния (сизигийные приливы).
Хорошо выраженные полусуточные приливы наблюдаются вдоль
Мурманского берега Баренцева моря, на большей части Белого моря
и в пределах почти всего Атлантического океана.
Суточные приливы — характеризуются одной полной и одной ма-
лой водой, вследствие чего период явления равен суткам. Величина
прилива увеличивается и уменьшается в зависимости от изменения скло-
нения Луны. Во время прохождения Луны через экватор при суточных
приливах могут наблюдаться стояния уровня. Подъем и падение уров-
ня графически выражаются синусоидальной кривой. При малых скло-
нениях Луны величины приливов малы (экваториальные приливы), а
при достижении максимальных значений склонения Луны — наиболь-
шие (тропические приливы).
Суточные приливы наблюдаются главным образом в Тихом океа-
не и встречаются редко.
Смешанные приливы по своему характеру сложны и разнообразны.
На протяжении месяца период приливных колебаний уровня меняет-
ся с полусуточного на суточный, и наоборот. Смешанные приливы под-
разделяются на две группы: неправильные полусуточные и непра-
вильные суточные. Неправильные полусуточные приливы по своему
характеру близки к полусуточным приливам и в них существует разница
между временем роста и временем падения уровня. В неправильных
суточных приливах преобладают особенности характера суточных при-
ливов, и основные элементы этих приливов меняются в зависимости
от изменения склонения Луны. Неправильные суточные приливы чаще
всего встречаются в водах Тихого океана.
Аномальные приливы отличаются по отдельным признакам от пере-
численных выше основных видов приливов.Такие приливы усложняют-
ся влиянием мелководья (так называемые «мелководные приливы»),
у которых нарушается симметрия в подъеме и спаде уровня. Иногда
в условиях мелководья полусуточные приливы становятся четверть-
суточными с четырьмя полными и четырьмя малыми водами (двойные
полусуточные). Такие приливы наблюдаются в некоторых портах про-
лива Ла-Манш и в Белом море. Кроме таких приливов, встречаются и
другие разновидности, но наблюдаются они редко.
Термины и условные обозначения. При решении задач приняты сле-
дующие основные термины и обозначения:
ПВ — полная вода (высший уровень) Тс — судовое время
МВ — малая вода Тп — поясное время
ВПВ — высокая полная вода Д/ч — декретный час
НПВ — низкая полная вода Тгр — гринвичское время
нмв — низкая малая вода Тр — продолжительность роста
В — величина прилива Тп — продолжительность па-
h — поправка глубины
дения
АТП — промежуток времени
166
Гл — глубина действительная
Глк — глубина, указанная на
карте
Zo — средний приливной уровень
йлв — высота полной воды
ZiMB — высота малой воды
/г3 — заданный уровень прилива
Д/г — поправка высоты уровня воды
Д/гпв — поправка высоты полной воды
Д/гмв — поправка высоты малой воды
ДТПВ — промежуток времени от
полной воды
ДТМВ — промежуток времени от
малой воды
/пв — момент полной воды
/мв — момент малой воды
Д/Пв— поправка времени
ПВ
Д/мв— поправка времени
МВ
Тл — лунный промежуток
ПЧ — прикладной час
ДПЧ — поправка приклад-
ного часа
Полная вода (ПВ) — это наивысший уровень воды при приливе.
Малая вода (МВ) — наинизший уровень воды при отливе.
Величина прилива (В) — это разность между высотами уровней
смежных полной и малой воды
В = АПВ ^мв- (133)
Продолжительность роста Тр — это промежуток времени от мо-
мента малой воды до момента полной воды
Тр==^пв 7мв- (134)
Продолжительность падения Тп — промежуток времени от момен-
та полной воды до последующего момента малой воды
Тп — ^МВ"^ПВ- (135)
Состояние уровня — явление покоя уровней вблизи полной или
малой воды. Средний уровень Zo— это полусумма высот полной и ма-
лой воды
= ЛПв “F^mb/2 . (136)
Промежуток от ближайшей полной или малой воды ДТПВ; ДТМВ —
это промежуток времени от заданного момента до ближайшей полной
или малой воды.
Сизигийные приливы — это те приливы, которые наблюдаются в
дни сизигий, т. е. в дни новолуния и полнолуния. Сизигийный прилив
дает наибольшую высоту уровня /гпв — max, а отлив имеет наимень-
шую высоту уровня ZiMB — min. Сизигийные приливы и отливы быва-
ют 2 раза в течение лунного месяца.
Квадратурные приливы — это приливы, которые наблюдаются в
дни астрономических квадратур, т. е. в дни первой и последней чет-
вертей Луны. В дни квадратур /гпв— min, a ZiMB — max. Величина
прилива в квадратуре наименьшая.
Величины приливов в течение месяца постепенно меняются: 2 раза
в месяц наблюдаются приливы с большими величинами и 2 раза — с
малыми. Эти изменения называются полумесячными неравенствами в
высотах и величинах приливов. При больших склонениях Луны при-
167
ливы называются тропическими, а при прохождении Луны через эк-
ватор — экваториальными. Месячные неравенства приливов прояв-
ляются в зависимости от расстояния между Землей и Луной. В пери-
гее наблюдаются наибольшие, а в апогее наименьшие приливы.
Лунный промежуток (Тл) — это промежуток времени между мо-
ментами кульминации Луны на данном меридиане и наступлением
ближайшей за этой кульминацией полной воды.
Прикладной час порта (ПЧ) — средний из лунных промежутков
в дни сизигий, выведенный из значительного числа наблюдений.
Приливные уровни. Высоты уровней отсчитываются от нуля глу-
бин. На морских навигационных картах все глубины даны для этого
уровня — нуля глубин.
Для советских карт нуль глубин — это наинизший уровень из ма-
лых сизигийных вод, наблюдаемый за ряд лет. Для судоводителя всег-
да необходимо знать истинную глубину в заданный момент. Возвы-
шение уровня над нулем глубин называется поправкой глубины (К).
Тогда действительная глубина
Гл = Глк + Л. (137)
Приливные уровни подразделяются на главные и навигационные
(рис. 130).
К главным уровням относятся: действующий уровень — уровень,
наблюдаемый в данный момент; нуль глубин (самая малая сизигийная
вода).
СЧ *
ей
Средний уродень ПВ 6 сизигию
Средний уровень У В в квадратуру
-
Действующий уровень воды
— --------- -*5 — —— n J
*
Средний уровень прилива 4 i
Й 'С
Средний уровень МВ у в квадратуру
8 5
Ъмв в Квадратуру §
Средний уровень мВ в сизигию
Самый малый уровень МВ б сизигию i
глубин] Глубина
,, на карте х
Рис. 130. Приливные уровни
168
К навигационным уровням относятся: средняя малая сизигийная
вода; средняя малая квадратурная вода; средний уровень; средняя
полная квадратурная вода; средняя полная сизигийная вода.
При плавании вблизи берегов, в особенности при подходе к берегу,
входе в порт, плавании в узкостях, по фарватеру и в устьях рек и т. д.,
все время приходится учитывать изменения глубин, связанные с при-
ливно-отливными явлениями. Сведения о глубинах судоводитель дол-
жен иметь заранее до подхода к данному району и поэтому он должен
уметь предвычислять элементы прилива.
§ 68. УЧЕТ ПРИЛИВОВ В СУДОВОЖДЕНИИ
Степень изученности приливно-отливных явлений различна в раз-
ных районах Мирового океана, и в зависимости от этого все пункты
Мира подразделяют на 3 группы.
1. Основные пункты (порты), для которых имеются подробные
данные о приливах на каждый день в ежегодных изданиях.
2. Дополнительные пункты, приписанные к основным, для которых
расчет приливов производится через основной пункт.
3. Пункты, для которых даются прикладные часы, позволяющие
рассчитывать время полных и малых вод и их высоты исходя их мо-
ментов кульминации Луны.
Таблицы приливов. Существуют специальные таблицы приливов, с
помощью которых можно предвычислить важнейшие приливные эле-
менты или путем несложных расчетов найти моменты и высоты прили-
вов.
Для решения различных задач на предвычисление элементов для
большего числа пунктов (портов) земного шара, посещаемых судами,
служат таблицы приливов, издаваемые ежегодно Главным управле-
нием навигации и океанографии Министерства обороны СССР.
Ввиду многочисленности таких пунктов таблицы издаются в 4 то-
мах.
Том I. Воды европейской части СССР.
Том II. Воды азиатской части СССР.
Том III. Зарубежные воды, Атлантический, Индийский и Северный
Ледовитый океан.
Том IV. Зарубежные воды. Тихий океан.
Тома I и II состоят из трех частей: часть I — приливы в основных
пунтках; часть II — поправки для дополнительных пунктов; часть
III — приливные течения.
Тома III и IV — из двух частей: часть I —основные пункты,
часть II—дополнительные пункты.
В каждом томе даны общие сведения и примеры пользования таб-
лицами, вспомогательные таблицы, где основными являются «интер-
поляционные» таблицы для вычисления высот уровня моря на проме-
жуточные между полными и малыми водами моменты времени.
В конце каждого тома дан алфавитный указатель для нахождения
заданного пункта. При решении различных задач необходимо пользо-
ваться пояснениями, даваемыми в таблицах приливов.
169
С помощью «Таблиц приливов» решаются следующие основные за-
дачи.
1. Определение времени и высот полных и малых вод (утренних
и вечерних), продолжительности роста, продолжительности падения,
величины прилива и величины среднего уровня.
2. Определение поправки глубины на заданный момент.
3. Определение времени, когда поправка глубины достигнет
заданного значения.
Ниже даны примеры решения некоторых задач на предвычисление
некоторых элементов приливов с помощью таблиц приливов для ос-
новных и дополнительных пунктов, а также решение задач на прилив-
ные течения.
Задачи для основных пунктов.
Пример 1. Определить время и высоты полных и малых вод, продолжитель-
ность роста и падения уровня, величину прилива и средний уровень в пункте
Порт-Владимир 1 мая 1981 г. (без поправки на атмосферное давление).
Решение. 1. По таблице приливов на 1981 г. том I «Воды европейской части
СССР» находим, что данные для пункта Порт-Владимир на 1 мая 1981 г. нахо-
дятся на стр. 17 (по алфавитному указателю и порядковому номеру).
2. Выписываем моменты и высоты полных и малых вод:
Порт-Владимир
1 Мая 1981 г.
Gib ^пв
04 ч 00 мин 3,1
16 ч 12 мин 3,3
^мв ^мв
10 ч 17 мин 0,9
22 ч 42 мин 0,5
3. Рассчитываем Тп и Тр для двух пар вод:
Тд — ^мв Gib»
_/мв~ 10 ч 17 мин
Gib~7 04 ч 00 мин
Тп = 06 ч 17 мин
22 ч 42 мин
16 ч 12 мин
06 ч 30 мин ,
Тр — ^пв ^мв,
_ /пв 16ч 12 мин
/мв = 10 ч 17 мин
Tt) - 05 ч 55 мин.
4. Рассчитываем величину прилива:
В — Лдв ^МВ •
__Лдн 3,1 м 3,3 м
Амн —0,9м_________0,5м
В =-2,2 м 2,8м.
Пример 2. Определить для р. Харловки глубину на фарватере, если глубина
на карте 4 м, 1 мая 1981 г., Тс = 12 ч (с учетом декретного часа).
Решение. 1. Переводим судовое время в поясное:
Тс = 12 ч 00 мин
—D/4 — 1 ч 00 мин
Тп = 11 ч 00 мин-
2. На стр. 37 часть 1 таблиц приливов для р. Харловки на 1 мая 1981 г. вы-
бираем время и высоты полной и малой воды, в промежутке между которыми
находится и заданный момент 11 ч 00 мин, и выписываем табличные значения:
Gib - 05 ч 27 мин, Лпв = 3,7м,
fмв — 11 ч 33 ми н, ймв = 1,0 м.
170
3. Рассчитываем Тп (так как по времени сначала будет ПВ, а за ией МВ):
__/мв = 11 ч 33 мин,
/пв —Q5 ч 27 мин
Тп = 06 ч 06 мин.
4. Рассчитываем величину прилива В:
__Лцв~3,7 м
^мв —1,0м
В = 2,7м.
5. Определяем промежуток между заданным моментом 11 ч 00 мин и време-
нем ближайшей воды. Ближайшей будет малая вода 11 ч 33 мин:
__fMB = И ч 33 мин
Тп^ П ч 00 мин
ДТмв = 00ч 33 мин.
6. По трем аргументам: Тп = 06 ч 06 мин; В = 2,7 м; ДТМв = 00 ч 33 мин
выбираем поправку высоты ДЛ из «интерполяционной» таблицы для вычисления
высоты уровня на промежуточные между полными и малыми водами моменты
времени Дй =0,1 м.
7. Так как промежуток ДТМв взят от момента МВ, то поправка глубины
Л ~ Лмв +
। Лмв = 1,0 м
ДймВ ~ 1 м
Л = 1,1 м.
8. Рассчитываем действительную глубину на фарватере р. Харловки 1 мая
1981 г. в Тп = 11ч:
Гл =Глк + Л
। Глк = 4,0м
А — 1,1 м
Гл — 5,1 м.
Задачи для дополнительных пунктов.
Пример 1. Определить для пункта Кола моменты и высоты полных и малых
утренних вод на 1 мая 1981 г., а также время роста (или падения) и величину
прилива.
Решение. 1. Из части II таблиц по алфавитному указателю находим, что
пункт Кола имеет № 12. По порядковому номеру 12 выписываем поправки вре-
мени, коэффициент и основной порт:
Д/пВ = -4-0 ч 51 мин
Д/мв = +0ч 46 мин.
Коэффициент прилива h = 1,02.
Основной порт: Екатерининская гавань.
2. Из оглавления части II таблиц находим, что основной пункт — Екате-
рининская гавань — расположен на стр. 20, а дата 1 мая-— на стр. 21, откуда
выписываем утренние воды:
/пв = 03ч 56 мин, йпв = 3,1 м,
^мв=Юч 17мин, Лмв=1,0м.
3. Рассчитываем моменты полных и малых утренних вод в пункте Кола :
Екатерининская гавань 1 мая 1981 г. ?пв = 03 ч 56 мин, йпв = 3,1 м.
Поправка Д/Пв = +0 ч 51 мин, Лг — 1,02.
Пункт Кола 1 мая 1981 г. /пв = 04 ч 47 мин, йпв = 3,16 м.
171
Екатерининская гавань 1 мая 1981 г. /Мв = Ю 4 мин, ЛМв=1,0 м.
Поправка Д/Мв = +0 4 46 мин, k = 1,02.
Пункт Кола 1 мая 1981 г. /Мв = 11 чОЗ мин, АМв — 1,0 м.
4. Рассчитываем время падения и величину прилива в пункте Кола:
________________/пв = 04ч47мин _____/zIIB -3,16 м
/мв = 11ч 03 мин Лмв=1,0м
Т -06 ч 16 мин, В-^2,16 м..
Пример 2. Определить элементы максимальных течений на подходах к мысу
Зимнегорскому 15 августа 1981 г. в первую половину суток.
Решение. 1. По рисунку 4 части III таблиц приливов определяем, что под-
ходы к мысу Зимнегорский находятся в районе :....IV.
2. По таблице части III находим максимальные течения в этом районе 15 ав-
густа 1981 г. (стр. 151):
Время................................ 01 ч 50 мин 07 ч 55 мин
Скорость............................... 1,8 уз 1,8 уз
Направление............................ 210° 30°
Глава XVI
СОВЕТСКИЕ ПОСОБИЯ ДЛЯ ПЛАВАНИЯ
§ 69. КАТАЛОГ КАРТ И КНИГ
К основным документам навигационных'пособий для плавания от-
носятся Каталог морских карт и книг, карты, лоции, книги «Огни
и знаки», дополнения к лоциям и руководства «Радиотехнические
средства навигационного оборудования».
Кроме вышеперечисленных документов, судоводители пользуются
и другими навигационными пособиями: навигационно-гидрографи-
ческими обзорами, атласами течений, различными таблицами, номо-
граммами и т. д. Эти пособия дополняют основные навигационные по-
собия и облегчают решение всевозможных повседневных задач, с ко-
торыми приходится сталкиваться во время плавания.
Каталог карт и книг издания Главного управления навигации и
океанографии Министерства обороны Союза ССР состоит из восьми
частей.
Первые семь частей включают в себя морские карты и руководства
для плавания, предназначенные для обеспечения общего мореплава-
ния. Часть VIII Каталога содержит специальные издания, предназна-
ченные для снабжения только кораблей, частей и учреждений Мини-
стерства обороны.
Каждый Каталог содержит номерной указатель карт, составлен-
ный в порядке возрастания их номеров, сборный лист сборных листов
карт, а также два отдела: «Навигационные карты» и «Справочные и
вспомогательные карты, номограммы».
Отдел I «Навигационные карты» состоит из двух подразделов:
«Морские навигационные карты» и «Радионавигационные карты».
Этот отдел содержит данные о генеральных картах, путевых, част-
ных картах и планах, а также о радионавигационных картах.
172
Навигационные карты, помещенные в отдел I каждой части Ката-
лога, разбиты на коллекции по географическому признаку. Каждая
коллекция состоит из сборного листа карт и сведений о картах.
В коллекцию генеральных карт помещены сведения о картах мас-
штаба 1 : 1 000 000 и мельче.
Отдел II включает в себя «Справочные и вспомогательные карты,
номограммы и книги».
Справочные и вспомогательные карты, номограммы содержат све-
дения о картах часовых поясов, картах элементов земного магнетизма,
картах для плавания по дуге большого круга, шлюпочных картах,
картах-сетках, номограммы и т. п., а в подразделе «книги» — сведения
о лоциях, описания огней, радиотехнических средств навигационного
оборудования, правил плавания и т. п.
Границы лоций и описание огней указаны на соответствующих
сборных листах лоций в разделе «Книги».
Сведения в Каталоге даны по состоянию на соответствующую да-
ту. Данные об изменениях, опубликованные после указанной даты,
необходимо искать в приложениях к Извещениям мореплавателям из-
дания Главного управления навигации и океанографии Министерства
обороны Союза ССР.
§ 70. лоции
Лоции являются официальными руководствами для плавания. Они
дополняют навигационные карты и содержат подробное навигационно-
гидрографическое описание определенных участков водной поверхно-
сти и условий плавания в данном районе. Лоции помогают морепла-
вателю опознать тот или иной географический пункт на местности,
дают указания о выборе наивыгоднейшего курса и приводят различ-
ные другие сведения, которые не указаны на картах и в описаниях
средств навигационного оборудования.
Весь материал в лоции изложен в следующей определенной по-
следовательности: лист для учета корректуры, важные предупрежде-
ния (о минной опасности, навигационные сведения, не помещаемые в
лоциях, о навигационных опасностях), циркулярное указание началь-
ника Главного управления навигации и океанографии о порядке поль-
зования лоциями, обращение к мореплавателям, общие замечания,
предисловие, оглавление, сборный лист карт, общий обзор, навигаци-
онное описание, справочный отдел, указания для выбора генеральных
курсов, таблица расстояний, алфавитный указатель и заметки по кор-
ректуре.
Основными разделами лоции являются общий обзор и навигацион-
ное описание.
Общий обзор содержит три отдела: навигационно-географический
очерк, где даются данные о границе района данной лоции, о рельефе
суши и береговой черте, об островах, проливах, шхерах, о глубинах,
рельефе дна и грунтах, о средствах навигационного оборудования, о
картах и якорных местах, о лоцманской и спасательной службах и
т. п.; гидрометеорологический очерк, где приводятся сведения о кли-
173
мате и погоде, ветрах, штормах и видимости, т. е. о всех метеорологи-
ческих явлениях и подробная гидрологическая обстановка; правила
плавания, где помещены выдержки из инструкций и правительствен-
ных распоряжений, которые регулируют мореплавание в районе, опи-
сываемом данной лоцией.
В навигационном описании изложен основной материал лоции,
который разбит на главы, описывающие отдельные участки района.
В начале каждой главы даны номера карт, охватываемых данной гла-
вой.
Навигационное описание содержит наставления для плавания, да-
ются указания о рекомендованных курсах, о мерах предосторожно-
сти, обеспечивающих безопасность плавания.
Лоции иллюстрированы фотографиями и зарисовками берегов и
приметных мест, и это в значительной мере облегчает ориентировку
при подходе к берегу.
Лоции издаются для всех морей и океанов сроком на 5—6 лет и
более, а в промежутках между переизданиями к лоциям выпускают-
ся дополнения под соответствующими номерами. Эти дополнения из-
даются периодически по мере накопления корректурных материалов.
Пункты в дополнениях располагаются в той же последовательности,
в какой составлена корректируемая лоция.
Чтение лоции заключается в умении выбрать необходимые сведе-
ния для характеристики условий плавания, чтобы обеспечить безопас-
ность плавания.
§ 71. РУКОВОДСТВА «ОГНИ И ЗНАКИ»
Руководства «Огни и знаки», так же как и лоции, издаются для каж-
дого района отдельно и позволяют мореплавателю получить необхо-
димые сведения о средствах навигационного ограждения: маяках, ог-
нях, створных знаках, звуковой туманной сигнализации, радиомая-
ках, сигнальных станциях и др.
В описание включены сведения о всех штатных средствах навига-
ционного оборудования (СНО), за исключением вех.
Описание средств навигационного оборудования ведется в геогра-
фической последовательности их расположения с присвоением каждо-
му СНО соответствующего номера.
Каждая книга руководства состоит из следующих основных раз-
делов: лист для учета корректуры, обращение к мореплавателям,
предисловие, оглавление, карта-схема района, общие замечания, пе-
речень принятых сокращений, таблица дальности видимого горизон-
та, номограмма дальности видимости предметов, таблица характера
огней описание средств навигационного оборудования, алфавитный
указатель и перечень звукосигнальных средств.
Основным разделом руководства «Огни и знаки» является «Описа-
ние средств навигационного оборудования», где помещаются сведения
о маяках, светящих и несветящих знаках и буях в табличной форме.
Дальность видимости маяков и знаков на картах дается с высоты гла-
174
за наблюдателя 5 м. Она, как правило, соответствует географической
дальности видимости предмета. Если дальность видимости, указанная
на карте, отличается от географической, ее следует считать оптической
дальностью видимости. На советских картах дается наименьшая даль-
ность видимости. Высота огня во всех случаях дана над уровнем пол-
ной воды.
Для выборки сведений о маяках (знаке, буе) необходимо в алфа-
витном указателе по названию маяка (знака, буя) найти его номер.
По номеру отыскивают описание маяка (знака, буя) и выбирают необ-
ходимые сведения о нем.
Книги «Огни и знаки» корректируются по извещениям мореплава-
телям. При значительном накоплении корректурных материалов кни-
ги «Огни и знаки» переиздаются.
§ 72. РУКОВОДСТВА
«РАДИОТЕХНИЧЕСКИЕ СРЕДСТВА НАВИГАЦИОННОГО ОБОРУДОВАНИЯ»
В руководствах «Радиотехнические средства навигационного обо-
рудования» (РТСНО) помещены необходимые сведения о радиомаяках,
радионавигационных системах, радиопеленгаторных станциях и бе-
реговых станциях, передающих навигационные извещения, сигналы
времени, прибрежных аэрорадиомаяках и т. п. Описание РТСНО в
руководствах совпадает в своей последовательности с описанием в ло-
циях соответствующих районов.
Руководство «Радиотехнические средства навигационного обору-
довйнияН|рстоит из следующих основных разделов: лист для учета
кор регуры, обращение к мореплавателям, предисловие, оглавление,
сборный лист расположения радиомаяков, общие замечания, основ-
ные отделы, приложения и указатели.
Основными являются следующие отделы: отдел I — радионавига-
ционные системы; отдел II —секторные радиомаяки дальнего дейст-
вия; отдел III — морские радиомаяки и аэрорадиомаяки; отдел IV —
радиостанции, работающие по запросу для пеленгования; отдел V —
океанские суда службы погоды; отдел IV — радиопеленгаторные
станции; отдел VII — радиолокационные маяки.
Кроме этого, в руководстве дается сводная таблица, в которой гра-
фически изображено время работы морских радиомаяков. Радиомаяки
с малой дальностью действия, радиомаяки, не работающие по твердо-
му расписанию, и радиомаяки, имеющие только местное значение, в
свободную таблицу не включаются.
В каждом отделе руководства даются следующие необходимые
данные: название станции, ее координаты, режим работы, дальность
действия, характер радиосигналов, время и расписание работы, а так-
же другие сведения, характерные для различных радиотехнических
средств навигационного оборудования.
Каждое руководство РТСНО имеет следующие приложения: таб-
лица ортодромических поправок, таблица предельных расстояний,
при которых можно производить прокладку радиопеленгов без учета
175
ортодромической поправки, таблица для определения расстояния по
времени прохождения звука в воде и воздухе, азбука Морзе, схемы
расположения радиомаяков, указатели распределения радиотехни-
ческих СНО по частотам (волнам), алфавитный указатель-опознава-
тель радиотехнических СНО. Руководство корректируется по Изве-
щениям мореплавателям.
Кроме основных вышеперечисленных руководств и пособий, судо-
водителям в их практической деятельности приходится пользоваться
и другими документами, а именно: навигационно-гидрографическими
обзорами, извещениями мореплавателям, расписанием радиопередач
гидрометеорологических сведений и навигационных извещений море-
плавателям, описанием систем навигационного оборудования в водах
Союза ССР плавучими предостерегательными знаками, таблицами
приливов, таблицами морских расстояний, руководством «Океанские
пути мира», сводным описанием опасных, запретных и ограниченных
для плавания районов (по морям и океанам мира) и т. п.
§ 73. ОБЗОРЫ, СПРАВОЧНИКИ, ИЗВЕЩЕНИЯ
И ДРУГИЕ НАВИГАЦИОННЫЕ ПОСОБИЯ
Навигационно-гидрографические обзоры издаются для отдельных
морей и частей океанов. Основным материалом для составления обзо-
ров служат морские лоции, руководства «Огни и знаки», руководства
«Радиотехнические средства навигационного оборудования», всевоз-
можные пособия по гидрологии, океанографии, метеорологии, эконо-
мической и физической географии и т. д. Из навигационно-гидрогра-
фического обзора мореплаватель может получить сведения о геогра-
фическом положении того или иного района, берегах, островах, кана-
лах, данные о рельефе дна и грунте, данные о навигационном обору-
довании, рекомендации о выборе маршрута перехода, различную гид-
рологическую и метеорологическую информацию, данные о портах и
различную экономическую характеристику соответствующего района
моря и другие необходимые сведения.
Все эти данные помещены в трех основных разделах: навигационно-
географическом очерке, гидрометеорологическом очерке и справочном
отделе.
Радиолокационные описания маршрутов. В настоящее время ши-
рокое использование радиолокационных станций на судах морского и
речного флота вызвало необходимость оборудования путей навига-
ционными радиолокационными отражателями, а также издания спе-
циальных карт и других пособий для мореплавания. В издаваемых
радиолокационных описаниях даются сведения об условиях радиоло-
кационной ориентировки и фотоснимки с экранов РЛС различных
районов побережья.
Радиолокационные описания маршрутов получают сейчас самое
широкое распространение как одно из необходимых навигационных
пособий для плавания.
176
Извещения мореплавателям (ИМ), выпускаемые Главным управ-
лением навигации и океанографии Министерства обороны СССР, яв-
ляются основным документом, который оповещает мореплавателей о
режиме плавания и изменениях в навигационной обстановке морей
всего мира, о выходе новых и изъятии старых карт, различных посо-
бий и постановлений. Извещения мореплавателям выпускаются еже-
недельно и являются основным документом для корректуры навига-
ционных пособий. В каждом выпуске содержится несколько извеще-
ний. В начале каждого года выходит за № 1 специальный выпуск Из-
вещений мореплавателям, в котором публикуются постоянно дейст-
вующие правила и положения о плавании в советских водах, а также
приводится список сокращений и условных обозначений, которыми
необходимо пользоваться при корректуре карт и различных пособий.
Извещения мореплавателям издаются по следующей стандартной
схеме:
титульный лист с указанием для мореплавателей;
содержание, в которое входит перечень карт, руководств и посо-
бий для плавания, подлежащих корректуре по данному выпуску.
Последовательность расположения извещений мореплавателям в
выпуске следующая:
Отдел I. Навигационные извещения и общая информация по воп-
росам мореплавания.
Отдел II. Корректура карт.
Отдел III. Корректура руководств и пособий для плавания.
Отдел IV. Корректура каталога карт и книг.
Отдел V. Навигационные предупреждения.
Извещения мореплавателям подразделяются на постоянные, вре-
менные и предварительные. Ежегодно к Извещениям мореплавателям
составляют и публикуют «Алфавитный указатель» и «Нумерники ИМ»
к картам и руководствам для плавания, где перечисляются нуждаю-
щиеся в корректуре за истекший год карты и различные пособия.
Для плавания по озерам, где существуют навигационные способы
проводки судов, управлениями пути и судоходными инспекциями
соответствующих бассейнов издаются Извещения судоводителям.
Эти извещения издаются периодически, по мере накопления сведений,
необходимых для опубликования.
Расписание радиопередач гидрометеорологических сведений и нави-
гационных извещений мореплавателям. Данное руководство содержит
сведения о работе береговых радиостанций и океанских судов службы
погоды, передающих гидрометеорологические сведения (МЕТЕО), на-
вигационные Извещения мореплавателям (НАВИМ), а также сообще-
ния о ледовой обстановке. Расписания издаются в четырех томах. Ра-
бота зарубежных радиостанций описана в первых двух томах, в треть-
ем — работа радиостанций СССР, а в четвертом — работа радиостан-
ций, которые ведут факсимильные передачи гидрометеорологических
сведений. К данным расписаниям издаются книги «Гидрометеороло-
гические коды». Описание каждой радиостанции в расписании начи-
нается с присвоенного ей номера в определенной последовательности.
Указывается район, о котором дается информация в передачах дан-
177
ной радиостанции, сведения о частоте, роде работы и мощности радио*
станции, дается время начала и конца радиопередачи и режим работы-
В содержании передач указывается тип сообщения (штормовые
предупреждения, прогнозы погоды и т. п.), код и название языка, на
котором ведется передача. К данному расписанию издаются дополне-
ния, необходимые для корректуры по мере накопления корректурно-
го материала.
Описание систем навигационного оборудования в водах Союза ССР
плавучими предостерегательными знаками. В руководстве дано под-
робное описание систем навигационного оборудования в водах СССР
плавучими предостерегательными знаками.
В конце Описания приводится сводная таблица окраски, цветов и
характеристики огней плавучих предостерегательных знаков. В 1977 г.
Главное управление навигации и океанографии Министерства оборо-
ны Союза ССР издало описание новой комбинированной кординально-
латеральной сйстемы навигационного оборудования плавучими пре-
достерегательными знаками.
Таблицы приливов. Необходимые для мореплавателей данные о
приливах приводятся в специальных таблицах приливов, издаваемых
Главным управлением навигации и океанографии МО СССР. Таблицы
издаются в четырех томах: том I — воды европейской части СССР;
том II — воды азиатской части СССР; том III — зарубежные воды,
Атлантический, Индийский и Северный Ледовитый океаны; том IV —
зарубежные воды, Тихий океан.
С помощью «Таблиц приливов» решаются следующие основные за-
дачи.
1. Определение времени и высот полных и малых вод (утренних
и вечерних), продолжительность роста, продолжительность падения,
величины прилива и величины среднего уровня.
2. Определение поправки глубины на заданный момент.
3. Определение времени, когда поправка глубины достигнет за-
данного значения.
Таблицы морских расстояний содержат расстояния, выраженные
в морских милях, между портами и географическими пунктами зем-
ного шара по безопасным в навигационном отношении морским путям.
Данное пособие содержит 29 таблиц. В табл. I—XXVII даны расстоя-
ния между пунктами отдельных бассейнов (морей). В табл. XXVIII
даны расстояния между основными портами Советского Союза, а в
табл. XXIX —расстояния от этих портов до основных иностранных
портов.
Приведенные в таблицах расстояния являются кратчайшими, за
некоторым исключением, между отдельными пунктами Атлантическо-
го, Тихого и Индийского океанов. Эти расстояния приведены в табл.
XIII, XX и XXVI.
Сводное описание опасных, запретных и ограниченных для плавания
районов. Сводное описание включает в себя районы, опасные и бывшие
опасные от мин, районы и полигоны боевой подготовки, районы, за-
претные и опасные для плавания, якорной стоянки и лова рыбы, райо-
178
ны, ограниченные для плавания, установленные иностранными госу-
дарствами.
Сводное описание состоит из текстовой части и схем. В текстовой
части даны номера районов, координаты границ районов и их харак-
тер. Под каждым районом указан номер карты, на которой помещает-
ся весь район и номер схемы.
Данное пособие корректируется по Извещениям мореплавателям.
К остальным навигационным пособиям для мореплавания относят-
ся: атласы физико-географических данных, где помещен обширный
материал по изучению гидрометеорологических условий плавания
соответствующего моря; Морской атлас — фундаментальное руковод-
ство и пособие для мореплавателей, учащихся морских учебных заве-
дений, работников учреждений морского транспорта и т. д.; атласы
течений, атласы приливно-отливных течений, атласы для плавания в
шхерах и ряд других руководств, пособий и таблиц.
§ 74. КОРРЕКТУРА МОРСКИХ НАВИГАЦИОННЫХ ПОСОБИЙ
Навигационные пособия с течением времени стареют. Это проис-
ходит в связи с изменением навигационной обстановки на морях и оке-
анах.
Очень часто происходят изменения в плавучем и береговом нави-
гационном ограждении, появляются новые опасности, смещаются фар-
ватеры, изменяется видимый с моря прибрежный район, новые допол-
нительные промеры существенно меняют данные о рельефе дна, о по-
ложении опасностей и т. д.
Для обеспечения безопасного плавания все изменения, происхо-
дящие на морских театрах, должны быть отражены в навигационных
пособиях.
Для этого производят корректуру карт и всех других пособий.
Все поступающие из электрорадионавигационных камер на суда
карты и пособия корректируются по день выдачи, что удостоверяется
специальным штампом на картах и пособиях.
Последующая корректура карт и пособий производится на судах
штурманским составом на основании Извещений мореплавателям, до-
полнений и приложений к ним (сводного описания опасных, запретных
и ограниченных для плавания районов морей и океанов мира, сводно-
го описания режима плавания судов в водах СССР и др.), радиоизве-
щений и сообщений различных зарубежных станций.
В зависимости от характера и объема исправлений различают два
вида корректуры карт — производственную и текущую.
Производственная корректура включает в себя новые издания карт,
вклейки и малую корректуру и производится в подразделениях Глав-
ного управления навигации и океанографии Министерства обороны
Союза ССР..
Текущая корректура прозводится на судах и в базовых ЭРН ка-
мерах по мере поступления Извещений мореплавателям с № 2 каждого
года, содержащих материал для корректуры.
179
Корректура руководств для плавания осуществляется путем пере-
издания, если объем исправлений превышает 15 % издания дополне-
ний (главным образом к лоциям), изданием сводных корректур, объяв-
лением в Извещениях мореплавателям.
Дополнения к лоциям издаются по мере необходимости.
При производстве корректуры судоводитель обязан точно выдер-
живать все условные обозначения и сокращения в соответствии с при-
нятыми условными обозначениями, которые даются в книгах «Услов-
ные знаки для морских карт и планов» и «Навигационно-гидрографи-
ческая терминология, условные знаки и сокращения».
Корректура карт и пособий должна производиться с последних
Извещений мореплавателям, так как иногда последние извещения ан-
нулируют предыдущие.
Отметка о производстве текущей корректуры судоводителем отме-
чается в левом нижнем углу под рамкой карты, рядом с отметкой ти-
пографской корректуры с перечислением всех использованных Изве-
щений мореплавателям.
§ 75. ШТУРМАНСКАЯ ПОДГОТОВКА К РЕЙСУ
Подготовка к переходу. После получения рейсового задания на суд-
не одновременно с другими работами начинают навигационную под-
готовку к предстоящему переходу морем или океаном, которая сводит-
ся к подбору карт и различных навигационных пособий (лоций, огней
и знаков и т. п.) для плавания, тщательному их изучению и выбору
кратчайшего и наивыгоднейшего пути судна.
Навигационные карты и пособия на переход подбираются с помо-
щью Каталога карт и книг издания Главного управления навигации
и океанографии МО СССР.
По генеральным картам, таблицам расстояний, рекомендованным
маршрутам для плавания судов МРФ в морских бассейнах производят
расчет продолжительности рейса. Эти расчеты необходимы для опре-
деления запасов топлива, воды, продовольствия и других видов снаб-
жения.
После этого приступают к изучению карт и различных пособий по
судовождению для выбора наивыгоднейшего маршрута перехода,
производят предварительную прокладку и составляют штурманскую
справку на переход.
На переход подбираются: морские навигационные карты (гене-
ральные, путевые, частные и планы), вспомогательные, справочные
и специальные карты, лоции, руководства «Огни и знаки», «Радиотех-
нические средства навигационного оборудования», «Океанские пути
мира», а для судов смешанного плавания — «Рекомендованные марш-
руты для плавания судов МРФ в морских районах», «Радиолокацион-
ные описания маршрутов» и др.; описания и правила плавания; общие,
справочные и специальные пособия, включая «Сводное описание
районов, в которых запрещено или ограничено плавание судов (по
180
морям и океанам)», общие положения об установлении путей дви-
жения судов, таблицы расстояний, Извещения мореплавателям и
т. п.
Подготовка штурманского обеспечения предстоящего плавания пре-
дусматривает также проверку наличия и других навигационных посо-
бий, как: мореходных таблиц, морского астрономического ежегод-
ника (МАЕ) на год плавания, таблиц приливов, атласа течений ит. п.,
а также наличие различных бланковых изданий, журналов и таблиц.
Все подобранные карты и пособия для плавания должны быть тща-
тельно откорректированы по данным последних корректурных доку-
ментов по день их выдачи на судно, а судовые карты и пособия, имев-
шиеся на борту судна, должны быть откорректированы по день выхо-
да в рейс.
Перед использованием морских навигационных карт, в период под-
готовки к рейсу, производится их подъем. В процессе этой работы
выполняется следующее.
1. Магнитное склонение, указанное на картах, приводят к году
плавания и надписывают карандашом его новое значение.
2. Отрезками дуг, проведенными карандашом, показывают даль-
ности видимости маяков с учетом высоты глаза наблюдателя. Штри-
ховкой выделяют опасные секторы маяков и светящих знаков.
3. Около условных обозначений радиомаяков выписывают рабо-
чую частоту, позывные, дальность действия и характер работы.
4. Обводят карандашом искусственные и естественные ориентиры,
приметные с моря.
5. По данным лоции или других руководств для плавания таким
же образом выделяют участки береговой черты, естественные или
искусственные объекты, являющиеся хорошими радиолокационными
ориентирами.
6. Обводят кружками искусственные или естественные створы, ис-
пользование которых предполагается в рейсе.
7. Наносят на карты опасные углы, дистанции или пеленги, ограж-
дающие опасности, расположенные вблизи курса судна, и надписы-
вают их значение.
8. Карандашом выделяют предостерегательную или другую, за-
ранее назначенную изобату, пересечение которой не планируется или
должно быть зафиксировано.
9. Выделяют карандашом постоянные течения, показанные на кар-
тах. В районах действия приливных явлений, на свободном месте кар-
ты, составляют таблицу элементов приливно-отливных течений на пе-
риод предстоящего плавания.
Предварительная прокладка. На основании данных проработки
маршрута перехода (изучения трассы в навигационном отношении) и
штурманской справки, проработанной всем штурманским составом
судна, выполняют предварительную прокладку.
Проложив намеченный путь на генеральной карте и убедившись в
гом, что выбор пути плавания вполне обоснован, переходят к разра-
ботке практической прокладки на путевых картах.
181
При выполнении предварительной прокладки судоводитель обязан
рассчитать:
1. Продолжительность рейса с учетом захода в промежуточные
порты.
2. Плавание каждым курсом и ориентировочное время подхода к
основным точкам поворота.
3. Подход к местам принятия лоцмана, к якорным стоянкам и пор-
там.
4. Общую поправку компаса для каждого курса.
5. Ориентировочное время и пеленги открытия главнейших мая-
ков, предлагаемое расстояние до маяков, мысов и приметных пунктов
на траверзе.
6. Рабочие таблицы для районов действия приливно-отливных те-
чений, поправку глубин для мест якорных стоянок, портов и отдель-
ных районов плавания.
7. Время прохода особо опасных районов и узкостей.
8. Сведения о радиомаяках и радионавигационных системах.
При выборе безопасного и наивыгоднейшего маршрута перехода
принимают в расчет рекомендации руководства «Океанские пути ми-
ра», а для судов смешанного плавания — «Рекомендованные маршру-
ты для плавания судов МРФ в морских районах».
Все предварительные расчетные данные необходимо располагать
в таблицы последовательно соответственно плаванию для удобства их
использования в ходовых условиях. Количество таблиц неограничено
и они выбираются по усмотрению судоводителей.
Прилагаемые образцы таблиц (табл. 3—7) даны ориентировочно и в
практике производства расчетов могут видоизменяться. Все курсы с
генеральных карт переносятся на путевые, частные карты и планы.
Таблица 3
Список карт и навигационных пособий на рейс
п/п Адмирал- тейские номера 2 Заголовки карт» наименования пособий Год издания (масштаб) Дата последней корректуры Примеча- ние
1 3 4 5 6
Таблица 4
Сведения о портах и местах укрытия
Наименование порта, места укрытия, их координаты Номер карты, плана Наименование и страницы руководства с описанием порта Данные о глубинах, грунте, защищенности от ветров, местные правила и др.
1 2 3 4
182
Таблица курсов
Таблица 5
№ курсов | Судовое время ик Расстояние по курсу, мили Скорость судна Продолжи- тельность плавания по курсу, ч, мин Точки поворота Примеча- ние
Наимено- вание ориентира Поворот- ные пе- ленги или расстояния
1 2 3 4 5 6 7 8 9
Таблица 6
Таблица высот уровней воды
Наименование пункта Дата ПБутр Мвутр ^Ввеч М^веч Приме- чание
1 Л t h t h t 1 й
1 2 3 4 5 6 7 8 9 10 11
Таблица 7
Сведения о ежечасных высотах приливно-отливного уровня
Наименование пункта Дата Высоты уровня воды Примеча-
тс Тс-Н чТс+2 чТс+Зч ... .. ТСЧ-23 ч ние
1 2 3 4
При составлении таблиц и различных справок для перехода мате
риал располагают таким образом, чтобы любые интересующие данные
можно было быстро найти и использовать в работе. Немаловажно
значение при проработке маршрута перехода имеют гидрометеоро-
логические (течения, волнение, ветры, льды) и другие факторы, дей-
ствующие в конкретный момент перехода. Наивыгоднейший путь мо-
жет быть найден лишь с учетом всех действующих факторов.
В дальнейшем, при плавании судна в море, выполняется исполни-
тельная прокладка, которая ведется максимально приближенно к
предварительной.
Возможно, что некоторые данные расчетов предварительной про-
кладки во время плавания будут изменяться, прогнозы погоды не сов-
падут с действительными, курсы судна придется подправлять, ис-
пользуя навигационные, астрономические определения, с помощью
радиотехнических средств.
Но это нисколько не снижает значения предварительной проклад-
ки, так как общее направление перехода и главные его данные не из-
меняются.
183
Все отклонения исполнительной прокладки от предварительной
должны быть проанализированы и учтены штурманским составом в
процессе работы в рейсе.
§ 76. ОРГАНИЗАЦИЯ ШТУРМАНСКОЙ СЛУЖБЫ НА СУДНЕ
Одним из самых ответственных этапов работы штурманского сос-
тава является подготовка судна и его штурманской части к рейсу. Он
включает в себя многочисленные мероприятия и начинается с полу-
чением капитаном рейсового задания.
Безоговорочную ответственность за обеспечение навигационной
безопасности плавания несет капитан судна.
Капитан организует штурманскую и вахтенную службу в соответ-
ствии с требованиями Устава и других директивных документов и
систематически контролирует действия штурманского состава, пере-
давая им свой опыт, знания, заботится о повышении их квалифика-
ции.
Перед выходом в рейс капитан организует подготовку штур-
манской части в соответствии с требованиями наставления по органи-
зации штурманской службы на судах и получает дополнительную ин-
формацию о районе плавания в службе мореплавания пароходства.
Во время плавания капитан осуществляет судовождение с учетом
особенностей района плавания, навигационных опасностей, систем
разделения движения судов, гидрометеорологических условий и т. п.
Организует усиленную вахту при плавании в сложных навигационных
и гидрометеорологических условиях.
Он обязан контролировать работу штурманского состава, лично
определяя место судна всеми доступными способами, организует при-
ем навигационной и метеорологической информации по району пла-
вания.
В районах необязательной лоцманской проводки капитану реко-
мендуется пользоваться услугами лоцмана, если он впервые плавает
в этом районе или обстановка вызывает какие-либо сомнения.
Капитан организует сбор сведений об изменении навигационной
обстановки в районе плавания и дает информацию об этом согласно по-
ложению о навигационной информации. Контролируя повседневную
работу штурманского состава в рейсе и на стоянках, капитан ежесу-
точно подписывает каждую страницу судового журнала.
Штурманский состав судна в своей практической деятельности на
судне руководствуется положениями Наставления по организации
штурманской службы на судах.
Для выполнения повседневных обязанностей штурманский состав
должен уметь пользоваться судовой документацией, правильно ее
содержать и заполнять. К такой документации относятся: вахтенный
журнал, путевой журнал, каталог навигационных карт и пособий
(карты, лоции, извещения, справочники, маршрутники, рекомендации
судоводителям, атласы волнения и т. п.), журналы приема прогнозов
и путевой информации, журналы наличия и использования пиротех-
184
нических средств, таблица маневренных характеристик судна (типо-
вого состава), таблицы девиации, технические паспорта, таблицы и
инструкции к навигационно-штурманским приборам, директивные
документы по вопросам обеспечения безопасности плавания.
При подготовке к рейсу штурманский состав проводит работу,
предусматривающую надлежащее навигационное обеспечение безопас-
ности плавания, которая включает: укомплектование установленной
судовой коллекции картами и навигационными пособиями по всему
району плавания судна, подбор карт, руководств и пособий для пла-
вания на предстоящий рейс, их корректуру. Проверяются технические
средства судовождения и их поправки, исправность судовых огней и
знаков, средств световой, звуковой и аварийной сигнализации, а так-
же наличие пиротехнических средств.
Выбранный путь на основе проработки маршрута перехода и пред-
варительной прокладки прорабатывается со всем штурманским сос-
тавом судна.
Во время плавания штурманский состав при несении ходовых вахт
также руководствуется основными положениями Наставления по ор-
ганизации штурманской службы на судах и состоит в том, чтобы пра-
вильно организовать и обеспечить безопасность движения судна.
Вахтенные штурманы ведут графическое счисление пути судна с
записью всех условий плавания в судовом журнале. Определяют на-
вигационными способами место судна, стремясь избрать способ, даю-
щий максимальную точность обсервованного места, постоянно и бди-
тельно ведут наблюдение за окружающей обстановкой (визуально и с
помощью радиотехнических средств).
При плавании в особых условиях (в узкостях, вблизи берегов, в
условиях неудовлетворительной видимости, во время шторма и ледо-
вых условиях) работа штурманского состава осуществляется под
личным руководством капитана судна.
Часть третья
ОСОБЕННОСТИ УПРАВЛЕНИЯ СУДНОМ
В МОРСКИХ УСЛОВИЯХ и мппсс
Глава XVII
ОСОБЕННОСТИ УПРАВЛЕНИЯ СУДНОМ
В ПРИБРЕЖНОМ МОРСКОМ ПЛАВАНИИ
§ 77. ОБЩАЯ ХАРАКТЕРИСТИКА ПЛАВАНИЯ
В МОРСКИХ УСЛОВИЯХ
Плавание в морских районах характеризуется большими водными
пространствами, что затрудняет ориентировку и обусловливает не-
обходимость применения штурманского метода судовождения. Основ-
ным фактором, определяющим особенности управления судами в мор-
ских и озерных условиях, является тяжелый ветроволновой режим.
Действие ветра проявляется главным образом в возникновении крена,
ветрового дрейфа, рыскливости и в резком ухудшении управляемости
судна.
Ветровой дрейф, или боковой снос судна под действием ветра, ха-
рактеризуется углом ветрового дрейфа. Для обеспечения движения
судна в заданном направлении угол дрейфа судна учитывают при
счислении.
Ветер, превышающий по силе 3—4 балла, разводит волну. Сов-
местное действие ветра и волны порождает аэродинамические и гидро-
динамические силы и моменты, отклоняющие судно от направления
его движения. Эти моменты не удается точно скомпенсировать дейст-
вием руля, поэтому судно рыскает, как правило, неравномерно. Асим-
метричное рыскание, или зарыскивание, приводит к уходу судна с
курса, что обычно учитывается совместно с ветровым дрейфом. Для
удержания судна на заданном курсе приходится перекладывать руль
значительно чаще, чем на спокойной воде. Рыскание судна увеличи-
вается с увеличением размеров волн и достигает максимума при по-
путном волнении.
Для компенсации моментов сил, возникающих от действия ветра
и волн, при прямолинейном двжении судна необходима определенная
перекладка руля. В некоторых случаях максимальная перекладка
руля не обеспечивает движения по заданному курсу — судно теряет
управляемость. Особенно опасными являются курсы на попутном вол-
нении при длине волны, близкой к длине судна.
Возникающее от ветра волнение вызывает качку судна. Она пред-
ставляет большую опасность для речных судов. Под влиянием штор-
186
мовых условий увеличиваются напряжения в корпусе судна, при стре-
мительной бортовой качке силами инерции могут быть сорваны спа-
сательные средства, оборудование машинного отделения, антенны
ит. п. Сильная продольная качка часто сопровождается ударами волн
в днище, оголением винтов и рулей, усиленным заливанием палу-
бы. При этом могут нарушиться крепления люковых закрытий, и вода
попадает в трюм. В таких случаях положение судна становится ава-
рийным.
Известно, что мореходность и прочность судов внутреннего плава-
ния значительно ниже, чем мореходность и прочность морских судов.
Поэтому эксплуатация речных судов в озерно-морских районах до-
пускается с определенными ограничениями по погоде и по районам
плавания. Приказ министра речного флота РСФСР определяет райо-
ны, в которых допускается плавание речных судов, и требования,
предъявляемые к судну и экипажу при выходе в море.
В прибрежно-морских районах разрешается плавать судам, имею-
щим классы «М» и «О» Речного Регистра РСФСР. Как правило, уда-
ление от берега не должно превышать 20 и от мест убежища 50 миль.
Плавание судов допускается на волнении с высотой волны трехпро-
центной обеспеченности не свыше 2—2,5 м (4—5 баллов по шкале вол-
нения).
Суда смешанного плавания класса «М—СП» Речного Регистра
РСФСР и II—СП Регистра Союза ССР имеют менее жесткие ограниче-
ния и могут плавать в морских районах.
В штормовых условиях, когда высота волны или сила ветра пре-
вышают допустимые значения, суда должны укрываться в ближайших
портах-убежищах. Порядок пользования портами-убежищами на во-
дохранилищах определяется местными правилами плавания. Описа-
ние убежищ морских районов приводится в лоциях. Вход в убежища
и выход из них осуществляются под командованием капитанов или
первых штурманов в порядке очередности подхода судов. Запреща-
ется останавливаться во входной части убежища. Суда должны рас-
полагаться с интервалами, обеспечивающими безопасность стоянки.
Расстановку судов регулирует начальник пристани, расположенной
в убежище, капитан-наставник или капитан аварийно-спасательного
судна. Во время стоянки в убежище должно быть организовано тща-
тельное наблюдение за дрейфом судна.
При плавании в морях Северного Ледовитого океана и Дальнего
Востока необходимо учитывать колебания уровня моря, связанные с
приливно-отливными явлениями. Особенно большое значение имеет
учет приливов во время прохода районов с небольшими глубинами и
при стоянке в портах и на рейдах.
Якорная стоянка на рейдах с большими глубинами, буксировка
судов в море, управление судном в шторм — вот основные вопросы,
с которыми чаще всего приходится сталкиваться судоводителю-реч-
нику при выходе в море.
К специфике плавания в морских районах относится и то, что рас-
хождение судов регламентируется здесь «Международными правила-
187
ми для предупреждения столкновений судов в море» (МППСС—72).
Четкое знание МППСС является одним из главнейших условий безо-
пасности плавания судов в море.
§ 78. ПОДГОТОВКА СУДНА К ПЛАВАНИЮ.
