/




































































































































































































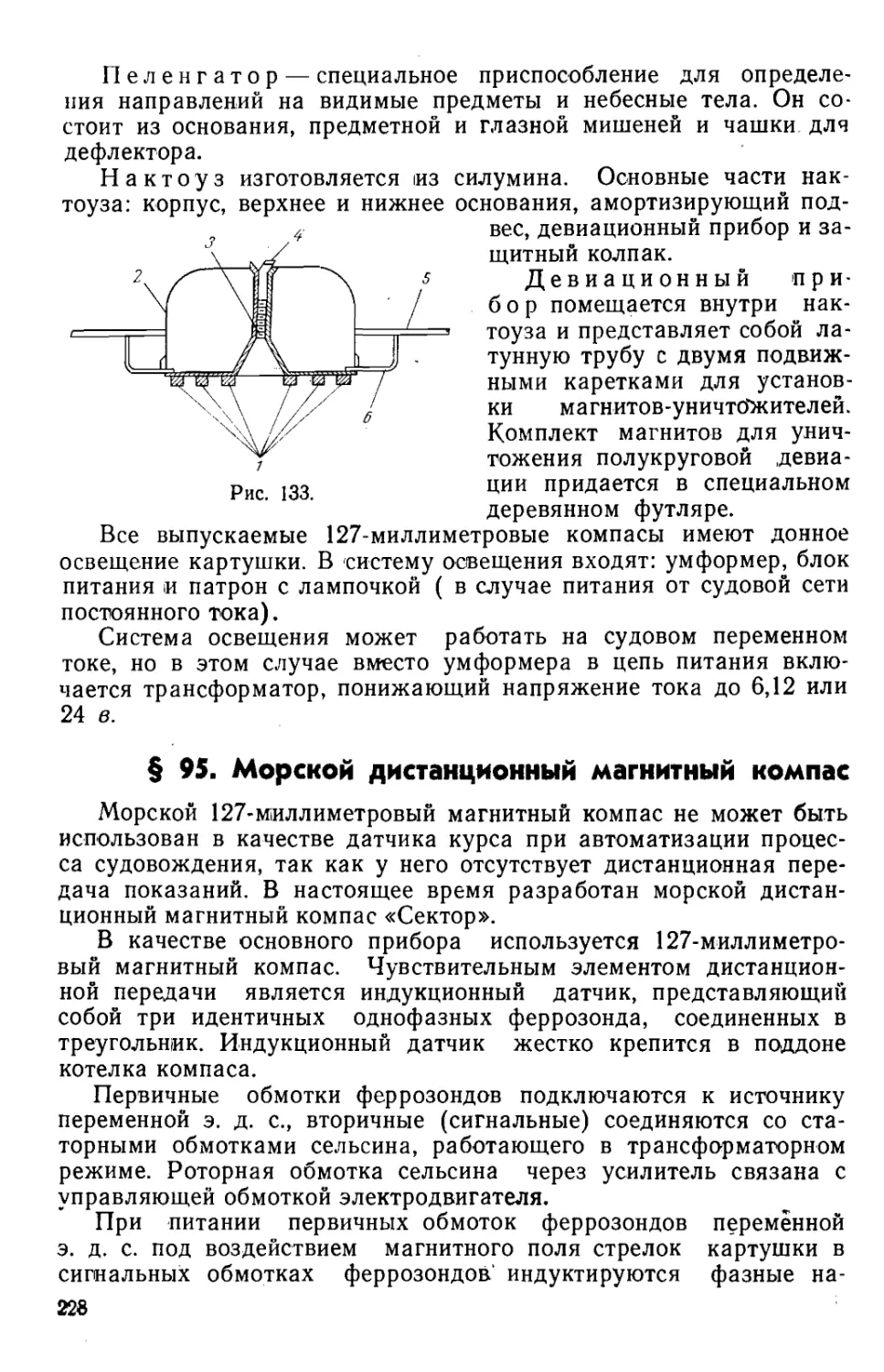











































































































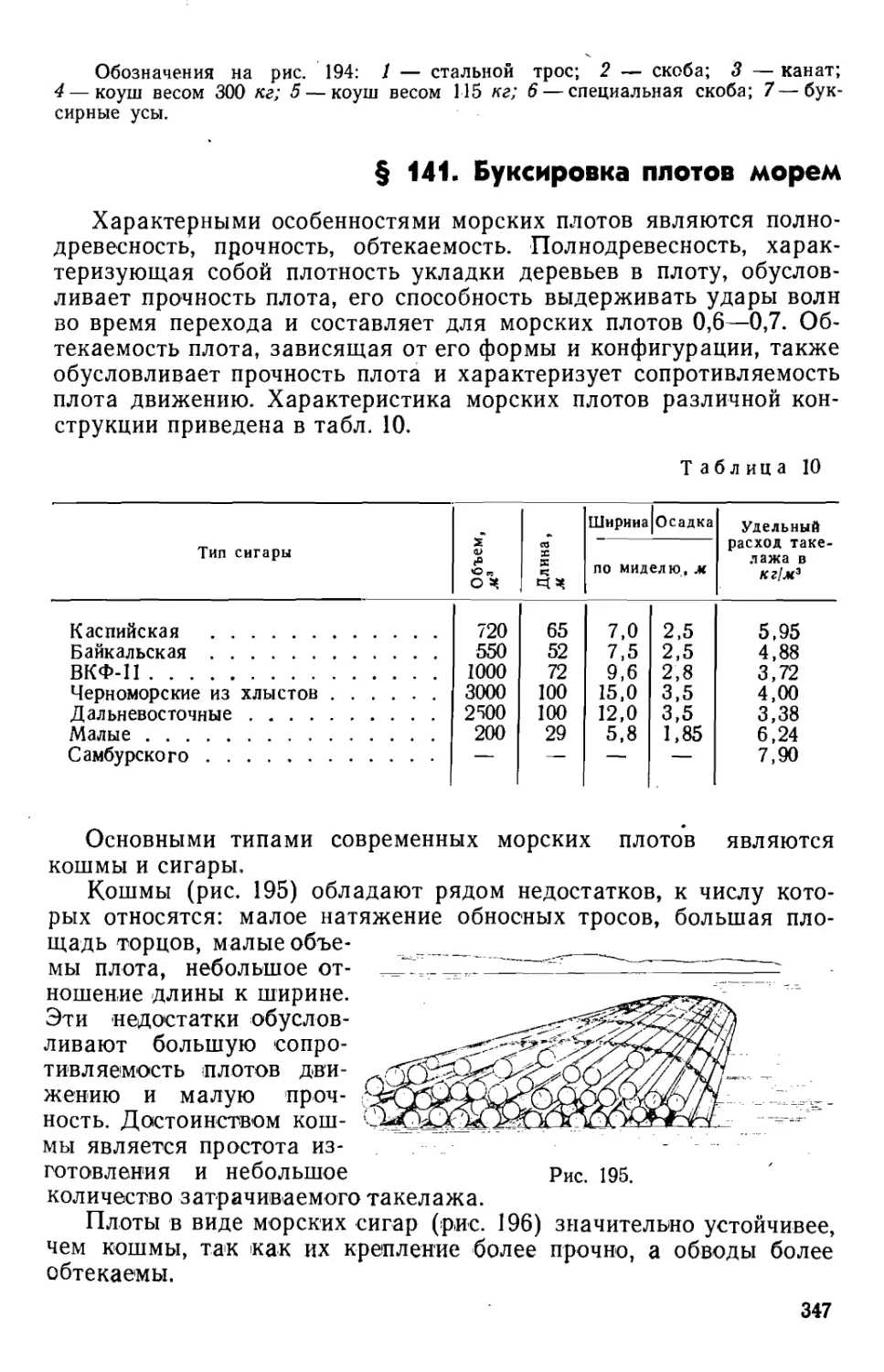

























Text
МОРСКОЕ
СУДОВОЖДЕНИЕ
• ! £ $4 С:
i Г Г. Г. ЁРМО^АЕВ, Л. п. АНДРОНОВ, Е. С. ЗОТЕЁВ,
Ю. П. КИРИН, Л. Ф. ЧЕРНИЕВ ;
МОРСКОЕ
СУДОВОЖДЕНИЕ
Издание третье, переработанное
Под общей редакцией
капитана дальнего плавания Г. Г. ЕРМОЛАЕВА
Утверждено Управлением учебных заведений ММФ
в качестве учебника
для эксплуатационных факультетов
высших учебных заведений
Министерства морского флота
| И-
|Вя'г;
Издательство «Транспорт»
Москва — 1970
УДК [656.61.0524-629.123.0534*527](075.8)
Морское судовождение. Г. Г. Ермолаев, Л. П. Андронов,
Е. С. 3 о т е е в, Ю. П. Кирин, Л. Ф. Ч е р н и е в. Изд-во «Тран-
спорт», 1970 г., стр. 1—368.
Книга охватывает основной комплекс вопросов, который помо-
гает судоводителю провести судно безопасным и наивыгоднейшим
путем из пункта отправления в пункт назначения. Сюда относятся:
лоция (морские опасности, их ограждения, описание навигационных
пособий и т. п.), навигация (определение пройденного расстояния,
направлений в море, счисление пути судна; навигационные определе-
ния места судна в море и т. п.), гидрометеорология, мореходная
астрономия (измерение и исправление высот светил в море, опреде-
ление географических координат места судна и т. п.), морская прак-
тика (снабжение судов, управление ими, ППСС и т. п.).
Предназначена в качестве учебника для учащихся эксплуата-
ционных специальностей высших морских учебных заведений, может
быть использована как справочное пособие судоводителями, меха-
никами, радистами и другими специалистами транспортного и про-
мыслового судов.
Учебник написан коллективом авторов: канд. физ.-мат. наук, доц.
Г. Г. Ермолаевым — введение, краткий исторический очерк, § 1—47,
69—88, 145—146; канд. физ-мат. наук доц. Л. Ф. Черниевым —
§ 48—68; канд. физ.-мат. наук, доц Е. С. Зотеевым — § 89—111; ст.
преподавателем Ю. П. Кириным — § 112—120, 122,124—129; канд.
техн, наук доц. Л. П. Андроновым — § 121, 123, 130—144.
3-18-5
291—70
ВВЕДЕНИЕ
СССР — великая морская держава. Грузооборот морского
транспорта Советской страны растет из года в год; непрерывно уве-
личивается роль отечественного тоннажа в перевозке внешнеторго-
вых грузов, реконструируются старые и строятся новые морские
порты, прокладываются новые торговые морские пути.
Мощный шветский торговый флот обеспечивает СССР полити-
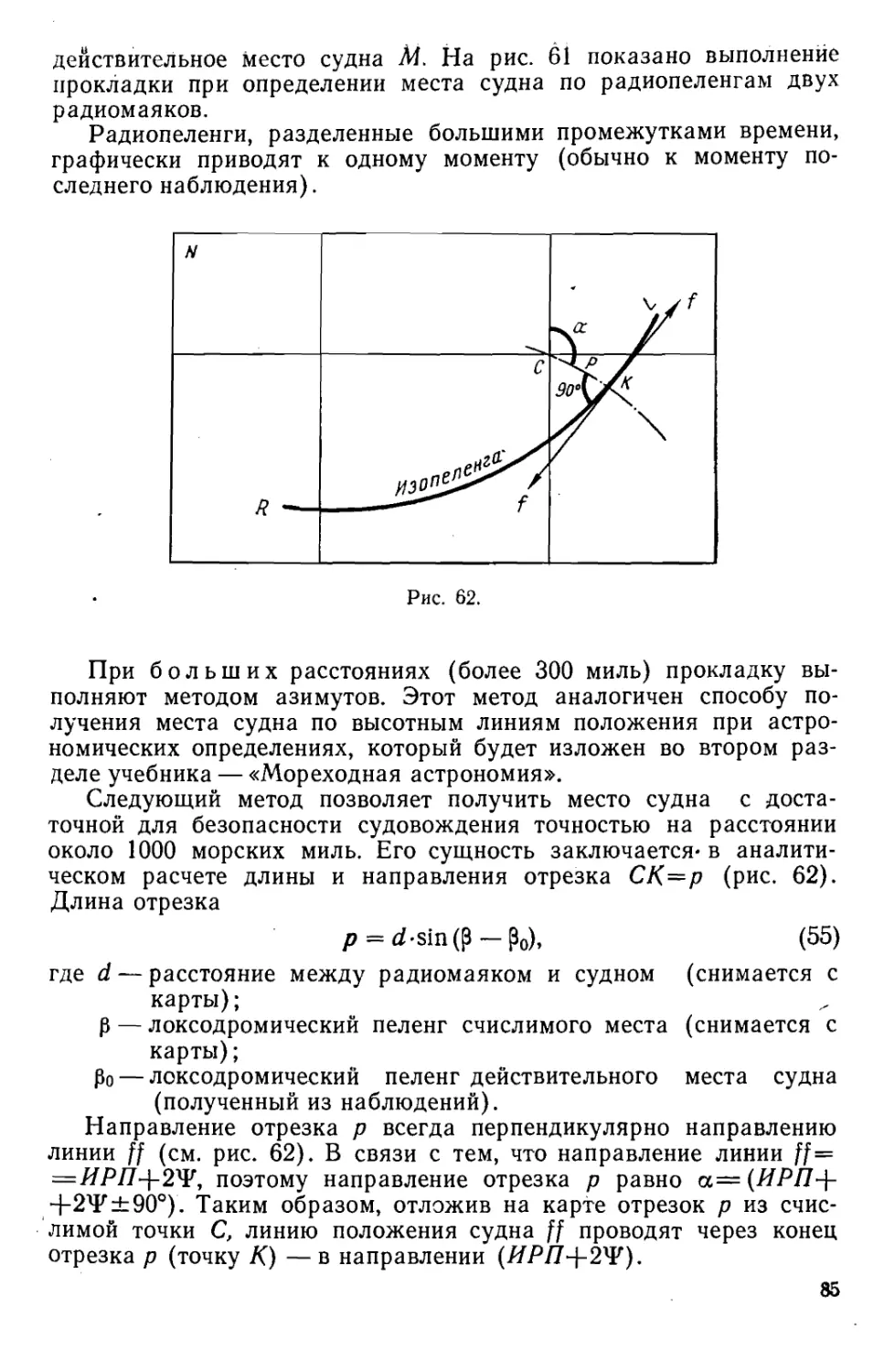
ческую и экономическую независимость его внешней торговли, ока-
зывает серьезную помощь мировому социалистическому лагерю в
его экономическом соревновании со странами капитала. Морская
политика Страны Советов оказывает также реальную помощь
развивающимся странам в становлении их экономики и внешней
торговли, служит делу мира во всем мире.
Эксплуатация морского транспорта — сложный комплекс ор-
ганизационно-технических мероприятий по обеспечению государ-
ственного плана морских перевозок. Наука об эксплуатации фло-
та органически связана с судовождением на морских путях, поэ-
тому будущему эксплуатационнику необходимы значительные
знания в области судовождения. Грамотное управление современ-
ным флотом, оптимальное использование его возможностей немыс-
лимо без изучения основ таких дисциплин, как навигация, море-
ходная астрономия, лоция, технические средства судовождения, уп-
равление судном и его техническая эксплуатация.
Первый раздел учебника — навигация — описывает во-
просы ориентирования в открытом море, определения пройденного
судном расстояния, следования избранным путем и определения ме-
ста по счислению и обсервациям по береговым объектам с
помощью различных технических средств, автоматизации процес-
сов судовождения.
Второй раздел — мореходная астрономия — дополня-
ет описанные в навигации способы определения места судна в мо-
ре определениями по наблюдениям небесных светил.
Третий раздел — лоция — освещает вопросы, связанные с
выбором наивыгоднейшего морского пути и изучением условий
плавания судна в предстоящем рейсе.
а
Технические средства судовождения в данном из-
дании книги впервые выделены в самостоятельный раздел, ввиду
исключительно интенсивного их развития и широкого внедрения в
эксплуатацию на морских судах, особенно за последние годы.
Здесь читатель найдет достаточные для будущего эксплуатацион-
ника теорию, описание материальной части, правила эксплуатации
и анализ надежности выходных параметров гироскопических ком-
пасов, лагов, эхолотов, радиопеленгаторов, радиолокаторов и
аппаратуры систем дальней радионавигации.
Заключительный раздел книги — управление судном и
его техническая эксплуатация — знакомит с организа-
цией службы на морском судне, снабжением, управлением судном
в обычных условиях, при морской буксировке и с другими вопро-
сами морской практики.
КРАТКИЙ ИСТОРИЧЕСКИЙ ОЧЕРК РАЗВИТИЯ СУДОВОЖДЕНИЯ
Более двух третей земного шара покрыто водами Мирового
океана, озерами и реками. Поэтому еще в глубокой древности во-
да привлекала внимание человека как один из наиболее удобных
путей сообщения. Прошло много веков прежде чем люди научились
сооружать суда, способные преодолевать большие водные про-
странства. Первые суда были гребными, затем человек применил
в качестве движителя парус; это имело огромное значение для
дальнейшего развития мореплавания, так как позволяло совер-
шать длительные путешествия по воде.
Первые морские плавания совершались вблизи берегов. По-
зднее мореплаватели научились ориентироваться по солнцу и звез-
дам и стали смелее уходить все дальше в открытое море. Так, уже
в VI в. до н. э. финикийцы обошли вокруг Африки, карфагенянин
Гамилькон обогнул Пиренейский полуостров, а грек Скилак из
Карианды совершил плавание по Индийскому океану. Примерно
в это же время Фалес из Милета предложил способ ориентации в
море по созвездию Малая Медведица, Анаксимандр составил пер-
вые географические карты. Несколько позднее (III век до н. э.)
был построен Александрийский маяк.
Мореплаватели древности проложили дорогу великим географи-
ческим открытиям средних веков эпохи феодализма.
Развитие экономики и большой рост международной торговли
требовали поиска новых рынков. Это вызвало строительство боль-
ших парусных судов, обладавших большей мореходностью и позво-
ливших совершить многочисленные дальние плавания и даже кру-
госветные путешествия. Организация таких плаваний влекла уче-
ных и путешественников. Успеху предприятий способствовали от-
личное снабжение эспедицией и экипировка судов, обеспечиваемая
купцами, ждавших от плаваний выгодных торговых связей.
На протяжении нескольких веков были открыты тысячи новых
земель. Наиболее значительными по своим историческим результа-
4
там были плавания венецианского купца Марко Поло в XIII в.;
походы китайского мореплавателя Чжэн Хэ в XV в.; генуэзца Хри-
стофора Колумба, открывшего’в своем плавании американский
материк (1492—1493 гг.); Васко да Гама, обогнувшего Африку и \
достигнувшего берегов сказочной Индии (1497—1499 гг.); Америго
Веспуччи, вторично достигшего берегов Америки, и многих других.
В начале XIII в. Фернан Магеллан совершил первое кругосвет-
ное плавание (1519—1521 гг.).
Наши предки, населявшие берега морей или спускавшиеся к
ним по течению рек, уже в начале нашей эры совершали далекие
плавания. В IX в. н. э. с укреплением основных центров древней
Руси — Новгорода и Киева — начал широко использоваться вели-
кий водный путь «из варяг в греки» — от берегов Скандинавии че-
рез Финский залив, Неву и далее по внутренним водным путям до
гирла Днепра, затем вдоль западного побережья Черного (Русско-
го) моря до Константинополя, нередко далее, до берегов Африки
и Андалузии. Не менее оживленными были торговые морские пути
для славян в водах Балтики и «морях полунощных». Так, к XVI в.
поморы ходили на своих лодьях не только к Новой Земле и на
о. Медвежий, но и на Шпицберген (Грумант), открытый ими за-
долго до Баренца. Уже в 1496 г. помор Григорий Истома совершил
плавание из устья Сев. Двины в Копенгаген, в обход Скандина-
вии; Василий Власов несколько позднее прошел из Белого моря в
Испанию. Подобные плавания более чем на полвека опередили
экспедицию Ченслера.
Освободившись от татарского ига, Россия делает попытки обес-
печить себе выход в Балтийскобчиоре и южные моря, увенчавшие-
ся успехом при Петре I.
Значительны заслуги наших моряков в освоении Великого Се-
верного морского пути. Еще'в 1648 г. Семен Дежнев своим муже-
ственным походом доказал, что Азия и Америка отделены проли-
вом. Большой вклад в дело освоения Арктики и Дальнего Востока
внесли Камчатские экспедиции. Участники Камчатских экспедиций
привезли сведения о «морских бобрах» на побережье Северной
Америки; русские промышленники организовали поселения на
Алеутских островах и на побережье Аляски. Это же явилось одной
из причин развития русского мореплавания на Дальнем Востоке
и положило начало эпохе знаменитых русских кругосветных
плаваний первой половины XIX в. под командованием И. Ф. Кру-
зенштерна, Ю. Ф. Лисянского, В. М. Головнина, О. Е. Коцебу,
Ф. Ф. Беллинсгаузена, М. П. Лазарева, Ф. П. Литке, С. О. Мака-
рова. Появление железного и стального судостроения потребовало
разработать теорию воздействия магнитного поля судна на кар-
тушку магнитного компаса. Благодаря трудам И. П. Белавенца,
И. П. Колонга, А. Н. Крылова, Н. Н. Оглоблинского, В. В. Павлико-
ва и др. магнитно-компасное дело в нашей стране получило боль-
шое развитие, а конструкция 127-миллиметрового магнитного ком-
паса, разработанная ими, и сегодня считается лучшей в мире.
5
Еще в 1749—1765 гг. русский академик Л. Эйлер вывел основ-
ные законы теоретической механики, определяющие движение ги-
роскопа — главной части современного гироскопического компаса
и большой семьи других электронавигационных приборов. Эйлером
же были получены уравнения гидродинамики, на которых основано
конструирование современных гидравлических лагов.
Изобретение радио А. С. Поповым послужило основой для раз-
работки теории и конструкций большой группы современных ра-
дионавигационных систем. Большой вклад в это дело внесли наши
замечательные ученые Н. Д. Папалекси, Л. И. Мандельштам,
А. М. Берг, М. В. Шулейкин, А. .Н. Вологдин, Е. Я. Щеголев и др.
Октябрьская революция 1917 г. ознаменовала собой начало
новой эры в истории человечества. Коммунистическая партия и
Советское правительство проявляли заботу о торговом флоте с
первых дней существования Страны Советов. 23 января (5 февра-
ля) 1918 г. В. И. Ленин подписал Декрет о национализации торго-
вого флота. Перевозки на внешних и внутренних морских путях
требовали увеличения флота. В 1925 г. СТО СНК СССР принял
решение о поставке морскому флоту страны 200 судов в течение
шести лет. С этого времени практически утраченный в годы граж-
данской войны морской флот СССР начал расти небывалыми тем-
пами. В 1939 г. Указом Президиума Верховного Совета СССР был
организован Народный Комиссариат (ныне министерство) морско-
го флота СССР.
В годы Великой Отечественной войны (1941—1945 гг.) моряки
торгового флота, выполняя ответственные задания Родины, показа-
ли пример мужества, героизма и самопожертвования. В послевоен-
ный период наш флот возродился и вновь вышел на внешние и
внутренние коммуникации. С каждым годом морской флот рос в
количественном и качественном отношениях, увеличивались пере-
возки, расширялись и строились морские порты, улучшалась рабо-
та судоремонтных предприятий, расширялась подготовка квалифи-
цированных специалистов в морских учебных заведениях, продол-
жались планомерные научные исследования во всех связанных с
морским флотом сферах.
Теоретические и практические вопросы судовождения получи-
ли свое дальнейшее развитие в трудах советских ученых моряков
Н. Н. Матусевича, В. В. Каврайского, А. П. Ющенко, Н. Ю. Ры-
балтовского, К. С. Ухова, А. П. Белоброва, Д. М. Жонголовича и др.
Особенно бурным рост морского флота стал после XXII и XXIII
съездов КПСС, которые поставили перед моряками большие зада-
чи. Выполняя исторические постановления партии, определенные
Программой КПСС, работники морского транспорта вместе со
всем советским народом воодушевленно трудятся, создавая мате-
риально-техническую базу коммунистического общества,
РАЗДЕЛ ПЕРВЫЙ
НАВИГАЦИЯ
Глава I
ОСНОВНЫЕ ПОНЯТИЯ ИЗ НАВИГАЦИИ
§ 1. Предмет навигации
Среди дисциплин^ входящих в науку судовождения, навигация
занимает ведущее место. Она разрабатывает основы судовожде-
ния и непрерывного учета движения судна в море. Этот учет на-
зывают счислением пути судна. Элементами счисления пути яв-
ляются направление и скорость движения судна. При их опреде-
лении могут быть допущены ошибки, поэтому счисление требует
постоянного контроля. Такой контроль осуществляют при помощи
наблюдений береговых предметов и небесных светил. Результаты
этих наблюдений позволяют определить место судна в море.
Навигация — точная наука, основанная на строгих законах
математики. Однако из-за воздействия ветра, течения, волнения
моря и т. п. нельзя точно учесть результаты влияния внешних
гидрометеорологических факторов даже при помощи современ-
ных технических средств. Поэтому только судовождение, базиру-
ющееся на научно-математической основе, в соединении с реко-
мендациями хорошей морской практики обеспечивает безопас-
ность мореплавания в любой обстановке и при любых условиях.
Предметом навигации является изучение способов счисления
пути судна и определения его места в море по наблюдениям бе-
реговых предметов. Раздел «Навигация» охватывает следующий
комплекс вопросов:
основные сведения о Земле; определение направлений и рас-
стояний на море; картографические проекции для морских карт
и приемы графического решения основных штурманских задач на
морских картах;
счисление пути судна и способы его проверки при помощи тех-
нических средств судовождения;
судовождение при особых обстоятельствах.
§ 2. Форма и размеры Земли
Рассмотрение основных вопросов навигации связано со зна-
нием фигуры Земли и ее размеров.' Фигура Земли имеет непра-
7
вильную форму, которая получила название геоид (земной).
Геоид представляет собой поверхность, нормаль к каждой точке
которой совпадает с отвесной линией в этой точке.
Из сферических форм наиболее
эллипсоид вращения, образованный
вокруг его малой оси PnPs (рис. 1).
близкой к геоиду является
вращением эллипса PnEPs
Подбирая соответствующим
образом параметры эл-
липсоида вращения (боль-
шую а и малую Ь полу-
оси), можно добиться, что
его поверхность будет
близкой к поверхности
действительной фигуры
Земли (геоиду). Незначи-
тельные отклонения при
этом не будут оказывать
ощутимого
результаты
возможных
ских задач
сти Земли, даже при про-
ведении геодезических и
картографических работ
высокой точности.
Эллипсоид вращения,
поверхность которого достаточно близка к поверхности действи-
тельной фигуры Земли, называется земным сфероидом, либо
референц-эллипсоидом (эллипсоидом отнесения)1.
Ось вращения земного сфероида (малая ось 2Ь на рис. 1) и
его экваториальная плоскость совпадают с осью вращения Земли
и ее экватором.
В астрономических, картографических и геодезических работах
часто применяют понятие эксцентриситет е и сжатие а земного
сфероида, определяемые следующими выражениями:
9 а2 — Ь*
е2 =
"Рп'~
Эквй.
Рис. ].
тор
а
влияния на
решения все-
математиче-
на поверхно-
(1)
а*
а — b
а — ----.
а
Связь между этими величинами выражается так:
£2 = 2а-а2^2а.
Из-за незначительного сжатия земного сфероида в
дении для большинства задач форму Земли принимают за шар
(2)
(3)
судовож-
1 Эллипсоидом отнесения (референц-эллипсоидом) называется поверхность
некоторого принятого в данной стране, близкого к действительной поверхности
Земли, эллипсоида вращения (сфероида), на поверхность которого мысленно
проектируют все измерения, относящиеся к поверхности геоида.
8
одинакового объема или одинаковой поверхности с земным сфе-
роидом. Так, радиус шара одинаковой поверхности с эллипсои-
дом Красовского /?=6 371 116 м\ радиус шара одинакового объема
с эллипсоидом Красовского 7?=6 371 109 м.
В СССР для всех геодезических и картографических работ
приняты размеры референц-эллипсоида Ф. Н. Красовского.
§ 3. Основные точки и круги на земном шаре
Приняв Землю за шар (рис. 2), вообразим прямую, вокруг
которой происходит суточное вращение Земли. Точки пересече-
ния такой прямой с поверхностью земного шара называют гео-
графическими, или земными полюсами: северный
- Рп, ЮЖНЫЙ — Ps,
Известно, что при сечении шара плоскостью получается круг,
размеры которого будут тем больше, чем ближе к центру шара
плоскость сечения. Наибольшими окажутся круги от сечения ша-
ра плоскостями, проходящими через его центр. Такие круги на-
зывают большими. Круги, образующиеся от сечения шара
плоскостями, не проходящими через его центр, называют м а-
л ы м и.
Окружность большого круга EGQG', перпендикулярного оси
вращения Земли называют экватором. Последний делит по-
верхность земного шара на два полушария — северное и
южное. Окружность малого круга ММ'М”, параллельного эква-
тору, называют географической параллелью.
Половину окружности большого круга PnMKPs, заключенную
между географическими полюсами, называют географиче-
ским меридианом места. Географический меридиан
места часто называют меридианом наблюдателя.
9
Из всех географических меридианов особо выделены два (см.
рис. 2): PnGPs, проходящий через Гринвичскую обсерваторию
(близ Лондона), и PnG'Ps, противоположный гринвичскому. Эти
два меридиана условно делят поверхность земного шара на два
полушария — восточное и западное. Если рис. 2 изоб-
разить на плоскости земного экватора (рис. 3), то его заштрихо-
ванная часть будет находиться в восточном полушарии, а неза-
штрихованная — в западном. Меридиан, проходящий через Грин-
вич, называют гринвичским, или начальным (нуле-
вым) меридианом, так как от него ведется счет долгот (см. §4).
' § 4. Географические координаты
Пусть судно и находящийся на нем наблюдатель расположены
в точке М на поверхности Земли (см. рис. 2). Проведем парал-
лель и меридиан этой точки, отметив пересечение последнего с
экватором в точке /С.
Положение точки на поверхности шара определяется двумя
сферическими координатами — широтой <р и долготой 1.
Широта — угол между плоскостью экватора и линией, сое-
диняющей место наблюдателя на поверхности Земли с центром
земного шара. Так, широта точки Л1 выражается центральным
углом МОК, измеряемым дугой меридиана КМ. Широта <р изме-
ряется в пределах от 0 до 90° от экватора в сторону географиче-
ских полюсов ц имеет наименование N — северная или S —
южная в зависимости от того, в каком полушарии находится
наблюдатель. Таким образом, географическая параллель ММ'М"
является геометрическим местом точек, имеющих одну и ту же
широту.
Широта точек, расположенных на. экваторе, равна 0°, широта
северного полюса — 90°N, а широта южного полюса — 90°S.
Долгота — двугранный угол между плоскостями нулевого
(гринвичского) меридиана и меридиана наблюдателя (точки М).
Этот угол измеряют меньшей дугой экватора (но не па-
раллели) , заключенной между указанными меридианами, от 0
до 180° в обе стороны от начального (гринвичского) меридиана.
Так, долгота точки М (см. рис. 2 и 3) измеряется дугой экватора
GK.
Долгота имеет наименование. Ost — восточная или W —
западная, в зависимости от того, в каком полушарии (за-
падном или восточном) находится наблюдатель.
Таким образом, географический меридиан РпМР* является геомет-
рическим местом точек, имеющих одну и ту же долготу.
Долгота точек, расположенных на гринвичском меридиане (Рп GPS—
— рис. 2 или PnG — рис. 3), равна 0°; долгота точек, расположенных
на меридиане PnGr Pj(cm. рис. 2), равна 180° Ost или 180° IV.
Морские карты крупных масштабов (см. § 78), предназначенные
ю
для плавания вблизи берегов, позволяют снимать с них географические
координаты точки с точностью до десятых долей минуты дуги. Так,
маяк Аркона имеет координаты <? = 54°40', 8N и k = 13°26',IOs;
маяк Балье <р = 53'31', 7N и X = 9'04v,_9Ost; маяк Гельголанд <р =
= 54°ll',0N и X =_7°53',(OOst;
§ 5. Разность широт и разность долгот
Совершая плавание из одной точки на земной поверхности А
(фь ki — пункт отхода) в точку В (фг> кг — пункт прихода) судно
меняет свою широту и долготу; при этом образуется разность
широт и разность долгот (рис. 4).
Рис. 4.
Разность широт (РШ) — меньшая из дуг любого мери-
диана, заключенная между параллелями пунктов отхода и прихода
(дуга СВ на рис. 4) измеряется в пределах от 0 до 180° и имеет на-
именование к N, если северная широта увеличивается или южная
широта уменьшается, и к S, если северная широта уменьшается или
южная увеличивается.
Если северной широте условно приписать знак «плюс», а юж-
ной— знак «минус», то РШ и ее наименование определятся по фор-
муле
РШ = <р2 — <Pi- (4)
В примерах 1, 2 и 3 для простоты рассуждений пункты отхода
и прихода расположены на одном географическом меридиане, т. е.
имеют одну и ту же долготу. На рис. 5 стрелкой показаны напра-
вления движения судна и сделанные им разности широт.
Пример 1
Пункт отхода А — — 16e44'0 N по формуле (4у <рг = 4-58°17'1 5
Пункт прихода______В — <рд = 58 17, 5 N <р, = + 16 44 ,0
Плавание АВ—РШ = 41®33'( 5 к N РШ = + 41в33', 5
11
Пример 2
Пункт отхода С — <pi = 47*10', 4 S по формуле (4) ср2 = — 21°23', 0
Пункт прихода D — ср2 = 21 23 , 0 S epi =— 47 10 ,4
Плавание CD—PLL1 = 25°46', 6 к N РШ = +25° 46', 6
Пример 3
Пункт отхода F — cpi = 24°17', 5 N по формуле (4) <р2 = — 5°49',2
Пункт прихода Я — ср2 = 5 49 , 2 S <?i = + 24 17 , 5
Плавание FK—РШ = 30°06', 7 к S РШ = - 30°06',
Рис. 6.
Разность долгот (РД) — меньшая из дуг экватора, за-
ключенная между меридианами пунктов отхода и прихода (дуга
KD, рис. 4), измеряется в пределах от 0 до 180° и имеет наиме-
нование к Ost, если восточная долгота увеличивается или запад-
ная долгота уменьшается, и к W, если восточная долгота умень-
шается или западная долгота увеличивается.
Если восточной долготе условно приписать знак «плюс», а запад-
ной «минус», то PD и ее наименование определятся по формуле
РД = Х2-ХР (5)
В примерах 4, 5, 6 и 7 для простоты рассуждений пункты от-
хода и прихода выбраны расположенными на одной географиче-
ской параллели, т. е. имеющими одну и ту же широту. На рис. 6,
а, б стрелками показаны направления движения судна и сделан-
ные им разности долгот.
Разность долгот не может быть больше 180°. Однако при реше-
нии задач на разность долгот по* формуле (5) величина РД мо-
жет получиться более 180°. В этом случае полученный результат
вычитают из 360° и изменяют наименование РД на обратное (при-
мер 7).
12
Пример 4
Пункт отхода А — Xi = 12°44'. OOst tio формуле (5) Х2 =-|-48°13', 5
Пункт прихода_______В— Х2 =» 48 13, 5 Ost_____ Л] = 4- 12 44 ,0
Плавание АВ — РД= А'ВГ = 35°29', 5 к Ost РД = + 35°29', 5
Пример 5 Пункт отхода С — Xi = Ц0°15', 0 W по формуле (5) Х2 = — 87°10',0
Пункт прихода В — Х2 = 87 10 , 0 W Xi = —ПО 15,0
Плавание CD -РД=С'Д' ~ 23°05',0 к Ost Пример 6 Пункт отхода М — Xj = 21°37\8 W по РД = формуле (5) Х2 = 4- 23°05',0 + 11°42\4
Пункт прихода L — Х2 = 11 42 ,4 Ost Xi = — 21 37 ,8
Плавание ML—РД = М’L’ = 33°20',2 к Ost РД = 4-33°20',2
Пример 7 Пункт отхода F — Xi = 164°06',3 W по формуле (5) Х2 = : + 170°35',1
Пункт прихода К — Х2 = 170 35 , 1 0s 1 __Xi = —164 06 ,3
Плавание FT —РД\ = 15 53 , 7 к W Плавание ТК—РД2 = 9 24 , 9 к W РД = т. е. + 334°41',4
Плавание FK —РД = 25°18', 6 к W РД = -25°18',6
Непосредственно из рис. 6, а видно, что (АВ)°=(А'В')°, но
длины этих дуг не равны, т. е. ^АВ^\уА'В'. Таким образом, дли-
на окружности географической параллели в широте <р короче
длины экватора, так как радиус г такой параллели короче ради-
уса R экватора, связанных отношением
= г sec ср.
Поэтому ~^А' В' = ^АВ sec ср или
РД = ОТ LUszcy, (6)
где ОТШ — отшествие, длина дуги параллели (но не эква-
тора) в широте <р, заключенная между меридианами пунктов от-
хода и прихода (подробнее см. § 21 и 26).
§ 6. Основные линии и плоскости на земном шаре
В любой точке В на земной поверхности (рис. 7) наблюда-
тель, глаз которого находится в некоторой точке А, при помощи
отвеса может получить направление отвесной линии или верти-
каль. Плоскость, проходящую через вертикальную линию, назы-
вают вертикальной, а перпендикулярную отвесной линии — го-
ризонтальной.
13
Горизонтальную плоскость, проходящую через глаз наблюда-
теля, называют плоскостью истинного горизонта
наблюдателя (плоскость Н). Вертикальную плоскость, про-
ходящую через глаз наблюдателя и земные полюсы, называют
плоскостью истинного меридиана наблюдате-
ля (плоскость R). Пересечение этой плоскостью земного шара
Рис. 7.
дает в сечении большой круг
BPnqP8e, окружность которого
называют меридианом ме-
ста, или меридианом на-
блюдателя (§3).
Вертикальную плоскость, про-
ходящую через глаз наблюдате-
ля перпендикулярно плоскости
истинного меридиана наблюда-
теля, называют плоскостью
первого вертикала (плос-
кость Q). Пересечение земного
шара плоскостью Q дает в се-
чении большой круг ВВ', кото-
рый является меридианом толь-
ко в одном частном случае, когда
наблюдатель находится на гео-
графическом полюсе (точка В
совпадает с точкой Рп или точ-
кой Р8).
Плоскости истинного горизонта Н и истинного меридиана R на-
блюдателя пересекаются по линии NS. Эта линия определяет на-
правление истинного меридиана в данной точке В и называется по-
луденной линией, так как в плоскости NB (плоскость R)
Солнце бывает точно в полдень.
Направление линии AN от глаза наблюдателя в сторону се-
верного полюса указывает наблюдателю точку севера N, а обрат-
ное направление ЛВ— точку юга В. Таким образом, полуденная
линия NS определяет положение двух главных точек горизонта,
или стран света — севера и юга.
Плоскости истинного горизонта и первого вертикала пересека-
ются по линии WO8t, определяющей направления на W и на Ost
в данной точке А земной поверхности. Таким образом, линия WO8t
определяет положение еще двух других стран света — востока
и запада.
§ 7. Системы деления горизонта
Линии NS и U7Q8t (см. рис. 7) занимают вполне определен-
ное положение в любой точке земной поверхности (кроме полю-
сов). Направления N, Ost, S и W называются главными на-
правлениями, или главными румбами.
14
Главные румбы делят истинный горизонт на четыре четверти:
NO — северо-восточная;
SO — юго-восточная;
SW — юго-западная;
NW — северо-западная.
В эпоху парусного флота каждая часть горизонта разбива-
лась на восемь основных направлений — румбов (рис. 8). Эта
система называлась румбовой.
С развитием точности судовождения каждая четверть гори-
зонта была разбита на 90 направлений. Главные румбы N и S
отмечались 0°, а румбы W и Ost—90°. Наименование же четвер-
тей и принцип счета направлений оставался прежним. Эта си-
стема разбивки получила название четвертной (средняя
шкала на рис. 8). Направления указывались наименованием чет-
верти и числом градусов, например: NO 35°, NW 47°, SW 22°,5,
SO 86° и т. д.
Картушки современных компасов по-прежнему разделены на
360°, но при этом применяется круговая система счета, без раз-
личия четвертей. В этой системе главные румбы отмечаются так:
15
N — 0°(360°), 08t — 90°, S — 180° и W — 270°. Круговая систе-
ма счета проще и нагляднее. Однако решение большинства за-
дач по судовождению часто заставляет судоводителей пользо-
ваться другими системами. Для этого переводят направления, дан-
ные в одной системе, в направления по другой системе, особенно
из круговой в четвертную и обратно. В табл. 41 «Мореходных
таблиц» (МТ-63) даны румбы в градусах.
Рис. 9.
§ 8. Истинный курс. Истинный пеленг. Курсовой угол
Диаметральная плоскость судна пересекает земную поверх-
ность по дуге большого круга К К'. Сферический угол РпАК
(рис. 9), измеряемый двугранным углом между плоскостью истин-
ного меридиана PnPs и диаметральной плоскостью судна КК', на-
зывают истинным курсом (ИК).
Вертикальная плоскость, проходящая через наблюдаемый пред-
мет R и место наблюдателя А, в пересечении с поверхностью Зем-
ли также образует дугу большого круга СС' (см. рис. 9, а). Сфе-
рический угол PnAR, измеряемый двугранным углом между пло-
скостью истинного меридиана PnPs и вертикальной плоскостью СС',
проходящей через место наблюдателя и предмет, называют ис-
тинны м пел енгом (ИП) данного предмета.
На плоскости истинного горизонта (см. рис. 9, б) истинный
курс и истинный пеленг будут плоскими углами: HK=NnAK и
Hn=NKAR.
Истинный курс и истинный пеленг отсчитывают от нордовой
части истинного меридиана по направлению движения часовой
стрелки от 0 до 360°. Из рис. 9, б видно, что ИП=ИК+КУ, где
КУ — курсовой угол между диаметральной плоскостью
судна и направлением на предмет. Счет курсовых углов произ-
водится от носовой части диаметральной плоскости судна по ча-
совой стрелке от 0 до 360°. Часто применяют полукруговрй счет
16
курсовых углов от 0 до 180° от носовой части диаметральной пло-
скости судна в сторону борта, по которому расположен пред-
мет. При этом:
ИП = И К + КУ п. б. (правого борта);
ИП = ИК — КУ л. б. (левого борта).
Направления по курсовым углам 45, 90 и 135° носят соответ-
ственно названия «на крамболе», «на траверзе» и «на раковине»
того или иного борта.
Направление, отличающееся от ИП на 180°, называется об-
ратным истинным пеленгом (ОИП):
ОИП = ИП + 180°.
Пример 8. ИК=~ 150°; КУ = 35° л. б.; найти ИП и ОИП,
Решение. ИП = ИК—КУ л. б.= И50°—135°=115°.
О ИП=ИП 4-180° = 115°4-180°=295°.
Пример 9. 7777 = 220°; 7(У=60 л. б.; найти ИК.
Решение. ИК=ИП+КУ л. б. = 200°+60°=260°.
Пример 10. ИК = 241°; ИП = 357°; найти КУ.
Решение. КУ=ИП—ИК= 375°—241°= 116° п. б.
§ 9. Морские меры длины и скорости
Единицей измерения расстояний на море является морская
миля, равная линейной длине 1' дуги меридиана земного шара,
т. е. 1852 м 66070 фут. Кроме морской мили, для измерения рас-
стояния на море приняты также следующие единицы длины:
морской кабельтов — 185 м (607 фут)
морская сажень — 1,83 м 6 »
ярд ’ — 0,914 м 3,0 »
фут - 0,3048м 1,0 »
дюйм — 0,0254 м (0,0833 фут)
При решении вопросов повышенной точности следует помнить,
что Земля — не шар, а сфероид. Так, длина одной морской ми-
ли, принятая в СССР, соответствует линейной длине 1' земного
сфероида в широте 44°. Длина Г дуги такого сфероида в районе
экватора равна 1842,9 м, на полюсе — 1861,6 м. Разницей 18,7 м.
(около 1%) на практике пренебрегают.
Скорость морского судна измеряют узлами, т. е. количе-
ством морских миль, которое оно проходит за 1 ч. Говорят, на-
пример, что судно имеет скорость 12 узлов, т. е. оно проходит
12 морских миль в час.
При плавании по внутренним водным путям часто применяют
метрические единицы измерения расстояния и скорости. Перевод
морских миль в километры и обратно осуществляется по следу-
ющим формулам:
S км = 1,852 морских миль; S морских миль = 0,54 км.
17
По аналогичным формулам делают перевод узлов в км/ч, в
м!сек и обратно:
V км/ч, = 1,852 узлов; V узлов = 0,5400 км/ч\
V м/сек = 0,5145 узлов; V узлов = 1,943 м/сек.
В Мореходных таблицах МТ-63 помещены сравнительные
таблицы скоростей (табл. № 37), облегчающие указанный пере-
вод.
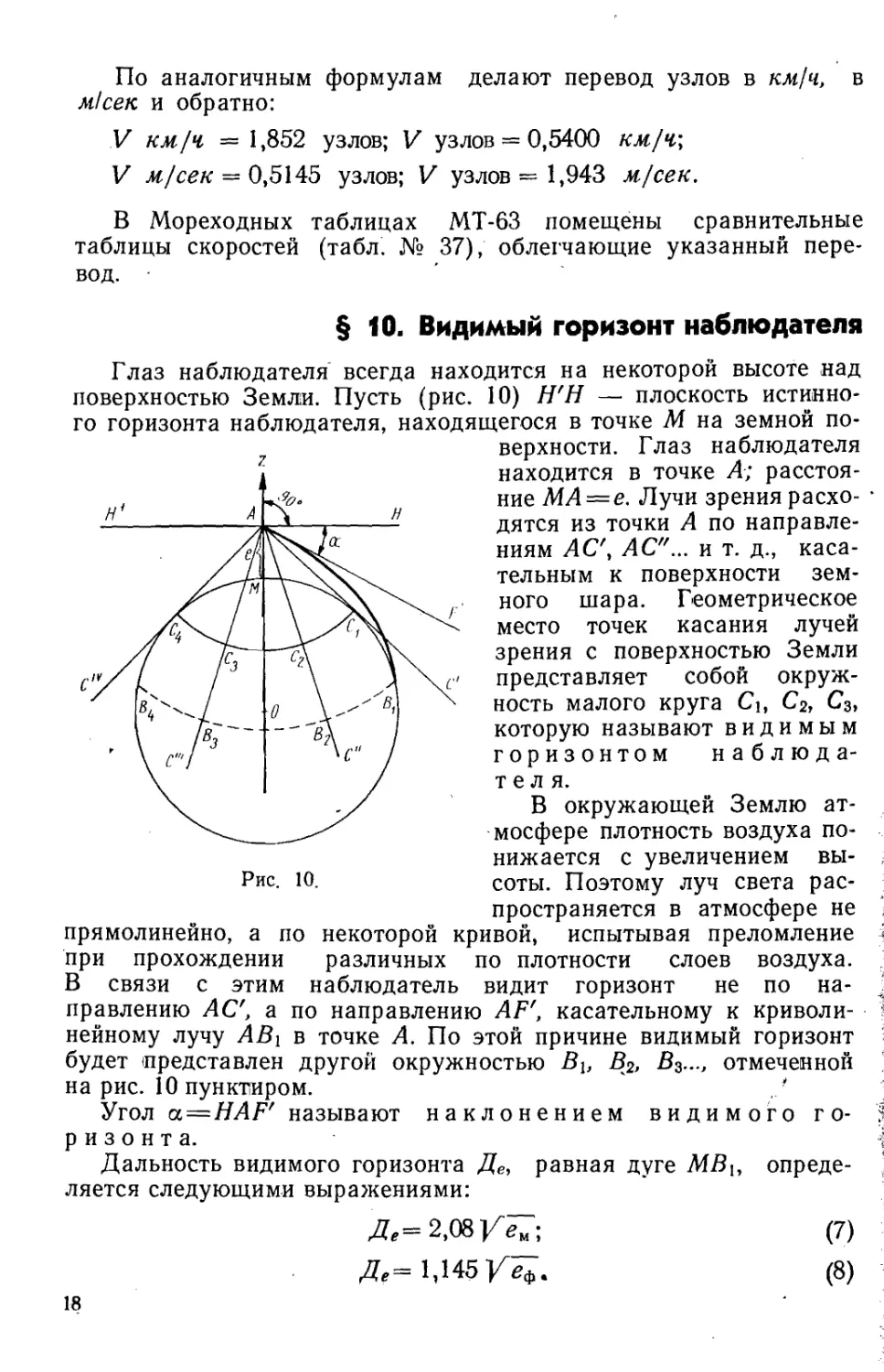
§10. Видимый горизонт наблюдателя
Глаз наблюдателя всегда находится на некоторой высоте над
поверхностью Земли. Пусть (рис. 10) Н'Н — плоскость истинно-
го горизонта наблюдателя, находящегося в точке М на земной по-
верхности. Глаз наблюдателя
' находится в точке А; расстоя-
ние МА=е. Лучи зрения расхо-
дятся из точки А по направле-
ниям АС\ АС"... и т. д., каса-
тельным к поверхности зем-
ного шара. Геометрическое
место точек касания лучей
зрения с поверхностью Земли
представляет собой окруж-
ность малого круга Ci, Сг, Сз>
которую называют видимым
горизонтом наблюда-
теля.
В окружающей Землю ат-
мосфере плотность воздуха по-
нижается с увеличением вы- ,
Рис. 10. соты. Поэтому луч света рас-
пространяется в атмосфере не ;
прямолинейно, а по некоторой кривой, испытывая преломление 1
при прохождении различных по плотности слоев воздуха.
В связи с этим наблюдатель видит горизонт не по на-
правлению АС', а по направлению AF', касательному к криволи-
нейному лучу ABi в точке А. По этой причине видимый горизонт
будет представлен другой окружностью Blf В2, В3..., отмеченной
на рис. 10 пунктиром. /
Угол a = HAF' называют наклонением видимого го-
р и з о н т а.
Дальность видимого горизонта Де, равная дуге опреде-
ляется следующими выражениями:
Де=2,08/еи;
Де= 1,145 Уеф.
(7)
(8)
18
где ем и еф — высота глаза наблюдателя, выраженная соответ-
ственно в метрах и футах.
Для облегчения работы судоводителя в МТ-63 помещена табл.
22-а значений дальности видимого горизонта.
§ 11. Дальность видимости предметов
Каждый предмет имеет определенную высоту Н (рис. 11), по-
этому дальность видимости предмета Дп—МЯ слагается из даль-
ности видимого горизонта наблюдателя Де=МС и дальности ви-
димого горизонта предмета ДН=ДС:
Дп — Дн + Де = 2,08 (/Ям + /ё7) ; (9)
дп = дн + Де = 1,15 (у77ф + /^). (10)
Но формулам (9) и (10) Н. Н. Струйским составлена номо-
грамма (рис. 12), а в МТ-63 приведена табл. 22-в «Дальность ви-
димости предметов», рассчитанная по формуле (9).
Пример 11. Найти дальность видимости предмета высотой над уровнем моря
//=26,5 м (88 фут) при высоте глаза наблюдателя над уровнем моря е = 4,5 м
(15 фут).
Решение.
1. По номограмме Струйского (рис. 12) на левой вертикальной шкале «Вы-
сота наблюдаемого предмета» отмечаем точку, соответствующую 26,5 м
(86 фут), на правой вертикальной шкале «Высота глаза наблюдателя» отме-
чаем точку, соответствующую 4,5 м (15 фут)\ соединив отмеченные точки пря-
мой линией, в месте пересечения последней со средней вертикальной шкалой
«Дальность видимости» получаем ответ: Д п = 15,1 м.
2. По МТ-63 (табл. 22-в). Для е=4,5 м и //=26,5 м величина Дп=15,1 м.
Приводимая в навигационных пособиях и на морских картах
дальность видимости маячных огней ДК=/СД рассчитана для
высоты глаза наблюдателя, равной 5 м. Если действительная
высота глаза наблюдателя не равна 5 м, то к данной в пособиях
дальности Дк необходимо прибавить поправку Д=Л1С—КС—
=Де—Д$. Поправка является разностью между дальностями ви-
димого горизонта с* высоты еми 5 м и называется поправкой на
высоту глаза наблюдателя:
Д =2,08 (/£-/57) = 2,08У"ём-4,7 мили. (11)
19.
Как видно из формулы (.11), поправка на высоту глаза на?
блюдателя А может быть положительной (когда е>5 м) или от-
рицательной (когда е<5 м).
Итак, дальность видимости маячного огня определяется по
формуле
ДП=ДХ + А. (12)
Высота
наблюдаемого
предмета
%
Высота
глаза
наблюдателе
600*180
353'-.П0
Js
то
130
120
110
W0
30
80
70
60
50 ;
№
Ш'
35.0-
зот
250
200-
150-
mo-
no}
юо-
80-
80
70-
60-
50-
90
30
20
15-
Ю-
35 >
30^
1?
10
5
6
<3
г
г 36
-35
то
-33
.32
-31
.30
29
28
.27
25
25
29
11
10
3
8
. 7
.6
.5
9
3
2
1
О
сальность
видимости
050
Пример: Найти дальность видимости
предмета высотой над уроднем моря
25}2м(ддфут) при Высоте глаза над
у род нем моря м (15фут)
Решение: Дальность Видимости
15,1 мили, к ан и показано на чертеже
пунктиром
Рис. 12.
Пример 12. Дальность видимости маяка, указанная на карте, Дк = 20,0 мили.
С какого расстояния увидит огонь наблюдатель, глаз которого находится на вы-
соте е = 16 м. ___
Решение. 1) по формуле (11) Д = 2,80 1^16,0 — 4,7 =« 3,6 мили;
2) по табл. 22-а МТ-63 Д=Де — Д5 = 8,3—4,7 = 3,6 мили;
3) по формуле (12) Дп = (20,0-p3,6) = 23,6 мили.
Пример 13. Дальность видимости маяка, указанная на карте, Дк = 26 миль.
С какого расстояния увидит огонь наблюдатель, находящийся на шлюпке (е=2,0 м)
20
Решение. 1) по формуле (II) Д = 2,08 1^2,0— 4,7 =2,9— 4,7 = —1,6;
2) по табл. 22-а МТ-63 &=Де— Д5 = 2,9 — 4,7 = —1,6 мили;
3) по формуле (12) Дп = 26,0—1,6 = 24,4 мили.
Дальность видимости предмета, рассчитанную по формулам
(9) и (10)» называют географической.
Рис. 13.
Дальность видимости маячного огня, или оптическая
дальность видимости, зависит от силы источника света, системы
маячного аппарата и цвета огня. В правильно построенном маяке
она обычно совпадает с его географической дальностью.
В пасмурную погоду действительная дальность видимости мо-
жет значительно отличаться от географической или оптической
дальности.
В последнее время исследованиями установлено, что в усло-
виях дневного плавания дальность видимости предметов точнее
определяется по следующей формуле:1
Дп = 2 [утм - 0,54 + /о,29-1,О8Г^ + Яж )• (13)
На рис. 13 приведена номограмма, рассчитанная по формуле
(13). Пользование номограммой поясним на решении задачи с
условиями примера 11.
1 См. Ф. Н. Красковский и В. В. Данилов (название работы здесь и
далее см. в списке литературы, в конце учебника).
21
Пример 14. Найти дальность видимости предмета высотой над уровнем моря
И = 26,5 м, при высоте глаза наблюдателя над уровнем моря е = 4,5 м.
Решение. 1 по формуле (13): Дл = 2 /0 — 0,54+ /0,29 — 1,08 + /О+
+26,5. Дп = 13,1 мили.
2) по номограмме (рис. 13): Дп = 13,1 мили.
В примере, решенном по формуле (9) либо по номограмме
Струйского, был получен результат Дп= 15,1, т. е. на две мили
больше.
Уменьшенная дальность видимости предмета при расчете по
формуле (13) связана с учтенной в этой формуле ограниченно-
стью разрешающей способности человеческого глаза по верти-
кальному углу, равной Г.
Глава II
ОПРЕДЕЛЕНИЕ ПРОЙДЕННОГО РАССТОЯНИЯ И ИЗМЕРЕНИЕ
1 ГЛУБИН В МОРЕ
§ 12. Определение пройденного расстояния
Классификация лагов. Пройденное расстояние и скорость суд-
на измеряют при помощи специальных приборов, называемых ла-
гами.
Современные лаги определяют пройденное судном расстояние
и скорость относительно воды, которая, в общем случае, сама
движется относительно грунта. Поэтому перемещение судна с вод-
ными массами, т. е. течение, лагами не учитывается. Дрейф судна
(снос от ветра) при углах дрейфа до 10—12° практически полно-
стью учитывается лагами.
В зависимости от принципа действия и устройства все
лаги подразделяются на вертушечные (механические и элект-
ромеханические) и гидродинамические. На небольших судах,
имеющих малую скорость, применяется простой, или ручной,
лаг.
Вертушечные лаги. Несжимаемость и незначительная вяз-
кость морской воды позволяют определять скорость судна при помо-
щи буксируемой им вертушки. При известном шаге лопасти
вертушка делает определенное количество оборотов на одну милю
пройденного судном расстояния. Количество оборотов вертушки
фиксируется механическим или электромеханическим путем. В за-
висимости от этого вертушечные лаги подразделяют на механиче-
ские (забортные) и электромеханические (днищевые).
Все системы механических забортных лагов основаны на од-
ном принципе и отличаются лишь устройством отдельных частей.
Отечественная промышленность выпускает две системы забортных
лагов: ЛЗМ—для измерения малых скоростей (от 5 до 15
22
узлов) и ЛЗБ — для измерения больших скоростей (от 5 до 25 уз-
лов).
Лаг ЛЗМ (рис. 14) состоит из вертушки 1, соединитель-
ной груши 2, лаглиня 3, маховика 4 и механического счетчи-
ка 5.
От сопротивления воды вертушка начинает вращаться, закру-
чивая лаглинь; последний, раскручиваясь, приводит в аналогичное
по угловой скорости вращение ось хвостовой части механиче-
ского счетчика лага. Эта ось передает вращение механизму счет-
чика, который приводит в движение указательные стрелки на его
Рис. 14.
циферблате. Маховик обеспечивает плавное и равномерное рас-
кручивание лаглиня. Соединительная груша позволяет вертушке
лага занимать горизонтальное (Положение и облегчает смену ис-
порченной вертушки запасной.
Показания механического лага могут репетовать электрическим
путем приборы, установленные в любом месте на судне. Для это-
го в счетчике лага имеется контактный прибор, который произво-
дит 10 замыканий на 1 милю пройденного расстояния.
Хорошо выверенный забортный механический лаг является
надежным прибором. Но он имеет недостатки: требует тщательно-
го ухода, особенно за лаглинем; вертушку можно легко поте-
рять, кроме того, на нее наматываются водоросли и др.
Электромеханические (днищевые) лаги имеют вертушку, вы-
ставляемую в подводной части корпуса судна. Однако в послед-
нее время эти лаги выходят из употребления из-за множества
конструктивных и других недостатков.
Гидродинамические лаги. Работа гидродинамического
лага основана на измерении динамического давления воды, возни-
кающего в приемном устройстве’лага при движении судна. Подроб-
ное описание принципа работы, конструкции и правил эксплуатации
такого лага приведено в разделе четвертом (§96 и 97).
Поправка лага и ее определение. Все лаги показывают ско-
рость только относительно воды. Следует также иметь в виду, что
пройденное расстояние определяется с некоторой ошибкой, зави-'
сящей от скорости судна. Поэтому показания лага необходимо
направлять поправкой. Постоянство поправки лага на данной ско-
рости служит показателем достоинства прибора.
23
Поправка лага, относящаяся к разности его показаний, выра-
жается формулой
5-(ОЛ2-0Л,) 1(Ю
где S — истинное пройденное судном расстояние;
ол2 — ОЛ1 — разность отсчетов лага по счетчику пройденного рас-
стояния.
Из формулы (14) можно определить истинное расстояние
S = (ол2 - олг) + 0Лг^Л' Ал %. (15)
Вместо поправки лага иногда применяют коэффициент лага,
который, воспользовавшись формулой (14) и (15), можно выра-
зить следующим образом:
S = 1 г Ал%
0Л2—0Л\ 100 *
(16)
Из формулы (16) истинное расстояние
S = Кл{ол2 — олх). (17)
Для определения поправки лага необходимо знать истинное
расстояние, пройденное судном, и разность отсчетов лага (рол),
соответствующую промежутку времени, затраченному на прохож-
дение этого расстояния.
Поправку лага определяют на специально оборудованном
участке, называемом мерной линией.
Мерная линия представляет собой свободный от навигацион-
ных опасностей, защищенный от ветров и волнений водный поли-
гон с достаточной глубиной, предназначенный для скоростных
испытаний судов.
На мерной линии основной является линия ведущего створа
AAf (рис. 15), по которому судно следует во время испытаний.
Перпендикулярно ведущему створу устанавливают секущие ство-
ры ВВ', СС',.- и т. д., отбивающие на ведущем створе точно изме-
ренные расстояния не менее 1 мили.
Зная действительно пройденное судном расстояние и разность
отсчетов лага, поправку рассчитывают по формуле (14). Поправка
24
соответствует Определенной скорости судна. Делая пробеги
на мерной линии с различными скоростями хода, определяют
различные значения Дл%. Обычно поправку лага находят для
трех скоростей судна, соответствующих работе машины на режи-
мах «полный ход», «средний ход», «малый ход». В дальнейшем
поправку лага для данной скорости выбирают линейным интерпо-
лированием.
При движении судна в море пройденное расстояние опреде-
ляется с помощью показаний лага и его поправки по формуле
(15). Для облегчения работы судоводителя в МТ-63 приведены
вспомогательные таблицы для определения пройденного расстоя-
ния при положительных и отрицательных поправках лага.
Пример 15. Расстояние, снятое с карты между двумя обсервованными (точ-
но определенными) пунктами равно 42,5 мили. Отсчеты лага в моменты первой и
второй обсервации — ^ = 42,6 и ол2=86,3. Определить поправку лага.
Решение. По формуле (15)
42,5 — (86,3 — 42,6)
Лл% - (86,3 — 42,3) 100 ---2>7%-
Пример 16. Пользуясь лагом, поправка которого Ал = +5,0%, в 21.30 отме-
тили ОЛ1 = 37,5, а в 23.20—ол2=64,8. Определить плавание судна по лагу.
Решение. По формуле (15)
(64,8—37,5)
5 = (64,8—37,5)+ 37,5+ -------— (+5,0) = 28,7 мили.
По табл. № 28-а МТ-63:
ол2 = 64,8 на рол = 27,0...5=28,4
oAi = 37,5 на рол = 00,3... 5=0,3
рол = 27,3 на рол = 27,3....5=28,7 мили.
Пример 17. Поправка лага Ал = —6%. Определить величину коэффициента
лага, а затем рассчитать рол при плавании судна 5 = 68\4 мили.
Решение. По формуле (16)
—6%
Ял=1++=0-94.
По формуле (17)
68',4 о
рол — 0,94 “ ’°’
§ 13. Измерение глубин в море
Классификация лотов. Практика мореплавания подтверждает
насущную необходимость иметь на борту судна всегда готовыми
к действию приборы, позволяющие измерять глубины и брать про-
бы грунта. Так, тщательное измерение глубин через определенные
промежутки времени дает возможность хорошо проверить место
судна в тумане и благополучно подойти к якорному месту. Глу-
бины на море измеряют специальными приборами — лотами.
25
В зависимости от измеряемой глубины лоты разделяются на
глубоководные и навигационные. Навигационные предназначаются
для измерения сравнительно небольших глубин. Ими снабжают
все морские суда для обеспечения безопасности плавания. Устрой-
ство навигационных лотов позволяет измерять глубины на ходу
судна с достаточной для судовождения точностью.
По принципу действия и устройству нави-
гационные лоты подразделяются на ручные,
механические и гидроакустические.
Ручной лот. Основными частями ручно-
го лота являются свинцовая (или чугунная)
гиря 1 и дотлинь 2 (рис. 16). Гиря имеет
форму усеченной пирамиды или конуса высо-
той около 30 см и весом от 3 до 5 кг. Верх-
няя часть гири оканчивается ушком с проде-
той в него стропкой из стального троса, об-
шитого кожей. В нижней, более широкой ча-
сти гири сделана выемка, в которую перед
замером глубины вмазывают смесь сала с тол-
ченым мелом. При опускании гири на дно
частицы грунта прилипают к замазке. Это
позволяет определить характер грунта после
подъема лота на палубу. Гиря соединена с
лотлинем, который делают из линя длиной более 50 м и толщиной
около 25 мм. Перед разбивкой (разметкой) лотлинь хорошо вытя-
гивают. При разбивке за нуль принимают место соединения лот-
линя с гирей, так как она при измерении глубины моря обычно ло-
жится на грунт. На расстоянии 2—Зм от гири в лотлинь вплескивают
клевант-колышек из твердой породы дерева, а затем через каждые
10 м — флагдуки (разноцветные кусочки материи) со следующей по-
следовательностью цветов: красный—10 м, синий—20 м, белый—30 м,
желтый — 40 м, бело-красный — 50 м. Каждый десятиметровый
участок делят пополам кожаной маркой с «топориками». Марку с
одним «топориком» вплеснивают на отметке 5 м, с двумя — 15 м
и т. д. Каждый пятиметровый участок разбивают на пять равных
частей кожаными марками в виде зубцов: марку с одним зуб-
цом вплеснивают в местах, соответствующих 1; 6; 11; 16; 21; 26;
31 и 46 м; марку с двумя зубцами — на 2; 7; 12; 17; 22; 27; 32;
37; 42 и 47 м и т. д. Иногда метровые участки лотлиня разби-
вают не более мелкие деления небольшими кожаными марочками
(для шлюпочного промера).
Лот бросают с наветренного борта, чтобы лотлинь не попал
под корпус судна. Ручной лот используют лишь при скорости
судна до 5 узлов и глубине моря не более 50 м. При глубинах
до 150 м применяют диплот, устройство которого аналогично уст-
ройству ручного лота. Измерять глубины диплотом можно толь-
ко на стоянке.
Ручной лот и диплот используют не только для измерения
26
глубины. Ими определяют дрейф судна, стоящего на якоре, вы-
соту прилива в месте якорной стоянки и др.
Механический лот. Действие механического лота (рис.
17, а) основано на принципе гидростатического давления. Основ-
ными частями механического лота являются батометрическая труб-
ка, гиря 1 и лебедка (рис. 17, б) с лотлинем 3, снабженная
Рис. 17.
автоматическим тормозом, срабатывающим в момент касания ги-
рей грунта. При помощи гири в море погружают медный пенал 2
с вложенной в него стеклянной трубкой (см. рис. 17, а), запаян-
ной с одного конца. По мере погружения заключенный в трубке
воздух сжимается под давлением заполняющей ее воды. Глуби-
ну погружения трубки определяют по формуле
н = чйо - (18)
где h — высота подъема воды в трубке;
Ро — атмосферное давление воздуха на поверхности воды;
6 — вес единицы объема морской воды;
I — длина трубки.
Внутренние стенки трубки покрыты специальной краской, ко-
торая смывается морской водой. Это позволяет легко определить
величину h. Трубки лотов имеют стандартные размеры. Поэтому
глубину определяют при помощи специальной шкалы, рассчи-
танной по формуле (18). Прикладывая трубку к шкале 4, глуби-
27
ну определяют по отсчету, совпадающему с границей смытой кра-
ски в трубке.
Недостатком механического лота являются трудоемкость про-
цесса измерения глубины и возможность использования лишь при
скорости судна до 12 узлов.
Гидроакустический лот. Гидроакустическими лота-
ми измеряют глубину до 2000 м при неограниченной скорости суд-
на. Специальные приборы лота — самописцы дают наглядное
представление о рельефе морского дна. Большие преимущества
гидроакустических лотов способствовали их широкому распрост-
ранению на морских судах.
Подробное описание принципа действия, конструкции и пра-
вил эксплуатации гидроакустических лотов приведено в четвер-
том разделе данного учебника.
Глава III
ОПРЕДЕЛЕНИЕ НАПРАВЛЕНИЙ В МОРЕ
§ 14. Компасы и их характеристика
Основным прибором на судне, указывающим направление его
движения и направления на различные земные и небесные ориен-
тиры, является компас. По компасу определяют также направ-
ление ветра и течения. Компасы подразделяют на магнитные, ги-
роскопические и гиромагнитные. В судовождении используют
магнитные и гироскопические компасы.
В магнитных компасах используют свойство намаг-
ниченной стрелки располагаться вдоль магнитных силовых линий
магнитного поля Земли в направлении север — юг. На судне на
магнитную стрелку, кроме магнитного поля Земли, действуют маг-
нитные поля, создаваемые судовым железом и электроустановка-
ми. Поэтому магнитная стрелка компаса, установленного на
судне, будет располагаться в так называемом компасном мери-
диане.
Простота устройства, автономность, постоянная готовность
к действию и малые размеры — преимущества магнитного ком-
паса по сравнению с другими типами компасов.
К его недостаткам относятся необходимость исправлять по-
казания поправкой на разность направлений компасного и геог-
рафического (истинного) меридианов. Величина и знак этой
поправки изменяются в зависимости от курса судна, местоположе-
ния его на земной поверхности и других причин. В высоких широ-
тах точность показаний магнитного компаса уменьшается, а в рай-
оне магнитного и географического полюсов Земли магнитный ком-
пас вообще перестает действовать.
28
В гироскопических компасах используется свойст-
во быстровращающегося тела (гироскопа) сохранять неизменное
направление главной оси в мировом пространстве. При помощи
специальных устройств в гирокомпасе ось гироскопа устанавли-
вается в плоскости гирокомпасного меридиана, направление ко-
торого почти совпадает с плоскостью истинного меридиана.
Гирокомпас обладает рядом преимуществ по сравнению с маг-
нитным. Являясь механическим прибором, он не зависит от маг-
нитных полей Земли и судна, которые подвержены изменениям.
Хорошо отрегулированный гирокомпас позволяет получать истин-
ные направления и курсы, не требующие дополнительных вычис-
лений. Ось гирокомпаса занимает устойчивое положение в плос-
кости истинного меридиана, что повышает точность ведения суд-
на по курсу и позволяет осуществить автоматическое удержание
судна на курсе при помощи прибора авторулевого.
Недостатками гирокомпаса является сложность конструкции
и необходимость непрерывного специального обслуживания. Ги-
рокомпас нельзя использовать немедленно, так как требуется не-
которое время для приведения его главной оси в меридиан. Боль-
шое количество вспомогательного электрооборудования лишает
гирокомпас автономности. В районе географического полюса
Земли гирокомпас также перестает указывать направления1.
Современные суда снабжаются магнитными компасами и гиро-
компасами, что позволяет взаимно контролировать работу этих
приборов.
§ 15. Земной магнетизм и его элементы. Магнитные
карты
Пространство, в котором действуют магнитные силы Земли,
называют магнитным полем Земли. Принято считать, что маг-
нитные силовые линии земного поля выходят из южного маг-
нитного полюса и сходятся в северном, образуя замкнутые кри-
вые.
Положение магнитных полюсов не остается неизменным, коор-
динаты их медленно меняются. Приближенные координаты маг-
нитных полюсов в 1950 г. были следующие:
северного — ср ^'76°N; X W96°W;
южного -<p«75°S; k«150°Ost.
Магнитная ось Земли — прямая, соединяющая магнитные по-
люса, проходит вне центра Земли, и составляет с ее осью враще-
ния приближенно угол около 1Г,5.
1 Подробное описание принципа действия, конструкции и правил эксплуата-
ции гирокомпасов приведено в четвертом разделе.
29
Сила магнитного поля Земли характеризуется вектором напря-
женности Т, который в любой точке земного магнитного поля на-
правлен по касательным к силовым линиям. На рис. 18 сила земно-
го магнетизма в точке А изображена по величине и направлению
вектора AF. Вертикальную плоскость N^AZF, в которой распола-
гается вектор AF, а следовательно, и ось свободно подвешенной
магнитной стрелки, называют плос-
костью магнитного меридиана.
Эта плоскость составляет с плоскостью ис-
тинного меридиана NUAZM угол РАН, кото-
рый называют магнитным склонени-
ем и обозначают буквой d.
Магнитное склонение d отсчитывается
от северной части истинного меридиана к
востоку и западу от 0 до 180°. Восточному
магнитному склонению приписывают знак
«плюс», а западному — знак «минус». На-
пример: d=+4°,6 или d=—11°,0.
Угол НЪ1АР. образуемый вектором AF
с плоскостью истинного горизонта NUAH, на-
зывают магнитным наклонением
и обозначают буквой 0.
Магнитное наклонение 0 отсчитывают от
горизонтальной плоскости вниз от 0 до 90° и считают положи-
тельным, если опущен северный конец магнитной стрелки, и отри-
цательным, — если опущен южный конец.
Точки на земной поверхности, в которых вектор Т направлен
горизонтально, образуют замкнутую линию, дважды пересекаю-
щую географический экватор и называемую магнитным эк-
ватором. Полную силу земного магнетизма — вектор Т —
можно разложить на горизонтальную Н if вертикальную Z со-
ставляющие в плоскости магнитного меридиана.
Из рис. 18 имеем:
Н = Т cos0, Z=Tsin0 или Z = //tg0.
Величины d, Н, Z и 0, определяющие магнитное поле Земли
в данной точке, называют элементами земного магне-
тизма.
Распределение элементов земного магнетизма по поверхности
земного шара принято изображать на специальных картах в ви-
де кривых линий, соединяющих точки с одинаковым значением
того или иного элемента. Такие линии называют изолиния-
ми. Кривые равного магнитного склонения — изогоны на-
носят на карты изогон (рис. 19); кривые, соединяющие точки
с равным магнитным напряжением, называют изодинами,
или изодинамами. Кривые, соединяющие точки с равным
магнитным наклонением — изоклины, наносят на карты Изо-
клин.
30
Рис, 19.
Магнитное склонение — наиболее важный элемент для судо-
вождения, поэтому его, помимо специальных магнитных карт,
указывают на навигационных морских картах, на которых запи-
сывают, например, так: «Скл. к. 16°,5 W».
Все элементы земного магнетизма в любой точке земной по-
верхности подвержены изменениям, носящим название вариа-
ций. Изменения элементов земного магнетизма делятся на пери-
одические и непериодические (или возмущения).
- К периодическим относятся дековые, годовые (сезонные) и су-
точные изменения. Из них суточные и годовые вариации невели-
ки и для судовождения во внимание не принимаются. Вековые
же вариации представляют собой сложное явление с периодом,
равным нескольким столетиям. Величина векового изменения маг-
нитного склонения колеблется в различных точках земной поверх-
ности в пределах от 0 до 0,2—0°,3 в год. Поэтому на морских кар-
тах магнитное склонение компаса приводится к определенному
году с указанием величины годового увеличения или уменьшения.
Чтобы привести склонение к году плавания, надо рассчитать его
изменение за истекшее время и на полученную поправку увели-
чить или уменьшить склонение, указанное на карте в районе
плавания.
Пример 18. Плавание происходит в 1968 г. Склонение компаса, снято
с карты, d — 11°, 5OsC приведено к I960 г. Годовое увеличение склонения 5' .При-
вести склонение к 1968 г.
Решение. Промежуток времени с 1968 по 1960 г. равен восьми годам; изме-
нение bd — 8 X 5 =э 40' ^0°, 7. Склонение компаса в 1968 г. d = 11°,5 0°,7 =
12°, 2 Ost •
Внезапные кратковременные изменения элементов земного
магнетизма (возмущения) называются магнитными бурями, воз-
никновение которых обусловлено северными сияниями и количе-
ством пятен на Солнце. При этом наблюдаются изменения скло-
нения в умеренных широтах до 7°, а в полярных областях — до
50°.
В некоторых районах земной поверхности склонение резко от-
личается по величине и знаку от его значений в прилегающих
точках. Это явление носит название магнитной аномалии. На
морских картах указывают границы районов магнитной аномалии.
При плавании в этих районах необходимо внимательно следить за
работой магнитного компаса, так как точность работы нарушается.
§ li. Девиация магнитного компаса и ее уничтожение
Стальной набор корпуса судна, его обшивка приобретают маг-
нитные свойства с момента постройки. В магнитном поле Земли
все продольные, поперечные и вертикальные связи судна намаг-
ничиваются неодинаково. Судовое железо в магнитном отноше-
нии принято делить на твердое и мягкое.
32
Твердое судовое железо обладает свойством постоянных маг-
нитов. Постоянный магнетизм, приобретенный судном во время
постройки, сохраняется годами. Мягкое в магнитном отношении
судовое железо не «задерживает» магнитное состояние надолго.
Оно обладает индуктивным магнетизмом, зависящим от положе-
ния корпуса судна относительно
Таким образом, на маг-
нитную стрелку компаса,
установленного на судне,
оказывают влияние магнит-
ные силы твердого и мяг-
кого в магнитном отноше-
нии железа, причем дейст-
вие их различно. Кроме то-
го, в результате действия
магнитных сил, возникаю-
щих от магнитного поля,
создаваемого различными
магнитного меридиана.
Рис. 20.
работающими судовыми агрегатами, контурами с током, стрелка
компаса отклоняется от магнитного меридиана.
Вертикальную плоскость, проходящую через полюсы подве-
шенной за центр тяжести магнитной стрелки на судне, имеющей
свободное вращение вокруг вертикальной оси, называют плос-
костью компасного меридиана в данной точке
судна. Компасный меридиан — это воображаемая ли-
ния пересечения плоскости истинного горизонта наблюдателя с
плоскостью компасного меридиана, проходящей через данную
точку на судне.
Угол в плоскости истинного горизонта наблюдателя между
магнитным и компасным меридианами называют девиацией
магнитного компаса (б). Этот угол отсчитывают от нор-
довой части магнитного меридиана к Ost или W от 0 до 180°. Де-
виацию называют остовой (восточной), если северная часть ком-
пасного меридиана отклоняется от северной части магнитного
меридиана к востоку, западной (вестовой), если северная часть
компасного меридиана отклоняется от северной части магнит-
ного меридиана к западу. Остовой девиации приписывают знак
«плюс», а вестовой — знак «минус» (рис. 20). Величина и знак
девиации зависят от влияния, которое оказывает на магнит-
ную стрелку компаса магнитное поле судна совместно с земным
магнитным полем.
По характеру возникновения различают полукруговую, чет-
вертную и креновую девиации. Полукруговая создается твердым
в магнитном отношении железом, четвертная — мягким, креновая
возникает во время качки судна.
Значительная девиация создает большие неудобства при пользо-
вании магнитным компасом. Поэтому на судах уничтожают де-
виацию путем искусственного создания в центре компаса сил,
2-933 33
одинаковых по характеру, равных по величине и противополож-
ных по направлению силам, вызывающим девиацию1. Для этого
бруски твердого и мягкого железа располагают около компаса в
специальных приспособлениях. Компас будет автономным и на-
дежным курсо-указателем в том случае, если силы, вызывающие
девиацию, компенсируются.
Уничтожение девиации компаса на судне — трудоемкая ра-
бота, обычно выполняемая специалистами-девиаторами, а иног-
да и судоводителями.
После уничтожения девиации у судовых магнитных компа-
сов определяют остаточную девиацию, которая обыч-
но не превышает 2—3°. Ее находят из наблюдений на восьми
равноотстоящих главных и четвертных курсах.
Для определения остаточной девиации компасов существует
несколько способов. Чаще всего ее определяют по:
створам;
пеленгу отдаленного предмета;
взаимным пеленгам;
пеленгам небесных светил.
Простой и наиболее точный способ — это определение девиа-
ции по створам. Для этого, следуя одним из курсов, пересекают
линию створных знаков, магнитное направление которых изве-
стно. В момент пересечения створов, по магнитному компасу за-
мечают компасный пеленг створов.
Девиация на данном курсе определится из соотношений:
омп - окп\ з = —'кп,
где ОМП — отсчет магнитного пеленга;
ОКП— отсчет компасного пеленга.
Определив остаточную девиацию, по специальным формулам
вычисляют таблицу девиации для компасных курсов через 15
или 10° (табл. 1).
Правилами технической эксплуатации предусмотрено уничто-
жение девиации магнитного компаса не реже раза в шесть меся-
цев. Если на судне производились ремонтные работы с примене-
нием электросварки, а также после погрузки грузов, изменяющих
магнитное состояние судна (металлические конструкции, трубы,
рельсы и т. п.), необходимо дополнительно уничтожить девиа-
цию. В этих случаях при выдаче капитану плана-задания на рейс
следует учитывать время, необходимое для уничтожения и опре-
деления девиации компаса. Обычно на девиационные работы тре-
буется 2—4 ч. Судно приводят в походное состояние, трюмы за-
крывают, грузовые стрелы укладывают по-походному, палубный
груз принайтовывают, а затем выходят на рейд, оборудованный
1 Способы уничтожения полукруговой и четвертной девиаций изложены в
учебнике В. П. К о ж у х о в а и др. Девиация магнитного компаса, М., «Тран-
спорт», 1967.
34
Таблица остаточной девиации
Таблица 1
кк в кк . 1 Я* в ЯЯ в
0° +2°,3 100 —3°,3 180° —1°,7 280° +4°,5
10 +1.7 ПО —3,7 190 —0,7 290 . +4,3
20 + 1.3 120 —4,0 200 +0,3 300 +4,0
30 + 1,0 130 —4,3 210 + 1,3 310 +3,7
40 +0,5 140 -4,0 220 +2,0 320 +3,5
50 ±0,0 150 —3,7 230 + 2,7 330 +3,0
60 —0,7 160 —3,3 240 +3,5 340 +2,7
70 —1,5 J70 -2,5 250 +4,0 350 +2,5
80 —2,0 180 —1,7 260 +4,3 360 +2,3
90 —2,7 270 +4,5
специальными створами,
и девиатор производит
все работы по
уничтожению девиации.
§17. Магнитные и компасные румбы, курсы и
пеленги. Общая поправка компаса
Рис. 21.
Направление в море определяют не только относительно ис-
тинного меридиана, но также относительно магнитного и компас-
ного меридианов, называя их
в общем случае магнитны-
ми и компасными рум-
бами.
Изобразим на плоскости
истинного горизонта три мери-
диана (рис. 21): истинный
магнитный jVmSm и компасный
jVrSk, направление диаметраль-
ной плоскости OD и направле-
ние с судна на береговой ориен-
тир ОМ, На чертеже угол
N^OD — истинный курс судна,
а угол N^OM — истинный пе-
ленг. По аналогии считают, что
угол N^OD — магнитный курс
(МК)> угол NKOD — компасный
курс (КК), угол NMOD — маг-
нитный пеленг (МП), а угол
ПкОМ — компасный пеленг (КП
Таким образом, магнитнь
при центре компаса, отсчитываемый от нордовой части магнитного
меридиана до направления носовой части диаметральной плоско-
сти судна по часовой стрелке от 0 до 360°. Компасный
2* 35
м курсом судна называют угол
курс—угол при центре компаса, отсчитываемый от нордовой ча-
сти компасного меридиана до направления носовой части диамет-
ральной плоскости судна по часовой стрелке от 0 до 360°. М а г-
нитным пеленгом предмета называют угол при центре
компаса, отсчитываемый от нордовой части магнитного мери-
диана до направления на предмет по часовой стрелке от 0
до 360°. Компасным пеленгом предмета называют угол
при центре компаса, отсчитываемый от нордовой части компасного
меридиана до направления на* предмет по часовой стрелке от 0
до 360°.
Истинные курсы и пеленги связаны с магнитными следующи-
ми алгебраическими соотношениями:
ИК-МК+d- MK = HK-d- d = HK-MK; (19)
ИП = МП +d\ МП = ИП -d\ d = ИП - МП. (20)
Пример 19. ИК = 355\ d= 1I°,5W. Рассчитать МК. Пример 20. МП = 132°, d = 5° Osf. Рассчитать ИП.
Решение (формулы 19) ИК = 355° ~~ г/^—11,5 Решение (формулы 20) МП = 132° + +5
МК = 366°,5 ~ 360 ИП = 127°
МК = 6°,5
Магнитные курсы и пеленги связаны с компасными следующи-
ми алгебраическими соотношениями:
МК = КК + $\ КК = МК-?> Ъ = МК-КК\ (21)
МП = КП + §\ кп;=мп — ^ 8 = МП —КП. (22)
Пример 21. АТС == 357°; 3 = 5°O?t. Пример 22. МП = 4°: Я77 == 358°
Рассчитать МК. Рассчитать девиацию б.’
Решение (формулы 21) Решение (формулы 22)
. КК = 357° + 5^+5 ,Л477= 4° + 360
МК = 362° ~ 360 МП = 364° ~ KZ7 = 358
МК = 2° 3 = +6°
Совместное действие сил земного магнетизма и магнитного
поля судна приводит к тому, что магнитная стрелка отклоняет'
ся от истинного меридиана на некоторый суммарный угол,' назы-
ваемый общей поправкой компаса. Ее обозначают
символом Д/С
Общую поправку называют остовой или вестовой и ставят
знак «плюс» или «минус» в зависимости от того, к осту или весту
36
отклонена северная часть компасного меридиана от северной
части истинного меридиана. Например:
ДАТ = +3° или ДК = —10°.
Общая поправка компаса, склонение и девиация связаны сле-
дующими алгебраическими соотношениями:
ДК = d + 6; d = Д/С -3 и а = &K-d. (23)
Пример 23. d = 12°Ost; S = 4°, 5W\ Рассчитать ДА".
Решение (формулы 23)
^=+.12°
+s = — 4,5
+ 7°,5.
§ 18. Перевод и исправление румбов
На судне по магнитному компасу получают компасные курсы
и компасные пеленги. На навигационной карте прокладывают
только истинные курсы и истинные пеленги. Поэтому судоводи-
телям необходимо уметь переходить от компасных направле-
ний к истинным и обратно. Переход от истинного курса или пе-
ленга, снятого с карты, к компасному носит название перевода
курса или пеленга, а от компасного курса или пеленга,
полученного по компасу, к истинным их значениям — исправ-
лением курса или пеленга. Обе задачи могут быть
решены как графически, так и аналитически.
При графическом решении в каждом случае строят чертеж и
рядом с ним производят расчеты истинного или компасного кур-
са и пеленга. Чертеж дает наглядное представление о том, что
нужно сделать, т. е. прибавить или отнять магнитное склонение
и девиацию, чтобы получить искомый курс или пеленг.
Перевод истинных курсов в компасные осуществляют следу-
ющим образом. Пусть судно находится
в точке О (рис. 22). На карте проло-
жен курс судна на маяк D. Проведем
через точку О линию NUO, которая
представит северную часть истинного
меридиана. Тогда угол NUOD — истин-
ный курс судна. Пусть в данном месте
наблюдается остовое магнитное скло-
нение. Угол A\jOAfM есть склонение
магнитного компаса, а линия —се-
верная часть магнитного меридиана.
Из рисунка видно, что угол между маг-
нитным меридианом и носовой частью
диаметральной плоскости судна OD
стал меньше на величину склонения по
сравнению с истинным курсом. Угол
NM0D — магнитный курс судна.
37
Для перехода к компасному курсу необходимо учесть девиацию
магнитного компаса. Для этого компасный меридиан проводят на
чертеже так, чтобы его положение относительно магнитного мери-
диана соответствовало знаку и величине девиации.
Девиацию выбирают из таблицы девиации на компасный курс
простым интерполированием. Но при переводе курсов, как видим,
компасный курс неизвестен. Однако при хорошо уничтоженной
девиации (остаточная девиация не превышает 2—3°) ее значе-
ние на магнитных и компасных курсах практически одно и то же.
Поэтому, учтя склонение, указанное на карте, и переведя истин-
ный курс в магнитный, выбирают на него девиацию. Имея девиа-
цию, переводят магнитный курс в'компасный.
Пусть в нашем примере магнитному курсу соответствует ос-
товая девиация определенной величины. Тогда угол WMCWK — де-
виация, а линия NKO — северная часть компасного меридиана.
Угол — компасный курс судна.
При переводе истинных курсов и пеленгов в компасные ис-
пользуют также аналитические соотношения:
MK = HK-d\ КК = МК-^ Ъ'КП = ИП-ЬК. (24)
Общая поправка определяется на компасный курс, которым
следует судно в момент пеленгования.
Пример 24. Судно, следуя ИК = 235°, должно [сделать поворот в момент,
когда ИП маяка будет 115°. Склонение компаса d = 20°Ost. Девиацию выбрать
из табл. 3. Рассчитать КК и КП маяка в^момент поворота.
Решение (формулы 24)
1) ИК= 235° 2) .d = +20° 3) ИП = 115°
d = +20 ^ + 1,7 ~~ Д/С^ + 21,7
МК= 215° Atf = +21°,7 КП = 93°,3
~ +1,7
КК = 213°,3
ридиан NMO так, чтобы отклонение
нитного соответствовало величине
38
Исправление компасных
курсов в истинные производят
следующим путем. Пусть суд-
но находится в точке О (рис.
23) и следует некоторым КК.
Проведем через точку О линию
NKO, которая представит север-
ную часть компасного меридиа-
на. От компасного меридиана
по часовой стрелке отложим
угол NKOD, соответствующий
заданному КК. Затем через точ-
ку О проведем магнитный ме-
компасного меридиана от маг-
И- знаку девиации компаса
iia Данном курсе. Пусть в нашем примере девиация компаса поло-
жительная (остовая), тогда угол NMOD — магнитный курс судна.
Полученный магнитный курс исправляют в истинный, прибав-
ляя или вычитая склонение компаса, указанное на карте.
На чертеже необходимо провести истинный меридиан NKO че-
рез точку О так, чтобы отклонение магнитного меридиана от ис-
тинного соответствовало наименованию и величине магнитного
склонения. Если в нашем примере склонение положительное (ос-
товое), то угол N^OD изображает истинный курс судна.
При исправлении компасных курсов и пеленгов в истинные
используют аналитические соотношения
И К = КК\+ ДК и ИП =[КП + ДЛГ, (25)
гдеД/<=^+б.
В этом случае девиацию выбирают из таблицы девиации на
компасный курс; склонение снимают с карты и получают общую
поправку Д/<, которой исправляют компасные курсы и пеленги.
Пример 25. Судно, следуя КК = 356°, имеет КП предмета 62°. Склонение
снятое с карты, 14°Ost. Девиацию выбрать из табл. 3. Определить ДЯ\ ИКнИП.
Решение (формулы 25)
1) , d = + 14° 2) .КК = 356° 3) , КП = 62°
= + 2,4 + +16,4 + Д7С= +16,4
LK = + 16°,4 ИК = 372°, 4 ИП = 78°,4
360
ИК = 12°,4
Перевод и исправление курсов и пеленгов очень ответственная
работа, ее следует выполнять тщательно, так как небрежность
может привести к аварии судна.
Глава IV
КАРТОГРАФИЧЕСКИЕ ПРОЕКЦИИ И МОРСКИЕ КАРТЫ
§ 19. Картографические проекции
При осуществлении перехода по наивыгоднейшему пути судо-
водителю необходимо иметь отчетливое представление о взаим-
ном расположении пунктов отхода и прихода, о навигационных,
условиях, через которые проходит трасса выбранного пути, а так-
же знать гидрометеорологическую обстановку на тот период вре-
мени, в течение которого будет проходить плавание.
Изучение районов земной поверхности, в которых предпола-
гается плавание судов, осуществляется с помощью специальных
навигационных пособий.
Наиболее распространенным видом навигационных пособий
являются морские карты. Они используются для ведения навига-
ционной прокладки, составления навигационно-гидрографических
обзоров и дают разнообразные справочные сведения, необходи-
мые судоводителю для изучения района плавания.
39
Карты изображают на плоскости земную поверхность илй
часть ее в определенном масштабе. Земля имеет сферическую
форму, и изобразить ее на плоскости без искажений невозможно.
Поэтому любая карта земной поверхности имеет искажения того
или иного характера.
Способ условного изображения поверхности Земли на плоско-
сти называют картографической проекцией, а полученную при
этом систему меридианов и параллелей — картографической сет-
кой. При этом каждой точке на изображаемой поверхности соот-
ветствует однозначная точка на плоскости.
Существует много видов картографических проекций. Их мож-
но классифицировать по следующим двум важнейшим признакам:
характеру искажений (по свойствам изображений), которые име-
ет данная карта, и виду меридианов и параллелей нормальной кар-
тографической сетки.
По характеру искажений проекции делят на равноугольные
(конформные), равновеликие (эквивалентные) и произвольные
виды проекций.
На картах в конформной проекции бесконечно малые фигуры
изображаются подобными соответствующим фигурам на земной по-
верхности. Например, бесконечно малый кружок на земной поверх-
ности изобразится на карте в равноугольной проекции также
кружком. Подобие фигур обусловливает равенство соответст-
вующих углов. Поэтому на картах в конформной проекции сохра-
няется равенство углов между какими-либо направлениями на
местности и теми же направлениями на карте. Отсюда и назва-
ние проекции — равноугольная (конформная). На картах в такой
проекции невозможно сохранить эквивалентность площадей.
На картах в равновеликой (эквивалентной) проекции сохра-
няется пропорциональность площадей соответствующим площадям
на земной поверхности, но hq сохраняется подобие фигур. На-
пример, бесконечно малый кружок на земной поверхности изобра-
зится на карте в равновеликой проекции, пропорциональ-
ным по площади эллипсом. Пропорциональность площадей сохра-
няется в равновеликих проекциях независимо от размеров изоб-
ражаемой площади.
Произвольные проекции не сохраняют ни равенства углов, ни
пропорциональности площадей, но они обладают особыми специ-
альными свойствами. Из числа произвольных проекций часто
выделяют равнопромежуточные проекции, обладающие промежу-
точными свойствами между равноугольными и равновеликими
проекциями. В таких проекциях масштаб сохраняет свою величи-
ну по одному из главных направлений.
По виду меридианов и параллелей нормальной картографичес-
кой сетки различают конические, цилиндрические, азимутальные,
перспективные и условные проекции.
При конических и цилиндрических проекциях земную поверх-
ность проектируют по тому или иному закону на боковую
40
поверхность касательного или секущего конуса или цилиндра, с
последующей разверткой этой поверхности в плоскости. Разли-
чают нормальные, поперечные или косые конические или цилинд-
рические проекции в зависимости от того, совпадает ли ось кону-
са или цилиндра с осью Земли, с экватором или занимает неко-
торое промежуточное положение.
При азимутальной проекции земную поверхность проектируют
на касательную к ней плоскость.
Перспективные проекции являются частным случаем азиму-
тальных проекций и отличаются от последующих тем, что строят-
ся по законам перспективы.
Условные проекции предполагают построение картографичс
ских сеток, исходя из тех или иных предварительно поставлен-
ных условий, исполнение которых позволяет создать проекции, об-
ладающие необходимыми достоинствами. Таких проекций можно
мыслить бесконечно большое число.
§ 20. Локсодромия
Кратчайшим расстоянием между двумя точками на земной
поверхности является дуга большого круга - о р т о д р о м и я, пе-
ресекающая все меридианы под разными углами. При плавании
по ортодромии приходится постоянно менять курс судна, произ-
водя трудоемкие и громоздкие вычисления. Поэтому к плава-
нию по ортодромии прибегают только при больших океанских
переходах (тысячи миль). Меньшие переходы делают постоян-
ным курсом, линия которого на поверхности Земли представляет
кривую двоякой кривизны — локсодромию. Локсодромия
пересекает все меридианы под одним и тем же углом, спиралеоб-
разно приближаясь к земному полюсу. Выведем уравнение локсо-
дромии.
