/

































































































































Text
СИСТЕМЫ
ПОДЧИНЕННОГО
РЕГУЛИРОВАНИЯ
ЭЛЕКТРОПРИВОДОВ
ПЕРЕМЕННОГО ТОКА
С ВЕНТИЛЬНЫМИ .
ПРЕОБРАЗОВАТЕЛЯМИ
р
МОСКВА ЭНЕРГОАТОМИЗДАТ 1983
G&l.
31.291
C40
УДК"б2:83.021.'ЗТЭ.З
n 1,3.-г S
Рецензент T. А. Глазенко
Авторы: О. В. Слежановский, Л. X. Дацковский, И. С. Куз-
нецов, Е. Д. Лебедев, Л. М. Тарасенко
Системы подчиненного регулирования электро-
С40 приводов переменного тока с вентильными преоб-
разователями/ О. В. Слежановский, Л. X. Дацков-
ский, И. С. Кузнецов и др.—М.: Энергоатомиздат,
1983. — 256 с., ил.
В пер.: 95 к.
Рассмотрены основные вопросы теории, проектирования н расче-
та систем подчиненного регулирования электроприводов переменного
тока с вентильными преобразователями. Проанализированы характе-
ристики электрических машин как объектов регулирования и вентиль-
ного преобразователя как элемента замкнутой системы. Изложены
принципы построения систем подчиненного регулирования.
Для инженеров и научных работников, занимающихся проектиро-
ванием, исследованием, наладкой н эксплуатацией таких систем.
р2302050000-568 )с<_ ББК 31.291
051(01)-83 6 П2.1.081
ОЛЬГЕРД ВЛАДИСЛАВОВИЧ СЛЕЖАНОВСКИЙ,
ЛЕВ ХАНИНОВИЧ ДАЦКОВСКИЙ, ИВАН СЕМЕНОВИЧ КУЗНЕЦОВ,
ЕВГЕНИЙ ДМИТРИЕВИЧ ЛЕБЕДЕВ, ЛЕОНИД МИХАЙЛОВИЧ ТАРАСЕНКО
Системы подчиненного регупироввния электроприводов
переменного токв с вентильными преобразователями
• 1 w Редактор Б. И. Моцохейн
БИБЛИО
издательства Л. А. Решминв
Днепродэср-^^^еллёт художника В. Д. Козлове
ратнический редактор О. Д. Кузнецове
иа’ „ Корректор М. Г. Г у л и н в
ИБ № 393
Сдано в набор 27.04.83
Формат 84Х1081/,,
Печать высокая
Уч.-изд. л. 15.51
Подписано в печать 19.08.83 Т-17660
Бумага типографская № 3 Гарнитура литературная
Усл. леч. л. 13,44 Усл. кр.-отт. 13,55
Тираж 690Э экз. Заказ 3169 Цена 95 к.
Энергоатомиздат, 113114, Москва, М-114, Шлюзовая наб., 10
Ордена Октябрьской Революции и ордена Трудового Красного Знамени Первая
Образцовая типография имени А. А. Жданова Союзполнграфпрома при Госу-
дарственном Комитете СССР по делам издательств, полиграфии и книжной
-торговли. Москва, М-54, Валовая, 28
© Энергоатомиздат. 1983
Предисловие
Автоматизированный электропривод на основе тири-
сторных преобразователей частоты в последнее десятиле-
тие завоевал прочные позиции среди всех видов электропри-
водов. Трудами многих коллективов, среди которых необ-
ходимо отметить 'кафедры автоматизированного электро-
привода МЭИ и УПИ им. С. М. Кирова, НИИ ХЭМЗ,
ВНИИЭ, ВНИИпреобразователь, разработаны и внедрены
в промышленность регулируемые электроприводы перемен-
ного тока на основе тиристорных преобразователей часто-
ты различных типов: с автономным инвертором тока, авто-
номным инвертором напряжения и непосредственными
преобразователями частоты (НПЧ). Эти электроприводы
оснащены системами .автоматического регулирования
(САР), отвечающими современному техническому уровню.
Традиционный подход к синтезу САР, как правило, ос-
новывался на анализе статических характеристик и режи-
мов работы машин переменного тока. Наиболее совершен-
ные САР в рамках такого подхода, среди которых следует
выделить частотно-токовые, обеспечивают заданные ста-
тические характеристики и лишь приемлемые динамичес-
кие. С совершенствованием средств регулирования и уде-
шевлением тиристорных преобразователей частоты наме-
тилась тенденция к расширению области применения
электроприводов переменного тока для механизмов с вы-
сокими требованиями к динамическим характеристикам.
При этом нередко тиристорные электроприводы перемен-
ного тока применяются там, где традиционно применялись
электроприводы постоянного тока. Этому способствуют
многие факторы, среди которых в первую очередь следует
выделить более высокие динамические показатели регули-
руемых машин переменного тока, их высокую перегрузоч-
ную способность, практически ничем не ограничиваемую
единичную мощность и более высокий КПД.
Высокие динамические показатели электроприводов
переменного тока с тиристорными преобразователями ча-
3
СтотЫ могут быть достигнуты прй сйнтёзе их САР на осно-
ве принципов подчиненного регулирования с последова-
тельной коррекцией. Эти САР получили широкое примене-
ние в электроприводах постоянного тока. В развитие воп-
росов теории и практики электропривода постоянного тока
с подчиненным регулированием большой вклад внесли
ВНИИэлектропривод, ВНИПИ Тяжпромэлектропроект,
Укртяжпромэлектропроект и другие организации.
Применение методов теории систем подчиненного регу-
лирования для синтеза САР электроприводов переменного
тока позволяет унифицировать их аппаратную основу с
САР электроприводов постоянного тока.
В предлагаемой читателю книге впервые в системати-
зированном виде изложены вопросы теории, проектирова-
ния и расчета систем подчиненного регулирования приме-
нительно к электроприводам на основе НПЧ и с исполни-
тельными двигателями переменного тока разных типов.
В книге также описаны устройства УВСР-АИ, выполнен-
ные с применением интегральных микросхем.
В настоящее время устройства УБСР-АИ являются ап-
паратной основой систем управления комплектных тири-
сторных электроприводов постоянного и переменного тока,
освоенных в серийном производстве. Однако в отечествен-
ной литературе отсутствует достаточно полная информация
по устройствам УБСР-АИ. Авторы поставили перед собой
задачу в какой-то степени восполнить этот пробел.
Материалы книги отражают в основном опыт работы
коллектива ВНИИэлектропривод по созданию электропри-
водов переменного тока на основе НПЧ. Эти работы вы-
полняются под руководством доктора техн. наук. проф.
О. В. Слежановского. В книге также нашли отражение
некоторые результаты исследований, выполненных совме-
стно с коллективами кафедры теоретических основ элек-
тротехники УПИ им. С. М. Кирова и ВНИИЭ. Авторы счи-
тают своим долгом выразить признательность канд. техн,
наук А. М. Вейнгеру, канд. техн, наук В. А. Скрыпнику,
инж. Ю. Г. Пикусу, принимавшим участие в этих работах,
а также приносят благодарность рецензенту доктору техн,
наук Т. А. Глазенко за ценные замечания по рукрписи,
канд. техн, наук Б. И. Моцохейну за большой труд по ре-
дактированию книги.
Все замечания по содержанию книги будут приняты с
благодарностью. Их следует направить в адрес Энерго-
атомиздата: 113114, Москва, М-114 Шлюзовая наб., 10.
Авторы
4
Введение
-- На основе НПЧ реализуются разные по своему назна-
чению и техническим характеристикам системы электро-
привода: НПЧ — синхронный двигатель, НПЧ — асинхрон-
ный двигатель с короткозамкнутым ротором, машина двой-
ного питания. Укажем некоторые производственные меха-
низмы, для которых эти электроприводы разрабатываются
или перспективны:
система НПЧ — синхронный двигатель — для главных
приводов станов: обжимных, широкополосных, универсаль-
ных раскатных, непрерывных редукционных трубопрокат-
ных; приводов основных механизмов прокатных станов
(летучих ножниц, нажимных винтов); приводов крупных
размольных мельниц повышенной -производительности це-
ментной и горнорудной промышленности; приводов круп-
ных подъемных машин, гребных винтов;
система НПЧ — асинхронный двигатель с короткозам-
кнутым ротором — для приводов низкоскоростных роль-
гангов, малых подъемных машин и лебедок, главных ме-
ханизмов экскаваторов, уникальных грузоподъемных ме-
ханизмов;
машина двойного питания — для главных приводов
непрерывных черновых групп современных широкополос-
ных станов; приводов вентиляторов главного проветрива-
ния, насосов главного водоотлива, насосов гидравлического
транспорта, мощных конвейеров в угольной промышлен-
ности, питательных насосов, размольного оборудования,
электромеханических преобразователей для связи двух
энергосистем в энергетике.
Простой перечень приводов производственных механиз-
мов определяет широкий диапазон требований к САР этих
электроприводов.
В последние несколько лет в разработке САР электро-
приводов переменного тока наметился новый подход, за-
ключающийся в использовании дифференциальных урав-
5
нений объекта регулирования и методов преобразования
электромеханических систем при изменении систем коор-
динат (систем отчета), в которых формируются управляю-
щие воздействия.
В основе инженерной методики синтеза таких САР, по-
лучивших название векторно-матричных, лежат представ-
ление нестационарного многосвязного объекта (каким яв-
ляется машина переменного тока) в виде некоторой сово-
купности стационарных подобъектов с линейными звеньями,
в основных каналах регулирования и принципы подчинен-
ного регулирования переменных с последовательной кор-
рекцией параметров. Это позволяет, с одной стороны, обес-
печить такие показатели конкретных электроприводов, как
высокая перегрузочная способность, высокая степень ис-
пользования габаритной мощности электрооборудования,
заданный 'диапазон регулирования скорости, высокое каче-
ство регулирования момента и скорости, а с другой сторо-
ны, унифицировать аппаратную основу и целые функцио-
нальные узлы схем независимо от вида конкретной струк-
туры регулирующей части САР и типа исполнительного
двигателя. z
В рамках такого 'подхода к разработке САР электро-
приводов переменного тока частотно-токовые системы мо-
гут в большинстве случаев рассматриваться как упрощен-
ные .векторно-матричные'и синтезироваться с применением
той же аппаратной основы.
Глава первая
ОСНОВНЫЕ ПОЛОЖЕНИЯ
1.1. Электрическая машина как объект регулирования
1.1.1. Обобщенная электрическая машина
№
Рис. 1.1. Схема обобщенной
электрической машины
В современном регулируемом вентильном электропри-
воде используются в основном два типа электрических ма-
шин: синхронные и асинхронные. В классической теории
электрических машин рассматриваются вопросы рациональ-
ного проектирования конкрет-
ных типов машин и исследу-
ются установившиеся режимы
их работы. В созданной
позднее математической тео-
рии электрических машин они
рассматриваются как элемен-
ты сложных электромеханиче-
ских систем.
Несмотря на многообразие
типов электрических машин,
их действие основано на еди-
ном принципе, определяемом
законами электромагнитной
индукции. Этим обусловлена
определенная общность аналитического описания процес-
сов в различных машинах, что дает возможность обобщить
свойства большинства машин в единой модели. Упомяну-
тая модель, называемая часто обобщенной машиной, изо-
бражена на рис. 1.1.
Обобщенная двухфазная машина имеет на роторе й
статоре две пары обмоток, сдвинутых в пространстве на
90°. Процессы в многополюсной машине аналогичны про-
цессам в двухполюсной. Можно также показать, что при
некоторых ограничениях любая машина независимо от чис-
7
ла фаз на статоре и роторе приводится к двухфазной ма-
шине.
Обобщенная машина является идеализированной. Для
нее приняты следующие допущения:
1) магнитодвижущие силы, созданные фазными токами,
синусоидально распределены вдоль воздушного зазора, т.е.
не учитывается влияние высших пространственных гармо-
ник магнитного поля;
2) машина симметрична, т. е. фазные обмотки имеют
одинаковое число витков;
3) не учитывается влияние пазов, но машина может
быть явнополюсной;
4) насыщение и потери в стали отсутствуют;
5) не учитываются емкости внутри обмоток и между
ними, а следовательно, и энергия электростатического
поля;
6) параметры обмоток — приведенные.
На основании второго закона Кирхгофа уравнения обоб-
щенной электрической машины могут быть записаны сле-
дующим образом:
at
и f* =
udr = *drRr + ^dr’y
Uqr = 4“ ~
(1.1)
Выражения для потокосцеплений:
= Д*м “Ь Alerf t'rtr Ч~ Alag iqr'y
• = Lsi$s -f- Afpd idr~t- Afp, iqr-,
^dT —Afrfa lae-f" Mtyipi-}- Lfidr',
= -J- Afep Lf iqT.
Здесь «as, w₽s, Udr, Uqr, ias, ifa, idr, iqr — соответственно
фазные напряжения и токи обмоток статора и ротора; Rs,
kr, Ls, Lr — соответственно активные сопротивления и ин-
дуктивности обмоток статора и ротора; Afad, Afda, Afpd, Afd₽,
Maq, Mqa, AfpQ, AfQp — взаимные индуктивности соответст-
вующих обмоток.
8
Если подставим (1.2) в (1.1), то получим уравнение
в матричной форме:
Has *+1L- 0 las
Ups 0 R' +— L, s 1 dt ’ Iй»
Udr Rr+‘Lr 0 hr
uqr 0 K'+iL' hr
(1-3)
Индуктивности и взаимные индуктивности в (1.3) есть
функции угла х (рис. 1.1), определяющего положение ро-
тора.
Электромагнитная энергия обмоток машины определя-
ется соотношением
^9М= + + (1-4)
Электромагнитный момент
M==^2a-Z (1.5)
дх г
где Zp — число пар полюсов.
Уравнение движения привода
М — Мс = — —, (1.6)
с Zp dt ’ ' '
где ®=dx/dt-, J — момент инерции электропривода, приве-
денный к валу АД; Л4С — момент сопротивления на валу
АД.
Уравнения (1.3) — (1.6) образуют полную систему урав-
нений обобщенной машины.
1.1 Л. Асинхронная машина
Наибольшее применение в промышленном электропри-
воде находят трехфазные асинхронные двигатели (АД)
двух типов: короткозамкнутые и с фазным ротором. У ко-
роткозамкнутых АД энергия подводится к статору от внеш-
него источника, а к ротору — через воздушный зазор от
статора. У АД с фазным ротором энергия от внешнего
источника может подводиться как к статору, так и к рото-
ру через контактные кольца и щетки.
9’
Регулирование энергии, Подводимой к АД, производит-
ся с помощью силового регулирующего органа. Свойства
последнего оказывают существенное влияние на характе-
ристики электропривода в целом, а также определяют ме-
тодику исследования конкретного типа электропривода.
Так, в некоторых случаях возможно рассматривать асин-
хронную машину как самостоятельный объект управления
системы. В других же случаях асинхронную машину нель-
зя отделить от силового регулирующего органа, и тогда
целесообразно рассмотреть их совместно как единый объ-
ект управления. В связи с этим дадим краткий обзор совре-
менных асинхронных электроприводов.
В настоящее время используются следующие основные
способы управления АД: параметрическое, и в частности
фазовое, частотное и каскадное.
Параметрическое управление заключается в изменении
параметров внешних резисторов, реакторов и конденсато-
ров, подключаемых к фазам статора и ротора. При фазо-
вом управлении с помощью реакторов насыщения или ти-
ристоров изменяется напряжение статора. Параметриче-
ский способ неэкономичен и не пригоден для длительного
глубокого регулирования скорости.
При частотном управлении производится согласованное
изменение частоты и напряжения статора короткозамкну-
того АД [17]. Этот способ экономичен, обеспечивает до-
статочно широкий диапазон регулирования и в зависимости
от типа применяемого преобразователя частоты (ПЧ) по-
зволяет перекрывать область как сверхнизких (до
1(Н рад/с), так и сверхвысоких (до 103 рад/с) частот вра-
щения.
Каскадное управление сводится к тому, что цепь стато-
ра двигателя подключается к сети, а в цепь ротора вво-
дится дополнительная ЭДС. Эта ЭДС может быть введена
с помощью роторного выпрямителя и машинного агрегата
(так называемые вентильно-машинные каскады) либо с по-
мощью выпрямителя и зависимого инвертора (асинхрон-
но-вентильный каскад— АВК). Асинхронные каскады про-
сты и экономичны, так как обеспечивают рекуперацию
мощности скольжения. При небольших диапазонах регули-
рования (до 2:1—3:1) вентильные каскады могут ока-
заться в целом экономичнее частотного привода и привода
постоянного тока. Их специфическим недостатком являет-
ся сравнительно низкий коэффициент мощности (0,7 и
менее), особенно при значительном снижении частоты вра-
щения.
10
Особым типом каскадных соединений является так на-
зываемая машина двойного питания (МДП). Здесь внеш-
няя ЭДС вводится в ротор с помощью ПЧ (обычно непо-
средственного). Машина двойного питания экономична, она
перекрывает диапазон частот вращения с границами, от-
стоящими примерно на 30% вверх и вниз от синхронной.
Преимущество МДП перед
другими каскадами и частот-
ным приводом — высокий ко-
эффициент мощности в ука-
занном диапазоне частот вра-
щения.
Из сказанного можно за-
ключить, что среди рассмот-
ренных приводов наиболее
перспективны АВК, частотный
привод (НПЧ — АД) и МДП.
Вентильный каскад как объ-
ект управления близок к при-
воду постоянного тока. По-
Рис. 1.2. Схема трехфазного
АД
скольку статика
АВК описаны
полно в [33, 35],
и динамика
достаточно
мы в дальнейшем
сосредоточим внима-
ние на двух последних системах —НПЧ — АД и МДП,
являющихся наиболее универсальными среди асинхронных
приводов. Так как оба этих привода содержат в качестве
объекта регулирования АД, а в качестве силового регу-
лирующего органа — НПЧ, то к ним применимы единые
методы анализа и синтеза.
Напряжения статора и ротора трехфазного АД
(рис. 1.2) определяются следующими матричными урав-
нениями [61]:
jlM^M4ll+-£ll<ll; (1-7)
11М=М4|1+-£|1М. (L8)
где
нм= “са ^4/> : 11411 = 4a 4ь < Il «411 = gy § J
^sc 4c * sc
ura 4a *ra
II «г |1 = urb ; 11411= 4b ; IIM=* *rb
urc 4c *ГС
Л
Rs, Rr — соответственно активные сопротивления фазных
обмоток статора и ротора; 4а, 4ь, L, 4а, 4ь, 4С, 4fsa, Ч4ь,Ч4с,
Чгга, Чггб, 44с — соответственно токи и потокосцепления фаз
статора и ротора.
Так как обмотки статора и ротора симметричны, а воз-
душный зазор — равномерный, то индуктивности фазных
обмоток статора равны:
£ва==£вЬ==£«с^=£вф, (1.9)
а также равны индуктивности фазных обмоток ротора:
Lra=LTjj=Lrc=Lr^. (1.10)
Эти индуктивности состоят из индуктивностей от полей
рассеяния и индуктивностей от главного потока:
^st Ч~ Lsm, | (Ill)
Lr^Lrl+Lrm.]
Точно так же равны взаимные индуктивности фаз ста-
тора:
4аЬ(я)=£бс(в) == ^‘ca(e')==R т (1.12)
и фаз ротора:
4аЬ(г) = 2.Ьс(г) = 4аС(с) = А т, (1.13)
причем, так как обмотки ротора приведены к статору,
(1.14)
Ранее было принято синусоидальное распределение
МДС от каждой фазной обмотки вдоль воздушного зазо-
ра, поэтому при цилиндрическом роторе взаимная индук-
ция между двумя обмотками, магнитные оси которых сдви-
нуты на некоторый угол, равна произведению взаимной,
индукции при совпадении осей обмоток на косинус угла
между ними. Тогда из (1.11) — (1.14) получим:
L^ = 4mcos^ = _l/2Lsm = -l/2£rm. (1.15)
О
То же положение справедливо для взаимной индукции
обмоток статора н ротора. При совпадении осей этих обмо-
ток, сцепленных с одним и тем же главным потоком, вза-
имная индуктивность Lsr максимальна и выполняется ра-
венство »
L>sr ==Lsm=Lrm‘ (1.16)
12
Если же оси сдвинуты на угол х, то взаимная индук-
тивность равна Lsr cos х.
С учетом введенных соотношений получим следующие
выражения для потокосцеплений:
II *JI=II MIK II+11 АМН ir II; (1-17)
11М=11Ч,1111М1+11М11М|. (118)
где 11^11= t J ? к) s] f t f t t f »
'll Msr Ц = cosjc cos (jc-f-2it/3) cos (jc — 2и/3) cosjc cos(jc-|-2it/3) cos (jc — 2it/3) cosjc cos(jc —2it/3) cos(jc-|- 2it/3) cosx cos (jc — 2it/3) cos (;c -f- 2it/3) cos (jc — 2it/3) cos (jc -f- 2it/3) COSJC cos(jc+2it/3) cos (jc — 2it/3) COS JC 1 »
^гф ^тф
^тф ^Тф
^тф
ДпЬ
7-тф
^Гф
им=
Одно из допущений, принятых для обобщенной маши-
ны, заключается в синусоидальном распределении МДС,
создаваемых фазными токами, вдоль воздушного зазора.
При этом МДС каждой фазной обмотки образуют собст-
венную пространственную синусоидальную волну, а все
вместе — результирующую. Так как в идеализированной
машине потоки и потокосцепления пропорциональны МДС
и токам, то можно оперировать с синусоидальными волна-
ми потоков, потокосцеплений, токов, ЭДС и напряжений.
Пространственная синусоидальная волна может быть пред-
ставлена пространственным вектором, равным по модулю
амплитуде волны и направленным вдоль этой волны. Ре-
зультирующей волне соответствует результирующий век-
тор, который для трехфазной машины выражается следую-
щим образом:
»=?.+»6 + »е. (1-19)
13
где fta, fib, fl'c — фазные пространственные векторы, равные
мгновенным значениям фазных величин.
Амплитуда результирующей волны в 1,5 раза больше._______
'фазной амплитуды.
Результирующий вектор удобно изображать на ком-
плексной плоскости. Направим действительную ось вдоль
оси фазы а, а мнимую — под углом л/2 в положительном
направлении. Тогда
&а = &о; »ь=М; = (1-20)
где а== е‘2и13 =---§- 4" / — е/4и/3 = ~~2~~ ‘
Подставив (1.20) в (1.19) -и умножив обе части на 2/3,
получим:
& = -|-(&а-|-а&ь4-л’&с)- (1-21)
о
Вектор О', обладающий тем свойством, что его проекции
на оси фаз определяют мгновенные значения фазных ве-
личин, называется обобщенным. В матричной форме (1.21)
представляется так:
«S
||
или & = || а || |] & ||, (1.22)
где || а || =-|-|] laa’|| .
О
Теперь, умножив (1.7) и (1.8) на матрицу ||а|| слева,
получим с учетом (1.22):
Us=7sRs+dWsldt-, (1,23)
Ur=7rRr+(ftrldt. (1.24)
Проделав ту же операцию над (1.17) и (1.18), после
преобразований можем записать:
+ 7rLme^, (1.25)
14
где
Lm = — Lsm,
m g sm*
(1.26)
Уравнения электрического равновесия для нулевых со-
ставляющих имеют вид:
= ho Rs + dVh'/dt-, |
urB = iroRf-}-d^dt, J
где Wso=isoLeo', ro—hoLro, а индуктивности нулевой после-
довательности статора и ротора равны:
LBo== Е1вф~}~2Ьтф‘, £гО=Т'гф + 2//пгф.
Введем на комплексных плоскостях системы ортого-
нальных осей а, р для статора и d, q для ротора.' Направ-
ления осей обозначены на рис. 1.2. Оси a, d будем считать
действительными, а оси р, q— мнимыми. Тогда обобщен-
ные векторы переменных статора и ротора можно предста-
вить в виде
Л=/а* + /<в«;
= Uas -J- jUpt’,
4 = hr “1“ jiqr’t
Uff=Udr “F /^r>
^r:=^+/v
(1-28)
(1.29)
Подставляя (1.28) в (1.23), a (1.29) в (1.24) и прирав-
нивая действительные и мнимые части в левой и правой
частях уравнений, получаем:
Has hsRs -j- dWagjdt',
lips = igt Rs -f- dW^I dt\
udr = IdrRr ~^d'Vdrl dt-,
u^r = hT Rr -}- d^^r/dt.
Преобразовав аналогично (1.25), (1.26) и подставив
(1.30)
15
в (1.30), будем иметь в матричной форме:
udr
Rs + ~ Ls
s^dt 5
О
d
— (Lm cos ZpX)
d
(LmSinZpX)
0
d „
Rs+ dt s
d
(I'm sin ZpX)
df cos
В случае двухфазной симметричной машины с равно-
мерным воздушным зазором взаимные индуктивности об-
моток в (1.3) выражаются следующим образом:
Med = Л1йа = = М<п = Lm cos Zpx;
Mfd = Mdf = — Md„ = — Af4<J = Lm sin Zpx.
Из сравнения (1.31) с (1.3) с учетом (1.32) следует,
что при отсутствии токов нулевой последовательности урав-
нения трехфазной асинхронной машины в ортогональных
координатах совпадают с уравнениями обобщенной ма-
} (1-32)
шины.
Токи* нулевой последовательности при синусоидальном
распределении индукции в
Рис. 1.3. Преобразование обоб-
щенного вектора й вращаю-
щейся системе координат
воздушном зазоре не создают
электромагнитного момента и
практически не влияют на ди-
намику привода. Кроме того,
при соединении трехфазных
обмоток АД в звезду без ну-
левого провода или симмет-
ричный треугольник токи ну-
левой последовательности от-
сутствуют.
Как можно видеть из (1.7),
(1.8) и (1.31), приведение
трехфазной машины к двух-
фазной позволило сократить
число уравнений и уменьшить количество членов в них
(так как взаимные индуктивности ортогональных обмоток
равны нулю). Однако уравнения (1.31) неудобны для ис-
следования, поскольку их коэффициенты переменны. Это-
следствие того, что уравнения статора и ротора записаны
в собственных («естественных») системах координат а, 0
и d, q. Приведение обмоток статора и ротора к некоторой
общей системе координат 1, 2 позволит получить уравне-
16
Г)
d
— (Lm cos ZpX)
d ,
(LmSinZpX)
d
Rr + ~dlLf
0
- (Lm Sin ZpX)
d
(Lm COSZpX)
0 '
d ,
Rf+ dt ‘
as
-₽s
Чг
чг
(1-31)
ния с постоянными коэффициентами, поскольку подобные
фиктивные обмотки оказываются взаимно неподвижными.
Положим, что система координат 1,2 вращается со ско-
ростью o)v.=dxc/dt (рис. 1.3) относительно неподвижной
системы координат статора а, fj, а система координат ро-
тора d, q — со скоростью ca—dx/dt. Очевидны следующие
соотношения для обобщенных векторов токов статора и
ротора в различных системах координат:
^31.1 == l'sa,p£ 1
Trt.^ird.4e-l(Xc-x}. (1.34)
Для других обобщенных векторов соотношения анало-
гичны. Уравнение (1.23) с учетом (1.33) преобразуется
к
(1.33)
виду
Ust+ №st
a (1.24) с учетом (1.34) —к виду
^,.1=7п.Л+-%2-+/К-»)Фг..г
at
Объединим (1.35) и (1.36), опустив индексы
скольку все обобщенные векторы относятся к одной и той
же системе координат:
(1.35)
(1.36)
1, 2, no-
0s = /&+<&№|
^=/Я+^/Л+/(<ос-<о)Фг. )
Аналогично преобразуются к системе координат 1, 2
уравнения (1.25), (1.26):
Уравнения (1.37), (1.38)
2—3169
L
Фг=7Лт+/Л- (1-38)
уо содержа»- пермвдичеення ;
БИБЛИОТЕКА 17
Г- - = прод:. Ср.” ’НС.'СГу
«! .., ЩМ’Л.А. О л
гл. М. И. г А. - ; ,
коэффициентов, что является их большим преимуществом
перед исходными уравнениями.
Если в (1.37) положить <ос=0, то получим уравнения
в системе координат а, ₽:
U^r = igf Rr-\-
Выведем зависимость между фазными величинами и ор-
тогональными составляющими обобщенного вектора. Из
(1.33) и (1.21) следует:
+ А = &«.9<Мс=4(&“’+^’+^’№‘/Хс: (1-40)
о
Разложив (1.40) на вещественную и мнимую части, по-
лучим формулы прямого преобразования фазных величин
в ортогональные составляющие:
Система (1.41) должна быть дополнена в общем слу-
чае уравнением для нулевых составляющих
0о=1 /3(0<Н-0Н-0С). (1.42)
Проектируя обобщенный вектор на оси фазных обмоток
и учитывая нулевые составляющие, получаем формулы об-
ратного преобразования ортогональных составляющих
обобщенного вектора в фазные:
&„ = cos хс — &vsin хс &0; | _
&ь=cos (хс — 2-п/З) — &s sin (хе — 2-гс/З) 4- &0; | (1.43)
&с = cos (хс 2-гс/З) — &, sin (хс 4* 2it/3)4~&0. I
Формулы (1.41) и (1.43) действительны для обобщен-
ных векторов токов, потокосцеплений, напряжений и ЭДС
статора и ротора.
Электромагнитная энергия трехфазной машины опре-
деляется выражением
^3 = 4" + ** irb + •"
(1.44)
18
Электромагнитный момент определим в соответствии с
(1.5). При этом-считаем, что при повороте на угол Ах токи
в обмотках статора и ротора не изменились. Восполвзо-
вавшись выражениями для потокосцеплений (1.17), (1.18),-
получим:
М
д [Z.sr cos(x + 2л/3)]
_ 7 (; ; d[Lsrcosx]
дх . -sa-ru
. . d[Lsr cos (х—2п/3)] , . . d[£srcos(x— 2л/3)]
дх +^Ь1га дх
I ; , д [Lsr cosx] . д [£sr cos(х 4- 2п/3)] t
I IstrTb ' t ^sb^rc
; • d [Lsr cos(x + 2n/3) ] t .
- lsclra---------------------L- '
дх
д [Lsr cosx]
дх
д [£sr cos (х—2л/3) ]
дх
дх
I ; ; д [£Sf COSX]
se rc дх
' Подставив в (1.45) выражения для токов статора и
ротора в соответствии с (1.43), после преобразований
имеем:
(1.45)
^4— ^pT'ni
что можно представить в форме векторного произведения
(1.46)
Л4= A ZpLm\Ir Xls]=-^-ZpLmRe {j7rTs}, (1.47)
где 7*s — сопряженный пространственный вектор тока ста-
тора.
Из (1.46) следует, что электромагнитный момент не за-
висит от токов нулевой последовательности.
Если подставить в (1.47) выражения для векторов то-
ков из (1.38), то можно получить другие, более удобные
формулы для определения электромагнитного момента:
Af = -|- Zp х 41=Y (1 -48)
ZpK, [Фг X 4] =~ZpKr - «Ftrlls); (1.49)
M= -|- ZpKs{Ir x = -|- (1-50)
где /fr—7т/Lt] Ks—Ls.
Уравнения (1.37), (1.38) не содержат периодических
коэффициентов при любом выбранном значении скорости
<ос системы координат. В теории электрических машин [28,
61, 62] обычно используются системы координат, вращаю-
щиеся с синхронной скоростью (система х, у), со скоро-
2* 19
стью ротора (система d, q) и неподвижные (система а, £).
Выбор той или иной из указанных систем координат обыч-
но производится из соображений удобства для расчетов
или моделирования конкретных переходных процессов АД
при питании непосредственно от сети [22].
Целью настоящей работы является синтез высококаче-
ственных асинхронных частотно-управляемых электропри-
водов. Это накладывает дополнительные ограничения на
выбор систем координат. В настоящее время разработаны
сравнительно простые и удобные методы оптимизации пе-
реходных процессов для таких координат электропривода,
которые постоянны в установившемся режиме. В этом от-
ношении системы координат а, р и d, q не могут быть
использованы, так как в установившемся режиме частоты
регулируемых координат отличны от нуля. И лишь си-
стема координат х, у отвечает указанному требованию.
Дополнительные преимущества с точки зрения простоты
представления объекта и синтеза регуляторов получаются
при рациональном выборе угловой скорости и ориентации
кооординатных осей в переходном режиме. Поскольку ре-
зультирующие пространственные векторы токов, напряже-
ний и потокосцеплений статора и ротора в установившемся
режиме взаимно неподвижны, если питающие напряжения
синусоидальны, любая система координат, привязанная
к.одному из этих векторов (назовем его «опорным»), при-
годна для оптимизации [24, 34, 42].
Для получения шести основных структурных представ-
лений АД, которые обозначаются далее по выбранному,
опорному вектору как структуры 08, 0T, Ts, 7Г, Чг8, Чгг, ис-
ходными являются уравнения (1.37), (1.38), (1.49) и
(1.50). Применительно к каждому частному случаю ось 1
системы координат направлена по опорному вектору, а
ось 2— в опережающем ее на 90° направлении, поэтому
уравнения (1.37), (1.49) и (1.50) упрощаются, так как
проекция обобщенного опорного вектора на ось 2 равна
нулю. При выводе уравнений АД в различных системах
координат использованы те выражения электромагнитного
момента, которые позволяют получить простейшие струк-
туры с минимальным числом важнейших переменных, под-
лежащих регулированию.
Рассмотрим вывод уравнений структуры Wr. Вектор по-
токосцепления статора можно представить в виде [61]
ф8=7д+кЛ. (1.51)
Где L!s=Lsi+К.т1"г1‘
20
Рис. 1.4. Структурная схема АД (с НПЧ в цепи статора) в системе
отсчета, ориентированной по вектору Ч7,
Подставив (1.51) в первое уравнение (1.37), получим
уравнение в операторной форме (при нулевых начальных
условиях):
Us = 1в [Ps + (р + J4) q + (p + /4) Kr4r • (1.52)
Из второго уравнения (1.38) получим:
Гг = Кг(Фг/Л„,-75). (1.53)
Подставив (1.53) во второе уравнение (1.37), имеем:
й = + + - Ws. (1-54)
Из (1.53) и (1.54) найдем:
Us - К А = Л р?' + (р + /Ч) L's] + Фг ,(1.55)
где R'=Rs+K2rRr.
Разложив (1.55) на действительную и мнимую части,
получим:
«и - KrUir = ilsR' (1 4-р7/) - Wlf; ’
* г
uts - K^r = ilsR' (1 + pTt') 4-^L/hs + W
(1.56)
где T'i—L'siR'; Tr=Lr/Rr.
Разложив (1.54) на действительную и мнимую части,
найдем:
^ = (^ + ^/(1+^); 1
21
По уравнениям (1.56), (1.57) и уравнению электро-
магнитного момента
> M = ±ZpKrWtri!s (1.58)
на рис. 1.4 построена структура Vr АД.
Рассмотрим вывод уравнений структуры Ve. Из перво-
го уравнения (1.38) имеем:
Ts = Ks^s/Lm-rr). (1.59)
Подставив (1.59) в первое уравнение (1.37), получим:
+ (/’+14)1 Ъ- (1-60)
L Ltn J
Вектор потокосцепления ротора представим в виде
Фг=/Л'+кХ. (1-61)
где L'r=Lri+KsLsi.
Подставим (1.60) во второе уравнение (1.37):
= (Rr + pL/) Tr + / (шс - ш) L/ Jr + К+ j К - <»)]
(1-62)
Из (1.60) и (1.62) находим:
Ur-KJJ~ =7r(R" + PLr') +
Рис. 1.5. Структурная схема АД (с НПЧ в цепи ротора) в системе от-
счета. ориентированной по вектору ¥»
22
+ j К - w) Lr'7r++/ (®c -«>)] Ъ (1.63)
где R"=Rr+K2sRs-
Разложив (1.63) на действительную и мнимую состав-
ляющие, получим:
«,г ~ = iirR" (1 +pTt") - К
uv - (14- pTt") + К
/IV ’-p lo ’
1 S
— m)LT'iir — Kj»4u,,
(1:64)
где T'^L'rlR", Ts = LsIRa.
Разложив (1.60) на действительную и мнимую состав-
ляющие, найдем:
___uts + KsRshr. m _Tsuis + Lmiir g^\
C «p > IS II 'г * ' *
4 ¥IS 1 + PTS
На рис. 1.5 no (1.64), (1.65) и уравнению электромаг-
нитного момента
M = --|-ZpKXAr (1-66)
построена структура АД.
Опуская промежуточные преобразования, приводим
конечные уравнения для остальных структур.
Уравнения структуры Os (рис. 1.6):
=/?"<! + pTt") hr - К -<»)ьгч„ - £
/ 1 в
=R" (1+#/") Чг +
J s
I + 2pZ„' 4- p'TsTn'
_Lt- УсЬпТп'
v l+2pTn' +p‘TsTn' ’
t^(U„+w.,)(-^ ,+2^;.Лг„,)+
I £ n' (1 ~b pT s}_#
* Ts(\+2pTn' +p*TsTn') •
M = -1 zpKs (iir^s - iv^lsy,
где Тп' = Т5/(1 + <»сЛ2).
(1-67)
23
Уравнение структуры Ог (рис. 1.7):
uls 7<ruir =
=Я' (1 + pTt') iis - vcLs' ils - А- V.r - шКгФгГ;
* г
u^R’ (1 +рГ/) zas + <»cVZls - Лс ЧГ!г + шКгТ1Г;
И* | 17 D t \ ^n” (1 4~ pFr) !
1Г ( ir + r Is) J + 2рГп,г + p*TrTn" +
. I • (<0e—w)Wnff .
“Г 2S i+W + p^rTn"'
xjr = _|_ Jf p ; ) Г_(юс ы) TfTn"_1 .
2Г ( ifT г г is) 14-2pTn" +p‘7'r7'n"l +
I . LmTn"(l+pTr)
“T" * Тг(1 + 2рГп" + р'ГгГ„") ’
м = 4zp^r- ^isy>
где Т/' = Тг/[1+(Шс-ш)Т/1.
Уравнение структуры ls (рис. 1.8):
uls ~ KrU^R’ (1 + pTt’) ils - - K^v\
J r
Ц) __/., I : К pi ^n"(^ + pTf) _L
ir 1 ir"Г is r r) j + 2pTn„ + piTrTtn “
I u (<oc—W) TrTn'
‘r \+2pTn'' + p'TrTn"‘ .
m | ; 17 n \ Г___(юс—^TrTn" )
tr ( ir+ м Г r)|^ i+2pTn" + ргТгТп"\^'
_1_„ Tn"Q+PTA -
"Г ” \+2рТп"+р'ТтТп'’'
(1.68)
(1.69)
uis Rruer ^ar P-t^^ir
Wc = —;--------------у---------------
^s'^ts
M=^-ZpRr^vils-
24
V-1.
i-2r
О)
ZS
V,
2S
Д’
71 1S
к,
Т,
1 s
Л)------
1+p
T?(\ + pTs)
U-tr
o>c Lm TA
и-РгтА+ргт,тА
тА(1+рТ,)
и-Р2тА+РгтетА
Hp2T,;+p2TsTr!
LmTn (1+рТв)
T,(1+pZJA^TaTi)
Zp
Рис. 1.6. Структурная схема АД в системе отсчета, ориентированной
по вектору О,
Уравнение структуры Ir (рис. 1.9):
uir - Ksuls=R" (l+pTt") iir-J^Pls + Ks^
* s
—+
T 2 1
Vl- + a’^’
1 s
Г 2
й
(1-70)
Z Zp
+m
где
Ks
а1Г K-sPss + “Z T'as + К sto^is
«>с =-----------------Ц-----------------
7-г'Чг
To^l/fOc.
25
Рис. 1.7. Структурная схема АД в системе отсчета, ориентированной
по вектору От
Рис. 1.8. Структурная схема АД в системе отсчета, ориентированной .
по вектору 7,
2G
Обратимся к анализу полученных структур. Критерием
сравнительной оценки структурных схем АД может слу-
жить их относительная простота, определяющая удобство
измерения, вычисления и регулирования координат АД,
а также простота тёхнической реализации регуля-
торов.
Структурные схемы по потокосцеплению Vr (см.
рис. 1.4) и Vs (см. рис. 1.5) имеют небольшое число пере-
крестных связей, простые выражения для момента, срав-
нительно простые выражения для ioc; нелинейности в пря-
мых каналах регулирования отсутствуют. Решающее пре-
имущество этих структурных схем заключается в том, что
они содержат лишь одну составляющую потокосцепления
(Vi, или Vis), которая простейшим с^бразом выражается
через ток и напряжение. Трудности развязки каналов здесь
минимальны, а передаточные функции регуляторов наибо-
лее просты. По сложности структуры Vr и одинаковы,
однако они неравноценны, если рассматривать их приме-
нительно к различным типам приводов. Структура V», со-
держащая в явном виде лишь токи ротора iir и tar, кото-
рые в короткозамкнутом АД не поддаются непосредствен-
ному измерению, очевидно, малопригодна для системы
НПЧ—АД. Для этой системы следует рекомендовать
структуру Vr. И, напротив, структура Vr малопригодна для
27
МДП, так как не Позволяет произвести непосредственное
симметрирование фазных токов ротора, питаемого от НПЧ,
с помощью контуров фазных токов. Эта задача легко осу-
ществляется в структуре Ч^.
Структура 0s (см. рис. 1.6) содержит наибольшее число
прямых и обратных, собственных и перекрестных связей
между двумя основными каналами управления. Здесь —
сравнительно сложное формирование момента, в виде сум-
.мы двух произведений, и сложные зависимости между по-
токосцеплениями Vv и Ч^в, с одной стороны, и токами iir,
itr и напряжением Ut8, с другой.
Некоторым преимуществом структуры 0е является то,
что toc=const для МДП и <ос— независимая величина для
НПЧ — АД. В связи с Этим структуру 0s удобно исполь-
зовать для оптимизации МДП, так как в этом случае все
нелинейности находятся лишь в перекрестных связях, под-
лежащих компенсации.
В системе НПЧ — АД появляются нелинейные звенья
в прямых каналах, формирующих Tis и Ч^.
Структура 0г (см. рис. 1.7), сохраняя все недостатки
структуры О„ имеет более сложные нелинейные зависи-
мости для формирования потокосцеплении, обозначенные
на рис. 1.7 через Ft и F2, выражения для которых легко
МОЖНО ПОЛУЧИТЬ ИЗ Ч^ И Чг2г (1.68).
В токовых структурах 7S (см. рис. 1.8) и 1Т (см.
рис. 1.9) сокращается число перекрестных связей и упро-
щается формирование момента по сравнению с вариантами
структур по напряжению. В частности, нет перекрестных
связей по токам. Однако выражения для сос в токовых
структурах значительно сложнее, чем во всех остальных,
а нелинейные операторы F3, F4 и F5, F6 так же сложны,
как и в структурах 0s и 0т. Последнее видно из выраже-
ний для Vir, 4f2r (1.69) и Wis, Ч'г® (1.70). Структура 1* не-
сколько сложнее структуры 1Г, но в целом токовые струк-
туры практически сложны для технической оптимизации.