РАЗРЕШЕНИЕ НА ВЫХОД
Выход судна в море разрешается, если оно находится в исправном
техническом состоянии, снабжено топливом, пресной водой, провизи-
ей и имеет экипаж, укомплектованный для морского плавания. Под-
готовка судна к плаванию должна включать проверку аварийно-спа-
сательного имущества и снабжения, необходимого для выхода в море.
Особое внимание должно быть уделено состоянию навигационных при-
боров, инструментов и пособий для плавания. Если необходимо, то
делается уничтожение и определение девиации магнитных компасов.
Выход судов в море с неисправными навигационными приборами не
разрешается.
Еще в порту начинается подготовка к плаванию в шторм: задраива-
ют и проверяют горловины всех танков и двери водонепроницаемых
переборок; надежно крепят шлюпки, плотики и палубные грузы; в
грузовых помещениях производят тщательное крепление и штивку
грузов для того, чтобы исключить перемещение их во время качки;
проверяют плотность прилегания крышек люковых закрытий к ко-
мингсам люков; проверяют исправность водомерных трубок, чистоту
приемных сеток осушительной системы, опробовают в действии водо-
отливные средства.
Для выхода в море все суда МРФ должны иметь документы но дей-
ствующим нормам Речного Регистра РСФСР. На суда класса М—СП
Речным Регистром РСФСР выдаются документы по формам, аналогич-
ным формам, выдаваемым Регистром Союза ССР: Р—19 «Удостове-
рение на годность к плаванию», Р—15 «Свидетельство на световые и
звуковые сигналы» и Р—33. «Свидетельство о грузовой марке». Суда
заграничного плавания должны иметь документы, требуемые междуна-
родными конвенциями. Такие документы выдаются Регистром Союза
ССР на основании документов, выданных Речным Регистром РСФСР.
Некоторые суда смешанного плавания (например, проект № 1557
«Сормовский», проект № 781 «Балтийский») построены на класс Ре-
гистра Союза ССР. Они стоят на учете в Регистре Союза ССР и имеют
соответствующие документы.
Суда класса «М» и «О» должны иметь «Книгу судовых документов
Речного Регистра РСФСР на годность к плаванию» (форма РР—1).
При выходе в море на борту должен находиться весь штатный эки-
паж судна. В исключительных случаях капитан морского порта мо-
жет выпустить судно в морские прибрежные районы при отсутствии
некоторых членов экипажа, руководствуясь Положением о минималь-
ном составе экипажей.
Командный состав должен иметь морские дипломы или квалифи-
кационные свидетельства, соответствующие занимаемой должности.
188
В прибрежно-морском плавании на судах класса «О» право занимать
должность командного состава дают вкладыши в диплом судоводите-
ля. Морские дипломы и классификационные свидетельства выдаются
капитанами морских торговых портов в соответствии с Положением
о званиях лиц командного состава морских судов и Положением о
званиях судоводителей и механиков морских маломерных судов.
Вкладыши в диплом судоводителя выдаются также капитанами
портов лицам, прошедшим дополнительную подготовку и проверку
знаний морского судовождения по специальным программам.
Разрешение на выход судна в море дает портовый надзор, если от-
сутствуют препятствия к выходу в части мореходного состояния
судна, а также со стороны органов пожарной охраны порта, сани-
тарно-карантинного, таможенного и пограничного контроля.
Капитан обязан известить портовый надзор о предстоящем выходе
заблаговременно, но не позже чем за 6 ч до намеченного срока. При
кратковременной стоянке извещение должно быть подано не позднее
2 ч до выхода. Оформление отхода производится за 2—3 ч до выхода.
Для получения разрешения в портовый надзор должны быть предъяв-
лены:
судовая роль в двух экземплярах;
дипломы лиц командного состава;
разрешение санитарно-карантинной службы на право выхода из
порта;
свидетельство о дератизации;
свидетельство пожарной охраны на право выхода судна в рейс;
свидетельство на право плавания под флагом СССР (только для
судов класса «М—СП»);
судовое свидетельство;
документы Речного Регистра РСФСР или Регистра Союза ССР, оп-
ределяющие мореходное состояние судна;
заполненный и подписанный капитаном бланк «Заявление на право
отхода».
Перед выходом судна в море представитель портового надзора про-
веряет фактическое состояние судна и дает разрешение на выход.
Кроме того, перед отходом подается письменная заявка диспет-
черу порта на комиссию для производства всех формальностей по от-
ходу судна (таможенный и пограничный надзор), заявка на лоцмана
и, если необходимо, на буксиры.
Выход судов в море запрещается в случаях, если:
не выполнено указание портового надзора о ликвидации недостат-
ков;
отсутствуют необходимые судовые документы или срок действия их
просрочен;
судно перегружено сверх установленных норм;
не укомплектован судовой экипаж;
на судно принято количество пассажиров, превышающее установ-
ленную для него Регистром пассажировместимость;
судно имеет крен более 5° или дифферент на нос, если этот диффе-
рент не предусмотрен конструкцией судна;
189
корпус судна имеет водотечность;
судно не приведено в походное состояние и груз не закреплен;
неисправны или некомплектны люковые закрытия;
отсутствует полный комплект аварийного, противопожарного иму-
щества и спасательных средств;
экипаж не подготовлен к борьбе за живучесть;
загромождены палубным грузом или другим имуществом спаса-
тельные средства, место посадки в них, проходы, пожарные рожки,
средства борьбы за живучесть, мерительные трубки;
неисправно действует рулевое устройство, а на судах с механичес-
ким рулевым устройством отсутствует запасное ручное управление;
неисправны средства связи и сигнализации или их недостаточно;
на борту судна находятся лица, не имеющие специального разре-
шения или установленных документов на выход в рейс;
район предстоящего плавания не соответствует ограничениям, ука-
занным в судовых документах.
§ 79. ЯКОРНАЯ СТОЯНКА НА НЕЗАЩИЩЕННЫХ РЕЙДАХ
Важное значение для успешной постановки и последующей безо-
пасной стоянки судна на якоре имеет правильный выбор места отдачи
якоря. При выборе места якорной стоянки следует учитывать цель и
продолжительность стоянки, навигационные и гидрометеорологичес-
кие особенности рейда и состояние судна.
Место постановки на якорь должно быть выбрано с учетом возмож-
ного разворачивания судна под действием ветра и течения. Свободная
акватория (рис. 131) должна вмещать в себя окружность с радиусом
R L 4-Ая ' ААя, (138)
где L — длина судна;
Ln — горизонтальная проекция вытравленной якорной цепи;
ЛЛЯ — длина якорной цепи, которая может быть дополнительно вытравлена
при ухудшении погоды.
Горизонтальная проекция цепи может быть заменена при расчете
длиной вытравленной
Рис. 131. К расчету якор-
ного места
цепи.
Глубины в пределах выбранной акватории
стоянки должны иметь необходимый запас,
учитывающий качку судна на волнении. Ми-
нимальную глубину (м) можно определить
по формуле
Н 1,27 г0,7Лв,
(139)
где Т — наибольшая осадка судна, м;
Лв — максимальная высота волны в районе
стоянки для данного сезона, м.
В морях с приливами минимальная глу-
бина должна быть рассчитана для малой
воды.
190
При выборе места якорной стоянки следует заблаговременно изу-
чить по лоциям и картам сведения о рельефе дна, грунтах, господст-
вующих ветрах, течениях и т. д.
Не рекомендуется становиться на якорь в районах с неровным рель-
ефом дна.
Хорошо держащими грунтами являются ил, глина и ил с песком,
менее надежны песок, ракушка, жидкий ил, плита. Глубины в районе
якорной стоянки должны быть 15—30 м, дно ровное или почти ровное.
Место якорной стоянки должно быть выбрано с учетом возможной
внезапной съемки с якоря при усилении ветра и должно позволять
контролировать положение судна по приметным ориентирам.
Подход к месту якорной стоянки обычно выполняют на малом хо-
ду, тщательно контролируя место судна с помощью навигационных
и радиолокационных обсерваций. Для контроля глубин включают эхо-
лот или измеряют глубины ручным лотом.
Подход к месту якорной стоянки осуществляется по возможности
на курсах против ветра или течения, а при совместном действии ветра
и течения против того, что сильнее действует в данный момент. Не до-
ходя до намеченной точки, стопорят машину и далее двигаются по
инерции. С приходом в заданную точку дают машине задний ход, а
когда судно получит небольшое движение назад, отдают якорь.
В условиях ограниченной акватории иногда приходится стано-
виться на якорь при боковом ветре и течении. В этом случае с прихо-
дом на якорное место отдают якорь с наветренного борта или с той
стороны, откуда действует течение.
Якорную цепь следует травить с умеренной скоростью, чтобы мож-
но было легко застопорить ее в момент касания якорем грунта. По ме-
ре натяжения якорь-цепь вытравливают до длины, обеспечивающей
надежную работу якоря. Длина вытравленной цепи во всех случаях
должна быть достаточной, чтобы обеспечить горизонтальное направ-
ление тягового усилия у скобы якоря.
Изменение направления тягового усилия (от горизонтального) вы-
зывает появление вертикальной составляющей, которая стремится
вырвать якорь из грунта, чем резко уменьшает держащую силу якоря.
Морская практика рекомендует при средних условиях погоды
иметь длину вытравленной якорной цепи: на малых глубинах (до 20 м)
равную 4—5 глубинам якорного места; на средних глубинах
(20—50 м) — 3—3,5 глубины места постановки; на больших глубинах
(50—100 м) — 2—2,5 глубины места стоянки.
Длина каната (м) на клюзе может быть рассчитана по формуле
^=|/ ~q—+2М+^2, (140)
гДе G — масса якоря, кг;
q — масса одного погонного метра якорной цепи, кг/м;
k — коэффициент держащей силы якоря;
h — высота клюза над грунтом, м;
а — длина участка цепи, лежащей на грунте, м;
f — коэффициент трения цепи о грунт.
191
Необходимо учитывать, что даже при кратковременной стоянке
длина якорной цепи не должна быть меньше значения, полученного
по формуле (140) при а = 0. Участок цепи, лежащий на грунте, не
дает большого увеличения держащей силы, а делает неизменным на-
правление тягового усилия во время действия динамических нагру-
зок — шквалов, ударов волн и т. п. Однако при выборе количества
вытравливаемой цепи следует учитывать, что излишняя длина увели-
чивает рыскание судна, способствует быстрому износу цепи и за-
держивает съемку судна с якоря.
На малых глубинах при отдаче якоря звездочку брашпиля разъ-
единяют и пользуются ленточным стопором. Набольших глубинах ис-
пользование такого приема может привести к тому, что якорь наберет
большую скорость, снизить которую с помощью ленточного стопора
невозможно. В результате якорь вытраливается до жвака-галса и цепь
обрывается.
Для предотвращения обрыва цепи якорь стравливают до грунта с
помощью брашпиля при соединенной звездочке. После того как якорь
коснется грунта, разъединяют звездочку и травят якорь-цепь обычным
порядком. При глубинах свыше 80 м вообще не рекомендуется поль-
зоваться ленточным стопором.
Стоянка судна на незащищенных рейдах осложняется в случае
ухудшения погоды и усиления ветра. При этом следует привести в го-
товность машины, приготовить к отдаче второй якорь, подготовить к
действию брашпиль. Якорь-цепь при необходимости потравливается
и за ней устанавливается наблюдение.
Вахтенная служба должна вести тщательное наблюдение за по-
ложением судна с целью своевременного обнаружения дрейфа.
Место судна может контролироваться с помощью навигационных
определений (обсерваций), наблюдением за изменением пеленгов, ди-
станций, вертикальных и горизонтальных углов, наблюдением за из-
менением глубины под килем. Дрейф судна может быть обнаружен
наблюдением за якорной цепью. Периодическое натягивание и осла-
бевание цепи указывает на наличие дрейфа. Дрейф можно также вы-
явить с помощью ручного лота, опущенного с носа судна.
Для прекращения дрейфа необходимо потравить якорь-цепь или
отдать второй якорь. Чтобы отдать его (рис. 132), следует подобрать
излишек отданной цепи (положение /), не «подрывая» якоря. Якорь
отдается в момент максимального отклонения судна на рыскании в
сторону, противоположную первому отданному якорю (положение//).
С приходом судна на линию ветра потравливают обе цепи, выравнивая
их натяжение (положение III). Следует учитывать, что при укорачи-
вании цепи может возникнуть дрейф и подорваться якорь. Поэтому
при выполнении приведенного способа постановки на 2 якоря надле-
жит держать машину в готовности.
Отдачу второго якоря можно выполнить и без предварительного
подбирания первой цепи. Отдав второй якорь, его цепь задерживают,
а первую потравливают, чтобы второй якорь лучше вошел в грунт.
Когда последний хорошо заберет, потравливают обе цепи. Для поста-
новки на 2 якоря с хода (рис. 133) к месту стоянки подходят курсом,
192
Рис. 132. Отдача Рис. 133. Постановка на два Рис. 134. Положение шлюп-
якоря при ухуд- якоря при боковом ветре ки во время работ у бочки
шении погоды или течении
перпендикулярным к линии ветра или течения. С приходом на якорное
место останавливают машину и отдают якорь с наветренного борта.
Продолжая двигаться по инерции, травят 2—3 смычки цепи. После
остановки судна отдают второй якорь. Когда судно под действием вет-
ра пойдет назад, травят цепь второго якоря, а затем выравнивают на-
тяжение обеих цепей.
Рейды морских портов часто оборудуют швартовными бочками.
Стоянка на бочках имеет значительные преимущества по сравнению
с обычной стоянкой (уменьшение акватории, занимаемой судном, по-
вышение надежности стоянки, сохранность якорного устройства).
Подход к бочке осуществляется против ветра или течения. Плани-
руя маневр, следует учитывать, что удержать судно рядом с бочкой
очень сложно. Поэтому лучше остановить судно, не дойдя до бочки,
чем проскочить ее. На подходе к бочке, когда судно движется по инер-
ции, спускают судовую шлюпку и с ее помощью или с помощью бере-
гового катера подают на бочку швартовный трос (для облегчения ра-
боты сначала заводят проводник, а с его помощью заводят стальной
швартовный трос). При кратковременных стоянках швартов подается
на бочку дуплинем, тогда ходовой конец троса пропускают в рым боч-
ки, возвращают на судно и крепят на кнехтах. Указанный прием удо-
бен тем, что при отшвартовке не требуется посылка людей на бочку
для отдачи конца. В случае продолжительной стоянки швартовы кре-
пят к рыму бочки с помощью такелажной скобы или глаголь-гака. Для
длительных стоянок в тяжелых условиях на бочку подают якорную
цепь, которую предварительно отсоединяют от якоря.
С целью обеспечения безопасности людей, работающих на заводке
швартовных тросов, шлюпка должна стоять так, чтобы бочка находи-
лась между судном и шлюпкой (рис. 134).
После закрепления швартовного троса на бочке судно подтягивают
к ней на нужное расстояние. При этом нет необходимости иметь длин-
ные швартовы, так как удары волн и порывы ветра гасятся провесом
бриделя.
7 Зак, 4 83 193
Во время стоянки на бочке необходимо вести наблюдение за креп-
лением и состоянием швартовных тросов и за поведением бочки на
волне. Если бочка на большой волне или при рывке судна периоди-
чески погружается в воду, якорь держит хорошо и бридель цел. Если
бочка прыгает на волне и не погружается, то, очевидно, оборван бри-
дель или не держит якорь. В таком случае следует встать на якорь и
освободиться от бочки.
Съемка с бочек обычно трудностей не представляет. Во время под-
готовки к съемке заводят на бочку стальной трос дуплинем, если тако-
го не было подано, а остальные концы отдают. После уборки всех кон-
цов отдают дуплинь и судно следует по назначению.
§ 80. МОРСКАЯ БУКСИРОВКА
На речном флоте применяют три основных способа буксировки:
за кормой на буксирном тросе (в кильватер), борт о борт (лагом) и
способом толкания. В открытом море буксировку лагом не применяют,
а буксировка за кормой имеет на море свои особенности.
На тихой воде натяжение буксирного троса равняется сопротивле-
нию воды буксируемого судна или состава. Если пренебречь влиянием
кильватерной струи буксировщика, то натяжение буксирного троса
можно считать равным упору, развиваемому движителями судна при
движении его со скоростью, равной скорости буксировки.
Однако при трогании с места в начале буксировки, при рыскании
буксируемого судна, резком повороте и в некоторых других случаях,
когда наблюдаются рывки и появляются динамические нагрузки, уси-
лия в буксирном тросе могут значительно превысить величину упора.
Умелое управление судами может свести до минимума действие дина-
мических нагрузок, при отсутствии которых максимальное натяжение
буксирного троса может быть равно упору буксировщика на шварто-
вах.
В штормовых условиях буксирующее и буксируемое суда участ-
вуют в орбитальном движении частиц воды. Центр тяжести каждого
из судов, если оно свободно, опишет некоторую орбиту, уравнения ко-
торой имеют вид:
х = a cos (2л//т); |
у — b sin (2л//т); J
где а и b — постоянные величины для данного судна и данной волны;
т — период волны.
Таким образом, на взволнованном море суда то сближаются между
собой, то удаляются друг от друга. В связи с этим движением в бук-
сирном тросе возникают усилия, во много раз превышающие тягу
буксировщика, равные
T^ = ^aD!^t (142)
где D — масса судна.
194
Академик А. Н. Крылов показал, что величины а й b не превышают
половину высоты волны (Л).
Учитывая наихудший случай, когда а равно половине высоты вол-
ны, определяем максимальное натяжение в буксирном тросе для
ft = 5м (предельно допустимой для судов смешанного плавания, име-
ющих класс Регистра СССР II—СП) Tmax D/10, т. е. максимальное
усилие в тросе в наших условиях примерно численно равно 0,1 массы
судна.
Из приведенного расчета очевидно, что сила действия волны весь-
ма велика, и остановить орбитальное движение судов практически не-
возможно. Отсюда вытекает необходимость устройства буксирной ли-
нии, допускающей удлинение, равное высоте волны. Если буксирная
линия не допускает такой «игры», то на волнении она неизбежно по-
рвется от возникших в ней напряжений.
Указанное увеличение расстояния между судами при буксировке
можно получить за счет:
упругих деформаций буксирного каната;
распрямления цепной линии, по которой располагается канат во
время буксировки;
применения специальных буксирных лебедок.
Удлинение буксирного каната за счет упругих деформаций
д/;—д/;,
где Д/{ — начальное упругое удлинение буксирного каната, соответствующее
усилию, равному тяге на гаке;
Д/1 — конечное упругое удлинение каната при усилии, соответствующем
разрывному с 30%-ным запасом.
Упругое удлинение троса (м) рассчитывается по следующему вы-
ражению:
МУТНЕЕ, (143)
где Т — усилие, приложенное к тросу, кН;
/ — длина троса, м;
Е — модуль упругости троса, кН/см2 (для стального троса Е = 7500 кН/см2);
F — площадь поперечного сечения троса, см2.
Увеличение расстояния между судами за счет распрямления бук-
сирной линии
д// = д/;-д/;,
где Д/д — разность расстояния между судами и длины буксирной линии при на-
чальном усилии;
Д/g — разность расстояния между судами и длины буксирной линии при
предельном усилии, равном 0,7 разрывного.
В свою очередь разность расстояния между судами й длины бук-
сирной (цепной) линии (м) рассчитывается по формуле
А/а=/^/ЗТ, (144)
где f — стрелка провеса цепной лйнйи при данном натяжении, м;
q — масса 1 м буксирного троса, кг/м;
g — ускорение сйободного падения, м/с2.
7*
195
Величина провеса характеризует возможность «игры» буксирной
линии и определяется по выражению
(145)
Таким образом, наибольшее удлинение может быть получено от тех
канатов, которые при заданной длине имеют больший вес. Наиболь-
шим погонным весом обладает якорная цепь. Для получения доста-
точно большого провеса буксирной линии применяют комбинирован-
ные линии, состоящие из стального троса и якорной цепи. Для расчета
«игры» такой линии можно применить приведенные формулы, если
длина якорной цепи не превышает 1/8 длины линии. В таком случае
масса 1 м линии рассчитывается по выражению
q = + , (146)
где — масса 1 м цепи;
/ц — длина цепи;
qT — масса 1 м троса;
/т — длина троса.
Составные буксирные линии, удовлетворяющие требованиям бук-
сировки, получаются громоздкими, тяжелыми и неудобными в экс-
плуатации. Стрелы провеса в таких случаях достигают больших вели-
чин, превышающих глубины моря в некоторых районах. Поэтому на
подходах к портам и в проливах буксирную линию приходится укора-
чивать.
Неудобства составных буксирных линий привели к появлению на
буксирных судах специальных лебедок, автоматически поддерживаю-
щих определенное натяжение буксирного троса.
Во время рывка лебедка автоматически потравливает трос, а при
ослабевании натяжения — подбирает слабину троса.
В процессе подготовки к морской буксировке должны быть вы-
полнены расчеты для определения диаметра и длины буксирного тро-
са с учетом необходимого удлинения, а также оценена скорость бук-
сировки.
Скорость буксировки рассчитывается по методике, изложенной в
курсе «Судовые тяговые расчеты». Для приближенных расчетов мож-
но использовать формулу
<-' (,47)
где Т — рабочее натяжение буксирного троса, кН;
V — скорость буксировки, уз;
D — масса буксируемого судна, т;
k — коэффициент, учитывающий осадку объекта на буксире (k = 3200-г
4-3500).
Диаметр буксирного троса подбирается в зависимости от тяги на
гаке буксирующего судна. Тяговое усилие буксировщика равно со-
противлению воды и воздуха движению буксируемого судна и может
быть рассчитано приемами, рассмотренными в курсе «Судовые тяговые
расчеты».
196
В том случае, когда буксируется судно, примерно одинаковое с
буксировщиком, тяга на гаке равна половине упора буксировщика
на швартовах. При буксировке судов, значительно превышающих
размеры буксировщика, тяговое усилие можно принимать равным
упору на швартовах. Для приближенного расчета тяги на швартовах
(кН) можно также использовать следующую формулу
Т = 0,15Л^, (148)
где Ni — индикаторная мощность машин буксировщика, кВт.
Регистр Союза ССР установил запас прочности в буксирной линии
для морских буксировок равным шести. Поэтому буксирный трос вы-
бирается исходя из разрывного усилия, равного шести усилиям на
гаке буксировщика. Диаметр троса можно выбрать из таблиц ГОСТа
или рассчитать из следующей формулы:
R = kd2,
где R — разрывное усилие троса, кН;
d — диаметр троса, мм;
к — коэффициент прочности троса, кН/мм2 (0,4—0,5 для стального троса,
ГОСТ 3071—74).
Длина буксирного троса при буксировке обычно выбирается из
условий сохранения удовлетворительной управляемости буксируемо-
го судна и исключения тормозящего влияния кильватерной струи бук-
сировщика. В таком случае длина троса (м) может быть определена по
формуле проф. В. В. Звонкова
/б=аУл^. (149)
где а — коэффициент (а = 35^36).
Для морских буксировок длина троса должна обеспечивать также
и необходимую «игру» буксирной линии с целью обеспечения свобод-
ного движения судов на волнении. Поэтому при выборе длины троса
необходимо провести проверочный расчет возможного увеличения
расстояния между судами за счет упругой деформации буксирного
троса и распрямления буксирной линии.
Оптимальная длина буксирного троса (м) может быть рассчитана
по эмпирической формуле
/б = ™в'Ла, (150)
где Лв — максимальная высота волны в районе буксировки, м;
ka — коэффициент амортизации стального буксирного троса;
Т — рабочее натяжение буксирного троса, кН.
Величина коэффициента амортизации зависит от усилия на гаке
буксировщика и принимается равной 3,0 при усилии 250 кН; 2,4 —
при усилии 200 кН; 1,8 — 150 кН; 1,2 — 100 кН; 0,6 — 50 кН; 03 —
25 кН.
Выбирая длину буксирного троса, необходимо учитывать, что чрез-
мерно длинный и тяжелый трос будет иметь большую стрелу прове-
са. Поэтому в районах с глубинами, меньшими, чем величина стрелки
провеса, трос будет волочиться по дну и быстро перетираться.
197
Рис. 135. Пода- Рис. 136. Пода-
ча буксира с ча буксира на
постановкой иа ходу
якорь
Планируя буксировку, следует
сравнить глубины на пути следо-
вания со стрелкой провеса и при-
нять решение по обеспечению без-
опасности плавания.
Во время буксировки на волне-
нии для уменьшения рывков рас-
стояние между судами лучше вы-
бирать равным или кратным длине
волны с тем, чтобы суда одновре-
менно поди имались на гребнях
волн.
Одной из ответственнейших и
сложных операций буксировки яв-
ляется подача буксирного троса в
море при наличии ветра и волне-
ния. Способы выполнения указанной операции зависят от состояния
буксируемого судна и гидрометеорологических условий.
Если глубины позволяют судам встать на якорь, то буксировщик
становится на якорь впереди стоящего буксируемого судна. Потрав-
ливая якорную цепь, буксирующее судно постепенно приближается
кормой к буксируемому (рис. 135) и при первой возможности подает
бросательный конец и проводник. Подачу проводника можно осущест-
вить с помощью бочки, спасательного круга или другого плавающего
предмета, который спускается с кормы буксировщика к носу букси-
руемого.
В таком случае, когда глубины не позволяют встать на якорь, а
буксируемое судно имеет возможность двигаться, подача буксира
выполняется на ходу. Буксирующее судно подходит к корме букси-
руемого на параллельном курсе, находясь на некотором расстоянии
в стороне от него (рис. 136). После сближения судов с наветренного
судна подается бросательный конец, затем заводят проводник и по-
дают буксирный конец. Если сближение судов на расстояние подачи
бросательного конца опасно, то используют линеметательное устрой-
ство. Подача буксира указанным способом выполняется на возможно
меньшей скорости при сохранении хорошей управляемости судов.
Особенно сложной является подача буксира в открытом море на
судно, не имеющее хода. В этих условиях проводник подается чаще
всего при помощи линеметательного устройства. Метод подхода к бук-
сируемому судну выбирается с учетом скорости дрейфа судов по вет-
ру. Для сравнения скоростей дрейфа буксировщик стопорит машины
и некоторое время наблюдает за взаимным дрейфом. Если буксируе-
мое судно дрейфует быстрее буксировщика, то последний в начале
операции располагается под ветром. Во время подачи буксира необхо-
димо внимательно следить за перемещением судов относительно друг
друга, не допуская навала.
Проводник можно подавать также при помощи какого-либо по-
плавка, который буксируется около буксируемого судна и подбира-
ется с него на борт.
198
Во время буксировки на судах должна быть четко организована
вахтенная служба и наблюдение за креплением буксирного троса.
Для связи между судами используют радиотелефон, световые и зву-
ковые сигналы, а также сигнальные флаги международного свода сиг-
налов.
§ 81. УПРАВЛЕНИЕ СУДНОМ В ШТОРМОВУЮ ПОГОДУ
Безаварийное плавание речных судов в штормовых условиях даже
в прибрежных районах представляет собой наиболее сложную и от-
ветственную задачу управления судном. Главной опасностью при
шторме является качка судна и ее последствия. Во время сильной кач-
ки может произойти перемещение груза и как следствие существенное
снижение или потеря остойчивости судна.
Удары волн в днище судна и его подзоры, а также большие пере-
напряжения в продольных связях могут вызвать значительные повреж-
дения и даже разрушение корпуса судна. Вследствие громадных инер-
ционных сил иногда происходит срыв главных и вспомогательных ме-
ханизмов с фундаментов и нарушение их нормальной работы.
Методы управления судном в шторм зависят от особенностей суд-
на, его мореходности, загрузки, а также от состояния моря и погоды.
Судоводитель должен обеспечить в данных условиях минимальную-
качку и заливаемость судна, не допуская больших напряжений в кор-
пусе судна.
Наиболее жесткий и опасный характер качка принимает в услови-
ях резонанса, т. е. равенства периода собственных колебаний судна и
кажущегося периода волны.
Период собственных поперечных колебаний (с) можно приближен-
но найти из выражения
T^fBlVh, (151>
где В — ширина судна, м;
/ — коэффициент (для транспортных судов / = 0,74—0,92);
h — поперечная метацентрическая высота, м.
На качке период собственных колебаний судна легко определить
по секундомеру как средний по продолжительности из нескольких
колебаний.
Период продольных колебаний (с) приближенно рассчитывается
по формуле
Т2 = О,6л1/Т/£77, (152>
где L — длина судна, м;
Н — продольная метацентрическая высота, м.
Если величина продольной метацентрической высоты неизвестна,
то период продольных колебаний судна может быть вычислен по фор-
муле
тг=ь~\/т^,
где Т’ср — средняя осадка для данного состояния загрузки судна, м;
k —коэффициент (для речных судов 6 = 2,74-3,0).
199
Кажущийся или наблюдаемый с судна период волны зависит не j
только от скорости распространения волны, но и от величины проек- !
ции скорости движения судна на направление бега волны. Для при- ;
брежно-морских районов кажущийся период (с) рассчитывается по
формуле
1,09 У к + 0,51 V cos q '
где Л — длина волны, м;
V — скорость судна, уз;
q — курсовой угол на направление бега волны, град.
Из формулы (153) видно, что, изменяя скорость или курс судна,
можно изменять кажущийся период волны и уходить из резонансных
условий качки судна. Область резонанса ограничивается значениями
отношения Т/% в пределах от 0,7 до 1,3. Для выбора безопасного соче-
тания курса и скорости судна рядом авторов были предложены спе-
циальные диаграммы качки.
Наиболее удобной является универсальная диаграмма Ю. В. Ре-
меза. На основе этой диаграммы разработана диаграмма качки с уче-
том специфики плавания судов в прибрежно-морских районах.
Диаграмма представляет графическое изображение зависимости
тк = f V cos q) (рис. 137).По оси абсцисс диаграммы отложены ве-
личины V cos 7, а по оси ординат — значения кажущегося периода
волны т.. Для удобства пользования диаграммой под горизонтальной
осью построен дополнительный график, который состоит из семейства
концентрических полуокружностей с центром, расположенным в точ-
ке пересечения осей диаграммы, и пучка лучей, исходящих из этого
центра.
Каждая полуокружность соответствует определенному значению
скорости хода судна в узлах, а каждый из лучей — определенному
Рис. 137. Диаграмма качки
курсовому углу по отношению
к волне. График позволяет
определить любые сочетания
скорости V и курсового угла
q волны при заданном значе-
нии проекции скорости на
направление бега волны.
Оценку условий попадания
судна в резонанс качки на
волне X = 50 м рассмотрим на
примере теплохода «Сормов-
ский» с грузом леса (7\ — 6 с).
Через точки на оси ординат,
соответствующие резонансу
качки Tj = 0,8 7\, Tj = 4,8 с
и т2 = 1,47\, т2 = 8,4 с, па-
раллельно горизонтальной
оси проводятся прямые ли-
нии. Через точки пересечения
этих-линий с кривой, соот-
200
ветствующей длине волны X = 50 м, проводим вниз вертикальные
линии. На нижнем графике зона, лежащая между указанными вер-
тикальными линиями, является зоной усиленной бортовой качки
(заштрихованная часть). Сочетания курсового угла и скорости судна,
располагающиеся вне данной зоны, соответствуют умеренной борто-
вой качке.
По диаграмме можно получить сочетания курсовых углов и скоро-
стей, при которых судно попадает непосредственно в резонанс. Для
этого через точку на вертикальной оси тк = Т, = 6 с проводят пря-
мую параллельно оси абсцисс до пересечения с кривой, соответствую-
щей X = 50 м. Прямая, проходящая через точку пересечения парал-
лельно оси ординат, покажет на нижней части диаграммы сочетания
курсовых углов и скоростей, при которых возникает резонанс.
Оценка резонансных условий килевой качки выполняется анало-
гично изложенному с учетом периода Т2.
Таким образом, диаграмма качки дает возможность судоводителю
выбрать безопасные скорости и курсовые углы волны, при которых
судно не будет значительно удаляться с намеченного пути.
Пользуясь диаграммой качки, необходимо помнить, что наиболее
опасным является резонанс бортовой качки при следовании лагом к
волне. Морская практика рекомендует избегать курсов лагом к волне,
так как на этих курсах суда получают тяжелые повреждения и могут
даже опрокинуться.
При следовании курсами против волны или по волне режим качки
зависит от соотношения кажущегося периода волны и периода собст-
венных продольных колебаний судна. В том случае, когда период кач-
ки мал по сравнению с периодом волны, судно почти не принимает на
себя воду, а корпус судна стремится сохранить положение, параллель-
ное склону волн, испытывая при этом небольшую килевую качку.
Если же период продольных колебаний больше кажущегося пе-
риода волны, то судно будет качаться независимо от волн, принимать
на себя много воды, а его винты могут оголяться. Такая качка не безо-
пасна для плавания.
На курсах судна против волнения может наблюдаться слеминг —
сильные гидродинамические удары о днищевую часть корпуса. Слеминг
может привести к деформациям или даже трещинам в обшивке корпу-
са судна. Угроза наступления слеминга возрастает с увеличением
скорости, поэтому в реальных условиях уменьшение силы ударов и
заливаемости достигается сбавлением скорости. Уход от резонансных
условий качки нельзя осуществлять за счет увеличения скорости
судна.
Для того чтобы судно хорошо всходило на волну и не зарывалось
носом, следует иметь небольшой 0,6—0,8 м дифферент на корму. При
этом уменьшается и возможность оголения винтов, вредно отражаю-
щегося на машине и валопроводе.
При движении судна по волне скорость хода судна необходимо
подобрать так, чтобы она отличалась от скорости бега волны. Напря-
жение в корпусе судна в таком случае уменьшится, а управление суд-
ном улучшится.
201
Опыт мореплавания показывает, что наиболее благоприятными
курсами для большинства судов в шторм являются курсы, составляю-
щие угол 30—40° с направлением волны.
Наиболее сложным и ответственным маневром при плавании в
шторм является поворот на другой курс. Особую опасность представ-
ляет изменение курса на 180° (оборот), так как при этом судно неминуе-
мо должно проходить положение лагом к волне. До поворота необ-
ходимо установить периодичность прохождения крупных волн и на-
чинать поворот перед началом относительно спокойного периода с
расчетом пройти положение лагом к волне в спокойный период и воз-
можно быстрее. Обороты машин регулируются так, чтобы судно не
увеличивало хода, а поворот выполнялся энергично. Такое движение
осуществляется «толчками» — периодической работой машин на
полный ход.
Во время жесткого шторма дальнейшее движение по заданному
направлению может представлять непосредственную опасность для
судна. В этих условиях для обеспечения безопасности судна начина-
ют шгпормование. В настоящее время применяют в основном два спосо-
ба штормования: против волны и по волне. В обоих случаях режим
работы машин должен обеспечить сохранение управляемости и мини-
мальную скорость движения.
Штормование по волне обычно проходит спокойнее, но требует
значительного свободного пространства, так как судно довольно быст-
ро спускается по ветру.
Во время штормования против ветра «носом на волну» судно дви-
жется очень медленно, но при этом испытывает удары волн в днище и
носовой подзор. У судов с небольшим баком, штормующих против
волны, палуба может заливаться водой.
Выбор способа штормования зависит от технических данных суд-
на, его состояния, загрузки, направления и силы ветра, высоты вол-
ны, а также от навигационных условий плавания.
Глава XVIII
МОРСКАЯ СИГНАЛИЗАЦИЯ
§ 82. ВИДЫ И СРЕДСТВА СИГНАЛИЗАЦИИ.
ГОСУДАРСТВЕННЫЙ ФЛАГ СССР
Для передачи и приема распоряжений, приказаний и различной
информации в море на судах используются специальные сигнальные
средства.
Все сигнальные средства подразделяются на визуальные, звуко-
вые и радио.
К визуальным средствам относятся флаги, ручной семафор, свето-
сигнальные устройства и сигнальные фигуры.
К звуковым относятся свистки, тифоны, колокола, туманные гор-
ны, звуковые ракеты и сигнальные пушки.
202
Речные суда оборудуются и снабжаются сигнальными средствами
согласно Правилам плавания по внутренним судоходным путям
РСФСР. При выходе в море снабжение речных судов должно соответ-
ствовать Правилам Регистра СССР по оборудованию и снабжению сиг-
нальными средствами морских судов.
В указанных Правилах приводится состав, навигационные требо-
вания и технические нормативы, предъявляемые к сигнальному обо-
рудованию.
Сигнальные средства и оборудование на судах, выходящих в море,
должны также полностью отвечать требованиям Международных пра-
вил для предупреждения столкновений судов в море.
Государственный флаг СССР, поднятый на судне в установленном
месте, т. е. на гафеле или на кормовом флагштоке, определяет принад-
лежность судна Союзу Советских Социалистических Республик.
Охрана Государственного флага и поддержание его достоинства —
почетная обязанность каждого члена экипажа судна.
Порядок подъема и спуска Государственного флага на речных су-
дах регламентируется Уставом службы на судах Министерства реч-
ного флота РСФСР.
На морских судах Государственный флаг как на ходу, так и на сто-
янке поднимается ежедневно в 8 ч утра и спускается с заходом солнца.
В полярных морях Государственный флаг должен быть поднят в пре-
делах времени его видимости, а во время полярного дня — от 8 до
20 ч ежедневно.
Государственный флаг поднимается ранее 8 ч и не спускается после
захода солнца в условиях видимости при входе судна в порт и выходе
из порта, при . встрече в море с военными кораблями и с торговыми
судами под флагом СССР.
Суда СССР при встречах в море приветствуют друг друга приспус-
канием Государственного флага СССР. Торговые суда обязаны первы-
ми приветствовать военные корабли СССР. Исключением является тот
случай, когда на судне находится Председатель Президиума Верхов-
ного Совета СССР, Председатель Совета Министров СССР, Замести-
тель Председателя Совета Министров СССР или член Президиума
Верховного Совета СССР. В этом случае судно, кроме кормового фла-
га, поднимает Государственный флаг СССР на носовой мачте (фор-
стеньге), а военные корабли первыми приветствуют указанное судно.
При встрече в море с военным кораблем государства, находящего-
ся в дипломатических отношениях с Союзом ССР, торговое судно са-
лютует первым. Приветствие флагом военного корабля государства,
не имеющего дипломатических отношений с СССР, производится толь-
ко в территориальных водах данного государства.
Салют флагом выполняется по команде вахтенного штурмана «При-
готовиться к салюту». Когда носовые части встречных судов порав-
няются, вахтенный штурман дает один продолжительный сигнал своим
свистком. По этому сигналу вахтенный матрос медленно спускает
кормовой флаг на 1/8 длины фала. Когда на судне, которому отдается
салют, также приспустят флаг, вахтенный штурман дает два про-
должительных свистка, а матрос быстро поднимает флаг до места.
20з
В дни общесоюзных праздников во время стоянки в советских
портах суда могут расцвечиваться флагами Международного свода
сигналов. Для расцвечивания флаги соединяются между собой и раз-
носятся от форштевня через топы мачт к гакаборту.
Во время стоянки в иностранном порту в дни национальных празд-
ников этой страны расцвечивание флагами производится по обычаям
порта после согласования с советским консулом.
Расцвечивание флагами судна в дни праздников СССР при стоянке
в иностранном порту также должно предварительно согласовываться
с советским консулом.
Для расцвечивания не должны употребляться государственные и
военно-морские флаги, флаги вспомогательных и гидрографических
судов, флаги должностных лиц, флаги Красного Креста и Красного
Полумесяца.
Флаги сигнального комплекта, имеющие расцветки, одинаковые с
указанными флагами, для расцвечивания не применяются.
§ 83. МЕЖДУНАРОДНЫЙ СВОДПЗИГНАЛОВ (МСС)
Для связи между судами и с береговыми станциями служит Между-
народный свод сигналов (МСС—65). Международный свод сигналов
предназначен для связи различными средствами в целях обеспечения
мореплавания и охраны человеческой жизни на море, особенно в слу-
чаях, когда возникают языковые трудности общения. МСС дает воз-
можность вести переговоры с судном любой национальности.
Сигналы, используемые в своде, состоят из:
однобуквенных сигналов, предназначенных для очень срочных,
важных или часто употребляемых сообщений;
двухбуквенных сигналов (составляют общий раздел);
трехбуквенных сигналов (составляют медицинский раздел и начи-
наются с буквы «М»).
Каждый сигнал свода имеет завершенное смысловое значение. В
отдельных случаях с целью расширения значения основного сигнала
используются цифровые дополнения.
Для передачи сигналов могут быть использованы: флажная сигна-
лизация; световая сигнализация с применением знаков Морзе; звуко-
вая сигнализация с применением знаков Морзе; связь голосОхМ через
мегафон; радиотелеграфная связь; радиотелефонная связь; сигнали-
зация ручным семафором.
Для флажной сигнализации по МСС используются 40 сигнальных
флагов. На судах СССР применяются флаги (приложение 2) в соот-
ветствии с ГОСТ 8498—81.
Двадцати шести флагам прямоугольной формы присвоены буквен-
ные значения, Десять флагов треугольной формы имеют цифровые
значения от нуля до девяти. Все буквенные и цифровые флаги имеют
названия (А — Альфа, В — Браво, С — Чарли,.. 1 — Унауан, 2 —
Биссоту и т. д.), Эти названия используются при передаче сообщений
2(М
по радиотелефону. Три флага являются заменяющими буквенные
или цифровые флаги, если они повторяются в одном сочетании.
Любой заменяющий флаг заменяет ту букву сочетания, которая
указывается номером заменяющего флага. Например: сочетание МВВ
поднимается на фалах как сочетание флагов «М», «В» и второго заме-
няющего.
Один флаг вымпельной формы выполняет роль служебного знака
при переговорах и называется ответным вымпелом.
Материал в своде сведен в группы в соответствии с тематикой и для
удобства разбора сигналов расположен в алфавитном порядке сигналь-
ных сочетаний, которые помещены с левой стороны страниц перед зна-
чением сигналов. Такое расположение материала позволяет вести на-
бор и разбор сигналов по одной книге. Набор сигналов для передачи
сообщений выполняется с помощью слов-определителей, отражающих
основную тему подготавливаемого сообщения.
Подробные правила ведения переговоров приведены в Международ-
ном своде сигналов.
Значение важнейших сигналов МСС, приведенных ниже, необхо-
димо знать на память.
Флаг В (Браво) — гружу, или выгружаю, или имею на борту опас-
ный груз.
Флаг D (Дэлта)—держитесь в стороне от меня, я управляюсь
с трудом.
Флаг G (Голф) — мне нужен лоцман.
Флаг Н (Хотэл) — у меня есть на борту лоцман.
Флаг О (Оска) — человек за бортом.
Флаг Р (Папа) — все должны быть на борту, так как судно скоро
снимается.
Флаг S (Сиэра) — мои машины работают на задний ход.
Флаг U (Юниформ) — вы идете к опасности.
Флаг Y (Янки) — меня дрейфует на якоре.
Флаг NC (Новэмбэр Чарли) — сигнал бедствия.
Право ведения переговоров по МСС имеет только капитан и вахтен-
ный штруман.
§ 84. РУЧНОЙ СЕМАФОР. СВЕТОВАЯ СИГНАЛИЗАЦИЯ
Для ведения переговоров с помощью ручного семафора применя-
ется сигнальная русская или международная семафорная азбука. Рус-
ская семафорная азбука применяется для переговоров между советскими
судами, а связь с иностранными судами осуществляется по междуна-
родной азбуке.
Во время переговоров сигнальщик должен держать в руках спе-
циальные флажки, длина древка которых 75 см, а размер флага, при-
крепленного к древку, 35 X 35 см.
205
В семафорной азбуке каждая буква алфавита соответствует опре-
деленному положению рук сигнальщика по отношению к его тулови-
щу (рис. 138).
Цифры по семафору передаются словами, например цифра 5 пере-
дается словом «пять».
При семафорной связи сигнальщик должен выбрать место так, что-
бы обеспечить хорошую видимость с принимающего судна. Вызов на
связь осуществляется передачей «знака вызова» (рис. 139). На при-
нимающем судне подают «знак ответа». При передаче сообщения после
Рис. 138. Русская семафорная азбука
206
1 Знак вызова
3. Знак повторения
(ошибки)
4. Знак ожидания 5. Знак разделительный
Первый знак перемены Второй знак перемены Третий знак перемены
места (вправо) места (влево) места (выше)
14
Четвертый знак
перемены места
(ниже)
Рис. 139. Служебные знаки семафорной азбуки
каждого переданного слова делают паузу, во время которой принима-
ющий подтверждает прием «знаком ответа». В том случае, когда текст
не разобран, дается знак повторения. Если передающий допустил
ошибку во время передачи, он обязан подать «знак ошибки» и повто-
рить ошибочный текст заново.
Кроме упомянутых служебных знаков, для связи ручным семафо-
ром употребляются и другие служебные знаки (см. рис. 139).
207
Таблица 8
Знаки препинания, за исключением вопросительного знака, пе-
редаются сокращенно: «тчк» (точка), «двтч» (двоеточие), «зпт» (запятая)
и т. д.
В случае невозможности переговоров ручным семафором передает-
ся «знак невозможности приема», после чего необходимо переходить
на другой вид связи.
На небольших расстояниях при хорошей видимости связь осу-
ществляется одним сигнальщиком. На больших расстояниях, когда
необходимо применять бинокль, целесообразно иметь по три сигналь-
щика с каждой стороны: один читает или записывает текст, другой
работает с флажками, третий следит в бинокль за сигналами. Средняя
скорость передачи 40—60 знаков в минуту.
Правила ведения переговоров ручным семафором по Международ-
ному своду сигналов изложены в книге МСС.
Световая переговорная сигнализация осуществляется с помощью
клотиковых ламп, специальных сигнальных фонарей и прожекторов.
Для ведения переговоров применяются Международная латинская и
русская азбука Морзе (табл. 8).
Соотношение длительности проблесков и промежутков между ни-
ми при передаче знаков азбуки должно быть следующим: точка при-
нимается за единицу, тире равно трем единицам, промежуток между
проблесками в знаке равен трем единицам, промежуток между двумя
словами равен паузе в пять единиц.
Переговоры между советскими судами ведутся с помощью русской
азбуки Морзе. При переговорах применяются следующие условные
знаки:
А А А — знак вызова;
Т Т Т — знак ответа;
Б Т — знак отправления;
Е Е Е — знак ошибки;
ИИ — знак разделения;
208
3 М — знак молчания;
АР — знак окончания;
УД — знак повторения;
А А — все последующее;
А Б — все предыдущее.
Вызов судна или сигнальной станции осуществляется подачей сиг-
нала вызова А А А до тех пор, пока вызываемый не ответит сигналом
Т Т Т. После этого начинается передача самого сообщения.
При переговорах с иностранными судами применяется азбука Мор-
зе латинского алфавита и особые служебные знаки, значения которых
помещены в МСС.
§ 85. ЗВУКОВАЯ И ПИРОТЕХНИЧЕСКАЯ СИГНАЛИЗАЦИЯ.
СИГНАЛЬНЫЕ ФИГУРЫ
Звуковая сигнализация применяется для передачи сообщений по
коду МСС и по кодам специальных правил, предусматривающих по-
дачу звуковых сигналов.
За исключением однобуквенных, все специальные сигналы МСС
могут передаваться звуком только в случаях крайней необходимости
и никогда не должны передаваться в районах с интенсивным судоход-
ством.
Передача сообщений звуковыми сигналами предусмотрена Меж-
дународными правилами для предупреждения столкновений судов
в море. Правилами плавания по внутренним судоходным путям
РСФСР, а также Правилами для судов, проводимых ледоколами через
лед.
Передача сообщений осуществляется звукоизлучающими аппара-
тами: судовыми свистками, тифонами, сиреной и т. п.
Для подачи звуковых сигналов согласно МППСС на судах приме-
няется также судовой колокол и гонг.
В соответствии с Международной конвенцией по охране человечес-
кой жизни на море Регистр Союза ССР предусматривается снабжение
судов пиротехническими средствами сигнализации. На судах должны
быть в наличии ракеты (сигнала бедствия, парашютные судовые и
шлюпочные, спасательные, однозвездные), дымовые шашки, звуковые
гранаты, фальшфейеры.
Ракета сигнала бедствия красного цвета запускается с рук или со
специального станка. На высоте 300—400 м она выбрасывает 6—
8 звезд красного цвета, которые должны иметь время горения не ме-
нее 20 с.
Парашютная судовая ракета красного цвета имеет специальное
устройство, раскрывающее парашют на потолке взлета ракеты (300—
400 м), благодаря которому ракета должна гореть в воздухе в течение
45 с.
Шлюпочная парашютная ракета применяется для подачи сигнала
бедствия со спасательных плотов и шлюпок. Она отличается от судо-
209
вой ракеты меньшими размерами и несколько меньшей (300 м) высотой
взлета.
Звуковая ракета или граната предназначена также для подачи сиг-
нала бедствия. Она взлетает и взрывается на высоте. Звук взрыва слы-
шен на расстоянии до 5 миль. Запуск ракеты производится только с
пускового станка.
Спасательные однозвездные ракеты зеленого и красного цвета со-
гласно Международному своду сигналов применяются для сигнализа-
ции при спасательных операциях.
Дымовая шашка обладает способностью плавать на воде. При сго-
рании шашки образуются клубы оранжевого дыма, которые явля-
ются сигналом бедствия.
Фальшфейер состоит из гильзы с пиротехническим составом и ру-
коятки. От ракеты фальшфейер отличается тем, что он не запускается,
а сжигается на видном месте. Во время горения фальшфейер удержи-
вается за рукоятку над водой. Красный фальшфейер является сигна-
лом бедствия, белый применяется для привлечения внимания, а синий
употребляют как международный сигнал вызова лоцмана.
Пиротехнические средства необходимо охранять от сырости и ме-
ханических повреждений. Поэтому ракеты и фальшфейеры хранят в
стальных оцинкованных ящиках или шкафах с герметическими крыш-
ками.
Пиротехнические средства должны иметь надпись завода-изготови-
теля с указанием года и месяца изготовления, цвета огня, способа при-
менения пиротехнических средств и обращения с ними, а также допус-
каемых сроков хранения. Хранение пиротехнических средств сверх
указанных сроков не допускается.
Сигнальные фигуры применяются на судах в соответствии с МППСС
и на береговых сигнальных станциях для сигнализации о штормах и
сильных ветрах, о приливах и отливах, высоте воды и для регулиро-
вки движения на рейдах.
Сигнальные фигуры изготовляются из парусины, а каркас —
из проволоки таким образом, чтобы их можно было складывать. На
судах для сигнализации применяются шары, ромб и конусы. Форма,
цвет, размеры и значение фигур установлены МППСС и Правилами
Регистра СССР.
В СССР указанные сигнальные фигуры изготавливаются по ГОСТу
двух размеров: большого и малого.
На сигнальных станциях используются шар, конус, цилиндр, Т-
образная фигура, а для сигнализации о времени наступления ожидае-
мой погоды — полосы. Ночью сигнальные фигуры заменяются огня-
ми.
Международным соглашением установлен регламент, относящийся
к некоторым категориям морских сигналов, определяющий сигналы
и порядок сигналопроизводства о штормах, приливах и отливах, о
движении на рейдах.
Сведения о портах, поднимающих сигналы о штормах и ветрах, и
правила сигнализации можно найти в соответствующих лоциях.
210
Глава XIX
РАСХОЖДЕНИЕ СУДОВ В МОРЕ
§ 86. РАЗВИТИЕ И ЗНАЧЕНИЕ МППСС
Проблема безопасного расхождения судов в море всегда имела пер-
востепенное значение. Столкновения судов являются одним из наибо-
лее распространенных и тяжелых видов аварий, происходящих на
море. С развитием судоходства проблема предотвращения столкнове-
ний судов становилась все более острой. Статистика показывает, что
число аварий от столкновений с годами не уменьшается, и в настоящее
время в связи с быстрым ростом интенсивности судоходства, увеличе-
нием тоннажа и скорости судов предупреждение столкновений судов
в море является актуальной проблемой.
С самого зарождения мореплавания люди пытались создать пра-
вила и наставления, регулирующие движение судов. Еще в своде за-
конов о мореплавании, действовавшем на острове Родос в IV веке до
нашей эры, были отражены вопросы расхождения судов.
В дальнейшем правовые нормы, регулировавшие расхождение
судов, содержались в той или иной форме в морских законах. С уве-
личением размера судов и ростом их скоростей правила постепенно
совершенствовались и видоизменялись.
До прошлого века узаконенных международных правил не сущест-
вовало, а во многих государствах действовали свои собственные пра-
вила. Так, в 1837 г. в России были изданы «Правила для плавания
казенных и частных пароходов во всех проходах и реках Российской
империи».
С 1848 г. правила предупреждения столкновений судов носят ха-
рактер международных договоров. В этом году Англия и Франция
согласились о взаимном признании правил, составленных английским
адмиралтейством, с учетом поправок, внесенных представителями
Франции. Тогда же правила были узаконены и в России.