Пусть радиус Земли равен 7? (рис. 24), а радиус некоторой
параллели АВ — г. Тогда выражение
2тсг = cos ср (26)
определяет соотношение между длиной экватора и длиной парал-
лели в широте <р.
Пусть дуга М0С есть локсодромия с двумя произвольными
точками на ней М] (фЬ XJ и М2(ф2, Х2); К — угол пересечения
локсодромии с земными меридианами. Тогда из треугольника
MMiM2, который из-за малых размеров можно считать плоским и
прямоугольным при вершине М, имеем
DF =-----COSffl~‘
Обозначим DF = ДХ, MMi = Дер. Переходя к дифференциалам,
получим
d). = -nv4d<p,
cos'ep - т’
4!
на оснований чего можем записать
d\
С tgtt
' cos <₽
<Р1
dy.
Так как tg — постоянная величина, то уравнение локсо-
дромии получает следующий окончательный вид:
Х2 - X! = tg К [in tg (45э + » - In tg (45° + £-)] . (27)
§ 21. Меркаторская проекция
Во время плавания необходимо вести учет движения судна в
море. Для этого наиболее удобен и нагляден графический способ
учета, связанный с прокладкой на карте пути судна и с построе-
нием углов, под которыми с судна наблюдают различные пред-
меты. Поэтому к морской карте предъявляются следующие тре-
бования:
линия пути судна, следующего одним и тем же курсом (лок-
содромия), должна изображаться на карте прямой;
картографическая проекция должна быть равноугольной.
Этим требованиям удовлетворяет равноугольная нормальная
цилиндрическая (меркаторская) проекция. Свое второе название
эта проекция получила по имени предложившего ее впервые в
1569 г. голландского ученого Кремера (Меркатора). Рассмот-
рим эту проекцию,
42
Пусть вокруг земного шара ойисай цилиндр, ось которого сов-
падает с осью вращения Земли. Такой цилиндр (рис. 25) каса-
ется земного шара по экватору в точках EABCGFQ. Если на бо-
ковую поверхность этого цилиндра спроектировать изображения
земных меридианов и параллелей, а затем его развернуть по одной
из образующих, то получим нормальную цилиндрическую проек
цию. На этой проекции все меридианы и параллели изображены
прямыми линиями, образуя прямоугольную сетку. На такой сетке
расстояния между меридианами пропорциональны разностям соот-
ветствующих им долгот, а расстояния D параллелей от экватора
являются функцией широты. Исходя из требований, предъявляе-
мых к морской карте, эта функция D{=f (<рг) должна удовлетворять
условиям равноугольности, т. е. конформности.
Возьмем на поверхности земного шара участок LMTS (рис.
25 — сфера), образованный пересечением меридианов и паралле-
лей, и соответствующую этому участку фигуру Imts на нормаль-
ной цилиндрической проекции. Фигуры LMTS и Imts должны
быть подобными — только в этом случае проекция будет конформ-
ной. Тогда
tm _ ts
ТМ “ 7\S’
(28)
Определим значение сторон отмеченных фигур следующим
образом:
ТМ = AS — отрезок дуги меридиана;
TS = гДХ —длина дуги параллели между меридианами точек
S и Т (г — радиус параллели точек S и Т);
43
ts = BA = /?-Дк — Длина дуги параллели на проекции, равная длине
изображения дуги экватора В А (В ~~ радиус зем-
ного шара);
tm = &D — разность расстояния двух параллелей от экватора
по меридиану.
Тогда выражение (28) получит вид
дг> _ /?• да
дГ " г* ДА ’
а так как г—В cosq? и Д5=/?Аф, то
4D = ——— Д<г •
cos 9 ‘
Переходя к дифференциалам, получим
dD = R и {dD = ф?
cos 9 J J cos 9
ИЛИ
O = /?lntg(45c + f) . (29)
Итак, если на нормальной цилиндрической проекции параллель про-
водить на расстоянии D = /?lntg^45° + ~?г) от экватора, то такая
проекция будет конформна (равноугольна).
Величину D, выраженную в минутах дуги экватора, называют
меридиальной частью данной параллели.
Уравнение прямой линии на меркаторской проекции выведем,
подставляя в общий вид уравнения прямой с угловым коэффи-
циентом вместо текущих координат их выражение через ф и К.
Полагая y=D=B Intg (45°+-^-); х = (см. рис. 25), полу-
чим следующий вид уравнения прямой линии на равноугольной
цилиндрической проекции:
*2- = tg Ar[lntg(45°+^) — Intg (45°+-§-)] . (30)
Сравнение выражений (27) и (30) показывает, что локсодро-
мия изображается на меркаторской карте прямой линией.
§ 22. Масштаб
Вне зависимости от характера картографической проекции,
при составлении карты всегда уменьшают действительные размеры
участков земной поверхности. Отношение длины какой-нибудь
линии на карте к длине той же линии на поверхности Земли на-
зывают масштабом.
Различают два вида масштабов: числовой и линейный.
Числовой масштаб — дробь, числитель которой —
единица, а знаменатель — число, показывающее, скольким
44
единицам длины на местности равна единица длины на карте. На-
пример, дробь \ 20^000 означает, что одной единице длины на
карте соответствует 200 000 таких же единиц длины на местности
(1 см на карте р^вен 200 000 см на местности и т. п.).
Линейный масштаб указывает, какое число более крупных
единиц расстояния ца местности содержится в одной более мел-
кой единице на карте (например, 5 миль в 1 см).
Для перехода от числового масштаба к линейному знамена-
тель числового масштаба делят на длину морской мили, выражен-
ную в тех единицах, к которым приводится линейный масштаб.
Например, числовой масштаб 20(У000~’ тогда линейный масштаб
г 200 000 . .
будет “(85 2QQ- = 1,03 мили в 1 см.
Для перехода от линейного масштаба к числовому линейную
длину изображения одной мили на карте делят на длину мор-
ской мили в тех же единицах, в которых длина мили дана на
карте. Например, линейный масштаб 5 миль в 1 см, тогда число-
. 1 1
вой масштаб 51 852 100 ~ 926 000,'
Выбор масштаба карты обусловливается тем, насколько под-
робной должна быть карта или размер района, изображаемого на
ней.
От масштаба карты зависит предельная точность, с которой
можно производить измерения на карте.
Известно, что невооруженный человеческий глаз в состоянии
различить расстояние на бумаге не менее 0,1 мм. Поэтому рас-
стояние на местности, соответствующее 0,1 мм на карте, назы-
вают предельной точностью масштаба. Однако практически точ-
ность графических построений на карте редко превышает 0,2 мм
и под точностью масштаба обычно принимают удвоенную пре-
дельную точность масштаба.
Предельная точность масштаба различна у карт с различны-
ми масштабами. Так, например, если имеется карта с масштабом
1:200 000, т. е. 1 мм на карте соответствует 200 м на мест-
ности, тогда предельная точность масштаба будет 0,2x200—40 м.
Морские карты печатают на листах стандартных размеров, по-
этому если необходимо изобразить на карте определенный район,
то масштаб определяют в соответствии с предельными размерами
листа меркаторской карты.
На карте обычно изображен значительный участок местности,
что может быть выполнено лишь в переменном масштабе. Поэто-
му на карте, составленной в меркаторской проекции 1' дуги ме-
ридиана — морская миля — изображается отрезками различной
длины, в зависимости от широты. На самом деле, меридианы на
меркаторской карте «растягиваются» в каждой точке пропорцио-
нально In tg (45° + -^-). Поэтому изображение / дуги меридиана
45
йа Меркаторской карте изменяет свою Длину с Изменением широ-
ты, а масштаб меркаторской карты — величина переменная, уве-
личивающаяся с увеличением широты. Следовательно, для измере-
ния расстояний на карте необходимо пользоваться переменным
линейным масштабом. Таким линейным масштабом являются вос-
точная и западная (вертикальные) рамки карты, разбиваемые на
градусы, минуты и их доли. Изображение Г/дуги меридиана на
проекции Меркатора (!' дуги вертикально^ рамки) называется
меркаторской милей.
§ 23. Основные штурманские задачи, решаемые
на морской карте
Прокладочный инструмент. Основой решения повседневных
штурманских задач на морской карте является прокладка — со-
вокупность всех графических работ, выполняемых на морской
карте специальным прокладочным инструментом: навигационным
транспортиром, параллельной линейкой и измерителем.
Навигационный транспортир (рис. 26, а) служит
для построения и измерения углов и представляет собой градуи-
рованный полукруг авс с линейкой acdf. Центр этого полукруга
46
находится в\точке О, К нижнему краю транспортира прикрепле-
на планка г. цДена деления транспортира равна 1°. У исправного
транспортира деления должны быть одинаковой величины, срезы
линейки параллельны друг другу; градуированная дуга долж-
на быть дугой круга, а центральный штрих (точка О) — совпа-
дать с центром этой. дуги.
Параллельной линейкой (рис. 26, б) проводят на
карте прямые линиш параллельные заданному направлению. Ли-
нейки / соединены двумя тягами 2, которые крепятся к йим шар-
нирами 3. У исправном параллельной линейки каждая из ее час-
тей (половинок) должца иметь строго параллельные и прямоли-
нейные внешние и внутренние срезы.
Измеритель (рис\ 26, в) служит для измерения и откла-
дывания на морской карте расстояний. Ножки исправного изм^
рителя, сдвинутые вместе, должны давать на карте один укол раз-
мером не более 0,2 мм.
Рассмотрим основные задачи, встречающиеся при ведении про-
кладки. Выполняя эту работу, следует строго руководствоваться
правилами записи в навигационных документах, изложенными в
справочном руководстве «Навигационно-гидрографическая терми-
нология. Условные знаки и сокращения», которое является при-
ложением к т. IV «Курса кораблевождения».
Снятие с карты широты и долготы данной точки. Поставив
в заданную точку ножку измерителя, подбирают такой раствор
последнего, чтобы вторая ножка описала дугу, касательную к
ближайшей промежуточной параллели- на карте. Сохраняя ра-
створ измерителя, переносят его на вертикальную рамку карты
(левую или правую): одну ножку измерителя ставят на парал-
лель, к которой производилось касание, а другой отмечают на
шкале вертикальной рамки карты отсчет, соответствующий ши-
роте заданной точки.
Долготу точки снимают с карты так же, но все действия про-
изводят относительно меридиана, а отсчет берут по горизонталь-
ной шкале карты.
Нанесение на карту точки по заданным координатам. На вер-
тикальной рамке карты отмечают место, соответствующее широте
заданной точки, а на горизонтальной — место, соответствующее
ее долготе. Параллельной линейкой через отмеченные на шкалах,
места карандашом проводят параллель и меридиан; их пересе-
чение определяет место заданной точки на карте.
Ориентировка линейки производится по нанесенным на карту
промежуточным параллелям и меридианам, ближайшим к задан-
ной точке.
Измерение расстояния на карте между двумя точками. Рас-
стояния обычно снимают при помощи измерителя, раствор ножек
которого вмещается между соответствующими точками. Затем из-
меритель прикладывают к вертикальной рамке карты, по воз-
можности р той же широте, в которой расположен измеряемый от-
. 47
резок. Это необходимо делать потому, что длина /меркаторской
мили изменяется с изменением широты (см. § 22). /
Если расстояние не может быть измерено о/ним раствором,
то его определяют как сумму отдельных частей,/измеренных опи-
санным выше способом. /
Прокладка направления (ИК или ИП) от/ заданной точки.
Транспортир накладывают на промежуточный^ меридиан карты,
ближайший к заданной точке таким образом^ чтобы центральный
штрих транспортира и деление на его градуированной дуге, со-
ответствующее заданному направлению, Совпали с нанесенным
на карту промежуточным меридианом. Приложив к планке транс-
портира параллельную линейку, не изменяя ее направления, пе-
реводят одну из половинок линейки к заданной точке на карте.
Затем через эту точку проводят прямую линию, которая пред-
ставляет собой заданное направление на карте.
На градуированной дуге транспортира одним и тем же штри-
хом отмечены два взаимно противоположных направления. По-
этому сторону направления определяют по четверти горизонта.
Определение направления линии, проложенной на карте. Сов-
мещают параллельную линейку с проложенной на карте линией и
прикладывают к линейке транспортир. Затем его двигают вдоль
среза линейки до тех пор, пока центральный штрих не совпадает
с одним из промежуточных меридианов, проведенных на карте.
Иногда для этого бывает необходимо несколько раздвинуть поло-
винки параллельной линейки. При совпадении центрального штри-
ха транспортира с изображением* меридиана отсчет на градуи-
рованной дуге транспортира против изображения этого меридиа-
на укажет заданное направление (и ему противоположное).
Перенесение данной точки с одной карты на другую. На пер-
вой карте выбирают какой-либо ориентир, расположенный по
возможности ближе к заданной точке и отмеченный на второй
карте. Далее, на первой карте снимают направление от выбран-
ного ориентира на заданную точку и измеряют расстояние между
этой точкой и ориентиром.
Для получения места заданной точки на второй карте доста-
точно от выбранного (общего) ориентира провести линию направ-
ления, снятого с первой карты, и по этому направлению отложить
от ориентира в масштабе второй карты расстояние, измеренное
на первой карте.
Снятие широты и долготы точки на плане. Некоторые планы
вместо координатной рамки имеют в заголовке точные географи-
ческие координаты какого-либо основного пункта, отмеченного на
плане. В этом случае снятие координат заданной точки плана
производится следующим образом.
Через заданную точку проводят карандашом ее меридиан и
продолжают его до пересечения с изображением параллели ос-
новного пункта. Далее измеряют по проведенному меридиану
расстояние от параллели заданной точки до параллели основного
4»
пункта плана\и сравнивают это расстояние с линейным масшта-
бом плана похшироте. Затем определяют разность широт задан-
ной точки и основного пункта плана. По определенной таким об-
разом разности цтирот вычисляют широту заданной точки.
Для определения долготы заданной точки через нее проводят
карандашом ее параллель до пересечения с изображением мери-
диана основного пункта плана. Далее измеряют по проведенной
параллели расстояний от меридиана заданной точки до меридиа-
на основного пункта цлана, сравнивают это расстояние с линей-
ным масштабом плана \по долготе и определяют разность долгот
заданной точки и основного пункта плана. По определенной та-
ким образом разности долгот вычисляют долготу заданной точки.
В том случае, если на плане имеется только широтный мас-
штаб, для получения долготы заданной точки, пользуясь этим
масштабом, нужно также измерить отрезок параллели между ме-
ридианами заданной точки и основного пункта плана. Затем по
измеренному расстоянию следует выбрать разность долгот из
табл. 25-а МТ-63.
§ 24. Гномонические карты
При больших океанских переходах часто прибегают к плава-
нию по дуге большого круга — ортодромии. Прокладка орто-
дромии на карте меркаторской проекции — дело сложное, требу-
ющее трудоемких предварительных вычислений. В то же время
существует такая картографическая проекция, на которой дуга
большого круга, а также меридианы прокладываются в виде пря-
мой линии. Карты, выполненные в такой проекции, называемой
центральной (гномонической), широко используются в морском
судовождении, несмотря на то, что проекция не конформна, лок-
содромия на ней выглядит в виде кривой линии и с такой карты
очень трудно производить снятие расстояний.
Известно, что большой круг есть кривая, плоскость которой
проходит через центр сферы, т. е. ч^рез точку зрения, поэтому
любая дуга большого круга на центральной проекции изобразит-
ся обязательно только в виде прямой линии. Карты в гномониче-
ской проекции используются для расчетов плавания в открытом
море по дуге большого круга, т. е. для прокладки на них ортодро-
мических курсов и пеленгов, изображающихся на таких картах
в виде прямых линий. Наглядное представление об изображении
ортодромии (точечная линия) и локсодромии (сплошная линия)
на гномонической а и меркаторской б проекциях дает рис. 27.
Гномоническая проекция1 — древнейшая из всех из-
вестных, принадлежит к одному из видов азимутальных (пер-
спективных) проекций.
1 Центральная (гномоническая) проекция была впервые использована для
изображения поверхности Земли древнегреческим ученым Фалесом, жившим за
600 лет до ц. э.
49
Рис. 27.
географического положения точки касания (центральной точки)
гномонические проекции делят на три типа:
нормальной, прямой или полярной (рис. 28, а) называют про-
екцию, если центральная точка совпадает с одним из географиче-
ских полюсов Земли;
поперечной или экваториальной (рис. 28, б) — если централь-
ная точка находится на экваторе;
при горизонтальной или косой проекции (рис. 28, в) цент-
ральная точка находится между полюсами и экватором.
Наиболее употребительны карты в нормальной (полярной)
50
гномонической проекции. В этой проекции, в частности, состав-
лены карты океанов и околополярных районов земной поверхно-
сти. \ .
Карты в поперечной центральной проекции удобно использо-
вать для изображений экваториальных областей звездного неба.
Глава V
СЧИСЛЕНИЕ ПУТИ СУДНА
/
§ 25. Предварительная и исполнительная
прокладка
После получения рейсового задания на судне производится так
называемая проработка маршрута. Она заключается в подроб-
ном изучении по лоциям и откорректированным картам района
предстоящего перехода. Руководствуясь результатами такого изу-
чения и выбрав наивыгоднейший путь, штурман наносит его на
подобранные для перехода карты. Итогом работы по выбору на-
51
ййыгоднеишего Пути судна является предварительная
прокладка (подробно см. раздел «Лоция»). /
Техника выполнения предварительной прокладки на картах
относительно проста. Подбирают по возможно/ти такую карту,
на которой отмечены пункт отхода А и пункт Назначения В (рис.
29). Далее, недалеко от начального пункта А ^намечают исходную
начальную точку а, обстановка в которой позволяет определить
Ж//
61, J
Рис. 29.
место судна одним из навигационных способов. Аналогичную ко-
нечную точку Ъ отмечают вблизи порта назначения В. Начальную
и конечную точки пути соединяют прямой или ломаной линией,
руководствуясь тем, что путь судна должен быть наивыгоднейшим.
Чаще всего такой картой, на которой одновременно находят-
ся пункты отхода и прихода, оказывается карта мелкого масшта-
ба, не обеспечивающая безопасного мореплавания из-за отсутст-
вия на ней необходимых подробностей об условиях предстоящего
плавания. В этом случае проложенный на генеральной карте
путь разбивают на ряд участков, которые полностью и подробно
отражены на путевых или частных картах, составленных в более
крупных масштабах. Далее для каждого из участков снимают с
52
Мелкомасштабной карты координаты начала й конца каждого из
участков пути, а затем по этим координатам такие участки пере-
носят на соответствующие карты более крупного масштаба.
Намечая путь судна, рекомендуется предусматривать воз-
можно меньшее количество поворотов, так как это потребует до-
полнительного определения места судна в момент смены курсов
в точке поворота.
После нанесения выбранного пути судна на карту (карты) из
каждой линии курса пишут число градусов и число миль плава-
ния данным курсом — И К и S.
Заканчивая предварительную прокладку, по ИК рассчитывают
соответствующие им КК и общие поправки компаса; измерив
плавания судна по каждому отдельному участку пути, подсчи-
тывают число миль всего перехода.
Если время выхода в море заранее известно, то для районов
с приливами производится предварительный расчет воды в пунк-
тах выбранного маршрута. Значительно лучше, когда время вы-
хода в море основывается на соображениях, связанных с расче-
тами при предварительной прокладке. В этом случае становится
ясным, в какое время суток наиболее удобно проходить опасные
места, когда лучше подходить к пункту назначения или к месту
якорной стоянки и т. п.
Из-за несовершенства мореходных инструментов, влияния гид-
рометеорологических условий и других обстоятельств судно не бу-
дет точно следовать по курсам предварительной прокладки, ко-
торая дает только общее представление об условиях плавания.
Тем не менее предварительная прокладка облегчает работу
штурмана во время перехода судна. Она правильно ориентирует
судоводителя о порядке его работы в рейсе и освобождает о
необходимости выполнять часть расчетов, которые отвлекали бы
штурмана от наблюдения за безопасностью судна во время
рейса.
На переходе ведут исполнительную прокладку на
карте самого крупного масштаба для данного района. Под такой
прокладкой понимают всю совокупность графической работы, вы-
полняемой на карте для обеспечения безопасности судовождения,
т. е. прокладку истинных курсов судна, навигационных и других
определений места судна и т. д. Во время ведения исполнитель-
ной прокладки происходит окончательный выбор курсов, их уточ-
нение в связи с конкретной обстановкой в момент прохождения
того или иного участка пути. Задачей штурмана во время пере-
хода является стремление возможно ближе придерживаться выб-
ранного им при предварительной прокладке маршрута.
При ведении прокладки наносимые на карту и отмеченные на
линиях пути судна точки обозначаются условными знаками, пре-
дусмотренными пособием «Навигационно-гидрографическая тер-
минология. Условные знаки и сокращения».
Выйдя из порта и определив место судна, например, в точке
53
судно должно было ложиться йа зйранёе рассчйтайный курс
(///(= 170°,О, т. е. /</<=166°,5 при А /<=4-3°,5) и следовать этим
курсом до момента прихода в первую точку поворота. Однако
заранее рассчитанная и действительная исходные точки а и а'
существенно расходятся. Поэтому, если судно будет идти в даль-
нейшем намеченным предварительной прокладкой курсом, то оно
слишком близко пройдет опасности, лежащие справа (пунктир-
ная линия на рис. 29). В подобном случае курс судна изменяют
так, чтобы выйти на предварительно намеченную линию ас, либо
выйти в точку поворота с измененным, но также безопасным кур-
сом а'с. Контролируют дальнейшее следование по намеченному
пути графическим или письменным счислением пути судна, а так-
же определением его места навигационными или астрономически-
ми способами.
Образец навигационной прокладки на карте приводится в при-
ложении 5.
§ 26. Графическое и письменное счисление
пути судна
Общие сведения. Прокладка, выполняемая без проверки поло-
жений судна путем определений его места по береговым пред-
метам или по небесным светилам, называется счислением
пути судна. Счисление, выполняемое на карте методом гра-
фических построений, называется графическим счислением пути
судна, а выполняемое с помощью вычислений по специальным
формулам — письменным (аналитическим).
Графическое счисление. Сущность этого метода заключается в
следующем. В момент определения начальной точки а' (см. рис.
29) замечают время по судовым часам (до 1 мин) и показания
счетчика лага (до 0,1 мили). Начальную точку а' обводят круж-
ком и около нее на свободном месте делают надпись в виде дро-
Л 18.00
би: числитель — время, знаменатель — показания лага 5
Если обсервованная точка а' достаточно близка к начальной
точке а, то от точки а' прокладывают линию первого курса в ви-
де прямой линии, параллельной линии ас. После этого линию ас
стирают с карты, а на вновь проведенной линии надписывают
число градусов компасного курса и рядом, в скобках, — рассчи-
танную для этого курса общую поправку компаса А/С чтобы
всегда можно было установить, по какому курсу правили.
Если же обсервованная точка а' удалена от точки а настоль-
ко, что линия пути судна проходит близко к опасностям (пунк-
тир на рис. 29), тогда прокладывают новый курс так, как это бы-
ло показано выше в § 25.
На линии пути ежечасно отмечают счислимые места судна.
Для этого расстояние, пройденное судном за 1 ч, в масштабе карты
откладывают измерителем на пути судна от начальной точки.
54
В отмеченном измерителем месте делают засечку в виде корот-
кой прямой линии, перпендикулярной линии пути, а также над-
пись времени й показания лага.
Если судну необходимо изменить направление движения, то
в момент смены курса вновь замечают время и отсчет лага. Рас-
считав совершенное от последней счислимой точки плавание, от-
кладывают его по линии пути, отмечают точку поворота с записью
/ 04.37 \ „ „
в виде дроби t ~70- g ) и ог этои точки прокладывают новый курс.
Если по каким-либо причинам судно окажется в точке с', ко-
торая удалена от намеченной предварительной прокладкой точ-
ки с значительно, то новый курс прокладывают так, чтобы выйти
в точку d второго поворота. После этого линию cd также стирают
с карты, а на линии c'd' надписывают число градусов Д7С и ря-
дом, в скобках, — общую поправку компаса А/С для этого курса.
Ведение графической прокладки позволяет судоводителю
иметь наглядное представление о месте судна относительно нави-
гационных опасностей.
Точность прокладки зависит от того, насколько правильно
проложен курс и учтено пройденное расстояние. Точность про-
кладки выражается следующей формулой:
р = (М2 + 36 Д?, (31)
где 5л ~ величина совершенного судном плавания;
—ошибка в общей поправке компаса;
— ошибка в поправке лага, %.
Пример 26. Определить радиус круга, внутри которого должно быть место
судна, прошедшего одним курсом 60 миль, если возможная ошибка в курсе
±1°, а возможная ошибка в поправке лага (—2,0%).
Решение. По формуле (31)
р =^/Ю0-(1)2+36-(-2)2 = 1,6 мили.
Поворот судна с одного курса на другой вносит некоторую до-
полнительную ошибку в прокладку, так как после перекладки
руля судно не мгновенно изменяет направление движения, а
описывает центром тяжести определенную кривую (циркуляцию).
Учет циркуляции имеет большое значение при плавании в стес-
ненных водах, узкостях, шхерах и т. п. Циркуляцию учитывают
следующим образом.
Судно (рис. 30), следуя в направлении Къ в точке А должно
повернуть в направлении К2 (угол поворота равен а). Для учета
циркуляции проводят биссектрису внутреннего угла поворота
0=180°—а и на ней ищут центр О окружности с радиусом, равным
половине тактического диаметра циркуляции который определя-
ют опытным путем и выражают обычно в длинах корпуса судная
55
Проведя окружность, отмечают точки В и С касания ее с линиями
и /(г- Точку В считают началом поворота.
Письменное счисление. Счислимое место судна может быть
получено аналитическим способом письменного счисления в тех
случаях, когда нерационально применять графическое счисление
пути судна: при пла-
вании в высоких ши-
ротах, во время ледо-
вого плавания, кито-
бойного промысла и
т. д.
Сущность пись-
менного счисления
заключается в опре-
делении координат
пункта прихода при
известных координа-
тах пункта отхода,
курсе и плавании
судна. При помощи
письменного счисле-
ния можно решить
обратную задачу:
определить плавание и курс судна по известным координатам пунк-
тов прихода и отхода.
На основании формул (4) и (5) координаты пункта прихо-
да могут быть выражены так:
= + РШ]
(32)
^2 — \ + РД-
(33)
Если плавание происходит в невысоки?; широтах, то выраже-
ния для РШ и РД легко получить из рассмотрения так называе-
мого навигационного треугольника АВС (рис. 31),
в котором:
А — точка отхода с координатами ф1 и Zj;
В — точка прихода с координатами ф2 и Z2;
K = /LCAB — курс судна при переходе из точки А в точ-
ку В;
AB—S — расстояние между пунктами отхода и прихода;
АС = РШ и ВС=ОТШ.
Если допустить, что треугольник АВС плоский и прямоуголь-
ный, то непосредственно из рис. 31 получаем:
PZZZ =-S-cos/C; (34)
OTLU^S-sin К- (35)
56
Далее подставляя значение ОТШ из формулы (6), получаем
РДХ = S-sin/<-sec<pB или РД2 = 5-sin/<-seccp^ .
На самом деле &АВС не плоский и не прямоугольный (фигура
АС ВС' представляет собой сферическую трапецию). Поэтому РДХ=£
=£ РДч (?в ¥= ?д ), а действительное
РД = S-sir
значение
K-sec?™,
(36)
широта1.
Для облегчения работы штурмана
в МТ-63 имеются вспомогатель-
ные таблицы: табл. 24 дает вели-
чины РШ и ОТШ по аргументам
S (плавание) и К (курс); табл.
25-а — величины РД по аргумен-
там и ОТШ.
Если счисление ведется на пе-
реходе, совершаемом судном од-
ним и тем же курсом, то его назы-
вают простым, а если нескольки-
ки курсами — составным. Состав-
ное счисление применяют при пла-
вании на течении, особенно на
приливо-отливном; при этом тече-
ние учитывают как отдельный до-
полнительный курс (курсы). При составном счислении РШ и РД
вычисляют или выбирают изтаблиц по каждому отдельному курсу и
плаванию. Составляя алгебраическую сумму всех РШ и ОТШ, по-
лучают генеральную РШ и генеральное ОТШ. Далее вычисляют
широту пункта прихода по формуле
?2 = + генеральная РШ
и генеральную РД по формуле
генеральная РД = генеральное ОТШ sec —
затем по формуле Хз= Zi+генеральная РД вычисляют долготу
пункта прихода.
1 При плавании в высоких широтах РД — S • sin К • sec сря, где <ря —
промежуточная широта, определяемая несколько сложнее, чем средняя широта
<рт. Подробно см. А. П. Ющенко, М. М. Лесков. Навигация. М., «Транс-
порт», 1965.
57
Вычисления при письменном счислении производят по опре-
деленным схемам.
Пример 27. Судно в 20.00 вышло из пункта А (дч =50°17',0S и Xi = 100°22',0W)
ЛЛ = 327°,0 при северном ветре около 6 баллов (а =—13°), имея Ул =
10 узлов. В 20.30 курс изменили на КК = 77°, 0, сохраняя скорость хода; ветер
усилился до 7 баллов (а=+5°,0). В 21.30 ЛЛ=132°,0, скорость увеличи-
ли до ил = 12 узлам; дрейф левого галса 1°, 0. В 22.15 ЛЛ=244°, 0, скорость
= 12 узлам, дрейф равен нулю. В 24.00 подошли к месту назначения и отдали
якорь. За все время перехода действовало течение, средние направления и ско-
рость которого за час были следующие: с 20.00 до 21.00 — 137°,0 и 2 узла; с
21.00 до 22.00—126°, О и 1,7 узла; с 22.-00 до 23.00— 120°,0 и 1,5 узла; с 23.00
до 24.00—136°, 0 и 1, 2 узла.
Найти координаты якорной стоянки. .
Решение
Моменты, ч, мин кк 6 d дя ИК а ПУ а
20.00—20.30 327° —3° —14° —17° । 310° —3° 307°
20.30-21.30 77 +3 —14 -11 66 +5 71
21.30—22.15 132 +3 — 14 —11 121 + 1 122
22.15—24.00 20.00—21.00 21.00—22.00 22.00—23.00 23.00—24 .00 241 0 1 —14 Г е ч е » » — 14 н и е 227 0 227 137 126 120 136
5 РШ ОТШ
к N | к S к ost к W
5',0 3,01 —, 3,99
10,0 3,26 — 9,46 —.
9,0 — 4,77 7,63 —.
21,0 — 14,32 — 15,36
2,1 .— 1,46 1,36 —
1,7 .— 1,00 1,33 —
1,5 — 0,75 1,30 —..
1,2 — ’ 0,86 0,83 —
6,27 22,96 21,96 19,35
Генеральная РШ = 16,69 к S.
Генеральное ОТШ = 2,61 к Ost
Генеральная РД = 4,10 к Ost
<р2= 50°33',7.W.
Х2 = 100°17',9.И<
58
§ 27. Дрейф судна
Рис. 32.
быть определен по наблюдениям бере-
дают возможность знать действитель-
При движении судно испытывает сопротивление водной и
воздушной среды. Течение, волны и ветер, действуя на судно,
отклоняют его от намеченного курса, поэтому проложенная на
карте линия истинного курса не совпадает с линией пути судна.
Отклонение судна от
линии истинного курса
под влиянием действия на
него ветра называют
дрейфом, а угол откло-
нения — углом дрей-
ф а.
Напомним, что напра-
вление ветра определяют
наименованием той точки
горизонта, откуда ветер
приходит к наблюдателю;
например, говорят «ветер
дует в компас». Если ве-
тер дует в правый борт,
то говорят, что судно идет
правым галсом (п. г.), ес-
ли в левый борт — левым
галсом (л. г.). Термино-
логия курсов судна отно-
сительно ветра приведена
на рис. 32.
Угол дрейфа а может
говых предметов, которые
ное (обсервованное) место судна. Этот способ определения наде-
жен, прост и дает достаточную точность (до ±1°,5). В море, вне
видимости берегов, угол дрейфа часто определяют по отклонению
кильватерной струи.
Действие ветра изменяет и скорость судна. Так, при свежем вет-
ре возможна потеря скорости до 10%, вызываемая парусностью
судна и его неустойчивостью на курсе под действием волны (рыск-
ливость) .
Дрейф судна учитывают при графической прокладке. Пусть
судно следует истинным курсом АК (рис. 33) и имеет дрейф пра-
вого галса а. Под влиянием ветра судно сносит влево и оно пе-
ремещается в направлении АП под углом к линии АК равным дрей-
фу а. Линию действительного перемещения судна АП при
ветре называют линией пути судна (путь-дрейф), а угол, образо-
ванный ею с нордовой частью истинного меридиана, — путевым
углом (ПУ) судна с учетом дрейфа.
Деление картушек современных компасов возрастает в направ-
лении по часовой стрелке. Поэтому при дрейфе правого галса
59
ИК>ПУ и поправка на снос судна от ветра имеет знак «минус», а
при дрейфе левого галса — знак «плюс». На этом основании
ПУ = ИК±'£- (37)
Пример 28. ИК = 135°,0; ветер NOst;a = 6°,0. Рассчитать путь судна.
Решение. При заданных условиях судно имеет дрейф левого галса, следова-
тельно, по формуле (37)
ПУ = 125°, 0 + ( + 6°, 0) = 131°, 0.
Пример 29. И К = 210°,0; ветер NW; а — 4°,0. Рассчитать ПУ.
Решение (формула 37)
ПУ = 210°, 0 + (—4°, 0) = 206°, 0.
Пример 30. ПУ = 30°,0; ветер SOst; а=7°,0. Рассчитать ИК.
Решение (по формуле 37)
ИК = ПУ + а = 30°, 0 + (7°, 0) = 37°, 0.
На карте всегда должна быть проложена линия действитель-
ного перемещения судна. Счисление ведется обычным образом с
учетом скорости по лагу, которую принимают за истинную ско-
рость.
§ 28. Плавание на течении
Направление течения определяют наименованием той точки
горизонта, к которой перемещается судно под влиянием течения;
говорят, например, что «течение идет из компаса».
С навигационной точки зрения течения подразделяют на три
типа: приливно-отливные, дрейфовые и постоянные. Элементами
любого течения являются его скорость vT и направление. Данные
об элементах течений выбирают из специальных пособий, пользо-
вание которыми подробно описано в третьем разделе. Данные этих
пособий часто искажаются влиянием случайных (дрейфовых) те-
60
чений. Считают, что направление течения может быть ошибочным
на 20—30°, а его скорость — на ±(0,2—0,5) узла. Влияние тече-
ний, скорость и направление которых известны, учитывают при
прокладке на карте.
Предположим, что судно вышло из точки А (рис. 34) и следу-
ет постоянным курсом со скоростью 1/л- При отсутствии различ-
ного рода сносов угол N^AK = HK будет истинным направлением
движения судна, а Ул — его истинной скоростью. Через час суд-
но окажется в точке В, Линия
АВ —есть вектор скорости суд-
на по лагу Ул (судно продви-
гается под действием только
своих движителей).
Рис. 35.
Если плавание происходило на постоянном течении, то судно
в продолжение того же часа подвергалось влиянию этого тече-
ния и таким образом получило дополнительное перемещение, ко-
торое на рисунке изображено вектором BC=vT, образованным
элементами течения.
Общее влияние движителей и течения определяется как вектор-
сумма АС, являющийся диагональю параллелограмма ABCD,
построенного на векторах АВ и ВС. В результате суммарного дей-
ствия машин и течения судно будет перемещаться в направле-
нии АП. Это направление называют линией пути судна, по кото-
рому оно перемещается со скоростью, равной длине вектора АС.
Эту скорость называют истинной скоростью судна и обозначают
знаком V. Угол, образованный нордовой частью истинного мериди-
ана и линией пути судна (АУИЛ77), называют путевым углом
(или путем) судна (ПУ). Разность между ПУ и ИК называют
углом сноса от течения, или поправкой на течение и обозначают
знаком р. Определение знака поправки на течение р делается точ-
61
но так же, как и определение знака дрейфа а: знак «плюс», если
течение направлено в левый борт, и знак «минус»—в правый борт.
При плавании на течении решают две основные задачи: опре-
деляют ПУ и V по заданным ИК и Ул; находят ИК и V — по задан-
ным ПУ и Ул. Обе задачи решают при помощи параллелограмма
ABCD (см. рис. 34). Для решения первой задачи достаточно сло-
жить векторы скорости по лагу и течения Ул и ит. Тогда вектор-
сумма определит ПУ и V. Для решения второй задачи вектор
течения vT откладывают от начальной точки Л, через которую
проходит путь судна. Затем, поставив ножку циркуля в конец
вектора vT (точка Z)), делают засечку на линии пути судна
раствором, равным Ул. В полученном треугольнике ACD сторона
CD определяет направление И К, а АС — величину истинной ско-
рости V.
При одновременном действии на судно ветра и течения (рис.
35) вектор скорости судна по лагу Ул откладывают от начальной
точки по линии пути с учетом дрейфа АП'. В дальнейшем пост-
роение ведется совершенно так же, как при действии на судно
только одного течения. Направление линии пути судна с учетом
дрейфа и течения определяется вектором-суммой АС. Угол ИиАП
по-прежнему называют путем судна и обозначают знаком ПУ. Раз-
ность между ПУ и ИК называют углом общего сноса судна. Этот
угол обозначают знаком с —а+р.
При плавании на приливо-отливном течении элементы учи-
тываемого течения меняют, принимая во внимание среднее на-
правление и среднюю скорость течения за данный час.
Глава VI
ОПРЕДЕЛЕНИЕ МЕСТА СУДНА ПО ВИЗУАЛЬНЫМ НАБЛЮДЕНИЯМ
БЕРЕГОВЫХ ПРЕДМЕТОВ
§ 29. Понятие об изолиниях и
линиях положения
Определить место судна в море — значит получить его геогра-
фические координаты в какой-то момент. Эти координаты опреде-
ляют на поверхности Земли некоторую точку S (рис. 36), в ко-
торой в данное время находится судно. Эту точку S можно рас-
сматривать как результат пересечения меридиана наблюдателя
PnSPs и его параллели aSb.
В общем случае та же точка S является точкой пересечения
целого семейства кривых на поверхности Земли (см. рис. 36).
Поэтому для определения положения этой точки на поверхности
Земли (т. е? для определения географических координат судна)
достаточно уметь нанести на изображение поверхности Земли
(глобус или карту) две любые кривые из семейства кривых S.
62
В некоторых случаях Географические координаты точки Пред-
почитают получать аналитическим путем. Для этого уравнения
двух любых кривых из семейства S решают совместно.
Из бесконечно большого числа кривых этого семейства можно
выделить такие, , которые обладают особым отличительным
свойством — соответствовать результатам специальных наблюде-
ний, измерений.
Пусть, например, из точки S измерено расстояние D до объек-
та 7?, расположенного на земной поверхности (см. рис. 36). Тог-
да из всех кривых семейства S можно выделить такую кривую,
каждая точка которой (в том числе и точка S) удалена от объек-
та 7? на одно и то же расстояние D. Эта кривая представляет со-
бой окружность на поверхности Земли сферического радиуса D с
Рис. 36.
центром в точке 7?. Все лежащие ца этой окружности точки (пунк-
тир на рис. 36) имеют различные географические координаты <р и
X. Следовательно, данная кривая (окружность) на поверхности
Земли представляет собой графически некоторую функцию от ко-
ординат, отвечающую постоянному значению измеренной величи-
ны — расстоянию D.
Пусть та же точка S усматривается из некоторого объекта 7?i
по пеленгу А. Тогда из семейства кривых S можно выделить кри-
вую, каждая точка которой усматривается из объекта 7?i по пе-
63
Лейгу А. Эта кривая представит собой дугу большого круга
(штрих-пунктир на рис. 36), проходящую через точку и S и пе-
ресекающую меридиан точки под углом, равным А. Все лежа-
щие на этой дуге большого круга точки имеют различные геогра-
фические координаты qp и X. Следовательно, данная кривая на
поверхности Земли также представляет собой графически некото-
рую функцию от координат, отвечающую постоянному значению
измеренной величины — пеленгу Л.
Наконец, если на судне измерена глубина, то из семейства
кривых S можно выделить такую кривую, каждая точка которой
будет находиться на глубине, равной измеренной. Такая кривая
на поверхности Земли (изобата) будет графически представлять
некоторую функцию от координат, отвечающую постоянному зна-
чению измеренной величины — глубине (пунктирная линия на рис.
36).
Линии на поверхности Земли, отвечающие постоянному значе-
нию некоторой функции от координат, называются изолиниями.
Это значит, что изолиния представляет собой геометрическое ме-
сто точек, в которых некоторая функция имеет одно и то
же значение. Так, упоминавшаяся выше линия постоянного рас-
стояния до объекта (окружность); линия постоянного пеленга А
из объекта на судно S (дуга большого круга) и линия постоян-
ной глубины (изобата) являются изолиниями.
С изолиниями судоводитель встречается в практической рабо-
те довольно часто. В качестве примера можно привести изотер-
мы— линии равной температуры, изогоны — линии равного скло-
нения, изоклины — линии равного наклонения, изорахии, или ко-
тидальные линии, — линии одновременного наступления полной
воды и т. д. Каждая из них представляет собой геометрическое
место точек на поверхности Земли, в которых некоторая функция
от координат сохраняет постоянное значение.
Таким образом, если в некоторый момент на судне измерены,
например, расстояние D до объекта R и глубина, то место судна
(его географические координаты) определится как точка пере-
сечения двух изолиний — линии постоянного расстояния D до
объекта R и изобаты.
Следовательно, определение места судна связано с различного
рода наблюдениями, измерениями. Всякое наблюдение, измерение
дает изолинию какого-либо определенного вида. Результат изме-
рения позволяет выделить из общего числа семейства кривых про-
ходящую через данную точку на поверхности Земли вполне опре-
деленную кривую — изолинию, отвечающую результатам произ-
веденного наблюдения. После этого изолиния тем или иным прие-
мом, описанным ниже, наносится на изображение поверхности
Земли — глобус или карту. Точка, полученная от пересечения
двух или более изолиний, каждая из которых отвечает постоян-
ному значению величины, измеренной для обсервации, даст место
судна.
64
В зависимости от характера наблюдений изолинии представля-
ют собой различные геометрические линии. Некоторые из них
имеют довольно простой вид и могут быть без особого труда на-
несены на карту судоводителем в штурманской рубке. Некоторые
же изолинии представляют собой сложные кривые, построение
которых в условиях плавания значительно затруднено, а иногда
просто невозможно. В таких случаях большую помощь судоводи-
телю оказывают специальные карты изолиний, о которых подроб-
нее будет сказано ниже.
При определениях места судна результатами наблюдений и
измерений являются обычно углы, расстояния либо разности
расстояний.
Рис. 37.
При измерении с судна горизонтального угла а между двумя
предметами В и С судно будет находиться на окружности (рис.
37), проходящей через эти предметы, причем вершина S измерен-
ного угла а будет также лежать на этой окружности.
Пеленг представляет собой частный случай горизонтального
угла между двумя объектами, одним из которых является полюс
Земли. Если пеленг предмета R (рис. 38) с известными коорди-
натами измерен с судна, положение которого неизвестно, то изо-
линия представится близкой к окружности кривой линией, прохо-
дящей через полюс Земли Рп и пеленгуемый предмет R.
Эта линия — геометрическое место вершин сферического угла
PnSR постоянной величины, равной измеренному пеленгу, т. е.
линия постоянного пеленга, и называется изопеленгой, или
изоазимутой.
Из любой точки S изоазимуты (см. рис. 38) пеленг на объект
R один и тот же а.
Уравнение линии равных пеленгов легко вывести, рассматривая лю-
бой из сферических треугольников PnRS, в которых стороны PnR =
= 90° — срА ; PnS = (90° — ср), сферические углы RPn S = (Х^ — X),
Рп S R = а.
Применяя основную формулу сферической тригонометрии, свя-
3-933 ' 65
зывающую четыре рядом лежащих элемента, уравнение изоазн-
муты получают в следующем виде:
ctgasin(Xfl — X) = tg<?ц cos<? — cos(Xfl — X)sin<?, (38)
где a, , X/j — постоянные величины, т. e. параметры линии равных
пеленгов;
<р, X — неизвестные (искомые) величины координат места судна S (те-
кущие координаты).
В морской практике место судна может определяться пеленго-
ванием “
его
Е
Лв'Ло
Рис. 39.
с берега или с другого судна. В этом случае пеленг
судна, положение которого
S (рис. 39) на поверхности
Земли неизвестно, измеряют
из точки, положение R кото-
рой известно. Поэтому изо-
линия в данном случае
представится в виде дуги
большого круга, проходящей
q через предмет, из которого
производилось пеленгова-
ние судна, под углом к его
меридиану, равным величи-
не А измеренного пеленга.
Уравнение дуги большого
круга можно вывести, рас-
сматривая прямоугольные сфе-
рические треугольники FSL
и RFH (см. рис. 39), в ко-
торых F — точка пересечения
дуги большого^круга с’экватором; стороны SL = <р; FL = (X — Хо);
RH = <ря ; FH = (XR — Хо); сферические углы RFH = 90° — До;
FRH = А - 180°; SLF = RHF = 90°.
Применяя правило Модюи—Непера, получим для дуги боль-
шого круга следующую группу формул:
tg<p = sin(X — X0)ctg До
sin Ло = sin Д cos <рЛ
tg(^o — ХЛ ) = sin<p^ tg Д -
(39)
где До, Хо, Д, <рЛ , Хя — параметры (До и Хо — курс и долгота при
пересечении дугой большого круга экватора).
<р и X — текущие координаты места судна.
Таким образом, при пеленговании берегового предмета с суд-
на изолинией будет линия равных пеленгов.
При измерении пеленга судна с берега изолиния представля-
ется дугой большого круга. ”
Рассмотренные случаи с геометрической точки зрения совер-
шенно различны, об этом следует помнить при практической рабо-
те по определению места судна в море.
66
Рис. 40.
При измерении расстояния до берегового предмета с судна
изолинией будет сферическая окружность на поверхности Земли,
описанная из положения объекта как из полюса, сферическим
радиусом, равным измеренному расстоянию D (рис. 40).
Уравнение сферической р
окружности можно вывести,
рассматривая сферический
треугольник (на рисунке
заштрихован), в котором РР =
= 90° — фЛ; PS = 90°—ф; =
= D — расстояние по поверхно-
сти Земли между судном и
береговым предметом; RPS —
сферический угол, равный
(X — Хв).
Применяя первую основ-
ную формулу сферической три-
гонометрии, уравнение сфери-
ческой окружности получают
в следующем виде:
cosZ) = sin сру? sin с? +
!+' COS сря COS ср cos (k — ), (40)
где £), cpR , К/? — параметры сферической окружности;
ср, К—текущие координаты места судна.
В современных системах
дальней радионавигации при-
меняют метод измерения с суд-
на в некоторый момент време-
ни разности расстояния AD до
двух радиостанций (импульс-
ные и фазовые системы). В
этом случае изолиния изобра-
зится в виде гиперболы на по-
верхности Земли, фокусы кото-
рой и /?2 (рис. 41) совпада-
ют с положениями упомянутых
радиостанций.
На меркаторской карте кри-
вые отмеченных выше изолиний
(дуги большого круга, изо-
азимуты, сферические окруж-
ности и гиперболы) выглядят
иначе, чем на поверхности зем-
ного сфероида.
Как указывалось, дуга большого круга на меркаторской карте
имеет вид кривой линии, выгнутой в сторону ближайшего геогра-
фического полюса (рис. 42). Изоазимута же (при небольших
3*
67
расстояниях между судном и предметом) представляется на
мекраторской карте кривой линией, расположенной симмет-
рично дугам больших кругов, по другую сторону от прямых линий
RC\t RC2, RC3, ..., RCni соединяющих возможные места судна Сь
C2i С3, ..., Сп с местом пеленгуемого предмета R. Прямые ли-
нии RCi, RC2, RC3, ..., RCn (точечный пунктир) называют линиями
локсодромического пеленга.
Рис. 42.
Линия равных пеленгов (изоазимута) в каждой своей точке
пересекается дугой большого круга, соединяющей данную точку
с пеленгуемым предметом под разными углами: уь у2, Уз, —, Yn-
Эти углы называют углами схождения меридианов пеленгуемого
предмета R и соответствующих точек Clf С2, ..., Сп линии рав-
ных пеленгов. Каждый из углов уь у2, Уз, —, Уп соответствующим
ему локсодромическим пеленгом делится на два равных угла —
углы Y1, Т2, Тз, *Fn.
Таким образом, в любой точке Сг линия равных пеленгов пе-
ресекается с соответствующим этой точке локсодромическим пе-
ленгом под углом Yi. Под тем же углом в той же точке пересе-
каются и линии ортодромического и локсодромического пеленгов.
Угол Т называют ортодромической поправкой.
Его приближенное значение определяют по формуле
Т=^-ДХ81псрот, (41)
где ДХ — разность долгот между местом судна и пеленгуемым
предметом, а
= <Р1 + <?3 .
68
Сферическая окружность на меркаторской карте имеет вид
циклической кривой, близкой по форме к эллипсу.
Работу штурмана по прокладке кривых изолиний на мерка-
торской карте можно значительно упростить, если небольшой уча-
сток кривой изолинии заменить отрезком проведенной к ней ка-
сательной, совершая при этом допустимую в практических вопро-
сах погрешность. Такие вспомогательные отрезки прямых линий,
заменяющие небольшие участки кривых изолиний, называют л и-
ниями положения.
При визуальных наблюдениях расстояния до наблюдаемых
объектов совсем незначительны. Это позволяет еще более упрос-
тить прокладку линий положения на меркаторской карте. Так, в
случае измерения визуального расстояния линия положения на
меркаторской карте может быть представлена обычной окруж-
ностью. Линия равных пеленгов при небольшом расстоянии до
пеленгуемого предмета совпадает с прямой линией локсодромиче-
ского пеленга и поэтому может быть проложена на карте в виде
прямой.
Предельные расстояния (в милях), при которых можно без
существенных погрешностей производить прокладку изоазимуты
(и дуги большого круга) в виде прямой линии локсодромического
пеленга, т. е. без учета ортодромической поправки, даны в табл. 2.
Каждое наблюдение дает одну линию положения. Для полу-
чения обсервованного места судна необходимо иметь по крайней
мере две линии положения: обсервованное место судна получает-
ся как результат пересечения этих двух линий положения.
Таблица 2
Направление на объект пеленгования Средняя широта, град
70 60 1 50 1 1 40 1 1 30 1 | .2° 10
0° 180° 180° 360°
10 170 190 350 56 ПО 167 224 334 545 ИЗО
20 160 200 340 28 56 84 112 168 293 568
30 150 210 330 20 39 59 79 118 194 395
40 140 220 320 15 30 46 61 92 148 307
50 130 230 310 13 26 38 51 76 124 258
60 120 240 300 12 23 35 47 70 113 235
70 ПО 250 290 11 21 31 42 62 102 210
80 100 260 280 10 19 29 38 58 94 ’195
90 90 270 270 9 18 28 37 56 90 187
§ 30. Определение места судна по двум
горизонтальным углам
Два обозначенных на карте предмета А и В (рис. 43, а) разли-
чимы с судна под некоторым углом а. В этом случае изолинией
будет окружность, вмещающая угол а. Чтобы найти центр этой
69
окружности, точки А и В соединяют прямой линией; из этих то-
чек в сторону предполагаемого места судна проводят две другие
прямые под углом (90°—а) к линии АВ. В результате пересече-
ния трех прямых образуется треугольник АВО, в котором углы
при точках А и В равны каждый 90°—а, а угол при точке О ра-
вен 2а. Если точку О принять за центр окружности, проходящей
Рис. 43.
через точки Л и В, то угол АОВ окажется центральным углом,
опирающимся на хорду АВ и равным 2а. Тогда всякий вписан-
ный в такую окружность угол, опирающийся на ту же хорду,
будет равен половине угла
АОВ, т. е. а. Если а>90°, то
при построении ДАОВ прямые
АО и ВО проводят под углом
(а—90°) к линии АВ и в сторо-
ну, обратную предполагаемому
месту судна.
Если с судна видны три
предмета А, В и С (рис. 43, б),
то можно получить две линий
положения в виде окружностей,
пересечение которых определит
место судна.
Может случиться, что все три предмета и судно лежат на одной
окружности (рис. 44). Тогда из любой точки окружности предметы
будут видны под одинаковыми углами а и р и место судна опреде-
лить невозможно. Этот случай называют случаем неопреде-
ленности, который может быть, если угол при среднем предме-
те В
/ЛВС^180°^(а + рХ
(42)
70
Чтобы избежать случая неопределенности, следует правильно
выбирать предметы для наблюдений. Так, если все три предмета
расположены на одной прямой или средний предмет ближе к на
блюдателю, чем крайние, а также если предметы образуют тре-
угольник, внутри которого находится место судна, или расстояние
до всех трех предметов одинаковое, то случай неопределенности
исключен.
Определение места судна по двум горизонтальным углам яв- .
ляется наиболее точным из всех навигационных способов. Ошибка
в определении места судна этим способом может быть выражена
формулой
_ Д^о
£ъб = ТПГо
(43)
где А — возможная ошибка в измеренных углах;
d0 — расстояние до среднего предмета;
di — расстояние до правого предмета;
d2 — расстояние до левого предмета;
Si — расстояние между средним и правым предметами;
S2 — расстояние между левым и средним предметами;
0 —угол пересечения окружностей.
Выбрав предметы, при помощи секстана измеряют медленно
изменяющийся угол а, получая для него некоторое значение аь
Одновременно с измерением второго угла 0 замечают время по
судовым часам и показания лага. Затем вновь из-
меряют угол а, получая для него второе значение 1
а2. Полагая, что изменение углов происходит
пропорционально времени, рассчитывают значе- 9В
ние первого угла, как среднее из результатов пер-
вого и второго измерений этого угла, т. е. по фор-
муле J 2~ • Полученные таким 1 °б- I vk
разом значения углов аир считают приведенны- j 1 1
ми к одному моменту (к моменту измерения вто- № 1 flk j
рого угла). Исправив значения а и 0 необходимы- J
ми инструментальными поправками, производят J № I vk
прокладку на карте. Графическое построение я 1 vk
при прокладке упрощается применением спе- Ж | ™
циального прокладочного инструмента — про-
трактора. Рис* 45.
Протрактор (рис. 45) состоит из кругового лимба 1 и трех лине-
ек: средней — неподвижной 2 и двух подвижных 3. Для нанесения
места на карту боковые (подвижные) линейки устанавливают по
отношению к средней (неподвижной) под углами, равными измерен-
ным углам. Боковые линейки протрактора можно установить с
точностью до 0,2—О',3 при помощи отсчетных барабанов 4.
После установки линеек протрактор кладут на карту, совмеща-
71
ют две крайние линейки с нанесенными на карте крайними пред-
метами и двигают протрактор таким образом, чтобы срез треть-
ей неподвижной линейки совпал с изображением третьего предме-
та. Центр круга протрактора будет общей вершиной измеренных
углов. Место судна определяется уколом острия иглы 5.
Протрактор часто заменяют листом прозрачной бумаги или
кальки. В центре листа проводят прямую линию, заменяющую
неподвижную линейку протрактора. При любой точке этой пря-
мой линии строят левый и правый измеренные углы аир. Далее
калькой пользуются так же< как и протрактором. Точность про-
кладки при помощи кальки вполне достаточна для целей судовож-
дения.
К недостаткам способа определения места судна по двум го-
ризонтальным углам относятся: большое количество времени, за-
трачиваемое на наблюдения и прокладку; зависимость от нали-
чия трех предметов, расположенных приблизительно в одной го-
ризонтальной плоскости с глазом наблюдателя; отсутствие конт-
роля за возможными ошибками в измерениях, а также правиль-
ностью нанесения видимых предметов на карту (последнее не обна-
руживается даже при повторных наблюдениях). Поэтому в райо-
нах, где карты недостаточно точны, определение места судна по
двум горизонтальным углам не рекомендуется.
§ 31. Определение места судна по пеленгам
< трех предметов
Если с судна видны три предмета, положения которых нане-
сены на карту, то место судна может быть определено измере-
нием направлений на эти предметы при помощи судового компа-
са. Из-за небольшого расстояния до предметов, пеленгуемых
визуально, линиями положения в данном случае будут прямые ли-
нии истинных пеленгов, обратные значения которых прокладывают-
ся на карте от соответствующих предметов в виде локсодромии.
Пересечение линий истинных пеленгов дает обсервованное место
судна (рис. 46).
Для определения места судна достаточно иметь две линии
положения. Третья линия (третий пеленг) служит хорошим конт-
ролем, когда из-за различных ошибок три линии пересекаются не
в одной точке, а образуют треугольник погрешности.
К случайным ошибкам при таком положении можно отнести
ошибки пеленгования и прокладки на карте. Если случайные ошиб-
ки вызывают появление небольшого треугольника, то место судна
принимают либо в его центре, если треугольник равносторонний,
либо ближе к его короткой стороне, если треугольник сильно
вытянут (под небольшим треугольником подразумевают треуголь-
ник, стороны которого менее 0,5 мили),
72
Большой треугольник погрешности получают в том случае, ес-
ли при наблюдении допущены промахи или систематические
ошибки. Для выяснения причины, вызвавшей появление большо-
го треугольника погреш-
ности, все наблюдения
следует повторить. Если
повторная прокладка
вновь дает большой тре-
угольник, значит он вы-
зван систематической
ошибкой.
Систематические ошиб-
ки могут происходить из-
за неодновременное™
наблюдений, неправиль-
ной поправки компаса и
неверного положения
предмета на карте. Исп-
правляют их следующим
образом.
Неверное положение предметов на карте исправить нельзя.
Поэтому если повторные наблюдения не дают удовлетворительно-
го результата, то следует выбрать другие предметы для пеленго-
вания.
Ошибки от неодновременного наблюдения пеленгов исключа-
ют приведением их к одному моменту. Для этого берут подряд
пеленги всех трех предметов Р% и Рз, заметив время и отсчет
лага при взятии пеленга на последний предмет; затем берут пов-
торные пеленги второго и первого предметов Р'2 и Р'\. Считая из-
менение пеленгов пропорциональным времени, рассчитывают пе-
ленги первого и второго предметов как арифметические средние
----2 и §—~’ которые будут приведены к моменту
взятия пеленга третьего предмета Р$.
Систематическую ошибку, вызванную ошибкой в принятой
поправке компаса, устраняют тем, что определяют место судна
способом двух горизонтальных углов. Углы между предметами
рассчитывают по разности полученных из наблюдений компасных
пеленгов. Ошибка в общей поправке компаса на такой расчет
влияния не окажет. Определив место судна по способу двух углов,
снимают с карты значения истинных пеленгов и, сравнивая их с
соответствующими компасными пеленгами, получают верное
значение общей поправки компаса, как арифметическое сред-
нее из трех разностей между истинными и компасными пелен-
гами.
Если судно и все три предмета лежат на одной окружности,
то надежное место судна может быть получено только при верной
поправке компаса (случай неопределенности).
73
Определение места по пеленгам трех предметов — наиболее
точный способ определения при помощи компаса. Ошибка в опре-
делении места судна этим способом может быть выражена форму-
лой
у sin2 ot + rfjSin2 3 + ’
где Д—возможная ошибка в пеленгах;
dx — расстояние до первого предмета;
d2 — расстояние до второго предмета;
d3 — расстояние до третьего предмета;
а — разность между пеленгами первого и второго предметов;
Р — разность между пеленгами второго и третьего предметов;
7 — разность между пеленгами первого и третьего предметов.
§ 32. Определение места судна по пеленгам
двух предметов
При определении места судна по пеленгам двух предметов
наблюдатель не может контролировать надежность обсервованной
точки при помощи третьей линии положения (рис. 47). В этом
случае ошибка
е =
sin Д
sin со
V dl + ti,
(45)
где А — возможная ошибка в пеленгах;
со — угол между пеленгами первого и второго предметов;
di —расстояние до первого предмета;
d 2 — расстояние до второго предмета.
Порядок пеленгования также влияет на точность определения:
Рис. 47.
сначала пеленгуют предмет, направле-
ние на который составляет с диаметраль-
ной плоскостью судна меньший угол. За-
тем приводят пеленги к одному моменту
способом, описанным в § 31. Если по
какой-либо причине взять пеленг второго
предмета нельзя, применяют способ
определения места по пеленгу и горизон-
тальному углу. Взяв пеленг одного пред-
мета Pi по компасу и измерив угол меж-
ду двумя предметами секстаном, рассчи-
тывают второй пеленг Р%. Точность этого
способа несколько выше точности спосо-
ба определения места судна по пеленгам
двух предметов.
74
§ 33. Измерение расстояния в море
Для измерения расстояния в море используют дальномеры,
радиотехнические средства и секстан. Дальномеры обеспечивают
высокую точность определения места судна, но на морских судах
они встречаются редко. Для этих целей широкое применение полу-
чили радиотехнические средст-
ва. Радиолокатор позволяет из-
мерять расстояние независимо
от условий видимости.
Расстояние определяют так-
же при помощи секстана измере-
нием вертикального угла берего-
вого предмета с известной высо-
той.
Пусть предмет имеет высоту Н (рис.
судна на расстоянии MB=D. Из Д АВМ
Рис. 48.
48) и расположен от
D = //ctg а.
(46)
Угол АМВ, равный а, измеряют секстаном, а расстояние D
рассчитывают по формуле (46). Рабочая формула для вычисления
расстояния имеет следующий вид:
или
£>миль = 1,86^! (47)
£>МиЛЬ=0,57^. (48)
При выводе формул (47) и (48) не учитывали рефракцию,
кривизну земной поверхности и высоту глаза наблюдателя.
В МТ-63 (табл. 29) даны рассчитанные значения D для высот
наблюдаемого предмета от 10 до 100 м для вертикального угла
от 3' до 5°.
§ 34. Определение места судна по двум
расстояниям
Измерив тем или иным способом расстояние до двух берего-
вых предметов, проводят две линии положения в виде окружно-
стей, пересекающихся в двух точках. Место судна определяют
измерением третьего расстояния, приближенным пеленгом или ори-
ентировкой на счислимое место, находящееся обычно вблизи об-
75
сервованного (рис. 49). Точность определения судна можно про-
верить формулой1
£об = AZ) cosec (49)
где AZ) — возможная ошибка в измерении расстояния;
9—угол пересечения линий положения.
Точность определения места судна по расстоянию значительно
повышается при измерении расстояния до трех береговых пред-
метов.
Если виден только один предмет, то место судна определяют
путем измерения направления и расстояния до него. Для этого
прокладывают пеленг наблюдаемого предмета, затем из положе-
ния предмета на карте описывают окружность радиусом, равным
измеренному расстоянию. Место судна получают в точке пересе-
чения пеленга и окружности (рис. 50). Точность определения ме-
ста судна оценивают формулой
е°б - У + AD2,
(50)
где D — расстояние до предмета;
е° — возможная ошибка в пеленге;
AZ)—возможная ошибка в измерении расстояния.
Формула (50) действительна в том случае, если наблюдения
приведены к одному моменту. Этим способом опознают место суд-
на в момент открытия (скрытия) предметов, дальность видимости
которых может быть рассчитана заранее.
Место судна, определенное описанными выше методами (два
горизонтальных угла, пеленги трех или двух предметов, расстояния
до двух или трех предметов), называют обсервованным и отме-
чают на карте специальным условным знаком ф.
1 Формулу (49) применяют в том случае, если измеренные расстояния приве-
дены к одному моменту.
76
§ 35. Определение места судна
по крюйс-пеленгу
Если с судна виден только один предмет, измерить расстояние
от которого по каким-либо причинам невозможно, то место судна
определяют по способу к р ю й с-п е л е н г а. Сущность этого метода
заключается в том, что один и тот же предмет пеленгуют несколь-
ко раз через определенные промежутки времени.
Пусть в какой-то момент получен истинный пеленг Pi предме-
та А (рис. 51,а), а через некоторое время — Р2. За это время
судно, следуя в направлении пути П, прошло расстояние S. Что-
бы определить место судна, производят прокладку следующим
образом.
1. Из точки С (пересечения линии пути П с линией первого
пеленга Pi) откладывают расстояние S в сторону движения судна.
Получают точку D, из которой проводят прямую DPi. параллель-
ную линии пеленга Pi. Пересечение линии DPi с линией второго
пеленга Р2 даст точку М2 — место судна в момент взятия второго
пеленга. Дальнейшее счисление ведут от точки М2 в направлении
пути П'.
2. Через видимый с судна предмет А (рис. 51, б) проводят ли-
нию АП". параллельную линии П. На линии АП" откладываю!
расстояние S, пройденное судном за время между наблюдениями.
Из полученной точки D проводят прямую ДР i , параллельную пе-
ленгу Pi. Пересечение линии DP'i со вторым пеленгом дает место
судна М2 в момент взятия второго пеленга. Этот способ особенно
удобен, если в промежутке между наблюдениями судно меняло
направление движения. Тогда от изображения предмета на кар-
те последовательно прокладывают векторы всех участков пути и
из конца суммарного вектора проводят линию, параллельную
первому пеленгу.
Пересечение этой линии с линией второго пеленга даст место
судна в момент второго наблюдения.
77
Определенное по методу крюйс-пеленга место судна называют
счислимо-обсервованным и отмечают на карте специальным ус-
ловным знаком Д.
Надежность счислимо-обсервованного места зависит не только
от ошибок наблюдений и прокладки на карте, но еще и от ошибок
счисления. Поэтому счислимо-обсервованное место менее надежно,
чем обсервованное.
Способ крюйс-пеленга имеет ряд частных случаев.
1. Двойной угол. Если при первом наблюдении заметить
угол ЛС77 = а (рис. 52), а второе провести в момент, когда истин-
ный пеленг Р2 составит с направлением движения судна угол
4/)/7=2а, то образовавшийся треугольник ACD будет равнобед-
ренным (AD — CD), Поэтому в момент второго наблюдения судно
будет находиться на линии второго пеленга и на расстоянии от
пеленгуемого предмета, равном величине плавания за промежу-
ток времени между наблюдениями.
2. Траверзное расстояние. При первом наблюдении
замечают угол АСП = а (рис. 53), а второе производят в тот мо-
мент, когда предмет будет находиться на линии Р2, перпендику-
лярной линии пути. Тогда из треугольника ACD
AD = CDtg^ (51)
где CZ)=S — плавание, совершенное судном за промежуток вре-
мени между наблюдениями.
Если первое наблюдение делать тогда, когда угол а имеет
только определенные значения—45, 63,5 или 76°, то расстояние
AD (кратчайшее) будет равно одинарной, удвоенной или учетве-
ренной величине пройденного судном расстояния CD.
78
При отсутствии сноса от ветра и течения путь судна совпада-
ет с его истинным курсом, а кратчайшим является траверзное рас-
стояние. В связи с этим описываемый способ и получил название
траверзный.
3. Прямой угол при предмете. Угол АСП=а (рис. 54),
составляемый линией истинного пеленга Pi с направлением дви-
жения судна, замечают при первом наблюдении. Второе наблюде-
ние производят в тот момент, когда истинный пеленг Рг составит
с направлением движения судна угол ADII= (90°+а). В образо-
вавшемся треугольнике Л CD
AD = CD sin a,
(52)
где CD=S— плавание
судна за
промежу-
ток време-
ни между
наб л ю д е-
ниями.
Если условиться де-
лать первое наблюдение
Рис. 54.
тогда, когда угол а=30°, то расстояние AD будет равно половине
плавания CD. Поэтому в момент второго наблюдения судно будет
находиться на линии второго пеленга Р% и на расстоянии от пелен-
гуемого предмета, равном половине плавания судна за промежуток
Рис. 55.
времени между наблюдениями.
4. Разновременные пе-
ленги двух предметов
(рис. 55). Если с судна виден
предмет А, который невозмож-
но запеленговать дважды, то
перед его скрытием берут пе-
ленг замечая по судовым
часам время и показания лага.
После открытия предмета В на
него также берут пеленг Р2 и
замечают время и отсчет лага.
Рассчитав расстояние, пройден-
ное судном за время между
двумя наблюдениями, получа-
ют место в момент второго на-
блюдения.
5. Крюйс-р асстояние — определение места судна по изме-
рению двух расстояний до одного и того же предмета. Теория и
практическое выполнение аналогичны определению по крюйс-пе-
ленгу.
79
Глава VII
ОПРЕДЕЛЕНИЕ МЕСТА СУДНА В МОРЕ РАДИОТЕХНИЧЕСКИМИ
И ГИДРОАКУСТИЧЕСКИМИ СРЕДСТВАМИ
§ 36. Радионавигация
Радио, изобретенное А. С. Поповым в 1895 г., получило широ-
кое применение во всех отраслях деятельности человечества. На
основе развития радиотехники возникла новая область и в судо-
вождении — радионавигация. В последние годы создано большое
количество различных радиотехнических средств (РТС) судовож-
дения.
В зависимости от типа радиотехнического средства, используе-
мого для определения места судна, т. е. в зависимости от того,
что измеряется при помощи РТС — пеленг, расстояние, разность
расстояний и т. д. — изолинии имеют различный вид: линия рав-
ных пеленгов (изопеленги), дуга большого круга, сферическая
окружность или гипербола.
Радиотехнические средства судовождения имеют различное
назначение и в зависимости от последнего называются системами
дальнего, среднего, ближнего действия либо системами, пред-
назначенными для лоцманской проводки судов при плавании в
узкостях.
Вопросы теории, устройства и правил эксплуатации радиона-
вигационных систем изложены в четвертом разделе настоящего
учебника «Технические средства судовождения».
В последнее время районы Мирового океана интенсивно на-
сыщаются фазовыми и импульсными системами навигации, приоб-
ретающими все более важное значение в вопросе обеспечения бе-
зопасности мореплавания. Особенно широкое распространение на
морском флоте получили азимутальные и полярные системы —
радиопеленгатор и радиолокатор стали неотъемлемой частью штур-
манского вооружения судов.
При проведении радиопеленгования по разным причинам мо-
гут возникать ошибки, которые необходимо знать, чтобы своевре-
менно их устранить. Одной из наиболее существенных и главное
постоянно действующей из них является радиодевиация. Сущ-
ность ее заключается в следующем.
Электромагнитное поле пеленгуемого сигнала наводит э. д. с.
во всех металлических частях судна, которые, находясь под током
высокой частоты, сами превращаются в излучателей электромаг-
нитной энергии. Это излучение называют вторичным, а его источ-
ники— вторичными излучателями. Таким образом, рамка пелен-
гатора оказывается под воздействием основного первичного поля
и дополнительных вторичных полей. В результате интерференции
вектор суммарного электромагнитного Поля отклоняется от вектора
80
первичного поля на угол, называемый углом радиодевиации и
обозначаемый символом f.
Для значительного уменьшения радиодевиации рамки радиопе-
ленгаторов устанавливают как можно выше под большими ме-
таллическими массами (лучше на топе мачты).
Наблюдения показали, что радиодевиация возрастает с увели-
чением осадки судна и с уменьшением длины волны принимаемого
сигнала. На величину радиодевиации оказывают влияние крен и
дифферент судна, превышающие 10°, положение палубного груза,
стоячего такелажа, стрел, лебедок, шлюпбалок, которые являются
вторичными излучателями.
Определяют радиодевиацию путем сравнения визуального
курсового угла радиомаяка и радиоотсчета, взятых одновременно.
Если получают большое значение радиодевиации, то ее уменьша-
ют электрической или механической компенсацией (см. раздел
четвертый).
Остаточную радиодевиацию вычерчивают в виде кривой в пря-
моугольных координатах или сводят в таблицу.
§ 37. Использование радиопеленгатора на судне
Место судна радиопеленгами определяют так же, как визуаль-
ными. Поэтому для расчетов можно применять все способы, опи-
санные в предыдущей главе. Кроме того, при помощи радиопелен-
гатора можно решать и ряд специальных задач, например, как
выйти кратчайшим путем на маяк,
снабженный радиопередатчиком, к
терпящему бедствие судну (если оно
подает радиосигналы), и т. д.
Радиопеленгаторы являются самы-
ми распространенными радиоприбора-
ми, служащими для судовождения. Их
положительные свойства: а) определе-
ние места судна вне зависимости от ус-
ловий видимости и на расстоянии от
радиомаяка до 200—300 миль; б) про-
стота обслуживания и надежность в
работе; в) относительно небольшая
стоимость прибора и т. д.
При установке радиопеленгатора
на судне его рамку вместе с непод-
Рис. 56.
вижным азимутальным кругом ориентируют относительно диамет-
ральной плоскости судна или линии, параллельной ей (рис. 56).
Если передающая радиостанция расположена в точке R, то при ми-
нимуме слышимости ее сигнала индекс рамки (или гониометра)
должен занять положение, отмеченное пунктиром, а отсчет на ази-
мутальном круге (радиоотсчет q) представит радиокурсовой угол
радиостанции. Вне зависимости от конструкции радиопеленгатора
51
КУ отсчитывается по лимбу азимутального круга от 0 до 360° по
часовой стрелке. Поэтому для получения радиопеленга к отсчету q
следовало бы прибавлять ИК*
Однако из-за радиодевиации полученный непосредственно из
наблюдений радиоотсчет q не равен истинному радиокурсовому
углу р (рис. 57) и отличается от него на величину угла радиоде-
виации f. Если f =#0, ’ то истинный радиокурсовой угол р равен
сумме радиоотсчета q и радиодевиации /. Поэтому истинный радио-
пеленг
ИРП = р + И К = q + f + ИК.
(53)
Картушки современных радиопеленгаторов состоят из двух
шкал (рис. 58): внутренней неподвижной — 1 (азимутальный круг)
и внешней подвижной — 2. Последнюю при помощи шаг-моторчи-
ка гирокомпаса (либо вручную) устанавливают так, чтобы значе-
ние ИК приходилось против нуля азимутального круга. Тогда
нуль картушки на шкале 2 совпадает с направлением истинного
меридиана, а соответствующий индексу поворотной рамки
отсчет — со значением радиопеленга. Истинный радиопеленг в
этом случае
ИРП = РП + /,
(54)
где значение f берут из таблицы радиодевиации ио аргументу q,
снимаемому с неподвижной шкалы одновременно со снятием ра-
диопеленга.
82
§ 38. Радиопеленгование на малых, средних
и больших расстояниях
При нормальных условиях распространения радиоволна про-
ходит путь от радиомаяка до радиопеленгатора по кратчайшему
расстоянию. Линию радиопеленга в общем случае прокладывают
на карте как линию равных пеленгов (изоазимута). Если рас-
стояние между судном и радиомаяком таково, что изоазимуту
можно без заметной погрешности заменить линией локсодромиче-
ского пеленга (см. табл. 2), то такое расстояние называют малым.
Рис. 50.
На малых расстояниях прокладку радиопеленгов на карте про-
изводят так же, как и визуальных пеленгов, т. е. в виде прямых
линий. Радиопеленги, разделенные большим промежутком време-
ни, приводят к одному моменту. Приведение делается графически.
Пусть, например, в некоторый момент Т\ измерен радиопеленг
радиомаяка 7?i (рис. 59) — ИРП\, а в момент Г2 — радиопеленг
ИРП2 радиомаяка /?2. За промежуток времени ДГ=Г2—7\ между
наблюдениями судно прошло определенное расстояние S.
При прокладке радиопеленгов поступают следующим образом.
Из положения первого радиомаяка на карте прокладывают линию
Р\П", параллельную линии пути судна АП, и на ней откладывают
расстояние S в сторону движения судна. Из полученной таким об-
разом точки прокладывают линию первого радиопеленга Pi, а
из точки — линию второго радиопеленга Р2.
В точке М пересечения радиопеленгов считают место судна,
обсервованное (определенное из наблюдений) по радиопеленгам.
Точку М отмечают на карте специальным условным знаком <•>.
83
Дальнейшее счисление пути судна ведут из обсервованной точки М.
Средними называют расстояния, не превышающие 300 миль.
На них изоазимуту и дугу большого круга нельзя считать совпада-
Н ющими. Прокладывать на
карте линию положения в
виде кривой линии трудно.
Поэтому поступают ина-
че. Пусть действительное
место судна находится в
некоторой точке М
(рис. 60) и линия
равных пеленгов (ЛРП)
пересекает меридиан и па-
раллель счислимого места
в точках См и Сп. Счисли-
мое место обычно известно
более или менее точно, так
что расстояния ССМ и ССЛ
невелики. Поэтому отре-
рис эд зок линии равных пелен-
гов См и Сп можно считать
также прямой линией. Если из точки С восстановить перпендикуляр
GB к прямой линии См Сп, то линия СВ пересечется с линией
локсодромического пеленга в точке К под углом, равным (90°—ф).
Поэтому от пеленгуемого радиомаяка прокладывают линию обрат-
ного локсодромического пеленга ЛокП±180°==ЯР/7±180°+ф. Из
счислимого места прово-
дят линию под углом
(90°—ф) к линии локсо-
дромического пеленга, по-
лучая в пересечении точ-
ку К — угол (90°—ф)
всегда отсчитывают от
направления СК по часо-
вой стрелке. Через точку К
перпендикулярно СК про-
водят прямую линию, ко-
торую считают линией по-
ложения судна. На рис. 60
линия положения 1Г не
проходит через действи-
тельное место судна М
из-за умышленно увели-
ченного на чертеже уг- Рис. 61.
ла ф (ортодромическая поправка). При пеленговании на средних
расстояниях этот угол не превышает 2—3°. Расстояние СМ обычно
невелико, поэтому линия положения И' практически пройдет через
84
действительное место судна М. На рис. 61 показано выполнение
прокладки при определении места судна по радиопеленгам двух
радиомаяков.
Радиопеленги, разделенные большими промежутками времени,
графически приводят к одному моменту (обычно к моменту по-
следнего наблюдения).
При больших расстояниях (более 300 миль) прокладку вы-
полняют методом азимутов. Этот метод аналогичен способу по-
лучения места судна по высотным линиям положения при астро-
номических определениях, который будет изложен во втором раз-
деле учебника — «Мореходная астрономия».
Следующий метод позволяет получить место судна с доста-
точной для безопасности судовождения точностью на расстоянии
около 1000 морских миль. Его сущность заключается-в аналити-
ческом расчете длины и направления отрезка СК=р (рис. 62).
Длина отрезка
p = d-sln(P — Ро), (55)
где d — расстояние между радиомаяком и судном (снимается с
карты);
р — локсодромический пеленг счислимого места (снимается с
карты);
Ро — локсодромический пеленг действительного места судна
(полученный из наблюдений).
Направление отрезка р всегда перпендикулярно направлению
линии ff (см. рис. 62). В связи с тем, что направление линии ff=
=ИРП-\-2Чг, поэтому направление отрезка р равно а= (ИРП-\-
+2Чг±90°). Таким образом, отложив на карте отрезок р из счис-
лимой точки С, линию положения судна ff проводят через конец
отрезка р (точку К) —в направлении (ИРП-\-2Чг').
85
§ 39. Радиомайки и радиопеленгаторные станции
Радиостанции, служащие для ориентировки судов, называют
радиомаяками. Радиомаяки передают специальные радиосигналы
в определенном порядке и по расписанию. Дальность действия и
место установки радиомаяков определяются навигационными ус-
ловиями.
Радиомаяки кругового излучения обычно называют
круговыми или ненаправленными. Их антенное устройство излу-
чает радиоволны по всем направлениям равномерно. Эти радио-
маяки передают специальные, заранее обусловленные сигналы.
Их устанавливают в непосредственной близости от маяков, а так-
же на плавучих маяках для облегчения радиоопределения и пре-
дотвращения ошибок при радиопеленговании. С этой же целью
несколько круговых радиомаяков объединяют в навигационную
группу. В этом случае они работают на одной и той же волне по-
очередно. Каждый радиомаяк имеет свои позывные сигналы, име-
ющие присущие данному радиомаяку тон.
Радиомаяки кругового излучения работают круглосуточно
(без перерывов) по определенному расписанию либо по запросам
судов, в зависимости от сложности условий плавания в местах их
установки — частые туманы, оживленность судоходства и т. п., а
также от ряда других причин.
Определение места судна по сигналам кругового радиомаяка
производится судовым радиопеленгатором.
С успехом используются в судовождении предназначенные для
аэронавигации аэрорадиомаяки, установленные на побе-
режье. Они имеют определенное положение, работают по опреде-
ленному расписанию и обладают большой дальностью действия.
Створные, или курсовые, радиомаяки имеют антенное
устройство, состоящее из двух неподвижных рамок, расположен-
ных под углом друг к другу, и коммутатора для поочередного под-
ключения рамок к передатчику. Такое устройство антенны позво-
ляет работать радиомаяку по методу «коммутации переплетаю-
щимися сигналами». Створный радиомаяк узконаправленными
пучками передает два сигнала, например, буквы А и Н. Пучки
направлены так, что секторы слышимости А (—) и Н (—) ча-
стично накладываются друг на друга. В результате образуется
равносигнальная зона, где слышимые с одинаковой силой звуки
А и Н сливаются в одно сплошное тире (рис. 63). По обе стороны
от равносигнальной зоны образуются двухсигнальные, в которых
один из сигналов слышен сильнее другого. Поток сигналов на-
правляется так, чтобы равносигнальная зона целиком помещалась
в границах фарватера. Тогда при отклонении от середины фарва-
тера и при приближении к его кромке судно переходит границу
равносигнальной зоны, попадая в двухсигнальную. С этого момен-
та наблюдатель начнет принимать с большей силой один из сиг-
налов А или Н (в зависимости от направления отклонения).
86
Всенаправленные радиомаяки с веером вращающихся
равносигнальных зон позволяют определить радиопеленг
повышенной точности, без учета курса судна и на значительно
большем расстоянии, чем круговые радиомаяки.
Во время работы такого радиомаяка в окружающем простран-
стве создается тире-точечная перемещающаяся диаграмма направ-
ленности излучения.
Определяют место судна по этому радиомаяку с помощью лю-
бого радиоприемника, отсчитывая передаваемые точки (или тире).
Полученный таким способом ортодромический пеленг на судно от
всенаправленного радиомаяка дает изолинию в виде дуги большого
круга, пересекающей меридиан этого радиомаяка под углом, рав-
ным ортодромическому пеленгу.
Существуют специальные карты изолиний, значительно облег-
чающие прокладку линий положения при определении места суд-
на по всенаправленным радиомаякам (рис. 64).
Сетки изолиний вычерчивают обычно на картах в меркаторской
проекции1. Как правило, на таких картах нанесены различными
цветами изолинии от двух-трех радиомаяков.
Для облегчения работы границы секторов (для начального
момента каждого цикла работы радиомаяка) отмечены утолщен-
ными линиями. Каждый сектор имеет условную нумерацию.
Внутри каждого сектора проведено несколько более тонких
линий того же цвета, соответствующих числу сигналов, кратному
5, 10, 20 или 60, в зависимости от расстояний до радиомаяков.
Кроме того, в.каждом секторе показаны сигналы (точки или тире),
которые наблюдатель должен услышать до прихода равносигналь-
ной зоны.
Линию положения на таких картах прокладывают следующим
образом.
Настроив приемник на частоту выбранного секторного радио-
маяка, прослушивают его позывные и следующее за ними длин-
/•"KapVbi изолиний для некоторых иностранных секторных радиомаяков вы-
пускают >в гномонической проекции.
S7
ное тире, предназначенное для пеленгования секторного радиомая-
ка с помощью судового радиопеленгатора. После длинного тире
Рис. 64.
наблюдатель услышит подачу специальных сигналов — точек или
тире. При этом передача начнется с передачи точек, если судно
находится в «сектлое точек»; если судно находится в «секторе
88
тйре», то непосредственно после длинного тире будут прослуши-
ваться короткие.
Для определения линии положения судна достаточно точно
подсчитать количество специальных сигналов (точек или тире),
следующих после подачи длинного тире, до появления равносиг-
нальной зоны. Если, например, до появления равносигнальной зо-
ны было подсчитано 20 точек, то это означает, что судно находит-
ся в одном из «секторов тире» на изолинии, соответствующей
20 точкам. Остается лишь определись сектор нахождения судна,
руководствуясь счислимым местом или приближенным радиопе-
ленгом.
Прокладку линии положения, соответствующей числу приня-
тых сигналов, производят непосредственно на карте изолиний.
Для этого в районе счислимого места судна карандашом прово-
дят от руки кривую линию, соответствующую числу принятых до
равносигнальной зоны сигналов, интерполируя «на глаз», если
это требуется.
В результате нанесения изолиний от трех секторных радиомая-
ков на карте изолиний образуется небольшой треугольник от их
пересечения. Центр такого треугольника принимают за обсерво-
ванное место судна, которое при необходимости можно перенести
на путевую карту.
Подсчитать точно количество сигналов до равносигнальной зо-
ны невозможно, так как часть сигналов вблизи этой зоны «пропа-
дает» (их не слышно). Для восстановления «потери» поступают
следующим образом.
Всего в течение каждого цикла работы радиомаяка наблюда-
тель смог бы (при отсутствии «потерь») услышать ровно 60 сигна-
лов: часть до, часть после равносигнальной зоны. Таким обра-
зом, если подсчитывать сигналы не только до равносигналь-
ной зоны, но и после нее до конца цикла, то можно опре-
делить общую «потерю» сигналов. Если к тому же считать,
что «потери» точек и тире до и после равносигнальной зоны
одинаковы, то делением общей «потери» пополам можно доста-
точно точно определить «потерю» сигналов до равносигнальной
зоны.
Пусть, например, до равносигнальной зоны было получено 17
точек, а после — 37 тире. Таким образом, за весь цикл было по-
лучено 54 и «потеряно» 6 сигналов (60—54 = 6), из них 3 точки и
3 тире. Следовательно, надо считать, что до равносигнальной зоны
было получено не 17, а 20 точек (17+3 = 20).
Подсчитывать точки и тире можно также с помощью специаль-
ного электронного прибора с точностью ±1 знак.
Пример 31. В некоторый момент времени на судне были приняты следующие
сигналы от трех секторных радиомаяков:
1) РМ Плонейс — 21 тире и 31 точка (52 сигнала);
2) РМ Севилья — 29 точек и 21 тире (50 сигналов);
3) РМ Луго — 43 тире и Ш точек (54 сигнала).
89
Определить обсервованные координаты места судна в этот момент с помо-
щью карты ГУ № 191—РА (см. рис. 64).
Решение
Сигналы Плонейс ►Севилья Луго
Общая потеря 8 10 б
«Потеря» до равносигнальной зоны . Действительное число, полученное до 4 5 3
равносигнальной зоны 214-4 = 25 294-5=34 43+3=46
Условная нумерация сектора . . . : В-8 А-12 В-10
Прокладка дает следующие обсервованные координаты:
?0 = 45°02zN и Хо = 17°22ZW,
которые могут быть при необходимости перенесены на путевую
карту.
Береговые радиопеленгаторные станции пред-
назначены для определения пеленга по сигналу, излучаемому пе-
редатчиком с судна, запрашивающего пеленг. В этом случае ор-
тодромический пеленг на судно от береговой радиопеленгаторной
станции дает изолинию в виде ду^и большого круга, как и в слу-
чае определения пеленга на судно от всенаправленного радио-
маяка.
Комбинированные радиомаяки представляют собой
радиостанции, работающие синхронно с воздушными и подводны-
ми звуковыми излучателями.
§ 40. Использование радиолокатора на судне
Радиолокация — средство для обнаружения и определения по-
ложения различных объектов при помощи радиоволн. Судовые
радиолокационные станции (РЛС) . работают на сантиметровых
волнах, которые, подобно световым лучам, распространяются
прямолинейно и обладают свойствами рефракции, дифракции и
интерференции. Дифракция позволяет радиоволнам двигаться
по изогнутому пути, следуя кривизне земной поверхности; реф-
ракция увеличивает дальность радиолокационного горизонта до
2,2 yhM1 где hM—высота антенны радиолокатора в метрах.
Радиоволны сантиметрового диапазона хорошо отражаются
от препятствий, встречающихся на пути их распространения. Это
позволяет обнаружить объект, измерить направление на него и
определить расстояние до него (рис. 65).
Современный радиолокатор позволяет обнаруживать объекты
в море на расстоянии более 50 миль. С его помощью можно опре-
делять место судна, снос ветром и элементы течения, осуществлять
проводку в узкостях, в условиях плохой видимости, уточнять
маневренные элементы судна и элементы движения другого судна
и т. п.
90
Судовая радиолокационная станция не связана с береговыми
устройствами. Автономность прибора дает ему большие преиму-
щества перед методами определения места судна по визуальным
наблюдениям и радиопеленгованием.
Возможность определять с помощью радиолокационной судо-
вой станции расстояния до ориентиров и пеленги на них позволя-
ет использовать для радиолокационных определений места судна
все те способы, которые были описаны в гл. VI. Кроме того, бла-
годаря широким возможностям судовых радиолокационных стан-
Рис. 65.
ций, появились и дополнительные способы определений: веер пе-
ленгов и расстояний, способ параллельных расстояний и т. д. Из
всех способов определения места судна с помощью судовой радио-
локационной станции предпочтение следует отдавать тем, которые
основаны на измерении радиолокационных расстояний, так ' как
они обычно измеряются значительно точнее, чем радиолокацион-
ные пеленги.
Однако имеется немало факторов, ограничивающих использо-
вание РЛС или значительно снижающих точность ее показаний.
РЛС не всегда может обеспечить безопасность плавания в дан-
ной обстановка Малая ширина берегового фарватера, действие
91
течения, сильное волнение, неблагоприятные гидрометеорологиче-
ские условия (грозовые облака, ветер, дождь) часто не позволя-
ют полностью использовать РЛС для навигации. Пользуясь ра-
диолокатором, трудно измерять расстояние до участка береговой
линии в тех местах, где она вдается в сторону суши; не все объ-
екты доступны для радиолокационного наблюдения. Так, берега,
покрытые ледниками с ровной поверхностью, почти совершенно не
обнаруживаются на экране. Волна около четырех баллов часто
делает невозможным своевременно различить даже такой объект,
как встречное судно и т. п. Кроме того, очень вероятны ошибки в
N
Рис. 66.
опознании наблюдаемого объекта. Статистика столкновений судов
в иностранных флотах за несколько последних лет показывает,
что после широкого внедрения радиолокационной техники на тор-
говом флоте количество столкновений увеличилось. Это явление—
прямое следствие слепого доверия к радиолокационной технике,
основанное на неправильной завышенной оценке навигационных
возможностей судовых РЛС.
Несмотря на это судовая РЛС в условиях плохой видимости
имеет исключительно важное значение для предупреждения столк-
новений судов в море, так как позволяет заблаговременно обна-
ружить встречное судно, определить наличие опасного сближения
и принять меры для его устранения согласно ППСС,
92
Наиболее просто и быстро такая задача решается при помощи
способа относительной прокладки, заключающегося в следующем.
На листе чистой бумаги отмечают точку О (рис. 66, б, г), при-
нимаемую за место своего судна1. На экране РЛС этой точке со-
ответствует центр развертки. Через точку О проводят линию ис-
тинного меридиана ОУИ.
Обнаружив на экране РЛС эхо-сигнал другого судна (точка а
на рис. 66, а, в), переносят его положение на бумагу с помощью
измеренных радиолокационного пеленга и расстояния, получая
точку А (рис. 66, б, г). Через 3—6 мин (0,05—0,10 ч) вновь пере-
носят переместившийся на экране эхо-сигнал (точка b на рис.
66, а) на бумагу, получая точку В (рис. 66, б, г).
Таким образом, перемещение эхо-сигнала встречного судна по
экрану РЛС точно воспроизводится на бумаге. Отрезок АВ пред-
ставляет собой вектор относительного перемещения судов (0,05—
0,10 длины вектора относительной скорости V0TH). Линия АВ назы-
вается линией относительного движения (ЛОД). Опас-
ность столкновения возникает в том случае, когда ЛОД проходит
через центр индикатора кругового обзора (ИКО), т. е. через точ-
ку О (или достаточно близко к ней). Такое положение соответству-
ет низменности пеленга на встречное судно (рис. 66,0,2). Треуголь-
ник АВМ позволяет определить элементы движения встречного
судна, _вектор скорости которого V2=MB (рис. 66,6, г), если
У]=ЛМ — вектор скорости судна наблюдателя.
§ 41. Береговые радиолокационные станции
Во время тумана плавание в открытом море, и особенно в стес-
ненных водах, значительно осложняется. Наличие РЛС на судне
позволяет судоводителям продолжать плавание к намеченному
пункту с соблюдением соответствующих мер предосторожности.
Особенно сложно войти в порт во время тумана. Неблагоприятные
гидрометеорологические условия часто вызывают серьезные за-
труднения в работе ряда крупных портов мира. Вход в порт и вы-
ход из него, а также маневрирование судов на его акватории в
условиях плохой видимости, как уже было сказано выше, не обес-
печиваются в полной мере наличием на судах РЛС.
Для проводки судов в порт в тумане служат береговые РЛС,
которые по сравнению с судовыми обладают более высокой раз-
решающей способностью по пеленгу и расстоянию.
Данные радиолокационных наблюдений береговой станции о
положении судов передаются на суда в форме пеленга и расстоя-
ния от береговой РЛС или от известного объекта, ближайшего к
судну и достаточно яркого на экране судовой РЛС, а также в
1 Для относительной прокладки существуют специальные планшеты, значи-
тельно облегчающие и ускоряющие ее выполнение.
93
форме указания приближенного места судна по отношению к оси
фарватера.
При помощи береговой РЛС в порту могут в любой момент
знать местоположение всех судов на его акватории, проверить
правильность положения плавучих средств ограждения, опреде-
лить место аварий для своевременной высылки спасательных
средств и т. д.
В настоящее время практикуется соединение ряда береговых
РЛС в навигационные группы, управляемые специальными дис-
петчерскими. Так, уже на протяжении нескольких лет успешно
действует нидерландская система береговых РЛС на «Новом вод-
ном пути» от маяка Хук-ов-Холланд до порта Роттердам; функ-
ционирует немецкая цепь станций от плавучего маяка «Эльба-1»
до порта Гамбург.
Особый интерес представляет система «Телерадар», установ-
ленная во французском порту Гавр. Система состоит из береговых
РЛС и телевизионного радиопередатчика, который снимает ра-
диолокационное изображение с экрана береговой РЛС и передает
его в эфир по телевизионному каналу. Таким образом, данные ра-
диолокационных наблюдений береговой РЛС о положении судов
передаются на судно в виде изображения на экране телеви-
зора. '
По желанию капитана оператор «Телерадара» может острием
стрелки или специальной фишкой указать на точку, в которой
данное судно сейчас находится.
В последнее время достигнуты положительные результаты по
передаче радиолокационных изображений с экрана береговой
РЛС непосредственно на индикаторы судовых радиолокаторов.
§ 42. Комбинированные способы определения
места судна
В последнее время широкое распространение получили методы
определения расстояний по разности моментов приема звуковых
и радиосигналов. Сущность комбинированного радиоакустическо-
го метода заключается в следующем. Одновременно с подачей
звукового сигнала маяк начинает передавать по радио серию ти-
ре или точек, продолжительность которых вместе с интервалом
соответствует прохождению звуком одной мили. Тогда, считая
распространение радиосигналов мгновенным, расстояние до радио-
маяка определяют количеством тире или точек, принятых на судне
до прихода звукового сигнала. Направление на радиомаяк полу-
чают радиопеленгованием.
Если радиосигнал подается только в момент подачи звукового
сигнала, то для определения расстояния используют секундомер,
принимая скорость распространения звука 1500 м]сек в воде и
340 м]сек в воздухе. Источником подводных звуковых сигналов
служат мембранные отправители (осцилляторы) или подводные
94
Колокола. Выслушивание подводных звуковых сигналов на суДйё
производится при помощи оборудования, состоящего из двух
гидрофонов, которые соединены с телефоном, установленным в
штурманской рубке.
Точность определения расстояния радиоакустическим методом
зависит в основном от опыта наблюдателя и от состояния гидро-
сферы и атмосферы. Дальность действия радиоакустических мая-
ков до 20 миль при подводном излучении и до 5 миль — при воз-
душном.
