/













































































































































































































































































































































































































































Author: Ольховский В.Е.
Tags: транспорт военно-морской флот навигация морской транспорт издательство пищевая промышленность
Year: 1979




Text
47.2
0-86
УДК [656.61.052.1 : 527.6] : 639.2.06
Ольховский В. Е.
0 86 Навигация и промысловая навигация. — М.: Пи-
щевая пром-сть, 1979. — 544 с.
В пер. 1 р. 40 к.
В книге изложены основные сведения по навигации, приемы веде-
ния счисления пути судна, методы определения места судна по визу-
альным наблюдениям навигационных ориентиров, при помощи радио-
технических и гидроакустических средств с учетом специфических усло-
вий промысла.
Рассмотрены теоретические основы маневрирования судна с оруди-
ями лова и практические способы решения задач промыслового манев-
рирования.
В книге нашли отражение оригинальные исследования в области
промысловой навигации, выполненные под руководством и при участии
автора, а также обобщен опыт работы передовых судов флота рыбной
промышленности СССР.
Л 31705—087
О ------------ 87—79 4002020000
044(01)—79
47.2
639.2
Рецензенты: В. Н. Шагубатов и Кафедра промыслового судо-
вождения Калининградского технического института рыбной про-
мышленности и хозяйства
© Издательство «Пищевая промышлен-
ность», 1979 г.
ЧАСТЬ ПЕРВАЯ
НАВИГАЦИЯ
ВВЕДЕНИЕ
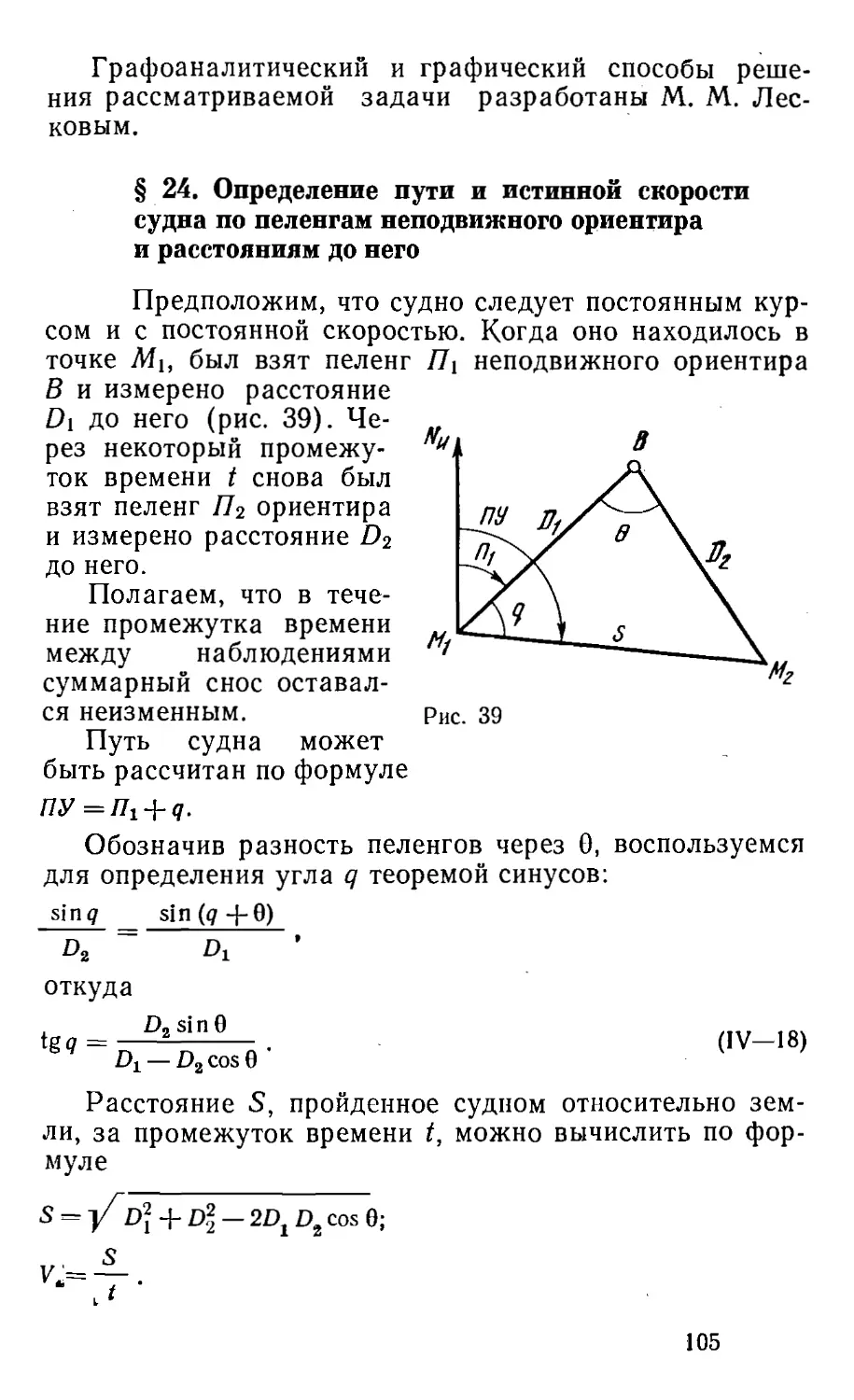
Предмет навигации. Предметом навигации* как
научной дисциплины является разработка способов вож-
дения судна в соответствии с заданной программой пла-
вания, основанных на использовании навигационных по-
собий и технических средств для определения элементов
движения судна и различных навигационных пара-
метров.
Эти способы базируются на закономерностях движе-
ния судна на поверхности Земли, теории получения и
обработки навигационной информации — совокупности
данных, характеризующих пространственно-временное
положение судна.
Навигация является ведущей дисциплиной в цикле
наук судовождения, так как она формирует общую тео-
рию вождения судов, которая лежит в основе других
дисциплин этого цикла, и непосредственно решает зада-
чу управления движением судна в соответствии с за-
данной программой плавания. В навигации, как и в дру-
гих дисциплинах, составляющих цикл наук судовожде-
ния, широко используются выводы и достижения
фундаментальных наук, а также ряда прикладных наук:
геодезии, картографии, гидрографии, океанологии и гид-
рометеорологии.
В курсе навигации, который читается в высших ин-
женерных морских училищах Министерства рыбного
хозяйства СССР, рассматривается следующий круг во-
просов: определение направлений и пройденного рассто-
яния в море; ведение счисления пути судна на перехо-
дах и на промысле с учетом влияния ветра и течения;
контроль счисления пути судна на переходах и на про-
* Слово «навигация» происходит от латинского «Navigare», что
означает «ездить по морю».
I* 3
мысле по результатам измерения различных навигаци-
онных параметров визуальными, радиотехническими и
гидроакустическими способами; оценка точности плава-
ния; выбор безопасных и оптимальных по различным
критериям оптимальности морских путей и осуществле-
ние плавания этими путями с учетом возможных изме-
нений навигационной обстановки; навигационное обес-
печение плавания и промысла в стесненных водах, при
пониженной видимости и во льдах.
В Советском Союзе был издан ряд учебников по на-
вигации. Первые советские моряки учились по учебни-
ку, написанному проф. Н. А. Саккелари. Многие годы
в высших морских учебных заведениях курс навигации
изучался по учебникам проф. К. С. Ухова, проф.
А. П. Белоброва и др.
Современный уровень развития навигации как науч-
ной дисциплины получил отражение в оригинальном
учебнике профессоров А. П. Ющенко и М. М. Лескова
(второе издание этого учебника вышло в свет в 1972 г.)
и фундаментальном теоретическом и практическом ру-
ководстве «Навигация» Г. П. Попеко и Е. П. Соломати-
на (I том курса «Кораблевождение»). Эти труды широ-
ко использованы в первой части настоящего учебника.
Этапы и перспективы развития методов и техничес-
ких средств судовождения. Развитие мореплавания и
неразрывно связанных с ним методов и технических
средств судовождения определяется уровнем развития
производительных сил общества в ту или иную истори-
ческую эпоху.
Мореплаватели древности и переходного к феода-
лизму периода не располагали приборами для опреде-
ления направления движения судна и его скорости.
Судовождение основывалось исключительно на лоцман-
ском методе — личном опыте и памяти человека, исполь-
зовавшего для ориентировки в море приметные берего-
вые предметы, небесные светила, которые наблюдались
в процессе движения судна, периодичность некоторых
гидрометеорологических явлений. В качестве измерите-
ля глубин применяли весло или шест, а позднее ручной
лот.
Накопление знаний об особенностях плавания в тех
или иных районах порождало естественное стремление
закрепить приобретенный опыт. Это стремление полу-
4
чило выражение в составлении простейших навигацион-
ных пособий.
В VI__IV вв. до н. э. для обеспечения безопасности
плаваний, совершавшихся по преимуществу вдоль бере-
гов, составлялись морские путеводители, получившие
название периплов (объездов). Периплы включали в се-
бя описания берегов, сведения о расстояниях между
различными населенными пунктами на побережье, об
удобных якорных стоянках, о прибрежных навигацион-
ных опасностях, о характерных местных признаках,
которые могли быть использованы для ориентировки во
время плавания. Древнейший из дошедших до нас пе-
риплов представляет собой описание берегов Средизем-
ного и Черного морей. Этот перипл состоит из несколь-
ких частей, которые, как полагают, были написаны в
период с VI по IV вв. до н.э. и собраны в едином тру-
де, названном именем грека Скилака, одного из его со-
ставителей.
Известны не только письменные, но и графические
периплы, в которых кроме письменных сведений
о районе плавания помещалось схематическое изо-
бражение береговой черты с указанием положения раз-
личных населенных пунктов, расположенных на побе-
режье.
Если письменные периплы можно рассматривать как
прообразы лоций, то графические — как прообразы мор’
ских навигационных карт.
В период наибольшего подъема производительных
сил феодального общества (XII—XV вв.) значительное
развитие производства и обмена привело к огромному
росту международной торговли и бурному развитию мо-
реплавания. Поиски новых рынков способствовали орга-
низации многочисленных плаваний в отдельные страны
и ознаменовали эпоху великих географических откры-
тий. Расширение границ мореплавания не могло проис-
ходить без совершенствования морских судов, методов
и средств судовождения. На судах появляются простей-
шие датчики курса и скорости хода, совершенствуются
морские навигационные карты.
На этом этапе судовождение основывается не только
на лоцманском методе, но и на счислении пути судна,
которое, хотя и было весьма примитивным, позволяло
осуществлять плавание вдали от берегов.
5
Имеются сведения, что скандинавы пользовались
простейшим курсоуказателем — магнитной иглой — уже
в XI в. В XII в. русские поморы, совершая плавания на
о-в Шпицберген (Грумант), применяли в качестве кур-
соуказателя магнитную стрелку, вделанную в костя-
ную оправу. В начале XIV в. на магнитной стрелке ста-
ли укреплять разделенную на 16 румбов картушку, а
стрелку надевать на шпильку, помещая всю систему в
коробку. В XVI в. картушка компаса была разделена на
32 румба, а компас помещен в ящик с кардановым под-
весом и приспособлением для пеленгования.
Долгое время для определения скорости хода судна
мореплаватели пользовались методом «планширного ла-
га»: с носовой части судна бросали в воду плавающий
предмет и замечали промежуток времени, за который
этот предмет проходил мимо двух наблюдателей, стояв-
ших на палубе на известном расстоянии друг от друга.
Промежуток времени оценивали при помощи водяных
или песочных часов.
В конце XVI в. начали применять ручной лаг — дере-
вянный сектор специальной конструкции, который вы-
брасывали за борт на лаглине, разбитом марками (уз-
лами). По длине лаглиня, вытравленного за определен-
ный промежуток времени при движении судна, судили
о скорости его хода относительно воды.
На рубеже XIII—XIV вв., после того как в Европе
начали использовать в качестве курсоуказателя магнит-
ный компас, получили широкое распространение мор-
ские навигационные карты, названные компасными кар-
тами, или портоланами. Портоланы, в которых нашли
свое отражение накопившиеся к тому времени сведения
о морях и океанах, не имели в своей основе какой-либо
картографической проекции. При их построении земную
поверхность принимали за плоскость. Так как портола-
ны охватывали сравнительно небольшие по протяжен-
ности районы, они мало отличались от планов и сохра-
няли по всей своей площади достаточное постоянство
масштаба. На изображении суши и водной поверхности
в ряде точек наносили компасные сетки, указывающие
положение стран света и 28 промежуточных румбов.
Кроме того, на портоланах помещали линейные мас-
штабы и показывали курсы для плавания между от-
дельными портами.
6
Однако с расширением границ районов плавания
портоланы не могли удовлетворить потребности море-
плавания. Они не учитывали кривизны Земной поверх-
ности, а потому оказывались непригодными для изобра-
жения протяженных участков побережья. Отсутствие на
портоланах картографической сетки затрудняло веде-
ние счисления пути судна. Все это потребовало приме-
нения для составления морских навигационных карт
какой-либо картографической проекции. Долгое время
мореплаватели пользовались картами в квадратной рав-
нопромежуточной цилиндрической проекции, хотя это бы-
ло связано с рядом трудностей и неудобств, обусловлен-
ных неравноугольностью этой проекции.
Значительный вклад в создание первых морских на-
вигационных карт был сделан русскими мореходами.
Так, например, при составлении портоланов Черного ив
особенности Каспийского морей были широко исполь-
зованы сведения, собранные русскими мореходами. В ат-
ласе морских карт, изданном Агнезе (1525 г.), имелся
портолан Черного моря, составленный по материалам,
полученным от Димитрия Герасимова — посла Москов-
ского государства в Риме.
На картах XV в. были нанесены открытые отважны-
ми русскими полярными мореходами о-ва Шпицбергена
(Грумант), Новая Земля, Вайгач, Колгуев и др.
С 1569 г. начали издаваться морские навигационные
карты в равноугольной цилиндрической проекции, пред-
ложенной мореплавателям голландским картографом
Меркатором. Использование в практике мореплавания
карт в этой проекции благодаря присущему ей свойству
изображать локсодромию в виде прямой линии и равно-
угольности значительно упростило решение различных
навигационных задач и повысило точность получаемых
результатов.
Появление ручного лага, часов с балансиром и мор-
ских навигационных карт в проекции Меркатора спо-
собствовало дальнейшему совершенствованию счисле-
ния пути судна. Однако в XVI в. счисление было весьма
приближенным из-за несовершенства датчиков скоро-
сти и^ направления движения судна, а также недоста-
точной точности морских карт.
Вместе с развитием средств и методов счисления
пути судна начали решаться и простейшие задачи
7
мореходной астрономий с целью контроля счисления.
В XV в. мореплаватели располагали рядом, правда, гру-
бых и неприспособленных к работе на движущейся плат-
форме угломерных инструментов (градштоком, астроля-
бией, ноктурналием) и умели определять широту места
судна. Так было положено начало инструментальному
расчетному методу судовождения.
В XVIII в. развивающийся капитализм начинает со-
здавать реальные предпосылки для технического пере-
вооружения флота, проведения широких океанографиче-
ских и гидрографических исследований. XVIII в. можно
рассматривать как начало становления инструменталь-
ного расчетного метода судовождения, основанного на
счислении пути судна и определении его места по визу-
альным наблюдениям береговых ориентиров и небесных
светил. На этом этапе важную роль сыграли изобрете-
ние секстана, хронометра и механического лага, даль-
нейшее совершенствование магнитных компасов, повы-
шение точности морских навигационных карт и других
пособий для плавания, обобщение накопленного опыта
мореплавания и разработка научных основ судовож-
дения.
Идея создания угломерного инструмента, основанно-
го на двойном отражении объекта в зеркалах и обеспе-
чивающего возможность измерений с движущейся плат-
формы, принадлежит Ньютону. Однако она не получила
известности и в 1730 г. такой инструмент изобрели Дж.
Гадлей и Т. Годфрей независимо друг от друга и от
Ньютона. Этот инструмент был назван октаном, так как
его лимб представлял собой дугу в 45°. Впоследствии
лимб стали делать в виде дуги в 60° и инструмент стал
называться секстаном. В 1765 г. Дж. Гаррисоном был
построен хронометр.
Секстан и хронометр расширили возможности опре-
деления места судна астрономическими способами и
значительно повысили точность обсерваций. Появление
секстана способствовало и развитию навигационных
способов определения места судна, основанных на изме-
рении горизонтальных углов между береговыми ориен-
тирами и их угловых высот.
С начала XVIII в. русское мореплавание пережива-
ет свое новое рождение. Русский народ возвратил себе
побережье Балтийского моря и закрепился на берегах
8
Черного и Азовского морей. Усилился интерес к изуче-
нию северных и восточных окраин России. Для подго-
товки русских навигаторов начали создаваться специ-
альные морские учебные заведения. Разработкой науч-
ных основ судовождения занялись крупнейшие русские
ученые.
14 января 1701 г. Петр Первый издает указ об уч-
реждении Навигацкой школы: «...во забаву же и пользу
православного христианства быть Математических и
Навигацких, то есть хитростно наук учению». Одним из
преподавателей этой школы, образованнейшим челове-
ком того времени, Л. Ф. Магницким в 1703 г. был на-
писан фундаментальный труд «Арифметика», третья
часть которого посвящена вопросам навигации и море-
ходной астрономии. К «Арифметике» были приложены
различные математические и астрономические таблицы.
В 1723 г. библиотекарем Навигацкой школы Киприяно-
вым были изданы первые мореходные таблицы, вклю-
чавшие таблицу разности широт и меридиональных ча-
стей, а также ряд астрономических таблиц.
В 1715 г. старшие классы Навигацкой школы преоб-
разовываются в Морскую академию, которая была от-
крыта в Петербурге. Питомцами Навигацкой школы и
Морской академии были выполнены выдающиеся пото-
му времени гидрографические исследования, созданы
ценные пособия для плавания, сделан крупный вклад
в разработку научных основ судовождения.
В 1733 г. издается труд С. Г. Малыгина «Сокращен-
ная навигация по карте де-редукцион», представляющий
собой оригинальное исследование по частному вопросу
навигации. В 1739 г. выходит в свет труд Ф. Соймонова
«Экстракт штурманского искусства из наук, принадле-
жащих к мореплаванию, сочиненный в вопросах и отве-
тах для пользы и безопасности мореплавания», а в
1748 г. — первый полный курс судовождения «Книги
полного собрания о навигации», написанный С. Морд-
виновым. Труд С. Мордвинова отражает уровень разви-
тия научных основ судовождения в XVIII в. Его первая
часть посвящена вопросам геометрии и тригонометрии,
вторая — космографии и географии, третья — мореход-
ной астрономии и четвертая — навигации. В четвертой
части подробно рассматривается плавание по счислению,
графическое и аналитическое решение задач счисления
и графические приемы, облегчающие применение фор-
мул аналитического счисления.
Вторая половина XVIII в. особенно богата работами
русских ученых в области мореплавания. Разработке
этих вопросов большое внимание уделяет Петербург-
ская академия наук.
Л. Эйлер публикует труд под заглавием «Полное
умозрение строения и вождения кораблей», разрабаты-
вает вопросы механики, которые легли в основу теории
гироскопа. Д. Бернулли пишет трактат по гидродинами-
ке (уравнение Бернулли до сего времени лежит в осно-
ве теории гидродинамических лагов).
Неоценимый вклад в развитие методов и техниче-
ских средств судовождения внес великий русский ученый
М. В. Ломоносов. В 1759 г. он представил в Петербург-
скую академию наук доклад «Рассуждения о большей
точности морского пути». В этом труде были изложены
основные принципы, которые должны лечь в основу раз-
вития науки судовождения, впервые указано на необ-
ходимость создания теории земного магнетизма, мор-
ских течений, разработки методов предсказания погоды.
Для повышения точности счисления пути судна
М. В. Ломоносов предложил ряд приборов оригиналь-
ной конструкции: самопишущий компас (прообраз сов-
ременного курсографа), клизеометр, или дрейфомер—
прибор для определения угла ветрового дрейфа, дромо-
метр — прибор для определения скорости судна относи-
тельно воды (прообраз стационарного вертушечного ла-
га), салометр — прибор для определения скорости и на-
правления течения. М. В. Ломоносов уделял много
внимания вопросам мореходной астрономии. Он работал
над созданием секстана с искусственным горизонтом,
занимался конструированием хронометра. Для наблю-
дения Солнца М. В. Ломоносов предложил поставить
перед зеркалом секстана цветные стекла (светофильт-
ры). М. В. Ломоносов указал на преимущества азиму-
тальных наблюдений при определении места судна по
небесным светилам. Однако этот метод еще не нашел
применения из-за недостаточной точности измерения
азимутов.
Сущность основных задач судовождения М. В. Ло-
моносов сформулировал следующим образом: «Двумя,
как известно, между собой разными образы положение
in
корабля на море ищут й определяют. Первое ширину из
вышины светил, долготу по сравнению времени на ме-
ридиане корабельном со временем на первом меридиа-
не. Второе по указанию компаса и по скорости кора-
бельного ходу, который вервью измеряют или по силе
ветра и по числу и положению парусов примечают, и
по тому долготы и широты места корабельного ищут».
С именем М. В. Ломоносова связан и новый подъем
русской гидрографии и картографии, который способст-
вовал созданию более совершенных морских навигаци-
онных карт и других пособий для плавания.
Дальнейшему развитию науки судовождения в зна-
чительной мере способствовали предпринятые русскими
моряками в первой четверти XIX в. многочисленные на-
учные экспедиции и кругосветные плавания. Имена за-
мечательных русских моряков-исследователей, руково-
дителей и участников этих плаваний, И. Ф. Крузенштер-
на и Ю. Ф. Лисянского, Ф. Ф. Беллинсгаузена и
М. П. Лазарева, В. М. Головнина, О. Е. Коцебу,
Ф. П. Литке и других, вписаны в страницы мировой ис-
тории мореплавания. Эти плавания не только позволи-
ли расширить географические познания, но и дали бо-
гатый материал для дальнейшего совершенствования
методов судовождения. В России появляются труды по
судовождению, в которых методы судовождения полу-
чают трактовку, близкую к современной.
Среди этих трудов особенного внимания заслужива-
ет вышедший в свет в 1803 г. и выдержавший с 1806 по
1830 г. три издания фундаментальный учебник П. Га-
малея «Теория и практика кораблевождения». Этот
учебник состоит из трех частей. В первой части рас-
сматриваются вопросы навигации, во второй — мореход-
ной астрономии, а третья часть содержит необходимые
для судоводителей таблицы. В разделе, посвященном
навигации, приводятся сведения о фигуре Земли, об ос-
новных геодезических работах, магнитном компасе, о
переводе и исправлении румбов, об учете ветрового
дрейфа и течения. Подробно рассматриваются мерка-
торская проекция и ее использование для решения раз-
личных навигационных задач, впервые описаны способы
определения места судна по крюйс-пеленгу, по пелен-
гу и расстоянию, по пеленгу и полученной из астрономи-
ческих наблюдений широте места. Приводятся формулы
аналитического счисления с такими уточняющими по-
нятиями, как представление о промежуточной широте и
«сжатии» Земли. Излагаются вопросы, связанные с пла-
ванием «по дуге великого круга».
В 1832—1849 гг. русскими астрономами и моряками •
были выполнены важные исследования, посвященные
дальнейшему совершенствованию астрономических ме-
тодов определения места судна (работы К. X. Кнорре,
М. А. Акимова, Н. Ф. Жамбова, А. А. Асташева,
В. Е. Фуса).
В 1888 г. издается учебник Н. Зыбина «Руководство
к кораблевождению», а в 1893 г. учебник В. Лукина
«Навигация». В этих учебниках уже подробно излага-
ются способы определения места судна по береговым
ориентирам и небесным светилам.
Появление в начале XIX в. паровых судов, а затем
переход к железному судостроению, увеличение скоро-
сти хода паровых судов поставили задачу дальнейшего
совершенствования датчиков направления движения
судна и его скорости — магнитного компаса и механиче-
ского лага.
К концу XIX в. были достигнуты значительные успе-
хи в области магнитно-компасного дела. В России в
1865 г. был издан труд И. П. Белавенца «О девиации
магнитного компаса и диаграммах». Работы И. П. Бе-
лавенца и его ученика И. П. Колонга подняли теорию
девиации магнитного компаса на высокий уровень. Уче-
ники И. П. Колонга А. Н. Крылов, Н. Н. Оглобленский,
В. Я. Павлинов продолжали успешно развивать маг-
нитно-компасное дело на русском флоте. Разработанная
ими конструкция 127-миллиметрового магнитного ком-
паса является лучшей в мире.
Еще в XVIII в. появились механические лаги, дейст-
вовавшие с помощью вертушек различного устройства.
Однако эти лаги не давали достаточно точных показа-
ний. Изобретенный в начале XIX в. Э. Массем винтовой
лаг необходимо было выбирать из воды для снятия от-
счетов. Только в 1878 г. Уокером был создан гекаборт-
ный вертушечный лаг, свободный от указанных выше
недостатков.
Наряду с совершенствованием средств счисления пу-
ти судна осуществлялись работы, направленные на по-
вышение точности морских навигационных карт и дру-
12
гих пособий для плавания. В решении этой задачи
крупный вклад внесли русские моряки-гидрографы Г. А.
Сарычев, Л. Ф. Спафарьев, Ф. П. Рейнеке, М. П. Ман-
ганари, Ф. П. Литке и многие другие, выполнившие об-
ширные, базирующиеся на более точных методах гидро-
графические исследования. На основе этих исследований
был создан ряд новых морских навигационных карт,
лоций, наставлений для плавания.
Дальнейшее развитие методов и технических средств
судовождения связано с достижениями технической фи-
зики и использованием этих достижений для создания
приборов, устройств и систем для измерения элементов
движения судна и различных навигационных па-
раметров.
В начале XX в. закладывается фундамент метода су-
довождения, основанного на сочетании точного счисле-
ния пути судна и определений его места по результатам
измерений навигационных параметров не только визу-
альным, но и радиотехническим, гидроакустическим и
гидрорадиоакустическим способами.
Появляются первые гирокомпасы, а затем гидроди-
намические лаги. Для создания и совершенствования
этих приборов, в особенности гирокомпасов, большое
значение имели труды выдающихся русских ученых
Л. Эйлера, Д. Бернулли, С. В. Ковалевской, а также из-
вестных советских ученых старшего поколения В. А. Сте-
клова, С. А. Чаплыгина, Г. К. Суслова, Н. Е. Жуков-
ского, А. Н. Крылова, Ю. А. Крутикова, Б. И. Кудреви-
ча, Б. В. Булгакова. В настоящее время теоретические и
практические вопросы, связанные с развитием электро-
навигационных приборов, успешно решаются в нашей
стране крупными научными коллективами и научно-
производственными объединениями.
Коренные изменения в методах судовождения свя-
заны с изобретением радио и его использованием для
решения навигационных задач.
Великий русский ученый А. С. Попов — изобретатель
радио — не только разрешил проблему беспроволочной
электрической связи между судами, но и впервые вы-
сказал мысль о возможности применения электромаг-
нитных волн для определения места судна и обеспече-
ния безопасности плавания при отсутствии зрительной
видимости. В своих отчетах о производстве опытов по
радиосвязи между транспортом «Европа» и крейсером
«Африка» на Балтийском море в 1897 г. А. С. Попов
писал: «Применение источников электромагнитных волн
на маяках в добавлении к световому или звуковому сиг-
налам может сделать маяки видимыми в тумане и в
бурную погоду: прибор, обнаруживающий электромаг-
нитную волну, звонком может предупредить о близости
радиомаяка, а промежутки между звонками дадут воз-
можность различать маяки». А. С. Поповым было сде-
лано открытие отражения радиоволн металлическими
предметами (корпусом судна, мачтами и т. д.), лежа-
щее в основе радиолокации.
Благодаря выдающимся трудам отечественных уче-
ных П. В. Вологдина, М. В. Шулейкина, А. А. Петров-
ского, Н. Н. Циклинского, А. И. Берга, М. А. Бонч-Бру-
евича, Б. А. Веденского, Л. И. Мандельштама, Н. Д. Па-
палекси, Е. Я. Щеголева радиотехника за сравнительно
короткий промежуток времени достигла значительных
успехов. Созданные на основе работ этих ученых раз-
личные навигационные устройства и системы являются
наиболее эффективными техническими средствами сов-
ременного судовождения.
В 1906—1907 гг. Н. Д. Папалекси, тогда еще моло-
дой ученый, начал опыты по радиопеленгованию, а в
1912 г. И. И. Рейнгартеном были построены первые
русские радиопеленгаторы.
После Великой Октябрьской социалистической рево-
люции открылись широкие возможности для развития
методов и технических средств судовождения, что было
неразрывно связано с общим прогрессом науки и тех-
ники в Советском Союзе.
В двадцатые годы советские ученые и конструкторы
создали несколько типов судовых радиопеленгаторов,
которые начали успешно применяться на судах и не-
прерывно совершенствовались.
В 1930 г. Л. И. Мандельштам и Н. Д. Папалекси
разработали фазовый метод измерения расстояний.
К 1932 г. под руководством Е. Я. Щеголева была соз-
дана необходимая аппаратура (МПЩ), получившая на-
звание радиодальномера.
В 1934 г. были сделаны попытки использовать ра-
диодальномер в геодезической практике для измерения
базисов и длин сторон триангуляции. Ознакомившись с
работами геодезистов, А. П. Ющенко обратил внимание
на возможность применения радиодальномеров для оп-
ределения места судна при плавании вне видимости бе-
регов. По его инициативе в 1935 г. на Черном море бы-
ли проведены опытные работы, увенчавшиеся полным
успехом. В дальнейшем радиодальномеры получили ши-
рокое распространение в гидрографии для промера от-
крытого моря и непрерывно совершенствовались. f
Большим достижением советских ученых и констук-
торов явилось создание на основе работ Л. И. Мандель-
штама, Н. Д. Папалекси фазовых гиперболических ра-
дионавигационных систем типа «фазовый зонд». Следует
заметить, что принцип действия широко распростра-
ненной английской радионавигационной системы «Дек-
ка» полностью совпадает с принципом действия «фазо-
вого зонда», хотя в английских материалах, касающихся
системы «Декка», не встречается ссылок на работы со-
ветских ученых, опубликованные на много лет раньше
создания этой системы.
В 1938 г. под руководством Э. М. Рубчинского была
начата разработка импульсной радионавигационной си-
стемы.
В 1941 г. Ю. В. Козыревым, А. А. Погорелко и
П. Я. Чернецовым создана первая отечественная радио-
локационная установка.
Широкое применение в практике судовождения раз-
личных радионавигационных устройств и систем, увели-
чение дальности их действия, повышение точности из-
мерений поставили перед учеными, работающими в об-
ласти навигации, ряд важнейших задач, не решив
которые, нельзя было обеспечить эффективное исполь-
зование этих устройств и систем. Сюда следует отнести
задачи, связанные с изысканием наиболее рациональ-
ных, учитывающих сфероидичность Земли способов об-
работки радионавигационной информации, созданием
специальных карт с сетками изолиний, таблиц для по-
строения линий положения, разработкой радиолокаци-
онных методов судовождения и радиолокационных на-
вигационных пособий. Решению этих задач судовожде-
ния посвятили свои труды известные советские ученые-
моряки старшего поколения — В. В. Каврайский,
Н. Н. Матусевич, А. П. Ющенко, А. П. Белобров,
К. С. Ухов, Н. Ю. Рыбалтовский. Актуальные проблемы
современного судовождения успешно разрабатываются
их многочисленными учениками.
Благодаря успехам технической физики и радиоэлек-
троники появились новые технические средства для из-
мерения элементов движения судна и различных нави-
гационных параметров: относительные индукционные
лаги-дрейфомеры, абсолютные гидроакустические лаги,
основанные на эффекте Допплера, новые гироскопичес-
кие курсоуказатели, инерциальные навигационные си-
стемы, высокоточные радионавигационные системы, об-
ладающие большой дальностью действия, спутниковые
навигационные системы. На судах начали использовать
цифровую вычислительную технику. В настоящее вре-
мя наметились две тенденции в этой области: разработ-
ка и внедрение специализированных цифровых вычис-
лительных устройств для решения частных задач
судовождения и создание общесудовых вычислительно-
управляющих центров. На современном этапе развития
судовождения решается проблема автоматизации этого
процесса — полуавтоматического или автоматического
управления движением судна в соответствии с заданной
программой плавания.
Создание материально-технической базы коммуниз-
ма в нашей стране предусматривает широкое внедрение
средств автоматизации производственных процессов. Ав-
томатизация судовождения является необходимой со-
ставной частью комплексной автоматизации судов и
рассматривается как одно из основных направлений
технического прогресса на морском флоте.
В настоящее время осуществляется разработка и
внедрение на судах информационно-управляющих нави-
гационных комплексов. Внедрение таких комплексов,
обеспечивающих соединение навигации с управлением
судном, будет способствовать росту эффективности ра-
боты флота благодаря существенному повышению точ-
ности и надежности судовождения.
Типовой объем автоматизации судовождения, реали-
зуемый в информационно-управляющих навигационных
комплексах, включает в себя следующие процессы:
вычисление счислимых координат места судна по
результатам определения элементов его движения с по-
мощью средств курсоуказания и измерения скорости
хода;
16
вычисление координат места судна по результатам
измерения навигационных параметров с помощью ра-
дионавигационных и спутниковых навигационных си-
стем (обсервованных координат);
прокладку пути судна по вероятнейшим координа-
там, полученным по результатам измерений навигаци-
онных параметров и данным счисления;
выработку сигналов для управления движением суд-
на в соответствии с заданной программой плавания;
определение элементов движения встречных судов,
оценку возможностей, возникающих при встрече, и про-
игрывание маневров для расхождения;
визуальную индикацию (отображение) динамиче-
ской картины навигационной обстановки для оценки си-
туации и контроля за движением судна.
Глава I. ОСНОВНЫЕ ПОНЯТИЯ
§ 1. Морские единицы длины и скорости
В навигации удобно использовать такую единицу
длины, которая позволяла бы выражать расстояния од-
ним и тем же числом как в линейной, так и в угловой
мере. Поэтому в качестве основной единицы длины для
измерения расстояний в море принята морская ми-
л я, равная длине одной минуты дуги географического
меридиана.
Однако длина одной минуты дуги меридиана на зем-
ном эллипсоиде является величиной переменной, завися-
щей от широты
АН М а(1—е2)
Д1 = Магс1 = —— —-575-arc Г,
(1—е2 sin2 <р)3/2
где М — радиус кривизны меридионального сечения эллипсоида на
широте <р;
а — большая полуось земного эллипсоида;
е — первый эксцентриситет земного эллипсоида.
На полюсах длина одной минуты дуги меридиана
имеет максимальное значение, равное 1861,6 м, на эк-
ваторе— минимальное, равное 1842,9 м, при <р=45°
Д1'= 1852,2 м. Пользоваться на практике переменной по
величине единицей длины неудобно. Это значительно
усложнило бы и конструкцию приборов, предназначенных
2 В. Е. Ольуппгиий 1-7
для определения проходимого судном расстояния. По-
этому за морскую милю принимают величину постоян-
ную. В 1928 г. Международное гидрографическое бюро
в качестве международной стандартной морской мили
приняло округленное значение ее средней величины, рав-
ное 1852 м. К этому решению присоединилось большин-
ство стран, в том числе и Советский Союз (в 1932 г.).
Полагая длину одной минуты дуги географического
меридиана величиной постоянной и равной 1852 м, мы,
по существу, заменяем земной эллипсоид шаром, имею-
D 1852*60*360°
щим радиус /<=-----------=6366707 м.
2 л
Следовательно, международная стандартная морская
миля может быть определена как длина одной минуты
дуги меридиана земного шара, радиус которого равен
6366707 м.
Некоторые страны не присоединились к решению
Международного гидрографического бюро и пользуются
морской милей, отличающейся от международной стан-
дартной. Так, в Англии, Японии морская миля принята
равной 1853,18 м, в Италии, Дании, Нидерландах —
1851,85 м, в Португалии — 1850,00 м.
Так как колебания в значении длины одной минуты
дуги меридиана земного эллипсоида в различных широ-
тах не превышают ±0,5%, пользование стандартной мор-
ской милей не вызывает существенных ошибок. Эти
ошибки, особенно в средних широтах, малы по сравне-
нию с ошибками определения пройденного судном рас-
стояния. Если возникнет необходимость учесть различие
между стандартной милей и длиной одной минуты дуги
меридиана земного эллипсоида в той или иной широте
(например, при плавании вблизи экватора или полюсов),
то решение такой задачи может быть заложено в конст-
рукцию приборов для измерения проходимого судном
расстояния.
Одна десятая часть морской мили называется мор-
ским кабельтовым. Международное стандартное
значение морского кабельтова равно 185,2 м, но на прак-
тике часто пользуются округленным значением — 185 м.
Кабельтовыми измеряются небольшие расстояния.
При артиллерийских и торпедных стрельбах применя-
ется артиллерийский кабельтов, равный
182,88 мм (округленно 183 м).
18
Кроме того, в иностранных флотах используются сле-
дующие единицы длины:
фут — равен 30,48 см, применяется для обозначения
высот ориентиров на берегу и малых глубин на англий-
ских морских картах (1 м=3,281 фута);
сажень морская — равна 1,83 м или 6 футам,
применяется для обозначения глубин на английских
морских картах (1 м=0,547 морской сажени);
статутная, или береговая, миля — равна
1609,4 м, применяется для измерения расстояний на су-
ше. В английских и американских навигационных посо-
биях в статутных милях выражается дальность действия
некоторых радионавигационных систем;
ярд — равен 91,44 см или 3 футам, применяется в
Англии для измерения небольших расстояний.
Соотношения между различными единицами длины
даны в табл. 44 Мореходных таблиц 1975 г. (МТ—75).
Так как в качестве основной единицы длины в нави-
гации принята морская миля, то скорость судна выра-
жается числом миль, проходимым в час. Единица скоро-
сти, равная одной морской мили в час, называется
узел*.
При решении некоторых задач навигации и промыс-
ловой навигации, в частности задач маневрирования су-
дов с орудиями лова, скорость судна, а также подвижно-
го косяка рыбы выражается иногда в кабельтовых в ми-
нуту. Переход от скорости в узлах к скорости в кабель-
товых в минуту осуществляется по формуле
VS™
V кбт/мин = ~ .
Полезно также помнить, что 1 уз ~0,5 м/с.
§ 2. Видимый горизонт
Предположим, что глаз наблюдателя располага-
ется в точке А' на высоте е над уровенной поверхностью
* Такое название единицы скорости возникло в период парус-
ного флота, когда для измерения скорости использовался ручной
лаг. Лаглинь этого лага разбивался узлами на отрезки, приблизи-
тельно равные V120 мили (с учетом «скольжения» сектора лага при
натяжении лаглиня). Сколько узлов вытравливалось при движении
судна за ’/120 % столько миль в 1 ч проходило судно.
2* 19
Земли, которую примем за сферу радиуса У? (рис. 1).
Лучи зрения, касательные к поверхности сферы и прохо-
дящие через глаз наблюдателя, определят на поверх-
ности сферы малый круг ВВ\ называемый видимым го-
ризонтом. Наблюдателю кажется, что по этому малому
кругу водная поверхность соприкасается с небом.
Величина сферического радиуса малого круга BBf
называется географической или геометрической дально-
стью видимого горизонта: АВ=Де-
Световой луч, проходя через слои земной атмосферы,
н
а' Н
А
/е
имеющие различную плотность, испытывает преломле-
ние, и его траектория А'В будет представлять собой
кривую. Это явление называется земной рефракцией. На
сравнительно небольшом расстоянии от точки В траек-
торию светового луча можно принять за дугу окружно-
сти некоторого радиуса р. Отношение =% характери-
зует преломляющую способность земной атмосферы и
называется коэффициентом
земной рефракции. Этот коэф-
фициент изменяется в зависи-
мости от района плавания, вре-
мени года, суток, высоты гла-
за наблюдателя и некоторых
других факторов. По данным
многочисленных наблюдений,
среднее значение коэффициен-
та земной рефракции прини-
мается равным 0,16.
Воображаемая плоскость,
Н—7/, проходящая через глаз
наблюдателя и перпендикуляр-
ная отвесной линии, называет-
ся плоскостью истинного гори-
зонта наблюдателя.
Вертикальный угол HArT'=d между направлением
на видимый горизонт и плоскостью истинного горизонта
Рис. 1
называется наклонением видимого горизонта.
Определим дальность видимого горизонта Де и его
наклонение d в функции высоты глаза наблюдателя е
и коэффициента земной рефракции %. При этом примем
следующие допущения:
1) так как кривизна земной поверхности и тем бо-
20
Лее траектории светового луча достаточно мала
будем считать, что прямая ВТ является одновременно
касательной и к траектории светового луча и к поверх-
ности сферы в точке В, а угол г, называемый земной
рефракцией, величина малая;
2) величина е ничтожно мала по сравнению с вели-
чиной /?, поэтому угол С будем считать малым, угол при
вершине А в треугольнике АА'В близким к прямому,
а Де=АВжА'ВжАВ (в навигационной практике углы
Сиг выражаются обычно небольшим числом дуговых
минут).
Q
Из треугольника АА'В, в котором угол В=~^------г»
с достаточной точностью можем написать:
е к (С \ С
--- = tg -— я» ----
Де к 2 ) 2
Но по рис. 1
2г = ^-и
р
Выполнив подстановку, получим:
g__Де
Де ~ 2R X2R
(1-1)
(1-2)
Де _Де^_ Де
2р = 2Rp=X R •
Дв __Де п .
2R ~ 2R (
откуда
Д2= 2^ и Де
Х _2_
Разложив (1—%) 2 в ряд и ограничившись двумя
первыми членами разложения, будем иметь:
Ле=(1+тх)^^-- (1-3)
Подставляя в выражение (I—3) величины коэффи-
циента земной рефракции (хср=0,16), радиуса земного
шара (7?=6366707 м) и выражая Де в милях, а е в мет-
рах, получим
21
Или окончательно
Де (мили) = 2,08 е (м) . (I—4)
Если высота глаза наблюдателя дается в футах, то
формула (I—3) приводится к виду:
Де (мили) = 1,14 V ^(ф). (1—5)
Из рис. 1 следует:
<ОЛ'В = 180° — С — (90° — г) = 90° — (С — г),
d = 90° — т — [90° — (С — г)] = С — 2г.
Вводя для углов Сиг подстановки (I—1) и (I—2) и
выражая d в минутах дуги, будем иметь:
= 1 № _ Де (1-х)
arcl' \/? % Д ) Д arc Г ’
Подставляя в это выражение значение Де из форму-
лы (I—4), величины х=Хср=0,16 и /?=6366707 м, окон-
чательно получим
d' = l,76 /7(м). (1-6)
По формулам (I—4) и (I—6) составлены табл. 22 и
11-а МТ—75.
§ 3. Дальность видимости навигационных
ориентиров
Дальность видимости ориентира, находящегося за
Линией горизонта, зависит от его высоты над уровнем
моря й, высоты глаза наблюдателя е, коэффициента зем-
ной рефракции % и разрешающей способности глаза по
углу у. Если пренебречь разрешающей способностью
глаза, за дальность видимости ориентира (Дп) можно
принять величину АС=АВ-]-СВ. Эта дальность видимо-
сти называется географической или геометрической. Из
рис. 2 видно, что АВ=Де является дальностью видимо-
го горизонта с высоты глаза наблюдателя, а СВ=ДК —
дальностью видимого горизонта с высоты ориентира.
Следовательно,
Дп = Дй + Де. (1-7)
22
Очевидно, что Дп представляет собой расстояние до
наблюдаемого ориентира в момент его открытия или
скрытия.
На основании (I—4) и (I—7) можно написать:
Дп (мили) =2,08УЦм) + 2,08/7(м)
ИЛИ
Дп (мили) =2,08 (Kft (м) + (м)) . (I—8)
Аналогично
Дп (мили) = 1,14 (j/й (ф) +Уе(Ф)) .
Формула (I—8) позволяет решать две задачи, встре-
чающиеся в навигационной практике: определять в днев-
ное время дальность видимости ориентира (расстояние,
Рис. 2
на котором откроется или скроется ориентир) и пример-
ную высоту ориентира, если известно расстояние до него
в момент открытия или скрытия.
Эти задачи решаются с помощью вычисленной по
формуле (I—4) табл. 22 МТ—75. Можно также восполь-
зоваться и номограммой (приложение 6 к МТ—75), со-
ставленной по формуле (I—8).
Формула (I—8) может дать близкий к действитель-
ности результат лишь при условии, когда прозрачность
атмосферы соответствует ее среднему состоянию. При
пасмурной погоде, дымке или тумане дальность видимо-
сти ориентиров будет меньше рассчитанной по формуле
(I—8), а при повышенной рефракции больше.
На дальность видимости ориентиров оказывает влия-
ние и фон, на котором виден ориентир. Если контраст-
ность фона и ориентира очень мала, то его дальность
видимости может быть значительно меньше, чем это
2 ❖ б в Ю12Н161в20222Мб2д5932МММЮ
Ь,м
Рис. 3
следует из формулы (I—8), даже при достаточно про-
зрачной атмосфере.
Исследования, проведенные В. П. Кожуховым, пока-
зали, что точность определения дальности видимости
ориентиров в дневное время можно повысить, если учи-
тывать влияние разрешающей способности глаза.
Из рис. 2 следует, что наблюдатель, находящийся в
точке А', увидит ориентир С только тогда, когда его вер-
шина будет выше ви-
димого горизонта на
величину С'С", зави-
сящую от у. Поэтому
при расчете Дп по фор-
муле (I—8) высота
ориентира h должна
быть уменьшена на ве-
личину
При хорошем контра-
сте между ориентиром
и фоном для невоору-
женного глаза у= Г, а
при использовании би-
нокля с (о-кратным
Г
увеличением
На рис. 3 приведе-
на составленная В. П.
Кожуховым номограмма для определения географиче-
ской дальности видимости ориентиров в дневное время
при среднем состоянии атмосферы. Эта номограмма
учитывает разрешающую способность глаза, принятую
равной Г.
На морских картах и в навигационных пособиях ви-
димость навигационных ориентиров дается с постоянной
высоты глаза наблюдателя равной 5 м. Обозначив эту
дальность видимости через Дк, можем написать:
Дк (мили) =2,08 (м) +2,08 5
или
Дк (мили) = 2,08 Кй(м) + 4,7. (1—9)
Если высота глаза наблюдателя на судне больше или
меньше 5 м, то дальность видимости навигационного
24
ориентира, указанную на карте, следует исправить по-
правкой
Д = Дп — Дк-
На основании (1—8) и (1—9) будем иметь
Д (мили) - 2,08УГЙ-4,7. (1-10)
Формула (I—10) определяет и знак поправки Д.
Пример. На карте показана дальность видимости навигацион-
ного знака Дк=12,5 мили. Рассчитать дальность видимости этого
знака с высоты глаза е=3 м.
По табл. 22 МТ—75 или по формуле (I—4) для е—3 м находим
Дв=3.6 мили.
Д=3,6— 4,7 = — 1,1 мили;
Дп = Дк + Д = 12,5 + (— 1,1) = 11,4 мили.
На английских морских картах дальность видимости
навигационных ориентиров указывается с высоты глаза
наблюдателя, равной 15 футам (4,5 м). Следовательно,
А (мили) =2,08)/^(м)“4Л- (1~11)
В ночное время дальность видимости огней маяков и
навигационных знаков определяется оптической дально-
стью видимости, которая зависит от высоты установки ог-
ня, силы источника света, параметров оптической систе-
мы, цвета огня, его характеристики и прозрачности ат-
мосферы. Оптическая дальность видимости определяется
обычно экспериментально. При проектировании маяков
и навигационных знаков стремятся добиваться равенст-
ва их географической (дневной) и оптической (ночной)
дальности видимости. Однако нередко эти дальности
видимости отличаются друг от друга. В таких случаях
на картах указывается меньшая из этих двух дальностей.
При этом оптическая дальность видимости, так же как
и географическая, дается для ясной погоды.
В заключение подчеркиваем, что расчет дальности ви-
димости производится не с целью определения положе-
ния судна относительно навигационного ориентира в мо-
мент его открытия или скрытия, а для оценки возмож-
ностей использования ориентира для обсервации на том
или ином участке пути.
25
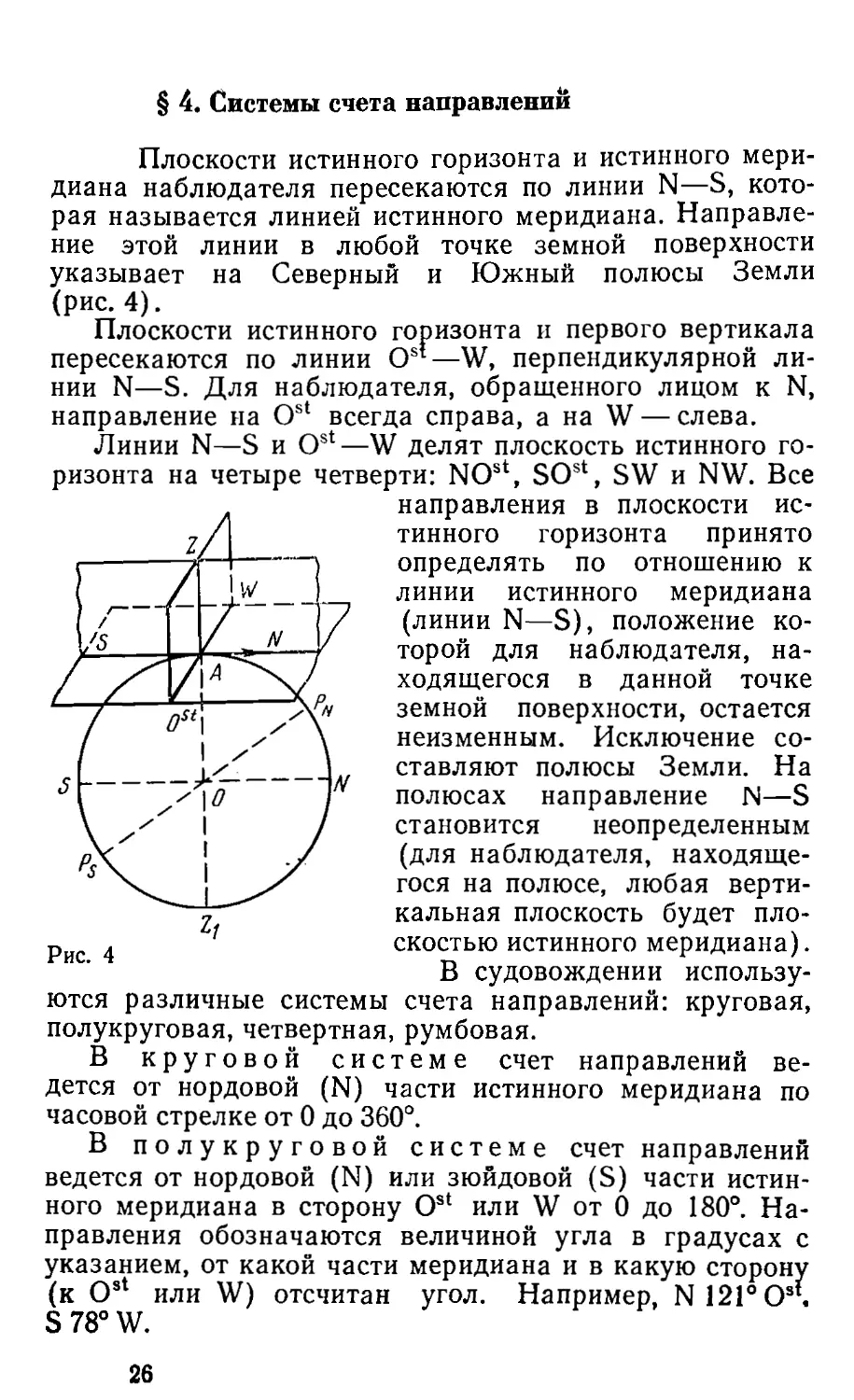
§ 4. Системы счета направлений
Плоскости истинного горизонта и истинного мери-
диана наблюдателя пересекаются по линии N—S, кото-
рая называется линией истинного меридиана. Направле-
ние этой линии в любой точке земной поверхности
указывает на Северный и Южный полюсы Земли
(рис. 4).
Плоскости истинного горизонта и первого вертикала
пересекаются по линии Ost—W, перпендикулярной ли-
нии N—S. Для наблюдателя, обращенного лицом к N,
направление на Ost всегда справа, а на W — слева.
Линии N—S и Ost—W делят плоскость истинного го-
ризонта на четыре четверти: NOst, SOst, SW и NW. Все
направления в плоскости ис-
тинного горизонта принято
определять по отношению к
линии истинного меридиана
(линии N—S), положение ко-
торой для наблюдателя, на-
ходящегося в данной точке
земной поверхности, остается
неизменным. Исключение со-
ставляют полюсы Земли. На
полюсах направление N—S
становится неопределенным
(для наблюдателя, находяще-
гося на полюсе, любая верти-
кальная плоскость будет пло-
скостью истинного меридиана).
В судовождении использу-
Рис. 4
ются различные системы счета направлений: круговая,
полукруговая, четвертная, румбовая.
В круговой системе счет направлений ве-
дется от нордовой (N) части истинного меридиана по
часовой стрелке от 0 до 360°.
В полукруговой системе счет направлений
ведется от нордовой (N) или зюйдовой (S) части истин-
ного меридиана в сторону Ost или W от 0 до 180°. На-
правления обозначаются величиной угла в градусах с
указанием, от какой части меридиана и в какую сторону
(к Ost или W) отсчитан угол. Например, N 121° Os\
S 78° W.
26
Рис. 5
В четвертной системе каждая четверть го-
ризонта делится на 90° и счет направлений ведется от
нордовой (N) и зюйдовой (S) частей истинного мери-
диана в сторону Ost или W от 0 до 90°. Направления
обозначаются величиной угла в градусах с указанием
наименования четвер-
ти истинного горизон-
та, которое пишется
впереди числа граду-
сов. Например: NO3t
32°, SO3 1 35°, SW 67°,
NW 43°.
В румбовой си-
стеме весь горизонт
делится на 32 части.
Полученные в резуль-
тате такого деления 32
направления называ-
ются румбами (рис. 5),
Румбы в каждой чет-
верти горизонта имеют
порядковый номер от
0 до 8 и считаются от
N или S к Ost или W.
Направления на главные точки горизонта — румбы
N, Ost, S и W называются главными. Направления, де-
лящие каждую четверть горизонта пополам, — четверт-
ными румбами. Эти румбы обозначаются буквами тех
главных румбов, между которыми они находятся: NOst,
SOst, SW и NW. Остальные 24 румба называются про-
межуточными. Промежуточные румбы с четными номе-
рами обозначаются буквами тех главных и четвертных
румбов, между которыми они находятся, при этом пер-
вой пишется буква главного румба. Промежуточные
румбы с нечетными номерами обозначаются буквами
ближайших главного или четвертого румба с прибавле-
нием приставки t (ten), обозначающей предлог «к», и
буквой главного румба, в сторону которого уклонен дан-
ный нечетный промежуточный румб.
Угол между двумя соседними румбами, равный
360°: 32 = 11°, 25, также называется румбом.
В настоящее время основной в навигации является
круговая система счета направлений. Полукруговая и
27
четвертная системы применяются в мореходной астроно-
мии и при решении некоторых частных задач навигации.
Румбовая система, являвшаяся основной во времена
парусного флота, в настоящее время из-за ее недостаточ-
ной точности применяется только для указаний направ-
лений ветра, волнения, а иногда и течения. Термин
«румб» стал синонимом термина «направление».
Для перевода направлений из четвертной системы в
круговую следует руководствоваться правилами, кото-
рые в соответствии с рис. 5 могут быть записаны так:
NOst а* = а*; SW «3 =180°+ а’;
SOst «2 = 180° — ссе; NW «4 >= 360° — а*.
Пример. Направление SOst 35° перевести в круговую систему.
SOst 35° =180° — 35° =145°.
Для перевода направлений из румбовой системы в
четвертную необходимо четвертной номер румба
(см. рис. 5) умножить на 11°,25 и приписать полученно-
му значению угла наименование четверти истинного го-
ризонта, в которой находится данный румб.
Пример. Румб NNW (находится в NW четверти, имеет номер 2)
перевести в четвертную и круговую системы.
11°, 25*2 = 22°, 5 = NW 22°, 5;
NW22°, 5 = 360° — 22°, 5 = 337°, 5.
Для перевода направлений из румбовой в круговую
систему можно воспользоваться таблицей 41 МТ—75.
§ 5. Истинный курс, истинный пеленг
и курсовой угол
Решение основных задач навигации постоянно
связано с необходимостью определять и рассчитывать
направление движения судна, а также направления с
судна на различные ориентиры.
При отсутствии течения и ветра направление движе-
ния судна определяется положением его диаметральной
плоскости по отношению к плоскости истинного мери-
диана. Двугранный угол между нордовой частью плоско-
сти истинного меридиана и носовой частью диаметраль-
ной плоскости судна называется истинным курсом.
28
Двугранный угол между нордовой частью плоскости
истинного меридиана и вертикальной плоскостью, прохо-
дящей через место наблюдателя и наблюдаемый ориен-
тир, называется истинным пеленгом.
Указанные плоскости в пересечении с поверхностью
Земного шара образуют дуги больших кругов (рис. 6),
а в пересечении с плоскостью истинного горизонта —
Рис. 7
прямые линии. Поэтому на поверхности Земли истинные
курс и пеленг измеряются сферическими углами между
соответствующими дугами больших кругов, а в плоско-
сти истинного горизонта — плоскими углами между со-
ответствующими прямыми линиями.
След от пересечения плоскости истинного горизонта
с диаметральной плоскостью движущегося судна назы-
вается линией курса, а с вертикальной плоскостью, про*
ходящей через место наблюдателя и наблюдаемый ори-
ентир, — линией пеленга.
Таким образом, в плоскости истинного горизонта ис-
тинным курсом называется угол между нордовой частью
истинного меридиана и линией курса по направлению
движения судна, а истинным пеленгом — угол между
нордовой частью истинного меридиана и линией пеленга
в сторону наблюдаемого ориентира (рис. 7).
В круговой системе истинный курс (ИК) и истинный
пеленг (ИП) отсчитываются от нордовой части истин-
ного меридиана наблюдателя по часовой стрелке от 0 до
29
Направление, отличающееся от истинного пеленга
на 180°, называется обратным истинным пеленгом
(ОИП) :
ОИП=ИП ± 180°.
Направления с судна на различные ориентиры могут
определяться и относительно диаметральной плоскости
судна. Двугранный угол между диаметральной плоско-
стью судна и вертикальной плоскостью, проходящей че-
рез место наблюдателя и наблюдаемый ориентир, назы-
вается курсовым углом (КУ).
В полукруговой системе счет курсовых углов ведет-
ся от носовой части диаметральной плоскости судна (0°)
по правому и левому бортам от 0 до 180°. При этом кро-
ме величины курсового угла в градусах указывается и
его наименование — правого или левого борта. Напри-
мер: КУ 65° п/б\ КУ 30° л/б. При аналитических расче-
тах курсовому углу правого борта приписывается знак
плюс, а курсовому углу левого борта — знак минус.
В круговой системе счет курсовых углов ведется от
носовой части диаметральной плоскости судна (0°) по
направлению часовой стрелки от 0 до 360°. В навигации
применяются обе эти системы.
На основании рис. 7 легко установить соотношение
между истинным курсом, пеленгом и курсовым углом:
ИП = ИК + КУ.
Если счет курсовых углов ведется в полукруговой си-
стеме, то при пользовании этой формулой необходимо
учитывать знак курсового угла, определяемый его на-
именованием.
Пример. И К=205°, КУ 64° л/б. Рассчитать ИП и ОИП.
ИП = 205° + (— 64°) = 141°;
0ИП = 141° + 180° = 321°.
Пример. ЯХ=20°, КУ 130° л/б. Рассчитать ИП.
ИП = 20° + (— 130°) = (20° + 360°) — 130° = 250°.
Направление, перпендикулярное диаметральной
плоскости судна (линии курса), называется траверзом.
Поэтому курсовые углы, равные 90° правого или левого
борта, носят название траверзных курсовых углов.
30
Глава II. ОПРЕДЕЛЕНИЕ НАПРАВЛЕНИЙ В МОРЕ
§ 6. Краткая характеристика компасов
Основным прибором, предназначенным для не-
прерывного указания курса судна и определения направ-
лений на различные ориентиры, является компас.
На транспортных и добывающих судах используются
гироскопические и магнитные компасы.
Гирокомпас обеспечивает достаточно высокую точ-
ность показаний и является основным курсоуказателем.
Он представляет собой электромеханическое устройство,
основанное на использовании свойств гироскопа. Под
влиянием вращения Земли и силы земного притяжения,
при ограничении свободы поворота гироскопа вокруг од-
ной из его осей возникает момент сил, который стремит-
ся привести ось гироскопа в плоскость истинного мери-
диана.
Информация о направлении движения судна переда-
ется от гирокомпаса с помощью следящих систем на ре-
питеры (повторители) гирокомпаса, которые устанавли-
ваются на ходовом мостике и в других местах судна.
Кроме того, эта информация вводится в различные при-
боры, обеспечивающие автоматическое п полуавтома-
тическое решение задач судовождения и маневрирова-
ния с орудиями лова.
Направляющая сила гирокомпаса значительно боль-
ше, чем у магнитного компаса, и как сила механическая
не зависит ни от магнитного поля Земли, ни от магнит-
ных полей судна. Но с увеличением географической ши-
роты эта сила уменьшается, и в районе географическо-
го полюса Земли гирокомпас также не может быть ис-
пользован в качестве курсоуказателя.
Гирокомпас является сложным прибором, требую-
щим квалифицированного обслуживания, питания элек-
троэнергией, что не исключает возможность выхода его
из строя. Кроме того, гирокомпас нельзя использовать
немедленно, так как приведение его главной оси в плос-
кость меридиана требует некоторого времени после за-
пуска.
Все это заставляет иметь на судне кроме гирокомпаса
Другой дублирующий курсоуказатель, достаточно прос-
той по устройству, полностью автономный, безотказный
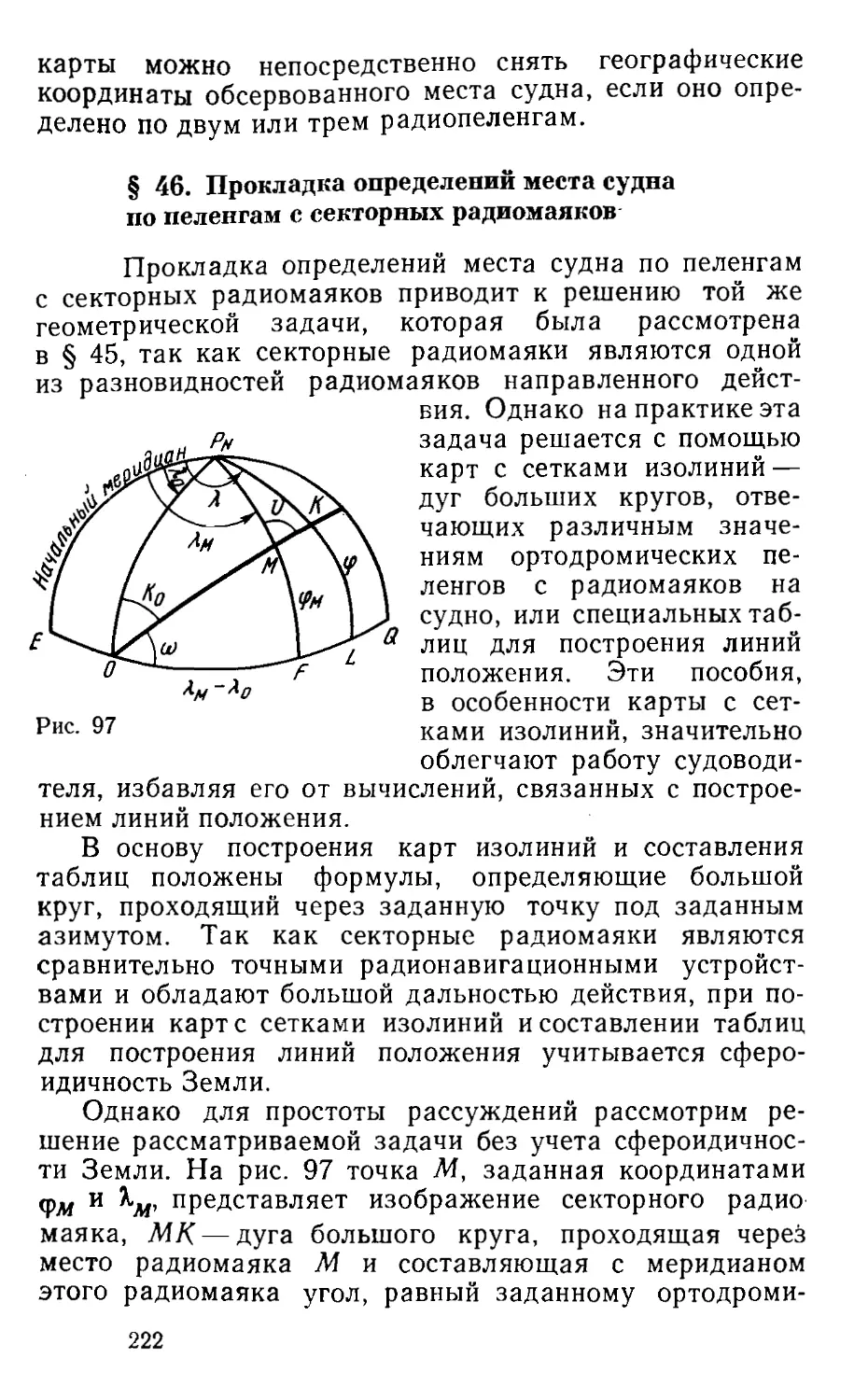
31
в работе и постоянно готовый к действию. Таким прибо-
ром является стрелочный магнитный компас, работа ко-
торого основана на свойстве свободно вращающейся на
вертикальной оси магнитной стрелки устанавливаться в
направлении действующего на нее магнитного поля
Земли.
Хотя магнитный компас и не обеспечивает достаточ-
но высокой точности определения направлений, указан-
ные выше достоинства этого компаса делают его обяза-
тельным элементом навигационного оборудования
любого самоходного морского судна.
Наличие на судне гироскопического и магнитного
компасов дает также возможность осуществлять взаим-
ный контроль их показаний, что повышает надежность
определения направлений в море.
Компасы на судах подразделяются на главные и пу-
тевые.
Главным называется компас, по которому ложат-
ся на заданный курс, определяют пеленги различных ви-
димых ориентиров. Этот компас устанавливают обычно
на верхнем мостике в диаметральной плоскости судна
так, чтобы от места его установки был обеспечен наи-
больший круговой обзор.
Путевым называется компас, по которому правит
рулевой, удерживая судно на заданном курсе. Этот ком-
пас используют только как курсоуказатель и устанавли-
вают в рулевой рубке перед штурвалом, а также в дру-
гих постах управления рулем.
В заключение заметим, что при автоматизации про-
цессов судовождения стремятся использовать комплекс-
ные системы курсоуказания, обеспечивающие повыше-
ние не только надежности, но и точности определения
направления движения судна за счет взаимной компен-
сации ошибок различных курсоуказателей, входящих в
такую систему.
Случайные ошибки гироскопического и магнитного
компасов находятся в разных областях частотного спек-
тра. Эти компасы имеют различные достоинства и не-
достатки.
Все это определяет целесообразность использования
комплексной системы курсоуказания, включающей ги-
рокомпас и магнитный компас с дистанционной элект-
рической передачей показаний.
32
§ 7. Земной магнетизм и его элементы.
Магнитные направления
Силовые линии магнитного поля Земли представ-
ляют собой замкнутые кривые. Они направлены верти-
кально в двух точках, носящих название магнитных по-
люсов, и горизонтально на линии, окружающей Землю
и проходящей приблизительно посредине между магнит-
ными полюсами. Эта линия называется магнитным эква-
тором.
Положение магнитных полюсов и экватора с течени-
ем времени медленно и непрерывно изменяется. Для
эпохи 1955 г. магнитные по-
люсы Земли имели следую-
щие приближенные коорди-
наты:
Северный магнитный по-
люс ф=74° N, X=100°W.
Южный магнитный по-
люс <p=69°S, Х=145° Ost.
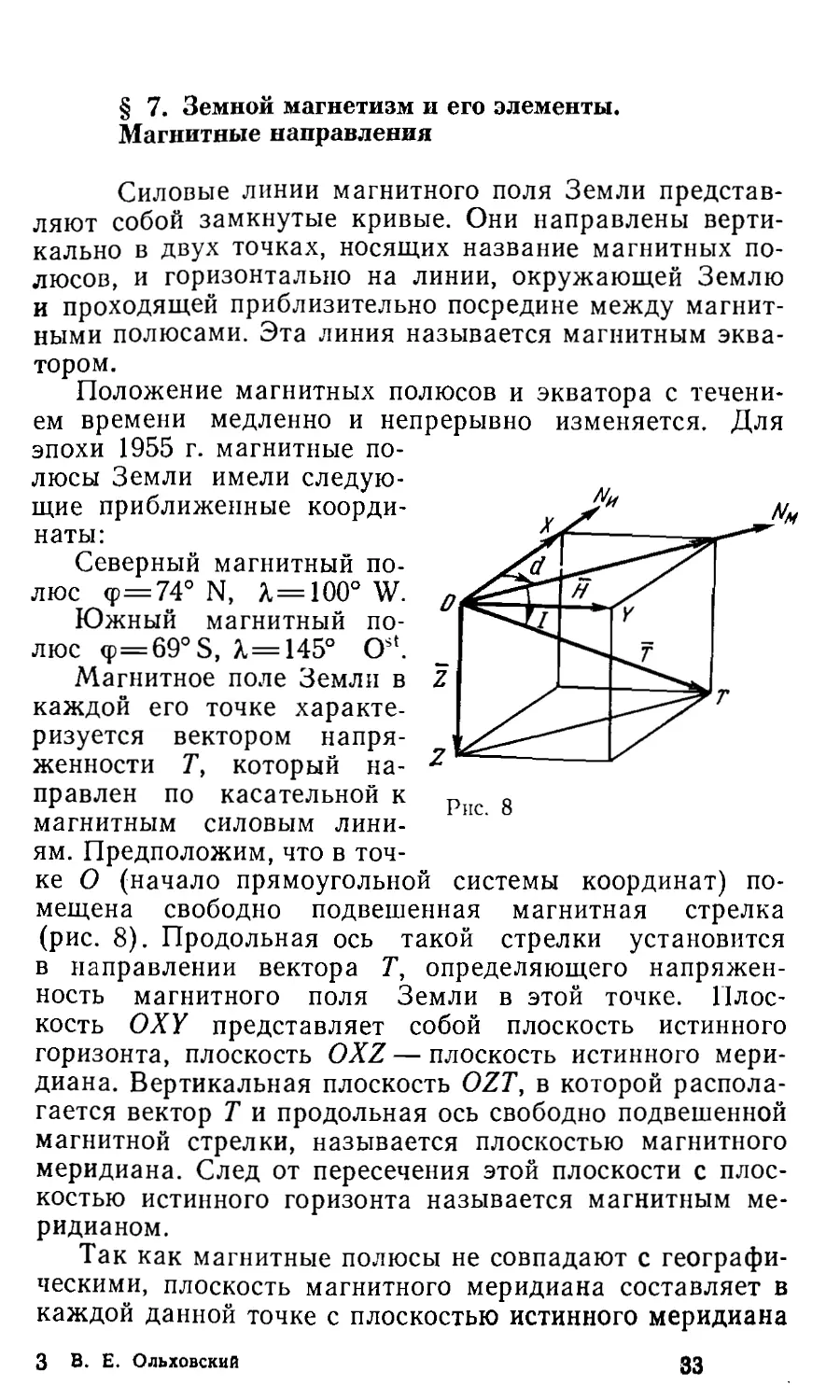
Магнитное поле Земли в
каждой его точке характе-
ризуется вектором напря-
женности Т, который на-
правлен по касательной к
магнитным силовым лини-
ям. Предположим, что в точ-
ке О (начало прямоугольной системы координат) по-
мещена свободно подвешенная магнитная стрелка
(рис. 8). Продольная ось такой стрелки установится
в направлении вектора Т, определяющего напряжен-
ность магнитного поля Земли в этой точке. Плос-
кость OXY представляет собой плоскость истинного
горизонта, плоскость OXZ — плоскость истинного мери-
диана. Вертикальная плоскость OZT, в которой распола-
гается вектор Т и продольная ось свободно подвешенной
магнитной стрелки, называется плоскостью магнитного
меридиана. След от пересечения этой плоскости с плос-
костью истинного горизонта называется магнитным ме-
ридианом.
Так как магнитные полюсы не совпадают с географи-
ческими, плоскость магнитного меридиана составляет в
каждой данной точке с плоскостью истинного меридиана
3 В. Е. Ольховский
33
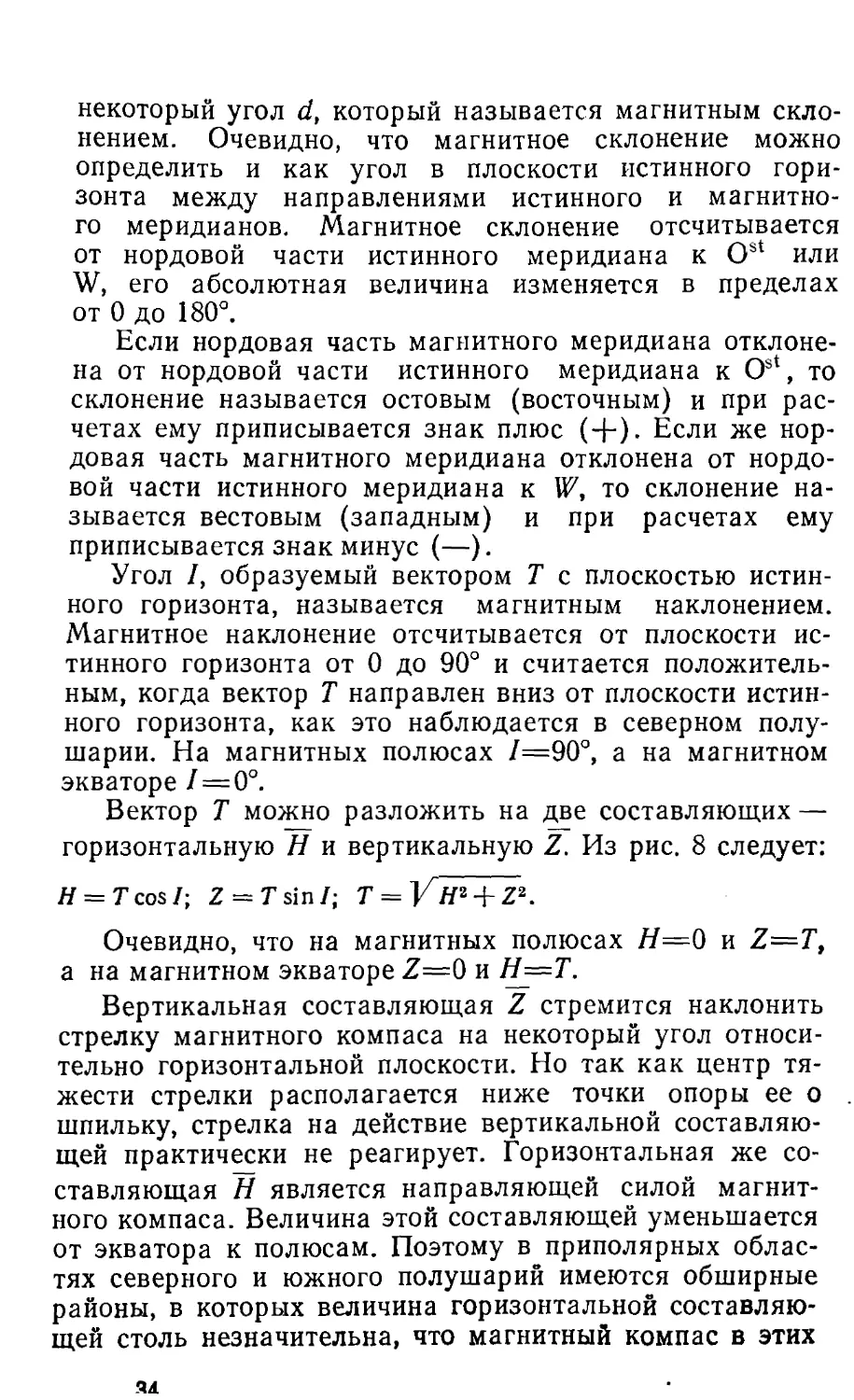
некоторый угол dt который называется магнитным скло-
нением. Очевидно, что магнитное склонение можно
определить и как угол в плоскости истинного гори-
зонта между направлениями истинного и магнитно-
го меридианов. Магнитное склонение отсчитывается
от нордовой части истинного меридиана к Ost или
W, его абсолютная величина изменяется в пределах
от 0 до 180°.
Если нордовая часть магнитного меридиана отклоне-
на от нордовой части истинного меридиана к Ost, то
склонение называется остовым (восточным) и при рас-
четах ему приписывается знак плюс (+). Если же нор-
довая часть магнитного меридиана отклонена от нордо-
вой части истинного меридиана к W, то склонение на-
зывается вестовым (западным) и при расчетах ему
приписывается знак минус (—).
Угол /, образуемый вектором Т с плоскостью истин-
ного горизонта, называется магнитным наклонением.
Магнитное наклонение отсчитывается от плоскости ис-
тинного горизонта от 0 до 90° и считается положитель-
ным, когда вектор Т направлен вниз от плоскости истин-
ного горизонта, как это наблюдается в северном полу-
шарии. На магнитных полюсах /=90°, а на магнитном
экваторе / = 0°.
Вектор Т можно разложить на две составляющих —
горизонтальную Н и вертикальную Z. Из рис. 8 следует:
tf = Tcos/; 2 = Tsin/; T=V W + Z*.
Очевидно, что на магнитных полюсах /7=0 и Z=T9
а на магнитном экваторе Z=0 и Н=Т.
Вертикальная составляющая Z стремится наклонить
стрелку магнитного компаса на некоторый угол относи-
тельно горизонтальной плоскости. Но так как центр тя-
жести стрелки располагается ниже точки опоры ее о
шпильку, стрелка на действие вертикальной составляю-
щей практически не реагирует. Горизонтальная же со-
ставляющая Н является направляющей силой магнит-
ного компаса. Величина этой составляющей уменьшается
от экватора к полюсам. Поэтому в приполярных облас-
тях северного и южного полушарий имеются обширные
районы, в которых величина горизонтальной составляю-
щей столь незначительна, что магнитный компас в этих
районах перестает действовать и не может быть ис-
пользован как курсоуказатель.
Величины //, Z, d и /, определяющие магнитное поле
Земли в данной точке, называются элементами земного
магнетизма. Наглядное представление о распределении
этих элементов на земной поверхности дают специаль-
ные магнитные карты, на которых нанесены линии рав-
ного значения того или иного элемента земного магне-
тизма. Линии, соединяющие точки с равным значением
напряженности магнитного поля, называются изодина-
ми, а карты, на которых эти линии нанесены, — картами
изодин.
Линии, соединяющие точки с одинаковым магнитным
наклонением, называются изоклинами, а карты, на кото-
рых эти линии нанесены, — картами изоклин.
Линии, соединяющие точки с одинаковым значением
магнитного склонения, называется изогонами, линия ну-
левого склонения — агоной, а карты, на которых нане-
сены эти линии, — картами изогон.
Величина того или иного элемента земного магнетиз-
ма в заданной точке определяется путем линейной ин-
терполяции между двумя ближайшими изолиниями, на-
несенными на карте.
Все элементы земного магнетизма изменяются с те-
чением времени. Эти изменения разделяются на перио-
дические, из которых наиболее существенными являют-
ся вековые изменения, и непериодические, называемые
магнитными возмущениями, или магнитными бурями.
Вековые изменения (вековой ход) представляют со-
бой разность между среднегодовыми значениями элемен-
та земного магнетизма для какого-либо длительного пе-
риода. Так, например, годовое изменение склонения,
обусловленное его вековым ходом, колеблется в различ-
ных точках поверхности Земли в пределах от 0 до 15'.
С течением времени эти изменения накапливаются и
могут достигать больших величин. Поэтому магнитные
карты составляются для определенной эпохи (года) и на
них обычно дается информация о годовых изменениях.
Линии, соединяющие точки с одинаковым годовым из-
менением того или иного элемента земного магнетизма,
называются изопорами.
Сведения о магнитном склонении приводятся и на
навигационных картах в виде надписей определенного
образца, содержащих данные о величине склонения и
его наименовании. При этом указывается год, к которо-
му эти данные относятся, и величина годового измене-
ния склонения. Так как магнитное склонение на навига-
ционной карте обычно приводится для отдельных точек
района, охватываемого картой, то для нахождения скло-
нения в заданной точке или зоне необходимо произвести
интерполяцию между ближайшими точками, для кото-
рых склонение показано на карте. Расчет склонения нуж-
но делать с точностью до ±0°,1 с учетом общего направ-
ления изогон в данном районе.
Для периода, не превышающего 10 лет, можно при-
нимать, что склонение изменяется равномерно, и по го-
довому изменению, указанному на карте (магнитной или
навигационной), рассчитывать величину и знак склоне-
ния для года плавания.
Пример. Магнитное склонение, указанное на карте, равно 4°, 5 W
и отнесено к эпохе 1965 г. Его годовое уменьшение 9'. Привести
склонение к 1975 г. (году плавания).
1965 — 1975 = 10 лет;
Д</ = —9'.10 = —1°,5;
d = 4°, 5 — 1°,5 = 3°, 0W.
Примечание: указание «уменьшение» или «увеличение»
склонения относится к его абсолютной величине.
Во время магнитных бурь склонение испытывает рез-
кие кратковременные колебания, которые могут иногда
достигать десятков градусов. Предупреждение о наступ-
лении бури передается судам по радио. В некоторых
районах земной поверхности наблюдаются резкие откло- j
нения величин элементов земного магнетизма, в частно- |
сти склонения, от их значений в окружающих точках.
Такие отклонения называются магнитными аномалиями, j
Это явление вызывается магнитными породами, зале-
гающими под поверхностью Земли. Границы районов
магнитных аномалий указываются на навигационных
картах.
Получив предупреждение о наступлении магнитной
бури или проходя район магнитной аномалии, следует
использовать только показания гирокомпаса. Если на
судне гирокомпаса нет, необходимо внимательно сле-
дить за работой магнитного компаса и возможно чаще
36
осуществлять контроль за перемещением судна с помо-
щью других средств.
Направления, определяемые относительно магнитно-
го меридиана, называются магнитными. Угол в плоско-
сти истинного горизонта между нордовой частью маг-
нитного меридиана и лини-
ей курса в направлении дви-
жения судна называется
магнитным курсом (Л1К).
Угол в этой плоскости ме-
жду нордовой частью маг-
нитного меридиана и лини-
ей пеленга в сторону наблю-
даемого ориентира называ-
ется магнитным пеленгом
Рис. 9
(МП).
В круговой системе маг-
нитные курс и пеленг отсчи-
тываются от нордовой час-
ти магнитного меридиана
по часовой стрелке от 0 до
360°. Направление, отличающееся от магнитного пелен-
га на 180°, называется обратным магнитным пеленгом
(О МП).
ОМП = МП ± 180°.
Как следует из рис. 9, переход от магнитных направ-
лений к истинным, и наоборот, может быть осуществлен
по формулам:
ИК = МК + d; МК = ИК — d;
ИП = МП + d; МП = ИП — d;
ОИП = ОМП + d; ОМП = ОИП — d,
Все эти формулы алгебраические и при пользовании
ими необходимо учитывать знак (наименование) маг-
нитного склонения.
Пример, а) ИК=30°, d=4° W. Рассчитать МК.
МК = ИК— d = 30° — (— 4°) = 34°.
б) ИП = 85°, d = 3°Ost.
Рассчитать МП. МП=ИП—(1=85°—(+3°) =82°.
в) М/7=120°, d=5°W.
Рассчитать ИП.
ИП = МП + Л= 120°+ (— 5°) = 115°.
37
§ 8. Девиация магнитного компаса.
Компасные направления
На судне система стрелок магнитного компаса на-
ходится не только под действием магнитного поля Зем-
ли, но и под действием магнитного поля судна. В ре-
зультате ось N—S катушки магнитного компаса откло-
няется от направления магнитного меридиана и
устанавливается по направлению силовых линий равно-
действующего магнитного поля.
Вертикальная плоскость, проходящая через ось N—S
картушки установленного на судне магнитного компаса,
называется плоскостью компасного меридиана, а след от
пересечения этой плоскости с плоскостью истинно-
го горизонта наблюдателя — компасным меридианом
(см. рис. 9). Направления, определяемые относительно
компасного меридиана (курсы, пеленги), называются
компасными. Угол в плоскости истинного горизонта на-
блюдателя между нордовыми частями магнитного и
компасного меридианов называется девиацией магнит-
ного компаса и обозначается буквой б. Девиация отсчи-
тывается от нордовой части магнитного меридиана к Ost
или W от 0 до 180°. Если нордовая часть компасного ме-
ридиана отклонена от магнитного меридиана к Ost, де-
виация называется остовой (восточной) и ей приписыва-
ется знак плюс (+)» если же к W, то девиация называ-
ется вестовой (западной) и ей приписывается знак
минус (—).
Как следует из рис. 9, соотношения между компас-
ными и магнитными направлениями могут быть выра-
жены следующими формулами:
МК = ККмк + &, ККмк = МК-б;
МП = КПмк+&; КПмк = МП-Ь;
ОМП = 0КПмк + 6; 0КПмк = ОМП - б.
Эти формулы алгебраические и при пользовании ими
необходимо учитывать знак (наименование) девиации.
Намагничивание корпуса судна зависит от угла, под
которым судно пересекает силовые линии магнитного по-
ля Земли, поэтому девиация является функцией курса
судна. Девиация изменяется и с изменением района пла-
вания (магнитной широты), так как напряженность маг-
38
нитного поля Земли возрастает по направлению от эк-
ватора к полюсам. Кроме того, на девиацию влияет и
ряд других факторов: погрузка, выгрузка и перемеще-
ние грузов, обладающих магнитными свойствами, пере-
мещение деталей судового оборудования, расположен-
ного вблизи компаса (например, грузовых стрел), силь-
ные сотрясения корпуса судна и т. д.
Наличие значительной по величине девиации препят-
ствует нормальной эксплуатации магнитного компаса,
поэтому ее периодически компенсируют (уничтожают).
Для этого в непосредственной близости от системы маг-
нитных стрелок компаса создают искусственно магнит-
ные поля, равные полям, создаваемым судовым железом,
проводниками, находящимися под током, и электроуста-
новками, но противоположные им по направлению.
Однако практически полностью компенсировать влия-
ние всех этих полей на систему магнитных стрелок ком-
паса не представляется возможным. Девиация, обнару-
живаемая у компаса после ее уничтожения, называется
остаточной. Остаточная девиация, которая обычно не
превышает 2—5°, определяется из наблюдений, как пра-
вило, на восьми равноотстоящих компасных курсах глав-
ных и четвертных.
В основу различных способов определения девиации
положены формулы:
6 = м П - КПмк
или
Ь = МК-ККмк.
После обработки результатов определения остаточ-
ной девиации составляют таблицу девиации*. В табли-
це девиацию приводят с точностью до 0°,1 как функцию
компасного курса с интервалом в 10° или 15°. Для про-
межуточных курсов девиацию находят интерполирова-
нием. Аргументом для входа в таблицу девиации служит
компасный курс, но когда компасный курс неизвестен,
в таблицу входят с магнитным курсом, так как разница
между компасным и магнитным курсом при небольшой
* Способы компенсации девиации магнитного компаса, опреде-
ления остаточной девиации и приемы составления таблиц девиации
рассматриваются в курсе «Технические средства судовождения».
39
Девиации незначительна. Если же девиация велика и из-
меняется быстро, делают второе приближение.
В таблице указывают положение грузовых стрел, вен-
тиляторов и других металлических предметов, кото-
рые расположены близко к компасу и могут переме-
щаться.
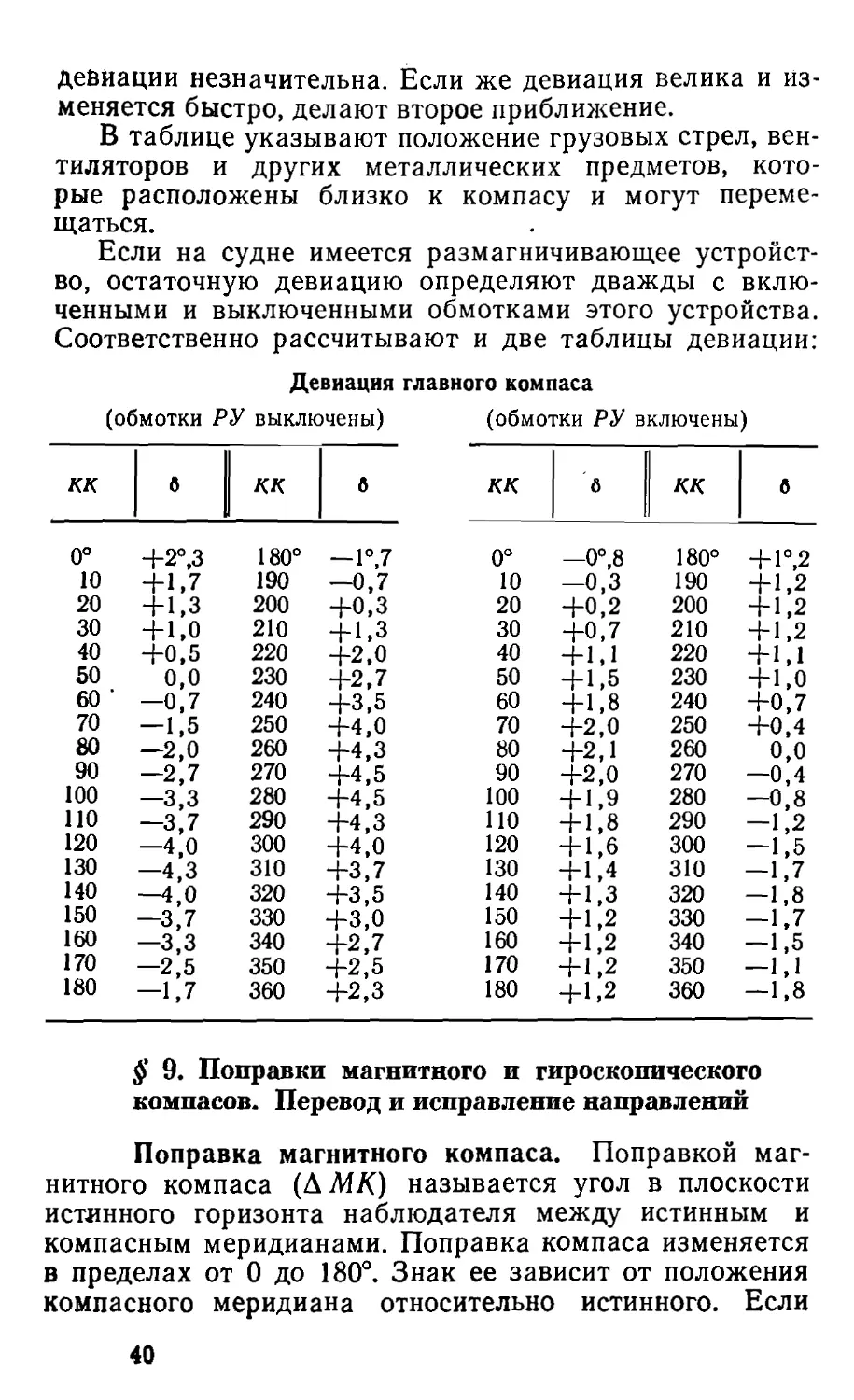
Если на судне имеется размагничивающее устройст-
во, остаточную девиацию определяют дважды с вклю-
ченными и выключенными обмотками этого устройства.
Соответственно рассчитывают и две таблицы девиации:
Девиация главного компаса
(обмотки РУ выключены) (обмотки РУ включены)
кк 6 КК б кк б кк б
0° +2°,3 180° —1°,7 0° —0°,8 180° + 1°,2
10 +L7 190 —0,7 10 —0,3 190 +1.2
20 + 1,3 200 +0,3 20 +0,2 200 + 1,2
30 + 1,0 210 + 1,3 30 +0,7 210 + 1,2
40 +0,5 220 +2,0 40 +1.1 220 +1,1
50 0,0 230 +2,7 50 +1,5 230 +1,0
60 ’ —0,7 240 +3,5 60 +1.8 240 +0,7
70 —1,5 250 +4,0 70 +2,0 250 +0,4
80 —2,0 260 +4,3 80 +2,1 260 0,0
90 —2,7 270 +4,5 90 +2,0 270 —0,4
100 —з,з 280 +4,5 100 + 1.9 280 —0,8
ПО —3,7 290 +4,3 110 + 1.8 290 —1,2
120 —4,0 300 +4,0 120 + 1,6 300 —1,5
130 —4,3 310 +3,7 130 + 1.4 310 —1,7
140 —4,0 320 +3,5 140 + 1,3 320 —1,8
150 —3,7 330 +3,0 150 + 1,2 330 —1.7
160 —з,з 340 +2,7 160 +1,2 340 —1.5
170 —2,5 350 +2,5 170 + 1.2 350 —1,1
180 —1,7 360 +2,3 180 +1,2 360 —1,8
§ 9. Поправки магнитного и гироскопического
компасов. Перевод и исправление направлений
Поправка магнитного компаса. Поправкой маг-
нитного компаса (ДЛ1К) называется угол в плоскости
истинного горизонта наблюдателя между истинным и
компасным меридианами. Поправка компаса изменяется
в пределах от 0 до 180°. Знак ее зависит от положения
компасного меридиана относительно истинного. Если
40
нордовая часть компасного меридиана отклонена от нор-
довой части истинного меридиана к Ost, то поправка счи-
тается положительной, если же компасный меридиан от-
клонен от истинного меридиана к W, то эта поправка
считается отрицательной.
Очевидно (см. рис. 9 и 10), что поправка компаса
представляет собой алгебраическую сумму магнитного
склонения и девиации:
Поправка гироскопического компаса. В силу ряда
причин главная ось работающего на движущемся судне
гирокомпаса не устанав-
ливается точно в плоско-
сти истинного меридиана.
Вертикальная плоскость,
в которой располагается
ось гироскопа или систе-
мы гироскопов, называет-
ся плоскостью гироскопи-
ческого меридиана, а
след от пересечения этой
плоскости с плоскостью
истинного горизонта на-
блюдателя — гироскопи-
ческим меридианом. Угол
в плоскости истинного
Рис. 10
горизонта между истинным и гироскопическим мериди-
аном называется поправкой гироскопического компаса
(А ГЛ).
Знак этой поправки определяется по тому же пра-
вилу, что и поправки магнитного компаса.
Перевод и исправление направлений (румбов). С по-
мощью магнитного или гироскопического компаса на суд-
не определяют компасные направления — компасные
курсы судна и компасные пеленги на различные ориен-
тиры. На морской же навигационной карте прокладыва-
ются истинные направления — истинные курсы и пелен-
ги. Поэтому постоянно возникает необходимость перехо-
да от компасных направлений к истинным. Такой
переход называется исправлением направлений (рум-
бов) и осуществляется по формулам (см. рис. 10):
‘= К*мд + <* + 6 = ККмк + ДМЯ;
41
ИП = КПмк + ДЖ
или
ИК = ККгк + ДГЛ;
ИП = КПгк + ДГК.
На практике не реже приходится решать и обратную
задачу — осуществлять переход от истинных направле-
ний к компасным. Предположим, что на морской нави-
гационной карте проложена линия истинного курса. Для
того чтобы осуществить плавание по этой линии, необхо-
димо рассчитать компасный курс, которым следует пра-
вить. Переход от истинных направлений к компасным на-
зывается переводом направлений (румбов) и осуществ-
ляется по формулам:
= —6 = ЯК-ДЖ;
КПЛ1Х = ЯП-ДЖ
или
кпгк = ип—ьгк.
Все приведенные выше формулы алгебраические и
при пользовании ими необходимо учитывать знак по-
правки компаса.
Задачи на перевод и исправление направлений необ-
ходимо решать с особой тщательностью, результаты рас-
четов по формулам контролировать с помощью чертежа.
Следует помнить, что ошибки, допущенные при решении
задач на перевод и исправление румбов, могут стать
причиной аварии судна.
Пример. Дано ККмк = №\ О, Л77=15°, О, J=4°, 5 W (рассчи-
тано для года плавания по карте), б = +0°,5 (выбрана из приве-
денной в § 8 таблицы девиации на заданный компасный курс).
Определить ИК и ИП.
1. Рассчитываем поправку магнитного компаса
ЬМК = d + 6 = (— 4°,5) + 0°,5 = — 4°,0.
2. Рассчитываем истинные направления
ИК = ККМк + ДЖ = 40°, 0 + (- 4°, 0) = 36°, 0;
ИП = кпмк + ДЖ = 15°, о + (— 4°, 0) = 11°, 0.
Правильность результатов расчетов проверили с помощью чертежа
(рис. 11).
42
Пример. Дано ЯК=13б°,0. cf=6°,0 Ost. Определить ККмк
1. Рассчитываем магнитный курс
МК = ИК —d = 136°,О- ( + 6е,0) = 130°,0.
Из таблицы девиации выбираем б на Л!К=130о,0 б =—4°,3.
Рис. И
2. Рассчитываем поправку магнитного компаса
ЬМК = d + б = 6°, 0 + (— 4°, 3) = + 1°, 7.
3. Рассчитываем компасный курс
ККмк =ИК — АЖ = 136°, 0 — (+ 1°, 7) = 134°, 3.
Правильность результатов расчетов проверили с помощью чер-
тежа (рис. 12).
§ 10. Определение поправки компаса
из наблюдении
Во время плавания необходимо систематически
контролировать работу гироскопического и магнитного
компасов, использовать все возможности для определе-
ния из наблюдений поправок этих компасов и постоянно
сличать их показания.
Поправка компаса любого типа может быть опреде-
лена из сравнения истинных направлений (пеленгов,
курсов) с наблюденными компасными направле-
ниями.
43
Определение поправки компаса по пеленгу створа
(рис. 13). В момент пересечения судном линии створа,
когда оба створных знака совместятся (состворятся), бе-
рут компасный или обратный компасный (магнитный
компас) пеленг створа. Истинный пеленг створа, если он
не показан на карте, снимают с карты при помощи тран-
спортира и линейки.
Поправку компаса определяют по формуле
кГП = ИП — КП*гк
или
ШК = ОИП-ОКПМ^
Рис. 13
Если судно, следуя заданным курсом, может пересечь
не один, а несколько створов( веер створов), то по пе-
ленгу каждого из пересеченных створов определяют по-
правку компаса и за наиболее вероятное значение этой
* По этой формуле определяется так называемая мгновенная
поправка гирокомпаса. Для вычисления постоянной поправки гиро-
компаса (ДГ/Сп) используют формулу
п
где [ДГК] — алгебраическая сумма мгновенных поправок, опреде-
ленных с интервалом 10—15 мин;
я— число определений.
44
поправки принимают среднее арифметическое из резуль-
татов всех наблюдений.
Определив поправку магнитного компаса, можно рас-
считать величину девиации магнитного компаса для того
компасного курса, которым судно следовало во время
пеленгования створа. Для этого необходимо снять с кар-
ты значение магнитного склонения для района, где про-
изводилось определение поправки компаса, и найти де-
виацию по формуле
6 = &МК — d.
Створы, которые используются для определения по-
правки компаса, должны обладать достаточной чувстви-
тельностью. Линейной чувствительностью створа назы-
вается расстояние W, на которое наблюдатель должен
переместиться в направлении, перпендикулярном линии
створа, чтобы раствор (расхождение) створных знаков
сделался ему заметным. Чем меньше это расстояние, тем
чувствительней створ.
На рис. 14 точки Ai и А2 — соответственно передний и
задний створные знаки, представляющие собой верти-
кальные линии или накрашенные на скалах точки (ши-
риной знаков пренебрегаем), L — расстояние между
створными знаками, или разнос знаков.
Предположим, что наблюдатель, находящийся на
линии створа в точке /Со на расстоянии D от переднего
створного знака, начал перемещаться по направлению
ЛоЛь перпендикулярному линии створа. Створные зна-
ки будут казаться наблюдателю совмещенными (соство-
рившимися) до тех пор, пока угол между ними у, верши-
на которого находится в глазе наблюдателя, не достиг-
нет величины, равной разрешающей способности
человеческого глаза.
45
На основании рис. 14 можно написать:
IF IF
Y = ₽-a, tg₽=—, tga = —.
Заменив по малости углов тангенсы их дугами, будем
иметь:
W W WL
у =---—------= ----------.
D D + L D(D + L)
Принимая разрешающую способность человеческого
глаза у, равной Iх, окончательно получим
D(D + L) t,
W = --------arc 1 .
(П—I)
Из этой формулы видно, что чувствительность створа
зависит от разноса створных знаков и расстояния от
наблюдателя до переднего створного
знака. При L=const чувствительность
створа будет возрастать с уменьшением
этого расстояния. Следовательно, при оп-
ределении по створу поправки компаса
и девиации необходимо стремиться пе-
ленговать створ, находясь возможно
ближе к переднему створному знаку.
Определение поправки компаса по
пеленгу отдаленного ориентира. Для оп-
ределения поправки компаса этим спо-
собом необходимо, чтобы место ориенти-
ра и место судна в момент пеленгования
ориентира были известны.
Пусть М (рис. 15)—выбранный для
определения поправки компаса ориентир,
Рис. 15 О — центр циркуляции стоящего на яко-
ре судна. Истинный пеленг ориентира М
из точки О снят с карты. Тогда, взяв с
судна компасный или обратный компасный пеленг ори-
ентира М, можно рассчитать поправку гироскопического
компаса по формуле
&ГК = ИП — КПгк
или поправку магнитного компаса на данном компасном
курсе по формуле
ШК = ОИП — ОКПмк.
46
Ориентир М выбирают с таким расчетом, чтобы
ошибка определения поправки компаса за счет развора-
чивания судна на якорной цепи не превышала допусти-
мой.
Предположим, что в точке О (см. рис. 15) находится
якорь и радиус окружности разворота судна на якорной
цепи равен г. Обозначив расстояние ОМ через О, на ос-
новании рис. 15 можем написать
г
D~sinen
или учитывая, что угол ея мал,
zv = о * V11—
где еп—наибольшая ошибка в фактическом истинном
пеленге ориентира М, которая целиком войдет в полу-
ченную из наблюдений поправку компаса. Если принять
допустимую ел, равной ±0°, 2, получим
£>min = 300 г.
Эта формула определяет понятие «отдаленный ори-
ентир». Так, при допустимой ея = ±0°,2 необходимо
выбирать ориентир на расстоянии не менее 300 г от ме-
ста судна.
Если имеется возможность определить место судна с
высокой точностью, то поправка компаса может быть
определена этим способом и на ходу судна. В момент
определения места судна берут пеленг отдаленного ори-
ентира по компасу. В этом случае при выборе ориентира
величину г в формуле (II—2) принимают равной пре-
дельной радиальной ошибке определения места судна.
В условиях тралового промысла можно использо-
вать промысловый буй, координаты которого известны.
При прохождении судна в непосредственной близости от
буя с его подветренной стороны берут пеленг отдален-
ного ориентира по компасу. При выборе ориентира ве-
личину г можно принимать равной радиусу разворота
буя на буйрепе.
Определение поправки компаса по сличению показа-
ний гироскопического и магнитного компасов. Для того
чтобы определить этим способом поправку одного из
42
компасов, поправка другого компаса должна быть из-
вестна. Одновременно по сигналу замечают курсы по ги-
роскопическому и магнитному компасам. Разность этих
курсов ККгк—называется сличением.
И К = ККгк + АГ К,
ИК = ККмк + АМК.
Следовательно,
ДМА = ДГК + (ККгк - ККмк),
или
ДМК = ДГК + 7?.
По этой формуле можно рассчитывать поправку маг-
нитного компаса, если известна поправка гироскопичес-
кого компаса, или поправку гироскопического компаса,
если известна поправка магнитного компаса. Обычно та-
ким способом определяется поправка магнитного ком-
паса.
По сличению с главным компасом определяется и по-
правка путевого магнитного компаса, находящегося в за-
крытом помещении, откуда невозможно пеленговать.
Другие способы определения поправки компаса, свя-
занные с определением места судна, будут рассмотрены
в главе V.
Глава III. ОПРЕДЕЛЕНИЕ ПРОЙДЕННОГО СУДНОМ
РАССТОЯНИЯ
§ 11. Определение пройденного судном
расстояния по показаниям лага
Для определения скорости хода судна и пройден-
ного им расстояния обычно используются специальные
электронавигационные приборы — лаги. Лаги в зависи-
мости от физических принципов, положенных в основу их
устройства, позволяют определять скорость хода судна и
пройденное им расстояние либо относительно воды (от-
носительные лаги), либо относительно земли (абсолют-
ные лаги). На транспортных и добывающих судах пока
используются только относительные лаги, которые по
48
принципу действия подразделяются на гидродинамичес-
кие и индукционные. С помощью этих лагов непосред-
ственно измеряется скорость хода судна относительно
воды, а величина пройденного судном относительно воды
расстояния как функция скорости и продолжительности
(времени) плавания вырабатывается в лаге специаль-
ным интегрирующим устройством.
Принцип действия гидродинамических лагов основан
на измерении давления, вызываемого потоком воды, ко-
торый образуется при движении судна относительно во-
ды. Принцип действия индукционных лагов основан на
измерении э. д. с., индуктируемой в морской воде движу-
щимся электромагнитом, неподвижно закрепленным на
корпусе судна.
Скорость хода судна и, следовательно, пройденное им
расстояние определяются при помощи лага с некоторой
ошибкой. Эта ошибка зависит от конструктивных осо-
бенностей лага, скорости хода и ряда других факторов.
Поэтому в процессе плавания работу лага следует посто-
янно контролировать, определять поправку лага для ос-
новных режимов работы двигателей и исправлять пока-
зания лага этой поправкой.
Поправкой лага называется величина, равная
относительной ошибке лага, выраженной в процентах и
взятой с обратным знаком. На основании приведенного
определения поправку лага можно выразить одной из
следующих формул:
Дл% =^р0Л.100 (Ш—1)
рол
или
Дл% = ~ ,~V” .100, (III—2)
"л
где S — действительное расстояние, пройденное судном
относительно воды;
рол = ол2 — ол± — разность отсчетов лага, соответствующая рас-
стоянию S;
Vo—действительная скорость хода судна относи-
тельно воды при заданном режиме работы дви-
гателя;
Ул — скорость хода судна, показанная лагом.
Очевидно, что поправка лага может быть как поло-
жительной (5>рол или Го>Гл), так и отрицательной
(8<рол или Го<Ул).
4 в. Е. Ольховскцй
49
Вместо поправки лага иногда используют коэффици-
ент лага k„.
рол
или
*л=^-
Связь этого коэффициента с поправкой лага может быть
выражена так:
АЛ = 1'4
Дл%
100 :
(III—3)
Дл% = 100 (Ал — 1).
Из формулы (III—1) следует, что если за какой-либо
промежуток времени разность отсчетов лага равна рол,
а поправка лага Ал, то расстояние, пройденное судном
относительно воды, может быть рассчитано по формуле
S. <ni—4)
Эта формула положена в основу таблицы, помещен-
ной в приложении 4 к МТ—75 и предназначенной для на-
хождения пройденного по лагу расстояния. Аргументами
для входа в эту таблицу служат рол и +л% или рол и —
—Ал %. Если вместо поправки лага используется коэф-
фициент лага, то расстояние, пройденное судном относи-
тельно воды, рассчитывается по формуле
«$л = рол kji. (Ill—5)
При решении некоторых задач навигации возникает
необходимость предвычислить отсчет лага ол2 к моменту
прихода судна в заданную точку, расположенную на
расстоянии S Ът исходной точки, отсчет лага в которой
был ОЛ2.
На основании формул (III—4) и (III—5) можно на-
писать:
S
100
БО
или
рол=^- (Ш-6)
«Л
И
ол2 — ол± + рол.
Эта задача может быть решена с помощью таблицы,
помещенной в приложении 4 к МТ — 75 обратным вхо-
дом в таблицу.
§ 12. Определение пройденного судном
расстояния по скорости хода
и продолжительности плавания
Если по каким-либо причинам нельзя использо-
вать лаг, скорость хода судна относительно воды опре-
деляют по частоте вращения (числу оборотов) гребных
винтов, используя для этой цели график или таблицу
соответствия скорости хода Vo, частоте вращения винтов
при заданном водоизмещении. Пройденное судном отно-
сительно воды расстояние вычисляют по формуле
$об = Уоб*>
где 50б — расстояние, рассчитанное по скорости хода Кв;
Гоб — скорость хода, определенная по частоте вращения ^ин-
тов (движителей);
/— продолжительность плавания.
График Vo=f(N) составляется по результатам спе-
циальных скоростных* испытаний судна. В процессе этих
испытаний определяются скорости хода судна относи-
тельно воды и соответствующая им частота вращения
винтов на всех основных режимах работы двигателей:
на самом полном, полном, среднем, малом и самом ма-
лом ходу. На траулерах зависимость Vo=f(N) опреде-
ляется, кроме того, и на оптимальных для различных
условий промысла режимах траления.
По результатам испытаний строят график Vo=f(N)>
а с графика снимают данные для составления таблицы
соответствия скорости хода судна частоте вращения
винтов.
Следует учитывать, что скорость хода судна относи-
тельно воды и, следовательно, зависимость V0=f(2V) из-
меняются под влиянием ряда факторов. Рассмотрим
кратко важнейшие из них.
4*
51
1. Волнение моря, встречные ветры й сильный попут-
ный ветер вызывают уменьшение скорости хода судна и
только при попутном ветре небольшой силы и слабом
волнении иногда наблюдается увеличение скорости хода
на 2—5%.
2. В процессе эксплуатации транспортных и добыва-
ющих судов их загрузка, а следовательно, и водоизме-
щение могут значительно изменяться. Влияние изменения
водоизмещения судна на скорость его хода характери-
зуется приближенно следующей зависимостью:
2
’ / (?! V
где Vo —скорость хода судна относительно воды, соответствую-
щая водоизмещению Gj;
Vo —скорость хода судна относительно воды, соответствую-
щая новому водоизмещению G2.
Дифферент на нос увеличивает лобовое сопротивле-
ние воды движению судна, снижает эффективность рабо-
ты винтов. Все это приводит к уменьшению скорости хо-
да. Значительный дифферент на корму и крен также вы-
зывают уменьшение скорости хода из-за рыскания судна
на курсе.
3. Обрастание подводной части корпуса судна раз-
личными организмами, ракушками, водорослями увели-
чивает сопротивление воды движению судна, и скорость
хода уменьшается. Уменьшение скорости хода зависит от
времени, прошедшего после выхода судна из дока (очи-
стки корпуса), и интенсивности обрастания, которая
определяется главным образом районом плавания. В ма-
лых широтах обрастание происходит интенсивнее, чем в
больших, увеличение солености воды ускоряет обраста-
ние. Во время стоянки корпус судна обрастает быстрее,
чем во время плавания. Обрастание корпуса судна мо-
жет повлечь за собой уменьшение скорости хода судна
на 20—30%.
4. На мелководье при ограниченной глубине под ки-
лем сопротивление воды движению судна возрастает и
скорость хода уменьшается. Экспериментальные иссле-
дования позволили составить таблицу наименьших глу-
бин, при которых влияние мелководья на скорость хода
практически не сказывается (табл. 1).
52
Таблица 1
Осадка судна, м Глубина (в м) при скорости хода (в уз)
5 1 10 1 15 1 20
3 20 25 35 45
5 25 35 45 60
7 35 45 55 70
9 45 55 65 80
Практически допустимо считать, что наименьшая глу-
бина моря //min при осадке судна Т определяется соот-
ношением
Н min
Т
> 6.
Учесть уменьшение скорости хода при плавании на
мелководье можно с помощью специальных графиков:
графика Уо =/(/?), выражающего зависимость скорости
хода относительно воды от сопротивления /?, и графика
выражающего зависимость сопротивления R
от отношения глубины моря //min к осадке судна Т.
В результате воздействия перечисленных выше фак-
торов действительная скорость хода судна относительно
воды на переходе может значительно отличаться от ско-
рости, выбранной из таблицы или графика Vo=f(N).
Расстояние, рассчитанное по этой скорости, будет содер-
жать ошибку, величина которой зависит главным обра-
зом от того, насколько фактические условия плавания
отличаются от тех, при которых определялась зависи-
мость VQ=f(N).
На многих траулерах установлены лаги, которые не
обладают достаточной чувствительностью и не обеспечи-
вают удовлетворительных показаний, особенно на ниж-
нем диапазоне скоростей траления (2,5—3,5 уз). Опре-
деление же скорости траления и пройденного растояния
при помощи графика или таблицы соответствия скорости
хода частоте вращения винта не обеспечивает необходи-
мой при тралении точности. Поэтому на траловом про-
мысле применяется метод определения скорости хода по
времени прохождения судном некоторого расстояния
53
относительно выбранного на воде ориентира. Расстояние
выбирается равным длине судна или длине базы, разби-
той на планшире. Ориентиром может служить сброшен-
ный с судна вперед по курсу предмет, например щепка
или рыбина. Когда этот предмет приходит на траверз
форштевня или первой марки на планшире, пускают се-
кундомер. Когда же сброшенный предмет приходит на
траверз ахтерштевня или второй марки на планшире,
секундомер останавливают. Зная длину судна или длину
базы (расстояние между марками на планшире) L в
метрах и время t в секундах можно рассчитать скорость
хода в узлах по формуле
L 3600 , L
По этой формуле составляется таблица, из которой
по аргументу времени t в секундах можно выбрать ско-
рость хода в узлах. Расстояние, пройденное траулером,
буксирующим трал, рассчитывается по скорости хода и
продолжительности плавания с помощью соответствую-
щих таблиц.
Средняя квадратическая ошибка определения скоро-
сти ту может быть определена по формуле
mL
mV = VoT,
где mL —средняя квадратическая ошибка в проходимом сброшен-
ным предметом расстоянии (фиксирование траверза пред-
мета всегда производится с некоторой случайной
ошибкой).
Наблюдения, сделанные в одинаковых условиях не-
сколько раз, позволяют получить осредненную скорость
хода, средняя квадратическая ошибка которой может
быть вычислена по формуле
mL
mVo/cp "" ^ср ’
Lyn
где п — число наблюдений.
Этот метод определения скорости хода получил на-
звание метода «планширного лага». Он применяется не
только на траловом промысле, но и при плавании во
льдах.
54
При благоприятных условиях скорость хода опреде-
ляется методом «планширного лага» с ошибкой, не пре-
вышающей 5%.
§ 13. Определение скорости хода
и поправки лага
Скорость хода относительно воды, которая харак-
теризует ходовые качества судна, определяют на специ-
альных скоростных испытаниях для всех основных режи-
мов работы двигателей и заданного водоизмещения. Та-
кие испытания проводятся после постройки судна, его
ремонта, а также при необходимости уточнить зависи-
мость между скоростью хода и частотой вращения греб-
ных винтов. Поправка лага, как и поправка компаса, оп-
ределяется в процессе плавания систематически, так как
постоянный и тщательный контроль за этими поправка-
ми— одно из важнейших условий уверенного плавания.
Способы определения скорости хода судна и поправ-
ки лага аналогичны. Все они сводятся к определению
расстояния 3, пройденного судном относительно воды
за некоторый промежуток времени, и различаются лишь
по методике, навигационному оборудованию и техничес-
ким средствам, используемым для измерения этого рас-
стояния. Для достижения достаточной точности опреде-
ления скорости хода и поправки лага необходимо вы-
полнить ряд общих для всех способов требований: к на-
чалу измерений судно должно развить заданную
скорость хода и сохранять ее в течение всего пробега,
во время пробега судно должно следовать постоянным
курсом, ветер и волнение в районе испытаний не должны
превышать соответственно 3 и 2 баллов, а глубины дол-
жны быть достаточными.
Желательно, чтобы скорость течения была по воз-
можности меньше и в период наблюдений не менялась
по величине и направлению.
При определении скорости хода (относительно воды)
и поправки лага влияние течения исключают из наблю-
дений, выполняя несколько пробегов или используя в
качестве ориентира при измерении расстояния 3 свобод-
но плавающий буй, веху или лежащее в дрейфе судно.
