/














































































































Author: Шрейнер Р.Т.
Tags: характеристика машин по способу привода электротехника электрические машины и аппараты электронно-и аппаратостроение математика
ISBN: 5-7691-1111-9
Year: 2000
Similar



Text
Шрейнер Рудольф Теодорович,
профессор Уральского государственного
профессионально-педагогического универ-
ситета, доктор технических наук. Окон-
чил электроэнергетический факультет
Уральского политехнического института.
Докторскую диссертацию на тему “Асин-
хронные электроприводы с полупроводни-
ковыми преобразователями частоты (ма-
тематическое моделирование, оптимиза-
ция режимов, структуры систем управле-
ния)” защитил в 1991 г, в Московском
энергетическом институте. Автор более
250 научных и методических трудов и изобретений (в том числе
двух научных монографий) в области математического моделиро-
вания, теории оптимальных процессов в сложных нелинейных
электромеханических системах, автоматического управления
электроприводами, теоретического и практического решения за-
дач энергосбережения средствами автоматизированного элек-
тропривода. Автор публикаций в области разработки компьюте-
ризированных педагогических технологий и программных педаго-
гических средств для профессиональной подготовки специалистов
электроэнергетического профиля. Ряд материалов опубликован за
рубежом в трудах международных конгрессов и конференций.
РОССИЙСКАЯ АКАДЕМИЯ НАУК
УРАЛЬСКОЕ ОТДЕЛЕНИЕ
Р. Т. Шрейнер
МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ
ЭЛЕКТРОПРИВОДОВ ПЕРЕМЕННОГО ТОКА
С ПОЛУПРОВОДНИКОВЫМИ
ПРЕОБРАЗОВАТЕЛЯМИ ЧАСТОТЫ
ЕКАТЕРИНБУРГ
2000
ББК 31.26
Ш86
УДК 62-83:621.313.333
Шрейнер Р.Т. Математическое моделирование электро-
приводов переменного тока с полупроводниковыми преобразо-
вателями частоты Екатеринбург УРО РАН, 2000. 654 с.
ISBN 5-7691-1111-9
В монографии излагаются теоретические положения, лежащие в
основе математического моделирования электрических машин
переменного тока и полупроводниковых преобразователей частоты.
Рассматриваются математические модели систем “преобразователь-
двигатель ”, в том числе перспективных систем частотного управления
с активными выпрямителями. Анализируются различные алгоритмы
управления преобразователями частоты, включая алгоритмы ШИМ.
Рассматриваются особенности цифровых алгоритмов и структуры
цифровых статических и динамических моделей электропривода.
Приводятся результаты математического моделирования.
Книга адресована специалистам в области разработки,
проектирования
и эксплуатации автоматизированных электро-
приводов, а также студентам старших курсов и аспирантам
соответствующих специальностей.
Рецензенты
д-р техн, наук, профессор Н. Ф. Ильинский
д-р техн, наук, профессор Ф. Н. Сарапулов
ISBN 5-7691-1111-9
Ш
17! (2000)
БО
© Р. Т. Шрейнер. 2000
8116(03)1998
ВВЕДЕНИЕ
Настало время, когда сбылись научные предвидения и
устремления поначалу немногочисленных энтузиастов регулируемого
электропривода переменного тока. Ныне электропривод с
двигателями переменного тока и управляемыми полупроводниковыми
преобразователями частоты занял лидирующее положение среди
других типов регулируемого электропривода. Быстро растет
количество фирм-производителей частотно-регулируемых электропри-
водов переменного тока, расширяется объем производства и
номенклатура силовой полупроводниковой преобразовательной
техники для электропривода, улучшаются ее массогабаритные и
энергетические характеристики, повышаются электромагнитная
совместимость, надежность, качество функционирования и сервисные
возможности электропривода. Интенсивному развитию этого
направления способствуют значительные успехи в
усовершенствовании традиционных и создании новых силовых
управляемых полупроводниковых приборов и интегральных схем,
развитии цифровых информационных технологий и разнообразных
средств микроконтроллерного управления.
Владение комплексом знаний и умений в области регулируемого
электропривода переменного тока стало необходимым элементом
технической культуры и востребованности специалистов на рынке
труда, важной частью их профессиональной подготовки и
переподготовки. Этому способствует обширная техническая
литература по вопросам построения электроприводов переменного
тока с частотным управлением, осуществляемым с помощью
регулируемых полупроводниковых преобразователей частоты. Вместе
с тем для специалистов в области традиционных систем регулируемого
электропривода постоянного тока освоение новой сферы деятельности
осложнено необходимостью преодоления определенного психологи-
ческого барьера и сложившихся стереотипов, связанных с
относительной простотой двигателя постоянного тока как объекта
управления и наличием хорошо отработанных унифицированных
методик расчета и проектирования систем регулирования
электроприводов постоянного тока с заданными характеристиками.
Комплексное изучение регулируемых электроприводов переменного
тока с полупроводниковыми преобразователями частоты и их систем
управления представляет определенные сложности и для молодых
специалистов. Это связано с дефицитом актуальной учебно-
методической литературы по данной динамично развивающейся
проблеме, а также фактором конкуренции фирм-производителей, что
препятствует свободному распространению научно-технической
3
информации о новых разработках. В доступных источниках
информации методическая проработка, строгость, полнота и ясность
изложения важных вопросов, относящихся к регулируемым
электроприводам переменного тока, представляются весьма
недостаточными.
Эти обстоятельства явились побудительным мотивом для
написания монографии, аккумулирующей опыт многолетней научно-
педагогической работы автора в области электропривода. Другие
побудительные мотивы связаны с определенными диспропорциями,
сложившимися в процессе развития регулируемых электроприводов
переменного тока. Здесь автор солидарен с высказываниями ведущих
отечественных специалистов о том, что в последние годы заметно
изменились приоритеты развития электропривода в пользу улучшения
его потребительских свойств, введения и усовершенствования
сервисных функций и элементов интеллекта: адаптации, расширенного
контроля, диагностики, защиты, индикации, визуализации. Это стало
возможным за счет новой элементной базы и средств цифрового
управления. Но в то же время, несмотря на повышение общего
технико-экономического уровня электропривода, прогресс в решении
основных задач регулирования, таких как повышение быстродействия,
точности, диапазона регулирования и др. в последние годы нельзя
признать значительным [41]. В подтверждение этого можно привести
следующий характерный пример. Обратимся к публикациям
последних лет, представляющим новую генерацию регулируемых
электроприводов переменного тока с прямым управлением моментом
[151.1881. Быстродействие таких приводов, использующих
современные быстродействующие силовые полупроводниковые
ключи, устройства высокоскоростной цифровой обработки сигналов и
интегральные схемы специального назначения, характеризуется
временем реакции электромагнитного момента двигателя на скачок
задания порядка 2 мс, статическая точность поддержания заданной
скорости составляет ±10% от номинального скольжения двигателя.
Напомним, что проблема построения высококачественных
быстродействующих систем управления электромагнитным моментом
и скоростью двигателей переменного тока получила теоретическое
обоснование и принципиальное решение более 20 лет назад [113,140 и
др.]. К тому же периоду времени относятся и первые реализации
быстродействующих электроприводов переменного тока. Причем
уровень быстродействия, соизмеримый с указанным выше для систем с
прямым управлением моментом, был достигнут на гораздо менее
совершенной элементной базе и средствах управления. Подобными
характеристиками обладали, например, электроприводы переменного
тока с частотно-токовым управлением [14], снабженные
4
быстродействующими релейными гистерезисными регуляторами
фазных токов, а также ряд других разработок того времени.
В 1977 г. на Всемирной электротехнической выставке Электро-77
в г. Москве демонстрировался разработанный в Уральском
политехническом институте действующий образец регулируемого
электропривода переменного тока с диапазоном регулирования
скорости 1:1000. Привод был выполнен на базе короткозамкнутого
трехфазного асинхронного двигателя, двухзвенного транзисторного
преобразователя частоты с ШИМ и снабжен векторной системой
подчиненного регулирования с преобразованием координат и
регулированием полосы пропускания внешнего контура САР в
функции скорости [122,123]. Привод имел абсолютно жесткую
статическую механическую характеристику с возможностью работы в
четырех квадрантах, ограничением тока и момента при перегрузках и
при работе на упор. Предусмотрена возможность варьирования
порядком астатизма САР по управлению и возмущению, а также
жесткостью механической характеристики. Динамические свойства
привода характеризуются следующими показателями. Полоса
пропускания внутренней САР тока - 450 Гц, внешней астатической
САР скорости - не менее 50 Гц; время реакции электромагнитного
момента двигателя на скачок задания - 1,4 мс ; время реакции
астатической САР скорости на скачок задания - не более 10 мс с
перерегулированием не более 10%, время реакции на скачок нагрузки
на валу двигателя - не более 12 мс.
По своей физической природе и конструктивным особенностям
регулируемые приводы с бесколлекторными электродвигателями
переменного тока и полупроводниковыми преобразователями частоты
обладают большими потенциальными возможностями для создания
принципиально новых конструкций рабочих машин, дальнейшей
интенсификации и оптимизации производственных процессов, роста
производительности и улучшения условий труда, экономии трудовых
и энергетических ресурсов.
Вместе с тем как объекты управления, эти электроприводы
относятся к классу нелинейных многомерных дискретно-непрерывных
объектов со сложной специфичной структурой. Поэтому для
практического использования отмеченных выше возможностей
необходимо располагать как высокоэффективными техническими
средствами, так и совершенными алгоритмами автоматического
управления. Построение качественных, удовлетворяющих
современным требованиям систем управления такими объектами
представляет сложную научно-техническую задачу, которая не может
получить удовлетворительного решения лишь на основе
практического опыта и интуиции инженеров.
5
Для этого необходима теоретическая и экспериментальная
проработка задач управления электроприводами переменного тока
на уровне, адекватном уровню проработки этих вопросов
применительно к электроприводам постоянного тока. В данном
аспекте важное значение имеет теория оптимальных процессов в
электроприводах переменного тока с частотным управлением как
научно обоснованная платформа для оценки их предельных
возможностей и создания электроприводов, наиболее полно
удовлетворяющих требованиям различных классов рабочих машин
современного автоматизированного производства.
Эффективным и универсальным инструментом исследователя и
инженера при решении задач управления электроприводами служит их
математическое моделирование. Более того, удачный выбор
математической модели является залогом успешного решения задачи.
Например, именно удачный выбор математической модели
асинхронного двигателя с преобразованием координат и ориентацией
системы координат по вектору потокосцеплений ротора послужил
основой разработки нового эффективного технического принципа
ориентации по полю. В результате были созданы известные
высококачественные системы регулирования TRANSVEKTOR
[153,154], представляющие собой значительный этап развития
электроприводов переменного тока. Аналогичная модель [112],
независимо разработанная в нашей стране, позволила впервые
получить корректное решение задач оптимального частотного
управления асинхронными электроприводами с учетом
электромагнитных переходных явлений в двигателе. В результате
выявлены условия, обеспечивающие предельное быстродействие
двигателей при произвольных начальных электромагнитных условиях
и обоснованы законы регулирования магнитного потока, существенно
снижающие потери энергии в силовой части электропривода не только
в установившихся, но и в переходных режимах его работы [113-118,
123,139,140 и др.]. На основе использования математических моделей
с произвольной ориентацией вращающейся системы координат были
разработаны системы управления асинхронными двигателями с
ориентацией поля [123], не требующие датчиков магнитного потока.
Системы с ориентацией поля явились дальнейшим развитием систем
частотно-токового управления в части обеспечения возможности
оптимального регулирования магнитного потока в статических и
динамических режимах в сочетании с нормированными
электромеханическими свойствами электропривода. Высокоточные
быстродействующие модели двигателей переменного тока являются
неотъемлемыми атрибутами современных систем прямого управления
моментом [ 151,164,188 и др.].
6
Новые возможности элементной базы и цифровых
информационных технологий актуализируют новые задачи
построения математических моделей электропривода как объекта
управления. Эти обстоятельства побудили автора при работе над
книгой основное внимание уделить вопросам математического
моделирования электроприводов переменного тока.
В монографии излагаются теоретические положения, лежащие в
основе математического моделирования электрических машин
переменного тока с полупроводниковыми преобразователями
частоты. Рассматриваются математические модели систем
преобразователь-двигатель, в том числе электроприводов
переменного тока с активными выпрямителями, открывающими
новые возможности энергосбережения и улучшения
электромагнитной совместимости преобразователей с питающей
сетью. Анализируются различные алгоритмы управления
преобразователями частоты, включая алгоритмы ШИМ.
Рассматриваются особенности цифровых алгоритмов и структуры
цифровых статических и динамических моделей электропривода.
Приводятся результаты математического моделирования.
Материал книги структурирован в рамках пяти основных
разделов, из которых первый и третий разделы носят как научный, так
и учебно-методический характер и призваны облегчить изучение
разделов, посвященных собственно математическому моделированию
электроприводов переменного тока. При отборе, разработке и
изложении материала автор руководствовался принципом единства
подхода, методологии и математического аппарата, используемого
для описания моделей электрических машин, полупроводниковых
преобразователей частоты и их устройств управления.
Первый раздел посвящен изложению базовых положений,
определению, уточнению и обобщению некоторых основных понятий
теории электрических машин переменного тока в приложении к
задачам математического моделирования их динамических и
статических режимов работы. В качестве исходных положений
рассматриваются магнитодвижущие силы обмоток с использованием
базовых понятий о пространственных обмоточных функциях,
нейтральных и намагничивающих токах многофазных обмоток машин
переменного тока, многомерных векторов, изображающих
пространственное распределение МДС и других физических величин.
Рассматриваются уравнения электромагнитного поля и
базирующихся на этих уравнениях методы расчета магнитного поля в
машинах переменного тока. На этой основе формулируются
обобщенные определения потокосцеплений и электродвижущих сил
обмоток, справедливые для установившихся и переходных режимов
ненасыщенных и насыщенных электрических машин. Важное
7
внимание уделено вопросам электромеханики, в том числе
механическим силам электрических машин переменного тока.
Проанализированы и сопоставлены различные формы выражения
электромагнитного момента и показан механизм взаимодействия
электрических токов в обмотках и магнитного поля машины.
Показана целесообразность использования таких понятий, как
ортогональное потокосцепление; полное значение, активная и
реактивная составляющие механической мощности многофазной
машины переменного тока. Рассмотрены вопросы применения
относительных единиц, в том числе организация системы базисных
величин, процедура преобразования уравнений модели к системе
относительных единиц и рациональные варианты построения таких
систем.
Второй раздел посвящен построению математических моделей
машин переменного тока для задач управления. Здесь
рассматриваются структура модели машины как управляемого
электромеханического преобразователя энергии, уравнения
электромагнитных контуров, математический аппарат и
геометрическая интерпретация преобразования координат, принципы
построения самоориентирующихся моделей, уравнения
энергетического баланса и электромеханического преобразования
энергии. На основе уравнений общего вида анализируются наиболее
типичные частные случаи. Подробно анализируются математические
модели асинхронных машин с короткозамкнутым ротором.
Третий раздел посвящен изложению физических основ и ряда
общих вопросов теории систем "преобразователь частоты - двигатель
переменного тока”. Дается общая характеристика развития
полупроводниковых преобразователей частоты для регулируемого
электропривода переменного тока. Основное внимание уделено
анализу двухзвенных преобразователей частоты с промежуточным
звеном постоянного тока, получивших наиболее широкое
распространение на практике. На основе анализа рабочих процессов в
системе преобразователь - двигатель выявлены особенности работы и
условия совместимости элементов силовой схемы электропривода,
необходимые их атрибуты и требования к устройствам управления.
Значительное внимание уделено анализу режимов работы
автономных инверторов с широтно-импульсной модуляцией, широко
используемых в схемах современных полупроводниковых
преобразователей частоты. Наряду с традиционными рассмотрены и
сопоставлены модифицированные алгоритмы ШИМ, включая
стратегию векторных систем ШИМ, используемых для управления
инверторами напряжения и тока.
Четвертый раздел посвящен построению математических
моделей систем "преобразователь частоты - трехфазный асинхронный
8
двигатель” для задач управления. Дается вывод уравнений
обобщенной трехмерной дискретно - непрерывной модели системы
преобразователь - двигатель при произвольном законе коммутации
ключей инвертора. На этой основе рассмотрены более простые модели
систем преобразователь - двигатель с жесткими законами коммутации,
а также эквивалентные непрерывные модели анализируемых
дискретно-непрерывных систем. Показана эффективность применения
так называемого координатного подхода в задачах математического
моделирования и упорядоченного исследования рабочих процессов в
преобразователях частоты с модуляцией напряжения или тока.
Дана геометрическая интерпретация моделей трехфазных
преобразователей частоты, адекватная геометрической интерпретации
трехмерных моделей трехфазных двигателей переменного тока.
Рассмотрены особенности моделирования электромеханических
систем при асимметрии нагрузки преобразователя частоты.
Пятый раздел носит прикладной характер и посвящен
особенностям построения цифровых математических моделей систем
“преобразователь - двигатель”. Здесь рассмотрены алгоритмы
цифрового моделирования установившихся и переходных режимов
асинхронных двигателей при частотном управлении, включая
аналитическое представление характеристики намагничивания
двигателя, выбор методов решения нелинейных алгебраических
уравнений, учет электромагнитных явлений, насыщения главной
магнитной цепи и вытеснения тока в обмотке ротора. Анализируются
особенности алгоритмизации и расчета рабочих статических
характеристик и динамических режимов при питании двигателя от
управляемых по частоте и амплитуде источников напряжения, либо
источников тока. Дается методика и алгоритм расчета экстремальных
характеристик двигателя как объекта экстремального управления при
решении оптимизационных задач.
Рассматривается универсальная цифровая динамическая модель
системы "преобразователь частоты - асинхронный двигатель” и ее
специализированные реализации. Большое внимание уделено
моделированию активных выпрямителей напряжения и тока как
перспективных элементов энергосберегающего электропривода
переменного тока.
Теоретические положения монографии иллюстрируются
примерами расчета рабочих характеристик и результатами
математического моделирования динамических режимов
электроприводов с помощью специально разработанного пакета
моделирующих компьютерных программ.
В монографии отражены результаты научных работ,
выполненных автором и его учениками в Уральском
государственном техническом университете, Уральском
9
государственном профессионально-педагогическом университете и
Новоуральском политехническом институте Московского
государственного инженерно-физического института (технического
университета).
Автор выражает признательность рецензентам, профессорам
Н.Ф. Ильинскому и Ф.Н. Сарапулову за полезные замечания по
рукописи; коллегам, доцентам В.И. Лихошерсту, В.Н.Полякову,
Н.И.Томашевскому и А.М.Зюзеву за участие в обсуждении
материалов монографии. Автор признателен профессору
А.А.Пульникову, взявшему на себя труд по написанию третьей главы
книги, а также доценту А.А.Ефимову за участие в подготовке
материалов двадцать четвертой главы по математическому
моделированию активных выпрямителей для энергосберегающих
электроприводов переменного тока.
Автор признателен инженерно-производственному предприятию
“Автоматизированные системы и комплексы”, институту ВНИПИ
Тяжпромэлектропроект и Новоуральскому политехническому
институту за поддержку в издании книги.
Книга адресована специалистам в области разработки,
проектирования и эксплуатации автоматизированных электро-
приводов, а также студентам старших курсов и аспирантам
соответствующих специальностей.
10
Раздел первый
ОБЩИЕ ВОПРОСЫ ТЕОРИИ
ЭЛЕКТРИЧЕСКИХ МАШИН
ПЕРЕМЕННОГО ТОКА
Глава первая
ИСХОДНЫЕ ПОЛОЖЕНИЯ.
ФАЗНАЯ ОБМОТКА КАК ЭЛЕМЕНТ
МАГНИТНОЙ ЦЕПИ МАШИНЫ
1.1. Исходные положения
Важным компонентом теории и математического моделирования
многофазных электрических машин переменного тока является анализ
намагничивающих сил и магнитных потоков, вызванных действием
электрических токов в их обмотках. Именно на этом этапе
формулируются основные допущения, определяющие уровень
идеализации электрической машины как объекта моделирования и
вводятся базовые понятия и положения, определяющие структуру ее
математической модели. Рассмотрим данные вопросы применительно
к наиболее широко распространенным трехфазным электрическим
машинам переменного тока.
11
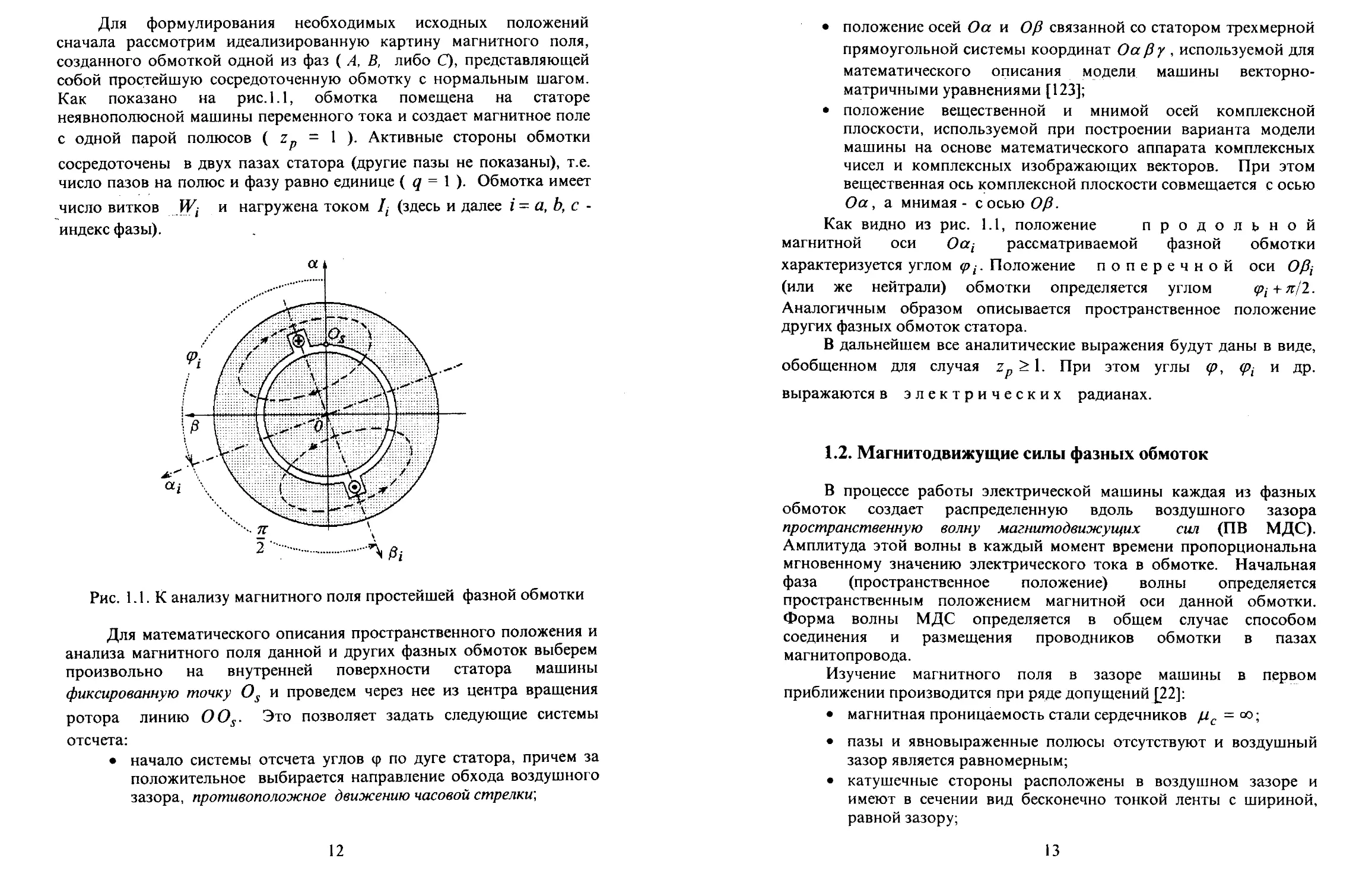
Для формулирования необходимых исходных положений
сначала рассмотрим идеализированную картину магнитного поля,
созданного обмоткой одной из фаз ( А, В, либо С), представляющей
собой простейшую сосредоточенную обмотку с нормальным шагом.
Как показано на рис. 1.1, обмотка помещена на статоре
неявнополюсной машины переменного тока и создает магнитное поле
с одной парой полюсов ( zp - 1 ). Активные стороны обмотки
сосредоточены в двух пазах статора (другие пазы не показаны), т.е.
число пазов на полюс и фазу равно единице ( q = 1 ). Обмотка имеет
л Л
число витков W] и нагружена током /z (здесь и далее i~ а,Ь, с -
индекс фазы).
Рис. 1.1. К анализу магнитного поля простейшей фазной обмотки
Для математического описания пространственного положения и
анализа магнитного поля данной и других фазных обмоток выберем
произвольно на внутренней поверхности статора машины
фиксированную точку Os и проведем через нее из центра вращения
ротора линию OOS. Это позволяет задать следующие системы
отсчета:
• начало системы отсчета углов (р по дуге статора, причем за
положительное выбирается направление обхода воздушного
зазора, противоположное движению часовой стрелки]
12
• положение осей Оа и Ор связанной со статором трехмерной
прямоугольной системы координат Оару , используемой для
математического описания модели машины векторно-
матричными уравнениями [123];
• положение вещественной и мнимой осей комплексной
плоскости, используемой при построении варианта модели
машины на основе математического аппарата комплексных
чисел и комплексных изображающих векторов. При этом
вещественная ось комплексной плоскости совмещается с осью
Оа, а мнимая - с осью 0/7.
Как видно из рис. 1.1, положение продольной
магнитной оси Оа^ рассматриваемой фазной обмотки
характеризуется углом Положение поперечной оси ОД-
(или же нейтрали) обмотки определяется углом д^+л/!.
Аналогичным образом описывается пространственное положение
других фазных обмоток статора.
В дальнейшем все аналитические выражения будут даны в виде,
обобщенном для случая zp>\. При этом углы ср, (pi и др.
выражаются в электрических радианах.
1.2. Магнитодвижущие силы фазных обмоток
В процессе работы электрической машины каждая из фазных
обмоток создает распределенную вдоль воздушного зазора
пространственную волну магнитодвижущих сил (ПВ МДС).
Амплитуда этой волны в каждый момент времени пропорциональна
мгновенному значению электрического тока в обмотке. Начальная
фаза (пространственное положение) волны определяется
пространственным положением магнитной оси данной обмотки.
Форма волны МДС определяется в общем случае способом
соединения и размещения проводников обмотки в пазах
магнитопровода.
Изучение магнитного поля в зазоре машины в первом
приближении производится при ряде допущений £22]:
• магнитная проницаемость стали сердечников /ас = ;
• пазы и явновыраженные полюсы отсутствуют и воздушный
зазор является равномерным;
• катушечные стороны расположены в воздушном зазоре и
имеют в сечении вид бесконечно тонкой ленты с шириной,
равной зазору;
13
• воздушный зазор 5 мал по сравнению с радиусом статора и
полюсным делением т.
При этих условиях линии магнитной индукции в воздушном зазоре
прямолинейны и перпендикулярны поверхностям зазора.
Исходя из соображений наглядности и удобства математического
описания кривых распределения МДС и индукции магнитного поля
вдоль воздушного зазора используют линейную развертку круговых
машин. Схема линейной развертки приведена на рис. 1.2.
Рис. 1.2. Схема линейной развертки машины
Используя зеркальное (сопряженное) отображение линейной
развертки рис. 1.2 относительно оси Оа, получаем традиционную
картину магнитного поля, представленную на рис. 1.3. Как видно,
простейшая сосредоточенная обмотка создает распределенную вдоль
воздушного зазора волну магнитодвижущих
Ffa}. В случае равномерного воздушного зазора волна МДС
прямоугольную форму с амплитудой
имеет
i. max
2zp
Период волны равен двойному угловому полюсному делению.
Коэффициент l/2z в формуле (1.1) обусловлен следующим
обстоятельством. Полная МДС одной пары полюсов обмотки
(12)
14
создает главный магнитный поток, который
циркулирует по замкнутому контуру, включающему магнитопроводы
статора и ротора. Каждая силовая линия главного магнитного поля
от данной пары полюсов пересекает воздушный зазор между
статором и ротором дважды (в двух точках, равноотстоящих от
нейтрали обмотки). Другие пары полюсов обмотки также создают
аналогичные магнитные потоки, однако они пересекают воздушный
зазор в других точках. Поэтому для каждой конкретной точки (р
по дуге воздушного зазора используется расчетное значение
МДС одной пары полюсов, приходящееся на половину длины
замкнутой силовой магнитной линии, которая пересекает зазор в
данной точке. В связи с этим определяемую формулой (1.1) величину
Ft называют магнитодвижущей (или же намагничивающей ) силой
фазной обмотки на один зазор £22].
Рис. 13. Магнитное поле сосредоточенной фазной
обмотки с полным шагом при Zz-(z) = consz
В соответствии с приведенным на рис. 13 графиком функции
распределения пространственной волны МДС при обходе
зазора каждая активная сторона сосредоточенной обмотки вызывает
скачок магнитного потенциала на величину полной МДС,
15
определяемой формулой (1.2). Знак приращения МДС определяется
направлением тока в проводниках.
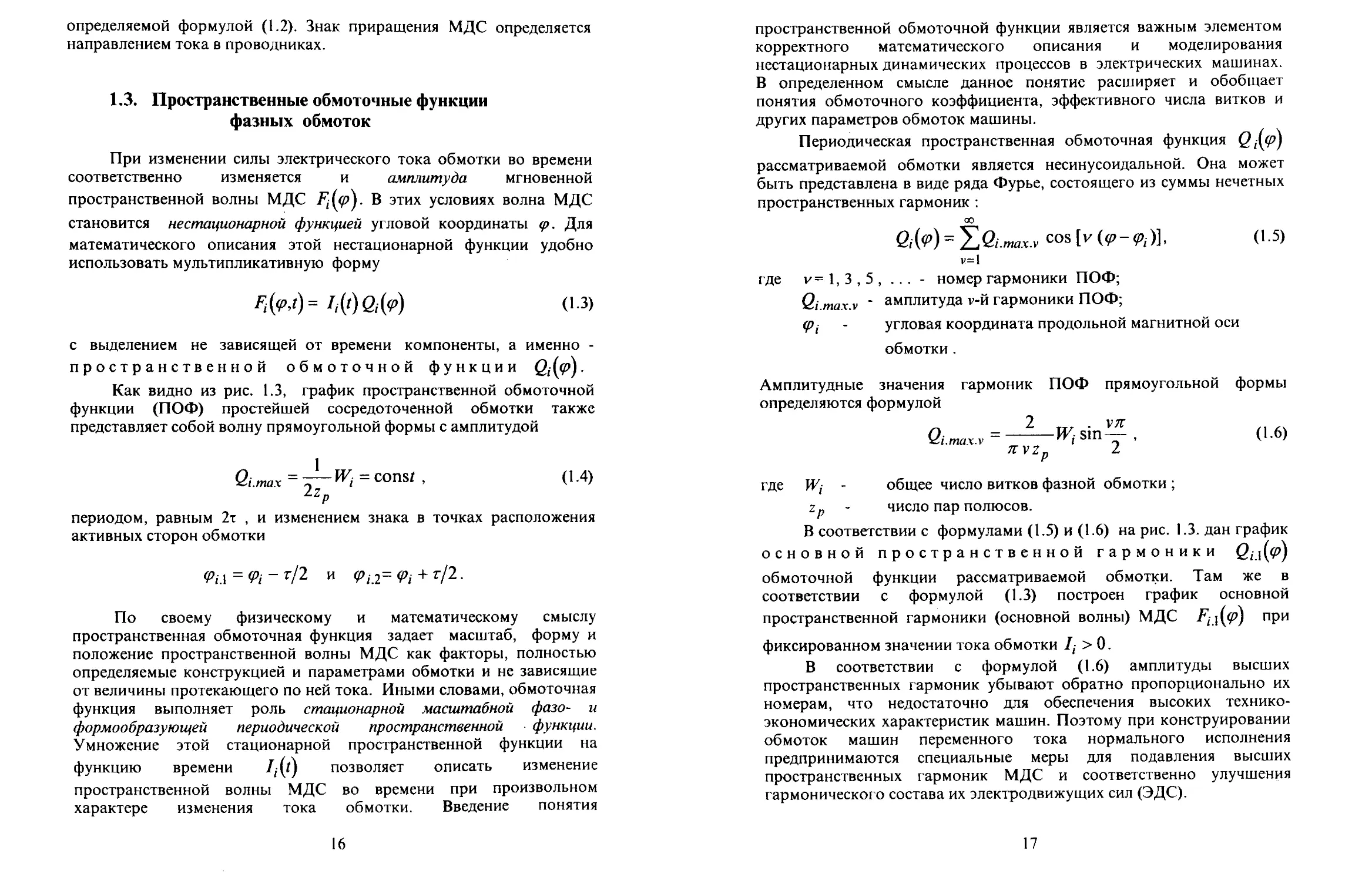
1.3. Пространственные обмоточные функции
фазных обмоток
При изменении силы электрического тока обмотки во времени
соответственно изменяется и амплитуда мгновенной
пространственной волны МДС ^(^). В этих условиях волна МДС
становится нестационарной функцией угловой координаты <р. Для
математического описания этой нестационарной функции удобно
использовать мультипликативную форму
(1.3)
с выделением не зависящей от времени компоненты, а именно -
пространственной обмоточной функции
Как видно из рис. 1.3, график пространственной обмоточной
функции (ПОФ) простейшей сосредоточенной обмотки также
представляет собой волну прямоугольной формы с амплитудой
периодом, равным 2т , и изменением знака в точках расположения
активных сторон обмотки
<Pt.\ = <Pi - Ф и <Pi.2= <Pi + г/2.
По своему физическому и математическому смыслу
пространственная обмоточная функция задает масштаб, форму и
положение пространственной волны МДС как факторы, полностью
определяемые конструкцией и параметрами обмотки и не зависящие
от величины протекающего по ней тока. Иными словами, обмоточная
функция выполняет роль стационарной масштабной фаза- и
формообразующей периодической пространственной функции.
Умножение этой стационарной пространственной функции на
функцию времени (/) позволяет описать изменение
пространственной волны МДС во времени при произвольном
характере изменения тока обмотки. Введение понятия
16
пространственной обмоточной функции является важным элементом
корректного математического описания и моделирования
нестационарных динамических процессов в электрических машинах.
В определенном смысле данное понятие расширяет и обобщает
понятия обмоточного коэффициента, эффективного числа витков и
других параметров обмоток машины.
Периодическая пространственная обмоточная функция
рассматриваемой обмотки является несинусоидальной. Она может
быть представлена в виде ряда Фурье, состоящего из суммы нечетных
пространственных гармоник :
Qi И = Z Qi.max. v COS [ V ( (р - (pt )]. (1.5)
где v- 1, 3,5 , ... - номер гармоники ПОФ;
Qi.max.v ~ амплитуда v-й гармоники ПОФ;
<Pi - угловая координата продольной магнитной оси
обмотки.
Амплитудные значения гармоник ПОФ прямоугольной формы
определяются формулой
г*
Qi.max.v =----sin V - 0-6>
/Т vzp 2
где Wj - общее число витков фазной обмотки ;
Zp - число пар полюсов.
В соответствии с формулами (1.5) и (1.6) на рис. 1.3. дан график
основной пространственной гармоники
обмоточной функции рассматриваемой обмотки. Там же в
соответствии с формулой (1.3) построен график основной
пространственной гармоники (основной волны) МДС при
фиксированном значении тока обмотки >0.
В соответствии с формулой (1.6) амплитуды высших
пространственных гармоник убывают обратно пропорционально их
номерам, что недостаточно для обеспечения высоких технико-
экономических характеристик машин. Поэтому при конструировании
обмоток машин переменного тока нормального исполнения
предпринимаются специальные меры для подавления высших
пространственных гармоник МДС и соответственно улучшения
гармонического состава их электродвижущих сил (ЭДС).
17
1.4. Улучшение качества обмоточных функций.
Распределение и укорочение шага обмоток
Действие многофазных электрических машин переменного тока
основано на принципе создания с помощью неподвижных обмоток
вращающегося (у линейных машин - бегущего) магнитного
поля. Равномерность вращения поля достигается за счет:
• приближения формы пространственных волн распределения
МДС каждой из обмоток к синусоидальной, что обеспечивается
при конструировании и изготовлении обмоток;
• питания обмоток машины многофазной системой токов,
изменяющихся во времени по синусоидальному закону.
Пространственная волна МДС простейшей сосредоточенной
обмотки является прямоугольной, т. е. значительно отличается от
синусоидальной. Вследствие этого помимо основной (полезной)
пространственной гармоники такая обмотка создает значительные
высшие пространственные гармоники поля, ухудшающие
характеристики машин при питании их от источников
синусоидального напряжения. Для подавления высших
пространственных гармоник используются следующие
конструктивные решения :
• распределение активных сторон обмоток по дуге статора;
• укорочение шага обмоток;
• выполнение обмоток с дробным числом пазов на полюс и фазу
(дробных обмоток);
• конструирование специальных синусных обмоток повышенной
точности и другие меры.
Распределение обмоток. Для иллюстрации возможности
улучшения гармонического' состава МДС рассмотрим пример
выполнения фазной обмотки в виде распределенной катушечной
группы, изображенной на рис. 1.4. Группа состоит из трех катушек
(q=3) с полным шагом и одинаковым числом витков на каждую пару
полюсов:
W/f= W/ff=
И<).
Катушки соединены последовательно и сдвинуты в пространстве
относительно друг друга на угол
mq ’
где т - число фаз.
18
Рис. 1.4. Обмоточные функции распределенной фазной
обмотки с полным шагом
Амплитуды пространственных обмоточных функций каждой из
катушек
О' -О" =0'" = - W
*5i.max *£i.max ^ci.max f rr i
OZp
(1.8)
т. е. втрое меньше, чем у предыдущей обмотки. Амплитуда суммарной
пространственной обмоточной функции катушечной группы
Qi.max ~ т. е. остается неизменной. Гармонический состав
этой функции по-прежнему описывается формулой (1.5).
Однако благодаря сдвигу катушек форма суммарной
пространственной обмоточной функции б/(^) оказывается ближе к
синусоидальной. Амплитуды гармоник суммарной обмоточной
функции теперь описываются выражением
19
" J ттг V Л"
Q i.max.v ~ vWi$VCY—— , (1.9)
xvz 2
где kpV - коэффициент распределения обмотки для
V-й гармоники ее пространственной обмоточной функции.
Коэффициенты распределения рассматриваемой обмотки для
каждой из гармоник ( V = 1, 3,5 , ...) определяются формулой
sin
kpv=-------(1.10)
- V/
q sin —
4 2
При указанных выше параметрах фазы трехфазной обмотки формула
(1.10) дает следующие значения коэффициентов распределения
соответственно для первой, третьей, пятой, седьмой и девятой
пространственных гармоник:
А: л 1=0.960; kD з=0.667; £d5= 0.217 ; kD1 = -0.177 ; =-0.333.
Следовательно, в сравнении с сосредоточенной обмоткой (она имеет
для всех у величину £^ v = l) распределенная обмотка обеспечивает
значительное снижение амплитуд высших пространственных гармоник
при незначительном снижении основной гармоники.
Укорочение шага обмоток. Дальнейшее улучшение
гармонического состава достигается за счет укорочения шага
обмоток. Из теории машин переменного тока известно [22], что
всякую обмотку с укороченным шагом у- рт можно представить в
виде двух обмоток с полным шагом, сдвинутых между собой на
величину укорочения шага Л = р}т. ^За счет этого достигается
частичная, но существенная взаимная нейтрализация высших
гармоник при незначительном уменьшении основной гармоники
пространственной обмоточной функции и МДС обмотки.
На основе вышеизложенного приведем обобщающие формулы,
справедливые для фазных распределенных обмоток с укороченным
шагом:
F\<p,t)= ; (1.11)
20
i.max.v
W A. A.
r 1.эффх
ko6.v ~
p.v
i.max.v
• qvy
sin-
V71
^1:зфф.у
- sin
(1.12)
(1.13)
(1-14)
(1.15)
(1.16)
V = 1
. VY
?sm^
9
Систематизируем также условные обозначения и наименования
параметров обмотки:
i - индекс фазы ( i = а,Ь,с)'>
v - номер пространственной гармоники (v = 1, 3, 5,...);
Qi.max.v~ амплитуда гармоники обмоточной функции. Ее
значение представляет собой конструктивную постоянную
для У-й пространственной гармоники МДС z-й фазы;
(pi - угловая координата продольной магнитной оси фазной
обмотки;
W АА -
гт 1.эффх
зшк
ективное число витков фазной обмотки для у-й
гармоники;
Wi - число последовательно соединенных витков фазы;
zp - число пар полюсов;
ко^ у - обмоточный коэффициент фазы для у-й гармоники;
кр v - коэффициент распределения обмотки для У-й гармоники;
kv v - коэффициент укорочения шага обмотки для У-й
✓
гармоники;
У - угловой шаг сдвига катушек в катушечной группе;
Р - относительный укороченный шаг обмотки (р - у т)\
г - угловое полюсное деление;
q - число пазов на полюс и фазу;
т - число фаз.
21
Комплексное изображение
обмоточных функций
и магнитодвижущих сил обмоток
Электромагнитные процессы в многофазных машинах
определяются совокупным действием всех фазных обмоток, что
предполагает в процессе анализа этих процессов как минимум
суммирование создаваемых ими пространственных волн МДС. Для
удобства представления и оперирования с компонентами
волнообразных явлений в теоретической электротехнике разработан
метод комплексного изображения периодически
изменяющихся величин [11]. При этом каждая изменяющаяся по
гармоническому закону величина (гармоническая функция)
изображается комплексным числом, модуль которого несет
информацию об амплитуде, а аргумент - о текущей фазе, либо о
начальной фазе изображаемой гармонической функции. Данное
комплексное число геометрически интерпретируется в виде вектора на
комплексной плоскости - изображающего вектора.
Используем подобное изображение в приложении к задаче анализа
пространственных функций распределения МДС.
Рассмотрим основные гармоники пространственной обмоточной
функции и пространственной волны МДС Ftфазной
обмотки. Полагая в формулах (1.12) и (1.11) номер гармоники у=1,
получаем
Qi.\{<P) = Qimax.tCOS^ - ^); (1.17)
ЪлМ = Л(0QM = ^.™.v.i(0 cos(p- , (1.18)
амплитуда ПОФ;
мгновенная амплитуда
волны МДС.
Данным гармоническим функциям пространственного
аргумента (р поставим в соответствие изображающие
комплексные амплитудные векторы
i.maxA с
(119)
22
^) = ^)0.^=^тахА^^‘. (1.20)
Геометрическое представление
векторов дано на рис. 1.5.
введенных изображающих
а)
Линия
аргумента ф
Рис. 1.5. Векторы, изображающие основные гармоники
обмоточной функции и МДС фазной обмотки
б)
Линия
аргумента $0
Важно отметить, что гармоническая обмоточная функция (1.17)
не зависит от времени. Поэтому она изображается комплексной
константой (1.19) и соответственно - постоянным, не
зависящим от режима работы машины радиус - вектором Q^. Длина
этого вектора отображает амплитудное значение ПОФ, а
угол поворота - угловое положение продольной магнитной оси
обмотки и соответственно точки максимума ПОФ.
В отличие от этого пространственная волна МДС (1.18)
изображается комплексной функцией в р е м е н и (1.20),
зависящей от изменения тока обмотки во времени. Поэтому волна
МДС представляется переменным радиус - вектором
длина которого пропорциональна мгновенным значениям тока
обмотки, а направление либо совпадает с направлением вектора Q. ।
( при /2- >0, что изображено на рис. 1.5,а ) , либо противоположно
ему (при 7, < 0, что показано на рис. 1.5,6 ).
Во избежание недоразумений отметим, что описанные выше
изображающие комплексные векторы отличаются от используемых в
23
теоретической электротехнике комплексных амплитуд [11]
знаком аргумента. Строго говоря, в данном случае
используются сопряженные комплексные амплитуды.
Целесообразность использования в данном случае сопряженных
векторов обусловлена сопряженным (зеркальным) характером
линейной развертки, рассмотренной в п. 1.1.
Переход к оригиналам. Описанное выше комплексное
отображение является обратимым. Формулы перехода от
изображающих комплексных векторов (1.19) - (1.20) к скалярным
функциям-оригиналам (1.17)-(1.18) имеют вид:
(1.21)
^.iW = Re £/.i(0e
(1.22)
Геометрически такой переход интерпретируется как проектирование
изображающих векторов на линию аргумента (р,
показанную на рис. 1.5. штриховой линией. Заметим, что в силу
четности тригонометрической функции cosx можно записать
6,» = Re QiA e-j^
= Qi.max.] СОФ -Vi) i
Л.1(^0 = Re £«.i(0e i<p
= I^)Qi.max.\co^V - Vi\
что совпадает с выражениями (1.17) и (1.18).