В 1852 и 1863 гг. текст правил несколько уточнялся и к началу
1889 г. почти все морские государства широко ими пользовались.
В 1889 г. для обсуждения действовавших правил в Вашингтоне бы-
ла созвана международная конференция, в которой приняли участие
16 морских держав. «Правила для предупреждения столкновений су-
дов в море», принятые Вашингтонской конференцией, действовали
без изменения вплоть до января 1954 г.
Бурное развитие судоходства после второй мировой войны настоя-
тельно требовало пересмотра действовавших Правил, которые нужда-
лись в серьезных изменениях. В 1948 г. в Лондоне на Международной
конференции по охране человеческой жизни на море ППСС подверг-
лись существенной переработке, а с 1 января 1954 г. новый текст ППСС
был введен в действие.
В связи с прогрессом техники и особенно радиолокации ППСС в
1960 г. были пересмотрены. В новый текст ППСС включены в виде
приложения рекомендации по применению радиолокационной инфор-
211
мации для предупреждения столкновений судов в море. ППСС 1960 г.
вошли в силу 1 сентября 1965 г.
Однако быстрые темпы качественного и количественного роста
морского флота, непрерывное совершенствование методов и средств
судовождения, а также определенные недостатки существующих
ППСС потребовали дальнейшего совершенствования Правил. Поэтому
в 1972 г. на Международной конференции в Лондоне впервые была
принята Конвенция о Международных правилах предупреждения
столкновения судов в море.
На этой же конференции был выработан и текст Правил, которые
получили статус международных. МППСС—72 вступили в силу
15 июля 1977 г. и действуют по настоящее время. В 1981 г. в текст
МППСС внесены поправки, принятые Морской Международной орга-
низацией.
Главное назначение МППСС — регламентация действий судов, на-
ходящихся на видимости, в звуковом или радиолокационном контак-
те, на таком расстоянии и так расположенных относительно друг дру-
га, что при дальнейшем сокращении расстояния между ними при со-
хранении курса и скорости может возникнуть опасность столкнове-
ния.
МППСС носят обязательный характер: они не рекомендуют, а
предписывают, т. е. имеют силу закона.
Отличное знание МППСС судоводителями является одним из глав-
ных условий обеспечения безопасности плавания. Ни один судоводи-
тель не может быть допущен к управлению судном без твердого зна-
ния Правил. Однако простое заучивание МППСС не является доста-
точным для правильного их применения. Основным условием успеш-
ного применения Правил является правильное понимание сущности
и единого толкования требований и выражений МППСС.
Соблюдение МППСС имеет весьма важное значение при судебных
и арбитражных разборах дел о столкновении судов. Обычно даже ма-
лейшее нарушение Правил значительно увеличивает ответственность
за столкновение.
МППСС—72 содержат 5 частей, 38 Правил и 4 приложения:
Часть А — Общие положения (Правила 1—3).
Часть В — Правила плавания и маневрирования.
Раздел I — Плавание судов при любых условиях видимости (Пра-
вила 4—10).
Раздел II — Плавание судов, находящихся на виду друг у друга
(Правила 11—18).
Раздел III — Плавание судов при ограниченной видимости (Пра-
вило 19).
Часть С — Огни и знаки (Правила 20—31).
Часть D — Звуковые и световые сигналы (Правила 32—37).
Часть Е — Изъятия (Правило 38).
Приложение I — Расположение и технические характеристики ог-
ней и знаков.
Приложение II—Дополнительные сигналы для рыболовных су-
дов, занятых ловом рыбы вблизи друг от друга.
212
Приложение III —Технические характеристики звукосигнальных
устройств.
Приложение IV — Сигналы бедствия.
Часть Е (Правило 38) определяет сроки переоборудования экс-
плуатирующихся судов для выполнения требований МППСС в части
расположения и характеристик огней и звукосигнальных устройств
или освобождает такие суда от выполнения некоторых требований.
Правило 38 ниже не рассматривается.
§ 87. ПРИМЕНЕНИЕ ПРАВИЛ И ОБЩИЕ ОПРЕДЕЛЕНИЯ
Часть А — Общие положения
Правило 1 — Применение
(а) Настоящие Правила распространяются на все суда в открытых морях и соеди-
ненных с ними водах, по которым могут плавать морские суда.
(Ь) Ничто в настоящих Правилах не должно служить препятствием к действию
особых правил, установленных соответствующими властями относительно
плавания на акваториях рейдов, портов, на реках, озерах или по внутренним
водным путям, соединенным с открытым морем, по которым могут плавать
морские суда. Такие особые правила должны быть настолько близки к настоя-
щим Правилам, насколько это возможно.
<е) Ничто в настоящих Правилах не должно служить препятствием к действию
любых особых правил, устанавливаемых Правительством любой страны
относительно дополнительных стационарных или сигнальных огней, знаков
или звуковых сигналов для военных кораблей и судов, идущих в конвое,
а также относительно дополнительных стационарных или сигнальных огней,
либо знаков для рыболовных судов, занятых ловом рыбы в составе флоти-
лии. Эти дополнительные стационарные или сигнальные огни, знаки или зву-
ковые сигналы должны быть, насколько это возможно, такими, чтобы их
нельзя было по ошибке принять за один из огней, знаков или сигналов,
установленных настоящими Правилами.
(d) Применительно к целям настоящих Правил Организацией могут быть при-
няты системы разделения движения.
(е) В каждом случае, когда заинтересованное Правительство решит, что судно
по своей специальной конструкции или назначению не может без пре-
пятствия своим специальным функциям выполнять полностью положения
любого из этих Правил в отношении числа, положения, дальности или секто-
ра видимости огней или знаков, а также расположения и характеристик зву-
косигнальных устройств, то подобное судно должно выполнять такие другие
требования в отношении числа, положения, дальности или сектора види-
мости огней или знаков, а также расположения и характеристик звукосиг-
нальных устройств, которые по решению его Правительства явятся наиболее
близкими к настоящим Правилам применительно к данному судну.
Таким образом, действие МППСС распространяется на все суда,
включая и гидросамолеты, когда они находятся в море или соединен-
ных с ним водах, независимо от национальной принадлежности, ве-
домственного подчинения, назначения, размеров и технической осна-
щенности. Отсюда действие МППСС распространяется и на речные
суда, находящиеся в районах действия МППСС.
К понятию «открытое море и соединенные с ним воды» относятся
открытое море, территориальные и внутренние воды государств. Од-
нако в соответствии с пунктом (Ь) государствам разрешается устанав-
213
ливать особые местные правила в своих внутренних водах. Эти местные
правила могут дополнять, изменять или вовсе отменять отдельные
требования МППСС. Вопросы, не отраженные в местных правилах,
правомерно решать в соответствии с МППСС.
Местные правила учитывают влияние специфики района на безо-
пасность плавания судов и издаются отдельными изданиями (Правила
плавания в проливе Босфор, в Кильском канале, Общие правила
морских торговых и рыбных портов Союза ССР и т. п.) или помещают-
ся в соответствующих разделах лоций.
Все изменения правил публикуются в Извещениях мореплавате-
лям.
МППСС действуют также в Каспийском и Аральском морях, кото-
рые являются водами, не соединенными с открытым морем.
Пункт (с) Правила 1 разрешает Правительству любой страны
устанавливать специальные правила относительно несения дополни-
тельных огней, знаков или подачи звуковых сигналов для военных ко-
раблей и рыболовных судов.
В соответствии с пунктом (d) в районах интенсивного движения
устанавливаются системы разделения движения. Такие системы раз-
деляют потоки судов, движущихся в противоположных направлени-
ях, и уменьшают вероятность столкновений.
Согласно пункту (е) на судах, где не могут быть выполнены требо-
вания в отношении числа, положения, дальности или сектора видимо-
сти огней и знаков, а также характеристик и расположения звукосиг-
нальных устройств, возможны отступления от вышеуказанных тре-
бований МППСС.
Однако такие отступления производятся по решению Правитель-
ства и должны быть минимальными. Необходимость отступления мо-
жет возникнуть, в частности, на военных кораблях (подводные лодки,
-авианосцы), на плавучих самоходных кранах, на некоторых типах
неводоизмещающих судов.
Правило 2 — Ответственность
(а) Ничто в настоящих Правилах не может освободить ни судно, ни его владель-
ца, ни капитана, ни экипаж от ответственности за последствия, могущие
произойти от невыполнения этих Правил или от пренебрежения какой-либо
предосторожностью, соблюдение которой требуется обычной морской практи-
кой или особыми обстоятельствами данного случая.
(Ь) При толковании и применении этих Правил следует обращать должное вни-
мание на всякого рода опасности плавания и опасность столкновения и на все
особые обстоятельства, включая особенности самих судов, которые могут выз-
вать необходимость отступить от этих Правил для избежания непосредствен-
ной опасности.
Положение пункта (а) Правила требует не только неукоснительно-
го выполнения МППСС, но и принятия необходимых мер предосторож-
ности в соответствии с требованиями хорошей морской практики или
особыми обстоятельствами данного случая для избежания столкнове-
ния. Правило не содержит конкретных предписаний или указаний
способов маневрирования и сигнализации. Оно является логическим
дополнением к другим Правилам.
214
Правило определяет действия судоводителя в тех случаях, когда
формальное выполнение МППСС оказывается недостаточным для пре-
дупреждения столкновения. Необходимо учитывать требования хо-
рошей морской практики, которая предусматривает четкую органи-
зацию всей судовой службы, грамотные, своевременные действия су-
доводителя.
Принимая решение для избежания столкновения, судоводитель
должен всесторонне оценить его эффективность в данных условиях
(с учетом глубин, волнения, ветра, наличия опасностей и т. п.) и учи-
тывать возможности другого судна.
К нарушениям требований хорошей морской практики можно от-
нести:
сближение с другим судном на близкое расстояние без учета влия-
ния сил ветра и явления присасывания;
превышение скорости при расхождении;
постановку на якорь без учета возможности навала на другие су-
да; несоблюдение мер предосторожности при обходе судов, стоящих
на якоре;
неготовность к отдаче якорей, когда отдача якоря могла бы пред-
отвратить столкновение или уменьшить его ущерб;
отсутствие должного наблюдения при стоянке на якоре;
непринятие мер для избежания столкновения при стоянке на якоре
(перекладка руля, травление якорной цепи и т. п.).
Хорошая морская практика предусматривает укомплектование
экипажа в соответствии с нормами, правильную организацию смены
вахт, использование всех имеющихся средств для получения макси-
мальной информации о движении других судов.
Пункт (Ь) Правила 2 предусматривает не только возможность от-
ступления от Правил, но и указывает на необходимость этого в «осо-
бых обстоятельствах» для избежания «непосредственной опасности».
Особые обстоятельства — это исключительные случаи, когда вы-
полнение предписаний МППСС неминуемо приведет к столкновению
или к другой серьезной опасности для судна (навал, посадка на камни
и т. п.).
Такая обстановка может быть связана с условиями плавания, не-
достатками самого плавучего средства или с неверными действиями
другого судна.
Примером отступления от МППСС может служить вынужденный
переход судна на левую сторону узкости в связи с тем, что проход по
правой стороне невозможен из-за дноуглубительных работ. Отступить
от Правил вынуждено также, например, и судно А (рис. 140), встре-
тившее на противоположном курсе другое судно. Отворот вправо
судна встречного судну А небезопасен по навигационным условиям.
Отступление от МППСС необходимо при встрече трех и более судов,
так как Правила относятся к расхождению только двух судов. На
рис. 141 каждое из судов Л, В и С каждому судну, расположенному с
правого борта, обязано уступить дорогу (Правило 15k В то же время в
отношении судов, наблюдаемых с левого борта, они все обязаны со-
хранить свой курс и скорость (Правило 17). Наиболее разумным ма-
215
Рис. 140. Отступление
от Правил при рас*
хождении на противо-
положных курсах
Рис. 141. Расхождение трех судов
невром всех судов в данной обстановке является изменение курса
вправо.
Все случаи, когда наступают «особые обстоятельства», невозмож-
но перечислить, так как они могут быть самыми разнообразными.
Судоводитель обязан учитывать особенности каждого отдельного слу-
чая и, когда станет ясно, что формальное выполнение МППСС неиз-
бежно ведет к столкновению или другой непосредственной опасности,
отступление от МППСС становится его обязанностью.
Правило 3 — Общие определения
В настоящих Правилах, когда по контексту не требуется иного толкования:
(а) Слово «судно» означает все виды плавучих средств, включая неводоизмещаю-
щие суда и гидросамолеты, используемые или могущие быть использованными
в качестве средств передвижения по воде.
(Ь) Термин «судно с механическим двигателем» означает любое судно, приводи-
мое в движение механической установкой.
(с) Термин «парусное судно» означает любое судно под парусом, включая имею-
щее механическую установку, при условии, если она не используется.
(d) Термин «судно, занятое ловом рыбы» означает любое судно, производящее
лов рыбы сетями, ярусными крючковыми снастями, тралами или другими
орудиями лова, которые ограничивают его маневренность, но не относится к
судну, производящему лов рыбы буксируемыми крючковыми снастями или
другими орудиями лова, не ограничивающими маневренность судна.
(е) Слово «гидросамолет» означает любой летательный аппарат, способный ма-
неврировать на воде.
(f) Термин «судно, лишенное возможности управляться» означает судно, которое
в силу каких-либо исключительных обстоятельств не способно маневриро-
вать так, как требуется этими Правилами, и поэтому не может уступить
дорогу другому судну.
216
(g) Термин «судно, ограниченное в возможности маневрировать» означает судно,
которое по характеру выполняемой работы ограничено в возможности ма-
неврировать так, как требуется этими Правилами, и поэтому не может усту-
пить дорогу другому судну. Термин «судно, ограниченное в возможности ма-
неврировать» охватывает (но не исчерпывает) следующие суда:
(i) судно, занятое постановкой, обслуживанием или снятием навигационного
знака, прокладкой, осмотром или поднятием подводного кабеля или трубо-
провода;
(ii) судно, занятое дноуглубительными, океанографическими, гидрографи-
ческими или подводными работами;
(Ц1) судно, занятое на ходу пополнением снабжения или передачей людей, про-
довольствия или груза;
(iV) судно, занятое обеспечением взлета или приема летательных аппаратов;
(V) судно, занятое работами по устранению минной опасности;
(Vi) судно, занятое такой буксировочной операцией, которая значительно огра-
ничивает возможность буксирующего и буксирного судов.
(h) Термин «судно, стесненное своей осадкой» означает судно с механическим дви-
гателем, которое из-за соотношения между его осадкой и имеющимися глуби-
нами существенно ограничено в возможности отклониться от курса, которым
оно следует.
(i) Термин «на ходу» означает, что судно не стоит на якоре, не ошвартовано
х берегу и не стоит на мели.
(j) Слова «длина» и «ширина» судна означают его наибольшую длину и ширину,
(к) Суда должны считаться находящимися на виду друг у друга только тогда,
когда одно из них может визуально наблюдаться с другого.
(I) Термин «ограниченная видимость» означает любые условия, при которых ви-
димость ограничена из-за тумана, мглы, снегопада, сильного ливня, песча-
ной бури или по каким-либо другим подобным причинам.
Правило 3 дает определение терминов, применяемых в МППСС.
Некоторые из этих определений требуют дополнительного толкования.
Так, при рассмотрении термина «судно, лишенное возможности уп-
равляться» следует иметь в виду, что к исключительным обстоятель-
ствам могут быть отнесены повреждения или неисправности двигате-
лей, движителей, рулевого управления, корпуса судна, механизмов,
обеспечивающих движение и управление судном. Технически неис-
правное судно, потерявшее управляемость из-за действия внешних
факторов (ураганного ветра, тяжелой ледовой обстановки и т. п.),
вправе поднять сигнал «лишен возможности управляться», однако при
этом необходимо проявлять осторожность и учитывать, что при оп-
ределенных условиях капитан будет обязан доказать правомерность
своих действий. Нельзя рассматривать как «лишенное возможности
управляться» судно, при выполнении маневра «человек за бортом»,
при приемке лоцмана и т. п.
Судно, частично потерявшее управляемость вследствие техничес-
кой неисправности, может рассматриваться как судно, «лишенное
возможности управляться». Основным критерием для этого должна
служить способность судна выполнять требования правил расхожде-
ния в данных условиях плавания.
К судам, «лишенным возможности управляться», могут быть отне-
сены также суда, дрейфующие в штормовую погоду, суда с отданными,
но не держащими якорями, и суда, дрейфующие на якорных цепях без
якорей, если они не в состоянии дать ход и осуществлять необходимые
для расхождения маневры.
217
При толковании термина «судно, ограниченное в возможности ма-
неврировать» следует иметь в виду, что к ним относятся не только су-
да, перечисленные в пункте ^g) (i) — (Vi), но и другие, если по харак-
теру выполняемой работы они не могут уступить дорогу.
При расхождении с судами, занятыми специальными работами,
необходимо иметь в виду, что некоторые из них (авианосцы, суда,
занятые передачей снабжения на ходу и т. д.) могут иметь значитель-
ную скорость.
В качестве фактора, определяющего, можно ли рассматривать суд-
но как «стесненное своей осадкой», следует использовать не только
глубину под килем, но также'и доступную ширину судоходных вод.
Кроме этого, необходимо учитывать влияние мелководья на манев-
ренные качества судна.
Понятие «судно на ходу» имеет весьма важное значение, так как
суда «на ходу» и «не на ходу» несут разные сигналы. По смыслу МППСС
судно «на ходу» не должно иметь прочной связи с берегом или с грун-
том, удерживающей его на месте. Судно считается на ходу, если оно:
не стоит на якоре, бочке, бриделе; не ошвартовано к причалу, пирсу,
молу, сваям и т. п.; не ошвартовано к другому судну, стоящему на
якоре или у причальных сооружений; не стоит на мели.
Исходя из изложеного, судно будет считаться «на ходу» при съемке
с якоря с момента срыва якоря, а при постановке на якорь до тех пор,
пока якорь не заберет. Судно считается на ходу и в тех случаях, когда
оно дрейфует на якоре или бочке, дрейфует на рыболовных снастях,
дрейфует в море с остановленным двигателем или использует якорь
для разворота.
Понятие «судно на ходу» необходимо четко отличать от понятия
«судно, имеющее ход относительно воды». Понятие «судно, имеющее
ход», предполагает обязательным движение «судна на ходу» относитель-
но воды, сообщенное ему любым движителем.
Судно, перемещающееся относительно воды при ветровом дрейфе,
нельзя рассматривать, как судно, имеющее ход.
Таким образом, «судно на ходу» может быть как «судном, имеющим
ход», так и «судном, не имеющим хода относительно воды».
Термин «суда на виду друг у друга» относятся только к случаям
визуальной видимости судов. Поэтому суда, обнаруженные только с
помощью технических средств наблюдения (радиолокатор, гидролока-
тор и т. п.), не могут рассматриваться как суда «на виду друг у друга».
В тех случаях, когда суда не видят друг друга из-за плохой организа-
ции наблюдения, они юридически считаются на «виду друг у друга».
В этом смысле рассматриваемый термин означает, что суда находятся
на таком расстоянии, что могут наблюдать друг друга, в том числе и
ночью, по навигационным огням.
В определении термина «ограниченная видимость» отсутствует ко-
личественный критерий оценки видимости. Принято считать види-
мость ограниченной, когда она уменьшается до пределов дальности
видимости судовых навигационных огней, т. е. до трех и менее миль.
Руководство по единому применению некоторых правил МППСС—72
разъясняет, что выражение «не затруднять движение» другого судна
218
означает, что судно, насколько это практически возможно, должно не
создавать опасности столкновения. Однако если опасность столкно-
вения появилась, необходимо выполнять соответствующие Правила
плавания и маневрирования.
§ 88. ПЛАВАНИЕ СУДОВ
ПРИ ЛЮБЫХ УСЛОВИЯХ ВИДИМОСТИ
Раздел I — Плавание судов при любых условиях видимости
Правило 4 — Применение
Правила этого раздела применяются при любых условиях видимости.
Правило 5 — Наблюдение
Каждое судно должно постоянно вести надлежащее визуальное и слуховое
наблюдение, так же как и наблюдение с помощью всех имеющихся средств,
применительно к преобладающим обстоятельствам и условиям с тем, чтобы пол-
ностью оценить ситуацию и опасность столкновения.
Одна из важнейших мер предосторожности — хорошо организо-
ванное наблюдение. Различного рода упущения в наблюдении неред-
ко становились причиной столкновений. И, наоборот, должным обра-
зом организованное наблюдение позволяет раньше обнаруживать дру-
гие суда и различного рода опасности, резерв времени для оценки
обстановки и принятия решения становится большим.
Организация наблюдения должна предусматривать не только ви-
зуальное наблюдение, но и слуховое, и радиолокационное.
Присутствие на мостике одного вахтенного штурмана и рулевого
в сложных условиях плавания и обеспечение ими наблюдения не
может быть признано должным наблюдением.
Во время снегопада, дождя, тумана и т. п. для ведения зрительно-
го и слухового наблюдения необходимо выставлять впередсмотряще-
го. Последний не должен иметь других обязанностей, кроме наблюде-
ния. Лучшим местом впередсмотрящего обычно является носовая часть
палубы (бак). Это место наиболее удалено от источников шумов и по-
зволяет раньше всего обнаружить встречные суда. В штормовую пого-
ду, когда на баке находиться небезопасно, впередсмотрящий перево-
дится на крыло мостика.
Правильно организованное наблюдение должно быть непрерывным
и круговым. Опасность может подстерегать судно с любого направле-
ния в любое время.
Неиспользование радиолокатора или упущения при его использо-
вании (неправильная настройка и выбор шкалы, нерегулярный про-
смотр теневых секторов и т. п.) являются нарушением Правила 5.
В целях получения дополнительной информации и обнаружения
присутствия других судов рекомендуется также вести прослушивание
с помощью УКВ радиостанций. Особенно важно это делать при пла-
вании в узкостях и портовых водах.
219
Правило 6. — Безопасная скорость
Каждое судно должно всегда следовать с безопасной скоростью, с тем чтобы
оно могло предпринять надлежащее и эффективное действие для предупреждения
столкновения и могло быть остановлено в пределах расстояния, требуемого при
существующих обстоятельствах и условиях.
При выборе безопасной скорости следующие факторы должны быть в числе
тех, которые надлежит учитывать:
(а) Всем судам:
(i) состояние видимости;
(ii) плотность движения, включая скопление рыболовных или любых других
судов;
(iii) маневренные возможности судна и особенно расстояние, необходимое
для полной остановки судна, и поворотливость судна в преобладающих
условиях;
(iV) ночью — наличие фона освещения как от береговых огней, так и от
рассеяния света собственных огней;
(V) состояние ветра, моря и течения и близость навигационных опасностей;
(Vi) соотношение между осадкой и имеющимися глубинами.
(Ь) Дополнительно судам, использующим радиолокатор:
(i) характеристики, эффективность и ограничения радиолокационного обо-
рудования;
(ii) любые ограничения, накладываемые используемой радиолокационной
шкалой дальности;
(iii) влияние на радиолокационное обнаружение состояния моря и метеоро-
логических факторов, а также других источников помех;
(iV) возможность того, что радиолокатор может не обнаружить на достаточ-
ном расстоянии малые суда, лед и другие плавающие объекты;
(V) количество, местоположение и перемещение судов, обнаруженных ра-
диолокатором;
(Vi) более точную оценку видимости, которая может быть получена при ра-
диолокационном измерении расстояния до судов или других объектов,
находящихся поблизости.
Основное требование, которому должна удовлетворять безопасная
скорость, — это требование остановки судна в пределах расстояния,
необходимого при соответствующих обстоятельствах и условиях.
Исходя из расстояния, в пределах которого должно быть останов-
лено судно, можно определить и безопасную скорость V как функцию
от пути торможения /т. Зависимости V = f (/т) для каждого типа суд-
на могут быть построены из данных натурных наблюдений или рассчи-
таны методами, изложенными в курсе «Управление судами и правила
плавания».
Используя зависимость, предложенную профессором В. В. Звон-
ковым, получим
V = "|//т гт/510, (154)
где гт — средняя удельная сила торможения, приходящаяся иа 1 т массы судна,
кН;
V — скорость судна, м/с.
Для расчета гт(кН/т) можно использовать эмпирическую формулу,
полученную из материалов натурных испытаний судов:
гт^57,5(Ле/Г>)°’6в0, (155)
где Ne — общая мощность на гребном валу, кВт;
D — масса судна, т.
220
Однако следует учитывать, что количественного критерия, опреде-
ляющего безопасную скорость в условиях нормальной видимости, еще
не разработано из-за многообразия условий и обстоятельств плавания.
Назначение величины безопасной скорости должно производится с
учетом многих факторов. Основные из них приведены в пункте (а)
Правила 6. При использовании радиолокатора дополнительно необ-
ходимо учитывать и факторы, изложенные в пункте (&).
Безопасная скорость не должна быть чрезмерно большой, но и не
может быть настолько малой, что судно потеряет необходимую управ-
ляемость и не сможет принять эффективные действия для предупреж-
дения столкновения.
При плавании по системам разделения движения безопасной ско-
ростью является скорость потока, т. е. движения основной массы су-
дов.
В условиях ограниченной видимости морская практика выработа-
ла принцип выбора безопасной скорости для судов, не имеющих радио-
локатора или не ведущих радиолокационного наблюдения. Безопасной
является такая скорость, при которой обеспечена полная остановка
судна на половине дальности визуальной видимости.
Если все суда в условиях ограниченной видимости смогут остано-
виться на расстоянии, равном половине дальности визуальной види-
мости, то это позволит избежать столкновения.
При использовании радиолокатора в ограниченную видимость
другие суда обнаруживаются, как правило, на дистанциях, больших,
чем при визуальном наблюдении. Поэтому суда с надежно работающим
радиолокатором могут иметь скорость, несколько большую, чем они
выбрали бы без использования радиолокатора. Такое повышение ско-
рости допускается, если нет вероятности встречи с малыми судами,
плохо обнаруживаемыми радиолокатором, а наблюдение ведется су-
доводителем, умеющим правильно расшифровать изображение на эк-
ране и обработать радиолокационную информацию.
Один из методов приближенного определения величины безопасной
скорости основан на понятии «опасной зоны».
Если предположить, что радиолокатор обнаруживает все суда, на-
ходящиеся в пределах рабочей шкалы, то дистанцией опасного сбли-
жения судов при его использовании является такое расстояние, на
половине которого судно может быть остановлено. На экране радиоло-
катора опасное сближение невозможно заметить мгновенно, для этого
необходим некоторый промежуток времени, величина которого зави-
сит от системы радиолокатора, шкалы дальности и относительной ско-
рости сближения судов. Если расстояние а, на которое сблизятся суда
за указанный промежуток времени, прибавить к величине расстояния
опасного сближения, то получают величину радиуса опасной зоны —
минимального расстояния О3, на величину которого допустимо сбли-
жение с другими судами при использовании радиолокатора:
£>3 = 2/т-|-а, (156)
где /т — путь торможения при безопасной скорости.
221
Величину а можно принять для шкал средней дальности равной
1/10 шкалы.
Таким образом, величина опасной зоны зависит от скорости судна:
чем выше скорость, тем больше величина тормозного пути и величина
опасной зоны. Формула (156) дает величину опасной зоны для наибо-
лее неблагоприятного случая—сближения на встречных курсах и
позволяет получить в первом приближении критерий безопасной ско-
рости.
Из формулы (156) следует, что
/т^(П3-а)/2. (157)
Следовательно, путь торможения при безопасной скорости равен
половине разности принятого радиуса опасной зоны в данных услови-
ях и расстояния, на которое сблизятся суда за время обнаружения
опасного сближения. Например: если величина а равна 1,6 мили, а за-
данная дистанция расхождения — 2 милям, то путь торможения при
безопасной скорости должен быть рдвен 0,2 мили.
Исходя из этого находят величину безопасной скорости по форму-
ле (154) или из таблиц и графиков инерционных характеристик судна.
Зависимость радиуса опасной зоны и величины безопасной скоро-
сти бесспорна и чрезвычайно важна для обеспечения безопасного пла-
вания в условиях ограниченной видимости.
В тех случаях, когда имеется вероятность встречи с малыми су-
дами и возможно их первое обнаружение на расстоянии, меньшем, чем
вычисленное по формуле (156), за D3 следует принимать расстояние
надежного обнаружения малых судов.
Для некоторых быстроходных судов путь торможения при скоро-
стях 15—20 уз и выше меньше, чем величина пути, рассчитанная по
формуле (157). Указанное обстоятельство не дает права ходить в ту-
мане с высокими скоростями. При сближении судов на скоростях 20 уз
и выше время на оценку обстоятельств сближения очень мало и любая
ошибка или несогласованность действий судов может привести к столк-
новению.
При использовании радиолокатора информация, полученная с его
помощью, является одним из факторов, которые принимаются в расчет
при назначении безопасной скорости. Поэтому если обнаружено при-
сутствие значительного количества судов или судов на небольших рас-
стояниях, то скорость судна, использующего радиолокатор, может быть
меньше скорости судна без радиолокатора.
В некоторых случаях по техническим соображениям (потеря уп-
равляемости, технические данные двигателей) нет возможности обес-
печить движение судна с безопасной скоростью. При этом лучше все-
го прекратить движение вообще или в исключительных случаях про-
двигаться вперед, периодически останавливая машину, тщательно
сообразуясь с обстановкой. Никакие объективные причины не могут
рассматриваться как оправдание для превышения скорости сверх
безопасной.
222
Правило 7 — Опасность столкновения
(а) Каждое судно должно использовать все имеющиеся средства в соответствии с
преобладающими обстоятельствами и условиями для определения наличия
опасности столкновения. Если имеются сомнения в отношении наличия опас-
ности столкновения, то следует считать, что она существует.
(Ь) Установленное на судне исправное радиолокационное оборудование должно
использоваться надлежащим образом, включая наблюдение на шкалах даль-
него обзора с целью получения заблаговременного предупреждения об опас-
ности столкновения, а также радиолокационную прокладку или равноценное
систематическое наблюдение за обнаруженными объектами.
(с) Предположения не должны делаться на основании неполной информации, и
особенно радиолокационной.
(d) При определении наличия опасности столкновения необходимо прежде всего
учитывать следующее:
(i) опасность столкновения должна считаться существующей, если пеленг
приближающегося судна заметно не изменяется;
(ii) опасность столкновения может иногда существовать даже при замет-
ном изменении пеленга, в частности при сближении с очень большим
судном или буксиром или при сближении судов на малое расстояние.
Одной из основных и важнейших задач предупреждения столкнове-
ния судов является определение, обнаружение опасности столкнове-
ния. Кроме этого, необходимо всегда иметь в виду, что применение
большинства правил маневрирования МППСС требуется при наличии
опасности столкновения. Очень важно указание Правила 7 о том, что
при всех сомнениях в наличии опасности столкновения необходимо
считать ее существующей и действовать соответственно.
Правило обязывает судоводителя надлежащим образом использо-
вать радиолокатор для определения опасности столкновения, причем
не только в ограниченную видимость. Радиолокатор и при нормальной
видимости позволяет получить во многих случаях иноформацию о
встречных судах раньше, чем при визуальном наблюдении. В связи
с особенностями радиолокационного наблюдения и его ограничениями
Правило 7 требует обязательного ведения радиолокационной про-
кладки, т. е. необходимой обработки радиолокационной информации.
Применение радиолокатора для предупреждения столкновения судов
будет рассмотрено в главе XX.
Тщательное наблюдение за пеленгом на встречное судно позво-
ляет определить опасность столкновения. Если пеленг заметно не из-
меняется, то при дальнейшем сохранении курсов и скоростей суда
могут столкнуться. В случае возможности столкновения пеленг оста-
ется постоянным и тогда сущест-
вует треугольник АгВгС (рис. 142).
Аг и Вг — точки, соответствующие
положению судов в мо-
мент обнаружения;
С — точка столкновения
судов;
^iChBjC — расстояния, которые
суда пройдут до столк-
новения;
?а, Яь — курсовые углы судов.
Рис. 142. Сближение судов при по-
стоянном пеленге
223
Рис. 143. Сближение судов при из-
менении пеленга на нос
Рис. 144. Сближение судов при изме-
нении пеленга на корму
Кроме того, подразумевается; что
Аь Bi — соответствующие положения судов в определенные мо-
менты сближения (t~ 1, 2, 3...).
При сближении судов отношение сторон АгС и ВгС сохраняется
равным отношению скоростей, поэтому треугольники А2В2С,
АзВ^С подобны, курсовые углы судов qa и qb и пеленги остаются по-
стоянными в процессе сближения.
При заметном изменении пеленга в процессе сближения суда чисто
разойдутся. Причем если пеленг меняется на нос (курсовой угол умень-
шается), встречное судно пересечет курс судна А по носу (рис. 143),
а при изменении пеленга на корму (увеличении курсового угла) встреч-
ное судно пройдет по корме (рис. 144).
Изменение пеленга на встречное судно не всегда свидетельствует
о том, что опасность столкновения отсутствует.^Приведенные геомет-
рические рассуждения справедливы для сближения двух точек А и
В, а современные суда или буксируемые составы имеют значительные
размеры.
Поэтому опасность столкновения может существовать и при изме-
нении пеленга. Для правильной оценки ситуации в таких случаях
необходимо измерять пеленг на конечные части судна или состава.
Если оба пеленга заметно изменяются в одну сторону (уменьшаются
или увеличиваются), то можно считать, что опасность столкновения
отсутствует. Изменение пеленгов в разные стороны показывает нали-
чие опасности столкновения.
Такие же обстоятельства расхождения складываются и при сбли-
жении судов на малое расстояние.
Для исключения ошибок в наблюдении за пеленгом необходимо ис-
пользовать пеленгатор и пеленговать одну и ту же точку встречного
судна. Глазомерная оценка изменения курсового угла на другое судно
может быть использована лишь для грубой оценки ситуации сближе-
ния, при этом нужно учитывать рыскание судна.
Правило 8 — Действия для предупреждения столкновения
(а) Любое действие, предпринимаемое для предупреждения столкновения, если
позволяют обстоятельства, должно быть уверенным, своевременным и соот-
ветствовать хорошей морской практике.
224
(b) Любое изменение курса и (или) скорости, предпринимаемое для предупрежде-
ния столкновения, если позволяют обстоятельства, должно быть достаточно
большим, с тем чтобы оно могло быть легко обнаружено другим судном, наблю-
дающим его визуально или с помощью радиолокатора; следует избегать ря-
да последовательных небольших изменений курса и (или) скорости.
(с) Если имеется достаточное водное пространство, то изменение только курса
может быть наиболее эффективным действием для предупреждения чрезмер-
ного сближения при условии, что изменение сделано заблаговременно, явля-
ется существенным и не вызывает чрезмерного сближения с другими
судами.
(d) Действие, предпринимаемое для предупреждения столкновения с другим
судном, должно быть таким, чтобы привести к расхождению на безопасном
расстоянии. Эффективность этого действия должна тщательно контролиро-
ваться до тех пор, пока другое судно не будет окончательно пройдено и остав-
лено позади.
(е) Если необходимо предотвратить столкновение или иметь больше времени для
оценки ситуации, судно должно уменьшить ход или остановиться, засто-
порив свои движители или дав задний ход.
Правило 8 устанавливает общие требования ко всем действиям для
предупреждения столкновений как при ограниченной видимости,
так и при нормальной, в том числе по отношению к судну, уступающе-
му дорогу, и к судну, которому уступают дорогу.
Все действия для ликвидации опасности столкновения должны
быть уверенными и своевременными. Уверенными следует считать та-
кие действия, которые ясно показывают намерение другому судну,
после их однократного применения ликвидируют опасность столкно-
вения и приводят к расхождению на безопасном расстоянии.
Неуверенные действия, многократные незначительные изменения
курса или скорости могут ввести в заблуждение встречное судно и
привести к несогласованным действиям.
Своевременность действий в общем случае предусматривает их за-
благовременное применение. Маневр для предотвращения столкно-
вения необходимо начинать сразу после того, как установлена опас-
ность столкновения.
Несвоевременность действий исключает возможность исправления
ошибок в маневрировании судов и часто создает такую обстановку,
что столкновение становится неизбежным, так как поздно принятые
меры вынуждают применять крайние, часто рискованные маневры.
Действия судоводителя всегда должны соответствовать хорошей
морской практике, особенно в процессе расхождения судов. Оценивая
условия сближения судов, необходимо учитывать состояние моря и
погоды, навигационную обстановку, состояние своего и по возможно-
сти встречного судна. Судоводитель всегда должен быть готов отве-
тить на внезапные, неразумные или неосторожные действия встречно-
го судна.
Маневр изменением курса оценивается как наиболее эффективный,
когда имеется достаточно водное пространство, курс изменен забла-
говременно на значительную величину и не ведет к чрезмерному сбли-
жению с другими судами. Особенно важно это указание для речных су-
дов, имеющих хорошую поворотливость и сравнительно маломощные
двигатели. Маневр изменением курса в большинстве случаев легче
8 Зак. 483 225
обнаруживается с другого судна и, кроме того, на видимости судов
сопровождается звуковым сигналом.
Изменение скорости целесообразно, когда отворот малоэффективен
или затруднен в связи с ограниченностью водного пространства.
Пункт (е) Правила требует также уменьшения скорости или даже ос-
тановки судна, когда необходимо ликвидировать опасность столкно-
вения или иметь больше времени для оценки ситуации. Такая обста-
новка может сложиться, например, когда предпринятое действие изме-
нением курса не дало ожидаемого эффекта.
Результаты предпринятых действий должны обязательно контро-
лироваться наблюдением за другим судном, измерением пеленгов или
нанесением его позиций на радиолокационном планшете. Контроль
должен продолжаться до тех пор, пока судно не будет окончательно
оставлено позади.
Правило 9 — Плавание в узкостях
(а) Судно, следующее вдоль узкого прохода или фарватера, должно держаться
внешней границы прохода или фарватера, которая находится с его правого
борта настолько близко, насколько это безопасно и практически возможно.
(Ь) Судно длиной менее 20 м или парусное судно не должно затруднять движение
такого судна, которое может безопасно следовать только в пределах узкого
прохода или фарватера.
(с) Судно, занятое ловом рыбы, не должно затруднять движение любого другого
судна, следующего в пределах узкого прохода или фарватера.
(d) Судно не должно пересекать узкий проход или фарватер, если такое пересе-
чение затруднит движение судна, которое может безопасно следовать только
в пределах такого прохода или фарватера; это последнее судно может исполь-
зовать звуковой сигнал, предписанный Правилом 34 (d), если оно испытывает
сомнения в отношении намерений судна, пересекающего проход или фарва-
тер.
(е) (i) В узком проходе или на фарватере в том случае, если обгон может быть
совершен только при условии, что обгоняемое судно предпримет действие,
позволяющее безопасный проход, то судно, намеревающееся произвести
обгон, должно указать свое намерение подачей соответствующего звуко-
вого сигнала, предписанного Правилом 34 (с) (i). Обгоняемое судно долж-
но, если оно согласно на обгон, подать соответствующий сигнал, предпи-
санный Правилом 34 (с) (ii), и предпринять действия, позволяющие без-
опасный проход обгоняющего судна. Если обгоняемое судно испытывает
сомнения в отношении безопасности обгона, оно может подать звуковые
сигналы, предписанные Правилом 34 (d).
(ii) Это Правило не освобождает обгоняющее судно от выполнения требований
Правила 13.
(f) Судно, приближающееся к изгибу или к такому участку узкого прохода или
фарватера, где другие суда могут быть не видны из-за наличия препятствий,
должно следовать с особой внимательностью и осторожностью и подавать со-
ответствующий звуковой сигнал, предписанный Правилом 34 (е).
(S) Любое судно, если позволяют обстоятельства, должно избегать постановки
на якорь в узком проходе.
К узкостям относятся участки судоходного пути, стесненные в на-
вигационном отношении, где возможности маневрирования судов
с целью расхождения ограничены. К таким участкам можно отнести
каналы, реки, фарватеры в районах с навигационными опасностями и
в районах, опасных от мин, узкие проливы, фиорды и т. п. Узкость не
обязательно должна иметь большую длину, поэтому Правило 9 приме-
226
няется и к проходам незначительной
протяженности (вход в порт между
двумя молами, проход между двумя
банками т. п.).
Рекомендованные пути, огражден-
ные буями, там где выход за буи без-
опасен, не попадают под действие
рассматриваемого Правила.
В случае сомнений даже относи-
тельно широкий проход лучше отне-
сти к узкому и располагать свои кур-
сы согласно Правилу 9.
В основе Правила 9, так же как и
Правила 14, лежит идея расхождения
левыми бортами. Причем судно долж-
но не только идти правой стороной
узкости, но и придерживаться внеш-
ней границы фарватера или прохода
настолько близко, насколько это прак-
Рис. 145. Расхождение на изгибе
узкости
тически возможно.
Нередко в узких проходах местные правила устанавливают иной
порядок плавания, поэтому судоводитель должен при подходе к уз-
костям ознакомиться со всеми документами и пособиями для плава-
ния в данном районе.
Когда два судна идут в узкости друг другу навстречу вдоль про-
хода, предписания Правила 9 действуют всегда. Правило 15, преду-
сматривающее расхождение судов на пересекающихся курсах, не
должно применяться, несмотря на то, что взаимное расположение су-
дов иногда соответствует этому Правилу. На рис. 145 судно А не долж-
но уступать дорогу судну В, хотя и наблюдает его со своего правого
борта. В приведенном примере оба судна должны придерживаться пра-
вой стороны узкости.
Выполнение Правила 9 обеспечивает расхождение судов без при-
менения правил маневрирования, пока суда следуют своей стороной.
Пересечение узкости необходимо производить таким образом, чтобы
не затруднять движение судов, следующих вдоль узкого прохода.
Судно, идущее вдоль узкости, может обратить внимание на себя пода-
чей ряда коротких звуковых сигналов, если оно испытывает сомнение
в отношении маневров судна, пересекающего узкость. Однако если
суда встретились по какой-либо причине на одной стороне узкого про-
хода на пересекающихся или противоположных курсах и при этом воз-
никла опасность столкновения, то они оба должны выполнять прави-
ла маневрирования или действовать согласно Правилу 2.
Если обгон в узком проходе может быть выполнен только лишь при
определенных действиях обгоняемого судна, то обгоняющее судно
должно совершать обгон после получения согласия обгоняемого суд-
на. Обмен звуковыми сигналами при этом предусмотрен пунктом (е)
Правила 9 и пунктом (с) Правила 34.
8*
227
Звуковой сигнал, который должны подавать суда при подходе к
изгибу прохода, не означает начала маневра. Этот сигнал дает возмож-
ность избежать неожиданных встреч в изгибах узкости. При повороте
в изгибе узкости судно должно оставаться на своей правой стороне и
проходить его с осторожностью и вниманием.
Все маневры в узкости следует сопровождать звуковыми сигнала-
ми, предусмотренными Правилом 34.
Скорость движения судов в узкости должна выбираться с учетом
того, что на большой скорости судно в большей мере испытывает влия-
ние присасывания и создающейся при этом значительной волны. Силь-
ное волнение ухудшает управляемость других судов и может вызвать
аварии судов, стоящих у причалов. Однако слишком малая скорость
может явиться причиной потери управляемости судна, особенно в рай-
онах, где действуют сильные течения.
Правило 10 — Плавание по системам разделения движения
(а) Это Правило применяется при плавании по системам разделения движения,
принятым Организацией.
(Ь) Судно, использующее систему разделения движения, должно:
(i) следовать в соответствующей полосе движения в принятом на ней общем
направлении потока движения;
(ii) держаться, насколько это практически возможно, в стороне от линии
разделения движения или от зоны разделения движения;
(iii) в общем случае входить в полосу движения или покидать ее на конечных
участках, но если судно покидает полосу движения или входит в нее с
любой стороны, оно должно делать это под возможно меньшим углом
к общему направлению потока движения.
(с) Судно должно, насколько это практически возможно, избегать пересечения
полос движения, но если оно вынуждено пересекать полосу движения, то
должно делать это, насколько возможно, под прямым углом к общему направ-
лению потока движения.
(d) Суда, которые могут безопасно использовать для транзитного прохода со-
ответствующую полосу движения в системе разделения, ие должны, в общем
случае, использовать зоны прибрежного плавания. Однако суда длиной менее
20 м и парусные суда могут использовать зоны прибрежного плавания во
всех случаях.
(е) Судно, если оно не пересекает систему разделения движения, не входит в
полосу движения или не выходит из нее, не должно, в общем случае, вхо-
дить в зону разделения движения или пересекать линию разделения дви-
жения, кроме:
(i) случаев крайней необходимости для избежания непосредственной опас-
ности;
(ii) случаев, когда это связано с ловом рыбы в пределах зоны разделения
движения.
(f) Судно, плавающее вблизи конечных участков систем разделения движения,
должно соблюдать особую осторожность.
(g) Судно должно, насколько это практически возможно, избегать постановки
на якорь в пределах системы разделения движения или вблизи от ее конечных
участков.
(h) Судно, не использующее систему разделения движения, должно держаться
от нее на достаточно большом расстоянии.
(i) Судно, занятое ловом рыбы, не должно затруднять движение любого другого
судна, идущего в полосе движения.
(j) Судно длиной менее 20 м или парусное судно не должно затруднять безопас-
ное движение судна с механическим двигателем, идущего в полосе движения.
228
(к) Судно, ограниченное в возможности маневрировать, когда оно занято дея-
тельностью по поддержанию безопасности мореплавания в системе разделения
движения, освобождается от выполнения требований этого Правила в такой
степени, в какой это необходимо для выполнения этой деятельности.
(1) Судно, ограниченное в возможности маневрировать, когда оно занято работами
по прокладке, обслуживанию или поднятию подводного кабеля в пределах
системы разделения движения, освобождается от выполнения требований
этого Правила настолько, насколько это необходимо для выполнения этих
работ.
Разделение движения судов может производиться зонами и линия-
ми, естественными препятствиями, организацией кругового движения
судов и секторного разделения движения.
Чаще всего система разделения состоит из двух полос движения,
разделенных зоной или линией (рис. 146). Полоса движения является
зоной, в пределах которой установлено одностороннее движение.
Кроме этого, полоса движения отделена зоной или линией разде-
ления от зоны прибрежного плавания, где суда могут следовать в лю-
бом направлении.
В районах, где сходятся несколько систем разделения движения,
устанавливается круговое движение судов против часовой стрелки
(рис. 147).
Правило 10 четко определяет порядок плавания судов по системам
разделения. Однако следует иметь в виду, что при встрече судов, ког-
да возникает опасность столкновения, правила маневрирования
МППСС должны соблюдаться и на системах разделения движения.
Использование системы разделения и следование в установленной по-
лосе не дают никаких привилегий перед другими судами при расхож-
дении.
Для информации судна, нарушающего порядок движения, другие
суда могут использовать сигнал «КС» (янки голф) по МСС-65 «Вы, ка-
жется, не соблюдаете правил плавания в системе разделения движе-
ния».
Считается, что судно, использующее полосу движения, может сме-
щаться внутри этой полосы от одной ее стороны к другой, выполняя
Рис. 146. Система разделения движе-
ния зоной безопасности
Рис. 147. Район кругового движения
229
это смещение под возможно меньшим углом к общему направлению
потока движения.
Сведения об установленных системах разделения движения содер-
жатся в специальном пособии «Рекомендации для плавания в районах
разделения движения», а также в Извещении мореплавателям № 1 для
советских прибрежных вод. Системы разделения движения наносятся
на морские навигационные карты.
§ 89. РАСХОЖДЕНИЕ СУДОВ,
НАХОДЯЩИХСЯ НА ВИДУ ДРУГ У ДРУГА
Раздел II — Плавание судов, находящихся на виду друг у друга
Правило 11 — Применение
Правила этого раздела применяются к судам, находящимся на виду друг
У друга.
Правило 12 — Парусные суда
а) Когда два парусных судна сближаются так, что возникает опасность столкно-
вения, то одно из них должно уступить дорогу другому следующим образом:
(i) когда суда идут разными галсами, то судно, идущее левым галсом, долж-
но уступить дорогу другому судну;
(ii) когда оба судна идут одним и тем же галсом, то судно, находящееся на
ветре, должно уступить дорогу судну, находящемуся под ветром;
(iii) если судно, идущее левым галсом, видит другое судно с наветренной сто-
роны и не может точно определить, левым или правым галсом идет это
другое судно, то оно должно уступить ему дорогу.
(Ь) По этому Правилу наветренной стороной считается сторона, противополож-
ная той, на которой находится грот, а при прямом вооружении — сторо-
на, противоположная той, на которой находится самый большой косой
парус.
На рис. 148 показано расхождение парусных судов, идущих раз-
личными галсами, судно А уступает дорогу судну В. На рис. 149 суда
сближаются на одинаковых галсах — судно А должно уступить доро-
гу судну В.
Правило 13 — Обгон
(а) Независимо от предписаний, содержащихся в Правилах разделов 1 и II части
В, каждое судно, обгоняющее другое, должно держаться в стороне от пути
обгоняемого судна.
(Ь) Судно считается обгоняющим другое судно, когда оно подходит к нему с на-
правления более 22,5° позади траверза последнего, т.е. когда обгоняющее
судно находится в таком положении по отношению к обгоняемому, что ночью
обгоняющее судно может видеть только кормовой огонь обгоняемого судна
и не может видеть ни один из его бортовых огней.
(с) Если имеется сомнение в отношении того, является ли судно обгоняющим,
то следует считать, что это именно так, и действовать соответственно.
(d) Никакое последовавшее изменение во взаимном положении двух судов не
может дать повода считать обгоняющее судно, по смыслу настоящих Правил,
судном, идущим на пересечение курса, или освободить обгоняющее судно от
обязанности держаться в стороне от обгоняемого до тех пор, пока последнее
не будет окончательно пройдено и оставлено позади.
230
Ветер
Рис. 148. Расхождение
парусных судов, идущих
разными галсами
Рис. 149. Расхождение па- Рис. 150. Расхождение
русных судов, идущих одним при обгоне
и тем же галсом
Правило распространяется на все случаи обгона независимо от
взаимных обязанностей судов по Правилу 18. Поэтому Правило об-
гона действует и в том случае, когда обгоняющим является парусное
судно, судно, лишенное возможности управляться или другое при-
вилегированное судно.
Состояние обгона согласно пункту (Ь) определяется положением
приближающегося судна с направления 22,5° сзади траверза (рис. 150).
Никакие последующие изменения положения судов не прекраща-
ют действие Правила обгона, пока обгоняемое судно не будет окон-
чательно пройдено. На рис. 150 в позиции II судно В находится в по-
ложении судна, идущего на пересечение курса судну А. Несмотря на
то, что судно А наблюдает судно В с левого борта, оно обязано дер-
жаться в стороне от него.
В случае сомнений относительно обстоятельств сближения в усло-
виях, близких к обгону, всегда следует считать свое судно обгоняю-
щим и уступить дорогу обгоняемому судну.
Обгоняемое судно не должно затруднять обгон. Такое судно мож-
но считать судном, которому уступают дорогу. Поэтому на него распро-
страняется действие Правила 17, в частности оно обязано сохранять
курс и скорость.
При обгоне на параллельных курсах величина траверзного рассто-
яния между судами должна исключать явление присасывания. В слу-
чае небольшой разницы в скоростях обгоняющее судно медленно про-
ходит траверз обгоняемого, когда расстояние между судами наимень-
шее. Такое положение судов не является безопасным, поэтому для
ускорения процесса обгона на параллельных курсах обгоняемое суд-
но может уменьшить свою скорость, когда обгоняемое судно находит-
ся на траверзе.
При обгоне на пересекающихся курсах лучше избегать пересече-
ния курса обгоняемого по носу.
Большое значение имеет выбор времени и места обгона. Хорошая
морская практика не допускает такого маневрирования при огибании
буев и плавучих маяков. В узкостях обгон связан с возможным рас-
231
хождением со встречными судами и требует дополнительного анализа
обстоятельств плавания. Обгон при прохождении изгибов узкости
недопустим. Выполнение обгона в узкостях, когда требуется манев-
рирование обгоняемого судна, происходит в соответствии с Правилом
9 с подачей соответствующих звуковых сигналов.
Правило 14 — Ситуация сближения судов, идущих прямо друг на друга
(а) Когда два судна с механическими двигателями сближаются на противополож-
ных или почти противоположных курсах так, что возникает опасность столк-
новения, каждое из них должно изменить свой курс вправо, с тем чтобы каж-
дое судно прошло у другого по левому борту.
(Ь) Такая ситуация должна считаться существующей, когда судно видит другое
прямо или почти прямо по курсу, и при этом ночью оно может видеть в створе
или почти в створе топовые огни и (или) оба бортовых огня другого судна, а
днем оно наблюдает его соответствующий ракурс.
(с) Если имеется сомнение в отношении того, существует ли такая ситуация, то
следует считать, что она существует, и действовать соответственно.