Определение скорости хода и поправки лага на мер-
ной линии. Мерная линия представляет собой специаль-
Б5
но оборудованный полигон, предназначенный для опре-
деления скорости хода и других маневренных элементов
судна, а также поправки лага. Мерная линия оборуду-
ется несколькими параллельными секущими створами,
которые устанавливаются на берегу (рис. 16). Рассто-
яние между секущими створами точно измеряется и ука-
зывается на картах или в навигационных пособиях.
Для определения скорости хода и поправки лага суд-
но, управляемое по компасу, ложится на линию истин-
ного курса, перпендикулярную секущим створам, и раз-
вивает нужную скорость. При пересечении линий секу-
щих створов фиксируют моменты времени по секундоме-
ру и отсчеты лага.
Если в районе мерной линии течение практически от-
сутствует, скорость хода судна относительно воды при
заданной частоте вращения винтов и поправка лага или
коэффициент лага могут быть рассчитаны на основании
результатов одного пробега по формулам:
Vo = — 5;
S — рол
=------—-100; ,
рол
—
рол
56
Где S —длина пробега (расстояние между секущими
створами), мили;
t —продолжительность пробега, с;
рол = ол2 — олг — разность отсчетов лага в моменты пересечения
секущих створов.
Предположим, что в районе мерной линии (см. рис.
16) действует постоянное течение*. Обозначим скорость
судна относительно земли через V, скорость течения че-
рез ит, угол между линией истинного курса судна и на-
правлением течения через ^т, время, за которое судно
прошло расстояние S между секущими створами, через
Л. При наличии течения судно будет перемещаться_по
направлению геометрической суммы скоростей Г=Г0+
4-Пт и из точки А на линии секущего створа I придет в
точку В на _линии секущего створа //. Проектируя век-
торы VVi и wT(i на линию истинного курса, можем напи-
сать:
S = V0Zi + vTcosqTt1 (III—6а)
или, учитывая, что расстояние, пройденное судном от-
носительно воды на первом пробеге АС= V0t=poA\kn,
будем иметь:
S = рол! kn + vT cos qT . (Ill—66)
В каждом из этих уравнений два неизвестных: в ура-
внении (III—6а) Го и vT cos qT, а в уравнении (II—66)
kn и vT cos qT. Поэтому получить Го или /гл по резуль-
татам одного пробега нельзя. Выполнение второго про-
бега противоположным курсом позволит составить вто-
рое уравнение и исключить влияние течения. Обозначив
продолжительность второго пробега через t2, можем на-
писать
5 = Го /а — ат cos gT ta (HI—7)
или
8 = ролгкл — vTcosgT/2. (III—7a)
Решение системы уравнений (III—6a) и (III—7a) относи-
тельно Vo дает:
* Ющенко A. IL, Лесков M. M. Навигация. M., 1972.
57
Выражая Vo в узлах, S в милях, a t в секундах, бу-
дем иметь:
3600S(,1 + ,,)
2<1'.
Учитывая, что скорость судна на первом пробеге
Vx = —, а на втором пробеге V2 = — > формулу (III—8)
/1 /а
можно привести к следующему виду:
0 2 '
Частоту вращения винтов N, соответствующую этой
скорости, получают как среднее из наблюденных на обо-
их пробегах
2
Решая систему уравнений (III—66) и (III—7а) от-
носительно kn и учитывая, что Ад = ^1+^^, получим
Дл% = Г—Z1)— _ J Joo. (Ill—10)
Lpoxi — рол2 G J
Следовательно, если в районе испытаний имеется по-
стоянное течение, для исключения его влияния на ре-
зультаты наблюдений делается два пробега контркур-
сами и скорость хода относительно воды рассчитывается
по формуле (III—9), а поправка лага — по формуле
(III—10).
Для того чтобы убедиться в постоянстве элементов
течения во время наблюдений, необходимо сделать тре-
тий пробег в том же направлении, что и первый. Если
время первого 6 и третьего 6 пробега при неизменном
режиме работы двигателей одинаково, то это значит, что
элементы течения постоянны. Предположим, что тече-
ние в районе мерной линии переменное, но проекция
скорости течения на линию истинного курса изменяется
во времени по линейному закону:
°:=<.+а(т-го)=ч+а/>
где vtu — проекция скорости течения на линию истинного курса в
момент То;
vv — проекция скорости течения на линию истинного курса в
момент Т;
а — постоянный коэффициент, характеризующий ускорения
проекции скорости течения.
В этом случае можно исключить влияние течения, вы-
полнив три пробега.
Сделав первый пробег и определив скорость хода без
учета течения Vi = —, можем написать уравнение
V1 = V0+< + flTcP1 1 И”-11)
или
5 = рол^л+ < ^ + aTcpi (III—Па)
где ТСР1— средний момент первого пробега ^7cPi = —-j.
Сделав второй пробег противоположным курсом и оп-
ределив скорость хода на этом пробеге без учета тече-
ния V2 = можем написать второе уравнение
V2=^o-<2-^cPj (III—12)
или
$ = рол2А!л-/т/2-аТср2 /2,
(III—12a)
где Tcp2 —средний момент второго пробега ^7^=^ +/J
ti — время между концом первого и началом второго про-
бега.
Третий пробег в том же направлении, что и первый,
позволит составить еще одно уравнение. Определив
$
V9 = —» будет иметь
^3
V3=V0 + < + aTcp>
или
(Ill—13)
(III—13a)
где Гср/
з»
is
—~ — средний момент третьего про-
бега;
r t2— время между окончанием второго и
началом третьего пробега.
Из уравнений (III—И) и (III—13) можно найти
коэффициент а:
59
V3-V1
a =--------------
T —T
ep, cpi
а затем из уравнений (III—II) и (III—12) определить
скорость хода относительно воды:
Vx + V. + (Vs - / ^СРг~^,СР1
v____________________\ ' ср, 1 ср,
Ио— 2
Разделив уравнение (III—На) на 6, уравнение
(III—12а) на ti и уравнение (III—13а) на t3, в резуль-
тате получим следующую систему:
^ = ^л/л + < + аТср1;
У2 = УлЛ-<+вТс₽,;
Уз= УлЛ + < + аТсР,-.
(III—15)
В этой системе
_ ролх _ ролг _рол3
л*- tl ' t2 ' Ил>~ t3
Решая эту систему уравнений относительно неизвест-
ной величины kn и учитывая, что Дл% = 100 (k„—1), по-
лучим формулу для расчета поправки лага
' (^+Уа)Гср,-7’ср,)-(Уг+У8)(гср-тср,)
.(^л.+^) (7ср -TCPi) - (Ул +УЛз) (Тср -7ср,)
1 100.
(III-16)
Формулы (III—14) и (III—16) справедливы для слу-
чая, когда проекция скорости течения на линию истин-
ного курса (на направление пробега) изменяется со вре-
менем по линейному закону. Однако и при более слож-
ном законе изменения течения эти формулы в большин-
стве случаев обеспечивают достаточную для практики
точность, так как изменение скорости течения за время
работы на мерной линии практически линейно*.
* Во многих пособиях для определения скорости хода относи-
тельно воды и поправки лага при наличии течения приводятся фор-
мулы, отличные от формул (III—10), (III—14), (III—16), а также
формулы для расчета скорости хода и поправки лага по результа-
там четыре^ и пяти пробегов. Все эти формулы приближенные.
60
Определение скорости хода и поправки лага по точ-
ным обсервациям и с помощью радиолокатора. Скорость
хода и поправка лага могут быть определены непосред-
ственно на переходе или на промысле. Длина пробега S
рассчитывается по результатам точных обсерваций, на-
пример по фазовым РНС, либо измеряется радиолока-
тором. В условиях промысла для определения скорости
хода при той или иной частоте вращения винтов и по-
правки лага широко используют радиолокатор и про-
мысловый буй с пассивным отражателем. Выбрав на-
правление пробега по направлению ветра и приведя буй
на /(У=0°, развивают необходимую скорость и измеря-
ют расстояние до буя D\. При этом замечают момент по
секундомеру Т\ и отсчет лага ОЛ1.
Продолжая следовать постоянным курсом и пройдя
некоторое расстояние, равное рекомендованной длине
пробега, снова измеряют расстояние до буя D2t замеча-
ют момент по секундомеру Т2 и отсчет лага ол2. Рассто-
яния Di и D2 измеряются обычно при помощи подвиж-
ного круга дальности (см. § 52).
Скорость хода и поправку лага рассчитывают по фор-
мулам:
3600 (Г>А — Г>2)
Т2-Л ;
л..%СС.
рол
Здесь скорость выражена в узлах, время в секун-
дах, расстояние в милях.
Если в районе плавания имеется течение, можно сде-
лать два или три пробега в зависимости от характера
изменения течения во времени, но проще исключить вли-
яние течения, используя в качестве радиолокационного
ориентира свободно плавающий буй или веху (груз буя
или вехи заглубляются на величину осадки судна). Буй
или веха и судно будут практически одинаково переме-
щаться под действием течения, и оно не окажет влияния
на результаты определения скорости хода и поправки
лага. В качестве радиолокационного ориентира может
быть использовано и однотипное судно, лежащее в
дрейфе.
Расчет минимальной длины пробега при определении
скорости хода и поправки лага. Для вывода формулы,
61
устанавливающей зависимость между минимальной дли-
ной пробега и скоростью хода, продифференцируем по
переменным Vo, S и t формулу
s = v0/,
где Vq — определяемая скорость хода относительно воды;
о — длина пробега;
t — продолжительность пробега.
dS = dVQt + dtVQ.
Переходя к конечным приращениям и вводя замену
* 5
1= —, получим
Vo
5 = -^-(Д5-Д/У0).
Длина пробега S определяется, как правило, с боль-
шой точностью, поэтому ошибкой AS можно пренебречь,
полагая, что
ДИо Дг о
Vo
Пусть ДУ0=еу и А/=еь где еу— предельная допу-
стимая ошибка определения скорости хода, a et — пре-
дельная ошибка определения продолжительности пробе-
га (например, ошибка фиксирования момента прохож-
дения обоих секущих створов).
Тогда минимальная длина пробега может быть рассчи-
тана по формуле
О —
s=5tKo_ (III—17)
ev
Vo
Принимая предельную допустимую относительную
ошибку определения скорости хода, равной 5% (— =
=0,005), а предельную ошибку определения продолжи-
тельности пробега ег=±1,5 с, получим
(III—18)
где S — длина пробега, мили;
Vo — скорость, з?ода относительно воды, уз.
62
Формула для расчета минимальной длины пробега
при определении поправки лага может быть получена
аналогичным путем в результате дифференцирования
формулы для расчета поправки лага и последующего пе-
рехода к конечным приращениям, а затем к ошибкам.
Однако учитывая, что современные лаги позволяют снять
отсчет с большой точностью (до 0,1 кбт) и основная ошиб-
ка полученной рол будет определяться ошибкой фикса-
ции моментов времени, формулу (III—17) можно исполь-
зовать для расчета минимальной длины пробега и при
определении поправки лага.
Из формулы (III—17) следует, что ошибка определе-
ния скорости хода и поправки лага будет тем меньше,
чем больше длина пробега. Однако этот вывод не согла-
суется с практикой. Значительное увеличение длины
пробега и, следовательно, его продолжительности обычно
приводит к ощутимым изменениям течения и ветра, что
вносит большие ошибки, чем ограничение длины пробега.
В последующих главах будут рассмотрены и неко-
торые другие способы определения скорости хода.
Глава IV. СЧИСЛЕНИЕ ПУТИ СУДНА
§ 14. Графическое счисление и прокладка
Счислением пути называется непрерывный учет
перемещения судна по результатам определения элемен-
тов его движения с помощью автономных технических
средств судовождения. Счисление пути дает возможность
в любой момент времени судить о положении судна отно-
сительно окружающей обстановки.
Для ведения счисления используются различные ав-
тономные технические средства судовождения (датчики
навигационной информации): гироскопические и магнит-
ные компасы, относительные и абсолютные лаги, измери-
тели скорости и направления течения, угла ветрового
дрейфа, системы инерциальной навигации.
На транспортных и добывающих судах в настоящее
врямя счисление пути ведется по показаниям компаса и
относительного лага. На добывающих судах, ведущих
траловый промысел, используются лаги-дрейфомеры.
Применяются два способа счисления пути судна:
63
графическое счисление, при котором движение судна
учитывается с помощью графических построений на кар-
те крупного масштаба. На карту от исходной точки дви-
жения наносится линия, определяющая направление дви-
жения судна, и на этой линии по пройденному расстоя-
нию отмечаются места судна на тот или иной момент
времени;
аналитическое счисление, при котором движение суд-
на учитывается путем последовательного вычисления по
формулам координат текущего места судна и нанесения
этих мест на карту.
Счисление начинается сразу же после выхода судна
за пределы акватории порта, гавани или после съемки с
якоря при стоянке на открытом рейде или в открытом мо-
ре. Предварительно место судна определяется по ре-
зультатам измерений навигационных параметров. Полу-
ченное обсервованное место принимается за исходную
точку, от которой ведется счисление. Места судна, нано-
симые на карту по данным счисления, называются
счислимыми. Счисление может вестись не только
«вручную», но и автоматически. Автоматическое аналити-
ческое счисление осуществляется аналоговым вычисли-
тельным устройством — автосчислителем координат или
судовой ЭЦВМ, а автоматическое графическое счисле-
ние — автопрокладчиком. Автосчислитель координат яв-
ляется составной частью автопрокладчика.
Задачи, которые приходится решать графически на
морской навигационной карте, не ограничиваются счис-
лением пути судна. Совокупность графических построе-
ний, связанных со счислением, выбором наивыгоднейше-
го и безопасного пути, нанесением на карту обсервован-
ных мест судна, называется прокладкой*.
Прокладка, которая выполняется в период подготов-
ки к переходу, называется предварительной. Она сво-
дится к нанесению на карту выбранного на основе изу-
чения района плавания наивыгоднейшего и безопасного
пути, графическому отображению результатов расчетов,
связанных с выбором наиболее целесообразных способов
обсерваций. Как графическое счисление, так и прокладка
* В некоторых учебниках и учебных пособиях по навигации по-
нятия графическое счисление пути судна и прокладка отождествля-
ются. Однако, как следует из приведенных определений, проклад-
ка — понятие более широкое.
в значительной своей части состоят из решения на мср-
каторской карте ряда элементарных задач: нанесение на
карту точки по заданной широте п долготе, снятие с кар-
ты широты и долготы заданной точки, измерение рас-
стояния между двумя точками, прокладка линии по за-
данному направлению от заданной точки, определение
направления линии, проложенной на карте.
Перечисленные задачи, как и некоторые другие
графические построения, связанные с нанесением на кар-
ту навигационных изолиний или линий положения, вы-
полняются с помощью комплекта прокладочного инстру-
мента, в который входят навигационный транспортир,
параллельная линейка и циркуль-измеритель.
Прокладочный инструмент должен всегда находиться
в исправном состоянии и периодически подвергаться по-
веркам*. При помощи навигационного транспортира и
параллельной линейки можно снять с карты или проло-
жить на ней направление со средней квадратической
ошибкой порядка ±0°,2. Точность измерения (проклад-
ки) расстояний зависит от масштаба карты. При совме-
щении ножек циркуля с концами измеряемого отрезка
допускается ошибка, средняя квадратическая величина
которой составляет примерно ±0,2 мм. Таким образом,
средняя квадратическая ошибка измерения (прокладки)
расстояния на карте, зависящая от величины уколов
циркуля, может быть принята равной ±0,3 мм, выра-
женным в масштабе карты.
§ 15. Графическое счисление без учета дрейфа
и сноса течением
Если влияние течения и ветра пренебрежимо ма-
ло, то практически можно считать, что судно под дей-
ствием собственных движителей перемещается относи-
тельно Земли в направлении своей диаметральной
плоскости, т. е. по линии истинного курса, со скоростью,
равной скорости хода относительно воды.
При графическом счислении решаются две основные
задачи. Первая из этих задач (прямая) предусматри-
вает учет движения судна, когда компасный курс руле-
* «Мореходные приборы и инструменты»; под ред. Л. И. Щети-
ниной. М., 1960.
5 В. Е. Ольховский
65
вому уже задан. Если влияние ветра и течения не учи-
тывается, прямая задача сводится прежде всего к про-
кладке на карте от исходной точки счисления линии
истинного курса
/УХ-ДХ + ДХ.
Когда судно находится в исходной точке счисления,
замечают момент по часам 7\ и отсчет лага оль Счис-
лимое место судна на какой-либо момент Г2 получают,
откладывая по линии истинного курса от исходной точ-
ки счисления расстояние 3, пройденное судном за время
t = T2—Тс Зд = (ол2—ол1)1гл,
где ол2 — отсчет лага в момент Т2\
кд — коэффициент лага.
Если лаг по каким-либо причинам использовать
нельзя, пройденное расстояние рассчитывается по ско-
рости хода и продолжительности плавания
30б = VW или
Зпл = Кт л Л
где Роб - скорость, определенная по таблице или графику соответ-
ствия скорости хода частоте вращения винтов;
Епл —скорость, определенная методом «планширного лага».
Счислимое место судна отмечают небольшой черточ-
кой, перпендикулярной линии истинного курса. Анало-
гично находят счислимые места судна на моменты вре-
мени Тз(олз), Т^ол^ и т.д. Около исходной точки
счисления — обсервованного места и всех последующих
счислимых мест делают подпись дробью: в числителе —
момент по часам, в знаменателе — отсчет лага. Если
лаг не используют, надписывают только момент по ча-
сам без дробной черты. Вдоль линии проложенного на
карте истинного курса подписывают соответствующий
ему компасный курс, а в скобках — знак и величину по-
правки компаса.
Образец оформления на карте графического счисле-
ния без учета ветра и течения показан на рис. 17,6*.
На практике при ведении графического счисления
чаще приходится решать вторую (обратную) задачу.
* В учебнике образцы оформления на карте прокладки, как
и все условные обозначения, даны в соответствии с Правилами
штурманской службы № 27, 1971 г.
66
Она сводится к расчету компасного курса, которым над-
лежит править, чтобы следовать по заданному направ-
лению, и отсчета лага в заданной точке или момента
прихода в эту точку.
Предположим, что судну необходимо пройти из
точки А в точку В (рис. 17,а). Если влияние ветра и те-
чения пренебрежимо мало, то прямая, соединяющая эти
точки,будет представлять собой линию истинного курса.
Сняв с карты заданный И К из соотношения КК=ИК—
—АК, находят ЛЛ, которым следует править. Сняв с кар-
ты расстояние 5 между точками А и В и зная отсчет
лага в точке Л, по формуле (III—6) или по таблицам
МТ—75 можно рассчитать отсчет лага в точке В. Мо-
мент прихода судна в точку В находят по формуле
+ — • (IV—1)
*0
§ 16. дрейф судна.
Графическое счисление с учетом дрейфа
Наблюдаемый на движущемся судне (кажущийся)
ветер, воздействуя на подводную часть судна, вызывает
появление аэрогидродинамических сил. Равнодействую-
щая этих сил Л, приложенная к центру парусности над-
водной части судна, называется полной аэрогидродина-
мической силой.
Скорость и направление наблюдаемого ветра опре-
деляются вектором W
W = u_— у,
где V — вектор скорости судна;
U — вектор скорости истинного ветра.
5*
67
Сила А всегда направлена под ветер, по угол 7, со-
ставляемый вектором А
Рис. 18
с диаметральной плоскостью
судна, в общем случае не ра-
вен курсовому углу наблюдае-
мого ветра qw (рис. 18). Раз-
ложим силу А на две состав-
ляющие: продольную Х=
= A cosy, направленную вдоль
диаметральной плоскости, и
поперечную Z = A sin 7, направ-
ленную перпендикулярно диа-
метральной плоскости судна.
Составляющая X вызывает из-
менение скорости хода судна,
которое учитывается лагом.
Составляющая же Z вызывает
боковое перемещение судна с
некоторой скоростью идр, назы-
ваемой скоростью ветрового
дрейфа. Под действием двух
скоростей Vx, направленной
по диаметральной плоскости
судна, и Удр, направленной перпендикулярно этой плос-
кости, судно будет перемещаться по направлению рав-
нодействующей этих скоростей Уо-
^х + ’др-
Таким образом, направление вектора Vo определяет
направление линии перемещения судна относительно
воды, которая называется линией пути при
дрейфе.
Угол, составляемый этой линией с нордовой частью
истинного меридиана, называется путем при дрей-
фе и обозначается 77Уа. Угол, составляемый линией пу-
ти при дрейфе с линией истинного курса (диаметральной
плоскостью судна), называется углом дрейфа
и обозначается а. Как следует из рис. 21,
ПУа = ик + а.
68
Эта формула алгебраическая и при пользовании ею
необходимо учитывать знак (наименование) угла дрей-
фа. При ветре в левый борт (дрейф левого галса) углу
дрейфа придается знак «плюс», а при ветре в правый
борт (дрейф правого галса) —знак «минус».
Для того чтобы подчеркнуть, что угол а является
результатом воздействия только силы Z, и другие фак-
торы, вызываемые ветром, не учитываются, этот угол
называют углом собственного дрейфа.
При установившемся дрейфе действие силы Z урав-
новешивается силой Zo сопротивления воды (см.
рис. 18). В общем случае точки приложения этих сил
не совпадают, что приводит к возникновению двух пар
сил, одна из которых создает крен судна, а другая раз-
ворачивает его вокруг вертикальной оси. Разворот суд-
на по ветру или против ветра, усугубляемый действием
волнения, приводит к асимметричному рысканию судна,
при котором углы отклонения от курса вправо и влево,
а также продолжительность лежания на частных кур-
сах (рысках) неодинаковы. В результате средняя линия
фактического перемещения судна отклоняется от линии
пути, проложенной с учетом угла собственного дрейфа,
на некоторый угол а', который называется зарыски-
в а н и е м.
Практически величину и направление зарыскивания
можно определить по отклонению среднего значения
фактического курса судна за некоторый промежуток
времени от заданного.
Для определения среднего значения фактического
курса можно воспользоваться курсограммой — автома-
тической записью курса на ленте курсографа гироком-
паса. Однако на практике не прибегают к раздельному
определению угла собственного дрейфа и зарыскивания,
понимая под углом дрейфа угол между линией истинно-
го курса и линией пути, вызванный совместным дейст-
вием ветра и волнения. Этот угол представляет собой
алгебраическую сумму угла собственного дрейфа и за-
рыскивания. При ведении графического счисления с уче-
том дрейфа прямая и обратная задачи, рассмотренные
в § 15, решаются следующим образом.
Прямая задача. Задан /(Л, известны знак и величи-
на угла дрейфа. Требуется проложить на карте линию
пути при дрейфе. Рассчитывают:
69
ИК = КК+ лк
II
ПУа = ИК + а.
На карте от исходной точки счисления прокладыва-
ют линию пути при дрейфе (линия истинного курса на
карте не прокладывается, однако допускается проклад-
ка короткого отрезка этой линии для контроля). Рас-
стояние, пройденное судном по
Рис. 19
лагу, откладывают по линии
пути при дрейфе. Около счис-
лимых точек надписывают
дробью моменты времени и от-
счеты лага, а вдоль линии
пути при дрейфе — компасный
курс, поправку компаса и
угол дрейфа (рис. 19). Откла-
дывая пройденное по лагу рас-
стояние по линии пути при
дрейфе, полагают, что лаг да-
ет результирующую скорость
хода относительно воды.
Строго говоря, это справед-
ливо только для буксируемого
лага или лага, хотя жестко
связанного с судном, но име-
ющего датчики продольной и поперечной составляю-
щих скорости. Лаг с датчиком только продольной
составляющей измеряет скорость Vx. В таких лагах
УЛ = УХ.
Из рис. 18 следует:
Vrt = V у sec а.
о л
Так как углы дрейфа современных судов невелики
и обычно не превышают 10°, с достаточной для практи-
ки точностью можно принимать Vo = Ул.
Обратная задача. На карте проложена линия, по ко-
торой должно следовать судно. В рассматриваемом
случае это будет линия пути при дрейфе. Известен угол
дрейфа. Необходимо рассчитать компасный курс, кото-
рым надлежит править, чтобы судно фактически следо-
вало по заданной линии пути.
Сняв с карты рассчитывают ИК, а затем КК\
70
и к = ПУа — а
и
кк = ик — ьк.
Отсчет лага в заданной точке или момент прихода
судна в заданную точку определяют соответственно по
формулам (III—6) и (IV—1).
§ 17. Способы определения угла дрейфа
Определение угла дрейфа из сравнения, получен-
ного по результатам обсерваций пути при дрейфе
с истинным курсом судна. Если в районе плавания тече-
ние практически отсутствует, то средняя линия, прове-
денная между несколькими обсервованными точками,
может быть принята за линию пути при дрейфе (раз-
брос обсервованных точек обусловлен ошибками изме-
рений). Сняв с карты 77Уа и зная И К, которым следо-
вало судно, можно рассчитать угол дрейфа:
а = ПУа — ИК.
Если в районе плавания имеется течение, его влия-
ние должно быть исключено. Этого можно добиться,
определяя место судна относительно свободноплаваю-
щего ориентира, например вехи или буя. Веха или буй
должны обладать минимальной парусностью, а их груз
должен быть заглублен на величину, равную осадке
судна. При этом условии можно считать, что свободно-
плавающий ориентир и судно находятся под воздействи-
ем одного и того же течения. Место судна относительно
ориентира определяется по пеленгу и расстоянию. По
трем пеленгам свободноплавающего ориентира и време-
ни можно определить непосредственно 77Уа (см. § 23).
Определение угла дрейфа инструментальным спосо-
бом. Для определения угла дрейфа может быть исполь-
зован специальный электронавигационный прибор —
дрейфомер или лаг-дрейфомер. На судах, ведущих лов
тралом, используются индукционные лаги-дрейфомеры
с приемными устройствами, не выступающими за днище
судна.
Предположим, что под днищем судна установлен
источник магнитного поля с индукцией В, При движе-
71
пии этого источника относительно проводника, роль
которого выполняет поток морской воды, в проводнике
наводится электрическое поле с напряженностью £,
пропорциональной скорости судна относительно воды:
В лагах-дрейфомерах с приемным устройством, не
выступающим за днище судна, имеется два датчика.
Одни из этих датчиков устанавливаются поперек диа-
метральной плоскости судна, и с него снимается сигнал,
пропорциональный Vx — продольной составляющей ско-
рости судна относительно воды. Другой датчик устанав-
ливается вдоль диаметральной плоскости, и с него сни-
мается сигнал, пропорциональный идр— поперечной со-
ставляющей этой скорости судна (рис. 20,а). Угол
дрейфа вырабатывается счетно-решающим устройством,
реализующим зависимость
а = arctg-----,
Па
Рис. 20
гдет^и^—сигналы, пропорциональные соответственно Vx и ^’др
(рис. 20,6).
Индукционный лаг-дрейфомер
позволяет определять угол дрей-
фа с инструментальной погреш-
ностью порядка ±0,о5ч-0,°7.
Предвычисление угла дрейфа
по коэффициенту дрейфа. Пред-
вычисление угла дрейфа основа-
но на использовании формул, вы-
ражающих зависимость угла
дрейфа от скорости хода судна,
скорости и курсового угла на-
блюдаемого ветра. Эти формулы
содержат зависящие от типа суд-
на и его осадки коэффициент
или коэффициенты, которые мо-
гут быть определены на основе статистической обработ-
ки результатов натурных испытаний.
Рассмотрим метод предвычисления угла дрейфа,
предложенный Н. Н. Матусевичем. В соответствии
с данными аэродинамики и гидродинамики для сил Z
и Zo (см. рис. 18) можно написать следующие выраже-
ния:
72
W2
Z — H'f)——Ssinqw‘> (IV—2)
V20
Zo = H" Po — So sin (IV—3)
где Я' и Я" — коэффициенты;
p—плотность воздуха;
р0 — плотность воды;
W— скорость наблюдаемого ветра;
Vq — скорость судна относительно воды;
S — площадь надводной части диаметральной плоскости;
So — площадь подводной части диаметральной плоскости;
Приравнивая
полагая угол
qw —курсовой угол наблюдаемого ветра;
a — угол дрейфа.
При установившемся дрейфе Z=Z0.
правые части формул (IV—2) и (IV—3) и
дрейфа малым (а=^10°), можем написать:
Н' р 5 / W \2 .
а°_57°,3 • • I ) sm^r.
Я Ро \ Vo /
Допуская, что отношение 57\3 —— ------—равно по-
Я" р0 о0
стоянной величине /С, будем иметь:
/ Ц7 \2
a° = K — sin qWt (IV—4)
\ М) /
Величина К называется коэффициентом дрейфа
н выражается в градусах.
Если коэффициент дрейфа известен, то зная скорость
судна относительно воды и измерив скорость и курсовой
угол наблюдаемого ветра по формуле (IV—4), можно
вычислить соответствующий этим условиям угол дрей-
фа. Практически коэффициент дрейфа судна того или
иного типа определяется экспериментально.
Предположим, что в районе, где нет заметных тече-
ний, судно совершило пробег некоторым курсом. В тече-
ние этого пробега периодически определялось каким-
либо точным способом место судна, измерялись его
скорость, а также скорость и курсовой угол наблюдае-
мого ветра. По результатам обсерваций можно опреде-
лить ПУа и рассчитать а = ПУа— И К. Пусть W
и qw представляют собой средние за время пробега зна-
чения скорости хода, скорости и курсового угла наблю-
даемого ветра. Тогда на основании формулы (IV—4)
можем написать:
73
Для определения коэффициента дрейфа с достаточ-
ной точностью судно должно выполнить ряд пробегов
(25—50) различными курсами. По результатам п про-
бегов можно написать п уравнений вида:
= Каг (первый пробег);
а2 = Ка2 (второй пробег)
.................... и т. д.
ая = Кап
Поскольку имеются избыточные наблюдения (число
уравнений больше, чем число независимых неизвестных),
способом наименьших квадратов определяют вероят-
нейшее значение К.
Практически при проведении испытаний для опреде-
ления угла дрейфа используется один и тот же способ
обсерваций. Поэтому, считая все наблюдения равноточ-
ными, можно найти вероятнейшее значение Л, решив
нормальное уравнение
[аа] = /С[а2],
откуда
К = “ПГ’ (IV—5)
[а2]
где
[аа] =ai0ti + aaa2 + ...+ a„a,l;
1а21 = а? + а1+ ...+ 4
Точность полученного по формуле (IV—5) коэффи-
циента дрейфа можно оценить средней квадратической
ошибкой тк:
тк = ^=
/ [а2]
74
В этом выражении та = J/ -------средняя квадра-
тическая ошибка определения угла дрейфа, [Д2] = Д^ +
+ Д2+... + Д2 и Д. = а. —а' где а. —значение угла
дрейфа, полученное из наблюдений, at- — значение этого
угла, полученное из уравнения a' = Kat > в котором
К— коэффициент дрейфа, вычисленный по формуле
(IV—5). Практическая проверка формулы (IV—4) не
подтвердила пропорциональности угла дрейфа а мно-
I W\* ' "”'Л
жителю ---- при
рядом допущений,
(---1 <5^6, что объясняется
сделанных при выводе формулы.
Рис. 21
Поэтому коэффициент дрейфа следует рассматривать не
как постоянную величину, а как функцию:
Рекомендуется для ряда значений ---- , меньших
\ Ио /
5—6, определить на основании результатов семи — один-
надцати пробегов К и по этим данным составить график
или таблицу, выражающие зависимость К от — I . С
помощью такого графика (таблицы) можно получить ве-
личину К, соответствующую тому или иному значению
\ Ио /
Достаточно большие углы дрейфа можно определить
грубо приближенно по отклонению от диаметральной
75
плоскости судна кильватерной струи, лаглиня буксируе-
мого лага, ваеров. Все эти способы основаны на том, что
судно под действием ветра перемещается по линии пути
при дрейфе, а его диаметральная плоскость удерживает-
ся рулевым в направлении соответствующего истинного
курса (рис. 21).
Заметим, что это обстоятельство необходимо учиты-
вать при определении моментов прихода навигационных
ориентиров на траверз.
§ 18. Дрейф судна с застопоренными машинами
Добывающим и приемнотранспортным судам не-
редко приходится лежать в дрейфе с застопоренными ма-
шинами в ожидании разгрузки, при ремонте орудий ло-
ва и т. п.
На судно, дрейфующее с застопоренными машинами,
действуют две силы: сила давления ветра на его надвод-
Рис. 22
ную часть А и сила сопротивления воды 7?. Точки при-
ложения этих сил в общем случае не совпадают. Поэтому
судно, начав перемещаться под действием ветра, кренит-
ся и разворачивается. Разворот судна продолжается до
тех пор, пока моменты сил А и 7? относительно центра
вращения судна не станут равными по величине и про-
тивоположными по знаку (рис. 22). Угол между диамет-
ральной плоскостью судна и направлением наблюдаемо-
го ветра после того, как движение установилось, называ-
76
стся предельным углом разворота. Для большинства
современных судов предельный угол разворота близок
к прямому. При этом условии направление дрейфа прак-
тически совпадает с направлением ветра.
При установившемся дрейфе судно перемещается под
действием ветра относительно воды с некоторой скоро-
стью Удр, называемой линейной скоростью ветрового
дрейфа.
Значения сил А и R определяются следующими вы-
ражениями:
Л = С90 р$90 sin Г2 = У sinГ2;
£ £
1 1^1
R = ~^ с0(90) Р0 S0(90) sin «Одр = У N0 Sin “Одр’
где С9о — коэффициент сопротивления надводной части судна при
курсовом угле наблюдаемого ветра, равном 9 (Г;
Со(9О)—коэффициент сопротивления для подводной части суд-
на при перемещении его лагом;
р — плотность воздуха;
ро — плотность воды;
S9o — площадь проекции надводной части судна на диамет-
ральную плоскость;
50(90)—площадь проекции подводной части судна на диамет-
ральную плоскость;
IF — скорость наблюдаемого ветра;
Удр — линейная скорость ветрового дрейфа;
а — угол дрейфа (угол между направлением дрейфа и диа-
метральной плоскостью судна);
qw — курсовой угол наблюдаемого ветра.
Учитывая, что при установившемся движении силы
А и R равны, будем иметь
р V No sin а
В случае, когда судно перемещается примерно лагом
к ветру, можно принять
«др = W F, (IV—6)
где K.v — коэффициент скорости дрейфа.
В условиях промысла скорость п направление ветро-
вого дрейфа судна с застопоренной машиной можно оп-
ределить одним из следующих способов: при помощи
морской вертушки; при помощи привязных поплавков и
77
компаса; при помощи буйка, сброшенного с дрейфующе-
го судна, секстана и компаса.
Как известно, метод измерения течения морской вер-
тушкой с дрейфующего судна основан на том, что вер-
тушкой регистрируется равнодействующая скорости сум-
марного дрейфа судна у*др и скорости течения ут на
глубине погружения вертушки.
Рис. 23
Для получения элементов течения на исследуемой
глубине дрейф судна определяется и исключается из ре-
зультата измерений. На рис. 23, а показана зависимость
между скоростью суммарного дрейфа судна пс.др, ско-
ростью течения на исследуемом горизонте vT и показа-
ниями вертушки ив.
Определение скорости ветрового дрейфа Пдр при по-
мощи морской вертушки основано на допущении, что
скорость и направление течения, действующего на суд-
но и вертушку, одинаковы. Для соблюдения этого усло-
вия вертушка должна быть опущена на глубину, равную
половине осадки судна. Тогда она будет регистрировать
скорость и направление ветрового дрейфа судна (рис.
23,6).
Обычно вертушку крепят к поплавку, который букси-
руется дрейфующим судном на лине. Зная продолжи-
тельность дрейфа между посылками пускового и стопор-
ного грузов, а также отсчеты гц и Пг на шкалах вертуш-
ки, можно вычислить скорость ветрового дрейфа в мет-
рах в секунду, а умножив ее на коэффициент 1,94,
получить эту скорость в узлах. Этот способ достаточно
* Под суммарным дрейфом будем понимать, как это принято
в промысловой практике, перемещение судна с застопоренными ма-
шинами под действием ветра и течения (перемещение относительно
земли).
78
точен, но требует сравнительно большой затраты време-
ни на проведение и обработку наблюдений.
Более простой способ основан на использовании при-
вязных поплавков, которые легко изготовить на судне.
В качестве верхнего поплавка на судах, ведущих дриф-
терный промысел, используется обычно кухтыль. Длина
тросика, соединяющего оба поплавка, должна быть при-
мерно равна осадке судна. При этом условии можно по-
лагать, что скорость и направление течения, действую-
щего на судно и поплавки, одинаковы. Нижний поплавок
загружается балластом с таким расчетом, чтобы над по-
верхностью воды возвышалась только конусообразная
часть верхнего поплавка. Поплавки выпускаются на ма-
нильском тросе, разбитом марками. Можно использо-
вать и пеньковый трос с пенопластовыми насадками.
Методика определения скорости и направления вет-
рового дрейфа при помощи привязных поплавков сводит-
ся к следующему. Поплавки спускают на воду. Под дей-
ствием ветра судно будет отходить от поплавков. Когда
длина вытравленного линя станет равной примерно дли-
не судна, включают секундомер и замечают марку на
лине. Через некоторый промежуток времени /, вытравив
примерно 50—60 м линя, останавливают секундомер и,
слегка натянув линь, замечают марку, до которой он был
вытравлен.
Скорость ветрового дрейфа в узлах рассчитывают по
формуле
1'др^ 1,94 - у- ,
где I — длина вытравленного линя, м;
t — промежуток времени, с.
Направление дрейфа определяют пеленгованием над-
водной части верхнего поплавка по компасу.
Вместо привязных поплавков можно использовать
простой буек, надводная часть которого не представляет
сколько-нибудь значительной площади сопротивления
ветру. Практически можно считать, что система буек —
груз перемещается только под действием течения, ко-
торое в той же мере влияет и на дрейфующее судно.
Если пренебречь кривизной земной поверхности и
рефракцией, то расстояние между судном и буйком
79
основание которого располагается ниже видимого гори-
зонта (рис. 24), можно рассчитать по формуле
D = ectg(a + d), (IV—7)
где е — высота глаза наблюдателя;
а — вертикальный угол между видимым горизонтом и основа-
нием буйка (вертикальный угол снижения);
d — наклонение видимого горизонта.
Скорость ветрового дрейфа определяют следующим
образом. С борта дрейфующего судна сбрасывают буек
с грузом и измеряют секстаном вертикальный угол ccj
Истинный
горизонт
Направление
на видимый
горизонт
Рис. 24
между видимым горизонтом и основанием буйка. При
этом замечают момент 7\. Наблюдая за буйком и не те-
ряя его из виду, через некоторый промежуток времени
вторично измеряют угол а2 между видимым горизонтом
и основанием буйка и замечают момент Г2.
Как видно из рис. 24, перемещение судна относитель-
но воды $др за промежуток времени t=T2—1\ можно
рассчитать по формуле
$лР = D2 — Dj = е (etg у2 — etg yJ , (IV—8)
где
Yi = ai + d;
Y2 = «2 + d.
Скорость дрейфа в узлах по расстоянию $др в метрах
и времени t в секундах вычисляют по формуле
Направление дрейфа можно определить, если брать
пеленги буйка по компасу.
80
Чтобы уменьшить влияние случайных ошибок наблю-
дений, первый угол следует измерять в момент, когда
буек будет располагаться на расстоянии от судна, рав-
ном примерно 0,5 кбт, а второй угол — в момент, когда
расстояние между судном и буйком будет равно пример-
но 1 ктб. При этом условии, например, для среднетон-
нажных добывающих судов си ^4°,5, а а2^2°,2.
При надлежащей конструкции надводной части буйка
точность определения расстояния 5ДР, а следовательно,
и скорости идр в основном будет зависеть от точности, с
какой можно получить величину наклонения видимого
горизонта.
Как известно, выбираемые из табл. 11-а МТ—75 зна-
чения наклонения видимого горизонта могут существен-
но отличаться от действительных.
Продифференцировав выражение (IV—8) по перемен-
ным $дР и d и перейдя затем к конечным приращениям,
получим формулу, выражающую ошибку определения
5Др, обусловленную погрешностью принятой при расчете
величины d:
&d'
Двдр = е 477" <cosec2 Т2" cosec2 7i) •
Экспериментальные исследования показали, что при
надлежащем выборе моментов измерения углов а отно-
сительная ошибка определения расстояния 5ДР и скоро-
сти Цдр не превышает 5%.
Точность определения скорости ветрового дрейфа
можно значительно повысить, если величину наклонения
видимого горизонта определять из непосредственных
наблюдений при помощи наклономера.
Следует также заметить, что на точность определе-
ния скорости ветрового дрейфа этим способом будет ока-
зывать влияние и волнение. Качка судна может значи-
тельно изменить высоту глаза наблюдателя. Кроме то-
го, вследствие волнения будут получать смещение по
вертикали как видимый горизонт, так и буек, до кото-
рого измеряются расстояния. Влияние ошибок, обуслов-
ленных волнением моря, можно ослабить, применяя со-
ответствующую методику наблюдений:
при каждом определении расстояния до буйка необ-
ходимо измерять серию из 3—5 вертикальных углов и
для расчета $др использовать аср и Гср;
6 В. Е. Ольховский
81
наблюдения следует производить с верхнего мостика,
чтобы высота глаза наблюдателя была по возможности
больше;
место для наблюдений нужно выбирать ближе к диа-
метральной плоскости судна, чтобы ослабить влияние
бортовой качки на изменение высоты глаза (при дрейфе
лагом к ветру и волне бортовая качка может быть зна-
чительна).
Большинство судов в период установившегося дрейфа
располагаются примерно лагом к ветру. Скорость вет-
рового дрейфа таких судов может быть определена по
формуле (IV—6), но для этого необходимо знать коэф-
фициент скорости дрейфа судна Kv- Значение Kv для
данного типа промыслового судна можно вычислить на
основании результатов определений скоростей ветрового
дрейфа при различных скоростях наблюдаемого ветра.
Таких определений желательно иметь не менее 50. По
данным произведенных наблюдений, можно написать
уравнения:
‘'ар, = *Л1;
«др.=^Л2; <IV-9>
Поскольку имеются избыточные наблюдения, то спо-
собом наименьших квадратов определяется вероятней-
шее значение
Нормальное уравнение для решения этой задачи име-
ет вид
откуда
Ko=JT^rL- (IV-I0)
где [% 1F] = рДР1 + »др2 Г2 +... + vwWn;
[IT2] = + +...+ IF,;.
Средняя квадратическая ошибка вычисленного веро-
ятнейшего значения коэффициента скорости ветрового
дрейфа может быть определена по формуле
82
fflri——
mKv = —-S£— , (I v—11)
где /иОдр — средняя квадратическая ошибка скорости ветрового
дрейфа, полученной по формуле vA1) = KvW, где /(»—
вычисленный коэффициент.
Обозначим иДР(.—KvWi =Af, тогда
т _-i/jK
'""ДР" у п-1 ’
где [Д2] = Л? + Д2 +• •. + Д„ •
Ниже приведены величины скоростей дрейфа средне-
тоннажного добывающего судна, для которого по дан-
ным натурных наблюдений было получено значение /С»,
равное 0,07(уДр, уз, W, м/с).
Скорость ветра м/с Скорость дрейфа идр’ уз Скорость ветра W, м/с Скорость дрей- фа одр, уз
2 0,14 14 0,98
3 0,21 15 1,05
4 0,28 16 1J2
5 0,35 17 1,19
6 0,42 18 1,26
7 0,49 19 1,33
8 0,56 20 1,40
9 0,63 21 1,47
10 0,70 22 1,54
11 0,77 23 1,61
12 0,84 24 1,68
13 0,91 25 1,75
§ 19. Графическое счисление с учетом сноса
течением
Если в районе плавания имеется течение, то при
отсутствии дрейфа судно будет перемещаться по направ-
лению двух скоростей: скорости, создаваемой действием
упора движителя и направленной по линии истинного
курса (Vo), и скорости суммарного течения (vT).
Величина_и направление равнодействующей этих ско-
ростей V=Vo+vT определяют скорость и направление
движения судна относительно земли. При этом диамет-
ральная плоскость судна будет сохранять направление
6* . 83
относительно истинного меридиана, равное истинному
курсу.
Линия ЛС, по которой судно перемещается относи-
тельно Земли под действием собственных движителей и
течения, называется линией пути (рис. 25). Угол,
составляемый этой линией с направлением истинного ме-
ридиана, называется путем и обозначается ПУ. Путь
отсчитывается по часовой стрелке от 0 до 360°.
Угол между линиями истинного курса и пути назы-
вается углом сноса течением и обозначается р.
77У, ИК и р связаны между собой следующими соотно-
шениями:
ПУ = +
= ЛУ-р.
Эти формулы алгебраические и при пользовании ими
необходимо учитывать знак угла р. Если судно сносится
течением вправо от линии истинного курса (течение в
левый борт), угол р считается положительным, а если
влево (течение в правый борт), то угол считается отри-
цательным.
Как видно из рис. 25, графическое счисление с учетом
сноса течением сводится к решению треугольника скоро-
стей,-Образованного векторами Vo(Vo= Ул или Уо=У0б),
vT и V. При графических построениях, связанных с реше-
нием треугольника скоростей, скорость судна и скорость
течения обязательно берутся в одинаковой мере и за
один и тот же промежуток времени t. Решение треуголь-
84
пика скоростей может быть заменено решением подобно-
го ему треугольника^ путей, образованного_векторами
или So6~~ voби 5 — 4“5ф или 5 —
=5об + Зт-
При ведении графического счисления, с учетом сноса
постоянным течением, как и при учете дрейфа, приходит-
ся решать две основные задачи: прямую и обратную.
Прямая задача. Известен компасный курс судна, его
скорость по лагу или по частоте вращения гребных вин-
тов, скорость и направление течения. Нужно проложить
Рис. 26
на карте линию пути и определить истинную (относи-
тельно Земли) скорость судна.
Решение. Из начальной точки счисления А (рис.
26) прокладывают линию истинного курса (ИК=КК +
+ ДЛ) и по этой линии откладывают скорость судна по
лагу или по частоте вращения гребных винтов. Из конца
вектора этой скорости (точка В) по направлению тече-
ния откладывают в том же масштабе скорость течения.
Соединив точку А с концом вектора vT (точка С), полу-
чают линию пути судна и измеряют транспортиром ПУ.
Отрезок АС, изображающий геометрическую сумму
вектора скорости судна относительно воды и вектора
скорости^ течения, определит истинную скорость судна.
Угол сноса течением рассчитывают по формуле
₽ = ПУ — ИК.
Непосредственно снимать этот угол с карты не реко-
мендуется, так как при измерении транспортиром малых
углов возможны значительные ошибки.
Обратная задача. На карте проложена линия, по ко-
торой должно следовать судно. В рассматриваемом слу-
85
чае это будет линия пути. Известны скорость судна по
лагу или по частоте вращения гребных винтов, скорость
и направление течения. Нужно определить компасный
курс, которым надлежит править, чтобы судно следовало
по заданной линии пути, а также истинную скорость суд-
на.
Решение (см. рис. 25). От начальной точки счис-
ления А по направлению течения откладывают его ско-
рость. Затем из конца вектора ит (точка а) радиусом,
равным скорости судна по лагу или по частоте вращения
гребных винтов, делают в том же масштабе засечку на
заданной линии пути (точка С). После этого из точки А
прокладывают прямую АВ, параллельную прямой аС.
Линия АВ представляет собой линию истинного курса.
Сняв с карты ИК и ПУ, рассчитывают:
$ = ПУ—ИК.
Отрезок АС определит истинную скорость судна.
Графическое счисление при плавании на постоянном
течении оформляют на карте следующим образом. Ли-
нию пути прокладывают более жирной линией по срав-
нению с линией истинного курса. Вдоль линии пути
(с внешней стороны угла) надписывают соответствую-
щий компасный курс, а также поправку компаса (в скоб-
ках) и угол сноса течением со своими знаками. В счис-
лимых точках на линии пути надписывают время и от-
счет лага.
Расстояние, определенное по лагу или по скорости
относительно воды и продолжительности плавания, от-
кладывают по линии истинного курса. Все расчеты вре-
мени делают по соответствующим отрезкам, измеренным
или отложенным по этой линии. Таким образом, задача
нанесения счислимой на тот или иной момент времени
точки сводится к построению треугольника путей (см.
рис. 26).
Если изменились курс судна, его скорость относи-
тельно воды или элементы течения, как прямая, так и
обратная задачи решаются заново.
Графическое счисление при плавании на приливо-от-
ливном (переменном) течении имеет некоторые особен-
86
ности*. Эти особенности обусловлены тем, что направле-
ние и скорость приливо-отливного течения меняются в
общем случае как при переходе от одной точки к другой,
так и во времени в каждой данной точке.
В навигационных пособиях по течениям данные об
элементах приливо-отливных течений приводятся для
определенных моментов времени (обычно через час) и
избранных координат. Учет приливо-отливного течения
при графическом счислении производится путем осредне-
ния элементов течения по координатам и времени. Если
решают прямую задачу, то на карте прокладывают ли-
нию истинного курса AD, соответствующую плаванию с
заданной скоростью за один час (см. рис. 26). Для на-
чальной А и конечной D точек этой линии и соответствен-
но для моментов ТА и Тп = ТА+\ ч выбирают элементы
течения и осредняют их. Осредненные скорость и направ-
ление течения учитывают как постоянные в продолжение
данного часа плавания. Для следующего часа все дейст-
вия повторяют. При решении обратной задачи из исход-
ной точки счисления прокладывают линию пути и по ней
откладывают расстояние, равное часовой скорости суд-
на относительно воды (точка Р). Затем для точек А и Р
и соответственно для моментов ТА и ТР = ТА+1 ч выби-
рают элементы течения и осредняют их. Осредненные
скорость и направление течения учитывают как постоян-
ные в продолжение данного часа плавания.
§ 20. Определение элементов течения
на переходах и на промысле
Знание элементов течения в районе промысла не-
обходимо не только для повышения точности счисления
пути судна, но и для решения задач, связанных с выбо-
ром курсов траления, позиции спуска трала или начала
замета кошелькового невода, с определением оптималь-
ной скорости траления при работе с донным тралом и
т. д.
Определение элементов течения навигационным спо-
собом. Сущность этого способа заключается в сопостав-
лении полученных на один и тот же момент времени счи-
* Предполагается, что в районе плавания суммарное течение
формируется в основном за счет приливо-отливной составляющей.
87
слимого и обсервованного мест судна. При этом могут
быть использованы и относительные обсервации, на-
пример по пеленгу и расстоянию до промыслового буя,
координаты которого неизвестны.
Навигационный способ предполагает, что несовпаде-
ние относящихся к одному и тому же моменту времени
счислимого и обсервованного мест — невязка счисле-
ния — является результатом сноса судна течением.
Рис. 27
Допустим, что течение в районе промысла неизвест-
но. Проложив на карте от исходного обсервованного ме-
ста А (рис. 27, а), полученного на момент линию ис-
тинного курса и нанеся счислимое Вс и обсервованное
Во места судна на момент Т2, можно рассчитать средние
за время t=T2—Т\ скорость и направление течения.
Обозначив величину невязки счисления ВСВО через
С, получим:
Направление течения Кт принимается равным на-
правлению невязки, которое считается от счислимого ме-
ста к обсерованному. _ ______
При наличии ветра вектор С=ВсВ0 будет характе-
ризовать суммарный снос. Для того чтобы исключить
влияние ветрового дрейфа, следует от исходного обсер-
вованного места А проложить линию пути при дрейфе
ПУа=ИК + а (рис. 27,6) и по этой линии отложить
расстояние 5Л = АВ'С, пройденное судном относительно
воды за промежуток времени Т2—Л между обсервация-
ми. Вектор С' = В'В0 определит средние за этот проме-
жуток времени скорость и направление течения.
88
Навигационный способ определения элементов тече-
ния используется в районах, где постоянная составляю-
щая суммарного течения является преобладающей. Это
наблюдается обычно в районах открытого моря. Навига-
ционный способ позволяет определять средние за проме-
жуток времени между обсервациями скорость и направ-
ление течения лишь приближенно, так как невязка счис-
ления обусловлена не только влиянием течения, но и
ошибками в принимаемых поправках компаса и лага в
определении величины угла дрейфа, а также ошибками
обсерваций.
Определение элементов течения в дрейфе. По резуль-
татам двух определений места судна, дрейфующего с за-
стопоренной машиной под действием ветра и течения,
можно рассчитать средние скорость и направление сум-
марного дрейфа* за время между наблюдениями:
Ус.др = Ут + Удр*
Скорость и направление ветрового дрейфа судна «на
стопе» (идр) могут быть определены одним из способов,
рассмотренных в § 18. Зная цс.др и идр, при помощи гео-
метрического построения, показанного на рис. 30, можно
получить средние за время между обсервациями ско-
рость и направление суммарного течения (цт).
На траловом промысле, когда судно лежит в дрей-
фе в пределах визуальной или радиолокационной види-
мости промыслового буя, скорость и направление сум-
марного дрейфа можно рассчитать по результатам опре-
делений места судна относительно буя.
Использование навигационных пособий по течениям.
По назначению навигационные пособия по течениям
можно разделить на две группы: пособия, дающие све-
дения о течениях в открытом море; пособия, дающие све-
дения о течениях в прибрежных районах.
В районах открытого моря суммарное течение форми-
руется главным образом за счет постоянного и ветрово-
го течений. Приливо-отливное течение в таких районах
обычно характеризуется небольшими скоростями. Поэто-
му практически допустимо полагать
* Как это принято в промысловой практике, здесь под термином
«суммарный дрейф» понимается перемещение судна с застопоренной
машиной под действием ветра и течения.
89
«Т = fT! + t»T2,
где t'T — скорость суммарного течения;
vTi —скорость постоянного течения;
fTa — скорость ветрового течения.
Скорость и направление постоянного течения можно
определить с помощью карт постоянных течений, охва-
тывающих район перехода или промысла, а скорость
ветрового течения с помощью таблицы (номограммы)
скоростей поверхностных ветровых течений открытого
моря. В основу такой таблицы положена формула
г. = 1,94---------U,
Т2 /---
у sin ф
где t\2 — скорость поверхностного ветрового течения, уз;
U — скорость истинного ветра, вызвавшего это течение, м/с;
Ф — широта места;
— ветровой коэффициент, среднее значение которого обыч-
но принимается равным 0,0127.
Ветровое течение в поверхностном слое имеет направ-
ление, зависящее от соотношения глубины моря Н и глу-
бины трения //о. В теории ветровых течений глубиной
трения называют такую глубину, на которой при данной
скорости ветра течение затухает:
Ниже приведены величины углов у отклонения на-
правления поверхностного ветрового течения от направ-
ления, вызвавшего это течение ветра, в зависимости от
отношения глубины моря к глубине трения. В северном
полушарии поверхностное ветровое течение отклоняется
от направления ветра вправо, а в южном полушарии
влево.
— = q < 0,1 q = 0,25 q > 0.5
Но
* 7° 0° 21°,5 45°
Скорость и направление ветра, по которым определя-
ются элементы поверхностного ветрового течения, следу-
ет выводить по данным судовых наблюдений за 4—8
предшествующих часов.
90
Учитывать ветровое течение при ведении счисления
пути судна целесообразно лишь при устойчивых по силе
(более 4 баллов) ветрах. При силе ветра менее 4 баллов
можно полагать vT = vTl.
Навигационные пособия по течениям открытого моря
позволяют получать сведения лишь о наиболее вероят-
ных значениях скорости и направления суммарного тече-
ния. Эти пособия могут быть использованы при ведении
счисления пути судна на переходах открытым морем, для
изучения навигационной обстановки в районе промыс-
ла, при выборе поисковых и промысловых курсов. Но
они не обеспечивают требуемой точности определения
элементов течения при ведении счисления на промысле,
в особенности, когда облавливаются тралом донные и
придонные косяки рыбы.
Вблизи берегов суммарные течения в общем случае
возникают в результате сочетания постоянных, приливо-
отливных и ветровых течений:
*т=ч+ч+ч-
При этом скорость приливо-отливного течения (иТв)
может достигать весьма больших величин (3—4 уз и
более). Скорость ветровых течений также может значи-
тельно превышать значения, обычные для открытого мо-
ря, в особенности в узких проливах.
Навигационные пособия по течениям прибрежных
районов представляют собой атласы, которые в общем
случае содержат карты приливо-отливных течений, кар-
ту постоянных течений, таблицу ветровых течений. В при-
* При исследовании работы орудий лова может возникнуть
необходимость рассчитать элементы ветрового течения на какой-ли-
бо глубине Н. Эта задача может быть решена при помощи следую-
щих приближенных формул:
’8 (’тЛ = '8 % - °>0045 •
Т2
Тя = 0°,6-^,
Т2
гдеуя—угол отклонения глубинного ветрового течения от его на-
правления в поверхностном слое.
Угол ун следует прибавлять к направлению течения в поверх-
ностном слое (северное полушарие) нли вычитать из этого направ-
ления (южное полушарие).
91
ложении к атласу помещают обычно таблицы полных и
малых вод в порту сравнения, коэффициентов для пере-
счета скорости сизигийных, квадратурных и промежу-
точных приливо-отливных течений и некоторые другие
таблицы.
Каждое из течений, составляющих суммарное, опре-
деляют
с
помощью атласа раздельно. Элементы сум-
марного течения получают пу-
тем геометрического сложения
составляющих течений, опре-
деленных раздельно. Такие
атласы позволяют определить
скорость суммарного течения
в прибрежных районах с ошиб-
кой около 0,2 уз, а направле-
ние — с ошибкой порядка 20°,
что удовлетворяет практиче-
ским требованиям судовожде-
ния и промысла.
Определение элементов те-
чения на ходу судна инстру-
ментальными способами. Весь-
ма перспективным является
использование на транспортных и в особенности на до-
бывающих судах точных инструментальных способов
определения элементов течения на ходу судна. К таким
способам относится определение элементов течения при
помощи абсолютного гидроакустического лага. Такой лаг,
основанный на эффекте Допплера, позволяет измерять
скорость перемещения судна относительно земли по на-
правлению диаметральной плоскости Vx и по направле-
нию, перпендикулярному к этой плоскости, Ку. Зная ИК,
величины Vx и Ку, а также скорость судна относитель-
но воды КО=КЛ, можно определить скорость п направ-
ление суммарного течения (рис. 28):
Ух-Ул;
VT = У ДИ2 + Vy-,
. Vy
tg qT =--— ;
4 AV
Кт = ИК + дт.
92
§ 21. Совместный учет дрейфа и сноса течением
Особенность совместного учета дрейфа и сноса
течением заключается в том, что вектор скорости судна
относительно воды прокладывают по направлению пути
при дрейфе.
При решении прямой задачи вначале учитывают
дрейф. По формуле /7Уа=ЙТ(+а определяют путь при
дрейфе и прокладывают на карте линию этого пути. За-
тем учитывают снос течением. По линии пути при дрей-
фе от начальной точки счисления А откладывают ско-
рость судна относительно воды (рис. 29). Из конца век-
тора Vo (точка D) по направлению течения откладывают
в том же масштабе скорость течения. Соединив точ-
ку А с концом вектора ит (точка В), получают линию
Рис. 29
пути, снимают с карты ПУ и рассчитывают суммарный
угол сноса с, представляющий собой алгебраическую
сумму углов аир
с = ПУ — ИК.
Отрезок АВ, изображающий сумму векторов скоро-
сти судна относительно воды и скорости течения, опре-
делит истинную скорость судна.
При решении обратной задачи вначале учитывают
снос течением, а затем дрейф. Из начальной точки счи-
сления А по направлению течения_откладывают скорость
течения. Затем из конца вектора ит (точка а) радиусом,
равным скорости судна относительно воды, в том же
масштабе делают засечку па линии пути (точка В). Пос-
ле этого из точки А прокладывают прямую AD, парал-
лельную прямой аВ. Линия AD представляет собой ли-
нию пути при дрейфе. Сняв с карты ПУ&, рассчитывают:
93
ИК = ПУа~а;
КК = ИК- АК;
С = ПУ — ИК.
Задача нанесения счислимой на тот или иной момент
времени точки, как и при учете только сноса течением,
сводится к построению треугольника путей.
Рассмотрим теперь учет перемещения
ЪЛР под действием ветра и течения судна с
-------*7 застопоренной машиной.
/ Скорость и направление суммарного
/ у дрейфа (перемещения относительно Зем-
vTl \ I ли) определится величиной и направле-
/ / нием равнодействующей скоростей вет-
/ V / рового дрейфа и течения:
“ ^с.др = ^др + гг-
Рис. 30 Для того чтобы найти элементы сум-
марного дрейфа, необходимо определить
скорости и направление ветрового дрейфа и течения, за-
тем выполнить графическое построение, показанное на
рис. 30.
§ 22. Определение пути судна по пеленгам
неподвижного ориентира и времени
В распоряжении судоводителя обычно имеются
навигационные пособия по течениям, однако эти пособия
в большинстве случаев не дают возможности определить
элементы суммарного течения с достаточной для про-
мыслового судовождения точностью, в особенности в
районах открытого моря. В условиях тралового промыс-
ла ограничена также возможность определения элемен-
тов течения навигационным способом. Поэтому для су-
доводителей тралового флота большое практическое зна-
чение приобретает способ, позволяющий определить
путь и суммарный угол сноса судна, буксирующего трал,
по пеленгам какого-либо неподвижного ориентира, ко-
ординаты которого могут быть и неизвестны. Этот спо-
соб был предложен М. Н. Андреевым и в дальнейшем
разрабатывался П. П. Глазковым и М. М. Лесковым.
При ведении тралового промысла как в прибрежных
районах, так и в открытом море судоводитель в боль-
94
шинстве случаев располагает ориентиром, который мож-
но использовать для определения пути и суммарного уг-
ла сноса (промысловый буй, плавучий маяк, выставлен-
ный в районе работы группы судов, приметный предмет
на берегу и т. п.).
Предположим, что судно следует постоянным курсом
и с постоянной скоростью при неизменном суммарном
сносе. В произвольные, но фиксированные моменты вре-
мени Т\, Т2, Т3 взяты три пеленга промыслового буя Ль
Л2, Из- Обозначим Т2—7\ через а 7з—Т2 через t2. Так
как движение судна было равномерным и прямолиней-
ным, то направление линии пути должно удовлетворять
требованию, при котором отрезки пройденного расстоя-
ния, пропорциональные /1 и /2, могут быть вмещены меж-
ду соответствующими линиями пеленгов. Или, говоря
иными словами, любая прямая, пересекающая все три
пеленга так, что ее отрезки между линиями пеленгов
относятся как t\ : t2i будет параллельна линии пути.
Путь и суммарный угол сноса можно определить гра-
фическим и аналитическим приемами.
Рассмотрим решение этой задачи в общем случае,
когда промежутки времени между моментами пеленго-
вания различны (/1=й=/2) и углы между пеленгами не
равны.
Графическое решение. В свободном углу карты или
промыслово-навигационного планшета из произвольно
взятой точки В прокладывают линии обратных истин-
ных пеленгов ОИП^ ОИП2, ОИП$ неподвижного ориен-
тира (рис. 31).
95
Затем по линии первого пеленга откладывают отрез-
ки BQ и ВМ, пропорциональные соответствующим про-
межуткам времени между наблюдениями пеленгов
BQ = kt2;
Из точки Q проводят линию, параллельную третье-
му пеленгу, до пересечения ее со вторым пеленгом в точ-
ке L. Прямая, проходящая через точки Ми L, будет па-
ML
раллельна линии пути судна, так как-=—.
NL t2
Определив ПУ, можно рассчитать угол суммарного
сноса:
с = ПУ — ИК.
На точность определения угла суммарного сноса
этим способом ошибка в принимаемой поправке компа-
са не окажет влияния, так как полученные ПУ и ИК
Калька
Полоска бумаги
Рис. 32
судна будут содержать одинаковую ошибку в поправке
компаса, а следовательно, их разность будет свободна
от этой ошибки.
Путь можно также определить методом вмещения
(рис. 32). На кальке прокладывают прямую линию. На
этой линии от произвольной точки L откладывают в вы-
бранном масштабе отрезки, пропорциональные t\ и /2
(точки Ми N). Наложив затем кальку на карту или
промыслово-навигационный планшет, устанавливают ее
таким образом, чтобы точки М, L и N располагались на
96
линиях первого, второго и третьего пеленгов соответ-
ственно. При этом условии прямая MN будет параллель-
на линии пути судна. Вместо кальки можно использовать
полоску бумаги.
Определение пути и суммарного угла сноса несколь-
ко упрощается, если промежутки времени между пелен-
гованием неподвижного ориентира будут равны
В этом случае достаточно из произвольной точки О
(рис. 33) на линии второго пеленга провести прямые, па-
раллельные линиям первого и третьего пеленгов, до их
пересечения с линиями этих пеленгов (точки М и N),
Прямая, проведенная через точки М и N, будет парал-
лельна линии пути судна, так как ML—NL.
Для повышения точности наблюдений моменты пе-
ленгования необходимо замечать по секундомеру, а гра-
фическое построение производить в крупном масштабе.
При медленном изменении пеленгов можно использо-
вать часы.
Выше мы полагали,.что судно следует по линии пути
с постоянной скоростью. Это условие на траловом про-
мысле, как правило, соблюдается.
Аналитическое решение. Как видно из рис. 34, путь
судна может быть определен по одному из следующих со-
отношений:
/7У = /72 + ?а1
ПУ = /73 + q3t
7 В. Е. Ольховский 97
где fllt П2, П3 — истинные пеленги ориентира В;
*71» Я2» Я» — углы между линиями соответствующих пеленгов
и линией пути судна (если ориентир располага-
ется с левого борта, углу q приписывается
знак «плюс», а если с правого — знак «минус»).
Выберем для определения ПУ соотношение ПУ=
=Пъ-^2. Использование этого соотношения, как пока-
зал М. М. Лесков, приводит к более простому решению.
Обозначим через 01 угол между первым и вторым
пеленгами, а через 02 — угол между вторым и третьим
пеленгами. Из треугольника MBL можно написать:
BL hV
sin qY sin 0j
BL=t1V^nq1
sin Oj
Из треугольника BLN имеем:
BL ttV
sin<?b sin02
Z2Vsin<?3
DL = -------.
si n 02
Приравнивая значения BL, получим
/i singi /2 sin g3
sin 0! sin02
Подставляя вместо q\ —0i и вместо q$ 72+62, пос-
ле соответствующих преобразований будем иметь:
. ctg — z2 ctg 02
----------—---------.
(IV—12)
Обозначив у- =т, окончательно получим:
. т ctg 0, — ctg 02
с,8” = Гн '
В случае, когда пеленги ориентира берутся через рав-
ные промежутки времени, упрощается и аналитическое
решение. При t\=tz формула (IV—12) принимает вид:
е^И-1318-1;-18^ . (IV—13)
98
По этой формуле рассчитана таблица и составлена
номограмма (рис. 35), позволяющие быстро определять
величину угла q2 по аргументам 01 и 02.
Для случая, когда пеленги ориентира берутся через
равное количество градусов изменения пеленга 0i=02=
=0, формулу (IV—12) можно написать в следующем
виде:
т — 1
Ctg q2 = Ctg 0 —— .
т -j- i
Однако взятие пеленгов через равное число градусов
представляет определенные трудности в особенности при
работе с тралом, когда наблюдения должны быть мак-
симально упрощены. Значительно удобнее брать пелен-
ги через равные промежутки времени.
Очевидно, что ошибка в принимаемой поправке ком-
паса ек не влияет на точность вычисления угла q2 и угла
суммарного сноса с. Но так как /7У=Я/724-?2, а ИП
ориентира содержит ошибку в принимаемой поправке
компаса, то и полученный ПУ будет иметь ту же ошибку.
7* 99
На точность определения угла q2 и, следовательно,
пути судна будут оказывать влияние и случайные ошиб-
ки пеленгования.
Заменим средние квадратические ошибки тв и mQa
соответствующих разностей пеленгов через средние
квадратические ошибки самих пеленгов тп, тПг, тп*.
«е, =
me2 = V тп2 + тп,.
Полагая, что ошибки пеленгования равны, будем
иметь
те1 = тег=1>41тп-
Тогда, дифференцируя формулу (IV—13) по пере-
менным q2, 01 и 02 и переходя к средним квадратическим
ошибкам, окончательно получим
2,82т°п ______________
тчг= 57,3 [4 (ctg 0j — ctg е2)2] l^cosec4 ei + cosec4 еа О V—14)
Расчеты по этой формуле показывают, что при до-
статочно больших углах 01 и 02 mq, не превышает ±1°.
Практические наблюдения подтверждают этот вывод.
На номограмме для расчета угла q2 при t\ = t2 (см.
рис. 35) нанесены кривые равной точности определения
этого угла, при помощи которых можно легко оценить
величину ошибки тя,.
При построении кривых и=тЯг= const средняя
квадратическая ошибка пеленгования тп принималась
равной ±0,°2. Однако, как видно из формулы (IV—14),
с помощью этих кривых можно определить тЯг и при
других значениях тп, так как тп входит в формулу
(IV—14) множителем.
§ 23. Определение истинной скорости судна
по трем расстояниям, измеренным
до неподвижного ориентира
Для определения истинной (относительно Земли)
скорости судна может быть использован неподвижный
ориентир, находящийся в пределах визуальной или ра-
100
диолокационной дальности обнаружения. Координаты
этого ориентира могут быть неизвестны.
Если расстояния до ориентира измеряются при по-
мощи радиолокатора, то этот способ обеспечивает до-
статочно высокую точность определения истинной ско-
рости судна (1—2%). Такая точность необходима при
проведении испытаний
донных тралов и при
решении некоторых
других задач промыс-
лового судовождения.
В качестве неподвиж-
ного ориентира может
быть использован про-
мысловый буй с пассив-
ным радиолокацион-
ным отражателем или
какой-либо другой то-
чечный объект, хорошо
различаемый на экране
радиолокатора. Для определе-
ния истинной скорости судна по трем расстояниям, из-
меренным до неподвижного ориентира, можно восполь-
зоваться аналитическим, графоаналитическим или гра-
фическим способами.
Аналитический способ. Предположим, что судно
следовало с постоянной скоростью по линии пути
М2, М3. Пусть в моменты Ти Т2, Т3, когда судно находи-
лось соответственно в точках М2 и А43, были измере-
ны при помощи радиолокатора расстояния £>ь D2 и D3
до неподвижного ориентира В.
На рис. 36 М,М2 = V (T2—T\)=Vtx и М2М3 = V (Т3—
—T2)=Vt2, где V — истинная скорость судна.
Опустим из точки В на линию MiM3 перпендикуляр
ВН. Тогда из треугольников ВМ3М2 и ВТИ2ТИ1 можно
написать
ВМ} = BMl + Ml — 2М2 М3
ВМ2 = ВМ2 + Мх М2 + 2МХ М2 М2 Я.
Умножив первое равенство на М]ЛГ2, а второе на
М2М3 и сложив их почленно, получим равенство
вм2 М М + вм1 М. М — ВМ22 М, = м. мя м. м.
101
Применительно к принятым нами обозначениям это
равенство может быть написано в таком виде:
Vtt + Dj V\ -D2V(t1 + t^ = V3 t, t2 (tt + /2),
откуда
к=-|/Ж±°ПЕ^К±я. (1V_15)
Эта формула впервые получена М. Н. Андреевым на
основе разработанной им теории сопутствующих линий
положения.
Если промежутки времени между моментами изме-
рения расстояний выражены в минутах, а расстояния в
кабельтовых, то истинная скорость судна в узлах состав-
ляет:
/Dl t9 +dIl — Di (l + L)
Дифференцируя формулу (IV—16) по переменным
Dlt D2 и D3, считая промежутки времени tY и t2 без-
ошибочными, получим формулу для определения сред-
ней квадратической ошибки вычисленной истинной ско-
.рости судна
где —средняя квадратическая ошибка измерения расстояний,
выраженная в кабельтовых (полагаем mD = mD =
=mDt = mD}.
Если расстояния Dif D2 и D3 измерены через равные
промежутки времени ti^=t2 = t, то формула (IV—16)
принимает более простой вид:
V = У 0,5 + 0,5m3 —п3, (IV—17)
где т~——
^1
По формуле (IV—17) легко составить таблицу или
номограмму.
102
Графоаналитический способ. Проведем из точки М2
(см. рис. 36) прямую М2п, параллельную прямой ВМ3.
Из подобия треугольников МХВМ3 и пользуясь
принятыми нами обозначениями, можно написать:
Mtn = У(Та-1\) = Т2-Г1
£>э У(Та-7\) Ta-Tt q'
Мап = qDa.
Из свойств параллельных, пересекающих пучок пря-
мых, следует
Вп _ У(Та — Та) _ Та — Та _
D^ViTt-TJ Ta—Ti Р’’
Bn = pD±.
Рассчитав p и q и найдя величины отрезков Вп и
М2п, в свободном углу промыслово-навигационного план-
шета или карты выполняют следующее графическое по-
строение.
От произвольной точки В откладывают в выбранном
масштабе измеренное расстояние От этой же точки
по тому же направлению откладывают отрезок Вп. За-
тем из точки В проводят дугу окружности радиусом,
равным D2, а из точки п — дугу окружности радиусом,
равным М2п. Соединив точку пересечения дуг окружно-
стей М2 с точкой Mi, получают расстояние Sb пройден-
ное судном относительно земли за промежуток времени
/1 = ?2—7\. Проведя из точки В дугу окружности ради-
усом, равным £>з, до пересечения с продолжением пря-
мой MiM2 (точка М3), получают отрезок М2М3, равный
расстоянию S2, пройденному судном относительно
земли за промежуток времени t2=Т3—Т2. Зная Si, S2 и
Л, t2, рассчитывают истинную скорость судна.
Если расстояния измеряются через равные проме-
жутки времени, решение задачи упрощается. В этом
случае:
1 1 1'
P = ? = V firt = vD1’ M»n==~^D3-
Графический способ. В свободном углу промысло-
во-навигационного планшета или карты из произволь-
ной точки В проводят дуги окружностей радиусами,
равными D2 и D3 (рис. 37). Затем на листе кальки
проводят прямую и от произвольной точки L на этой
103
прямой откладывают в выбранном масштабе отрезки
LM и LN, пропорциональные Л = 7,2—Т\ и t2 = T^—Т2.
После этого через произвольную точку О и полученные
точки М, L и N проводят три прямые, а также серию
прямых, параллельных прямой MN. Наложив кальку
Рис. 37
на планшет и перемещая ее, добиваются совмещения
трех точек, лежащих на прямой, параллельной Л1М, и на
лучах ОМ, OL, ON, с соответствующими дугами окруж-
ностей. Снимают с планшета
Рис. 38
расстояние, пройденное судном
относительно земли, и рассчи-
тывают V.
Если расстояния измеря-
ются через равные промежут-
ки времени (t]=t2), то опре-
делить V можно при помощи
следующего простого графиче-
ского построения.
Из произвольной точки В
(рис. 38) в свободном углу
планшета или карты проводят
в произвольном направлении
прямой откладывают отрезок
точек В и О делают засечки
прямую и на этой
BO—2D2. Затем из
дугами окружностей, радиусы которых равны
r2=D3. Получают точки Мх и М3. MiAl3=S. Снимают
с планшета расстояние S, пройденное судном относи-
тельно Земли за промежуток времени 2/=Г3—Т\, и рас-
считывают V.
104
Графоаналитический и графический способы реше-
ния рассматриваемой задачи разработаны М. М. Лес-
ковым.
§ 24. Определение пути и истинной скорости
судна по пеленгам неподвижного ориентира
и расстояниям до него
Предположим, что судно следует постоянным кур-
сом и с постоянной скоростью. Когда оно находилось в
точке Afb был взят пеленг /71 неподвижного ориентира
В и измерено расстояние
Di до него (рис. 39). Че-
рез некоторый промежу-
ток времени t снова был
взят пеленг П2 ориентира
и измерено расстояние О2
до него.
Полагаем, что в тече-
ние промежутка времени
между наблюдениями
суммарный снос оставал-
ся неизменным.
Путь судна может
быть рассчитан по формуле
ny=n1 + q.
Обозначив разность пеленгов через 0, воспользуемся
для определения угла q теоремой синусов:
sin <7 sin (q +0)
D2
откуда
. D2 si n 0
tg q =-------------- .
Dr — D2 cos 0
(IV—18)
Расстояние S, пройденное судном относительно зем-
ли, за промежуток времени t, можно вычислить по фор-
муле
D2l+D^ — 2D1 D2 cos 0;
105
При «ручной» обработке информации задача реша-
ется графическим построением на карте или промысло-
во-навигационном планшете.
Применяя рассматриваемый способ при переменных
элементах движения судна и суммарного сноса, полу-
чим средние за время наблюдений путь судна и его ис-
тинную скорость.
Если, определяя путь судна по трем пеленгам непод-
вижного ориентира и времени (см. § 22), в момент взя-
тия одного из пеленгов измерить расстояние до ориенти-
ра, то можно найти не только путь судна, но и его истин-
ную скорость. Предположим, что пеленгование непод-
вижного ориентира осуществлялось через равные про-
межутки времени (ti=l2 = t) и в момент взятия треть-
его пеленга /73 было измерено расстояние D до ориен-
тира.
На основании рис. 34, используя теорему синусов,
можно написать
$2
sinO2 гл sin
откуда
S^ = D sin 02 cosec
Графическое решение этой задачи сводится к сле-
дующему. Выполнив графическое построение, показан-
ное на рис. 33, получают прямую MN, параллельную
линии пути. Переносят ее с помощью параллельной ли-
нейки в точку Р, расположенную на линии ОИП$ и от-
стоящую от ориентира на расстоянии D. Отрезок FP бу-
дет равен расстоянию S, пройденному судном относи-
тельно земли за промежуток времени 2/.
Определение пути и истинной скорости судна по трем
пеленгам неподвижного ориентира и расстоянию до
него может оказаться целесообразным в тех случаях,
когда расстояние до ориентира измеряется не с помо-
щью РЛС, а рассчитывается по угловой высоте ориен-
тира, измеренной секстаном.
* Для расчета S2 можно использовать номограмму «Расстояние
до судна, работающего на «пеленг» (см. § 43).
106
§ 25. Аналитическое счисление.
Основные формулы
Аналитическим счислением называется вычисле-
ние географических координат текущего места судна <рт,
Хт по курсу н пройденному расстоянию (плаванию) при
известных начальных координатах фы, Хи:
Фт = Фн + РШ\
= "Ь РД •
Входящие в эти формулы РШ — разность широт — и
РД — разность долгот — представляют собой прира-
щения начальных координат. РШ и РД являются функ-
циями элементов движения судна и в свою очередь вы-
числяются по формулам аналитического счисления.
Формулы аналитического счисления позволяют ре-
шать и обратную задачу: определять курс и плавание
судна по известным координатам начальной и конечной
точек перехода. Для вывода этих формул обратимся
к рис. 40.
Предположим, что судно находилось в точке А с ко-
ординатами фь Zi и, пройдя постоянным истинным
курсом К расстояние S, пришло в точку В с координа-
тами ф2, А,2-
Принимая Землю за сферу, разделим отрезок локсо-
дромии АВ на т равных и элементарно малых частей
AS и через каждую точку деления проведем меридианы
и параллели.
В результате получим т равных криволинейных пря-
моугольных треугольников, которые по малости сторон
можно принять за плоские. В каждом таком элементар-
ном треугольнике катет, расположенный по меридиану,
равен Дф; катет, расположенный по параллели, равен
Aw и гипотенуза равна AS.
Заменив элементарно малые величины Д<р, Aw и
AS бесконечно малыми с/ф, dw и dS, можно написать
дифференциальные уравнения
t/Ф = dS cos К;
dco = dS sin К.
В результате интегрирования, учитывая, что К =
=const, получим:
<ра S
J dф = cos К JdS,
<Р1 о
откуда
Ф2 — Фх = S cos К
или
PZZZ = ScosK. (IV—19)
Полученная формула читается так: разность широт
равна плаванию, умноженному на косинус курса.
© s
J da = sin К | dS,
откуда
со = S sin К
или
ОТШ = S sin К. (IV—20)
Величина w является суммарным перемещением суд-
на по параллели, выраженным в морских милях, и на-
зывается отшествием (ОТШ). Поэтому формула
(IV—20) читается так: отшествие равно плаванию, ум-
ноженному на синус курса.
Знак РШ в формуле (IV—19) определяется знаком
cos/С Если РШ имеет знак «плюс», ей приписывается
наименование к N, а если знак «минус» — то к S.
108
Знак ОТШ в формуле (IV—20) определяется знаком
sin Л. Если ОТШ имеет знак «плюс», ему приписывается
наименование к 0s*, а если знак «минус» — то к W.
Чтобы вывести формулу для вычисления разности
долгот, воспользуемся известным соотношением между
длиной дуги экватора и длиной дуги параллели:
dX = dcosectpi
Умножим и разделим выражение, стоящее в правой
части этого равенства, на dy, Тогда, принимая во вни-
мание, что
dco
— = tgK,
dtp
будем иметь:
dZ = tg К sec tp dtp.
Решая это дифференциальное уравнение, получаем
ф«
Х2 —Xi = tg Л J sec tp dtp.
Ф1
ф«
Интеграл j sec фа ф представляет собой, как извест-
Ф1
но, разность меридиональных частей на сфере (РМЧ),
соответствующих широтам фг и фь
Следовательно,
P£ = PAfVtgK, (IV—21)
т. е. разность долгот равна разности меридиональных
частей, умноженной на тангенс курса.
Эту формулу не следует применять при курсах, близ-
ких к 90°, так как тангенс таких углов меняется очень
быстро и небольшая ошибка в курсе судна может дать
значительную ошибку в искомой разности долгот.
Чтобы вывести другую формулу для вычисления
разности долгот воспользуемся теоремой о среднем зна-
чении определенного интеграла.
На основании этой теоремы можно написать:
<р2
РД = tg К j sec tp dtp = tg К (tp2 — Фх) sec tpn
Ф1
или
РД = РШ tg К sec tpn, (IV—22)
109
(IV—24)
ОТШ-морские мили В
РД-ЭК&. мин ~7
д
РШ-морские мили
К 1
А
Рис. 41
где фп—промежуточная широта (epi =Сфп=Сф2)» определяемая
выражением (IV—24).
~ + „ отш
Так как tgn = , получим
отш
РД = рш РШ sec фп
и окончательно
РД = ОТШ sec фп. (I V—23)
На основании формул (IV—21) и (IV—22) можно
написать
РМЧ
sec,₽n= “ЙГ*
следовательно,
РШ
фп==агссо5"^й7 *
В этих формулах РШ и РМЧ должны быть выраже-
ны в морских милях.
Из формулы (IV—23) следует, что отшествие чис-
ленно равно выраженной в морских милях длине дуги
параллели с широтой фп, заключенной
между меридианами начальной и ко-
нечной точке счисления.
Обратимся теперь к плоскости мер-
каторской проекции и рассмотрим пря-
моугольный треугольник Л СВ, образо-
ванный меридианом начальной точки
счисления Л, параллелью конечной
точки счисления В и отрезком локсо-
дромии АВ (рис. 41). Из этого тре-
угольника следует, что отшествие мож-
но определить и как выраженное в
морских милях расстояние между ме-
ридианами начальной и конечной точ-
ками счисления на меркаторской
карте.
Выразив все стороны треугольника ЛВС в морских
милях, легко получить формулы (IV—19) и (IV—20), а
выразив его катеты в экваториальных минутах — фор-
мулу (IV—21).
На практике при ведении счисления пути судна
аналитическим способом можно пользоваться для вы-
110
числения разности долгот приближенной формулой
рд = ОТШ sec <рср.
(IV—25)
1 , РШ
где фор=— (<р1 + ф2)=ф1+-^- — средняя широта.
Такая формула получается при замене в интервале
между Ф1 и ф2 кривой У=зесф отрезком прямой линии.
Ошибка определения РД по этой формуле будет воз-
растать по мере увеличения разности широт фг—Ф1 и
средней широты фСр (кривизна кривой У=эесф с уве-
личением ф возрастает). Однако если пройденные по
счислению без изменения курса расстояния не превы-
шают 100 миль, то ошибкой разности долгот, вычисляе-
мой по формуле (IV—25), можно пренебрегать даже
при плавании в высоких широтах.
По формулам (IV—19) и (IV—20) составлена табл.
24 МТ—75 «Разность широт и отшествие», а по формуле
(IV—25) — табл. 25а МТ—75 «Разность долгот». Для
того чтобы получить точное значение РД (без учета
сжатия Земли), следует входить в эту таблицу с аргу-
РШ
ментом фп=агссоэ------. РМЧ определяют с помощью
РМЧ
табл. 26 и 27 МТ—75.
Формулы аналитического счисления используют не
только при ведении счисления аналитическим способом,
но и при решении ряда других задач навигации, в част-
ности задач, связанных с вычислением элементов линий
положения. Эти формулы являются также математиче-
ской основой автоматизации счисления, и в этом заклю-
чается их основное значение для современного судо-
вождения.
§ 26. Виды аналитического счисления
При ведении счисления пути судна к аналитиче-
скому способу прибегают при плавании в открытом мо-
ре и океане в условиях, когда используются карты мел-
кого масштаба, а навигационная обстановка не требует
непрерывно следить за перемещением судна и позволя-
ет ограничиться прокладкой счислимых (текущих) мест
на заданные моменты времени.
В зависимости от условий плавания аналитическое
счисление может быть простым, составным и
111
сложным. Простое счисление ведется при переходе
судна из одной точки в другую одним курсом.
Предположим, что судно совершило переход из точ-
ки A (<pi, Xi) в точку В, пройдя истинным курсом К рас-
стояние S. Необходимо вычислить координаты конечной
точки перехода В(ф2, ta).
Находят:
PZZ/=ScosK; 1 (п0 табл 24 МТ—75).
ОТШ = SsinK.)
Рассчитывают:
Ф2 = Ф1 + ВШ;
1
Фер = —(Ф1 + Ф2)-
Находят:
РД = ОТШ sec фср ) (по табл. 25-а МТ—75)
Рассчитывают:
^2 = ^ + РД.
Задача определения локсодромического курса и рас-
стояния между двумя точками А и В, координаты кото-
рых известны, может быть решена по формулам:
РД
tg К = ——:
е РМЧ ’
3 = РШ sec К
или
5 = ОТШ cosec К.
Составное счисление ведется при переходе судна из
одной точки в другую несколькими курсами , когда не-
обходимо вычислить только координаты конечной точки
перехода, а координаты поворотных точек знать не
нужно.
В составном счислении вычисляются разности ши-
рот и отшествия при следовании каждым отдельным
курсом и соответственно алгебраически суммируются.
Алгебраическая сумма разностей широт, сделанных
различными курсами, называется генеральной раз-
ностью широт (Ген. РШ), а алгебраическая сумма
отшествий — генеральным отшествием (Ген.
ОТШ).
112
Расчет координат ф2 и Х2
выполняется по формулам:
конечной точки перехода
Ген.РШ = ^РШг,
1
Ген.ОТШ = ^\ОТШг,
1
ф2 = + Ген. РШ;
Фер = (Ф1 4" Фг);
рд = Ген.ОТШ sec <рср.
Курс, рассчитанный по генеральной разности широт
и генеральному отшествию, ведущий непосредственно
из начальной точки перехода в
конечную, называется гене-
ральным курсом, а рас-
стояние по генеральному курсу
между этими точками — гене-
ральным плаванием
(рис. 42).
Если счисление ведется с
учетом дрейфа, то во все фор-
мулы аналитического счисле-
ния нужно вводить не истин-
ный курс, а путь при дрейфе
ПУа =ИК-[-а. Снос течением
можно также учитывать, вво-
дя в формулы аналитического
счисления путь судна и прой-
денное им относительно земли
расстояние. Однако проще рас-
сматривать снос течением как
условный дополнительный
курс, которым следовало судно, принимая за дополни-
тельный истинный курс направление течения, а скорость
течения, умноженную на промежуток времени /, в про-
должение которого течение действовало на судно, за
плавание этим дополнительным курсом (К=/Ст и S =
= ут/). Таким образом, аналитическое счисление с уче-
том сноса судна течением будет всегда составным.
8 В Е. Ольховский
113
Составное счисление рекомендуется выполнять по
приведенной ниже схеме.
№ курсов ик S РШ ОТШ
kN | к S к Ost | к W
| 1
Ген, РШ. . . Ген ОТШ. . .
Составное счисление предполагает, что все отдель-
ные отшествия сделаны в одной и той же широте фСр, и
поэтому генеральная разность долгот может быть рас-
считана по генеральному отшествию и средней широте.
При длительном плавании по счислению в высоких
широтах принятое допущение может привести к замет-
ной ошибке в генеральной разности долгот. Для того
чтобы избежать этой ошибки, можно использовать
сложное счисление, которое отличается от составного
тем, что для каждого отдельного курса рассчитывают не
только разность широт и отшествие, но и разность дол-
гот. Генеральную разность долгот определяют по фор-
муле
Ген.РД = '^РД!.
1
Вычисление разности долгот для каждого отдельного
курса требует предварительного расчета широт точек
поворотов, так как для каждого курса в отдельности
определяется средняя широта. Все это значительно ус-
ложняет решение задачи, поэтому на практике к слож-
ному счислению не прибегают и заменяют его простым:
рассчитывают как широту, так и долготу каждой точки
поворота.
§ 27. Оценка точности счисления пути судна
Элементы счисления (истинные курс и скорость
судна, углы дрейфа и сноса), каким бы способом они
ни определялись, всегда известны с некоторыми ошиб-
ками. Эти ошибки, постепенно накапливаясь, приводят
114
к тому, что место судна, полученное по счислению, не
совпадает с действительным*.
Если ошибки обсерваций малы по сравнению с ошиб-
кой счисления за промежуток времени между обсерва-
циями, то можно считать, что ошибка счисления равна
невязке счисления. На этом основании будем обозна-
чать ошибку счисления через С.
Ошибка счисления является случайной функцией
времени (случайным процессом). Поэтому строгие ме-
тоды оценки точности счисления должны основываться
на выводах теории случайных функций.
Применяются два принципиально различных способа
оценки точности счисления—статистический и апри-
орный.
Статистический способ. Исследования показывают,
что стохастическая (содержащая элемент случайности)
связь между ошибкой счисления С и продолжительно-
стью плавания по счислению t с достаточной для реше-
ния практических задач точностью может быть выраже-
на функциональным (неслучайным) соотношением
вида
C = Kctm, (IV—26)
где т — показатель степени, характеризующий скорость нараста-
ния ошибки счисления с увеличением продолжительно-
сти плавания;
Кс — коэффициент точности счисления.
Если ошибка счисления выражается в милях, а про-
должительность плавания в часах, то коэффициент точ-
мили
ности счисления имеет размерность ----.
част
Показатель т и коэффициент точности счисления
Кс могут быть определены путем статистической обра-
ботки фактически наблюденных невязок счисления в за-
данном районе при различной продолжительности плав-
ления по счислению.
С карты снимают величины невязок счисления и
рассчитывают продолжительность плавания по счисле-
нию ti для каждой невязки. Затем составляют уравне-
ния вида:
* Ошибками графических построений на карте и методическими
ошибками формул аналитического счисления (замена Земного эл-
липсоида сферой и промежуточной широты средней) можно пре-
небречь.
«* 115
c2 = *c 4';
(IV—27)
С« = кс С-
Зависимость показательного типа C = KGtm легко
превращается в линейную путем логарифмирования.
Поэтому уравнения (IV—27) можно переписать так:
lg Ci = lg Kc + mlgG;
lgCa = lgKc + wlg/2;
lgCn = lgKc + mlg^'
Решая эту систему уравнений способом наименьших
квадратов, можно найти вероятнейшие значения т и
Кс. На практике при оценке точности счисления стати-
стическим способом часто показатель степени т не
вычисляют и пользуются известным значением этого
показателя, полученным по результатам ранее прове-
денных наблюдений. В этом случае вычисляют только
вероятнейшее значение коэффициента точности счисле-
ния Кс- На основании уравнений (IV—27) можно напи-
сать нормальное уравнение
откуда
ГС/ОТ]
*с=^. <IV-28>
где
[с/”]=с1^+са/2’+...+св^;
[z2m] =tlm + tlm+...+t2nm.
Точность счисления принято оценивать радиальной
средней квадратической ошибкой Afc(/):
Мс(0 = 1.13С,
где С — математическое ожидание ошибки счисления, которое, как
показывают исследования, подчиняется закону кругового
рассеивания.
116
Коэффициент 1,13 удобно вводить в формулу
(IV—28) и записывать ее в таком виде:
Ко=1,13-^^-. (IV—29)
При этом условии радиальную среднюю квадрати-
ческую ошибку счисления можно рассчитывать по фор-
муле
Mc(t) = Kctm. (IV-30)
Для многих районов Мирового океана и типов судов
показатель степени т оказался равным 0,5. При таком
т формула (IV—30) имеет вид:
Л1с(О=Кс/Г. (IV—31)
Исследования показывают, что если продолжи-
тельность плавания по счислению сравнительно неве-
лика, то ошибка счисления нарастает с увеличением
времени по линейному закону. Обозначим максималь-
ную продолжительность плавания, при которой прак-
тически допустимо полагать т = 1, через /л.н.
При т=1 формула (IV—29) будет иметь вид:
Кс/Л.н=1,13.^-. (IV-32)
Эта формула может служить для вычисления коэф-
фициента точности счисления Лс/л.н по невязкам счисле-
ния, полученным при продолжительности плавания
t I л.н.
Зная Кс/л.н , радиальную среднюю квадратическую
ошибку счисления можно рассчитать по формуле
Afc (0 = Кс/Л.н tf
t ^Л.Н’
Радиальную среднюю квадратическую ошибку счис-
ления при продолжительности плавания можно
вычислить и с помощью коэффициента точности счис-
ления, рассчитанного по формуле (IV—28). Отрезок
кривой C=f(t) на участке 0—/л.н с достаточной точно-
стью может быть заменен отрезком прямой — хордой.
На основании рис. 43, учитывая, что Са=Кс н, можно
написать:
117
Кс/л.н = tg а
кс G.h Кс
'л'н *'л~нт
Следовательно,
л*о(О = -р—КсЛ (1V-33)
УI—т
4л.н
Так, например, при /л.п^2ч и /п = 0,5 будем иметь:
Мс (/) =0,71Кс/.
Обычно принимают /л.тГ^24-3 ч. Однако рядом ав-
торов подтверждается нарастание ошибки счисления с
увеличением времени плавания по линейному закону
при продолжительности плавания до 5—6 ч.
Вычисленные на различных судах коэффициенты
точности счисления группируют по районам и условиям
плавания. По этим данным составляют таблицы коэф-
фициентов точности счисления. Такие таблицы целесо-
образно составлять и для основных промысловых райо-
нов, например, применительно к добывающим судам
типа БМРТ и ППР, БАТ и др. занятым траловым про-
мыслом.
Априорный способ. Этот способ основан на раздель-
ном учете ожидаемых (априорных) ошибок в элемен-
тах счисления.
При этом предполагается, что ошибки отдельных
элементов счисления независимы и постоянны на рас-
сматриваемом участке пути.
118
Допустим, что ошибки определения элементов счис-
ления малы. Тогда эти ошибки можно разделить на две
группы: ошибки, вызывающие смещение судна в направ-
лении, перпендикулярном линии пути; ошибки, вызы-
вающие смещение судна по направлению линии
пути.
При отсутствии в районе плавания течения к первой
группе следует отнести ошибку пути при дрейфе тпу :
а
тПУа=У тк + т1’
где тк~ ошибка курса (тк=У к + тдк , где ш0. к — ошибка
отсчета курса, /ид^ —ошибка принимаемой поправки
компаса);
та —ошибка принятого к учету угла дрейфа (здесь и далее
все ошибки средние квадратические).
Рис. 44
Если судно прошло по линии пути при дрейфе рас-
стояние S (рис. 44), то его смещение по направлению,
перпендикулярному этой линии, будет
6 = 5т^Уаагс1°. (IV-34)
Ошибка в определении по показаниям лага пройден-
ного судном расстояния зависит от ошибки в принима-
емой поправке лага /пДл . Следовательно, смещение
судна по направлению линии пути при дрейфе будет:
а = 0,01$тДл%. (IV-35)
Площадь возможного нахождения судна удобно
оценивать радиальной средней квадратической ошиб-
кой счисления Mc(t) = У a2~yb2 (ошибкой исходной
точки счисления пренебрегаем).
Принимая во внимание выражения (IV—34) и
(IV—35), будем иметь
119
Мс (О, = S У (т°Пуаагс 1’)2+ (0,01тДл%)2 (IV—36)
или, учитывая, что 5 = УЛЛ можем написать:
Мс (Ох = t У(гл тПУа arc Г)2 + (0,01 Ул /пДл%)2, (IV—37)
где t — продолжительность плавания по счислению.
Если плавание совершалось несколькими курсами,
радиальную среднюю квадратическую ошибку счисле-
ния вычисляют по формуле
мс (0 = }Лис (I)2 + Мс (1)1 +...+Мс (О2, (IV-38)
где Мс(/)1, Мс(/)2,..., Мс (t)n — радиальные средние квадратиче-
ские ошибки счисления на каждом
отдельном курсе.
Предположим теперь, что в районе плавания имеется
течение. Скорость этого течения известна с ошибкой
ги«т, а направление с ошибкой /Пкт. Будем рассматри-
вать снос судна течением как условный дополнитель-
ный курс. Примем ПУ=КТ и S = vTt Тогда по аналогии
с выражениями (IV—34) и (IV—35) можем написать:
\ = Ут агс 1<>:
откуда
мс (От =z т°Кт arc 1°)2 +
Таким образом, радиальная средняя квадратическая
ошибка счисления с учетом ошибок всех элементов
счисления, включая скорость и направление течения,
может быть вычислена по формуле
= мс (t)2 + мс (t)2
ИЛИ
Л1С (0 = t У (ул т°ПУа arc 1°)2 + (0,01Кл тДл%)2+‘*
+ ("т тКТ агс 1О)2+ m»T. (IV—39)
Априорному способу присущ ряд методических по-
грешностей. В действительности ошибки отдельных эле-
ментов счисления, в особенности скорости и направле-
но
ния течения, изменяются во времени. Эти ошибки могут
быть также зависимыми. Переменные ошибки элемен-
тов счисления в процессе плавания частично взаимно
компенсируются. Поэтому формула (IV—37) и особен-
но формула (IV—39) могут дать удовлетворительные
результаты лишь при небольшой продолжительности
плавания по счислению.
Ошибки счисления на отдельных курсах в общем
случае зависимы, следовательно, формула (IV—38) не
является строгой.
Кроме того, принимаемые при оценке точности счис-
ления ожидаемые (априорные) значения ошибок в эле-
ментах счисления могут значительно отличаться от их
действительных значений в тех или иных районах и ус-
ловиях плавания.
Априорный способ применяется при отсутствии не-
обходимых данных, обеспечивающих возможность оцен-
ки точности счисления статистическим способом. К оцен-
ке точности счисления прибегают при решении
различных задач судовождения. Некоторые из этих за-
дач рассмотрены в гл. VIII.
§ 28. Определение вероятнейшего пути судна
между двумя обсервациями
Нередко добывающим судам приходится вести
лов тралом в районах, которые не охватываются имею-
щимися промыслово-навигационными планшетами и
картами. Обычно в таких случаях одновременно с трале-
нием ведется работа по составлению промыслово-нави-
гационного планшета района и нанесению на этот
планшет рекомендуемых курсов траления. Анализируя
промысловую и навигационную обстановку, капитан
выбирает наиболее выгодное место и курс траления.
После успешно проведенного траления необходимо
проложить возможно точнее линию пути судна на рабо-
чем промыслово-навигационном планшете для того, что-
бы повторить траление и в дальнейшем принимать этот
путь за рекомендованный на данном участке.
Если траление осуществлялось переменными курса-
ми и место судна было определено в начале и в конце
траления (в начальной и конечной точках ломаного
галса), на планшет наносится вероятнейший путь судна.
121
Вероятнейшим путем судна называется счислимый
путь, увязанный с полученными определениями места.
Для того чтобы найти вероятнейший путь, необходимо
распределить по счислимому пути невязки счисления,
полученные сравнением обсервованных и счнслимых
мест судна.
При решении рассматриваемой задачи будем исхо-
дить из следующих допущений: время плавания по счис-
лению между двумя обсервациями при тралении срав-
нительно невелико. При этом условии можно полагать,
что факторы, вызвавшие появление невязки счисления,
в том числе главный фактор — погрешности в учете те-
чения, были одинаковы на протяжении всего времени
плавания по счислению, и ошибка счисления нарастала
пропорционально этому времени.
Предположим, что судно, удерживаясь на определен-
ной изобате, производило траление переменными курса-
ми. Начальная А и конечная В точки ломаного галса
(рис. 45,а) определены по результатам измерения на-
вигационных параметров. Для того чтобы найти вероят-
нейший путь судна с тралом между точками А и В,
необходимо разнести полученную невязку счисления
пропорционально продолжительности плавания. С про-
мыслово-навигационного планшета снимают величину
невязки и ее направление, затем рассчитывают величи-
ну невязки, приходящуюся на единицу времени:
С
122
где р — величина невязки, приходящаяся на единицу времени
(средняя скорость нарастания невязки по времени);
t — продолжительность плавания судна по счислению между
двумя обсервациями.
Из поворотных точек tn, п и I (см. рис. 45, а) прово-
дят прямые по направлению невязки, на которых от
этих точек откладывают соответственно отрезки
mm'=ptr, лл'=p(/j+ /,);] W = p(Ji + <2 + ^3).
где /j — продолжительность плавания по счислению между на-
чальной (обсервованной) точкой галса траления и первой
поворотной точкой;
/2 — продолжительность плавания по счислению между первой
и второй поворотными точками;
/3 — продолжительность плавания по счислению между второй
и третьей поворотными точками.
Соединив точки А, т', п', Г и В прямыми, получают
вероятнейший путь судна с тралом.
Аналогично решается задача и при большем числе
поворотных точек, а также в случае, когда необходимо
найти место судна на некоторый момент времени, про-
межуточный между моментами двух обсерваций.
Пример. Судно, удерживаясь иа промысловой изобате, произ-
вело траление истинными курсами 45, 93, 148° и следовало каждым
из этих курсов соответственно 40 мин (Л), 60 мин (/г), и 20 мин
(/3). Начальная А и конечная В точки ломаного галса траления оп-
ределены по пеленгу и расстоянию. При этом была получена невязка
счисления С—200°—Г,2 (рис. 45,6).
С 1,2
р = — = =0,01 мили/мин;
tnm' = ptx = 0,01-40 = 0,4 мили;
пп' = р «l + /2) = 0>01 • ЮО = 1 >0 мили.
Глава V. ОПРЕДЕЛЕНИЕ МЕСТА СУДНА ПО
ВИЗУАЛЬНЫМ НАБЛЮДЕНИЯМ НАВИГАЦИОННЫХ
ОРИЕНТИРОВ
§ 29. Общие положения
Ошибки счисления возрастают по мере увеличения
продолжительности плавания по счислению, поэтому
только счисление пути судна, как бы тщательно оно ни
велось, не может обеспечить навигационную безопас-
ность плавания и успешное решение специальных задач
судовождения, связанных с промыслом.
123
Возникает необходимость периодически корректиро-
вать счисление по результатам измерений различных на-
вигационных параметров *.
При плавании вблизи берегов, на промысле в приб-
режных районах для определения места судна широко
используются визуальные наблюдения навигационных
ориентиров.
Выбор способа определения места судна зави-
сит от числа навигационных ориентиров, находящихся
в пределах видимости, их взаимного расположения, тре-
буемой точности плавания, простоты проведения изме-
рений и обработки их результатов.
Так как для определения места судна необходимо из-
мерить не менее двух навигационных параметров, а из-
мерения производятся с движущегося судна и обычно
одним наблюдателем, необходимо принимать меры,
обеспечивающие ослабление влияния ошибки, обуслов-
ленной неодновременностью измерения навигационных
параметров.
Если измерения в быстрой последовательности вы-
полнить нельзя, а скорость хода судна значительна (бо-
лее 12—15 уз), измерения следует приводить к одному
моменту.
Предположим, что место судна определяется по ре-
зультатам измерений двух навигационных параметров
U\ и U2. В этом случае для приведения измерений к од-
ному моменту сначала измеряют величину первого на-
вигационного параметра потом второго U'2>
затем снова первого U\.
Время и отсчет лага замечают в момент измерения
второго навигационного параметра и принимают, что
в этот момент величина первого навигационного пара-
метра составляет:
Если место судна определяют по результатам измере-
ний трех навигационных параметров U\, U2t то сна-
чала измеряют величину первого из них 1/J, потом
* Основы теории определения места судна в море рассматрива-
ются в курсе «Математические основы судовождения».
второго U\ и за ним третьего £7з, затем опять второго
U”2 и снова первого U\. Время и отсчет лага за-
мечают в момент измерения третьего навигационного па-
раметра и принимают, что в этот момент величины пер-
вого и второго навигационных параметров соответствен-
но составляют:
^2 + ^2
Рассмотренный прием приведения результатов изме-
рений к одному моменту основан на допущении, что на-
вигационные параметры изменяются при движении
судна пропорционально времени, а сами измерения вы-
полняются через равные промежутки времени.
Если промежутки времени между моментами изме-
рений навигационных параметров значительны, то
этот прием применять нельзя. В таких случаях при каж-
дом измерении навигационного параметра замечают
время, отсчет лага и полученные линии положения при-
водят, используя данные счисления пути судна, к одно-
му месту наблюдений приемом, рассмотренным в § 36*.
Для того чтобы ослабить влияние ошибки, обуслов-
ленной не одновременным измерением навигационных
параметров с движущегося судна, необходимо также
первым измерять навигационный параметр, который
изменяется медленнее, а последним — параметр, изменя-
ющийся быстрее. Пусть, например, судно следует со
скоростью V по линии истинного курса АВ и его место
определяется по пеленгам двух навигационных ориен-
тиров, один из которых Mi расположен на остром кур-
совом угле, а другой М2 вблизи траверза (рис. 46).
Предположим, что первый пеленг взят из точки
а второй из точки С2. C{C2=S = Vty где t — время, про-
шедшее между моментами взятия обоих пеленгов. Если
пеленг ориентира Mi взят из точки Ci (первым), а пе-
* Если ошибка счисления за время между моментами измере-
ний навигационных параметров превышает 0,3—0,5 ошибки линии
положения, полученное место судна называют счислимо-обсерво-
ванным.
125
ленг ориентира /И2 из точки С2 (вторым), то обсервован-
ное место судна получится в точке Fi.
Если же изменять порядок пеленгования, то обсер-
вованное место судна получится в точке F2. В первом
случае ошибка места выразится отрезком C2Fi = Ai, а во
втором случае — отрезком C2F2=\2,
Обозначим курсовые углы навигационных ориенти-
ров АГ1 и М2 в момент нахождения судна в точке соот-
ветственно через qi и q2. Тогда можно написать:
Aj _ sin qj А2 singa
S sinOj ’ S sinOa
Так как практически расстояние S мало по сравне-
нию с расстояниями между судном и навигационными
ориентирами, можно принять, что sin 0i = sin 02. При
этом условии будем иметь:
Al sin <7i
А2 sin q2
Если q\<q^ то и Л1<Л2. Следовательно, чтобы ошиб-
ка места получилась меньше, нужно первым пеленго-
вать ориентир, расположенный на более остром курсо-
вом угле, пеленг которого изменяется медленнее.*
* Если место судна определяется ночью по пеленгам двух мая-
ков, один из которых имеет проблесковый огонь, а другой постоян-
ный, то независимо от расположения маяков относительно диамет-
ральной плоскости судна первым следует пеленговать маяк с про-
блесковым огнем. В противном случае после пеленгования маяка,
имеющего постоянный огонь, произойдет потеря времени на ожида-
ние появления проблеска.
126
Как известно, решение задачи определения места суд-
на по результатам измерения двух и более навигацион-
ных параметров может быть осуществлено аналитиче-
ским, графоаналитическим и графическим способами.
Если место судна определяется по визуальным наблюде-
ниям навигационных ориентиров, то расстояния между
судном и этими ориентирами сравнительно невелики.
Это позволяет использовать для прокладки определений
на карте наиболее простой графический способ и прене-
брегать искажениями, свойственными меркаторской
проекции, или, говоря иными словами, решать за-
дачу на плоскости без учета кривизны земной поверх-
ности.
Приемы прокладки определений места судна на про-
мысле в прибрежных районах имеют некоторые особен-
ности.
Судоводитель во время промысла, кроме решения
задачи судовождения, должен обеспечивать нормальную
работу орудий лова.
Поэтому использование обычных графических при-
емов прокладки определений места, распространенных
на транспортных судах, часто вызывают затруднения,
связанные с тем, что эти приемы не обеспечивают дос-
таточно быстрого решения задачи.
В связи с этим в практике работы добывающих су-
дов, в особенности судов, занятых траловым промыс-
лом, широко применяются приемы прокладки определе-
ний, которые требуют предварительной подготовки про-
мыслово-навигационных планшетов или карт, но вместе
с тем позволяют значительно сократить затраты време-
ни на прокладку определений непосредственно в процес-
се промысла. Предварительная подготовка планшетов
или карт выполняется обычно во время следования в
район промысла или на стоянке в порту.
§ 30. Определение места судна по двум
горизонтальным углам
Измерив одновременно два горизонтальных угла
между тремя или четырьмя навигационными ориентира-
ми, получим две изолинии — окружности, вмещающие
измеренные углы и проходящие через места ориентиров.
127
Точка пересечения F этих окружностей будет обсерво-
ванным местом судна. Горизонтальные углы измеряются
секстаном, но могут быть и вычислены как разности пе-
ленгов ориентиров, взятых по компасу. Обычно на прак-
тике место судна определяется по двум горизонтальным
углам, измеренным между тремя навигационными ориен-
тирами, т. е. по смежным углам. В этом случае устра-
Рис. 47
Построение окружностей,
няется двузначность
решения и значительно
упрощается прокладка
С обсервованного места
с помощью протракто-
ра или кальки. Проло-
жить на карте или
планшете обсервован-
ное место судна мож-
но несколькими спосо-
бами.
Рассмотрим эти
способы.
вмещающих измеренные
горизонтальные углы. Предположим, что с судна изме-
рен горизонтальный угол а между ориентирами А и В
(рис. 47). Для построения окружности, проходящей
через эти ориентиры и вмещающей угол а, из се-
редины хорды АВ восстановим перпендикуляр n/ii, яв-
ляющийся геометрическим местом центров окружностей,
проходящих через точки А и В.
Точка 01 пересечения этого перпендикуляра с прямой
линией, проведенной из ориентира В или А под углом
к хорде АВ, равным 90°—а, будет центром окружности,
вмещающей угол а. Радиус этой окружности л = О1Д =
= ОВЬ Очевидно, что любой угол, опирающийся на
хорду АВ и имеющий вершину на дуге AFB, равен
углу а.
При построении вмещающей окружности следует
иметь ввиду, что при а<90° центр окружности и место
судна располагаются по одну сторону от хорды, соеди-
няющей места ориентиров, а при а>90° — по другую
сторону от этой хорды. Поэтому если а>90°, то для на-
хождения центра вмещающей окружности строится в
сторону от судна угол а—90°.
128
Вторая окружность, вмещающая горизонтальный угол
0, измеренный между ориентирами В и С или С и D
(рис. 48), строится аналогично.
Использование протрактора или кальки. Крайние по-
движные линейки протрактора устанавливают под уг-
лами а и р к средней неподвижной линейке. Затем про-
трактор перемещают по карте и добиваются такого по-
ложения, при котором срезы всех трех его линеек про^
ходят через места ориентиров Д, В и С, между которыми
измерялись углы. Обсервованное место судна получают
наколом фиксатора, уста-
новленного в центре
лимба протрактора. Если
были измерены углы меж-
ду двумя парами ориен-
тиров А, В и С, D (не-
смежные углы), то прихо-
дится прибегать к более
сложному приему. Одну
из подвижных линеек
протрактора устанавли-
вают под углом а. Срезы
этой и неподвижной ли-
неек устанавливают так,
чтобы они проходили через места ориентиров А и В
(рис. 49). Затем, продолжая удерживать срезы линеек
на местах ориентиров, перемещают центр лимба про-
трактора вблизи счислимого места и намечают четыре
точки а, Ь, с и d, принадлежащие изолинии t/ = a=const.
Через полученные точки проводят плавную кривую, кото-
9 В. Е. Ольховский
129
рая представляет собой дугу окружности, проходящей
через точки А и В и вмещающей угол а. После чего уста-
навливают подвижную линейку протрактора на угол р и,
перемещая центр лимба протрактора по дуге abed, на-
ходят на этой дуге точку F, в которой угол между ориен-
тирами С и D равен р. Эта точка будет представлять со-
бой обсервованное место судна.
Использование кальки аналогично использованию
протрактора. На кальке проводят прямую линию, заме-
няющую неподвижную линейку протрактора. Из произ-
вольной точки на этой линии под углами аир проводят
две другие прямые, заменяющие подвижные линейки
протрактора. Углы аир строят с помощью транспортира.
Приемы прокладки обсервованного места, применяе-
мые на промысле в прибрежных районах. В условиях
тралового промысла может быть использован метод гра-
дуированного перпендику-
ляра, позволяющий нано-
сить обсервации на предва-
рительно подготовленный
планшет или карту при по-
мощи простейших прокла-
дочных инструментов с ми-
нимальной затратой вре-
мени. Предварительная под-
готовка планшета сводится
Рис- 50 к нанесению на него центров
вмещающих окружностей.
Эта задача решается следующим образом. Места ориен-
тиров А и В, а затем В и С (рис. 50) соединяют хорда-
ми. Из середины хорд восстанавливают перпендикуляры
nrti и mmi, на которых расположены центры вмещаю-
щих окружностей. Для нахождения центров окружностей,
проходящих через ориентиры А и В, берут протрактор с
вынутым фиксатором и^викладывают срезом средней
линейки к линии, соединяющей ориентиры. Центр лимба
протрактора должен находиться на любом из ориенти-
ров А и В. Чтобы протрактор не перемещался на план-
шете, его можно закрепить тремя булавками.
Двигая с помощью отсчетного барабана одну из
крайних линеек, строят для выбранных равноотстоящих
значений углов а их дополнения 90°—а и отмечают за-
сечками на перпендикуляре пп{ точки пересечения, опре-
130
деляющие положения центров вмещающих окружностей.
Около центра каждой окружности подписывают значе-
ние того угла а, который она вмещает. Точно также на-
ходят центры вмещающих окружностей для ориентиров
В и Сна перпендикуляре тип.
С меньшей, но достаточной для практики точностью
центры вмещающих окружностей можно нанести и при
помощи навигационного транспортира.
Во время промысла после измерения углов а и 0 на
подготовленном таким образом планшете обсервованное
место прокладывают с по-
мощью циркуля-измерителя.
Для проведения окружно-
сти, вмещающей угол а
между ориентирами А и В;
ставят одну ножку циркуля
на деление, соответствую-
щее числу градусов изме-
ренного угла, а другую —
на точку А или В. Затем на
планшете вычерчивают не
всю окружность, а только
короткую дугу в районе счи-
слимого места. Проделав то
же самое для угла 0 между
ориентирами В и С, в пересечении двух дуг вмещающих
окружностей получают обсервованное место траулера —
точку В.
Прокладка места на планшете с помощью градуиро-
ванного перпендикуляра и циркуля занимает 10—12 с,
в то время как решение этой задачи с помощью протрак-
тора требует 1,5—2 мин.
Если промысловые курсы располагаются на значи-
тельном удалении от навигационных ориентиров и для
проведения дуг вмещающих окружностей раствора цир-
куля недостаточно, обсервованные места можно проло-
жить с помощью параллельной линейки и чертежного
угольника. В этом случае предварительная подготовка
промыслово-навигационного планшета или карты сводит-
ся к следующему. Из точки А и С восстанавливают пер-
пендикуляры Ап и Ст к линиям, соединяющим навига-
ционные ориентиры (рис. 51). При среднем ориентире В
с помощью протрактора строят для выбранных равно-
9* 131
отстоящих значений углов а и р их дополнения 90°—а
и 90°—р и отмечают на перпендикулярах Ян и Ст засеч-
ками точки пересечения, причем около каждой точки
подписывают значение того угла, которому она соответ-
ствует. Прокладка определений во время промысла осу-
ществляется следующим образом. Находят на перпенди-
кулярах точки р и q, оцифрованные величинами измерен-
ных углов а и ₽, и прикладывают к ним срез параллель-
ной линейки. Переме-
щая затем вдоль среза
линейки угольник, на-
ходят на планшете
точку F пересечения
линии pq с перпенди-
куляром, опущенным
из среднего ориенти-
ра. Эта точка оп-
ределит положение
судна в момент обсер-
вации. Вместо линейки
и угольника можно ис-
пользовать кальку с
нанесенными на ней
взаимно перпендику-
лярными линиями.
Нетрудно убедить-
ся, что точка F являет-
ся общей для двух ок-
ружностей, вмещаю-
щих измеренные углы
аи0.
В тех случаях, когда необходимо прокладывать боль-
шое количество определений через сравнительно корот-
кие промежутки времени, наиболее целесообразно ис-
пользовать предварительно построенную непосредственно
на планшете или на кальке гониометрическую
сетку. Эта сетка образуется дугами окружностей, вме-
щающих измеренные углы. Каждая из дуг является гео-
метрическим местом вершин вписанных углов, опираю-
щихся на два навигационных ориентира. На планшете
сперва проводят дуги одной системы вмещающих окруж-
ностей для равноотстоящих значений углов а, а затем —
другой для углов 0. Около каждой окружности подписы-
132
вают цифру градусов того угла, который она вмещает
(рис. 52).
Систему вмещающих окружностей каждой пары нави-
гационных ориентиров наносят своим цветом.