Принцип разности моментов может быть использован и для
других сочетаний сигналов, имеющих различную скорость распро-
странения, например: звуковые волны в воздухе и воде, комби-
нация звука и света и т. д.
Глава VIII
ОСОБЕННОСТИ ПРОКЛАДКИ ВО ВРЕМЯ ПЛАВАНИЯ
ПРИ ОСОБЫХ ОБСТОЯТЕЛЬСТВАХ
§ 43. Ограждающие линии положения
При плавании вблизи берегов, изобилующих навигационными
опасностями, определять место судна следует как можно чаще, а
в особых случаях — непрерывно. Отсутствие достаточного количе-
ства ориентиров, неточность положения их на карте, неуверен-
ность в общей поправке компаса и другие причины не дают воз-
можности надежно определить место судна в то время, когда
навигационная обстановка требует гарантии его безопасности. Тог-
да исцользуют ограждающие линии положения в виде вертикаль-
ного или горизонтального угла опасности, опасного расстояния
или опасного пеленга.
Вертикальный угол опасности. Пусть в районе ка-
кой-нибудь навигационной опасности имеется один хорошо види-
мый предмет с известной высотой Н (рис. 67). Если из точки А
описать окружность такого радиуса, чтобы все навигационные
опасности оказались внутри нее, то такая окружность и будет ог-
раждающей линией положения. Так судно, двигаясь в направле-
нии П, которое не пересекает ограждающей окружности, будет га-
рантировано от опасности. Радиус ограждающей окружности
D = Hctga, (56)
где Н — высота предмета А;
а — угловая высота этого предмета, измеренная наблюдате-
лем, находящимся на ограждающей окружности.
Тогда формула
ctga=^- (57)
95
даст возможность получить величину угла а по формулам (47)
и (48). Этот угол называют вертикальным углом опасности. До
тех пор, пока измеряемая с судна угловая высота р предмета А
меньше вертикального угла опасности а, путь судна не пересечет
ограждающей окружности. Угловую высоту измеряют секстаном.
Рис. 67.
Горизонтальный угол опасности. Пусть с судна
видны два предмета А и В (рис. 68). Если описать окружность,
которая проходит через эти предметы и охватывает прибрежные
навигационные опасности, такая окружность также будет ограж-
дающей линией положения, а путь судна П, не пересекающийся
с данной окружностью, — безопасным путем. Прямые, проведен-
ные из точек А и В в любую точку ограждающей окружности, пе-
ресекаются под одним и тем же углом а, называемым горизон-
тальным углом опасности. Находясь вне ограждающей окружно-
сти, наблюдатель будет различать предметы А и В под некоторым
горизонтальным углом р, меньшим горизонтального угла опасно-
сти а.
96
Рис. 70.
Опасное расстояние. Если можно измерить расстояние
до предмета дальномером или радиолокатором, с карты снимают
опасное расстояние до предмета, при котором судно проходит
чисто все прибрежные опасности. В дальнейшем следят за тем,
чтобы измеряемое с судна расстояние всегда было большим или
меньшим (в зависимости от обстановки), чем опасное расстояние.
Из рис. 69 видно, что для безо-
пасного прохода между опасно-
стями в данном случае необхо- п
димо, чтобы измеряемое с судна
расстояние до предмета А было
больше Z>b но меньше D2.
Опасный пеленг. При
подходе к берегу часто пользу-
ются ограждающим пеленгом
предмета, который называют
опасным. Следуя в направлении
КС (рис. 70), делают поворот в
тот момент, когда пеленг на пред-
мет В совпадает с линией ВС; при
следовании в направлении СВ по-
ворот к месту якорной стоянки делают лишь после того, как пеленг
предмета D совпадет с линией DE. Этот способ можно использо-
вать лишь в том случае, если правильно учтены общая поправка
компаса, снос от ветра и течения.
§ 44. Прокладка при плавании в узкостях, во льдах
и во время тумана
При плавании в узкостях (шхерное плавание, плавание
по фарватерам, между минными полями, подходы судна к порту, в
устья рек и т. д.) судно строго держится определенного фарватера.
Определять место обычными навигационными способами в узко-
стях нельзя, так как расстояния до окружающих опасностей очень
малы и точность обычных навигационных способов (1—Зкбт) недо-
статочна для обеспечения безопасности судна. Более того, даже
полученное обсервованное место еще до своей прокладки на кар-
те теряет всю ценность как устаревшее, так как окружающая об-
становка меняется очень быстро даже при умеренном ходе.
При плавании по фарватерам пользуются створами, специаль-
но предназначенными для обеспечения безопасности плавания
в узкостях. Их разделяют на ведущие, секущие и ограждающие.
Ведущие — это створы, придерживаясь которых судно будет
идти точно по фарватеру; секущие пересекают линию ведущих
створов в точках поворота, после чего сами становятся ведущи-
ми; иногда секущий створ служит указателем расстояния, пройден-
ного судном по ведущему створу; ограждающие створы имеют то
же назначение,.что и опасные пеленги.
4—933 97
Створными знаками Могут служить естественные и искусствен-
ные сооружения: заводские трубы, радиомачты, отдельные де-
ревья, груды камней и т. д.
Иногда плавание в узкостях осложняется тем, что специально
установленные и отмеченные на карте створы отсутствуют. В этом
случае судоводитель самостоятельно заранее подыскивает и отме-
чает на карте какие-либо береговые предметы для ориентира.
Часто фарватер обставляют вехами, баканами или буями.
Но пользоваться ими надо осторожно, так как эти знаки могут
быть снесены со своих штатных мест.
Особенно трудную задачу при плавании в узкости представ-
ляют повороты. Для осуществления безопасного поворота заранее,
при подготовке к проходу узкости, рассчитывают и отмечают на
карте точки начала поворота и выхода на следующий створ.
При следовании фарватером поворот осуществляют согласно
заранее нанесенным точкам. При подготовке к проходу узкости
выбирают приметные объекты, пеленги которых в точке поворота
параллельны новому курсу (ограждающий пеленг). Если пеленг
этого объекта не приходится на точку поворота, то момент нача-
ла поворота рассчитывают по скорости судна на данном курсе.
Заранее предусматривают также место возможной якорной сто-
янки судна на тот случай, если пройти узкость днем не удастся,
а проход ночью не рекомендуется или невозможен.
Плавание во льдах может осуществляться под проводкой
ледокола или самостоятельно. Наиболее сложным является пла-
вание во льдах Арктики и Антарктики, где ледовая обстановка
бывает очень тяжелой даже в летний период навигации. Выбор
маршрута среди льдов — очень ответственное и трудное дело.
Для этого судоводители используют специальные пособия: карты
ледовой обстановки, данные авиаразведки и т. д. При плавании
во льду стремятся прокладывать путь судна по возможности по
чистой воде или в местах наиболее слабого и разреженного льда,
не считаясь с удлинением пути.
Плавание во льдах, как правило, происходит в условиях плохой
видимости, часто в тумайе или во время пурги. Поэтому преоблада-
ющее значение в определении места судна приобретают радиотех-
нические средства.
Перед входом в лед определяют место судна, используя для
этого любые методы. Сложность маневрирования судна во льду,
частая смена курсов, изменение скорости заставляют судоводи-
теля вести счисление особенно внимательно. Счисление во льдах
ведут способом, получившим имя адмирала С. О. Макарова. Этот
способ заключается в следующем. Каждые 5 мин записывают
курс судна и по возможности чаще определяют его скорость. Затем
выводят среднее значение скорости и курс судна за 1 ч и прокла-
дывают их от последнего счислимого места. Так получают счисли-
мое место судна по истечении каждого часа плавания во льду. При
прокладке учитывают течение и дрейф судна вместе со льдом.
98
Определяют скорость судна при плавании во льду различными
способами. Особенно распространено определение при помощи
планширного лага. На лед бросают какой-нибудь предмет и на
борту судна отмечают моменты его прохождения между двумя
точками. Получив время прохождения и зная расстояние, легко
определить скорость. Для облегчения расчетов по планширному
лагу на судне составляют специальную таблицу. Определенная по
планширному лагу скорость судна только относительная (отно-
сительно льда). Часто вместо предмета, брошенного на лед, просто
замечают моменты прохождения какой-нибудь льдины. Иногда
скорость судна определяют по оборотам машины или на глаз.
При плавании в тумане вблизи берегов курсы судна
прокладывают в 5—10 милях от берега, а если в районе плавания
имеются навигационные опасности, то курсы судна прокладывают
в 10—15 милях от самой мористой опасности.
На подходах к портам и в некоторых особо опасных местах
для безопасности плавания устанавливают специальные техниче-
ские средства: ведущий лоцманский кабель, ревуны, двойные
туманные сигналы, говорящие маяки и т. д.
Для определения места судна во время тумана наиболее на-
дежными являются радиотехнические и гидроакустические
средства. Кроме того, судоводитель может контролировать переме-
щение судна и предупредить его приближение к опасности путем из-
мерения глубин.
§ 45. Плавание по дуге большого круга
Известно, что кратчайшим путем из одной точки на земной по-
верхности в другую является меньшая из дуг большого круга, про-
ходящего через эти точки. Пусть судну надо перейти из точки А
в точку В по дуге большого круга (рис. 71). Для этого нужно не-
прерывно менять курс судна от величины Кн (курс начальный) до
величины Кк (курс конечный). Кроме того, дуга большого круга
на меркаторской карте представлена кривой линией, обращенной
своей выпуклостью к полюсу. Неудобство прокладки ортодромии
на меркаторской карте, а также постоянная смена курса судна при
следовании его по ортодромии осложняют плавание по дуге боль-
шого круга. Поэтому плавание по ортодромии совершается только
при больших океанских переходах, когда расстояния между пунк-
тами отхода и прихода по дуге большого круга и по локсодромии
значительно (иногда на сотни миль) отличаются друг от друга.
Расчет длины ортодромии D (для сравнения ее с длиной лок-
содромии S) производят по формуле сферической тригонометрии
(сферический треугольник РпАВ)
cos£) = Sin cpj-Sin <Р? + COS -COS <рг-С06 (>•;•, — kj)
(58)
99
4*
где ф] и Xi — координаты точки Л, а ф2 и Аг— координаты точки
В. Исследование формулы на знаки производят, считая положи-
тельными широту N и долготу Ost, а отрицательными широту S и
долготу W.
Расчет длины локсодромии S производят по формулам письмен-
ного счисления. ,
Для того чтобы проложить дугу большого круга на морской
карте, необходимо знать координаты нескольких промежуточных
точек ортодромии, по кото-
рым можно было бы уверен-
но провести согласную кри-
вую. Расчет координат про-
межуточных точек является
трудоемким, требующим
известного навыка и вре-
мени.
Вычерчивать точную про-
екцию дуги большого круга
Q на карте нет смысла, так
как судно во время плавания
вследствие ряда причин
(дрейф, течение и т. д.) бу-
дет лишь приближенно дер-
жаться намеченного пути. Поэтому при плавании по ортодромии
чаще применяют приближенные приемы расчетов.
§ 46. Приближенный расчет элементов дуги
большого круга
Если при плавании по дуге большого круга менять курс судна
нужно 1-^2 раза в сутки (через 200—300 миль), то судно будет пе-
ремещаться не по дуге большого круга, а по_близкой к ортодромии
ломаной прямой. Точки С, Рит. д. (см. рис. 71), в которых про-
исходит смена курсов, называют промежуточными точками. Курс
судна, по которому оно следует 'от одной промежуточной точки
до другой, называют промежуточным курсом.
Обозначим через D длину ортодромии между точками А и В,
п
S Si — длину ломаной прямой между точками А и В, где $1 =
=s2 = ...=sn — длина локсодромии между двумя промежуточными
п
точками. Разность между D и S s£ тем меньше, чем больше проме-
жуточных точек выбрано на дуге большого круга. При расстоянии
между промежуточными точками 200—300 миль эта разность прак-
п
гически неощутима, т. е. при si=s?=...=sn<;200-r3QQ
миль.
100
На практике поступают так. Вначале вычисляют значения на-
чального и конечного курсов Кн и /Ск по формулам сферической
тригонометрии (сферический треугольник РпАВ):
ctg/G = coscp1-tgcp2-cosec(X2 — XJ — sin<prctg(X2 — X,); ]
ctg/G = —tg’<prcos<p2-cosec(X2 —XJ + sin?2-ctg(X2 — XJ. J \
Если пункты отхода и прихода расположены в разных полу-
шариях (северном и южном), то разность между начальным и
конечным курсами (Ки—Кк) не представит величину полного из-
менения курса. В этом случае расчет производят дважды: пер-
вый — для плавания от пункта отхода до точки пересечения орто-
дромии с экватором; второй—для плавания от экватора до пунк-
та прихода. Поэтому необходимо знать курс Ко, которым орто-
дромия пересекает экватор, и долготу точки пересечения Xq. Эти
величины определяются по формулам сферической тригонометрии
(прямоугольный сферический треугольник MBF):
tg (^2 — Ч = sin ?2 tg Кк, Sin Ко = COS ср2.sin Кк.
Рассчитав Кв и Кк, далее вычисляют число п= —"дО-к ,
где а° — целое число градусов (от 1 до 5°), а п — число равных от-
резков дуги большого круга, каждый из которых можно пройти
одним курсом при условии изменения этого курса на а° при пере-
ходе на следующий участок.
Затем вычисляют длину одного отрезка ломаной линии, т. е.
длину плавания между двумя промежуточными точками по лок-
п
содромии, считая 0 = 2
i=i
где Si — длина отрезка ломаной линии;
D — длина ортодромии.
Имея значения величин s, и п, плавание совершают следую-
щим образом. В точке А судно ложится на ИК=КВ. Пройдя этим
курсом Si миль, судно меняет курс на а° и т. д. до прихода в точку-В.
Являясь самым коротким по расстоянию, плавание по ортодро-
мии не' всегда бывает самым выгодным. При выборе пути для боль-
шого океанского перехода решающее значение, кроме расстояния,
имеют также гидрометеорологические условия. Так, может ока-
заться, что дуга большого круга ведет в такой район океана, где
судно может встретиться с противным ветром, течением или со
льдами. Поэтому кратчайший путь не всегда является наивыгод-
нейшим, особенно для судов со слабыми машинами (см, подроб-
но в разделе «Лоция»).
Пример 32. Для перехода из района Филиппинских островов <р=(11о25', 6N и Л—127°15', OOst) в район Калифорний-
ского залива (<p=20°03', ON и Х=107°30', 0W) рассчитать, через сколько миль плавания следует менять курс на величину
а^=2°,0.
Решение
1) Расчет величин D, А"н и Кк по формулам (58) и (59).
^2 — 11=25', 6N 20=03', ON 125=15', OkOS‘ (54=45', 0) sin sin 9.29691 9.53509 COS cos cos 9.99131 9.97 285 9.76 129 cos tg cosec 9.99131 9.56224 0.08 797 sin ctg 9.26991 9.84 925 tg cos cosec 9.30 561 9.97 285 0.08 797 sin Ctg 9.53 509 9.84 925
+t АГ 8.83 200 0.89 345 —II 0 9.72 545 9.94 061 +' ° 9.64152 j 0.12045 +H АГ 9.14616 0.49 536 —I АГ 9.36 643 >0.01 791 —II a 9.38 434 0.29 216
cos 9.66 606 ctg 9.76 197 Ctg 9.67 650
D D 62°23', 7 117°36',3 1 * 59°58',2 >: »?i и и 64°36'; 1 115=23', 9
D | 7056°, 3 /Сн 160°, 0 Як 1115° 4
2)‘Расчет величин п и $/:
60°, 0—115°, 4 55°, 4 D 7056',3 п
п = ---go— = -------2°----- = ~~2°—’ т' е* П = ^7,7; = — = —27 7~’ т’ е* 254', 8‘
Ответ, Пройдя начальным курсом (Ян==60°,0) расстояние 255 миль, судно должно менять курс на 2°,«0 вправо и та-
ким образом следовать до пункта назначения.
РАЗДЕЛ ВТОРОЙ
МОРЕХОДНАЯ АСТРОНОМИЯ
Глава IX
ОСНОВЫ СФЕРИЧЕСКОЙ АСТРОНОМИИ
§ 47. Предмет мореходной астрономии
Современные радионавигационные методы позволяют определять
место судна практически в любых условиях погоды. Кроме того,
получившие в последние годы исключительное развитие системы
дальней радионавигации перекрыли своей сетью все участки Ми-
рового океана, в которых осуществляется судоходство. И все же
такие методы не являются универсальными, прежде всего по при-
чине их неавтономности, а при некоторых обстоятельствах и нена-
дежности в работе, приеме сигналов, низкой точности определе-
ний и т. д.
В связи с этим при весьма значительных удалениях от бере-
га единственно надежными и, главное, автономными способами
определения положения судна являются астрономические методы,
которые за последние годы также получили дальнейшее развитие.
Так, радиосекстан, улавливающий космическое излучение Солнца,
позволяет определять место судна непрерывно в течение всего
времени пребывания его над горизонтом, при любой погоде и лю-
бом состоянии моря. Поэтому роль мореходной астрономии в
общем комплексе наук судовождения остается по-прежнему боль-
шой.
Основной задачей мореходной астрономии является разработ-
ка астрономических методов ориентирования и определения ме-
стоположения судна во время плавания в открытом море.
Предмет «Мореходная астрономия» составляют следующие
основные вопросы:
основы сферической астрономии, измерение времени и высот
светил в море;
определение места судна в море по наблюдениям небесных
светил;
астрономические методы определения поправок судовых кур-
соуказателей.
103
§ 48. Небесная сфера. Основные точки, пийИй
и круги на небесной сфере
Небесной сферой называют сферу любого радиуса с центром
в произвольной точке пространства. За ее центр, в зависимости от
постановки задачи, принимают глаз наблюдателя, центр инструмен-
та, центр Земли и т. д.
Рассмотрим основные точки и круги небесной сферы, за центр
О которой принят глаз наблюдателя (рис. 72). Через центр небес-
z ной сферы проведем отвесную
Рис. 72.
линию. Точки пересечения отвес-
ной линии со сферой называют
зенитом Z и надиром- п.
Плоскость, проходящую че-
рез центр небесной сферы пер-
пендикулярно отвесной линии,
называют плоскостью ис-
тинного горизонта. Эта
плоскость, пересекаясь с небес-
ной сферой, образует окруж-
ность большого круга, называе-
мую истинным горизонтом. По-
следний делит небесную сферу
на две части: надгоризонтную
и подгоризонтную.
Прямую, проходящую через
центр небесной сферы параллельно земной оси, называют осью
мира. Точки пересечения оси мира с небесной сферой называют-
ся полюсами мира. Один из полюсов, соответственно полю-
сам Земли, называют северным полюсом мира и обозначают Pn,
другой — южным полюсом мира Рв.
Плоскость QQ', проходящую через центр небесной сферы пер-
пендикулярно оси мира, называют плоскостью небесного
экватора. Эта плоскость, пересекаясь с небесной сферой,обра-
зует окружность большого круга — небесный экватор, ко-
торый делит небесную сферу на северную и южную части.
Большой круг небесной сферы, проходящий через полюсы мира,
зенит и надир, называют меридианом наблюдателя P^rtPsZ.
Ось мира делит меридиан наблюдателя *на полуденную PN ZPs
и полуночную nPs части.
Меридиан наблюдателя пересекается с истинным горизонтом
в двух течках: точке севера N и точке юга S. Прямую, соеди-
няющую точки севера и юга, называют полуденной линией.
Если из центра сферы смотреть в точку N, то справа будет точка
востока Ost, абелева — точка запада W. Малые круги небесной сфе-
ры аа', параллельные плоскости истинного горизонта, называют
альмукантаратами; малые bb', параллельные плоскости не-
бесного экватора, — небесными параллелями.
104
Круги небесной сферы Zon, проходящие через точки зенита и
надира, называют вертикалами. Вертикал, проходящий через
точки востока и запада, называют первым вертикалом.
Круги небесной сферы PngPs, проходящие через полюсы мира,
называют кругами склонения.
Меридиан наблюдателя является одновременно вертикалом и
кругом склонения. Он делит небесную сферу на две части — вос-
точную и западную.
Полюс мира, расположенный над горизонтом (под горизон-
том), называют повышенным (пониженным) полюсом мира. Наи-
менование повышенного полюса мира всегда одноименно с наи-
менованием широты места.
Ось мира с плоскостью истинного горизонта составляет угол,
равный географической широте места.
Положение светил на небесной сфере определяют при помощи
сферических координатных систем. В мореходной астрономии при-
меняются горизонтная и экваториальная системы координат.
§ 49. Сферические координаты светил
Горизонтная система координат. Основными плоскостями
от которых отсчитывают координаты в этой системе, являются ме-
ридиан наблюдателя и плоскость истинного горизонта.
К горизонтной системе координат относят высоту светила h и
азимут А,
Высотой светила h называют угол (КОо) между плос-
костью истинного горизонта и направлением из центра небесной
сферы к центру светила (рис. 73).
Высоту светила измеряют дугой вер-
тикала от истинного горизонта до
центра светила (Ко) в пределах от
О до 90°. Высоте приписывают знак
«плюс», если светило находится над
горизонтом, и знак «минус», если
оно расположено под горизонтом. В 5
последнем случае высоту называют
снижением.
Вместо высоты иногда пользу-
ются зенитным расстоянием г, кото-
рое представляет собой дополнение
высоты до 90°, т. е. г=90°—ft;
оно измеряется дугой вертикала от
зенита до центра светила в преде-
лах от 0 до 180°.
Для определения места светила необходимо также определить
положение вертикала, проходящего через него. Положение верти-
кала определяет азимут.
' 105
ризонта от полуночной части
Рис. 74.
Азимут — это сферический угол при зените, заключенный меж-
ду меридианом наблюдателя и вертикалом светила; измеряется
дугой истинного горизонта от одной из точек меридиана наблюда-
теля. Точку меридиана наблюдателя выбирают в соответствии с
практической необходимостью и удобствами при вычислениях.
В мореходной астрономии приняты три системы счета азимута:
круговой, полукруговой и четвертной.
При круговом счете азимут измеряют дугой истинного горизон-
та от точки N в сторону Ost до вертикала светила в пределах от О
до 360° и записывают так: А = 120° (дуга NOsl К, рис. 73).
При полукруговом счете азимут измеряют дугой истинного го-
меридиана наблюдателя в сторону
востока или запада до вертикала
светила в пределах от 0 до 180°.
Полукруговой азимут записывают:
A = N120°Ost (дуга МО^К). Пер-
вая буква всегда одноименна с ши-
ротой, так как наименование полу-
ночной части меридиана наблюда-
теля определяется наименованием
повышенного полюса. Вторая буква
определяется местом положения
светила в восточной или западной
полусфере.
При четвертном счете азимут
измеряют дугой истинного горизон-
та от точки севера N или от точки
юга S в сторону востока или запа-
ределах от 0 до 90° и записывают
Вследствие вращения Земли высота и азимут светила непрерыв-
но изменяются.
На судне высоту светила измеряют секстаном, а азимут при-
ближенно может быть определен по компасу или вычислен по
формулам сферической тригонометрии.
Экваториальная система координат. Различают две системы -
экваториальных координат. Основными плоскостями в первой
экваториальной системе являются меридиан наблюдателя и пло-
скость небесного экватора. Координатами в этой системе будут
часовой угол t и склонение 6.
Часовым углом называют сферический угол при повышен-
ном полюсе, заключенный между полуденной частью меридиана
наблюдателя и кругом склонения светила (QPNK, рис. 74).
Приняты две системы счета часовых углов.
Обыкновенный часовой угол измеряют дугой небесного эква-
тора от полуденной части меридиана наблюдателя в сторону за-
пада до круга склонения светила в пределах от 0 до 360°, На
рис. 74 дуга QWQ' Ost К и ^310°,
106
да до вертикала светила в
A = 60°SO (дуга
Практический часовой угол измеряют дугой небесного эква-
тора от полуденной части меридиана наблюдателя в сторону за-
пада или востока до круга склонения светила в пределах от 0 до
180° (дуга QK). Практическому часовому углу всегда приписыва-
ют наименование Ost или W, например, /~50°Ost.
Склонением светила 6 называют угол между плоскостью
небесного экватора и направлением из центра небесной сферы
в центр светила КОо.
Склонение измеряют дугой круга склонения от небесного эква-
тора до центра светила в пределах от 0 до 90°. Склонению припи-
сывают букву N, если светило находится в северной полусфере, и
S, если в южной: например, d=40°N (см. рис. 74).
При вычислениях склонению приписывают знак «плюс», если
оно одноименно с широтой, и знак «минус», если разноименно.
Вместо склонения иногда рассматривают полярное рас-
стояние А, являющееся дополнением склонения до 90°, т. е.
А = 90°—6. Полярное расстояние измеряют дугой круга склонения
от повышенного полюса до центра светила в пределах от 0 до
180°.
При вращении Земли склонение в течение суток остается неиз-
менным, а часовой угол изменяется.
Ко второй системе координат относят прямое восхожде-
ние а и склонение 6 (или полярное расстояние А).
На небесном экваторе имеется условная неподвижная точка,
называющаяся точкой Овна Т. Прямое восхождение а измеряется
дугой небесного экватора от точки Овна Y до круга склонения
светила в сторону, обратную счету обыкновенных часовых углов,
в пределах от 0 до 360°.
Понятия о склонении и полярном расстоянии те же, что и в
первой экваториальной системе координат. Вращение Земли не
вызывает изменения величины прямого восхождения и склонения,
поэтому эти координаты служат для составления звездных карт
и каталогов звезд (приложение 6).
§ 50. Полярный треугольник и его решение
Полярным (или параллактическим) треугольником называют
сферический треугольник на небесной сфере, полученный в ре-
зультате пересечения трех дуг больших кругов: меридиана наблю-
дателя, круга склонения и вертикала светила (рис. 75). Элемента-
ми полярного треугольника являются угол ZPNa=t— часовой угол
(в практическом счете); угол §ZPN=A— азимут (в полукруговом
счете); угол ZaPN=p — параллактический угол: сторона PNZ— до-
полнение широты до 90°, т. е. (90°—ср); сторона Png — полярное рас-
стояние светила А = 90°—о, сторона Zo — зенитное расстояние
2-90°—й.
Параллактический треугольник связывает горизонтные коорди-
наты h и А, экваториальные координаты /иди географические
107
координаты ф и X места наблюдателя. Географическая долгота %, i
как будет показано дальше, входит в часовой угол t.
Этой связью объясняется большая практическая ценность по-
лярного треугольника. Если известны три его элемента, то можно, /
решив его, найти остальные неизвестные элементы, в частности !
географическую широту или долготу.
Решение полярного сферического треугольника возможно, ес-
ли известно не менее трех его элементов. Связь между сторонами и
углами в сферическом треугольнике выражается четырьмя основ-
ными формулами сферической тригонометрйи.
1. Формула синусов (рис. 76). Во всяком сферическом
треугольнике синусы сторон относятся как синусы противополож-
ных им углов:
sina^sin/l. sina _ sin Л ф sin£ _sinB
sin£ sinB ’ sine sinC ’ sine — sinC’
(60)
2. Формула косинуса стороны. Во всяком сфериче-
ском треугольнике косинус стороны равен произведению косинусов
двух других сторон плюс произведение синусов тех же сторон, умно-
женное на косинус угла между ними (т. е. на косинус угла, про-
тиволежащего первой стороне).
cos а = cos b • cos с + sin b • sin с • cos А
cos b = cos a - cos с + sin а • sin с • cos В
cost? = cos а • cos 6 + sin а • sinft • cos С ,
(61)
3. Формула косинуса угла. Косинус угла равен минус
произведению косинусов двух других углов плюс произведение
108
синусов тех же углов на косинус стороны, лежащей между ними
(т. е. противолежащей первому углу).
cos А = — cosB-cosC 4-sinB-sinC-cosa ?
cos В = — cos Д-cosC + sin Д-sin C eos b * (62)
cos C = — cos Д-cos В + sin Д-sin B-cos c
4. Формула котангенсов. Во всяком сферическом тре-
угольнике произведение котангенса крайнего угла на синус сред-
него угла равно произведению котангенса крайней стороны на си-
нус средней стороны минус произведение косинусов средних эле-
ментов.
ctg Д-sin В = etga-sin с — cos c-cos В
ctgB-sinC = etgb-sina — cosa-cosC
ctgC-sin A = etgosinb — cosb-cos A-
(63)
Правые части формул (61) — (63) нелогарифмические и пред-
ставляют собой сумму или разность двух членов. Поэтому при
решении необходимо пользоваться вспомогательными таблицами
для сумм и разностей логарифмов (таблицы Гаусса), помещенны-
ми в МТ-63.
Пример 33. Дано: а — 67°19',6, ’с’=33°42',8, В = П8°00',9. Найти AtbtC.
Решение. 1. Пользуясь сферическим треугольником, выписываем формулы,
связывающие три известных элемента с искомым (рис. 77).
etg А • sin В « ctg а • sin с — cos с • cos В;
cos b = cos а • cos с Д- sin а • sin с * cos В;
etg С • sin В =» etg с • sin а — cos а • cos В.
2. В полученных формулах слева оставляем только неизвестные элементы.
Анализируем их на знаки:
+ + + + “
etg А = etg a * sin с • cosec В — cos с • etg В +1 + II;
+ + + + —
cos b = cos а . cos с + sin а • sin с • cos В +1 — II;
+ + + + —
etg С = etg с • sin a -cosec В — cos а • etg В +1 + II;
3. Выписываем рабочую схему и решаем задачу
А | b
а В с 67°19',6 61°59',1 33°42',8 Ctg cosec sin 9.62 093 0.05412 9.74 432 Ctg cos 9.72595 9.92004 cos cos 9.58600 9.92004
+ АГ 9.41 937 0.22662 + а 9.64 599 0.20 234 + р 9.50 604 9.39758
Ig ctg А =3 9.84 833 8.90362
А = 54°48' ,4 85°24',4
109
c
sin 9.96 507 sin 9.96 507 cos 9.58 600
cos 9.67 183 cosec 0.05412 ctg 9.72595
sin 9.74 432 Ctg 0.17 571 —
— 9.38122 + 0.19 490 + 9.31 195
АГ 0.12 482 a 0.05 344 АГ 0.88 295
1g cos b 0.24 834 IgctgC
b 29°26', 7 = c
При решении полярного треугольника буквенные обозначения
в формулах (60) — (63) заменяют его элементами.
При исследовании формул на знаки необходимо иметь в виду
следующее:
широта <р всегда считается положительной;
склонение б, если наименование склонения одноименно с ши-
ротой, считается положительным; в противном случае — отрица-
тельным;
высота h всегда определена знаком;
азимут А в полярном треугольнике всегда рассматривается
полукруговой. Если азимут светила дан в круговом или четверт-
ном счете, его необходимо перевести в полукруговой, а затем ис-
следовать формулу на знаки. При исследовании тригонометриче-
ских функций на знаки имеет значение величина полукругового
азимута;
часовой угол t рассматривается только практический (он всег-
да меньше 180°). Знак тригонометрических функций определяется
величиной часового угла.
Пример 34. Дано ср = 56°17',2N; 6 = 2°40',4S и t = 18°00 ,9Ost. Найти h
и А.
Решение^ 1. Пользуясь полярным треугольником, выписываем необходимые
формулы (рис. 78);
cos (90°—h) = cos (90°—ср) • cos (90°—В) + sin (90°—ср) • sin (90°—5) . cos t;
sin h = sin <p • sin 5 -f- cos <p • cos 5 - cos t;
ctg A • sin t = ctg (90°—5) • sin (90°—<p) — cos (90°—<p) • cos /;
ctg A • sin t = t g 5 • cos <p — sin <p • cos t.
2. Выписываем рабочие формулы и анализируем их на знаки:
+ — + + +
sin h = sin ср • sin 5 + cos <p • cos 5 . cos t — I + II;
+ — + + +
ctg A =s cos <p • tg 5 • cosec t — sin <p • ctg t — I — II.
110
Рис. 77.
Рис. 78.
3. Решаем задачу по рабочей схеме.
<р 56°17',2N sin 9.92004 cos 9.74 432 cos 9.74 432 sin 9.92004
2°40', 4S sin 8.66 877 cos 9.99 953 tg 8.66 924
t 18°00',90sl cos 9.97817 cosec 0.50 967 ctg 0.48 783
АГ 8.58881 1.13 321 + 9.72 202 9.96681 (±) АГ 8.92 323 1.48 464 (±) a. 0.40 787 0.01 400
1g sin h =s 9.68 883 lg ctg (180°—Л) — 0.42187
29°14',4 j 180°— A = 20°44', 1
A ” 1 N159°15',9Ost
В связи с тем что в рассматриваемом примере оба члена пра-
вой части уравнения ctg А оказались отрицательными, в уравне-
нии знаки изменены на противоположные. В левой части урав-
нения вместо 1g (—ctg Л) вычислено 1g ctg (180°—Л).
Вычисленный азимут Л по формуле ctg Л будет всегда выра-
жен в полукруговом счете. Так как азимут в полукруговом счете
отсчитывается от полуночной части меридиана наблюдателя (ко-
торая одноименна с повышенным полюсом), то наименование
первой буквы вычисленного азимута всегда одноименно с геогра-
фической широтой. Наименование второй буквы азимута всегда
одноименно с практическим часовым углом.
Ш
Приближенное решение (или контроль этой задачи) может
быть выполнено с помощью графического построения небесной
сферы в заданной широте. На небесной сфере по заданным коор-
динатам наносят светило, а затем определяют искомые коорди-
наты (рис. 79). Для нашего примера h^30° и 160° Ost.
§ 51. Видимое суточное движение светил
Видимое (кажущееся) вращение небедной сферы с востока на
запад происходит из-за суточного вращения Земли с запада на
восток. При рассмотрении видимого суточного движения светил,
Рис. 79.
а также явлений, сопровождающих его, пользуются вспомога-
тельной небесной сферой. Условно полагают Землю неподвижной.
Вместо вращения Земли рассматривают кажущееся вращение не-
бесной сферы.
Если мы приняли Землю неподвижной, то для данного наблю-
дателя останутся неподвижными все основные линии и плоскости,
которые с ним связаны. Такими линиями и плоскостями будут: от-
весная линия, ось мира, плоскости'горизонта, меридиана наблю-
дателя и первого вертикала.
Небесная сфера со всеми на ней светилами будет вращаться
в сторону, противоположную вращению Земли. Звезды описывают
небесные параллели, которые с горизонтом составляют угол, рав-
ный дополнению географической широты данного места до 90°,
т. е. 90°—ср.
Разместим наблюдателя в широте <p = 60°N (рис. 80). Как вид-
но из рисунка, часть светил находится всегда над горизонтом (Л
2 и 3), а часть под горизонтом (7, 8, 9 и 10). Светила 4, 5 и 6
пересекают горизонт, т. е. наблюдаются явления восхода и захода.
112
Некоторые светила пересекают первый вертикал над горизон-
том (3 и 4) или под горизонтом (6, 7 и 8), а другие вовсе не
пересекают первого вертикала (/ и 10). Все светила дважды пере-
секают меридиан наблюдателя. Если светило пересекает полуден-
ную часть меридиана наблюдателя, то говорят, что светило нахо-
дится в верхней кульминации, если полуночную, то в нижней.
Найдем условия, при которых наблюдаются явления восхода
и захода светил.
Заметим, что дуги PnN и PsS равны <р места, а дуги #Q' и
QS равны 90°—ф.
Из чертежа видно, что все светила, которые находятся между
суточной параллелью 3 и 7, будут пересекать плоскость горизон-
та, т. е. светила, у которых б<^90°—ф, будут восходить и захо-
дить.
Время нахождения над горизонтом и под горизонтом у разных
светил неодинаково. Оно зависит от наименования б и ф. Светило,
у которого 6=0°, перемещаясь по небесному экватору, половину
пути находится над горизонтом и половину — под горизонтом.
Оно будет восходить в точке Ost и заходить в точке W.
Если 6=90°—ф (3 и 7), то светила в своем суточном движе-
нии только касаются плоскости горизонта.
Если б>90°—ф, то такие светила не восходят и не заходят.
При б и ф одноименных светила всегда будут над горизонтом, а
при б и ф разноименных — под горизонтом.
Рассмотрим условия, при которых светила пересекают первый
вертикал. Предварительно заметим, что дуги ZQ и nQ' равны ф.
Как видно из рис. 80, первый вертикал пересекают светила,
расположенные между суточными параллелями светил 2 и 9, т. е.
при условии б<ф. Если склонения светил одноименны с широтой,
то такие светила пересекают надгоризонтную часть первого вер-
тикала, а если разноименны, то подгоризонтную.
Светила, у которых б>ф (/ и 10), не пересекают первого вер-
тикала.
Перемещение наблюдателя по земному меридиану вызывает
изменение географической широты, а следовательно, изменение
угла наклона оси мира с плоскостью истинного горизонта. Это яв-
ляется причиной того, что в каждой широте видимое суточное дви-
жение небесных светил имеет свои особенности.
Высоту светила в момент кульминации называют меридио-
нальной. В верхней кульминации ее обозначают через Н, а в
нижней — Н'. Меридиональной высоте приписывают наименование
N или S в зависимости от расположения светила. Дополнение ме-
ридиональной высоты до 90° называют меридиональным
зенитным расстоянием. Его наименование всегда об-
ратно наименованию меридиональной высоты, например если
HN, то и, наоборот, Hs, то zN.
В момент кульминации любого светила существует за-
висимость между меридиональной высотой (или зенитным
113
расстоянием), склонением светила и географической широтой
места наблюдателя.
Рассмотрим на рис. 81 светила 1, 2 и 3, В момент верхней куль-
минации светила 1 между дугами будет следующее соотношение*
QZ = aZ—aQ, т.е. 4>x=zN —
Аналогично этому для светила 2 можно записать .
Для светила 3 будет QZ = QC — CZ, т. е. — zs.
Эти соотношения алгебраически можно записать так:
ср = z + 5,
(64)
Рис. 81,
т. е. географическая широта
всегда равна алгебраической
сумме меридионального зенит-
ного расстояния светила в
момент его верхней кульмина-
ции и склонения. Наименова-
ние широты всегда будет од-
ноименно с наименованием
большего слагаемого.
Формула (64) служит для
определения широты. Для оп-
ределения широты места необ-
ходимо измерить меридиональ-
ную высоту, рассчитать z =
= 90°—Я и алгебраически при-
бавить 6 светила, значение
которого дано в Морском Аст-
рономическом Ежегоднике.
Для светил, находящихся в нижней кульминации, пользуются
другой формулой. Из рис. 81 дуга PnC' — полярное расстояние
А светила 3.
Дуга C'N — меридиональная высота Н', тогда
<р = Н' + д,
(65)
где Д=90°—б, т. е географическая широта равна меридиональ-
ной высоте светила в нижней кульминации плюс его полярное
расстояние. Наименование широты будет одноименно с наимено-
ванием меридиональной высоты и с наименованием склонения
светила.
Особый интерес представляют широты, равные 0 и 90°:
а) широта 0°; наблюдатель находится на экваторе, ось мира
расположена в плоскости истинного горизонта; небесный экватор
совпадает с первым вертикалом; небесные параллели перпендику-
лярны плоскости горизонта; все светила восходят и заходят и по-
ловину своего пути находятся над горизонтом, а половину — под
горизонтом;
1И
6) широта §0б; наблюдатель находится йа полюсе, ось мира
совпадает с отвесной линией, а небесный экватор — с плоско-
стью истинного горизонта; небесные параллели совпадают с аль-
мукантаратами; светила всегда имеют одну и ту же высоту, рав-
ную их склонению; светила не восходят и не заходят.
§ 52. Видимое годовое движение Солнца и его
объяснение
Наблюдая за суточным движением Солнца в течение года, мож-
но легко заметить в его движении ряд особенностей, отличающих-
ся от суточного движения звезд. Наиболее характерные из них
следующие.
1. Место восхода и захода Солнца, а следовательно, и его
азимут изо дня в день изменяются. Начиная с 21 марта (когда
Солнце восходит в точке востока, а заходит в точке запада) по
23 сентября восход Солнца наблюдается в норд-остовой четверти,
а заход — ц норд-вестовой. В начале этого времени точки восхода
и захода Солнца перемещаются к северу, а затем в обратном на-
правлении. 23 сентября так же, как и 21 марта, Солнце восходит
в точке востока и заходит в точке запада. Начиная с 23 сентября
по 21 марта подобное явление повторится в зюйд-остовой и зюйд-
вестовой четвертях. Перемещение точек восхода и захода Солнца
имеет годичный период.
Звезды всегда восходят и заходят в одних и тех же точках
горизонта.
2. Меридиональная высота Солнца изменяется с каждым днем.
Например, в Одессе (<р = 46°,5 N) 22 июня она будет наибольшей
и равняться 67°, затем начнет уменьшаться и 22 декабря достиг-
нет наименьшего значения 20°. После 22 декабря меридиональная
высота Солнца начнет увеличиваться. Это явление также годич-
ного периода. Меридиональная высота звезд всегда постоянна.
3. Продолжительность времени между кульминациями какой-
либо звезды и Солнца беспрерывно изменяется, тогда как продол-
жительность времени между двумя кульминациями одних и тех
же звезд остается постоянной. Так, в полночь мы видим кульми-
нирующими те созвездия, которые в данное время находятся на
противоположной стороне сферы от Солнца. Затем одни созвездия
уступают место другим, а в течение года в полночь поочередно
прокульминируют все созвездия.
4. Продолжительность дня (или ночи) в течение года непо-
стоянна. Это особенно заметно, если сравнить продолжитель-
ность летнего и зимнего дней в больших широтах, например в Ле-
нинграде. Происходит это потому, что время нахождения Солнца
над горизонтом в течение года различное. Звезды над горизон-
том находятся всегда одинаковое количество времени.
Таким образом, Солнце, кроме суточного движения, совершае-
мого совместно со звездами, имеет еще видимое перемещение по
115
сфере с годовым периодом. Это перемещение называют види-
мым годовым движением Солнца по небесной
сфере.
Наиболее наглядное представление об этом движении Солнца
получим в том случае, если ежедневно будем определять его эк-
ваториальные координаты — прямое восхождение а@ и склонение
б © Затем по найденным значениям координат нанесем точки на
вспомогательную небесную сферу и соединим их плавной кривой.
В результате получим большой круг на сфере, который укажет путь
видимого годового движения
Солнца. Круг на небесной сфе-
ре, по которому перемещается
Солнце, называется эклипти-
кой. Плоскость эклиптики на-
клонена к плоскости экватора
под постоянным углом е =
=23°27', который называется
углом наклона эклиптики
к экватору (рис. 82).
Видимое годовое движение
Солнца по эклиптике происхо-
дит в направлении, противо-
положном вращению небесной
сферы, т. е. с запада на восток.
Эклиптика пересекается с
небесным экватором в двух
точках, которые называют точ-
ками равноденствий. Точка, в
которой Солнце переходит из
следовательно меняет наимено-
вание склонения с южного на северное (т. е. с 6s на 6n), назы-
вается точкой весеннего равноденствия и обозначается
значком Y. Этим значком обозначают созвездие Овна, в котором
когда-то находилась эта точка. Поэтому иногда ее называют точ-
кой Овна. В настоящее время точка Y находится в созвездии Рыб.
Противоположную точку, в которой Солнце переходит из север-
ного полушария в южное и меняет наименование своего склоне-
ния с 6n на 6s, называют точкой осеннего равноденст-
вия. Ее обозначают значком созвездия Весов Q, в котором она
когда-то находилась. В настоящее время точка осеннего равно-
денствия находится в созвездии Девы.
Точку L называют точкой летнего, а точку U — точкой
зимнего солнцестояний.
Проследим за видимым движением Солнца по эклиптике в те-
чение года.
В точку весеннего равноденствия Солнце приходит 21 марта.
Прямое восхождение а© и склонение Солнца 6© равны нулю. На
всем земном шаре Солнце восходит в точке Ost и заходит в точке
116
W, а день равен ночи. С 21 марта Солнце перемещается по Эк-
липтике в сторону точки летнего солнцестояния. Прямое восхож-
дение и склонение Солнца беспрерывно увеличиваются. В север-
ном полушарии наступает астрономическая весна, а в южном —
осень.
22 июня, примерно через 3 месяца, Солнце приходит в точку
летнего солнцестояния L. Прямое восхождение Солнца а®=90°, а
склонение 6® = 23°27ZN. В северном полушарии наступает астро-
номическое лето (самые длинные дни и короткие ночи), а в юж-
ном—зима (самые длинные ночи и короткие дни). При дальнейшем
движении Солнца его северное склонение начинает уменьшаться,
а прямое восхождение по-прежнему увеличивается.
Примерно еще через три месяца, 23 сентября, Солнце прихо-
дит в точку осеннего равноденствия Й. Прямое восхождение
Солнца а® =180°, а склонение 6®=0°. Так как S®=0° (как и 21
марта), то для всех точек земной поверхности Солнце восходит
в точке Ost и заходит в точке W. День будет равен ночи. Наиме-
нование склонения Солнца меняется с северного 6n на южное —
6s* В северном полушарии наступает астрономическая осень, а в
южном — весна. При дальнейшем перемещении Солнца по эклип-
тике к точке зимнего солнцестояния L' склонение 6®и прямое вос-
хождение а® увеличиваются.
22 декабря Солнце приходит в точку зимнего солнцестояния
L'. Прямое восхождение а®=270° и склонение 6®=23°27ZS. В се-
верном полушарии наступает астрономическая зима, а в юж-
ном — лето.
После 22 декабря Солнце перемещается к точке Y. Наимено-
вание его склонения остается южным, но уменьшается, а прямое
восхождение увеличивается. Примерно через 3 месяца, 21 марта,
Солнце, совершив полный оборот по эклиптике, возвращается в
точку Овна.
Изменения прямого восхождения и склонения Солнца в тече-
ние года не остаются постоянными. Для приближенных расчетов
суточное изменение прямого восхождения Солнца принимают рав-
ным 1°. Изменение склонения за сутки принимают равным 0°,4 в
течение одного месяца до равноденствия и одного месяца после,
а изменение 0°,1 в течение одного месяца до солнцестояний и од-
ного месяца после солнцестояний; все остальное время измене-
ние склонения Солнца принимают равным 0°,3.
Особенность изменения прямого восхождения Солнца играет
важную роль при выборе основных единиц для • измерения вре-
мени.
Точка весеннего (равноденствия перемещается по эклиптике
навстречу годовому движению Солнца. Годовое перемещение ее
равно 50/z, 27 или округленно 50zz,3 (для 1950 г.). Следовательно,
Солнце не доходит до первоначального места относительно не-
подвижных звезд на величину 50zz,3. Для прохождения Солнцем
указанного пути понадобится 20* 24е. По этой причине весна
117
Наступает раньше, чем Солнце окончит в своем видимом годовом
движении полный круг в 360° относительно неподвижных звезд.
Смещение момента наступления весны было обнаружено Гип-
пархом во II в. до н. э. по наблюдениям звезд, которые он про-
изводил на острове Родос. Это явление он назвал предварением
равноденствий, или прецессией.
Явление перемещения точки весеннего равноденствия вызвало
необходимость ввести понятия тропического и звездного годов.
Тропическим годом называют промежуток времени, в течение ко -
торого Солнце совершает полный оборот по небесной сфере отно-
сительно точки весеннего равноденствия Y. Продолжительность
тропического года равна 365,2422 суток. Тропический год согла-
суется с природными явлениями и точно содержит в себе полный
цикл сезонов года: весну, лето, осень и зиму.
Звездным годом называют промежуток времени, в течение ко-
торого Солнце совершает полный оборот по небесной сфере отно-
сительно звезд. Продолжительность звездного года равна 365,2564
суток. Звездный год длиннее тропического.
В своем видимом годовом движении по небесной сфере Солнце
проходит среди различных звезд, расположенных вдоль эклиптики.
Еще в глубокой древности эти звезды разделили на 12 созвездий,
большинству из которых дали имена животных. Полоса неба вдоль
эклиптики, образуемая этими созвездиями, была названа Зодиаком
(круг животных), а созвездия — зодиакальными.
По сезонам года Солнце проходит следующие созвездия:
Весна Лето Осень Зима
Рыбы Близнецы Дева Стрелец
Овен Рак Весы Козерог
Телец Лев Скорпион Водолей
От совместного движения Солнца — годового по эклиптике и су-
точного вследствие вращения небесной сферы создается общее
движение Солнца по спиралеобразной линии. Крайние параллели
этой линии удалены по обе стороны от экватора на расстояниях
е=23°,5.
22 июня, когда Солнце описывает крайнюю суточную парал-
лель, на северной небесной полусфере, оно находится в созвездии
Близнецов. В далеком прошлом Солнце находилось в созвездии
Рака. 22 декабря Солнце находится в созвездии Стрельца, а в
прошлом оно было в созвездии Козерога. Поэтому крайняя север-
ная небесная параллель была названа тропиком Рака, а южная —
тропиком Козерога. Соответствующие им земные параллели с ши-
ротами ф = 6@ тах =23°27/ в северном полушарии назвали тропи-
ком Рака, или северным тропиком, а в южном — тропиком Козерога,
или южным тропиком.
В совместном движении Солнца, которое происходит по эклип-
тике с одновременным вращением небесной сферы, имеется ряд осо-
бенностей: изменяется длина суточной параллели над горизонтом
118
и под горизонтом (а следовательно, и продолжительность дня и но-
чи), изменяются меридиональные высоты Солнца, точки восхода
и захода и т. д. Все эти явления зависят от соотношения между ге-
ографической широтой места и склонением Солнца. Поэтому для
наблюдателя, находящегося в разных широтах, они будут различ-
ными.
Рассмотрим эти явления в некоторых широтах:
1. Наблюдатель находится на экваторе, ф=0°. Ось мира ле-
жит в плоскости истинного горизонта. Небесный экватор совпадает
с первым вертикалом. Суточ-
ные параллели Солнца парал-
лельны первому вертикалу,
поэтому Солнце в своем суточ-
ном движении никогда не пе-
ресекает первого вертикала.
Солнце ежедневно восходит и
заходит. День всегда равен
ночи. В зените Солнце бывает
два раза в год — 21 марта и
23 сентября.
2. Наблюдатель находится *
в широте (p^23°27'N или S.
Этот пояс называют тропика-
ми. В местах тропического
пояса Солнце 2 раза в год
проходит через зенит, а на гра-
ницах пояса (<p = 23°27'N или
S)—по одному разу. Солнце ежедневно восходит и заходит.
3. Наблюдатель находится в широте 23o27'<(p<66°33'N или S.
Пояс называют умеренным. В этом поясе Солнце никогда не про-
ходит через зенит. В течение суток Солнце всегда восходит и за-
ходит. Если склонение Солнца одноименно с широтой, то Солнце
в суточном движении пересекает первый вертикал в надгори-
зонтной части и его азимут изменяется во всех четырех чет-
вертях.
4. Наблюдатель находится в широте <p^66°33'N или S (рис. 83).
Пояс полярный. Параллели <p = 66°33'N или S называют полярны-
ми кругами. В полярном поясе могут наблюдаться полярные дни
и ночи, т. е. когда Солнце больше суток находится над горизон-
том или больше суток под горизонтом. Продолжительность по-
лярных дней и ночей тем больше, чем больше широта. Солнце
восходит и заходит только в те дни, когда его склонение меньше
90°—<р.
5. Наблюдатель находится на полюсе cp=90°N или S. Ось ми-
ра совпадает с отвесной линией и, следовательно, экватор—с плос-
костью истинного горизонта. Положение меридиана наблюдателя
будет неопределенным, поэтому отсутствуют части света. В тече-
ние суток Солнце движется параллельно горизонту.
119
В дни равноденствий наступают полярные восходы или захо-
ды Солнца. В дни солнцестояний высота Солнца достигает наи-
больших значений. Высота Солнца всегда равна'его склонению.
Полярный день и полярная ночь продолжаются по 6 месяцев.
Таким образом, из-за различных астрономических явлений,
обусловленных совместным суточным и годовым движением Солн-
ца в разных широтах (прохождение через зенит, явления поляр-
ного дня и ночи) и вызванных этими явлениями климатических
особенностей, земная поверхность разделена на тропический, уме-
ренные и полярные пояса.
Тропическим поясом называется часть земной поверх-
ности (между широтами (p = 23°27'N и 23°27'S), в которой Солнце
ежесуточно восходит и заходит и в течение года два раза бывает
в зените. Тропический пояс занимает 40% всей земной поверх-
ности.
Умеренным поясом называется часть земной поверхно-
сти, в которой Солнце ежесуточно восходит и заходит, но никогда
не бывает в зените. Существуют два умеренных пояса. В север-
ном полушарии между широтами <р = 23°27'N и (p = 66°33zN, а в
южном — между широтами (p=23°27'S и (p=66°33'S. Умеренные
пояса занимают 50% земной поверхности.
Полярным поясом называется часть земной поверхно-
сти, в которой наблюдаются полярные дни и ночи. Существуют
два полярных пояса. Северный полярный пояс распространяется от
широты q) = 66°33zN до северного полюса, а южный — от (p = 66°33'S
до южного полюса. Они занимают 10% земной поверхно-
сти.
Впервые правильное объяснение видимого годового движения
Солнца по небесной сфере дал Николай Коперник (1473—1543).
Он показал, что годовое движение Солнца по небесной сфере не
действительное его движение, а только видимое, отражающее го-
довое движение Земли вокруг Солнца. Система мира Коперника
была названа гелиоцентрической. По этой системе в центре сол-
нечной системы находится Солнце, вокруг которого движутся пла-
неты, в том числе и наша Земля.
Земля одновременно участвует в двух движениях: вращается
вокруг своей оси и движется по эллипсу вокруг Солнца. Враще-
ние Земли вокруг оси вызывает смену дня и ночи. Движение ее
вокруг Солнца вызывает смену времен года. От совместного вра-
щения Земли вокруг ее оси и движения вокруг Солнца происхо-
дит видимое движение Солнца по небесной сфере.
Для объяснения видимого годового движения Солнца по небес-
ной сфере воспользуемся рис. 84. В центре расположено Солнце
S, вокруг которого против часовой стрелки движется Земля. Зем-
ная ось сохраняет неизменное положение в пространстве и состав-
ляет с плоскостью эклиптики угол, равный 66°33'. Поэтому плос-
кость экватора наклонена к плоскости эклиптики под углом
8=23°27'. Далее идет небесная сфера с эклиптикой и нанесенцы-
120
мй на ней знаками созвездий Зодиака в современном Их распо-
ложении.
В положение I Земля приходит 21 марта. Если смотреть с
Земли, то Солнце проектируется на небесную сферу в точку Y,
находящуюся в настоящее время в созвездии Рыб. Склонение
Солнца 6о=0°. Наблюдатель, находящийся на экваторе Земли,
видит Солнце в полдень в зените. Все земные параллели освеща-
ются наполовину, поэтому во всех точках земной поверхности
Рис. 84.
день равен ночи. В северном полушарии начинается астрономиче-
ская весна, а в южном — осень.
В положение II Земля приходит 22 июня. Склонение Солнца
5q=23°,5N. Если смотреть с Земли, то Солнце проектируется в
созвездие Близнецов. Для наблюдателя, находящегося в широте
tp=23°,5N, Солнце в полдень проходит через зенит. Большая часть
суточных параллелей освещается в северном полушарии и мень-
шая — в южном. Освещается северный полярный пояс и не осве-
щается южный. На северном длится полярный день, а на южном—
полярная ночь. В северном полушарии Земли лучи Солнца па-
дают почти отвесно, а в южное — под углом, поэтому в север-
ном полушарии наступает астрономическое лето, а в южном —
зима.
В положение III Земля приходит 23 сентября. Склонение
Солнца бе —0° и оно проектируется в точку Весов, которая теперь
находится в созвездии Девы. Наблюдатель, находящийся на эква-
торе, видит Солнце в полдень в зените. Все земные параллели
освещаются Солнцем наполовину, поэтому во всех точках Земли
121
День равен ночи. Ё северном полушарии .начинается астрономиче-
ская осень, а в южном — весна.
22 декабря Земля приходит в положение IV Солнце проекти-
руется в созвездие Стрельца. Склонение Солнца d=23°,5S.
В южном полушарии освещается большая часть суточных парал-
лелей, чем в северном, поэтому в южном полушарии день длин-
нее ночи, а в северном — наоборот. Лучи Солнца в южное полу-
шарие падают почти отвесно, а в северное — под углом. Поэтому
в южном полушарии наступает астрономическое лето, а в север-
ном — зима. Солнце освещает южный полярный пояс и не осве-
щает северный. На южном полярном поясе наблюдается поляр-
ный день, а на северном — ночь.
Соответствующие объяснения можно дать и для остальных
промежуточных положений Земли.
§ 53. Собственное движение, фазы и возраст Луны
Луна — спутник Земли, вращается вокруг нее и вокруг своей
оси. Время, за которое Луна совершает полный оборот вокруг
своей оси, равно времени оборота Луны вокруг Земли. Этим объ-
ясняется то, что с Земли всегда
Рис. 85.
Собственное движение Луны по
видна Луна, обращенная одной
и той же стороной.
Для объяснения видимого
движения Луны воспользуемся
небесной сферой (рис. 85). Лу-
на имеет собственное переме-
щение по небесной сфере в ту
же сторону, что и годовое дви-
жение Солнца, т. е. в сторону,
противоположную вращению
сферы. Плоскость лунной орби-
ты составляет с плоскостью
эклиптики угол (о=508/. Лунная
орбита Л Л' пересекается с эк-
липтикой в двух точках, назы-
вающихся лунными узлами.
Линию, соединяющую узлы,
называют линией узлов.
своей орбите в течение суток до-
стигает 13°,2. Вследствие этого момент кульминации Луны по от-
ношению к звездам ежесуточно запаздывает на 53 мин, а по отно-
шению к Солнцу — на 49 мин.
Промежуток времени, в течение которого Луна совершает пол-
ный оборот по небесной сфере относительно звезд, называют
звездным месяцем. Продолжительность звездного месяца
равна 360°: 13°,2 = 27,32 суток.
Промежуток времени, в течение которого Луна соверша-
122
ет полный оборот по небесной сфере относительно Солнца, назы-
вают лунным месяцем. Его продолжительность равна
360°: 12°,2=29,53 суток.
Луна удалена от Земли в среднем на 384 400 км (60 земных
радиусов). Масса Луны в 82 раза меньше массы Земли. Лу-
на — темное тело и светит отраженным светом солнечных
лучей.
Различные положения Луны относительно Земли меняют види-
мое соотношение освещенной и неосвещенной ее поверхности.
Эти явления называют фазами Луны. Различают четыре
главные фазы: новолуние, первая четверть, полнолуние и послед-
няя четверть.
При новолунии Луна находится между Землей и Солнцем, а при
полнолунии Земля находится между Луной и Солнцем. Поэтому
при новолунии Луна обращена к Земле неосвещенной стороной,
а при полнолунии — наоборот. Фазы Луны, новолуние и полно-
луние, называют сизигиями.
При первой и последней четвертях направления с Земли на
Луну и Солнце составляют угол, равный 90°. В обеих этих фазах
освещена половина диска Луны. Фазы первой и последней чет-
вертей называются квадратурами.
Главные положения Луны — сизигии и квадратуры — играют
большую роль при рассмотрении приливно-отливных явлений.
Остальные положения Луны характеризуются различным соот-
ношением освещенной и неосвещенной поверхности Луны, усмат-
риваемой с Земли.
Полный оборот Луны по небесной сфере относительно Солнца
равен 29,5 суток. Это и есть период полного возраста Луны.
Количество дней, протекших от новолуния до данного момента,
называют возрастом Луны. Новолуние имеет возраст 0 или 29,5
суток. Первая четверть — 7,5 суток, полнолуние — 15 суток и по-
следняя четверть — 22 суток. До полнолуния у Луны освещена
правая часть диска, после полнолуния — левая. Пользуясь эти-
ми рассуждениями, можно приближенно оценивать возраст Лу
ны любой фазы. Возраст Луны с точностью до 0,1 суток дается
в Морском Астрономическом Ежегоднике (МАЕ).
Для приближенных расчетов возраста, кульминации, восхода
и захода Луны пользуются следующими формулами.
1. Формула для расчета возраста Луны (В <{).
В^ = D № + Л,
где D — число месяца;
№ — номер месяца в году;
Л — эмпирическое число, называемое обычно «лунным чис-
лом». Для 1969 г. оно равно 8, для 1970 г. — 19, 1971 г. — 0, 1972 г. —
И, 1973 г. — 22 и т. д.
Если после вычислений возраст Луны окажется числом боль-
ше 30, то из него необходимо нычесть 30.
123
2. Формула для расчета местного времени верхней кульмина-
ции Луны (Гк).
7\ = 12ч + О4, 8 Ва.
3. Формулы для грубого расчета времени восхода (Гв) и
захода (Г3) Луны.
7\^7К-6Ч; 7\^7\+6ч.
Пример 35. Вычислить приближенно возраст Луны 24 ноября 1969 г.
Решение. В^ = 24 + 11 + 8 = 43— 30 = 13 (по МАЕ 1969 г. В$ = 14). Фа-
за Луны — полнолуние. Освещена почти вся поверхность Луны.
§ 54. Измерение времени
Основная единица измерения времени — звездные сутки. Это
промежуток времени, за который Земля совершает полный оборот
вокруг своей оси. При определении звездных суток вместо равно-
мерного вращения Земли удобнее рассматривать равномерное
вращение небесной сферы.
Звездными сутками называют промежуток времени между дву-
мя одноименными последовательными кульминациями точки Ов-
на (или какой-нибудь звезды) на одном и том же меридиане. За
начало звездных суток принимают момент верхней кульминации
точки Овна, т. е. момент, когда она проходит через полуденную
часть меридиана наблюдателя.
Вследствие равномерного вращения небесной сферы точка Ов-
на равномерно изменяет свой часовой угол на 360°. Поэтому звезд-
ное время можно выражать западным часовым углом точки Ов-
на, т. е. S = .
Часовой угол точки Овна выражают в градусной и во времен-
ной мере. Для этой цели служат следующие соотношения: 24ч =
= 360°; 1“ = 15°; Н= 15'; И =0/25 и наоборот: 360°=24ч;
1°=(1/15)4 =4-«; 1'= (1/15)х =4Г ; О',1=0* ,4.
Звездные сутки делят на еще более мелкие единицы. Звезд-
ный час равен 7г4 части звездных суток, звездная минута — Veo
части звездного часа и звездная секунда — 7во части звездной
минуты.
Следовательно, звездным временем называют коли-
чество звездных часов, минут и секунд, протекших от начала
звездных суток до данного физического момента.
Звездным временем широко пользуются астрономы при наблю-
дениях в обсерваториях. Но это время неудобно для обыден-
ной жизни человека, которая связана с суточным движением
Солнца.
Суточным движением Солнца можно воспользоваться для сче-
та времени в истинных солнечных сутках. Истинными рол-
124
нечными сутками называют промежуток времени между
двумя последовательными одноименными кульминациями Солнца
на одном и том же меридиане. За начало истинных солнечных
суток принимают момент верхней кульминации истинного Солн-
ца. Отсюда можно получить истинный, час, минуту и секунду.
Большим недостатком солнечных суток является то, что их про-
должительность в течение года непостоянна. Взамен истинных сол-
нечных суток приняты средние солнечные сутки, которые одина-
ковы по величине и равны среднему за год значению истинных
солнечных суток. Слово «солнечные» часто опускают и просто го-
ворят — средние сутки.
Для введения понятия средних суток пользуются вспомога-
тельной фиктивной точкой, равномерно движущейся по экватору
и называемой средним экваториальным солнцем. Положение ее
на небесной сфере предвычислено методами небесной механики.
Часовой угол среднего солнца изменяется равномерно, а следо-
вательно, средние сутки одинаковы по величине в течение года.
Имея представление о среднем солнце, можно дать другое оп-
ределение средним суткам. Средними сутками называют
промежуток времени между двумя последовательными одноимен-
ными кульминациями среднего солнца на одном и том же меридиа-
не. За начало средних суток принимают момент нижней кульмина-
ции среднего солнца.
Средние сутки делят на 24 части — получают средний час.
Средний час делят на 60, получают среднюю минуту и соответ-
ственно среднюю секунду. Таким образом, средним време-
нем называют количество средних часов, минут и секунд, про-
текших от начала средних суток до данного физического момента.
Среднее время измеряется западным часовым углом среднего
солнца. Средние сутки длиннее звездных на Зж 55е,9 средних еди-
ниц времени. Поэтому звездное время ежесуточно уходит вперед
примерно на 4 мин. За один месяц звездное время по сравнению
со средним уйдет на 2 ч и т. д. За год звездное время уйдет впе-
ред на одни сутки. Следовательно, начало звездных суток
в течение года будет приходиться на разное время средних
суток.
В навигационных пособиях и литературе по астрономии часто
встречается выражение «гражданские среднее время», или чаще
«среднее (гражданское) время». Это объясняется следующим.
До 1925 г. за начало средних суток принимали момент верхней
кульминации среднего солнца, следовательно, среднее время от-
считывалось от среднего полдня. Этим временем пользовались
астрономы при наблюдениях, чтобы не делить ночь на две даты.
В гражданской жизни пользовались тем же средним временем,
но за начало средних суток принимали среднюю полночь. Такие
средние сутки называли гражданскими средними сутками. Сред-
нее время, отсчитываемое от полночи, называли гражданским
средним временем.
125
В 1925 г. по Международному соглашению астрономы приняли
для своих работ гражданское среднее время. Следовательно, по-
нятие среднего времени, отсчитываемого от среднего полдня, ут-
ратило свое значение. Осталось только гражданское среднее вре-
мя, которое упрощенно стали называть средним временем.
Если обозначим через Т — среднее (гражданское) время, а
через t@ —часовой угол среднего солнца, то T=tQ +124 .
Особо важное значение имеет связь между звездным време-
нем, часовым углом какого-либо сйетила и его прямым восхож-
дением. Эта связь называется основной формулой звездного вре-
мени и записывается так:
5 = t + а , (66)
или
S = t + а - 360°.
Очевидность основной формулы времени вытекает из рис. 86.
В момент верхней кульминации t=Q°. Тогда S — a. Для ниж-
ней кульминации S= 12ч +а.
Основная формула времени может служить для вычисления
часового угла светила. В самом деле: £=$+360°—а; обозначим
360°—а=т. Тогда
t = $ + т. (67)
Величину т называют звездным дополнением, она приведена
в Морском Астрономическом Ежегоднике. Звездное время S вы-
числяют по заданному моменту.
Все полученные нами времена отсчитывались от произвольно
избранного меридиана наблюдателя. Поэтому они называются
местными временами. Итак, местным временем называется
время на данном меридиане. Очевидно, в один и тот же физи-
ческий момент местные времена различных меридианов не будут
равны между собой. Это относится и к часовым углам. Часовые
углы, отсчитываемые от произвольного меридиана наблюдателя,
называют местными часовыми углами, последние не равны меж-
ду собой.
Выясним соотношения между однородными местными вре-
менами и местными часовыми углами светил на разных меридиа-
нах.
Небесная сфера на рис. 87 спроектирована на плоскость экватора;
QZppPn Q'—меридиан наблюдателя, проходящий через Гринвич Zrp—
зенит Гринвича.
Рассмотрим дополнительно еще две точки: одну— расположенную
к востоку в долготе XQSt с зенитом Zn а другую — к западу в долго-
те Xw с зенитом Z2. Нанесем точку Овна у, среднее солнце ф и све-
тило а.
Если исходить из определений времен и часовых углов, то
Srp = $1,2 +; Ггр=Г1(2+Х^
й
/гр = /1,2 + MV , (68)
где Srp, Ггр й /гр — соответственно звездное время, среднее время и
часовой угол светила на меридиане Гринвича;
Si, Тг и — звездйое время, среднее время и часовой угол све-
тила на меридиане, расположенном к востоку от
Г ринвича;
S2, Т2 и /2 —звездное время, среднее время и часовой угол све-
тила на меридиане, расположенном к западу от
Г ринвича;
X — долгота.
Времена и часовые углы, отнесенные к какому-либо меридиану,
как сказано выше, называются местными временами и часовыми
углами, тогда
SM = Srp+^w ; = Ггр+ и ZM=./rp + ^w • (69)
Таким образом, однородные местные времена и местные ча-
совые углы в двух каких-либо точках отличаются между собой
на разность долгот между ними.
Для сравнения времен и часовых углов в один и тот же физи-
ческий момент принят начальный (нулевой) меридиан, проходя-
щий через Гринвичскую обсерваторию. Этот меридиан получил
название гринвичского.
Времена и часовые углы, отнесенные к этому меридиану, на-
зывают гринвичскими временами и гринвичскими часовыми углами.
127
Гринвичское среднее (гражданское) время называют всемирным
(или мировым) временем.
В соотношениях между временами и часовыми углами важно
помнить, что к востоку времена и западные часовые углы всегда
больше, чем на Гринвиче. Эта особенность — следствие того, что
восход, заход и кульминация небесных светил на меридианах, рас-
положенных к востоку, происходят раньше, чем на гринвичском
меридиане.
Таким образом, местное, среднее время в различных точках
земной поверхности будет неодинаково в один и тот же физиче-
ский момент. Это приводит к большим неудобствам. Для устра-
нения этого весь земной шар разбили по меридианам на 24 поя-
са. В каждом поясе принято одинаковое так называемое поясное
время, равное местному среднему (гражданскому) времени цент-
рального меридиана. Центральными меридианами являются мери-
дианы 0; 15; 30; 45° и т. д. к востоку и западу. Границы поясов
проходят в одну и другую сторону от центрального меридиана че-
рез 7°,5. Ширина каждого пояса равна 15°, а поэтому в один и
тот же физический момент разность времен в двух соседних поя-
сах равна 1 ч. Пояса нумеруются от 0 до 12 в восточную и запад-
ную стороны. Пояс, центральный меридиан которого проходит че-
рез Гринвич, принято считать нулевым поясом.
В действительности границы поясов проходят не строго по ме-
ридианам, в противном случае пришлось бы делить некоторые
районы, области и даже города. Для устранения этого границы
идут иногда по границам государств, республик, рек и т. д.
Таким образом, поясным временем называют местное,
среднее (гражданское) время центрального меридиана пояса, при-
нятое одинаковым для всего пояса. Поясное время обозначают Тп,
1957 г. вследствие из-
некоторые изменения
временем (гринвич-
(70)
Поясное время у нас введено в 1919 г. В
менения административных районов внесены
в ранее существовавшие пояса.
Связь между поясным Тп и всемирным
ским) ТгР выражается следующей формулой:
Т л = Ггр zb №w -
Кроме того (см. формулу 69)
Ты = ЛР zb •
На основании последних двух выражений
Т п = Т м -j- zb №w или = п + N-w zb •
После первой мировой войны в разных странах, в том числе
и в СССР, стали переводить часовую стрелку на 1 ч или больше
вперед или назад. Перевод делался на определенный срок, боль-
шей частью на лето и по правительственному распоряжению. Та-
кое время стали называть декретным временем Тд.
128
В Советском Союзе с 1930 г. по декрету Совнаркома стрелки
часов всех поясов были переведены круглогодично на 1 ч вперед.
Это было вызвано экономическими соображениями. Таким обра-
зом, декретное время на территории СССР отличается от грин-
вичского времени на номер пояса плюс 1 ч.
Судовая жизнь экипажа и счисление пути судна идут по су-
довым часам, которые показывают судовое время Тс. Судовым
временем называют поясное время того часового пояса, по
которому поставлены судовые часы; его записывают с точностью
до 1 мин.
При переходе судна из одного пояса в другой стрелки судовых
часов переводят на 1 ч вперед (если переход совершается в вос-
точный пояс) или на 1 ч назад (если в западный пояс).
Если в один и тот же физический момент отойти от нулевого
пояса ,и прийти к двенадцатому поясу с восточной и западной
сторон, то мы заметим расхождение на одну календарную дату.
Меридиан 180° принято считать линией смены даты (демарка-
ционная линия времени). Если суда пересекают эту линию в вос-
точном направлении (т. е. идут курсами от 0 до 180°), то в первую
полночь повторяют одну и ту же дату. Если суда пересекают ее
в западном направлении (т. е. идут курсами от 180 до 360°), то
в первую полночь опускают одну (последнюю) дату.
Демаркационная линия на преобладающей части своего протя-
жения совпадает с меридианом 180° и только местами уклоняется
от него, огибая острова и мысы.
Для счисления больших промежутков времени служит кален-
дарь. Основной трудностью создания солнечного календаря явля-
ется несоизмеримость тропического года (365, 2422 средних суток)
целым количеством средних суток. В настоящее время в СССР
и в основном во всех государствах пользуются григорианским ка-
лендарем. Для уравнивания длины тропического и календарного
(365, 25 средних суток) годов в григорианском календаре при-
нято в каждые четыре года считать: три года простыми по 365
средних суток и один год високосным — по 366 средних суток.
Пример 36. 20марта 1969г. Поясноевремя Тп = 04ч27ле17с,0; Л=81°55',0Ost
(5^27^40^,0 Оst). Определить 7гр и 7М.
Решение
Тп=Мч27м17с^ 20/П1
№ost = 5
7гр= 23*27^17^,0 19/1П
+ Aost = 05 27 40 ,0
Ты = 04"54ж57г,0 20/Ш
Пример 37. 4 ноября 1969 г. Судовое время Тс = 15Ч25Л (№ 7 Ost). Опре-
делить московское время Т'
г МОСК"
5—933
129
Решение
__ Тс = 15’25* 4/XI
~ №oSt = 7
Тг? = 08’25* 4/XI
№ost+l’ = 3
^моск = 4/XI
Пример 38. 19 июня 1969 г. Местное среднее время Гм= 02’32*12е,5;
= 64°02',50st(4’16*10c,0 0st). Определить Ггр> Тп и Гс.
Решение
Гм = 02’32*12£ ,5 19/VI
Xos t = 04 16 10 ,0
Tip = 22’16*02c,5 18/VI ;
+ №ost = 4
Ta = 26’16*02^,5 18/VI
1ЛИ ' Tn =. 02’16*02c,5 19/VI
Гс= 02’16* 19/VI
§ 55. Служба времени на судах морского флота
Для обеспечения точным временем навигационных и астроно-
мических определений, связи с берегом, расписания трудовой
деятельности экипажа и организации вахтенной службы на каж-
дом судне ведется служба времени. На судах Министерства мор-
ского флота СССР службу времени несет третий помощник капи-
тана, а руководство и контроль осуществляют старпом и капитан^
К основным задачам службы времени относятся: обеспечение
показаний судового и точного гринвичского времени на судне;
прием радиосигналов точного времени, расчет поправки и суточ-
ного хода хронометра и палубных часов; ведение хронометриче-
ского журнала; завод хронометров, палубных часов, секундомеров
и судовых часов; проверка показаний и согласование судовых
часов; наблюдение за работой и хранением хронометра, па-
лубных и судовых часов; перевод стрелок судовых часов при пе-
реходе границ поясов времени и линии смены дат; отметка дат и
времени на ленте курсографа, барографа и, если это необходимо,
хронометраж работы других навигационных приооров и ведение
ежесуточного судового штурманского бюллетеня.
Счисление пути судна, навигационные определения, радиосвязь
и повседневная жизнь экипажа обеспечиваются судовым време-
нем, которое показывают морские часы с точностью не ниже
±0,5 мин.
Для астрономических определений географических коорди-
нат места судна в море необходимо знать время с точностью до
130
десятых долей секунды. Для измерения времени с указанной точно-
стью служат хронометры (рис. 88) —точные приборы, устройство
которых предусматривает уменьшение
влияния температурных колебаний на
показания. Кроме морских часов и хро-
нометров, суда снабжаются еще па-
лубными часами и секундомерами.
Хронометрами, кроме определения
всемирного (гринвичского) времени,
которое необходимо знать для опреде-
ления географических координат суд-
на по астрономическим наблюдениям,
пользуются также для поддержания
правильных показаний морских часов.
Хронометры на судах устанавлива-
ют приближенно по всемирному вре-
мени. Счет гринвичского времени
ведется от 0 до 24 ч, а циферблат хро-
нометра разделен от 0 до 12 ч. Поэто-
му показания хронометра в течение
суток имеют двойственные значения,
например, 4 и 16 ч, 8 или 20 ч и т. д.
Это следует иметь в виду при расче-
тах гринвичского времени, показывае-
мого хронометром. Чтобы установить,
в каких случаях следует прибавлять
12 ч, а в каких нет, необходимо предва-
рительно определить приближенное
Рис. 88.
гринвичское время
7’rp = 7’c + №^s‘, (71)
где Т с — судовое время;
№ —номер пояса, по которому установлены судовые часы.
Поправкой хронометра называют разность между всемирным
временем и показанием хронометра в один и тот же физический
момент, т. е.
йхр — т гр — Т хр, (72)
где wxp — поправка хронометра;
Ггр —всемирное время;
Гхр— показания хронометра.
Поправка хронометра с течением времени изменяется. Это из-
менение неодинаково у различных хронометров. Оно зависит от
регулировки хронометра и от внешних условий. Изменение поправ-
ки хронометра характеризуется ходом хронометра со. Качество при-
бора определяется постоянством суточного хода.
Поправка хронометра определяется по специальным радио-
сигналам времени. Время, программы передач и другие сведе-
ния сообщаются в Извещениях мореплавателям.
5* ' 131
Определяемая поправка хронометра и суточный ход, дата,
всемирное время, название радиостанции, фамилия принявшего
сигналы и некоторые другие данные записывают в специальный
журнал, называемый хронометрическим.
Пример 39. 25 ноября 1969 г. Судовое время Т с — 6Ч27М. Л= 122°30',0 0st
(№ 8Ost); Т хр = 10*27*05е,0. Рассчитать показание гринвичского времени по
хронометру.
Решение. Рассчитываем приближенно гринвичское время и дату:
Тс = 6*27* 25/XI
№ost = 8
Ггр = 22*27* 24/XI *
Показание гринвичского времени по хронометру будет:
Ггр - 7\р + 12* = 10*27*05е,0 + 12* == 22*27*05е,0;
7rp = 22*27*05е,0 24/XI.
Пример 40. В Ггр = 10*00*00е показания хронометра Гхр = 10*14* 18е,3.
Определить нхр>
Решение. «хр = 10*00*00с — 10*14*18c,3= — 14*18с,3.
§ 56. Морской Астрономический Ежегодник
Астрономические ежегодники в зависимости от их назначения
имеют различную специализацию. В СССР издаются следующие
астрономические ежегодники.
Астрономический Ежегодник СССР (АЕ СССР) разрабатыва-
ется Институтом теоретической астрономии АН СССР и в нем
основные данные приводятся с точностью до ±0х/,01; предназна-
чен для астрономических обсерваторий и полевых астрономо-ге-
одезических работ, а также является основой для создания спе-
циализированных ежегодников.
Морской Астрономический Ежегодник (МАЕ) предназначен
для нужд мореплавания, им снабжаются все суда морского фло-
та; координаты светил приводятся с точностью ±0',1.
Авиационный астрономический ежегодник (ААЕ) предназна-
чен для нужд авиации; координаты светил в нем приводятся с
точностью ±il',0; разрабатывается Институтом теоретической
астрономии АН СССР и издается с 1930 г.
Из зарубежных ежегодников наиболее известными являются: «The
American Nautical Almanac» и «The Abriged Nautical Almanac» (из-
даются совместно Англией и США);
«Ephemerides Nautiques» (издается во Франции).
Некоторой популярностью среди моряков пользуется ежегодник,
издаваемый частной компанией в Англии «Brown’s Nautical Almanac».
132
Все морские астрономические ежегодники отличаются между
собой в основном общей формой устройства. Значения коорди-
нат, приводимых в ежегодниках, могут незначительно отличаться
между собой. Это зависит от принимаемых для их составления
каталогов звезд.
Общее устройство МАЕ следующее.
В начале приводится его содержание с кратким описанием
разделов. Пояснение к пользованию Морским Астрономическим
Ежегодником и приведенные в нем примеры исчерпывающе пояс-
няют правила определения следующих величин:
1) местных часовых углов /м и склонений звезд 6*;
2) местных часовых углов /®и склонений Солнца 3®;
3) местных часовых углов и склонений планет и Луны;
4) определение судового времени TCj кульминации Солнца,
планет и Луны;
5) ряд других величин, связанных с астрономическими явле-
ниями, используемыми в судовождении.
§ 57. Звездный глобус
Звездным глобусом пользуются для решения следующих глав-
ных задач:
а) определения названия звезды;
б) приближенного определения координат светил Л, А и t
в заданный момент;
в) подбора светил, удобных и выгодных для определения ме-
ста судна астрономическими способами;
г) определения азимута и приближенного времени восхода
и захода светил, кульминации и др.
Звездный глобус представляет собой пустотелый шар, изобра-
жающий небесную сферу (рис. 89). На звездном глобусе нанесе-
ны экватор, эклиптика, круги склонения через 15° (т. е. 1 ч), не-
бесные параллели через 10°, главнейшие созвездия и звезды. Не-
бесный экватор разбит на градусные деления.
На сферу звездного глобуса установлено металлическое коль-
цо, изображающее собой меридиан наблюдателя. В этом кольце
звездный глобус вращается вокруг оси, перпендикулярной небесно-
му экватору.
Звездный глобус вместе с кольцом помещается в деревянном
ящике, в нижней половине которого расположено плоское метал-
лическое кольцо, выполняющее роль истинного горизонта. Оно
проградуировано и имеет пометки N, S, Ost и W. Если вложить
звездный глобус в ящик, то одна половина его будет над гори-
зонтом, а другая под горизонтом.
Металлическое кольцо, выполняющее роль меридиана наблю-
дателя, будет перпендикулярно истинному горизонту глобуса и
проходит в пазах у точек N и S. На звездный глобус надевает-
ся крестовина сферической формы, изображающая вертикалы.
133
Вертикалы проградуированы, и по одному из них перемещается
ползунок-указатель.
Точность задач, решаемых с помощью звездного глобуса, ле-
жит в пределах градуировки кругов (1—2°).
При решении задач звездный глобус должен быть установлен
по широте места <р и по звездному местному времени SM. Уста-
новка производится в определенной последовательности: в первую
Рис. 89.
очередь по широте, затем по звездному местному времени путем
вращения глобуса вокруг оси мира до тех пор, пока под мериди-
ан наблюдателя не подойдет деление на экваторе, соответствую-
щее заданному местному звездному времени. Дальнейшая рабо-
та зависит от характера решаемых задач.
Пример 41. 1 октября 1969 г. В Тс = 19*49*, находясь в <рс =« 24°,0N и
Хс =« 36°,OOst измерили высоту звезды h* =« 28°,0 и заметили ее компасный пе-
ленг КП — 149°; ДА* = + 1°. Определить название наблюдаемой звезды.
Решение,
1) Рассчитываем гринвичское время ^гр и местное звездное время SM.
гс №ost 19*49* 1/Х 2
Т гр 17r49* 1/Х
S 265°14',9
AS 12 17 ,0
s + гр Xost СО О -) о сл
5М | 313°,5
134
2) устанавливаем Збездный глобус по шИроте ср = 24й,ON;
3) ориентируем звездный глобус по местному звездному времени 5М — 3136,5;
4) устанавливаем вертикал крестовины по азимуту: ИП = КП -|-Д/С; ИП=
= 149°+ 1° - 150°; А = 30°SOst;
5) устанавливаем индекс на вертикале у отсчета 28°,0 и читаем пЧ)д индексом
название звезды: а Южной Рыбы.
Глава X
ИЗМЕРЕНИЕ И ИСПРАВЛЕНИЕ ВЫСОТ СВЕТИЛ В МОРЕ
§ 58. Секстан
На судах для измерения высот светил и горизонтальных углов
между Предметами применяют угломерный инструмент, называе-
мый секстаном.
Идея создания секстана принадлежит Исааку Ньютону (1643—
1727 гг.). Название «секстан» происходит от* латинского «sex-
tans»— шестая часть круга.
Такова была величина рабо-
чей части лимба первона-
чальных инструментов.
На рис. 90: о —светило,
а Г — горизонт. В точках А и
В размещены два зеркала
(малое и большое), обра-
щенные друг к другу отра-
жающимися поверхностями
и перпендикулярные плос-
кости измеряемого угла. Ма-
лое зеркало неподвижно и
составляет постоянный угол
а с прямой ГО, равный при-
мерно 75°.
Большое зеркало, вра-
щается вокруг оси, перпен-
дикулярной плоскости изме-
ряемого угла в точке В. По-
воротом большого зеркала
можно добиться такого поло-
жения, при котором изобра-
жение светила о отразится
от его поверхности, упадет
Рис. 90.
на малое зеркало, отразится от него и пойдет в направлении точ-
ки О, в которой будут совмещены изображения двух предметов:
светило о, дважды отраженное, и горизонт Г.
Практическое измерение угла h может быть осуществлено путем
измерения угла между зеркалами со и при условии, когда будет
135
известна зависимость между Л и со, которую можно найти следую-
щим путем:
из к АВ С а = со + р, откуда (» = а — р;
из кАВО h = 2 (7, — р).
Отсюда
й = 2о). (73)
Выведенная зависимость показывает, что угол между зерка-
лами в два раза меньше измеряемого угла h.
Измерение угла w производится при помощи лимба ML, раз-
мещенного так, чтобы его центр совпадал с точкой В. Точку М,
ной трубы 3,
полученную путем продолже-
ния плоскости большого зерка-
ла при параллельном положе-
нии зеркал, принимают за ну-
левой штрих. От нулевого
штриха влево нанесены полу-
градусные штрихи, которые
приняты за градусные деле-
ния.
Если к большому зеркалу
прикрепить указатель BD, то
отсчет, снятый у его конца на
лимбе, будет равен углу h.
Секстан (рис. 91) состо-
ит из рамы Л лимба 10, боль-
шого зеркала 5, малого зерка-
ла 6, астрономической или зем-
алидады 2, бесконечного винта с отсчетным бараба-
ном Я светофильтров перед большим и малым зеркалами 7, 8,
подъемного механизма 4.
Перед измерением высоты определяют поправку индекса сек-
стана. Поправка индекса равна разности между 0° (или 360°) и
отсчетом, получаемым при параллельном положении зеркал.
Чтобы ее получить, алидаду ставят на отсчет, близкий к 0°. За-
тем направляют секстан на горизонт или звезду. Перемещая али-
даду, добиваются совмещений прямовидимого и дважды отражен-
ного изображения звезды или горизонта. После этого замечают
отсчет. Поправка индекса
I = 0° - ос.
(74)
Точного совмещения изображений Солнца нельзя достигнуть
этим способом из-за большого видимого диска. Поэтому поправ-
ку индекса по Солнцу определяют следующим образом: вначале
приводят к касанию одни края прямовидимого и дважды отражен-
ного изображений Солнца, а затем другие и при каждом каса-
нии краев замечают отсчеты секстана. Средний отсчет соответст-
вует отсчету секстана при совмещенных изображениях. Вычитая
средний отсчет из 0° (или 360°), получают поправку индекса г
136
Чтобы измерить высоту светила, устанавливают необходимые
светофильтры (для Солнца). Затем алидаду ставят на деление
0°. Секстан наводят на светило и смотрят в трубу. В поле зрения
трубы будут видны два изображения. Передвигая от себя алида-
ду, одновременно опускают секстан. Эта операция должна про-
изводиться так, чтобы в поле зрения трубы все время было видно
дважды отраженное светило. При появлении горизонта стопо-
рят алидаду. После этого секстан слегка покачивают по гори-
зонту и вокруг оси трубы . Светило будет описывать дугу. Если
оно касается горизонта, то это значит, что мы нашли вертикал
светила и измерили высоту.
§ 59. Поправки, служащие для исправления
измеренных высот
Высота светила — это вертикальный угол между плоскостью
истинного горизонта и направлением из центра небесной сферы в
центр светила. Такую высоту называют истинной геоцентриче-
ской высотой светила, или истинной высотой. Знание истинны'-
высот необходимо при решении параллактических треугольников.
Высоты светил в море измеряют секстаном над линией видимо-
го горизонта. Для Солнца или Луны измеряют высоту верхнего
или нижнего края. Для того чтобы перейти от измеренной секста-
ном высоты к истинной, необходимо ввести поправки. Рассмотрим
эти поправки.
Астрономическая рефракция. Лучи небесных светил, проходя
через земную атмосферу, испытывают в ней преломление. В атмо-
сфере лучи идут по изогнутой кривой, обращенной выпуклостью
в сторону зенита. Поэтому у глаза наблюдателя возникают два на-
правления: одно на истинное, а другое — на видимое место све-
тила. Угол между этими направлениями называют астрономиче-
ской рефракцией.
Величина астрономической рефракции изменяется с измене-
нием высоты светила. У горизонта, где луч проходит сравнительно
большую толщину атмосферы, рефракция достигает наибольшей
величины — 35'. Астрономическая рефракция зависит от темпера-
туры, влажности и давления. Поэтому ее величина у горизонта
часто колеблется и иногда достигает значительных отклонений.
Рефракция в зените равна нулю.
Рефракция всегда приподнимает светило, и истинная высота
будет меньше измеренной высоты:
h = hr - р, (75)
где р — рефракция;
h — истинная высота;
hr -- измеренная высота.
Астрономическая рефракция бывает средняя и истинная.
Средняя рефракция — это рефракция при средних метеорологи-
137
ческих условиях (£=-]-10оС и В = 760 мм). При высотах светил
больше 20° она может быть выражена формулой
р = 58", 2 ctg А'. (76)
Истинная рефракция — это рефракция при действительных ме-
теорологических условиях.
В МТ-63 дана табл. 12, в которой помещены поправки высоты
за среднюю рефракцию. В табл. 14-а и 14-6 помещены поправки
к высоте за температуру и давление воздуха.
Наклонение видимого горизонта. . Видимым горизонтом назы-
вают линию раздела воздушной и водной среды. Угол между
плоскостью истинного горизонта и направлением на видимый го-
ризонт называют наклонением видимого горизонта
Наклонение видимого горизонта.
d' = 1,77-/ё", (77)
где е — высота глаза над уровнем моря, м.
Наклонение горизонта в этой формуле зависит только от
высоты глаза над уровнем моря. По этой формуле составлена
табл. 11-6 МТ-63. Табличное значение наклонения горизонта все-
гда имеет знак минус.
В численный коэффициент наклонения горизонта входит коэф-
фициент К» который характеризует земную рефракцию. Земная
рефракция часто изменяет свою величину. Следовательно, из-
меняется и К, что влечет за собой изменение наклонения гори-
зонта. Таким образом, наклонение горизонта может отклоняться
в одну и другую сторону от значений, которые даны в таблица у
Эта особенность понижает точность определения места судна в
море. -
Для измерения действительного наклонения горизонта суш^
ствует несколько различных приборов. Наиболее точным и удоб-
ным является наклономер В. В. Каврайского1.
Параллакс светила. Все небесные координаты светил относятся
к единой точке начала координат — центру Земли. Измеряемые
высоты светил на поверхности Земли также необходимо отнести
к началу координат. Для того чтобы измеренные высоты относи-
лись к центру Земли, их необходимо исправить поправками за
параллакс.
Угол при светиле, под которым усматривается земной радиус
наблюдателя, называют параллаксом светила при высоте. Парал-
лакс светила
р = K-oash, (78)
где л — горизонтальный экваториальный параллакс;
h — высота светила.
1 Подробно см. Б. И. Красавцев. Мореходная астрономия М., «Тран-
спорт», 1968.
138
Значения параллакса даны в МТ-63 в табл. 9-6. Поправка за
Параллакс всегда имеет знак плюс.
Горизонтальные экваториальные параллаксы Солнца, Луны и
некоторых планет даются в МАЕ на 0 ч всемирного времени каж-
дых суток.
Полудиаметр светил. Вы-
соты светил всегда относят-
ся к их центру. Измерить
высоту центра светила, име-
ющего диск, практически
невозможно. Поэтому при
наблюдении Солнца и Луны
измеряют угол между верх-
ним или нижним краем и
видимым горизонтом. Для
того чтобы перейти от изме-
ренной высоты края свети-
ла к высоте его центра, не-
обходимо ввести поправку
за радиус. Если измеряем
нижний край, то поправка
за радиус светила будет по-
ложительной, и наоборот.
§ 60. Исправление высот светил, измеренных в море
над линией видимого горизонта
Классификация высот светил. Явления рефракции, наклоне-
ния горизонта, параллакса и полудиаметра влияют на величину
измеряемых высот светил в море.
При рассмотрении вопроса об исправлении высот светил при-
нята следующая классификация высот: измеренная высота свети-
ла h', видимая высота светила hn и истинная высота светила h
(рис. 92).
Измеренная высота светила hf равна отсчету секстана, исправ-
ленному поправками инструмента,
hf = ос + (/ 4- 5),
(79)
где ос — отсчет секстана;
i — поправка индекса;
$ — поправка за ошибки деления лимба.
Видимая высота светила Лв равна измеренной высоте светила,
исправленной поправкой за наклонение горизонта:
hB = h'—d.
(80)
139
Истинная высота -светила равна видимой высоте, /йсправлей-
ной поправками за рефракцию, параллакс и полудйаметр све-
тила:
h = h* — р + р±/?. (81)
Исправление высот звезд. Параллакс и полудиаметр звезд
принимают равным нулю. Поэтому измеренные высоты звезд
исправляют только астрономической рефракцией р и наклоне-
нием горизонта d. Истинная высота звезды
h* = ос + 5) - d — р. (82)
Поправки d и р помещены в табл. 9-а МТ-63. Аргументами
для входа в таблицу служат «измеренная высота» и «возвыше-
ние глаза в м».
Пример 42, ос = 44°19' ,0; z-|-s=+l',O;£ — Юл/
ос I 44°19',0
; + $ I + 1 ,0
hf 44°20',0
Д/г 6,6 табл. 9-а МТ-63
h 44°13',4
Решение этой задачи в случае, когда наклонение горизонта измерено наклоно-
мером Каврайского (HK)d = —6',0 следующее:
ос | 44°19',0
i + 5 I + 1 ,0
h' 44°20',0
d — 6 ,0 По НК
Р — 1 ,о Табл. 12 MT-G3
h 44°13',0
Исправление высот планет. Измеренные высоты планет исправ-
ляются теми же поправками, что и звезды, и дополнительно па-
раллаксом. Истинная высота планеты
h = ос + (Z + 5) — d — р + р, (83)
где р — параллакс планеты при высоте.
Поправки за параллакс помещены в табл. 9-6 МТ-63.
Пример 43. 5 ноября 19€9 г. Измерена высота планеты Венера.
<?с = 32 18',4; / + s = — О',7; е = 12,5 м.
ОС i + s 32°18',4 — О',7
h' Р 32°17', 6 Горизонтальный экватори- — 7', 8 альный параллакс выбран + О', 1 из МАЕ 1969 г. т. = 0',1 Табл. 9-6 МТ-63.
h I 32°10', 0
140
Исправление высот Солнца. Измеренные высоты Солнца исправ-
ляют наклойением горизонта, астрономической рефракцией, па-
раллаксом и прлудиаметром.
Если измерена высота нижнего края Солнца, то истинная вы-
сота его центра
ОС + (Z + 5) — d — Р + р + =
= ( — d —- р + р + 16') + Д/?@, (84)
где Д/?@ — дополнительная поправка к среднему значению полу-
диаметра Солнца, который равен 16',0.
Общая поправка (—d—р+р+16') дана в табл. 8-а МТ-63 по
аргументам «измеренная высота» и «возвышение глаза в м». По-
правка Д7?0 дана в табл. 8-6 МТ-63 по аргументу «дата».
Если измерена высота верхнего края Солнца, то истинная вы-
сота центра Солнца будет равна
= ос Ч~ (Z + 5) — d — р + р — =
= (—d—р + р + 16') — (32' + Д/?@). (8о)
Поправка (32'Н-Д/?®) дана в табл. 8-в МТ-63 по аргументу
«дата».