Аналогичное рассмотренному комплексное изображение
возможно не только для основных, но и для каждой из высших
пространственных гармоник анализируемых функций.
24
Глава вторая
МАГНИТОДВИЖУЩИЕ СИЛЫ
МНОГОФАЗНЫХ ОБМОТОК
2.1. Результирующая пространственная волна МДС
многофазной обмотки машины переменного тока
Объектом анализа теперь является трехфазная, в общем случае
несимметричная обмотка (рис. 2.1), числа витков фаз которой
представляют произвольные величины W.,, И4 и PR, а магнитные
оси фаз расположены под произвольными углами <ра^ (р^ и (рс.
Примем, что в связи с асимметрией трехфазная обмотка не
вырождена в двух- либо однофазную, т.е. ее параметры
удовлетворяют следующим условиям :
Wa>Q ; Wb>0 Wc>0 (2.1)
<Раф(Рь + кя ; <ph * <рс + к я ; <рс * <ра + к Я , (2.2)
к = 0,1,2,3,...
Для общности будем считать, что фазные обмотки получают
питание от автономных источников напряжения Ua,Ub,Uc
произвольной величины и формы и поэтому мгновенные значения
фазных токов I 1, линейно независимы ( т.е. не связаны между
Ы- (-•г к*
собой каким-либо линейным уравнением ).
25
Рис. 2.1. Трехфазная обмотка машины переменного тока
Пространственно-временное распределение МДС фазных
обмоток, создаваемых протекающими по ним переменными токами
4(0’ 4(0 и 4(0- описывается формулами
Здесь пространственные обмоточные функции фазных обмоток
Qa{4>} = ^Qa.max.v cos Ф " <Pa) »
v=l,3,5,...
Qb(<!>) = ZQb.max.v cos *(? " <Pb) ’ (2-4)
v= 1,3,5,...
ScGO = cos ~ <Pc)-
v=l,3,5,...
В соответствии с (1.13) и (1.14) амплитуды гармоник обмоточных
функций фаз:
; (2.5)
^vz„ 2
i- a, b, с.
26
В результате совместного действия фаз обмотки формируется
результирующая пространственная волна
магнитодвижущих сил (РПВ МДС). Распределение этой волны вдоль
воздушного зазора для каждого момента времени описывается
формулой
__ _ 00
~ ,Л (0Qi.max.v COS V ^7 — (2-6)
t i v
i = a, b,c ; v = 1,3,5,... .
Вследствие несинусоидальности распределения фазных МДС
результирующая волна МДС трехфазной обмотки является также
несинусоидальной. Как отмечалось, при конструировании
электрических машин переменного тока предпринимаются
специальные меры для уменьшения высших пространственных
гармоник МДС. Поэтому при построении их математических моделей
в качестве первого приближения вводят допущение об отсутствии
высших пространственных гармоник МДС.
В случае пренебрежения высшими гармониками обмоточных
функций выражения (2.3) - (2.6) приобретают вид;
Qi(<Р) = Qi.max COS{<Р ~ <PiY (2-7)
Fi(<Pj) = hit) Qi{<P А =1 Af} Qi.maxcos («’-9’i) i (2-8)
1
Fm(<P,l) = = E7/ (0 Qi max COS - ^). (2.9)
I I
Здесь
2 k *
Qi max =—^^1 ; i = a,b,c. (2.10)
Л-Z/,
Для удобства оперирования с гармоническими функциями (2.7) -
(2.9) введем комплексные амплитудные векторы
изображающие (рис. 2.2,а) пространственные обмоточные функции
фазных обмоток. Введем также переменные векторы
£, (/) = 1^)0. = I^t)Qijnax е ; / = а.Ь.с, (2.12)
27
изображающие пространственные волны МДС фазных обмоток с
учетом изменения их амплитуд во времени вследствие изменения токов
(рис. 2.2,6).
а)
Рис. 2.2. Векторы, изображающие основные гармоники:
а) обмоточных функций трехфазной обмотки;
б) мгновенных пространственных волн МДС обмотки
при 40 > °; 4(0 > ° ’ 4(0 > °
б)
Тогда определяемая формулой (2.9) результирующая простран-
ственная волна МДС трехфазной обмотки для каждого момента
времени изображается комплексным вектором
f«(0= У МО- <213>
'"Vs* .
i-a,b, с
Введенные комплексные векторы являются компактным
средством изображения обмоточных функций и намагничивающих
сил по всей длине дуги воздушного зазора машины. Для
определения их в каждой конкретной точке (p-(pj
по дуге зазора необходимо повернуть показанную на рис. 2.2 линию
аргумента на угол (р и спроектировать соответствующий вектор на
линию аргумента. Описывающие такую процедуру формулы перехода
от изображающих комплексных векторов (2.И) - (2.13) к скалярным
функциям-оригиналам (2.7) - (2.8) имеют вид:
2,(0 = Re Qi,max е
= Qi.max COs(p-^);
(2.14)
fj(<p,r) = Re Fhmax(t) = Ii{t)Qi.max^{(p-(p^- (2.15)
28
Распределение основной гармоники результирующей волны
МДС вдоль воздушного зазора может быть представлено в виде
пространственно-временной функции
Fm(^,?) = Re Fm.max(t) e“J<p
COS^iJ? (2.16)
где
мгновенные значения амплитуды ;
Фш(/) - мгновенные положения точки максимума
основной гармоники пространственной
результирующей волны МДС.
Наряду с формой*записи (2.16) будем использовать упрощенную
форму
rm(<p) = Re
Г
—т.та.х v
^т.тах Фт)
(2.16,а)
не содержащую указания в явном виде аргумента t . При этом
подразумевается, что амплитуда и фаза максимума пространственной
волны МДС - это величины, изменяющиеся во времени. Мгновенные
значения указанных параметров основной гармоники
пространственной результирующей волны МДС определяются
формулами :
На рис. 2.3 приведены графики обмоточных функций трехфазной
несимметричной обмотки, соответствующие комплексным векторам-
константам £,& “ et рис. 2.2,а. Здесь же показаны графики
мгновенного пространственного распределения фазных МДС и
результирующей МДС вдоль воздушного зазора, что соответствует
показанным на рис. 2.2,6 мгновенным положениям изображающих
векторов Fa(t), Fh(t), Fc(t) и Fm(t)
29
Рис. 2.3. Графики обмоточных функций и МДС
несимметричной трехфазной обмотки
Приведенные формулы удобны для математического описания
принципа действия машин переменного тока, в основе которого лежит
эффект формирования многофазными обмотками вращающегося (или
бегущего) магнитного поля. Покажем это на типичном примере.
Пусть трехфазная симметричная обмотка статора с параметрами
Wa = Wb = Wc = W, <pb = <pa + 2^/3, (Pc = (Pb +2Л-/3, <z>a = (pc +2тг/3
подключена к источнику питания, обеспечивающему симметричную
синусоидальную систему фазных токов:
АХО — I max + Са) 5
= AnavCOS(Q^ + » (2-19)
4(0 — I max ,
где Iniax, Qv " амплитуда и угловая частота токов;
- 0; = -2тг/3 ; Q = -^тг/3 - начальные фазы токов.
30
Тогда в соответствии с формулами (2.17) и (2.18) симметричная
обмотка обеспечивает волну МДС со следующими мгновенными
параметрами основной пространственной гармоники:
*т.тахV/ CODSZ ,
~ + Са + Фа ’
(2.20)
(2-21)
= ^-W
7UZp
- амплитуда основной гармоники фазной обмоточной функции.
Это означает, что результирующая волна МДС имеет постоянную
амплитуду и перемещается вдоль зазора относительно статора с
постоянной угловой скоростью
d(pm/dt Qj ,
(2.22)
выраженной в электрических радианах в секунду. В реальной машине
скорость вращения волны МДС относительно статора зависит и от
числа пар полюсов:
О Q
Qo= — = — • (2.23)
zp zp
Геометрическая интерпретация приведенных выше
математических формул для рассмотренного примера дана на рис. 2.4.
Как видно из рисунка, пространственно-временная функция (2.16) в
геометрическом смысле есть волнообразная поверхность. Сечение
этой поверхности различными плоскостями дает возможность
анализировать
• пространственные функции распределения МДС в
фиксированные моменты
времени Fm{(p)
временные функции Fm(i)
, т. е. изменения МДС во
времени в различных фиксированных точках пространства
(дуги воздушного зазора).
Первый вариант сечения свидетельствует о том, что в любой
момент времени результирующая МДС распределяется в пространстве
вдоль воздушного зазора по гармоническому закону.
Второй вариант сечения показывает, что в любой
фиксированной точке дуги воздушного зазора результирующая МДС
изменяется во времени также по гармоническому закону.
31
Рис.2.4. Формирование бегущей результирующей
пространственной волны МДС трехфазной обмотки
Рассмотренный пример может быть геометрически
интерпретирован и с помощью аппарата комплексных векторов,
непосредственно изображающих мгновенную амплитуду Fm и
точку (фазу) максимума результирующей пространственной
волны МДС. Очевидно, что в результате изображения бегущей с
постоянной скоростью результирующей пространственной волны с
неизменной амплитудой мы получаем равномерно вращающийся
изображающий вектор постоянной длины:
F = F (i\ - F
m * m.maxv) 2 m.max
(2.24)
Геометрическим местом концов этого вектора на комплексной
плоскости является окружность. В этом смысле говорят о
круговом магнитном поле обмотки.
При конструировании математических моделей, описывающих
как статические, так и динамические режимы машин (динамических
моделей) законы изменения токов заранее не известны. Поэтому мы
будем в основном оперировать мгновенными пространственными
сечениями Fm(<p)
пространственно-временных функций МДС.
32
2.2. Нейтральные и намагничивающие токи
многофазных обмоток
Многофазные обмотки с числом фаз более двух ( т>2 )
обладают избыточностью в том смысле, что
намагничивающая сила любой из фазных обмоток может быть
нейтрализована совместным действием других обмоток при
определенных соотношениях фазных токов. В связи с этим важное
значение имеет понятие о системе нейтральных фазных токов
1ап> удовлетворяющих условию
Как следует из формулы, нейтральные токи в любое мгновение
времени создают взаимно нейтрализующиеся фазные МДС. В данном
случае имеются в виду основные пространственные гармоники фазных
МДС.
Итак, нейтральными мы будем считать такие токи фазных
обмоток, которые по своему совокупному действию не участвуют в
создании основной гармоники результирующей волны МДС.
Комплексное уравнение (2.25) можно представить в следующем
виде:
Re Qi.max (pj 0 ,
(2.26)
Im А я (0 Qi.max У/ ® •
(2.27)
Отсюда система нейтральных токов трехфазной несимметричной
обмотки определяется соотношениями
Ьп ^Ь*п ’ *сп К'с*п'>
(2.28)
где 1п - произвольная величина ;
к — ] • fa — Qa.max {(рс <ра) _ Qa.max ^^^ФЬ Фа) 29)
Qb.max^^^Pb Фс)
Qc.max Фь)
33
В частном случае, для симметричной обмотки (Wa = = Wc,
(pb = <Pa + 2я/3 , фс - фь +2яг/3 , <ра-<рс +2tt/3) формулы (2.28) и
(2.29) дают хорошо известный результат:
fan ~ I bn ~~ I сп ~ fn ' (2.30)
Аналогичным образом можно квалифицировать и найти токи,
нейтральные по отношению к созданию не основной, а любой из
высших пространственных гармоник МДС трехфазной обмотки. В
частности, соотношение токов, нейтральных по отношению к третьей
пространственной гармонике результирующей МДС симметричной
обмотки, описывается уже не формулой (2.30), а иным выражением:
fan + ^Ьп +1сп = (2-31)
Вернемся к анализу токов, нейтральных по отношению к
созданию основной гармоники МДС. Следует подчеркнуть, что
формулы (2.28) и (2.29) определяют лишь соотношение
между нейтральными токами, т. е. являются необходимыми, но
не достаточными условиями их определения.
Рассмотрим подробнее этот вопрос.
Предположим, что по фазным обмоткам машины протекают
токи Z^(z) и /c(z), представляющие лицейно-независимую
систему функций времени. В соответствии с формулами (2.17) и (2.18)
эти токи в каждый момент времени создают пространственную
результирующую волну МДС с амплитудой основной гармоники
Fm.max = Fm.max(t) и точкой максимума (рт = .
При этом возникает вопрос: насколько эффективно в
обладающей избыточностью трехфазной системе используются токи
I,. , Ik и 1Г для создания волны результирующей МДС с данными
параметрами ? Для ответа на этот вопрос логично проверить, имеется
ли в системе фазных токов нейтральная составляющая, которая по
определению не участвует в создании результирующей МДС. Если
таковая составляющая существует, то она может быть исключена из
системы фазных токов Ia , и 1С. В этом случае для
формирования той же волны МДС в данное мгновение времени
будет более рациональной другая система токов, в которой
нейтральная составляющая отсутствует.
Методика решения этой задачи заключается в следующем [127].
Введем алгебраический вектор-столбец I ?, составленный из
мгновенных значений фазных токов и зададим его вариацию
34
с компонентами, удовлетворяющими соотношениям (2.28) и (2.29)
между нейтральными токами :
(232)
Общий скалярный множитель АI может рассматриваться как
свободно варьируемый параметр вариационной задачи, так как
при любом значении множителя АI новый вектор токов
if = IF + AIF создаст волну МДС с прежними значениями
параметров Fmmax и (рт. В то же время другие параметры,
например, потери мощности в многофазной обмотке, не останутся
прежними.
В качестве оценки последствий вариации токов используем
обобщенную квадратичную функцию
Р(Д7) = ^р/(//+Д//)2, i = a,b,c. (2.33)
I
В качестве весовых фазовых коэффициентов р, целесообразно
использовать относительные значения суммарных активных
сопротивлений электрических цепей фазных обмоток и источников
их питания:
Здесь R6 - произвольная базисная величина. В этом случае оценка
(2.33) отражает суммарные мгновенные электрические потери
мощности в обмотке и источниках ее питания.
Найдем оптимальную вариацию А/опт, минимизирующую
введенную оценку:
аг Ра^а^а^ Pb I b + Рс с
Отсюда Д70ПТ =-----------------------------. (2.34)
Ра + Pb к b + Рс
По своему физическому смыслу оптимальная вариация
исключает из произвольно заданного вектора исходных токов
такой вектор нейтральных токов
35
(2-35)
при котором минимизируется принятая оценка (2.33). Поэтому
формулы (2.34), (2.35) и (2.29) можно рассматривать как
необходимые и оптимально-достаточные условия определения
нейтральных токов.
В результате оптимальной вариации, исключающей нейтральные
составляющие, мы получаем оптимальные мгновенные значения
фазных токов. Эти токи создают ту же результирующую МДС, что и
исходные токи, но при минимуме оценки (2.33). Назовем вектор
новых фазных токов оптимальным намагничивающим
и определим его как
(2.36)
В терминах линейной алгебры рассмотренная вариационная
задача заключается в разложении линейно-независимой системы
фазных токов Ib 7cjT на две линейно-зависимые подсистемы
(составляющие), а именно оптимальную намагничивающую и
нейтральную 1^ :
• (2-37)
С учетом формул (2.34), (2.35) и (2.36) эти составляющие можно
представить в форме матричных произведений:
l£=MIF ; l£ = NIf (2.38)
Здесь фигурируют матричные коэффициенты разложения М и N:
N = E-M .
(2.39)
(2.40)
36
Здесь
^Ра^а + Pbfcb + Рскс ’
Е = diag [1 1 1] - матричная единица.
В частном случае, при симметрии обмотки и при равенстве
весовых коэффициентов ( ра~ р^~ рс ) обобщенной квадратичной
оценки (2.33) выражения (2.39) и (2.40) совпадают с известными
выражениями матричных коэффициентов разложения векторов на
составляющие ненулевой и нулевой последовательностей [123]:
М = -
5
(2.41)
N = -
(2.42)
Оптимальное разложение мгновенных значений фазных токов на
нейтральную и намагничивающую (или же результативную)
составляющие позволяет произвести подобное разложение и для
пространственных волн МДС фазных обмоток:
=А(0 £,• = £im(4 + Ei«(0; »’ = а^с (2.43)
at
ЗДесь ~ ~ е ’ (2-44)
E-in(f) ~ linfy) Q i = Лп.тилг(0 е (2.45)
есть комплексные функции времени, изображающие результат
разложения мгновенных пространственных волн МДС фазных
обмоток на намагничивающую и нейтральную составляющие.
Геометрическая интерпретация такого разложения дана на рис. 2.5.
X
Рис. 2.5. Разложение изображающих векторов МДС фазных
обмоток, на составляющие :
а) намагничивающую ; б) нейтральную
37
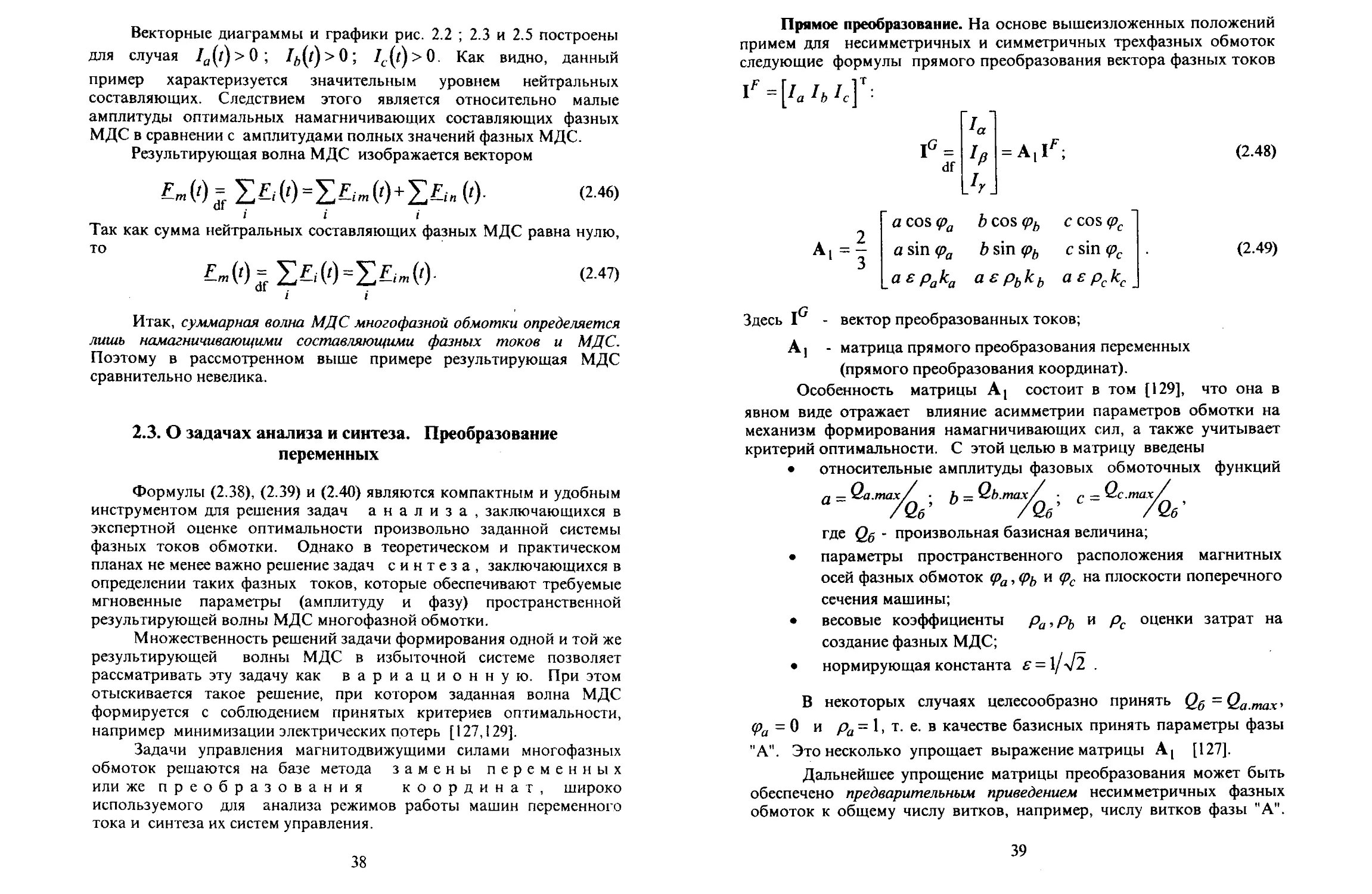
Векторные диаграммы и графики рис. 2.2 ; 2.3 и 2.5 построены
для случая Ia[t) > 0 ; /Д/) > 0 ; Ic[t) > 0. Как видно, данный
пример характеризуется значительным уровнем нейтральных
составляющих. Следствием этого является относительно малые
амплитуды оптимальных намагничивающих составляющих фазных
МДС в сравнении с амплитудами полных значений фазных МДС.
Результирующая волна МДС изображается вектором
£„('); Sb(')=Z&-(')+Z£..(') ,24б>
i i i
Так как сумма нейтральных составляющих фазных МДС равна нулю,
то
£-(')=. Z&(')=Z£U') <«’>
at
i l
p
Итак, суммарная волна МДС многофазной обмотки определяется
лишь намагничивающими составляющими фазных токов и МДС,
Поэтому в рассмотренном выше примере результирующая МДС
сравнительно невелика.
2.3. О задачах анализа и синтеза. Преобразование
переменных
Формулы (2.38), (2.39) и (2.40) являются компактным и удобным
инструментом для решения задач анализа, заключающихся в
экспертной оценке оптимальности произвольно заданной системы
фазных токов обмотки. Однако в теоретическом и практическом
планах не менее важно решение задач синтеза, заключающихся в
определении таких фазных токов, которые обеспечивают требуемые
мгновенные параметры (амплитуду и фазу) пространственной
результирующей волны МДС многофазной обмотки.
Множественность решений задачи формирования одной и той же
результирующей волны МДС в избыточной системе позволяет
рассматривать эту задачу как вариационную. При этом
отыскивается такое решение, при котором заданная волна МДС
формируется с соблюдением принятых критериев оптимальности,
например минимизации электрических потерь [127,129].
Задачи управления магнитодвижущими силами многофазных
обмоток решаются на базе метода замены переменных
или же преобразования координат, широко
используемого для анализа режимов работы машин переменного
тока и синтеза их систем управления.
38
Прямое преобразование. На основе вышеизложенных положений
примем для несимметричных и симметричных трехфазных обмоток
следующие формулы прямого преобразования вектора фазных токов
(2.48)
a cos (ра
a sin <ра
€ рака
b cos (рь
b sin <рь
ае рькь
с cos <рг
с sin (рс
а £ рскс
(2.49)
Здесь I - вектор преобразованных токов;
А] - матрица прямого преобразования переменных
(прямого преобразования координат).
Особенность матрицы А| состоит в том [129], что она в
явном виде отражает влияние асимметрии параметров обмотки на
механизм формирования намагничивающих сил, а также учитывает
критерий оптимальности. С этой целью в матрицу введены
• относительные амплитуды фазовых обмоточных функций
.тах/ с — Qc.max/
а - ъа.тах/ •
где Qq - произвольная базисная величина;
параметры пространственного расположения магнитных
осей фазных обмоток <ра,(Рь и (рс на плоскости поперечного
сечения машины;
весовые коэффициенты Ра,Рь и
создание фазных МДС;
нормирующая константа £ — 1/>/2 .
оценки затрат на
В некоторых случаях целесообразно принять Q6 = Qa.max,
сра = 0 и ра = 1, т. е. в качестве базисных принять параметры фазы
"А”. Это несколько упрощает выражение матрицы At [127].
Дальнейшее упрощение матрицы преобразования может быть
обеспечено предварительным приведением несимметричных фазных
обмоток к общему числу витков, например, числу витков фазы "А".
39
Напомним, что процедура приведения затрагивает пересчет как
параметров обмоток, так и их токов, напряжений и потокосцеплений.
Критерием и условием приведения являются неизменность МДС и
мощностей (в том числе, электрических потерь) в цепях исходных и
приведенных обмоток.
Так, в случае приведения переменных и параметров фаз
трехфазной несимметричной обмотки к числу витков фазы “А”
приведенные и исходные величины связаны соотношениями
_ , а ИС „ ИС
Здесь Ьп = ; сп = -—— - коэффициенты приведения.
^об.а ^об.а
Матрица преобразования приведенных токов, напряжений и
потокосцеплений несимметричной трехфазной обмотки имеет вид:
А
COS Фа
sin <ра
£р’ак’а
COS (pb COS (рс
sin <pb sin (рс
£Р'ьк'ь £Рскс.
(2.51)
Здесь Рака 1, Pfokfo bn pfokfr-, р^,кс с^р^к^.-
И, наконец, в случае симметрии трехфазной обмотки приходим
к известному выражению [123]:
2/3 -1/3
О l/л/з
л/2/З л/2/3
(2.52)
Однако в общем случае для анализа влияния параметров всех фаз
предпочтительнее формула общего вида (2.49).
А
40
Физический смысл преобразования. Результатом преобразования
переменных (2.48) с матрицей А] являются величины
<р=0
та ’
тр 1
(2.53)
<Р = <Ра
л ап.тах •
а
Первые две величины пропорциональны мгновенным значениям
результирующей пространственной функции распределения МДС
(рис. 2.6) в точках (р = 0 и (р = л/2.
Рис. 2.6. Геометрический смысл результата
преобразования вектора фазных токов
Они однозначно определяют амплитуду и начальную фазу
пространственной результирующей волны МДС :
41
Следовательно, компоненты 1а и Iр полностью характеризуют
действие намагничивающей составляющей вектора фазных токов.
Третья величина пропорциональна амплитуде волны МДС,
созданной нейтральной составляющей тока фазы "Д'* :
an,max
a.max
(2.56)
Волна МДС Fan(<p} от нейтральной составляющей тока фазы
"А” компенсируется волнами МДС Fbn((p^ и Fcn(<p}, созданными
нейтральными составляющими токов других фаз. Следовательно,
ненулевое значение I? характеризует наличие, а нулевое - отсутствие
нейтральной составляющей вектора фазных токов.
Непосредственную характеристику отмеченных МДС
вектор-столбец
дает
(2.57)
Таким образом, преобразование (2.48) является одним из
способов разделения переменных на оптимальную
намагничивающую и нейтральную составляющие. Действительно,
преобразованный вектор токов можно представить в виде
суммы преобразованного намагничивающего и преобразованного
нейтрального векторов:
(2.58)
Отсюда, в частности, следует, что компоненты оптимального вектора
непреобразованных намагничивающих токов несимметричной
обмотки должны удовлетворять следующему соотношению :
42
Pa ^a am + Pb ^b^bm + Pc &c % cm
(2.60)
В частном случае, при симметрии обмотки ( ка = кь = кс) и
при равенстве коэффициентов {ра — Рь~ Рс ) оценки (2.33) получаем
известное соотношение
(2.61)
Это соотношение автоматически выполняется в трехфазных системах,
не имеющих нулевого (нейтрального) провода.
Проведенный анализ дает строгое доказательство того факта,
что симметричные обмотки с питанием от симметричной сети по
системе без нейтрального провода оптимальны в смысле минимизации
потерь энергии, затрачиваемой на создание магнитодвижущих сил.
Очевидно также, что формула (2.60) ‘ дает более общие условия
оптимальности, охватывающие и несимметричные системы.
Обратное преобразование. При выполнении условий (2.1) и
(2.2) преобразование (2.48) обратимо, т. е. для определяемой
формулой (2.49) матрицы А| существует обратная матрица
A f1 , которая позволяет осуществить обратное преобразование
токов
(2.62)
и других переменных модели машины. С учетом (2.57) получаем
(2.63)
В развернутом виде
а
апут/ <р-сра
Итак, поскольку компоненты вектора IG пропорциональны
позволяет
компонентам вектора МДС (2.57), то матрица
решать задачи синтеза - находить фазные токи 1 , обеспечивающие
43
заданные параметры намагничивающих сил при выбранном критерии
оптимальности. Свойства трехфазной несимметричной обмотки и
критерий оптимальности учитываются матрицей преобразования.
В общем случае элементы матрицы обратного преобразования
определяются следующим образом:
«11
«21
«31
«12 «13
(2.64)
_ n _ b Pc kcsin%-c pbkbsm(pc
где ui । — -—- ;—7 c
25 be Sin(^c ~<Pb)
_ bpckccos<pb-cpbkbcos<pc
U|2 —---------------7-------\----
2sbe sin(^c -<pb)
eka
«1з = — ;
as
a pckcsin<pa -c pakasin^c
^2] —--------------— ------------
2sbc sin(^c -<pb)
a Pc kr costs’ -c p„ka co$(pr.
1
1
ан ------;
as
= a Pb kb sinffg - Ъ Ра ka sin
Isbc sin(^c-$fy)
a pbkb cospa -b paka cos<pb
«32 --------, ./------\;
ekr
as
Здесь а, b, с - относительные амплитуды фазовых обмоточных
функций; 5 = + Pbkfr + Pck^l 3.
При использовании предварительного приведения переменных к
числу витков базовой обмотки элементы матрицы несколько
упрощаются. В случае симметрии трехфазной обмотки матрица
обратного преобразования приобретает вид [123]:
44
1 О 1/Л
-1/2 V3/2 1/V2
-1/2 -V3/2 1/72
(2.65)
Описанное выше преобразование переменных создает основу для
следующего этапа их преобразования, геометрически
интерпретируемого как переход от неподвижной к вращающейся
системе координат. Соответствующие формулы прямого (2.66) и
обратного (2.67) преобразований на этом этапе имеют вид:
df
= A2(©JlG;(2.66)
(2-67)
Здесь используются прямая
и обратная ортогональные
поворота:
А2(®л) =
COS©£
-sin©A.
sin©^ О
со80Л О
О 1
матрицы
(2.68)
А^О^аЦ©,),
(2.69)
где 0^ - обобщенный параметр преобразования переменных,
геометрически интерпретируемый как угол поворота системы
координат.
Для построения полной модели, описывающей электрические и
магнитные связи несимметричной обмотки, представленным выше
прямому и обратному преобразованиям подвергаются не только токи,
но и напряжения, а также потокосцепления фазных обмоток
машины:
а
df
df
z J
df
df
45
Геометрическая интерпретация. Пространственные векторы. Как
показано в работе [123], для корректного математического описания и
геометрической интерпретации моделей трехфазных машин
целесообразно двойственное представление переменных: с одной
стороны, как трехмерных геометрических радиус-векторов
U, I и ? , изображающих напряжения, токи и потокосцепления в
трехмерном векторном пространстве, а с другой стороны, в виде
алгебраических векторов-столбцов U, I и , компоненты
которых численно равны координатам этих радиус-векторов в
различных базисах векторного пространства. Каждое из этих
представлений имеет свой специфический математический аппарат, и
поэтому можно говорить лишь о взаимном соответствии этих
представлений, но не смешивать их. В связи с этим приведенные выше
формулы преобразования (замены переменных) алгебраического
вектора-столбца фазных токов (2.48) и (2.66) интерпретируются в
терминах векторного пространства как формулы преобразования
координат радиус-вектора I, изображающего токи фазных
обмоток последовательно в трех различных базисах :
Формулы перехода от базиса F к базисам G и
имеют
вид:
(2.72)
(2.73)
Формулы разложения изображающего вектора токов по векторам
этих базисов следующие:
(2.74)
(2-75)
(2-76)
46
Аналогично изображаются в этих базисах радиус-векторы
напряжений U и потокосцеплений Т обмоток машины.
Рис. 2.7. Вектор, изображающий токи трехфазной обмотки
в базисе F
На рис. 2.7 показан изображающий радиус-вектор токов I в
"фазном" базисе F, образованном векторами а, b и с . В этом
базисе координаты изображающего вектора численно равны
мгновенным значениям исходных либо приведенных фазных токов.
Более детально вопросы преобразования координат изложены в гл. 8
Использование трехмерной системы базисных векторов не
противоречит традиционному представлению изображающих
комплексных векторов на плоскости поперечного сечения машины, но
дополняет его. Для подтверждения этого достаточно сопоставить
выражение трехмерного радиус-вектора токов в базисе G (2.75) с
выражением традиционного комплексного изображающего вектора
тока в алгебраической форме. Для несимметричной обмотки
изображающий комплекс
L = ^z-(laQa + hQb + = + jlp. (2.77)
47
Как видно, трехмерный радиус-вектор (2.75) своими
координатами ia и ip полностью определяет компоненты
комплексного вектора (2.77). Однако последний своими
компонентами характеризует координаты трехмерного радиус-
вектора с точностью до нейтральной составляющей, т.е. определяет
лишь намагничивающую составляющую вектора токов. Это
обстоятельство отражает тот факт, что исчерпывающее описание
трехмерных задач с использованием двумерных систем отсчета
принципиально невозможно. Использование в данном случае
трехмерной системы отсчета полностью соответствует размерности
задачи. Это позволяет также получить корректные представления о
сущности так называемых "трехфазных” плоских систем координат,
совмещенных с поперечным сечением машины. С позиций векторной
алгебры их следует квалифицировать как отображения ( проекции )
трехмерных систем координат на плоскости, что и предопределяет
ограничения при использовании двумерных систем координат для
моделирования трехфазных машин.
Отмеченные свойства описанного выше преобразования
переменных создают основу для решения задач оптимального
управления магнитодвижущими силами несимметричных и
симметричных обмоток. Методики и примеры решения задачи
формирования кругового магнитного поля при минимуме
электрических потерь в трехфазной несимметричной обмотке
рассмотрены в [ 127,129].
2.4. Выводы
1. Электромагнитные системы многофазных электрических
машин с числом фаз более двух являются избыточными в том смысле,
что МДС любой из фазных обмоток может быть нейтрализована
совместным действием других фазных обмоток при определенных
соотношениях фазных токов. Поэтому такие системы не обладают
взаимно однозначным соответствием между параметрами
пространственной результирующей волны МДС многофазной
обмотки, с одной стороны, и совокупностью фазных токов,
создающих эту МДС, с другой.
2. Для избыточной электромагнитной системы правомерной
задачей анализа эффективности действия в ней произвольно заданной
совокупности фазных токов является проверка их на наличие
нейтральных составляющих, т.е. таких токов, которые создают
взаимно нейтрализующиеся МДС и, следовательно, по своему
совокупному действию не участвуют в создании результирующей
48
МДС обмотки. При этом оказывается, что учет только
конструктивных параметров многофазной обмотки позволяет найти
лишь необходимые, но не достаточные условия выделения
нейтральной составляющей в системе фазных токов.
3. Для получения необходимых и достаточных условий
выделения нейтральных токов требуется введение дополнительной
оценки и решение вариационной задачи, доставляющее экстремум
введенной оценке при соблюдении необходимых условий выделения
нейтральных токов. Такой оценкой могут служить электрические
потери, затрачиваемые на создание данной пространственной волны
результирующей МДС.
4. При анализе эффективности действия произвольно заданной
системы фазных токов решение данной вариационной задачи
позволяет выделить из них вместе с нейтральной также и оптимальную
намагничивающую составляющую, т.е. такую систему фазных токов,
которая создает ту же МДС, что и исходные токи, но при обеспечении
введенного критерия оптимальности, например, при минимуме
потерь. Это свидетельствует о том, что разложение токов фазных
обмоток на нейтральную и оптимальную намагничивающую
(результативную) составляющие является конструктивным элементом
анализа многофазных электромагнитных систем.
5. Решение задач синтеза и управления МДС также базируется на
описанном выше разложении токов и на преобразовании переменных
(координат) с учетом параметров обмотки и критерия оптимальности.
Для трехфазных несимметричных и симметричных обмоток
целесообразно такое преобразование координат, при котором две
компоненты преобразованного вектора токов однозначно определяют
параметры (амплитуду и фазу) результирующей пространственной
волны МДС обмотки, а третья - позволяет судить о величине
нейтральной составляющей токов и обращается в ноль при
соблюдении принятого критерия оптимальности. В этом случае
обратное преобразование координат дает оптимальное решение
задачи синтеза - определение таких фазных токов, которые
обеспечивают заданные параметры результирующей волны МДС при
соблюдении принятого критерия оптимальности. Поскольку свойства
обмотки и критерий оптимальности учитываются матрицей
преобразования координат, для обеспечения требуемых параметров
результирующей волны МДС достаточно задать в качестве
аргументов обратного преобразования соответствующие значения
первых двух компонент, а для реализации выбранного критерия
оптимальности - задать нулевое значение третьей компоненты
преобразованного вектора фазных токов.
6. Указанные выше закономерности прямого и обратного
преобразований координат могут эффективно использоваться для
49
построения систем управления магнитодвижущими силами
несимметричных обмоток и оптимизации их режимов работы. В
частности, такие системы обеспечивают создание кругового
магнитного поля обмотки при минимуме электрических потерь. С этой
целью в системах управления необходимо использовать
преобразователи координат с соответствующими матрицами
преобразования, учитывающими параметры обмотки и критерий
оптимальности. В результате создаются условия для обоснованного
управления несимметричными электрическими машинами в рамках
структур, апробированных и использовавшихся ранее для управления
симметричными машинами.
7. Корректное математическое и методологическое описание, а
также геометрическая интерпретация моделей трехфазных машин и их
систем управления базируются на двойственном представлении
переменных: с одной стороны, как трехмерных геометрических
радиус-векторов, изображающих напряжения, токи и потокосцепления
обмоток в трехмерном векторном пространстве, а с другой стороны,
в виде алгебраических векторов-столбцов, компоненты которых
численно равны координатам этих радиус-векторов в различных
базисах векторного пространства.
8. Изложенные положения представляют обобщение и развитие
подхода к построению математических моделей симметричных машин
на несимметричные машины на случаи амплитудной (витковой) и
фазовой (пространственной) асимметрии обмоток и параметров цепей
их питания. Они полностью применимы и для уточненного анализа
характеристик симметричных машин с более общих позиций, в
частности, с учетом технологического разброса их параметров. Они
могут быть также использованы при создании интеллектуальных
систем управления повышенной надежности, сохраняющих
работоспособность симметричных машин в анормальных
несимметричных режимах, например, при аварийных отключениях
секций обмоток.
9. Приведенные материалы применимы для решения задач
анализа и синтеза систем управления как круговыми, так и
линейными машинами переменного тока.
50
Глава третья
МАГНИТНОЕ ПОЛЕ МАШИНЫ
ПЕРЕМЕННОГО ТОКА
3.1. Уравнения электромагнитного поля
Электромеханическое преобразование энергии в электрических
машинах связано с электромагнитным полем. Поэтому анализ
электромагнитного поля является одним из центральных вопросов
теории электрических машин. На основе анализа электромагнитного
поля можно определить те допущения и упрощения, которые
необходимы и приемлемы для создания инженерных методик
проектирования электрических машин, расчета установившихся и
нестационарных режимов, для разработки алгоритмов управления
электрическими машинами, для качественного анализа тех или иных
процессов, происходящих в электрических машинах.
Наиболее полно электромагнитное поле в электрических
машинах можно описать системой уравнений Максвелла:
rotH = 5;
div В = 0 ;
В = //аН;
D = £а Е ;
(3.1)
div D ~ р ;
51
Здесь фигурируют трехмерные пространственные векторы,
имеющие в системе единиц СИ следующие размерности:
Н - вектор напряженности магнитного поля, Д/м ;
В - вектор индукции магнитного поля, Тл;
Е - вектор напряженности электрического поля, В/м;
8 - вектор плотности электрического тока, д/м2;
D - вектор индукции электрического поля, к/м2;
v - вектор скорости движения зарядов в токе переноса, м/с.
Свойства среды описывают следующие величины:
у - удельная электрическая проводимость, (Ом • м) 1;
р - объемная плотность заряда, К/м ;
ёа ~ ££$ - абсолютная диэлектрическая проницаемость, Ф/м;
ра = А/Л) • абсолютная магнитная проницаемость, Гн/м ,
где £ - относительная диэлектрическая проницаемость ;
р - относительная магнитная проницаемость ;
= 8.854 10”12 ф/м- электрическая постоянная вакуума ;
р§ = 4яг10“7 Гн/м - магнитная постоянная вакуума.
Для описания процессов электромеханического преобразования
энергии систему уравнений (3.1) можно упростить, исключив из нее
уравнения, связанные с электрическими процессами в изоляции:
rot Н - 8 ;
rot Е =-----;
di
В = //аН; (3.2)
8 = у Е + 8 стор ;
divB = 0 .
52
Первое уравнение системы (3.2) представляет собой закон
полного тока в дифференциальной форме, выражающий связь между
вихрем (ротором) напряженности магнитного поля и плотностью тока
в той же точке поля. Второе уравнение выражает закон
электромагнитной индукции, согласно которому всякое изменение
индукции магнитного поля во времени возбуждает вихрь
напряженности электрического поля в этой же точке. Третье уравнение
описывает связь между напряженностью и индукцией магнитного
поля. В ферромагнетиках эта связь является нелинейной. Четвертое
уравнение представляет собой закон Ома в дифференциальной форме
и описывает плотность тока проводимости как сумму двух слагаемых.
Первое слагаемое обусловлено токами проводимости, которые
возникли в исследуемой области в результате явления
электромагнитной индукции. Второе слагаемое обусловлено
сторонними токами проводимости, источник которых лежит вне
исследуемой области пространства. Последнее уравнение описывает
непрерывность магнитных силовых линий поля.
Векторный потенциал магнитного поля. Непосредственное
решение системы уравнений (3.2) связано с большими
математическими трудностями в связи со сложной конфигурацией
разнородных сред и сложной картиной распределения токов в
активном пространстве электрической машины. Задачу упрощают
путем использования дополнительных функций
электродинамических потенциалов. Вектор индукции магнитного поля
принято определять как вихрь некоторого вектора А называемого
векторным потенциалом магнитного поля :
В = rot А . (3.3)
В общем случае выражения векторного потенциала и вектора
индукции магнитного поля в трехмерном ортогональном базисе,
образованном ортами х, у и г , имеют вид:
А = х Ах + у Ау + г Az ;
В = х Вг + у Bv + г В2.
Л * у £
Из определения (3.3) следует, что эти векторы взаимно
ортогональны т. е. их скалярное произведение
А.В = 0
Вектор плотности тока в этом же базисе выражается как
53
Из первого и третьего уравнений системы (3.2) следует, что
векторы плотности тока и индукции магнитного поля взаимно
ортогональны, так как их скалярное произведение
8.В = 0.
Электромагнитные поля в электрических машинах ' в
большинстве случаев можно считать плоскопараллельными. В
плоскопараллельном электромагнитном поле вектор индукции
магнитного поля лежит в плоскости поперечного сечения машины, а
векторный потенциал и вектор плотности тока направлены
параллельно оси вала. Исходя из этого орты х и у ориентируют в
плоскости поперечного сечения машины, a z - по оси ее вала. Тогда
выражения векторного потенциала, плотности тока и индукции
магнитного поля приобретают более простой вид :
А = Z Т ;
лл
5 = Z 37 ;
В = х Вх + у Bv.
л * у
Очевидно, что в данном случае первые два векторных уравнения могут
быть заменены скалярными:
А. 2 у
8 = 8Z .
В результате преобразований системы уравнений (3.2) можно
получить для векторного потенциала магнитного поля скалярное
дифференциальное уравнение второго порядка в частных
производных. При этом мгновенная картина плоскопараллельного
электромагнитного • поля описывается неоднородным уравнением
Гельмгольца:
сгА дгА ЗА
----+-----=- - U,. Y-
(3.4)
В частном случае, при отсутствии в исследуемой области
сторонних токов, вихревое электромагнитное поле описывается
54
однородным уравнением Гельмгольца. Для плоскопараллельного
поля оно имеет вид:
ду
При отсутствии вихревых токов электромагнитное поле,
уравнением
обусловленное сторонними токами, описывается
-Пуассона:
а ^стор *
В случае отсутствия токов в исследуемой области уравнение Пуассона
превращается в уравнение Лапласа:
= 0.
Значения проекций вектора индукции магнитного поля на оси
координат находятся из выражений (3.8), которое следуют из
определения векторного потенциала (3.3):
(3.8)
Скалярный потенциал магнитного поля. В той части
пространства, где плотность тока равна нулю, закон полного тока
приобретает вид
rotH-0.
Магнитное поле в этом случае можно рассчитывать не только через
векторный потенциал А, но и таким же образом, как потенциальное
поле. Напряженность магнитного поля в этом случае может быть
определена через скалярный потенциал магнитного поля U.
Напряженность потенциального магнитного поля равна
Поскольку di v В = 0,
div(grad (7) = 0.
divH = 0
или
В - Н, то
55
Последнее выражение есть ничто иное, как уравнение Лапласа
для скалярного потенциала магнитного поля:
А17 =:0.
Уравнение Лапласа для скалярного потенциала плоскопараллельного
магнитного поля имеет вид:
(3-9)
Для анализа электромагнитного поля в электрической машине
необходимо решить одно из уравнений (3.4) - (3.9) в зависимости от
физических условий решаемой задачи. Сложность решения этих
уравнений обусловлена, как отмечалось, сложной геометрией
электрических машин, особенно многополюсных машин с дробным
числом пазов на полюс и фазу, нелинейностью зависимости между
индукцией и напряженностью магнитного поля, что определяет
неоднородные свойства физических сред, составляющих электрические
машины. Для упрощения задачи в теории электрических машин
используется принцип декомпозиции единого магнитного поля
машины на главное магнитное поле и поля рассеяния.