Измерив горизонтальные углы аир, интерполирова-
нием на глаз между изолиниями, нанесенными на план-
шете, проводят карандашом в районе счислимого места
дуги, соответствующие сначала одному, а затем другому
углу. В точке пересечения этих дуг находят обсервован-
ное место F. Таким образом, прокладка обсервованных
мест с помощью гониометрической сетки осуществляет-
ся просто и быстро как при измерении смежных, так и
несмежных горизонтальных углов.
Углы пересечения вмещающих окружностей и рас-
стояния между ними характеризуют точность определе-
ния места на различных участках промысловой пло-
щадки.
Гониометрическая сетка позволяет осуществлять
уверенное траление на узких промысловых площадках в
районах, где имеются задевы и навигационные опасно-
сти. Так, например, для выхода в назначенную точку С
спуска трала снимают с гониометрической сетки значе-
ния соответствующих точке С углов а и 0 и ложатся на
курс, направленный в эту точку. Следуя в точку С, опре-
деляют место по двум углам и при помощи гониометри-
ческой сетки быстро прокладывают полученные обсерва-
ции на планшете. Руководствуясь обсервациями, коррек-
тируют курс, добиваясь того, чтобы назначенная точка
все время находилась прямо на носу. Следуя таким об-
разом переменными курсами, достигают назначенной
точки спуска трала.
Указанным приемом можно обеспечить выход судна
в назначенную точку спуска трала курсом, близким к
рекомендованному промысловому курсу, что позволит
избежать лишних поворотов во время траления.
Гониометрическую сетку наиболее просто можно
построить при помощи протрактора методом градуиро-
ванного перпендикуляра. Чтобы сетка не была слишком
густой и не затемняла нанесенную на планшете промыс-
ловую и навигационную обстановку, интервалы углов,
откладываемых протрактором, выбирают так, чтобы ра-
диусы вмещающих окружностей отличались друг от дру-
га на 10—15 мм.
133
Положение центров вмещающих окружностей на пер-
пендикулярах можно определить без помощи протракто-
ра по расстояниям пОг (см. рис. 48) от середины лорды
АВ, вычисленным по формуле
= —ctgaz,
где d — расстояние между ориентирами А и В (база).
При углах а, превышающих 90°, расстояние nOi рас-
считывают по формуле
nO^-^-ctgfaf-gO»)
и откладывают по другую сторону от базы АВ.
Радиусы вмещающих окружностей определяют на
планшете по расстояниям от соответствующего центра О
до любого из ориентиров А или В или рассчитывают по
формуле
d
г = — cosec а/.
2
Анализ точности определения места судна. На точ-
ность определения места судна по двум горизонтальным
углам преимущественное влияние оказывают случайные
ошибки измерения углов и в особенности ошибки про-
кладки*. Поэтому можно ограничиться рассмотрением
лишь случайных ошибок и для анализа точности исполь-
зовать формулу, выражающую радиальную среднюю
квадратическую ошибку места судна. Для случая, когда
место судна определяется по двум линиям положения,
эта формула имеет вид:
= TrnF + ' (V-1)
где 0 — угол пересечения линий положения;
тлп — средняя квадратическая ошибка (смещение) линии по-
ложения.
ти
тЛп = ,
ёи
где ту — средняя квадратическая ошибка навигационного пара-
метра;
gy —градиент навигационного параметра.
* Здесь и далее полагаем, что при необходимости ошибка, обус-
ловленная неодновременностью измерения навигационных параметров
ослаблена приведением измерений к одному моменту.
134
Если навигационными параметрами являются гори-
зонтальные углы, то можно записать
где и — суммарные * средние квадратические ошибки углов
аир;
d± и d2— расстояния между ориентирами (базы);
£\, D2, D3 — расстояния до ориентиров (величины d и D сни-
мают с карты).
При равноточных измерениях суммарные средние
квадратические ошибки углов аир будут одного поряд-
ка и можно полагать та =т^ . Таким образом, форму-
ла, выражающая радиальную среднюю квадратическую
ошибку определения места судна по двум смежным го-
ризонтальным углам, может быть написана в таком виде:
тар2 , Г/ у [ /_2з_у
57,3sine г ( di ) +\ d2 /
(V-2)
В рассматриваемом случае линиями положения бу-
дут касательные, проведенные к вмещающим окружно-
стям в точке Л Как следует из рис. 47, угол пересечения
линий положения 0 определяется соотношением
0 = 360° — (а + ₽ + ©),
(V-3)
где со — угол при среднем ориентире (угол АВС),
Из формулы (V—2) видно, что ошибка определения
места прямо пропорциональна расстоянию до среднего
ориентира, суммарной ошибке измерения и прокладки
угла и обратно пропорциональна синусу угла пересече-
ния линий положения. Следовательно, при выборе ори-
ентиров необходимо стремиться к тому, чтобы угол 0
был возможно ближе к 90°, а средний ориентир был
ближайшим к месту судна.
* та~ Г » где таГ~ сРеДняя Квадратическая ошибка
измерения угла а, та —средняя квадратическая ошибка проклад-
ки этого угла. Аналогично определяется и т$.
185
При определении места судна не следует допускать,
чтобы угол 0 был менее 30° или более 150°, так как при
ЗО°>0>15О° ошибка резко возрастает.
Если 0=0° или 0 = 180°, место судна рассматривае-
мым способом определить нельзя. В этом случае, кото-
рый называется случаем неопределенности, две изоли-
нии сливаются в одну. Если 0 = 180°, то все три ориен-
тира и место судна располо-
жены на одной окружности.
Как видно из рис. 53, из лю-
бой точки дуги окружности
APFC ориентиры А, В и С
будут видны с судна под од-
ними и теми же углами. Ес-
ли 0 = 0°, то все три ориен-
тира и место судна находятся
на одной прямой (г=оо).
Из рис. 53 и из выражения
(V—3) следует, что случай не-
определенности имеет место,
когда
а+р+ш = 180° или
а+р+ш=360°.
Если место судна прокладывают с помощью про-
трактора (кальки), то при углах 0, близких к (Гили 180°,
заметные смещения центра лимба протрактора не вы-
зывают заметных смещений какой-либо из линеек. Это
свидетельствует о ненадежности обсервации. Случай
неопределенности исключается при следующих взаим-
ных расположениях ориентиров и судна: судно нахо-
дится внутри треугольника, вершинами которого явля-
ются наблюдаемые ориентиры; средний ориентир нахо-
дится ближе к судну, чем любой из двух крайних;
ориентиры расположены на одной прямой, а судно на-
ходится в стороне от этой прямой: судно находится на
одинаковом расстоянии от всех трех ориентиров; один
из углов между ориентирами равен 0°.
Достоинством рассматриваемого способа определе-
ния места судна является его высокая точность и неза-
висимость от ошибки в поправке компаса. Если углы
измеряются секстаном и прокладка осуществляется
136
протрактором, суммарную среднюю квадратическую
ошибку горизонтального угла можно принимать равной
±0°,1, а при прокладке с помощью кальки —
±0°,2.
К недостаткам способа следует отнести отсутствие
контроля измерений и прокладки (место судна опреде-
ляется по двум линиям поло-
жения при наличии трех или
четырех ориентиров), возмож-
ность случая неопределенно-
сти, трудоемкость наблюдений
и прокладки.
Определение мест промыс-
ловых буев. В процессе про-
мысла и поиска рыбы часто
возникает необходимость опре-
делять места выставленных
промысловых буев. В прибреж-
ных районах при наличии в ви-
димости судна трех навигаци-
онных ориентиров место про-
мыслового буя определяют и
наносят на планшет или карту по двум горизонтальным
углам, измеренным секстаном.
На практике может встретиться случай, когда в ви-
димости судна имеется только два навигационных ори-
ентира. В этом случае место промысловбго буя можно
определить следующим способом, предложенным
М. М. Лесковым и основанным на измерении горизон-
тальных углов. Предположим, что в некоторой точке Р
был поставлен промысловый буй и одновременно изме-
рен секстаном угол а между ориентирами А и В
(рис. 54). Для определения места постановки этого
буя строят окружность, проходящую через ориентиры
А и В и вмещающую измеренный угол а, а затем ло-
жатся на курс, пересекающий эту окружность в любой
точке т. Подходя к точке т, уменьшают ход или даже
стопорят машину. В момент, когда угол между ориен-
тирами А и В снова станет равным а, измеряют угол р
между ориентиром А и поставленным буем Р. Постро-
ив затем при центре О окружности АРтВ угол 2р,
в пересечении одной из сторон этого угла с окружностью
получают точку Р — место промыслового буя. Ошибка
137
счисления при плавании судна между точками Р и т не
окажет влияния на точность определения места про-
мыслового буя. Следовательно, ошибка определения
места буя рассматриваемым способом имеет тот же по-
рядок, что и ошибка определения места судна по двум
горизонтальным углам.
Помимо геометрического построения для решения
этой задачи можно использовать также и графоанали-
тический метод. Из треугольника АРВ (см. рис. 54)
имеем:
sin а
др _ а Sin + Р)
sin а
Рассчитав по этим формулам расстояния АР и ВР9
засечками из точек А и В получают обсервованное мес-
то промыслового буя—точку Р. Рассмотренным способом
можно также определять место промыслового буя, пос-
тавленного другим добывающим или поисковым суд-
ном. В прибрежных районах промысловый буй можно
использовать для сгущения сети навигационных ориен-
тиров. Если на берегу в видимости судна имеются
только два навигационных ориентира, то перед нача-
лом промысла можно поставить буй и определить его
место. Тем самым количество навигационных ориенти-
ров будет увеличено до трех. Это позволит во время
промысла определить место судна по двум горизон-
тальным углам, т. е. способом, обеспечивающим наи-
большую точность.
§ 31. Определение места судна по двум пеленгам
Для определения места судна этим способом берут
по компасу в быстрой последовательности пеленги двух
навигационных ориентиров, исправляют их поправкой
компаса и прокладывают на карте. Точку пересечения
линий обратных истинных пеленгов принимают за об-
сервованное место судна. Точность этого места будет
зависеть от случайных ошибок пеленгования и от ошиб-
ки в принимаемой поправке компаса. Пр характеру
13?
воздействия ошибка в принимаемой поправке компаса
является повторяющейся (систематической). При от-
сутствии качки средняя квадратическая ошибка изме-
рения пеленга оценивается величиной ±0°,2 для опти-
ческого пеленгатора гирокомпаса и величиной ±0°,5
для обычного пеленгатора. Систематическая ошибка в
принимаемой поправке ком-
паса зависит от условий д
плавания, но обычно она
значительно превышает слу- s' l\ ^х
чайную ошибку пеленгова- / г\ \
ния. Только при качке, ког- I А \
да случайная ошибка пелен- Л I \ \
гования возрастает пример- |^хбх\ 271 \ I
но вдвое, и при регулярном I | \ /
определении поправки ком- \ Д /
паса из наблюдений величи- \ ^Х
ны этих ошибок примерно \ х^л|
о ди каковы. х.
Рассмотрим влияние на ----
точность определения места
судна по двум пеленгам
ошибки ек в принимаемой ис*
поправке компаса. Для это-
го воспользуемся известной
формулой, выражающей систематическую ошибку мес-
та судна, полученного по двум. линиям положения:
2 1 / I ец, у । / ецд \2 ецд
п о г \ / \ ёи2 ) ёиг ёи2
(V—4)
где — систематическая ошибка навигационного параметра;
ёи — градиент навигационного параметра;
0 — угол между направлениями градиентов.
Принимая ец =еа =ек и подставляя в эту фор-
1 г 1 1
мулу значения градиентов пеленгов gn =---------и8д =------
1 * 1 Z)2
получим
Д = eg-l/—2D, D cos0 .
sin0- 2 12
Учитывая, что выражение, находящееся под кор-
нем, равно d — расстоянию между навигационными
ориентирами (рис. 55), окончательно будем иметь:
139
(V-5)
A = ~ „ dcosec6.
57,3
Полученная формула показывает, что при опреде-
ленной величине ошибки в принимаемой поправке ком-
паса ошибка обсервованного места будет тем меньше,
чем меньше расстояние между ориентирами и чем бли-
же угол пересечения пеленгов 0 к 90°.
Радиальная средняя квадратическая ошибка об-
сервованного места судна, обусловленная влиянием
случайных ошибок пеленгования, может быть опреде-
лена по формуле (V—1). Подставляя в эту формулу зна-
чения градиентов пеленгов и полагая тп=тп —
средней квадратической ошибке измерения пеленга, по-
лучим:
м _ тп
ъ7,3 sin 6
(V-6)
При визуальном пеленговании можно принять
]/ Df + D2, ^/Й)Ср,
где
Пср = — (Dy + D2).
При этом условии формула (V—6) может быть за-
писана в следующем виде:
М = 0,025m„ cosec 0Dcp. (V—7)
Из формулы (V—7), как и из формулы (V—5), сле-
дует, что для определения места судна по двум пелен-
гам лучше всего использовать навигационные ориенти-
ры, расположенные как можно ближе к судну и под уг-
лом, близким к 90°. Пеленговать ориентиры, угол меж-
ду которыми меньше 30° или более 150°, не рекоменду-
ется, так как при ЗО°>0>15О° ошибка места резко воз-
растает.
Две линии положения всегда пересекаются в одной
точке, поэтому единичное определение места судна по
двум линиям положения и, в частности, по двум пелен-
гам не позволяет обнаружить ошибки измерений, рас-
четов и прокладки.
140
Как показали исследования, проведенные М. М. Лес-
ковым, анализ расположения нескольких мест, получен-
ных по двум пеленгам, позволяет обнаружить ошибку в
принимаемой поправке компаса. При наличии значи-
тельной ошибки в принимаемой поправке компаса опре-
деленные по двум пеленгам на одном и том же курсе
места судна располагаются по кривой, изгибающейся
в сторону линии, соединяющей места навигационных
ориентиров, расстояния на карте между обсервованны-
ми местами не пропор-
циональны соответст-
вующим промежуткам
времени или плавани-
ям по лагу, наблюдает-
ся разрыв между се-
риями определений по
пеленгам двух различ-
ных ориентиров, вы-
полненными с неболь-
шим интервалом по
времени.
М. М. Лесков раз-
работал ряд способов
исключения обнару-
женной ошибки в при-
нимаемой поправке
компаса. Рассмотрим
один из этих способов.
Рис. 56
Предположим, что две обсервации по пеленгам ориен-
тиров А и В получены так, что углы между пеленгами
при первом и втором определениях равны. Тогда обе
полученные обсервации — точки F\ и F2 (рис. 56) —
и действительные места судна в те же моменты време-
ни— точки Р\ и Р2— расположатся на окружности, про-
ходящей через места ориентиров Л и В и вмещающей
угол между пеленгами 0. Линия Р\Р2 будет представ-
лять собой линию, по которой следовало бы судно при
ек=0- Как видно из рис. 56, лини# F\F2 составляет с
линией Р\Р2 угол, равный 2ек.
Перейдем теперь к карте (рис. 57). Допустим, что
угол суммарного сноса равен нулю и линия KiK2 пред-
ставляет собой линию истинного курса, проложенного
на карте с учетом неверной поправки компаса. Очевид-
141
но, что эта линия будет развернута по отношению к ли-
нии ЛР2 (см. рис. 56) на угол, равный ек (/СЛгИЛ).
Следовательно, на карте угол между линией К1К2 и ли-
нией E1F2, соединяющий два обсервованных места, ра-
вен ек. Знак ек определяется согласно следующему пра-
вилу, справедливость которого очевидна из рис. 56. Ес-
ли второе обсервованное место расположено в сторону
движения стрелки часов от линии проложенного на кар-
те истинного курса, ек имеет знак «плюс», если же про-
тив движения часовой стрелки — знак «минус». Верная
поправка компаса определяется из алгебраического со-
отношения
ДК = ДКпр-е/<, (V—8)
где ДХпр — принятая поправка компаса.
Если суммарный угол сноса с не равен нулю, то на
карте должна быть проложена линия пути ПУ=КК+
+АЛ+с. Очевидно, что ошибка определения суммарно-
го угла сноса полностью войдет в рассчитанную по фор-
муле (V—8) поправку компаса. Поэтому угол суммар-
ного сноса следует определять из непосредственных
наблюдений по пеленгам ближайшего к траверзу ори-
ентира (см. § 22).
Контролем правильности определения поправки ком-
паса служит следующий признак: полученная при по-
вторной прокладке пеленгов с уточненной поправкой ком-
паса точка F2 должна лежать на линии проложенного
на карте истинного курса или пути.
На практике нет необходимости добиваться точного
равенства углов между пеленгами при первой и второй
142
обсервациях. Достаточно выдержать пределы в не-
сколько градусов.
Определив по двум пеленгам место судна Л при уг-
ле между пеленгами 0, следует рассчитать момент, ког-
да можно получить вторую обсервацию по двум пелен-
гам, угол между которыми приблизительно равен 0.
Предположим, что в момент Т\ по пеленгам ориенти-
ров А и В определено место судна — точка F\ (см. рис.
57). Угол между пеленгами равен 0. Найдем центр О
окружности, проходящей через места ориентиров А и В
и вмещающий угол 0. Затем сделаем из точки О радиу-
сом г=АО = ОВ засечку на линии истинного курса или
пути (точка С). Рассчитаем момент, когда судно при-
дет в точку С. В этот момент и следует вторично пелен-
говать ориентиры А и В,
Рассмотренный способ определения места судна яв-
ляется наиболее распространенным, так как часто в ви-
димости судна более двух ориентиров одновременно не
бывает. Взятие пеленгов по компасу и их прокладка на
карте осуществляются просто и быстро. Недостатком
этого способа, как и других способов определения мес-
та судна по двум линиям положения, является отсутст-
вие надежного контроля измерений, расчетов и про-
кладки. Для ускорения прокладки обсервованных мест
в процессе промысла на планшетах строят сетки лучей
или картушки большого радиуса, центры которых сов-
падают с местами навигационных ориентиров. Сетка
лучей применяется обычно при определении места суд-
на по пеленгам двух навигационных ориентиров, распо-
ложенных за рамками планшета или карты.
§ 32. Определение места судна по трем пеленгам
Для определения места судна этим способом бе-
рут по компасу в быстрой последовательности пеленги
трех навигационных ориентиров, исправляют их поправ-
кой компаса и прокладывают на карте. Так как изме-
рения, расчеты и прокладки сопровождаются ошибками,
проложенные на карте линии положения — линии об-
ратных истинных пеленгов, как правило, в одной точке
не пересекаются, а образуют треугольник, который на-
зывается треугольником погрешности. В рас-
сматриваемом способе, как и во всех других способах
143
определения места судна, основанных на использова-
нии трех и более линий положения, полученная фигура
погрешности позволяет судить о надежности обсерво-
ванного места и сравнительно просто обнаруживать до-
пущенные ошибки. Избыточные линии положения, как
известно, повышают и точность определения места
судна.
Появление треугольника погрешности при определе-
нии места судна по трем пеленгам может быть вызвано
следующими ошибками:
ошибками, обусловленными неодновременностью из-
мерения пеленгов с движущегося судна. Если пеленги
берутся в быстрой последовательности, а скорость суд-
на сравнительно невелика (не более 12—15 уз) или
если измеренные пеленги приведены к одному моменту,
этими ошибками можно пренебрегать;
случайными ошибками пеленгования и прокладки.
Эти ошибки обычно невелики и вызывают появление
треугольника погрешности малых размеров;
ошибками опознания навигационных ориентиров,
использованных для пеленгования. При определении
места судна по визуальным наблюдениям, даже при са-
мом тщательном изучении навигационных пособий, воз-
можны ошибки в опознании навигационных ориентиров,
особенно при плавании у незнакомых берегов или в ус-
ловиях плохой видимости. Ошибки опознания навига-
ционных Ориентиров вызывают, как правило, появление
очень большого треугольника погрешности. Эти ошиб-
ки могут быть обнаружены путем анализа полученного
треугольника погрешности и расположения на карте на-
вигационных ориентиров, которые могли быть видны с
судна в момент пеленгования. Если допущена ошибка
в опознании одного из навигационных ориентиров, то
при повторном определении места судна точки пересе-
чения линий пеленгов двух правильно опознанных ори-
ентиров будут располагаться примерно по прямой, сов-
падающей с линией пути судна;
ошибкой в поправке компаса, которая учитывалась
при исправлении измеренных компасных пеленгов. В тех
случаях, когда поправка компаса определяется из на-
блюдений нерегулярно или рассчитывается по формуле
можно ожидать значительную ошибку в этой
поправке, которая вызовет появление треугольника по-
144
грешности больших размеров. По характеру воздейст-
вия ошибка в принимаемой поправке компаса является
систематической (повторяющейся).
Получив треугольник погрешности, необходимо оты-
скать вероятное место судна. Как известно, приемы на-
хождения вероятного места судна при избыточных из-
мерениях зависят от характера действия ошибок. При
этом рассматриваются следующие случаи: преимущест-
венное влияние на точность определения места судна
оказывают случайные ошибки; преимущественное влия-
ние оказывают систематические ошибки; случайные и
систематические ошибки одного порядка.
Следовательно, прежде чем выбрать прием отыска-
ния вероятного места судна, необходимо проанализиро-
вать характер ошибок, вызвавших появление треуголь-
ника погрешности.
Если размеры полученного треугольника погрешно-
сти велики (его стороны на путевой карте более 0,5 см),
следует сразу же проверить правильность опознания
навигационных ориентиров, записей, расчетов, проклад-
ки. Если ошибки не обнаружены, повторяют пеленго-
вание. Получив в результате повторного пеленгования
треугольник погрешности с существенно отличными ори-
ентировкой и размерами, можно полагать, что преиму-
щественное влияние оказывают случайные ошибки пе-
ленгования. Если уменьшить эти ошибки не представ-
ляется возможным, необходимо найти вероятное место
судна, которое в рассматриваемом случае будет всегда
располагаться внутри треугольника погрешности. Для
этой цели можно было бы воспользоваться центрогра-
фическим приемом или более простым приемом, осно-
ванным на проведении антимедиан. Однако при визу-
альных наблюдениях эти приемы на практике не при-
меняют и вероятное место судна выбирают внутри тре-
угольника погрешности на глаз. При этом руководству-
ются рекомендациями, вытекающими из строгих реше-
ний. Если треугольник погрешности близок к равносто-
роннему, место судна принимают в его центре, при рав-
нобедренном или косоугольном треугольнике — ближе к
меньшей его стороне и к углу, более близкому к пря-
мому.
В тех случаях, когда при повторном пеленговании
размеры и ориентировка треугольника погрешности за-
10 0. Е. ОльховскиЯ
145
метно не изменяются, можно полагать, что преимущест-
венное влияние оказывает повторяющаяся систематиче-
ская ошибка — ошибка в принимаемой поправке ком-
паса.
Как известно, при наличии одних систематических
ошибок вероятное место судна получается в пересечении
биссектрис внутренних или внешних углов треугольни-
ка погрешности (в зависимости от того, как направле-
ны градиенты). Однако при определении места судна по
визуальным пеленгам можно применить более прос-
Рис. 58
тые приемы. На рис. 58 показаны треугольники погреш-
ности abc, полученные при трех различных
значениях ек — ошибки в принимаемой поправке компа-
са. Место судна, свободное от влияния этой ошибки, на-
ходится в точке F, Из рисунка видно, что вершины тре-
угольников погрешности, полученных при различных
значениях ек, лежат на окружностях, проходящих че-
рез места навигационных ориентиров А и В, В и С, А и
С и вмещающих углы между соответствующими пелен-
гами. Окружности пересекаются в точке F.
Все это позволяет использовать для получения веро-
ятного места судна, свободного от влияния ошибки в
принимаемой поправке компаса, следующие приемы:
по трем пеленгам навигационных ориентиров Л, В,
С (компасным или истинным) рассчитывают углы
Н6
ду этими ориентирами а и 0 и получают место судна по
двум горизонтальным углам, используя один из приемов
прокладки, рассмотренных в § 30;
изменяют поправку компаса на 2—4° и, проложив на
карте линии обратных истинных пеленгов, получают
второй треугольник погрешности, например aib\C\ (см.
рис. 58). Затем соединяют сходственные вершины пер-
воначального треугольника abc и нового aibiCi прямы-
ми линиями. Точку пересечения этих линий F принима-
ют за обсервованное место судна. При этом допускают
замену отрезков дуг вмещающих окружностей аа^ bb\,
cci прямыми линиями, что практически допустимо, так
как при сравнительно больших радиусах вмещающих
окружностей кривизна их невелика, а сами отрезки дуг
aaif bbi и cci малы.
На рис. 59 показаны наиболее характерные взаим-
ные расположения треугольника погрешности abc, по-
лученного первоначально, и треугольника погрешности
fli&iCi, полученного после прокладки пеленгов с учетом
измененного значения поправки компаса.
Получив точку F первым или вторым из рассмотрен-
ных выше приемов, снимают с карты истинный пеленг
любого из навигационных ориентиров А, В или С и,
зная компасный пеленг этого ориентира, рассчитывают
поправку компаса на данном курсе.
Следует иметь в виду, что в случае, когда все три
навигационных ориентира и место судна располагают-
10* 147
ся на одной окружности, линии истинных пеленгов этих
ориентиров будут пересекаться в одной точке при лю-
бых значениях ек (см. § 30). Следовательно, в рассмат-
риваемом случае обнаружить ошибку в принимаемой
поправке компаса и исключить ее не представляется
возможным.
Как известно, приемы нахождения вероятного места
судна при наличии в линиях положения случайных и
систематических ошибок одного порядка достаточно
трудоемки и при обработке результатов визуальных на-
блюдений навигационных ориентиров не применяются.
Практически при плавании вблизи берегов эта задача
может решаться только с помощью ЭЦВМ.
Следует, однако, иметь в виду, что, если углы меж-
ду пеленгами близки к 120° и получен примерно равно-
сторонний треугольник погрешности, вероятное место
судна можно принимать в его центре как при случай-
ных, так и при систематических ошибках. Поэтому та-
кую комбинацию навигационных ориентиров считают
наиболее выгодной. Строгая оценка точности определе-
ния места судна по трем пеленгам при ручной обработ-
ке результатов измерений практически не может быть
выполнена.
Если ограничиться рассмотрением влияния только
случайных ошибок пеленгования, считая, что повторяю-
щаяся систематическая ошибка исключена, точность
определения места судна, полученного по трем пелен-
гам, приближенно можно оценить радиальной средней
квадратической ошибкой. Как известно, при числе ли-
ний положения более двух, эта ошибка рассчитывается
по формуле
1/—1
V
(V-9)
где [Рлп] —сумма весов линий положения <Рлп , = —о— I
‘ тАП/
[Р0] — сумма весов точек пересечения линий положения.
PQij = Рлп1 Рап у sin2
Применительно к определению места судна по трем
пеленгам формула (V—9) может быть написана в сле-
дующем виде:
148
+ + (V_10)
V sin2 0|_2 + sin2 ei-3 + Dl sin 02-з
где Di, D2, D3 — расстояния до навигационных ориентиров;
01—2! ®2~з; 01—3 — углы пересечения линий соответствующих
пеленгов;
т/7—средняя квадратическая ошибка пеленгова-
ния = тп^ = тПз = тп),
Расчеты по формулам (V—6) и (V—10) показывают,
что радиальная средняя квадратическая ошибка опреде-
ления места судна по трем пеленгам в среднем на 20—
25% меньше, чем по тем двум пеленгам из трех, разность
которых ближе к 90°. Поэтому на практике поступают
следующим образом: вычисляют по формуле (V—6) ра-
диальную среднюю квадратическую ошибку определения
места судна по тем двум пеленгам из трех, которые пере-
секаются под углом, более близким к 90°. Полученную
ошибку уменьшают на 20% и ею оценивают точность оп-
ределения места по трем пеленгам.
Достоинствами способа определения места судна по
трем пеленгам, кроме сравнительно высокой точности,
являются возможность контроля измерений и прокладки,
позволяющая избегать промахов, а также простота прие-
мов исключения повторяющейся систематической ошиб-
ки— ошибки в принимаемой поправке компаса.
§ 33. Определение места судна по расстояниям,
измеренным до навигационных ориентиров
Измерив расстояние до какого-либо навигационно-
го ориентира, получаем, как известно, изолинию, пред-
ставляющую собой на земной поверхности сферическую
окружность. Изображение этой окружности на меркатор-
ской карте носит название циклической кривой. При ма-
лых расстояниях, измеряемых визуальными методами,
эта кривая может быть представлена окружностью ра-
диуса, равного измеренному расстоянию, с центром в ме-
сте изображения ориентира.
Определение места судна по двум расстояниям. Из-
мерив практически одновременно расстояния Dx и D2 до
двух навигационных ориентиров А и В и проложив на
карте изолинии — окружности радиусов, равных измерен-
ным расстояниям, с центрами в местах изображения ори-
149
ёнтйров, в одной из точек их пересечения получают место
судна (рис. 60). Счислимое место судна в момент изме-
рения расстояний или приближенный пеленг одного из
ориентиров позволяет безошибочно решить, какую из
этих точек, которые, как правило, располагаются доста-
точно далеко одна от другой, следует принять за обсер-
вованное место судна.
Величина систематической ошибки места судна, полу-
ченного по двум расстояниям, может быть вычислена по
формуле (V—4). Учитывая, что градиент расстояния ра-
вен единице, т. е. gv =gv =gD=l, эту формулу можно
написать в следующем виде:
Д = +eDa-2eD1CD.C0Se •
Полагая eD = ed =ео, где ео—повторяющаяся систе-
матическая ошибка, будем иметь:
0
A = eDsec—. (V—И)
Величина Д может быть определена и графическим
путем. Для этого необходимо вторично проложить на
карте изолинии, изменив расстояния, измеренные до на-
вигационных ориентиров, на предполагаемые значения
ИЛИ £
Систематические ошибки измеренных расстояний
обычно малы и в большинстве случаев ими можно пре-
небрегать.
150
Влияние случайных ошибок может быть оценено ра-
диальной средней квадратической места судна. Примени-
тельно к определению места судна по двум расстояниям
формула (V—1) может быть написана в следующем
виде:
где и mD^ — средние квадратические ошибки измерения рас-
стояний;
О — угол пересечения линий положения, равный гори-
зонтальному углу между ориентирами, до которых
измерялись расстояния.
При равноточных измерениях эта
формула примет вид:
М = 1,4/Пд cosec 0. (V—12)
Так как ошибка определения места судна по двум рас-
стояниям зависит от угла 0 пересечения линий положе-
ния, то выбирать навигационные ориентиры для наблю-
дений следует так, чтобы горизонтальный угол между ни-
ми был в пределах 30—150° и по возможности бли-
же к 90°.
Две линии положения всегда пересекаются в одной
точке, поэтому единичное определение места судна по
двум расстояниям не позволяет обнаружить ошибок из-
мерений, расчетов и прокладки. Полученные этим спо-
собом места можно считать достоверными, если при
неизменном курсе судна ряд обсервованных точек
располагаются практически на одной прямой, являющей-
ся линией пути, а расстояния между этими точками про-
порциональны соответствующим промежуткам времени
или плаваниям по лагу.
Определение места судна по трем расстояниям. При
определении места судна этим способом вследствие неиз-
бежных ошибок измерений, расчетов и прокладки пересе-
чение трех изолиний-окружностей образует криволиней-
ный треугольник погрешности. Появление этого треуголь-
ника может быть обусловлено влиянием как случайных,
так и систематических ошибок. Прием отыскания вероят-
ного места судна зависит, как известно, от характера дей-
ствия этих ошибок (см. § 32).
Если размеры треугольника погрешности велики (его
стороны на путевой карте более 0,5 см), следует сразу
151
же проверить правильность опознания навигационных
ориентиров, записи, расчеты, прокладку. Если ошибки не
обнаружены, рекомендуется снова измерить расстояния
и проложить изолинии. Получив вновь большой треуголь-
ник погрешности, можно полагать, что он обусловлен в
основном влиянием систематических ошибок. При опре-
делении места судна по трем расстояниям, когда эти рас-
стояния невелики, можно для отыскания вероятного ме-
ста судна не прибегать к
построению биссектрис
углов треугольника по-
грешности, а использо-
вать более простой прием.
Этот прием, по существу,
сводится к переходу от
определения места судна
по трем расстояниям к
определению по трем раз-
ностям расстояний D\—
D2, D2—D3 и —D3. Оче-
видно, что эти разности
будут свободны от повто-
ряющейся систематиче-
ской ошибки. Как извест-
но, изолинией, отвечаю-
Рис. 61
щей постоянной разности расстояний между судном и
двумя навигационными ориентирами, является гипер-
бола.
Изменим измеренные расстояния D2 и D3 на неко-
торую- постоянную величину Д£> и снова проложим на
карте отрезки изолинии — дуги окружностей (рис. 61).
В результате получим второй треугольник погрешности
aibiCi. Соединим сходственные вершины первоначально-
го треугольника погрешности abc и нового а^ЬуСу прямы-
ми линиями. Точку пересечения этих линий F примем за
обсервованное место судна, свободное от влияния повто-
ряющейся систематической ошибки. Из рис. 61 видно, что
вершины а и а\ треугольников погрешности лежат на ду-
ге гиперболы D\—£>2=const, вершины b и — на дуге
гиперболы D2—£>з = const, вершины с и Су на дуге гипер-
болы Dy—£)3=const. Точка пересечения дуг этих гипер-
бол определяет обсервованное место судна. Следователь-
но, соединяя сходственные вершины треугольников по^
152
грешности прямыми линиями, мы заменяем прямыми
линиями отрезки дуг гипербол. Это допустимо, так как
на практике кривизна дуг гипербол незначительна, а
их отрезки, заменяемые прямыми линиями, малы.
Если ориентиры расположены по одну сторону гори-
зонта, место судна, свободное от влияния повторяющейся
систематической ошибки, будет находиться вне треуголь-
ника погрешности. Если же ориентиры расположены по
всему горизонту (вокруг судна), это место будет нахо-
диться внутри треугольника погрешности.
Влияние случайных ошибок на точность определения
места судна по трем расстояниям можно оценить эллип-
сом ошибок или радиальной средней квадратической
ошибкой места, которая вычисляется по формуле (V—9).
Расчеты по формулам (V—9) и (V—12) показывают, что
радиальная средняя квадратическая ошибка места суд-
на, полученного по трем расстояниям, в среднем на 15—
20% меньше, чем ошибка места, полученного по двум
расстояниям, измеренным до тех двух ориентиров из
трех, угол между которыми ближе к 90°. Этим часто поль-
зуются на практике. Вычисляют радиальную среднюю
квадратическую ошибку определения места судна по
двум расстояниям (для оптимального 0) и уменьшают
величину полученной ошибки на 15—20%.
Достоинством способов определения места судна по
расстояниям является независимость этих способов от
показаний компасов и, следовательно, ошибок в их по-
правках. Способ определения места судна по трем рас-
стояниям обладает всеми достоинствами, которые прису-
щи любому способу определения места судна, основан-
ному на использовании трех одновременно полученных
линий положения (изолиний).
С целью сокращения времени, затрачиваемого на про-
кладку места судна, определенного по двум или трем
расстояниям, на промысле или при плавании в узкостях
используют стадиометрическую сетку. При небольших
расстояниях до ориентиров стадиометрическая сетка об-
разуется двумя или тремя системами концентрических
окружностей. Центром каждой системы концентрических
окружностей является навигационный ориентир, до кото-
рого измеряется расстояние. Окружности должны распо-
лагаться на расстоянии 10—15 мм друг от друга. Если,
например, масштаб промыслово-навигационного планше-
153
та равен 1: 50000, то это соответствует расстоянию йа Ме-
стности 2,7—4,0 кбт. Каждую систему окружностей нано-
сят своим цветом и оцифровывают величинами соответ-
ствующих расстояний. Если же расстояния определяют
по вертикальному углу, измеренному секстаном, то каж-
дую систему окружностей оцифровывают величинами со-
ответствующих вертикальных углов.
§ 34. Определение расстоянии до навигационного
ориентира по вертикальному углу
При визуальных наблюдениях расстояние до ори-
ентира может быть определено по вертикальному углу,
измеренному секстаном, или при помощи оптических
дальномеров. Оптические дальномеры построены на раз-
личных принципах. Монокулярные горизонтально-базис-
ные дальномеры автоматически решают горизонтальный
прямоугольный треугольник по известному катету — базе
прибора и противоположному углу, измеряемому оптиче-
ским устройством. Стереоскопические дальномеры явля-
ются бинокулярными оптическими приборами, в которых
для измерения расстояний используется свойство чело-
веческого зрения различать глубину пространства и оце-
нивать расстояние по специальной шкале, помещенной в
поле зрения дальномера. Дальномеры-микрометры реша-
ют вертикальный прямоугольный треугольник по извест-
ному катету — высоте ориентира и измеренному прибо-
ром противоположному углу.
Ошибки измерения расстояний горизонтально-базис-
ными и стереоскопическими дальномерами уменьшаются
с увеличением базы прибора и увеличиваются примерно
пропорционально квадрату расстояния. Ошибка измере-
ния вертикального угла дальномером-микрометром того
же порядка, что и ошибка измерения этого угла секста-
ном. Для измерения малых вертикальных углов с повы-
шенной точностью разрабатывались специальные прибо-
ры. Но серийно такие приборы не изготовлялись.
На транспортных и добывающих судах оптические
дальномеры широкого применения не нашли. На таких
судах расстояния до ориентиров при визуальных наблю-
дениях определяются обычно по вертикальному углу, из-
меренному секстаном.
Рассмотрим раздельно два случая определения рас-
стояния этим методом: расстояние до ориентира меньше
154
дальности видимого горизонта и, следовательно» наблю-
датель видит основание ориентира или урез воды у бе-
реговой черты; расстояние до ориентира превышает
дальность видимого горизонта, т. е. основание ориенти-
ра скрыто за видимым горизонтом.
Определение расстояния до навигационного ориенти-
ра, основание которого видно. Предположим, что из точ-
ки А', расположенной на высоте е над уровнем моря, из-
мерен секстаном вертикальный угол а между вершиной
Рис. 62
и основанием ориентира В'В, высота которого известна
и равна h (рис. 62). Так как расстояние до ориентира
сравнительно невелико — меньше дальности видимого
горизонта с высоты глаза наблюдателя е, кривизну зем-
ной поверхности можно не учитывать. По этой же при-
чине можно пренебрегать и рефракцией, тем более что
расстояния до вершины и основания ориентира незначи-
тельно отличаются друг от друга.
Предполагается также, что вершина В' и основание В
ориентира располагаются на одной вертикальной линии.
Если вертикальный угол а измеряется между вершиной
ориентира и урезом воды у береговой черты, то ориентир
располагается на вертикальной линии над береговой чер-
той, а высота h равна высоте вершины ориентира над
уровнем моря.
Определим по известным высоте глаза наблюдателя
е, высоте ориентира h и вертикальному углу а = ос-М+«
расстояние AB^D от наблюдателя до судна. Прямая
А'М параллельна АВ и делит угол а на две части, т. е.
а = р+у.
155
Из рис. 62 видно, что tgP= д g и — Вос-
пользуемся формулой тангенса суммы углов и заменив
тангенсы углов найденными выражениями:
tg Р + tg у ’ fiD
tga = tg(P + ?)- 1—tgptgy;- Z)2 — (Л — е)е '
откуда
D2 tg а — hD — (h — е) е tg а = 0.
Решая полученное квадратное уравнение относитель-
но £), найдем:
_______________________ . Г. 4 (й—е) е tg а~||
_ й+ /л2~И(/» —e)etgq _ й ‘ | + ft2 J
2tg a 2tg a 2 tg a
Рассмотрим только положительный корень и для уп-
рощения разложим в биномиальный ряд множитель, вхо-
дящий во второй член найденного выражения. Тогда, ог-
раничиваясь первыми двумя членами разложения, полу-
чим:
Г. . 4(Л — e)etga "|- , (ft —e)etga ,
|.’+ л2 J -1+2 +-'-
и окончательно
h — е
D = Actga-f- е--tga. (V—13)
h
Второй член этой формулы представляет собой про-
изведение величины е на две правильные дроби, из кото-
рых вторая (tga) обычно очень мала. На этом основании
можно заключить, что второй член по величине меньше
высоты глаза наблюдателя. Так как высота глаза наблю-
дателя на мостике современного судна не превышает
15—20 м, на практике почти всегда можно пользоваться
формулой
£> = Actga (V—14)
или
о =-^7-Ctg a. (V—15)
Формула (V—15) позволяет получать расстояния в
милях пр высоте ориентира з метрах. По этой формуле
156
составлена табл. 29-а МТ—63. Учитывая, что угол а мал,
полагают tga^oc^ и для приближенных расчетов
вместо формулы (V—15) применяют формулу
D=l,86 — .
а'
На практике часто
приходится измерять
вертикальные углы
между вершиной ори-
ентира и урезом воды у
береговой черты, когда
ориентир удален от бе-
реговой черты (ориен-
тир не располагается
на вертикальной линии
над береговой чертой).
В этом случае, как
видно из рис. 63, в
формулу (V—14) нуж-
но вместо высоты h ввести высоту Л-|-Лй. Следовательно,
D = h ctga -f- АЛ ctga. (V—17)
Неизвестную величину АЛ можно найти из подобных
треугольников Af AM и МВ2С:
М—И-,
D — 1 ’
где I — расстояние от береговой черты до основания ориентира,
расположенного на одной вертикальной линии с его вер-
шиной.
Учитывая, что ctga^—, формулу (V—17) можно
h
написать в следующем виде:
Del
Эту формулу можно использовать на практике, решая
задачу в такой последовательности:
найти
D' = h ctga,
C = D'
затем определить
D'el
^h(D-l) ’
(V—18)
157
Величина второго члена формулы (V—18) будет тем
больше, чем меньше высота ориентира и чем больше рас-
стояние ориентира от береговой черты. Эта величина мо-
жет быть значительной особенно при />Л. В таких слу-
чаях рассчитывать расстояние до ориентира следует по
формуле (V—18), предварительно сняв с карты величи-
ну I.
Выведем теперь формулу средней квадратической
ошибки определения расстояния рассматриваемым мето-
дом. Прологарифмируем, а затем продифференцируем
формулу (V—16) по Д h и d:
In D = In 1,86 -|- Inh — Ina',
dD dh da'
'Б~=~~ a’ ’
Переходя к конечным приращениям, а затем к сред-
ним квадратическим ошибкам в измеренном вертикаль-
ном угле та и в принятой высоте ориентира ти (эти
ошибки независимы), получим:
Средняя квадратическая ошибка измерения верти-
кального угла секстаном при видимом основании ориен-
тира равна ±0',5—Г,2. В районах, где отсутствуют при-
ливы, величину средней квадратической ошибки высоты
маяка или навигационного знака, выбранной из навига-
ционных пособий, можно принимать равной ±0,3 м.
Ошибка высоты горы, сопки и некоторых других естест-
венных ориентиров значительно больше и может дости-
гать нескольких метров. В морях с приливами высоту
ориентира, которая дается во всех навигационных посо-
биях, над средним уровнем полной сизигийной воды сле-
дует исправлять поправкой, зависящей от высоты прили-
ва в момент наблюдений. Однако, учитывая, что элемен-
ты прилива известны не для всех участков побережья, в
морях с приливами часто целесообразнее измерять вер-
тикальный угол между вершиной В' и основанием В са-
мого маяка или навигационного знака (см. рис. 62).
В этом случае h будет представлять собой высоту соору-
>58
женйя, а эта высота всегда известна с Достаточно высо-
кой точностью. Из анализа формулы (V—19) следует,
что выгоднее определять расстояния по близко располо-
женным ориентирам с большой высотой. В этом случае
измеренный угол будет больше и, следовательно, выра-
жение, стоящее под корнем, меньше. Следует также от-
давать предпочтение
вестны с минималь-
ными ошибками.
При большой вы-
соте глаза наблюда-
теля расстояние до
близко расположен-
ных и низких ориен-
тиров, например до
буев, можно опреде-
лить по вертикаль-
ному углу снижения
при помощи форму-
лы (IV—7). Оценка
точности этого мето-
да применительно к
определению скоро-
сти ветрового дрей-
фа судна и тактиче-
ориентирам, высоты которых из-
ского диаметра цир- Рис 64 -=
куляции дана в § 18
и § 6 части второй.
Определение расстояния до навигационного ориенти-
ра, основание которого скрыто за видимым горизонтом.
Расстояние до ориентира, расположенного за видимым
горизонтом, может быть велико, и в этом случае при рас-
четах необходимо учитывать кривизну земной поверхно-
сти и земную рефракцию. Предположим, что наблюда-
тель, глаз которого расположен в точке А' на высоте е
над уровнем моря, измерил секстаном угол а между на-
правлениями на видимый горизонт и вершину В' ориен-
тира (рис. 64). Эти направления будут определяться ка-
сательными А'В" и А'Н' к криволинейным траекториям
световых лучей. Как видно из рис. 64, угол р0 между пло-
скостью истинного горизонта наблюдателя и истинным
направлением на вершину ориентира составляет:
159
Ро = a — d — r = oc i + s — d — г, (V—20)
где d — наклонение видимого горизонта, которое выбирают из
табл. 11-а МТ—75 по аргументу е или непосредственно из-
меряется специальным оптическим прибором — наклоно-
мером;
г — земная рефракция, вычисляемая по эмпирической формуле
r*=0,08Dc, где Dc — счислимое расстояние до ориентира,
мили.
В треугольнике А'В'О угол О А'В' равен 9О° + ро,
а угол А'В'О равен 90°—(D + р0) • Следовательно, исполь-
зуя теорему синусов, можно написать
cos(D + Po) /? + е
cos ро R + h
или
cos(D+₽e) = -J-cos₽o, (V—21)
А Т «
где 7? — радиус Земли;
D — центральный угол, равный в угловой мере дуге АВ — ис-
комому расстоянию от наблюдателя до ориентира.
В принципе по формуле (V—21) можно вычислить ве-
личину D. Предварительно необходимо выбрать из таб-
лицы или измерить наклономером величину d, снять с
карты De, вычислить г и получить значение 0О. Если D6
известно с большой ошибкой, задача решается двойным
приближением.
Однако на практике формулу (V—21) в таком виде
не используют. Ее преобразуют и приводят либо к виду,
удобному для составления таблиц, либо к виду, удобному
для вычислений с помощью логарифмической линейки
или ЭКВМ. Так, например, для составления табл. 29
МТ—75 «Расстояние по вертикальному углу» формула
(V—21) приведена к виду:
tg Р
0,000245
В этом выражении D — в милях; h—е — в метрах, а р=р0+г-
=а—d=oc-|-i+s—d.
Введение в вычисления угла 0 вместо угла 0О позво-
лило освободиться от необходимости исправлять изме-
ренный угол рефракцией и учесть ее влияние при со-
ставлении таблицы. Для коэффициента рефракции при-
нято значение х=0,16. Расстояние D выбирают из табл.
29 МТ—75 по аргументам Л—е и 0,
160
I2 _ h~e _ tgP
1 , 0,22679 0,000245 '
(V—22)
Расстояние до навигационного ориентира, основание
которого скрыто под’ видимым горизонтом, определяется
с невысокой точностью из-за ошибок в рефракции и на-
клонении видимого горизонта, если наклонение видимого
горизонта выбирается из таблицы, а не измеряется непо-
средственно наклономером. На практике этот способ при-
меняется для определения места судна при подходе с мо-
ря к берегу. На промысле в прибрежных районах к нему
прибегают в тех случаях, когда промысловая площадка
располагается в большом удалении от высоких берегов,
но в пределах видимости характерных вершин гор, сопок.
При помощи табл. 29 МТ—75 можно определять рас-
стояние до ориентира и в том случае, когда оно меньше
дальности видимого горизонта и секстаном измеряют
вертикальный угол а между вершиной и основанием
ориентира. В этом случае измеренный угол исправляют
не поправкой за наклонение видимого горизонта d, а по-
правкой за наклонение зрительного луча da. Эта поправ-
ка выбирается из табл. 11-6 МТ—75 по аргументам е и
Таким образом, угол 0, являющийся аргументом для
входа в таблицу 29 МТ—75, рассчитывают в рассматри-
ваемом случае по формуле
0 " а — du = ос i И- s — dn • (V—23)
Если Dc известно с большой ошибкой, то определение
D может потребовать нескольких входов в табл. 11-6 и 29
до тех пор, пока одно и то же значение D не повторится.
Очевидно, что при частых определениях расстояний
по вертикальному углу, измеренному между вершиной
и основанием навигационного ориентира, а это практиче-
ски возможно на промысле в прибрежных районах, зна-
чительно удобнее пользоваться табл, типа 29-а МТ—63.
§ 35. Определение места судна комбинированными
способами
Комбинированные способы определения места суд-
на основаны на измерении разнородных навигационных
параметров, которым соответствуют и разнородные изо-
линии. К комбинированным относятся следующие спосо-
бы определения места судна: по пеленгу и расстоянию,
по пеленгу и горизонтальному углу, по створу и пеленгу,
по створу и горизонтальному углу. Эти способы, в осо-
11 В. Е. Ольховский 16]
бенности способ определения места судна по пеленгу и
расстоянию, используются не только при визуальных на-
блюдениях ориентиров, но и при измерениях навигацион-
ных параметров с помощью радиотехнических и гидро-
акустических средств.
Определение места судна по пеленгу и расстоянию.
Взяв пеленг навигационного ориентира А и измерив од-
новременно расстояние
Рис. 65
до него, получим место
судна в пересечении
линии истинного пе^
ленга с окружностью
радиуса, равного изме-
ренному расстоянию, и
центром в месте изо-
бражения ориентира
(рис. 65). Если рас-
стояние до ориентира
значительно (основание ориентира скрыто за видимым
горизонтом) и ортодромическая поправка превышает
0°,25, то полученный истинный пеленг необходимо испра-
вить этой поправкой*.
При прокладке на карте определения места судна по
пеленгу и расстоянию нет необходимости строить окруж-
ность. Достаточно, проложить линию пеленга и отложить
на ней измеренное расстояние. На промысле для ускоре-
ния и упрощения прокладки применяют комбинирован-
ную азимутально-стадиометрическую сетку. Иногда, для
того чтобы не затемнять навигационно-промысловую об-
становку, на планшет или карту наносят только систему
окружностей, а для прокладки линий пеленгов использу-
ют одну из этих окружностей, на которой с помощью про-
трактора строят картушку через 1—2°.
Радиальная средняя квадратическая ошибка опреде-
ления места судна по пеленгу и расстоянию может быть
рассчитана по формуле (V—1). При определении места
судна этим способом обе линии положения пересекаются
под прямым углом. Полагая 0 = 90°, тц =/nn, ga = —,
mut = mD и формулу (V—1) можно написать в
таком виде:
* В § 43 приведена таблица предельных расстояний, при кото-
рых допустимо пренебрегать ортодромической поправкой.
162
м=У +^* (v”24)
Из этой формулы следует, что с увеличением расстоя-
ния до ориентира точность определения места судна
уменьшается. Поэтому, если есть возможность выбора
ориентира, нужно отдавать предпочтение ближайшему
из них. Способ определения места судна по пеленгу и рас-
стоянию один из наиболее распространенных и единст-
венный, позволяющий получить обсервованное место
судна, когда в пределах видимости имеется только один
навигационный ориентир.
Недостатком этого способа, д
как и всех других способов
определения места судна по \
двум линиям положения, яв- \
ляется отсутствие надежно- \ 0 s'
го контроля измерений, рас- /
четов и прокладки. F а. 8
Определение места суд-
на по пеленгу и горизон- т
тальному углу. Взяв пеленг Рис. 66
ориентира А и измерив одно-
временно секстаном гори-
зонтальный угол 0 между ориентирами А и В, получим
место судна в пересечении линии истинного пеленга с ок-
ружностью, проходящей через места изображения ориен-
тиров А и В и вмещающей измеренный угол 0 (рис. 66).
Однако строить на карте вмещающую окружность нет
необходимости. Для получения обсервованного места
судна достаточно рассчитать пеленг ориентира В и про-
ложить на карте линии обратных истинных пеленгов
ориентиров А и В:
ипв = ипА±е.
Знак «плюс» или «минус» в этой формуле берется в
зависимости от того, как располагается ориентир В от-
носительно ориентира А — справа или слева.
Можно также проложить только пеленг ориентира А
и в любой точке т на линии этого пеленга построить из-
меренный угол 0, а затем сторону этого угла перенести
параллельной линейкой в место изображения ориентира
В. Точка F будет обсервованным местом судна.
163
Ошибка определения места судна по пеленгу и гори-
зонтальному углу будет в основном зависеть от ошибки
пеленга, так как по сравнению с этой ошибкой ошибка
измерения секстаном горизонтального угла очень мала.
Для оценки точности определения места судна этим спо-
собом могут быть использованы формулы (V—1) и
(V-4).
К определению места судна по пеленгу и горизонталь-
ному углу прибегают обычно в случае, когда в видимости
судна имеются два на-
вигационных ориенти-
ра, но один из них от
компаса не виден (на-
пример, закрыт какой-
либо надстройкой).
В этом случае опреде-
лить место судна по
двум пеленгам нельзя
и для получения второй
п линии положения ис-
пользуется секстан.
Определение места
судна по створу и пеленгу. Если, находясь на ли-
нии створа ориентиров Л1 и Л2, взять пеленг ка-
кого-либо ориентира В, то в пересечении линии
створа с линией обратного истинного пеленга получим
место судна на момент пеленгования (рис. 67). Этот спо-
соб можно использовать, когда судно следует по линии
створа или же пересекает линию створа. В этом и другом
случаях рекомендуется пеленговать не только ориентир,
но и створ. Зная компасный пеленг створа, можно опре-
делить поправку компаса и тем самым повысить точ-
ность истинного пеленга ориентира. Радиальную сред-
нюю квадратическую ошибку определения места судна
по створу и пеленгу можно вычислить по формуле (V—1).
В рассматриваемом случае под тм в этой формуле
следует понимать среднее квадратическое смещение на-
блюдателя в направлении, перпендикулярном линии
створа, соответствующее средней квадратической вели-
чине разрешающей способности человеческого глаза
На основании формулы (II—1) можно написать:
Фа + L) '
тлп1 = --А—ту arc 1',
164
где Da — расстояние от наблюдателя до переднего створного
знака;
L — разнос створных знаков.
Среднее квадратическое смещение линии пеленга бу-
дет
тп п
- 57>3 DB>
где DB — расстояние до пеленгуемого ориентира.
Следовательно,
1
sin О
DAt (DAr + L)
3438L
М =
2/о
, f тп
(V—25)
Определение места судна по створу и горизонтально-
му углу. Если, находясь на линии створа ориентира Ai
и А2, измерить секстаном горизонтальный угол 0 между
одним из створных знаков и ориентиром В, то в пересе-
чении линии створа с окружностью, проходящей через
ориентиры и вмещающей измеренный угол 0, получим
место судна на момент измерения угла. При прокладке
нет необходимости прибегать к построению вмещающей
окружности. Можно воспользоваться протрактором,
калькой или выполнить простое графическое построение,
показанное на рис. 66.
Учитывая, что средняя квадратическая ошибка линии
положения, соответствующей измеренному горизонталь-
ному углу, равна
^At db
d 3438 ’
формулу, выражающую радиальную среднюю квадрати-
ческую ошибку определения места судна по створу и го-
ризонтальному углу, можно написать в таком виде:
М =
3438 sin 0
(V-26)
§ 36. Определение места судна по двум
разновременно взятым пеленгам (крюйс-пеленг)
Использование двух разновременных линий поло-
жения (изолиний) основано, как известно, на переносе
по данным счисления первой линии положения к месту
165
получения второй линии положения. Первую линию по-
ложения переносят параллельно самой себе по направ-
лению движения судна на расстояние, пройденное суд-
ном за время между моментами измерения навигацион-
ных параметров. Точка пересечения второй линии поло-
жения с первой перенесенной и будет местом судна в
момент второго измерения навигационного параметра.
Эта задача может быть сведена к вмещению между пер-
вой и второй линиями положения отрезка пути судна,
равного расстоянию, пройденному по линии пути за вре-
мя между моментами измерения навигационных пара-
метров.
Так как при определении места судна по разновре-
менным линиям‘положения используются не только ре-
зультаты измерения навигационных параметров, но и
элементы счисления, полученное место называется счи-
слимо-обсервованным.
В отличие от обсервованного оно обозначается на
карте треугольником.
Способ определения места судна по двум разновре-
менно взятым пеленгам (способ крюйс-пеленга) приме-
няется в тех случаях, когда в видимости судна имеется
один ориентир и наблюдатель может измерить только
один навигационный параметр — пеленг.
Предположим, что в момент 1\ (ол^) был взят первый
пеленг навигационного ориентира Л, а в момент Т2(ол2)—
второй пеленг этого ориентира (рис. 68). При отсутст-
вии дрейфа и сноса течением для получения места судна
выполняют следующее графическое построение. По ли-
нии истинного курса, проложенной на карте, от точки N
166
пересечения этой линии с линией первого пеленга откла-
дывают расстояние, пройденное судном за время Т2—
Это расстояние вычисляют либо по показаниям лага, ли-
бо по скорости хода и продолжительности плавания по
формулам
Sji = (рл2 — олх) кд
ИЛИ
*^об = Vo6 (Га 7\).
Через полученную точку М проводят прямую, парал-
лельную линии первого пеленга, до пересечения с линией
второго пеленга в точке F. Эта точка и будет местом суд-
на в момент взятия второго пеленга. Точку ДА на линии
первого пеленга, от которой прокладывают перемещение
судна за время Т2—Т\> можно выбирать совершенно про-
извольно. Поэтому часто используют несколько иные по-
строения. Например, от места изображения ориентира А
прокладывают линию, параллельную линии истинного
курса. По этой линии от точки А откладывают расстоя-
ние Зл=(ол2—0Л1)^л или 30б=К)б(712—Л) и через полу-
ченную точку М' проводят прямую, параллельную линии
первого пеленга, до пересечения с линией второго пе-
ленга.
Если за время между моментами взятия первого и
второго пеленгов судно следовало не одним, а несколь-
кими, например тремя, курсами, то от любой точки Af на
линии первого пеленга прокладывают последовательно
линии всех истинных курсов и пройденные по каждой из
этих линий расстояния.
Через полученную точку М3 проводят прямую, па-
раллельную линии первого пеленга, до пересечения с
линией второго пеленга (рис. 69).
Если счисление пути судна ведется с учетом дрейфа,
то при всех рассмотренных выше построениях проклады-
вается не линия истинного курса, а линия пути при дрей-
фе и расстояние Зл=(ол2—олх)кл откладывается по этой
линии.
Если счисление пути судна ведется с учетом сноса те-
чением, то перенос линии первого пеленга осуществляет-
ся по направлению линии пути на расстояние, пройден-
ное судном относительно Земли за время между момен-
тами пеленгования. Это требует построения треугольника
путей. Предположим, что на карте проложены линия
167
Истинного курса и линия пути, а также линии первого и
второго пеленгов (рис. 70). В этом случае для получения
места судна выполняют следующее графическое построе-
ние.'ТТо линии истинного курса от точки N пересечения
этой линии с линией первого пеленга откладывают рас-
стояние 5Л= (ол2—oAi)kn, из полученной точки М прово-
дят прямую, параллельную направлению течения, а из
точки N — прямую, па-
раллельную линии пу-
ти судна. В пересече-
нии этих прямых полу-
чают точку Р. Очевид-
но, что MP=Vt(T2—
—Л), где ит — ско-
рость течения. Прове-
дя через точку Р пря-
мую, параллельную ли-
нии первого пеленга,
до пересечения с лини-
ей второго пеленга, по-
лучают точку F — место
судна в момент взятия второго пеленга.
Построить треугольник путей NPM можно и при точ-
ке А. Такой прием целесообразен на малых углах сноса
(рис. 71).
Если счисление пути судна ведется с учетом дрейфа
и сноса течением, то при построении треугольника путей
прокладывается не линия истинного курса, а линия пути
при дрейфе ПУа=Я/С-|-а, и расстояние 5л(ол2—олх)кл
откладывается по этой линии.
168
Кроме рассмотренных выше и некоторых других гра-
фических приемов получения места судна по двум разно-
временно взятым пеленгам существует и графоаналити-
ческий прием. Этот прием сводится к вычислению рас-
стояния между судном и навигационным ориентиром в
момент взятия второго пеленга. Обозначив угол между
пеленгами через 0 (см. рис. 68) и угол между линиями
пути и первого пеленга через q, из треугольника N'AF
можем написать
^Ssin<7
sin 0
(V—27)
Рассчитав £>, можно, не прокладывая линии первого
пеленга, получить счислимо-обсервованное место судна
в пересечении линии второго пеленга и окружности с ра-
диусом D и центром в месте изображения ориентира А.
Графические построения, связанные с получением ме-
ста судна по двум разновременным пеленгам, можно
упростить, если брать пеленги ориентира, когда он нахо-
дится на определенных курсовых углах. Такие приемы
определения места судна называются частными случая-
ми крюйс-пеленга. Для того чтобы воспользоваться ими
на практике, необходимо предварительно рассчитать по
заданным курсовым углам ОКП или КП и, устанавливая
пеленгатор на соответствующие отсчеты компасных пе-
ленгов, замечать моменты, когда ориентир придет в ви-
зирную плоскость пеленгатора. Все это усложняет на-
блюдения. Частные случаи крюйс — пеленга используют-
ся на практике редко.
Место судна можно определить и по разновременно
взятым пеленгам двух навигационных ориентиров. К та-
кому приему прибегают в условиях пониженной видимо-
сти, когда ориентир скрывается раньше, чем взят его вто-
рой пеленг, и вскоре после того, как он скрылся, откры-
вается другой ориентир. Графические способы получения
счислимо-обсервованного места в этом случае ничем не
отличаются от тех, которые используются в случае, ког-
да берутся два разновременных пеленга одного ориен-
тира.
Как известно, при отсутствии значительной качки точ-
ность пеленга определяется в основном ошибкой ек в
принимаемой поправке компаса. Эта ошибка содержится
как в проложенных на карте пеленгах, так и в проложен-
169
ном курсе судна и по характеру своего воздействия яв-
ляется систематической (повторяющейся). Как видно из
рис. 72, при прокладке на карте линии пеленгов и линия
курса судна окажутся развернутыми относительно их
верного положения на угол ек.
Ошибка определения места судна в момент взятия
второго пеленга FFi=A может быть рассчитана по фор-
муле
о
Biz
= (V—28)
О/
Из этой формулы видно, что для уменьшения влия-
ния ошибки в принимаемой поправке компаса следует
брать пеленг второго ориентира, когда расстояние до не-
го будет минимальным, т. е. в момент траверза.
Для оценки влияния случайных ошибок пеленгова-
ния и ошибок счисления пути судна воспользуемся фор-
мулой (V—1), полагая в этой формуле под тлп ошибку
перенесенной к месту судна в момент Т2 первой линии
положения )
\ 2
^1 / + \.тс (0I2-
(V—29)
В этом выражении первое
слагаемое под корнем пред-
ставляет собой квадрат сред-
ней квадратической ошибки
первой линии положения, обус-
ловленной только случайными
ошибками пеленгования, а
второе — квадрат линейной
средней квадратической ошиб-
ки счисления пути судна по
направлению нормали к пер-
вой линии положения за про-
межуток времени t — T2—Л между моментами взятия
первого и второго пеленгов.
Подставляя выражение (V—29) в формулу (V—1),
и учитывая, что
преобразований получим
D2> после соответствующих
170
М = 1/ ( ——я —) + d!) + [Г- (V—30)
V \57,3sin0/ ' 1 ' L sin 9 J ’
В этой формуле первое слагаемое под корнем пред-
ставляет собой квадрат радиальной средней квадратиче-
ской ошибки определения места судна по двум одновре-
менно взятым пеленгам. Формула (V—30) может быть
использована для расчета радиальной средней квадрати-
ческой ошибки определения места судна по двум разно-
временно взятым пеленгам, но она неудобна для анали-
за и обоснования практических рекомендаций.
Предположим, что для получения места судна по
двум разновременно взятым пеленгам прокладывается
только линия второго пеленга и по этой линии от места
изображения ориентира откладывается расстояние Z),
которое рассчитывается по формуле (V—27). При этом
условии можно считать, что место судна определяется по
двум взаимно перпендикулярным линиям положения:
линии пеленга и касательной к окружности с центром в
месте расположения ориентира и радиусом r=D.
Дифференцируя формулу (V—27) по переменным
S, q и 0, можем написать
si n a S S
dD = — dS Н-----— cos qdq — --— sin q ctg 0 dO.
sin0 sin0 77 sin0 7
Переходя к конечным приращениям, а затем к сред-
ним квадратическим ошибкам и вводя значение D, бу-
дем иметь:
тлп, = mD = D |/ + cfg2 Ят’я + ctg2 9т$ .
(V-31)
Подставляя выражение (V—31) в формулу (V—1)
тп
и учитывая, что тлп* =----D\, окончательно получим:
“I / f тгг \ ( \ „
М=£>|/ I 1 + I —— I +ctg2?m2+ctg20m| , (V—32)
где ms —средняя квадратическая ошибка определения пройденно-
го за время t=Tz—Т\ расстояния, обусловленная ошиб-
ками в поправке лага или учете течения;
~ mn^rnni (ПРИ тп1 = тп3 = тп тъ )»
171
tnq— у тпу + мп, где тпу —средняя квадратическая ошибка
определения пути судна.
Анализ формулы (V—32) показывает, что в общем
случае наиболее точно место судна по двум разновре-
менно взятым пеленгам можно получить при 7=504-80°
и 0=404-70°. Если исключить случаи малых углов q и 0,
на точность определения места судна наибольшее влия-
ние оказывает обычно неучтенное течение или ошибки
определения элементов течения в районе плавания. На
рис. 73 точка F—место судна, полученное с учетом те-
чения, а точка F' — место судна, полученное без учета
течения.
Обозначив угол между линией первого пеленга и на-
правлением течения через а и учитывая, что M'F=MP=
=ит(7’2—Г]), из треугольника M'F'F можем написать:
Дт = FF' =vT(T2 — ТО sin a cosec 0, (V—33)
Дт представляет собой ошибку счислимо-обсервованно-
го места, обусловленную влиянием неучтенного течения.
Очевидно, что при а=0° или а=180° Дт=0. Следова-
тельно, если известно направление течения в районе пла-
вания, ошибку Дт можно исключить, взяв первый пеленг
по направлению течения.
При vT=const и Т2—ri=const Дт=шах при а=90°
или а=270°.
172
§ 37. Определение места судна по двум
разновременно измеренным расстояниям
или горизонтальным углам
(крюйс-расстояние и крюйс-угол)
Прокладку определения места судна по двум раз-
новременно измеренным расстояниям или горизонталь-
ным углам, как и по двум разновременно взятым пелен-
гам, можно свести к переносу по данным счисления изо-
линии, полученной в момент 7\, к месту судна в момент
Т2 получения второй изолинии. Измерив расстояние до
навигационного ориентира или горизонтальный угол
между двумя ориентирами, получаем изолинию, кото-
рая при сравнительно небольших расстояниях изобра-
жается на меркаторской карте, как известно, окружно-
стью. Перенос дуги окружности параллельно самой себе
по направлению перемещения судна на величину прой-
денного им за промежуток времени t=T2—Т\ расстояния
равносилен соответствующему переносу центра окруж-
ности.
Если счисление ведется без учета дрейфа и сноса те-
чением, центр окружности, полученной в момент пе-
реносится по направлению линии истинного курса на
расстояние Зл=(ол2—0Л1)йл или 5Об=УОб(Л—Л)> где
ОЛ1 и ол2 — отсчеты лага в моменты Т\ и Т2 измерения
расстояний D[ и D2 или горизонтальных углов си и а2.
При учете дрейфа центр окружности, полученной в мо-
мент 7\, переносится по линии пути при дрейфе на рас-
стояние 5Л = (ол2—0Ai)kn. Если счисление ведется с уче-
том сноса судна течением, то этот центр переносится по
направлению линии пути судна на величину расстояния,
пройденного судном относительно земли за промежуток
времени t=T2—7\. При графическом учете сноса судна
течением это требует построения треугольника путей.
В случае совместного учета дрейфа и сноса течением
при построении треугольника путей прокладывается не
линия истинного курса, а линия пути при дрейфе и рас-
стояние 5л = (ол2—0Л1)£л откладывается по этой линии.
При определении места судна по разновременно из-
меренным расстояниям центр окружности (изолинии)
располагается в месте изображения навигационного ори-
ентира, до которого измерялось расстояние. Если место
судна определялось по двум горизонтальным углам, из-
173
Меренным между двумя ориентирами, то предваритель-
но необходимо найти центры Oi и О2 окружностей, про-
ходящих через эти ориентиры и вмещающих измерен-
ные в моменты Т\ и Т2 горизонтальные углы си и а2
(см. §30).
На рис. 74 показано графическое построение, которое
необходимо выполнить на карте для того, чтобы полу-
чить место судна по двум расстояниям D\ и D2, измерен-
ным в моменты 1\ и Т2, до ориентира А.
На рис. 75 показано графическое построение, которое
необходимо выполнить на карте для того, чтобы полу-
чить место судна по двум горизонтальным углам он и а2,
174
измеренным в моменты Т\ и Т2 между ориентирами А
и В. В том и другом случае предполагается, что счисле-
ние пути судна ведется с учетом дрейфа и сноса тече-
нием.
Оценка точности определения места судна по двум
разновременно измеренным расстояниям или горизон-
тальным углам производится так же, как и по двум раз-
новременным пеленгам.
Для оценки влияния случайных ошибок измерения
расстояний или горизонтальных углов и ошибки счисле-
ния пути судна за промежуток времени t=T2—Т\ можно
использовать формулу (V—1). При этом под тЛП1 в этой
формуле следует понимать ошибку перенесенной к мес-
ту судна в момент Т2 первой линии положения, получен-
ной в момент )
Предположим, например, что место судна определя-
ется по двум разновременно измеренным расстояниям.
Учитывая, что градиент расстояния равен 1 и полагая
mDi—mDt=mD, может написать
m\ni - V '"d + Н ю]2.
= mD •
Следовательно,
(V-34)
V \ sin 0 / L sin 0 J
В формуле (V—34) первое слагаемое под корнем
представляет собой квадрат радиальной средней квад-
ратической ошибки места судна, полученного по двум
одновременно измеренным расстояниям.
К определению места судна по двум разновременно
измеренным расстояниям целесообразно прибегать в тех
случаях, когда измерение расстояний обеспечит более
высокую точность определения места судна, чем взятие
пеленгов, например при сильной качке.
К определению места судна по двум разновременно
измеренным горизонтальным углам на практике прибе-
гают редко — при невозможности по какой-либо причи-
не использовать для пеленгования компас.
175
§ 38. Понятие о сопутствующей линии
положения*
Как известно из курса «Математические основы
судовождения», для однозначного определения места
судна, его пути и истинной (относительно земли) скоро-
сти, когда путь и истинная скорость судна постоянны, не-
обходимо и достаточно иметь четыре разновременно по-
лученные из наблюдений линии положения (изолинии).
Каждая такая линия положения связывает одним урав-
нением четыре параметра, которыми определяется век-
тор истинной скорости судна: координаты точки прило-
жения этого вектора (текущие координаты места судна),
величину скорости и направление линии пути (ПУ).
Предположим, что из наблюдений получены только
три разновременные линии положения, например три пе-
ленга. Если использовать метод крюйс-пеленга, то мож-
но иметь лишь счислимо-обсервованное место, на точ-
ность которого окажут влияние ошибки счисления.
М. Н. Андреев показал, что, имея три разновременные
линии положения (одновременность двух из них допу-
стима), можно получить на любой момент плавания, по-
ка судно сохраняет постоянными путь и истинную ско-
рость, еще одну линию положения, на которой находит-
ся место судна. Эта линия положения концентрирует в
себе всю навигационную информацию от наблюденных
разновременных линий положения и от постоянства век-
тора истинной скорости судна V. Она перемещается вме-
сте с судном и поэтому названа М. Н. Андреевым со-
путствующей линией положения (СЛП).
Для того чтобы легче понять сущность сопутствую-
щей линии положения (линии положения особого рода),
рассмотрим предварительно два частных случая.
Первый частный случай. Известно обсервованное ме-
сто судна в момент Т\. В момент Т2 из наблюдений полу-
чена еще одна линия положения (рис. 76). Найдем все
возможные места судна на некоторый момент Т при
условии, что с момента Л судно следует с постоянными,
* Этот параграф написан по материалам, переданным автору
М. Н. Андреевым, разработавшим теорию сопутствующих линий
положения. Основы аналитической теории сопутствующих линий
положения рассматриваются в курсе «Математические основы судо-
вождения».
176
хотя и неизвестными ПУ и V. В дальнейшем это усло-
вие подразумевается всегда и специально не оговарива-
ется. Для решения поставленной задачи проложим вна-
чале одну из линий возможных путей судна (ЛВП). Она
обязательно начинается в
Рис. 76
точке Т\ и пересекает линию
положения Т2. Если судно
следовало именно так, то
нетрудно рассчитать, где
оно окажется в момент Т.
Это наглядно показано на
рис. 76. Очевидно, что если
точка М — одно из возмож-
ных мест судна на момент
Т, то все возможные места
судна на этот момент будут
находиться на прямой, про-
ходящей через точку М па-
раллельно линии положе-
ния Т2. Эта прямая и будет
представлять собой сопутствующую линию положения
для момента 7, т. е. СЛП(Т),
Если в момент Т была получена из наблюдений ка-
кая-либо изолиния (на рис. 76 — кривая), то точка ее
пересечения с СЛП(Т)
77
места судна на некоторый
определит место судна
в этот момент. Имея
два места судна на
разные моменты, легко
получить вектор его
истинной скорости. -
Второй частный /
случай. В моменты Т{ /
и Т2 получены из на-
блюдений две парал- Рис
лельные друг другу
линии положения (рис.
77). Найдем все возможные
момент Т. Для решения поставленной задачи достаточ-
но провести одну из линий возможных путей судна, по-
лучить на этой линии точку М (возможное место судна
на момент Т) и из этой точки провести прямую, парал-
лельную линиям положения 7\ и Т2. Эта прямая будет
представлять собой сопутствующую линию положения
12 В. Е. Ольховский
177
на момент Т, т. е. СЛП(Т). Если в момент Т из наблю-
дений была получена какая-либо изолиния (кривая на
рис. 77), то точка ее пересечения с СЛП(Т) определит
место судна в этот момент.
В рассматриваемом случае вектор истинной скоро-
сти судна получить нельзя. Если бы задача решалась
аналитически, то мы имели бы только три уравнения
(две линии положения и изолиния), связывающие че-
тыре неизвестных. С помощью этих уравнений можно
получить лишь два неизвестных — координаты места суд-
на (точки приложения вектора истинной скорости).
В первом частном случае имели бы четыре уравнения
(две линии положения и обсервованное место судна, эк-
вивалентное двум уравнениям). Поэтому и графическое
построение позволило бы решить задачу полностью.
Перейдем теперь к способу геометрического построе-
ния сопутствующей линии положения в общем случае.
Предположим, что в моменты 71, и Т3 из наблюдений
получены три линии положения, не пересекающиеся в
одной точке. Найдем все возможные места судна на не-
который момент Т. За линию возможного пути судна
примем каждую из разновременных линий положения
поочередно и определим на этих линиях точки Мь Л12,
Л4з, в которых может находиться судно в момент 7. В ана-
литической теории сопутствующих линий положения до-
казывается, что все эти точки лежат на одной прямой,
представляющей собой сопутствующую линию положе-
ния— СЛП(Т). В этом можно убедиться, если выпол-
нить построение так, как показано на рис. 78. На рис. 78
принята система обозначений с помощью индексов. Так,
например, символ S” означает возможный отрезок ли-
нии пути судна между третьей и первой линиями поло-
жения, когда за линию возможного пути судна принята
вторая линия положения. Получив из наблюдений в мо-
мент Т какую-либо изолинию (кривая на рис. 78), в пе-
ресечении ее с СЛП(Т) найдем место судна в момент 7.
Имея место судна и еще две линии положения Т\ и 72
или 7t и 73, приемом, рассмотренным в первом частном
случае, можно определить вектор истинной скорости
судна.
Таким образом, СЛП(Т) есть геометрическое место
всех возможных мест судна на момент 7 при условии,
что в течение промежутка времени Т—Т\ судно шло рав-
на
номерно и прямолинейно, пересекая полученные из на-
блюдений разновременные линии положения в правиль-
ной последовательности и так, что отрезки линии пути
судна между ними были пропорциональны соответствуй
ющим промежуткам времени.
Если судно следует постоянным курсом и частота
вращения гребных винтов поддерживается постоянной, то
и при неизвестных поправке лага, угле дрейфа и элемен-
тах течения гипотеза о равномерности и прямолинейно-
сти движения судна в промежутке между измерениями
навигационных параметров практически справедлива.
Следовательно, обсервации по разновременным линиям
положения с использованием сопутствующей линии по-
ложения свободны от главного источника ошибок —
ошибок счисления. Поэтому к такого рода обсервациям
целесообразно прибегать во всех случаях, когда нет воз-
можности определить место судна по двум и более одно-
временным линиям положения.
§ 39. Графические приемы прокладки
обсервованного места судна в случае, когда
навигационные ориентиры находятся за пределами
рамок планшета или карты
Промысловое судовождение предъявляет высокие
требования к точности счисления пути судна, поэтому
при работе с тралом прокладка ведется на промыслово-
навигационных планшетах или картах крупного масшта-
ба. Однако при ведении промысла на удаленных от бе-
12* 179
рега участках выбор масштаба планшета или карты
ограничен условием: навигационные ориентиры, по ко-
торым определяют место судна, должны помещаться
внутри рамок планшета или карты. Это часто заставля-
ет использовать мелкомасштабные планшеты, на кото-
рых точное ведение счисления затруднено, либо приме-
нять неудобные в обращении крупномасштабные план-
шеты с размерами рамок, значительно превышающими
стандартный формат рамок морской навигационной
карты.
Ниже рассмотрен прием, позволяющий достаточно
просто наносить па крупномасштабный промыслово-на-
вигационный планшет (карту) стандартного формата
любые обсервации по углам, пеленгам, и расстояниям
в случае, когда навигационные ориентиры находятся за
рамками планшета (карты).
Прокладка определений места судна по двум гори-
зонтальным углам. Предположим, что промысел ведет-
ся на площадке, расположенной в значительном удале-
нии от видимых с судна ориентиров Д, В и С, которые
находятся за рамками промыслово-навигационного план-
шета MNLK (рис. 79).
Соединим углы рамок планшета прямыми линиями
и в пересечении диагоналей получим центральную точ-
ку О. Отложим на продолжении диагоналей от точек Л1,
У, L, К отрезки, равные ОМ, ON, OL, ОК, и получим
180
точки M't N\ L', К'у которые определят рамки нового
планшета M'N'L'K' того же масштаба. Как видно из
рис. 79, навигационные ориентиры А, В и С располага-
ются в пределах рамок этого планшета.
Проложив от точек А, В и С измеренные углы аир,
обсервованное место судна найдем в точке F. Соединим
затем точки А, В, С и F прямыми линиями с центром
планшета и разделим отрезки ОА, ОВ, ОС п OF по-
полам. Полученные точки А', В', С' и F' назовем соот-
ветственно условными местами ориентиров и судна.
Соединив точки А', В' и С' прямыми пунктирными ли-
ниями с точкой В', получим три пары подобных
треугольников OAF и ОА'В', OBF и OB'F't OCF и
OC'F'.
Из подобия этих треугольников следует, что /.AFB=
= ^A'F'B'=a и ZBBC=B'B'C'=p. Кроме того, отрезок
OF' равен отрезку F'F согласно построению.
Таким образом, при нахождении навигационных
ориентиров А, В и С за пределами рамок промыс-
лово-навигационного планшета или карты необхо-
димо:
предварительно за время стоянки судна в порту или
во время следования в район промысла на промыслово-
навигационный планшет нанести условные места ориен-
тиров А', В' и С'\
на промысле по условным ориентирам А', В' и С' и
измеренным горизонтальным углам аир проложить ус-
ловное место судна В', соединить затем точку F' пря-
мой линией с центральной точкой планшета и отложив
на продолжении этой прямой расстояние, равное OB', по-
лучить фактическое место судна в момент наблюде-
ний — точку В.
Нетрудно заметить, что описанными приемами
мы вначале уменьшаем масштаб планшета в 2 раза,
а после получения условного места В' вновь увели-
чиваем его и получаем точку В — обсервованное место
судна.
Центральную точку О и условные места ориентиров
А', В' и С' наносят на планшет цветной тушью во время
подготовки к промыслу. Географические координаты
ориентиров А, В и С следует снимать с наиболее круп-
номасштабной морской навигационной карты данного
181
района. Координаты центральной точки О и условных
мест ориентиров рассчитывают по формулам:
„в. =
«Уе+Л<^
с 2
- _
-----2--
_ Хл + Хо
------2--
_ Хв4-Х0
---2--
а _ ^с+\)
АС'-----9--
(V—35)
Меридиональные части северной и южной рамок
планшета и параллелей ориентиров выбирают из
табл. 26 МТ—75.
Центральную точку и условные места ориентиров на-
носят на планшет по меридиональным частям и долго-
там, для чего используют нижнюю или верхнюю рамки
планшета в качестве масштаба долгот и экваториаль-
ных миль.
Между разностью широт и разностью меридиональ-
ных частей практически наблюдается линейная зависи-
мость на участках, имеющих относительно большую про-
тяженность по широте. Поэтому в качестве широты ус-
ловного места ориентира в некоторых случаях может
быть принята средняя из широт ориентира и централь-
ной точки планшета. Интервал по широте Аф, в преде-
лах которого широту условного места ориентира можно
принимать равной этой средней широте, равен проме-
жутку практически постоянного масштаба. Этот проме-
жуток можно определить для планшета заданного мас-
штаба с помощью табл. 6 Картографических таблиц.
182
Прокладка определений места судна по двум пелен-
гам. Предварительная подготовка промыслово-навига-
ционного планшета (карты) сводится к нанесению
тушью на планшет центральной точки О и условных мест
А' и В' ориентиров. Во время промысла пеленги прокла-
дывают от точек А' и В', Для получения обсервованного
места судна — точки F — достаточно соединить прямой
Рис. 80
линией точку F' с центральной точкой планшета О и на
продолжении этой прямой отложить расстояние, рав-
ное OF' (рис. 80, а).
Прокладка определений места судна по двум расстоя-
ниям. Из условных мест ориентиров — точек А' и В'—
как из центров проводят окружности радиусами— Dr
и ~D2 (рис. 80,6). Полученную точку F' соединяют
прямой линией с центральной точкой планшета О. Затем
на продолжении этой прямой откладывают расстояние,
равное OF', и получают точку F — обсервованное место
судна.
Прокладка определений места судна по пеленгу и
расстоянию. От условного места ориентира (например,
от точки А') прокладывают линию ОИП, по этой линии
откладывают половину измеренного расстояния и полу-
чают точку F'. Обсервованное место судна — точку F на-
ходят описанным выше приемом (рис. 80, в).
183
На траловом промысле в прибрежных районах
уменьшение масштаба построения в 2 раза (см. рис. 79)
является обычно достаточным для того, чтобы условные
места навигационных ориентиров располагались в пре-
делах рамок планшета или карты. Если же навигаци-
онные ориентиры значительно удалены и уменьшение
масштаба построений вдвое недостаточно для нанесения
их условных мест на планшет, то этот масштаб следует
уменьшить в 3—4 раза. Если при нанесении на планшет
условных мест ориентиров масштаб построений был
уменьшен в и раз по сравнению с масштабом планшета,
то для нахождения обсервованного места судна — точ-
ки F расстояние OF' следует увеличить в п раз и отло-
жить его от центральной точки планшета О на протяже-
нии прямой OF'. Однако уменьшение масштаба построе-
ний более чем в 2 раза нежелательно, так как это
приводит к снижению точности обсервованных мест из-за
увеличения ошибок прокладки.
Глава VI. ОПРЕДЕЛЕНИЕ МЕСТА СУДНА ПРИ ПОМОЩИ
РАДИОТЕХНИЧЕСКИХ СРЕДСТВ
§ 40. Классификация радиотехнических средств
судовождения и способов обработки
радионавигационной информации
В общем комплексе технических средств судо-
вождения важная роль принадлежит радиотехническим
средствам, позволяющим точно определять место судна
при плавании вдали от берегов независимо от гидро-
метеорологических условий. Многие из этих средств ис-
пользуются в качестве датчиков навигационной инфор-
мации в автоматизированных навигационных и промыс-
лово-навигационных комплексах, обеспечивающих
наряду с решением других задач судовождения выра-
ботку вероятных географических координат места суд-
на и автоматическую прокладку траектории последнего.
Использование радиотехнических средств для опре-
деления места судна основано на функциональной свя-
зи навигационных параметров (пеленгов, расстояний,
разностей расстояний) с параметрами электромагнитно-
го поля, создаваемого радиоизлучением. Это поле из-
184
меняется по закону гармонических колебаний и в месте
приема может быть описано уравнением
е = Е sin со (t — т),
или
е = Е sin (со/ — ф),
где е — мгновенное значение электрической составляющей электро-
магнитного поля;
Е—амплитуда колебаний;
со — круговая частота колебаний;
Ф — фаза колебаний при условии, что начальная фаза равна
нулю;
т — время распространения колебаний от места излучения до
места приема;
t — непрерывно текущая координата — время (параметром по-
ля не является).
Функциональная связь подлежащего измерению на-
вигационного параметра U=F(q, X) может быть уста-
новлена непосредственно с любым из четырех парамет-
ров поля £, о, и т. Эта функциональная связь опреде-
ляет принцип действия радиотехнического средства су-
довождения.
Как известно, каждому навигационному параметру
U=F(<p, X) соответствует определенного вида изолиния.
Поэтому все радиотехнические средства судовождения
могут быть подразделены на группы (классифицирова-
ны) по следующим двум основным признакам: по прин-
ципу действия и по характеру получаемого в результате
измерений навигационного параметра или, что тоже са-
мое, по виду получаемой изолинии. Первый из этих при-
знаков является физическим или техническим, а вто-
рой— геометрическим. Методика получения обсервован-
ных координат места судна по результатам измерений
определяется в основном геометрическим признаком.
По принципу действия радиотехнические средства
судовождения делятся на амплитудные, частотные, или
частотно-измерительные, импульсные, или времяизмери-
тельные, фазовые, или фазометрические, и смешанные,
при помощи которых измеряются различные параметры
электромагнитного поля, например разность фаз и вре-
мя между сигналами.
По характеру навигационного параметра или виду
получаемой изолинии радиотехнические средства судо-
вождения можно подразделить на следующие группы:
185
угломерные, или азимутальные, радиотехнические
средства, позволяющие определять пеленг с судна на
радиомаяк кругового (ненаправленного) действия, а
также пеленг на судно с береговой радиопеленгаторной
станции или радиомаяка направленного действия. Ра-
диомаяками называются передающие радиостанции с
точно известными координатами, используемые для оп-
ределения места судна по радиопеленгам. По устройст-
ву излучающей системы радиомаяки подразделяются на
два класса: радиомаяки кругового, или ненаправленно-
го, действия и радиомаяки направленного действия.
Первые служат в качестве навигационных ориентиров
при определении радиопеленгов с помощью судового
радиопеленгатора, вторые сами являются угломерными
устройствами и позволяют определять радиопеленги на
судно без помощи судового радиопеленгатора. Судовые
радиопеленгаторы, береговые радиопеленгаторные стан-
ции, радиомаяки направленного действия, в том числе
секторные (ВРМ, «Консол» и «Консолан»), относятся к
группе угломерных, или азимутальных, и радиотехниче-
ских средств судовождения. В них используется зави-
симость амплитуды колебаний от направления распро-
странения радиоволны, для чего применяется либо на-
правленный прием, либо направленное излучение;
дистанционные, или стадиометрические, радиотехни-
ческие средства, позволяющие измерять расстояние или
изменение расстояния между судном и специальной бе-
реговой радиостанцией. Стадиометрические радионави-
гационные системы на транспортных и добывающих су-
дах не используются;
разностно-дистанционные, или гиперболические, ра-
диотехнические средства, дающие возможность изме-
рять разность расстояний до двух специальных берего-
вых радиостанций. К гиперболическим относятся сле-
дующие широко распространенные радионавигационные
системы: фазовые РНС «Декка» и «Омега», импульсная
РНС «Лоран-А», импульсно-фазовая РНС «Лоран-С» и
некоторые другие;*
угломерно-дистанционные, или полярные, позволяю-
щие измерять пеленг и расстояние. К этой группе отно-
* Спутниковые навигационные системы (принципы их действия,
методы получения обсервованных координат) рассматриваются в кур-
се «Мореходная астрономия».
186
сятся различного типа судовые и береговые радиолока-
ционные станции (РЛС и БРЛС).
Как известно из курса «Математические основы су-
довождения», определение координат места судна по
результатам измерения навигационных параметров мо-
жет быть выполнено следующими способами:
аналитическим, основанным на применении либо ал-
гебраических, либо численных методов решения уравне-
ний изолиний или линий положения;
графоаналитическим, основанным на вычислении ли-
бо элементов линий положения, либо координат точек
пересечения изолиний с определенными меридианами
или параллелями и последующей прокладке линий по-
ложения на карте в виде касательных к изолиниям или
хорд;
графическим, основанным на построении на карте
изолиний, их отрезков или линий положения.
При «ручной» обработке результатов измерений на-
вигационных параметров аналитический метод, как пра-
вило, не применяется. Этот метод представляет собой
математическую основу автоматизации вычисления гео-
графических координат места судна.
В тех случаях, когда навигационные параметры из-
меряются радиотехническими средствами, графоанали-
тический способ обычно реализуется в штурманской
рубке с помощью специальных таблиц для построения
линий положения, а графический — с помощью карт с
сетками изолиний (радионавигационных карт). Табли-
цы для построения линий положения издаются для раз-
личных гиперболических радионавигационных систем и
секторных радиомаяков. Они позволяют достаточно про-
сто и единообразно выполнять построение линий поло-
жения на карте любого масштаба.
В настоящее время получили распространение на су-
дах программно-управляемые ЭКВМ, которые можно эф-
фективно использовать для обработки радионавигаци-
онной информации.
Широкое применение в навигации находят карты с
сетками изолиний. Для определения места судна с по-
мощью гиперболических радионавигационных систем
издаются карты с сетками сфероидических гипербол, а
для определения по секторным радиомаякам — с ази-
мутальными сетками. При использовании таких карт
187
место судна находят в пересечении изолиний, соответст-
вующих измеренным и исправленным необходимыми
поправками значениям навигационных параметров.
Графический способ применяется при определении
места судна с помощью судового радиопеленгатора и
радиолокационной станции, когда расстояния между
судном и навигационными ориентирами сравнительно
невелики и эти ориентиры располагаются в пределах
рамок карты или планшета.
§ 41. Азимутальные радионавигационные
устройства
Определение пеленга при помощи судового ра-
диопеленгатора. Радиопеленгатор — устройство, пред-
назначенное для определения направления на источник
излучения электромагнитных колебаний. В этом устрой-
стве используется функциональная зависимость между
амплитудой колебаний и направлением их распростра-
нения.
Определение направления на работающую радиостан-
цию (радиомаяк) осуществляется двумя способами: пе-
ленгованием по минимуму слышимости сигналов, осно-
ванным на использовании рамочной антенной системы,
имеющей минимумы в диаграмме направленности при-
ема; пеленгованием по методу сравнения, основанным
на сопоставлении амплитуд сигналов, образующихся на
выходе двух взаимно перпендикулярных рамок.
Первый из этих способов используется в обычных
слуховых радиопеленгаторах и визуальных с вычерчи-
ванием диаграммы направленности на ЭЛТ, второй — в
автоматических и двухканальных визуальных радиопе-
ленгаторах (ДВРП).
При помощи радиопеленгатора измеряется угол ме-
жду диаметральной плоскостью судна и направлением
распространения радиоволн от радиомаяка. Этот угол
называется радиокурсовым углом (РКУ) и отсчитыва-
ется от носовой части диаметральной плоскости по на-
правлению часовой стрелки от 0 до 360°.
При прохождении радиоволн во всех металлических
частях судна, представляющих собой замкнутые и ра-
зомкнутые контуры, индуктируются токи высокой час-
тоты, которые создают свои электрические и магнитные
188
поля. Эти поля взаимодействуют с полями радиоволны,
приходящей от радиомаяка. В результате радиопелен-
гатор дает искаженное направление на радиомаяк. Угол,
образованный истинным направлением распространения
радиоволн и направлением, определенным судовым ра-
диопеленгатором, называется радиодевиацией и обозна-
чается буквой f. Поэтому, для того чтобы получить ра-
диокурсовой угол, отсчет этого угла, полученный непо-
средственно по радиопеленгатору (ОРКУ), нужно ис-
править радиодевиацией:
РКУ = ОРКУ+?.
Радиодевиация зависит от радиокурсового угла и
длины приходящей радиоволны, от осадки судна, поло-
жения грузовых стрел, шлюп-
балок и т. п. Для уменьшения
радиодевиации приемные
устройства радиопеленгаторов
(рамки) устанавливают воз-
можно выше над крупными ме-
таллическими частями судна и
симметрично относительно них.
В схемах радиопеленгаторов
предусматриваются специаль-
ные устройства для компенса-
ции радиодевиации.
Остаточная же радиоде-
виация определяется из на-
блюдений обычно по сличению
ОРКУ и КУ, взятых ви-
зуально по компасу на снижение антенны пеленгуемой
радиостанции. По результатам наблюдений вычерчива-
ют график радиодевиации f=F (ОРКУ) для той или
иной длины принимаемых радиоволн. По графику f=F
(ОРКУ) можно рассчитать таблицу радиодевиации*.
Как следует из рис. 81, зависимость между истин-
ным радиопеленгом (ИРП) и радиокурсовым углом вы-
ражается формулой
ИРП = РКУ + ИК
(VI-1)
* Способы компенсации радиодевиации, определения остаточной
девиации, составления графиков и таблиц радиодевиации рассмат-
риваются в курсе «Радионавигационные приборы».
189
или
ИРП == ОРКУ + f + КК + АХ. (VI—2)
Поверхностные радиоволны распространяются по
кратчайшему расстоянию. Если принять за фигуру Зем-
ли сферу, то направление распространения радиоволн
будет совпадать с дугой большого круга (ортодроми-
ей), соединяющей места судна и пеленгуемого радио-
маяка. Следовательно, рассчитанный по формуле
(VI—1) истинный радиопеленг будет ортодромиие-
ским, так как он определяет направление этой дуги
большого круга.
Многие радиопеленгаторы оснащены встроенным ре-
питером гирокомпаса. В таких радиопеленгаторах сум-
мирование ОРКУ и КК производится механически и со
шкалы прибора непосредственно снимается отсчет ком-
пасного радиопеленга (ОРП). Истинный ортодромичес-
кий радиопеленг при этом вычисляют по формуле
ИРП = А = ОртП = ОРП+ f + АХ.
В конструкциях некоторых типов радиопеленгаторов
предусмотрен автоматический ввод радиодевиации с по-
мощью специального механического компенсатора.
Дальность действия радиомаяков кругового дейст-
вия находится в пределах 50—300 миль. Следовательно,
этими пределами и определяются расстояния от нави-
гационных ориентиров при радиопеленговании с судна.
Радиомаяки кругового действия для удобства их ис-
пользования при определении места судна объединяют-
ся обычно в навигационные группы, состоящие из 2—6
радиомаяков. Все радиомаяки данной группы работают
на одной несущей частоте, но имеют различные часто-
ты модуляции. Работа каждого радиомаяка в навига-
ционной группе строго регламентирована во времени.
Характеристика работы радиомаяков, состав навигаци-
онных групп и другие сведения о радиомаяках приво-
дятся в описании радиотехнических средств навигаци-
онного оборудования данного моря.
Определение пеленга с направленного радиомаяка
или береговой радиопеленгаторной станции на судно.
Излучающие устройства береговых радиопеленгаторных
станций и радиомаяков направленного действия ориен-
тированы на местности относительно истинного мери-
диана. Поэтому радиопеленгаторные станции и радио-
190
маяки направленного действия позволяют получить не-
посредственно истинный (ортодромический) пеленг на
судно.
Береговая радиопеленгаторная станция по запросу
с судна пеленгует его радиостанцию, которая в течение
некоторого времени работает «на пеленг», и сообщает
на судно пеленг и момент пеленгования. Береговые ра-
диопеленгаторные станции бывают одиночными и груп-
повыми (по две-три станции в группе). Группа станций
через главную станцию группы может обеспечить опре-
деление координат места судна по двум или трем ра-
диопеленгам.
Администрация, в ведении которой находится ра-
диопеленгаторная станция, не отвечает за последствия
неточного пеленга, а также за то, что по каким-либо
причинам взять пеленг судна не представилось возмож-
ным. Кроме того, эти станции могут одновременно об-
рабатывать только одно судно.
Береговые радиопеленгаторные станции не относят-
ся к числу достаточно эффективных радиотехнических
средств судовождения и в настоящее время устанавли-
ваются редко.
Значительно более широкое применение получили
радиомаяки направленного действия, позволяющие оп-
ределять в пределах их рабочей зоны пеленг с радио-
маяка на судно без помощи радиопеленгатора. Прием
сигналов радиомаяка направленного действия осуществ-
ляется с помощью судового приемника связи. При ис-
пользовании приемника радиопеленгатора он должен
быть переключен на вертикальную антенну.
К радиомаякам направленного действия, предназна-
ченным для определения места судна, относятся радио-
маяки с вращающейся характеристикой излучения и
всенаправленные, или секторные, радиомаяки.
Радиомаяки с вращающейся характе-
ристикой излучения. В морской навигации при-
меняются различные типы таких радиомаяков. Наиболь-
шее распространение получили радиомаяки, имеющие
диаграмму излучения в форме кардиоды, которая мед-
ленно и равномерно вращается в плоскости горизонта
(рис. 82). Она поворачивается на 180° в течение первой
половины рабочего цикла и возвращается в исходное
положение в течение его второй половины. При этом в
191
Момент совпадения зоны молчания с каким-либо харак-
терным направлением, например Ost , подается специ-
альный сигнал и вслед за ним происходит излучение
коротких сигналов (точек) через каждые 1 или 2° пово-
рота диаграммы излучения. Подача точек избавляет от
необходимости пользоваться секундомером. Подсчитав
число точек п от момента То начала работы радиомая-
ка до момента Тк исчезновения их слышимости, можно
определить истинный ортодромический пеленг с радио-
маяка на судно U в момент Тк:
ИРП = и = UQ + 1° п
или
ИРП = V = t/0 + 2°п,
где t/0 — ортодромическое направление линии начала отсчета в
градусах (например, £/0 = 90о);
п — число принятых сигналов (точек) от момента начала ра-
боты радиомаяка до исчезновения слышимости сигналов.
Весь цикл работы радиомаяка занимает 4—6 мин.
За это время пеленг на судно может быть определен
дважды. Ошибка определения пеленга при помо-
щи радиомаяков с вра-
щающейся характеристи-
f Д. кой излучения лежит в
/ _(1^=^рна молчания— пределах 2—4°. Даль-
] ность их действия 50—
х. J 100 миль.
----- Секторные ра-
Рис 82----------------------диомаяки. Секторные
радиомаяки предназначе-
ны для определения места судна при плавании в откры-
том море. Дальность их действия достигает 1000—
1500 миль, а средняя квадратическая ошибка определе-
ния пеленга на судно находится в пределах 0,2—0°,5. Ра-
бочие зоны секторных радиомаяков охватывают значи-
тельные районы Мирового океана. В настоящее время
находится в эксплуатации 12 секторных радиомаяков,
из них 4 советских.
Рассмотрим кратко принцип действия секторного ра-
диомаяка, излучающее устройство которого состоит из
передатчика и трех антенн, расположенных на одной
линии на расстоянии около трех длин волн одна от
Другой.
192
Токи в крайних антеннах Ai и А2 (рис. 83) сдвинуты
по фазе относительно тока в средней антенне Ао на
+90° и на —90°. В результате сложения электромагнит-
ных полей, излучаемых этими тремя антеннами, созда-
ется многолепестковая диаграмма направленности, сим-
метричная относительно базовой линии AiA2. Такая
диграмма направлен-
ности (на рис. 83 изо-
бражена сплошной ли-
нией) сохраняется в те-
чение времени подачи
радиомаяком одной
точки. Затем фазы то-
ков в крайних антен-
нах мгновенно изменя-
ются на 180° и много-
лепестковая диаграм-
ма занимает положе-
ние, изображенное на
рис. 83 пунктиром.
В этом положении она
сохраняется в течение
времени подачи одного
тире. Такие изменения
фаз токов в крайних
антеннах продолжают-
ся в течение 30 с*. Так как время подачи одной точки или
одного тире занимает 0,5 с, то за 30 с будет передано
60 точек и 60 тире. При этом образуются ряд секторов,
в которых будут прослушиваться либо только точки, ли-
бо только тире.
По той или другой стороне от базовой линии (базы)
Л1Л2 имеются 12 секторов, из которых 6 секторов точек
и 6 секторов тире. Каждый сектор имеет свой номер, ко-
торому предшествует буква (рис. 84). Важно заметить,
что ширина этих секторов возрастает по мере удаления
от нормали к базовой линии, проведенной через ее сре-
дину. Наиболее узкими являются сектора, ближайшие
к нормали, а наиболее широкими — прилегающие к ба-
зовой линии. Чем шире сектор, в котором находится
судно, тем при прочих равных условиях с большей
ошибкой определяется его пеленг. Поэтому сектора, не-
* Этот период может быть и другим.
13 В. Е. Ольховский
193
Рис. 84
посредственно прилегающие к базовой линии, считают-
ся нерабочими* **.
В зонах пересечения секторов точек и тире вместо
сигналов (точек и тире) будет слышен непрерывный одно-
* Для обеспечения возможности определения места судна и
в пределах этих секторов некоторые радиомаяки имеют по 5 антенн,
расположенных на двух взаимно перпендикулярных базовых лини-
ях, пересекающихся в точке установки средней антенны. Антенны
этих базовых линий работают поочередно и при приеме сигналов
таких радиомаяков фиксируют не только число принятых сигналов,
но и работающую базу.
194
Рис. 85
тонный звук. Эти зоны называются равносигнальными.
Направление их осей относительно нормали к базе ра-
диомаяка в момент начала его работы известно.
За время одного цикла передачи (30 с) фазы тока
в крайних антеннах плавно и равномерно изменяются
на 180°, в результате чего равносигнальные зоны равно-
мерно поворачиваются по часовой стрелке с одной сто-
роны базы и против часовой стрелки с другой ее стороны
на определенные углы, величина которых может быть
точно определена. При этом сектора точек занимают
места секторов тире, и наоборот. Наблюдатель, находя-
щийся в точке, расположенной,
например, в секторе точек на
биссектрисе угла, образованно-
го осями равносигнальных зон,
услышит Сначала 30 точек,
а затем, после прохождения
равносигнальной зоны, 30 тире.
Таким образом, посредством
подсчета точек и тире, пода-
ваемых радиомаяком и прини-
маемых на судовой радиопри-
емник связи, можно опреде-
лить угол поворота оси равно-
сигнальной зоны, а затем и ее
направление относительно нормали к базе в момент при-
ема сигналов. Подсчет точек и тире является средством
измерения времени, прошедшего от момента начала цик-
ла работы радиомаяка до момента прохождения через
место наблюдателя равносигнальной зоны.
Если судно находится в точке Р (рис. 85), располо-
женной в каком-либо секторе радиомаяка, ширина ко-
торого равна В°, а число принятых сигналов (точек или
тире) от момента начала их подачи до момента прохож-
дения через точку Р равносигнальной зоны равно N, то
угол поворота у оси равносигнальной зоны будет:
N
Зная угол у и угол 0, определяющий положение оси
равносигнальной зоны относительно нормали к базовой
линии радиомаяка в начале цикла, можно получить
угол а, определяющий положение оси равносигнальной
13*
195
зоны относительно нормали к базовой линии в момент
ее прохождения через место судна:
Расчет угла а по известным параметрам секторного
радиомаяка выполняют по формуле
7V+6OX
sin а = —7777—
120Z
(VI-3)
где N — число знаков (точек или тире), сосчитанных до прохожде-
ния равносигнальной зоны;
— номер сектора радиомаяка, в котором находится судно;
Z — отношение половины длины базы к длине волны.
Ось равносигнальной зоны представляет собой на
сфере дугу большого круга, следовательно, угол Uy со-
ставляемый этой осью с истинным меридианом, проходя-
щим через место радиомаяка, будет истинным ортодро-
мическим пеленгом судна.
По геометрическому принципу, строго говоря, сектор-
ный радиомаяк следовало бы отнести к гиперболическо-
му радионавигационному устройству с малой базой. Оси
равносигнальных зон этого радиомаяка являются ги-
перболами, фокусами которых служат крайние антенны
At и Л2. Эти гиперболы изогнуты только около базы, а
на больших расстояниях они практически сливаются с
асимптотами, которые представляют собой на сфере ду-
ги больших кругов. Поэтому секторные радиомаяки поз-
воляют определять ортодромические пеленги на судно
и с практической точки зрения их удобнее относить к
азимутальным радионавигационным устройствам.
Как видно из рис. 85,
U = ± а, (VI—4)
где U — истинный ортодромический пеленг судна;
Un — направление (ортодромическое) нормали к базовой линии
радиомаяка.
Номер сектора К, в котором находится судно, опреде-
ляют по счислимому месту с помощью специальной
карты-схемы (см. рис. 84), величины UB и Z указывают-
ся в описаниях радиомаяков.
Практически определение пеленга U с помощью сек-
торного радиомаяка сводится к следующему:
подсчитывают число знаков Ni, следующих за подава-
емым радиомаяком длинным тире (начало цикла) до
196
прохождения равносигнальной зоны, а затем число зна-
ков Л^2 до конца передачи. Корректируют значение на
потерю знаков при прохождении равносигнальной зоны.
Если Л^1~|—Л^260, то рассчитывают поправку
ддг = 60 ~ и получают Af=Vi+AV;
руководствуясь счислимым местом судна при помо-
щи карты-схемы (см. рис. 84), определяют сектор ра-
диомаяка, в котором находится судно. При этом учи-
тывают, что если наблюдатель сначала услышит точки,
то судно находится в секторе точек, если же он услышит
сначала тире, то судно находится в секторе тире. До-
пустить ошибку в опознании сектора, в особенности на
больших расстояниях от радиомаяка, практически не-
возможно. На сравнительно же небольших расстояниях,
если возникнут трудности в определении сектора, мож-
но прибегнуть к помощи судового радиопеленгатора и
определить, хотя бы грубо, пеленг радиомаяка, что по-
зволит установить в каком секторе находится судно;
выбирают из специальной таблицы, рассчитанной по
формулам (VI—3) и (VI—4), по числу знаков N и наи-
менованию сектора радиомаяка, в котором находится
судно, величину пеленга U.
Подсчет точек и тире осуществляется не только на
слух. Для этой цели иногда используется прибор КИ-55,
обеспечивающий автоматический визуальный подсчет
сигналов. Кроме того, может быть определен момент
прохождения равносигнальной зоны через место судна
с помощью двух секундомеров, тестера и секундомера,
визуального радиопеленгатора и секундомера. Зная мо-
мент Т прохождения равносигнальной зоны через место
судна, момент То начала передачи сигналов и среднее
число сигналов п^г подаваемых радиомаяком каждую
секунду, можно легко рассчитать величину N:
tf = ncp(T-T0).
§ 42. Прокладка определений места судна
по радиопеленгам, взятым с судна
Определив с судна ортодромический пеленг А како-
го-либо радиомаяка (радиостанции) R (рис 86), полу-
чают изолинию v4=const, называемую изоазимутой. На
197
сфере изоазимута является частным случаем сфериче-
ской изогоны-изолинии, вмещающей постоянный угол А
между двумя точками на сфере. Если одной из этих то-
чек является ближайший полюс Р, то угол А представ-
ляет собой ортодромический пеленг другой точки, а изо-
гона получает название изоазимуты*
На рис. 86 показано изображение на плоскости мер-
изоазимуты, локсодромии
и дуги большого круга
(ортодромии), проходя-
щих через общие точки F
и R — места судна и ра-
диомаяка.
На сравнительно огра-
ниченных расстояниях, с
которыми приходится
иметь дело при определе-
нии места судна по ра-
диопеленгам, с достаточ-
ной для практики точно-
стью можно полагать, что
угол между изоазимутой
и дугой большого круга
равен удвоенной ортодро-
каторской проекции отрезков
мической поправке (i=
=2ф), изоазимута и дуга большого круга располагают-
ся симметрично относительно локсодромии, проходящей
через две общие точки.
Рассмотрим один из графоаналитических и некото-
рые графические способы определения на картах в мер-
каторской проекции координат места судна по радиопе-
ленгам (пеленгует судно).
Графоаналитический способ. В соответствии с общим
принципом построения линий положения, зная счислимое
место судна в момент пеленгования, рассчитывают счи-
слимый ортодромический пеленг радиомаяка (Дс),
а также модуль и направления градиента этого пеленга.
Затем вычисляют перенос п. Отложив величину п от
счислимого места по направлению градиента (рис. 87),
получают определяющую точку /С, через которую прово-
* Основы общей теории навигационных изолиний и общий прин-
цип построения линий положения рассматриваются в курсе «Мате-
матические основы судовождения».
198
дят перпендикулярно направлению градиента линию по-
ложения I—/, представляющую собой касательную к
изоазимуте.
На рис. 88 С — счислимое место судна в момент пе-
ленгования, R — пеленгуемый радиомаяк, рс — величи-
на сферического перпендикуляра, разделяющего сфери-
ческий треугольник CPR на два прямоугольных, х — ши-
Рис. 87 Рис. 88
рота основания этого сферического перпендикуляра
(точки N).
Из прямоугольных сферических треугольников CPN
и CNR можно написать:
tgx = tg<pc sec ДХ,
tgpc =
tgAX
sec x ’
tg(90° + pc)
sec ал —------------------.
tg<pc
tg a2 = sec (90° + pc ) tg (x — <рл).
(VI-5)
Если судно находится к W от радиомаяка, то
Ас — ± а2>
а если судно находится к Ost от радиомаяка, то
Ас = 360° — (аг ± а2). (VI—6)
Знак «плюс» берется в том случае, если перпендику-
ляр рс находится внутри треугольника CPR (х><ря), а
199
знак «минус» берется тогда, когда этот перпендикуляр
находится вне этого треугольника (х<фя).
Модуль градиента пеленга, взятого с судна на радио-
маяк, можно рассчитать по формуле
Следовательно, величина переноса п будет равна
п' = (Д — Дс)' tg рс cosec Лс. (VI—8)
Направление градиента (переноса) определяется уг-
лом а2 при Лс<180° и углом 180°—а2 при Ас>180°. Для
вычисления величин %, рс, alt а2 и п по фомулам (VI—5)
и (VI—8) можно воспользоваться таблицами ТВА—57.
Применительно к условным обозначениям, принятым в
этих таблицах, формулы (VI—5) могут быть записаны
в таком виде:
Т’(*) = 7’(ФС)+5(Д%), |
Т(рс) = Т(ДХ)-5(х), ।
S(a1) = T(90°+pc)-T(<pc), (VI~9)
Т(а,) = $(90° + рс)+Г(х~фЛ). |
Прологарифмировав формулу (VI—8) и применив ус-
ловные обозначения, принятые в ТВА—57, получим
Т(л) = Т(рс) + Т(Д-Дс)-Т(Лс) + 5(Лс). (VI—10)
Формулы (VI—5) и (VI—8) можно также привести
к виду, удобному для реализации на программно-управ-
ляемых ЭКВМ *.
Рассмотренный графоаналитический способ являет-
ся достаточно строгим и может быть использован при
любых практически возможных расстояниях до радио-
маяка.
Существуют и другие графоаналитические способы.
В большинстве этих способов допускаются некоторые
упрощения, которые несколько сокращают затрату вре-
мени на обработку информации, но приводят к ощути-
* В специализированные ЭКВМ такого типа заложены програм-
мы, обеспечивающие возможность вычисления как элементов линий
положения, так и обсервованных координат места судна с оценкой
их точности.
200
мым ошибкам, в особенности при сравнительно больших
расстояниях между судном и радиомаяками.
Напомним, что линия положения может представлять
собой и секущую, проходящую через две близко распо-
ложенные на изолинии точки. Если известны координа-
ты этих точек, легко проложить линию положения. Как
известно, уравнение изоазимуты может быть записано
в таком виде:
ctg A sin А, = tg cp^cos ср — sin ф cos X. (VI—11)
В этом выражении А — ортодромический пеленг на
радиомаяк, взятый с судна, и фд—широта радиомаяка
как величины постоянные являются параметрами, а ши-
рота ф и долгота X, считаемая от меридиана радиомая-
ка, являются текущими координатами, зависящими от
места судна. Уравнение (VI—11) позволяет рассчитать
широты ф1 и ф2 точек, в которых изоазимута А = const
пересекает меридианы с долготами Xi=Xc+AX и Хг =
=ХС—АХ, или долготы точек Xi и Хг, в которых изоази-
мута пересекает параллели с широтами фт=фс+Аф и
Ф2 = фс—Аф. Получив координаты двух точек изоазиму-
ты вблизи счислимого места, легко проложить линию
положения (см. рис. 98). Этот прием целесообразно по-
ложить в основу таблиц для построения линий положе-
ния при радиопеленговании с судна.*
Графические способы. Дальность действия большин-
ства радиомаяков кругового излучения не превышает
150—200 миль. При таких расстояниях можно использо-
вать графические способы построения на карте линий
положения, применяя приближенную формулу для орто-
дромической поправки ^tgip=tg^-АХ sin фср^ при перехо-
де от ортодромических к локсодромическим пеленгам.
Если радиомаяк находится в пределах рамок карты
или промыслово-навигационного планшета графические
построения, связанные с прокладкой линии положения,
выполняются в следующем порядке:
полученный ортодромический пеленг А переводят в
локсодромический Р, исправив его ортодромической по-
правкой (табл. 23а МТ—75):
р = Л + ф; (VI—12)
* Такие таблицы были бы аналогичны известным таблицам для
построения линий положения: «Лоран-А», «Лоран-С», «Омега» и др.
201
из места изображения радиомаяка прокладывают ли-
нию обратного локсодромического пеленга и из счисли-
мого места судна С проводят к этой линии прямую под
углом 90°—ф. В пересечении получают определяющую
точку /С через которую прокладывают линию положения
/—I — касательную к азимуте (рис. 89). Угол а0, состав-
ляемый линией положения с меридианом точки К опре-
деляется в северном полушарии по формулам:
а0 = Л+ 2гр при А < 180°,
а0 = А — 2ф при А > 180°.
(VI—13)
В южном полушарии знаки обратные.
На практике при малых значениях ф и достаточно
надежном счислимом месте судна определяющую точку
К получают, опуская
из счислимого места С
на линии обратного
локсодромического пе-
ленга перпендикуляр.
Другие линии положе-
ния строят аналогично.
При расчете локсо-
дромического пеленга
по формуле (VI—12)
ортодромическую по-
правку берут не для
действительного, а для
счислимого места суд-
на. При большой ошибке счислимого места судна (более
30—40 миль) такое допущение может вызвать ошибку то-
го же порядка, что ошибка графической прокладки ли-
нии пеленга. При необходимости эту ошибку можно прак-
тически исключить, решая задачу двойным приближени-
ем. Полученное место надо принять за приближенное,
снова определить ф и рассчитать новые значения локсо-
дромических пеленгов.
В тех случаях, когда радиомаяки располагаются вне
рамок карты или промыслово-навигационного планшета,
применение графического решения требует некоторой
предварительной подготовки карты (планшета).
При работе в удаленных от берегов промысловых
районах радиомаяки часто могут располагаться за пре-
делами рамок промыслово-навигационного планшета
202
Или карты. В этом случае целесообразно применять при-
ем прокладки линий положения, предложенный А. П.
Ковалевым. Этот прием является частным случаем обще-
го метода прокладки определений места судна, когда
навигационные ориентиры располагаются за пределами
рамок промыслово-навигационного планшета, и требует
предварительной подготовки планшета во время стоянки
судна в порту или при следовании в район промысла.
Но затрата времени на подготовку планшета или карты
полностью компенсируется на промысле, так как добы-
вающее судно работает в одном и том же районе срав-
нительно продолжительный период, в течение которого
прибегают обычно к многократным определениям места
судна по одним и тем же радиомаякам.
Подготовленный планшет (карта) позволяет исполь-
зовать такие же простые графические способы проклад-
ки линий положения, как и в случае расположения ра-
диомаяков в пределах его рамок.
Прием А. П. Ковалева предусматривает смещение
радиомаяка и ближайшей рамки планшета в сторону
промыслового района так, чтобы условное место радио-
маяка оказалось на фактической рамке планшета.
В зависимости от расположения радиомаяка относи-
тельно промыслового района, охватываемого планшетом
(картой), возможны три различных варианта решения
задачи.
1. Радиомаяк находится за боковой рамкой планше-
та (рис. 90). На меридиан mm[f ограничивающий рай-
он планшета со стороны радиомаяка /?1, наносят по
широте радиомаяка его условное место (точка Rf) и
рассчитывают разность долгот
ДХ —— X / —• X п ,
где —долгота радиомаяка
X , —долгота точки
/?1
Затем по параллели радиомаяка от точки Я* откла-
дывают величину ДА, и через полученную точку Ко про-
водят линию смещенной рамки планшета аа{ (смещен-
ный меридиан). На этом предварительная подготовка
планшета для использования радиомаяка заканчи-
вается..
203
Во время промысла, рассчитав по полученному РКУ
Локсодромический пеленг, прокладывают через точку
линию обратного локсодромического пеленга (вспо-
могательную линию пеленга) до пересечения ее со сме-
щенной рамкой ааг в точке К', По линии смещенной
рамки от точки К' откладывают отрезок, равный KqK' и
получают точку . Через эту точку прокладывают ли-
нию обратного локсодромического пеленга (фактичес-
кую линию пеленга). Справедливость такого построения
легко установить из подобия треугольников 7?! /Со /С' и
/?;ког.