Обстоятельства сближения судов, соответствующие Правилу 18,
включают в себя три основных случая:
суда идут прямо друг на друга;
суда идут почти прямо друг на друга, но одно несколько левее дру-
гого;
суда идут почти прямо друг на друга, но одно несколько правее
другого.
В первом случае положение и действие судов вполне определенны.
Во втором случае (рис. 151) действия судоводителей согласно Пра-
вилу 14 лишь увеличат расстояние, на котором разойдутся суда.
В третьем случае (рис. 152) судно А должно пересекать курс суд-
на В. При этом возникает желание не делать этого, а отвернуть влево,
чтобы увеличить дистанцию расхождения. Такое действие является
ошибочным и может привести к столк-
новению. Правильным действием при
такой ситуации является заблаговремен-
ное и решительное изменение курса
вправо.
В условиях, когда нет уверенности,
идут ли суда пересекающимися курсами,
или почти прямо друг на друга, или
курсами, обеспечивающими безопасное
расхождение, следует действовать по
Правилу 14, т. е. заблаговременно и ре-
шительно изменить курс вправо. Очень
важно, чтобы ни одно из судов не из-
меняло свой курс влево.
Если поворот вправо невозможен по
навигационным или другим соображе-
ниям, то необходимо заранее уменьшить
ход или даже остановить движение, но
не поворачивать влево.
Рис. 151. Расхождение встреч-
ных судов, из которых одно
идет несколько левее другого
Рис. 152. Расхождение встреч-
ных судов, из которых одно
идет несколько правее другого
232
Величина отворота вправо х/
должна быть такой, чтобы обеспе- X.
чить безопасное расхождение даже X.
в том случае, если встречное суд- / X.
но не изменит своего курса. /
В штормовую погоду рыскание /___________ X.
встречного судна можно ошибочно ' ---- ХХ
принять за начало поворота. Для Хц)
исключения ошибок В оценке СИ- Рис. 153. Расхождение судов на пере-
туации, связанных с рысканием, секающихся курсах
необходимо также решительное и
заблаговременное изменение курса вправо, чтобы у встречного судна
не оставалось никаких сомнений в оценке обстоятельств.
На встречных курсах суда сближаются на большой скорости, рав-
ной сумме скоростей судов. Поэтому маневр расхождения судов дол-
жен начинаться сразу после установления опасности столкновения.
Всякое промедление с началом маневра резко обостряет обстановку.
Правило 15 — Ситуация пересечения курсов
Когда два судна с механическими двигателями идут пересекающимися кур-
сами так, что возникает опасность столкновения, то судно, которое имеет дру-
гое на своей правой стороне, должно уступить дорогу другому судну и при этом
оно должно, если позволяют обстоятельства, избегать пересечения курса другого
судна у него по носу.
Правило применяется, если существует опасность столкновения
при сближении судов с механическими двигателями, и не применяется,
когда взаимные обязанности судов определяются Правилом 18. Таким
образом, Правило расхождения судов на пересекающихся курсах не
действует, например, когда судно с механическим двигателем сбли-
жается с парусным судном, с судном, занятым ловом рыбы, ограничен-
ным в возможности маневрировать или лишенным возможности управ-
ляться.
Рассматриваемое Правило не применяется, когда одно из судов
находится у другого на курсовом угле более 22,5° сзади траверза, т. е.
находится в положении обгоняющего.
Правило расхождения судов на пересекающихся курсах в отличие
от Правила 14 обязывает маневрировать лишь одно судно (рис. 153).
Право дороги для второго судна предполагает выполнение им Пра-
вила 17, т. е. сохранение своего курса и скорости.
Правило 15 не устанавливает конкретного способа маневрирова-
ния судна, уступающего дорогу. Судоводитель при выборе маневра
должен учитывать обстановку сближения и требования Правил 8 и 16.
Уступая дорогу на пересекающихся курсах, судно может:
отвернуть вправо и пройти по корме другого судна;
уменьшить ход или остановить движение и пропустить судно, име-
ющее право дороги;
изменить курс вправо и одновременно уменьшить скорость.
Маневры отворотом влево или увеличение скорости ведут к пере-
сечению курса другого судна по носу, поэтому их следует избегать.
233
При определенных условиях пересечение курса другого судна допус-
тимо, как правило, когда маневрирующее судно имеет большое пре-
имущество в скорости.
Иногда при отсутствии возможности поворота вправо с целью рас-
хождения выполняют полную циркуляцию влево.
Однако несмотря на изложенное, следует помнить, что в общем слу-
чае лучшим маневром является отворот вправо под корму другому
судну с расчетом перевести его после поворота на курсовые углы ле-
вого борта.
Правило 15 применяется не только в открытом море, но и в тех слу-
чаях, когда суда сближаются на пересекающихся курсах при огибании
мыса, плавучего маяка, буя и т. д.
Правило 16 — Действия судна, уступающего дорогу
Каждое судно, которое обязано уступить дорогу другому судну, должно,
насколько это возможно, предпринять заблаговременное и решительное действие
с тем, чтобы чисто разойтись с другим судном.
Правило вытекает из Правила 8 и подчеркивает необходимость за-
благовременных и решительных действий. Исходя из конкретной об-
становки судоводитель может: изменить курс, изменить скорость, ос-
тановить движение, одновременно изменить курс и скорость.
В любом случае заблаговременность действий предусматривает
начало действий сразу после обнаружения опасности столкновения и
полной оценки обстоятельств расхождения.
Решительность действий требует такого маневра, который ведет к
безопасному расхождению после однократного применения и может
быть легко замечен с другого судна. Поэтому маневры курсом следует
производить на значительную величину, а скорость судна снижать
до малого хода (на 50 %), застопорив машины или даже отработав
задним ходом.
Лучше выбрать маневр, выполнение которого сопровождается
звуковым сигналом (Правило 34). При этом другое судно сразу полу-
чает информацию о том, что предприняты действия для безопасного
расхождения.
Правило 17 — Действия судна, которому уступают дорогу
(a) (i) Когда одно из двух судов должно уступить дорогу другому, то это другое
судно должно сохранять курс и скорость.
(ii) Однако это другое судно, когда для него становится очевидным, что суд-
но, обязанное уступить дорогу, не предпринимает соответствующего дей-
ствия, требуемого этими Правилами, может предпринять действие, чтобы
избежать столкновения только собственным маневром.
(Ь) Когда по какой-либо причине судно, обязанное сохранять курс и скорость,
обнаруживает, что оно находится настолько близко к другому судну, что
столкновения нельзя избежать только действием судна, уступающего дорогу,
оно должно предпринять такое действие, которое наилучшим образом по-
может предотвратить столкновение.
(с) Судно с механическим двигателем, которое в ситуации пересечения курсов
предпринимает в соответствии с подпунктом (a) (ii) этого Правила действие,
234
чтобы избежать столкновения с другим судном с механическим двигателем,
не должно, если позволяют обстоятельства, изменять курс влево, если дру-
гое судно находится слева от него.
(d) Это Правило не освобождает судно, обязанное уступать дорогу, от выполне-
ния этой обязанности.
Сохранение курса и скорости судном, которому уступают дорогу,
облегчает выбор и расчет маневра другому судну для избежания опас-
ности столкновения и помогает избежать несогласованных действий
судов.
Правило 17 применяется во всех случаях, когда одно судно обяза-
но уступить дорогу другому: при сближении двух парусных судов;
при сближении судов с механическим двигателем на пересекающихся
курсах; при сближении парусного судна и судна с механическим дви-
гателем; при обгоне одного судна другим.
При встрече с судами, лишенными возможности управляться, ог-
раниченными в возможности маневрировать, занятыми ловом рыбы,
необходимо учитывать, что эти суда также обязаны, насколько это
возможно, сохранять свой курс и скорость.Если же они не имеют воз-
можности выполнить требование Правила 17, то обязаны принять все
меры к тому, чтобы не вводить в заблуждение своим маневром другие
суда.
В некоторых случаях требование сохранять курс и скорость не
означает сохранение компасного курса и оборотов двигателей. Напри-
мер: судно, которому уступают дорогу, подходит к лоцманскому судну
для приема лоцмана или подходит к опасности. В этих случаях судно
вправе изменить свой курс и скорость. С такой точки зрения надо по-
нимать обязанность сохранения курса и скорости как необходимость
сохранения курса и скорости, с которыми судно должно выполнять
данный маневр. При этом предполагается, что характер маневра из-
вестен другому судну.
Правило 17 дает право судну, которому уступают дорогу, самому
предпринять действия, чтобы избежать столкновения, если становит-
ся очевидным, что другое судно не предпринимает действий для безо-
пасного расхождения или его действия недостаточны. При выборе
маневра в этом случае судно не должно изменять свой курс влево,
если другое судно находится слева. Указанное ограничение связано
с тем, что наиболее вероятным действием судна, уступающего дорогу
в рассматриваемых условиях, является отворот вправо (см. рис. 153).
При таких несогласованных действиях резко возрастает опасность
столкновения. Если же сближение судов все же произошло, то Прави-
ло 17 обязывает судно, которому уступают дорогу, предпринимать
самому решительные действия для избежания столкновения. Такие
действия необходимо рассматривать как исключение, когда действи-
ями одного судна столкновение предотвратить невозможно.
Необходимость действий возникает, если другое судно не предпри-
няло действий для ликвидации угрозы столкновения или предприня-
тые им действия оказались неэффективными.
Судно, которому уступают дорогу, прежде чем предпринять необ-
ходимые действия для избежания столкновения, должно обратить
235
Самостоятель-
ные "ейслГоия
Подано сигнала
Ш Мрнеор последнего
момента
Я
курса и скорости
Рис. 154. Действия судна, которому
уступают дорогу
внимание другого судна подачей
звукового сигнала (Правило 34).
В дополнение к этому сигналу
можно применять любые сигналы
•для привлечения внимания.
Таким образом, при выполнении
Правила 17 существуют три зоны
сближения судов (рис. 154). Пер-
вая — зона сохранения курса и ско-
рости, в конце которой следует по-
дать сигнал для привлечения вни-
мания другого судна по Правилу 34 (d). Вторая — зона самостоятель-
ных действий привилегированного судна, которые он может предпри-
нять с целью безопасного расхождения, когда другое судно бездейст-
вует или действует неэффективно. В третьей зоне судно, которому ус-
тупают дорогу, обязано предпринять наилучшие действия для безо-
пасного расхождения. Это зона так называемого маневра последнего
момента.
В процессе сближения судов необходимо тщательно наблюдать за
приближающимся судном, контролировать пеленг на него и быть го-
товым отреагировать на неправильные и недостаточные действия дру-
гого судна.
Правило 18 — Взаимные обязанности судов
За исключением случаев, когда Правила 9, 10 и 13 требуют иного:
(а) Судно с механическим двигателем на ходу должно уступить дорогу:
(i) судну, лишенному возможности управляться;
(ii) судну, ограниченному в возможности маневрировать;
(iii) судну, занятому ловом рыбы;
(iV) парусному судну.
(Ь) Парусное судно на ходу должно уступать дорогу:
(i) судну, лишенному возможности управляться;
(ii) судну, ограниченному в возможности маневрировать;
(iii) судну, занятому ловом рыбы.
(с) Судно, занятое ловом рыбы, на ходу должно, насколько это возможно, усту-
пать дорогу:
(i) судну, лишенному возможности управляться;
(ii) судну, ограниченному в возможности маневрировать;
(d) (i) Любое судно, за исключением судна, лишенного возможности управляться,
или судна, ограниченного в возможности маневрировать, не должно, если
позволяют обстоятельства, затруднять безопасный проход судна, стеснен-
ного своей осадкой и выставляющего сигналы, предписанные Правилом
28;
(ii) судно, стесненное своей осадкой, должно следовать с особой осторож-
ностью, тщательно сообразуясь с особенностью своего состояния.
(е) Гидросамолет на воде должен, в общем случае, держаться в стороне от всех
судов и не затруднять их движение. Однако в тех случаях, когда существует
опасность столкновения, он должен выполнять Правила этой части.
Правило 18 предусматривает право дороги для категорий судов с
худшими маневренными возможностями. Таким образом, судно, име-
ющее меньше ограничений в маневрировании, должно уступать до-
рогу.
236
Рассматриваемое правило не применяется, когда суда плавают в
узкостях, по системам разделения движения и при обгоне. Парусные
суда, суда длиной менее 20 м, а также рыболовные не должны затруд-
нять движение судов по узкому проходу или в полосе движения сис-
темы разделения даже, если они по Правилу 18 являются привилеги-
рованными.
Расхождение судов одной категории (например, занятых ловом
рыбы, лишенных возможности управляться и т. д.). между собой не
регламентировано Правилами. Поэтому оно должно выполняться на
основе хорошей морской практики с учетом всех существующих ус-
ловий и обстоятельств плавания в соответствии с Правилом 2.
Особого внимания требует расхождение с судами, занятыми ловом
рыбы. Любое судно с механическим двигателем или парусное, не ли-
шенное возможности управляться и не ограниченное в возможности
маневрировать, обязано обойти рыболовное судно и его орудия лова
на достаточном расстоянии. Исключение составляет случай, когда
рыболовное судно является обгоняющим.
Конкретный маневр выбирается исходя из обстоятельств расхож-
дения. При сближении с рыболовным судном следует по возможности
определить способ лова и вероятное расположение снастей. При об-
наружении сетей, если уже невозможно их обойти, необходимо немед-
ленно застопорить машину и направить судно на середину интервала
между буями.
Скопление судов, занятых ловом рыбы, рекомендуется обойти на
достаточном расстоянии.
Судно с механическим двигателем на пересекающихся и проти-
воположных курсах уступает дорогу парусному, за исключением рас-
хождения в узкостях и на системах разделения.
Маневр для расхождения с парусным судном судоводитель выби-
рает исходя из конкретной обстановки, так как Правило 18 не уста-
навливает способ маневрирования.
Парусное судно в соответствии с Правилом 17 должно сохранять
свой курс и скорость при расхождении. Однако следует учитывать,
что это требование парусным судном не всегда может быть выполне-
но; изменение силы и направления ветра может резко изменить курс
и скорость парусника.
Все суда, за исключением судов, лишенных возможности управ-
ляться и ограниченных в возможности маневрировать при встрече с
судном, стесненным своей осадкой, должны маневрировать так, чтобы
не заставлять это судно менять свой курс. В свою очередь это судно
должно соблюдать особую осторожность и при наличии опасности
столкновения в ситуации пересекающихся или встречных курсов
должно применять соответствующие Правила плавания и маневриро-
вания как судно с механическим двигателем.
Выполнение Правила 18 в большинстве случаев должно сопровож-
даться выставлением судами огней и знаков, соответствующих данной
категории судов. Судоводитель должен иметь в виду, что указанные
знаки и огни иногда плохо видны. Поэтому привилегированное судно
237
должно при необходимости привлечь на себя внимание звуковым или
световым сигналом.
Правило 18 (е) обязывает гидросамолеты заблаговременно уходить
с путей судов, не препятствуя их плаванию. Если же гидросамолет
оказался все же в районе следования судов, он обязан выполнять Пра-
вила маневрирования при расхождении наравне с судном с механичес-
ким двигателем. Гидросамолет, лишенный возможности управлять-
ся, несет предписанные ему огни или знаки и рассматривается как суд-
но, лишенное возможности уступить дорогу.
§ 90. ПЛАВАНИЕ СУДОВ ПРИ ОГРАНИЧЕННОЙ ВИДИМОСТИ
Раздел III — Плавание судов при ограниченной видимости
Правило 19 — Плавание судов при ограниченной видимости
(а) Это Правило относится к судам, не находящимся на виду друг у друга при
плавании в районах ограниченной видимости или вблизи таких районов.
(Ь) Каждое судно должно следовать с безопасной скоростью, установленной
применительно к преобладающим обстоятельствам и условиям ограниченной
видимости. Судно с механическим двигателем должно держать свои машины
готовыми к немедленному маневру.
(с) При выполнении Правил раздела I этой части каждое судно должно тщательно
сообразовывать свои действия с преобладающими обстоятельствами и ус-
ловиями ограниченной видимости.
(d) Судно, которое обнаружило присутствие другого судна только с помощью
радиолокатора, должно определить, развивается ли ситуация чрезмерного
сближения и (или) существует ли опасность столкновения. Если этот так, то
оно должно своевременно предпринять действие для расхождения, причем
если этим действием является изменение курса, то, насколько это возможно,
следует избегать:
(i) изменения курса влево, если другое судно находится впереди траверза
и не является обгоняемым;
(ii) изменения курса в сторону судна, находящегося на траверзе или поза-
ди траверза.
(е) За исключением случаев, когда установлено, что опасности столкновения нет,
каждое судно, которое услышит, по-видимому, впереди своего траверза туман-
ный сигнал другого судна или которое не может предотвратить чрезмерно-
го сближения с другим судном, находящимся впереди траверза, должно
уменьшить ход до минимального, достаточного для удержания судна на курсе.
Оно должно, если это необходимо, остановить движение и в любом случае
следовать с крайней осторожностью до тех пор, пока не минует опасность
столкновения.
Правило 19 применяется, когда суда не наблюдают друг друга ви-
зуально. Рассматриваемое Правило действует не только в районах
тумана, мглы, ливня, снегопада и т. п., но и при плавании вблизи
таких районов на расстояниях менее 2—3 миль.
Одним из важнейших мероприятий по обеспечению безопасности
плавания является выполнение требования МППСС — следовать с
безопасной скоростью. Во многих случаях столкновений судов в усло-
виях ограниченной видимости причиной являлось нарушение именно
этого требования.
Безопасная скорость должна быть установлена с учетом факторов,
изложенных в Правиле 6, но во всех случаях она должна быть сниже-
238
на до такой степени, чтобы обеспечить готовность машин к немедлен-
ному реверсу. Порядок назначения величины безопасной скорости
рассмотрен в § 88.
Пункт (с) Правила требует, чтобы организация наблюдения, оцен-
ка опасности столкновения, действия для предупреждения столкно-
вения производились в соответствии с условиями ограниченной ви-
димости. Плавание в узкостях и по системам разделения движения
также должно происходить с учетом ограничений, связанных с обсто-
ятельствами плавания и условиями видимости. Кроме этого, при пла-
вании в условиях ограниченной видимости суда должны подавать
звуковые сигналы в соответствии с Правилом 35.
Пункт (d) определяет действия судна, обнаружившего присутствие
другого судна только с помощью радиолокатора. Такое судно должно,
во-первых, оценить ситуацию сближения. Методы оценки обстоя-
тельств сближения судов с помощью радиолокатора будут изложены
в следующей главе. В этих случаях, когда существует опасность столк-
новения или чрезмерного сближения, судно должно предпринять
своевременные действия для безопасного расхождения. Таким обра-
зом, в условиях ограниченной видимости каждое судно должно пред-
принимать действия для предупреждения столкновения или чрезмер-
ного сближения. Ни одно судно при этом не является привилегиро-
ванным и не должно ожидать, что ему уступят дорогу.
Чрезмерным сближением следует считать ситуацию, когда могут
потребоваться действия для избежания непосредственной угрозы
столкновения судов. Расстояние чрезмерного сближения зависит от
взаимного расположения судов и их курсов, от размеров и скоростей
судов, их маневренных характеристик, возможностей радиолокацион-
ного наблюдения и других факторов.
В открытом море расстоянием чрезмерного сближения обычно счи-
тают дистанцию в 2—3 мили. Один из методов количественной оценки
расстояния чрезмерного сближения — «опасной зоны» — рассмотрен
нами в § 88 при толковании Правила 6.
Правило 19 не делает жестких ограничений при выборе маневра
для расхождения судов, поэтому возможны случаи несогласованных
действий.
Согласно Правилу 8 наиболее эффективным действием признается
маневр изменением курса. При таком маневре рассматриваемое Пра-
вило ограничивает сторону поворота в зависимости от расположения
другого судна. Если другое судно находится впереди траверза, то наи-
более целесообразно изменять курс вправо. Это указание не должно
применяться при обгоне другого судна. При обнаружении другого
судна на траверзе или позади траверза следует избегать изменения
курса в сторону судна.
Пункт (е) Правила определяет действия судна, если оно не может
предотвратить чрезмерного сближения с другим судном. Такая си-
туация Может сложиться в тех случаях, когда судно услышит туман-
ный сигнал другого судна, а ранее не установит, что опасности столк-
новения нет (например, с помощью РЛС); когда предпринятый маневр
по данным РЛС не дал ожидаемого эффекта в случаях несогласованных
239
действий судов; кргДа встречное судно следует с большой скоростью;
при обнаружений встречного судна на небольших расстояниях, не
дающих возможности оценить обстановку и предпринять маневр
для расхождения.
В связи с особенностями распространения звука в воздухе опреде-
ление направления на источник звука производится весьма приблизи-
тельно, а иногда даже ошибочно. Поэтому надо с большой осторожно-
стью подходить к оценке ситуации по звуковым сигналам. Следует
уменьшить ход до минимального и в тех случаях, когда сигнал услы-
шан на траверзе или несколько позади траверза, а также, если направ-
ление на другое судно не удалось определить.
Снижение скорости до минимальной в случаях, перечисленных
выше, позволяет увеличить время для оценки обстоятельств сближения,
а в случае внезапного появления другого судна на видимости предпри-
нять эффективные меры для предупреждения столкновения. Умень-
шение хода до необходимой величины следует производить согласно
Правилу 8 уверенно, поэтому лучше снизить скорость, застопорив
машины.
Изменение курса в рассматриваемых ситуациях, когда положение
и направление движения другого судна не определены, является оши-
бочным действием, так как может осложнить обстановку.
В некоторых случаях чрезмерного сближения целесообразно не
только остановить машины, а даже дать задний ход для остановки суд-
на. Такие обстоятельства складываются, если судно не использует ра-
диолокатор:
когда туманный сигнал услышан прямо по носу в непосредствен-
ной близости;
когда услышан туманный сигнал судна, стоящего на якоре, парус-
ного или судна, имеющего ограниченные возможности маневрирова-
ния;
когда из тумана появляется силуэт судна.
Судно, использующее радиолокатор, также должно дать задний
ход для остановки движения, если услышит туманный сигнал судна,
не наблюдаемого на экране.
Меры предосторожности при плавании в условиях ограниченной
видимости. Обеспечение безопасного плавания в условиях ограничен-
ной видимости требует принятия заблаговременных мер. При обнару-
жении полосы тумана, снежного заряда, дождя и т. п. вахтенный
штурман обязан:
доложить капитану о подходе к полосе ограниченной видимости;
подготовить и включить радиолокатор;
определить место судна наиболее точным способом;
проверить исправность и включить навигационные огни;
принять меры к уменьшению шумов на судне;
опробовать средства для подачи туманных сигналов;
подготовить к отдаче якоря, если глубины в районе плавания позво-
ляют отдать якорь;
предупредить вахту в машине о подходе к полосе тумана и возмож-
ности реверсов.
240
При подходе к полосе тумана на расстояние 2—3 мили или при
уменьшении дальности видимости до 2—3 миль и ниже, кроме пере-
численных мероприятий, необходимо:
уменьшить ход до необходимой величины;
начать подачу звуковых сигналов согласно МППСС;
выставить впередсмотрящего, предварительно проведя с ним инст-
руктаж о связи с мостиком;
организовать непрерывное радиолокационное наблюдение и веде-
ние радиолокационной прокладки (см. гл. XX).
§ 91. ПРАВИЛА ОТНОСИТЕЛЬНО ОГНЕЙ И ДНЕВНЫХ
СИГНАЛОВ
Часть С — Огни и знаки
Правило 20— Применение
(а) Правила этой части должны соблюдаться при любой погоде.
(Ь) Правила, относящиеся к огням, должны соблюдаться от захода до восхода
солнца, и в течение этого времени не должны выставляться другие огни,
кроме таких огней, которые не могут быть ошибочно приняты за огни, пред-
писанные этими Правилами, или ухудшить их видимость и отличительные
характеристики, или служить помехой для должного наблюдения.
(с) Огни, предписанные настоящими Правилами, должны, если они имеются
на судне, также выставляться от восхода до захода солнца в условиях огра-
ниченной видимости и могут выставляться при всех других обстоятельствах,
когда это будет сочтено необходимым.
(d) Правила, относящиеся к знакам, должны соблюдаться днем.
(е) Огни и знаки, предписанные этими Правилами, должны соответствовать тре-
бованиям приложения 1 к настоящим Правилам.
Все огни, которые суда должны нести в соответствии с МППСС,
принято называть навигационными огнями. Каждое судно обязано
иметь огни включенными от захода до восхода солнца независимо от
видимости и прозрачности атмосферы. Время включения и выключе-
ния навигационных огней записывается в судовой журнал.
В условиях ограниченной видимости огни могут быть обнаружены
раньше, чем силуэт самого судна. Поэтому МППСС требуют включе-
ния навигационных огней при ухудшении видимости и в светлое время
суток.
Расположение и технические характеристики огней и знаков при-
ведены в Приложении I к МППСС.
Устройство огней и конкретные места их установки определяются
Правилами Регистра СССР. На каждом судне должно быть организо-
вано систематическое наблюдение за техническим состоянием и исправ-
ностью огней. Особенно тщательно необходимо следить за огнями в
штормовую погоду. Вышедшие из строя огни должны быть немедлен-
но введены в действие или заменены запасными. Всякое вынужденное
нарушение МППСС в части несения огней обязывает судоводителя
принять особые меры предосторожности: уменьшить скорость, усилить
наблюдение, иметь наготове сигнальные средства для привлечения
внимания, держаться в стороне от путей встречных судов.
241
На судне не должно быть никаких огней, которые могли бы ухуд-
шить видимость навигационных огней или могли бы быть ошибочно
приняты за огйи, предписанные МППСС. Палубное оборудование не
должно заслонять навигационные огни. Цветные плафоны в судовых
помещениях не должны быть видимы с моря.
Судебная и арбитражная практика показывает, что судно, имею-
щее какое-либо упущение в несении навигационных огней, при столк-
новении в большинстве случаев признается виновным.
Правило 21 — Определения
(а) «Топовый огонь» представляет собой белый огонь, расположенный в диа-
метральной плоскости судна, освещающий непрерывным светом дугу гори-
зонта в 225° и установленный таким образом, чтобы светить от направле-
ния прямо по носу до 22,5° позади траверза каждого борта.
(Ь) «Бортовые огни» представляют собой зеленый огонь на правом борту и красный
огонь на левом борту; каждый из этих огней освещает непрерывным светом
дугу горизонта в 112,5° и установлен таким образом, чтобы светить от направ-
ления прямо по носу до 22,5° позади траверза соответствующего борта. На
судне длиной менее 20 м бортовые огни могут быть скомбинированы в одном
фонаре, выставляемом в диаметральной плоскости судна.
(с) «Кормовой огонь» представляет собой белый огонь, расположенный, насколь-
ко это практически возможно, ближе к корме судна, освещающий непрерыв-
ным светом дугу горизонта в 135° и установленный таким образом, чтобы
светить от направления прямо по корме до 67,5° в сторону каждого борта.
(d) «Буксировочный огонь» представляет собой желтый огонь, имеющий такие же
характеристики, как и «кормовой огонь», описанный в пункте (с) этого
Правила.
(е) «Круговой огонь» представляет собой огонь, освещающий непрерывным све-
том дугу горизонта в 360°.
(f) «Проблесковый огонь» представляет собой огонь, дающий проблески через ре-
гулярные интервалы с частотой 120 или более проблесков в минуту.
Правило 22 — Видимость огней
Огни, предписанные этими Правилами, должны иметь интенсивность,
указанную в разделе 8 Приложения I к этим Правилам, с тем чтобы огни были
видимы на следующих минимальных расстояниях:
(а) На судах длиной 50 м или более:
топовый огонь — 6 миль;
бортовой огонь — 3 мили;
кормовой огонь — 3 мили;
буксировочный огонь — 3 мили;
белый, красный, зеленый или желтый круговой огонь — 3 мили.
(Ь) На судах длиной 12 м и более, но менее 50 м;
топовый огонь — 5 миль, но если длина судна менее 20 м — 3 мили;
бортовой огонь — 2 мили;
кормовой огонь — 2 мили;
буксировочный огонь — 2 мили;
белый, красный, зеленый или желтый круговой огонь — 2 мили.
(с) На судах длиной менее 12 м:
топовый огонь — 2 мили;
бортовой огонь — 1 миля;
кормовой огонь — 2 мили;
буксировочный огонь — 2 мили;
белый, красный, зеленый или желтый круговой огонь — 2 мили.
(d) На малозаметных полупогруженных буксируемых судах или буксируемых
объектах;
белый круговой огонь — 3 мили.
242
Правило 23 — Суда с механическим двигателем на ходу
(а) Судно с механическим двигателем на ходу должно выставлять:
(i) топовый огонь впереди;
(ii) второй топовый огонь позади и выше переднего топового огня, однако
судно длиной менее 50 м не обязано, но может выставлять такой огонь;
(iii) бортовые огни;
(iV) кормовой огонь.
(Ь) Судно на воздушной подушке, находящееся в неводоизмещающем состоянии,
в дополнение к огням, предписанным пунктом (а) этого Правила, должно вы-
ставлять круговой проблесковый желтый огонь.
(с) (i) Судно с механическим двигателем длиной менее 12 м может вместо огней,
предписанных пунктом (а) этого Правила, выставлять белый круговой огонь
и бортовые огни;
(ii) судно с механическим двигателем длиной менее 7 м, имеющее макси-
мальную скорость не более 7 уз, может вместо огней, предписанных пунк-
том (а) этого Правила, выставлять белый круговой огонь и должно, если
это практически возможно, выставлять также бортовые огни;
(iii) топовый огонь или белый круговой огонь на судне с механическим дви-
гателем длиной менее 12 м может быть смещен относительно диаметраль-
ной плоскости судна, если его установка в диаметральной плоскости
практически невозможна; при этом бортовые огни должны быть скомби-
нированы в одном фонаре, установленном в диаметральной плоскости
судна или, насколько это практически возможно, близко к продольной
плоскости, в которой установлен топовый или белый круговой огонь.
Весь комплекс огней судна с механическим двигателем на ходу
обычно называют ходовыми огнями. Назначение ходовых огней:
дать возможность обнаружить судно в темное время с любого на-
правления;
показать, что обнаруженное судно является судном с механическим
двигателем на ходу;
предоставить возможность приблизительной оценки курсового уг-
ла обнаруженного судна и его размеров.
Суда на ходу должны нести ходовые огни независимо от того, име-
ют они движение относительно воды или не имеют.
В любом случае бортовые огни не должны располагаться впереди
переднего топового огня, а расстояние между красным и зеленым бор-
товыми огнями на судах длиной более 20 м должно примерно соответ-
ствовать ширине судна. Примерная схема расположения огней пока-
зана в приложении 3 на рис. 1 и 2.
Правило 24 — Суда, занятые буксировкой и толканием
(а) Судно с механическим двигателем, занятое буксировкой, должно выставлять:
(i) вместо огня, предписанного Правилом 23 (a) (i) или (a) (ii), два топовых
огня, расположенные по вертикальной линии. Если длина буксира, изме-
ренная от кормы буксирующего судна до кормы буксируемого, превышает
200 м—три таких огня;
(ii) бортовые огни;
(iii) кормовой огонь;
(iV) буксировочный огонь, расположенный по вертикальной линии над кормо-
вым огнем;
(V) ромбовидный знак на наиболее видном месте, если длина буксира пре-
вышает 200 м.
243
(b) Если толкающее судно й судно, толкаемое вперед, жестко соединены в сочле-
ненное судно, они должны рассматриваться как судно с механическим двига-
телем и выставлять огни, предписанные Правилом 23.
(с) Судно с механическим двигателем, толкающее вперед или буксирующее лагом
другое судно, должно, если оно не является частью сочлененного судна,
выставлять:
(i) вместо огня, предписанного Правилом 23 (a) (i) или (a) (ii), два топовых
огня, расположенные по вертикальной линии;
(ii) бортовые огни;
(iii) кормовой огонь.
(d) Судно с механическим двигателем, к которому применяются пункты (а) или
(с) этого Правила, должно также соблюдать Правило 23 (a) (ii).
(е) Буксируемое судно или буксируемый объект, кроме указанных в пункте
(g) этого Правила, должны выставлять:
(i) бортовые огни;
(ii) кормовой огонь;
(iii) ромбовидный знак на наиболее видном месте, если длина буксира пре-
вышает 200 м.
(f) Любое количество буксируемых лагом или толкаемых судов в группе должно
быть освещено как одно судно:
(i) судно, толкаемое вперед, если оно не является частью сочлененного
судна, должно выставлять в передней части бортовые огни;
(ii) судно, буксируемое лагом, должно выставлять кормовой огонь и в перед-
ней части — бортовые огни.
(g) Малозаметные полупогруженные буксирумое судно или буксируемый объект,
либо комбинация таких буксируемых судов или буксируемых объектов долж-
ны выставлять:
(i) при их ширине менее 25 м — один белый круговой огонь в передней части
или вблизи нее и такой же огонь в кормовой части или вблизи нее, кроме
«драконов», которые могут не выставлять огонь в передней части или
вблизи нее;
(ii) при их ширине 25 м или более — два дополнительных белых круговых
огня на боковых оконечностях или вблизи них;
(iii) при их длине более 100 м — дополнительные белые круговые огни
между огнями, предписанными подпунктами (i) и (ii), таким образом,
чтобы расстояние между огнями не превышало 100 м;
(iV) ромбовидный знак на кормовой оконечности последнего буксируемого
объекта либо вбилизи нее и, если длина буксира превышает 200 м, —
дополнительный ромбовидный знак, установленный на наиболее видном
месте впереди настолько, насколько это практически возможно.
(h) Если по какой-либо существенной причине буксируемое судно или буксируе-
мый объект не могут выставлять огни или знаки, предписанные пунктами
(е) или (g) этого Правила, должны быть приняты все возможные меры для того,
чтобы осветить буксируемое судно или буксируемый объект или по крайней
мере указать на присутствие такого судна или объекта.
(i) Если по какой-либо существенной причине судно, не занимающееся обычно
буксировочными операциями, не может показать огни, предписанные пунк-
тами (а) или (с) этого Правила, то в случае, когда оно занято буксировкой
другого судна, терпящего бедствие или нуждающегося в помощи, оно не обя-
зано выставлять эти огни. Все возможные меры должны быть приняты для
того, чтобы показать характер взаимосвязи между буксирующим и буксируе-
мым судами, как это установлено Правилом 36, в частности — осветить бук-
сирный трос.
Белые огни, которые суда несут в соответствии с Правилом 24 (а)
(i), принято называть буксирными огнями.Основная цель несения ука-
занных огней — предупреждение, что судно занято буксировкой и не
свободно в своих действиях при маневрировании. Буксирные огни ори-
ентируют встречные суда о длине состава при буксировке в кильва-
тер на буксирном тросе.
244
Буксирующее судно в МППСС не рассматривается как судно, ко-
торое не может уступить дорогу. Поэтому и буксирующие и букси-
руемые суда не освобождаются от соблюдения правил расхождения.
Однако все суда должны учитывать, что буксирующие суда находятся
в менее благоприятных условиях. При расхождении с ними необходи-
мо соблюдать особые меры предосторожности.
При толкании, когда суда жестко сочленены, т. е. диаметральная
плоскость толкача не меняет положения относительно диаметральной
плоскости толкаемых судов, МППСС рассматривает состав как судно
с механическим двигателем. При этом толкаемый состав несет огни
как одно судно с механическим двигателем.
Суда, занятые буксировкой и толканием, несут огни согласно Пра-
вилу 23 только на ходу, поэтому при постановке на якорь они должны
нести огни судна, стоящего на якоре.
Если судно при буксировке значительно ограничено в возможно-
сти отклониться со своего курса, то оно рассматривается как судно
ограниченное в возможности маневрировать и должно нести дополни-
тельно соответствующие огни (Правило 27с).
Схема расположения огней при буксировке приведена в прило-
жении 3 на рис. 3 и 4, а при толкании — на рис. 5.
Правило 25 — Парусные суда на ходу и суда на веслах
(а) Парусное судно на ходу должно выставлять:
(i) бортовые огни;
(ii) кормовой огонь.
(Ь) На парусном судне длиной менее 12 м огни, предписанные пунктом (а) этого
Правила, могут быть скомбинированы в одном фонаре, выставляемом на
топе или около топа мачты на наиболее видном месте.
с) Парусное судно на ходу может в дополнение к огням, предписанным пунк-
том (а) этого Правила, выставлять на топе или около топа мачты на наиболее
видном месте два круговых огня, расположенные по вертикальной линии,
верхний из которых должен быть красным, а нижний — зеленым, но эти
огни не должны выставляться вместе с комбинированным фонарем, разре-
шенным в соответствии с пунктом (Ь) этого Правила.
(d) (i) Парусное судно длиной менее 7 м, если это практически возможно, долж-
но выставлять огни, предписанные пунктами (а) или (Ь) этого Правила, но
если это судно их не выставляет, оно должно иметь наготове электрический
фонарик или зажженный фонарь с белым огнем, который должен заблаго-
временно выставляться для предупреждения столкновения.
(ii) Судно, идущее на веслах, может выставлять огни, предписанные этим
Правилом для парусных судов, но если оно их не выставляет, оно должно
иметь наготове электрический фонарик или зажженный фонарь с белым
огнем, который должен заблаговременно выставляться для предупрежде-
ния столкновения.
(е) Судно, идущее под парусом и в то же время приводимое в движение механичес-
кой установкой, должно выставлять впереди на наиболее видном месте знак
в виде конуса вершиной вниз.
Таким образом, парусное судно на ходу обязано нести кормовой
и бортовые отличительные огни (приложение 3, рис. 6). Эти огни па-
русное судно несет независимо от того, имеет оно ход относительно во-
ды или не имеет.
245
Дополнительные (пункт с) огни введены для облегчения опознания
парусных судов. Эти огни располагаются на топе фок-мачты и поэтому
в отличие от бортовых не могут закрываться парусами.
Если парусное судно двигается при помощи механического двига-
теля и парусов, то оно считается, с точки зрения МППСС, судном с
механическим двигателем. Ночью такое судно несет ходовые огни суд-
на с механическим двигателем, а днем поднимает сигнал согласно
пункту (е).
Правило 26 — Рыболовные суда
(а) Судно, занятое ловом рыбы, когда оно на ходу или на якоре, должно выстав-
лять только огни и знаки, предписанные этим Правилом.
(Ь) Судно, занятое тралением, т.е. протаскиванием драги или другого орудия
лова в воде, должно выставлять: ,
(i) два круговых огня, расположенные по вертикальной линии, верхний из
которых должен быть зеленым, а нижний — белым, или знак, состоящий
из двух конусов вершинами вместе, расположенных по вертикальной ли-
нии один над другим; судно длиной менее 20 м вместо этого знака может
выставлять корзину;
(ii) топовый огонь позади и выше зеленого кругового огня; судно длиной
менее 50 м не обязано, но может выставлять такой огонь;
(iii) если судно имеет ход относительно воды, то в дополнение к огням,
предписанным этим пунктом, — бортовые огни и кормовой огонь.
(с) Судно, занятое ловом рыбы, за исключением судов, занятых тралением, долж-
но выставлять:
(i) два круговых огня, расположенные по вертикальной линии, верхний из
которых должен быть красным, а нижний — белым, или знак, состоящий
из двух конусов вершинами вместе, расположенных по верктикальной
линии один над другим; судно длиной менее 20 м вместо этого знака
может выставлять корзину;
(ii) если выметанные снасти простираются в море по горизонтали более чем на
150 м от судна, то в направлении этих снастей — белый круговой огонь
или знак в виде конуса вершиной вверх;
(iii) если судно имеет ход относительно воды, то в дополнение к огням, пред-
писанным этим пунктом, — бортовые огни и кормовой огонь.
(d) Судно, занятое ловом рыбы вблизи других судов, занятых ловом рыбы, мо-
жет выставлять дополнительные сигналы, описанные в Приложении II
к этим Правилам.
(е) Судно, не занятое ловом рыбы, не должно выставлять огни и знаки, предпи-
санные этим Правилом; оно должно выставлять только огни и знаки, предпи-
санные для судов соответствующей длины.
Огни и знаки судна, занятого ловом рыбы (приложение 3, рис. 7—
10), показывают что данное судно лишено возможности свободно ма-
неврировать, а часть водного пространства около судна занята ору-
диями лова.
МППСС делят все рыболовные суда на две группы. Первая груп-
па — суда, занятые тралением. Эти суда производят лов рыбы, имея
движение относительно воды, а их снасти располагаются за кормой
на сравнительно небольшом расстоянии. Вторая группа объединяет
все рыболовные суда, за исключением судов, занятых тралением. К
ним относятся суда, производящие лов рыбы сетями, ярусными крюч-
ковыми снастями и т. п. В этом случае суда имеют ход, как правило,
только во время выметывания снастей, а снасти могут простираться
на очень большие расстояния от судна (до двух и более миль). Ночью
на снастях обычно выставляют светящиеся буйки.
246
Судоводители, планируя маневр для расхождения с рыболовным
судном, должны учитывать указанное обстоятельство, поэтому Пра-
вило 26 устанавливает специальные огни для каждой группы судов.
Рыболовное судно считается занятым ловом рыбы, если оно произ-
водит выметывание снастей за борт, имеет снасти или часть снастей в
воде, выбирает снасти на борт.
К судам, занятым ловом рыбы, относятся также суда, которые
производят лов крабов, креветок, добычу водорослей и т. п., когда они
применяют снасти, стесняющие движение судна.
Зверобойные, китобойные суда, суда, занятые ловом рыбы букси-
руемыми крючковыми снастями, а также суда, обеспечивающие ра-
боту промысловых судов, не считаются рыболовными судами. Ука-
занные суда должны нести огни на общих основаниях со всеми судами.
Судно, занятое ловом рыбы, как на ходу, так и на якоре несет толь-
ко огни, предписанные Правилом 26. Бортовые и кормовой огонь
должны включаться только на ходу, когда судно имеет ход относитель-
но воды.
Рыболовное судно, у которого снасти зацепились за какое-либо
подводное препятствие, выставляет огни судна, занятого ловом рыбы,
не имеющего хода относительно воды. Если вблизи находятся дру-
гие рыболовные суда, то указанное судно может дополнительно пока-
зывать два красных огня, расположенных по вертикальной линии,
согласно Приложению II к МППСС.
Приложение II
Дополнительные сигналы для рыболовных судов, занятых ловом рыбы вбли-
зи друг от друга
1. Общие указания
Огни, указанные в этом Приложении, если они выставляются в соответствии
с Правилом 26 (d), должны быть расположены на наиболее видном месте на рас-
стоянии не менее 0,9 м в сторону от огней, предписанных Правилом 26 (b) (i)
и (с) (i), и ниже этих огней. Эти огни должны быть круговыми и видимыми на
расстоянии не менее 1 мили, но на меньшее расстояние, чем огни, предписанные
настоящими Правилами для судов, занятых ловом рыбы.
2. Сигналы для судов, занятых тралением
(а) Суда, занятые тралением независимо от того, используют ли они донные или
пелагические снасти, могут выставлять:
(i) когда они выметывают снасти — два белых огня, расположенные по верти-
кальной линии;
(ii) когда они выбирают снасти — белый огонь над красным, расположенные
по вертикальной линии;
(iii) когда снасть зацепилась за препятствие — два красных огня, распо-
ложенные по вертикальной линии.
(Ь) Каждое судно, занятое парным тралением, может показывать:
(i) ночью — луч прожектора, направляемый вперед и в сторону другого
судна этой пары;
(ii) когда суда выметывают или выбирают снасти или когда их снасти за-
цепились за препятствие — огни, предписанные пунктом 2 (а) этого
Приложения.
247
3. Сигналы для судов, производящих лов рыбы кошельковыми неводами
Суда, производящие лов рыбы кошельковыми неводами, могут выставлять ,
два желтых огня, расположенные по вертикальной линии. Эти огни должны по-
переменно давать проблески каждую секунду, причем продолжительность света
и затемнения должна быть одинаковой. Эти огни могут быть выставлены только
тогда, когда движение судна затруднено его рыболовными снастями.
Правило 27 — Суда, лишенные возможности управляться
или ограниченные в возможности маневрировать
(а) Судно, лишенное возможности -управляться, должно выставлять:
(i) два красных круговых огня, расположенные по вертикальной линии на
наиболее видном месте;
(ii) два шара или подобных знака, расположенные по вертикальной линии
на наиболее видном месте;
(iii) если судно имеет ход относительно воды, то в дополнение к огням, пред-
писанным этим пунктом, — бортовые огни и кормовой огонь.
(Ь) Судно, ограниченное в возможности маневрировать, за исключением судна,
занятого работами по устранению минной опасности, должно выставлять:
(i) три круговых огня, расположенные по вертикальной линии на наиболее
видном месте. Верхний и нижний из этих огней должны быть красными,
а средний — белым;
(ii) три знака, расположенные по вертикальной линии на наиболее видном
месте. Верхний и нижний из этих знаков должны быть шарами, а средний —
ромбом;
(iii) если судно имеет ход относительно воды, то в дополнение к огням,
предписанным подпунктом (i), — топовый огонь или огни, бортовые огни
и кормовой огонь;
(iV) если судно стоит на якоре, то в дополнение к огням или знакам, пред-
писанным подпунктами (i) и (ii), — огонь или знак, предписанные Прави-
лом 30.
(с) Судно с механическим двигателем, занятое такой буксировочной операцией,
которая значительно ограничивает возможность буксирующего и буксируе-
мого судов отклониться от своего курса, должно в дополнение к огням или
знакам, предписанным Правилом 24 (а), выставлять огни или знаки, предпи-
санные подпунктами (i) и (ii) пункта (Ь) настоящего Правила.
(d) Судно, занятое дноуглубительными работами, или подводными операциями,
когда оно ограничено в возможности маневрировать, должно выставлять ог-
ни и знаки, предписанные подпунктами (i), (ii) и (iii) пункта (b) этого Правила,
и, если существует препятствие для прохода другого судна, должно
дополнительно выставлять:
(i) два красных круговых огня или два шара, расположенные по вертикаль-
ной линии, — для указания стороны, на которой существует препятствие;
(ii) два зеленых круговых огня или два ромба, расположенные по вертикаль-
ной линии, — для указания стороны, с которой может пройти другое
судно;
(iii) если оно стоит на якоре, — огни или знаки, предписанные этим пунктом,
вместо огней или знаков предписанных Правилом 30.
(е) Если размеры судна, занятого водолазными работами, практически не поз-
воляют ему выставлять все огни и знаки, предписанные пунктом (d) этого
Правила, оно должно выставлять:
(i) три круговых огня, расположенные по вертикали на наиболее видном
месте. Верхний и нижний из этих огней должны быть красными, а средний
огонь белым;
(ii) флаг А по Международному своду сигналов, изготовленный в виде
жесткого щита высотой не менее 1 м. Должны быть приняты меры к тому,
чтобы обеспечить круговую видимость этого флага.
(f) Судно, занятое работами по устранению минной опасности, в дополнение к
огням, предписанным для судна с механическим двигателем Правилом 23,
248
либо к огням или знаку, предписанным для судна на якоре Правилом 30 со-
ответственно, должно выставлять три зеленых круговых огня или три шара.
Один из этих огней или знаков должен выставляться вблизи топа фок-мачты,
а два других — на ноках фока-рея. Эти огни или знаки указывают, что дру-
гому судну опасно приближаться к судну, занятому работами по устранению
минной опасности, на расстояние менее 1000 м.
(g) Суда длиной менее 12 м, за исключением судов, занятых водолазными рабо-
тами, не обязаны выставлять огни и знаки, предписанные этим Правилом.
(h) Сигналы, предписанные этим Правилом, не являются сигналами судов, тер-
пящих бедствие и требующих помощи. Такого рода сигналы приведены
в Приложении IV к настоящим Правилам.
Таким образом, судно, лишенное возможности управляться, ког-
да оно не имеет хода, независимо от размеров несет только два крас-
ных огня подпункт (i) пункта (а), а днем два шара. Если же судно име-
ет движение относительно воды, то ночью включает дополнительно
бортовые и кормовой огонь. При постановке на якорь судно, лишен-
ное возможности управляться, выставляет только якорные огни, а
днем поднимает шар (Правило 30).
Судно, ограниченное в возможности маневрировать, когда не име-
ет хода, несет независимо от размеров только красный, белый и крас-
ный огни на одной вертикали. Исключением являются суда, занятые
тралением мин и сложной буксировкой, которые выставляют также
бортовые, топовые или буксирные огни и кормовой огонь.
Все суда, ограниченные в возможности маневрировать, когда они
имеют ход, включают топовые, бортовые огни и кормовой огонь. При
постановке на якорь суда, занятые тралением мин, сложной букси-
ровкой, обеспечением взлета или приема летательных аппаратов, а
также пополнением снабжения, передачей людей или груза, включают
только якорные огни. Остальные огни они выключают, а днем несут
только один шар.
Суда, занятые работой с навигационным знаком, кабелем или тру-
бопроводом, а также океанографическими и гидрографическими ра-
ботами, при постановке на якорь выставляют якорные огни в допол-
нение к красному, белому и красному огню на одной вертикали. Днем
такие суда несут знаки судна, ограниченного в возможности маневри-
ровать, и якорный шар.
Судно, занятое дноуглубительными или подводными работами, при
стоянке на якоре включает якорные огни только тогда, когда не су-
ществует препятствий для прохода другого судна и не выставлены со-
ответствующие огни подпункты (i) и (ii) пункта (d).
Схема расположения огней судна, лишенного возможности управ-
ляться, показана в приложении 3 на рис. 17 и 18, а судов, ограничен-
ных в возможности маневрировать, — на рис. 11—16.
Правило 28 — Суда, стесненные своей осадкой
Судно, стесненное своей осадкой, в дополнение к огням, предписанным Пра-
вилом 23 для судов с механическим двигателем, может выставлять на наиболее
видном месте три красных круговых огня, расположенные по вертикальной ли-
нии или цилиндр.
Схема расположения огней показана на рис. 19 приложения 3.
249
Правило 29 — Лоцманские суда
(а) Судно при исполнении лоцманских обязанностей должно выставлять:
(i) на топе мачты или вблизи от него — два круговых огня, расположенные
по вертикальной линии; верхний из этих огней должен быть белым, а ниж-
ний — красным;
(ii) если оно на ходу, то дополнительно — бортовые огни и кормовой огонь.
(iii) если оно стоит на якоре, то в дополнение к огням, предписанным под-
пунктом (i),— якорный огонь, огни или знаки, предписанные Правилом
30 для судов на якоре.
(Ь) Лоцманское судно, не занятое исполнением лоцманских обязанностей, долж-
но выставлять огни или знаки, предписанные для подобного судна соответ-
ствующей длины.
Лоцманское судно рассматривается при исполнении лоцманских
обязанностей, если оно:
доставляет лоцмана на судно;
снимает лоцмана с судна;
стоит на якоре, дрейфует или крейсирует с лоцманом на борту в
ожидании подхода судов;
осуществляет проводку судна без высадки лоцмана (лидирует).
В остальных случаях лоцманское судно должно нести огни, пре-
дусмотренные для всех судов.
Лоцманское судно несет огни, предписанные ему Правилом 29,
в том числе и бортовые отличительные (приложение 3, рис. 20), неза-
висимо от того, имеет оно ход относительно воды или не имеет.
Днем исполнение судном лоцманских обязанностей, показывается
сигналом по МСС — подъемом флага Н (хотэл).
Правило 30 — Суда на якоре и суда на мели
(а) Судно на якоре должно выставлять на наиболее видном месте:
(i) в носовой части судна — белый круговой огонь или шар;
(ii) на корме или вблизи от нее и ниже огня, предписанного подпунктом (i),—
белый круговой огонь.
(Ь) Судно длиной менее 50 м может выставлять на наиболее видном месте белый
круговой огонь вместо огней, предписанных пунктом (а) этого Правила.
(с) Судно на якоре может, а судно длиной более 100 м должно использовать так-
же имеющиеся рабочие или другие равноценные огни для освещения своих
палуб.
(d) Судно на мели должно выставлять огни, предписанные пунктами (а) или (Ь)
этого Правила, и, кроме того, на наиболее видном месте:
(i) два красных круговых огня, расположенные по вертикальной линии;
(ii) три шара, расположенные по вертикальной линии.
(е) Судно длиной менее 7 м на якоре, или на мели, когда оно не находится в уз-
ком проходе, на фарватере, месте якорной стоянки или вблизи от них, а так-
же в районах, где обычно плавают другие суда, не обязано выставлять огни
или знаки, предписанные пунктами (а), (Ь) или (d) этого Правила.
(f) Судно длиной менее 12 м на мели не обязано выставлять огни и знаки, пред-
писанные подпунктами (i) и (ii) пунктами (d) этого Правила.