1.1.3. Синхронная машина
Синхронная мащина-генератор играет ведущую роль в
производстве электрической энергии, и в этом плане ей
посвящена обширная литература. Синхронная машина-
двигатель долгое время использовалась лишь в нерегули-
руемых приводах. В отличие от асинхронной машины
регулирование частоты вращения синхронного двигателя
28
(СД) обязательно СВязанб с Изменением Частоты питаю-
щего напряжения, поэтому развитие регулируемого син-
хронного электропривода началось, по существу, с появ-
лением тиристорных преобразователей частоты.
Эквивалентная схема синхронной машины получается
из обобщенной (см. рис. 1.1), если обмотки статора пита-
ются переменным током, а обмотки ротора — постоянным.
При этом в установившемся режиме ротор вращается син-
хронно с полем в воздушном зазоре. Ротор может быть яв-
нополюсным либо неявнополюсньщ. Обычно на роторе
расположена одна обмотка возбуждения по продольной
оси. Иногда применяются так называемые компенсирован-
ные СД, содержащие дополнительную поперечную обмотку
возбуждения. В нерегулируемых СД на роторе помещают
еще короткозамкнутую демпферную обмотку с целью по-
вышения динамической устойчивости машины. В частотно-
управляемом электроприводе эта обмотка не требуется,
более того, она оказывает неблагоприятное воздействие,
затрудняя форсирование переходных процессов. Поэтому
в дальнейшем принимается, что на роторе имеется одна
продольная обмотка возбуждения.
Кроме того, полагаем машину шихтованной, так что
влиянием вихревых токов в массивных частях магнитопро-
вода можно пренебречь.
Расчетная схема трехфазного СД представлена на
рис. 1.10. Уравнения равновесий напряжений для статор-
ных обмоток имеют такой же вид, как и уравнения (1.7)
для АД.
Потокосцепления статора равны:
11^11=111^11 His|| + ||M'er||i7, (1.71)
29
где if — ток обмотки возбуждения.
Матрица индуктивности статора выражается:
7-аа
Lab
Lac
7-cp + Lm COS 2X
I'ba
^bb
^bc
‘ ^cp 4“ ^tn COS
7-са
^eb
7-сс
— ^cp + COS
где Lcp, МСр — средние значения собственной индуктивно-
сти фазы статора и взаимной индуктивности между двумя
фазами статора.
Матрица взаимных индуктивностей фазы статора
мотки возбуждения:
и об-
7-of
Lbf
Мf cos x
/ 2п
ISI X ~ 3
(1.73)
^cf
Mf cos I x
l|Af'„|| =
где
Потокосцепление обмотки возбуждения равно:
Ч'/=ЦЛ4,.|| Ili.ll+Lj/O, _
HMr.U=l|Z./eZ./bL/cll=
(1-74)
Mf cos х М/cos
L/f — собственная индуктивность обмотки возбуждения;
Mf — максимальное значение взаимной индукции между
обмоткой возбуждения и фазой статора.
В силу несимметрии- ротора синхронной машины (маг-
нитной и электрической) уравнения с постоянными коэф-
фициентами могут быть получены лишь при выполнении
преобразований в системе отсчета d, q, оси которой жестко
связаны с
уравнения
ротором. Матрица этого преобразования для
статора имеет вид:
cos x
cos
cos
£
3
/ 1 2" \
— sin 1 х — — ) —sin
1
2
• (1.75)
£
2
£
2
30
Так, формулы преобразования токов статора к состав-
ляющим по осям d и q получим на основе выражения
НчЛ = 1|Л8||||»Л,
^ср
—^ср ~Ь Lm cos
^ср "Т cos 2х
(1.72)
— Л4Ср + Z-m cos2x
они имеют вид:
2 Г.
ld=~ kac°sx-
2п
~3~
isb sm i J
t
sc
(1.76)
1
Io— 3
Умножим обе части равенства (1.7) ра матрицу ||Л5[|
слева. После преобразований получим в развернутом виде:
(1-77)
(1.73>
(1-79)
at
dW
uq = iqRs 4
Аналогичная операция над равенством (1.71) приводит
к следующим выражениям для потокосцеплений статора:
(1.80)
(1-81)
(1.82)
=idLd 4- ifMf,
' Jr q—lqLq\
x¥o=ioL0,
гдеLd=Lcp+Mcp+|Lm; Lq = Тср+Чр-1Lm;L0=Lcp-2A1cp.
С учетом Первого уравнения (1.76) выражение (1.74)
для потокосцепления обмотки возбуждения можно пред-
ставить следующим образом:
Wf=-^idMf-{-ifLff. (1.83)
31
Уравнение для обмотки ротора:
“/=‘Л+тг- <1М>
Электромагнитный момент СД выражается аналогично
(1.48):
M = ±Zp(Wdi4~W4id). (1.85)
Уравнение движения ротора:
М-Мс= — —. (1.86)
zp dt
Уравнения (1.77) — (1.86) образуют полную систему
уравнений синхронной машины. Преобразуем ее к виду,
удобному для синтеза САР. Из (1.84) и (1.83) имеем:
uf — ifRf-\-Lff-^- (1.87)
dt# I f 3 din \ r»-.
откуда ---(1.88)
Из (1.77) и (1.80), (1.81) имеем:
«d = RJd + Ld^~ - • 0 -89)
Подставляя (1.88) в (1.89) и производя замену d(dt=
—р, получаем:
. Ud=Rs(^+pT'sd)id+KfUf—KfRfif—w’Fq, (1.90)
где T'Kd=L'd/Rs, L'd=Ld—3>M2f/2Lff, Kf=Mf/Lff.
Из (1.78) и (1.81) имеем:
ug=Rs(l+pTgq)ig+wWd-, (1.91)
здесь Tsq=LglRs.
Из (1.84), (1.80) получаем:
иг^(\+рТ"ао)1г+Кар^, (1.92)
где T"do—L'flRf, L'f—Lff—3M2f/2Ld; Kd=3Mf/2Ld.
Векторно-матричная система управления синтезируется
на основании структурной схемы СД с основными регули-
руемыми координатами id, ig, xPf-
Из (1.84) с учетом (1.83) получим:
l±£ZZ£.g, 3 w (| 93)
1 d. *
где T'dg=L}ljRp
32
Рис. 1.11. Структурная схема СД (с НПЧ в цепи статора) в системе
отсчета, ориентированной по ротору
Потокосцепление статора по продольной оси в этом слу-
чае можно представить в виде >
/ (1.94)
Структурная схема СД с основными регулируемыми
координатами-id, ig, ¥у построена по (1.81), (1.85), (1.86),
(1.90) — (1.94). Она показана на рис. 1.11. \
(Структурная схема СД с основными регулируемыми
координатами id, i9, if построена по (1.80), (1.8Г), (1.85),
(1.86)-, (1.90)—(1.92). Эта схема удобна для синтеза так
называемой частотно-токовой системы управления. Она по-
лучается путем замены на рис. 1.11 блока I на блок II.
1.2. Непосредственный преобразователь частоты
как элемент системы электропривода
1.2.1. Общие положения
Основой силовой схемы непосредственного преобразователя часто-
ты (НПЧ) является .реверсивный тиристорный преобразователь
(рис. 1.12). Многофазный выход НПЧ образуется эквивалентным чис-
лом преобразователей с однофазным выходом: необходимый сдвиг
выходных напряжений достигается путем соответствующего сдвига
управляющих сигналов на входе НПЧ. Выходное однофазное напря-
жение. (низкочастотный выход) образуется посредством управления,
осуществляемого по закону, обеспечивающему циклическое изменение
—3169 33
углов открытия тиристоров силовой схемы (рис. 1.13). Коммутация
тока тиристорами каждой группы НПЧ одного направления осу-
ществляется за счет напряжения сети, а управление моментом вклю-
чения обеспечивает изменение направления тока в нагрузке. Благодаря
этому НПЧ может пропустить реактивную мощность нагрузки и обес-
печить двусторонний обмен активной мощностью между сетью и на-
грузкой. Непосредственный преобразователь частоты может быть вы-
полнен по любой из известных в преобразовательной технике схем.
Подавляющее большинство разработанных и предложенных для
реализации электроприводов НПЧ 1 предусматривают согласованное
управление против овключеиным и группами тиристоров, при котором
системой управления обеспечивается изменение частоты выходного на-
пряжения от нуля до максимального значения. Верхнее значение ча-
стоты выходного напряжения НПЧ определяется режимами работы
Рис. 1.12. Схема НПЧ с одно- Рис. 1.13. Формирование кривой на-
фазным низкочастотным выхо- пряжения НПЧ
дом (imi=3)
элементов силовой схемы, условиями их равномерной загрузки и, как
правило, не превышает половины частоты питающей сети (25 Рц при
питании от сети промышленной частоты).
Рассмотрим НПЧ с идеальным преобразовательным трансформато-
ром, у которого индуктивность рассеяния обмоток, потери в магнито-
проводе и намагничивающий ток -полагают равными нулю; с идеаль-
ными вентилями, у которых отсутствует падение напряжения, а вос-
становление запирающих свойств происходит мгновенно;, с индуктив-
ностью, достаточной для обеспечения непрерывности тока. Тогда на-
пряжение на выходе НПЧ можно записать в виде
«г = Т" sin cos [° (0J = cos (°,Ц)Ь -95)
Где bi — действующее Значение ЭДС трансформатора; t/ю — средней
значение выходного напряжения при а(/)=0; а — угол открытия вен-
тилей, отсчитываемый от естественного угла начала проводимости;
mi — число фаз на вторичной стороне преобразовательного трансфор-
матора.
Для получения знакопеременного напряжения иа нагрузке углы
Открытия вентилей, включенных в реверсивную схему НПЧ при со-
гласованном управлении, должны быть связаны соотношением
сц(0=л—а2(/);
Поскольку в НПЧ вентили коммутируются напряжением питающей
сети, закон изменения углов открытия вентилей а»(/) и а2(/) во вре-
мени реализуется дискретно. Если а(<) в общем виде является
некоторой функцией времени, задающей закон изменения напряжения
иа выходе НПЧ, то при (где ш'1— круговая частота питаю-
щего напряжения, to2— круговая частота напряжения иа нагрузке)
выходное напряжение на нагрузке воспроизводит входной сигнал. Из-
меняя углы открытия вентилей по определенному закону, можно по-
лучить на выходе НПЧ напряжение, среднее значение которого изме-
няется периодически по любому, в частности синусоидальному, закону.
Кривая напряжения на нагрузке является по существу кривой
средних значений напряжений реверсивного преобразователя. Так как
при конечном числе фаз преобразователя кривая вторичного напряже-
ния (рис. 1.13) представляет собой участки питающего напряжения
несущей частоты и состоит из конечного числа этих участков, то для
формирования выходного напряжения с, огибающей синусоидальной
формы необходимо равенство среднего значения напряжения^ форми-
руемого Л-м вентилем за период его проводимости l/ь*, и среднего
значения выходного огибающего синусоидального напряжения за тот
же период 1/г*'.
У Ubk=U2k. (1.96)
Закон изменения во времени углов <x(f) может быть иайдеи после
несложных математических преобразований из условия (1.96) для
a(<)==-g-—arcsin [v sin (<oaf)], (1-97)
где 0^Ш2^л/2; v — глубина регулирования напряжения на нагрузке:
_г__ т, п
* — г 2 Ut л sin cos&max/U}t', (1.98)
<z(/)=arcsin(v sinfcoa/)]— л/2. (1.97a)
где л/2^<в2«^л.
Значения a(<) записаны для двух интервалов работы НПЧ, когда
функция непрерывна, так как при формировании каждой полуволны
кривой низкочастотной синусоиды угол а сначала убывает до предель-
3* - 35
Таблица 1Д-
Управляющее напряжение
ч Опорное напря- жение а(®,() Гладкая составляющая выходного напряжения У1гл1“«‘) Гармонический cQcrai 4fc ₽ при нагрузке КИсп,п’Я
вде- ениой везда
cos arccosf» сое »jt) •KcxU1'1 C08“af ... д =0 Лв,8,7 0 0 0,71К„
1 — — V Л — COS ®i t 2 2 K__Ui2J» (cose»! —cos 3«,t + c A I J 1 * j. Ji- cos 5«jt — ] Ji 1 fe-l Aft=(-V) 2 2JfeX Чт) ' 0,13 0,01 0,81Ксх
^COS «1 ?, ' 2®,t arccos* 11 — ' * 1 4 1 К У, — (cos Bit + 0,11 cos 3»at + 1 CX L«* / 3+ 0,04 COS 5«»t + —) A —• «.fe- 1 ' 0,12 II” 0,05 т- O,STSXC;, т '
v cos при
ж < вя t <2«И 0 < v < 1
/
COS Bit
W
— » при < 2х
t 2«if
arccos
1
arccos (± »)
. - 7 4» cos «__У1 (соз «,f+0,11 cos3®af + сх ltd—»») + 0,04 cos 5<o2f+.. ) 1 4v cos Дь= R »(*» — У») 0,12 0,05 4 0,71Xc,
«СХУ1 — (cos B}t — 0,33 cos 3»1 f + + 0,20 coy 5a>it — ...) ar* II 1. ^|T Ф 0,48 o.3i 0,905КСЯ
КСХ1Л sin (cos Ubt —
— 0,33 cos 3®s('+ 0,20 coS 5wif — ...)
9
X
_. 4 , ук
X — sin —
Kk 2
0,48
Примечания: 1, /2)—Бесселева функция первого рода Л-го порядка. «
2. А^— амплитуда гармонической составляющей, где А=1, 3, S, 7, ...
3. хн=Кй^А>, коэффициент хя связан с коэффициентом искажения соотношением /Сиск=1
4. К-—— коэффициент использования тиристора г.о напряжению, 1/"2 при »=1.
MVH ML Л «Лг »
031
ог9оак,_
С»
ио допустимого значений, а затем возрастает До начального значе-
ния и=л/2.
Для идеального случая v«=l
а(Г)=л/2^со2Г, где а(1)=ы21—л/2, где
функция изображается ломаной линией.
Как следует из изложенного, функция а (Г) при пцсо^аз реали-
зуется дискретными углами фазовых, сдвигов моментов пересечения
синусоид с угловой частотой соц фиксированных относительно соответ-
ствующих фаз питающей сети или трансформатора (в дальнейшем на-
зываемых сигналами опорных напряжений), и синусоиды с частотой со2
(в дальнейшем называемой сигналом управляющего напряжения). Из-
менение фазы и 'амплитуды напряжения иа нагрузке осуществляется
регулированием фазы и амплитуды низкочастотной синусоиды управ-
ляющего сигнала при фиксированном положении и амплитуде синусоид
опорных напряжений. Таким образом, система управления НПЧ долж-
на обеспечивать модуляцию фазы отпирающих импульсов по опреде-
ленному закону, а также некоторые параметры этих импульсов. Струк-
тура системы управления качественно не зависит от числа фаз на вхо-
де и выходе НПЧ. Число фаз влияет только на количество идентичных
каналов управления.
При практической реализации системы управления целесообразно
объединить в систему импульсно-фазового управления вентилями
(СИФУ) генератор опорных напряж§ний> узел сравнения управляю-
щих и опорных сигналов, а также устройство формирования импуль-
сов для включения вентилей. На вход этой системы вводится регу-
лируемый по амплитуде и частоте сигнал управления.
Характеристика управления [закон изменения угла управления век-
тилей a(t) НПЧ] определяет гармонический состав кривой выходного
напряжения, характер уравнительных' напряжений в реверсивном кон-
туре (при совместном управлении группами вентилей), использование
элементов силовой схемы НПЧ по напряжению и току, характер изме-
нения составляющих полной мощности в питающей сети и габаритную
мощность приводного электродвигателя.
В табл. 1.1 приведены данные сравнительного анализа выходного
напряжения НПЧ при разных сочетаниях форм опорных и управляю-
щих напряжений системы управления [27, 29, 55]. Сравнение проведе-
но по гладкой составляющей кривой выходного напряжения (т. е.
в предположении, что число фаз питающей сети /Л1~>оо).
В современных системах электропривода НПЧ, как правило, ох-
ватывается пофазно жесткой обратной связью по выходному току
(рис. 1.14) [16, 37, 41—44, 66]. Высокое быстродействие контуров
регулирования фазного тока и компенсация возмущающих воздействий
в ием позволяют условно считать такое устройство управляемым
«источником тока», управляющее воздействие на который -поступает
от системы автоматического регулирования (САР). Тогда форма кри-
38 _ _
Таблица 1.2
момент трехфазной машикыпри синусоидальном токе.
39
вой управляющего воздействия характеризует гладкую составляющую
кривой выходного тока НПЧ.
В табл. 1.2 показана зависимость степени использования машины
переменного тока от формы выходного тока НПЧ. В табл. 1.2’ срав-
нение проводится при токах разной формы, но имеющих равные дейст-
вующие значения, и синусоидальной форме поля. За базовый макси-
мальный момент принимается теоретически достижимый момент (при
числе фаз машины zn=oo и коэффициенте использования полюса 0=1)
Л1тох=ЗЛ1ср-
К сравнительному анализу характеристик управления- следует до-
бавить, что при прямоугольном характере управляющегб сигнала воз-
можность компенсации средней реактивной мощности при низких
Рнс. 1.14. Структурная схема многофазно-однофазного НПЧ с раздель-
ным управлением группами вентилей (в режиме. источника тока):
РТФ1, РТФ2 — регуляторы фазного тока; СИФУ1, СИФУ2 — системы импульсно-
фазового управления; UZI, UZ2 — тиристорные преобразователи; БЛЗ — блок ло-
гики запирания; BN1, BN2 — датчики нуля тока; ВГ$ — датчик фазного тока
cos фв и v ограничена вследствие значительных пульсаций с частотой,
кратной й>2. амплитуды и фазы основной гармоники тока в питающей
сети [12].
Режим работы вентилей каждой группы определяется коэффици-
ентом мощности нагрузки. При фазном угле нагрузки фв=/=0 отрица-
тельным значениям кривой напряжения низкой частоты, формируемого
_ токопроводящей группой, соответствуют инверторные режимы работы
49
НПЧ, при которых реактивная мощность низкочастотной нагрузки воз-
вращается в сеть несущей частоты в виде активной мощности. Рису-
нок 1.15 иллюстрирует режимы работы вентильных групп НПЧ в зави-
симости от коэффициента мощности нагрузки. С учетом необходимого
запаса по углу в инверторном режиме работы для реального НПЧ
предельно допустимый угол открытия вентилей ата1^10-т-25° и
<0,914-0,87, а диапазон изменения угла am<n—ато«<160°. Непосред-
ственный преобразователь частоты нагружает сеть реактивным током.
С переходом к конечному значению mi схеме НПЧ следует при-
менять специальные меры для устранения (или ограничения) взаимного
влияния вентильных групп, включен-
ных в реверсивную схему НПЧ. В
зависимости от способа ограничения
уравнительного тока НПЧ разделя-
ются на НПЧ с совместным и с раз-
дельным управлением группами вен-
тилей.
В НПЧ с совместным управленй-
. ем для огранйчения уравнительных
токов служат ограничивающие реак-
торы, индуктивность которых выби-
рается с учетом двух противоречи-
вых требований: с одной стороны,
ограничить уравнительный .ток зна-
чением, не вызывающим большого
увеличения мощности преобразова-
тельного трансформатора и загрузки
вентилей, а с другой стороны, паде-
ние напряжения от нагрузочного •
тока, которое растет с ростом вто-
ричной частоты, не должно вызывать
значительного, увеличения напряже-
ния преобразовательного трансфор-
матора.
Наличие реакторов в схеме НПЧ
обусловливает появление во внут-
реннем контуре (рис. 1.16) неском-
пенсированной ЭДС самоиндукции
реакторов и динамической состав-
ляющей уравнительного тока [12,13].
Ограничивающие реакторы увеличивают
размеры НПЧ, среднее значение тока силовых вентилей,
мощность преобразовательного трансформатора (за счет
и динамических уравнительных токов) и снижают его энергетические
показатели.
Чг
0
VZ1
Л/2 \я Wjt
UZ2
7 4
Двигатель-
ный режим
работы
привода^ О
0
UZ2
II
Двигатель-
ный режим
работы
привода „
2п
Л/2
I
UZ,2 UZf
II
I
uzz
VZ2
UZ1
Генераторный
режим рабо-
ты привода
°
Рис. 1.15. Диаграмма работы
НПЧ:
I — выпрямительный
инверторный
режям; II —•
режим
массу и
габаритные
габаритную
статических
41
?=5СГц
Рис. 1.16. Непосредственный преобразователь частоты с совместным,
управлением группами вентилей:
а —. схема трехфазно-однофазного НПЧ; б — диаграмма токов; в — осциллограм-
мы токов
Рис. 1.17. Непосредственный преобразователь частоты с раздельным
управлением группами вентилей:
а — схема трехфазно-однофазного НПЧ; б — диаграмма напряжений и токов
42
В НПЧ с раздельным управлением принципиально устраняется
контур уравнительного тока за счет попеременного снятия отпирающих
импульсов с той группы вентилей, через которую в данный момент
не протекает ток нагрузки. Снятие и восстановление, импульсов в це-
пях управляющих электродов производится логической схемой блока
запирания БЛЗ с частотой вторичной сети (рис. 1.17) [23]. ,
1.2.2. Схемы силовых цепей НПЧ. Факторы влияния НПЧ
на питающую сеть
Определяющее влияние на установленную мощность силового обо-
рудования НПЧ оказывают схема на стороне, связанной с питающей
сетью, и способ согласования и управления группами вентилей.
В настоящей книге рассматриваются то!лько . НПЧ с раздельным
управлением. Эти НПЧ нашли преимущественное применение в элек-
троприводах, так как применение в НПЧ совместного управления уве-
личивает мощность установленного оборудования (в зависимости от
верхнего предела <в2) на 20—40%. В электроприводах НПЧ выполня-
ются по трехфазным мостовым (при Р=102-=-103 кВт) и эквивалентным
многофазным (при Р>103 кВт) схемам на основе трехфазных мосто-
вых схем. Трехфазные нулевые схемы нашли ограниченное применение:
в установках небольшой мощности и преимущественно при автоном-
ных источниках питания повышенной частоты. Это обусловлено более
высоким качеством тока в питающей сети и выходного напряжения,
а также высокими значениями коэффициентов преобразования тока и
напряжения НПЧ на основе мостовых схем.
Схема силовой части НПЧ разрабатывается с учетом мощности
электропривода, необходимости компенсации влияния иа питающую
сеть, схемы цепей нагрузки..
Непосредственная связь цепей нагрузки и питающей сети в НПЧ
делает необходимым выбор силовой схемы и закона управления вен-
тилями с учетом ограничения влияния НПЧ на питающую сеть. Влия-
ние проявляется в трех аспектах:
в потреблении из питающей сети реактивной мощности сдвига
(характеризуемом коэффициентом сдвига cos ср*);
в появлении в кривой первичного тока широкого спектра высших
гармонических составляющих (высших гармоник) с частотами, крат-
ными частоте питающей сети;
в амплитудной и фазовой модуляции основной гармонической со-
ставляющей (основной гармоники) первичного тока.
Различным аспектам этого вопроса посвящены многочисленные
исследования [12—14, 25]. Анализ результатов этих исследований по-
зволяет рекомендовать мероприятия, с учетом которых должна вестись
разработка в первую « чередь мощных НПЧ.
43
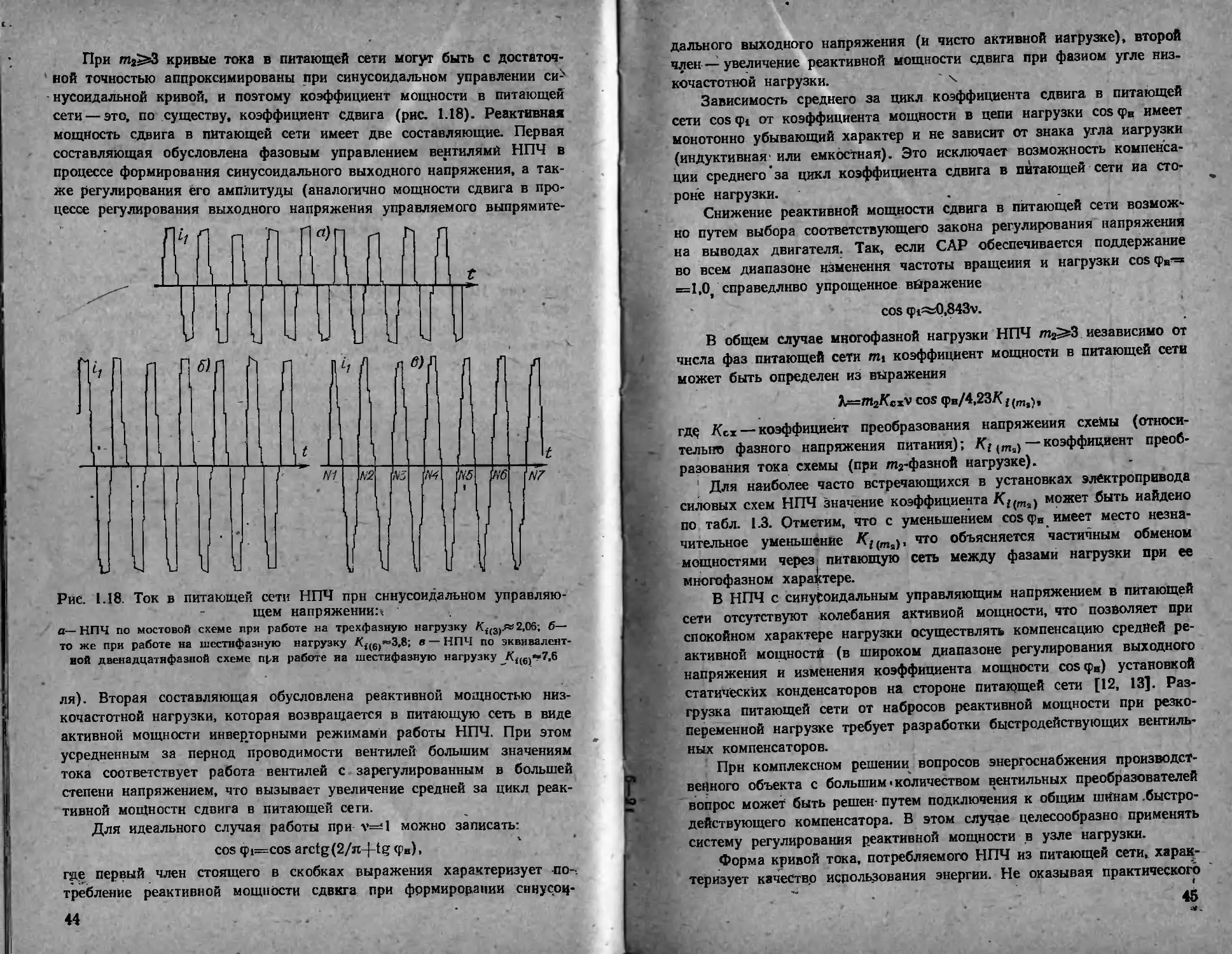
При т^З кривые тока в питающей сети могут быть с достаточ-
ной точностью аппроксимированы при синусоидальном управлении си*
нусоидальной кривой, и поэтому коэффициент мощности в питающей
сети — это, по существу, коэффициент сдвига (рис. 1.18). Реактивная
мощность сдвига в питающей сети имеет две составляющие. Первая
составляющая обусловлена фазовым управлением вентилями НПЧ в
процессе формирования синусоидального выходного напряжения, а так-
же регулирования его амплитуды (аналогично мощности сдвига в про-
цессе регулирования выходного напряжения управляемого выпрямите-
Рие. 1.18. Ток в питающей сети НПЧ прн синусоидальном управляю-
щем напряжении:» '
а—НПЧ по мостовой схеме при работе на трехфазную нагрузку Д j(3| ss 2,06; б—
то же при работе на шестнфазную нагрузку К((6)~3,8; в — НПЧ по эквивалент-
ной двенадцатифазпой схеме при работе на шестифазную нагрузку Кц6)“7,6
ля). Вторая составляющая обусловлена реактивной мощностью низ-
кочастотной нагрузки, которая возвращается в питающую сеть в виде
активной мощности инверторными режимами работы НПЧ. При этом
усредненным за период проводимости вентилей большим значениям
тока соответствует работа вентилей с зарегулированным в большей
степени напряжением, что вызывает увеличение средней за цикл реак-
тивной мощности сдвига в питающей сети.
Для идеального случая работы при v=d можно записать:
cos q>i=cos arctg(2/n-|-tg <рн),
где первый член стоящего в скобках выражения характеризует -по-,
требление реактивной мощности сдвига при формировании синусоц-
44
дальнего выходного напряжения (и чисто активной нагрузке), второй
член — увеличение реактивной мощности сдвига при фазном угле низ-
кочастотной нагрузки. ' х
Зависимость среднего за цикл коэффициента сдвига в питающей
сети cos q>i от коэффициента мощности в цепи нагрузки cos <рв имеет
монотонно убывающий характер и не зависит от знака угла нагрузки
(индуктивная' или емкостная). Это исключает возможность компенса-
ции среднего за цикл коэффициента сдвига в питающей сети иа сто-
роне нагрузки.
Снижение реактивной мощности сдвига в питающей сети возмож-
но путем выбора соответствующего закона регулирования напряжения
на выводах двигателя. Так, если САР обеспечивается поддержание
во всем диапазоне изменения частоты вращения и нагрузки cos <Рв"=
=1,0, справедливо упрощенное выражение
cos (pi^0,843v.
В общем случае многофазной нагрузки НПЧ /п2^3 независимо от
числа фаз питающей сети mi коэффициент мощности в питающей сети
может быть определен из выражения
h=m2KciV cos <pH/4,23/Cr(mj),
где Ксх — коэффициент преобразования напряжения схемы (относи-
тельно фазного напряжения питания); —коэффициент преоб-
разования тока схемы (при т2-фазной нагрузке).
Для наиболее часто встречающихся в установках электропривода
силовых схем НПЧ значение коэффициента может быть иайдеио
по табл. 1.3. Отметим, что с уменьшением cos<pH имеет место незна-
чительное уменьшение 470 объясняется частичным обменом
мощностями через питающую сеть между фазами нагрузки при ее
многофазном характере.
В НПЧ с синусоидальным управляющим напряжением в питающей
сети отсутствуют колебания активной мощности, что позволяет при
спокойном характере нагрузки осуществлять компенсацию средней ре-
активной мощности (в широком диапазоне регулирования выходного
напряжения и изменения коэффициента мощности cos<pH) установкой
статических конденсаторов на стороне питающей сети [12, 13]. Раз-
грузка питающей сети от набросов реактивной мощности при резко-
переменной нагрузке требует разработки быстродействующих вентиль-
ных компенсаторов.
Прн комплексном решении вопросов энергоснабжения производст-
венного объекта с большим количеством вентильных преобразователей
вопрос может быть решен путем подключения к общим шинам .быстро-
действующего компенсатора. В этом случае целесообразно применять
систему регулирования р.еактивной мощности в узле нагрузки.
Форма кривой тока, потребляемого НПЧ из питающей сети, харак-
теризует качество использования энергии. Не оказывая практического
45
о
Таблица 1.3
Схема
НПЧ
Коэффициент преобразования тока схемы К цт2)
Формула
Одна трехфазная система
к 2КТУ
Трехфаз-
ная мос-
товая
Эквива-
лентная
двенад-
цатифаз-
ная
’я/3 3 Г л J 0 3 Е- ч = 1 ®‘гг+(п— 1) х
л X——¥н е п 2 d<o2r
п 2n-sl”-x А',(з)- л к х s,nlT
«/3 т 0 гл я ^+(п-1)х
л X -?н_ 2
•1,85—2,0
3,6—3,9
Приближенное
значение
Условйя изменения угле тиристоров в. управления («10 Интервал
0 С Чн < - Л
“1,4 = arccos V cos f Л \ 1 ^—+“=7] 0 < CM <
аЬ4 = arccos V cos Hr-®»*)] Л ?H 3
а2 5 ж arccos v cos J— <o2f)] Л 0 (Oj f g"
a2t$ = arccos v cos ’ n \1 “’f—6j| л TC -g- < <o5f < -y
“з,| = arccos V cos ("Г+“»*)] OCOjf C“y"
Две трехфазные .системы, сдвинутые на 1 Е0° вторичной
частоты
Трехфаз-
ная
мостовая
Эквива-
лентная
двенад-
цатифаз-
ная
3,6—3,85
0 < wsi < -у
6,9—7,5
0 < и,; <
Л
<*>2^ g
я . 71
— 3
gj 1 Таблица 1.4
Схема НПЧ Высшие гармонические в кривой тока питающей сети
Частота высших гармонических тока Порядок выс- ших гармониче- ских k , Коэффициенты гармонического ряда (
Трехфаз- ная мостовая 1 (6с + 1) (Oj, с= 1, 2, 3, ... 5, 7, 11, 13 17, 19, 23, 25, ... Трехфазная система „ kit - , k 2,65 cos— ' sin — ул ak ~ k* L Гл * Л=1 1 sin / Г 2л cosf—(n —1)—— ?я sinfe ( 1 Yn \ ^°л+ 2 J
Эквива- лентная двенад- цатифаз- ная (12с ± 1) «J, е= 1, 2, 3, 11, 13, 23, 25, 35, 37, ... - kit 4 k 2,65cos-g- „ sin— Yn bk~ k* L Yn n=l ?l . sin , ,, 2л I Шг/_ (и—!)—— <₽н 1 cos k ^“л+ 2 J
Две трехфазвые системы, сдвинутые на 150* вторичной частоты
to
Трехфаз- (бс+Пш.,
ная мос-
товая с = 1, 2, 3, ...
5, 7, 11,
13, 17, 19,
23, 25, ....
ОЭ
o>
co
Трехфаз- ная моётовая (бс ± 1) (0р с = 1, 2, 3, ... 5, 7, 11, 13, 17, 19, 23, 257 ...
Эквива- лентная двенад- цатифа з- ная (12с ± о©;, с = 1, 2, 3, ... 11, 1*3, 23, 25, 35, 37... 1
kit
2,65cos —
л* = —ki
П —
— В 3 —?н
. „ „„ kit'
. 2,65cos-д-
bi ' 6
k*
. , k
" sin-g-Тлх
ni
ni=l
я , *
_ sin 2 Тлг
Глг
Л 1=4
Y/l!
— g ~?н. 81Д^Гала+ 2
, k
Д, sin— Yni
n,=l
k
Sin 2 Тлг
Ъг
Л,=4
6
sin
2л
(«»—4) —-
2л
:i—1)^3*—?и
'2п п
sin »,f—(л, —4)-y--g-—?н
cos
Примечания: 1. —ампл: туда гармснической ссставлякшей тент Ль = )/" а*ь+Ь*ь,
2. — фаза гармонической составляющей, фА = arctg (о^/ЬЛ. " • *
3. Углы коммутации вычисляются в соответствии с выражениями [13]:
ТП1 = аге
{Со® аЛ1+ (COST*-!) |
Тпг = arc ^соэ ая+ (сов T.-l) | sin
де cos То 1 UfolK[(j, sin • здесь Кц,) = ^гтр^ном, (i) ~ 1 LACn'tu рис. *-la> л;(,) ” u,'° “=мы .рис. i.^u «
), ЙГ ( ) ~0. 5 для схемы рис, 1.22 (для Д); К{( )= 0.563 для схемы рис. 1.21 (для Y); К.( j » 0,325 для схемы рис, 1.21 (для'д).
4. Значения »П1 и ад2 находят по табл. 1.3. nV '
• 2,0 для (схемы ряс. 1.19; Хг(1)
°Л2> J
0,78 для схемы рис. 1.20 ИТ1.22 (для
влияния на коэффициент Мощности установки (снижение к при тре^'
фазных мостовых схемах не превышает 3—4%, а при эквивалентных
двенадцатифазных—1%), высшие гармоники тока вызывают искаже-
ния кривой питающего напряжения.
Для больших значений <7=<Oi/co2 и неограниченной мощности источ-
ника питания при оценке спектра высших гармонических составляющих
кривой первичного тока справедливо выражение
K=cml±l,
где К — порядок гармонической составляющей; с=1, 2, 3, ...
Амплитуда и фаза каждой из высших гармонических составляю-
щих тока изменяются в течение периода выходной частоты и зависят
от силовой схемы НПЧ на стороне питающей сети и в цепи нагрузки,
а также от таких параметров, как фазовый сдвиг тока нагрузки -<рн,
частота вторичной сети <о2> характер изменения углов управления ти-
ристоров а (при многофазном выходе—-си, а2, as и a*. as, as), угол
коммутации у (при многофазном выходе — Уь у2, уа и yt, ys, ye).
Наиболее полное исследование гармонического состава кривой то-
ка питающей сети при арккосинусоидальном законе управления венти-
лями трехфазного мостового НПЧ проведено в [13, 26]. В табл. 1.4
приведены коэффициенты синусного и косинусного рядов высших гар-
монических тока питающей сети, выраженные через амплитудные зна-
чения тока нагрузки, для наиболее употребительных в установках элек-
тропривода силовых схем НПЧ.
Следует отметить, что коэффициент искажения первичного тока
НПЧ, изменяясь в Течение периода явления (60° выходной частоты для
трехфазных мостовых схем и 30° выходной частоты для эквивалентных
двенадцатифазных схем), не превышает значения коэффициента иска-
жения для аналогичной схемы выпрямителя.
Как видно из табл. 1.4, улучшение гармонического состава кривой
тока питающей сети достигается путем увеличения эквивалентного
числа фаз схемы на стороне питающей сети; так, переход к эквива-
лентным двенадцатифазным схемам исключает 5-ю и 7-ю гармониче-
ские составляющие и снижает до 17—20% коэффициент искажения
синусоидальности кривой тока.
Другой путь — установка на стороне питающей сети входных ин-
дуктивно-емкостных фильтров. Параметры фильтров выбирают из усло-
вия исключения резонанса для высших гармонических гока.
Кратность частот, соответствующая резонансу тока, составляет:
к _\f___________________________!_____, (1.99)
«₽ез- V ««.Сф^+Гф)’
тде Сф, £ф — параметры силового фильтра; £п — индуктивность пи-
тающей сети.
Из (1.99) видно, что, варьируя параметры фильтра, можно обес-
печить условия, при которых во всех режимах работы питающей сети
значение Крез будет оставаться меньше кратности первой из высших
50 '
Гармонических составляющих тока, потребляемого НПЧ, При синусои-
дальном управляющем напряжении первая, гармоническая тока, по-
требляемого НПЧ из питающей сети, модулирована по амплитуде и
фазе с частотой вторичной сети (см. рис. 1.18). Амплитудная модуля-
ция обусловлена изменением тока нагрузки в течение периода вторич.
ной частоты, фазовая — циклическим изменением углов открытия вен-
тилей. Частота модуляции <ом связана с частотой на выходе НПЧ
выражением
<0и = 2Щ2<В2- (1.100)
Аналитическое определение амплитуды модулирующей кривой за-
труднено, так как приводит к решению трансцендентных уравнений.
Более простым является определение ее методом совмещенных круго-
вых диаграмм [12, 13].
. Снижение модуляции основной гармонической первичного тока
может быть достигнуто путем увеличения фазности цепей нагрузки.
Так, если в НПЧ, выполненных по мостовой схеме, при трехфазной
нагрузке изменение амплитуды реактивной составляющей первичного
тока составляет 10—15%, то с переходом к схеме нагрузки по рис. 1.22
она снижается более чем в 2 раза (с. одновременным повышением в
2 раза ее частоты).
. При синусоидальном управляющем напряжении и многофазной
нагрузке активная составляющая тока в питающей сети не изменя-
ется; модуляция основной гармоники обусловлена изменением ее реак-
тивной составляющей. Это обстоятельство открывает возможность ком-
пенсации пульсирующей составляющей реактивной мощности с по-
мощью быстродействующего регулятора.
При выборе схемы НПЧ на стороне, связанной с питающей сетью,
учитывается также взаимное влияние трехфазно-однофазнцх НПЧ на
форму кривой падения напряжения.
Анализ известных разработок НПЧ, выполненных - для электро-
привода, показывает преимущественное применение трансформаторных
схем на стороне, связанной с питающей сетью, что обусловлено в пер-
вую очередь необходимостью согласования напряжений сети и двига-
теля.,
В трехфазио-многофазном НПЧ форма кривой падения напряже-
ния определяется коммутацией тока в тиристорах всех фаз нагрузки.
При мостовых схемах НПЧ коммутация тока тиристорами, связанными
со своей фазой нагрузки, определяет активную составляющую кривой
падения напряжения, которая зависит от тока нагрузки, а коммутация
тока тиристорами других фаз нагрузки — реактивную составляющую,
зависящую от коэффициента мощности нагрузки cos <ря и глубины
регулирования v [12, 13]. Взаимное влияние НПЧ на внешнюю ха-
рактеристику и кривую выходного напряжения может быть сведено
к минимуму путем питания каждого трехфазно-однофазного НПЧ от
отдельного трансформатора. При многообмоточных ..трансформаторах
4* 51
относительная автономность работы каждого трехфазно-однофазного
НПЧ достигается путем выполнения специальных требований к ком-
поновке обмоток трансформатора.