Затем из счислимого места С проводят прямую под
углом 90°—ф к линии фактического обратного локсодро-
Рис. 90
Рис. 91
мического пеленга и в пересечении получают определя-
ющую точку /С. Через эту точку проводят линию поло-
жения /—1 по направлению а0=Л±2ф.
2. Радиомаяк находится под нижней (над верхней)
рамкой планшета (рис. 91). На параллели, ограничива-
ющей район планшета со стороны радиомаяка R2l нано-
сят по долготе радиомаяка его условное место (точ-
ка и рассчитывают разность меридиональных частей
РМЧ = мч, — мч»
r2
где M4R* — меридиональная часть радиомаяка /?2;
* — меридиональная часть точки /?2 •
*2
204
Затем по меридиану радиомаяка от точки R2 откла-
дывают в масштабе долгот планшета РМЧ и получают
точку /<о. Через эту точку проводят линию смещенной
рамки планшета bbf (смещенную параллель). На этом
подготовка планшета для использования радиомаяка /?2
заканчивается.
Во время промысла прокладка линии фактического
обратного локсодромического-пеленга и построение ли-
Рис. 92
нии положения выполняются аналогично первому
случаю.
3. Ни одна из координатных линий радиомаяка не
пересекает район, охватываемый планшетом (рис. 92).
Условное место радиомаяка (точку R\) выбирают в точ-
ке пересечения параллели и меридиана, ограничиваю-
щих район планшета со стороны радиомаяка Затем
рассчитывают разность меридиональных частей и раз-
ность долгот
РМЧ = МЧ , — МЧп
*з *3’
ДХ = X * — Хр
Яз *3’
где МЧ и МЧ , — меридиональные части фактического и условного
*з мест радиомаяка;
X и X , —долготы фактического и условного мест радио-
Яз маяка.
20Б
Пользуясь масштабом долгот, по РМЧ и АХ наносят
на планшет точку Ко и проводят через эту точку сме-
щенный меридиан аа' и смещенную параллель bb'..
Во время промысла прокладывают из точки /?' ли-
нию обратного локсодромического пеленга (вспомога-
тельную линию пеленга) до ее пересечения со смещен-
ным меридианом в точке К' или смещенной параллелью
в точке К”*
Далее прокладывают линию фактического обратного
локсодромического пеленга и строят линию положения
аналогично первому случаю, если вспомогательная ли-
ния пеленга пересеклась со смещенным меридианом, и
аналогично второму случаю, если эта линия пересеклась
со смещенной параллелью.
Справедливость такого приема построений вытекает
из равенства треугольников K'KQR'Z и K2R'3R3, а также
треугольников KQK"R^ и R^K2R^
Если радиомаяк расположен далеко за пределами
рамок планшета (карты), то вспомогательные построе-
ния выполняются в уменьшенном масштабе. Например,
при нахождении радиомаяка 2?i далеко за линией боко-
вой рамки планшета (AX>Xost— Xw) наносят по ши-
роте радиомаяка его условное место 1?'. Рассчитан-
ную разность долгот АХ уменьшают в п раз и, отложив
ее по параллели радиомаяка от точки /?', получают точ-
ку Ко (см. рис. 90).
Затем, проложив из точки 1?' линию обратного лок-
содромического пеленга (вспомогательную линию пелен-
га), обычным порядком находят точку К'.
Для нахождения точки К{, через которую проклады-
вается фактическая линия обратного локсодромического
пеленга, расстояние КоК' нужно увеличить соответствен-
но в п раз и отложить по меридиану от точки К'. Следу-
ет, однако, иметь в виду, что точность решения задачи
при этом уменьшается, так как такое построение равно-
сильно соответствующему уменьшению масштаба план-
шета (карты).
При подготовке планшета условные места радиомая-
ков и смещенные рамки наносят тушью, чтобы они хо-
рошо выделялись. При построении линий положения
проводить полностью линии вспомогательного и факти-
ческого обратного локсодромического пеленга не сле-
206
дует. Линией вспомогательного пеленга отмечают толь-
ко точку на смещенной рамке, а линию фактического
пеленга проводят только в районе счислимого места
судна.
Опыт применения приема смещения показывает, что
построение двух линий положения может быть выполне-
но за 3—5 мин.
§ 43. Использование судового радиопеленгатора
на промысле
К определению места судна с помощью судового
радиопеленгатора прибегают при ведении промысла и
поиска рыбы в условиях как хорошей, так и плохой ви-
димости.
На малотоннажных добывающих судах, не имеющих
на вооружении гирокомпасов, место судна при возмож-
ности следует определять по трем радиопеленгам с тем,
чтобы исключить ошибку в принимаемой поправке ком-
паса. На таких судах ошибка в принимаемой поправке
компаса может быть значительной, так как девиация
магнитного компаса изменяется под влиянием переме-
щающегося в процессе работы с орудием лова промыс-
лового вооружения.
Если на добывающем судне используют в качестве
промыслового и навигационного ориентира буй с пас-
сивным радиолокационным отражателем, то в некото-
рых случаях целесообразно с возможно большей точ-
ностью определить по радиопеленгам место буя (не
менее чем по трем линиям положения из серии наблю-
дений), а затем в процессе промысла определять место
судна относительно буя по радиолокационному расстоя-
нию и визуальному или радиолокационному пеленгу.
В условиях промысла широко используется радиопе-
ленгование на малых (коротких) расстояниях. Приме-
нительно к радиопеленгованию малыми расстояниями
называются такие расстояния, при которых ортодроми-
ческой поправкой можно пренебрегать из-за ее малости
по сравнению с ошибками графической прокладки.
Ошибку прокладки радиопеленгов на меркаторской
карте принимают равной ±0°,25. Поэтому если ортодро-
мнческая поправка не превышает 0°,25, практически
207
можно полагать, что изоазимута и дуга большого круга
совпадают с локсодромией (см. рис. 86).
При этом условии полученные с помощью судового
радиопеленгатора истинные ортодромические пеленги,
как и визуальные пеленги, можно прокладывать на мер-
каторской карте в виде прямых линий. Предельные рас-
стояния (Snp), при которых допустимо прокладывать
пеленги без учета ортодромической поправки, могут
быть определены следующим образом.
Примем ортодромическую поправку ib равной 0°,25.
Тогда, воспользовавшись известным приближенным вы-
ражением для этой поправки, можем написать:
ф = 0°,25 = 15' = -^-РД sin Фер-
Учитывая, что РД=ОТШ sec <рСр=5 sin A sec<pCp и
выражая расстояния Snp в морских милях, получим:
Snp=.2^. (V,_I4)
sin А
По этой формуле вычислена табл. 2, в которой для
различных широт и направлений на радиостанцию (ра-
диомаяк) даны предельные расстояния Snp, при кото-
рых можно пренебрегать ортодромической поправкой.
Таблица 2
Средняя широта, град
Направление на радиомаяк (Д) 70 | 60 | 50 1 40 1 30 | । 20 | 10
морские милн
0° 180° 180° 360° оо оо оо оо оо оо оо
10 170 190 350 56 по 167 224 334 545 изо
20 160 200 340 28 56 84 112 168 293 568
30 150 210 330 20 39 59 79 118 191 395
40 140 220 320 15 30 46 61 92 148 307
50 130 230 310 13 26 38 51 76 124 258
60 120 240 300 12 23 35 47 70 113 235
70 ПО 250 290 11 21 31 42 62 102 210
80 100 260 280 10 19 29 38 58 Г 94 195
90 90 270 270 9 18 28 37 56 90 187
Определение расстояний до судов, имеющих большие
уловы и работающих на пеленг. В некоторых районах
промысла, расположенных в открытом море и океане,
208
возможность определения места судна ограничена. Эти
районы находятся за пределами рабочих зон радионави-
гационных систем и характеризуются большим коли-
чеством дней с туманами, ограничивающими возмож-
ность определения места астрономическими способами.
Поэтому при промысле в группе важное значение
приобретает радиопеленгование судов, имеющих боль-
шие уловы, что позволяет осуще-
ствлять перестановку флота в
районы с хорошими концентра-
циями рыбы.
Обычно радиопеленгование
производится ежедневно в часы,
назначаемые руководителем про-
мысла, который устанавливает
также порядок и последователь-
ность работы на пеленг судов,
имеющих большие уловы.
Чтобы по данным радиопелен-
гования правильно принять ре-
шение о том, в какой из промысловых квадратов целесо-
образнее следовать, кроме направлений на суда, имею-
щие большие уловы, необходимо также знать хотя бы
приближенно и расстояния до этих судов.
Допустим, что в точке Ni находится судно N, имею-
щее хорошие уловы и работающее на пеленг (рис. 93).
Судно N лежит в дрейфе. Учитывая, что скорость дрей-
фа обычно незначительна, будем полагать, что это суд-
но в течение некоторого промежутка времени t практи-
чески находится в точке
Другое судно М, следуя некоторым постоянным кур-
сом и с постоянной скоростью, находясь в точке Afi, в
момент Т{ определило отсчет радиокурсового угла ра-
диостанции судна N. Затем, пройдя прежним курсом
некоторое расстояние S, равное 3 или 4 милям, в мо-
мент ^2, находясь в точке Л12, вторично определило от-
счет радиокурсового угла радиостанции судна N.
На рис. 93 и q2— углы между направлениями на
судно N в момент Л и Т2 и линией истинного курса, ко-
торым следовало судно М в течение промежутка време-
ни t = T2—Т*.
* Практически этот промежуток времени равен 15—20 мин.
14 В. Е. Ольховский
209
Вследствие рыскания на волнении мгновенный курс
судна будет несколько отличаться от назначенного по-
стоянного курса. Поэтому на практике углы qx и q2 сле-
дует рассчитывать по формулам:
Я1 = ОРКУ г + Л + (ККо - KKi),
Яъ = ОРКУ2 + /2 + (^о - W,
где Д7<1 и /СЛ2— мгновенные компасные курсы судна в моменты
радиопеленгования Т\ и Г2;
ЛЛ0— назначенный компасный курс.
Истинный пеленг на судно N в момент определения
ОРКУ2 будет:
ЯЯ2 = ЯКо+~<72-
Расстояние до судна N в этот момент легко опреде-
ляется из треугольника M1NrM2. Очевидно, что
(VI—15)
S sin^x
sin (Я2 — Я()
Рис. 94
По формуле
(VI—15) составлена
номограмма, значи-
тельно упрощающая
определение по дан-
ным радиопеленгова-
ния расстояния до су-
дов, имеющих большие
уловы и работающих
на пеленг (рис. 94).
Рассмотрим на приме-
ре порядок пользова-
ния этой номограммой.
Пример. Дано Я\ =
=45°,0, 3 = 3,2 мили, Я2 =
= 51°,0. Вначале определяем
q2—qi = 51,0—45,0 = 6°,0.
По ^i=45°,0 и Яг—Я1 =
=6°,0 наносим отметку па
диагонали.
Соединяем линейкой
точку, соответствующую
S = 3,2 мили с отметкой на
диагонали и по левой боко-
вой шкале номограммы снимаем величину D—22 милям.
На номограмме решение этого примера показано пунктирными
линиями.
Как видно из рис. 93 и формулы (VI—15), расстоя-
ние до судна N, работающего на пеленг, не может быть
210
опредёлено, если это судйо находится ПряМо по йосу
или по корме. Практически курсовой угол должен ле-
жать в пределах от 30 до 120° или от 240 до 330°.
Если в момент первого пеленгования отсчет радио-
курсового угла судна N окажется менее 30° (более 330°),
необходимо сразу же отвернуть по компасу на 30° в сто-
рону от работающего на пеленг судна. Если же отсчет
первого радиокурсового угла будет более 120° (менее
240°), необходимо отвернуть по компасу на 30° в сторо-
ну этого судна и следовать новым курсом до момента
второго радиопеленгования.
На промысле обычно несколько судов, имеющих
большие уловы, поочередно работают на пеленг. Поэто-
му судно, которому необходимо выйти на хорошую кон-
центрацию рыбы, следует в течение некоторого проме-
жутка времени постоянным курсом и с постоянной ско-
ростью, последовательно пеленгует суда, имеющие
большие уловы, и по данным радиопеленгования опре-
деляет направление до них. Затем на промыслово-нави-
гационном планшете или карте наносят счислимые ме-
ста своего судна в моменты взятия вторых радиокурсо-
вых углов и от этих точек прокладывают направления
и расстояния до судов, имеющих большие уловы. Опре-
делив таким образом положение своего судна относи-
тельно этих судов, можно решить, в какой промысловый
квадрат, в район работы какого судна целесообразнее
всего следовать.
На дрифтерном промысле в тех случаях, когда осу-
ществляется централизованное управление работой про-
мысловых судов и перестановка их выполняется руко-
водителем промысла, практикуется определение по дан-
ным радиопеленгования мест всех судов относительно
флагмана. Для решения этой задачи на пеленг работает
флагман, а другие суда по данным радиопеленгования
определяют свое место относительно флагманского суд-
на. Сроки работы на пеленг флагманского судна уста-
навливаются заранее с таким расчетом, чтобы к этому
времени суда успели выбрать дрифтерные порядки.
В ежедневных промысловых радиосводках капитаны
судов указывают свое место относительно флагмана
(пеленг и расстояние), а также сообщают следующие
данные: ход промысла в каждом квадрате (направле-
ние движения облавливаемых косяков, направление
14*
211
дрейфа, температурные условия, глубины, на которых
держится рыба, количество сетей в порядке и средний
улов на одну сеть, ассортимент улова и т.п.). По дан-
ным радиосводок руководитель промысла и капитаны
судов наносят на планшет места всех добывающих и по-
исковых судов, находящихся в данном промысловом
районе. Все это позволяет капитану каждого судна пра-
вильно оценить обстановку, а руководителю промысла
произвести эффективную перестановку флота.
Аналогичные методы определения не только направ- •
лений, но и расстояний до судов, имеющих большие уло-
вы, или до флагманского судна могут быть применены
и на траловом промысле при работе группами или от-
рядами.
Подход с помощью радиопеленгатора к заданному
объекту. Чтобы подойти к другому добывающему судну
или плавучей базе, находящимся за пределами видимо-
сти и работающим «на пеленг», определяют направле-
ние на радиостанцию выбранного объекта и ложатся на
компасный курс, при котором Р/СУ=0°. При таком РКУ
радиодевиация обычно равна нулю или незначительна.
Кроме того, поскольку направление движения судна
определяется радиопеленгатором, ошибка в принимае-
мой поправке компаса не будет оказывать влияния.
Если на данном курсе сближения при контрольном
(повторном) радиопеленговании отсчет РКУ изменится
влево, то это означает, что судно сносит вправо от кур-
са, если же отсчет РКУ изменится вправо, то судно сно-
сит влево от курса. В первом случае следует повернуть
влево, а во втором — вправо, чтобы вновь привести пе-
ленгуемую станцию на Р/(У=0. Систематическое конт-
рольное радиопеленгование позволяет следовать к за-
данному объекту путем, близким к кратчайшему, а при
отсутствии сноса — кратчайшим путем, т. е. по дуге
большого круга.
При помощи радиопеленгатора часто осуществляет-
ся подход в тумане к стоящей на якоре плавучей базе,
вблизи которой обычно находится много судов, лежащих
в свободном дрейфе. В этом случае по данным радиопе-
ленгования предварительно определяют расстояние до
плавбазы, а затем ложатся на компасный курс, при ко-
тором РКУ радиостанции плавбазы будет равен нулю.
Знание расстояния до плавбазы дает возможность свое-
212
временно уменьшить ход и следовать вблизи плавбазы
с осторожностью, обеспечивающей безопасность пла-
вания.
На китобойном промысле при помощи радиопеленга-
тора осуществляется подход к поставленному «на флаг»
киту по сигналам установленного на его теле радиобуя.
Подход к заданному объекту особенно удобно осу-
ществлять с помощью двухканального визуального ра-
диопеленгатора (ДВРП). Радиопеленгаторы этого типа
обеспечивают возможность постоянной визуальной ин-
дикации направления на источник сигнала и освобож-
дают от необходимости контрольных (повторных) опре-
делений радиопеленга, необходимых при слуховом ме-
тоде пеленгования.
§ 44. Оценка точности определения места судна
по радиопеленгам, взятым с судна
Как видно из формулы (VI—2), на точность опре-
деления истинного (ортодромического) радиопеленга
влияют ошибки измерения радиокурсового угла, ошиб-
ка в радиодевиации, ошибки в компасном курсе и по-
правке компаса, принятых при расчете радиопеленга.
Ошибки измерения радиокурсового угла. Ошибка
определения минимума слышимости. Эта
ошибка свойственна судовым радиопеленгаторам, в ко-
торых радиокурсовой угол определяется по минимуму
слышимости сигнала с помощью рамочной антенной си-
стемы, имеющей минимум в диаграмме направленности
(слуховые радиопеленгаторы с гониометрами и визуаль-
ные с вычерчиванием диаграммы направленности на
экране ЭЛТ). В пределах некоторого угла у, называе-
мого углом молчания, уровень полезного сигнала будет
ниже уровня помех и работа радиомаяка на фоне этих
помех прослушиваться не будет. Величина угла молча-
ния зависит от соотношения напряжений полезного сиг-
нала и помех, а в слуховых радиопеленгаторах и от по-
рога чувствительности слуха наблюдателя. С увеличе-
нием расстояния до радиомаяка напряженность поля
полезного сигнала уменьшается. Следовательно, угол
молчания при данном уровне помех с увеличением этого
расстояния возрастает.
213
При измерении радиокурсового угла нахоДят поло-
жение минимума сигнала на середине угла молчания.
Случайные ошибки измерения радиокурсовых углов, по-
являющиеся из-за наличия угла молчания, подчиняются
закону равной вероятности. В соответствии с этим зако-
ном среднюю квадратическую ошибку радиокурсового
угла можно определить по формуле
V
тх =---zr = 0,Зу.
2уЛ3
При использовании слуховых радиопеленгаторов с
гониометрами в благоприятных условиях приема на
расстояниях 50—100 миль для наблюдателя средней
опытности можно принять у = 1°,5 и, следовательно,
т! = ±0°,5. Для визуальных радиопеленгаторов эта
ошибка на 20—25% меньше.
Ошибка отсчета радиокурсового угла
или радиопеленга по шкале азимуталь-
ного круга. Эту ошибку, учитывая сравнительно ма-
лые градусные деления и довольно значительную шири-
ну индекса, принимают равной т2=±0°,24-0°,3.
Инструментальные ошибки радиопе-
ленгатора. Причинами этих ошибок могут быть не-
точная установка рамочной антенной системы, антенный
эффект, погрешности гониометра или визирно-шкальной
системы *. У правильно установленного и тщательно вы-
веренного радиопеленгатора инструментальные ошибки
сравнительно невелики. Их совместное действие можно
оценить средней квадратической ошибкой т3=±0°,5.
Ночной эффект. В ночное время суток на ра-
мочную антенную систему радиопеленгатора воздейству-
ют не только радиоволны, распространяющиеся вдоль
поверхности Земли, но и радиоволны, отраженные от
ионосферы. Поверхностные радиоволны имеют нормаль-
ную поляризацию (вектор электрического поля нахо-
дится в плоскости распространения волны, а вектор
магнитного поля перпендикулярен этой плоскости).
Пространственные же радиоволны при отражении от
ионосферы меняют плоскость поляризации. Это приво-
дит к искажению электромагнитного поля радиомаяка.
* Эти ошибки подробно рассматриваются в курсе Радионавига-
ционные приборы.
214
С увеличением расстояния до радиомаяка и с уменьше-
нием длины волны поляризационные ошибки возраста-
ют. Эти ошибки создают так называемый ночной эф-
фект, проявляющийся в расплывчатости и «блуждании»
минимумов, замираний слышимости сигналов. В ночное
время не рекомендуется пеленговать радиомаяки (ра-
диостанции), удаленные на расстояние более 25—
30 миль.
Если к точности радиопеленгов не предъявляются
высокие требования, то это расстояние может быть уве-
личено до 70—80 миль. Определяя в ночное время ра-
диопеленг удаленного радиомаяка, нужно взять серию
радиопеленгов за промежуток времени не менее 15 мин
и осреднить их. При этом условии можно полагать, что
корреляция не будет оказывать влияние и можно счи-
тать осредненные радиопеленги независимыми друг от
Друга.
Учитывая, что ночной эффект особенно сильно про-
является в течение 1 ч до и после захода солнца, пелен-
говать в этот период времени радиомаяки, удаленные
более чем на 20 миль, нецелесообразно.
Береговой эффект. При переходе радиоволной
границы раздела воды и суши вследствие изменения
фазовой структуры электромагнитного поля происходит
некоторый поворот фронта волны. По мере удаления от
берега фазовые скорости выравниваются и фронт волны
постепенно принимает прежнее положение. Ошибка в
радиокурсовом угле, вызываемая береговым эффектом,
зависит от угла, под которым радиоволна пересекает
береговую черту, и расстояния до берега. На расстоя-
ниях, превышающих 10 длин волн радиомаяка, берего-
вой эффект практически не оказывает влияния на точ-
ность измерения радиокурсового угла. При меньших
расстояниях (D<10%) следует пользоваться указаниями
о секторах надежного пеленгования радиомаяка, кото-
рые обычно даются в описаниях радиотехнических
средств навигационного оборудования данного моря.
Если эти секторы не указаны в случаях, когда линия
счислимого локсодромического пеленга радиомаяка пе-
ресекает береговую черту под углом, меньшим 20°, пе-
ленговать этот радиомаяк не рекомендуется.
Ошибки определения радиодевиации. Остаточная
радиодевиация определяется с некоторой ошибкой, ко-
215
торая полностью входит в истинный радиопеленг.
Среднюю квадратическую ошибку определения радиоде-
виации принимают равной zn4 = ±0,°5.
При этом следует иметь в виду, что радиодевиация
зависит от длин принимаемых радиоволн и осадки суд-
на. Поэтому ее определяют для нескольких длин волн
(Х=600 м, %=800м и к= 1000 м) и для различных
осадок, например в полном грузу и в балласте. Исполь-
зование на судне одной таблицы или графика ра-
диодевиации не позволит учесть влияние этих фак-
торов на изменение радиодевиации и может привести
к значительному снижению точности радиопеленго-
вания.
Ошибки расчета истинного радиопеленга. Для того
чтобы рассчитать истинный (ортодромический) радио-
пеленг по известному радиокурсовому углу, необходимо
одновременно с взятием отсчета этого угла заметить
компасный курс и исправить его поправкой компаса.
При сравнительно небольшой качке ошибку компасного
курса можно принять равной /п5=±0°, 5. Неодновре-
менность взятия отсчетов радиокурсового угла и ком-
пасного курса приводит к возникновению дополнитель-
ной ошибки тб = ±0°, 3.
Обычно компасный курс определяется по гирокомпа-
су. При благоприятных условиях плавания и регуляр-
ных определениях поправки гирокомпаса из наблюде-
ний среднюю квадратическую ошибку в этой поправке
можно принять равной /n7=±0°, 5.
Из приведенного выше краткого анализа видно, что
ошибка истинного (ортодромического) радиопеленга за-
висит от ряда факторов, многие из которых заранее
учесть трудно.
При отсутствии влияния ночного и берегового эф-
фектов суммарную среднюю квадратическую ошибку
определения истинного (ортодромического) радиопелен-
га можно рассчитать по формуле
тИРП= n^2+ mj+ ml+ ml + ml+ т^. (VI—16)
При оценке точности определения места судна по
радиопеленгам ошибки /пь /п2, /п3, т6 следует
относить к случайным, а ошибку т7 — к повторяю-
щимся (систематическим).
216
Подставив в формулу (VI—16) принятые численные
значения рассмотренных ошибок будем иметь /Пирп =
= ±1°, 2.
Полученное значение суммарной средней квадрати-
ческой ошибки истинного (ортодромического) пеленга
следует рассматривать как минимальное. Оно хорошо
согласуется с данными о точности радиопеленгования,
полученными на практике в дневное время на расстоя-
ниях 10Z<D^100 миль.
Формулу (VI—16) можно написать в таком виде:
тИРП = mq mf 4“ (VI—17)
где mq— суммарная ошибка измерения радиокурсового угла;
mf—ошибка определения радиодевиации;
—суммарная ошибка истинного курса, принятого при рас-
чете радиопеленга (все ошибки средние квадратические).
Для слуховых радиопеленгаторов с гониометрами
(пеленгование в дневное время) ошибку tnq можно вы-
числить по приближенной эмпирической формуле
^ = 0°,3 + ^- , (VI—18)
Црм
где D — расстояние от судна до радиомаяка;
Дрм — дальность действия радиомаяка, указанная в описании
радиотехнических средств навигационного оборудования.
Для визуальных радиопеленгаторов ошибку, полу-
ченную по формуле (VI—18), уменьшают на 20—25%.
Так, например, приняв, как и ранее, /«/ = ±0°, 5, тик =
=±0°, 6, для £>=100 миль и Дрд|=150 миль получим:
100
тИРП = /(1.0)2 + (0,5)2 + (0,6)2 = ± 1°,3.
Оценка точности определения места судна по радио-
пеленгам и нахождение его вероятнейшего места при
избыточных наблюдениях осуществляется общими мето-
дами и приемами в зависимости от числа линий поло-
жения, используемых для обсервации, и соотношения
случайных и повторяющихся ошибок измерений навига-
ционных параметров.
Если навигационную информацию обрабатывают
«вручную», то оценку точности определения места судна
по радиопеленгам при использовании судового радио-
217
пеленгатора осуществляют так же, Как и по визуальным
пеленгам. Для сокращения вычислений вводят практи-
чески допустимые упрощения. Расчет ведут для локсо-
дромических пеленгов, и градиент пеленга, взятого
с судна, определяют по формуле Так, например,
радиальную среднюю квадратическую ошибку опреде-
ления места судна по двум радиопеленгам вычисляют
по формуле
м = 573^ Т D1 + р2. (VI—19)
о / sin и
где 0 — угол пересечения линий локсодромических пеленгов;
Di и D2 — расстояния до радиомаяков (эти расстояния снима-
ются с карты и они являются локсодромическими);
тИРП — средняя квадратическая ошибка истинного радиопе-
ленга [если тирп =/=тИРП , то тиРП =
_2_/ т ‘ Ч ‘
— 2 I тИРП, “г тИРП, И •
Формулу (VI—19) можно написать и в таком виде:
М = Ши к =
ъ sine ’
= /р1 + ^2-
Величины k и Afi выбирают из специальных таблиц
соответственно по аргументам тирп, 0 и D\ и Z)2-
Если место судна определяют по трем и более радио-
пеленгам, радиальную среднюю квадратическую ошиб-
ку М рассчитывают по формуле (V—9). При трех
радиопеленгах величина этой ошибки может быть при-
ближенно получена и с помощью формулы (VI—19).
В этом случае выбирают два радиопеленга из трех,
обеспечивающие более высокую точность определения
места, т. е. пеленги радиомаяков, расположенных на
самых малых расстояниях от судна (но не меньших
10 X), и углы пересечения которых ближе к 90°. Рассчи-
танная по формуле (VI—19) ошибка должна быть
уменьшена примерно на 20% благодаря наличию
третьего радиопеленга.
При определении места судна по трем радиопелен-
гам можно исключить повторяющуюся ошибку (ошибку
в принимаемой поправке компаса) приемами, рассмот-
ренными в § 32.
218
§ 45. Прокладка определений места судна
по пеленгам с направленных радиомаяков
или радиопеленгаторных станций
Определив ортодромический пеленг U с направ-
ленного радиомаяка или радиопеленгаторной станции
на судно, получаем изолинию J7=const, представляю-
щую собой на сфере дугу большого круга, проходящую
через радиомаяк (радиопеленгаторную станцию) и со-
ставляющую с меридианом радиомаяка угол, равный U.
Рассмотрим один из графоаналитических
прокладки обсервованного
места судна, основанный на
построении линий положе-
ния из счислимого места.
В соответствии с общим
приемом построения линий
положения рассчитывают
счислимый ортодромиче-
ский пеленг на судно (£7С),
а также модуль и направле-
ние градиента этого пеленга.
Затем вычисляют перенос п.
Отложив величину п от счи-
слимого места по направле-
нию градиента, получают
определяющую точку Д’, через которую проводят перпен-
сцособов
и
Рис. 95
дикулярно направлению градиента линию положения
/—/, представляющую собой касательную к дуге боль-
шого круга (см. рис. 87).
На рис. 95 С — счислимое место судна в момент пе-
ленгования, М — направленный радиомаяк (радиопе-
ленгаторная станция), с которого определялся пеленг
на судно. Градиент пеленга с радиомаяка на судно по
абсолютной величине равен
_ 1
& sinD
а угол, составляемый направлением градиента с мери-
дианом счислимого места равен £7=2ф±90°. Следова-
тельно, элементы линии положения пит могут быть
рассчитаны по формулам:
219
n' = (U~Ucy sin Dc, (VI-20)
t=(/ + 2i|) ± 90°. (VI—21)
Ортодромическую поправку гр выбирают из табл.
23-6 МТ—75. В северном полушарии при /7<180°2г|)
учитывается со знаком «плюс», а при t/>180° — со
знаком «минус». В южном полушарии наоборот. Если
U>UC, то, как видно из рис. 95, 90° прибавляют, если
же U<UC— вычитают. При этом величину п независи-
мо от ее знака всегда откладывают по направлению т.
Для вычисления входящих в формулу (VI—20)
счислимых аргументов — расстояния Dc и ортодроми-
ческого пеленга Uc — можно воспользоваться формула-
ми, которые выводятся из сферического треугольника
PNMC, разделенного на два прямоугольных треугольни-
ка сферическим перпендикуляром CN. Эти формулы по-
ложены, как известно, в основу табл. ТВА—57 и приме-
нительно к обозначениям, принятым в этих таблицах
(см. § 42), могут быть записаны в таком виде:
Т(х) = Т(Фс)+5(АХ),
Т (Z7C) = Т (АХ) - S (х) + S [90° + (х Фм)],
Т (90° - Dc) = Т [90° + (х фм)] - S (Uc). (VI—22)
Величину переноса п также можно вычислить с по-
мощью табл. ТВА—57. Для этого следует переписать
формулу (VI—20) в таком виде:
Т (л) = Т (U — (/с) — 5 (90° — Dc). (VI-23)
Элементы линий положения можно рассчитать и по
другим формулам сферической тригонометрии. Вычис-
ления можно вести и на плоскости меркаторской проек-
ции, применяя формулы аналитического счисления.
Однако наиболее целесообразно решать эту задачу по
формулам (VI—22) и (VI—23) с помощью таблиц
ТВА—57 и в особенности по формулам, реализуемым на
программно-управляемых ЭКВМ.
При сравнительно небольших расстояниях между
судном и направленными радиомаяками или радиопе-
ленгаторными станциями можно использовать графичес-
кие способы построения линий положения, применяя
приближенную формулу для ортодромической поправки
при переходе от ортодромических к локсодромическим
пеленгам.
220
Прокладка линий положения осуществляется в таком
же порядке, как и в случае, когда определяется ортодро-
мический пеленг с судна на радиомаяк (см. §42). Разли-
чие заключается лишь в том, что через полученную оп-
ределяющую точку К проводят линию положения,
представляющую собой касательную не к изоазимуте, а
к дуге большого круга (ортодромии), которая выпук-
лостью обращена к ближайшему полюсу (рис. 96). Угол
а0, составляемый этой линией положения с меридианом
точки Л, определяется в северном полушарии по фор-
мулам:
ао = U +2ф при U < 180°,
а0 =-• U — 2яр при U > 180°.
В южном полушарии знаки обратные.
Для прокладки радиопеленгов с направленных ра-
диомаяков или радиопеленгаторных станций на судно
можно использовать
карты в гномонической
(центральной) проек-
ции. На этой проекции
изолиния t/=const —
дуга большого круга —
изображается, как из-
вестно, прямой линией.
При этом должно быть
учтено искажение уг-
лов, пропорциональное
косинусу расстояния от
центральной точки
проекции до места расположения направленного радио-
маяка (радиопеленгаторной станции).
Если карта в гномонической проекции построена
специально для прокладки радиопеленгов, то для каж-
дого направленного радиомаяка или радиопеленгатор-
ной станции строят с учетом искажения углов специаль-
ную картушку, при помощи которой прокладывают
дугу большого круга, соответствующую полученному
ортодромическому пеленгу U.
Отрезок дуги большого круга вблизи счислимого
места может быть перенесен по географическим коорди-
натам двух точек с гномонической карты на меркатор-
скую и принят за линию положения. С гномонической
221
карты можно непосредственно снять географические
координаты обсервованного места судна, если оно опре-
делено по двум или трем радиопеленгам.
§ 46. Прокладка определений места судна
по пеленгам с секторных радиомаяков
Прокладка определений места судна по пеленгам
с секторных радиомаяков приводит к решению той же
геометрической задачи, которая была рассмотрена
в § 45, так как секторные радиомаяки являются одной
из разновидностей радиомаяков направленного дейст-
вия. Однако на практике эта
задача решается с помощью
карт с сетками изолиний —
дуг больших кругов, отве-
чающих различным значе-
ниям ортодромических пе-
ленгов с радиомаяков на
судно, или специальных таб-
лиц для построения линий
положения. Эти пособия,
в особенности карты с сет-
ками изолиний, значительно
облегчают работу судоводи-
теля, избавляя его от вычислений, связанных с построе-
нием линий положения.
В основу построения карт изолиний и составления
таблиц положены формулы, определяющие большой
круг, проходящий через заданную точку под заданным
азимутом. Так как секторные радиомаяки являются
сравнительно точными радионавигационными устройст-
вами и обладают большой дальностью действия, при по-
строении карте сетками изолиний и составлении таблиц
для построения линий положения учитывается сферо-
идичность Земли.
Однако для простоты рассуждений рассмотрим ре-
шение рассматриваемой задачи без учета сфероидичнос-
ти Земли. На рис. 97 точка Л4, заданная координатами
фм и представляет изображение секторного радио
маяка, МК— дуга большого круга, проходящая через
место радиомаяка М и составляющая с меридианом
этого радиомаяка угол, равный заданному ортодроми-
222
ческому пеленгу на судно U, К — текущая точка на
этой дуге с координатами ф и X. Обозначив через Ло
долготу точки пересечения большого круга с экватором
и через со угол наклона его к экватору, из сферического
прямоугольного треугольника OMF можем написать:
cos ш = cos фд! sin U t
Ко = 90° —со,
tg —=sin<PA1tg^/
(VI—24)
Эти формулы применяют для расчета параметров
заданного большого круга /Со и Хо.
Из сферического прямоугольного треугольника OKL
следует:
tg <р = sin (X - Хо) ctg Ко (VI—25)
или
sin (X - Хо) = tg KQ tg ср. (VI-26)
По формуле (VI—25) можно рассчитать широты то-
чек, в которых дуга большого круга пересекает мериди-
аны с наперед заданными долготами Xi, Х2, ...» а по
формуле (VI—26)—долготы точек, в которых, дуга
пересекает параллели с наперед заданными широтами
Фь Ф2» ...»фп. Формулой (VI—25) пользуются при/Со>20°,
а формулой (VI—26) при‘/Со <20°.
Эти формулы позволяют найти координаты любых
точек дуги большого круга в пределах той или иной
акватории. Нанеся на карту по координатам ряд точек,
принадлежащих заданной дуге большого круга, и про-
ведя через эти точки согласную кривую, получают изо-
линию иг =const Как известно, линию положения мож-
но рассматривать как секущую, проходящую через две
близкие на изолинии точки. Формула (VI—25)) позво-
ляет рассчитать широты точек ф1 и ф2, в которых дуга
большого круга =const пересекает меридианы с дол-
готами Х1=Хс4-АА и Х2=Хс—АХ, где Хс— долгота счис-
лимого места в момент пеленгования. Можно также по
формуле (VI—26) рассчитать долготы точек Xi и Х2, в
которых дуга большого круга I7f=const пересекает па-
раллели ф!=фС4-Дф и ф2=фс—Аф, где фс—широта
счислимого места.
Прямая линия, проведенная через точки с координа-
тами фЬ Xi и ф2, Х2, будет представлять собой линию по-
223
ложения (рис. 98). Этот метод положен в основу таблиц
для построения линий положения при определении мес-
та судна с помощью секторных радиомаяков.
Карты с сетками изолиний. Карты с сетками изоли-
ний для определения места судна с помощью секторных
радиомаяков издаются4
обычно в проекции
Меркатора. На них на-
носятся различными
цветами изолинии U=
=const от двух или бо-
лее секторных радио-
маяков (рис. 99). Изо-
линии на картах оциф-
ровываются числом N
принятых сигналов ра-
диомаяка (точек или
тире), соответствую-
щим ортодромическому пеленгу U с радиомаяка на суд-
но. Это упрощает определение места судна, так
как исключает необходимость предварительного опреде-
ления величины ортодромического пеленга по числу при-
нятых сигналов при помощи специальных таблиц, состав-
ленных по формулам (VI—3) и (VI—4).
На карты наносятся изолинии, соответствующие чис-
лу сигналов кратному 5, 10, 20 или 60 в зависимости от
расстояния до радиомаяка. Утолщенные изолинии прово-
дятся по границам секторов для начального момента
цикла работы каждого радиомаяка. В секторах показа-
ны те сигналы (точки или тире), которые наблюдатель
должен слышать в начале цикла (после позывных и
длинного тире) до прохождения равносигнальной зоны.
Кроме того, приводится условная нумерация секторов с
возрастанием порядковых чисел в направлении их вра-
щения.
Линию положения, соответствующую принятому чис-
лу сигналов, прокладывают путем интерполяции между
двумя соседними изолиниями, нанесенными на карте.
Для облегчения интерполяции применяется специальная
палетка в виде углового масштаба или линейки с мил-
лиметровыми делениями. Полученное на карте с сеткой
изолиний обсервованное место судна переносят затем на
путевую карту.
224
Карты с сетками изолиний для определения места
судна при помощи секторных радиомаяков, издаваемые
Главным управлением навигации и океанографии МО
СССР, имеют литер РА. Эти карты составляются в
масштабе обычно не крупнее 1:500 000.
Рис. 99
Многие промысловые районы, лежащие вдали от
основных морских путей, но расположенные в пределах
рабочих зон секторных радиомаяков, не охватываются
картами с сетками изолиний, изданными Главным управ-
лением навигации и океанографии МО СССР. Для таких
районов строятся специальные планшеты с сетками изо-
линий в масштабах, принятых для промыслово-навига-
ционных карт. Эти планшеты издаются картографичес-
кими предприятиями по заказу рыбохозяйственных ор-
ганизаций. Они используются не только для определения
15 в. Е. Ольховский 225
Места судна по пеленгам с секторных радиомаяков, но
и для ведения счисления в процессе промысла.
В связи с тем, что добывающие суда обычно рабо-
тают длительное время в сравнительно ограниченном
районе моря, такие планшеты более удобны, чем обыч-
ные карты с сетками изолиний, издаваемые для обеспе-
чения переходов судов. Эти карты имеют мелкий мас-
штаб и вести на них счисления пути судна во время
промысла нельзя. Обсервованное место судна, проложен-
ное на такой карте, необходимо затем по координатам
переносить на планшет, на котором ведется промысловое
счисление. Это требует дополнительной затраты
времени.
Сетки изолиний для определения места судна при
помощи секторных радиомаяков нанесены и на некото-
рые промыслово-навигационные карты, изданные*как в
СССР, так и за рубежом.
В отдельных случаях под влиянием рельефа берега
в месте установки антенн радиомаяка изолинии £7=const
искривляются. Это учитывается либо при построении изо-
линий, либо путем введения поправок в число принятых
сигналов. Поправки выбираются из специальных таб-
лиц или графиков по числу принятых сигналов и номе-
ру сектора радиомаяка .
Таблицы для построения линий положения. В этих
таблицах даны географические координаты точек пере-
сечения дуг больших кругов, соответствующих принято-
му числу сигналов радиомаяка с определенными мериди-
анами и параллелями. В основу составления таблиц
положены формулы (VI—24), (VI—25), (VI—26),
(VI—3), (VI—4). Порядок пользования ими описан в
пояснении к таблицам.
Сетка изолиний позволяет получить обсервованное
место с наименьшей затратой времени. Поэтому на до-
бывающих судах таблицы для построения линий поло-
жения целесообразнее использовать не для прокладки
линий положения в процессе ведения промысла, а для
нанесения сеток изолиний на промыслово-навигационный
планшет во время подготовки к промыслу.
С помощью таблиц эта задача решается достаточно
просто: зная сектор радиомаяка, в пределах которого
лежит данная изолиния, и число сигналов, которому она
отвечает, задаются табличными значениями параллелей
226
Сл
* Радиомаяк Рыбачий
227
Тире
<р=70° 1 ф=71°С
X Д:20 А: 10
0 33°07',4 >33°57',2
5 0,74
10 0,140 34 04 ,6
15 0,75
20 33 10 ,2 34 12 ,1
25 0,77
30 0,145 34 19 ,8
35 0,78
40 33 13 ,1 34 27 ,6
45 0,79
50 0,150 34 35 ,5
55 0,83
60 33 16 ,1 34 43 ,8
Таблица 3
Сектор тире Р-6
Параллели Тире
Ф=72° ф=72°30* ф=73°
X д: 10 к I Д:5 X | д:5
34°52',6 35°22'7 1,78 35°54'6 2,16 0
1,41 35 31,6 36 05,4 5
1,78 2,18
35 06 ,7 35 40,5 36 16,3 10
1,80 2,22
1,44 35 49,5 35 27,4 15
1,82 2,22
35 21 ,1 35 35 ,7 1,46 35 58,6 36 07,8 36 17,1 36 38,5 36 49,7 37 01,1 20 25 30
1,84 2,24
1,86 2,28
1,90 2,32
1,50 36 26,2 37 12,7 35
1,90 2,34
35 50 ,7 36 36,1 37 24,4 40
1,94 2,33
1,54 36 45,8 37 36,3 45
1,96 2,40
36 06 ,1 36 55,6 37 48,3 50
2,00 2,46
1,59 37 05,6 38 00,6 55
2,04 2,50
36 22 ,0 37 15,8 38 13,1 60
или меридианов, пересекающих район, охватываемый
планшетом, и определяют по таблицам долготы точек
пересечения изолинии с выбранными табличными парал-
лелями или широты точек пересечения изолинии с выб-
ранными табличными меридианами. По координатам
наносят точки на плашет и проводят через них соглас-
ную кривую.
Пример. Нанести на планшет, ограниченный параллелями 70° N
и 73° N и меридианами 33°Ost и 45°Ost, изолинию для секторного
радиомаяка Рыбачий— сектор Р—6,20 тире.
Задаваясь широтами 70°, 71°, 72°, 72°,30 и 73° N, из табл. 3 (вы-
держка из таблиц для построения линий положения) выбираем дол-
готы точек пересечения данной изолинии, с табличными параллеля-
ми: 33°10',2; 34°12',1; 35°21'1; 35°58',6; 36°38',5 Ost.
По координатам наносим точки на планшет и проводим через
них согласную кривую.
Точно так же рассчитывают и наносят на планшет
изолинии для других секторов и другого числа сигна-
лов— точек или тире. При этом никаких поправок в ши-
роты вводить не требуется, поскольку сфероидичность
Земли уже учтена при составлении таблиц.
§ 47. Оценка точности определения места судна
по пеленгам с секторных радиомаяков
Точность определения пеленга с секторного радио-
маяка на судно зависит от инструментальных ошибок
самого радиомаяка и случайных ошибок приема сигна-
лов, зависящих от условий распространения радиоволн
и применяемого способа подсчета числа сигналов. Инст-
рументальные ошибки секторного радиомаяка не превы-
шают 0°, 1. Основное влияние на точность определения
пеленга оказывает случайная ошибка приема сигналов.
Дифференцируя выражение (VI—3) по переменным
а и V, можно получить формулу для вычисления сред-
ней квадратической ошибки пеленга, обусловленной
ошибками приема сигналов:
57°,3тл/
= 120Z SeCa*
Если сигналы принимаются на слух, то днем средняя
квадратическая ошибка подсчета сигналов tnN по опыт-
ным данным принимается равной ±1,5 знака. При на-
хождении судна на нормали к базовой линии радиомая-
228
ка (а=0) средняя квадратическая ошибка пеленга
ти будет иметь минимальное значение. Полагая а=0
и mN=± 1,5, получим:
0°,718 /Х7Т
m47(min) = = а‘ (VI—27)
Следовательно, можно написать
ти = a sec а, (VI—28)
где а — постоянный для данного радиомаяка коэффициент про-
порциональности, равный ошибке определения пеленга на
нормали к базовой линии радиомаяка.
При приеме сигналов на слух днем значение коэф-
фициента а определяется выражением (VI—27).
Из формулы (VI—28) видно,
что секторный радиомаяк обла-
дает направленной точно-
стью: ошибка пеленга увеличи-
вается пропорционально секансу
угла между нормалью к базовой
линии радиомаяка и направлени-
ем с радиомаяка на судно. Вели-
чины этих ошибок в дневное вре-
мя при приеме сигналов на слух
приведены на рис. 100.
Ночью вследствие влияния
ночного эффекта случайные
ошибки пеленгования значитель-
но больше, чем днем, в особенно-
сти на расстояниях 300—400
миль от радиомаяка.
Примерные величины средних
бок пеленга в ночное время и их зависимость от рассто-
яний до радиомаяка показаны на рис. 101.
Радиальную среднюю квадратическую ошибку опре-
деления места судна по пеленгам с двух секторных
радиомаяков можно рассчитывать по формуле (V—I).
Подставляя в эту формулу приближенное значение мо-
дуля градиента пеленга с радиомаяка на судно ga =
и выражая средние квадратические ошибки пеленгов
т^1 и тия в градусах, получим:
0,0175 /"/о (° гч \ 2
м = г °2) (VI-29)
/77Л/
0'3
о;в
0'7
0*6
О°5
0^
0Г5
О9 10° ДГ5(Г НГМГМ'а
Рис. 100
квадратических оши-
229
Формулу (VI—29) можно упростить, используя из-
вестное выражение приближенных вычислений
]/~^42+В2 «0,964+0,375 при А>В. Применим это вы-
ражение к формуле (VI—29) и заменим ортодромиче-
ские расстояния D локсодромическими S, выразив их в
градусах. В результате получим:
М = + 0,4/п^а $2)cosec 6»
Рис. 101
По этой формуле составлены номограммы для опре-
деления М. Пользование номограммами (рис. 102) по-
казано на примере, приведенном ниже.
Пример. 0 = 47°, 5; тУ1 = 0°, 5; /Иу2=0°, 3; Sj = 9°, 6; S2=8°, 1.
На левой и средних шкалах номограммы Н-1 соединяем прямой
линией точки, отвечающие значениям тц = 0°,5 и Si=9°,6. В точке
пересечения этой прямой с правой внутренней шкалой снимаем от-
счет а=4,8. Затем, соединив прямой линией на левой и средней шка-
лах точки, отвечающие значениям Шц =0°,3 и £2 = 8°,1, снимаем от-
счет 6=1,0. При помощи номограммы Н-2, соединив прямой линией
точки, отвечающие значениям 0=47°,5 и а+6=5,8, определяем по
средней шкале ошибку М = 7,8 мили.
На практике может возникнуть необходимость оце-
нить возможную точность определения места судна с
помощью секторных радиомаяков в районе предстояще-
го промысла. Район промысла разбивают на несколько
участков и рассчитывают радиальные средние квадра-
тические ошибки определения места судна только для
центральных точек этих участков, делая допущение,
что на всем таком участке ошибка одинакова. Локсо-
230
дромическйе расстояния Si и S2 снимают с мелкомас-
штабной карты, на которой помещаются радиомаяки, и
район промысла. С этой же карты снимают локсодро-
мические пеленги с радиомаяков на центральную точку
выбранного участка. Угол пересечения изолиний 0 оп-
ределяют по формуле
0 = у —(ipi —i|)a),
где у — угол между локсодромическими пеленгами с радио-
маяков на центральную точку участка;
'1’1 и Фа — ортодромические поправки.
Алгебраическая разность этих поправок образуется
по правилу: поправка правой стороны (направления)
минус поправка левой стороны (направления).
Величины си и а2, необходимые для определения
ошибок и рассчитывают по формулам:
t/f = Pi U2 = Ра
= t/i а2 = U2 Uqs,
где UQ и{/0з — ортодромические направления нормалей к базовым
линиям радиомаяков, выбираемые из соответствую-
щих навигационных пособий.
231
Если имеется карта или навигационно-промысловый
планшет с сеткой изолиний, оценка точности определе-
ния места судна на том или ином участке района пла-
вания или промысла упрощается. В этом случае для
вычисления радиальной средней квадратической ошиб-
ки определения места судна используют формулу
М = cosec 0 + т2лп*,
а ошибки (смещения) линий положения определяют
при помощи сетки изолиний
А£> Д£>
т*п = ~ыГ тц —длГ ты ’ (VI-30)
где AD— кратчайшее расстояние между двумя соседними изолиния-
ми около точки, для которой рассчитывается М;
&U — разность значений навигационного параметра, которым
оцифрованы эти две изолинии;
ти — средняя квадратическая ошибка измерения этого навига-
ционного параметра в рассматриваемом случае — числа
сигналов.
Пример. Расстояние по нормали между двумя соседними изо-
линиями от радиомаяка К около центра промысловой площадки со-
ставляет 5,1 мили, а разность значений чисел сигналов, которыми
оцифрованы эти изолинии, равна 10; тЛ^±1)5 знака (сигналы
принимаются на слух днем).
AD 5,1X1,5 п_
^дл = г;;---=0,8 мили.
ал ю
Зная и тЛП1, можно, как известно, не вычис-
ляя величины Л1, приближенно построить на карте
эллипс погрешности. Для этого, учитывая равновероят-
ную возможность смещения линий положения в обе
стороны, строят параллелограмм и вписывают в него
на глаз от руки эллипс.
Для общего суждения о точности определения мес-
та судна с помощью секторных радиомаяков в том или
ином районе можно воспользоваться мелкомасштабны-
ми картами-схемами зон ожидаемых точностей. На
этих картах-схемах нанесены линии равной точности
определения мест судна по пеленгам с каких-либо двух
секторных радиомаяков. Линии равной точности нане-
сены и на некоторых обзорных промыслово-навигацион-
ных картах, охватывающих районы, расположенные в
пределах рабочих зон секторных радиомаяков.
232
§ 48. Импульсная гиперболическая
радионавигационная система
Импульсная гиперболическая РНС основана на из-
мерении в точке приема (на судне) промежутка време-
ни t между моментами 71 и Т2 прихода импульсных
сигналов от двух береговых передающих радиостан-
ций А и В. Измерив величину t=Tz—7\ и зная ско-
рость распространения радиоволн и, можно определить
и разность расстояний r=vt от места судна до берего-
вых станций. Этому навигационному параметру соот-
ветствуют, как известно, изолиния r=const, представ-
ляющая собой гиперболу с фокусами в местах располо-
жения береговых станций.
Рассмотрим общие принципы работы такой системы
на примере широко распространенной РНС «Лоран-А».
Береговые передающие радиостанции РНС «Лоран-А»,
входящие в одну цепочку, разделяются на пары. Каж-
дая станция имеет условное буквенное обозначение.
Одна из станций пары называется ведущей, другая ве-
домой. Расстояние между ними равно 300—400 милям.
Для уменьшения общего количества станций одна ве-
дущая станция может быть общей для двух пар и ра-
ботать попеременно то с одной, то с другой ведомой.
Ведущая станция излучает импульсы, посылает син-
хронизирующие импульсы на ведомые станции и под-
держивает постоянной частоту повторения (следова-
ния) импульсов для каждой пары станций.
Ведомая станция, приняв синхронизирующий им-
пульс с ведущей станции, излучает импульсы на одной
с ведущей станцией частоте с некоторой постоянной за-
держкой 0,5тг+^к, где т; — период повторения импуль-
сов, — некоторый дополнительный промежуток вре-
мени, называемый кодовой задержкой.
Синхронизирующий импульс принимается ведомой
- a d
станцией через промежуток времени td = —, где d—
v
расстояние между ведущей и ведомой станциями (ба-
за). Поэтому общее время задержки излучения сигна-
лов ведомой станцией по отношению к моменту излу-
чения сигналов ведущей станцией t3 составляет:
/, = 0,5т(- + ^ + /к.
233
Измерение промежутка времени t между момента-
ми прихода импульсных сигналов от ведущей и ведо-
мой станций осуществляется с помощью судового прие-
моиндикатора, основной частью которого является
электроннолучевая трубка с электростатическим откло-
нением луча. Отсчет t производится по цифровому
счетчику в микросекундах. При этих измерениях вели-
чина 0,5 п автоматически исключается. Поэтому об-
щую задержку во времени 1Э можно принимать равной
/з=^ + ^к.
Обозначим моменты прихода на судно импульсных
сигналов от ведущей и ведомой станций соответственно
через Та и Тв. Тогда можем написать:
* = тв-тА >0.
Так как при /3=^ + /к импульсные сигналы от веду-
щей станции в любую точку пространства придут рань-
ше, чем импульсные сигналы ведомой станции, параметр
t всегда будет иметь положительный знак. Как извест-
но, гипербола является кривой, симметричной относи-
тельно мнимой оси. Если бы ведущая и ведомая стан-
ции излучали импульсные сигналы одновременно, то
разности расстояний r = v (Т2—Т}) отвечали бы две
гиперболы 1—1 и /'—симметрично расположенные
относительно нормали, проходящей через середину ба-
зовой линии ведущей и ведомой станций (рис. 103).
При введении постоянной задержки во времени /3
разность расстояния можно определить по формуле
r = u(t — /3),
где t = Тв - ТА .
Следовательно, каждому значению t будет соответ-
ствовать только одна определенная гипербола, при
этом величина t будет изменяться в пределах
2td + tK>t>tK.
Для точки Кь расположенной на продолжении ба-
зовой линии со стороны ведомой станции В (см.
рис. 103), промежуток времени между приходом им-
пульсных сигналов от ведущей и ведомой станций бу-
дет:
— ^ш1п
= + = /«•
\ G /
234
Для точки /С2» расположенной на продолжении ба-
зовой линии со стороны ведущей станции А, этот про-
межуток времени будет:
^2 = бпах = (?d + + id Ч-- = 2?d + •
\ V / V
Таким образом, введение задержки t3 во времени
излучения сигналов ведомой станцией по отношению к
моменту излучения сигналов ведущей станцией обеспе-
чивает опознавание сигналов ведущей и ведомой стан-
ций (импульс А располагается всегда слева от импуль-
са В), однозначность отсчета навигационного пара-
метра и положительный знак этого параметра.
Станции РНС «Лоран-А» работают непрерывно и
никаких позывных сигналов не излучают. Пары стан-
ций этой системы различаются между собой по несу-
щей частоте импульсов и частоте повторения импуль-
сов. По этим данным, которые указываются на картах
с сетками изолиний и в некоторых других пособиях,
осуществляется настройка судового приемоиндикатора
для работы с выбранной парой станций. РНС «Лоран-
А» имеет четыре канала несущих частот и 24 значения
повторения импульсов, объединенных в три группы:
высокая, обозначаемая буквой Н\ низкая, обозначае-
235
мая буквой L; специальная, обозначаемая буквой S.
Каждая из этих групп состоит из восьми монотонно
возрастающих частот повторения импульсов, обознача-
емых порядковыми номерами от 0 до 7. Частотные кана-
лы береговых передающих станций системы «Лоран-А»
приведены в табл. 4, а основные и точные частоты пов-
торения импульсов — в табл. 5.
Таблица 4
№ канала Длина волны, м Частота, кГц
1 154 1950
2 162 1850
3 158 1900
4 172 1750
Таблица 5
Обозначе- ние 5(специальная) Ь(низкая) //(высокая)
частота, с интервал, мкс частота, с интервал, мкс частота, с интервал, мкс
0 20 50,0 25 40,0 33 1/3 30,0
1 20 1/25 49,9 25 1/16 39,9 33 4/9 29,9
2 20 2/25 49,8 25 1/8 39,8 33 5/9 29,8
3 20 3/25 49,7 25 3/16 39,7 33 2/3 29,7
4 20 4/25 49,6 25 1/4 39,6 33 7/9 29,6
5 20 1/5 49,5 255/16 39,5 33 8/9 29,5
6 20 6/25 49,4 25 3/8 39,4 34 29,4
7 20 7/25 49,3 25 7/16 39,3 34 1/9 29,3
Для измерения промежутка времени t=TB — ТА
можно использовать импульсы поверхностной радиовол-
ны и пространственной радиоволны, однократно отра-
женной от ионизированного слоя Так как простран-
ственные радиоволны проходят пути большие, чем по-
верхностные, отраженные сигналы приходят в точку
приема с некоторым запаздыванием во времени, которое
сравнительно стабильно. Поэтому при определении ве-
личины t по сигналам пространственной волны снятые
с судового приемоиндикатора отсчеты необходимо ис-
236
правлять поправками за распространение радиоволн
(поправками за пространственные радиоволны). Эти
поправки помещаются в специальных таблицах и на
картах с сетками изолиний.
Если возможно, то следует использовать импульсные
сигналы поверхностных радиоволн от обеих передающих
станций, так как это обеспечивает более высокую точ-
ность измерения навигационного параметра. Одна пара
станций РНС «Лоран-А» позволяет получить только
одну изолинию. Поэтому для определения места судна
необходимо выбрать две пары станций цепочки, кото-
рые позволяют получить изолинии, пересекающиеся под
углом, более близким к 90°.
В настоящее время в круглосуточной эксплуатации
находятся 63 пары береговых передающих радиостан-
ций РНС «Лоран-А». Рабочие зоны этих станций по-
крывают три четверти водной поверхности северного
полушария. Дальность действия РНС «Лоран-А» при
использовании сигналов поверхностных радиоволн до-
стигает 800 миль, а при использовании сигналов прост-
ранственных волн — 1400 миль.
§ 49. Фазовые гиперболические
радионавигационные системы
Фазовые гиперболические РНС основаны на из-
мерении в точке приема (на судне) разности фаз элект-
ромагнитных колебаний, приходящих от двух береговых
передающих радиостанций. Одна из этих станций назы-
вается ведущей, а другая ведомой. Электромагнитные
колебания ведущей станции синхронизируют колебания
ведомой станции, и обе они излучают колебания, совпа-
дающие по фазе.
Разность фаз колебаний, приходящих от этих двух
станций, пропорциональна разности расстояний между
судном и станциями. Поэтому измеренной разности фаз
соответствует определенная изолиния — гипербола с фо-
кусами в местах расположения станций. Для обеспече-
ния технической возможности выделения сигналов стан-
ций и измерения разности фаз, станции должны из-
лучать колебания либо на различных частотах,
относящихся друг к другу как простые целые числа,
либо на одной и той же частоте, но последовательно.
237
В первом случае перед измерением разности, фаз часто-
ты принятых колебаний приводятся к одной и той же
частоте__частоте сравнения. Во втором случае колеба-
ния, излучаемые ведущей станцией, подаются на запо-
минающее устройство, которое «запоминает» их фазу,
а затем эта фаза сравнивается с фазой колебаний ведо-
мой станции.
В зависимости от того, какой из этих методов реали-
зуется, фазовые гиперболические РНС подразделяются
Рис. 104
на системы с частотной и временной селекцией сигна-
лов. Первые носят название фазовых зондов и были
впервые разработаны в СССР. Принцип их действия
сводится к следующему *.
Предположим, что ведущая станция А излучает ко-
лебания, описываемые выражением
«1 = cos mot. (VI—31)
Когда эти колебания достигнут ведомой станции В,
находящейся на расстоянии d от ведущей (рис. 104),
они будут иметь вид
еВ = ^В cos mco b — ~~
(VI—32)
где t/ф — фазовая скорость распространения радиоволн.
* Быков В. И., Никитенко Ю. И. Фазовая радионавигационная
система Декка-навигатор. М., 1969.
238
На ведомой станции это колебание усиливается
и трансформируется по частоте в отношении —(т и п —
п
простые целые числа). Поэтому колебание, излучаемое
ведомой станцией, будет описываться выражением
е2 = EzcosЬ — “I • (VI—33)
\ Оф/
В точке приема (на судне), находящейся от стан-
ций А и В соответственно на расстояниях DA и DB,
колебания, описываемые выражениями (VI—31) и
(VI—33), примут вид:
• . ( da\
е. = Е, cos mco t — — I ,
\ w
, , ( \
e9 = E9 COS П(£) / — - I .
\ "Ф /
Судовой приемоиндикатор, расположенный в точ-
ке К, принимая эти колебания, усиливает их в отдель-
ных приемных трактах и приводит путем умножения на
м м
— и—к одной частоте сравнения М, являющейся на-
т п
именыией кратной для принятых частот шео и /гео. После
приведения к одной частоте сравнения колебания
( da \
Ui = Ui CQS М(д t — -- ,
\ Оф /
/
= U2 COS M(£) t — -- I
\ Оф/
подаются на фазометры, позволяющие измерить раз-
ность фаз этих колебаний, которая является мерой за-
паздывания одного колебания по отношению к другому:
( d &в\ ( \
¥ = М(д / — — —------- — М (о / —--- .
\ Оф Оф / \ Оф /
, 7 2 л л X
Учитывая, что (о = , где лм =------длина волны
сравнения, можно написать:
V = 2л ----------- - 2я — . (VI—34)
239
Величина 2л — называется базовой задержкой
и учитывается как постоянная величина при оцифровке
изолиний. Поэтому при дальнейшем рассмотрении прин-
ципа работы фазового зонда будем принимать
ЧГ = ^-(РЛ-ОВ) (VI—35)
или
DA-DB = r = -^4. (VI-36)
Из выражения (VI—36) следует, что Т пропорцио-
нальна разности расстояний г от судна до двух берего-
вых передающих радиостанций и определяет гиперболу
r=const с фокусами в местах расположения станций.
При движении судна разность расстояний r=DA — DB
будет изменяться.
Если г=2ХМ,..., то Т=2л, 2-2л,..., V-2n.
Во всех этих случаях отсчет фазометра будет один и тот
же: 2л (360° или 0°).
Пространство на земной поверхности между гипербо-
лами, соответствующими нулевой разности фаз на часто-
те сравнения Л1со, называется дорожкой. Дорожка может
быть также определена как пространство между гипер-
болами, проведенными через точки, для которых раз-
ность расстояний г кратна Если судно находится на
границах дорожки, отсчет фазометра будет равен нулю
(2л), а если внутри дорожки, то дробной части фазового
цикла (фазовым циклом называется изменение фазы от
0 до 2л). Таким образом, при г>Км значение Т может
быть представлено в таком виде:
W = + (VI—37)
где N—число целых фазовых циклов (число дорожек);
ф— дробная часть фазового цикла.
При единичном измерении с помощью фазометра мо-
жет быть определена только дробная часть фазового
цикла ф, а число N остается неизвестным. Это приводит
к многозначности отсчета фазометра, которая должна
быть устранена. Устранение многозначности отсчетов
связано с определением ширины дорожки I при той или
иной Км-
249
Если судно будет пересекать дорожку от одной ее
границы к другой по кратчайшему пути, то отсчет фазо-
метра изменится на 2л, а разность расстояний на некото-
рую величину Аг, которую можно определить по извест-
ной формуле
Д67
п =---- ,
ё
где « — смещение линии положения, вызванное изменением навига-
ционного параметра U на величину ЛГУ;
g — градиент этого навигационного параметра.
Полагая/=п, Af7=Ar и gr =-------------, где у — ба-
2 sin 4-
2
зовый угол в некоторой точке Л, для которой определя-
ется ширина дорожки, можно написать:
v
Дг = 2Z sin — .
2
Изменение отсчета фазометра на 2л соответствует
изменению разности расстояний на величину Хм- Следо-
вательно,
ХМ = &г= 2/sin-j- ,
2sin^
2
(VI—38)
На базовой линии (у =180°) ширина дорожки будет
иметь минимальное значение, равное ld = м. По мере
удаления от базовой линии и уменьшения угла у ширина
дорожки будет возрастать. Для нахождения числа доро-
жек для данной пары станций нужно разделить длину
базовой линии d на ширину дорожки на этой линии
„ ___________
У» — / — 1
ld
Таким образом, устранение многозначности сводится
к нахождению среди N дорожек именно той, в которой
располагается изолиния, соответствующая отсчету фа-
зометра.
В. Е. Ольховский
Рассмотрим процесс измерения навигационного пара-
метра и методы устранения многозначности результатов
измерения на примере РНС «Декка», которая является
одним из вариантов фазового зонда. Стандартная цепоч-
ка этой системы состоит из трех пар береговых передаю-
щих радиостанций: одной общей ведущей, расположен-
ной в центре, и трех ведомых, расположенных приблизи-
тельно в вершинах равностороннего треугольника
Рис. 105
(рис. 105). При помощи каждой пары станций опреде-
ляется одна изолиния или линия положения.
Ведомые станции цепочки излучают незатухающие
колебания на фиксированных частотах, находящихся по
отношению к частоте колебаний, излучаемых ведущей
5 8
станцией, в простых целочисленных отношениях —, —,
6 6
9
—. Основной (базисной) частоте f=14,2 кГц* соответ-
6
ствует длина волны Л=21 км.
f
24?
Таблица 6
Пара станций Ведущая станция mf Ведомая станция mf Частота сравнения Aff Длина волны сравнения км Ширина точной дорож- ки на базе >d- “
Зеленая 6f 18/ 1170 525
Красная V У 24 f 880 440
Фиолетовая W 30/ 700 350
В табл. 6 приведены частоты сравнения Mf для трех
пар станций цепочки РНС «Декка». Для удобства работы
с картами изолиний и обозначения отдельных элементов
системы паре станций ведущая 6f — ведомая 5f присвоен
фиолетовый цвет, паре ведущая 6f — ведомая 8f— крас-
ный и паре ведущая 6f— ведомая 9f — зеленый.
На частотах сравнения Mf с помощью каждой пары
станций образуются дорожки, которые называются точ-
ными. Внутри точной дорожки заключено 100 гипербол,
которые называются линиями положения. Приемоинди-
катор РНС «Декка» имеет три точных фазометра (деко-
метра) — зеленый, красный и фиолетовый. Каждый фазо-
метр имеет шкалу точных дорожек и шкалу долей точной
дорожки, разбитую от 0 до 100 (шкалу линии положе-
ния) . Упрощенная блок-схема приемоиндикатора РНС
«Декка» показана на рис. 106.
Существуют два способа устранения многозначности
отсчетов точных фазометров.
Первый из этих способов основан на привязке перво-
начальных фазовых отсчетов к точно известным коорди-
натам судна. Точные дорожки на карте с сетками изоли-
ний РНС «Декка» нумеруются (см. рис. 112). Определив
надежно место судна каким-либо другим способом, прок-
ладывают обсервацию на карте с сетками изолиний, на-
ходят номера точных дорожек и устанавливают их на
шкалах дорожек соответствующих фазометров. В даль-
нейшем при движении судна и непрерывной работе бере-
говой и судовой аппаратуры номера дорожек будут ука-
зываться на шкалах фазометров автоматически. Этот
метод хотя и прост, но обладает существенными недо-
статками. Ошибка определения места судна в момент
привязки не должна превышать половины ширины точ-
16*
243
ной дорожки. Такую точность обсерваций можно обеспе-
чить лишь при плавании вблизи берегов по визуальным
наблюдениям навигационных ориентиров. Кроме того,
бортовая аппаратура должна работать непрерывно.
Второй способ устранения многозначности отсчетов,
используемый в последних моделях РНС «Декка», осно-
ван на измерении разности фаз на более низких частотах,
чем частоты сравнения Mf, и создании таким образом
Фазометры (декометры)
Зеленый
Фиолетовый
Умножители
частоты
Фазовые
дискриминаторы
. Зеленая ведомая станция 3f
х ведомая станция fff
красная
ведомая станция fy
Рис. 106
более широких грубых и промежуточных дорожек. Самой
низкой из частот является основная (базисная) частота f.
Пространство на земной поверхности между гипербо-
лами, соответствующими нулевой разности фаз на основ-
ной частоте, называется грубой дорожкой, или зоной.
Ширина зоны на базовой линии равна
244
I =a__l
<4(rp) 2 ~ 2f '
где X — длина волны на основной частоте.
Число зон зависит от длины базовой линии и основной
частоты и близко к 10. Зоны обозначаются буквами ла-
тинского алфавита от А до I и содержат строго опреде-
ленное число точных дорожек, равное для каждой пары
числу М (см. табл. 6).
При принятой в РНС «Декка» f= 14,2 кГц (Х = 21 км ),
ширина зоны на базовой линии /d(rp)« 10,5 км и с увели-
чением расстояния от станций увеличивается. При такой
ширине зон судоводитель, пользуясь только данными
счисления, может определить, в какой зоне находится
судно и установить ее литер на буквенном счетчике зон,
который механически связан со стрелкой фазометра точ-
ных дорожек.
Рассмотрим принцип создания грубых дорожек (зон)
на примере красной пары станций. Для получения таких
дорожек ведущая станция этой пары излучает колебания
двух частот — 5/ и 6f, а ведомая — 8f и 9f. Принятые на
судне колебания с частотами 5/ и 9/, 8f после усиления
подаются на смесители, с выхода которых снимаются
разностные частоты /, образованные колебаниями веду-
щей и ведомой станций. Колебания f подаются на спе-
циальный фазометр грубых дорожек.
Для более надежного устранения многозначности в
РНС «Декка» кроме грубых дорожек (зон) создаются
еще и промежуточные дорожки на частоте 6/. Ширина
такой дорожки на базе
- __^пр____у
^(пр)~ 2 “ 12/ ’
Величина К = , называемая коэффициентом
*пр
сопряжения грубых и промежуточных дорожек, будет
равна 6. Это означает, что каждая грубая дорожка (зо-
на) содержит 6 промежуточных. Следовательно, многоз-
начность определения промежуточной дорожки в преде-
лах зоны равна 6.
Рассмотрим принцип создания промежуточных доро-
жек на примере красной пары станций. Ведущая станция
излучает колебания на частоте 6/, которые после усиле-
ния подаются в фазометр промежуточных дорожек. Коле-
245
бания ведомой станции с частотами 8f и 9f умножаются
соответственно на 3 и на 2 и подаются на смеситель с
выхода которого снимается разностная частота 24f—
— 18f=6f. Она также подается на фазометр промежуточ-
ных дорожек. Индикаторы фазометров грубых и проме-
жуточных дорожек объединены в один, имеющий шкалы
точных дорожек для красной, зеленой и фиолетовой пар
соответственно с делениями от 0 до 24 (М=24), от 30
до 48 (М = 18) и от 50 до 90 (М=30), а также два незави-
Рис. 107
симых указателя, укрепленных на концентрических осях
(рис. 107). Указатель промежуточных дорожек имеет
форму звездочки с шестью концами. Один из них указы-
вает точную дорожку, в пределах которой находится мес-
то судна, а другие — неверные дорожки.
Указатель грубых дорожек представляет собой 60-гра-
дусный сектор, показывающий положение промежу-
точной дорожки в зоне. Отсчет номера точной дорожки
производится по тому концу звездочки, который находит-
ся в пределах указателя грубых дорожек. На этот отсчет
устанавливают вручную указатель точных дорожек на
фазометре соответствующей пары станций. Так, напри-
мер, при работе с красной парой станций с помощью
246
объединенного фазометра опознания дорожек при поло-
жении указателей грубых и промежуточных дорожек, по-
казанном на рис. 107, определен номер точной красной
дорожки — 7.
В настоящее время в эксплуатации находится 38 цепо-
чек РНС «Декка». В ближайшие годы планируется вве-
дение в действие ряда новых цепочек в Средиземном мо-
ре, Австралии, на Западном побережье Канады, Южной
Америке. Прием сигналов РНС «Декка» возможен днем
на расстояниях 500—600 миль, а ночью на расстоянии до
300 миль. Однако эту систему рекомендуется использо-
вать на расстояниях не более 240—250 миль от станций,
так как при больших расстояниях и существующих дли-
нах баз градиенты разности расстояний будут малы,
кроме того, изолинии будут располагаться под очень ост-
рыми углами. На расстояниях свыше 250 миль значи-
тельное влияние на точность измерения навигационных
параметров оказывают пространственные волны.
В последнее время получила распространение фазо-
вая гиперболическая РНС «Омега»*, которая основана
не на частотной, а на временной селекции сигналов. Эта
система работает в диапазоне сверхдлинных волн на ча-
стотах 10—14 кГц, что позволяет обеспечить уверенный
прием сигналов на расстояниях 5000—6000 миль. Длина
базовых линий береговых передающих станций РНС
«Омега» также порядка 5000—6000 миль.
Практически для того, чтобы рабочие зоны этой сис-
темы покрывали всю поверхность Земли, достаточно 6
таких станций, но для получения избыточной навига-
ционной информации и повышения надежности работы
системы в случае выхода из строя одной или двух стан-
ций их число увеличено до 8. Станции условно обозна-
чаются буквами А, В, С, Z), В, F, G, Н и располагаются в
следующих районах: Норвегия, Либерия, Гавайские ост-
рова, Северная Дакота, о-ов Реюньон, Аргентина, Авст-
ралия, Япония. Для получения места судна выбирают те
три станции, при помощи которых можно получить изо-
линии, пересекающиеся в районе нахождения судна под
углом, более близким к 90°.
* Описание принципа действия этой системы дано по материа-
лам, содержащимся в книге «Новые технические средства судовож-
дения». М., 1973.
247
10с
5
5
_р,9 .7/ r f>24A г 1'Z
_А_ Щгкг^бнг^И^м^----------------------------
f^7]J /^IJ/uj I_______________________
J 10,2 U W |_p/,jj|______________
в
Jlt35\
Рис. 108
13,6 LJ/4JJ
Ym,z U
_______р/?2
время
Станции PHC «Омега» не разделяются на ведущие и
ведомые. Все они работают на частотах 10,2, 11,33 и
13,6 кГц, излучая колебания последовательно с 10-се-
кундным циклом. Порядок работы станций определяется
временной диаграммой излучения сигналов (рис. 108), а
синхронизация обеспечивается стабилизацией частот на
каждой станции с помощью атомных стандартов
частоты.
В табл. 7 приведены рабочие частоты станций РНС
Таблица 7
Параметры станции Режим работы станций РНС «Омега»
сетка точных дорожек сетка грубых дорожек (первая ступень устра- нения многознач- ности) сетка промежу- точных дорожек (вторая ступень устранения мно- гозначности)
Излучаемая частота, кГц 10,2 11,33 13,6
Частота сравнения, кГц 10,2 1,13 3,4
Длина волны сравнения, км 15 135 45
Ширина дорожки на ба- зовой линии, мили 8 72 24
Коэффициент сопряже- ния дорожек — 9 3
248
«Омега», используемые для создания сетки точных, гру-
бых (первая ступень устранения многозначности) и про-
межуточных (вторая ступень устранения многозначно-
сти) дорожек, ширина этих дорожек на базовой линии и
коэффициенты сопряжения дорожек.
Использование двух дополнительных частот 11,33 и
13,6 кГц позволяет получать разность фаз на значитель-
но более низких частотах сравнения 1,13 кГц= 11,33—
—10,2 кГц и 3,4 кГц= 13,6—10,2 кГц и устранять многоз-
начность путем создания грубых и промежуточных до-
рожек.
Первая ступень устранения многозначности при опре-
делении места судна практически может быть исключе-
на, так как ширина
промежуточной до-
рожки позволяет на-
дежно определить ее
номер на карте с
сетками изолиний
по данным счисле-
ния.
Судовой приемо-
индикатор РНС
«Омега» имеет два
индикатора для ра-
боты с двумя пара-
ми береговых пере-
дающих станций. В
циферблате каждого
индикатора сделана
прорезь для четырехразрядного счетчика, который
предназначен для подсчета точных дорожек. Этот счет-
чик механически связан со стрелкой индикатора ли-
ний положения, шкала которого разбита на 100 деле-
ний, что позволяет отсчитывать сотые доли точной до-
рожки (см. рис. 114).
Для устранения многозначности фазовых отсчетов
используются те же индикаторы, что и для определения
точных дорожек. В режиме опознавания дорожек один
из индикаторов фиксирует разность фаз колебаний на
частоте 10,2 кГц, а второй на частоте 13,6 кГц. Разность
отсчетов двух индикаторов определяет разность фаз ко-
лебаний на частоте 3,4 кГц и, следовательно, часть проме-
249
жуточной дорожки, начиная от изолинии, соответствую-
щей нулевой разности фаз на этой частоте. Внутри каж-
дой промежуточной дорожки располагаются три точных
(Я=3).
Рассмотрим порядок устранения многозначности оп-
ределения номера точной дорожки на примере. На карте
изолиний системы РНС «Омега», на которой нанесены
точные дорожки, образованные на частоте 10,2 кГц, про-
ложено счислимое место судна С (рис. 109). Предельная
радиальная ошибка этого места равна 11 милям. Окруж-
ность радиуса И миль с центром в точке С охватывает
три «точные» дорожки — 807-ю, 808-ю и 809-ю. Отсчет
индикатора I, работающего на частоте 10,2 кГц, равен
20, а отсчет индикатора II, работающего на частоте
13,6 кГц, равен 60. Разность отсчетов обоих индикато-
ров, равная 40, представляет собой 40 сотых промежу-
точной дорожки, начиная от изолинии с нулевой разно-
стью фаз в сторону ее увеличения. Откладывая получен-
ную величину от границы точной дорожки 807, которая
в данном случае будет нулевой изолинией, определим
номер точной дорожки, в пределах которой располага-
ется судно. Это дорожка 808. Установим номер найден-
ной дорожки на счетчике точных дорожек индикатора
I. Отсчет индикатора будет, таким образом, равен 808,2.
§ 50. Импульсно-фазовая гиперболическая
радионавигационная система
Достоинством фазовой гиперболической РНС яв-
ляется высокая точность измерения навигационных пара-
метров, недостатками — сравнительно небольшая даль-
ность действия при работе на средних волнах, особенно
в ночное время, из-за помех, создаваемых пространствен-
ными волнами (РНС «Декка»), многозначность показа-
ний, которую необходимо устранять.
Достоинствами импульсной гиперболической РНС
являются сравнительно большая дальность действия, вы-
сокая помехоустойчивость, однозначность показаний.
Стремление объединить в одной системе достоинства фа-
зовых и импульсных систем привело к созданию импульс-
но-фазовых гиперболических РНС.
Принцип действия такой комбинированной системы
заключается в совмещении импульсного и фазового ме-
250
тода измерений. Импульсный метод обеспечивает срав-
нительно грубое, но однозначное измерение навигацион-
ного параметра, фазовый метод уточняет результаты этих
измерений. В конечном счете точность измерения нави-
гационного параметра определяется точностью фазовых
измерений.
Важной особенностью импульсно-фазовой РНС яв-
ляется исключение воздействия пространственных волн
на фазовые измерения, что обеспечивает высокую точ-
ность этих измерений на значительных расстояниях от
береговых передающих станций. Применительно к фазо-
вому методу измерений действительное запаздывание в
точке приема сигналов ведомой станции по отношению к
сигналам ведущей станции по аналогии с выражением
(VI—37) можно представить в таком виде:
/ = N1T1 + /ф + Д/ф» (VI—39)
где Nf — целое число периодов 7\ сравниваемых колебаний, кото-
рое, как было показано в § 49, из фазовых измерений не
может быть получено;
/ф — дробная часть периода, которая может быть однозначно
определена фазовым методом (путем измерения разности
фаз между высокочастотными колебаниями, заполняющи-
ми импульсы);
Д/ф—ошибка измерения 1$ этим методом.
Применительно к импульсному методу измерений ве-
личину t можно представить так:
* = /и + Д/и, (VI-40)
где — результат измерения параметра t импульсным методом
(по огибающей радиоимпульсов);
Д/и — ошибка измерения /ж этим методом.
Совместное решение уравнений (VI—39) и (VI—40)
позволяет получить неизвестное число ЛГр
Л
Учитывая, что фазовые измерения значительно точнее
импульсных, и полагая Д^ф<СД^и, можно написать
+ <Vr-42)
Ti Ti
Из выражения (VI—42) видно, что число Ni будет
определено однозначно при условии, если
Так, например, при Т1 = 10мкс ^=100кГц) для устране-
251
ния многозначности фазовых измерений навигационный
параметр t должен быть измерен импульсным методом
с ошибкой |А^и|<5мкс.
В импульсно-фазовой гиперболической РНС совмест-
ное решение уравнений (VI—39) и (VI—40) осуществ-
ляется автоматически при помощи импульсной и фазовой
систем измерений. Каждая из этих систем связана со
своим счетчиком. Импульсный счетчик дает грубый отс-
чет навигационного параметра t, определяющий число
N\ целых .периодов 7\ несущих колебаний, а фазовый —
точный отсчет до сотых долей периода Ть Оба счетчика
механически связаны между собой, и с них снимается
отсчет t, мкс.
В настоящее время широкое распространение получи-
ла импульсно-фазовая РНС «Лоран-С». Береговые пере-
дающие радиостанции этой системы работают группами,
образующими единую цепочку. Цепочка состоит обычно
из ведущей станции и двух, трех или четырех ведомых.
Внутри каждой цепочки ведомые станции условно обоз-
начаются буквами X, У, Z, W, а ведущая станция — бук-
вой М. Длина базовых линий достигает 800—1000 миль.
Все станции цепочки РНС «Лоран-С» работают непре-
рывно на одной и той же несущей частоте 100 кГц и по-
очередно излучают серии (пакеты) радиоимпульсов.
Импульсы ведомых станций излучаются с определенны-
ми задержками во времени, величины которых обеспе-
чивают приход импульсов ведомых станций всегда после
импульсов ведущей станции. Никаких позывных сигналов
станции РНС «Лоранс-С» не излучают. Опознавание раз-
личных пар станций осуществляется по периодам повто-
рения серий (пакетов) импульсов. Эти периоды объеди-
нены в четыре группы: специальную, медленную высо-
кую, медленную низкую, медленную специальную,
которые условно обозначаются S, SH, SL и SS соответ-
ственно. Каждая группа состоит из восьми монотонно
уменьшающихся периодов повторения, обозначаемых по-
рядковыми номерами от 0 до 7 (табл. 8).
Данные, приведенные в табл. 10, указываются на
картах с сетками изолиний и в некоторых других посо-
биях. По этим данным осуществляется настройка судо-
вого приемоиндикатора для работы с выбранными
парами станций. Эти пары станций могут относиться к
различным цепочкам РНС «Лоран-С».
252
Таблица 8
Номер Значения периодов повторения пакетов радиоимпульсов РНС «Лоран-С» (в мкс) по группам
S 1 i SL | SS
0 50 000 60 000 80 000 100 000
1 49 900 59 900 79 900 99 900
2 49 800 59 800 79 800 99 800
3 49 700 59 700 79 700 99700
4 49 600 59 600 79 600 99 600
5 49 500 59 500 79 500 99 500
6 49 400 59 400 79 400 99 400
7 49 300 59 300 79 300 99 300
Судовой приемоиндикатор РНС «Лоран-С» может
принимать сигналы как поверхностной радиоволны, так
и пространственной, однократно отраженной от ионизи-
рованного слоя Еь При использовании сигналов прост-
ранственной волны отсчеты, снятые с приемоиндикатора
необходимо исправлять поправками за распространения
радиоволн (поправками за пространственные радиовол-
ны). Эти поправки приводятся на картах с сетками изо-
линий и в некоторых других пособиях.
Дальность действия РНС «Лоран-С» при использо-
вании поверхностных радиоволн достигает 1400—
1600 миль, а при использовании пространственных радио-
волн — 2300—2500 миль. Рабочие зоны восьми действу-
ющих в настоящее время цепочек этой системы охваты-
вают примерно три четверти поверхности северного по-
лушария Земли.
§ 51. Прокладка определений места судна,
полученных при помощи гиперболических
радионавигационных систем
Гиперболические РНС относятся к основным
техническим средствам определения места судна при
плавании вдали от берегов.
На добывающих судах фазовые и импульсно-фазо-
вые гиперболические РНС, обеспечивающие достаточно
высокую точность измерения навигационных парамет-
253
ров и необходимую частоту обсерваций, позволяют ус-
пешно решать ряд важных для промысла задач: сле-
дить на основе информации, поступающей от различных
судов, за перемещением косяков рыбы, выбирать зоны
наибольших уловов, осуществлять в открытом море
при отсутствии визуальных ориентиров выход на галс
траления, на котором прежде был получен хороший
улов, точно удерживать судно на выбранном галсе тра-
ления или в пределах рекомендованной промысловой
площадки, облавливать разноглубинным тралом мало-
подвижные косяки рыбы, повысить точность нанесения
на промыслово-навигационные планшеты районов от-
крытого моря различных элементов навигационной и
промысловой характеристики, в частности мест задевов,
участков с неблагоприятными для траления грунтами,
рекомендованных курсов траления. Эффективность ис-
пользования гиперболических РНС на транспортных и
в особенности на добывающих судах может быть значи-
тельно повышена при условии автоматизации с помощью
ЭЦВМ процесса вычисления обсервованных координат
места судна и применения специальных автопутепро-
кладчиков, осуществляющих прокладку пути судна
либо по обсервованным координатам, либо по вероят-
нейшим координатам, получаемым с учетом данных
счисления.
При «ручной» обработке результатов измерений на-
вигационных параметров с помощью приемоиндикаторов
гиперболических РНС в условиях штурманской рубки
применяются два метода прокладки определений места
судна: графический, основанный на использовании карт
с сетками изолиний и графоаналитический, основанный
на использовании таблиц для построения линий поло-
жения.
Таблицы построены по тому же принципу, что и таб-
лицы для построения линий положения при определе-
нии места судна по пеленгам секторных радиомаяков.
Отрезок изолинии r=const вблизи счислимого места
заменяется секущей, проходящей через две близкие на
изолинии точки. Секущая принимается за линию поло-
жения. В таблицах даются географические координаты
точек пересечения сфероидических гипербол, соответст-
вующих снятым с приемоиндикатора и исправленным
необходимыми поправками отсчетам навигационного па-
254
раметра (t или 49, с определенными меридианами и па-
раллелями.
Гидрографические номера карт с сетками изолиний
(радионавигационных карт) соответствуют номерам
обычных навигационных карт и отличаются от них лишь
буквенными литерами: для РНС «Лоран-А»— LA, для
РНС «Лоран-С»—LC, для РНС «Омега» — ИОЗО, для
РНС «Декка» — литеры, состоящие из буквы D и номе-
ра цепи, для которой составлена данная карта.
Карты с сетками изолиний и таблицы для построе-
ния линий положения для РНС «Лоран-А». Карты с сет-
ками изолиний для РНС «Лоран-А» издаются в проекции
Меркатора в масштабе не крупнее 1:500000. Так, на-
пример, карты под номерами 2440, 6611 и 5617, охваты-
вающие многие промысловые районы Северной Атлан-
тики, составлены соответственно в масштабах 1:720240,
1:776100 и 1:1200000.
Изолинии-гиперболы для различных пар станций
рассчитываются для сигналов поверхностной радиовол-
ны. Они проводятся различными цветами и оцифровы-
ваются, как и шкалы судового приемоиндикатора, в
микросекундах с учетом общей задержки времени. Пе-
ред числом микросекунд ставится индекс, характеризу-
ющий режим работы пары береговых станций, являю-
щихся фокусами данного семейства гипербол, например
1Z.3-2100 (рис. ПО).
Первая цифра индекса обозначает номер частотного
канала, следующая за ней буква указывает основную
частоту повторения импульсов и следующая за буквой
цифра — точную частоту повторения импульсов (см.
табл. 4 и 5).
На карты наносят гиперболы через интервал, рав-
ный какому-либо круглому значению числа микросе-
кунд от 10 до 100, но индекс указывают лишь на гипер-
болах, оцифрованных числом микросекунд, кратным
100. Кроме того, по всей площади карты равномерно в
местах пересечения меридианов и параллелей наносят
величины поправок за пространственные волны в микро-
секундах. Знак перед поправкой указывает, следует ли
ее вычитать или прибавлять к отсчету промежутка вре-
мени, полученному по сигналам пространственной вол-
ны, однократно отраженной от слоя Ег. Поправка имеет
также показатель степени, например +182, —31’, +394
255
Рис. 110
и т.д. Показатель степени указывает частоту повторения
импульсов (точную частоту), к которой эта поправка
относится. Поправки за пространственные волны для
всех высоких частот повторения импульсов (частот бук-
вы Н) нанесены курсивом, а для низких частот (частот
буквы L) — прямым шрифтом, причем тем же цветом,
что и соответствующие гиперболы.
256
На некоторых картах принята другая система указа-
ния поправок за пространственные волны. По всей пло-
щади карты равномерно распределены таблицы, попра-
вок, отнесенные к точкам пересечения меридианов и
параллелей. Перед значением каждой поправки указан
индекс, характеризующий режим работы пары станций,
для которого эта поправка дается, например:
1Н1 —0,4
1Н2 +0,4
1L3 +3,1
1L2 —0,9
Значения поправок в этом случае для всех частот
повторения импульсов наносят прямым шрифтом и цве-
том, присвоенным данному семейству гипербол.
Для некоторых районов, где возможен прием поверх-
ностных и пространственных сигналов от одной из стан-
ций пары и только пространственных сигналов от другой
станции пары, поправки за пространственные волны не
приводятся. В этих случаях эти поправки определяются
при помощи графика задержек пространственных сиг-
налов, который помещается в специальных руководст-
вах по использованию РНС «Лоран-А».
Так как на картах нанесены семейства гипербол,
оцифрованные некоторыми круглыми значениями числа
микросекунд, то для прокладки определения необходи-
мо, интерполируя между этими гиперболами, провести
на карте линии положения, отвечающие измеренным
значениям промежутков времени, и в их пересечении
получить обсервованное место.
В тех случаях, когда нанесенные на карте гиперболы
расположены на сравнительно больших расстояниях
одна от другой, интерполяция на глаз может привести к
ощутимым ошибкам. В этих случаях целесообразно ис-
пользовать линейку с миллиметровыми делениями или
палетку. При определении по карте поправок за прост-
ранственные волны также используется метод линейной
интерполяции. Применение этого метода к расчету по-
правки Д/с для счислимого места по поправкам, приве-
денным на карте в ближайших точках пересечения ме-
ридианов и параллелей, схематически показано на
рис. 111.
17 В. Е. Ольховский
257
На расстояниях, больших 400—500 миль, поправки
за пространственные волны малы и интерполяцию мож-
но осуществлять на глаз. В отдельных случаях на ма-
лых расстояниях при расчете этих поправок приходится
прибегать ко второму приближению.
Использование на промысле карт с сетками изоли-
ний РНС «Лоран-А», предназначенных для обеспечения
переходов судов, сопряже-
но с рядом неудобств и
ограничений. Эти карты
имеют мелкий масштаб,
и вести на них счисление
нельзя. Перенесение же
по координатам обсерво-
ванных мест с этих карт
на промыслово-навигаци-
онные планшеты требует
дополнительной затраты
времени и затрудняет вы-
полнение частых опреде-
лений места судна, к ко-
торым приходится прибе-
гать на промысле. Но
главный недостаток заключается в том, что перенесение
обсервованных мест с карты изолиний на планшет не
всегда позволяет использовать для решения задач про-
мысловой навигации возможную точность получения изо-
линий. А это особенно важно тогда, когда с помощью
РНС «Лоран-А» решаются такие задачи, как, например,
выход на галс траления, где прежде был получен хоро-
ший улов, выход на небольшой по протяженности мало-
подвижный косяк, удержание траулера в пределах узкой
промысловой площадки и т. п.
Поэтому на промысле в районах, где может быть
обеспечена достаточно высокая точность определения
места по РНС «Лоран-А», для прокладки обсерваций
целесообразно использовать специальные планшеты с
гиперболическими сетками или наносить такие сетки на
обычные промыслово-навигационные планшеты или кар-
ты этих районов.
Кроме карт с гиперболическими сетками для систе-
мы «Лоран-А» издан комплект таблиц для построения
линий положения. На титульном листе каждой таблицы
258
ставится название цепочки, буквенные обозначения стан-
ций и индекс, характеризующий режим их работы. На-
пример, Северо-Атлантическая цепь, пара UA—1L6.
Таблицы, относящиеся к определенной паре станций,
содержат приложение, состоящее из карты-схемы рас-
положения этих станций, и таблицу поправок за прост-
ранственные волны. Аргументом для входа в эти табли-
цы служат счислимые координаты судна.
На картах-схемах показаны вид и оцифровка гипер-
бол и нанесены приближенные границы распростране-
ния поверхностных волн, а также границы районов, где
не следует пользоваться пространственными волнами.
Длины гипербол определяют границы района, для кото-
рого рассчитаны данные таблицы. Таблицы позволяют
выбрать по измеренному в микросекундах навигацион-
ному параметру t и ближайшим к счислимому месту це-
лым значениям долготы li и 12 или целым значениям
широты ф1 и <р2 соответствующие широты ф1 и ф2 или
долготы 11 и 12 двух точек гиперболы. Эти точки по ко-
ординатам наносят на навигационно-промысловый план-
шет или путевую карту и проводят через них прямую
линию.
Пример. Находясь по счислению в точке фс=44о30' N Хс =
99°30'W, при помощи приемоиндикатора по сигналам поверхностной
радиоволны получили 1HI-3030 мкс.
Построить на промыслово-навигационном планшете линию поло-
жения. Для X]==99OW и X2=100°W по табл. 9 (выдержка нз табли-
цы для построений линий положения РНС «Лоран-А») находим: (pi =
=45°08',4 N и (p2=45°29',2 N. Прокладываем на планшете по полу-
ченным координатам две точки и проводим через них прямую — ли-
нию положения.
При построении с помощью таблиц линий положения
на крупномасштабных картах (планшетах) может ока-
заться, что на карту возможно нанести только одну точ-
ку данной гиперболы. Вторая точка будет находиться за
пределами рамки карты. В этих случаях для прокладки
линий положения необходимо получить дополнительную
промежуточную точку путем интерполирования коорди-
нат точек гиперболы, полученных по таблицам.
Таблицы для построения линий положения могут
быть использованы для нанесения гипербол на промыс-
лово-навигационные планшеты. Эта задача решается
аналогично нанесению на планшет с помощью такого
рода таблиц дуг больших кругов (см. § 46).
17« 959
Таблица 9
т 1Н1-3000 1HI-3020 1Н1-3040 1HI-3060 1Н1-3080 Т
Широта д д д д д Долгота 45°52,3N —78 45°36,8N —77 45°21,5N —76 45°06,3N —76 44°51,3N —75 100° W 45 30,9N —75 45 15,9N —75 45 01,ON —74 44 46,3 N —73 44 31,7N —73 99 W 45 08,6N —73 44 54,IN —72 44 39,8N —72 44 22,5N —71 44 11,4N —70 98W
T 1Н1-3000 1Н1-3020 1Н1-3040 1Н1-3060 1Н1-3080 т
Широта д ’ д д д д Долгота 24N 70°36,4W +52 70°46,9W +52 70°57,3W +52 70°07,5W +51 71°17,6W +51 23 N 69 59,OW +57 7010,3W +56 70 21,5W +56 7032,5W +55 70 43,5W +55 23 N 69 22,2 W +61 69 34,3W +60 69 46,3 W +60 69 58,2 W +59 70 10,OW +59 Д — изменение долготы или широты в точке пересечения в сотых долях минуты на 1 мкс.
Карты с сетками изолиний для РНС «Декка». Кар-
ты с сетками изолиний для РНС «Декка» издаются в
меркаторской проекции и в основном в масштабах от
1:200000 до 1:300000, т. е. в масштабах, более крупных
или близких к масштабам, в которых строятся промыс-
лово-навигационные планшеты и карты. Поэтому для
некоторых промысловых районов, расположенных в пре-
делах рабочих зон РНС «Декка», целесообразно стро-
ить промыслово-навигационные планшеты в масштабах,
принятых для штатных карт с сетками изолиний РНС
«Декка», охватывающих эти районы. При этом условии
судоводитель легко может перенести сетку изолиний со
штатной радионавигационной карты на промыслово-на-
вигационный планшет, что исключит необходимость в
процессе промысла переносить по координатам обсерво-
ванные места с карты изолиний на планшет. Такой пе-
ренос вызывает определенные затруднения при частых
определениях места судна, к которым приходится при-
бегать на промысле для обеспечения прицельного тра-
ления донным тралом, удержания судна в пределах уз-
кой промысловой площадки и т. п.
В настоящее время практикуется нанесение сеток
изолиний РНС «Декка» на издаваемые штатные про-
мыслово-навигационные карты районов, расположенных
в пределах рабочих зон этой системы.
На карте с сетками изолиний РНС «Декка»
(рис. 112) гиперболы одного семейства, относящиеся к
определенной паре станций, окрашены в присвоенный
этой паре цвет (красный, зеленый или фиолетовый) и
оцифровываются так же, как и шкалы фазометров (де-
каметров).
Каждая зона обозначена соответствующей буквой
(от А до 7) и содержит строго определенное число доро-
жек:* красная зона — 24 красные дорожки с номерами
от 0 до 23; зеленая зона— 18 зеленых дорожек с номе-
рами от 30 до 47 и фиолетовая зона — 30 фиолетовых до-
рожек с номерами от 50 до 79.
Такая нумерация дорожек применена для того, что-
бы исключить возможные промахи при отыскании на
* На карты с сетками изолиний для РНС «Декка» промежуточ'
ные дорожки не наносятся. Поэтому здесь под термином дорожка
понимается точная дорожка, полученная на частоте сравне-
ния Mf.
261
Рис. 112
карте изолиний, отвечающих отсчетам, снятым с дека-
метров. Каждая шестая или двенадцатая дорожка (в
зависимости от масштаба карты) изображается более
толстой линией, чем остальные, и на этой линии ука-
зывается буквенное обозначение зоны. В пределах до-
262
рожки заключено 100 линий положения имеющих нуме-
рацию от 0 до 99.
Буквенное обозначение зон, а также оцифровка до-
рожек и их долей — линий положения осуществляется
на карте в направлении от ведущих станций к ведомым
(рис. 113). На этом рисунке в качестве примера пока-
Рис. 113
зано, как найти на карте точку пересечения линий по-
ложения, соответствующих отсчетам I 16 30 по красно-
му декаметру и D 35 80 по зеленому декаметру.
В общем случае отыскание на карте линий положе-
ния, соответствующих тому или иному отсчету по де-
каметру, требует интерполяции. Интерполяцию выполня-
ют на глаз или с помощью интерполяционной линейки
обычно в сторону дорожки с большим номером.
При расчете сеток изолиний принимают некоторое
среднее значение скорости распространения радиоволн.
Фактическая скорость в различных районах, располо-
263
женных в рабочих зонах цепочек РНС «Декка», может
не соответствовать принятому среднему значению. Это
вызывает необходимость введения в отсчеты, полученные
по декаметрам, поправок на местные ошибки, которые
даются в специальных таблицах. Местные ошибки не
превышают 0,2—0,4 точной дорожки.
Кроме того, имеются также таблицы поправок на
переменные ошибки. Источником этих ошибок является
влияние пространственных волн. Таблицы поправок на
переменные ошибки составлены на основании резуль-
татов многочисленных наблюдений за распространением
радиоволн рабочего диапазона РНС «Декка» в различ-
ные времена года и часы суток.
Для выбора пар станций, обеспечивающих более вы-
сокую точность обсерваций, можно воспользоваться
специальными картами-схемами. На этих картах-схе-
мах показаны сектора, в пределах которых рекоменду-
ется пользоваться определенными изолиниями двух цве-
тов с оптимальным углом пересечения, а также сектора, в
пределах которых параметры этих изолиний определя-
ются с наименьшими ошибками. Такие карты-схемы по-
мещаются в руководствах по использованию РНС
«Декка».
Карты с сетками изолиний и таблицы для построения
линий положения для РНС «Омега». Карты с сетками
изолиний для РНС «Омега» издаются в меркаторской
проекции и имеют масштаб 1:2188800. Изолинии каждой
пары станции окрашены в свой цвет и им присваивают-
ся буквенные индексы соответствующих станций, напри-
мер А—D или В—D. Оцифровка изолиний совпадает с
оцифровкой счетчиков и шкал точных индикаторов. Нор-
маль к середине базовой линии (гипербола r=0=const)
для всех пар станций условно обозначается номером
900.
Номера точных дорожек увеличиваются по мере
удаления от той станции, которая на карте обозначена
первой буквой. Учитывая, что карты с сетками изоли-
ний РНС «Омега» строятся в мелком масштабе, на эти
карты наносят только промежуточные дорожки, получа-
емые на частоте 3,4 кГц. Так как коэффициент сопря-
жения этих и точных дорожек равен 3 (см. табл. 7),
внутри каждой промежуточной дорожки заключены три
точные.
264.
Рис. 114
Для нахождения на карте линии положения, соот-
ветствующей показанию точного индикатора, в общем
случае необходимо выполнять интерполяцию между со-
седними изолиниями, нанесенными на карте. Для этого
используют линейку с миллиметровыми делениями или
палетку. На рис. 114 показано, как найти на карте с сет-
ками изолиний РНС «Омега» точки пересечения линий
265
положения, соответствующих отсчетам точных индика-
торов А—D 801,5 и В—D 948,8.
Таблицы для построения линий положения РНС
«Омега» издаются для 25 зон, на которые условно раз-
бита поверхность Земли. Каждая зона охватывает район
протяженностью 45° по широте и 60° по долготе. Ко-
личество таблиц для каждой зоны зависит от количест-
ва рабочих пар станций в этой зоне.
Табл. 10 представляет собой выдержку из таблиц
для пары станций В—D, расположенной в 12-й зоне
(Северная Атлантика). Структура и методика исполь-
зования таблиц для построения линий положения РНС
«Омега» аналогичны структуре и методике использова-
ния такого рода таблиц других радионавигационных
систем, в частности РНС «Лоран-А».
Для исключения ошибки навигационного параметра
Т, вызванной влиянием пространственных волн для
различных зон и районов протяженностью 4—6° по ши-
роте при постоянной долготе, издаются таблицы попра-
вок за пространственную волну, учитывающие регуляр-
но повторяющиеся закономерные изменения условий
распространения радиоволн*.
Поправки в этих таблицах приводятся в сотых до-
лях фазового цикла для каждых двух недель месяца и
времени суток через каждый час. Поправка навигацион-
ного параметра Т рассчитывается как алгебраическая
разность поправок двух станций, выбранных из соответ-
ствующих таблиц. Так, например, если принимались
сигналы станций А и D, то отсчет навигационного па-
раметра должен быть исправлен поправкой А=Аа—Ад.
Карты с сетками изолиний и таблицы для построения
линий положения РНС «Лоран-С». Карты с сетками
изолиний РНС «Лоран-С» (рис. 115) издаются в мер-
каторской проекции и имеют масштаб 1:2180000.
* Для повышения точности определения места судна с помощью
РНС «Омега» используется так называемый дифференциальный ме-
тод, предусматривающий получение сведений и о дополнительных
поправках на данный район с учетом аномальных возмущений. Для
этого в данном районе устанавливается специальный контрольный
пункт, который по расхождениям между истинными и наблюдаемы-
ми отсчетами навигационных параметров определяет поправки н пе-
редает их по линии связи всем судам. Возможен автоматический
учет этих поправок (РНС «Микроомега»). Дифференциальный ме-
тод позволяет определять место судна с радиальной средней квад-
ратической ошибкой порядка 0,2—0,4 мили.
266
Таблица 10
B-D 935 B-D 936 B-D 937 B-D 938 B-D 939
Широта д Д Д Д Д Долгота
42°25',4N 170 42°47',4N 170 42°59',5N 171 43°16',7N 172 43°33',9N 172 30° w
42 33 ,8N 172 42 31 ,0N 172 43 05 ,4N 173 43 23 ,8N 176 43 43 ,2 N 175 29 W
42 41 ,7N 174 42 59 ,1 N 173 43 16 ,7N 175 43 34 ,3N 176 43 52 ,0N 177 28 W
42 49 ,1 N 176 43 06 ,8N 177 43 24 ,6N 178 43 42 ,4N 178 44 00 ,3N 179 27 W
42 56 ,0N 178 43 13 ,9N 179 43 31 ,9N 180 43 50,ON 180 44 05 ,1 N 182 26 W
43 02 ,4N 181 43 20 ,6N 181 43 38 ,8N 187 43 57 ,2N 183 44 15 ,6N 183 25 W
43 08 ,4N 183 43 26 ,7N 183 43 43 ,2 N 184 44 03 ,6N 185 44 22 ,2 N 183 24 W
43 13 ,8N 185 43 22 ,4N 186 43 58 ,0N 183 44 09 ,7N 187 44 28 ,3N 188 23 W
ьэ о 43 18 ,7N 187 43 37 ,5 N 188 43 56 ,4N 188 44 15 ,3N 189 44 34 ,3N 190 22 W
43 23 ,2N 189 43 42 ,2N 190 44 01 ,3N 191 44 20 ,4N 192 44 39 ,6N 192 21 W
Изолинии — гиперболы для различных пар станций
рассчитаны для сигналов поверхностной радиоволны.
Они наносятся на карту различными цветами (синим
красным, зеленым)
и оцифровываются в
микросекундах так
же, как и шкалы
счетчиков судового
приемоиндикатора с
учетом общей задер-
жки времени. Перед
числом микросекунд
ставится индекс,
включающий харак-
теристику режима
работы данной пары
станций и условное
буквенное обозначе-
ние ведомой станции
цепочки. Например,
SL3-Y-51850. Пер-
Рис. 115
вые две буквы ин-
декса обозначают
группу периодов по-
вторения пакетов импульсов, следующая за ними циф-
ра — номер периода повторения пакетов импульсов
в группе (см. табл. 8), и следующая за цифрой буква —
ведомую станцию цепочки. Индекс и значение навига-
ционного параметра в микросекундах наносятся тем же
цветом, что и соответствующая изолиния.
Изолинии на карте проводятся и оцифровываются
через каждые 200 или 100 мкс. В районах, прилежащих
к продолжениям базовых линий, проводятся и оцифро-
вываются через каждые 50 или 20 мкс дополнительные
изолинии.
Линию положения, соответствующую полученно-
му с помощью приемоиндикатора отсчету навигацион-
ного параметра /, находят на карте путем интерполяции.
В точках пересечения меридианов и параллелей через
2° по широте и 4а по долготе проводятся величины по-
правок за пространственные волны для каждой пары
станций.
268
Таблица 1J
т 11 850 11 860 И 870 11 880 11 890 Т
Широта Долгота Д Долгота Д Долгота Д Долгота Д Долгота Д
17°N 38°54',4Ost +102 39°04',60st + 102 39°14,9Ost+102 39°25',1 Ost +103 39°35,4Ost +103 16 39 53,7 106 40 04,3 106 40 14,9 106 40 25,6 107 40 36,2 107 15N 40 52,10st +110 41 03,0Ost+109 41 14,OOst+110 41 25,OOst +110 41 36,1 Ost +111 14 41 49,6 113 42 00,9 113 42 12,3 114 42 23,7 114 42 35,1 114 13 42 46,3 117 42 58,0 117 43 09,7 117 43 21,5 118 43 33,3 118 12 43 42,3 121 43 54,4 121 44 06,5 121 44 18,6 121 44 30,7 121 11 44 37,8 124 44 50,2 124 45 02,6 124 45 15,1 125 45 27,5 125 ION 45 32,6Ost +127 45 45,4Ost+127 45 58,1 Ost+128 46 10,9Ost +128 46 23,7Ost +128 9N 46 26,9Ost +131 4640,0Ost +131 46 53,2Ost+131 47 06,3Ost +131 47 19,4Ost +132 T 11 850 11 860 11 870 11 880 11 890
SL4 — X
Поправки для дневного времени имеют индекс 2), а
для ночного индекс N. Если отсчет навигационного па-
раметра получен по сигналам поверхностной радиоволны
от ведущей станции и пространственной радиоволны от
ведомой станции, то поправка имеет индекс GS. Если
же отсчет навигационного параметра получен по сигна-
лам поверхностной радиоволны от ведомой станции и
пространственной радиоволны от ведущей станции, то
поправка имеет индекс SG.
Для РНС «Лоран-С» также издается комплект таб-
лиц для построения линий положения. Выдержка
из таблиц для построения линий положений РНС «Ло-
ран-С» приведена в табл. 11. Структура этих таблиц и
методика их использования ничем не отличаются от
структуры и методики аналогичных по назначению таб-
лиц для РНС «Лоран-А». С их помощью можно также
наносить сетки изолиний на промыслово-навигационные
планшеты и карты.
В приложении к таблице для каждой пары станций
содержатся карта-схема с оцифровкой изолиний данной
пары станций и границами районов, для которых рас-
считаны таблицы, карта-схема с ориентировочными гра-
ницами приема сигналов поверхностных и пространст-
венных радиоволн, карта-схема с границами районов,
для которых рассчитаны поправки с индексами GS и
SG, таблицы поправок за пространственные радиоволны.
§ 52. Оценка точности определения места судна
с помощью гиперболических радионавигационных
систем
При оценке точности определения места судна с
помощью импульсных, фазовых и импульсно-фазовых
гиперболических РНС можно полагать, что ошибки из-
мерения навигационных параметров носят в основном
случайный характер и подчиняются нормальному зако-
ну распределения. Ошибка определения разности рас-
стояний вызывает ошибку линии положения (смещение
линии положения), равную
тлп =-------- . (VI—43)
2 sin —
2
270
Значение градиента разности расстояний g =2sin—
r 2
определяет следующие свойства гиперболической радио-
навигационной системы. Эта система обладает направ-
ленной точностью. Ошибка линии положения при тг=
=const возрастает по мере удаления от нормали к
базовой линии береговых передающих станций. Она не
зависит от расстояния до середины базовой линии (цент-
ра системы), а обусловливается отношением этого рас-
стояния к длине базовой линии, которое и определяет
модуль градиента разности расстояний.
Для случая определения места судна по двум раз-
ностям расстояний формула (V—1), выражающая ра-
диальную среднюю квадратическую ошибку определе-
ния места судна по двум линиям положения, может
быть написана в таком виде:
М = 0,5 cosec 0 cosec2 cosec2 , (VI—44)
где и —суммарные средние квадратические ошибки определе-
ния разностей расстояний ri и г2\
71 и у2 — базовые углы на первую и вторую пары станций;
0—угол пересечения линий положения.
По этой формуле составлена номограмма, упрощаю-
щая расчет величины Л4.
Если используются станции с совмещенными базами
(рис. 116, а), то 0 = -у- (Ti + у2), а если с разделен-
ными базами (рис. 116, б), то 0 = а +-^-(^+у2)-
При трех береговых передающих станциях, когда
одна из них является ведущей, а две другие ведомые,
случайные ошибки разностей расстояний будут величи-
нами зависимыми. В этом случае для более точного
определения величины М следует учитывать коэффициент
взаимной корреляции между ошибками тГ1 и тГ2 и вы-
числять М по формуле
М = 0,5cosec X
/2 2 V1 . 2 2 72 , mr,mr, Vl-Hs
< cosec —+mrt cosec T+^
S,n 2 S,n 2
(VI—45)
271
Так, например, для РНС «Лоран-А» среднее значе-
ние коэффициента kx<y=0,15-4-0,20, для РНС «Декка»
днем 6ял/=0,4-^0,5, ночью ^х!?/=0,8^-0,9.
Величины и тГг в милях для РНС «Лоран-А» и
«Лоран-С» можно рассчитать по формулам:
mr = mt *0,162мили/мкс,
т = т< -0,162 мили/мкс,
G ч
где^П/ и mi—средние квадратические ошибки определения проме-
жутков времени Л и (запаздываний), величины
которых зависят от ряда факторов.
При предварительной оценке точности обсерваций
в том или ином районе по РНС «Лоран-А» mt прини-
Рис. 116
мают равной: при определении t по сигналам поверх-
ностной радиоволны ±2 мкс, при определении t по
сигналам пространственной радиоволны на расстояниях
от станций, превышающих 600—800 миль, ±5 мкс и на
расстояниях около 400 миль ±10 мкс. При значительном
уровне помех эти ошибки могут быть в 1,5—2 раза
больше.
РНС «Лоран-С» позволяет получить навигационный
параметр с меньшими ошибками. При использовании
приемоиндикатора, реализующего все преимущества
этой системы, величину mt при определении t по сигна-
лам поверхностной радиоволны можно принять равной
±0,2±0,5 мкс, а при определении по сигналам прост-
272
ранственной радиоволны на всем диапазоне расстоя-
ний — ±14-2 мкс.
Для фазовой гиперболической РНС зависимость
между разностью фаз Т колебаний ведущей и ведомой
станций и разностью расстояний г определяется фор-
мулой (VI—36). Из этой формулы следует:
Л, М м
где тур— суммарная средняя квадратическая ошибка измерения
разности фаз.
Точность определения разности фаз зависит от ус-
ловий распространения радиоволн, степени синхрони-
зации в работе станций и от ошибок, вносимых приемо-
индикаторным устройством. Главным источником оши-
бок определения разности фаз является влияние прост-
ранственных радиоволн, вызывающих отклонение в
точке приема фазы результирующего поля от фазы поля
поверхностной радиоволны.
Для РНС «Декка» по опытным данным может
быть принята днем равной ±0,05 периода (±18°). Но-
чью величина ошибки возрастает в несколько раз. Если
ошибками синхронизации работы станций и инструмен-
тальными ошибками допустимо пренебречь, то для рас-
чета Шур можно использовать формулу
= (VI—47)
где /Пф —среднее квадратическое отклонение фазы результирую-
щего поля от фазы поля поверхностной радиоволны
(предполагается, что расстояния до ведущей и ведомой
станций примерно одинаковы).
Величину в долях периода для различных рас-
стояний и времени суток можно определить при помощи
специального графика, который помещается в руковод-
ствах по использованию РНС «Декка».
Если базы имеют длину более 80—100 миль, учиты-
вают ошибки синхронизации работы станций. При таких
базах полученное по формуле (VI—47) значение тп^
рекомендуется увеличивать на 30—50%. Для оценки
точности определения места с помощью гиперболичес-
ких РНС целесообразно использовать соответствующие
18 В. Е. Ольховский
273
карты с сетками изолиний. При помощи такой карты,
используя формулу (VI—30), легко рассчитать ошибки
линий положения тЛП1 итЛПг-
Пример. Расстояние между двумя ближайшими изолиниями на
карте в районе расположения промысловой площадки равно 10 ми-
лям, а интервал между этими изолиниями равен 20 мкс. Средняя
квадратическая ошибка измерения навигационного параметра со-
ставляет 2 мкс.
Следовательно,
ДР 10-2 <
т- = ^7тУ=1о" = 1миля
Как известно, изменению показаний фазометра от 0
до 2л соответствует перемещение изолинии на одну до-
рожку. Таким образом, средняя квадратическая ошибка
измерения разности фаз, выраженная в долях периода
представляет собой среднюю квадратическую
\2л /
ошибку линии положения, выраженную в долях дорожки.
Поэтому применительно к фазовой системе формулу
(VI—30) можно написать в таком виде:
ttltp тп-р
тм ~ 2а 360° 1'
где I—ширина дорожки, измеренная на карте в районе обсерво-
ванного или счислимого места судна или же в центре про-
мысловой площадки.
Определив лп^и тлп и сняв с карты угол 0, рассчи-
тывают величину Af по формуле
М = cosec о\/~(VI—48)
или
М = cosec 0 + т2п* + 2kxy тлп* cos 0 ,
Можно также, не вычисляя величины М, приближен-
но построить на карте эллипс погрешности. Для этого,
учитывая равновероятную возможность смещения линии
положения на величины и тлп в обе стороны,
строят параллелограмм и в этот параллелограмм на глаз
от руки вписывают эллипс.
Для приближенного суждения о возможной точности
обсерваций в том или ином районе пользуются мелко-
масштабными картами-схемами, на которых нанесены
274
линии равной точности определения места судна с помо-
щью той или иной гиперболической РНС. Такие линии
равной точности нанесены и на некоторых обзорных про-
мыслово-навигационных картах.
§ 53. Эксплуатационные данные судовых
радиолокационных станций
Радиолокационная станция (РЛС) представляет
собой импульсное дистанционно-азимутальное радиона-
вигационное устройство, предназначенное для обнару-
жения надводных объектов и определения направлений
на эти объекты и расстояний до них с помощью ультра-
коротких радиоволн. При этом могут быть использованы
как сигналы, отраженные от пассивных объектов, так и
сигналы активных объектов — радиолокационных мая-
ков-ответчиков. Навигационные РЛС подразделяются на
судовые и береговые. Судовые РЛС предназначены для
решения задач: определения места судна по расстояниям
или по пеленгу и расстоянию; управления движением
судна при плавании по фарватерам; определения и про-
верки маневренных элементов судна; расхождения со
встречными судами.
Судовые РЛС используются не только при отсутст-
вии достаточной зрительной видимости. В условиях хо-
рошей зрительной видимости часто прибегают к опреде-
лению места судна по радиолокационным расстояниям,
по радиолокационному расстоянию и визуальному пелен-
гу, определяют различные маневренные элементы судна.
Навигационная РЛС имеет индикатор кругового об-
зора (ИКО), в котором используется электроннолуче-
вая трубка со значительным послесвечением. Изображе-
ние на экране ИКО образуется радиально-круговой
разверткой в полярной системе координат. Начало ко-
ординат соответствует месту судна. Окружающая судно
обстановка отображается на экране ИКО в равноуголь-
ной азимутальной проекции. Положение диаметральной
плоскости судна фиксируется на экране ИКО светящей-
ся радиальной линией, называемой отметкой курса. Эк-
ран ИКО охватывают две круговые шкалы, центры ко-
торых совпадают с центром экрана. Внутренняя шкала
подвижная и разделена на градусы по 180° вправо и вле-
во от нуля шкалы. Эта шкала обычно связана с гироком-
18*
275
пасом, что обеспечивает возможность непосредственного
определения пеленгов наблюдаемых объектов. Внешняя
шкала неподвижна и разбита на 360°. По этим шкалам
с помощью подвижного визира, ось вращения которого
совпадает с центром экрана, производится отсчет ком-
пасных пеленгов и курсовых углов (рис. 117).