Главное магнитное поле и поля рассеяния. Рассмотрим типичную
мгновенную картину распределения магнитного поля
четырехполюсного асинхронного двигателя, представленную на
рис.3.1. Двигатель работает под нагрузкой и поэтому в создании
магнитного поля участвуют электрические токи как обмотки статора,
так и обмотки ротора. Как видно из рисунка, большая часть силовых
линий результирующего магнитного поля, созданного токами статора
и ротора, сцеплена с витками обмоток и статора и ротора. Другая
часть магнитных силовых линий сцеплена только с витками обмотки
статора, либо только с витками обмотки ротора. Число таких силовых
линий значительно меньше числа магнитных силовых линий,
сцепленных с обеими обмотками. В связи с этим оказывается
целесообразным разделение результирующего магнитного поля
машины на две составляющие.
Магнитное поле, образованное совместным действием всех
обмоток статора и ротора и сцепленное с вышеупомянутыми
обмотками, называется главным магнитным полем.
Магнитные поля, образованные токами только одной из
обмоток и не сцепленные с другими обмотками, называются полями
рассеяния.
Анализ главного поля позволяет опредиУтить распределение
индукция магнитного поля в воздушном зазоре и других активных
56
частях машины, вычислить главные составляющие потокосцеплений и
ЭДС обмоток, электромагнитный момент и другие величины,
характеризующие процесс электромеханического преобразования
энергии.
Рис.3.1. Распределение магнитного поля в четырехполюсном
асинхронном двигателе
На основе анализа полей рассеяния рассчитываются
индуктивные сопротивления рассеяния обмоток, которые в некоторых
режимах работы электрических машин определяют величины токов и
соответственно МДС этих обмоток.
Разделение магнитного поля на главное магнитное поле и поле
рассеяния позволяет существенно упростить практические приложения
теории электрических машин на основе принципа декомпозиции.
57
3.2. Главное магнитное поле
Индукция составляющей главного магнитного поля, созданного
одной сосредоточенной катушкой, может быть найдена исходя из
закона полного тока:
(3.10)
Если в первом приближении принять допущение о том, что магнитная
проницаемость стали сердечников бесконечно велика (jic = оо), то
напряженность магнитного поля в сердечниках Нс = 0. Поэтому для
любой силовой линии главного магнитного поля машины,
охватывающей ток IW, выражение циркуляции вектора
напряженности (3.10) при равномерном воздушным зазоре принимает
вид:
2Hsls = H¥.
(З.П)
Здесь Н$ - напряженность магнитного поля на участках
воздушного зазора машины, А/м;
- величина одного воздушного зазора, м ;
I - ток катушки, А ;
W - число витков катушки.
Отсюда напряженность главного магнитного поля катушки на
участках воздушного зазора машины :
Индукция главного магнитного поля (Bw) на участках
воздушного зазора и в сердечниках машины для рассматриваемой
силовой линии, охватывающей ток IW, определяется формулой
^0 IW
= = (3.13)
18 1
В практических расчетах выражение индукции (3.13) удобно
представить в следующем виде :
Вт Л'З у
(3-14)
58
(3.15)
IW
(3.16)
Здесь Bm- магнитная индукция, Тл;
- удельная магнитная проводимость
равномерного воздушного зазора, Гн/м2;
F - МДС катушки на один зазор, А.
Для удобства анализа пространственного распределения
напряженности, МДС и индукции главного магнитного поля теория
электрических машин использует линейную развертку круговых
машин, описанную в п.1.1. Как видно из рис. 3.2, напряженность
магнитного поля в воздушном зазоре, созданного током
сосредоточенной катушки, при равномерном воздушном зазоре имеет
прямоугольный график распределения вдоль полюсного деления.
Аналогичный вид имеет график МДС катушки на один зазор. В этом
случае форма графика пространственного распределения индукции
совпадает с формой графика МДС, поскольку удельная проводимость
равномерного воздушного зазора постоянна. Очевидно, что в случае
синусоидального распределения МДС в пространстве индукция
магнитного поля имеет также синусоидальное пространственное
распределение.
Вышеизложенные положения справедливы для определения
индукции главного магнитного поля, обусловленной действием не
только МДС отдельной катушки, но и результирующей МДС
многофазной обмотки статора либо ротора машины, рассмотренной в
гл. 2. При этом распределение вдоль воздушного зазора
пространственной волны индукции главного магнитного поля для
каждого мгновения времени описывается формулой
А.£ Fm{<P5 /) •
, /) - результирующая прост!
(3.17)
Здесь Fmy(p,lj - результирующая пространственная волна МДС
многофазной обмотки, определяемая формулой (2.6).
Аналогично определяется и результирующая пространственная волна
индукции главного магнитного поля машины, обусловленная
результирующей МДС ее обмоток статора и ротора.
Проводники обмоток электрических машин нормального
исполнения размещаются в пазах либо на полюсах. В связи с этим для
59
построения картины магнитного поля оказываются существенными
следующие обстоятельства:
• проводники с током распределены вдоль дуги воздушного
зазора неравномерно, т. к. сосредоточены в пазах либо на полюсах;
• зазор между сердечниками статора и ротора является
неравномерным.
Рис.3.2. Магнитное поле сосредоточенной катушки
В этих обстоятельствах график пространственного
распределения МДС имеет переменный, либо кусочно-постоянный
характер с изменением МДС в зонах пазов. В случае замены
проводников паза эквивалентным сосредоточенным проводником и
при допущении о бесконечно большой магнитной проницаемости
60
стали получаем ступенчатый график с дискретным изменением МДС
на осях пазов. Учет неравномерности зазора между сердечниками
статора и ротора производится на основе следующих закономерностей
теории электромагнитного поля.
Как известно из условий преломления векторов индукции и
напряженности магнитного поля на границах раздела сред с
различными значениями магнитной проницаемости, при переходе
магнитного поля из воздуха с // — 1, в сталь с д = оо вектор
напряженности магнитного поля и, следовательно, вектор индукции
направлен перпендикулярно границе раздела сред. Векторный
потенциал магнитного поля (А = Az) связан со скалярным
потенциалом магнитного поля U следующим образом:
дА dU
дх ду
(3.18)
дА
Выражения (3.18) следуют из определения векторного и скалярного
потенциалов. Условия (3.18) в математике называют условиями Коши-
Римана. Из них следует, что в каждой точке пространства, где
существует электромагнитное поле, магнитные силовые линии,
описываемые уравнением = const, перпендикулярны линиям
равного скалярного потенциала, которые описываются уравнением
J7 (л, j) = const. В каждой точке магнитной силовой линии вектор
индукции магнитного поля направлен по касательной к силовой
линии. Из условий Коши-Римана следует также, что в каждой точке
пространства, где существует электромагнитное поле, вектор
индукции магнитного поля перпендикулярен касательной к линии
равного потенциала. На границе раздела сред вектор индукции
направлен перпендикулярно к ней. Следовательно, граница раздела
воздушного зазора с р = I и стального сердечника с /7 - оо является
эквипотенциальной поверхностью.
Как следует из формул (3.10), (3.16) и из определения скалярного
потенциала магнитного поля, МДС фазы на эквипотенциальном
участке воздушного зазора равняется
->
1
(3.19)
61
где U\ и U2 - значения скалярных потенциалов магнитного поля на
эквипотенциальных границах раздела воздушного
зазора со стальными сердечниками статора и ротора.
Из определения векторного и скалярного потенциалов величины
проекций вектора индукции магнитного поля могут быть определены
следующим образом:
вх(х,у) = ~Мо—;
(3.20)
ВДх,^) = -^0 —
z ay
Пространственное распределение фигурирующего в формулах (3.20)
скалярного потенциала U = U(x9y) находится в результате решения
уравнения Лапласа:
д2Ц ! д2Ц
дх2 ду2
Если разность потенциалов между поверхностями воздушного зазора
при задании граничных условий взять равной 1 А, то тогда значения
индукции магнитного поля в воздушном зазоре будут численно равны
значениям функции распределения удельной проводимости
воздушного зазора:
В(х,у) = В2 + В2 = As(x,y).
Для произвольного значения МДС индукция магнитного поля в
воздушном зазоре при наличии зубцов на роторе и на статоре, при
постоянной разности магнитных потенциалов между поверхностями
статора и ротора на изучаемом участке воздушного зазора может
быть найдена по формуле, аналогичной формуле (3.14) для
полученного распределения удельной магнитной проводимости:
5(x,y) = Aj(x,y)F.
(3-21)
Для упрощения анализа режимов электрических машин
неравномерный воздушный зазор, обусловленный зубчатой
поверхностью сердечников, приводят к равномерному воздушному
зазору через коэффициент воздушного зазора к$ > 1, который
62
определяют на основе решения уравнении электромагнитного поля.
Величина приведенного воздушного зазора определяется формулой
h •
Для приведенного воздушного зазора удельная магнитная
проводимость считается постоянной и определяется как
~ = const.
(3.22)
Пространственно-временная функция распределения индукции
главного магнитного поля в воздушном зазоре в этом случае также
определяется аналогично формуле (3.17):
(3.23)
Дальнейшее упрощение анализа достигается выделением из
периодической ступенчатой функции распределения МДС ее
первой пространственной гармонической составляющей
Пренебрегая высшими пространственными гармониками МДС,
пространственно-временную функцию распределения индукции
главного магнитного поля в воздушном зазоре определяют как
гармоническую нестационарную функцию:
0 ^5 ^71.1 О'
В частности, при питании трехфазной симметричной обмотки
симметричной системой синусоидальных токов (см. п. 2.1)
формируется пространственная волна индукции главного поля,
основная составляющая которой вращается с постоянной скоростью и
имеет в соответствии с формулами (2.20), (3.17) постоянную
амплитуду:
mJ.max rmJ.max
, з V2 кобА W
Здесь 1ф3фф- эффективное значение синусоидального фазного тока.
В практические расчетные формулы вводят коэффициент > 1,
позволяющий приближенно учесть конечную величину магнитной
проницаемости и насыщение стали, т.е. характеристику
ферромагнитных участков главного магнитного пути машины:
63
m.l.max
Ao
Зл/2 кобЛ W
kzp
ф.эфф
^^^m.l.max
Величина главного магнитного потока определяется
интегрированием индукции главного магнитного поля по площади
(3.24)
Л'
Интегрирование ведется по цилиндрической площади S,
расположенной в воздушном зазоре и ограниченной активной длиной
машины и длиной дуги воздушного зазора в пределах полюсного
деления основной пространственной гармоники магнитной индукции.
Результат интегрирования основной пространственной волны
индукции главного магнитного поля имеет вид:
Ф
т
^ra.l.max
У
(3.25)
где
га.1.max
т
главный магнитный поток одной пары полюсов, Вб;
амплитуда основной гармоники пространственной
волны магнитной индукции главного поля, Тл;
диаметр дуги воздушного зазора, м;
активная длина машины, м;
zp - число пар полюсов.
3.3. Магнитные поля рассеяния
Часть магнитного поля, созданного, например, обмоткой
статора, но не сцепленного с витками обмотки ротора, в теории
электрических машин называют полем рассеяния.
К полю рассеяния относится часть магнитного поля,
замыкающегося по пазам статора (или ротора) электрической машины
(рис.3.3). Это поле называется полем пазового рассеяния.
Часть поля пазового рассеяния, которое выходит в воздушный
зазор и частично замыкается по противоположному сердечнику, не
сцепляясь с витками расположенной на нем обмотки, в теории
электрических машин принято называть полем рассеяния по коронкам
зубцов-
64
Рис.3.3. Картина магнитного поля пазового рассеяния
К полю рассеяния относится также часть магнитного поля,
замыкающегося вокруг лобовых частей обмотки (рис.3.4). Это поле
называется полем лобового рассеяния.
Рис.3.4. Картина магнитного поля лобового рассеяния
Обмотки электрических машин располагаются в пазах. Из-за
наличия пазов пространственное распределение индукции магнитного
поля фазы в воздушном зазоре отличается от синусоидального. Поля
высших пространственных гармоник индукции магнитного поля в
65
воздушном зазоре, обусловленные конструкцией обмотки
электрической машины, называются полями дифференциального
рассеяния.
3.4. Индуктивности рассеяния обмоток переменного тока
Индуктивность рассеяния фазной обмотки определяется как
отношение величины потокосцепления обмотки с суммарным
потоком рассеяния к величине тока обмотки:
Понятие потокосцепления обмотки подробно рассмотрено в гл. 4.
На основании закона Ома для магнитной цепи индуктивность
рассеяния можно выразить в виде:
(3.26)
сумма удельных магнитных
проводимостей пазового рассеяния, рассеяния по коронкам зубцов,
лобового и дифференциального рассеяния.
Удельные магнитные проводимости пазового рассеяния
находятся в результате расчета электромагнитных полей в
предположении бесконечно большой магнитной проницаемости
ферромагнитных сред. Удельная магнитная проводимость пазового
рассеяния прямоугольного паза определяется формулой
(3.27)
Здесь h - высота паза, занятая обмоткой;
Ьп - ширина паза;
- высота шлица;
Ьш - ширина шлица;
Р= ук)т - коэффициент укорочения шага обмотки;
J,* - шаг обмотки;
г - полюсное деление.
66
Удельная проводимость рассеяния по коронкам зубцов
(3.28)
Удельная проводимость лобового рассеяния
Лл = 0.34(^|7^Т0Л ,
(3.29)
где /Зл -1Л/ук = 1л{Рт) - относительный вылет лобовых частей;
1Л - вылет лобовых частей (рис.3.4).
Удельная проводимость дифференциального рассеяния
Хд = (0.7... 1.0)
(3.30)
где tz - зубцовый шаг.
3.5. Методы расчета электромагнитного поля
3.5.1. Краевые задачи и их граничные условия
При использовании уравнений (3.4) - (3.9) для расчета
магнитного поля конкретного физического устройства необходимо
отыскивать не всю совокупность решений, которых бесконечное
число, а лишь частные решения при определенных дополнительных
условиях, которые делают решение однозначным. Для эллиптических
дифференциальных уравнений в частных производных, к которым
относятся уравнения (3.4) - (3.9), такие дополнительные условия
задаются на границах исследуемой области для искомой функции. Они
называются граничными условиями. Задачи по отысканию решения
уравнений (3.4) - (3.9) с заданными граничными условиями
называются краевыми задачами. Решению краевых задач посвящен
раздел математики, называемый уравнениями математической физики
[93].
67
Для эллиптических дифференциальных уравнений различают
следующие виды граничных условий.
• Граничные условия первого рода - это такие граничные
условия, когда на границах исследуемой области заданы значения
искомой функции. Граничные условия первого рода для уравнения
Лапласа называются условиями Дирихле.
• Граничные условия второго рода ~ это такие граничные
условия, когда на границах области заданы значения производных
искомой функции по нормалям к границам исследуемой области.
Граничные условия второго рода для уравнения Лапласа называются
условиями Неймана.
• Граничные условия третьего рода - это такие граничные
условия, когда на границах области задана линейная комбинация
условий первого и второго рода.
На граничные условия первого рода не накладывается каких-
либо ограничений. На граничные условия второго рода
накладываются ограничения, связанные с возможным изменением
входящего в исследуемую область и выходящего из нее магнитного
потока в случае наличия источников магнитного поля внутри области.
Математически эти ограничения вытекают из второй формулы Грина
[15,93]. Для задач анализа плоскопараллельного поля эта формула
записывается в виде
Здесь дА/дп- производная векторного потенциала по направлению
нормали к контуру интегрирования.
Данные граничные условия учитываются следующим образом.
Для неоднородного уравнения Гельмгольца
записывается выражение оператора Лапласа
-ца8{х,у).
Подставляя значение оператора Лапласа во вторую формулу Грина,
получаем дополнительные условия краевой задачи второго рода для
неоднородного уравнения Гельмгольца:
68
Здесь / - полный ток через поверхность 5, обусловленный
сторонними источниками и вихревыми процессами.
Аналогично можно получить дополнительные условия краевых
задач второго рода и для других дифференциальных уравнений
электромагнитного поля.
Правильное задание граничных условий определяет результат
успешного решения краевой задачи. Граничные условия для
векторного или скалярного потенциалов магнитного поля задают
исходя из физических соображений, из результатов экспериментов, из
опыта предыдущих исследований или же полагаясь на интуицию.
3.5.2. Методы решения уравнений электромагнитного поля
Методы решения уравнений электромагнитного поля можно
разделить на две большие группы: аналитические и численные.
Аналитические методы применяются обычно для решения простейших
задач. Они позволяют рассчитывать электромагнитное поле в
однородных и изотропных средах. К преимуществам аналитических
методов относятся возможности подробно анализировать ход
решения задачи и полученные результаты, отыскивать возможные
ошибки в решении. К наиболее распространенным аналитическим
методам относятся метод разделения переменных (метод Фурье) [93],
метод конформных отображений [16,32,142], метод Гринберга [27],
метод Ритца [15].
Для решения инженерных задач расчета электромагнитных
полей в электрических машинах применяются численные методы. Они
позволяют решать задачи для неоднородных и анизотропных сред с
учетом их нелинейности. К наиболее распространенным численным
методам относятся метод конечных элементов [29,87,182] и метод
конечных разностей [16,32,142]. Для расчета установившихся и
переходных режимов работы электрических машин широко
применяется также метод зубцовых контуров [97].
69
Метод разделения переменных (метод Фурье). В качестве примера
аналитических методов рассмотрим метод разделения переменных.
Основы метода проиллюстрируем примером решения задачи Дирихле
для уравнения Лапласа
(331)
в прямоугольной области (рис.3.5) при следующих
условиях:
А(х, у)х=0 = 0 ;
Ах’У)х=ь =0 •
граничных
(3.32)
Согласно методу Фурье
общее решение краевой
задачи
отыскивается в виде ряда Фурье:
Q0
А(х’У) = ^Ап(х’У)’
Л = 1
п - 0,1,2,3....
(333)
При этом члены ряда Фурье рассматриваются как
частные решения краевой задачи. Они отыскиваются в виде
произведения двух функций, каждая из которых является функцией
только одной из координат:
(334)
70
Подставляя предполагаемые частные решения (3.34) в исходное
дифференциальное уравнение Лапласа (3.31), получаем:
Разделим все члены последнего выражения на произведение
/л (х) <Рп (^) ;
(3.35)
Выражение (3.33) справедливо, если выполняются условия
(3.36)
1 d2<p„(y) _ 2
dy2 ’ "
где Лп - некоторая произвольная постоянная.
Итак, для каждого п исходное уравнение (3.35) распалось на два
независимых обыкновенных дифференциальных уравнения для
каждой из переменных в отдельности:
(3.37)
В результате решения систем обыкновенных дифференциальных
уравнений (3.37) при заданных граничных условиях, получаем общее
решение
(3.38)
71
где постоянные интегрирования
.пл . , пл
sm- — хах~ сп -а
. пл ,
sin хах
_____0
1л
О
. пл
sh— а
п
. пл
sin— хс[х .
О
С помощью метода разделения переменных можно решить
задачи по определению удельных проводимостей рассеяния в
прямоугольном или круглом пазу в случае бесконечно большой
магнитной проницаемости сердечника; по расчету удельной
проводимости воздушного зазора для односторонней зубчатости
сердечника и другие локальные задачи расчета электромагнитного
поля в электрических машинах.
Метод конечных элементов. В настоящее время это один из
самых распространенных методов расчета электромагнитных полей в
электрических машинах и других электротехнических и
электрофизических устройствах. В основу метода положен
вариационный метод Ритца [15]. Краевая задача решается путем
решения обратной вариационной задачи. В этом случае решение
уравнения Эйлера-Лагранжа отыскивается путем минимизации
соответствующего ему функционала [29,87,182]. В отличие от метода
Ритца, аппроксимация векторного потенциала в локальной области
делается не на базе граничных условий, а на базе неизвестных узловых
потенциалов сетки конечных элементов, на которую разбита
исследуемая область. Для упрощения системы нелинейных
алгебраических уравнений для неизвестных значений векторного
потенциала в узлах сетки конечных элементов аппроксимация
векторного потенциала внутри конечного элемента делается
максимально простой. Для этого применяют конечные элементы
максимально простой, чаще всего треугольной формы, а векторный
потенциал аппроксимируют полиномом первой степени относительно
текущих значений координат.
Рассмотрим основы метода конечных элементов на примере
решения уравнения Лапласа
^ = 0
ду1
(3.39)
72
для простейшего случая - треугольного элемента (рис.3.6) на
плоскости поперечного сечения машины.
Значение векторного потенциала магнитного поля внутри
треугольника представим в виде полинома первой степени вида:
А(х,у) = С1+С2х + С3у. (3.40)
Выразим значения потенциалов в узлах;
(3.41)
Найдем выражения коэффициентов С|,С2,С} уравнений (3.41):
73
- главный определитель системы (3.41);
Ут
Ci хт Xj ,
Г— у— X
Uy ,
С — X - — X-
j 1 •
Функционал, соответствующий уравнению Лапласа, имеет вид:
(3.42)
Экстремальное значение функционала соответствует выражениям
^ = о: ^ = о; ^4 = 0. <3.43,
Л1;- дА. <5'Лт
После подстановки в систему уравнений (3.43) значения векторного
потенциала она а результате преобразований приобретает вид:
74
dJ
dAt
dJ
dAi
dJ
dA
m _
(3.44)
m
Здесь Мд - матрица жесткости треугольника ;
О 1 А
Лд = — Д- площадь треугольника.
Рис.3.7. Фрагмент картины магнитного поля
асинхронного двигателя
75
В результате решения системы уравнений (3.44) получим
значения векторных потенциалов в узлах треугольника. Если
исследуемая область состоит из многих треугольников, то из условия
экстремума функционала во всей области и матрицы жесткости для
каждого треугольника можно получить систему алгебраических
уравнений для неизвестных значений векторного потенциала в узлах
сетки конечных элементов.
На рис.3.7. представлен фрагмент сетки треугольных элементов и
картина магнитных силовых линий, полученная в результате расчета
поля асинхронного двигателя методом конечных элементов.
Метод конечных элементов позволяет выполнять самые
разнообразные расчеты электромагнитных полей в электрических
машинах. С помощью этого метода можно учесть влияние насыщения
магнитной цепи и рассчитать магнитное поле с минимальным
количеством допущений.
Метод зубцовых контуров. Для детального исследования
электромагнитных переходных процессов в электрических машинах
требуется проводить расчет магнитной цепи всей машины, либо хотя
бы одной пары полюсов многократно, что дает данные о магнитном
состоянии машины в каждое анализируемое мгновение времени.
Использование для этой цели метода конечных элементов или метода
конечных разностей требует больших ресурсов памяти компьютера и
большого времени для решения задачи Коши. Поэтому для расчета
установившихся и переходных процессов в электрических машинах
находят применение комбинированные методы расчета,
характеризующиеся меньшим объемом вычислений.
Суть комбинированных методов состоит в том, что
электромагнитное поле в электрической машине в конечном итоге
рассчитывается на основе схемы замещения магнитной
цепи. Элементами схемы замещения магнитной цепи машины
являются источники магнитодвижущих сил и магнитные
сопротивления (или проводимости) участков воздушного зазора и
ферромагнитных участков статора и ротора. Магнитодвижущие силы
в схеме замещения определяются мгновенными значениями токов в
обмотках статора и ротора, пространственным распределением и
взаимным расположением этих обмоток. Величины магнитных
проводимостей участков воздушного зазора предварительно
определяются на основе решения уравнений электромагнитного поля с
помощью точных методов, таких, как метод конечных элементов,
метод конечных разностей и других. Величины магнитных
проводимостей ферромагнитных участков определяются либо также
на основе точных методов, либо на основе упрощенных методов,
например, по трубкам магнитного потока. В итоге расчет магнитного
76
поля с учетом насыщения стали сводится к решению уравнений
нелинейной магнитной цепи с помощью методов теории цепей, таких
как метод узловых потенциалов или метод контурных токов. Расчет,
как отмечалось, производится для каждого анализируемого
мгновения времени.
Одним из наиболее распространенных комбинированных
методов является метод зубцовых контуров [97]. В основу метода
положен тот факт, что МДС обмоток электрических машин с
ненасыщенной магнитной цепью имеет ступенчатый характер
пространственного распределения, что обусловлено зубцовым
строением сердечников. Величина МДС постоянна в каждой области
воздушного зазора, расположенной между осями соседних пазов. Эти
области воздушного зазора называют зубцовыми контурами. Исходя
из этого поверхности железа статора и ротора на каждом зубцовом
контуре считаются соответственно эквипотенциальными. Разность
скалярных потенциалов магнитного поля на поверхностях
сердечников статора и ротора в пределах каждого зубцового контура
считается постоянной и равной величине соответствующей МДС на
один зазор.
Исследования, проведенные в [97], показывают, что поверхности
зубцовых контуров допустимо считать эквипотенциальными и для
машин с насыщенной магнитной цепью. Это дает основание для
определения магнитных проводимостей воздушного зазора зубцовых
контуров в виде функций положения ротора относительно статора
независимо от величин МДС обмоток.
Расчет поля в воздушном зазоре зубцового контура выполняется
в соответствии с граничными условиями для скалярного потенциала
магнитного поля исходя из значений МДС первичной и вторичной
обмоток. По результатам расчета поля определяются магнитные
проводимости воздушного зазора. Магнитные проводимости
ферромагнитных участков определяются по трубкам магнитного
потока. В результате расчета магнитных проводимостей воздушного
зазора и ферромагнитных участков определяются параметры
магнитной цепи для данного положения ротора относительно статора.
Далее решаются уравнения схемы замещения нелинейной магнитной
цепи и определяются величины магнитных потоков в активном
пространстве машины.
При изменении мгновенных значений токов в обмотках машины
и (или) угла поворота ротора относительно статора расчет
повторяется. Причем, изменение токов влечет за собой изменение
только МДС, а изменение угла поворота ротора - изменение только
проводимостей воздушного зазора в схеме замещения магнитной цепи.
Таким образом, причинами изменения магнитных потоков могут быть
77
изменения либо МДС, либо проводимостей воздушного зазора, либо
совокупное действие этих факторов.
Точность метода зубцовых контуров достаточно высокая,
поскольку магнитное поле в воздушном зазоре рассчитывается на
основе точных методов. Порядок системы линейных алгебраических
уравнений значительно ниже, чем в методе конечных элементов или в
методе конечных разностей. Поэтому с помощью метода зубцовых
контуров успешно рассчитываются установившиеся режимы работы
асинхронных и синхронных машин [97]. Метод применяется также для
расчета переходных процессов в синхронных и асинхронных машинах
[64,65].
78
Глава четвертая
ПОТОКОСЦЕПЛЕНИЯ
И ЭЛЕКТРОДВИЖУЩИЕ СИЛЫ
ОБМОТОК
4.1. Фазная обмотка как элемент магнитосвязанной
электрической цепи
В наиболее общем случае
азная обмотка электрической
машины как элемент магнитосвязанной электрической цепи может
быть представлена схемой замещения, изображенной на рис. 4.1 ,а.
Рис. 4.1. Схема замещения обмотки как элемента
магнитносвязанной электрической цепи
б)
При указанных на рисунке положительных направлениях
величин переходные и установившиеся процессы в этой цепи
описываются уравнением
(4.1)
79
где Ui - напряжение источника питания обмотки i-й фазы;
Z, - ток фазной обмотки;
Rl - активное сопротивление обмотки;
Ei - полная ЭДС, индуцированная в обмотке магнитным полем
машины.
В соответствии с законом электромагнитной индукции полная
ЭДС обмотки определяется формулой
d^
(4-2)
где - полное потокосцепление фазной обмотки.
Отсюда уравнение (4.1) приобретает вид :
Ut = Ri Z, +
dP,
dt
(4.3)
По своему физическому смыслу потокосцепление представляет
количественную интегральную меру связи или же сцепления всех
витков обмотки (замкнутых пространственных контуров) с
распределенным в пространстве магнитным потоком
машины. По своему математическому смыслу потокосцепление
представляет собой величину, дифференцирование которой по
времени определяет ЭДС, индуцированную в обмотке магнитным
полем.
Магнитный поток распределен в активном пространстве
машины неравномерно, причем количественной мерой интенсивности
(плотности) магнитного потока в различных точках активного
пространства служит магнитная индукция. Поэтому в общем
случае потокосцепление обмотки определяется интегрированием
магнитной индукции в пределах площади, ограниченной замкнутыми
пространственными контурами витков обмотки.
В связи с волнообразным распределением магнитной индукции в
пространстве магнитные потоки имеют характер пространственных
волн, причем в машинах переменного тока эти волны перемешаются в
пространстве относительно обмоток машины. Поэтому в каждое
мгновение времени величина потокосцепления обмотки зависит не
только от амплитуды и формы волны магнитного потока, но и от
пространственного положения волны магнитного потока
относительно каждого из витков обмотки, от размеров их
пространственных контуров и количества витков.
80
Для упрощения анализа процессов электромагнитного
преобразования энергии полное потокосцепление каждой из обмоток
машины представляется в виде суммы двух составляющих - главного
потокосцепления и потокосцепления рассеяния:
i т
(4.4)
Соответственно полная ЭДС обмотки разделяется на две
составляющие - ЭДС от главного поля и ЭДС от поля рассеяния:
(4.5)
(4.6)
(4.7)
где Eim и - это ЭДС, наведенные в обмотке соответственно
главным магнитным потоком машины и потоком рассеяния обмотки.
Вводя допущение о линейности характеристики намагничивания
цепи, по которой циркулирует поток рассеяния обмотки, можно
выразить потокосцепление рассеяния в форме произведения тока в
обмотке Д- на постоянный коэффициент самоиндукции от потока
рассеяния (или же индуктивность рассеяния) Llo. данной обмотки :
(4.8)
Тогда дифференциальное уравнение (4.3) электрической цепи обмотки
приобретает вид:
(4-9)
где главная ЭДС Е 1т определяется формулой (4.6). Соответствующая
схема замещения электрической цепи обмотки показана на рис. 4.1 ,б.
В отличие от потока рассеяния сцепленный с фазной обмоткой
главный магнитный поток машины является результатом действия всех
ее фазных обмоток. Поэтому главную ЭДС фазной обмотки мы будем
определять в предположении, что в каждое мгновение времени в
машине существует распределенная вдоль воздушного зазора волна
результирующей МДС всех обмоток, которая вызывает
соответствующую пространственную волну магнитной индукции в
воздушном зазоре машины.
81
4.2. Потокосцепление и ЭДС витка фазной обмотки
Рассмотрим сначала математические выражения главного
потокосцепления и ЭДС одного витка фазной обмотки
идеализированной машины. Для этого воспользуемся объемной
схемой линейной развертки, изображенной на рис. 4.2,а. Дополним
допущения и условия, сформулированные в п.1.1, следующими:
• магнитное поле в пределах активного пространства машины
является плоскопараллельным, т. е. в любом поперечном
сечении машины в пределах ее активной длины картина поля
остается неизменной;
• пространственный контур витка представляет собой
прямоугольник, т. е. скос активных проводников отсутствует;
• линии магнитной индукции потока в зоне контура витка
прямолинейны и перпендикулярны поверхности,
ограниченной пространственным контуром витка.
При этих условиях можно записать в системе единиц СИ
следующие выражения мгновенных значений потокосцепления и
ЭДС витка:
хп2
Km = L \Bm(x)dx -, (4.10)
*nl
EBJn =----(4.Н)
at
- главное потокосцепление витка, Вб;
EB tn - ЭДС витка от главного потокосцепления, В;
/ - время, с;
х - аргумент линейной развертки вдоль полюсного
деления, отсчитываемый по распрямленной дуге
воздушного зазора от фиксированной точки “0”
на магнитопроводе, м;
5w(x) - функция распределения индукции главного
магнитного поля вдоль распрямленного
полюсного деления обмотки, Т;
хп1, Л'п2 - линейные координаты активных проводников
витка, м;
L - длина активной стороны витка, отсчитываемая
по оси вала, м.
82
б)
Хп1 Хт Хп2 X
Рис. 4.2. К определению главного потокосцепления и ЭДС витка
Формула (4.10) по существу определяет потокосцепление как
суммарное значение пронизывающего виток главного магнитного потока
с учетом его неравномерной плотности. При этом потокосцепление и
магнитная индукция при описании процессов в магнитной цепи
83
машины находятся между собой в тех же отношениях, что сила тока и
плотность тока при описании процессов в электрической цепи.
Неравномерность плотности тока в проводниках электрических цепей
машин нормального исполнения учитывается главным образом лишь
для описания эффекта вытеснения тока в роторе. В отличие от этого
учет неравномерной плотности магнитного потока (неравномерности
распределения магнитной индукции) в магнитопроводах лежит в
основе теории и анализа магнитных цепей не только специальных, но
и нормальных электрических машин.
Отметим, что на рис. 4.2 показан частный случай гармонического
распределения магнитной индукции вдоль полюсного деления. Однако
формула (4.10) справедлива и для более общего случая, а именно как
синусоидального, так и неси ну со дальнего закона распределения
магнитной индукции.
При анализе электромагнитных цепей с помощью приведенных
уравнений оказывается более удобным использовать не линейный (х),
а угловой аргумент линейной развертки (р, измеряемый в
электрических радианах. Формула связи этих аргументов имеет вид:
(4-12)
где D - средний диаметр окружности воздушного зазора
между статором и ротором, м;
z - число пар полюсов анализируемой обмотки.
В результате замены аргумента формула (4.10) приобретает вид:
B.Z77
^п2
- d<P ’
Р <®п1
где <рп| ~ —р Лн1 5 *^п2 = ^^хп2 ' угловые координаты активных
сторон витка. В дальнейшем будем выражать их (см. рис.4.2'б) через
угловую координату магнитной оси ср3 и угловой шаг витка гв:
где
(4.14)
84
На основе вышеизложенного можно записать следующие общие
(базовые) формулы для определения потокосцепления и ЭДС фазной
обмотки /-й фазы статора или ротора :
р. j ^п2.А
= х z («»/«>
2г"‘=^.,Л
(4.15)
<Рп1.к
\Bm((p)d<p
(4.16)
Здесь к - порядковый номер витка;
^п2.& ' угловые координаты активных сторон витка;
- количество последовательно соединенных
витков обмотки.
Подчеркнем, что базовые формулы (4.15) и (4.16) выражают
мгновенные значения потокосцепления и ЭДС. Их изменения во
времени могут быть обусловлены либо движением в пространстве
обмотки, либо изменением амплитуды, формы или пространственного
положения волны магнитной индукции. Поэтому эти формулы
представляют упрощенную запись более строгих выражений:
wt пт w, к (О
= Z= S ; (4.17)
*=' Рк^^.к(‘)
(4.18)
В дальнейшем мы будем использовать в основном упрощенную
форму записи выражений потокосцепления и ЭДС.
Базовые формулы приемлемы для определения потокосцеплений
и ЭДС различных по исполнению обмоток: сосредоточенных,
распределенных, с нормальным или укороченным шагом и др. при
различных формах волн пространственного распределения магнитной
индукции. Рассмотрим наиболее типичные частные случаи.
85
4.3. Потокосцепление и ЭДС сосредоточенной
обмотки с нормальным шагом
Все витки сосредоточенной обмотки работают в идентичных
магнитных условиях. Поэтому потокосцепление (*ЛП7) и ЭДС (Eim)
обмотки соответственно равны произведениям потокосцепления и
ЭДС витка на количество последовательно соединенных ее витков:
DLW^c
*i.m = ™i ^m=——L ; (4.19)
Ei.m = ~Wi J jk(^) dJ ; (4.20)
at 2zn at J
p \ 7
Здесь i = sa, sb,...,rc - индекс обозначения обмотки;
Vi.X и 9tl ’ угловые координаты ее активных сторон;
(pi - угловая координата магнитной оси обмотки;
г = 71 - нормальный угловой шаг обмотки.
Рассмотрим влияние параметров волны магнитного потока на
потокосцепление и ЭДС фазной обмотки. Пусть мгновенная
пространственная волна магнитной индукции главного магнитного
потока, являющаяся в общем случае периодической несинусоидальной
функцией, описывается рядом Фурье :
00
~ ^^^т.тахл cos(v^— (4-22)
v—1
где v - номер пространственной гармоники;
Bmmaxv- мгновенная амплитуда (модуль) v-й гармоники;
- мгновенная начальная фаза (аргумент) v-й
гармоники.
С течением времени значения амплитуд и начальных фаз
основной (v = 1) и высших (v > 1) пространственных гармоник
магнитной индукции могут изменяться, т. е.
Bm.max.v ~ ^v(0'
86
Поэтому будем иметь в виду, что формула (4.22) представляет
упрощенную запись выражения
00
COs(v^9 — £v(/)) • (4-23)
v=l
Тогда с учетом (4.19) и (4.22) мгновенные значения
потокосцепления обмотки определяются в результате интегрирования
следующими выражениями:
(4.24)
— $i.v & m.maxyty) cos^.v(0 ♦ (4-25)
3,v(0 = V ^(z) - £v(z) ; (4.26)
DLW;
tf
ZPV
(4.27)
Здесь V/ w v(z) -
^.v(0 -
Si.v
потокосцепление /*-й обмотки с v-й гармоникой
пространственной волны главного магнитного
потока;
угол смещения обмотки относительно v-й
пространственной гармоники главного
магнитного потока;
конструктивная постоянная, которая по своему
физическому смыслу представляет суммарную
площадь сцепления витков обмотки с v-й
пространственной гармоникой главного
магнитного потока.
Иными словами, потокосцепление обмотки с несинусоидальной
пространственной волной магнитного потока представляется в виде
суммы потокосцеплений этой обмотки со всеми гармоническими
составляющими волны потока.
В соответствии с (4.20) - (4.27) ЭДС обмотки также можно
представить в виде суммы ЭДС, вызванных изменением
потокосцеплений обмотки с различными гармониками
пространственной волны главного магнитного потока:
87
(4.28)
Как следует из (4.25) - (4.26), причинами изменения
потокосцепления обмотки с каждой из гармоник пространственной
волны потока и как следствие - индукции электродвижущей силы
могут быть различные факторы :
• изменение пространственного положения
обмотки, например, вследствие вращения ротора ( = var);
• изменение начальной фазы гармоники, например,
вследствие вращения магнитного поля машины ( £v(f) = var);
• изменение амплитуды гармоники
Эти факторы могут действовать совокупно или раздельно. При
раздельном действии они дают следующие составляющие ЭДС от
сцепления обмотки с у -й пространственной гармоникой потока:
m.max.v sin<5/.v
d(pi
l.V
dt
V
(4.29)
m.max.v
dt
(4.30)
z.m.v(0 . v COS <5; v
d И
u ° m.max.v
dt
(4.31)
отмеченных
факторов
результирующая ЭДС от сцепления обмотки с v-й пространственной
гармоникой магнитного потока представляет сумму
При
совместном
действии
i.m.v
i.m.v
i.m.v
'tfr
i.m.v •
(4.32)
Первую и вторую составляющие этой суммы называют
составляющими ЭДС вращения (движения), а третью составляющую -
трансформаторной ЭДС. Группируя составляющие ЭДС вращения,
получаем формулу
i.m.v
m.max.v
sin<?,. „ - cos 8, v
, v dt ' * dt
(4.33)
где
88
Рассмотрим особенности формирования основной составляющей
ЭДС, обусловленной сцеплением обмотки с основной
пространственной гармоникой магнитного потока. Эта ЭДС
определяется подстановкой в (4.33) значения v =1 :
Вщ.тах.\ sin
d8iA
dt
л л
- cos#,. ттахЛ
dt
(4.34)
^<.1 Vi Vtn •
Здесь ] - угол смещения магнитной оси обмотки
относительно основной гармоники пространственной волны
магнитного потока. Он характеризует (рис.4.3) взаимное
расположение пространственного контура обмотки и
пространственной волны магнитного потока как разность координат
магнитной оси обмотки и точки максимума (рт - основной
гармоники пространственной волны магнитной индукции.
Рис. 4.3. К определению ЭДС сосредоточенной обмотки
Трансформаторная ЭДС, как следует из формулы (4.34),
порождается изменением амплитуды волны магнитной индукции. При
фиксированном темпе изменения амплитуды волны во времени эта
ЭДС имеет экстремальные значения в случае совпадения точек
89
(4.35)
экстремума основной пространственной волны индукции с магнитной
осью обмотки, т. е. при = 0 и S^ = я.
ЭДС вращения порождается изменением угла смещения и при
фиксированном темпе его изменения во времени зависит от амплитуды
пространственной волны и величины угла смещения. При прочих
равных условиях ЭДС вращения достигает экстремумов при
<5/1 = ±я/2, т. е. при нулевых значениях потокосцепления обмотки.
Для появления ЭДС вращения безразлично, чем вызвано изменение во
времени угла смещения - вращением (движением) волны потока при
неподвижном состоянии обмотки, либо вращением обмотки
относительно неподвижной волны потока или одновременным
вращением обмотки и пространственной волны потока с различными
скоростями. Во всех случаях мгновенная частота индуктированной
ЭДС вращения будет равна, а амплитуда - пропорциональна скорости
изменения во времени угла смещения:
dSiX
dt
На рис. 4.3 показаны направления ЭДС, индуктированной в
проводниках обмотки в результате движения волны потока, либо
обмотки в направлениях, указанных стрелками. Направления ЭДС
определяются по известному из курса физики правилу правой руки.
Аналогичным образом из формул (4.33) в результате
подстановки значений v > 1 определяются и электродвижущие.£илы от
сцепления обмотки с высшими пространственными гармониками
магнитного потока.
Анализ гармонического состава результирующей ЭДС,
индуктированной в сосредоточенной обмотке с нормальным шагом
магнитным полем с несинусоидальной стационарной
пространственной волной магнитной индукции, вращающейся с
постоянной скоростью, показывает следующее. Соотношение основной
и высших гармоник временной функции Elrnfy оказывается
аналогичным соотношению основной и высших гармоник
пространственной функции Вт((р}. Поэтому для сосредоточенных
обмоток единственным средством улучшения гармонического состава
ЭДС является приближение к синусоиде формы пространственной
волны магнитного потока.
При конструировании электрических машин улучшение формы
ЭДС достигается также распределением активных проводников
обмоток вдоль полюсного деления и другими мерами,
обеспечивающими также улучшение пространственных функций
распределения МДС этих обмоток.
90
4.4» Потокосцепление и ЭДС распределенной
обмотки
Рассмотрим пример выполнения фазной обмотки в виде
распределенной катушечной группы, описанной в п. 1.4.
Рис. 4.4. К определению ЭДС распределенной обмотки
Группа состоит (рис. 4.4) из трех катушек ( q ~ 3 ) с полным
шагом (г = я) и одинаковым числом витков (И7/ = W{'=
W;'" = - W-. ).
' 3 '
Катушки соединены последовательно и сдвинуты в пространстве
относительно друг друга на угол у =
где
т - число фаз.
Обозначив угловые координаты магнитных осей катушек как (р\ ,(р" и
ср " , представим их в виде
9l = (Pi - У; 9" = 9i; (Pi- (Pi +У,
где (pi - координата магнитной оси распределенной обмотки.
91
Запишем выражения угловых координат активных катушечных
сторон:
Будем считать, что распределение индукции магнитного поля
вдоль полюсного деления по-прежнему описывается выражением
(4.22). Используя базовые формулы (4.15) и (4.19), можно записать
выражение потокосцепления распределенной обмотки как суммы
потокосцеплений трех катушек :
i.m
<P'il <Р"2
И? f ВМdtp + Jz^)dtp + W’"fBm(<p) dtp .
<Pi i i <Pt'i
(4.37)
Интегрируя выражение в указанных выше пределах,
получаем мгновенные значения потокосцепления распределенной
обмотки в виде суммы ее сцеплений с гармоническими составляющими
пространственной волны потока:
.m.v »
(4.38)
i.m.v
m.max.v
COS S'v + COS 3"v + COS <3f”
(4-39)
Здесь фигурируют углы смещения катушек относительно
пространственных гармоник магнитного потока:
<?', - S-= vtf"- (4.40)
Введем обобщенные углы смещения распределенной обмотки
относительно v-x пространственных гармоник магнитного потока по
соотношению
div = <% (4.41)
и представим выражения (4.40) в виде
d;v = d'V-v/ ; = = + (4.42)
В результате для распределенной обмотки получаем:
92
m.mux.v
.V
cos£IV;
(4.43)
1 + 2cosv/
(4.44)
Сравнивая полученный результат с формулой потокосцепления
сосредоточенной обмотки (4.25), видим, что формула
потокосцепления распределенной обмотки (4.43) отличается
дополнительным множителем, который имеет смысл коэффициента
распределения обмотки. Для трехкатушечной обмотки с указанными
выше параметрами коэффициент распределения выражается формулой
(4.44). Более общее выражение этого коэффициента представлено
ранее формулой (1.10).