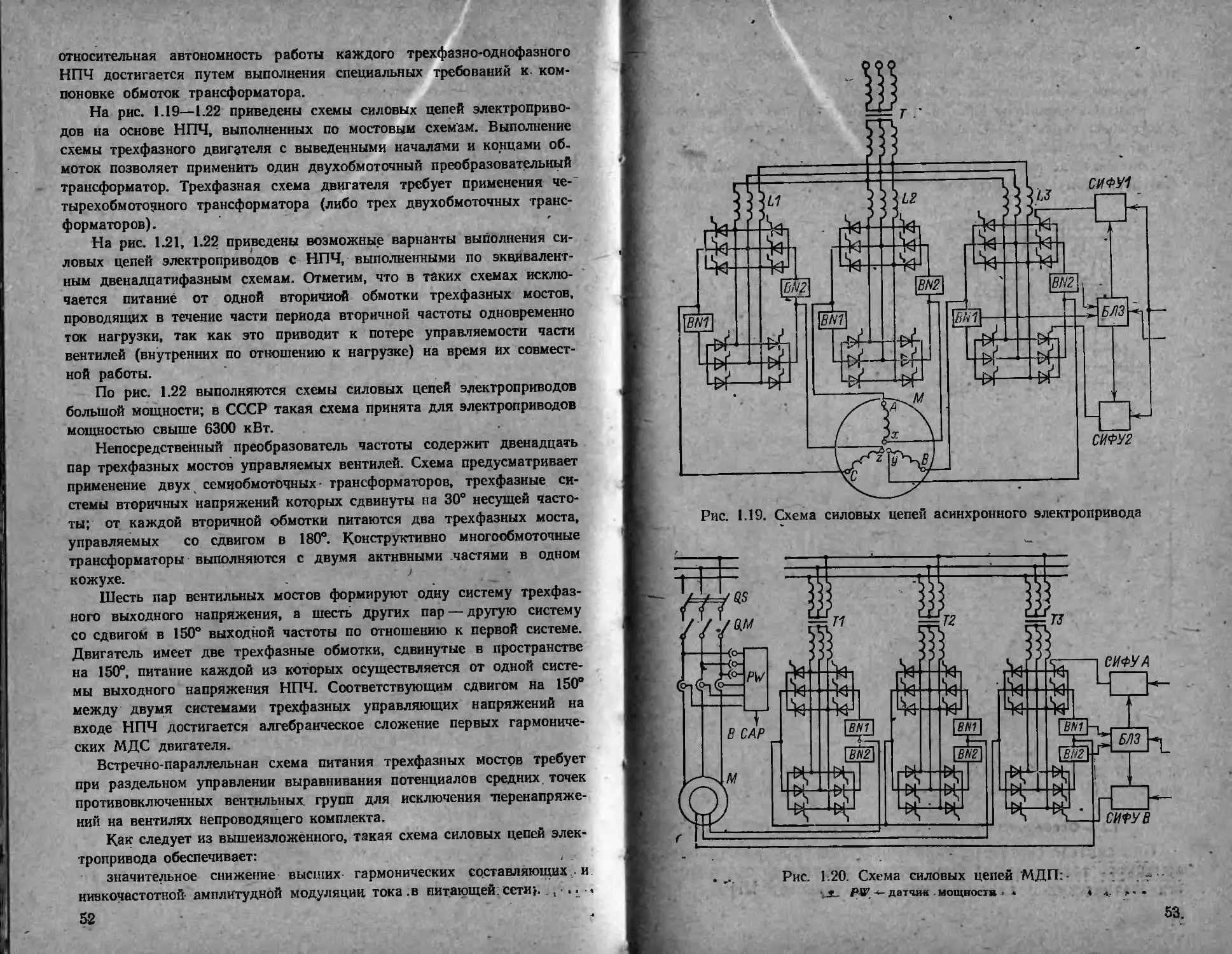
На рис. 1.19—1.22 приведены схемы силовых цепей электроприво-
дов на основе НПЧ, выполненных по мостовым схемам. Выполнение
схемы трехфазного двигателя с выведенными началами и концами об-
моток позволяет применить один двухобмоточный преобразовательный
трансформатор. Трехфазная схема двигателя требует применения че-
тырсхобмотоциого трансформатора (либо трех двухобмоточных транс-
форматоров).
На рис. 1.21, 1.22 приведены возможные варианты выполнения си-
ловых цепей электроприводов с НПЧ, выполненными по эквивалент-
ным двенадцатифазным схемам. Отметим, что в таких схемах исклю-
чается питание от одной вторичной обмотки трехфазных мостов,
проводящих в течение части периода вторичной частоты одновременно
ток нагрузки, так как это приводит к потере управляемости части
вентилей (внутренних по отношению к нагрузке) на время их совмест-
ной работы.
По рис. 1.22 выполняются схемы силовых цепей электроприводов
большой мощности; в СССР такая схема принята для электроприводов
мощностью свыше 6300 кВт.
Непосредственный преобразователь частоты содержит двенадцать
пар трехфазных мостов управляемых вентилей. Схема предусматривает
применение двух семиобмоточных- трансформаторов, трехфазные си-
стемы вторичных напряжений которых сдвинуты на 30° несущей часто-
ты; от каждой вторичной обмотки питаются два трехфазных моста,
управляемых со сдвигом в 180°. Конструктивно многообмоточные
трансформаторы выполняются с двумя активными частями в одном
кожухе.
Шесть пар вентильных мостов формируют одну систему трехфаз-
ного выходного напряжения, а шесть других пар — другую систему
со сдвигом в 150° выходной частоты по отношению к первой системе.
Двигатель имеет две трехфазные обмотки, сдвинутые в пространстве
на 150°, питание каждой из которых осуществляется от одной систе-
мы выходного напряжения НПЧ. Соответствующим сдвигом на 150°
между двумя системами трехфазных управляющих напряжений на
входе НПЧ достигается алгебраическое сложение первых гармониче-
ских МДС двигателя.
Встрсчно-параллельнан схема питания трехфазных мостов требует
при раздельном управлении выравнивания потенциалов средних точек
противовключенных вентильных, групп для исключения перенапряже-
ний на вентилях непроводящего комплекта.
Как следует из вышеизложенного, такая схема силовых цепей элек-
тропривода обеспечивает:
значительное снижение высших гармонических составляющих и
нивкочастотной- амплитудной модуляции тока .в питающей сети}. , .. <
52
= т .
Рис. 1.20. Схема силовых цепей МДП:
31- WFдатчик мощности . *
53.
возможность компенсации средней реактивной мощности в питаю-
щей сети во всем диапазоне регулирования скорости;
высокое качество кривых тока и напряжения в нагрузке;
полную компенсацию 5-й, 7-й, 17-й, 19-й и кратных им гармони-
ческйх составляющих МДС двигателя при полном использовании его
магнитной системы;
автономность работы каждого многофазно-однофазного НПЧ и
благодаря этому увеличение надежности установки: сохраняется воз-
Рис. 1.21. Схема силовых цепей синхронного электропривода (трех-
фазный вариант)
можность работы при селективном отключении одного из шести пре-
образователей (с заниженным значением нагрузочного момента).
1.2.3. Особенности динамических характеристик НПЧ
При синтезе систем регулирования электроприводов пе-
ременного тока должны быть учтены некоторые особенно-
сти статических и динамических характеристик НПЧ.
54
Т1-2 Т2-2 Т1-3 72-3 71-4 72-4 71-5 72-5 71-6 72-6
Рис. 1.22. Схема силовых цепей синхронного электропривода (вариант —две трехфазиые обмотки)
Наличие бестоковой паузы , переменной длительности
при раздельном управлении противбвключенными группа-
ми, разброс характеристик СИ ФУ, несимметрия фаз НПЧ
и двигателя, наличие зоны прерывистых токов требуют вве-
дения специальных контуров регулирования фазных токов
двигателя. Назначением этих замкнутых контуров являет-
ся линеаризация соответствующих участков трактов САР
и их симметрирование. Сравнительно просто и с достаточ-
ной для практических целей точностью это достигается
введением пропорциональных регуляторов фазных токов
[36, 37].
Если обозначить коэффициенты передачи пропорцио-
нальных регуляторов фазных токов А₽,ф, датчиков фазных
токов Кт,ф, то с учетом передаточной функции ЙПЧ и
фильтра Ат,п/(1+р7’ц) получим выражения для фазных
напряжений статора (или ротора)- машины-
, (1-101)
где — задающий сигнал фазного тока статора (или ро-
тора); ix — фазный ток статора (или ротора); их — фазное
напряжение статора (или ротрра); Кт,п — коэффициент пе-
редачи НПЧ.
Совокупность трех фазных уравнений типа (1.101) мож-
но заменить одним комплексным уравнением во вращаю-
щейся системе отсчета 1, 2, в которой производится синтез
системы регулирования:
(£;-кт.ф7л*р,фКт,п=ЭД1 .Г(1-Ю2)
Уравнение (1.102) можцо представить в виде
двух скалярных уравнений:
, ^р.ф^т.п
Si — Кт.ФЧ 1 + рТ*
V* V г ^Р-Ф^т.п ______ .
^2 — А-г.фЧ 1 -|- р7~ —“I
«1 —
“сТ'р.
1+^“/
-----— и
системы
(1.103)
во вра-
Отметим, что в неподвижной (фазные оси) и
щающейся сиртемах отсчета коэффициенты передачи про-
порцйОнальных регуляторов и датчиков фазных токов
идентичны; контуры регулирования фазных токов во .вра-
щающихся системах отсчета взаимозависимы; соответст-
вующие перекрестные связи (см. р,ис. 1.4, 1.5) при синтезе
САР в этих системах отсчета в обп^ем случае должны быть
компенсированы.
56
Динамические 'свойства НПЧ определяют выбор часто-
ты срез# контуров регулирования фазных токов. Следует
стремиться к максимальной частоте среза контура для
увеличения быстродействия, эффекта линеаризации НПЧ
и подавления влияния перекрестных внутренних связей
объекта регулирования [18]. Одновременно отметим, что
в частотно-токовых системах коэффициенты усиления ра-
зомкнутых контуров фазных токов полностью определяют
их динамическую погрешность, а также степень искажения
статических характеристик, ухудшения энергетических по-
казателей и перегрузочную способность привода.
- Сигналы на входе СИФУ практически никогда не изме-
няются скачком, поэтому можно оперировать представле-
нием НПЧ как безынерционного звена вплоть до граничной
частоты [49]
-• 0)15,=mid>i/2. (1.104)
Частота среза внутреннего контура (контура фазного
тока), синтезируемого по предписаниям модульного опти-
мума ((Оср^ОД/Тщ), ограничивается условиями фильтра-
ция высших гармонических составляющих в сигнале об-
ратной связи по току, которые при определенных условиях
приводят к искажению статической характеристики преоб-
разователя, и условиями устойчивости замкнутого контура
регулирования фазного тока с учетом дискретного харак-
тера работы НПЧ (в линеаризованной системе в режиме
малых отклонений от установившегося значения НПЧ мо- -
жет быть аппроксимирован импульсным звеном). В [20]
проанализированы оба эти фактора при работе НПЧ на
активно-индуктивную нагрузку с непрерывной кривой вы-
ходного тока.
Более жестким оказывается ограничение по второму
условию, при этом
cocpi<O,26mi(Oi (1.105)
и минимальное значение постоянной времени фильтра
которое следует ввести в прямой канал регулирова-
ния фазного тока, составит:
Тц i min > 1,5//П1®1. (1.106)
Эти результаты могут быть распространены и на слу-
чай работы НПЧ на двигатель переменного тока, так как
ЭДС вращения двигателя изменяется гораздо медленнее,
Чем ток во внутреннем контуре; кроме-того, при синтезе
быстродействующего электропривода компенсация ЭДС
вращения САР является непременным условием, а бесто-
67
Id
и*
tn+t=3w .6=15,4%
I-* - |
wM*w*№<^№wA^A^Wl 1Д
t=4w
0,02c
1/1
Ld
i*
L4
/7*
t=3uc
0,02C
58
койая пауза в кривой выходного тока может быть получе-
на сколь угодно малой (при соответствующем выпс^лнении
системц управления НПЧ).
В соответствии с (1.105) и (1.106) теоретически допу-
стимые значения составляют:
для НПЧ, выполненного по трехфазной мостовой схеме,
(*)ср i max <490 рад/с; T’nimjn>0,82-10“3 с;
для НПЧ,. выполненного по эквивалентной двенадцати-
фазной схеме,
<Врс I max<980 рад/с; м jm/n>0,410 3 с.
Результаты экспериментальных исследований подтверж-
дают, что дискретность НПЧ не оказывает существенного
влияния на процессы в системе, если быстродействие вну-
тренних контуров в 1,5—2 раза ниже предельного.
На рис. 1.23 приведены осциллограммы переходных про-
цессов в контуре регулирования фазного тока в режиме
упора при изменении скачком выхода регулятора скорости
для случая эквивалентной двенадцатифазной схемы. ЙПЧ.
Из анализа осциллограмм следует, что при соСр<<500 рад/с
дискретность НПЧ не оказывает существенного влияния на
процессы в контуре: перерегулирование практически не
зависит от момента включения.
1.3. Общие принципы построения систем подчиненного
регулирования
1.3.1. Обобщенная структура систем подчиненного регулирования
и принципы выбора параметров
Развитие техники регулирования открыло большие воз-
можности для совершенствования ср.едств и методов управ-
ления автоматизированными электроприводами. Создание
регулируемых электроприводов на базе вентильных пре-
образователей значительно расширило эти возможности и
Рис. 1.23. Контур регулирования фазного тока в режиме упора (т,=
= 12) (а) и осциллограммы переходных процессов (б—ж).
Рисунок “ср- */с *о.с- кОм Со.с- МкФ Рисунок со . 1 /с ср • *о.с- кОм С мкФ о ,с
б 500 47 0.047 д 500 47 0,01
в 400 33 0 ' в 400 33 0,01
г 200 16 0 ж 200 16 0.01
59
вместе с тем обусловило повышение требовании к регуля-
торам, особенно к их быстродействию.
Для управления вентильными электроприводами были
разработаны регуляторы на базе транзисторов, а затем
и интегральных схем. Характерным направлением в по-
следние годы является создание унифицированных систем
регулирования для электроприводов постоянного и пере-
менного тока. Наибольшее распространение получают
структуры, представляющие многоконтурную систему под-
Рис. 1.24. Обобщенная структурная схема системы ’подчиненного регу-
, лирования
чиненного регулирования с последовательной коррекцией.
Здесь каждый контур имеет отдельный регулятор, настраи-
ваемый в соответствии с передаточной функцией объекта
регулирования этого контура [47].
Системы подчиненного регулирования с последователь-
ной коррекцией будем называть в дальнейшем системами
подчиненного регулирования.
Системы подчиненного регулирования характеризуются
каскадным включением регуляторов, количество которых
соответствует количеству регулируемых координат электро-
привода, таких, например, как токи и напряжения обмоток,
угловая скорость двигателя, положение вала приводимого
механизма и др. Обобщенная структурная схема одномер-
ной Системы, построенной по указанному принципу, пред-
ставленд на рис. 1.24. На входе регулятора каждого из
контуров сравниваются сигналы, пропорциональные задан-
ному и действительному значениям выходной координаты
60
Данного контура, а выходное напряжение регулятора блу-
жит задающим сигналом для последующего контура.
В рассматриваемых системах контур регулирования
каждой координаты содержит, как правило, только одну
большую постоянную времени, компенсируемую действием
регулятора, что значительно облегчает синтез систем и
позволяет применять однотипные регулирующие элементы.
Важным достоинством данной структуры является также
возможность простыми средствами осуществлять ограни-
чение, любой из координат системы. Для этого достаточно
ограничить задание данной координаты. В зависимости от
конкретных условий пределы ограничения могут быть не-
изменными либо изменяться по заданному закону.
Каждый контур системы регулирования, показанной на
рис. Г.24, может быть структурно расчленен на два звена—
регулятор и объект регулирования. Объект регулирования
включает в себя выходное звено данного контура, т. е.
собственно объект, и замкнутый контур регулирования,
внутренний по отношению к данному контуру. __-
В соответствии с этим, как видно из рис. 1.24, переда-
точная функция объекта регулирования, например второ-
го контура, запишется в виде
<?«. W = О.. И о„ W=О„ и O^)C°W + 1 • (1107)
А
где бО2 (р) — передаточная функция собственно объекта
второго контура; Goi (р) =G'oi (р)—передаточная функция
объекта первого контура; Gperi (р) — передаточная функция
регулятора первого контура; G3i(p)—передаточная функ-
ция замкнутого первого контура.
Заметим, что в рассмотренном примере внутренним из
соподчиненных контуров является первый, для которого!
передаточная функция объекта регулирования G'oi(p) сов-
падает с передаточной функцией Goi(p) собственно объ-
екта.
В общем случае для передаточной функции объекта
i-ro контура имеем:
G'ol==Goi{p) (1.108)
Расчет параметров системы подчиненного регулирования '
производится путем последовательной (от i==l до i=n)
оптимизации отдельных контуров. Под оптимизацией бу-
дем понимать приведение передаточной функции замкнуто-
го контура в соответствии с поставленными требованиями.
Передаточная функция (1.108) объекта оптимизируемо-
го контура при определенных рассматриваемых ниже допу-
61
Щениях может быть представлена в видё
°'М=°-М -g^-. (Lift))
Здесь сомножитель Go,i<(p) соответствует звеньям, дей-
ствие которых компенсируется регулятором. Второй сомно-
житель представляет собой произведение передаточных
функций эквивалентных апериодических звеньев; действие
которых принципиально не может быть скомпенсировано
в силу их физической природы, а также реальных апериоди-
ческих звеньев, компенсация действия которых для данных
условий нецелесообразна. Заметим, что первая группа
эквивалентных апериодических звеньев определяет прин-
ципиально достижимый предел быстродействия системы.
Обычно постоянные времени т или их сумма малы по
сравнению с постоянными времени, входящими в сомножи-
тель GO,K(P) уравнения (1.109). Поэтому некомпенсируе-
мые постоянные принято называть также малыми, а ком-
пенсируемые — большими постоянными времени.
Остановимся несколько подробнее на вопросе компенса-
ции постоянных времени. Рассмотрим вначале простейший
«случай, когда объект регулирования представляет собой
апериодическое звено:
G'o(p)=G0,K(p)=K/(p74-l), (1.110)
тде К и Т — соответственно коэффициент усиления и’ по-
стоянная времени звена.
Очевидно, что для осуществления абсолютной компен-
сации постоянной времени, т. е. трансформации апериоди-
ческого звена в усилительное, регулятор, включенный по-
следовательно с объектом, должен был бы иметь переда-
точную функцию идеального форсирующего звена
Gper(p)=pT+l. (1.111)
Физически это означает, что для мгновенного изменения
Выходной величины инерционного звена на его вход необ-
ходимо подать импульс напряжения бесконечной ампли-
туды. Поэтому в реальных системах, имеющих ограничен-
ные ресурсы управления, абсолютная компенсация неосу-
ществима. Тем не менее если применяется безынерционный
регулятор, то при малых задаваемых приращениях выход-
ной величины объекта принципиально возможная степень
компенсации приближается к абсолютной. Однако при та-
кой степени компенсации контур регулирования становит-
ься весьма чувствительным к помехам. Поэтому даже в том
(62 '
случае, когда объект регулирования с удовлетворительной
точностью может быть представлен апериодическим зве-
ном, степень приближения компенсации к абсолютной огра-
ничивается пределом, при котором полоса пропускания
замкнутого контура обеспечивает его помехозащищен-
ность. Последнее условие, в частности, может быть удов-
летворено применением пропорционально-интегрального
(ПИ) регулятора с передаточной функцией
' Goer (Р) = -Г°'С + 1 = — + — (1-112)
₽еГ рТвК Т„К т рТвК
При условии Т0,с=Т (где То.с— постоянная -времени
цепи обратной связи) передаточные функции разомкнуто-
го и замкнутого контуров соответственно имеют вид:
бразГр) ==брег(р) G0,k(P) = il рТо‘, (1.113)
G3(p)=l/(pTo+l), (1.114)
а статическая ошибка замкнутого контура сводится к ну-
лю. Постоянную То в дальнейшем будем называть постоян-
ной времени интегрирования контура. При То-+0 первый
член (пропорциональная часть) передаточной функции
(1.112) регулятора стремится к бесконечности, ’ т. е. ком-
пенсация приближается к абсолютной.
В реальных условиях, как указывалось выше, наимень-
шее значение То при отсутствии других ограничений опре-
деляется максимальной полосой пропускания Олтах зам-
кнутого контура, при которой уровень шумов на его выхо-
де не превышает допустимых значений:
Т о = 1 / Wcpmaxj
где (оершах — частота среза разомкнутого контура, соответ-
ствующая ПОЛОСе ПрОПуСКаНИЯ (0Птпах.
Если под полосой пропускания замкнутого контура под-
разумевать частоцу, лри которой отношение амплитуд вы-
ходной координаты равно:
Л(Юп)/Д(0) = .1//2,
"ТО (Оортах —'(Оцтах-
Таким образом, в рассмотренном случае результатом
•компенсации явилась замена в разомкнутом контуре апе-
риодического звена с постоянной времени Т интегрирую-
щим звеном с постоянной времени То-
В дальнейшем компенсацию, удовлетворяющую усло-
вию 7\ь—Т, будем называть точной компенсацией.
63
Если объект регулирования состоит из двух последова-
тельно включенных апериодических звеньев с постоянными
времени Л и Г, и коэффициентами усиления Ki, Кз, т. е.
°0,к = (рЛ + 1) (ртг +1)= (Р7\ +1) (pTt+i) ’ (1'115-
то компенсация постоянных времени этих звеньев может
осуществляться пропорционально-интегрально-дифферен-
циальным (ПИД) регулятором с передаточной функцией
G г(р) = !£г1+.1) = Zi±L_ рИЬ, (и 16)
. рТ„К Т„К рТеК— ТЛК ' '
Поскольку реальные объекты регулирования содержат
как большие, так и малые постоянные времени, в резуль-
тате компенсации большой постоянной времени, входящей
в сомножитель G0,K(p) уравнения (1.113), передаточная
функция разомкнутого контура приводится к виду
<?ваэ(р)=—---------. ‘ О-117)
рэГ7 рЛТИрт-Н)
При То^22!т без большой погрешности можно принять
[59]:
П(рт|1)^рЕг_р1 = рГи-|-1, (1Л18)
где 2т=7’ц — сумма малых постоянных времени.
Gpa3(p)=l/p70(pTM+l). (1.119)
Передаточная функция замкнутого контура
<5з(Р) = 1/[Р7’о(рГ|.+ 1) + 1] =1/[р27ц7'о+рТ’о+1]. (1.120)
Полагая в общем случае Т0=аТц, где а — коэффициент,
зависящий от выбранной степени демпфирования, для ра-
зомкнутого контура получаем:-
Gpa3(P)=l/P«7’l»(P7’r.+ l). (1-121)
Соответственно для замкнутого контура
Ga(p)=l/[paT|»(p7’|l-f-l) + l]- (1122)
Таким образом, оптимизация в данном случае свелась
к замене разомкнутой цепи с большой постоянной времени
замкнутым контуром, описываемым дифференциальным
уравнением * того же порядка, но с меньшей постоянной
7’0=а7'м. Значение этой постоянной определяется суммой
некомпенсируемых постоянных Тц и выбранной степенью
демпфирования (коэффициентом а).
64
На основании (1.109) и (1.118) передаточная функция
объекта регулирования может быть представлена в виде
G/0(p)=Go,«(p)/(pT14+l). (1.123)
Искомая передаточная функция регулятора с учетом
(1.121) и (1.123) определяется из уравнения
Gper (Р) = Gpaa (Р) / G'o (Р)=1 / Go,к (р) раТр. (1.124)
Существуют некоторые апробированные, удобные на-
стройки контуров, которые наиболее часто используются в
практике электроприводов постоянного и переменного тока.
Так, если положить в (1.122) а=2, то получим переда-
точную функцию замкнутого контура в виде
Сз,ад,0(р)=1/(р227’2р+р27’р+1). (1.125)
Такая настройка замкнутого контура называется мо-
дульным оптимумом [59]. Как видно из (1.125), свойства
контура, оптимизированного по модулю, зависят лишь от
суммы малых постоянных времени.
амплитудно-частотная характе- ция контура, оптнмнзирован-
рнстика разомкнутого контура, ного по модульному оптимуму
оптимизированного по модуль-
ному оптимуму
На рис. 1.25 показана логарифмическая амплитудно-
частотная характеристика (ЛАЧХ) соответствующего ра-
зомкнутого контура, а на рис. 1.26 — переходная функция
замкнутого контура, которая описывается уравнением
t
f(t)=l-e ^^cos-^ + sin-^-), (1.126)
5—3169 fjg
Здесь время нарастания регулируемой величины до
установившегося значения составляет /н=4,71Тм, перере-
гулирование 0=4,3%, время регулирования (т. е. вхожде-
ния регулируемой величины в область значений, отличаю-
щихся от установившегося не более чем.на ±2%) /р=
=8,47'и.
- Оптимизация по модулю используется обычно для вну-
тренних контуров регулирования токов и потокосцеплений.
Она обеспечивает приемлемое качество воспроизведения
Рже. 1.27. Логарифмическая
амплитудно-частотная харак-
теристика разомкнутого конту-
ра, оптимизированного по сим-
метричному оптимуму
Рис. 1.28. Переходная функ-
ция контура, оптимизирован-
ного по симметричному опти-
муму
заданных воздействий. В то же время отработка возму-
щений в контуре часто не удовлетворяет требованиям. Кро-
ме того, возможно появление статической ошибки по неко-
торым координатам.
С целью повышения порядка астатизма контура (и всей-
еистемы) применяется (обычно в контуре регулирования
скорости) другая типовая настройка, так называемый сим-
метричный оптимум [60].
На рис. 1.27 приведена ЛАЧХ разомкнутого контура,
настроенного по этому критерию. Передаточная функция
разомкнутого контура в этом случае имеет вид:
G₽a3,e,0(p) = (р47’и+1)/р287’2ц(рГц+1) * (1.127)
и соответственно замкнутого контура:
Сз,с,.(р) -(р47’|.+ 1)/(р’87’и+р2872и+р47и+1). (1.128)
Переходная функция замкнутого контура описывается
Уравнением
t t
f(0^=14-e 2Г“-2е ^cos-^Xt (1-129)
Свойства контура, оптимизированного по симметрично-
му оптимуму, также зависят лишь от суммы малых посто-
янных времени Тц. Переходная функция такого контура
{рис. .1.28) характеризуется временем нарастания ts=
•=3,17ц, перерегулированием 0=43,4% и временем регу-
лирования /р=16,57’и. .
Перерегулирование по управляющему воздействию мо-
жет быть уменьшено путем введения фильтра на входе
Контура. Симметричный оптимум обеспечивает высокое ка*
чество отработки. возмущений' (например, при ударном
приложении нагрузки к валу двигателя).
Таким образом, применение той или иной типовой на-
стройки зависит от вида передаточной функции объекта
в контуре и требований к качеству отработки задающего
воздействия и основных возмущений. Применение методики
оптимизации контуров конкретных объектов в структурах
подчиненйого регулирования будет проиллюстрировано в
дальнейшем.
1.3.2. Алгоритм синтеза систем электроприводов
переменного тока с подчиненным регулированием
Представление машин переменного тока в виде стацие-
нарных объВктов (при допущении отсутствия насыщения)
показывает, что АД и СД в выбранных системах отсчета
являются соответственно двух- и трехмерными нелинейны-
ми объектами. Как видно из структурных представлений
АД и СД, они характеризуются нелинейными связями
между каналами управления и нелинейными зависимостя-
ми, между регулируемыми переменными. Характер послед-
них, как будет показано ниже, при разработке структурных
схем САР, определяется путем выбора регулируемых пере-
менных и закона управления частотно-регулируемым АД
или СД.
Системы регулирования тиристорных электроприводов
переменного тока синтезируются в классе многомерных
автономных систем [30].. В случае многомерных нелиней-
ных объектов, характеризующихся как совокупность линей-
ных подобъектов, связанных через нелинейные функцио-
нальные зависимости, возможна реализация регуляторов
в виде активных линейных фильтров, исходя из оптималь-
5* 67
Мой передаточной функции замкнутых контуров регулиро-
вания 18,19].
Порядок синтеза САР можно свести в общем случае
к нескольким основным этапам.
1. Выбор системы координат (или отсчета); соответст-
вующий выбор системы отсчета должен обеспечить пред-
ставление машины переменного тока как простейшего ста-
ционарного объекта.
2. Выбор регулируемых переменных и законов их взаи-
мосвязанного управления. Рациональный выбор регулируе-
мых переменных позволяет пренебречь некоторыми пере-
крестными связями между каналами объекта ввиду их
слабости.
Выполнение задач первого и второго этапов сводится
к поиску рациональных структур, которые характеризуют-
ся относительно простым выражением электромагнитного
момента с минимальным числом важнейших переменных,
подлежащих регулированию; минимальным числом внут-
ренних (прямых и обратных, собственных и перекрестных)
связей; наличием в прямых каналах управления только
линейных звеньев; удобством измерения и вычисления пе-
ременных объекта, подлежащих регулированию.
3. Компенсация основных внутренних перекрестных
связей (ВПОС) между каналами объекта регулирования
посредством введения компенсирующих сигналов в САР.
Компенсирующие обратные связи являются важнейшим
средством обеспечения заданных динамических характери-
стик САР, а в некоторых случаях и ее устойчивости. Удов-
летворительная компенсация перекрестных связей требует
достаточного быстродействия как измерителей сигналов
этих связей, так и внутренних контуров регулирования.
Если в перекрестных связях структурной схемы содержат-
ся нелинейности, то развязка каналов управления одно-
временно и линеаризует объект регулирования.
4. Компенсация статических нелинейностей объекта ре-
гулирования посредством включения в САР нелинейных
элементов, воспроизводящих функциональные зависимости,
обратные соответствующим зависимостям между регули-
руемыми переменными.
5. Определение передаточных, функций регуляторов в
соответствии с принципом подчиненного регулирования с
последовательной коррекцией параметров.
Как показано в §1.2.3, введение в САР электроприводов
переменного тока с НПЧ контуров регулирования фазных
токов учитывается выбором параметров П-регуляторов фаз-
68
fF
йых токбй посредством эквивалентных преобразований их
из неподвижной во вращающуюся систему отсчета.
В рассматриваемом классе электроприводов на основе
НПЧ, для которых максимальная частота выходного на-
пряжения =-25 Гц, влияние перекрестных связей, вноси-
мых контурами регулирования фазных токов, проявляется
слабо и при синтезе САР ими можно пренебречь. Наличие
статической ошибки в замкнутом внутреннем контуре фаз-
ного тока не имеет существенного значения, так как она
компенсируется внешним токовым контуром, настройка ко-
торого на модульный оптимум осуществляется во вращаю-
щейся системе координат посредством И-регуляторов.
На рис. 1.29 показана обобщенная функциональная схе-
ма САР скорости электропривода переменного тока с под-
чиненным регулированием. Можно выделить следующие
составные части схемы:
силовую часть: приводной двигатель, НПЧ (с преобра-
зовательным трансформатором), тиристорный возбудитель
(для СД);
регулирующую часть САР: регулятор скорости, регуля-
торы переменных во вращающихся системах отсчета, ре-
гуляторы фазных токов статора (ротора);
исполнительную часть САР: координатные преобразо-
ватели для связи частей САР (синтезируемых в разных
системах отсчета), решающие устройства для вычисления
переменных (вводимых в регулирующую часть САР), дат-
чики переменных скорости, токов, потоков, положения ро-
тора и т. д.
Контуры регулирования переменных во вращающихся
системах отсчета и контуры регулирования фазных токов
составляют в совокупности многомерный контур регулиро-
вания момента (МКМ).
Системы автоматического регулирования электроприво-
дов переменного и постоянного тока различаются в основ-
ном размерностью многомерного контура регулирования
момента. На вход МКМ поступает выходной сигнал регу-
лятора скорости и в общем случае — заданное значение
потокосцепления (или соответствующего тока намагничи-
вания). В системе электропривода осуществляются коор-
динатные преобразования регулируемых переменных, а
также вычисления (с помощью математических моделей
элементов объекта регулирования) значений переменных,
трудно поддающихся непосредственному измерению.
Регуляторы САР выполняются на аппаратной основе,
единой с аналогичными устройствами электроприводов по-
69
70
стоянного тока. Специфическими устройствами тиристор-
ных электроприводов переменного тока с подчиненным ре-
гулированием переменных являются элементы исполнитель-
ной части схемы.
1.3.3. Алгоритм синтеза 1ас1отно-тфкеаых систем регулирования
В частотно-токовых САР имеются только контуры регу--
лирования переменных, связанные с неподвижными систе-
мами координат. Контур регулирования момента, подчи-
ненный контуру регулирования скорости, содержит конту-
ры регулирования фазных токов.
Синтез частотно-токовых САР осуществляется на осно-
Рис. 1.30. Осциллограммы работы контура регулирования фазного то-
ка АД (прн отсутствии компенсации ВПОС по ЭДС вращения)
71
ве анализа статических характеристик и режимов работы
машины переменного тока и представления НПЧ, охва-
ченного жесткой обратной связью по току, в качестве
«источника тока». Так как в САР этого типа отсутствуют
контуры регулирования во вращающихся системах отсчета,
точность выполнения заданных параметрических зависимо-
стей между переменными в значительной степени опреде-
ляется динамическими свойствами контуров фазных токов.
В § 1.2.3 было показано, что значение Ар,ф ограничива-
ется дискретными свойствами НПЧ, кроме того, далее бу-
дет показано, что в регулируемых приводах переменного
тока очень существенно влияние внутренних обратных свя-
зей по ЭДС вращения.
Рис. 1.31. Экспериментальные характеристики токового контура АД
типа BAO-355L-4
Рис. 1.32. Эффект фильтрации сигнала управления в контуре регулиро-
вания фазного тока АД при упрощенной компенсации ВПОС по ЭДС
вращения: без положительной обратной связи (а) и с положительной
обратной связью по напряжению (б)
Осциллограммы на рис. 1.30 и экспериментальные кри-
вые на рис. 1.31 иллюстрируют амплитудную и фазовую
ошибки контуров регулирования фазных токов частотно-
регулируемого АД в двигательном и генераторном режи-
мах работы. В [6] предложена упрощенная компенсация
ЭДС вращения частотно-регулируемой машины переменно-
го тока посредством введения на вход НПЧ положитель-
ной обратной связи по напряжению.
В [43] показано, что если в цепь положительной об-
ратной связи по напряжению включен фильтр с параметра-
ми схемы замещения АД для высших гармонических, то
на входе НПЧ будет происходить фильтрация сигнала
72
упраЁлбнйя: пульсации сигнала положительной обратной
связи по напряжению складываются алгебраически с пуль-
сациями выходного сигнала регулятора фазного тока РТФ.
Это позволяет увеличить контурный коэффициент усиле-
ния. Эффект фильтрации иллюстрируют осциллограммы
рис. 1.32. Осциллограммы рис. 1.33 иллюстрируют работу
контура регулирования фазного тока при введении поло-
жительной обратной связи> по напряжению.
При допущении компенсации ВПОС выбор параметров
пропорциональных регуляторов фазных токов может быть
Генераторный режим Двигательный режим
f=15^
Рис. 1.33. Осциллограммы работы контура регулирования фазного то-
ка АД при упрощенной компенсации ВПОС по-ЭДС вращения
произведен по правилам, изложенным в § 1.2.3. Многомер-
ный контур момента заменяется звеном первого порядка
с постоянной времени Определение передаточных
функций регулятора скорости производится в соответствии
с принципом подчиненного регулирования переменных с
последовательной коррекцией параметров.
73
Глава вторая
ЭЛЕКТРОПРИВОД ПО СИСТЕМЕ НЕПОСРЕДСТВЕННЫЙ
ПРЕОБРАЗОВАТЕЛЬ ЧАСТОТЫ — СИНХРОННЫЙ
ДВИГАТЕЛЬ
2.1. Рациональные законы связанного управления
синхронным двигателем
Системы непосредственный преобразователь частоты—
синхронный двигатель (НПЧ—СД) перспективны при со-
здании безредукторных тихоходных электроприводов ме-
таллургического оборудования, отличающихся повышенны-
ми требованиями к быстродействию, перегрузочной спо-
собности и качеству регулирования частоты вращения
[3—5, 9, 10], а также в качестве приводов размольных
агрегатов повышенной производительности горнорудной,
цементной и химической промышленности [44, 54, 63, 67].
Решающими преимуществами приводных СД являются
отсутствие ограничений, свойственных прокатным двига-
телям постоянного тока (по мощности, перегрузочной спо-
собности и скорости нарастания тока), и возможность су-
щественного улучшения динамических показателей путем
изменения конструкции, машины. Так, разработка обра-
щенного СД, у которого обмотка возбуждения располага-
ется на статоре, а обмотка переменного тока — на роторе,
позволит повысить динамический показатель ад=А1Ном/ОД2
на ’10—15% и динамический фактор производительности
/7=Рномад на 10—20% по сравнению с прокатными дви-
гателями серии П2 [46].
Электроприводы этого класса разрабатываются, как
правило; с применением высокомоментных СД индивиду-
ального исполнения, и высокая степень электромагнитного
использования их является определяющей при разработке
САР, что обусловливает высокие требования к быстродей-
ствию внутренних контуров регулирования токов статора.
— Требования оптимального использования габаритной
мощности СД (и установленной мощности НПЧ) приводят
к необходимости выполнения условий:
обеспечения работы СД с номинальным потокосцепле-
нием статора во всем диапазоне изменения нагрузок и ре-
гулирования скорости (за исключением режима ослабле-
ния поля при двухзонном регулировании):
¥*'-'Ч'ЯНом, (2.1)
обеспечения работы СД с коэффициентом- мощности,
равным (или близким) единице:
74
Qs = -f-(Vdid+,^)=°-
(2.2)
Алгоритм управления
СД в системе. отсчета, свя-
занной с ротором, и основ-
ные условия его реализации
могут быть сформулирова-
ны, если предположить, что
статорные обмотки питают-
ся от НПЧ, работающего^
режиме источника тока пе-
ременной частоты (что рав-
нозначно для НПЧ допуще-
Рис. 2.1. Векторная диаграмма
частотно-регулируемого СД при
- управлении с Чг*=Чга
НИЮ /И]--X», Кр.ф--->оо).
При выполнении (2.1) и (2.2) справедливо
(2.3)
При выполнении условий (2.1) — (2.3) вектор полного
потокосцепления статора Vs на векторной диаграмме СД
рис. 2.1 при изменении нагрузки 1а скользит по окружности
радиусом r=|Vs| и всегда перпендикулярен вектору 1В,
т. е. Re(V*Js)=0.
Так как электромагнитный момент СД всегда пропор-
ционален площади треугольника, образованного векторами
Vs, V,, V/, то это соответствует задаче оптимального ис-
пользования его габаритной мощности.
Из векторной диаграммы рис. 2.1 с помощью соотноше-
ния (2.3) легко выводятся зависимости
75
где 7/о — ток возбуждения по характеристике холостого
хода.
Эти зависимости должны быть реализованы САР для
управления СД с Чг*=Чг8Ном и cos<p=l,0.
Найдем статические зависимости для других перемен-
ных.
Ток статора из Is = -|- 7/ с учетом (2.4) и (2.5)
7S = M/f—(2-7)
Той ротора из (1.83) с учетом (2.4) и (2.6)
Составляющее потокосцепления статора из (1.80),
(1.81) с учетом (2.4), (2.5), (2.6):
(2.9)
(
(2.Ю)
Составляющие напряжения статора из (1.77),
при р=0 с учетом (2:9) и (2.10):
(1.78)
; (2.Н)
76
Напряжение статора из Us — VUid-\-Uiq с учетом (2.11)
и (2.12)
+ Ж /(vz₽^)- <2ЛЗ)
Для анализа работы СД интерес представляет зависи-
мость потокосцепления от потока в воздушном зазоре (и
его составляющих) от нагрузки.
Составляющие потокосцепления от потока в воздушном
зазоре определим из векторной диаграммы рис. 2.1:
W6d=Wd--/dLsl; (2.14)
^6q=Wq-IqLsl. (2.15)
С учетом (2.4), (2.5) и (2.9), (2.10) имеем:
Угол нагрузки 0, как видно из векторной диаграммы,
с ростом нагрузки стремится к значению 0=п/2. Текущее
значение находим из выражения 0=arctg(4f3/4rd) с учетом
(2.9) и (2.10):
6 = arctg-g—--------- (2.19)
77
Ш' рис.. 2.2,а—д приведены статические характеристики*
низкочастотного СД типа СДТ-3200-60. Анализ статических
характеристик позволяет выявить основной недостаток,
присущий управлению при Tx=const: с ростом нагрузки
имеет место рост потокосцепления от потока воздушного
зазора Те, что в условиях больших перегрузок
^s(3-t-4)MHOM] может привести к насыщению магнитной
цепи СД и как следствие — ограничению перегрузочной
способности электропривода и/ нарушению пропорциональ-
ности между током статора и моментом/ -
78
Рис. 2.2. Статические характеристики частотио-регулируемого СД для
V,=const (-------------------) и 4f4=const
a-V,, ил. U -F(M)-. U',, U'd, U'a-F'(M); cos q>H-F'(M): 6~/„ ld,
I’,. ,rd< e-V„.Vd,.VQ, e-f(M); W't. V'd. 1%, e--F'(M); •-
Ф6 , Tjj. 4-6(J = F (M); Ф'а , ЧГ'М. vlq -F(M); 0~Wf. Uf, I^-FW-
U't. Fj-F'tM)
79
Рис. 2.3. Векторная диаграмма
частотно-регулируемого СД
при переменной структуре
САР:
----т» = ts;------т* = фь
троприводов, работающих
Кроме того, как будет пока-
зано в § 2.2, при высоких тем-
пах изменения внешних воз-
действий (управляющих и воз-
мущений) условия обеспечения
нормированного характера пе-
реходного процесса требуют
высоких «потолочных» значе-
ний напряжения возбудителя,
а ограничение линейной зоны
характеристики возбудителя
приводит к неудовлетворитель-
ному качеству переходных про-
цессов.
Некоторые авторы [31, 32,
45] рекомендуют для элек-
в условиях больших ударных
перегрузок, синтез САР проводить при условии 4r6=const,
хотя это и приводит к недоиспользованию габаритной мощ-
ности СД и увеличению установленной мощности НПЧ
(так как во всем диапазоне нагрузок коэффициент мощ-
ности СД меньше единицы). Последнее усугубляется в слу-
чае двухзонного регулирования скорости, так как при
регулировании вверх от номинальной скорости растет на-
пряжение на выводах СД.
На рис. 2.3 приведена векторная диаграмма СД для
случая управления С Чг*=Чгвном: с ростом нагрузки вектор
Ч'а скользит по окружности радиусом г=|Чгс| и всегда
перпендикулярен вектору тока ls, т. е.
Re (ВД = 0.
Выражение электромагнитного момента для этого слу-
чая управления:
2W = -^ZpT5homX. (2.20)
Из векторной диаграммы рис. 2.3 выводятся зависимо-
80
(2.23)
Эти зависимости должны быть реализованы САР для
управления СД при Ф*=Чгсном.
Из (2.21) и (2.22) находим выражение для тока ста-
тора:
Zs = Al/(-|-Zp^. (2.24)
Зависимость для тока ротора:
(2.25)
Составляющие и полное потокосцепление статора из
(1.80), (1.81) с учетом (2.21) — (2.23):
Составляющие напряжения статора из (1.77), (1.78)
при р=0 и с учетом (2.26) и (2.27):
• Напряжение статора
(2.31)
Коэффициент мощности СД можно найти из выраже-
ния
cosTh=----. (2.32)
С учетом выражения Is из (2.24) и U,s из (2.31) урав-
нение (2.32) перепишем в виде .
cos<pH^
9^ + MrJ
(2.33)
82
Найдем для случая управления при 4^=const зависи-
мости от нагрузки составляющих Wed и We*?, которые, как
и в случае управления при We=const, характеризуют усло-
вия работы СД. Из векторной диаграммы рис. 2.3 (для ре-
жима работы We=const) и с учетом (2.21), (2.22) и (2.26),
(2.27) можно записать:
Угол нагрузки находится из выражения
8=arctg--------------------------------. (2.36)
KfLffIf(l4<t [~zP*b) +M^L\t-L4Lal)
Статические характеристики двигателя типа СДТ-3200-60
для управления при W*=WeHoM приведены на рис. 2.2,а—д
(штрихпунктирные кривые). . ’
Анализ статических характеристик представляет также
интерес с точки зрения оценки по ним переменных в пере-
ходных процессах: если САР синтезирована таким обра-
зом, что выполняются стандартные переходные функции
для М и со, то с достаточной для практических целей точ-
ностью могут быть найдены мгновенные значения электри-
ческих переменных в' любой момент времени переходного
процёсса по соответствующей статической характеристике
(по мгновенному значению М) [18].