Пример 44. 4 мая 1969 г. измерена высота нижнего края Солнца, ос =
= 39°02',5; г + 5 = —4',1; е - 7,9 м,
ос | 39°02',5
Л + $ | — 4',1
h 1 38°58',4 + 9',8 Табл. 8-а и 8-6 МТ-63
39°08',2
Решение этой задачи в । номером Каврайского (НК) < ос \ * + * 1 случае, когда d = — 4',5. 1 39°02',5 1 ~4 ,1 наклонение горизонта измерено накло
h® d 38°58',4 — 4 ,5 по НК
h® - р к 38°53',9 — 01,1 + 15,9 Табл. 13-а МТ-63 Табл. 13-6 МТ-63
h I 39°08',7
Исправление высот Луны. Измеренную высоту Луны исправ-
ляют поправками за наклонение горизонта, астрономическую
рефракцию, параллакс и полудиаметр.
/ Глава XI
ЬПРЕДеДЕНИЕ ГЕОГРАФИЧЕСКИЙ кбОРДИНАТ М^СТА СУДНА
/ В МОРЕ
§ 61. Общие сведения об определении
географических координат в море
Совместное определение географических координат места суд-
на в море сводится к графическому решению Двух уравнений. Эти
уравнения записываются из параллактических треугольников двух
каких-либо светил:
sinhy = sin «р-sin Bj -i- cos <p-cos Brcos/М1; (86)
sin h2 = sin <p-sinB2 + cos <p-cos B2-cos tM2,
где
QSf _ QSt
^m1 = /гр! + И /м21= /гр2 ~|-A W ’
Если во время измерения высот светил заметить время по хро-
нометру, поправка которого известна относительно гринвичского
времени, то с помощью
МАЕ можно вычислить
гринвичские часовые
углы /гр] и /гр2> а также
склонения этих светил
61 и 62- В этой системе
уравнений неизвестны-
ми останутся только
ф и 1
Q1 Идея графического
определения места суд-
на в море по линиям
равных высот заклю-
чается в следующем.
Изобразим Землю и
небесную сферу (рис.
93), центр которой
отнесем к центру О. Ду-
га qqf — земной эква-
тор, а дуга QQ' — не-
бесный. Точки pN и Pn
соответственно будут земной полюс и полюс мира. Пусть в точке Ггр
находится Гринвич, а его зенит — на небесной сфере в точке Zrp-
Проведем на Земле Гринвичский меридиан pNPrpdps, а на небесной
сфере — круг склонения, проходящий через зенит Гринвича
PxZrpDPs- Нанесем на небесной сфере светило в точке В. Проекцию
этого светила на земную поверхность (точка Ь) условимся называть
полюсом освещения.
142
S
Рис. 93.
Измерим! высоту светила В и вычислим его зенитное расстоя-
ние: 2в = 90V-hB> Из полюса освещения светила В проведем ок-
ружность сферическим радиусом, равным полученному зенитному
расстоянию. ВХе точки этой окружности будут равно удалены от
полюса освещения на расстояние zB.
Из последнего свойства вытекает важный практический вывод,
а именно: если измерять высоты светила В из любой точки ок-
ружности «101, то\все высоты будут равны между собой. Такая
особенность свойственна только точкам этой окружности, в силу
чего последнюю называют окружностью равных высот, которую
в дальнейшем, как это принято в мореходной астрономии, будем
называть кругом равных высот, или кругом равных зенитных рас-
стояний. \
Итак, если измерить высоту светила В и вычислить его зенит-
ное расстояние zB, затем из полюса освещения b сферическим ра-
диусом, равным полуденному зенитному расстоянию, провести
круг, то можно утверждать, что место судна, находится где-то на
этом круге равных высот. Один круг равных высот еще не опреде-
ляет места судна.
Для того чтобы определить место судна, необходимо измерить
высоту второго светила Л, вычислить зенитное расстояние zA и,
воспользовавшись им, провести второй круг равных высот.
Очевидно, что судно должно находиться и на этом круге. Удов-
летворить одновременно этим двум условиям возможно только
в том случае, когда судно будет находиться в общей точке этих
кругов, т. е. в точке их пересечения. Но круги равных высот пе-
ресекаются в двух точках. Расстояние между такими точками
очень большое. В одной из этих точек, ближайшей к счислимым
координатам, находится действительное место судна.
Все рассмотренные построения для определения места судна
легко выполнить на земном глобусе. Для нанесения полюса осве-
щения необходимо знать его координаты. Но так как светила по
отношению к своим полюсам находятся в зените, то экваториаль-
ные координаты светил Л и В определяют на Земле положения
полюсов следующим образом:
?» = Зв; X» = и <ра = 8Л; \а = • (87)
Это значит, что координаты полюса освещения будут: геогра-
фическая широта равна склонению, а долгота — гринвичскому
часовому углу светила.
Склонение светила и гринвичский часовой угол рассчитывают
с помощью МАЕ по замеченному времени в момент наблюдений.
После нанесения полюсов освещений на земном глобусе необхо-
димо вокруг них начертить круги равных высот с радиусами, рав-
ными зенитным расстояниям измеренных светил, т. е. Z=90°—h.
Ближайшая к счислимому месту точка пересечения кругов рав-
ных высот будет определенным местом судна.
143
Рис. 94.
Для построения кругов равных высот на земном/ глобусе, с
учетом необходимой точности (Г), потребуется большая сфера
диаметром примерно около 7 м. Такие размеры земного глобуса
и работа с ним практически неприемлемы. Удобнее пользоваться
имеющимися на судне морскими картами, на i/оторых ведется
прокладка. /
§ 62. Решение задачи определения места судна от его
счислимого места
Идея определения места судна в море nd линиям равных вы-
сот впервые практически была осуществлена в 1839 г. Она при-
надлежит оюицеру Черноморского
флота поручику корпуса флот-
ских штурманов М. А. Акимову.
Основная идея этого метода
заключается в том, что высотная
линия положения проводится пер-
пендикулярно линии азимута
светила, проведенного из счисли-
мо-обсервованного места.
Впоследствии метод Акимова
получил дальнейшее практиче-
ское усовершенствование и стал
более универсальным. В настоя-
щее время линии положения
строятся также перпендикуляр-
но азимуту светила, но линия азимута проводится от счислимого
места.
Сущность построения высотной линии положения от счисли-
мого места заключается в следующем.
Счислимая точка находится сравнительно недалеко от дейст-
вительного места, например, в точке с (рис. 94). Ее зенит на небес-
ной сфере Zc. Пусть В — светило, а b его полюс освещения. Во-
круг полюса освещения проведем круг равных высот. Соединив счи-
слимую точку с дугами больших кругов с земным полюсом Pn и
полюсом освещения Ь, мы получим земной меридиан Pnc и направ-
ление на полюс освещения cb. Угол Р^сЬ между дугами боль-
ших кругов есть азимут полюса освещения. Направление на по-
люс освещения называют линией азимута. Линия азимута пере-
секается с кругом равных высот в точке к, которую называют оп-
ределяющей точкой.
Небольшой отрезок окружности круга равных высот вблизи
линии азимута заменяют прямой линией, называющейся высотной
линией положения, или сокращенно линией положения. Она
пройдет через точку к и будет перпендикулярна линии азимута
светила.
144
Как видцо из рис. 94, для построения линии положения доста-
точно избрать счислимую точку с, вычислить азимут полюса ос-
вещения А и\лину отрезка ck. После этого на карте от счислне-
мого места судна проводят линию, составляющую с северной
частью меридиана угол, равный азимуту полюса освещения. На,
проложенной линии азимута откладывают отрезок ck и находят
определяющую точку k. Через точку k, перпендикулярно линии
азимута, проводят линию положения.
Для того чтобы вычислить азимут полюса освещения и отрезок ck,
пользуются параллактическим треугольником Pn ZCB. В нем
/>vZc = 90° -^с; РкВ = 90° —8; ZCB = 90° -Ас;
угол ;
BPvZc = tM и = Д,
где hc — счислимая высота;
/м — местный часовой угол светила для счислимого места с.
Дуга КВ = 90° — А, где
h — истинная высота све-
тила, полученная из наб-
людений на судне. Отре-
зок дуги ZCK, соответству-
ющий отрезку на Земле
ck, будет ZCK=90°—hc—
— (90°—А)=А —Ас.
Счислимая высота Ас
определится из параллак-
тического треугольника
PN BZC по преобразован-
ной формуле косинуса сто-
роны:
sin Ac=sin (pc * sin 6+
+cos (pc • cos 6 • cos (88)
Из этого параллакти-
ческого треугольника по
формуле синусов можно
Рис. 95.
определить азимут светила А, являющийся одновременно азимутом
полюса освещения. Он будет равен
sin Д = sec Ac-cos8-sin/M.
(89)
Величины А—Ас и А называют элементами высотной линии
положения.
Если известны элементы двух высотных линий положения, то,
выполнив по ним соответствующие построения, получим точку
пересечения линий положения М, называемую обсервован-
н ы м местом судна (рис. 95), •
145
Определяющая точка Л (на рис. 95 /<1 и К2) в Зависимости
от знака разности высот h—hc может быть расположена на ли-
нии азимута по направлению к светилу от счислимой точки или
в противоположную от него сторону, или в счислимом месте.
Рассмотрим эти случаи. /
1 h—/zc>0. Тогда h^>hc, т. е. z<zc. Счислимая точка находит-
ся вне круга равных высот. Определяющая точка К и линия по-
ложения расположены относительно счислимо/о места в сторону
светила (рис. 96, а). /
2. h—hc<0. Тогда /i</ic/t. е. z>zc. В этом случае счисли-
мая точка находится внутри круга равных высот. Определяющая
точка Л и линия положения прокладываются относительно счи-
слимого места в противоположную сторону от светила (рис. 96,6).
3. h—hc=0. Значит, h=hG и z=zc. Определяющая точка нахо-
дится на круге равных высот. Линия положения пройдет через
счислимое место (рис. 96, в).
Итак, для получения определяющей точки Л и проведения линии
положения необходимо на карте из счислимого места провести ли-
нию вычисленного азимута светила. По линии азимута, из счисли-
мой точки, отложить величину h—hc к светилу, если h—hc>0 и
в противоположную сторону от светила, если h—hc<Q. Если
h—Дс = 0, то определяющая точка совпадает со счислимым местом.
Во всех случаях через полученную точку Л проводят линию поло-
жения перпендикулярно линии азимута.
§ 63. Приемы вычисления счислимой высоты и
азимута светила
Счислимую высоту hc и азимут светила А вычисляют при по-
мощи различных формул, таблиц и приборов. Наиболее широко
применяют формулу sin hc и sin А:
sinftc = sin <рс-sin 8 -f- cos cpc-cos"B-cos fu;
sin A = secftc-cosB.sinfM. (90)
146
Азимуту вычисляемый по формуле sin А, всегда буДеТ четйерТ-
ным. Для определения наименования четверти горизонта следует
руководствоваться следующими правилами:
Наименование 8 Величина 8 Величина hc Первая буква азимута Вторая буква азим ута
Разноименно с широтой " - Не имеет значения Разноименна с широтой Всегда одного наименования с практическим ча- совым углом
Одноименно
с широтой о < ф hc >h\ То же То же
То же В < <р Одноименна с ши- ротой »
» 0 > ф Не имеет значения То же »
Высота светила в первом вертикале hx приводится в табл. 21
МТ-63 по аргументам и б.
Четверти, в которых находятся светила во время измерения их
высот, могут быть также практически определены при помощи ком-
паса.
Пример 45. срс = 56°29't3N; $ 2°35',8S; = 48°16',8W. Вычислить h и
А светила.
Решение.
+ ~ + + +
sin йс = sin срс-sin Б + cos cpc-cos 5-cos — I + II
sin A = sec />c-cos 5-sin
9 5 t 56°29', 3N 2°35', 8S 48°16', 8W sin sin 9.92105 8.65614 cos cos cos 9.74 202 9.99 955 9.82 314 sec he cos sin 0.02 49 9.99 96 9.8730
—_ 8.57 719 + 9.56471 sin A 9.89 75
АГ 0.98 752 fj 9.95 283 A 92°, 2SW
1g sin hz = 9.51 754 A 232°,2
hc = 19°13',4
Кроме указанных приемов, для вычисления счислимых высот
и азимутов существуют различные таблицы. Наиболее распрост-
раненными из них являются:
«Таблицы для вычисления высоты и азимута» проф.
147
А. П. Ющенко. Сокращенно ТВА-57 (ранее издавались кйк ТВА-52
и табл. 27 в МТ-43). /
Таблицы «Высоты и азимуты светил» — ВАС-58. /
Точность вычисления счислимых высот по этйм таблицам
очень высокая ±0/3. /
Из приборов для вычисления hc и А применяются цилиндри-
ческая линейка и оптический вычислитель высоту и азимута све-
тила (прибор «Вега»). Точность их йе превышает от ±1' до+1',5.
§ 64. Прокладка высотных линий на карте и бумаге
масштаб карты большой и обеспечивает
Рис. 97.
Графические построения на карте. Из
навигационной карте С(срс, Хс) откладыва
Прокладку высотных линий положения для определения коор-
динат места судна на картах выполняют в тех случаях, когда
достаточную точность
при графических пост-
роениях.
При плавании в
океане пользуются ка-
ртами мелкого масш-
таба. Поэтому прокла-
дка линий положения
на них не обеспечивает
необходимой точности
В этом случае ее лучше
выполнять на отдель-
ном листе бумаги.
Окончательно опреде-
ленные координаты ф и
X переносят на карту,
счислимой точки на
ют линии азимутов по
вычисленным значениям Aj и А2. Разности высот, полученные в ми-
нутах и их долях, откладывают от счислимой точки С в сторону
светила, если разность положительная, и в обратную сторону, если
разность отрицательная. Величину разности высот, выражен-
ную в минутах, снимают с баковой рамки карты измерителем.
Через найденные определяющие точки К\ и К2 проводят ли-
нии положения перпендикулярно линиям азимутов и в точке их
пересечения получают обсервованное место. Координаты
обсервованной точки ф0 и Хо снимаются непосредственно с
карты.
Графическое построение на бумаге. На меркаторской карте
линейная величина одной минуты дуги меридиана в seccp раз
больше линейной величины Г дуги экватора. Эту зависимость
можно выразить графическим построением углового масштаба.
3 нем горизонтальная линия изображает дуговые минуты долготы
(рис. 97, а), а наклонная прямая, построенная под углом, рав-
ным счислимой широте фс, дает угловые минуты широты. В этом
148
легко убедиться, если рассмотреть в угловом масштабе треуголь-
ник oab. В нем oa=ob cos<pc, отсюда ob = oa sec(pc-
Для определения координат обсервованного места наносим
произвольно счислимое место судна С (qpc, Хс). Прокладываем
азимуты Ai и (рис. 97, б). Откладываем разности высот (h—
—hc)i и (h—Лс)2, пользуясь наклонной шкалой углового масш-
таба. Через полученные определяющие точки /\1 и Л'2 проводим
линии положения. Разность долгот между обсервованным местом
и меридианом счислимой точки определяют по горизонтальной
шкале, а разность широт между обсервованным местом и парал-
лелью счислимой широты определяют по наклонной шкале масш-
таба.
Окончательно географические координаты обсервованного ме-
ста будут:
% =?С + РШ-, Хо = Хс + РД.
Пример 46. (А — Ac)t = + 2' ,5; Л1 = 105°; (Л — /гс)2 = — 3' ,0; А?= 192°;
фс = 45°07',2N; Лс =33°14',7 Ost.
Решение (см. рис. 97, at б)
фс = 45°07',2 N Лс = 33°14',7Ost
РШ = + 2z,4(kN) РД A- 4\6(KOst)
?0 = 45°09',6 N Ло = 33°19',3Ost
§ 65. Определение места судна по одновременным
наблюдениям нескольких светил
Определениями места судна по одновременным наблюдениям
двух, трех или четырех светил называют такие определения, при
которых наблюдения разделены небольшими (в несколько минут)
интервалами времени.
Наблюдения производят в вечерние или утренние сумерки.
В это время при относительно хорошей видимости горизонта мо-
жно подобрать для наблюдений звезды, планеты и Луну. Днем
примерно в течение 5—6 дней в месяц, для одновременных наблю-
дений бывает благоприятное расположение Солнца и Луны.
Для наблюдений подбирают такие светила, высоты которых
больше 7—10° и меньше 60—65°. Первое условие вызвано коле-
баниями величины астрономической рефракции у горизонта, кото-
рые не поддаются точному учету. Высоты светил, большие 70°, не
рекомендуется измерять потому, что большая кривизна круга рав-
ных высот, небольшую часть которого мы заменяем прямой —
линией положения, вызовет некоторую погрешность.
Точность определения места судна зависит также от разности
азимутов между наблюдаемыми светилами. Наиболее точные оп-
ределения будут при разности азимутов, равной 90°. Такое усло-
вие не всегда выполнимо. Поэтому в практике допускают откло-
нения от 90°, но для обеспечения надежных определений
149
Необходимо, чтобы разйость азйМу^ов была не меньше 30° н нё
более 150°. J
Одновременные наблюдения дают возможность наиболее точ- •
но определить место судна, особенно если для наблюдений избра
но три или четыре светила. В этом случае место судна опреде-
ляется пересечением трех или четырех линий положений. Если ли-
нии положения образуют небольшой (со сторонами менее 2 миль)
треугольник или четырехугольник, то за обсервованное место суд-
на принимают центр площади, ограниченный линиями положения.
При наличии больших систематических ошибок, особенно в на-
клонении горизонта, треугольники будут большими. Место суд-
на в этом случае определяют путем особых построений.
Рассматривая теоретическйе основы определения места судна
в море по высотным линиям положения, мы предполагали, что
наблюдения всех светил производились из одной и той же точки
на земной поверхности. В действительности между наблюдениями
пройдет небольшой промежуток времени (5—15 мин). За это вре-
мя судно совершит плавание S, и высоты будут измерены над
различными горизонтами, т. е. они будут отнесены к различным
зенитам. Вследствие этого возникает необходимость привести изме-
ренные высоты к одному зениту (к зениту места судна, когда за-
мечены отсчет лага и судовое время). Для этого необходимо оп
ределить величину изменения одной из двух высот светил в связь
с перемещением судна:
ДАг = 5 cos (Л - К) = ДП/ cos КУ, (91)
где AAZ—величина изменения высогы вследствие перемещения судна;
S — проплытое расстояние за промежуток времени АГ;
А — азимут светила;
К — курс;
ДГ — промежуток времени между моментом, когда замечен отсчет
лага, и моментом наблюдения светила;
V — скорость судна;
КУ — курсовой угол светила.
Величина приведения к одному зениту может быть вычислена
по формуле, графически и при помощи табл. 16 МТ-63.
Пример 47. 26 марта 1969 г. измерена h звезды а Волопаса, 7\р=9ч52л<48с
ос=39°33',2; i + s = 2', 1. В 7,с=бч00л<; ол = 41,8, находясь в счислимых
координатах <рс = 12°15',0N; Хс = 113°52',2Ost измерена h звезды а Скорпиона,
7хр = 9ч57-“56с; ос = 46°41',8; / + $ = +2',2; ИК = ЗГ; V = 14 узлам;
tfxp - +2-“Юс; е = 11,4 м.
Определить обсервованные координаты до, места судна и невязку С.
Решение тс = 6ч00ж 26/П1
№ost == 8
’ Тгр= 22ч00ж 25/1П
150
а Волопаса а Скорпиона a Волопаса a Скорпиона
rxp+l2 ^xp 21“ 52*48c +2 10 21’ 57* 56е 4-2 10 oc i 4“ $ 39’33',2 4*2 ,1 46°41',8 4-2 ,2
25/III 7rp 21’ 54* 58е 22’ 00* 06е h' ДА 39°35',3 —7,2 46’44',0 -6,9
^MC 138°08',4 13 46 ,8 153’10',8 0 01 ,5
h 39°28',1 —0 ,3 46°37',1
+ 5rp + 151°55',2 113 52 ,2 153’12',3 113 52 ,2
hn hc 39°27',8 39 25 ,9 46’37', 1 46 40 ,6
5M T 265°47',4 146 25 ,8 267°04',5 113 07 ,1
412°13',2W 380°l Г, 6 W h- hc 4-1',9 —3',5
52°13',2W 20°H',6W A 285°,1 206°, 8
4 19°20',3N 26°22',1S
Приведение к зениту Z2.
А = 285°; К = 31°; КУ =- 106°; Д7' = 4-5Ж,1; ДА^—О'.Об;
ДАг = — О',3.
а Волопаса (Арктур)
4- 4- 4-4-4-
sin h = sin <f sin S 4“ cos cos 5-cos t (4-1 4-11)
sin A = cos 5-sin t sec h
<P t 12°15',0N 19 20 ,3N 52 13 2W sin sin 9.32670 9.52002 cos cos cos 9.99000 9.97478 9.78720 sec h cos sin 0.11218 9.97478 9.89783
4-1 АГ 8.84672 0.90526 4-П a 9.75198 0.05091 Ig- sin A A 9.98479 74°55Z,5NW
!g sin Ac 9.80289 A 285°,1
ЗЭ’гб'.Э
a Скорпиона (Антарес)
4- — 4-4-4-
sin h — sin ф sin S 4- cos cos b cos t (—1 4-11)
,sin A = pos 5-sin ^-sec h
151
ф б t 12°15',0N 26 22 , IS 20 11 ,6W sin sin 9.32670 9.64752 cos cos cos 9.99000 9.95228 9.97245 sec h cos sin 0.16360 9.95228 9,53805
—1 АГ 8.97422 0.94051 1g sin Ac +11 9.91473 9.94710 9.86183 46°40',6 ig sin A A A 9.65393 26°47\5SW 206°, 8
' Выполняем графические построения (рис. 98). Затем рассчитываем обсервованные
координаты и невязку с.
Рис. 98.
, <рс = 12°15',0N _ Хс = 113°52',2О,1:
РШ = 4 ,4kN РД = 0,8kW
<fo = 12°19',4N, Хо = 113°5r,4Ost
Ответ
26/Ш 1969 г.
Тс = 6W; ол = 41,8
<Fo = 12°19',4N
: Хо = 113°51',4 Ost '
С = 350° —4',4.
§ 66. Определение места судна по наблюдениям,
разделенным большим промежутком времени
Результаты обработки наблюдений одного светила, как это
-показано в предыдущих параграфах, дают возможность построить
только одну линию положения. Спустя некоторое время, в течение
которого это светило изменит свой азимут на 40—50°, можно про
152
извести повторные наблюдения и по результатам вычислений по-
строить вторую линию положения. Первую линию положения
можно графически перенести к моменту повторных наблюдений
Точка пересечения высотных линий положения одного и того же
светила определит место судна. В этом случае место судна назы-
вают счислимо-обсервованным.
Рис. 99.
Для изменения азимута светила на величину более 30° в сред-
них широтах понадобится промежуток времени примерно около
2 ч. Поэтому такие определения называют определениями места
судна, разделенными большим промежутком времени. Этим спо-
собом пользуются днем при наблюдениях Солнца.
Физический смысл графического переноса первой линии поло-
жения к моменту вторых наблюдений объясняет рис. 99, где Cj —
счислимое место в момент первых наблюдений, С2 — счислимое
место при повторных наблюдениях, S — плавание.
По элементам высотной линии положения, вычисленным для
первого наблюдения, прокладываем из точки С] (фЬ Xi) первую
линию положения I, из счислимой точки С2 (ф2, ^2) — вторую
линию положения II. Если судно в момент первых наблюдений
находилось в точке а на линии положения I, то в момент второго
наблюдения оно будет в точке аъ так как за это время судно пе-
реместится на величину плавания S.
Точно такие же рассуждения можно применить к точке b и к
любой другой. Следовательно, линию положения I можно пере-
нести параллельно самой себе на величину проплытого расстоя-
ния S.
Такой графический перенос первой линии положения дости-
гается тем, что ее построение по элементам высотной линии вы-
полняют не из точки Сь а из точки С2.
Полученная точка Мо (ф0, Хо) от пересечения двух линий по-
ложения даст счислимо-обсервованное место судна.
Как видно из графических построений, точка С2 должна быть
строго определена относительно точки С]. Это одна из самых
153
главных особенностей определения Mecta судна Ио разновремен-
ным наблюдениям.
В действительности абсолютно точно учесть путь и плавание
судна относительно грунта практически невозможно. Всегда бу-
дут некоторые ошибки в поправках компаса и лага. Ошибки
счисления накапливаются со временем и влияют на точность оп-
ределения счислимо-обсервованных координат. На этом основа-
нии ждать изменения азимута светила до наивыгоднейшей вели-
чины 90° нецелесообразно. Влияние ошибок счисления на точность
определения места будет значительно больше, чем влияние пере-
сечения линий положения под углом, отличающимся от 90°.
Практикой установлено, что при дневных наблюдениях Солнца
достаточно, когда его азимут изменится на 40—60°.,
Пример 48. 19 декабря 1969 г. Тихий океан. В ГС( = 15^04*; ол{ = 15,0
(Дд=-|-2о/о), находясь в счислимых координатах фС1= 47°35',0S, Ас = 15Г17',3№;
ИК = 119°, измерили серию высот нижнего края Солнца и заметили момент по
хронометру ср. Гхр1 = 1ч02м21е; ср. = 46°38',3; i -j- s = —О',8; е = 12,1 м\
ИхР1= + 1*42с.
В ГСз= 18*27*; од2=«74,3; <?с2 = 48°04',3S; Ас2 = I49°58',5W, измерили
вторую серию высот нижнего края Солнца, ср Гхр2 — 4*25*36с; ср 12°22',8
i-|-s = — О',4; £—12,1 м\ «хр2 « + 1*42с; « -|- 21°; В = 754 мм.
Определить обсервованные координаты <р0, Ао места судна и невязку С.
Решение Г с= 15*04* 19/XII
№w= Ю
Ггр = 1*04* 20/XII
т и*9 ХР 1ч02м21с + 142 4Ч25*36С + 142 ос i + s 46°38',3 — 0 ,8 12°22',8 — 0 ,4
20/XII Тгр 1ч04ж03с 4*27-*18е h' ДА ДА^В 46°37' ,5 + 9 ,4 0 ,0 + + ^ О О) м мод
*4 Д/ 195°39',1 1 00 ,7 0 ,0 240°38',1 6 49 ,4 0 ,0
ho СП) СП) фь +£ Сл съ о ю СО (О оо 00 сч сч сч сч
^гр 196°39',8 151 17 ,3 247°27',5 ’ 149 58 ,5
ha — hc + Г.9 О',О
45°22',5W 97°29',0W A 287°,6 248°, 7
д/д 0',0/0',0 O',0/0',0
' 8* Д8 23°25',8S 0 ,0 23°25',9S 0 ,0
8® 23°25',8S 23°25',9S
154
Первые наблюдения
t X 23°25',8S 45 22 ,5W 31 40 ,4S 47 35 ,0S + Co -S 63 462 3 068 1 70 839
T 66530 1 4UI
+ 69 438
У Ас Лс 105°54',6 72°21',8NW 46°45',0 72°,4NW 11241 T ~S 81627 10 371
T 80 679
T 71256
Вторые наблюдения
5 t X 23°25',9S 97 29 ,0W 106 43 ,5S 48 04 ,3S Ь-ч co -F 63 463 17 705 ' T 88 356
T 81 168 10 «19
+ Co 77537
У Ac Лс 148°39',2 68°42',2SW 12°28',6 s' 68°,7SW 1 371 T 66 419 8 796
T 78 908
T 57623
Выполняем графическое построение (рис. 100). Затем рассчитываем обсерво
ванные координаты и неувязку.
<рс = 48e04',3S;
~ PL1I=! 2,8kN;
сроъ= 48°01' ,5S;
. \ = 149°58',5W
РД = 1 ,6kW
Ао= 15O°OO',1W
19/XII 1969 г.
ол = 74,3
с0С = 48o01',5S;
Хо = 150°00',1W
С =J339°—2',9.
155
•3
§ 67. Определение широты места по меридиональной ;
или близмеридиональной высотам светил •
и Полярной звезде '
1
Из формул (64) и (65) видно, что определение широты места )
по меридиональной высоте светила не требует сложных наблю- >
дений и большой обработки. Для этого достаточно измерить вы-
соту светила в одной из кульминаций, исправить ее необходимы-
ми поправками и выбрать склонение из МАЕ.
Момент кульминации светила для измерения меридиональной
высоты рассчитывают при помощи МАЕ.
Недостаток этого способа — возможность измерять только
одну высоту. Вследствие этого наблюдатель не может уменьшить
влияние случайных ошибок и контролировать измеренные вы-
соты. При облачной погоде меридиональная высота может быть
пропущена.
Более совершенным является способ определения широты мес-
та по измеренным близмеридиональным высотам светила. Этот
способ заключается в следующем. Если измерение высот выпол-
нено вблизи верхней кульминации светила, то близмеридиональ-
ные высоты будут меньше меридиональных и h-}-r=H. Величина
г называется редукцией.
Чтобы получить широту по близмеридиональным наблюдени-
ям, необходимо измеренную высоту исправить редукцией, полу-
чить меридиональную высоту, от нее перейти к зенитному рас-
стоянию, а затем вычислить широту.
Если высоты измерялись вблизи нижней кульминации, тогда
они больше меридиональной высоты и редукция г будет отрица-
тельной, т. е. h—г=Н'.
Редукция вычисляется по формуле
о f
200 s*n 2 г2
" = ^'-lFFT— Т^аГс1'-
где г — редукция;
К = lOOtg?—100 tg 6 при <f и 8 одноименных и верхней кульми-
нации, или К = 100 tg + 100 tg 8 при <р и 6 разноименных,
а также при одноименных, но при нижней кульминации; знак -
— означает, что из большей величины вычитается меньшая;
t — местный часовой угол светила;
Н — меридиональная высота светила.
Второй член редукции обычно мал. Он достигает О', 1 при высо-
те светила Я>65° и при значении первого члена редукции боль-
ше 15'.
Для удобства вычислений величины редукции составлены табл.
17-а, 17-6 и 17-в (МТ-63). При помощи табл. 17-а и 17-6 вычис-
ляют первый член редукции. Табл. 17-в дает значение второго
члена редукции.
156
При рассмотрении близмеридиональных высот предполагают
существование границ или пределов, в которых измеренные вы-
соты принимают за близмеридиональные. Иногда эти пределы
достигают часа, а в некоторых случаях — нескольких минут. Пре-
делы для наблюдения близмеридиональных высот обусловлива-
ются точностью вычисляемой редукции и помещены в табл. 19
МТ-63.
Преимущество определения широты места по близмеридиональ-
ным высотам состоит в том, что этим способом можно измерить
серию высот, что при обработке уменьшает влияние случайных
ошибок и позволяет осуществлять контроль качества измеренных
высот.
Ранее было показано, что ось мира составляет с плоскостью
истинного горизонта угол, равный широте места. Отсюда следует,
что высота повышенного полюса также равна широте места.
В северном полушарии, вблизи полюса мира, находится Поляр-
ная звезда. Поэтому, измерив ее высоту и введя некоторые допол-
нительные поправки, можно получить широту места.
Рис. 101.
Воспользуемся частью небесной сферы (рис. 101), спроектиро-
ванной на плоскость первого вертикала. Здесь а — Полярная звез-
да. Дуга PNa равна полярному расстоянию звезды А, а угол ZPnQ—
часовому углу /. Как видно из рисунка
Ф = h—х,
где х равен дуге PnK. Величину х приближенно можно получить
из сферического треугольника PnKg- Так как этот треугольник мал,
то его можно принять за плоский; тогда x = Acos/ и ф=/1—A cos Л
При учете сферичности треугольника и изменения координат
Полярной звезды в течение года формула широты имеет сложное
выражение, которое символически записывают так:
^ = h~\-I-\-II+ III.
157
В этой формуле наибольшую величину имеет первый член:
1=—Aocos (S—а0)>
где Доиао — среднегодовые значения полярного расстояния и пря-
мого восхождения Полярной звезды;
S — местное звездное время.
Поправки к высоте Полярной звезды Л II, и /// помещены
в МАЕ.
Пример 49. 26 марта 1969 г. В- Гс = 12Ч13Л ; ол = 34,7; находясь в счис-
лимых координатах срс = 23°30',0S; Лс = 74°15',0W\ измерены близмеридиональ-
ные высоты нижнего края Солнца. Осредненные значения для измеренных высот
и показаний хронометра следующие: ср.ос® = 63°39',4kN; ср.Гхр = 5^29м37е ;
i + s = — О',9; е = 10,0 м\ нхр = — 16*03^. Определить широту места <р0.
Решение
Тс = 12"13* 26/Ш
+ №ш -- 5
7\р= 17ч13* 26/Ш
7\₽.+ 12 ЦХр 17ч29л37с — 1603 ОС L —1“ S 63’39', 4kN — 0,9
26/Ш Ггр 17ч13м34с ! h' Kh 63°38',5 + ю,о
^Ч д/мс Lt 73°34',8 3 23 ,4 0 ,1
йо г 63’48',5 + 8,2
_ *гр 76°58',3 74 15 ,0 Но 63’56', 7kN
Ь) 26°03',3kS 2 19 ,9N
2°43',3W
д/д +0',5/+1',0 <Ро 23’43', 4S
Д» 2’19', 7N + 0/2
8® 2’19',9N
, 100 tg = 43
+ 100 tg 6 = 4
Я =47
26/Ш 1969 г.
Тс = 12ч13^; ол=34,7
То = 23°43',4S
§ 68. Определение поправки компаса
Определение поправки компаса астрономическим путем заклю-
чается в определении компасного пеленга светила с одновременным
отсчетом времени. По замеченному времени в момент пелен-
гования вычисляют азимут А (т. е. истинный пеленг) светила. Раз-
ность А—КП даст искомую поправку компаса:
= А-КП. (93)
148
Азимут светила может быть вычислен по одной из формул, по-
лученной из параллактического треугольника, в частности фор-
мулы котангенсов:
ctg A sin t = tg 8 cos ср — sin c? cos /;
откуда
ctg* A = cos ср tg 8 cosec t — sin cp ctg /. (94)
Азимут, вычисленный по этой формуле, всегда будет полукру
говым. Для его вычисления необходимо знать широту места, скло-
нение и местный часовой угол. Широту 'места снимают с карты,
склонение светила выбирают из МАЕ, а местный часовой угол
рассчитывают по замеченному моменту хронометра или часов,
поправки которых известны относительно гринвичского времени
Лр-
Вычисление азимута светила по формулам занимает много
времени, поэтому для ускорения вычислений пользуются специаль-
ными таблицами А. П. Ющенко, ВАС-58, А. П. Демина и др.
Таблицы проф. Ющенко служат для вычисления азимутов
Солнца, Луны, планет и звезд, склонения которых находятся в
пределах от 30°N до 30°S. Таблицы составлены по десятиградус-
ным широтным зонам со средними широтами 5; 15; 25° и т. д.
Значения азимутов в таблицах даны для соответствующих сред-
них широт. Аргументами для входа в таблицы служат склоне-
ние и местный часовой угол светила.
Внизу каждой страницы помещены вспомогательные таблицы
изменения азимута ДА, соответствующие изменению широты на
±1°, для вычисления поправки к выбранному азимуту за раз-
ность широт между табличным и заданным значениями.
Таблицы ВАС-58, предназначенные для вычисления высот и
азимутов Солнца, Луны, планет и звезд при определении места
судна, служат также для расчетов азимутов при определении по-
правок компаса. Полукруговые азимуты, приводимые в табли-
цах, вычисляются по аргументам: широта места ср, склонение б и
местный часовой угол светила.
Таблицы А. П. Демина ТИПС—56 служат для расчетов истин-
ных пеленгов светил при определении поправки компаса по наблю-
дениям небесных светил, имеющих высоту не более 30°, склоне-
ния которых лежат в пределах от 24° S до 24° N. Главной особен-
ностью является то, что ими можно пользоваться при отсутствии
МАЕ. Они получили широкое распространение на судах ММФ.
Пример 50. 20 декабря 1969 ,г. В Тс= 15ч49*; ол = 41,2; находясь в счис-
лимых координатах срс= 32°40zN; XC=41°28'W\ замечены компасные пеленги
Солнца. Осредненные значения следующие: ср. Я77@ = 232°,1; ср. Тхр= 6ч45*10с ;
и хр =+3*55с; ЯЯ = 143°.
Определить поправку компаса ДЯ.
159
Решение
7^ = 15*49* 20/X II
№w = 3
ТГр = 18*49* 20/XII
S4 23°26',3S
AS 0 ,0
S® 23°26Z,3S
S® 23°26'S
7’хр+12 Цхр i8*45*ioc + 3 55
20/ХП^р 18ч 49*05е
Д^мс Д/ 90°33',8 12 16,0 0,0
. ZrP 102°49',8 41 28 ,0
t® 61°21',8W
t® м 61°22ZW
д/д 0z,0/0z,0
Расчет истинного пеленга по таблицам ВАС-58.
Q
Данные (Д) Табл. (Г) Д-Т Поправки 9°17',5 125°, 3 132
<Р S t 32°40'N 23 26S 61 22W 33° 23 61 —20z +26 +22 за <р » S » t —0,1 +0,3 —0,2
ИП — КП - 234°,7— 232°,1 = 4-2°,6; ДЯ = +2°,6.
N125°, 3W
В малых северных широтах поправку компаса удобно опреде-
лять по Полярной звезде. Для вычисления азимута Полярной
звезды пользуются формулой
А = До sin (SM — е-о) sec ср, (95)
где До и а0 — среднегодовые значения полярного расстояния и
прямого восхождения Полярной звезды;
— местное звездное время.
Местное звездное время рассчитывают по времени, замечен-
ному в момент пеленгования. Счислимую широту снимают с кар-
ты. В МАЕ помещена специальная таблица значений азимутов
Полярной звезды для северных широт от 0 до 70°.
РАЗДЕЛ ТРЕТИЙ
ЛОЦИЯ
Глава XII
ПРЕДМЕТ И НАЗНАЧЕНИЕ ЛОЦИИ
§ 69. Предмет лоции
Перед выходом в плавание судоводитель должен тщательно
изучить район предстоящего перехода: опасности, встречающиеся
на пути судна, и средства их ограждения; навигационное обору-
дование морских путей; гидрометеорологическую обстановку на
переходе; рекомендованные на основании многолетнего опыта мо-
реплавания курсы и т. д.
Изучение районов предстоящего плавания осуществляется
с помощью специально издаваемых навигационных пособий.
Океаны, моря и их части (заливы, проливы, устья рек и т. д.)
наиболее подробно описываются в навигационном и гидро-
метеорологическом отношениях в специальных книгах — ру-
ководствах для плавания. Такие книги называют ло-
циями.
Лоции содержат обширную информацию об обеспечении безо-
пасности мореплавания в открытом море вне видимости берегов,
при плавании в узкостях, шхерах, морских и подходных к портам
каналов, под проводкой лоцмана и т. п.
Кроме лоций, современные суда снабжаются такими источника-
ми информации, как карты, атласы, описания средств навигаци-
онного оборудования, радиолокационные описания маршрутов
и т. д.
Описания таких навигационных пособий, рекомендации по их
использованию в практике мореплавания, освещение вопросов по
созданию этих пособий и их возможностей — все это составляет
основное содержание одной из частей комплексной науки судо-
вождения, получившей название лоции.
Предмет науки лоции составляют следующие вопросы: навига-
ционные опасности, их классификация и терминология, ограждение
навигационных опасностей, средства навигационного оборудова-
ния морских путей, сигналы и сигнальные станции; советские по-
собия для плавания: карты, текстовые описания; таблицы; глав-
нейшие иностранные пособия для плавания; особенности обеспече-
ния безопасности мореплавания в ледовой обстановке и в морях с
6-933 161
Приливами; подготовка судна к переходу (предварительная прб*
кладка).
§ 70. Обеспечение безопасного мореплавания
Навигационная и гидрометеорологическая обстановка океанов
и морей требует систематического их изучения для издания и под-
держания лоций, карт и других навигационных пособий на уровне
современности, для постановки ограждений навигационных опас-
ностей и оборудования морских путей. Этими вопросами в каж-
дой морской стране занимаются особые службы. Так, в СССР
такой организацией является Гидрографическое управление Мини-
стерства обороны СССР (ГУ МО СССР), в Англии — Гидрогра-
фический департамент британского Адмиралтейства и т. д. Функ-
ции ГУ МО чрезвычайно обширны: проведение гидрографических
и научно-исследовательских работ на морях; подбор материалов
для составления всех навигационных пособий; установка, надзор
за действием и эксплуатацией средств навигационного оборудова-
ния (СНО) на морях СССР; издание лоций, карт и многих других
пособий по гидрографии и судовождению.
Большая роль в обеспечении мореплавания и культуры судо-
вождения принадлежит Главному управлению мореплавания ММФ
СССР и его органам — Гидрографическому предприятию ММФ и
службам безопасности мореплавания пароходств и управлений.
Основными задачами Гидрографического предприятия ММФ явля-
ются: навигационно-гидрографическое обеспечение плавания судов
морского флота; развитие и внедрение новых средств и методов
судовождения. Особую задачу ГП ММФ составляет обеспечение
мореплавания по Северному морскому пути.
Службы мореплавания пароходств и управлений флотов ММФ
через свои электрорадионавигационные камеры обеспечивают су-
да морского флота необходимыми навигационными пособиями,
откорректированными по день их выдачи, а также документацией
по корректуре всех пособий, имеющихся на борту судна.
Своевременное выявление существенных для мореплавания из-
менений на местности совершенно необходимо для непрерывного
поддержания лоций, карт и других пособий на уровне современ-
ности. Последнее возможно только при систематическом сборе
сведений об изменениях в навигационной обстановке не только
средствами гидрографических органов, а также капитанами и
штурманским составом всех плавающих судов, особенно по зару-
бежным водам. Такие сведения составляют навигационную инфор-
мацию, которую делят на срочную (оперативную) и обычную.
К срочной информации относят сведения о наиболее важ-
ных изменениях, представляющих непосредственную опасность
для мореплавания: плавающие мины; брошенные суда и другие
дрейфующие предметы; обнаруженные впервые новые банки, ме-
ли; неисправность в работе СНО или их разрушение и т. п. Такая
162
информация должна немедленно передаваться всем находящимся
поблизости судам и одновременно в адрес ГУ МО СССР. Обычная
навигационная информация об изменениях в навигационной обста-
новке, не представляющих непосредственной опасности для море-
плавания, но существенно улучшающих условия плавания и каче-
ство лоций, карт и других пособий, направляется капитанами
судов в возможно короткий срок в почтовые адреса ГУ МО
СССР.
Глава XIII
НАВИГАЦИОННОЕ ОБОРУДОВАНИЕ МОРСКИХ ПУТЕЙ
§ 71. Навигационные опасности
Классификация опасностей. Безопасность плавания судна в во-
дах, стесненных навигационными опасностями, обеспечивается вы-
бором соответствующих курсов, указанием опасностей на местнос-
ти и умелым маневрированием судна. Различают постоянно
существующие и временные навигационные опасности. К первым
относятся опасности рельефа морского дна и затонувшие суда, ко
вторым — опасности, возникающие из-за гидрометеорологических
факторов (туман, ветер, течение и т. п.), минные заграждения,
плавающие предметы (прйтопленные деревья, сорванные с якорей
буи, бочки и т. п.).
Опасности рельефа морского дна. Мель — более или менее об-
ширное по площади, сложенное из нетвердых грунтов возвышение
на материковой отмели, глубины над которой малы сравнительно
с окружающими. Мели образуются чаще под действием течений.
Мели, глубина над которыми менее 20 л/, считаются опасными для
плавания судов.
Отмель — мель, идущая от берега, глубины над которой
увеличиваются от берега к морю.
Мелководье — часть моря с малыми или относительно ма-
лыми глубинами независимо от того, обеспечивают или не обеспе-
чивают эти глубины плавание надводных судов.
Банка — изолированное и ограниченное по площади рез-
кое поднятие морского дна. Если глубина над банкой менее 20 м,
то такая банка считается опасной для судоходства.
Риф—опасное для плавания подводное или осыхающее1 воз-
вышение морского дна со скалистым грунтом или скопление под-
водных и осыхающих камней.
Подводная коса — узкая длинная отмель.
Бар — мель или ряд мелей, отгораживающая устье реки от
1 Осыхающими называются банки, рифы, косы, камни и т. п., обнажающиеся
в малую воду.
6* 163
моря. Иногда баром называют мель, лежащую поперек входа в
бухту.
Камни — обломки твердых пород или небольшие гладкие
скалы, расположенные вблизи берега. Камни бывают подводные,
надводные и осыхающие.
Скала — отдельное, небольшое по площади, резкое возвы-
шение дна из твердых пород.
Осушка—часть берега или отмели, обнажающаяся в малую
воду.
Яма — незначительный участок дна с резким увеличением
глубины.
Пятно — совокупность отличительных глубин.
Район свалки грунта — определенный район в море, в
пределах которого производится свалка грунта, извлеченного при
дноуглубительных работах, а также мусора, вывезенного из
порта.
Затонувшие суда делятся на суда, опасные для плавания всех
судов, и суда, полностью погруженные, с глубиной над ними боль-
шей, чем осадка любого современного судна. Такие затонувшие
суда не опасны для надводного судовождения. Разновидностью
затонувших судов являются «покинутые суда», т. е. брошенные
своим экипажем, но оставшиеся на плаву.
Временные навигационные опасности. Гидрометеороло-
гические факторы. К этим опасностям относятся тропиче-
ские циклоны, штормы, льды, туманы, пурга, течения.
Минная опасность сохранилась после второй мировой
войны во многих морях.
Плавающие льды: временные (случайные) в средних ши-
ротах и постоянные в полярных районах.
Плавающие предметы вынуждают судно при встрече
с ними изменять курс.
§ 72. Терминология форм береговой черты
Шхеры — скопление множества островов различной величи-
ны, надводных скал, камней в прибрежном районе.
Фьорд — узкий, глубокий и далеко вдающийся в гористую
сушу залив (бухта) с высокими и очень крутыми берегами. Фьор-
ды имеют корытообразное ложе и часто отделяются от моря под-
водными порогами.
Залив, бухта — часть океана или моря, вдающаяся в су-
шу. Бухта — это залив небольших размеров. Строгого разграни-
чения между ними нет.
Пролив — узкое водное пространство между двумя матери-
ками, островами или между материками и островами, соединяю-
щее смежные океаны, моря или их части.
Проход — стесненный, но доступный для сквозного плава-
164
ния участок водного пространства между берегами, островами и
опасностями.
Губа — местное название заливов вытянутой формы, обра-
зованных речными устьями.
Лиман — мелководный, глубоко вдающийся в сушу залив с
косами и пересыпями, представляющий собой затопленную морем
долину устьевой части реки или затопленную прибрежную низмен-
ность. ’
Лагуна — вытянутый вдоль берега, как правило, мелковод-
ный залив (бухта) с соленой или солоноватой водой, соединен-
ный с морем небольшим проходом или совершенно отделенный от
него косой.
Плес — сравнительно обширный и безопасный для плавания
район, расположенный среди островов, скал, банок и других пре-
пятствий, допускающих маневрирование судов.
Фарватер — безопасный путь плавания судов среди различ-
ного рода препятствий (между островами, подводными опаснос-
тями, в районах, опасных от мин, и т. д.), показанный на карте и
обычно обозначенный средствами навигационного оборудования.
Морской канал — канал, искусственно прорытый в мор-
ском дне для прохода судов через мелководье, обозначенный сред-
ствами навигационного оборудования.
Рейд — участок водного пространства, у берега или остро-
вов, расположенный обычно перед портом, гаванью, приморским
населенным пунктом или устьем реки, используемый для стоянки,
а в некоторых случаях для перегрузки судов. По степени защищен-
ности от ветров рейды бывают открытые и закрытые. Большим
достоинством рейда считается наличие хорошо держащего грунта,
достаточных глубин (но не более 50 м), широкого и свободного от
опасностей входа с моря, а также отсутствие препятствий для
входа на рейд в любое время и при любой погоде.
Гавань — часть акватории порта, вполне защищенная от
волнения, окаймленная портовой территорией и предназначенная
для стоянки и грузовых операций судов.
Аван-порт — рейд, находящийся за пределами или внутри
акватории порта (но снаружи от внутренних гаваней), защищен-
ный молами, волноломами или имеющий естественные укрытия.
Бассейн — часть акватории порта, образованная причала-
ми, пирсами и молами, предназначенная для стоянки и грузовых
операций. В портах, где наблюдаются значительные колебания
уровня моря, бассейны изолируют от остальной акватории специ-
альными шлюзами. Такие бассейны иногда называют доками.
Порт — прибрежная акватория, естественно или искусствен-
но защищенная от волнения, заносимости и наносного льда и при-
легающая к этой акватории полоса берега (портовая территория),
оборудованная причальными сооружениями. По назначению порты
подразделяются на торговые, рыбные, порты-убежища и военные
базы.
165
Серьезное влияние на маневрирование судов оказывают различ-
ные гидротехнические сооружения порта.
Дамба — сооружение в виде укрепленной насыпи (вала) на
берегу или вблизи него, предназначенное для предохранения бере-
га от размывания и затопления морем, защиты каналов и рейдов
от волнения и заносов, соединения между собой различных участ-
ков суши.
Мол — связанное с берегом внешнее оградительное сооруже-
ние. Конечная часть сооружения, выступающая в море, называет-
ся головой мола, примыкающая к берегу — корнем мола.
Волнолом — не связанное с берегом внешнее оградительное
сооружение.
Пирс — причальное сооружение в виде дамбы, выступающей от
берега, и служащее для швартовки судов с продольных сторон, а
иногда и с головной (мористой) части.
Эстакада — причальное сооружение, построенное на отдель-
ных опорах.
Дебаркадер (пристань) — понтон, расположенный у берега
и предназначенный для причала небольших судов и перегрузоч-
ных операций.
Причал — место стоянки судов в порту, гавани и т. д. При-
чалами могут служить набережные, пристани, эстакады, молы,
пирсы и т. д.
Пал—1) конструкция в виде куста свай или забитой в грунт
железобетонной трубы, установленная на дне, заполненная и воз-
вышающаяся над водой настолько, чтобы на ней можно было кре-
пить швартовы при самом высоком уровне воды; 2) конструкция в
виде отдельных свай или кустов свай, забитых в грунт и служащих
для ограждения от навала судна на берег.
§ 73. Средства навигационного оборудования
Классификация, общие сведения. В зависимости от наличия
навигационных опасностей, посещаемости судов и других условий
плавания в данном районе и на подходах к нему устанавливаются
средства навигационного оборудования (СНО), обеспечивающие
безопасность мореплавания в таком районе. По предназначе-
нию СНО делятся на средства для определения места судна, обес-
печения плавания во время тумана, ограждения навигационных
опасностей и специальных районов, опасных или запретных
для плавания. Дальность действия разделяет все сред-
ства навигационного оборудования на СНО дальнего действия
(маяки, радиомаяки, специальные радиотехнические СНО) и
средства ближнего действия (береговые знаки, буи, бака-
ны, вехи).
Техническое оснащение навигационного оборудова-
ния делит СНО на визуальные (освещаемые и неосвещаемые) и
специальные (акустические и радиотехнические),
166
По месту й способу установки все СНО делят на береговые и
плавучие.
Береговые средства навигационного оборудования устанавли-
вают на суше, у береговой черты материков и островов; они слу-
жат надежным средством для определения места судна и безо-
пасной проводки судов среди навигационных опасностей. Обычно
это капитальные сооружения с мощной техникой, жестко связан-
ные с берегом или грунтом.
Маяк (рис. 102) — это дневной и ночной навигационный ори-
ентир, представляющий собой капитальное сооружение, преиму-
щественно башенного типа, отли-
чительной формы и окраски со
светооптическим аппаратом и ис-
точником света; постоянно
обслуживается личным соста-
вом.
Маяки оборудуются надежны-
ми средствами туманной сигна-
лизации: воздушными (сирена,
колокол, пушка, наутофон, диа-
фон и т. п.) и подводными (под-
водные колокол, осциллятор).
Часто маяк оборудуется радио-
маячной установкой; иногда тут
же располагаются сигнальные,
спасательные и другие станции.
Навигационный знак
(рис. 103) — сооружение того
же вида, что и маяк, но более
легкой конструкции, оборудован-
ное светотехническим устройст-
вом. Знаки часто оборудуют ра-
диолокационными отражателями.
Различают навигационные знаки
несветящие и светящие. В по-
следнем случае оптическая даль-
Рис. 102.
ность видимости огня знака не превышает 15 миль.
Огон ь — светотехническое устройство, обычно действующее
автоматически, обеспечивающее дальность видимости огня ночью
до 15 миль.
Створ — система нескольких соответственно расположенных
на местности маяков, знаков или огней, предназначенная для обес-
печения сравнительно узкой зоны (полосы или сектора), безопас-
ной для плавания.
Створы, предназначенные для фиксирования границ районов
на местности и для обеспечения следования судна по заданному
направлению, по своему назначению подразделяются на ведущие,
секущие, девиационные, временные и т. д. Оптическое устройство
167
створных огней позволяет посылать световой поток в узком сектб-
ре, в направлении оси створа. Конструкции самих створных зна-
ков таковы, что позволяют легко определить положение, когда
они усматриваются наблюдателем в одной вертикальной плос-
кости.
Радиотехнические средства навигационного оборудования
(РТСНО): береговые радиолокационные станции (БРЛС); пас-
сивные (РЛП) и активные (РМО) радиолокационные отража-
тели; береговые радиопеленгаторные станции (БРПС); радиомаяки
кругового действия (РМ); радиомаяки направленного излучения и
всенаправленные радиомаяки (ВРМ-5, «Консол»); системы дальней
Рис. 103.
радионавигации («Лоран», «Декка» и др). Навигационное исполь-
зование РТСНО подробно описано в разделе «Навигация», а прин-
цип их действия и конструкции — в разделе «Технические сред-
ства судовождения».
Плавучие средства навигационного оборудования представля-
ют собой сооружения, приспособленные держаться на плаву и
связанные с грунтом при помощи какого-либо устройства. Такие
сооружения (плавучие маяки, буи, баканы и вехи) обеспечивают
непосредственное предостережение об опасности, устанавливаются
на самой опасности или вблизи нее; они могут .быть светящими и
несветящими.
Плавучий маяк (рис. 104) — дневной и ночной навига-
ционный ориентир, резко отличительной окраски, с характерными
надстройками, установленный на якорях, в определенном (штат-
ном) месте с точно определенными координатами. Такое судно
оборудовано маячной аппаратурой, радиомаяком и установкой
для подачи туманных сигналов. Плавучий маяк обычно выполня-
ет функции лоцманской станции. Плавмаяк не на своем штатном
месте (сорван с яйоря, следует по назначению, дрейфует и т. п.)
168
днем несет сигнал ПЦ (PC) по Международному своду сигналов;
ночью — сжигает одновременно красный и белый фельшфейеры,
не реже чем через каждые четверть часа.
Рис. 104.
Буй (рис. 105)—это различной формы, размера и конструк-
ции бочка, несущая на себе ажурную надстройку для фонаря и
имеющая противо-
вес. Буи действуют
автоматически. Кро-
ме осветительных
аппаратов, на них
часто устанавливают
техническое приспо-
собление для подачи
звуковых сигналов
(колокол, ревун, си-
рена), пассивные ра-
диолокационные от-
ражатели, иногда
особую конструкцию
из зеркал, отражаю-
щую свет прожекто-
ров или солнечных
лучей. Оптическая
дальность видимо-
сти огня буя до
10 миль.
Бакан — буи
без надстройки и
Рис. 105.
169
противовеса; выставляют преимущественно на лиманах и реках.
Дальность видимости огня до двух миль.
Веха (рис. 106) — шест с топовой фигурой и поддержива-
ющим их в вертикальном положении поплавком, устанавливае-
мый в заданном месте с помощью якорного устройства. В отдель-
ных случаях вехи несут отличительные огни и пассивные радиоло-
кационные отражатели.
В зависимости от назначения и места установки относительно
опасности буи, баканы и вехи имеют соответствующую окраску,
нумерацию, характер и период огня.
Период освещения — промежуток времени, в течение которого
заканчивается весь цикл присущих данному огню изменений.
Секторы (углы) освещения огней в ночное время указывают
на границы опасных в навигационном отношении районов; опасные
участки располагаются обычно в секторах красного цвета.
§ 74. Системы ограждения опасностей плавучими
предостерегательными знаками
Расстановка плавучих предостерегательных знаков производит-
ся в зависимости от размеров и местоположения опасностей.
Отдельно лежащие опасности размером не более 1 кбт огра-
ждаются крестовыми предостерегательными знаками: буй или
веха, имеющие определенную окраску и характер огня. Большие
опасности ограждают несколькими знаками, расстояние между ко-
торыми не должно превышать 10 кбт, а в случае минной опасно-
сти — 5 кбт.
Морские державы применяют различные системы ограждения
опасностей плавучими предостерегательными знаками, а также
различную окраску и форму последних. Подробное описание та-
ких систем и знаков можно найти в соответствующей лоции. Одна-
ко можно отметить следующие практически общепринятые пять
видов систем: кардинальная, ограждения рыболовных снастей, ла-
теральная, обозначения осей фарватеров и рекомендованных кур-
сов, локальная.
Кардинальная система ограждения навигационных опасностей
предусматривает ограждение плавучими предостерегательными
знаками относительно стран света (по компасу).
Северные знаки по такой системе выставляют к югу от
опасности и судно должно оставлять их к северу; южные зна-
ки — к северу от опасности и их надо оставлять к югу; восточ-
ные знаки указывают: «Оставь меня к востоку», западные —
«Оставь меня к западу»; крестовый знак указывает: «Стою на
опасности — обходи со всех сторон».
Вид, раскраска знаков и характер их огней при кардинальной
системе даны в приложении 1,
170
tlo кардинальной системе ограждаются опасности, лежащиё в
открытом море (банки, мели и т. п.) и близ берегов (отмели, ри-
фы, косы и т. п.), а также районы минных опасностей, свалки грун-
та, запретных для плавания районов и т. д.
Ограждение рыболовных снастей (приложение 1) производит-
ся по кардинальной системе с помощью нестандартных вех сила-
ми рыболовецких организаций по согласованию с органами Гидро-
графической службы
Северная рыбацкая веха — красный шест с красным голи-
ком раструбом вверх на вершине шеста; южная — белый шест
с черным голиком раструбом вниз на вершине шеста; восточ-
ная —• черно-белый шест с двумя черными голиками раструбами
вместе на вершине шеста; западная — бело-красный шест
с двумя красными голиками раструбами врозь на вершине
шеста.
На рыбацких вехах могут выставляться огни, на северной —
красный постоянный огонь; на западной — двойной красный
огонь; на южной — белый постоянный огонь; на восточной — двой-
ной белый постоянный огонь. Двойные огни устанавливают по
вертикали на расстоянии не менее 0,5 м.
Латеральная система навигационного ограждения предусматри-
вает ограждение сторон каналов и фарватеров относительно пути
судна, по принципу правой и левой стороны. Наименование сторон
(«правая», «левая») определяется в Зависимости от положения при
движении с моря; для рек — по направлению их течения; в
сложных случаях оговаривается особо.
Знакам правой стороны (веха, буй правой стороны) присвое-
ны черный цвет окраски, белый цвет огня и нечетные номера.
Знакам левой стороны — красный цвет окраски, красный цвет огня
и четные номера. Знаки поворотов и разделения каналов и фарва-
теров имеют отличную окраску и характеристику огня.
Вид, раскраска и огни знаков латеральной системы даны в
приложении 2.
Система обозначения осей фарватеров и рекомендованных кур-
сов (осевая) применяется там, где район плавания на широком
пространстве не имеет навигационных опасностей, располагающих-
ся по курсу следования, а рекомендованный путь (фарватер) со-
кращает путь, а также в тех случаях, когда требуется указать
наиболее глубокую часть фарватера. Эта система удобна также на
мерных линиях вместо ведущего створа или при обеспечении
плавания по протраленным от мин фарватерам.
Вид, раскраска, характер огней осевой системы приведен в
приложении 2.
Локальная система (ограждения отдельных мест). Огражде-
ние затонувших судов (приложение 2) производится веха-
ми, светящими и несветящими, и буями зеленого цвета. Буи и ве-
хи выставляют вблизи затонувших судов или над ними. Эти зна-
ки — общие для всех систем ограждения. Положение вехи или буя
171
относительно затонувшего судна каждый раз оговаривается особо
в Извещениях мореплавателям.
Ограждение районов прокладки подводных ка-
белей, обозначение мест якорных и карантинных сто-
янок показаны также в приложении 2.
В иностранных водах можно встретить различные смешанные
(кардинально-латеральные) системы ограждения опасностей пла-
вучими предостерегательными знаками. Они построены по принци-
пу ограждения сторон каналов и фарватеров, лежащих на них на-
вигационных опасностей и затонувших судов относительно основ-
ных направлений фарватеров N—S (или S—N) и Ost—W (или
W—Ost).
§ 75. Станции, обслуживающие мореплавателей
Общие сведения. Обеспечение безопасного мореплавания пре-
дусматривает своевременную информацию судоводителей различ-
ного рода сведениями: гидрометеорологическими сводками;
предупреждениями об опасностях; лоцманскими, врачебными и дру-
гими советами, связанными с эксплуатацией судна. Такая инфор-
мация поступает на суда со специальных станций, обслуживаю-
щих мореплавателей. Сведения о подобных станциях приведены в
соответствующих лоциях, на картах и в других навигационных
пособиях («Огни и знаки», «Радиотехнические средства навигаци-
онного оборудования» и др.).
Радиостанции, обслуживающие мореплавателей, подразделяют
на станции, передающие: гидрометеорологические сведения; радио-
навигационные извещения (НАВИМ); сигналы времени; медицин-
ские советы; на радиостанции ведомств, обеспечивающие непрерыв-
ную связь с судами, и многие другие.
Телефонные станции при маяках передают на телеграф тексты
сообщений, принятых с судов (по светофору, флажному семафо-
ру и т. п.).
Семафор предназначается для передачи сведений по Междуна-
родному своду сигналов (МСС) или по специальному, заранее объ-
явленному мореплавателям коду. Семафор нередко используется
для предостережения судов с плавучих маяков о временно запре-
щенных для плавания районах, о курсах, ведущих к опасности, о
находящихся поблизости подводных лодках, обнаруженных минах
и т. п.
Лоцманские станции, или лоцманские вахты, находятся в
портах, на плавучих маяках, а также на специальных лоцман-
ских судах, крейсирующих в определенных районах. Сведе-
ния о таких станциях, о порядке вызова лоцмана на судно,
об оплате лоцманских услуг и другие сообщения публикуются
в лоциях.
Спасательные станции (посты) находятся в портах, при берего-
вых или плавучих маяках.
172
§ /6. Сигналы, правила и инструкции,
регламентирующие движение судов
Сигнал, предостерегающий об опасности—днем поднимают
двухфлажный сигнал по МССИД(7£>) «Вы идете к опасности»
и одновременно выпускают через каждую минуту сигнальную ра-
кету с двумя взрывами или светящимися звездами; ночью сигнал
подают только ракетами.
Сигнал безопасности по радиотелеграфу передают в виде не-
скольких групп «ТТТ»; по радиотелефону — троекратным повторе-
нием слова «сэкюрите».
Сигнал означает, что вслед за ним будет передаваться сообще-
ние, имеющее важное значение для безопасности мореплавания.
Сигнал срочности передают по радиотелеграфу в виде несколь-
ких групп «ЬЬЬ» (XXX); по радиотелефону — трехкратным повто-
рением слова «ПАН». Сигнал означает, что судно, не находящееся
в серьезной и неминуемой опасности, требует помощи, либо желает
послать радиограмму, касающуюся его безопасности или безопас-
ности лица, находящегося на его борту или видимого с борта
судна.
Сигнал тревоги — 12 тире, — означающий, что немедленно за
ним судно начнет передавать по радио сигнал бедствия.
Сигнал бедствия по радиотелеграфу передают в виде несколь-
ких групп SOS; по радиотелефону — словом «мэйдей»; по МСС —
флагосочетанием НЦ (NC). Кроме этого, аналогичный смысл
имеет сигнал, состоящий из квадратного флага с шаром над ним
или под ним. Пламя на судне (горящая смоляная бочка); ракеты
или гранаты, выбрасывающие красные звезды, выпускаемые через
короткие промежутки времени; производимые взрывом сигналы с
промежутком около одной минуты; красный свет ракеты с парашю-
том или фальшфейер красного цвета; выпуск клубов дыма оранже-
вого цвета; медленное, повторяемое поднятие и опускание рук, вы-
тянутых в стороны; непрерывный звук любого аппарата — все это
также должно расцениваться как сигнал бедствия.
Все суда, принявшие сигнал бедствия, должны немедленно пре-
кратить все обычные переговоры любыми средствами и принять
все меры к оказанию максимально возможной помощи терпящим
бедствие. Капитан судна может быть освобожден от обязанности
всей возможной скоростью идти на помощь только лишь при нали-
чии серьезной опасности для собственного судна, экипажа или пас-
сажиров, а также если явно не сможет прибыть вовремя.
Предостерегательный сигнал для обозначения присутствия под-
водных лодок передают по радиотелеграфу на волне 600 м в ви-
де буквосочетаний АЛЗИЖ—ИСЦШУ (ALZIV—ISCQU), означа-
ющих: «Обращаю Ванщ внимание на подводные лодки» либо пере-
дают это сообщение открытым текстом. ' Равнозначным сигналом
по МСС является флагосочетание ХП (HP) или ОНЫ (OIY).
Аварийная подводная лодка выпускает на поверхность аварийно-
173
сигнальный буй определенной формы, раскраски и с соответствую-
щим характером огня.
Районы с ограничением пути следования. Иногда вход в неко-
торые прибрежные районы запрещается или свободный выбор пути
в них ограничивается. Для оповещения мореплавателей об этом
в таких районах часто устанавливают службу предупреждения в
виде специальных судов, брандвахт, береговых постов, которые не-
сут следующие отличительные знаки: днем — треугольный синий
флаг; ночью — три синих, вертикально расположенных огня, под-
нятых на гафеле. Если вход или плавание в данном районе закры-
ты, то служба предупреждения дополнительно к отличительному
знаку поднимает следующие сигналы: днем — три вертикально
расположенных черных шара; ночью — три вертикально располо-
женных красных огня.
В портах, на маяках и в других пунктах устанавливают специ-
альные сигнальные мачты для предупреждения судов о местных
правилах плавания, о глубинах на фарватере, приливах и отливах,
течениях, циклонах, тайфунах. Подробности о таких сигналах мож-
но получить в соответствующих лоциях.
Глава XIV
НАВИГАЦИОННЫЕ ПОСОБИЯ
§ 77. Морские карты и атласы
1. Назначение морских карт и требования, предъявляемые
к ним. Морская карта—это изображение на плоскости (на бумаге)
моря или его части с прилегающими к нему участками суши. Такое
изображение строят в заданном масштабе и в определенной карто-
графической проекции. Кроме элементов общегеографической ха-
рактеристики, морская карта содержит также элементы специаль-
ной характеристики изображаемого района.
Морские карты, являясь одним из важнейших средств судовож-
дения, должны обладать геометрической точностью, соответствую-
щей назначению карты, быть достоверными по содержанию, иметь
простое и хорошо читаемое изображение нанесенных на них объек-
тов. Кроме того, морские карты должны быть составлены в таких
проекциях, которые обеспечивают удобство и простоту графичес-
ких и других расчетов. Поэтому морские карты строят обычно в
меркаторской проекции.
На морских картах должны быть полностью отражены элементы
водного пространства и прилегающей к нему суши, которые со вре-
менем могут изменяться. Эти изменения систематически вносят на
карту путем корректуры.
Содержание морских карт. Содержанием морских карт называ-
ют совокупность всех наносимых на нее элементов: математической
основы, элементов специальной морской обстановки и, наконец,
174
элементов оформления карты. Математическая основа—это кар-
тографическая сетка, внутренние рамки карты, разбитые на граду-
сы, минуты и их доли, масштабы, опорные пункты, границы карты
(нарезка) ит. д.
Элементы специальной морской обстановки состоят из геогра-
фических и навигационных элементов, наносимых на морскую кар-
ту с помощью различных условных обозначений.
К элементам оформления относятся: заголовок и сопутствующие
ему надписи, имеющие пояснительное или справочное значение,
различного рода примечания и предупреждения и т. п.
В зависимости от назначения карты и ее масштаба все элемен-
ты содержания даются с различной степенью подробности или, как
говорят, карта получает ту или иную степень нагрузки.
Чтение морских карт. Перед тем как пользоваться картой, су-
доводитель обязан ее внимательно изучить. Для этого необходимо
уметь правильно разбираться во всех условных обозначениях,
нанесенных на карту, т. е. уметь читать карту.
Изучение карты начинают с чтения заголовка и всех помещен-
ных на карте примечаний, предостережений и т. п. После общего
ознакомления с картой следует изучить навигационно-географиче-
ские данные района, изображенного на ней.
Глубины на каждой карте приведены к единому уровню — ну-
лю глубин. На морях, где приливов не бывает, глубины приведены
к среднему уровню; на морях с приливами за нуль глубины прини-
мают высоту самой малой сизигийной воды в данном районе.
Большим облегчением для чтения карт являются наносимые на
них характеристики грунтов и изобаты (линии равных глубин),
позволяющие судить о качестве и рельефе морского дна. Плавный
рельеф, отсутствие банок и островов благоприятны для судовожде-
ния. Сложный рельеф, характеризующийся скачками глубин, нали-
чием банок и островов, опасен и требует предосторожностей, так
как при таком положении можно встретить какие угодно малые
глубины, не обнаруженные промером. Белое пятно на карте ука-
зывает на то, что в этих местах глубины никогда не измерялись.
На советские морские карты все объекты нанесены условными
знаками, грунты — сокращенными надписями, согласно помещен-
ным в книге «Навигационно-гидрографическая терминология.
Условные знаки и сокращения», являющейся приложением к т. IV
«Курса кораблевождения». Некоторые извлечения из этой книги
приводятся в приложении 3, листы 1—5.
Склонение для данного района указывают на картах с точ-
ностью до 0,°25. Сведения о годовом изменении склонения и эпоху,
к которой оно относится, помещают в заголовке карты. Места ма-
гнитных аномалий замыкают сплошными или пунктирными линия-
ми; значение магнитного склонения в районе магнитной' аномалии
отмечают звездочкой.
Течение на морских картах показывают стрелками: скорость те-
Ченця с точностью до 0,25 узла пишется над стрелкой.
175
Часто на картах приводят контурные зарисовки берегов и дру-
гие подробности для облегчения ориентировки.
Объекты, для которых не предусмотрено обозначений в указан-
ном выше документе, изображают специально установленными для
них условными знаками, помещаемыми под заголовком карты.
Степень доверия карте. Морские карты составляют на основа-
нии гидрографических работ. Проведение описи и время составле-
ния указывают на каждой карте под рамкой, в правом нижнем уг-
лу. Эти даты служат основным критерием для оценки ее достоин-
ства. Естественно, лучше пользоваться картой, составленной по
материалам более поздних гидрографических работ.
Важным критерием для оценки достоинства карты является
также ее масштаб, от которого зависят количество наносимых на
карту деталей, подробности промеров и характер рельефа дна.
Если между картой и лоцией существует расхождение в навигаци-
онных сведениях, за основу принимают данные карты самого круп-
ного масштаба.
§ 78. Классификация морских карт
Морские карты различаются по своему назначению, экватори-
альной принадлежности, по масштабам, проекциям и другим при-
знакам. Однако все морские карты можно разделить на два основ-
ных типа: навигационные и вспомогательные, справочные.
Навигационные морские карты предназначены для обеспечения
безопасного плавания судна. На них выполняют счисления пути
судна и определяют его местонахождение. На таких картах под-
робно отражены рельеф морского дна, характер берега и вся
навигационная обстановка в районе, описываемом данной картой.
Выбор масштаба морских навигационных карт обусловлен уда-
лением от берега трасс следования судов. Понятно, что по мере при-
ближения к берегу условия плавания в общем случае усложняются,
возможность выбора курсов ограничивается, количество навига-
ционных опасностей увеличивается. Поэтому на такой карте необ-
ходимо иметь большую подробность в элементах содержания
(большую нагрузку карты), что требует большего масштаба карты.
Навигационные морские карты подразделяются на общие и спе-
циальные. Общие карты подразделяют на генеральные, путе-
вые, частные карты и планы.
Генеральные (обобщенные) карты предназначены для общего
изучения условий плавания в большом водном бассейне, счисления
пути судна при плавании в открытом море, предварительной про-
кладки маршрута предстоящего перехода и общих навигационных
расчетов. Такие карты обычно составляют в масштабах от 1:5 000 000
до 1:500 000. На генеральных картах нанесены важнейшие маяки,
навигационные опасности, расположенные на значительном удале-
нии от берега, плавучие средства навигационного ограждения, вы-
ставленные у опасностей, лежащих вдали от берегов.
176
Путевые карты предназначены для обеспечения плаваний вдоль
побережий на некотором удалении от берегов, а также для обеспе-
чения подходов судна с моря к берегу; составляются в масшта-
бах от 1 :500 000 до 1:100 000. На путевых картах нанесены
маяки, огни и знаки, обеспечивающие прибрежное , плавание, все
навигационные опасности, плавучие средства навигационного
ограждения.
Частные карты служат для обеспечения плавания в непосред-
ственной близости от берегов, в стесненных навигационных услови-
ях (узкости, проходы, фарватеры и т. п.); составляются в масшта-
бах от 1:75 000 до 1:25 000. Частные карты представляют собой бо-
лее подробные путевые карты. На них нанесены все маяки, огни и
знаки, включая рейдовые и портовые, все навигационные опасности,
включая малые банки и камни, все плавучие средства навигацион-
ного ограждения.
Планы необходимы для обеспечения входа в порты, гавани, бух^
ты, на рейды и для ориентировки при передвижении в пределах ,
этих акваторий. Планы составляют в масштабах от 1:25 000 до
1:500. На них наносят те же элементы морской обстановки, что и
на частные карты. По внешнему виду план отличается от карты тем,
что его рамка не разбита на градусы и минуты, а промежуточные
меридианы и параллели не приводятся. На практике штурман
пользуется для каждого участка моря картой самого крупного мас-
штаба.
Специальные навигационные карты предназначены
так же, как и общенавигационные для графического решения за-
дач судовождения и для удовлетворения специальных навигацион-
ных и других требований. Они представляют собой обычные нави-
гационные или бланковые карты различных масштабов с нанесен-
ной на них дополнительной нагрузкой содержания. Наиболее рас-
пространенные типы специальных карт: радионавигационные карты
со специальными стадиметрическими, гиперболическими или азиму-
тальными сетками, предназначенными для определения места суд-
на с помощью радионавигационных систем, и навигационно-про-
мысловые карты с подробной грунтовой характеристикой морского
дна, предназначенные для обеспечения лова рыбы.
Справочные и вспомогательные карты включают карты различ-
ного содержания и назначения. Состав этой группы карт из-за мно-
гих причин не остается постоянным й время от времени меняется.
Наиболее важными из справочных карт являются карты реко-
мендованных путей, гидрометеорологических элементов (течения,
приливы, льды и т. п.) и грунтов, радиомаяков и радиостанций, зве-
здного неба, часовых поясов и др.
Определенную ценность для мореплавания представляют гидро-
метеорологические карты, издаваемые для отдельных морей и ча-
стей океанов на каждый месяц. На таких картах приведены под-
робные сведения о течениях, ветрах, волнении и т. п.
177
Справочные карты, объединенные общностью содержания и наз-
начения, часто сводятся в один общий атлас, например, Атлас при-
ливо-отливных течений; Атлас течений для плавания в шхерах и
т. д. Из вспомогательных карт наиболее распространен-
ными являются карты-сетки для участков океанов и отдельных мо-
рей (не перекрываемых путевыми картами) без элементов спе-
циальной морской обстановки.
§ 79. Руководства для плавания
Назначение руководства для плавания. Многие навигационные и
гидрографические сведения, важные для безопасности судовожде-
ния, не могут быть показаны графически даже на самых крупномас-
штабных картах и планах. Так, рекомендации для плавания в раз-
личных условиях, правила плавания в отдельных районах, подроб-
ные данные о СНО, о гидрометеорологическом режиме в разное
время года и другие сведения, дополняющие информацию морских
карт и нередко ее поясняющие, могут быть помещены лишь в спе-
циальных руководствах, издаваемых обычно в виде книг. Такие
книги содержат также специальные указания и данные для выбора
пути судна. Использование их совместно с картами позволяет обес-
печить безопасность мореплавания даже в наиболее трудных в на-
вигационном отношении районах Мирового океана.
Существуют три основных вида руководства для плавания:
1) лоции; 2) навигационно-гидрографические обзоры; 3) описание
средств навигационного оборудования.
Лоции подробно описывают отдельные части океанов и морей с
их прибрежными районами. Они занимают основное место в числе
руководств для плавания. Назначение лоции — ознакомить море-
плавателя с условиями плавания в описываемом районе, помочь
ему опознать тот или иной географический пункт на местности,
дать указание в выборе курсов и привести другие сведения, кото-
рых нет на картах и в описаниях средств навигационного оборудо-
вания. Лоции дополняют и поясняют морские карты. Каждая лоция
охватывает определенный водный бассейн; она содержит материал
для решения навигационных задач, имеющих характер подготовки
к переходу. Все сведения в лоции приведены к определенной дате
для упрощения последующей корректуры и поддержания на уровне
современности по Дополнениям к лоции и по Извещениям морепла-
вателям. Лоции иллюстрируются фотографиями и зарисовками бе-
регов и приметных мест, облегчающими ориентировку при подхо-
дах к берегам.
Лоция может быть сброшюрована в одну или несколько книг
установленного формата; для каждого моря установлен определен-
ный цвет обложки или переплета. Каждая книга лоции содержит:
лист для учета корректуры; важное предупреждение о запретных
районах; циркулярное указание начальника . Гидрографической
службы; обращение к мореплавателям; общие замечания; огдавле-
I7S
ние; репродукции сборных листов для районов, описанных в лоции;
общий обзор; гидрометеорологический очерк; правила плавания;
навигационное описание; указания для выбора генеральных курсов;
справочный отдел; алфавитный указатель. В конце книги помеще-
ны чистые листы для заметок по корректуре.
По мере накопления новых сведений или изменений для какого-
либо района (если их недостаточно для полного переиздания ло-
ции) издают Дополнения к лоциям. Каждое новое Дополне-
ние включает материал предшествующего, которое утрачивает свое
значение.
Навигационно-гидрографические обзоры характеризуют отдель-
ные крупные водные бассейны в навигационно-гидрографическом и
гидрометеорологическом отношениях.
Радиолокационные описания маршрутов. Широкое распростра-
нение радиолокационных станций на судах морского флота вызва-
ло необходимость оборудования берегов пассивными и активными
радиолокационными отражателями, а также издание специальных
карт, альбомов и других видов радиолокационных пособий. Наи-
более ценным является радиолокационное описание определенного,
наиболее часто используемого судами маршрута. В настоящее
время издано несколько таких радиолокационных описаний мар-
шрутов: Черное море — Дальний Восток; Черное море — Бал-
тика и др.
Описания средств навигационного оборудования (СНО) инфор-
мируют мореплавателей о маяках, знаках, туманных сигналах, бу-
ях и радионавигационных средствах для безопасности плавания
судов.
«Огни и знаки» («Огни») — издается на советские, а в отдель-
ных случаях и на иностранные воды. Оно содержит сведения о всех
штатных средствах навигационного оборудования, за исключением
вех. Под «огнями» понимают маяки, плавучие маяки, аэромаяки,
светящие огни, огни, плавучие огни и светящие буи. Под «знаками»
понимают несветящие знаки и несветящие буи. На иностранные во-
ды издаются руководства под названием «Огни». Временно дей-
ствующие СНО в таких руководствах не приводятся. Каждая книга
«Огни и знаки» охватывает определенный бассейн или страну. Все
СНО в нем описываются в последовательности, принятой в соответ-
ствующей лоции.
Интересующий судоводителя огонь или знак отыскивается в
Алфавитном указателе руководства; таким образом определяется
номер, присвоенный в данном руководстве искомому огню или зна-
ку. Далее, по номеру отыскивается та страница, на которой приве-
дено полное описание такого огня или знака.
«Радиотехнические средства навигационного оборудования» —
издается на советские и иностранные воды; руководство содержит
сведения о морских маяках и радионавигационных системах, приб-
режных аэрорадиомаяках и пеленгаторных станциях. Последова-
179
7еЛьйОсТь описания СНО в таких руководствах совпадает с их описа-
нием в соответствующей лоции. При этом морские радиомаяки,
входящие в одну навигационную группу, описываются, как прави-
ло, в одном месте. Каждый том книги руководства включает сведе-
ния: о радионавигационных системах «Декка» и «Лоран» (отдел I);
секторных радиомаяках дальнего действия (отдел II); морских
радиомаяках и аэрорадиомаяках (отдел III); радиостанциях, рабо-
тающих по запросу для пеленгования (отдел IV); океанских судах
службы погоды (отдел V); радиопеленгаторных станциях (отдел
VI); радиолокационных маяках (отдел VII).
«Расписание радиопередач гидрометеорологических сведений
и навигационных Извещений мореплавателям» содержит сведения
о работе береговых радиостанций, передающих гидрометеорологи-
ческие сведения для судов (МЕТЕО), навигационные Извещения
мореплавателям (НАВИМы) и Навигационные предупреждения
(НАВИПы).
Расписания издаются в четырех томах: два описывают зарубеж-
ные станции; третий — радиостанции СССР; четвертый — радио-
станции, ведущие факсимильные передачи гидрометеорологических
сведений.
«Сводные описания опасных, запретных и ограниченных для
плавания районов» содержат сведения о районах, опасных от мин
и бывших опасных от мин районов, открытых для надводной на-
вигации; информируют мореплавателей о районах запретных и опа-
сных для плавания, районах боевой подготовки, запретных для
якорной стоянки, лова рыбы. Здесь же описываются районы, в ко-
торых плавание небезопасно или ограничено.
Морской атлас является фундаментальным картографическим
руководством и ценным справочником. Первый том атласа — на-
вигационно-географический; второй — физико-географический.
«Океанские пути мира» — руководство для выбора пути сле-
дования судов с механическими двигателями между наиболее важ-
ными портами мира в зависимости от сезона, гидрометеорологи-
ческих условий и эксплуатацйонных качеств судна. Руководство
состоит из трех отделов; I — гидрометеорологический обзор, II —
пути судов, III — справочный. В конце книги к руководству при-
ложены восемь карт.
Все руководства для плавания (лоции, навигационно-гидрогра-
фические обзоры и т. д.) поддерживаются на уровне современности
с помощью навигационной информации, доставляемой мореплава-
телям особым видом навигационных пособий—Извещениями мо-
реплавателям.
Справочный и инструктивный материал, сведения учебного ха-
рактера и другая вспомогательная информация публикуется в ви-
де специальных изданий: каталогов карт и книг, астрономических
ежегодников и таблиц, таблиц приливов, мореходных таблиц,
правил плавания, описаний отдельных водных районов, инструк-
ций, правил, методик, наставлений и т. п.
180
§ 86. Пользование морскими навигационными
пособиями
Советский каталог карт и книг — основное пособие по систе-
матизации навигационных пособий, он издается периодически по
мере накопления изменений. Каталог состоит из следующих час-
тей: I—Ледовитый океан; II — Балтийское море с .проливами;
III — Средиземное, Черное, Азовское, Каспийское и Аральское мо-
ря; IV — Атлантический океан; V — Индийский океан; VI — Япон-
ское, Охотское и Баренцево моря; VII—Тихий океан. Каждая
из частей каталога состоит из двух разделов — «Карты» и
«Книги». Каждый раздел «Карты» состоит из двух отделов:
в первом приведены сведения о морских навигационных картах,
во втором — о специальных, справочных и вспомогательных
картах.
Раздел «Карты» части II имеет третий отдел озерных и речных
карт. Правила пользования каталогом карт и книг приведены в
предисловии к каждой части каталога. Раздел «Книги» любой
части каталога содержит сведения о руководствах и пособиях для
плавания.
Поддержание навигационных пособий на уровне современности.
Изображенные на морских навигационных картах и в руковод-
ствах для плавания элементы местности не остаются неизменны-
ми: береговая линия и рельеф морского дна изменяются; дельты
рек перемещаются, появляются новые искусственные сооружения,
прокладываются новые каналы и фарватеры, производятся дно-
углубительные работы; изменяется оборудование морских путей
и т. д. Все это требует систематического исправления содержания
карт и руководств для плавания. Несоответствие содержания на-
вигационных пособий действительной обстановке на местности
приводит к грубым навигационным ошибкам, а порой — к авари-
ям.
Приведение современных пособий на уровень современности на-
зывается корректурой пособий. Систематической коррек-
туре подлежат все навигационные пособия. Важное значение име-
ет корректура, производимая штурманским составом непосред-
ственно на судах.
Документами для корректуры являются:
Извещения мореплавателям;
Дополнения к лоциям и другим руководствам для плавания;
Сводные корректуры к руководствам для плавания.
Особое место среди корректурных документов занимает выпуск
№ 1 Извещений мореплавателям, в котором публикуются постоян-
но действующие правила и положения о плавании в советских во-
дах.
Наиболее важные и срочные сведения об изменениях в навига-
ционной обстановке передаются по радио в виде радионавига-
181
циойных Извещений мореплавателям (НАВИМов), с последующим
включением таких сведений в печатные издания.
Хранение карт и пособий на судне. Навигационные пособия
являются документами строгой отчетности; их получение, сдача
или передача оформляются специальным актом, копия которого в
обязательном порядке направляется в базовую электрорадионави-
гационную камеру.
Суда с неограниченным районом плавания судовых номеров на
картах и навигационных пособиях не проставляют. Карты уклады-
вают по адмиралтейским номерам. На суда с ограниченным райо-
ном плавания, не располагающие полным комплектом карт и книг
всего Мирового океана, обычно проставляют на картах и пособиях
судовые номера, облегчающие подбор навигационных пособий на
переход.
Замена карт и пособий производится только в случае их изъ-
ятия либо физического износа. Полная замена карт производится
через четыре года либо по специальному разрешению начальника
службы мореплавания. Срок использования на судах всех посо-
бий (лоций, «Огней и знаков», «Каталогов карт и книг» и др.)
определяется их переизданием.
При постановке судна в ремонт «Каталог карт и книг» судна
необходимо сверить в электрорадионавигационной камере; заяв-
ку на карты и навигационные пособия для предстоящего после ре-
монта рейса надо сделать заблаговременно. При постановке судна
в капитальный ремонт или при полной его ликвидации судовые
карты и навигационные пособия сдают в навигационную камеру.
Глава XV
ГИДРОМЕТЕОРОЛОГИЧЕСКОЕ ОБЕСПЕЧЕНИЕ ПЛАВАНИЯ
§ 81. Организация гидрометеорологической
службы
Экономические исследования работы морского транспорта по-
казывают, что ходовое время в значительной степени зависит
от правильности учета гидрометеорологической обстановки во
время плавания. Поэтому знание фактической гидрометеорологи-
ческой обстановки на трассе перехода и прогноза ее изменения
совершенно необходимы.
Основным документом, регламентирующим организацию гидро-
метеорологического обеспечения мореплавания, является Генераль-
ное соглашение между Министерством морского флота (ММФ) и
Главным управлением гидрометеорологической службы при Сове-
те Министров СССР (ГУ ГМС). ГУ ГМС осуществляет гидроме-
теорологическое обеспечение:
плавания судов в морях и океанах;
182
плавания судов по наивыгоднейшим путям с учетом прогнози-
руемой гидрометеорологической обстановки;
ледовой навигации в неарктических морях СССР;
перегонов и буксировок плавсредств с ограниченной мореход-
ностью по морям и океанам;
других видов деятельности морского флота, подверженных
влиянию гидрометеорологических условий.
В целях такого обеспечения ГУ ГМС поставляет регулярную
информацию о текущем состоянии гидрометеорологических усло-
вий в океанах, морях, акваториях портов и т. д.; передает долго-
срочные и краткосрочные прогнозы погоды и элементы режима
моря; предупреждает об опасных для мореплавания явлениях по-
годы и режима моря; снабжает справками, консультациями
и пособиями по гидрометеорологическому режиму океанов и
морей.
На основе того же Соглашения Министерство морского флота
обеспечивает производство выполняемых штурманским составом
стандартных гидрометеорологических наблюдений на судах и сво-
евременную передачу гидрометеорологической информации в ус-
тановленном порядке. Так, некоторые суда морского флота обя-
заны передавать в местные управления гидрометеослужбы сведе-
ния о состоянии погоды и моря по радио четыре раза в сутки
(00, 08, 12, 20 ч). На таких судах морского флота ведут гидро-
метеорологические журналы, которые по истечении каждого ме-
сяца отправляют в органы ГУ ГМС (список судов имеется в
ММФи ГУ ГМС).
Местные органы ММФ и ГУ ГМС (пароходства, порты, с одной
стороны, и Бюро погоды — с другой), в развитие Генерального
соглашения, заключают между собой локальные договоры о вза-
имных обязанностях и порядке взаимодействия по вопросам гид-
рометеорологического обслуживания.
Гидрометеорологическая информация по всем штатным рай-
онам передается радиостанциями ММФ два раза в сутки. Штор-
мовые предупреждения передаются немедленно на русском и анг-
лийском языках.
Существуют также следующие методы доведения оперативных
материалов до диспетчерского аппарата пароходств и капитанов
судов.
Месячные прогнозы по данному району специальным курьером
областного Бюро погоды доставляют пароходству и морагентству
«Инфлот» через контору капитана порта. Ежедневные гидромете-
орологические бюллетени доставляет курьер Бюро погоды в служ-
бы мореплавания и аварийно-спасательных подводных и техниче-
ских работ (АСПТР) пароходств, а также капитану порта. Мор-
агентство «Инфлот» получает ежедневные гидрометеорологиче-
ские бюллетени через контору капитана порта.
Радиостанции пароходств по установленному расписанию пе-
редают в эфир суточные прогнозы погоды и волнения моря, анг-
' 183
лийский прогноз погоды, уточненный прогноз на день, прогнозы
погоды на последующие два дня, ледовые прогнозы и обзоры (в
ледовый период), штормовые предупреждения (при угрозе).
Бюро погоды также передает прогнозы погоды, обзоры и
штормовые предупреждения по своему району. Кроме этого, еже-
дневно «Инфлот» информируют об уточненном прогнозе погоды на
день.
Если опасное гидрометеорологическое явление не было пре-
дупреждено прогнозом, то необходимое штормовое предупрежде-
ние осуществляется всеми средствами связи и сигнализации:
подъем соответствующих сигналов на специальных сигнальных
постах и мачтах; срочные телефонограммы в адрес диспетчерской
пароходства, службы АСПТР, конторы капитана порта и мор-
агентства «Инфлот».
Предупреждения об особо опасных гидрометеорологических
явлениях составляют независимо от того, были они предусмотре-
ны прогнозом или нет.
Для капитанов судов дальнего плавания гидрометеорологи-
ческие бюллетени передают через контору капитана порта.
Для понимания сущности и значимости гидрометеорологическо-
го обеспечения безопасного мореплавания необходимо познако-
миться с физическими явлениями, происходящими в воздушной
оболочке Земли, а также иметь достаточное представление о фи-
зической, химической и биологической сущности основных океано-
графических элементов — глубинах, течениях, приливах и т. п.
§ 82. Метеорологические элементы
Общие понятия. Основные задачи метеорологии — это изуче-
ние процессов изменения метеорологических элементов и явлений
в пространстве и во времени, раскрытие физической сущности и
закономерностей таких процессов, а также разработка способов
прогноза (предсказания) изменений погоды.
За условную границу окружающей Землю газовой оболочки
— атмосферы — принимается высота 1000 км, на которой еще
наблюдаются полярные сияния. Верхний слой атмосферы —
ионосфера — отличается повышенной электропроводностью и
способностью отражать радиоволны. Ее нижняя граница находит-
ся на высоте 70—80 км от поверхности Земли. Ниже ионосферы
располагается следующий слой воздуха — стратосфера. Ее
нижняя граница находится на высоте 10—12 км от поверхности
Земли. Примечательным для стратосферы являются сильные вет-
ры. Обычные метеорологические явления (сильная конвекция, воз-
никновение облаков, выпадение осадков и т. п.) присущи нижнему
слою воздуха — тропосфере.
Температура воздуха в тропосфере понижается с увеличением
высоты. В нижних слоях тропосферы, до высоты около 1,5 км, тем-
пература воздуха убывает в среднем на 0°,5С на каждые 100 м
184
febicoTbi. Изменение Температуры воздуха по вертикали характери-
зуется вертикальным градиентом температуры: при падении тем-
пературы с увеличением высоты он имеет положительное значение;
при увеличении — отрицательное.
Минимум температуры наблюдается перед восходом Солнца
и максимум — около 14 ч. Суточные амплитуды — суточный
ход температуры воздуха — над морем при одних и тех же
условиях имеют меньшие величины, чем над сушей; обычно они не-
много больше, чем амплитуда колебания температуры воды —
1,5—2°С. Наибольшая температура над морем наступает в сред-
нем в 12 ч 30 мин. С увеличением широты суточный ход темпе-
ратура воздуха уменьшается. В летние месяцы и в ясные дни он
больше, чем в зимние месяцы и в пасмурные дни.
Годовой ход инсоляции и излучения земной поверхности обус-
ловливают годовой ход температуры воздуха; максимум
приходится обычно на август; минимум — на февраль (северное по-
лушарие). С увеличением широты до 40° годовой ход возрастает;
в высоких широтах он незначителен. В табл. 3 приведено распреде-
ление средних температур по параллелям.
Таблица 3
Широта
10 20 30
60 70 80 90
Север-
ное
Январь
Июль
+26,4 +25,8 +21,8 +14,5 +5,0 —7,1
+25,6 +26,9 +28,0 +27,3 +24,0 +18,1
-16,1 -26,3—32,2:—41,0
+ 14,1+7,3 +2,0 1,0
Юж-
ное
Январь
Июль
+26,4 +26,3 +25,4+21,9 +15,6 +8,1 +2,1 +3,5
+25,6 +23,9 +20,0+14,7+9,0 +3,4 —9,1—23,0
-10,8—15,5
—39,5—48,0
Температуру воздуха на судах измеряют с помощью обычных
ртутных термометров, имеющих специальные оправы для защи-
ты их от осадков и воздействия прямых солнечных лучей. Не-
прерывная регистрация температуры воздуха осуществляется
термографом (рис. 107). Чувствительным элементом этого прибора
является биметаллическая пластинка, один конец которой закреп-
лен в кронштейне, а другой через систему рычагов соединен со
стрелкой, несущей на своем конце перо. Перо касается бумажной
ленты, укрепленной на барабане, вращающемся от часового ме-
ханизма вокруг своей оси. Биметаллическая пластинка изгибается
пропорционально величине изменения температуры, а связанное
с ней перо воспроизводит на вращающейся ленте линию хода тем-
пературы воздуха.
Влажность воздуха. Абсолютной влажностью назы-
вается вес (q) в граммах водяного пара, содержащегося в 1 jw3
воздуха. Количество водяного пара в воздухе чаще выражают
185
Величиной его упругости ё> выраженной в миллиметрах ртутного
столба в миллибарах:
е = 0,0008 (t — (96)
где t — температура по сухому термометру психрометра;
t' — температура по влажному термометру психрометра;
р — атмосферное давление.
Наибольшая абсолютная влажность наблюдается при наиболь-
шей температуре воздуха: после полудня, в самые теплые меся-
цы, в наиболее теплых морях. .
Рис. 107.
Воздух с максимально возможным при данной температуре со-
держанием пара называется насыщенным. Давление упругости
пара, насыщающего воздух, обозначают Е. Температура, при кото-
рой в воздухе с заданной абсолютной'влажностью наступит на-
сыщение, называется точкой росы. Разность между упругостью
паров, насыщающих воздух при данной температуре^ и фактиче-
ской упругостью паров, содержащихся в воздухе, называется не
достатком (дефицитом) насыщения.
Относительной влажностью (г) называется отно-
шение упругости водяного пара, содержащегося в воздухе (аб-
186
солютная влажность), к упругости водяного пара, насыщающего
воздух при данной температуре, т. е.
г = 4 loo-
с
(97)
С изменением широты относительная влажность меняется не-
значительно. Суточный и годовой ход относительной влажности
обычно противоположен суточному и годовому ходу температуры
воздуха. Над морями относительная влажность
практически постоянна (80%).