При указанных выше параметрах трехфазной обмотки обе
формулы дают следующие значения коэффициентов распределения
соответственно для первой, третьей, пятой, седьмой и девятой
пространственных гармоник магнитной индукции:
£р1=0.960; ^з=0.667; £р5-0.217 ; kp 7 = -0.177 ; kp9 = -0.333.
Следовательно, в сравнении с сосредоточенной распределенная
обмотка обеспечивает не только уменьшение высших гармоник
пространственных функций распределения МДС, но и значительное
снижение влияния высших пространственных гармоник магнитной
индукции на потокосцепление обмотки. Соответственно снижается
влияние высших пространственных гармоник и на ЭДС
распределенной обмотки :
р cin Л ллсХ т.таху
“т.тах.\ , COSdz-v
at at
(4.45)
Это подтверждается сравнением формул (4.45) и (4.33).
Дальнейшее снижение влияния высших пространственных
гармоник достигается за счет укорочения шага обмоток. При анализе
не только МДС, но также потокосцеплений и ЭДС обмотку с
укороченным шагом у - рт целесообразно привести к эквивалентной
распределенной обмотке с полным шагом, используя коэффициент
укорочения шага kyv.
93
4.5. Итоговые выражения
На основе вышеизложенного приведем обобщающие формулы,
справедливые для определения потокосцеплений и ЭДС фазных
сосредоточенных и распределенных обмоток с полным и укороченным
шагом при несинусоидальном распределении индукции магнитного
поля, описываемым выражением (4.22):
cos£
(4.46)
i.m.v
Ьэфф.у ^m.max.v
(4.47)
Здесь Si эфф.у - эффективная площадь сцепления
пространственного контура z-й обмотки
2
с v-й гармоникой волны магнитного потока, м ;
8lv ~ v(Pi -£у-угол смещения z-й обмотки
относительно v-й гармоники пространственной
волны магнитного потока, эл. рад;
Qi v - амплитуда v-й гармоники пространственной
обмоточной функции, задающей распределение
МДС обмотки вдоль воздушного зазора.
В соответствии с приведенными ранее итоговыми формулами
(1.13)-(1.16):
I.V
. V7T
sin-—- ,
W , , = к W
ГГ !.эфф.У ^OO.V r I ’
94
y.v Sin
В итоговых выражениях потокосцеплений и ЭДС можно
выделить две группы факторов. Первая группа имеет смысл
конструктивных констант, а вторая - характеристик режима работы
машины.
Первая группа. Обобщенной количественной характеристикой
первой группы является ансамбль эффективных площадей (${ЭффЛ1,
у = 1,...,оо) сцепления пространственных контуров обмотки с
пространственными гармониками индукции магнитного поля. Сюда
входят линейные размеры активной части машины (Z), L) и
параметры обмотки (Wi9 zp, кр ку v). Обобщенной характеристикой
последних является гармонический состав (или же ансамбль амплитуд
пространственных гармоник) обмоточной функции (Q/ v, v = l,...,co)
обмотки. Именно он порождает ансамбль эффективных площадей
$1.эфф.у- Поэтому гармонический состав обмоточной функции играет
определяющую роль с одной стороны, в характере распределения МДС
обмотки вдоль воздушного зазора, а с другой - в обеспечении
фильтрующих свойств обмотки как источника ЭДС по отношению к
высшим пространственным гармоникам магнитного поля,
порождающего эту ЭДС.
В качестве примера рассмотрим свойства идеальной синусной
обмотки. Ее обмоточная функция содержит лишь одну, основную
гармонику, а для всех т>1 значения (^ффу —$• Такая обмотка
обеспечивает, с одной стороны, синусоидальное пространственное
распределение своей МДС, а с другой - полностью нейтрализует
влияние высших пространственных гармоник магнитного поля в
механизме формирования своей ЭДС. Заметим, что высшие
пространственные гармоники поля могут возникнуть, например,
вследствие несинусоидального распределения МДС других обмоток
машины, неравномерности воздушного зазора, насыщения участков
магнитной цепи и др. Математически избирательные свойства
синусной обмотки выражаются тем, что в соответствии с формулой
(4.49) ее эффективные площади сцепления со всеми высшими
гармониками поля равны нулю (для всех v > 1 значения = О
так как 01эфф г =0).
95
Из формул (4.46) - (4.49) следует возможность построения
синусной или же гармонической модели обмотки. В
такой модели любая сосредоточенная либо распределенная обмотка
машины представляется совокупностью последовательно соединенных
синусных обмоток, каждая из которых формирует одну
пространственную гармонику МДС, соответствующую своему
полюсному делению и сцеплена с соответствующей пространственной
гармоникой индукции магнитного поля.
Вторая группа характеризуется двумя факторами, которые могут
претерпевать количественные изменения в процессе работы
электрической машины. В их числе
• гармонический состав (или же ансамбль амплитуд
пространственных гармоник) функции распределения индукции
магнитного поля (Вт тах v, у = 1,...,со) ;
• углы смещения обмотки относительно пространственных
гармоник поля v = 1,...,qo).
Проявление этих факторов зависит не только от характера режимов
работы машины, но и от особенностей конструкции и характеристик
ее активных материалов.
В заключение отметим следующее. При конструировании
электрических машин переменного тока можно выделить два
различающихся концептуальных подхода, которые условно назовем
синусоидальным и несинусоидальным. Первый подход ставит задачей
максимально возможное приближение к синусоиде пространственных
функций распределения МДС, магнитной индукции и соответственно -
временных графиков ЭДС и токов в обмотках машины. Такой подход
оправдан и эффективен с позиций обеспечения электромагнитной
совместимости и высокого качества генерирования, передачи и
потребления электроэнергии в тех условиях, когда электрические
машины-генераторы и электрические двигатели вместе с другими
потребителями электроэнергии непосредственно подключены к оби!ей
электрической сети синусоидального переменного тока.
В связи с непрерывным развитием электротехнического и
электронного оборудования . автоматизированных производств,
транспорта, бытовой техники и ужесточением проблем
энергосбережения существенно возрастает доля регулируемого
электропривода, обслуживающего эти и другие сферы. В таких
условиях электрические двигатели, а иногда и генераторы (например,
генераторы ветроэнергетичесих электростанций) подключаются к
общей электрической сети не непосредственно, а через управляемые
полупроводниковые преобразовательные агрегаты. Здесь требования
электромагнитной совместимости в сети предъявляются уже не к
электрическим машинам, а к связывающим их с сетью
96
преобразовательным агрегатам. Одновременно возникает проблема
совместимости электрических машин с полупроводниковыми
преобразовательными агрегатами, представляющими, как правило
импульсные устройства с несинусоидальными напряжениями и
токами.
В этих условиях становится рациональным переход к более
широкому использованию не синусоидальной концепции
конструирования электрических машин. Здесь задача
конструирования заключается уже не в борьбе с высшими
гармониками, а в целенаправленном формировании таких условий
появления высших гармонических составляющих пространственных
функций распределения МДС, магнитной индукции и временных
графиков ЭДС и токов в обмотках машины, при которых оказывается
возможным их полезное использование для улучшения характеристик
машины, а также для улучшения ее совместимости с импульсным
полупроводниковым преобразовательным агрегатом. В качестве
примера можно привести вентильно-индукторные двигатели, удельные
массо- и весогабаритные, а также энергетические показатели которых
превышают показатели традиционных машин переменного тока
нормального исполнения [24,42]. __
В свете сказанного подчеркнем, что приведенные выше
обобщающие формулы носят общий, объективный характер и
поэтому пригодны для использования в рамках как синусоидальной,
так и несинусоидальной концепции. Подтверждением этому служит и
последующий анализ механических сил электрической машины.
97
Глава пятая
ВОПРОСЫ ЭЛЕКТРОМЕХАНИКИ.
МЕХАНИЧЕСКИЕ СИЛЫ ЭЛЕКТРИЧЕСКОЙ
МАШИНЫ ПЕРЕМЕННОГО ТОКА
5.1. Исходные положения. Электромагнитный
момент витка
Принцип действия электромагнитной электрической машины
как электромеханического преобразователя энергии основан на
действующих одновременно двух законах электричества и магнетизма
- законе электромагнитной индукции и законе электромеханического
взаимодействия тока в проводнике и магнитного поля. Первый закон
определяет электродвижущие, а второй - механические
(электромагнитомеханические) силы электрической машины.
Также, как и для математических выражений электродвижущей
силы, для получения обобщающих формул механической силы и
вращающего электромагнитного момента машины целесообразно
сначала рассмотреть выражение механической силы, обеспечиваемой
одним витком обмотки статора или ротора машины. С этой
целью обратимся к объемной схеме линейной развертки,
изображенной на рис. 5.1. Анализ механических усилий произведем
при тех же условиях и допущениях, что и анализ ЭДС. Положительные
направления механических сил, потока магнитной индукции и
электрических токов в проводниках витка выберем совпадающими с
положительными направлениями соответствующих осей - Ox, ОВ и 01.
98
б)
•^nl -^в Хт Хп2 X
Рис. 5.1.К определению механической силы витка
Механическая сила, воздействующая на проводник с током,
находящийся в плоскопараллельном магнитном поле и
99
расположенный перпендикулярно силовым магнитным линиям поля,
определяется законом Ампера следующим образом:
(5-1)
где Fu ~ сила, воздействующая на проводник с током, Н;
Вп - магнитная индукция в позиции размещения проводника, Т;
1п - сила тока в проводнике, А;
L - активная длина проводника, м.
Направление действия силы определяется известным из курса
физики правилом левой руки .
Механическая сила FB, воздействующая на виток, равна сумме
сил Fn j и Гп 2, воздействующих на его активные проводники :
1 Лт ] 7П j L ;
2 ^п2 Ai2 '
(5.2)
Здесь Вп[-Вт{х)
Л-^ХП1
9
значения индукции
главного магнитного поля в позициях размещения активных
проводников витка.
В примере, показанном на рис. 5.1, поток магнитной индукции в
позиции правого активного проводника витка и протекающий по нему
электрический ток совпадают с выбранными положительными
направлениями этих величин (Вп2 > 0 , /П2 > ® )» и поэтому усилие
/?п2>0- Для левого активного проводника значения
ВП1 <0 , 7П[ <0 , и поэтому их произведение также положительно
(Fnl>0). Следовательно, в данном примере силы Fn| и Fn2
действуют в одном и том же направлении.
Введем обобщенную характеристику токов проводников - ток
витка 7П по соотношению
о
7В — 7п2 — -7П1 • (5.4)
В результате из выражений (5.2) - (5.4) получим формулу силы,
воздействующей на виток с током :
100
Виток вместе с другими витками обмотки укреплен на активной
части машины (статоре либо роторе), и поэтому данное усилие
передается на ее соответствующую часть. В этом смысле формула (5.5)
определяет электромагнитомеханическую силу витка с током (или же
кратко - механическую силу витка).
Переходя от линейного (л) к угловому аргументу развертки (#>) и
учитывая средний диаметр окружности воздушного зазора (О),
получаем базовую формулу электромагнитного вращающего момента
машины, возникающего в результате действия одного витка (момента
одного витка) обмотки:
(5.6)
где <ОП1 =<г’в-Г/4; «9п2=«’в + Г/
Здесь угловые координаты активных сторон $>п| и ^?п2 витка
выражены через координату его магнитной оси <рв и полюсное
деление тв.
5.2. Электромагнитный момент одной фазы
На основе вышеизложенного можно записать следующую общую
(базовую) формулу для определения электромагнитного вращающего
момента машины, возникающего в результате действия тока одной
(i-й) фазы обмотки статора или ротора (кратко назовем эту величину
моментом фазы)'.
k=l
k=l
Здесь Ц
к
ток /-й фазы;
порядковый номер витка фазной обмотки;
Фпкк " угловые координаты активных сторон витка;
Ж
количество последовательно соединенных
витков обмотки.
Итак, момент одной фазы определяется как сумма моментов всех
витков фазной обмотки.
101
5.3. Электромагнитный момент многофазной машины
Аналогичным образом можно определить электромагнитный
момент m-фазной обмотки статора или ротора как сумму фазных
моментов этой обмотки:
w DZL w г / \ / \1
Т BmyPn2.ik)~ ^myPn\.ik) » (5.8)
i=l Z <=! <=1
где i = 1,2,...,?n - индекс номера фазной обмотки;
Vnl.ik ‘ угловые координаты активных сторон к-о
витка i-й фазы;
Ц - ток i-й фазы.
Для определения вращающего момента, воздействующего на
ротор машины (Л/г) достаточно в формуле (5.8) учесть действие всех
обмоток, расположенных на роторе. При учете в этой формуле
действия всех обмоток, расположенных только на статоре, получаем
момент, воздействующий на статор машины (М s). Эти два момента
равны по величине и противоположны по направлению. При учете
действия всех обмоток (и статора и ротора) машины формула (5.8)
дает результат М — 0.
Итак, формула (5.8) при оговоренных условиях представляет
искомое базовое выражение электромагнитного момента машины :
М = МГ.
(5-9)
Выражения (5.7) и (5.8) справедливы для симметричных и
несимметричных, сосредоточенных и распределенных /л-фазных
обмоток с полным и укороченным шагом при синусоидальном и
несинусоидальном распределении индукции магнитного поля.
Для учета влияния высших пространственных гармоник поля
при определении момента также, как и при определении ЭДС, удобно
использовать представление периодической функции мгновенного
пространственного распределения индукции поля рядом Фурье в
соответствии с (4.22). В этом случае формула (5.8) приобретает вид:
D L т 00 г / \ / V
Z /=1 А=1 v
(5.10)
102
Достоинством полученного обобщенного выражения
электромагнитного момента является его универсальность,
обстоятельный учет всех факторов формирования электромагнитного
момента и пригодность для исследования задачи методом
гармонического анализа.
5.4. Выражение электромагнитного момента через
токи и потокосцепления обмоток машины
Основным недостатком обобщенного выражения электромагнит-
ного момента (5.10) является его громоздкость. В связи с этим для
построения моделей используются более удобные для практического
использования выражения электромагнитного момента. Одним из
наиболее распространенных является выражение электромагнитного
момента через токи и потокосцепления обмоток машины.
Целесообразность такого варианта обусловлена следующими
обстоятельствами.
• В дифференциальных уравнениях равновесия электрических
цепей вида (4.3) фигурируют напряжения, токи и потокосцепления
обмоток машины. Здесь отсутствуют в явном виде выражения
магнитной индукции, входящие в исходную формулу
электромагнитного момента (в уравнениях равновесия электрических
цепей они скрыты в выражениях потокосцеплений). Поэтому логично
выразить момент через переменные состояния дифференциальных
уравнений электрических цепей, т. е. через токи и потокосцепления
обмоток машины.
• В соответствии со структурой формулы (5.10)
электромагнитный момент машины равен сумме моментов фаз
ротора. В свою очередь момент каждой фазы равен сумме моментов
витков фазной обмотки, зависящих от расположения ее активных
проводников. Необходимость учета пространственного положения
всех активных проводников многофазной обмотки (а она может быть
распределенной, с укороченным шагом и т. д.) обусловливает
громоздкость базовой формулы (5.10).
Аналогичная по физическому смыслу задача учета
пространственного положения всех активных проводников фазной
обмотки возникает и при определении ее потокосцепления. Принцип
рационального решения этой задачи заключается в том, что в
итоговых формулах потокосцеплений (L43) - (1-46) реальная
(распределенная, с укороченным шагом и т.д.) обмотка приводится к
эквивалентной сосредоточенной обмотке с полным тагом за счет
введения коэффициентов распределения и укорочения шага.
Благодаря этому положение всех активных проводников приведенной
ЮЗ
обмотки однозначно характеризуется обобщенной величиной
координатой ее магнитной оси (р^ Это значительно упрощает
итоговые формулы потокосцеплении и облегчает их использование в
качестве “рабочих” вариантов определения потокосцеплений в
уравнениях модели машины.
Отсюда очевидно, что выражение электромагнитного момента
через поткосцепления позволяет избежать вторичного выполнения
процедуры приведения обмоток при выводе рабочих вариантов
формулы электромагнитного момента.
Вместе с тем выражение электромагнитного момента через
потокосцепления имеет ряд важных особенностей. Для рассмотрения
сути данного вопроса сопоставим элементарные выражения
потокосцепления витка (4.13) и его электромагнитного его момента
(5.6) :
Рп2
К.т=^ \в (<p)d<p ,
2z J
Р %T1
мв = ^-[Вт(_<рп2)-Вт(<рп1)].
(5.11)
(5-12)
Физический смысл этих выражений иллюстрирует рис. 5.1,6. Обратим
внимание на то, что как математическая величина, потокосцепление
пропорционально определенному интегралу функции распределения
магнитной индукции Вт[(р} в пределах, определяемых позициями
активных проводников витка (рп । и <рп2. В то же время
электромагнитный момент определяется не интегралом функции
Вт(<р) , а разностью ее значений Вц2 и Вп] на границах интервала
интегрирования. Поэтому при подстановке потокосцепления в
формулу электромагнитного момента (5.12) должна быть
предусмотрена математическая операция, позволяющая восстановить
из интеграла (5.11) значения подынтегральной функции В(<р} на
границах интервала ее интегрирования. В математике такая задача
решается дифференцированием аналитического выражения
определенного интеграла по его пределам. Воспользуемся этим
методом.
Поскольку позиции активных проводников ^П1 - (ръ - тв/2;
^п2 = + гв/^ связаны между собой шагом витка тв, то для
дифференцирования по пределам будем использовать обобщенный
параметр позиции витка - координату его магнитной оси (рв. Найдем
104
частную производную определенного интеграла (5.11) по
обобщенному параметру (рв:
- вт(Рп1)].
(5-13)
Разрешая уравнение (5.13) относительно выражения в квадратных
скобках и производя его подстановку в формулу момента (5.12),
получаем искомое базовое выражение электромагнитного момента
через ток и потокосцепление вихка :
дТ
М ~z I
1V1B ^рлВ ~
д<рв
(5-14)
Отсюда следует важный вывод: в общем случае электромагнитный
момент витка с током в магнитном поле выражается через
потокосцепление не в конечной, а в дифференциальной
форме.
С точки зрения аналитического исследования выражений
электромагнитного момента весьма полезным свойством машины
является принципиально периодический характер мгновенной
пространственной функции распределения магнитной индукции вдоль
полюсных делений. Используя описание этой функции в общем виде
рядом Фурье
00
= ^^m.max.v COs(v^> — , (5.15)
v=l
получаем удобные для аналитического исследования формулы
электромагнитного момента витка, потокосцепления и его частной
производной по углу <рв :
Вщ.тах.у ^b.v > (5.16)
m.max.v COS <5^ ,
(5-17)
В m.max.v ^b.v (5-18)
Здесь 8B v - v - углы смещения витка;
105
v m v - составляющие момента и поткосцепления
витка, вызванные пространственными
гармониками распределения магнитной
индукции главного поля.
Соответственно выражения электромагнитных момента одной
фазы и многофазной обмотки имеют вид:
~ 52 ^в.к ~ %р Л
Л'=1
т т
M = 2Mi = zPlLli
1=1 1=1
dpi
с * i.m
d<pi
(5.19)
(5.20)
Входящая в эти формулы частная производная потокосцепления
по углу определяется выражением
~ IE ~ ~ V ^1эффл' Bm.max.v s'n $i.v
v—1 rj v=l
(5.21)
где параметр
1.эффл>
определяется формулой (4.49).
Рассмотрим характерные частные случаи, раскрывающие
влияние пространственных гармоник поля на электромагнитный
момент. Сначала проанализируем влияние основной гармоники поля.
Виток в поле с гармонической волной магнитной индукции. Пусть
(рис. 5.2,а) пространственная волна магнитной индукции не содержит
высших гармоник и описывается выражением
где
^т.тах COs(^> Фт}-
Тогда из формул (1.63) и (1.64) для v = 1 получаем
Мп = - М„ тах sin ;
Ь п.ггШЛ о 7
COS<JB ,
в.т
ь.т.тах
м
в.тих
sin
т.тах 01X1
ъ.т.тах
sin
т.тах *
•>
- угол смещения витка .
(5.22)
(5.23)
(5.24)
(5.25)
(5-26)
(5.27)
в
в
t
106
График зависимости потокосцепления от угла смещения приведен
на рис. 5.2,6. Здесь же показана зависимость от угла смещения и
электромагнитного момента витка (для случая /в >0). Как видно,
при отсутствии смещения магнитной оси витка относительно точки
максимума волны индукции (т.е. при JB - 0) потокосцепление витка
максимально, а его электромагнитный момент равен нулю.
а)
Рис. 5.2. Потокосцепление и электромагнитный момент витка
при синусоидальной волне магнитной индукции поля
При возникновении смещения (JB^0) возникает
электромагнитный момент, противодействующий этому смещению (на
рис. 5.2,а изображен случай, в котором JB<0). Электромагнитный
момент достигает экстремальных значений при ортогональных
смещениях (JB — ± тг/2), где потокосцепление витка равно нулю.
Момент обращается в ноль в двух точках (при <5В - 0 и при = я).
Одна из них является точкой устойчивого, а вторая - неустойчивого
положения витка с током в волнообразном магнитном поле. Точка
устойчивого положения определяется направлением тока в витке (на
рис, 5.2 показан случай, когда /в >0 и положение витка устойчиво
при <5В ~ 0).
107
Виток в поле с прямоугольной волной магнитной индукции. Для
оценки влияния высших пространственных гармоник поля на
электромагнитный момент и потокосцепление витка рассмотрим
второй характерный пример (рис. 5.3), в котором волна магнитной
индукции имеет прямоугольную форму. В этом случае амплитуды
высших пространственных гармоник поля обратно пропорциональны
их номерам, причем четные гармоники отсутствуют.
б)
Рис. 5.3. К оценке влияния формы волны магнитной индукции
поля на потокосцепление и электромагнитный момент витка
Пусть амплитудное значение прямоугольной волны будет
равным амплитуде гармонической волны предшествующего примера,
показанной здесь прерывистой линией. Сопоставление зависимостей
потокосцепления и момента витка от угла смещения позволяет
констатировать следующее.
• График зависимости потокосцепления от угла смещения витка
при прямоугольной волне магнитной индукции является не
гармоническим, а треугольным (кусочно-линейным), причем
максимальное значение потокосцепления возрастает в л/2 раз.
108
• График зависимости электромагнитного момента от угла
смещения является не гармоническим, а прямоугольным, по существу
повторяя график прямоугольной пространственной волны магнитной
индукции.
• При одном и том же максимальном значении магнитной
индукции (что может быть лимитировано, например условиями
насыщения магнитопровода машины) прямоугольная волна
магнитной индукции в сравнении с синусоидальной волной
обеспечивает при одном и том же значении тока витка повышенные
значения электромагнитного момента в широком диапазоне углов
смещения. Это обстоятельство является весьма важным с позиций
улучшения использования активных материалов и характеристик
машин на основе упомянутой ранее несинусоидальной концепции их
конструирования.
• Изменения потокосцепления, вызванные изменением угла
смещения, в случае прямоугольной волны магнитной индукции не
сопровождаются изменением электромагнитного момента (см.,
например, диапазон углов смещения 0 < 5В < тг). Этот пример
наглядно иллюстрирует положение о том, что по известному
конкретному значению тока и потокосцепления витка (обмотки) в
общем случае принципиально невозможно определить его
электромагнитный момент, так как в общем случае момент
выражается не через потокосцепление, а через его частную
производную по углу смещения в соответствии с формулами (5.13) и
(5.14). Именно постоянство частной производной потокосцепления по
углу в диапазоне углов 0<£в<7Г и л < <5В < 2л обеспечивает в
данном примере постоянные значения электромагнитного момента
несмотря на изменение потокосцепления.
Таким образом, форма пространственной волны индукции
магнитного поля оказывает существенное влияние на угловую
моментную характеристику машины.
5.5. Выражение электромагнитного момента через
токи и потокосцепления машины в конечной
форме
Гармонический анализ общих выражений (5.15) - (5.18)
позволяет получить выражение электромагнитного момента через
токи и потокосцепления обмоток не в дифференциальной, а в
конечной форме. Достигается это с помощью введения понятия
“ортогональное потокосцепление". Для определения и иллюстрации
удобства использования этого понятия сопоставим следующие
109
выражения электромагнитного момента /-й фазной обмотки, ее
потокосцепления и частной производной потокосцепления по углу:
~ ^в.к — %р Л
1=1
(5.28)
i.m.v $1.эфф.у $m.max.v COS<5Z_V
(5-29)
m.max.v
sinJz v
(5.30)
Воспользовавшись
cos(ct + ;r/2) = - sin a,
(5.30) в виде
известной тригонометрической формулой
запишем выражение частной производной
d<pi
COs(<5(-д, + Тг/2^. (5.31)
Учитывая структуру формулы (5.29), выделим в составе
выражения (5.31) переменную
i.opm.v
1.эффх m.max.v
(532)
По своему физическому смыслу данная величина представляет
собой такое потокосцепление рассматриваемой фазной обмотки с v-й
гармоникой магнитного поля, которое бы она имела в случае смещения ее
магнитной оси (по отношению к фактическому положению оси) на угол
л/2. Эту же величину можно квалифицировать и как потокосцепление
какой-либо другой, идентичной (по параметру $1Эффу) фазной
обмотки, смещенной в пространстве по отношению к
рассматриваемой на угол я/2. Поэтому условно назовем эту
величину ортогональным потокосцеплением обмотки в
отличие от ее фактического (собственного) потокосцепления,
определяемого выражением (5.29).
С учетом выражения (5.32) формула частной производной (5.30)
приобретает вид:
.opm.v •
(5.33)
НО
В результате получаем следующую формулу представления
момента одной фазы:
(5-34)
На рис. 5.4. представлены графики, поясняющие смысл понятия
ортогонального потокосцепления фазной обмотки с основной
гармоникой магнитного поля. Здесь ортогональное смещение обмотки
показано прерывистой линией, а ортогональное потокосцепление
характеризуется заштрихованным участком графика основной
гармоники пространственной волны магнитной индукции. Здесь же
показаны графики изменения собственного т и ортогонального
орт потокосцеплений обмотки с основной пространственной
гармоникой магнитного поля в зависимости от угла смещения
магнитной оси обмотки относительно максимума индукции поля.
Рис. 5.4. К определению понятия ортогонального
потокосцепления фазной обмотки
График зависимости электромагнитного момента М, от угла
смещения построен для случая постоянства тока в обмотке. Как видно,
график электромагнитного момента при постоянстве тока аналогичен
графику ортогонального потокосцепления, что следует также из
формулы (5.28).
Итак, введение понятия ортогонального потокосцепления
позволяет по отношению к каждой из гармоник магнитного поля
заменить дифференциальную форму выражения электромагнитного
момента (5.28) на конечную (5.34). Удобство использования такой
формы покажем на следующих примерах.
5.6. Электромагнитный момент двухфазной
обмотки
Предположим, что на роторе машины размещена симметричная
двухфазная обмотка (рис. 5.5), магнитные оси фаз которой
ортогональны между собой.
Рис. 5.5. Потокосцепления и электромагнитные силы
симметричной двухфазной обмотки
112
Пусть обмотка находится в магнитном поле с гармоническим
распределением индукции вдоль воздушного зазора, т.е. высшие
пространственные гармоники поля отсутствуют. Тогда выражения
электромагнитного момента, собственного и ортогонального
потокосцепления фаз обмотки имеют следующий вид.
Для фазы RD:
М — 7 7 Vх
rd zр 1 rd rd.opm ’
^rd.m ~ ^rd/эфф ^m.max COS <5,.^ ,
^rd.opm ~ Srd.-эфф ^m.max
где 8rd — (prj — (pm .
Для фазы RQ:
rq “ p л rq rq.oprn >
rq.m
rq.opm
cos Л
m.tnax >
гц.эфф ит.пш
где 8r(^ (prg (pm.
(535)
(536)
(537)
(538)
(539)
(5.40)
(5.41)
(5.42)
Здесь rd, rq - индексы фаз двухфазной обмотки;
zp - число пар полюсов;
(pr фГд - угловые координаты магнитных осей фаз;
Ird ’ hq _ мгновенные токи фазных обмоток;
$гЛ.эфф' Srq.-эфф " эффективные площади сцепления фазных
обмоток с главным магнитным потоком;
Вт тах> Фт~ амплитуда и точка максимума пространственной
волны индукции главного магнитного потока.
Результирующий электромагнитный момент, воздействующий на
ротор машины, определяется суммой моментов фаз обмотки ротора :
М Мrd + Mrq
[jq/ л. j in
рУ1 rd т rd. орт * rq 1 rq. орт
(5.43)
Как видно, электромагнитный момент каждой из фаз
определяется в форме произведения фазного тока на ортогональное
потокосцепление фазной обмотки. Учтем, что в силу симметрии
обмотки
113
гс1.эфф ^гд.эфф
г.эфф ’
(5.44)
(5.45)
Тогда из сопоставления выражений (5.36)-(5.37) и (5.40)-(5.41), а
также соответствующих зависимостей рис. 5.5 становится очевидным,
что для каждой из фазных обмоток ее ортогональное потокосцепление
может быть выражено через собственное потокосцепление другой
фазной обмотки:
(5-46)
Поэтому моменты фаз выражаются следующим образом:
as ~ 7 j w
lvlrd £p1rd Trq.m »
(5-47)
(5-48)
Отсюда получаем удобную для практического использования
формулу результирующего электромагнитного момента,
воздействующего на ротор машины:
(5-49)
При построении моделей можно использовать и альтернативную
формулу электромагнитного момента
M = Zp(lrd4'rq-IfqTrd\ (5.49,а)
в которой фигурируют не главные, а полные потокосцепления
обмоток:
Л rq * rq.m ' rq.a rq.m ’ ^ra^rq^
где Lra- индуктивность рассеяния фазных обмоток.
Для формального доказательства тождественности правых
частей уравнений (5.49) и (5.49,а) достаточно подставить в (5.49,а)
приведенные выше выражения полных потокосцеплений и произвести
соответствующие сокращения. Физическое объяснение
тождественности формул момента можно получить на основе
материалов п. 5.9 с использованием понятий собственного и
стороннего полей фазной обмотки.
114
Приведенные формулы описывают взаимодействие токов ротора
только с основной пространственной гармоникой магнитного поля. Учет
влияния высших пространственных гармоник поля на
электромагнитный момент машины может быть произведен по
рассмотренной выше методике в результате учета всех значимых
составляющих суммы (5.34).
В тех случаях, когда уравнения электромагнитных контуров
машины записываются в векторно-матричной форме, полученные
выражения электромагнитного момента машины целесообразно
представлять в виде скалярного произведения
алгебраических векторов-столбцов, составленных из мгновенных
значений токов и ортогональных либо собственных потокосцеплений
Тогда формулы момента двухфазной обмотки (5.43) и (5.49) в
развернутой матричной форме имеют вид :
rd.opm
(5.50)
М = zp
rq.opm
(5.51)
В компактной матричной форме те же формулы записываются
следующим образом:
Л/ ~ zplr • ^ГОрт ; (5.52)
М = 2р\Г.Ъ1Чгт. (5.53)
Матричная форма записи формулы (5.49,а) следующая :
М = z lr «В тг.
*
(5.54)
Здесь
(5.54,а)
- матрица преобразования собственных потокосцеплений двухфазной
обмотки в ее ортогональные потокосцепления. В геометрическом
смысле матрица (5.54) интерпретируется как матрица ортогонального
поворота вектора.
5.7. Электромагнитный момент трехфазной
обмотки
Пусть на роторе машины размещена симметричная трехфазная
обмотка, магнитные оси фаз которой расположены под углами 120
электрических градусов. Обмотка находится в магнитном поле с
гармоническим распределением индукции вдоль воздушного зазора.
Тогда для каждой из фаз этой обмотки можно записать следующие
выражения ее электромагнитного момента, собственного и
ортогонального потокосцепления.
Для фазы RA :
га “ р * га га.орт ’
га.т ~ ^га.эфф $ т.тах ^08 $га »
Т г а. орт *^га.эфф т.тах
&ra ““ Фга ~ Фт •
Для фазы RB :
М — 7 1 Ч*
1 rb ^p^rb 1 rb.opm ’
cos£r£ ;
rb.m
т.тах
Тrb.opm ^гЬ.эфф т.тах
&rb ~~ ФгЬ “ Фт
Для фазы RC:
гс “p*rc гс. орт ’
гс.т ~~ ^гс.эфф т.тах ^Os 3re ,
гс.орт ^гс.эфф ° т.тах
(5.55)
(5.56)
(5-57)
(5.58)
(5-59)
(5.60)
(5-61)
(5.62)
(5.63)
(5.64)
(5.65)
(5.66)
1
Результирующий электромагнитный момент трехфазной обмотки
Л/ — Мга 4" + мгс.
С учетом приведенных выше формул получаем
д/ — 7 (т us л. г if/ -ь J и/
1 рХ1 га 1 га.орт 1 rb * rb.opm л гс гс.орт
(5.67)
В силу симметрии обмотки
^га.эфф ^гЬ.эфф
(5.68)
116
<Prb <P га + 2я/3 ,
<Prc ^tprb^17^ .
Тогда для каждой из фазных обмоток ее ортогональное
потокосцепление может быть выражено через линейную комбинацию
собственных потокосцеплении других фазных обмоток :
(5-69)
Поэтому моменты фаз выражаются следующим образом :
(5.70)
Отсюда получаем следующую формулу результирующего
электромагнитного момента, воздействующего на ротор машины :
М =
rb.m
гс.т
га.т
(5.71)
Возможно
использование альтернативного варианта:
М = + + (5.71,а)
Так же, как (5.43), (5.49) и (5.49,а), формулы (5.67), (5.71) и (5.71,а)
описывают взаимодействие токов обмотки ротора только с основной
пространственной гармоникой магнитного поля. Учет влияния высших
пространственных гармоник поля на электромагнитный момент
трехфазной машины может быть также произведен в результате учета
всех значимых составляющих суммы (5.34).
Формулы электромагнитного момента трехфазной обмотки
(5.67) и (5.71) в развернутой матричной форме имеют вид :
117
rc.m
(5.72)
(5.73)
В компактной матричной форме те же формулы записываются
следующим образом :
м = zp if . ^орт (5.74)
Л/ - zp If . Bf . (5.75)
Альтернативная формула
М — Zp 1г • В3 .
(5.75,а)
(5.76)
Здесь
- матрица преобразования собственных потокосцеплений трехфазной
обмотки в ее ортогональные потокосцепления (матрица
ортогонального поворота).
5.8. Выражение электромагнитного момента в
моделях, использующих преобразование координат
В случае записи
электромагнитных контуров
преобразованных переменных
дифференциальных уравнений
трехфазной машины относительно
г.орт
118
с матрицей преобразования
(5.77)
формула электромагнитного момента (5.74) преобразуется следующим
образом. Вначале фигурирующие в ней векторы-столбцы фазных
переменных if и ^г.орт представляются в виде результатов
обратного преобразования новых переменных if и ^^рт с
матрицей обратного преобразования
(5.77,а)
Здесь Т - символ транспонирования матрицы.
Тогда формула (5.74) приобретает вид :
Из матричной алгебры известно, что действие матрицы на один
из сомножителей скалярного произведения эквивалентно действию
транспонированной матрицы на другой сомножитель. Поэтому можно
записать
Л/ z р
г. орт
Поскольку матрица обратного преобразования и
транспонированная матрица прямого преобразования связаны
приведенным выше соотношением (5.77,а), в результате получаем
формулу момента:
= (5.78)
Аналогичным образом преобразуются и формулы
электромагнитного момента (5.75) и (5.75,а):
М = Zp I? • B^G„„ (5.79)
М = zAGr .b£tg , (5.79,а)
119
Здесь Т =
df
rq.m
df
rq
r.m ’
векторы-столбцы преобразованных главных и полных
потокосцеплений соответственно;
0
0
(5.80)
0
0
преобразованная матрица ортогонального поворота.
Развернутые выражения электромагнитного момента трехфазной
симметричной машины через преобразованные токи и
потокосцепления обмотки ротора имеет вид:
rq.m
rq
9
М ~ ~z
(5.81)
(5.81,а)
При переходе к вращающейся системе координат получаем
М = zp I, •
Здесь
М = Zp I, . В3ТГ .
(5.82)
(5.82,а)
в3 = в£.
В развернутом виде
гут
либо
(5.83)
(5.83,а)
В литературе по математическому моделированию
электрических машин описываются и другие формы выражения
электромагнитного момента.
120
5.9. О выражении электромагнитного момента в
форме векторного произведения токов и
потокосцеплений
Среди различных форм выражения момента в учебной и научно-
технической литературе встречаются формулы, определяющие
электромагнитный момент трехфазной электрической машины в виде
Af = |z/,IxT, (5.84)
т.е. векторного произведения токов и потокосцеплений. По этому
поводу представляется уместным высказать некоторые оценки и
соображения.
В математической модели машины токи и потокосцепления
обмоток определяются решением дифференциальных уравнений
электромагнитных контуров. Для многофазных машин переменного
тока наиболее широко распространены матричная либо комплексная
формы записи уравнений, для каждой из которых существует
соответствующий математический аппарат. В первом случае для
описания многофазных систем напряжений, токов и потокосцеплений
используют алгебраические векторы (матрицы-столбцы, составленные
из мгновенных значений переменных), правила действия над
которыми определяет математический аппарат матричного
исчисления. Во втором случае - это комплексные числа, допустимые
операции с которыми определяет математический аппарат
комплексных чисел.
В обоих этих случаях формула (5.84), представляющая момент в
виде векторного произведения, несовместима с уравнениями
электромагнитных контуров, поскольку ни для алгебраических
векторов-столбцов, ни для комплексных чисел операция векторного
произведения в их математических аппаратах не определена.
Формула (5.84) совместима только с такими уравнениями
электромагнитных контуров, в которых объектами математических
операций (их операндами) являются геометрические векторы. Для этих
объектов математическая операция векторного произведения вполне,
определена. Однако здесь следовало бы применять более корректную
форму записи формулы момента, а именно :
M = (5.85)
В сравнении с (5.84) формула (5.85) подчеркивает тот
существенный факт, что результат векторного произведения
121
принадлежит к тому же классу математических объектов, что и
векторы-сомножители. Иными словами, выражение
электромагнитного момента в виде векторного произведения дает нам
не скалярную величину Л/, а геометрический вектор М,
ортогональный геометрическим векторам-сомножителям I и У.
Представление электромагнитного момента в виде вектора в
принципе вполне правомочно, но в данном случае вызывает ряд
вопросов и проблем. Они возникают как с позиций обеспечения
однородности математического аппарата модели, описывающего
процессы в электромагнитной и механической системах машины, так
и с позиций адекватной и непротиворечивой геометрической
интерпретации математических объектов модели.
Во-первых, с позиций однородности математического аппарата,
представление электромагнитного момента в виде геометрического
вектора требует записи уравнений механического движения в
соответствующей векторной форме. В этом случае все движущие и
тормозящие механические усилия (моменты) и скорости движения
элементов механической системы должны также представляться
геометрическими векторами.
Поскольку скорость вращения ротора входит в
дифференциальные уравнения электромагнитных контуров, то и эти
уравнения также должны представляться в геометрической векторной
форме. Таковы вкратце требования совместимости и однородности
математического аппарата модели.
Во-вторых, в теории переходных процессов в электрических
машинах токи и потокосцепления обмоток традиционно
интерпретируются геометрическими векторами, как правило,
совмещенными с плоскостью поперечного сечения машины.
Следовательно, их векторное произведение в соответствии с формулой
(5.85) дает электромагнитный момент в виде геометрического вектора
(рис. 5.6), направленного ортогонально к плоскости поперечного
сечения машины, т. е. действующего вдоль ее вала [47].
В таком случае в уравнениях механического движения момент
сопротивления механизма и скорость вращения ротора также должны
интерпретироваться геометрическими векторами, направленными
вдоль вала машины. Такая аксиальная геометрическая интерпретация
механических усилий и скоростей формально приемлема. Однако она
вряд ли может быть признана наглядной, поскольку непосредственно
не демонстрирует фактических направлений действия касательных
электромагнитных сил и вращательного движения ротора.
122
Рис. 5.6. Геометрическая интерпретация выражения
электромагнитного момента в форме векторного
произведения токов и потокосцеплений
Следует, однако, подчеркнуть, что геометрическая интерпрета-
ция, более адекватная фактическому направлению действия усилий,
скоростей и перемещений, может быть получена и в форме
векторного произведения.
Рис. 5.7. Касательные электромагнитные силы,
определяющие вращающий момент машины
123
Это иллюстрирует рис. 5.7, где показаны касательные
электромагнитные механические силы, воздействующие на активные
проводники витка (либо сосредоточенной фазной обмотки) с полным
шагом. В такой интерпретации сомножителями векторного
произведения, выражающего электромагнитное усилие, являются
вектор тока и вектор магнитной индукции. Причем, для получения
фактического касательного усилия векторы-сомножители в формуле
электромагнитного момента должны отражать фактические
направления потока магнитной индукции и электрического тока в
проводниках обмотки. Следовательно, вектор магнитной индукции
плоскопараллельного поля должен быть совмещен с плоскостью
поперечного сечения машины, а вектор тока - с расположением
активных проводников, т. е. расположен перпендикулярно к плоскости
ее поперечного сечения.
Однако такая геометрическая интерпретация вектора токов
противоречит традиционной геометрической интерпретации
операндов уравнений электромагнитных контуров, где и
потокосцепления и токи изображаются векторами, совмещенными с
плоскостью поперечного сечения машины. Поэтому требуется
пересмотр традиционной концепции, устраняющий данное
противоречие. Пересмотр концепции затрагивает и математическое
выражение переменных и вид связывающих их уравнений. Логическим
завершением отмеченной адекватной геометрической концепции
является модель машины, непосредственно использующая векторные
уравнения электромагнитного поля (см. гл.З). Такие модели являются
достаточно сложными, однако обладают наиболее широкими
возможностями и позволяют описывать процессы в нормальных и
специальных электрических машинах, в том числе с числом степеней
свободы механической системы, превышающим единицу. И в этих
условиях применение моделей, непосредственно использующих
уравнения электромагнитного поля, безусловно оправдано.
Что же касается идеализированной круговой машины, то ее
механическая система имеет лишь одну степень свободы, отражающую
возможность ротора совершать лишь вращательное движение.
Поэтому для математического описания касательных усилий и
скоростей в уравнениях механического движения вполне достаточно
использование одномерных (скалярных) величин, а не трехмерных
пространственных векторов, порождаемых формулой (5.85). В этих
условиях определяемый формулой (5.85) трехмерный математический
объект М оказывается не только неадекватно геометрически
интерпретируемым, но и избыточным по числу координат.
Вышеизложенное позволяет заключить, что выражение
электромагнитного момента как векторного произведения токов и
124
потокосцеплений в виде (5.84) непосредственно не совместимо ни с
матричными и комплексными уравнениями электромагнитных цепей,
ни со скалярными уравнениями движения механической системы.
Использование же его в системе с векторными уравнениями
электромагнитных и кинематической цепей не отвечает условию
наглядности геометрической интерпретации последних. Поэтому
применение такого выражения электромагнитного момента в рамках
единой законченной модели машины не оправдано ни с
математической, ни с геометрической, ни с методической точек зрения.
Аналогичный вывод может быть сделан и в отношении других,
эквивалентных формуле (5.84) выражений, в которых сомножителями
векторного произведения являются токи статора и ротора либо
потокосцепления статора и ротора, например :
М =
либо
.V ’
“ т
а также других аналогичных по форме выражений электромагнитного
момента, встречающихся в литературе.
В отличие от этого выражение электромагнитного момента как
скалярного произведения токов и ортогональных потокосцеплении.
машины, например, в виде (5.78) либо (5.82), лишено отмеченных
выше недостатков. Такое представление момента в виде скалярной
величины строго обосновано с физических и математических позиций,
не требует замены матричных уравнений электромагнитных цепей
машины и пересмотра традиционных концепций в части
геометрической интерпретации их переменных. Оно не требует также
неоправданного усложнения уравнений механической части для
машин с одной степенью свободы движения ротора.
Выражение электромагнитного момента в форме скалярного
произведения имеет ряд эквивалентных вариантов, которые
рассмотрены в гл. 10. Там же даны выражения электромагнитного
момента, совместимые
магнитных контуров и со скалярными уравнениями механического
движения.
комплексными уравнениями электро*
5.10. О взаимодействии электрических токов в
обмотках и магнитного поля машины
Проведенный выше анализ электромагнитомеханического
взаимодействия токов в обмотках и магнитного поля машины полезно
дополнить в том смысле, что каждая обмотка с током является не
только объектом механического воздействия поля, но и одним из
125
факторов создания этого поля. Именно в этом заключается
взаимодействие обмотки с током и магнитного поля. Для пояснения
особенностей механизма такого взаимодействия проанализируем
следующие примеры.
Пример 1. Рассмотрим идеализированную неявнополюсную
машину переменного тока, на статоре и роторе которой расположены
трехфазные симметричные сосредоточенные обмотки. Взаимное
расположение их фазных компонент SA, SB, SC и RA, RB, RC показано
на рис. 5.8. Точки расположения магнитных осей этих обмоток
обозначены как <psa, (psb , q>sc и <pra, q>rb , <prc.