'Изображение на ИКО может быть ориентировано
(стабилизировано) либо относительно компасного мери-
Рис. 117
диана — по норду, либо относительно диаметральной
плоскости судна — по курсу. Ориентировка по норду при-
меняется при определении с помощью РЛС места судна.
Такая ориентировка облегчает сличение изображения на
экране ИКО с изображением на карте (изображение на
экране ИКО при поворотах судна не смещается, и рыс-
кание судна не нарушает его четкости). При ориенти-
ровке изображения по курсу судоводитель, стоящий ли-
цом к экрану ИКО, видит на экране окружающую об-
становку так, как он наблюдал бы ее с мостика, стоя
лицом по ходу судна. Это представляет определенные
удобства при плавании в узкостях и при расхождении
со встречными судами. Однако при таком режиме ра-
боты РЛС с изменением курса судна отметки всех на-
блюдаемых на экране ИКО объектов смещаются на ве-
личину угла поворота в сторону, обратную стороне по-
ворота, что затрудняет сличение изображения на экране
ИКО с изображением на карте. Кроме того, рыскание
276
судна на курсе нарушает четкость изображения, «сма-
зывает» его.
Для измерения расстояний до отметок эхо-сигналов
наблюдаемых объектов используется образуемая на эк-
ране ИКО система неподвижных концентрических све-
тящихся кругов дальности (НКД) или специальное
дальномерное устройство с подвижным кругом дально-
сти (ПКД).
Масштаб изображения на экране ИКО можно изме-
нять переключением ИКО на соответствующую шкалу
дальности. Чем меньше шкала дальности, тем крупнее
масштаб изображения и тем выше точность измерения
расстояний. Выбор той или иной шкалы дальности зави-
сит от условий плавания и характера решаемой с помо-
щью РЛС задачи.
Окружающая обстановка может отображаться на эк-
ране РЛС не только в относительном, но и в истинном
движении. В индикаторах истинного движения начало
развертки перемещается со скоростью судна (в масшта-
бе используемой шкалы дальности) по направлению его
движения. Такие индикаторы используются при манев-
рировании, связанном с расхождением со встречными
судами, при глазомерной проводке судов в узкостях и
позволяют более уверенно решать эти задачи.
Для того чтобы эффективно использовать РЛС в раз-
личных условиях плавания, необходимо знать и учиты-
вать эксплуатационные характеристики РЛС, зависящие
от ее технических параметров и гидрометеорологических
факторов.
Максимальная дальность действия РЛС и дальность
обнаружения объектов. В РЛС используются радиовол-
ны сантиметрового и миллиметрового диапазонов, кото-
рые распространяются и отражаются по законам, близ-
ким к законам распространения и отражения световых
волн, но с несколько большим коэффициентом земной
рефракции. Поэтому дальность радиолокационного го-
ризонта может быть вычислена по формуле, аналогичной
формуле для расчета дальности видимого горизонта:
= 2,23 УЙ, (VI—49)
где Я—высота антенны РЛС над уровнем моря, м;
Рд—дальность радиолокационного горизонта, мили.
277
При выводе этой формулы принято среднее значение
коэффициента земной рефракции для Х=3,2 см, равное
0,3. В действительности коэффициент земной рефракции
может отличаться от принятого среднего его значения.
При некоторых гидрометеорологических условиях на-
блюдается аномальное распространение ультракоротких
радиоволн, в результате чего дальность радиолокацион-
ного горизонта значительно уменьшается или увеличи-
вается. Когда холодный влажный воздух распространя-
ется над теплой поверхностью моря (температура возду-
ха на 20° и более ниже температуры воды), наблюдает-
ся пониженная рефракция — субрефракция. В тихую
погоду, когда над относительно холодной поверхностью
моря находится теплый сухой воздух, наблюдается по-
вышенная рефракция — сверхрефракция. Исключитель-
ным случаем повышенной рефракции является волно-
водное распространение радиоволн, при котором эти
волны распространяются внутри высотного атмосферного
волновода на большие расстояния, следуя кривизне зем-
ной поверхности. При пониженной рефракции дальность
радиолокационного горизонта меньше, а при повышенной
больше, чем рассчитанная по формуле (VI—49).
Максимальная дальность действия РЛС, обусловлен-
ная геометрическими факторами, определяется при ко-
эффициенте земной рефракции, равном 0,3, формулой
£> = 2,23(/Я + рТ), (VI—50)
где D — максимальная дальность действия РЛС, мили;
h — высота объекта над уровнем моря, м.
Дальность обнаружения объекта с помощью РЛС за-
висит не только от геометрических факторов, но и от тех-
нических параметров станции и отражающих способно-
стей объекта (величины, формы объекта, строения его
поверхности). Кроме того, туман, снег и дождь, погло-
щая и рассеивая радиоволны, уменьшают дальность об-
наружения объектов тем больше, чем интенсивнее осад-
ки. Во многих случаях препятствием для обнаружения
эхо-сигналов тех или иных объектов служат помехи ра-
диолокационному наблюдению, создаваемые морскими
волнами, ливневыми осадками и кучевыми облаками.
Импульсы от них засвечивают экран ИКО, делая неза-
метными эхо-сигналы от окружающих судно объектов,
особенно небольших.
278
Таким образом, дальность обнаружения объектов мо-
жет быть меньше максимальной дальности действия
РЛС, рассчитанной по формуле (VI—50). Теоретический
расчет дальности обнаружения реальных объектов очень
сложен и на практике для определения возможной даль-
ности обнаружения тех или иных объектов пользуются
опытными данными:
Вероятная даль-
ность обнаруже-
Объект ния, мили (Н=15м,
1 = 3,2 см)
Малый морской буй Большой морской буй Морской буй с пассивным отражате- лем Промысловый буй с пассивным от- ражателем Шлюпки Небольшие деревянные суда Суда водоизмещением, т 1000 10 000 50 000 Низкий песчаный берег (пляж) Холмы и горы Отвесные скалы и утесы высотой до 60 м 0,5—1 4—6 6—8 2,5—3 До 2 1—4 6—10 10—16 16—20 1—3 15—20 До 20
Причалы и волноломы Здания Отдельные льдины, ровные ледяные поля Смерзшийся лед, торосы Высокие айсберги Отдельно расположенные маяки 5—10 5—20 До 3 До 5 3—15 5—10
Определяя вероятную дальность обнаружения объ-
ектов с помощью таблицы, составленной по опытным
данным, следует иметь в виду, что эта дальность может
значительно снижаться из-за различных помех радиоло-
кационному наблюдению.
Минимальная дальность действия РЛС и «мертвая
зона». Минимальной дальностью действия РЛС называ-
ется наименьшее расстояние от антенны, ближе которого
окружающие судно объекты не могут быть обнаружены.
Это расстояние зависит от длительности зондирующего
импульса, запаздывания прохождения сигнала в цепях
279
аппаратуры, высоты установки антенны и ширины диаг-
раммы направленности в вертикальной плоскости. Во
время излучения зондирующего импульса прием отра-
женных сигналов невозможен. Теоретически прием на-
чинается с момента «отрыва» заднего фронта импульса
от антенны. За время излучения передний фронт импуль-
са пройдет расстояние, равное ит, где и— скорость рас-
пространения радиоволн (и «300000 км/с), т — длитель-
ность импульса Но так как принимаемый импульс про-
ходит удвоенное расстояние до объекта, то наименьшее
расстояние, с которого может быть получен отраженный
сигнал, равно 0,5 vx. Практически же это расстояние из-
за запаздывания прохождения сигнала в цепях аппа-
ратуры несколько больше и для современных РЛС оп-
ределяется выражением
0,7vr>Dmln(T) < Mvr.
На шкалах крупного масштаба у большинства совре-
менных РЛС длительность импульса равна 0,1 мкс и,
следовательно, Dmln (Т) может достигать 42 м.
Так как ширина диаграммы направленности антенны
в вертикальной плоскости характеризуется некоторым
углом ав, а сама антенна находится в некоторой высоте
Н над уровнем моря, то, как видно из рис. 118, объекты,
расположенные под нижней кромкой угла излучения, не
могут быть обнаружены РЛС.
Теоретически при отсутствии крена и дифферента
расстояние D(Ha) , в пределах которого такие объекты
нельзя обнаружить, составляет:
280
DW.a) .
Так, например, у РЛС «Океан» ав=20°. Следова-
тельно, При Я=15 М £\н,а) = 85 м-
Пространство вокруг судна, в пределах которого ок-
ружающие судно объекты с помощью РЛС не могут быть
обнаружены, называется «мертвой зоной». Радиус
этой зоны гм.’з определяется одним из следующих выра-
жений:
Гм.з = ПРИ £>(Я,а) > ^пНп(т) »
Гм.з = ^mln(T) ПРИ ^шш(т) > ^(Я,а) •
Однако величину гм.3 рекомендуется получать из экс-
периментальных наблюдений на стоянке судна, исполь-
зуя в качестве надводного объекта шлюпку или катер с
каким-либо пассивным отражателем. Измерив расстоя-
ние до шлюпки в момент, когда отраженный сигнал при
удалении ее от судна появится на экране ИКО или, на-
оборот, исчезнет при ее приближении к судну, можно оп-
ределить гм.3. Такие наблюдения следует выполнять при
различных осадках судна и при отсутствии крена или
дифферента.
Разрешающая способность РЛС. Разрешающая спо-
собность РЛС по направлению определяется наимень-
шим углом между двумя, расположенными на одинако-
вом расстоянии от антенны точечными объектами*, при
котором эхо-сигналы от этих объектов будут изобра-
жаться на экране ИКО раздельно.
Теоретически разрешающая способность РЛС по на-
правлению Да должна быть равна ширине диаграммы
направленности ее антенны в горизонтальной плоскости.
Практически же необходимо учитывать и диаметр рису-
ющего пятна электронного луча. Поэтому разрешающая
способность РЛС по направлению определяется следую-
щим выражением:
Ла--«; + 57-,3. -2-.
* Объект, линейные размеры которого малы по сравнению
с расстоянием до него, называется точечным объектом. Эхо-сигнал
от такого объекта изображается на экране ИКО практически в ви-
де точки.
281
где Ctp—ширина диаграммы направленности РЛС в горизонталь-
ной плоскости;
д— ширина пятна, рисуемого электронным лучом;
__расстояние до наблюдаемого объекта,
числовой масштаб изображения на экране ИКО.
Очевидно, что D М=р представляет собой расстояние
эхо-сигнала объекта от начала развертки. Так, напри-
мер, принимая а=0,7 мм, М= 1:12000 и £)=0,7 мили
для аг= Г, получим Да= Г, 4.
Разрешающая способность РЛС по расстоянию опре-
деляется наименьшим расстоянием между двумя распо-
ложенными на одном курсовом угле точечными объек-
тами, при котором эхо-сигналы от этих объектов изобра-
жаются на экране ИКО раздельно. Теоретически
разрешающая способность РЛС по расстоянию Д£)
определяется длительностью импульса т и равна 0,5 vx,
где v — скорость распространения радиоволн. С учетом
же диаметра рисующего пятна Д£) будет
а
ДР = 0,5рт Н---.
М
Так, например, при т = 0,1 мкс, а=0,7 мм и М=
= 1:12000 (шкала дальности 0,8 при длине развертки
125 мм) получим Д£)=23,4 м.
Разрешающая способность РЛС по направлению и по
расстоянию обычно определяется по результатам экспе-
риментальных исследований. Эти исследования показы-
вают, что для современных судовых РЛС разрешающая
способность характеризуется следующими пределами:
Да = (1,0-н 1,4) аг,
trr
ДР = (0,7-г-1,4) — <
Разрешающая способность РЛС является ее важней-
шей эксплуатационной характеристикой. Чем она выше,
тем более детально и четко изображается окружающая
обстановка на экране ИКО.
Особенности изображения на экране индикатора
кругового обзора побережья и различных ориентиров.
Изображение на экране ИКО окружающей судно обста-
новки имеет ряд особенностей, которые необходимо учи-
тывать при опознании с помощью РЛС различных уча-
стков побережья и находящихся на них ориентиров. На
экране ИКО могут быть получены отметки эхо-сигналов
282
только объектов, расположенных выше радиолокацион-
ного горизонта.
Каждый облучаемый объект создает на экране ИКО
отметки эхо-сигналов, отличные по своей величине, фор-
ме и яркости. На вид этих отметок влияют не только от-
ражающие свойства объектов, но и их положение отно-
сительно направления оси радиолокационного луча, вза-
имное расположение, удаление от антенны РЛС, угол
облучения (угол между нормалью к плоскости облучения
и осью радиолокационного луча)*.
Важным фактором, определяющим своеобразие изо-
бражения на экране ИКО окружающей судно обстано-
вки, является затенение (экранирование) высокими объ-
ектами расположенных за ними более низких объектов.
Так, например, если два объекта расположены на одной
прямой, совпадающей с направлением оси радиолокаци-
онного луча, и передний объект выше и больше по го-
ризонтальным размерам, чем задний, то на экране ИКО
будет видна только отметка эхо-сигнала переднего объ-
екта. Затенение одних объектов другими затрудняет
опознавание берега, особенно при подходе к нему с моря.
При следовании судна вдоль берега изображение мест-
ности на экране ИКО может постоянно изменяться, так
как одни объекты будут выходить из затенения, а дру-
гие, ранее видимые, затеняться.
Чем шире диаграмма направленности антенны РЛС
в горизонтальной плоскости и чем дальше располагается
от антенны объект, тем больше растягивается его изобра-
жение на экране ИКО в направлении, перпендикулярном
оси радиолокационного луча. В результате узкие проли-
вы, входы в бухты, проходы между волноломами «зама-
зываются», мелкие детали изображения берега исчезают
и могут быть обнаружены лишь в непосредственной бли-
зости.
Эффективное использование РЛС требует тщатель-
ного изучения радиолокационных особенностей побережья
и накопления материалов, позволяющих по изобра-
жению на экране ИКО опознать район плавания и необ-
ходимые для определения места судна ориентиры. Вна-
чале радиолокационные особенности побережья изучают
* Различные помехи при радиолокационном наблюдении рас-
сматриваются в курсе «Радионавигационные приборы».
283
по материалам, помещаемым в лоциях. Затем подготав-
ливают путевую карту или промыслово-навигационныи
планшет. На карту (планшет) наносят цветным каран-
дашом имеющиеся на берегу возвышенности, которые по
предварительной оценке обладают хорошими отражаю-
щими свойствами и должны обнаруживаться на больших
расстояниях, другие радиолокационные ориентиры. Если
на карте достаточно подробно изображен рельеф берега,
то с помощью имеющихся горизонталей, используя фор-
мулу (VI—50), можно нанести на карту контур ожидае-
мого изображения на экране ИКО того или иного уча-
стка берега на заданном расстоянии. Далее во время
плавания в условиях хорошей видимости уточняют по
визуальным наблюдениям очередность и фактическую
дальность обнаружения с помощью РЛС различных ори-
ентиров, соответствие нанесенных на карту контуров ра-
диолокационного изображения тех или иных участков
побережья наблюдаемым на экране ИКО.
В настоящее время ведутся работы по созданию спе-
циальных радиолокационных карт для наиболее сложных
в навигационном отношении районов с интенсивным су-
доходством. В практике судовождения получили распро-
странение радиолокационные фотосхемы и описания
маршрутов. Фотосхемы составляют обычно для районов
узкостей путем монтажа фотоснимков с экрана ИКО,
сделанных в определенных расчетных точках с судна,
которое точно следовало по фарватеру. Эти точки по-
казывают на фотосхемах и нумеруют. На фотосхему на-
носят и некоторые данные: ограждающие изобаты, ось
фарватера или его кромки, плавучие предостерегатель-
ные знаки и т. д. Фотосхемы особенно удобно использо-
вать для глазомерной (лоцманской) проводки судов не-
посредственно по радиолокационному изображению ок-
ружающей обстановки.
Радиолокационные описания маршрутов представля-
ют собой набор фотографий с экрана ИКО, сделанных
на наиболее сложных в навигационном отношении уча-
стках перехода и сопровождаемых фоторепродукциями
соответствующих участков карт, а также необходимыми
пояснительными надписями.
Пассивные отражатели и маяки-ответчики. Для луч-
шего опознания с помощью РЛС навигационных ориенти-
ров (буев, вех, береговых знаков) на них устанавлива-
284
ются пассивные отражатели — многогранные фигуры из
листового металла или металлической сетки, обладаю-
щие способностью отражать падающую на них энергию
в обратном направлении, не рассеивая ее. Наиболее ши-
рокое распространение получили так называемые угол-
ковые отражатели, состоящие из трех взаимно перпен-
дикулярных’ пересекающихся металлических плоско-
стей— треугольных (рис. 119, а) или прямоугольных
(рис. 119,0. Отдельный уголок дает достаточное отра-
Рис. 119
жение в пределах сектора 50—60°. Установка на буе пя-
ти-шести уголков обеспечивает надежное отражение по
всему горизонту.
Уголковые отражатели с площадью одной стороны
уголка 1X1 м2 обнаруживаются на экране ИКО на рас-
стоянии порядка 10 миль.
Отметка эхо-сигнала пассивного отражателя предста-
вляет собой небольшое светящееся пятно размером 2—
4 мм. Опознание этого эхо-сигнала на фоне других силь-
ных эхо-сигналов, например от берега, может быть за-
труднено. Поэтому пассивные отражатели на берегах н
других объектах с хорошими отражающими свойствами
устанавливают в виде геометрических фигур так, чтобы
они имели отличительную характеристику. При этом учи-
тывается разрешающая способность РЛС по расстоянию
и направлению.
Радиолокационные маяки представляют собой уст-
ройства, излучающие электромагнитные импульсы в ди-
285
апазоне частот судовой РЛС. Эти маяки бывают двух
типов: непрерывно излучающие импульсы; излучающие
импульсы после облучения судовой РЛС.
Сигнал радиолокационного маяка, непрерывно излу-
чающего импульсы, изображается на экране ИКО пун-
ктирной линией, идущей от центра экрана по направле-
нию на маяк. С помощью радиолокационного маяка та-
кого типа можно определить только его пеленг.
Более широкое применение получили радиолокацион-
ные маяки второго типа — маяки-ответчики. Эти маяки
имеют два режима работы: режим ожидания и режим
излучения. Принятые в режиме ожидания импульсы су-
довой РЛС поступают в приемник, откуда после усиле-
ния передаются в передатчик, который посылает ответ-
ные импульсы судовой РЛС. Маяк-ответчик имеет коди-
рующее устройство. В зависимости от конструкции этого
устройства передатчик может посылать простой сигнал-
импульс или особую серию сигналов. По характеру изо-
бражения этой серии сигналов на экране ИКО можно
безошибочно отличить один маяк-ответчик от другого.
Изображение ответного сигнала на экране ИКО имеет
вид одной или нескольких небольших концентрических
дуг. Середина дуги соответствует направлению на маяк-
ответчик, а расстояние от центра экрана ИКО до бли-
жайшей к этому центру дуги — расстоянию до маяка-
ответчика в масштабе шкалы дальности.
Так как на срабатывание аппаратуры маяка-ответчи-
ка требуется некоторое время, отметка его ответного
сигнала на экране ИКО располагается на расстоянии,
несколько большем, чем то, которое соответствует дей-
ствительному расстоянию между антенной РЛС и мая-
ком-ответчиком. Выбрав из описания маяка-ответчика
величину этой задержки, можно ввести в измеренное
расстояние поправку на задержку.
Маяки-ответчики позволяют практически безошибоч-
но опознать ориентир, их ответные сигналы легко выде-
лить на фоне помех, они имеют большую дальность дей-
ствия, чем пассивные отражатели, и обеспечивают ра-
боту судовой РЛС в пределах максимальной дальности
радиолокационного обнаружения. Работа маяков-ответ-
чиков автоматизирована, и они могут одновременно об-
служивать десять-двадцать судов.
286
§ 54. Измерение направлении н расстояний
с помощью радиолокационной станции
Измерение пеленгов. При ориентировке изображе-
ния по норду (см. рис. 117, а) отметка курса на экране
ИКО поворачивается в соответствии с изменением курса
и составляет с линией 0—180° неподвижной шкалы, ус-
ловно изображающей компасный меридиан, угол, равный
компасному курсу судна. Визир, установленный на от-
метку эхо-сигнала наблюдаемого объекта, укажет на
подвижной шкале компасный пеленг. Истинный пеленг
рассчитывают по формуле
РЛП = РЛПГК + ДГЛ. (VI—51)
Если изображение ориентировано по курсу (см. рис.
117,6), то отметка курса всегда совмещена с нулем не-
подвижной шкалы. В этом случае визир, установленный
на отметку эхо-сигнала наблюдаемого объекта, укажет
на неподвижной шкале его курсовой угол в круговом
счете. Истинный пеленг можно рассчитать по формуле
РЛП = РЛКУ + ККгк + дгл.
Курс по гирокомпасу сле-
дует замечать в момент изме-
рения курсового угла. Этот
курс можно определить по не-
подвижной шкале против ну-
ля подвижной шкалы.
Определение радиолокаци-
онного пеленга сопровождает-
ся систематическими и случай-
ными ошибками. К наиболее
существенным систематичес-
ким ошибкам относятся следу-
ющие.
Ошибка, вызываемая
эксцентриситетом раз-
вертки. Такая ошибка воз-
никает в тех случаях, когда
центр окружности, описываемой началом развертки,
смещен относительно центра вращения линейки меха-
нического визира. На рис. 120 Ов —центр вращения
линейки визира, Ор —центр развертки, Д —расстояние,
287
на которое смещен центр развертки, г расстояние до
отметки эхо-сигнала объекта в масштабе изображения,
р — уГ0Л между линейкой визира и направлением сме-
щения центра развертки. Как видно из рис. 120, ошиб-
ку пеленга, вызванную эксцентриситетом развертки,
можно определить по формуле
ерлп = 5? ,3’~—sinp.
Из этой формулы следует, что рассматриваемая
ошибка является переменной. При прочих равных усло-
виях величина ее будет тем больше, чем ближе к цент-
ру развертки находится отметка эхо-сигнала объекта.
Исключить ошибку ерлп путем введения соответствую-
щих поправок затруднительно, так как в процессе экс-
плуатации РЛС смещение центра развертки по различ-
ным причинам изменяется. Путем соответствующих ре-
гулировок можно уменьшить эксцентриситет развертки.
Однако практически величину Д обычно не удается сде-
лать меньшей ±1 мм.
Таблица 12
г, мм ЕРЛП- град
А—1 мм | А=2 мм | Д=3 мм
20 2°,9 5°,7 8°, 7
40 1,4 2,9 4,3
60 0,9 1,9 2,9
120 0,4 1,0 1,4
В табл. 12 приведены наибольшие величины еРЛП при
различных значениях Д и г (р=90°).
Ошибка, вызванная рассогласовани-
ем направления антенны с указанием ее
положения на экране ИКО. Эта ошибка может
быть обнаружена путем сличения курсовых углов или
пеленгов на различные точечные объекты, измеренных
визуально и с помощью РЛС. Если эта ошибка превы-
шает ±0°,5 и необходимые для ее уменьшения регули-
ровки выполнить по каким-либо причинам невозможно,
то из серии наблюдений определяют поправку радиоло-
кационного пеленга:
288
ьрлп*=*ип — рлп9
где ИП — визуальный пеленг точечного объекта, удаленного от
судна на расстояние, не меньшее 2—3 миль, взятый с пи-
лоруса, находящегося на расстоянии не более 5—10 м от
мачты, на которой установлена антенна РЛС;
РЛП—радиолокационный пеленг того же объекта, измеренный
в тот же момент времени.
Эта поправка учитывается при расчете РЛП.
Ошибка в принимаемой поправке ги-
рокомпаса. Эта ошибка, как видно из формул
(VI—51) и (VI—52), полностью войдет в радиолокаци-
онный пеленг. При плавании в широтах менее 75° сред-
нюю квадратическую величину этой ошибки можно при-
нять равной +0°,5.
К случайным ошибкам измерения радиолокационно-
го пеленга относятся ошибки из-за некоторой ширины
диаграммы направленности РЛС в горизонтальной плос-
кости, ошибки визирования, ошибки отсчета.
Влияние ширины диаграммы направ-
ленности РЛС в горизонтальной плос-
кости. Как уже рассматривалось выше, некоторая
ширина диаграммы направленности РЛС в горизон-
тальной плоскости вызывает растягивание отметки эхо-
сигнала в направлении, перпендикулярном оси радиоло-
кационного луча (по дуге окружности). Это растягива-
ние тем больше, чем шире диаграмма направленности и
чем дальше от центра экрана ИКО находится отметка
эхо-сигнала. Отметка эхо-сигнала точечного объекта
растягивается симметрично в обе стороны от оси радио-
локационного луча. Следовательно, если при пеленгова-
нии устанавливать визир над серединой отметки эхо-сиг-
нала точечного объекта, то некоторая ширина диаграммы
направленности РЛС в горизонтальной плоскости прак-
тически не будет оказывать влияние на точность изме-
рения пеленга. Изображение на экране ИКО протяжен-
ных в горизонтальной плоскости объектов, например
срезов мысов, облучаемых вдоль их водных урезов, рас-
тягивается несимметрично — только в сторону моря. По-
этому при пеленговании кромок изображения таких объ-
ектов допускается неподдающаяся учету ошибка измере-
ния пеленга (рис. 121, позиции а, б). Малоразмерный
объект с неодинаковыми отражающими свойствами бе-
реговых склонов, например небольшой островок, одна
сторона которого обрывистая, а другая пологая, также
19 B E. Ольховский
289
Дает отметку эхо-сигнала с конфигурацией, несиммет-
ричной относительно средины объекта (рис. 121, пози-
ция в),
По исследованиям И. Л. Бухановского ошибки изме-
рения пеленга, обусловленные некоторой шириной диа-
граммы направленности в горизонтальной плоскости,
могут достигать 2°,5 для РЛС с шириной диаграммы на-
Рис. 121
правленности 1°6 и 1,5—2° для РЛС с шириной диаграм-
мы направленности 1°, 1.
Ошибка визирования. Рассмотрим эту
ошибку применительно к пеленгованию точечных объек-
тов. В рассматриваемом случае наблюдатель устанавли-
вает визир над отметкой эхо-сигнала так, чтобы разде-
лить ее пополам. Размер отметки обычно всегда больше,
290
чем толщина визирных нитей или электронной визирной
метки. Следовательно, ошибка визирования будет опре-
деляться способностью глаза симметрично делить де-
таль радиолокационного изображения. При этом значи-
тельную роль играет даже сравнительно небольшое от-
клонение глаза наблюдателя от строго вертикального
положения над визиром.
Угловая ошибка визирования зависит и от расстоя-
ния отметки эхо-сигнала объекта от центра экрана ИКО.
Величина ее уменьшается с увеличением этого расстоя-
ния. По исследованиям И. Л. Бухановского и Г. Ф. Плат-
но средняя квадратическая ошибка визирования на рас-
стоянии Уз радиуса экрана, считая от центра, составля-
ет около 4-0°, 6 и на расстоянии 2/3 радиуса экрана —
около ±0°,3.
На точность измерения с помощью РЛС пеленгов зна-
чительное влияние оказывает качка судна. Исследования
показывают, что возникающая по этой причине ошибка
имеет минимальное значение при курсовых углах объек-
та, близких к 0—180° или к 90° каждого борта, а мак-
симальное при курсовых углах, близких к 45—135°. Рас-
смотрение источников ошибок, сопровождающих изме-
рение с помощью РЛС пеленгов, позволило сформули-
ровать следующие практические рекомендации, выпол-
нение которых будет способствовать повышению точно-
сти радиолокационного пеленгования*:
необходимо стремиться пеленговать только точечные
или малоразмерные объекты; остро выступающие в море
мысы можно пеленговать только на траверзе. Пеленго-
вание для определения места судна срезов мысов, участ-
ков берега, облучаемых вдоль, недопустимо;
для пеленгования следует выбирать объекты, распо-
ложенные от центра экрана ИКО на расстоянии
не менее Уз его радиуса и, если возможно, переклю-
чить шкалу дальности на больший масштаб, чтобы
отодвинуть отметку эхо-сигнала объекта к периферии
экрана;
при измерении пеленга или курсового угла необходи-
мо располагать глаз над линией визира и делить визиром
отметку эхо-сигнала объекта пополам;
• Бухановский И. Л. Радиолокационные методы судовождения.
М., 1970.
19* 291
для уменьшения влияния качки судна на точность из-
мерений необходимо пеленговать объекты, расположен-
ные на курсовых углах, близких к 0,90, 180 и 270°.
Как видно из приведенного выше анализа, измерение
с помощью РЛС пеленгов сопровождается значительны-
ми ошибками. Точность радиолокационного пеленгова-
ния во многом зависит от опытности наблюдателя, одна-
ко в общем случае при пеленговании объектов, линейны-
ми размерами которых пренебречь нельзя, можно
ожидать ошибку в пеленге порядка ±2—2°,5. При пе-
ленговании точечных объектов в благоприятных услови-
ях (хорошо выверенная РЛС, опытный наблюдатель, от-
метка эхо-сигнала объекта находится на периферии
ИКО) средняя квадратическая ошибка пеленга равна
±1°, не считая ошибки в принимаемой поправке гиро-
компаса.
Из-за невысокой точности измерения пеленга с помо-
щью РЛС следует по возможности избегать использова-
ния радиолокационных пеленгов для определения мес-
та судна. Если же такой возможности не представляет-
ся, то необходимо строго соблюдать приведенные выше
практические рекомендации, позволяющие повысить точ-
ность радиолокационного пеленгования.
Измерение расстояний. В РЛС, не имеющих точного
дальномерного устройства с подвижным кругом дально-
сти (ПКД), расстояния до отметок эхо-сигналов объек-
тов измеряются с помощью образуемой на экране ИКО
системы светящихся концентрических неподвижных кру-
гов дальности (НКД). Расстояние определяется глазо-
мерной оценкой положения отметки эхо-сигнала объек-
та между двумя соседними кругами дальности. Средняя
квадратическая ошибка измерения расстояния таким
способом равна примерно 0,1 интервала между соседни-
ми кругами дальности. Чем меньше шкала дальности,
тем крупнее масштаб изображения на экране ИКО и тем
выше точность измерения расстояний. Так, например.
РЛС «Океан» имеет 7 шкал дальности: 1, 2, 4, 8, 16. 32
и 64 мили. Расстояния в милях между соседними НКД
соответственно равны: 0,25; 0,5; 1; 2; 3; 4; 8 и 16.
На точность измерения расстояний с помощью НКД
влияет также нелинейность хода развертки, если она
превышает установленные допуски. При нелинейности
развертки положение отметки эхо-сигнала объекта меж-
292
ду кругами дальности не пропорционально положению
этого объекта на местности. В этом случае линейная ин-
терполяция при измерении расстояния с помощью НКД
приводит к ошибке. Поэтому в РЛС, в которых для из-
мерения расстояний используются НКД, линейность раз-
вертки должна быть достаточно высокой. При нелиней-
ности развертки не более 2—3°/о возникающие по этой
причине ошибки будут на порядок ниже ошибок интер-
поляции и ими можно пренебрегать. Ошибки расстанов-
ки неподвижных кругов дальности у исправной и вы-
веренной РЛС также значительно меньше ошибок ин-
терполяции.
Для повышения точности измерений с помощью НКД
рекомендуется определять расстояние до отметки эхо-
сигнала объекта по ее
переднему фронту.
При снятии отсчета
вначале нужно опре-
делить долю проме-
жутка между соседни- а
ми кругами дальности,
а затем уже сосчитать
число колец. ;
При помощи даль- ;;
номерного устройства ;>
с ПКД расстояния из- «
меряются с большей >1
точностью. Радиус /
ПКД изменяют так, /
чтобы он коснулся от-
метки эхо-сигнала объ-
екта или совместился
с ней. Расстояние от-
Рис. 122
считывают по специ-
альному цифровому счетчику дальномерного устройства.
При определении места судна измерение расстояний с
помощью ПКД может производиться либо способом
касания, либо способом совмещения. Первый способ
(рис. 122, а) предусматривает соприкосновение внешней
кромки ПКД с передним (ближайшим к центру экрана
ИКО) фронтом отметки эхо-сигнала объекта, а второй
(рис. 122, б)—наложение средины ПКД на передний
фронт этой отметки.
293
Каждый из этих способов имеет свои достоинства и
недостатки. Большее распространение получил способ
касания. Измерение расстояний с помощью ПКД также
сопровождается ошибками. Рассмотрим основные из
этих ошибок.
Ошибка калибровки РЛС. Каждому фикси-
рованному значению радиуса ПКД должно соответство-
вать равное расстояние на местности. Для этого осуще-
ствляется калибровка РЛС — установка нуля дально-
мерного устройства. При калибровке сличают измеренные
с помощью РЛС расстояния до точечных объектов
с расстояниями до тех же объектов, определенными гео-
дезическими способами с ошибкой, не превышающей
±5 м. Разность измеренного с помощью РЛС и опреде-
ленного геодезическим способом расстояний при пра-
вильной установке нуля дальномерного устройства не
должна превышать ±0,15 кбт. Следовательно, система-
тическую ошибку измеренного с помощью ПКД расстоя-
ния, обусловленную ошибкой калибровки, можно счи-
тать не превышающей ±0,2 кбт. Ошибку такого поряд-
ка необходимо учитывать только при проводке судна по
фарватерам ограниченной ширины. При оценке же точ-
ности определения места судна ею можно пренебречь.
Важно отметить, что при калибровке дальномерного
устройства расстояния должны измеряться с помощью
ПКД тем же способом, который будет использоваться
при дальнейшей эксплуатации РЛС.
Масштабная ошибка. Эта ошибка возникает
при работе на шкалах дальности, отличных от той, на
которой осуществлялась установка нуля дальномерного
устройства. Так как РЛС калибруется на самой крупно-
масштабной шкале дальности, то измерение расстояний
на шкале дальности более мелкого масштаба будет со-
провождаться ошибкой, называемой масштабной.
Если расстояния измеряются способом касания, то
масштабная ошибка еЛм имеет систематический харак-
тер. Ее можно рассчитать по приведенной ниже прибли-
женной формуле и при необходимости исключить путем
исправления измеренного расстояния соответствующей
поправкой:
еом = -°(уиг-7и„).
294
где а—диаметр пятна электронного луЧа;
Л4К— масштаб шкалы, на которой производилась калибровки,
РЛС;
Mi—масштаб шкалы, на которой измеряются расстояния.
Выразив М в милях на 1 мм длины развертки, а — в
миллиметрах (а^0,6 мм), получим елм в милях. Вели-
чина 8рм для той или иной шкалы дальности может
быть определена по результатам измерений расстояний
до одних и тех же точечных объектов на шкалах даль-
ности Мк и Mi.
Если расстояния измеряются способом совмещения,
то, как показывают исследования, масштабная ошибка
нестабильна и учитывать ее как систематическую невоз-
можно. При использовании способа совмещения масш-
табную ошибку рассматривают при одиночном измере-
нии как случайную.
Случайные ошибки измерения рассто-
яний с помощью ПКД. К этим ошибкам относят-
ся инструментальная ошибка и ошибка установки ПКД.
Предельная инструментальная ошибка у современных
РЛС не превышает 10—15 м и ею можно пренебречь.
Ошибка установки ПКД зависит от разрешающей спо-
собности человеческого глаза, контрастности и четкости
кромок радиолокационного изображения, а также от спо-
соба установки (касание или совмещение).
Величины ошибок измерения расстояний с помощью
ПКД способом касания, полученные по результатам на-
блюдений, приведены в табл. 13.
Таблица 13*
Шкала дальности (мили) и средний масштаб (для длины развертки 125 мм) Ошибки, кбт
г масштабная (относительно первой шкалы) случайные
средняя квадратическая предельная
0,8(1:12 000) 0 ±0,03 ±0,09
1,5(1:22 000) 0 ±0,03 ±0,10
5(1:15 000) —0,15 ±0,06 ±0,17
15(1:222000) —0,65 ±0,13 ±0,39
30(1:420 000) —1,25 ±0,20 ±0,60
* Бухановский И. Л. Радиолокационные методы судовождения. М.,
1970.
295
Как видно из приведенного выше анализа, РЛС как
дальномерный прибор обладает высокой точностью.
При достаточном опыте наблюдателя среднюю квадра-
тическую ошибку измерения расстояния до неподвиж-
ного точечного объекта можно считать равной 0,5—1 %
предельного значения дальности шкалы, на которой про-
изводятся измерения. Однако при измерении расстоя-
ний до неточечных объектов появляются дополнительные
ошибки — ошибки опознавания объектов. Наблюдатель
не всегда может достаточно точно определить на карте
ту часть наблюдаемого объекта, которая создала перед-
ний фронт отметки эхо-сигнала на экране ИКО. Поэто-
му наиболее точно расстояния измеряются до малораз-
мерных, отдельно лежащих объектов, обрывистых мы-
сов, наименее точно — до низких берегов, пологих
мысов, объектов, расположенных в отдалении от уреза
воды.
На величине ошибки опознавания объектов сказыва-
ется и степень усиления. Так, например, при повышен-
ном усилении очертания изображения объекта на экра-
не ИКО расплываются, вследствие чего измеренное
расстояние будет меньше действительного. Для того что-
бы ослабить влияние ошибок опознавания объектов, на-
блюдатель должен хорошо представлять себе особенно-
сти изображения побережья на экране ИКО, изучать раз-
личные радиолокационные пособия. В ряде случаев для
опознавания объектов целесообразно выполнять допол-
нительные измерения навигационных параметров с по-
мощью РЛС и другими возможными способами, исполь-
зовать данные счисления.
Для измерения расстояний нужно выбирать объекты
с наиболее четко очерченными кромками отметок эхо-
сигналов. При измерении расстояний до береговой чер-
ты ПКД следует совмещать с наиболее выступающей в
море частью ее изображения на экране ИКО.
§ 55. Использование радиолокационной станции
для определения места судна
РЛС позволяет измерять два навигационных па-
раметра: расстояние и пеленг. Поэтому все способы оп-
ределения места судна с помощью РЛС сводятся к раз-
личным комбинациям этих параметров.
296
За редким исключением (расстояние менее 0,3—0,5
мили) линия положения, полученная по результатам из-
мерения расстояния, точнее линии положения, получен-
ной по результатам измерения пеленга. Кроме того, зна-
чительная часть естественных объектов дает на экране
ИКО протяженные отметки эхо-сигналов, до которых
практически можно измерить лишь кратчайшее расстоя-
ние. Поэтому РЛС используется главным образом для
измерения расстояний. К радиолокационному пеленго-
ванию прибегают лишь при плохой зрительной видимости
исключающей возможность визуального пеленгова-
ния. При определении места судна с помощью РЛС при-
меняются следующие основные способы: по радиолока-
ционным расстояниям до двух или трех ориентиров, по
визуальному пеленгу и радиолокационному расстоянию
до одного ориентира, по разновременно измеренным ра-
диолокационным расстояниям до одного или двух ори-
ентиров.
Если в качестве навигационных ориентиров использу-
ются опознанные точечные объекты, то прокладка обсер-
ваций на карте и оценка их точности осуществляются
так же, как и при аналогичных методах определения
судна по визуальным наблюдениям (см. гл. V).
Оценивая точность обсерваций, нужно учитывать,
что измерение расстояний с помощью НКД сопровожда-
ется в основном случайными ошибками глазомерной
оценки положения отметки эхо-сигнала между двумя со-
седними кругами дальности. Если же расстояния изме-
ряются с помощью ПКД способами касания, то случай-
ные и систематические ошибки имеют либо один поря-
док, либо систематические ошибки превосходят по
величине случайные (см. табл. 16).
При подходе к берегу с моря возникает задача опо-
знавания объектов, отметки эхо-сигналов которых вид-
ны на экране ИКО и которые затем могут быть исполь-
зованы в качестве навигационных ориентиров при опре-
делении места судна с помощью РЛС. Если берег
изрезанный и обрывистый или имеет характерные дета-
ли рельефа, расположенные за береговой чертой, хоро-
шие результаты дает опознавание по вееру пеленгов и
расстояний. Сущность этого способа заключается в сле-
дующем. На экране ИКО выбирают отметки эхо-сигна-
лов от характерных объектов Л, В, С, В... (мысы, остро-
297
ва и т. п.) (рис. 123) ив быстрой последовательности
измеряют пеленги и расстояния до этих отметок. В мо-
мент средних наблюдений замечают отсчет лага. Затем
на листе кальки проводят прямую mim2, условно изобра-
жающую линию пути судна, и из произвольной точки О
на этой линии прокладывают истинные пеленги и рас-
стояния (в масштабе карты). В результате получают
точки а, Ь, с, d.,.y соответствующие положению объектов
Д, В, С, D... Наложив кальку на карту в районе счисли-
мого места и перемещая ее так, чтобы линия m\mz все
время оставалась параллельной линии пути судна МiAf2»
добиваются такого положения, при котором большинст-
во точек a, Ь, с, d... лучшим образом совпадает с харак-
терными объектами береговой черты Д, В, С, В... на кар-
те. Точка О пересечения пеленгов, перенесенная на кар-
ту уколом циркуля, будет приближенным местом судна
на средний момент наблюдений, а объекты Д, В, С, В,...,
с которыми совпали точки a, b, с, d.„, можно считать
опознанными. Наблюдения рекомендуется повторить не-
сколько раз для исключения случайных совпадений и для
их контроля использовать данные счисления.
Если измерения выполняются при скорости свыше
12 уз, необходимо в момент каждого измерения заме-
чать отсчет лага и прокладывать на кальке пеленги и
расстояния из точек, соответствующих месту судна в мо-
мент измерения.
При плавании вдоль берега целесообразно измерять
траверзные расстояния до наиболее характерных отме-
299
ток эхо-сигналов (антенна РЛС устанавливается на кур-
совом угле 90° соответствующего борта). Если в качест-
ве навигационных ориентиров используются простран-
ственные объекты, то прокладка определений места
судна на карте осуществляется особыми приемами. Рас-
смотрим некоторые из них.
Расстояния измеряются до участка
береговой черты с плавными очерта-
ниями и отдельно расположенного то-
чечного объекта. На участке береговой черты с
плавными очертаниями
невозможно найти точку,
до которой измерялось
расстояние. Поэтому при-
бегают к следующим по-
строениям (рис. 124). Из
места точечного объекта,
радиусом, равным изме-
ренному до него рассто-
янию Z>i, проводят дугу
окружности (отрезок изо-
линий) и на ней с помо-
щью циркуля ищут точ-
ку, из которой проведен-
ная радиусом, равным
второму измеренному
расстоянию D2, дуга ок-
ружности коснулась бы
береговой черты. Поло-
жение острия циркуля
будет соответствовать
месту судна.
Расстояния изме-
ряются до двух
участков береговой
черты с плавными Рис 12-
очертаниями. На ли- °
сте кальки из произволь-
ной точки О проводят в масштабе карты дуги окруж-
ностей радиусами, равными измеренным расстояниям
Di и D2 до обоих участков береговой черты (рис. 125).
Дуги проводят примерно в тех курсовых углах, в кото-
рых измерялись расстояния. Затем кальку накладывают
299
на карту так, чтобы точка О находилась в районе счис-
лимого места судна на момент измерения расстояний, и,
передвигая кальку по карте, находят такое положение
точки О, при котором дуги окружностей коснутся обоих
участков берега. Точка О, перенесенная на карту уко-
лом циркуля, будет местом судна. Рассматриваемый
способ не рекомендуется применять, если нет уверен-
ности в том, что на экране ИКО изображен именно
урез воды.
Очевидно, что в случае, когда участки береговой
черты параллельны, место судна определить этим спо-
собом нельзя.
Прокладка определения места судна
по расстояниям, измеренным до несколь-
ких пространст-
венных объектов,
выполняется также с
помощью кальки спо-
собом, аналогичным
тому, который приме-
няется при опознава-
нии объектов по вееру
пеленгов и расстояний.
В этом случае одно-
временно с измерени-
ем расстояний замеча-
ют / и приближенные
пеленги точек касания
ПКД с изображением
береговой черты. Эти
пеленги используются
только для ориентиров-
ки при проведении дуг
окружностей, соответ-
ствующих измеренным
расстояниям (рис.
126).
Определение места
судна с помощью бло-
ка совмещения радиолокационного изображения с на-
вигационной картой. К судовой РЛС может быть подк-
лючен блок совмещения (картосличительнаяприставка).
Этот блок представляет собой выносной индикатор кру-
300
гового обзора (ВИКО) с вертикальным экраном. Мас-
штаб изображения на экране ВИКО можно изменять
специальными рукоятками. Перед экраном установлено
под углом 45° полупрозрачное зеркало, с помощью кото-
рого изображение с экрана ВИКО проектируется на
карту. Смотря на зеркало сверху, наблюдатель видит
одновременно лежащую на столе карту района плавания
и проектируемое на нее с экрана ВИКО радиолокацион-
ное изображение местности (рис. 127).
Для того чтобы определить место судна, кладут на-
вигационную карту на стол под зеркало блока. Затем
приводят в соответствие
масштаб на экране
ВИКО с масштабом кар-
ты в районе плавания
судна. Для этого, изме-
няя масштаб на экране
ВИКО, добиваются сов-
мещения НКД с соответ-
ствующими делениями на
боковой рамке карты в
широте района плавания
судна (рис. 128). Затем,
перемещая карту, совме-
щают контуры радиоло-
кационного изображения
с очертаниями берега на
карте и точку, совпада-
ющую с центром разверт-
ки, принимают за обсер-
вованное место судна. По
существу такое совме-
щение сводится к определению места судна по беско-
нечно большому числу пеленгов и расстояний.
Учитывая рассмотренные в § 53 особенности радио-
локационного изображения, совмещение надо осуществ-
лять по передним фронтам отметок эхо-сигналов. При
этом следует отдавать предпочтение участкам побере-
жья, облучаемым под углом, близким к 90°. Если невоз-
можно добиться полного совмещения изображений, то
карту устанавливают в такое положение, при котором
расхождения контуров наименьшие и примерно одинако-
вые в различных направлениях от центра развертки.
301
Вследствие сферичности экрана ВИКО изменение Поло-
жения глаза наблюдателя приводит к некоторому смеще-
нию изображения. Поэтому в процессе определения мес-
та судна необходимо сохранять положение глаза по воз-
можности постоянным.
Что же касается ошибок, возникающих в результате
совмещения различных по характеру проекций — мерка-
торской (навигационная карта) и азимутальной (радио-
локационное изображение), —то при принятой методи-
ке использования блока совмещения эти ошибки неве-
лики и существенного влияния на точность определения
места не оказывают.
Средняя квадратическая ошибка определения места
судна с помощью блока совмещения близка к ±1,3 мм
в масштабе карты. Так, при масштабе карты 1 : 50000
эта ошибка равна примерно ±0,35 кбт, а при масштабе
1 : 200000 —±1,4 кбт.
Использование РЛС на промысле. На промысле с
помощью РЛС решают широкий круг навигационных за-
дач: определяют в процессе траления скорость судна от-
носительно земли, скорость и направление течения в
районе промысла, элементы циркуляции при поворотах
с тралом, при его спусках и подъемах, скорость и на-
правление дрейфа судна с застопоренной машиной (при
работе у буя), направления и расстояния до других до-
бывающих судов, используемых в качестве навигацион-
ных ориентиров, обеспечивают сохранность орудий лова
путем применения метода опасного расстояния, осуще-
ствляют плавание по изостадиям, когда изостадия на
данном участке приблизительно совпадает с рекомендо-
ванной промысловой изобатой.
При определении с помощью РЛС места судна, как
правило, используют только точечные объекты, позво-
ляющие обеспечить необходимую точность обсерваций
за счет исключения ошибок опознавания.
На траловом промысле как в прибрежных районах,
так и в районах открытого моря часто прибегают к опре-
делению места судна по визуальному пеленгу и радио-
локационному расстоянию до промыслового буя, снаб-
женного пассивным отражателем. Этот способ исполь-
зуют и в тех случаях, когда координаты буя точно
неизвестны, так как и определение места судна только
относительно буя значительно облегчает удержание суд-
302
на на косяке и его успешный облов. Часто координаты
буя определяют по результатам измерений навигацион-
ных параметров не сразу при его постановке, а в процес-
се промысла. В этом случае впоследствии по результа-
там относительных определений места судна можно
нанести на промыслово-навигационный планшет реко-
мендованные курсы траления, границы промысловых
площадок, положения задевов и другие необходимые
для составления или пополнения планшета данные.
Глава VII. ОПРЕДЕЛЕНИЕ МЕСТА СУДНА С ПОМОЩЬЮ
ГИДРОАКУСТИЧЕСКИХ СРЕДСТВ
§ 56. Принцип действия и эксплуатационные
данные судовых гидроакустических станций
На добывающих судах флота рыбной промышлен-
ности установлены гидроакустические станции (ГАС),
предназначенные для поиска косяков рыбы, определения
элементов их движения, а также для обеспечения манев-
рирования судна с орудием лова относительно облавли-
ваемого косяка. Эти станции можно использовать и для
определения места судна при плавании вблизи берегов.
С их помощью, как и с помощью РЛС, можно измерять
два навигационных параметра: пеленг (курсовой угол)
и расстояние до ориентира.
В настоящее время на судах флота рыбной промыш-
ленности наиболее широко применяются импульсные
ГАС прожекторного типа. Станция такого типа осуществ-
ляет направленное излучение импульсов ультракорот-
ких волн и их направленный прием в виде эхо-сигналов,
отраженных от встретившихся на пути распространения
волн подводных объектов.
Расстояние D до подводного объекта определяется
по промежутку времени t между моментами посылки сиг-
нала и приема эхо-сигнала от объекта. Оно выражается
формулой
О = (VII—I)
где с — скорость распространения звука в морской воде.
Малые промежутки времени t измеряются в ГАС при
помощи электромеханических или электронных измери-
тельных устройств, так называемых разверток времени.
303
Измерение курсового угла или пеленга объекта сво-
дится к определению положения акустической оси ан-
тенны ГАС относительно диаметральной плоскости суд-
на или компасного меридиана, при котором эхо-сигнал
от облучаемого объекта будет максимальным. Антенна
ГАС помещается в специальном обтекателе, располо-
женном под днищем судна, и вместе с ним может вра-
щаться в горизонтальной плоскости в пределах курсовых
углов ±150°—±160° при автоматическом управлении и
+ 180° при ручном управлении. Угол, на который пово-
рачивается антенна ГАС между двумя посылками сиг-
налов, называется шагом поиска. Шаг поиска зависит от
ширины диаграммы направленности антенны и выбира-
ется обычно так, чтобы водное пространство вокруг суд-
на обследовалось с перекрытиями. Шаговый поиск объ-
екта ведется по направлению движения судна следую-
щим образом: антенну поворачивают шагами от одной
границы сектора поиска к его средине, затем быстро
переводят к другой границе сектора поиска и от нее
вновь шагами поворачивают к средине сектора. Если по-
иск объекта осуществляется по обе стороны диаметраль-
ной плоскости судна в области равных курсовых углов,
то такой поиск называется поиском в симметричном сек-
топе. Если области поиска по обе стороны диаметраль-
ной плоскости судна неравны, то такой поиск называет-
ся поиском в асимметричном секторе.
В рыбопоисковых ГАС антенна может разворачивать-
ся не только в гопизонтальной, но и в вертикальной плос-
кости в секторе 0—90°. от нормали к плоскости горизон-
та. Это позволяет определять направление и расстоя-
ния до подводных объектов, расположенных на глубине.
Расстояние, измеренное до объекта при наклоненной к
плоскости горизонта антенне, называется наклонной
дальностью. Если пренебречь рефракцией и считать, что
звуковые лучи распространяются в морской воде прямо-
линейно, то горизонтальная дальность (расстояние, ко-
торое прокладывается на карте) можно рассчитать по
формуле
D = DHcosf, (VII—2)
где Оп —измеренная ГАС наклонная дальность;
Р—угол наклона антенны к плоскости горизонта.
В настоящее время на добывающих судах устанавли-
ваются ГАС секторного обзора. В таких станциях про-
304
изводится одновременное излучение акустической энер-
гии в пределах широкого сектора и быстрое последова-
тельное обследование этого сектора узкой приемной
диаграммой направленности антенны. Это обследование
осуществляется электронным путем без поворота антен-
ны. Секторные ГАС обладают более высокой скоростью
получения информации и большей разрешающей способ-
ностью по направлению. Применение ГАС такого типа
в навигационных целях особенно эффективно.
В качестве индикаторов измеренного расстояния в
ГАС используются самописцы с линейной или круговой
механической разверткой, а
также электроннолучевые
трубки длительного после-
свечения с линейной или
круговой (секторной) раз-
верткой электронного луча.
Обычно одна и та же ГАС
имеет самописец и электрон-
ный индикатор, а также
блок звуковой индикации.
Этот блок обладает боль-
шей по сравнению с инди-
каторами других типов чув-
ствительностью. С его по-
мощью осуществляется ре-
гистрация эхо-сигналов от
удаленных объектов, осуществляются распознавание и
классификация эхо-сигналов на слух и пеленгование
объектов по максимуму слышимости эхо-сигналов.
Самописцы с линейной механической разверткой по-
лучили наиболее широкое распространение. В таком са-
мописце (рис. 129) на равномерно передвигающейся бу-
мажной ленте осуществляется запись короткими штри-
хами моментов посылки сигналов (слева) и моментов
приема эхо-сигналов (справа). Расстояние между левой
(А) и правой (В) отметками пропорционально расстоя-
нию до облучаемого объекта и может быть отсчитано по
специальной шкале. Так как лента самописца переме-
щается непрерывно с постоянной скоростью, то ряд по-
следовательных отметок принятых эхо-сигналов от облу-
чаемого объекта (трасса) образуют график изменения
расстояния со временем, называемый эхограммой.
20 В- Е. Ольховский 305
Угол наклона трассы к вертикальной оси эхограммы
характеризует относительную скорость изменения рас-
стояния. Характер записи трассы (четкость или расплыв-
чатость отдельных отметок, их протяженность) позволя-
ет распознавать и классифицировать эхо-сигналы, полу-
чаемые от различных подводных объектов. Так,
например, сигналы, отраженные от скалистого обрывис-
Рис. 130
того берега, мола, дамбы, дают на эхограмме четкие
штрихи. Длина штрихов тем больше, чем меньше кру-
тизна берегового склона, плотность грунта и чем дальше
судно от берега.
Изменение масштаба записи на ленте самописца осу-
ществляется путем изменения скорости движения запи-
сывающего пера по штанге. На рис. 130,6 и а изобра-
жены электронные индикаторы соответственно с линей-
ной и круговой (секторной) разверткой, на которых
высвечивается положение облучаемых объектов. Индика-
тор с круговой (секторной) разверткой позволяет снять
не только расстояние D до объекта, но и его курсовой
угол.
Если ГАС используется для определения места суд-
на, то измеренные расстояния снимаются обычно с са-
мописца. Большинство рыбопоисковых ГАС позволяют
непосредственно определять курсовой угол объекта.
В ГАС прожекторного типа отсчет курсового угла сни-
мается со специального указателя курсовых углов, свя-
занного с поворотно-выдвижным устройством станции.
Отсчет курсового угла берут в момент совмещения аку-
стической оси антенны с направлением на облучаемый
30$
объект, о Чем судят по максимуму эхо-сигнала, прослу*
шиваемого в телефоне, или по показаниям электронного
отметчика.
В ГАС секторного обзора, обладающих высокой раз-
режающей способностью по направлению, курсовой угол
определяется, как и в РЛС, по азимутальной шкале элек-
тронного индикатора с помощью подвижного визира
(см. рис. 130). Для того чтобы эффективно использовать
ГАС для определения места судна, необходимо учи-
тывать ее эксплуатационные характеристики, зависящие
от технических параметров станции и гидрологических
условий в районе плавания.
Дальность действия ГАС. Дальность действия — это
максимальное горизонтальное расстояние, на котором
практически возможно определение пеленга объекта и
расстояния до него. Дальность действия ГАС, как и даль-
ность действия РЛС, зависит от геометрических факто-
ров, а также от технических параметров станции и отра-
жающих свойств объектов. В связи с этим различают
геометрическую и энергетическую дальность действия
ГАС.
Геометрическая дальность зависит от характера тра-
ектории звукового луча и глубины нахождения объекта
(цели). Основным фактором, определяющим эту даль-
ность, является рефракция звуковых лучей, обусловлен-
ная изменением скорости звука на пути их распростра-
нения. Как известно, в морской воде может быть как го-
ризонтальная, так и вертикальная рефракция звуковых
лучей. При распределении звука в горизонтальной плос-
кости в пределах дальности действия ГАС скорость рас-
пространения звука практически не изменяется. Исклю-
чение могут представлять прибрежные воды, опреснен-
ные речным стоком. Однако горизонтальная рефракция
даже в таких районах не оказывает существенного влия-
ния на дальность действия ГАС и может вызвать лишь
некоторую ошибку в определении пеленга подводного
объекта.
Практическое значение для гидроакустики имеет вер-
тикальная рефракция. Характер и степень вертикальной
рефракции зависят от знака и величины вертикального
градиента скорости звука Gc:
„ dc(t,S,H)
(jr = -------- ,
с dH
20
307
где c{t9 S, H) — функциональна^ зависимость скорости
распространения звука от температуры солености S
морской воды и глубины Н. Наибольшее влияние на из-
менение скорости распространения звука с глубиной ока-
зывает изменение температуры воды. При значительной
величине температурного градиента изменениями соле-
Рис. 131
ности и гидростатического давления можно пренебре-
гать.
При отрицательных значениях Gc (скорость распро-
странения звука с глубиной уменьшается) звуковой луч
своей выпуклостью направлен к поверхности моря
(рис. 131, a). Gc отрицательное значение чаще всего име-
ет в летнее время, когда температура поверхностных
слоев воды значительно выше температуры нижних сло-
ев. При положительных значениях Gc (скорость распрост-
308
ранения звука с глубиной возрастает) звуковой луч
своей выпуклостью направлен ко дну моря. Gc положи-
тельное значение имеет обычно зимой, когда температу-
ра воды с глубиной увеличивается. В этот период созда-
ются более стабильные условия распространения звука
и геометрическая дальность действия ГАС увеличивает-
ся. Если Gc имеет переменный знак, то возможно рас-
щепление звуковых лучей и появление области звуковой
тени (рис. 131,6). Такое явление чаще всего наблюда-
ется осенью и весной, когда в море образуются чередую-
щиеся по глубине теплые и холодные слои воды. При
интенсивном перемешивании поверхностных слоев воды
может образоваться изотермический слой, в пределах
которого температура и соленость практически постоян-
ны. В этом случае небольшой по величине положитель-
ный градиент скорости звука создается только за счет
изменения с глубиной гидростатического давления. Лу-
чи, выходящие из антенны под различными углами, име-
ют в изотермическом слое одинаковую кривизну и раз-
личные координаты центров кривизны (рис. 131, в).
Для определения геометрической дальности действия
ГАС при тех или иных гидрологических условиях можно
воспользоваться специальными графиками, основанны-
ми на построении траекторий звуковых лучей при раз-
личном распределении скорости распространения звука
по глубине.
Энергетическая дальность ГАС определяется техни-
ческими параметрами станции, акустическими свойства-
ми водной среды и отражающей способностью объектов.
Зависимость между параметрами, характеризующими
энергетическую дальность ГАС, выражается основным
уравнением гидролокации. Однако расчет энергетиче-
ской дальности ГАС на основе этого уравнения для кон-
кретных условий представляет значительные трудности.
Для успешной эксплуатации ГАС необходимо знать
ее практическую дальность действия. Практическую
дальность можно определить из непосредственных на-
блюдений в районе плавания или в районе промысла,
например, следующим способом. Судно отходит от под-
водного точечного объекта (морского буя, отдельно рас-
положенной скалы, затонувшего судна и т.д.), с которым
имеется хороший гидроакустический контакт. При этом
непрерывно измеряют расстояния до объекта до момен-
309
Та поТерй гидроакустического контакта^ ним. Расстоя-
ния можно измерять и до специальной искусственной
цели — уголкового отражателя. Отражатель, соединен-
ный тросом с буем, опускают на заданную глубину.
Практическая дальность современных рыбопоисковых
ГАС равна примерно 1,2 мили. При звуковой индикации
эхо-сигналов она достигает 2 миль.
Помехи при гидроакустических наблюдениях. При ис-
пользовании ГАС прием полезных эхо-сигналов всегда
происходит на фоне посторонних сигналов шумового ха-
рактера, которые называются помехами. Помехи, накла-
дывающиеся на полезный эхо-сигнал, затрудняют его
выделение и уменьшают дальность действия ГАС. Поме-
хи гидролокационному наблюдению имеют различные
источники возникновения и различное происхождение.
Основными видами помех являются электрические, виб-
рационные и гидроакустические помехи. Влияние этих
помех ослабляется конструктивными мерами, регули-
ровкой станций, соответствующей методикой поиска объ-
ектов и измерения пеленгов и расстояний до них (выбор
сектора поиска, длительности посылок, скорости хода
судна и т. д.)*.
Точность измерения расстояний и курсовых углов.
Ошибка измерения с помощью ГАС расстояний зависит
от приборной ошибки, которая определяется в основном
типом используемого индикатора дальности, и ошибок,
обусловленных особенностями распространения звука в
море.
В основу определения расстояния с помощью ГАС по-
ложена формула (VII—1), в которую входит скорость
распространения звука в воде. Эта скорость непостоян-
на и зависит от гидрологических условий в районе пла-
вания. В ГАС же принимается постоянная расчетная
скорость ср (для большинства станций ср = 1500м/с). Не-
соответствие расчетной скорости распространения звука
ср фактической с является источником ошибки измерен-
ного с помощью ГАС расстояния. При необходимости
эту ошибку практически можно исключить введением в
измеренное расстояние поправки на скорость звука. Эту
поправку вычисляют по формуле
* Помехи гидроакустическим наблюдениям, пути и способы их
подавления подробно рассматриваются в курсе «Электронавигаци-
онные и гидроакустические поисковые приборы^.
310
&dc = d(~—
\ c /
или выбирают из табл. 34-в МТ-75.
Скорость распространения звука в горизонтальном
направлении на некоторой глубине Н можно определить
на основании данных гидрологических наблюдений по
одной из эмпирических формул, например по формуле
Дель-Гросса:
с = 1448,6 + 4,618; —0,0523 ;2+ 0,00023 ;3 +1,25 (S —35) —
— 0,011 (S — 35) t + 0,0027-10“5 (S — 35) Р — 2-10~7 X
X(S —35)<(1 + 0,577;— 0,0072 ;а) +0,0175 Я.
Из-за сложного и не поддающегося строгому учету
распределения температуры и солености в толще воды
формулы для определения скорости распространения
звука в вертикальном направлении или в направлении,
составляющем некоторый угол р с плоскостью горизон-
та, не имеется. Приближенно эту скорость принимают
равной скорости распространения звука на горизонте
Я=-^-Яц, где Яц — глубина объекта (цели). Более точ-
но фактическую скорость распространения звука при из-
мерении наклонной дальности можно вычислить по фор-
муле
2£слоя ДЯ
С~ 2 ДЯ ’
где ССлоя — средняя вертикальная скорость распространения звука
в слое между двумя смежными горизонтами (рассчи-
тывается как среднее из скоростей на этих горизонтах);
ДЯ—толщина слоя воды между двумя смежными горизон-
тами;
2ДЯ = ЯЦ —Яа,
где Яа — глубина, на которой расположена антенна ГАС.
Если измеряется наклонная дальность, то расчет го-
ризонтальной дальности (расстояния до объекта, кото-
рое прокладывается на карте) должен выполняться с
учетом вертикальной рефракции звуковых лучей по фор-
муле
О = D cos 3 — + Dl-2 sin р.
в 2с “
311
Из-за отсутствия на добывающих судах автоматиче-
ских измерителей изменения температуры и солености
с глубиной определение градиента скорости звука за-
труднено. Поэтому на практике при расчете горизонталь-
ной дальности по измеренной ГАС наклонной дально-
сти пользуются приближенной формулой (VII—2), не
учитывающей влияние вертикальной рефракции звуко-
вых лучей.
Из-за ошибок, вызываемых особенностями распрост-
ранения звука в морской среде, даже при точных инди-
каторах дальности, имеющих малую приборную ошибку,
относительная средняя квадратическая ошибка опреде-
ления расстояния может достигать ±2%.
Точность измерения с помощью ГАС курсового угла
определяется приборными ошибками, зависящими от
типа индикатора, ширины диаграммы направленности
антенны в горизонтальной плоскости, а при пеленгова-
нии по максимуму эхо-сигнала — от угла чувствитель-
ности характеристики направленности (в пределах это-
го угла принимаемая акустическая энергия изменяется
на величину, не ощущаемую органом слуха); ошибками
за счет рефракции звукового луча в горизонтальной
плоскости.
По экспериментальным данным средняя квадратиче-
ская ошибка определения курсового угла точечного объ-
екта при пеленговании на слух по максимуму эхо-сиг-
нала может быть принята равной ±2°.
При определении курсового угла гидролокатором
секторного обзора, имеющего узкую приемную диаграм-
му направленности, эта ошибка будет меньше. Следует
учитывать, что в истинный гидролокационный пеленг
объекта войдет ошибка в принимаемой поправке гиро-
компаса и ошибка фиксации курса по гирокомпасу в
момент измерения курсового угла. Среднеквадратиче-
ское значение каждой из этих ошибок принимается
равным ±0°, 5.
§ 57. Использование гидроакустической станции
для определения места судна
Гидроакустическая станция, как отмечалось вы-
ше, позволяет измерять два навигационных параметра:
расстояние и пеленг (курсовой угол). Поэтому все спо-
312
собы определения места судна с помощью ГАС, как и
с помощью РЛС, сводятся к различным комбинациям
этих параметров.
В зависимости от характера подводных объектов, ис-
пользуемых в качестве навигационных ориентиров, спо-
собы определения места судна с помощью ГАС можно ус-
ловно разделить на две группы. Первая группа вклю-
чает в себя способы определения места по точечным
объектам, вторая — по пространственным объектам.
К точечным подводным объектам можно отнести под-
водные скалы, камни, затонувшие суда, буи, пассивные
гидролокационные отражатели и т. д. Это-сигналы от
Рис. 132
таких объектов обычно хорошо прослушиваются и за-
писываются на ленте самописца в виде четких коротких
штрихов. На экране электронного индикатора эти эхо-
сигналы практически изображаются в виде точек. Если
в качестве навигационных ориентиров используются то-
чечные объекты, то прокладка обсерваций на карте и
оценка их точности осуществляется так же, как и при
аналогичных способах определения места судна по ви-
зуальным наблюдениям (см. гл. V).
Определению места судна по точечным объектам
предшествует их поиск. При наличии на судне ГАС ша-
гового поиска он производится «шагами». Величина сек-
тора поиска зависит от предполагаемой радиальной
средней квадратической ошибки счислимого места судна
313
Aic и счйслймогб расстояния до объекта Dc. Для выяв-
ления характера этой зависимости обратимся к рис. 132.
Предположим, что счислимое место судна находится в
точке С. Опишем из точки С как из центра окружность
радиусом г=Мс.
Из места расположения подводного ориентира А про-
ведем к этой окружности касательные Ат и Ап. Сектор
поиска ориентира А будет определяться углом ап=
= <KiCK2=<mAn.
Вследствие равенства прямоугольных треугольников
АтС и АпС 1—шАС=1_САп-^- ап. Следовательно,
. «п 1^с|
ЯП 2 Dc
или
|MC|
ап = 2 arcsin —— . (VII—3)
Обозначим счислимый курсовой угол ориентира А
через qc (<7с = 1—АСК). Тогда границы сектора поиска
по курсовым углам определятся следующим образом:
Як = Яс + (кормовая граница),
ап
Ян = Яс — (носовая граница).
Из формулы (VII—3) видно, что чем меньше рас-
стояние до ориентира, тем больше величина сектора
поиска. Минимально возможным расстоянием до ориен-
тира при данных условиях плавания может быть рас-
стояние
А
~ ^тр-- 3 pW(J — ^тр - И*с| >
где £>Тр — траверзное расстояние до ориентира в момент нахожде-
ния судна в точке С;
А
Мс—предельная ошибка счислимого места судна.
Таким образом, максимальную для данных условий
плавания величину сектора поиска можно рассчитать по
формуле
(«п)тах = 2 arcsin [-------I.
Vz)Tp — |мс| /
314
По этой формуле составлена номограмма, позволяю-
щая находить (ап) max по заданным значениям Г>тр и Л1С.
Пример. Дальность действия ГАС позволяет получать контакт
с подводным точечным объектом на расстоянии D=12 кбт. При этом
условии счислимый курсовой угол объекта по данным прокладки
А
#с=60°пр/б, а £>тр = Ю,4 кбт. Afc=3Afc = ±2,l кбт. Определить мак-
симальную величину сектора поиска и его границы по курсовым
углам.
^min = ^тр — lAfc| = 8,3 кбт.
1 2,1
— (an)max = arcsin —- 14°.
Z 0,0
Кормовая граница сектора поиска
7„ = 60° + 14° = 74° пр 16.
Носовая граница сектора поиска
7„ = 60°—14° = 46° пр/б.
При определении места судна по двум точечным
объектам А и В заранее рассчитывают максимальный
сектор поиска для ближайшего из ориентиров, например
ориентира А, и затем приступают к его поиску. Обнару-
жив ориентир А, поддерживают с ним контакт и вклю-
чают самописец. Затем предварительно определяют
место судна по пеленгу и расстоянию до ориентира А,
снимают с карты пеленг на ориентир В и осуществляют
поиск этого ориентира в секторе с границами /7в±20°.
Обнаружив ориентир В, записывают на ленту само-
писца эхо-сигналы от него. Обычно при наличии двух
ориентиров место судна определяют по двум расстояни-
ям. С эхограммы считывают первое расстояние до ориен-
тира В и последнее до ориентира А, благодаря чему
приводят расстояния к одному моменту. Аналогичная
методика применяется и при определении места судна
по тоем ориентирам.
При наличии на судне ГАС с индикатором секторно-
го или кругового обзора поиск ориентиров значительно
упрощается. Однако и в этом случае рекомендуется
рассчитывать сектора поиска, что уменьшает вероят-
ность промахов при опознавании ориентиров.
Точечные подводные объекты встречаются на практи-
ке довольно редко, и место судна с помощью ГАС чаще
приходится определять по контурам берегового склона
(по пространственным объектам). Применение этого
способа требует определения положения и нанесения на
карту отражающей изобаты. Под отражающей изобатой
понимается кривая, соединяющая точки берегового скло-
на, отражающие импульсы звука, излучаемые антенной
ГАС, расположенной на некоторой глубине На.
Если допустить, что морская вода является однород-
ной средой, то отражающей изобатой будет изобата с
глубиной На, равной глубине погружения антенны ГАС.
Отражающая изобата
/7a=const может быть
вычерчена на путевой
карте с достаточно по-
дробной детализацией
глубин. Для районов,
где наблюдаются при-
ливы, отражающая
изобата проводится на
карте для малой воды.
Однако такой способ
нанесения на карту от-
ражающей изобаты яв-
ляется грубо прибли-
женным, так как он не
учитывает рефракции зву-
ковых лучей.
Значительно точнее
положение отражающей
изобаты может быть оп-
ределено способом, ос-
нованным на непосред-
ственных наблюдениях в
процессе плавания в
данном районе. Сущность
этого способа заключа-
ется в следующем. При
плавании вдоль берега
уменьшают ход судна до
малого и устанавливают
антенну ГАС на курсовой угол 90° в сторону берега. За-
тем через определенные промежутки времени измеряют
траверзные расстояния до берега Db D2. Dn (рис.
133). Одновременно с измерением расстояний определя-
ют место судна одним из наиболее точных способов, на-
316
пример по двум горизонтальным углам. Проложив на кар-
те от обсервованных мест судна а, Ь, с, ... п по пеленгу
Я/7=ЯК±90° измеренные расстояния D2, Dz,..Dn,
получают точки ai Сь...П], принадлежащие отража-
ющей изобате. Соединив эти точки плавной кривой в со-
ответствии с характером трассы записи на ленте само-
писца, получают практическую отражающую изобату.
Около этой изобаты подписывают год, месяц, число и
время наблюдений, глубину места под килем.
В последующем этой практической отражающей изо-
батой можно пользоваться при определении места судна
с помощью ГАС, например при плохой видимости, имея,
однако, в виду, что изменение гидрологических условий
и глубины погружения антенны ГАС вызывает измене-
ние положения отражающей изобаты. Получив несколь-
ко практических отражающих изобат, можно построить
среднюю отражающую изобату для данного времени
года. Делают это следующим образом. Все полученные
практические отражающие изобаты/—/,II—II, ...,N—N
наносят на общую кальку (рис. 134). С карты снимают
расстояния:
= аа1, хЬ1 =
хаг = аа2 • xb2 = bb2 ХхСг = сс2.
хап = аап, хЬп = bbn," хСп = ссп.
Величины отстояния точек средней отражающей
изобаты от линии курса судна для данного времени
года и данной глубины погружения антенны ГАС рас-
считывают по формулам:
п
Ха = tS4’
h
f=l
n
Xc= ~
i=\
317
На практике может возникнуть необходимость нане-
сения отражающей изобаты для любого наперед задан-
ного времени года и для района, в котором положение
практической отра^кающеи изобаты не определялось.
В этом случае расчет и построение отражающей изоба-
ты можно осуществить
теоретическим спосо-
бом. Этот способ осно-
ван на использовании
уравнения траектории
звукового луча и дан-
ных гидрологической
изученности района.
Он предусматривает
значительный объем
вычислений и поэтому
практически может
быть использован лишь
береговыми службами
для составления спе-
циальных карт-схем
отражающих изобат
прибрежных районов и
узкостей, где особен-
но целесообразно ис-
пользование ГАС в на-
вигационных целях.
Определение места
судна по контурам бе-
регового склона при
условии, если отража-
ющая изобата имеет
достаточно характер-
ные очертания, осуще-
ствляется одним из
следующих способов:
по траверзным рассто-
яниям или расстояни-
ям на постоянном пеленге, по вееру пеленгов и рас-
стояний.
Сущность первого из этих способов сводится к сле-
дующему (рис. 135). Судно следует примерно парал-
лельно общему направлению береговой черты. Антенну
318
ГАС ориентируют по курсовому углу 90° в сторону бе-
рега. Затем измеряют серию расстояний до отражающей
изобаты Di, D2, Dn- Частота измерений должна
быть тем больше, чем сложнее контур отражающей
изобаты. При каждом измерении фиксируют моменты
по часам и отсчеты лага.
Прокладку обсервованного места судна осуществля-
ют с помощью кальки. На листе кальки проводят ли-
нию АВ, изображающую линию пути судна, и на ней
наносят в масштабе карты точки a, bt с,..., п соответст-
вующие моментам измерения расстояний. Проложив от
этих точек по пеленгу ИПрасстояния Dh D2t
D3,...,Dn, получают точки aif bif Ci,..., принадлежа-
щие отражающей изобате. Затем накладывают кальку
на карту, на которой нанесена отражающая изобата.
Передвигая кальку по карте так, чтобы линия АВ
оставалась параллельной проложенной на карте линии
пути судна, совмещают возможно полнее отражающие
изобаты на карте и на кальке. После этого уколом
циркуля отмечают на карте обсервованное место судна
на момент последних измерений (точка п). При совмеще-
нии отражающих изобат на карте и на кальке следует
возможно точнее совмещать точки, ближайшие к линии
пути (например, точки at и ni на рис. 135).
При плавании в узкости, берега которой входят в
зону дальности обнаружения ГАС, место судна рекомен-
дуется определять с помощью отражающих изобат, по-
строенных для обоих берегов. В этом случае для оты-
скания обсервованного места судна калька с
нанесенными на ней по данным измерений отражающи-
ми изобатами должна располагаться так, чтобы от-
носительные смещения точек изобат на карте и на каль-
ке были приблизительно одинаковы с обоих бортов.
Сущность определения места судна по вееру пелен-
гов и расстояний также сводится к построению на
кальке по данным измерений точек, принадлежащих
отражающей изобате, и совмещению их с точками от-
ражающей изобаты, нанесенной на карте (рис. 136).
При измерении расстояний до отражающей изобаты,
изменяя угол наклона оси вибратора к плоскости гори-
зонта, нужно установить вибратор в такое положение,
при котором эхо-сигналы будут наиболее четкими (дли-
на штрихов на ленте самописца наименьшей). Это бу-
319
дет иметь место при условии, если угол между осевым
лучом диаграммы направленности и отражающей поверх-
ностью берегового склона близок к прямому*.
Точность определения места судна по результатам
измерения расстояний и пеленгов до отражающей изо-
баты зависит главным образом от соответствия гидроло-
гических условий во время плавания условиям, которые
имели место при нанесении отражающей изобаты на
карту.
По экспериментальным данным величина радиаль-
ной средней квадратической ошибки определения места
судна по траверзным расстояниям и по вееру пеленгов
и расстояний лежит в пределах +0,4-f0,6 кбт. Таким
образом, при плавании вблизи берегов и в узкостях, в
особенности при плохой видимости, рыбопоисковая ГАС
может быть эффективно использована как дополнитель-
ный источник навигационной информации, способствую-
щей обеспечению безопасности плавания. Наиболее су-
щественным недостатком ГАС, ограничивающим воз-
можность ее применения в навигационных целях,
является сравнительно малая дальность действия.
Глава VIII. ОЦЕНКА ТОЧНОСТИ ПЛАВАНИЯ СУДНА
§ 58. Ошибка счислимого места судна
и допустимая продолжительность плавания
по счислению
Ошибка счислимого (текущего) места судна за-
висит от ошибки обсервованного места, принятого за
основу для счисления, и ошибки последующего счисле-
ния за время плавания без обсерваций.
Обозначим радиальные средние квадратические
ошибки обсервованного места судна через Mq и счис-
ления через Так как эти ошибки независимы, то
результирующую радиальную среднюю квадратическую
* Оптимальный угол р наклона оси вибратора к плоскости гори-
зонта может быть рассчитан по формулам, которые приводятся
в специальных руководствах по использованию ГАС в навигацион-
ных целях.
320
ошибку счислимого места судна Мс можно рассчитать
по формуле
Ма = + М2С (0 . (VIII—1)
Величина радиальной средней квадратической ошиб-
ки Мо зависит от способа определения места судна и
ошибок измерения навигационных параметров. Форму-
лы для расчета величины Мо при различных способах
определения места судна приведены в гл. V и гл. VI.
В этих же главах даны сведения и об ошибках измере-
ния навигационных параметров с помощью различных
технических средств.
Радиальную среднюю квадратическую ошибку счис-
ления Мс (0 можно определить статистическим или апри-
орным способом при помощи формул (IV—30), (IV—37)
и (IV—39). Если необходимо определить предельную
Л
ошибку счислимого (текущего) места судна Мс, то эту
ошибку можно вычислить с заданной вероятностью по
формуле
Л10 = Кр м 01
где Кр—коэффициент, зависящий от заданной вероятности пре-
дельной ошибки.
Как известно, радиальная средняя квадратическая
ошибка места судна М = У а2+&2, где а и b — полуоси
среднего квадратического эллипса рассеивания. В табл.
14 приведены значения Кр в зависимости от заданной
вероятности Р3 и соотношения полуосей эллипса —.
Так как при оценке точности места судна радиаль-
ной средней квадратической ошибкой полуоси эллипса
Таблица 14
Кр при отношении полуосей эллипса ошибок
0,1 1 °’2 1 0,4 | 0.6 I 1 о-8 1 1,0
0,950 1,96 1,93 1,86 1,79 1,74 1,73
0,990 2,57 2,54 2,43 2,29 2,18 2,15
0,993 2,69 2,66 2,52 2,38 2,27 2,23
0,997 2,96 2,92 2,78 2,61 2,47 2,41
21 В. Е. Ольховский
321
а и b не рассчитываются, то величина Кр выбирается
для отношения — = 1.
а
Для обеспечения заданной точности плавания необ-
ходимо, чтобы ошибка места судна не превышала допу-
стимой. Допустимой ошибкой места судна называют та-
кую наибольшую ошибку, при которой еще сохраняется
с заданной вероятностью навигационная безопасность
плавания или возможность выполнения стоящих перед
судном специальных задач, связанных с его производст-
венным назначением. Применительно к траловому про-
мыслу к таким задачам относятся наведение трала на
косяк рыбы, обеспечение сохранности трала при работе
в районах с задевами и неблагоприятными для трале-
ния грунтами и др.
Рассмотрим методику расчета допустимой продол-
жительности плавания по счислению. Допустимой про-
должительностью плавания по счислению называют та-
кую его наибольшую продолжительность, при которой
непрерывно увеличивающаяся со временем ошибка счи-
слимого места судна не превысит допустимой для дан-
ных условий плавания величины.
Предположим, что на данном участке плавания ве-
личина Л40 имеет некоторое постоянное значение, обус-
ловленное способом обсерваций. Обозначим допустимую
радиальную среднюю квадратическую ошибку счисли-
мого места судна Л1Д. Тогда на основании формулы
(VIII—1) допустимую радиальную среднюю квадрати-
ческую ошибку счисления пути судна можно выразить
следующим образом:
Л1о(0 = Кл1д-Л1о- (VIII-2)
Если точность счисления оценивается статистичес-
ким способом и величина Л1С(/) определяется формулой
(IV—30), то в левую часть формулы (VIII—2) следует
подставить выражение, характеризующее нарастание
ошибки счисления с увеличением продолжительности
плавания t. В результате такой подстановки получим
Kctm=\fМ\-М*о. (VIII—3)
Отсюда следует формула, позволяющая вычислить
допустимую при данных условиях продолжительность
322
/д = Т
(VIII—4)
плавания по счислению tK или период коррекции счис-
ления Т — допустимый промежуток времени между мо-
ментами смежных обсерваций:
£ )
При т=0,5 формула (VIII—4) будет иметь вид
Формула (VIII—4) положена в основу составления
номограммы, позволяющей определить величину Т по
заданным значениям Мо и Мд (рис. 137). Если продол-
жительность плавания не превышает двух часов, то на
основании выражения (IV—33) формулу (VIII—4) мо-
жно записать в таком виде:
/д = Т =
л-м1
аК.й
где а = -^.
Величины коэффициента а при различных значениях
безразмерного параметра т, определяющего закон на-
растания ошибок счисления со временем, приведены
ниже:
т 0,3 0,4 0,5 0,6 0,7 0,8 1,0
а 0,62 0,66 0,71 0,76 0,81 0,87 1,00
Если оценка точности счисления пути судна осуще-
ствляется априорным способом, основанным на раздель-
ном учете ожидаемых ошибок в элементах счисления,
то в левую часть формулы (VIII—2) следует подставить
правую часть выражения (IV—39). В результате полу-
чим
= т =____________Ум\-м1_______________
V«с I’)2 + (0,01Ил тДл%)2 +
+ (°т'яктагс1в)2+т21 *
21*
323
Рис. 137
Рис. 138 условно иллюстрирует принцип коррекции
счисления. Как только ошибка Мс достигает величины
Л1Д, должна осуществляться коррекция счисления по
данным обсервации, в результате которой ошибка счис-
лимого места судна
будет снижена до
уровня ошибки обсер-
вованного места. За-
тем, когда ошибка
счислимого места
вновь достигнет уров-
ня допустимой ошибки,
снова должна быть
осуществлена коррек-
ция счисления и т. д. рис. 133
Из рис. 138 видно, что
чем быстрее накапли-
вается ошибка счисления Л1С(/) и чем меньше разность
Мд—Л10, тем короче период коррекции счисления Т.
Таким образом, для того чтобы ошибка счислимого
места судна не превышала допустимой при данных ус-
ловиях плавания, необходимо рассчитать с учетом оши-
бок обсерваций и счисления период коррекции счисле-
ния Т и в процессе плавания определять место судна
через промежутки времени, не превышающие величины
Т (предполагается, что МД>МО).
Пример. Судно следует в открытом море в пределах рабочей
зоны РНС «Лоран-С». Коэффициент точности счисления Кс =
1,2 мили/ч0-5 (ги = 0,5). Ошибка определения места судна с помощью
РНС «Лоран-А» на данном участке пути Мо=2,0 мили. Требуется
определить период коррекции счисления по результатам обсерваций,
если допустимая ошибка места судна при плавании в данном районе
Мд —3,0 мили.
При помощи номограммы 1 (см. рис. 137) или формулы
(VIII—4) по Мо=2,0 мили, Мд=3,0 мили и Кс = 1,2 мили/ч0*5 нахо-
дим: Г=б ч.
§ 59. Обеспечение плавания судна с заданной
вероятностью в пределах заданной полосы
В качестве теоретической основы решения прак-
тических задач, связанных с обеспечением плавания
судна с заданной вероятностью в заданной полосе мо-
жет быть принят нормальный закон распределения на
325
плоскости. Как известно, для двух независимых случай-
ных величин х и у плотность нормального распределе-
ния выражается формулой
_ 1 ' (х—х)2 (у—'у)2
f(x'y)=^h~e 2 ’
2лах Оу
где х и у— математические ожидания случайных величин х и у
(координат центра рассеивания);
ох и Оу—их средние квадратические отклонения от этих ожи-
даний.
Если х и у — случайные ошибки, то при отсутствии
ошибок систематических математические ожидания х и
у равны нулю (х=у=0). Тогда нормальный закон рас-
пределения ошибок на плоскости принимает канониче-
ский вид:
1 2 k Gx °у /
---— е V • (VIII—5)
2лПд* Оу
Обозначим
X2 у2
-г + -Т=с2. (VIII—6)
ах °у
Выражение (VIII—6) представляет собой уравнение
эллипса рассеивания, во всех точках которого плотность
распределения постоянна, т. е. f(x, у) = const. Полуоси
этого эллипса а=сах, Ь—соу. Вероятность попадания
случайной ошибки (х, у) в произвольную область D оп-
ределяется двойным интегралом
P(X,YCD)= f $f(x,y)dxdy.
D
В соответствии с этим выражением и условием
(VIII—6) вероятность попадания случайной точки в об-
ласть Z), ограниченную эллипсом рассеивания с полу-
осями а и Ь, будет
с1
P(X,Y(ZD) = 1— е 2". (VIII—7)
Формула (VIII—7) позволяет вычислять вероят-
ность попадания случайной точки (х, у) в эллипс с
полуосями сох и соу. Если crx=cFy=cF, то рассеивание по
нормальному закону становится круговым. При этом по-
326
луосй эллипса будут одинаковыми: а=Ь = со=г. Суче-
том этого равенства формулу (VIII—7) можно записать
в виде:
Р = 1 — е 2ff3
и использовать для расчета вероятности Р попадания
в круг радиуса г случайной точки, имеющей круговое
рассеивание со средним квадратическим отклонением а.
Точность определения места судна обычно оценива-
ется на практике радиальной средней квадратической
ошибкой Af = ]/о2 + о2. Заменим приближенно эллип-
тическое рассеивание круговым, т. е. будем полагать,
что во всех случаях определения места судна ох=ау=
М
=а. При этом условии а= у— > следовательно,
_ г*
Р=1—е м. (VIII—8)
Формулу (VIII—8) можно использовать для прибли-
женного вычисления вероятности того, что точка, поло-
жение которой определе-
но с радиальной средней
квадратической ошибкой
М, не будет иметь откло-
нений, превышающих г
в направлении, перпенди-
кулярном заданному.
При решении задач,
связанных с обеспечени-
ем плавания судна с за-
данной вероятностью в
пределах заданной поло-
сы, под г в формуле
(VIII—8) следует пони-
мать половину ширины этой полосы В. При этом пред-
полагается, что судно следует посредине заданной
полосы (рис. 139).
С помощью формулы (VIII—8) решаются задачи
двух типов: определяется величина допустимой радиаль-
ной средней квадратической ошибки текущего места
судна, обеспечивающей движение судна в пределах за-
/’оаница полосы
Граница полосы
Рис. 139
327
данной полосы с заданной вероятностью; определяется
вероятность удержания судна в пределах заданной по-
лосы при известной величине радиальной средней квад-
ратической ошибки текущего места судна.
Применительно к задачам, связанным с расчетом
допустимой радиальной средней квадратической ошиб-
ки места судна, формулу (VIII—8) можно написать в
таком виде:
где Рэ — заданная вероятность;
В—полуширина заданной полосы.
Переходя от натуральных к
мам, получим:
десятичным логариф-
_ 0,4343
д lg (1— Ра)
ИЛИ
А4д — Bkp ,
а л Г 0,4343
где кр = I /-------------
V Ig(l-Ps)
Безразмерные множители kP для
ятностей Р3 приведены ниже.
(VIII—9)
различных веро-
Р3 0,300 0,500 0,683 0,800 0,900 0,950 0,990 0,997 0,999
kp 1,67 1,20 0,94 0,79 0,66 0,58 0,47 0,42 0,37
По формуле (VIII—9) составлена номограмма, поз-
воляющая определять величину Мд по заданным зна-
чениям В и Р (рис. 140).
Пример. Курс траления проложен посредине между участками
дна с возможными задевами трала. Для гарантии сохранности трала
судно должно следовать в пределах полосы шириной 2В=2,8 мили.
Определить величину допустимой радиальной средней квадратиче-
ской ошибки определения места судна, обеспечивающей движение
судна в пределах такой полосы с вероятностью Ра —0,990 (99%).
По Рз-0,990 из данных, приведенных выше, выбираем kP=*
="0,47 и, полагая В =1,4 мили, находим
Мя — Bkp = 1,4*0,47 = 0,6 мили.
328
Величину ЛГд можно определить и при помощи номограммы 2
(см. рис. 140).
Пример. Курс траления проложен посредине между участками
дна с возможными задевами трала. Для гарантии сохранности
трала судно должно следовать в пределах полосы шириной 2В =
=2,8 мили. Рассчитать вероятность нахождения судна в пределах
Рис. 140
I
-
& _
50,0
60,0
$
§
70,0
75,0
80,0
85,0
90,0
| - 96,0
97,0
98,0
99,0
99,3
99,7
99,9
99,99
99,999
I
1
заданной полосы, если удержание на галсе траления осуществляется
при помощи путепрокладчика РНС «Декка>, обеспечивающего опре-
деление текущего места судна с радиальной средней квадратической
ошибкой Л/=0,6 мили.
Цо формуле , полагая Л| = 0(6 мили и В=1,4 мили,
Р
3?9
находим £р==0,47. Затем из табличных данных по kp— 0,47 выби-
раем Р=0,990 (99%). Эту задачу можно решить и с помощью но-
мограммы 2 (см. рис. 140).
Пример. При помощи РНС «Лоран-С» определена начальная
точка траления с радиальной средней квадратической ошибкой
ЛГ0 = 1,5 мили, и от этой точки проложен курс траления. После об-
сервации судно следует по счислению и в дальнейшем корректиров-
ка счисления не может осуществляться. Требуется определить до-
пустимую продолжительность траления, при которой еще будет обес-
печено движение судна в пределах полосы шириной 2В = 5,0 мили
с вероятностью 0,800 (80%), если коэффициент точности счисления
Л'с=0,6 мили/ч0-5 (т=0,5).
1) С помощью номограммы 2 (см. рис. 140) по В=2,5 мили и
Р3=0,800 находим ЛГд=2,0 мили.
2) С помощью номограммы 1 (см. рис. 139) по ЛГд=2,0 мили,
ЛГо=1,5 мили и Кс = 0,6 мили/ч0-5 находим допустимую продолжи-
тельность траления при отсутствии возможности повторных обсер-
ваций /Д=Т=4,4 ч.
При помощи формулы (VIII—8) можно приближен-
но решать и много других аналогичных задач, связан-
ных с точностью плавания.
Глава IX. ПЛАВАНИЕ ПО ОПТИМАЛЬНЫМ ПУТЯМ
§ 60. Критерии оптимальности при выборе пути
Оптимальным называется такой безопасный в на-
вигационном отношении путь судна, который удовлетво-
ряет заданному критерию оптимальности. В качестве
критерия оптимальности выбирают показатель, с по-
мощью которого при данных условиях наиболее целе-
сообразно оценивать результаты перехода, например
продолжительность перехода (время), величину плава-
ния (расстояние), расход топлива на переходе и т.п.
Если в качестве критерия оптимальности выбрано ми-
нимальное время перехода, то оптимальным путем бу-
дет путь, кратчайший по времени, если же в качестве
такого критерия выбрана минимальная величина пла-
вания, то оптимальным будет путь, кратчайший по рас-
стоянию. При этом во всех случаях должна б^тть пол-
ностью обеспечена безопасность плавания и сохранная
перевозка грузов. Выбирая критерий оптимальности пу-
ти судна, необходимо учитывать влияние этого крите-
рия на общие экономические показатели работы судна.
Подавляющее большинство факторов, определяю-
ззо
Щих эти показатели, находится в прямой зависимости
от времени, затрачиваемого на переход из одного порта
в другой или из порта в район промысла и обратно. По-
этому на практике чаще всего руководствуются крите-
рием минимального времени перехода и путь, кратчай-
ший по времени, называют наивыгоднейшим пу-
тем.
Сокращение времени перехода добывающего судна
из порта базирования в район промысла и обратно поз-
воляет увеличить промысловое время и благодаря это-
му повысить вылов рыбы. По данным ЦНИИМФа, со-
кращение ходового времени транспортного судна на
2% приводит к сокращению себестоимости грузовых
перевозок в среднем на 1%. Следует иметь в виду, что
даже и в тех случаях, когда сокращение ходового вре-
мени привело к такому же увеличению времени непро-
изводительной стоянки судна в порту, общие затраты на
содержание судна уменьшаются. Если судно находи-
лось в пути в течение времени /1 и простояло непроиз-
водительно в порту в течение времени то общие за-
траты на его содержание определятся следующим вы-
ражением:
я— t — -k t —
B~li 24+'а24 ’
где Qx — суточная стоимость эксплуатации судна на ходу;
Qc—суточная стоимость эксплуатации судна на стоянке;
и G— время, ч.
При уменьшении ходового времени на величину А/и
увеличении времени непроизводительной стоянки судна
в порту также на величину А/, общие затраты на со-
держание судна будут:
Qx Qc
но так как Qx>Qc. то При этом предполагает-
ся, что сокращение ходового времени достигнуто в ре-
зультате плавания наивыгоднейшим путем, а не форси-
рованием работы судовых двигателей.
Выбор наивыгоднейшего пути связан с необходи-
мостью учета влияния на скорость хода судна различ-
ных гидрометеорологических факторов. Наибольшее
влияние на скорость хода оказывают ветер и волнение.
Обработка экспериментальных данных показывает, что
331
с достаточной для практики точностью потеря скорос-
ти хода судна в зависимости от высоты волны h и кур-
сового угла ветра tfw может быть представлена выраже-
нием
&V = ah + b№ — cqwht
где а, Ь,с — коэффициенты, определяемые для каждого типа судна.
Это выражение может быть использовано для со-
ставления таблиц или графика ветроволновых потерь
скорости хода судна.
Если выбор наивыгоднейшего пути осуществляется
на основании средних многолетних данных о силе и на-
правлении ветра, волнения, скорости и направления те-
чения, частоте туманов, то такой путь называется кли-
матическим.
Очевидно, что климатический путь будет оптималь-
ным по критерию минимума времени перехода только
тогда, когда фактические гидрометеорологические усло-
вия плавания будут совпадать со средними многолетни-
ми. Карты климатических путей и их описания помеща-
ются в специальных навигационных пособиях. К таким
пособиям относятся «Океанские пути мира» (изда-
ние ГУ ВМФ), «Ocean Passages for the World», «Pilot-
Charts» и др. В «Океанских путях мира» приводятся
принятые в СССР климатические пути для судов малой
мощности (со скоростью хода до 10 уз), средней мощ-
ности (со скоростью хода 10—15 уз) и мощных (со ско-
ростью хода более 15 уз).
Если выбор наивыгоднейшего пути осуществляется
на основании прогноза гидрометеорологических усло-
вий в районах плавания, то такой путь называется про-
гностическим. Степень соответствия прогностиче-
ского пути оптимальному по критерию минимума време-
ни перехода будет зависеть от достоверности прогноза.
Учитывая, что чем больше заблаговременность прогно-
за, тем меньше его достоверность, на практике выбор
наивыгоднейшего пути осуществляют обычно на основа-
нии пятисуточного прогноза и корректируют по данным
суточных прогнозов.
Выбор наивыгоднейшего пути приводит к решению
сложной задачи, так как в общем случае скорость суд-
на зависит от направления его движения. На практике
эта задача решается с помощью ЭЦВМ методом дина-
332
мического программирования или вариационным мето-
дом на основе учета изменения вектора скорости судна
в зависимости от гидрометеорологических условий пла-
вания и курса.
Выбор наивыгоднейшего пути в принципе может осу-
ществляться как на гидрометеорологических центрах с
передачей по радио соответствующих рекомендаций на
судно, так и непосредственно на судне. В настоящее
время Гидрометеорологическая служба СССР осуществ-
ляет проводки судов морского флота и рыбной промыш-
ленности наивыгоднейшими путями при плавании в от-
крытых водах Мирового океана. Гидрометеорологичес-
кие центры, расположенные на берегу или на судах
погоды, осуществляют при помощи ЭЦВМ выбор наи-
выгоднейшего пути и сообщают по радио свои рекомен-
дации капитану судна. Капитан в свою очередь инфор-
мирует гидрометеорологический центр о состоянии по-
годы в районе плавания, для того чтобы обеспечить
оперативную корректировку курсов*. При плавании су-
дов наивыгоднейшими путями по рекомендациям Гид-
рометеослужбы экономится в среднем до 3—5% ходо-
вого времени.
Если скорость хода судна не зависит от направле-
ния его движения, то путь, кратчайший по времени
(наивыгоднейший), совпадает с путем, кратчайшим по
расстоянию. На практике плавание кратчайшим по рас-
стоянию путем осуществляют при больших океанских
переходах в тех случаях, когда не представляется воз-
можным выбрать путь, кратчайший по времени.
Кратчайшим расстоянием между двумя точками на
земной поверхности, если принять Землю за шар, явля-
ется меньшая из дуг большого круга, соединяющая эти
точки. Плавание по дуге большого круга (по ортодро-
мии) сложнее, чем плавание по локсодромии. Поэтому к
плаванию кратчайшим по расстоянию путем прибегают
при больших океанских переходах, когда разность А в
длине пути при обычном плавании по локсодромии и по
ортодромии составляет сотни миль. Для того чтобы ре-
шить вопрос о практической целесообразности плавания
по ортодромии, необходимо рассчитать величину
д = 5-Р,
* См. приложение 1.
333
где 5 — плавание по локсодромии между двумя заданными точка-
ми (локсодромическое расстояние);
£)— плавание по ортодромии между этими же точками (орто-
дромическое расстояние).
Величину 5 можно вычислить по формулам анали-
тического счисления:
3 = РШ secK
или при 7<=90° (270°)
S = со cosec К = РД cos фср cosec К.
Величину D можно вычислить по формуле косинуса
стороны из сферического треугольника Р^АВ (см.
рис. 143):
cos D = siп sin qpB -f- cos фл cos фв cos (Яв — Л л),
гдефд, и фв , %в — географические координаты точек А и В, ме-
жду которыми осуществляется переход.
Разности А между длинами локсодромий и ортодро-
мий, рассчитанные по формулам, учитывающим сферои-
дичность Земли, помещены в табл. 23-6 МТ—75. Аргу-
ментами для входа в эту таблицу служат широта пунк-
та отхода, широта пункта прихода и разность долгот
между этими пунктами.
Приближенно величина А определяется следующим
известным выражением*:
S — D
А % -------100 = 0,0048 ф2, (IX—1)
о
где ф — ортодромическая поправка.
Из составленной по формуле (IX—1) таблицы вид-
но, что плавание по ортодромии дает заметный выиг-
рыш в расстоянии, только начиная со значения ф=10°
(табл. 15).
Дуга большого круга пересекает меридианы под раз-
личными углами, и для того, чтобы вести судно точно
по ортодромии, необходимо непрерывно изменять курс,
что без специального автоматического устройства прак-
тически невозможно. Поэтому плавание совершают по
* Это приближенное выражение для расчета А — редукции рас-
стояний при проведении их на плоскость меркаторской проекции —
выводится в курсе «Математические основы судовождения».
334
Таблица 15
фо А % фв А %
5 0,1 30 4,3
10 0,5 40 7,7
20 1,9 50 12,0
ломаной линии, состоящей из отрезков локсодромий,
стягивающих промежуточные точки ортодромии (см.
рис. 141). Количество этих промежуточных точек, в ко-
торых происходит смена курсов, выбирают с таким рас-
четом, чтобы длина отрезка локсодромии между сосед-
ними точками не превышала длины отрезка ортодромии,
соединяющего те же точки больше чем на 0,1%. При
этом условии с достаточной для практики точностью
можно считать, что плавание осуществляется кратчай-
шим по расстоянию путем.
Из формулы (IX—1) следует, что Л % ^0,1 % имеет
место при ф=С5°. Полагая ф=5°, по приближенной фор-
муле ф=-^-РД sirup найдем разность долгот между со-
седними промежуточными поворотными точками, при
которой будет обеспечено выполнение заданного усло-
вия A%sg0,l %:
10°
РДн=-— ; (IX-2)
Sin Ф
Как видно из формулы (IX—2), интервал по долготе
между соседними промежуточными поворотными точка-
ми РДп=10° всегда будет достаточным. Изменение кур-
сов в промежуточных точках при плавании по отрезкам
локсодромии (по хордам ортодромии) будем опреде-
ляться принятой разностью долгот РДп-
« 2ф = РДП sin фср. (IX-3)
§ 61. Прокладка дуги большого круга
на меркаторской карте, расчет курсов
для плавания
Для того чтобы осуществить переход кратчайшим
по расстоянию путем, необходимо проложить на мор-
ской навигационной (меркаторской) карте дугу большо-
335
го круга, соединяющую пункты /тхода и прихода, убе-
диться, что она проходит чисто От опасностей, и снять с
карты или рассчитать по формулам промежуточные лок-
содромические курсы.
Дугу большого круга прокладывают на морской на-
вигационной карте по промежуточным точкам, принад-
лежащим этой дуге. Приемы прокладки дуги большого
круга различаются способами нанесения на карту про-
межуточных точек.
Прокладка дуги большого круга на меркаторской
карте при помощи ортодромических поправок. Сущность
этого способа прокладки дуги большого круга заключа-
ется в следующем. Пункт отхода А(фл, Ха) и пункт
Рис. 141
прихода В(фВ, Хв) соединяют на генеральной навигаци-
онной карте прямой линией. По формуле (IX—2) рас-
считывают необходимый интервал по долготе между
промежуточными точками дуги большого круга и на
карте проводят меридианы с долготами Х1=Ха+РДп,
Х2=Х1+РДП, Хз=Х2+РДп и т. д. Затем снимают с кар-
ты локсодромический курс /Со из точки А в точку В и из
табл. 23-6 МТ—75 выбирают ортодромические поправ-
ки фо и ф] (рис. 141). После этого рассчитывают локсо-
дромический курс /С1=/Со—фо+Ф1 и прокладывают этот
курс из точки А. В пересечении линии локсодромическо-
го курса с меридианом Х1=Ха+РДп получают пер-
вую промежуточную точку лежащую на дуге боль-
336
шого круга АВ. Плавание из точки А в точку гщ осуще-
ствляется курсом Ль a Si=Amx.
Учитывая, что в реальных условиях плавания крат-
чайшим по расстоянию путем разность широт между со-
седними промежуточными точками дуги большого кру-
га сравнительно невелика, при выборке из табл. 23-6
МТ—75 ортодромической поправки делают допущение,
ЧТО ф1=ф2=фл.
Следующие промежуточные точки дуги большого
круга наносят аналогичным способом, условно прини-
мая за пункт отхода последовательно точки т2, т3
и т. д.
На практике может встретиться случай, когда в рас-
поряжении судоводителя нет генеральной карты, на ко-
торой помещаются и пункт отхода А и пункт прихода В.
В этом случае локсодромический курс Ло (из точки А в
точку В), а может быть и Ло, (из точки в точку В),
Лой (из точки т2 в точку В) и т. д. нельзя будет снять с
карты.
Их придется рассчитывать по формуле tgKq= —
РМЧ*
Прокладка дуги большого круга по точкам, коорди-
наты которых сняты с карты в гномонической проекции
или с маневренного планшета. Как известно, на карте в
гномонической проекции любая дуга большого круга
изображается прямой линией. Если на такую карту (ге-
неральную или бланковую) нанести пункт отхода Л и
пункт прихода В и соединить их прямой линией, то мож-
но снять координаты ряда промежуточных точек т\,
т3 и т. д., лежащих на прямой ЛВ, и нанести эти точки
на навигационную (меркаторскую) карту. Проведя че-
рез полученные точки плавную кривую, получим изобра-
жение дуги большого круга. Промежуточные точки сле-
дует наносить на навигационную карту с интервалом, по
долготе равным 10°. В этом случае плавание по отрезкам
локсодромии ИЗ ТОЧКИ А В точку ИЗ ТОЧКИ 7П1 в точку
т2 и т. д. обеспечит выполнение условия А % =С0,1%.
* При необходимости можно прибегнуть ко второму приближе-
нию: проложить иа карте промежуточную точку т, сиять ее широ-
ту, вторично выбрать из табл. 23-6 МТ—75 ортодромическую по-
правку, получить уточненный локсодромический курс и снова вы-
полнить графическое построение.
22 В. Е. Ольховский 337
Локсодромические курсы Ki, Кл, Кз и т. д. снимают-
ся с навигационной карты транспортиром. Этот способ
очень удобен, но точность его невысока, так как карты
в гномонической проекции дли всех океанов издаются в
мелких масштабах от 1:10(Х)000 до 1:4000000. Поэтому
координаты промежуточных точек снимают с этих карт
со значительными ошибками.
При отсутствии карты в гномонической проекции, ох-
ватывающей район плавания, картографическую сетку
такой проекции можно легко построить на маневренном
планшете типа Ш-26М
графическим способом,
предложенным В. П.
Шупиком. Рассмотрим
прием построения кар-
тографической сетки
нормальной (поляр-
ной) гномонической
проекции.
Вообразим, что
внешняя окружность
маневренного планше-
та изображает мери-
диональное сечение
земного шара с цент-
ром в точке О и полюс
Земли Р находится в
точке Z (рис. 142).
Проведем картинную
плоскость Як, касаю-
щуюся земного шара на полюсе, и спроектируем на
эту плоскость две точки, расположенные на парал-
лелях с известными широтами <рл и <рв (полагаем, что
эти широты одноименны). В результате получим отрезки
ZA' и ZB', равные радиусам рл и рв этих параллелей.
Предположим теперь, что маневренный планшет пред-
ставляет собой картинную плоскость в плане, на кото-
рой изображение полюса Земли совпадает с централь-
ной точкой О. Тогда, выбрав произвольно положение
начального меридиана (прямая OZo) и обозначив вос-
точное и западное полушария с учетом наименования
полюса Земли, можно нанести меридианы с известными
долготами Ха и Хв. Сделав затем из точки О как из
33g
центра радиусом рл и рв засечки на этих меридианах,
получим положения точек А и В — пункта отхода и
пункта прихода. Прямая АВ представляет собой изо-
бражение дуги большого круга в гномонической проек-
ции. Координаты промежуточных точек, лежащих на ду-
ге большого круга АВ, определяют в обратном порядке.
Так, долготу ^промежуточной точки mt определяют
углом между начальным меридианом и меридианом
OZh проходящим через точку /«/. Для нахождения ши-
роты этой точки снимают с маневренного планшета
расстояние Oznf=pf и откладывают его на картинной
плоскости от точки Z. Полученную точку irit соединяют
с точкой О. Угол m'fiQ определяет широту фг- точки
/п,. Широты и долготы точек снимают с внешней окруж-
ности планшета, разби-
той на градусы.
Следует иметь в ви-
ду, что положение плос-
кости по отношению к
центру О определяет
масштаб проекции и, сле-
довательно, точность оп-
ределения координат то-
чек, принадлежащих ду-
ге большого круга. Если
проектируемые на кар-
тинную плоскость точки
выходят за пределы ра-
мок планшета (это мо-
жет случиться при плава-
нии в малых широтах),
Рис. 143
то эту плоскость следует
несколько приблизить к
центру О. Способ В. П. Шупика позволяет определять
координаты промежуточных точек с точностью порядка
0°, 2.
Прокладка дуги большого круга по точкам, коорди-
наты которых вычислены по формулам или выбраны из
специальных таблиц. На рис. 143 изображена окруж-
ность большого круга OVO'V', часть которой — дугаАВ
соединяет пункты отхода Л(фл, Аа) и прихода В(фв,
Ав). Положение большого круга на сфере характеризу-
ется его параметрами Ао и /Со или фу и Ау.
22*
339
Параметр Хо определяет долготу точки пересечения
окружности большого круга с экватором, а параметр
Ко — направление («курс») этой окружности в точке
пересечения ее с экватором. Параметры фу и Ху явля-
ются координатами точки V или точки V', в которой ок-
ружность большого круга достигает наибольшей широ-
ты— северной или южной. Точки V и V называются
вертексами большого круга. Их широты численно рав-
ны, но противоположны по наименованию, а долготы от-
личаются друг от друга на 180°.
Как видно из рис. 143, параметры большого круга Хо,
Ко и фу, Ху взаимно связаны между собой следующими
соотношениями;
Фи = 90°-Ко, Ko = 90°-q>j,,
(IX—4)
хи = Ло ± 90°; A0 = Xj, т 90°.
Координаты точек, лежащих на дуге большого круга
АВ, можно вычислить двумя приемами: при помощи па-
раметров Хо, Ко и при помощи параметров фу, Ху. Вос-
пользуемся первым из этих приемов и выведем форму-
лы для расчета параметров Хо и Ко по заданным значе-
ниям координат пунктов отхода и прихода. Из прямо-
угольных сферических треугольников ОАА' и ОВВ'
имеем:
tg Фл = sin (Хл - Хо) ctg К9. (IX—5)
tg фа = sin (Хв — Хо) ctg К9.
Разделив второе уравнение на первое, получим:
sin(Xs-X0)
‘ЗФл _ип(Лд-Х0)’
Решив это уравнение относительно Хо, окончательно
можно записать:
/ ^в 4* Хл \ 1
tg I ~ — Хо I = tg—(X в — X z)si п (фв + фл) cosec (фв — фл).
(IX-6)
После определения Хо по формуле (IX—6) из любо-
го соотношения (IX—5) можно найти Ко-
etg*0 =^ФЛ cosec (Хл — Х0) (IX-7)
340
или
ctg Kq = tg фв cosec (Хв — \).
При вычислении сумм и разностей широт и долгот,
входящих в формулу (IX—6), необходимо учитывать
наименования географических координат и руководство-
ваться следующим известным правилом: северной ши-
роте и восточной долготе приписывается при расчетах
знак «плюс», южной широте и западной долготе — знак
«минус».
Найдем теперь уравнение дуги большого круга, свя-
зывающее текущие координаты точки m(q>i, Хг), при-
надлежащей этой дуге, с параметрами Хо и До. Из пря-
моугольного сферического треугольника Отт' имеем:
tg Ф/ = sin (Xf — Хо) ctg До. (IX—8)
По формуле (IX—8), задаваясь долготами Aj, можно
вычислить широты фг промежуточных точек, лежащих
на дуге большого круга, с параметрами и До. Долго-
тами следует задаваться так, чтобы разность долгот
двух соседних промежуточных точек не превышала ве-
личины РДП, рассчитанной по формуле (IX—2). Нанеся
на навигационную карту по координатам промежуточ-
ные точки /И], т2, т$ и т. д., можно снять с карты лок-
содромические курсы для плавания Дь Д2, Дз и т. д.
(см. рис. 141).
Формулу (IX—8) рекомендуется использовать при
До>2О°. Если До<2О° (дуга большого круга пересека-
ет меридианы под очень острым углом), то целесообраз-
нее, задаваясь широтами, рассчитывать долготы Хг про-
межуточных точек по формуле
sin (X; - Хо) = tg ф, tg До (IX-9)
Однако на практике такие случаи встречаются ред-
ко, так как при Д0<20° величина Д=3—D обычно ма-
ла и плавание осуществляется по локсодромии.
По формулам (IX—8) и (IX—9) составлены
табл. 30а и 306 МТ—53, в которых даны готовые реше-
ния этих формул. По известным параметрам Ло и До, ис-
пользуя простые формулы, можно рассчитать и плава-
ние D по дуге большого круга. Обозначим отрезки дуги
большого круга OA=Di, OB=D2 и AB=D (рис. 144).
341
Тогда из прямоугольных сферических треугольников
ОАА' и ОВВ' (см. рис. 143) можем написать:
sinq>j _ sin(pB
sinDx= ----— и sin D2= k •
COS Ao C0S
Если пункты отхода А и прихода В расположены по
одну сторону от вертекса (Ху = ХогЬ90 ), то
D = D% — &!•
Если же эти пункты расположены по разные стороны
вертекса, то, как видно из рис. 144,
180°-Р1+Г>2).
Расчет параметров Ко и Хо и координат промежуточ-
ных точек, лежащих на дуге большого круга, заданной
этими параметрами, целесообразно выполнять с по-
мощью программно-управ-
ляемых ЭКВМ. Для этого
г формулы (IX—6), (IX—7),
(IX—8) должны быть при-
J ведены к виду, удобному для
решения на вычислительных
х. У машинах такого типа. Рас-
______смотренный прием проклад-
0 ки дуги большого круга на
меркаторской карте явля-
Рис. 144 ется наиболее точным, но и
наиболее трудоемким.
В тех случаях, когда плавание судна совершается с
пересечением экватора, прокладка дуги большого круга
на меркаторской карте осуществляется в два этапа. На
карте прокладывают отдельно два отрезка дуги большо-
го круга: от пункта отхода А до точки ее пересечения с
экватором О и от этой точки до пункта прихода В.
§ 62. Графический метод выбора наивыгоднейшего
пути
Рассмотрим сущность грубо приближенного гра-
фического метода выбора наивыгоднейшего (кратчай-
шего по времени) пути. Предположим, что необходимо
проложить наивыгоднейший путь между пунктами А и
В, используя данные пятисуточного прогноза гидроме-
342
теорологических условий в районе плавания. На бланко-
вой карте в гномонической проекции точки А и В соеди-
няют прямой линией — ортодромией (рис. 145). Затем
из точки А в секторе ±30°-=-±45° от ортодромии, ведущей
в точку В, проводят расходящиеся прямые линии, пред-
ставляющие собой возможные пути судна на первые
сутки плавания и назы-
ваемые пробными марш-
рутами. В области сла-
бого волнения эти линии
могут быть проведены
реже, в области сильного
волнения — чаще.
С прогностической
карты волнения на пер-
вые сутки плавания сни-
мают данные об ожида-
емых высотах волн и
направлениях волнения
на каждом из пробных
маршрутов. При помощи графиков или таблиц ветровол-
новых потерь скорости хода для данного типа судна оп-
ределяют скорости хода при следовании каждым из этих
маршрутов. Полученные величины скоростей хода кор-
ректируют с учетом действия течения. Если прогноз гид-
рометеорологических условий содержит сведения о дру-
гих факторах, влияющих на скорость хода судна, напри-
мер сведения об областях пониженной видимости, то
расчеты скоростей хода судна по пробным маршрутам
выполняют с учетом всех этих факторов.
Полученные значения скоростей хода умножают на
шаг времени (24 ч) и получают расстояния, которые
пройдет судно за первые сутки при следовании каждым
из пробных маршрутов. Эти расстояния откладывают
на карте и получают точки alt а2, вз>...» в которых может
находиться судно в конце первых суток. Точки а2,
а3,... соединяют плавной кривой Еь Кривую Ех можно
рассматривать как изолинию равного времени плава-
ния — изохрону.
Затем наносят возможные положения судна к исхо-
ду вторых суток плавания и строят изохрону Е2. Для
этого пробные маршруты продолжают от кривой Ei по
нормалям к ней и по всем вновь проложенным проб-
843
ным маршрутам откладывают расстояния, которые прой-
дет судно за вторые сутки плавания с учетом потерь
скорости хода, рассчитанных по данным гидрометеоро-
логического прогноза на эти сутки.
Подобным же образом строят на карте изохроны
Е3 £4, £5. При этом к первоначальным пробным марш-
рутам’ при необходимости добавляют промежуточные,
а внешние, отклоняющиеся далеко от ортодромии, веду-
щей из точки А в точку В, исключают. Судно будет
ближе всего к пункту назначения В, если оно находит-
ся в точках касания окружностей с центром в точке В
с изохронами £5, £4, £3, £2, £ь Линия, соединяющая эти
точки касания, представляет собой наивыгоднейший
(кратчайший по времени) путь. После уточнения гидро-
метеорологического прогноза во время перехода произ-
водят соответствующую корректировку выбранного пути.
Если в районе плавания имеются острова, навигаци-
онные опасности, запретные районы, то пробные марш-
руты, проходящие через острова, опасности и т. п., при
построении изохрон исключают, поэтому изохроны мо-
гут иметь разрывы. В этом случае получают наивыгод-
нейший путь в обход навигационных опасностей.
Глава X. ПЛАВАНИЕ В СТЕСНЕННЫХ
НАВИГАЦИОННЫХ УСЛОВИЯХ
§ 63. Особенности навигационного обеспечения
плавания в узкостях
Узкостями называют районы морей, стесненные
берегами материков, островами, мелями, банками, рифа-
ми, в которых для судов остаются только узкие и часто
извилистые проходы, ограничивающие свободу манев-
рирования.