Аспирационный психрометр. Температура и
влажность воздуха имеют исключительно важ-
ное значение для мореплавания: в соответствии
с ними определяют режим вентиляции судовых
трюмов в целях сохранной перевозки грузов.
Температуру и влажность воздуха определя-
ют с помощью аспирационного психрометра
(рис. 108), состоящего из двух одинаковых ртут-
ных термометров т, резервуары р которых нахо-
дятся в специальных трубках, соединяющихся с
центральной трубой ц аспиратора а. Пружин-
ный завод аспиратора позволяет его вентилято-
ру протягивать воздух через центральную трубу
так, что во время измерения резервуары обоих
термометров постоянно омываются потоком
наружного воздуха.
Резервуар правого термометра аспирацион-
ного психрометра должен быть обернут бати-
стом, перед наблюдением его надо смачивать
дистиллированной водой с помощью прилагае-
мой' к прибору пипетки. К прибору прилагается
номограмма для определения относительной вла-
жности; пользование такой номограммой подроб-
но изложено в заводской инструкции прибора.
Значения температур сухого и смоченного
термометров позволяют с помощью специаль-
ных Психрометрических таблиц определить аб-
солютную q, относительную г влажность воздуха,
а также точку росы т.
Для определения параметров влажного воздуха могут быть ис-
пользованы также диаграммы i—d и t—т. Первая применяется в
технических расчетах по кондиционированию воздуха помеще-
ний, вторая — при расчетах, связанных с микроклиматом грузо-
вых помещений — трюмов, складов и т. д.
Непрерывную запись относительной влажности воздуха полу-
чают с помощью волосяного гигрографа, чувствительным
элементом которого служит пучок обезжиренных волос. Последние
изменяют длину пропорционально изменению относительной влаж-
187
пости воздуха и через систему рычагов приводят в движение ин-
дикаторную стрелку с пером. Развертывание показаний прибора
по времени осуществляется с помощью часового механизма и ба-
рабана, устройство которых аналогично у вышеописанного тер-
мографа.
Облака — скопление мельчайших капель или кристаллов
льда в высоких слоях атмосферы. В суточном ходе облачности
летом наблюдаются два максимума — рано утром и после полуд-
ня, зимой — в утренние и ночные часы. Максимума облачность
достигает в экваториальной зоне, минимума — в широтах 30—35°.
Отсюда она вновь увеличивается, достигая второго максимума в
широтах 60—80°, а к полюсу вновь несколько убывает.
Все облака делятся на три класса: нижнего (высота ниже
2 км), среднего (от 2 до 6 км) и верхнего (высота более 6 км)
ярусов.
Облачность измеряется в баллах от 0 до 10, в зависимости от
того, сколько десятых частей неба закрыто облаками. Так, напри-
мер, над Белым морем среднее годовое значение облачности рав-
но 0,8; в Асуане — 0,5 балла.
Осадки. Различают осадки, выпадающие из облаков (дождь,
снег, ледяной дождь, снежная крупа, ледяная крупа, град,
снежные зерна) и выделяющиеся на поверхности земли и пред-
метов (роса, иней, изморозь, жидкий налет, твердый налет, голо-
лед).
Количество осадков выражается толщиной слоя воды, покры-
вающего земную поверхность при выпадении осадков, и измеряет-
ся в миллиметрах (мм).
Наибольшее среднее годовое количество осадков наблюдается в
Черрапунджи (Индия) — 12 665 мм. В Батуми в среднем за год
выпадает 2500 мм.
Видимость — предельное расстояние, дальше которого наблю-
даемый объект сливается с фоном и становится невидимым. Ви-
димость зависит от прозрачности атмосферы, возрастающей с уве-
личением широты. Для оценки видимости пользуются специаль-
ной шкалой. Шкала горизонтальной видимости приведена в МТ-63,
табл. 51.
Туманы — скопление продуктов конденсации1 водяного пара
в близких к поверхности земли слоях воздуха. Различают следу-
ющие виды туманов: дымка (размер капелек не превышает
0,0005 мм, а видимость от 1 до 10 км), слабый туман (види-
мость от 500 м до 1 км), сильный туман (видимость ме-
нее 50 м).
Подробные сведения о туманах, их распределении, суточном
и годовом ходе можно найти в соответствующих лоциях.
Атмосферное давление — это давление, создаваемое весом
воздуха. Нормальное давление воздуха уравновешивает столб ртути
1 Конденсация—процесс превращения пара в воду.
188
Рис. 109.
тонкостенная металлическая
в 760 мм на уровне моря в широте 45° при температуре 0°С. Ча-
сто атмосферное давление выражают в миллибарах (1 мб = 0,75 мм;
1 мм=1,33 мб). Шкалы перехода миллиметров атмосферного
давления в миллибары и миллибаров в миллиметры приведены в
МТ-63, № 48-а и 48-6 соответственно.
Линии, соединяющие на карте точки с равным атмосферным
давлением, называются изобарами, а определяемое распо-
ложением изобар распределение давлений на каком-либо горизон-
тальном уровне — барическим
полем. В различных точках оп-
ределенного горизонтального уров-
ня давление атмосферы может быть
различным. Разность таких давле-
ний в сторону наибольшего его
' падения называется барическим
градиентом. Тип падения (или
повышения) давления характеризу-
ется системами расположения изо-
бар. Такие системы определяют
формы барического релье-
ф а.
Атмосферное давление на судах
измеряют барометром-анероидом
(рис. 109), чувствительным элемен-
том которого является герметическая
коробка, из которой практически откачан весь воздух. Такая «ба-
рометрическая» коробка сжимается либо расширяется («дышит»)
с изменением атмосферного давления, а ее деформации через
систему рычагов фиксируются на специальной шкале с помощью
индикаторной стрелки. Правила исправлений показаний баромет-
ра-анероида и необходимые для этого таблицы приводятся в при-
лагаемой к прибору заводской инструкции.
Непрерывная регистрация изменения атмосферного давления
осуществляется барографом с помощью пишущего на бара-
банной ленте пера, приводимого в движение рычагами, связан-
ными с набором спаянных между собой (столбиком) барометри-
ческих коробок.
Ветер — горизонтальное передвижение воздуха, вызванное
разностью атмосферного давления (рис. НО). Ветер характери-
зуется направлением, скоростью и силой. На экваторе направ-
ление ветра совпадает с барическим градиентом; воздух переме-
щается от центров высокого давления к центрам низкого давления.
Однако к северу и югу от экватора, вследствие влияния силы
Кориолиса и центробежной силы, ветер отклоняется от направ-
ления градиента вправо в северном и влево в южном полу-
шариях. Таким образом, в северном полушарии, став спиной к
ветру, наблюдатель будет иметь низкое давление слева; в южном
полушарии соответственно — справа.
189
Сила ветра зависит от величины барического градиента. Для
оценки силы ветра пользуются специальной шкалой Бофорта,
приведенной в МТ-63, табл. 49.
На движущемся судне наблюдается кажущийся ветер.
Определение направления истинного ветра показано на
рис. 111, где:
Рис. Г10.
V — вектор скорости судна, м/сек;
— вектор кажущегося ветра, откладываемый в сторону,
противоположную направлению этого ветра, м/сек;
Vh.b — вектор скорости истинного ветра, направление кото-
рого противоположно направлению действительного
ветра, м/сек.
Вместо построения на листе бумаги направление истинного вет-
ра определяют ветрочетом — кругом СМО (рис. 112), значи-
тельно упрощающим и ускоряющим решение векторного тре-
угольника.
Скорость ветра на судах измеряют с помощью ручного
анемометра (рис. 113). Обращенные в одну сторону четыре
полушария заставляют крестовину анемометра вращаться в одну
сторону со скоростью, пропорциональной скорости ветра. Враще-
ние крестовины через систему шестеренок передается счетчику
оборотов. Количество оборотов крестовины в секунду (обычно
среднее за 100 сек) позволяет по специальной шкале, прилагае-
мой к прибору, определить скорость ветра в метрах в секунду.
В суточном ходе скорость ветра с утра возрастает, к вечеру —
ослабевает.
В малых и реже в умеренных широтах преимущественно в теп-
лое время года наблюдаются смерчи — вихри большой разру-
шительной силы с диаметром до 100 м, высотой от 100 до 1000 м>
190
скоростью вращательного движения до 100 м/сек. Й скоростью по-
ступательного движения до 30—40 км/ч. Продолжительность смер-
ча от нескольких минут до 3—4 ч. Разновидность смерча — тор-
надос с диаметром до 300 м и скоростью перемещения до 70 км/ч.
Очень^опасно резкое увеличение
ветра от штиля до значительной ве-
личины. Такой ветер называется
шквалом.
Рис. 112.
Рис. .113.
Пассаты — постоянные ветры, дующие в экваториальной
зоне по обе стороны экватора до' широты 30°. В северном полу-
шарии направление пассатов от северо-востока, в южном — от
юго-востока; скорость 6—8 м/сек (4 балла). Области пассатов у
термического экватора разделены полосой затишья. Области пас-
сатов характеризуются в основном ясной погодой и малым коли-
чеством осадков.
Муссоны — ветры, дующие зимой с суши на море, а летом —
с моря на сушу. Летние муссоны отличаются влажностью, боль-
шой облачностью и осадками, зимние — сухой, ясной и безоб-
лачной погодой. В Индийском океане северо-восточный муссон
имеет силу 2—5 баллов, юго-западный достигает силы шторма..
Смена муссонов происходит в апреле — мае и в октябре — но-
ябре.
В отдельных пунктах наблюдаются местные ветры.
191
Бризы — Иетры Приморских побережий, дующие днем с моря
на сушу, ночью — с суши на море.
Бора — холодный ветер ураганной силы от северо-востока,
спускающийся из охлажденных мест вдоль крутых склонов к мо-
рю. Наблюдается в Цемесской бухте (Новороссийск) и у север-
ных берегов Адриатического моря.
Фен —теплый сухой ветер, дующий с гор.
Сведения о ветрах на морях приводятся на ежемесячных гид-
рометеорологических картах и в морских атласах.
§ 83. Циклоны и антициклоны
Воздушные массы. Воздушной массой называется большое ко-
личество воздуха, имеющего сравнительно однородные свойства в
горизонтальных направлениях, порой на протяжении тысяч кило-
метров.
Воздушная масса, двигающаяся над более теплой подстилаю-
щей поверхностью, называется холодной; двигающаяся над
более холодной подстилающей поверхностью — теплой; находя-
щаяся в тепловом равновесии с окружающей средой — мест-
ной.
Воздушная масса, формирующаяся в Арктике, называется арк-
тическим воздухом, который сильно охлажден по всей
толще, обладает малой абсолютной и большой относительной
влажностью, несущий с собой туманы и дымки. В умеренных ши-
ротах формируется полярный воздух. Зимой массы такого
воздуха близки по своим свойствам к арктическому; летом поляр-
ный воздух сильно запылен и отличается пониженной видимостью.
Формирующийся в субтропиках и тропиках тропический
воздух сильно прогрет, запылен, отличается большой абсолютной
влажностью, нередко вызывающий явления опалесценции (крас-
новатое солнце и далекие предметы в голубой дымке). Кон-
тинентальный тропический воздух днем неустойчив
(конвекция, пыльные вихри и бури, смерчи). Видимость пони-
жена.
Экваториальный воздух имеет в общем те же свойства,
что и тропический, но некоторые из них выражены еще в большей
степени.
Фронты. Место соприкосновения двух воздушных масс, обла-
дающих различными физическими свойствами, называется поверх-
ностью раздела (фронтом). Линия пересечения такой поверхности
с подстилающей поверхностью (моря или земли) называется ли-
нией фронта. Фронты разделяются на подвижные и стационар-
ные.
Главный арктический фронт отделяет арктический воздух от
полярного; главный полярный фронт — полярный воздух от тро-
пического; главный тропический фронт — тропический воздух от
экваториального.
192
Теплый фронт возникает при наползании теплой воздуш-
ной массы на холодную. Давление перед таким фронтом падает.
Предвестником теплого фронта служат также перистые облака в
виде «коготков». Перед теплым фронтом наблюдаются предфрон-
товые туманы. Пересекая зону теплого фронта, судно попадает в
широкую полосу обложного дождя или снега с пониженной види-
мостью.
Холодный фронт возникает когда холодные воздушные
массы вклиниваются под теплые. Он наступает «стеной» ливне-
вых облаков. Давление перед фронтом значительно падает. При
встрече с холодным фронтом судно попадает в зону ливней, гроз,
шквалов и сильного волнения. Однако если клин холодного
воздуха «подсекает» теплые массы медленно, то за линией та-
кого холодного фронта судно попадает в зону обложных осад-
ков.
Фронт окклюзий возникает при взаимодействии двух
масс воздуха — теплого и холодного. Если догоняющая масса
имеет температуру ниже впереди идущей, то фронт называют
фронтом холодной окклюзии; если догоняющая масса имеет тем-
пературу выше впереди идущей — фронт теплой окклюзии. Про-
ходя фронты окклюзий, судно может попасть в условия понижен-
ной видимости, осадков, сильного ветра, сопровождаемого волне-
нием.
Циклоны. Циклон зарождается как область пониженного дав-
ления на границе двух масс воздуха разной температуры. Обыч-
но это волновое возмущение на фронтальной поверхности. При
длинё более 1000 км волна становится неустойчивой и говорят, что
циклон «углубляется»: между холодным и теплым фронтами об-
разуется сектор теплого воздуха языкообразной формы. При даль-
нейшем развитии холодный фронт, движущийся быстрее теплого,
нагоняет его; смыкание теплого и холодного фронтов ликвидиру-
ет теплый сектор, образуя фронт окклюзии.
Диаметр циклона колеблется от нескольких сот до 5000 км;
средняя скорость перемещения 30—60 км/ч. Внимательные на-
блюдения за облачностью, ветром, изменениями атмосферного дав-
ления и температуры воздуха позволяют делать важные для море-
плавания выводы:
если отдельные небольшие кучевые облака движутся в том же
направлении, как и ветер внизу, наблюдатель находится в задней
стороне циклона и можно ожидать улучшения погоды;
если направление движения облаков не совпадает с направле-
нием ветра внизу, наблюдатель находится в передней части цик-
лона и через один-два дня следует ожидать продолжительных осад-
ков и изменения температуры (понижение ее летом и повышение
зимой);
если ветер усиливается и направление его изменяется по солнцу,
наблюдатель северного полушария (южного полушария) находит-
ся в правой (левой) половине циклона; если направление усили-
7—933 193
вающегося ветра изменяется против солнца, следует сделать об-
ратное заключение;
если направление ветра не меняется, наблюдатель находится
на пути центра циклона и следует ожидать временного затишья,
а затем усиления ветра с противоположной стороны.
Тропические циклоны. В отличие от зарождающихся в умерен-
ных широтах циклонов, циклонические возмущения, возникающие
между тропиками, называются тропическими циклонами. В Вест-
Индии они
называются ураганами; к востоку от Азии — тайфу-
нами; в Индийском океане — ци-
клонами; в южной части Индий-
ского океана — арканами. Тро-
' пические циклоны обычно менее
100—300 миль в поперечнике с
диаметром центральной части
20—30 миль. Барический гради-
Qt ент в тропическом циклоне порой
превышает 40 мб, а скорость вет-
ра достигает 100 км/час, причем
эти показатели, в отличие от ци-
клонов
няются
ласти
т. д.).
Одним из признаков прибли-
жения тайфуна является появле-
идущей не от того направления, от которого дует или
н
NO31
Рис. T14.
NW
умеренных широт, сохра-
практически во всей об-
урагана (тайфуна и
ние зыби,
дул ранее ветер. Развиваемая ветром зыбь может быть обнаруже-
на уже на расстоянии 400—600 миль от центра тайфуна. По на-
правлению зыби можно судить о положении центра тайфуна, а по
изменению этого направления — о направлении его движения.
При приближении центра тайфуна атмосферное давление резко
падает, перистые облака сменяются нагромождением ливневых об-
лаков; наступает предгрозовое затишье с удушливой жарой. За-
тем температура воздуха быстро падает, начинается дождь, пере-
ходящий в тропический ливень.
Упрощенная схема тропического циклона для северного полу-
шария приведена на рис. 114. Как видно из рисунка, ветры в об-
ласти тайфуна отклонены от направления на его центр вправо в
среднем на 60°. Следовательно, для наблюдателя, стоящего спи-
ной к ветру, центр тайфуна будет находиться впереди, приблизи- ''
тельно на 60° влево от направления ветра*. При приближении к
центру тайфуна угол отклонения ветра от радиуса увеличивается,
и достигает 90° в непосредственной близости к центру. В центре
тайфуна наблюдаются слабые ветры и даже штиль при бурном
море. После прохождения центра тайфуна («глаз бури») ветер
очень быстро усиливается до ураганного. Сила ветра 12 баллов
сохраняется на расстоянии 30—35 миль от центра и более. За-
194
тем она постепенно слабеет. Так, на расстоянии от центра тайфуна
в 50—75 миль сила ветра равна 10 баллам; на расстоянии 100—
150 миль — 8—9 баллам. И только на расстоянии 200—250 миль
сила ветра снижается до 6—7, баллов. Пользуясь макетом тропи-
ческого циклона (см. рис. 114), нетрудно установить положение
судна относительно пути движения центра тропического циклона:
если направление ветра меняется по часовой стрелке, то через
судно проходит правая половина циклона; если направление вет-
ра меняется против часовой стрелки — левая половина; если на-
правление ветра не меняется — центр циклона. Таким образом,
Рис. 115.
для выбора правильного курса при встрече тропического цикло
на необходимо руководствоваться следующими правилами:
1) при плавании в северном полушарии (рис 115, а):
при прохождении правой половины тропического циклона ну-
жно лечь в байдевгинд правого галса (ветер привести в правую
скулу) и сохранять этот курс, пока барометр не начнет поднимать-
ся;
при прохождении левой половины тропического циклона нуж-
но лечь в бакштаг правого галса (привести ветер в корму спра-
ва) и держать этот курс до выхода из зоны тропического цикло-
на; находясь на пути центра тропического циклона, также ложат-
ся в бакштаг правого галса (рис. 115, а) и держатся, как указано
ранее;
2) при плавании в южном полушарии (рис. 115, б):
при прохождении левой половины тропического циклона лечь
в бейдевинд левого галса, сохраняя курс до начала подъема ба-
рометра;
при прохождении правой половины тропического циклона лечь
в бакштаг левого галса и Держать, как указано ранее; при нахож-
дении на пути урагана также привести ветер в бакштаг левого
галса и так править до выхода из зоны урагана.
Антициклоны — области повышенного атмосферного давления
бывают, как и циклоны, стационарными и подвижными.
Антициклон, проникший с севера, в холодное время года при-
носит понижение температуры, ясную погоду и хорошую види-
мость; в теплое время года — грозы. Антициклон, приходящий с
195
юга, в холодное время года несет длительную пасмурную погоду; в
теплое — дожди с грозами, а по ночам — росу и поземные ту-
маны. Явным признаком антициклонической погоды является
резкий суточный ход температуры воздуха, влажности и других
метеоэлементов.
§ 84. Статика Мирового океана
Общие сведения. Водная поверхность земли составляет 71%
всей ее поверхности (61% северного полушария и 81% южного).
Вся совокупность вод, сообщающихся между собой, называется
Мировым океаном, который подразделяется на океаны, моря, за-
ливы и проливы.
Основную часть Мирового океана (78%) составляет его ложе—
глубины от 2440 до 6000 м. Материковый склон (глубины от 200
до 2440 м) занимает 11%, материковая отмель (глубины от 0 до
200 м)—8% площади, глубоководные впадины или ложбины
свыше 6000 м — 3% площади Мирового океана (например, глу-
бина Филиппинской впадины 10 789 м).
Относительная прозрачность морской воды опре-
деляется средней глубиной исчезновения видимости погруженного
в воду белого диска диаметром 30 см. Наибольшая прозрачность
морской воды наблюдается в Саргассовом море (Атлантический
океан) — 66,5 м; наименьшая — в Северном море — 6,5—22 м.
Цвет морской воды зависит от количества находящихся в нем
механических примесей. Тропические воды Мирового океана от-
личаются темно-голубой, иногда синей окраской; в умеренных и
полярных широтах цвет морской воды зеленоватый.
Массовое развитие растительных и животных организмов в по-
верхностном слое вызывает изменение цвета и прозрачности мор-
ской воды. Так, в тропическом поясе цветение наблюдается
зимой, а в умеренных и полярных поясах — в течение гидрологи-
ческой весны и осени.
Свечение морской воды вызывается бактериями (ровный
молочный свет, не усиливающийся при механическом воздейст-
вии), ночесветками и другими мелкими простейшими организма-
ми (множество отдельных вспышек, увеличивающихся при меха-
ническом воздействии), а. также отдельно светящимися организ-
мами — большими медузами, гребневками и др.
Растительные и животные организмы, присасываясь к дни-
щу и другим погруженным в воду частям судна, вызывают о б-
растание корпуса, значительно снижающее скорость судна.
При входе судна в пресную воду часть приставших организмов от-
падает.
Температура морской воды. Средняя температура поверхности
Мирового океана + 17°,4; средняя температура воздуха на всем
земном шаре + 14°,3. Поэтому океан сильно влияет на термиче-
ский режим тропосферы,
I9S
На поверхности воды наибольшая температура обычно на-
ступает между 15 и 16 ч; наименьшая — через несколько часов
после захода солнца. Суточная амплитуда температуры воды в
открытом океане: в тропиках — около 0°,5, в средних широтах —
около 0°,4, а в высоких — 0°,1. В годовом ходе температуры воды
на поверхности наибольшая амплитуда в августе, наименьшая —
в феврале—марте. Годовые амплитуды больше в средних широтах.
В морях годовые амплитуды значительно больше, чем в открытом
океане, вследствие воздействия окружающих масс суши.
Наиболее высокая из наблюдавшихся температур морской
воды +35°,6 (Персидский залив); наименьшая — 2°,О (Полярный
бассейн).
Соленость морской воды — это общее количество всех солей,
находящихся в 1 кг морской воды, выраженное в граммах. Соле-
ность (S°/oo) выражается в тысячных долях, т. е. в промилях.
Средняя соленость Мирового океана около 35%о. Воды Мирового
океана подразделяются по своей солености следующим образом:
Осолоненнь^е..........
Повышенной солености
Океанической солености
Пониженной солености
Распресненные ....
Пресные...............
Свыше 41,0 %0
От 35,5 до 41,0 °/00
От 34,5 до 35,5 %q
От 24,7 до 34,5 %0
От 0,05 до 24,7 %0
Менее 0,05 %0
Температура замерзания воды зависит от солености.
Льды разделяются на два типа: неподвижные (ледяной забе-
рег, припай, подошва припая, стояк, стамуха) и плавучий, или
дрейфующий (обширные большие и малые ледяные поля, крупно-
битый и мелкобитый лед, куски льда, ледяная каша).
По строению и состоянию поверхности различают ровный, на-
слоенный и торосистый лед, сморозь, бесснежный и заснеженный
лед.
Наконец, по возрасту различают: начальные образования льда
(ледяные иглы, ледяное сало, снежура, шуга, блинчатый лед,
склянка, темный нилас); молодой лед (светлый нилас, серый лед)
толщиной 5—15 см и зимний (серо-белый, белый) толщиной 15—
200 см.
Под влиянием ветров и течения льды могут дрейфовать и сжи-
маться, быть в состоянии разрежения и торошения. В арктических
морях наблюдаются уклонения дрейфующих льдов вправо от на-
правления ветра под влиянием вращения Земли.
В зависимости от сплоченности и распределения на видимой
поверхности моря бывают различные состояния льда:
редкий лед — различного вида плавучий лед, преимуще-
ственно битый, равномерно распределенный и занимающий до
30% видимой поверхности моря (сплоченность 1—3 балла);
разреженный лед — различного вида битый дрейфую-
щий лед, занимающий* более половицы видимой поверхности мо-
ря (сплоченность 4—6 баллов);
19?
J
сплоченный лед — скопление плавучих льдов, покрываю- i
щих около 80% видимой поверхности (сплоченность 7—9 баллов).
Мореплаватели обязаны учитывать сезонные условия, от кото-
рых зависит форма, прочность, а следовательно, возможность
преодоления льда судами.
Легкий лед — толщиной до 60 см свободно преодолим ледоко-
лами, а при благоприятных условиях — судами с усиленным под-
креплением корпуса.
Тяжелый лед — толщиной более 60 см с торосами возрастом
больше одного года — с трудом преодолим только мощными ле-
доколами.
Деформированный лед — наслоенный лед, с глубиной наслое-
ния до 20 м. Этот лед торосистый и может быть непроходим даже
для самых мощных ледоколов.
В шуге суда двигаются легко, а плотный эластичный покров
снежуры затрудняет движение, так как он не колется форштев-
нем, а только сжимается. Тонкий лед или корку суда проходят
с некоторым затруднением.
Сжатие льда — уплотнение под влиянием ветров и течений, со-
ставляет самое большое затруднение для плавания. Во время
смены приливно-отливных течений такое явление может наблю-
даться даже при полном отсутствии ветров.
Торошение — вид формирования ледовых препятствий, когда
разломы, столкновения и сжатия льда образуют торосы.
Торосы — нагромождение льдин, обычно смерзшихся.
Айсберги (ледяные горы) — крупные обломки глетчерного
льда, встречающиеся в море и обычно возвышающиеся не более
чем на 5 м. Айсберги южного полушария достигают огромных
размеров и проникают в умеренные и даже тропические широты.
Ледяные горы в навигационном отношении представляют боль-
шую опасность. Приближение к айсбергам опасно, так как они
имеют подводные тараны и, подтаивая, могут внезапно перевора-
чиваться. Сведения о ледяных горах и плавучих льдах передаются
проходящими судами и ледовыми службами.
Для нанесения ледовой обстановки на карту приняты специ-
альные Условные обозначения для ледовых карт (см. приложение
4 альбома «Ледовые образования на морях», М., Гидрометеоиздат,
1956).
§ 85. Динамика Мирового океана
Волнение. Различают несколько типов морских волн в зависи-
мости от вызывающих их причин: волны трения (ветровые,
глубинные), барические (сейши или стоячие волны, создавае-
мые изменениями атмосферного давления), сейсмические
(возникающие при подводных землетрясениях), прилив о-о т-
ливные (вызываемые приливообразующими силами Луны и
Солнца). Основными элементами волн являются:
УГ98
длина (L или X) — расстояние между соседними гребнями
или подошвами-;
период (т или Т) — промежуток времени между прохожде-
ниями двух последовательных гребней через одну и ту ?ке точку
(т. е. время, за которое волна проходит расстояние, равное длине
волны);
скорость (с или V) — расстояние, проходимое формой волны
в единицу времени (обычно в 1 сек);
высота (А) — расстояние от гребня волны до ее подошвы по
вертикали; v
направление — истинный румб, от которого движутся волны.
Связь между элементами волны определяется следующими
формулами:
L = 1,525
V = 1,525
h = 0,073 W У D - Л-
(98)
где W — максимальная скорость ветра, м)сек;
D — длина пути ветра над морем, км.
Для расчета высоты волны на прибрежных глубинах пользу-
ются формулами:
Аср = 0,5£> (при ветре силой 5 баллов) 1 /дд\
Аср = 0,1£>2 ( » » » более 5 баллов) ] ’ '
где Б — сила ветра, баллы.
Наибольшие волны в океанах достигают высоты порядка 20 м
и длины 400 м. Зыбь может обладать еще большей длиной волн.
Зыбью называется волнение, продолжающееся после ветра, уже
затихшего или изменившего свое направление. Мертвой зыбью на-
зывается зыбь, распространяющаяся при полном безветрии.
При прохождении волн над банками, рифами и камнями обра-
зуются буруны. При встрече волн с разных румбов на некоторой
площади образуется толчея. Набегание и опрокидывание волн на
берег называется прибоем. Набегание волн на крутые и приглу-
бые берега образует взбросы.
Сила ударов волн достигает более 38 т на 1 м2; высота взбро-
сов доходит до 43 м.
Оценка состояния поверхности моря проводится в соответствие
со специальной шкалой, приводимой в МТ-63 под № 50-а.
Волнение оказывает существенное влияние на скорость судов.
В табл. 4 приведены сведения о потерях скоростей судами на вол-
нении.
Течения. В зависимости от ряда факторов течения имеют сле-
дующую классификацию.
199
По устойчивости: постоянные, сохраняющие свою скорость
и направление; периодические, меняющие свое направление и ско-
рость с таким периодом, как и силы, их вызывающие; временные,
возникающие под влиянием случайных факторов.
По глубине: поверхностные, глубинные и придонные.
По температуре: теплые, холодные и нейтральные.
По происхождению: ветровые приливно-отливные, гра-
витационные, стоковые — возникающие вследствие повышения
уровня в каком-либо месте Мирового океана и компенсационные,
вызываемые оттоком или сгоном вод из какого-либо района в дру-
гой.
Для изображения течений на картах применяются различные
способы в соответствии с условными обозначениями. Одним из
способов являются особые векторные диаграммы — розы течений.
В таких диаграммах поверхность карты делится на квадраты, ве-
личина которых зависит от степени ее подробности. В левом верх-
нем углу каждого квадрата приведены числа, дающие границы
квадрата по широте и долготе, в левом нижнем — число в виде
дроби: знаменатель — общее число наблюдений, на основе кото-
рых построена роза течений; числитель — число случаев, когда
течений не наблюдалось. В центральной части каждого квадрата
вычерчена окружность, радиус которой взят в определенном мас-
штабе. От окружности по различным румбам отходят стрелки,
длина которых в известном масштабе соответствует числу наблю-
давшихся случаев течений по данному румбу: чем длиннее стрел-
ка, тем вероятнее течение данного направления. Вид стрелки, ее
толщина и оперение указывают на скорость течений по данному
направлению. При пользовании картами следует помнить, что
течение всегда «выходит из компаса» (ветер всегда «дует в ком-
пас»).
В заключении перечислены наиболее важные для мореплавания
течения, подробную справку о которых можно найти в специальных
пособиях (атласах, справочниках и т. п.).
Течения Атлантического океана: Южно-Пассатное, Гвианское,
Северо-Пассатное, Гольфстрим, Северо-Атлантическое, Восточно-
Гренландское, Западно-Гренландское, Восточно-Исландское, Нор-
вежское, Лабрадорское, Бразильское, Фолькендское, Бенгуэль-
ское.
Течения Индийского океана: Южно-Пассатное, Экваториальное,
Сомалийское, Мозамбикское, Игольного мыса, Западных Ветров.
Течения Тихого океана: Северно-Пассатное, Куро-Сиво, Ку-
рильское, Южно-Пассатное, Восточно-Австралийское, Западных
Ветров, Перуанское, Калифорнийское, Алеутское, Ойя-Сиво.
Приливно-отливные явления. Водные массы Мирового океана,
обладая большой подвижностью, никогда не бывают в состоянии
полного покоя вследствие воздействия на них различных сил. Поэ-
тому в любой точке высота поверхности воды не остается постоян-
ной, т. е. уровень моря постоянно меняется. Одной из основных
200
Таблица 4
Сведения о потерях скоростей судами на волнении разной силы
по данным Морской обсерватории в Гамбурге
Тип судна Встречный ветер | Боковой ветер | Попутный ветер
Сила ветра, 'а+ты шкалы Бофорта
4 6 « 1 10 1 4 1 6 1 8 1 10 1 4 1 0 1 8 110
Процентное увеличение продолжительности переходов /в про- центах ко времени перехода при штилевой погоде
Быстроходные суда (скорость более 19 узлов) 0 +6 + 16 +43 0 +2 +5 + П 0 +1 +2 +3
Суда большого тонна- жа (свыше 8 тыс. рег. т и скоростью 15—16 узлов) 0 +10 +22 +74 0 +2 +6 +27 0 +1 + 1 +3
Суда среднего тоннажа (до 6 тыс. рег. т и ско- ростью 12—14 узлов) 0 +23 +46 + 102 0 +13 +22 +49 —2 —1 —1 +4
Малые суда (менее 4 тыс. рег. т и скоростью 10 узлов) 0 +25 +88 +248 —3 +5 +21 +45 —4 —3 0 +5
причин регулярного колебания уровня являются приливо-образую-
щие силы Луны и Солнца.
Элементы прилива. При явлении прилива вода законо-
мерно то приливает к берегам, образуя наиболее высокое положе-
ние уровня — полная вода (ПВ), то отступает от берегов, занимая
самое низкое положение, — малая вода (МВ). На морской
карте указывается глубина при самом низком уровне моря. Этот
уровень называют нулем глубин (НГ). Таким образом, на карте
указана глубина (Глк) моря (рис. 116).
ГЛК = Анг*
Разница между глубиной моря ГлМв в данную малую воду и ну-
лем глубин (глубиной на карте) называют высотой малой воды—
(hMB на рис. 116). Разницу между глубиной моряГллв в данную
полную воду и нулем глубин называют высотой полной воды (h ПВ
на рис. 116). Таким образом, действительная глубина в момент
полной воды
Глпв = Глк + h[jB\
действительная глубина в момент малой воды
Гллтв = Глк + hMB.
Полезно знать следующие элементы прилива:
величина прилива В = hnB — Iimb\
высота среднего уровня Zo = л—
амплитуда прилива Д = -пв—^ Нмв <
201
Репер
береговая
' ь марка)
Нуль карты
Дно
а
и
Рис. 116.
Наивысший уровень, возмож-
ный по~ астрономическим условиям
ПВсз-полш сизигийная вода
Действующий уровень_______
(уровень в данный момент)
ПВкв -полная квадратурная вода
СУМ-средний уровень моря
МВкв-малая квадратурная вода
МВсз-мшя сизигийная вода
НГ-наименьший уровень,воз-
можны и по астрономическим услови-
ям (теоретический нуль глубин)
Номенклатура приливных уровней показана на рис. 116.
Промежуток времени Гр от момента tM$ наступления малой во-
ды до момента 1пв наступления полной воды называется временем
роста* т. е.
Тр = 1мв — tne', (100)
время падения
Та = 1мв — 1пв- (Ю1)
Описанные элементы прилива непрерывно изменяются вследст-
вие изменения сил, вызывающих приливы. Характер и величина
приливов в Мировом океане отличаются большим разнообразием и
сложностью. Величина прилива в океане не превышает 0,8—1,0 м.
У прямолинейных берегов и выдающихся в океан мысов величина
прилива колеблется в пределах 2—3 м; в вершинах заливов и при
сильно изрезанной береговой линии она достигает 16 м и более.
Приливно-отливные колебания уровня океана сопровождаются
горизонтальным перемещением водных масс, которое носит назва-
ние приливно-отливного течения. В открытом океане скорость та-
ких течений не превышает 0,5 узла, однако в узкостях и проливах
достигает 10 узлов и более.
Приливная волна, проникая в устья рек, способствует колеба-
нию их уровня, а также существенно влияет на скорость течения
воды в устьях. Так, нередко скорость приливного течения, преоб-
ладая над скоростью реки, изменяет течение реки на обратное.
Явление прилива может распространяться на сотни миль вверх
по течению. Сложность обстановки, с которой приходится сталки-
ваться при плавании морских судов по речным фарватерам, обя-
зывает тщательно изучить характер местных приливно-отливных
явлений. Отдельные из лих чрезвычайно опасны, но есть и такие,
использование которых приносит явную пользу. Примером может
служить постановка судов на «обсушку», широко практикуемая в
наших северных бассейнах. Практика постановки морских судов
на «обсушку» позволяет упростить грузовые операции, произво-
дить осмотры и ремонтные работы подводной части корпуса судна
и его движителей и т. п .
Существенное влияние на приливно-отливные явления оказыва-
ет погода, особенно ветры. Скорость и направление ветра тесно
связаны с изменением атмосферного давления, которое также
действует на уровень моря: при падении давления уровень повы-
шается, при росте — понижается. Резкий скачок давления вызы-
вает появление особых волн — сейш. Льды также оказывают вли-
яние на приливы, уменьшая их высоту и скорость. В некоторых
случаях льды даже изменяют характер прилива. Приливы, в свою
очередь, также влияют на ледовый режим моря: содействуют
взламыванию льдов, влияют на замерзание и вскрытие моря.
Всестороннее изучение приливно-отливных явлений имеет боль-
шое значение для безопасности мореплавания.
203
Приливно-отливные течения в отличиё от всех течений распро-
страняются на всю толщу водных масс: скорость приливно-отлив-
ного течения во всех слоях по глубине практически одинакова.
Для открытых участков океана характерны приливно-отлив-
ные течения вращательного типа. В узкостях, наоборот, приливно-
отливные течения приобретают реверсивный (возвратно-поступа-
тельный) характер, когда направления приливного и отливного те-
чений в одном и том же пункте имеют противоположные значения.
Скорость и направление приливно-отливного течения непрерыв-
но изменяются. Это усложняет учет влияния приливно-отливного
течения на путь судна и одновременно делает учет такого влияния
исключительно важным в целях безопасного мореплавания.
Элементы приливно-отливных течений обычно приводятся в
виде таблицы на морских навигационных картах, образец кото-
рой приведен в табл. 5.
Таблица 5
Время, ч А. Широта 55n34' N Долгота 6 58 W Б. Широта 55°22' N Долгота 7 04 W
Направление Скорость, узлы Направление Скорость, узлы
сз. | кв. сз. | кв.
ПОЛ - (6 880 0,5 0,2 ЗО9о 0,1 0,1
НОЙ ВОДЫ В 5 ПО 0,4 0,2 72 0,4 0,2
Дувре 4 135 0,4 0,2 77 0,8 0,4
3 171 0,3 0,2 77 1,1 1,6
2 201 0,5 0,2 80 1,0 0,6
11 219 0,6 0,3 99 0,8 0,4
Полная вода 269 0,7 0,4 130 0,4 0,2
После пол-р 299 0,7 0,4 226 0,3 0,2
ной воды в 2 333 0,7 0,4 259 0,7 0,4
Дувре 3 7 0,4 0,2 264 0,9 0,5
4 62 0,4 0,2 270 0,9 0,5
5 73 0,4 0,2 275 0,7 0,4
,6 82 0,5 0.2 291 0,2 0,1
Учет приливно-отливных явлений в судовождении. Штурман-
ские задачи, связанные с колебанием уровня. Ко-
лебание уровня моря в некоторой точке Мирового океана можно
представить в виде кривой в системе прямоугольных координат,
по осям которой откладываются высоты прилива в метрах (ось
ординат) и соответствующее им время суток в часах (осьабсцисс).
В случае близкого к правильному приливу построение такой кри-
вой без труда может быть выполнено при известных высотах пол-
ной и малой воды и моментах их наступления.1 Имея для задан-
1 Подробно см. Г. Г. Ермолаев. Судовождение в морях с приливами. М.,
«-.Транспорт», 1969.
204
ного места график прилива, предвычисление его элементов бсуг
ществляется просто и наглядно.
Пример 51. Пусть в некотором пункте, где на карте указана глубина ГЛК =
= 2,5 м, в заданную дату определены следующие элементы прилива (см. таб-
лицу):
Полные воды Малые воды
Моменты, ч, мин Высоты, м Моменты, ч, мин Высоты, м
04.58 5,2 17.25 5,4
00.06 2,5 10.51 2,1
Определить:
максимальную йтах и минимальную Amin высоты прилива;
высоту прилива в заданный момент ^зад = 12 ч 00 м;
время наступления заданной высоты прилива ^Зад = 3,5 м;
промежуток времени, в течение которого высота прилива будет не ниже йзад=
=3,5 м;
действительную глубину Гл в ?зад = 12 ч 00 мин, если указанная на карте
глубина Глк =2,5 м (см. рис. 116);
промежуток времени, в течение которого будет полностью покрыта водой
скала, если на карте она указана выступающей над водой на 3,0 м;
промежуток времени, в течение которого возможен безопасный проход ка-
тера с осадкой 0,5 м над указанной выше скалой, при обеспечении запаса во-
ды под килем не менее 1,0 м;
высоту маяка в полдень, если на карте для этого знака указана высота над
уровнем моря, равная 2,5 м.
Решение
Построение графика прилива показано на рис. 117. Основные точ-
ки I, XIII, IV > VII и X соответствуют данным таблицы. Правило нане-
сения дополнительных точек II, III, V, VIII, IX, XI, XII и ХШ видно из чер-
тежа.
Непосредственно с чертежа (см. рис. 117) получаем ответы:
^min я ^НМВ — 2,1 м; йтах = hBnB = 5,4 М\
2) Л1200 = 2,4 м;
3) ^ад = 02 ч 06 мин; ^зад = 08 ч 00 мин;
dan =* 13 ч 55 мин; = 20 ч 50 мин.
ЗаД ' ЗаД
4) От 02 ч 06 мин ж 08 ч 00 мин; от 13 ч 55 мин до 20 ч 50 мин.
5) Гл = Глк + hi 2оо = 4,9 м.
6) От 01 ч 30 мин до 08 ч 50 мин; от 13 ч 15 мин до 21 ч 40 мин.
7) От 03 ч 35 мин до 21 ч 40 мин; от 15 ч 25 мин до 19 ч 40 мин.
8) Высота маяка 5,5 м.
Как видно, решение штурманских задач на предвычисление
приливов с помощью графика возможно при известных элементах
прилива — высотах полных и малых вод и моментах их наступле-
ния. Такие элементы на заданную дату можно получить с помощью
205
различных приливных пособий, таблиц й атласов приливов и при-
ливно-отливных течений, специальных карт, сведений в лоциях и т. д.
Приливные пособия. Основным отечественным пособием
для предсказания приливов в морях СССР и зарубежных водах
являются советские Таблицы приливов.
Наиболее полным иностранным пособием для предвычисления
приливов во всех морях являются английские Адмиралтейские
Таблицы приливов. Принцип построения этих таблиц и правила
предвычисления с их помощью' приливов таков же, как и в совет-
ских Таблицах приливов.
Для ряда пунктов Мирового океана сведения в Таблицах при-
ливов отсутствуют. Для таких пунктов на морских навигационных
картах часто приводят данные, позволяющие предвычислять прили-
вы в этих пунктах: прикладной час, сизигийные и квадратурные
высоты полных и малых вод, средний уровень моря и др.
Известно, что поясное время наступления вод может быть вы-
числено по следующим формулам:
. /п в = T«p + (2k)&st + (N - k)+ ПЧпв + Д/7У; (102)
гм Тлпв
tMB = Tlp +(2)#+ (N - к)°st + ПЧмв + ЬПЧ, (103)
т*мв
rd
. п
где 7Vrp— гринвичское время кульминации Луны;
(2k)°st — поправка в минутах времени за долготу, учиты-
вающая отставание Луны от среднего Солнца на
величину около 2 мин в 1 ч (долгота выражена
в часах и его долях);
N — номер пояса;
ПЧПв и ПЧмв — прикладной час полной и малой воды соответст-
венно;
206
\ПЧ — поправка прикладного часа порта, выражающая
полумесячное неравенство по времени;
В случае, если ПЧМВ неизвестен, тогда
1мв = 1пв + Тр (или Тп), (104)
где 7Р (или 7П)=6 ч Г2 мин (приближенно).
Можно также рассчитать моменты двух последовательных пол-
ных вод. среднее арифметическое из которых будет близко ко вре-
мени наступления малой воды.
Высоты вод вычисляются по следующим формулам:
hns = Асз. пв — (Асз. пв — ккв. пв)М\ (105)
Ьмв = Лез. мв — (^сз. мв — Лкв. мв) М, (106)
где М — множитель для предвычисления высот вод и величин
прилива по величине сизигийных и квадратурных высот вод в дан-
ном месте.
Величины поправок к высотам средних сизигийных и квадра-
турных вод обычно мало отличаются между собой, т. е.
(Лез. пв — Лкв. пв) М = (Асз. мв — Лкв. мв) М.
Поэтому вместо формулы (106) часто применяют ее упрощен-
ный вид:
&мв = Лез. мв + ААсз. пв> (Ю7)
ААсз. пв = (Асз. пв — Лкв. пв)М.
Высоты вод могут быть также вычислены по формулам
А/zb = 2Z0 — Ьмв\ (108)
h-мв = 2Z0 — Алд, (109)
где Zo — средний уровень моря.
Если данные о Zo, hc3MB и ^кв.мв отсутствуют, то для прибли-
женного расчета полагают, что Нмв=0, т. е. за высоту малой воды
принимают глубину, указанную на карте.
Глава XVI
ПРОРАБОТКА ПЕРЕХОДА
§ 86. Подготовка перехода
Рейсовое задание. Основным видом технологического процесса
работы морского транспортного судна является его рейс. Судно в
своей работе руководствуется рейсовым планом-заданием, кото-
рое вручается капитану в первоначальном порту отправления или
передается на судно по радио не позднее чем за сутки до начала
рейса. Продолжительность рейса в рейсовом плане-задании
исчисляется как сумма ходового и стояночного tc времени. Ходо-
вое время зависит от протяженности рейса I и скорости судна V.
При планировании рейса длина пути I берется из специальных
таблиц морских расстояний. Однако следует иметь в виду, что в
различных по длине пути рейсах навигационные условия плавания
207
часы
Рис. 118.
также различны, а потому фактически
проходимое судном расстояние часто
отличается от табличного, так как
судоводитель выбирает курсы в за-
висимости от конкретных условий пла-
вания. Удобным пособием для быст-
рого определения времени, необходи-
мого на переход судна, может слу-
жить график (рис. 118).
Рейсовый план судна является опе-
ративным заданием, осуществление
которого за соответствующий рейсу
отрезок времени обеспечивает выпол-
нение судном календарных планов.
В рейсовый план включаются все необходимые инструктивные ука-
зания, разъясняющие и уточняющие условия проведения пред-
стоящего рейса: наименования портов назначения и последователь-
ность захода судна в них; род и количество грузов; характер гру-
зовых операций и т. п. Очень важным элементом рейсового плана
является продолжительность рейса, с указанием времени его на-
чала и окончания.
Подбор навигационных пособий на переход. Получив рейсовое
задание, на судне одновременно с прочими работами начинают
навигационную подготовку к предстоящему переходу: с помощью
Каталога карт и книг подбирают все необходимые для успешного
выполнения рейса навигационные пособия, корректируют их по
самым последним корректурным документам, изучают трассу пред-
стоящего перехода в навигационном отношении, выбирают наибо-
лее выгодные пути, производят предварительную прокладку и со-
ставляют штурманскую справку на переход.
На переход должны быть подобраны:
морские навигационные карты (генеральные, путевые, частные)
и планы;
вспомогательные, справочные и специальные карты (обзорные,
радиомаяков и радиостанций, рекомендованных путей, часовых
поясов, радионавигационные, карты-сетки, гидрометеорологические
И др.);
лоции и руководства для плавания («Океанские пути мира».
«Радиолокационные описания маршрутов», «Огни и знаки», «Ра-
диотехнические средства навигационного оборудования» и др.);
атласы;
описания и правила плавания;
общие, справочные и специальные пособия, включая «Сводное
описание районов, в которых запрещено или ограничено плавание
судов (по морям и океанам)»;
таблицы расстояний;
комплект Извещений мореплавателям.
Корректура навигационных пособий. Карты и навигационные
208
пособия, получаемые из базовой электрорадионавигационной ка-
меры, должны быть откорректированы по день их выдачи на суд-
но. Ранее имевшиеся на борту карты и пособия корректируют на
основании последних корректурных документов по день выхода
судна в рейс. В условиях плавания корректуру производят по на-
вигационным радиоизвещениям мореплавателям (НАВИМам).
В первую очередь корректируют карты и пособия для предсто-
ящего перехода. При коротких стоянках часть корректуры произ-
водят на переходе. Эта работа должна осуществляться так, чтобы
на последующие 1—2 суток перехода карты были откорректирова-
ны в предшествующие сутки.
Выбор пути. После корректуры карт и навигационных пособий
для плавания с их помощью производится проработка перехода
(изучение трассы в навигационном отношении) и составляется
штурманская справка. Если стоянка непродолжительна, прораба-
тывается только часть рейса, а остальная работа проводится в
море. В штурманской справке в достаточной мере должны быть
отражены следующие вопросы:
гидрометеорологические условия плавания: видимость, тума-
ны, господствующие ветры, штили и штормы, постоянные и дрей-
фовые течения, приливы и приливно-отливные течения, ледовая
обстановка и т. д.;
навигационная обстановка перехода: общая длина пути, ха-
рактеристика береговой черты, надводные и подводные опасности,
запретные и опасные районы, средства навигационного оборудова-
ния, приметные пункты и радиолокационные объекты, условия под-
хода к портам захода и якорным стоянкам, портовые правила ит. д.
Особенно подробно должны быть отмечены:
наименьшие глубины, встречающиеся на пути следования;
описания всех опасностей (банок, рифов, мелей и т. д.), распо-
ложенных вблизи курсов судна;
расстояния от опасностей до курса следования судна и при-
знаки приближения к таким опасностям (ограждающие пеленги,
горизонтальные и вертикальные углы опасности, опасные радио-
локационные расстояния);
наиболее выгодное и безопасное расположение курсов при раз-
личных гидрометеорологических условиях в соответствии с указа-
ниями лоций;
наиболее удобное время для прохода опасных мест;
возможности получить уверенные обсервации и рекомендации
по оптимальным способам определения места судна. (При под-
боре способов определения места судна в первую очередь
учитывают его точность, возможность контроля правильности опо-
знания ориентира, измерений и прокладки их результатов на карте,
а также трудоемкость способа. Важно также учитывать возможно-
сти для исключения систематических и уменьшения случайных
ошибок измерений);
мероприятия для обеспечения безопасного перехода;
209
если трасса предстоящего перехода включает океанский пере-
ход, то в штурманской справке должны быть отражены рекомен-
дации по выбору наивыгоднейшего пути в океане.
Описания особо опасных моментов должны быть отмечены в
штурманской справке красными чернилами или красным каранда-
шом.
Предварительная прокладка. Штурманская справка должна
быть проработана всем судоводительским составом судна. На ос-
новании этой справки выполняют предварительную прокладку.
При ее осуществлении вновь подсчитывают и корректируют общую
длину пути, необходимую для точного определения потребного
количества топлива, воды и запасов продовольствия, сопоставля-
ют ее с данными таблицы расстояний, уточняют продолжительность
рейса с учетом захода в промежуточные порты. Здесь же, измеряя
длину отдельных участков пути, рассчитывают моменты подхода к
основным точкам поворотов, время прохода особо опасных мест
трассы, вычисляют моменты и пеленги открытия основных маяков
и прохождения их траверзов, предполагаемые расстояния до бере-
говых объектов. Для районов действия приливно-отливных явлений
заранее предвычисляют уровни воды и элементы приливно-отлив-
ных течений.
Для удобства использования предварительных расчетов в даль-
нейшей работе их желательно сводить в табличную форму.
Принцип отыскания наивыгоднейшего пути в океане заклю-
чается в следующем.
За основу для расчетов принимают рекомендации руководства
«Океанские пути мира». Приводимую в этом пособии трассу по
точкам переносят на генеральную карту. Влияние гидрометеоро-
логических (течения, волнение, ветры, льды) и других факторов,
имеющих место в сезон конкретного перехода, могут оказаться
отличными от средних и столь неблагоприятными, что выгода при
плавании по рекомендованному пути окажется совсем незначи-
тельной либо даже отрицательной. Наивыгоднейший путь может
быть найден лишь с помощью достоверной карты текущей синоп-
тической обстановки на трассе перехода, карты волнения с глав-
ными элементами высотой и фронтом океанской волны,- .а так-
же достоверного прогноза всех этих гидрометеорологических эле-
ментов на 2—3 суток вперед. Такая задача может быть решена
только непосредственно на переходе.
Кроме этого, для решения задачи плавания по наивыгоднейше-
му пути необходимо иметь достаточные данные о зависимости ско-
рости судна от высоты и "направления волны относительно курса
судна и его дрейфа от ветра.
§ 87. Осуществление перехода
Исполнительная прокладка. Во время перехода стремятся воз-
можно точнее придерживаться выбранного при предварительной
21Q
прокладке маршрута. Однако из-за несовершенства морёхоДнЫХ
инструментов, влияния гидрометеорологических ц многих других
факторов судно не будет точно следовать по курсам предваритель-
ной прокладки. Поэтому на переходе ведут исполнительную про-
кладку. Во время такой прокладки окончательно выбирают курсы
судна, уточняют и увязывают его с конкретной обстановкой в мо-
мент прохождения того или иного участка пути. Техника ведения
исполнительной прокладки описана ранее в § 25. Дополним ее не-
которыми рекомендациями с точки зрения лоции.
При ведении исполнительной прокладки наносимые на карту
и отмечаемые на линии пути судна точки обозначаются условны-
ми знаками, предусмотренными пособием «Навигационно-гидро-
графическая терминология, условные знаки и сокращения».
При плавании вблизи берегов, в сложных в навигационном
отношении районах, необходимо пользоваться картой самого
крупного масштаба. При плавании в узкостях по створам следу-
ет заблаговременно намечать точки поворотов с учетом радиуса
циркуляции, чтобы не сойти со створной линии. Все точки поворо-
тов при плавании вблизи берегов и в узкостях должны фиксиро-
ваться пеленгами береговых объектов. Если при плавании учиты-
вается дрейф, необходимо ежечасно наблюдать скорость и направ-
ление ветра, а при их изменении немедленно докладывать капитану.
При плавании на приливно-отливном течении его элементы
учитывают ежечасно, как дополнительный курс. Если по условиям
плавания неучет сноса судна приливно-отливным течением за
один час опасен, тогда предварительно рассчитывают поправки на
течение на каждый час с последующим расчетом истинного курса,
обеспечивающего следование судна по выбранному и проложенно-
му на карте пути? Режим плавания и безопасность судовождения
современных морских судов еще в значительной степени зависят от
погоды и состояния моря. Пренебрежение учетом гидрометеороло-
гических условий плавания может привести к значительным ошиб-
кам в счислении, а в отдельных случаях — к авариям судов.
Только в случае, если на судне должным образом поставлена
гидрометеорологическая служба (внимательное изучение информа-
ции, поступающей от станций, обслуживающих мореплавателей,
ее анализ судоводителями, ведутся необходимые судовые гидроме-
теорологические наблюдения), можно своевременно реагировать на
такие серьезные явления, как ураганы, дрейфовые течения, сгонно-
нагонные колебания и т. п. При выходе в океан судно придержи-
вается выбранной при подготовке к переходу трассы.
Понятие о плавании по наивыгоднейшему пути. Время, необ-
ходимое для перехода судна из одной точки в другую и определяю-
щее экономический результат работы судна, зависит от длины вы-
1 Подробно см. Г. Г. Ермолаев. Судовождение в морях с приливами.
М., «Транспорт», 196$.
211
бранного пути, навигационных й гидрометеорологических условий
на переходе, а также от способов судовождения и управления судном?
Ветер силой более 4 баллов, независимо от его направления,
вызывает уменьшение скорости судна и, следовательно, увеличи-
вает время его перехода. Даже быстроходные пассажирские суда
при встречном ветре 20—25 м!сек теряют 30—40% скорости. Сред-
ние же суда при встречном ветре до 12 м!сек теряют 14% скоро-
сти, при встречном ветре до 18 м1сек — 47%, а при встречном вет-
ре до 25 м!сек— почти 100% скорости. Кроме непосредственного
влияния на корпус судна и его настройки, ветер вызывает уменьше-
ние скорости судна создаваемым ветром волнением и дрейфовым
течением. Известно, что сильные ветры 30—50 м!сек. а в тропиче-
ских ураганах до 100 м1сек и более вызывают штормовые йолны,
высота которых в отдельных случаях достигает 20 м, однако уже
при высоте волнения 6—8 м скорость судна уменьшается на
43—64% (в зависимости от фронта волны и типа судна).
В условиях шторма судно испытывает сильную качку; возни-
кает угроза смещения груза. Сильное и длительное волнение моря
наносит порой значительные повреждения корпусу, надстройкам
и оборудованию судна. В отдельных случаях штормовые волны
являются основной причиной гибели морских судов.
Кроме потери скорости, волнение вызывает несимметричное
рыскание и уклонение судна с курса.
Перечисленное выше указывает на необходимость иметь на суд-
не документы, отражающие зависимость скорости данного судна от
высоты волн и направления их распространения относительно
курса судна (курсового угла волнения). Такая зависимость может
быть получена на основании статистической обработки результа-
тов массовых наблюдений. На рис. 119 приведен образец подоб-
ного документа, на котором кривые, соответствующие различным
И узлы
17
16
15
12
11
10
3
курсовым углам волнения (</°),
позволяют в зависимости от
высоты волн определить ско-
рость судна.
Постоянные и приливно-от-
ливные течения, туманы, льды
и мелководные районы на пере-
ходе могут также вызвать
серьезные затруднения, увели-
чить время перехода, а в от-
м дельных случаях явиться непо-
средственной причиной серьез-
ных повреждений.
Способы судовождения и управления судном на переходе самым
непосредственным образом влияют на протяженность пути и время
перехода. Так, одно только внедрение на судах морского флота ги-
рокомпасов, авторулевых, радионавигационных систем и других
современных технических средств судовождения дало до 0,8% со-
212
Рис. 119.
крйЩенйя Протяженности пути морских судов. Значительные резер-
вы в экономии времени перехода заложены в выборе такого пути,
трасса которого не перегружена потоком встречных судов и судов,
пересекающих такую трассу.
Наиболее полный учет всех таких факторов, определяющих
плавание наивыгоднейшими путями, возможен только с внедрени-
ем автоматизации судовождения. В настоящее время работы в
этом -направлении ведутся широким фронтом: от средств и мето-
дов частичной автоматизации уже переходят к комплексной авто-
матизации управлением движения судна. Переход к автоматизи-
рованному судовождению не изменяет традиционных методов на-
вигации. Обладая принципиально новыми способами обработки
навигационных измерений, позволяющими быстро и точно проана-
лизировать конкретную обстановку и выдать оптимальный совет,
автоматизация судовождения позволит практически осуществлять
плавания морских судов по наивыгоднейшим путям со всеми вы-
текающими из такого плавания экономическими и другими преи-
муществами.1
Навигационный анализ рейса. После завершения перехода не-
обходимо произвести тщательный разбор прошедшего рейса. При
таком анализе обычно разрабатывают следующие вопросы:
какие невязки в счислении пути наблюдались в прибрежном
плавании, в открытом море и океане; число миль, проходимых за
сутки на различных участках пути, и величина сноса на них; на-
блюдались ли случаи сноса в сторону опасных в навигационном
отношении районов;
точность навигационных, астрономических и радиотехнических
определений места судна на переходе;
точность учета дрейфа и течения (по предварительной про-
кладке и фактически); оправдываемость предвычислений приливов
и приливно-отливных течений;
оправдываемость прогнозов погоды, передаваемых различными
станциями;
оправдываемость предварительной прокладки на различных
участках пути; отклонения и их причины;
случаи расхождения фактической навигационной обстановки
с опубликованной;
характеристика работы гирокомпаса, магнитных компасов, ла-
га, эхолота, радиопеленгатора, радиолокационной станции, при-
боров радионавигационных систем; особо отмечается дальность
открытия и конфигурация берегов на экране радиолокатора; '
обеспечили ли карты и другие навигационные пособия полно-
ту сведений, необходимых для безопасности мореплавания.
Кроме общей оценки перехода, важно также определить сте-
пень подготовленности каждого судоводителя и устранить установ-
ленные недочеты в их работе.
1 Подробно см. А. А. Якушенков и др. Автоматизация судовождения.
М., «Транспорт», 1967.
213
РАЗДЕЛ ЧЕТВЕРТЫЙ
ТЕХНИЧЕСКИЕ СРЕДСТВА СУДОВОЖДЕНИЯ
Глава XVII
ЭЛЕКТРОНАВИГАЦИОННЫЕ ПРИБОРЫ
§ 88. Классификация технических средств
судовождения
Совокупность электроаппаратуры, предназначенной для опре-
деления направления, скорости и пройденного судном относитель-
но Земли расстояния, принято называть электронавигацион-
н ы м и приборами. В соответствии с основным назначением эти
приборы подразделяются на три основные группы:
приборы для определения направлений в море, использующие
свойства гироскопа (гироскопические компасы, гироазимуты и
др.); автоматические устройства, обеспечивающие современное су-
довождение — автоматические счислители, прокладчики и рулевые
(авторулевые);
приборы для измерения глубины и обнаружения подводных
препятствий, базирующиеся на свойстве акустических колебаний
при распространении их в воде отражаться от различных объектов
(эхолоты, гидролокаторы);
приборы для измерения скорости и проходимого судном рас-
стояния, основанные на различных физических принципах, в со-
ответствии с которыми современные лаги разделяются на ги-
дродинамические, инерционные и вертушечные.
Вторая составная часть технических средств судовождения —
радионавигационные (радиотехнические) средства —
представляет собой совокупность радиоэлектронной аппаратуры,
предназначенной для решения следующих навигационных задач:
определение места судна в море; навигационное обеспечение бе-
зопасности плавания вблизи берегов, в узкостях и по фарватерам;
обнаружение надводных опасностей; обеспечение расхождения су-
дов в море и регулирование движения на портовых акваториях и
др. Среди радиотехнических средств (РТС) также можно выде-
лить три основные группы:
азимутальные, позволяющие определять направление на ис-
точник излучения радиоволн (радиопеленгаторы, радиомаяки на-
правленного действия);
дальномерные и разностно-дальномерные, позволяющие опре-
214
делять место судна с высокой степенью точности на больщих рас-
стояниях («Лоран», «Декка», «Сайтак», «Шоран» и др.);
азимутально-дальномерные (полярные), позволяющие изме-
рять направление и расстояние до объекта, отражающего радио-
волны (радиолокаторы различных систем и назначения).
§ 89. Свободный гироскоп и его основные
свойства
г .
Рис. 120.
Все навигационные гироскопические приборы, применяемые
для указания направлений в море, используют свойства свобод-
ного гироскопа.
Гироскопом называется быстро вращающееся вокруг своей оси
симметрии тело, причем ось, вокруг которой происходит враще-
ние, может изменять свое положение в
пространстве. Гироскоп представляет
собой массивный диск, который прак-
тически во всех современных навига-
ционных приборах приводится во вра-
щение электрическим путем, являясь
ротором электродвигателя.
Возможность изменения положения
оси вращения гироскопа в пространст- *
ве можно осуществить с помощью
карданных колец (рис. 120). Подве-
шанный таким образом гироскоп по-
лучает возможность поворачиваться
вокруг следующих трех взаимно пер-
пендикулярных и пересекающихся в
одной точке О осей: оси вра-
щения X—X самого гироскопа, называемой главной осью или осью
собственного вращения, оси вращения Y—Y внутреннего кольца,
оси вращения Z—Z наружного кольца подвеса.
Гироскоп, у которого возможны вращения вокруг трех указан-
ных осей, называется гироскопом с тремя степенями свободы.
Точка пересечения этих осей называется точкой подвеса гироскопа.
Гироскоп с тремя степенями свободы, у которого центр тяжес-
ти всей системы, состоящей из ротора и карданных колец, совпада-
ет с точкой подвеса, называется уравновешенным, или ас-
татическим, гироскопом.
Уравновешенный гироскоп, к которому не прикладываются
внешние вращающие моменты, называется свободным гиро-
скопом.
Свободный гироскоп благодаря быстрому вращению приобрета-
ет свойства, широко используемые во всех гироскопических при-
борах. Основными свойствами свободного гироскопа являются
свойства устойчивости и прецессии.
215
Первое состоит в том, что главная ось свободного гироскопа
стремится сохранить первоначально заданное ей направление
относительно мирового пространства. Устойчивость главной оси
тем больше, чем точнее центр тяжести системы совпадает с точ-
кой подвеса, чем меньше силы трения в осях карданова подвеса
и чем больше вес гироскопа, его диаметр и скорость вращения.
Величина, которая характеризует гироскоп с этой качественной
стороны, называется кинетическим моментом гироскопа и опреде-
ляется произведением момента инерции гироскопа на его угловую
скорость вращения, т. е.
H = IQ, (НО)
где I— момент инерции ротора гироскопа;
Q — угловая скорость вращения.
При конструировании гироскопических приборов стремятся до-
стигнуть значительной величины кинетического момента Н путем
придания ротору гироскопа
особого профиля, а также
путем увеличения угловой
скорости его вращения. Так,
в современных гирокомпасах
роторы гиромоторов имеют
скорость вращения от 6000
до 30 000 об]мин.
Устойчивость оси свобод-
ного гироскопа дает возмож-
ность использовать его в ка-
честве прибора для обнару-
жения суточного вращения
Земли, так как по отноше-
нию к земным предметам ось
гироскопа будет совершать
кажущееся или видимое дви-
жение.
Впервые это свойство гироскопа демонстрировалось известным
французским физиком Леоном Фуко в 1852 г. Ему же принадлежит
идея использования гироскопа в качестве прибора для определе-
ния направления движения и для определения широты судна в
море.
Свойство прецессии состоит в том, что под действием силы,
приложенной к кардановым кольцам, главная ось гироскопа пере-
мещается в плоскости, перпендикулярной к направлению действия
силы (рис. 121).
Такое движение гироскопа называется прецессионным. Прецес-
сионное движение будет происходить в течение всего времени дей-
ствия внешней силы и прекращается с прекращением ее действия.
Направление прецессионного движения определяется с помощью
правила полюсов, которое формулируется следующим образом: при
215
приложений к гироскопу момента внешней силы полюс гироскопа
кратчайшим путем стремится к полюсу силы. Полюсом гироскопа
называется тот конец его главной оси, со стороны которого враще-
ние гироскопа наблюдается происходящим против часовой стрелки.
Полюсом силы называется тот конец оси гироскопа, относи-
тельно которой приложенная внешняя сила стремится повернуть
гироскоп против часовой стрелки.
На рис. 121 прецессионное движение гироскопа указано
стрелкой.
Угловая скорость прецессии может быть подсчитана по фор-
муле
ш₽=4, (in)
где L — момент внешней силы;
Н — кинетический момент гироскопа.
§ 90. Основы теории гирокомпаса
Превращение свободного гироскопа в гирокомпас. Если глав-
ную ось свободного гироскопа установить в плоскости меридиана,
то с течением времени, вследствие вращения Земли, она будет
уходить из этой плоскости, совершая относительно нее видимое
движение (рис. 122).
Видимое движение точки S,
обусловленное вращением Зем-
ли, будет совершаться по мало-
му кругу So S Sj, при этом глав-
ная ось гироскопа описывает
конус вокруг оси PN, Ps.
Таким образом, свободный
гироскоп не может быть ис-
пользован в качестве курсоука-
зателя по следующим причи-
нам:
главная ось гироскопа, опи-
сывая конус вокруг оси мира,
совершает колебание около
плоскости меридиана;
свободный гироскоп не обладает направляющей силой, т. е.,
будучи отклоненным от плоскости меридиана, он не возвращается
к ней.
Для того, чтобы превратить свободный гироскоп в гирокомпас,
необходимо сообщить ему направляющий момент, который удер-
живал бы его главную ось в плоскости меридиана, подобно тому,
как магнитный момент стрелок магнитного компаса удерживает
картушку компаса в плоскости компасного меридиана.
Направляющий момент приобретается гироскопом благодаря
217
Ограничению одной из трех степеней свободы — степени свободы по
оси У—У.
Наиболее простой способ этого ограничения — смещение цент-
ра тяжести гироскопа ниже точки подвеса.
Гирокомпас, у которого центр тяжести расположен ниже его
точки подвеса, называется маятниковым гирокомпасом.
Гироскопическая система (гироскоп и его подвес) — основной
элемент гирокомпаса,
она реагирует на зем-
z
ное вращение и поэто-
му называется чувст-
вительным элементом.
Рассмотрим прин-
цип действия маятни-
кового гирокомпаса, у
которого чувствитель-
ный элемент состоит
из одного гироскопа.
На рис. 123 изобра-
жен вид на Землю со
стороны северного по-
люса (плоскость зем-
ного экватора совпа-
дает с плоскостью чер-
тежа).
Допустим, что гироскоп находится на экваторе и в начальный
момент главная ось гироскопа горизонтальна и направлена в пло-
скости восток — запад. Центр тяжести чувствительного элемента,
вес которого P=Mg смещен вниз от точки подвеса О на величи-
ну а, называемую метацентрической высотой.
Момент силы тяжести чувствительного элемента относительно
точки подвеса О называется маятниковым моментом.
В начальном положении маятниковый момент равен нулю, так
как направление силы тяжести проходит через точку под-
веса.
С течением времени Земля повернется на некоторый угол 0,
и гироскоп окажется в новом положении.
При этом главная ось гироскопа, стремясь сохранить первона-
чальное заданное ей направление, отклонится от вращающейся в
пространстве плоскости горизонта на тот же угол 0.
В этом положении направление силы тяжести не пройдет че-
рез точку подвеса, и к гироскопу прикладывается некоторый ма-
ятниковый момент
Л у = Ра sin 0 = Mg а sin 0 = 5sin0, (112)
где B=Mga — модуль маятникового момента гироскопа.
Этот момент направлен на оси у—у. Под действием маятнико-
вого момента возникает прецессионное движение гироскопа вокруг
218
оси z—z. Согласно правилу полюсов, полюс гироскопа будет дви-
гаться к полюсу Земли Pn, т. е. к плоскости меридиана. Угловая
скорость этой прецессии соР= 0.
Следовательно, гироскоп, у которого центр тяжести находится
ниже точки подвеса, принципиально превращается в гирокомпас.
При отклонении гироскопа от плоскости меридиана у него по-
является направляющий момент, стремящийся привести его глав-
ную ось в плоскость меридиана.
Значение направляющего момента определяется формулой
R = I cos ср sin а, (113)
где /2 — кинетический момент гироскопа;
to cos <р — горизонтальная составляющая земного вращения;
а — угол отклонения полюса гироскопа от плоскости меридиана;
о)£ — угловая скорость вращения Земли, равная 7,3-1СГ5 рад/сек.
Направляющий момент достигает максимального значения на
экваторе при отведении главной оси гироскопа от меридиана на
90°. С увеличением широты направляющий момент уменьшается и
на полюсе обращается в нуль. Поэтому на полюсе гирокомпас ра-
ботать не может.
В гирокомпасах типа «Курс», используемых на судах морского
флота, чувствительный элемент представляет собой герметически
закрытый шар, называемый гиро-
сферой. Подвес гиросферы в под-
держивающей жидкости обеспе-
чивает ей возможность вращения
вокруг всех трех осей.
Для предупреждения вредного
влияния качки гироскопическая
система гиросферы состоит из
двух гироскопов (рис. 124). Гиро-
скопы 2 расположены внутри ги-
росферы под углом 90° друг к
другу и под углом 45° к оси х (ли-
нии N—S гиросферы). Гироскопы
скреплены кривошипами 1, свя-
заны между собой спарником 3, а
с оболочкой гиросферы — пружи-
нами 4 и могут вращаться вокруг
х
Рис. 124.
своих вертикальных осей. При изготовлении гиросферы подбирают
гироскопы, у которых кинетические моменты и Н2 одинаковы.
Суммарный кинетический момент, создаваемый вращающимися
роторами гиромоторов, направлен по оси x(N—S гиросферы) и
определяется по формуле
Нт =2/£2 cos 45° = /2/2 = 1,4172. (114)
219
Благодаря указанному соединению гироскопов между собой
поведение гиросферы при вращении Земли будет аналогично по-
ведению чувствительного элемента одногироскопного маятниково-
го гирокомпаса.
Незатухающие и затухающие колебания гирокомпаса. Подроб-
ные исследования движения главной оси чувствительного элемен-
та гирокомпаса после того, как он прецессионным движением на-
чал стремиться к плоскости меридиана, показывают, что главная
. ось гирокомпаса будет совершать
м
Рис. 125.
и
так называемые незатухающие ко-
лебательные движения около ме-
ридиана. Траектория движения
представляет собой сильно сжатый
эллипс (рис. 125). Принципиально
это уже и есть гирокомпас, так как
положением равновесия чувстви-
тельного элемента является плос-
кость истинного меридиана ММ.
Однако гирокомпас, совершающий незатухающие колебания
около меридиана, не пригоден для использования в качестве кур-
соуказателя на судах.
Для того чтобы гирокомпасом можно было пользоваться для
целей навигации, необходимо, чтобы главная ось чувствительного
элемента гирокомпаса постоянно находилась в плоскости мериди-
ана.
Это достигается в современных гирокомпасах путем гашения
незатухающих колебаний с помощью специальных устройств, в
результате чего незатухающие колебания превращаются в зату-
хающие.
Девиация гирокомпаса. Мы рассмотрели работу гирокомпаса
без учета движения судна. На движущемся судне главная ось ги-
рокомпаса отклоняется по тем или иным причинам от истинного
меридиана. Это отклонение называется девиацией гирокомпаса.
§ 91. Технические данные и особенности
конструкции гирокомпаса «Курс-4»
Гирокомпас «Курс-4» является двухгироскопным маятниковым
гирокомпасом, чувствительный элемент которого (гиросфера) для
уменьшения вредного влияния сил трения в подвесе помещен в
поддерживающую жидкость.
В расчетной широте 60° период незатухающих колебаний равен
84,3±5 мин; точность показаний ±Г,0; время прихода в меридиан
2,5—6 ч. Точность отработки следящей системы 0°,2; время отра-
ботки следящей системы при рассогласовании на 90° равно
20 сек±2 сек; рабочая температура токопроводящей поддержива-
ющей жидкости 37^41°; питание агрегата гирокомпаса осущесТ'
220
вляется от судовой сети переменного трехфазного тока напряже-
нием 220—380 в, частотой 50 гц. агрегат преобразует этот ток в
переменный напряжением 120 в и частотой 330 гц; стабилизация
частоты обеспечивается регулятором типа БРЧ-201 при колебани-
ях судового напряжения ±20 в; мощность, потребляемая установ-
кой при нормальной работе, 1 кет. в начале пуска — 2 кет.
Гирокомпас может быть на-
гружен восемью принимающи-
ми приборами.
В состав комплекта гиро-
компаса входят следующие
приборы:
прибор 1М — основной
компас (рис. 126), в котором
расположены:
гироскопическая система,
создающая направляющий мо
мент, ориентирующий ее в
плоскости меридиана (чувст-
вительный элемент);
следящая сфера, обеспечи-
вающая подвод питания ко
всем электрическим узлам ги-
росферы, измерение курса
центрирование гиросферы;
внешние или неподвижные
части гирокомпаса — нактоуз
с карданным подвесом, резер-
вуар с поддерживающей жид-
костью, «стол» с приборами
Рис. 126.
системы охлаждения, конт-
рольными приборами и корректором скоростной погрешности;
прибор 4Д — пусковой прибор, предназначенный для подачи
питания в установку, разветвления и защиты электрических ли-
ний, контроля величины токов, потребляемых чувствительным
элементом и следящей системой;
прибор 9Б — трансляционно-усилительный прибор, предназна-
ченный для усиления и отработки сигнала рассогласования следя-
щей системы и передачи курса принимающим сельсинам;
прибор ЮМ — сигнальный прибор, служащий для подачи зву-
кового сигнала об отклонении температуры токопроводящей жид-
кости от нормальной и визуальных сигналов, показывающих не-
нормальную работу следящей системы;
прибор 12М — помпа охлаждения, осуществляющая циркуля-
цию воды в системе охлаждения гирокомпаса;
прибор 18 — двухмашинный агрёгат, который преобразует
трехфазный ток судовой сети напряжения 220—380 е, 50 гц в
трехфазный ток напряжением 120 et 330 гц;
2?1
прибор 34 — штурманский пульт, в котором располагаются ме-
ханизмы указания и записи курса, механизм дистанционного
управления корректором и комплект измерительных приборов и
сигнальных ламп;
приборы 19А — репитеры для пеленгования;
прибор ЗУ-2 — защитно-разветвительное устройство репитеров.
В комплект также входят пелорусы для установки репитеров на
мостике судна.
Чувствительный1 элемент гирокомпаса «Курс-4» представляет
собой герметически закрытый шар диаметром 252 мм (рис. 127),
внутри которого находятся два гиромотора /, катушка электромаг-
нитного дутья 2 и успокоитель 3 с реле выключателем затуха-
ния 4.
Гиросфера состоит из двух латунных полусфер, покрытых эбо-
нитом, за исключением токопроводящих мест, которые покрывают-
ся графито-эбонитом.
В экваториальной части гиросферы нанесены деления от 0 до
360° через каждые 1°, служащие для отсчета курса.
Следящая система гирокомпаса состоит из следящей сферы,
реверсивного .двигателя, датчика и азимут-мотора.
Следящая сфера (рис. 128) состоит из следующих частей: сле-
дящих чаш Л 2, токопроводящих колец 3, держателя со стержня-
ми 4, коллектора 5 и комплектующих деталей. В экваториальной
222'
области следящей сферы расположёны семь распорйЫх кблойок
и семь смотровых стекол. На смотровых стеклах, служащих для
наблюдения за положением гиросферы, нанесены голубые риски.
§ 92. Эксплуатация гирокомпаса
На судне гирокомпас устанавливают в хорошо защищенных
от проникновения вода, угольной пыли, копоти и дыма помеще-
ниях. Желательно, чтобы гирокомпас находился возможно ближе
к центру тяжести и в диаметральной плоскости судна. Допускает-
ся смещение от центра
тяжести в нос или кор-
му не более чем на
30—40 м, смещение от
диаметральной плоско-
сти — не более 3—4 м.
Основной прибор 1М
должен быть установ-
лен так, чтобы курсо-
вая черта его была па-
раллельна диаметраль-
ной плоскости судна.
Для обеспечения
нормального теплового
режима гирокомпаса
гиропост должен быть
оборудован подводом
воды из пожарной и
санитарной магистрали
к змеевику помпы
(прибор 12М) с расче-
том циркуляции по
этому змеевику за-
бортной воды со ско-
ростью 90 л в 1 ч в
умеренном климате и
180 л в 1 ч в тропиках.
Перед пуском гирокомпаса надо проверить наличие предохра-
нителей в приборе 4Д и в разветвительных коробках; отключить
мотор помпы охлаждения снятием предохранителей 15, 16 и 17 в
приборе 4Д. Затем проверить готовность основного прибора к
пуску. Особое внимание следует обращать на количество поддер-
живающей жидкости в резервуаре. Выключатель следящей систе-
мы в приборе 9Б ставят в положение «Выключено», проверяют
уровень дистиллированной воды в помпе и в случае необходимо-
сти долить до красной риски водомерного стекла.
В штурманском приборе проверяют наличие чернил и бумаги
в курсографе. Все репитеры согласовывают с прибором 1М.
223
Пуск гирокомпаса осуществляется включением однофазного
тока в приборе 4Д, а затем включением в том же приборе выклю-
чателя судовой сети трехфазного тока. После пуска необходимо
проверить соответствие пусковых и рабочих токов в линиях гиро-
моторов и следящей системы, включить следящую систему, про-
верить работу корректора и механизма дистанционного управле-
ния корректором. После достижения температуры поддерживаю-
щей жидкости 37°С поставить в приборе 4Д в гнездо предохра-
нитель 73. Убедившись, что ревун дает сигнал при температурах
37 и 41°С, вставить предохранители 15, 16 и 17 в цепи двигателя
помпы. Через 3—4 ч после запуска проверить положение чувст-
вительного элемента по высоте. После прихода гирокомпаса в
меридиан определить его поправку.
Для остановки гирокомпаса нужно:
выключатель следящей системы поставить в положение «Вы-
ключено»; ..
снять питание трехфазного переменного тока судовой сети;
после остановки ротора генератора снять питание однофазно-
го тока.
Точность и устойчивость гирокомпаса в меридиане проверяют
путем сличений его показаний с магнитным компасом, а также
путем определения поправки гирокомпаса.
Обслуживание прибора находится в ведении четвертого по-
мощника капитана или специального квалифицированного спе-
циалиста.
• Технический уход за гирокомпасом в рейсе предусматривает
ежедневное наблюдение за температурой поддерживающей жид-
кости, положением гиросферы по высоте и показаниями контроль-
ных и измерительных приборов. Ремонт производится с разреше-
ния капитана.
§ 93. Приборы, работающие от гирокомпаса
Репитер — прибор, повторяющий показания основного при-
бора гирокомпаса. Репитеры устанавливают в различных местах
судна, где необходимо иметь курсоуказание: на главном мостике,
в рулевой и штурманских рубках, в каюте капитана. Репитер име-
ет две картушки, изготовленные из матового стекла. Внутренняя
картушка точных отсчетов градуирована на 10° через 0°,1, внеш-
няя картушка грубых отсчетов разбита на 360° через Г.
Курс о граф (рис. 129)—прибор, записывающий курс судна
на бумажной ленте в течение рейса. Чтобы прочесть запись кур-
са на(ленте курсографа, необходимо сначала по записи четверто-
го пера определить четверть, в какой располагается курс судна,
затем по шкале, соответствующей четверти, прочесть курс, запи-
санный курсовым пером в правой части ленты.
На рис. 129 введены следующие обозначения:
1 — синхронный двигатель; 2 — передача к ведущему валу; 3 — перья;
224
4 — рычаг четвертного пера; 5 — барабан; 6 — каретка; 7 — держатель кур-
сового пера; 5 — диск; 9 — передаточные шестерни; 10 — самосин; 11 — ве-
дущий вал; 12 — подающий вал; 13 — пружинный тросик; 14 — навивающий
вал; 15 - бумажная лента.
Автоматический рулевой (рис. 130)—прибор для ав-
томатического удержания судна на заданном курсе. Для судов
морского флота, оснащенных гирокомпасами типа «Курс», отече-
ственная промышленность выпускает электромеханические бес-
контактные рулевые АБР и АР.
Рис. 129.
Рис. 130.
Опыт эксплуатации авторулевых показал, что точность удер-
жания судна на курсе в автоматическом режиме на 40% выше,
чем при ручном управлении, а эксплуатационная скорость судна
повышается на 2—3%. Авторулевой освобождает матроса от бес-
прерывного наблюдения за картушкой компаса, повышает точ-
ность судовождения и уменьшает износ рулевой машины.
На рис. 130 введены следующие обозначения:
1 — штурвал следящего управления; 2 — регулятор освещения шкал; 3 —/
регулятор коэффициента обратной связи (КОС); 4 — переключатель режимов
работы «следящее-автомат»; 5 — картушка грубого отсчета репитера; 6 — ка-
ртушка точного отсчета репитера; 7 — индекс градусных поправок; 8 — аксио-
метр заданного положения руля; 9 — регулятор тахометра; 10 — рукоятка
8—933 225
согласования Шкал репитера; 11 — регулятор звукового сигнала; 12 — регуля-
тор освещения сигнальных ламп; 13 — усилитель; 14 — выключатель питания
схемы; 15 — рукоятка загрубления усилителя; 16 — переключатель видов уп-
равления.
§ 94. Магнитный компас и его эксплуатация
К техническим средствам, служащим для определения основ-
ных направлений в море, относятся также магнитные компасы.
В магнитных ( компасах используют свойство намагниченной
стрелки располагаться вдоль магнитных силовых линий магнит-
ного поля Земли в направлении север—юг. На судне на магнитную
стрелку, кроме магнитного поля Земли, действуют магнитные
поля, создаваемые судовым железом и электроустановками. По-
этому магнитная стрелка компаса, установленного на судне, бу-
дет располагаться в так называемом компасном меридиане.
Простота устройства, автономность, постоянная готовность к
действию и малые размеры — преимущества магнитного компаса
по сравнению с гироскопическим.
Но показания магнитного компаса необходимо исправлять
поправкой, величина и знак которой изменяются в зависимости
от курса судна, местоположения его на земной поверхности и
других причин. В высоких широтах точность показаний магнитно-
го компаса уменьшается, а в районе магнитного и географическо-
го полюсов Земли он вообще перестает действовать.
Все суда морского флота снабжаются морскими магнитными
127-миллиметровыми (5-дюймовыми) компасами (рис. 131).
Основными частями компаса являются: котелок 1 с картушкой,
нактоуз 2, пеленгатор 3 и девиационный прибор 4.
Котелок (рис. 132) представляет собой латунный цилиндри-
ческий резервуар, разделенный на две камеры, которые сообща-
ются между собой. В верхней камере 1 помещается картушка
компаса, нижняя 2 служит для компенсации изменения объема
компасной жидкости при колебаниях температуры окружающего
воздуха.
В качестве компасной жидкости употребляется раствор этило-
вого спирта (43% по объему) в дистиллированной воде, замер-
зающей при температуре —26°С. Для уменьшения колебаний ко-
телка во время качки к нижней части его корпуса прикреплена
латунная чашка со свинцовым грузом 5.
Котелок снабжен кардановым кольцом, которое позволяет
сохранять в горизонтальном положении азимутальное кольцо ко-
телка.
Картушка (рис. 133)—главная часть компаса, состоит из
системы магнитных стрелок 1, поплавка 2, агатовой топки 3, вин-
та для крепления топки 4, шести кронштейнов 6, поддерживаю-
щих слюдяной диск 5, на который наклеивается бумажный диск,
разделенный на румбы и градусы.
226
Рис. 131.
Рис, Л 32.
8*
Пеленгатор — специальное приспособление для определе-
ния направлений на видимые предметы и небесные тела. Он со-
стоит из основания, предметной и глазной мишеней и чашки для
дефлектора.
Нактоуз изготовляется из силумина. Основные части нак-
тоуза: корпус, верхнее и нижнее основания, амортизирующий под-
z вес, девиационный прибор и за-
щитный колпак.
Девиационный при-
бор помещается внутри нак-
тоуза и представляет собой ла-
тунную трубу с двумя подвиж-
ными каретками для установ-
ки магнитов-уничтбжителей.
Комплект магнитов для унич-
тожения полукруговой девиа-
ции придается в специальном
деревянном футляре.
Рис. 133.
Все выпускаемые 127-миллиметровые компасы имеют донное
освещение картушки. В систему освещения входят: умформер, блок
питания и патрон с лампочкой ( в случае питания от судовой сети
постоянного тока).
Система освещения может работать на судовом переменном
токе, но в этом случае вместо умформера в цепь питания вклю-
чается трансформатор, понижающий напряжение тока до 6,12 или
24 в.
§ 95. Морской дистанционный магнитный компас
Морской 127-миллиметровый магнитный компас не может быть
использован в качестве датчика курса при автоматизации процес-
са судовождения, так как у него отсутствует дистанционная пере-
дача показаний. В настоящее время разработан морской дистан-
ционный магнитный компас «Сектор».
В качестве основного прибора используется 127-миллиметро-
вый магнитный компас. Чувствительным элементом дистанцион-
ной передачи является индукционный датчик, представляющий
собой три идентичных однофазных феррозонда, соединенных в
треугольник. Индукционный датчик жестко крепится в поддоне
котелка компаса.
Первичные обмотки феррозондов подключаются к источнику
переменной э. д. с., вторичные (сигнальные) соединяются со ста-
торными обмотками сельсина, работающего в трансформаторном
режиме. Роторная обмотка сельсина через усилитель связана с
управляющей обмоткой электродвигателя.
При питании первичных обмоток феррозондов переменной
э. д. с. под воздействием магнитного поля стрелок картушки в
сигнальных обмотках феррозондов индуктируются фазные на-
228
пряжения. Величина и фаза этих напряжений зависят от положе-
ния феррозондов относительно стрелок магнитного компаса, т. е.
от курса судна.
При изменении курса положение феррозондов относительно
стрелок картушки изменяется, что приводит к перераспределению
токов в обмотках статора сельсина. В роторе сельсина возникает
сигнал, и электродвигатель отрабатывает ротор сельсина на угол
поворота судна. Одновременно электродвигатель заводит на тот
же угол сельсин-датчик дистанционной передачи. Электрически
связанные с сельсином-датчиком приемники курса поворачива-
ются на угол поворота судна и показывают новый курс. Предель-
ная погрешность курсоуказания на неподвижном основании не
превышает ±0°,5, на ходу на прямом курсе ±0°,8, на качке
±1°,5.
§ 96. Принцип устройства и работы
гидродинамических лагов
Действие гидродинамического
на измерении скоростного напора
приемного устройства лага,
воспринимающего гидродина-
мическое давление, служит
приемная трубка, опускаемая
на днище судна или штевневое
устройство. При движении суд-
на уровень в трубке поднимает-
ся на некоторую высоту, кото-
рая связана с давлением следу-
ющей зависимостью:
+ ("5)
лага (рис. 134) основывается
встречного потока. В качестве
где v — скорость потока жидкости, см/сек;
g — ускорение силы тяжести, см!сек2\
Р — статическое давление воды, г!см2\
у — удельный вес жидкости, г/слР.
Таким образом, давление в динамической линии приемного
устройства определяется двумя составляющими: динамической
(скоростной напор), равной y2/2g, и статической, равной P/у. Ско-
ростной напор зависит от скорости судна, а статическое давление —
от его осадки. Уравнение (115) справедливо для идеальной жидко-
сти, не обладающей вязкостью.
Для того чтобы это уравнение имело практическое применение
к слоям морской воды, необходимо, чтобы отверстие приема сум-
марного давления было расположено за пределами пограничного,
прилегающего к корпусу судна слоя. В этом случае лаг будет пока-
зывать скорость судна.относительно ВОДЫ. ..... . .
229
Возникающее при движении судна суммарное давление в при-
емном устройстве не может быть использовано непосредственно
для определения скорости из-за наличия статической составляю-
щей, так как это привело бы к зависимости отсчета скорости от
осадки судна. Для исключения влияния осадки на показания ла-
га в конструкции прибора предусмотрена компенсация статиче-
ского давления с помощью сильфонного аппарата (см. рис. 134^
Сильфонный аппарат 1 представляет собой камеру, разделен-
ную диафрагмой 2 на две полости — нижнюю и верхнюю. При
работе лага под днище судна опускают приемную трубку 5 с от-
верстиями 6 и 7. Нижняя полость камеры соединена с каналом
приема суммарного давления трубопроводом 8 и с каналом ста-
тического давления трубопроводом 4,
При движении судна в обе полости сильфонного аппарата по-
ступают давления, действующие друг другу навстречу. Поскольку
давления, действующие на диафрагму 2 по направлению противо-
положны, результирующее давление, испытываемое диафрагмой,
будет равно динамической составляющей суммарного давления
воды, пропорциональной скоростному напору. К диафрагме при-
креплен шток 3, связанный через рычаг со стрелкой указателя
скорости. Динамическое давление, приподнимая диафрагму и
шток, заставит отклониться стрелку указателя.
Следовательно, величина давления на диафрагму может быть
использована для определения скорости судна. В этом случае
уравнение (115) примет вид:
я-т=^2- (В6)
Для того чтобы найти зависимость между давлением на диаф-
рагму 2 и скоростью судна, умножим обе части уравнения (116)
на величину удельного веса воды. Тогда
(П7)
Величина (Я------)у представляет собой вес столба жидкости
р Т р
высотой (Я---—). Обозначив величину (Я— — )у = Рд, получим
V2
(118)
Величина Ря называется гидродинамическим давлением. Урав-
нение (118) дает теоретическую зависимость между гидродинами-
ческим давлением воды и скоростью судна V.
Для учета реальных гидродинамических условий, в которых
находится приемное устройство, необходимо в формулу (118)
230
ввести коэффициент К (коэффициент Пито), учитывающий физи-
ческие свойства жидкости, конструктивные особенности корпуса
судна, а также влияние места установки приемных трубок лага
Тогда уравнение (118) примет вид:
= (119)
Гидродинамический коэффициент в действительных условиях
несколько больше или меньше единицы.
Механизмы центрального прибора лага автоматически реша-
ют уравнение (119) и вырабатывают величину скорости судна
в узлах и пройденное расстояние в милях.
Независимо от конструктивных особенностей типовой проект
гидравлического лага состоит из следующих основных узлов:
приемной трубки (двухканальной или одноканальной);
клинкета для установки приемной трубки в днище судна;
приемника давления или сильфонного аппарата;
кранового распределителя с трубопроводами для соединения
приемной трубки с приемником давления;
центрального прибора лага;
приборов — повторителей (репитеров) скорости и пройденного 1
расстояния;
станции лага для управления и контроля за работой лага.
Диафрагма приемного устройства при движении судна посто-
янно находится под напряжением, что ухудшает работу лага.
Металл, из которого сделана диафрагма, «устает», параметры
меняются, и в показаниях лага появляется ошибка.
Для улучшения работы сильфонного аппарата лаги имеют
специальное компенсационное устройство, которое разгружает
диафрагму приемника давления, компенсируя гидродинамическое
давление.
Сущность компенсационного устройства состоит в следующем.
Как только при движении судна диафрагма сильфонного 'аппара-
та отклонится от нейтрального положения, механизм центральна
го прибора начнет отрабатывать значение скорости, соответствую-
щее определенному гидродинамическому давлению. Одновремен-
но компенсационное устройство центрального прибора, состоящее
из коноида, пружины и рычагов, начнет оказывать на диафрагму
противодействие. Как только значение скорости, соответствующее
динамическому давлению, будет отработано, сила противодейст-
вия (компенсации) возвратит шток и связанную с ним диафрагму
в нейтральное положение. Таким образом, деформация диафраг-
мы происходит только при изменении скорости судна, а следо-
вательно, упругость диафрагмы не будет влиять на работу лага.
В зависимости от способа компенсации гидродинамического
давления гидравлические лаги подразделяются на лаги:
с механической компенсацией;
с электромагнитной компенсацией;
231
с гидравлической компенсацией;
без компенсации.
На судах морского флота наибольшее распространение полу-
чили лаги с механической компенсацией.
§ 97. Устройство и эксплуатация лага МГЛ-25
Гидравлический лаг МГЛ-25 с механической компенсацией,
устанавливаемый на морских судах среднего и крупного тоннажа,
позволяет измерять расстояние и скорость до 25 узлов.
Питание лага осуществляется или непосредственно от сети
переменного однофазного тока ПО в частотой 50 гц или от судовой
сети постоянного тока через агрегат питания. Потребляемая мощ-
ность 1,5 кет.
Конструкция лага обеспечивает непрерывную работу приборов
не менее 2000 ч.
Допустимые остаточные поправки лага МГЛ-25 зависят от
скорости судна. Так, при скорости 3 узла поправка не должна
превышать по пройденному расстоянию ±5,2%, при скорости до
10 узлов — ±3,2%, при скорости выше 10 узлов — ± 1 %.
Комплект лага МГЛ-25 состоит из:
приемной двухканальной трубки;
клинкета для выстреливания трубки за днище судна;
кранового распределителя с воздухособирателями;
переходных штуцеров;
дюритовых гибких шлангов;
центрального прибора с сильфонным аппаратом;
станции лага;
указателя скорости и пройденного расстояния, указателя ско-
рости;
разветвительной коробки;
агрегата питания типа АМГ-ЗА или АМГ-ЗБ;
ящика с запасными частями и инструментом и принадлежно-
стями.
Указанный комплект лага — основной, или штатный. Однако
лаг МГЛ-25 может работать и в штевневом варианте.
Приемная трубка, клинкет, крановый распределитель, переход-
ные штуцеры, дюритовые шланги и сильфонный аппарат состав-
ляют гидравлическую систему лага, которая служит для выделе-
ния из полного давления динамического давления, пропорциональ-
ного квадрату скорости судна.
Приемная двухканальная трубка представляет собой латунный
стержень овального сечения, внутри которого имеются два канала
для приема статического и полного давлений.
Крановый распределитель с воздухособирателями
предназначен для переключения гидравлических линий лага в раз-
личные положения и для удаления воздуха из гидравлической си-
стемы лага. Он состоит из корпуса, в котором находятся воздухо-
232
собиратели и смонтированы игольчатые краны. Установка кра-
нов в нужное положение производится по таблице, имеющейся
на корпусе распределителя.
Сильфонный аппарат — чувствительный элемент лага.
В нем выделяется динамическое давление, которое по штоку пе-
редается на механизм центрального прибора. Внутри бронзового
корпуса находятся три сильфона: большой, малый и нижний ма-
лый. Большой сильфон воспринимает динамическое давление и
через шток передает его в централь-
ный прибор. Малый верхний силь-
фон обеспечивает крепление што-
ка к основанию большого сильфо-
на таким образом, что передача да-
вления с помощью штока осущест-
вляется без использования сальника,
а следовательно, и без трения.