Статор
sc
<PSb <PSc
Рис. 5.8. Собственное магнитное поле фазной обмотки
Проанализируем сначала следующую ситуацию. Пусть
электрические цепи всех фазных обмоток (за исключением RA)
разомкнуты, а в обмотку RA от внешнего источника питания задается
ток 1га. Под действием этого тока в машине возбуждается магнитное
поле. Поскольку другие обмотки в создании этого поля не участвуют,
назовем его собственны м полем обмотки RA,
В каждое мгновение времени индукция собственного
магнитного поля обмотки RA в воздушном зазоре машины имеет вид
126
периодической пространственной волны, основная гармоника
которой показана на рис. 5.8. Амплитуда Вт тах основной
пространственной гармоники магнитной индукции собственного поля
обмотки RA пропорциональна мгновенному значению электрического
тока обмотки 1га, а точка максимума (рт лежит на магнитной оси
обмотки (<рт — <рга). Следовательно, углы смещения фазных обмоток
ротора относительно основной гармоники собственного поля обмотки
RA равны:
&га “ Фга ~ Фт ~ ® •>
5rb = <Prb ~<Рт = 2^/3 J (5 86>
&гс ~ Фгс ~ Фт ~ ~
Потокосцепления фазных обмоток ротора с основной
гармоникой собственного поля обмотки RA :
га.т
f cos 3 - 4*
rm.max ^ra rm.max ’
где
rm. max
rc.m
rm.max COS &rb
rm.max
m.max
COS#
г nt.max ’
rni.mux'
W В
г.эффл m.max
(5.87)
величина,
‘f'rb.m
представляющая собой потокосцепление обмотки RA с ^основной
гармоникой ее собственного магнитного поля. Как видно, эта
величина зависит от линейных размеров, эффективного числа витков
обмотки и пропорциональна величине максимума волны индукции, а
следовательно - электрического тока в обмотке.
Порождаемые основной гармоникой магнитного поля в
воздушном зазоре машины электромагнитные моменты фаз
симметричной трехфазной обмотки ротора определяются в общем
случае формулами:
Мга =
Мгь
(5.88)
127
С учетом выражений (5.87) получаем:
Mra=Q- Mrh=Q- Mrc=0.
С физической точки зрения очевидно, что равенство нулю
моментов МгЬ и Мгс обусловлено отсутствием электрических токов
в фазных обмотках RB и RC. Что же касается обтекаемой током
обмотки RA, то равенство нулю ее электромагнитного момента
обусловлено (см. рис. 5.8) равенством нулю магнитной индукции ее
собственного магнитного поля в позициях размещения активных
проводников данной обмотки. Таким образом, оказывается, что в
рассмотренных условиях собственное магнитное поле обмотки с током
не оказывает на нее механического воздействия. Этот вывод справедлив
по отношению не только к основной, но и к высшим
пространственным гармоникам собственного магнитного поля
сосредоточенной обмотки с нормальным шагом. Этот вывод может
быть принят во внимание и при анализе влияния полей рассеяния,
являющихся собственными полями фазных обмоток.
Появление механического воздействия поля на рассматриваемую
обмотку RA с током возможно только при иных, следующих
условиях.
• Свойства (параметры) магнитной среды при изменении
координаты <р не остаются неизменными, например, вследствие
неравномерности воздушного зазора между статором и ротором.
В этих условиях волна магнитной индукции собственного поля
“уходит” от магнитной оси обмотки в направлении зоны с
наименьшим воздушным зазором, т. е. с наименьшим магнитным
сопротивлением контуров замыкания силовых линий поля. В
результате смещения волны собственного поля значения
магнитной индукции в позициях размещения активных
проводников обмотки с током оказываются отличными от нуля,
что и обеспечивает механическое воздействие поля на обмотку.
Подобный механизм формирования электромагнитного
вращающего момента используется, например, в реактивных
синхронных двигателях переменного тока.
• В создании магнитного поля машины помимо рассматриваемой
обмотки участвует какая-либо другая, смещенная в пространстве
обмотка. Рассмотрим эту типичную для многофазных машин
ситуацию более подробно на примерах 2 и 3.
Пример 2. Пусть в обмотку RA по-прежнему от внешнего
источника питания задается ток 1га. Замкнем цепь питания другой
фазной обмотки ротора (например, обмотки RB) и зададим в нее от
128
другого источника питания ток 1Г^. Для общности будем считать, что
* Ira, например Irb > Ira. Направления этих токов показаны на
рис.5.9. Анализ ситуации проведем при условии отсутствия насыщения
главной магнитной цепи машины, что позволяет использовать
принцип суперпозиции полей.
О
Рис. 5.9. Взаимодействие двух фазных обмоток ротора
с магнитным полем
Под действием двух фазных токов в машине возбуждаются
теперь две составляющие магнитного поля, основные
пространственные гармоники которых и $ гЬ.т{ф) )
показаны на рис. 5.9. Первая составляющая по-прежнему является
собственным полем обмотки RA , а вторая - собственным полем
обмотки RB. Основная пространственная волна индукции
результирующего магнитного поля в воздушном зазоре
выделена штриховкой.
129
Рассмотрим сначала особенности механического воздействия
результирующего магнитного поля на обмотку RA. Поскольку
результирующее поле представляет сумму двух полей, можно считать,
что обмотка RA сцеплена с двумя магнитными полями: собственным
и сторонним.В качестве стороннего поля для обмотки RA
выступает собственное поле обмотки RB. Как видно из рисунка,
вследствие появления второй, сторонней для обмотки RA,
составляющей точка максимума <рт основной волны
магнитной индукции результирующего поля оказывается смещенной
относительно магнитной оси обмотки RA.
Вследствие смещения поля значения индукции в позициях
активных проводников обмотки RA оказываются уже не равными
нулю;
В\ 2 ВгЬт^<р=<рга-я:2
В3 ~ Bm(^9>=9>ra+!Ii2 ~ ВгЬ.т(.<Р^9>=ч,га+я 2
Существенно, что значения и (см. рис. 5.9) полностью
определяются значениями индукции не собственного, а именно
стороннего поля, поскольку индукция собственного поля в этих
позициях равна нулю. Поэтому в соответствии с законом Ампера на
каждую из активных сторон обмотки RA воздействует механическая
сила Frcj, пропорциональная произведению тока в этой обмотке на
значения магнитной индукции результирующего, а по существу -
стороннего поля:
^га ^га га $ 3 ~ ^га ^ra 1 » (5.89)
где kra — Wra L - конструктивный коэффициент.
Пара сил Fra создает электромагнитный момент фазы RA :
DLWra z х
М,а = j ha (В3 - -81)- (590)
То обстоятельство, что значения В| и В] с равным успехом
определяются из графиков индукции как результирующего, так и
стороннего полей, дает основание при определении механического
воздействия поля на обмотку RA ограничиваться рассмотрением лишь
стороннего поля как внешнего фактора, не зависящего от МДС
обмотки RA. При прочих равных условиях значения индукции и
В з пропорциональны значению тока 1гь. Поэтому
130
электромагнитный момент фазы RA может быть представлен в форме
произведения токов:
(5.91)
lvlra Kab 1 га 1 rb ’
где каЬ - коэффициент пропорциональности.
Формулы (5.90) и (5.91) справедливы как для ненасыщенной, так
и насыщенной машины при условии, что значения магнитной
индукции В] и В3 определяются с учетом насыщения, а коэффициент
каЬ рассматривается как переменная величина, зависящая от
насыщения главной магнитной цепи.
Итак, важная особенность рассматриваемого примера
заключается в том, что в результирующем магнитном поле находятся
две фазные обмотки с током - RA и RB. Каждая из них является
источником возникновения результирующего магнитного поля и
одновременно - объектом механического воздействия этого поля.
Поэтому так же, как RA, обмотка RB не только создает собственное
поле с индукцией ВгЬлп(ф), но и находится под воздействием
стороннего поля Brafn(<p), которым в данном случае является
собственное поле обмотки RA. Следовательно, на каждую из активных
сторон обмотки RB воздействует механическая сила
?rb - krb = ~^гь <5-92)
где кгЬ — Wrb L - конструктивный коэффициент.
Пара сил Frb создает электромагнитный момент фазы RB
мгь - ^^1гЬ (в4-В2). (5.93)
Электромагнитный момент фазы RB может быть представлен
также в форме произведения токов :
МГЬ ^ba ^rb га ’ (5-94)
где kfa - коэффициент пропорциональности.
Можно показать, что коэффициенты пропорциональности каЬ и
кЬа связаны между собой соотношением
kba ~ ~~kab- (5.95)
Тогда из сопоставления формул электромагнитных моментов
фаз (5.91) и (5.94) следует, что
^rb Мга > т- е-
(5.96)
131
Мы пришли к выводу о том, что при одновременном действии
двух обмоток в качестве источников поля возникает две пары
механических сил. Одна пара сил воздействует на одну обмотку, а
вторая, точно такая же по величине, но противоположно
направленная, - на другую обмотку.
Направление действия созданных этими силами
электромагнитных моментов фаз определяется соотношением
направлений токов в фазных обмотках-источниках поля. При
изменении направления тока в любой из этих обмоток направление
обоих электромагнитных моментов изменяется на противоположное.
Абсолютные значения электромагнитных моментов двух фаз
строго равны друг другу независимо от соотношения величин токов
фазных обмоток. В рассмотренном примере, где 1Г^ > 1га, равенство
М Га М rb
можно объяснить следующим образом. В соответствии с
формулой (5.91) величина Мга определяется умножением
относительного малого тока 1га < 1Г& на относительно большие
значения магнитной индукции В\ и В3, созданные большим током
Ir/j. Соответственно формуле (5.94) величина Мг^ определяется
умножением относительного большого тока 1Г^ > 1га на относительно
меньшие значения магнитной индукции В 2 и В 4, созданные меньшим
током 1га. Соотношение величин В\ - В4 магнитной индукции в
воздушном зазоре видно из рис. 5.9.
Более общим является вывод о том, что в неявнополюсной машине
с произвольным количеством фазных обмоток, участвующих в создании
главного магнитного поля, на все эти обмотки воздействует система
механических сил, сумма мгновенных значений которых равна нулю.
Поэтому для получения вращающего усилия ротора относительно
статора необходимо режим работы всех фазных обмоток машины-
двигателя формировать таким образом, чтобы из общей системы
взаимно уравновешенных сил:
• на фазные обмотки ротора действовала подсистема сил
преимущественно одного направления',
• на фазные обмотки статора - противоположного
направления.
Ситуация, рассмотренная в примере 2, не удовлетворяет
сформулированным выше условиям формирования вращающего
усилия, так как обе активные обмотки расположены только на одной
активной части машины, а именно на роторе. Поэтому
132
воздействующие на них механические силы Fra и Fr^ являются по
существу межфазными, взаимно уравновешенными усилиями, не
способными привести в движение ротор относительно статора.
Пример 2 иллюстрирует механизм механического
взаимодействия двух обмоток через общее магнитное поле и
свидетельствует о том, что для получения вращающего момента
активные обмотки должны быть разнесены на обе активные части
неявнополюсной машины.
Пример 3. Отличительная особенность данного примера состоит
в том (рис. 5.10), что одна из двух активных (обтекаемых током)
обмоток по-прежнему расположена на роторе (RA), а вторая (SB) - на
статоре. Для удобства сопоставления примеров 1, 2 и 3 угол поворота
ротора относительно статора принят равным нулю. Поэтому
магнитные оси одноименных обмоток статора и ротора совпадают.
Кроме того, принято, что параметры и переменные всех обмоток
приведены к одинаковому числу витков. Мгновенные значения токов
Ла Ць пРимеРа 3 приняты равными соответственно значениям токов
1га и hb примера 2.
Короче говоря, одна из активных обмоток по существу
перенесена с ротора на ту же угловую позицию статора. Вследствие
такого изменения функций обмоток картина их собственных полей и
результирующего магнитного поля в воздушном зазоре машины
остается неизменной. Остаются неизменными также механические
силы, воздействующие на активные обмотки. Электромагнитные
моменты активных фаз описываются формулами:
DLWra / х
Мга = —~-1га (В з - В,) ; (5.97)
DLWu / \
^У5Л(в4-В2). (5.98)
Эти моменты так же, как в примере 2, равны по абсолютной
величине и противоположны по направлению, т. е.
Mra+Msb = Q.
Однако один из них воздействует на ротор, а другой - на статор,
что и создает условия для приведения в движение ротора относительно
статора и осуществления электромеханического преобразования
энергии.
133
Рис. 5.10. Взаимодействие двух фазных обмоток, дающее
вращающий момент машины
В реальных рабочих режимах машин переменного тока системы
сил, рассмотренных в примерах 2 и 3, существуют одновременно. Для
подтверждения этого рассмотрим следующие режимы.
5.11. Установившийся режим работы двухфазной
обмотки ротора асинхронной машины
Предположим, что в двухфазной симметричной неявнополюсной
машине существует вращающееся магнитное поле с синусоидальным
распределением индукции вдоль воздушного зазора.
Пространственная волна магнитной индукции поля в воздушном
зазоре (рис. 5.11) имеет постоянную амплитуду и вращается
относительно статора с постоянной скоростью :
м.max Const ,
134
Йо = Zp ~ const
1 di
(5-99)
Ротор с симметричной двухфазной обмоткой вращается
относительно статора с постоянной скоростью :
= const,
(5.100)
где 0 и 0ЭЛ - угол поворота ротора относительно статора,
выраженный соответственно в геометрических и электрических
радианах.
Рис. 5.11. К анализу установившегося режима
работы двухфазной машины
Рассмотрим установившийся режим асинхронного вращения
ротора относительно поля, т. е. работу машины с постоянным
значением абсолютного скольжения
ДЙ = Й0-Й, (5.101)
определяющего угловую частоту ЭДС и токов обмотки ротора:
(5.102)
135
При этом относительное скольжение ротора определяется формулой:
S = —. (5.102,а)
Qq
Для описания взаимного пространственного положения
магнитного поля и ротора обозначим угол между осью максимума
волны индукции в зазоре и магнитной осью фазы RD обмотки ротора
как
~ Фт ~ <Prd 103)
В установившемся режиме асинхронного вращения ротора этот угол
изменяется во времени по линейному закону
3m(t) = &rt + 8m(Q) (5.104)
с постоянной скоростью
^- = Qr = const. (5.105)
dt
В дальнейшем примем начальное значение угла = 0.
Мгновенные значения потокосцеплений фазных обмоток ротора
с главным магнитным потоком определяются формулами:
^rd.m »
rq.m
f sin 8
m.max
m. max
(5.106)
m .max
г.эфф m.max
—W
rr г.эфф m.max •
P
В соответствии с законом электромагнитной индукции ЭДС,
наведенные в фазах обмотки ротора главным магнитным полем (или
же главные ЭДС ), определяются как
(5.107)
d8
где
m.max
m.max
m.max •
136
Итак, вследствие линейного изменения во времени аргумента Sm
потокосцепления и ЭДС фазных обмоток ротора (рис.5.12)
изменяются во времени по гармоническим законам с частотой
Qr-ZpAQ и амплитудными значениями ^mifnax и Еттах
соответственно.
Под действием ЭДС, индуктированных главным магнитным
полем, в фазах обмотки ротора протекают синусоидальные токи :
где
г. шах
(5.108)
m.max
амплитуда фазного тока;
= arctg —-—— - фазовый сдвиг тока относительно ЭДС ;
Rr и Lra - активное сопротивление и индуктивность
рассеяния фазных обмоток ротора.
Фазовый сдвиг тока относительно главной ЭДС обусловлен
влиянием ЭДС от потоков рассеяния ротора, что учитывается в
приведенных выше формулах индуктивностью рассеяния в
соответствии со схемой замещения на рис. 4.1 ,б.
Мгновенные значения электромагнитных моментов фаз ротора
в общем случае определяются как
Л/ = 7 I Ф
11 rd ^p*rd rq.m ’
Мrq — ~Zplrq^rd.m * (5.109)
С учетом приведенных выше выражений токов и
потокосцеплений после несложных тригонометрических
преобразований получаем выражения'мгновенных моментов фаз в
установившемся асинхронном режиме вращения ротора :
Мrd Zр ^r.max ^m./Max[C0S4r COs(2Qf t ;
iM
rq 2 p r-max
+COs(2Qr/ <^r)] .
(5.110)
Временные графики электромагнитных моментов фаз ротора
приведены на рис. 5.12.
137
Рис. 5.12. Установившийся режим работы двухфазной обмотки
138
Как видно, каждый из моментов можно представить в виде
суммы постоянной составляющей и переменной составляющей с
удвоенной частотой скольжения:
Mrd = М rd + М X/ ;
Mrq = M=rq + bTrq.
(5.111)
Здесь постоянные составляющие электромагнитных моментов
фаз :
Мr(j ~ МГд — —Zр Ir max m.max , (5.1 1 2)
Z
а переменные составляющие:
= X, = -^рЬ.таЛ.тах^2^1-^)- (5.113)
Результирующий электромагнитный момент двухфазной
обмотки ротора в общем случае определяется как
мrd + Mrq .
Очевидно, что в данном случае постоянные составляющие
электромагнитных моментов фаз суммируются, а переменные -
взаимно уравновешиваются как межфазные усилия. Следовательно,
результирующий электромагнитный момент двухфазной машины
постоянен по величине и равен удвоенному (суммарному) значению
постоянных составляющих электромагнитных моментов фаз :
рЛ г.max
m.max
cos£
(5.114)
Здесь фигурирует коэффициент мощности ротора
(5.115).
С учетом приведенных выше выражений тока получаем формулу
электромагнитного момента двухфазной асинхронной машины:
р А m.max
(5.116)
Данная формула применима для исследования различных
режимов управления машиной. В частности, при управлении
электрическим двигателем по условию постоянства (независимости
от частоты питания и нагрузки на валу) амплитуды волны магнитной
139
индукции поля в зазоре (Вттах = const) критические значения
частоты токов ротора и электромагнитного момента находятся по
условию
дМ
дО..
= 0 .
ллг “А*-г.кр
Соответствующие выражения критических параметров имеют
вид:
(5.117)
(5.118)
Некоторые энергетические соотношения. При выводе
энергетических соотношений полезно проанализировать мгновенные
значения механических мощностей, развиваемых каждой из фаз
ротора. Умножая выражения (5.109) электромагнитных моментов фаз
на скорость вращения ротора, получаем выражения мгновенных
механических мощностей фаз ротора :
rd .мех
М Z р Ird
rq.Mex
= Mrqa = -zpIrq4rd.m£l.
(5.119)
Поскольку Q = const, временные графики мощностей фаз по
форме идентичны временным графикам электромагнитных моментов
фаз, изображенным на рис. 5.12. Поэтому каждый из них также можно
представить в виде суммы постоянной составляющей и переменной
составляющей с удвоенной частотой скольжения:
rd.мех ~ rd.мех + rd.мех »
л rq.Mex л rq.Mex
Здесь постоянные составляющие:
rq.Mex
(5.120)
rd. мех
rq.Mex
т.тах
(5.121)
а переменные составляющие:
rd. мех rq.M3X
г. max т.тах
Результирующая механическая мощность ротора
г.мех
rd.мех
rq.Mex ‘
(5.123)
140
Как видно, и в этом случае постоянные составляющие
мгновенных мощностей фаз суммируются, а переменные - взаимно
компенсируются. Следовательно, результирующая механическая
мощность постоянна по величине и равна удвоенному (суммарному)
значению постоянных составляющих мгновенных мощностей фаз :
г.мех % р т.тах т.тах COS^.
(5.124)
Здесь уместно провести аналогию графиков мгновенных
электромагнитных моментов, либо механических мощностей фаз и
графиков мгновенных электрических мощностей фаз в электрических
цепях синусоидального тока. Как известно [11], при анализе
энергетики электрических цепей переменного тока используют
понятия полной, активной и реактивной мощностей. Учитывая эти
обстоятельства, в принципе возможно использовать аналогичные по
смыслу понятия и при анализе баланса электромагнитных моментов и
механических мощностей.
Например, можно оперировать следующими понятиями и их
математическими выражениями:
полный электромагнитный момент фазы ротора -
(5.125)
А/ _ - J US
г. ф.полн р г.эфф J т.эфф
активный электромагнитный момент фазы -
Мг.ф.акт ~ Мг.ф.полнСО^г ~ 2р^т.эфф^.т.эфф^^^г » (5.126)
реактивный электромагнитный момент фазы -
Мг.ф. реакт ~ г.ф. полн — %р ^г-эфф ^т.эфф S*n (5.1 27)
Здесь 1г эфф р~ 1гмакс и ^тэфф ^т.макс ” эффективные
(действующие) значения фазного тока и главного
потокосцепления;
cos£r - коэффициент мощности ротора, определяемый
формулой (5.115).
Умножая приведенные выражения моментов на скорость
вращения ротора, получаем выражения полной, активной и реактивной
механических мощностей фазы ротора:
$г.ф.мех Мг.ф.полн ’
г.ф.мех г.факт
(5.128)
О’Г.ф.мех
Мг.ф.реакт
141
Тогда оказывается, что результирующий электромагнитный
момент машины равен сумме активных моментов фаз, а
результирующая механическая мощность равна сумме активных
мощностей фаз ротора :
М — 2Мг факт Ц.эфф ^гп.эфф^^^г > (5.129)
^мех ^\.ф.акт Iгэфф ^т.эфф £®$%г • (5-130)
Как и следовало ожидать, электромагнитный момент и
механическая мощность оказались связаны соотношением:
= A/Q.
(5.131)
В энергетическом балансе машины наряду с механическими
мощностями следует учитывать и электрические мощности фаз ротора.
Мгновенные значения электрических мощностей, генерируемых
фазами ротора, определяются формулами:
ЭЛ
ГЦ,ЭЛ
гчгЧ ’
(5.132)
(5.133)
Сопоставляя формулы, нетрудно показать, что в установившемся
асинхронном режиме мгновенные электрические и механические
мощности каждой из фаз изменяются во времени пропорционально друг
другу. Они связаны между собой и с мгновенными моментами фаз
следующим образом:
> D AQ _ . _ ЛП
rd.эл * rd.мех
„ „ AQ „
г — Р ----------— М ЛчЛ
гцэл 2 гд.мех о 22 rq 1
(5.134)
(5.135)
Кроме того, в энергетических соотношениях учитываются:
полная электрическая мощность, генерируемая фазой ротора -
$г.ф ~ ^т.эфф ^г.эфф ’ (5.136)
активная электрическая мощность фазы -
Р,.ф ~~ ^т.эфф Iг.эфф >
реактивная электрическая мощность фазы -
<2Г.ф ~ Ет.эфф!гэфф^^^!
(5.137)
(5.138)
142
Здесь
т.эфф
т.макс
т.эфф
(5.139)
эффективное (действующее) значение фазной
ЭДС от главного потокосцепления ;
- частота потокосцеплений, ЭДС и токов
обмотки ротора.
Суммарная активная электрическая мощность фаз ротора
Рг -^Р'г.ф т.эффЬзффЫЯ^г (5.140)
полностью расходуется на покрытие электрических потерь в активных
сопротивлениях цепи ротора. Действительно, так как
то из формулы (5.136) получаем:
Pr = 21? Rr = 2ЬРгмф = ЬРГ.ЭЛ. (5.141)
По логике электромеханического преобразования энергии
электрические потери в роторе являются платой за возбуждение в
активных проводниках ротора электрических токов, принципиально
необходимых для формирования электромагнитного момента и
генерирования на этой основе механической мощности.
Энергетическим ресурсом как для генерирования электрической
мощности возбуждения ротора, так и для электромеханического
преобразования является передаваемая через воздушный зазор
машины электромагнитная мощность, которая выражается в виде:
Рэл„ = МС10. (5.142)
Уравнение энергетического баланса, связывающее значения
данных мощностей, можно вывести различными путями. Для
иллюстрации одного из них представим выражение активной
электрической мощности (5.140) с учетом (5.139) в виде:
С учетом (5.102) и (5.129) получаем выражение активной
электрической мощности ротора через механические величины:
Рг -дпл/.
(5.143)
143
С учетом (5.101), (5.131), (5.142), (5.143) в итоге получаем
уравнение энергетического баланса :
ЭЛИ
мех
(5.144)
Итак, в процессе электромеханического преобразования энергии
часть электромагнитной мощности преобразуется в электрическую, а
часть - в механическую. Электрическая мощность далее преобразуется
в тепловую в активных сопротивлениях цепи ротора. Механическая
мощность за вычетом механических потерь передается через вал
машины рабочему механизму.
Более детальное описание энергетического баланса с учетом
дополнительных составляющих потерь дается в учебной и
специальной литературе по электрическим машинам.
5.12. Установившийся режим работы трехфазной
обмотки ротора асинхронной машины
Режим работы трехфазной симметричной обмотки ротора
асинхронной машины рассмотрим при тех же условиях, что и
двухфазной. Обозначим угол между осью максимума волны индукции
в зазоре и магнитной осью фазы RA обмотки ротора как
&т Фт Фта' ^5)
В установившемся режиме асинхронного вращения ротора
^(z) = QrZ + <5m(0).
(5.146)
Примем — 0- Не повторяя приведенных выше
пояснений, приведем выражения главных потокосцеплении, ЭДС,
токов и электромагнитных моментов фаз ротора.
Главные потокосцепления:
где
ra.m
ro.m
f
rc.m
m .max
m.max COSQrZ ,
cos(QrZ-2^/3) ;
m.max Z + 2?г/3),
m.max
$ г.эфф
— W ллВ
г.эфф m.max
P
(5.147)
m.max
144
Электродвижущие силы от главного потокосцепления:
га.т
rb.m
гс.т
m.max •>
sin(QrZ - 2тг/3) ;
m.max sin+ 2я"/3^,
m.max
(5.148)
где
Фазные токи:
m.max
m.max •
га Л.тал $•) ,
rb ~ If.max — ^г ” ^я/З) ,
(5.149)
rc r.max
где
r.max m.max
Электромагнитные моменты фаз:
ra 1VJ. га п- iVl га ,
(5.150)
Здесь постоянные составляющие электромагнитных моментов фаз
ra Mrb Mrc _ % p Ir.max m.max
Переменные составляющие моментов:
cos(2£V-£) ;
м;а
2 р г. max
m.max
2 p * r.max m.max
(5.152)
% p Ir.max m.max 2я/3)
удовлетворяют условию
га
Результирующий электромагнитный момент
обмотки ротора:
трехфазной
145
Очевидно, что и в данном случае постоянные составляющие
электромагнитных моментов фаз суммируются, а переменные -
взаимно уравновешиваются как межфазные усилия трехфазной
системы.
Итак, результирующий электромагнитный момент трехфазной
машины постоянен по величине и равен суммарному значению
постоянных составляющих электромагнитных моментов фаз’.
где
р Л г. max
т. max
cos£
(5.154)
Для трехфазной машины полностью приемлемы описанные
выше понятия полной, активной и реактивной механических
мощностей фаз и их электрических мощностей. Поэтому
результирующий электромагнитный момент трехфазной машины
может быть представлен и как сумма активных моментов фаз,
выраженных через эффективные значения синусоидальных фазных
токов и потокосцеплений, и коэффициент мощности ротора:
М факт ^^р^ф.эфф^ф.эффСО^^г
(5.155)
Результирующая механическая мощность равна сумме активных
мощностей фаз ротора :
Р.иех ~ ^^глр.акт ~ ^QZp ^г.эфф ^т.эфф ' ($• ^6)
Суммарная активная электрическая мощность фаз ротора
Л - ^Рг.ф ~ ^Р'т.эфф^г.эффЫЯ^г (5.157)
также полностью расходуется на покрытие электрических потерь в
активных сопротивлениях цепи ротора, т. е.
Pr = 31*Rr = 3 ДРЛ,,,/> = ДР,эл. (5.158)
Остается справедливым уравнение энергетического баланса
(5.144), составляющие которого по-прежнему выражаются через
механические величины как
Pj lu М fig ,
Рцех - МО. ;
Рг = м до.
146
Рис. 5.13. Установившийся режим работы трехфазной обмотки
147
Временные графики описанных величин приведены на рис. 5.13.
Для удобства сопоставления характеристик двухфазной и трехфазной
машин графики рис. 5.12 и 5.13 построены при условии равенства
амплитуд магнитной индукции в зазоре, равенства абсолютного
скольжения, а также равенства объема активных проводниковых
материалов ротора. При этом двухфазная и трехфазная обмотки
имеют одно и то же общее эффективное число витков, т. е. число
витков фазы трехфазной обмотки составляет 2/3 числа витков фазы
двухфазной обмотки при одинаковом сечении.
Как видно из графиков, в связи с уменьшенным числом витков
фазы трехфазная обмотка имеет уменьшенные значения фазных
потокосцеплений и ЭДС. Однако благодаря уменьшенному
сопротивлению фазы амплитуда фазного тока остается неизменной. В
результате фазные электромагнитные моменты трехфазной машины
составляют 2/3 моментов двухфазной машины. Результирующие
значения электромагнитного момента трехфазной и двухфазной
машин при описанных условиях оказываются одинаковыми. В то же
время трехфазная машина выгодно отличается меньшей амплитудой
переменной составляющей момента каждой фазы по отношению к
результирующему моменту машины. При этом переменные
составляющие моментов фаз образуют трехфазную симметричную
систему с удвоенной частотой скольжения-и обратным чередованием
фаз в сравнении с системами фазных потокосцеплений, ЭДС и токов
ротора.
Вследствие постоянства скорости временные графики
механической мощности и электрической мощности фаз идентичны
графикам электромагнитного момента.
148
Глава шестая
ИСПОЛЬЗОВАНИЕ ОТНОСИТЕЛЬНЫХ
ЕДИНИЦ
6.1. Предварительные замечания
В дальнейшем все параметры и переменные состояния
электропривода представляются в относительных единицах.
Использование относительных единиц при моделировании режимов
работы электрических машин и источников их питания
характеризуется рядом положительных моментов. Отметим некоторые
из них.
• Основной принцип перехода к относительным единицам
заключается в том, что все переменные и параметры модели
выражаются в долях от соответствующих базисных
величин. В принципе базисные величины могут выбираться
совершенно произвольно. Однако по ряду практических соображений
они выбираются так, что характеризуют номинальный режим
работы моделируемого объекта. Поэтому в сравнении с абсолютными
значениями токов, напряжений, мощностей и других величин их
относительные значения гораздо нагляднее и непосредственнее
показывают степень загрузки и использования активных материалов,
позволяют оценить уровень приближения исследуемого режима
работы объекта к номинальному режиму или же отклонения от него.
Например, относительное значение тока статора двигателя 1.15
непосредственно означает, что двигатель работает с перегрузкой по
току, составляющей 15%. В то же время абсолютное
(неотносительное) значение того же тока 115 А непосредственно не
несет подобной информации.
149
• Результаты аналитического исследования и имитационного
моделирования, полученные с использованием относительных единиц,
имеют большую степень общности в сравнении с
использованием физической (абсолютной) системы единиц. Это
обусловлено тем обстоятельством, что при изменении мощности
электрических машин относительные значения их параметров
(например, активных и индуктивных сопротивлений обмоток) и их
относительные характеристики изменяются в гораздо меньшей
степени, чем абсолютные значения параметров и характеристики. Это
позволяет с определенной степенью приближения обобщать и
распространять результаты, полученные для одной конкретной
машины, на отрезок или на всю серию машин либо на машины
близких серий.
Вместе с тем анализ изменения относительных параметров и
характеристик машин в пределах серии наглядно показывает
изменение параметрических и конструктивных пропорций и свойств
машин различных мощностей, а также облегчает сопоставление серий
машин различного назначения. Кроме того, знание типовых
конструктивных и параметрических пропорций и относительных
показателей работы машин облегчает выявление ошибок в
результатах аналитического исследования и имитационного
моделирования режимов их работы.
• Процедура перехода к относительным единицам вносит элемент
рационального масштабирования уравнений модели и приводит их к
виду, удобному для математического моделирования как цифрового,
так и в особенности аналогового. Запись уравнений модели в
относительных единицах позволяет оперировать с безразмерными
величинами, диапазон численных значений которых, как правило,
значительно меньше, чем в исходной системе уравнений. Это
способствует повышению точности решения уравнений модели и
снижению требований к средствам вычислительной техники,
используемой для моделирования.
Вместе с тем при использовании относительных единиц следует
учитывать некоторые особенности, связанные со спецификой понятия
номинального режима [48,109]. Эти особенности рассмотрены в гл. 21.
Для указания системы единиц мы используем запись уравнений
в исходной (физической) системе единиц прописными
буквами, а уравнений в относительных единицах
соответствующими строчными буквами. Исключение
составляют обозначения момента инерции и времени, Так как
строчный символ у традиционно используется в математическом
аппарате комплексных чисел, a t ~ для обозначения текущего времени
в физической системе единиц.
150
6.2. Организация системы относительных единиц
Общая формула перехода к относительным единицам имеет вид:
(6.1)
где Y - значение физической величины (параметра, воздействия,
переменной состояния и др.) в исходной системе
единиц, например, в системе единиц СИ;
Y6 - базисное значение, выраженное в той же исходной
системе и принятое в качестве единицы измерения величины
Y в системе относительных единиц;
у - значение величины в системе относительных единиц.
В соответствии с общей формулой перехода относительные
значения переменных и параметров модели электрической машины
определяются выражениями:
время
напряжение, ЭДС
электрический ток
потокосцепление
магнитная индукция
индуктивность
емкость
* =tjT6-
u = U/V6-,
V = ЧП;
ь = В/Вб;
1 = LIL6-
С = C!C6;
e = E/U6-,
(6.2)
сопротивления
мощности
r = R/R6;
P = P!Pf>-,
x-X/Xg-,
q = Q/Q6'>
s = S/S6-,
энергия
угол поворота ротора
угловая частота вращения ротора
электромагнитный момент
момент сопротивления механизма
момент инерции
w = W/W6;
е = ;
О/ ^гбч
т = М/М6\
т( = MJM6;
151
6.3. Процедура преобразования уравнений модели
к системе относительных единиц
Рассмотрим следующий пример преобразования уравнений
модели. Пусть требуется преобразовать к системе относительных
единиц дифференциальное уравнение равновесия электрической цепи
/-й фазной обмотки и дифференциальное уравнение механического
движения ротора электрической машины
(6-3)
(6.4)
Первое уравнение представляет баланс напряжений и ЭДС, а
второе - баланс моментов. Поэтому для перехода к относительным
единицам в соответствии с формулами (6.2) каждый член первого
уравнения следует разделить на базисное напряжение, а второго - на
базисный момент. Кроме того, для перевода в относительные
единицы значений токов, сопротивлений, потокосцеплений, времени,
момента инерции и скорости вращения ротора необходимо
соответствующие члены уравнений умножить и разделить на базисные
значения фигурирующих в них величин:
R6I6 | I <Р6Тб .
иб иб R6I6 U6 dt УбТб ’
М_Мс.= 1 jtZQ Ч^гбТб
Мб М6 М6 dt J6Qr6T6
(6.5)
(6.6)
С учетом соотношений (6.2) получаем следующие уравнения в
относительных единицах (или же относительные уравнения):
152
Данные уравнения универсальны в том смысле, что справедливы
при совершенно произвольном выборе всех базисных величин
(разумеется, здесь исключаются нулевые значения). Однако в
сравнении с исходными уравнениями (6.3) и (6.4) эти универсальные
относительные уравнения содержат дополнительные постоянные
коэффициенты к\, и к^ зависящие от соотношения базисных
величин. С позиций упрощения вида относительных уравнений
очевидно, что базисные величины следует выбирать не произвольно, а
с учетом определенных условий взаимосвязи между ними. Например,
выбор соотношений базисных величин, входящих в формулы (6.9), по
условию
к\ ~ = ку = 1 (6.10)
обеспечивает вид относительных уравнений (6.7) и (6.8), аналогичный
виду исходных уравнений:
dy/i
, 3
d со
т — т
(6.12)
Аналогично переводятся в систему относительных единиц и
другие уравнения модели. При этом некоторые из относительных
уравнений приобретают более простой и более общий вид в сравнении
с исходными уравнениями. Например, определяемое формулой (5.83,а)
выражение электромагнитного момента трехфазной машины
в относительных единицах при произвольном выборе базисных
величин имеет вид
т = K4(irx i//ry -iry <//rx], (6.13)
где
ЗУД
2Л/б
(6.14)
Здесь lrx>y= Irxy I6 ', Ч/гх,у = Ч'гх,у '1'б ’ относительные
значения токов и потокосцеплений обмотки ротора, преобразованных
к вращающейся системе координат.
Постоянный коэффициент к4 зависит от соотношения базисных
величин. В случае выбора соотношения базисных величин по условию
153
к4 = \ (6.15)
формула электромагнитного момента (6.13) приобретает более
простой вид:
“ ^гх Wry ~ ^гу W ГХ ' (6.16)
Здесь отсутствуют конструктивные коэффициенты (число фаз,
число пар полюсов), которые фактически “спрятаны” в выражениях
базисных величин. Поэтому данное выражение оказывается и более
общим в том смысле, что сохраняет неизменный вид применительно к
машинам с различным числом фаз и пар полюсов.
6.4. Система базисных величин
Вид уравнений и конкретные параметры модели машины в
системе относительных единиц определяются выбором базисных
величин. Как следует из приведенных выше примеров, при выборе
базисных величин целесообразен системный подход, в результате
которого формируется система базисных величин
с определенным перечнем ее элементов, указанием их значений и
связей между ними.
Перечень элементов системы базисных величин
формируется на основе анализа общего перечня воздействий,
переменных состояния и параметров модели, представляемых в
относительных единицах. При этом в общем перечне обычно
выделяются группы величин одной и той же физической природы (и
размерности), для каждой из которых устанавливается общая базисная
величина соответствующей размерности.
Значения базисных величин, как отмечалось, выбираются
с ориентацией на номинальный режим работы машины. Тем не менее,
существует множество возможных вариантов выбора. Поясним
сказанное следующими примерами. Предположим, что для
моделирования трехфазной асинхронной машины в относительных
единицах необходимо выбрать базисное значение тока ее обмоток.
Асинхронная машина имеет две обмотки - статора и ротора, причем
в номинальном режиме работы машины токи статора и ротора
различаются между собой. Приведение обмоток машины к общему
числу витков изменяет в определенной степени различие
номинальных токов статора и ротора, но не устраняет его полностью.
Обычно в системе относительных единиц стремятся выбрать
значение базисного тока, общее для всех обмоток асинхронной
машины. Поэтому возникает вопрос: какой из номинальных токов
(статора или ротора) выбрать в качестве базисного для системы
154
относительных единиц? Аналогичные вопросы возникают и при
выборе базисных величин для других переменных (ЭДС,
потокосцеплений, моментов, скоростей и др.).
Связи между базисными величинами указываются с учетом
ряда следующих обстоятельств. Элементы системы базисных величин,
характеризующих номинальный режим работы машины, объективно
взаимосвязаны между собой законами природы: электричества,
магнетизма, механики. Однако подобно другим физическим объектам
электрическая машина обладает определенным числом степеней
свободы [131]. Поэтому при организации системы относительных
единиц из общей совокупности базисных величин выделяется
подсистема основных (независимых) базисных величин.
Оставшиеся элементы образуют подсистему производных
(зависимых) базисных величин.
В итоге формируется иерархическая система, в которой
основные базисные величины системы относительных единиц
формируются путем выбора их независимо друг от друга.
Например, для определения относительных мгновенных значений
токов всех обмоток машины может быть выбран базисный ток,
численно равный амплитудному значению номинального тока обмотки
статора. В принципе возможен и другой вариант, где выбор сделан в
пользу номинального тока обмотки ротора, в то время как другие
элементы группы основных базисных величин остаются прежними.
Производные базисные величины выражаются через
основные и в этом смысле они зависимы. Математические выражения
зависимых величин отражают соответствующие физические законы.
Например, если в группу основных базисных величин включены
базисный ток и базисное напряжение, то базисное сопротивление
логично отнести к группе производных величин и выразить его через
базисные величины тока и напряжения в соответствии с законом Ома.
Использование этого принципа имеет важные последствия, а именно -
обеспечивает вид уравнений модели в относительных единицах,
аналогичный виду исходных уравнений. Нарушение этого принципа
приводит к появлению в преобразованных уравнениях
дополнительных коэффициентов.
При одних и тех же номинальных значениях напряжения, тока и
коэффициента мощности машины для относительной характеристики
энергетических процессов могут быть выбраны различные значения
базисной мощности - с ориентацией либо на полную мощность на
зажимах обмотки статора, либо на активную мощность, либо на
электромагнитную мощность машины в номинальном режиме и т. д.
Этим объясняется наличие в литературе различных вариантов
моделей, использующих относительные единицы.
155
6.5. Система относительных единиц с ориентацией
на переменные цепей статора и полную мощность
машины
Для описания моделей асинхронных машин и машин двойного
питания мы будем использовать в качестве основной систему
относительных единиц, описанную в работе А.А.Янко-Триницкого
[144] и обобщенную в работе [123] на случай произвольного числа пар
полюсов. Рассмотрим подробнее этот вариант, обеспечивающий
удобство использования благодаря ориентации на паспортные данные
машины и наиболее простому виду уравнений модели.
Основные базисные величины:
~Us.max.n ’ амплитудное значение номинального фазного
напряжения обмотки статора;
1б ~ Ц.тах. н " амплитудное значение номинального фазного
тока обмотки статора;
fS H - номинальное значение угловой частоты
напряжения статора;
= Елпап " единица измерения углов.
Производные базисные величины:
Тб = &б1С1б - время;
Чб = U6T6 - потокосцепление;
Вб = 153фф б - магнитная индукция;
Iq - индуктивность;
С$= IfiTfilUfi - емкость;
R6 = Хб = Z6=U6!1$ - сопротивления; (6.17)
mf
Рб=йб=^6=^-^б1б - мощности;
W6 = PqT6 - энергия ;
“ ®б I zp " Угол поворота ротора;
Qr6 -Slfil zp - угловая частота вращения ротора;
т Мб Тб z р W& Р() Zp ©^
j --------, момент инерции.
О2.
156
электромагнитный момент,
момент сопротивления;
Здесь zp и rrij- - число пар полюсов и число фаз машины;
SЗфф^ = zр[ D- конструктивная постоянная,
представляющая собой суммарную эффективную площадь сцепления
витков базовой обмотки с главным магнитным потоком.
Описанный вариант системы базисных единиц обеспечивает
наиболее простой вид относительных уравнений модели (6.11), (6.12) и
(6.16), не содержащих дополнительных коэффициентов, а также и
конструктивных коэффициентов исходной модели. Это создает
значительные удобства для аналитического исследования задач и
имитационного моделирования режимов работы электрических
машин, оценки и обобщения полученных результатов. Вместе с тем
модели, построенные на базе данного варианта системы
относительных единиц, имеют особенности, которые следует
учитывать при оценке механических величин.
Первая особенность состоит в том, что в качестве базисной
скорости вращения ротора принята не номинальная скорость
ротора, а скорость вращения магнитного поля при номинальной
частоте:
= Q0H • <6.18)
ZP
Для асинхронных машин определяемая формулой (6.18) базисная
скорость оказывается не равной номинальной скорости ротора.
Однако это обстоятельство мало существенно ввиду относительной
малости номинального скольжения асинхронных машин. Кроме того,
формула (6.18) задает ансамбль базисных скоростей гораздо более
четко и определенно в сравнении с подверженными определенному
разбросу величинами номинальных скоростей вращения роторов ‘
асинхронных машин.
Для синхронных машин первая особенность вообще не имеет
значения, так как ротор вращается синхронно с полем и поэтому
базисная скорость оказывается равной номинальной скорости ротора.
Вторая, более существенная особенность состоит в том, что
базисный момент системы относительных единиц оказывается не
равным номинальному электромагнитному моменту машины.
Для оценки различия отмеченных моментов рассмотрим
выражение базисного момента из системы (6.17) с учетом (6.18):
157
М
m fU
SfL
5.Н
(6.19)
О.Н
н
Итак, базисный момент системы относительных единиц определяется
как отношение полной мощности на зажимах обмотки
статора к скорости вращения магнитного поля в номинальном
режиме. В то же время в теории машин переменного тока
электромагнитный момент определяется при тех же допущениях
как частное от деления электромагнитной мощности
на скорость вращения магнитного поля. В номинальном режиме
получаем
Мн
(6.20)
Отсюда соотношение базисного и номинального моментов определяется
соотношением полной и электромагнитной мощностей машины в
номинальном режиме:
мб
Л элм.н
(6.21)
5.Н
Введем обозначение номинального параметра машины:
5.Н
н
(6.22)
элм.н
Электромагнитную мощность идеализированной машины можно
найти из полной мощности с учетом коэффициента мощности и потерь
в статоре:
^ЭЛМ — Ss ™*<PS ~ ДРг •
Тогда очевидно, что
=—Чл; ’' <6П>
C0S^.H-V
^S.H
Например, асинхронная машина мощностью 320 кВт с параметрами
номинального режима cos =0.91; ДР$,Н / SSJI = 0.017 имеет
величину (Гн =1.12 , т.е. различие базисного и номинального
моментов составляет 12%. Наиболее существенными данные различия
оказываются у асинхронных машин средней и особенно малой
мощности.