Правило 30 распространяется на все суда, стоящие на якоре, за
исключением судов, занятых ловом рыбы. Такие суда на якоре несут
огни, предписанные им Правилом 26. Суда, занятые дноуглубитель-
ными и подводными работами, если существует препятствие для про-
хода других судов, также не несут якорных огней, а несут огни в со-
ответствии с Правилом 27 подпункты (i) и (ii) пункта (d).
250
Судно считается стоящим на якоре, если оно стоит на своем якоре,
стоит на швартовной бочке или бриделе, ошвартовано к судну, стояще-
му на якоре (бочке), при этом имеет прочную связь с грунтом и надеж-
но удерживается на месте.
Включение палубного освещения является обязательным для су-
дов длиной более 100 м, однако включение его, так же как и
других огней, даже многочисленных и ярких, не освобождает судно
от несения якорных огней.
Судно, ошвартованное к причалу с отдачей якоря, не обязано по
смыслу МППСС включать якорные огни. Однако несение якорных ог-
ней во многих случаях целесообразно. Обычно портовые правила обя-
зывают суда, стоящие у причалов, нести специальные огни или осве-
щать наружный борт для ориентировки других судов.
Расположение огней судов, стоящих на якоре и на мели, показано
на рис. 21 и 22, приложения 3.
Правило 31 — Гидросамолеты
Если гидросамолет практически не может выставлять огни или знаки, кото-
рые по своим характеристикам или расположению отвечали бы требованиям Пра-
вил этой части, он должен выставлять огни и знаки, которые по своим характе-
ристикам и расположению были бы настолько близки к требованиям Правил,
насколько это возможно.
Из Правила 31 следует, что гидросамолет несет такие же огни, как
и суда, при соответствующих обстоятельствах. Обычно топовый огонь
выставляется в передней части самолета, а бортовые — на оконечно-
стях крыльев. Поэтому высота топового огня над бортовыми у гидро-
самолета, как правило, значительно меньше расстояния между борто-
выми огнями.
§ 92. РАСПОЛОЖЕНИЕ
И ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ ОГНЕЙ И ЗНАКОВ
Расположение огней, их цветовые характеристики, сила света, го-
ризонтальные и вертикальные секторы освещения, размеры знаков
даны в Приложении I к МППСС. Ниже приводятся пункты Приложе-
ния I, которые необходимо знать судоводителю.
Приложение I (извлечение)
Расположение и технические характеристики огней и знаков
1. Определение
Термин «высота над корпусом» означает высоту над самой верхней непрерыв-
ной палубой. Эта высота должна измеряться от точки, расположенной на верти-
кали под местом установки огня.
2. Вертикальное расположение огней и расстояния между ними
(а) На судне с механическим двигателем длиной 20 м или более топовые огни
должны быть расположены следующим образом:
(i) передний топовый огонь, или если имеется только один топовый огонь,
то этот огонь — на высоте не менее 6 м над корпусом, а если ширина судна
251
превышает б м, то на высоте над корпусом не менее этой ширины, однако
нет необходимости, чтобы этот огонь находился на высоте более 12 м над
корпусом;
(ii) если судно несет два топовых огня, то задний из них должен быть по
меньшей мере на 4,5 м выше по вертикальной линии, чем передний огонь. ’
(Ь) Вертикальное расстояние между топовыми огнями судов с механическим дви-
гателем, должно быть таким, чтобы при всех нормальных условиях диффе-
рента задний огонь был виден выше переднего и раздельно от него на рас-
стоянии 1000 м от форштевня, если смотреть от уровня моря.
(с) Топовый огонь судна с механическим двигателем 12 м и более, но менее 20 м
должен быть расположен на высоте не менее 2,5 м над планширем.
(d) Судно с механическим двигателем длиной менее 12 м может нести самый
верхний огонь на высоте менее 2,5 м над планширем.
Однако если оно несет топовый огонь дополнительно к бортовым и кормовому,
то такой топовый огонь должен быть расположен по меньшей мере на 1 м выше
бортовых огней.
(е) Один из двух или трех топовых огней, предписанных для судна с механи-
ческим двигателем, когда оно буксирует или толкает другое судно, должен
быть расположен в том же месте, что и передний или задний топовый огонь;
в случае если он установлен на задней мачте, то самый нижний из задних
топовых огней должен быть по меньшей мере на 4,5 м выше по вертикали,
чем передний топовый огонь.
(f) (i) Топовый огонь или огни, предписанные Правилом 23 (а), должны быть рас-
положены таким образом, чтобы они были отчетливо видны над всеми дру-
гими огнями и конструкциями, за исключением случаев, описанных в
подпункте (ii);
(ii) когда круговые огни, предписанные Правилами 27 (b) (i) или 28, прак-
тически невозможно выставить ниже топовых огней, они могут быть вы-
ставлены над задним топовым огнем (огнями) или на высоте между перед-
ним топовым огнем (огнями) и задним топовым огнем (огнями); в послед-
нем случае должно обеспечиваться выполнение требований пункта 3 (с)
настоящего Приложения.
(g) Бортовые огни судна с механическим двигателем должны быть расположены
на высоте над корпусом не более чем три четверти высоты переднего топово-
го огня. Они не должны располагаться настолько низко, чтобы их видимости
мешали палубные огни.
(h) Бортовые огни, если они в комбинированном фонаре и когда их несет судно с
механическим двигателем длиной менее 20 м, должны быть расположены не
менее чем на 1 м ниже топового огня.
(i) В тех случаях, когда Правила предписывают, чтобы судно несло два или три
огня по вертикальной линии, расстояния между огнями должны быть сле-
дующими:
(i) на судне длиной 20 м и более расстояние между такими огнями должно
быть не менее 2 м и нижний из них должен быть расположен на высоте не
менее 4 м над корпусом; это последнее требование не распространяется
на кормовой огонь, когда судно несет кормовой и буксировочный огни
одновременно;
(ii) на судне длиной менее 20 м расстояние между такими огнями должно
быть не менее 1 м и нижний из них должен быть на высоте не менее 2 м над
корпусом, это последнее требование не распространяется на кормовой
огонь, когда судно несет кормовой и буксировочный огни одновременно;
(iii) если судно несет три огня, то они должны располагаться на равных рас-
стояниях друг от друга.
(j) Нижний из двух круговых огней, предписанных для судна, занятого ловом
рыбы, должен быть расположен над бортовыми огнями на высоте, не мень-
шей, чем двойное расстояние по вертикали между этими круговыми огнями.
(к) Когда судно выставляет два якорных огня, то носовой якорный огонь пред-
писанный Правилом 30 (a) (i) должен быть выше кормового не менее чем на
4,5 м. На судне длиной 50 м или более носовой якорный огонь должен быть
расположен на высоте не менее 6 м над корпусом.
252
3. Горизонтальное расположение огней и расстояния между ними
(а) Если для судна с механическим двигателем предписаны два топовых огня,
то горизонтальное расстояние между ними должно быть не менее половины
длины судна, однако нет необходимости, чтобы оно превышало 100 м. Пе-
редний огонь должен быть расположен от форштевня на расстоянии, не пре-
вышающем четверти длины судна.
(Ь) На судне с механическим двигателем длиной 20 м или более бортовые огни
не должны располагаться перед передним топовым огнем. Они должны быть
расположены на бортах или вблизи бортов судна.
(с) Когда огни, предписанные Правилами 27 (b) (i) или 28, располагаются на
высоте между передним топовым огнем (огнями) и задним топовым огнем
(огнями), эти круговые огни должны быть вынесены на расстояние не менее
2 м от диаметральной плоскости судна.
4. Расположение информационно-указательных огнен и знаков на рыбо-
ловных судах и судах, занятых дноуглубительными или подводными ра-
ботами
(а) Огонь, предписанный Правилом 26 (с) (ii) для указания направления вы-
метанных снастей с судна, занятого ловом рыбы, должен быть расположен на
расстоянии не менее 2 м и не более 6 м по горизонтали от двух красного и бе-
лого круговых огней, предписанных Правилом 26 (с) (i), и при этом указанный
огонь должен быть расположен не выше белого и не ниже бортовых огней.
(Ь) Огни и знаки судна, занятого дноуглубительными или подводными работами,
предписанные Правилом 27 (d) (i) и (ii) для указания стороны, на которой
существует препятствие, и (или) стороны, с которой может безопасно пройти
другое судно, должны быть расположены на максимально возможном удале-
нии по горизонтали, но ни в коем случае не находиться на расстоянии менее
2 м от огней и знаков, предписанных Правилом 27 (b) (i) и (ii). Верхний из
этих огней или знаков ни в коем случае не должен быть расположен выше
нижнего из трех огней или знаков, предписанных Правилом 27 (b) (i) и (ii).
5. Горизонтальные секторы
(a) (i) Установленные на судне бортовые огни должны обеспечивать в направле-
нии по носу минимальную требуемую силу света. Эта сила света должна
уменьшаться так, чтобы в пределах от 1° до 3° за границами установленных
секторов свет практически исчезал;
(ii) минимальная требуемая сила света кормовых, топовых и бортовых огней
должна обеспечиваться по дуге горизонта в пределах, предписанных Пра-
вилом 21 секторов, не доходя 5° до границы сектора в направлении 22,5°
позади траверза. Далее сила света может уменьшаться до 50% на гра-
нице сектора; затем она должна постепенно уменьшаться с тем, чтобы в
пределах 5° за границами предписанных секторов свет практически ис-
чезал.
(Ь) Круговые огни должны быть расположены таким образом, чтобы их не за-
темняли мачты, стеньги или конструкции в пределах угловых секторов более
6°. Это требование не распространяется на якорные огни, которые нет необ-
ходимости выставлять на чрезмерной высоте над корпусом.
§ 93. ЗВУКОВЫЕ И СВЕТОВЫЕ СИГНАЛЫ СУДОВ
Часть Д — звуковые и световые сигналы
Правило 32 — Определения
(а) Слово «свисток» означает любое звукосигнальное устройство, могущее
подавать предписанные звуки и соответствующее требованиям Приложе-
ния III к настоящим Правилам.
253
(b) Термин «короткий звук» означает звук продолжительностью около 1 с.
(с) Термин «продолжительный звук» означает звук продолжительностью от 4
до 6 с.
Правило 33 — Оборудование для подачи звуковых сигналов
(а) Судно длиной 12 м или более должно быть снабжено свистком и колоколом,
а судно длиной 100 м и более должно, кроме того, быть снабжено гонгом,
тон и звучание которого не могли бы быть приняты за звук колокола. Свисток,
колокол и гонг должны соответствовать требованиям Приложения III к
настоящим Правилам. Колокол и (или) гонг могут быть заменены другими
устройствами, имеющими такие же соответствующие звуковые характери-
стики, причем всегда должна быть предусмотрена возможность подачи предпи-
санных сигналов вручную.
(Ь) Судно длиной менее 12 м не обязано иметь звукосигнальные устройства, пред-
писанные пунктом (а) этого Правила, но если такое судно не имеет их, то оно
должно быть снабжено другими средствами подачи эффективного звукового
сигнала.
Требование Правила 33 распространяется на все суда, включая
парусные и несамоходные суда. Технические характеристики оборудо-
вания для подачи звуковых сигналов даны в Приложении III к МППСС.
Чтобы обеспечить достаточно большое разнообразие характеристик
сигналов, основная частота звучания свистков должна различаться в
зависимости от длины судна. Суда длиной 200 м и более должны пода-
вать самые низкие (70—200 Гц) сигналы. Вторая группа судов длиной
75—200 м подает сигналы частотой звучания 130—350 Гц. Суда длиной
менее 75 м подают самые высокие (250—700 Гц) сигналы.
Сила звука свистка должна быть такова, чтобы обеспечивать с
90%-ной вероятностью в условиях спокойной атмосферы и среднего
уровня шума на судне в месте прослушивания следующие дальности
слышимости:
на судах длиной 200 м и более — 2 мили;
на судах длиной 75—200 м — 1,5 мили;
на судах длиной 20—75 м — 1 миля;
на судах длиной менее 20 м — 0,5 мили.
Фактическая дальность слышимости сигналов может значительно
отличаться от приведенных данных в зависимости от условий распрост-
ранения звука и уровня шумов на судне.
Колокол на судах длиной более 20 м должен иметь раструб диамет-
ром не менее 300 мм.
Правило 34 — Сигналы маневроуказания и предупреждения
(а) Когда суда находятся на виду друг у друга, то судно с механическим двига-
телем на ходу, маневрируя так, как это разрешается или требуется настоя-
щими Правилами, должно показать свой маневр сигналами, подаваемыми
свистком, следующим образом:
один короткий звук означает «Я изменяю свой курс вправо»;
два коротких звука означают «Я изменяю свой курс влево»;
три коротких звука означают «Мои движители работают на задний ход».
(Ь) Судно может сопровождать звуковые сигналы, предписанные пунктом (а)
этого Правила, световыми сигналами, повторяемыми в течение всего маневра;
(i) эти световые сигналы должны иметь следующее значение:
один проблеск означает «Я изменяю свой курс вправо»;
254
два проблеска означают «Я изменяю свой курс влево»;
три проблеска означают «Мои движители работают на задний ход»;
(ii) продолжительность каждого проблеска должна быть около 1 с, интервал
между проблесками — около 1 с, интервал между последовательными
сигналами — не менее 10 с;
(iii) используемый для подачи такого сигнала огонь, если он установлен,
должен быть белым круговым огнем, видимым на расстоянии не менее
5 миль, и должен соответствовать требованиям Приложения I к настоя-
щим Правилам.
(с) Когда суда находятся на виду друг у друга в узком проходе или на фарвате-
ре, то:
(i) судно, намеревающееся обогнать в соответствии с Правилом 9 (е) (i)
другое судно, должно показать свое намерение следующими сигналами,
подаваемыми свистком:
два продолжительных звука и вслед за ними один короткий звук,
которые означают «Я намереваюсь обогнать вас по правому борту»;
два продолжительных звука и вслед за ними два коротких звука, ко-
торые означают «Я намереваюсь обогнать вас по левому борту»;
(ii) судно, которое намереваются обогнать, должно, действуя в соответствии
с Правилом 9 (е) (i), подтвердить свое согласие следующим сигналом,
подаваемым свистком в указанной последовательности:
один продолжительный, один короткий, один продолжительный и
один короткий звук.
(d) Когда суда, находящиеся на виду друг у друга сближаются и по какой-либо
причине одно из них не может понять намерений или действий другого судна
или сомневается в том, предпринимает ли это другое судно достаточное дейст-
вие для предупреждения столкновения, оно должно немедленно сообщить об
этом подачей по меньшей мере пяти коротких и частых звуков свистком.
Такой сигнал может сопровождаться световым сигналом, состоящим по мень-
шей мере из пяти коротких и частых проблесков.
(е) Судно, приближающееся к изгибу или к такому участку прохода или фарва-
тера, где другие суда могут быть не видны из-за наличия препятствий, долж-
но подавать один продолжительный звук. Любое приближающееся судно,
находящееся в пределах слышимости за изгибом или препятствием, должно
отвечать на такой сигнал одним продолжительным звуком.
(f) Если на судне свистки установлены на расстоянии более 100 м друг от друга,
то для подачи сигналов маневроуказания и предупреждения должен ис-
пользоваться только один свисток.
Подача звуковых сигналов Правилом 34 предусмотрена для судов,
находящихся на визуальной видимости. Исключением является преду-
предительный сигнал при подходе к изгибу узкости, который может
подаваться, когда другие суда не видны. Подача сигналов согласно
рассматриваемому Правилу в условиях ограниченной видимости, когда
суда визуально не наблюдают друг друга, является нарушением
МППСС.
Парусное судно при изменении курса не подает сигналов согласно
пункту (а).
Несмотря на то что МППСС предусматривает подачу звуковых сиг-
налов при выполнении маневра разрешаемого Правилами, сигналы
маневроуказания надо подавать во всех случаях, когда информация о
маневрировании судна может быть полезной для других судов при
обеспечении безопасности плавания. Поэтому противоречащие МППСС
маневры или изменения курса по навигационным соображениям необ-
ходимо также показывать звуковыми сигналами.
Дача заднего хода всегда должна сопровождаться звуковым сигна-
лом, который определяется началом работы машин на задний ход.
255
Звуковой сигнал об изменении курса подается одновременно с
началом маневра независимо от величины изменения курса. Очень
важно, чтобы такой сигнал означал фактический поворот судна, а не
факт перекладки руля.
Большое расстояние между судами, которые находятся в видимости
друг друга, не является основанием для невыполнения требований о
подаче звуковых сигналов. Если суда находятся на виду друг у друга,
то звуковой сигнал необходимо подавать при любом расстоянии между
ними. Важное значение при этом имеет световой сигнал, которым мо-
жет сопровождаться подача звукового сигнала. Пренебрежение ис-
пользованием сигнала для привлечения внимания служит основанием
для обвинения судоводителя в непринятии всех мер, чтобы избежать
столкновения. Если другое судно не предпринимает необходимых мер
для избежания столкновения, следует продолжать подачу звукового
сигнала для привлечения внимания и показывать другие сигналы сог-
ласно Правилу 36.
Кроме звуковых сигналов, предусмотренных Правилом 34, специ-
альные международные звуковые и световые сигналы употребляются
для связи между ледоколом и проводимыми судами. В портовых водах
СССР действуют также правила сигнализации между буксирующими и
буксируемыми судами. Описание упомянутых сигналов приводится в
«Общих правилах морских торговых и рыбных портов Союза ССР»
и в Извещении мореплавателям № 1.
Правило 35 — Звуковые сигналы при ограниченной видимости
В районах ограниченной видимости или вблизи таких районов днем или но-
чью сигналы, предписанные этим Правилом, должны подаваться следующим об-
разом:
(а) Судно с механическим двигателем, имеющее ход относительно воды, должно
подавать через промежутки не более 2 мин один продолжительный звук.
(Ь) Судно с механическим двигателем на ходу, но остановившееся и не имеющее
хода относительно воды, должно подавать через промежутки не более 2 мин
два продолжительных звука с промежутком между ними около 2 с.
(с) Судно, лишенное возможности управляться или ограниченное в возможности
маневрировать, судно, стесненное своей осадкой, парусное судно, судно,
занятое ловом рыбы и судно, буксирующее или толкающее другое судно,
должны вместо сигналов, предписанных пунктами (а) или (Ь) этого Правила,
подавать через промежутки не более 2 мин три последовательных звука, а
именно — один продолжительный и вслед за ним два коротких.
<d) Судно, занятое ловом рыбы на якоре, и судно, ограниченное в возможно-
сти маневрировать, выполняющее свою работу на якоре, должны вместо сиг-
налов, предписанных пунктом (g) этого Правила, подавать звуковой сигнал,
предписанный пунктом (с) этого Правила.
(е) Буксируемое судно, а если буксируется больше одного судна, то последнее
из них, если на нем находится команда, должно через промежутки не более
2 мин подавать четыре последовательных звука, а именно—один продолжи-
тельный и вслед за ним три коротких. По возможности этот сигнал должен
быть подан немедленно после сигнала буксирующего судна.
(f) Если толкающее судно и судно, толкаемое вперед, жестко соединены в сочле-
ненное судно, они должны рассматриваться как судно с механическим дви-
гателем и подавать сигналы, предписанные пунктами (а) или (Ь) этого Пра-
вила.
(g) Судно на якоре должно через промежутки не более 1 мин учащенно звонить
в колокол в течение приблизительно 5 с. На судне длиной 100 м или более
256
этот сигнал колоколом должен подаваться на носовой части и немедленно
вслед за ним на кормовой части — учащенный сигнал гонгом в течение при-
близительно 5 с. Судно на якоре может для предупреждения приближаю-
щихся судов о своем местонахождении и о возможности столкновения до-
полнительно подавать три последовательных звука свистком, а именно —
один короткий, один продолжительный и один короткий.
(h) Судно на мели должно подавать сигнал колоколом и, если требуется, гонгом,
как это предписано пунктом (g) этого Правила, и дополнительно подавать
три отдельных отчетливых удара в колокол непосредственно перед каждым
учащенным звоном в колокол и после него. Судно на мели может дополни-
тельно подавать соответствующий сигнал свистком.
(i) Судно длиной менее 12 м не обязано подавать вышеупомянутые сигналы, но
если оно их не подает, то оно должно подавать другой эффективный звуковой
сигнал через промежутки не более 2 мин.
(j) Лоцманское судно,’когда оно находится при исполнении своих лоцманских
обязанностей, в дополнение к сигналам, предписанным пунктами (а), (Ь) или
(g) этого Правила, может подавать опознавательный сигнал, состоящий из
четырех коротких звуков.
Звуковые сигналы позволяют в условиях ограниченной видимости
установить присутствие встречного судна, род движителей, возмож-
ность маневрирования и его состояние (на ходу, на якоре, на мели).
На распространение звука влияют различные географические и ме-
теорологические факторы. Поэтому направление на встречное судно и
расстояние до него по звуковым сигналам определяется весьма
приближенно. Отсутствие слышимости туманных сигналов не явля-
ется доказательством отсутствия вблизи встречных судов.
В МППСС нет указания о минимальной видимости, при которой сле-
дует подавать туманные сигналы. Морская практика считает, что при
уменьшении видимости до 2—3 миль подача туманных сигналов необ-
ходима. Это расстояние является минимальной дальностью видимости
бортовых огней и примерно соответствует дальности слышимости зву-
кового сигнала.
Подачу сигналов следует начинать на подходе к полосе ограничен-
ной видимости заблаговременно на расстоянии не менее 2—3 миль,
учитывая возможное движение судов в полосе тумана.
Исходя из тех же соображений туманные сигналы необходимо по-
давать и в случае плавания вдоль полосы тумана.
Время начала подачи сигналов и их характер должны обязательно
записываться в судовом журнале.
Промежутки времени между туманными сигналами в МППСС ука-
заны максимальные. В некоторых случаях, особенно когда установ-
лено присутствие другого судна, рекомендуется подавать сигналы ча-
ще.
В районах интенсивного судоходства следует согласовывать мо-
менты подачи своих сигналов с моментами подачи сигналов другими
судами так, чтобы сигналы не сливались.
Судно с механическим двигателем на ходу должно переходить к
подаче двух продолжительных сигналов вместо одного в момент пол-
ной остановки. Неподвижность судна особенно трудно определить но-
чью, поэтому от судоводителя требуется исключительное внимание и
применение специальных мер, вплоть до использования ручного лота.
9 Зак. 483 257
Лоцманское судно должно подавать, как основной сигнал, сигнал
судна с механическим двигателем или судна, стоящего на якоре. Сиг-
нал, установленный Правилом 35, является дополнительным для ин-
формации, что судно исполняет лоцманские обязанности.
Судну, стоящему на якоре, рекомендуется использовать дополни-
тельный сигнал (короткий — продолжительный — короткий) в том
случае, когда установлено приближение других судов (слышен туман-
ный сигнал, судно обнаружено с помощью радиолокатора).
Судно на мели в дополнение к сигналам колоколом и гонгом может
подавать сигнал свистком, как судно, стоящее на якоре (короткий,
продолжительный, короткий), или сигнал по MCC «U» (Юниформ) —
«Вы идете к опасности» (два коротких и продолжительный звуки).
Правило 36 — Сигналы для привлечения внимания 1
Любое судно при необходимости привлечь внимание другого судна может
подавать световые или звуковые сигналы, но такие, которые не могли бы быть
по ошибке приняты за сигналы, установленные этими Правилами, или может на-
правлять луч прожектора в сторону опасности, но так, чтобы это не мешало дру-
гим судам.
Любой огонь, использующийся для привлечения внимания другого судна,
должен быть таким, чтобы его нельзя было по ошибке принять за какое-либо
средство навигационного оборудования. Применительно к целям настоящего
Правила следует избегать использования прерывающихся или вращающихся
огней с большой силой света (таких, как импульсные огни).
Дополнительные сигналы должны применяться, если для предотв-
ращения столкновения необходимо привлечь особое внимание встреч-
ного судна. Такая обстановка может сложиться в случаях, для которых
МППСС не предусмотрены огни или сигналы, указывающие особое
состояние судна (буксировка парусным судном других судов, букси-
ровка судов без навигационных огней, неисправность навигационных
огней и т. п.).
Сигналы для привлечения внимания также следует применять, если
другое судно, обязанное уступить дорогу, своевременно не делает этого
или его действия недостаточны для предотвращения столкновения.
На практике для привлечения внимания применяются: сжигание ;
фальшфейеров, выпуск ракет, дымовые сигналы, освещение прожекто-
ром и звуковые сигналы. Запрещается использовать ракеты и фальш-
фейеры красного цвета и оранжевые дымы, так как они означают сиг-
нал бедствия. Не следует применять синий фальшфейер, который слу-
жит для вызова лоцмана.
Пренебрежение применением сигналов для привлечения внимания
резко увеличивает ответственность судоводителя в случаях столкнове-
ния.
Правило 37 — Сигналы бедствия
Когда судно терпит бедствие и требует помощи, оно должно использовать
или выставлять сигналы, описанные в приложении IV к настоящим Правилам.
258
Приложение IV
Сигналы бедствия
1. Следующие сигналы, используемые или выставляемые вместе либо раздельно,
указывают, что судно терпит бедствие и нуждается в помощи:
(а) пушечные выстрелы или другие производимые путем взрыва сигналы с
промежутками около 1 мин;
(Ь) непрерывный звук любым аппаратом, предназначенным для подачи ту-
манных сигналов;
(с) ракеты или гранаты, выбрасывающие красные звезды, выпускаемые по-
одиночке через короткие промежутки времени;
(d) сигнал, переданный по радиотелеграфу или с помощью другой сигналь-
ной системы, состоящей из сочетания звуков ...---... (SOS) по азбуке
Морзе;
(е) сигнал, переданный по радиотелефону, состоящий из произносимого
вслух слова «Мэйдэй»;
(f) сигнал бедствия по Международному своду сигналов — NC;
(g) сигнал, состоящий из квадратного флага с находящимся над ним или
под ним шаром или чем-либо похожим на шар;
(h) пламя на судне (например, от горящей смоляной или мазутной бочки и
т.п.);
(i) красный свет ракеты с парашютом или фальшфейер красного цвета;
(j) дымовой сигнал — выпуск клубов дыма оранжевого цвета;
(к) медленное и повторяемое поднятие и опускание рук, вытянутых в сто-
роны;
(1) радиотелеграфный сигнал тревоги;
(т) радиотелефонный сигнал тревоги;
(п) сигналы, передаваемые аварийными радиобуями указания положения.
2. Запрещается применение или выставление любого из вышеуказанных сигна-
лов в иных целях, кроме указания о бедствии и необходимости помощи; не до-
пускается также использование сигналов, которые могут быть спутаны с лю-
бым из вышеперечисленных сигналов.
3. Следует также обращать внимание на соответствующие разделы Международ-
ного свода сигналов, Руководства по поиску и спасанию торговых судов, а
также на возможность использования следующих сигналов:
(а) полотнище оранжевого цвета с черным квадратом либо кругом, или дру-
гим соответствующим символом (для опознания с воздуха);
(Ь) цветное пятно на воде.
«Бедствие» следует понимать как состояние судна, когда ему вслед-
ствие каких-либо обстоятельств угрожает опасность аварии или гибе-
ли и для ликвидации ее требуется немедленная помощь извне. Сигналы
бедствия используются судами не только в открытом море, но и во
внутренних водах, где действуют местные правила.
Категорически запрещается применять сигналы, предусмотренные
Приложением IV, если судно не терпит бедствия.
Радиотелефонный и радиотелеграфный сигналы тревоги предназна-
чены для срабатывания автоматических приемников сигнала бедствия—
автоалармов. Описание сигналов производится в специальных доку-
ментах по радиосвязи.
9*
259
Глава XX
ИСПОЛЬЗОВАНИЕ РАДИОЛОКАТОРА
ДЛЯ ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ СУДОВ
В МОРЕ
§ 94. ОСОБЕННОСТИ
И ОРГАНИЗАЦИЯ РАДИОЛОКАЦИОННОГО НАБЛЮДЕНИЯ
С появлением радиолокатора многие ошибочно полагали, что имея
его, судоводитель может ориентироваться в обстановке так же, как и в
хорошую видимость. Однако радиолокационное наблюдение, несмотря
на ряд преимуществ (большая дальность обнаружения, точность изме-
рения расстояния), уступает визуальному в наглядности. Недостатка-
ми радиолокационного наблюдения являются невозможность быстро
определить, как идут другие суда относительно своего, невозможность
быстро заметить маневр других судов и в короткий срок обнаружить
угрозу столкновения. Эти недостатки связаны с тем, что современные
радиолокаторы не позволяют определить по виду эхо-сигнала на экра-
не курс другого судна.
Следствием переоценки возможностей радиолокатора явились мно-
гие тяжелые аварии (в том числе и столкновения двух пассажирских
лайнеров «Андреа Дореа» и «Стокгольм»). В первые годы внедрения ра-
диолокаторов количество столкновений судов не уменьшилось, а даже
увеличилось, появились так называемые «радиолокационные» столкно-
вения.
Для оценки обстоятельств сближения судов необходимо иметь пол-
ную радиолокационную информацию. Кроме пеленга и расстояния до
другого судна, необходимо знать дистанцию кратчайшего сближения, а
также элементы движения (курс и скорость) другого судна. Для чего
следует пронаблюдать в определенном порядке за перемещением отме-
ток на экране. На основе этих данных оцениваются необходимость и
возможности уклонения от столкновения и выбирается конкретный
маневр.
Первым этапом радиолокационного наблюдения является обна-
ружение встречного судна и получение необходимой информации.
Радиолокационное наблюдение наиболее надежно и эффективно, если
оно ведется непрерывно. При этом наблюдатель постоянно находится
у индикатора РЛС. В случаях, когда по каким-либо причинам не-
возможно обеспечить непрерывное наблюдение за экраном, макси-
мальные промежутки времени t (мин) между просмотрами можно рас-
считать по формуле
(158)
где D — надежная дальность обнаружения самых малых судов, с которыми
вероятна встреча в районе плавания, мили;
d — минимальное допустимое расстояние обнаружения отметки судна впе-
реди траверза, мили;
Ус — скорость своего судна, уз;
Ув — скорость встречного судна, уз.
260
Радиолокационное наблюдение следует вести на шкалах среднего
масштаба (12—16 миль) с периодическим просмотром шкал крупного
масштаба. В стесненных водах используют шкалы крупного масштаба
и периодически, если позволяет конфигурация берега, просматривают
шкалы среднего масштаба дальности.
Большое значение имеет правильная настройка радиолокатора
(яркость, усиление и т.п.) и периодический просмотр теневых секторов.
Особенно опасна чрезмерная яркость отметки курса, которую рекомен-
дуется периодически выключать.
Дальность и надежность обнаружения судов может существенно
уменьшаться от влияния волнения моря, атмосферных осадков и дру-
гих радиолокационных помех. Судоводитель должен знать условия
возникновения помех и способы уменьшения их влияния.
Радиолокационое изображение на экране лучше ориентировать
«по норду». При обнаружении нескольких отметок наблюдение следует
начинать с отметки, представляющей наибольшую опасность, для чего
необходимо предварительно глазомерно оценить обстановку. Данные
для прокладки с индикатора должен снимать один и тот же наблюдатель
с одной и той же шкалы среднего масштаба (для РЛС «Донец-2» —
12 миль). Снятие пеленгов для прокладки должно производиться
с точностью до 0,5°, а расстояния —до 0,1 мили. На многих судах
внутреннего плавания отсутствуют гирокомпасы, поэтому ориентация
изображения на экране радиолокатора по норду невозможна. В слу-
чае стабилизации изображения по «курсу» для определения пеленга
необходимо одновременно с изменением курсового угла замечать дей-
ствительный курс судна.
Все измерения должны сопровождаться записью текущих коорди-
нат эхо-сигнала (радиолокационный пеленг и расстояние) на моменты
времени, по возможности кратные целым минутам.
Наблюдения удобнее обрабатывать по данным, полученным через
промежутки времени 3 или 6 мин. Рекомендуется сначала измерить
пеленг, а затем сразу же расстояние до отметки. При наличии на экра-
не нескольких эхо-сигналов измерение пеленгов и дистанций следует
производить в одной и той же последовательности целей через установ-
ленные интервалы.
Вторым этапом радиолокационного наблюдения является обработ-
ка данных, полученных при помощи радиолокатора, с целью оценки об-
стоятельств сближения судов.
§ 95. ОЦЕНКА СИТУАЦИИ СБЛИЖЕНИЯ СУДОВ
И ОБРАБОТКА РАДИОЛОКАЦИОННОЙ ИНФОРМАЦИИ
Согласно Правилу 19 МППСС при обнаружении другого судна с по-
мощью радиолокатора прежде всего необходимо определить, развива-
ется ли ситуация чрезмерного сближения и существует ли опасность
столкновения.
9в Зак. 4 83
261
Признаком наличия опасности столкновения является постоянство
пеленга на приближающееся судно. Математически это условие можно
выразить следующим образом:
d(— =0; ^D=Dt—Dl<0.
dt
Кроме этого, признаком геометрически точного столкновения двух
движущихся точек является постоянство производной по времени от
дистанции и ее отрицательное значение
dt
Ситуация чрезмерного сближения считается существующей, если
дистанция кратчайшего сближения судов (£)кр) меньше значения, до-
пустимого в данных условиях плавания (О3). Обстоятельства сближе-
ния двух судов характеризуют также время кратчайшего сближения
(/кр), дистанция и время пересечения курса судна (£)пер и /пер).
Если при оценке обстоятельств сближения обнаружена опасность
столкновения или чрезмерного сближения судов, то необходимо в соот-
ветствии с Правилом 19 предпринять действия для расхождения. Для
выбора и расчета маневра необходимо знать элементы движения дру-
гих судов.
В настоящее время используют два основных метода для оценки об-
стоятельств сближения с помощью РЛС.
Первый метод — приближенная, визуальная оценка ситуации на
экране индикатора РЛС по наблюдениям за изменением пеленгов и
перемещением эхо-сигналов на экране. Направление и скорость пере-
мещения отметок других судов определяются по направлению и вели-
чине послесвечения эхо-сигнала («хвоста»),
Второй метод — получение необходимых данных с помощью гра-
фической (радиолокационной) прокладки.
Геометрически движение судов можно изобразить двумя способа-
ми: истинной и относительной прокладкой.
Истинная прокладка предусматривает определение курса и скоро-
сти другого судна в неподвижной системе координат (рис. 155). Из счис-
лимого места судна на карте или из произвольной точки С\ специаль-
ного планшета прокладывают курс своего судна. В момент обнаруже-
ния эхо-сигнала другого судна измеряют пеленг nj и расстояние Dy до
него. Через некоторый промежуток времени наблюдения повторяют
(П2, £)2). От точки Су по линии курса своего судна откладывают расстоя-
ние, пройденное им за время между моментами наблюдений, и получа-
ют точку С2.
Проложив из точек С\ и С2 соответственно пеленги Пх и П2 и рас-
стояния Dy и £)2, получают места By и В2 другого судна в моменты пер-
вого и второго наблюдений. Вектор ВуВ^ представляет собой курс и
расстояние, пройденное встречным судном за время между наблюде-
ниями. Скорость наблюдаемого судна легко определить из выражения
Vv = ByB2/tt
где t — промежуток времени между наблюдениями.
262
Рис. 155. Истинная прокладка
Рис. 156. Относительная прокладка
Основной недостаток истинной прокладки заключается в том, что
для получения расстояния кратчайшего сближения судов — величи-
ны, интересующей судоводителя в первую очередь при оценке обстоя-
тельств, необходимы дополнительные построения для нанесения линии
относительного движения.
Поэтому в настоящее время для обработки радиолокационных наб-
людений применяется метод относительной прокладки. Этот метод вос-
производит перемещение одного судна относительно другого так, как
оно видно на экране радиолокатора с движущегося судна. Прокладка
ведется в подвижной системе координат, начало которой перемещается
вместе с судном, ведущим наблюдение. Места встречных судов наносят-
ся по их полярным координатам (пеленгу и расстоянию от своего суд-
на).
На рис. 156 показана схема относительной прокладки для случая,
приведенного на рис. 155. Из начала координат точки О (место судна-
наблюдателя) откладываются пеленги Пх и П2 и расстояния Dr и £>2 ДО
другого судна, измеренные через промежуток времени t.
Полученные точки Вг и В2 — места встречного судна относительно
судна-наблюдателя. Прямая, соединяющая точки Вг и В2, называется ’
линией относительного движения (ЛОД). По этой линии происходит от-
носительное перемещение другого судна и на экране радиолокатора.
Длина перпендикуляра ОТ, опущенного на линию относительного дви-
жения из начала координат, является в масштабе расстояний дистан-
цией кратчайшего сближения судов £>кр.
Величина относительной скорости определяется из выражения
Промежуток времени от момента первых наблюдений до момента
кратчайшего сближения /кр получают из известного соотношения
кр — / 17О •
Длина отрезка ОА от начала координат до точки пересечения ЛОД
с линией нашего курса представляет в принятом масштабе дистанцию
пересечения курса (Dnip),
9в*
263
Время пересечения вычисляется по формуле
^пер ~ В1Л/У0«
Элементы истинного движения другого судна можно получить до-
полнительным построением. Вектор пути встречного судна 5В равен
геометрической сумме векторов пути судна-наблюдателя 5Н и относи-
тельного перемещения 50:
SB = “F •%,
О1В2 — Oj.Bi -f- Bi В2.
Если разделить все части первого уравнения на промежуток вре-
мени между наблюдениями, то получим соотношение скоростей
VB = Vc+V0,
где VB — истинная скорость встречного судна;
Vc — истинная скорость своего судна;
Vo — относительная скорость.
Из практических соображений удобнее принять промежуток вре-
мени за единицу, тогда отрезки векторов скоростей при построении ока-
жутся равными перемещениям судов.
Решение векторного уравнения построением треугольника скоро-
стей можно получить двумя приемами.
Первый прием — прием прямого построения. В точку проклады-
вается вектор скорости судна-наблюдателя, а начало этого вектора —
точку Ог соединяют с точкой В2 и получают вектор скорости встреч-
ного судна ОлВ2.
Второй прием — прием обратного построения. Из точки В2 прокла-
дывается по направлению И К вектор скорости судна-наблюдателя.
Соединив точку Вх с концом вектора скорости своего судна полу-
чают суммарный вектор — вектор скорости встречного судна.
Направление линии относительного перемещения и расстояние
кратчайшего сближения между судами можно получить аналитически.
Из треугольника ОАВх (см. рис. 156) имеем
ф = Я1 т Р> (159)
где ср — угол пересечения ЛОД с линией курса своего судна;
qr — курсовой угол на встречное судно в момент первых наблюдений;
Р — угол между ЛОД и линией первого пеленга.
Из треугольника О1В1В2 получаем
tgp=-
Di—D2cosY
— расстояния до встречного судна соответственно в моменты первого
и второго наблюдений;
— угол между последовательными пеленгами (изменение пеленга
за время между наблюдениями).
(160)
Где Dx и D2
У
Тогда из треугольника ОТВХ
DKP = D1Sinp. (161)
264
Элементы движения другого судна можно получить из треугольни-
ка ОВ±В^ по формулам для решения косоугольных треугольников.
Приведенные зависимости позволяют определить интересующие
судоводителя величины, однако отсутствие какой-либо наглядности
делает аналитический способ непригодным для практического приме-
нения. Аналитические зависимости имеют большое значение при реше-
нии задачи на расхождение с применением вычислительной техники.
Направление ЛОД и величину расстояния кратчайшего сближения
при обработке наблюдений получают не точно, а с некоторой ошибкой.
Продифференцировав формулу (161) и перейдя к ошибкам, получаем
± Dr cos ₽д₽.
где Д£>кр — ошибка в определении £>кр;
Др — ошибка в определении угла р.
На практике важно учесть ошибку в дистанции кратчайшего сбли-
жения, когда имеется опасность столкновения. Для этого случая мож-
но принять Р = 0 и у = 0. После преобразований для случая, когда
разность дистанций при расчетных наблюдениях равна одной миле, по-
лучаем формулу следующего вида
дОд|,= Р.<°.-1)
кр 57>3о I >
(162)
где Ду — возможная ошибка в определении величины изменения пеленга.
Величина Ду может быть вычислена по формуле
Ду = Удщ + дщ , (163)
где ДПХ и ДП2—случайные ошибки пеленгования.
Если принять Д/7Х = ДП2, то
Ду=1,4ДП. (164)
При наблюдении через 2 мили ошибки уменьшатся примерно в 2 ра-
за. Если принять случайную ошибку пеленгования равной 0,7°, то при
наблюдениях через милю на расстояниях около 8 миль ошибка в £)кр
будет равна одной миле, т. е. имеет тот же порядок, что и дистанция
кратчайшего сближения. Таким образом, при оценке обстоятельств
сближения необходимо учитывать вероятные ошибки в дистанции крат-
чайшего сближения.
Относительная прокладка ведется на специальных радиолокацион-
ных планшетах, облегчающих работу штурмана при обработке резуль-
татов наблюдений.
Радиолокационный планшет (рис. 157) представляет собой сетку по-
лярных координат, на которой наносятся позиции встречных судов.
Запись исходных данных производят в таблицах, где фиксируют по
времени курс и скорость своего судна, а также пеленги и дистанции
других судов. Имеющаяся на планшете логарифмическая шкала пред-
назначена для облегчения расчетов при прокладке.
Позиции встречных судов наносят через стандартные промежутки
времени (3 или 6 мин). Дистанции кратчайшего сближения и пересече-
ния курса оценивают по расположению ЛОД относительно центра план-
шета .
265
Время кратчайшего сближения и пересечения курса определяют из-
мерением отрезка ЛОД до соответствующих точек трехминутным или
шестиминутным вектором относительной скорости Векторный
треугольник строят приемом прямого построения.
§ 96. РЕШЕНИЕ ЗАДАЧИ РАСЧЕТА МАНЕВРА
ДЛЯ РАСХОЖДЕНИЯ СУДОВ
Если установлено, что дистанция кратчайшего сближения судов с
учетом вероятной ошибки в ней меньше радиуса опасной зоны, то необ-
ходим маневр для безопасного расхождения.
266
Расчет маневра происходит в предположении, что другое судно бу-
дет следовать с постоянным курсом и скоростью. Такое предположение
правомерно, так как может встретиться судно, не использующее радио-
локатор, которое вероятнее всего маневрировать не будет. При расхож-
дении с судном, ведущим радиолокационное наблюдение, в случае сог-
ласованных действий эффект от маневра увеличивается.
На рис. 158 точки Вг и В2 — положения встречного судна в моменты
первого и второго наблюдений. ЛОД проходит от центра планшета на
расстоянии, меньшем, чем радиус опасной зоны. Необходимо выпол-
нить такой маневр, чтобы суда разошлись на расстоянии, большем, чем
радиус опасной зоны D3.
На ЛОД намечается точка М, в которой начнется выполнение ма-
невра на расхождение с учетом времени, необходимого для решения
задачи. В точку Вг проводят вектор скорости нашего судна за время
между наблюдениями (за 3 или 6 мин). Если соединить начало этого
вектора точку с точкой В2, то получим вектор скорости встречного
судна.
Из точки М сближение судов должно происходить по новой линии
относительного движения так, чтобы они разошлись на расстоянии D3.
Линия нового относительного курса проводится из точки М касатель-
но к окружности планшета, равной D3. Эта линия называется ожидае-
мой линией относительного движения (ОЛОД).
Расчет необходимого маневра производят построением нового век-
торного треугольника по данным: вектор скорости встречного судна
1/в, направление вектора относительной скорости (направление ОЛОД)
и один из известных элементов вектора скорости нашего судна. Если
маневрируют изменением скорости, то известно направление вектора
(наш курс), а при маневре изменением курса — известна скорость.
Для построения нового треугольника скоростей из точки В2 про-
водят в обратную сторону линию, параллельную ОЛОД (В2 У).
При маневре изменением только курса из точки радиусом, рав-
ным скорости нашего судна (OjBJ, делают засечку на линии B2N и по-
лучают точку В\, новый вектор нашей скорости и угол отворота а,
равный углу Время сближения на D 3 определяется измерением
отрезка М7\ вектором новой относительной скорости (В\В2). Если ок-
ружность радиусом 1/с не пересекает линию B2N, то маневр расхожде-
ния изменением только курса невозможен.
Маневру изменением только скорости соответствует вектор нашей
скорости OjB] векторный треугольник (^В^. Если при построени-
Рис. 158. Графическое решение задачи на расхождение с другим судном
267
Рис. 159. Проверка эффективности выполненного маневра изменением
. курса
ях окажется, что длина вектора OxBi в избранном масштабе окажется
больше возможной скорости судна или вектор изменяет направление
на обратное, то маневр расхождения изменением только скорости не-
выполним.
Все промежуточные точки конца вектора скорости своего судна на
линии ВХВ2 (например 0хС) соответствуют маневрам с одновремен-
ным изменением скорости и курса.
Построением векторного треугольника может быть решена задача
проверки эффективности выполненного маневра. Сначала также нано-
сят позиции встречного судна Вх, В2 (рис. 159), проводят ЛОД и строят
первый векторный треугольник ОХВХВ2. Затем при изменении курса раз-
ворачивают вектор Ус (0хВх) на угол поворота судна и получают точку
В!. Соединив точки В[ и В2, снимают новый вектор относительной ско-
рости, а следовательно, и направление ОЛОД, соответствующее выпол-
ненному маневру. ОЛОД проводят из точки окончания маневра (точ-
ки Мх, В2, М2) и оценивают дистанцию кратчайшего сближения в ре-
зультате предпринятых действий.
Аналогично делают построение при проверке эффективности манев-
ра изменением скорости (рис. 160).
На планшете можно проверить влияние маневра другого судна на
условия расхождения. Для этого вектор скорости встречного судна
ОХВ2 (рис. 161) разворачивают в соответствии с предполагаемым изме-
нением курса или уменьшают (увеличивают) его длину в зависимости
от изменения скорости.
Рис. 160. Проверка эффективности вы-
полненного маневра изменением ско-
рости
268
Полученную точку В2 (В2) соединяют с начальной точкой В± и оп-
ределяют вектор новой относительной скрости ВгВ2 (ВгВ2), направле-
ние ОЛОД и Окр в результате маневра встречного судна.
Ветровой дрейф судна вносит в расчеты ошибки, поэтому его необ-
ходимо учитывать, оперируя с вектором скорости своего судна. В от-
крытом море течение, как правило, действует на оба судна одинаково
и поэтому на элементы относительного дь ижения не влияет.
Важное значение имеет хотя бы прибл! женный учет инерции и цир-
куляции при выполнении маневра.
Простейший способ учета заключается в том, что маневрирование
начинают с приходом встречного судна в упрежденную точку, отстоя-
щую от расчетной на величину относительного перемещения за 2/3 вре-
мени выполнения маневра. Время маневрирования рассчитывают с по-
мощью таблиц поворотливости, инерции, графиков разгона и торможе-
ния.
§ 97. РАСХОЖДЕНИЕ С НЕСКОЛЬКИМИ СУДАМИ
В тех случаях, когда обнаружено несколько судов, маневр рас-
считывают исходя из условия расхождения на заданном расстоянии с
наиболее опасным судном.
Опасность сближения оценивают по дистанции и времени кратчай-
шего сближения (Окр, /кр). Если Окр примерно одинаковы, то наибо-
лее опасно судно с меньшим значением /кр. Определяя степень опасно-
сти наблюдаемых судов, необходимо учитывать потенциально опасные
суда. К ним относятся суда, ситуация сближения с которыми может
ухудшиться и стать опасной в результате маневра этих судов или наме-
чаемых действий нашего судна.
На рис. 162, например, показана радиолокационная прокладка при
расхождении с тремя судами. Расчетные точки 1и2 каждого из судов
нанесены через 6 мин, D3 принята равной 2 милям, курс нашего суд-
на — 0°, а скорость—13 уз. Опасными судами являются суда Л и В с
дистанциями кратчайшего сближения ноль и 0,3 мили. Наибольшую
опасность представляет судно В, у которого время сближения на Окр
равно всего 17 мин (у судна А — 52 мин). ЛОД судна С проходит на
кратчайшем расстоянии 2,4 мили, поэтому оно может считаться неопас-
ным. Однако следует учитывать, что судно В идет противоположным
курсом и эффективным маневром для расхождения с ним может быть
только отворот вправо. При этом судно С становится опасным, так как
его ЛОД также развернется и зайдет в опасную зону. Таким образом,
судно С является потенциально опасным. Расчет маневра в приведен-
ном примере целесообразно вести для расхождения с судном С и прове-
рить его эффективность для судна В. На рисунке видно, что при отво-
роте на курс 55° дистанция расхождения с судном С составит 2 мили, а
судном В — 3,5 мили. Расстояние до судна А сразу после маневра нач-
нет увеличиваться.
Решение задачи расхождения с несколькими судами производится
в следующем порядке.
269
Рис. 162. Расчет маневра расхожде-
ния с тремя судами
Рис. 163. Расчет времени возвращения
на старый курс и дистанции отхода
1. Нанесение начальной ситуации на планшет и построение вектор-
ных треугольников. После первых измерений пеленгов и дистанций на-
носят позиции встречных судов и пристраивают к ним вектор скорости
нашего судна (вектор движения за 6 мин), не ожидая последующих оп-
ределений. Затем фиксируют положение встречных судов на момент
вторых измерений и приступают к оценке ситуации сближения.
2. Анализ ситуации расхождения и выбор вида маневра. Опреде-
ляют степень опасности каждого из наблюдаемых судов, рассчитывают
£>кр, ^кР» ^пер- Значение /кр и /пер записывают дробью у первых рас-
четных точек судов на планшете (/кр/7пер)- Потенциальная опасность
судов выявляется определением тенденции к изменению направления
ЛОД при маневрировании. Для этого проигрывают маневры нашего
или встречного судна, соответственно изменяя длину векторов при ма-
неврах скоростью или разворачивая их при изменениях курса. Такую
проверку можно проводить как мысленно, так и с помощью каранда-
ша на планшете. Аналогично выбирают вид маневра (поворот, умень-
шение скорости) и судно наиболее опасное при этом маневре.
3. Уточнение маневра (определение угла отворота, степени измене-
ния скорости). Расчет производят построением второго векторного
треугольника (§ 96) у наиболее опасного судна (судно С на рис. 162) и
проверкой эффективности маневра для судов, безопасность расхожде-
ния с которыми при выбранном маневре не очевидна (судно В на том же
рисунке).
При этом одновременно рассчитывают упрежденную точку и вре-
мя начала маневра.
4. Выполнение маневра.
5. Контроль выполнения маневра. На планшете наносят ожидае-
мые линии относительного движения (ОЛОД) для всех судов, представ-
ляющих потенциальную опасность. Далее, фиксируя положение су-
дов через стандартные промежутки времени, контролируют их факти-
ческое перемещение на планшете с целью своевременного обнаружения
маневра и неблагоприятного развития ситуации.
270
6. Возвращение на старый курс. Время возвращения определяют
графическим построением на планшете. Для этого проводят касатель-
ную к окружности £)3, параллельную первоначальной ЛОД. Точка
пересечения полученной линии с ОЛОД является точкой возвращения
на старый курс. Момент прихода в рассчитанную точку фиксируют по
времени расхождения (/расх) или по пеленгу на другое судно.
На рис. 163 показана радиолокационная прокладка при расхожде-
нии с двумя судами. Расчет маневра (отворот на ИК-60°) произведен
для судна В, а эффективность действий проверена для судна А (£)кр =
= 3,5 мили). Цифры у каждой из точек на линиях относительного дви-
жения показывают оперативное время, прошедшее с момента начала
прокладки. Расчетная точка начала маневра назначена на двенадцатую
минуту оперативного времени. Время возвращения на прежний курс—
20 мин получено, исходя из времени расхождения /расх = 8 мин.
Пеленг на судно В в указанный момент должен быть равен 323°. Для
судна А рассчитано и нанесено дальнейшее относительное перемеще-
ние.
При маневрировании в районах, сложных в навигационном отно-
шении, очень часто необходимо знать удаление судна от генерального
курса в результате предпринятых действий для расхождения —
дистанцию отхода (Dorx). Для ее расчета от центра планшета по ли-
нии нового курса нашего судна откладывают пройденное расстояние
за /расх (на рис. 163 — 2,4 мин). Из полученной точки опускают пер-
пендикуляр на линию прежнего (генерального) курса. Длина перпен-
дикуляра в принятом масштабе представляет собой дистанцию отхода
(на рис. 163 Z)OTX = 2,3 мили). Если обстоятельства плавания не допус-
кают полученного удаления, то необходимо выбрать другой вид ма-
невра.