Нижний малый сильфон служит
для компенсации влияния верхнего
сильфона.
Центральный прибор ла-
га (рис. 135) преобразует механи-
ческое усилие, передаваемое што-
ком сильфонного аппарата, в пока-
зания скорости судна и пройден-
ное расстояние. Пуск лага произ-
водится с выходом судна из порта.
Глубина под килем при пуске лага
должна быть не менее 5 м. При
этом необходимо:
установить переключатель «Агрегат» в положение «Пуск», а
затем в положение «Ход»;
установить переключатели «Репитер», «Двигатель» в положение
«Включено»;
пустить часы;
установить краны кранового распределителя в рабочее поло-
жение; *
открыть клинкет и опустить приемную трубку в рабочее поло-
жение, а затем открыть оба крана двухканальной трубки;
закрыть сливные краны, убедившись в том, что из сливных тру-
бок течет вода без пузырьков воздуха;
открыть сливные краны статической и динамической полостей
сильфонного аппарата и дождаться, когда из сливных трубок по-
течет вода без пузырьков воздуха, затем закрыть сливные краны.
Во время работы лага необходимо систематически проверять
гидравлическую систему на отсутствие в ней пузырьков воздуха.
При килевой качке, когда воздух в больших количествах может
попадать в устройство «Штевень», необходимо открывать сливные
краны через каждые 2 ч. Необходимо также проверять работу
233
часового регулятора в центральном приборе путем определения
скорости вращения контрольного диска (два раза в сутки).
При остановке лага необходимо:
установить краны кранового распределителя в нулевое поло-
жение;
поднять приемную трубку и закрыть клинкет;
(после прихода стрелки указателя скорости на нуль установить
выключатели станции лага в положение «Выключено»;
выключить подачу питания на станцию лага.
§ 98. Гидроакустический принцип измерения
глубин
В соответствии с Правилами Регистра СССР все суда морско-
го флота рснащаются приборами для быстрого и точного измере-
ния глубий. Такими приборами являются эхолоты, в которых из-
мерение глубины производится с помощью акустической энергии.
Все современные эхолоты, в том числе и навигационные, являют-
ся эхолотами ультразвуковыми,
Для правильного понимания действия эхолота познакомимся
с принципом акустического измерения глубин.
Излучение ультразвукового сигнала и прием отраженного сиг-
нала осуществляются электроакустическими преобразователями—
вибраторами.
При работе вибратора-излучателя (ВИ) используется магни-
тострикционный эффект, заключающийся в изменении геометри-
ческих размеров ферромагнитных тел при их намагничивании.
При работе вибратора-приемника (ВП) используется обрат-
ный магнитострикционный эффект, заключающийся в изменении
магнитного поля в ферромагнитных намагниченных телах в мо-
мент приложения к ним механических усилий.
Рассмотрим принципиальную схему действия эхолота при ра-
боте с указателем глубин, изображенную на рис. 136.
Электродвигатель М через коробку скоростей КС вращает с
постоянной скоростью планку 77, на которой укреплена неоновая
лампочка Л.
Каждый раз, при прохождении неоновой лампочки через ну-
левое деление шкалы глубин, посылочный кулачок К производит
кратковременное размыкание посылочных контактов КП, вслед-
ствие чего цепь, питающая обмотку реле Р, размыкается и якорь
Я под действием пружины замыкает контакты. При этом контур,
состоящий из посылочного конденсатора С, заряженного до на-
пряжения порядка 1500 в, и обмоток вибратора-излучателя ВИ
окажется замкнутым.
Ток разряда конденсатора С, протекая по обмоткам вибрато-
ра-излучателя, вызовет появление переменного электромагнитного
234
поля в толще никелевого пакета вибратора. Вследствие явления
магнитострикции излучающая поверхность вибратора совершит не-
сколько колебаний с определенной частотой.
Механические колебания пакетов никелевых пластин вибрато-
ра-излучателя передаются окружающей среде (воде) и распрост-
раняются в виде короткого
ультразвукового импульса в
направлении морского дна.
Обладая свойством отра-
жения от поверхности раздела
двух сред различной плотно-
сти, ультразвуковой импульс
частично отразится от дна п
достигнет вибратора прием-
ника ВП. Часть импульса бу-
дет поглощена грунтом дна
моря. Отраженный импульс,
попадая на пакет вибратора
приемника, вызовет его коле-
бания, а следовательно, из-
менение остаточного магнит-
ного поля никелевого пакета.
Под влиянием изменения
магнитного поля в обмотке
вибратора будет наводиться не-
значительная переменная эле
ктродвижущая сила. Напря-
жение, возникающее на кон- * Рис. 136.
цах обмоток вибратора, пода-
ется на вход усилителя У. Усиленный сигнал подается на сетку ти-
ратрона усилителя и вызывает его срабатывание, вследствие чего
происходит разряд конденсатора, находящегося в цепи анода тира-
трона, на первичную обмотку выходного трансформатора Т.
С концов вторичной обмотки трансформатора напряжение, по-
вышенное до 500 в, подается на неоновую лампочку Л, вызывая
ее кратковременное зажигание.
Так как ультразвуковой импульс имеет определенную скорость
распространения, то за промежуток времени между посылкой и
приемом сигнала диск с неоновой лампочкой повернется от своего
нулевого положения на некоторый угол, пропорциональный
времени прохождения сигнала, следовательно и измеряемой глу-
бине.
Угол поворота неоновой лампочки измеряется по круговой
шкале, разбитой на равномерные деления и градуированной в
метрах. Таким образом, вспышка неоновой лампочки показывает
на шкале указателя измеряемую глубину.
Пользуясь рис. 136, найдем точное выражение для глубины
под вибратором. Обозначим кратчайшее расстояние между цент-
235
рами вибраторов (база вибратора) через L. Глубина под вибра-
торами Н будет, представлять собой катет прямоугольного треу-
гольника АОК, из которого следует
ок = ]/^№-(4)2 (120)
В этом выражении АК представляет собой половину пути,
а
пройденного звуком, т. е. АК= -g—, следовательно,
н - /(-?)’-(4)!- <'21>
Формула (121) показывает, что выражение для глубины под
вибраторами имеет однозначную зависимость между измеряемым
эхолотом промежутком времени и искомой глубиной Н.
Рассмотренный гидроакустический принцип измерения глубин
позволяет осуществить также автоматическую запись глубин с по-
мощью специальных приборов — самописцев, включаемых в ком-
плект эхолота.
§ 99. Устройство и эксплуатация эхолота НЭЛ-5
Эхолот НЭЛ-5 представляет собой навигационный магнито-
стрикционный эхолот, предназначенный для установки на крупно-
тоннажных судах и позволяющий измерять глубины от 1 до 2000 м.
Комплект эхолота содержит следующие приборы:
указатель глубин,
самописец,
посылочное реле,
усилитель,
фильтр,
два вибратора,
кабельные коробки,
футляр с бумагой,
ящик с запасными частями и инструментом.
Все приборы эхолота работают от переменного тока 127 в, 50 гц.
Если на судне отсутствует переменный ток, то питание прибора осу-
ществляется через преобразователь ПО-550. Одновременная работа
осуществляется с помощью реле переключения, расположенного в
самописце.
Указатель глубин (рис. 137) предназначен для визуаль-
ных отсчетов глубин и для управления посылкой и приемом уль-
тразвуковых импульсов. Отсчет глубины производится по вспыш-
кам неоновой лампочки, которая, вращается с постоянной скоро-
стью относительно неподвижной шкалы, укрепленной на крышке
указателя глубин. Шкала имеет два диапазона — от 0 до 100 и
от 0 до 2000 м.
236
На корпусе указателя расположены рукоятки управления эхо-
лотом в случае работы указателя глубин, а именно: выключатель
Л переключатель диапазона 5, регулятор усиления 3, выклю-
чатель 4 гашения нулевой вспышки неоновой лампочки и вольт-
метр 2, контролирующий величину рабочего напряжения.
При работе с указателем глубин необходимо:
выбрать нужный диапазон измеряемой глубины и установить
переключатель диапазонов в положение от 0 до 100 или от 0 до
2000 м;
включить указатель глубин, поставив включатель в положение
«Включено»;
с помощью регулятора усиления и регулятора в усилителе до-
биться яркой вспышки неоновой лампочки;
Рис. 137.
при измерении малых глубин включить «Гашение нуля».
В самописце эхолота НЭЛ-5 используется электротерми-
ческий метод записи.
Внешний вид самописца показан на рис. 138.
На лицевой стороне крышки самописца расположены: два предо-
хранителя 1, вольтметр 3, лампочка 2, сигнализирующая о вклю-
чении в работу указателя, выключатель самописца 10, переклю-
чатель диапазонов 9, рукоятка 6 регулятора* усиления, выключа-
тель 8 гашения нулевой вспышки, кнопка 7 оперативных отметок,
тумблер 5 и лампа 4 контроля скорости вращения двигателя са-
237
подвижного контакта,
Рис. 138.
мописца. Крышка самописца имеет застекленное окно 11 для на-
блюдения за записью глубин и для заправки бумаги.
При работе самописца необходимо:
поставить выключатель в самописце в положение «Включено»;
выбрать нужный диапазон измеряемой глубины и переклю-
чатель диапазонов поставить в положение «200», «1000» или
«2000»;
с помощью регулятора усиления и регулятора в усилителе до-
биться отчетливой записи глубин;
при измерении малых глубин включить тумблер «Гашение ну-
ля».
Посылочное реле осуществляет автоматическое переклю-
чение конденсаторов, заряженных до (Высокого напряжения, на об-
мотку вибратора-излучателя. Реле состоит из двух катушек,
тося якорем реле, спиральной
пружины и неподвижного кон-
такта. Питание реле осуществля-
ется через выпрямитель. В ко-
робке реле расположены также
посылочные конденсаторы и вы-
соковольтный выпрямитель для
зарядки посылочных конденсато-
ров.
Усилитель резонансного
типа настроен на частоту прини-
маемого сигнала. Максималь-
ный коэффициент усиления около
106 раз. На передней стенке
шасси расположены кнопка под-
магничивания, регулятор смеще-
ния на тиратроне, плавкий пре-
дохранитель, включенный в пер-
вичную обмотку силового транс-
форматора и патрон с сигналь-
ной лампой.
Фильтр предназначен для защиты судовой сети от проникно-
вения высокочастотных помех со стороны эхолота. Состоит из
дросселей и конденсаторов. На фильтре имеется рубильник для
подачи питания на комплект эхолота.
Пуск эхолота НЭЛ-5 производится следующим образом. В слу-
чае питания от сети йеременного тока следует выключатель филь-
тра поставить в положение «Включено», при этом будет подано пи-
тание на силовой трансформатор усилителя, посылочное реле и на
выключатель питания самописца и указателя.
Для остановки эхолота следует:
вывести регулятор усиления;
выключатель самописца или указателя глубин поставить в поло-
жение «Выключено».
238
Глава XVIII
РАДИОНАВИГАЦИОННЫЕ ПРИБОРЫ
§ 100. Судовые радиопеленгаторы
Радиопеленгатор — это радиоприемное устройство, предназ-
наченное для определения направления на передающую станцию.
Принцип действия радиопеленгатора базируется на свойстве на-
правленности приемных антенн специальной конструкции. Антен-
ны радиопеленгаторов имеют резко выраженные минимумы и мак-
симумы силы приема. Ориентируя антенну соответствующим обра-
зом, можно получить, например, минимальную интенсивность
принимаемых, сигналов и таким образом определить направление
(пеленг) на передающую радиостанцию.
Ориентиром для радиопеленгования может служить любая пе-
редающая радиостанция, если точно известно ее местоположение
на карте. Однако использование радиовещательных станций за-
трудняется по причине неудачного их расположения, редкой пода-
чей позывных радиостанции и перерывами в работе станции.
Радиопеленгатор состоит из трех основных частей: направлен-
ных антенн, радиоприемника и индикатора.
Рассмотрим простейший тип направленной антенны радиопе-
ленгатора— рамочную антенну (рис. 139), представляющую собой
несколько витков провода, выполненных в виде плоской рамки.
Рамка может вращаться вокруг вертикальной оси 00'. К зажимам
х и у подключается вход радиоприемного устройства. Предполо-
жим, что рамочная антенна находится в электромагнитном поле,
создаваемой передающей станцией, находящейся в точке А. Пусть
плоскость рамки составляет угол 0 с направлением на передаю-
щую радиостанцию. Результирующее напряжение на зажимах
определяется по формуле
Е тр = Етр cos©, (122)
где
_ 2*NSEm .
^гпр — ----- ,
N — количество витков рамки;
S -- площадь рамки;
Ет — напряженность электромагнитного поля в месте установки
рамки.
Напряжение, возникающее на зажимах рамочной антенны, яв-
ляется функцией угла 0, т. е. зависит от направления на пере-
дающую радиостанцию.
Если плоскость рамки перпендикулярна направлению на радио-
станцию (угол 0 = 90°), то результирующее напряжение на зажи-
мах рамки равно нулю.
239
При 0 = 0° (плоскость рамки совпадает с направлением на ра-
диостанцию) напряжение Ump будет максимальным и сила приема
наибольшей. Характеристика направленности рамочной антенны в
полярных координатах имеет вид восьмерки (см. рис. 139).
Рамочная антенна может быть использована для радиопелен-
гования. Действительно, подключив рамку ко входу приемника и
настроив его на частоту пеленгуемой станции, вращением рамки
Д01биваются максимальной или минимальной силы приема и по по-
ложению рамки определяют направление на радиостанцию.
Рис. 139.
Большая точность пеленгования достигается при пеленговании
по минимуму слышимости, поэтому при радиопеленговании на слух
все радиопеленгаторы работают по методу определения направле-
ния минимальной интенсивности силы приема.
Однако пеленгование с помощью рамочной антенны невозмож-
но, так как вследствие несимметричности всей схемы соединения
рамки и приемника возникает так называемый антенный эффект
рамки, который сглаживает минимум слышимости сигналов.
Для устранения вредного влияния антенного эффекта стремят-
ся всю антенную цепь радиопеленгатора сделать более симмет-
ричной. Для этого заземляют среднюю точку рамки, а всю обмотку
рамки, соединительный кабель всей схемы радиоприемника за-
ключают в металлический экран. Для приема радиоволн в метал-
лической трубке, экранирующей рамку, делают разрыв.
Для полной компенсации антенного эффекта используют
специальную вертикальную антенну, с которой снимают напряже-
240
иие, равное по величине напряжению антенного эффекта, но про-
тивоположное по фазе.
Характеристика направленности рамочной антенны, как мы
видели, имеет два минимума. Поэтому при пеленговании по мини-
муму направление определяется двузначно: кроме истинного на-
правления получается также обратное, отличающееся от истинно-
го на 180°.
Для устранения двузначности в схемах радиопеленгаторов
используется кардиоидная характеристика направленности. Кардио-
ида имеет один минимум слышимости, по кото-
рому и определяется сторона при пеленговании.
Для получения кардиоидной характеристики
направленности необходимо на вход приемника
подать напряжение, возникающее в вертикаль-
ной антенне, и напряжение от рамки. Конструк-
ция поворотной рамочной антенны несколько
сложна, поэтому в последнее время на судах
применяют радиопеленгаторы, имеющие непод-
вижные рамки. В этом случае вместо рамки вра-
щают специальное устройство, называемое ра-
диогониометром.
Схема гониометрического пеленгатора дана
на рис. 140. Он состоит из трех катушек — двух
неподвижных Л' и В' (статорные), перпендику-
лярных друг другу, и одной Р (роторной), нахо-
дящейся внутри статорных. Статорные катушки
подключаются к двум взаимно перпендикуляр-
ным неподвижным рамочным антеннам. Концы
обмотки роторной катушки присоединяют ко
входу радиоприемника. На оси ротора гониомет-
ра укрепляют стрелку, которая указывает радио-
курсовой угол на пеленгуемый радиомаяк.
Характеристика направленности роторной ка-
тушки гониометра совпадает с характеристикой
обычной поворотной рамки, а поэтому все рассуждения, сделанные
для радиопеленгаторов с поворотной рамкой справедливы для
гониометрического радиопеленгатора.
Сторону в гониометрических пеленгаторах определяют с по-
мощью вертикальной ненаправленной вспомогательной антенны
так же, как в пеленгаторах с поворотной рамкой.
И приемнину
Рис. Г40.
направленности
§ 101. Судовой радиопеленгатор СРП-5
Радиопеленгатор "^СРП-б является слуховым радиопеленгато-
ром с неподвижными рамками (гониометрический).
Комплект радиопеленгатора состоит из рамочной и вспомога-
тельной вертикальной антенн, компенсирующего устройства,
приемно-гониометрического устройства, динамика, щитка питания,
241
распределительной коробки и сигнального щитка в радиорубке.
Антенное устройство радиопеленгатора состоит из двух взаим-
но перпендикулярных рамок и вспомогательной вертикальной ан-
тенны длиной 6—8 м.
Рамочная антенна представляет собой две взаимно перпенди-
кулярные кольцевые рамки диаметром 1,2 м (большие) или 0,6 м
(малые), изготовленные из дюралюминиевой трубы, внутри кото-
рой на диэлектрических вкладышах укрепляется намотка рамок.
В верхней части трубки имеют разрез, заполненный текстолито-
вым вкладышем. Средние точки обмотки соединяют через разде-
лительный конденсатор с корпусом судна, а концы обмоток ра-
мок — двумя коаксиальными кабелями с неподвижными катушка-
ми радибгониометра. Между рамками и гониометром включены
катушки компенсирующего устройства, предназначенного для ком-
пенсации четвертной девиации (коэффициенты D и Е) в пределах
от 2 до 20°.
Приемно-гониометрическое устройство предназначено для осу-
ществления всех видов работы радиопеленгатора: дежурного при-
ема, пеленгования. Оно состоит из следующих основных частей:
гониометра, антенного усилителя, входных контуров и переклю-
чателя рода работы.
Приемно-гониометрическое устройство имеет на передней па-
нели шкальное устройство, состоящее из наружной вращающейся
шкалы и неподвижной внутренней школы с выточкой под диск для
нанесения кривой остаточной радиодевиации.
Кривую наносят простым черным карандашом. Для предохра-
нения кривой бт стирания диск закрывают двумя прозрачными
полудисками. На оси ротора гониометра закрепляют визир, на ко-
тором имеется продольная шкала для отсчета остаточной радио-
девиации. Наружная шкала вращается с помощью сельсина, име-
ющего связь с гирокомпасом. Согласование показаний этой шка-
лы с показаниями гирокомпаса осуществляется с помощью ручки,
выведенной на переднюю панель.
Радиоприемник пеленгатора СРП-5 выполнен по супергетеро-
динной схеме и имет шесть ламп (не считая антенного усилите-
ля). С помощью приемника можно принимать незатухающие и
амплитудно-модулированные колебания в диапазоне от 750 до
186 кгц (400—1600 м). Весь диапазон разбит на два поддиапазо-
на: /86—375 и 375 — 750 кгц.
На выходе приемника включается телефон или громкогово-
ритель.
Питание радиопеленгатора СРП-5 может осуществляться от
судовой сети переменного тока частоты 50 гц с напряжением ПО,
127, 220 в или от бортовой сети постоянного тока с напряжением
ПО, 220 в через специальный преобразователь, предусмотренный
комплектом радиопеленгатора. Аварийное питание возможно от
двух аккумуляторов через специальный преобразователь, на выхо-
де которого тоже получается переменное напряжение 127 в.
242
§ 102. Двухканальный визуальный радиопеленгатор
с электроннолучевым индикатором
В последние годы на судах морского флота все большее при-
менение находят двухканальные визуальные радиопеленгаторы с
электроннолучевым индикатором (ДВРП).
Эти радиопеленгаторы позволяют производить пеленгование с
более высокой степенью точности, обладают большей дальностью
действия, представляется возможным также визуально оценить ка-
чество принятого сигнала (наличие помех, ночного и антенного
эффектов и т.п.).
Принцип визуальной индикации радиопеленга состоит в следу-
ющем. Приходящая радиоволна индуктирует в продольной и по-
перечной рамках антенны напряжения Uip и U2p, которые по-
даются на входы каналов усилителя и усиливаются до напряже-
ний
= kxUm cos (а)/ — cpj cos р\
U2P =^2^ffiCos(a)/ — cp2) sin py (123)
где Um — амплитудное напряжение;
p — курсовой угол на радиомаяк;
ki, k2—коэффициенты усиления каналов;
фь ф2 — углы сдвига фаз, возникающие в процессе усиления
колебаний в приемнике.
Напряжения Uip и U2p подаются соответственно на верти-
кальные X—X и горизонтальные Y—Y отклоняющие пластины
электроннолучевой трубки и создают между ними переменные
электрические поля.
Радиопеленгатор (рис. 141» а) состоит из неподвижной рамоч-
ной антенны 7, двухканального приемника 6 и электроннолучевой
трубки (ЭЛТ) с электростатическим отклонением электронного лу-
ча (рис. 141, б), подключаемой к выходу приемника.
В горловине ЭЛТ расположена электронная пушка /, создаю-
щая узкий электронный луч 2, который вызывает появление светя-
щейся точки 3 на экране трубки 4. Отклонение электронного луча
производится с помощью вертикально X—X и горизонтально Y—Y
отклоняющих пластин.
Под действием суммарной напряженности электрического поля
Е = Ex + Ey электронный луч совершает колебания в плоскости
вектора £ и на экране 4 трубки появляется светящаяся линия раз-
вертки, расположенная под углом q к линии 0—180° азимуталь-
ного круга 5.
Угол q определится из прямоугольного треугольника ОЕХЕ:
(124)
Если ki=k2 и Ф1=Ф2. то tg q = tgp, тогда q=p.
243
Рис. 141.
Следовательно, угол наклона q линии развертки равен курсово-
му углу р на радиомаяк.
В визуальных радиопеленгаторах предусмотрена баланси-
ровка каналов приемника по усилению и фазовому сдвигу.
Для определения стороны радиомаяка к каналу продольной рам-
ки приемника дополнительно подключается вертикальная антенна.
Рис. 142.
В результате сложения диаграммы направленности продольной
рамки (оо) с диаграммой направленности вертикальной антенны
(о) образуется новая диаграмма направленности в виде «улит-
ки» Паскаля. Наблюдая за изменением длины линии развертки
или направлением ее поворота можно определить сторону радио-
пеленга.
Примером рассмотренного двухканального визуального радио-
пеленгатора может служить радиопеленгатор ФГС-340, изготовляе-
мый в ГДР.
Комплект прибора состоит из двухканального приемника с ин-
дикатором, блока питания, неподвижной рамочной антенны со
штыревой антенной, сигнального прибора и ящика с запасными ча-
стями и инструментом. К комплекту придается техническое опи-
сание со схемами.
Двухканальный приемник с индикатором (рис. 142) состоит
из металлического корпуса, внутри которого расположены два
канала усиления, ЭЛТ и блок-прослушивания. На переднюю па-
нель выведены ручки управления, экран индикатора, шкала на-
стройки, контрольный миллиамперметр с переключателем, дина-
мик и гнезда для включения телефонов.
245
В индикаторном блоке смонтирован сельсин гирокомпаса, кото-
рый разворачивает курсовую шкалу, расположенную вокруг экра-
на трубки. Перед включением прибора шкала согласуется с пока-
заниями гирокомпаса. Кроме этого, имеется внутренняя шкала,
разделенная на четыре сектора, для определения стороны пеленга
и средняя неподвижная шкала — азимутальный круг с делениями
от 0 до 360°.
Блок питания радиопеленгатора служит для выработки следу-
ющих напряжений:
накала ламп приемника +£,3 в;
постоянного стабилизированного + 150 в;
постоянного анодного +250 в;
постоянного стабилизированного —70 в.
Неподвижная рамочная антенна состоит из двух взаимно
перпендикулярных дюралевых рамок диаметром 1200 мм, внутри
которых расположены по два витка обмотки. Штыревая антенна
высотой 2,6 лг крепится к этой антенне. Обе антенны соединяют-
ся с приемником коаксиальным кабелем.
Сигнальный прибор предназначен для блокировки судовых ан-
тенн при работе с радиопеленгатором.
§ 103. Принцип действия импульсных
радионавигационных систем
Рассмотренные в предыдущем параграфе азимутальные радио-
навигационные системы имеют существенный недостаток: ошиб-
ка получаемой с их помощью линии положения возрастает про-
порционально расстоянию от судна до радиомаяка.
Поэтому были разработаны различные дистанционные радио-
навигационные системы, позволяющие определять место судна по
расстояниям, изменениям расстояний или по разностям расстоя-
ний.
Остановимся на рассмотрении радионавигационных систем, в
основе которых лежит метод измерения разности расстояний. В
зависимости от применяемого способа определения разности рас-
стояний различают системы импульсные, фазовые и импульсно-
фазовые. Во всех трех случаях изолинией, соответствующей по-
стоянной разности расстояний, является гипербола. Поэтому ука-
занные радионавигационные системы называются также гипербо-
лическими навигационными системами.
К импульсным радионавигационным системам относятся две
системы: «Лоран-А» и «Лоран-С» (английские LONG RANGE
NAVIGATION).
Наибольшее распространение получила РНС «Лоран-А», зона
действия которой охватывает три четверти водной поверхности
северного полушария. Дальность действия этой системы до 600
миль днем и до 1400 ночью. В последнее время введена в дей-
246
ствие импульсно-фазовая РНС «Лоран-С», которая обеспечивает
большую точность определения места и имеет дальность действия
до 2000 миль.
Рассмотрим принцип действия импульсной РНС «Лоран-А».
Наземный комплекс радионавигационной системы «Лоран-А»
состоит из одной ведущей и двух или трех ведомых станций, рас-
положенных друг от друга на расстоянии до 400 миль.
Станция, которая контролирует и задает цикл работы, явля-
ется ведущей. Ведомая станция излучает импульсы только после
получения импульсов от ведущей станции, синхронизируя по ним
свою работу.
Метод определения места судна с помощью импульсной си-
стемы «Лоран-А» основан на измерении на судне промежутка вре-
мени между моментами прихода двух радиоимпульсов, посылае-
мых ведущей и ведомой станциями. Рассмотрим работу ведущей
станции А с одной ведомой станцией В (рис. 143).
Расстояние D между станциями называется базой. Пусть судно
находится в точке М на расстоянии DA от станции А и на рас-
стоянии DB от станции В.
Ведущая станция А посылает радиоимпульсы а, которые через
промежуток времени /=—(с = 3,105 км/сек) достигают ведомой
станции В.
Ведомая станция, получив радиоимпульс а, излучает свой ра-
диоимпульс b с задержкой по отношению к сигналам ведущей
станции, которая равна сумме времени прохождения сигналами
расстояния от ведущей станции к ведомой и кодовой задержки,
введенной на ведомой станции.
Введение кодовой задержки tk исключает перекрывание им-
пульсов а и b во всей рабочей зоне системы, т. е. на судне импуль-
сы b будут всегда приниматься после импульсов а. -Кроме того,
изменение кодовой задержки д&еч возможность перемещать
гиперболическую сетку линий положения по любой заданной про-
грамме.
На судне импульс а будет принят через промежуток времени
< Ва „ л ,
f.\ — —- после получения станцией А, а импульс b — через проме-
В в
жуток iR = после излучения станцией В.
В точке приема М на судне, таким образом, необходимо изме-
рить интервал
&tAB = t + tk + (^В )•
Подставляя значения /, tA и tB, получим
/ Р X /Z)R — D д \
А/дв = + + (125>
Из последнего равенства видно, что время запаздывания им-
пульса ведомой станции В зависит только от разности DB—DA
расстояний между судном и станциями А и В, так как первый член
247
может быть исключен из отсчета. Геометрическое же место точек,
имеющих постоянную разность расстояний от двух заданных то-
чек, представляет гиперболу.
Импульсы йерегобых станций б моменты излучения
b а
Ь)[ -
а
о
t
—*'
Е2к
Импульсы берегобых станций б моменты приема на судне
b
а
t
О
— 1а
Д1а&
Рис. 143.
Гиперболы рассчитывают для различных значений разностей
DB—Da и наносят на карту меркаторской проекции.
248
На гиперболах наносят значение Д/ав в микросекундах, рас-
считанное по формуле (125).
Для получения обсервованного места необходимо иметь по
крайней мере две гиперболы, поэтому вторая гипербола опреде-
ляется путем замера времени запаздывания Д/ас импульса с вто-
рой ведомой станции С относительно импульса а ведущей стан-
ции. Место судна получится на пересечении двух гипербол.
§ 104. Устройство и эксплуатация
приемоиндикатора РНС КПИ-4
Измерение времени запаздывания импульса ведомой станции
относительно момента приема импульса ведущей станции произ-
водится на судне с помощью специального приемоиндикатора.
В комплект такого приемоиндикатора входят следующие
блоки:
приемник, предназначенный для приема и усиления принимае-
мых сигналов наземных станций. Приемник включает в себя эле-
мент согласования с открытой и рамочной антеннами;
индикатор, предназначенный для отсчета разности времени при-
хода сигналов;
блок питания и слежения, который обеспечивает комплект не-
обходимыми питающими напряжениями и включает в себя почти
все элементы автоматического слежения за сигналами береговых
.станций.
Комплект КПИ-4 рассчитан на питание от сети переменного
тока 220 в, 400 гц, поэтому в комплект прибора включается также
соответствующий преобразователь со щитком управления для пи-
тания от судовой сети.
Принцип работы судового приемоиндикатора состоит в следу-
ющем.
Сигналы береговых станций поступают на приемник, усилива-
ются, детектируются и поступают в индикатор, где производится
непрерывное автоматическое измерение временного интервала
между двумя сигналами в микросекундах. Для измерения в схеме
индикатора формируются два селекторных импульса, которые
совмещаются во времени каждый со своим сигналом. Временной
интервал между импульсами, поступающими со входа приемника,
замеряется по откалиброванному расстоянию между селекторны-
ми импульсами.
Первоначальное совмещение селекторных импульсов с сигна-
лами осуществляют вручную по экрану электроннолучевой труб-
ки. Путем небольшой расстройки частоты развертки достигают
плавного перемещения принимаемых сигналов по развертке до сов-
мещения их с пьедесталами. Затем включают цепи автоматического
сдежения, и сигналы совмещают с селекторными импульсами, рас-
стояние в микросекундах между которыми известно по счетчикам,;
249
находящимся на индикаторе. По экрану электроннолучевой трубки
контролируют совмещение сигналов.
В настоящее время на судах морского флота устанавливают
модернизированный приемоиндикатор КПИ-4, с помощью которо-
го можно измерять на средневолновом диапазоне время запазды-
вания импульсов двух пар РНС «Лоран-А», а в длинноволновом
диапазоне можно принимать импульсы РНС «Лоран-С» и опреде-
лять отсчет линий положения только импульсным методом.
Общий вид передней панели индикатора и приемника приводит-
ся на рис. 144.
Включение приемоиндикатора и измерение запаздывания им-
пульсов двух пар станций РНС «Лоран-А» производится в опре-
деленной последовательности в соответствии с инструкцией по эк-
сплуатации приемоиндикатора.
В импульсно-фазовой радионавигационной системе «Лоран-С»
используются преимущества импульсной (большая дальность дей-
ствия) и фазовой (высокая точность, определение места) систем.
Станции системы «Лоран-С» работают на частоте 100 кгц. В
системе «Лоран-С» импульсным методом грубо определяется ли-
ния положения путем измерения времени запаздывания импульса
ведомой станции относительно импульса ведущей по огибающей
радиоимпульсов этих станций. Этот метод обеспечивает однознач-
ность определений.
260
Точное определение линии положения производится фазовым
методом путем измерения фаз между высокочастотными колеба-
ниями, заполняющими импульсы.
Цепь РНС «Лоран-С» состоит из одной ведущей станции и
двух или трех ведомых, с базой между ними равной 500—700 миль.
Ведомые станции принимают импульсы ведущей и используют их
для точной синхронизации на частоте и фазе (синхронизация по
огибающим и несущим колебаниям) своих импульсов.
Точность определения места с помощью РНС «Лоран-С» в
среднем в 50 раз выше, чем с помощью РНС «Лоран-А», дальность
действия ее превышает 2000 миль, поэтому она является наиболее
перспективной для морской радионавигации.
, Цепи РНС «Лоран-С» установлены в северной части Атлан-
тического океана, на восточном побережье США, в Средиземном
море и на Тихом океане.
Приемоиндикатор РНС «Лоран-С» состоит из приемника, бло-
ков импульсного и фазового отсчетов. Работа блока импульсно-
го отсчета в основном аналогична работе приемоиндикатора
РНС «Лоран-А» (или КПИ-4) в системе автоматического сле-
жения.
Время запаздывания Д/дв импульса ведомой станции ороситель-
ного импульса ведущей станции с точностью до 1 мсек фиксирует-
ся в левой части счетчика «Грубо». Измерение разности фаз про-
изводится с помощью блока фазового отсчета. Так ’ как сигналы
ведущей и ведомых станций поступают на приемник не одновре-
менно, измерение разности фаз между ними возможно только при
условии запоминания фаз этих колебаний на время их периода по-
вторения Ти. Запоминание фаз осуществляется с помощью фазо-
вращателей, фазовых детекторов и стабильного опорного генера-
тора.
§ 105. Принцип действия фазовой радионавигационной
системы
К разностнодальномерным системам относятся также фазо-
вые радионавигационные системы типа «фазовый зонд», принцип
действия которых основан на
измерении в точке приема раз-
ности фаз электромагнитных
колебаний, приходящих от
двух береговых станций.
Пусть станция А (веду-
щая) и станция В (ведомая)
излучают колебания, совпада-
ющие по фазе (рис. 145).
С удалением от береговой
станции фаза колебаний отно-
251
сительно колебаний в точке излучения непрерывно изменяется и
на расстоянии D от береговой станции
? = — о.
На судне в точке приема М фазы электромагнитных колебаний
от ведущей до ведомой станций соответственно будут:
2^ гл 2л
<Рд Da и = -у- £)в,
где DA и Db — расстояния до станции А и В соответственно.
Разность фаз приходящих сигналов от станций А и В
д? = <?д - (Da - Db ). (126)
Из выражения (126) видно, что разность фаз А<р зависит толь-
ко от разности расстояний DA и DB> следовательно линия, на кото-
рой наблюдается одинаковая разность фаз, — гипербола.
Сетку линий положения (гипербол) для различных значений
разности фаз рассчитывают заранее и наносят на карту.
Для определения места судна, как известно, необходимо на-
личие не менее двух линий положения, поэтому одна цепочка бе-
реговых станций РНС «Декка» состоит из одной ведущей и двух
или трех ведомых станций. Так образуется сетка гипербол.
Гиперболы, на которых разность расстояний равна целому
числу длин волн Х(0, ±Х, ±2Х,..., ±nZ), а разность фаз Дф = 0,
называются главными гиперболами (рис. 146).
Пространство между двумя смежными главными гиперболами
называется дорожкой. Дорожкам присваиваются определенные
номера. Так как внутри каждой дорожки находится гипербола,
соответствующая измеренной разности фаз Дф, то фазовая си-
стема обладает многозначностью определений места.
Эта многозначность может быть устранена первоначальной при-
вязкой, которая заключается в определении номера дорожки по
обсервованной точке в начале плавания. На этот номер устанав-
ливают стрелку фазового счетчика, и он всегда показывает номер
дорожки, а фазометр — положение судна (гиперболу) внутри до-
рожки. Кроме того, в современной судовой приемоиндикаторной
аппаратуре для определения номера дорожки предусмотрена си-
стема их опознания.
К достоинствам фазовой РНС следует отнести высокую точ-
ность определения места, так как точность определения угла сдви-
га фаз (точность фаз) составляет 3°,6, при этом точность опреде- ।
ления расстояния на базе составит 0,01 X (7—12 м), Недостаток -
фазовой РНС — многозначность отсчета и большое влияние про-
странственной волны на точность определения.
Дальность действия системы около 250 миль, точность опреде-
ления места судна 50—200 м днем и до 2000 м ночью. Даль-
ность действия высокоточной фазовой РНС ближнего действия
252
«Хай-Фикс» составляет 50—100 миль при точности определения
места до 7—12 м,
В ближайшие годы вводится в строй новая фазовая глобаль-
ная РНС «Омега». Работа этой системы будет обеспечиваться
восемью береговыми станциями, которые обеспечат навигацию с
достаточной точностью в пределах всего земного шара. Ожидае-
мая точность определения места по сигналам РНС «Омега» на рас-
стояниях до 14 000 км составляет 0,8—1,6 км днем и 1,6—3,3 км
ночью.
§ 106. Береговые цепочки РНС «Декка-навигатор»
и блок-схема судового приемоиндикатора
Рассмотрим принцип работы всего комплекса фазовой радио-
навигационной системы «Декка» в целом. Этот комплекс состоит
из цепочки береговых станций, судового приемоиндикатора и спе-
циальных радионавигационных карт с нанесенными на них сетка-
ми гиперболических линий положения. Цепочка РНС «Декка» со-
стоит из четырех (иногда трех) береговых станций, одна из кото-
рых ведущая, а остальные ведомые.
>253
Цепочки различаются между собой значениями излучаемых ча-
стот. В настоящее время в эксплуатации находятся 28 цепочек
РНС «Декка», которым присвоены определенные обозначения и
номера.
Станции РНС «Декка» работают в диапазоне 70—130 кгц. Они
излучают незатухающие колебания на частотах, кратных общей
«базисной» частоте f, приблизительно равной 14,2 кгц, которая од-
нако в излучении не участвует.
Станции системы обеспечивают два режима работы: режим со-
здания точной сетки и режим устранения многозначности (опозна-
вания дорожек).
Точная сетка гипербол создается в том случае, если ведущая
станция цепочки излучает частоту 6f, а ведомые 5f, 8f и 9f
(рис. 147).
Для различия каждой паре станций (ведущая — одна из ведо-
мых) присваивается свой цвет, а именно 6/ и 5/ — фиолетовая,
6/ и 8/— красная и 6f и 9f — зеленая. Шкалы декометров при-
емоиндикаторов и соответствующие изолинии на декка-картах так-
же отмечены этими цветами.
Судовой приемоиндикатор в режиме создания точной сетки вы-
полняет следующие функции: прием, усиление сигналов берего- '
вых станций, приведение их к единой для каждой пары частоте
сравнения и выдача на декометры напряжений, пропорциональных
разности фаз сравниваемых колебаний.
Так, колебания 8/ красной ведомой станции умножаются на 3,
а ведущей 6f — на 4 и приводятся к одинаковой частоте сравне-
ния 24f=340 кгц. Колебания 9f зеленой ведомой станции умножа-
ются на 2, а ведущей 6f— на 3 и приводятся к частоте сравне-
ния 18/ = 255 кгц.
Колебания 5f фиолетовой ведомой станции умножаются на 6,
а ведущей 6f — на 5 и приводятся к частоте сравнения 30f=426 кгц.
Частоты сравнения подаются на соответствующие красный,
зеленый и фиолетовый декометры, малые стрелки которых пока-
жут разности фаз колебаний (положение судна внутри красных,
зеленых и фиолетовых дорожек).
Малые стрелки декометров соединены с большими стрелками
через понижающие передачи. Большие стрелки фазовых счетчиков
указывают номер дорожки.
Для того чтобы не перепутать отсчеты дорожек, наружные шка-
лы декометров оцифрованы в следующей последовательности: у
красного декометра — от 0 до 24, у зеленого — от 30 до 48 и у
фиолетового — от 50 до 80 (см. рис. 147).
Дорожки образуют зоны, которые обозначаются буквами ла-
тинского алфавита Д, В, С,... Красная зона состоит из 24, зеленая
из 18, фиолетовая из 30 дорожек.
Буквы зоны видны в вырезе нижней части шкалы декометра.
254
При пересечении судном одной дорожки малая стрелка деко-
метра совершает один оборот, а большая перемещается на одно
деление. При пересечении судном зоны большая стрелка счетчика
дорожек делает один оборот, а указатель зоны перемещается на
одну букву.
Ведомая станция
Дек о метры
Рис. 147.
Первоначальная установка больших стрелок на номера доро-
жек, а указателей зоны на буквы зоны производится с помощью
ручек, расположенных в верхней части шкалы декометров. Уста-
новка эта производится по известному месту судна.
Для устранения многозначности каждая пара станции по-
очередно излучает сигналы в виде кратковременных посылок на
255
частотах 6f и 5f (ведущая), 9f и 8f (ведомая). Эти посылки пре-
образуются приемоиндикатором в разностные частоты 6/—5/=1Ди
9f—8f=lf и подаются на
Рис. 148.
фазометр определения до-
рожек (грубый декометр).
Грубый декометр име-
ет три концентрические
шкалы зеленого, красного
и фиолетового цветов с
нумерацией, соответству-
ющей оцифровке шкал
точных декометров. Эти
шкалы в грубом декомет-
ре автоматически подсве-
чиваются в той же после-
довательности, в какой ра-
ботают береговые стан-
ции: красная, зеленая,
фиолетовая. При снятии
отсчета прежде всего не-
обходимо обратить внима-
ние на цвет отражаемой шкалы, а затем на ближайший номер до-
рожки, на который указывает острие звездочки, находящееся в пре-
делах секторного указателя грубого декометра.
Внешний вид блока индикаторов приемоиндикатора МК-12
производства фирмы «Декка-навигатор» (Англия) дан на рис. 148.
Для непрерывной авто-
матической записи движе-
ния судна по РНС «Дек-
ка» фирмой разработан
специальный путепро-
кладчик (рис. 149), кото-
рый по желанию заказчи-
ка может входить в ком-
плект приемо-индикатора.
Автоматический про-
кладчик позволяет непре-
рывно контролировать
м а нев р ир ов а ние судн а,
его скорость и место с
записью этих элементов
на специальную навига-
ционную карту.
Наиболее эффективно
применение этого путепро-
кладчика при линейном
Рис. 149.
плавании судов, т. е. ког-
да судно совершает регулярные рейсы в одном и том же районе.
256
§ 107. Приемоиндикатор «ПИРС-1»
Приемоийдикатор* «Пирс-1» предназначен для определения
места судна по сигналам фазовой РНС с временной (режим Р)
и частотной (режим Д) селекцией. Его изготовляют в трех вари-
антах: унифицированный, предназначенный для работы в режиме
Р и Д; в режиме Р; в режиме Д («Декка»).
В состав комплекта «Пирс-1» входят: приемник с блоками
управления и синхронизации, блоки индикаторов и питания, про-
тиволокационный фильтр
Рис. 150.
И прибор обнаружения
неисправностей.
Блок индикаторов
(рис. 150) представляет
собой прибор, устанавли-
ваемый на штурманском
столе или на переборке
с помощью кронштейна.
Блок индикаторов со-
стоит из трех индикато-
ров точного отсчета, од-
ного индикатора грубого
отсчета, и пульта управ-
ления. Оцифровка шкал
точных индикаторов та-
кая же, как и в МК-12, но
номера дорожек нанесены
на внутренней шкале и
отсчет их производится
по малой стрелке, а на-
ружные шкалы, разбитые на 100 делений, служат для снятия точных
отсчетов (долей дорожек) с помощью большой стрелки.
Грубый индикатор имеет четыре шкалы: наружная для опре-
деления номера дорожки по зеленой зоне, две последующие для
определения дорожек по фиолетовой и красной зонам. Отсчет но-
меров дорожек производится по рискам во время загорания под-
светки каждой из этих шкал.
Внутренняя шкала грубого индикатора служит для устране-
ния многозначности. При нормальной работе во время подсвета
этой шкалы риска должна находиться в районе нулевого от-
счета.
Блок питания приемоиндикатора служит для обеспечения не-
обходимыми напряжениями всей аппаратуры. Он рассчитан на
питание от сети переменного тока напряжением 220/127 в, часто-
той 50 гц.
В комплект приемоиндикатора «Пирс-1» может быть включен
также путепрокладчик.
9—933
257
Приемоиндикатор «Пирс-1» рассчитан на непрерывную работу
в течение 48 ч, с последующим двухчасовым перерывом и на
скорость судна до 25 узлов. Приемник работает от вертикальной
антенны высотой 4 м, потребляемая мощность не более 100 вт.
§ 108. Радиолокация
Действие радиолокационных станций (РЛС) основано на ис-
пользовании явления отражения радиоволн от различных пре-
пятствий, расположенных на пути их распространения, т. е. в ра-
диолокации для определения положения объектов используется
явление эха. Для этого в РЛС имеется передатчик, приемник,
специальное антенно-волноводное устройство и индикатор с экра-
ном для визуального наблюдения эхо-сигналов. Таким образом,
работу радиолокационной станции можно представить так: пере-
датчик РЛС генерирует высокочастотные колебания определенной
формы, которые посылаются в пространство узким лучом, непре-
рывно вращающимся по горизонту. Отраженные колебания от
любого предмета в виде эхо-сигнала принимаются приемником
и изображаются на экране индикатора, при этом имеется воз-
можность немедленно определять на экране направление (пеленг)
на объект и его расстояние от судна.
Пеленг на объект определяется по направлению узкого ра-
диолокационного луча, который в данный момент падает на
объект и отражается от него.
Расстояние до объекта может быть получено путем измерения
малых промежутков времени между посылкой зондирующего им-
пульса и моментом приема отраженного импульса, при условии, что
радиоимпульсы распрастраняются со скоростью с = ЗХ Ю8 м/сек.
Судовые РЛС имеют индикаторы кругового обзора (ИКО),
на экране которого образуется изображение окружающей судно
навигационной обстановки.
Широкое распространение нашли береговые РЛС, устанавли-
ваемые в портах, на подходах к ним и на каналах или на слож-
ных фарватерах. С их помощью стало возможным осуществлять
ввод судов в порт, руководить движением судов по фарватеру,
каналу в условиях плохой видимости, в результате чего значи-
тельно снижается простой судов. Эти станции в некоторых пор-
тах дополняют специальной телевизионной передающей аппарату-
рой, которая передает изображение с экрана радиолокационной
станции на подходящие к порту суда. Передаваемые изображения
принимаются на судне обычным телевизионным приемником, что
в значительной степени облегчает судоводителю задачу ввода суд-
на в порт при плохой видимости.
Береговые (портовые) РЛС могут быть использованы также
диспетчером порта для наблюдения за передвижением судов, на-
ходящихся на акватории порта или на подходах к нему.
Рассмотрим принцип работы судовой РЛС с индикатором
258
кругового обзора. Воспользуемся упрощенной блок-схемой РЛС,
объясняющей ее работу (рис. 151).
Запускающий импульс, вырабатываемый генератором ЗИ,
осуществляет запуск (синхронизацию) всех блоков РЛС.
При поступлении запускающих импульсов в передатчик моду-
лятор (Мод) вырабатывает прямоугольный импульс длитель-
ностью в несколько десятых микросекунд, который подается на
магнетронный генератор (МГ).
Рис. 151.
Магнетрон генерирует зондирующий импульс мощностью
70—80 кет длиной волны Х=3,2 см, частотой /с=9400 Мгц.
Импульс магнетрона через антенный переключатель (АП) по
специальному волноводу подводится к антенне и излучается в
пространство узким направленном лучом. Ширина луча в гори-
зонтальной плоскости 1—2е, а вертикальной около 20°. Антенна,
вращаясь вокруг вертикальной оси со скоростью 12—30 об/мин,
облучает все окружающее судно пространство.
Отраженные сигналы принимаются той же антенной, поэтому
АП производит поочередное подключение антенны то к передат-
чику, то к приемнику. Отраженный импульс через антенный пере-
ключатель поступает на смеситель, к которому подключен клист-
ронный генератор (КГ). Последний генерирует маломощные ко-
лебания с частотой /г=9460 Мгц.
В смесителе в результате сложения колебаний выделяется про-
межуточная частота /пр=/г—/с=60 Мгц, которая затем поступа-
ет на усилитель промежуточной частоты (УПЧ), он усиливает
отраженные импульсы. С помощью детектора, стоящего на выходе
9* 259
УПЧ, усиленные импульсы преобразуются в видеоимпульсы, ко-
торые через видеосмеситель (ВС) поступают на видеоусилитель.
Здесь они усиливаются и поступают на катод электроннолучевой
трубки (ИКО),
Электроннолучевая трубка представляет собой вакуумную
электронную лампу особой конструкции (см. рис. 151).
Она состоит из трех основных частей: электронной пушки с
фокусирующим устройством, отклоняющей магнитной системы и
стеклянной колбы с экраном, обладающим свойством послесвече-
ния.
Электронная пушка 1—2 и фокусирующее устройство 4 форми-
руют плотный, хорошо сфокусированный луч электронов, а от-
клоняющая система 5 служит для управления этим электронным
лучим.
После прохождения отклоняющей системы электронный луч
ударяет в экран S, который покрыт специальным веществом, обла-
дающим способностью светиться при бомбардировке его электро-
нами. Внутренняя сторона широкой части трубки покрывается
специальным проводящим слоем (графитом). Этот слой является
основным анодом трубки 7 и имеет контакт, на который подается
высокое положительное напряжение. Анод 3 — ускоряющий элек-
трод.
Яркость светящейся точки на экране ЭЛТ регулируется измене-
нием отрицательного напряжения на управляющем электроде 2 с
помощью потенциометра «Яркость». В нормальном состоянии
трубка заперта отрицательным напряжением на управляющем
электроде 2.
Изображение окружающей обстановки на экране индикатора
кругового обзора получается следующим образом.
Одновременно с началом излучения передатчиком зондирую-
щего импульса запускается генератор развертки, состоящий из
мультивибратора (МВ) и генератора пилообразного тока (ГПТ),
который генерирует пилообразные импульсы. Эти импульсы пода-
ются на отклоняющую систему 5, имеющую механизм вращения,
который связан с принимающим сельсином 6,
Одновременно прямоугольный положительный импульс напря-
жения подается на управляющий электрод 2 и отпирает ее.
С поя1влением в отклоняющей системе ЭЛТ нарастающего (пи-
лообразного) тока электронный луч начинает плавно отклонять-
ся от центра к краю трубки и на экране появляется светящийся
радиус развертки. Радиальное движение луча по экрану видно
очень слабо. В момент прихода отраженного сигнала потенциал
между сеткой и управляющим катодом возрастает, трубка отпи-
рается и на экране начинает светиться точка, соответствующая
положению в данный момент луча, совершающего радиальное
движение. Расстояние от центра .экрана до светящейся точки будет
пропорционально расстоянию до объекта. Отклоняющая система
имеет вращательное движение,
260
Механизм вращения отклоняющей системы связан синхронной
передачей с сельсином-датчиком антенны 9, поэтому отклоняющая
катушка вращается вокруг горловины ЭЛТ синхронно и синфазно
с антенной 12. В результате этого на экране ЭЛТ 'появляется вра-
щающийся радиус развертки.
При повороте антенны поворачивается линия развертки и на
экране индикатора начинают светиться новые участки, соответ-
ствующие импульсам, отражающимся от различных объектов, на-
ходящихся на различных пеленгах. За полный оборот антенны
вся поверхность экрана ЭЛТ покрывается множеством радиальных
линий разверток, которые засвечиваются только при наличии на
соответствующих пеленгах отражающих объектов. Таким образом,
па экране трубки воспроизводится полная картина окружающей
судно обстановки.
Для ориентировочного измерения расстояний до различных
объектов на экране ЭЛТ наносятся путем электронной подсветки,
вырабатываемой в блоке НКД масштабные кольца (неподвижные
круги дальности). Для более точного измерения расстояния в РЛС
применяется специальное дальномерное устройство, с так называ-
емым подвижным кругом дальности (ПКД).
Для измерения расстояния до какой-либо цели на эране ЭЛТ
необходимо, вращая ручку дальномера, совместить ПКД с меткой
цели и взять отсчет в милях и десятых долях по счетчику, меха-
нически связанному с рукояткой дальномера.
Кроме эхо-сигналов и дистанционных колец, на экране ЭЛТ за-
свечивается отметка курса 10 (см. рис. 151). Это достигается пу-
тем подачи на управляющую сетку ЭЛТ положительного импуль-
са в тот момент, когда максимум излучения антенны проходит на-
правление, совпадающее с диаметральной плоскостью судна.
Изображение на экране ЭЛТ /может быть ориентировано от-
носительно ДП судна (стабилизация по курсу) или относительно
истинного меридиана (стабилизация по норду). В последнем слу-
чае отклоняющая система трубки имеет также синхронную связь
с гирокомпасом.
При плавании в узкостях наиболее удобна стабилизация изо-
бражения относительно диаметральной плоскости. Кроме того, при
такой стабилизации легко решается задача о выборе маневра для
расхождения со встречным судном.
Достоинством стабилизации по норду является то, что ры-
скание и изменения курса судна не вызывают смазывания изобра-
жения, а также легко сличить изображение на экране ЭЛТ с нави-
гационной картой.
Большинство РЛС является станциями, на индикаторах кру-
гового обзора (И на рис. 151) которых отображается относи-
тельная картина взаимного движения судов. Некоторые судовые
РЛС (например, «Океан», «Декка») имеют приставки для индика-
ции истинного движения. В отличие от индикаторов относительно-
го движения, в которых начало развертки (эхо-сигнал собственно-
го
го судна) всегда находится в центре экрана ЭЛТ, в индикаторах
истинного движения начало развертки с помощью вычислительного
устройства может перемещаться по экрану в направлении и
со скоростью, которые соответствуют движению собственного судна.
Благодаря этому неподвижные навигационные объекты на
экране не остаются на месте, а подвижные перемещаются в на-
правлении, соответствующем их истинному курсу.
§ 109. Основные тактико-технические
характеристики РЛС
Основными тактическими характеристиками судовой РЛС яв-
ляются:
максимальная и минимальная дальности обнаружения объек-
тов;
разрешающая способность по дальности;
разрешающая способность по углу;
точность в определении дальности и направлений.
Максимальная дальность обнаружения объектов зависит от
импульсной мощности передатчика Ря, коэффициента направлен-
ного действия антенны G, длительности излучаемого импульса
т, полосы пропускания приемника РЛС АД эффективной отра-
жающей площади объекта S3, высоты антенны РЛС hi и высо-
ты отражающего объекта а также от чувствительности прием-
ника Pnp.min.
Технические характеристики РЛС и величины, от которых за-
висит максимальная дальность обнаружения, связаны (следующей
зависимостью:
8 <4* Рн S9Ga Д/(Мз)4
Т) max — I/ р }
V 'пр. min л
Формула (127) определяет дальность действия РЛС в сво-
бодном пространстве. Однако ультракороткие волны сантиметро-
вого диапазона, 'применяемые в РЛС, распространяются прямо-
линейно, поэтому дальность обнаружения ограничивается прямой
видимостью.
С учетом атмосферной рефракции при нормальном ее состоя-
нии дальность радиолокационного горизонта Д рассчитывается по
формуле
Д = 2,2(ГЛГ+КЛ2). (128)
Минимальная дальность обнаружения объектов зависит от
длительности излучаемого импульса т и промежутка времени п,
необходимого для перехода станции с режима «Передача» на
режим «Прием».
Для уменьшения минимальной дальности обнаружения объек-
тов в судовых РЛС длительность зондирующих импульсов т при-
262
нйМается равной 0,1 —1,0 мксек. При т = 0,5 мксек и п = 0,2т —
= 0,1 мксек минимальная дальность обнаружения
п с (Т! +т) _ 3x108x0,6Х10-6
ZZmin 2 — ' 2 УО М.
Минимальная дальность обнаружения зависит также от высо-
ты антенны и ширины диаграммы направленности в вертикальной
плоскости. Эта зависимость определяется по формуле
4min = h ctg . (129)
где h — высота антенны над уровнем моря;
аъ — ширина диаграммы направленности.
Разрешающаяся способность РЛС по дальности — это способ-
ность РЛС изображать на экране ИКО объекты, расположенные
на различных расстояниях от судна, но находящиеся на одном пе-
ленге. Она характеризуется минимальным расстоянием AZ) меж-
ду объектами, при котором они изображаются на экране ЭЛТ
раздельно. Чем меньше расстояние AZ), тем лучше разрешающая
способность РЛС.
Разрешающая способность зависит от длительности зондиру-
ющего импульса т, диаметра электронного пятна на экране ЭЛТ,
диаметра экрана ЭЛТ и просматриваемого диапазона.
Разрешающая способность РЛС по углу — это способность
РЛС изображать на экране ЭЛТ раздельно объекты, расположен-
ные на различных курсовых углах, но находящихся на одинаковом
расстоянии от судна. Она характеризуется разрешающим углом
Да—минимальным углом между объектами, при котором они
раздельно изображаются на экране ЭЛТ. Этот угол зависит от
ширины диаграммы направленности в горизонтальной плоскости
аг, диаметра электронного пятна, диаметра экрана и расстояния
от центра экрана до отметки объекта.
§ 110. Судовые радиолокационные станции «Дон»,
«Донец», «Океан»
Радиолокационная станция «Дон», устанавливаемая на суда
водоизмещением не менее 2000 рег. т, имеет индикатор кругового
обзора с ЭЛТ диаметром 310 мм; максимальная дальность обзора
РЛС 50 миль; время подготовки к работе из полностью выклю-
ченного состояния 5 мин; время непрерывной работы неограни-
ченно.
Комплект РЛС «Дон» состоит из следующих основных прибо-
ров:
прибор, синхронизирующий работу всей РЛС с индикатором
кругового обзора;
п ри ем оп ер ед атч и к;
263
а и тени ое уст р ойство;
выпрямительное устройство;
агрегат питания;
пуско-р егул ир у ющ а я апл а р ату р а;
ящики с запасными частями и инструментом, малогабаритный
осциллограф С1 =6, тестер АВ0 = 5М и техническая документация.
Включают станцию в определенной последовательности. Если
станция долгое время не включалась, то сначала ее прогревают,
включив на выпрямительном устройстве систему подогрева. Затем
включают агрегат питания нажатием кнопки «Пуск» на приборе
дистанционного управления. При исправной работе агрегата пи-
тания загораются белые сигнальные лампочки и неоновая лампоч-
ка 230 в, 427 гц на панели управления. Убедившись в том, что
генератор вырабатывает нужное напряжение 230 в, включают
станцию на подготовку, для чего переключатель «Подготовка —
Работа» на панели индикатора устанавливают в положение «Под-
готовка». Проверив с помощью контрольно-измерительного прибо-
ра на панели управления прибора все напряжения и токи, включа-
ют переключатель вращения антенны.
Затем, поворачивая ручку «Яркость», добиваются появления на
экране развертки и с помощью ручки «Фокус» фокусируют изобра-
жение. Радиолокационное изображение должно быть согласовано
по «Норду» или по «Курсу» с помощью переключателя «Курс-
Норд» и выключателя «Гирокомпас-Согласование».
Через 3 мин после включения станции переключатель «Подго-
товка — Работа» «следует поставить в положение «Работа», при
этом на панели загорается неоновая сигнальная лампочка «Работа».
Установив переключатель «Шкалы дальности» в нужное поло-
жение, вращением ручки «Усиление» добиваются появления на эк-
ране ЭЛТ радиолокационного изображения.
Если нужно снять пеленг и дистанцию до наблюдаемого объек-
та, то необходимо воспользоваться дальномером и визиром, руч-
ки управления которых выведены на переднюю панель индикатора.
Выключение станции производится установкой включателей
двигателя антенны и «Подготовка — Работа» на прцборе, синхрони-
зирующем работу всей РЛС с индикатором в положение «Выклю-
чено», а затем нажатиехМ кнопки «Стоп» на приборе дистанционно-
го управления останавливают агрегат питания.
На судах малого тоннажа устанавливается радиолокационная
станция «Донец-2». Эта станция имеет пять шкал дальности:
0,5; 3; 6; 12 и 24 мили. Мертвая зона 30—40 м. Разрешающая
способность на различных шкалах по дальности 30—90 м, по на-
правлению 3—1°,8. Точность определения расстояния 5—3% от
максимального значения шкалы дальности.
Большинство эксплуатационно-технических параметров РЛС,
установленных в настоящее время на судах ММФ, в основном
удовлетворяют требованиям судовождения. С целью повышения на-
дежности работы станции «Океан» основные приборы дублируются
264 _ ______
(полный комплект аппаратуры включает в себя два приемопере-
датчика и два индикатора).
РЛС «Океан» — двухдиапазонная станция, ома может рабо-
тать на волнах 3,2 и 10 см на одну антенну. В этой станции пре-
дусмотрена возможность индикации изображения в режимах от-
носительного и истинного движений. Предусмотрен также режим
автоматического сопровождения выбранного объекта наблюдения
с непрерывной индикацией текущих пеленга и дальности.
В комплект станции входит вычислительное устройство, позво-
ляющее решать задачи расхождения со встречными судами с вы-
дачей рекомендаций по маневрированию и .регистрацией элемен-
тов движения своего и сопровождаемого судов.
Вычислитель РЛС автоматически рассчитывает следующие
элементы движения судов;
расстояние кратчайшего сближения с сопровождаемым судном;
время следования до точки кратчайшего сближения;
курс и скорость сопровождаемого -судна;
рекомендуемые маневры (курсом и скоростью), обеспечиваю-
щие расхождение с судном на заданном расстоянии.
Станция питается от судовых сетей переменного или постоян-
ного тока через преобразователь типа АТО, входящий в комплект
станции.
Одной из важнейших особенностей станции является дублиро-
вание индикаторов и возможность их переключения на любой из
передатчиков. Схема коммутации позволяет выбрать четыре вариг
анта использования станции. Внешний вид индикаторов РЛС
«Океан» дан на рис. 152.
Впервые в мировой практике судовождения в этой станции
создано автосопровождение цели и выдача линии относительного
движения (ЛОД), применение вычислителя и системы сигнализа-
ции о появлении объекта в данном секторе обзора. В связи с этим
применение РЛС «Океан» очень перспективно.
§ 111. Береговые радиолокационные станции
В настоящее время проводка судов в порт в условиях плохой
видимости осуществляется с помощью специальных береговых
РЛС. По сравнению с судовыми они обладают более высокой раз-
решающей способностью по пеленгу и расстоянию.
Береговыми РЛС оборудован ряд портов Европы и Америки.
В некоторых портах, имеющих сложный в навигационном отноше-
нии фарватер для входа в гавань, устанавливают ряд береговых
РЛС, которые объединяют в навигационные группы, управляемые
специальными диспетчерскими. Такие системы береговых РЛС ус-
пешно эксплуатируются на «Новом водном пути» от маяка Хук-
ов-Холланд до порта Роттердам, а также от плавучего маяка
«Эльба-1» до порта Гамбург (немецкая цепочка).
265
В порту Гавр установлена система «Телерадар». Она состоит
из береговых РЛС и телевизионного радиопередатчика, который
снимает радиолокационное изображение с экрана береговой РЛС
и передает его на суда по телевизионному каналу, где принима-
ется на обычный телевизор. По желанию капитана оператор «Те-
лерадара» может острием стрелки или специальной фишкой ука-
зать точку, в которой данное судно сейчас находится.
Рис. 152.
В 1961 г. в Ленинградском порту была установлена и введена
в опытную эксплуатацию отечественная портовая РЛС «Раскат».
В настоящее время станции «Раскат» установлены в портах Жда-
нов, Ильичевск, Мурманск.
Эта станция представляет собой сложный технический комп-
лекс, оборудование которого размещается в специальном двухэтаж-
ном здании. В состав комплекта аппаратуры входят следующие ос-
новные блоки:
аннтенно-волноводная система;
передающее устройство, состоящее из двух передатчиков;
приемное устройство, состоящее из двух приемников:
распределительный Щит индикаторов;
стойка управления РЛС;
индикатор кругового обзора (ИКО);
индикаторы секторного обзора ИСО (до 6 шт. в комплекте);
стойка датчика электронных отметок оси фарватера;
главный силовой щит и силовые щиты индикаторов и приемр-
передающих устройств;
2W
два комплекта агрегатов питания АЛА-7М со стабилизаторами
напряжения.
Индикатор кругового обзора служит для наблюдения за окру-
жающей навигационной обстановкой, а также для обнаружения
судов на дальних подступах к порту.
Индикаторы секторного обзора ИСО служат для точной радио-
локационной проводки судов то фарватеру. Для удобства ориенти-
ровки на экран ИСО накладывают специальный съемный планшет,
на который нанесены линии фарватера, знаки ограждения, навига-
ционные ориентиры и контрольные метки для проверки стабиль-
ности изображения. Датчик электронных отметок оси фарватера
создает на экране РЛС изображение фарватера с помощью высо-
костабильных электронных меток.
Надежность работы станции повышена за счет наличия в ком-
плекте БРЛС двух приемо-передающих устройств. Время пере-
ключения на резервный комплект составляет 3 мин.
Основные технико-эксплуатационные данные БРЛС «Раскат»
не уступают данным современных зарубежных БРЛС и характе-
ризуются следующими величинами:
дальность обнаружения судна водоизмещением 1000 т — не
менее 13 миль;
разрешающая способность по углу — 0°6;
разрешающая способность по расстоянию — 25 jw;
погрешность измерений направления на ИКО — не хуже 1°,
на ИСО — не хуже 0°,5;
погрешность измерения расстояний на ИСО — 25 му на ИКО
(шкалы 2 и 5 л<) — 0,8% от номинала шкалы, на ИКО (шкалы
10 и 25 м) — 0,6% от номинала шкалы.
Проводка судов возможна как с помощью лоцмана, так и без
него. Связь судов с оператором БРЛС осуществляется посредст-
вом судовых УКВ радиостанций или с помощью имеющихся у
лоцманов УКВ радиостанций типа «Лоцман».
Точность радиолокационной проводки по РЛС «Раскат» очень
высокая: оператор может фиксировать смещение судна от оси
фарватера на расстояние до 10 м.
РАЗДЕЛ ПЯТЫЙ
УПРАВЛЕНИЕ СУДНОМ
И ЕГО ТЕХНИЧЕСКАЯ ЭКСПЛУАТАЦИЯ
Глава XIX
ОРГАНИЗАЦИЯ СЛУЖБЫ НА МОРСКОМ СУДНЕ
§ 112. Устав и вахтенная служба
на морском судне
Современное судно — сложное инженерное сооружение, снаб-
женное различными 1оовершенными машинами, устройствами и
приборами. Обслуживающий судно экипаж должен хорошо знать
порученную ему технику, уметь правильно ее использовать и содер-
жать в надлежащем техническом состоянии. Обязанности каждо-
го члена экипажа регламентированы Уставом службы на судах
морского флота СССР. В соответствии с ним весь экипаж разде-
ляется на палубную и машинную команды и обслуживающий пер-
сонал, а также на командный состав и судовую команду. Команд-
ный состав делится на старший, средний и младший. К старшему
относятся капитан, старший помощник, помощник капитана по по-
литической части, главный и старший механики. Помощники ка-
питана, механики, электромеханики, начальник судовой радио-
станции и радиооператоры, врач и бухгалтер относятся к сред-
нему комсоставу. Боцман, старший машинист и старший моторист —
к младшему составу.
В состав палубной команды входят боцман, подшкипер, плот-
ник, старший матрос, старший рулевой, матросы I и II классов,
матрос-санитар, палубный слесарь, матрос-водолаз, трюмные мат-
росы, штурманский ученик, практиканты, санитар. Машинная
команда в своем составе имеет старшего машиниста (старшего мо-
ториста), машинистов (мотористов) I и II классов, кладовщика,
токаря, рефрижераторных и крановых машинистов, учеников и
практикантов. В обслуживающий состав входят: бухгалтер, стар-
ший кок, коки, камбузники, артельщик, буфетчик, уборщики, дне-
вальный, прачка и т. д.
Численность экипажа зависит от типа, назначения и размеров
судна и регламентируется штатным расписанием каждого судна,
в котором указывается перечень должностей и количество штатных
мест на каждую должность.
Штурманский состав судна во главе с капитаном обеспечивает
выполнение основных производственных задач судна: приемку,
сдачу и качественную перевозку грузов, перевозку пассажиров,
268
.сохранность суДна, обеспечивает навигационную проводку судна,
управление судном, содержит в належащем состоянии материаль-
ную часть навигационного оборудования.
Руководство всей деятельностью судна осуществляет капитан,
на которого возложено единоличное управление судном. Капитан
подчиняется начальнику пароходства. Все распоряжения пароход-
ства поступают на судно только через капитана, отвечающего за
их выполнение. Капитан судна несет ответственность за вверен-
ные ему судно и экипаж, за судовождение и сохранность перево-
зимых (грузов, обеспечивает выполнение судном производственных
планов и правильное техническое использование судна, отвечает
за политико-моральное состояние личного состава.
В своей деятельности капитан руководствуется Уставом служ-
бы на судах морского флота Союза ССР, Кодексом торгового мо-
реплавания Союза ССР, Правилами технической эксплуатации су-
дов морского флота, международными конвенциями, договорами,
приказами и указаниями пароходства и соответствующих властей.
Старший помощник — первый заместитель капитана, он отве-
чает за порядок и дисциплину на судне. Ему в административном
отношении подчинен весь экипаж судна. Старший помощник руко-
водит работой штурманского состава и палубной команды и не-
сет ответственность за техническое состояние корпуса судна, над-
строек, грузового устройства, якорного, швартовного, рулевого
устройств, судовых помещений, спасательных средств, сигнальных
огней и устройств и т. п.; отвечает за подготовку трюмов и других
грузовых помещений к приему груза; обеспечивает безопасную
погрузку на судно тяжеловесов и их крепление; контролирует
правильность укладки и сепарирования грузов, ведает размеще-
нием на судне запасов и перемещением их из одного отсека в дру-
гой.
Старший помощник руководит аварийно-спасательным и про-
тивопожарным отделением и обеспечивает борьбу за живучесть и
непотопляемость судна; несет ходовую вахту.
Второй помощник несет ходовую и стояночную вахты. Во вре-
мя швартовки судна он обычно руководит операциями по швар-
товке с кормы. Одной из основных обязанностей второго помощ-
ника является приемка, выдача, размещение и обеспечение со-
хранности перевозимых на судне грузов, почты и пассажирского
багажа. Он выдает штурманские расписки в приеме грузов, руко-
водит работой трюмных матросов и береговых счетчиков, отвеча-
ет за состояние грузовых помещений и грузового инвентаря, сле-
дит за распределением грузов по трюмам, составляет извещение
о готовности судна к грузовым операциям, ведет грузовую книгу;
на ледоколах, морских буксирах и других судах, не занимающих-
ся перевозкой грузов, ведет судовую кассу и выполняет другие
поручения по указанию капитана.
Третий помощник несет ходовую и стояночную вахты. Одной
из основных его обязанностей является содержание в должном
269
Порядке навигационного оборудования «и 'Пособий на судне. В ве-
дении третьего помощника находятся электрорадионавигацион-
ные устройства, компасы, лаги, лоты, средства визуальной и зву-
ковой сигнализации и связи, навигационные пособия и инструмен-
ты, служба времени на судне. Он заботится о своевременном по-
полнении навигационным и электрорадионавигационным оборудо-
ванием и пособиями. При отсутствии на суднё четвертого помощни-
ка третий помощник ведет судовую -канцелярию, кассовую книгу.
Он оформляет приход и отход судна, судовые роли, ведет учет
перемещения личного состава судна и выдает необходимые
справки.
Обязанности четвертого и пятого помощников устанавлива-
ются приказом 'капитана. ' •
Помощник капитана по пассажирской части несет ответствен-
ность за правильное обслуживание пассажиров, является непо-
средственным начальником судового персонала, обслуживающего
пассажиров. Подчиняется капитану и старшему помощнику.
Помощник капитана по пожарно-технической части несет от-
ветственность за исправность и готовность к действию средств
пожаротушения и отвечает за выполнение всеми членами экипа-
жа и рабочими во время ремонта судна противопожарного режи-
ма и правил пожарной безопасности. Подчиняется старшему по-
мощнику капитана.
Боцман является непосредственным начальником палубной
команды и распределяет работу между членами палубной коман-
ды, следит за правильностью, точностью и быстротой ее исполне-
ния. Боцман отвечает за содержание в должном порядке корпуса
судна, судовых помещений, грузовых устройств, якорного, рулево-
го и швартовного устройств и спасательных средств. Во время
швартовных операций боцман управляет работой брашпиля и обес-
печивает слаженную работу^ команды на баке.
Помощником боцмана по хозяйственной части является под-
шкипер, в обязанности которого входят приемка, хранение и вы-
дача материалов и инвентаря, их учет и заправка инструментов.
Матросы приводят в порядок палубу, надстройки, такелаж, за-
нимаются покраской на судне, несут ходовые и стояночные вахты.
Старший матрос назначается из числа наиболее опытных мат-
росов, он ведает порядком в штурманской рубке и стоит на руле
при входе и выходе судна из порта, в узкостях и в других случаях
по усмотрению капитана.
Трюмные матросы назначаются из числа наиболее опытных
матросов и обеспечивают в соответствии с указаниями второго по-
мощника правильную погрузку и выгрузку грузов, их оформле-
ние, укладку и сепарацию, несут ответственность за соблюдение
правил технической эксплуатации, техники безопасности, правил
погрузки и выгрузки грузов.
Вахтенный помощник несет ответственность за вахтенную
службу, за безопасность судна, людей, за сохранность грузов и
270
имущества. Без разрешения капитана вахтенный помощник не име-
ет права отлучаться; обязан следить за своевременным подъемом и
спуском флага, включением ходовых и стояночных огней, обеспечи-
вать своевременную вентиляцию грузовых помещений и закрытие
люков в плохую погоду, не допускать курения в запрещенных мес-
тах, наводить (порядок на судне в случае его нарушения, вести
судовой журнал в установленном порядке, в экстренных случаях,
до (получения распоряжения капитана, принимать самостоятельно
решения и меры, по обеспечению безопасности судна, экипажа,
пассажиров, груза.
На ходу судна судоводитель до вступления на вахту должен
ознакомиться с районом плавания судна и навигационной обста-
новкой. Принимая вахту, штурман должен получить у сдающего
вахту полную информацию относительно условий плавания и раз-
личных обстоятельств, сопутствовавших плаванию, проверить по
карте место судна, исправность огней (действующих и запасных).
Вахтенный помощник ведет счисление пути судна, возможно чаще
проверяя место судна путем обсерваций.
На стоянке судна при заступлении на вахту штурман должен
получить от сдающего полную информацию о навигационном и
эксплуатационном состоянии судна: о готовности судна к выходу
в рейс, о наличии на судне экипажа, состоянии грузовых опера-
ций, наличии груза на судне, о предстоящих судовых и погрузоч-
но-разгрузочных работах, о количестве вытравленной якорь-цепи
и наличных швартовных концах и т. п.
Вахтенный помощник обеспечивает несение вахтенной службы,
следит за гидрометеорологической обстановкой на стоянке на рей-
де, за швартовными концами у причала, за ходом грузовых опе-
раций, не допуская крена судна, наблюдает за высотой воды в
льялах, ведает увольнением экипажа на берег. Во вр,емя стоянок
в портах он обязан знать местные правила и руководствоваться
ими.
Во главе машинной команды стоит главный (старший) механик,
который является техническим руководителем всех членов эки-
пажа, осуществляющих управление машинами и прочей судовой
техникой. Старший механик отвечает за техническую эксплуата-
цию всей механической и электромеханической части судна.
Второй механик руководит всей работой машинной команды
судна по эксплуатации и ремонту механической и электромехани-
ческой части судна. Третий механик несет ответственность за вспо-
могательные двигатели, котельные установки и паропроводы, ком-
прессоры, топливную, балластную и воздушную системы, механи-
ческую часть рулевого устройства. Четвертый механик отвечает
за состояние всех палубных механизмов и систем. Если на судне
только три механика, то эти обязанности выполняет третий меха-
ник.
Все механики, кроме главного (старшего), несут вахты в ма-
шинном отделении,
271
В ведении электромеханика находятся судовые электромеха-
низмы, электрическая сеть, электрические лебедки, брашпиль, ру-
левое устройство, размагничивающее устройство.
§ 113. Подготовка судна к выходу в плавание
Подготовка судна к (плаванию заключается в 'приведении судна
в такое состояние, (которое обеспечивало бы безопасность плавания
судна, сохранность грузов, культурно-бытовые условия для пасса-
жиров, нормальные условия работы и отдыха экипажа.
В соответствии с Кодексом торгового мореплавания СССР судно
должно быть укомплектовано экипажем в составе, обеспечивающим
безопасное плавание, т. е. как минимум должна быть обеспечена
двухсменная вахта. Поэтому при подготовке судна к очередному
рейсу комплектуют экипаж, подготавливают судовые роли и пасса-
жирские списки, судовые и грузовые документы, навигационное
оборудование, средства связи и сигнализации, судовые машины и
механизмы, рулевое, якорное, грузовое и прочие устройства, спа-
сательные и противопожарные средства, заготавливают запасы
продовольствия, воды, снаряжения, оформляют отход, вызов
лоцмана и буксиров.
Большое внимание уделяют бытовым и производственным усло-
виям жизни и работы экипажа на судне, особенно на судах даль-
него плавания.
Перед выходом в плавание старший помощник проверяет нали-
чие команды на борту и докладывает об этом капитану, а судовой
врач осматривает весь личный состав, удаляет инфекционных и
тяжело больных, подписывает вместе с капитаном удостоверение о
состоянии здоровья экипажа и пассажиров для представления в
санитарный надзор порта.
Третий помощник составляет судовые роли, списки личного со-
става, собирает дипломы и свидетельства командного состава суд-
на и оформляет отход судна в инспекции портового надзора.
Перед выходом в рейс каждое судно должно иметь надлежащ
щим образом оформленные судовые документы.
Номенклатура и порядок выдачи судовых документов регламен-
тируются: Правилами технической эксплуатации судов морского
флота, Уставом службы на судах морского флота СССР, Кодексом
торгового мореплавания и международными конвенциями. Выдачу
и продление судовых документов осуществляют Регистр Союза
ССР, инспекция портового надзора, портовые санитарно-карантин-
ные власти, пожарная охрана и другие органы, на основании про-
верки технического состояния судна, отдельных его устройств и ме-
ханизмов, что находит отражение в специальных актах освидетель-
ствования.
Каждое судно подлежит регистрации в одном из портов СССР.
В соответствии с Правилами о приписке морских судов к морским
272
тортовым ’портам СССР и о регистрации судов основные сведения
о судне (вносятся в судовой реестр.
Навигационная подготовка судна к рейсу должна начинаться с
момента прихода судна в порт. Каждое лицо начальствующего со-
става обязано по своему заведованию предусмотреть проведение
ремонта, исправление и налаживание навигационного оборудова-
ния, сигнальных средств в период стоянки судна в порту.
Третий помощник заблаговременно составляет список необходи-
мых на следующий рейс карт и навигационных пособий и получает
их в навигационной камере. Перед выходом в море проверяют со-
стояние навигационных, электронавигационных и радионавигаци-
онных приборов, всего штурманского имущества, сигнальных огней,
ракет и устройств для подачи звуковых, световых сигналов, теле-
фонов, телеграфов, карт, лоций, пособий и т. п.
Как уже говорилось в §86, на переход должны быть подобраны:
морские навигационное, вспомогательные, справочные и специаль-
ные карты; лоции и руководства для плавания; атласы; описания и
правила плавания; общие, справочные и специальные пособия,
включая «Сводное описание районов, в которых запрещено или ог-
раничено плавание судов (по морям и океанам»); таблицы расстоя-
ний; комплект извещений мореплавателям.
Третий помощник проверяет и сличает судовые часы в машинном
отделении, в каюте капитана, кают-компании с часами в штурман-
ской рубке, которые сверяются по хронометру, сверяет показания
магнитных компасов и проверяет их, подготавливает все необходи-
мые пособия и инструмент для прокладки пути судна.
Перед выходом в море необходимо особое внимание уделять под-
готовке рулевого устройства, состояние которого должно обеспечи-
вать бесперебойное и исправное управление судном.
Все части рулевого устройства должны быть осмотрены и в
нужных местах смазаны. За исправным состоянием штуртросов и
румпель-талей следят боцман и старший рулевой. Исправное дей-
ствие электрического рулевого устройства проверяет электромеха-
ник. Рулевое устройство в действии проверяет старший помощник.
Перед выходом судна в море боцман смазывает и проверяет
действие брашпиля, шпилей, швартовных лебедок. Третий механик
и электромеханик соответственно проверяют механическую и элек-
трическую части этих устройств. За 15—20 мин до отхода боцман
начинает подготовку к отшвартовке.
Все спасательные средства и запасы снабжения перед выходом
в море проверяются самым тщательным образом. Матросы первого
класса проверяют закрепленные за ними спасательные шлюпки, их
исправность, снабжение и оборудование. Боцман и вахтенный по-
мощник проверяют крепление шлюпок по-походному, готовность
дежурной шлюпки к немедленному спуску, наличие на своих ме-
стах спасательных кругов и светящихся буйков. Старший помощ-
ник проверяет техническое состояние спасательных и противопо-
жарных средств, инвентаря и палубного груза.
273
После окончания грузовых операций боцман под руководством
старшего помощника осматривает все палубы судна с носа до кор-
мы, проверяет надежность крепления палубного груза, закрытий
грузовых люков, воздушных и замерных трубок, вентиляционных
труб, световых и прочих люков, наличие брезентовых чехлов и т. д.
Все лица судового состава готовят судно подоходному.
Для того чтобы судно было в состоянии выполнить поставлен-
ную задачу по перевозке грузов, оно должно быть полностью обес-
печено судовым снаряжением и снабжением, бункером, водой и
пр одово л ьств нем.
Еще до окончания предыдущего рейса начальствующий состав
судна под руководством старшего помощника определяет предпо-
лагаемые остатки материалов, бункера, воды и составляет требо-
вания на все виды судового снабжения, исходя из намечаемых на
судне работ и характера предстоящего рейса. Требования вручают-
ся по приходе в порт морскому агенту или в соответствующие слу-
жб ы п ароходств а.
Продовольствие для экипажа заготовляет по указанию старшего
помощника артельщик, назначаемый приказом по судну из числа
команды. Питьевую и мытьевую воду заказывает старший помощ-
ник, котельную — старший механик. Требования на материал, ин-
вентарь и инструмент по палубной части готовит брцман, который
после доклада старшему помощнику обеспечивает получение и до-
ставку заказанного со складов пароходства на судно.
Обеспечением машинного отделения соответствующими матери-
алами и запасами ведают старший, второй и третий механики.
Старший механик согласовывает свои действия с капитаном, кото-
рый контролирует обеспечение судна запасами, продовольствием и
материалами.
§ 114. Судовые расписания
Большую роль в организации труда судового экипажа играют
судовые расписания, в которых указываются место и действия
каждого члена экипажа в различных случаях судовой жизни. К их
числу относятся расписания личного состава: по швартовным опе-
рациям, при выбирании буксирного троса, при буксировке и т. д. На
случай аварий на каждом судне составляется расписание общесу-
довых тревог (общесудовая, пожарная, пробоина, «Человек за бор-
том» и шлюпочная). Основной сигнал тревог — непрерывный зво-
нок громкого боя в течение 1 мин и в дальнейшем по судовой транс-
ляции голосом объявляется вид тревоги, место пожара или пробои-
ны.
Расписание по тревогам заполняет старший помощник и утвер-
ждает капитан судна.
Расписание следует вывешивать на видном месте. На каждом
судне должен быть вывешен список звуковых сигналов, установ-
ленных для водяной, пожарной и шлюпочной тревог.
На аварийный случай при стоянке в порту составляют доцол-
374
йительное расписание, рассчитанное только на вахтенный состав.
Для отработки четкости и быстроты работ и ‘проверки знаний
обязанностей по тревогам на грузовых судах не реже раза в месяц
проводятся учебные тревоги, по возможности приближающиеся к
действительности.
Общее руководство проведением тревог осуществляет капитан
судна. При водяной и пожарной тревогах экипаж делится на че-
тыре группы. Первая обеспечивает управление судном и представ-
ляет собой усиленную вахту на мостике и в машинном отделении.
Вторая группа — санитарная — предназначена для оказания по-
страдавшим медицинской помощи. Третья — наиболее многочис-
ленная — при пожарной тревоге составляет пожарную партию,
при водяной — аварийно-спасательную. Четвертая группа обеспе-
чивает подготовку шлюпок к спуску на случай, если борьба с ог-
нем или поступлением воды будет безрезультатной и придется ос-
тавить судно.
По шлюпочной тревоге весь экипаж расписан по шлюпкам с
учетом физических данных, знаний и опыта. Для удобства каждо-
му члену экипажа присваивается судовой номер. Обязан-
ности каждого номера по судовым тревогам выписываются на от-
дельную карточку, которая закрепляется над койкой владельца но-
мера.
На пассажирских судах дополнительно создается группа обеспе-
чения порядка, которая предупреждает пассажиров о тревоге, за-
драивает иллюминаторы и следит за тем, чтобы на всех пассажи-
рах были надеты спасательные нагрудники .
Глава XX
ПРЕДМЕТЫ ТАКЕЛАЖНОГО СНАБЖЕНИЯ СУДОВ И ТАКЕЛАЖНЫЕ
РАБОТЫ
§ 115. Тросы, средства отакелаживания и тали
Тросы. На морских судах применяют тросы растительные (пень-
ковые, манильские, сизальские, кокосовые, льняные, хлопчатобу-
мажные и др.), проволочные, а также тросы из синтетического во-
локна1. В зависимости от выделки растительные тросы подразде-
ляют на тросы тросовой и кабельной работы.
Для изготовления троса волокна пеньки свивают в каболки 1
(рис. 153) слева направо (по часовой стрелке), из которых спуска-
ют пряди 2 справа налево (против часовой стрелки). Пряди, сви-
тые по часовой- стрелке, образуют канат тросовой работы прямого
спуска 3. Трос тросовой работы обратного спуска изготовляют в
обратном порядке.
1 В Государственных общесоюзных стандартах (ГОСТ) тросы именуют
канатами.
275
Три или четыре троса тросовой работы прямого или обратного
спуска, скрученные вместе, образуют трос кабельной работы соот-
ветствующего спуска 4. Составляющие его тросы тросовой работы
в этом случае называют стрендями.
Тросы трехпрядные несмоленые тросовой работы применяют в
качестве швартовов, стропов, буксирных тросов, оттяжек для гру-
зовых стрел, фалиней, ликтросов, такелажа, лееров и т. д.
Тросы трехпрядные смоленые
тросовой работы используют глав-
ным образом как буксирные и
швартовные концы, бегучий таке-
лаж.
Тросы сизальские трехпрядные
заменяют (пеньковые смоленые и не-
смоленые (бельные). Тросы ка-
бельной работы, пеньковые смоле-
ные и сизальские используются как
буксирные и швартовные концы п
амортизаторы.
Срок службы растительных тро-
сов зависит от их качества, пра-
вильности хранения и использова-
ния и равен 2—4 годам. На них
вредно действуют сырость, масла, кислоты, щелочи, песок и зола.
Поэтому перед укладкой в бухту трос нужно промыть и просу-
шить. Для предотвращения образования колышков (завитков)
растительные тросы тросовой работы прямого спуска укладывают
в бухты на банкетах слева направо, а тросы кабельной работы —
справа налево.
Тросы толщиной от 100 до 150 мм называются перлинями, от
150 до 350 — кабельтовыми и -свыше 350 мм — канатами.
Проволочные тросы изготовляют из углеродистой оцинкованной
или неоци1нкованной канатной проволоки с расчетным пределом
прочности на растяжение до 200 кг!см2. Их преимущество перед
растительными заключается в том, что при той же крепости они
легче и тоньше. Однако на них часто образуются колышки, они
легко портятся от крутых изгибов, мало эластичны и менее гиб-
ки, чем растительные.
Для расчета разрывного усилия тросов в судовых условиях
пользуются следующими опытными формулами:
для стального жесткого троса
Рр= 40 rf2;
для гибкого стального троса
Pp=36rf2,
где Рр — разрывное усилие, кг;
d — диаметр троса, мм.
276
Для бегучёго такелажа и ё устройствах для подъёма грузбв
рабочая крепость стальных тросов берется равной 7в от разрыв-
ной; в устройствах для (подъема и спуска людей — 7м от разрыв-
ной.
В настоящее .время получили признание комбинированные тро-
сы типа «Геркулес», в которых отдельные пряди состоят из сталь-
ной проволоки, покрытой манильской пряжей.
Тросы из синтетического волокна (капроновые, нейлоновые и
др.) имеют прочность в 2—5 раз выше прочности пенькового ка-
ната. Они более эластичны, значительно легче, не подвержены кор-
розии и не обрастают микроорганизмами, мало гигроскопичны и
стойки по отношению к гниению, а также позволяют значительно
уменьшить длину буксирных концов. Тросы из синтетического во-
локна (например, капроновый) выдерживают температуру до
+220°. Поэтому такие тросы находят все большее применение на
судах морского флота. Недостатком капронового троса является
плавление нитей от трения о поверхность барабанов или кнехты.
Различные типы тросов имеют неодинаковую крепость. Разрыв-
ную крепость троса Рр определяют минимальной нагрузкой, при
которой трос разрывается. Рабочую крепость троса Р\ определяют
натяжением, которое выдерживает трос в течение продолжитель-
ного времени.
Для быстрых расчетов крепости растительных тросов с точ-
ностью, достаточной для целей морской практики, пользуются фор-
мулой
Р = /С2,
где f — опытный коэффициент, соответствующий виду троса и ма-
териалу, из которого он изготовлен;
С — окружность троса в мм.
Величины коэффициента f приведены в табл. 6.
Таблица 6
Трос Коэффициент f при прочности
разрывной | рабочей
Пеньковый несмэ левый трехпрядный 0,6 0,1
» смоленый трехпрядный 0,5 0,08
Манильский или сизальский 0,54 0,09
Помимо этого, нужно помнить, что:
смоленый пеньковый трос на 25% слабее несмоленого;
четырехпрядный трос слабее одинаковой с ним-толщины трех-
прядного на 20—25%;
тросы кабельной работы имеют прочность на 25% ниже тросов
тросовой работы;
277
кокосовый трос примерно в 4 раза слабее пенькового троса оди-
наковой с ним толщины.
Сведения о крепости и весе тросов в зависимости от длины их
окружности приведены в специальных таблицах ГОСТа.
Средства отакелаживания. Такелажные цепи изготовляют из
мягкого сварочного железа без распорок и измеряют диаметром
круглого железа (в мм), а также длиной цепи (в пог. м.).
Такелажные цепи разделяют на короткозвенные (длина звена
не более 5 d) й длиннозвенные (длина звена более 5 d). Они при-
мерно в 3 раза прочнее стального и в 8 раз пенькового троса то-
го же диаметра. Наряду с этими преимуществами такелажные це-
пи имеют недостатки. К ним относятся большой вес (особенно по
сравнению со стальными тросами) и почти полное отсутствие
эластичности. В местах сварки такелажные цепи могут иметь скры-
тые дефекты.
Цепи с износом диаметра железа на 10% должны быть изъяты
из употребления.
Разрывная крепость для такелажных цепей может быть опре-
делена по приближенной формуле
Рр= 3,8 d2,
где Рр — разрывная крепость, т;
d — диаметр круглого железа цепи, см.
Рабочая крепость такелажной цепи может быть определена по
приближенной формуле
10rf2,
где Pi — рабочая крепость, кг;
d — диаметр круглого железа цепи, см.
Не следует допускать крутых перегибов отдельных звеньев це-
пей, поэтому диаметр шкивов должен быть равным не менее чем
25—30 диаметрам железа звена. Для увеличения срока службы
такелажных цепей их рекомендуется смазывать маслом или смесью
растопленного сала с порошком графита.
Б л о ки. На морских судах применяют деревянные, деревянные
с оковкой и металлические блоки. Деревянные части блоков изго-
товляют из твердых пород дерева (дуба, ясеня и т. п.), а метал-
лические— из стали. По числу шкивов в блоке их подразделяют на
одно-, двух- трех- и многошкивные.
Канифас-блоки (рис. 154) имеют откидную щеку (или ее часть).
Это позволяет закладывать снасть в блок средней частью.
Гаки — кованые крюки из мягкой стали, применяемые для
подъема тяжестей, закладывания блоков и т. п. Гак состоит из
спинки, обуха с проушиной и носка.
Рабочая нагрузка, допускаемая на все гаки, определяется при-
ближенной формулой
p1=0,6d2,
278
где Р\ — рабочая нагрузка, кг;
d — диаметр спинки гака, мм.
На рис. 155 показаны типы гаков, применяемых на морских су-
дах: а — простой, б — повернутый, в — храпцы, г — глаголь-гак,
д — гак с вертлюгом, е — грузовой.
Скобы бывают прямые и за-
кругленные (рис. 156), состоят из
спинки, лапок с проушинами и за-
мыкающего болта. В зависимости
от места применения скобы пос-
ледняя может иметь замыкающий
болт с винтовой нарезкой (таке-
лажные и швартовные скобы),
шпилькой или чекой (якорные и
скобы для поднятия больших тя-
Рис. 156.
жестей).
Размер скоб определяется по диаметру спинки в мм. Рабочая
нагрузка на скобу может быть рассчитана по приближенным опыт-
ным формулам:
для прямой скобы
Л=4,5г/2;
для закругленной
A*i=3,7d2,
где Pi — рабочая нагрузка в кг;
d — диаметр круглого железа скобы в мм.
Винтовые талрепы (открытые и закрытые) состоят из
двух стержней с нарезкой и рамы талрепа (рис. 157); употребляют-
ся для крепления и обтягивания снастей стоячего такелажа, штур-
тросов, лееров, для найтовки палубных грузов и т. п.
Коушем называют металлическое кольца с желобком (кипом)
27?
снаружи, предохраняющее трос от крутого излома, изнашивания
при надевании его на штырь скобы, гак и г п.
Обух — металлическая проушина для закладывания скоб,
привариваемая к корпусу судна либо составляющая одно целое
с какой-либо частью судна. Обухи служат для крепления штагов,
вант, цепных стопоров, топенантов грузовых стрел и других сна-
стей стоячего и бегучего такелажа.
Рымом называют кольцо, продетое
через обух. Рым значительно слабее обу-
ха; поэтому за него нельзя крепить сна-
сти, находящиеся под большим натяже-
нием^
Гордень — трос, пропущенный че-
рез одношкивный блок, Служит для изме-
нения направления тяги. Выигрыша в си-
ле гордень не дает. Исключением является
подвижный гордень.
Тали — система соединения одного
неподвижного и одного подвижного бло-
ков с тросом, дающая выигрыш в силе.
Р и ф-т а л и основываются между дву-
мя одношкивными блоками, причем ко-
ренной конец лопаря крепится за непод-
вижный блок.
п . с_ Хват-тали основываются между
двухшкивным (неподвижным) и одно-
шкивным блоками, причем коренной ко-
нец взят за подвижный блок; широко применяются при судовых
работах для подъема небольших тяжестей, уборки трапов и т. д.
С е й-т а л и основываются между двумя двухшкивными блока-
ми и используются для подъема тяжелых гузов и обтягивания та-
келажа.
Гинцы — тали, постоянно заведенные за какую-либо снасть и
основанные между блоками с одинаковым числом шкивов.
Гини основываются между двумя*трехшкивными или много-
шкивными блоками (пятишкивные, шестишкивные) и применяются
для работы с тяжелыми грузами.
При расчете талей в судовых условиях допустимо считать, что
для преодоления трения в каждом шкиве затрачивается усилие,
равное 10% 'веса поднимаемого груза, если тали основаны расти-
тельным тросом, и около 5%, если тали основаны гибким сталь-
ным тросом.
Ходовой лопарь талей может сбегать как с подвижного, так и
с неподвижного блоков. Напряжение ходового лопаря при подъе-
ме груза определяется по формуле
Q + friQ
л 1
28Q
если ходовой лопарь сбегает с подвижного блока, и по формуле
„ = Q + ^,Q
п ’
если ходовой лопарь сбегает с неподвижного блока.
В формулах Q — вес поднимаемого груза, кг;
k— коэффициент, равный 0,1, если тали основаны
растительным тросом, и 0,05, если — гибким
стальным;
п —число шкивов обоих блоков.
§ 116. Такелажные работы
Под такелажными работами подразумевают установку и ремонт
находящегося в эксплуатации различного такелажа и обработку
новых канатов (вязание узлов, плетение матов, сеток, кранцев,
вязание кнопов и мусингов, бензелей и марок и т. п.).