Наиболее сложным в навигационном отношении яв-
ляется плавание в шхерах, представляющих собой скоп-
ление многочисленных островков, надводных и подвод-
ных скал и камней различной формы, окаймляющих
побережья некоторых морей и заливов. Рельеф дна в
шхерах имеет сложный характер, глубины изменяются
резко и неравномерно, грунт каменистый. В шхерах, рас-
положенных в морях с приливами, наблюдаются прилц-
644
во-отливные течения, скорость которых на отдельных
участках достигает 3—5 уз и более. Кроме того, прили-
во-отливные колебания уровня моря резко изменяют
окружающую обстановку, так как при отливе появляет-
ся масса осыхающих навигационных опасностей, что
затрудняет ориентировку.
Плавание в узкостях осуществляется, как правило,
по фарватерам и рекомендованным курсам. Шхерные
фарватеры особенно узки и извилисты. Они разделяются
на лоцманские и рекомендованные. Плавание лоцман-
скими фарватерами осуществляется под руководством
лоцмана. Плавание по рекомендованным фарватерам
возможно и без лоцмана. Эти фарватеры подробно про-
мерены или протралены гидрографическими тралами и
описаны в соответствующих пособиях и руководствах.
При плавании в узкостях обычные способы опреде-
ления места судна, требующие выбора ориентиров, вы-
полнения наблюдений, их обработки и, главное, про-
кладки обсерваций на карте с помощью прокладочного
инструмента, часто не могут быть использованы, так как
для их осуществления требуется слишком много време-
ни. В результате информация о положении судна будет
поступать с опозданием и не обеспечит возможности
своевременного выполнения необходимых маневров.
Кроме того, многие способы определения места судна,
применяемые в прибрежных районах моря, не обеспе-
чивают требуемой точности плавания в узкостях.
Эффективный контроль за движением судна при
плавании в узкостях и на подходах к ним может быть
осуществлен при помощи автоматического путепроклад-
чика высокоточной гиперболической РНС, если район
плавания находится в пределах рабочей зоны такой сис-
темы. Так, например, для этой цели широко применяется
автопутепрокладчик РНС «Декка». При «ручной» обра-
ботке навигационной информации для ускорения про-
цесса определения места судна за счет сокращения
времени, затрачиваемого на прокладку обсерваций,
используют сетки изолиний: гониометрическую, стади-
метрическую, азимутальную и комбинированную. Та-
кие сетки предварительно наносят либо непосредствен-
но на карту, либо на кальку, которую при прокладке
обсерваций накладывают на карту. Методы расчета и
построения сеток изолиний были рассмотрены в главе V,
345
При наличии необходимых радиолокационных ори-
ентиров место судна на карте без всяких вычислений и
графических построений можно получить с помощью
блока совмещения радиолокационного изображения с
навигационной картой (картосличительной приставки к
РЛС). Если фарватеры имеют ограниченную ширину,
то их направления обозначаются специальными средст-
вами навигационного оборудования: ведущими и ди-
станционными створами, секторными огнями, плавучими
предостерегательными знаками обычного типа и с пас-
сивными радиолокационными отражателями. Эти сред-
ства позволяют непрерывно контролировать движение
судна путем глазомерной ориентировки по визуальным
или радиолокационным наблюдениям (как при хорошей,
так и при пониженной видимости). Однако и в рассмат-
риваемом случае место судна необходимо периодически
наносить на карту.
При глазомерной проводке судна по фарватерам и
рекомендованным курсам с помощью РЛС задача состо-
ит в том, чтобы удерживать начало развертки в таком
положении относительно изображения окружающих
радиолокационных ориентиров, при котором судно бу-
дет перемещаться по заданной линии пути. В качестве
радиолокационных ориентиров используют характер-
ные участки берегов (плавание в узкости с приглубыми
берегами), буи с пассивными отражателями и другие
точечные объекты. Когда боковое смещение судна с за-
данной линии пути достигает величины, которую спо-
собен заметить на экране РЛС оператор, курс судна
изменяют в сторону, противоположную смещению. Дви-
гаясь по новому курсу, судно снова начнет отклоняться
от линии заданного пути и следующая коррекция курса
осуществляется после обнаружения этого нового сме-
щения.
Теоретические и экспериментальные исследования
показывают, что при таком способе проводки судно пе-
ремещается по кривой, близкой к синусоиде. Величина
боковых смещений судна от заданного пути на местно-
сти зависит от способности глаза ощущать изменение
положения центра развертки относительно отметок эхо-
сигналов радиолокационных ориентиров и от масштаба
радиолокационного изображения. В свою очередь вели-
чина изменения взаимного положения начала развертки
346
и отметок это-сигналов радиолокационных ориентиров
зависит главным образом от расстояния до этих ориен-
тиров.
Таблица 16
Расстояние между
отметками эхо- сигналов
ориентиров на экране
РЛС, мм
Предельная ошибка глазомерной оценки
положения начала развертки, мм
при симметричном
расположении заданной
линии пути относительно
ориентиров
при несимметричном
расположении заданной
линии пути относительно
ориентиров
20
40
80
120
160
*0,6
*0,6
*1,3
±1,5
*2,0
*1,0
±1,5
*3,5
*5,5
*5,5
В табл. 16 приведены величины ошибок, допускаемых
при оценке положения центра развертки относительно
отметок эхо-сигналов радиолокационных ориентиров,
для случаев симметричного и несимметричного располо-
жения заданной линии пути относительно этих ориен-
тиров*.
Зная величину этих ошибок в миллиметрах и масш-
таб используемой шкалы РЛС, легко рассчитать ошиб-
ку в оценке положения судна на местности при его про-
водке по тому или иному фарватеру.
Приемы глазомерной проводки судна с помощью
РЛС по огражденным фарватерам зависят от характера
расстановки буев. Наилучшие условия для такой про-
водки будут в том случае, когда фарватер огражден
парными буями с пассивными радиолокационными от-
ражателями и расстояние между буями больше линей-
ного значения разрешающей способности РЛС по
направлению. Курс судна выбирают так, чтобы его от-
метка на экране РЛС проходила между отметками эхо-
сигналов ближайшей пары буев (буи изображаются
раздельно). Если фарватер или рекомендованный курс
ограждены буями по осевой системе, то для успешной
проводки судна необходимо, чтобы на экране РЛС бы-
* Плотно Г. Ф. Приборы судовождения. М., 1968.
347
ли видны одновременно отметки эхо-сигналов, по край-
ней мере, двух смежных буев: одного впереди по курсу,
а другого по корме. В этом случае курс судна выбирают
так, чтобы визир, установленный по отметке курса на
экране РЛС, пересекал отметки эхо-сигналов обоих
буев.
Для опознавания отметок эхо-сигналов буев в быст-
рой последовательности измеряют расстояния до по-
явившейся отметки эхо-сигнала, который должен при-
надлежать очередному бую, и до отметки эхо-сигнала
пройденного буя. Сумма этих расстояний должна соот-
ветствовать дистанции между
буями. Если на судно дейст-
вует ветер и течение, то ось
фарватера или линия реко-
мендованного курса должна
рассматриваться как линия
заданного пути: ПУ—ИК+с,
где с — суммарный угол сноса.
В этом случае при глазомер-
ной радиолокационной провод-
ке судна по заданной линии
пути устанавливают визир и
выбирают курс судна так, что-
бы линейка визира проходила
визир
Рис. 146
через отметки эхо-сигналов буев или между этими от-
метками, если буи парные (рис. 146). При использова-
нии визира точность удержания судна на заданной ли-
нии пути несколько снижается из-за параллактических
ошибок, вносимых визиром. Если буи, ограждающие
фарватер или рекомендованный курс, не имеют пассив-
ных радиолокационных отражателей, то при волнении
моря проводка судна может быть затруднена из-за об-
разования вокруг центра развертки засвеченной зоны.
Отметки достаточно сильных эхо-сигналов буев с пас-
сивными радиолокационными отражателями выделяют-
ся в засвеченной зоне своей яркостью.
Повышению безопасности плавания в узкостях, осо-
бенно в шхерных районах, способствует применение
ГАС, в частности непрерывный обзор с помощью ГАС
подводной обстановки впереди по курсу судна.
Для проводки судов по фарватерам и рекомендо-
ванным курсам широко применяются визуальные створы.
348
Плавание по створу представляет собой частный случай
изолинейного плавания. Большинство фарватеров огра-
ниченной ширины оборудованы линейными ведущими
створами. Линейный створ представляет собой систему
двух знаков или огней, расположенных на одной прямой
на некотором расстоянии друг от друга. Осуществляя
проводку судна по линии такого створа, судоводитель
должен удерживать оси симметрии створных знаков или
огней на одной общей вертикали.
По расхождению знаков (огней) судят об уклонении
судна от линии створа. Очевидно, что плавание по ли-
нейному створу можно рассматривать как плавание по
изолинии J7=y=0=const, где у — горизонтальный угол
между створными знаками. Точность удержания судна
на линии створа зависит от линейной чувствительности
створа, которая определяется выражением (II—1).
Прежде чем лечь на створ, необходимо опознать створ-
ные знаки (огни) по данным, приведенным в лоции, «Ог-
нях и знаках» и других пособиях, а направление створа
обязательно проверить по компасу. Для того чтобы
судно точно вышло на линию створа, поворот осущест-
вляют с учетом циркуляции (см. § 64). Для фиксации
точек поворота используют секущие створы и секущие
пеленги различных навигационных ориентиров.
При следовании судна по створу с линией створа сов-
падает линия его пути. Поэтому угол между линией ис-
тинного курса судна и линией створа в общем случае
равен углу суммарного сноса. Это необходимо учиты-
вать при выходе на створ и при расчете компасного кур-
са, обеспечивающего движение судна по линии створа.
§ 64. Циркуляция судна и способы ее учета
при графическом счислении
При повороте с одного курса на другой центр тя-
жести судна описывает некоторую кривую. Эта кривая,
как и сам процесс поворота, называется циркуля-
цией.
При плавании в стесненных навигационных услови-
ях, когда прокладка ведется на картах крупного масш-
таба, для повышения точности графического счисления
и проводки судна по фарватерам необходимо при пово-
ротах учитывать циркуляцию. Предположим, что в не-
349
которой точке А (рис. 147) на судне, следующем прямым
курсом, была подана команда рулевому о перекладке
руля на тот или иной угол. Наблюдения показывают,
что в течение некоторого промежутка времени назы-
ваемого «мертвым промежутком», судно продолжает
движение по прямому курсу, а затем (точка АО центр
тяжести судна незначительно отклоняется в сторону,
противоположную стороне поворота. Обратное смеще-
ние не превышает по-
луширины судна и в
практике судовожде-
ния обычно не учиты-
вается. В дальнейшем
(точка Аз) центр тя-
жести судна начинает
перемещаться в сторо-
ну перекладки руля по
кривой, радиус кривиз-
ны которой непрерыв-
но уменьшается до мо-
мента, когда угловая
скорость изменения
курса достигает наи-
большего значения.
Это происходит при
угле поворота, равном
примерно 120°. После
этого угловая скорость
изменения курса становится практически постоянной, а
кривая циркуляции приближается к окружности. Под
действием сил сопротивления воды диаметральная плос-
кость судна во время циркуляции располагается не по
касательной к кривой циркуляции, а составляет с ней
некоторый угол 0Ц, называемый углом дрейфа на цирку-
ляции. При этом форштевень судна всегда направлен
внутрь описываемой циркуляции. Угол 0Ц увеличивается
от момента начала циркуляции до момента поворота на
70—110°, после чего он практически остается постоянным.
Для большинства судов средняя величина этого угла
равна 5—12°. Дрейф на циркуляции приводит к тому,
что ширина полосы, занимаемой судном при повороте,
всегда шире самого судна. Это необходимо учитывать
при плавании в узкостях. Кроме того, вследствие дрей-
350
фа на циркуляции судно изменяет свой курс на некото-
рый угол а раньше, чем на такой же угол изменится на-
правление касательной к кривой циркуляции.
Во время циркуляции сопротивление воды движению
судна увеличивается и фактическая скорость хода суд-
на становится меньше, чем при той же частоте вращения
гребных винтов на прямом курсе. Потеря скорости хода
возрастает с увеличением угла перекладки руля и до-
стигает наибольшего значения при углах поворота от 20°
до 70°. При изменении курса судна на 180° потеря ско-
рости хода может составлять 50—60%. от первоначаль-
ного ее значения.
Для навигационных целей чаще всего исполь-
зуют основные элементы циркуляции: тактический
диаметр циркуляции Дц и полупериод циркуля-
ции Т180.
Тактическим диаметром циркуляции называется рас-
стояние по нормали между линией первоначального кур-
са и линией курса после поворота судна на 180°. Для
данного типа судна величина тактического диаметра
циркуляции зависит главным образом от угла пере-
кладки руля. На величину этого диаметра влияют также
скорость хода судна, его осадка и дифферент, волнение
моря и ветер.
Время, в течение которого судно совершает поворот
на первые 180°, называется полупериодом циркуляции.
Полупериод циркуляции зависит в основном от скорости
хода судна и угла перекладки руля. С увеличением ско-
рости хода судна и угла перекладки руля он уменьша-
ется.
Продолжительность поворота на заданный угол а (/а)
определяется угловой скоростью изменения курса на
циркуляции. Так как эта скорость на различных участ-
ках циркуляции различна, то продолжительность пово-
рота на различные углы а изменяется непропорциональ-
но величине этого угла.
Применяемые на практике приближенные способы
учета циркуляции основаны на следующих допущениях:
кривая циркуляции представляет собой окружность ра-
диуса 7?ц=0,5Дц; угловая скорость изменения курса в
течение полупериода циркуляции постоянна и, следова-
тельно, t ~ 7^- а°.
06 180е
351
Использование приближенных способов для учета
циркуляции крупнотоннажных судов, у которых момент
инерции относительно вертикальной оси велик, приводит
к ощутимым ошибкам. На таких судах рекомендуется
применять диаграммы циркуляции, составленные на ос-
нове натурных определений кривых циркуляции. Анало-
гичные диаграммы используются и для учета циркуля-
ции судна, буксирующего донный трал (см. § 6 части
второй).
Учет циркуляции судна сводится к решению следую-
щих двух задач: известно положение точки А начала по-
Рис. 148
ворота и требуется опре-
делить положение точки
В конца поворота, из
которой следует проло-
жить новый курс (пря-
мая задача); заданы ли-
ния первоначального кур-
са, линия нового курса
и требуется определить
положение точки А, в
которой следует начать
поворот, чтобы после цир-
куляции оказаться на за-
данной линии нового
курса, а также положе-
ние точки В конца пово-
рота (обратная задача).
Эти задачи могут быть решены табличными
(графоаналитическими) и графическими способами.
Тактический диаметр циркуляции и полупериод цирку-
ляции определяют предварительно по результатам на-
турных наблюдений.
Учет циркуляции способом П. А. Домогарова. Пред-
положим, что судно, следующее курсом ИКъ в точке А
начало поворот и, описав циркуляцию, легло на новый
курс в ИКл точке В (рис. 148). Примем кривую циркуля-
ции за дугу окружности радиуса /?ц=0,5Дц.
Положение точки конца поворота В относительно
известной точки начала поворота А можно определить
углом ЫпАВ=ИК^ называемым средним курсом, и от-
резком AB=d, называемым промежуточным курсом. На
основании рис. 148 можно написать
352
ИКс? =HKt ± ~ , (X—1)
где а—угол поворота (знак «плюс» при повороте вправо, знак
«минус» при повороте влево);
, а
а = 2Кц sin — .
(Х-2)
Положение точек АиВ начала и конца поворота от-
носительно точки пересечения линий первоначального и
нового курсов может быть определено отрезком АМ =
=BM=di, называемым расстоянием до линии нового
курса:
di = /?4tg-y . (X—3)
Плавание на циркуляции (путь поворота) Sa и про-
должительность поворота ta рассчитывают по формулам:
(Х-4)
где Г18о — полупериод циркуляции.
По формулам
(Х-2), (X—3), (X—4)
рассчитываются таб-
лицы циркуляции, с
помощью которых осу-
ществляется учет цир-
куляции при графиче-
ском счислении. Одной
из наиболее удобных
по структуре является
таблица циркуляции,
помещенная в МТ—63
(табл. 30). Из этой
таблицы по аргумент
там радиус циркуляции 7?ц (в кбт) и полупериод цирку-
ляции (в мин) можно выбрать для различных углов
поворота на новый курс а такие данные: промежуточное
плавание d, расстояние до линии нового курса di, пла-
вание на циркуляции Sa (в кбт) и продолжительность
поворота на новый курс ta (в мин и с). С помощью таб-
23 В. Е. Ольховский
353
лицы такого типа циркуляцию учитывают следующим
образом (рис. 149).
Прямая задача. По известным значениям и
а из таблицы выбирают величину d и рассчитывают
tfKcp = /7Ki±-J-. Затем
£
из точки А начала поворота
прокладывают линию ЙТСср и по этой линии откладыва-
ют выбранную из таблицы величину d. В результате
получают точку В конца поворота, из которой прокла-
дывают линию нового курса ИК2.
Обратная задача. По известным значениям /?ц
и а из таблицы выбирают величину d\ и откладывают от
точки М пересечения линий курсов назад по линии пер-
воначального курса и вперед по линии нового курса.
В результате получают искомую точку А начала поворо-
та и точку В, в которой судно придет на новый курс.
Если точка М пересечения линий первоначального и
нового курсов находится за пределами рамок карты, то,
как и при решении прямой задачи, из таблицы_ выбира-
ют величину d и рассчитывают ИК.^=ИК\± . Затем
отрезок d по направлению Z/Дср вмещают между линия-
ми первоначального и нового курсов (см. рис. 149). Об-
ратную задачу приходится обычно решать при поворо-
тах на линию створа, ось фарватера и т. п. Для того
чтобы более точно осуществить выход на линию створа
или ось фарватера, команду на руль следует подавать,
не доходя до точки А на расстояние SM=WM, где tM —
«мертвый промежуток».
Если в районе плавания наблюдается сильное тече-
ние, элементы которого известны и учитываются при ве-
дении счисления, положение точки А начала поворота
должно быть определено с учетом действия на судно
течения. Для этого, найдя положение точки А без учета
течения, прокладывают из этой точки вектор —5Т
(рис. 150). Направление вектора -—ST противополож-
но направлению течения, а модуль его равен 5Т =
= ^т/а, где vT— скорость течения, ta— продолжитель-
ность поворота. Проведя затем из конца вектора —ST
прямую, параллельную новой линии пути ПУ2 до пе-
ресечения с первоначальной линией пути ПУг, получа-
ют точку Дт начала поворота с учетом действия тече-
354
линии первоначального
к
ния. КК для выхода на линию нового пути ПУ г рас-
считывают заранее с учетом течения.
Учет циркуляции способом М. Н. Андреева. М. Н. Ан-
дреев предложил определять положение точки конца
поворота В относительно точки начала поворота А
двумя отрезками: т — по линии первоначального кур-
са и п — по перпендикуляру
курса (рис. 151). Ве-
личины этих отрезков
нетрудно определить,
зная радиус циркуля-
ции 7?ц и угол поворо-
та на новый курс а.
На основании рис. 151
можно написать:
OF = /?ц cos а,
BF = /?4sIna,
BP = OA — OF = Rn —
—/?ц cos а = 2?ц (1 — cos а)=
= 2/?4sin2-^- .
Следовательно,
m = /?4sina, '
О
П—7п
I*
--->
а
п = 22?ц si п« — .
(Х-5)
Линия A'Ki
А
Формулы (X—5) мо- Рис. 151
гут быть положены в
основу таблиц циркуляции, из которых по аргументам
/?ц и а можно выбирать величины т и п*.
При отсутствии таблиц циркуляции, но при извест-
ном радиусе циркуляции /?ц циркуляция может быть
учтена графическим способом.
При решении прямой задачи (рис. 152) из
точки А начала поворота перпендикулярно линии пер-
воначального курса проводят в сторону поворота суд-
на прямую, на которой откладывают отрезок АО, рав-
* Величины тип можно определить и по аргументам Sa и а.
Решение этой задачи рассмотрено в § 6 части второй,
23*
355
Рис. 152
ный в масштабе карты радиусу циркуляции Дц. Из по-
лученной таким образом точки 0—центра циркуляции—
раствором циркуля, равным в масштабе карты величи-
не Дц, проводят дугу окружности. Линию нового курса
прокладывают как касательную к этой дуге. Точка ка-
сания В будет точкой конца поворота.
При решении обратной задачи проводят
две прямые, параллельные линиям первоначального и
нового курсов и отсто-
ящие от них на рассто-
янии Дц (рис. 153,а).
Точка пересечения
этих прямых О будет
центром циркуляции,а
перпендикуляры, опу-
щенные из точки О на
линии обоих курсов,
определят положение
точек А и В начала и
конца поворота.
Другой прием сво-
дится к проведению
биссектрисы угла, об-
разованного линиями
первоначального и но-
вого курсов и к отыс-
канию на ней такого
положения ножки цир-
куля, при котором ду-
га окружности, прове-
денная радиусом Дц
(в масштабе карты)
обоих курсов (рис. 153,б).
ЛИНИЯМ
к
будет касательной
Для того чтобы учитывать циркуляцию судна рас-
смотренными выше приближенными способами, доста-
точно знать только основные элементы циркуляции:
тактический диаметр Дц и полупериод Лео- Определе-
ние тактического диаметра циркуляции основано на из-
мерении в момент Ti начала поворота и в момент Т2
прихода судна на обратный курс тех или иных навига-
ционных параметров. При этом используются методы
измерения, обеспечивающие достаточно высокую точ-
ность. Одновременно получают из наблюдений величи-
356
ну полупериода циркуляции Ti8o=^2—Л и при необхо-
димости величину «мертвого промежутка» fM.
Тактический диаметр циркуляции определяют
обычно при углах перекладки руля 10, 20 и 30° в обе
стороны для одновинтового и в одну сторону для двух-
винтового судна, а также при двух различных осадках
судна — в полном грузу и в балласте. Если возможная
скорость хода судна в узлах выходит за рамки нера-
венства 7^2,5 j/L, где L— длина судна в метрах, то
учитывают влияние скорости хода на величину такти-
ческого диаметра циркуляции и этот диаметр опре-
деляют для различных режимов работы двигате-
лей.
Определение тактического диаметра циркуляции с
помощью РЛС — наиболее распространенный и удоб-
ный способ. Он основан на измерении с помощью РЛС
траверзных расстояний до радиолокационного ориен-
тира в момент начала поворота и в момент йрихода
судна на новый курс. В качестве ориентира наиболее
целесообразно использовать буй с пассивным радиоло-
кационным отражателем.
Возможность маневрирования судна на достаточно
малом расстоянии от буя повышает точность определе-
ния тактического диаметра циркуляции. При наличии
сильного течения в качестве ориентира следует исполь-
зовать свободно плавающий буй, груз которого заглуб-
лен на величину осадки судна.
После того как судно разовьет необходимую ско-
рость, ложатся на курс с расчетом пройти буй в рас-
стоянии нескольких кабельтовых (рис. 154). На тра-
верзе буя подают команду рулевому о перекладке руля
на заданный угол и по самой крупномасштабной шка-
ле ИКО измеряют расстояние до буя £>ь Придя на об-
ратный курс и удерживая судно на этом курсе, в мо-
мент траверза вновь измеряют расстояние до буя D2.
Тактический диаметр циркуляции Дц рассчитывают
как разность измеренных траверзных расстояний:
дд = •
Точность определения тактического диаметра цир-
куляции этим способом можно оценить по формуле
100 1 / й й-
тд%=угУ mD + mD
Ц Дц
357
Полагая тп =тп =тп, можно записать
_ ио
где
тп
дц
— средняя квадратическая ошибка определения такти-
ческого диаметра циркуляции;
и mD — средние квадратические ошибки измерения траверз-
ных расстояний с помощью РЛС.
т
Систематические оши-
бки измерения этих рас-
стояний на точность оп-
ределения тактического
диаметра циркуляции
практически не влияют.
Полупериод циркуля-
ции определяют при по-
мощи секундомера. Се-
кундомер пускают в мо-
мент начала поворота и
останавливают в момент
прихода на заданный
курс.
Можно определять
тактический диаметр цир-
куляции по створу и го-
ризонтальным углам. По-
сле того как судно ра-
зовьет необходимую ско-
рость хода, ложатся на
курс, перпендикулярный
линии створа (рис. 155).
В момент пересечения ли-
нии створа подают ко-
манду рулевому о пере-
кладке руля на заданный
Рис. 155 угол и измеряют секста-
ном горизонтальный угол
01 между линией створа и направлением на выбранный
на берегу ориентир М. Придя на обратный курс, удер-
живают судно на этом курсе и в момент пересечения
линии створа снова измеряют секстаном горизонталь-
ный угол 02 между линией створа и направлением на
358
ориентир М. Тактический диаметр циркуляции рассчи-
тывают по формуле
Дц = d (ctg 62 — ctg 0J,
где d — кратчайшее расстояние от линии створа до ориентира М.
Из этой формулы следует, что тактический диаметр
циркуляции будет определен тем точнее, чем меньше
ошибки измерения горизонтальных углов 01 и 02, чем
эти углы ближе к 90° и чем точнее известна величина
кратчайшего расстояния d от линии створа до ориен-
тира.
Величину тактического диаметра циркуляции мож-
но найти и не прибегая к вычислениям. Для этого сле-
дует проложить на крупномасштабной карте по створу
(пеленгу) и горизонтальному углу точки А и В — места
судна в моменты пересечения линии створа — и снять
с карты расстояние АВ=ДЦ. При таком приеме реше-
ния задачи влияние графических ошибок на точность
определения тактического диаметра циркуляции будет
больше.
В § 6 части второй будут рассмотрены и некоторые
другие приближенные способы, позволяющие определить
тактический диаметр циркуляции непосредственно при
каждом повороте судна на новый курс. Такие способы
применяются при учете циркуляции судна, буксирую-
щего донный трал.
§ 65. Метод ограждающих изолиний
Для обеспечения безопасного прохода судна
вблизи навигационных опасностей и сохранности бук-
сируемого трала в районах с тяжелыми грунтовыми ус-
ловиями и задевистыми местами широко используется
метод ограждающих изолиний. Сущность этого метода
заключается в следующем. Предварительно на карте
крупного масштаба прокладывают однородные изоли-
нии, ограждающие навигационные или промысловые
опасности, и с карты снимают значения навигационно-
го параметра Ui и U2, соответствующие ограждающим
изолиниям. Предположим, что опасные зоны распола-
гаются в области значений навигационного параметра
меньших Ui и больших U2. На переходе систематиче-
ски измеряют навигационный параметр Ua и курс суд-
на корректируют так, чтобы соблюдать условие Ui<.
359
Рис. 156
образом расположенных от
<Un<U2, где [7И —измеренное значение навигацион-
ного параметра. В результате обеспечивается практи-
чески непрерывный контроль за движением судна без
каких-либо вычислений и прокладки непосредственно
во время прохождения судна участков, стесненных на-
вигационными или промысловыми опасностями. Нави-
гационный параметр, которому соответствует огражда-
ющая изолиния, называется ограждающим параметром.
В зависимости от коли-
чества навигационных
ориентиров, находящих-
ся в пределах видимости
судна, в качестве ограж-
дающего навигационного
параметра используют
горизонтальный и верти-
кальный углы, расстояние,
пеленг.
Ограждающий гори-
зонтальный угол (рис.
156). Применяется при
наличии в видимости суд-
на двух соответствующим
юсительно ограждаемых
опасностей навигационных ориентиров. На промыслово-
навигационном планшете или карте прокладывают
вмещающие окружности (изолинии), проходящие
через ориентиры и ограждающие опасные для траления
участки, задевистые места или навигационные опас-
ности. Для этого места ориентиров соединяют прямой
линией и восстанавливают из ее середины перпендику-
ляр, на котором опытным путем находят центр окруж-
ности АВС, ограждающей опасность. Любую точку С,
лежащую на этой окружности, соединяют прямыми ли-
ниями с местами ориентиров и снимают с планшета или
карты величину ограждающего горизонтального угла
ЛСВ=«1. При проходе мимо опасности систематически
измеряют секстаном горизонтальный угол а между ори-
ентирами А и В. Если измеренный угол аи<аь судно
находится в безопасной зоне. Если же аи=аь судно на-
ходится на границе опасной зоны и следует немедленно
изменить курс, чтобы выйти за ее пределы.
Если заданная линия пути судна (рекомендованный
360
курс траления) проходит между двумя опасностями
Ех и £2, то на карте или планшете прокладывают две
вмещающие окружности АС В и AFB, между которыми
заключена безопасная зона. Проходя между опаснос-
тями Ех и Е2, систематически измеряют секстаном го-
ризонтальный угол а между ориентирами А и В и, кор-
ректируя соответствующим образом курс судна, доби-
ваются такого положения, при котором измеряемый
угол аи был бы все
время меньше угла щ
и больше угла а2.
Ограждающий вер-
тикальный угол (рис.
157). Применяется при
визуальных наблюде-
ниях, когда в пре-
делах видимости суд-
на имеется один на-
вигационный ориентир.
На карте или планше-
Рис. 157
те из места ориентира
как из центра прово-
дят окружность (изолинию) таким образом, чтобы
опасность располагалась в ее пределах. Сняв с карты
радиус этой окружности r\=D\ и зная высоту ориенти-
ра над уровнем моря, рассчитывают ограждающий вер-
тикальный угол pi по формуле
tg Pi = —-—,
н . 1852 Di
где h — высота ориентира над уровнем моря, м;
Di— радиус ограждающей окружности, мили.
р! можно выбрать и из таблицы типа 29 МТ—63.
Полученное значение Pi исправляют величиной по-
грешности индекса секстана с обратным знаком. Про-
ходя мимо опасности, систематически измеряют секста-
ном вертикальный угол между вершиной и основанием
ориентира. Если измеренный угол меньше угла рь суд-
но находится в безопасной зоне. Если же он равен рь
судно находится на границе опасной зоны и следует не-
медленно изменить курс, чтобы выйти за ее пределы.
Если необходимо обеспечить проход между двумя
рпасностями и Е%, то на карте проводят две огр аж-
361
Рис. 158
дающие окружности (изолинии) FiBj и Р2В2, снимают
с карты радиусы окружностей r\=D\ и г2 = П2, а затем
рассчитывают значения ограждающих вертикальных
углов Pi и р2. Проходя между опасностями, системати-
чески измеряют секстаном вертикальный угол между
вершиной и основанием ориентира и, корректируя со-
ответствующим образом курс судна, добиваются тако-
го положения, чтобы
измеряемый угол ри
был бы все время мень-
ше угла Pi и больше
угла р2. На промысле
в прибрежных районах,
когда с акватории про-
мысловой площадки
виден только один ори-
ентир А (рис. 158),
нанесенный на карте,
но высота его h над уровнем моря неизвестна, можно
предварительно определить эту высоту и затем рассчи-
тать ограждающие вертикальные углы Pi и р2. Для это-
го, следуя курсом на ориентир, в некоторой точке Ci
измеряют секстаном угол Pi между вершиной и основа-
нием ориентира. Через некоторый промежуток времени,
когда судно будет находиться в точке С2, вновь измеря-
ют угол р2 между вершиной и основанием ориентира.
В моменты измерения углов 01 и р2 замечают отсчеты
лагов ОЛ1 и ол2 и рассчитывают расстояние S между
точками Ci и С2:
S = (ол2 — олх) kn.
На основании рис. 158 можно написать
ftctgPi = ftctgpa + S,
Откуда
ft = — —, о . (X—6)
ctg Pi —ctg Ра
Путем несложных преобразований формулу (X—6)
можно привести к виду:
tgpttgpa
tgfe- tg₽* •
35?
При углах р, не превышающих 5° с точностью до
третьего десятичного знака, можно принять tg р=р.
Тогда, обозначив разность углов 02 — ₽i через Др, по-
лучим:
s. (Х_7)
др
В формуле (X—7) высота ориентира h и пройденное
судном расстояние S выражены в одинаковых единицах
а углы в радианах. Если выразить расстояние S в милях,
а углы в минутах дуги, то для расчета высоты ориентира
в метрах формулу (X—7) следует записать в таком ви-
де:
Pl (Pi + ДР)
Л == О,539^ПН1У — S=KS. (Х-8)
др
Для упрощения расчета высоты ориентира по этой
формуле можно воспользоваться табл. 17, в которой да-
ны величины Л. Аргументами для входа в таблицу слу-
жат Pi и Др в минутах дуги.
Таблица 17
\р1 Д₽'\ 10' 20' 30' 40' 50' 60' \₽1* Др'\
5' 16,170 53,900 113,19 194,04 296,45 420,42 5'
10' 10,780 32,340 64,680107,80 161,70 226,38 10'
20' 8,085 21,560 40,425 64,680 94,325 129,36 20'
30' 7,169 17,949 32,340 50,289 72,687 97,020 30'
40' 6,738 16,170 28,298 43,120 60,368 80,850 40'
50' 6,468 15,092 25,872 38,808 53,900 71,150 50'
60' 6,306 14,391 24,255 35,897 49,427 64,680 60'
Пример. р1 = 0°31/, р2=0°52', S=2,4 мили. Определить Л. Рас-
считываем Др=0°2Г и по аргументам Pi = 0°31' и Др=(Г21' выбира-
ем из таблицы /(=41,390. Следовательно, h=KS=41,390-2,4=99,3 м.
На точность определения высоты навигационного
ориентира рассматриваемым способом кроме ошибок из-
мерения углов Pi и р2 оказывает влияние и ошибка счис-
лимого расстояния S. Поэтому расстояние, проходимое
судном за промежуток времени между моментами изме-
рения вертикальных углов, следует определять при по-
363
Мощи хорошо выверенного лага и при необходимости
учитывать действие течения.
Ограждающее расстояние. Применяется при наличии
в пределах визуальной или радиолокационной видимо-
сти одного навигационного ориентира, до которого име-
ющимися средствами может быть непосредственно из-
мерено расстояние. Обычно для определения расстояния
используется РЛС. В этом случае ориентир должен пред-
ставлять собой точечный объект с четкой отметкой
эхо-сигнала на экране РЛС. Построив на карте или
планшете ограждаю-
ta щие окружности (см.
/ рис. 157), снимают с
/ карты их радиусы Т\ =
гх й ------------* —D\ и г2=Ь2. Судно
пройдет чисто от опас-
vjy / / ностей, если система-
/ / т тически измеряемое с
к/ { тт 1 \ помощью РЛС расстоя-
/ \ ние до ориентира А бу-
" дет все время больше
рис 159 расстояния Di и мень-
ше расстояния D2.
Ограждающий пеленг. При плавании в узкостях ог-
раждающие пеленги применяют часто, так как это не
требует предварительных расчетов, а измерения выпол-
няются при помощи компаса. Предположим, что судно
должно пройти узкость по линиям рекомендованных кур-
сов /С1Л2 и /С3Л4, минуя опасность Е (рис. 159). Исполь-
зуя ориентиры Л и В, можно проложить на карте линии
истинных пеленгов Аа и ВЬ, ограждающих эту опасность,
а затем снять с карты ограждающие истинные пеленги
и перевести их в компасные. При следовании по линии
рекомендованного курса К1К2 с помощью пеленгатора
ведут наблюдение за пеленгом ориентира Л. Если изме-
ренный (компасный) пеленг ориентира А меньше ограж-
дающего (компасного), то судно проходит чисто от опас-
ности. Поворот на линию рекомендованного курса К3К4
может быть сделан только после того, как судно пере-
сечет линию пеленга ВЬ. Возможны и другие различные
варианты применения ограждающих пеленгов.
Прокладка ограждающих изолиний на карте или
планшете должна осуществляться с некоторым запасом,
364
покрывающим наибольшие возможные ошибки измере-
ний навигационных параметров и расчетов. В качестве
ограждающих изолиний наряду с навигационными изо-
линиями широко используются и изобаты. По показа-
ниям эхолота можно визуально следить за тем, чтобы
судно не перешло ограждающую (предостерегательную)
изобату. Чтобы обеспечить следование судна в заданном
диапазоне глубин, используют специальные сигнализа-
торы изменения глубины в виде отдельной блок-при-
ставки к эхолоту. При выходе судна на ограждающую
(предостерегательную) изобату подаются звуковой и
световой сигналы.
Глава XL ПЛАВАНИЕ ПРИ ПОНИЖЕННОЙ
ВИДИМОСТИ И ВО ЛЬДАХ
§ 66. Навигационное обеспечение плавания при
пониженной видимости
Понижение видимости связано с особыми гидро-
метеорологическими явлениями: туманами, дождями,
снегопадами, мглой. Чем интенсивнее эти явления, тем
меньше видимость. Наиболее существенное влияние на
дальность видимости оказывает туман. При сильном ту-
мане интервал видимости лежит в пределах от 0 до
1 кбт.
При пониженной видимости возможности зрительного
наблюдения окружающей обстановки и применения ме-
тодов определения места судна, основанных на визуаль-
ных наблюдениях навигационных ориентиров и небес-
ных светил, либо ограничены, либо вовсе исключены.
Кроме того, при пониженной видимости усиливается опас-
ность столкновения с другими судами. Поэтому плава-
ние в таких условиях, несмотря на наличие в распоряже-
нии судоводителя различных технических средств, пред-
ставляет значительные трудности, особенно в стесненных
водах.
При подходе к зоне пониженной видимости или при
внезапном ухудшении видимости необходимо принять
меры предосторожности, предусмотренные наставлением
по организации штурманской службы на морских судах:
уменьшить скорость хода до умеренной и начать подачу
365
туманных сигналов согласно Международным правилам
предупреждения столкновения судов в море; включить
РЛС и начать радиолокационное наблюдение в соответ-
ствии с Рекомендациями по использованию РЛС для
предупреждения столкновения судов; принять меры к
прекращению или уменьшению посторонних шумов на
судне, выставить впередсмотрящего и обеспечить надеж-
ную связь его с мостиком, выключить или затемнить ог-
ни, мешающие наблюдению, и включить (даже днем) хо-
довые огни, так как электрический свет может быть за-
мечен на большем расстоянии, чем силует судна; опре-
делить место судна наиболее точным способом из всех
возможных в данных условиях; при плавании в районах
с малыми или отличительными глубинами включить на
постоянную работу эхолот, а при необходимости и гидро-
локатор для обнаружения подводных препятствий впере-
ди по курсу судна.
При плавании вблизи берегов прокладка курсов дол-
жна осуществляться так, чтобы полоса, в пределах кото-
рой может следовать судно с заданной вероятностью, про-
ходила бы чисто от опасностей ( см. § 59). Сближаясь с
берегом, целесообразно выбирать курс судна так, чтобы
оно следовало перпендикулярно общему направлению
изобат. Это позволит своевременно обнаружить с помо-
щью эхолота приближение к зоне опасных глубин и при-
нять необходимые меры предосторожности (уменьшить
ход, изготовить к отдаче якоря или стравить якоря на
глубину, равную примерно двум осадкам судна и т. п.).
Счисление пути судна необходимо вести особенно
тщательно с учетом ветра и течения, чаще сличать ком-
пасы, контролировать скорость хода по лагу и по частоте
вращения винтов.
При плавании в условиях пониженной видимости воз-
растает роль обсерваций, хотя получить их часто бывает
труднее, чем при хорошей видимости. Поэтому не следует
упускать любой возможности для определения места
судна с помощью имеющихся на судне технических
средств судовождения, применять, как и при плавании
в узкостях, метод ограждающих изолиний, измеряя ог-
раждающие навигационные параметры при помощи ра-
диотехнических и гидроакустических средств, использо-
вать в качестве ограждающей навигационной изолии
предостерегающую для судна данной осадки изобату.
366
туманных сигналов согласно Международным правилам
предупреждения столкновения судов в море; включить
РЛС и начать радиолокационное наблюдение в соответ-
ствии с Рекомендациями по использованию РЛС для
предупреждения столкновения судов; принять меры к
прекращению или уменьшению посторонних шумов на
судне, выставить впередсмотрящего и обеспечить надеж-
ную связь его с мостиком, выключить или затемнить ог-
ни, мешающие наблюдению, и включить (даже днем) хо-
довые огни, так как электрический свет может быть за-
мечен на большем расстоянии, чем силует судна; опре-
делить место судна наиболее точным способом из всех
возможных в данных условиях; при плавании в районах
с малыми или отличительными глубинами включить на
постоянную работу эхолот, а при необходимости и гидро-
локатор для обнаружения подводных препятствий впере-
ди по курсу судна.
При плавании вблизи берегов прокладка курсов дол-
жна осуществляться так, чтобы полоса, в пределах кото-
рой может следовать судно с заданной вероятностью, про-
ходила бы чисто от опасностей ( см. § 59). Сближаясь с
берегом, целесообразно выбирать курс судна так, чтобы
оно следовало перпендикулярно общему направлению
изобат. Это позволит своевременно обнаружить с помо-
щью эхолота приближение к зоне опасных глубин и при-
нять необходимые меры предосторожности (уменьшить
ход, изготовить к отдаче якоря или стравить якоря на
глубину, равную примерно двум осадкам судна и т. п.).
Счисление пути судна необходимо вести особенно
тщательно с учетом ветра и течения, чаще сличать ком-
пасы, контролировать скорость хода по лагу и по частоте
вращения винтов.
При плавании в условиях пониженной видимости воз-
растает роль обсерваций, хотя получить их часто бывает
труднее, чем при хорошей видимости. Поэтому не следует
упускать любой возможности для определения места
судна с помощью имеющихся на судне технических
средств судовождения, применять, как и при плавании
в узкостях, метод ограждающих изолиний, измеряя ог-
раждающие навигационные параметры при помощи ра-
диотехнических и гидроакустических средств, использо-
вать в качестве ограждающей навигационной изолии
предостерегающую для судна данной осадки изобату.
366
командами лечь на тот или иной курс, а прямые коман-
ды коррекции курса дополняются информацией о поло-
жении судна в полосе проводки.
Место проводимого судна должно определяться бере-
говой РЛС с большой точностью. Поэтому береговые
РЛС имеют высокую разрешающую способность по на-
правлению и расстоянию. Для того чтобы оператор мог
быстро определять пеленг и расстояние от судна до
какого-либо ориентира, применяются специальные элект-
ронные устройства, которые обеспечивают быстрое и точ-
ное получение необходимых данных. На экраны берего-
вой РЛС наносятся электронным или механическим спо-
собами ось и бровки фарватера, что позволяет оператору
глазомерно оценивать положение судна в полосе про-
водки и передавать на судно команды о необходимой
корректировке его курса. Оператор береговой РЛС дол-
жен быть уверен, что наблюдаемая им отметка эхо-сиг-
нала принадлежит проводимому судну. Судно, нужда-
ющееся в проводке, устанавливает со станцией двусто-
роннюю связь и делает запрос, в котором указывает вре-
мя начала проводки, свое место (пеленг и расстояние от
условного ориентира), курс и скорость хода. Если этих
данных для береговой РЛС недостаточно для опознания
проводимого судна среди других объектов, то судно со-
вершает опознавательный маневр — обычно кратковре-
менное изменение курса по сигналу со станции. Иногда
для этой цели лоцман доставляет на судно портативный
радиолокационный маяк-ответчик с кодированной ха-
рактеристикой.
При большой протяженности фарватера проводка су-
дов осуществляется с помощью нескольких береговых
РЛС. Однако и в этом случае управление движением мо-
жет быть сконцентрировано на одном посту, на который
выводятся индикаторы от всех других береговых РЛС.
В настоящее время разрабатываются комплексы ав-
томатизированных телеуправляемых береговых РЛС для
проводки судов с помощью ЭЦВМ из диспетчерского
центра. Один из вариантов такого комплекса предусмат-
ривает доставку на судно лоцманом портативного радио-
локационного маяка-ответчика и переносного цифрового
экрана. Лоцман сообщает в диспетчерский центр по ра-
диотелефону свой номер (код), наименование судна, его
назначение, осадку и вид груза. Эти дацные вводятся-в
368
запоминающее устройство ЭЦВМ. Одновременно с им-
пульсом береговой РЛС излучается запросный кодиро-
ванный сигнал. Находящийся на судне радиолокационный
маяк-ответчик излучает ответный сигнал, код которого
соответствует номеру лоцмана. Этот сигнал обрабатыва-
ется в ЦВМ вместе с эхо-сигналом от судна. В результате
вычисляется пеленг и расстояние до какого-либо условно-
го ориентира, например до
ближайшей поворотной
точки оси фарватера. По-
лученные данные автома-
тически по линии ультра-
коротковолновой связи
передаются на судно, где
они индицируются на пе-
реносном лоцманском
цифровом индикаторе.
Необходимая дополни-
тельная информация пе-
редается по радиотелефо-
ну. Последовательность
запросов различных су-
дов программируется
ЭЦВМ.
Пользование услуга-,
ми береговой РЛС не
снимает с судоводитель-
ского состава проводимо-
го судна ответственности
за безопасность плава-
ния.
Створный радиомаяк (радиоствор) представ-
ляет собой азимутальное радионавигационное устройст-
во, предназначенное для проводки судов по фарватерам
и рекомендованным курсам. Обычно радиостворы дубли-
руют визуальные створы и используются при плавании
в условиях пониженной видимости. В створных радио-
маяках применен равносигнальный метод вождения суд-
на, сущность которого состоит в том, что в пространстве
создается узкая зона равной слышимости сигналов
(равносигнальная зона). Ось равносигнальной зоны сов-
падает с осью фарватера или рекомендованным курсом.
Створный радиомаяк (рис. 160) состоит из передатчика
24 В. Е. Ольховский
369
и двух рамочных антенн, которые устанавливаются под
углом 120° относительно друг друга и под углом 60° к
оси фарватера. Точка пересечения диаграмм направлен-
ности антенн (восьмерок) находится на оси фарватера.
Антенны излучают в двух смежных секторах одно-
буквенные переплетающиеся сигналы, подобранные так,
чтобы тире или точкам в одном сигнале соответствовали
промежутки между тире или точками в другом. Наибо-
лее распространенными сочетаниями являются сигналы
«А» (—) и «//» (—). При такой передаче в пределах
равносигнальной зоны образуется непрерывный звук од-
ного тона, а по обе стороны от нее будут слышны бук-
венные сигналы одного или другого сектора. Если ук-
лонения от равносигнальной зоны незначительны, то
буквенные сигналы сектора, в котором находится судно,
будут слышны на фоне сигналов другого сектора. С уве-
личением этого уклонения будут слышны только буквен-
ные сигналы сектора, в котором находится судно.
Проводка судна по фарватеру или рекомендованно-
му курсу при помощи створного радиомаяка осуществ-
ляется следующим образом.
Настроив на частоту радиомаяка любой радиопри-
емник соответствующего диапазона или радиопеленга-
тор, включенный на режим кругового приема, принима-
ют сигналы радиомаяка и устанавливают, по какую сто-
рону от равносигнальной зоны находится судно. Затем
ложатся на курс, обеспечивающий выход на ось этой зо-
ны. Курс судна рекомендуется выбирать так, чтобы ли-
ния курса пересекала ось равносигнальной зоны под ост-
рым углом. Как только, следуя этим курсом, судно вой-
дет в равносигнальную зону (будет слышен непрерыв-
ный звук одного тона), делают поворот и ложатся на
курс, совпадающий с направлением оси равносигнальной
зоны. Продолжая прослушивание сигналов радиомаяка,
корректируют курс так, чтобы судно следовало в преде-
лах равносигнальной зоны. При таком методе проводки,
как и при глазомерной радиолокационной проводке, тра-
ектория движения судна будет представлять собой кри-
вую, близкую к синусоиде.
Вследствие увеличения линейной ширины равносиг-
нальной зоны по мере удаления от створного радиомая-
ка чувствительность радиоствора с увеличением рассто-
яния до радиомаяка уменьшается, границы секторов ста-
370
новятся болёё размытыми й точность удержания судна
в пределах равносигнальной зоны снижается. Следует
также иметь в виду, что чувствительность радиоствора,
как правило, значительно ниже чувствительности визу-
ального линейного ведущего створа.
Дальность действия створных радиомаяков состав-
ляет 25—30 миль, а угловая величина равносигнальной
зоны обычно не превышает 1—2°.
Для предупреждения судна о близости навигацион-
ной опасности при плавании в условиях пониженной ви-
димости, используют различные воздушные звуко-
сигнальные средства (туманные сигналы). Эти
средства устанавливаются на береговых и плавучих ма-
яках, буях, специальных постах и приводятся в действие
при появлении тумана или снижении видимости до
3 миль в районе их установки. Источниками воздушных
звуковых туманных сигналов могут быть различные по
принципу действия устройства: электрические (наута-
фон), пневматические (сирена, диафон, тайфон) или
ударные (гонг, колокол, пушка). Каждое из таких уст-
ройств издает характерные звуки, что позволяет отли-
чать их друг от друга. Сведения о воздушных звукотех-
нических средствах и характере подаваемых ими туман-
ных сигналов помещаются в лоциях, в пособиях «Огни
и знаки», на картах.
Распространение звука в атмосфере зависит от рас-
пределения температуры, от влажности, давления, а так-
же от скорости и направления ветра. Эти факторы, в осо-
бенности изменение температуры и скорости ветра с вы-
сотой, влияют как на скорость распространения звука в
атмосфере, так и на траекторию звукового луча. Кроме
того, выдающиеся в море мысы, острова, утесы и т. п.,
встречающиеся на пути распространения звука, также
искажают траекторию звукового луча и уменьшают си-
лу звукового сигнала. Поэтому воздушные звуковые ту-
манные сигналы нельзя использовать даже для грубо
приближенного определения места судна. Эти сигналы
следует рассматривать только как средство предупреж-
дения о близости навигационной опасности и необходи-
мости принятия всех возможных в данных условиях мер
для обеспечения безопасности плавания. Таким образом,
воздушные туманные звуковые сигналы по своему на-
значению являются сигналами предостерегательными.
24* 371
Благодаря тому что морская вода представляет со-
бой более однородную среду, чем воздух, дальность рас-
пространения подводных звуковых сигналов превосхо-
дит дальность распространения воздушных звуковых
сигналов и направление их распространения искажается
значительно меньше (см. § 56). Для подачи подводных
звуковых сигналов используются различные подвод-
ные звукосигнальные средства — электриче-
ские или пневматические подводные колокола и электро-
динамические или электромагнитные излучатели мем-
бранного типа (осцилляторы).
Прием подводных звуковых сигналов может быть
осуществлен с помощью судовой гидроакустической
станции (ГАС), работающей в режиме эхопеленгования.
При работе в таком режиме ГАС не излучает импуль-
сов и фиксирует только направление на источник звука
в секторе прослушивания. Если судно находится в зоне
действия подводных звуковых излучателей, то его мес-
то может быть определено одним из навигационных спо-
собов, основанным на измерении пеленгов. Эхопеленг
подводного звукового излучателя измеряется со средней
квадратической ошибкой ±1,5—2°, 0.
§ 67. Определение места судна по глубинам
При плавании в условиях пониженной видимости
необходимо использовать все возможные способы конт-
роля счисления пути судна. Поэтому наличие на судах
современных радионавигационных приборов не исклю-
чает определения места судна по глубинам, измеренным
эхолотом. Место судна, определенное по глубинам, сле-
дует всегда рассматривать как приближенное. При пер-
вой возможности оно должно быть уточнено.
Для того чтобы определить место судна по глубинам
с достаточной достоверностью, необходимо, чтобы глу-
бины по курсу судна изменялись сравнительно равно-
мерно и в распоряжении судоводителя имелась бы под-
робная карта крупного масштаба (1:250000 и крупнее).
Информация о рельефе дна на таких картах представ-
ляется в виде изобат, которые могут быть использованы
как навигационные изолинии.
Если, например, проложенная на карте линия пути
судна пересекает две изобаты Н\ = const и Н2=const,
372
общие направления которых в пределах полосы воз-
можного перемещения судна образуют некоторый угол
0^30°, то эти изобаты могут быть использованы
как разновременные навигационные изолинии (ли-
нии положения). В этом случае получение места
судна сводится к вмещению между первой и второй изо-
батами отрезка пути судна, равного расстоянию 5, прой-
денному им по линии пути за промежуток времени меж-
ду моментами Л и Т2 пересечения изобат /Л = const и
//2=const (рис. 161). Для
определения моментов 1\ и
Т2 пересечения судном изо-
бат и расстояния 5, прой-
денного им по линии пути за
промежуток времени t =
= Т2—Т\, подходя по счис-
лению к изобате //i = const,
включают на непрерывную
работу эхолот и, наблюдая
за показаниями самописца
эхолота, замечают момент
Т\ пересечения судном изо-
баты //1 = const и соответст-
вующий этому моменту отсчет лага ол\. Аналогично
определяют момент Т2 пересечения судном изобаты Н2 =
= const и соответствующий этому моменту отсчет лага
ол2. Зная ол{ и ол2, а также направление и скорость те-
чения в районе плавания, можно получить величину S
известным графическим построением. Если счисление
пути судна ведется без учета течения, то 5л=5. Вмеще-
ние плавания 5 между изобатами параллельно линии
пути судна можно произвести с помощью параллельной
линейки и измерителя. При определении по показаниям
эхолота момента пересечения судном изобаты должны
быть учтены поправки глубин ДЯ:
ДЯ = ДЯ0 + ДЯС + ДЯУ,
где ДЯЭ — инструментальная поправка эхолота;
ДЯС — поправка за отклонение скорости звука в воде от рас-
четной;
ДЯу —поправка за колебания уровня моря.
Средняя квадратическая ошибка определения места
судна рассмотренным способом может быть рассчитана
по приведенной ниже формуле, аналогичной формуле
(V—30):
373
м~V +Ч>, +отс(о>
1де 9 — угол пересечения изобат в определенном месте;
тс(/) — линейная средняя квадратическая ошибка счисления
по направлению нормали к первой изобате за время
/ = Т2-Т1;
тлп и тАП — средние квадратические ошибки положения изобат,
где ти—средняя квадратическая ошибка измеренной эхолотом и
исправленной соответствующими поправками глубины;
g— градиент изобаты;
/zzP —средняя квадратическая ошибка положения глубин, по-
казанных на карте.
Если линия пути судна пересекает участок дна с от-
личительной глубиной, то, включая заблаговременно
эхолот и заметив по его показаниям момент прохожде*
ния над соответствующим этой глубине участком дна,
можно уточнить счислимое место судна. Более надежно
место судна можно определить при одновременном
измерении отличительной глубины и какого-либо нави-
гационного параметра, например радиопеленга. Навига-
ционный параметр можно измерить и в момент пересе-
чения судном по показаниям эхолота изобаты. В этом
случае место судна будет находиться в точке пересече-
ния изобаты и линии положения (изолинии), соответст-
вующей измеренному навигационному параметру. Для
более надежного определения места судна линия поло-
жения должна пересекать изобату под углом, близким
к 90°.
Добывающие суда обычно располагают промыслово-
навигационными картами или планшетами, на которых
дана более подробная характеристика рельефа дна, чем
на обычных навигационных картах. Это облегчает опре-
деление места судна по глубинам, особенно в хорошо
изученных промысловых районах. Определение места
судна по глубинам может производиться как в процессе
поиска рыбы, так и в процессе ее промысла. Как извест-
но, поиск осуществляется переменными курсами, причем
плавание каждым курсом сравнительно непродолжи-
тельно. Это требует применения некоторых специфиче-
374
ских приемов определения места судна по глубинам.
Ниже описаны некоторые из этих приемов.
Определение места судна в районе с характерным
рельефом дна. Предположим, что судно ведет гидро-
акустический поиск в районе, где рельеф дна хорошо
изучен и контроль счисления можно достаточно надеж-
но осуществлять путем
определения места суд-
на по глубинам. Начав
поиск в счислимой точке
Д1 (рис. 162), выбирают
курсы так, чтобы они пе-
ресекали изобаты при-
мерно под прямым углом.
На кальке отмечают точ-
ки поворотов Л3, 46, Л8,
а также точки Л2, А4, >45,
4 7, в которых по счисле-
нию находилось судно в
моменты пересечения по
показаниям эхолота ха-
рактерных изобат, нане-
сенных на карте. При
прокладке поисковых
галсов учитывают дрейф
и снос течением.
Обнаружив по показаниям эхолота промысловое
скопление рыбы, приступают к пробному тралению и
одновременно определяют место судна по глубинам.
Для этого, перемещая кальку по карте так, чтобы ли-
ния пути судна смещалась параллельно самой себе,
добиваются такого положения, при котором отмеченные
на кальке точки Д2, 44, Л5, Л7, совпадают с соответству-
ющими изобатами на карте. Перенеся на карту уколами
циркуля точки Ah Л2, ...,Л8, уточняют расположение об-
следованного эхолотом участка (ломаная линия В],
В2,..., В8), находят место судна В7 в момент пересечения
последней изобаты и место судна Ск в момент обнару-
жения скопления рыбы.
Определение места судна с использованием промыс-
лового буя. Если по результатам пробного донного тра-
ления улов достигает промысловой величины, обычно
ртарят буй, который служит промысловым и навигацц?
375
онным ориентиром. Прокладку курсов, пробных трале-
ний при дальнейшем обследовании района также целе-
сообразно вести на кальке, наложенной на промыслово-
навигационную карту (планшет) и ориентированной
относительно меридиана.
На рис. 163 точка Ао— счислимое место промысло-
вого буя на карте. Располагая курсы пробных тралений
на различных расстоя-
ниях от буя, определя-
ют место судна отно-
сительно буя по пелен-
гу и расстоянию до не-
го при спусках и подъ-
емах трала (точки
А3, Д5, Л8), а также в
моменты пересечения
по показаниям эхоло-
та характерных изо-
бат, нанесенных на
карте (точки А2, Л4,
As, А7).
Для уточнения гра-
ниц обследованного
пробными тралениями
участка на кальке че-
рез место промыслово-
го буя проводят меридиан и параллель и, перемещая каль-
ку по карте так, чтобы меридиан и параллель кальки
были соответственно параллельны меридианам и парал-
лелям карты, добиваются возможно большего совпаде-
ния определенных по пеленгу и расстоянию до буя точек
A2t A4j Aq, Л7 с соответствующими изобатами на карте.
Затем уколами циркуля переносят на карту маршрут
судна (ломаная линия В2,...,В3) и одновременно
уточняют место постановки промыслового буя (точка
Во). Этот прием позволяет исключить влияние недоста-
точно точно известных внешних факторов: течения и
ветра.
При наличии зрительной видимости место судна
относительно промыслового буя определяют по визуаль-
ному пеленгу и радиолокационному расстоянию, а при
отсутствии видимости — по радиолокационным пеленгу
и расстоянию.
376
§ 68. Использование одной линии положения
для уточнения счислимого места судна
При плавании в условиях ограниченной видимо-
сти нередки случаи, когда представляется возможность
измерить только один навигационный параметр и проло-
жить только одну линию положения. Одна линия поло-
жения может быть использована для уточнения счисли-
мого места судна в мо-
мент измерения нави-
гационного параметра.
Предположим, что
в некоторый момент
времени Т, когда судно
находилось по счисле-
нию в точке С, был из-
мерен навигационный
параметр U. Счисли-
мое место судна мож-
но условно рассматри-
вать как результат
Рис. 164
определения места по
пеленгу и расстоянию
(линии положения /—/ и //—// на рис. 164). Тогда, про-
ложив на карте линию положения ///—///, соответству-
ющую измеренному навигационному параметру U, полу-
чим треугольник погрешности, образованный тремя раз-
новесными линиями положения: /—/ (S), //—// (ПУ) и
III—III (U). За редким исключением наибольший вес
будет иметь линия положения III—III.
Как известно, при наличии избыточных линий поло-
жения вероятное место судна F может быть найдено
одним из способов, рассматриваемых в общей теории на-
вигационных определений.
Если обработка навигационной информации произво-
дится «вручную», то для уточнения счислимого места
судна по результатам измерения одного навигационного
параметра на практике используют обычно простые
приближенные приемы, вытекающие из строгих решений.
Считают, что наиболее вероятное место судна находится
в точке С', являющейся основанием перпендикуляра,
опущенного из счислимого места на линию положения,
если предполагаются значительные ошибки как вопреде-
377
Ленин Пути, так и пройденного судном расстояния
(рис. 165,а); в точке пересечения линии положения
с линией пути, если предполагается значительная ошиб-
ка только в определении пройденного судном расстояния
(рис. 165,6); в точке Со" пересечения линии положения
Рис. 165
с перпендикуляром,
проведенным из счис-
лимого места С к ли-
нии пути, если предпо-
лагается значительная
ошибка только в опре-
делении пути (рис.
165, в).
Одна линия поло-
жения может быть так-
же использована для
уменьшения площади
Рис. 166
вероятного местона-
хождения судна. Эта
задача решается тем
успешнее, чем боль-
шим весом обладает
полученная линия по-
ложения. Предполо-
жим, что в некоторый
момент времени Т, ког-
да судно находилось
по счислению в точке
С (рис. 166), был из-
мерен навигационный
параметр U. Радиальную среднюю квадратическую
ошибку счислимого (текущего) места судна Afc можно
вычислить по формуле
м0 = ]/м^+м2е({),
где Mq — радиальная средняя квадратическая ошибка обсерво-
ванного места судна, принятого за исходную точку
счисления;
Мс(0 — радиальная средняя квадратическая ошибка последу-
ющего счисления.
Если не принимать в расчет измеренный навигацион-
ный параметр (7, то надо полагать, что действительное
место судна в момент Т находится с вероятностью 63—
378
68% в пределах окружности, описанной из точки С, как
из центра радиусом г=Л1с.
Проложим теперь на карте линию положения, соот-
ветствующую измеренному навигационному параметру
U. Из-за случайных ошибок наблюдений эта линия мо-
жет сместиться параллельно самой себе в ту или другую
сторону на величину Ап. Средней квадратической ошиб-
ке навигационного параметра ти будет соответствовать
смещение линии положения Ап=/плл_, где тАП —сред-
няя квадратическая ошибка линии положения:
где gu — градиент навигационного параметра.
Проведем по обе стороны от проложенной линии по-
ложения на расстоянии, равном тлл, параллельные ей
прямые и продолжим их до пересечения с окружностью,
описанной из точки С радиусом г=Мс (точки a, Ь, с и
d). Полученная площадь abed будет представлять собой
площадь возможного местонахождения судна. Как вид-
но из рис. 166, она значительно меньше площади круга
радиуса г=Мс. В некоторых случаях, когда по услови-
ям плавания возможно измерить только один навигаци-
онный параметр, стремятся выполнить наблюдения так,
чтобы на участке плавания получить линию положения,
либо примерно параллельную линии пути (предполага-
ется значительная ошибка в определении пути), либо
примерно перпендикулярную линии пути (предполагает-
ся значительная ошибка в определении пройденного рас-
стояния), либо пересекающую линию пути под некото-
рым определенным углом, при котором обеспечивается
уменьшение площади возможного местонахождения суд-
на в наиболее выгодном для плавания направлении
(см. рис. 166).
Рассмотренными в этом параграфе вопросами ко-
нечно не ограничивается применение одной линии поло-
жения или изолинии в навигации. В других главах учеб-
ника рассмотрены приемы использования одной изолинии
в качестве ограждающей, а также способы осуществле-
ния, плавания по различным изолиниям, которые широ-
ко применяют при проходе узкостей, подходе к бере-
гу с моря, тралении в районах, стесненных навигацион-
ными и промысловыми опасностями.
379
§ 69.»Навигационные особенности плавания
во ЛЬДАХ
Плавание во льдах относится к наиболее слож-
ным видам плавания. С навигационной точки зрения оно
характеризуется следующими особенностями.
Плавание во льдах осуществляется наиболее легко-
проходимым для судна путем, который по продолжи-
тельности плавания оказывается наиболее выгодным,
хотя и не является кратчайшим по расстоянию. Выбор
такого пути и его последующая корректировка в процес-
се плавания осуществляются на основе тщательного
анализа ледовой информации, поступающей на судно
по различным каналам, и непрерывного визуального или
радиолокационного наблюдения за состоянием льдов в
пределах зрительной и радиолокационной видимости
с судна.
Плавание наиболее легкопроходимым для судна пу-
тем может быть связано с необходимостью частых и не-
закономерных изменений курсов и скорости хода, зави-
сящих от толщины, прочности и сплоченности льда. Это
заставляет прибегать к особым приемам ведения счисле-
ния, более трудоемким и менее точным, чем при плава-
нии на чистой воде.
Большинство современных лагов во льдах работать
не могут. Возможно использование гидродинамического
лага, но только в том случае, если он имеет штевневое
приемное устройство. Однако показания такого лага
могут иметь значительные погрешности вследствие за-
бивания приемного отверстия мелкобитым льдом и сне-
журой. Кроме того, в высоких широтах, особенно при
маневрировании, магнитный и гироскопический компа-
сы работают менее надежно. Все это создает дополни-
тельные трудности при ведении счисления пути судна и
снижает его точность.
Наличие льда часто сопровождается пониженной
видимостью или резко повышенной рефракцией, что при-
водит к ограничению возможности определения места
судна по визуальным наблюдениям навигационных ори-
ентиров и астрономическими способами, затрудняет
ориентировку по береговой черте. При плавании в при-
брежных районах, стесненных навигационными опасно-
стями, практически исключается использование плаву-
380
чих предостерегательных знаков. Поэтому особенно
важное значение для определения места судна при пла-
вании во льдах приобретают радиотехнические средства
судовождения и спутниковые навигационные системы.
Выбор пути при плавании во льдах. Плавание судна
во льдах может осуществляться как под проводкой ле-
докола, так и самостоятельно. При плавании под про-
водкой ледокола выбор пути и руководство проводкой
осуществляет капитан ледокола. Плавание судов под
проводкой ледокола регламентируется специальными
правилами, которые объявляются в Извещениях море-
плавателям. В этих правилах приводятся требования к
проводимым судам.
Оценка ледовой обстановки в районе плавания и
предварительная прокладка общего (генерального) на-
правления движения судна выполняются на основании
поступающей на судно ледовой информации. Эта ин-
формация содержит следующие сведения, полученные
по данным ледовой авиационной и судовой разведки и
специальных ледовых прогнозов: положение и состояние
кромки льда; общая характеристика ледовых условий
в районе плавания; предполагаемые изменения ледовых
условий на ближайшие несколько суток; рекомендации
о наиболее выгодном общем направлении движения (для
судна, совершающего самостоятельное плавание, или
для ледокола, осуществляющего проводку).
Частные курсы выбирают непосредственно в процессе
плавания по результатам непрерывных визуальных и ра-
диолокационных наблюдений за окружающей ледовой
обстановкой. С помощью РЛС можно определять поло-
жение кромки льда и его сплоченность в пределах ра-
диолокационной видимости*. Следует, однако, иметь в
виду, что РЛС, являясь хорошим средством ориенти-
ровки при выборе частных курсов судна, не гарантирует
обнаружения отдельных плавающих льдин.
Самостоятельное плавание судна во льдах осущест-
вляется, как правило, только по разводьям, общее на-
правление которых совпадает с рекомендованным гене-
ральным направлением движения судна. Выбранные
разводья должны сообщаться друг с другом или, по
* Радиолокационные методы наблюдения за людьми рассмат-
риваются в курсе «Навигационная гидрометеорология».
381
крайней мере, разделяться слабыми перемычками. Пере-
ходя из одного разводья в другое или подходя к пере-
мычке, необходимо наити наиболее удобное для прохода
место.’Не следует выбирать курс, проходящий через те
места перемычки, где наблюдаются торосообразования,
если даже ширина перемычки в этом месте будет наи-
меньшей. Форсировать перемычки надо по возможности
против ветра. При этом условии за кормой судна будет
держаться чистый от льда канал. Следуя чистой водой
или разводьями и встречая отдельные скопления спло-
ченного льда, нужно стремиться обходить их с наветра.
При плавании во льдах, даже при самых благоприятных
условиях, неизбежны отклонения от предварительно
проложенного общего (генерального) направления дви-
жения судна. Для того чтобы сохранить предваритель-
но проложенное направление, необходимо, чтобы такие
отклонения производились по возможности в обе сто-
роны.
Неосторожный вход судна во льды может повлечь за
собой серьезные повреждения корпуса, винтов, рулей.
Поэтому при подходе ко льдам надо соблюдать особую
осторожность, вести наблюдения всеми доступными
средствами и учитывать признаки приближения к кром-
ке льдов (возрастание земной рефракции, появление
полосы низкого тумана, появление белесых отблесков на
облаках, заметное уменьшение волнения моря при силь-
ном ветре со стороны льдов, появление отдельных пла-
вающих льдин, понижение температуры воды).
Определение скорости хода судна при плавании во
льдах. Большинство современных лагов при плавании
во льдах использовать нельзя. Поэтому скорость хода суд-
на во льдах определяют обычно методом «планширного
лага» (см. § 12), при наличии необходимых условий —
с помощью РЛС, а также глазомерно. Методом «план-
ширного лага» скорость судна определяется относитель-
но льда по времени прохождения льдиной траверза двух
точек на судне, расстояние между которыми L известно.
Используемые для наблюдений льдины должны распо-
лагаться от борта не далее 20—30 м. Скорость хода оп-
ределяют по таблице, рассчитанной по формуле
„ L-3600 L
V ------------= 1 94 в -—
/•1852 t
(XI—I)
382
гДе L — величина 6а$ы, ii;
t— время, с.
Чтобы обеспечить возможность определения скоро-
сти хода этим методом одним наблюдателем с мостика
судна, на некоторых судах
используют специальный
сектор, снабженный двумя
визирами (рис. 167). Сек-
тор устанавливают на што-
ке, который крепят к план-
ширу мостика с помощью
специальной цапфы с шар-
нирными соединениями, по-
зволяющими устанавливать
шток в вертикальное поло-
жение. Сектор крепят к што-
ку на некоторой высоте е
под углом а=30-7-40°. Обо-
значив угол между визир-
ными линиями сектора р,
на основании рис. 167 лег-
ко получить формулу для
расчета величины базы
L=AB-.
L р
ON = е sec a, ~z~ = ONtg — ,
Л ^5
следовательно,
р
L = 2е sec a tg — .
Рис. 167
Например, при а=30° и р=120° L=4 е.
Заметив по секундомеру моменты Т\ и Т2 прохожде-
ния какой-либо льдины через линии визирования ОА и
ОВ, из таблицы, рассчитанной по формуле (XI—1) для
базы L, выбирают по аргументу t=T2—скорость
хода. .
Если вблизи судна имеются приметные льдины
(стамухи, торосы), отметки эхо-сигналов которых хоро-
шо видны на экране РЛС, скорость хода можно опреде-
лять с помощью РЛС. Если такая льдина расположена
прямо по носу или по корме, то, измерив в моменты 1\
и Т2 расстояния до нее DY и Р2, определяют раз-
ность этих расстояний, равную плаванию судна отно-
383
сительно этой льдины за промежуток времени t=
= Т2—7\, и рассчитывают скорость хода в узлах.
Однако обычно в качестве радиолокационного
ориентира приходится использовать приметную льдину,
расположенную на произвольном курсовом угле. В этом
Рис. 169
случае в какой-либо момент 7\ измеряют пеленг И111 и
расстояние до выбранного ориентира. Через некото-
рый промежуток времени /, в течение которого судно
следовало постоянным курсом, вторично измеряют пе-
ленг ИП2 и расстояние D2 до этого же ориентира. Затем
на листе бумаги или в свободном углу карты из произ-
вольной точки К (см. рис. 168) прокладывают в крупном
масштабе измеренные пеленги и расстояния, получают
величину плавания судна S7 относительно льдины-ори-
ентира и рассчитывают скорость хода в узлах.
Если в качестве ориентиров приходится использо-
вать отдельные плавающие льдины, то нужно выбирать
старые, глубокосидящие льдины средних размеров,
дрейф которых под влиянием ветра и сил инерции мал.
Определение скорости и направления дрейфа льда.
При плавании в сплоченных льдах судно дрейфует вме-
сте со льдами, совершая переносное движение, которое
учитывается при ведении счисления так же, как и те-
чение.
Дрейф льда, как правило, определяют по результа-
там обсерваций. На малых глубинах для этой цели мож-
но использовать ручной или механический лот. С навет-
ренного борта судна, стоящего с застопоренной маши-
384
ной в районе полыньи бортом к подветренной льдине,
вытравливают лот до грунта и измеряют глубину места
Н (рис. 169). Затем дают лотлиню некоторую слабину
и в этот же момент запускают секундомер. Когда под
действием дрейфа судна вместе со льдом слабина лот-
линя будет полностью выбрана и он туго натянется, се-
кундомер останавливают и замечают длину вытравлен-
ного лотлиня I. На основании рис. 169 приближенную
формулу для расчета скорости дрейфа можно записать
в таком виде:
3600 ]Л2 —Н2 , ]Ла—я2
Опт) == — »94
др 1852 t t
где И— глубина места, м;
I—длина вытравленного лотлиня, м;
t — промежуток времени, замеченный по секундомеру, с.
Более точно скорость дрейфа определяют при помо-
щи специальной таблицы, рассчитанной по формуле,
учитывающей провисание лотлиня. Такая таблица поме-
щена в Океанологических таблицах и в некоторых дру-
гих пособиях и руководствах.
Направление Кдр дрейфа определяют по направле-
нию лотлиня:
К^ = ИК±д± 180°,
где Я — курсовой угол, по которому направлен лотлинь (знак «+>
берется для правого борта, знак «—» для левого).
Ведение счисления при плавании во льдах. При пла-
вании в сильно разреженных льдах, когда курсы и
скорость хода приходится менять сравнительно редко,
счисление пути судна ведут так же, как и при плавании
на чистой воде. При ледовой обстановке, требующей
частных изменений курсов и скоростей хода, прибегают
к особым приемам ведения счисления. Эти приемы впер-
вые применил адмирал С. О. Макаров во время ледо-
вых плаваний на ледоколе «Ермак». Они основаны на
определении генерального курса судна и его плавания
за час по результатам записей каждые пять минут кур-
са и скорости хода. При этом курс замечают в конце
каждой пятой минуты, т. е. 12 раз за час, скорость хода
оценивают за большую часть пятиминутного промежут-
ка. Дрейф судна вместе со льдом учитывают как само-
стоятельный курс.
25 В. Е, Ольховский
385
Расчет генерального курса и плавания за час в таб-
личной форме предусматривает:
расчет генерального истинного курса за час по фор-
муле
12
гик = ^~ъ—'
где ИКъ — истинный курс судна в конце каждой пятой минуты;
расчет генерального плавания за час по формуле i
12
Ген <$ = 2 cos Д,
1
где S6 —плавание, за пять минут, рассчитанное по скорости хода, «
а Ь=ИКъ—ГИК. |
Очевидно, что выражение S5 cos А представляет собой |
проекцию пятиминутного плавания по частному истин- |
ному курсу на линию генерального истинного курса. *
Все расчеты, которые удобно выполнять с помощью
ЭКВМ, ведутся по специальной схеме, которая приведе-
на ниже.
Время t КК5 дк ИК» S» Д cos Д Sb cos Д
Недостатками рассмотренного приема ведения счис-
ления являются его трудоемкость и ошибки, возникаю-
щие при осреднении частных (пятиминутных) курсов в
генеральный. Эти ошибки могут быть значительными,
если частные курсы располагаются в пределах широко-
го сектора (более 60°), а плавания этими курсами совер-
шаются с различной скоростью.
С целью упрощения расчетов М. В. Готский предло-
жил следующий прием обработки записей элементов
счисления за час: одни и те же (повторяющиеся) курсы
сводить в один общий курс и плавание по этому курсу
принимать равным сумме плаваний по каждому курсу
в отдельности; из курсов, лежащих в пределах сектора
15—20°, выводить средние курсы и плавание по ним
суммировать.
386
Полученные в результате такой обработки наблюде-
ний несколько компасных курсов (общих или средних)
исправляют поправкой компаса и прокладывают на пу-
тевой карте. По линии каждого истинного курса откла-
дывают соответствующее плавание. Этот прием частич-
ного осреднения частных курсов также имеет недостаток.
Откладывая по линии осредненного курса плава-
ние, равное сумме плаваний отдельными частными кур-
сами, вводят в счисле-
ние систематическую
ошибку методического
характера. В результа-
те счислимое место
судна будет всегда впе-
реди его действитель-
ного места.
Графический прием
сводится к прокладке
в свободном углу пу-
тевой карты в увели-
ченном, например в 10 раз, масштабе всех частных (пя-
тиминутных) компасных курсов и плаваний по ним.
Выполнив такую прокладку, снимают с карты гене-
ральный компасный курс за час и генеральное плавание.
Генеральный компасный курс исправляют поправкой
компаса, а затем полученный генеральный истинный
курс прокладывают на карте от исходной точки счисле-
ния и по линии этого курса откладывают генеральное
плавание (рис. 170).
Задача определения генерального курса и генераль-
ного плавания за час может быть решена и с помощью
специальных механических приборов, предназначенных
для сложения векторов и получения результирующего
вектора.
Для ведения счисления при плавании во льдах мож-
но использовать и автопутепрокладчик. Если на судне
нет лага со штевневым приемным устройством или та*
кой лаг работает ненадежно (приемное отверстие заби-
вается, например, мелкобитым льдом, снежурой), то
скорость хода при каждом ее определении методом
«планширного лага», с помощью РЛС или глазомерно
вводится в прибор вручную. Дрейф судна вместе со
25‘
387
льдом учитывается узлом учета течения автосчислителя
координат. Элементы дрейфа также вводятся в прибор
вручную.
Учет перемещения судна при плавании во льдах с
помощью РЛС. Если на отдельных участках перехода
имеются приметные льдины (стамухи, торосы), отметки
эхо-сигналов которых хорошо видны на экране РЛС, то
такие льдины могут
Ао быть использованы в
/\^ качестве радиолокаци-
хг х^ х^ онных ориентиров. На-
у хХ -А личие льдин-радиоло-
4^ Kat*H0HHbIX ориентиров
Fd(W 1 позволяет частично
или полностью отка-
Рис. 171 заться от ведения пя-
тиминутного счисле-
ния и периодически
определять с помощью РЛС места судна относительно
этих ориентиров по пеленгу и расстоянию.
Предположим, что в исходной точке Го в момент То
измерены пеленг По и расстояние Do до льдины-ориен-
тира До и на карту нанесено ее положение относительно
точки Го (рис. 171). Через некоторый промежуток време-
ни в момент Г] вторично измерены пеленг ГЦ и расстоя-
ние до льдины-ориентира До, а также пеленг П2 и рас-
стояние D2 до новой льдины-ориентира Дь расположен-
ной впереди по курсу. Проложив на карте от ориентира
До пеленг /71 и расстояние получают место суд-
на относительно этого ориентира на момент Т{ (точ-
ка Л).
Затем по пеленгуП2 и расстоянию/^ наносят на кар-
ту положение ориентира Д1 относительно точки Гь Изме-
рив через некоторый промежуток времени в момент Т2
пеленг /73 и расстояние D3 до ориентира Дь получают
место судна относительно этого ориентира на момент Т2
(точка Г2) и т. д.
Если в качестве радиолокационных ориентиров
используют отдельно плавающие льдины, то, как и при
определении скорости хода судна, выбирают старые глу-
бокосидящие льдины средних размеров, собственный
дрейф которые под влиянием ветра и сил инерции
мал.
388
ЧАСТЬ ВТОРАЯ
ПРОМЫСЛОВАЯ НАВИГАЦИЯ
ВВЕДЕНИЕ
Предмет промысловой навигации. Развитие науки
на современном этапе характеризуется, с одной стороны,
интеграцией наук (их взаимным проникновением), а с
другой — дифференциацией как отраслей знаний, так и
каждой отрасли.
Дифференциация науки судовождения связана в зна-
чительной мере с тем, что методы вождения отдельного
судна или группы судов определяются не тольно навига-
ционной и гидрометеорологической обстановкой в рай-
оне плавания, но и задачей плавания, обусловленной в
общем случае назначением судна.
Так, например, необходимость решения задач такти-
ки морского боя, совершенствование боевых кораблей и
их вооружения привели к становлению и развитию как
самостоятельной научной дисциплины тактической на-
вигации, на основе которой впоследствии сформирова-
лась дисциплина «маневрирование». Основной приклад-
ной задачей этой научной дисциплины является дости-
жение наивыгоднейшего положения относительно объек-
та маневра при одновременном сохранении наибольшей
безопасности собственного движения маневрирующего
корабля.
Развитие активного морского рыболовства, гидроаку-
стической техники, необходимость облова небольших по
протяженности и подвижных косяков рыбы, освоение
промысловых районов, стесненных опасностями для ору-
дий лова поставили такие задачи тактики промысла, ко-
торые могли быть решены только на основе использова-
ния достоверной гидроакустической информации о поло-
жении относительно судна облавливаемого косяка,
орудия лова, подводных опасностей и изучения динами-
ки сложной системы судно — орудие лова. Так возникла
дисциплина «промысловая навигация»,
389
Предметом промысловой навигации как научной дис-
циплины является разработка способов маневрирования
добывающего судна, обеспечивающих наведение орудия
лова на облавливаемый косяк рыбы (или обмет косяка).
Эти способы базируются на использовании гидроакусти-
ческой информации о положении относительно судна
орудия лова, косяка рыбы и подводных опасностей, а
также на изучение динамики системы судно — ору-
дие лова.
Навигация и промысловая навигация имеют хотя и во
многом схожие, но принципиально различные теорети-
ческие основы. Закономерности, на основе которых, раз-
рабатываются способы промысловой навигации, уста-
навливаются по результатам исследований динамики
системы судно — орудие лова и существенно отличаются
от законов перемещения судна относительно поверхности
земли в свободном плавании, лежащих в основе решения
задач навигации.
Одна из наиболее сложных задач промысловой нави-
гации сводится к разработке способов маневрирования
судна, обеспечивающих наведение буксируемого им тра-
ла на локальный подвижной косяк. Если косяк рыбы
располагается в толще воды, то задача наведения трала
на такой косяк является пространственной. Учитывая,
что в процессе непосредственного наведения трала на
косяк пелагических рыб глубина хода трала изменяется
в ограниченных пределах, эту задачу можно разделить
на две независимые: наведение трала на косяк в плоско-
сти горизонта (в плане) и наведение трала на косяк в
вертикальной плоскости (по глубине). Решение первой
задачи требует маневров курсом судна, а второй —
скоростью судна.
Промысловая навигация полностью решает задачу
наведения трала на косяк в плоскости горизонта, тре-
бующую маневрирования курсом судна. Задача же наве-
дения трала на косяк в вертикальной плоскости решает-
ся не только маневрированием скорости судна, но и
изменением длины вытравленных ваеров, а также созда-
нием заглубляющей или подъемной силы с помощью
управляемой гидродинамической оснастки трала. Поэто-
му здесь промысловая навигация объединяется с техни-
кой промышленного рыболовства, отдавая ей пальму
первенства.
390
С точки зрения кинематики задача наведения трала
на локальный подвижный косяк в плоскости горизонта
(в плане) сводится к определению координат точки
встречи цели — центра плоскости косяка — с буксируе-
мым судном тралом. Такая задача, как известно, может
быть решена, если заданы траектории и уравнения дви-
жения трала и косяка. Этим вопросам посвящена гла-
ва XII. Расчетные методы наведения трала на косяк ры-
бы или обмета его кошельковым неводом требуют исполь-
зования достаточно точной гидроакустической информа-
ции. Такая информация может быть получена только с
помощью современных рыбопоисковых гидроакусти-
ческих станций, обладающих высокой разрешающей
способностью и обеспечивающих возможность выделения
центра плотности — ядра косяка.
Быстротечность процессов прицельного облова ло-
кальных подвижных косяков разноглубинным тралом
и кошельковым неводом не позволяет достаточно успеш-
но осуществлять расчеты маневрирования «вручную».
Как показала практика, применение для этой цели спе-
циальных таблиц, номограмм, планшетов во многих слу-
чаях не дает должного эффекта. Все это заставляет уде-
лять особое внимание аналитическим методам решения
задач промысловой навигации, которые могут быть реа-
лизованы с помощью вычислительной техники и состав-
ляют математическую основу автоматизации процессов
маневрирования судов с орудиями лова.
В настоящее время разрабатываются и внедряются
на добывающих судах автоматизированные информа-
ционно-управляющие промыслово-навигационные комп-
лексы обеспечивающие полуавтоматическое решение за-
дач замета кошелькового невода, наведения разноглу-
бинного трала на косяк рыбы в плоскости горизонта и
автоматическое решение задачи наведения трала на ко-
сяк в вертикальной плоскости (по глубине).
Практическое значение промысловой навигации, ее
роль в повышении эффективности активных методов ло-
ва будет непрерывно возрастать по мере развития и внед-
рения на добывающих судах средств вычислительной
техники и автоматизации, рыбопоисковых гидроакусти-
ческих станций, обеспечивающих работу в режиме «ма-
неврирование», и других датчиков промыслово-навига-
ционной информации.
391
Промысловая прокладка. Промысловой прокладкой
называется графическое изображение на картах или
планшетах пути судна в процессе промысла, горизон-
тального перемещения ядра облавливаемого косяка ры-
бы и его контуров (при прохождении над косяком судна
с целью его обследования), положения буксируемого тра-
ла в тот или иной момент времени после поворота судна.
Она включает в себя расчеты и графические построения,
связанные с выбором маневров судна, обеспечивающих
наведение трала на облавливаемый косяк или обмет его
кошельковым неводом. Практически перечисленные вы-
ше задачи могут быть решены «вручную» за небольшим
исключением только при донном и придонном тралени-
ях, а также при облове разноглубинным тралом мало-
подвижных косяков пелагических рыб и при некоторых
способах замета кошелькового невода.
При работе донным тралом и разноглубинным тра-
лом в придонном варианте промысловую прокладку ве-
дут на промыслово-навигационных картах или планше-
тах. Промыслово-навигационные карты содержат все
элементы, присущие путевым навигационным картам, и,
кроме того, элементы специальной промысловой харак-
теристики, к которым относятся: задевы и участки с
неблагоприятными для траления грунтами; сведения о
местах с сильными течениями, затрудняющими работу с
орудиями лова; сведения о местах массового развития
морских животных и растений, затрудняющих промысел,
а также являющихся излюбленной пищей для промысло-
вых рыб или характеризующих гидрологические условия
промысла; сведения о местах, которые являются наи-
более благоприятными для ведения промысла в различ-
ное время года; рекомендованные курсы траления.
Промыслово-навигационные карты составляются обыч-
но в масштабах от 1:100000 до 1:200000. При отсутствии
промыслово-навигационных карт промысловую проклад-
ку ведут на планшетах, которые составляются и раз-
множаются рыбохозяйственными организациями. Про-
мысловые планшеты строят, как и карты, в проекции
Меркатора и в тех же масштабах.
При «ручном» ведении промысловой прокладки в до-
полнение к условным обозначениям, предусмотренным
Правилами штурманской службы № 27, используют и
специфические обозначения.
392
Промысловая прокладка может вестись на промыс-
лово-навигационных картах или планшетах с помощью
специального автопрокладчика. Использование в таком
приборе быстродействующих следящих систем, обеспе-
чивающих высокую скорость пробега записывающей го-
ловки, автоматического переключателя датчиков инфор-
мации и вычисли-
тельных блоков, по-
зволяет осущест-
вить графическое
изображение траек-
тории движения суд-
на (по данным счис-
ления, по результа-
там практически не-
прерывных измере-
ний навигационных
Рис. 172
параметров или по
вероятнейшим коор-
динатам), трала, ядра косяка пелагических рыб и конту-
ров косяка с учетом его собственного перемещения.
На рис. 172 показан общий вид промысловой про-
кладки на планшете автопрокладчика прибора ПАМС
при разноглубинном траловом лове (прибор разработан
в Мурманском высшем инженерном морском училище
имени Ленинского комсомола).
Обозначения на рисунке следующие: аб — курс трау-
лера при поиске; BiBi — траектория движения встречно-
го судна; в2 — судно с застопоренной машиной; гь г2 —
косяки рыбы; бд— курс траулера при записи встречных
судов и косяков; де — курс сближения по кривой погони;
жжх — траектория движения ядра косяка; ез — рекогнос-
цировочный курс; м — запись конфигурации косяка на
рекогносцировочном курсе; зз' — «забег» для спуска тра-
ла; з'и— курс траулера при отсутствии контакта с кося-
ком; ик— курс траления после поворота с тралом; лл\ —
траектория движения трала после поворота; н — запись
конфигурации косяка на курсе траления.
При > облове разноглубинным тралом или кошелько-
вым неводом косяков рыбы, расположенных в толще
воды, когда при выборе курсов судна нет необходимо-
сти учитывать характер рельефа дна, грунта и т. п.,
автоматическая промысловая прокладка на картах или
393
планшетах может быть заменена динамическим отобра-
жением основных ее элементов на визуальных электрон-
ных индикаторах.
На рис. 215 показано отображение на электронном
индикаторе фирмы «Simrad» элементов промысловой
прокладки при замете кошелькового невода.
В настоящее время разработаны визуальные элек-
тронные индикаторы, позволяющие воспроизводить на
экране карту района плавания. С помощью таких ин-
дикаторов может осуществляться автоматическая про-
мысловая прокладка и при работе донным тралом или
разноглубинным тралом в придонном варианте.
Глава I. ОПРЕДЕЛЕНИЕ ТРАЕКТОРИИ ТРАЛА
В ГОРИЗОНТАЛЬНОЙ ПЛОСКОСТИ ПРИ СЛЕДОВАНИИ
СУДНА ПЕРЕМЕННЫМИ КУРСАМИ И ЭЛЕМЕНТОВ
ГОРИЗОНТАЛЬНОГО ПЕРЕМЕЩЕНИЯ КОСЯКА РЫБЫ
§ 1. Траектория трала в горизонтальной плоскости
после поворота судна
Знание траектории трала в горизонтальной плоско-
сти после поворота судна (положения трала относи-
тельно судна в тот или иной момент времени после по-
ворота) необходимо для решения следующих задач:
наведения разноглубинного трала на локальные, в осо-
бенности быстроподвижные, косяки пелагических рыб;
выбора маневра курсом судна для уклонения донного
трала от подводных опасностей, обнаруженных эхоло-
том (вертикальным трактом ГАС); расхождения судов
при совместном траловом промысле, обеспечивающего
не только безопасность самих судов, но и буксируемых
ими тралов.
Определить точную траекторию трала очень трудно,
так как она зависит от многих факторов: траектории
судна, длины ваеров, конструкции трала, траловых до-
сок и т. п. Кроме того, гидродинамические характери-
стики любого трала изменяются с течением времени.
Рассмотрим приближенное решение этой задачи, удо-
влетворяющее практическим требованиям промысловой
навигации. Предположим, что судно после быстрого по-
ворота движется по прямой линии, а система трал-дрс*
394
ки представляет собой материальную точку с массой и
гидродинамическим сопротивлением, соответствующими
реальным тралу-доскам. Так как прогиб ваеров в плос-
кости горизонта сравнительно мал, заменим их в рас-
четах гибкими стерж-
нями. Эксперименталь-
но установлено, что
при изменении курса
судна на углы до 60°
горизонт хода разно-
глубинного трала из-
меняется незначитель-
но, поэтому будем счи-
тать горизонт хода та-
кого трала при манев- у т
рировании курсом не-
изменным. При приня- п
тых допущениях диф-
ференциальное урав-
нение вращения трала
относительно точки подвеса ваеров С (рис. 173) может
быть записано в таком виде:
/Ф = AfT + MBf (I—I)
где ф — вторая производная по времени от ф, где ф — угол откло-
нения трала (ваеров) от направления вектора скорости
судна;
/— момент инерции системы трал — доски — ваера относитель-
но точки подвеса ваеров С;
AfT — момент суммарной силы сопротивления трала и досок
относительно точки подвеса ваеров С;
Мв— момент от гидродинамических сил сопротивления ваеров.
Если выразить Мт и Мв через скорость судна V, то
получается сложное нелинейное дифференциальное
уравнение второго порядка.
Анализ численного решения этого дифференциаль-
ного уравнения на ЭЦВМ, выполненный А. М. Ивановым
и В. В. Козловым, показал, что интегральные кривые
с достаточной степенью точности можно апроксимиро-
вать семейством кривых, уравнения которых в относи-
тельной полярной системе координат имеют вид:
ф = 2 arctgl tg — е
395
где
(s \
—м- — \
tg -у- е L у, (1—2)
где Ф©—значение угла ср в начальный момент после поворота;
е — основание натуральных логарифмов;
р,—параметр семейства кривых;
S—расстояние, пройденное судном после поворота;
L — горизонтальное отстояние трала от судна (L = CT), рав-
ное проекции на плоскость горизонта расстояния между
точкой подвеса ваеров и серединой устья трала *.
Обозначим курсовой угол судна на трал через (?т,
а величину изменения курса судна через Д/<. Тогда,
учитывая, что при отсутствии дрейфа ^т=л—<р, а
дК=(р0, уравнение (I—2) можно переписать так:
(5 \
дк й I
ctg—— е J. (1—3)
Параметр р, является функцией безразмерного коэф-
фициента а = , где /?в — коэффициент сопротивле-
ния единицы длины ваера, X — коэффициент сопротив-
ления трала.
Функциональная зависимость между а и ц приведены
ниже:
а 0 0,2 0,5 1,0 оо
р 1,0 1,16 1,24 1,30 1,56
Кривые, соответствующие уравнению (I—2), полу-
чили название «траловых кривых» (рис. 174).
Если пренебречь сопротивлением ваеров и принять
7?в=0, то получим соответственно а=0 и р,= 1. При
р=1 уравнение (I—2) представляет собой трактрису
прямой линии, у которой отрезок касательной от точки
* Величина L может быть рассчитана по формуле L=LB+LK,
где LB — горизонтальная проекция ваера, a LK — длина кабеля. При-
ближенно LB= УI2—И2, где I — длина вытравленного ваера, Н —
глубина в месте промысла (донный трал) или горизонт хода трала
(разноглубинный трал). Более точно LB вычисляется по формуле
LB=LB+AL, где LB у~I2—Н2, a Д1— поправка, выбираемая из
специальной таблицы по аргументу L*.
396
Рис. 175
стержня в воде.
Рис. 174
касания до данной прямой (ось ОХ) есть величина по-
стоянная и равная в рассматриваемом случае горизон-
тальному отстоянию L трала от судна.
Если учитывать только сопротивление ваеров
(стержней), приняв сопротивление трала равным ну-
лю, то при Х=0 получим <
(1—2) с ц=1,56 бу-
дет представлять со-
бой уравнение движе-
ния
Из данных, характери-
зующих функциональ-
ную зависимость меж-
ду а и ц, следует, что
чем больше коэффици-
ент а, тем больше па-
раметр ц. Расчеты по-
казывают, что для ре-
альных тралов макси-
мальное значение ко-
эффициента а может
быть принято равным
Ятах = 0,45. Этому зна-
чению а соответствует
И=1,23.
Учитывая, что ли-
нии семейства «трало-
вых кривых» нигде,
кроме начальной точ-
ки, не пересекаются,
можно считать, что
траектории реальных
тралов при L^IOOO м
будут находиться вну-
три полосы, ограни-
ченной с одной сторо-
ны трактрисой — «тра-
ловой кривой» с ц=
= 1, а с другой стороны — «траловой кривой» с ц= 1,23.
На рис. 174 эта полоса заштрихована. Расчеты и экспе-
рименты показывают, что при А/<=60о и L= 1000 м ее
максимальная ширина не превышает 100 м, а при А/(=
= 30° и Л = 1000 м — 50 м.
а=оо и ц=1,56. Уравнение
L
397
При изменении курса судна траловые доски дви-
жутся с разными скоростями и имеют разные распор-
ные усилия (рис. 175). Разность распорных усилий
траловых досок создает момент силы относительно точ-
ки подвеса ваера, который стремится «расширить» по-
лосу, ограниченную «траловыми кривыми» с ц=1 и
ц= 1,23. Исследования, проведенные И. А. Ивановым и
В. В. Козловым, показали, что влияние разности рас-
порных усилий траловых досок на ширину этой полосы
незначительно. Так, например, по данным расчетов на
ЭЦВМ для частного случая Л/С=60° и £=1000 м от
разности распорных усилий траловых досок полоса ста-
новится шире лишь на 17 м. Кроме того следует учесть
что, пренебрегая гибкостью ваеров, мы получаем по-
лосу, шире действительной, т. е. с некоторым «запа-
сом». Это в определенной мере компенсирует влияние
разности распорных усилий траловых досок при пово-
роте судна. Полученные результаты позволяют решить
вопрос о выборе математической модели траектории
трала.
Анализ уравнения (I—2) показывает, что при уме-
ренной длине вытравленных ваеров и небольших углах
Д/С(фо) в качестве математической модели траектории
трала может быть принята «траловая кривая» с ц=1
(трактриса).
Если в процессе маневрирования с тралом £ изме-
няется в широких пределах, например 0<£< 1000 м и
Л^60°, то в качестве математической модели траек-
тории трала целесообразно принять «траловую кривую»
с ц= 1,16, которая проходит примерно посередине по-
лосы, образованной «траловыми кривыми» с ц=1
(трактрисой) и с ц=1,23 (см. рис. 174).
Уравнение «траловой кривой» с ц=1 (трактрисы)
является наиболее простым. Поэтому при «ручной» обра-
ботке промыслово-навигационной информации в качест-
ве математической модели траектории трала принима-
ют обычно трактрису. Рассмотрим подробнее свойства
этой кривой. С точки зрения кинематики трактриса —
это траектория, описываемая буксируемой точки Т на
нити постоянной длины £ (см. рис. 173 и 175) при усло-
вии, что вектор скорости точки Т будет все время на-
правлен на буксирующую точку С(ут = 0). Если точка
С движется по прямой, то траектория точки Т будет
398
представлять собой трактрису прямой линии. Уравне-
ние этой кривой в полярной относительной системе ко-
ординат получим, приняв в выражении (I—3) ц=1:
/ s\
n А I А L | /т
Ят = 2 arctg I ctg —— е I (1—4)
или
s
С7Т ЛК L
tg^ = ctg— е . (1-5)
Это уравнение нетрудно вывести. Воспользуемся
принятыми ранее обозначениями и обратимся к
рис. 175, на котором точка Р пересечения перпендику-
ляров к направлениям скорости точек С (судно) и Т
(трала) представляет собой мгновенный центр скоро-
стей прямой СТ. Мгновенная угловая скорость этой
прямой со будет
dqT V V si n qT
CO = --- = ---- = ------- ,
dt CP L
откуда
singT L
Интегрируя получим
<zT f
J sin<7T L .)
0
Так как qr, =л—ЛК, a Vt=S, окончательно мож-
но записать
s
ffT , ДК L
tg-l-=ctg—e •
Анализ уравнения (I—5) показывает, что при не-
больщой длине вытравленных ваеров трал после изме-
399
нения курса судна достаточно быстро приходит в диа-
метральную плоскость судна, а при значительной дли-
не ваеров медленно.
Для упрощения расчетов при «ручной» обработке
промыслово-навигационной информации, а также при ис-
пользовании ЭКВМ уравнение (I—5) можно апрокси-
мировать следующими математическими зависимо-
стями-
, / i V
в =180° — 0,454 — ДЛ.
’ V S /
, / L \2
^ = 180° — 0,4541 — \ Д/< —0,03Д/С, (1—6)
где Цт и — углы в градусной мере.
Ошибки расчета курсового угла с судна на трал по
приведенным выше приближенным зависимостям при-
ведены в табл. 18. В этой таблице
Я^ = ЯТ~и А<7т = ?т—?т’
где 9т — значение курсового угла с судна на трал, вы-
численное по формуле (I—4)
Таблица 18
дк — L \ 15° 30° 45° 60° Д К // / s / L
1,5 —0°,4 0 ,0 —0°,8 +0 ,1 —1°,6 —о ,2 —2°7 —0,9 1,5
2,0 —0 ,3 +0 ,1 —0 ,7 +0 ,2 -1 ,3 +0 ,1 —2,1 —0,3 2,0
2,5 0 ,1 +0 ,3 —0 ,3 +0 ,6 -0 ,6 +0 ,8 —1,1 +0,7 2,5
3,0 0 ,0 +0 ,4 0 ,0 +0 ,9 —0 ,1 +1 ,3 +0,3 +2,1 3,0
Из табл. 23 видно, что приближенные математичес-
кие зависимости позволяют рассчитать курсовой угол на
трал в пределах точности удержания судна на курсе
при следовании с тралом.
400
Перейдем к прямоугольной системе координат
(рис. 176), Так как трактриса представляет собой кри-
вую, у которой длина касательной СТ является величи-
ной постоянной, равной L, ее дифференциальное урав-
нение имеет вид
t/2 + СР® = £®.
Длина подкаса-
тельной СР для пло-
ской кривой, как изве-
стно, будет
ср = у-~,
dy
а у = Lsin<7T.
Рис. 176
Следовательно,
£» sin® q? + L® sin® qT (= L*t
\ dy )
откуда
dx == ctg qT dy.
Подставляя в это выражение значение dy=L cos ?т^т,
получим
После интегрирования, найдем
x = Llntg-y + Гсо5<7т + Л, (1-7)
где А — постоянная интегрирования.
Из начальных условий х=0, </т = — имеем Л = 0.
Таким образом, параметрические уравнения трактрисы
прямой линии можно записать в таком Виде:
пт
х = L In tg — + L cos qT.
y = LsinqT. (1—8)
При маневрировании судна с тралом особый инте-
рес представляет закон изменения ординаты у, т. е.
бокового уклонения трала от линии истинного курса
26 В. Е. Ольховский 4QI
судна. С учетом формулы (1—5) выражение для орди-
наты у будет иметь вид:
у = LsinqT =
2tgT
L--------- =2L
i + tg’-y
, Ж Т
ctg—
1 + (ctg —eL 1
(1-9)
Если из параметрических уравнений трактрисы пря-
мой линии исключить параметр <?т, получим уравнение
этой кривой в декартовой системе координат
£ _ 1/" £2 —„а , ,-------
х = L In--------------+ У£а — {/а . (1-10)
Форму трактрисы удобно исследовать, пользуясь ее
параметрическими уравнениями (I—8). Из этих урав-
нений следует, что параметр qT может изменяться в ин-
тервале 0<^т<л. Поэтому всегда «/>0
При qT 0 х — «о и у -* 0.
При qT-+ я х оо и у -* 0.
—_ л „
При Ят — х Q и у L.
Следовательно, ось абсцисс является асимптотой
трактрисы. Так как всем значениям qt и л—q? соответ-
ствуют одинаковые значения у, а значения х отличают-
ся только знаком, трактриса симметрична относитель-
но оси ординат.
Траектория трала, апроксимируемая трактрисой
прямой линии, может быть построена для конкретно-
го случая приближенным графическим способом. На
линии нового курса судна выбирают ряд точек а, Ь, с,
d и т. д., расположенных на одинаковом и достаточно
малом расстоянии одна от другой (рис. 177). Соединя-
ют точку а прямой линией с точкой Т (середина устья
трала) и откладывают на этой линии отрезок аа', рав-
ный L. Затем соединяют точку b прямой линией с точ-
кой а' и откладывают на этой линии отрезок bb'=L.
Аналогичным образом находят точки с', d' и т. д. Сое-
динив точки Т, a', b', с', d' и т. д. согласной кривой,
получают трактрису прямой линии.
403
При прицельйом облове локальных и в особенности
быстроподвижных косяков рыбы курс траления должен
определяться с учетом бокового уклонения трала пос-
ле поворота судна. Так как трал выйдет на линию кур-
са после того, как судно пройдет новым курсом некото-
рое расстояние S, возникает вопрос: при каком рассто-
янии от точки встречи
трала и ядра (центра
плотности) облавли-
ваемого косяка при
расчете курса прицель-
ного траления необ-
ходимо учитывать
траекторию трала?
Допустим, что уг-
лом отклонения трала
от линии истинного
курса судна Аф = 2°
можно пренебречь.
Расстояние 5, которое
судно должно пройти
после поворота до точ-
Рис. 177
ки встречи трала с яд-
ром косяка, прибли-
женно составляет (см. рис. 197). Предполо-
жим, что в качестве математической модели траектории
трала принята «траловая кривая» с ц = 1,16. Тогда
подставляя в уравнение (I—5) значение S, можно
записать
, АК , 1е 1
tg — = tgfe
d-П)
Формула (I—11) определяет условия, при которых
расчет курса прицельного траления при облове локаль-
ных косяков необходимо осуществлять с учетом траек-
тории трала после поворота судна. По этой формуле
составлена следующая зависимость:
D L 0,25 0,5 1 1,5 2
ьк 8°,3 11°,3 21°,3 35°3 60°
403
Из приведенных данных видно, что при изменений
курса судна на углы до 60° учитывать траекторию тра-
ла необходимо, если расстояние от точки поворота
судна, буксирующего трал, до точки встречи трала и
ядра косяка не превышает удвоенного горизонтально-
го отстояния трала от судна, т. е. если —
При обнаружении локального косяка, имеющего
промысловое значение, впереди траверза на достаточно
большом расстоянии f — > 21 курс прицельного трале-
ния можно выбирать приведением ядра косяка на курсо-
вой угол ?с = 0. В этом случае еще до встречи с кося-
ком трал успевает прийти к направлению диаметраль-
ной плоскости судна.
Выше предполагалось, что учет траектории трала
при прицельном тралении осуществляется путем ис-
пользования различных математических моделей этой
траектории. Следует, однако, иметь в виду, что поло-
жение трала относительно судна может быть определе-
но и с помощью специальных приборов с гидроакусти-
ческим или кабельным каналами связи. Такие приборы
в настоящее время разрабатываются. Кроме того, поло-
жение трала относительно судна может быть определе-
но и с помощью некоторых современных рыбопоиско-
вых гидроакустических станций. Как будет показано
в следующей главе, наведение в горизонтальной плос-
кости трала на локальный косяк требует определения
упрежденного положения трала относительно судна—
положения на момент встречи с косяком. Поэтому упо-
мянутые выше приборы не исключают необходимости
использования при расчете курсов прицельного трале-
ния математических моделей траектории трала. Но они
будут способствовать повышению точности прицельного
траления.
При условии автоматизации процесса разноглубин-
ного тралового лова наличие на судне специального
прибора для определения положения трала относитель-
но судна обеспечивает возможность точного наведения
в плоскости горизонта трала на ядро локального кося-
ка при условии апроксимации действительной траекто-
рии трала близкой к ней математической кривой. Это
достигается периодической коррекцией курса траления
404
X
Ус
Рис. 178
находят среднее
курсовому углу
в соответствии с результатами измерений угла <?т. Кор-
рекцию курса траления осуществляют всякий раз, как
только разность между расчетной (формула I—3) и
измеренной величинами угла q? превышает допусти-
мые пределы.
Приближенно курсовой угол с судна на трал может
быть определен по азимутальному сектору, установлен-
ному на кормовом слипо-
вом мостике. Азимуталь-
ный сектор представляет
собой половину окружно-
сти с делениями от 180
до 90° на каждый борт.
В центре сектора для
определения курсового
угла на трал (или угла
дрейфа) устанавливают
вертикально медный
прут длиной 100 м и диа-
метром 2—3 мм. Опреде-
лив курсовые углы точек
входа в воду правого и левого ваеров,
значение, которое принимают равным
на трал. При исследовании траектории трала предпола-
галось, что судно после поворота на новый курс следу-
ет по прямой линии — линии проложенного курса. Одна-
ко после поворота судна ваера отклонены от диаметраль-
ной плоскости судна на некоторый угол ф. После пово-
рота на судно будет действовать поперечная составля-
ющая усилия F, возникающего в ваерах /7у=/751Пф
(рис. 178), под действием которой происходит перемен-
ный «дрейф» судна и его боковое смещение с линии
проложенного курса. Величину полного бокового смеще-
ния судна ус можно рассчитать по формуле, выведен-
ной И. Л. Бродским и В. М. Судниным на основе диф-
ференциального уравнения бокового смещения судна.
Эта формула в принятых ранее обозначениях может
быть записана в таком виде:
Ус = (sin gTo — sin gT),
л
где А. — коэффициент сопротивления трала;
К— коэффициент сопротивления воды боковому смещению
судна.
(1-12)
405
Формула (I—12) получена при следующих допуще-
ниях: после поворота трал движется по трактрисе пря-
мой линии; точка подвеса ваеров совпадает с центром
тяжести судна; сопротивление воды боковому переме-
tga₽ =
Ус
S
щению судна пропорцио-
нально скорости этого пере-
мещения; сопротивление
трала пропорционально
скорости трала (/?Т=ЛИТ).
Физический смысл фор-
мулы (I—12) очевиден: чем
больше вытравлено ваеров,
тем длительнее действует
поперечная составляющая*
Fy и тем больше боковое
смещение судна с линии
проложенного после поворо-
та курса.
Для расчета величины
бокового смещения по фор-
муле (I—12) нужно снача-
ла определить qTo =л—
—Д/С и из выражения
(I—4). На промысле судо-
водителя обычно интересу-
ет не боковое смещение ус,
а результирующий угол
дрейфа ау:
где 5—расстояние, которое пройдет судно по новому курсу до
встречи трала с ядром (центром плотности) косяка рыбы.
На рис. 179 приведены графики бокового смещения
БМРТ типа «Пушкин» и РТ типа «Пионер» для скоро-
сти траления У=4,5 узла и величины изменения курса
Д/С=60° при работе 35-метровым донным тралом.
Пример. РТ «Пионер» осуществил быстрый поворот с тралом на
60° на расстоянии 1000 м от локального плотного косяка донных рыб.
Ко времени встречи трала с этим косяком судно прошло расстояние
S = 1600 м (1 = 600 м). Определить боковое смещение судна и ре-
зультирующий угол «дрейфа».
406
По графику находим #с=*=74 м и tg cty= ~~ = =0,046,
о 1600
откуда ау=2°,6. Если бы БМРТ «Пушкин» совершил поворот при
тех же условиях и прошел новым курсом расстояние 5=2000 м (L =
= 1000 м), то //о=38 м, tg ау= =0,019 и ау=Г1.
о 2000
В промысловой практике углы поворота буксирую-
щего трал судна на новый курс, как правило, меньше
60° и, следовательно, результирующие углы дрейфа бу-
дут меньше рассчитанных с помощью приведенного
графика. В большинстве случаев величина результиру-
ющего угла дрейфа находится в пределах точности
удержания судна на курсе и, таким образом, боковое
смещение судна под действием поперечной составляю-
щей натяжения ваеров можно не учитывать. Это сме-
щение может быть значительным только у малотон-
нажных судов, работающих большими тралами.
§ 2. Сближение с быстроподвижным локальным
косяком пелагических рыб и определение
элементов его горизонтального перемещения
При облове локальных плотных и быстроподвижных
косяков пелагических рыб (сельди, ставриды, мойвы,
сардины и др.) разноглубинным тралом или кошелько-
вым неводом судно предварительно сближается с кося-
ком. В процессе сближения по данным гидролокаци-
онных наблюдений определяют элементы горизонталь-
ного перемещения косяка: направление (курс) и
скорость. При этом предполагается, что в течение вре-
мени сближения косяк сохраняет неизменными направ-
ление и скорость горизонтального перемещения.
Важно подчеркнуть, что определение элементов го-
ризонтального перемещения локального косяка пелаги-
ческих рыб с достаточной для решения задач промыс-
ловой навигации точностью может быть выполнено
только при помощи современных рыбопоисковых ГАС,
обладающих высокой разрешающей способностью не
только по расстоянию, но и по направлению, а также
дающих возможность выделять центр плотности — яд-
ро косяка.
При кошельковом лове сближение с косяком пред-
полагает выход судна на позицию начала замета нево-
да, а при разноглубинном траловом лове в зависимости
от применяемой тактики промысла либо выход судна
на косяк без трала для обследования косяка
эхолотом (вертикальным трактом ГАС), либо
в точку поворота на курс траления, обеспечивающий
наведение трала на косяк в плоскости горизонта. К
последнему варианту прибегают в тех случаях, когда
на курсе сближения
определена с помо-
щью горизонтального
тракта ГАС глубина
залегания косяка с
учетом рефракции зву-
ковых лучей в морской
воде. Зная достаточно
точно эту глубину, мо-
жно сразу же с курса
сближения выйти на
курс траления, обеспе-
чивающий наведение
трала на косяк в пло-
Рис- 180 скости горизонта, и за-
благовременно выве-
сти трал на нужную
глубину. Элементы горизонтального перемещения плот-
ного локального косяка пелагических рыб могут быть
определены при сближении с косяком на прямых курсах
или при сближении с косяком по кривой погони (судно
в процессе сближения с косяком непрерывно удержива-
ет его ядро — центр плоскости — на курсовом уг-
ле qG=0).
Рассмотрим задачу сближения судна
с косяком на прямых курсах с предваритель-
ным приведением ядра косяка на курсовой угол ?с=0-
В момент То сразу же после разворота судна на ядро
косяка, имеющего промысловое значение, запускают се-
кундомер и с помощью ГАС определяют расстояние
D* до ядра косяка (рис. 180). Следуя этим курсом при-
* В этом и последующих параграфах под расстоянием D, опре-
деленном с помощью ГАС, следует понимать проекцию на плоскость
горизонта измеренной ГАС наклонной дальности Рн. С достаточной
для практических целей точностью D определяется по формуле
cos р, где р — угол наклона вибратора к плоскости горизонта.
403
мерно в течение 3 мин, в момент Т\ вновь определяют с
помощью ГАС расстояние до ядра косяка, а также
курсовой угол qCi с судна на ядро косяка. На рис. 180
точки Cq и Ао — соответственно места судна и ядра ко-
сяка в момент TQ (судно повернуло на косяк и его курс
совпадает с пеленгом на ядро косяка), а точки Ci и
Ai — соответственно места судна и ядра косяка в мо-
мент Т\ определения и qcj q^ и qKl~^ углы между
линией перемещения косяка и линиями пеленгов на ко-
сяк в моменты То и 7\.
При «ручной» обработке информации элементы гори-
зонтального перемещения косяка и курс судна для вы-
хода на его ядро (сближения вплотную) могут быть
определены графически методом истинной или относи-
тельной прокладки, а также при помощи специальных
таблиц.
Истинную прокладку выполняют на промыслово-на-
вигационном планшете или на листе бумаги следующим
образом. От счислимого места в начальный момент То
следования первым курсом сближения (точка Со) от-
кладывают по линии первоначального пеленга на ядро
косяка расстояние DQ и отмечают точку Ко— положение
ядра косяка относительно судна в момент То- Через не-
который промежуток времени в момент прокладыва-
ют счислимое место судна на этот момент (точка Ci)
и по курсовому углу 4С1 и расстоянию Di наносят но-
вое положение ядра косяка относительно судна (точка
Ai). Судно начинает поворот в сторону ядра косяка, а в
это время продолжают дальнейшие построения. Точки
Ко и Ki соединяют прямой линией и находят направле-
ние горизонтального перемещения (курс) ядра косяка
величину этого перемещения (путь) SK1 за промежу-
ток времени t=T\—TQ и скорость перемещения косяка
Затем на продолжении линии AoAi откладыва-
ют в выбранном масштабе от точки Ki вектор скоро-
сти косяка Гк и отмечают точку К{, из которой раство-
ром циркуля, равным в выбранном масштабе скорости
судна V, делают засечку на линии CiAi. Полученную
таким образом точку m соединяют прямой линией с
точкой Ку При помощи параллельной линейки перено-
сят направление линии тК'г к точке С\ и прокладыва-
409
ют прямую C\Kz до пересечения с продолжением линии
/(oKj в точке Kit которая является местом встречи суд-
на с ядром косяка. Направление прямой CiK2 опреде-
ляет курс сближения судна вплотную с ядром косяка
Кс. Угол KiCiK2=^ представляет собой угол упрежде-
ния.
Прежде чем перейти к решению поставленной выше
частной задачи методом относительной прокла д-
к и, рассмотрим кратко
f теоретические основы от-
/ носительного движения
Л , применительно к промыс-
у' /X ловой навигации. На рис.
/ 181 ХОУ— система ко-
х. / ординат, принятая ус-
/ ловно за неподвижную;
ly0' X'O'Y' — подвижная сис-
// тема координат, связан-
ная с маневрирующим
судном М; К. — объект
Z?----------------------маневра (ядро локально-
го подвижного косяка ры-
Рис. 181 бы). Движение косяка
по отношению к подвиж-
ной системе координат
X'O'Y' называется относительным. Движение самой сис-
темы координат X'O'Y' по отношению к системе коорди-
нат XOY, условно принятой за неподвижную, называет-
ся абсолютным движением.
Скорости абсолютного, относительного и переносно-
го движений связаны, как известно, следующим соотно-
шением:
°абс — ^отн 4" °пер-
За неподвижную систему координат примем прямо-
угольную декартову систему координат, неподвижно
закрепленную на местности. За начало неподвижной си-
стемы координат примем судно М. Тогда собственное
движение судна М относительно местности будет пере-
носным, собственное движение объекта маневра К, (ядра
косяка) относительно местности абсолютным, а относи-
тельно судна М относительным движением. Для того
чтобы определить, по какому направлению и с какой
410
скоростью перемещается объект маневра К (ядро кося-
ка) относительно судна М, перейдем от абсолютного дви-
жения к относительному (заменим два движения одним).
Предположим, что судно М следует курсом Км со
скоростью VM, а косяк курсом Лк со скоростью 7К. В
начальный момент взаимное положение судна и ядра ко-
сяка определяется пеленгом ГК и расстоянием D\
(рис. 182). Через некоторый промежуток времени судно
и ядро косяка переместятся соответственно в точки М2
и /С2. Их новое взаимное положение определяется пелен-
гом П2 и расстоянием D2. Отложим отточки ТИ2 путь яд-
ра косяка SK в сторону, обратную его перемещению, и
отметим точку К[. Тогда, соединив точку К{ с точкой
7И1, получим Soth — относительный путь. Треугольник
, сторонами которого являются векторы пути
судна, косяка и вектор относительного пути, называется
треугольником
путей. Если проме-
жуток времени для
которого построен тре-
угольник путей, при-
нять за единицу, то по-
следний превратится в
треугольник скоростей.