С приобретением определенного опыта обработки радиолокацион-
ной информации судоводитель может не производить построение век-
торных треугольников на планшете, а оценивать направление ЛОД и
тенденции к ее изменению глазомерно по наблюдениям за развитием
ситуации прямо на экране индикатора РЛС. Метод глазомерной оценки
обстоятельств сближения и графическая прокладка должны дополнять
друг друга. Графическую работу целесообразно начинать после вни-
мательной визуальной оценки ситуации на экране в тех случаях, когда
судоводитель убедится, что правильное решение возможно принять
только с помощью радиолокационного планшета.
Количество судов, данные о которых могут быть обработаны на
планшете, ограничено. Практически даже опытному судоводителю
трудно вести прокладку, когда учитывается движение свыше 5—6 су-
дов. Глазомерная оценка ситуации позволяет выбрать из большого ко-
личества эхо-сигналов на экране РЛС те отметки, движение которых
необходимо фиксировать на планшете, и тем самым ограничить коли-
чество контролируемых целей.
Глазомерная оценка ситуации начинается сразу после обнаружения
эхо-сигнала судна цели, предшествует радиолокационной прокладке
и не прекращается до полного расхождения судов. При оценке ситуа-
271
ции опасными считают такие суда, перемещение эхо-сигналов которых
вызывает необходимость маневрирования для безопасного расхожде-
ния. Основными критериями опасности при этом являются расстояние,
в котором проходит направление следа послесвечения эхо-сигнала от
начала развертки (Z)Kp) и величина следа послесвечения, характери-
зующая относительную скорость, а следовательно и время кратчай-
шего сближения (?кр).
Для определения величины Z)KP механический визир устанавлива-
ют так, чтобы одна из параллельных нитей визира проходила по на-
правлению следа послесвечения эхо-сигнала цели. По отстоянию этой
линии от центра экрана с помощью ПКД или НКД определяют Z)Kp.
Если ни одна нить визира не проходит по следу послесвечения, то бли-
жайшую к отметке цели нить устанавливают параллельно следу на
глаз.
Под потенциально опасной целью подразумевают судно, переме-
щение эхо-сигнала которого в данный момент в соответствии с ус-
тановленными критериями опасности не требует маневра, однако
такой маневр может потребоваться после выполнения маневра нашим
судном для расхождения с опасными судами или при вероятных дейст-
виях другого судна для расхождения с другими целями.
При определении реальной опасности цели по первичной информа-
ции направление следа послесвечения, тенденции изменения пеленга,
дистанцию и время кратчайшего сближения и другие параметры срав-
нивают с критериями опасности. Эхо-сигналы, обнаруженные впереди
траверза, требуют большего внимания, так как среди них более веро-
ятны сигналы опасных целей, время сближения с которыми мало из-
за большой относительной скорости. В большинстве случаев чем ближе
эхо-сигнал, тем цель опаснее, точно так же как и чем ближе направле-
ние следа послесвечения к началу развертки, тем опасность выше.
В тех ситуациях, когда дистанция кратчайшего сближения (Окр)
меньше установленной величины (Z)3), степень опасности целей опре-
деляют на основе закономерностей перемещения эхо-сигналов с учетом
возможных маневров своего судна. Так при перемещении эхо-сигналов
параллельно нашему курсу более опасной будет цель» направление сле-
да послесвечения эхо-сигналов которой проходит в той стороне от нача-
ла развертки, в которую произойдет отворот нашего судна. При пере-
мещении эхо-сигналов непараллельно линии нашего курса степень
опасности зависит и от возможного изменения скорости нашего судна.
Величина времени кратчайшего сближения позволяет правильно оце-
нить развитие ситуации по времени с тем, чтобы действовать заблаго-
временно. Опаснее являются те цели, у которых время кратчайшего
сближения меньше.
При глазомерной оценке большую помощь оказывает систематизи-
рованная схема перемещений эхо-сигналов целей на экране РЛС.
Все возможные случаи перемещений эхо-сигналов целей сведены в
три вида.
Первый вид — эхо-сигнал перемещается параллельно курсовой
черте. Этот вид включает в себя 4 случая перемещений.
272
Случай первый: относительная скорость равна сумме скоростей на-
шего судна и судна-цели Vo = Vc + VB — сигнал судна, идущего
противоположным курсом.
Случай второй: относительная скорость равна разности скоростей
нашего судна и судна-цели Vo = Vc — VB — эхо-сигнал догоняемого
судна.
Случай третий: относительная скорость равна разности скоростей
судна-цели и нашего судна Vo = VB — Vc — эхо-сигнал обгоняющего
нас судна.
Случай четвертый: относительная скорость равна скорости нашего
судна и эхо-сигнал перемещается в сторону противоположную нашему
курсу — эхо-сигнал неподвижной цели (относительно воды).
Все четыре случая имеют общие закономерности перемещения:
при изменении .скоростей судов параллельность перемещения
эхо-сигналов курсовой черте сохраняется;
при изменении курса нашим судном направление следа после-
свечения разворачивается для наблюдателя в сторону противо-
положную повороту;
изменение направления следа послесвечения при сохранении
курса нашего судна указывает на поворот судна-цели в ту же
сторону;
эхо-сигнал неподвижной цели всегда перемещается параллельно
линии нашего курса при всех его изменениях.
Если при неизменных курсе и скорости нашего судна перемещение
эхо-сигнала другого судна на экране стало непараллельным курсовой
черте, то это означает, что наблюдаемое судно начало движение курсом,
непараллельным нашему.
При начале движения судна-цели курсом параллельным нашему —
параллельность перемещения эхо-сигнала курсовой черте сохраняется
и этот маневр может быть не обнаружен, так как изменяется только
величина относительной скорости.
Второй вид — эхо-сигнал перемещается непараллельно курсовой
черте нашего судна. Этот вид включает три случая перемещений.
Случай первый: эхо-сигнал перемещается по линии, проходящей
через начало развертки, — существует реальная угроза непосредст-
венного столкновения.
Случай второй: эхо-сигнал перемещается по линии, пересекающей
курсовую черту, — наблюдаемое судно будет пересекать наш курс
впереди (по носу) нашего судна.
Случай третий: эхо-сигнал перемещается по линии, проходящей
по корме (позади) от начала развертки, — наше судно будет пересекать
или уже пересекло курс наблюдаемого судна.
Для всех случаев второго вида перемещения эхо-сигналов влияние
маневров нашего судна сводится к следующему:
поворот нашего судна в сторону судна-цели, находящегося на
носовых курсовых углах, приводит к изменению направления
следа послесвечения от кормы к носу нашего судна. В случаях
наблюдения целей на траверзных и кормовых курсовых углах
закономерности изменения направления движения эхо-сигналов
273
при повороте нашего судна более сложные и могут быть оценены
с помощью радиолокационной прокладки;
поворот нашего судна от судна-цели вызывает сложное изме-
нение направления движения эхо-сигнала. При таком маневре
эффективность не может быть оценена глазомерно — необходима
радиолокационная прокладка;
уменьшение нашей скорости приводит к изменению направления
следа послесвечения от кормы к носу нашего судна;
увеличение нашей скорости вызывает разворот направления дви-
жения эхо-сигнала от носа к корме нашего судна.
В тех случаях, когда изменилось направление следа послесвечения,
а наше судно не изменяло курс и скорость, однозначный вывод — о дей-
ствиях наблюдаемого судна при глазомерной оценке определить невоз-
можно. При этом действуют сложные закономерности и необходима
радиолокационная прокладка.
Третий вид — один случай, когда эхо-сигнал цели неподвижен от-
носительно начала развертки, т. е. пеленг и дистанция не изменяются.
Относительная скорость равна нулю (Vo 0) и след послесвечения от-
сутствует — наблюдаемое судно следует тем же курсом и скоростью,
что и наше судно.
При изменении скорости одного или обоих судов появляется движе-
ние эхо-сигнала параллельное курсовой черте и начинают действовать
закономерности первого вида.
Изменение курса или курса и скорости одного или обоих судов вы-
зывает движение эхо-сигнала непараллельное курсовой черте.
Если в конкретной ситуации мы имеем дело с простыми закономер-
ностями и можем предсказать влияние своего маневра или определить
вид маневра судна-цели, то можно считать, что информация является
достаточно надежной для оценки ситуации сближения и выбора манев-
ра расхождения.
В случаях сложных закономерностей для надежной оценки ситуа-
ции необходима радиолокационная прокладка. Ввиду того, что в про-
цессе радиолокационного наблюдения ситуация на экране РЛС изме-
няется из-за маневрирования судов, качество глазомерной оценки во
многом зависит от своевременного обнаружения перехода одного вида
движения эхо-сигналов к другому.
На основе глазомерной оценки ситуации и радиолокационной про-
кладки производят полную оценку ситуации. При этом обобщают дан-
ные визуального, радиолокационного и слухового наблюдения, учи-
тывают конкретную навигационную и гидрометеорологическую обста-
новку и требования МППСС.
Основной задачей полной оценки ситуации является обоснование
необходимости и вида маневра. Судоводитель в результате полной оцен-
ки должен решить: для расхождения с каким судном будет рассчиты-
ваться маневр (с кем расходиться?), какой маневр будет предпринят
(что делать?), когда маневрировать.
Выбор и обоснование маневра выполняют этапами (приближения-
ми) с учетом требований МППСС, хорошей морской практики, навига-
ционных условий и резерва времени для расхождения.
274
Сначала судоводитель, глядя на векторы целей и представляя кур-
сы судов, воспроизводит в пространственном воображении существую-
щую ситуацию и возможные маневры своего судна для предотвраще-
ния опасного сближения судов. Из всех возможных маневров исключа-
ются маневры, противоречащие МППСС и не соответствующие навига-
ционной обстановке. Например: в данной ситуации согласно МППСС
следует избегать отворота влево, а поворот вправо ограничен навига-
ционными опасностями, тогда следует рассмотреть возможность манев-
ра изменением скорости.
Выбор судна, относительно которого следует рассчитывать маневр,
делают с учетом степени опасности (£>нр, /кр, /пер). Особого внимания
требуют суда, ситуация сближения с которыми в результате нашего
маневра сначала будет ухудшаться.
При выборе и обосновании маневра определяется реальность на-
значенных величин D3 и £>отХ и других критериев. Если в результате
выполненного анализа предположения, основанные на логических рас-
суждениях и качественных оценках, не подтвердятся, судоводитель
должен от них отказаться и искать другое решение задачи.
В соответствии с руководящими документами по штурманской служ-
бе и правилами ведения судового журнала о начале радиолокацион-
ного наблюдения производят запись в судовом журнале. Кроме этого
в судовом журнале независимо от причин маневрирования делают за-
пись о любом изменении курса и (или) скорости судна.
Если радиолокационная прокладка ведется на планшете, то он со-
держит все необходимые данные для восстановления взаимного по-
ложении судов в процессе расхождения. В то же время, если на основа-
нии радиолокационной прокладки принято решение сделать маневр
для расхождения с другим судном, то в черновой журнал с планшета
переносят судовое время, пеленг и дистанцию начальной позиции дру-
гого судна, что узаконивает все последующие записи на планшете. За-
тем в черновой журнал записывают и данные о своем маневре. (Напри-
мер: 1852 Начали радиолокационную прокладку. РЛП-252,5°; D? =
= 10,2 мили. 1907 Легли на ГКК-285,0°.) В случае отсутствия записей
в судовом журнале трудно доказать момент начала прокладки и ис-
тинность измерений. Прокладка на планшете сохраняется в полном объ-
еме до окончательного расхождения.
Нет необходимости записывать в журнал маневр другого судна, об-
наруженный из прокладки до тех пор, пока наше судно не начнет ма-
неврировать.
При ведении радиолокационной прокладки на зеркальном планше-
те в черновой журнал записывают только время начала прокладки и
используемую шкалу радиолокатора. (Например: 1641 Начали проклад-
ку по цели А, шкала 8 миль). В случае маневрирования записывают
время начала маневра своего или другого судна. (Например: 1701 Лег-
ли на ГКК=42,0° или 1705 Цель А уменьшила скорость до 8 узлов).
При этом прокладка сохраняется до полного расхождения.
Если появляется необходимость стереть прокладку на зеркальном
планшете до полного расхождения, то в черновой журнал записывают
время, пеленг и дистанцию последней точки прокладки.
275
§ 98. ВЫБОР ОПТИМАЛЬНОГО ВИДА МАНЕВРА
Произведя тщательные наблюдения за изменением пеленга и рас-
стояния до встречного судна и обработав их, судоводитель определяет
свои возможности и получает необходимую информацию для выбора ма-
невра. /
Маневр, предпринимаемый на основе радиолокационной информа-
ции, для избежания чрезмерного сближения должен быть эффективным
как в случае бездействия встречного судна (при сохранении курса и
скорости), так и в случае наиболее вероятных его действий. Предполо-
жения о вероятных действиях встречного судна не могут быть катего-
ричными.
Если встречное судно не имеет радиолокатора или не ведет радиоло-
кационного наблюдения, то наиболее вероятно, что оно не изменит свой
курс и скорость. Однако не исключено, что такое судно может умень-
шить или увеличить свою скорость в зависимости от изменения визу-
альной видимости в его районе или остановиться, когда услышит ту-
манные сигналы другого судна.
Если встречное судно ведет радиолокационное наблюдение, то ско-
рее всего оно также предпримет какие-то действия. Наиболее вероят-
ными действиями встречного судна в этом случае могут быть: умень-
шение скорости хода, остановка движения и во многих случаях с уче-
том требований МППСС поворот вправо.
При выборе маневра следует учитывать, что в условиях ограничен-
ной видимости в любой момент может появиться необходимость умень-
шения скорости или остановки своего судна. Например, если на экра-
не радиолокатора обнаружен на малом расстоянии эхо-сигнал другого
судна или услышаны туманные сигналы впереди траверза.
Иногда для расхождения с другим судном на заданном расстоянии
требуется изменить курс на небольшую величину. Однако Правило
8 МППСС требует, чтобы действия для предупреждения столкновения
были уверенными, а изменение курса или скорости достаточно боль-
шими с тем, чтобы их можно было бы легко обнаружить с другого суд-
на.
Поэтому маневр изменением курса должен быть значительным, а
скорость должна изменяться не менее чем вдвое.
Характер маневра в МППСС жестко не регламентирован. Судно мо-
жет выбрать любой вид действия в зависимости от условий плавания и
обстоятельств сближения. Однако при маневрировании изменением
курса Правило 19 дает ограничения при выборе стороны поворота.
Если другое судно находится впереди траверза и не является обгоняе-
мым, то следует избегать поворота влево, а при расхождении с судном,
находящимся на траверзе или позади траверза, следует избегать пово-
рота в сторону судна.
С учетом этих ограничений и хорошей морской практики при сбли-
жении судов на прямо противоположных или близких к ним пересека-
ющихся курсах наиболее оптимальным маневром является изменение
курса вправо на угол 60—90°. Снижение скорости в этом случае лишь
276
уменьшает скорость сближения и не увеличивает расстояние кратчай-
шего сближения.
Если другое судно обнаружено с правого борта на острых курсовых
углах, то наиболее предпочтительным маневром следует считать пово-
рот вправо нД величину, по крайней мере, на 30° большую, чем курсо-
вой угол на встречное судно. Этот маневр будет эффективным даже в том
случае, если встречное судно уменьшит скорость или даже остановит
движение.
Если встречное судно обнаружено с левого борта впереди траверза,
то действиями для предупреждения столкновения могут быть отворот
вправо с приведением другого судна на траверз или изменение скоро-
сти. При этом следует учитывать, что поворот нашего судна в приведен-
ной ситуации вправо приведет к пересечению курса другого судна по
носу и при вынужденном уменьшении нашей скорости (что не исклю-
чено в тумане) ведет к опасности столкновения. Вместе с тем нельзя пол-
ностью исключить возможность отворота вправо для предотвращения
опасного сближения с судном, находящимся слева, при пересекающих-
ся курсах. В некоторых случаях, когда пересечение курса произойдет
быстро и на большом расстоянии, поворот вправо может быть эффек-
тивным маневром. В других же случаях наиболее целесообразным дей-
ствием является остановка движения.
При нахождении другого судна на траверзе или за траверзом для
ликвидации угрозы столкновения рекомендуется изменять курс в сто-
рону от этого судна с расчетом привести его за корму. Если другое суд-
но находится по корме или близко к этому направлению, то для укло-
нения от него целесообразно повернуть влево на угол около 30°.
Маневр изменением скорости предпочтительно применять для безо-
пасного расхождения с судном, находящимся на траверзе или около
него, так как отворот от другого судна в этом случае обычно затягива-
ет время маневрирования и ведет к большим уклонениям от генераль-
ного курса.
Очевидно, невозможно рассмотреть все ситуации, которые могут
возникнуть на практике, или свести многообразие ситуации к типовым,
так как обстоятельства сближения характеризуются большим числом
факторов.
Во всех случаях, когда окажется, что предпринятый маневр не при-
вел к желаемому результату, наиболее благоразумным действием яв-
ляется уменьшение скорости или остановка движения еще до входа в
опасную зону или в звуковой контакт.
§ 99. ПАЛЕТКА И УСТРОЙСТВА
ДЛЯ ОБРАБОТКИ РАДИОЛОКАЦИОННОЙ ИНФОРМАЦИИ
Как видно из вышеизложенного, обработка радиолокационной ин-
формации графическим методом довольно трудоемкая, а при большом
количестве судов и не всегда эффективная работа. С целью упрощения
и автоматизации процесса создаются различные устройства и при-
способления.
277
Простейшим приспособлением, несколько облегчающим решения
векторных треугольников при наблюдении нескольких судов, является
палетка.
Палетка (рис. 164) представляет собой лист прозрачного или мато-
вого пластика с проведенными на нем двумя взаимно перпендикуляр-
ными прямыми — основными линиями и параллельным^ им — вспо-
могательными. При необходимости в качесте палетки можно исполь-
зовать лист кальки с нанесенными тушью основными и вспомогатель-
ными линиями. Точка пересечения основных линий палетки К' назы-
вается индексом палетки.
Из центра планшета по линии курса откладывают вектор скорости
нашего судна (вектор движения за время между расчетными наблюде-
ниями). Конец вектора (точку К) называют базой. Точки А± и Д2, Вг и
В2, С± и С2 — расчетные позиции судов в моменты расчетных наблюде-
ний (рис. 165).
Дальнейшая обработка информации происходит в следующем по-
рядке.
Палетка устанавливается так, чтобы ее основные линии были парал-
лельны направлениям 0—180° и 90—270° планшета, индекс палетки
К' совмещается с базой К. На палетку переносят точки первых расчет-
ных наблюдений судов Сг (на палетке Д[, В\, С[).
Если теперь перемещать палетку в любое положение, сохраняя па-
раллельность основных линий, палетки и планшета, то прямые
В'\В2, С']С2 укажут ожидаемые направления относительного движе-
ния (ОЛОД), а отрезок прямой ОК', соединяющий центр планшета с ин-
дексом палетки, представит новый вектор скорости нашего судна, со-
ответствующий ОЛОД.
Совмещение индекса палетки с центром планшета соответствует
маневру остановки нашего судна. Отрезки А{А2, В{В2, С[С2 в этом
случае представляют векторы скорости другого судна, так как направ-
ление линии относительного движения совпадает с курсом встречного
судна.
Перемещение индекса палетки вдоль вектора нашей скорости к
центру планшета соответствует маневрам с уменьшением скорости, а
Рис. 165. Расчет миневра расхожде-
ния с помощью палетки
278
перемещение по линии курса за
пределы окружности нашей скоро-
сти—маневрам с увеличением ско-
рости .
Перемещением индекса палетки
по окружности нашей скорости вы-
бираются маневры с изменением
курса. Все остальные положения
индекса палетки соответствуют ма-
неврам с изменением курса и ско-
Рис. 166. Зеркальный пл ан.нет
рости одновременно.
Параллельность основных линий палетки и планшета проверяется
глазомерно с использованием вспомогательных линий.
После выбора маневра точки Л[, С{ уколом циркуля переносят
на планшет и проводят ожидаемые линии относительного движения,
соединив полученные точки с точками вторых расчетных позиций судов
на планшете (Л2, В2, С2). Для правильного решения задачи очень важ-
но, чтобы вектор скорости нашего судна (ОЛ) и векторы скорости от-
носительного движения (ЛИ2» CiC2) представляли собой соот-
ветствующие перемещения судов за одно и то же время.
Сравнительно несложным, но эффективным прибором, облегчаю-
щим обработку радиолокационной информации, является зеркальный
планшет. Зеркальный планшет позволяет наносить позиции встречных
судов без измерения пеленгов и дистанций и вести графические пост-
роения над экраном индикатора РЛС, не отрываясь от наблюдения за
обстановкой.
Планшет представляет собой оптическое антипараллаксное устрой-
ство, которое устанавливается над экраном РЛС и крепится к передней
панели индикатора. Прибор состоит из плоского полупрозрачного зер-
кала (рис. 166) и рабочей поверхности, закрепленных в металлическом
корпусе. Рабочая поверхность сделана из органического стекла и име-
ет сферическую форму с радиусом, равным радиусу кривизны экрана
РЛС. Полупрозрачное зеркало должно находиться строго посредине
между экраном и рабочей поверхностью, поэтому прибор имеет устрой-
ство для регулировки положения зеркала. Кроме этого, в корпусе
планшета имеется устройство подсветки и его регулятор.
Если на экране РЛС имеется какая-либо цель С (см. рис. 166), то
на рабочей поверхности ей соответствует единственная точка С, от-
ражение которой от полупрозрачного зеркала совпадает с изображе-
нием точки С независимо от положения глаза наблюдателя.
Радиолокационная прокладка ведется на рабочей поверхности ка-
рандашом типа «Стеклограф» желтого цвета. При максимальной ярко-
сти подсветки прокладка хорошо видна на фоне радиолокационного
изображения. Когда подсветка выведена, нанесенные карандашом
знаки не видны и не мешают радиолокационному наблюдению.
Визуальная оценка обстоятельств сближения облегчается, если
РЛС снабжена индикатором истинного движения. Начало развертки
на экранах таких индикаторов перемещается со скоростью своего суд-
на в масштабе радиолокационного изображения. Поэтому эхо-сигналы
279
неподвижных объектов на экране неподвижны, а отметки судов пере-
мещаются соответственно их истинному движению. Такая информация
помогает принять решение при выборе маневра для расхождения. Од-
нако в истинном движении затруднена оценка опасности столкновения
и определение £)кр. Поэтому при работе с индикаторами истинного
движения необходимо наносить позиции встречных судов на радиоло-
кационном или на зеркальном планшете.
Более совершенными средствами обработки радиолокационной ин-
формации являются специальные устройства и приставки к радиоло-
кационным станциям со счетно-решающими устройствами и электрон-
ной индикацией на экране РЛС элементов движения других судов
(РЛС «Океан», приставка «Альфа», некоторые модификации РЛС «Дек-
ка» и др.).
Наибольшими возможностями обладают системы автоматической
радиолокационной прокладки (САРП). Такая система реализована в
отечественном специализированном индикаторе «Бриз-Е» и в автомати-
зированной РЛС «Океан-С». Основой САРП является специализиро-
ванная цифровая вычислительная машина. Отечественные САРП авто-
матически измеряют пеленги и дистанции до сопровождаемых объек-
тов, автоматически вычисляют курсы, скорости сопровождаемых су-
дов и относительную скорость. Кроме этого, определяются £>кр и /кр.
При проигрывании маневра системы вычисляют параметры экстрапо-
лированной ситуации. На экране индикатора одновременно с обычным
радиолокационным изображением у всех сопровождаемых объектов
показывается вектор относительной или истинной скорости за опреде-
ленное время прогноза. Кольца сопровождения или символы опасных
целей и векторы их скорости мигают и включается сигнал опасности.
Захват целей на сопровождение происходит автоматически или вруч-
ную. Одновременно может сопровождаться от 20 целей («Бриз-Е») до
57 («Океан-С»).
Часть четвертая
МОРСКОЕ ПРАВО
Глава XXI
ПРЕДМЕТ И ИСТОЧНИКИ МОРСКОГО ПРАВА.
МОРСКОЕ СУДНО И ЭКИПАЖ
§ 100. ПРЕДМЕТ И ИСТОЧНИКИ МОРСКОГО ПРАВА
Право — это совокупность норм, установленных или санкциониро-
ванных государством. Нормой права называется правило поведения,
которое предоставляет участникам общественного отношения юриди-
ческие права и налагает на них юридические обязанности. Нормы пра-
ва охраняются принудительной силой государства. В буржуазном об-
ществе право — это возведенная в закон воля господствующего класса
эксплуататоров. Оно используется эксплуататорами для защиты част-
ной собственности и сохранения их экономического и политического
господства в обществе.
Советское социалистическое право — это возведенная в закон воля
советского народа, руководимого КПСС. В отличие от буржуазного со-
ветское право выражает волю трудящихся масс и является подлинно
демократическим.
Советское право содержит большое количество различных по содер-
жанию и целям правовых норм. Они различаются по предмету правово-
го регулирования, по характеру содержащихся в них предписаний и
т.д. Каждая норма советского права практически состоит из трех взаи-
мосвязанных элементов: гипотезы, диспозиции и санкции. Гипотезой
называется та часть нормы, которая указывает на условия ее действия.
Описание поведения, предписываемого правовой нормой, называется
диспозицией. Санкция предусматривает меры, применяемые к лицу
при несоблюдении конкретной нормы права. В действующем в настоя-
щее время советском праве различают три группы санкций: уголовную,
административную и гражданскую.
В соответствии с этим советское право подразделяют на следующие
основные отрасли: уголовное, административное и гражданское право.
Особенности общественных отношений, возникающих в разнообразных
сферах человеческой деятельности, выраженных в гипотезах и диспо-
зициях норм советского права, обусловливают выделение отдельных
комплексных отраслей права, таких, как: трудовое, финансовое, зе-
мельное, воздушное, морское и др. Следовательно, советское право
281
можно рассматривать как систему, состоящую из основных и комплекс-
ных отраслей.
В зависимости от степени определенности веления государственного
органа, издавшего нормативный акт, все нормы права делятся на два
вида — императивные и диспозитивные правовые нормы. Императив-
ные правовые нормы всегда имеют строго определенную диспозицию,
конкретно и точно регламентирующую права и обязанности участни-
ков регулируемого отношения и не допускающую никаких отклонений
по воле сторон от этого предписания. Например, распоряжения капи-
тана в пределах его полномочий подлежат беспрекословному исполне-
нию всеми находящимися на судне лицами (ст. 48 КТМ СССР).
В отличие от императивных норм диспозитивные правовые нормы
предоставляют субъектам правоотношений возможность самим дого-
вориться о характере взаимоотношений в рамках законности и лишь в
случае отсутствия такого соглашения сторон государство предписыва-
ет им должную норму поведения. Например, «размер вознаграждения
за спасение определяется соглашением сторон, а при отсутствии согла-
шения — судом или арбитражем» (ст. 266 КТМ СССР).
Коллизионной нормой называют норму, которая указывает, право
какого определенного государства следует применить к данному конк-
ретному правоотношению или юридическому факту. Коллизионная
норма является отсылочной нормой всякий раз, когда необходимо ре-
шить вопрос о законе, подлежащем применению. Она действует при
столкновении (коллизии) разнонациональных законов. Коллизионная
норма состоит из двух частей: 1) объема, т. е. указания тех отношений,
к которым данная норма применяется; 2) привязки, т. е. указания за-
кона, который подлежит применению. Например, согласно ст. 14 КТМ
СССР к спорам о распределении между членами экипажа судна воз-
награждения за оказание помощи (объем) применяется закон флага
судна, оказавшего помощь (привязка).
Советское морское право является комплексной отраслью, предме-
том которой являются общественные отношения, возникающие между
советскими государственными, кооперативными и общественными ор-
ганизациями и гражданами при использовании Мирового океана в свя-
зи с торговым мореплаванием. Согласно ст. 1 Кодекса торгового море-
плавания Союза ССР под торговым мореплаванием понимается дея-
тельность, связанная с использованием судов для осуществления пере-
возок, морских промыслов, добычи ископаемых и т. д.
Советское морское право — это совокупность установленных совет-
ским государством норм, регулирующих общественные отношения со-
ветских, а в ряде случаев и иностранных организаций и граждан, уча-
ствующих в торговом мореплавании.
Под источником права понимают юридические формы выражения
воли государства. Их можно подразделить на две основные группы:
законы и подзаконные нормативные акты. Отличие советских законов
от подзаконных актов заключается в том, что законы издаются только
высшими органами государственной власти Союза ССР и союзных рес-
публик, а подзаконные акты — на основе и во исполнение законов. Ос-
новным источником морского права является Конституция (Основной
282
Закон) Союза ССР, законы Верховного Совета Союза ССР и союзных
республик, указы Президиума Верховного Совета, в том числе Ко-
декс торгового мореплавания Союза ССР (КТМ СССР), утвержден-
ный Указом Президиума Верховного Совета СССР от 17 сентября
1968 г. КТМ СССР — законодательный акт, содержащий в системати-
зированном виде нормы советского морского права, регулирующие от-
ношения, вытекающие из торгового мореплавания.
Подзаконные нормативные акты издаются на основании, во испол-
нении и в развитие законов СССР и союзных республик. Это норматив-
ные акты Совета Министров СССР и советов министров союзных рес-
публик, акты, издаваемые министерствами, ведомствами, решения мест-
ных Советов народных депутатов трудящихся и их исполнительных ко-
митетов и др.
Источниками советского морского права являются международные
морские соглашения и международные морские обычаи. Правила, со-
держащиеся в международных морских соглашениях, имеют обяза-
тельную силу для советского государства, подписавшего данное согла-
шение, и эти правила часто воспроизводятся в законах или подзакон-
ных актах. Международные морские обычаи — это правила поведения,
сложившиеся вследствие их применения в торговом мореплавании в те-
чение длительного периода времени. Некоторые международные обы-
чаи были использованы при разработке морских законов СССР. На-
пример, ст. 56 КТМ закрепила давний морской обычай: «Если по мне-
нию капитана, судну грозит неминуемая гибель, капитан, после при-
нятия всех мер к спасению пассажиров, разрешает судовому экипажу
оставить судно. Капитан оставляет судно последним ...»
К важным источникам морского права относятся обычаи иностран-
ных морских торговых портов и обязательные постановления началь-
ников морских торговых портов СССР.
К источникам морского права относятся постановления Пленума
Верховного Суда СССР, обобщающие судебную практику по транспорт-
ным делам, а также инструктивные указания Государственного арби-
тража при Совете Министров СССР, обобщающие арбитражную практи-
ку по имущественным спорам, вытекающим из торгового мореплавания.
§ 101. ПРАВОВОЕ ПОЛОЖЕНИЕ МОРСКОГО СУДНА
Определение морского судна. Согласно ст. 9 КТМ СССР под судном
понимается самоходное и несамоходное сооружение, используемое для
перевозки грузов, пассажиров, багажа и почты, для рыбного или иного
морского промысла, добычи полезных ископаемых, спасания судов,
терпящих бедствие на море, буксировки других судов и иных плаву-
чих объектов, производства гидротехнических работ или подъема зато-
нувшего в море имущества, для несения специальной службы, для спор-
та, научных, учебных, культурных и других целей.
Как техническое сооружение (вещь) судно может быть объектом
разнообразных имущественных прав, таких, как: права собственности,
купли-продажи, аренды и др.
283
Однако в морском праве судно рассматривается не только как вещь,
являющаяся продуктом судостроительных предприятий, но и как уч-
реждение, имеющее свой коллектив, свою организационную структуру,
наделенное определенными обязанностями и правами. Судно является
производственной единицей, входящей в состав предприятия, напри-
мер пароходства. Судно не обладает правом юридического лица и, сле-
довательно, не обладает гражданской правоспособностью. Оно не не-
сет самостоятельной ответственности по имущественным обязательст-
вам, не выступает от своего имени при заключении договоров, не имеет
своего обособленного имущества. Гражданская ответственность по обя-
зательствам морского судна падает на судовладельца. Судно обычно на-
ходится на внутреннем хозрасчете.
Право собственности. Согласно ст. 19 КТМ СССР суда в СССР мо-
гут находиться в собственности государства либо в собственности кол-
хозов, иных кооперативных или общественных организаций. В личной
собственности граждан могут находиться суда валовой вместимостью
не более 10 per. т и использоваться для удовлетворения их материаль-
ных и культурных потребностей.
Подавляющее число судов в СССР является собственностью госу-
дарства и находится в оперативном пользовании соответствующих ми-
нистерств и других организаций.
На суда, находящиеся в собственности Советского государства, не
может быть наложен арест или обращено взыскание без согласия Совета
Министров СССР. Это положение содержится в ст. 20 КТМ и закрепля-
ет принцип иммунитета государственных морских судов, который озна-
чает недопустимость применения к судам принудительных мер со сто-
роны иностранных судебных и других органов власти для обеспечения
чьих-либо имущественных требований. Отдельные судебные учрежде-
ния ряда стран не всегда признают иммунитет государственных мор-
ских судов. Реакционные буржуазные юристы утверждают, что им-
мунитетом могут обладать только суда, выполняющие публичные
функции и не занимающиеся коммерческой деятельностью. Это нашло
отражение в ст. 20 Конвенции о территориальном море 1958 г., кото-
рая предоставляет возможность ареста государственных торговых су-
дов или обращения на них взыскания. В связи с тем что это положение
противоречит принципам международного права, Советский Союз ра-
тифицировал Конвенцию с оговоркой по ст. 20: «Правительство СССР
считает, что государственные суда в иностранных территориальных во-
дах пользуются иммунитетом и поэтому применение к ним мер, упо-
мянутых в настоящей статье, может иметь место лишь с согласия госу-
дарства, под флагом которого плавает судно». В силу указанной ого-
ворки в отношении советских государственных судов ст. 20 Конвенции
о территориальном море 1958 г. не имеет юридической силы.
Право плавания под Государственным флагом Союза ССР. Судам,
находящимся в собственности Советского государства, колхозов, дру-
гих кооперативных или общественных организаций, а также граждан
СССР, предоставляется право плавания под Государственным флагом
Союза ССР. Это право судно нриобретает только с момента регистра-
ции (приписки) в одном из портов СССР. Государственный флаг Союза
284
ССР на судне устанавливает его национальную принадлежность Со-
ветскому Союзу и выражает реальную связь между судном и государ-
ством, которое осуществляет контроль над ним в административной,
технической и социальной областях. В открытом море советское судно
подчинено юрисдикции Советского государства, а во время пребывания
в иностранных водах находится под защитой и содействием со стороны
консульских и дипломатических представительств СССР.
Осуществление каботажных перевозок, рыболовства, морских про-
мыслов, спасательных и других видов хозяйственных работ в террито-
риальных и внутренних водах СССР предоставляется только судам,
плавающим под Государственным флагом Союза ССР. Изъятия из этих
прав могут быть установлены только специальными решениями прави-
тельства СССР и соглашениями между Союзом ССР и иностранными
государствами.
Подъем на морском судне Государственного флага Союза ССР или
союзной республики без права на этот флаг преследуется в уголовном
порядке.
Порядок подъема Государственного флага СССР на советских мор-
ских судах определяется уставами службы на судах соответствующих
министерств или ведомств.
§ 102. СУДОВЫЕ ДОКУМЕНТЫ
На борту каждого морского судна должны быть судовые документы,
предусмотренные законами страны флага судна, международными
договорами и соглашениями, которые удостоверяли бы правовое поло-
жение и техническое состояние судна, а также другие обстоятельства,
имеющие юридическое значение.
Судовые документы, выдаваемые по законам СССР. После внесения
судна в Государственный судовой реестр ему выдается Свидетельство
о праве плавания под Государственным флагом Союза ССР, которое
удостоверяет национальную принадлежность судна Союзу ССР.
Свидетельство о праве собственности на судно выдается портом ре-
гистрации судна и служит доказательством принадлежности судна на
право собственности соответствующему субъекту. В свидетельствах со-
ветских государственных судов, состоящих в оперативном управлении
пароходства, наряду с указанием названия пароходства-судовладель-
ца отмечается, что судно является собственностью Союза ССР, чем под-
тверждается, что данное судно обладает иммунитетом.
Свидетельство о годности судна к плаванию выдается органом, осу-
ществляющим технический надзор за судном. Оно служит одним из до-
казательств должного мореходного состояния судна и подтверждает
пригодность его для безопасного плавания в определенных районах.
Мерительное свидетельство выдается Регистром СССР и содержит
данные о валовой и чистой регистровой вместимости судна, его раз-
мерениях в целом и отдельных его помещений. На основании данных
мерительного свидетельства с судна взимаются сборы и платы за факти-
ческие услуги, оказываемые судну в портах.
285
Пассажирское свидетельство выдается Регистром СССР всем судам,
перевозящим более 12 пассажиров и удостоверяет пригодность судна к
перевозке пассажиров морем.
Разрешение на право пользования судовой радиостанцией выдается
Государственной инспекцией электросвязи Министерства связи СССР
и подтверждает, что радиостанция удовлетворяет техническим услови-
ям и правилам, а также содержит присвоенный судну позывной сигнал.
Классификационное свидетельство (сертификат) выдается Регистром
СССР судну после присвоения ему класса Регистра СССР, которое сви-
детельствует о высоких мореходных и эксплуатационных качествах
судна и отличном техническом его состоянии.
Судовые документы, выдаваемые на основании международных кон-
венций. По уполномочию Союза ССР на основании международных
конвенций Регистр СССР выдает судну следующие документы: между-
народное свидетельство о грузовой марке, свидетельство о безопасно-
сти грузового судна по конструкции, свидетельство о безопасности пас-
сажирского судна, радиотелеграфное и радиотелефонное свидетельства
и др.
Международное свидетельство о грузовой марке выдается судам за-
граничного плавания валовой вместимостью свыше 150 per. т на осно-
вании Конвенции о грузовой марке. В нем указывается минимальная
высота надводного борта судна от грузовой марки до палубной линии
при различных условиях плавания, чем устанавливаются пределы за-
грузки судна в зависимости от района плавания и времени года.
Свидетельство о безопасности пассажирского судна выдается пас-
сажирским судам загранплавания на основании Конвенции об охране
человеческой жизни на море. Кроме этого, на основании указанной
конвенции судну выдается: свидетельство о безопасности грузового
судна по конструкции] свидетельство о безопасности грузового судна по
оборудованию и снабжению] радиотелеграфное и радиотелефонное сви-
детельства о безопасности грузового судна. Разрешение на право поль-
зования судовой радиостанцией выдается Государственной инспек-
цией электросвязи Министерства связи СССР. В этом документе ука-
зывается позывной сигнал судна и его название, порт приписки, судо-
владелец и приводится краткая характеристика судовой радиостанции.
Документы, составляемые администрацией судна. К ним относятся
судовой, машинный, радиотелеграфный и санитарный журналы, а так-
же судовая роль и др. Судовой журнал — это официальный документ,
отражающий в хронологическом порядке деятельность судна, а также
объективные условия и обстоятельства, сопровождающие эту деятель-
ность. Он имеет важное юридическое значение в качестве основного
письменного доказательства при рассмотрении споров в арбитражах и
судах, расследовании аварийных случаев и т. д. Машинный журнал —
документ, в котором фиксируется работа судовых двигателей, содержа-
ние распоряжений относительно реверсов, скорости и т. п., а также ис-
полнение этих команд. Юридическое значение его такое же, как и судо-
вого журнала. Машинный и судовой журналы имеют установленную
форму и ведутся в соответствии с Правилами. Радиотелеграфный жур-
нал ведется по форме и в порядке, изложенных в Правилах радиосвязи
286
морской подвижной службы Союза ССР. Судовая роль — это список лиц
судового экипажа. Она служит для контроля за соблюдением судовла-
дельцем национальных и международных правовых норм относительно
минимального состава экипажа, комплектования, квалификации ко-
мандного состава и других целей.
§ 103. ЭКИПАЖ СУДНА
В состав судового экипажа входят капитан, другие лица командного
состава и судовая команда.
К командному составу относятся капитан, помощники капитана,
судовые механики, электромеханики, радиоспециалисты, врачи, а так-
же другие лица согласно Уставу службы на судах МРФ и уставов служ-
бы на судах других министерств и ведомств.
Судовой экипаж комплектуется из граждан СССР, признанных год-
ными по состоянию здоровья для плавания на морских судах.
Выход судов в море допускается лишь при наличии на борту экипа-
жа в составе, обеспечивающем безопасность плавания. Минимальный
состав экипажа судна, выходящего в море, устанавливается ММФ на
основании КТМ СССР и межведомственного протокола.
Порядок приема на работу лиц судового экипажа, их права и обя-
занности, основание и порядок увольнения определяются уставами
службы на судах и уставами о дисциплине.
Экипаж судна комплектуется людьми, имеющими свидетельства
о том, что они прошли специальное обучение. Лица командного состава
должны иметь соответствующее морское образование и пройти испыта-
ния в специальной квалификационной комиссии, которая присваивает
звания, установленные Положением о званиях лиц командного состава
морских судов. В зависимости от наличия того или иного звания спе-
циалисты могут быть допущены к занятию определенных должностей
по своей специальности на морских судах.
Звания лиц командного состава морских судов удостоверяются со-
ответствующими дипломами и квалификационными свидетельствами.
Капитан судна. Специфические условия работы судов, особенно в
заграничном плавании, обусловливают особое правовое положение ка-
питана судна, на которого возлагаются разнообразные и ответственные
функции.
Капитан несет обязанности по управлению судном, включающие
непосредственно судовождение и осуществление всех мер, необходимых
для обеспечения безопасного плавания. Осуществляя управление суд-
ном, капитан должен обеспечивать выполнение производственных пла-
нов, добиваться рентабельной и эффективной работы судна. Капитан
должен принимать все возможные меры для предотвращения всякого
вреда судну и находящимся на нем людям и грузу. В силу своего слу-
жебного положения капитан признается законным представителем
судовладельца и грузовладельцев в отношении сделок, вызываемых
нуждами судна, груза или плавания. Большую группу полномочий
капитана составляют административно-правовые, которые он осуществ-
287
ляет в качестве представителя государственной власти и администра-
ции на судне.
Распоряжения капитана в пределах его полномочий подлежат бес-
прекословному выполнению всеми находящимися на судне лицами.
В отношении членов экипажа капитан осуществляет дисциплинарную
власть в соответствии с Уставом о дисциплине. Если действия кого-либо
из лиц, находящихся на борту судна, не содержащие признаков уго-
ловно-наказуемого деяния, угрожают безопасности судна или находя-
щимся на нем людей и имущества, капитан вправе изолировать такое
лицо в особом помещении вплоть до прихода судна в первый порт СССР.
За незаконное содержание лица в особом помещении капитан
несет установленную законом ответственность. Капитан имеет
право задержать лицо, подозреваемое в совершении преступле-
ния, до передачи его соответствующим властям в первом пор-
ту СССР. Если на судне будет совершено деяние, предусмотренное со-
ветским уголовным законодательством, на капитана возлагается функ-
ция органа дознания. При производстве дознания капитан должен
руководствоваться нормами уголовно-процессуального кодекса и соот-
ветствующей инструкцией. Капитану не предоставлено право соверше-
ния актов гражданского состояния (вступление в брак, рождение,
смерть). Однако на капитана судна возлагается обязанность по состав-
лению документов, удостоверяющих факт рождения на судне ребенка
или факт смерти на судне. О наступлении этих фактов в судовом журнале
должны быть сделаны соответствующие записи. Капитан обязан удосто-
верить и принять на хранение составленные находящимися на судне
лицами завещания, которые затем он должен передать начальнику
порта СССР либо соответственно консулу СССР.
В соответствии со ст. 53 КТМ капитан обязан оказать помощь лю-
бому обнаруженному в море лицу, которому угрожает гибель, посколь-
ку капитан может это сделать, не подвергая опасности свое судно, его
экипаж и пассажиров. За неисполнение указанной обязанности капи-
тан несет установленную законом ответственность. Капитан решает
вопрос об оставлении судна, если судну грозит неминуемая гибель.
После принятия всех мер для спасения пассажиров капитан разрешает
судовому экипажу покинуть судно и сам оставляет его последним. Пос-
ле оставления судна капитан сохраняет дисциплинарную власть по от-
ношению к членам экипажа.
Капитан несет ответственность за политическое и моральное состоя-
ние экипажа, а также состояние трудовой дисциплины на вверенном
ему судне. Во внешних сношениях своего судна капитан является долж-
ностным лицом советского государства. В международной практике
торгового мореплавания недружелюбное отношение к капитану, осу-
ществление дискриминационных и других подобных им мер рассмат-
риваются как акты недружелюбия и дискриминации по отношению к го-
сударству флага судна.
Глава XXII
ПРАВО ПОЛЬЗОВАНИЯ МОРЕМ
§ 104. ПРАВОВОЙ РЕЖИМ МОРСКИХ ВОД
Международное морское право делит морские пространства в зави-
симости от правового режима на следующие виды: открытое море, тер-
риториальное море (воды), внутренние (национальные) воды, между-
народные проливы и каналы.
Под правовым режимом морских пространств понимается совокуп-
ность правовых норм, которыми регулируются отношения, возникаю-
щие между государствами, государствами и юридическими лицами, а
также государствами и гражданами в связи с использованием морей
и их ресурсов в транспортных, промысловых, научных и иных мирных
целях.
В 1982 г. была принята новая Конвенция СЮН по морскому праву.
Указанная Конвенция состоит из 320 статей и девяти приложений, ко-
торые детально регламентируют правомочия государств во всех сферах
использования пространств и ресурсов Мирового океана.
Конвенция создает правовую базу в области международного судо-
ходства, разработки ресурсов морского дна, международного рыболов-
ства, морских научных исследований и защиты морской среды от за-
грязнения.
Правовой режим морских вод, используемых в целях торгового море-
плавания различен. Это определяет и различный по своему объему ком-
плекс прав и обязанностей, которыми судно располагает в тех или иных
водах.
Открытое море. Им признаются все морские пространства, которые
не входят ни в территориальные, ни во внутренние воды какого-либо
государства. Основу режима открытого моря составляют следующие
два принципа: открытое море открыто для всех наций и никакое госу-
дарство не вправе претендовать на подчинение какой-либо его части
своему суверенитету; свобода открытого моря должна осуществляться
всеми государствами согласно нормам международного права с учетом
интересов всех государств.
Первый принцип означает, что все государства, в том числе и не име-
ющие морского побережья, имеют право свободы судоходства и рыбо-
ловства, право свободно прокладывать подводные кабели и трубопро-
воды, свободу полетов над открытым морем.
Каждое судно должно обладать определенной национальностью,
внешним выражением которой является флаг, под которым оно плавает.
В открытом море судно подчиняется исключительной юрисдикции го-
сударства флага судна. Это означает, что в политическом, правовом и
административном отношении судно подчиняется власти государства
флага судна и никакое другое государство не вправе претендовать на
подчинение этого судна своей власти и препятствовать осуществлению
над ним юрисдикции государства флага.
289
Предусмотрены следующие изъятия из исключительной юрисдик-
ции государства флага судна: если акты вмешательства основаны на
правах, устанавливаемых международными соглашениями, участни-
ком которых является государство флага судна; когда имеются доста-
точные основания подозревать, что судно занимается пиратством или
работорговлей; если есть основания подозревать, что судно непра-
вомерно присвоило себе иностранный флаг или не поднимает свой флаг,
а в действительности имеет ту же национальность, что и военный
корабль, производящий его задержание.
В случае столкновения или другого происшествия с судном в откры-
том море уголовное или дисциплинарное преследование против капи-
тана и других лиц судового экипажа может быть возбуждено только
перед соответствующими властями государства флага судна или того
государства, гражданином которого это лицо является. Отобрать у
судоводителя диплом или классификационное свидетельство может
только государство, которое их выдало, даже в том случае, если их
владелец является гражданином другого государства.
Свобода пользования открытым морем включает также предостав-
ление свободного прохода через морские проливы и каналы, по которым
проходят мировые морские пути. К числу морских проливов, имеющих
международное значение относятся, например, Гибралтарский пролив,
Суэцкий и Панамский каналы.
Территориальным морем (водами) называется примыкающий к сухо-
путной территории или внутренним водам прибрежного государства
морской пояс, который входит в состав государственной территории и
находится под его суверенитетом, но с учетом общепризнанных норм
международного морского права.
В СССР режим территориальных вод регламентирован Положением
об охране государственных границ Союза ССР. Основная цель установ-
ления территориальных вод состоит в обеспечении политической, воен-
ной и экономической безопасности прибрежного государства. Ширина
территориального моря Советского Союза равняется 12 милям.
Практика иностранных государств в части определения ширины
своего территориального моря крайне разнообразна и ширина террито-
риального моря колеблется от 3 до 200 миль.
Новая Конвенция ООН по морскому праву устанавливает, что ши-
рина территориального моря не должна превышать 12 морских миль.
Конвенция устанавливает право мирного прохода иностранных нево-
енных судов через территориальные воды прибрежного государства.
Мирным проходом считается плавание судов через территориальные
воды с целью пересечения их без захода во внутренние воды или входа
во внутренние воды, а также выхода из них, совершаемое ими таким об-
разом, что они не нарушают мир, добрый порядок или безопасность
прибрежного государства. Проход включает также остановку судна и
стоянку на якоре, если они связаны с обычным плаванием или необхо-
димы вследствие непреодолимой силы или бедствия.
Прибрежное государство может полностью закрывать для плавания
отдельные участки территориальных вод и временно приостанавливать
проход судов в определенных районах, устанавливать обязательные
290
курсы следования судов и обязательную лоцманскую проводку судов
в опасных для плавания местах.
Иностранные суда, осуществляя право мирного прохода, должны
соблюдать все законы и правила, издаваемые прибрежным государст-
вом, в частности, касающиеся судоходства.
Прибрежное государство в определенных случаях может осуществ-
лять уголовную и гражданскую юрисдикцию над иностранными судами,
находящимися в территориальных водах. Так, если судно вышло из
внутренних вод прибрежного государства, последнее может применить
любые меры для ареста лиц или расследования на борту иностранного
судна согласно нормам уголовного законодательства. Однако компе-
тентные органы должны уведомить консульские власти государства
флага судна до принятия указанных мер и способствовать установле-
нию контакта консула с экипажем судна.
Если иностранное судно только пересекает территориальные воды,
то прибрежное государство не имеет права производить арест какого-
либо лица или производить расследование на борту судна в связи с со-
вершенным на нем преступлением во время прохода судна территори-
альными водами, за исключением случаев, если: последствия преступ-
ления распространяются на прибрежное государство; совершено такое
преступление, в результате которого нарушается спокойствие в стране
или порядок в территориальных водах; капитан судна или консул стра-
ны флага судна обратится к местным властям с просьбой оказать в этом
помощь; это необходимо для пресечения незаконной торговли наркоти-
ками.
Иностранное частновладельческое судно, находящееся в террито-
риальных водах прибрежного государства, подлежит его гражданской
юрисдикции. Однако, если судно только пересекает территориальные
воды (без захода во внутренние воды), прибрежное государство не впра-
ве останавливать его или менять его курс в целях осуществления граж-
данской юрисдикции в отношении лица, находящегося на борту судна,
но имеет право применять меры по отношению самого судна, если его
имущественная ответственность или обязательства возникли во время
или в связи с проходом судна через территориальные воды.
Иностранные торговые суда пользуются правом мирного прохода
через советское территориальное море при следовании в свои порты или
порты третьих стран без захода во внутренние воды СССР. Мирный
проход исключает совершение каких-либо действий, причиняющих
ущерб миру, порядкам и безопасности Советского государства.
Экономическая зона. Согласно новой Конвенции по морскому праву
ширина экономической зоны не должна превышать 200 миль.
Прибрежное государство в своей экономической зоне имеет суве-
ренные права в целях разведки, разработки и сохранения природных
ресурсов, а также распространяет юрисдикцию на создание и исполь-
зование установок, сооружений и искусственных островов, морских на-
учных исследований, охраны морской среды и др.
Морские внутренние воды. В состав морских внутренних (нацио-
нальных) вод входят: акватории морских портов; внутригосударст-
венные заливы и моря; исторические заливы и моря.
291
В состав акватории морского порта входят бассейны, гавани, рейды
и подходы к порту.
К внутригосударственным заливам и морям относятся такие, по-
бережье которых на всем протяжении находится под властью данного
государства и когда ширина входа в залив (море) не превышает 24 миль.
К историческим заливам (морям) относятся заливы, которые в си-
лу традиционной, исторической их принадлежности к национальной
территории государства рассматриваются этим государством как его
внутренние морские воды. Например, историческим заливом Канады
является Гудзонов залив, Англии —Бристольский и т.д. К историчес-
ким морям СССР относятся моря заливов типа Карское, Лаптевых,
Восточно-Сибирское и Чукотское.
Внутренние воды являются частью территории прибрежного госу-
дарства и на них полностью, без каких-либо изъятий, распространяется
суверенитет данного государства. Правовой режим внутренних вод
определяется источниками морского права соответствующего примор-
ского государства и, следовательно, является обязательным для испол
нения всеми судами независимо от их национальности.