При выполнении такелажных работ используют следующий ин-
струмент (рис. 158).
На рис. 158 введены обозначения: а, б — свайки; в — драек; а — мушкель;
д — полумушкель; с — лопатка; ж — киянка; з — марочница; и — секач; к — бед-
ро; л — трепало; м — машинка для слбма тросов.
281
Мушкель — деревянный молоток; боек мушкеля изготов-
ляется из граба, ручка — из березы.
По л у мушке ль — деревянный молоток, применяемый для
клетневания тросов; вдоль цилиндра бойка имеется кип.
Свайки — деревянные и стальные; их применяют для пробив-
ки прядей троса при изготовлении сплесней, огонов, кнопов на
растительных и стальных тросах. Конусообразные свайки бывают
прямые и согнутые. Деревянные свайки изготовляют из крепких
пород дерева — клена, граба, дуба.
Д р а е к — деревянный двусторонний конусообразный инстру-
мент из твердого дерева для натягивания вручную каких-нибудь
снастей или концов.
Лопатка — деревянная или стальная; (применяется при кле-
тневании; в плоской части имеется одно или несколько отвер-
стий.
Киянка — большой деревянный молоток, применяемый при
работах с проволочным тросом и при конопатке.
Бердо — деревянная четырехугольная рама, между двумя
сторонами которой натянуты перекладины из шкимушгзра с очком
в середине; применяется для изготовления матов.
Трепало — доска с ручкой из крепкого дерева, применяемая
для выделки матов; одна из кромок трепала заострена.
Машинка для слома тросов применяется для соедине-
ния вплотную двух концов троса при наложении бензеля или за-
делке коуша.
Кроме перечисленных инструментов, для такелажных работ
применяют ручники, зубила, кусачки, такелажный нож.
Узлы. Вязка узлов — один из простейших видов такелажных
работ. Морские узлы должны быстро вязаться, быстро отдаваться
(развязываться) и не распускаться самопроизвольно. Наиболее
распространенные морские узлы приведены на рис. 159.
Прямой узел (рис. 159,а) служит для соединения двух кон-
цов растительного троса одинаковой толщины при слабой тяге.
При больших натяжениях прямой узел не применяется, так как он
сильно затянется и его трудно будет развязать.
Плоским узлом (рис. 159, б) соединяют два различных по
диаметру троса.
Рифовый узел (рис. 158, в) применяют для связывания риф-
штертов при взятии рифов, а также при прочих такелажных рабо-
тах, требующих быстрой отдачи связанных снастей.
Шкотовый -узел (рис. 159, г) употребляют6 при ввязывании
шкотов в шкотовые углы парусов и в случаях, когда нужно
ввязать снасть концом в очко (крепление флагов на флаг-
фале и пр.).
Брамшкотовый узел (рис. 159, д) применяют в тех же
случаях, что и шкотовый, но он более надежен; может быть ис-
пользован при подъемных работах, при ввязывании шкотов в углы
пластыря, для связывания фалиней шлюпок при буксировке и т. д.
282
Выбленочный узел (рис. 159, е) употребляют для бы-
строго и надежного закрепления троса за кольцо, к круглому
предмету, для связывания троса с серединой другого троса (вязка
выбленок) и ввязывания двойных шкотов и галсов в металличес-
кие коуши.
Беседочный узел (рис. 159,ж)—надежный, незатягива-
ющийся узел в виде петли; применяют для обвязывания человека
концом во время его работы за бортом, на надстройках и рубках,
а также для изготовления временного огона.
Двойной беседочный узел (рис. 159, з) вяжется для
того, чтобы у работающего на высоте или за бортом человека бы-
ли свободны руки. Этот узел имеет две петли. Человек садится на
длинную петлю, а короткую пропускает подмышки.
Шлюпочный узел (рис. 159,и) служит для закрепления
на шлюпках поданных концов; применяют его при буксировке
шлюпок (крепление буксирного конца); легко развязывается.
Стопорный узел (рис. 159, к) применяют для временного
задерживания швартовов, лопаря, талей, горденя. При застопори-
вании стального троса в качестве стопора может быть использова-
на такелажная цепь.
Сваечный узел (рис. 159, л) применяют при обтягивании
свайкой концов бензелей и найтовов.
Восьмерку (рис. 159, м) вяжут на свободном (ходовом)
конце лопаря, чтобы он не ушел из блока.
283
Гачный узел (рис. 159, н) применяют при необходимости
заложить гак блока для тяги снасти. Ходовой конец узла прика-
боливают к коренному, чтобы гачный узел при ослаблении тяги не
развязывался.
Двойной гачный узел употребляют при закладывании
на гак талей лопаря тонкого троса.
Удавку со шлагом (рис. 159,о) применяют при букси-
ровке и подъеме (бревен и других предметов круглого сечения на
борт судна, при работах по установке рангоута.
Бочечный узел (рис. 159, п) служит для подъема или опу-
скания бочек, бидонов, бутылей и т. д.
Кноп (рис. 460) — особый узел, который заделывают на кон-
це растительного троса в виде утолщения для того, чтобы закре-
пить пряди и предохранить их от развивания, а также для крепле-
ния коренного конца троса к какой-либо снасти.
Мусинг (рис. 161)—кноп, сделанный посередине троса. Из-
готовляют мусинги на шкентелях выстрелов и шлюпбалок, где они
служат опорой для ног.
Огон (рис. 162) — большая петля, сделанная на конце или в
середине троса. Огоны бывают простые (рис. 162, а), подкововид-
ные (рис. 162, б) и разрубные (рис. 162, в). Их изготовляют на
швартовных тросах, бросательных концах, на вантах, штагах и
других снастях стоячего и бегучего такелажа судна. Для предохра-
нения троса от перетирания и крутого изгиба огоны выполняются
с ‘коушами.
Сплесни. Сращивание тросов без узла называютсплесниванием,
а сам сросток — сплеснем. Сплеснивают тросы одинаковой
толщины. В зависимости от вида, прочности и способа выполне-
ния сплесни бывают короткие (рис. 163, а) и длинные, или разгон-
ные (рис. 163, б). Последние применяют в тех случаях, когда
284
снасть приходится пропускать через шкив блока и в месте соеди-
нения не должно быть значительного утолщения.
При расчетах следует помнить, что каждый сплесень уменьша-
ет крепость троса на 10%.
Марка служит для заделывания концов троса, предохраняя
его от распускания при выполнении сплесней, огонов и других та-
Рис. 163.
келажных работ. В зависимости от материала маркируемого троса
для наложения марки может применяться тонкий линь, каболка,
парусная нитка или мягкая луженая проволока.
Чаще всего применяют простую марку (рис. 164). Один из кон-
цов линя (каболки) укладывают вдоль троса петлей, затем на нее
накладывают 12—15 шлагов линя (каболки и т. д.), а оставшийся
Рис. 164.
Рис. 165.
конец пропускают в петлю и при ее помощи затягивают под шла-
ги марок. Свободные концы линя обрезают.
Бензель (рис. 165) служит для скрепления двух параллель-
но идущих тросов. В качестве материала, употребляемого при нало-
жении бензеля, применяют хорошо скрученные каболки, линь или
мягкую луженую проволоку.
Тренцевание предохраняет трос от проникновения в него вла-
ги. Оно производится для выравнивания поверхности тросов, пред-
назначенных для клетневания. Материалом для трений является
смоленый щкимушгар, линь или тонкий трос. Трос туго натягива-
285
ют, затем к нему прикрепляют лини (трени). Число треней дол-
жно быть равно числу прядей. Каждую трень поочередно уклады-
вают вручную между прядями троса. Если тренцуют толстый трос,
то между смежными прядями и тренью укладывают полутрени,
диаметр которых должен быть в два раза меньше диаметра тре-
ни.
Трени и полутрени должны ложиться ровно и плотно заполнять
собой промежутки между прядями. Для этого прогоняют драйком
по направлению свивки троса трени и полутрени.
Клетневание троса — обвертывание его просмоленной паруси-
ной (клетневиной) и наложение 'клетня — длинной марки из рас-
тительного или стального троса малого диаметра. Перед клетнева-
нием трос обязательно должен подвергаться тренцеванию.
§ 117. Организация судовых работ по поддержанию
судна в исправном техническом состоянии
Организация и планирование судовых работ. Судовые работы
выполняются в соответствии с планами, которые составляют на
каждый рейс старший помощник (по палубной части) и старший
механик (по машинной части). Планы судовых работ утверждает
капитан.
При составлении плана в первую очередь учитывают обязатель-
ные работы, связанные с движением судна (например, вахты на
руле), охраной судна на стоянке и с проведением грузовых работ
(спуск или постановка грузовых стрел, открытие и закрытие гру-
зовых люков, осмотр деталей грузового устройства и т. п.). В пла-
не учитывают и выходные дни.
Судовыми работами руководят: по палубной части — боцман,
по машинной—второй механик, по котельной (на паровых су-
дах) — третий механик.
Палубные работы на ходу выполняют лица, не связанные не-
посредственно с движением судна (боцман, плотник, подшкипер,
матросы II класса, практиканты). Работы, которые вызваны осо^
быми обстоятельствами и требуют участия всего или большей час-
ти экипажа, называют авральными. Аврал объявляется по указа-
нию капитана.
Повседневная и генеральная приборка судна. Для поддержанйя
порядка и чистоты на судне ежедневно проводят приборку и не ре-
же одного раза в месяц — генеральную приборку (санитарный
аврал). На пассажирских судах генеральная приборка проводится
после высадки пассажиров в конечных портах.
При повседневной приборке подметают, протирают мокрыми
швабрами, моют жилые и служебные помещения, коридоры, ска-
тывают забортной водой и пролопачивают верхние палубы, промы-
вают шпигаты, чистят медные и металлические части судна и при-
боров, смазывают части механизмов-и т. д. На транспортных су-
дах повседневную приборку заканчивают до подъема Государствен-
ного флата СССР.
При генеральной приборке проводят полную мойку судовых
помещений; мягкую мебель, матрацы и ковры тщательно выбива-
ют, проветривают и чистят щетками; койки, диваны, полки и прочую
мебель, палубы всех помещений протирают дезинфицирующим ра-
створом; деревянную палубу моют 5-процентным раствором каусти-
ческой соды в воде (применять каустическую соду или поташ для
мытья окрашенных поверхностей не разрешается).
После повседневной или генеральной приборки старший помощ-
ник в сопровождении судового врача и боцмана осматривает судно
и о результатах приборки докладывает капитану.
Уход за рангоутом и такелажем. Мачты и стрелы не реже одно-
го раза в месяц моют теплой водой с мылом; наиболее грязные и за-
пущенные места промывают керосином или раствором зеленого мы-
ла. Рангоут смазывают специальным составом — тиром, который
приготовляют из сырого льняного масла, мелкого толченого гарпиу-
са (канифоли) и шеллака.
Стоячий такелаж рангоута должен быть всегда обтянут. Появив-
шуюся слабину в такелаже выбирают натяжением талрепов. Тал-
репы должны быть постоянно зашплинтованы и хорошо сма-
заны.
Покрасочные работы на судне. Для проведения покрасочных
работ суда снабжают красками, олифой и лаками.
Судовая краска обладает хорошей кроющей силой: если нанести
тонкий слой на ранее окрашенную поверхность, то она совершенно
закроет прежнюю окраску. Краска должна быть устойчивой против
действия щелочей, кислот и безвредной.
На судах применяют белые (свинцовые, цинковые, титановые
и литопоновые белила), красные (свинцовый и железный сурики,
киноварь, мумия), зеленые (свинцовая зелень), желтые (охра, крон
№ 1), синие (берлинская лазурь, ультрамарин), коричневые (ум-
бра), черные (чернь) краски, а также шаровые краски (кодеры),
приготовляемые путем добавления к белилам черной и синей кра-
сок.
Олифа (натуральная, полунатуральная и искусственная) —свя-
зующее вещество для приготовления масляных красок. Лучшей
является вареная натуральная олифа, приготовляемая из высыха-
ющих растительных масел, нагретых до температуры 220—280°.
Хорошая олифа имеет светло-коричневый цвет, не дает осадка и
высыхает за 12—20 ч летом и за 24—36 ч зимой.
Лаки — жидкости, которые после высыхания дают на поверх-
ности предмета непроницаемую для воздуха прозрачную блестя-
щую пленку.
Перед окрашиванием металлических поверхностей с них удаля-
ют ржавчину, после чего очищают металлическими щетками или
протирают керосином. Если старая краска отстает или прилегает
287
Неплотно, то её счищают. Подготовленные металлические поверх-
ности грунтуют обычно железным суриком; на неровности кладут
шпаклевку (смесь олифы с толченым мелом). К окраске приступа-
ют после высыхания грунтовки; производят покраску дважды. Вто-
рой (беловой) слой краски накладывают после того, как совершен-
но высохнет первый. ,
Деревянные поверхности очищают от старей краски, зашпакле-
вывают и затем красят. Для окраски больших поверхностей приме-
няют краскораспылители.
Покрасочные работы следует производить
в соответствии с Правилами по окраске мор-
ских судов ММФ.
Конопатка и заливка пазов. Пазы и стыки
деревянной палубы конопатят паклей и зали-
вают смолой, чтобы через них не проникала
вода внутрь судна. Конопатку производят в
Рис. 166. сухую и ясную погоду.
В последнее время в судостроении нашел
применение новый способ уплотнения деревянных палуб. Доски
палубного настила по пазам и стыкам заделывают на полукруг-
лую канавку, в которую закладывают фигурную прокладку из
специальной резины (хлорированный искусственный каучук), сох-
раняющий свои упругие свойства десятки лет (рис. 166). Этот спо-
соб позволяет экономить около 50% времени на работах по уплот-
нению деревянных палуб и значительно повышает надежность и
срок службы деревянного палубного настила.
Проверка технического состояния корпуса судна. Одной из ос-
новных задач Регистра Союза ССР и его инспекций является кон-
троль за техническим состоянием корпуса судна, находящегося в
эксплуатации. Этот контроль осуществляется в виде периодичес-
ких классификационных освидетельствований, которые подраздели- •
ются на очередные, ежегодные и доковые. Очередные освидетель- -•
ствования производятся каждые четыре года, ежегодные — в про- ;
межутках между ними. /
При постановке судна в док1 освидетельствованию подвергает- j
ся подводная часть корпуса судна.
При любых освидетельствованиях инспектор Регистра составля-
ет акт с подробным описанием технического состояния корпуса суд- ’
на, с указанием дефектов, подлежащих устранению.
Помимо этого для проверки выполнения со стороны экипажа
судна Правил обслуживания корпуса судна и ухода за ним не ре-
же одного раза в шесть месяцев проводятся инспекторские осмот-
ры. Здесь специальная комиссия руководствуется в своей работе
Положением о наблюдении за техническим состоянием морских су-
дов.
1 Постановка пассажирских судов в док производится ежегодно, грузовых —
не реже одного раза в два года.
288
Уставом службы на судах морского флота предусмотрен еже-
дневный контроль за состоянием корпуса судна со стороны команд-
ного состава. Капитан обязан производить ежемесячные осмотры
технического состояния корпуса судна, его надстроек, помещений.
Все мелкие повреждения, обнаруженные во время осмотров,
устраняются экипажем судна; более крупные вносятся в специаль-
ный формуляр и устраняются во время очередного ремонта.
Глава XXI
ТЕХНИЧЕСКАЯ ЭКСПЛУАТАЦИЯ СУДОВЫХ УСТРОЙСТВ
§ 118. Якорное и швартовное устройства
Якорное устройство обеспечивает стоянку судна на свободной
воде; его швартовку кормой к причалу; быстрое погашение инер-
ции хода судна, предотвращающее навал на причальное сооруже-
ние или другое судно; постановку судна на шпринг; снятие судна с
мели собственными силами и средствами.
Якорное устройство состоит из якорей, якорных канатов, бор-
товых и цепных палубных клюзов, цепных ящиков, стопоров и па-
лубного механизма (шпиля или брашпиля).
Якоря, удерживающие судно на определенном месте от сноса
ветром и течением, называются становыми. Якорем, обладающим
большой держащей силой, является адмиралтейский якорь; его не-
достаток — сложность уборки после подъема. Кроме того, одна из
лап адмиралтейского якоря, торчащая из грунта, представляет под-
водную опасность.
В настоящее время самыми распространенными становыми яко-
рями являются патентованные бесшточные якоря типа Холла
(рис. 167). Последние имеют меньшую держащую способность,
чем адмиралтейские, но выгодно отличаются быстротой и удобством
уборки.
На небольших судах широкое распространение получили якоря
Матросова (рис. 168).
Кроме становых якорей, каждое судно снабжают вспомогатель-
ными якорями — верпами, которые применяются для снятия судна
с мели. Наибольший из верпов — стоп-анкер должен по правилам
Регистра СССР иметь вес около 7з веса станового якоря.
Якорные канаты (цепи) состоят из звеньев с распорками
(контрфорсами) калибром от 13 до 100 мм (по ГОСТ 228—52).
Для замены изнашивающихся частей каната, а также для того,
чтобы в случае необходимости канат можно было быстро разъеди-
нить, он состоит из отдельных кусков цепи — смычек длиной по
25 м. Смычки соединяются между собой соединительными скобами.
Однако они при прохождении якорь-цепи через брашпиль, клюзы и
стопоры (рис. 169) вызывают резкие рывки, что нередко влечет к
10-933 289
соскакиванию якорных цепей со звездочки шпиля или брашпиля.
Поэтому соединительные скобы заменяют скобами особой конструк-
ции (патентованными), имеющими разъемные звенья. Эти скобы
не отличаются по размерам от нормальных звеньев якорной цепи и
обеспечивают равномерные размеры якорной цепи во всей длине.
Чтобы якорная цепь не перекручивалась, в смычки вводят вер-
тлюги: один — в первую смычку неподалеку от якорной скобы,
другой — в последнюю смычку.
Внутренний конец якорной цепи крепят к корпусу судна по-
средством жвака-галса (концевой
Рис. 169.
смычки), состоящего из куска
цепи, заканчивающейся
откидным гаком (глаголь-
гаком). Жвака-галс слу-
жит для быстрой отдачи
якорной цепи.
Снабжение судов яко-
рями и якорными кана-
тами производится в со-
ответствии с ГОСТами и
Правилами Регистра
СССР в зависимости от
типа, района плавания и
величины того или иного
судна. По правилам Ре-
гистра Союза ССР мор-
ские суда в зависимости
от района плавания де-
лятся на четыре катего-
рии:
290
I — суда неограниченного района плавания;
II — суда для плавания в закрытых морях без ограничений, в
открытых морях—с удалением от порта-убежища до 200 миль;
III — суда ограниченного района плавания с удалением от пор-
та-убежища на 50 миль;
IV — суда портового, рейдового и прибрежного плавания.
Для входа в таблицы ГОСТа необходимо вычислить аргумент,
называемый характеристикой снабжения, который имеет вид квад-
ратичного модуля, зависящего от главных размерений судна
ЦВ+Н).
Характеристика снабжения дополняется поправкой на парус-
ность надстроек и рубок. Окончательно она имеет вид
ЛГС = km [Z (В + Н) + (130)
где k — коэффициент, равный 1,0 для самоходных и 1,3 для неса-
моходных судов;
т — коэффициент, принимаемый равным 1,0 — для судов I ка-
тегории; 0,9—II; 0,8—III и 0,7 — для судов IV категории;
SS — сумма 3/4 произведений длины надстроек на их высоту
и ’/2 суммы произведений длины рубок на их высоту.
Если характеристика, полученная вычислением, лежит между
смежными характеристиками таблицы, то снабжение производится
в соответствии с ближайшей большой характеристикой.
Брашпили и шпили служат для подъема якорей; они бы-
вают ручные, паровые и электрические. Тяговое усилие на звездоч-
ке этих механизмов должно превышать вес якоря в пять раз.
Для закрепления якорей по-походному, помимо ленточных сто-
поров, имеющихся у брашпилей и шпилей, на палубе устанавлива-
ют постоянные и переносные стопора.
Правила технической эксплуатации якорного и швартовного
устройств. Якорное устройство должно удовлетворять следующим
основным требованиям:
обеспечить при всех условиях плавания быструю, легкую, удоб-
ную отдачу и подъем якорей, а также надежную стоянку на них
судна; *
число и вес якорей, калибр и длина якорных цепей должны со-
ответствовать размерам, назначению и району плавания судна и
отвечать требованиям Правил Регистра СССР;
обеспечить одновременный подъем двух якорей с глубины не ме-
нее 45 м (без отрыва от грунта) со средней скоростью не менее
8 м/сек; скорость подъема каждого якоря в отдельности должна
быть не менее 12 м/сек;
стопоры должны обеспечить быструю отдачу якорей, крепить
якоря по-походному прочно и надежно. Перед каждым выходом в
море якорное устройство должно быть проверено старшим помощ-
ником.
Швартовное устройство должно обеспечивать легкое и быстрое
проведение работ по швартовке судна. Отдельные части его должны
10* 291-
быть правильно расположены и обладать прочностью, обеспечи-
вающей крепление судна у причальной линии, ручные швартовные
механизмы (шпили, лебедки) должны иметь исправные и надежно
действующие стопорные приспособления, не допускающие произ-
вольного стравливания швартовов при их выбирании;
при швартовке, а также при стоянке в свежую погоду должны при-
меняться мягкие тросы. Количество, качество и минимальные раз-
меры швартовных тросов должны удовлетворять нормам и требова-
ниям Регистра СССР и Табелю снабжения судов морского флота.
§ 119. Рулевое устройство
Рулевое устройство транспортного судна состоит из руля, руле-
вого привода, рулевого двигателя и привода управления им.
Различают три типа рулей: обыкновенный руль
(рис. 170, а) — перо руля расположено по одну сторону от оси вра-
щения; балансирный руль (рис. 170,6)—балансирная часть
имеет ту же высоту, что и главная часть руля; полубалансир-
ный руль (рис. 170, в) — балансирная часть по высоте меньше,
чем главная часть руля.
Рулевыми приводами называют механизмы, передающие вра-
щающий момент на рули. Их подразделяют на румпельные и винто-
вые. В румпельных приводах передача осуществляется румпелями
продольными (стержень, утолщенной частью насаженный на бал-
лер руля и расположенный в диаметральной плоскости судна), по-
«2
перечными и секторными. Последние два румпеля представляют со-
бой двуплечие рычаги, сидящие на голове баллера.
Рулевые приводы бывают с гибкой связью (штуртросом) и же-
сткой (зубчатой, винтовой и т. д.). Штуртрос — проволбчный
трос или цепь, передающие усилия от рулевого двигателя к румпе-
лю и через него — к рулю.
Примером рулевых приводов с жесткой связью может служить
секторный привод с пружинным амортизатором. Вал рулевого
двигателя имеет зубчатую шестерню, которая входит в зацепление
Рис. 171.
с зубчатым сектором, насаженным свободно на голову баллера ру-
ля. Под сектором укреплен на баллере прямой румпель. Он связан
с сектором буферными пружинами. Если буферные пружины вый-
дут из строя, сектор временно соединяют жестко с баллером при
помощи закладной чеки.
Винтовые приводы (рис. 171) применяются для ручного
управления рулем в случаях, когда повреждено рулевое устройство.
В качестве рулевых двигателей на судах применяют паровые
машины, электродвигатели и гидравлические машины (гидромо-
торы). Для установления связи между постами управления и руле-
выми двигателями применяют специальные передачи, называемые
телединамическими или телемоторными. При валиковой передаче
связь между штурвальной тумбой и золотником парового рулевого
двигателя осуществляется при помощи стальных валиков диамет-
ром от 30 до 38 мм, соединенных между собой шарниром Гука. Ва-
ликовая передача проводится под палубами на подвесках с под-
шипниками. Конические шестерни позволяют изменять направление
требуемой проводки. Этот тип передачи рекомендуется при корот-
ких проводках, так как при деформациях палубы может произойти
заедание в узлах передачи.
При больших расстояниях от штурвала до рулевого двигателя
целесообразнее применять тросовую передачу. Один тросовый ба-
рабан связан со штурвалом, второй — со спусковым золотником.
Эти барабаны соединены между -собой гибким проволочным троном
диаметром 10 мм,
29$
Гидравлическая передача состоит из отправительного цилиндра,
движение поршня которого связано со штурвалом, и контрольного
цилиндра, движение поршня которого связано с золотником (те-
лемотор). Эти цилиндры соединены между собой медными трубка-
ми диаметром от 10 до 15 мм. Всю систему заполняют смесью во-
ды и очищенного глицерина.
Электрическую передачу применяют при электрическом управ-
лении рулем.
На штурвальных тумбах имеются указатели (аксиометры) ис-
тинного положения пера руля.
Правила технической эксплуатации рулевого устройства. Ру-
левое устройство должно обеспечивать исправное и бесперебойное
управление судном и удовлетворять следующим основным требо-
ваниям:
а) перекладка руля от среднего положения на каждый борт
не должна продолжаться более 15 сек, а перекладка руля с борта
на борт — более 35 сек при полном переднем ходе судна;
б) угол перекладки руля от среднего положения на каждый борт
должен быть не менее 35°; стопорные (ограничительные) устрой-
ства с обеих сторон рулевого сектора не должны допускать откло-
нения руля более чем на 2—3° против допускаемых углов пере-
кладки;
в) для удержания руля на месте при штормовой погоде,
когда осуществляется переход с одного рулевого привода на дру-
гой, должно быть предусмотрено надежное стопорное или тормоз-
ное устройство;
г) румпельное отделение должно быть освещено днем и ночью;
иметь аварийное освещение; при наличии паровой или гидравличе-
ской рулевой машины отапливаться. Румпельное отделение долж-
но быть постоянно заперто.
Перед выходом в рейс части рулевого устройства хорошо сма-
зывают, осматривают, в период рейса проверяют при каждой сме-
не вахт. Осмотр рулевой машины производит ежедневно вахтен-
ный машинист или электрик.
§ 120. Грузовое устройство
Грузовое устройство судна (стрелы или краны) должно обеспе-
чить быстрое и безопасное проведение погрузочно-разгрузочных
работ, сохранность перерабатываемого груза и его тары. Стрелы
или краны используются при грузовых операциях на открытых
рейдах, в портовых пунктах, которые незначительно или совсем
не оборудованы грузоподъемными средствами. Даже в 'высокоме-
ханизированных портах при современной тенденции к скоростной
обработке судов весьма эффективным является метод совместного
использования грузовых средств порта и судна.
Грузовое устройство судов основного назначения (рис. 172, а, б)
состоит из грузовых стрел (обыкновенных и тяжеловесов) или кра-
294
Рис. 172.
нов; такелажа грузовых стрел или кранов; грузовых люков и гру-
зоподъемных механических лебедок (паровых, электрических
И др.).
На рис. 172, а введены обозначения: / — мачта; 2 — стопор топенанта;
,3 — вилка; 4 — блок топенанта; 5 — топенант; 6 — стрела; 7 — оттяжка;
8 — грузовой блок; 9 — грузовой шкентель; 10 — барабан лебедки.
Обозначения на рис. 172, б: 1 — поворотная платформа; 2— стрела; 5 —
грузовой шкив; 4 — грузовой шкентель; 5 — топенант; 6 — блок электромо-
торов.
В простейшем случае грузовые операции осуществляются одной
-стрелой. Перетравлением оттяжек вручную стрела выносится за
борт и заваливается обратно с грузом (рис. 172, в). Это медлен-
ный и трудоемкий способ. Чаще всего грузовые операции произво-
дят совместной работой двух грузовых стрел (способ работы на
«телефон»). В этом случае одна из стрел устанавливается над про-
светом грузового люка, другая — выносится за борт (рис. 172, г).
Свободные концы грузовых шкентелей соединяются на один грузо-
вой гак. Стрелы крепятся неподвижно с помощью оттяжек. При
втором способе темп грузовых операций увеличивается на 25—30%.
В последнее время все большее распространение на судах по-
лучают электрические грузовые краны. В последних конструктивно
сочетаются стрела и лебедка, смонтированные на общей поворот-
ной платформе.
Грузовые краны удобнее в обслуживании и производительнее,
чем стрелы, имеют сравнительно небольшие размеры и почти по-
стоянную готовность к действию. Краны устанавливают по обоим
бортам судна, так как они имеют ограниченный вынос стрелы.
По Правилам технической эксплуатации запрещается исполь-
зование грузовых устройств при:
наличии трещин и разрывов в ответственных деталях — грузо-
вых гаках, вертлюгах, блоках, скобах и др.;
неисправности тормозного устройства;
наличии лопнувших проволок в грузовом шкентеле в количест-
ве свыше 10% от общего их числа, на длине, равной 8 диаметрам
троса;
уменьшении диаметра звеньев, скоб, болтов, штырей, вертлю-
гов вследствие износа их более чем на 10%;
наличии опасных трещин и гнили у деревянных стрел, а также
опасных трещин и деформаций стальных стрел;
отсутствии у грузового устройства сертификатов и Регистровой
книги подъемных механизмов.
§ 121. Грузовые операции на открытых рейдах
Успех проведения грузовых операций на открытом рейде зави-
сит от внешних факторов — состояния моря, защищенности рей-
да, погоды, глубин, наличия и типа плавсредств и т. д. Судно дол-
жно становиться как можно ближе к берегу, что зависит от уклона
296
дна на рейде, и всегда быть готовым прекратить грузовые опера-
ции и уйти в открытое море или защищенное место. Не следует
проводить никаких работ, влекущих за собой потерю мореходнос-
сти судна. Если погода резко ухудшилась, команду вызывают на
аврал и обеспечивают подготовку судна к штормованию: закрыва-
ют люки, крепят стрелы и палубный груз и т. д.
Командный состав судна при стоянке'на плохо защищенных
рейдах должен быть всегда готов принять на себя заботу по обес-
печению сохранности плавсредств, обслуживающих судно, вплоть
до подъема их на палубу.
На рейдах с открытым отмелым берегом при посвежении вет-
ра или зыби со стороны моря судно должно прекращать грузовые
работы заблаговременно. При ветрах, дующих с берега, погрузоч-
но-разгрузочные работы не прекращаются. Стоянка судна у ска-
листых берегов с неровным крутым дном сложна и требует осо-
бой бдительности при несении вахтенной службы.
Между судном и берегом устанавливают постоянную визуаль-
ную, звуковую или радиотелефонную связь.
Грузовые работы осуществляются судовыми средствами, кото-
рые должны быть соответственно подготовлены. Для разгрузки
судна используют береговые плавсредства: кунгасы и плашкоуты
грузоподъемностью 50—100 т.
Для успешной и безопасной обработки судна имеет большое
значение расстановка плавсредств. При необходимости работы
на все люки баржи расставляют в шахматном порядке у обоих
бортов. Этим обеспечивается свободная раскантовка плавсредств
и перестановка их к соседним трюмам. Кроме того, при работе на
два борта судно не получает большого крена и колебательных
движений при одновременном подъеме груза на всех стрелах.
Поскольку судно при наличии ветра обычно уваливается под ве-
тер, у носового трюма баржу ставят у борта, противоположного
борту отданного якоря. Остальные баржи ставят в шахматном по-
рядке, если погода позволяет швартовать их с наветренного борта.
При плохой погоде плавсредства ставят только у подветренного
борта. В этом случае может понадобиться постановка судна на
шпринг с тем, чтобы защитить плавсредства от действия, ветра и
волнения.
Если для подходящих к судну плавсредств не хватает места, их
швартуют к баржам, стоящим у борта. В этом случае целесооб-
разно швартовы подавать непосредственно на верхнюю палубу
судна, что позволяет быстро отводить от борта обработанную
баржу, а ошвартованную к ней ставить к борту без помощи ка-
теров.
Для быстроты и надежности швартовки плавединиц на судне
целесообразно заранее приготовить необходимое количество тросов.
Огоны тросов подвешивают за бортом на растительном проводни-
ке длиной 10—15 м. При подходе к борту баржи проводники по-
травливают и огоны ложатся на палубу баржи. После закрепления
297
их набивают при помощи брашпиля, шпиля или лебедок и крепят
на судне. В последнее время получили широкое применение швар-
товные тросы со вставками из синтетического троса, которые игра-
ют роль амортизаторов при рывках на волнении.
Швартовка плавединиц у носовой и кормовой оконечностей
имеет свои особенности. Здесь швартовные тросы проводят за кор-
мой и перед носом с противоположного борта. Более удобно для
швартовки барж использовать неотданный якорь, который браш-
пилем кладут на грунт. Носовой конец подходящей плавединицы
заводят дуплинем за якорную цепь и потравливают так, чтобы
баржа стала на место. Для этой же цели на корме целесообразно
опустить на прочном тросе вспомогательный якорь. При стоянке
плавсредств у кормы особое внимание уделяют защите руля и вин-
тов от повреждений. В качестве защитного средства можно ис-
пользовать ограждения в виде брусьев (бревен), подвешенных на
тросах с двух бортов судна.
§ 122. Шлюпочное устройство и спасательные
средства морских судов
Шлюпочное устройство современного транспортного судна со-
стоит из шлюпок ( спасательных и рабочих), приспособлений для
хранения шлюпок по-походному на своих штатных местах,
устройств для спуска шлюпок на воду и подъема их на борт судна
и палубных механизмов (шлюпочные лебедки).
При размещении спасательных шлюпок учитывают доступность
и возможность быстрой посадки в них пассажиров и команды, лег-
кость, быстроту и безопасность спуска шлюпок на воду при не-
благоприятных условиях крена и дифферента и безопасность хра-
нения. Шлюпки располагают так, чтобы они не мешали работе у
других шлюпок. Палубы, на которых размещены шлюпки, должны
быть освещены.
Шлюпки хранят по обоим бортам на одной из наиболее вы-
соко расположенных палуб в средней части судна. Спасательные
шлюпки нельзя располагать в носовой части в пределах ’А длины
судна, так как здесь они могут быть повреждены или смыты вол-
нами. При размещении шлюпок в кормовой части они при спуске
могут попасть под винты.
На танкерах грузоподъемностью более 3000 т должно быть не
менее четырех спасательных шлюпок: две на кормовой надстройке
и две посередине судна. На крупнотоннажных судах допускается
расположение шлюпок в два яруса, по две под одной парой шлюп-
балок.
На своих штатных местах шлюпки должны быть установлены
таким образом, чтобы при любых сложных условиях рейса они
оставались неподвижными и не повредились. Их располагают на
двух или трех ростр-блоках (кильблоках), которые должны иметь
29В
простую конструкцию и быть точно Цригйаны по форме обводов
шлепки. Крепят шлюпки по-походному при помощи найтовов,
имеющих глаголь-гак для быстрой их отдачи.
Для подъема и спуска шлюпок на воду применяют шлюпбалки
различных конструкций. Шлюпку подвешивают к головам двух
шлюпбалок на талях. Шлюпбалки должны обеспечивать быстрое
вываливание шлюпки за борт, спуск
ее с полным снабжением и комплек-
том для людей, на который она рассчи-
тана; спуск шлюпок с обоих бортов
судна при крене до 15°.
Шлюпбалки подразделяют на три
группы.
Поворотные (обыкновенные)
шлюпбалки (рис. 173) состоят из
стальных изогнутых балок, вращаю-
щихся вокруг своей продольной оси.
Заваливающиеся шлюп-
балки также парные, но вращение их
производится на шарнире у пятки, j
такому типу шлюпбалок относят сек-
торную шлюпбалку (рис. 174), у ко-
торой по зубчатой рейке, закрепленной
на палубе судна, катится зубчатый
сектор благодаря вращению рукоятки
винтового стержня, проходящего через нарезную обойму.
К третьей группе относят гравитационные (скользя-
щие) шлюпбалки (с катящейся тележкой). Существует не-
Рис. 174.
сколько разновидностей таких шлюпбалок. Один из типов показан
на рис. 175. Спуск шлюпки производится под действием ее собствен-
299
кого веса при ослаблении тормозного устройства шлюпочных
лебедок. Преимущество этой группы шлюпбалок состоит в том,
что при их применении нельзя повредить и смыть шлюпки, так/как
они хранятся над самой высокорасположенной палубой суд^а и
далеко от борта.
Рис. 175.
Спуск и подъем шлюпки осуществляют вручную или при помо-
щи шлюпочных лебедок. Шлюпку спускают до такой высоты, что-
бы киль ее находился немного выше уровня гребня волны, а за-
тем плавно, но быстро спускают на подошву волны. Это исключает
возможность удара под днище шлюпки подошедшей волны. Важно
своевременно выложить нижние блоки шлюпочных талей, что зна-
чительно упрощается при наличии приспособления для одновре-
менного выкладывания шлюпочных талей. При спуске шлюпки на
воду предварительно заводят к носу судна фалинь, который про-
пускают через носовой рым шлюпки и крепят шлюпочным узлом за
вторую банку1. После выкладывания шлюпочных талей шлюпку
1 Некоторые капитаны рекомендуют проводить носовой фалинь через ук-
лючину б нос от мачтовой банки.
300
удерживают параЛЛёл^но борту суДна на необходимом расстоя-
ние, управляя рулем. Чтобы .не ’повредить шлюпку от ударов о
бор! судна, ее спускают с подветренного борта, снижая ход до
малого. Если шлюпку спускают при сильном волнении, рекомен-
дуется выпускать растительное или минеральное масло1. Для этой
цели! вдоль борта судна подвешивают мешки с маслом, которое,
просачиваясь через стенки мешка, распространяется тонким слоем
по поверхности воды и ослабляет силу удара волны.
При подъеме шлюпки на судно в ней должны находиться два
человека. На борт подают фалинь. Лопаря шлюпочных талей раз-
носят йо палубе судна через канифас-блоки (при подъеме вруч-
ную). ' Отрывать шлюпки от воды нужно в момент нахождения ее
на гребне наибольшей волны. После отрыва от воды открывают
пробки для удаления воды из шлюпки.
К спасательным средствам современного морского судна отно-
сят шлюпки, плоты, скамьи, круги, нагрудники и т. д.
Судовые шлюпки — главные спасательные средства
для пассажиров и команды. Шлюпками также пользуются для со-
общения с берегом, для завозки верпов, для выполнения различных
работ (забортные работы, завозка концов при постановке на боч-
ку и т. д.). Для последних целей обычно используют рабочие
шлюпки.
Плавучесть шлюпки и способность ее держаться на воде долж-
ны быть такими, чтобы шлюпка не тонула при полной нагрузке,
будучи при этом заполненной водой. Шлюпка должна обладать
остойчивостью, достаточной для того, чтобы нести парус, не опро-
кидываться на волнении и допускать без значительного крена сво-
бодное перемещение в ней людей; быть поворотливой и иметь ма-
лый дрейф при следовании под парусами; обводы ее должны обес-
печить наименьшее сопротивление движению под парусами и на
веслах; высота борта шлюпки должна быть такой, чтобы можно
было работать веслами, но волна не должна захлестывать ее. Кор-
пус шлюпки должен выдерживать тяжелые условия плавания на
волнении с полной нагрузкой, а также возможные удары при экс-
плуатации или спуске на воду. Наружная обшивка не должна про-
пускать воду и рассыхаться при длительном хранении на судне.
Габариты шлюпки при заданном количестве размещаемых людей
должны быть минимальными, чтобы она занимала возможно мень-
ше места на борту судна. Люди должны удобно размещаться
в шлюпке, иметь возможность сидеть на банках, не мешая управ-
лению (гребцам и рулевому).
В настоящее время разработан общепризнанный наилучший
тип спасательных шлюпок — вельботы. Эти лучшие конструк-
ции получили свое отражение в правилах Регистра СССР и
ГОСТах.
1 Следует помнить, что наилучшнй эффект в этом случае дают масла ра-
стительные и животные.
301
Суда заграничного -плавания снабжают спасательными сред-
ствами в соответствии с правилами, выработанными Международ-
ной конвенцией по охране (человеческой жизни на море. Снабже-
ние спасательных шлюпок такелажем и продовольствием произ-
водят по нормам ГОСТа. /
На каждую спасательную шлюпку судовым расписанием по
шлюпочной тревоге назначают старшее лицо из штурманов/ или
квалифицированных гребцов. На моторную шлюпку выделяют че-
ловека, умеющего управлять мотором, а в шлюпку, снабженную
радиотелеграфной установкой и прожектором, — лицо, умеющее
обращаться с радио и прожекторными установками.
Универсальный плот используют в закрытом / поло-
жении в качестве обычного спасательного плота. В открытом
положении плот используют для ведения с него покрасочных
работ за бортом или доковых работ.
Надувные сп асательные плоты изготовляют на
6, 10 и 20 человек для торговых судов всех типов. Это прочная
надувная конструкция, защищающая от действия волн, дождя и
солнца. Хранят плоты на палубе в виде компактных пакетов. Вре-
мя, необходимое для приведения плота в готовность, начиная от
момента сбрасывания до окончания заполнения углекислым газом,
не более 30 сек.
Спасательные круги и нагрудники изготовляют
из кусковой пробки или другого эквивалентного материала. При-
менение кругов и нагрудников, наполненных тростником, пробоч-
ными опилками, крошеной пробкой, с воздушными камерами,
требующими предварительного наполнения воздухом, воспрещает-
ся. Спасательный круг должен в течение 24 ч поддерживать в
пресной воде 14,5 кг балласта. Спасательные круги должны
иметь закрепленные лееры. Один спасательный круг на каждом
борту должен быть снабжен спасательным линем длиной не мень-
ше 27,5 м.
Для всех судов нормами снабжения установлено минимальное
число описательных кругов. Половина из них, но не менее двух,
должна иметь светящиеся буйки, которые автоматически зажига-
ются при падении (круга в воду.
Размещать спасательные круги следует таким образом, чтобы
они были легко доступными.
Спасательный нагрудник должен поддерживать в пресной во-
де в течение 24 ч 7,5 кг железа, а затем дополнительно еще не
менее 15 мин такого же рода груз весом 8 кг.
Конструкция нагрудника должна быть такова, чтобы его мож-
но было надевать с любой стороны. По расчетам нагрудник дол-
жен поддерживать голову человека, находящегося в бессознатель-
ном положении над водой.
Спасательный жилет изготовляется из .материалов,
стойких против воздействия нефти и нефтепродуктов. Заполните-
лем спасательного жилета является пенопласт с удельным весом
302
0}1\г/сл13. Поддерживающая сила около 11 кг, весит жилет
1,5-1-1,6 кг. Он снабжен свистком, электрической лампочкой с ба-
тарейкой, питаемой водой.
Запрещено выпускать в плавание суда при отсутствии или не-
достаточном количестве спасательных шлюпок, плотов, нагрудни-
ков й других спасательных средств и неисправности пускового
устройства.
НА морских судах обязательно должен быть неприкосновенный
запас! (НЗ) пищевых продуктов, необходимых для питания оста-
вившего судно личного состава в течение нескольких дней. Для
судов Дальнего плавания НЗ рассчитывают на пять суток, для су-
дов каботажного плавания — на трое суток. При этом рекомен-
дуется пищевые продукты уложить в деревянные ящики соответ-
ствующих размеров с веревочными ручками по бокам, исходя из
расчета вместимости каждой шлюпки и района плавания судна.
Наличие заготовленных таким образом ящиков обеспечивает
удобство хранения НЗ на морских судах.
На каждого человека полагается иметь в составе неприкосно-
венного запаса следующие продукты на день: а) мясные консер-
вы— 300 г или рыбные консервы — 400 г, мясо-растительные кон-
сервы — 500 г; б) масло — 50 г; в) сухари или галеты — 500 г;
г) сахар — 50 г; д) чай—1 г; е) соль — 5 г; ж) витаминные пре-
параты — 2 г. В состав неприкосновенного запаса входит также
молоко сгущенное сладкое — 500 г на весь трехдневный или пя-
тидневный срок.
Помимо пищевых продуктов,, спасательная шлюпка должна
обеспечиваться запасом пресной воды в анкерках из расчета 3 л
на человека.
Неприкосновенный запас расходуют при кораблекрушении,
необходимости оказания помощи судну, терпящему бедствие, и
если по непредвиденным обстоятельствам рейс продолжается бо-
лее предполагаемого срока.
§ 123. Особенности работы на специализированных
судах
Особенности работы на специализированных судах определи-
ются спецификой перевозимых грузов и связанными с этим осо-
бенностями в конструкции судов и судовых устройств и систем.
На танкерах, в большинстве своем перевозящих легковоспла-
меняющиеся нефтепродукты, особенное значение имеет пожарная
безопасность. При перевозке легковоспламеняющихся жидкостей
следует соблюдать строгий противопожарный режим (запрет куре-
ния, работ с использованием открытого огня или случайным обра-
зованием искры и т; д.). Многие наливные грузы обладают уду-
шающими и даже ядовитыми свойствами (например, этилирован-
ный бензин), поэтому при проведении работ в насосных
303
отделениях, танках и коффердамах необходимо следить за коныен- i
трацией паров груза и не входить в эти помещения, если конпен- '
трация превышает предельно допустимые значения, указанные в
правилах перевозки этих грузов. /
При производстве грузовых операций вахтенная служба долж-
на внимательно следить за состоянием грузовых шлангов и /уров-
нем груза в танках, не допуская разрыва шлангов, утечки /груза
через неплотности в соединениях и перелива груза в танках.
Особое внимание состоянию шлангов уделяют при ( погрузке-
разгрузке танкера на рейде, когда он швартуется к бочкам/ и вет-
ром или течением может быть снесен на опасное расстояние от
места выхода грузовых шлангов со дна, где уложен трубопровод.
На танкерах —газовозах особое внимание уделяется вопросу
загазованности жилых и служебных помещений газами, проникаю-
щими из грузовых цистерн через неплотности соединений йли при
сбросе газов в атмосферу предохранительными клапанами.
На судах, перевозящих зерно и другие сыпучие материалы
(особенно рудные концентраты), следует следить за остойчивостью.
Для перевозки этих грузов судно должно быть подготовлено в
соответствии с требованиями Международной конвенции по охра-
не человеческой жизни на море 1960 г. (гл. VI) и национальных ,
правил (в СССР — Правила Регистра). Для предотвращения пе-
ресыпания груза в трюмах устанавливают продольные переборки, ;
питатели и принимаются другие меры предосторожности.
На лесовозах особое внимание уделяется вопросам остойчиво-
сти и крепления палубного груза леса. Загруженность палубы
лесом затрудняет использование ряда систем и палубных уст-
ройств, что должно учитываться при размещении груза на палубе
с таким расчетом, чтобы были обеспечены свободный доступ к
этим устройствам и удобство их использования. Для безопасности
передвижения членов экипажа на поверхности палубного груза
устраивают мостки, надежно закрепленные и огражденные мер-
ным устройством. Груз на палубе должен быть надежно закреп-
лен при помощи стоек и тросов. В то же время должна быть пре-
дусмотрена возможность быстрой разнайтовки груза для сбрасы-
вания его за борт в аварийных ситуациях.
Глава XXII
ОСОБЫЕ СЛУЧАИ ИЗ МОРСКОЙ ПРАКТИКИ
§ 124. Течь на судне
Причинами появления течи могут служить ослабление заклепок
в подводной части, слабость корпуса (набора и обшивки) и по-
вреждения обшивки.
Наличие течи в грузовых трюмах устанавливают наблюдением
за уровнем воды в льялах, а в междудонных танках—за уровнем
304
ж кости в танках. В других помещениях течь устанавливают при
появлении воды.
есто течи можно определить по изменению скорости хода суд-
о увеличению или уменьшению количества прибывающей во-
станавливают, в какой части судна появилась течь. Наиболее
на.
ды
Рис. 176.
W 0Х0Д0Х0Х оХоД
ОХУХОХ ОХ ОХОХОХ ЗХОХ О ХОХ ОХ А
й$о
Рис. 178.
Рис. 179.
интенсивное поступление воды внутрь судна происходит при низ-
ком расположении места течи. Пузырьки воздуха, выходящие на
поверхность, свидетельствуют о течи в тапках междудонного про-
странства. Об этом же свидетельствуют подтеки и струи внутри
трюмов (когда последние загружены неполностью). Течь немедлен-
но устраняют. При потере заклепок отверстия забивают пробками
из мягкого дерева. Если заклепка вывалилась в подводной части
судна, то изнутри судна на поверхность воды выпускают на парусной
305
ит-
ого
нитке пробку, которую поднимают на палубу. К парусной
ке привязывают тонкий крепкий линь, к другому концу кото[
крепят болт с резиновой прокладкой; этот болт на лине подтягива-
ют к отверстию и затягивают гайкой с резиновой шайбой изнутри
судна. /
Быстро и эффективно течь или пробоину устраняют установкой
цементных ящиков, которые изготовляют без крышек и заливают
раствором чистого цемента в
теплой воде. Мелкие пробои-
ны площадью не более 300 лш2
заделывают наложением
та с деревянным щитом/1
ром.
Для ликвидации течи
роко применяют пластыри:
кольчужный (рис. 176), об-
легченного типа (рис. 177),
шпигованный (рис. 178) и
учебный (рис. 179). Посереди-
не верхней шкаторины каж-
Рис. ISO.
ма-
упо-
ШИ-
дого пластыря заделывают кренгельс с круглым коушем для
закладывания контрольного штерта. Для заводки пластыря мор-
ское судно снабжают подкильными концами, шкотами, контроль-
ным штертом, талями и скобами.
Если судну требуется капитальный ремонт подводной части (за-
делка значительной пробоины, правка шпангоутов, смена листов
наружной обшивки и т. д.), а постановка в док невозможна, то
применяют специальные приспособления — кессоны. Кессон —
это водонепроницаемый ящик, который при помощи подкильных
концов притягивают к месту пробоины. После откачки воды из не-
го плотно прижимается к борту судна наружным давлением воды.
Кессоны бывают деревянные, стальные (сварные и клепаные),
композитные (стальной набор и деревянная обшивка) и железобе-
тонные. По месту применения их подразделяют на кессоны для ра-
боты в днищевой части с лазом из трюма или через двойное дно
(рис. 180, б) и кессоны с открытой верхней частью (рис. 180, а).
§ 125. Методы борьбы с пожарами на морских
судах
Причинами пожаров на судне являются небрежное обращение
с открытым огнем, курение в трюмах, подшкиперских, машинном j
отделении; неисправность электрооборудования; искры при свароч- ;
ных работах; самовоспламенение грузов, неправильно уложенных ;
в трюмах, угля и др.
Для предотвращения пожара и борьбы с ним применяют преду-
предительные меры; средства сигнализации, предупреждающие о
Ж
возникновений пожара; средства Для локализации возникшего по-
жара; средства для тушения пожаров.
К предупредительным .мероприятиям относят специальные ,поме-
щения с соответствующей вентиляцией для перевозки самовоспла- г
меняющихся грузов (угольные ямы, нефтяные и другие цистерны
для жидкого горючего, крюйт-камеры на промысловых судах).
Для ^тделки и оборудования помещений судна применяют негорю-
чие и невосплвменяющиеся материалы и краски.
Судовые источники тепла располагают в удалении от грузов
и предметов оборудования, которые могут легко воспламениться.
На судах имеются две группы средств сигнализации: электриче-
ская и дымовая. В обеих системах в качестве сигнализаторов ис-
пользуется звук или свет. Электрические сигнальные аппараты со-
стоят из термостатических приборов, включенных параллельно со-
противлению в цепь, находящуюся под напряжением батареи. При
дымовой сигнализации в сигнальный шкаф, установленный в штур-
манской рубке, из различных судовых помещений проводятся труб-
ки диаметром 20 мм, Они снабжаются колпаками — дымоуловите-
лями. В шкафу вентиляторами поддерживается некоторый вакуум.
Пожар обнаруживается по дыму в соответствующей трубке.
При постройке судна предусматривают меры локализации по-
жара конструктивного порядка: отделяют огнестойкими перебор-
ками и дверями отдельные отсеки судна; устанавливают в коридо-
рах крупных пассажирских судов водораспылители, создающие во-
дяные зонты или экраны из водяной «пыли».
Огнетушительные средства подразделяются на четыре основные
группы:
разбавления (водяной пар, углекислота и другие инертные
газы);
изоляции (химическая и воздушно-механическая пены, кошма,
песок);
охлаждающие (вода и растворы с преимущественным содержа-
нием воды);
химического торможения (химические жидкостные бромэтило-
вые составы).
При возникновении пожара в трюме стремятся сделать его
местным. Для этого грузы поливают по границам горения и одно-
временно часть груза убирают в сторону от очага или по возмож-
ности вообще удаляют из грузового помещения.
Средства тушения пожара водой основаны на охлаждении го-
рящих предметов. Водой не рекомендуется тушить пожары нефти и
продуктов ее перегонки, если на шлангах не имеется специальных
насадок. Пар наиболее эффективен при тушении пожаров в закры-
тых помещениях (не исключая пожаров нефти и продуктов ее пере-
гонки) .
Тушение пожара инертным газом (углекислотой) основано на
растворении .кислорода, содержащегося в воздухе в количестве от
21 до 15%, при котором горение прекращается. Инертные газы по
307
сравнению -с ЛругйМй проФййопожарнЫМи СредсТваМ-й наиболее
эффективны и безвредны три тушении пожаров в грузовых поме-
щениях. /
При горении любых предметов в открытых или закрытых поме-
щениях эффективен метод тушения пожара пеной. Обильная лена,
покрывающая горящую поверхность и оттесняющая кислород (воз-
духа, образуется при химической реакции между специальными
кислотным и щелочным растворами. Различают систему с мертвым
пенообразованием, при которой смешение растворов происходит на
месте потребления пены и генератора пенообразования, где пена
подается по магистралям к месту пожара (под плиты машинного
отделения, в мазутный танк и т. д.).
§ 126. Повреждения рулевого устройства
Повреждение любой части рулевого устройства ставит судно в
очень тяжелое положение. Практикой установлены следующие ос-
новные повреждения: румпеля, баллера, когда перо руля цело;
штуртроса, рулевого двигателя, ручного рулевого привода, штур-
вала; повреждение или потеря руля.
При повреждении баллера или румпеля целым пером руля уп-
равляют при помощи специальных тяг, для которых обычно ис-
пользуют цепи сорлиня. Иногда при необходимости вместо тяг за-
водят руль-тали.
Повреждение штуртроса, рулевого двигателя и т. д. вынуждает
перейти работать на другой рулевой привод. Правилами техниче-
ской эксплуатации предусматриваются два рулевых привода (ос-
новной и запасной), независимо действующих на баллер руля.
В качестве рулевого привода используют румпель-тали и механи-
ческие приводы (винтовые) со штурвалом, служащие для ручного
управления рулем в аварийных случаях. Переход с основного ру-
левого привода на запасной осуществляют два человека; время пе-
рехода не должно превышать 5 мин.
При современном уровне развития техники потеря руля — яв-
ление очень редкое, но морская практика такие случаи знает.
Это может произойти из-за посадки на мель в свежую погоду,
когда судно бьет кормой о грунт; халатности или недосмотра судо-
вой администрации, не обратившей внимания на дефекты в руле-_
вых петлях и крючьях; при сильных размахах пера руля с борта
на борт в штормовую погоду, когда не удается быстро взять перо
руля на стопор при повреждении румпеля, рулевого привода, при
плавании во льдах и т. д.
Судно с поврежденным пером руля теряет способность управ-
ляться и находится в критическом положении. Лишь двухвинтовые
суда могут держаться на курсе благодаря регулировке работы
правой и левой машин. При потере руля применяют рули, изготов-
ленные судовыми средствами.
зов
§ 11/. Повреждения и НРтёри вийтоЬ
Обламывание лопасти винта может произойти от удара о плава-
ющие, неподвижные и береговые предметы (буи, льдины, сваи).
В быстроходных винтах иногда отрываются лопасти под действием
центробежной силы. Это происходит при наличии незаметных, но
глубоких трещин. Причиной повреждений гребных винтов служит
их коррозия и эрозия.
Заменить винт или ступицу, потерявшую все лопасти, можно
только в закрытой гавани на спокойной волне или во льдах, где от-
сутствует зыбь. Судно нужно дифферентовать до такого положе-
ния, пока ступица целиком выйдет из воды. Процесс дифференте-
вания на обычных грузовых судах не представляет особой трудно-
сти. На промысловых судах винт посажен глубоко, и дифференто-
вать судно настолько, чтобы винт вышел из воды, невозможно.
На таких судах устанавливают винты со съемными лопастями.
Сдвиг винта с места (с конуса вала) производится при помощи
клиньев, натяжных болтов и специальных скоб, гидравлических
домкратов или путем взрыва 40—50-граммовой шашки взрывчато-
го вещества.
§ 128. Снятие судов с мели
В зависимости от конкретной обстановки суда снимают с мели
судовыми средствами: размыванием грунта под корпусом судна,
промыванием каналов в грунте на подходе к судну, сидящему на
мели, устройством спусковых приспособлений, частичной разгруз-
кой судна и буксированием другими судами.
При снятии судна с мели (своими средствами тушить огни в кот-
лах и выводить их из строя следует лишь в случаях прямой уг-
розы котлам, так как пар будет нужен на брашпиль, лебедки,
отопление и т. д.
Если судно село на мель с мягким грунтом, то возникает опас-
ность присасывания подводной части судна к грунту. Поэтому
необходимо сразу же принять все меры для снятия судна с мели
судовыми средствами. При посадке на мель с каменистым грунтом,
скалами, рифами спасательные операции должны быть проведены
в минимальные сроки с применением всевозможных средств. При
этом должны быть подготовлены судовые пластыри, цемент и дру-
гое аварийное снаряжение. Если судовые средства оказываются не-
эффективными, то прибегают к помощи других судов.
Если судно после посадки на мель бьется о грунт, появляется
угроза дальнейшего выноса его на мель или выброса на берег, то
Целесообразно заполнить танки междудонного пространства, фор-
пик и ахтерпик, а также трюмы водой.
Для -определения усилий, необходимых для снятия судна с мели,
находят величину потерянного водоизмещения (давления судна
на грунт).
309
Если
AD — потерянное водоизмещение (давление судна [ на
грунт), т,
Т, Ти, Тк — осадка судна до посадки на мель — средняя, носом
и кормой соответственно, м;
Т\УТН, Тк — то же после посадки, м\
q — число тонн на 1 см осадки судна;
S — площадь грузовой ватерлинии, м2\
SK — сумма объемов воды в затопленных отсеках, лс3;
у — удельный вес забортной воды,
то
bD = 100? (Т - Тх) + (131)
или
ДЯ = Т[5(Г-Л) + 21Л]. (132)
Если корпус судна не поврежден и отсеки его сухие, то форму-
лы потерянного водоизмещения примут соответственно вид:
ДП = \W)q(T (133)
= 4 S(T - Тх). (134)
Зная из расчетов величину потерянного водоизмещения, не
трудно определить величину усилий, необходимых для стягивания
судна с мели. Так, если
F — величина усилий, необходимых для стягивания, т;
f — коэффициент трения стального корпуса судна о грунт, то
F = /ДП. (135)
Значения коэффициента f в зависимости от характера грунта
приведены в табл. 7.
Таблица 7
Характер грунта Значение коэффициента
Жидкая глина 0,18-0,22
Мягкая глина 0,23—0,30
Глина с песком 0,30—0,32
Песок мелкий 0,35-0,38
Галька • • 0,38—0,42
КамеНйая плита 0,30-0,42
Камень-булыжник 0,42-0,50
310
§ 129. Спасение людей и оказание помощи
на море
Оставление судна. В результате аварии (столкновения, пожара,
посадки на мель и т. д.) экипаж судна должен быть готовым вос-
пользоваться для спасения шлюпками и плотами. Чтобы макси-
мально уменьшить возможность гибели людей, необходимо регу-
лярно проводить тренировки по пожарной, водяной и шлюпочной
тревогам.
Сигналы об оставлении судна обычно подают внутрисудовыми
сигнальными средствами и голосом: «Все к шлюпкам» — через
громкоговоритель. Когда все шлюпки и плоты спущены и укомп-
лектованы людьми, капитан отдает приказ покинуть судно. Все
люди, находящиеся на борту, распределены по спасательным сред-
ствам судовым расписанием по тревогам. Это дает возможность
при спуске шлюпок и плотов легко управлять группами людей.
Комплектование плотов происходит после их сбрасывания или
спуска за борт. Плоты прикрепляют к судну фалинем. Шлюпки мо-
жно спускать с людьми, количество которых определяют состоя-
нием моря. После спуска шлюпка отходит от судна и подбирает из
воды людей до полного комплекта.
Шлюпки и плоты должны отойти от судна на 200—300 я. При
свежей погоде рекомендуется прикреплять шлюпки и плоты друг
к другу фалинями.
При оставлении судна нужно помнить:
1. Если возможно, следует спускаться в воду по спасательным
шкентелям или канатам; в противном случае прыгать только нога-
ми вперед. Не рекомендуется прыгать с высоты, превышающей
3 я, с надетым на себя спасательным нагрудником, так как на-
грудник от резкого смещения вверх может оглушить человека или
причинить физическое увечье. Если прыжок с высоты более 3 я
неизбежен, то нужно придавить нагрудник, охватив его перекре-
щенными руками.
2. Дрейфующее судно лучше покидать через наветренный борт.
3. Если судно имеет крен, покидать его следует через нос или
корму.
4. Всегда нужно избегать любого жидкого топлива, плавающе-
го на поверхности воды. При горящей на поверхности нефти следу-
ет плыть под водой как можно дольше, периодически выныривая и
делая глубокий вдох.
После того как судно затонет, действие команд шлюпок и пло-
тов зависит от погоды, места гибели судна, близости или дальности
берегов. Если судно погибло далеко от берега на неоживленных
морских путях и на его сигналы бедствия были получены ответы,
следует держаться как можно ближе к месту затонувшего судна.
Маневр «Человек за бортом». Падение человека за борт может
произойти при любой обстановке на море. Каждый, заметивший
это, должен немедленно бросить упавшему спасательный крут, буй
311
или другой плавающий предмет и сообщить о происшедшем вах-
тенному помощнику, Государственный флаг СССР при этом при-
спускают, на флагфале поднимают флаг «О»; на марс или ванты
посылают матроса для непрерывного наблюдения за утопающим.
Кроме того, прекращают движение судна вперед. При свежей по-
годе судно делает такой маневр, чтобы упавший за борт человек
находился с подветренной стороны. Шлюпку спускают с подветрен-
ного борта. Матрос-наблюдатель показывает спущенной шлюпке
направление на утопающего флажком или рукой.
Для постоянной тренировки по оказанию помощи при несчаст-
ном случае на судах должны регулярно проводиться учебные тре-
воги «человек за бортом».
Снятие людей с гибнущего судна. Международная конвенция по
охране человеческой жизни на море 1960 г. обязывает капитанов
судов оказывать всякую возможную помощь людям, грузу и судну,
терпящим бедствие. Для этих же целей созданы специальные ава-
рийно-спасательные службы и береговые спасательные станции,
имеющие в своем распоряжении необходимые материально-техни-
ческие средства (суда, вертолеты и т. д.).
Морской практике известны следующие способы снятия людей
с гибнущего судна:
снятие людей с гибнущего 'судна судном-спасателем;
снятие людей с гибнущего судна на берег;
снятие людей с гибнущего судна, пересадка их на судно-спа-
сатель или высадка на берег с помощью вертолета.
Наиболее эффективный способ снятия людей — подход суд-
на-спасателя к борту гибнущего судна. Проведение подобной опе-
рации связано с целым рядом факторов, которые должны учиты-
ваться капитаном и экипажем судна-спасателя.
Успех этого маневра зависит от гидрометеорологических факто-
ров, крена и характера разрушения аварийного судна, наличия
плавающих обломков вокруг него, величины дрейфа обоих судов,
обученности и опытности экипажа судна-спасателя.
В случаях, если к гибнущему судну нельзя подойти лагом или
носом, то для спасения людей применяют шлюпки, плоты, спаса-2
тельные беседки (при установленном леерном сообщении) и ис -
пользуют вертолеты. ,
Аварийное^ судно и судно-спасатель должны выпускать масло ;
для создания пространства без опрокидывающихся гребней волн,
что значительно облегчает работу шлюпок.
Не рекомендуется производить спасательные операции ночью,
если условия погоды и состояние аварийного судна позволяют ему
продержаться до наступления светлого времени суток.
Во всех случаях чрезвычайно важно установить надежную I
связь между спасателем и гибнущим судном. 2
Снятие людей с гибнущего судна на берег наиболее успешно
осуществляется береговыми спасательными станциями, оборудо- >
ванными шлюпками различных тицор, линеметательными аппара-
31?
тами и приспособлениями Для леерного сообщения при помощи бе-
седки или крытой шлюпки.
На терпящее бедствие судно со спасательной станции при по-
мощи линеметательного аппарата подают линь, к которому крепят
блок горденя с бесконечным лопарем. После того как блок закреп-
лен к мачте или другому возвышенному месту судна, на него с
помощью горденя подают леер, который закрепляют на 350—400 мм
выше горденя, и беседку. Последнюю четырьмя стропами крепят к
особому блоку, который ходит по лееру. Блок беседки крепят, к
горденю так, что если тянуть за верхнюю ветвь горденя, то бесед-
ка будет перемещаться к берегу; если за нижнюю, то блок вместе
с беседкой пойдет к судну.
В тех случаях, когда аварийное судно находится от берега на
расстоянии, которое не позволяет установить леерное сообщение
или когда необходимо спасти большое количество людей, применя-
ют специальную крытую спасательную шлюпку.
В настоящее время весьма эффективными являются операции
по снятию людей с гибнущего судна при помощи вертолета.
Для подачи линя на бедствующее судно или на берег суда
снабжаются линеметательными устройствами, в комплект которых
входит приспособление для пуска ракеты, перчатка, ракета,
линь и кассета для укладки линя. Для пуска ракеты служит пи-
столет, линеметательное ружье и пушка, принципиальное устрой-
ство которых одинаково.
По требованиям Международной конвенции по охране человече-
ской жизни на море линеметательное устройство должно бросать
линь с достаточной точностью на расстояние не менее 230 м и
включать не менее четырех метательных снарядов и четырех
линей.
Глава XXIII
УПРАВЛЕНИЕ СУДНОМ С МЕХАНИЧЕСКИМ ДВИГАТЕЛЕМ
§ 130. Управляемость и инерционные свойства судна
Управляемость — это способность подчиняться действию
руля.
Рыскливость — отклонение от курса независимо от дей-
ствия руля.
Устойчивость на курсе — это способность сохранять •
заданное ему направление движения.
Увальчивость — свойство уклоняться в своем движении
под -ветер при руле, поставленном прямо.
Поворотливость — способность быстро и легко подчи-
няться действию руля.
Инерционные свойства — это способность сохранять
заданное ему первоначальное ускорение.
313
Управляемость судна Зависит от работы гребных винтов, кре-
Иа, дифферента и осадки судна, ветра и волнения, глубины воды
под килем, расстояния до стенок гидротехнических сооружений,
бровок каналов и узкостей.
Основным фактором, определяющим управляемость судна, яв-
ляется взаимодействие комплекса: руль — винты — корпус. При
Рис. 181
вращении винта по часовой стрелке (если смотреть с кормы) лопа-
сти винта испытывают воздействие воды, направленное против
часовой стрелки и называемое силой реакции D (рис. 181,а).
Вследствие того что гидростатическое давление у нижней ло-
пасти винта всегда больше, чем у верхней (сила меньше силы
£>з), силы реакции стремятся отклонить корму судна вправо. Воз-
действие сил реакции на горизонтально расположенные лопасти
винта (сила D2 и D4) направлено в противоположные стороны и
вызывает вибрацию кормовой части судна.
Струи воды за кормой, имея направление назад, вращаются в
виде спирали, наталкиваясь на перо руля. Сила набрасывав
ем ой струи С (рис. 181, б) всегда больше у нижней части ру-|
ля (где больше гидростатическое давление) и поэтому стремится^
отклонить корму судна влево.
Во время движения судна вперед за его кормой образуется раз- j
реженное пространство, в которое устремляется вода, находящая-
ся сзади судна. Так как разрежение больше у верхней более широ- '
кой части кормы (6i>&2), сила попутного следа b (см. :
рис. 181, а) стремится отклонить корму влево. |
Сумма сил набрасываемой струи С и попутного следа 6, как [
правило, больше силы реакции D, поэтому при движении вперед 3
судна, имеющего один винт правого шага, на установившемся хо-«
ду при прямом положении руля корма уклоняется влево, а нос \
вправо .
В первый момент после того, как дали передний ход, действует
только сила реакции и корма судна стремится вправо. По мере
314
роста скорости отклонения судна влево уменьшается, и как только
судно наберет определенную скорость, нос судна начнет уклонять-
ся вправо. Диаметр циркуляции судна с винтом правого шага при
повороте вправо меньше, чем при повороте влево.
При ходе назад судна с винтом правого шага силы реакции,
направленные по часовой стрелке, стремятся уклонить корму вле-
во. Силы набрасываемой струи также уклоняют корму влево. Это
объясняется тем, что лопасть винта, находящаяся справа, набра-
сывает струю на кормовой подзор под углом, близким к 90°, а ле-
вая лопасть направляет струю почти параллельно кормовому
подзору под киль. Действие всасываемой струи при прямом положе-
нии руля не оказывает влияния на уклонение кормы. Таким обра-
зом, на заднем ходу судна с винтом правого шага корма его укло-
няется влево, а нос — вправо.
Для удержания судна с одним винтом правого шага на прямом
курсе в нормальных условиях при ходе вперед необходимо держать
руль немного влево. Удержать судно на заднем ходу на прямом
курсе поворотом руля вправо очень трудно.
Если судно имеет ход вперед, а машины работают задним хо-
дом при прямом положении руля, нос судна уклоняется вправо.
При руле, положенном на борт, нос судна уклоняется в сторону
положенного руля до момента погашения судном инерции
вперед.
При перемене заднего хода на передний в первый момент рабо-
ты винтов сила реакции резко отбрасывает корму вправо. По-
этому следует сначала положить руль вправо на борт для увели-
чения силы набрасываемой струи (сила винтовой отработки),
а затем отводить его, сообразуясь с конкретной обстанов-
кой.
На двухвинтовом судне винты вращаются в разные стороны,
поэтому действие сил реакции, набрасываемой струи и попутного
следа взаимно уничтожается.
Двухвинтовое судно описывает примерно такую же циркуля-
цию, как и одновинтовое при работе двух машин. При застопорен-
ной машине того борта, куда осуществляется поворот, диаметр цир-
куляции значительно уменьшается. При работе машин «враздрай»
(одна вперед, другая назад) судно можно развернуть на месте, но
время разворота увеличится. При выходе из строя одной машины
судно можно удержать на курсе, если по борту работающей маши-
ны не действуют сильный ветер и волнение.
Управляемость судна зависит от типа, формы, размеров и ус-
тановки руля. Чем больше площадь пера руля, тем быстрее можно
выполнить заданный маневр.
При выводе руля из среднего положения на угол а вода, об-
текающая судно, будет производить давление Л направленное
нормально к плоскости пера руля (рис. 182, а) и приложенное в
Центре давления, который в общем случае не совпадает с центром
тяжести площади пера руля. Силу давления воды на руль Р мож-
315
но определить по приближенной формуле Жосселя
Р~ 0,2+ 0,3 sin я <136>
где k=40 для одновинтовых судов со скоростью 8—12 узлов
и k=22,5 для двухвинтовых судов;
а — угол перекладки руля;
S — площадь пера руля, которая приближенно может быть
вычислена по формуле S=k\ LT;
здесь L, Т — длина и осадка судна соответственно; ;
— коэффициент, который для крупных грузовых судов';
равен 0,018—0,027; малых — 0,023—0,033; крупных;
пассажирских —0,017—0,019; танкеров—0,018—0,022:
буксиров — 0,03—0,06 м2; ;
V — скорость судна, м/сек.
316
Приложим в центре тяжести судна две равные и противополож-
ные силы Pi и Ра, параллельные и равные силе давления воды на
руль Р. Силы Р и Р2 образуют пару сил, вращающую судно, мо-
мент которой можно приближенно определить по формуле
М «г Р cos а,. (137)
Разложив силу Pi, получим силу F, увеличивающую сопротив-
ление движению судна, и силу Q, которая создает дрейф судна.
Циркуляция судна при отклоненном на постоянный угол а
совершается так, как показано на рис. 182, 6. Диаметр устано-
вившейся циркуляции судна можно приближенно определить по
формуле
Л« = 2^4, (138)
где ki — эмпирический коэффициент, зависящий от водоизмещения
судна V, длины L и площади погруженной части диамет-
ральной плоскости Рдп",
ki — эмпирический коэффициент, зависящий от угла пере-
кладки руля а. Значения коэффициентов k\ и k2 приве-
дены в табл. 8;
V — объемное водоизмещение судна, л3;
S — площадь пера руля, м2.
Таблица 8
V LFgn 0,05 0,06 0,07 0,08 0,09 0,10 0,11 0,12 0,13 0,14 0,15
kl 1,41 1,10 0,85 0,67 0,55 0,46 0,40 0,37 0,36 0,35 0,34
а0 10 15 20 25 30 35 40
*2 0,55 0,73 0,85 0,95 1,00 1,05 1,00
Тактический диаметр циркуляции на полном ходу с рулем, от-
клоненным на угол а=30°, определяется по эмпирической фор-
муле
(139)
Обычно тактический диаметр циркуляции составляет 90—120%
от диаметра установившейся циркуляции или колеблется от четы-
рех до семи длин судна. Диаметр циркуляции уменьшается с рос-
том скорости судна и угла перекладки руля. Он зависит также от
31i
соотношения длины судна к ширине. Скорость, диаметр циркуля-
ции и другие маневренные элементы судна определяются на ходо-
вых испытаниях судна, на мерной миле или в процессе эксплуата-
ции и записываются в специальные таблицы в журнале маневрен-
ных элементов судна, отдельно для разных случаев загрузки и ре-
жимов работы машин.
Расстояние, на которое переместится судно в направлении пер-
воначального движения от точки начала циркуляции до поворота
судна на 90°, /1 составляет для различных судов 60—120% от ве-
личины диаметра циркуляции Do. Расстояние от линии первона-
чального курса до точки, когда судно повернется на 90°, /2 состав-
ляет 50—60% от Do. Наибольшее отклонение судна от линии пер-
воначального курса в сторону, противоположную повороту /3, до-
стигает 10% отЬ0.
Скорость судна на установившейся циркуляции можно опреде-
лить по следующей эмпирической формуле:
(140)
Центробежная сила Q приложена в центре тяжести судна Zdt
а сила бокового сопротивления — примерно посередине осадки
судна Т, что на установившейся циркуляции вызывает крен судна
обычно в сторону, противоположную циркуляции. Максимальный
угол крена на установившейся циркуляции 0тах можно вычислить
по приближенной формуле Г. А. Фирсова
©max — [%д 2
(141)
где h — поперечная метацентрическая высота судна, м.
В начальный период перекладки руля судно получает крен в
сторону поворота, так как центр давления на руль расположен
обычно ниже центра тяжести судна и центра бокового сопротив-
ления дрейфу.
На управляемость судна влияет форма подводной части судна.
Чем больше длина и осадка судна, но меньше ширина, тем устой-
чивее оно на курсе.
При наличии крена судно стремится уклониться от курса в
сторону, противоположную крену, так как на накрененный борт
воздействуют силы давления воды значительно большие, чем на
противоположный борт. При наличии дифферента судна нанос
обводы корпуса испытывают большее сопротивление, что снижает
ход судна. Так как площадь носовой части подводного борта при
дифференте на нос больше, чем кормовой, поворот судна осу-
ществляется как бы вокруг точки, расположенной между миделем
и носом судна. Это. приводит к «забрасыванию» кормы влево при
повороте вправо и наоборот. При дифференте на нос радиус цирку-
ляции судна уменьшается.
318
При небольшом дифференте на корму улучшается ход судна.
Поворот судна в этом случае происходит как бы вокруг точки, рас-
положенной между миделем <и кормой судна. Забрасывание кор-
мы на повороте меньше, чем при дифференте на нос. Слишком
большой дифферент на корму ухудшает ход судна. При одновре-
менном действии крена и дифферента судна влияние крена на уп-
равляемость судна увеличивается при дифференте на нос и умень-
шается при дифференте на корму. В последнем случае радиус
циркуляции судна увеличивается.
Качка судна ухудшает управляемость. Встречное волнение
сбивает нос судна под ветер, попутное волнение усиливает рыскли-
вость судна.
Влияние ветра на управляемость судна зависит от соче-
тания таких факторов, как длина судна, высота надводного борта,
осадка, крен, дифферент судна, форма штевней, количество, форма
и расположение надстроек, сила ветра, наличие палубного груза,
курс судна относительно ветра.
Судно с застопоренными машинами становится в бакштаг по от-
ношению к ветру либо лагом. Большое число развитых надстроек
в носовой части способствует уваливанию судна носом под ветер
на переднем ходу и выходу судна кормой на ветер на заднем ходу.
В последнем случае судно трудно удержать на заданном курсе.
Суда, имеющие развитые надстройки в кормовой части, на перед-
нем ходу обладают повышенной рыскливостью, а на задаем — пло-
хо выходят на ветер. Обтекаемые формы надводной части судна
способствуют улучшению управляемости судна. Чем ближе направ-
ление встречного ветра к диаметральной плоскости судна, тем
больше увальчивость судна. В этом случае малейший поворот суд-
на от ветра приводит к резкому увеличению парусности наветрен-
ного борта, и сила бокового давления ветра быстро возрастает.
При курсовых углах ветра более 90° большинство судов дрейфует
на ветер. Это объясняется тем, что время рыскания судна на ветер
обычно больше времени рыскания под ветер.
На управляемость судна оказывает влияние род двигателя суд-
на. Наиболее удобным двигателем с этой точки зрения является
паровая машина, которая дает возможность в широких пределах
варьировать числом оборотов винта. Двигатель внутреннего сго-
рания при запуске дает сразу большое число оборотов и сообщает
резкое поступательное движение судну, что в значительной степени
затрудняет маневрирование. Время реверса на турбинных и ди-
зельных установках гораздо больше, чем у паровой машины, а
процесс реверсирования сложнее.
Наличие палубного груза, уложенного высокими штабелями,
увеличивает парусность судна и снижает его управляемость. По-
воротливость судна снижается при относительной перегрузке кон-
цевых трюмов, поэтому следует концентрировать нагрузку в сере-
динных трюмах.
Инерционные свойства судна являются важным фактором в
319
эксплуатации судна. Аварии судов часто являются следствием
плохого знания и учета судоводителями инерционных качеств судов.
Инерция судна зависит от сообщенной ему кинетической энергии,
которая пропорциональна массе судна и квадрату скорости его.
Сила движения судна вперед почти в 2 раза больше силы тор-
можения судна сопротивлением воды при свободном гашении инер-
ции. Поэтому путь и время разгона судна значительно меньше пути
и времени торможения судна.
Путем торможения называют путь, который пройдет суд-
но при полном ходе вперед после момента дачи сигнала «стоп
машины».
Длина тормозного пути судна с хорошими обводами без работы
винтами назад примерно равна 25—30 длинам судна (1500—
3000 м). Время до полной остановки судна колеблется в пределах
10—20 мин. Длина тормозного пути при работе машин полным хо-
дом назад сокращается до 4—7 длин судна (300—800 м), а время
до полной остановки — до 2—4 мин. Длина тормозного пути судна
уменьшается с ростбм мощности машин при работе на задний ход
и уменьшением водоизмещения судна. Практически чем быстроход-
нее судно, тем сравнительно меньше длина его тормозного пути
при работе винтов полным ходом назад. Исключение составляют
суда с турбинными установками, мощность которых при работе
на задний ход равна 30—50% мощности на передний ход.
Установлены следующие соотношения между силой заднего хо-
да N3, силой переднего хода Nn и длиной тормозного пути судна
S, выраженной в длинах судна L:
К = 0,25; 050; 0,75; 1,00; 1,25; '
п = 11; 7; 5; 4; 3,5.
Способность судна гасить свою инерцию во многом зависит от
загрузки судна; дифферента, типа и мощности силовой установки,
гидрометеорологических факторов.
§ 131. Якорная стоянка судна
Выбор места якорной стоянки зависит от ее цели. При отстое
судна от шторма во внимание принимают только вопросы обес-j
печения безопасности судна. При постановке судна на якорь для|
проведения погрузочно-разгрузочных работ и высадки пассажиров^
судно ставят возможно ближе к порту (берегу), чтобы обеспечить*
скорейшую выгрузку. Во всех случаях принимают все меры предо-
сторожности для безопасности судна. Если суда оказываются на
незащищенном рейде, они должны менять место стоянки в зави-
симости от погоды и других факторов.
Для якорной стоянки имеют значение глубины, рельеф дна,
грунт, величина свободной акватории рейда. Под влиянием изме-^
320 |
нения направления ветра или течения стоящее на якоре судно
жег -перемещаться по окружности относительно якоря. Радиус
этой окружности равен сумме длины судна и горизонтальной
проекции якорь-цепи. Поэтому расстояние до ближайшей опаснос-
сти должно несколько превышать этот радиус.
При постановке судна на якорь учитывают глубину и измене-
ние глубин в период стоянки. Лучшими для стоянки судов, имею-
щих осадку около 10 м, являются глубины 15—Э0 ле. Для судов с
осадкой около 6 м оптимальными являются 8—20 м. Минималь-
ную глубину якорной стоянки определяют по эмпирической форму-
ле
Н = Т + 4 Л + 0,6, (142)
где Т — осадка судна, м;
h — наибольшая высота волны во время стоянки, м;
0,6 — минимальный запас воды под килем, м.
При стоянке в районе действия приливно-отливных течений та-
кой расчет делается на момент наибольшего отлива в период сто-
янки.
Для судов в балласте и неполностью загруженных требуется
якорная стоянка более защищенная, чем для судов в полном гру-
зу. Это объясняется тем, что суда в балласте имеют большую па-
русность и более подвержены действию ветра. Они сильно рыска-
ют на якоре, из-за чего может быть разорвана якорь-цепь или
вызван дрейф судна. Благоприятными условиями для якорной
стоянки судов считают хороший грунт, ветер не более 5 баллов,
умеренное волнение и слабое течение. Грунт на месте якорной
стоянки должен быть по возможности ровным.
С точки зрения якорной стоянки грунты можно разделить на
три группы. Хорошими грунтами считаются глинистые и илистые
с песком, грунты с галькой, ракушечником; средними — чистая
глина и ил, песок, галька; плохие грунты — каменистые.
Длина вытравливаемой якорь-цепй зависит от глубины места,
погоды и материала, из которого изготовлена якорь-цепь. На
рис. 183 приведен график зависимости длины якорь-цепи от глуби-
ны места стоянки. В основу графика положена формула
L = kVH, (143)
где L — длина якорь-цепи, м;
Н — глубина места стоянки, м.
Коэффициент k для якорь-цепи из сварочного железа равен 25,
для якорь-цепи из ковкой стали — 27,5, для якорь-цепи из стали
повышенного сопротивления разрыву — 38,6.
Во время якорной стоянки судно под воздействием ветра, тече-
ния и волнения рыскает. Наиболее опасными являются положения
судна, когда якорь-цепь испытывает наибольшее натяжение. Осо-
бенно опасным является положение, когда якорь-цепь ложится на
форштевень и испытывает добавочные изгибающие моменты.
11—933 321
Натяжение якорь-цепи при рыскании суммируется из сил воз-
действия ветра, течения и центробежной силы инерции. Макси-
мальное добавочное напряжение на якорь-цепь от действия силы
инерции при рыскании можно определить по формуле
D & 1 / 2л: \2 /1
Ялоб — Л ?о (-jtj J , (144)
Рис. 183.
где D — водоизмещение судна, т;
g — 9,81 — ускорение силы тяжести, м]сек2\
li — горизонтальное расстояние от якоря до центра тяжести
судна, м;
фо — амплитуда рыскания, град;
То — период рыскания, сек.
После подстановки известных значений получим
Ядов = 4DZ, (^)2 . (145)
Если выразить <р0 в градусах, То — в минутах, то вместо коэф-
фициента 4 нужно взять 3,4 • 10-7.
Амплитуда рыскания уменьшается, если угол между направ-
лением течения и ветра близок к 90°. Для уменьшения рыскания
в свежую погоду необходимо по возможности добавочно вытра-
вить якорь-цепь тем больше, чем сильнее ветер и меньше глубина.
При ветре в 7 баллов и средних глубинах вытравливают якорь-
цепь в полтора раза больше, чем в тихую погоду, а на малых глу-
бинах — в два раза больше.
Для уменьшения рыскания якорь-цепи, когда цепь ложится на
форштевень, руль следует положить в сторону, противоположную
отданному якорю. В моменты опасных напряжений рекомендуется
потравить якорь-цепь или погасить инерцию работой, машин, од-
нако так, чтобы судно не получило движения вперед от машин, ибо
это приведет в дальнейшем к более резким рывкам.
322
Во время стоянки судна на открытом рейде оно должно быть
готово в любой мо-мент сняться с якоря и уйти в море.
При постановке судна на якорь учитывают обстановку на рей-
де. Не следует подходить к месту стоянки с наветренной стороны
или со стороны течения по отношению к стоящему на якоре судну
или опасности. Подход к месту якорной стоянки осуществляют
малым ходом; часто определяют глубину; в особо сложных слу-
чаях предварительно посылают шлюпку для промера глубин.
При слабом ветре, незначительном течении и волнении к мес-
ту якорной стоянки подходят с любого направления. В общем слу-
чае нужно подходить под углом не более 15—20° к направлению
ветра или течения.
Перед отдачей якоря рулем приводят судно прямо против вет-
ра (течения, волнения) и, погасив инерцию, дают машинам ход
назад. Как только судно получит ход назад, отдают якорь. В ава-
рийных случаях и на значительной скорости якорь отдают при ма-
лой скорости вперед. При одновременном действии ветра и тече-
ния учитывают, что ветер сильнее действует на незагруженные
суда с большим надводным бортом, а течение — на суда с боль-
шей осадкой.
Если в период якорной стоянки на рейде в закрытой бухте по-
является волнение, не опасное для судна, но причиняющее вред
плавсредствам, судно устанавливают лагом к волнению или ветру.
Для этого через кормовые кипы борта со стороны, противополож-
ной борту выгрузки, на якорь-цепь подают и крепят трос (шпринг).
Якорь-цепь травят, и судно становится лагом к ветру (рис. 184, а).
При постановке на шпринг судно можно расположить под лю-
бым углом к ветру или волнению, но съемка с якоря усложняется
и возникает опасность намотки шпринга на винт. При постановке
на шпринг вполкорпуса (рис. 184, б), когда шпринг заводят из
бортового клюза, расположенного перед надстройкой, судно полу-
чает большую маневренность. Способ постановки судна на шпринг
с завозом верпа или стоп-анкера (рис. 184, в) менее надежен, так
П* 323
как верп может поползти. Но этот способ удобен тем, что перлинь
можно легко отдать и сразу получить возможность маневрирова-
ния на якоре.
Постановка на бочку требует проведения ряда подготовитель-
ных мероприятий и спуска шлюпки для крепления швартова на
бочке. В качестве швартова применяют якорь-цепь. Не рекомен-
дуется заводить на бочку несколько швартовов, так как всю на-
грузку почти полностью принимает на себя обычно только один
трос, а маневр значительно усложняется.
Во время якорной стоянки вахтенная служба должна постоян-
но следить за малейшими изменениями обстановки, чтобы вовре-
мя предупредить аварию и выйти из опасного положения. В ма-
шинном отделении и на мостике несут ходовые вахты независимо
от длительности стоянки и обстановки на рейде.
При постановке на якорь судна с буксируемыми судами учиты-
вают значительное удлинение радиуса циркуляции каравана. При
входе каравана на рейд буксирные тросы укорачивают до мини-
мума. Рыскание буксируемых судов гасится под воздействием мае-
сы буксировщика. Буксируемое судно ставят на собственный
якорь, так как оно создает дополнительную нагрузку на якорь- *
цепь буксировщика и, кроме того, может произойти навал судов
друг на друга.
Маневр снятия судна с якоря зависит от условий стоянки и '
причин ухода с места стоянки. В особо тяжелых случаях для сок-
ращения времени снятия судна с якоря расклепывают якорь-цепь и
оставляют якорь на грунте. Для того чтобы после найти якорь, к
нему привязывают яркий буек.
§ 132. Швартовка судна ;
Движение и стоянка судов в порту регулируются Правилами ?
плавания судов на каналах и акваториях портов и Правилами
технической эксплуатации гидротехнических сооружений и аквато-
рий портов. I
Движение судов по искусственным каналам возможно только I
при достаточном запасе воды под килем и наличии разрешения ка-
питана порта. Скорость движения на каналах и акватории уста- j
навливается приказом начальника порта в зависимости от техни- j
ческого и естественного состояния гидротехнических сооружений и -|
грунта в порту.
Швартовка судна — сложный и ответственный процесс. На суд-
не заблаговременно подготовляют швартовные концы, брашпиль,^
лебедки, бросательные концы, кранцы, судовую связь и другие j
средства и приспособления. Палубную команду вызывают на палу-
бу по авралу, и каждый член экипажа занимает свое место соглас-1
но расписанию.
В порту причалы также заранее готовят для приема судна. ;
Причал освобождают для обеспечения работ, связанных со швар- <
324
товкой. На причале не должно быть никаких выступающих и дру-
гих частей, которые могут повлечь за собой затруднения при швар-
товке и даже аварию судна или причала. Причал должен иметь
отбойную раму и другие защитные приспособления. Привальные
брусья должны быть по всей длине сплошными.
С судна подаются следующие швартовные концы (рис. 185, а):
продольные (носовой и кормовой), пиринги (носовой и кормо-
вой), прижимные, идущие от кормы, носа или через бортовой по-
луклюз перпендикулярно диаметральной плоскости судна.
Рис. 185.
Количество швартовных концов, необходимых для крепления
судна у причала, зависит от условий стоянки и гидрометеорологи-
ческой обстановки. При усилении ветра заводятся дополнительные
концы. Крепление швартовных концов за береговой пал, показан-
ное на рис. 185, б, позволяет снять концы в любой последователь-
ности. Огон последующего конца 2 продевается снизу вверх через
огоны предыдущих 1 и после этого набрасывается на пал сверху.
Подачу швартовного конца на берег производят легким линем
с небольшой тяжелой «грушей» на конце, которая служит для за-
брасывания его на берег. Такой линь с грушей называют броса-
тельным концом, или легостью.
После окончания швартовки на швартовные концы устанавли-
вают специальные щиты, предотвращающие перебегание крыс с
берега на судно и обратно.
При изменении осадки судна (погрузка, выгрузка) или уровня
воды (приливы, отливы) изменяется натяжение швартовных кон-
цов, поэтому их подбирают или травят. Усиление отжимного ветра
требует подачи дополнительных концов. При ухудшении погоды в
плохо защищенном порту судно должно быть готово к выходу в
море.
На стоянке у причала нельзя производить швартовные испыта-
ния судна, связанные с работой винтов. Струи воды от винтов мо-
гут нанести вред гидротехническим сооружениям. Крен в сторону
моря при подходе к свайным набережным грозит повреждением
последних или самого судна.
Швартовка судов друг к другу в открытом море или на откры-
том рейде к судну, стоящему на якоре,— операция сложная и
325
ответственная. Все выступающие части (стрелы, трапы, шлюпки,
люстры и т. п.) должны быть убраны; все иллюминаторы задрае-
ны, особенно с того борта, которым судно швартуется; на отлив-
ные шпигаты навешены щиты; вдоль борта развешены кранцы (на-
дувные или из автомобильных шин) —по два-три в носовой и кор-
мовой частях судна, и особенно у выступающих частей.
В рейдовых условиях и в открытом море для швартовки лучше
использовать синтетические тросы или стальные с капроновыми
амортизаторами.
Чаще всего швартуются к правому борту судна, стоящего на
якоре, так как на заднем ходу нос швартующегося судна отходит
от судна, к которому швартуются.
При швартовке судов друг к другу в открытом море особое
значение имеют кранцы. Для этой цели используют кранцы, изго-
товленные из пакетов автопокрышек, надувные резиновые кранцы,
дополнительные кранцы из бревен мягкого дерева длиной 2 м, ок-
летневанные 8—10-дюймовым растительным тросом.
При швартовке танкеров к китобазам и китобойных судов к
танкерам в качестве кранцев используют добытых китов. Три-
четыре кита-кранца вдоль корпуса и надувные резиновые кранцы
в районе спардека и кормы обеспечивают безопасную швартовку
при ветре силой до 6—7 баллов и волнении моря до 4 баллов. Иног-
да практикуется парное расположение китов-кранцев.
Швартовка китобойных судов к танкеру, лежащему в дрейфе,
при силе ветра до 5 баллов и волнении моря 2—3 балла осуще-
ствляется с обоих бортов. На танкере развешивают мягкие кран-
цы. Китобойное судно, швартующееся с подветренной стороны, дол-
жно иметь не менее одного кита-кранца, а с наветренной сторо-
ны — не менее двух. Китобойное судно подходит к танкеру с кор-
мы на параллельном курсе. На расстоянии 4—5 м подают швар-
товные тросы, начиная с носового. Отход осуществляется обычным-
порядком. При свежем ветре отходят от наветренного борта на ма-
лом ходу танкера против ветра и зыби. На китобойном судне oc-j
тавляют только один носовой конец и дают ход, постепенно eroj
увеличивая. Когда швартовный трос ослабнет, его отдают и увели-]
чивают ход. ]
§ 133. Маневрирование судна в узкостях
При плавании в узкостях управление судном значительно ус^
ложняется стесненностью акватории, мелководьем и необходимое-}
тью частого расхождения и обгона судов. |
На мелководье судно плохо слушается руля, особенно^
при разворотах машинами. Скорость уменьшается. Изменение глу-j
бин приводит к сильной рыскливости. При резком изменении глу-^
бин судно рыскает носом в сторону большей глубины. j
При прохождении узкостями скорость судна замедляется до^
25—30%, поворотливость снижается, рыскливость увеличивается. 1
326 j
рыскливость судна приводит к потерям эксплуатационного време-
ни (удлинению времени перехода) до 5—6% и затрате дополни-
тельного топлива на переход.
Глубина фарватера, при которой не сказывается влияние мел-
ководья на сопротивление судна, определяется по приближенной
формуле
/7>4Г + 3-у ,
(146)
где Т — осадка судна, м;
V — скорость судна, м!сек..
Рис. 186.
При управлении судном в узкостях необходимо учитывать яв-
ление присасывания, возникающее от взаимодействия гидродинами-
ческих полей судов, движущихся близко друг к другу, а также в
результате влияния течений, узкостей и мелководья. Явление при-
сасывания особенно проявляется при обгоне одного судна другим,
при подходе судна к месту стоянки другого судна, при проходе
устоев мостов на реках с большим течением. Присасывание, явля-
ющееся следствием неравномерного давления воды вокруг судна и
вызываемого им волнения, возрастает с ростом скорости и умень-
шением расстояния между судами.
Взаимное присасывание двух одинаковых судов при обгоне
имеет следующий характер (рис. 186). Судно А медленно* обгоня-
ет судно Б. Когда судно А перекроет Vs длины судна Б (положе-
ние 1), нос судна А будет уклоняться вправо, а корма судна Б —
влево. Между судами возникнет сила притяжения, а вращатель-
ное усилие будет отклонять их вправо.
2
В положении II, когда перекрытие корпуса достигнет у L,
суда продолжают отклоняться вправо, но сила притяжения умень-
шается до минимума. Когда перекрытие достигнет значения у L
(положение III), суда начнут уклоняться влево, одновременно
испытывая сильное притяжение, которое будет увеличиваться до
момента выхода судна А на траверз судна £ (положение IV),
гДе вращательное усилие перестанет действовать. Когда судно А
выйдет вперед (положение V), сила притяжения будет равна ну-
лю а суда начнут уклоняться вправо.
Из рассмотренного видно, что при обгоне судна одинакового
327
размера с обгоняющим оба судна отклоняются в одну и ту же
сторону и столкновение маловероятно, но возможно опасное сбли-
жение судов друг с другом.
Наиболее опасной является ситуация, когда обгоняемое судно
имеет значительно большие размеры, чем обгоняющее, а послед-
нее движется в волновой области, образованной нагоняемым. Для
устранения возможности столкновения обгоняющее судно должно
идти вне волновой области. Обгоняющее судно должно выдержи-
вать безопасную дистанцию между диаметральными плоскостями
судов, которая должна быть равна не менее 0,9 длины обгоняемо-
го судна.