2.2. Регулирование момента
На рис. 2.4 приведена структурная схема САР, регу-
ляторы которой -синтезированы в системе отсчета d, q:
контуру регулирования скорости подчинены контуры регу-
лирования составляющих токов статора id, iq и потоко-
сцепления обмотки ротора Wf. Синтез CAP р системе отсче-
та d, q впервые' предложен канд. техн, наук А. М. Вейнге-
ром [31]. Три вышеназванных контура вместе с контурами
6* 83
Рис. 2.4. Структурная схема регулирующей части САР скорости СД при управлении с Ч”
84-
регулирования фазных токов статора образуют в совокуп-
ности многомерный контур момента (МКМ). Задающие
сигналы на входе контуров регулирования продольной и
поперечной составляющих токов статора и потокосцепле-
ния обмотки возбуждения формируются блоками нелиней-
ностей БН1 — БНЗ в соответствии с выражениями (2.4) —
(2.6).
При высоком быстродействии внутренних контуров ре-
гулирования МКМ блоки нелинейностей в задающем уст-
ройстве по существу компенсируют нелинейности объекта
регулирования (СД) в выбранной системе отсчета. Как
легко проверить подстановкой в (1.85), (2.1) и (2.2) выра-
жений для i*a, i*g, Д*у, реализация в задающем устройстве
зависимостей (2.4) — (2.6) или (2.21) — (2.23) обеспечивает
3
регулирование при Д«=const, Qs=0, ZpxPsis или
Дв=сопБ1, Qs=var, М = — Zp^iis.
На рис. 2.4 указаны устройства компенсации двух глав-
ных перекрестных связей по ЭДС вращения. При выборе
в качестве регулируемых переменных составляющих id и
iq токов статора и потокосцепления Д/ обмотки возбужде-
ния необходима компенсация только этих внутренних пе-
рекрестных связей; перекрестные связи между контуром
возбуждения и контуром продольной составляющей ток'а
статора проявляются очень слабо. Это видно из осцилло-
грамм на рис. 2.5 для регулирования при 4rs=const и на
рис. 2.6,а, б для регулирования при Де—const, на которых
показаны процессы при набросе и сбросе нагрузки на валу
СД в системе с ПИ-регулятором скорости.
Из осциллограмм видно повышение колебательности си-
стемы с ростом скорости и темпа изменения возмущающих
воздействий при отсутствии в САР сигналов, компенсирую-"'
щих главные перекрестные связи по ЭДС вращения.
Компенсацией главных перекрестных связей и нелиней-
ностей СД достигается практически полная развязка кон-
туров регулирования id, iq, Д/. Регуляторы реализуются
в виде активных линейных фильтров. На структурной схеме
рис. 2.4 три действительных контура регулирования фаз-
ных токов статора с пропорциональными регуляторами
РТФА, РТФВ, РТФС заменяются двумя эквивалентными
«фиктивными» контурами в системе отсчета d, q с регуля-
торами РТФа и РТФд. Вследствие симметрии П-регулято-
ров фазных токов и идентичности их коэффициентов пере-
дачи Кр,ф в системе координат статора А, В, С и ротора d,
q полная компенсация постоянных времени ТВд и T'Sd ока-
85
Рис. 2.5. Осциллограммы переходных процессов в САР скорости СД
части характеристики
д —Мс—2 "отн. ед., ВПОС между каналами d и f и ЭДС вращения
в — Мс=1 отн. ед., отн. ед., ВПОС не скомпенсированы; г — Мс=2 отн. ед..
зынается невозможной. Компромиссным вариантом являет-
ся настройка на среднюю постоянную времени
Tcp=(T'sd+Tsg)l2.
При этом передаточная функция «фиктивных» регуля-
торов РТФд и РТФд (и, следовательно, регуляторов в си-
стеме координат статора РТФА, РТФВ, РТФС), определен-
ная из условий приближенного модульного оптимума,, име-
ет вид:
„ - ____ (7',sd4-7's<?)^s
ДР-Ф— 47^ Кт.пКт.ф
(2.37)
Приближенные передаточные функции замкнутых
«фиктивных» контуров регулирования токов id и iq соот-
ветственно равны:
86
типа СДТ-3200-60 при регулировании с ЧГ*=ЧГ, (работа на линейной
возбудителя):
скомпенсированы; б — Мс~2 отн. ед., ВПОС по ЭДС вращения скомпенсированы;
ВПОС по ЭДС вращения не скомпенсированы
(2'38)
(2-39)
где К, = Т^ЦТп+2Т^)- Л,=(Гг,+Г.,)/(Гя,+2Г.,);
К,=(Г,„ + М/(Т,+27^); Г, = (T',d+T.J/2.
Статическая ошибка замкнутых контуров регулирова-
ния фазного тока компенсируется внешними токовыми кон-
турами, настроенными на модульный оптимум. Передаточ-
ные функции соответствующих И-регуляторов составляю-
щих токов:
rez =-----—----S
₽’т« ^К^КгР
(2.40)
87
tw ____ Кт.ф
P-Td“ 4T^KtKsKrp '
(2-41)
Где Кт — коэффициент передачи датчика тока.
Передаточная функция ПИ-регулятора потокосцепления
обмотки возбуждения
TW_________1 + pT'do
wР.п—p2T^KBKnfT'dv ’
(2.42)
здесь Кв — коэффициент передачи возбудителя; Knf — ко-
эффициент передачи датчика потокосцепления.
ы=1Н,6(Д=11,б%}
а>=0,В8
n=3,0(^2%)if1)B2-n=2,T
--
id=f,eS(A=№%)
1=о,о199ь
1а=1,оз н*~7,72
6)
Vf=O ----
Vf-o —
MC=O _5
Ld=O
Uf=l
Uf=o
Н*=2}1>9(Д=50%) (Jf-7,05
Рис. 2.6. Осциллограммы переходных процессов в САР скорости СД
типа СДТ-3200-60 при регулировании с ЧГ*=Ф5 (работа на линейной
чаСти характеристики возбудителя):
а — Мс—2 отн. ед., ВПОС по ЭДС вращения скомпенсированы; б —Мс=2 отн.
ед., ВПОС по ЭДС вращения не скомпенсированы
Компенсирующие связи вводятся на выходе И-регуля-
торов токов и формируются й соответствии с выражениями
^K,O,Cg 47'ц/£рКт,ф(0тЧ',д/ (Т'sd~\~TSq) Ks~, (2.43)
rK,0cd=47’M(ZpKT,i(omyd/(T'Sd+Tsg)7?s. (2.44)
С учетом (2.3) и (2.20) и при обычном соотношении
параметров СД МКМ с хорошим приближением аппрок-
88
Рис. 2.7. Осциллограммы пере-
ходной функции МКМ САР ско-
рости СД типа СДТ-3200-60
(М*=1 отн. ед., <о=О)
ty=0—
° М-1,03(А-5%) М-1,0
у/?°7
Кэд=О id-Of '
м. к. м
и**0
симируется звеном первого
порядка:
tw ЛПом 1
Мюм Р^у.1 + 1
Это подтверждается ос-
циллограммой переходной
функции МКМ на рис. 2.7.
Заришем уравнения, :
МКМ:
характеризующие процессы в
(T'sd + Tsq) Rs . у
V" <? — ЛТ, ф‘?/’
ич = ^1 (1 + рТ^) Кг. ф
___. (T'sd-l-T'sq) Rs
Ud ~ 4Тул (1 + РТ^) Кг. ф (£ d Кт- ф d’’
^р^рКт.ф
2*,= ^
d (T'sd+Tsq) Rs ’
v* •** ire ф .
Sd — 1 d (T'sd+Tsq)Rs '
;**________
^КгКгКгР
Кт, Ф
1 d —
47^/СЛЛтР (l*d
Uf = Д a+^f)(4fXf ~ Кп/^);
i*q = Ft (M*);. i*d’= = Fa (M*).
Формирование электромагнитного момента СД в пере-
ходном процессе требует определенного быстродействия
как контуров регулирования токов статора, так и контура
регулирования потокосцепления обмотки возбуждения.
Однако решающее значение для быстродействия МКМ
имеют контуры регулирования токов статора.
На рис. 2.8,а, б приведены осциллограммы наброса-
сброса нагрузки в системе электропривода для двух слу-
$9
чаев регулирования возбуждения (4fB=const и 4re=const)
при снижении в 10 раз быстродействия 10TMf) в
контуре регулирования потокосцепления обмотки возбуж-
дения. Сравнение переходных процессов на этих осцилло-
граммах и на осциллограммах рис. 2.5 и 2.6 (на которых
переходные процессы соответствуют Т'ц/=Тц1) под-
тверждают слабое влияние быстродействия контура регу-
лирования на формирование электромагнитного момента
СД в переходных режимах.
Рис. 2.8. Осциллограммы переходных процессов в САР скорости типа
СДТ-3200-60 при снижении быстродействия в контуре регулирования
*¥/ (работа на линейной части характеристики возбудителя); Л1с =
=2 отн. ед., быстродействие по каналу регулирования потокосцепле-
ния обмотки возбуждения уменьшено в 10 раз:
а — Чрв—const; б — —const
Введение П-регуляторов фазных токов в САР снижает
быстродействие МКМ по сравнении? с двухконтурными
САР [31].
На рис. 2.9,а приведена структурная схема контуров
регулирования составляющих id и ig токов статора в двух-1
контурной системе регулирования СД. Путем эквивалент-
ных преобразований из нее может быть получена структур-
ная схема внутренних контуров с П-регуляторами фазных
токов и И- (Пи-) регуляторами составляющих id и ig то-
ков, быстродействие которых равно быстродействию ис-
ходной схемы.
90
ZTp'L Zp Кт,<р
Tfntn Rs Ru
— \— РТЧ 2Тр£ 2р К^ф X ЛЛ(Г Л»
^mtn Ъ Kfiq
Рис. 2.9. Структурные схемы контуров регулирования токов статора
СД с повышенным быстродействием
91
W — Lmin (t -I- 1+р
р-т« 27^,пКт к
Йреобразования йередаточной функции ПЙ-регулятора
составляющей id тока статора (рис. 2.9,6, в):
m । ~l~ . 14“pL''aJRs _______J________ i
P-Td p2rv_.KT/(T, n/R~ p2T^KTKt. n/Rs — р2Т^КтКг, n/Rs
-[_ ^'d' Ltnin Rtnin_______^min \Rs/Lmint
^yiiRr. iAt пДт nR-t | p
_1_ P (L'd Lmjn\ |L p . 1_Lmin ( i I l-j-P^L'g — Lmin)/Rs \
pLmin/Rs “T J-2Гр/Кт,пКт pTmln )
(2.45)
По аналогии с (2.45) запишем:
(L4-Lmin)/Rs ' . 46)
Р* tnin J
В (2.49) и (2.50) Tmin —L'min/Rsi Lmin~ наперед задан-
ное значение индуктивности, меньшее -L'd и Lg.
Передаточным функциям №p>Td и U7p>Tg по (2.45), (2.46)
соответствует преобразованная структурная схема внутрен-
них контуров САР на рис. 2.9,6. Дальнейшими эквива-
лентными преобразованиями она приводится к виду
рис. 2.9,в. Быстродействие. САР с внутренними контурами
регулирования токов, выполненными по рис. 2.9, в 2 раза
выше, чем САР по рис. 2.4. Однако так как Lmin>
"d+h
------2---- ’ т0 частота среза контуров регулирования
фазных токов меньше и, следовательно, условия симме-
трирования их хуже. Заметим, что если принять Lmtn=L'd,
то в системе координат, связанной с ротором, регулятор
тока id будет И-типа, a iq — ПИ-типа. Представляет инте-
рес оценка необходимого запаса по напряжению возбуди-
теля для обеспечения стандартного характера протекания
переходных процессов. Уравнение напряжения для обмотки
возбуждения (1.84) может быть переписано в виде
uf=Rfif+ (рМ) (pMWf), _ (2.47)
где рм — символ дифференцирования по моменту.
В реальных системах максимальное значение напряже-
ния возбуждения определяется условиями ударного прило-
жения нагрузки.
Для нормированного характера переходного процесса
оценка рмТ/ может быть произведена по статической ха-
рактеристике 4r/=F(A!) для значения рЛГ=0,65Л1с/(47’(11)2
из условия совпадения (РмЧ^тах с моментом первого со-
гласования электромагнитного момента [45].
92
Из (2.47) с учетом (2.6) и Afc==MiHoM получаем:
Ufmax Rfh
0,16Л»Л4%ОМ
2^£
Так, расчетное значение напряжения возбуждения для
тихоходного двигателя типа СДТ-3200-60 при ударном при-
ложении нагрузки Л4с=2Л4Ном и регулировании при
4rSHoM=const составляет Uf^8,0U/Ном-
При ограничении напряжения возбудителя значением
меньшим, чем необходимо для оптимальных процессов, по-
следние при регулировании с Vs=const отступают от стан-
дартных и при определенных условиях становятся вообще
. неудовлетворительными. Это видно из осциллограмм
(рис. 2.10,а—в), которые характеризуют переходные про-
цессы при набросе-сбросе нагрузки: на рис. 2.10,а пере-
крестные связи по ЭДС вращения скомпенсированы; на
рис. 2.10,6 перекрестные связи по ЭДС вращения скомпен-
сированы, но в 10 раз снижено быстродействие по каналу
потокосцепления обмотки возбуждения; на рис. 2.10,в в
регулирующей части САР отключены связи, компенсирую-
щие ЭДС вращения.
При ограничении напряжения возбудителя более бла-
гоприятным является регулирование с Ve=const. Это вид-
но из сопоставительного анализа осциллограмм переходных
процессов при набросе-сбросе нагрузки для двух случаев
регулирования возбуждения: на рис. 2.10 и 2.11.
При регулировании с Ve=const потокосцепление ста-
тора в переходных режимах форсируется по цепи ста-
тора. Так как постоянные времени по цепям d, q статора
существенно меньше, чем постоянная времени по цепи воз-
буждения f, то требуемый дополнительный запас по напря-
жению НПЧ для форсировки полного потокосцепления по
цепи статора невелик.
93
Йыбор закона угфШШй вь^вуждеиием СД для kdtf<
кретных электроприводов определяется требованиями к
динамическим показателям и характеристикой нагрузки.
. Ниже приведены двё структуры САР скорости тихоход-
ных СД:
для приводов со спокойной нагрузкой или темпом измене-
ния внешних воздействий (разгон, замедление, ударное при-
Рис. 2.10. Осциллограммы переходных процессов в САР скорости СД
типа СДТ-3200-60 при регулировании с 4',*=4f, (работа с ограничен-
ным напряжением возбудителя): .
О_.М -4 отн. ед, ВПОС по ЭДС вращения скомпенсированы; б — Мс"5 оти.
•д быстродействие по каналу потокосцепления обмотки возбуждения уменьше-
но’в 10 раз; в —Л1С»5 отн. ед., ВПОС по ЭДС вращения ие скомпенсированы
94
ложеиие нагрузки), при которых обеспечивается работа на
линейной части характеристики возбудителя;
для приводов с высокими темпами изменения внешних
воздействий, для которых при реальных потолочных значе-
1^=3,12(3=39%) М=5,17
М=%09(Д=37%)
^=1,74(Л=13%)
5,46(3=69%) ।
10=0,07
tlf-0
CO=CJ*-/
Не-0
М*=£ „
14=01
"^=2,(!з(А=32%
П^5
Uf?lO
rf=5,Bi(A=iiyj)
19=1,33(Л=33°/^
Ьд ~2}83
Т У*=1,53
з. - '^1,53: Ilf=306
lti=3,23 Т Т
1=0,0199 £ 6)
Рис. 2.11. Осциллограммы переходных процессов в САР скорости СД
типа СДТ-3200-60 при регулировании с Чг*=Чгг (работа с ограиичен-
— йым напряжением возбудителя):
я —Мс—5 оти. ед., ВПОС по ЭДС вращения скомпенсированы; б^Мс—5 оти.
ед„ уменьшено в 10 раз быстродействие по каналу потокосцепления обмотки
озоуждения; а — Мр—5 оти. ед, ДПОС по ЭДС вращения не скомпенсированы
' 95
ниях напряжения возбудителя возможна работа и на нели-
нейной части его характеристики.
Система регулирования приводов первой группы реали-
зует управление СД с поддержанием потокосцепления ста-
тора 4rs=const. В структуре САР для второй группы при-
водов реализовано управление с переменной структурой:
в переходных режимах с невысоким темпом изменения
внешних воздействий и установившихся режимах (для ко-
торых требуемое значение напряжения возбуждения
<«/тах)—регулирование при Ts—const; в переходных
режимах с высоким темпом изменения внешних воздейст-
вий —- регулирование при Te^^onst.
2.3. Система регулирования скорости синхронного
двигателя при 4fff=const
На рис. 2.12 представлена функциональная схема САР
скорости СД, реализующей управление при 4fs=const для
случая однозонного регулирования скорости. Силовая часть
системы электропривода, регуляторы фазных токов, датчи-
ки переменных и координатные преобразователи для связи
частей САР, синтезируемых в разных системах отсчета
(статора и вращающейся), показаны в системе отсчета,
связанной со статором. Сигналы S*d и S*g, поступающие
Рис. 2.12. Функциональная схема САР скорости
на входы исполнительной схемы, являются выходными сиг-
налами регулирующей части САР, синтезируемой в системе
отсчета ротора. Сигналы S*d и 2*g преобразуются в задаю-
щие периодические сигналы S*a, S*b, S*c на входе регу-
ляторов фазных токов с помощью координатных преобра-
зователей. ПК1 и ПК2 и датчика углового положения ВС
в соответствии с равенствами:
в координатном преобразователе ПК1 (d, q-^a, р)
S*p=2*d sin a-f-S*g cos a;
S*a=S*d cos a—S*g sin a; (2.48)
в координатном преобразователе ПК.2 (a, В, С)
1 КТ
Е*р. (2.49)
Координатными преобразователями ПКЗ и ПК.4 сигна-
лы датчиков токов, размещенных в фазах СД, переводятся
в систему отсчета, связанную с ротором, в соответствии
с равенствами:
СД при регулировании с 4^,=const
. 7—3169
97
в координатном преобразователе ПК4 (А, В, С-+а, ₽)
G = 4 'а ~ 4" 1в - 4 ‘с: '₽ = 7=у 1в ~ 1с С2-50)
в координатном преобразователе ПКЗ (a, fi-+d, q)
ia = ia cos a -J- <‘B sin a; tfl= — iesina-|-igCosa. (2.51)
В (2.48) и (2.51) а —угол между неподвижной систе-
мой отсчета а, р, связанной со статором, и вращающейся
системой отсчета d, q, связанной с ротором; он вводится
в GAP посредством датчика положения ВС.
Рис. 2.13. Осциллограммы переходных процессов в САР скорости^СД
типа СДТ-3200-60 при регулировании с ЧГ*=1Г, (работа на линейной
части характеристики возбудителя):
а-Мс-О. Мдин-1 оти. ед.; б-Л1с-1 отн. ед.. Мдип-2 отн. ед.; в-Мс-0.
«дни"1 °™ ед‘
Вычисления переменных, вводимых в регулирующую
часть САР, производятся в соответствии с равенствами:
в решающем устройстве (вычисление 4G, и V/)
'Pg = ’Prf = lf + Ldid< "
98
4
В зависимости от требований к статизму САР по отно-
шению к нагрузке возможны два варианта настройки кон-
тура скорости на модульный и симметричный оптимумы.
Передаточная функция регулятора скорости при настройке
на модульный оптимум:
(2.53)
где Аь> — коэффициент передачи датчика скорости; Дм—
= М ном/А1ном-
При настройке на симметричный оптимум
w _ 1 + 16^ ________£____
с - /,167^ ^КМКШ С2-54)
На рис. 2.13 показаны процессы в системе при разгоне,
замедлении и реверсе. ‘
2.4. Система регулирования скорости синхронного
двигателя при управлении с переменной структурой
На рис. 2.14.представлена функциональная схема САР
скорости СД с переменной структурой, а на рис. 2.3—
векторная диаграмма, характеризующая режимы работы
СД при переменной структуре САР: сплошными линиями
изображена часть диаграммы, соответствующая работе при .
4rs=const, а штриховыми — при const. Преобразова-
ния сигналов координатными преобразователями /7Л'3,
ПК4, ПД5, ПД6 осуществляются в соответствии с выраже-
ниями (2.48) — (2.51).
Задающие сигналы на входе контуров регулирования
составляющих токов статора и потокосцепления обмотки
возбуждения формируются в системе отсчета, связанной с
вектором тока статора, с помощью перестраиваемых (в за-
висимости от режима работы) нелинейных преобразовате-
лей. Перестройка задания осуществляется по выходному
сигналу ПИ-регулятора потокосцепления обмотки возбуж-
дения с помощью делительного блока БДЗ, решающих
устройств РУ1 и РУ2, блока регулируемой нелинейности
БН2 (с регулируемым источником опорного напряжения,
минимальное напряжение которого соответствует значению .
напряжения возбудителя, близкому к Uj max)-
В РУ1 производятся вычисления в соответствии с равен-
ствами 4f=£gi*s; ^si-Pst^s- В зависимости от режима ра-
боты САР на выходе БДЗ' (в соответствии с функциональ-
7* 99
Рис. 2.14. Функциональная схема САР скорости СД при регулировании
ной схемой рис. 2.14 и векторной диаграммой рис. 2.3)
имеем:
для режима работы
tg0=Lffi%/Ys;
для режима работы ЧГ*=ЧГ6
tgO-(L9i*8-LsZi%)/Te.
Заданные значения составляющих токов статора на
входе МКМ формируются с помощью блоков нелинейно-
стей БНЗ, БН4 и координатного преобразователя ПКЛ в
соответствии с равенствами i*d=—<t>s sin 0; i*q=is cos 0.
Заданные значения потокосцепления обмотки возбужде1-
ния в зависимости от режима работы САР формируются
на входе МКМ с помощью координатного преобразователя
ПК.2 и решающего устройства РУ2 в соответствии с равен-
ствами:
для режима при 4rs=const
^ = ^№Mcos6-^t*d;
для режима при Ve—const
"Ч = ST (’. sin в) - i%.
100
с переменной структурой
' Характер-переходных процессов в САР с переменной
структурой определяется темпом изменения внешних воз-
действий. Так, в случае приводного двигателя типа
СДТ-3200-60 при разгоне-торможении, реверсе с Мдин^
^2 отн. ед. и набросе-сбросе нагрузки, равной
^2 отн. ед., переходные процессы совпадают с таковыми
для САР с регулированием 4rs=const, а при набросе-сбро-
се нагрузки, равной Мс^2 отн. ед., и в режиме упора с
Л4*>2 отн. ед. — для САР с регулированием 4r6=const.
На рис. 2.15,а—в приведены осциллограммы переход-
ных процессов в САР с переменной структурой при набро-
се-сбросе нагрузки на валу для Л4С=5 отн. ед. при <о=
=1 отн. ед.
Характер переходных процессов в САР с переменной
структурой при компенсации главных перекрестных связей
СД и ограниченном потолочном значении возбудителя бли-
зок к нормированному.
Отметим, что в случае режима работы с Чг*=Чгв при
подстановке в (2.2) значений 1д и id из (2.21), (2.22) с уче-
том (1.83) и (2.23) реактивная мощность Qs>0, т. е. ко-
эффициент мощности имеет отстающий характер.
Укажем на относительную легкость реализации в САР
с переменной структурой двухзонного регулирования, для
чего в схему следует ввести узел формирования задания
101
потокосцепления Ч*1*, состоящий (см. рис. 2.14) из модуль-
ного звена М3, делительного устройства БД2 и устройства
сравнения скоростей. С помощью узла формирования зада-
ния в диапазоне скоростей 0^ | <о | | (Оном | обеспечивается
Рис. 2.15. Осциллограммы переходных процессов в
Рис 2 15 Осциллограммы переходных процессов в САР частоты^ вра-
'щепня СДТ-3200-60 при управлении с переменной структурой:
а — ВПОС по ЭДС вращения скомпенсированы; б — уменьшено в 10 раз быстро-
действие по каналу потокосцепления обмотки возбуждения: в — ВПОС по ЭДС
вращения не скомпенсированы
102
поддержание номинального потокосцепления ЧГ*=ЧГЯЮМ
или Т*=Чгсном (в зависимости от режима работы), а при
скорости | (о | ^ | (Оном | — соответствующей ЭДС. Одновре-
менно в канал регулирования момента должно быть введе-
но делительное устройство для автоматической настройки
коэффициента передачи канала при изменениях потоко-
сцепления (в зоне регулирования скорости выше основ-
ной). Благодаря этому выход регулятора скорости незави-
симо от режима работы привода определяет активную со-
ставляющую тока статора. ч
2.5. Частотно-токовая система регулирования скорости
При частотно-токовом управлении СД САР обеспечивает выпол-
нение параметрических зависимостей вида (2.4), (2.5) и (2.8). Особен-
ностью этих САР является формирование задающих воздействий во
вращающейся системе отсчета (с последующим их преобразованием
в систему отсчета, связанную со статором) и наличие регуляторов
только в этой неподвижной системе.
На рис. 2.16 показана обобщенная функциональная схема частот-
но-токовой САР скорости СД. Контуру регулирования скорости под-
чинен МКМ., включающий три контура регулирования фазных токов
iA, 1в и ic статора и контур регулирования тока возбуждения if.
С помощью блоков нелинейностей БН1—БНЗ по выходному сиг-
налу PC формируются уставка тока возбуждения if* и уставки
составляющих токов статора по осям d и q — id*, iq*.
Из id* и iq* с помощью координатных преобразователей ПК1,
ПК2 и ВС формируются периодические задающие аоздействия на
входе регуляторов фазных токов. Регуляторы фазных токов пропор-
циональные, регулятор тока возбуждения — ПИ-типа.
На рис. 2.17 показана функциональная . схема чаетотно-токовой
САР, разработанная во ВНИИэлектроприаод. Особенностью схемы
является устройство датчика положения ВС, совмещающее функции
собственно ВС и преобразователя координат.
Датчик положения представляет собой специальную электрическую
машину с числом пар полюсов, равным числу пар полюсоа приводно-
го СД, и с двумя обмотками на статоре и роторе; обмотки распола-
гаются под углом л/2. Вместо специальной электрической машины
возможно применение двух сельсинов илн вращающегося трансфор-
матора с редуктором для согласования числа пар полюсов (этих ма-
шин и СД). Датчик положения устанавливается на валу приводного
двигателя так, чтобы ось одной из роторных обмоток совпадала с
продольной d, а ось другой — с поперечной q осями ротора СД; одна
из статорных обмоток ВС совпадала бы с осью а, а другая — с осью
Р статора СД,
103
Рис. 2.16. Обобщенная функциональная схема частотно-токовой САР скорости СД
В соответствии с функциональной схемой рйс. 2.17 заданные зна-
чения токов id* и 1Я* поступают на входы модуляторов UB1 и UB2,
где модулируются напряжением несущей частоты прямоугольной
формы;
„ —II 4 V sln<2ra+ 1)«W . о /т /о
ит Um max п 2л-|-1 ’ Шм—2п/^м> (2.55)
л=0
где Um max — амплитудное значение напряжения несущей частоты;
Ты — период несущей частоты.
На выходах модуляторов образуются сигналы, равные произведе-
нию входных сигналов и напряжения несущей частоты единичной
амплитуды:
.* _ . 4 V sin .
l md — ‘ d п 7j 2я + 1
л=0
., ., 4 уч sin (2л + 1)<от<
1 “Ч—1 ч П Zj 2п+ 1
л=0
Сигналы i*md и i*mg подводятся к соответствующим обмоткам
ротора ВС. Пульсирующее поле ротора индуктирует в статорных об-
мотках ВС сигналы, которые зависят от взаимного расположения ро-
торных и статорных обмоток. Если коэффициент трансформации меж-
ду обмотками равен единице, то
i*ma = i*md cos е„—i*m4 sin ep; = i*lnd sin cos 0o>
ИЛИ
» 4 V sin(2n+
1 ma— n 2n+l </COS0o —t <jSinB0),
n=0
4 V4 sin (2n + 1) <nmt
‘4 = — 2j 2n + 1 s,n «• + cos e»>-
л=0
где Oo —начальный угол между осями роторной и статорной обмо-
ток ВС.
При равномерном вращении ротора с угловой скоростью ю сигна-
лы статорных обмоток ВС будут равны:
Г. - 4Еь1" VК-— <»' +*•)-'•, + Ml:
п=0
= 4- £ sin(?4li)^ [«*d sin И + е.) + cos (at + e.)J.
n=0
106
Сигналы i*ma и i*mp содержат полезный сигнал и сигнал несущей
частоты. Выделение полезных сигналов производится демодуляторами
UR1 и UR2. Процесс демодуляции рассматривается как произведение
демодулируемого сигнала на напряжение несущей частоты единичной
амплитуды:
4 VI sin (2п + I) a>,nt
»*а = 1*mA = — /J ---------2n + t----- [‘*d COS.(W« + sin («/ +
n=0
CO
+0o)J ~ sin (Йт + 1) toM< = COS{M< + во) — <%sin (at + 0,);
n-Q
= V £j [‘*d s,n (t0/ + 0«) + ‘*4 C0S
n=0
+ 0»)1 T" Sin^ln^T " = Sin + 9o) + ‘*4 cos + fi«)-
n=0
Последние уравнения характеризуют задающие воздействия в си-
стеме координат, связанной со статором.
Сигналы i*a и преобразуются в задающие периодические сигна-
лы 1а*, 1в* и «с* на входе регуляторов фазных токов с помощью
преобразователя координат ПК в соответствии с равенствами
2 1*«+ 2
1 . VT.
1*С = 2 **<» 2 '*₽•
При отсутствии компенсации основных перекрестных связей объ-
екта регулирования частотно-токовым САР скорости СД. присущи
следующие недостатки:
значительные фазовая и амплитудная погрешности в контурах
регулирования фазных токов, что приводит к отклонению от задан-
ного закона регулирования СД: Ч'*е=Чгл ном cos<p=l,0; нарушение
пропорциональностей: 1Л~1Л* и М~1,; высокое потолочное значение
напряжения возбудителя при высоких темпах изменения внешних
воздействий; склонность к колебательности системы при ограничении
напряжения возбудителя.
•Качество переходных процессов частотно-токовой САР при отсут-
ствии компенсации перекрестных связей иллюстрируется осциллограм-
мами рис. 2.18,а—в.
107
----tf^O
----
Uf^s.g^
AM=4B%
/~\Aid=120%
/^\A\H=5/% M=1
in=c,gg '14=0,49
Aif-42%
Г\Л1^53К
м^о
M,ld,lfO Uf-0,92
if=1,22
1Г1
—----Uf^O
—------Uf=0.92‘
M*= 0,97
Ч Aif^30% \Г^' ' Vх ^~^D/ ‘° lq-o,86 ‘ 14 и Mz=o
V/
^Aif^40% Au=3^ 1451=1,«
Ы*=0 OJ=0
a)
A^3% t=0,0199c
Рис. 2.18. Осциллограммы переходных процессов частотно-токовой САР.
скорости СД:
а — Мо-1 отн. ед., ы-О, Uf maI-10 отн ед.; б —Мс-1 отн. ед., <о-1 отн. ед,
t/y mex~10 отн. ед., ВПОС по ЭДС вращения не скомпенсированы; в — Мс —
->1 отн. ед., со=1 отн. ед.. Uf maI“5 отн. ед., ВПОС по ЭДС вращения ском-
пенсированы
108
Как указывалось в § 13.3, при невысоких темпах изменения внеш-
них воздействий возможна упрощенная компенсация главной пере-
крестной связи по ЭДС вращения: на рис. 2.17 выходы регуляторов
фазных токов включены на регуляторы фазных напряжений,' на кото-
рые подаются сигналы положительной обратной связи по напряжению.
Глава третья
ЭЛЕКТРОПРИВОД ПО СИСТЕМЕ НЕПОСРЕДСТВЕННЫЙ
ПРЕОБРАЗОВАТЕЛЬ ЧАСТОТЫ — КОРОТКОЗАМКНУТЫЙ
АСИНХРОННЫЙ ДВИГАТЕЛЬ
3.1. Рацибнальные законы связанного управления ।
асинхронным двигателем
По системе НПЧ—‘АД с короткозамкнутым ротором
выполняются тихоходные электроприводы бредней мощно-
сти с АД специального исполнения, а также глубокорегу-
лируемые электроприводы с повышенными требованиями
в отношении быстродействия, перегрузочной способности и
качества регулирования скорости. Последние могут выпол-
няться с применением серийных АД с короткозамкнутым
ротором, предназначенных для работы в промышленной
сети с частотой 50 Гц. Габаритная мощность исполнитель-
ного двигателя определяется нагрузочной диаграммой.
В случае самовентилируемых АД габаритная мощность
определяется в зависимости от глубины регулирования
[11, 40].
В частотно-регулируемом АД изменение управляющих
воздействий, осуществляемое для изменения электромаг-
нитного момента, сопровождается в общем случае электро-
магнитным переходным процессом, основным признаком
которого является наличие свободных составляющих пото-
косцепления ротора. Колебательный характер такого пере-
ходного процесса наглядно подтверждается анализом урав-
нения электромагнитного момента, записанного в виде
М=4- Zp-^trPWir - ’Р1ГрЧТ1Г+ К - ш) (Т‘,г + ЧГ’1Г)].
(3-1)
Уравнение (3.1) получено из общего уравнения для
электромагнитного момента (1.49) с помощью уравнений
для составляющих напряжения ротора (1.36) и составляю-
109
щих потокосцеплении ротора (1.38). Из (3.1) следует, что
нормированный характер изменения момента в частотно-
регулируемом асинхронном электроприводе достижим при
условии регулирования потокосцепления ротора Г39, 50,
53, 58].
Анализ структурных представлений АД, проведенный
в § 1.1.2, показывает, что наиболее просто и строго эта зада-
ча решается при синтезе САР в системе отсчета, связанной
с вектором потокосцепления ротора Чгг. Фирмой «Сименс»
предложена такая система частотно-регулируемого асин-
хронного электропривода на основе ПЧ с автономным
инвертором тока [51—53, 57].
Алгоритм управления АД в системе отсчета, связанной
с вектором Чгг, и основные условия его реализации могут
быть определены, если осуществлять питание статорных
обмоток от НПЧ, работающего в режиме источника тока
переменной частоты. В этом случае уравнения (1.56) —
(1.58) после несложных преобразований приводятся к виду
; : _(«с—®)Ф1Г.
is~ KrRr KrRr
(3.2)
Zp(M-Mc)
(0=-----=---
Jp
3
м=-TZpKrWirits-,
Система (3.2) получена при учете зависимостей для
составляющих потокосцеплений ротора (1.38), из которых
следует:
Обобщенный управляющий параметр — вектор тока ста-
тора
Л = (3.4)
в соответствии с векторной диаграммой (рис. 3.1) и урав-
нениями (3.2) характеризуется амплитудой
/(^+^Г+к - ' (35)
и фазой
»g=V + arctg (3.6)
110
Из (3.2)— (3.6) следует,
что реализация оптимально-
го управления [59, 60] ди-
намической системы, фазо-
вое состояние которой ха-
рактеризуется вектором по-
токосцепления ротора, воз-
можно, если САР обеспечи-
вает поддержание 4₽'ir=
=const и регулирование
амплитуды и фазы тока ста-
тора is при изменениях
скольжения (<ос—<о)-
Дополним систему урав-
нений объекта регулирова-
ния (3.2) уравнениями пре-
образования обобщенного
управляющего параметра —
вектора тока статора—из си-
стемы отсчета статора АД
Рис. 3.1. Векторная диаграмма
частотно-регулируемого АД при
управлении с
а, р в систему отсчета, связанную с вектором потокосцеп-
ления ротора 1, 2. В соответствии с векторной диаграммой
рис. 3.1 имеем:
^=^С08ф- ieJsin<p.
(3-7)
В задающем устройстве САР соответственно должна
быть включена нелинейность
=4scos<p —iIS
ip, = hasin<|>4-iJscos<|>.
(3-8)
Из (3.7) и (3.8) следует, что условием реализации
управления АД в системе отсчета, связанной с вектором
потокосцепления ротора, является введение в САР инфор-
мации об угловом положении этого вектора.
Статические характеристики АД находятся из (1.56),
(1.57) и (3.2) с учетом того, что САР обеспечивает в уста-
новившихся режимах равенство фактических и заданных
значений переменных.
Выражение для полного тока статора с учетом выра-
жения для hs и i2a из (3.2):
4=(3.9)
. Чп
ш
Выражения для составляющих и полного напряжения
на выводах статора:
uls = [-у—4~— L'‘ 1-F— ]; (3- Ю)
*s ,г c[<oc/.m 7>c RrKr j’ '
ик=Ф1гЮГ-^^=^_4-^+^кг]; • (3.11)
us=‘р.л 1/ [ Д—-4— Г+
Jr 7>c Rr^r J
"+Г^£с?)-+^+^'Ча‘ (312)
]_ A fKf^c wc J
Выражение под знаком корня по существу является
коэффициентом, учитывающим увеличение напряжения на
выводах статора *для компенсации падения напряжения в
нем. Оно отражает сложный характер зависимости паде-
ния напряжения MJe=Ia(R'+/юс1Л) от скольжения wc—<о
(в выражении для тока статора) и от частоты <o0 (в вы-
ражении для сопротивления). .
Зависимость момента от скольжения
TW=4zp^K-«’)- (3.13)
Из (3.13) видно, что электромагнитный момент АД при
поддержании 4rir=const не ограничивается электрически-
ми параметрами и зависимость его от скольжения имеет
прямолинейный характер.
Из векторной диаграммы рис. 3.1 с учетом (3.3) выра-
жение для потокосцепления воздушного зазора имеет вид:
= (3-14)
С учетом выражения для 1г8 из (3.2) выражение (3.14)
преобразовывается к иду
Выражения для составляющих полного потокосцепле-
ния статора:
’ (3.16)
4f2s==^(rl'rf^2a_|_l-sl^2e (3.17)
112
и для полного потокосцепления статора с учетом (3.2):
+ £)’+ (КА.+М;; (3.18)
Коэффициент мощности АД определяется из векторной
диаграммы рис. 3.1 (при допущении 7^=0):
cos<pH = cos arctg^-f-p-|- 281, (3.19)
или с учетом выражений (3.2), (3.9), (3.14) и (3.18)
cos <fn = sin |arctg Tr (шс — <u) — arctg — (<oc — <o) —
_ 2Г(Л+В-С)(Л+С-В)(В+С-Л)/Л+#+С ]
rci& л+вч-с J*
где Л = + (3.20)
8-]/i + ^r(”.—); c=E7»Z|+(‘".-“)'JV
Анализ выражений для потокосцеплений показывает,
что в случае регулирования при Tr=const настройка САР
скорости АД на режим, обеспечивающий работу двигателя
на линейной части характеристики намагничивания (для
обеспечения нормированного характера изменения момен-
та М), приводит в электроприводах с высокой кратностью
динамических перегрузок к заниженным значениям Та при
нагрузках, близких к номинальной. Следовательно, реали-
зация такого способа управления АД, обеспечивая высокие
динамические показатели системы электропривода, приво-
дит к некоторому снижению использования магнитных
материалов АД и завышению установленной мощности
HIPL Поэтому для электроприводов, нагрузочные диаграм-
мы которых характеризуются относительно большой про-
должительностью работы на установившейся скорости
(электропривод шахтных подъемных установок, лифтов
и т. п.), целесообразен такой алгоритм управления: в пе-
реходных режимах — регулирование при T7=const, в
установившихся режимах — регулирование при Та—const
Выражения для статических характеристик в случае
регулирования при Та—const получаются из аналогичных
выражений для случая регулирования при Tr=const с
с учетом (3.15).
8—3169 . из
Выражения для составляющих й полного тока статора:
/«=-- --------; (3.21)
1 +~£Г(“с—«О1
/„=—(3.22)
'Мг У I +
Е,уГК1+(<Ос-«>)* 7~8г1
(3.23)
Выражения для составляющих и полного напряжения
на выводах статора:
II Г R' _ Кг Г,К~<Д) 1.
,s У Г ТУГ, I “cZ.m 7>с RrKr 1’
У 1 + «V к-®)*
U„
1 + (“с—W)’
L'b
К fR^c * Rm
(О
“с
(3.24)
(3.25)
US=*
(сов—со)’
R' Kr _ R's («ос—«о)1г
^cRm Rr^c RfKr I
R' (wc—w) L's
RrRf^c Rm
(О
Выражение для момента:
3 Ф’6Яг(сос-со) .
М— 2 R*r+L2rl (<ос—«)=
Выражение для полного потокосцепления статора:
(3.26)
(3.27)
’ , («Ос —и)г
+ №r/?’f
I + -£Г-(«*>с—ь»)’
(3.28)
Выражение для потокосцепления ротора:
Ф „=
(3.29)
^-К-<о)а
114
Is, ошн.е0.
У$,огпн.е0.
о —1„. M~F(ac—a>); /'с, M'=F'(ac—ад); б— UB = F(ac—a), U'B-Ff(ac—ад);
в —4Fe, 1vr,wi ->F(toc—ад), 4?’t, W'r, W I -F(a>c—ад); г — cos q>H=F(coc—co)
Статические характеристики двигателя типа 4АН315МЧ
для двух случаев управления потокосцеплением (при Тг='
=const и Te^const) приведены на рис. 3.2,а—г.
3.2. Регулирование момента
На рис. 3.8 приведена структурная схема САР, регуля-
торы которой синтезированы в системе отсчета, связанной
с вектором Тг-
8* 115
Рис. 3.3. Структурная схема регулирующей части САР скорости АД при управлении с Чг* =
116
Из рис. 1.4 видно, что объект регулирования состоит
из двух взаимозависимых контуров; зависимость контуров
обусловлена четырьмя внутренними обратными связями АД
(из которых три нелинейные) и двумя обратными связями
НПЧ. Посредством включения в задающее устройство не-
линейного преобразователя координат (3.8) компенсиру-
ются нелинейности объекта регулирования (АД).
Регулирование при 4rr=const однозначно определяет
зависимость электромагнитного момента АД от составляю-
щей i2s тока статора и одновременно линеаризует звен<
формирования момента в объекте регулирования. Для раз '
вязки каналов регулирования в схему вводятся устройства,
осуществляющие компенсацию внутренних связей объ-
екта.
Система регулирования имеет два канала регулирова-
. ния:
канал регулирования момента, в котором контур регу-
лирования составляющей тока i2s подчинен контуру регу-
лирования скорости;
канал регулирования потокосцепления ротора, в котором
контур регулирования составляющей тока iis подчинен кон-
туру регулирования потокосцепления ЧЛГ.
Из двух агтономных подсистем одна выполняется (в
канале 1) как система стабилизации, а вторая (в канале
2) — как программная.
Определим передаточные функции регуляторов. Три
действительных контура регулирования фазных токов ста-
тора с пропорциональными регуляторами РТФА, РТФВ
и РТФС заменяются на структурной схеме двумя эквива-
лентными «фиктивными» контурами в системе отсчета 1,
2 с регуляторами РТФ1 и РТФ2.
С учетом того, что в системах отсчета статора (А, В, С)
и вектора (/, 2) коэффициенты передачи датчиков и
регуляторов фазного тока одни и те же, можно записать:
<з-з<»
Передаточная функция разомкнутого внутреннего кон-
тура
^т.Ф= (1+pT'i) • (3>31)
Динамические свойства такого контура близки к «чи-
стсшу» ^модульному оптимуму, так как для АД мощно-
стью от 10 кВт до нескольких тысяч киловатт T'i^(7-s-
45) • 10-3 с. Статическая ошибка замкнутых внутренних
117
(3.32)
(3.33)
токовых
(3.35)
контуров компенсируется внешними токовыми контурами.