§ 105. ПРАВОВОЙ РЕЖИМ СУДНА В ПОРТУ
Под правовым режимом судна в порту понимается совокупность
норм, регулирующих права и обязанности судна при входе в порт,
пребывание в нем и выходе из порта. В международном праве нет
кодифицированных норм, устанавливающих определенный правовой
режим судов в иностранных портах. Указанный режим устанавливает-
ся нормами, содержащимися в двусторонних договорах между госу-
дарствами, правовыми нормами и обычаями данных государств. В на-
стоящее время применяются два основных вида правового режима ино-
странных судов в портах: режим наиболее благоприятствуемой нации и
национальный режим. Режим наиболее благоприятствуемой нации
означает, что государство обязуется предоставлять на своей террито-
рии другому государству такие же преимущества и льготы, какие
представляются любой третьей стране. Национальный режим озна-
чает, что одно государство предоставляет на своей территории дру-
гому государству преимущества и льготы, которыми пользуются
собственные суда, юридические лица и т. д.
Иностранное судно, находясь в порту, должно выполнять установ-
ленные прибрежным государством правила относительно регулирова-
ния движения судов, постановки на якорь, таможенного и санитарного
контроля, приема лоцманов, пользования радиостанцией, мест и спосо-
бов погрузки и выгрузки грузов, уплаты портовых сборов и налогов,
схода на берег членов экипажа и т. п.
В соответствии с Конвенцией по облегчению морского судоходства,
ратифицированной Советским Союзом, государства — участники Кон-
венции обязаны принимать соответствующие меры для облегчения меж-
дународного судоходства и предотвращения ненужных задержек судов
в портах в связи с осуществлением портовых формальностей.
292
Иностранное торговое судно, находясь в порту, подчиняется адми-
нистративной, уголовной и гражданской юрисдикции прибрежного го-
сударства.
Подчинение административной юрисдикции означает, что власти
прибрежного государства имеют право осуществлять расследование и
привлекать к административной ответственности капитана и других
лиц экипажа судна за нарушение установленных государством поли-
цейских, таможенных, санитарных и других административных пра-
вил и производить задержание судна по этим причинам. Кроме этого,
портовые власти имеют право задержать судно в порту, а капитана при-
влечь к ответственности в случае технической неисправности судна и
непригодности его к плаванию, нарушения требований о загрузке судна,
снабжении и снаряжении и т. п. Власти прибрежного государства име-
ют право расследовать аварии судов, происшедших в порту независимо
от их причин.
Подчинение уголовной юрисдикции заключается в том, что компетент-
ные органы прибрежного государства могут производить расследование
и рассмотрение дел о преступлениях, совершенных экипажем или дру-
гими лицами, находящимися на иностранном судне, а также произво-
дить обыск и арест, если на это имеются достаточные основания. Одна-
ко признается, что указанные действия не предпринимаются в тех слу-
чаях, когда преступление, совершенное на борту иностранного судна,
не нарушает правопорядок, общественное спокойствие и безопасность
в порту и не затрагивает интересы учреждений и граждан прибрежного
государства. Внутренний распорядок на иностранном судне регулиру-
ется законами и правилами государства флага судна. Согласно
консульских конвенций и других соглашений между государствами в
случае необходимости производства ареста или обыска на борту ино-
странного судна местные власти должны предварительно сообщать об
этом консульскому представительству государства флага судна с тем,
чтобы его должностные лица могли присутствовать при совершении
указанных действий, а также способствовать установлению контакта
между ними и экипажем судна.
Подчинение гражданской юрисдикции состоит в том, что судебные
учреждения прибрежного государства имеют право рассматривать и
выносить решения в отношении иностранного, судна по имущественным
требованиям, а также задерживать и налагать арест на иностранное
судно в порядке обеспечения исков либо взысканий по уже вынесенным
судебным решениям.
Согласно законодательству СССР суда, принадлежащие на
правах собственности государству, не могут быть задержаны или аре-
стованы в порядке обеспечения исков или исполнения уже вынесенных
судебных решений. В некоторых государствах иммунитет признается
только за государственными судами публичной службы и не признает-
ся за государственными торговыми судами, используемыми для ком-
мерческих целей. Поэтому, если компетентные органы иностранного
государства применят к советскому судну какие-либо принудительные
меры в указанных целях, капитан должен заявить протест и обратиться
за содействием и помощью к консулу СССР.
293
Глава XXIII
НАДЗОР ЗА БЕЗОПАСНОСТЬЮ МОРЕПЛАВАНИЯ
§ 106. ГОСУДАРСТВЕННЫЙ НАДЗОР
И МЕЖДУНАРОДНЫЕ СОГЛАШЕНИЯ ПО БЕЗОПАСНОСТИ МОРЕПЛАВАНИЯ
Безопасность плавания судов в открытом море наряду с националь-
ным законодательством в большой степени регламентируется нормами
международных договоров.
Международные договоры являются правовыми средствами обеспе-
чения безопасности мореплавания, которые устанавливают определен-
ные обязанности государств как субъектов международного права.
К правовым формам обеспечения безопасности мореплавания также
относятся рекомендации компетентных специализированных учрежде-
ний Организации Объединенных Наций, таких, как: ИМО, Междуна-
родной организации труда, Международным союзом электросвязи
и др.
Наиболее важными международными договорами по вопросам обес-
печения безопасности мореплавания являются: Конвенция по охране
человеческой жизни на море 1974 г.; Конвенция о грузовой марке
1966 г.; Конвенция о Международных правилах предупреждения столк-
новений судов в море 1972 г.; Соглашения относительно морских сиг-
налов и об охраняемых плавучих маяках, находящихся вне своих
обычных постов (Лиссабонские соглашения 1930 г.) и другие.
Конвенция по охране человеческой жизни на море содержит требо-
вания к конструкции судов, остойчивости, спасательным средствам,
противопожарной защите, механизмам, электроустановкам и т. п.
Соответствие состояния судна требованиям Конвенции удостоверя-
ется унифицированными свидетельствами, которые выдаются прави-
тельством страны флага судна или уполномоченными на это организа-
циями или лицами. В СССР такой организацией является Регистр Союза
ССР. Правительства государств — участников Конвенции обязаны из-
давать по входящим в Конвенцию вопросам соответствующие законы,
приказы, правила и направлять их для сведения ИМКО.
Конвенция о грузовой марке устанавливает минимальную величи-
ну надводного борта судна и, следовательно, максимально допустимую
загрузку судна при условии, что оно сохраняет достаточную прочность
и остойчивость. Минимальный надводный борт — это расстояние меж-
ду грузовой ватерлинией и палубой надводного борта, которое обозна-
чается на бортах судна специальным знаком — грузовой маркой.
Конвенция распространяется на морские торговые суда стран —
участниц Конвенции, совершающих международные рейсы, за исклю-
чением судов длиной менее 24 м, рыболовных судов, яхт и судов, пла-
вающих в Каспийском море, по Великим Озерам и по рекам Св. Лав-
рентия, Ла-Плата, Парана, Уругвай.
Судно не может выйти в море в международный рейс, если оно долж-
ным образом не освидетельствовано, на его бортах не нанесена грузо-
вая марка и ему не выдано международное свидетельство о грузовой
294
марке или, в соответствующих случаях, свидетельство об изъятии гру-
зовой марки.
Как Конвенция по охране человеческой жизни на море, так и Кон-
венция о грузовой марке содержит положение о возможности осуществ-
ления контроля со стороны властей иностранных портов за соблюде-
нием требований конвенций судами, находящимися в этих портах.
Центральным органом государственного надзора за безопасностью
мореплавания в СССР является Министерство морского флота. Опреде-
ленные законом надзорные функции ММФ реализует через Всесоюзное
объединение мореплавания и аварийно-спасательных работ — В/О
«Мореплавание» и Регистр СССР.
Надзорные функции ММФ по обеспечению безопасности мореплава-
ния распространяются на все министерства, ведомства, организации и
всех граждан. ММФ предоставлено право издавать в пределах его ком-
петенции и в соответствии с КТМ, другими нормативными актами и
международными договорами, в которых участвует СССР, обязатель-
ные для всех министерств, ведомств, организаций и граждан правила,
инструкции и положения по вопросам торгового мореплавания.
Контоль и надзор за безопасностью судоходства на внутренних
водных путях осуществляет Главная инспекция по безопасности судо-_
ходства Минречфлота РСФСР через свои бассейновые и линейные
судоходные инспекции. Она имеет право: запрещать судоходство на
тех участках водного пути, которые не отвечают требованиям безо-
пасности, производить осмотр судов и прекращать движение, если их
техническое состояние, снабжение, укомплектованность экипажем и
судовые документы не отвечают требованиям действующих норматив-
ных актов по безопасности судоходства.
Инспекция портового надзора. Морские торговые порты осуществ-
ляют надзор за соблюдением законов и правил по торговому мореплава-
нию. Административно-надзорные функции советских морских торго-
вых портов определяются ст. 64 КТМ СССР. Функции по обеспечению
безопасности мореплавания и порядка в порту осуществляет капитан
порта, которому подчинены Инспекция портового надзора, лоц-
манская и спасательная службы. Распоряжения капитана порта по
обеспечению безопасности мореплавания и административного надзора
обязательны для всех организаций и лиц, независимо от их ведомст-
венной подчиненности и национальной принадлежности. Лица, винов-
ные в нарушении законодательства о торговом мореплавании, могут
привлекаться к административной, а в необходимых случаях к уголов-
ной ответственности.
Каждое судно обязано до выхода из порта получить на это разреше-
ние капитана порта.
С целью подтверждения готовности судна к выходу из порта ка-
питан судна обязан по требованию портового надзора предъявить суд-
но и его экипаж к проверке. О всех нарушениях и недостатках, обна-
руженных при проверке и препятствующих выпуску судна в море,
Инспекцией портового надзора совместно с администрацией судна со-
ставляется акт-предписание, вручаемое капитану судна. Капитан
морского торгового порта может запретить выход судна в море в сле-
295
дующих случаях: при неустранении недостатков, обнаруженных при
проверке и указанных в акте-предписании; отсутствия необходимых
судовых документов, истечения их срока действия до возвращения суд-
на в порт, а также несоответствия документов фактическим данным;
отсутствия у командного состава соответствующих дипломов или клас-
сификационных свидетельств; неукомплектованности экипажа в со-
ответствии с Положением о минимальном составе экипажа, при кото-
ром допускается выход судов в море; загрузки судна сверх установ-
ленных норм; наличии крена судна свыше 5°; недостаточной герметич-
ности палубных закрытий, водонепроницаемых дверей и клинкетов,
водотечности корпуса судна; неисправности или некомплектности за-
крытий грузовых люков; несовершенного крепления палубного
груза; отсутствия полного комплекта аварийного, противопожарного
имущества и спасательных средств в соответствии с нормами; неподго-
товленности экипажа к борьбе за живучесть судна; несоответствия
района и условий плавания ограничениям, указанным в судовых доку-
ментах и т. д.
В случае изменений навигационной или гидрометеорологической
обстановки, препятствующих выходу судна из порта, капитан порта
имеет право задержать выход судна в море. В случае выхода судна из
порта без разрешения Инспекции портового надзора капитан порта
принимает меры к возвращению судна в порт.
Согласно Общим правилам морских торговых и рыбных портов
СССР все суда в течение 6 ч с момента прибытия судна в порт обязаны
оформить свой приход в Инспекции портового надзора с соблюдением
санитарных, карантинных, таможенных и пограничных формальное'
тей.
Разрешение на выход судна из порта оформляется портовым надзо-
ром путем производства разрешительной надписи на Заявлении на пра-
во отхода и наложения штампа отхода на судовой роли. Разрешение
на выход из порта действительно в течение 24 ч. Если судно задержа-
лось в порту сверх установленного срока, капитан обязан сообщить об
этом в портовый надзор и заново оформить отход. В случае изменений
в составе экипажа или техническом состоянии судна после оформления
отхода капитан обязан до отхода судна известить об этом портовый над-
зор.
Согласно ст. 64 КТМ в функции морских торговых и рыбных пор-
тов также входит: внесение судов в Государственный судовой реестр и
выдача судовых документов; выдача дипломов и квалификационных
свидетельств на звания лиц командного состава морских судов; конт-
роль за поддержанием надлежащих глубин в порту, на подходных фар-
ватерах и каналах; организация сигнальной службы; контроль за сред-
ствами навигационного ограждения в порту и на подходах к нему; рас-
следование морских происшествий; регулирование движения судов на
акватории порта, подходных каналах и фарватерах; выдача разреше-
ний на подъем затонувшего в море имущества и др.
§ 107. расследование Аварийных случаев.
ЛОЦМАНСКАЯ ПРОВОДКА
Международная конвенция по охране человеческой жизни на море
возлагает на каждое государство—участника Конвенции обязанность
проводить расследование любой аварии, которую потерпит любое из
его судов.
Расследование аварийных случаев в СССР регулируется КТМ, из-
данным на его основании Положением, утвержденным министром мор-
ского флота, а также другими нормативными актами. Органами рас-
следования аварийных случаев в СССР являются капитаны портов, су-
довладельцы, капитаны судов. Кроме этого, органами расследования
могут быть специальные аварийные комиссии, создаваемые компетент-
ными органами.
Действующее Положение о порядке расследования аварий распро-
страняется на все морские суда, принадлежащие министерствам и ве-
домствам СССР и союзных республик, общественным и коорперативным
организациям, а также спортивным клубам. Действие Положения рас-
пространяется также на иностранные суда, если аварийный случай
произошел в пределах территориальных или внутренних вод СССР и в
результате которого были затронуты интересы Советского государст-
ва, его организаций или граждан. Кроме этого, Положение имеет силу
в следующих случаях: если последует просьба о проведении расследова-
ния от капитана иностранного судна, его судовладельца или консула
страны флага судна; если происшествие имело место за пределами тер-
риториальных или портовых вод СССР, но при этом последовала смерть
или был причинен вред здоровью граждан СССР или был причинен
ущерб имуществу СССР, его граждан или организаций.
Под аварийными случаями понимаются чрезвычайные происшествия
или несчастные случаи, повлекшие за собой повреждения транспорт-
ных средств. Аварийные случаи подразделяются на кораблекрушения,
аварии и аварийные происшествия.
Под кораблекрушением понимается аварийный случай, в результате
которого произошли гибель судна или его полное конструктивное раз-
рушение. Аварией признается: повреждение судна, вызвавшее потерю
его мореходности и требующее не менее 48 ч для исправления повреж-
дений; повреждение судном берегового сооружения, исправление ко-
торого требует вывод сооружения 'из эксплуатации на срок не менее
48 ч; нахождение судна на мели: грузового — не менее 48 ч, а пасса-
жирского — не менее 12 ч независимо от наличия повреждений. К ава-
рийным происшествиям относятся случаи, когда повреждения, указан-
ные выше, вызывают последствия, на устранение которых требуется
менее 48 или 12 ч соответственно, а также случаи повреждения судном
средств навигационного оборудования, выведшие его из эксплуатации.
Любой случай, приведший к человеческим жертвам, рассматрива-
ется как чрезвычайное происшествие и расследуется как авария. По-
вреждение корпуса, руля, винтов, главных и вспомогательных меха-
низмов, полученные не по вине экипажа из-за плавания в ледовых ус-
ловиях, признаются ледовыми аварийными случаями. Все другие по-
Ю Зак. 4 83 297
вреждения судна, не приведшие к потере мореходности, в том числе слу-
чаи касания грунта или посадки судна на мель без повреждения кор-
пуса в том случае, когда грузовое судно самостоятельно сошло с мели
в течение 6 ч (пассажирское — 2 ч) после посадки, а также случаи по-
вреждения судном берегового сооружения, не приведшие к выводу его
из эксплуатации, к аварийным случаям не относятся.
Все кораблекрушения и аварии с судами вместимостью 500 б.р.т
и более или мощностью 500 л. с. и более, а также аварийные случаи с
человеческими жертвами расследуются капитанами портов и учитыва-
ются организациями, эксплуатирующими суда.
Все аварийные происшествия и аварии с судами вместимостью и
мощностью, меньшей, чем указано выше, расследуются и учитывают-
ся непосредственно организациями, эксплуатирующими эти суда.
Все повреждения судов, касания грунта и посадки на мель, не яв-
ляющиеся аварийными случаями, расследуются и оформляются непо-
средственно капитаном судна.
О всех аварийных случаях капитан судна обязан немедленно сооб-
щить своему владельцу, и если случай имел место в иностранных тер-
риториальных или внутренних водах — сообщить советскому консулу,
а в необходимых случаях — советскому посольству и обратиться к ним
за оказанием необходимого содействия и помощи.
По прибытии аварийного судна в советский порт капитан судна обя-
зан немедленно представить капитану порта письменное заявление об
аварийном случае и технический акт.
Капитан порта регистрирует аварийный случай и устанавливает
его вид.
Если аварийный случай подлежит расследованию капитаном порта,
то он на основании представленных ему капитаном судна документов
производит расследование и составляет заключение, которое должно
содержать: описание обстоятельств, при которых произошел данный
случай; указание его причин; перечень лиц, виновных в аварийном
случае, а также описаний его последствий с подробным перечнем по-
вреждений и потерь. Материалы и заключение по аварийному случаю
направляются владельцу судна.
Судовладелец по получении заключения и материалов расследова-
ния аварийного случая обязан в десятидневный срок издать приказ
с указанием обстоятельств, причин и последствий аварийного случая,
наказать виновных лиц, разработать и провести в жизнь конкретные
мероприятия по предупреждению аналогичных аварийных случаев в
будущем. Решение по аварийному случаю, принятое владельцем судна,
может быть обжаловано лицами, которых это решение касается, в
пятидневный срок министру (по подчиненности). Подача жалобы не
приостанавливает приведение решений в исполнение.
Те аварийные случаи, которые согласно Положению подлежат рас-
следованию непосредственно судовладельцами, производятся послед-
ними. Если же при рассмотрении аварийного случая установлены при-
знаки преступления, материалы и заключение (если расследование за-
кончено) направляются прокурору.
298
Лоцманская проводка. Для обеспечения безопасного прохода судов
в морские порты в СССР организована лоцманская служба.
Государственные морские лоцманы обязаны обеспечивать безава-
рийную проводку судов на подходах к морским портам, в пределах этих
портов, а также между портами. Попутно с обязанностями по проводке
на лоцманов возлагается контроль за соблюдением судами портовых
обязательных постановлений.
Существует два вида лоцманской проводки: добровольная и обяза-
тельная. При добровольной проводке решение о пользовании услугами
лоцмана целиком зависит от капитана судна. При обязательной про-
водке прием лоцмана не зависит от желания капитана. Районы обяза-
тельной лоцманской проводки указываются в лоциях, извещениях мо-
реплавателям и обязательных постановлениях морских портов.
Лоцман обязан прибыть на судно по вызову капитана к указанному
в заявке времени и предъявить лоцманское удостоверение. Оформле-
ние проводки производится на бланке установленного образца.
Лоцман не может покинуть судно без согласия капитана раньше,
чем он поставит судно на якорь или ошвартует его в установленном
месте или передаст другому лоцману, или выведет судно в море.
Присутствие лоцмана на судне не снимает с капитана ответственно-
сти за управление судном.
Если капитан, приняв лоцмана, не будет следовать его рекоменда-
циям или потребует проводки в условиях, которые лоцман считает опас-
ными, он имеет право в присутствии третьего лица отказаться от про-
должения проводки судна. Вместе с тем капитан может не принимать
советов лоцмана, которые, по его мнению, не обеспечивают безопас-
ность судна, и в необходимых случаях отстранять лоцмана от проводки.
Если капитан судна попытается нарушить какое-либо из правил
плавания в районе проводки, лоцман обязан указать капитану на его
неправильные действия и, если капитан все же нарушил эти правила,
лоцман обязан сообщить об этом Инспекции портового надзора.
Несмотря на то, что лоцман является только советником капи-
тана, при определенных обстоятельствах возможны виновные действия
лоцмана, повлекшие за собой аварию судна. Аварийные убытки, про-
исшедшие по вине лоцмана при исполнении им служебных обязаннос-
тей, несет морской порт, которому подчинен данный лоцман.
Глава XXIV
ВОЗМЕЩЕНИЕ УБЫТКОВ ОТ СТОЛКНОВЕНИЯ СУДОВ
И ВОЗНАГРАЖДЕНИЕ ЗА СПАСЕНИЕ НА МОРЕ
§ 108. ВОЗМЕЩЕНИЕ УБЫТКОВ ОТ СТОЛКНОВЕНИЯ СУДОВ
В целях унификации правовых норм, регламентирующих вопросы
имущественной ответственности за ущерб, причиненный столкновением
судов, в 1910 г. на Международной конференции в Брюсселе была при-
нята Конвенция для объединения некоторых правил относительно столк-
10* 299
новения судов. Эта Конвенция признана имеющей силу для Советского
Союза Постановлением СНК СССР от 2 февраля 1926 г.
Положения Конвенции применяются при столкновении между дву-
мя (или более) морскими судами или морскими и речными судами неза-
висимо от того, в каких водах (морских или речных) произошло столк-
новение. Конвенция применяется также и в тех случаях, когда столк-
новения (физического соприкосновения) между судами не произошло,
но ущерб был причинен одним судном другому из-за выполнения или
невыполнения маневра, или несоблюдения правил судоходства. Кроме
этого, положения Конвенции распространяются на те случаи, когда не
все из столкнувшихся судов были на ходу, а одно из них в момент столк-
новения находилось на якоре.
Советский Союз, как и большинство стран мира, привел свое зако-
нодательство в соответствие с основными положениями Конвенции.
Нормы, регулирующие вопросы, связанные со столкновением судов,
приведены в главе XIV КТМ СССР «Возмещение убытков от столкнове-
ния судов».
Возмещение убытков, причиненных столкновением судов, основано
на принципах имущественной ответственности за причинение вреда.
Согласно советскому законодательству вред, причиненный личности
или имуществу гражданина, а также вред, причиненный организации,
подлежит возмещению в полном объеме лицом, причинившим вред.
Для возложения обязанностей по возмещению вреда на лицо, при-
чинившее этот вред, необходимо, чтобы одновременно имели место про-
тивоправные и виновные действия, а также имелась причинная связь
между этими действиями и возникшим вредом.
Противоправное поведение представляет собой такое действие или
бездействие, которое приводит к нарушению правовой нормы, напри-
мер нарушение судоводителями МППСС, правил технической эксплуа-
тации и т. п. Виновные действия могут проявляться в форме умысла или
в форме неосторожности. При умысле причинитель вреда осознает про-
тивоправный характер своего поведения и желает наступления вреда.
«Неосторожная» вина в отличие от умысла заключается в том, что при-
чинитель не желает наступления вреда и не предвидит вредоносных по-
следствий, но он обязан их предвидеть и недопустить их наступления.
Причинение убытков от столкновения судов является, как правило,
результатом противоправных, неосторожных, виновных действий судо-
водителей.
Вопрос о возмещении убытков от столкновения судов решается
в зависимости от того, что явилось причиной и по чьей вине произо-
шло столкновение. Возможны следующие три случая: столкновение
произошло по вине одного из столкнувшихся судов; в столкновении ви-
новны оба (или все) столкнувшиеся суда; столкновение произошло
вследствие случая или непреодолимой силы.
Если столкновение вызвано неправильными действиями или упу-
щениями одного из судов, убытки возмещаются той стороной, по чьей
вине произошло столкновение.
В практике мореплавания наиболее частыми являются случаи столк-
новения по вине обоих судов. В таких случаях ответственность каждо-
300
го из судов определяется соразмерно степени вины, которая устанавли-
вается либо в процентах, либо в соответствующих частях, например,
25 и 75%, или ¥4 и %.
При смешанной вине в столкновении владельцы судов несут соли-
дарную ответственность перед третьими лицами за ущерб, происшед-
ший вследствие смерти или повреждения здоровья людей, причем
судовладелец, уплативший по иску сумму, большую, чем с него сле-
дует, имеет право обратного требования костальным владельцам столк-
нувшихся судов.
Если столкновение произошло по вине всех столкнувшихся судов и
установить степень вины каждого из них не представляется возможным,
то ответственность устанавливается в равных долях.
На практике бывают случаи, когда невозможно установить причины
столкновения судов, что исключает возможность возмещения убытков,
поскольку в таких случаях нельзя установить, являлись ли действия
противоправными и виновными, а также находились ли они в причин-
ной связи с возникшим вредом. Поэтому если невозможно установить
причины столкновения, то убытки несет тот, кто их потерпел.
Если столкновение произошло случайно или вследствие действия
непреодолимой силы, то убытки также несет та сторона, которая их
претерпела. В настоящее время признание столкновения случайным
или вызванным действием непреодолимой силы практически не имеет
места, так как степень технического оснащения судов и уровень обеспе-
чения безопасности мореплавания сравнительно высоки.
Согласно ст. 258 КТМ СССР владелец судна, виновного в столкно-
вении, несет имущественную ответственность за ущерб, причиненный
другому судну, его имуществу, судовому экипажу, пассажирам и дру-
гим лицам, находящимся на борту и в том случае, когда столкновение
произошло по вине лоцмана независимо от того, была-ли лоцманская
проводка обязательной или факультативной. В этом случае судовладе-
лец, возместивший ущерб, имеет право предъявить обратное требова-
ние к морскому порту, которому подчинен лоцман (ст. 84 КТМ СССР).
При столкновении судов, принадлежащих советским организациям
(кроме колхозов), независимо от того, где имело место столкновение,
споры решаются в органах Государственного арбитража или при до-
стижении соглашения об этом—в Морской арбитражной комиссии
(МАК). Подавляющее число дел о столкновении судов рассматривается
в МАК как в специализированном, компетентном третейском суде.
Капитан каждого из столкнувшихся судов обязан оказать помощь
другому судну, его пассажирам и экипажу, поскольку он может это
сделать без серьезной опасности для своего судна, пассажиров и экипа-
жа. Кроме этого, капитаны обязаны, в пределах возможного, сообщить
друг другу название и порт приписки судна, порты отправления и наз-
начения, либо порт-убежище, в который направляется судно после
столкновения. За неисполнение указанных обязанностей капитан
несет установленную законом ответственность.
В случае столкновения судов капитан обязан немедленно передать
судовладельцу информацию, содержащую краткое, но исчерпывающее
изложение фактических обстоятельств столкновения.
301
При столкновении советского и иностранного судов капитан обя-
зан направить капитану иностранного судна письменное или по радио
заявление о возложении на него ответственности за повреждения и
все убытки, которые могут возникнуть вследствие данного столкнове-
ния.
Если судно после сюлкновения направляется в иностранный
порт, капитан обязан известить морского агента о случившемся и,
если нужно, обратиться к нему с просьбой об оказании необходи-
мого содействия и помощи.
По прибытии в порт капитан обязан заявить морской протест, и,
если необходимо, пригласить сюрвейера для осмотра полученных суд-
ном повреждений, известив об этом капитана или владельца иностран-
ного судна. По указанию пароходства капитан должен обговорить с ка-
питаном иностранного судна вопрос о заключении договора об арбит-
раже в случаях столкновения формы МАК.
В случае предъявления владельцем иностранного судна требова-
ния о предоставлении обеспечения капитан советского судна обязан не-
медленно известить об этом пароходство, указав при этом реквизиты
требования. При угрозе ареста советского судна в иностранном порту
капитан должен сообщить об этом пароходству и консулу СССР, а так-
же совместное морским агентом и, если необходимо, с представителя-
ми консульских учреждений СССР принять все возможные меры против
ареста судна, руководствуясь при этом наличием иммунитета Советс-
ких государственных морских судов, а также к оформлению банков-
ской гарантии в пользу владельцев иностранного судна.
Капитан обязан контролировать, чтобы о всех обстоятельствах и по-
следствиях столкновения в судовой журнал были внесены ясные и
подробные записи в строгом соответствии с правилами его ведения.
Кроме этого, капитан должен составить письменное объяснение, ука-
зав в нем все обстоятельства как непосредственно предшествующих
столкновению, так и самого факта столкновения и его последствий, и по
прибытии в советский порт вручить его капитану порта и пароходству.
К письменному объяснению должны быть приложены выписки из судо-
вого, машинного и радиотелеграфного журналов, курсограммы, схе-
мы взаимных расположений судов, фотографии, относящиеся к факту
столкновения судов, объяснительные записи членов вахты, морской
протест, акт осмотра судна сюрвейером, а также все прочие документы,
которые капитан сочтет полезными при рассмотрении дела о столкнове-
нии судов.
§ 109. ПРАВОВЫЕ УСЛОВИЯ СПАСАНИЯ НА МОРЕ
Законодательства большинства морских стран об оказании помощи
и спасении на море обобществлены Брюссельской конвенцией 1910 г.
«для объединения некоторых правил относительно оказания помощи и
спасения на море».
Советское правительство Постановлением СНК СССР от 2 февраля
1926 г. признало эту Конвенцию имеющей силу для СССР и все ее ос-
новные положения воспроизведены в Кодексе Торгового Мореплава-
302
ния Союза ССР. В развитие положений, содержащихся в главе XV
КТМ СССР «Вознаграждение за спасение на море» ММФ разрабатыва-
ет специальные ведомственные нормативные акты.
Положения Брюссельской конвенции 1910 г. и главы XV КТМ при-
меняются при оказании помощи как морскими судами друг другу, так
и морскими судами иным судам и, наоборот, независимо от того, в ка-
ких водах имеет место оказание помощи.
Спасение людей, гибнущих на море или ином водном пути, является
обязанностью капитана любого судна. Этот общепризнанный, гуман-
ный принцип закреплен в международных и национальных правовых
актах. Так, ст. 11 Брюссельской конвенции 1910 г. устанавливает, что
«каждый капитан обязан, насколько он может это сделать без серьез-
ной опасности для своего судна, своего экипажа, своих пассажиров,
оказать помощь всякому лицу, даже враждебному, встреченному в мо-
ре в опасности погибнуть». Аналогичная норма содержится в КТМ
(ст. 53).' Неоказание помощи людям рассматривается как преступле-
ние и капитан подлежит наказанию согласно уголовному законода-
тельству.
Спасенные люди не обязаны выплачивать спасателю вознагражде-
ние за свое спасение. В то же время спасатели людей имеют право на
справедливую долю в вознаграждении за спасенное имущество наравне
со спасателями имущества, если спасение людей осуществлялось в свя-
зи с тем же происшествием, что и спасение имущества.
При оказании помощи судам и спасении имущества, гибнущего на
море, международные и национальные нормы устанавливают право спа-
сателей на вознаграждение.
Основными критериями для решения вопроса о возникновении пра-
ва на спасательное вознаграждение являются: наличие реальной опас-
ности для судна и достижение полезного результата при выполнении спа-
сательной операции. Под реальной опасностью понимаются такие об-
стоятельства, которые в данных, конкретных условиях могут угрожать
судну гибелью или причинением тяжелых повреждений. Для призна-
ния реальной опасности не обязательно, чтобы она уже наступила.
Достаточно, чтобы эта опасность была вполне реальной.
Под полезным результатом понимается полное или частичное спа-
сение судна, груза и других материальных ценностей, а также фрахта,
плата за провоз пассажиров и багажа.
Если при спасании не был достигнут полезный результат, спасатель
не приобретает право на вознаграждение. Ему также не возмещаются
расходы и убытки, которые он понес при осуществлении спасательной
операции.
Сопровождение аварийного судна до места — убежища или нахож-
дение вблизи бедствующего судна по просьбе его капитана рассматри-
вается как достижение полезного результата и дает спасателю право на
вознаграждение.
Полезный результат может быть достигнут в результате комбини-
рованных усилий и мер, предпринятых как спасателем, так и аварий-
ным судном. В таких случаях размер вознаграждения зависит от того,
303
в какой мере спасатели своими действиями способствовали достижению
полезного результата.
Правом на вознаграждение за спасение не пользуются экипаж суд-
на, подвергшегося опасности, экипаж буксирующего его или буксируе-
мого им судна, а также лица, оказавшие услуги вопреки прямому и
разумному воспрещению капитана бедственного судна.
Международная конвенция по унификации некоторых правил от-
носительно спасания и оказания помощи на море (ст. 3) и КТМ СССР
(ст. 260) предусматривают, что услуги по спасанию, оказанные вопре-
ки прямому и разумному воспрещению капитана судна, подвергшего-
ся опасности, не дают право на вознаграждение.
Воспрещение оказывать помощь должно быть ясно (прямо) выра-
женным. Бремя доказывания того, что запрет не был прямым, возлага-
ется на спасателей.
Разумность запрета осуществлять действия по спасанию устанавли-
вается в зависимости от конкретных обстоятельств данного случая.
Чтобы приобрести право на вознаграждение, спасатели, оказавшие
помощь вопреки прямому запрету, должны доказать, что запрет был
неразумным. Анализ судебно-арбитражных дел показывает, что при-
знание запрета неразумным бывает в тех случаях, когда аварийное
судно подвергалось несомненной опасности гибели.
Обычно операции по спасанию имущества осуществляются по спе-
циальным договорам. Многие страны мира имеют одну или несколько
типовых проформ договоров. В СССР используется проформа, раз-
работанная МАК. Во многих странах широкое применение получил до-
говор по форме Ллойда. Договор спасания выполняет двоякую роль: яв-
ляется доказательством наличия отношений по спасанию имущества и
документом, в котором фиксируются условия, обязанности и права сто-
рон. Как проформа договора МАК, так и Ллойда предусматривают, что
спасатель берет на себя обязанность выполнять операции по спасанию и
приобретает право на вознаграждение только при достижении полез-
ного результата спасания. Их девиз: «Без спасения — нет вознагражде-
ния». Как правило, размер вознаграждения в момент заключения до-
говора в нем не указывается. Однако проформы предусматривают, что
внесение размера вознаграждения в договор не препятствует возмож-
ности оспорить его в соответствующем арбитраже или суде.
Проформы предусматривают также возможность для спасателя
обеспечить свои требования в определенном размере. Так, договор МАК
предусматривает условия об обеспечении уплаты спасательного вознаг-
раждения, в соответствии с которыми председатель МАК устанавливает
по просьбе спасателей размер и форму обеспечения, а также может вы-
нести постановление о задержании спасенного судна и находящегося
на нем имущества до предоставления соответствующего обеспечения.
Размер спасательного вознаграждения определяется сообразно об-
стоятельствам дела и устанавливается соглашением сторон, а если та-
кого соглашения нет — судом или арбитражем. При этом принимаются
во внимание: результат спасания; труд и заслуги спасателей; опас-
ность, которой подвергались спасенное судно и его пассажиры, эки-
паж и груз, а также спасатели; время, затраченное на спасание; по-
304
несенные издержки и убытки; стоимость подвергавшегося опасности
имущества спасателя; стоимость спасенного имущества; специальное
назначение судна-спасателя.
Вознаграждение не может превышать по своему размеру стоимос-
ти спасенного имущества.
В вознаграждении может быть отказано или его сумма может быть
уменьшена, если необходимость в оказании помощи была вызвана дей-
ствиями самих спасателей, если спасатели совершили кражу, утайку
или иные обманные действия.
Оформление спасательных операций. При обращении иностранного
судна с просьбой о помощи советское судно должно проследовать со
всей возможной скоростью к бедствующему судну (если такое действие
капитан сочтет разумным), и, подойдя к нему, капитан должен выяс-
нить его положение и требуемую помощь, оценить возможность спаса-
ния судна и груза, а также степень риска, которому будет подвергаться
советское судно. Приняв разумное решение о целесообразности про-
изводства спасательной операции, капитан должен предложить капи-
тану иностранного судна подписать договор о спасании по форме
МАК. Если обстоятельства не позволяют подписать договор, то до на-
чала операций необходимо получить согласие капитана иностранного
судна подписать договор при первой возможности. В этом случае вре-
мя и способ получения согласия капитана иностранного судна необхо-
димо зафиксировать в судовом журнале. Если капитан иностранного
судна предлагает оформить договор другой проформы, например, Ллой-
довской, то капитан может подписать его с согласия пароходства.
В случае недостижения соглашения о подписании договора о спасании
капитан может начать операцию только после получения от пароход-
ства соответствующего распоряжения.
При наличии обстоятельств, угрожающих жизни людей, находя-
щихся на борту иностранного судна, капитан обязан незамедлитель-
но начать спасание людей независимо от переговоров по поводу подпи-
сания договора о спасании и достижении согласия на его оформление.
Капитан должен иметь в виду, что оказание помощи вопреки прямо-
му, разумному и обоснованному отказу капитана бедствующего судна
принять помощь не дает права спасателю на получение вознагражде-
ния. При оформлении договора о спасании капитан не должен вносить
в договор конкретную сумму вознаграждения, а указывать, что размер
вознаграждения должен устанавливаться решением арбитража (суда),
оговоренного договором о спасании.
В случае когда для успешного выполнения работ по спасанию ка-
питан сочтет необходимым привлечь соспасателя (или соспасателей),
он должен согласовать это с капитаном иностранного судна.
По прибытии судна спасателя в первый порт захода капитан дол-
жен сделать заявление о морском протесте и оформить его.
Окончание работ по спасанию необходимо оформить двусторонним
актом. Если в ходе операции по спасанию был причинен ущерб иност-
ранному судну или его грузу, зафиксировать в акте все обстоятельства,
указывающие на то, что этот ущерб был вызван и явился следствием
условий, при которых производились спасательные работы. Если ущерб
3S5
по судну или грузу был причинен с согласия капитана иностранного
судна, — то указать это в акте.
В первом порту захода советского и спасенного иностранного судна
капитан должен обеспечить производство сюрвейерного осмотра спа-
сенного имущества для установления его стоимости, а также своего суд-
на и находящегося на нем груза, если при спасении ему был нанесен
ущерб.
По распоряжению пароходства капитан должен потребовать от ка'
питана иностранного судна предоставления достаточного обеспечения
и в случае отказа, применить к спасенному судну меры задержания,
руководствуясь при этом правовыми нормами данного иностранного
государства.
Капитан обязан с момента начала спасательной операции, в ходе
ее и по окончании сообщать пароходству данные, характеризующие
обстоятельства и действия спасания, а также в возможно кратчайший
срок переслать тщательно оформленные документы: подлинный дого-
вор о спасании, акт о морском протесте, выписки из судового журнала,
акт об окончании спасательной операции, акт сюрвейерного осмотра,
а также прочие документы, которые капитан сочтет необходимыми н
полезными для ведения дела.
Капитан обязан строго следить, чтобы записи, вносимые в черновой
судовой, судовой и машинный журналы с момента получения известия
о том, что иностранное судно терпит бедствие до момента завершения
спасательных работ, отвечали бы требованиям, установленным прави-
лами ведения журналов.
Если советское судно терпит аварию в районе, где привлечение су-
дов под флагом СССР к спасательным работам не представляется воз-
можным, капитан может обратиться за помощью к иностранному спа-
сателю, предварительно получив согласие пароходства. Если состоя-
ние аварийного судна требует немедленного осуществления спасания,
капитан может принять решение самостоятельно.
Принимая помощь от иностранного спасателя, капитан должен до-
биваться заключения договора о спасании по форме МАК. Если иност-
ранный спасатель предлагает оформить договор иной проформы, капи-
тан может согласиться на его подписание только с согласия пароход-
ства. В случаях когда обстоятельства не позволяют ожидать указания
пароходства, капитан может подписать предлагаемый договор при ус-
ловии, что он содержит условие: «без спасения — нет вознаграждения».
Если степень реальной опасности невелика и позволяют обстоя-
тельства, капитан должен предложить иностранному спасателю за-
ключить договор буксировки, а не спасания и настаивать на этом.
После того как будет устранена реальная угроза гибели судна и
ликвидировано его угрожающее состояние, капитан должен требовать
оформления акта об окончании спасательной операции; если после
этого будет необходима буксировка судна до порта назначения или
убежища — следует заключать самостоятельный договор на букси-
ровку. По прибытии судна в первый порт захода капитан обязан
оформить морской протест, а также, в необходимых случаях, пригла.
306
сить сюрвейера для осмотра повреждений, причиненных судну спасате-
лем и оформить акт сюрвейерного осмотра.
В судовом журнале должно быть зафиксировано: наименование,
флаг, принадлежность и назначение судна-спасателя (если с согласия
капитана были привлечены соспасатели — то аналогичные данные);
обстоятельства аварии, состояние судна, действия спасателя (каждого
из соспасателей), объем, продолжительность, результат спасательных
работ и т. п.
По окончании спасательной операции иностранным спасателем ка-
питан обязан составить подробный отчет и направить его с приложен-
ными к нему документами пароходству.
Глава XXV
МОРСКОЙ ПРОТЕСТ. ОБЩАЯ АВАРИЯ
§ 110. МОРСКОЙ ПРОТЕСТ
Если в период плавания или стоянки судна рулело место происшест-
вие, которое может явиться основанием для предъявления к судовла-
дельцу имущественных требований, капитан в целях обеспечения дока-
зательств для защиты прав и законных интересов судовладельца дела-
ет в установленном порядке заявление о морском протесте (ст. 286
КТМ). Закон не устанавливает определенной формы морского протес-
та. Содержание их разнообразно и зависит от конкретных обстоя-
тельств.
Капитан судна обязан заявлять морской протест в следующих слу-
чаях: при наличии общей аварии; наличия или предположения частной
аварии; в случаях оказания помощи и спасания на море; при задержа-
нии отхода или ареста судна в иностранном порту; при столкновении
и навалах судов; аварий при буксировке судов, плотов и других плаву-
чих объектов; аварий во время лоцманской проводки; во всех других
случаях, когда могут быть предъявлены имущественные требования.
Юридическое значение морского протеста состоит в том, что он яв-
ляется одним из видов доказательств тех или иных обстоятельств и про-
исшествий с судном и принятых капитаном мер. Поэтому, как и любое
доказательство, он может быть опровергнут другими доказательствами,
представленными заинтересованными лицами. Однако до того, как со-
держание протеста будет опровергнуто, его оформление создает офи-
циальное предположение о действительности тех обстоятельств или про-
исшествий, на которые ссылается капитан. Поэтому основное назна-
чение протеста — создать выгодное для судовладельца процессуаль-
ное положение. До тех пор пока содержание морского протеста не бу-
дет опровергнуто противной стороной, судовладелец не должен пред-
ставлять никаких других доказательств, кроме морского протеста.
В советских портах заявление о морском протесте капитан подает
в местную нотариальную контору не позднее 24 ч с момента прихода
судна в порт. В подтверждение времени прихода судна в порт капитан
307
должен представить справку капитану порта. Если происшествие, по-
служившее основанием для заявления протеста, имело место при сто-
янке судна в порту, то заявление должно быть подано не позднее 24 ч
с момента происшествия. В тех местах захода судна, где нет нотари-
альных контор, их обязанности по совершению морских протестов вы-
полняются местными органами власти. В случаях когда истечение 24-
часового срока наступает в нерабочее для нотариальной конторы вре-
мя, капитан должен направить на имя нотариуса радиограмму, уведом-
ляя его о намерении оформить морской протест. Время направления
радиограммы считается временем подачи заявления.
Если есть основания предполагать, что имевшее место происшест-
вие причинило вред грузу, находившемуся в трюмах, завление о морс-
ком протесте должно быть сделано до открытия люков. Однако в край-
не необходимых случаях капитан может открыть люки и приступить к
выгрузке до подачи заявления. В этих случаях капитан обязан при-
гласить на борт судна в советском порту представителя Инспекции пор-
тового надзора, в иностранном порту — сюрвейра для установления ис-
правности люковых закрытий, соблюдения правил и обычаев, вырабо-
танных хорошей морской практикой, и совместно с ними составить со-
ответствующий акт.
Одновременно с заявлением либо в срок не свыше семи дней с мо-
мента прихода судна в порт или с момента происшествия, если оно име-
ло место в порту, капитан обязан совершить дополнительные процессу-
альные действия по оформлению морского протеста. Для этого лично
капитан и двое свидетелей из числа администрации судна и двое из
судовой каманды должны явиться к нотариусу и представить на обоз-
рение судовой журнал. Нотариус на основании заявления, данных
судового журнала, а также опроса капитана и свидетелей составляет
акт о морском протесте и заверяет его своей подписью и гербовой пе-
чатью.
Советским законодательством право совершения морских протес-
тов предоставлено только капитанам судов. Оно также распространя-
ется и на капитанов судов внутреннего и смешанного река — море пла-
вания во время их следования по морским путям, а также по рекам,
озерам, водохранилищам и другим водным путям при осуществлении
перевозок с заходом в иностранные порты, а также в случаях столкно-
вения в морских или иных водах с морскими судами и в случаях ока-
зания помощи и спасания судов внутреннего и смешанного река — мо-
ре плавания морскими судами.
В иностранном порту капитан судна может заявить морской про-
тест как консулу СССР, так и компетентным должностным лицам ино-
странного государства. Как правило, капитан заявляет морской про-
тест консулу СССР, поскольку протест, совершенный советским кон-
сульским представительством, обычно имеет такую же доказательную
силу, как и другие документы, удостоверенные официальными влас-
тями.
Необходимость заявления морского протеста компетентным долж-
ностным лицам иностранного государства возникает тогда, когда сог-
ласно законодательству или обычаям данного государства суды при
308
рассмотрении споров признают только документы, составленные в со-
ответствии с местным законодательством. В указанном случае капитан
до подачи заявления должен ознакомиться с существующей в данной
стране процедурой оформления морских протестов, используя для это-
го содействие представителя ММФ при Торгпредстве СССР или морско-
го агента судна, либо приглашенного им иностранного адвоката.
§ 111. ОБЩАЯ АВАРИЯ
В морском праве термину «авария» в отличие от общепринятого зна-
чения чрезвычайного происшествия, повлекшего за собой какие-либб
повреждения технических средств, например судов, принято прида-
вать другой смысл. «Авария» означает убытки и расходы, возникшие в
связи с какой-либо морской опасностью. Морское право издавна разли-
чает два вида распределения убытков или расходов: в порядке общей
аварии или частной аварии.
Согласно ст. 232 КТМ общей аварией признаются убытки, понесен-
ные вследствие произведенных намеренно и разумно чрезвычайных рас-
ходов или пожертвований для спасения судна, фрахта и перевозимо-
го на судне груза от общей для них опасности.
Общую аварию характеризуют четыре признака', преднамерен-
ный характер произведенных расходов; разумность понесенных рас-
ходов; их чрезвычайный характер; наличие общей опасности для суд-
на, груза и фрахта, для предотвращения которой были произведены
расходы и причинены убытки. Отсутствие хотя бы одного из перечис-
ленных выше четырех признаков лишает права относить расходы и
убытки на общую аварию. Такие убытки признаются частной аварией
и их несет тот, кто их претерпел, или тот, на кого падает ответствен-
ность за их причинение.
Сущность общей аварии заключается в том, что при наличии ава-
рийной ситуации, которая может повлечь за собой гибель судна и гру-
за, капитаном предпринимаются чрезвычайные меры с тем, чтобы на-
иболее рациональным образом, путем сознательной потери части гру-
за или принадлежности судна, либо преднамеренными и разумными
расходами спасти судно, груз и фрахт. Поскольку такие убытки и рас-
ходы причиняются для спасения «морского предприятия» в целом, они
должны распределяться между всеми участниками морской перевозки.
Общая авария распределяется между судном, фрахтом и.грузом сораз-
мерно их стоимости (ст. 232 КТМ). Такое распределение общей ава-
рии производится и в том случае, когда опасность, вызвавшая ее, воз-
никла по вине одного из участников договора перевозки или третьего
лица.
Типичными случаями общей аварии являются: намеренная посадка
судна на мель, выбрасывание груза за борт, получение помощи на море,
заход в место убежища, пожар на судне и др. Не признаются общей ава-
рией, даже при наличии всех четырех признаков, указанных ранее,
следующие убытки: стоимость выброшенного за борт самовозгоревшего-
ся груза и груза, перевозившегося на судне не в соответствии с прави-
309
лами и обычаями хорошей морской практики, причиненные тушением
пожара тем частям судна или груза, которые были в огне, всякие убыт-
ки или потери, понесенные судном или грузом вследствие увеличения
продолжительности рейса и др. Такие убытки или потери относятся на
частную аварию. Отнесение расходов и убытков на общую или частную
аварию, а также распределение общей аварии между участниками пере-
возки производятся специальными лицами — диспашерами. В СССР
диспашеры являются официальными экспертами Бюро диспашеров при
Всесоюзной торгово-промышленной палате СССР.
В практике торгового мореплавания получили широкое примене-
ние Йорк-Антверпенские правила, содержащие основные положения об
общей аварии. Условия о применении указанных правил включаются в
чартер-партии и коносаменты по соглашению между участниками пере-
возки.
В СССР нормы, регулирующие общую аварию, приведены в главе
XIII КТМ «Общая авария».
Расчет общей аварии. К производству дела диспашер приступает по
письменному заявлению заинтересованных лиц. К заявлению обычно
прилагаются: морской протест, выписки из судового, машинного, радио-
телеграфного журналов, акт об аварии, аварийные подписки, справки о
стоимости груза и другие документы. Диспашер, изучив представлен-
ные документы, составляет постановление, определяющее вид аварии.
Если авария признана общей, он приступает к составлению диспа-
ши — расчета распределения убытков по общей аварии между грузом,
судном и фрахтом. Диспашер вначале устанавливает сумму убытков,
относимую на общую аварию, т.е. активную массу (актив—А). Сумма
общего убытка по грузу определяется в соответствии со стоимостью гру-
за, определяемой ко дню разгрузки судна в порту назначения. Затем
определяется стоимость фрахта, т. е. контрибуционная стоимость
(пассив — П)
П = Сс + Cj р + Ф,
где П — контрибуционная стоимость;
Сс — стоимость судна;
Сгр — стоимость груза;
Ф — фрахт.
В расчет принимается чистая стоимость имущества по окончании
рейса с добавлением к ней не вошедшей в нее стоимости пожертвован-
ного имущества, так как владельцы пожертвованного имущества то-
же участвуют в покрытии общих убытков и принимают на себя соответ-
ствующую долю.
После указанных расчетов определяется контрибуционный диви-
дент (аварийный процент)
К = А/П*100,
где А — активная масса;
П — пассивная масса.
310
Доля взносов по общей аварии каждого из участников определяет-
ся по формуле
В^-С/К,
где Bf — доля взносов данного участника;
Cj — стоимость имущества данного участника.
Например, за оказание помощи груженому судну пароходство уп-
латило спасателю вознаграждение в размере 25 тыс. р. (актив — А),
Стоимость имущества, участвовавшего в общей аварии, составила
2500 тыс. р. (пассив — П), в том числе стоимость судна 1000 тыс. р.,
стоимость груза владельца коносамента № 1—640 тыс. р., коносамента
№ 2 — 860 тыс. р.
Аварийный процент составит К = 100 = 1%.
Сумма взносов составит:
а) судовладельца — Вс = Сс • К = 1 000 000-0,01 = 10 000 р.;
б) владельца коносамента № 1—Вх = СГК = 640 000-0,01 =
б 400 р.;
в) владельца коносамента № 2 — В2 = Со - К = 860 000 -0,01 =
- 8 600 р.
Поскольку пароходство уплатило спасательное вознаграждение в
сумме 25 тыс. р., а его доля в общей аварии составляет только 10 тыс.
р., то владельцы грузов должны возместить ему понесенные расходы в
размере 15 тыс. р.
Оформление общей аварии. Для обеспечения интересов судовла-
дельца капитан судна, понесшего расходы и убытки, которые могут
быть признаны общей аварией, обязан принять должные меры, которые
в основном сводятся к следующему:
немедленно как только произойдет чрезвычайное происшествие,
которое причинит расходы или убытки, относимые на общую аварию,
капитан должен известить об этом пароходство и морского агента суд-
на в порту назначения груза;
капитан обязан строго следить за тем, чтобы записи в судовом, ма-
шинном и радиотелеграфном журналах производились с верным и до-
статочно подробным изложением всех обстоятельств, которые вызвали
необходимость преднамеренных и разумных расходов, а также содер-
жали подробное изложение всех обстоятельств и действий, предшест-
вовавших факту общей аварии и последовавших вслед за ними;
по прибытии судна в первый порт захода капитан обязан зая-
вить морской протест;
если требуют обстоятельства, следует пригласить сюрвейера и, если
возможно, грузополучателя для осмотра повреждений судна, груза
и т. п. и оформить соответствующий акт;
получить от каждого владельца груза аварийные подписки. В слу-
чае отказа грузовладельца выдать аварийную подписку капитан дол-
жен использовать предоставляемое законом перевозчику право залога
на груз и не выдавать его До получения аварийной подписки. В этом
случае груз во избежание простоя судна сдается на склад порта, а в ино-
странном порту — на склад (по указанию агента) на хранение до мо-
31!