158
Различие базисного и номинального моментов является
недостатком, так как затрудняет непосредственную оценку усилий в
механической системе и нагрузок на валу двигателя в системе
электропривода на основе относительных значений моментов.
6.6. Система относительных единиц с ориентацией на
переменные цепей статора и электромагнитную
мощность машины
Отмеченный выше недостаток основного варианта системы
относительных единиц устраняется в следующем модернизированном
варианте. Здесь основные базисные величины остаются прежними.
Изменения вносятся в производные базисные величины, а именно -
базисное значение мощности теперь определяется формулой
(6.24)
Тогда оказывается, что базисная мощность равна электромагнитной
мощности машины в номинальном режиме :
5.Н
элм.н •
(6.25)
н
Все остальные формулы системы (6.17) остаются справедливыми
при условии, что фигурирующая в них базисная мощность равна уже
не полной, а электромагнитной мощности машины в номинальном
режиме. В результате мы получаем желаемое соотношение моментов, а
именно - равенство базисного момента системы относительных единиц
номинальному электромагнитному моменту машины :
(6.26)
Базисная энергия и базисный момент инерции с учетом нового
значения базисной мощности приобретают новые численные значения.
Базисное значение энергии:
(6.27)
159
Поскольку ®r$ = 1 геом. рад, то базисная энергия численно
равна работе, которую совершает ротор, развивающий номинальный
электромагнитный вращающий момент, при изменении его угла
поворота на I геометрический радиан.
Базисное значение момента инерции:
(6.28)
Следовательно, базисный момент инерции численно равен
отношению номинального электромагнитного момента к номинальной
скорости вращения магнитного поля, помноженному на базисное время.
Рассмотренный модернизированный вариант дает удобные
относительные оценки как электрических, так и механических величин
при исследовании режимов работы машины на модели.
Преобразованные к системе относительных единиц уравнения модели
в основном сохраняют свой вид, такой же, как в предыдущем варианте
системы относительных единиц. Исключение составляют формула
электромагнитного момента и энергетические соотношения, что
является следствием изменения базисной мощности. В частности,
формула электромагнитного момента (6.16) приобретает вид:
ЛИ — Y Wry ~ ^ry * (6.29)
Наличие здесь дополнительного коэффициента несколько
усложняет формулу, но зато позволяет оценивать момент в долях от
номинального значения.
Энергетические соотношения. Для выявления особенностей
энергетических соотношений запишем сначала в исходной физической
системе единиц выражения мгновенной мощности на зажимах
обмотки статора (Ps) и мощности электрических потерь в обмотке
статора (ЛЛ.эл) симметричной трехфазной машины:
V * ж Л
(6.30)
i = sa, sb, sc. (6.31)
Проанализируем видоизменение этих выражений мощности в
различных системах относительных единиц. Для этого преобразуем
уравнения в обобщенную систему относительных единиц:
160
В результате получаем формулы общего вида, справедливые для
произвольного соотношения базисных величин:
где
Рз fts i Ч ’
(632)
(633)
(634)
Для предыдущего варианта системы относительных единиц (п. 6.5):
(635)
(636)
Для модернизированного варианта:
(637)
(638)
Итак, в обоих случаях коэффициенты к$ = А:6, однако в данном
модернизированном варианте значения этих коэффициентов
возрастают в 4н Раз- Обратим внимание на то, что в обоих случаях
коэффициенты к$ и к^ не равны единице.
Рассмотрим особенности моделей, использующих преобразование
координат. В результате преобразования в базис Gv либо Н
161
формулы мгновенной мощности на зажимах обмотки статора и
электрических потерь в обмотке статора трехфазной симметричной
машины в физической системе единиц приобретает вид:
’ (6-39)
’ <6-4°)
J
где j - sa, sfi, sy либо j = sx, sy, sz.
Подчеркнем, что коэффициент 3/2 появляется в формулах вследствие
преобразования координат с матрицей А ।.
В результате перевода преобразованных уравнений (6.39) и (6.40)
в относительные единицы получаем формулы общего вида:
Ps^kl^Ujij, (6.41)
Ар.у.эл ~ ^8 * j ’ (6.42)
«
7 3 /а j 3 Rfi I fi
где Aj = - ° о . E 6 . (6.43)
2 Рб 2 Рб
В предыдущем варианте системы относительных единиц
fc7=|fc5 = l; ^8 = j^=l, (6.44)
и поэтому
(6.45)
^Л.ЭЛ
(6.46)
В рассматриваемом модернизированном варианте
Н ’
(6.47)
и поэтому
ил
3
(6.48)
^Ps.3Jl
(6.49)
162
Таким образом, при использовании преобразования координат
предыдущий вариант системы относительных единиц обеспечивает
отсутствие дополнительных коэффициентов в энергетических
соотношениях (6.45) и (6.46), выраженных через преобразованные
переменные. Модернизированный же вариант системы относительных
единиц приводит к появлению в энергетических соотношениях
коэффициента, такого же, как в выражении электромагнитного
момента через преобразованные относительные токи и
потокосцепления.
Можно рассмотреть и другие варианты построения системы
относительных единиц, в частности, вариант с ориентацией на
номинальный ток (1б = Ismax н) и электромагнитную мощность
(Р$ = Алм.н)’ в котором базисное напряжение переводится в группу
производных величин:
Рассмотрим особенности подобных вариантов.
6.7. Система относительных единиц с ориентацией на
переменные цепей ротора и электромагнитную
мощность машины
Предшествующие варианты строятся на основе использования
номинальных значений напряжения и тока обмотки статора, т. е.
“сетевых” величин, указываемых в паспортных данных машин. В
отличие от них данный вариант использует в качестве базисных не
статорные, а роторные величины следующим образом.
Основные базисные величины:
U- Егтах н - амплитудное значение приведенной к статору полной
фазной ЭДС ротора в номинальном режиме ;
= 1гтах. н - амплитудное значение приведенного к статору
фазного тока обмотки ротора в номинальном
режиме;
= 2л*fs н - номинальное значение угловой частоты напряжения
статора;
= 1Эл.рад " единица измерения углов.
Производные базисные величины в этом варианте определяются
по формулам (6.17), т.е. по формулам основного варианта. Однако в
163
результате изменения основных базисных величин оказывается, что
базисная мощность теперь равна номинальной электромагнитной
мощности, а базисный момент - номинальному электромагнитному
моменту машины:
^6 Ег эфф п 1г эффм — -^элм.Н ’ (6.50)
М() ^элм.н/^О.н
= Л/Н.
(6.51)
Вид формулы электромагнитного момента не отличается от вида
формулы основного варианта (6.16):
/77 /у-у Ч? гу ^гу Ч^гх' (6.52)
Итак, достоинствами данного варианта являются сохранение
вида формул при переходе к системе относительных единиц, удобство
оценки механических величин и энергетических соотношений.
Принципиальной отличительной особенностью здесь является
некоторое изменение базисного сопротивления, так как в данном
варианте
г.тах.н /Л г.тах.н »
(6.53)
а в предшествующих вариантах базисных величин
&б.осн
з.тах.н
(6-54)
Это влечет необходимость пересчета относительных значений
параметров схемы замещения машины (активных и индуктивных
сопротивлений) и представления их в нетрадиционной базе. Заметим,
что справочные относительные значения параметров электрических
машин приводятся обычно в базе основного варианта (п.6.5),
ориентированной на их паспортные данные.
Непосредственная оценка напряжений и токов статора по их
относительным значениям осложнена тем, что их относительные
номинальные значения в данной системе единиц оказываются не равными
единице в отличие от предшествующих систем.
Соотношение базисных значений напряжения и тока данного
варианта с соответствующими базисными значениями основной
системы единиц ((7^осн ~ Us max H ; Ц.осн ~ Ц.тахм) Л5151 асинхронных
машин характеризуют следующие формулы :
ОСН ’
(6.55)
164
где
- коэффициенты, зависящие от параметров Т-образной схемы
замещения машины и номинального относительного скольжения
(5Н). Отсюда определяемое формулой (6.53) базисное сопротивление в
данной системе единиц
R
(6.56)
Из (6.55) следует, что относительные амплитудные значения
номинального напряжения и тока статора в данной системе единиц
определяются как
s.max.H
(6.57)
(6.58)
Например, для упомянутой выше асинхронной машины с
параметрами Лн= 3.967; кг н = 0.976; Хт.н!&б.осн = 3.8594;
5Н = 0.0177 получаем usmaxAi = 1.06; ismaxn = 1.0566 . При этом
величина нового базисного сопротивления составляет
R& = 0.997 R6,0CH.
Как видно, отклонение относительных амплитуд номинального
напряжения и тока статора от единицы не превышает 6% . Различие
базисных величин сопротивлений оказалось весьма несущественным.
Относительные значения некоторых других величин в номинальном
режиме работы машины по определению данной системы
относительных единиц следующие:
С г.max.н * >
^г.тах.н * ’
Wг.max.н * ’ Рэлм.н ’ ’
Для сравнения укажем, что
относительных единиц (п. 6.5)
по определению основной системы
Щ.тах.н 1 »
Ь.тах.н * »
Рэлм.н
165
Первый модернизированный вариант (п.6.6.) по своему
определению базисных величин дает относительные значения
Щ.тах.н * ’ Ц.тах.н 1 ’ Рэлм.н 1 » 1 И те
же значения ег тах н < 1 и > что и основной вариант.
(6.59)
(6.60)
6.8. Система относительных единиц с ориентацией
на векторные системы управления током статора
и потокосцеплением ротора
В теории и практике частотного управления машинами
переменного тока используются модели, в которых переменными
состояния электромагнитных контуров являются токи обмотки
статора и потокосцепления обмотки ротора [112-114,116-124,140,153 и
др.]. Для представления этих моделей в относительных единицах
целесообразно несколько видоизменить предшествующий вариант,
внеся в его систему базисных величин следующие коррективы:
lk~k F
б Аг.н ^г.тах. н »
/ = 1
1б ''т.н 1 r.max. н •
При этом формулы определения остальных базисных величин не
изменяются, что по-прежнему обеспечивает
Ллм.Н — 1 — 1 *
Различие данного и предшествующего вариантов иллюстрируют
векторные диаграммы одного и того же номинального режима
асинхронной машины, изображенные на рис. 6.1.
На рис. 6.1,а показаны базисные величины напряжения и тока,
соответствующие варианту п. 6.7. Как видно, за основу здесь приняты
длины изображающих векторов Ег н и 1г н . Для сравнения на
рис.6.1,6 указаны базисные величины напряжения и тока, принятые в
данном варианте. Смысл изменений (6.59) и (6.60) состоит в
следующем. При анализе режимов векторного управления машинами
переменного тока используется представление вектора токов статора
в виде суммы двух ортогональных составляющих:
у _ такт ж реакт
Vi' — "Г .У
166
a)
Рис. 6.1. Векторные диаграммы номинального режима
асинхронной машины
Базой для ортогонального разложения вектора токов служит
вектор потокосцеплении ротора , причем первая составляющая
вектора токов ортогональна, а вторая - коллинеарна вектору
потокосцеплений. По своей роли в формировании электромагнитного
момента машины первая, т.н. “активная” составляющая,
167
рассматривается как эквивалент тока якоря машины постоянного
тока. Вторая, “реактивная” составляющая, служит эквивалентом тока
возбуждения машины постоянного тока [117,123]. Результат такого
ортогонального разложения вектора токов в номинальном режиме
показан на рис. 6.1,6. Оказывается, что формула (6.60) дает значение,
равное амплитуде “активной” составляющей тока статора в
номинальном режиме:
j — J = 1акт Гб 611
В соответствии с формулами (6.55) и (6.60) связь этой новой базисной
величины тока с базисным током основной системы относительных
единиц следующая:
4 = ! Лн 7 1б.осН • (6-62)
л/1 + ^н
ь
Связь базисных напряжений определяет формула
ив = кг.„х'"" ие.„. (6.63)
Новое базисное сопротивление системы относительных единиц :
= (6.64)
В связи с тем, что значение к. н »1, изменение значений базисных
величин и параметров модели при переходе от предшествующего к
данному варианту сравнительно невелико. В то же время данный
вариант позволяет провести корректное и наглядное сравнение
режимов управления машинами переменного и постоянного тока в
сопоставимых системах относительных единиц. Более полно данный
вариант описан в работе [132]. Описание сопоставимой системы
относительных единиц для машин постоянного тока приводится в
[76,131].
6.9. Обратимость относительных единиц. Частично-
относительные уравнения моделей
Переход к системе относительных единиц, как один из видов
преобразования координат, должен удовлетворять двум основным
требованиям: не только целесообразности, но и обратимости.
168
Рассмотренные выше принципы и процедуры перехода к
относительным единицам этим требованиям удовлетворяют. Общая
формула обратного перехода, т.е. возврата в физическую систему
единиц непосредственно следует из формулы перехода к
относительным единицам (6.1):
Y = yY6. (6.65)
Иными словами, для восстановления физической величины (параметра,
воздействия, переменной состояния и др.) в исходной физической
системе единиц необходимо относительное значение величины
умножить на соответствующую базисную величину.
Формула (6.65) непосредственно приемлема для перевода в
физические единицы значений каждой отдельно взятой величины
(параметра,, воздействия и др.). Это могут быть, например, массивы
данных, полученных в результате моделирования в относительных
единицах, либо какие-то другие данные.
В некоторых случаях возникает необходимости перевода в
физические единицы не массивов данных, а математических
выражений, например, уравнений модели объекта. Наиболее
целесообразная процедура перевода относительных уравнений
состоит в том, что в них производится подстановка каждой
относительной величины (параметра, воздействия и др.) в форме (6.1),
т. е. как отношения физической величины к базисной. После
соответствующих сокращений базисных величин получаем искомые
уравнения в физических единицах.
Проиллюстрируем эту процедуру примером перевода в
физические единицы относительных уравнений (6.11) и (6.12),
полученных с использованием основной системы относительных
единиц. Запишем их еще раз :
• л d^i .
Щ ij + >
ат
r da)
т-т, =J—- ,
с dr
(6.66)
(6.67)
Сначала выразим переменные и коэффициенты этих уравнений в
форме (6.17):
т -t т- М/ Мб ; тс = Мс/ ; (6.68)
ft> = Q/Qr6; r^RjR,-,- J =
169
Произведя подстановку этих выражений в относительные
уравнения (6.66) и (6.67) и производя с учетом условий (6.17)
сокращение базисных величин, получим исходные уравнения (6.4) и
(6.5). Попутно заметим, что перевод исходных уравнений в систему
относительных единиц целесообразно производить по аналогичной
методике, а именно - путем подстановки в них выражений
неотносительных переменных и параметров в форме (6.65).
Частично-относительные уравнения моделей. В зависимости от
специфики прикладных задач и традиций различных научных школ
исследователей и инженеров переход к относительным единицам,
равно как и обратный переход, может быть либо полным, либо
частичным. Полный переход предусматривает перевод в
альтернативную систему единиц всех без исключения
переменных (включая независимую переменную /) и коэффициентов
уравнений модели (или же параметров объекта). Частичный переход
затрагивает не все, а лишь часть переменных и параметров модели,
т. е. предусматривает некоторые исключения.
Типичным, широко распространенным примером результатов
частичного перехода могут служить уравнения моделей электрических
машин и систем электропривода в относительных единицах, где
сделано исключение относительно текущего времени, представляемого
в физической системе единиц.
Такие частично-относительные уравнения в принципе можно
получить различными путями:
• частичным переводом исходных уравнений модели,
например (6.4) и (6.5), в относительные единицы, затрагивающим все
переменные и параметры за исключением независимой переменной t ;
• частичным переводом полностью относительных
уравнений модели - соответственно (6.66) и (6.67), в физические
единицы, затрагивающим лишь независимую переменную т .
И в том и в другом случаях мы получаем один и тот же
результат:
(6.69)
~ dco
m-mr = 1.--,
с J dl
(6.70)
где t
т6 = *в/иб = ®б/Пб -
Tj=JT^}T6li6 -
текущее время, с;
базисная электромагнитная
постоянная времени, с;
базисная механическая постоянная
времени, с.
170
В данных частично-относительных уравнениях величина Tg
рассматривается уже не как единица отсчета времени, а как базисная
константа, необходимая для описания электромагнитных связей и
явлений в реальном времени в случае представления напряжений,
ЭДС, потокосцеплений и других факторов электромагнитных
процессов в относительных единицах.
В уравнении механического движения (6.70) величина Tg входит
в произведении с относительным моментом инерции J =
механической системы. Здесь она сокращается с той же величиной,
входящей в выражение базисного момента инерции, приведенное в
формулах (6.17). Это дает возможность при описании динамических
процессов в электромеханических системах с машинами постоянного и
переменного тока использовать обобщенную временную константу -
базисную механическую постоянную времени :
T=J^-,c. (6.71)
Mg
Здесь J - суммарный момент инерции механической
системы, приведенный к валу двигателя, кгм2;
£lrg - базисная скорость, рад/с ;
Mg - базисный момент, Нм.
Величина Tj имеет весьма показательный физический смысл
[131]. Она численно равна времени разгона электромеханической
системы от состояния покоя до базисной скорости при условии, что
электрический (либо иной) двигатель обеспечивает в процессе разгона
постоянный по величине динамический момент, равный базисному.
Базисные значения момента и скорости выбираются равными
либо близкими к номинальным значениям момента и скорости
двигателя. Поэтому данное определение по сути описывает реальную
типичную ситуацию: пуск электропривода на холостом ходу с
пусковым моментом, равным номинальному, либо пуск под
нагрузкой, например, с двукратным пусковым моментом (не
превышающим допустимой перегрузочной способности двигателя по
моменту) и с номинальным моментом статического сопротивления на
валу двигателя. В этих ситуациях динамический момент оказывается
равным номинальному моменту двигателя. И в том и другом случаях
время разгона электропривода до базисной скорости оказывается
численно равным величине
171
Таким образом, величина Tj непосредственно характеризует
время разгона электропривода в нормальных условиях и поэтому
служит важным оценочным параметром электромеханической
системы.
В заключение заметим, что не следует отождествлять базисную
механическую постоянную времени Tj с электромеханической
постоянной времени Тм, традиционно используемой в теории
электропривода [4 3,48,109] для аналитического исследования
механических и электромеханических переходных процессов. В
наиболее общем случае электромеханическая постоянная времени
определяется как
Т I /А 7»
Тм = J ~ >с • <6-72)
Здесь - выражение механической характеристики
двигателя, в котором фигурируют его параметры и параметры
источника питания. Как видно из (6.72), электромеханическая
постоянная времени Тм зависит от суммарного момента инерции
механической системы и от жесткости механической характеристики
двигателя, отражаемой в данном случае в виде частной производной
скорости по электромагнитному моменту двигателя. Поэтому
величина Тм может рассматриваться в качестве временной константы
лишь в частных случаях, а именно - в задачах исследования динамики
двигателей с линейной механической характеристикой либо в случае
линеаризации нелинейной механической характеристики двигателя “в
малом” или “в большом”. В отличие от этого величина Tj не связана с
формой механической характеристики двигателя и поэтому имеет
более широкую область применения в качестве временной константы.
Для этого достаточно выполнения единственного условия
постоянства суммарного момента инерции механической системы.
Особенности использования относительных единиц в задачах
динамики электромеханических систем с переменным моментом
инерции рассмотрены в [131].
Для использования величины Тм в качестве временной
константы условие постоянства момента инерции является также
необходимым, но не достаточным - оно дополняется условием
линейности механической характеристики двигателя. Кроме того,
определяемые формулой (6.72) значения Тм, соответствующие
линеаризованным рабочим участкам естественных механических
характеристик, у большинства двигателей оказываются существенно
172
(например, на порядок) меньшими, чем значения Ту, определяемые
формулой (6.71). И хотя значения Тм и Ту у одного и того же
электропривода определенным образом взаимосвязаны и могут быть
выражены друг через друга [131], в силу существенного различия их
значений путаница между ними совершенно не допустима.
Приведенные материалы позволяют в каждом конкретном
случае выбрать наиболее приемлемый вариант системы
относительных единиц.
173
Раздел второй
МАТЕМАТИЧЕСКИЕ МОДЕЛИ
МАШИН ПЕРЕМЕННОГО ТОКА
ДЛЯ ЗАДАЧ УПРАВЛЕНИЯ
Глава седьмая
УРАВНЕНИЯ ЭЛЕКТРОМАГНИТНЫХ
КОНТУРОВ НЕЯВНОПОЛЮСНОЙ МАШИНЫ
ДВОЙНОГО ПИТАНИЯ
7.1. Вопросы математического моделирования
электрических машин переменного тока
Математическая теория электрических машин переменного тока
характеризуется весьма полным описанием физических процессов,
протекающих в них в установившихся и переходных режимах работы.
Основополагающие аспекты общей теории переходных процессов в
машинах переменного тока и ее приложения к асинхронным машинам
освещены в монографиях М.П.Костенко [54], Е.Я.Казовского [44],
С.В.Страхова [89], И.И.Трещева [95], И.П.Копылова [51], а также в
трудах Т.Лайбля [61], В.Лайона [62], В.Адкинса [1], К.П.Ковача и
И.Раца [47], С.Сили [83], Д.Уайта и Г.Вудсона [96] и др.
Динамические модели электрических машин переменного тока
базируются на дифференциальных уравнениях, которые
характеризуются большим разнообразием, применением различных
систем координат и базисных величин [2,20].
174
На первых этапах развития теории переходных процессов и
методов математического моделирования были отработаны модели
существенно идеализированных симметричных машин, учитывающие
электромагнитные переходные явления. Развиты методы исследования
задач динамики электрических машин в заданных ситуациях с
использованием математических моделей с синхронно вращающимися
системами координат. Эти ситуации характеризуются
детерминированными внешними факторами - напряжениями на
зажимах обмоток, коммутациями электрических цепей и
воздействиями на машину со стороны вала. Сюда относятся,
например, случаи включения машины в сеть, ее отключения,
повторного включения, короткого замыкания, частотного пуска с
заданным темпом изменения частоты и др.
В последующие годы в научной литературе развивается
системный подход к анализу всей совокупности электромагнитных и
электромеханических процессов на основе создания нелинейной
теории электрических машин, учитывающей насыщение
магнитопроводов [100,101], разработки универсальных методов учета
реальных проводимостей зубцового слоя (двусторонняя зубчатость,
произвольные конфигурации пазов и структура обмоток) [97],
представления электрических машин в качестве нестационарных
параметрических систем и разработки основ общей аналитической
теории несимметричных машин с неидеальными (несинусными)
обмотками [33].
В связи с постоянным расширением области применения машин
переменного тока в регулируемом электроприводе рассматриваются
модели и задачи анализа электрических машин, как элементов
сложных замкнутых нелинейных электромеханических систем
[21,55,81,84,123,141 и др.]. Разрабатываются математические модели и
методы исследования свойств электрических машин, ориентированные
на задачи управления и оптимизации их режимов работы по тому или
иному критерию [111-118,123,139,140 и др.]. Здесь модель машины
призвана служить инструментом поиска ее оптимальных режимов и
определения обеспечивающих эти режимы величин контролируемых
внешних воздействий на машину. Последние превращаются таким
образом из заданных в искомые функции времени и координат
состояния системы, а модель - в инструмент синтеза ее управляющей
части.
Оптимизация режимов работы электрических машин объективно
достигается за счет рационального использования их активных частей
и в том числе работы в зоне глубокого насыщения главной магнитной
цепи. Оптимальные динамические режимы характеризуются
быстрыми изменениями во времени как кинетической энергии ротора
и сопряженных с ним элементов, так и электромагнитных полей
175
машины. Поэтому важным этапом решения задач об оптимальном
частотном управлении является разработка моделей, учитывающих
насыщение, электромеханические и электромагнитные переходные
процессы в машинах.
В системах регулируемого электропривода двигатели получают
питание от полупроводниковых преобразователей частоты с
несинусоидальной формой выходного напряжения [92]. Причем в
практике используются электрические схемы соединения многофазных
машин с источниками питания как без нейтрального провода, так и с
раздельным (автономным) питанием фазных обмоток. Поэтому в
общем случае модель машины должна учитывать эффекты,
обусловленные автономным питанием ее обмоток.
При решении каждой конкретной задачи модель должна быть
максимально упрощена за счет отбрасывания второстепенных
факторов. В связи со сложностью алгоритмов поиска оптимальных
управлений и фактором нелинейности машины как объекта
управления удачный выбор модели объекта является залогом
успешного решения задачи. Поэтому в распоряжении исследователя
должен быть набор моделей, наиболее хорошо приспособленных для
решения различных конкретных задач.
В дальнейшем основное внимание мы уделим описанию
математических моделей неявнополюсных машин переменного тока
для задач управления.
7.2. Уравнения электрического равновесия цепей
статора и ротора
Рассмотрим идеализированную трехфазную симметричную
неявнополюсную машину переменного тока, фазные обмотки статора
и ротора которой получают питание от автономных источников с
произвольной формой напряжения. При выборе уровня идеализации
свойств машины примем следующие допущения, сформулированные в
работах [100, 101] в области неявнополюсных машин переменного
тока с насыщенной главной магнитной цепью.
1. Не учитываются потери в стали.
2. Рабочее поле электрической машины считается
плоскопараллельным.
3. Учитываются только первые пространственные гармоники
МДС обмоток и магнитной индукции главного магнитного
поля вдоль полюсного деления.
4. Не учитываются насыщение путей рассеяния и взаимное
влияние потоков рассеяния и главного магнитного потока.
176
При записи уравнений будем использовать основную (базовую)
систему относительных единиц, описанную в гл. 6. Примем, что
переменные, относящиеся к обмотке ротора (напряжения источников
питания, токи и потокосцепления), а также параметры обмотки
ротора приведены к числу витков обмотки статора.
Исходя из соображений компактности и упрощения
промежуточных преобразований наиболее целесообразной
представляется векторно-матричная форма записи уравнений. Но
чтобы за компактностью матричных уравнений не терялся физический
смысл описываемых процессов, а . также для удобства их
геометрической интерпретации будем, как и в работах [89,123],
оперировать трехмерными векторами-столбцами и соответствующими
квадратными матрицами. Принятые в работе условные обозначения и
развернутые выражения векторов и матриц помещены в приложении.
Введем абстрактные алгебраические векторы-столбцы,
составленные из мгновенных относительных значений напряжений
источников питания, токов и потокосцеплений фазных обмоток
статора и ротора:
Назовем их векторами фазных (непреобразованных) величин.
Исходя из симметрии машины примем, что активные
сопротивления фазных обмоток статора и ротора
= diag [ ггв rrb rrc ] = ггЕ ,
df
где Е = diag [1 1 1 j - матричная единица.
Тогда на основании законов Кирхгофа и Фарадея для цепей
статора и ротора записываем матричные уравнения:
(7-1)
(7.2)
Uf' = рТД + Rf lfr,
177
относительному времени г.
Для решения этих уравнений необходимо определить связь
между фигурирующими в них потокосцепления ми и токами. Как
известно [83], это можно осуществить либо на основе теории
магнитно-связанных электрических цепей с использованием понятия
"индуктивность", либо на основе теории магнитных цепей,
предполагающей рассмотрение магнитных полей в воздушном зазоре
машины. Первый путь оказался наиболее эффективным для описания
идеализированных машин с линейной характеристикой
намагничивания и поэтому на данном уровне их идеализации получил
весьма широкое распространение [44, 47, 50, 89, 144 и др.]. Однако, как
показано в работах [100, 101], в случае учета нелинейности
характеристики намагничивания процедура определения
индуктивностей значительно усложняется. Кроме того, увеличивается
количество коэффициентов само- и взаимоиндукции, необходимое для
записи уравнения связи. Поэтому для построения моделей,
учитывающих насыщение, и следовательно более адекватных объекту,
предпочтительным является второй путь. Рассмотрим основные этапы
получения уравнений связи на основе анализа плоскопараллельного
поля в поперечном сечении машины.
7.3. Магнитодвижущие силы обмоток статора
и ротора
Поток индукции, обусловливающий магнитную связь обмоток
статора и ротора (главный магнитный поток) определяется суммой
намагничивающих сил, создаваемых токами в обмотках статора и
ротора. В нормально спроектированных машинах средней и большой
мощности обмоточные коэффициенты для высших гармоник
намагничивающих сил достаточно малы, что позволяет пренебречь
этими составляющими. Для характеристики основных
пространственных гармоник намагничивающих сил обмоток статора
и ротора введем в системе отсчета, фиксированной относительно
статора, относительные обмоточные вектор-функции
распределения:
Ч.М
Qf4(p) = яМ =Qs
.max
cos(<p - <psa)
cos(<p-<psh) ;
cos (cp - <psc)_
(7.3)
178
=
cos
Чгь{<Р>в)
Ягс{<Р,^)
—
— Яг.max C0S
COS
{fP-<Pra~e'}
(<p-<prh-0)
{(p-(PrC-0)
(7.4)
Здесь приняты следующие условные обозначения :
(р - угловая координата, отсчитываемая вдоль воздушного зазора от
фиксированной точки на статоре в направлении чередования фаз
обмоток статора;
VsaiVsb'Vsc ' координаты, определяющие положения продольных
магнитных осей фазных обмоток статора относительно
фиксированной точки на статоре;
Фга’ФгЬ'Фгс “ координаты, определяющие положения продольных
магнитных осей фазных обмоток
ротора относительно
л
риксированнои точки на роторе;
О -
угол поворота ротора, т.е. угловой интервал между
фиксированными точками на статоре и роторе. Все углы
измеряются в электрических радианах, причем фиксированные
точки на статоре и роторе удобно выбирать так, чтобы
~ Фга — 0 ’
Яг.пих ' относительные амплитудные значения основных
гармоник обмоточных функций обмоток статора и ротора. В
связи с приведением параметров и переменных состояния всех
обмоток к числу витков обмотки статора
Яг.max ~ Яхтах ~~ Я max •
Выражения (7.3) и (7.4) позволяют определить пространственно-
временные функции распределения относительных результирующих
намагничивающих сил трехфазных обмоток статора fs (#М ) и ротора
fr t) в виде скалярных произведений введенных векторов:
Л(^0 = 1Г5(0 •Qf'G9) ;
(7.5)
(7.6)
Результирующая относительная МДС всех обмоток по
главному пути машины определяется формулой
fm= fs0 + fr• (7-7)
179
Ля Bs Cs As
Рис. 7.1. Распределение магнитодвижущих сил и индукции
главного магнитного поля в идеализированной машине
180
В дальнейшем мы будем использовать упрощенное обозначение
функций (7.5), (7.6) и (7.7) без указания в явном виде аргументов 0 и
^обозначая их как fr(<p} и
Графики обмоточных функций изображены на рис. 7.1. Там же
приведены типичные графики намагничивающих сил для
фиксированного момента времени и угла поворота ротора.
В связи с избыточностью трехфазной системы в общем случае
формулы (7.5) и (7.6) не позволяют получить взаимно однозначное
соответствие между функциями fs((p) и fr(<p), с одной стороны, и
компонентами векторов Iv и 1г - с другой. Например, для любой
пары векторов и соответствующие компоненты которых
различаются на одну и ту же величину А/, формула (7.5) дает один и
тот же результат. Это следствие того, что при синусоидальном
распределении намагничивающих сил каждой из обмоток
симметричной машины равные по величине фазные токи являются
нейтральными и не участвуют в создании главного магнитного потока.
В наиболее общем случае питания фазных обмоток от автономных
источников в системах фазных токов статора и ротора могут иметь
место нейтральные составляющие, определяемые выражениями:
han
hen
= NI*;
(7-8)
Для выделения этих составляющих
симметричных трехфазных обмоток
вещественную матрицу (2.42)
из систем фазных токов
используем квадратную
(7-9)
Для определения намагничивающих сил, действующих по
главному пути, целесообразно выделить из систем фазных токов лишь
те составляющие, которые оказывают влияние на функции
распределения (7.5) и (7.6). Указанные составляющие векторов полных
токов
181
Тл = Тл - Тл = М lFs
sm s *sn 1 ’
где
Fr _ yFr _ iFr _ тГг
M-E-N=-
(7.10)
(7.П)
(7.12)
есть постоянная вещественная симметричная матрица, являющаяся
частным случаем матрицы (2.39).
В дальнейшем векторы-столбцы и будем
называть векторами намагничивающих токов
статора и ротора, а матрицу М - матрицей выделения их из полных
токов lfs и [123].
г *
Так как • Q^v = • Qfr = 0, функцию (7.7) можно
представить следующим эквивалентным выражением:
(7.13)
которое приводится к виду
~ fm.max — Фт)»
_3
гДе J m.max ~ ? max ^т ~~ Я max.же ^т •
(7-14)
Физический смысл выражения (7.14) состоит в том, что действие
всех обмоток многофазной машины можно представить как
результат действия одной эквивалентной обмотки, обтекаемой
результирующим током намагничивания im и
имеющей угловую координату магнитной оси (р = (рт.
Аналогичным образом можно представить функции
распределения результирующих намагничивающих сил трехфазных
обмоток статора (7.5) и ротора (7.6) как результаты действия
эквивалентных однофазных обмоток статора и ротора:
fs (^) 9 Я max h т COS ’
**
(7.15)
182
у ЧтахКт^^Ф Фгт)'
(7.16)
Здесь iSfn , irm - результирующие токи намагничивания статора
и ротора;
<psm ’ Фгт “ угловые координаты магнитных осей
эквивалентных обмоток статора и ротора.
7.4. Главные потокосцепления и ЭДС фазных обмоток.
Учет насыщения главной магнитной цепи
Формула (7.14) определяет результирующую волну
распределения намагничивающей силы вдоль воздушного зазора как
гармоническую функцию, четную относительно оси, проходящей
через точку (р — (рт. По известной геометрии машины и
характеристикам отдельных участков главной магнитной цепи можно
построить кривую распределения плотности магнитного
потока вдоль воздушного зазора, т. е. кривую пространственного
распределения относительной магнитной индукции
Вследствие нелинейности главной магнитной цепи функция
в отличие от fm{(p) имеет (см. рис. 7.1) несинусоидалъный
"уплощенной” вид [22]. Для оценки влияния несинусоидальности этой
функции представим ее в виде ряда Фурье, состоящего из суммы
нечетных гармоник:
т. max. v
(7.17)
Рассмотрим сначала некоторую произвольно расположенную
сосредоточенную обмотку с угловой координатой магнитной оси (pt и
полным шагом, равным л. Потокосцепление этой обмотки с
главным магнитным потоком машины (главное потокосцепление)
определяется в соответствии с формулой (4.19) интегралом
= \bm{(p)d<p
(7.18)
183
где - относительная константа, учитывающая число витков
обмотки и линейные размеры машины (см. п. 4.3 и п. 6.5).
С учетом (7.17) результат интегрирования имеет вид:
Как видно, влияние высших гармоник Ьт((р) в полученном
выражении ослабляется тем сильнее, чем выше номер гармоники.
Далее предположим, что вследствие изменения токов во времени
пространственная волна Ьт{(р) перемещается вдоль воздушного
зазора с постоянной скоростью й)т - (1(рт/(1т — const и имеет
постоянную амплитуду. В этом случае относительная ЭДС,
наведенная в обмотке главным магнитным полем, определяется как
i.m PWi.m $i.\ ^т
т.max.у81П V\O)mT (рЛ .
Следовательно, удельный вес гармоник во временной функции
е (т) оказывается таким же, как и в кривой Ьт((р). Однако в
реальных машинах фазные обмотки выполняются не
сосредоточенными, а распределенными. Кроме того, используется
укорочение шага, выполнение обмоток с дробным числом пазов на
полюс и фазу и другие меры, способствующие значительному
подавлению влияния высших пространственных гармоник главного
магнитного поля не только на величины потокосцеплений обмоток, но
и на наведенные в них ЭДС [54].
Поэтому при определении потокосцеплений и ЭДС не только в
ненасыщенной, но и в насыщенной машине допустимо учитывать
лишь основную пространственную гармонику кривой распределения
магнитной индукции. Тогда можно принять
Vi.m =si.lbm_maxA COS (рт-^) = у/т COS (1АУ)
где Ьт тах \ - амплитуда основной гармоники кривой Ьт{<р).
При этом нелинейность характеристики главного магнитного
пути будет проявляться лишь в том, что зависимость амплитуды
основной гармоники магнитной индукции в зазоре, а следовательно,
величины у/т от амплитуды результирующей намагничивающей силы
(или от намагничивающего тока im), окажется нелинейной.
184
В первом приближении такую связь можно определить,
используя кривую намагничивания машины по главному пути:
Wm “ (7.20)
По своему физическому смыслу - есть потокосцепление
фазной обмотки с главным магнитным полем в случае совпадения оси
симметрии волны Ьт((р) с магнитной осью данной обмотки. Таким
образом, используя формулу (7.19) и принимая <psa =(рга =0, векторы
потокосцеплений симметричных фазных обмоток статора и ротора с
главным магнитным полем определим следующим образом:
Wsam
Wsbm
Wscm
Vm cos <Рт
Vm COS (фт ~ A)
j^wcos(^ + A)
(7-21)
rm
df
У^гат
W rbm
4? rem
Vm C0*{<Pm ~^~A)
Vm COs(pm-0+A)
(7.22)
где А = 2я/3.
7.5. Потокосцепления рассеяния
Для определения полных потокосцеплений обмоток необходимо
также учесть потоки рассеяния. Введем векторы потокосцеплений
фазных обмоток статора и ротора с потоками рассеяния:
W saa
df
sea
W rba
V rca
(7.23)
В большинстве работ, посвященных математическому описанию
симметричных машин [47, 89, 100 и др.], потокосцепления рассеяния
принимаются пропорциональными соответствующим фазным токам,
и определяются как
185
(7.24)
где (vo- и 4<т " индуктивности рассеяния обмоток статора и ротора.
Но в этом случае индуктивности рассеяния оказываются
равными индуктивностям нулевой последовательности этих обмоток,
что не совпадает с результатами экспериментальных исследований.
Для более точного математического описания машины в работе
[123] предложено разделить потоки рассеяния и соответствующие
потокосцепления статора и ротора на две составляющие.
Применительно к статору в качестве первой (основной)
составляющей рассматриваются такие сцепленные только с фазными
обмотками статора поля, которые не создают магнитной связи между
этими обмотками. Во вторую составляющую выделяется поле, также
сцепленное только с обмотками статора, но так, что фазные обмотки
оказываются магнитно связанными. Аналогичное разделение полей
рассеяния производится и для ротора.
Соответствующие первым составляющим полей рассеяния
потокосцепления рассеяния обмоток статора и ротора определяются
по формулам, аналогичным (7.24), с использованием в них
соответствующих коэффициентов самоиндукции, помеченных
верхним индексом "о":
„ ]О ^Fs. xyFr _ jo vFr n
* 5<т0 ’ * ГСТО VCT1/- V *
Что касается вторых составляющих потокосцеплений рассеяния,
то они, очевидно, определяются соответственно результирующими
намагничивающими силами трехфазных обмоток статора
1
Л М = *зт • Qf5 = | Я max Чт C0S (? " <Psm ) (7 26)
и ротора
fr(<P) = Irm • QrS = | Я max ~в~ <Prm)' <7-27>
В отличие от первых составляющих потокосцеплений рассеяния их
вторые составляющие и определяются не полными, а
намагничивающими токами статора и ротора.
Для связи соответствующих потокосцеплений рассеяния с
намагничивающими токами в принципе можно использовать схему
вывода, аналогичную рассмотренной ранее для главных
потокосцеплений. Не повторяя приведенных выше рассуждений,
запишем результаты в виде
186
ram
Vraa
V^ba
..jn
CO® —
VGctCOS (Psm + A)
(7.28)
VZ^Vrm
W™a cos (<prm - Д)
cos (<prmr + Д)
(7.29)
Вводя допущения о линейности характеристик намагничивания
по соответствующим путям рассеяния
(7.30)
(7.31)
представим векторы потокосцеплений обмоток статора и ротора со
вторыми составляющими полей рассеяния так:
sam ~ her *sm ’
Г/7 _ тЕг
ram ~ ha Lrm ’
(7-32)
где и - постоянные индуктивности, соответствующие
вторым составляющим потоков рассеяния.
В принципе, рассматривая эти индуктивности как нелинейные
функции токов ism и irm, указанные выше допущения можно было бы
и не вводить, что не слишком усложнило бы уравнения машины в
процессе их последующих преобразований. Однако этого можно не
делать по следующим соображениям. Во-первых, индуктивности 1^ и
l^j. в сравнении с 1®а и невелики. Во-вторых, логично было бы
прежде всего учесть изменение индуктивностей от основных (первых)
составляющих потоков рассеяния. Однако в этом случае приходится
оперировать с функциональными матрицами индуктивностей
рассеяния вида
Fs (tFs
‘sa0\
diag lsao\isa)
diag lraa(ira)
(7.33)
(7.34)
187
элементы которых являются нелинейными функциями полных
значений фазных токов. Иными словами, для характеристики
действия автономных полей рассеяния при нелинейности магнитных
цепей невозможно найти обобщенный скалярный аргумент,
подобный, например, току isni (или 1гт), определяющий одновременно
индуктивности рассеяния всех фазных обмоток статора (ротора).
Введение матриц (7.33) и (7.34) значительно усложняет процедуру
последующего преобразования уравнений машины и, в частности, не
позволяет устранить в них периодические коэффициенты.
Учитывая вышеизложенное, а также то, что потокосцепления
рассеяния составляют обычно небольшую долю в общем балансе
потокосцеплений обмоток, мы будем все введенные индуктивности
рассеяния считать величинами постоянными, ограничиваясь выбором
так называемых "ненасыщенных" или "насыщенных" их значений в
зависимости от исследуемого режима работы машины.
Итак, векторы полных значений потокосцеплений рассеяния
фазных обмоток статора и ротора определяются выражениями:
Fs _ vp^s . vpAs . \uFr — \&Pr । vpfr’
sa .scrQ Trcr TrcrO Tram
(7.35)
После соответствующих подстановок и тригонометрических
преобразований в [123] получено
(7.36)
где Ь^ = /^Е + /-М;(7.37) L* =Е + /™ М (7.38)
- постоянные симметричные матрицы индуктивностей рассеяния
обмоток статора и ротора.
7.6. Полные потокосцепления фазных обмоток
Векторы полных потокосцеплений фазных обмоток статора и
ротора определяются как суммы векторов главных потокосцеплений и
потокосцеплений рассеяния:
Связь этих потокосцеплений с токами статора и ротора определяется
выражениями (7.10) - (7.14), (7.20) - (7.22) и (7.36).
188
Глава восьмая
ПРЕОБРАЗОВАНИЕ КООРДИНАТ
8.1. Формулы преобразования переменных
симметричной трехфазной машины
Преобразование координат является важным этапом
построения математической модели электрической машины,
позволяющим привести уравнения модели к виду, наиболее удобному
для анализа режимов ее работы и решения конкретных задач
управления.
Введем векторы преобразованных напряжений, токов и
потокосцеплений обмоток статора и ротора:
Преобразование переменных, относящихся к статору и ротору,
мы будем осуществлять с помощью следующих матриц [123]:
189
cos [0k - 0)
- sin (0k - 0)
(8.3)
(8-4)
где - обобщенный параметр преобразования; A = 2^/3.
Формулы прямого преобразования имеют вид:
и =А5иГ5; I =Aslfs; Т =А?РЛЛ;
и, = А,и*; Г = адГ; тг = а,тЛ.
Данное преобразование является обратимым. Для
преобразования используются матрицы
(8.5)
(8-6)
обратного
т т
где Ау и Аг - транспонированные матрицы прямого преобразования.
Формулы обратного преобразования имеют вид:
Fs
S ’ .V
(8-8)
ufr=A;’ur; 1Г=А;'1Г; Tf = а;1 У,. (8.9)
Рассмотрим геометрический смысл данных преобразований,
полагая, что в общем случае компоненты преобразуемых векторов
представляют собой линейно независимые системы переменных.
190
8.2. Геометрическая интерпретация
Введем трехмерную декартову систему координат, оси которой
обозначим как Oas, Obs и Ocs (рис. 8.1). Рассмотрим в этой системе
координат точку координаты которой равны
мгновенным значениям фазных токов статора. Совокупность
введенных таким образом точек образует трехмерное точечное
(аффинное) пространство. Как известно из аналитической геометрии,
координаты всякой точки численно совпадают с координатами ее
радиус-вектора. Обозначим радиус-вектор рассматриваемой точки как
I л и будем рассматривать этот вектор как элемент трехмерного
векторного пространства R. Выберем в качестве базиса в
пространстве R единичные векторы
и введем сокращенное обозначение этого ортонормированного базиса
(8.11)
Разложим вектор 1у по векторам базиса F$ т. е. представим
фазные токи статора как координаты вектора 15 в базисе FiV:
а i sb
(8-12)
Формула (8.12) дает представление вектора 1Л. в виде
геометрической суммы трех взаимно ортогональных векторов, длины
которых определяются мгновенными значениями фазных токов
статора. Каждая из составляющих суммы (8.12) определенным
образом характеризует намагничивающую силу соответствующей
фазной обмотки. Если иметь в виду картину плоскопараллельного
поля в поперечном сечении идеализированной машины, то при
заданных фазных токах распределение намагничивающих сил вдоль
воздушного зазора определяется пространственным сдвигом
магнитных осей фазных обмоток. В симметричной трехфазной
191
машине данные оси расположены под углами, кратными 2тг 3
электрических радиан.