При оптимизации контуров регулирования токов iJs и i2s
передаточная функция внутреннего замкнутого контура
приближенно заменяется звеном первого порядка:
U7 . «------—_______—
з-т-Ф ~ рЪТ^+Х Кг.ф
В уравнении (3.32)
к- Т'1 -к- r'l+7»1
(Г/ + 2Г^) ’ А‘— Т'1 + 2Т^
Настройка на_ модульный оптимум внешних
контуров обеспечивается И-регуляторами составляющих
тока с передаточной функцией
^р- " = 4Т^К,КгКтр'
Аналогично определяется передаточная функция ПИ-
регулятора потокосцепления ротора:
IV/ __ Ч-рТ'г
Р-" ’
где Ка — коэффициент передачи датчика потокосцепления.
Компенсирующие связи вводятся на выходе И-регуля-
торов составляющих токов статора. При этом перекрест-
ные связи, вносимые НПЧ и характеризующие взаимосвязь
контуров регулирования фазных токов в системе отсчета 1,
2, не компенсируются, так как их действие в рабочем диа-
пазоне выходных частот НПЧ проявляется слабо. Осталь-
- ные компенсирующие связи формируются упрощенно, по
сигналу tom (а не Фп) и по выходным сигналам соответст-
вующих регуляторов тока (F/J и ^2), имеющих лучший
"гармонический состав, чем при непосредственном измере-
нии значений регулируемых величин.
С учетом изложенного выражения для компенсирующих
сигналов имеют вид:
^к.о.с(и5) = 2Гц/р«>тГ; (3.36)
= (3.37)
<338>
У„. (3.39)
Главными внутренними перекрестными связями явля-
ются (o<X'e«2s, (Oc^-'eiis и (HmZpKr^ir', осциллограммы на
118
рис. 5.4 характеризуют уменьшение запаса устойчивости И
потерю устойчивости системы по мере увеличения задания
скорости при отсутствии компенсирующих обратных связей
в регулирующей части САР.
Рис. 3.4. Осциллограммы переходных процессов в САР скорости АД
типа 4АН315М4 при регулировании с ЧГ*=’РГ, ВПОС не скомпенси-
рованы:
с —разгоя до <0=0.1 отн. ед., иаброс. сброс нагрузки Мс=1 отн. ед.; б —разгон
до в—03 отн. ед.; в — разгон до ы=0.4 отн. ед.
При подключении компенсирующих обратных связей по
loL'siis и (uL'siis система становится устойчивой, хотя ха-
рактер переходных процессов заметно отличается от стан-
дартных, принятых в качестве оптимальных (осциллограм-
мы на рис. 3.5). Колебательность «намагничивающей» со-
ставляющей тока статора iis объясняется формированием
компенсирующих обратных связей упрощенно, по сигналу
датчика скорости (от (при условии пропорциональности
самих перекрестных связей скорости координатной систе-
мы (Ос) (1.56). Этим также объясняются высокочастотные
119
Рис. 3.5. Осциллограммы переходных процессов в САР скорости АД
типа 4АН315М4 при. регулировании с ЧГ*=Ч,Г:
а — разгон до ш=0,4 с М = 1 отн. ед.. ВПОС по ,1Г)Г. а> скомпенсированы; б —
разгон до Ю“0,4 отн. ед. с М=1 отн. ед., ВПОС по (й£'в/|в н tt>L'ef2e скомпен-
сированы; в — наброс, сброс нагрузки Мс"*1 отн. ед., ВПОС по £0L'aQe н (оЬ'/г®
скомпенсированы
колебания М, i2s при скачкообразном изменении напряже-
ния питающей сети (осциллограммы на рис. 3.6).
Если Тг велико, то компенсирующую связь (3.38) мож-
но не вводить, так как динамическое воздействие соответ-
ствующей связи объекта проявляется слабо.
В целом характер переходных процессов в отношении
М, со и he при введении компенсирующих обратных связей
приближается к стандартным (рис. 3.6).
Запишем уравнения, характеризующие процесс^ в ре-
гулирующей части САР:
Т’ iR' zv# 1 v
2ГИ< (1+р7>) Ат, ф 1 ,s
Uss " 2Ги/ (1+дГ^Ит,ф ~ Кт-
. .. .. 27^Жт фК.
2 = i - i 2T.Zpwm - Ф,г %,Ф
is IS 2S W r 1,1 ' IfL a
120
^•1% Уц.4,0
Л^К^М^ЯХ
! I ~
&i2s-=33%
м?1,о-
11Г1,0
=2^%
l/Pto
i/o
tlg-0
0,3/c
Н'-Ю
a)
fatnipsi i
^•1,0
/,6
Л11е-П%
^Vfr.-O,s%
<i)*°/,0
Mc-1,0
ло=г,7%
to-1,0
bs'f,0
№'•43,3%
H=1,0 iis=io
4s~°
M=0
'ai2s‘3s% ”<г° %*“0
№•40%
4J/c
дм=
•2,9%
if
AM=2,9%
ДГ1-2,9%
'Aih-ff,5^A
&
fl f 1,0 i2s t0 ' M2s=3,3% ‘ ." Ai2s~3,3%
м----------- -4--- - ----
4s"4® Aifs^Sfi
nif,o
V.Wb
6)
Рис. 3.6. Осциллограммы переходных процессов в САР скорости АД
типа 4AH3L5M4 при регулировании с Ч,*=ЧГГ> ВПОС скомпенсированы:
а — М— 1 отн. ед., сброс и наброс нагрузки с ПИ-регулятором скорости; б —
М-1 отн. ед., сброс н наброс нагрузки с П-регулятором скорости; в —скачко-
образное изменение напряжения Д17с=15%, ПИ-регулятор скорости
S
28
’m £,
в 1S ул Р т
_____ ^Т, ф .* „ . .
‘is-'47’IliK1A2ATp^ *? At'is);
»т=— KTt ф
‘е»— ^K^KrP
;* — ____/ф* _ к : i-
ts~ &T^LMnP/KT ‘r AtI,s’’
Быстродействие внутренних контуров может быть по-
вышено в 2 раза; эквивалентные преобразования и оконча-
тельный вид структурной схемы приведены на рис. 3.7,а—в.
Преобразование передаточной функции регуляторов
внешних токовых контуров:
П7 3 __ 1 4~ ____________1________I
^p.TiU)— p^Kr.^/R' — Р^К-г.иКт/R'
12!
122
Рис. 3.7. Структурные схемы контуров регулирования токов статора
АД с повышенным быстродействием
I_______L's____________L's , f. I 1 \ .
"r27’liZAT. nAT -27^/G. ПАТ “Г pT'i )
(3.40)
Следует отметить, что реализация управления АД в си-
стеме отсчета, связанной с вектором потокосцепления ро-
тора, требует высокой точности в определении его про-
странственного положения. Информация может быть полу-
чена посредством измерения (и последующей переработки
в САР) с помощью датчиков Холла мгновенных значе-
ний поля в двух точках воздушного зазора, сдвинутых на
2л/3 [64], либо вычислена. Предпочтительней первый спо-
соб, так как погрешность в измерении угла ф, присущая
второму способу (особенно в динамических режимах рабо-
ты), приводит к колебательности электромагнитного мо-
123
Мента. Угол ф в ооъекте регулирования определяется инте-
грированием второго уравнения системы (3.2):
Р \ v ir J
Уравнения для вектора тока статора в системе отсчета
% могут быть записаны из (3.4) и (3.6) в виде
(рФ—<о)Ф1г
Gs — lscos arctg
hs — is sin arct wtr/Tr
(3.42)
-При наличии погрешности а определении угла ф, оцени-
ваемого значением Дф, переходный процесс в АД опреде-
ляется системой нелинейных дифференциальных уравнений
второго порядка, так как из (3.2) с учетом (3.42) первые
два уравнения принимают вид:
^p^ + ^^cosarctg - f ^-4-Дф];
щ ш
= is sin arctg + Д<)
(3.43)
. Из (3.43) следует, что качество регулирования элек-
тромагнитного момента при наличии погрешности Дф при-
ближается к частотно-токовым САР скорости АД.
Рис 3.8. Функциональная схема САР скорости АД при регулировании
124
3.3. Система регупирс ания скорости двигателя
На рис. 3.8 представлена функциональная схема САР
скорости АД. Силовая часть системы, регуляторы, фазных
токов, датчики переменных и координатные преобразова-
тели ПК для связи частей САР, синтезируемых в разных
системах отсчета статора и вращающейся), показаны в
системе отсчета; связанной со статором. Сигналы 2*ie ,и
2*2s, поступающие на входы исполнительной схемы, явля-
ются выходными сигналами регулирующей части САР,
синтезируемой в системе отсчета, связанной с лектором V,.
Сигналы 2*is и 2*28 преобразуются в задающие сигна-
лы 2*а, 2*в и 2*с на входе регуляторов фазных токов РТФ
с помо!цыо координатных преобразователей ПК1, ПК2 и г
сигналов датчиков магнитного потока. В ПК1 осуществля- '
ются нелинейные преобразования в соответствии с равен-
ствами (3.8), в которых следует заменить обозначения за-
данных величин (i на 2*).
Отметим, что координатный преобразователь ПК1
одновременно компенсирует нелинейности АД в системе
отсчета, связанной с вектором Чгг.
Линейные преобразования в ПК2 (а, р->А, В, С):
2* — 2* •
А а8’,
1 Кз"
у* __ __У* 1 г ° у* .
" В-- 2 21 ав • 2 21 рз’
1 КТ
у* __ V* ' ° У
Л С— 2 А Ы 2 ^8-
С
125
В ПКЗ действительные значения потокосцеплении от
потока воздушного зазора, измеренные с помощью датчи-
ков Холла, преобразуются (Л, В, С-^-а, ₽) Для последую-
щих вычислений в соответствии с выражениями
1 2
'г,»=гг%+гг’г«.- <344>
В ПК4 и ПК5 сигналы датчиков токов, размещенных
в фазах АД, переводятся в систему отсчета, связанную
с Чгг: в ПК4 (АВС-*-а, 0) — в соответствии с равенствами
(3.44), в которых следует заменить обозначения Ч7 на i;
а в ПК5 (а, 2) — в соответствии с равенствами (3.7).
Вычисление переменных, вводимых в САР, производит-
ся в соответствии с равенствами:
в РУ1 (вычисление составляющих потокосцепления ро-
тора)
Ч^аг—Ч'аЬ / Кг—ВтАал,
х¥'^г=хУаь/Кт—ВГ11р3;
в РУ2 (вычисление модуля и угла вектора потокосцеп-
ления ротора)
|ФЛ=/«г8вг+«Г‘Вг;]
СО8ф=^аг/|Ч>г|.
Устройство РУ2 вводит в САР скорости задающие сиг-
налы частоты сое и постоянной амплитуды, которые гене-
рируются приводным двигателем (АД). В соответствии
со структурной схемой объекта регулирования (рис. 1.4)
в любой момент времени угловая частота этих сигналов
определяется из равенства
Р'ф=КгРйгзРУ 1 г±(о.
Эти сигналы по существу определяют форму кривой вы-
ходного тока НПЧ. Это обстоятельство, а также необхо-
димость высокой точности в управлении фазой тока стато-
ра обусловливают жесткие требования к фильтрующим
устройствам в канале переработки информации датчиков
Холла (на рис. 3.8 эти устройства не показаны). Из из-
вестных устройств такого типа этим требованиям в полной
мере отвечает «векторный фильтр», предложенный в [53].
В § 5.2 дано описание такого устройства.
126 -
г
127
Чтобы избежать насыщение АД в области высоких зна-
чений перегрузок, при регулировании при 4^=const за-
данное значение намагничивающей составляющей при-
нимается меньше значения йяю.,1- Для реальных АД
0,2isHOM^a^'l«HOM^0,5lsHOM-
Регулятор скорости подключен к контуру регулирова-
ния активной составляющей тока через делительное уст-
ройство. Благодаря этому осуществляется автоматическая
перестройка коэффициента передачи канала при измене-
ниях
Ограничение момента АД обеспечивается ограничением
выхода регулятора скорости. Сигнал задания скорости
формируется задатчиком интенсивности.
Передаточная функция регулятора скорости
стройке на симметричный оптимум
™ 1 + pieryjKs /КтКп
l^ZpK^rK,
при на-
(3.45)
На рис. 3.9 показаны процессы в систем? при разгоне,
замедлении и реверсе.
Рис. 3.10. Функциональная схема САР скорости АД при управлении
138
3.4. Система регулирования скорости двигателя
при управлении с переменной структурой
На рис. 3.10 показана функциональная схема САР ско-
рости АД, реализующая управление по алгоритму; регули-
рование в установившихся режимах работы на поддержание
vKe=const, а в переходных режимах пуска-торможения—/'
на поддержание y¥r== eonst [7]. Перестройка струк-
туры задающего устройства САР осуществляется по сигна-
лу ЗИ (наличие сигнала на входе ПИ-части ЗИ) с по-
мощью блока регулируемой нелинейности БН1 (с регули-
руемым источником опорного напояжения БН2).
Работа задающего устройства в канале регулирования
Чгг описывается выражением 4r*i7.=const в переходных
режимах, 4f*ir= V*1П5 — №riswL’rJ — в установившихся ре-
жимах.
При этом, как видно из рис. 3.11, с помощью блоков
БН1 и БН2 в установившихся режимах в канале регули-
рования вводится добавочный сигнал ATr (пропорцио-
нальный заштрихованной площади на рис. 3.11). Чтобы
исключить работу на нелинейной части регулировочной ха-
рактеристики НПЧ (при принятом максимальном значе-
о переменной структурой
9—3169
129
Рис. 3.11. Характер изменения по-
токосцепления для двух случаев
регулирования: при 4s г =
= const (Ф8, Фг) и при Ф8 —
= const (ф'8, Ф'г)
нии его выходного напряже-
ния) , заданные значения
V‘ir вводятся в канал регу-
лирования через интеграль-
ный регулятор с большой
постоянной времени. Следу-
ет отметить, что .аналогично
может быть осуществлена
оптимизация АД в устано-
вившихся режимах по любо-
му другому критерию (а не
только Та—const). Если ра-
бота привода характеризу-
ется не только режимами
пуска-торможения, но и ударным характером нагрузки, то
перестройку структуры задающего устройства в канале Тг
следует осуществлять: при П-регуляторе скорости—по рас-
согласованию на входе И-регулятора составляющей i2S то-
ка статора; при ПИ-регуляторе скорости — по сигналу
ошибки по ускорению.
3.5. Частотно-токовая система регулирования скорости
При частотно-токовом управлении АД САР обеспечивает выпол-
нение параметрической зависимости между током статора и частотой
тока ротора. Конкретный вид ее определяется принятым законом ре-
гулирования. Для наиболее часто встречающегося случая регулирова-
ния с поддержанием Ф8 = const зависимость эта принимает вид (3.23).
Следует отметить, что реализация САР зависимости (3.23) обес-
печивает в диапазоне нагрузок 1Л> (0,64-0,8) Л1НОИ оптимальное ис-
пользование АД и высокие энергетические показатели НПЧ [43].
Общим недостатком частотно-токовых САР является косвенное
регулирование потока АД посредством их параметрической настройки:
в реальных условиях имеет место зависимость параметров АД от его
режима работы. Зависимость (3.23) можно переписать в виде
1+(£т ^--Г^е-со)3 .
4=--------- ------------------------(3.46)
l+-^r-(<oc-«o)s
Как следует из (3.46), с изменением параметров Lm, LTl, RT под-
держание САР заданной зависимости между /, и <ос—со не обеспечи-
вает работу с постоянным значением Ф5. Анализ показывает, что
основным параметром АД, влияющим на отклонение Ф от заданно-
го значения, является активное сопротивление ротора RT, которое
130
в зависимости от теплового состояния двигателя может меняться
в 1,5 раза. Изменениями параметра Lri можно пренебречь, так как
его значение определяется геометрическими размерами АД и состав-
ляет всего 5—7% Lm. Изменения с насыщением индуктивности конту-
ра намагничивания Lm могут быть учтены при построении зависи-
мости (3.46) методом, предложенным в [43, 68]. Сущность метода
заключается в линеаризации магнитной цепи АД посредством введе-
нии эквивалентного тока намагничивания.
Окружность на рис. 3.12 является геометрическим местом коцца
вектора тока намагничивания /^= ls-\-Jr при изменении скольжения
Рис. 3.12. Круговая диаграм-
ма тока' намагничивания АД
Рис. 3.13. Учет нелинейности
характеристики намагничива-
ния АД
(со«—со) как параметра и /S=const. Выражение для момента АД
может быть записано в виде
3 ~ ~
— g
(3.47)
С учетом рис. 3.12 оно может быть переписано в виде
3
М = — ZpLmIsr^ sin X, (3.48)
или
М = КмАС, (3.49)
так как при Is = const
3
2 si по-
следовательно, ординаты точек на круговой диаграмме определя-
ют в выбранном масштабе тока значения момента АД при изменении
<0с—со для фиксированного значения I,.
Вследствие насыщения магнитной цепи АД равенства (3.47) и
(3.48) нарушаются, и момент будет уменьшаться (см. штриховую кри-
вую на рис. 3.12).
9»
131
По кривой намагничивания (рис. 3.13) из условия постоянства пото-
ка находят эквивалеитиое значение тока намагничивания./'ц для
каждой точки круговой диаграммы:
Из круговой диаграммы легко определяется выражение для
<0о—со:
Rr -»Г 4—/^cosX
У /11cosA(Lm+^)-4Z.r/ <3-50>
Порядок графоаналитического расчета параметрической зависи-
мости /ж=/’(<ое—со) методом «моментных характеристик» [43] следу-
ющий.
1. Рассчитывают н строят кривую намагничивания АД
2. Для фиксированных значений тока /, строят круговые диаграм-
мы по уравнению
г ^г+7 («ос—«о) V
> /?г+/ (“С—“) (4n+M S
(3.51)
Уравнение (3.51) получено прн совместном решении (1.37) (для
Or—0) и (1.38).
3. Для произвольных точек круговой диаграммы находят ток и по
кривой ^a = F(/(i) определяют V(с учетом насыщения АД).
4. Откладывая значения 1'на векторе и, соединяя точки, полу-
чают кривую момента АД (кривая Л1).
5. Подставляя ординаты кривой М в (3.49), получают значения
момента АД для фиксированных значений I, и <ос—ю. Значения
«Ос—«о определяют из (3.50) по измеренному на круговой диаграмме
углу X.
6. Строят семейство характеристик M=F(<s>c—<о) для фиксиро-
ванных значений /,=const. На рис. 3.14 представлены «моментные
характеристики» АД типа BAO-630L-8 мощностью 700 кВт, рассчи-
танные для двух тепловых режимов АД: «холодного» (температура
обмотки ротора 15 °C) и «горячего» (температура обмотки ротора
115°С).
7. По моментным характеристикам строят параметрическую зави-
симость /,=Д(шс—со) для выполнения функционального преобразова-
теля САР.
Семейство моментных характеристик и соответственно зависимость
/,=F((i)c—со), реализуемая САР, могут быть рассчитаны для любого
закона управления двигателем (в частности, 4,,=const, 4',=const или
для регулирования по минимуму тока). При этом следует учесть, что
если рабочие точки на моментных характеристиках лежат слева от точ-
132
кн экстремума, то АД при нагрузках Af>O,5JMBew находится в зоне глу-
бокого насыщения,*
Обычно настройка функционального преобразователя, реализую-
щего зависимость I.=F (<ов—<•>), производится для «горячего» состоя-
ния АД. При этом при «холодном» состоянии АД будет иметь место
возрастание тока I,.
На рис. -3.15 показаны зависимости тока I, от момента на валу
АД для* двух тепловых режимов ротора (регулирование по закону
Ф8 = const); увеличение тока I, достигает 30%.
Рис. 3.14. Момеитиые характеристики АД
типа BAO-630L-8 для двух температур об-
моток ротора:
----- —+15 °C;---------— +115 “С
Рис. 3.15. Зависимость
ls от М при *FS =. const
для двух температур об-
моток ротора:
-------+15 ”С;---------
+ 115 °C
Рис. 3.16. Обобщенная функциональная схема частотио-токовой САР
скорости АД
133
На рис. 3.16 представлена обобщенная функциональная схема
частотно-токовой САР скорости АД. По измеренному скольжению
®с—с выхода регулятора скорости PC с помощью преобразовате-
ля БН реализуется заданное значение тока I,. Задающий генератор
G синусоидальных сигналов с регулируемой частотой и амплитудой
имеет два канала управления: по <ос и амплитуде тока К2 Is.
Трехфазная система синусоидальных сигналов задания токов поступа-
ет на входы регуляторов фазных токов РТФ.
Реализация такой САР предполагает высокую точность измерения
скольжения и высокий коэффициент усиления в контуре регулирования
тока, обеспечивающий работу НПЧ в режиме, близком к источнику
тока.
Экспериментальные и теоретические исследования показывают,
что в системах регулирования, разомкнутых по каналу частоты, в
рабочем диапазоне изменений напряжения и частоты возникают устой-
чивые колебания скорости . [65]. Неустойчивая работа проявляется,
главным образом, в режиме холостого хода и малых нагрузок, и зона
ее увеличивается с ростом внутреннего сопротивления НПЧ.
При выборе в качестве управляющего параметра частоты тока
ротора достигается наиболее простой и эффективный способ стабили-
зации скорости во всем диапазоне рабочих режимов: <ос в каждый
момент времени определяется как
Шс=ь)±(сос—<о). (3.52)
При заданном ограничении (сое—<о)кр и поддержании Ф8 = const
такой способ формирования сос обеспечивает работу АД на линейной
части механических характеристик как в установившихся, так и в пе-
реходных режимах пуска и торможения, при ограничении момента
и тока.
В САР по рнс. 3.16 жесткость линейной части характеристик опре-
деляется жесткостью характеристик самого АД.
На рис. 3.17 представлена частотно-токовая САР скорости АД,
разработанная ВНИИВЭ и ВНИИЭлеКтропривод [2, 8, 43]. Система
выполнена с подчиненным регулированием: контуры регулирования
фазных токов подчинены контур/ регулирования скорости. Контроль
скорости ротора осуществляется Импульсным датчиком BF. С выхода
BF поступают две последовательности прямоугольных импульсов со
сдвигом в я/2, частота следования которых пропорциональна скорости
ротора. Импульсы с выхода BF поступают в устройство учетверите-
ля-формирователя УФ, в котором они формируются по длительности,
а также умножаются на 1, 2 и 4 (для согласования BF с различным
числом пар полюсов АД). Последнее обеспечивает прн двух типоис-
полнениях дисков BF (96 и 144 импульса на оборот) управление АД
- с числом пар полюсов Zp=l, 2, 3, 4, 6. С выхода УФ поступает так-
же сигнал sign fm направления вращения ротора.
134
Рис- 3,17. Функциональная схема частотно-токовой САР скорости АД
135
На входе регулятора скорости PC заданное и действительное
значения скорости сравниваются в аналоговой форме; действительное
значение <о вводится на вход PC посредством преобразователя часто-
та— напряжение ПЧН. Вывод PC определяет активную составляю-
щую тока , статора в системе отсчета, связанной с вектором 0,\
сигнал i*2, поступает на вход модулятора UB2. Намагничивающая
составляющая тока в выбранной системе отсчета i*u= =const
поступает на вход модулятора UB1. Выходные напряжения модуля-
торов UB1 н UB2 сдвинуты относительно друг друга на л/2, сигнал
на выходе фильтра-сумматора Ф равен:
l*s = arctg i*ls/i*ls.
Одновременно выход PC посредством преобразователя напряже-
ние-частота ПНЧ вводится в САР как заданное значение частоты
тока ротора ыс—со. Такой способ формирования параметрической
зависимости ток — частота скольжения улучшает динамические пока-
затели частотно-токовой САР: доворот вектора тока в переходных
режимах пуска и торможения обеспечивает форсированный характер
их протекания. Другой особенностью рассматриваемой САР в отли-
чие от САР рис. 3.16 является задание зависимости ток — частота
скольжения в виде сос—<o=f(/«). Необходимая жесткость механиче-
ских характеристик в такой САР обеспечивается только контуром
регулирования скорости: в разомкнутой по скорости САР механические
характеристики привода предельно мягкие (вертикальные). Контур
регулирования частоты скольжения <ос—ы выполнен разомкнутым
с использованием принципа регулирования по возмущению и воздей-
ствием на частоту НПЧ в соответствии с выражением (3.52).
Сложение скорости ротора и заданной частоты тока ротора осу-
ществляется в импульсной форме. В сумматоре Si происходит сложе-
ние <о и несущей частоты Им тактового генератора С; в сумматоре
S2 (ис—ив) и Им. Сигнал с выхода Si через делитель частоты DD1
поступает в пересчетную схему DD3, где преобразуется в трехфазную
систему'прямоугольных напряжений, управляющих работой коммута-
торов DA1—DA3. Сигналы разностной частоты с выходов коммутато-
ров сглаживаются выходными фильтрами Ф1—ФЗ.
Направление вращения ротора АД задается сигналом slgnfe.
который вводится в сумматор Si, определяя порядок чередования фаз
НПЧ. Режим работы АД определяется нуль-органом U/ на выходе
РС-, сигнал sign вводится в сумматор S2, определяя режим
его работы (суммирование или вычитание частот). Трехфазная систе-
ма синусоидальных сигналов Sa*, Sb*, Sc* с выхода фильтров
ф]—ФЗ вводится как заданные значения токов на входы -регулято-
ров фазных токов РТФА, РТФВ, РТФС. На входы регуляторов фаз-
ных напряжений подаются сигналы положительной обратной связи по
136
напряжению, компенсирующие (упрощенно), влияние ЭДС вращения.
Частотно-токовые САР благодаря практически синусоидальной форме
фазного тока АД обеспечивают диапазон регулирования скорости не
менее 100:1.
Глава четвертая
ЭЛЕКТРОПРИВОД ПО СХЕМЕ МАШИНА ДВОЙНОГО
ПИТАНИЯ
4.1. Общие замечания
Электропривод по схеме машина двойного питания
(МДП) состоит из АД с фазным ротором, НПЧ, выполняю-
щего функцию регулятора энергии скольжения, и САР.
Асинхронный двигатель выполняется с симметричной
трехфазной обмоткой на статоре, питающейся от сети пе-
ременного тока промышленной частоты, и трехфазной (или
двухфазной) обмоткой на роторе, питающейся от НПЧ.
Это единственный вид регулируемого тиристорного элек-
тропривода, который может работать без потребления из
сети реактивной мощности и даже в режиме ее компен-
сации.
Схема МДП наиболее перспективна для мощных нере-
версивных электроприводов со сравнительно небольшим
диапазоном регулирования благодаря следующим показа-
телям:
малому объему оборудования НПЧ, который пропор-
ционален глубине регулирования скорости;
возможности регулирования скорости вверх и вниз от
синхронной;
возможности регулирования реактивной 'мощности по
цепи статора, что придает МД 11 свойства СД;
высокому КПД, обусловленному однократным преобра-
зованием энергии скольжения.
Основные механизмы, для которых перспективно при-
менение МДП в качестве регулируемого электропривода:
вентиляторы главного проветривания, насосы для гидрав-
лического транспорта (горнодобывающая промышлен-
ность), турбокомпрессоры, насосы (в • химической, нефтя-
ной, газовой и горнодобывающей промышленности), домен-
ные воздуходувки, главные приводы непрерывных черновых
групп современных широкополосных прокатных станов,
некоторых трубопрокатных станов (в металлургической
промышленности), питательные и циркуляционные насосы,
137
дымососы (в электроэнергетике), размольное оборудование
(в электроэнергетике и цементной промышленности).
Исследования и разработка МДП на современной осно-
ве с использованием достижений теории и практики элек-
трических машин и автоматического регулирования были
начаты в 1955 г. во ВНИИЭ под руководством М. М. Бот-
винника и Ю. Г. Шакаряна. Теория МДП к настоящему
времени разработана достаточно полно [15, 48].
Выбор системы отсчета для синтеза САР МДП в зна-
чительной степени определяется характером нагрузки и,
следовательно, требованиями к динамическим характери-
стикам электропривода. Система регулирования МДП
должна быть синтезирована таким образом, чтобы она
обеспечивала в установившихся режимах поддержание ско-"
роста со и реактивной мощности Qs на уровне заданий не-
зависимо от момента нагрузки на валу двигателя. В дина-
мических режимах САР должна обеспечивать быстрый
выход на уровень заданий как при возмущениях со сторо-
ны нагрузки на валу или питающей сети, так и со стороны
задания. При этом переходные процессы должны иметь
характер, близкий к оптимальному. Эти требования в пол-
ной мере удается выполнить лишь в том случае, если при
синтезе САР максимально учтены динамические свойства
объекта регулирования (АД). Анализ структурных пред-
ставлений АД (см. § 1.1.2) показывает, что для регулируе-
мого электропривода по схеме МДП могут быть рекомен-
дованы две системы отсчета: связанная с вектором напря-
жения питающей сети (Js и с вектором потокосцепления
статора
• Полный учет динамических свойств АД при синтезе
САР МДП в системе отсчета Os затруднителен, что обус-
ловлено характером перекрестных и внутренних обратных
связей объекта регулирования. Поэтому синтез САР МДП
в системе отсчета 03 проводится, исходя из приближенной
структурной схемы АД [10, 21]. Это усугубляется непол-
ной управляемостью МДП: во всех установившихся и пере-
ходных режимах работы потокосцепление статора опреде-
ляется в основном напряжением питающей сети, что ис-
ключает возможность активного воздействия на его
формирование с помощью регуляторов. В совокупности это
приводит к влиянию на процессы регулирования скорости
и реактивной мощности колебаний напряжения питающей
сети, а также к взаимному влиянию этих процессов.
Несмотря на отмеченные недостатки, электропривод по
схеме МДП с САР в системе отсчета О, нашел преимуще-
138
ственное распространение [10, 38, 56], особенно для меха-
низмов со спокойным характером нагрузки из-за относи-
тельной простоты ее реализации.
Динамические свойства АД как объекта регулирования
в системе МДП могут быть максимально учтены в САР,
синтезированной в системе отсчета [1, 36]. Такая САР
обеспечивает инвариантность скорости к колебаниям на-
пряжения питающей сети.
4.2. Рациональные законы связанного управления
асинхронным двигателем
Рис. 4.1. Векторная диаграмма
АД в режиме МДП (двигатель-
ный режим, cos<pH=l,0)
В МДП управление источником питания фаз ротора
(НПЧ) осуществляется таким образом, что при скольже-
нии ротора магнитный поток, создаваемый обмотками ро-
тора, вращается с синхрон-
ной скоростью. В частности,
в установившихся режимах
работы на обмотку- ротора
подается симметричная трех-
фазная система напряжений,
частота которой равна час-
тоте скольжения. Изменяя
заданным образом модуль,
фазу (относительно некото-
рого опорного вектора) и
частоту напряжения ротора,
можно в МДП изменять
электромагнитный момент
(скорость) и реактивную
мощность.
В соответствии с диа-
граммой рис. 4.1 можно за-
писать:
рР=рф—ра, (4.1)
где рф=сос; ра=со.
Из соотношения следует, что рР>0 при со<<ос, т. е.
ротор двигателя имеет скорость ниже синхронной, и рР<0
при (о>шс, т. е. ротор двигателя имеет скорость выше
синхронной.
По аналогии с САР скорости АД для управляющих воз-
действий можно записать уравнения преобразования и»
системы отсчета, связанной с ротором (d, q), в систему
13»
отсчета, связанную с вектором потокосцепления статора
(оси 1, 2):
«.r = «<frcos(<|»-a)4-ursin(<|» —a); J
«*г=—udr sin (ф — а)+ uqr cos (ф — a). J
В задающем устройстве схемы САР соответственно
должны быть включены нелинейности, компенсирующие
нелинейные зависимости объекта регулирования в выбран-
ной системе отсчета, характеризуемые (4.2). С учетом
того, чтб САР должна обеспечить в установившихся ре-
жимах равенство заданных и фактических значений пере-
менных, т. е. «ir=2*ir! u2r=Z*2r; Vi«»W*i,; udT=^*dr;
uqr=^*qr, нелинейные зависимости в задающем устройстве
имеют вид:
2*а- = 2*ir cos (ф - a) - S*lr sin (ф — а); |
2%г = 2*.г sin (ф - а) + SV cos (ф - a), j
Из (4.2) и (4.3) следует, что условием реализации
управления МДП в системе отсчета, связанной с вектором
Vs, является введение в САР информации об угловых по-
ложениях ротора и вектора Vs. Информация об угловом
положении ротора вводится посредством датчика положе-
ния ВС, аналогичного ВС в САР скорости СД. Информа-
ция об угловом положении вектора Vs может быть получе-
на таким же способом, как и для САР скорости АД.
Систему регулирования скорости МДП в системе от-
счета, связанной с вектором Vs, целесообразно синтези-
ровать из условий максимального использования габарит-
ной мощности приводного двигателя. Это приводит к вы-
полнению зависимостей
Qs = 4 =°; а ± *)(4Л)
где 6=0,05-8-0,1. ° °
Запишем выражения для токов статора из (1.38):
Из (4.4) следует, что условие компенсации реактивной
мощности в статоре имеет вид: i
I Re(V%t7s)=0; йв=0. I (4.6)
140 I
(4-5)
Из (1.65) для составляющей потокосцепления статора
Yu и (4.5) для составляющей тода статора ils следует, что
если компенсация возмущения u\s произведена, то второе
условие выполнено. С другой стороны, из выражения (1.37) I
для составляющей напряжения статора и1в следует, что для I
установившихся режимов работы (pYis=0), щй=0 (так
как iis=0 и Y2s = 0), т. е. выполняется условие (4.6). Ста-
тические зависимости МДП находятся с учетом того, что
САР обеспечивает в установившихся режимах равенство
фактических и заданных значений переменных. Кроме
того, предполагается постоянство напряжения питающей
сети t/e=const. Составляющие тока статора можно найти
из (4.5), (4.6) с учетом выражения для электромагнитного
момента из (1.66):
/ц=0; Ia=l2s, ht=2M/3Zp^ia. (4.7)
Составляющие тока ротора из (4.5) с учетом (4.6):
I 7ir=Yi,/Lm; (4.8)
/2r=_2M/3ZpYisKe. (4.9)
Составляющие напряжения родора из уравнений систе- _
мы (1.64) при р=0 и с учетом компенсации в САР возму-'
щающих воздействий питающей сети, а также выражений
(4.8) и (4.9) имеют вид:
Utr= R" + к L'r ~ : (4-Ю)
^p^is^s 7 8
П JPls(e>c^e>)£7 2 MR" .41]
ir~ Lm ~3
Напряжение ротора из (4.10) и (4.11) в предположе-
нии 7?s=0
7/_пг ~ , 2 Л! (юс—и) £7 V
иг~ |£т+з Zp4*lsKs
• ^ , | (<°c—<Д) 2 MRr 1*. /412)
|_ 3 j
Составляющие потокосцепления от потока в воздушном
зазоре:
Yie=Yls-ZleLSJ; . (4.13)
Y2e=Y2e-/21LiI. (4.14)
141
С учетом (4.6), (4.7) и Ч'ав—О запишем зависимости
для значений Ч'м; Ч^в и Чга:
<4Л5>
1 + (4^)’-’ (4.16)
Реактивная и активная составляющие мощности ро-
тора:
J Сг=4({/ггдг-С7,Лг); - .(4.17)
Рг = 4 + "М . (4.18)
С учетом (4.8) — (4.11) в предположении ^=0 запи-
щим зависимости для Qr и Рг:
Q __JL(0) _С.Л 4f2lsL,r 2 M2{a>c—v>)L'T .
Qr— 2 ( с ) L!m + з Z2pV\sK2s ’ (4 I9)
p 3 Ф21Я/?г I 2 M2Rr I Af (co—<oc) /Д Ofn
r— 2 L2m т з г2рШ>1^’г Zp ’
Активная мощность статора
P^Moc/Zp. (4.21)
С учетом (4.8) и (4.9) выражение для полной активной
мощности, потребляемой МДП из сети:
f^^)-+(^)-J. (4.22)
Статические характеристики двигателя типа АКС-14-59-6
в режиме двойного питания приведен^ на рис. 4.2,а—в.
Анализ статических характеристик позволяет сделать
следующие выводы.
1. Токи статора и ротора по оси 2 определяются только
моментом на валу.
2. Напряжение на роторе зависит как от нагрузки на
валу, так и от скорости.
3. Реактивная мощность ротора (и, следовательно, ре-
активная мощность, потребляемая из питающей сети) за-
висит от нагрузки на валу и скорости.
4. Активная мощность ротора зависит от нагрузки на
валу и скорости. . • ’. -
5. Активная мощность статора зависит только от на-
грузки на валу. •./* ’ -
№
Рис. 4.2. Статические характеристики АД в режиме МДП (при соз<рв=1):
t/2r. Ur-F(M) при <о-0.7; 1; J.3 отн. ед.; б-I,, iiT, 13т, V25, <Рг -F(M); в-Р, .
Qr-F1M)
143
4.3. Регулирование момента
На рис. 4.3 приведена структурная схема САР, регу-
ляторы которой синтезированы в системе отсчета, связан-
ной с вектором V,. В этой системе отсчета объект регули-
рования (см. рис. 1.5) состоит из двух взаимозависимых
контуров, зависимость которых определяется четырьмя вну-
тренними обратными связями. Из них две перекрестные
нелинейные обратные связи зависят от частоты скольже-
ния и одна перекрестная нелинейная обратная связь — от
скорости. Кроме того, объект находится под воздействием
возмущающих сигналов Uis и которые в переходных
режимах, вызванных изменением нагрузки или регулиро-
ванием в роторе, даже при постоянстве сетевого напряже-
ния статора являются переменными величинами (т. е. при
постоянстве модуля напряжения сети изменяются его со-
ставляющие по осям 1, 2).
Возмущающие сигналы iha и и2а влияют не только на
формирование токов ротора, но и на потокосцепление ста-
тора и частоту скольжения. Чтобы достигнуть полной
управляемости МДП по регулирующим воздействиям щт
и и2г и упростить условия формирования заданной диа-
граммы электромагнитного момента, необходимо компенси-
ровать возмущающие воздействия ,uia и и2а и развязать
основные каналы управления путем компенсации внутрен-
них обратных связей объекта в регулирующей части САР.
Проделав эти операции и компенсировав в задающем
устройстве САР нелинейные зависимости между регули-
руемыми переменными в выбранной системе отсчета,
получаем объект регулирования в виде совокупности линей-
ных подобъектов, причем важнейшие переменные, опреде-
ляющие динамику МДП, — полное потокосцепление статора
Vs и активный ток ротора 12т— регулируются раздель-
но. Так как в нормальных режимах работы системы элек-
| троснабжения возможны колебания напряжения (0,05—
। 0,10)Lzs„om, то стабилизация потокосцепления Vis нецелесо-
образна. Система регулирования должна содержать узел
{задания потокосцепления статора в зависимости от напря-
жения питающей сети.
Система имеет два канала регулирования:
канал регулирования потокосцепления статора, в кото-
ром контур регулирования реактивной составляющей тока
ротора iir подчинен контуру регулирования потокосцепле-
ния Vis;
144
Рис. 4.3, Структурная схема регулирующей части САР скорости МДП
канал регулирования момента, в котором контур регу-
лирования активной составляющей тока ротора i2r подчи-
нен контуру регулирования скорости <о.
Для развязки каналов регулирования и компенсации
возмущающих воздействий питающей сети в схему вводят-
ся компенсирующие связи.
Устройство задания в канале регулирования потоко-
сцепления 4Fis выполняется в соответствии с условиями
(4.4) и (4.6). Уставка W*i8 задается в зависимости от на-
пряжения питающей сети в соответствии с приближенным
выражением I
Т*18=^| (78|/шс. (4.23)
Выражение (4.23) получено из первого уравнения си-
стемы (1.37) в предположении, что Rs=0, £Л8=0,
^ияа. ' - ------——
Погрешность задания 4f*is корректируется посредством
И-регулятора реактивной составляющей тока статора Л8,
имеющего большую постоянную времени интегрирования и
уставку i*18=0.
Таким образом обеспечивается работа канала регули-
рования Ти при ступенчатых колебаниях и длительных
посадках напряжения питающей сети.
• Из двух автономных подсистем одна выполняется (в ка-
нале 1) как система стабилизации (с коррекцией задаю-
щего воздействия), а вторая (в канале 2) — как программ-
ная. Определим передаточные функции регуляторов.
По аналогии с САР скорости АД три действительных
контура регулирования фазных токов ротора с пропор-
циональными регуляторами РТФа, РТФв и РТФс заме-
няются на структурной схеме двумя эквивалентными фик-
тивными контурами в системе отсчета /,2 с регуляторами
РТФ1 и РТФ2.
Коэффициент передачи регуляторов фазного тока
Кр,Ф=Т"Л"/2ГмКт,пКт,ф. (4.24)
Передаточная функция разомкнутого внутреннего кон-
тура
W ж=____________—--------- /4 25)
т- * 27-^ (1+р^,) (1+/>?’",) • 1 ;
-
Статическая ошибка замкнутых внутренних контуров
компенсируется внешними токовыми контурами.
При оптимизации контуров регулирования токов hr и
i2r передаточная функция внутреннего замкнутого контура
146
(4.26)
(4.28)
приближенно заменяется звеном первого порядка:
vw Кг______1
кт,ф •
где K3=n/(r/I+2Tlli); К4= (Т'^+Тщ)/ (T'WT^). (4.27)
Передаточная функция И-регуляторов составляющих
токов ротора в системе отсчета, связанной с вектором Ч^,
П7 — ^т’ф
4Т^К^Кгр'
Передаточная функция ПИ-регулятора потокосцепле-
ния статора
W —________________
р-п -W^LmKtKnP/KT
Компенсирующие связи вводятся на выходах И-регуля-
торов составляющих токов ротора. При этом перекрестные
связи, вносимые НПЧ, так же как и в случае САР скоро-
сти АД, не компенсируются (их действие в рабочем диа-
пазоне выходных частот НПЧ проявляется слабо). Выра-
жения для компенсирующих обратных связей
о. с (iir) = ^v.1 К ~ ш) ^т, ф'1п
^о,с(М= 2Л.К-") Q
С (<1в) — TaL'r *»»’
ш,- _ ф°>т
W к, о, с (Е) Р'г * 1S-
Выражения для сигналов, компенсирующих
тания сети:
1+pZa
(4.29)
имеют вид:
(4.30)
(4-31)
(4.32)
(4.33)
влияние пи-
w W,t(W) |. .
L KaL'r KKL.nT"i[\+pT*) Jls’ 1 '
r«.B(u (4.35)
где — коэффициент передачи датчика напряжения сети.