мента получения от владельца груза аварийной подписки и оплаты сто-
имости вынужденного хранения, после чего груз выдается получате-
лю;
если пароходством будет дано соответствующее указание, то капи-
тан должен потребовать от владельцев грузов, или их страховщиков,
представления соответствующего обеспечения будущих платежей по
общей аварии в форме банковской гарантии, депозита или аварийного
взноса наличными. В случае отказа грузовладельца представить обес-
печение капитан по согласованию с пароходством должен использовать
право залога;
капитан должен в возможно кратчайший срок передать пароходст-
ву донесение о случившемся, приложив к нему всю документацию (акт
о морском протесте, выписки из судового журнала, аварийные подпис-
ки, гарантийные письма и т. п.).
t Глава XXVI
МОРСКАЯ ПЕРЕВОЗКА ГРУЗОВ И ПАССАЖИРОВ
§ 112. ДОГОВОР МОРСКОЙ ПЕРЕВОЗКИ ГРУЗА
Конкретные условия перевозок грузов фиксируются в договорах
морской перевозки. Правоотношения сторон договора определяются
как содержанием плана перевозок, на основе которого он заключен,
так и условиями самого договора. Во взаимоотношениях между совет-
скими организациями правила гл. VIII КТМ СССР «Договор морской
перевозки» носят императивный характер и, следовательно, не могут
быть изменены соглашением сторон.
В ст. 118 КТМ СССР дано следующее определение договора морской
перевозки: «По договору морской перевозки грузов перевозчик или
фрахтовщик обязуется перевезти вверенный ему отправителем груз в
порт назначения и выдать его управомоченному на получение груза ли-
цу (получателю), а отправитель или фрахтователь обязуется уплатить
за перевозку груза установленную плату (фрахт).
Согласно общим правилам морской перевозки грузов, пассажиров и
багажа договор перевозки грузов оформляется: при перевозках в за-
граничном сообщении чартером и коносаментом или только коносамен-
том; при перевозках грузов в малом и большом каботаже — коноса-
ментом; при перевозках в прямом смешанном железнодорожно-водном
сообщении, прямом водном сообщении, при перевозке в Каспийском
бассейне нефтеналивных грузов — накладной.
Договор морской перевозки оформляется чартером при фрахтова-
нии иностранного тоннажа, при отфрахтовании советских судов под
перевозку грузов иностранных фрахтователей, а также в тех случаях,
когда по внешнеторговой сделке, заключаемой объединениями МВТ,
предусмотрена определенная проформа чартера. Если внешнеторговая
сделка не содержит такого условия, чартер обычно не заключается,
так как отношения советского перевозчика и отправителя регулируют-
ся актами планирования, КТМ и другими нормативными актами.
312
Чартер подробно регламентирует условия перевозки. В вводной его
части приводятся сведения о месте и времени заключения договора, на-
именовании сторон, индивидуальной характеристике судна (название,
тип двигателя, дедвейт, класс судна и т. п.). Далее чартер содержит
следующие пункты: род и количество груза; порты погрузки и выгруз-
ки; порядок подачи судна под погрузку; нормы грузовых работ; поря-
док исчисления сталийного времени; ставки демереджа, диспача;
ставка, валюта и время'оплаты фрахта; порядок оплаты стивидорных
работ; порядок разрешения споров; генеральные оговорки (о войне,
забастовках, ледовая) и др. Поскольку чартер обычно содержит более
20 пунктов, то согласование всех условий для каждой конкретной пере-
возки—сложная и длительная операция. Поэтому практика фрахтова-
ния судов привела к разработке проформ чартеров. Наличие проформ
позволяет сторонам при заключении договора ограничиваться лишь
согласованием конкретных условий, таких, как: количество груза,
нормы грузовых работ, фрахтовая ставка, порядок оплаты грузовых
работ и т. п. Прочие условия перевозки определяются проформой чар-
тера.
Проформы чартеров разрабатывались объединениями судовладель-
цев и грузовладельцев для перевозки определенных видов грузов на
конкретных направлениях. В настоящее время имеется более 200 про-
форм чартеров: угольные, рудные, зерновые, для перевозки лесных
грузов и др. Каждая проформа чартера имеет свое кодовое название,
например, «Gencon», «Sovcoa 1», «Nuvoy» и др.
Чартер регулирует отношения фрахтовщика (перевозчика) и фрах-
тователя (отправителя). Для получателя груза условия чартера будут
обязательными только в тех случаях, когда коносамент содержит ссыл-
ку на соответствующий чартер. Если такой ссылки нет, то отношения
перевозчика и получателя регулируются только условиями коноса-
мента. КТМ СССР предусматривает обязанность перевозчика всегда
выдавать отправителю коносамент после приема груза к перевозке.
С развитием линейной формы судоходства широкое распростране-
ние получил договор морской перевозки — коносамент. В загранич-
ном сообщении правовая природа коносамента определяется тремя
функциями этого документа: служит доказательством наличия и со-
держания договора морской перевозки грузов;.является распиской
перевозчика в получении груза от отправителя; выступает в качестве
товарораспорядительного документа .в отношении указанного в нем
груза.
Очень важна функция коносамента как товарораспорядительного
документа. В международной торговой практике право держателя ко-
носамента эквивалентно праву владения товаром. Держатель коноса-
мента по предъявлении его перевозчику может получить груз в порту
назначения либо распорядиться о передаче другому лицу груза, нахо-
дящегося еще в пути, посредством совершения передаточной надписи
на коносаменте. Это имеет большое значение для внешнеторговых сде-
лок купли-продажи, поскольку ускоряет расчеты и упрощает операции
банков. Как любая другая ценная бумага, коносамент должен содер-
жать точно определенные законом следующие реквизиты: наименова-
313
ниесудна, если груз принят к перевозке на определенном судне; найме-
нование перевозчика; наименование отправителя; место приема или
погрузки груза; место назначения груза либо при наличии чартера |
место назначения судна; наименование груза, число мест или количе- |
ство груза, маркировка груза; данные о внешнем виде, состоянии или
особых свойствах груза (если необходимо); фрахт и другие причитаю- 1
щиеся перевозчику платежи либо указание, что фрахт полностью опла- ч
чей, или порядок его оплаты согласно чартеру либо другого документа; л
время и место выдачи коносамента; число составленных оригиналов ко-
носамента; подпись капитана или иного представителя перевозчика.
При отсутствии какого-либо йз указанных реквизитов коносамент
теряет свое значение.
Коносаменты подразделяются на три вида: именной, который сос-
тавляется на имя определенного получателя; ордерный, в котором ука-
зывается, что он выдан «приказу отправителя» либо «приказу получате-
ля» и он передается по именным или бланковым надписям; на предъя-
вителя.
В международной практике широко применяются ордерные коно-
саменты.
При перевозке каботажных грузов коносамент является лишь основ-
ным перевозочным документом и не имеет качества ценной бумаги. Он
не содержит условий перевозки, поскольку взаимооотношения сторон
договора регламентируются КТМ СССР и другими нормативными ак-
тами.
§ 113. ОБЯЗАННОСТИ ПЕРЕВОЗЧИКА,
ОТПРАВИТЕЛЯ И ПОЛУЧАТЕЛЯ
Обязанности перевозчика. Согласно ст. 129 КТМ СССР перевозчик
обязан заблаговременно, до начала рейса, привести судно в мореход-
ное состояние. Указанная статья является императивной. Чтобы суд-
но было признано мореходным, перевозчик обязан: обеспечить техни-
ческую годность судна к плаванию в данном рейсе; надлежащим обра-
зом снарядить его; укомплектовать экипажем в соответствии с требова-
ниями к численности экипажа и его профессиональной компетенции;
снабдить всем необходимым в соответствии с задачами предстоящего
рейса; привести трюмы и все другие помещения судна, в которых пере-
возится груз, в состояние, обеспечивающее надлежащий прием, пере-
возку и сохранность данного вида груза.
Перевозчик несет ответственность за ущерб, причиненный грузу
вследствие немореходности судна. Чтобы освободиться от ответственно-
сти за причиненный грузу ущерб, перевозчик обязан доказать, что он
проявил должную заботливость о мореходном состоянии судна и что
данный дефект судна, явившийся причиной ущерба, он не мог обнару-
жить, несмотря на добросовестное выполнение своих обязанностей.
Перевозчик обязан подать судно под погрузку в срок, установлен-
ный договором. Срок прибытия судна может быть оговорен либо твер-
дой датой, либо определенным промежутком времени, ограниченным
314
начальной датой (лейдейс) и конечной датой канцеллинга. Прибытие
судна в порт погрузки ранее даты лейдейс не обязывает отправителя
начинать погрузку судна и оплачивать расходы, связанные с его прос-
тоем. Если судно не прибудет в порт погрузки к дате канцеллинга, фрах-
тователь имеет право расторгнуть (канцеллировать) договор. Согласно
международным обычаям судно считается прибывшим и готовым к при-
ему груза, если выполнены следующие требования: по прибытии на ак-
ваторию порта судно проследовало в коммерческую зону; получило
«свободную практику», т.е. выполнило административные, санитар-
ные, таможенные и другие формальности согласно обычаям данного
порта; грузовые помещения и устройства судна подготовлены к приему
и размещению данного груза; подан нотис готовности судна к грузовым
операциям (капитанский нотис).
Перевозчик обязан надлежащим образом погрузить груз согласно
грузовому плану, утвержденному капитаном судна. Размещение груза
на палубе судна допускается с письменного согласия отправителя, за
исключением каботажных грузов, допускаемых к перевозке на палубе
согласно правилам.
Перевозчик несет ответственность за правильное размещение, креп-
ление и сепарацию грузов на судне. Указания перевозчика по разме-
щению, креплению и сепарации груза обязательны для организации
и лиц, производящих грузовые работы. На судно груз принимается
только в надлежащем по внешнему виду состоянии.
После приема груза перевозчик обязан выдать отправителю коноса-
мент. Перевозчик обязан проявить должную заботливость о сохране-
нии груза в пути, используя для этого все возможные и зависящие от
него способы и меры. Перевозчик обязан доставлять грузы в установ-
ленные сроки, а если они не установлены — в обычно принятые сроки.
Согласно договорам морской перевозки судно должно следовать в порт
назначения со всей возможной скоростью по обычно принятым и разум-
ным для данного рейса путям. Судно может отклониться от намечен-
ного пути в целях спасания на море людей, судов и грузов, а также в
других разумных целях. Доставив груз по назначению, перевозчик
обязан выдать груз управомоченному на получение груза лицу.
Обязанности отправителя. Основной обязанностью отправителя яв-
ляется своевременное предъявление к перевозке груза, наименование
и количество которого установлены актом планирования и договором
морской перевозки. Предъявляемый отправителем груз должен нахо-
диться в транспортабельном состоянии. Если состояние груза не соот-
ветствует требованиям правил перевозки и тара, упаковка и марки-
ровка не обеспечат его полную сохранность при перевозке и перевалке
и отправитель по предложению перевозчика не привел его в надлежа-
щее состояние в срок, обеспечивающий своевременную погрузку, груз
считается непредъявленным. Грузоотправитель обязан за свой счет
предоставить все необходимые для погрузки, крепления, перевозки и
выгрузки груза вспомогательные материалы и приспособления.
Отправитель должен своевременно вручить перевозчику все каса-
ющиеся груза документы, требуемые таможенными, санитарными или
иными административными правилами и отвечает перед перевозчиком
315
за убытки, происшедшие вследствие несвоевременной передачи, не-
правильности или неполноты этих документов. Отправитель обязан
оплатить фрахт, если по договору перевозки эта обязанность возложе-
на на него.
Обязанности получателя. Грузополучатель обязан принять и вы-
везти из порта прибывший в его адрес груз. Если получатель не востре-
бовал груз или отказался от него, перевозчик может выгрузить его и
сдать на хранение за счет и риск отправителя. В советских морских
портах сроки и порядок хранения невостребованных грузов определя-
ются соответствующими правилами.
Получатель обязан уплатить перевозчику, если это не было сделано
отправителем, причитающийся фрахт, плату за простой судна, возмес-
тить расход, произведенные перевозчиком за счет груза, а в случае об-
щей аварии — внести аварийный взнос или предоставить надлежащее
обеспечение.
Получатель при приеме от судна груза должен письменно заявить
перевозчику до окончания или в процессе выгрузки о повреждении или
недостаче груза. Если письменного заявления в указанный срок полу-
чатель не сделал, то предполагается, что груз выдан в количестве и со-
стоянии, указанными в коносаменте. Если несохранность груза не яв-
ляется видимой и не может быть обнаружена при обычном способе при-
ема груза, получатель может сделать письменное заявление о несохран-
ности груза в течение трех дней после его приема. В указан-
ных случаях бремя доказательства вины перевозчика в повреждении
груза или его недостачи возлагается на получателя (императивная
ст. 156 КТМ СССР).
Ответственность перевозчика. Согласно ст. 160 КТМ СССР перевоз-
чик отвечает за утрату, недостачу или повреждение принятого к пере-
возке груза, если не докажет, что утрата, недостача или повреждение
произошли не по его вине. Для того чтобы освободиться от ответствен-
ности, перевозчик должен доказать, что несохранность груза произош-
ла не по вине капитана, экипажа судна или других служащих перевоз-
чика. Он также должен доказать, что им были приняты все возможные
и необходимые меры по обеспечению сохранной перевозки, предста-
вить доказательства того, что утрата, недостача или повреждение гру-
за произошли по независящим от него причинам.
Перевозчик несет ответственность за утрату, недостачу или повреж-
дение груза с момента принятия его к перевозке до момента выдачи по-
лучателю.
Момент начала ответственности за несохранность груза и момент
окончания этой ответственности определяются правилами соответству-
ющих международных конвенций, национальным морским законода-
тельством, обычаями и правилами морских портов, а также соглаше-
нием сторон в договоре морской перевозки. В соответствии с КТМ СССР
перевозчик несет ответственность в следующих размерах: за утрату и
недостачу груза — размере действительной стоимости утраченного
или недостающего груза; за повреждение груза — в сумме, на которую
понизилась его стоимость.
316
В ст. 160 КТМ СССР приводится примерный перечень обстоя-
тельств, при наличии которых перевозчик освобождается от ответствен-
ности за несохранную перевозку груза. К ним относятся: непреодоли-
мая сила; опасности и случайности на море и в других судоходных
водах; спасание человеческих жизней, судов и грузов; пожар, возник-
ший не по вине перевозчика; действия или распоряжения властей (за-
держание, арест, карантин и т. д.); военные действия и народные вол-
нения; действия или упущения отправителя или получателя; скрытые
недостатки груза, его свойства или естественная убыль; незаметные по
наружному виду недостатки тары и упаковки груза или сплотки леса
в плоту; недостаточность или неясность марок; забастовки или иные
обстоятельства, вызвавшие приостановление или ограничение работы
полностью или частично.
Согласно ст. 161 КТМ СССР перевозчик не отвечает за несохран-
ность груза, за исключением груза, перевозимого в каботаже, если она
произошла вследствие действия или упущений капитана, прочих лиц
судового экипажа и лоцмана в судовождении или управлении судном.
В данном случае перевозчик освобождается от имущественной ответст-
венности за виновные действия указанных лиц, что является исключе-
нием из общего принципа ответственности за вину. Виновные лица при-
влекаются к дисциплинарной или уголовной ответственности за их лич-
ную вину.
§ 114. ДОГОВОР ПЕРЕВОЗКИ ПАССАЖИРА.
РАЗРЕШЕНИЕ ИМУЩЕСТВЕННЫХ СПОРОВ
По договору морской перевозки перевозчик обязуется перевезти
пассажира в пункт назначения, а также доставить его багаж и вы-
дать его управомоченному на получение багажа лицу; пассажир обя-
зуется уплатить установленную плату за проезд, а в при сдаче багажа
и плату за провоз багажа.
Перевозчик обязан к началу перевозки привести судно в мореход-
ное состояние и поддерживать это состояние до ее окончания. Пере-
возка охватывает время нахождения пассажира на судне, время посад-
ки и высадки пассажира. Если необходима доставлять пассажира вод-
ным путем с берега на судно или с судна на берег плавсредством, пре-
доставляемым перевозчиком, а также если плата за доставку включена
в стоимость билета, время этой операции также включается в пере-
возку.
Перевозчик обязан совершать рейс по установленной расписанием^
договором или обычно принятой трассе. Отклонение судна от маршру-
та следования возможно лишь по согласованию с другой стороной дого-
вора либо в случаях, установленных национальным или международ-
ным правом.
Обязанности перевозчика по обслуживанию пассажиров на судах
установлены правилами перевозки пассажиров.
Перевозчик несет имущественную ответственность за вред, причи-
ненный пассажиру во время и вследствие перевозки, в частности, за
317’
смерть и ущерб здоровью пассажира в том случае, если не сможет до-
казать, что вред был причинен действием непреодолимой силы либо
умыслом или грубой неосторожностью самого потерпевшего. Совет-
ское законодательство не устанавливает предела ответственности пере-
возчика при причинении смерти или повреждении здоровья пассажи-
ра. Если перевозка пассажира подпадает под действие международного
договора, участником которого является СССР, условия, поряддк и
предел ответственности перевозчика за причинение смерти или повреж-
дения здоровья пассажира определяются правилами данного договора.
Имущественная ответственность перевозчика за ущерб, связанный с
перевозкой багажа, регулируется КТМ СССР и нормативными актами,
изданными в его развитие.
Споры, вытекающие из договора морской перевозки пассажира и
багажа, рассматриваются в судах по месту нахождения ответчика.
Разрешение имущественных споров. Споры имущественного харак-
тера, возникающие в торговом мореплавании, могут быть разрешены
либо в претензионном порядке путем соглашения сторон, либо в прину-
дительном, путем предъявления в суд иска к стороне-ответчику. Во
взаимоотношениях между советскими организациями претензионный
характер рассмотрения споров является обязательным. Советское за-
конодательство устанавливает общий порядок предъявления и рассмот-
рения претензий.
Претензия (т. е. требование возместить нанесенный ущерб) должна
быть заявлена в письменной форме. К заявлению о претензии должны
быть приложены подтверждающие ее документы. КТМ устанавливает
сроки, в течение которых претензия должна быть рассмотрена и реше-
ние по ней передано заявителю претензии. Если претензия отклонена
или ответ не получен в установленный срок, заявителю предоставляет-
ся право на предъявление иска в арбитраже либо в суде.
Имущественные споры между советскими государственными пред-
приятиями и организациями в СССР, подчиненными разным министер-
ствам, рассматриваются органами государственного арбитража, учреж-
денными при исполнительно-распорядительных органах власти. Выс-
шим органом является Госарбитраж при Совете Министров СССР. Да-
лее следуют госарбитражи при советах министров союзных республик,
автономных республик, при исполкомах краевых или областных Со-
ветах народных депутатов. Компетенция каждого органа Госарбитража
определяется суммой иска, подчиненностью спорящих сторон и их мес-
тонахождением.
В систему органов арбитража входят ведомственные арбитражи, ко-
торые рассматривают хозяйственные споры между структурными под-
разделениями данного министерства или ведомства.
К ведению судебных органов относятся дела, в которых участвуют
иностранные граждане, иностранные предприятия и организации. Кро-
ме этого, суды рассматривают дела, в которых одной из спорящих сто-
рон является колхоз или гражданин. Суд по заявлению заинтересо-
ванной стороны (истца), а в отдельных случаях по инициативе третьих
лиц привлекает в качестве ответчика соответственно организацию или
318
гражданина независимо от их согласия. Подсудность и подведомствен-
ность споров установлены законом.
Национальные законодательств всех стран предусматривают воз-
можность разрешения споров по соглашению сторон не в судебном по-
рядке, а в порядке третейского разбирательства — третейскими суда-
ми, которые не являются государственными органами.
В СССР третейский суд может рассматривать споры на основании
Положения о третейском суде для разрешения споров между объеди-
нениями, предприятиями, организациями и учреждениями. Примером
постоянно действующего третейского суда в СССР является Морская
Арбитражная Комиссия.
Деятельность МАК осуществляется на основе Положения о МАК
при Всесоюзной торгово-промышленной палате и Правил о производст-
ве дел в МАК. При рассмотрении дел МАК руководствуется законода-
тельством Союза ССР, международными конвенциями, в которых уча-
ствует СССР, обычаями, принятыми в международной торговле, а так-
же иностранными законами (если они не противоречат основам советс-
ского строя).
К компетенции МАК относится рассмотрение в порядке арбитраж-
ного разбирательства дел о вознаграждении за спасение на море, о
столкновении судов, разрешение споров, вытекающих из отношений по
фрахтованию судов и их агентскому обслуживанию; дел о морской
перевозке грузов, о буксировке, о морском страховании; разрешение
споров, вытекающих из причинения повреждений рыболовным судам,
сетям и другим орудиям лова, а также из иного причинения вреда при
осуществлении морского рыболовного промысла. Кроме этого, МАК мо-
жет разрешать указанные выше споры и в тех случаях, когда они воз-
никли при плавании морских и речных судов по международным ре-
кам.
Президимум Торгово-промышленной платы СССР избирает состав
МАК в количестве 25 арбитров сроком на один год из лиц, компетент-
ных в вопросах морского права, морской коммерческой деятельности,
морского страхования и др.
МАК принимает на рассмотрение споры по письменному соглаше-
нию сторон о передаче дел МАК- В течение установленного срока каж-
дая из спорящих сторон может назвать желательного ей арбитра. Если
этого не будет сделано, арбитры назначаются председателем МАК.
Решение по делу выносятся арбитрами единогласно. В случае недости-
жения соглашения между арбитрами избирается суперарбитр, и реше-
ние принимается большинством голосов. Решение МАК может быть
обжаловано заинтересованной стороной или опротестовано Прокура-
турой СССР в Верховный Суд СССР, который либо оставляет вынесен-
ное МАК решение в силе, либо отменяет его с передачей дела МАК в
другом составе арбитров.
319
Приложение 1
СИСТЕМА «А» НАВИГАЦИОННОГО ОБОРУДОВАНИЯ
ПЛАВУЧИМИ ПРЕДОСТЕРЕГАТЕЛЬНЫМИ ЗНАКАМИ
КАРДИНАЛЬНЫЕ ЗНАКИ,
ОГРАЖДАЮЩИЕ НАВИГАЦИОНЫЕ ОПАСНОСТИ
ФОРМА-буи сигарообразные, столбовидные или вехи
ТОПОВАЯ ФИГУРА-два черных конуса один над другим
II Зак ^з
329
Продолжение приложения I
ЛАТЕРАЛЬНЫЕ ЗНАКИ,
ОБОЗНАЧАЮЩИЕ МЕСТА РАЗДЕЛЕНИЯ ФАРВАТЕРОВ
ЗНАКИ, ОБОЗНАЧАЮЩИЕ НАЧАЛЬНЫЕ
ТОЧКИ И ОСЬ ФАРВАТЕРА (КАНАЛА)
И СЕРЕДИНУ ПРОХОДА (ОСЕВЫЕ)
ЗНАКИ, ОГРАЖДАЮЩИЕ ОТДЕЛЬНЫЕ
ОПАСНОСТИ НЕЗНАЧИТЕЛЬНЫХ
РАЗМЕРОВ
ЗНАКИ СПЕЦИАЛЬНОГО НАЗНАЧЕНИЯ
330
Приложение 2
ФЛАГИ МЕЖДУНАРОДНОГО СВОДА СИГНАЛОВ
БУКВЕННЫЕ ФЛАГИ
ЦИФРОВЫЕ ФЛАГИ
г 1 1 унауан 2 биссоту 3 тзратри 4 1 картзфоур 5 пантафайв
6 соксисикс 7 сетэсэвн 8 октозйт 9 1 ноувэнайнз О надаззро
ЗАМЕНЯЮЩИЕ ФЛАГИ
1-й 2-й 1 1 ~ З-й
заменяющий заменяющий заменяющий
331
Приложение 3,
ОГНИ И ЗНАКИ СУДОВ
УСЛОВНЫЕ ОБОЗНАЧЕНИЯ
белый огонь
проблесковый огонь
желтый огонь
• красный огонь
В зеленый огонь
круговой огонь
сектор освещения огней
/ дополнительные
(необязательные) огни
огни, видимые в
определенных секторах
изображения огней,
расположенных на одной
вертикальной линии
СУДА С МЕХАНИЧЕСКИМИ ДВИГАТЕЛЯМИ НА ХОДУ
(Правило 23 , рис. 1-2)
ПРИ ДЛИНЕ СУДНА 50 М И БОЛЕЕ
Схема расположения огней
Рис. I
332
Продолжение приложения 3
ПРИ ДЛИНЕ СУДНА МЕНЕЕ 50 М
Вид с левого борта
Вид с носа
Вид с кормы
Схема расположения огней
БУКСИРУЮЩИЕ И БУКСИРУЕМЫЕ СУДА
(Правило 24 , рис. 3-5)
Рис. 2
БУКСИРОВКА НА БУКСИРНОМ ТРОСЕ
ПРИ ДЛИНЕ БУКСИРУЮЩЕГО СУДНА 50 М И БОЛЕЕ
ПРИ ДЛИНЕ БУКСИРА 200 М И БОЛЕЕ
333
Продолжение приложения 3
ПРИ ДЛИНЕ БУКСИРУЮЩЕГО СУДНА МЕНЕЕ 50 М
И ДЛИНЕ БУКСИРА МЕНЕЕ 200 М
БУКСИРОВКА МЕТОДОМ ТОЛКАНИЯ ПРИ ДЛИНЕ ТОЛКАЮЩЕГО СУДНА
334
Продолжение приложения 3
ПАРУСНЫЕ СУДА НА ХОДУ
(Правило 25t рис. 6)
ПРИ ДЛИНЕ СУДНА 12 М И БОЛЕЕ
РЫБОЛОВНЫЕ СУДА
(Правило 26, рис 7-10)
СУДА, ЗАНЯТЫЕ ЛОВОМ РЫБЫ ТРАЛОМ И ИМЕЮЩИЕ ХОД ОТНОСИТЕЛЬНО ВОДЫ
ПРИ ДЛИНЕ СУДНА 50 М И БОЛЕЕ
Рис. 7
Схема расположения огней 3^
335
Рис. 8
Вид днем
СУДА, ЗАНЯТЫЕ ЛОВОМ РЫБЫ НЕТРАЛОВЫМИ СНАСТЯМИ
И ИМЕЮЩИЕ ХОД ОТНОСИТЕЛЬНО ВОДЫ
Вид днем
336
Продолжение приложения 3
ДЛИНА СНАСТЕЙ БОЛЕЕ 150 М
Вид с левого борта
Вид с кормы
Вид с носа
Рис. 10
СУДА, ОГРАНИЧЕННЫЕ В ВОЗМОЖНОСТИ МАНЕВРИРОВАТЬ
(Правило 27 (в), рис. 11-13)
НА ХОДУ, ИМЕЯ ХОД ОТНОСИТЕЛЬНО ВОДЫ
ПРИ ДЛИНЕ СУДНА 50 МИ БОЛЕЕ
Рис. II
Вид с кормы
337
338
Продолжение приложения 3
СЛОЖНАЯ БУКСИРОВКА
(Правило 27 (с), рис. 15)
/
ПРИ ДЛИНЕ БУКСИРУЮЩЕГО СУДНА 50 М И БОЛЕЕ
ПРИ ДЛИНЕ БУКСИРА 200 М И БОЛЕЕ
Вид с левого борта
Вид с носа Вид с кормы
Рис. 15 • Вид днем
339
Продолжение приложения 3
СУДА, ЗАНЯТЫЕ РАБОТАМИ ПО УСТРАНЕНИЮ МИННОЙ ОПАСНОСТИ
(Правило 27 (f), рис. 16)
Вид с кормы
Вид с правого борта
340
Продолжение приложения 3
СУДА, ЛИШЁННЫЕ ВОЗМОЖНОСТИ УПРАВЛЯТЬСЯ
(Правило 27(a), рис. 17-18)
НА ХОДУ, ИМЕЯ ХОД ОТНОСИТЕЛЬНО ВОДЫ
Вид с кормы
рис. 17
I
Вид днем
НА ХОДУ, НЕ ИМЕЯ ХОДА ОТНОСИТЕЛЬНО ВОДЫ
34 1
Продолжение приложение 3
СУДА, СТЕСНЁННЫЕ СВОЕЙ ОСАДКОЙ
(Правило 28 , рис. 19)
Вид с левого борта Вид с носа
\1/ \1/
Вид с кормы Вид с правого борта
Схема расположения огней
рис. 19 Вид днем
34 2
Продолжение приложения 3
ЛОЦМАНСКИЕ СУДА
(Правило 29, рис. 20)
СУДА НА ЯКОРЕ
(Правило 30, рис. 21)
ПРИ ДЛИНЕ СУДНА МЕНЕЕ 50 М
Вид с борта
Схема расположения огней
Вид днем
рис. 21
343
Окончание приложения 3
СУДА НА МЕЛИ
(Правило 30 (d), рис. 22)
ПРИ ДЛИНЕ СУДНА МЕНЕЕ 50 М
344
СПИСОК РЕКОМЕНДУЕМОЙ ЛИТЕРАТУРЫ
Бухановский И. Л. Радиолокационные методы судовождения.
2-е изд., перераб. и доп. М.: Транспорт, 1970. 248 с.
Готский М. В. Практическая навигация. М.: Морской транспорт,
1963, 342 с.
Ермолаев Г. Г.,. Захаров В. К. Морская лоция. 2-е изд., перераб.
и доп. М.: Транспорт, 1969. 368 с.
Кодекс торгового мореплавания Союза ССР. М.: изд-во «Известия Советов
депутатов трудящихся СССР», 1968. 62 с.
Кожухов В. П., Воронов В. В., Григорьев В. В. Магнит-
ные компасы. М.: Транспорт, 1981. 212 с.
Коккрофт А. Н., Л а м е й е р Дж. Н. Ф. Толкование МППСС—72.
Пер. с англ. М.: Транспорт, 1981. 280 с.
Кубачев Н. А., Кургузов С. С. Использование радиолокацион-
ных тренажеров. М.: Рекламбюро ММФ, 1975. 78 с.
Лесков М. М., Баранов Ю. К., Г а в р ю к М. И. Навигация.
М.: Транспорт, 1980. 344 с.
Международные правила для предупреждения столкновений судов в море,
1972 г., Изд. ГУНиО МО СССР, 1972. 54 с.
Наставление по организации штурманской службы на судах Министерства
морского флота Союза ССР (НШС—82). М.: ЦРИА «Морфлот», 1982. 98 с.
Основы морского судовождения/Мизерницкий А. И., Милославская Е. П.,
Семенов Ю. К., Фатьянов Р. Н.; Под общ. ред. А. И. Мизерницкого. М.: Транс-
порт, 1973. 368 с.
Рекомендации по использованию радиолокационной станции для преду-
преждения столкновения судов. ММФ СССР. Главное управление мореплавания.
М.: Рекламбюро ММФ, 1970. 63 с.
Советское морское право/Под ред. В. Ф. Мешеры. М.: Транспорт, 1980.
267 с.
Справочник капитана дальнего плавания/Под общ. ред. Б. П. Хабура.
М.: Транспорт, 1973. 704 с.
Управление судном и его техническая эксплуатация/Под ред. А. И. Щети-
ниной. М.: Транспорт, 1975. 608 с.
Яскевич А. П., Зурабов Ю. Г. Новые МППСС. М.: Транспорт,
1979. 391 с.
320
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Настоящий предметный указатель составлен по принципу «слово за словом», разме-
щение слов алфавитное. Одинаковые слова заменены знаками ?тире>, число которых
соответствует числу одинаковых, повторяющихся слов. Цифры при рубриках и подруб-
риках — номера страниц, где находятся термины и понятия встречающиеся в учебнике.
Абсолютная скорость судна 31, 62, 63
Авария 297
— общая 309
— частная 310
Аварийная подписка 311
Аварийное происшествие 297
Аварийный случай 297
Автосчислитель 51
Агона 14
Азбука международная семафорная 205
— Морзе 208
— сигнальная русская, 205. 206
Азимутальный круг 12
Акватория 291, 292
Аномалии магнитные 14
Антенна активная круговая 108
— рамочная 107
Бакан 158
Банка 151
Бар 151
Безопасная скорость 221
Береговой эффект 115
Береговые средства навигационного обо-
рудования 152, 153
Бочка швартовная 193
Буй морской 157
Бури магнитные 14
Вариации склонения:
апериодические 14
вековые 14
суточные 14
Вертикальная линия 5
— плоскость 5
Веха 158
Видимый горизонт 8
Визир механический 118
— электронный 118
Возмещение убытков от столкновения су-
дов 300
Возмущения магнитные 14
Генеральиая разность широт 74
Генеральное отшествие 74
Географическая долгота 5
— параллель 5
— широта 5
Географический полюс 4
— меридиан 4
Геоид 3
Геоцентрическая широта 6
Гирокомпасный курс 29
— мернднан 29
— пеленг 29
Гироскопический компас 13, 28
Глазная мишень компаса 27
Гонг 254
Гониометрическое устройство 107
Градиент навигационного параметра 80
Гринвичский меридиан 4
Дальномер 93
Дальность видимого горизонта 9
— видимости географическая 10
----- геометрическая 10
----- огней н маяков 10
----- оптическая 10
— — предмета 9
Девиационный прибор компаса 28
Девиация магнитного компаса 16
----- креновая 17
----- остаточная 19
----- полукруговая 17
-----постоянная 17
------- четвертная 17
— скоростная 29
Диаграмма качки 200
Диспаша 310
Диспашер 310
Диспозитивные правовые нормы 282
Дистанция кратчайшего сближения су-
дов 263
— отхода 271
- пересечения курса 263
Дифракция 116
Дифферент 31
Договор спасания 304
— — Ллойда 304
-----МАК 304
321
Долгота восточная 5
— западная 5
Дорожка фазовой РНС 123
Дрейф 57
— ветровой 55
— ледовый 146
Дуга меридиана 5
— экватора 5
Дуплннь 194
Единица карты 46
Зарыскнванне 57
Земная рефракция 93
Земной сфероид 3
Зеркальный планшет 279
Зона сближения судов 236
Извещения мореплавателям 164
Изоазнмут 77
Изобата 137
Изогона 14
Изолиния 76
— ограждающая 135, 137
Изопеленг 77
Изостадия 76
Иммунитет государственных морских су-
дов 284
Императивные правовые нормы 282
Индекс палетки 278
Индикатор истинного движения 280
Инерционные погрешности 30
Интерполяция склонения 15
Истинный меридиан 4
— пеленг 12
— полюс 4
— радиопеленг 109
Источники права 282, 283
Кабельтов 7
Каботаж 317
Канцеллинг 315
Кардинальная система ограждения опас-
ностей 158
Картографическая проекция 38
---азимутальная 38
--- коническая 39
--- меркаторская 43
--- нормальная цилиндрическая 40
--- произвольная 38
---поперечная цилиндрическая 40
--- равновеликая или эквивалентная 38
---равноугольная нли конформная 38
---цилиндрическая 39
— сетка 38
Картография 38
Картушка 25
Коллизионная норма 282
Колокол 254
Компасная жидкость 27
Компасный курс 16
— меридиан 16
— пеленг 16
Коносамент 313
— именной 314
— на предъявителя 314
— ордерный 314
Контрибуционная стоимость 310
Кораблекрушение 297
Корректор гирокомпаса 29
Коса подводная 151
Котелок компаса 26
Коэффициент дрейфа 59
— земной рефракции 8
— лага 36
— прозрачности атмосферы 10
Коэффициенты девиации 17
Крен 32
Круг погрешности 53
Крюйс-пеленг 101
— с поворотом ЮЗ
322
Крюйс-расстоянне 104
Курс генеральный 145
— истинный II
Курсовой угол 12
Лаг 32, 35
— абсолютный 35
— гидродинамический 35
— индукционный 35
— ручной 8
Лаглинь 8
Латеральная система ограждения опасно-
стей 158
Лейдейс 315
Линия истинного курса 11
• меридиана 12
— курса 12
— локсодромического пеленга 112
— относительного движения 263
— пеленга 12
— положения 76, 123
--- пути судна 62
--- на течении 61
--- при дрейфе 57
- створа 58
— теоретического видимого горизонта 8
- траверзного пеленга 64
Логарифмическая спираль 41
Локсодромический пеленг 77
Локсодромия 41
Лот ручной 149
Лотлинь 149
Лоция 150
Лоцман 299
Лоцманская проводка 299
Магнитное наклонение 14
— поле 13
Магнитный компас 13, 25
---главный 25
— - - путевой 25
— курс 15
Магнитный меридиан (3
— пеленг 15
— полюс 13
— экватор 14
Масштаб 40
— главный карты 40
— линейный 41
— частный 40
— числовой 40
Машинный журнал 286
Маяк 153
— береговой 153
— морской 153
- плавучий 156
Мелководье 32, 151
Мель 151
Меридиональная часть 44
Мерная линия 32
Местные правила 214
Место постановки на якорь 190
— судна обсервованное 76
---счислимое 63
---счислимо-обсервованное 102
Метод относительной прокладки 263
Миля береговая 8
— меркаторская 45
- морская 7
— статутная 8
- экваториальная 44
Морская арбитражная комиссия 319
Морские внутренние воды 291
Морской протест 307
Навигационно-гидрографические обзоры
176
Навигационные опасности 151
— параметры 76
Навигационный знак 154
Нактоуз компаса 27
Национальный режим 292
Невязка 53
Норма права 281
Ночной эффект 115
Обратный истинный пеленг 12
- - компасный пеленг 17
— магнитный пеленг 15
Обязанности перевозчика 314
- получателя 316
— отправителя 315
Огни 154
— навигационные 241
— ходовые 243
— бортовые 242
Огонь буксировочный 242
— кормовой 242
— круговой 242
- - проблесковый 242
- - топовый 242
- - якорный 250, 251
Ограждающие параметры 136
Ограждающий пеленг 137
Ограниченная видимость 218
Ожидаемая линия относительного движе-
ния 267
Оптическое антнпаралаксное устройство
275
Ориентир морской навигационный 93
- точечный 120, 121
Ориентир малой протяженности 121
Ортодромия 41
Осушка 151
Ответственность перевозчика 312
Открытое море 289
Отличительная глубина 151
Отмель 151
Относительная скорость судна 31
Оформление общей аварии 311
— спасательных операций 305
Отшествие 73
— генеральное 74
Ошибка векториальная 69
— в поправке компаса 69, 114
----- лага 69
скорости учитываемого течения 69
-------- учете дрейфа 69
— знания высоты ориентира 94
— инструментальная 79, 114
— линии положения 80
— личная наблюдателя 79
— полная 79
— предельная 78
— систематическая 78
— случайная 78
— средняя квадратичная 78, 114
— счисления круговая 53
— угла молчания 114
Ошибка угловая 118
— эксцентриситета 119
Палетка 278
Пассивные отражатели 118
Пеленгатор компаса 27
Период волны кажущийся 200
— качки 201
— освещения 154
— продольных колебаний 199
— собственных поперечных колебаний 199
Плавучее ограждение 152
Плавучие средства навигационного ограж-
дения 152
— предостерегательные знаки 158
Плоскость гнрокомпасного меридиана 29
— истинного горизонта 5
меридиана 4
— компасного меридиана 16
— магнитного меридиана 13
Подчинение административной юрисдикции
293
- - гражданской юрисдикции 293
- уголовной юрисдикции 293
Полуденная линия 5
Полярное сжатие 3
Поправка гирокомпаса 29
— компаса 23
— лага 35
— ортодромическая 109
Пособия навигационные морские 172
Постоянная девиации 17
Право 281
Правой режим 289, 292
Предметная мишень компаса 27
Прибрежно-морские районы 137
Приливно-отливные уровни 168
— явления 169
Приливы 1'65
— аномальные 166
— квадратурные 167
— полусуточные 165
— сизигийные 167
— смешанные 166
— суточные 168
Прокладка исполнительная 183
— истинная 262
— навигационная 53
— предварительная 54, 181
— радиолокационная 271
Промах 79
Протрактор 82
Проформы чартеров 313
Путевой угол на течении 61
--- при дрейфе 57
Пятно 151
Радиодевиация 107
- остаточная 107
Радиолокационная станция 116
Радиолокационное описание маршрута
176
Радиолокационный пеленг 118
- планшет 265, 266
- курсовой угол 118
Радиомаяк 155
— всенаправленный 156
— кругового излучения 155
— направленного излучения 156
Радионавигационная система 105
--- гиперболическая 106
------импульсная 106
------импульсно-фазовая 106
------фазовая 106, 122
Радиопеленг 77
Радиопеленгатор визуальный 106
— слуховой 106
Радиосклонение 115
Радиосигнал тревоги 161
Радиостанция 160
Разность долгот 6
— широт 6
Редукция 6
Режим наиболее благоприятствуемой на-
ции 292
Рельеф морского дна 49
Референц-эллипсоид 3, 4, 7
Рефракция 116
Риф 151
— коралловый 151
Румб главный 11
- • промежуточный 11
— четвертной 11
Сажень морская 8
Санкция 281
Свидетельство классификационное 286
— мерительное 285
— о безопасности судна 286
- — годности судна к плаванию 285
---грузовой марке 286
---праве собственности на судно 285
— пассажирское 286
Сводные описания опасных, запретных и
ограниченных для плавания районов 178
323
Свисток 254
Секстан 93
Сетка изолиний азимутальная 132, 134
— — азимутально-стаднометрическая 132
— — гониометрическая 132, 134
----стадиометрическая 135
Семафор 160
— ручной 205
Сигнал безопасности 161
— в портах о приливе и отливе 162
— времени 164
— лоцманский 162
— о штормах и сильных ветрах 153
---- течениях 162
— для обозначения присутствия чодзодных
лодок 161
— предостерегающий от опасности 161
— специальный о циклонах и тайфунах
163
— срочности 161
— туманный 164
Сигнальные средства визуальные 202
— - - звуковые 202
---- радио 202
Система автоматической радиолокационной
прокладки 276
— координат географическая 5
---- геодезическая 5
---- геоцентрическая 5
----прямоугольная 5
— счета направлений круговая 11
---- полукруговая 11
----румбовая 11
---- четвертная 11
— ограждения опасностей кардинальная
158
— -- комбинированная 159
------ латеральная 158
Скала 151
Склонение магнитное 13
Слеминг 201
Смещение 79
Советское морское право 282
Способ нормали к пеленгу 112
Средства навигационного оборудования
152
Станция лоцманская 160
— сигнальная 210
— спасательная 160, 161
— телефонная 160
Створы 155
— ведущие 137
— линейные 155
— ограждающие 137
— перспективные 155
- прицельные 155
— секущие 137
— щелевые 155
Судовая роль 287
Судовое магнитное поле 16
Судовой журнал 286
Сфероид 3
Счисление пути судна аналитическое
(письменное) 71
----- простое 74
— - ----сложное 75
------ составное 74
—-----графическое 51
- автоматическое 51
------с помощью обсерваций 75
Сюрвейер 311
Таблица девиации 19
— морских расстояний 178
— остаточной радиодевиацин 108
— приливов 169, 178
Тахометр 33
Территориальное море 290
Течения морские 60
---временные 61
-- — встречные 63
--- периодические 61
---попутные 63
---приливно-отливные 64
---постоянные 60 ,
Точность масштаба предельная 41
Траверз 13
Траверзный истинный пеленг 64
Третейский суд 315
Треугольник векторный 267, 268
— навигационный (путевой) 63
— погрешности 85, 86
— скоростной 62
Угол вертикальный 136
— горизонтальный 76
— дрейфа судна 57
— молчания 114
— отворота 267
— сноса 61
— суммарного сноса 65
— схождения меридианов 109
Узел 8
Узкость 129, 228
Уничтожение девнацнн 18
— — способом Эри 18
Управляемость судна 32
Уравнение локсодромии 42
Фальшфейер 210
Фарватер 138
Фигура погрешности 53
— сигнальная 210
Фрахт 312
Фут 8
Циклон тропический 151
Циркуляция 54
Чартер 309
Частота коррекции счисления 99
Широта северная 5
- - южная 5
Шторм 151
Штормование 202
Экваториальная минута 45, 46
Экономическая зона 287
Элемент земного магнетизма 14
Эллипсоид вращения 3
— Красовского 3
Эхолот 98
Эхо-сигнал 116
Яма 151 ,
Ярд 8
ОГЛАВЛЕНИЕ
Часть первая. Навигация
Глава I. Сведения о Земле ........................................ 3
§ 1. Форма и размеры Земли ................................. 3
§ 2. Основные точки, линии и плоскости земного сфероида .... 4
§3. Координаты точки на Земле. Разность широт и разность долгот 5
§ 4. Длина одной минуты земного меридиана. Морские единицы
длины и скорости............................................ 7
Глава II. Ориентирование в море................................... 8
§ 5. Видимый горизонт и его дальность....................... 8
§ 6. Дальность видимости предмета и огней................... 9
§ 7. Счет направлений в море................................11
Глава III. Определение направлений в море.........................13
§ 8. Земной магнетизм и его элементы. Магнитные направления 13
§ 9. Девиация магнитного компаса. Компасные направления ... 16
§ 10. Определение остаточной девиации.......................19
§ 11. Исправление и перевод курсов и пеленгов. Поправка компаса. 22
§ 12. Магнитные компасы.....................................25
§ 13. Особенности использования гирокомпаса в навигации .... 28
Глава IV. Определение пройденного расстояния в море...............31
§ 14. Измерение скорости и пройденного судном расстояния ... 31
§ 15. Поправка лага и коэффициент лага......................35
Глава V. Изображение поверхности Земли............................37
§ 16. Картографические проекции.............................37
§ 17. Локсодромия...........................................41
§ 18. Нормальная равноугольная цилиндрическая проекция Мерка-
тора .......................................................43
§ 19. Масштаб меркаторской карты............................45
§ 20. Классификация морских карт по назначению .........47
§21. Степень доверия к морским навигационным картам .... 49
Глава VI. Счисление пути судна....................................51
§ 22. Графическое счисление и его точность .................51
§ 23. Графический учет циркуляции ...............54
§ 24. Учет дрейфа...........................................55
325
§25. Учет течения...........................................60
§ 26. Совместный учет течения и дрейфа судна ................65
§ 27. Аналитическое счисление............................. 71
Глава VII. Визуальные методы определения места судна..............
§ 28. Необходимость обсерваций и их сущность................
§ 29. Ошибки наблюдений и точность обсерваций...............
§ 30. Определение места судна по двум горизонтальным углам . . .
§31. Определение места по пеленгам трех ориентиров .........
§ 32. Определение места судна по пеленгам двух ориентиров . .
§ 33. Измерение расстояний в море...........................
§ 34. Определение места по расстояниям......................
§ 35. Комбинированные способы определения места судна.......
§ 36. Контроль счисления пути и анализ достоверности обсерваций
Глава VIII. Обсервации по разновременным наблюдениям..............
§37. Крюйс-пеленг..........................................
§ 38. Определение места судна по крюйс-расстоянию...........
Глава IX. Использование радиотехнических средств в навигации . . . .
§39. Понятие о радиотехнических средствах судовождения . . .
§ 40. Радиопеленгование с судна..................................
§41. Особенности исправления радиопеленгов.................
§ 42. Определение места по радиопеленгам....................
§ 43. Ошибки радиопеленгования и точность определения места судна
§ 44. Особенности использования судовых радиолокационных стан-
ций ........................................................
§ 45. Определение места судна с помощью РЛС........... .
§ 46. Фазовые РНС . •.......................................
75
75
78
81
85
90
93
94
96
99
101
101
104
105
105
106
109
111
114
116
118
122
Глава X. Использование одной изолинии в навигации................125
§ 47. Уменьшение площади вероятного местонахождения судна . 125
§ 48. Проход узкости при наличии одной линии положения .... 126
§ 49. Выход на подходной буй ............................. . 128
Глава XI. Плавание в узкостях....................................129
§ 50. Подготовка к плаванию в узкостях.....................129
§ 51. Вспомогательные сетки, ограждающие линии положения . . 133
§52. Навигационные особенности плавания в узкостях........138
Глава XII. Плавание в условиях ограниченной видимости и во льдах . . . 140
§ 53. Подход к берегу в тумане.............................140
§ 54. Использование измеренных глубин......................141
§ 55. Особенности плавания в тумане........................143
§56. Навигационные особенности плавания во льдах ..... 144
§ 57. Счисление во льдах ..................................145
Часть вторая. Лоция пути
Глава XIII. Морские опасности и навигационное оборудование путей . . 150
§ 58. Предмет и назначение лоции...........................150
§ 59. Навигационные опасности, их классификация и терминология 151
§ 60. Навигационное оборудование морских путей . ..........152
§61. Береговые средства навигационного оборудования.......153
§ 62. Плавучие средства навигационного оборудования .... 156
§63. Системы ограждения опасностей...................... 158
Глава XIV. Сигналы и сигнальные станции .........................160
§64. Станции, обслуживающие мореплавателей................160
§ 65. Сигналы, правила и инструкции, относящиеся к движению су-
дов ........................................................161
§66. Штормовые и навигационные сигналы.....................163
326
Глава XV. Приливно-отливные явления..............................165
§ 67. Понятие о приливах и терминология ...................165
§ 68. Учет приливов в судовождении ...................• • * 169
Глава XVI. Советские пособия для плавания........................172
§69. Каталог карт и книг..................................172
§ 70. Лоции................................................173
§71. Руководства «Огни и знаки» ..........................174
§ 72. Руководства «Радиотехнические средства навигационного
оборудования»............................................ 175
§ 73. Обзоры, справочники, извещения и другие навигационные по-
собия ....................................................176
§ 74. Корректура морских навигационных пособий...........179
§ 75. Штурманская подготовка к рейсу.......................180
§ 76. Организация штурманской службы на судне............184
Часть третья. Особенности управления судном в морских условиях
и МППСС
Глава XVII. Особенности управления судном в прибрежном морском пла-
вании ................................................186
§ 77. Общая характеристика плавания в морских условиях . . . 186
§ 78. Подготовка судна к плаванию. Разрешение на выход .... 188
§ 79. Якорная стоянка на незащищенных рейдах ..................190
§ 80. Морская буксировка ......................................194
§81. Управление судном в штормовую погоду ....................199
Глава XVI11. Морская сигнализация ...................................202
§ 82. Виды и средства сигнализации. Государственный флаг СССР . 202
§ 83. Международный свод сигналов (МСС) . . ...................204
§ 84. Ручной семафор. Световая сигнализация ...................205
§ 85. Звуковая и пиротехническая сигнализация. Сигнальные фи-
гуры....................................................209
Глава XIX. Расхождение судов в море .................................211
§86. Развитие и значение МППСС..........................211
§87. Применение правил и общие определения ...................213
§ 88. Плавание судов при любых условиях видимости .............219
§ 89. Расхождение судов, находящихся на виду друг у друга . . 230
§ 90. Плавание судов при ограниченной видимости..........238
§91. Правила относительно оглей и дневных сигналов......241
§ 92. Расположение и технические характеристики огней и знаков 251
§ 93. Звуковые и световые сигналы судов .......................253
Глава XX. Использование радиолокатора для предупреждения столкно-
вения судов в море...............................................260
§ 94. Особенности и организация радиолокационного наблюдения 260
§ 95. Оценка ситуации сближения судов и обработка радиолокаци-
онной информации...........................................261
§ 96. Решение задачи расчета маневра для расхождения судов . . 266
§ 97. Расхождение с несколькими судами ........................269
§ 98. Выбор оптимального вида маневра..........................276
§ 99. Палетка и устройства для обработки радиолокационной инфор-
мации .....................................................277
Часть четвертая. Морское право
Глава XXI. Предмет и источники морского права. Морское судно и
экипаж...........................................................281
§ 100. Предмет и источники морского права......................281
§ 101. Правовое положение морского судна.......................283
327
§ 102. Судовые документы....................................258
§ 103. Экипаж судна.........................................287
Глава XXII. Право пользования морем...............................289
§ 104. Правовой режим морских вод..........................289
§ 105. Правовой режим судна в порту .......................292
Глава XXIII. Надзор за безопасностью мореплавания ................294
§ 106. Государственный надзор и международные соглашения по без-
опасности мореплавания......................................294
§ 107. Расследование аварийных случаев. Лоцманская проводка 279
Глава XXIV. Возмещение убытков от столкновения судов и вознагражде-
ние за спасение на море...........................................299
§ 108. Возмещение убытков от столкновения судов ..............299
§ 109. Правовые условия спасания на море.................... 302
Глава XXV. Морской протест. Общая авария .......................307
§ 110. Морской протест......................................307
§111. Общая авария .....................................309
Глава XXVI. Морская перевозка грузов и пассажиров.................312
§112. Договор морской перевозки груза ....................312
§ 113. Обязанности перевозчика, отправителя и получателя . . . 314
§ 114. Договор перевозки пассажира. Разрешение имущественных
споров..................................................... 317
Список рекомендуемой литературы.....................320
Предметный указатель ..................................337