За единицу времени
можно взять и любой
промежуток времени.
Во всех случаях тре-
Рис. 182
угольник скоро-
стей и треугольник
путей подобны. Сторонами треугольника скоростей бу-
дут векторы скорости судна, ядра косяка и вектор отно-
сительной скорости.
При этом
УоТн = ^к-Ы?к=^абс’ = П-13)
SOTH = SK-SJV1. (1-14)
В треугольниках скоростей и путей векторы скорости
пути маневрирующего судна и объекта маневра всегда
направлены в сторону их движения, а векторы относи-
тельной скорости и относительного пути — по линии от-
носительного курса. При этом вектор относительной ско-
рости или относительного пути является стороной, проти-
411
волежащей углу, равному разности курсов маневриру-
ющего судна и объекта маневра. Треугольник скоростей
или путей можно построить двумя приемами: прямым
построением и обратным построением.
При прямом построении треугольника скоростей век-
торы скоростей маневрирующего судна и объекта ма-
невра (косяка) прокладывают из общей начальной точ-
ки по направлению их
действительного пере-
мещения (по курсам).
Замыкающий вектор,
направленный из век-
тора скорости манев-
рирующего судна в ко-
нец вектора скорости
объекта маневра, пред-
ставляет собой вектор
относительной скоро-
сти (рис. 183,а). При
обратном построении
векторы скоростей ма-
неврирующего судна
и объекта маневра про-
кладывают по направ-
лению их действитель-
ных перемещений (по
курсам), но так, чтобы
концы этих векторов
сходились в одной точ-
ке. Вектор относитель-
ной скорости изобра-
начало векторов скорос-
тей маневрирующего судна и объекта маневра. Он на-
правлен из начала вектора скорости объекта маневра к
началу вектора скорости маневрирующего судна (рис.
183,6). Треугольник путей строят этими двумя приема-
ми точно так же, как и треугольник скоростей. При гра-
фическом решении задач маневрирования на промысло-
во-навигационном планшете или на листе бумаги тре-
угольник путей или скоростей строят обычно приемом
обратного построения.
Рассмотрим теперь определение элементов горизон-
тального перемещения плотного локального косяка пе-
Рис. 184
жается отрезком, соединяющим
412
лагических рыб и курса судна, обеспечивающего выход
на косяк (сближение с ядром косяка вплотную). При
этом будем вначале предполагать, что судно предвари-
тельно не приводит косяк на курсовой угол При
графическом решении задачи на промыслово-навигаци-
онном планшете или листе бумаги (рис. 184) из точки
Л1о, принимаемой за место судна (судно считается не-
подвижным), прокладывают определенные с помощью
ГАС в момент То пеленг По и расстояние Do до ядра ко-
сяка и по ним наносят точку Ко. Затем через некоторый
промежуток времени, равный обычно 3 мин, в момент
Ti вторично определяют пеленг /71 и расстояние Di до
ядра косяка. Проложив их от точки Л1о, получают точку
Ki. Через точки Ко и Ki проводят прямую, которая пред-
ставляет собой линию относительного курса. Эту линию
называют также линией относительного движения — со-
кращенно лод.
Затем из точки Ki откладывают в сторону движения
судна вектор его пути Sm и соединяют конец этого век-
тора (точку N) с точкой Ко. Треугольник KiNKo пред-
ставляет собой треугольник путей. В этом треугольнике
сторона KoKt — вектор относительного пути S0Th ядра
косяка за время t=Ti—То между наблюдениями, сторо-
на КоК — вектор пути SK ядра косяка за тот же проме-
жуток времени. Сняв направление вектора SK, получа-
ют истинное направление (курс) перемещения косяка
Ккт а частное от деления модуля этого вектора на про-
межуток времени t между наблюдениями равно скоро-
сти горизонтального перемещения косяка VK-
Для того чтобы обеспечить выход судна на косяк
(сближение с косяком вплотную), на первоначальной ли-
нии относительного движения ЛОДо на заданный напе-
ред момент времени 7^ выбирают точку Ki, называемую
упрежденной позицией. Из этой точки прокладывают но-
вую линию относительного движения ЛОД\, так, чтобы
она проходила через точку Л40- После этого в точку Ki
проводят вектор пути ядра косяка SK и получают точку
N'. Из этой точки радиусом, равным модулю вектора пу-
ти судна SM, делают засечку на продолженной в обратном
* Момент Тг выбирают с таким расчетом, чтобы к этому момен-
ту были закончены построения, необходимые для определения курса
судна, обеспечивающего сближение вплотную с ядром косяка.
413
направлении ЛОД\. Полученную точку П\ соединяют с
точкой N'. Направление вектора Af' определяет курс /Сс,
на который нужно лечь в момент Тг, чтобы выйти на ядро
косяка (сблизиться с ним вплотную). В рассматривае-
мом случае задача всегда решается однозначно, так как
Vm>Vk*. Изменить направление линии относительного
движения можно не только маневрированием курсом
судна, но также и маневрированием его скоростью или
курсом и скоростью одновременно. При сближении суд-
на с подвижным косяком вплотную необходимое измене-
ние линии относительного движения, как правило, осу-
ществляют маневрированием курсом судна.
Относительную прокладку можно быстро выполнить
на специальных планшетах, получивших название манев-
ренных. Маневренный планшет может быть изготовлен
на бумаге или представлять собой механическое устрой-
ство, позволяющее обходиться без помощи прокладочно-
го инструмента. На судах флота рыбной промышленно-
сти наиболее широко распространены отпечатанные на
плотной бумаге типографским способом специальные
бланки. Такой бланк представляет собой сетку системы
полярных координат, состоящую из ряда концентриче-
ских окружностей, проведенных на равном расстоянии
друг от друга, и радиальных прямых, нанесенных через
10°. По внешней окружности нанесены градусные деле-
ния от 0 до 360° по направлению часовой стрелки. Вдоль
радиальных прямых указаны различные линейные мас-
штабы, которые могут быть использованы при про-
кладке.
Определение элементов горизонтального перемеще-
ния плотного, локального косяка пелагических рыб и
курса судна, обеспечивающего сближение вплотную с
ядром такого косяка, выполняют на маневренном план-
шете следующим образом. Центр планшета О принима-
ют за место судна, которое считается неподвижным
(рис. 185). По наблюденным пеленгам и расстояниям
По, Dq и 77ь 7)1, выбрав удобный масштаб, наносят на
планшет точки Ко и Ki, определяющие положение объ-
* Если Умг^Ук, то сближение вплотную было бы возможно
лишь в том случае, когда судно находится в пределах сектора пе-
Ум
ленгов с косяка на судно /G+Q, где Q = arcsin — -
Ук
414
Рис. 185
екта маневра — ядра косяка в моменты наблюдений То
и Л. Соединив эти точки прямой, получают линию отно-
сительного движения ЛОДа. Разделив расстояние меж-
ду точками Ко и Ki на промежуток времени t=Ti—То,
получают величину относительной скорости горизонталь-
ного перемещения ядра косяка VOth. Затем при центре
планшета приемом прямого построения строят треуголь-
ник скоростей, используя любой из масштабов, нанесен-
ных на радиальных прямых (VOth=Vk—VM). Получен-
ный в результате этого построения вектор скорости го-
ризонтального перемещения ядра косяка VK определит
Кк и VK. Для решения задачи выхода судна на косяк точ-
ку К2 (упрежденную позицию, соответствующую момен-
415
ту Т2) соединяют с центром планшета О. Линия /С2О бу-
дет представлять собой новую линию относительного
движения ЛОДл. Затем из конца вектора скорости го-
ризонтального перемещения ядра косяка проводят
прямую, параллельную этой новой линии относительного
движения в сторону точки /С2. Точку пх пересечения этой
прямой с окружностью планшета, соответствующей в
выбранном масштабе скорости судна Ум, соединяют с
центром планшета О. Направление вектора Опг опреде-
лит курс /Со, на который следует лечь в момент Т2, что-
бы выйти на косяк (сблизиться с его ядром вплотную).
Если ядро косяка предварительно приводят на кур-
совой угол qc=0, то после определения элементов гори-
зонтального перемещения косяка из конца вектора VK
проводят прямую линию в направлении, обратном вто-
рому пеленгу на ядро косяка, и точку п пересечения этой
линии с окружностью планшета, соответствующей в вы-
бранном масштабе скорости судна VM, соединяют с цент-
ром планшета О. Направление вектора On определит
курс сближения судна с ядром косяка /Со.
Недостаток метода сближения с подвижным локаль-
ным косяком пелагических рыб на прямых курсах
заключается в том, что этот метод предусматривает обя-
зательно маневрирование курсом судна в течение пер-
вых 3—6 мин с момента обнаружения косяка. При ма-
лых дистанциях обнаружения и значительной подвиж-
ности косяка судно может оказаться далеко в стороне от
ядра косяка и выход на курс сближения с ним вплотную
будет затруднен, так как потребуется быстрый поворот
на большой угол.
При сближении с косяком по кривой
погони судно движется, удерживая ядро (центр плот-
ности) косяка прямо по носу — на курсовом угле qc = G.
Очевидно, что при таком методе сближения курс судна
в любой момент времени совпадает с пеленгом на ядро
косяка. Метод сближения по кривой погони обладает ря-
дом существенных преимуществ:
значительно упрощается работа гидроакустика при
определении направления на ядро косяка вследствие
сравнительно медленного изменения пеленга и уменьша-
ется вероятность потери контакта или ошибочного пе-
рехода на наблюдения ядра другого, близко расположен-
ного косяка;
416
от быстрого уменьшения расстояния до ядра косяка
снижается ошибка измерения этого расстояния;
исключается необходимость быстрого поворота суд-
на на значительный угол. Если судно с курса сближения
сразу же выходит на курс траления, это позволяет из-
бежать порыва трала от неравномерного распределения
нагрузок и обеспечивает его устойчивое движение по
глубине;
значительно снижается общее время сближения и
траления, т. е. улучшается режим промысловой работы
судна.
Рассмотрим задачу определения элементов горизон-
тального перемещения косяка при сближении с ним по
кривой погони. Введем
следующие обозначения
(рис. 186); точка С —
место судна, точка К —
положение ядра косяка,
относительно судна, П —
текущий пеленг на ядро
косяка, D — текущее рас-
стояние между судном и
ядром косяка, — ско-
рость горизонтального
перемещения косяка, qK—
угол между направлени-
ем текущего пеленга и
вектором скорости ко-
сяка.
Проектируя векторы скорости V и Ук на линию
текущего пеленга и на линию, к ней перпендикуляр-
ную, найдем выражения для скорости изменения рас-
стояния между судном и ядром, косяка и угловой скоро-
сти вращения линии пеленга:
dD
— = VKcos^-y, (1-15)
dn sin
dt ~~ D
(1-16)
Разделив уравнение (1—15) на уравнение (1—16) и
имея в виду, что dIJ=—dqKl получим:
dD Т\ ( I ' Р
—— =— D ctg дк ——— cosec qK
dqK \ Рн
27 В- Ольховский
417
Откуда
dD I 1 \ ,
= — cosec qn — ctg qn ) dqK,
d-17)
где
V
Проинтегрировав уравнение (I—-17), получим:
D
C dD If J C .
| —— = — I cosec gK <*7к I ctg gK dgK,
J D к J J
D> %.
откуда
sin<?K,
sin^K
Потенцируя, найдем:
si n qKo
sin
(1-18) *
На рис. 187 показано маневрирование судна при
сближении с ядром косяка по кривой погони. Как видно
из этого рисунка, изменение пеленга на ядро косяка
Д77 = 77—/70 равно изменению курса судна ЛК и измене-
нию угла между направлением пеленга и вектором ско-
рости ядра косяка А^к. Поэтому уравнение (I—18) мож-
но записать в таком виде:
(1—19)
Уравнение (I—19) устанавливает связь между теку-
щими значениями расстояния D и угла qK. Выразим D
418
и qK в зависимости от расстояния S, пройденного судном
по кривой погони. Для этого умножим уравнение (I—15)
на cos^k, а уравнение (I—16) на sin^K и, имея в виду,
= — , сложим эти уравнения. В результате
dt
получим:
dD
— cos«7k — Dsin^H
at at
dqK
VK-VcosgK.
В правую часть полученного равенства вместо cos^K
подставим его значение из уравнения (I—15):
1 dD , V
cos Ou =------+ ---- .
Тогда будем иметь:
dD n . dqK „ V dD V*
—-cosgK —DsmgK—— = VK-—---------— — —
at dt di VH
или
dD [ , M r. - dqu „ V
— cosgK + — — PsingK—— = VK — — .
dt \ k ) dt k
Левая часть полученного равенства представляет со*
„ d D cos Оц + —')
бои производную L \ fe /J
~dt ’
27
419
Поэтому можно написать
d Id (cos qK + — И = (J'k — —j dt-
После интегрирования получим:
/ 1 \ / 1 \ / V \
D cos<7k + — 1 — &o I cos 7„o + — J = - — у
или
D cos + — — Do cos (qK + ДК) -f-
\ « /
Совместное решение уравнений (I—18) и (I—20) по-
зволяет определить qK и k. Зная же qK и k, легко полу-
чить элементы горизонтального перемещения ядра ко-
сяка:
VK = kV
и
Кк = ± <7к •
Уравнения (I—18) и (I—20) были получены для слу-
чая движения судна вдогонку косяка, т. е. когда на-
чальный курсовой угол qK9 <90°. Если судно движется
навстречу косяку (?Кв>90°), уравнения (I—18) и (I—
20) принимают следующий вид:
(1—21)
Система уравнений (I—18), (I—20) или (I—21),
(I—22) может быть решена на ЭЦВМ. При «ручной»
же обработке промыслово-навигационной информации
можно воспользоваться таблицами или номограммами,
составленными по трем входным аргументам —— , ——
Do Dq
и ДЯ.
420
Расчет такого рода таблиц или номограмм при
помощи приведенных выше уравнений может быть вы-
полнен любым из известных способов приближенных вы-
числений, например способом Ньютона — Рафсона.
Выдержка из таких таблиц для значения входного
аргумента = 0,5 приведена ниже (табл. 19).
Таблица 19
S По Д К—20е дк=зо° ДК=40°
к 1 к 1 к 1 ’к
0,3 0,62 60° 0,71 42°
0,4 — — 0,62 48 0,71 41
0,5 0,46 41° 0,62 39 0,72 39
0,6 0,47 36 0,62 36 0,72 37
0,7 0,48 33 0,62 33 0,72 35
0,8 0,49 30 0,62 31 0,73 34
0,9 0,52 25 0,62 28 0,73 31
1,0 0,56 18 0,63 24 0,73 28
Пример. После обнаружения косяка, имеющего промысловое
значение, в момент То судно легло на курс сближения, находясь на
расстоянии Ро= 1600 м от ядра косяка. В процессе сближения с ко-
сяком по кривой погони через некоторый промежуток времени t в
момент Т1, когда курс судна изменился вправо на угол ДК=30°,
вновь измерено расстояние до ядра косяка Z>=800 м и рассчитано
по показаниям лага пройденное судном за промежуток времени t
расстояние S=6 кбт (1110 м). Скорость судна 7=5 уз. В момент
Ti курс судна на косяк Кс=53°.
Определить с помощью таблиц Кк и 7К.
Рассчитываем значения входных аргументов
= 0,7, ДЯ=30°.
D S
—=0,5,—
Войдя в таблицу (см. табл. 19) по этим аргументам, находим: Л=
=0,62 и ?к=33°. Следовательно, 7к=А7=0,62-5=3,1 уз; /Ск=/Сс+
+^«=53+33=86°.
Полученные выше формулы предусматривают опре-
деление элементов горизонтального перемещения ядра
локального косяка пелагических рыб по наблюдениям из
двух точек кривой погони. При этом число наблюдений
равно числу неизвестных Кк и 14, т. е. избыточные на-
блюдения отсутствуют,
421
При автоматизации процесса обработки промысло-
во-навигационной информации алгоритм, реализуемый
в вычислительном устройстве, должен обеспечить воз-
можность оптимальной статистической обработки избы-
точных наблюдений в целях повышения точности полу-
чаемых результатов.
При сближении по кривой погони гидроакустик в со-
стоянии выдавать информацию о положении косяка в
среднем через 20 с. В настоящее время на добывающих
судах начали внедряться ГАС с автоматическим сопро-
вождением цели, с помощью которых информация о по-
ложении ядра косяка относительно судна может вво-
диться в вычислительное устройство в течение 6 мин
40—60 раз, что значительно повышает точность получае-
мых результатов.
Это полностью относится и к определению элемен-
тов горизонтального перемещения косяка при сближе-
нии с ним на прямых курсах.
Элементы горизонтального перемещения косяка
можно определить следующим грубоприближенным ме-
тодом. Следуя по кривой погони (7с = 0) и сблизившись
с косяком на некоторое расстояние D, с которого удобно
выполнять гидролокационные наблюдения косяка, ло-
жатся в дрейф и стараются удерживать судно на месте
относительно воды, подрабатывая при необходимости
машиной. С помощью ГАС в моменты То, Л, Т2 и т. д.
измеряют курсовые углы на ядро косяка и расстояния до
него.
Проложив в крупном масштабе ряд последователь-
ных положений ядра косяка относительно судна (судно
считается неподвижным), определяют элементы гори-
зонтального перемещения косяка Кк и VK. После того,
как закончены наблюдения, судно продолжает сближе-
ние с косяком по кривой погони и выходит на косяк для
обследования его эхолотом (вертикальным трактом
ГАС) или следует на начальную позицию замета ко-
шелькового невода.
Полученные рассматриваемым способом Кк и VK
обычно не используются для расчета курса траления с
учетом собственного горизонтального перемещения ко-
сяка.
Они служат для ориентировочного выбора курса
траления или начальной позиции замета невода.
422
Глава II. ВЫБОР И РАСЧЕТ ПРОМЫСЛОВЫХ КУРСОВ
(ПРИ РАЗНОГЛУБИННОМ ТРАЛОВОМ ЛОВЕ
§ 3. Промысловые курсы при разноглубинном
траловом лове.
Расчет курса траления
Выбор промысловых курсов при разноглубинном
траловом лове определяется тактикой промысла, кото-
рую выбирают, исходя из состояния сырьевой базы и
промыслово-навигационных условий в районе лова. Раз-
ноглубинный траловый лов можно подразделить на сле-
дующие виды: облов локальных плотных косяков рыбы
в толще воды, когда имеется большой запас глубины и
касание тралом грунта при маневрировании судна прак-
тически исключено; облов плотных косяков и разрежен-
ных скоплений рыбы в придонных слоях, когда рыба
приподнята над грунтом, а трал движется на расстоянии
нескольких метров от него, ограничивая возможность
судна маневрировать без риска посадки трала на грунт;
облов разреженных скоплений рыбы в толще воды вдали
от грунта.
Процессу лова предшествует местный поиск (развед-
ка) рыбы горизонтальным и вертикальным трактами
гидроакустических поисковых приборов. Поиск осуще-
ствляют как прямыми, так и ломаными галсами, кото-
рые выбирают так, чтобы за минимальное время обсле-
довать максимальную акваторию. При выборе курсов
поиска учитывают и условия работы гидроакустических
приборов. На значительном волнении поисковые курсы
стремятся выбирать под острым углом к направлению
волн, чтобы уменьшить помехи приему эхо-сигналов, воз-
никающие при сильной бортовой качке и рыскании суд-
на на курсе. Скорость судна во время поиска выдержи-
вают в пределах 7—9 уз. При подробном обследовании
отдельных участков короткими галсами скорость судна
снижают до 5—6 уз.
Обнаружив контакт, его классифицируют и, если он
принадлежит косяку рыбы, определяют курсовой угол
или пеленг на ядро (центр плотности) косяка, расстоя-
ние до него, протяженность косяка по направлению пе-
ленга на ядро, по направлению, перпендикулярному к
пеленгу, и глубину залегания. Получение необходимой
информации об обнаруженном косяке, как и его поиск,
значительно облегчается, если ГАС имеет визуальный
электронный индикатор секторного или кругового обзо-
ра. Во время поиска на судне ведут промыслово-навига-
ционный планшет, на котором прокладывают поисковые
курсы, контуры обнаруженных скоплений и косяков ры-
бы, отмечают глубины их залегания, места лежащих в
дрейфе судов, занятых дрифтерным промыслом, и рас-
положение их сетных порядков.
Методика поиска рыбы с помощью гидроакустиче-
ских приборов базируется на выводах теории вероятно-
стей. В соответствии с этими выводами и с учетом про-
мыслово-навигационной и гидрометеорологической об-
становки в районе поиска выбирают поисковые курсы,
сектора (курсовые углы) поиска горизонтальным трак-
том ГАС, скорость обзора горизонта, углы наклона виб-
ратора ГАС.
Облов разноглубинным тралом ло-
кальных плотных косяков, расположен-
ных в толще воды в достаточном удале-
нии от грунта (50 м и более) ведется прицельно
как по глубине, так и по горизонту и имеет особенности,
зависящие от скорости горизонтального перемещения ко-
сяков. Различают следующие промысловые курсы при
облове таких косяков: курс сближения, рекогносциро-
вочный курс, курс «забега», курс траления.
Если в результате предварительного поиска выявле-
но, что обнаруженный косяк имеет промысловое значе-
ние и принято решение об его облове, судно ложится на
курс сближения с косяком. Если глубина залега-
ния косяка определяется на рекогносцировочном курсе
с помощью эхолота (вертикального тракта ГАС), то
курс сближения должен обеспечить выход судна на ко-
сяк без трала. Если косяк подвижный, то на курсе сбли-
жения определяются элементы его горизонтального пе-
ремещения.
При облове практически неподвижных косяков сбли-
жение осуществляется на прямом курсе Ас, равном пе-
ленгу Пк на ядро косяка (,Кс=Пк). Если же наблюдает-
ся ветровой дрейф, то судно следует по линии пути при
дрейфе ПУа/с = Пк. При этом курсовой угол с судна на
ядро косяка будет равен углу дрейфа (<?с=а). В процес-
се сближения с помощью ГАС уточняют пеленг Пн на
424
ядро косяка и при необходимости корректируют курс
судна. Сближение с быстроподвижным косяком осущест-
вляют по кривой погони или на прямых курсах. В про-
цессе сближения определяют элементы горизонтального
перемещения косяка Ак и VK (см. § 2).
Рекогносцировочный курс. Этот курс явля-
ется продолжением курса сближения и должен обеспе-
чить прохождение судна без трала по наиболее плотной
и протяженной части косяка с тем, чтобы с помощью
эхолота (вертикального тракта ГАС) точно определить
глубину его залегания, а также толщину и горизонталь-
ную протяженность. Одновременно на рекогносцировоч-
ном курсе определяют контуры косяка по курсовым уг-
лам и расстояниям, измеренным горизонтальным трак-
том ГАС, до внешних кромок косяка. По полученным
данным изображение косяка (его контуры) наносят на
промыслово-навигационный планшет, и в дальнейшем
оно служит ориентиром, относительно которого осущест-
вляется маневрирование судна, связанное с выходом на
косяк для облова его тралом.
Когда эхолот (вертикальный тракт ГАС) отметит
прохождение судна над ядром (центром плотности) ко-
сяка, на промыслово-навигационный планшет наносят
положение ядра, отнесенное к этому моменту времени,
и из полученной точки прокладывают направление
(курс) горизонтального перемещения косяка Кк. Ско-
рость судна при следовании рекогносцировочным курсом
меньше, чем при следовании поисковым курсом. Она
равна обычно 5—6 уз. Объясняется это необходимостью
получить подробную запись контуров косяка и умень-
шить помехи, вызываемые вибрацией корпуса судна при
большой частоте вращения (числе оборотов) вала глав-
ного двигателя.
Если облавливаются небольшие по размерам плот-
ные косяки, то, определив на курсе сближения горизон-
тальным трактом ГАС глубину залегания косяка с уче-
том рефракции звуковых лучей в морской воде, можно,
минуя рекогносцировочный курс, выйти на курс трале-
ния. Это значительно экономит промысловое время, в
особенности когда судно, не поднимая трала, может об-
ловить несколько небольших косяков, расположенных
«пятнами». Поэтому в настоящее время уделяется боль-
шое внимание разработке расчетных и приборных мето-
425
дов, позволяющих с достаточной точностью учитывать
рефракцию при определении горизонтальным трактом
ГАС глубины залегания косяка, находящегося в стороне
от судна. Если судно с курса сближения ложится на
курс траления, минуя рекогносцировочный курс, то в
процессе сближения оно не выходит на косяк без трала.
В этом случае сближение с косяком может осуществ-
ляться и на произвольном курсе Кс.
«3 а б е г» имеет целью вывести судно на позицию по-
становки трала. Положение этой позиции по отношению
к облавливаемому косяку определяется рядом факторов:
глубиной залегания и конфигурацией косяка, на-
правлением его горизонтального перемещения (если об-
лавливается быстроподвижный косяк), направлением и
силой ветра, расположением других судов, ведущих на
данной акватории промысел. Удовлетворить всем требо-
ваниям, которые обусловливаются этими факторами,
естественно, нельзя. Поэтому при выборе курса (на-
правления) и расстояния «забега» учиты-
ваются наиболее существенные из них для конкретных
условий промысла. Расстояние «забега» выбирают с та-
ким расчетом, чтобы к моменту выхода на косяк трал
успел прийти на заданный горизонт хода. «Забег» боль-
ший, чем требуется для выполнения этого условия, не-
желателен, так как может привести к потере гидроаку-
стического контакта с облавливаемым косяком.
Горизонт, на котором должен идти трал, определя-
ется по вертикальному разрезу косяка, записанному эхо-
лотом (вертикальным трактом ГАС) при прохождении
судна над косяком рекогносцировочным курсом. Если
судно без трала над косяком не проходило, то горизонт
хода трала определяется по результатам измерения глу-
бины залегания косяка горизонтальным трактом ГАС.
Вначале тралу задается более высокий горизонт хода,
чем это требуется по эхограмме или по результатам из-
мерения глубины залегания косяка горизонтальным
трактом ГАС, так как за время «забега», постановки
трала и следования курсом траления глубина залега-
ния косяка может изменяться, а опустить трал значи-
тельно быстрее, чем поднять его.
Управление горизонтом хода трала осуществляется
при помощи траловых зондов различной конструкции.
Опускание трала производится обычно увеличением дли-
426
ны ваеров, а подъем — увеличением скорости судна, бук-
сирующего трал, так как мощность траловой лебедки
часто оказывается недостаточной для уменьшения дли-
ны ваеров.
Хотя с помощью ГАС и тралового зонда можно на-
блюдать обстановку как под килем судна, так и в райо-
не трала (в вертикаль-
ной плоскости), необ-
ходимо располагать
данными и о манев-
ренных характеристи-
ках системы судно —
трал. Это позволяет
выбрать оптимальный
режим траления и
обеспечить более точ-
ное наведение трала
на косяк по глубине.
Экспериментальное оп-
ределение маневрен-
ных характеристик си-
стемы судно — трал на-
зывается тарировкой
трала. Она выполня-
ется заблаговременно
в специально выбран-
ном для этой цели рай-
оне с помощью трало-
вого зонда. По резуль-
татам тарировки стро-
ят графики. На рис. 188
показан график, струк-
тура и методика составления которого разработана
Ю. В. Шишло. С помощью такого графика можно опре-
делить: горизонт хода трала по длине ваеров и ско-
рости траления (кривые /), вертикальное раскрытие
трала при той или иной скорости траления (кривая 2),
изменение горизонта хода трала в зависимости от ско-
рости траления (кривые /), изменение горизонта хода
трала и время его прихода на новый горизонт при до-
травливании ваеров без изменения режима работы ма-
шины (кривая 4). Кривая 5а на графике характеризует
скорости хода судна при изменении курса траления на
427
30°, а кривая 56 — глубину хода трала при длине ваеров
550 м (процессы рассматриваются во времени, т. е. от-
несены к нижней оси абсцисс). Все эти данные позволя-
ют более уверенно управлять горизонтом хода трала
после выхода судна на курс траления.
Расстояние 8Л, пройденное судном за время поста-
новки трала и выхода его на заданный горизонт, слага-
ется из следующих составляющих:
Sn = S' + S"+S"',
где S' —расстояние, пройденное за время спуска сетной части тра-
ла, травления кабелей и подключения досок;
S" —расстояние, пройденное за время травления ваеров;;
S'" — расстояние, пройденное от момента взятия ваеров на сто-
пор до момента выхода трала на заданный горизонт.
Если пренебречь собственным горизонтальным пере-
мещением косяка, то расстояние «забега» S3 должно
быть:
S3 = Su - L = (S' + S" + S'") -L, (II—1)
где L — горизонтальное отстояние трала от судна.
При постановке трала
скорость судна является
величиной переменной.
Кроме того, время, затра-
чиваемое на выполнение
различных операций, свя-
занных с постановкой
трала, зависит от субъек-
тивного фактора — опыта
и натренированности па-
лубной команды. По-
этому определить точно
расстояние «забега» труд-
но. На рис. 189 приве-
ден график изменения скорости судна на различных
стадиях постановки разноглубинного трала к при его
погружении. Он составлен по данным наблюдений, про-
веденных на одном из БМРТ (длина вытравленных вае-
ров /=650 м). Используя такой график, можно по вре-
мени и средней скорости рассчитать расстояния S', S",
S'"t а затем и расстояние S3 при той или иной длине I
вытравленных ваеров. По результатам расчетов нетруд-
но составить таблицу приближенных значений расстоя-
428
ний «забега» в зависимости от длины вытравленных ваё-
ров. Для вычисления расстояния «забега» предложены
также различные эмпирические формулы*.
Курс (направление) «забега» выбирают, исходя из
следующих соображений. При ветре до 4—5 баллов «за-
бег» в свободной для маневрирования обстановке мож-
но выполнять в любом направлении от облавливаемого
косяка. Если косяк имеет значительную протяженность
в одном направлении, то позицию постановки трала луч-
ше выбирать так, чтобы при тралении трал прошел по
наиболее плотной и протяженной части косяка. При вет-
ре более 5—6 баллов «забег», как правило, выполняют
только против ветра с таким расчетом, чтобы тралить
примерно по ветру. При существующих мощностях до-
бывающих судов и размерах буксируемых ими тралов
при тралении на ветер наблюдается перегрузка главно-
го двигателя. Кроме того, при тралении примерно по вет-
ру угол ветрового дрейфа будет мал и его можно не учи-
тывать.
* По средним опытным данным для БМРТ можно принять
S' ~ 2 кбт, $"л$1,5/. Зависимость времени выхода трала на задан-
ный горизонт tB от длины вытравленных ваеров / практически ли-
нейна. Поэтому расстояние S'", которое пройдет судно за время
погружения трала, можно определить по формуле
S"' = VfB = v—,
V
где V — средняя скорость судна на участке cd (см. рис. 189);
v — скорость погружения ваеров.
Если выразить V в узлах, / в кабельтовых, а и в кабельтовых
V I
в минуту, то расстояние S'" в кабельтовых будет S'" —---.
6 v
$3 = $'+$" + $'"— L.
Принимая приближенно L=l, можно записать
V
5з = 2+1,5/ + -—/-Z
Ьи
или
Зз=Я-
3 2 I Зи
Для БМРТ можно принять v — — кбт/мин (на погружение
3
каждых 185 м ваеров требуется 3 мин). Тогда $а = —- (V + 1) + 2.
429
Если поворот судна с тралом для выхода на косяк
был сделан на достаточно большом расстоянии от ко-
сяка (£>>2L), то курс траления определяется без
учета траектории трала после поворота судна. Когда об-
лавливается практически неподвижный косяк, то при
отсутствии ветрового дрейфа курс траления Лт совпа-
дает с пеленгом Пк на ядро косяка (Лт = Т7к). Для конт-
роля выполнения маневра при прохождении судна над
косяком можно определить с помощью ГАС траверзное
расстояние £)Тр до ядра косяка. Если /)тр окажется боль-
ше допустимого, то нужно изменить курс траления
(в сторону ядра косяка) на угол ДЛ, который рассчи-
тывают с учетом траектории трала после поворота судна,
так как практически всегда Z)TP<2L (см. § 71). Это обес-
печит точное наведение трала на ядро косяка в плоско-
сти горизонта.
Если наблюдается ветровой дрейф, то судно следу-
ет с тралом по линии пути при дрейфе /7Уа/т =ПК. Ком-
пасный курс, которым правят,
^(к) = 77к-а-АГ^
При расчете Лт<к) по этой формуле необходимо учи-
тывать знаки угла дрейфа и поправки компаса. При на-
личии ветрового дрейфа трал будет находиться на линии
пути при дрейфе. Его линейное отклонение от диамет-
ральной плоскости судна приближенно определяется
формулой
у = Л sin а,
где L — горизонтальное отстояние трала от судна.
Таким образом, при ветре необходимо учитывать
влияние ветрового дрейфа судна не только на его соб-
ственное перемещение, но и на положение трала отно-
сительно судна с таким расчетом, чтобы обеспечить про-
хождение трала через ядро косяка. Угол дрейфа можно
определить при помощи навигационно-промыслового ла-
га-дрейфомера — или приближенно по отклонению вае-
ров от диаметральной плоскости судна на прямом курсе.
Если облавливается быстроподвижный косяк, эле-
менты горизонтального перемещения которого Лк и Ук
известны, то в момент выхода на курс траления опреде-
ляют пеленг 17к на ядро косяка и рассчитывают угол
=77к—Лк (см. рис. 180), а затем угол упреждения ф:
430
Ф = — singKp
где V — скорость судна при движении с тралом.
Для расчета угла упреждения можно использовать
простую номограмму (рис. 190). Он может быть получен
и путем графических построений (см. рис. 180). Курс
траления, обеспечивающий прохождение трала через
ядро косяка (£)>2 L), будет
Кт = /?к i ф
(знак « + » при движении косяка вправо, а знак «—» при
движении косяка влево по отношению к линии пеленга).
Если наблюдается ветровой дрейф, то судно должно сле-
довать по линии пути при дрейфе = 77к±ф. При
этом /СТ(к)=Як±ф—а—&ГК.
Практически в течение короткого промежутка време-
ни (1—2 мин), который затрачивается на расчет /СТ(к),
судно следует по на-
правлению пеленга на
ядро косяка. Если пос-
ле окончания поста-
новки трала гидроаку-
стический контакт с яд-
ром косяка отсутствует,
то пеленг на ядро ко-
сяка 77к определяют на
промыслово - навигаци-
онном планшете по из-
вестным элементам го-
ризонтального переме-
щения косяка, а затем
уточняют с помощью
ГАС.
Так как исходные
данные для расчета
курса (пути) траления
содержат значительные
ошибки, необходимо
Хурсодой угол косяка
Рис. 190
постоянно корректи-
ровать выполнение маневра. Для этого следуя
курсом траления, определяют с помощью ГАС
курсовой угол 9с с судна на ядро косяка. Он должен
быть постоянным и равным углу упреждения ф, а при
«I
наличии ветрового дрейфа — углу —а. Если же курсо-
вой угол qc непрерывно меняется к носу или к корме, то
это свидетельствует о существенных ошибках в опреде-
лении элементов горизонтального перемещения косяка
на курсе сближения с ним. В этом случае незначитель-
ным маневрированием курсом судна можно добиться
постоянства курсового угла на ядро косяка. Очевидно,
что курс траления Кт можно определить и методом отно-
сительной прокладки на маневренном планшете, так же
как и курс Кс сближения с ядром подвижного косяка
вплотную.
Методы расчета курсов траления для облова локаль-
ных плотных малоподвижных и быстроподвижных кося-
ков пелагических рыб при условии, когда необходимо
учитывать траекторию трала после поворота судна
(Z)^2L), рассмотрены в § 4.
Облов сравнительно плотных (оформ-
ленных) косяков рыбы в придонных слоях
осуществляется прицельно не только по глубине, но и по
курсу. Под прицельностью по курсу траления следует
понимать опускание или подъем трала на тот или
иной горизонт в заданных точках на линии курса
(пути).
Положение этих точек определяется горизонтальным
отстоянием трала от судна, скоростью судна и момента-
ми фиксации эхолотом (вертикальным трактом ГАС)
рыбы под килем судна или неровностей морского дна.
Трал должен быть опущен на горизонт, в котором фикси-
руется рыба, к моменту подхода к косяку и поднят на
более высокий безопасный горизонт хода после того, как
косяк им пройден. Если траление ведется на участках с
неровным рельефом дна, то при обнаружении под килем
судна препятствия трал своевременно должен быть под-
нят на безопасный горизонт хода, а после прохождения
препятствия снова опущен на прежний промысловый го-
ризонт. Предположим, что при следовании судна курсом
траления эхолотом был записан «бугор». Зная горизон-
тальное отстояние трала от судна, рассчитывают момент
подхода трала к этому препятствию. За промежуток
времени t до наступления этого момента (/ определяют
по тарировочному графику) увеличивают скорость суд-
на. В результате трал начинает подниматься над грун-
том и выходит на заданный безопасный горизонт. Изме-
432
нение горизонта хода трала контролируют траловым
зондом. Определив по отметкам на эхограмме эхолота
промежуток времени /п, в течение которого судно про-
ходило над препятствием, отмечают на ленте тралового
зонда момент Т\ подхода к препятствию трала. В момент
7'2 = 7'i+^n (как только трал прошел препятствие) умень-
шают скорость судна и выводят трал на прежний про-
мысловый горизонт.
Величину горизонтального отстояния трала от суд-
на, которую необходимо знать для ведения прицельного
траления по курсу, можно определить с помощью спе-
циального тарировочного графика, предложенного
Ю. В. Шишло (рис. 191). На этом графике плоскость
чертежа совпадает с диаметральной плоскостью судна.
Судно находится в точке О. На графике показаны толь-
ко ваера длиной 300 м, остальные (350, 400 м и т. д.)
изображены конечными стрелками. Горизонтальные
линии изображают 100-метровые кабели. В точке
пересечения конца кабеля с одной из наклонных ли-
ний, соответствующей скорости траления, находит-
ся устье трала (средняя точка верхней подборы, где
установлен датчик тралового зонда). Глубину хода тра-
28 В. Е- Ольховский
433
ла снимают с оси ординат, а отстояние трала от судна
в плоскости горизонта — по оси абсцисс.
Пример. Длина ваеров / = 650 м, длина кабелей £к = 100 м. По
графику определяем горизонтальное отстояние трала от судна L =
= 720 м. Менее точно величину горизонтального отстояния трала от
судна можно рассчитать по формулам, приведенным в § 1.
Для осуществления прицельного траления по курсу
важно знать не только горизонтальное отстояние трала
от судна, но и «время запаздывания» трала — промежу-
ток времени, равный разности моментов прохождения
тралом и судном какой-либо фиксированной точки на
линии курса (пути) траления. «Время запаздывания»
трала определяют при помощи таблицы, рассчитанной
по формуле
60
*зап = 1R-9V W, (I I—2)
1OOZ у
где /8ап — время запаздывания, мин;
LK — длина кабеля, м;
LB—горизонтальная проекция ваера (можно снять с графи-
ка, изображенного на рис. 191);
V —скорость судна, уз.
При облове в придонных слоях разреженных скопле-
ний рыбы также практикуется прицельное траление как
по глубине, так и по курсу. Однако когда облавливают-
ся такие скопления, необходимость подъема или опуска-
ния трала в заданных точках на линии курса (пути)
траления определяется только характером рельефа дна,
так как границы разреженных скоплений «размыты»
и не могут быть четко зафиксированы эхолотом (вер-
тикальным трактом ГАС).
При выборе курсов придонного траления необходимо
учитывать, что изменение курса судна, буксирующего
трал, или уменьшение его скорости могут привести
к посадке трала на грунт. Если необходимо значительно
изменить курс траления, ваера подбирают до досок, де-
лают поворот, выходят на новый курс, после чего ваера
травят и выводят трал на заданный горизонт хода. Тра-
ление осуществляют на таких скоростях, чтобы всегда
иметь запас мощности главного двигателя для увеличе-
ния скорости при необходимости вывести трал на более
высокий горизонт.
Облов разреженных скоплений рыбы
в толще воды вдали от грунта осуществляет-
434
ся прицельно только по глубине. Так как рыба держит-
ся разреженно, трал не нужно наводить на цель в плос-
кости горизонта. Судно, буксирующее трал, может
маневрировать как курсом, так и скоростью, не опасаясь
посадки трала на грунт.
На рис. 192 показан фраг-
мент промыслово-навига-
ционного планшета, на ко-
тором нанесены пример-
ные контуры площади, за-
нятой разреженными
скоплениями рыбы, выяв-
ленные во время местно-
го поиска, по результатам
предшествующих трале-
ний и сведениям, получен-
ным от других судов, ве-
дущих промысел на дан-
ной акватории. Курсы
траления выбирают обыч-
но так, чтобы трал прошел по наиболее протяжен-
ной части площади, занятой скоплением рыбы (курсы
ab и Ъс).
§ 4. Расчет курсов траления с учетом траектории
трала после поворота судна
Рассмотрим методы расчета курсов траления при
облове разноглубинным тралом локальных плотных ко-
сяков рыбы, расположенных вдали от грунта, при усло-
вии, когда судно, буксирующее трал, делает поворот на
курс траления на небольшом расстоянии D от точки
встречи трала с косяком (D^2L). При этом условии
расчет курса траления должен быть выполнен с учетом
траектории трала после поворота. Если облавливается
быстроподвижный косяк, то должно быть учтено и соб-
ственное горизонтальное перемещение косяка.
Облов быстроподвижных косяков. Как уже отмеча-
лось, с точки зрения кинематики наведение в плоскости
горизонта трала на подвижной косяк — это задача об
определении координат точки пересечения траекторий
трала и ядра косяка, заданных своими уравнениями.
Рассмотрим принципиальные основы ее решения в об-
28*
435
щем случае, когда после определения элементов гори-
зонтального перемещения косяка Лк и судно следует
произвольным курсом Лс со скоростью К Предположим,
что в некоторый момент времени судно, идущее этим
курсом, находится в точке Со, а ядро косяка, перемеща-
ющееся по направлению Лк со скоростью VK, находится
в точке Ло (Рис. 193). Положение ядра косяка относи-
тельно судна определяется пеленгом П и расстоянием
Рис. 193
D, а положение трала относительно судна в точке Го—
курсовым углом q? и горизонтальным отстоянием L
(в частном случае 9т=180°).
Для облова подвижного косяка судно в точке Со
ложится на курс траления Лт. Поставленная задача бу-
дет решена, если этот курс траления обеспечит встречу
устья трала с ядром косяка в точке Л(Л1) с координа-
тами dN и dE.
Следовательно, условие встречи трала с ядром ко-
сяка — это равенство координат:
dEr = dEK-
436
Как видно из рис. 193,
dNK =DcosIJ + VK /т cos Кк,
S=V/tCOsKt + Lcos(Kt + ^)-
dEK =DsinIJ + Vk <TsinKK, 3)
dET = WTsinXT + Lsin(KT + £).
где iT — время следования судна курсом траления Кт до выхода
трала на ядро косяка (время сближения);
<7* — курсовой угол с судна на трал в момент встречи трала с
ядром косяка (конечный курсовой угол).
На основании выражений (II—3) можно написать
DCOS/7+ VkcosKk ?т= VcosKt 7t + Lcos (Кт + <?“), (II—4)
D sin /7 + sin Кк = V sin KT tT + L sin (KT + qty,
Уравнения (II—4) содержат три неизвестных: /Ст>
tT и q*. Добавим к этим уравнениям третье — уравнение
траектории трала, приняв за математическую модель
траектории трала «траловую кривую» с-р=1 (трактри-
су). Уравнение трактрисы с учетом величины курсового
угла с судна на трал qT в момент начала поворота мож-
но записать в таком виде:
. + ^т-(^-Кс)
tgT = tg---2----
VtT
е L .
(П-5)
Уравнение (II—5) можно с достаточной для практи-
ки точностью апроксимировать выражением
/ I \а
9тк = 9т-0,56 — (Кт-Кс). (П-6)
\ V • т /
Ошибка такой апроксимации для реальных значений
—Кс и — , гДе 5 = WT, не превышает 0°,5, что
выше точности удержания судна на курсе траления.
В результате будем иметь систему из трех уравнений
с тремя неизвестными /Ст, /т и
D cos П + (VK cos Кк — V cos Кт) tT = L cos (Кт + <#)
D sin77+ (К sin 7C — Vsin 7Q 7 = L sin
\ к к т/ т
(^t)2(<?t-<?kt)=0,56L2(Xt-Xc).
(П-7)
437
Если за математическую модель траектории трала
принять «траловую кривую» с р,= 1Д6» то третье урав-
нение этой системы будет иметь такой вид:
Систему уравнений (II—7) можно решить средства-
ми судовой вычислительной техники. Из уравнений
(II—7) определяется не только курс траления Лт и вре-
мя /т следования этим курсом до выхода трала на ядро
косяка в плоскости горизонта, но и конечный курсовой
угол с судна на трал q*. Зная этот угол, на траулерах
кормового траления можно заранее определить необхо-
димую величину потравливания одного из ваеров с тем,
чтобы к моменту встречи трала с косяком трал не имел
перекоса и было обеспечено его оптимальное раскрытие.
Величину потравливания ваера с борта, противополож-
ного наименованию курсового угла q* определяют по
формуле
AZ = Bsin<£, (II—8)
где В — расстояние между точками подвеса ваеров.
Рис. 194
Задача наведения в
плоскости горизонта тра-
ла на подвижный косяк
может быть решена и в
относительном движении.
Из теории относительного
движения (см. § 2) сле-
дует, что сближение
вплотную ядра косяка и
буксируемого судном тра-
ла будет обеспечено, если
ЛОД ядра косяка прой-
дет через текущее положе-
ние косяка и конечное
положение трала относи-
тельно судна, определяе-
мое величиной угла q* (L=const).
На рис. 194 точка Тк— конечное положение трала
относительно судна, которое принимается неподвижным,
К— текущее положение ядра косяка. Расстояние КТк
представляет собой относительный путь косяка (КТк=
=S0Th). Графическое решение задачи определения кур-
са траления /Ст на промыслово-навигационном или ма-
невренном планшете затруднено, так как неизвестно
конечное положение трала относительно судна (угол д“,)
Метод последовательных приближений требует выпол-
нения трех-четырех этапов расчета угла при помощи
выражения tT = -^ и формулы (II—6), а также боль-
шого объема графических построений. Все это в услови-
ях быстро протекающего процесса лова практически не
может быть выполнено. В то же время рассматриваемая
задача достаточно просто решается полуавтоматически
на экране визуального электронного индикатора путем
проигрывания маневра в ускоренном масштабе времени.
В центре экрана электронно-лучевой трубки высвечива-
ются место судна (точка Со), текущее относительно суд-
на положение трала (точка Т) и ядро косяка (точка Д’).
Проигрывание маневра осуществляется при помощи двух
рукояток «Дт» и «/т». По мере вращения этих рукояток
из точки текущего положения ядра косяка начинает вы-
свечиваться по направлению и расстоянию ЛОД косяка.
Одновременно на экране разворачивается линия курса
судна и изменяется положение трала относительно суд-
на по курсовому углу, т. е. по экрану начинает переме-
щаться точка Т.
В процессе проигрывания маневра вектор скорости
относительного горизонтального перемещения косяка
при вращении_рукоятки «Дт» изменяет свое направле-
ние по закону Vотн — Vk-V.
При вращении рукоятки «/т» изменяется длина вы-
свечиваемой на экране линии относительно пути косяка
5отп=Готн/т, а положение трала относительно судна
движется по экрану в соответствии с законом, который
описывается уравнением (II—5). Участие оператора в
определении курса траления Кт сводится к совмещению
на экране электронного индикатора конца вектора S0TH
с перемещающейся по экрану точкой Г, к снятию по со-
ответствующим шкалам на пульте управления электрон-
ного индикатора отсчета курса траления Дт и времени
следования этим курсом до сближения вплотную устья
трала и ядра косяка. Затем подают команду на руль
и судно ложится на курс а электронный индикатор
439
переключают на режим отображения, промысловой
обстановки в реальном масштабе времени. Движение
судна курсом траления Кт продолжается до тех пор по-
ка светящиеся на экране точки К и Т, отображающие
текущие положения ядра косяка и устья трала, не со-
вместятся в одну точку.
Из рассмотрения принципиальных основ решения за-
дачи наведения в плоскости горизонта разноглубинного
трала на ядро быстроподвижного косяка рыбы с учетом
траектории трала после поворота судна, видно, что эта
задача без помощи вычислительной техники (ЭЦВМ
или АВУ) практически не может быть решена. Однако
она может быть упрощена и решена при «ручной» обра-
ботке информации, если наводить трал на ядро подвиж-
ного косяка не одним, а двумя курсами. В этом случае
и при условии, если можно не учитывать траек-
торию трала после поворота судна.
Сущность метода наведения трала на ядро подвиж-
ного косяка двумя курсами заключается в следующем:
вначале рассчитывают курс Лс, обеспечивающий
сближение судна вплотную с фиктивной точкой, которая
движется по той же линии, в том же направлении и с
той же скоростью, что и ядро косяка, но находится впе-
J Vk Т
реди ядра на расстоянии a = —L ;
в момент выхода судна в эту точку измеряют курсо-
вой угол с судна на трал (?Т1 и ложатся на курс траления
Лт = Лс± (180°-?Т1);
пройдя этим курсом расстояние S=L (tT = вы-
водят трал в плоскости горизонта на ядро косяка.
На рис. 195 точки Со и То представляют собой поло-
жения судна и трала в момент начала маневра (элемен-
ты горизонтального перемещения косяка Лк и VK уже
определены). Ядро косяка располагается по пеленгу IJQ
и на расстоянии Do от судна. Отвернув от линии пелен-
га на угол ДЛь судно следует курсом Кс в упрежден-
ную точку С], расположенную на линии горизонтально-
го перемещения косяка. Точку Ci выбирают так, чтобы
к моменту прихода судна в эту точку ядро косяка нахо-
дилось бы в точке Л1 на расстоянии от судна d = VKt,
где f — или Трал, который перемещается по
440
своей траектории То1\, будет находиться в этот момент
в точке 7\ на курсовом угле qT (предполагается, что
DQ<2L, и при ДК=ДК1 трал к моменту выхода судна
в точку Ci не успеет прийти к направлению диаметраль-
Рис. 195
ной плоскости судна). Для того чтобы обеспечить наве-
дение трала на ядро косяка, судно должно в точке Ci
отвернуть на угол ДК2=180°—qTl и лечь на курс трале-
ния Кл = Ас±ДАг (знак «+» при курсовом угле с судна
на трал левого борта, знак «—» при курсовом угле
с судна на трал правого борта). Этим маневром трал
приводят в диаметральную плоскость судна. Курсовой
угол на трал к моменту поворота судна на курс трале-
ния определяют визуально пеленгованием точек вхо-
да ваеров в толщу воды (см. § 1). Более точно этот
угол можно измерить при помощи специального прибо-
ра для определения положения трала относительно
судна.
Когда судно пройдет курсом траления КТ=КС±ДК2
расстояние, равное L, ядро косяка переместится по ли-
нии на расстояние d и в точке Ci поворота судна на
441
курс траления произойдет встреча устья трала с ядром
косяка. При этом трал будет следовать по линии курса
(пути) судна, что исключает перекос трала и обеспечи-
вает его оптимальное раскрытие. Расчет курса Лс сво-
дится к решению задачи выхода на позицию впереди по
курсу объекта маневра — косяка на расстоянии от его
ядра d = y-L.
Рассмотрим решение этой задачи на промыслово-на-
вигационном планшете методом истинной прокладки.
В этом случае построения и расчеты выполняются в сле-
Рис. 196
дующей последовательности (рис. 196). От точки Со по
линии пеленга /70 прокладывают в выбранном масшта-
бе расстояние DQ и наносят точку Ко— положение ядра
косяка относительно судна. Из этой точки проводят ли-
нию горизонтального перемещения (курса) косяка.
Затем по этой линии от точки Ко откладывают расстоя-
ние d и полученную точку С' соединяют прямой лини-
ей с точкой Со. От точки с\1 по линии горизонтального
перемещения косяка откладывают в выбранном масш-
табе модуль вектора скорости косяка Ук и из получен-
ной точки п раствором циркуля, равным модулю векто-
ра скорости судна V, делают засечку на линии Со С'
(точка т). После этого из точки Со проводят прямую
линию, параллельную линии тп, до пересечения ее
с линией горизонтального перемещения косяка в точ-
ке Сь Направление линии СоСх определяет курс судна
Кс, а длина ее S представляет собой расстояние, кото-
рое пройдет судно этим курсом за время /т.
442
Определить курс KG можно также методом относи-
тельной прокладки на маневренном планшете или при
помощи специальных таблиц, составленных В. И. Яков-
левым. Достоинство рассматриваемого метода наведе-
ния в плоскости горизонта трала на ядро подвижного
косяка заключается в простоте графических построений
и расчетов, которые практически могут быть выполнены
при «ручной» обработке информации. К недостаткам
метода следует отнести ограничение по расстоянию об-
наружения косяка. Если косяк обнаружен впереди тра-
верза на сравнительно небольшом расстоянии, а ско-
рость его горизонтального перемещения соизмерима со
скоростью судна, то для выхода в упрежденную точку
Ci курсом Кс в ряде случаев может потребоваться
быстрый поворот судна на угол свыше 60°, что не допус-
кается промысловой практикой из-за опасности переко-
са или порыва трала. Кроме того, при отсутствии спе-
циального прибора для определения положения трала
относительно судна, курсовой угол на трал qT в момент
поворота на курс траления может быть определен лишь
грубо приближенно.
Облов малоподвижных косяков (Кк«0). Рассмотрим
случай облова на одном ломаном галсе траления (без
подъема на борт трала) нескольких небольших по раз-
мерам косяков, расположенных сравнительно близко
друг от друга. Такой метод облова приводит к необходи-
мости делать на небольших расстояниях от ядра косяка
(Z)<2L) повороты на значительные углы для того,
чтобы навести трал на очередной косяк, глубина зале-
гания которого определена горизонтальным трактом
ГАС с учетом рефракции звуковых лучей в морской
воде*.
Допустим (рис. 197), что в момент обнаружения
ядра косяка в точке Ко на курсовом угле qc и расстоя-
нии D судно следовало по линии курса Кс, а трал нахо-
дился на этой линии на расстоянии L от судна. Чтобы
обеспечить прохождение трала через ядро косяка (Z)<
* Возможен и другой вариант. Если в процессе местного поиска
установлено, что косяки на данной акватории располагаются при-
мерно на одном горизонте, то судно проходит рекогносцировочным
курсом через один из косяков. По глубине залегания этого косяка
определяется горизонт хода трала, который всякий раз корректиру-
ется при выходе судна на очередной косяк.
443
<2L), необходимо отвернуть от линии первоначального
курса ’кс не на угол qc, а на некоторый угол ДК<<70
и лечь на курс траления Кт=Ка±&К, (знак « + », если
qc правого борта, знак «—», если qa левого борта).
Когда судно пройдет курсом Кт расстояние S и будет
находиться в точке С\, трал движущийся по своей тра-
ектории, достигнет ядра косяка в точке 1\ (Ко). В этот
же момент курсовой, угол на трал q* и боковое уклоне-
ние трала от линии курса судна будут:
sin <ft =-^-sin(<?c — ЛК), (II—9)
у = D sin (qc — ЛК) (II—10)
ИЛИ
z/ = Lsin<£. (И—И)
Приравнивая правые части выражений (II—10) и
(II—11), получим
Dsin(<?c — ДК) = Lsin<£. (И—12)
Расстояние S, пройденное судном за промежуток
времени от момента поворота на курс Кт до момента
встречи трала с ядром косяка, может быть определено
по формуле
S = D cos (qa — ЛК)— Leos . (III. 13)
Примем за математическую модель траектории тра-
ла «траловую кривую» с ц = 1 (трактрису). При этом
условии
U-y = ctg — ?L . (ii—14)
444
Совместное решение уравнений (II—12), (II—13) и
(II—14) позволяет получить формулу для определения
угла отворота Д/С по измеренным с помощью ГАС ве-
личинам t/с и D и предварительно рассчитанной по дли-
не ваеров, кабелей и глубине хода трала величине L:
1 Г / D\2 ~
ЛК V '~\т
18 "Г -------D---------------- Х
— sin (9с — ЛК)
2
। sin=(<7c-AK)
D
-----cos
Хе L ' “ r v ь . (II—15)
На рис. 198 показан график ДК = /^9С, > со-
ставленный по формуле (II—15). С помощью этого гра-
фика по 9с и — можно
быстро найти величину
угла поворота ДЛ, а за-
тем и /Ст = /<с±Д/С
Формулы (II—15),
(П-9), ” “
(II—13) положены и в
основу
таблицы, в которой по
D
аргументам qc и
даны величины &К, q*,
S' и у'. Расстояние, ко-
торое необходимо прой-
ти судну после поворо-
та до встречи трала с
ядром косяка S и бо-
ковое уклонение у тра-
ла от линии курса суд-
на в момент встречи
трала с ядром косяка,
определяют умножением
величину горизонтального отстояния трала от судна L,
т. е. S=S'L и y=y'L. Ниже приведена выдержка из
этой таблицы только для у- =0,25 в качестве примера
(табл. 20)
(П-Ю),
составления
D/L
4?
Кб
К5
//
кг
ко
0,9
0,8
0,1
0,6
0,5
04
5 10 15 20 25 50 55 60 *5 «О 55 51Ш*
Рис. 198
табличных значений Sr и у' на
445
Таблица 20
График AK=f^c, —-Jh таблица могут быть исполь-
зованы не только при облове на одном галсе траления
нескольких косяков, расположенных сравнительно близ-
ко друг от друга, но и при облове одиночных косяков,
когда Z)<2L.
Так, например, если после постановки трала судно
потеряет гидроакустический контакт с косяком, то оно
может значительно отклониться от направления на ядро
косяка. В этом случае после возобновления гидроаку-
стического контакта с косяком потребуется изменение
курса траления на большой угол уже вблизи косяка
(£)<2А). Кроме того, как указывалось выше, для конт-
роля маневрирования при прохождении судна, букси-
рующего трал, над косяком с помощью ГАС определя-
ют траверзное расстояние от ядра (центра плотности)
косяка £)тр. Если величина £>Тр будет больше допусти-
мой, необходима корректировка курса траления, но
446
обязательно с учетом траектории трала после поворота,
так как практически всегда Z)Tp<2A. Величину необхо-
димого изменения курса траления А К можно опреде-
лить с помощью таблицы или графика по аргументам
<7с = 90° и —где Z)=Z)TP.
Д
Пример. Судно, следуя курсом траления (<7т = 180°), вышло
на косяк, эхолот фиксирует рыбу. С помощью горизонтального трак-
та ГАС определено траверзное расстояние до наиболее плотной час-
ти косяка DTP = 100 м. Определить величину ДА, если Д=400 м.
Из таблицы по <7с=90° и -у“=0,25 находим ДА=40° (в сторону
ядра косяка). <
В таблице приведены величины курсовых углов на
трал в момент встречи устья трала с ядром косяка q*
и боковых уклонений трала от линии курса (пути) суд-
на в этот момент. Зная угол q*> на траулерах кормово-
го траления можно заранее потравить ваер с борта,
противоположного наименованию q*> на величину Д/,
определяемую формулой (II—8), и тем самым исклю-
чить перекос трала.
При облове на одном ломаном галсе несколько срав-
нительно близко расположенных друг от друга косяков
желательно линию курса (пути) траления проложить
по отношению к ядру косяка с соблюдением условия
У<.Кк-}-Гз, где 7?к — радиус косяка, г3 — радиус зоны,
освещаемой эхолотом на глубине залегания косяка. При
этом условии косяк окажется в зоне действия эхолота
(вертикального тракта ГАС) и по его показаниям мож-
но будет уточнить глубину залегания косяка, а затем
осуществить необходимую корректировку горизонта
хода трала до его встречи с косяком. Поэтому при об-
лове малых косяков целесообразно наводить трал на
косяк двумя курсами, как это показано на рис. 199.
Находясь в точке Со и определив при помощи ГАС кур-
совой угол qc на ядро косяка и расстояние D до него,
ложатся на курс Кс> приведя ядро косяка на курсовой
угол <7с=О(ДА1 = «7с)- Когда судно выйдет на ядро ко-
сяка (точка Ci)f трал, который движется по своей
траектории, будет находиться в точке 7\ на некотором
курсовом угле ^т. В точке Ci судно отворачивает в сто-
рону, обратную наименованию на угол ДА2=180а—
447
—*7т и ложится на курс траления Этим
маневром трал приводится к направлению диаметраль-
ной плоскости судна, что обеспечивает прохождение
трала через ядро косяка в плоскости горизонта.
Курсовой угол на трал к моменту поворота судна на
курс траления определяют визуально пеленгованием то-
чек входа ваеров в толщу воды (см. § 1). Этому ме-
тоду присущи те же недостатки, что и методу облова
быстроподвижных косяков двумя курсами.
Глава Ш. ВЫБОР ПРОМЫСЛОВЫХ КУРСОВ И
МАНЕВРИРОВАНИЕ ПРИ ДОННОМ ТРАЛОВОМ ЛОВЕ
§ 5. Выбор курсов траления
При выборе курсов облова донным тралом про-
мысловых скоплений рыбы необходимо учитывать сле-
дующие факторы: генеральное направление движения
рыбы, ее подвижность, размеры и распределение косяков,
плотность и устойчивость скоплений; условия, которые
определяют наличие промысловых скоплений в данном
месте и в данное время года (температура воды и ее рас-
пределение, кормовая база, физиологическое состояние
рыбы); рельеф дна (размеры банок и желобов, протя-
448
женность и крутизна их склонов); грунт (тип грунта,
его консистенция, органогенные включения, задевы
и т. п.); течение (направление и скорость, ширина пото-
ка); возможные изменения погоды; наличие навигаци-
онных ориентиров и опасностей; наличие других судов
в районе промысла.
Ряд сведений, необходимых для выбора курсов тра-
ления, можно получить из навигационно-промысловых и
навигационных пособий. Эти сведения рекомендуется
наносить на рабочий промысловый планшет. Непосред-
ственно в районе промысла используют различные при-
емы выбора курсов траления.
Выбор курсов траления по рекомен-
дациям поискового судна. В задачу поисковых
судов входит не только поиск скоплений рыбы, но и ока-
зание помощи добывающим судам в облове этих скоп-
лений. Капитан поискового судна информирует капита-
нов добывающих судов, пришедших в район обнаружения
рыбы, о промысловой обстановке и дает рекоменда-
ции по выбору наиболее удобных мест постановки буев,
скорости траления, длины ваеров, вооружения нижней
подборы трала, оптимального диапазона промысловых
глубин и курсов траления. Придерживаясь этих реко-
мендаций, добывающие суда начинают промысловую
работу. В дальнейшем на основании результатов трале-
ния и показаний гидроакустических поисковых прибо-
ров, а также тщательного анализа промысловой обста-
новки уточняют глубины, на которых наблюдаются на-
иболее плотные скопления рыбы и выбирают наиболее
выгодные курсы траления.
Выбор курсов траления по рекоменда-
циям других добывающих судов, имею-
щих хорошие уловы. Такой прием выбора курсов
траления применяется в тех случаях, когда капитан до-
бывающего судна перед промыслом не располагает не-
обходимыми сведениями о глубинах, на которых наблю-
даются плотные скопления рыбы, и эффективных курсах
траления. В этих случаях возможно несколько вариан-
тов выбора этих курсов:
на переходе к месту лова по радиосводкам и выступ-
лениям капитанов на радиосовещаниях тщательно изуча-
ют промысловую обстановку в районе предстоящей рабо-
ты. На планшет наносят промысловые буи, выставленные
29 В- Ольховский
449
в этом районе, а также курсы траления судов, име-
ющих хорошие уловы. На основе анализа этих данных
выбирают место лова и наиболее выгодные курсы тра-
ления;
подходят к судну, имеющему хорошие уловы, вызы-
вают на радиоразговор капитана и, получив необходи-
мую информацию, дублируют его курсы, придерживаясь
рекомендованных глубин и режима траления. Достоин-
ство этого приема — возможность с первого же трале-
ния иметь хорошие уловы, недостаток — ограниченное
представление о характере и размерах облавливаемого
скопления;
подходят к судну, имеющему хорошие уловы, а затем
без трала с включенными гидроакустическими поиско-
выми приборами делают несколько коротких галсов в
различных направлениях с целью выявления размеров
скопления и его наиболее плотной части. На основании
полученных данных выбирают оптимальный диапазон
глуоин и наиболее выгодные курсы траления;
наблюдая за показаниями гидроакустических поис-
ковых приборов и изменением глубин, подходят на ви-
димость группы судов, ведущих промысел, и далее сле-
дуют с тралом к судну, имеющему хорошие уловы. Этот
прием позволяет после первого же траления получить
дополнительные сведения о характере и размерах скоп-
ления. Недостаток приема — потеря времени в случае
пролова при первом тралении.
Во всех рассмотренных выше случаях на основании
результатов тралений, показаний гидроакустических по-
исковых приборов и анализа промысловой обстановки
по радиосводкам изменяют курсы траления и глубины
так, чтобы все время удерживать судно «на рыбе». Не-
обходимые для этой цели данные наносят на промысло-
вый планшет.
Промысловой практикой установлено, что при рас-
положении курсов траления по течению уловы увеличи-
ваются, а против течения — снижаются. Это объясняет-
ся тем, что рыба продвигается против течения и таким
образом движется в сторону идущего ей навстречу рас-
крытого трала. В районах, где преобладают постоянные
течения, направления которых известны, траления вы-
полняют на контркурсах вдоль струи течения. Иногда
целесообразно следовать с тралом курсом только по те-
450
чению и для повторного траления заходить «на течение»
без трала.
Выбор курсов траления в районах с
тяжелыми грунтами и мелкобитым льдом.
При выборе курсов необходимо учитывать, что основ-
ными трудностями для траления являются плохие грун-
ты, задевистые места, крутые склоны дна, сильные тече-
ния и мелкобитый лед.
На плохих грунтах промысловой практикой рекомен-
дуется вести траление постоянными курсами, избегать
поворотов с тралом, чтобы не допустить переворачива-
ния мешка верхней полостью вниз. В необходимых слу-
чаях выполняют быстрый поворот с отрывом трала от
грунта. Скорость траления на плохих грунтах должна
быть несколько повышена, а длина ваеров — минималь-
но допустимой для данной глубины в районе промысла.
Это позволяет тралу легко преодолевать препятствия.
Время траления сокращается до 40—60 мин. Вахтенный
штурман должен находиться вблизи телеграфа, чтобы
иметь возможность в случае задева сразу остановить
судно.
При значительной крутизне склонов курсы траления
рекомендуется располагать вдоль изобат, так как в та-
ких местах имеется опасность даже при непродолжи-
тельных тралениях нарушить нормальную работу трала
из-за резкого изменения глубин. По этой же причине в
прибрежных районах ваера целесообразно травить от
берега, так как при травлении ваеров к берегу тралы по-
вреждаются чаще. При сильных течениях (10—12 миль
в сутки) выгоднее тралить только по течению. При вол-
нении моря 4—5 баллов траление рекомендуется вести
на ветер, что гарантирует сохранность трала в случае
задева.
Во время промысла в мелкобитом льду травят и вы-
бирают ваера без хода судна (во избежание порывов
полотна при попадании льда в трал). В случае дрейфа
льда к берегу район промысла покидают. Нельзя про-
кладывать курсы траления между берегом и льдом. Эти
курсы нужно выбирать мористее.
При частых туманах, большом количестве пасмурных
дней, тяжелых грунтовых условиях и большой подвиж-
ности льда от судоводителей, ведущих промысел в
мелкобитом льду, требуется напряженная и оператив-
29*
451
ная работа. В ходовой рубке обычно находятся два су-
доводителя. Вахтенный штурман осуществляет навига-
ционное обеспечение, а подвахтенный штурман занима-
ется промысловой работой.
Выбор промысловых курсов при сов-
местной работе в группе судов. Внедрение
на добывающих флотах автоматизированных систем уп-
равления промыслом (АСУ) открывает широкие пер-
спективы перед групповым (отрядным) методом ведения
промысла. Работа судов на промысле группой, управля-
емой флагманом, позволяет значительно повысить эф-
фективность местного поиска и использовать для выбо-
ра мест лова, курсов поиска и траления математические
методы. Ведение местного поиска группой судов дает
возможность в сравнительно короткое время обследовать
обширную акваторию и составить более точное представ-
ление о характере промысловых скоплений рыб и тен-
денции их перемещений.
Информация о показаниях гидроакустических поис-
ковых приборов и результатах пробных тралений перио-
дически передается по каналам связи в автоматизиро-
ванную систему управления, находящуюся на флагман-
ском судне (или на берегу), и там обрабатывается. В ре-
зультате обработки этой информации математическими
методами могут быть определены наиболее производи-
тельные места лова и генеральные промысловые курсы.
В настоящее время добывающие суда часто ведут
промысел настолько плотными группами, что на гори-
зонте невооруженным глазом можно усмотреть несколь-
ко десятков судов. Безаварийная работа в таких боль-
ших группах достигается строгим соблюдением Между-
народных правил предупреждения столкновения судов
в море, а также Правил совместного плавания и промыс-
ла судов флота рыбной промышленности СССР, которые
выработаны в результате обобщения многолетнего опы-
та группового промысла и утверждены Министерством
рыбного хозяйства СССР.
Расположение линий курсов траления по отношению
к промысловым буям. При помощи промысловых буев
отмечают места скоплений рыбы, ограждают участки с
неблагоприятными грунтами, показывают местоположе-
ние отдельных задевов или вершин банок и т.п. Однако
во всех случаях буй рекомендуется ставить на таком ме-
45?
сте, где, облегчая ориентировку, он не затруднял бы ра-
боту судов, т. е. в стороне от линий курсов траления.
Вместе с тем буй должен располагаться на таком рас-
стоянии, чтобы он был хорошо виден в течение всего
времени траления.
Обычно судно-разведчик (или добывающее судно)
при обнаружении промыслового скопления рыбы сразу
ставит буй на месте подъема трала с достаточно большим
уловом рыбы. Затем тралениями в разные стороны от
буя устанавливают наиболее выгодные курсы и глубины.
После этого выбирают наиболее удобное место для буя
и переставляют его.
Если в том или ином промысловом районе установ-
лены пути миграций рыбы и места достаточно плотных
и устойчивых ее скоплений, относительно хорошо изу-
чен рельеф дна и грунт, известны наиболее выгодные
промысловые курсы и глубины, целесообразно вначале
поставить буй, а затем начинать промысловую работу.
Когда промысловый буй применяется в целях огражде-
ния промысловых опасностей, рекомендуется придержи-
ваться следующих правил: при ограждении одиночных
задевов ставить буй вблизи задева со стороны, обращен-
ной к наиболее выгодным промысловым глубинам и
курсам траления; при ограждении участка (места) с
неблагоприятными для траления грунтами ставить буй
на границе этого участка в точке, расположенной ближе
всего к курсам тралений; при ограждении отдельных
проверенных промысловых площадок ставить два буя на
границах площадки по рекомендованному курсу трале-
ния. Работа у буя добывающего судна существенно отли-
чается от работы судна-разведчика. Главная задача по-
искового судна при работе у буя — установление опти-
мальных курсов траления и глубин. Поэтому поисковое
судно делает короткие пробные траления в разные сто-
роны от буя на разных глубинах, сопровождая их изуче-
нием промысловых условий как в местах траления, так
и на переходах между ними. По результатам работы в
районе буя поисковое судно должно установить наибо-
лее удобные места постановки буев добывающими суда-
ми и дать этим судам подробную информацию о промыс-
ловой обстановке — сообщить им условия промысла,
ассортимент уловов, наиболее выгодные курсы траления,
глубины с лучшими уловами и т. д.
453
Основная задача добывающих судов — эффективный
облов промысловых скоплений рыбы. Поэтому, ориенти-
руясь на буй, поставленный уже после того, как были
определены наиболее выгодные курсы тралений и глу-
бины, а также используя рекомендации судна-развед-
чика, добывающее судно осуществляет траления у буя
только вполне определенными, наиболее выгодными
курсами, придерживаясь оптимальных глубин и соблю-
дая соответствующую скорость и продолжительность
тралений.
Практикуется большое число различных вариантов
расположения линий курсов траления относительно буя
(или плавмаяка), установленного в районе работы груп-
пы судов. Однако все варианты можно свести к следу-
ющим наиболее характерным случаям.
Траление от ориентира и на ориентир (рис. 200, а)
практикуется в местах с относительно ровным рельефом
дна при облове зимовальных скоплений в местах интен-
сивного откорма, а также на склонах банок, когда не-
обходимо придерживаться определенного диапазона глу-
бин на ограниченном участке склона. При ровном рель-
ефе и отсутствии сильных течений траление осуществля-
ют на прямых курсах (от ориентира и обратно). В неко-
торых случаях, пройдя определенное расстояние от ори-
ентира одним курсом, делают поворот на 180° и следуют
обратно к ориентиру. Выбор сектора работы относитель-
но ориентира зависит от промысловой обстановки.
Если необходимо строго придерживаться определен-
ного диапазона глубин на ограниченном участке склона
банки, особенно при сильных течениях, ориентир уста-
навливают на склоне и траление ведут в одном направ-
лении от ориентира, придерживаясь рекомендованных
глубин (рис. 200, б).
Траление около ориентира (рис. 200, в, д) практику-
ется в разные сезоны года при облове косяков рыбы, ко-
торые придерживаются определенного склона банки,
вершины банки или узкого желоба. Ориентир обычно
выставляют на склоне за пределами промысловых глу-
бин или на вершине банки ближе к промысловому ее
склону. Траление начинают в некотором отдалении от
ориентира, проходят его траверз и продолжают трале-
ние. Ориентир находится на середине линии курсов тра-
ления. Подобным же образом располагают линии курсов
454
и в случаях, когда ориентир поставлен вблизи задева
или на границе площадки с задевистым грунтом
(рис. 200, г).
В ряде случаев приходится вести промысел в таких
районах, где участки, пригодные по грунтовым условиям
для траления, имеют небольшие размеры. Выход за гра-
ницу этих участков обычно приводит к серьезным пов-
реждениям и даже к потерям орудий лова. Удерживать
судно точно в пределах границ этих участков при отсут-
455
ствии двух ориентиров трудно, особенно при сильных
течениях и свежих ветрах (рис. 200, е, ж, з).
К ограждению буями промысловых площадок при-
бегают не только для обеспечения сохранности орудий
лова. В районах с сильно пересеченным рельефом дна,
разнотипными грунтами или с различным гидрологичес-
ким режимом отдельных участков рыба в периоды от-
корма или зимовки часто образует плотные и устойчи-
вые скопления только на определенных участках.
При работе у буя курсы тралений выбирают не толь-
ко с учетом достижения высоких уловов и сохранности
орудий лова, но и с соблюдением правил, исключающих
возможность подрезания буя тралом;
при следовании с тралом с наветренной стороны
траверзное расстояние до буя должно быть не менее
четырех глубин места, а при следовании с подветренной
стороны — не менее двух глубин. Если скорость течения
больше скорости ветра (об этом можно судить по рас-
положению поплавка относительно буя), то при опреде-
лении минимально допустимого траверзного расстояния
до буя необходимо принимать в расчет направление те-
чения, а не ветра;
поворот с тралом в сторону буя можно делать, лишь
пройдя после траверза буя расстояние, равное двойной
длине вытравленных ваеров;
при расхождении с другими судами вблизи буя нель-
зя ставить их в такое положение, при котором они мог-
ли бы срезать буй. В этом случае, руководствуясь Меж-
дународными правилами предупреждения столкновения
судов, следует создать им условия для безопасного про-
хождения буя.
Таким образом, курсы траления по отношению к бую
следует располагать с учетом всех факторов, на основе
которых выбираются эти курсы при облове рыб донным
тралом, а также с учетом места постановки буя и гидро-
метеорологических условий — ветра, течения, видимости.
§ 6. Повороты с тралом.
Учет циркуляции судна, буксирующего трал
Траление донным тралом часто ведется с поворо-
том на обратный курс или переменными курсами. Тра-
ление контркурсами применяется обычно на узких про-
456
мысловых площадках и при облове небольших по про-
тяженности плотных и устойчивых скоплений рыбы.
Такой способ позволяет удерживаться на оптимальных
глубинах и грунтах, а также не терять из зрительной
или радиолокационной видимости промысловый буй.
За исключением особых случаев, когда характер
скопления рыбы, грунт, глубина или наличие вблизи
других судов, занятых промыслом, заставляют прибе-
гать к быстрому повороту, рекомендуется делать плав-
ный продолжительный поворот в течение 20—30 мин.
Плавание на циркуляции (путь поворота) может дости-
гать при этом 8—13 кбт. Ведение счисления при таких
условиях без учета циркуляции, особенно когда возмож-
ности определения места судна ограничены, может при-
вести к потере промыслового скопления рыбы, выходу
на участок с неблагоприятными грунтами, навигацион-
ными опасностями и т. п.
К тралению переменными курсами прибегают обыч-
но и в тех случаях, когда желательно удерживать судно
на определенной изобате,
имеющей извилистый харак-
тер, или необходимо обойти
участки с неблагоприятны-
ми для траления грунтами,
а также при работе в райо-
нах, в которых встречаются
льды. Если нет достоверных
данных о том, на каких имен-
но глубинах находится наи-
более плотная часть скопле- $
ния рыбы, и известно лишь,
что рыба держится между j
какими-то определенными
изобатами (под «завалом»),
также прибегают к тралению переменными курсами. Ли-
нии курсов располагают под острым углом к общему на-
правлению изобат и тралением охватывается участок
между минимальной и максимальной изобатами, где мо-
жет удерживаться рыба. Этот способ траления носит
название способа «змейки» и применяется в районах, в
которых грунтовые условия позволяют тралить с пово-
ротами, а рельеф дна таков, что пет опасности траловым
доскам врезаться в слишком крутые склоны.
201
457
Если принять, что при достаточно медленном и плав-
ном повороте судна с тралом кривая циркуляции судна
представляет собой окружность, то траектория трала
в горизонтальной плоскости будет близка к трактрисе
окружности.
Допустим (рис. 201), что характерная точка трала
Т(х, z/) принадлежит трактрисе, а характерная точка суд-
на С(хс, Ус) движется по окружности радиуса /?ц*.
Уравнение этой окружности можно записать в таком
виде:
^ + Ус = Яц- (in-1)
Из рис. 201 следует
Ус = У — L sin aj
где L — горизонтальное отстояние трала от судна.
Пользуясь известными соотношениями дифферен-
циальной геометрии, можно записать:
dy dx
sina = —; cosa = — (III—3)
do do
где dS — дифференциал длины дуги.
Подставляя выражения (III—2) и (III—3) в уравнение
(III—1), получим
/ dx \2 / du \2
=7?«- (Ш—4)
\ aS / \ aS /
Для удобства интегрирования уравнения (III—4)
перейдем к полярным координатам р и 0, где р — ра-
диус-вектор, а 0 угол между радиусом-вектором и
осью ОХ
у = psinO,
х = pcos 6,
dS = p2 + (p')2d0,
где p'
dp
d6 ’
(III—5)
(III—6)
* Здесь, как и в § 1, движение трала и судна заменяется дви-
жением их характерных точек. Характерной точкой трала является
средина его устья, а характерной точкой судна — точка подвеса
ваера.
458
Дифференцируя выражения (III—5), получим:
dy — (pcos 0 + р' sin 0) d0
dx — (— p sin 0 + p' cos 0) d0. (HI—7)
После подстановки выражений (III—5), (III—6)
и (III—7) в уравнение (III—4), получим:
P2 - - 2LPP' + L2 = /?2 . (Ill—8)
Ур2 + (р')2
Умножив обе части полученного равенства на
VP2+(pz)2> найдем:
d0=1/---------— — dp,
V (£2 + р2_^2 р2 Р-
откуда
0 f V^+p2-/?2)2 pa<fp’
(Ш-9)
Решение интеграла (III—9) дает уравнение трактри-
сы окружности в полярных координатах.
Для исследования траектории движения трала на
циркуляции судна и автоматической прокладки этой
траектории формулы вида 0=f(p, L, 2?ц) неудобны.
Необходимо иметь зависимости вида qT=f(L, /?ц, Д7<),
где q? — курсовой угол на трал, а Д^—величина изме-
рения курса судна. Такие зависимости при условии, что
судно с прямого курса выходит на окружность, были
получены А. М. Ивановым.
Для случая < 1 (L < /?ц)
л , Л
Ян = — + 2arcctg
j/’l — a2 u ДК/1 — а2
1 — а _________2а
У71 —а2 ДК ]Л — а2
1 + а 2а
(III—10)
L
где а = — .
Для случая — > 1 (А > /?ц)
7?ц
459
Л , Л
4т = — + 2 arcctg
X
(Ш-11)
Для случая = 1 (L = /?ц)
Ац
?т = + 2 arcctg (ДК + 1).
(Ш-12)
Остановка трала и его последующий заверт возмож-
ны только при некоторых значениях —> 1. Определим
Яц
опасную величину этого отношения при повороте судна
на 180° (Д/С=180°). Остановка трала наступит, когда
я
q-г достигнет значения qt =-трал выйдет на траверз
судна. Подставляя значения Д/С=л и qT = -^~ в форму-
лу (III—11), получим
а+ 1
Ка2 — 1
= tg
л Р^а2 — 1
2а
(III—13)
Приближенное решение этого уравнения дает: а —
«1,4. Отсюда следует, что при—>1,4 поворот судна на
2?ц
180 приведет к остановке трала и его заверту. В то же
время поворот судна на 90—120° не влечет за собой
заверта трала при любых значениях —. Таким образом,
формула (III—13) дает возможность правильно вы-
брать маневр курсом и исключить аварию трала
(Ь>/?ц).
В действительности из-за действия гидродинамичес-
ких сил на ваера, траектория трала в горизонтальной
плоскости будет отклоняться от трактрисы окружности
в сторону траектории судна (пунктирная кривая на
рис. 202) и при — «1,4 не будет остановки трала. Та-
L
ким образом, неравенство — >1,4 получено с некото-
рым «запасом».
460
Учет циркуляции судна при поворотах
с тралом. Приближенные способы учета циркуляции
при поворотах с тралом, как и в свободном плавании,
основаны на следующих допущениях: кривая циркуля-
ции судна, буксирующего трал, представляет собой
окружность радиуса /?ц=0,5Дц, где Дц — тактический
диаметр циркуляции; угловая скорость изменения курса
в течение полупериода циркуляции постоянна и, следо-
вательно, время поворота судна на угол а равно ta=*
Т
= где — полупериод циркуляции.
180°
Тактический диаметр циркуляции судна, буксирую-
щего трал, зависит не только от положения руля и ско-
рости на циркуляции, но
и от поперечной составля-
ющей натяжения ваеров.
Поэтому для учета цир-
куляции судна при пово-
ротах с тралом нельзя ис-
пользовать данные о ве-
личинах тактического диа-
метра циркуляции при
различных углах пере-
кладки руля, полученные
из наблюдений в условиях
свободного плавания (без
трала). В зависимости от
условий промысла, кон-
струкции трала, его ос-
настки при одном и том
же угле перекладки руля
величина тактического диаметра циркуляции суд-
на может быть различной. Это приводит к необходимос-
ти использовать такие способы учета циркуляции, кото-
рые не требуют знания тактического диаметра цирку-
ляции или позволяют определить его величину из
непосредственных наблюдений при каждом повороте
с тралом. Известно несколько способов, позволяющих
учитывать циркуляцию в тех случаях, когда ее такти-
ческий диаметр неизвестен, но можно определить из на-
блюдений плавание на циркуляции или скорость на
циркуляции и время поворота. Все эти способы, несмот-
ря на различие расчетных формул, рабочих таблиц
и приемов прокладки точки конца поворота, принци-
461
пиально основаны на возможности вычисления такти-
ческого диаметра циркуляции если из наблюдений
известны плавание на циркуляции Sa или скорость на
циркуляции и время поворота /а, а также угол по-
ворота а. Из рис. 148 очевидно, что
Следовательно
П4’,6 114’6
Sa или
При тралении с поворотом на обратный курс
(а=180°) тактический диаметр циркуляции можно рас-
считать по формуле Дц=0,64 За или Дц=0,64 Уц/а.
По этой формуле составлена табл. 21, в которой при-
менительно к рекомендованным режимам траления
даны величины тактического диаметра циркуляции (в
милях).
Таблица 21
Продолжи- тельность поворота, мин Тактический диаметр циркуляции (в милях) при скорости (в уз)
2,6 | 1 2-8 1 1 3-° 1 3,2 1 3-4 1 3,6 1 3-8 1 4,0
15 0,4 0,4 0,5 0,5 0,5 0,7 0,7 0,7
20 0,6 0,6 0,6 0,7 0,7 0,8 0,9 0,9
25 0,7 0,7 0,8 0,8 0,8 1,0 1,1 1,2
30 0,8 0,9 1,0 1,0 1,0 1,2 1,3 1,3
35 1,0 1,0 1,1 1,2 1,2 1,3 1,4 1,5
40 1,1 1,2 1,3 1,4 1,5 1,6 1,7 1,7
Плавание на циркуляции с тралом можно опреде-
тить с помощью навигационно-промыслового лага,
рбеспечивающего надежные показания на малых ско-
ростях, например с помощью индукционного лага-дрей-
})омера:
а = (ола-о>'1)*л’
де ол\ — отсчет лага в момент начала поворота;
ОЛ2 — отсчет лага в момент прихода судна на новый курс.
462
Если на вооружении судна такого лага нет, то при-
ходится прибегать к определению методом «планшир-
ного лага» скорости судна с тралом на циркуляции. В
этом случае При плавных продолжительных
поворотах со скоростью изменения курса 6—10° в ми-
нуту и сравнительно благоприятных гидрометеороло-
гических условиях скорость судна с тралом на цирку-
ляции определяется с ошибкой, не превышающей 10%.
Для расчета этой скорости используют и эмпирическую
формулу
где Vn — скорость судна, буксипуюшего трал на прямом курсе;
К — коэффициент, который определяется экспериментально
для различных скоростей изменения курса и длин вы-
травленных ваеров.
Рассмотрим применение способа М. Н. Андреева
для учета циркуляции судна, буксирующего трал
(см. рис. 151У. Выразим радиус /?ц через плавание на
циркуляции Sa и угол поворота а:
Подставим полученное для /?ц выражение в форму-
лы (X—5). В результате получим
57°,3
т = ----S„ si п а,
а° а
114°,6 а
п = —^5asin^ —. (Ill—15)
По формулам (III—15) М. Н. Андреевым составлена
таблица, в которой даны величины отрезков т и п по
аргументам а — угол поворота и Sa — плавание на
циркуляции.
Рассмотрим применение способа П. А. Домогарова
для учета циркуляции судна, буксирующего трал
(см. рис. 148). Подставив выражение (Ш—14) в фор-
мулу (X—4, часть первая), получим:
114е,6 а
d = -^7-Sasin—. (Ш-16)
По этой формуле составлена номограмма для опре-
деления d — плавания по промежуточному (среднему)
463
курсу. Входом в номограмму служат половина угла по-
ворота и плавание на циркуляции Sa .
Определение тактического диаметра циркуляции
при тралении с поворотом на обратный курс из непо-
средственных наблюдений. Определение тактического
диаметра циркуляции при тралении контркурсами из
непосредственных наблюдений позволяет повысить точ-
ность счисления, в особенности в тех случаях, когда на
судне нет лага, обеспечивающего надежные показания
на малых скоростях. Рассмотрим приближенный способ
определения тактического диаметра циркуляции, сущ-
ность которого заключается в следующем. Судно, бук-
сирующее трал, начинает поворот в какой-либо точке
Лив точке В приходит на обратный курс (рис. 203). В
момент прихода судна на обратный курс измеряют сек-
станом по траверзу вертикальный угол между види-
мым горизонтом и кильватерной струей (секстан удер-
живают в плоскости, перпендикулярной диаметральной
плоскости судна).
Кратчайшее расстояние между первоначальным и
обратным курсами — тактический диаметр циркуля-
ции— рассчитывают по формуле
4n = ectg(a + d), (Ш-17)
где е — высота глаза наблюдателя;
а — вертикальный угол между видимым горизонтом и кильва-
терной струей, измеренный секстаном по траверзу в момент
прихода судна на обратный курс и исправленный необхо-
димыми поправками;
d — наклонение видимого горизонту.
464
Пример. В момент прихода судна на обратный курс секстаном
измерен вертикальный угол между видимым горизонтом и кильва-
терной струей аи=Г07', /+$=—2', е=8 м, d = +5' (табл. 11—а
МТ—75), п=1°05' и Дц=8 ctg (1°05'+5'=8-49,104=392,8 м =
= 2,2 кбт.
Определять этим способом тактический диаметр цир-
куляции при тралении контркурсами можно только в
светлое время суток и лишь в тех случаях, когда пово-
рот на обратный курс осуществляется сравнительно
быстро (Лво^Ю мин). При медленных поворотах к
моменту прихода судна на обратный курс кильватерная
струя в месте начала поворота становится плохо за-
метной. Кроме того, при малых углах а на точность оп-
ределения Дц будут оказывать значительное влияние
ошибки измерения этого угла (Да) секстаном, а также
ошибка принятой в расчет величины наклонения види-
мого горизонта (Ad).
На основании формулы (III—17) можно записать:
ДДЦ1 = ^7 cosec2 (“ + <9 >
дд«. = ^77cosec2 <“ + (Ш—18)
Если d выбирают из табл. Па МТ—75, то преи-
мущественное влияние будет иметь систематическая
ошибка, а при измерении угла а хорошо выверенным
секстаном следует ожидать преимущественное действие
случайной ошибки. Поэтому наибольшую суммарную
ошибку определения Дц рассматриваемым способом
можно выразить следующим образом:
(чи=(аа1+н. <ш—19»
где 8j—наибольшее возможное значение систематической ошибки
наклонения видимого горизонта;
та. —средняя квадратическая ошибка измерения секстаном
угла.
С учетом формул (III—18) выражение (III—19)
примет такой вид:
е +3m'l
(АДц) max — “- --- cosec2(« + <*). - (Ill—20)
3437
Пример. е=8 м, d=+5', аи = 1°07'(t’+s = —2'), (8d)max=4',
та =0°,6.
Определить I ——1
\ Д /max
3Q В. В. Ольховский 455
и
при которых Дц
"-fyr const
АI/
th const
- Ду
Линия Щ 4
-const
Рис. 204
Дц = 8ctg<le05' + 5') = 392,8 м а 2,2 кбт,
(ЛДц)тах = ^7 -2412,18 = ± 32,6 м,
3437
--8%
\ Дц /тах
Если поставить условие определять Дц из наблюде-
ний при каждом повороте с тралом на обратный курс
с ошибкой, не превышающей 10%, то применение рас-
сматриваемого способа следует ограничить случаями,
” скорости судна на цирку-
ляции, равной 3 уз, Дц^
^3 кбт будет при
10 мин. Нетрудно рас-
считать полупериод цир-
куляции, при котором
Дц^3 кбт и для любой
другой возможной скоро-
сти судна с тралом на цир-
куляции. Если наклонение
видимого горизонта изме-
ряют наклономером, то
Дц^З кбт при благоприятных гидрометеорологических
условиях можно определить с ошибкой, не превы-
шающей 3%.
На точность определения Дц рассматриваемым спо-
собом оказывает влияние и качка судна. Необходимые
практические рекомендации, позволяющие ослабить
влияние этого источника ошибок при работе в свежую
погоду, даны в § 18 части первой.
В некоторых промысловых районах, где рельеф дна
хорошо изучен и глубины изменяются равномерно, так-
тический диаметр циркуляции судна при тралении кон-
тркурсами можно приближенно определить по изме-
нению глубины.
Предположим, что судно следовало с тралом по
изобате #i=const (рис. 204). В некоторой точке А был
начат поворот и в точке В судно пришло на обратный
курс. В этот момент была измерена глубина Н. По этой
глубине определяют, между какими двумя изобатами,
нанесенными на промыслово-навигационном планшете
(карте), располагается точка В, Допустим, что это бу-
дут изобаты 77^= const и #2=const С планшета снима-
466
ют по направлению промежуточного курса ЯЛПр=
=ИЛ14-90° расстояние I между этими изобатами и
рассчитывают Дц по формуле
1(НХ-Н) АН
Ц Н1 — Н2 АНа'
Если траление ведется в пределах дальности радио-
локационного обнаружения пассивного отражателя
промыслового буя, то тактический диаметр циркуляции
судна при поворотах на обратный курс может быть оп-
ределен с достаточно высокой точностью с помощью
РЛС (см. § 64 части первой).
В заключение отметим, что при определении Дц по
вертикальному углу,
кильватерной струей
после поворота и ви-
димым горизонтом,
будет учтен ветровой
дрейф судна за вре-
мя циркуляции, а
при определении Дц
с помощью РЛС или
по изменению глу-
бин — также и снос
течением.
Д и а грамма
циркуляции. Все
способы учета цир-
куляции судна, бук-
сирующего трал, со-
измеренному секстаном между
нованные на предположении о движении судна на цирку-
ляции по окружности, являются приближенными. Исполь-
зование диаграмм циркуляции позволяет принимать в рас-
чет действительный характер кривой циркуляции. Такие
диаграммы строят по результатам экспериментальных
определений кривых циркуляции судна с тралом опре-
деленной конструкции при различных углах перекладки
руля и длинах вытравленных ваеров. Необходимые для
построения кривой циркуляции данные могут быть по-
лучены с помощью РЛС. Сущность этого способа за-
ключается в следующем (рис. 205). Судно осуществля-
ет поворот с тралом на благоприятном для траления
участке в пределах зрительной и радиолокационной ви-
30*
467
димости ориентира Р. В качестве ориентира удобно ис-
пользовать промысловый буй с пассивным радиолока-
ционным отражателем. При сильном течении буй дол-
жен быть свободноплавающим (его груз заглубляется
на величину осадки судна). В момент, когда дается
команда о перекладке руля на заданный угол (J измеря-
ют с помощью РЛС расстояние DQ до ориентира Р и оп-
ределяют его пеленг /70 по компасу. В дальнейшем при
каждом изменении курса судна на 10° такие наблюде-
ния повторяют, фиксируя моменты по секундомеру.
После окончания маневра на листе бумаги отмечают
условное положение ориентира Р и в выбранном мас-
штабе наносят по пеленгу и расстоянию места судна от-
носительно этого ориентира через каждые 10° поворота.
Согласную кривую, проведенную через полученные точ-
ки 1, 2, 3, ...» принимают за кривую циркуляции судна
с тралом той или иной конструкции для данного угла
перекладки руля (J и длины вытравленных вае-
ров L.
Для получения кривой циркуляции судна с тралом
можно использовать и фотографирование экрана РЛС
при работе у промыслового буя, имеющего пассивный
радиолокационный отражатель. Если изображение на
экране РЛС будет ориентировано по курсу, то при по-
вороте судна отметка эхо-сигнала буя опишет на экра-
не кривую, соответствующую траектории судна при по-
вороте, но только в обратную сторону. Если во время
поворота судна затвор фотоаппарата со специальной
приставкой оставить открытым, то на пленке будет не-
прерывно фиксироваться движение отметки эхо-сигна-
ла буя, т. е. будет осуществлено фотографирование
кривой циркуляции. Методика определения кривой цир-
куляции таким способом разработана А. Г. Гамовым и
Ю. К. Барановым.
Кроме того, кривую циркуляции судна с тралом
можно приближенно построить по данным наблюдений
за изменением курса и скорости судна в процессе цир-
куляции. Сущность этого способа, предложенного А. И.
Карапузовым, заключается в следующем. Кривую цир-
куляции судна, буксирующего трал, апроксимируют
отрезками дуг окружностей ASb различных радиусов
Ri. Каждый из этих радиусов рассчитывают по фор-
муле
466
Д/f Да,
где Ri — средний радиус циркуляции при средней скорости на
циркуляции за промежуток времени Д/<;
AS;— плавание на циркуляции за промежуток времени Д/<;
Да; — изменение курса судна за промежуток времени АЛ;
(От*— средняя угловая скорость судна за промежуток време-
ни ДЛ-.
В табл. 22 приведены в качестве примера данные
наблюдений за изменением курса и скорости судна при
повороте с тралом за 12 мин на 180° (длина вытрав-
ленных ваеров / = 500 м).
Таблица 22
A мин Да,, град vm(’ «/с ₽,. м
1,0 20,0 1,48 255,0
1,3 20,0 1,34 300,0
1,7 20,0 1,50 440,0
1,9 20,0 1,60 520,0
1,1 20,0 1,70 325,0
1,5 20,0 1,70 440,0
0,5 10,0 1,70 295,0
1,0 10,0 1,70 590,0
1,0 20,0 1,80 310,0
1,0 20,0 1,80 310,0
По этим данным построена кривая циркуляции,
составленная из дуг окружностей (рис. 206). Как вид-
но из рис. 206, центр каждой последующей дуги окруж-
ности AS находят на
продолжении радиуса
предыдущей. Радиусы
проводят от конца пре-
дыдущей дуги AS в на-
правлении, перпендику-
лярном к касательной
в этой точке.
Располагая несколь-
кими кривыми цирку-
ляции судна, получен-
ными по результатам
экспериментальных на- Рис. 206
469
блюдений для различных положений руля и различной
длины вытравленных ваеров, можно построить диа-
грамму циркуляции судна применительно к тралу дан-
ной конструкции. Точка А на диаграмме циркуляции
(рис. 207) соответствует моменту подачи команды на
руль. На каждой кривой циркуляции (на рис. 207 по-
Рис. 207
казана для примера только одна такая кривая) нане-
сены точки, соответствующие повороту через 10°, и в
некоторых из них указаны промежутки времени, про-
шедшие от момента подачи команды на руль. На коор-
динатных осях отложены расстояния в кабельтовых.
Для удобства определения промежуточного курса про-
ведена вспомогательная окружность с разбивкой
через 10°.
При решении с помощью диаграммы циркуляции
прямой задачи положение точки А окончания поворота
определяется промежуточным плаванием d и промежу-
точным курсом HKn^=HK±q. Величины d и q снима-
ют с диаграммы следующим образом. Находят на кри-
вой циркуляции точку А, соответствующую повороту
470
судна на заданный угол а, и соединяют ее прямой ли-
нией с началом координат.
Отрезок ОА равен в масштабе диаграммы промежу-
точному плаванию d, а угол между осью ординат и пря-
мой ОА равен углу q.
При решении обратной задачи из точки А, соответ-
ствующей повороту судна на заданный угол а, прово-
дят прямую под этим углом к оси ординат и получают
на оси ординат точку 7И. Отрезок ОМ равен в масшта-
бе диаграммы расстоянию до нового курса d\.
§ 7. Прицельное донное траление
Облов локальных и плотных косяков рыбы дон-
ным тралом можно осуществлять прицельно как по
курсу траления, так и в плоскости горизонта. Под при-
цельностью по курсу следует понимать отрыв трала от
грунта или посадку его на грунт в заданных точках на
линии курса (пути). Положение этих точек определяет-
ся моментами фиксации эхолотом (вертикальным трак-
том ГАС) рыбы под килем судна или участков с небла-
гоприятными для траления грунтами, горизонтальным
отстоянием трала от судна и скоростью судна. Трал
должен быть посажен на грунт к моменту подхода его к
косяку и оторван от грунта после того, как косяк им
пройден. Если промысел ведется в районе, где имеют-
ся участки с неблагоприятными для траления грунтами,
отрыв трала от грунта осуществляется при подходе его
к границе такого участка, а посадка на грунт — после
того, как этот участок пройден. Положение точек на
линии курса траления, в которых следует выполнить
тот или иной маневр, может быть определено не только
по показаниям поисковых гидроакустических приборов,
но и по данным прокладки на крупномасштабном про-
мыслово-навигационном планшете. На таких планше-
тах, предназначенных для донного тралового промыс-
ла, нанесены контуры участков с неблагоприятными
для траления грунтами.
Если в процессе местного поиска на планшет нане-
сены по показаниям гидроакустических приборов, ре-
зультатам обсерваций и данным счисления контуры об-
наруженных косяков, то траление донным тралом ве-
дется прицельно в плоскости горизонта. Изображение
471
косяка на планшете (его контуры) служат ориентиром,
относительно которого выполняется маневрирование
судна, связанное с выходом на косяк и обловом его
тралом.
Контуры косяков и направление их горизонтально-
го перемещения определяют при местном поиске, обсле-
дуя район, в котором обнаружена промысловая конце-
трация рыбы, ломаными или
параллельными галсами. При
этом включают устройство «бе-
лая линия» или дифференциру-
ющую цепь поискового гидро-
акустического прибора.
Рис. 208 иллюстрирует при-
ем определения контуров кося-
ка и контроля за его перемеще-
нием, предложенный Н. К. Ел-
фимовым. —
лом через
Рис. 208
Пройдя с тра-
плотный косяк
и подняв улов, сразу же разворачивают судно на
обратный курс, стремясь пройти через середину косяка,
как он был отмечен на планшете по предыдущим на-
блюдениям (на каждом галсе отмечают засечками на-
чало и конец показаний гидроакустического поисково-
го прибора). Пройдя вторую границу косяка, делают
поворот вправо или влево и ложатся на обратный курс.
Когда на очередном галсе поисковый гидроакустичес-
кий прибор не фиксирует рыбу, переключаются на об-
следование другой половины косяка (галс III на
рис. 208). Наконец, когда и на второй половине косяка
на очередном параллельном галсе рыба не регистриру-
ется (галс VI на рис. 208), обследование прекращают.
Расстояние между галсами /г устанавливают в зависи-
мости от ширины косяка Вк:
1г=—вк.
По нанесенным на промыслово-навигационный план-
шет засечкам прокладывают новые контуры косяка,
показывающие характер его горизонтального переме-
щения. Если в районе промысла имеются навигацион-
ные ориентиры или этот район располагается в пределах
рабочей зоны точной гиперболической РНС, контуры
473?
косяка наносят на планшет ио результатам обсерваций.
Горизонтальное отстояние трала от судна и время
«запаздывания» трала. Для осуществления прицельного
донного траления как по курсу, так и в плоскости гори-
зонта необходимо знать и учитывать при расчете манев-
ров горизонтальное отстояние трала от судна и время
«запаздывания» трала, равное разности моментов про-
хождения тралом и судном какой-либо фиксированной
точки на линии курса (пути) траления. Горизонтальное
отстояние трала от судна L составляет:
= £В “Ь £к>
где £в— горизонтальная проекция ваера;
LK — длина кабеля.
Приближенно величину Ав можно рассчитать по
формуле
£в =/ р —//а, (III—21)
где I—длина вытравленных ваеров, зависящая от глубины места
лова и скорости траления;
Н — глубина места лова.
Формула (III—21) не учитывает характер кривой,
по которой располагается ваер. Если принять, что фор-
ма ваера представляет собой цепную линию, то вели-
чину Ав следует рассчитывать по формуле
£3
£в = /Р-Н* --^ = LB-AL. (Ill—22)
где а — параметр цепной линии.
Анализ этой формулы показывает, что поправка ДА
мала (ДА = 1+8 м) и в большинстве случаев ею можно
пренебрегать. Поэтому на практике величину L опреде-
ляют обычно при помощи таблицы, составленной по
формуле
L = //»-№ + £к. (II1—23)
Если необходимо получить величину L с большей
точностью, прибегают к последовательному приближе-
нию. Сначала по длине вытравленных ваеров и глуби-
не места вычисляют по формуле (III—21) приближенное
значение горизонтальной проекции ваера L'B по это-
му значению, используя специальную таблицу, находят
поправку ДА, а затем АВ=АВ—ДА и окончательно А =
473
=£в+^к. Время «запаздывания» трала t3 определяют
по таблице, рассчитанной по формуле (II—2).
Курс и расстояние «забега». При прицельном дон-
ном тралении как и при разноглубинном с помощью
«забега» выводят судно на позицию постановки трала.
Положение этой позиции по отношению к облавливае-
мому косяку, контуры которого проложены на промыс-
лово - навигационном
планшете, определяет-
ся следующими факто-
рами: направлением и
скоростью течения, на-
правлением и силой вет-
ра, глубиной места ло-
ва, конфигурацией ко-
сяка, расположением
других судов, ведущих
промысел. Расстояние
«забега» выбирают с
таким расчетом, чтобы
к моменту выхода на
косяк была обеспечена
посадка трала на грунт. Величина этого расстояния за
висит в основном от длины вытравленных ваеров и опы-
та палубной команды в выполнении операций по поста-
новке трала.
Скорость судна при постановке донного трала, так
же как и разноглубинного, является величиной пере-
менной. На рис. 209 показан график, характеризующий
зависимость скорости судна и пройденного им расстоя-
ния от времени, затраченного на постановку трала при
длине вытравленных ваеров 1=750 м. Этот график по-
строен А. И. Карапузовым по данным наблюдений на
БМРТ типа «Мир». Как видно из рис. 209, расстояние
Sn, пройденное судном за время постановки трала,
будет:
зп = з14-з24-з3,
где 32 — расстояние, пройденное судном с момента спуска трало-
вого мешка до момента травления ваеров;;
За— расстояние, пройденное судном за время травления вае-
ров;
3, — расстояние, пройденное судном с момента взятия ваеров
на стопор до момента посадки трала на грунт.
Величина расстояния Si зависит от типа судна, схе-
мы траления и опыта палубной команды. Так как на
операции по спуску трала до начала травления ваеров
затрачивается 5—6 мин, величина Si может лежать в
пределах от 1 до 4 кбт. Величина расстояния S2 может
быть приближенно принята равной 1,5 /, где I — длина
вытравленных ваеров. По опытным данным при сред-
ней скорости судна около 8 уз S3~0,5 I.
Если принять в расчет верхний предел величины Si,
то формула для определения расстояния Sn в кабельто-
вых может быть записана в таком виде:
где I — длина вытравленных ваеров, м.
Для получения расстояния «забега» 53 следует рас-
стояние, проходимое судном за время постановки тра-
ла, уменьшить на величину горизонтального отстояния
трала от судна:
*^з — — L.
При прицельном донном тралении расстояние «за-
бега» определяется с меньшей точностью, чем при раз-
ноглубинном, и обычно с некоторым «запасом». При
выборе курсов прицельного донного траления ориенти-
руются на проложенное на промыслово-навигационном
планшете изображение (контуры) косяка, и «забег»
больший, чем это требуется для своевременной посадки
трала на грунт, не может привести к потере ориенти-
ровки. На разноглубинном же траловом лове такая
ориентировка может быть потеряна из-за утраты гидро-
акустического контакта с косяком при значительном
удалении судна от косяка.
Курс (направление) «забега» выбирают в зависимо-
сти от направления и скорости течения, направления
и силы ветра, конфигурации косяка и расположения
других судов, ведущих промысел. При донном трало-
вом лове, как и при разноглубинном, удовлетворить
всем требованиям, которые обусловливаются перечис-
ленными факторами, невозможно. Выбирая курс (на-
правление) «забега», учитывают наиболее существен-
ные из них для конкретных условий промысла. В сво-
бодной для маневрирования обстановке обычно
главным фактором, определяющим выбор курса «забе-
475
га» является направление течения. При сильном тече-
нии «забег» делают против течения с таким расчетом,
чтобы курс траления примерно совпадал с направле-
нием течения.
При сильном ветре и волнении в особенности на
больших глубинах (//>400-^500 м), буксирная мощ-
ность судна может оказаться недостаточной для обес-
печения траления на ветер. В таких условиях соверша-
ют «забег» на ветер и тралят по ветру.
Маневрирование при прицельном донном тралении.
На практике, если обстановка не стеснена, применяют
следующие основные
варианты маневрирова-
ния курсом и скоростью
судна при прицельном
донном тралении.
1. Если косяк рыбы
имеет значительную
протяженность и плот-
ность (например, вытя-
нут вдоль склона бан-
ки) , траление ведут
р прямым курсом или
ис' змейкой (рис. 210, а).
Руководствуясь пока-
заниями гидроакустических приборов придерживаются
все время наиболее плотной части косяка. Как только
трал наполнится, его начинают поднимать, иногда и не
доходя до противоположной границы косяка. Если косяк
вытянут вдоль склона банки, но имеет недостаточную для
наполнения трала протяженность или небольшую плот-
ность, его проходят 2—3 раза не поднимая трал. Для
этого, достигнув границы косяка, дают полный ход (вы-
тягивают ваера), на этом ходу делают крутой поворот в
течение 5—10 мин и ложатся на обратный курс. Как
только трал после поворота придет в нормальное поло-
жение, устанавливают оптимальную для данных условий
промысла скорость траления.
2. Если рыба держится отдельными плотными и не-
большими по размеру косяками («пятнами»), располо-
женными вблизи друг от друга, такие косяки облавли-
вают на различных скоростях прямыми или переменны-
ми курсами (рис. 210,6), При прохождении тралом
476
«пятна» судно следует с нормальной скоростью трале-
ния, а при выходе трала за его границы скорость уве-
личивают до максимальной. Когда гидроакустический
прибор вновь начнет регистрировать рыбу, скорость
судна уменьшают до нормальной и т. д. При определе-
нии моментов маневрирования скоростью учитывают
время «запаздывания» трала.
При работе на тяжелых грунтах прибегают к друго-
му варианту этого способа лова. Судно следует вы-
бранным курсом траления и буксирует трал на среднем
или малом ходу в 25—30 м от грунта. Когда поисковый
гидроакустический прибор начинает регистрировать
рыбу (судно выходит на косяк), ваера дотравливают
через специальный канифас-блок стопора. Трал при
этом очень быстро садится на грунт и судно, не меняя
курса, протягивает трал по косяку.
При отсутствии канифас-блока у стопора судно сле-
дует с тралом, буксируемым над грунтом, полным хо-
дом, а при подходе трала к косяку судно, не меняя кур-
са, уменьшает ход до малого или самого малого. При
этом трал погружается на дно без дотравливания вае-
ров и протаскивается по косяку. В этом случае скорость
погружения трала значительно меньше, чем при до-
травливании ваеров через канифас-блок. При выборе
скорости хода судна, гарантирующей погружение трала
на грунт к моменту встречи его с косяком, необходимо
учитывать первоначальный горизонт хода трала, гори-
зонтальное отстояние трала от судна, скорость погру-
жения трала в зависимости от скорости хода. Для этой
цели по опытным данным составляют графики или таб-
лицы скорости погружения трала той или иной кон-
струкции и оснастки в зависимости от изменения ско-
рости хода судна.
3. Небольшие по протяженности, но плотные ко-
сяки рыбы облавливают иногда способом циркуляции,
осуществляя повороты судна, как только гидроакусти-
ческий поисковый прибор зафиксирует выход за гра-
ницы косяка.
При облове донным тралом на одном ломаном гал-
се траления нескольких небольших по протяженности
плотных косяков, расположенных сравнительно близко
друг от друга (контуры этих косяков нанесены на про-
мыслово-навигационный планшет в процессе местного
477
поиска), может возникнуть необходимость делать пово-
роты на небольших расстояниях D до косяка (D^2L)
на значительные углы, чтобы протащить трал по оче-
редному косяку. В этих случаях необходимо учитывать
траекторию трала после поворота судна (см. § 4) и
рассчитывать курс траления по формуле
*т = <± М,
где Д’* —курс, обеспечивающий прохождение судна через центр
нанесенного на промыслово-навигационный планшет изо-
бражения косяка;
Д/С — угол отворота от этого курса.
Знак ДК определяется наименованием курсового уг-
ла qc на центр косяка в точке поворота судна. Этот угол
снимают с промыслово-навигационного планшета. Если
qG правого борта Д7< имеет знак «плюс», а если левого
борта, то знак «минус». Величинуможно
определить при помощи графика, изображенного на
рис. 198 или по табл. 19.
Маневрирование курсом, обеспечивающее обход тра-
лом подводного препятствия. Рассмотрим способ расче-
та маневрирования кур-
сом, обеспечивающего
обход буксируемым
тралом подводного пре-
пятствия, обнаруженно-
го эхолотом или верти-
кальным трактом ГАС.
Предположим, что
в момент нахождения
судна в точке Со (рис.
211) эхолот зафиксиро-
вал подводное препят-
ствие, представляющее
собой опасность для
трала. Необходимо рас-
считать угол отворота
судна Д7< от первона-
чального курса тра-
ления, при котором будет обеспечено безаварийное дви-
жение трала Г. Для решения этой задачи проведем вок-
руг точки Со окружность, ограничивающую опасную зо-
ну. Радиус этой окружности 7? будет:
(Ш-24)
где И — глубина места в точке Л;
Р — ширина диаграммы направленности эхолота или вертикаль-
ного тракта ГАС;
В — расстояние траловой доски от оси симметрии трала.
Очевидно, что угол Д/С
должен быть не меньше
такого угла отворота
судна, при котором траек-
тория TqT буксируемого
им трала будет проходить
касательно к окружности,
проведенной из точки Со
как из центра радиусом,
равным /?. Исходя из это-
го условия и принимая
траекторию трала после
поворота судна за тракт-
рису прямой линии (см.
§ 1), получим систему
уравнений:
s
4 ДК , Ф Г
tg^“ = tgTe ’
S =/fl2 + L2(
/? L
$1Пф=—; COS<p= — ,
О о
Рис. 212
(III—25)
где L — горизонтальное отстояние трала от судна;
S — расстояние, пройденное судном после поворота до выхода
трала в точку Г;
ф = 180°—где q? — курсовой угол с судна на трал в точке
C(CQC=S).
Первое из этих уравнений представляет собой, как
известно, уравнение трактрисы прямой линии, а осталь-
ные следуют из рис. 211. Решение системы уравнений
(III—25) приводит к выражению
tg =_______ т ------
2 /1 + m3 + 1
(III—26)
479
где tn = — .
По формуле (III—26) составлена номограмма, с по-
мощью которой можно быстро определить минималь-
ный угол отворота Д^ от первоначального курса тра-
ления, обеспечивающий обход тралом подводного пре-
пятствия, обнаруженного эхолотом или вертикальным
трактом ГАС.
Аргументом для входа в эту номограмму
р
служит отношение —. Величину L выбирают
ние. 212)
из табли-
цы, составленной по формуле (III—23). Для определе-
ния величины R применительно к конкретным гидроаку-
стическому прибору и тралу может быть также состав-
лена таблица по формуле (III—24).
Пример. При следовании с тралом истинным курсом Кт =48°
вертикальным трактом ГАС «Палтус-М» обнаружили препятствие.
Принято решение изменить курс вправо на минимальный угол ДХ,
обеспечивающий обход тралом обнаруженного препятствия.
Дано L=750 м, R= 100 м.
Определить Д/С
Я 100 п 1О
1. Рассчитываем отношение —г~ = = 0,13.
L 750
R
2. По номограмме (см. рис. 212) для -£- = 0,13 находим ДХ=
=2Г. Следовательно, Кт = Кт +ДК=48О+2Г=69°.
11 *0
§ 8. Особенности навигационного обеспечения
донного и придонного тралового лова
Донный и придонный траловый лов предъявляет
высокие требования к точности счисления пути судна и
определений его места по результатам измерений нави-
гационных параметров не только в прибрежных районах,
но и в районах открытого моря на значительном удале-
нии от берегов. Только при выполнении этих требова-
ний в открытом море могут успешно решаться такие за-
дачи, как удержание судна, буксирующего трал, в преде-
лах заданной узкой полосы (см. § 59), повторное
траление прежним галсом, прицельный облов небольших
по размеру плотных косяков донных рыб, местоположе-
ние и контуры которых нанесены на промыслово-навига-
ционный планшет при местном поиске и др.
480
Наиболее эффективное навигационное обеспечение
донного и придонного тралового лова связано с автома-
тизацией процессов промыслового судовождения. На до-
бывающих судах должна осуществляться автоматичес-
кая прокладка пути судна на промыслово-навигацион-
ных планшетах или картах: по результатам практически
непрерывных измерений навигационных параметров при-
емоиндикаторами фазовых или импульсно-фазовой РНС,
работающих в автоматическом режиме; по вероятней-
шим координатам, полученным по результатам дискрет-
ных измерений навигационных параметров с помощью
приемоиндикаторов фазовых, импульсно-фазовой РНС,
спутниковой навигационной системы и по данным счис-
ления.
Определение мест судна в процессе донного тралово-
го лова имеет ряд особенностей. Рассмотрим главные из
них.
1. Судоводитель во время промысла кроме решения
задач судовождения должен обеспечивать нормальную
работу трала. Поэтому использование обычных приемов
прокладки обсерваций, распространенных на транспорт-
ных судах, часто встречает затруднения, связанные глав-
ным образом с тем, что эти приемы не позволяют выпол-
нить прокладку достаточно быстро. Поэтому на донном
траловом промысле находят широкое применение такие
приемы прокладки обсерваций, в особенности по визу-
альным наблюдениям навигационных ориентиров, кото-
рые требуют предварительной подготовки промыслово-
навигационного планшета или карты, но вместе с тем
позволяют значительно сократить затраты времени на
прокладку обсерваций непосредственно в процессе про-
мысла. Предварительная подготовка планшетов или
карт выполняется обычно во время перехода в район
промысла методами, рассмотренными в главе V части
первой.
2. Если процесс вычисления обсервованных географи-
ческих координат на судне не автоматизирован, про-
кладка обсерваций, полученных с помощью гиперболи-
ческих РНС, осуществляется обычно на промыслово-на-
вигационных картах или планшетах, на которых нанесены
сетки изолиний. При отсутствии карт или планшетов
достаточно крупного масштаба линии положения не про-
кладывают, а ограничиваются систематическими изме-
31 В. Е. Ольховский
481
рениями навигационных параметров (предполагается,
что ошибки линий положения, обусловленные ошибками
измерения навигационных параметров, не превышают
допустимую для данных условий промысла). Заметив
показания приемоиндикатора в месте скопления рыбы,
выйти на это место вторично можно следующим прие-
мом: лечь на курс в намеченную точку по счислению и
наблюдать за показаниями приемоиндикатора; в мо-
мент, когда показания приемоиндикатора по одной из
пар береговых станций РНС будут совпадать с замечен-
ными ранее, изменить курс так, чтобы эти показания
больше не менялись (следовать по изолинии); следить
за показаниями приемоиндикатора по второй паре бере-
говых станций РНС, пока они не станут равными заме-
ченным ранее.