Отметим следующие особенности формирования ком-
пенсирующих обратных связей:
компенсирующий сигнал (4.31) формируется по выход-
ному сигналу И-регулятора составляющей тока РТ2 (как
и в случае САР скорости АД), а компенсирующий сигнал
(4.30) — по действительному значению составляющей iir
10* И7
тока ротора; последнее объясняется структурой канала
формирования потокосцепления статора АД в системе от-
счета, связанной с Vs (наличие двух параллельных цепей
по каналу 1 на рис, 1.5);
точное выражение для компенсирующего сигнала (4.34)
содержит упреждающую составляющую от t/is, для сглажит
вания которой в канале формирования компенсирующего
сигнала вводится фильтр с постоянной времени Тф; ис-
следования подтвердили допустимость пренебрежения
компенсацией возмущающего воздействия (рис. 4.4);
Рис. 4.5. Осциллограммы переход-
ных процессов в САР скорости
МДП с двигателем типа АКС-14-
59-6. Наброс, сброс нагрузки Мс =
=2 отн. ед.:
а — <о—<ос. ВПОС по ЭДС скольжения
не скомпенсированы; б — со—<ос,
ВПОС по Чг1, не скомпенсированы;
в —со—1,3шс. ВПОС по IFj, не ском-
пенсированы
Yte-tz? Л^1%
Мс~2,0— M=s,0
‘if дн*-зв%
iir-lfi ^=^5%
п*=о № £ . /At2r.=fay,
г 0J18&.
и* в»
Рис. 4.4. Осциллограммы переход-
ных процессов в САР скорости
МДП с двигателем типа
АКС-14-59-6 при компенсации
ВПОС. Наброс, сброс нагрузки
Мс=2 отн. ед.:
а — <0-0,70.; б — <о=<о.; в —
<о-1,3юс
148
если Тв велико, то компенсирующий сигнал (4.32) мож-
но не вводить, так как динамическое воздействие соответ-
ствующей связи объекта проявляется слабо, что подтверж-
дено исследованиями математической модели САР
(рис. 4.5).
Рис. 4.6. Осциллограммы переходных процессов САР скорости МДП
с двигателем типа АКС-14-59-6 при отсутствии компенсации ВПОС по
ЭДС скольжения:
«— разгон от «ос до 1,3шс; б — торможеипе от шс до О.7о>с; в -г разгон от
о»о до 1,3<ос, ВПОС по Vj, не скомпенсированы
149
150
Главными перекрестными связями АД в системе от-
счета, связанной с вектором Ч^, подлежащими обязатель-
ной компенсации в регулирующей части САР, являются
«Ти, (й)с—(oJL'rhr и (<0с—(n)L'ri2r- Без компенсации их,
а также компенсации возмущающих воздействия питающей
сети система работает неустойчиво: осциллограммы на
рис. 4.6 характеризуют переходные процессы в САР при
отключенных связях, компенсирующих ЭДС скольжения:
(Ос (о) Z* -tir И ((0с—‘(о) А г^2г«
При подключении компенсирующих обратных связей по
(o4fis; (йс—(o)£'riir; ((ос—(o)L'rt2r и воздействию питающей
сети характер изменения активной составляющей тока ро-
тора i2r, момента М, скорости (о приближается к нормиро- |
ванным (рис. 4.4). Некоторое нарушение пропорциональ-
ности между i2r и М объясняется возмущающим воздейст-
вием питающей сети.
Осциллограммы на рис. 4.7 характеризуют переходные i
процессы в САР при скачкообразных’ колебаниях напряже- 1
ния питающей сети. Основным признаком этих переходных
процессов являются высокочастотные колебания потоко-
сцепления, момента и токов, частота которых близка к ча-
стоте сети, а амплитуда линейно зависит от скачка. Коле-
бания скорости отсутствуют.
Появление высокочастотных колебаний обусловлено
возникновением в фазах статора постоянных составляю-
щих потокосцеплений. Последние порождают во вращаю-
щихся системах отсчета знакопеременные составляющие
переменных, частота которых близка к скорости координат-
ной системы [21]. Скорость затухания колебаний почти не
зависит от режима работы МДП и быстродействия CAP, I
__а_определяется в основном параметрами АД.
Сравнительный анализ осциллограмм на рис. 4.7 позво-
ляет произвести оценку работы интегрального регулятора
реактивной составляющей тока статора i\s по поддержанию
заданного значения коэффициента мощности в конце пере-
ходного процесса, вызванного скачкообразным изменением
напряжения питающей сети (или уровня напряжения).
Рост реактивной составляющей тока ротора iir при от-
сутствии И-регулятора тока iis на осциллограммах рис. 4.7
Рис. 4.7. Осциллограммы переходных процессов в САР скорости МДП
с двигателем типа АКС-14-59-6 при скачкообразных колебаниях на-
пряжения питающей сети для <o=O,7fi>c; «с; 1,3<ос:
а — Мс—0, ЧТ*], корректируется; б— Мс = 1 оти. ед.. ЧГ*1Ж корректируется; а—
Мс>-1 оти. ед.. ие корректируется
151
обусловлен неточным заданием уровня потокосцепления
статора при колебаниях напряжения сети (пренебрежение
активной составляющей падения напряжения в статоре),
которое и должно корректироваться этим регулятором.
Запишем уравнения, характеризующие процессы в ре-
гулирующей части САР:
T"tR" ,у* , у
1Г~ 2тц1 (1 + рТ^) Кт, ф Лт-
Utr= 27-и£(1+/ги,^т,ф ~ ^т. ф* Ji
V* •" I "от ( \ I Ш Ф |
2 = +1 2Т. (со — <о) -+- ч?Ijs —=г-7т---4-
ir * ir 1 2Г ' с 71 TsL'r ।
, Г 2ruiKsKT. ф 2Ги,Г8Кт. ф (1 +рТ"й I
Ь'г LmT”t (1 + рТф) J’
Т* •" К -от t \ I пт 27" y.iZfjKsKr, ф<й^ 1
2 г= 1гг - ф^рт*. К - со) + ф18 -JT---------------1-
I 27'^^Кт>ф
+“«—^77;-------•
Рис. 4.8. Функциональная схема САР скорости МДП при регулирова
152 . -
____ Кт. ф , If ‘
l»r~ 4Т^КгК^КгР аг “ Ат‘*"’
__J+pZ»__________/;* __; \ 1 __
бТ^ЬМяР/Кт [“с < IS pr,
?v= M*IKaWia.
V.,];
Как и в случае САР скорости АД, быстродействие вну-
тренних контуров может быть повышено в 2 раза; эквива-
лентные преобразования и окончательный вид структурной
схемы приведены на рис. 3.7.
4.4. Система регулирования скорости двигателя
На рис. 4.8 представлена функциональная схема САР
скорости МДП; силовая часть системы, регуляторы фаз-
ных токов, датчики переменных, координатные преобразо-
ватели для связи частей САР, синтезируемых в разных
системах отсчета (статора и вращающейся), показаны в
фазных координатах.
Сигналы S*ir и S*2r, поступающие на входы исполни-
тельной схемы, являются выходными сигналами регули-
рующей части САР, синтезируемой в системе отсчета, свя-
занной с 'Ps. Сигналы S*ir и S*2r преобразуются в задаю-
вии с 4f*=Y,
153
щие сигналы S*a, S*& и S*c на входе регуляторов фазных
токов с помощью координатных преобразователей ПКК
ПК2 и сигналов датчиков положения и магнитного потока.
В ПК1 осуществляются нелинейные преобразования в
соответствии с (4.3).
Линейные преобразования в ПК2 (d, q^a, b, с):
£* v* • V* 1 V* L
а — Д *’ * b—----7>~ 2jdr'
1 КГ
I ' ° V* V* ___ V* ' ° V*
с— 27 21 dr------—
В ПКЗ преобразуются действительные значения пото-
косцепления от потока воздушного зазора, измеренные с
помощью датчиков Холла, размещенных на статоре:
I 2
иг _.тот • ш _________тог I__—ХР
ab АЬ' рЬ АЬ^ у— ВЪ'
В
в
в
В ПК.4—ПК6 сигналы датчиков' токов, размещенных
фазах обмотки ротора АД, перерабатываются сначала
систему отсчета, связанную с ротором (d, q), а потом —
систему отсчета, связанную с вектором (/, 2):
в ПК4 (a, b, c-+d, q)
I dr I a'
1
2 .
== гб!
в ПК5 (d, q->a, P) »
iar=i<jr cos a—iqr sin a; ipr=tdr sin a+iQr>cos a;
в ПК6 (a, p->l,.2) ’
iir=iarcosT+tprsinY; i2/-=iprcos4r—iaf-sin4r. ~
В ПК7 и ПК8 сигналы датчиков напряжения питающей
сети перерабатываются в систему отсчета, связанную с век-
тором Ф8(/, 2):
в ПК7 (А, В, С—^а, р)
1 2
Uas = UA’ Mgs — К~ + К“ “В’
в ПК8 (и, р—*-/, 2)
UiB=uaB cosTp+u₽s sin ф; «2в—“₽« cos ф—uas sin ф.
Вычисление переменных, вводимых в САР, производит-
ся в соответствии с равенствами:
в РУ1 (вычисление составляющих потокосцепления ста-
тора)
154-
в РУ2 (вычисление модуля и угла вектора потокосцеп-
ления статора)
1^1 = ^ = ms + ^; sin ф = ’Fgs/’F1S; cos ф = Tes/4T1S;
в РУЗ (вычисление угла р=ф—а)
sin (ф—а) —sin ф cos а—cos ф sin а;
cos (ф—-a) ==cos ф cos а-f-gjn ф sin а;
в РУ4 (вычисление скорости «р=<йс—со)
«» — ® = _ z
. С w m P
Рис. 4.9. Осциллограммы переходных процессов в САР скорости МДП
с двигателем типа АКС-.14-59-6 при компенсации ВПОС. Разгон
(0,7ыс—1.3сос), торможение (1,3<о0—0,7шс):
а — идеальная компенсация ВПОС, ПИ-регулятор скорости; б — реальная ком-
пенсация ВПОС. ПИ-регулятор скорости; в — реальная компенсация ВПОС, П-
регулятор скорости
155
в РУ5 (вычисление реактивной составляющей тока ста-
тора Йе)
Вычисление вектора может быть произведено и без
датчиков Холла, с помощью датчиков фазных токов стато-
ра и ротора:
Чаа=Ьm(ias +1' ar) L8iiaa‘9
'Jf₽s=£m(ips+i₽r) 4-bs/ips.
Недостатком такого способа является погрешность вы-
числения, обусловленная зависимостью от степени на-
сыщения магнитной цепи двигателя^
В канале регулирования скорости выход PC' подклю-
чен к контуру регулирования i^r через делительное устрой-
ство Д1. Благодаря этому осуществляется перестройка ко-
эффициента передачи канала при изменениях Ограни-
чение момента МДП обеспечивается ограничением выхода
регулятора скорости. Сигнал задания скорости формирует-
ся задатчиком интенсивности.
Передаточная функция регулятора скорости при на-
стройке на симметричный оптимум
™ I-!-
₽-с — •
На рис. 4.9 показаны процессы в системе при разгоне
для диапазона 0,7<ас—1,3<вс и замедлении для диапазона
1,3<вс—0,7гос.
4.5. Система регулирования реактивной мощности
и скорости
Автоматическое регулирование реактивной мощности
цепи статора МДП в целях поддержания ее на экономиче-
ски целесообразном уровне и одновременное регулирование
скорости наиболее просто реализуются в САР, синтезиро-
ванной в системе отсчета, связанной с вектором 0в. Как
видно из рис. 1.6, объект регулирования в этой системе от-
счета характеризуется внутренними перекрестными связя-
ми по ЭДС скольжения (в обмотках ротора) и ЭДС вра-
щения (в обмотках статора) и внутренними обратными
связями между статором и ротором по каждой оси коорди-
натной системы, которые оказывают обратное влияние иа
регулирующие воздействия САР по этим осям. Кроме того,
электромагнитный момент М и реактивная мощность Qt,
являющиеся выходными величинами САР, имеют сложное
выражение. Поэтому полный учет динамических свойств
АД сильно усложняет синтез САР.
156
В основе всех разрабо-
танных САР МДП [10, 38,
56], синтез которых приве-
ден в системе отсчета 03,
дежат допущения: сопро-
тивление цепи статора Rs—
=0; питание статора АД
осуществляется от сети не-
ограниченной мощности. Эти
допущения идентичны пре-
небрежению влияния про-
цессов в МДП на потоко-
сцепление статора V,.
На рис. 4.10 показана
0
Рис. 4.10. Векторная диаграмма
АД в режиме МДП при работе
с СОЗ<₽в<1
векторная диаграмма асин-
хронного двигателя в режиме МДП при работе с cos<p<l.
Согласно диаграмме можно записать:
РТ=®с; =
(4.37)
Уравнения преобразования управляющих воздействий
из системы отсчета, связанной с ротором (d, q), в систему
отсчета, связанную с вектором £7в(1, 2):
uir = Udr cos (у - а) + sin (y - а);
игг = — udr sin (у — а) + u^r cos (y — a).
(4.38)
Преобразования в задающем устройстве, компенсирую-
щие нелинейные зависимости АД в системе отсчета, свя-
занной с вектором Os, и характеризуемые (4.38), имеют
вид:
S*dr = S*ircos(Y-a)-2*Irsin(Y-a); 1 (4 39)
2> = S*irsin(Y-a) + SVcos(Y-a). J
Из (4.38) и (4.39) следует, что условием реализации
управления МДП в системе отсчета, связанной с вектором
Os, является введение в САР информации об угловых по-
ложениях ротора и вектора Ot. Структурная схема САР
МДП показана на_рис._4.11.
САР имеет два канала регулирования: канал регулиро-
вания момента, в котором контур регулирования активной
составляющей тока ротора подчинен контуру регулирова-
ния скорости; канал регулирования реактивной мощности.
157
to'
Us
fls
siny
1-2г
Siny
«.Г
Г*
'\ЛК1 р^ГП/М?
- slnfy-«) • cosfy-fij
since
ПК1
РУ2
РУ1
-1 COS 06
cosy
-| Jks --
r ПКЗ
—
cosy
ifr
У»
иВ
_____t sin ос
ПК5
cos и
yy. (?r| 1 4r i-ir
W pyj.
to„
ПКЧ
с.
РК6
Рис. 4.11. Функциональная схема CAP скорости МДП при регулиро-
Для развязки каналов регулирования в САР вводятся
сигналы, компенсирующие перекрестные связи по ЭДС
скольжения.. Ограничение момента МДП обеспечивается
ограничением выхода р егулятора скорости. Сигнал задания
скорости формируется задатчиком интенсивности. Сигнал
задания реактивной мощности статорной цепи вводится
вручную, но также обеспечивается возможность автомати-
ческого ^правления реактивной мощности МДП. Назначе-
ние регуляторов фазных токов остается таким же, как и
в САР, рассмотренных ранее.
Следует отметить, что формирование управляющих воз-
действий в системе отсчета, связанной с вектором 08, мо-
жет быть осуществлено с помощью как регуляторов со-
ставляющих токов рогора, так и регуляторов составляю-
щих токов статора. На функциональной схеме САР МДП
в фазных координатах показаны силовая часть системы,
регуляторы фазных токов, датчики переменных и коорди-
натные преобразователи. Сигналы S*lr и 2*2г формируются
регулирующей частью САР во вращающейся системе от-
, счета. Эти сигналы преобразуются в задающие сигналы
1 S*a, и 2*с на входе регуляторов фазных токов с помо-
щью ПК.1, ПК2 и сигналов датчиков положения ротора и
напряжения питающей сети.
,158
вании реактивной мощности
В ПК.1 осуществляются нелинейные преобразования
в соответствии с (4.39); в ПК2— линейные преобразования
в соответствии с (2.49) (d, q—>a, b, с). В ПКЗ преобразу-
ются сигналы датчиков напряжения питающей сети:
1 । 2
и =и- и=- _ .—,и.-к— и.
as Д’ В5 3 Л 1 V 3 "
В ПК4, ПК.5 и ПК6 сигналы датчиков токов, размещен-
ных в фазах обмотки ротора АД, перерабатываются в си-
стему отсчета, связанную с ротором (d, q), а потом — в си-
стему отсчета, связанную с вектором t/e(l, 2):
в ПК.4 (а, Ь, с-—*d, q)
' • - . 1 । 2 . .
ldr—la' lqr—'l/'ij"10"!"' У~3~ lb'
в ПК5 (d, q—>a, 0)
iOJ==i*-cos a—iqr sin a; i&=idr sin a-^i9r cos a;
в ПК6 (a, ₽—*1, 2)
iiT—iar cos у+ipr sin y; i2r=i₽r cos y—iar sin у.
159
Вычисление переменных» вводимых в САР, производит-
ся в соответствии с равенствами:
в РУ1 (вычисление модуля и угла вектора напряжения)
PJ = «u = /«sas + «V
siny=ups/\0,|; cosу=иаа/\ 0,|;
в РУ2 (вычисление угла ₽=у—а)
sin (у—a) =sin у cos а—cos у sin а;
cos (у—a) =cos у cos a-j-sin у sin a;
в РУЗ (вычисление составляющих потокосцепления ро-
тора Yjr и Ч^)
Vlr=Ilr (Lm-^Lri—LZm/Lai) ; '
ЧГ2т==^2г ( Lm~l~J-rl—tl\aLmi
в РУ4 (вычисление частоты скольжения)
юр=<о*с—щ»;
в РУ5 (вычисление задания реактивной составляющей
тока)
• __ Us | Lsi-\-Lm 1
Ю»с£т-Г- Lm U'4r
Поскольку такая CAP синтезируется, исходя из прибли-
женной структурной схемы АД, имеет место расхождение
между реальными и заданными показателями системы [10,
21]. Во-первых, как уже отмечалось, имеет место взаимное
влияние процессов в каналах: при изменении задания ско-
рости и момента происходит изменение реактивной мощно-
сти и наоборот. В установившихся режимах работы элек-
тропривода реактивная мощность ротора и подводимое от
НПЧ напряжение зависят как от нагрузочного момента,
так и от заданий по реактивной мощности статора и ско:*
рости. Во-вторых, на работу электропривода влияют коле-
бания напряжения читающей сети._В установившихся ре-
жимах изменения напряжения питающей сети существен-
но влияют на активную составляющую тока статора t?„
а также составляющие тока i’lri i*2r и напряжения Ui„ и2г
ротора. Однако активные мощности цепей статора и рото- •
ра, момент и скорость не зависят от колебаний налряже-
1 ния. Ступенчатое изменение напряжения вызывает пере-
ходный процесс изменения скорости, момента и токов.
160
Глава пятая
УНИФИЦИРОВАННАЯ БЛОЧНАЯ СИСТЕМА
РЕГУЛЯТОРОВ УБСР-АИ
5.1. Номенклатура типовых средств управления и их
характеристики
Достижения современной отечественной микроэлектро-
ники, а также дальнейшее совершенствование управления
промышленными автоматизированными электроприводами
легли в основу создания унифицированной блочной систе-
мы регуляторов УБСР-АИ аналогового действия. В отли-
чие от систем УБСР, УБСР-А первого поколения, построен-
ных на дискретных компонентах, в устройствах УБСР-АИ
нашли широкое применение интегральные и гибридные ми-
кросхемы. Это позволило существенно уменьшить габари-
ты устройств, повысить их надежность и резко улучшить
электрические характеристики как отдельных устройств,
так и систем управления электроприводом в целом. Устрой-
ства УБСР-АИ рассчитаны на унифицированный выходной
сигнал ±10 В при токе до 5 мА. Питание осуществляется
от источников стабилизированного напряжения ±15 В.
Набор разработанных средств управления содержит
'устройства ввода задания, усилительные, регулирующие и
вычислительные устройства, функциональные преобразова-
тели, устройства памяти, датчики регулируемых парамет-
ров, потенциальные разделители, источники питания,
устройства коммутации, технологической логики, индика=
ции, защиты и вспомогательные устройства.
Классификация, номенклатура и основные технические
данные этих устройств приведены в табл. 5.1. По мере раз-
вития систем управления электроприводами номенклатура
устройств УБСР-АИ будет пополняться.
Для решения различных логических задач в устройст-
вах УБСР-АИ нашли широкое применение микросхемы се-
рии К5П с входными и выходными параметрами:
Входное напряжение логического нуля, В. . , . . . <6
Входное напряжение логической единицы, В . . ^8
Выходное напряжение логического нуля, В.....................
Выходное напряжение логической единицы, В .... .............^13,5
С помощью приведенных в табл. 5.1 типовых устройств
УБСР-АИ можно компоновать системы управления авто-
матизированным электроприводом различного назначения
и сложности.
11—3169 161
Таблица 5.V
Наименование и тип устройства Назначение Технические данные
Ячейка задатчика интенсивности Устройства ввода задания Задание ускорения Время отработки 0,5—120 с. Линейный
ЗИ-2АИ Ячейка ступенчатого задатчика ско- Дискретное задание скорости при закон изменения скорости Три ступени скорости с независимой
рости СЗ-6АИ совместной работе с командоаппаратом настройкой. Напряжение ступеней 0,01 —
Ячейка сельсинного задатчика ско- Плавное задание скорости при со- 10 В. Ограничение хода механизмов. По- тенциал разделяемых цепей 220 В Гальваническое разделение входныхце-
рости СЛЗ-ЗАИ вместиой работе с сельсинным коман- пей. Ограничение хода механизмов. Зона
Ячейка входа логических сигналов доаппаратом Потенциальное разделение и согла- нечувствительности ±2° Восемь независимых входных цепей. Во-
ВЛ-1АИ сование по уровню входных дискрет- семь прямых и инверсных выходов с об-
Ячейка ввода ВЛ-4АИ них сигналов То же щей точкой. Потенциал разделяемых це- пей 100 В Шесть независимых входных цепей.
Ячейка усилителей У12-АИ Усилительные устройства Операционные усилители многоце- Шесть выходов с общей точкой. Потен- циал разделяемых цепей 250 В. Входное напряжение 10—220 В Трн независимых усилителя типа
* левого назначения К553УД2 и один каскад усиления мощ-
Ячейка операционных усилителей Операционные усилители для сбор- ности на ток до 20 мА. Полоса пропус- кания 15 кГц Шесть частично связанных усилителей
У13-АИ ки контуров регулирования типа К553УД2 с ключевыми элементами
на полевых транзисторах. Полоса про- пускания 15 кГц
Ячейка УЛ-1АИ усилителя логического Усиление По МоЩНбстй и гальвани- ческое разделение логических сигна- лов Шесть независимых каналов усиления с общей точкой по входу и общей точкой по «уходу. Ток нагрузки одного канала до 0,2 А
Ячейка РС-1АИ регулятора скорости Регулирующие устройства Реализация контура регулирования скорости Обеспечение построения структур П и ПИ-регулятора. Постоянная времени 0,03—0,5 с, коэффициент передачи 0,5— 100, уставка ограничения тока 0,1—10 В
Ячейка регулятора тока РТ-1АИ Реализация контура регулирования тока Обеспечение построения структур П, ПИ-регуляторов. Постоянная времена 0,002—0,2 с. Коэффициент передачи 0,2—20. Уставка ограничения 1,5—10 В
Ячейка Z умножителя УМ-ЗАИ Вычислительные устройства Четырехквадрантиое перемножение аналоговых сигналов Коэффициент передачи 0,1. Приведен- ная погрешность 1,5 %. Полоса пропуск кания 15 кГц
Ячейка МД-2АИ множите л ьно-де лите льна я Четырехквадрантное перемножение аналоговых сигналов и одновременное деление на сигнал одного знака Коэффициент передачи 0,1—1,0. При- веденная погрешность умножения 1,5 ’/о, деления—2 %. Полоса пропускания 200 Гц
Ячейка МД-ЗАИ множительно-делительная ЧетырехквадрантноеЭ перемножение аналоговых сигналов или дрление на сигнал одного знака Коэффициент передачи умножения 0,1, деления—1,0. Приведенная погрешность умножения 1,5 ’/о, деления—2 ’/о. Поло- са пропускания 200 Гц
Продолжение табл. 5.1
Наименование и тип устройства Назначение • Технические данные
Ячейка квадратичного преобразова- теля ПК-2АИ Возведение в квадрат или извлече- ние квадратного корня из аналоговых величин Приведенная погрешность 2,5 ’/»
Ячейка функционального преобра- зователя ПФ-2АИ Функциональные преобразователи Воспроизведение нелинейных зави- симостей Наклон воспроизводимых кривых: мини- мальный 0,075; максимальный 13,2
Ячейка интегрозапоминающего уст- ройства ИЗУ-ЗАИ Ячейка памяти ПМ-2АИ Устройства памяти * Интегрирование по времени и дли- тельное запоминание аналоговой ин- формации Запоминание и оптическая индика- ция дискретных сигналов Приведенная погрешность запоминания 1 %, Постоянная времени 0,05—20 с. Задаийе начальных условий 0—10 В Десять каналов с общей точкой
Ячейка датчика напряжения ДН-2АИ Яче"ка датчика тока ДТ-ЗАИ Датчика регулируемых параметров Ввод в систему аналогового сигна- ла обратной связи по напряжению Ввод в систему аналогового сигна- ла обратной связи по току при со- вместной работе с шунтом Потенциал разделяемых цепей 1000 В. Коэффициент передачи 0,6—1,0. Приве- денная погрешность 1 »/о. Полоса про- пускания 1,3 кГц Потенциал разделяемых цепей 1000 В. Коэффициент передачи 53—133. Крат- ность измеряемых токов 1,0—2,5. При- веденная погрешность 1 %. Полоса про- пускания 2 кГц
Ячейка реверсивной приставки к та-
хогенератору РП-2АИ
Ввод в систему аналогового сигна-
ла обратной связи по скорости при
совместной работе с тахогенератором
переменного тока
Диапазон регулирования скорости
1:400. Приведенная погрешность 1’/«
Потенциальные разделители
Ячейка разделителя гальваническо- Гальваническая трансформаторная Потенциал разделяемых цепей 100 В,
го РГ-ЗАИ Ячейка гальванической развязки развязка входных и выходных анало- говых сигналов То же коэффициент передачи 0,65—2,5. Приве- денная погрешность 1 %. Полоса про- пускания 120 Гц. Наличие питания на входе Потенциал разделяемых цепей 250 В.
РГ-4АИ Ячейка гальванической развязки Гальваническая трансформаторна я Коэффициент передачи 1,0. Приведенная погрешность 1 %. Полоса пропускания 120 Гц. Питание не имеет связи с вхо- дом и выходом Потенциал разделяемых цепей 1000 В.
РГ-5АИ Ячейка- гальванической развязки развязка входных и выходных анало- говых сигналов. Датчик тока или на- пряжения Гальваническая оптронная развязка Коэффициент передачи 1 ,0 или 45—140. Приведенная погрешность 1,5 »/0. Поло- са пропускания 500 Гц. Наличие питания на выходе Потенциал разделяемых цепей 100 В.
РГ-6АИ СП СП входных и выходных аналоговых сиг- налов Коэффициент передачи 1,0. Приведен- ная погрешность 1,5 %. Полоса пропус- кания 0,7 кГц. Питание от отдельных источников на входе и выходе
Продолжсние табл. 5.1
Наименование и тип устройства Назначение Технические данные
Ячейка потенциального разделителя ПР-ЗАИ Гальваническая трансформаторная развязка входных и выходных анало- говых сигналов Потенциал разделяемых цепей 120 В. Коэффициент передачи 0,3—0,6 или 0,6—1,0. Приведенная погрешность 1 ’/о. Полоса пропускания 1,3 кГц. Наличие питания на выходе
Ячейка разделителя гальванического РГ-7АИ _ • Гальваническая трансформаторная развязка входных и выходных анало- говых сигналов, датчик тока или напряжения Источники питания Потенциал разделяемых цепей 1,5 кВ. Коэффициент передачи 50—150. Приве- денная погрешность 1 %. Полоса про- пускания 500 Гц. Наличие питания на выходе
Ячейка стабилизаторов напряжения СН-4АИ Питание аналоговых устройств УБСР-АИ стабилизированным напря- жением Выходное напряжение +15 В. Ток на- грузки 0,8 А по каждому каналу. Не- стабильность по напряжению и току
Ячейка стабилизаторов напряжения СН-5АИ Питание логических микросхем се- рии К511 стабилизированным напря- 0» 1 уО Выходное напряжение 2X15 В. Ток на- грузки 2X0,8 А. Нестабильность по на-
Ячейка генератора Г-2АИ жением Питание сельсинных командоаппара- тов напряжением прямоугольной фор- мы Устройства коммутации пряжению 0,3 %, по току 0,8 »/0 Частота 1000 Гц. Ток нагрузки 50 мА. Напряжение 24 В
Ячейка ключей К4-АИ Прецизионный коммутатор аналого- вых сигналов Два ключа. Коэффициент передачи 1,0. Напряжение срабатывания +(5—15) В .
Ячейка бесконтактных реле БР-2АИ Коммутатор аналоговых и дискрет- ных сигналов 12 ключей. Напряжение срабатывания 8-15 В
Ячейка управления реле УР-2АИ
Ячейка реле Р2-АИ
Ячейка ключей К6-АИ
Ячейка коммутационная ЯК-1АИ
Ячейка логического И-ИЛИ, ИИ-1АИ
Ячейка логического ИЛИ, ИИ-2АИ
Ячейка индикаторов напряжения
ИН-ЗАИ
Ячейка компараторов К5-АИ
Формирование сигналов управления
различными коммутационными аппара-
тами
Коммутатор аналоговых и дискрет-
ных сигналов
То же
Организация вариантов внутриблоч-
ных .соединений
Устройства технологической
логики
Построение схем комбинационной
логики
То же
Устройства индикации
Сравнение уровней одно- и двухпо-
лярных аналоговых сигналов
То же
Параметры логических микросхем серии
К511, семь отдельных узлов
Пять реле с герметизированными кон-
тактами. Напряжение катушек 12,6 В
Шесть реле РЭС55А с герметизирован-
ными контактами. Одна группа на пере-
ключение. Напряжение срабатывания 1 —
15 В
Количество коммутируемых цепей 40
Параметры логических микросхем се-
рии К5Н. Шесть отдельных узлов
Параметры логических микросхем се-
рии К511. 12 отдельных узлов, из кото-
рых пять имеют световую индикацию
Три двухполярных компаратора. Нап-
ряжение срабатывания 0,1—10 В
Три однополярных компаратора с вы-
ходом по напряжению и через контакты
реле. Напряжение срабатывания 0,05—
10 В
168
5.1.1. Устройства ввода задания
Ячейка задатчика интенсивности ЗИ-2АИ. Структурно схема ячей-
ки (рис. 5J) состоит из интегратора на усилителе DA2, сумматора на
усилителе DA1 в режиме ограничения и схемы регулируемого двух-
полярного ограничения иа усилителях DA3, DA4. Выходное напряже-
ние сумматора DA1 поступает на вход интегратора DA2 через резис-
тор R18. С достаточной для практических расчетов точностью выход-
ное напряжение интегратора описывается линейной зависимостью
Нвых2=—Ивш^/Т», (5.1)
где Нвых1 — выходное напряжение усилителя DA1 в режиме ограни-
чения; t — время интегрирования; TX=RC— постоянная интегрирова-
ния; R=iR18; С=С7.
ХР1 . .
->ffW Вых.1
-> В9
^АТ
XS4.2
Вых.2
81
ХР1
819
82
Вх.1 86 +
ВхЗ А11
XS4.1
Вых.1
R3
84
УВВ'Вых.2
R7
УВ1Я
А28
819
821
810
815
816
±ВМ0бщ.
)В12+15В
-> В13-15&
К
08
XS3.2
Огр +
XS3.1
Огр,-
826
VB2
-К
XS2.2
ВыхНАЧ сз
817
чг :
818
ВА1
ВА2
85
86,
813
820
то
VD1
XS2.1
Вых. ВАЗ
Огр.
822
823
Огр.+
82"
XS5.1
ХВ20
>В29
>В18
Рис. 5.1. Схема ячейки задатчика интенсивности ЗИ-2АИ
169
Время отработки задатчика представляет собой такое время ин-
тегрирования, в течение которого выходное напряжение усилителя
DA2 изменяется на 10 В. Время отработки плавно регулируется путем
воздействия на схему ограничения выходного напряжения усилителя
DA1.
Суммирование сигналов осуществляется по неннвертнрующему
входу усилителя ПА/'для того, чтобы можно было всю систему сум-
матор — интегратор охватить жесткой единичной отрицательной об-
ратной связью через резистор R7. При равенстве сопротивлений вход-
ных резисторов R2=iR3=R4=R5=R статический коэффициент пере-
дачи схемы по напряжению равен для каждого входа отношению
R7/R Коэффициент передачи собственно усилителя DAI составляет
около 100 и определяется выражением
R1+R8 R26
Kn,=S: R1 R+R26' <5-2>
Усилители DA3, DA4 схемы ограничения включены в цепь обрат-
ной связи усилителя DA1 н применены с комбинированными входами.
На неннвертирующие входы этих усилителей поданы опорные напря-
жения ограничения, снимаемые с потенциометров R21, R24. Под дей-
ствием напряжения ограничения усилители DA3 и DA4 с коэффициен-
том передачи около 100 выдают на выходе напряжения соответствен-
но отрицательной и положительной полярности, которые, однако, не
проходят на вход усилителя DA1 благодаря наличию диодов VD1,
VD2 (цепь обратной связи ограничения разомкнута). Если выходное
напряжение усилителя DA1 под действием входного сигнала достига-
ет напряжения ограничения, то в зависимости от полярности этого
сигнала один из усилителей DA3 и DA4 срабатывает, его выходное
напряжение изменяет полярность и поступает на нход усилителя DA1
через открывающийся диод VD1 или VD2 и резистор R6. Цепь обрат-
ной снязн ограничения замыкается, и выходное напряжение усилителя
DA1 поддерживается на уроние, примерно равном уставке ограни-
чения, которая регулируется в пределах ±(0,05—10) В.
Таким образом, при подаче на ячейку задатчика входного сигна-
ла под действием нормированного выходного напряжения усилителя
DA1 напряжение выхода интегратора начинает линейно нарастать.
По достижении этим напряжением значения входного сигнала
вступает н действие задержанная обратная связь через резистор R7,
выходное напряжение усилителя DA1 уменьшается до нуля, и процесс
интегриройания прекращается. Аналогично происходит спад напряже-
ния интегратора при уменьшении или отключении входного сигнала.
Если нремя отработки задатчика устанавливается жестко, то цепь
ограничения следует подключить через вывод В19 электрического
соединителя к минусу, а через вывод В24 — к плюсу источника пита-
ния ячейки. В случае, когда требуется автоматическая корректировка
темпа отработки задания, к контактам В19, В24 подключают внешний
170
управляемый источник парафазного сигнала с указанной выше поляр-
ностью.
В схеме задатчика предусмотрена раздельная независимая настрой-
ка уставок ограничения каждой полярности, а также темпа нарастания
и .спада выходного напряжения интегратора. Для уменьшения темпа
отработки задания необходимо соединить попарно выводы В18, В14 и
В20, В14. Эта коммутация осуществляется автоматически внешней
логической схемой.
Конденсаторы С1-—СЗ, С8 корректируют частотные характеристики
усилителей, конденсаторы С4—С6 предназначены для обеспечения
устойчивости работы схемы ограничения. Конденсаторы С9, СЮ выпол-
няют роль развязывающих фильтров в цепях питания. С помощью по-
тенциометра R12 производят установку нуля выходного напряжения
задатчика при отсутствии входного сигнала. На лицевой панели ячей-
ки размещены контрольные гнезда для настройки и проверки работы
схемы задатчика.
Технические данные ячейки ЗИ-2АИ
Входное сопротивление, кОм.................................... 100
Статический коэффициент передачи.............................1+0,01
Отклонение от линейности, % . . . .... . 5
Температурный дрейф нуля, мВ/°С. 1
Ток потребления от источника +15 В, мА................. . . 25
Ячейка ступенчатого задатчика скорости СЗ-6АИ. Эта ячейка
обеспечивает три ступени задания скорости, их независимую регули-
ровку, ввод блокировок от конечных выключателей, потенциальное
разделение от коммутирующих устройств. Сигналы с командоанпарата
поступают последовательно на входное устройство ячейки, где проис-
ходит гальваническая развязка н формирование логических сигналов.
Схема логики преобразует входной последовательный код в выходной
диагональный, которым управляется узел формирования ступеней. Это
позволяет осуществлять независимую уставку напряжения каждой
ступени. Кроме того, схема логики отключает все последующие ступени
при отключении любой ступени, не допускает включения следующей
ступени до включения предыдущей, выполняет блокировку одновремен-
ного включения ступеней разной полярности и переводит схему в ис-
ходное состояние при срабатывании конечных выключателей.
Технические данные ячейки СЗ-6АИ
Напряжение управления ступенями, В . '........................24; 80
Ток потребления, мА:
от источника +15 В.........................................200
от источника —15 В .................................. 30
от источника управления 24; 80 В........................... 40
Ячейка сельсинного задатчика скорости СЛЗ-ЗАИ. Эта ячейка обес-
печивает фазочувствительное выпрямление и фильтрацию выходного
171
напряжения сельсинного командоаппарата, гальваническое разделение
с его цепями, регулировку масштаба сигнала задания скорости и его
отключение блокировочными аппаратами без потенциальной связи с
ними, а также ввод сигналов контроля нулевого положения сельсинно-
го командоаппарата .и блокировок в схему логики системы управления
электроприводом.
Технические данные ячейки СЛЗ-ЗАИ
Входное напряжение (ампл.), В....................................0—12
Входное сопротивление, кОм.................22
Несимметрня выходной характеристики, </0....................- . 1
Двойная амплитуда пульсаций выходного напряжения, мВ ... . 50
Ток потребления, мА:
от источника +15 В.........................................150
от источника —15 В . . .................................... 40
Ячейка входа логических сигналов ВЛ-1АИ. Эта ячейка содержит
восемь одинаковых каналов, на входе каждого из которых имеется
оптронный ключ для потенциального разделения от выходных цепей.
На выходе каналов включены логические микросхемы серии K5I1, обес-
печивающие прямой н инверсный выходы.
Технические данные ячейки ВЛ-1АИ
Входное напряжение логической единицы, В................... 24; 80
Входное сопротивление, кОм....................................2,7;9,5
Ток потребления от источника +15 В, мА............... 140
Ячейка ввода логических сигналов ВЛ-4АИ. Эта ячейка предна-
значена для потенциального разделения и согласования по уровню
входных дискретных сигналов. Каждый из шести каналов имеет иа
входе диодную оптронную пару для потенциального разделения цепей,
управляющую ключами на микросхемах серин К190.
Технические данные ячейки ВЛ-4АИ
Сопротивление нагрузки, кОм, не менее........................... 5
Время задержки канала, мс........................................ 1
Ток потребления от источника —15 В, мА ......................... 20
5.1.2. Усилительные устройства
Ячейка усилителей У12-АИ. В состав ячейки (рис. 5.2) входят три
микросхемы усилителей DA1 — DA3, для образования входных цепей
и цепей обратных связей которых предназначены резисторы R1— R20,
R26, R39, R40. Резисторы R14, R15 включены на иеинвертирующнй
вход усилителя DA1, остальные —на инвертирующий вход усилителей.
С помощью резисторов R23, R24 настраивают нуль выходного напря-
жения усилителей DAI, DA2 (Уст. 01, Уст. О?). Усилитель DA1 снаб-
жен схемой регулируемого двухполярного ограничения выходного на-
пряжения, построенной на транзисторах VT1, VT2 и диодах VD1,
VD3, включенных в цепь обратной связи усилителя.
172
tJ-QDCQ
Рис. 5.2. Схема ячейки усили'
173
Напряжение ограничения положительной и отрицательной полярно-
сти устанавливают подачей соответствующих опорных запирающих
напряжений на базы транзисторов VT1, VT2 с потенциометров R29,
R33, подключенных к источнику питания ячейки. Диоды VD1, VD3
защищают переход эмиттер — база транзисторов от обратных напря-
жений. Конденсаторы С6, С7 повышают устойчивость работы схемы
ограничения на высокой частоте. Бели уровень ограничения выходного
напряжения усилителя DA1 должен в процессе работы автоматически
корректироваться, то необходимо снять перемычки 9, 10, 11, 12 и уста-
новить перемычки 9, 13, 11, 14, вывод А21 электрического соединителя
соединить с выводами А5, В14 общего провода, а на выводы А6, А15
относительно общего провода подать соответственно с положительной
и отрицательной полярностью внешнее управляющее парафазное на-
пряжение. Уровень ограничения устанавливают в данном случае пере-
менными резисторами R31, R35. В общем случае резисторы R30, R31,
R35, R36 н дноды VD4, VD5 можно использовать как вспомогательные
элементы при построении различных схем на базе ячейки У12-АИ. При
установке перемычки 1—2 конденсатор СП обеспечивает работу уси-
лителя DA1 в режиме интегратора.
Нерегулируемое ограничение выходного напряжения усилителя
DA2 осуществляется двуханодным стабилитроном VD2 прн установ-
ленной перемычке 5—6. На выходе усилителя DA2 включен эмиттер-
ный повторитель на транзисторах VT3, VT4, который предназначен
для расширения нагрузочной способности усилителя на току. Резисто-
ры R37, R38 обеспечивают защиту транзисторов VT3, VT4 от возмож-
ных случайных кратковременных замыканий выхода 4 на общий про-
вод. Защита от замыканий выходов усилителей DA1—DA3 предусмот-
рена непосредственно в микросхемах.
Усилитель DA3 имеет вспомогательное назначение и может быть
применен н качестве инвертора с коэффициентом .передачи 0,1; 1 илн 10.
В цепи обратной снязн усилителей DAI, DA2 включены бескон-
тактные ключи в виде пар полевых транзнсторон микросхемы DA4.
Ключи замыкаются при наличии на входах 2, 4, 6 микросхемы DA4
управляющих .напряжений положительной полярности 2,3—5,5 В. Эти
напряжения формируются с помощью логического элемента DD и сни-
маются с нагрузочных резисторов R41—R43, получающих питание от
параметрического стабилизатора, выполненного на стабилитроне VD6
и резисторе R34. При подаче на входы В 20, В22, В23 сигналов логи-
ческого 0 ключи DA4 замыкаются, а при подаче сигналов логиче-
ской 1 размыкаются. Цепь одного из трех ключей DA4 выведена на
контакты электрического соединителя А19, В19 и может использовать-
ся по назначению.
Если ключи DA4 не используются, то перемычки 3—4, 7—8 сле-
дует снять, а выводы В20, В22, В23 соединить с выводами А5, В14
соединителя. Конденсаторы СЗ, С4, С8 корректируют частотные ха-
174
рактеристикн усилителей DA1—DA3, конденсаторы С5, С9, СЮ могут
быть применены для ослабления действия высокочастотных составляю-
щих в цепях входных сигналов. С помощью конденсаторов Cl, С2 вы-
полнены развязывающие фильтры по цепям питания.
Элементы R14, R15, R30, R36, R40, С5, С9 — СП смонтированы на
монтажных лепестках, их номинальные значения можно заменять при
настройке схемы на заданные параметры.
На лицевой панели ячейки размещены контрольные гнезда для
проверки работы схемы, а также органы регулировки.
Технические данные ячейки У12-АИ
Диапазон регулируемого ограничения, В . ..........+ (1,5—10)
Нерегулируемое ограничение, В ....................+(9,3—10,7)
Температурный дрейф нуля, мкВ/°С . . . ф........... Ю0
Температурный дрейф напряжения ограничения, мВ/°С 5
Ток потребления от источника +15 В, мА............. 100
Ячейка операционных усилителей У13-АИ. Эта ячейка содержит
шесть усилителей с ключевыми элементами на полевых транзисторах в
цепях обратных связей или на входе, а также имеет резисторы и кон-
денсаторы для образования различных передаточных функций. Ячейка
может применяться при построении контуров регулирования или в ряде
других схем с усилительными устройствами.