Рис. 8.1. Изображающий вектор токов статора
Поэтому с точки зрения геометрии машины совокупное действие
фазных токов, казалось бы, более логично характеризовать
пространственным вектором, составленным из суммы трех
неортогональных составляющих, направления которых совпадают с
направлениями магнитных осей фазных обмоток. Именно такое
геометрическое представление результирующего вектора широко
используется в литературе. Однако для системы линейно-независимых
переменных ixa, и isc с позиций векторной алгебры оно
неправомочно. Действительно, лежащие в одной плоскости орты
магнитных осей фазных обмоток образуют линейно-зависимую
систему векторов и, следовательно, не могут служить базисом
трехмерного векторного пространства.
Итак, в качестве базиса трехмерного векторного пространства
мы будем использовать линейно независимую систему векторов (8.10).
Покажем, как в соответствующей декартовой системе координат
целесообразно сориентировать плоскость поперечного сечения
машины. Запишем формулу (8.12) в виде:
!< — 1.ш+ I хе »
192
где I sa = a5; I = isb ал ; I = isa c5 назовем векторами,
изображающими фазные токи, а 15 - результирующим
изображающим вектором трехфазной системы токов
статора.
8.3. Ортогональное разложение изображающих векторов
В соответствии с формулами (8.10) и (8.12) координаты векторов,
изображающих фазные токи в базисе Fj, задаются столбцами:
Рассмотрим сначала вектор
. Произведем разложение его
координат в базисе F$ на две составляющие, используя для этой
цели матричные коэффициенты разложения М и N (см.п.7.3):
(8.13)
В результате такого разложения получаем два изображающих
вектора, которые обозначим соответственно как I Sam и lsan . В
соответствии с (2.41), (2.42) и (8.12) координаты этих векторов в базисе
Fj определяются алгебраическими векторами-столбцами:
sam
193
Геометрические изображающие
представить в виде
векторы I Sam и 15ал1 удобно
san — lsa И sn
1 1 г* 1
tiSn =- а.+-Ь.+-с.
kJ и fcJ
- направляющие векторы. Координаты этих векторов в базисе F.v
определяются алгебраическими векторами;
Данные направляющие векторы можно рассматривать (рис. 8.2,а) как
орты некоторых новых осей Oasm и Oasn, на которых расположены
точки isam и isan, т. е. концы радиус-векторов Isam и
Нетрудно убедиться в том, что скалярное произведение avm • а5М - 0 .
Отсюда следует, что векторы asm и а5Л1, а следовательно, и оси Oasnv
Oasn ортогональны. Причем ось Oasn образует с осями системы
координат OaJ)scs одинаковые острые углы
£ - arc cos
(1/75).
Осуществляя аналогичное разложение векторов и Ivc,
можно показать, что для каждого из них мы получим пару взаимно
ортогональных векторов:
I sbm = * Ь $т И I sbn — isfr * Ь sn i
sem — lsc ’ C sm И
sen — lsc * C sn
Координаты новых направляющих векторов в базисе F Л
— Csn — &sn •
194
Рис. 8.2. Ортогональное разложение изображающих векторов
195
Каждой паре направляющих векторов можно поставить в
соответствие (см. рис. 8.2,6) плоскую ортогональную систему
координат ОЬ'„.Ь-п и Oc.mcVfl. Очевидно, что оси Oav„, Obv„ и
Оскп этих трех новых систем координат совпадают. Они оказываются
совмещенными с линией L, являющейся геометрическим местом
концов радиус-векторов а^, и с5« •
Что касается осей Oasm, Obsm и Ocsm, то все они лежат в одной
плоскости Р, проходящей через начало координат и ортогональной к
L. Причем оказывается, что взаимное расположение этих осей на
плоскости аналогично взаимному расположению магнитных осей
фазных обмоток статора симметричной электрической машины.
Итак, разложение изображающих векторов фазных токов по
формулам
I sa “ I sam + I san ,
I sb = I sbm+ I sbn j (8.14)
дает нам три пары взаимно ортогональных векторов. Составляющие
Ij/rt и Ij/m (j = a,b,c) представляют собой результат
ортогонального проектирования векторов I Sj как элементов
трехмерного векторного пространства R, соответственно на
одномерное подпространство с элементами Кл = 2ада (Л
произвольное число) и двухмерное подпространство
ортогональное к R^. Очевидно, что подобное разложение
результирующего изображающего I $ вектора даст нам два
ортогональных результирующих вектора:
196
причем
Как видно, координаты этих изображающих векторов в базисе F5
определяются результирующими алгебраическими векторами
(8-15)
(8.16)
С позиций теоретической электротехники разложение координат
вектора I? по формулам (8.15) и (8.16) есть разложение линейно-
независимой системы фазных токов на две линейно-зависимые
подсистемы. Имея в виду определяемые матрицами М и N следующие
свойства этих подсистем:
ham hbm hem ~ ® ’
1 чг"' .
han ~ lsbn ~ hen ~ , h j ’
можно назвать их мгновенными симметричными составляющими
ненулевой и нулевой последовательностей. Важно подчеркнуть, что
данное разложение может быть осуществлено в любое мгновение
времени без использования информации о предыстории процесса и его
дальнейшем развитии. Если же известны законы изменения во времени
фазных токов, то в некоторых частных случаях возможно дальнейшее
однозначное разложение мгновенной симметричной составляющей
ненулевой последовательности на составляющие прямой и обратной
последовательности.
197
С точки зрения анализа главного плоскопараллельного поля в
поперечном сечении машины определяющим является вектор не
полных, а намагничивсиощих токов статора I , т.е. токов ненулевой
последовательности. При любом наборе численных значений
переменных isj ( j ~ a,b,c) геометрическим местом концов векторов
Ijy/и является плоскость Р. Поэтому плоскость поперечного сечения
машины следует совместить с плоскостью Р, а магнитные оси фазных
обмоток статора - с направляющими векторами aSm, b $т и cSm-
Тогда изображающие векторы фазных токов Isjm будут
характеризовать намагничивающие силы фазных обмоток статора с
учетом их пространственного расположения, а вектор I Sm
результирующую намагничивающую силу обмоток статора.
Вышеизложенное дает корректные представления о сущности
так называемых "трехфазных" плоских систем координат, связанных
со статором или ротором машины. Их следует рассматривать как
отображение трехмерных систем координат на плоскости.
8.4. Основные этапы преобразования координат
Опишем основные этапы преобразования переменных,
относящихся к статору. Для упрощения анализа плоскопараллельного
поля целесообразно ввести новую систему координат, более просто
связанную с поперечным сечением машины. Обозначим оси этой
системы координат как Oas, O[fs и Oys. Совместим первую ось с
магнитной осью фазы А. Вторую ось направим относительно первой
под углом я/2, отсчитываем в плоскости Р по направлению
чередования фаз (магнитных осей). Третью ось совместим с осью вала
машины, т. е. с линией L. Соответственно в векторном пространстве
R введем новый базис
df
(8-17)
198
где - матрица перехода от базиса F5 к новому базису Е5.
Можно показать, что матрица Ауг£ может быть получена как
произведение трех матриц поворота :
cos <9 sin 19 О
= —sin 19 cos<9 О
О 0 1
о-----; у/ ~--£
4 2-
Здесь #, у/ и <9 - уп
cos}/ 0 -sin}/
0 1 0
sin}/ 0 cos}/
19 = 0 .
Эйлера, определяй:
1 0 0
0 cos 8 sin J
0 - sin# cos#
(8.18)
е положение новой
системы координат относительно исходной [66].
В результате перемножения матриц получаем ортогональную
матрицу
0
FE ~
(8.19)
Следовательно, векторы базиса
имеют в базисе F5
следующие координаты:
df
л/2/Л
-1/V6
-1/76
о
1/V2
-1Д/2
1Д/Г
1/V3
1Д/3
Обозначим координаты вектора L в новом базисе как ias, i@s
и Ls и разложим его по векторам базиса
Формула определения новых координат [66] вектора токов имеет
вид :
199
(8.20)
Вследствие ортогональности матрицы
преобразования координат вектора I
FE
FE -
матрица
(8-21)
Далее предположим, что исходные переменные представляют
симметричную систему синусоидальных токов:
^sa
Д COS QLT
Is cos( А)
Д cos( + А)
kJ \ J
где А = 2тг/3 . Тогда координаты вектора Iв новом базисе в
соответствии с формулами (8.20) и (8.21)
las
ips
Д COS СОТ
Д sin co л
J J
0
Следовательно, амплитудные значения переменных ias, ips в
сравнении с амплитудными значениями исходных переменных
возрастают в 43/41 раз. Это создает некоторые неудобства в
оценке, например, относительных величин фазных токов с помощью
относительных величин преобразованных токов. Поэтому
целесообразно перейти к новому базису
Р
(8.22)
df
200
где матрица перехода от базиса Е5 к базису G?
Тогда вектор
Aeg = diag [Я
(8.23)
Соответствующие оси новой системы координат (рис. 8.3,а)
обозначим Оа, 0(3 и Оу . Очевидно, что координаты вектора в
базисе Gv изменятся в Л"1 раз, что и устраняет различие амплитуд.
Иными словами, переход к базису G5 можно трактовать как
рациональное изменение масштаба отсчета переменных. С учетом
(8.17) и (8.22) матрица перехода от базиса F5 к базису G5
О
(8.24)
При этом координаты вектора в базисах
формулой
связаны
*sa
Чр
sa
(8.25)
sy
sc
где матрица преобразования координат вектора
201
a)
б)
Рис. 8.3. Геометрическая интерпретация преобразования
координат
202
Обратное преобразование
hb 1
hp
(8.27)
осуществляется с помощью матрицы
- &FG ~
£
2
1
2
'2
1
'2
1
(8.28)
И наконец, в дальнейшем целесообразно перейти от неподвижной,
связанной со статором системы координат Oafly к вращающейся
ортогональной системе координат, оси которой (см. рис. 8.3,6)
обозначим Ох, Оу, Oz, а соответствующие векторы базиса как
Н= х
У z
Данную систему координат получим (рис. 8.3,6) поворотом
системы координат Оару вокруг оси Оу на угол 0к, который будем
рассматривать как произвольную величину. Тогда векторы
“вращающегося” базиса
Н = Ася(^.)С,
(8.29)
определим с помощью ортогональной матрицы поворота
cos
^GH (&к) = "s*n ^k
о
sin
cos
О
О
(8.30)
Формула преобразования координат вектора Iиз базиса G 5 в Н
203
*sa
(831)
а матрица преобразования координат вектора
1=Ася(^)‘
(8.32)
Обратное преобразование
(8.33)
задается матрицей
- sin 0k О
cos 0к 0 •
О 1
(8.34)
Итак, в процессе преобразования
координат вектора I .у из
исходного базиса FkV в базис Н можно выделить два основных этапа,
определяемых формулами (8.25) и (8.31). Очевидно, что данное
преобразование можно представить как одноэтапное :
(8.35)
где матрица одноэтапного преобразования координат
аД^) = а2(^)а1
(8.36)
с учетом (8.32) и (8.26) в развернутом виде совпадает с выражением
(8.3). Одноэтапное обратное преобразование координат
204
(8.37)
можно осуществить с помощью матрицы обратного преобразования
АЖ)=АГ' А;1^.),
(8.37,а)
что в развернутом виде совпадает с выражением (8.7).
Из сопоставления формул (8.35), (8.37) с формулами (8.5), (8.8)
видно, что упорядоченные наборы переменных isaAsb^ he и
tFs t
определяющие алгебраические векторы и в геометрическом
смысле можно рассматривать как координаты пространственного
вектора I а соответственно в базисах F$ и Н. Если иметь в виду
двухэтапное преобразование, то тогда следует ввести вектор
промежуточных переменных (пометим его верхним индексом Gs)
(8.38)
составленный из координат вектора 15 в промежуточном базисе G у.
Тогда формулы двухэтапного прямого и обратного преобразований
координат имеют вид:
т<7$ _ а тЕ?. ¥ _ д (п
(8.39)
1^ = А^)15; 1Г=АГ>е. (8.40)
В сравнении с одноэтапным двухэтапное преобразование в
некоторых случаях более удобно для построения моделей в связи с
меньшим числом вычислений тригонометрических функций.
Итак, нами рассмотрены вопросы преобразования токов
статора. Преобразование других переменных, относящихся к статору
(напряжений и потокосцеплений), осуществляется и геометрически
интерпретируется аналогичным образом. Что касается
преобразования переменных, относящихся к ротору (например,
фазных токов обмотки ротора), то здесь также следует ввести радиус-
вектор
205
(8-41)
(8.42)
с координатами в базисе
F, =
df
Векторы базиса Fr образуются путем поворота векторов базиса
F5 вокруг оси вала машины на угол, равный углу 0 поворота ротора
относительно статора. Далее следует осуществлять преобразование
этого вектора последовательно в базисы
(8.43)
причем
Ас™ - ) -
cos 0 - sin 0 О
sin 0 cos 0 0
0 0 1
(8.44)
- матрица, учитывающая угол 0 поворота ротора относительно
статора. Тогда алгебраические векторы, составленные из координат
пространственного вектора I г соответственно в базисах G r, G у и
Н, определяются формулами
1ГХ
L _
Формулы обратного преобразования
(8.47)
206
г
г
2
5
(8.46)
j Fr _ а “ 1 yGr
Очевидно, что данные трехэтапные преобразования можно
заменить одноэтапными, осуществляемыми с помощью матриц
Аг = А2(0Л) А2'(0) А, ; (8.47)
А;1 = АГ1 А2(0) А2*(0л) . (8.48)
В результате перемножения матриц получаем выражения (8.4) и (8.7).
8.5. Итоговые выражения. Мнемоническая схема
преобразования координат
Рассмотренное линейное преобразование переменных является
средством упрощения уравнений машины и прежде всего исключения
из них периодических коэффициентов. С этой целью вовсе не
обязательно приводить все переменные к “вращающемуся” базису.
Важно привести их к какому-то одному базису, в том числе к F$, либо
G5 , либо Fr, либо к Gr. В этом смысле формулы прямого
преобразования токов статора надо дополнить следующими:
lf'=A2(0)lf5; (8.49)
j/7 _ А“* yGr
— А । ,
где 15 и ls - алгебраические векторы, составленные из координат
вектора 1Л соответственно базисах Gr и Fr (т.е. координатах,
связанных с ротором). Аналогично формулы (8.46) дополним
следующей:
if5 = А[1, (8.50)
207
где 1/ - алгебраический вектор, составленный из координат вектора
I г базисе Fy. Преобразование других переменных, относящихся к
ротору (напряжений и потокосцеплений), осуществляется и
геометрически интерпретируется аналогичным образом.
Из вышеизложенного следует общий вывод о том, что
упорядоченные наборы величин, характеризующих на различных этапах
преобразования алгебраические векторы напряжений, токов и
потокосцеплений обмоток машины, в геометрическом смысле есть
координаты
и
соответствующих
изображающих
в пяти базисах. Из них базисы
векторов
Fy и Gs
порождают трехмерные системы координат, фиксированные
относительно статора; базисы Fr и Gr - фиксированные
относительно ротора; базис Н - вращающуюся систему координат.
Результаты такого подхода систематизированы в табл. 8.1 и 8.2. и на
мнемонической схеме рис. 8.4. Для каждого из базисов в таблицах
приводятся условные обозначения элементов, формулы разложения
изображающих векторов по векторам базиса, формулы
преобразования координат векторов базиса и изображающих
векторов. На мнемонической схеме показаны основные этапы
преобразования векторов напряжений статора и ротора (U^‘v и Ufr)
в различные системы координат, соответствующие базисам F.s -е- Fr.
Каждому из базисов присущ определенный вариант модели
электромагнитных контуров ( т. е. системы уравнений, записанных
относительно преобразованных переменных). Наиболее общим
является базис Н и соответствующий ему вариант модели 3.
Действительно, полагая ^”0, получаем базис G5 (вариант 2); при
0^-в базис Н вырождается в базис Gr (вариант 4). Поэтому в
дальнейшем основное внимание уделено варианту 3 с
использованием результирующих матриц Ау и Аг преобразования
переменных статора и ротора от базисов Fy и Ff к базису Н.
208
Таблица 8.1
Условные обозначения и формы представления векторов
209
Таблица 8.2
210
Модели
электромагнитных
контуров
Преобразователи координат
вектора U
и*
ь2> I
F
us
Преобразователи координат
вектора Us
о у... —
Н
1)|Вариант 5
|jGs
==|>1 Вариант 2
ufj---------
=зЛ Вариант 4
А2(^)
Вариант 3
ufs I--------1 и/
==т>|Варианг 1 Кг=
Н
Рис. 8.4. Мнемоническая схема преобразования координат
В заключение следует отметить некоторое отличие матриц А5 и
Аг от матриц обобщенного преобразования, используемых в работе
[89]. Оно заключается в увеличении в -Д раз элементов нижних строк.
Это дает возможность более компактно записывать матрицы
обратного преобразования и облегчает процедуру преобразований
уравнений электромагнитных контуров.
Кроме того, существенно упрощается (см. гл. 10) запись
энергетических соотношений, поскольку компоненты векторов
преобразованных переменных в энергетических соотношениях
оказываются столь же ’’равноправными”, как и компоненты векторов
непреобразованных величин.
211
Глава девятая
ПРЕОБРАЗОВАНИЕ УРАВНЕНИЙ
ЭЛЕКТРОМАГНИТНЫХ КОНТУРОВ.
ОРИЕНТАЦИЯ СИСТЕМЫ КООРДИНАТ
9.1. Преобразование уравнений электромагнитных
контуров машины двойного питания
Преобразуем сначала дифференциальные уравнения (7.1) и (7.2),
рассматривая параметр преобразования как переменную величину.
Для этого произведем в них подстановку выражений (8.8) и (8.9) и
умножим слева обе части этих уравнений соответственно на матрицы
As. и Аг. В результате получим следующие дифференциальные
уравнения для преобразованных напряжений, токов и
потокосцеплений:
и = fl‘Pv + Av»A7l'rv + A.R^A;1I (9.1)
J Л. J J А 4) L1 J J h) J
ил = рЧг + А.рА;1 Т, + ArRfrA;11, • (9.2)
Аналогичным образом преобразуются и другие уравнения
модели. Подробный вывод этих уравнений, определяющих с учетом
принятых допущений модель электромагнитных контуров
симметричной машины двойного питания во вращающейся системе
координат (вариант 3), дан в работе [123]. Эти уравнения имеют вид:
212
Ur = pTr+fi>A.BTr + RrIr;
^ = ^4-^;
I„=C(l,+Ir) ;
(93)
Pk = <»k-^ ;
°> к = p&k >
a^pe .
Здесь вместе с преобразованными переменными состояния
фигурируют преобразованные матрицы активных
сопротивлений и индуктивностей рассеяния обмоток статора и
ротора:
(9-5)
(9-6)
(9-7)
213
Кроме того, в преобразованные уравнения входят следующие
постоянные матричные коэффициенты:
о
О
О
О
о
(9.8)
1 0 01
с = а,ма;' = а.ма;1 =
(9-9)
0 I о
ООО
В процессе вывода этих уравнений в [123] выявлены механизмы
действия функций пространственного распределения МДС фазных
обмоток и влияния насыщения главной магнитной цепи. Обоснована
целесообразность разложения векторов состояния системы на
намагничивающую и нейтральную составляющие.
Показано, что по своему физическому смыслу результирующий
вектор преобразованных намагничивающих токов
т
(9.Ю)
- это такая часть суммы токов статора и ротора, из которой
исключены компоненты, не участвующие в создании главного
магнитного потока вследствие действия функций распределения
намагничивающих сил фазных обмоток вдоль дуги воздушного задора.
Матричный коэффициент С в преобразованных уравнениях
выполняет ту же роль, что и коэффициент разложения М в
непреобразованных уравнениях.
С помощью описанных выше геометрических представлений
переменных состояния показано, что изображающие векторы
намагничивающих токов I т и главных потокосцеплений - это в
сущности двумерные векторы, лежащие в плоскости Р. Для
неявнополюсных машин строго доказана коллинеарность этих
векторов. Что касается модулей (норм) этих векторов, то они связаны
нелинейной скалярной функцией - характеристикой намагничивания
главного пути
При учете насыщения главной
магнитной цепи закон соответствия между алгебраическими
векторами и 1т задается нелинейным оператором Fw,
осуществляющим над вектором 1т преобразование типа нелинейного
растяжения (сжатия) без изменения его направления. В символической
форме записи:
214
nr
m
(9 11)
Существует также обратный оператор, позволяющий найти ток
по известному потокосцеплению:
(9.12)
Эти операторы удобно задавать с помощью переменного
коэффициента 1т, имеющего смысл тангенциальной динамической
индуктивности [100], определяемой по кривой намагничивания:
либо
(9.13)
(9-14)
Тогда формулы связи главных потокосцеплений и
намагничивающих токов
приобретают простой вид:
^т ?т гп)
(9.15)
(9.16)
Ч^ т д/ W тх + Ч? ту ' н°рМЫ
векторов.
При допущении о линейности характеристики главного
магнитного пути коэффициент lm ~ const и представляет собой
постоянный коэффициент взаимной индукции трехфазных обмоток
статора и ротора [89], а параметр хт = соslm - const есть
реактивное сопротивление намагничивающей ветви Т-образной схемы
замещения машины.
На основе описанного выше разделения потоков рассеяния в
работе [123] для преобразованных уравнений электромагнитных
контуров получены выражения (9.6) и (9.7) матричных коэффициентов
индуктивностей рассеяния L5(T и Они дают теоретическое
обоснование факту различия сопротивлений рассеяния машины при
питании ее системами токов нулевой и ненулевой
последовательностей.
215
Соответствующая уравнениям (9.3) структурная схема модели
электромагнитных контуров машины показана на рис. 9.1.
Рис. 9.1. Структурная схема модели электромагнитных
контуров машины
По своей структуре модель электромагнитных контуров
представляет двухканальную многосвязную нелинейную
динамическую систему с преобразованием координат на входе и
выходе. Входными воздействиями каналов являются трехмерные
векторы фазных напряжений, приложенных к обмоткам статора и
ротора. Выходными переменными являются векторы фазных токов и
потокосцеплений машины. Связующим элементом каналов является
главное потокосцепление, которое в свою очередь нелинейно зависит
от суммы намагничивающих составляющих токов статора и ротора.
Инерционные свойства электромагнитных контуров машины
отображаются в структуре модели трехмерными интегрирующими
звеньями в каждом из ее каналов. Падения напряжения на активных
сопротивлениях обмоток учитываются внутренними (т.е.
отражающими свойства объекта) обратными связями по токам статора
и ротора. В структуре модели имеется два вида нелинейностей:
216
• нелинейная функциональная зависимость, учитывающая
насыщение главного магнитного пути;
• нелинейности типа перемножения переменных,
учитывающие влияние скорости вращения ротора на
электромагнитные процессы.
Модель представлена во вращающейся системе координат. Угол
поворота системы координат 0^ может быть постоянной, либо
произвольно изменяющейся величиной. В конечном итоге величина
0^ не влияет на соотношение выходных (фазных токов,
потокосцеплений) и входных величин модели (фазных напряжений).
Она оказывают влияние лишь на преобразованные переменные
(напряжения, токи, потокосцепления). Поэтому величина 0^ и
закон ее изменения и выбираются исходя из соображений удобства
анализа преобразованных переменных и (или) решения задач
управления на этапе рациональной ориентации системы координат.
9.2. Некоторые варианты математических моделей
электромагнитных контуров машины как объекта
управления
При решении задач анализа свойств машины и построении
автоматических управляющих устройств целесообразно дальнейшее
преобразование уравнений (93) с целью исключения из них
максимально возможного количества промежуточных переменных.
Например, для ненасыщенных асинхронных короткозамкнутых
машин известны [23, 144 и др.] различные варианты записи уравнений,
в которых фигурируют лишь комбинации переменных состояний
электромагнитных контуров, необходимые для определения
электромагнитного моменты машины. Остальные переменные
исключаются из уравнений.
Рассмотрим некоторые варианты подобного преобразования
уравнений электромагнитных контуров машины с нелинейной
характеристикой намагничивания пои питании ее от автономных
источников линейно независимых напряжений.
Модель в переменных 1Л — Ч*. . В результате исключения путем
подстановок из системы уравнений (9.3) потокосцеплений Ч\ и токов
1Г преобразованные уравнения электромагнитных контуров имеют
вид:
217
U5-KrUr =ЧА+(КЭ+Й>АВЬэ)15-'-(й’КГВ-Кгаг+РКгХ ;
Ur = pYr+(ar+A.B)'Pr-RrKrI5 . (9.17)
Выражения матричных коэффициентов этих уравнений :
13
о
о
о
1э
о
о о
аг О
О «,°ст.
(9.18)
О
О
о
о
О
О
о о
о
Элементы матриц:
(9.19)
Как видно, элементы матричных коэффициентов зависят от
степени насыщения главного магнитного пути. Поэтому необходимы
дополнительные уравнения, позволяющие найти ток im или \ут как
функции переменных состояния уравнений (9.17). Использовав
конечные уравнения связи токов и потокосцеплений, из системы (9.3)
можно получить уравнения связи:
= C(T, + Lr<TlJ; (9.20)
(9.21)
218
Так как нормы результирующих векторов, определяющих левую и
правую части уравнения (9.20), должны быть равны, а
Т +/ I
т г& т
Ут + 5
то, следовательно,
(9.22)
(9.23)
Относительно переменной im (либо у/ш) функция (9.23) задана в
неявном виде. При аналоговом моделировании решение уравнения
связи (9.23) удобно осуществлять в соответствии со структурной
схемой, изображенной на рис. 9.2.
Рис. 9.2. Структурная схема решения уравнения связи (9.23)
и расчета переменных коэффициентов уравнений модели
Модель в переменных ХРГ. Рассмотрим другой вариант
преобразования системы (9.3) с исключением из нес переменных
1Л и 1г. В этом случае преобразованные уравнения электромагнитных
контуров насыщенной машины имеют вид:
U5 = P^s + (aJ<7 +^В)т, -алл ;
и, = рч>, + (ага+д.в )тг - а,дд,
(9.24)
где
о
о
о
о о
ага 0
Л
219
kv
0
0
о 0
ks 0
о 0
kr
0
(9.25)
Элементы матриц:
(9.26)
0
0
0
0
В случае необходимости вычисления токов статора и ротора
можно использовать формулы:
(9.27)
Для учета связанного с насыщением изменения параметров в
данном случае также необходимы дополнительные уравнения связи:
Д' +1 I
(9.28)
где
постоянный коэффициент.
(9.29)
Как и в предыдущем случае, от векторных уравнений удобно перейти
к скалярному уравнению
(9.30)
которое при аналоговом моделировании решается (рис. 9.3) таким же
путем, как и (9.23). Цифровые алгоритмы решения уравнений связи
рассмотрены в гл. 21, 22 и 23.
220
Рис. 9.3. Структурная схема решения уравнения связи (9.30)
Один из других возможных вариантов уменьшения количества
переменных рассмотрен в работе [100], в которой из уравнений общего
вида исключены потокосцепления статора и ротора. Результатом
является модель в переменных I s — 1г.
Сопоставление описанных вариантов уравнений с уравнениями
общего вида (9.3) показывает, что исключение части переменных в
общем случае не приводит к существенному упрощению уравнений и
процедуры их решения. Вместо исключенных из уравнений
переменных состояния (токов, потокосцеплений) в них появляются
переменные коэффициенты (as,ar и т. д.), для определения которых в
процессе решения необходимы уравнения связи. Поэтому в общем
случае следует отдать предпочтение модели, описываемой
уравнениями (9.3), как наиболее полной в информационном
отношении относительно переменных состояния, а не связывающих их
коэффициентов.
Вместе с тем укажем на некоторые практически важные случаи,
когда целесообразно использование преобразованных уравнений
(9.17) и (9.24). Прежде всего это даст возможность представить модель
машины, являющуюся сложной динамической системой, в виде
совокупности более простых подсистем, выходы которых имеют для
нас наибольший интерес в смысле контроля и управления. Такое
представление - один из необходимых этапов построения
автоматических систем управления электрическими приводами на
основе принципов подчиненного регулирования [84,131 и др.].
Исключение второстепенных в указанном смысле величин
позволяет нагляднее вскрыть связь между главными величинами и в
конечном итоге - эффективнее решать задачи управления ими.
Дополнительные переменные коэффициенты кг реально
изменяются (см. гл. 12) в меньших пределах в сравнении с
исключенными из рассмотрения переменными, что дает возможность
проводить упрощенный качественный анализ, ориентируясь на
221
усредненные постоянные значения коэффициентов, и на этой основе
вскрыть главные свойства моделируемого объекта управления.
Наиболее простой вид имеют модели ненасыщенных машин при
отсутствии составляющих нулевой последовательности в системе
напряжений источника питания. Такие модели, например [23], можно
рассматривать как частные случаи моделей (9.17) и (9.24).
Широко известные в настоящее время векторные системы
автоматического регулирования с ориентацией по полю [153,154]
строятся на базе упрощенной модели машины, в которой главными
переменными состояния электромагнитных контуров являются
векторы токов статора и потокосцеплений ротора. Разработанные в
последующие годы системы прямого регулирования момента
двигателей [151,156,157,164,185,188,191 и др.] базируются на моделях,
в которых главными переменными состояния электромагнитных
контуров являются векторы потокосцеплений обмоток статора и
ротора.
Итак, нами рассмотрены векторно-матричные уравнения,
определяющие модель симметричной неявнополюсной машины для
наиболее общего случая питания ее обмоток от автономных
источников линейно-независимых напряжений. Все другие варианты
питания машины могут анализироваться с помощью этих уравнений
как частные случаи.
9.3. Частный случай. Переход к комплексным уравнениям
Характеризуя пути возможного упрощения моделей машины,
отметим автономность скалярных уравнений, связанных с
нейтральными составляющими, и независимость электромагнитного
момента от этих составляющих. В реальных системах электропривода
предусматриваются специальные меры для устранения нейтральных
составляющих. Для этого используются схемы питания с соединением
фазных обмоток машины в звезду без нейтрального провода. В схемах
раздельного питания фазных обмоток предусматриваются
специальные регуляторы, устраняющие нейтральную составляющую
токов [149]. Поэтому представляет интерес рассмотрение моделей
машины при Uf* =0 и - 0, т. е. при питании ее от источника
линейно зависимых напряжений, удовлетворяющих условию
+ ^sb + Usc ~ 0 * Ща Urb ~ ® * (9-3 )
222
Тогда исчезают различия между намагничивающими и полными
токами статора:
tFs _ тЛ
xs “ »
(9.32)
а также между намагничивающими и полными токами ротора:
Fr _ jFr
г “ *гт ’
(9.32,а)
Кроме того, в этом случае все преобразованные внешние
воздействия и переменные состояния электромагнитных контуров
представляют в сущности не трехмерные, а двумерные векторы.
Удобным для построения модели в таком случае является
математический аппарат комплексных чисел.
Введем взамен двумерных векторов-столбцов напряжений, токов
и потокосцеплений комплексные переменные :
+ J у ’
(9.33)
Поставим в соответствие системе уравнений общего вида (9.3)
следующую систему комплексных уравнений:
ILS = p^s+j a)k^s+rs Ls;
Ur^p'E.r+jPk Fr + rrLr ;
(9.34)
Формулы прямого
ротора имеют вид:
преобразования напряжений
статора и
где i - а, Ь,с ;
(9.35)
<pri ~ 0, 2^/3, 4zr 3.
223
Комплексные коэффициенты этих выражений геометрически
интерпретируются как единичные векторы, определяющие
направления магнитных осей фазных обмоток во вращающейся
системе координат.
Формулы обратного преобразования напряжений статора и
ротора можно представить как
иР; = Re IK е
(9 36)
Геометрической интерпретацией обратного преобразования
является проектирование изображающих комплексных векторов на
магнитные оси обмоток статора и ротора. Формулы преобразования
других переменных аналогичны приведенным выше.
Рассмотренным ранее частным вариантам записи уравнений
электромагнитных контуров при условиях (931) можно поставить в
соответствие следующие системы уравнений.
Модель в переменных /Л — Ч^г :
ILs -krUr = l3pLs + (гэ + ja>k 13)J_S + (pkr -krar + jtokr)4Lr;
(9.37)
Модель в переменных :
Us = p + ja>k)¥s - asa kr ¥r;
ar = pVr^ara + j0k)Pr-araksPs
(9.38)
Токи статора и ротора определяются формулами
Ls = rs-'as^s-kr4Lr)-,
Lr = r~'-ks*Ps).
(939)
Более простой вид дифференциальных уравнений и формул
преобразования координат, их физическая наглядность и легкость
геометрической интерпретации являются существенными
преимуществами комплексной формы записи уравнений машины.
224
При соответствующих дополнениях комплексные уравнения
машины можно использовать и в тех случаях, когда нейтральные
составляющие не равны нулю. Однако здесь более рационально
использование матричной формы их записи как наиболее компактной
и однородной по структуре.
9.4, Автоматическая ориентация систем координат
Приведенные выше уравнения и блок-схема рис.9.1
характеризуют моделируемый объект как сложную нелинейную
многомерную и многосвязную динамическую систему. Для
эффективного управления такой системой необходимы совершенные
автоматические устройства, построенные с учетом всего комплекса
специфических особенностей данного объекта.
Факторами, специфическими для многофазных машин
переменного тока, являются
• явно выраженный многомерный (векторный^ характер
внешних воздействий (фазных напряжений) и переменных,
характеризующих состояние электромагнитных контуров
(токов, потокосцеплений);
• изменение их во времени не только в переходных, но и в
установившихся режимах работы машины.
Высококачественное управление такими векторными
величинами при непосредственном использовании информации о
фазных значениях переменных представляет значительные трудности.
В этом аспекте важным является вопрос о рациональной системе
отсчета переменных, или, иными словами, ориентации системы
координат Охуг. Как известно, использование вращающейся
системы координат позволяет преобразовать векторы симметричных
синусоидально изменяющихся во времени величин в векторы
постоянных величин.
Однако полупроводниковые преобразователи как источники
питания электрических машин характеризуются несинусоидальной
формой напряжения. Кроме того, на этапе синтеза автоматических
систем управления (например следящих систем) невозможно заранее
определить законы изменения воздействий, внешних для
электромагнитных контуров машины, а также координат их
состояния. Поэтому в данных условиях выбор ориентации модели
затруднителен.
Кроме того, у неявнополюсных машин не существует столь явно
выраженной естественной "платформы" для отсчета переменных,
какой обладают явнополюсные машины (имеется в виду система
отсчета, связанная с продольной и поперечной осями ротора).
225
Поэтому в общем случае для моделирования неявнополюсных
машин переменного тока целесообразно применение так называемых
самоориентирующихся моделей, в которых угол поворота системы
координат Oxyz автоматически определяется пространственным
положением какого-либо из векторов переменных
состояния
, либо векторов внешних воздействий
Об эффективности такого подхода, в частности, свидетельствуют
работы [28, 67, 112, 153, 154 и др.]. Рассмотрим принципы построения
и математические соотношения, определяющие самоориенти-
рующиеся модели, с более общих позиций, сформулированных в
работе [123].
Пусть в нашем распоряжении имеется произвольно
ориентированная модель машины, электромагнитные контуры
которой описываются уравнениями (9.3).
В геометрическом смысле (см. п. 8.5) переменные этих уравнений
есть координаты векторов U^Ur и т.д. в произвольно
ориентированном базисе Н. Указанный базис имеет одну степень
свободы, характеризуемую угловой координатой 0 .
К
Рассмотрим задачу автоматической ориентации базиса Н по
какому-либо из геометрических векторов. Выберем произвольно из
множества
вектор, который назовем
ориентирующим и обозначим его в общем случае X . Будем иметь в
виду, что координаты этого вектора в базисах FJ?G5,H, Gr и Fr и
задаются соответственно столбцами:
226
В уравнениях (9.3) вектор X представлен в базисе Н.
Воспользовавшись формулой преобразования координат
(9.40)
разложим вектор
статора базиса G:
X по векторам фиксированного относительно
X = Ха^ + ХрР + Ху У-
(9-41)
Найдем его ортогональную проекцию на плоскость поперечного
сечения машины:
х rn = Хаа + XflP + ХуУ- (9-42)
Обозначим угол, образованный векторами X т и а (рис. 9.4), как
ву и зададим условие автоматической ориентации базиса Н по
Л-
вектору X в виде
0к = 0х. (9.43)
Рис. 9.4. Геометрический смысл условия ориентации (9.43)
227
Иными словами, ориентацию координатной системы Oxyz
будем осуществлять по ортогональной проекции ориентирующего
вектора на плоскость поперечного сечения машины.
Для удобства вычисления элементов матрицы преобразования
введем вектор-столбец нормированных координатных
функций:
cos0z
Л
sin#,,
Л
(9.44)
и перепишем условие (9.43) в виде
COS ok Sin6^ = Pb\O7
J \
(9.45)
Фигурирующая в уравнениях (9.3) скорость вращения системы
координат вычисляется так:
сок ~ Р&у = cosOy р sin#z -sin#y р cos#y. (9.46)
Л Л Л Лг Л
Дополнив систему уравнений, определяющих произвольно
ориентированную модель машины, уравнениями (9.40), (9.44)-(9.46),
получим самоориентирующуюся модель машины. Ее блок-схема
приведена на рис. 9.5,а.
Необходимость дифференцирования координат
ориентирующего вектора накладывает некоторые ограничения на его
выбор. В частности, при анализе режимов питания электрических
машин от полупроводниковых преобразователей воздействия
представляются кусочно-непрерывными функциями
времени. В связи с этим координаты векторов U$ и Ur в базисе G5,
которые, вообще говоря, инвариантны к параметру О, также
принадлежат к отмеченному классу функций. В отличие от них
координаты векторов состояния и I в базисе непрерывны.
Поэтому при выборе ориентирующего вектора в общем случае следует
отдавать предпочтение не векторам внешних воздействий на машину,
а векторам состояния, причем векторам с наиболее "инерционными”
координатами.
228
Другие варианты систем ориентации. Рассмотрим другие, более
просто реализуемые варианты построения систем автоматической
ориентации, выполненные в виде замкнутых следящих систем.
Предположим вначале, что базис Н ориентирован таким образом,
что 6^ *0?. Найдем зависимость координат вектора X в базисе
Н от угловой ошибки Дд.=#г~0д.. Разворачивая матричную
формулу X = А2Х v с представлением 0^ - 0% - Дд. и учетом (9.44),
получаем
(9.47)
2 2 2 2 v 2
причем %х + Ху = Ха+Хр~ . Отсюда следует возможность
вычислить по текущим координатам вектора X в базисе Н вектор-
функцию угловой ошибки :
а(*)=
cosAa.
sin Д i.
(9.48)
При выполнении условия ориентации (9.43) вектор
(9.49)
Это позволяет ориентировать базис Н с помощью
автоматической замкнутой системы, блок-схема которой показана на
рис. 9.5,6. Здесь из произвольно ориентированной модели на вход
блока ориентации задается вектор X, где преобразуется элементом 2
в нечетную функцию угловой ошибки /(Дд.) = sinA^ по формуле
(9.48). Регулятор САР 3 воздействует на частоту синусно-косинусного
генератора координатных функций 4 так, чтобы свести /(Дд.) и
соответственно Дд. к нулю.
229
U л
S
тс
a)
Блок ориентации
б)
иЛ
S
тс
и Г
S
О)
Fr
В)
Блок ориентации I
_____________________।
Рис. 9.5. Самоориентирующиеся модели машин переменного тока
230
Отметим, что точка Д^ = я-, в которой функция sinA^ также
равна нулю, является точкой неустойчивого равновесия системы. Это
исключает неоднозначность реализации условия (9.49). Для задания в
модель 1 переменной используется входной сигнал генератора 4.
а)
Рис. 9.6. Эквивалентные структурные схемы систем
автоматической ориентации моделей
На рис. 9.6,а изображена эквивалентная структурная схема такой
системы ориентации с выражением времени в физических единицах.
Она позволяет найти передаточную функцию Нр(р) регулятора
исходя из требуемых показателей САР. По отношению к непрерывно
изменяющемуся во времени задающему воздействию 07 порядок
астатизма САР следует выбирать не ниже второго [123]. Например,
для синтеза регулятора методом последовательной коррекции в
качестве эталона может быть выбрана оптимальная передаточная
функция разомкнутой системы с настройкой на симметричный
оптимум [173]
231
8Га2/(г^ + 1) ’
(9.50)
Здесь - малая некомпенсируемая постоянная времени,
выбираемая по условиям обеспечения необходимого быстродействия
и помехоустойчивости замкнутой системы. Используя метод
последовательной коррекции, легко установить, что эталонные
свойства системы обеспечивает регулятор системы ориентации с
передаточной функцией
(9.51)
где - коэффициент передачи измерителя рассогласования
на входе регулятора. В данном случае можно принять
дА^0
В соответствии с (9.51) в структуре регулятора можно выделить
• интегрирующее звено с постоянной времени 87\ , которое
г*
совместно с интегрирующим звеном объекта обеспечивает
астатизм второго порядка замкнутой САР;
• форсирующее звено с постоянной времени 47^, которое
обеспечивает устойчивость замкнутой системы с двумя
последовательно включенными интегрирующими звеньями;
• апериодическое
времени
фильтрующее звено с малой постоянной
определяющей помехоустойчивость и
быстродействие системы ориентации.
Кроме того, в структуре регулятора предусмотрено
усилительное звено, компенсирующее конструктивные коэффициенты
передачи узла измерения рассогласования и объекта регулирования,
т.е. генератора координатных функций.
В тех случаях, когда исследуемые режимы машины
характеризуются небольшими изменениями
(например, режимы
управления с постоянством потока), можно использовать упрощенный
вариант (рис. 9.5,в) с заданием на вход регулятора координаты %у в
качестве ненормированной функции угловой ошибки
m
Эквивалентная структурная схема (рис. 9.6,6) и задача выбора
регулятора при этом несколько усложняются.
232
В связи с ограниченностью полосы пропускания САР снимаются
ограничения по выбору ориентирующего вектора. Тем не менее
выполнение приведенных выше рекомендаций объективно
способствует повышению их динамической точности. Повышение
точности может быть достигнуто также за счет введения в закон
управления САР производных от задающего воздействия 0%. В
первом приближении это обеспечивается введением на вход
генератора 3 (см. рис. 9.5,в) дополнительной связи по скорости со.
Эффективность такой связи зависит от того, насколько различаются
скорости вращения ориентирующего вектора (о^ = р0% и ротора в),
т.е. от скольжения Поэтому данный вариант можно
рекомендовать прежде всего для исследования режимов с малыми
скольжениями, например, режимов частотного управления.
В заключение отметим следующее. Рассмотренные модели имеют
широкую область применения. Они оказались эффективным
инструментом исследования в синхронно вращающихся координатах
динамики машин переменного тока в сложных системах
автоматического регулирования [94, 121]. При рациональном выборе
ориентирующего вектора подобные модели упрощают решение задач
оптимального управления машинами с учетом электромагнитных
переходных процессов [56,112-114,116-118,123]. В задачах
оптимального управления и аналитического конструирования
регуляторов модель электромагнитных контуров машины
описывается уравнениями (9.3), в которых рассматривается как
зависимая переменная, связанная условиями автоматической
ориентации (9.49). Следует отметить также эффективность
использования моделей в системах управления машинами с
координатными преобразованиями переменных [94,119,120, 123, 146 и
ДР-]-
Итак, применение самоориентирующихся моделей значительно
упрощает задачи анализа, синтеза автоматических управляющих
устройств и организации высококачественных процессов управления
машинами переменного тока.
233
Глава десятая
УРАВНЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОГО
ПРЕОБРАЗОВАНИЯ ЭНЕРГИИ
10.1. Уравнение энергетического баланса
Одной из важнейших величин, характеризующих процесс
преобразования энергии, является электромагнитный момент
машины.
Наиболее
изически
наглядный путь определения
электромагнитного момента базируется (см. гл. 5) на анализе сил,
воздействующих на проводник с током в магнитном поле. Вместе с
тем существуют и другие пути определения электромагнитного
момента машины, базирующиеся на анализе уравнения ее
энергетического баланса [95,123]. Рассмотрим эти вопросы.