Маневры по развороту судна в узкостях требуют особого вни-
мания и осторожности. При отсутствии ветра и течения разворот
осуществляют с помощью якоря. Для этого выбирают место с до-
статочными глубинами и шириной фарватера. На малом ходу под-
ходят к бровке фарватера или берегу того борта, через который
осуществляют разворот, и отдают якорь, соответствующий борту
разворота. После этого кладут руль на борт и, работая машинами
вперед, разворачиваются. Когда судно развернется на угол более
120—130°, руль перекладывают на другой борт и работают зад-
ним ходом до полного разворота. При этом следует остерегаться
навала судна на бровку фарватера или берег.
Разворот облегчается, если судно следует по течению или с
попутным ветром, так как эти силы помогают развернуть его в
нужном направлении.
Гораздо сложнее развернуть судно, следующее против течения
или ветра. В этом случае целесообразно использовать кормовой
якорь.
§ 134. Управление судном в шторм
Во время шторма судно подвергается сильному действию
ветра и волнения, что требует особых мер по управлению
судном.
Ветер вызывает дрейф судна, крен и изменение скорости, что
зависит от направления и силы ветра, формы и размеров судна,
в частности от осадки, крена и дифферента судна, размеров обду-
ваемой поверхности, положения центров парусности и сопротивле-
ния воды.
Ветровой дрейф увеличивается с усилением ветра, уменьшени-
ем осадки и скорости, увеличением парусности и достигает наи-
больших значений при курсовых углах ветра 50—60°. Крен появ-
ляется при курсовых углах ветра 30—120°, имея наибольшее
значение при 60—80°. Особенно опасен шквалистый ветер. При
курсовых углах ветра до ПО—120° уменьшается скорость ветра.
Наибольшее уменьшение скорости бывает при курсовых углах
ветра 25—35°. При попутном ветре скорость может значительно
увеличиться.
328
На волнении судно подвергается качке, заливанию и забрызги-
ванию палуб и мостика, сильным динамическим нагрузкам на
корпус. При этом снижается скорость, ухудшается управляемость,
а в районах с низкой температурой возможно обледенение. Осо-
бенно опасным является случай резонансной качки, т. е. совпаде-
ния периода качки с периодом собственных колебаний судна. Пе-
риод качки т зависит от длины волны X, скорости судна V, кур-
сового угла направления гребней волны а и может быть опреде-
лен по формуле
т=~1,25X0.6 ±0,5147 sin а ' '
Период собственных колебаний судна определяется по форму-
лам:
при бортовой качке
TB^cBh^\ (148)
где В — ширина судна, м\
h—поперечная метацентрическая высота, м;
с — эмпирический коэффициент (для грузовых судов в полном
грузу е=0,8; для пассажирских — с = 0,77—0,87):
при килевой качке
Tl « 2,8 V^T, (149)
где х — коэффициент вертикальной полноты судна;
Т — осадка судна, м.
Практически опасными считаются блиэрезонансные режимы
качки, когда соблюдаются условия
0,7 1,3 или 0,7 С — с 1,3.
X т
Из приведенных выше формул видно, что выводить судно из ре-
зонансного режима качки можно изменением курса и скорости,
т. е. менять период качки т, что удобно определять с помощью
универсальной штормовой диаграммы Ю. В. Ремеза.
Во время качки судно испытывает огромные динамические на-
грузки. Сила удара волны в перпендикулярную направлению волн
поверхность ориентировочно определяется
Р = 0,1т2 т/м2. (150)
Для истинного периода волны т=6—10 сек сила удара волны
достигает 3—10 т/м2, что очень опасно для палубных грузов и мно-
гих палубных устройств судна.
Встречная волна вызывает потерю скорости, достигающую
40—50%, а для тихоходных судов — до 60—80%. В результате за-
ливания палубы водой остойчивость судна уменьшается. При тем-
пературе воздуха от —4 до —10°С и воды от —1 до + 1°С наблю-
дается интенсивное обледенение.
52?
3
Каждое судно должно быть подготовлено к шторму еще до вы-
хода в плавание. Понятие «штормовые условия» зависит от кон-
кретных условий плавания и технических данных судна. Независи- j
мо от продолжительности и района плавания и ожидаемой погоды ;
судно всегда должно быть готово к встрече и преодолению штор- i
ма. Для этого тщательно проверяют исправность рулевого устрой-
ства, осушительной и других систем судна, надежность крепления :
спасательных шлюпок, якорей, грузовых стрел. Особое внимание
уделяется найтовке палубного груза и креплению крышек грузовых
люков.
Получив информацию о приближении шторма, на судне прово- ;
дят следующие мероприятия: оповещают о надвигающемся шторме :
экипаж и пассажиров, усиливают наблюдение за гидрометеороло-
гической обстановкой, уточняют место нахождения судна, прове-
ряют внешнюю и внутрисудовую связь. Независимо от объема и
качества предшествующей подготовки до начала шторма следует
провести дополнительную техническую подготовку к его преодоле-
нию: проверить водоотливные средства и льяльные сетки; задра-
ить горловины, люки и двери, выходящие на открытую палубу;
закрыть световые люки и иллюминаторы; закрыть чехлами отвер-
стия вентиляционных дефлекторов и развернуть рефлекторы-раст-
рубы по ветру; проверить водонепроницаемые двери; проверить и
дополнительно закрепить палубный груз и различные палубные
устройства; проверить исправность действия штормовых портиков;
шпигатов и других водосточных отверстий; закрыть якорные клю-
зы заслонками, забить ветошью или зацементировать; особенно
тщательно проверить надежность и водонепроницаемость трюмных
закрытий.
Должна быть сделана оценка опасности от ожидаемых штор-
мовых условий для данного судна в данном районе плавания, по-
сле чего принимается конкретное решение о курсе и скорости суд-
на. При этом возможны решения: следование через штормовую
зону, уклонение от встречи с ней, уход в порт-убежище, постанов-
ка на якорь, маневрирование короткими галсами под укрытием
берега. Эти решения предварительные, так как обстановка может
измениться, но во всех случаях судно должно быть готово к худ-
шему.
Современные суда водоизмещением 10 000 т и более, имеющие
надежные машины и правильно загруженные, успешно выдержи-
вают штормовое плавание почти на любых курсах при силе ветра
до 6—7 баллов. Те же суда в балласте и при тех же условиях часто
вынуждены прекращать плавание и переходить к штормованию.
В общем случае к маневрам по управлению судном при штор-
мовом плавании относятся изменение скорости и курса с целью
недопущения резонансной качки и заливания палубы водой. Обыч-
но судно продолжает штормовое плавание до тех пор, пока это
возможно, а затем переходит к штормованию, чтобы при улучше-
нии обстановки продолжить плавание,
330
Наиболее распространенными способами штормования явля-
ются: против волны и ветра, кормой к волне и ветру; лагом к вол-
не, в дрейфе без хода, на якоре. Выбор способа штормования за-
висит от комплексной оценки следующих факторов: штормовые
условия; навигационные условия плавания (глубины, опасности);
размеры, конструктивные и архитектурные особенности судна;
мощность главных машин; степень и характер загрузки судна (па-
лубный груз, дифферент, осадка, остойчивость, наличие свободных
балластных емкостей и т. д.); род груза (вероятность его смеще-
ния, намокания, порчи); соотношение элементов судна и элемен-
тов волны; наличие судовых запасов; вероятность обледенения при
плавании в районах Арктики и Антарктики.
Из всех способов штормования - следует выбирать такой, при
котором судно:
двигается по крайней мере не в сторону навигационных опас-
ностей;
испытывает наименьшие удары волн и динамические нагрузки;
меньше заливается водой и забрызгивается;
не испытывает резонансной бортовой или килевой качки;
не остается в море без топлива и других необходимых запасов.
Способ штормования против волны рекомендуется в том
случае, если судно:
сохраняет за счет сильных машин или смещения центра парус-
ности достаточную управляемость при таком курсе;
достаточно остойчиво, имеет прочную конструкцию носовой
части и обводы, обеспечивающие хорошую всхожесть на волну;
имеет длину в полтора-два раза больше длины волны, а бор-
товая качка представляет наибольшую опасность.
Этот способ не рекомендуется, если судно в балласте или мало
загружено; имеет большой дифферент на нос или корму, большую
парусность, центр которой смещен к носу; машины слабые или
ненадежные.
Штормование в положении кормой на волну и ветер
рекомендуется для судов, которые сохраняют в этом поло-
жении управляемость, в том числе и за счет смещения центра
парусности к носу. К ним могут относиться суда:
имеющие прочную и высокую кормовую часть и длину в > пол-
тора и более раза большую длины волны;
короткие, с прочной кормовой частью, скорость которых мень-
ше скорости -волны, но больше скорости орбитального движения
частиц воды в профиле волны;
длиннее, узкие и низкие, скорость которых значительно превы-
шает скорость волны.
В положении кормой на волну и ветер не рекомендуется штор-
мовать судам, плохо управляемым в этом положении, тихоходным
судам с открытой низкой кормой, судам со слабой конструкцией
рулевого устройства или с малой остойчивостью, малым судам с
небольшой осадкой.
331
Штормование лаГом к волне МаЛо распространёно, fak как
имеет большие недостатки, основным из которых является сильная
бортовая качка. Штормовать лагом к волне приходится судам
с большим дифферентом, которые не могут штормовать первыми
двумя способами. Не рекомендуется штормовать этим способом
судам с большой парусностью, малой остойчивостью и значитель-
ным постоянным креном.
Штормование судов в дрейфе без хода осуществляют, как пра-
вило, при невозможности использовать другие способы. Различают
пассивный и активный дрейф. При пассивном дрейфе судно более
всего подвержено действию ветра и волнения. Активный дрейф
осуществляется в основном в положениях бейдевинд, галфвинд
или фордевинд, что в некоторой степени похоже на первые два
способа штормования. В этом случае на малых судах или судах,
потерявших управление, с носа или кормы выпускают плавучий
(штормовой) якорь.
На глубинах до 100—150 м вытравливают якорь-цепи (якоря
предварительно отклепывают), которые удерживают судно за
счет трения о грунт. На больших глубинах можно дрейфовать с
вытравленными якорями.
Для успокоения волнения применяют масло, выпускаемое из
парусиновых мешков или шпигатов, расположенных выше поверх-
ности воды. Наилучший эффект при этом дают рыбий и тюлений
жир, затем скипидар, растительные масла. Масло растекается по
поверхности моря в виде пленки толщиной около 1/10 000 мм,
но этого уже достаточно, чтобы сгладить гребни волн, пред-
ставляющие опасность для судна. Расход масла около 2—3 л
в 1 ч.
Штормование на якоре имеет смысл, если якоря хорошо держат.
§ 135. Особенности управления пассажирскими
судами, танкерами и лесовозами
Специфика пассажирских и наливных судов и лесовозов вызы-
вает некоторые особенности в их управлении. Пассажирские суда
имеют развитые надстройки, поэтому ухудшается обзор с постов
управления, особенно в сторону кормы. Большая парусность пас-
сажирских судов вызывает увеличение их дрейфа при ветре и
снижении скорости. Средние и крупные пассажирские суда имеют,
как правило, два винта, что обеспечивает лучшую управляемость
судна.
Пассажирские суда часто заходят в порты, поэтому приходит-
ся осуществлять частые маневры в стесненных условиях порта,
швартовки и отшвартовки, что налагает большую ответственность
и требует хороших навыков со стороны экипажа судна.
Поскольку на этих судах имеется большое число пассажиров,
не имеющих подчас элементарных знаний морской практики, то
332
необходимы особая бдительность со стороны экипажа и принятие
мер предупреждения падения человека за борт. Вахтенная служ-
ба в любой момент готова к осуществлению маневра «человек за
бортом» или к пожарной тревоге.
Многие пассажирские суда имеют специальные успокоители
качки, что улучшает управление судном в штормовую погоду.
Танкеры, полностью загруженные, имеют большую осадку и
малый надводный борт. Во время шторма волны забрызгивают
или накатываются на палубу. В этих условиях особое значение
имеет герметизация помещений и надежное крепление всех палуб-
ных устройств танкера.
Сложным является управление танкером на балластном пере-
ходе, когда носовая часть судна высоко поднимается над водой и
имеет большую парусность, что снижает управляемость, увеличи-
вает рыскливость судна при ветре. Для обеспечения хорошей мо-
реходности танкера необходимо принять соответствующее коли-
чество балласта и так его распределить, чтобы судно имело
оптимальную осадку и дифферент. Эта задача решается при
помощи диаграммы загрузки танкера, где указаны оптимальные
значения осадок и дифферента для разных условий погоды.
Особенность управления лесовозом определяется тем, что
часть груза размещается на палубе, что приводит к уменьшению
метацентрической высоты и ухудшает обзор с мостика. Высота
палубного груза леса должна быть таковой, чтобы обеспечивался
круговой обзор с мостика, а остойчивость сохранялась на протя-
жении всего рейса, независимо от наличия свободной поверхности
жидкости, расходования запасов, намокания или обледенения
груза.
Крепление груза должно быть таким, чтобы в аварийном со-
стоянии, когда судну угрожает опасность опрокидывания, можно
было легко сбросить груз в море. Для этого крепежные тросы или
цепи соединяются при помощи глаголь-гака, который легко разъ-
единяет цепи в необходимых случаях.
§ 136. Плавание в ледовых условиях
Общие сведения. Для плавания во льдах приспособлены суда,
имеющие ледовые подкрепления. При правильном учете обстоя-
тельств плавания обычные судд могут успешно преодолевать ледо-
вую обстановку. Перед выходом в ледовое плавание тщательно
осматривают винт, руль, рудерпост, штевни, заклепочные швы, на-
ружную обшивку, особенно в районе ватерлинии, кингстоны. Для
этих целей судно желательно поставить в док. В районе форпика,
если обшивка не обладает достаточной прочностью, сменяют лис-
ты, или ставят дополнительные шпангоуты, или устанавливают
временные подкрепления носовой части из деревянных брусьев.
ззз
Подводную часть судна, особенно йосовук), проверяют на, водо-
непроницаемость. Перед длительным плаванием рекомендуется
снять все выступающие детали в надводной части борта и подвод-
ной части корпуса.
Сложность ледового плавания требует укомплектования судна
опытными моряками. Наибольшие требования предъявляются к
палубной команде и комсоставу. В ледовых условиях нередко при-
ходится привлекать к авральным работам весь экипаж, поэтому
личный (состав судна должен быть обеспечен теплой одеждой и
обувью.
Перед выходом в ледовое плавание проверка рулевого и якор-
ного устройств, судовых систем, состояния трюмов, укомплектова-
ние навигационным оборудованием, спасательными средствами
(шлюпками, плотами, комбинезонами и др.), средствами сигнали-
зации проводится особенно тщательно. В соответствии с Правилами
снабжения аварийным имуществом и материалами, изданными Ре-
гистром СССР, аварийный запас цемента, песка, досок и т. п. бе-
рется на 50% больше обычного.
Подготовку трюмов к погрузке оформляют актом и записью в
судовом журнале. Принимаемый к перевозке груз должен удовлет-
ворять условиям плавания. При распределении грузов по трюмам
предусматривают возможность минимальных затрат на грузо-
вые операции при погрузочно-разгрузочных работах в нескольких
пунктах, даже при нарушении очередности захода в порты. Грузы,
боящиеся подмочки, грузят в помещения, расположенные выше
ватерлинии. В помещения над ватерлинией не следует грузить то-
вары, боящиеся подмораживания (фрукты, сыр, напитки и т. п.).
При укладке грузов в трюмах следует предусмотреть коридоры
или колодцы, позволяющие быстро и легко достичь места повреж-
дения. На судне со слабой обшивкой коридоры делаются шириной
1 м вдоль бортов в* носовой части. На крупных судах рекомендует-
ся делать колодцы. К бортам не рекомендуется устанавливать тя-
желые грузы.
При составлении грузового плана и проведении работ в на-
чальном и промежуточном портах необходимо предусматривать
дифферент на корму (для среднетоннажного судна 0,9—Г м, для
крупнотоннажного около 1,5 м) и возможность в случае пробоин
в носовой части откачать из носовых танков воду или топливо,
чтобы приподнять носовую часть судна. Во всех случаях корма
судна при следовании во льдах должна иметь осадку по грузовую
ватерлинию, над винтами должно быть не менее 1 м воды до
льда.
Дифферент судна дает возможность легче форсировать льды,
повышает скорость судна во льдах. При слишком малой осадке
носом лед может попадать под днище. Для крупных танкеров, на-
пример, рекомендуется иметь осадку носом в 1,5—2 м, у судов,
имеющих ледокольный срез, форштевень углубляется до этого
среза.
334
В качестве меры против действия отрицательных температур
на грузы в надводной части трюмов рекомендуется засыпать па-
лубу и люки 10—42-сантиметровым слоем сухих опилок с после-
дующей укладкой деревянного настила. При плавании во льдах
особенно четко должно быть поставлено наблюдение за состояни-
ем воды в льялах и танках. Замеры воды нужно проводить каж-
дый час и дополнительно после каждого сильного удара льдин в ту
или иную часть борта.
Самостоятельное плавание во льдах. При плавании в районе,
где возможны льды, необходимо принять меры для своевре-
менного, их обнаружения. Основой для этого является наблюдение
за видимым горизонтом, атмосферными явлениями, температурой
воды и воздуха, волнением моря, направлением и силой ветра,
течением. Торосистый лед можно обнаружить радиолока-
тором.
К признакам, свидетельствующим о близости льда, относятся:
резкое, уменьшение температуры воды и воздуха; наличие так на-
зываемого ледяного неба — светлого пятна в небе над горизонтом;
появление далеко в море птиц и животных; характерный шум,
грохот от торошения льда; уменьшение ветра и волнения, если
они направлены со стороны льда; появление мелких льдин.
При подходе к ледяной кромке следует замедлить скорость хо-
да .судна, особенно, если перед этим оно вошло в полосу тумана.
Входить в лед могут суда, которые имеют соответствующее разре-
шение Регистра СССР, или суда, у которых нет другого выхода
в создавшейся обстановке.
Большие суда со слабой или старой обшивкой могут преодоле-
вать льды до 5 баллов, средние суда в нормальном техническом
состоянии—до 6 баллов. Суда ледового класса могут плавать во
льдах до 7 баллов. При слабом и тонком льде возможность прохо-
димости повышается на 1—2 балла, при толстом — снижается на
1—2 балла.
Вход в лед осуществляется только на малом ходу. Скорость
можно увеличивать в зависимости от состояния льда и судна.
Следует держаться середины разводий, чтобы избежать подвод-
ных выступов льда. Работа машинами на заднем ходу во льду мо-
жет привести к поломке руля и винтов и допускается в крайнем
случае при самых тщательных мерах предосторожности.
Ледяная шуга — серьезное препятствие движению судна, по-
этому не следует входить в нее вблизи берегов, так как это связа-
но с риском быть вынесенным на берег.
При форсировании сплошного льда рекомендуется идти уме-
ренной скоростью, не прибегая к ударам с разгона, так как можно
повредить корпус. Если необходимо форсировать лед с разгона,
следует делать короткие разбеги и проявлять бдительность на зад-
нем ходу.
При плавании в сплошном льду следует держать руль по воз-
можности прямо,
335
Суда с прямым форштевнем и полными обводами плохо проби-
вают себе путь во льду и легко застревают. Наклонный форште-
вень и острые обводы носовой части имеют значительные преиму-
щества. Ледокольные образования носовой части позволяют суд-
ну подниматься и наваливаться на лед, подминая его под себя.
Практика ледового плавания советских судов показывает, что
обычное транспортное судно, имеющее класс Регистра СССР, мо-
жет следовать в зависимости от сплоченности льда со следующей
скоростью: /
Лед до 2 баллов................ полным ходом
» > 3 » ......... 7—8 узлов
» » 4 > ............. 4—5 *
» » 5 » ................. 3—4 узла
» » 6 » ................ 2—3 »
» 5> 7 з> ................... по возможности
Судно, идущее в сплоченном льду, может заклиниться. Тогда
пробуют «раскачать» судно перекладкой руля при работе машины.
Для освобождения судна из ледового плена завозят ледовые яко-
ря с кормы. Цепи становых якорей применяют для распиливания
льда путем их подбирания и потравливания. В тяжелых случаях
взрывают лед аммоналом.
Плавание судна под проводкой ледокола. Требование о провод-
ке судна ледоколом дается в порту капитану порта, в море — ка-
питану ледокола. Капитан судна, идущего под проводкой ледоко-
ла, выполняет все распоряжения капитана ледокола в течение сов-
местного плавания и сообщает необходимые технико-эксплуатаци-
онные данные о судне при требовании на проводку. В первую оче-
редь ледоколы обслуживают военные и почтово-пассажирские су-
да, имеющие специальные указания о срочности груза. Остальные
суда обслуживаются в порядке очереди.
При следовании во льдах суда не должны обгонять друг друга, '
а держаться на таком расстоянии (примерно 3—3,5 длины судна),
которое позволило бы ему остановиться при внезапной задержке
впереди идущего судна.
Скорость следования каравана зависит от скорости самого ти-
хоходного судна в нем. Всякая авария одного судна задерживает
все суда каравана, поэтому капитаны судов не должны прибегать
к рискованным маневрам.
Суда, следующие под проводкой ледокола, пользуются как об-
щепринятыми сигналами, так и специальными сигналами, приме-
няемыми при проводке во льдах. Каждое судно обязано
репетовать все сигналы, поданные ледоколом или другим судном,
за исключением сигналов бедствия, «Застрял во льду» и «Будьте
готовы принять буксир».
Многолетняя практика ледового плавания показала, что в
опасный момент идущее сзади судно имеет возможность уклонять-
336
ся от столкновения с впереди идущим либо, в худшем случае,
уменьшить силу навала. При этом надо стремиться к тому, чтобы
неотвратимый навал на судно произошел не форштевнем, а скуло-
вой частью или бортом. Наоборот, при неизбежности ударов судна
о лед нужно принять все меры, чтобы удар пришелся в форште-
вень, а не в скуловую или бортовую часть судна.
Порядок построения судов в караване и дистанцию определяет
капитан ледокола. На каждом судне должна вестись тщательная
прокладка пути, хотя ледокол и сообщает по окончании проводки
контрольную точку.
При проводке судов ледоколами необходимо убрать якоря на
палубу и снять все выступающие детали, которые могли бы при-
чинить повреждения при навале судов друг на друга. Во время ле-
дового плавания под проводкой ледокола якоря не нужны судну и
затрудняют работу при буксировке судна ледоколом. Ледокол,
окалывающий застрявшее судно, может зацепить за выступаю-
щий якорь.
Буксировка судна ледоколом может осуществляться на длин-
ном или коротком тросе и вплотную в кормовом вырезе ледокола.
Буксировку на длинном тросе применяют при плавании в разре-
женных льдах, на коротком тросе — при плавании в сплоченном
льду, когда канал быстро заполняется битым льдом. Буксировку
вплотную применяют тогда, когда буксируемое судно не сильно
влияет на управляемость ледокола. Ледокол, буксирующий судно
вплотную и сам застрявший во льду, почти полностью лишается
возможности давать задний ход и вынужден ожидать помощи дру-
гого ледокола. В хороших ледовых условиях при совпадении высо-
ты кормового выреза ледокола с высотой клюзов судна и при ту-
го выбранных стропах буксировка в кормовом вырезе считается
лучшим и наиболее безопасным способом проводки судов.
При буксировке судна ледоколом последний подает свой бук-
сирный трос, снабженный усами. На судне должны быть подго-
товлены тросы-проводники и бросательные концы для приема
буксира.
В случае, если судно, следуя самостоятельно или под провод-
кой ледокола, застряло во льдах, ледоколы проводят окалывание
судна. Для этого идущий впереди судна ледокол разворачивает-
ся и проходит с подветренной стороны судна от носа к корме, где
разворачивается и идет вперед еще ближе от судна. Капитан суд-
на должен внимательно следить за обстановкой и быть готовым в
благоприятный момент дать ход своей машине. Если такой момент
будет упущен, то канал за ледоколом забьет лед, наносимый вин-
том ледокола. Судно может- не преодолеть этот лед, и ледоколу
придется повторять маневр.
Владелец ледокола и фрахтователь не несут имущественной от-
ветственности за повреждения судна, вызванные проводкой во
льдах. Ледокольное обслуживание производят бесплатно для всех
торговых судов.
337
Глава XXIV
МОРСКАЯ БУКСИРОВКА
§ 137. Основные понятия о морской буксировке
Буксировкой называют транспортировку несамоходных судов
самоходными. Ее осуществляют буксиры — самоходные суда, пред-
назначенные для буксировки несамоходного (буксируемого) суд-
на. Караван буксирующих судов с буксируемыми называют бук-
сирным, а буксирным составом — несамоходную часть каравана,
т. е. буксируемые объекты.
Буксирный трос — стальной или пеньковый канат, трос из
синтетического волокна, либо якорная цепь, при помощи которых
осуществляется тяга судо’в.
Буксирная лебедка — специальная автоматическая лебедка,
устанавливаемая на буксирном судне для регулирования длины
буксирного троса в зависимости от его натяжения и условий пла-
вания.
По району плавания различают буксировки:
морские дальние — между портами, расположенными на раз-
ных морях и океанах;
морские ближние — между портами одного морского бассейна;
рейдовые — связаны обычно с разгрузкой судов на открытых
рейдах или вводом больших судов в порт; t
портовые — осуществляются в пределах портовой акватории
в целях транспортировки судов и портовых средств;
речные — осуществляются в реках;
канальные — передвижение судов по каналам.
По типу буксирного каравана различают буксировки:
простую, когда одно буксирующее судно ведет одно буксируе-
мое;
сложную, когда одно или несколько буксирующих судов ведут
одно или несколько буксируемых.
Буксировку производят в зависимости от условий специальные ?
буксирные суда, грузовые, грузо-пассажирские и ледокольные суда. J
В зависимости от условий плавания и объектов буксировки по- i
следняя осуществляется на длинном и коротком тросах и вплот-
ную лагом. 5
Особым видом буксировки является вождение судов методом
толкания, который применяют на реках, небольших водоемах и ?
при соответствующей гидрометеорологической обстановке в мор-1
ских условиях. 1
В зависимости от назначения буксиры подразделяются на оке- *
анские, морские и портовые. > i
Океанские буксиры, предназначенные для дальних
океанских буксировок больших судов и плавучих сооружений без |
ограничения района плавания, имеют мощность от 1200 до 4000 л. с, з
338 |
скорость порожнем—17 узлов, экономическую — до 11 узлов, за-
пасы топлива — до 25 суток, что обеспечивает им радиус действия
до 12 000 миль.
Некоторые океанские буксиры специально оборудуются для
аварийно-спасательных работ и носят название океанских спасате-
лей. Такие суда имеют противопожарные, водоотливные и ремонт-
ные средства, а также иногда водолазное, электросварочное и дру-
гое оборудование.
Морские буксиры, предназначенные для буксировок в
пределах одного морского бассейна, имеют мощность силовых
установок от 500 до 2200 л. с. Запасы топлива значительно меньше,
чем у океанских буксиров. Мореходные качества морских букси-
ров должны удовлетворять условиям района их работы. Некото-
рые морские буксиры переоборудуют как морские спасатели.
Портовые буксиры, имеющие мощность 200—600 л. с.,
подразделяют на рейдовые и внутрипортовые; они обладают море-
ходными качествами, соответствующими району плавания. Порто-
вые буксиры обеспечивают транспортировку плавсредств в гаванях
и на рейдах.
Особо важные характеристики мореходности буксиров — остой-
чивость и непотопляемость. Большое эксплуатационное значение
имеет характеристика, называемая тягой на гаке.
При кантовке больших судов в портах наиболее опасным явля-
ется положение буксирного троса, перпендикулярное диаметраль-
ной плоскости буксирного судна, что может привести к потере бук-
сиром остойчивости при рывке.
Для предупреждения опрокидывания буксиров принимают сле-
дующие конструктивные меры: надстройки, рубки, горловины, две-
ри делают водонепроницаемыми; угол перекладки буксирного тро-
са ограничивают путем смещения точки его приложения в корму;
для смягчения рывков буксир оборудуют пружинными гаками,
буксирными лебедками, гидравлическими амортизаторами; для
быстрой отдачи троса применяют полуавтоматические и автомати-
ческие гаки.
К мерам предупреждения опрокидывания буксиров в процессе
эксплуатации относят: согласованность действий капитанов букси-
рующего и буксируемого судов; применение длинного буксирного
троса, смягчающего рывки; перекладку руля* на малых ходах; вы-
полнение маневров только при условии их безопасности.
Буксирное устройство состоит: из буксирного гака или буксир-
ной лебедки, кормового буксирного клюза или полуклюза, кормо-
вых кнехтов для крепления оттяжки, буксирного троса, кормовых
отводных битенгов, буксирных арок, носовых битенгов, буксирных
тросов, различных вспомогательных материалов и такелажа, про-
водников. вспомогательных концов, коушей, соединительных скоб,
зажимов для стальных тросов и т. д.
Основной деталью буксирного устройства является буксирный
вак. В настоящее время почти не применяют простые буксирные"
339
Гакй, опасйые с точки зрения опрокидывания буксира и работы
с ними обслуживающего персонала. На буксирах средней и малой
мощности наиболее распространен откидной полуавтоматический
или автоматический буксирный гак. На буксирных судах мощно-
стью свыше 500 л. с. гаки снабжаются амортизационными пружи-
нами. Для отдачи буксира с полуавтоматического гака (рис. 187)
необходимо откинуть вертикальный упор и ударить по хвостовой
части горизонтальной защелки молотом. Отдача буксирного троса
при наличии автоматического гака (рис. 188) производится непо-
средственно из ходовой рубки. На буксире должно быть не менее
двух буксирных гаков.
Буксирные гаки крепят при помощи катающегося ролика к бук-
сирной дуге, расположенной несколько позади миделя, вблизи х
точки, через которую проходит ось вращения буксира на циркуля-
ции. Управляемость буксира будет наилучшей, если радиус кри-
визны буксирной дуги равен расстоянию ее от центра . тяжести
буксира.
Наличие буксирной лебедки значительно упрощает процесс .
буксировки. Натяжение буксирного троса на барабане автомати-
ческой лебедки остается постоянным. Если натяжение троса уве- '
личивается, то он автоматически травится лебедкой. При ослаб-
лении натяжения троса лебедка автоматически подбирает слаби-
ну до уравновешивания натяжения с заданным.
Буксиры часто подходят к судам и причалам лагом, кормой, |
носом. Для предотвращения поломок и повреждений судов и при- ;<
чальных сооружений буксиры оборудованы привальными брусья- j
ми, кранцами. В носовой и кормовой частях установлены большие *
мягкие горизонтальные кранцы. В качестве кранцев применяют ав-
томобильные шины. При буксировке лагом используют швартов- j
ные тросы буксира либо специальный комплект тросов. J
Перед буксировкой выполняются специальные расчеты, в ре- <
зультате которых определяют общее сопротивление буксируемого ;
судна, сопротивления воды буксировке, застопоренных винтов, ве-
личину воздушного сопротивления, сопротивления буксирного тро- '
са в воде, рабочее натяжение тросов и т. д.
340
$ 136. Буксировка несамохоДнМх судов
Морская буксировка барж и лихтеров является основным ви-
дом планируемой буксировочной работы. Типы морских барж ус-
тановлены ГОСТом. Их грузоподъемность колеблется в пределах
от 50 до 3000 т, осадка от 1,2 до 4,6 м. Грузоподъемность некото-
рых лихтеров доходит до 5000 т.
Буксирное устройство буксируемого судна, называемое бра-
гой, — стальной трос, обведенный под привальным брусом вокруг
всей баржи и оканчивающийся в носовой части двумя огонами,
за которые крепится буксирный трос. Брага крепится к бортам
судна скобами. Для предотвращения потери браги крайние носо-
вые скобы должны быть особенно прочными. Срок службы браги
3—4 года. Буксирный трос на барже закрепляют за кнехты, битен-
ги, рымы и другие специальные приспособления.
Устойчивость баржи на курсе зависит от точки приложения
буксира. Чем дальше точка приложения буксирного троса от цент-
ра тяжести баржи, тем послушнее идет она на буксире.
Если мощность одного буксира недостаточна, буксировку про-
изводят двойной тягой; оба буксирующих судна становятся в киль-
ватерную колонну впереди состава.
Команда барж не всегда способна постоянно работать штурва-
лом, поэтому руль на баржах часто закрепляют в положении пря-
мо. При таком положении руля удовлетворительно держатся на
курсе баржи с клинообразными обводами носа и кормы.
Рыскливость барж приводит к большим эксплуатационным по-
терям и нередко к тяжелым авариям. В зависимости от конструк-
тивных особенностей баржи, гидрометеорологических условий и
загрузки угол рыскания барж колеблется от 10 до 80° ( в среднем
20—50°).
Время перехода при буксировке рыскливых барж увеличива-
ется на 30—50% (иногда на 100—120%) от номинального. При
волнении моря в 3—4 балла ход снижается до среднего, а при
5—6 баллах — до малого. При волнении свыше 6 баллов, особенно
если угол рыскания баржи превышает 60°, ход уменьшается до
самого малого. Иногда караван вынужден ложиться в дрейф. Ры-
скливость барж уменьшается, если барже придается дифферент
на корму величиной в 1—2% от длины судна, перекладкой и за-
креплением руля на одном борту, постановкой за кормой плаву-
чих или глубинных волокуш.
Перекладкой руля на один борт достигается уравновешивание
момента силы натяжения буксирного троса, приложенной к носо-
вой части, и сил сопротивления воды при движении баржи с нали-
чием дрейфа. Этот способ не даёт положительных результатов у
судов, имеющих большие коэффициенты полноты водоизмещения
при малых площадях рулей.
Плавучая волокуша представляет собой связку из 4—10 бре-
вен, буксируемую на тросе длиной 50—100 л за баржей. Глубинная
341
(донная) волокуша состоит из связки цепей, тросов и других
тяжестей, спускаемых с кормы буксируемого судна на тросе дли-
ной 50—60 м. При применении указанных способов уменьшения
рыскливости потери во времени снижаются ш несколько раз (от
30—120 до 15—30%).
В караване буксируемые суда располагают таким образом, что-
бы впереди шла баржа большего водоизмещения. Малую, но сли-
шком рыскливую баржу ставят впереди одной большой или меж-
ду двумя большими.
Практикой морской буксировки выработано следующее пример-
ное сочетание судов в буксирном караване (табл. 9).
Таблица 9
Состав Мощность буксира, л. с.
500 | 1 800 | 1200
Из 1 баржи 1000 2000—3000 До 5000
» 2 » 2x400 1x3000+1x500 2 x3000
» 3 » 3x250 3x500 2 x 2000 + 1x500
» 4 » ........ — 4X400 —
Успех буксировки в большой мере зависит от слаженности ра-
боты всех экипажей каравана. Между капитанами судов должна
быть налажена постоянная связь и взаимная информация о поло-
жении на каждом судне. Общее руководство буксировкой осуще-
ствляет капитан буксира.
При встрече со штормом на всех судах каравана проводят
подготовительную работу. В частности, проверяют готовность уд-
линить буксирный трос при усилении волнения.
При подходе каравана к узкостям и проходе через них буксир-
ные тросы укорачивают, а скорость замедляют. В некоторых слу-
чаях проводку состава через узкости или по рекам производят по
частям.
§ 139. Буксировка самоходных судов
другим судном
Буксируют самоходные суда либо при перегоне из одного пор-
та в другой, либо в аварийном случае. Такую буксировку выпол-
няют как буксирные, так и транспортные суда. Если в качестве
буксирующего судна используют буксирное, то оно подает свой
трос на транспортное судно. При буксировке самоходного судна
другим транспортным судном буксирный трос может быть подан
с любого из них, хотя обычно его должно подавать буксируемое су-
цно.
Крепят буксирный трос за кнехты буксирующего судна, мачту,
комингс люка, надстройку путем заведения браги. Прежде чем
342
крепить брагу, проверяют прочность этих конструкций. Перед за-
водкой браги по углам комингсов люков или рубок устанавлива-
ют деревянные брусья сечением не менее 150X150 мм. Трос обво-
дят вокруг комингса люка или рубки дважды (рис. 189, а).
Более удобно составлять брагу из двух отдельных тросов, ка-
ждый из которых обводят один раз вокруг рубки и крепят за бор-
товые или кормовые кнехты (рис. 189, б).
Если надстройки и комингсы люков не могут быть использова-
ны для крепления браги, то ее заводят вокруг судна. Ходовые кон-
цы браги, после того как ими обогнут форштевень, пропускают
через бортовые клюзы и крепят на нескольких парах кнехтов. Под-
веска браги в кормовой части должна быть выполнена так, чтобы
трос не мог попасть под гребные винты. На форштевень брага
должна опираться через мягкий кранец, по бокам форштевня на
протяжении двух-трех шпаций подвешивают деревянные брусья.
При буксировке мелких судов и сооружений брагу можно крепить
непосредственно на нескольких кормовых кнехтах. Часто брагу за-
водят за носовые якорные клюзы, а буксирный трос крепят за
якорь-цепь, отсоединив от нее якорь. Использование якорь-цепи
для буксировки дает более надежное крепление буксира, предо-
храняет буксирный трос от перетирания, позволяет регулировать
длину троса на ходу судна и увеличивает провес буксира. Недо-
статок способа — вывод из строя одного из становых якорей суд-
на, который может оказаться нужным при обрыве буксирного
троса.
Буксирная брага изготовляется из стального троса диаметром
на 30—50% больше буксирного троса, она пропускается через клю-
зы различными способами.
В тех случаях, когда концы браги с коушами пропускают че-
рез клюзы со стороны бака, их соединяют скобой перед форштев-
нем, а за скобу крепят буксир (рис. 190). Во втором и третьем
случаях брагу (здесь ее называют стропом) заводят с внешней сто-
роны при помощи стальных тросов-проводников.
Огоны браги на палубе крепят соединительной скобой, или
заложенным в несколько шлагов растительным тросом, или брев-
ном. Соединение браги скобой или бревном нежелательно, так как
скоба может деформироваться, а в бревно сильно врезается трос.
Это затрудняет отдачу браги.
343
При использовании растительного троса брага быстро отдается
путем разрубания троса, но растительный трос быстро изнашива-
ется. Для предотвращения перетирания троса капитаном Николае-
вым предложен блок, который ставят вместо соединительной ско-
бы и крепят буксирный трос к браге.
Чтобы предупредить перетирание тросов, под них подкладыва-
ют маты, делают оклетневку тросов тонким растительным или
стальным тросом, латунными лентами, смазывают вязкими смазоч-
ными материалами.
При передаче грузов или снаряжения в аварийных случаях
в /условиях открытого моря буксируют судно ошвартованным ла-
гом. В настоящее время считаются обычным явлением бункеровка
китобойных судов на полном ходу с китобазы «Слава», разгрузка
и погрузка транспортных судов в море при обеспечении сельдяного
и китобойного промыслов.
В процессе буксировки следят за тем, чтобы буксирные тросы
не перегибались слишком сильно при проходе через киповые план-
ки или клюзы, не терлись. Их ежедневно понемногу травят, чтобы
место перелома троса не было постоянным.
Каждое транспортное судно должно быть готово . принять и
подать буксир.
В аварийных случаях большое внимание уделяется обеспечен-
ности судов топливом и продовольствием. Топливо и продовольст-
вие буксируемого судна передаются на буксирующее; в некоторых
случаях на него перемещают экипаж. Если буксируемое судно не
может обеспечить буксирующее топливом, водой и продовольстви-
ем, то капитан последнего должен немедленно радировать в паро-
ходство и ближайшему агенту о наличных запасах, о курсе, кото-
рым он намеревается идти, а также о месте и времени, до которо-
го возможно пройти с наличными запасами.
§ 140. Буксировка доков, плавкранов и земснарядов
Большинство плавучих сооружений имеет сравнительно неболь-
шую осадку, сильно развитые надводные устройства, неудобообте-
каемую форму подводной части. Поэтому они обладают повы-
шенной парусностью, высоким сопротивлением в воде.
При подготовке плавучих доков к океанскому переходу произ-
водят расчеты на местную и общую прочность и ставят необхо-
344
димые подкрепления. Известно, что доки не имеют устройств для
управления, статель-палуба во время волнения сильно заливает-
ся, сопротивление движению у доков в 3—4 раза больше, чем у
транспортного судна при равных условиях. Для уменьшения со-
противления движению дока устанавливают носовые обтекатели
округлой или клинообразной формы, а для уменьшения заливае-
мости стапель-палубы — стальные волноломы у переднего транца.
Рыскливость и дрейф от бокового ветра уменьшают путем балла-
стировки дока и приданием ему дифферента на корму. С палуб
убирают все лишнее, не нужное для перехода. В башнях дока обо-
рудуют каюты для комсостава, кубрики для команды, бытовые,
провизионные, генераторные помещения, ходовую рубку и радио-
рубку, оборудуют буксирное, якорное и швартовное устройства;
рядом с рубкой устанавливают сигнальное устройство в виде мач-
ты с реем.
Доки буксируют как специальные буксиры, так и транспортные
суда. Особые требования к транспортному судну в этом случае
предъявляются в отношении управляемости. Количество буксиру-
ющих судов, их мощность и тип зависят от дальности перехода,
типа и водоизмещения дока, обстановки рейса.
Плавучие краны, имеющие верхнее строение типа укосины,
могут буксироваться морем на небольшие расстояния без разбо-
ра верхнего строения. Однако, как правило, разборка верхнего ос-
нования необходима. Козловые краны и краны с качающейся стре-
лой для дальних перегонов не приспособлены, поэтому требуют
специальной подготовки. Универсальные краны при определенной
степени волнения можно буксировать без подготовки.
Недемонтированные плавкраны со снятыми противовесами и
закрепленной по-походному стрелой буксируют при волнении до
4—5 баллов. Понтон без стрелы и противовеса можно буксировать
при волнении до 5—6 баллов.
Сопротивление движению у кранов большое, но меньше, чем
у доков, так как понтоны кранов имеют подрезы в кормовой и но-
совой частях. Подготовка к буксировке на кранах проводится та-
кая же, как и при перегоне доков.
Для буксировки морских земснарядов не требуется дополни-
тельных креплений. Для речных дноуглубительных снарядов и
драг следует проводить контрольные расчеты прочности при поста-
новке их на волну. Папильонажные лебедки снарядов могут быть
использованы после соответствующей проверки для выбирания и
вытравливания буксирного троса. Буксирные битенги или обухи
устанавливаются дополнительно.
При подготовке к буксировке дноуглубительных снарядов, осо-
бенно многочерпаковых, имеющих высоко поднятую раму, необ-
ходимо* провести тщательный расчет остойчивости. Сопротивление
движению у земснарядов меньше, чем у доков и плавкранов, но
больше, чем у судов. Морские земснаряды обладают достаточной
незаливаемостью палубы, аварийно-спасательным оборудованием
345
и в большей степени приспособлены к морской буксировке, чеМ
речные снаряды.
На рис. 191—194 показаны типы буксировочного снаряжения.
Обозначения на рис. 191: 1 — буксирные обухи; 2 — брага; 5 — стальной
трос; 4 — треугольное звено; 5 — буксирные усы.
Обозначения на рис. 192: 1 — буксирные кнехты; 2 — стальные тросы;
3 — соединительная скоба; 4 — буксирные усы; 5 — буксирные отводы.
Обозначения на рис. 193: / — буксирная лебедка; 2 — кнехты; 3 — сталь-
ной трос; 4 — манильский спаренный трос; 5 — буксирные усы; 6 — треуголь-
ное звено.
346
Обозначения на рис. 194: 1 — стальной трос; 2 — скоба; 3 — канат;
4 — коуш весом 300 кг; 5 — коуш весом 115 кг; 6 — специальная скоба; 7—бук-
сирные усы.
§ 141. Буксировка плотов морем
Характерными особенностями морских плотов являются полно-
древесность, прочность, обтекаемость. Полнодревесность, харак-
теризующая собой плотность укладки деревьев в плоту, обуслов-
ливает прочность плота, его способность выдерживать удары волн
во время перехода и составляет для морских плотов 0,6—0,7. Об-
текаемость плота, зависящая от его формы и конфигурации, также
обусловливает прочность плота и характеризует сопротивляемость
плота движению. Характеристика морских плотов различной кон-
струкции приведена в табл. 10.
Таблица 10
Тип сигары £ CD (О О 5? та X X Н Ширииа|осадка Удельный расход таке- лажа в кг/м3
по миделю, м
Каспийская 720 65 7,0 2,5 5,95
Байкальская 550 52 7,5 2,5 4,88
ВКФ-П 1000 72 9,6 2,8 3,72
Черноморские из хлыстов 3000 100 15,0 3,5 4,00
Дальневосточные 2500 100 12,0 3,5 3,38
Малые 200 29 5,8 1,85 6,24
Самбурского — — — — 7,90
являются
Основными типами современных морских плотов
кошмы и сигары.
Кошмы (рис. 195) обладают рядом недостатков, к числу кото-
рых относятся: малое натяжение обносных тросов, большая пло-
щадь торцов, малые объе- ________ __________
мы плота, небольшое от- ' . J Z'""'''"—Z:^
ношение длины к ширине.
Эти недостатки обуслов-
ливают большую сопро-
тивляемость плотов дни-
жению и малую проч- -
ность. Достоинством кош-
мы является простота из- _
готовления и небольшое Рис. 195.
количество затрачиваемого такелажа.
Плоты в виде морских сигар (рис. 196) значительно устойчивее,
чем кошмы, так как их крепление более прочно, а обводы более
обтекаемы.
347
Наиболее известными являются плоты-сигары типа ВКФ (Вол-
жско-Камского филиала ЦНИИЛесосплава) и плоты-сигары
ЦНИИЛесосплава. Однако и эти плоты иногда не обеспечива-
ют необходимой прочности конструкции.
Капитан В. Д. Самбурский в 1945 г. предложил способ креп-
ления плота за буксирный трос, который обеспечивает самозатя-
гивание плота при натяжении буксирного троса. Разработанные
на осн,ове этог0 предложения пло-
“ ты показали значительные преиму-
щества самозатягивающихся пло-
тов перед всеми другими конструк-
циями*
Т- В плотах перевозятся не только
круглый лес, но и пиломатериалы,
1Ш включая даже мелкие доски для
изготовления ящиков и бочек. При
I этом прочность таких плотов зна-
чительно выше, так как пилома-
П териалы можно уложить плотнее,
чем круглый лес.
- • , Инж. А. Ф. Пустошкин и капи-
тан дальнего плавания Н. И. Гур-
Рис. 196. ский разработали приспособление
для сплотки леса в виде носовой и
кормовой приставки, которое уменьшает сопротивление плота
движению и увеличивает его прочность.
К морской буксировке принимают только те плоты, которые
удовлетворяют техническим условиям на сплотку. При этом обра-
щают внимание на прочность и исправность такелажа, плотность
укладки леса, наличие короткомерного леса (не более 20%), осад-
ку и форму плота.
Для буксировки морских плотов используют буксирные и тран-
спортные суда. Мощность буксиров определяют из примерного
расчета 0,15—0,5 и. л. с. на 1 м3 плота. Нижний предел соответст-
вует более прочным и удобообтекаемым плотам, которые не име-
ют каких-либо устройств для управления.
При буксировке судном нескольких плотов первым идет самый
крупный на тросе длиной от 250 до 500 м. Длина троса между
плотами составляет 50—100 м, а в условиях непродолжительного
перехода в благоприятной обстановке — 5—10 м, что снижает со-
противление плотов движению. На случай обрыва заводятся запа-
сные буксирные тросы. Скорость буксировки зависит от мощности
буксира, прочности плота, погоды, обтекаемости плота и составля-
ет в среднем 4,5—6 узЛов. Морские сигары выдерживают шторм
до 6—7 баллов, а иногда и больше.
При повреждении, угрожающем потерей леса, плот отбуксиро-
вывают в ближайший порт-убежище, где силами команды или
348
специально высланной бригады подготовляют его для дальнейше-
го следования.
Прием и передачу плотов производят в местах, безопасных для
плавания судна. Транспортные суда принимают и сдают, плоты
на открытых рейдах, куда (или откуда) их доставляют портовые
буксиры.
§ 142. Буксировка мелких и речных судов
Буксировку мелких судов-катеров, небольших барж, шлюпок
производят эпизодически при перегоне из одного порта в другой
или от места постройки к месту эксплуатации. Легкость корпуса
этих судов приводит к сильной рыскливости состава. Поэтому пе-
ребазировку таких судов производят только при соответствующих
благоприятных метеорологических условиях.
Перед морской буксировкой мелкие суда обычно конвертуют,
т. е. плотно задраивают, заваривают, заколачивают, конопатят
все отверстия, через которые вода может попасть внутрь судна.
Для защиты от разрушительного действия волн к носовым частям
мелких судов приваривают специальные щиты. При частичной
конвертовке на судне оставляют команду для управления и наблю-
дения за буксирным устройством, при полной конвертовке коман-
ду снимают с судна.
Буксирный состав может состоять из 10—11 мелких судов.
Буксирный трос должен быть в этом случае толщиной 40—45 мм
при длине 200—300 м. Длина тросов между судами около 100 —
150 м при диаметре 40 мм. Скорость хода каравана примерно рав-
на 5—6 узлам.
Буксирный трос на шлюпке крепят за вторую банку шлюпоч-
ным узлом и прихватывают фалинем к носовому рыму. Один мат-
рос должен быть готовым в нужном случае перерубить топором
буксирный трос.
Начиная с 1948 г. перегон речных судов морем применяют
в больших масштабах. Речные суда можно буксировать поодиноч-
ке, а также мелкими и большими группами (до 10 судов и более).
Буксировку одного или нескольких речных судов осуществляют
одним буксирным или транспортным судном, капитан которого яв-
ляется начальником каравана.
Большие группы речных судов (экспедиции) буксируются не-
сколькими буксирными судами. Экспедицию возглавляет флаг-
манский буксир или транспортное судно, которые обладают более
высокими мореходными и ходовыми качествами, чем остальные
буксиры. Флагманское судно на буксир судов не принимает, идет
впереди каравана и может подойти к любому его судну. Экспеди-
ции придается 2—3 посыльных судна с повышенными мореходны-
ми качествами. Экспедиция должна быть очень тщательно подго-
товлена; командный состав и палубная команда всех судов экспе-
диции должны в совершенстве владеть флажной сигнализацией и
349
специальными сигналами каравана. Все суда должны быть закон-
вертованы, оборудование закреплено по-походному. На переходе
необходима хорошая согласованная работа всех экипажей.
Опыт экспедиций показал, что лучшими являются следующие ;
походные порядки:
в открытом море строй стайки, при котором караван со- <
стоит из трех колонн: первая и вторая колонны идут строем усту- j
па, третья — несколько поодаль в сторону от средней флагман- 1
ской; этот строй напоминает форму неправильного клина; |
в тумане строй уступа, обеспечивающий взаимную види- :
мость судов; в этом случае суда идут параллельными курсами на J
расстоянии не более одного кабельтова.между колоннами; ?
в узкостях строй кильватерной колонны. j
Флагман постоянно поддерживает связь с берегом и получает
регулярно гидрометеорологические прогнозы, что дает возможность
своевременно подготовиться и принять меры в случае ухудшения
погоды. В условиях Северного Ледовитого океана такая экспеди-
ция должна сопровождаться самолетом — разведчиком ледяной
обстановки или вертолетом. Ледовую разведку ближнего действия
может осуществлять одно из посыльных судов.
На Черном море известны случаи буксировки 12 речных судов ,
одним буксиром из Одессы и Херсона в Ждановский порт. Длина ;
буксирных тросов в море достигала 200—300 м. При подходе к ?
Керченскому проливу буксирные тросы укорачивались при помощи ;
лебедок и свистовов, а ввод судов в Ждановский порт осуществ-
лялся группами по 3—4 судна.
Рыскливость судов представляет большую трудность при бук- >
сировке крупных буксирных составов. Однако при волнении 5— *
6 баллов буксировка не приостанавливалась, и только при 6—8 бал-
лах ход уменьшался и караван разворачивался против ветра.
§ 143. Буксировка судов методом толкания
Сущность метода толкания заключается в том, что буксирное
судно становится позади жестко скрепленного состава и толкает
его перед собой. Такое соединение судов каравана уменьшает со- !
противление движению, так как из-за расположения буксирного j
судна сзади состава баржи не испытывают дополнительного сопро- j
тивления от кильватерной струи, появляющейся при действии дви- ;
жителя буксира. Буксир расположен в попутном потоке, что сни- '
жает сопротивление движению самого буксира и повышает эффек-
тивность работы движителя.
Как показали исследования, проводящиеся Горьковским инсти-
тутом инженеров водного транспорта, метод толкания по сравне- ;
нию с обычной буксировкой судов на тросе дает увеличение скоро-
сти буксировки на 8—'15%, увеличивает упорную силу толкача по
сравнению с силой тяги на гаке на 12—29%, буксировочный к. п. д.
возрастает на 20—51%, себестоимость перевозки снижается иа
360
10—34%. При толкании судов улучшаются надежность управлении
и маневровые качества караванов.
• При буксировке судов методом толкания счалку караванов про-
изводят различными способами.
Жесткая счалка — все суда каравана счалены друг
с другом неподвижно. Буксир:толкач расположен в диаметральной
плоскости каравана сзади и не имеет возможности разворачивать-
ся относительно состава. Повороты осуществляются перекладкой
рулей барж или толкача.
Мягкая счалка — состав счален монолитно, толкач имеет
возможность поворачиваться на 20—50° от диаметрали каравана.
Поворот каравана осуществляется рулями и отклонением толкача
относительно диаметрали каравана.
§ 144. Буксирные работы в порту
Портовые буксиры вводят крупные суда в порт и выводят их
из порта, оказывают помощь им во время швартовки и отшвар-
товки, переставляют суда с одного места стоянки на другое, осу-
ществляют кантовку судов, буксировку портовых барж, перегру-
зочных механизмов, земснарядов и других плавучих объектов.
Рис. 197.
Вводят и ставят суда к причалу при помощи двух буксиров.
Для буксировки крупных океанских лайнеров- требуется до восьми-
девяти буксиров.
На рис. 197 показаны различные случаи буксирного обслужи-
вания: А — ввод к причалу океанского лайнера несколькими бук-
351
сирами; Ё— установка буксиром судна в стесненных условия^
кормой вперед; В — установка судна к причалу двумя буксирами;
Г — поджимание одним из буксиров кормы судна к причалу; Д—•
установка судна одним буксиром при отжимном ветре; Е — от-
швартовка крупного судна от причала на шпринге при помощи
буксирного судна; Ж— отшвартовка судна от причала бортом на
носовом шпринге при помощи буксира; И — разворачивание од-
ним буксиром судна в стесненной акватории; К — отшвартовка
судна средних размеров одним буксиром, отшвартованным к суд-
ну лагом; Л — оттягивание кормы судна от причала буксиром, нос
судна отводится при помощи якорногб каната; М — вывод судна
из ковша двумя буксирами.
Если судно по своим размерам близко к размерам буксира, то
последний швартуется так, чтобы форштевень буксира был позади
форштевня буксируемого судна примерно на —Vs его длины, а
буксир располагался бы относительно судна параллельно или под
небольшим углом к нему.
Буксируя тяжелое и плохо управляемое судно, буксир распола-
гается под углом до 10° к буксируемому судну. Корма буксира дол-
жна выходить за корму судна. Такое расположение буксира дает
большую управляемость каравана и снижает сопротивление дви-
жению.
При работе двух буксиров более мощный из них буксирует суд-
но в порт, а другой, принявший буксирный трос с кормы буксируе-
мого, помогает первому развернуть судно в нужные моменты. Раз-
ворот судна при помощи двух буксиров может быть сделан при
наименьшем радиусе циркуляции. При подводе судна к причалу
следят за своевременным погашением им инерции. Длину буксир-
ных тросов определяют в зависимости от стесненности портовой
акватории.
Глава XXV
СИГНАЛИЗАЦИЯ И ПРАВИЛА ДЛЯ ПРЕДУПРЕЖДЕНИЯ
СТОЛКНОВЕНИЙ СУДОВ В МОРЕ
§ 145. Средства судовой сигнализации
ч
Классификация средств сигнализации. На судах морского фло-
та сигнальную службу несут вахтенный помощник капитана и вах-
тенный матрос.
Все морские суда оборудованы средствами внутренней и внеш-
ней сигнализации в точном соответствии с Правилами Регистра
СССР и Табелем снабжения судов морского флота. Исправное со-
стояние, постоянная готовность судовых сигнальных средств и пра-
вильная организация сигнальной службы — необходимые условия
успешного и безаварийного плавания.
362 >
Внутренняя сигнализация (авральная, пожарная, трюмная, тем-
пературная, служебная) играет важную роль в обеспечении безо-
пасности судна, груза и людей на борту. Авральная сигнализация
оповещает об объявленном общесудовом аврале; пожарная — о
месте пожара; трюмная и температурная — об изменениях темпе-
ратуры или появлении воды в трюмах; служебная позволяет быст-
ро оповестить любого члена экипажа или вызвать его в назначен-
ное место.
Средства внешней сигнализации подразделяются на зрительные
(оптические), звуковые (акустические) и радиотехнические.
Зрительными средствами связи являются:
флажные — Международный свод сигналов (МСС);
семафорные — ручная и механическая (крылья семафора);
сигнальные фигуры — шары, конусы, цилиндры, Т-образные
знаки и полосы и др.;
световые — отличительные огни, прожекторы, проблесковые
лампы, ракеты, фальшфейеры и др.
Звуковыми средствами связи являются: колокола,
гонги, свистки, сирены, воздушные тифоны.
Радиотехническими средствами связи являют-
ся судовые радиотелеграфные н радиотелефонные станции.
Флажная сигнализация располагает 40 флагами,
из них 26 — буквенных, четырехугольной формы; 10 —
цифровых, треугольных; 3 — треугольных, заменяющих любой
из 36 основных флагов в случае их повторения в одном
и том же сигнале. Последний (40-й) флаг — вымпел свода — слу-
жит для оповещения о том, что переговоры ведутся по Междуна-
родному своду сигналов (МСС).
Международный свод сигналов (1965 г.) предназначен для
поддержания связи в обстановке, вызванной необходимостью
обеспечения безопасности мореплавания и охраны человеческой
жизни на море, особенно в случаях, когда возникают языковые
трудности общения. Свод удобен для осуществления сигналопро-
лзводства всеми средствами связи, включая радиотелефон п радио-
телеграф, что позволяет отказаться от отдельного радиотелеграф-
ного кода. Каждый сигнал МСС имеет завершенное смысловое
значение, что исключает необходимость составления сигналов по
ловам.
Сигналы, используемые в Международном своде сигналов, со-
стоят из:
однобуквенных сигналов, предназначенных для очень срочных,
важных или часто употребляемых сообщений (табл. 11);
двухбуквенных сигналов, составляющих общий раздел: бедст-
вие— авария, несчастные случаи — повреждения, средства нави-
гационного оборудования — навигация — гидрография, маневриро-
вание, разное (груз, балласт, экипаж, люди, рыбный промысел,
лоцман, порт, гавань), метеорология — погода, связь, международ-
ные санитарные правила, таблицы дополнений;
7г J 2 —933 353
Таблица II
Однобуквенные сигналы
Сигнал Значение сигнала
А У меня спущен водолаз; держитесь в стороне от меня и следуйте малым ходом
В Я гружу, или выгружаю, или имею на борту опасный груз
С Утвердительный «ДА» или «Значение предыдущей группы должно» читаться в утвердительной форме»
D Держитесь в стороне от меня; я управляюсь с трудом
Е Я изменяю свой курс вправо
F Я не управляюсь; держите связь со мной
G Мне нужен лоцман
Н У меня есть на борту лоцман
I Я изменяю свой курс влево
J У меня пожар, и я имею на борту опасный груз; держитесь в стороне от меня
К Я хочу установить связь с вами
L Остановите немедленно свое судно
М Мое судно остановлено и не имеет хода относительно воды
N Отрицательный «НЕТ» или «Значение предыдущей группы должно читаться в отрицательной форме»
О Человек за бортом
Р Все должны быть на борту, так как судно скоро снимается 1 7
354 ,j
Сигнал Значение сигнала
Q Мое судно незаражен‘ное, прошу предоставить мне свободную практику
S Мои машины работают на задний ход
и Вы идете к опасности
V Мне требуется помощь
W | Мне требуется медицинская помощь
X | Приостановите выполнение ваших намерений и наблюдайте за моими сигнал 1ми 1
Y Меня дрейфует на якоре
Z Мне требуется буксирное судно
трехбуквенных сигналов, составляющих медицинский раздел и
начинающихся с буквы М.
Материал в Своде сведен в группы в соответствии с тематикой
и для удобства разбора сигналов расположен в алфавитном по-
рядке сигнальных сочетаний, которые помещены с левой стороны
страниц перед значениями сигналов. Для облегчения набора сиг-
налов некоторые из них повторяются в различных тематических
группах. Сигналы для передачи сообщений наблюдают с помощью
слов-определителей, отображающих основную тему подготавли-
ваемого сообщения. Алфавитный указатель слов-определителей по-
мещен в конце Свода.
Семафорная сигнализация (ручная, механическая, семафорны-
ми полотнищами) позволяет вести переговоры по МСС или при по-
мощи специальной семафорной азбуки. При ведении переговоров
по специальной семафорной азбуке различному положению
рук по отношению к туловищу сигнальщика или различному
положению крыльев механического семафора по отношению
к вертикальному основанию соответствуют буквенные зна-
чения.
Сигнальные фигуры имеют свои преимущества: они видны на
значительном расстоянии, не зависят от направления ветра, хоро-
шо различимы при заходе и восходе солнца.
Ч2 12* 355
Сигнальные фигуры в дневное время заменяют сигнально-от-
личительные огни, а также служат для переговоров с судами и бе-
реговыми станциями.
На побережьях морен и океанов расположены многочисленные
береговые сигнальные станции, которые следят за движением судов,
передаваемыми сигналами, за погодой, предупреждая суда о гро-
зящей опасности. Каждому сигналу (сочетанию из флагов, кону-
сов, цилиндров, шаров) присвоен свой номер, при помощи которо-
го в таблицах Международной системы сигналов можно найти его
смысловое значение.
Судоводители обязаны хорошо знать смысловое значение бе-
реговых сигналов, огней и фигур.
Световая сигнализация ведется при помощи клотиковых проб-
лесковых огней, проблесковых ламп, фонарей, прожекторов, гели-
ографов и призм. "Передача ведется короткими (точка) и длинны-
ми (тире) проблесками по азбуке Морзе.
Звуковые средства связи. Для ведения переговоров при помо-
щи звуковых сигналов принята такая же азбука Морзе, как и для
световой. Производить звуковые сигналы можно любым звуковым
средством, включая судовой гудок или сирену.
Звуковые сигналы могут иметь местное или международное
значение.
Пиротехнические средства сигнализации (фальшфейеры, раке-
ты, гранаты) на морских судах используются в качестве световых,
звуковых или взрывных сигналов. Их применяют как в темное, так
и в светлое время суток, но обязательно при хорошей видимости.
В светлое время суток используют только ракеты, дающие цветные
огни или звезды.
Радиотехнические средства связи. Минимум обязательного ра-
диооборудования для каждого судна в зависимости от района пла-
вания и назначения определяется Правилами Регистра СССР.
§ 146. Правила для предупреждения столкновений
судов в море
Наиболее распространенным и тяжелым видом аварий на море
является столкновение судов. Такие аварии нередко сопровожда-
ются человеческими жертвами, большими убытками, порой гибе-
лью судна. Правила для расхождения судов начали применяться
давно. Однако только с 1889 г. они приобрели законную силу меж-
дународного документа, когда Международная конференция в Ва-
шингтоне утвердила первые «Правила для предупреждения столк-
новений судов в море (ППСС)». В 1948 г. на лондонской Между-
народной конференции по охране человеческой жизни на море
ППСС были пересмотрены и дополнены. С 1 сентября 1965 г. дей-
ствуют ППСС в редакции второй лондонской Международной кон-
ференции 1960 г. Кроме изменения и дополнения ряда правил
356
1948 г. в новые ППСС включено приложение «Рекомендации по
использованию радиолокатора для предупреждения столкновений
судов в море в условиях ограниченной видимости».
Правила 1960 г. содержат 31 правило, объединенные в шесть
частей: А — «Предварительные замечания и определения»; В — «Ог-
ни и знаки»; С — «Звуковые сигналы и управление судном при ог-
раниченной видимости»; Д — «Правила маневрирования»; Е —
«Звуковые сигналы для судов, находящихся на виду друг у дру-
га»; F— «Разное».
В части А «Предварительные замечания и определения»
содержится Правило 1, устанавливающее, что ППСС должны ру-
ководствоваться все суда и гидросамолеты в открытых морях и
соединенных с ними водах, по которым могут плавать морские су-
да. ППСС являются не рекомендациями, а законом. В Правиле 1
отмечено, что все положения ППСС об огнях должны соблюдать-
ся от захода до восхода солнца во всякую погоду, а в случае ог-
раниченной видимости такие правила должны выполняться кругло-
суточно. Далее поясняется, что термин «судно с механическим
двигателем» означает любое судно, приводимое в движение меха-
нической установкой; судно считается «на ходу», если оно не сто-
ит на якоре, не ошвартовано к берегу или не стоит на мели; суда
считаются на виду друг у друга только тогда, когда одно может
наблюдаться визуально с другого; термин «короткий звук» озна-
чает звук длительностью около 1 сек, «продолжительный звук» —
от 4 до 6 сек; термин «занят ловом рыбы» означает лов рыбы се-
тями, ярусными крючковыми снастями или тралами, за исключе-
нием лова рыбы буксируемыми крючковыми снастями.
Часть В «Огни и знаки» (Правила 2—14) описывает огни и
знаки (места их установки, устройство, секторы освещения, даль-
ность видимости, цвет), предписанные различным судам: на ходу,
не имеющим возможности уступать дорогу, специальным судам
и т. п.
Так, например, судно с механическим двигателем на ходу не-
сет следующие ходовые огни (приложение 4):
топовые — два белых огня, установленных выше всех других
огней и надстроек в диаметральной плоскости судна (обычно на
фок- и грот-мачтах) и одинаково устроенных так, чтобы освещать
непрерывным светом дугу горизонта в 225° по 112°,5 с каждого
борта судна, т. е. от направления прямо по носу до 22°,5 позади
траверза с каждого борта; дальность видимости топовых огней не
менее 5 миль.
отличительные (бортовые) — на правом борту зеленого, а на
левом борту красного цвета, каждый одинаково устроенный так,
чтобы освещать непрерывным светом дугу горизонта в 112°,5 от
направления прямо по носу до 22°,5 позади траверза; дальность
видимости отличительных огней не менее 2 миль;
гакабортный (кормовой) — белый огонь, освещающий непре-
рывным светом дугу горизонта в 135° от направления прямо по
357
корме до 67°,5 на каждый борт судна; дальность видимости кор-
мового огня не менее 2 миль.
Буксирующее или толкающее судно на ходу в дополнение к
отличительным и гакабортному огням механического судна на хо-
ду должно нести два или три (в зависимости от длины каравана)
белых вертикальных огня, расположенных один над другим на
равном расстоянии; каждый из таких огней должен быть такого
же устройства и такой же дальности видимости и один из них
должен находиться на том же месте, что и вышеупомянутые топо-
вые огни.
Судно, лишенное возможности управляться, если оно на ходу,
несет отличительные и гакабортный огонь, а вместо топовых ог-
ней — два красных огня, расположенных по вертикальной линии
один над другим; красные огни должны быть видимыми по всему
горизонту на расстоянии не менее 2 миль. Днем такое судно дол-
жно нести на самом видном месте два черных шара или подобных
им предмета, расположенных по вертикальной линии один над
другим.
Судно на якоре несет якорные белые огни, видимые по всему го-
ризонту на расстоянии не менее 2 миль и устанавливаемые в носо-
вой и кормовой частях судна, стоящего на якоре, однако кормовой
огбнь не обязателен для судов длиной менее 150 футов. Днем судно
на якоре должно держать на носовой части на самом видном ме-
сте один черный шар.
Судно на мели в дополнение к якорным огням несет два крас-
ных огня, предусмотренных для судна, лишенного возможности
управляться. Днем оно должно держать на самом видном месте
три черных шара, расположенных по вертикальной линии один
над другим.
Часть С «Звуковые сигналы и управление судном при ограни-
ченной видимости» (Правила 15, 16 и приложение к Правилам) в
своих предварительных замечаниях отмечает, что информация,
полученная с помощью радиолокатора, не освобождает никакое
судно от обязанностей строго придерживаться Правил 15 и 16
ППСС.
Правило 15 устанавливает требования к звуковым туманным
сигналам судов.
Так, например, во время тумана, снегопада, мглы, сильного
ливня или при любых других обстоятельствах, ограничивающих
видимость днем или ночью, судно с механическим двигателем,
имеющее ход относительно воды, должно подавать через проме-
жутки не менее 2 мин один продолжительный звук. Если такое
судно не имеет хода относительно воды, оно должно подавать че-
рез промежутки не более 2 мин два продолжительных звука. Па-
русное судно в подобной обстановке должно подавать через про-
межутки не более 1 мин один звук, когда оно на правом галсе, по-
следовательно два звука, когда оно на левом галсе, и последова-
тельно три звука, когда оно идет при ветре позади траверза. Суд-
358
но, стоящее на якоре, должно через промежутки не более 1 мин
учащенно звонить в колокол в течение 5 сек. Если же оно стоит
на мели, то таким якорным звуковым сигналам должны предше-
ствовать три ясных и отдельных удара в колокол, повторяемые
также и после учащенных (якорных) сигналов. Наконец, букси-
рующее судно, а также любое другое судно, которое не в состоя-
нии уступить дорогу приближающемуся судну, потому что не мо-
жет управляться или маневрировать, должно подавать через про-
межутки не более 1 мин один продолжительный и вслед за ним
два коротких звука.
Правило 16 регламентирует плавание и расхождение судов в
условиях ограниченной видимости. Это правило категорически
требует от судоводителей при тумане, мгле, снегопаде, ливне сле-
довать только умеренным ходом, тщательно сообразуясь с сущест-
вующими обстоятельствами и условиями плавания.
В своих Рекомендациях ППСС напоминают судоводителям,
что радиолокатор может не обнаружить малые суда, небольшие
айсберги и другие подобного рода плавающие объекты.
Если радиолокатор показывает, что поблизости находится одно
или несколько судов, то «умеренная скорость» должна быть мень-
ше той, которую судоводитель при прочих равных условиях мог
бы считать умеренной без применения радиолокатора.
Если с помощью радиолокационного наблюдения убедились,
что чрезмерное сближение судов неминуемо, то наиболее благора-
зумным действием следует считать полную остановку судна.
Часть Д «Правила маневрирования» (Правила 17—27) опре-
деляют действия судов, предпринимаемые для безопасного расхо-
ждения. Эти правила предполагают, что любое предпринятое су-
доводителем действие должно быть своевременным и соответство-
вать хорошей морской практике. Правила этой части относятся к
судам, находящимся на виду друг у друга. Решающим фактором
в вопросах расхождения является лишь взаиморасположение су-
дов, определяющее их подчинение тем или иным правилам манев-
рирования ППСС, а не размеры и назначение судов.
Правила маневрирования ППСС регламентируют:
расхождение парусных судов;
расхождение судов с механическим двигателем на встречных,
пересекающих курсах, а также в узкостях;
расхождение парусных судов с судами с механическим двига-
телем;
маневрирование судов, которым уступают или которые уступа-
ют дорогу;
обгон судов;
расхождение с судами, занятыми ловом рыбы.
В целях избежания формального подхода к выполнению ППСС
Правило 27 регламентирует права судоводителей отступать от
ППСС, когда дальнейшее их выполнение не может предотвратить
столкновение (маневр «последнего момента»).
359
Часть Е «Звуковые сигналы для судов, находящихся на виду
друг у друга» (Правило 28), регламентирует подачу звуковых сиг-
налов судами с механическим двигателем на ходу, находящимися
на виду друг у друга при фактическом изменении ими курса или
даче заднего хода.
Так, Правило 28 (а) регламентирует, что в указанных условиях
один короткий звук означает: «Я изменяю свой курс вправо»; два
коротких звука — «Я изменяю свой курс влево»; три коротких зву-
ка — «Мои машины работают на задний ход». Кроме того, Прави-
ло 28 (0) предусматривает в подобной же обстановке подачу осо-
бого сигнала — не менее пяти коротких и частых звуков — в том
случае, если другое судно не принимает достаточных действий для
предотвращения столкновения. •
Часть F «Разное» устанавливает ответственность за нарушег
ние требований ППСС и хорошей морской практики (Правило 29);
оговаривает особые условия при плавании во внутренних водах
(Правило 30); устанавливает сигналы бедствия (Правило 31).
Многолетняя практика применения ППСС показывает, что ши-
рокий круг охватываемых ими вопросов требует дополнительного
разъяснения и толкования ППСС применительно к различным об-
стоятельствам и условиям плавания. Такие сведения наиболее
полно изложены в пособии «Комментарии к Правилам для преду-
преждения столкновений судов в море, 1960 г.», изданных изда-
тельством «Транспорт» в 1966 г.
Приложение 3, лист 1
УСЛОВНЫЕ ЗНАНИ ДЛЯ МОРСКИХ КАРТ
БЕРЕГА
№
1
2
3
4
5
6
7
8
9
Условные знаки Названия условных знаков Условные знаки Названия условных знаков №
Береговая линия Берега глинис- тые (3)
достоверная
11
Береговая линия
недостовер-
ная (2)
Берега скалис- тые (3) Берега болоти- стые (илистые) 12
(3)
Берега нависа-
ющие (3) £) & ~ СУ
Берега обрыви- стые с пляжем (3) Берега с валу- нами (4) 13
Мангровые за - росли (5) 14
Берега обрыви- стые без пляжа (3)
Берега песча — ные (3) Берега опасные 15
1 4 1 > * Г 4 • < ТЩ *_ берега камени- (6)
стые (3) Береговые валы, озы и другие гря- ды, не выражаю- щиеся в масштабе карты
Берега песчано- 16
галечные (3)
Приложение 3, лист 2
ИЗОБАТЫ, ФАЛАТЕВЫ, ГРАНИЦЫ РАЙОНОВ
НА АКВАТОРИЯХ
№ Условные знаки Названия условных знаков Условные знаки названия условных знаков №
31 32 33 34 35 36 37 ЗВ 20 а .1 Т. I.. ‘..I t 60 (7.0) [5-2] Изобаты, их оцифровка и бергштрихи (13) Изобаты утол- щенные (13) Изобаты, недо- статочно обеспе- ченные проме- ром (13) Границы опас- ностей, отличи- тельных глубин и прибрежных камней Морские ка- налы (14) Рекомендован- ные фарватеры или курсы (15) То же, с указа- нием наимень- шей глубины (15) Стёорные фар- ватеры с указа- нием глубины и способа трале- ния (15) П Q’ = Ф Г ! 6 X Границы про- траленных райо- нов (16) Глубина и спо- соб траления для малых районов и над навигацион- ными опасностя- ми (17) Границы запрет- ных эон, районов учений, портов и т. п. (18) Границы райо- нов, запретных или открытых для лова рыбы (19) Границы райо- нов, м ал ооб с ле- дованных в гид- рографическом отношении Границы рас- пространения донных грун- тов (20) 39 40 41 42 43 44
Приложение 3, лист 3
НАВИГАЦИОННЫЕ ОПАСНОСТИ
№ Условные знаки Названия условных знаков Условные знаки названия условных знаков №
45 46 47 да 49 50 51 52 53 54 55 56 ф ж •Т т * 1 2 $? L?1M С--25М 10м Опм 20м Опмз 10М-20М фз-лмз жл ®(5) Ск Ск Камни надводные (21) Камни подводные (21) Камни осыхающие (21) Буруны (22): 1. На картах оте- чественных вод; 2. На картах ино- странных вод Отдельные банки, занимающие неболь- шие площади (23) Подводные препят- ствия (24) Подводные мише- ни и глубины над ними от поверхности оды (25) Подводные мише- ни звуковые (25) Скалы надводные и их высоты в мет- рах Скалы подводные Рифы подводные (26) Рифы осыхающие (26) i ДО si S \Z * О 03 Острова, не выра- жающиеся в мас- штабе (27) Отдельные остро- ва, не выражающие- ся в масштабе, и их высота в метрах (27) Затонувшие суда (28): 1. С частями над водой; 2. С глубинами над ними 18 мет- ров и менее; 3. С глубиной над ними более 18 мет- ров Сулой (29) Водовороты Вулканические проявления (места подводных изверже- ний и выходы горя- чих газов). 1951-год 21 — глубина Рыболовные сети и заколы Водоросли Плавник Поясняющие над- писи у опасностей (30) 57 58 59 60 61 62 63 64 65 66
По донесению
Приложение 3, лист 4
СРЕДСТВА НАВИГАЦИОННОГО ОБОРУДОВАНИЯ
№ Условные Названия условных Условные Названия условных №
зна к и знаков знаки знаков
137 * Гр Пр 15 М Маяки Светящие дЗн Несветящие на- 148
навигационные вигационные зна-
знаки (69) ки (76)
138 ★ П4М (U) Огни (70) дЗн10 5м Несветящие на- вигационные зна- ки и их высоты (76) 149
139 ★ П5М Рефл Светящие навита- Зн А гур Г у рий 150
ционные знаки и £ Зн Несветящие на-
огни со с ветовыми 151
вигационные зна-
отражателями (71) ки со световыми
отражателями (76)
140 * 2 верт Л2М (и) Навигационные вертикальные огни 1 вКаб-зн. 1. Кабельные 152
2 2 каб.ста.зн. знаки
ж ПлМкНьиарп ^Пр(10с) • 2. Кабельные
141 Плавучие маяки (72) створные знаки (77)
10МТ(д) / РеФл Световые отра- 153
Зтм кр бл Плавучие огни (73) жатели на соору-
142 / / РефлР жениях (78)
Предостерегаю- 154
143 3 ТМ Огни на затонув- ших судах с частями Тп.н. А° ,оЛ*> щие надписи в пор- тах (79)
над водой Створные маяки, 155
2 стеП и Лр светящие навига-
144 АэроMR* Гр Пр А эромаяки ционные знаки й огни (80)
Створные светя- 156
к ., щие навигационные
145 АэроИ * Пр скт Аэромзяки сектор- знаки и огни со све-
н ые *'"'2 ста. Пр Реал товыми отражате- лями (71, 80)
146 та. & кр. or. А эрон а ви рацион- ные предостерега- Створные несветя- щие навигационные 157
тельные огни (74) знаки (80)
Маяки, светящие навигационные зна- 2СТР.ЗН. о Створные несве- 158
147 а ГрПр(2)(Вс)17М тящие навигацион- ные знаки со све-
ки и огни, положе- товыми отражате-
ние которых на карте приближен- но (75) 2ств.зн.РеФл лями (80)
Приложение 3, лист 5
ИЗОБРАЖЕНИЕ НА КАРТАХ ЦВЕТА ОГНЕЙ СВЕТЯЩИХ СНО
N2 Условные знаки Названия условных знаков Условные знаки Названия условных знаков №
180 181 182 183 ф (щ) И Огни маяков и светящих на- вигационных знаков круго- вого освещения (88. 89) Переменные огни маяков и * светящих нави- гационных зна- ков кругового освещения (88, ос; Огни плаву- чих маяков (88, 91) Огни створных маяков и светя- щих навигацион- ных знаков (88, 92) Огни секто светящих нав ков (88, 95) /4\\ 1 ш ''п₽ (12 1 2 «Пр «'(1скт йПр М|> 2ств.Пр У 2вертПЗМ рных маяков и игационных зна- ПР~^^ х * *4- / У Ж \ро 1 Z Ж 1 (18е)2ОМЗтм ~t ~\~ с)18мпюм Портовые, ры- бацкие, речные и другие огни (88, 96): 1. Одноцвет- ные; 2. Многоцвет- ные Створные огни (88, 96) Навигацион- ные вертикаль- ные огни (88, 97) 189 190 191 192
184 185 Пр(5с)12М А Пр Аэро^^ Огни маяков, светящих навига- ционных знаков и аэромаяков на картах масштабов 1 : 1000 000 и мельче (93) Огни аэромая- ков кругового освещения (88, 94) J 2 Апр АЧПр кр fa в3 Ju Гр ЗЯ Зтм 1. Буи светя- щие 2. Буи светя- щие с ТОЛОВЫ- МИ фигурами 3. Буи светя- щие со свето- выми отража- телями (88, 98) Плавучие огни (88, 98) 193 194
186 Азро|^^р(рПр Переменные огни аэромаяков кругового осве- щеним (88, 94) кр fa jjjpdp Огни на за- тонувших судах с частями над водой (88, 98) 195
187 188 АэроМКй ГрПрскг Аэро М*»мк Огни сектор- ных аэромаяков (88, 94) Огни аэромая- ков вместе с аэрорадиомаяма- ми (88, 94) 0 to МИШЕНЬ о ЧПр »п ИЛ я Illi Огни на боч- ках (88, 98) Огни на ми- шенях (88, 98) Светящие ве- хи (рыбацкие) (88, 98) 196 197 198
Приложение 4
СХЕМА РАСПОЛОЖЕНИЯ СУДОВЫХ ОГНЕЙ
Я? /
ЗЕ Ъ
Сп х
Приложение 5
ЛИТЕРАТУРА
Аверкиев В. П. Судовые радионавигационные приборы. Л., «Судострое-
ние», 1966.
Андронов Л. П. Грузоведение и стивидорные операции. М., «Тран-
спорт», 1966.
Аносов А. В., Ди дык А. Д. Управление судном и его техническая эк-
сплуатация. М., «Транспорт», 1969.
Бакаев В. Г. Эксплуатация морского флота. М., «Транспорт», 1965.
Баранов Ю. К. Использование радиотехнических средств в судовож-
дении. М., «Морской транспорт», 1963.
Басин А. М. Ходкость и управляемость судов. М., «Транспорт», 1968.
Богданов Б. В., Петров М. К. Морская буксировка. М., «Морской
транспорт», 1955.
Б у р л а к о в С. Ф. и др. Якорная стоянка судов на открытых рейдах. М.,
«Транспорт», 1968.
Б ух ано-вс кий И. Л. Радиолокационные методы судовождения. М.,
«Транспорт», 1964.
Власов В. Г., Свечников В. Г. Электрорадионавигационные приборы.
М., «Транспорт», 1966.
Воронов В. В., Перфильев В. К. Атлас электронавигационных при-
боров. М.—Л., «Транспорт», 1966.
Готский М. В. Практическая навигация. М., «Морской транспорт», 1963,
Дремлют В. В. и др. Навигационная океанография. М., «Транспорт»,
1965.
Ермолаев Г. Г., Захаров В. К. Морская лоция. М., «Транспорт»,
1969.
Ермолаев Г. Г. Картографические проекции и морские карты. М., «Тран-
спорт», 1970.
Ермолаев Г. Г. Судовождение в морях с приливами М., «Транспорт»,
1969.
Блинов И. А. и др. Электронавигационные приборы. М., «Транспорт»,
1967.
Жуковский Г. Р. Океанография для судоводителей. Л.—М., Водтрансиз-
дат, 1953.
Зотеев Е. С. и др. Новые морские электронавигационные приборы. М.,
«Транспорт», 1966.
Кожухов В. П. и др. Девиация магнитного компаса. М., «Транспорт»,
1967.
Чер ниев Л. Ф. Служба времени на морских судах. М., «Морской тран-
спорт», 1963.
Ющенко А. П., Лесков М. М. Навигация. М., «Транспорт», 1965.
Григорьев В. В. и др. Под общ. ред. Щетининой А. И. Мореходные
приборы и инструменты. М., «Морской транспорт», 1960.
Я к у ш е н к о в А. А. и др. «Автоматизация судовождения», М., «Транс-
порт», 1967.
цат
363
ОГЛАВЛЕНИЕ
Введение 3
Краткий исторический очерк развития судовождения.............................................................................4
Раздел первый. НАВИГАЦИЯ
Глава!. Основные понятия из навигации .......................................................................................7
§ 1. Предмет навигации 7
§ 2- Форма и размеры Земли .............................................................................................7
§ 3. Основные точки и круги на земном шаре ..... 9
§ 4. Географические координаты........................ 10
§ 5. Разность широт и разность долгот..................П
§ 6. Основные лилии и плоскости на земном шаре .... 13
§ 7. Системы деления горизонта.........................14
§ 8. Истинный курс. Истинный пеленг. Курсовой угол .... 16
§ 9. Морские меры длины и скорости ....... 17
§ 10. Видимый горизонт наблюдателя......................18
§ 11. Дальность видимости предметов.....................19
Глава II. Определение пройденного расстояния и измерение глубин в
море 22
§ 12. Определение пройденного расстояния 22
Классификация лагов .......... 22
Поправка лага и ее определение . 23
§ 13. Измерение глубин в море . . ...... 25
Классификация лотов .... 25
Глава III. Определение направлений в морс...................................................................................2$
§ 14. Компасы и их характеристика.............................................................................28
§ 15. Земной магнетизм и его элементы. Магнитные карты . . 29
§ 16. Девиация магнитного компаса и ее уничтожение . . 32
§ 17. Магнитные и компасные румбы, курсы и пеленги. Общая по-
правка компаса.....................................................35
§ 18. Перевод и исправление румбов..........................................................37
Г л а в а IV. Картографические проекции и морские карты .... 39
§ 19. Картографические проекции ..............................................................39
§ 20. Локсодромия 41
§ 21. Меркаторская проекция........................................................................42
§ 22. Масштаб....................................................................................................44
§ 23. Основные штурманские задачи, решаемые на морской карте . 46
§ 24. Гномонические карты 49
304
Глава V. Счисление пути судна 51
§ 25. Предварительная и исполнительная прокладка .... 51
§ 26. Графическое и письменное счисление пути судна ... 54
§ 27. Дрейф судна '............................................59
§ 28. Плавание на течении......................................60
Глава VI. Определение места судна по визуальным наблюдениям бере-
говых предметов ................................62
§ 29. Понятие об изолиниях и линиях положения............................62
§ 30. Определение места судна по двум горизонтальным углам . 69
§ 31. Определение места судна по пеленгам трех предметов . . 72
§ 32. Определение места судна по пеленгам двух предметов . . 74
§ 33. Измерение расстояния в море............................ . 75
§ 34. Определение места судна по двум расстояниям ... 75
§ 35. Определение места судна по крюйс-пеленгу .... 77
Глава VII. Определение места судна в море радиотехническими и гид-
роакустическими средствами ......................................80
§ 36. Радионавигация .... 80
§ 37. Использование радиопеленгатора па судне...........................81
§ 38. Радиопеленгование на малых, средних и больших расстояниях 83
§ 39. Радиомаяки и радиопеленгаторные станции .... 86
§ 40. Использование радиолокатора на судне.....................90
§ 41. Береговые радиолокационные станции ...................93
§ 42. Комбинированные способы определения места судна . . 94
Глава VIII. Особенности прокладки во время плавания при особых об-
стоятельствах ...................................................95
§ 43. Ограждающие линии положения . 95
§ 44. Прокладка при плавании в узкостях, во льдах и во время ту-
мана ............................................................ 97
§ 45. Плавание по дуге большого круга ..................................99
§ 46„ Приближенный расчет элементов дуги большого круга . . . 100
Раздел второй. МОРЕХОДНАЯ АСТРОНОМИЯ
Глава IX. Основы сферической астрономии.....................................103
§ 47. Предмет мореходной астрономии ....................................103
48. Небесная сфера. Основные точки, линии и круги па небесной сфере 104
4 49. Сферические координаты светит.....................................105
§ 50. Полярный треугольник и его решение................................107
§ 51. Видимое суточное движение светил..................................112
§ 52. Видимое годовое движение Солнца и его объяснение . 115
§ 53. Собственное движение, фазы и возраст Луны . . .122
§ 54. Измерение времени ...............................................124
§ 55. Служба времени на судах морского флота.......................130
§ 56. Морской Астрономический Ежегодник . 132
§ 57. Звездный глобус..............................................133
Глава X. Измерение и исправление высот светил в море .... 135
§ 58. Секстан....................................................135
§ 59. Поправки, служащие для исправления измеренных высот . 137
§ 60. Исправление высот светил, измеренных в море над линией ви-
димого горизонта .... . ... 139
Глава XI. Определение географических координат места судна в море . 142
§ 61. Общие сведения об определении географических координат в
море...................................................... ...... 142
365
§ 62. Решение задачи определения места судна от его счислимого места 144
§ 63. Приемы вычисления счислимой высоты и азимута светила . 146
§ 64. Прокладка высотных линий на карте и бумаге .... 148
§ 65. Определение места судна по одновременным наблюдениям не-
скольких светил 14^
§ 66. Определение места судна по наблюдениям, разделенным боль-
шим промежутком времени......................................152
§ 67. Определение широты места по меридиональной или близмериди-
оналыюй высотам светил.......................................156
§ 68. Определение поправки компаса ...................................158
Раздел третий. ЛОЦИЯ
Глава XII. Предмет и назначение лоции....................................161
§ 69. Предмет лоции 161
§ 70. Обеспечение безопасного мореплавания............................162
Глава XIII. Навигационное оборудование морских путей .... 168
§ 71. Навигационные опасности........................................168
§ 72. Терминология форм береговой черты..............................164
§ 73. Средства навигационного оборудования ......................... 165
§ 74. Системы ограждения опасностей плавучими предостерегательны-
ми знаками...................................................170
§ 75. Станции, обслуживающие мореплавателей...........................172
§ 76. Сигналы, правила и инструкции, регламентирующие движение
судов........................................................178
Глава XIV. Навигационные пособия 174
§ 77. Морские карты и атласы.......................................174
§ 78. Классификация морских карт . 176
§ 79. Руководства для плавания.......................................178
§ 80. Пользование морскими навигационными пособиями . . . 181
Глава XV. Гидрометеорологическое обеспечение плавания . 182
§ 81. Организация гидрометеорологической службы .... 182
§ 82. Метеорологические элементы ....................................184
§ 83. Циклоны и антициклоны..........................................192
§ 84. Статика Мирового океана........................................196
§ 85. Динамика Мирового океана........................................198
Глава XVI. Проработка перехода...........................................207
§ 86. Подготовка перехода.............................................207
§ 87. Осуществление перехода ........................................211
Раздел четвертый. ТЕХНИЧЕСКИЕ СРЕДСТВА СУДОВОЖДЕНИЯ
Глава XVII. Электронавигационные приборы 214
§ 88. Классификация технических средств судовождения . . . 214
§ 89. Свободный гироскоп и его основные свойства .... 215
§ 90. Основы теории гирокомпаса 217
§ 91. Технические данные и особенности конструкции гирокомпаса
«Курс-4» ............ 220
§ 92. Эксплуатация гирокомпаса 223
§ 93. Приборы, работающие от гирокомпаса..............................224
§ 94. Магнитный компас и его эксплуатация ............................226
§ 95. Морской дистанционный магнитный компас ..... 228
§ 96. Принцип устройства и работы гидродинамических лагов . . 229
§ 97. Устройство и эксплуатация лага МГЛ-25 ......................... 232
§ 98. Гидроакустический принцип измерения глубин .... 234
§ 99. Устройство и эксплуатация эхолота НЭЛ-5 • 236
366
Глава XVIII. Радионавигационные приборы....................................................... 239
§ 100. Судовые радиопеленгаторы 239’
§ 101. Судовой . радиопеленгатор СРП-5.....................................................241
§ 102. Двухканальный визуальный радиопеленгатор с электроннолуче.
вым индикатором......................................................................243
§ 103. Принцип действия импульсных радионавигационных систем . 246»
§ 104. * Устройство и эксплуатация приемоиндикатора РНС КПИ-4 . 249*
§ 105. Принцип действия фазовой радионавигационной системы . 251
§ 106. Береговые цепочки РНС «Декка-навигатор» и блок-схема су-
дового приемоиндикатора 253-
§ 107. Приемоиндикатор «Пирс-1»....................................257
§ '108 . Радиолокация.....................................................................258
§ 109. Основные тактико-технические характеристики РЛС . . . 262'
§ НО. Судовые радиолокационные станции «Дон», «Донец», «Океан» 268
§ ГН. Береговые радиолокационные станции................................................ 265'
Раздел пятый. УПРАВЛЕНИЕ СУДНОМ И ЕГО ТЕХНИЧЕСКАЯ
ЭКСПЛУАТАЦИЯ
Глава XIX. Организация службы на морском судне ..... 268-
§ 112. Устав и вахтенная служба на морском судне .... 268
§ 113. Подготовка судна к выходу в плавание..................... 272’
§ 114. Судовые расписания.........................................274
Глава XX. Предметы такелажного снабжения судов и такелажные работы 275
§ 115. Тросы, средства отакелаживания и тали.................... 275-
§ 116. Такелажные работы.........................................281
§ 117. Организация судовых работ по поддержанию судна в исправ-
ном техническом состоянии....................................... 285
Глава XXI. Техническая эксплуатация судовых устройств . . 289
§ 118. Якорное и швартовное устройства...........................289
§ 119. Рулевое устройство .............................. 292'
§ 120. Грузовое устройство ... . 294
§ 121. Грузовые операции на открытых рейдах..................... 296*
§ 122. /Шлюпочное устройство и спасательные средства морских судов 298>
§ 123. Особенности работы на специализированных судах . . 303
Глава XXII. Особые случаи из морской практики 304
§ 124. Течь на судне ......................................5 304
§ 125. Методы борьбы с пожарами на морских судах .... 305
§ 126. Повреждения рулевого устройства................... 308'
§ 127. Повреждения и потери винтов.........................309
§ 128д /Снятие судов с мели.......................................309
§ 129. Спасение людей и оказание помощи на море . . . .311
Глава XXIII. Управление судном с механическим двигателем 313
§ 130. Управляемость и инерционные свойства судна .... 318
§ 131. ^'Якорная стоянка судна ...................................320
§ 132. Швартовка судна............................................324
§ 133. Маневрирование судна в узкостях............................326
§ 134. Управление судном в шторм .................................328
§ 1J35 . Особенности управления пассажирскими судами, танкерами
и лесовозами................................................... 332
§ 136. Плавание в ледовых условиях . .... 338
Глава XXIV. Морская буксировка ..................................... 338
§ 137. Основные понятия о морской буксировке......................338
§ 138. Буксировка несамоходных судов ... ... 341
367
§ 139. Буксировка самоходных судов другим суднОхМ .... 342
§ 140. Буксировка доков, плавкранов и земснарядов . 344
§ 141. Буксировка плотов морем . 347
§ 142. Буксировка мелких и речных судов..................349
§ 143. Буксировка судов методом толкания................350
§ 144. Буксирные работы в порту..................................351
Глава XXV, Сигнализация и Правила для предупреждения столкновений
судов в море.................................................... . 352
§ 145. Средства судовой сигнализации.........................................................352
§ 146. Правила для предупреждения столкновений судов в море . 356
Приложения ................................................................................. 361
Литера тура ... - . ... . . 363
Герман Григорьевич Ермолаев, Леонид Петрович Андронов,
Евгений Степанович Зотеев, Юрий Петрович Кирин,
Леонид Федорович Черниев
МОРСКОЕ СУДОВОЖДЕНИЕ
Редактор Л, А. Ступакова
Переплет художника В. П. Провалова
Техн, редактор Е. А, Тихонова
Корректоры: Т. А, Мальцева, Л. П. Узлова
Сдано в набор 22/1-1970 г. Подписано к печати 28/Х 4'9)70 г. Т15841. Бумага ти-
пографская № 2. Формат 60x 90/16. Объем 11,75 бум. л., 23,5 печ. л. 24,28 уч.-изд. л.
с вкл. Тираж 10 000 экз. Изд. 1-1-1/8 № 3693. Цена 92 коп. Переплет 18 коп.
Зак. № 933.
Издательство «Транспорт», Москва, Б-174, Басманный тупик, 6а.
Типография изд-ва «Волжская коммуна»,
г. Куйбышев (обл.), проспект Карла Маркса, 201.