Технические данные ячейки У13-АИ
Диапазон регулируемого ограничения, В .... . +(0,05—10)
Нерегулируемое ограничение, В.........................+ (9,3—10,7)
Ток потребления от источника +15 В, мА................... 40
Ячейка усилителя логического УЛ-1АИ. Эта ячейка предназначена
для гальванической развязки и усиления по мощности выходных сиг-
налов схем логики, построенных на элементах серии К511. Схема ячей-
ки содержит шесть одинаковых независимых каналов с транзисторными
усилителями мощности на выходе и оптронными развязками и логиче-
скими микросхемами 2И-НЕ иа входе. В каждом канале имеется инди-
кация состояния на светодиодах.
Технические данные ячейки УЛ-1АИ
Выходное напряжение логического 0, В . . . . <3,5
Выходное напряжение логической единицы, В . . .... ^22
Напряжение питания первичных цепей, В .................+15
Напряжение питания вторичных цепей, В.....................+24
Ток потребления от источника +15 В, мА . . 90
Ток потребления от источника -j-24 В, А ... . ... 1,4
5.1.3. Регулирующие устройства
Ячейка регулятора скорости РС-1АИ. Эта ячейка содержит набор
из трех операционных усилителей и схему прецизионного ограничения
для реализации структур П- и ПИ-регуляторон скорости в системах
подчиненного регулирования электроприводов. Регулятор скорости поз-
175
воляет перестраивать параметры регулятора. Для технологических
блокировок в ячейке применены бесконтактные ключи.
Технические данные ячейки РС-1АИ
Входное сопротивление, кОм........................................^10
Жесткость ограничения, %............................ . • .... 0,5
Ток потребления, мА:
от источника +15 В . 70
от источника —15 В..................................... . . 40
Ячейка регулятора тука РТ-1АИ. Эта ячейка включает в себя пять
операционных усилителей для построения П- и ПИ-регуляторов, в том
числе контура тока в системах подчиненного регулнронання электро-
приводов, а также для использования н ряде других схем. В ячейке
предусмотрено регулируемое ограничение выходного напряжения одного
из усилителей и бесконтактные ключи в цепи обратной связи трех уси-
лителей.
Технические данные ячейки РТ-1АИ
Входное сопротивление, кОм........................................ 0
Жесткость ограничения, % . . . •................................ 2
Ток потребления, мА:
от источника +15 В . . . . . ... 50
от источника —15 В . ................. .... 30
5.1.4. Вычислительные устройства
Ячейка умножителя УМ-ЗАИ. Эта ячейка (рис. 5.3) осуществляет
перемножение двух аналогоных величин, заданных в виде напряжений
Ubx2, путем реализации соотношения
L'BbIx=0,l[(UeII + U„2)/2]=-0,l[(t7exl-L'B«)/2P=0,WBxIl/B„.
(5.3)
С помощью усилителя DA1 образуется полуразность входных сиг-
налов. Схема иа усилителях DA3, DA5 выделяет модуль этой полураз-
ности. Усилители DA2, DA4 одновременно образуют полусумму входных
сигналов и выделяют ее модуль.
При включении диодон VD1 — VD4 так, как это указано на схеме,
на выходе усилителя DA4 всегда получается сигнал только положи-
тельной полярности, а на ныходе усилителя DA5 — только отрицатель-
ной. Дли тех исполнений, ячейки, где включение диодов VD1 — VD4
выполнено с обратной полярностью, меняется соответственно и поляр-
ность выходных сигналов усилителей DA4, DA5. В этом случае вместо
перемычек 1, 2, 3, 4 устанавливают перемычки /, 4, 2, 3. С выхода
усилителей DA4, DA5 сигналы, пропорциональные модулю полусуммы
н полуразности входных сомножителей, поступают на квадраторы по-
I7G
R50 R52 R5R- R5S R58 RS 0 R62 R6R R68 R70
Рис. 5,3. Схема ячейки умножителя УМ-ЗАИ
12—3169
177
ложительного н отрицательного знака, собранные на резнстивно-днод-
яых цепочках R32— R69, VD7—VD24. Требуемая квадратичная зави-
симость выполняется с помощью аппроксимации монотонной функции
отрезками ломаной линии. Стабилитроны VD5-, VD6 являются источ-
никами опорных напряжений квадраторов. Уровень опорных напряже-
ний настраивают переменными резисторами R28, R31. Диоды VD25,
VD26 предназначены для температурной стабилизации квадраторов.
Выходные токи квадраторов суммируются алгебраически на уси-
лителе DA6, выходное напряжение которого н определяет результат
перемножения входных сигналов. Резистором R70 подстраивают общий
коэффициент передачи умножителя. С помощью резистора R26 уста-
навливают нулевой выход умножителя при нулевых значениях сомно-
жителей.
Напряжение питания положительной и отрицательной полярности,
а также входные и выходные сигналы измеряют относительно общего
провода ячейки. Для указанного на схеме включения диодов VD1 —
VD4 входным сигналам одинаковой полярности соответствует отрица-
тельный знак выходного напряжения умножителя. При обратном вклю-
чении диодов VD1 — VD4 однополярным сомножителям соответствует
положительное выходное напряжение умножителя.
Для выполнения операции деления ячейка умножителя включается
в обратную связь операционного усилителя.
Технические данные ячейки УМ-ЗАИ
Входное сопротивление, кОм..........................................10
Ток потребления от источника -4-15 В, мА...............•............50
Ячейка множительно-делительная МД-2АИ. Схема этой ячейки
>(рис. 5.4) позволяет производить вычисление результата операции
умножения н деления входных аналоговых сигналов, заданных в виде
напряжений Ux, Uv, Uz, н соответствии с выражением
U,^=KUxVv/Ux. (5.4)
Принцип перемножения входных сигналов основан на выделении
средней составляющей переменного напряжения прямоугольной формы,
которое формируется по амплитуде напряжением сомножителя Uv, а по
длительности—напряжением сомножителя Ux. Деление осуществляется
в результате изменения коэффициента усиления н канале формирова-
ния по длительности под действием сигнала Ut.
Функционально схему можно разделить на три составные части:
широтно-импульсный модулятор (ШИМ); амплитудно-временной моду-
лятор (АВМ); выходной усилитель с фильтром (УФ). Рассмотрим ра-
боту этих узлов.
Шнротно-нмпульсный модулятор построен с применением инверто-
ра DA1, интегратора DA3, компаратора DA5 н ключей VT2, VT3. На
вход Z подано напряжение положительной полярности. Предположим,
178
12*
179
•что VT2, VT3, управляемые выходным напряжением DA5, разомкнуты
(напряжение DAS отрицательное). В этом случае при отсутствии вход-
ного • сигнала Ux под воздействием сигнала U,, поступающего через
резисторы R10, Л15, выходное напряжение интегратора DA3 начинает
линейно во времени возрастать в сторону отрицательной полярности.
В некоторый момент времени выходной сигнал интегратора DA3 срав-
нивается по действию с входным сигналом Vt, поступающим через
.резистор R20, и компаратор DA5 изменит свое состояние. На его вы-
воде появится напряжение положительной полярности, и ключи VT2,
VT3 замкнутся.
С этого момента на интегратор DA3 и компаратор DA5 подклю-
чаются дополнительные входы соответственно через резисторы R12 и
Л13, коэффициент передачи по которым в 2 раза больше, чем по ранее
рассмотренным. Поскольку через эти дополнительные входы поступает
сигнал с отрицательной полярностью, благодаря наличию инверто-
ра DA1 с коэффициентом передачи, равным 1, производная выходного
напряжения DA3 меняет знак, и выход DA3 начинает увеличиваться
в сторону положительной полярности. Одновременно изменяется и по-
лярность порога переключения компаратора DA5, который вновь сра-
батывает по достижении выходным напряжением интегратора этого
порога. Далее цикл повторяется.
В результате на выходе интегратора формируется пилообразное
напряжение, симметричное относительно Онс одинаковой крутизной,
н на выходе компаратора—прямоугольные разнополярные импульсы
«со скважностью, равной двум. Подстройка скважности достигается ре-
гулировкой резистора ЛЮ. Для отрицательной полярности сигнала
делителя t/2 следует установить перемычки a — в, б — г.
При наличии входного сигнала Ux в зависимости от его полярно-
сти изменяются значения положительной и отрицательной производных
выходного напряжения интегратора DA3. В результате пропорциональ-
но Ux изменяется длительность положительных и отрицательных им-
пульсов на выходе компаратора DA5. Узел АВМ включает в себя
усилитель DA2 и ключ VT1. Без учета действия конденсатора СЗ вы-
ходное напряжение DA2 представляет собой импульсы положительной
или отрицательной полярности в зависимости от знака сомножителя
Uy с амплитудой, пропорциональной Uv. Коэффициент передачи усили-
теля DA2 равен 1. Скважность этих импульсов определяется режимом
работы ключа VT1, управляемого выходным напряжением ШИМ ана-
логично VT2, VT3, т. е. в конечном итоге значением сомножителя 1/х.
‘Выходное напряжение DA2 предварительно фильтруется благодаря
наличию конденсатора СЗ и поступает на вход выходного усилителя
.DA4, одновременно выполняющего роль активного фильтра первого
порядка. Однако при этом для нулевого значения U* и отличного от
яуля Uy выходное напряжение DA4, которое должно быть результа-
том их перемножения, не будет равно 0. Поэтому в схеме предусмот-
380
рена дополнительная цепочка R4, R7, выбранная так, чтобы при
,</х=0 и UV=A=O результирующее действие двух входных сигналов на
усилитель DA4 обеспечивало его нулевое выходное напряжение. Соот-
ношения по входам регулируют резистором R16, коэффициент переда-
чи усилителя DA4 устанавливают резистором R27. Резистором R24
подстраивают смещение нуля DA4. С помощью резистора R1 устанав-
ливают общий коэффициент передачи ячейки в пределах 0,1—1,0.
Конденсатор С1 предназначен для создания задержки, компенси-
рующей запаздывание в цепи усилителя DA2 и уменьшающей дина-
мическую ошибку. Постоянные времени R4R7C1 / (R4+R7) и R11C3
должны быть при этом одинаковы.
Диоды VD1 — VD3, VD5 — VD7 защищают от пробоя полевые
транзисторы VT1—VT3 в режиме их отключения. Диоды VD4, VD8,
VD9 исключают попадание на затворы транзисторов положительного
потенциала, нарушающего нормальный режим их работы. Конденсато-
ры С2, С4, С6, С8 корректируют частотные характеристики усилите-
лей, конденсаторы С9, СЮ выполняют роль фильтров в цепях пи-
тания.
Двуханодный стабилитрон VD10 может подключаться через вывод
А13 к плюсу или минусу источника питания. Напряжение стабилитро-
на используется в том случае, когда какой-либо из входных перемен-
ных сигналов не .поступает в ячейку, например только в режиме пере-
множения или только в режиме деления. В этом случае его заменяют
постоянным напряжением стабилитрона, перемыкая контакты В5— А7
или В5 —А8.
Таблица 5.2
Входные и выходные пара- метры Полярность сигналов
их 4- + _ —
+U* 4- + —
+ — — 4-
их + + — —
Uz + — + —
^ьых — 4- . + —
Полоса пропускания и амплитуда пульсации выходного напряже-
ния ячейки МД-2АИ зависят от емкостей конденсаторов С1, СЗ, С7.
Резистор R16 предназначен также для установки нуля выходного
напряжения усилителя DA4 при Uv = 10 В и 17х=0. Полярность вы-
ходного напряжения ячейки в зависимости от полярности входных
сигналов Ux, Uy, Uz представлена в табл. 5.2.
181
Технические данные ячейки МД-2АИ
Двойная амплитуда пульсаций выходного напряжения, мВ...........150
Температурный дрейф нуля, МВ/°С.................................15
Ток потребления от источника ±15 В, мА....................• . . 30
Ячейка множительно-делительная МД-ЗАИ. Эта ячейка (рис. 5.5)
осуществляет перемножение двух аналоговых величин, заданных в
виде напряжений Ux, Uv, путем выделения постоянной составляющей
из переменного напряжения прямоугольной формы, которое формирует-
ся по амплитуде напряжением Uv, а по длительности — напряжением
Ux. Как и в ячейке МД-2АИ, здесь функционально схему можно раз-
делить иа три составные части: широтно-импульсный генератор
(ШИГ); амплитудно-временной модулятор (АВМ); выходной усили-
тель с фильтром (УФ).
Рис. 5.5. Схема множительно-делительной ячейки МД-ЗАИ
Широтно-импульсный генератор, построенный на усилителе DAI,
предназначен для формирования прямоугольных импульсов, длитель-
ность которых можно изменять входным сигналом Ux.
Предположим, что напряжение на входе х отсутствует. При под-
ключении ячейки к источнику питания на выходе усилителя DA1 мо-
жет быть напряжение +U, либо —U, (U, — напряжение насыщения
усилителя DA1). Допустим, что на выходе усилителя DA1 напряжение
+ U,. Это напряжение, ограниченное стабилитроном VD6 до иапряже-
182
ния, равного Uct, поступает через делитель напряжения R6, R1I на
иеинвертирующий вход усилителя DA1.
Напряжение на неинвертирующем входе равно:
+ 1Л, = £7Ст Р>
где P=R6/(R6+R11).
За счет тока, протекающего по цепи обратной связи, через R10
начнет заряжаться конденсатор С2. Как только напряжение на кон-
денсаторе станет более положительным, чем + 1/н, операционный уси-
литель DA1 скачком перейдет из состояния +Ut в состояние —U,. Это
приведет к тому, что напряжение на неинвертирующем входе станет
равным —1/н, а конденсатор С2 начнет перезаряжаться. В тот момент,
когда напряжение на конденсаторе станет более отрицательным, чем
—1/н, выходное напряжение DAI изменит знак и вернется в первона-
чальное состояние. Данный цикл повторяется.
В результате на выходе усилителя DA1 формируются импульсы
прямоугольной формы, частота следования которых определяется по-
стоянной времени цепочки RIO, С2, уровнем ограничения выходного
напряжения Uct и параметрами цепи положительной обратной связи
R6, R11.
Все параметры ШИГ выбраны таким образом, что обеспечивают
максимальную частоту колебаний при Ux=0. Диодная мостовая схема
VD4, VDS, VD7, VD8 со стабилитроном VD6 в его диагонали предна-
значена для формирования одинакового по модулю сигнала на инвер-
тирующем и неинвертирующем входах усилителя DA1 при разной
полярности его выходного напряжения. Резисторам R9 устанавливают
скважность импульсов, равную 2.
При наличии входного сигнала Ux в зависимости от его значения
и полярности меняется время перезаряда конденсатора С2. В резуль-
тате пропорционально сигналу Ux изменяется длительность положи-
тельных и отрицательных импульсов на выходе усилителя DA1.
Узел АВМ включает в себя усилитель DA2 и ключ VT1. Работа
этого узла так же, как и выходного усилителя DA4 с фильтром (УФ),
аналогична работе узла рассмотренного ранее для ячейки МД-2АИ.
С помощью резистора R2 устанавливают общий коэффициент передачи
ячейки в режиме умножения.
Для выполнения операций деления в ячейке МД-ЗАИ предусмот-
рен усилитель DA3, в обратную связь которого включается умножи-
тель. При этом выходное напряжение определяется уравнением
Uz R26 Uz
^выхг — К их — о, 1 R27 их, (5- 5)
где K=R26/G,\R27—‘Коэффициент передачи схемы деления; 0,1—ко-
эффициент передачи умножителя; Uz — двухполярное входное напря-
жение делимого; Ux — однополярное входное напряжение делителя.
183
Конденсатор СЮ емкостью 10000 пФ в схеме'/) АЗ устраняет вы-
сокочастотные паразитные автоколебания.
Полоса пропускания и амплитуда пульсаций выходного напряже-
ния ячейки МД-ЗАИ зависят от емкостей конденсаторов С1, С5, С7.
Поэтому в ячейке существует возможность изменения емкостей этих
конденсаторов. В табл. 5.3 приведены значения номиналов емкостей
для двух значений полосы пропускания и амплитуды пульсаций.
Таблица 5 3
Емкость. пФ Двойная амплитуда Полоса пропуска-J ния, Гц
с/ С5 С7 пульсаций выходно* го напряжения» В
18 000 18 000 3300 '’300 22 000 4700 0,15 1,3 200 SOO
Резистор R15 предназначен для установки нуля выходного напря-
жения усилителя DA4 при t/v=10 В и 1/х=0. Полярность выходного
напряжения ячейки в зависимости от полярности входных сигналов
l/x, Uy, Uz представлена в табл. 5.4.
Таблица 5.4
Режим умножения Режим деления
Ux иу ^ВЫХ1 иг
+ + + —
+ — + — — +
— +1 +
Резистор R23 предназначен для установки нуля выходного напря-
жения усилителя DA3 в режиме деления при Ut=0, 1/х=±10 В.
Технические данные ячейки МД-ЗАИ
Двойная амплитуда пульсаций выходного напряжения, мВ . - . . . 150
Температурный дрейф нуля, мВ/°С................................. 4
Ток потребления от источника ±15 В, мА......................... 30
Ячейка квадратичного преобразователя ПК-2АИ. Ячейка (рис. 5.6)
состоит из двух одноквадраитных диодных преобразователей, которые
в сочетании с усилителем iDA позволяют получать необходимую ква-
дратичную зависимость. С этой целью заданные монотонные функции
UBtix=kiU2BI или ивЬ11— k2 VTJbx. аппроксимируются отрезками ло-
маной линии с помощью полупроводниковых диодов VD1—VD8, шун-
тирующих резисторов R10—R13, R17—R20 и опорных напряжений,
формируемых делителями R1—R8, R22—R29. В качестве источника
опорных напряжений можно использовать общий источник питании
184
ячеек, для чего на электрическом соединителе следует соединить вы-
воды А12 с В12 и А13 с В13.
Коэффициенты kl и k2 определены из условия равенства номи-
нальных ВХОДНЫХ И ВЫХОДНЫХ сигналов 1/Вх,Вом = 1/Вых,ном= 10 В.
При этом Ai=0,l; k2= V10 3,16.
При малом входном сигнале все диоды закрыты опорным напря
жением, а выходное напряжение определяется лишь соотношением
сопротивлений резисторов обратной связи и входного в цепях усили-
теля DA. С ростом входного сигнала происходит поочередное откры-
тие диодов и шунтирование резисторов на входе или в обратной свя-
зи усилителя в зависимости от того, в какую цепь включен диодный
+ЯГВ В12$
—15В В13^
Общ. В1Ч<;
$А12 +15В
УВ22 Вых.
-}А5 Общ.
Рис. 5.6. Схема ячейки квадратичного преобразователя ПК-2АИ
преобразователь. В случае, когда преобразователь подключен к вход-
ной цепи усилителя, реализуется функция 1/Выж=±0,Ш2Вх. Для этого
(одной сигнал подводят к выводу В19, а выводы В 20, В22 соединя-
ют между собой. Входное сопротивление схемы при этом меняется от
20 до 2 кОм с ростом входного сигнала.
Если функциональный преобразователь включен в цепи обратной
СВЯЗИ уСИЛИТеЛЯ, ТО ВОСПРОИЗВОДИТСЯ фуНКЦИЯ 17Вых = ± 3,1бКС7вх.
В данном с 1учае входной сигнал должен поступать на вывод В20,
а контакты В19 и В22 следует соединить. Сопротивление нагрузки при
этом должно быть не менее 10 кОм. Резистором R21 устанавливается
0 выходного напряжения при отсутствии входного сигнала.
185
Технические данные ячейки ПК-2АИ
Постоянная времени, мкс..........................................50
Ток потребления от источника.+ 15 В, мА..........................20
5.1.5. Функциональные преобразователи
Ячейка функционального преобразователя ПФ-2АИ. Эта ячейка
(рис. 5.7) состоит из двух одноквадрантных регулируемых диодных
преобразователей, которые в сочетании с усилителем DA позволяют
получить необходимую нелинейную зависимость.
Принцип действия преобразователя основан на аппроксимации за-
данной монотонной нелинейной функции отрезками ломаной линии
путем изменения коэффициента передачи усилителя селективным под-
ключением диодно-резисторных цепочек во входную цепь или в цепь
обратной связи усилителя в зависимости от вида реализуемой
функции.
186
Реализация нелинейности осуществляется на цепочках, построен-
ных на диодах VD1—VD8 и резисторах R11—R14, R20—R23. Сопро-
тивления R1—R8, R27—R34 образуют цепь опорного напряжения.
Наличие переменных резисторов в цепи опорного напряжения и в це-
почках селективного подключения позволяет построить нелинейности
различного вида и крутизны.
Преобразователь позволяет реализовать следующие функции:
UBUX = ±KU'BX, (5.6)
t/вых = ±t/’Bx±6; (5-7)
1/вых = ±К^; (5.8)
( 71 t/BX \
^вых = i^Bux,HOMs^n I 9 77 I» (5-9)
\ А с'вх. иом у
^вых = i ^вых, ном cos f 9 77 » (5. Ю)
\ <-'вх, НОМJ
= ± t/вых. ном (1 -е~и^'и^- и°“). (5.11)
Для получения функций вида (5.6), (5.7), (5.10) диодные преоб-
разователи следует подключить на вход усилителя. Для этого в элек-
трическом соединителе ХР1 устанавливают перемычку между В8, АП,
которая подключает в обратную связь усилителя резисторы RIO, R17.
Входное напряжение подается на вывод А7.
Для получения функций вида (5.8), (5.9), (5.11) диодные преоб-
разователи следует подключить в обратную связь усилителя. Для это-
го в электрическом соединителе ХР1 устанавливают перемычку между
контактами В6 и АП. Входное напряжение подается на вывод В8.
Для получения всех видов функций к выводу А12, А13 необходи-
мо подвести опорное напряжение. Для этого в электрическом соеди-
нителе ХР1 устанавливают перемычку между выводами А12 н В12,
А13 и В13. Напряжение питания подводится к выводам В12, В13.
Смещение характеристик по оси ординат производится с помощью
подачи на вывод В9 напряжения смещения.
Для реализации функции, заданной графически, необходимо раз-
бить ее на отрезки. Число отрезков должно быть не более пяти. На-
клон первого отрезка определяется соотношением сопротивлений ре-
зисторов R9, RIO, R15, R17.
При воспроизведении первого отрезка- необходимо сопротивление
резистора R9 сделать максимальным для усугубления влияния шун-
тирующего действия диодных цепочек. Наклон первого отрезка регу-
лируют сопротивлением резистора R10. При невозможности установить
нужный наклон первого отрезка используют резистор R9.
Для реализации последующих отрезков необходимо селективное
подключение диодных цепочек. Точки перегиба получают, регулируя
сопротивления резисторов R1—R4, R27—R30. Сопротивления этих
резисторов определяют последовательность подключения соответству-
ют
ющих цепочек. Сопротивления резисторов R11—R14, R20—R23 опреде-
ляют наклон соответствующего аппроксимирующего отрезка.
Технические данные ячейки ПФ-2АИ
Напряжение смещения, В............................ 0±10
Входное сопротивление, кОм.............................
Ток потребления от источника + 15 В, мА................ 30
5.1.6. Устройства памяти
Ячейка интегрозапоминающего устройства ИЗУ-ЗАИ. Схема ячей-
ки (рис. 5.8) обеспечивает возможность работы в режимах интегриро-
вания, ввода начальных условий н запоминания. Интегрирование вход-
ного сигнала осуществляется с помощью интегратора, построенного на
базе операционного усилителя DA1. Изменение напряжения 17ВЫх на
выходе интегратора во времени после подачи скачка входного сигнала
UBX описывается уравнением
£^ВЫХ =--
где T—R3C4=R5C4 — постоянная интегрирования.
Напряжение на вход интегратора поступает либо непосредствен-
но (Вх. 2), либо через управляемый ключ на полевом транзисторе
VT2 (Вх. /), который замкнут при отсутствии сигнала управления или
при его отрицательной полярности на выводе В12 и разомкнут при
его наличии в пределах +9-J-15 В.
При работе в режиме интегрирования необходимо разомкнуть
ключ VTt в цепи задания начальных условий, который управляется
аналогично ключу VT2 через вывод В 20. Конденсатор С5 корректиру-
ет частотную характеристику усилителя, а конденсаторы СЗ, С6 выпол-
няют роль развязывающих фильтров в цепи питания.
Входные резисторы \R3, R5, R8 и конденсатор обратной связи С4
установлены на монтажных лепестках. Их сопротивления можно из-
менять для выбора требуемой постоянной времени интегрирования.
Узел на резисторах R9, R13—R15 предназначен для настройки нуля
выходного напряжения интегратора при отсутствии входных сигналов.
Диоды VD1, VD2 и VD4, VD5, подключенные к стоку транзисто-
ров VT1, VT2, ограничивают напряжение сток — исток в закрытом со-
стоянии этих транзисторов. В открытом состоянии транзисторов ука-
занные диоды на работу схемы не оказывают влияния, поскольку
в этом режиме напряжение на стоках мало и примерно равно напря-
жению в суммирующей точке усилителя. Диоды VD3, VD6 препятст-
вуют поступлению отрицательного управляющего напряжения на за-
творы транзисторов VT1, VT2, искажающего их работу.
Резисторы R2, R4 необходимы для подачи нулевого потенциала
на затворы при отсутствии сигналов управления. Эти резисторы спо-
собствуют также уменьшению влияния помех на затворы полевых
транзисторов, обладающих высоким входным сопротивлением.
188
Рис, 5.8. Схема ячейки иятегрозапомина^ощего устройства ИЗУ-ЗАИ
189
Установку начальных условий интегратора производят путем пере-
вода усилителя DA1 в масштабный режим работы путем замыкания
ключа VTL При этом в обратную связь усилителя параллельно кон-
денсатору С4 включается резистор R7, а напряжение задания началь-
ных условий подводится к контакту В28 при отсутствии входных
сигналов. Коэффициент передачи усилителя DA1 по цепи задания на-
чальных условий равен 1. После установки начальных условий инте-
гратора ключ VT1 размыкают.
Остальная часть схемы представляет собой антидрейфовое устрой-
ство (АДУ), предназначенное для обеспечения режима длительного
запоминания аналоговой информации. Принцип работы АДУ заключа-
ется в том, что весь диапазон выходного напряжения интегратора
разбивается иа отдельные участки (ступеньки), в пределах которых
при нулевых входных сигналах выходное напряжение интегратора
автоматически поддерживается на неизменном уровне. В состав схемы
АДУ входят генератор низкой частоты (ГНЧ), генератор высокой
частоты (ГВЧ) и узел выработки импульсов подпитки.
Генератор низкой частоты построен на усилителе DA2 и управля-
ется выходным напряжением интегратора DA1 через резистор R20.
•Схема ГНЧ обеспечивает режим автоколебаний с широким положи-
тельным и узким отрицательным импульсами выходного напряжения,
причем длительность положительного импульса увеличивается линейно
с изменением напряжения интегратора от отрицательного значения к
положительному.
Частота - автоколебаний ГНЧ определяет периодичность импульсов
подпитки, которые вырабатываются и подаются на вход интегратора
каждый раз в момент появления заднего фронта положительного
импульса. Времязадающая цепочка отрицательной обратной связи об-
разована конденсатором С7, резисторами R22, R23 и диодом VD13.
Переброс усилителя DA2 из одного насыщенного состояния в другое
происходит в тот момент, когда напряжение на конденсаторе С7 при
•его перезаряде достигнет уровня порогового напряжения на неинвер-
•тирующем входе 5 усилителя. Для получения большей длительности
положительного импульса выбрано соотношение R22^R23. При отри-
цательном импульсе выходного напряжения усилителя DA2 парал-
лельно R22 подключается цепочка VD13, R23, что существенно умень-
шает постоянную времени перезаряда конденсатора С7. В этом случае
пороговое напряжение на неинвертирующем входе усилителя задает-
ся цепочкой VD12, R24, VD14 и равно падению напряжения на дио-
де VD12 (около — 0,6 В). При положительном выходном импульсе
ГНЧ пороговое напряжение переключения определяется действием
цепочек R19, R20, R21. Для нулевого напряжения интегратора поро-
говое напряжение на резисторе R21 составляет примерно +1,05 В и
обусловлено действием положительного источника питания через ре-
зистор R19. При изменении выходного напряжения интегратора DA1
190
в пределах ±10 В пороговое напряжение изменяется соответственно
от 1,7 до 0,4 В.
На рис. 5.9 приведены эпюры напряжений, поясняющие работу
схемы АДУ, где показаны напряжения U2 генератора ГНЧ, напряже-
ние Uc7 на конденсаторе С7 и пороги его переключения, соответству-
ющие выходному сигналу Ui интегратора для значений 0±10 В. Час-
тота колебаний ГНЧ для нулевого выхода интегратора составляет
около 30 Гц.
Генератор высокой частоты выполнен на
тор работает в автоколебательном режиме со
Скважность настраивается рези-
стором R27. Задержанная отрица-
тельная обратная связь образова-
на конденсатором С8 н резисто-
ром R29, безынерционная положи-
усилителе DA3, генера-
скважностью, равной 2,
тельная обратная связь — рези-
сторами R28, R30. Так как на-
пряжения насыщения различной
полярности для усилителей могут
быть неодинаковы, то для получе-
ния симметричных импульсов об-
ратные связи снимают с двухпо-
лярного стабилизатора напряже-
ния, построенного на элементах
R31, VJD16—VD20. Автоколебания
ГВЧ с частотой около 25 кГц
возникают только при положитель-
ном импульсе на выходе ГНЧ.
При отрицательном импульсе ГНЧ
усилитель DA3 переходит в ре-
жим положительного насыщения
по цепи VDI5, R26 и колебания
ГВЧ срываются. На рис. 5.9 вы-
ходные импульсы генератора ГВЧ
представлены в укрупненном мас-
штабе в виде напряжения иа.
Рис. 5.9. Эпюры нанряжений в
схеме ИЗУ-ЗАН
Основу схемы выработки импульсов подпитки составляют клю-
чи на транзисторах VT3—VT6 и конденсатор С2. Транзисторные
ключи управляются напряжением генератора ГНЧ. При положитель-
ном импульсе генератора замкнуты ключи VT4, VT6 и разомкнуты
VT3t VT5. Через резисторы Rll, R18 начинает перезаряжаться кон-
денсатор С2 под действием выходного напряжения генератора ГВЧ.
Двойной размах пилообразного напряжения Uc2 на конденсаторе С2
составляет около 0,4—1,0 В. Настройка осуществляется резистором1
R18. С приходом отрицательного импульса ГНЧ ключи VT4, VT6 раз-
191
мыкаются, a VT3, VT5 замыкаются, и конденсатор С2 разряжается на
вход интегратора DA1.
Импульсы подпитки, показанные на рис. 5.9 в виде напряжений
Мщ, Una, пропорциональны рассогласованию выходного напряжения
интегратора относительно его начального значения в первый момент
перехода на режим запоминания и препятствуют этому рассогласова-
нию. Если, например, в начальный момент времени t рассогласование
отсутствует, то замыкание ключа VT3 происходит при прохождении
пилообразного напряжения на конденсаторе С2 через 0, и подзаряда
интегратора не происходит. Если же под влиянием каких-либо деста-
билизирующих факторов выходное напряжение интегратора откло-
нится от первоначального значения, то сместится задний фронт поло-
жительного импульса ГНЧ, н считывание информации с конденсато-
ра С2 произойдет при том или ином пилообразном напряжении. Та-
ким образом, амплитуда н полярность компенсирующих импульсов
подпитки зависят от напряжения рассогласования интегратора н его
знака. Момент времени t\ на рис. 5.9 соответствует дрейфу напряже-
ния интегратора в область отрицательных значений, a t2— в область
положительных.
В режиме интегрирования задний фронт положительных импульсов
ГНЧ проходит последовательно участки пилообразного напряжения в
зависимости- от уровня выходного напряжения интегратора. Цена та-
ких участков (дискретных ступенек), выраженная в долях выходного
напряжения интегратора, определяется числом периодов напряжения
ГВЧ, которые укладываются на части периода напряжения ГНЧ, за-
пятой перемещением заднего фронта положительного импульса. При
выбранных параметрах схемы ячейки напряжение этой ступеньки ле-
жит в пределах 50±Ю мВ. Следует отметить, что рабочими являются
только нарастающие участки пилообразного напряжения U с2. Осталь-
ные участки находятся в области неустойчивой работы АДУ и не ис-
пользуются.
• С помощью АДУ можно компенсировать дрейф интегратора, эк-
вивалентный входному току, в пределах до 0,8 мкА. Однако АДУ
препятствует также и действию полезного входного сигнала, создавая
зону нечувствительности по входу, определяемую входным током АДУ.
Для настройки, а также разграничения режимов интегрирования и
запоминания можно отключить выход АДУ, подавая через вывод В8
сигнал положительной полярности, который закрывает ключ VT3.
Конденсатор С! уменьшает пульсацию напряжения на выходе интегра-
тора, конденсаторы С9—С12 выполняют роль развязывающих фильт-
ров в цепях питания.
На лицевой панели ячейки расположены контрольные гнезда для
проверки работы схемы и органы настройки.
192
Технические данные я ч е й к и ИЗУ-ЗАИ
Входное сопротивление, кОм........................" 40—4000
Входное сопротивление цепи задания начальных условий,
кОм.................................................... Ю
Зона нечувствительности по входу 1, В ..........- - 0,032—3,2
Двойная амплитуда пульсаций выходного напряжения, мВ 50
Ток потребления от источника + 15 В, мА............... 40
Ячейка памяти ПМ-2АИ. Эта ячейка предназначена для запоми-
нания и оптической индикации кратковременных н длительных логи-
ческих сигналов в схемах сигнализации. В ячейке имеется десять оди-
наковых каналов, каждый из которых содержит узел памяти на эле-
ментах И-НЕ и оптический индикатор, светящийся при наличии на вы-
ходе канала сигнала логической 1. В схеме ячейки предусмотрена по-
дача сигналов Опробование сигнализации и Сброс сигнализации. Ток
потребления от источника +15 В —170 мА.
5.1.7. Датчики регулируемых параметров
Ячейка датчика напряжения ДН-2АИ. Эта ячейка предназначена
для ввода в систему регулирования аналогового сигнала обратной
связи по напряжению с одновременным гальваническим разделением
входной и выходной цепей. Датчик построен по принципу МДМ (мо-
дуляция— демодуляция). Входной сигнал преобразуется амплитудным
модулятором в напряжение прямоугольной формы частотой 30—40 кГц
и через разделительный трансформатор поступает на демодулятор,
после чего доводится до унифицированного уровня выходным масш-
табным усилителем постоянного тока. Схема ячейки включает в себя
также генератор коммутирующего напряжения для управления рабо-
той модулятора и демодулятора.
Технические данные ячейки ДН-2АИ
Двойная амплитуда пульсаций выходного напряжения, мВ ... . 40
Температурный дрейф нуля, мВ/“С...........................0,3
Температурный дрейф коэффициента передачи, о/о/°С..........0,05
Ток потребления от источника+15 В, мА . . . ............... 40
Ячейка датчика тока ДТ-ЗАИ. Эта ячейка предназначена для фор-
мирования и ввода в систему регулирования аналогового сигнала с
гальваническим разделением входной и выходной цепей пропорцио-
нального току электропривода. Схема датчика тока построена ана-
логично схеме датчика напряжения ДН-2АИ, кроме того, после моду-
лятора и разделительного трансформатора имеется дополнительно про-
межуточный усилитель переменного тока, т. е. выполняется структура
модуляция — усиление — демодуляция.
Технические данные ячейки ДТ-ЗАИ
Вкодное напряжение, мВ....................•..................0+75
Двойная амплитуда пульсаций выходного напряжения, мВ ... . 60
Температурный дрейф нуля, мВ/вС............................2,2
Температурный дрейф коэффициента передачи, %/®С............0,065
Ток потребления от источника +15 В, мА...................... 40
13—3169 193
Ячейка реверсивной приставки к тахогенератору РП-2АИ. Эта ячей-
ка предназначена для формирования сигнала обратной связи по ско-
рости н его полярности при использовании в качестве датчика скоро-
сти тахогенератора переменного тока. Схема ячейки обеспечивает вы-
прямление напряжения тахогенератора и выдачу его с полярностью,
соответствующей направлению вращения электропривода. Это дости-
гается схемой логики по чередованию фаз напряжений тахогенератора.
Технические данные яче йки'РП-2АИ
Входное напряжение (фазное)., В...............................О—127
Двойная амплитуда пульсаций выходного напряжения, мВ:
без фильтра................................................500
с фильтром 0,94 мкФ....................................... 15
Ток потребления, мА:
от источника +15 В................................... 90
от источника —15 В...................................... 40
5.1.8. Потенциальные разделители
Ячейка гальванического разделителя РГ-ЗАИ. Эта ячейка предназ-
начена для потенциального разделения системы управления от внеш-
них цепей, в которые выдаются сигналы из данной системы. Структур-
но схема ячейки содержит входной усилитель постоянного тока, мо-
дулятор, разделительный трансформатор, два демодулятора и генера-
тор коммутирующего напряжения на частоту 30—40 кГц. Один из де-
модуляторов является выходным, а второй используется в цепи отри-
цательной обратной связи, охватывающей усилитель и модулятор и
повышающей точность устройства в целом.
Технические данные ячейки РГ-ЗАИ
Выходное напряжение, В.........................................0+20
Двойная амплитуда пульсаций выходного напряжения, мВ .... 50
Ток потребления, мА:
от источника +15 В......................................... 80
от источника —15 В ... ,..........................- . • . . 45
Ячейка гальванической развязки РГ-4АИ. В состав ячейки
(рис. 5.10) входят узел гальванического разделения, генератор напря-
жения прямоугольной формы, стабилизатор тока и операционный уси-
литель. Основой ячейки является узел гальванического разделения, ко-
торый работает по принципу преобразования (модуляции) входного
напряжения постоянного тока в промежуточное напряжение перемен-
ного тока с последующим выпрямлением (демодуляцией) этого напря-
жения на выходе. Трансформаторная связь между модулятором и де-
модулятором обеспечивает гальваническую развязку входного и ВЫХОД*
ного напряжений.
194
Рис. 5.10. Схема ячейки гальванической развязки РГ-4АИ
Модулятор на транзисторах VTI, VT2, VT5, VT6 и демодулятор
на транзисторах VT7, VT8, VT10, VT11 связаны между собой через
обмотки разделительного трансформатора TV1. Ключевые транзисторы
модулятора и демодулятора управляются коммутирующим напряже-
нием, подаваемым в цепь эмиттер — база с вторичных обмоток транс-
форматора TV2 через резисторы R5, R6, Rll, R12.
В зависимости от полярности коммутирующего напряжения поло-
вину периода замкнуты либо транзисторы VTI, VT2 и VT10, VT11, ли-
бо VT5, VT6 и VT7, VT8. -В результате к входному напряжению,
подводимому к выводам В26-—ВЗО, оказывается подключенной обмот-
ка 1 или 2, а под током нагрузки находится обмотка 3 или 4 транс-
форматора TV1. Тем самым осуществляется двухполупериодная ам-
плитудная модуляция входным сигналом постоянного тока и фазочув-
ствительное синхронное детектирование преобразованного напряжения
переменного тока на выходе. Положительной полярности входного сиг-
нала на выводе В26 соответствует положительная полярность выход-
ного напряжения на выводе В22.
Коммутирующее напряжение прямоугольной формы для управле
ния транзисторами модулятора и демодулятора вырабатывается гене-
ратором, собранным на транзисторах VT9, VT12 и трансформаторе
TV2. Отрицательное напряжение смещения поступает на базы транзис-
торов через резисторы R8, RIO, R13. Резисторы RIO, R13 образуют
дополнительно искусственную среднюю точку в цепи положительной
обратной связи на обмотке 3 трансформатора TV2, которая через
цепочку С4, R9 соединена с эмиттерами VT9, VT12.
Первичные обмотки /, 2 трансформатора TV2, работают поочеред-
но в зависимости от того, какой из транзисторов VT9, VT12 проводит
ток в данный полупериод. Конденсатор С5 уменьшает коммутацион-
ные всплески напряжения на первичных обмотках трансформатора.
Частота генератора составляет около 15 кГц.
Питание генератора осуществляется от стабилизатора постоянного
тока на транзисторах VT3, VT4. Транзистор VT3 является последова-
тельным регулирующим элементом, a VT4 — управляющим. Резисторы
R2, R3 и стабилитрон VD2 составляют параметрический стабилизатор
напряжения на входе питания. Перемычка 3, 4 устанавливается, если
напряжение питания меньше 15 В. Резистором R7 настраивают ток
стабилизации. Если этот ток увеличивается, то рост падения напряже-
ния на резисторе R7 приводит к включению транзистора VT4, повы-
шению потенциала базы транзистора VT3 и, следовательно, к его за-
крытию, т. е. стабилизации тока нагрузки. Такой режим питания обес-
печивает переключение генератора без насыщения трансформатора
TV2. Конденсаторы С2, СЗ являются фильтрующими.
Операционный усилитель DA может применяться либо непосредст-
венно в схеме ячейки, либо при необходимости во внешних цепях.
Усилитель имеет два входа через резисторы R14, R15 и вывод с_умми-
196
рукицей точки чёрез вывод А20. Резисторами RI7, R19 настраивают
коэффициент передачи усилителя по напряжению. Узел R18, R20 пред-
назначен для установки нуля выходного напряжения усилителя при
отсутствии входных сигналов. Конденсатор С7 может использоваться
для получения характеристики апериодического звена, конденсатор С8
корректирует частотную характеристику усилителя, а конденсаторы
С9, СЮ служат развязывающими фильтрами в цепях питания.
Включение ячейки во внешнюю схему может быть выполнено в
нескольких вариантах.
При наличии источника входного сигнала с малым внутренним
(выходным) сопротивлением ячейку можно использовать в режиме
трансформатора напряжения. При этом входной сигнал подводят к
выводам В26—ВЗО, а выходной снимают с выводов В18—В22. Следует
учитывать, что в данном случае входное сопротивление ячейки на
постоянном токе примерно равно сопротивлению нагрузки на ее вы-
ходе. Если источником входного сигнала является- делитель напряже-
ния, то для сглаживания пульсаций на входе можно подключить кон-
денсатор С1. Для этого следует соединить выводы электрических со-
единителей ВЗО и А32. Если же источником входного сигнала явля-
ется операционный усилитель, то конденсатор С1 в схему не включа-
ют, поскольку, как правило, интегральные операционные усилители не
могут работать на емкостную нагрузку. Для согласования схемы ячей-
ки с нагрузкой до 2 кОм, а также для получения парафазного выхо-
да можно в данном случае подать выходной сигнал через усили-
тель DA.
При делителе напряжения на входе или ином источнике входного
сигнала с высоким внутренним сопротивлением можно применить вклю-
чение ячейки в режиме трансформатора тока. В этом случае входной
сигнал до ±250 В подводят к выводам А24, ВЗО, устанавливают в
ячейке перемычку 1—2 для защиты стабилитроном VD1 от чрезмерных-
напряжений на входе, а конденсатор С1 в схему не включают из-за
появления большой постоянной времени T—R1C1. Выводы В18, В22
соединяют соответственно с выводами В14, А20. Выходное напряжение
при этом снимают с вывода В2 относительно вывода В14. В режиме
трансформатора тока входной ток и входное сопротивление ячейки
определяются сопротивлением резистора R1, а коэффициент передачи
по напряжению — отношением сопротивлений (Rl7-\-R19)/RI. В дан-
ном режиме имеет место повышение пульсации выходного напряжения
ячейки, поскольку выход демодулятора подключен непосредственно на
суммирующую точку усилителя. Уровень пульсаций выходного напря-
жения можно уменьшить путем увеличения емкости конденсатора С7.