3. Если направления каких-либо изолиний, парамет-
ры которых можно измерить, совпадают на данном уча-
стке с линией рекомендованного курса траления или эти
изолинии ограничивают узкую промысловую площадку,
то как в прибрежных районах, так и в районах открыто-
го моря используют методы изолинейного плавания и
ограждающих изолиний.
Рассмотрим некоторые примеры. Предположим, что
судно, осуществляя местный поиск, следовало параллель-
ными галсами в генеральном направлении на NW. Глу-
бины менялись в пределах 44—55 м. В отдельных местах
эхолот фиксировал наличие небольших плотных скопле-
ний рыбы. В момент начала показаний эхолота на глу-
бине 50 м по приемоиндикатору РНС «Лоран-А» был
замечен отсчет разности времени 1L2—2900. Затем,
когда эхолот перестал фиксировать рыбу, глубина была
48 м, а отсчет разности времени по приемоиндикатору
1^2—2920. Полученные данные позволяют выбрать кур-
сы траления. В рассматриваемом случае следует тра-
лить по изобате 50 м в пределах промысловой площад-
ки, ограниченной изолиниями 1L2—2920 и 1L2—2900.
Предположим, что судно следовало из точки В в точ-
ку А (рис. 213) с тралом. Подняв трал в точке А, судно
некоторое время лежало в дрейфе, после чего было
принято решение выйти на прежний курс траления, на
котором был получен хороший улов. Выход в начальную
точку галса траления А может быть осуществлен, напри-
мер, следующим образом: по показаниям приемоиндика-
482
или
тора судно выходит на изолинию 1L2—2920 и следует по
этой изолинии до пересечения изобаты 50 м. Затем тра-
ление ведется по этой изобате до пересечения второй ог-
раждающей изолинии 1L2—2900. Если нужно снова про-
вести траление этим ж галсом, то аналогично осущест-
вляется выход траулера в точку В и т. д.
Можно вначале выйти на промысловую изобату и
следовать по этой изобате до пересечения соответствую-
щей ограждающей изолинии 1Л2—2920
Чтобы зафиксировать
расположение удобных
для промысла площадок,
характеризующихся хоро- /
шим грунтом, записывают х1/ /
и сохраняют на будущее t / /
параметры изолиний, ог- Д / /
раничивающих такие пло- / /
щадки. /&/
Пользуясь одной па-
рой береговых станций
РНС «Лоран-А» или «Ло-
ран-С», обеспечивающей
получение линии положе- рИс. 213
ния в месте промысла с
меньшей ошибкой, мож-
но определить во время траления
на относительно земли (V). В районах,
ся сильные течения, этот метод дает особенно хорошие
результаты, если траление ведется по изобате, имеющей
на данном участке незначительную кривизну и пересе-
кающей изоляции примерно под прямым углом. Если
район промысла расположен в пределах рабочих зон
двух пар береговых передающих станций, то такой спо-
соб определения скорости целесообразен в тех случаях,
когда не может быть обеспечена достаточно высокая
точность обсерваций из-за больших ошибок линий поло-
жения, относящихся к какой-либо одной паре станций,
или из-за острых углов пересечения линий положения.
Предположим, что судно следует с тралом по изоба-
те, пересекающей изолинии под прямым углом. В мо-
мент Г] получен отсчет разности времени по приемоин-
дикатору мкс. Через некоторый промежуток времени
в момент Т2 получен отсчет /2 мкс. При помощи планшет
скорость суд-
где наблюдают-
31*
483
та с гиперболической сеткой рассчитывают для данного
участка расстояние S по нормали между изолиниями,
параметры которых отличаются на (/2—^1) мкс> а затем
Кроме того, следуя с тралом и поддерживая постоян-
ную частоту вращения винта, по показаниям приемоин-
дикатора можно определить величину изменения пара-
метра изолиний (в мкс) за определенный промежуток
времени (например, каждые 15 мин отсчет разности
времени изменяется на 25 мкс). Если был поднят хо-
роший улов, то при следовании с тралом в обратном
направлении целесообразно установить частоту враще-
ния винта, при которой будет наблюдаться такое же
изменение во времени показаний приемоиндикатора.
При этом условии независимо от влияния течения, ветра
и волнения судно будет следовать с той же скоростью
относительно земли, при которой был ранее получен хо-
роший улов.
4. В районах со сложным рельефом дна и неблаго-
приятными грунтовыми условиями используют специ-
альные навигационные ориентиры — промысловые буи.
Промысловый буй играет важную роль при работе в
районах открытого моря с малоизменяющимися глуби-
нами. В таких районах, если они не располагаются в
пределах рабочей зоны точной гиперболической РНС,
без ориентировки по бую трудно повторить траление
прежним галсом, выйти на ранее обнаруженный косяк
рыбы и т. д. Место судна относительно промыслового
буя, имеющего пассивный отражатель, определяют обыч-
но по визуальному пеленгу и радиолокационному рас-
стоянию. Используют также и радиобуи, имеющие сред-
неволновые радиопередатчики, работающие на заранее
установленной фиксированной частоте в пассивном или
активном режиме. Дальность действия такого буя около
50 миль. На всех промысловых буях устанавливаются
проблесковые фонари, в которых используется импульс-
ный источник света, и электронная схема управления
проблесковой характеристикой.
В фонаре может быть установлен фотоэлемент, обес-
печивающий автоматическое его включение с наступле-
484
нием темноты и выключение с наступлением светлого
времени.
По наблюдениям промыслового буя (неподвижного
ориентира) при работе вне видимости берегов можно
определять путь и угол сноса судна, буксирующего трал,
его скорость относительно земли (см. главу IV части
первой).
Траление ведут на скоростях, лежащих в диапазоне
2,0—5,5 уз. Поэтому в качестве датчика скорости на
добывающих судах, ведущих траловый лов, должны ис-
пользоваться лаги, обеспечивающие надежные показа-
ния на малых скоростях. К таким лагам относятся отно-
сительные индукционные лаги обычого типа и лаги-
дрейфомеры, а также абсолютные лаги, основанные на
эффекте Допплера, которые начинают устанавливать
на крупнотоннажных добывающих судах, оснащенных
приемоиндикатором спутниковой навигационной сис-
темы.
Если на судне нет лага, обеспечивающего надежные
показания на малых скоростях, то скорость траления
относительно воды определяют методом «планширного
лага» (см. § 12 части первой). Как известно, определе-
ние скорости этим методом требует определенной затра-
ты времени и привлечения в помощь судоводителю мат-
роса, что на добывающем судне затруднено, тем более
что при следовании с тралом заданным галсом судно
может изменять скорость (частоту вращения винта).
В таких случаях необходимо определять скорость на
одном и том же галсе траления несколько раз.
Рассмотрим способ нахождения скоростей траления,
который позволяет и в этих случаях ограничиться опре-
делением скорости методом «планширного лага» только
в начале галса траления.
Многочисленные натурные испытания показали, что
при неизменной длине вытравленных ваеров зависи-
мость между скоростью хода судна, буксирующего трал,
и частотой вращения винта является практически линей-
ной (рис. 214) и может быть выражена уравнением
V0=Ntga = KN,
где Vo —скорость хода относительно воды;
N—частота вращения винта;
К = tga—угловой коэффициент прямой V0=f(N);
а —угол наклона прямой Vo=f(*V) к оси абсцисс.
485
Величина углового коэффициента зависит от ряда
факторов: типа трала и его вооружения, длины вытрав-
ленных ваеров, характера грунта, скорости и направле-
ния наблюдаемого ветра, волнения моря.
Поскольку протяженность галсов траления сравни-
тельно невелика (6—7 миль), практически допустимо
полагать, что влияние вет-
ра и волнения при следо-
вании траулера неизмен-
ным курсом имеет посто-
янный характер. Таким
образом, можно считать,
что на данном галсе тра-
ления при неизменной
длине вытравленных вае-
ров угловой коэффициент
К будет иметь некоторое
рис 214 определенное постоянное
значение.
Предположим, что име-
ем график, на котором нанесена серия прямых линий
Ko=f(W). Каждая из этих прямых имеет свой угловой
коэффициент, величина которого зависит от перечислен-
ных выше факторов. Чтобы отыскать прямую, характе-
ризующую зависимость V0=f(iV) при данных условиях
промысла, достаточно определить скорость судна Уо ме-
тодом «планширного лага» только в начале галса тра-
ления и зафиксировать частоту вращения винта N. По
полученным значениям Vo и Af на графике, изображен-
ном на рис. 214, легко найти «рабочую прямую». С по-
мощью этой прямой на данном галсе траления можно
решать следующие задачи: определять скорость хода
судна при изменении частоты вращения винта, опреде-
лять частоту вращения винта АГОп, соответствующую оп-
тимальной скорости траления УОп.
Оптимальная скорость траления зависит от гидроди-
намических характеристик трала, грунтовых условий,
особенностей поведения облавливаемой породы рыб в
зоне действия трала, тяги судна и факторов, обеспечи-
вающих экономный расход его мощности. Эта скорость
должна определяться относительно земли.
Для того чтобы учесть влияние течения (когда изве-
стны его элементы), необходимо рассчитать скорость
486
судна относительно воды (Уо)оп, при которой трал бу-
дет перемещаться относительно земли со скоростью,
равной Уоп:
(^о)оп = ~Т~ Von»
R
(Vrj. \
— * <7т — коэффициент скорости.
Vo /
ит—скорость течения;
ат — курсовой угол течения.
Затем с помощью графика (см. рис. 214), пользуясь
той же «рабочей прямой», надо найти по (Уо)оп часто-
ту вращения винта Л^п-
Глава IV. РАСЧЕТ КУРСОВ И МАНЕВРИРОВАНИЕ
ПРИ КОШЕЛЬКОВОМ ЛОВЕ
§ 9. Замет кошелькового невода с помощью
гидроакустической станции. Траектории замета
В настоящее время на добывающих судах, веду-
щих кошельковый промысел, устанавливаются рыбопо-
исковые гидроакустические станции, обладающие высо-
кой разрешающей способностью и обеспечивающие воз-
можность выделения центра плотности — ядра косяка.
Поэтому замет кошелькового невода, как правило, осу-
ществляется только по обнаруженным ГАС косякам
рыбы.
В процессе замета непрерывно определяют направ-
ление и расстояние до передней (левой) кромки косяка,
и замет невода осуществляют таким образом, чтобы ис-
ключить опасность сближения судна с передней кромкой
на расстояние, с которого косяк начинает реагировать
на судовые шумы. Современная практика кошелькового
лова учитывает в первую очередь направление движения
косяка и влияние метеорологических факторов на выбор
начальной позиции замета невода. Между тем внедре-
ние на судах подруливающих устройств и лагов-дрейфо-
меров позволяет практически исключить влияние ветра,
волнение и натяжение невода на траекторию его замета.
Опыт кошелькового лова показывает, что основанные
на общих рекомендациях и не подкрепленные строгим
487
расчетом заметы невода по подвижным косякам часто
заканчиваются неудачей. Статистические данные свиде-
тельствуют о том, что 60% подобных заметов оказыва-
ются безуспешными. Поэтому возникает необходимость
математического описания процессов кошелькового ло-
ва, исследования траекторий замета невода и разработ-
ки практических приемов расчета маневрирования судна
в процессе замета. Основными факторами, которые
должны быть приняты в расчет, являются размеры,
скорость горизонтального перемещения и глубина по-
гружения косяка, длина и высота невода.
Маневрирование судна на кошельковом лове долж-
но удовлетворять следующим основным требованиям:
исходя из длины имеющегося на судне невода, обеспе-
чить его замет без «ворот» и перекрытий; с учетом ско-
рости горизонтального перемещения косяка и длины
невода обеспечить оптимальную площадь замета; ис-
ключить опасность сближения судна с внешней кромкой
косяка на расстояние реакции рыбы на судовые шумы; с
учетом высоты имеющегося на судне невода выполнить
его замет таким образом, чтобы ко времени возвраще-
ния судна в начальную позицию и начала кошелькова-
ния косяк не успел уйти под нижнюю подбору.
Рекомендуется облавливать подвижные косяки пела-
гических рыб кошельковым неводом при маневрирова-
нии судна на криволинейном участке траектории на по-
стоянном расстоянии или постоянном курсовом угле на
ядро (центр плотности) косяка. Практическая реализа-
ция подобных заметов не вызывает трудностей, а их
математическое описание позволяет выбрать траекто-
рию, отвечающую сложившимся промысловым усло-
виям.
Облов подвижных косяков кошельковым неводом
наиболее эффективно может быть осуществлен в том
случае, если все необходимые расчеты и управление
курсом судна при замете полностью автоматизированы.
Эта задача решается с помощью автоматизирован-
ных информационно-управляющих комплексов, ко-
торые находятся в стадии разработки. В настоящее вре-
мя на кошельковом промысле используются только ин-
формационные комплексы. Примером такого комплекса
является автоматизированная система «Display CD»
норвежской фирмы «Simrad». Эта система включает в
488
себя визуальный электронный индикатор динамической
картины промыслово-навигационной обстановки, много-
вибраторную сканирующую ГАС с режимом автомати-
ческого сопровождения цели, лаг, гирокомпас и специа-
лизированную ЭЦВМ, осуществляющую обработку по-
ступающей информации.
Система имеет три режима работы: «относительное
движение», «истинное движение» и «истинное движение
с автосопровождением цели». «Относительное движе-
ние» является режимом поиска, программа которого за-
дается автоматически. Символ судна располагается не-
подвижно в центре экрана индикатора и ориентирован
носом вверх (рис. 215,а). Он заканчивается отрезком
линии курса. Длина этого отрезка и цифра рядом опре-
деляют масштаб картины. При движении судна высве-
чиваемые на экране контуры обнаруженных косяков
смещаются вниз по экрану. Для ориентировки на экра-
не специальными отметками указывается диапазон
дальности обнаружения косяков с помощью ГАС.
Режим «истинного движения» (рис. 215,6) использу-
ется для выхода в позицию начала замета невода.
489
В этом режиме символ судна движется по экрану в со-
ответствии с маневрами судна. На экране отображается
также траектория судна за последние 10 мин.
В режиме «истинное движение с автосопровождени-
ем цели» (рис. 215, в) осуществляется замет невода. На
экране индикатора также отображаются диапазон даль-
ности обнаружения косяков с помощью ГАС, контур
облавливаемого косяка, траектория судна и масштаб-
ная линия курса. Кроме того, в этом режиме вектором,
исходящим из середины отметки косяка, указывается
скорость и направление его горизонтального перемеще-
ния по данным гидроакустической информации, обрабо-
танной ЭЦВМ. Концевой буй невода, отмечающий нача-
ло замета, маркируется на изображении траектории суд- .
на специальной отметкой — небольшим квадратным
символом. В левой части экрана на шкале глубин верти-
кальной линией указывается протяженность косяка по
глубине.
Система «Display CD» представляет собой чисто ин-
формационный промыслово-навигационный комплекс и
как всякий комплекс такого типа не дает судоводителю
никаких рекомендаций по выбору начальной позиции
замета невода и не решает задачу автоматического уп-
равления курсом судна при замете по программе, реа-
лизующей тот или иной алгоритм. При помощи инфор-
мационных промыслово-навигационных комплексов
маневрирование судна при кошельковом лове осущест-
вляется методом проб.
Процесс облова подвижных косяков пелагических
рыб кошельковым неводом в общем случае можно под-
разделить на шесть последовательных по времени эта-
пов: обнаружение и распознавание косяка, определение
его размеров, центра плотности и установление промыс-
ловой значимости; определение глубины погружения ко-
сяка с учетом рефракции звукового луча в морской
среде; определение направления и скорости горизон-
тального перемещения косяка; выход судна прямым кур-
сом в начальную позицию замета невода; замет невода
при маневрировании судна переменными курсами на по-
стоянном расстоянии или постоянном курсовом угле на
ядро косяка; выход судна в начальную позицию замета
для стягивания невода и его кошелькования.
Первые три этапа осуществляются так же, как и при
49Q
облове подвижных косяков разноглубинным тралом.
Поэтому остановимся только на трех последних этапах.
Для этого предварительно рассмотрим траектории за-
мета невода по результатам математического исследова-
ния этих траекторий.*
Траектории замета невода на постоянном расстоя-
нии от ядра косяка. Замет кошелькового невода целе-
сообразно подразделить на три
фазы (рис. 216). Первая фаза —
замет от начальной позиции С\ до
пересечения судном линии гори-
зонтального перемещения косяка
впереди по его «курсу» (точка
С2, ?к = 0). На этой фазе замета
вектор скорости судна и вектор
скорости косяка находятся в од-
ной полуплоскости (маневриро-
вание «разноименными борта-
ми»). Вторая фаза — замет от
точки С2 на линии горизонталь-
ного перемещения косяка до ко-
нечной позиции С3 по курсовому
углу и расстоянию до косяка. На
второй фазе вектор скорости суд-
на и вектор скорости косяка находятся в разных полупло-
скостях (маневрирование «одноименными бортами»).
Третья фаза — замет на прямом курсе, ведущем в на-
Рис. 216
чальную позицию постановки невода.
Маневрирование в целом должно быть осуществлено
таким образом, чтобы пятной и бежной клячи невода со-
шлись без «ворот» и перекрытий. Так как при замете не-
вода предполагается, что его траектория полностью по-
вторяет траекторию судна, должно быть соблюдено ус-
ловие: расстояние, проходимое судном в процессе заме-
та, равно длине невода, т. е. 5 = /.
Для вывода уравнений движения судна обратимся к
рис. 216, на котором приняты следующие обозначения:
V и Vk — скорость судна и косяка соответственно, qc —
курсовой угол с судна на ядро косяка; qK — курсовой
угол с ядра косяка на судно; D — заданное расстояние
от ядра косяка.
* Математическое описание траекторий выполнено В. И. Мень-
шиковым под руководством автора.
На первой и второй фазах замета маневрирование
судна осуществляется на постоянном расстоянии от яд-
ра косяка {d = const, = О.1)
\ ш }
Проектируя векторы скоростей судна и косяка на. ли-
нию текущего пеленга (CiKi) и на перпендикулярную к
ней линию, найдем выражения для скорости изменения
расстояния между судном и ядром косяка и для угловой
скорости вращения линии пеленга:
, dD
V cos qc + VK cos qK = = О, (IV—1)
dt
Vsinqc~VK singK = dqK
D dt * { '
Формула (IV—2) соответствует маневрированию на
первой фазе замета (маневрирование «разноименными
бортами»). Для второй фазы замета (маневрирование
«одноименными бортами») последнее уравнение будет
иметь вид:
Vsingc +VKsingK = (IV—3)
D dt ’ '
Из уравнения (IV—1) следует, что при замете нево-
да судно должно маневрировать, непрерывно удерживая
ядро косяка на курсовом угле qCi который должен удо-
влетворять условию
cos qc = — k cos gK (IV—4)
или
sin qc = — Л2 cos2 gK,
где k = — .
Для определения расстояния пройденного судном
на первой фазе замета невода, уравнение (IV—2) с уче-
том уравнения (IV—5) приведем к виду
~£2c<>s2?k —*singK.
V dt
Преобразуем правую часть этого уравнения, вос-
пользовавшись известным равенством
л п А* —В2
А - В= ---1 г. •
Л + В
492
(IV—5)
Ё результате получим
J_d^k =1-&а
1—Zs2cos2^K+^sin?K
откуда
(1 — &2 cos2 qK + k sin qn) dqK = (1 — &2) ~ dt • (IV—6)
Расстояние Sb пройденное судном на первой фазе за-
мета, можно определить интегрируя уравнение (XV—6):
о о t
J k2 COS2 <?к) dqR + k j sin qR dqR = 1 д * J Vdt =
% ^Ki 0
= (1 — A2) = (1 — k2) alf (IV—7)
где fli = —
(?K1—курсовой угол с ядра косяка на судно в началь-
ной позиции Ci при маневрировании на криво-
линейном участке траектории на постоянном
расстоянии от ядра косяка.
Расстояние S2, пройденное судном на второй фазе за-
мета, можно определить из выражения
?кэ <7к3
[ (1/1 — A2cos2<7K) dqR — k ( singKdgK — (l — A2)-^-=(l— k2)at
d JU
о 0
(IV—8)
S2
где a2 = — , qKt— курсовой угол с ядра косяка на судно в конеч-
ной позиции С3 при маневрировании на криво-
линейном участке траектории на постоянном рас-
стоянии от косяка.
После прихода судна в точку С3, расположенную на
траверзе или несколько позади траверза ядра косяка,
когда qK ^90°, замет на постоянном расстоянии D що
ядра косяка прекращается и судно ложится на прямой
курс, ведущий в начальную позицию постановки невода
Ci и проходит этим курсом-расстояние S3.
Для определения расстояния S3 спроектируем отре-
зок C3Ci (см. рис. 216) на линию горизонтального пере-
мещения косяка и на перпендикулярную к ней линию.
493
Учитывая, что SK1 +SK, =fe(St + S2), получим
S3 cos a = k (Sx + S2) + D cos qK> — D cos <7Kp
<Sa sin a = D sin qKt + D sin ?Кр
где SKi и SKj—расстояния, проходимые косяком па первой и
второй фазе замета;
а — угол между прямым курсом выхода судна в на-
чальную позицию замета и линией горизонтально-
го перемещения косяка.
Из приведенных выше выражений можно записать
У № (ai + а2) + cos Ч ” cos <7KJ2+(sin 7к,+ sin Ч)2 = -5- = °3-
(IV—9)
После прихода судна в конце второй фазы замета в
точку С3 положение в точке С\ пятного ключа, отмечен-
ное на водной поверхности вешкой или светящимся бу-
ем, наблюдают визуально и судно следует прямым кур-
сом в точку Cf.
Замет невода без «ворот» и перекрытий требует со-
блюдения условия /=S1+S2+S3, где I — длина невода.
Это условие можно записать и в таком виде:
/ S3
= -5- +-у + ~~ = «1 + «2 + «3. (IV—10)
Определив по формуле (IV—10) значение
дя обратную величину —, можно рассчитать длину от-
дельных участков траектории судна в единицах длины
невода:
Si D
---= :
l * 1 /
и най-
S2 D
I 2 / ’
$3
I
D
(IV—11)
Таким образом, основное условие замета невода без
«ворот» и перекрытий окончательно может быть пред-
ставлено следующим выражением:
S, s3 s3
-7- + —"+-^- = 1. (IV—12)
Входящие в уравнения (IV—7) и (IV—8) эллиптиче-
ские интегралы второго рода в замкнутом виде не ре-
шаются и могут быть выбраны из специальных таблиц.
Для практических целей замета невода достаточно вос-
494
пользоваться приближенным решением этих интегралов:
f (1^1 — k2 cos2 dqK = qK f1 ” 7^ *2) + sin 2?K *
о
Ошибка от замены точного значения интеграла его
приближенным решением не превышает единицы треть-
его знака после запятой. Подставляя приближенное ре-
шение интеграла в уравнения (IV—7), (IV—8) и выпол-
нив необходимые преобразования, получим
/ 1 \ k2
М1 — "Г Н + Тsin 2q^+ k0~cos
* = —------------L---. (IV—13)
f \ \ k2
як. 1 - ~Г »I + -y sin 2<7Ka + k (cos qK) — I)
«a =-------------L---: 5-------------------• (IV—14)
1 —
Формулы (IV—13), (IV—14) позволяют найти зави-
симости вида a=f(k, 9к), которые при известном отно-
шении —— = k дают возможность выбрать начальную и
конечную позиции замета невода по курсовым углам
qKt и qVi при маневрировании судна на постоянном рас-
стоянии до ядра косяка. Затем по заданным отношениям
D
— можно рассчитать длину отдельных участков траек-
тории судна в единицах длины невода по формулам
(IV—11).
В приложении 2 приведено графическое изображение
типовых программ замета невода для различных отно-
» « Vk t
шении скоростей ~^-=япри маневрировании судна на
криволинейном участке траектории замета на постоян-
ном расстоянии от ядра косяка. Для наглядности в этих
программах все расстояния выражены в единицах дли-
ны невода. Программы позволяют выбрать начальную
позицию постановки невода, обеспечивающую замет без
«ворот» и перекрытий.
В процессе замета невода судно должно непрерывно
удерживать ядро косяка на курсовом угле qc, который
рассчитывают по формуле (IV—4). Замет кошелькового
невода длится 4—5 мин, в течение которых берут 20—25
406
пеленгов на ядро косяка и корректируют курс судна. Кур-
совой угол с косяка на судно определяют по формуле
Як = О/7К — Кк
где ОПК — обратный истинный пеленг ядра косяка;
Кк—направление горизонтального перемещения (курс) кося-
ка, рассчитанное на этапе сближения.
Текущий курсовой угол qc в процессе замета невода
может быть снят с графика,
20 W 60 80 100 120$
Рис. 217
рассчитанного по формуле
(IV—4) и приведенного
на рис. 217. Очевидно, что
курс судна на любой мо-
мент времени будет равен
л — /7К—9С.
Следует иметь в виду,
что при замете невода
скорость судна на цирку-
ляции Уц значительно
меньше его скорости V на
прямом курсе, поэтому
при расчете замета нево-
да нужно пользоваться
VK ТТ
отношением ——. На суд-
Уц
не должна быть специ-
альная таблица потери скорости на циркуляции. Для со-
ставления такой таблицы можно использовать эмпири-
ческую формулу Г. А. Фирсова, которая хорошо согла-
суется с опытными данными. Напишем эту формулу в та-
ком виде:
Е>
v” = vth2-^T’ (lv-15)
где Уц — скорость судна на циркуляции;
И—скорость судна на прямом курсе;
/?ц — радиус циркуляции;
L— длина судна.
Траектория замета невода на постоянном курсовом
угле на ядро косяка. Замет невода на постоянном курсо-
вом угле на ядро косяка целесообразно подразделить на
два этапа: замет по криволинейной траектории, замет
на прямом курсе возвращения в начальную позицию по-
становки невода.
Для определения закона изменения расстояния между
судном и ядром косяка на первом этапе замета спроек-
496
тируем векторы скорости судна и косяка на линию теку-
щего пеленга и перпендикулярное к ней направ-
ление (рис. 218), полагая 9c = const,
dD
= V cos qc + Vk COS qK, (IV—16)
О ^ = Vsinffc — VKsinffK. (IV—17)
Для определения характера изменения D на первом
этапе замета невода разделим уравнение (IV—16) на
уравнение (IV—17):
dD cosqc kcosqK
n — . г . dq^ + . , . dq^.
D sinqc—ksmqK sin qc — k sin qK
(IV—18)
Проинтегрируем уравнение (IV—18) в пределах рас-
стояний от до D3 и от курсового угла qKi «левого бор-
та» до курсового угла qK3 «правого борта», которому
присвоим знак «минус»:
D, ——?к3
С dD Г* dqK
I = cos Яс ------------------—------
J D J sin qc — k sin qn
D1
Ajcos^k
. . . dq^.
sin qc — k sin qn
Первый интеграл правой
части выражения (IV—19) яв-
ляется табличным, и его реше-
ние определяется знаком раз-
ности sin2<7c—k2. Маневрирова-
ние при замете невода осуще-
ствляется, как правило, на qc
от 45° до 135°, т. е. sm2<?c 0,41.
Отношение скоростей
при облове косяков пелагиче-
ских рыб не превышает 0,4,
т. е. &2^0,16. Следовательно,
sin2 9с—&2>0, и решение ин-
теграла имеет вид:
(IV—19)
Рис. 218
dqK
sin^c — £ sin
2cos qc
sin2 q^ — k2
32 В. E. Ольховский
497
I sin<?c + sin<?0 tg-^J_ — k \
X I arctg--- — 4- arctg-------- - — I. (IV—20)
\ у sin2 4C —&2 J^sin3^ — k2 /
Для второго интеграла правой части выражения
(IV—19), введя подстановку x=sin^c—Asin^K и dx=
=—kcosqKdqKf получим
“ffK3 Хл X,
f k cos qK f dx , I
1 ----------—----=— I ---------= In x
J sin^ — ^sin<7H J x |
% *1 X,
откуда
С k cos gK
J sint/c — ^sin^K
%
sin<7c + £sin<7K9
dqK =— in -----.
sint/c — ftsin^Ki
(IV—21)
na
тл C dD , D3 , ,
Имея в виду, что 1 = In , решение дифферен-
Dt 1
циального уравнения (IV—19) с учетом формул
(IV—20) и (IV—21) запишем в следующем виде:
, D3 (si n qc + k si n qKt) 2cos qc
Di (sin qc—k sin ?K1) j<sin2 qc — k*
f sin<7c tg-^y-+£ sin 9c tg-y1- —k \
X I arctg-- — + arctg------- --- I. (IV—22)
\ j/ sin2 qc — № Y sin2?c — £2 /
Потенциируя формулу (IV—22), также получим:
D3 sin qc —k sin оК1 Г 2cos qc
-----=---------------- exp —-------------—
Di sinqc+ksinqK3 [ /sin2(?c_^
(sin qc tg Ai- — k sin <7C tg + k
arctg- ---+ arctg-----
j/" sin2 <7c — &2 sin2 qz — №
. (IV—23)
Исследуем характер изменения расстояния до ядра
косяка при маневрировании судна на криволинейном
участке замета от qKl =90° «левого борта» до ?к, =90°
«правого борта». Формула (IV—23) для этого случая
498
после некоторых преобразований может быть записана
в таком виде:
D3 sinffc — k / л cosgc
"7Г" = ---------7 GXP I — ----
Z>1 sin^c + A jAsin27o — A2
(IV—24)
На рис. 219 приведены отношения —- для различ-
ных курсовых углов qc маневрирующего судна. Как вид-
но из этого рисунка, при маневрировании на курсовом
угле ?с^90° расстояние до ядра косяка быстро умень-
шается. Подобное маневрирование может привести к
тому, что ко времени прихо-
да судна на траверз косяка
«правого борта» косяк ока-
жется на расстоянии, мень-
шем его реакции на судовые
шумы, и, испугавшись этих
шумов, сделает попытку вый-
ти из зоны облова или опу-
стится под нижнюю подбору
невода. При маневрировании
на постоянном qc> 110° рас-
стояние до ядра косяка бы-
стро увеличивается, в резуль-
тате чего непроизводительно
используется площадь заме-
та невода. В то же время
из рис. 219 видно, что замет невода на постоянном qc =
= 101° близок к оптимальному, так как обеспечивает
изменение расстояния до ядра косяка в сравнительно не-
больших пределах.
Для исследования траектории замета невода при ма-
неврировании судна на постоянном qc от точки С\ до
точки С3 (см. рис. 218) в зависимости от времени t вос-
пользуемся уравнением (IV—17). Входящее в это урав-
нение расстояние D до ядра косяка в любой точке С на
траектории судна может быть определено по формуле
(IV—23) путем замены прлярных координат £>3 и ^Кз
точки Сз текущими полярными координатами D и ?к.
В этом случае курсовые углы qK «левого борта» нужно
считать положительными, а «правого борта» отрицатель-
ными. После подстановки формулы (IV—23) в формулу
(IV—17) получим:
32*
499
£\(sin qQ — k sin q^, ) exp
2cos
Vsin3 qz — k2
sin<7ctg-^— k
Asin3 gc — k2
— arctg
sin^c tg-Y“~ £
V si n2 gc — k2
(sin — £ sin (?K)2
Проинтегрируем обе части этого уравнения:
р3ехр|
(sin^c — Л sin (/К1) 1
2cos (/с
A si п2 (/с — k2
arctg
sin (?c tg—— k
V sin2(/c —k2
(sin (7C — Asin(?K)2
<?K1
2cos (/c
A sin2 (/c — k2
arctg
sin<7ctg — — k
A sin2 (?c — k2
t
1 c S'
Vdt = — =blt (IV—25)
ui J ui
о
где S'— расстояние, проходимое судном по криволинейному участ-
ку траектории замета от точки Ci до точки Сз.
Входящий в формулу (IV—25) нетабличный интеграл
при расчете величины Ь\ решается численным методом
на ЭЦВМ. Если начальная позиция постановки невода
выбрана на курсовом угле косяка </К1 =90° «левого бор-
та», то после прихода судна на курсовой угол qKv =90°
«правого борта» косяк практически окажется окружен-
ным неводом, и дальнейшее маневрирование судна дол-
жно быть направлено на его скорейшее возвращение в
начальную позицию замета. Для этой цели с приходом
в точку С3, о чем можно судить по текущему пеленгу на
ядро косяка (773180°), руль перекладывают на
правый борт и судно осуществляет циркуляцию с мини-
мальным радиусом /?ц.
Первый этап замета заканчивается приходом судна
500
в точку С4, когда отмеченная буем-вешкой начальная
позиция окажется по курсу судна. Затем начинается вто-
рой этап замета, в процессе которого судно сближается
с пятным клячем невода.
Ранее было рассмотрено условие, соблюдение кото-
рого при маневрировании судна на постоянном расстоя-
нии от ядра косяка обеспечивает замет невода без «во-
рот» и перекрытий. Однако в практике кошелькового ло-
ва замет невода обычно осуществляется с «воротами»,
равными примерно одной длине корпуса судна. Необхо-
димость «ворот» объясняется конструктивными особен-
ностями применяемых неводов, у которых длина нижней
подборы на 10—15% больше длины верхней подборы.
Отсутствие «ворот» приводит к тому, что при выборе
стяжного троса происходит наброс на него сетей кляче-
вых частей невода, которые затем втягиваются в стяж-
ные кольца. Это влечет за собой порыв сети и аварию
невода. Поэтому маневрирование должно удовлетворять
условию замета с минимальными «воротами», равными
примерно одной длине корпуса судна, т. е. путь S, прохо-
димый судном по траектории замета, должен быть при-
ближенно равен сумме длины невода I и длины корпуса
судна L.
При известных длине невода /, длине судна L и при
минимальном радиусе циркуляции судна /?ц условие за-
мета с минимальными «воротами» может быть обеспе-
чено правильным выбором расстояния между ядром
косяка и судном в начальной позиции постановки невода.
В результате выполненного на ЭЦВМ моделирования
различных промысловых ситуаций В. И. Меньшиков
предложил формулу для расчета этого расстояния
= 0,1702 (/ + L) — 0,1125/?ц. (IV—26)
При замете невода на постоянном курсовом угле
qc= 101° значительно упрощаются расчеты курсов при
движении судна на криволинейном участке траектории.
В процессе замета непрерывно берут пеленги на левую
и правую кромки косяка, рассчитывают пеленг /7К на
ядро косяка и курс судна на любой момент времени:
К = Пк—Ю1°. (IV—27)
При облове практически неподвижных косяков, т. е.
при k^O, 1, начальную позицию постановки невода вы-
бирают на расстоянии
501
^ = -^-U+L)=0,159(/4-L)
и его замет осуществляют по окружности приведением
косяка на траверз правого борта судна, причем курс суд-
на в любой момент времени будет
К = Лк —90°.
(IV—28)
На рис. 220 изображены траектории замета невода
при маневрировании судна относительно ядра подвиж-
ного косяка на постоянном курсовом угле <7с=101° для
Рис. 220
реальных в условиях про-
мысла отношений скоро-
стей k = 0,24-0,4. Траекто-
рия облова практически
неподвижного косяка
оцифрована величиной
6=0.
§ 10. Выбор
начальной позиции
замета кошелькового
невода и расчет
курсов выхода
судна в эту позицию
Выбор начальной
позиции замета невода.
При выборе позиции на-
чала замета по курсовому
углу следует стремиться
к тому, чтобы она находи-
лась на кормовых курсо-
вых углах порядка 110—
120°, т. е. примерно на
траверзе хвостовой части косяка. Однако, чтобы увели-
чить расстояние замета, можно выбирать начальную по-
зицию впереди траверза косяка на курсовых углах
?Ki>50°. Конечная позиция на криволинейном участке
траектории замета должна находиться во всех случаях
на траверзе ядра косяка «противоположного борта», т. е.
?кэ^90°. В этом случае после поворота судна на прямой
курс выхода в начальную позицию косяк полностью ока-
жется в зоне обмета.
502
Важным фактором, который необходимо учитывать
при выборе начальной позиции замета, является поведе-
ние косяка, зависящее от его видового и размерного со-
става, биологического состояния и времени года.
Подвижные преднерестовые косяки очень пугливы и
чутко реагируют на судовые шумы. Малоподвижные жи-
рующие косяки менее пугливы. Поведение рыбы может
быть учтено правильным выбором расстояния до косяка
в процессе замета невода. Расстояние DPt на которое
судно может приблизиться к кромке косяка, не вызывая
изменений направления и скорости его горизонтального
перемещения, характеризуется следующими величина-
ми: для сельди и скумбрии 15—20 м, для ставриды и кор-
мящей пеламиды 50 м. По материалам Н. Н. Андреева
и других преобладающими формами косяков являются
серповидная или круглая, и в практических расчетах
форму косяка можно принять за круг радиуса г. Причем
радиус косяков, облавливаемых кошельковым неводом,
не превышает 25 м. Попытка облова более крупных ко-
сяков путем их расчленения на отдельные мелкие час-
ти, как правило, заканчивается неудачей. При выборе
расстояния до ядра косяка условие, при котором пос-
ледний не реагирует на судовые шумы, записывается в
следующем виде:
2) 5 = Dp г.
Величина В называется обобщенной биологической
характеристикой косяка.
При маневрировании судна на постоянном расстоя-
нии D от ядра косяка размеры последнего можно учесть
следующим образом. В момент пересечения судном ли-
нии движения косяка в точке С2 (см. рис. 216) передняя
кромка косяка будет находиться на расстоянии D — г от
этой точки. Ко времени подхода косяка к стенке невода
судно должно успеть перейти в точку С3, лежащую на
траверзе или позади траверза ядра косяка. Это предот-
вратит возможность выхода косяка из зоны обмета. Та-
ким образом, время /К2 движения передней кромки ко-
сяка к стенке невода должно быть равно или больше
времени /2 перехода судна из точки С2 в точку С3. Из
условия /к2^^2 получаем:
D-- Г Sg flg &
V* >~= v *
503
откуда
<iv-29)
где a2— величина, определяемая из выражения (IV—14).
Правая часть формулы (IV—29) определяет мини-
мальное расстояние £>тт, на которое можно сблизиться
с косяком, исходя из его размеров.
При выборе расстояния замета глубину погружения
косяка и скорость его ухода под нижнюю подбору нево-
да учитывают следующим образом. Подойдя к стенке
невода, косяк в поисках выхода из зоны облова может
опуститься вниз под нижнюю подбору невода. Для пре-
дотвращения ухода косяка необходимо, чтобы время /Нз
движения косяка к нижней подборе невода было боль-
ше времени /3 перехода судна из точки С3 в начальную
позицию замета для кошелькования невода.
Из условия /кз^з имеем
// — Йк &3 &
где Н— высота невода;
йк — глубина погружения косяка;
—скорость ухода косяка под нижнюю подбору невода;
аз —величина, определяемая из выражения (IV—9).
Следовательно,
D < Я~ЙК . (IV—30)
k Оз
v'K
где *'=— .
Формула (IV—30) определяет максимальное рассто-
яние £>щах, на которое можно удалиться от ядра косяка
в зависимости от глубины его погружения, скорости ухо-
да под нижнюю подбору и высоты невода.
По данным исследований Н. Н. Андреева и
В. В. Честного, для практических расчетов можно при-
нять V’ = 1,0 1,4 уз и £'=0,14-0,2. Большинство су-
дов кошелькового лова работают в настоящее время не-
водами с наибольшей высотой в посадке около 150 м и
облавливают косяки на глубинах до 50 м. Анализ тра-
екторий показывает, что величина аз обычно не превы-
504
шает 3,5, поэтому для £'=0,14-0,2 Ршах= 1434-286 м.
При кошельковом лове условие £><£>тах всегда соблю-
дается. Следовательно, постоянное расстояние от ядра
косяка на криволинейном участке траектории замета
должно быть выбрано таким образом, чтобы оно пре-
вышало Ощш и обобщенную биологическую характерис-
тику В. Для выбора начальной позиции замета невода
при облове подвижных косяков, когда движение судна
по криволинейному участку траектории на постоянном
расстоянии D заканчивается его выходом на траверз ко-
сяка (дКз=90о). В. И. Меньшиков предложил использо-
вать специальные графики ?К1=/Н&п ~1» приведенные
на рис. 221. Эти графики рассчитаны по формулам (IV—
9, IV—10, IV—13, IV—14). Они содержат также мини-
мально допустимые расстояния до ядра косяка Рщщ и
коэффициент использования невода ц. Коэффициент ис-
пользования площади невода р представляет собой от-
ношение площади обмета к максимальной площади, ко-
торую можно охватить неводом данной длины. Поль-
зуясь этими графиками, по отношениям-^-и =£,
можно выбрать величину определяющую началь-
ную позицию замета невода длиной I на заданном рас-
стоянии D от ядра косяка. Такой выбор начальной
позиции обеспечивает
крытий.
Вероятность облова
косяка в общем случае
пропорциональна коэф-
фициенту использова-
ния площади невода ц.
Поэтому начальную по-
зицию замета невода
желательно выбирать
по курсовому углу и
расстоянию так, чтобы
коэффициент ц имел
максимально возмож-
ное значение. Графики,
изображенные на рис.
221, позволяют решать
замет без «ворот» и пере-
Рис. 221
и такую задачу.
505
Пример. СРТ с неводом длиной /=760 м облавливает косяк,
для которого k=0,33, В = 60 м. Необходимо выбрать начальную по-
зицию замета невода по курсовому углу qKi и расстоянию D, обес-
печивающую высокий коэффициент использования площади невода.
Как видно из графика на рис. 221, при k=0,33 наибольшее значение
коэффициента использования площади невода ц = 0,70. При этом
=105°, Pmin=45 м, — = 0,156 и, следовательно, D— 118 м.
Таким образом, выбор начальной позиции замета на
курсовом угле =105° на расстоянии 0=118 м от яд-
ра косяка обеспечивает маневрирование судна в процес-
се замета на расстоянии, исключающем реакцию косяка
на судовые шумы (О>В) или уход его под нижнюю
подбору (О<Отах). НаПОМНИМ, ЧТО Отах= 1434-286 м.
При маневрировании судна на постоянном курсовом
угле ?с=ЮГ начальная позиция замета невода должна
быть выбрана таким образом, чтобы ко времени прихо-
да судна на траверз косяка «противоположного борта»
расстояние до его ядра превышало обобщенную биологи-
ческую характеристику В.
D3
Рассчитанное по формуле (IV-24) отношение
при различных значениях k характеризуется следующи-
ми величинами:
А = 0,2, А = 0,3, Л = 0,4,
D3 — = 1,18; D3 — =1,00; Dx ^- = 0,83, Di
Длина современных судов кошелькового лова со-
ставляет 40—55 м, а минимальный радиус циркуляции
колеблется в пределах от 40 до 80 м. При длине невода
/=750 м по формуле (IV—26) найдем Dx —127-Н34 м.
Следовательно, минимальное расстояние £>3=0,83£>1 =
= 1054-111 м и превышает обобщенную биологическую
характеристику косяка В.
Таким образом, рассмотренные способы замета нево-
да на постоянном расстоянии или постоянном курсовом
угле на ядро косяка исключают опасность сближения
судна с косяком на дистанцию его реакции на судовые
шумы.
При современных длинах неводов и скоростях заме-
та движение судна на криволинейном участке траекто-
506
рии продолжается 2,5—3 мин. Вполне естественно счи-
тать, что находящийся за пределами реакции на судовые
шумы косяк сохраняет постоянными направление и ско-
рость своего перемещения, поскольку отсутствуют ка-
кие-либо внешние факторы, побуждающие его предпри-
нять внезапный маневр для выхода из зоны обмета.
При замете невода на постоянном расстоянии от яд-
ра подвижного косяка для расчета текущего курса необ-
ходимо пользоваться приведенным на рис. 217 графиком,
что представляет определенное неудобство. В то же вре-
мя при замете невода на постоянном курсовом угле
<7с = 101° расчет текущего курса выполняется по прос-
той формуле (IV—27) и не представляет затруднения.
Как отмечено в § 9, в процессе маневрирования на
криволинейном участке замета скорость поступательно-
го движения судна может изменяться в зависимости от
изменяется от-
угла перекладки руля, вследствие чего
ношение скоростей -у- = k.
При замете невода на постоянном курсовом угле
<7с=101° выбор исходной позиции постановки невода и
замет с минимально необходимыми «воротами», как это
видно из формулы (IV—26), зависят только от постоян-
ных и известных величин: длины невода, длины судна и
минимального радиуса его циркуляции. Потеря скорости
судна на циркуляции не оказывает влияния на замет в
пределах реальных для облова подвижных косяков от-
ношений скоростей &=0,2ч-0,4.
Такой способ замета в значительной мере упрощает
расчеты курсов судна, учитывает его маневренные каче-
ства и позволяет выбрать начальную позицию замета
невода по курсовому углу и расстоянию от ядра косяка
без использования специальных графиков.
Следовательно, замет невода на постоянном курсо-
вом угле qc = 101° имеет ряд существенных преимуществ
по сравнению с заметом на постоянном расстоянии от
ядра косяка.
Расчет курсов выхода судна в позицию замета. После
выбора начальной позиции постановки невода ложатся
на прямой курс выхода в эту позицию. Применяемая на
судах промысловая схема обеспечивает возможность за-
мета невода только с правого борта, поэтому начальную
позицию постановки невода выбирают на курсовых уг-
507
лах «левого борта» косяка. Выход судна в начальную
точку постановки невода представляет собой известную
задачу тактического маневрирования на занятие пози-
ции относительно подвижного объекта.
На рис. 222 в точках Со и Ко показаны положение суд-
на и положение косяка. Начальная позиция замета нахо-
дится в точке С' на курсовом угле
на расстоянии D от ядра косяка. Гра-
фическое решение задачи о занятии
судном начальной позиции замета не-
вода выполняется следующим образом.
Соединяют точки Со и С, прямой
линией. От точки С'х по направлению
горизонтального перемещения косяка
откладывают в выбранном масштабе
вектор его скорости VK. Из конца век-
тора VK раствором циркуля, равным
модулю вектора скорости судна V, де-
лают засечку на линии C0Cj (точка
CJ) и находят направление вектора
скорости судна V. Затем проводят из
точки Со линию, параллельную векто-
ру скорости судна до ее пересечения
с линией CiC в точке Cj. Направление
линии С0С] указывает курс выхода
судна в начальную позицию постановки невода, а ее
длина равна расстоянию, которое должно пройти судно
этим курсом. Время следования в начальную позицию
С с
t= 1 . к моменту прихода судна в точку Ct ядро
косяка будет находиться в точке К\.
Курс выхода судна в начальную позицию замета
можно также рассчитать графоаналитическим путем.
Для этой цели необходимо снять с промыслово-навига-
ционного планшета направление (курс) горизонтального
перемещения ядра косяка Кк и направление По линии
C0CJ, а затем рассчитать угол упреждения ф
по формуле sinip=£ sin (Кк—По). Курс выхода в на-
чальную позицию замета К=П0—ф.
Если после сближения с косяком и определения эле-
ментов его горизонтального перемещения судно окажет-
508
ся по «правому борту» косяка (рис. 223), то выход в
начальную позицию замета осуществляется двумя кур-
сами. Первым курсом судно следует в позицию, нахо-
дящуюся по «корме» подвижного косяка в точке CJ
на расстоянии D от его ядра. Вторым курсом К2 судно
выходит в начальную позицию, находя-
щуюся в точке Cj, заданную этим же
расстоянием D и курсовым углом qKi.
Графоаналитическое решение этой зада-
чи выполняется следующим образом (см.
рис. 223). С промыслово-навигационного
планшета снимают направление П'о ли-
нии С0С1 и рассчитывают угол упрежде-
ния ф' и курс Kf.
sin if' = k sin ,
+ Ф
После прихода судна в точку С\ на
линии горизонтального перемещения ко-
сяка, который к тому времени будет на-
ходиться в точке /Ci, рассчитывают угол
упреждения ф". Так как треугольник
CiKiC* равнобедренный, то
sin ф" = k sin —•
Курс выхода судна в начальную позицию замета
(точка Ср) определяется из выражения
Углы if, if' и ф" целесообразно рассчитывать по спе-
циальным таблицам углов упреждения или номограм-
мам.
Многошаговая схема замета кошелькового невода.
Кроме рассмотренных выше, известны также другие
способы расчета маневрирования судна при замете не-
вода.
Например, А. П. Лисовым предложена так называе-
мая многошаговая схема замета, сущность которой за-
ключается в следующем. Предполагается, что в процес-
се замета невода косяк будет придерживаться одного из
трех вариантов своего поведения: сохранять такое же
поведение, как и до начала замета (двигаться по пря-
мой или оставаться практически неподвижным); прояв-
ляя реакцию на судовые шумы, уходить по прямой, про-
ходящей через центр косяка и начальную точку поста-
новки невода; проявляя реакцию на судовые шумы,
непрерывно изменять свой «курс», уходя от судна по ли-
нии текущего пеленга.
При этом в третьем варианте делается допущение, что
косяк, уходя от судна по линии текущего пеленга, про-
должает сохранять постоянной скорость своего горизон-
тального перемещения.
Начальную позицию постановки невода выбирают по
произвольному пеленгу от ядра косяка и на расстоянии
от него DGt определяемому по формуле
DQ = kl-\-B,
Процесс замета подразделяется на три этапа: сбли-
жение с ядром подвижного косяка на минимально допус-
тимое расстояние В, на котором косяк еще не реагирует
на шумы судна; маневрирование на постоянном рассто-
янии от ядра подвижного косяка; сближение по прямой
вдоль проводника с пятным клячем невода.
Маневрирование судна на первом этапе замета осу-
ществляется путем удержания ядра косяка на курсовом
угле qC) определяемом из выражения
/ в г-----
qG = arcsin k arcsin I — у 1 — A2
где D — текущее расстояние до ядра косяка.
На втором этапе осуществляется процесс замета на
постоянном расстоянии от ядра косяка, равном его об-
общенной биологической характеристике В. Текущий
курсовой угол с судна на ядро косяка рассчитывают по
формуле
cos qG = — k cos qK.
Второй этап заканчивается, когда начальная точка
замета, отмеченная буем-вешкой, окажется по курсу суд-
на и начинается третий этап, в процессе которого судно
сближается с пятным клячем невода.
Не вдаваясь в подробный анализ, отметим, что при
описанном способе замета невод должен иметь большую
510
длину. Например, при отношении скоростей 6=0,4 и об-
общенной биологической характеристике В=80 м
облов косяка, уходящего по прямой, соединяющей на-
чальную позицию постановки невода и центр косяка,
возможен при длине невода /=1867 м. При этих же на-
чальных условиях для облова косяка, уходящего в про-
цессе замета по линии текущего пеленга, необходим не-
вод длиной 1 = 1167 м. Следовательно, длина кошелько-
вого невода должна быть в 1,9—2,3 раза больше приме-
няемых в настоящее время на судах типа СРТ различ-
ных модификаций.
Глава V. ОПРЕДЕЛЕНИЕ СКОРОСТИ И НАПРАВЛЕНИЯ
ДРЕЙФА СУДНА С ДРИФТЕРНЫМИ СЕТЯМИ
§ 11. Выбор места и направления постановки
дрифтерного порядка.
Учет перемещения судна при дрейфе с сетями
С наступлением сумерек сельдь и некоторые дру-
гие пелагические рыбы поднимаются за кормом в верх-
ние горизонты. При этом отдельные стаи «рассыпаются»,
рыба становится более подвижной. Такие разреженные
скопления рыбы на большой площади облавливаются
обычно дрифтерными сетями.
Для обеспечения эффективности дрифтерного лова
необходимо:
выбрать место постановки дрифтерного порядка с та-
ким расчетом, чтобы в процессе дрейфа порядок макси-
мально преграждал путь скопления рыбы. В весенне-лет-
ний период центр порядка после его постановки должен
приходиться на самую плотную часть скопления, а в
осенне-зимний период он должен быть немного сдвинут
к области холодных вод, так как рыба при движении к
местам зимовки прижимается к холодному фронту. По-
скольку дрифтерными сетями облавливают скопление ры-
бы, имеющее горизонтальное перемещение, место поста-
новки порядка выбирают с «упреждением» на ее ход,
т. е. на некотором удалении от наиболее плотной части
скопления в генеральном направлении его горизонталь-
ного перемещения. При групповом ведении промысла
511
как при выборе места постановки порядка, так и в про-
цессе дрейфа судна с сетями необходимо учитывать рас-
положение других судов и их порядков;
установить с помощью гидроакустических поисковых
приборов глубину постановки порядка и рассчитать из
какого количества сетей должен состоять порядок, чтобы
он полностью перекрывал путь наиболее плотной части
облавливаемого скопления, должным образом натяги-
вался давлением ветра на надводную часть судна и со-
вершал минимальное продольное перемещение;
выбрать такое направление постановки порядка, при
котором он в процессе дрейфа будет наибольшее время
стоять примерно перпендикулярно генеральному направ-
лению горизонтального перемещения облавливаемого
скопления рыбы;
в процессе дрейфа с сетями вести на промыслово-на-
вигационном планшете тщательный учет перемещения
судна, следить за расположением порядка и наполнением
сетей рыбой.
Рассмотрим кратко решение перечисленных выше за-
дач с точки зрения навигационного обеспечения.
Придя в район промысла, судно получает информа-
цию о промыслово-навигационной обстановке от поиско-
вого судна или от других добывающих судов, ведущих
дрифтерный лов. Если эта информация недостаточно
полная и не позволяет обоснованно выбрать место, на-
правление и глубину постановки порядка, то предвари-
тельно осуществляют местный поиск (разверку). В про-
цессе местного поиска решают следующие задачи:
уточняют расположение струй течения и характер гидро-
логического фронта по распределению поверхностной
температуры воды; определяют с помощью гидроакусти-
ческих поисковых приборов контуры и относительную
плотность скопления рыбы, распределение ее по глубине,
генеральное направление горизонтального перемеще-
ния.
На практике используют различные методы ведения
местного поиска для дрифтерного лова. Рассмотрим ме-
тод, предложенный А. И. Семеновым и получивший наи-
более широкое распространение. Руководствуясь инфор-
мацией о промысловой обстановке, выходят на аквато-
рию, где предполагается скопление рыбы, и начинают
вести поиск галсами, расположенными под тупым углом
512
Рис. 224
к общему направлению изотерм на данном участке
(рис. 224, а).
Обнаружив на одном из таких галсов скопление ры-
бы, пересекают его границы, а затем делают поворот и
33 В. В. Олыовскжв
613
выходят на галс, перпендикулярный общему направле-
нию изотерм. Следуя этим галсом, уточняют гидрологи-
ческую обстановку и характер скопления рыбы (его ши-
рину, относительную плотность, расположение по глуби-
не). Если полученные данные позволяют предполагать,
что обнаружена «голова» скопления, делают поворот и
проходят по направлению, противоположному генераль-
ному направлению горизонтального перемещения рыбы,
расстояние, равное половине ширины скопления /. После
этого выходят на галс, перпендикулярный общему на-
правлению изотерм. Если предположение о генеральном
направлении горизонтального перемещения рыбы под-
твердилось, выбирают место и направление постановки
порядка. Иногда для уточнения ширины и относительной
плотности скопления рыбы выполняют еще несколько
галсов перпендикулярно к общему направлению изотерм.
Если первые поисковые галсы (например, Г-1 и Г-2
на рис. 224, б) дают основание считать, что обнаружена
не «голова», а «хвост» скопления рыбы, выходу на оче-
редной галс, перпендикулярный к общему направлению
изотерм, предшествует «забег» судна по генеральному
направлению горизонтального перемещения рыбы на рас-
стояние, равное примерно удвоенной ширине скопления,
так как «хвостовые» стаи растягиваются обычно боль-
ше, чем «головные».
Приближенный расчет количества сетей, из которых
должен состоять порядок, чтобы обеспечить достаточное
перекрытие пути скоплению рыбы, можно выполнить по
формуле
ЛГ я 250 . ,
^0
где N—количество сетей в порядке;
/таж — наибольшая ширина скопления рыбы в направлении, пер-
пендикулярном генеральному направлению ее горизон-
тального перемещения, кбт;
/с — длина одной сети в посадке, м.
Эта формула предполагает, что длина дрифтерного
порядка должна быть не менее чем на 25% больше
максимальной ширины облавливаемого скопления рыбы.
В целях уменьшения продольного перемещения порядка
рекомендуется при небольшой ширине скопления наби-
рать порядок не менее чем из 40 сетей,
514
Наиболее целесообразно ставить порядок перпенди-
кулярно к генеральному направлению горизонтального
перемещения рыбы. Однако только в том случае, когда
направления ветра и горизонтального перемещения рыбы
составляют угол, близкий к прямому, порядок сохранит
в процессе дрейфа свое первоначальное положение. Во
всех других случаях порядок, поставленный перпенди-
кулярно к генеральному направлению горизонтального
перемещения рыбы и натягиваемый судном, будет пол-
ностью или частично разворачиваться по ветру. Время
разворота зависит от длины порядка, парусности судна,
направления и силы ветра. Поэтому при неблагоприят-
ных по направлению ветрах прибегают к различным спо-
собам удержания порядка в наиболее выгодном положе-
нии (постановка судна на шпринги различной длины,
буксировка, отсоединение судна от порядка и др.).
При групповом ведении промысла как при выборе
места и направления постановки порядка, так и в про-
цессе дрейфа с сетями необходимо учитывать расположе-
ние других судов и их порядков, чтобы своими действи-
ями не мешать работающим рядом судам и не допустить
сцепления сетей. По Правилам совместного плавания и
промысла судов флота рыбной промышленности СССР
выбирать место постановки порядка нужно с таким рас-
четом, чтобы в конце выметки расстояния между судами
и их порядками были не менее 5 кбт. В условиях ограни-
ченной видимости (туман, снегопад, изморось и т. п.)
интервалы между порядками должны быть увеличены до
двух миль и более. Поэтому при групповом промысле в
таких условиях рекомендуется перед постановкой по-
рядка предварительно обследовать выбранное место —
пройти по направлению намеченного расположения по-
рядка расстояние, равное двойной длине порядка (S =
=2АП), возвратиться обратно и, только убедившись в
том, что место свободно или опасности сцепления нет,
приступить к выметке (рис. 225).
После постановки дрифтерного порядка поиск рыбы
с помощью ГАС или эхолота существенно повлиять на
результаты дрейфа уже не может. Он ведется лишь для
того, чтобы убедиться, правильно ли выбраны место, нап-
равление и глубина постановки порядка. Во избежание
затопления сетей обильным уловом в процессе дрейфа
за их наполнением рыбой следят с помощью эхолота
33*
515
Линия К9 Sc2Ln
j
ЛинияS=2Lfi
Рис. 225
(вертикального тракта ГАС) или горизонтального трак-
та ГАС. В первом случае судно оставляет порядок и с
работающим прибором проходит над ним. По эхограмме
ориентировочно оценивают величину улова. Во втором
случае оставлять порядок для проверки сетей необяза-
тельно. Судно отрабатывает на вожаке в сторону от се-
тей, и по гидроакустическому контакту с сетями судят
о величине улова.
В принципе возможно осуществление не только нап-
равленного, но и прицельно-направленного дрейфа судна
с сетями. Для этого не-
обходимо выбрать ме-
сто постановки поряд-
ка так, чтобы его центр
в определенное, зара-
нее заданное время
встретился с наиболее
плотной частью скопле-
ния рыбы. Встреча дол-
жна произойти в тот
момент, когда рыба
поднимется на гори-
зонт постановки сетей.
Поэтому промежуток
времени, который должен пройти с момента обнаружения
центра плотности скопления рыбы до момента его встре-
чи с центром порядка, зависит от того, в какие часы су-
ток происходят вертикальные перемещения рыбы и на
какую глубину предполагается ставить дрифтерные сети.
Исходную позицию постановки порядка можно опре-
делить графическим или аналитическим методом, но для
этого необходимо знать положение центра плотности
скопления рыбы, скорость и направление его горизон-
тального перемещения, а также скорость направленного
ветрового дрейфа судна с сетями. В основе решения рас-
сматриваемой задачи лежит условие
____$п
Гк ин,др
где SK— путь центра плотности скопления рыбы;
Гк — скорость горизонтального перемещения скопления;
$п — путь центра дрифтерного порядка;
ин,др — скорость направленного ветрового дрейфа судна с се-
тями.
516
Дрифтерными сетями, как правило, облавливают раз-
реженные скопления рыбы, состоящие из множества не-
больших стаек. Такие скопления перемещаются с незна-
чительной скоростью в том или ином генеральном нап-
равлении, а отдельные стайки движутся в разные
стороны с различной скоростью. При подобных условиях
определение центра плотности или геометрического
центра скопления и элементов его горизонтального пере-
мещения может быть осуществлено лишь грубо прибли-
женно. Сопряжен с рядом трудностей и предваритель-
ный расчет скорости направленного ветрового дрейфа
судна с сетями. Поэтому на практике метод прицельно-
направленного дрейфа, как правило, не применяется.
Дрейфуя с сетями, судно перемещается по направле-
нию равнодействующей двух скоростей: скорости сум-
марного течения ит и скорости ветрового дрейфа пдр, соз-
даваемого давлением ветра на его надводную часть.
Скорость суммарного дрейфа судна с сетями ус-др равна
геометрической сумме этих двух скоростей: пс.др=Ут+
+ °ДР-
Очевидно, что здесь, как это принято в промысловой
практике, под термином «суммарный дрейф» понимает-
ся перемещение судна под действием течения и ветра.
В навигации перемещение судна под действием этих
двух факторов называют суммарным сносом.
Скорость и направление суммарного дрейфа судна с
сетями можно определить по результатам обсерваций,
а при отсутствии такой возможности методом счисле-
ния. Этот метод предусматривает определение из на-
блюдений или при помощи соответствующих навигаци-
онных пособий скорости и направления суммарного те-
чения в районе дрейфа судна (ут); определение скорости
и направления ветрового дрейфа судна с сетями (идр);
выполнение на промыслово-навигационном планшете
графического построения для нахождения скорости и
направления суммарного дрейфа судна с сетями (ис.др).
§ 12. Определение скорости и направления
ветрового дрейфа судна с дрифтерными сетями
Скорость и направление ветрового дрейфа судна
с сетями можно определить из наблюдений при помощи
морской вертушки, привязных поплавков, а также пу-
517
тем измерения секстаном вертикальных углов между
видимым горизонтом и основанием специального буйка,
сброшенного с дрейфующего судна, и пеленгования это-
го буйка по компасу (см. § 18 части первой). Примене-
ние всех этих способов основано на допущении, что
средняя скорость и направление течения, действующего
на систему судно — порядок и морскую вертушку, при-
вязные поплавки или буек с грузом, одинаковы.
Таким образом, по мере увеличения глубины поста-
новки порядка ошибки определения элементов ветрово-
го дрейфа перечисленными выше способами будут воз-
растать. Возможность практического применения этих
способов для определения скорости и направления вет-
рового дрейфа судна с сетями зависит от глубины по-
становки сетей и характера изменения элементов сум-
марного течения с глубиной в районе промысла. Зави-
симость между скоростью ветрового дрейфа судна с
сетями и скоростью ветра можно определить и по фор-
мулам. Для расчета величины давления ветра на над-
водную часть судна в морской практике применяется
формула
Т = (V—1)
где W—скорость наблюдаемого ветра;
k — коэффициент сопротивления;
F— площадь проекции надводной части судна на плоскость
миделыппангоута.
Величину F рассчитывают по формуле F=0,8 Fi +
4-F2, в которой Fi — проекция надводной части корпуса
судна на плоскость миделыппангоута, a F2 — проекция
надстроек, труб, рангоута и т. д. на эту же плоскость.
Для условия установившегося ветрового дрейфа суд-
на с сетями уравнение движения будет иметь следую-
щий вид:
F = Ясетей + Ясудна»
где Т — давление ветра на судно;
Ясетей — сопротивление движению сетного порядка в воде;
/?судна —Сопротивление движению судна в воде.
Дрифтерный лов ведется с добывающих судов сред-
него тоннажа. В связи с тем что скорость ветрового
дрейфа такого судна с сетями не превышает двух уз-
лов, а его смоченная поверхность сравнительно мала,
сопротивление судна движению в воде при дрейфе с се-
518
тями будет незначительным по сравнению с сопротивле-
нием сетного порядка. Учитывая, что /?судна<^/?сетей,
будем полагать, что
Т = ^сетей* (У 2)
Величину сопротивления движению сетного порядка
можно определить при помощи эмпирической формулы,
полученной Н. Т. Сениным,
Rc^ = 0,256lhnv^N, (V-3)
где I — длина сети в порядке, м;
Ад —действительная высота сети, м;
Удо —скорость ветрового дрейфа судна с сетями, уз;
N — число сетей в порядке.
По данным А. В. Засова, эта формула дает наилуч-
шее совпадение результатов расчетов величины сопро-
тивления порядка с результатами непосредственных из-
мерений.
Величину йд можно определить по формуле, предло-
женной А. В. Засовым,
(V—4)
где й0— высота сети в посадке;
<7з.в—масса звена вожака (в рассматриваемом случае перво-
го звена);
7?с— сопротивление сети движению в воде.
Сопротивление сети движению в воде равно натя-
жению на голом конце вожака, или давлению ветра на
судно, деленному на число сетей в порядке, т. е. Rc =
т
= —. Величину q3Jl рассчитывают по формуле дэ.в=
N •
= ^£3.в> где q — масса единицы длины вожака; L3:b—
длина звена.
Величина k =
1
—называется коэффи-
циентом уменьшения высоты сети.
Так как согласно принятому нами допущению Т =
т
~Rcete&, a Rc =—, формулу (V—2) можно написать в
N
следующих вариантах*.
519
Т = 0,256 Ih^N, (V—5)
/?o = 0,256/^-p72 (V—6)
и, следовательно,
Т Rc
Рдр = 0,256/ЛдЛ/ = 0,256/Лд * (V~7)
Ю. В. Кадильников составил номограммы, для опре-
деления на промысле скорости ветрового дрейфа судна
с сетями*. В основу этих номограмм положены форму-
лы (V—1), (V—2), (V—3), (V—4) и (V—6). По номо-
грамме «Давление ветра на судно» находят величину Г,
а затем величину по номограмме «Действительная
высота сети и поводца» — величину йд. После этого по
номограмме «Скорость дрейфа судна с сетями» находят
величину Одр. Номограммы Ю. В. Кадильникова целе-
сообразно использовать в тех случаях, когда штормовая
погода или плохая видимость затрудняет определение
скорости ветрового дрейфа судна с сетями по результа-
там наблюдений.
§ 13. Поиск потерянного дрифтерного порядка
В практике работы с дрифтерными сетями быва-
ют случаи обрыва вожака. Обрыв вожака может про-
изойти в штормовую погоду из-за резкого увеличения
нагрузки при стремительной качке, а также в результа-
те намотки сетей на винт из-за неправильного маневра
при их выметке.
Обрыв вожака при плохой видимости и штормовой
погоде часто приводит к потере дрифтерного порядка.
В таких условиях сразу приступить к поиску потерянно-
го порядка нельзя: приходится ожидать рассвета или
улучшения погоды. Судно приводят носом против вол-
ны и дают машине малый или средний ход, чтобы удер-
жаться в районе потери порядка до тех пор, пока мож-
но будет приступить к поиску. Если же обрыв вожака
произошел из-за намотки сетей на винт, приходится ло-
житься в дрейф и только, после очистки винта выходить
на поиск потерянного порядка. Когда условия позволя-
ют приступить к поиску, судно должно выйти к месту
* Справочник судоводителя рыбопромыслового флота. М,, 1965.
520
I 5-^ 1др
Z7z сг
Рис. 226
вероятного нахождения порядка и обследовать его по-
исковыми галсами. Рассмотрим приемы поиска потерян-
ного порядка судном, работающим вне группы. Предпо-
ложим, что скорость и направление течения, действую-
щего на судно, и оторвавшийся порядок одинаковы. При
этом условии, определяя положение судна относитель-
но потерянного порядка, снос судна и порядка течением
можно не учитывать. Принимая такое условие, допус-
каем некоторую ошибку, так как на судно действует
течение, наблюдаемое в слое воды, глубина которого
равна осадке судна, а порядок сносит-
ся течением, наблюдаемым в более
глубоких слоях. Предположим также,
что порядок, находящийся в погружен-
ном состоянии и имеющий на поверх-
ности моря только кухтыли, не пред-
ставляет сколько-нибудь значительной
площади сопротивления ветру и пере-
мещается только под действием течения. Таким об-
разом, при принятых допущениях для определения
взаимного (относительного) расположения потерян-
ного порядка и судна в момент его выхода на позицию
поиска и в дальнейшем необходимо учитывать только
влияние ветра на перемещение судна. Это обстоятельст-
во имеет существенное практическое значение, посколь-
ку элементы течения во многих промысловых районах,
расположенных в открытом море, недостаточно изучены,
а определить, их, особенно на глубинах, трудно.
Предположим, что судно находилось по счислению в
точке Ci (рис. 226). Вследствие неправильного манев-
ра сети намотались на винт и оборвался вожак. Затем
судно легло в дрейф. После очистки винта приступили к
поиску потерянного порядка. Зная скорость и направ-
ление ветрового дрейфа судна с застопоренной маши-
ной, а также промежуток времени /др, в течение которо-
го оно лежало в дрейфе, можно определить положение
судна относительно потерянного порядка в момент окон-
чания дрейфа и выхода на поиск (точки С\ и С2). Ли-
ния C2Ci будет представлять собой линию истинного
курса или пути при дрейфе, по которой судно должно
следовать к месту вероятного нахождения порядка.
Пройдя расстояние 5=пдргдр и не обнаружив из-за
ошибок счисления порядка, начинают поиск, распола-
521
гая галсы по прямоугольной разворачивающейся спи-
рали (рис. 227,а). Такой способ поиска называют спо-
собом «коробочки».
Пусть расстояние, на котором при данных условиях
видимости и волнения может быть обнаружен порядок,
равно Р (рис. 227,6). Если предположить, что судно
удерживается на одном месте, то весь район, находя-
Рис. 227
щийся под наблюдением с мостика, будет характеризо-
ваться площадью круга, радиус которого равен дально-
сти обнаружения порядка Р. Будем считать, как это
принято в маневрировании, район наблюдений ограни-
ченным не пределами окружности радиуса Р, а преде-
лами вписанного в эту окружность квадрата abed, сторо-
ны которого параллельны поисковым галсам. Обозначим
отрезок прямой гщт2 через d и назовем его даль-
ностью наблюдений. Очевидно, что d=l,4 Р. Таким об-
разом, если вести наблюдения по правому и левому бор-
там, расстояние между галсами поиска следует прини-
мать равным d. Определив расстояние между галсами,
рассчитывают промежуток времени в минутах, в тече-
ние которого судно пройдет это расстояние:
t 60d
~ V ’
где V—скорость судна, уз;
d—расстояние между поисковыми галсами, мили.
Как первым, так и вторым галсом судно должно сле-
довать в течение t мин, так как протяженность каждо-
го из них равна d. Время следования каждыми двумя
последующими галсами нужно увеличивать на t мин.
522
Направления галсов, по которым ведется поиск, сов-
падают с четырьмя взаимно перпендикулярными рум-
бами. Например, можно выбрать четыре главных румба
N, Ost , S и W и перевести их в компасные. Зная d и
t. нетрудно составить таблицу протяженности поисковых
галсов, времени следования каждым галсом и компас-
ных курсов, которыми надлежит править. Ниже приво-
дится образец такой таблицы в общем виде (табл. 23).
Таблица 23
Гален Длина галса, мили Время следования данным галсом, мин
1 d t
2 d t *\>st
3 2d 2t
4 2d 2t
5 3d 3t
6 3d 3t KKos‘
Предположим, что судно после обрыва вожака лег-
ло носом на волну и работало машиной с таким расче-
том, чтобы удержаться в районе потери порядка до рас-
света, улучшения погоды и т.п., а затем приступить к
поиску. В этом случае поиск осуществляется так же,
как и в случае, когда судно, потерявшее порядок, ле-
жало в дрейфе. Зная курс, которым следовало судно
после потери порядка, а также пройденное этим курсом
расстояние, ложатся на обратный курс и проходят та-
кое же расстояние. Придя в точку начинают поиск,
располагая галсы по прямоугольной разворачивающей-
ся спирали. Предварительно составляют таблицу про-
тяженности галсов, времени следования каждым гал-
сом и компасных курсов, которыми надлежит править.
Если судно, потерявшее порядок, работает в группе
и вблизи него располагаются другие суда, лежащие в
дрейфе с сетями, то применяется другой метод выбора
исходной позиции поиска. Место потери порядка опре-
деляют по пеленгам и расстояниям относительно нахо-
523
дящихся вблизи судов, дрейфующих с сетями. При этом
записывают их номера. В дальнейшем выход на позицию
поиска (к месту потери порядка), осуществляют, ис-
пользуя эти суда в качестве навигационных ориентиров.
Такой метод эффективен, если промежуток времени
между моментами потери порядка и выхода на позицию
поиска, а также скорость ветрового дрейфа судов с се-
тями, используемых в качестве навигационных ориенти-
ров, сравнительно невелики.
Поиск потерянных порядков способом «коробочки»
ведется и в тех случаях, когда места судна в моменты
отрыва порядка и выхода на позицию поиска (точки
Ci и С2) были определены по результатам радионави-
гационных или астрономических обсерваций.
Приложение 1
ОСНОВЫ ОРГАНИЗАЦИИ ШТУРМАНСКОЙ СЛУЖБЫ
НА СУДАХ ФЛОТА РЫБНОЙ ПРОМЫШЛЕННОСТИ СССР
ЗАДАЧИ ШТУРМАНСКОЙ СЛУЖБЫ И ОСНОВНЫЕ ДО-
КУМЕНТЫ, РЕГЛАМЕНТИРУЮЩИЕ ЕЕ ОРГАНИЗАЦИЮ
Штурманская служба на судах является особым видом вы-
полнения служебных обязанностей, возлагаемых в основном на чле-
нов экипажа штурманской (судоводительской) специальности в це-
лях навигационного обеспечения безопасности плавания н производ-
ственной деятельности судна. На штурманскую службу возлагаются
следующие задачи:
навигационное обеспечение переходов, промысла, грузовых опе-
раций в море и якорных стоянок;
осуществление судовождения на переходах и на промысле (про-
мыслового судовождения);
зрительные и радиолокационные наблюдения за окружающей
обстановкой;
сигналопроизводство средствами зрительной связи и сигнали-
зации;
содержание и эксплуатация мореходных приборов и инструмен-
тов, технических средств судовождения и рыбопоисковой техники,
средств зрительного наблюдения, флажной и пиротехнической сиг-
нализации;
сбор и анализ материалов о навигационной и промысловой об-
становке;
сбор и анализ гидрометеорологической информации (местных
признаков и прогнозов погоды, штормовых предупреждений, ледо-
вых прогнозов и т. п.), производство судовых гидрометеорологиче-
ских наблюдений;
обеспечение судна точным временем для навигационных целей н
производственных нужд (служба времени);
сбор и передача информации для автоматизированной системы
управления промыслом (АСУП).
Исполнение штурманских обязанностей возлагается на капитана,
его помощников (судоводителей), специалистов, обслуживающих тех-
нические средства судовождения и поисковую технику. Капитан за-
нимает на судне особое положение, и в силу этого на нем лежат
наиболее ответственные обязанности по штурманской части. Капи-
тан должен организовать штурманскую службу на судне в соответ-
ствии с уставными положениями, осуществлять руководство этой
службой и контроль за содержанием и эксплуатацией технических
средств судовождения, поисковой техники, средств зрительного на-
блюдения и сигнализации. Для помощников капитана штурманские
525
обязанности являются основными. В своей деятельности штурман-
ский состав судна во главе с капитаном руководствуется следующи-
ми основными документами:
Кодексом торгового мореплавания СССР;
Уставом службы на судах флота рыбной промышленности СССР;
Международной конвенцией об охране человеческой жизни на
море;
Международными правилами для предупреждения столкновения
судов в море;
Правилами совместного плавания и промысла судов флота рыб-
ной промышленности СССР;
Правилами Регистра СССР;
Правилами технической эксплуатации судов флота рыбной про-
мышленности СССР;
Правилами техники безопасности на судах флота рыбной про-
мышленности СССР;
Наставлением по штурманской службе на судах флота рыбной
промышленности СССР;
Извещениями мореплавателям;
Обязательными постановлениями по морским рыбным и торго-
вым портам;
постановлениями, приказами, инструкциями Министерства рыб-
ного хозяйства СССР и других государственных учреждений, свя-
занных с мореплаванием.
Штурманские обязанности судового состава при подготовке суд-
на к переходу и промыслу, на переходе и на промысле при различ-
ной навигационной и гидрометеорологической обстановке изложены
в концентрированном виде в подготавливаемом к изданию Настав-
лении по штурманской службе на судах флота рыбной промышлен-
ности СССР. Проект этого наставления содержит перечень штур-
манских обязанностей капитана при подготовке к рейсу, на перехо-
де, на промысле и по окончании рейса, штурманских обязанностей
помощников капитана, специалистов по обслуживанию технических
средств судовождения и поисковой техники, указания, касающиеся
организации штурманской вахты и перечень обязанностей вахтенно-
го помощника капитана на стоянке судна в порту, при подготовке
судна к выходу в море, на переходе и на промысле, при постановке
судна на якорь и при стоянке на якоре, во время выполнения грузо-
вых операций в море.
В проекте Наставления излагаются также задачи штурманской
службы по подготовке судна к рейсу и навигационному обеспечению
перехода и промысла при обычных и особых условиях плавания,
включая ведение счисления пути судна с учетом влияния ветра и
течения, его корректировку по результатам обсерваций, маневриро-
вание при работе с различными орудиями лова. Проект Наставле-
ния содержит требования к материально-техническому снабжению
штурманской службы, содержанию и эксплуатации навигационных,
электрорадионавигационных и гидроакустических поисковых прибо-
ров, приборов для гидрометеорологических наблюдений, средств
сигнализации, а также типовой перечень документации по штурман-
ской части.
Наиболее сложной и ответственной задачей штурманской служ-
бы является несение ходовой вахты. Межправительственная морская
консультативная комиссия (ИМКО), членом которой является Со-
526
ветский Союз, приняла в 1973 г. резолюцию, содержащую основ-
ные принципы, которые должны соблюдаться при несении ходовой
вахты (см. приложение 3).
Подготовка к переходу и промыслу по штур-
манской части
Объем и характер подготовки к предстоящему переходу и про-
мыслу зависят от навигационных и гидрометеорологических условий
района плавания, района промысла, его удаления от порта базиро-
вания судна, а также от вида промысла (донный или разноглубин-
ный траловый лов, кошельковый лов и т. п.).
Подготовка к переходу и промыслу по штурманской части со-
стоит из следующих мероприятий:
осмотра и проверки электрорадионавигационных приборов, по-
исковой техники, мореходных и гидрометеорологических приборов и
инструментов;
подбора карт, планшетов, руководств для плавания и промысла
и их корректуры;
изучения навигационной и гидрометеорологической обстановки
в районе плавания с целью разработки маршрута перехода и выбо-
ра оптимальных средств и способов навигационного обеспечения
перехода;
изучения навигационной, гидрометеорологической, правовой об-
становки и состояния сырьевой базы в районе промысла с целью вы-
бора мест лова (промысловых площадок), поисковых и промысло-
вых курсов, а также оптимальных средств и способов навигацион-
ного обеспечения промысла;
предварительной прокладке на генеральной карте маршрута пе-
рехода (составления графического плана перехода);
уточненной предварительной прокладки маршрута перехода на
путевых картах;
предварительной подготовки промыслово-навигационных план-
шетов или карт (нанесение условных мест ориентиров, Находящих-
ся за рамками планшета, сеток изолиний, ограждающих изолиний
и т. п.);
составления штурманской записки, содержащей справочный ма-
териал по маршруту перехода и району промысла (в основном в
табличной форме), а также краткое обоснование выбора маршру-
та перехода, мест лова, поисковых и промысловых курсов, средств
и методов навигационного обеспечения перехода и промысла *.
* Изучение методики подготовки к переходу и промыслу по
штурманской части осуществляется в высших морских учебных за-
ведениях путем выполнения курсового проекта, предусматривающе-
го разработку маршрута перехода в район промысла, изучение на-
вигационной, гидрометеорологической и промысловой обстановки в
районе промысла в указанное время года. В методических указа-
ниях по выполнению этого курсового проекта подробно излагаются
порядок подбора карт, планшетов и руководств для плавания и про-
мысла, содержание штурманской записки, указания по выполнению
предварительной прокладки (А. М. Таран и П. К. Белкин «Методи-
ческие указания по курсовому проектированию для специальности
«Судовождение на морских путях». Калининград, 1974.)
Б27
Штурманская записка должна быть проработана всеми судово-
дителями.
При разработке маршрута перехода обычно решаются две ос-
новные задачи: выбор пути судна при плавании в прибрежных во-
дах, стесненных навигационными опасностями; выбор пути судна в
открытом море или океане.
Рекомендации, которыми следует руководствоваться при выбо-
ре пути в стесненных навигационных условиях, средства и методы
навигационного обеспечения плавания в таких условиях, включая
предварительную подготовку к плаванию по штурманской части,
рассмотрены в главе X.
Океанские переходы должны осуществляться оптимальными пу-
тями (см. главу IX). Учитывая, что эксплуатационные расходы про-
порциональны продолжительности перехода, в качестве критерия
оптимальности принимают продолжительность перехода и стремятся
выбрать путь, кратчайший по времени, с безусловным соблюдением
всех условий навигационной безопасности плавания. В тех случаях,
когда из-за отсутствия необходимой информации не представляется
возможным выбрать путь, кратчайший по времени или близкий к
нему, океанский переход осуществляется путем, кратчайшим по рас-
стоянию, т. е. по дуге большого крута.
Если в процессе подготовки к рейсу капитан решит для осу-
ществления океанского перехода воспользоваться рекомендациями
прогностических органов Гндрометслужбы СССР, ои должен напра-
вить запрос на обслуживание в соответствующий гидрометеороло-
гический центр не позднее чем за сутки до предполагаемого выхода
в океан. В запросе указываются: название судна н фамилия капи-
тана, водоизмещение, скорость судна, время и координаты точки
выхода судна в океан и порт (пункт) назначения, гидрометеоро-
логические факторы, ограничивающие плавание судна, данные о вет-
роволновых потерях скорости хода.
Получив запрос капитана, оперативная группа гидрометеороло-
гического центра выполняет расчет наивыгоднейшего прогностиче-
ского пути (см. главу IX) и сообщает на судно координаты точек,
определяющих рекомендованный путь судна на 3—4 суток вперед,
прогноз ветра, волнения, ледовой обстановки на первые и вторые
сутки.
Подготовка к переходу и промыслу начинается сразу же после
получения рейсового задания, представляющего собой план-приказ.
Во время перехода стремятся возможно точнее придерживаться вы-
бранного при предварительной прокладке маршрута. Однако в ре-
зультате изменения навигационной н гидрометеорологической об-
становки, ошибок счисления и обсерваций судно не следует точно
курсами предварительной прокладки. На переходе ведут исполни-
тельную прокладку. Во время такой прокладки окончательно выби-
рают курсы судна с учетом конкретной обстановки при прохождении
того или иного участка пути. Это полностью относится и к океан-
ским переходам. Так, например, осуществляя океанский переход
наивыгоднейшим прогностическим путем с помощью гидрометеоро-
логического центра, капитан, получив первую рекомендацию, в тече-
ние всего перехода регулярно сообщает в гидрометеорологический
центр сведения о местоположении судна и погоде в районе плава-
ния. Гидрометеорологический центр подтверждает или уточняет ра-
нее указанные координаты точек, определяющих путь судна, а так-
528
же передает прогноз гидрометеорологических условий на последую
щие двое суток. В случае резкого непредвиденного ухудшения гид-
рометеорологической обстановки на судно немедленно передается,
информация о погодных условиях и рекомендация об изменении
пути.
Штурманская работа на переходе и на промысле
Переход. Учет движения судна начинают с момента отхода от
причала или съемки с якоря и ведут его непрерывно, пока судно на-
ходится на ходу. При следовании судна по указаниям лоцмана или
капитана по портовым водам к выходу в море, когда курс и ско-
рость судна часто изменяются, штурманский состав обязан осуще-
ствлять непрерывный контроль за безопасностью движения судна,
отмечая на крупномасштабной карте места судна и время прохож-
дения навигационных ориентиров и приметных мест. С выходом суд-
на в район относительно свободного маневрирования, когда появ-
ляется возможность следовать достаточно продолжительное время
постоянным курсом с постоянной скоростью, ведется прокладка —
графическое счисление пути судна и нанесение на карту мест суд-
на по результатам измерений различных навигационных параметров.
При следовании вблизи берегов, в стесненных водах прокладка осу-
ществляется на картах самого крупного масштаба, которые имеются
для данного района плавания. На картах масштаба 1 : 100000 и круп-
нее обязателен учет циркуляции судна при поворотах. Счислимое
место судна отмечается на путевых картах ежечасно и при измене-
нии курса или скорости. При плавании в открытом море, океане,
когда счисление ведется на картах мелкого масштаба, счислимое
м^сто судна может отмечаться через четыре часа — в конце каждой
вахты. Требования к оформлению графического счисления рассмот-
рены в главе V. Если графическое счисление ведется с помощью ав-
топрокладчика, вахтенный помощник капитана обязан ежечасно
контролировать его работу.
При плавании в открытом море и океане, когда используются
карты мелкого масштаба, а навигационная обстановка не требует
непрерывно следить за перемещением судна и позволяет ограни-
читься прокладкой счислимых мест иа заранее заданные моменты
времени, графическое счисление пути судна заменяется аналитиче-
ским. Аналитическое счисление может вестись и автоматически с по-
мощью автосчислителя координат.
Важной задачей штурмана является своевременная корректи-
ровка счисления по результатам обсерваций, включая выбор опти-
мальных средств и способов получения обсервованных мест. Необ-
ходимая частота коррекции счисления зависит от допустимой при
данных условиях плавания ошибки счислимого места судна, точно-
сти счисления и обсерваций (см. § 58).
При плавании в стесненных водах, пониженной видимости и во
льдах работа штурмана значительно усложняется и требует приня-
тия ряда дополнительных мер по обеспечению безопасности плава-
ния. Особенности работы штурмана в этих условиях рассмотрены в
главах X и XI.
Промысел. На промысле штурманская служба обеспечивает:
навигационную безопасность плавания судна в процессе ведения
поиска промысловых скоплений рыбы и их облова;
34 В. В. Ольховский
539
удержание судна на промысловом скоплении рыбы путем ис-
пользования счисления, результатов обсерваций, метода ограждаю-
щих изолиний и изолинейного плавания;
выполнение расчетов, графических построений и маневров кур-
сом или скоростью судна, связанных с наведением буксируемого
судном орудия лова на облавливаемый косяк рыбы или обметом его
неводом (прицельное траление, выход в начальную позицию заме-
та кошелькового невода, маневрирование курсом судна в процессе
замета и т. д.);
сохранность орудий лова и их эффективную эксплуатацию в про-
цессе маневрирования (обход тралом подводных препятствий, об-
наруженных эхолотом, исключение случаев посадок разноглубинного
трала на грунт, «завертов» трала, сцепления тралами, обрыва во-
жака и потери дрифтерного порядка, достижение оптимального рас-
крытия трала и т, п.).
В процессе промысла на крупномасштабных промыслово-навига-
ционных планшетах или картах ведется промысловая прокладка
Она включает в себя навигационную прокладку, обеспечивающую
безопасность плавания судна и его удержание на линии заданного
поискового или промыслового курса, а также расчеты и графические
построения, связанные с решением различных задач промысловой на-
вигации. Характер этих задач зависит от вида промысла.
Большой объем навигационной и промысловой информации, ко-
торый должен переработать штурман на промысле в сравнительно
короткое время, требует применения рациональных приемов ведения
счисления пути судна, прокладки обсерваций, решения задач про-
мысловой навигации. При «ручной» обработке информации это до-
стигается предварительной подготовкой промыслово-навигационных
планшетов или карт, использованием различных таблиц, графиков и
номограмм, облегчающих и ускоряющих решение задач навигации и
промысловой навигации (см. главу V части первой, главы II—V ча-
сти второй).
Следует подчеркнуть, что особенно сложной и напряженной яв-
ляется работа штурмана на промысле, когда в пределах сравни-
тельно небольшой акватории находится большое количество добы-
вающих судов, которые ограничивают свободу маневрирования и по-
стоянно создают опасность столкновения или сцепления орудиями
лова.
Судовой и промысловый журнал
Судовой журнал является единственным официальным докумен-
том, отражающим в хронологической последовательности деятель-
ность отдельных должностных лиц и судна в целом, а также усло-
вия и обстоятельства, сопровождающие эту деятельность.
Судовой журнал ведется с момента подписания капитаном акта
о приемке судна и подъема Государственного флага СССР в тече-
ние всего времени, пока на судне имеется капитан или лицо, его за-
меняющее.
Правила ведения судового журнала на судах флота рыбной
промышленности СССР требуют, чтобы все условия и обстоятельства
плавания судна, его производственной деятельности, а также дейст-
вия экипажа отражались в журнале в сжатой, но ясной и не допу-
скающей двойственного толкования форме. При этом из большой
массы событий должны выбираться для записи лишь самые сущест-
ву
венные, важные и необходимые для последующего анализа обста-
новки и происшедших событий.
Правильное ведение записей в судовом журнале имеет чрезвы-
чайно важное значение для защиты интересов судовладельца при
предъявлении претензий к другой стороне, при ^ведении дел в су-
дебно-арбитражных органах. В части, касающейся навигационного
обеспечения плавания, записи в судовом журнале должны с пре-
дельной точностью отражать ведение счисления и контроль за дви-
жением судна, а также все меры, предпринятые для безопасности
судовождения. Эти записи должны давать возможность в случае не-
обходимости полностью восстановить прокладку в таком виде, как
она велась на судне во время рейса. Особой тщательности требуют
записи обстоятельств и маневров при расхождении с другими судами.
На добывающих судах в судовой журнал записывают и основ-
ные данные, относящиеся к промысловой работе судна. Так, напри-
мер, при ведении тралового промысла в журнал записывают время и
координаты точек спуска и подъема трала, курс и скорость трале-
ния, длину вытравленных ваеров. При сцеплении орудий лова запи-
сывают все действия своего судна и судна, с орудием лова которого
произошло сцепление, в том числе курсы, скорости, маневры, сигна-
лы н т. п. Капитан должен не реже чем один раз в сутки проверять
записи в судовом журнале, сделанные вахтенными помощниками и
их достоверность подтверждать своей подписью.
На каждом добывающем судне кроме судового журнала ведет-
ся промысловый журнал, форма которого зависит от вида лова
(журнал для тралового лова, журнал для дрифтерного лова и т. д.).
Этот журнал является основным документом, предназначенным
для учета и анализа промысловой работы добывающего судна. Так,
например, на донном траловом лове после каждого подъема трала
в журнал записывают номер промыслового квадрата, координаты
места судна, глубину и характер грунта, продолжительность и курс
траления, сведения о величине улова, его размерном составе, о жир-
ности, пище рыбы, о придонных животных, навигационных и гидро-
метеорологических условиях во время промысла, случаях поврежде-
ния трала. Промысловый журнал ведется вахтенным помощником,
контролируется и подписывается капитаном судна.
Обработанные промысловые журналы используются научно-ис-
следовательскими рыбохозяйственными организациями для состав-
ления общей промысловой характеристики данного района.
34*
Приложение 2
ПРОГРАММА ЗАМЕТА КОШЕЛЬКОВОГО НЕВОДА
НА ПОСТОЯННОМ РАССТОЯНИИ ОТ ЯДРА
ПОДВИЖНОГО КОСЯКА
532
Пример. Траулер-сейнер с кошельковым неводом длиной I—
=760 м при“скорости V=10 уз облавливает ходовой косяк пелами-
ды, имеющий скорость горизонтального перемещения VK=5 уз. Об-
общенная биологическая характеристика косяка В —65 м.
Начальная позиция постановки невода может быть выбрана, на-
пример, на курсовом угле косяка qKi =90° левого борта. По про-
VK
грамме для А = —— =0,5 получаем:
а) расстояние до ядра косяка при замете D'=0,15/=114 м
б) расстояния, которые пройдет судно на отдельных участках
траектории замета, Sj ~0,411=312 м, S2 = 0,111— 129 м и S3 =
= 0,42/=319 м.
Контроль /= Sj + S* + S' =312+ 129 + 319 = 760 м.
На криволинейном участке замета текущее значение курсового
угла qc с судна на ядро (центр плотности) подвижного косяка оп-
ределяется по графику, приведенному на рис. 217. Маневрирование
на криволинейном участке замета заканчивается выходом судна на
курсовой угол с ядра косяка на судно q^ =90° правого борта.
Приложение 3
Приложение А к резолюции
ИМКО № 285 от 20 ноября
1973 г.
ОСНОВНЫЕ ПРИНЦИПЫ, которые должны
СОБЛЮДАТЬСЯ ПРИ НЕСЕНИИ ХОДОВОЙ ВАХТЫ
Правительства стран — членов ИМКО должны обратить вни-
мание судовладельцев, капитанов и всей вахтенной службы на сле-
дующие принципы, которые должны соблюдаться с целью поддер-
жания на должном уровне безопасной ходовой вахты.
а) Капитан каждого судна обязан обеспечить такую организа-
цию, которая бы соответствовала в наибольшей степени всем нор-
мам безопасной ходовой вахты. Под общим руководством капита-
на вахтенные помощники ответственны за безопасность плавания
судна в течение всего периода их вахты, особенно, когда они пред-
принимают меры по избежанию столкновения или посадки на мель.
б) На всех судах должны приниматься во внимание изложен-
ные ниже, но этим не ограничиваемые, основные принципы:
Организация вахты. Состав вахты с учетом требований, предъ-
являемых к наблюдению, в течение всего времени должен удовле-
творять и соответствовать преобладающим условиям и обстоятель-
ствам.
При определении состава вахты на мостике следует принимать
во внимание следующее:
1) мостик никогда не должен оставаться без вахты;
533
2) состояние погоды, видимость, а также время суток (день
или ночь);
3) близость навигационных опасностей, что может потребовать
от вахтенного помощника выполнения дополнительных обязан-
ностей;
4) целесообразность использования и техническое состояние на-
вигационных средств, таких как радиолокатор или другая элект-
рорадионавигационная аппаратура, а также любое другое обору-
дование, обеспечивающее безопасное плавание судна;
5) оборудовано ли судно авторулевым;
6) любые другие требования к ходовой вахте, которые могут
возникнуть в результате особых условий эксплуатации судна.
Пригодность к исполнению служебных обязанностей. Вахта
должна быть сформирована так, чтобы ее эффективность не ослаб-
лялась из-за усталости персонала. В соответствии с этим составы
первой вахты в начале рейса и последующих вахт должны форми-
роваться из мореплавателей, получивших соответствующий отдых
и другую необходимую подготовку перед заступлением на вахту.
Плавание. 1. Предполагаемый рейс должен планироваться за-
ранее с учетом всей относящейся к этому информации и с прора-
боткой различных вариантов маршрута.
2. При заступлении на вахту следует убедиться в правильно-
сти счислимого или обсервованного места судна, заданного пути,
курса и скорости; при этом должны быть приняты в расчет любые
навигационные опасности, которые могут встречаться в течение
вахты.
3. В течение вахты через достаточно частые промежутки вре-
мени необходимо проверять курс судна, его место и скорость, ис-
пользуя для этого любые доступные навигационные средства, не-
обходимые для обеспечения следования судна по заданному пути.
4. Следует отчетливо представлять принципы работы средств
безопасности и навигационного оборудования, установленных на
судне, а также способы их использования; следует принимать в
расчет и их техническое состояние.
5. На ходовой вахте нельзя заниматься каким-либо делом или
принимать на себя какие-либо обязанности, мешающие обеспече-
нию безопасного плавания судна.
Наблюдение. Каждое судно должно постоянно вести надлежа-
щие визуальное и слуховое наблюдение, так же как и наблюдение
с помощью всех других имеющихся средств, применительно к пре-
обладающим обстоятельствам и условиям с тем, чтобы полностью
оценить ситуацию и опасности столкновения, посадки на грунт или
другие навигационные опасности. Кроме того, в обязанности служ-
бы наблюдения должно включаться обнаружение терпящих бед-
ствие людей, судов и самолетов, затонувших судов и их обломков.
В дополнение к перечисленному необходимо принимать в расчет
следующее:
1) наблюдатель, кто бы он ни был, должен уделять все свое
внимание наблюдению и не принимать на себя какие-либо обязан-
ности, снижающие эффективность надлежащего наблюдения;
2) обязанности наблюдателя и рулевого раздельны и рулевой
не должен считаться наблюдателем в то время, когда он управля-
ет рулем; это положение не распространяется на малые суда, где
обеспечена возможность беспрепятственного кругового обзора с ме-
534
ста рулевого, причем эта возможность не ухудшается в ночное вре-
мя, и где нет других помех для осуществления надлежащего на-
блюдения;
3) в дневное время могут сложиться такие обстоятельства, ког-
да вахтенный помощник, соблюдая требования безопасности, мо-
жет осуществлять наблюдение один. Однако такая практика может
применяться лишь после того, как в каждом конкретном случае
ситуация оценена как безопасная и имеется полная уверенность в
том, что принимаемое решение не приведет к снижению безопасно-
сти. При этом должны приниматься в расчет все факторы, вклю-
чая (но не ограничивая) состояние погоды, условия видимости,
интенсивность судоходства, близость навигационных опасностей,
а также нахождение судна в зонах раздельного движения или вбли-
зи них.
Плавание с лоцманом на борту. Несмотря на права и обязан-
ности лоцмана, его присутствие на борту не освобождает капита-
на или вахтенного помощника от их прав и обязанностей, связан-
ных с безопасностью судна. Капитан и лоцман обязаны обмени-
ваться информацией, относящейся к их действиям по управлению
судном и особенностям плавания, местным условиям и характери-
стикам судна.
Защита окружающей морской среды. Капитан и вахтенный по-
мощник должны сознавать серьезные последствия производствен-
ного или случайного загрязнения морской среды н принимать все
возможные меры по предупреждению такого загрязнения, особенно
выходящего за рамки существующих международных соглашений.
СПИСОК РЕКОМЕНДУЕМОЙ ЛИТЕРАТУРЫ
АВТОМАТИЗАЦИЯ промыслового судовождения и такти-
ческое управление промыслом/[В. Е. Ольховский, М. Н. Андреев,
А. А. Левин, В. Я. Яковлев]. — М.: Пищевая промышленность,
1970.—278 с.
АНДРЕЕВ Н. Н. Проектирование кошельковых неводов.—М.: Пи-
щевая промышленность, 1970.—276 с.
БАРАНОВ Ю. К. Использование радиотехнических средств в судо-
вождении.— М.: Морской транспорт, 1963.—148 с.
БЕЛОБРОВ А. П. Гидрография моря. — М.: Транспорт, 1964.—515 с.
БУХАНОВСКИИ И. Л. Радиолокационные методы судовождения.—
М.: Транспорт, 1970.—247 с.
БЫКОВ В. И. Импульсная радионавигационная система «Лоран»—
М.: Транспорт, 1964.—132 с.
БЫКОВ В. И., НИКИТЕНКО Ю. И. Импульсно-фазовая радионави-
гационная система «Лоран-С».—М.: Транспорт, 1967.—95 с.
БЫКОВ В. И. и НИКИТЕНКО Ю. И. Фазовая радионавигационная
система «Декка-навигатор». — М.: Транспорт, 1969.—176 с.
ВЕНЦЕЛЬ Е. С. Теория вероятности. — М.; Наука, 1964. — 576 с.
ГАМОВ А. Г., АВЕРБАХ Н. В. Использование радиолокации в су-
довождении.— М.: Морской транспорт, 1960—238 с.
ГРИШИН Ю. А. История мореплавания. — М.: Транспорт, 1966.—
228 с.
ЕРМОЛАЕВ Г. Г. Морская лоция. — М.: Транспорт, 1975.—320 с.
КАДИЛЬНИКОВ Ю. В. Расчеты по технике дрифтерного лова.—
Калининград: БалтНИРО, 1955—20 с.
КАМАНИН В. И. Гидроакустические станции в кораблевождении.—
М.: Воениздат, 1964—178 с.
КАРАПУЗОВ А. И. Маневрирование судов при совместном трало-
вом промысле. — Калининград: Книжное издательство, 1972.—87 с.
ЛОГИНОВ К. В. Гидроакустические поисковые приборы. — М.: Пи-
щевая промышленность, 1971.—304 с.
МАВРОДИН В. В. Начало мореходства на Руси.—Л.: Изд. Лен-
госуниверситета, 1962.—148 с.
НАСТАВЛЕНИЕ по организации штурманской службы на судах
морского флота. — М.: Рекламбюро ММФ, 1970.—72 с.
НОВЫЕ технические средства судовождения/под общ. ред. А. А. Яку-
шенкова. — М.: Транспорт, 1973. — 464 с.
ОЛЬХОВСКИЙ В. Е. Определение места судна с помощью радио-
технических средств (вопросы навигации). — М.: Морской транс-
порт, 1956—123 с.
ОЛЬХОВСКИЙ В. Е. и др. Промысловая навигация. — М.: Пище-
вая промышленность, 1966. — 423 с.
536
ПРАКТИЧЕСКОЕ руководство для штурманов/под ред. А. И. Ще-
тининой.— М.: Транспорт, 1965.-559 с.
ПОПЕКО Г. П., СОЛОМАТИН Е. П. Навигация (Курс кораблевож-
дения. Т. I). —Л.: Изд-во УГС ВМФ, 1961. — 679 с.
СКВОРЦОВ М. Н. и др. Основы маневрирования кораблей. — М.:
Воениздат, 1966.—269 с.
СПРАВОЧНИК судоводителя рыбопромыслового флота/под общ.
ред. В. Е. Ольховского. — М.: Пищевая промышленность, 1965.—
195 с.
СПРАВОЧНИК штурмана/под общ. ред. В. Д. Шандабылова. — М/.
Воениздат, 1968.—544 с.
УХОВ К. С. Навигация. — Л.: Водтрансиздат, 1954.—448 с.
ФИЛЛИПОВ Ю. М., САЗОНОВ А. Е. Теоретические основы авто-
матизации судовождения. — Л.: Судостроение, 1971.—312 с.
ШИБАЛ ИН В. И. Некоторые перспективные разработки в рыбопо-
исковой гидролокации. — ЭИ ЦНИИТЭИРХ, 1975, серия 6, вып. 11.
ШИШЛО Ю. В. Тактика пелагического тралового лова. — Мур-
манск. Книжное издательство, 1975.—103 с.
ЩЕГОЛЕВ Е. Я. Радиотехнические средства морского судовожде-
ния.— Л.: Морской транспорт, 1956.—569 с.
ЮЩЕНКО А. П., ЛЕСКОВ М. М. Навигация. М.: Транспорт, 1972.—
360 с.
ИМЕННОЙ УКАЗАТЕЛЬ
Акимов М. А., 12
Андреев М. Н., 94, 102, 176,
355, 463
Андреев Н. Н., 503, 504
Асташев А. А., 12
Баранов Ю. К-, 488
Белобров А. П„ 4, 15
Беллинсгаузен Ф. Ф., 11
Берг А. И., 14
Белавенец И. П., 12
Бернулли Д., 13
Бонч-Бруевич М. А., 14
Булгаков Б. В., 13
Бухановский И. Л., 290, 291
Веденский Б. А., 14
Вологдин П. В., 14
Гамов А. Г., 468
Гамалей П., 11
Глазков П. П., 94
Головнин В. М., 11
Готский М. В., 386
Дель-Гросс, 311
Домогаров П. А., 352, 463
Елфимов Н. К., 472
Жамбов Н. Ф., 12
Жуковский Н. Е., 13
Иванов А. М„ 395, 396, 459
Каврайский В. В., 15
Кадильников Ю. В., 520
Карапузов А. И., 468, 474
Кнорре К. X., 12
Кожухов В. П., 24
Козлов В. В., 395, 396
Козырев Ю, В., 15
Ковалев А. П., 203
Колонг И. П., 12
Ковалевская С. В., 13
Коцебу О. Е., 11
Крутиков Ю. А., 13
Крузенштерн И. Ф., 11
Крылов А. Н„ 12
Кудревич Б. И., 13
Лазарев М. ГТ, 11
Лесков М. М., 4, 94, 137, 141
Лисянский Ю. Ф., 11
Литке Ф. П., 13
Лисовой А. П., 509
Ломоносов М. В., 10, 11
Магницкий Л. Ф., 9
Макаров С. О., 385
Малыгин С. Г., 9
Манганари М. П., 13
Мандельштам Л. И., 14, 15
Матусевич Н. Н., 15, 72
Меньшиков В. И., 491, 501,
505
Мордвинов С., 9
Ньютон 8, 420
Оглобленский Н. Н., 12
Павлинов В. Я., 12
Папалекси И. Д., 14, 15
Петровский А. А., 14
Платко Г. Ф., 291
Погорелко А. А., 15
Попов А. С., 13, 14
Попско Г. П., 4
Рейнгарт И. И., 14
Рейнеке Ф. П., 13
Рубшинский Э. М., 15
Рыбалтовский Н. Ю., 15
538
Саккелари Н. А., 4
Сарычев Г. А., 13
Семенов А. И., 512
Соломатин Е. FL, 4
Соймонов Ф., 9
Спафарьев JL Ф., 13
Стеклов В. А., 13
Суднин В. М., 405
Суслов Г. К-, 13
Ухов К. С., 4, 15
Фирсов Г. А., 496
Фус В. Е., 12
Циклинский Н. Н.» 14
Чаплыгин С. А., 13
Чернецов П. Я-, 15
Честной В. В., 504
Шулейкин М. В., 14
Шупик В. П., 338
Шышло Ю. В., 427, 433
Щеголев Е. Я-, 14
Эйлер Л., 13
Ющенко А. П., 4, 15
Яковлев В. И., 443
ОГЛАВЛЕНИЕ
Часть первая.................................... 3
НАВИГАЦИЯ....................................... 3
Введение.......................................... 3
Глава /. ОСНОВНЫЕ ПОНЯТИЯ................. 17
§ 1. Морские единицы длины и скорости .... 17
§ 2. Видимый горизонт................... 19
§ 3. Дальность видимости навигационных ориентиров 22
§ 4. Системы счета направлений ............... 26
§ 5. Истинный курс, истинный пеленг и курсовой
угол............................................ 28
Глава И. ОПРЕДЕЛЕНИЕ НАПРАВЛЕНИЙ В МОРЕ
§ 6. Краткая характеристика компасов ..... 31
§ 7. Земной магнетизм и его элементы. Магнитные
направления............................... . 33
§ 8. Девиация магнитного компаса. Компасные на-
правления ....................................... 38
§ 9. Поправки магнитного и гироскопического ком-
пасов. Перевод н исправление направлений ... 40
§ 10. Определение поправки компаса из наблюдений 43
Глава III. ОПРЕДЕЛЕНИЕ ПРОЙДЕННОГО
СУДНОМ РАССТОЯНИЯ ...... 48
§ 11. Определение пройденного судном расстояния
по показаниям лага............................... 48
§ 12. Определение пройденного судном расстояния
по скорости хода и продолжительности плавания . , 51
§ 13. Определение скорости хода и поправки лага. 55
Глава IV. СЧИСЛЕНИЕ ПУТИ СУДНА..................... 63
§ 14. Графическое счисление и прокладка .... 63
§ 15. Графическое счисление без учета дрейфа и сно-
са течением ..................................... 55
§ 16. Дрейф судна. Графическое счисление с учетом
дрейфа................................ . . 67
§ 17. Способы определения угла дрейфа ..... 71
§ 18. Дрейф судна с застопоренными машинами . . 76
§ 19. Графическое счисление с учетом сноса тече-
нием . .................т........................ 83
540
§ 20. Определение элементов течения на переходах
и на промысле................................ 87
§ 21. Совместный учет дрейфа и сноса течением . . 93
§ 22. Определение пути судна по пеленгам непод-
вижного ориентира н времени................... 94
§ 23. Определение истинной скорости судна по трем
расстояниям, измеренным до неподвижного ориен-
тира ........................................ юо
§ 24. Определение пути и истинной скорости судна
по пеленгам неподвижного ориентира и расстояниям
до него........................................ Ю5
§ 25. Аналитическое счисление. Основные формулы. 107
§ 26. Виды аналитического счисления........... 111
§ 27. Оценка точности счисления пути судна ... 114
§ 28. Определение вероятнейшего пути судна между
двумя обсервациями........................... 121
Глава V. ОПРЕДЕЛЕНИЕ МЕСТА СУДНА ПО
ВИЗУАЛЬНЫМ НАБЛЮДЕНИЯМ
НАВИГАЦИОННЫХ ОРИЕНТИРОВ ... 123
§ 29. Общие положения......................... 123
§ 30. Определение места судна по двум горизон-
тальным углам ............................... 127
§ 31. Определение места судна по двум пеленгам . 138
§ 32. Определение места судна по трем пеленгам . 143
§ 33. Определение места судна по расстояниям, из-
меренным до навигационных ориентиров.......... 149
§ 34. Определение расстояний до навигационного ори-
ентира по вертикальному углу ........ 154
§ 35. Определение места судна комбинированными
способами.................................... 161
§ 36. Определение места судна по двум разновре-
менно взятым пеленгам (крюйс-пеленг) ..... 165
§ 37. Определение места судна по двум разновре-
менно измеренным расстояниям или горизонтальным
углам (крюйс-расстояние и крюйс-угол) ..... 173
§ 38. Понятие о сопутствующей линии положения . 176
§ 39. Графические приемы прокладки обсервованно-
го места судна в случае, когда навигационные ори-
ентиры находятся за пределами рамок планшета или
карты ........................................ 179
Глава VI. ОПРЕДЕЛЕНИЕ МЕСТА СУДНА ПРИ
ПОМОЩИ РАДИОТЕХНИЧЕСКИХ
СРЕДСТВ............................... 184
§40. Классификация радиотехнических средств су-
довождения и способов обработки радионавигацион-
ной информации................................ 184
§ 41. Азимутальные радионавигационные устройства. 188
§ 42. Прокладка определений места судна по радио-
пеленгам, взятым с судна................... . 197
541
§ 43. Использование судового радиопеленгатора на
промысле....................................... 207
§ 44. Оценка точности определения места судна по
радиопеленгам, взятым с судна....................213
§ 45. Прокладка определений места судна по пелен-
гам с направленных радиомаяков или радиопеленга-
торных станций ..................................219
§ 46. Прокладка определений места судна по пелен-
гам с секторных радиомаяков......................222
§ 47. Оценка точности определения места судна по
пеленгам с секторных радиомаяков.................228
§ 48. Импульсная гиперболическая радионавигацион-
ная система......................................233
§ 49. Фазовые гиперболические радионавигационные
системы .........................................237
§ 50. Импульсно-фазовая гиперболическая радиона-
вигационная система..............................250
§ 51. Прокладка определений места судна, получен-
ных при помощи гиперболических радионавигацион-
ных систем ......................................253
§ 52. Оценка точности определения места судна с
помощью гиперболических радионавигационных си-
стем ................................... , . . 270
§ 53. Эксплуатационные данные судовых радиоло-
кационных станций ..............................275
§ 54. Измерение направлений и расстояний с помо-
щью радиолокационной станции ................... 287
§ 55. Использование радиолокационной станции для
определения места судна ................. ..... 296
Глава VII. ОПРЕДЕЛЕНИЕ МЕСТА СУДНА С ПО-
МОЩЬЮ ГИДРОАКУСТИЧЕСКИХ
СРЕДСТВ......................................... . 303
§ 56. Принцип действия и эксплуатационные данные
судовых гидроакустических станций...........303
§ 57. Использование гидроакустической станции для
определения места судна.....................312
Глава VIII. ОЦЕНКА ТОЧНОСТИ ПЛАВАНИЯ СУДНА 320
§ 58. Ошибка счислимого места судна и допустимая
продолжительность плавания по счислению .... 320
§ 59. Обеспечение плавания судна с заданной веро-
ятностью в пределах заданной полосы ............ 325
Глава IX. ПЛАВАНИЕ ПО ОПТИМАЛЬНЫМ ПУТЯМ
§ 60. Критерии оптимальности при выборе пути . . 330
§ 61. Прокладка дуги большого круга на меркатор-
ской карте, расчет курсов для плавания ..... 335
§ 62. Графический метод выбора наивыгоднейшего
пути , ,.........................................342
542
Глава X. ПЛАВАНИЕ В СТЕСНЕННЫХ
НАВИГАЦИОННЫХ УСЛОВИЯХ.....................344
§ 63. Особенности навигационного обеспечения пла-
вания в узкостях....................... 344
§ 64. Циркуляция судна и способы ее учета при
графическом счислении.................. 349
§ 65. Метод ограждающих изолиний ....... 359
Глава XI. ПЛАВАНИЕ ПРИ ПОНИЖЕННОЙ
ВИДИМОСТИ И ВО ЛЬДАХ.......................365
§ 66. Навигационное обеспечение плавания при по-
ниженной видимости..................... 365
§ 67. Определение места судна по глубинам . . . 372
§ 68. Использование одной линии положения для
уточнения счислимого места судна....... 377
§ 69. Навигационные особенности плавания во льдах. 380
Часть вторая....................................389
ПРОМЫСЛОВАЯ НАВИГАЦИЯ...........................389
Введение................................. 389
Глава I. ОПРЕДЕЛЕНИЕ ТРАЕКТОРИИ ТРАЛА В
ГОРИЗОНТАЛЬНОЙ ПЛОСКОСТИ ПРИ СЛЕДОВА-
НИИ СУДНА ПЕРЕМЕННЫМИ КУРСАМИ И ЭЛЕ-
МЕНТОВ ГОРИЗОНТАЛЬНОГО ПЕРЕМЕЩЕНИЯ
КОСЯКА РЫБЫ............................. 394
§ 1. Траектория трала в горизонтальной плоскости
после поворота судна................, . 394
§ 2. Сближение с быстроподвижным локальным ко-
сяком пелагических рыб и определение элементов его
горизонтального перемещения.......... . 407
Глава II. ВЫБОР И РАСЧЕТ ПРОМЫСЛОВЫХ КУР-
СОВ ПРИ РАЗНОГЛУБИННОМ ТРАЛОВОМ ЛОВЕ 423
§ 3. Промысловые курсы при разноглубинном тра-
ловом лове. Расчет курса траления....... . 423
§ 4. Расчет курсов траления с учетом траектории
трала после поворота судна.............. 435
Глава Щ. ВЫБОР ПРОМЫСЛОВЫХ КУРСОВ И МА-
НЕВРИРОВАНИЕ ПРИ ДОННОМ ТРАЛОВОМ ЛОВЕ 448
§ 5. Выбор курсов траления...............448
§ 6. Повороты с тралом. Учет циркуляции судна,
буксирующего трал...................... 456
§ 7. Прицельное донное траление ....... 471
§ 8. Особенности навигационного обеспечения донно-
го и придонного тралового лова ........ 480
643
Глава IV. РАСЧЕТ КУРСОВ И МАНЕВРИРОВАНИЕ
ПРИ КОШЕЛЬКОВОМ ЛОВЕ............................ 48
§ 9. Замет кошелькового невода с помощью гидро-
акустической станции. Траектории замета .... 48
§ 10. Выбор начальной позиции замета кошелькового
невода и расчет курсов выхода судна в эту позицию. 50
Глава V. ОПРЕДЕЛЕНИЕ СКОРОСТИ И НАПРА-
ВЛЕНИЯ ДРЕЙФА судна с ДРИФТЕРНЫМИ СЕ-
ТЯМИ ...............................> . . . . 51
§ 11. Выбор места и направления постановки дриф-
терного порядка. Учет перемещения судна при дрей-
фе с сетями.................................. 51
§ 12. Определение скорости и направления ветрового
дрейфа судна с дрифтерными сетями............ 5Г
§ 13. Поиск потерянного дрифтерного порядка . . 52(
Приложение 1. Основы организации штурманской служ-
бы на судах флота рыбной промышленности СССР . . 52i
Приложение 2. Программа замета кошелькового невода
на постоянном расстоянии от ядра подвижного косяка. 53
Приложение 3. Основные принципы, которые должны
соблюдаться при несении ходовой вахты.............58
Список рекомендуемой литературы.................. 53
Именной указатель.................................53
ВЛАДИМИР ЕВГЕНЬЕВИЧ ОЛЬХОВСКИЙ
НАВИГАЦИЯ И ПРОМЫСЛОВАЯ НАВИГАЦИЯ
Редактор В. С. Кузьмина
Художник М. В. Носов
Художественный редактор В. В. Водзинекий
Технический редактор Т. С. Пронченкова
Корректор 3. В. Коршунова
ИВ № 263
Сдано в набор 13,09.78. Подписано в печать 27.02.79. Т-03083. Формат 84X10873»
Бумага типографская № 1. Литературная гарнитура. Высокая печать. Объеи
17 п. л. Усл. п. л. 28,56. Уч.-изд. л. 29,06. Тираж. 9000 экз. Зак. 700.
Цена 1 р. 40 к. .
Издательство «Пищевая промышленность»
113035, Москва, М-35, 1-й Кадашевский пер., д. 12
Владимирская типография «Союзполиграфпрома» при Государственном ;
комитете СССР по делам издательств, полиграфии и книжной торговли
600000, г. Владимир, Октябрьский проспект, д. 7 i