В любое мгновение времени суммарная мощность
потребляемая рассматриваемой идеализированной машиной от
источников питания, равна сумме механической мощности рмех,
мощности потерь в обмотках статора Ар5ЭЛ и ротора &ргэл и
производной энергии магнитных полей машины и>п по времени
рп -dw^/dr. Учитывая, что в общем случае мощность р^ равна
сумме мощностей, потребляемых от источников питания обмоток
статора (ps) и ротора (рД запишем уравнение энергетического
баланса машины в виде
Ps + Рг Рп + Рмех + ^Рз.эл + ^Рг.эл'
(10.1)
Мгновенные относительные значения мощности трехфазных
источников питания обмоток статора и ротора машины выражаются
через фазные (непреобразованные) переменные следующими
скалярными произведениями векторов:
234
sa ha
sc sc
5
(Ю.2)
(Ю.З)
Коэффициент 2/3 обусловлен тем обстоятельством, что в
качестве базисного значения мощности (см. гл. 6) выбрана величина
Описанное в гл. 8 преобразование координат характеризуется
следующим соотношением энергетических выражений, использующих
исходные и преобразованные величины :
(Mv(r + иу h + uzh
Поэтому мгновенные относительные значения мощности
трехфазных источников питания обмоток статора и ротора
выражаются через преобразованные переменные следующим образом:
Ps • I5
^ry hy + urz hz
(Ю.4)
(Ю.5)
Для математического описания составляющих энергетического
баланса рассмотрим дифференциальные уравнения системы (9.3):
U, = рТ, + Т, + R, I,;
U. = рТ, + (а>к - а>) ВТГ + Rr I, .
• \ /V J г f f
Произведем подстановку данных выражений напряжений Uv и Ur
в формулы (10.4) и (10.5). Суммируя мощности источников питания
статора и ротора, получаем уравнение энергетического баланса в виде
Ps + Рг = (p*s •Is + p'¥r.Ir)+а>к (ВТ, • I, + ВТ, • I,) -
— а) В1?,. • Ir + • I5 + гг 1Г • .
(Ю.6)
Проанализируем слагаемые правой части полученного
уравнения. Первое слагаемое представляет производную по времени
энергии магнитных полей, сцепленных с обмотками статора и ротора:
235
Р И11 = P^S • Is + p^r • Ir • (10.7)
Отсюда мгновенные значения полной энергии магнитного поля
определяются как
г
и’п (г) = (°) + f(P4'.s*Is+P4/r*lJ^r- (1°-8)
о
Интегральное выражение (10.8) справедливо для машин как с
линейной, так и нелинейной характеристикой намагничивания [123].
Для машин с линейной характеристикой намагничивания из него
можно получить более простое, алгебраическое выражение энергии
магнитного поля:
wn= 1(^’1, + ^ •!,)• (Ю-9)
Вернемся к анализу правой части уравнения (10.6). Можно
показать, что второе слагаемое правой части
^(В'Р, . I, + ВТ, . I,) = о.
Формально это очевидно из того, что уравнение (10.6) справедливо
при всех значениях 6)^, в том числе и при - 0. Изменение 0)^ не
должно влиять на энергетический баланс машины. Более детальный
анализ показывает, что сомножителем здесь является
алгебраическая сумма электромагнитных моментов, действующих на
ротор и статор двигателя. Эти моменты (см. гл. 5) всегда одинаковы
по величине и направлены в противоположные стороны. Поэтому их
сумма равна нулю.
Последние два слагаемых уравнения (10.6) представляют собой
выражения мощности электрических потерь в обмотках статора и
ротора:
^Рг.эл ~ Гг !/ е Гг ( hx + hy + 1
Таким образом, из сопоставления формул (10.1) и (10.6) следует,
что
р„ех = -а ВТ • I, - а) Тг • В1г (10.12)
Учитывая, что механическая мощность
236
мех
= та> ,
(10.13)
получаем компактное выражение электромагнитного момента в виде
скалярного произведения векторов:
(10.14)
В развернутом виде
Полученное выражение полностью эквивалентно выражению
электромагнитного момента (6.16). Напомним, что выражение (6.16)
представляет результат перевода в относительные единицы формулы
(5.83,а). Она получена на основе анализа сил, воздействующих на
активные проводники обмотки ротора в случае синусоидального
пространственного распределения индукции главного магнитного
поля. Поэтому не следует забывать о том, что формула (10.14)
определяет электромагнитный момент без учета влияния высших
пространственных гармоник индукции главного магнитного поля. Их
влияние на электромагнитный момент рассмотрено в гл. 5.
10.2. Формулы электромагнитного момента
Вместе с формулой (10.14) ниже приведены другие
эквивалентные варианты выражения электромагнитного момейта в
виде скалярных произведений векторов в их компактной и
развернутой формах. Эти формулы получены с учетом уравнений
связи токов и потокосцеплений системы (9.3).
Приведенные формулы позволяют в каждом конкретном случае
выбрать наиболее приемлемый вариант выражения момента.
Напомним, что формулы (10.15) и (10.16) записаны в системе
относительных единиц с ориентацией на переменные цепей статора и
полную мощность машины, в которой (см. п. 6.5.) базисный момент не
равен номинальному моменту машины. Для перехода к системе
относительных единиц, ориентированной на электромагнитную
мощность (п. 6.6), в которой базисный момент равен номинальному,
все выражения (10.15) и (10.16) следует умножить на коэффициент в
соответствии с формулами (6.22) и (6.29).
237
т = Т, • BI, = y/ry irx - y/rx iry ;
~ BTy * 1$ ~ WSX i.sy ~~ V^sy ^SX ’
* I .у Vхmxhy V^mybx ’
m
(10.15)
~ ^m * ®®г Vmy bx Vmx by ’
~ k$ (^5 * ® If ) ( y^sy bx Vsxby ) ’
” ^л’ст (®^т * ^v) ^.vct ( Wmx Vsy Vту Vsx}
“ ^rcr (^m * ®^г) ha ( V^my У^гх У^mx ’
m = ls\ (Tf • ВТ,) = la\ (y/sy y/rx - y/sx y/ry)
Здесь
Соответствующие формулам (10.15) выражения электромагнит-
ного момента через комплексные переменные имеют вид :
т = Im
т = Im
w = Im
т = Im
(10.16)
т = Im
т = Im
m = Im OT.T
С* ч7 J
5
238
При использовании систем единиц, ориентированных на
переменные цепей ротора и электромагнитную мощность машины
(п.6.7), а также на векторные системы (п.6.8), формулы (10.15) и (10.16)
остаются неизменными.
10.3. Уравнения механического движения
Для построения полной математической модели машины как
управляемого электромеханического преобразователя энергии
необходимо систему уравнений электромагнитных контуров и
уравнений электромеханического преобразования энергии дополнить
уравнениями механического движения ротора. Для случая J = const
рсо -J
рв ~ OJ,
(10.17)
(10.18)
где J и тс - приведенные к валу двигателя относительные значения
момента инерции механической системы и момента статического
сопротивления.
Варианты более полного математического описания движения
электромеханических систем рассмотрены в литературе по теории
электропривода [43,48,109,131] и других источниках. Особенности
использования относительных единиц и частично-относительных
уравнений механического движения изложены в гл. 6.
10.4. Структура модели машины как управляемого
электромеханического преобразователя энергии
Блок-схема модели машины как объекта управления.
Изображенная на рис. 10.1 схема модели электрической машины
представлена в виде совокупности блоков прямого преобразования
внешних воздействий 1, решения преобразованных уравнений
электромагнитных контуров 2, обратного преобразования координат
состояния 3, решения уравнений электромеханического
преобразования энергия 4 и решения уравнений механического
движения ротора 5.
Такая модель дает весьма полное представление о процессах,
протекающих в машине при произвольном характере изменения
внешних воздействий LL‘ , LL и тг. Она может быть использована
для описания машины, как элемента более сложных
239
электромеханических систем, в соответствии с методом структурного
моделирования.
- со
Рис. 10.1. Блок-схема математической модели машины
В случаях исследования тепловых процессов рассмотренная
^структура должна быть дополнена блоком решения уравнений для
координат теплового состояния [31,105,123 идр.].
240
Глава одиннадцатая
МАТЕМАТИЧЕСКАЯ МОДЕЛЬ
НЕЯВНОПОЛЮСНОЙ МАШИНЫ
С ПОСЛЕДОВАТЕЛЬНЫМ СОЕДИНЕНИЕМ
ОБМОТОК СТАТОРА И РОТОРА
11.1. Схема питания обмоток машины. Уравнения
электрических связей
При ограниченном максимальном значении частоты
управляемого источника питания ( например, тиристорного
преобразователя частоты с непосредственной связью и естественной
коммутацией ) рационально использование машин двойного питания
с последовательным соединением обмоток статора и ротора [14].
Показанная на рис. 11.1 схема питания машины благодаря
транспонированию фаз при последовательном соединении обмоток
статора и ротора обеспечивает удвоение скорости вращения ротора в
сравнении со скоростью вращения магнитного поля относительно
статора машины.
Рассмотрим модель трехфазной неявнополюсной машины с
последовательным транспонированным соединением обмоток статора
и ротора, получающей питание от автономных источников
переменного напряжения произвольной частоты, амплитуды и
формы. Основы построения такой модели изложены в работе [128].
Обратим внимание на то обстоятельство, что в данной схеме
питания машины электрическая связь (последовательное соединение)
обмоток статора и ротора обеспечивает равенство реальных
(неприведенных) токов статора и ротора. В то же время в уравнениях
математических моделей фигурируют переменные состояния и
параметры обмоток, приведенные к числу витков обмотки статора
либо ротора. Это должно быть учтено при построении модели.
241
Источник
Машина
Рис. 11.1. Схема питания машины с последовательным
транспонированным соединением обмоток
Для обозначения неприведенных к статору напряжений и токов
трехфазной обмотки ротора в данном случае используем верхний
индекс ”v”. Тогда можно записать следующие уравнения
электрических связей :
иа ~ w га ’
~ U гс *
«с ~ Use + U rb
(1Т2)
Математические соотношения между приведенными к статору
напряжениями и токами трехфазной обмотки ротора и реальными
(неприведенными) величинами имеет вид :
uri = кеи^ ; (11.3) iri = k;'i^, (11.4)
где i = а, Ь,с - индексы фаз;
- Л ЭФФ _ коэффициент трансформации,
^г.эфф
определяемый соотношением эффективных чисел
витков обмоток статора и ротора машины.
На основе формул (11.1) - (Н-4) можно получить учитывающие
схему питания машины векторно-матричные уравнения электрических
242
связей обмоток, записанные относительно приведенных к статору
величин:
(11.5)
где
(116)
и Fs
df
usb
5
Ща
Use
hb
«
I
* гс
- алгебраические векторы, составленные из мгновенных значений
фазных напряжений источника питания, фазных напряжений и токов
обмотки статора и приведенных к статору фазных напряжений и токов
обмотки ротора;
5-0 0
(1L7)
1 О
0
- матрица, учитывающая конкретный вариант транспонирования фаз
(5и С) при соединении обмоток статора и ротора.
11.2. Преобразование уравнений электрических
связей
Преобразование переменных в произвольно ориентированную
вращающуюся систему координат с матрицами преобразования
и приводит к следующим уравнениям электрических
связей
(Н.8)
(11.9)
243
векторы преобразованных напряжений источника питания,
напряжений и токов обмоток статора и ротора машины;
f(^a,(0,)sa;’(0J =
COS £
-sin £
О
- sin £ О
- COS £ О
О 1
(11.10)
- функциональная матрица, отображающая транспонирование фаз в
преобразованной системе координат;
8 = +
(И.И)
- обобщенный аргумент функциональной матрицы;
< = 2тг/3, 4тг/3
- константа, зависящая от варианта схемы транспонирования фаз.
Для схемы, изображенной на рис. 11.1, ^ = 0 .
11.3. Уравнения модели машины. Структурная схема
Основой для описания электромагнитных цепей машины служат
преобразованные уравнения общего вида (9.3):
и, = />т,+;
e>k=pQk\ со — р 6 .
(11.12)
При совместном рассмотрении приведенных выше уравнений
общего вида и уравнений электрических связей целесообразно
исключить зависимые переменные и ввести ряд обобщенных
переменных и параметров машины. С этой целью вводятся
обобщенный вектор полных потокосцеплений и обобщенные матрицы
активных сопротивлений и индуктивностей рассеяния машины по
соотношениям:
244
(11.13)
R = R5 + к? Rr;
Тогда полная модель электромагнитных контуров машины с
последовательным соединением обмоток описывается уравнениями :
U = As(^.)Uft;
U - j3T + o4.B'P + RIs;
й>А. = рвк
£ = 20^ ~ 6 + Q
1Г=а;*(^)15
(И.14)
Здесь As(^) - матрица прямого преобразования координат (8.3);
А/(^) _ матрица обратного преобразования;
О 01
матричные константы;
О О
K(f) = Е + ке 1 F(^) - функциональная матрица. В развернутом
виде
1 + /С JcOS£
С*-
-к, sins
- к„1 sin £•
1-к~ cosf
С
о
(11.15)
Электромагнитный момент машины может быть определен по
любому, из следующих выражений, представленных в виде скалярных
произведений:
245
* I, W тх *sy ту hx >
(11.16)
Первая формула имеется в перечне эквивалентных выражений
электромагнитного момента (10.15). Вторая и третья формулы
выражают момент с помощью переменных, специфичных для данной
схемы соединения обмоток. Это обобщенное потокосцепление 4х и
функциональная матрица . Последняя формула с учетом
некоторого различия в обозначениях совпадает с приведенной в [14].
Рис. 11.2. Структурная схема модели машины с
последовательным соединением обмоток статора и ротора
На рис. 11.2 изображена структурная схема модели машины,
соответствующая уравнениям (11.14), второй формуле (11.16) и
уравнениям механического движения ротора:
pco~J \т-тс}\
рв-со.
(IL17)
Уравнения (11.14) определяют произвольно-ориентированную
модель и дают возможность в каждом конкретном случае выбрать
наиболее удобный вариант ее ориентации. С позиций исключения
246
периодических коэффициентов, удобства анализа и формирования
режимов управления машиной отметим целесообразность следующих
двух вариантов ориентации системы координат:
• по половинному углу поворота ротора;
• по направлению радиус-вектора результирующего
намагничивающего тока.
В первом случае условие ориентации системы координат имеет
вид:
ек = |(0-<) , Т.е. £ = 0. (11.18)
Во втором случае
(И.19)
причем величина £ определяется решением следующей системы
уравнений:
sinf= k~X[^kl -11 ;
COS £ - к„
Сн
(11.20)
+ cos^) ~ lsy Sin £
Для машин с коэффициентом трансформации ке — 1 (а это
наиболее приемлемое значение параметра ке для работы машины при
последовательном соединении обмоток статора и ротора) оба
варианта ориентации совпадают. При этом намагничивающий ток и
электромагнитный момент машины оказываются зависимыми от
компонент вектора токов статора следующим образом :
/и — 2 zy Y isy .
(11.21)
(11.22)
Данное свойство ориентированной модели упрощает задачу
раздельного либо связанного управления возбуждением (главным
магнитным потоком) и электромагнитным моментом машины путем
воздействия на соответствующие компоненты вектора
преобразованных токов статора.
При ке Ф1 последовательное соединение обмоток
нецелесообразно вследствие существенного ограничения
перегрузочной способности машины.
247
В заключение отметим, что представленный математический
аппарат и изложенная методика учета электрических и магнитных
связей применимы для моделирования электрических машин как
переменного, так и постоянного тока [74] с различными вариантами
электромагнитных связей обмоток.
248
Глава двенадцатая
МАТЕМАТИЧЕСКИЕ МОДЕЛИ
АСИНХРОННОЙ МАШИНЫ С
КОРОТКОЗАМКНУТЫМ РОТОРОМ
12.1. Особенности уравнений электромагнитных цепей
асинхронной машины с короткозамкнутым ротором
Для построения моделей насыщенной асинхронной машины с
короткозамкнутой обмоткой ротора и питанием обмоток статора от
автономных источников можно использовать уравнения (9.3), (9.17)
либо (9.24), полагая Ur=0. Кроме того, полезно учитывать
следующее.
В соответствии с принятым допущением о синусоидальности
распределения намагничивающих сил фазных обмоток вдоль
воздушного зазора трехфазная симметричная электрическая машина,
как трансформатор ЭДС, является идеальным заграждающим
фильтром по отношению к нейтральным составляющим. Поэтому
данные составляющие в системах токов и потокосцеплений фазных
обмоток статора могут иметь место только при наличии нейтральных
составляющих в системе напряжений источника питания статора.
Это утверждение справедливо и для обмоток ротора. Очевидно,
при - 0 компоненты вектора также равны нулю, что
обеспечивает отсутствие нейтральных составляющих в системе фазных
токов и потокосцеплений обмоток ротора даже при наличии таковых
в цепях обмоток статора. Из формулы (7.11) следует, что для машин с
короткозамкнутой обмоткой ротора , а с учетом формулы
преобразования токов (8.6) \rm ~ 1г. Следовательно, в данном случае
249
нет нужды различать векторы полных и намагничивающих токов
ротора. Поэтому фигурирующее в (9.3) уравнение намагничивающего
тока целесообразно представить в виде
(12.1)
Эта формула дает определенные удобства при построении моделей
машины, поскольку вырожденная (не имеющая обратной) матрица С
здесь не препятствует определению тока по известным токам 15 и
Iw. С учетом вышеизложенного соответствующие уравнениям общего
вида (9.3), (9.17) и (9.24) системы уравнений электромагнитных
контуров асинхронной машины с короткозамкнутым ротором
приобретают следующий вид:
ил. = АЛ. uf1';
0 = p’Pz+A,BT, + RrIz;
(12.2)
ср — и Т • I = Г’Т -к Т •
ид. = Ьэр1Л. + (R, + й?А.ВЬэ)1д. + ((Укгв- кгаг + рКгУ?г;
(12.3)
U5 = P^s+(а w+^В)Т, -а^к/р,;
О = РЧГ +(ага + Д.В)Т, -агак5%.;
(12.4)
250
В некоторых случаях, например, при построении моделей систем
"полупроводниковый преобразователь частоты - асинхронный
двигатель" для описания последнего целесообразно использовать
комбинацию уравнений из системы (12.2) и (12.3):
U5 - Ьэр15 +(R3 L3)ly +(й?КгВ-К,.аг + pKz.)vPr;
-RrI, =рЧг+0кВЧ’г-
(12.5)
-Ir=CL-Im;
Следует отметить, что помимо формул электромагнитного
момента (10.15) для рассматриваемой машины возможно получение
еще одной формулы, имеющей несколько иную структуру [123]:
m = r/(BTr.pTr + &C4'f.Tr).
(12.6)
Отсюда следует, что
(12.7)
где - абсолютное скольжение вектора потокосцеплений ротора.
Эта величина геометрически интерпретируется как мгновенная
скорость вращения вектора потокосцеплений ротора относительно
ротора. В установившихся режимах эта величина равна абсолютному
скольжению по определению [18]:
р _
(12.8)
Формула (12.7) используется как для анализа особенностей
протекания электромагнитных переходных процессов, так и для
построения систем автоматического управления.
Приведенные выше уравнения позволяют рассмотреть ряд
вариантов структурных и функциональных схем моделей
асинхронной машины с короткозамкнутым ротором и
проанализировать ее особенности как объекта управления.
12.2. Модель общего вида
На рис. 12.1 показана структурная схема модели,
соответствующая уравнениям общего вида (10.15), (10.17), (12.2) и
представляющая собой совокупность связанных определенным
251
образом многомерных и одномерных звеньев направленного действия.
На входе модели машины включен блок преобразования вектора
фазных напряжений Up в вектор U5 с помощью матрицы прямого
преобразования АЛ
Рис. 12.1. Структурная схема модели асинхронной машины
с короткозамкнутым ротором
Для определения реакции машины как элемента нагрузки
источника питания в модели предусмотрено вычисление вектора
tFs г—
фазных токов статора 1/ с помощью матрицы обратного
преобразования Ар($д.). Параметр преобразования 0^ может быть
произвольной функцией времени либо переменных состояния
моделируемого объекта. Нелинейность главной магнитной цепи
машины учитывается с помощью блока F^1, осуществляющего
нелинейное преобразование вектора в вектор 1т. На рис. 12.2,а
изображена структурная схема этого блока. На рис. 12.2,6 показан
более простой и удобный для моделирования вариант, в котором
252
взамен нелинейного элемента с характеристикой вида введен
элемент с характеристикой:
Данная функция легко рассчитывается из кривой намагничивания.
Преобразование вектора 1т в вектор показано на рис. 12.2,в.
в)
Рис. 12.2. Учет нелинейности характеристики намагничивания
Существен тот факт, что при учете нелинейности кривой
намагничивания каналы преобразования компонент вектора
результирующих намагничивающих токов в компоненты вектора
главных потокосцеплений (либо обратного преобразования)
оказываются не автономными. Любое изменение одной из входных
величин, например при постоянстве другой (zmr) влияет на
253
величину 1т и, следовательно, приводит к изменению как так и
Wmy *
Рис. 12.3. Схемы моделей асинхронной машины
с короткозамкнутым ротором
Модель рис. 12.1 дает полную картину взаимосвязи между
переменными состояния объекта. Однако в ряде случаев
целесообразно представление модели в виде совокупности
укрупненных звеньев, выходы которых имеют наибольший интерес с
позиций управления объектом. Такая блок-схема показана на
рис. 12.3,а, где выделены звенья тока (ЗТ), потокосцепления (ЗП),
электромагнитного момента (ЗМ) и механического движения (ЗМД).
Координатные преобразования осуществляются блоками ПК1 и ПКз.
Выделенные звенья тока, потокосцепления и момента являются
нелинейными, причем помимо прямой связи между ними существуют
обратные связи по переменным и . Звенья тока и
254
потокосцепления подвержены, кроме того, действию координатного
возмущения В случае, если для вычисления электромагнитного
момента используется уравнение (12.6), блок-схема модели (рис. 12.3,6)
характеризуется более явно выраженной цепью прямой связи
U5 -> Iy —> т со, причем структура связей по переменным
и 6)^ несколько видоизменяется.
Рассмотрим подробнее варианты построения модели машины.
12.3. Модель в переменных 15 - Я*.
Структурная схема модели, построенной на основе уравнений
(12.3), изображена на рис. 12.4. Как показано ранее, исключение
переменных Ч'у, 1г из уравнений электромагнитных контуров
приводит к необходимости вычисления переменных коэффициентов
аг,кг и ркг.
Рис. 12.4. Структурная схема модели насыщенной
асинхронной машины в переменных 1у -
255
Структурная схема блока вычисления переменных
коэффициентов показана на рис.9.2. Соответствующие связи
изображены на рис. 12.4 штриховыми линиями. В сравнении с ранее
рассмотренным такой вариант модели машины более сложный, но в
некоторых случаях он предпочтительнее. Проанализируем данный
вопрос.
На рис. 12.5 изображена типичная для асинхронных машин
нормального исполнения кривая намагничивания и
соответствующие ей зависимости параметров аг и кг тока im. Как
видно, данные параметры зависят от степени насыщения, причем
последнее влияет более на значение параметра аг, чем на кг.
Рис. 12.5. Изменение параметров машины в связи с насыщением
В первом, наиболее грубом приближении анализ свойств
машины как объекта управления можно проводить без учета
изменения этих параметров вследствие насыщения, т.е. при
ar - const, kr = const. Очевидно, что такое допущение не приведет
к существенным погрешностям при анализе режимов,
характеризующихся изменением у/т в пределах линейного участка
характеристики намагничивания, либо режимов работы машины при
произвольном, но фиксированном значении главного потока.
Во втором приближении, анализируя характер кривых рис. 12.5,
целесообразно учитывать изменение лишь параметра аг, как наиболее
подверженного влиянию насыщения, полагая кг величиной
256
постоянной. Это позволяет шире рассмотреть режимы работы
машины. Оказывается, что наиболее удобной для анализа является
модель машины, соответствующая уравнениям (12.3) либо (12.4) в
первом случае, и уравнениям (12.5) - во втором.
Модель ненасыщенной асинхронной машины. При допущении
const структурная схема модели, изображенная на рис. 12.4,
значительно упрощается и приобретает вид, показанный на рис. 12.6.
В главной (прямой) цепи преобразования внешнего воздействия
последовательно включены два линейных многомерных динамических
звена, характеризующихся матричными передаточными функциями:
W3(^) = [R3(T^ + E)]’1;
(12.9)
(12.10)
где Тэ d i ag Тэх ТЭу Тэ ~
; Tr = diag
(12.11)
- матрицы электромагнитных постоянных времени.
Рис. 12.6. Структурная схема модели ненасыщенной
асинхронной машины
Элементы этих матриц определяются выражениями:
257
(12.12)
(12.13)
Матрицы Тэ и Тл являются диагональными, что свидетельствует
об автономности каналов преобразования компонент векторов.
Каждое из этих звеньев состоит из трех одномерных линейных
апериодических звеньев первого порядка. Полезно отметить, что
постоянные времени Тэх у и Тгх у имеют такой же физический смысл и
примерно те же величины, что и электромагнитные постоянные
времени соответственно цепей якоря и возбуждения
компенсированных машин постоянного тока [117]. Постоянные Тэ~ и
Trz характеризуют инерционность канала преобразования величин,
связанных с нейтральными составляющими .
Каждое из выделенных многомерных звеньев охвачено
отрицательной, в общем случае нелинейной обратной связью, глубина
которой зависит от значений переменных и . Данные связи
являются перекрестными по отношению к прямым каналам
преобразования переменных с индексами х и у. Третий канал z по
отношению к ним автономный и не охвачен данными связями.
Внешнее воздействие на входе звена с учетом выражения
матрицы Кг характеризуется нулевым значением третьей
компоненты. Поэтому звено можно рассматривать как
двумерное, в отличие от трехмерного в общем случае звена
В верхней части структурной схемы рис. 12.6 показаны элементы
и связи, характеризующие вектор ЭДС, наведенных в обмотке статора
полем ротора. Наиболее существенной ее составляющей является ЭДС
вращения, определяемая выражением
-(окгу/гу
(12.14)
Электромагнитный момент вычисляется как скалярное
произведение векторов кгвтг и 15, которое инвариантно к
параметру преобразования 6^.
258
На рис. 12.7 приведена развернутая по компонентам векторов
структурная схема такой модели. Привлекает внимание ее
определенное сходство со структурной схемой машины постоянного
тока. Данное сходство наиболее очевидно при ориентации
координатной системы по вектору потокосцеплений ротора [112].
Математически условие ориентации выражается так:
ч'гу = р = °;
(12.15)
Тогда второе матричное уравнение системы (12.3) в развернутом виде
представляется как
rr lsx ~ РЧ^г + агУ/г (12.16)
rrkTisy = Pky/r • (12.17)
Рис. 12.7. Развернутая структурная схема модели ненасыщенной
машины при произвольной ориентации системы координат
Отсюда следует, что скольжение системы координат и скорость ее
вращения
Pk=rrkriSy4'?(12.18)
сок=а> + Рк (12.19)
259
превращаются из независимых в зависимые переменные. Вектор ЭДС
вращения приобретает вид:
- [0 а) кгу/г 0]Г.
Следовательно, обратная связь по ЭДС преобразуется из перекрестной
в связь одностороннего действия. Значительно упрощается формула
электромагнитного момента:
m-kry/r isy . (12.20)
Соответствующая структурная схема модели (рис.12.8)
подтверждает отмеченное сходство. Очевидно, что компонента
вектора токов статора 1^. является эквивалентом тока якоря машины
постоянного тока. Компонента isx в соответствии с уравнением (12.16)
определяет норму вектора потокосцеплений ротора, которая с учетом
коэффициента кг служит эквивалентом потока возбуждения машины
постоянного тока. Величина е(оу ~ О) кг1//г соответствует величине
ЭДС якоря машины постоянного тока.
Рис. 12. 8. Структурная схема модели ненасыщенной машины
при ориентации системы координат по вектору
потокосцеплений ротора
260
Рассмотренный вариант ориентации системы координат - это не
только рациональный математический прием, значительно
упрощающий структуру модели и исследование ее режимов [112], но
также и эффективный технический принцип [153], используемый при
построении высококачественных систем автоматического управления.
Вместе с тем существуют и другие варианты ориентации, анализ
которых дан, например, в работах [28, 67,84].
12.4. Модель в переменных Ч*? -
Структурная схема модели, построенной на основе уравнений
(12.4), изображена на рис. 12.9.
Рис. 12.9. Структурная схема модели насыщенной
асинхронной машины в переменных Ч/5 ~ Ч/г
Исключение переменных 15, 1г из уравнений электромагнитных
контуров приводит к необходимости вычисления определяемых
формулами (9.26) и (10.15) переменных коэффициентов ks, kr, (%sa,
аггг и , зависящих от насыщения :
261
Ут
V m + ha Ifn
Структурная схема вычисления переменных у/т и im с учетом
насыщения показана на рис. 9.3.
Важным достоинством данного варианта модели в сравнении с
предшествующим (см. рис. 12.4) является существенно меньшая
зависимость всех переменных коэффициентов модели от насыщения,
так как в их выражениях отсутствует параметр аг, наиболее
зависимый от насыщения (см. рис. 12.5). Это дает большие основания
для использования модели ненасыщенной машины, структурная схема
которой изображена на рис. 12.10.
Рис. 12.10. Структурная схема модели ненасыщенной
асинхронной машины в переменных
В главной цепи преобразования внешнего воздействия
последовательно включены два линейных многомерных динамических
звена, характеризующихся матричными передаточными функциями :
Wsa(p) = Т,.Д(Т^р + Е/
Wr Д р) = ТгД(ТГ£Гр + Е) ]
(12.21)
(12.22)
*
где
di Tffjx
диагональные матрицы электромагнитных постоянных времени.
262
Элементы этих матриц определяются выражениями :
(12.23)
(12.24)
Каждое из многомерных звеньев состоит из трех одномерных
линейных апериодических звеньев первого порядка. Постоянные
времени звеньев в каналах с индексами х и у соизмеримы с
постоянными ТЭХ)У предыдущей модели (см. рис. 12.6), превышая их
примерно в два раза, а постоянные времени звеньев в канале z те же,
что и в предыдущей модели.
Как и в предыдущей модели, каждое из выделенных
многомерных звеньев охвачено локальной отрицательной нелинейной
обратной связью, глубина которой зависит от значений переменных
и р^. Данные связи являются перекрестными по отношению к
каналам х и у. Канал z по отношению к ним автономен.
Рис. 12.11. Развернутая структурная схема модели ненасыщенной
асинхронной машины в переменных — Ч*г
263
Помимо локальных перекрестных обратных связей звенья
охвачены по каналам л и у общей (глобальной) положительной
обратной связью, показанной в верхней части схемы. Именно
благодаря действию этой положительной неперекрестной связи два
последовательно включенных звена с относительно малыми
постоянными времени Т5СГ и Tfcr образуют гораздо более
инерционную систему, эквивалентная постоянная времени которой
оказывается соизмеримой с величиной Гг предыдущей модели. Это
вполне объяснимо, так как при одних и тех же внешних воздействиях
обе модели одного и того же двигателя должны воспроизводить
идентичные законы изменения во времени координат вектора
потокосцеплений ротора.
Развернутая структурная схема модели в переменных ЧРУ — Ч*.
представлена на рис. 12.11. В сравнении с развернутой схемой
предыдущей модели (см. рис. 12.7) здесь отсутствует явно выраженная
глобальная перекрестная обратная связь по ЭДС вращения, что
упрощает данный вариант модели.
Рис. 12.12. Структурная схема модели асинхронной машины
в переменных - Ч/г при ориентации системы координат
по вектору потокосцеплений ротора
264
Дальнейшее упрощение модели может быть достигнуто за счет
ориентации системы координат, например, по вектору
потокосцеплений статора или ротора. Последний вариант модели
изображен на рис. 12.12. Здесь мы приходим к архитектуре
структурной схемы, аналогичной рис. 12.8, за исключением явно
выраженной обратной связи по ЭДС вращения.
Проводя аналогии данной схемы со схемой предыдущей модели
(см. рис. 12.8) и с моделью компенсированного двигателя постоянного
тока [74,76,131], отметим следующее. Величина цгг по-прежнему
служит эквивалентом потока возбуждения машины постоянного тока.
Канал возбуждения асинхронной машины содержит два звена с
относительно малыми постоянными времени (Tso. и Тга),
включенных последовательно и охваченных положительной обратной
связью. Первое звено канала подвержено, кроме того, влиянию
перекрестной обратной связи с каналом у.
При условии компенсации (развязки) межканальных связей
канал управления возбуждением асинхронной машины может быть
представлен в виде последовательного соединения двух эквивалентных
динамических звеньев, не охваченных обратной связью и имеющих
передаточные функции:
(12.25)
(12.26)
Здесь и* Y = w.,v - (Ok. - входное воздействие по каналу возбуждения
Г
с учетом компенсации межканальной связи.
Результирующая передаточная функция канала возбуждения
где
У
(12.27)
постоянная времени ;
(12.28)
коэффициент затухания. (12.29)
265
При реальном соотношении параметров (Т,
коэффициент затухания можно оценить приближенно как
в
(12.30)
Так как коэффициенты ks < 1, кг < 1 и всегда положительны, то
> 1. Следовательно, результирующая передаточная функция (12.27)
характеризует канал возбуждения как апериодическое звено второго
порядка. Поскольку значения коэффициентов ks и кг (см. рис. 12.5)
близки к единице, то определяемая формулой (12.28) величина
постоянной времени Тв канала возбуждения оказывается намного
выше величин постоянных времени TSCF и Т га. Поэтому
фигурирующие на структурной схеме рис. 12.11 переменные y/sx и у/г
являются величинами намного более инерционными в сравнении с
величиной
Последняя играет ту же роль, что и “активная” составляющая
тока статора isy модели асинхронной машины (см. рис. 12.8) и
соответственно - ту же, что и ток якоря машины постоянного тока.
Малая инерционность величины у/ определяется относительной
малостью постоянной времени Tsa в канале у.
В результате может быть сделан вывод о возможности быстрого
управления электромагнитным моментом машины
(12.31)
в ориентированной системе координат за счет быстрого изменения
y/sy в результате воздействия по каналу у. Рассмотренная модель, ее
свойства и принцип управления моментом служат теоретической
базой для построения систем, получивших в литературе название
системы прямого управления моментом [151,157,164,186,188,191 и др ].
В заключение отметим следующее. Асинхронный
короткозамкнутый двигатель в сравнении с машинами двойного
питания, в том числе синхронными, является объектом с более
ограниченной управляемостью и наблюдаемостью. Первое свойство
обусловлено тем, что управляющие воздействия могут быть
приложены непосредственно лишь к обмотке статора АД, т.е. данный
объект имеет меньше "рычагов” управления. Второе свойство связано
с невозможностью непосредственного контроля координат состояния
266
цепей ротора без внедрения в конструкцию машины измерительных
элементов. Поэтому организация высококачественных процессов
управления АД в сравнении с другими отмеченными машинами
представляет собой более сложную задачу.
Рис. 12.13. Модель как средство вычисления
координат состояния объекта
Одним из эффективных путей решения указанной задачи является
использование в системах управления асинхронными двигателями их
моделей в качестве датчиков координат состояния, недоступных
непосредственному измерению. Этот путь иллюстрируется блок-
схемой рис. 2.13.
Здесь в процессе функционирования АД производится измерение
фазных токов статора и угловой частоты вращения ротора.
Информация поступает на вход модели, которая вычисляет текущие
значения потокосцеплений, токов и электромагнитного момента
машины. По своей структуре (рис. 12.14) модель представляет собой
совокупность звеньев потокосцепления (ЗП) и момента (ЗМ)
структурной схемы, изображенной на рис. 12.1. На входе модели
включен преобразователь координат вектора токов IЛ с матрицей
А^. Это позволяет производить измерение координат состояния
электромагнитных контуров во вращающейся системе Oxyz. Угловая
частота ее вращения задается сигналом со^ на входе модели.
267
Автоматическая ориентация системы координат по выбранному
г ’Х
ориентирующему вектору Аге<кРг,...Ду> осуществляется в
соответствии с вариантом рис. 9.4,6 либо 9.4,в.
Рис. 12.14. Структурная схема модели как средства
вычисления координат состояния объекта
Итак, в целом алгоритм вычисления координат состояния
объекта базируется на уравнениях (12.2), (10.15) и (10.17),
описывающих его полную модель. Причем частично эти уравнения
"решаются" объектом, а частично - моделью, что дает следующие
преимущества.
1. Снимается проблема задания на вход полной модели
неконтролируемого возмущения со стороны вала АД.
2. Уменьшается количество решающих элементов модели и
повышается ее точность.
3. Устраняются ошибки измерения координат состояния,
обусловленные флюктуацией некоторых параметров объекта
(сопротивлений обмотки статора, параметров механической
части системы и т.д.).
Из числа параметров объекта, изменения которых оказывают
наибольшее влияние на точность функционирования системы "объект-
модель", следует прежде всего выделить параметр гг, подверженный
268
влиянию изменения температуры ротора. Для учета этого фактора
могут быть использованы непосредственное измерение температуры
двигателя или его тепловая модель [31,105,123,155,179 и др.] либо
системы идентификации активного сопротивления и
электромагнитной постоянной времени обмотки ротора. В последние
годы это направление активно развивается на пути использования
моделей, функционирующих на основе непосредственного или
косвенного измерения напряжений и токов питания двигателя
[4,38,39,41,59,69,73.86,132,150,151,161,170,175 - 178,180,181,185,188,193,
194 и др.].
12.5. Выводы
На основании вышеизложенного сформулируем следующие
рациональные принципы построения математических моделей
электрических машин переменного тока как элементов управляемых
электромеханических преобразовательных комплексов.
1. Спектральный анализ пространственного распределения
магнитодвижущих сил фазных обмоток, результирующей
пространственной волны МДС и индукции главного магнитного поля
в поперечном сечении машины и выделение основных
пространственных гармоник анализируемых функций.
2. Разложение мгновенных значений внешних воздействий
(напряжений источников питания) и переменных состояния
электромагнитных контуров (токов, потокосцеплений)
идеализированной машины на намагничивающую и нейтральную
составляющие исходя из степени их участия в создании главного
магнитного поля машины. В связи с этим целесообразно введение
понятий полных, намагничивающих и нейтральных токов обмоток
статора (ротора), и определение понятия результирующего
намагничивающего тока как результата действия токов всех обмоток
с учетом функций пространственного распределения их МДС.
Разложение полных значений переменных на нейтральную и
намагничивающую (в более общем смысле - результативную)
составляющие представляет собой вариационную задачу, решение
которой возможно на основе введения определенных критериев.
3. Учет насыщения главной магнитной цепи путем установления
закона соответствия между основными пространственными
гармониками результирующей МДС обмоток и индукции главного
магнитного поля в воздушном зазоре машины. Отсюда следует
возможность представления характеристики намагничивания машины
по главному пути в виде нелинейной вектор-функции, связывающей
269
векторы результирующих намагничивающих токов и главных
потокосцеплений. Для неявнополюсных машин данная вектор-
функция сводится к нелинейной скалярной функции у/т = »
связывающей нормы этих векторов.
4. Разделение потоков рассеяния машины на две составляющие,
первая из которых не создает магнитной связи между фазными
обмотками статора (ротора) по путям рассеяния, а вторая - создает
такую связь. На основе такого разделения потоков рассеяния модель
машины дает теоретическое обоснование факту различия
индуктивностей рассеяния для токов ненулевой и нулевой
последовательностей.
5. Преобразование координат на основе геометрической
интерпретации переменных трехфазной машины в трехмерном
аффинном (точечном) пространстве с использованием прямоугольных
декартовых систем координат в сочетании с представлением этих же
величин радиус-векторами в трехмерном векторном пространстве с
соответствующими ортогональными базисами.
При таком двойственном представлении переменных модели
упорядоченные наборы величин, характеризующие на различных
этапах преобразования уравнений модели алгебраические векторы-
столбцы напряжений, токов и потокосцеплений обмоток трехфазной
машины, в геометрическом смысле есть координаты соответствующих
трехмерных изображающих радиус-векторов в пяти основных базисах.
д- L_ !
Из них базисы Fy и Gy порождают ортогональные трехмерные
системы координат, связанных со статором; базисы Fr и Gr - с
ротором машины; базис Н - вращающуюся систему координат.
Процедура преобразования переменных строго систематизируется
мнемонической схемой, для которой указываются формулы
преобразования координат не только изображающих векторов, но и
векторов базиса. В геометрическом смысле разложение переменных
на намагничивающую и нейтральную составляющие (в терминах
теоретической электротехники - на составляющие ненулевой и нулевой
последовательностей) есть ортогональное проектирование трехмерных
изображающих векторов на два взаимно-ортогональных
подпространства - соответственно двумерное подпространство Rw и
одномерное подпространство Rq. В трехмерном точечном
пространстве первому из них соответствует плоскость поперечного
сечения машины, второму - ось вращения ее вала. Подпространство
270
Rq определяет ось вращения систем базисных векторов Fr и Gr
и
Н
Трехмерная геометрическая интерпретация не противоречит
общепринятым в литературе представлениям изображающих векторов
на плоскости поперечного сечения машины, но уточняет и дополняет
их для анализа более широкой гаммы режимов ее работы.
Трехмерное геометрическое представление дает для
традиционных двумерных результирующих векторов токов статора
(ротора) более строгое определение, квалифицируя их как
результирующие векторы намагничивающих токов статора (ротора) и
отличая их от результирующих векторов полных токов. Последнее
принципиально важно для анализа наиболее общего случая питания
обмоток машины от автономных источников, а также анализа
режимов несимметричных и симметричных машин с общих позиций.
6. Автоматическая ориентация систем координат. Это позволяет
использовать трехмерные самоориентирующиеся модели, в которых
ориентация векторов базиса Н автоматически определяется каким-
либо из векторов внешних воздействий, либо переменных состояния
электромагнитных контуров. Самоориентирующиеся модели являются
эффективным инструментом анализа динамики машин переменного
тока в сложных системах автоматического регулирования, в задачах
синтеза оптимального управления и аналитического конструирования
регуляторов, а также представляют алгоритмическую основу
построения систем управления машинами с координатными
преобразованиями переменных.
7. Анализ уравнения энергетического баланса насыщенной
машины, что позволяет получить уточненное выражение энергии
магнитного поля, справедливое для машин как с линейной, так и с
нелинейной характеристикой намагничивания. Из уравнения
энергетического баланса непосредственно следуют выражения
электромагнитного момента машины в форме скалярного
произведения векторов состояния электромагнитных контуров.
Эти выражения не противоречат более общим выражениям
электромагнитного момента, непосредственно следующим из анализа
механических сил, воздействующих на проводники с током в
магнитном поле. При этом оказывается, что в общем случае
электромагнитный момент машины выражается через токи и
потокосцепления обмоток не в конечной, а в дифференциальной форме.
Однако на основе гармонического анализа функции
пространственного распределения индукции главного магнитного
поля в зазоре машины для каждой пространственной гармоники
271
магнитной индукции возможен переход к выражениям
электромагнитного момента через токи и потокосцепления обмоток в
конечной форме. Для физической и геометрической интерпретации
этого перехода целесообразно введение понятия ортогонального
потокосцепления. В итоге базовая формула определяет
электромагнитный момент в виде скалярного произведения векторов
токов и ортогональных потокосцеплений обмоток.
8. Использование относительных единиц при моделировании
режимов работы электрических машин и источников их питания, что
характеризуется рядом положительных моментов. Процедура
перехода к относительным единицам вносит элемент рационального
масштабирования уравнений модели и приводит их к виду, удобному
для математического моделирования, как цифрового, так и в
особенности аналогового. Запись уравнений модели в относительных
единиц позволяет оперировать с безразмерными величинами,
диапазон численных значений которых, как правило, значительно
меньше, чем в исходной системе уравнений. В сравнении с
абсолютными значениями переменных - токов, напряжений,
мощностей и других величин их относительные значения гораздо
нагляднее и непосредственнее показывают степень загрузки и
использования активных материалов.
Результаты аналитического исследования задач и
имитационного моделирования, полученные с использованием
относительных единиц, имеют большую степень общности в
сравнении с использованием абсолютной системы единиц. Знание
типовых конструктивных и параметрических пропорций и
относительных показателей работы машин облегчает выявление
ошибок в результатах аналитического исследования и имитационного
моделирования режимов их работы.
На основе сформулированных выше принципов получены
уравнения, определяющие динамические модели насыщенных машин
переменного тока в переменных y/s - у/г и Is - . Модели пригодны
для решения разнообразных задач управления, в том числе, задач
оптимизации. Уравнения характеризуют моделируемые объекты
управления как сложные нелинейные многомерные и многосвязные
динамические системы. Для эффективного управления такими
объектами необходимы совершенные автоматические устройства,
построенные с учетом всего комплекса специфических особенностей
электрических машин переменного тока.
272
Раздел третий
ВОПРОСЫ ТЕОРИИ СИСТЕМ
’’ПРЕОБРАЗОВАТЕЛЬ ЧАСТОТЫ -
ДВИГАТЕЛЬ ПЕРЕМЕННОГО ТОКА”
Глава тринадцатая
РАБОЧИЕ ПРОЦЕССЫ В СИСТЕМЕ
"АВТОНОМНЫЙ ИНВЕРТОР НАПРЯЖЕНИЯ -
АСИНХРОННЫЙ ДВИГАТЕЛЬ"
13.1. Общая характеристика полупроводниковых
преобразователей частоты для электропривода
Полупроводниковые преобразователи частоты для
электропривода подразделяются на два основных класса,
различающихся по способу связи двигателя с питающей сетью:
• непосредственные преобразователи частоты (НПЧ);
• двухзвенные преобразователи частоты (ДПЧ) с промежуточным
звеном постоянного либо переменного тока.
Непосредственные преобразователи частоты. В классе НПЧ
наибольшее практическое применение получили преобразователи с
естественной коммутацией. В них используются силовые
полупроводниковые приборы с неполным управлением (тиристоры),
273