Резисторы Rl, R8, R14, R15, R17 и конденсаторы С1, С6, С7 ус-
тановлены на монтажных лепестках. Сопротивления резисторов и ем-
кости конденсаторов можно регулировать при настройке ячейки иа
заданные параметры.
197
Технические данные ячейки РГ-4АИ
Входное сопротивление при /?н—со, кОм...................... 30
Выходное сопротивление, Ом.................................150
Сопротивление нагрузки, кОм................................J&5
Двойная амплитуда пульсаций-выходного напряжения, мВ . . . . 100
Температурный дрейф нуля, мкВ/°С........................... 50
Выходное напряжение при нулевом входном сигнале, мВ .... 0+20
Ток потребления от источника +15 В, мА •................... 25
Ячейка гальванической развяжи РГ-5АИ. В состав схемы
(рис. 5.11) входят генератор напряжения прямоугольной формы на
усилителе DA1, измерительный орган, выполненный на трансформато-
рах TV1, TV2, и выходной усилитель DA2. Первичные обмотки транс-
форматоров соединены последовательно и подключены к генератору
с напряжением 12—14 В и частотой около 10 кГц. Выходные напря-
жения трансформаторов выпрямляются транзисторными сборками
DA3, DA4, работающими в диодном режиме. Средние точки обмоток
2, 3 трансформаторов через переменный резистор R5 подключены к
общему проводу схемы. Выпрямленные напряжения обмоток 2, 3
с положительной полярностью для трансформатора TV1 и с отрица-
тельной для трансформатора TV 2 поступают через резисторы R13—
R16 на вход усилителя DA2.
198
Конденсаторы С4, С5 во входной цепи усилителя DA2 образуют
первое звено сглаживающего фильтра для подавления пульсаций вы-
прямленного напряжения. При отсутствии входного сигнала ячейки
резистор R5 настраивают таким образом, чтобы выпрямленные напря-
жения обмоток 2, 3 трансформаторов на контрольных гнездах XS2.1
и XS2.2 имели одинаковое значение по отношению к выводам XS1.2.
В этом случае выходное напряжение усилителя DA2 равно 0, а напря-
жение генератора DA1 распределяется между первичными обмотками
трансформаторов поровну.
Обмотки 4, 5 трансформаторов образуют измерительную часть
схемы и через выпрямители элемента DA3 нагружены на резисторы
R3, R4 и общий резистор R2 таким образом, что через R2 протекает
разностный ток выпрямителей. Входной сигнал ячейки, подаваемый на
резистор R2, в зависимости от его полярности включен согласно или
встречно с напряжением каждого из выпрямителей DA3. Нагр'узка
обмоток 4, 5 трансформаторов при согласованном включении входно-
го сигнала увеличивается, а при встречном уменьшается.
В результате трансформации этой нагрузки в первичную цепь
происходит перераспределение напряжения питания: напряжение на
нагруженном трансформаторе уменьшается, а на разгруженном уве-
личивается. Вследствие этого выпрямленные напряжения обмоток 2, 3
трансформаторов становятся различными, и их разность усиливается
усилителем DA2. Требуемый коэффициент передачи ячейки устанав-
ливают с помощью переменного резистора R20. Конденсатор Сб в це-
пи обратной связи усилителя DA2 образует второе звено сглаживаю-
щего фильтра. Конденсатор С7 предназначен для коррекции частот-
ной характеристики усилителя DA2. Резистором R21 настраивают О
выходного напряжения ячейки при отсутствии входного сигнала. При
работе ячейки в режиме датчика напряжения входной сигнал в пре-
делах 0±10 В подводят к контактам Б2, Б4, а прн работе в режиме
датчика тока входной сигнал с шунта подключают к выводам БЗ, Б4.
Положительной полярности напряжения на входных выводах Б2, БЗ
соответствует отрицательная полярность выходного напряжения на
клемме А6. Конденсаторы С8, С9 выполняют роль развязывающих
фильтров в цепях питания.
Основу генератора напряжения прямоугольной формы для пита-
ния первичных обмоток трансформаторов TV1, TV2 составляет уси-
литель DA1 с положительной обратной связью через резисторы R6,
R7. Времязадающая цепочка отрицательной обратной связи RIO, С1
определяет частоту автоколебаний генератора. Для получения авто-
колебаний со скважностью, равной 2, напряжение обратной связи
поступает с /{вухполярного ограничителя-стабилизатора, собранного
на диодах VD1—VD4, стабилитроне VD5 и резисторе R9. Переброс
усилителя DA1 из одного насыщенного состояния в другое происхо-
дит в тот момент, когда напряжение на конденсаторе С1 при его пе-
резаряде достигает напряжения на резисторе R6.
199
Рис. 5.12. Схема ячейки гальванической развязки РГ-6АИ
Для согласования выхода усилителя DA1 с трансформаторной на-
грузкой применен эмиттерный повторитель на транзисторах VT1, VT2'.
Конденсатор С2 предназначен для подавления выбросов в выходном
напряжение генератора. Каждый из транзисторов VT1, VT2 в нерабо-
чий полупериод закрывается перепадом напряжения на переходе эм-
миттер — база работающего в данный момент транзистора этой пары.
Резисторы Rll, R12 в коллекторной цепи транзисторов VT1, VT2
защищают их от повреждения при кратковременных случайных замы-
каниях на выходе генератора. В цепь выхода генератора включен
конденсатор СЗ для исключения небольшой постоянной составляющей,
которая может иметь место в выходном напряжении при работе гене-
ратора. Конденсатор С6 установлен на монтажных лепестках, его ем-
кость можно изменять при настройке схемы на заданные параметры
по полосе пропускания и пульсациям выходного напряжения. На ли-
цевой панели ячейки размещены контрольные гнезда для проверки ра-
боты схемы и резистор настройки нуля выходного напряжения.
Те х и и ч е'с кие данные ячейки РГ-5АИ
Двойная амплитуда пульсаций выходного напряжения, мВ...........150
Температурный дрейф нуля, мВ/°С................................. 3
Ток потребления от источника + 15 В, мА.........................25
Ячейка гальванической развязки РГ-6ЛИ. В этой ячейке
(рис. 5.12) гальваническое разделение цепей постоянного тока проис-
ходит на оптронном переключателе DA3 путем преобразования элек-
трической энергии в световую, а затем световой в электрическую. Для
повышения уровня выходного сигнала В DA3 имеется импульсный уси-
200
литель. Применение оптрона, работающего й импульсном режиме, тре-
бует наличия импульсной модуляции входного сигнала. В качестве фор-
мирователя прямоугольных импульсов, длительность которых можно
менять аналоговым входным сигналом '£/вх, использован ШИГ на уси-
лителе DA1, работающий аналогично рассмотренному ранее примени-
тельно к ячейке МД-ЗАИ. Все параметры ШИГ выбраны таким обра-
зом, что обеспечивают максимальную частоту колебаний при t7BX=0
около 20 кГц. При наличии входного сигнала 4/вх в зависимости от его
амплитуды и полярности меняется время перезаряда конденсатора СЗ.
Вследствие этого пропорционально сигналу t/BX изменяется длитель-
ность положительных и отрицательных импульсов на выходе усилите-
литель.
С выхода генератора разнополярный сигнал поступает на усили-
тель тока VT1. Днод VD7 предназначен для защиты транзистора
VT1 от обратных напряжений в режиме отсечки. Для повышения
уровня выходного сигнала оптрона установлен импульсный усилитель
на транзисторе VT3. Верхний уровень напряжения на ием ограничива-
ется и стабилизируется стабилитроном VD11.
Однополярные положительные импульсы с транзисторного усили-
теля VT3 поступают на вход фильтра нижних частот второго поряд-
ка R16, R17, С4—С7, на котором происходит выделение положитель-
ной постоянной составляющей модулированного сигнала, и затем на
выходной апериодический усилитель DA2. Для компенсации постоян-
ной составляющей при </вх=0 на инвертирующий вход усилителя
DA2 подается отрицательное смещение от стабилитрона VD13 через
резистор R21. Резистор R24 предназначен для установки нуля усили-
201.
теля DA2 при t/BI=0. С Помощью резистора Р25 устанавливают
коэффициент передачи ячейки. Напряжение питания оптрона подается
от стабилитрона VD9. Если напряжение стабилизации VD9 недостаточ-
но для питания оптрона, то необходимо сиять перемычку 1, 2, в резуль-
тате напряжение питания увеличивается на значение прямого падения
напряжения на дноде VD8.
С помощью резистора Р1 устанавливают одинаковое по модулю
значение выходного напряжения при смене полярности входного сиг-
нала. Конденсаторы Cl, С2 выполняют роль фильтров в цепях питания.
Полоса пропускания и пульсации выходного напряжения ячейки
РГ-6АИ зависят от емкостей конденсаторов СЗ, С4—С7, С9, поэтому
в ячейке существует возможность замены емкостей этих конденсато-
ров. В табл. 5.5 приведены значения емкостей дли двух значений по-
лосы пропускания, амплитуды пульсаций выходного напряжения и
погрешности.
Та блица 5.5
Емкость, мкФ Полоса про- пускания, Гц Амплитуда пульсаций, мВ Погреш- ность, %
СЗ С4. С6 С5, С7 С9
0,022 0,1 0,01 0,033 0,0033 0,047 680-10-“ 0,0022 700 150 150 100 1,5 1
Для оптрона DA3, заложенного в данную схему, полярность вы-
ходного напряжения соответствует полярности входного сигнала.
В случае применения оптрона с инверсным выходом по отношению к
данному необходимо подключить транзистор VT2 для неизменности
работы ячейки в целом. Для этого перемычки между выводами 3, 5,
6, 7 убирают и ставят иа выводы 3, 6, 4, 5.
Технические данные ячейки РТ-6 АИ
Входное сопротивление, кОм.......................................27
Температурный дрейф нуля, мВ/°С . . . •.......................... 7
Ток потребления от источника ±15 В, мА . •............... . . . 50
Ячейка потенциального разделителя ПР-ЗАИ. Эта ячейка струк-
турно построена аналогично датчику напряжения ДН-2АИ, но изоля-
ция разделительного трансформатора и входных и выходных цепей вы-
полнена на меньшее рабочее напряжение. Ячейка применяется для
потенциального разделения входных сигналов от системы управления.
202
Технические данные ячейки ПР-ЗАИ
Входное напряжение, В ........................... 0+10; 0+20
Двойная амплитуда пульсаций выходного напряжения, мВ 40
Температурный дрейф нуля, мВ/°С.................... 0,3
Температурный дрейф коэффициента передачи, %/°С . . . 0,05
Ток потребления от источника ±15 В,. мА............ 40
Ячейка разделителя гальванического РГ-7АИ. Эта ячейка струк-
турно построена аналогично ячейке РГ-5АИ, одиако разделительные
трансформаторы выполнены каждый иа двух тороидальных сердечни-
ках, на одном из которых размещены обмотки высокого потенциала,
а иа другом низкого. Электромагнитная связь между этими обмотка-
ми осуществляется с помощью одного замкнутого витка, охватываю-
щего оба сердечника трансформаторов. Такая конструкция трансфор-
маторов позволяет выполнить изоляцию иа значительно большие ра-
бочие напряжения и повысить потенциал разделяемых цепей.
Технические данные ячейки РГ-7АИ
Входное напряжение, мВ ..............................0+75
Ток потребления от источника +15 В, мА . • .......... 20
5.1.9. Источники питания
Ячейка стабилизаторов напряжения СН-4АИ. Эта ячейка
(рис. 5.13) содержит два канала стабилизированных напряжений +15
и —15 В. Основу схемы составляет микромодульный элемент GV ти-
па 701МП23, обеспечивающий стабилизацию двух разнополярных на-
пряжений относительно общей точки при токе нагрузки до 50 мА. Для
получения тока нагрузки до 0,8 А по каждому выходу в схеме вклю-
чены усилители мощности на транзисторах VT1—VT4. Резисторы
Rl, <R2 предназначены для выработки сигнала защиты от коротких
замыканий на выходе ячейки. С помощью резисторов R3—R6 уста-
навливается требуемый режим работы регулирующих транзисторов
VT1—VT4. Конденсаторы С1—СЗ обеспечивают устойчивость работы
стабилизаторов, остальные конденсаторы являются фильтрующими.
Светодиоды HVDl, HVD2 предназначены для визуальной сигнализа-
ции о наличии напряжений на выходах стабилизаторов. Кроме того,
схема на транзисторе VT5 и микроэлементе DD вырабатывает сигнал
логического 0 при наличии выходных напряжений или логической 1
при отсутствии напряжения любого из каналов ячейки. Этот сигнал
снимается с вывода В17 электрического соединителя ячейки относи-
тельно общей точки и используется в схеме защиты электропривода.
Если на выходе ячейки необходимо получить напряжение ±12,6 В,
то следует установить перемычки А, Б, А, Д, В, Г,
203
Технические данные ячейки СН-4АИ
Входное напряжение, В . ........................±(24±2,0)
Отклонение выходных напряжений от номинальных значе-
ний, В.........................................±0,3
Температурный дрейф выходного напряжения, мВ/°С . . 2,2
Ток срабатывания защиты, А........................1,5
Двойная амплитуда пульсаций выходного напряжения, мВ 10
Ячейка стабилизаторов напряжения СН-5АИ. Эда ячейка
(рис. 5.14) имеет два одинаковых канала стабилизированных напря-
жений ±15 В относительно общей точки, основу которых составляют
микромодули GV1, GV2 типа 701МП21 с собственным выходным то-
ком до 100 мА. Цепочки Rl, VD1 и R2, VD2 задают опорные напря-
Рис. 5.13. Схема ячейки стабилизаторов напряжения СН-4АИ
жения на вход элементов GV1, GV2. Переменными резисторами R5,
R6 осуществляется регулировка выходного напряжения каналов в пре-
делах 3—15 В. В остальном работа ячейки примерно аналогична ра-
нее рассмотренному стабилизатору СН-4АИ. j.
Технические данные ячейки СН-5АИ
Входное напряжение, В........................................24+2
Температурный дрейф выходного напряжения, мВ/°С ...... 2,1
Двойная амплитуда пульсаций выходного напряжения, мВ ... . 10
Ток срабатывания защиты, А .................................. 1,5
204
+и„
85 4:
+U„1
А5
815 4
Общ
ХР1
XS2.1
О.Т
XS2.2
J
УВ1Г
-^А27
• +ивы*2
ХР1у 812
Рис. 5.14. Схема ячейки стабилизаторов напряжения СН-5АИ
Ячейка генератора Г-2ЛИ. Эта ячейка включает в себя задающий
автогенератор на операционном усилителе, транзисторный усилитель
мощности и выходной трансформатор.
Технические данные ячейки Г-2АИ
Нагрузка генератора:
сельсины БД404А, шт.................................... 6
сельсины БД501А, шт....................................... 3
сельсины БД 160А, шт........................................ 2
Ток потребления от источника +15 В, мА...........................120
5.1.10. Устройства коммутации
Ячейка ключей К4-АИ. Схема (рис. 5.15) содержит два ключа,
построенных на усилителях DAI, DA2 с единичным коэффициентом
передачи по напряжению, на входе которых включены полевые тран-
зисторы DA3, DA5, замыкающие или размыкающие входную цепь в
зависимости от состояния ключей. Входной сигнал поступает на не-
инвертирующий DA1 или инвертирующий DA2 входы усилителей. Во
включенном состоянии неинвертирующего ключа DA1 транзисторы эле-
мента DA3 разомкнуты (на затвора» положительный потенциал), н
205
Рис, 5.15. Схема ячейки ключей К4-АИ
200
йкОДной сигнал проходит на вход усилителя. Выходное напряжение
усилителя DA1 имеет одинаковую полярность с входным сигналом.
Коэффциент передачи по напряжению усилителя DA1 настраивают пе-
ременным резистором R19 в цепи обратной связи усилителя. В отклю-
ченном состоянии ключа DA1 затворы полевых транзисторов элемен-
та DA3 приобретают отрицательный потенциал, вследствие чего тран-
зисторы открываются и шунтируют входной сигнал на общий провод,
образуя двухступенчатый ослабитель по входу. Переменный резистор
R18 предназначен для подстройки нуля выходного напряжения усили-
теля DA1 в отключенном состоянии ключа при отсутствии входного
сигнала.
Схема иа транзисторах VT1, VT2, DA4 служит для управления
транзисторами элемента DA3. Для образования нормально разомкну-
того ключа (ключ отключен при отсутствии сигнала управления) сле-
дует соединить выводы В5, В6. В данном случае в исходном состоянии
транзисторы VTI, VT2, DA4 закрыты, и иа затворах транзисторов эле-
мента DA3 действует отрицательный потенциал, приводящий к их
открытию. Транзистор VT2 закрыт по цепи смещения R17, VD2, а
транзистор VT1— по цепи R8, R14, R16, причем R8+RI4<R16.
Сигнал управления положительной полярности подводят к выводу
В8, а отрицательной полярности—к выводу В9. При подаче сигнала
управления транзисторы VT7, VT2, DA4 открываются, а транзисторы
элемента DA3 закрываются, и ключ переходит во включенное состоя-
ние. Если соединить выводы В5, В7, то ключ включается при отсут-
ствии сигнала управления. При этом в исходном состоянии транзи-
стор 1 элемента DA4 открыт, а остальные транзисторы закрыты.
В схеме инвертирующего ключа на усилителе DA2 полевые тран-
зисторы элемента DA5 выполняют роль последовательно-параллель-
ного клапана во входной цепи. При включенном состоянии ключа
транзистор 1 элемента DA5 закрыт, а транзистор 2 открыт. При этом
входной сигнал проходит на выход усилителя DA2 с коэффициентом
передачи, равным 1 и определяемым настройкой переменного резисто-
ра R38.
Полярность выходного напряжения противоположна по знаку по-
лярности входного сигнала. В отключенном состоянии ключа транзи-
стор 2 элемента DA5 закрыт, а транзистор / открыт. В этом случае
входной сигнал не поступает на усилитель и соответственно не про-
ходит иа его выход. Отключенный от входного сигнала инвертирую-
щий ввод усилителя DA2 через транзистор 1 элемента DA5 и резистор
R23 — R22 подсоединяется к общему проводу схемы, что позволяет
сохранить неизменной проводимость входных цепей усилителя и исклю-
чить смещение нуля его выходного напряжения.
Схема управления на транзисторах VT3, VT4, DA6 работает ана-
логично рассмотренной ранее для ключа на усилителе DA1. Для обра-
зования разомкнутого при отсутствии управления ключа следует соеди-
207
нить выводы В19, В21, для образования замкнутого при отсутствии
управления ключа—-выводы В19— В22. Сигнал управления положи-
тельной полярности подводят к выводу В23. При использовании сигна-
ла управления отрицательной полярности его подключают к выводу
В24.
В исходном состоянии для разомкнутого при отсутствии управле-
ния ключа транзисторы VT3, VT4, DA5.2, DA6.1, DA6.3 закрыты, а
транзисторы DA5.1, DA6.2 открыты. Для замкнутого при отсутствии
управления ключа транзисторы VT3, VT4, DA5:1, DA6.2, DA6.3 закры-
ты, a DA5.2, DA6.1 открыты. При подаче сигнала управления состоя-
ние транзисторов изменяется на противоположное.
Переменные резисторы R21, R40 предназначены для настройки
нуля выходного напряжения усилителей в замкнутом состоянии клю-
чей при отсутствии входных сигналов. Конденсаторы Cl, С2 выпол-
няют роль развязывающих фильтров в цепях питания. Конденсаторы
СЗ, С5 в обратной связи усилителей сглаживают пульсацию выходного
напряжения усилителей, обусловленную ее наличием во входных сигна-
лах. Эти конденсаторы установлены на монтажных лепестках и могут
в зависимости от условий конкретных применений ячейки отключаться
или заменяться другими. Конденсаторы С4, С6 корректируют частот-
ные характеристики усилителей. Стабилитроны VD5, VD6 обеспечивают
питание полевых транзисторов элементов DA4, DA6 пониженным на-
пряжением— около 10—12 В. Диоды VD1 — VD4 защищают переход
эмиттер — база транзисторов VT1 — VT4 от недопустимых обратных
напряжений, предельное значение которых составляет около 4 В.
Технические данные ячейки К4-АН
Входное сопротивление, кОм..........................................20
Полоса пропускания, кГц............................................. 5
Ток управления, мА.................................................1,5
Ток потребления от источника ±15 В, мА..............•...............50
Ячейка бесконтактных реле БР-2АИ. Эта ячейка предназначена
для коммутации в схемах с аналоговыми или дискретными сигналами
и содержит 12 аналоговых ключей на микросхемах К284КН1 и схему
управления на элементах серии К511. В зависимости от соедииеиия
выводов электрического соединителя, а также от установки внутрен-
них перемычек ячейки можно получить различные комбинации работы
ключей на замыкание или на размыкание.
Технические данные ячейки БР-2АИ
Напряжение срабатывания, В, не менее............................. 8
Сопротивление открытого ключа. Ом, не более.....................250
-Ток утечкн закрытого ключа, нА, не более.......................10
Ток потребления от источника ±15 В, мА.........................100
Ток потребления от источника —15 В, мА..........................40
Ячейка управления реле УР-2АИ. Эта ячейка содержит набор ло-
гических элементов, которые позволяют формировать программы работы
208
различных коммутационных аппаратов в схемах управлений электро*
приводом. Имеется световая индикация состояния элементов и возмож-
ность создания выдержки времени 0,1—7 с. Ток потребления от источ-
ника + 15 В — 120 мА.
Ячейка реле Р2-АИ. Ячейка имеет в своем составе два двухкату-
шечных реле РЭС46 и три реле РЭС55А, цепи катушек и контактные
группы которых выведены на электрический соединитель. Последова-
тельно с катушками реле включены добавочные резисторы, позволяю-
щие включать реле на стандартные напряжения.
Ячейка ключей К6-АИ. Ячейка имет шесть .реле с герметизирован-
ными контактами. Катушки реле включены в коллекторные цепи тран-
зисторных усилителей мощности, .каждый из которых может управлять-
ся по двум диодным входам сигналами положительной полярности.
Контакты реле могут использоваться во внешних схемах по назна-
чению.
Технические данные ячейки К6-АИ
Входное сопротивление, кОм......................•................ 5
Время задержки канала, мс......................................... 3
Ток потребления от источника 4-15 В, мА..........................250
Ячейка коммутационная ЯК-1АИ. Ячейка имеет 40 пронумерован-
ных лепестков, соединенных с электрическим соединителем. Между
лепестками посредством пайки можно устанавливать перемычки для
образования необходимых внутриблочных соединений в соответствии с
требуемой схемой включения элементов блока.
5.1.11. Устройства технологической логики
Ячейка логического И-ИЛИ ИИ-1АИ. Ячейка содержит шесть от-
дельных узлов, которые в различных комбинациях могут выполнять
простейшие илн более сложные логические функции. С помощью све-
тоизлучающих диодов фиксируется состояние отдельных элементов.
Ток потребления от источника +15 В — 100 мА.
Ячейка логического ИЛИ ИИ-2АИ. Ячейка имеет 12 отдельных
узлов для построения схем комбинационной логики различной слож-
ности. Пять элементов снабжены световой индикацией состояний. Ток
потребления от источника +15 В— 120 мА.
5.1.12. Устройства индикации
Ячейка индикаторов напряжения ИН-ЗАИ. Ячейка (рис. 5.16) со-
держит три одновходовых компаратора на усилителях DA1—DA6,
предназначенных для управления двухполярными входными сигналами.
Резисторы R22 — R39 образуют цепи положительной обратной связи,
применяемой для повышения четкости переключения компараторов и
улучшения их помехозащищенности.
14—3169 - 209
*В12хР1
+ 15% <тт-
Рис. 5.16. Схема ячейки индикаторов напряжения ИН-ЗАИ
210
14*
211
Входные сигналы поступают одновременно на инвертируют.ил ввод
одного и неинвертирующий ввод другого усилителя каждого компара
тора. На остальные вводы усилителей подается напряжение устав.си
срабатывания, снимаемое с потенциометров R7 — R12. Напряжение за-
дания уставкн срабатывания подводят - от внешнего источника
0±(10—15) В либо непосредственно к указанным потенциометрам,
либо, через резисторы R1—RG, причем на инвертирующие вводы уси-
лителей должно быть подано напряжение положительной полярности,
а на неинвертирующие — отрицательной. Диапазон уставки срабатыва-
ния-в первом случае составляет 0±10 В, а во втором — 0±1 В Под
действием напряжения уставки срабатывания .выходной сигнал усили-
телей имеет отрицательную полярность и благодаря наличию диодов
VD1 — VD6 на выход схемы не проходит.
Таблица 5.6
Цепь по р ИС. 6.16 Логические сигналы на входах и выходах
^ВЫХ1 1 1 110 0. 0 0
^ВЫХ2 0 0 110 0 1
^выхз 0 1 0 10 1 0 1
^B2S 1 01 010101010 1 0 1 0
^А20 1 01 010101111 1 1 1 1
^А18 1 11 110 10 1111 1 0 1 0
^В20 1 1Г011101110 1 1 1.0
^В21 0 10 101010001 0 1 0 1
UA21 1 01 010101110 1 0 1 0
При появлении на входах компараторов сигналов положительной
или отрицательной полярности, превышающих напряжение уставки,
срабатывают соответственно .усилители DAt, DA3, DA5 или DA2, DA4,
DA6, их выходные сигналы становятся .положительными и передаются
на аналоговые выходы 1—3 ячейки, а также поступают на входы ло-
гической микросхемы DD2, работающей в режиме И-НЕ. Наличие ре-
зисторов R41— R43 предотвращает разрыв входных цепей микросхемы
DD2 при отрицательной полярности выходного напряжения усилите-
лей DA1—DA6, когда диоды VD1— VD6 закрыты.
Возможные режимы работы узла логики на микросхемах DD2,
DD3 указаны в табл. 5.6.
Аналоговые ключи DA7 управляются от логической микросхемы
DD1. Сигналы управления ключами поступают с сопротивлений кол-
лекторной нагрузки R45 — R47, получающих питание от параметриче-
ского стабилизатора R40, VD7. При логическом сигнале 0 на входах
212
Рис. 5.17. Схема ячейки компараторов К5-АИ
микросхемы DD1 ключи замкнуты, при логическом сигнале 1 разомк-
нуты.
С помощью конденсатора С9 осуществлена цепь временной задерж-
ки на одном из элементов микросхемы DD1.' При подаче на вход 2
микросхемы логического сигнала 1 на выходе 3 схемы логический сиг-
нал 0 появляется с задержкой 3—7 мс. Резистор R44 является в дан-
ном случае внешней коллекторной нагрузкой элемента.
Если какие-либо из входов А8, В8, А9, В9, В26 микросхем DD1,
DD3 не используются, то их следует соединить с общим проводом или
с плюсом источника питания ячейки.
С помощью конденсаторов С1 — С6 корректируют частотные ха-
рактеристики усилителей. Конденсаторы С7, С8 образуют развязываю-
щий фильтр по цепям питания ячейки. Для уменьшения влияния высо-
кочастотных помех по входам усилителей в цепь отрицательной обрат-
ной связи усилителей включены конденсаторы СЮ—С15.
Технические данные ячейки ИН-ЗАИ
Напряжение аналоговых выходов, В;
в режиме Включено •....................................10—14
в режиме Отключено................................... 0—0,2
Сопротивление нагрузки аналоговых выходов, кОм............. ^4
Ток потребления, мА:
от источника +15 В . •................................ 100
от источника —15 В.................................... 60
Ячейка компараторов К.5-АИ. В состав ячейки (рис. 5.17) входят
интегральные операционные усилители DA1—DA3 с большим коэф-
фициентом усиления, образующие три однополярных компаратора для
сигналов отрицательной и положительной полярности. Резисторами
R14, R15, R17 на усилители DA1—DA3 задается смещение, опреде-
ляющее порог срабатывания компараторов в пределах 0,05—10 В. На-
пряжение смещения с полярностью, указанной на схеме, подается от
источника питания ячейки или от любого другого источника через вы-
воды All, А14, В10 относительно общего вывода А5. При этом порог
срабатывания компараторов может быть настроен в пределах от 1 до
10 В. Для настройки порога срабатывания от 0,05 до 1 В необходи-
мо снять перемычки 1, 2, 3, 4, 5, 6, шунтирующие резисторы R4, R5
и R6. Под действием смещения усилитель DA1 выдает отрицательный'
сигнал, а усилители DA2, DA3 — положительный. При этом транзисто-
ры VTI, VT2, VT3 закрыты.
Входы А6, В6, В8 являются базовыми. Остальные входы А7, В7,
В9 с помощью потенциометров R1 — R3 подстраиваются на требуемый
уровень по отношению к базовым входам. Входные сигналы отрица-
тельной полярности подаются иа выводы А7, А6, а положительной
полярности — на выводы В6 — В9. При подаче разнополярных вход-
ных сигналов выводы А6, В6 и А7, В7 соответственно попарно объеди-
214
няются и образую! схему двухйолйриого компДраЮра иа усиЛитеЛйХ
DAI, DA2.
Входные сигналы, когда их уровень превысит уставки смещения,
приводят к перебрасыванию выхода усилителей DA1—DA3, включе-
нию транзисторов VT1—VT3 и срабатыванию реле К/—КЗ.
Через диоды VD10—VD12 снимается выходной сигнал усилителей
DA1—DA3 в виде напряжения постоянного тока различной полярно-
сти, соответствующий логическому состоянию компараторов. Кроме
того, в цепь коллекторов транзисторов VT1 — VT3 включены обмотки
катушек реле К1—КЗ с герметизированными контактами, которые
выведены на выводы ХР электрического соединителя. Реле К4 можно
подключить во внешнюю цепь и использовать в соответствии с назна-
чением.
Диоды VD1 — VD3, VD7 — VD9 и стабилитроны VD4 — VD6 за-
щищают транзисторы VT1— VT3 от недопустимых перенапряжений
при индуктивной нагрузке, а также от обратных напряжений на пе-
реходах эмиттер — база. Через резисторы R22— R24 иа усилители
DA1 — DA3 вводится положительная обратная связь. Для снятия им-
пульсных помех в цепях баз транзисторов VT1 — VT3 установлены
Т-образные фильтры, собранные на резисторах R25—R30 и конденса-
торах С7 — С9. Конденсаторы СЮ, СИ выполняют роль фильтра для
развязки цепей питания. Для заземления корпуса ячейки служит
вывод А28.
Конденсаторы С2, СЗ, С5 корректируют частотные характеристики
усилителей, а С/, С4, СБ способствуют подавлению помех по вход-
ным цепям. Резисторы R8, R9, R11 и конденсаторы Cl, С4, СБ — С9
установлены на монтажных лепестках. При необходимости их можно
заменять. На лицевой панели ячейки расположены контрольные гнезда
и органы настройки.
Технические данные ячейки К5-АИ
Входное сопротивление, кОм.................................... 7,5
Выходное-напряжение, В......................................10—14
Сопротивление нагрузки, кОм.................................^4
Сопротивление катушек реле, Ом...............................380
Ток катушек реле, мА.......................................... 30
Максимальная частота включения, Гц.......................... 50
Ток потребления от источника +15 В (без учета тока катушек
реле) мА..................................................... 25
5.1.13. Устройства защиты
Ячейка защиты от стоянки под током ЗСТ-4АИ. Ячейка произво-
дит отключение электропривода с выдержкой времени при его пере-
грузках в различных режимах работы. Схема ячейки включает в себя
узел компараторов, осуществляющих сравнение с уставками контроли-
руемых величин, узел логики для набора программы работы н регули-
215
руеМое электронное реле времени. В качестве Первичной информаций
используются сигналы обратной связи по скорости и току электропри-
вода.
Технические данные ячейки ЗСТ-4АИ
- Ток потребления, мА;
от источника +15 В..........................................; . 120
от источника —15 В . . .........................................85
5.1.14. Вспомогательные устройства
Ячейка выделенця модуля ВМ-2АИ. Основой схемы (рис. 5.18) яв-
ляются усилители DA2, DA3. Для получения выходного напряжения
отрицательной полярности на электрическом соединителе ячейки сле-
дует соединить выводы А20 с А24 и А22 с А23. Входной сигнал 6/вц
через резисторы R8, R10 поступает одновременно на оба усилителя.
Кроме того, на вход усилителя DA3 через резистор R13 подключен
выход DA2, в результате чего выходное напряжение схемы опреде-
ляется суммарным действием сигналов на входе DA3. Обратная связь
усилителя DA2 выполнена нелинейной путем включения диодов VD3,
VD4.
R10
>В6
Ь В5
81
R2
83
>А24
УА23
XS2.1
•уот
>А21
ЬА22
А26+
В23 ,
Вх1^
822
Вых.2'
В»<-
817 .
8x 2
А2^
R11
84
^А18
>А16
+А17
)В8
> AS
)А7
+A2Q
J10
'Вых.1
+А19
XS3.2
Вых.1 - -
Рис. 5.18. Схема ячейки выделения модуля ВМ-2АИ
й I»
VH3 VD4
А5
814
0бщ<-
812
+758'
813,
-758
А28
812 R1J
XS3.1 I
ЁыхЛА2
ТсёТс7
216
Принцип работы схемы выделения модуля заключается в том, что
выход усилителя DA2, являющийся одним из входных сигналов уси-
лителя DA3, зависит пт полярности входного сигнала i/BX|. При поло-
жительном входном сигнале обратная связь усилителя DA2 зашунти-
рована диодом VD3 и выход усилителя DA2 ие превосходит порого-
вого напряжения диода VD3 (около 0,5—0,8 В). Диод VD4 с таким же-
пороговым напряжением не пропускает этот малый сигнал на вход
усилителя DA3. Выход DA3 в данном случае определяется лишь
основным входным сигналом ПВХ|, коэффициент передачи по которому
равен 1 (R10=R15). Полярность выходного напряжения усилителя
ВАЗ при этом отрицательная. При отрицательном входном сигнале
1/вх1 диод VD3 закрыт, и обратная связь усилителя DA2 образуется
из резистора R12 и диода VD4. При выбранных R8=R12 коэффициент
передачи усилителя DA2 для точки соединения R12, VD4 равен 1,
выходной сигнал его в данном случае положительный.
Коэффициент передачи усилителя DA3 по входу от DA2 равен
2(R15=2R13). Таким образом, в каждом из рассмотренных случаев
результирующий сигнал на выходе 1 равен входному сигналу и име-
ет отрицательную полярность. Для получения выходного напряжения
положительной полярности следует поменять местами диоды VD3,
VD4, т. е. соединить выводы А20 с А23 и А22 с А24.
Для работы ячейки в режиме сравнения двух сигналов отрица-
тельной полярности используются усилители DAI, DA2, а на электри-
ческом соединителе соединяются выводы В15 с А25, А20 с А24 и В18,
А26 с А22, А23. Последняя точка соединения является выходом схемы.
Прн этом напряжение в точках соединения R2, VD2 и R12, VD4 име-
ет положительную полярность и стремится к значению сооветствую-
щего входного напряжения, поскольку коэффициент передачи цепей
равен l(Rl—R2, R8=R12). Однако вследствие того, что эти точки
объединены, на выходе будет напряжение, определяемое наибольшим
по абсолютной величине входным сигналом.
Усилитель с меньшим входным сигналом под действием большего
выходного сигнала изменяет полярность выходного напряжения на
обратную, и диоды VD2 или VD4 закрываются, а напряжение усили-
теля становится равным пороговому напряжению диодов VD1 или
VD3. При работе с положительными входными сигналами следует
изменить схему подключения диодов VD1—VD4 путем соединения вы-
водов В15 с А26, А20 с А23 и В18, А25 с А22, А24. В этом случае
выходное напряжение имеет отрицательную полярность.
Таким образом, схема сравнения обеспечивает выходное напряже-
ние положительной или отрицательной полярности. Это напряжение
всегда определяется большим по абсолютному значению входным
сигналом. Усилитель DA1 может иметь также самостоятельное приме-
нение в качестве сумматора, инвертора, компаратора и в ряде других
схем. Резистор R7 предназначен для установки нуля его выходного
напряжения.
217
Переменный резистор R16 может быть использован для различ-
ных целей, например для плавной регулировки коэффициента переда-
чи усилителей. Конденсаторы С1—СЗ корректируют частотные харак-
теристики усилителей, а С6, С7 служат развязывающими фильтрами
по цепям питания. Конденсаторы С4, С5 с помощью внешних соеди-
нений можно подключать на выход усилителя DA3 для сглаживания
пульсаций напряжения в схеме выделения модуля при его работе в
качестве прецизионного выпрямителя сигналов переменного тока.
Диоды VD5, VD6 могут быть применены в случае необходимости
их установки в тех или иных цепях.
Технические данные ячейки ВМ-2АИ
Входное сопротивление, кОм..................................„ . 10
Температурный дрейф нуля, мВ/“С.................................. 1
Ток потребления от источника +15 В, мА ... 25
Ячейка выделения модуля ВМ-4АИ имеет три канала по структу-
ре, приведенной для ячейки ВМ-2АИ, а также один вспомогательный
операционный усилитель с четырьмя входами.
Технические данные ячейки ВМ-4АИ
Температурный дрейф нуля, мВ/°С ... ..................... 1
Ток потребления от источника +15 В, мА . . .........40
Ячейка фазочувствительного выпрямителя ФВ-2АИ. Схема ячейки
(рис. 5.19) содержит канал преобразования входного сигнала перемен-
ного тока в выходное напряжение постоянного тока, построенный на
усилителях DA1—DA3, и узел технологических блокировок на микро-
схемах DA4—DA6, DD1—DD3.
Усилитель DA1 выполняет роль амплитудного фазочувствительно-
го синхронного детектора. Транзистор VT управляется внешним ком-
мутирующим сигналом, подаваемым на вывод В5 и синхронным с
входным сигналом, подводимым к выводу В6. В замкнутом состоянии
транзистора VT усилитель DA1 работает как инвертор половину пе-
риода входного сигнала с коэффициентом передачи, равным 1 и опре-
деляемым отношением резисторов R5/R1. Вторую половину периода,
когда транзистор VT закрыт, усилитель DA1 работает как повтори-
тель также с коэффициентом передачи, равным 1. В результате на
выходе усилителя DA1 осуществляется двухполупериодное выпрям-
ление входного сигнала. При этом полярность выходного напряжения
определяется соотношением фаз входного и коммутирующего сигна-
лов. Внутреннее сопротивление источника входного сигнала, например
внешнего потенциометра, должно быть не более 1 кОм.
, Усилитель DA2 является фильтром. Предварительно выходное
напряжение усилителя DA1 сглаживается /?С-цепочкой, которая со-
стоит нз резистора R6 и конденсаторов С2, СЗ, С5, С6. Усилитель
DA2 дифференцирует переменную составляющую сигнала на его вхо-
де, подавая ее на выход в противофазе по отношению к сигналу на
218
Рис. 5.19. Схема ячейки фазочувствителйного выпрямителя ФВ-2АИ
R8 £5 4= 06
219
входе. Ё результате Возникает эффект дополнительного существенно-
го подавления пульсаций без увеличения постоянной времени фильтра.
Конденсаторы СЗ, С6 подключают только при частоте входного сигна-
ла 50 Гц. На частотах 400 и 1000 Гц перемычки 1, 2, 3, 4 не устанав-
ливают. Усилитель ВАЗ осуществляет масштабное преобразование.
Резистором R13 настраивается нуль выходного напряжения усилителя,
резистором R14 — его коэффициент передачи.
Конденсаторы Ct, С4, С8 предназначены для коррекции частот-
ной характеристики уснлителёй DA1—DA3. Конденсатор С7 подавляет
низкочастотные пульсации выходного напряжения, а конденсаторы С9,
СЮ выполняют роль развязывающих фильтров в цепях питания. Диоды
VD1—VD2 при снятой перемычке 5, 6 создают зону нечувствитель-
ности по входу. Ширина этой зоны 0,6—0,8В для каждой полярности
выходного напряжения в функции входного сигнала. При необ-
ходимости в схеме применения ячейки могут быть использованы для
различных технологических блокировок аналоговые ключи DA4—DA6,
включаемые отдельно нлн в различных комбинациях друг с другом.
Сигналы управления на этн ключи поступают с нагрузочных резисто-
ров R2O—R27 в цепи логических микросхем DD1—DD3. Прн логиче-
ском сигнале управления 0 нд входе ключей, соответствующем 0—
0,4 В, клгочн разомкнуты, а при логической 1 в пределах 2,3—5,5 В
ключи находятся в замкнутом состоянии. Микросхемы DD1—DD3,
предназначенные для управления ключами, являются инверторами.
Ключи в цепи диодов VD3, VD4 могут быть использованы в схе-
ме ограничения • хода механизмов с помощью конечных выключателей.
В этом случае выходное напряжение усилителя DA3 подводят к вы-
воду В23. При входных сигналах, соответствующих логическому сигна-
лу 0 на выводах В8, В9, последовательные ключи в цепи диодов
VjDS, VD4 замкнуты, и выходной сигнал проходит на вывод В24. При
появлении логического сигнала 1 на выводе В8 нлн В9 последователь-
ные ключи соответственно в цепи диодов VD3 нлн VD4 размыкаются,
препятствуя прохождению выходного напряжения отрицательной нлн
положительной полярности на вывод В24. Перемычки 7, 8, 9, 10 слу-
жат для образования последовательно-параллельного типа ключей,
если это возможно в конкретной схеме применения ячейки.
Для организации схемы запрета включения электропривода мо-
жет быть применен последовательно-параллельный ключ, подключен-
ный к клеммам В25, В26. Прн этом выходное напряжение усилителя
DA3 подсоединяют к выводу ключа В25. При наличии логического
сигнала 0 на выводе ВЮ выходное напряжение проходит на вы-
вод В 26.
При подаче логического сигнала 1 последовательный ключ размы-
кается, а параллельный замыкается, и выходное напряжение на вы-
вод В26 не поступает, что соответствует полному снятию сигнала зада-
ния на входе системы управления электроприводом.
220
Ключ, подключенный к выводам В27, Ё28, предусмотрел дли сту-
пенчатого снижения скорости электропривода в режиме ползучей ско-
рости нли прн переходе на пониженную скорость в зоне, предназна-
ченной для точной остановки электропривода. В этом случае при на-
личии логического сигнала 1 на выводе В16 ключ размыкается, и в
цепь выхода ячейки, в которую включены выводы В25, В26, вводится
резистор R29, определяющий пониженное значение скорости.
Ключ, присоединенный к выводам В20, В21, является свободным
н может быть применен по назначению. При логическом сигнале 0 на
выводе ВГ7' этот ключ замкнут.
Параметрический стабилизатор R28, VD5 предназначен для пита-
ния цепей входа аналоговых ключей DA4—DA6 напряжением около
5 В. Резисторы R15—R19 предотвращают недопустимое размыкание
входных цепей логических микросхем DD1—DD3.
In ™ -УА17 R17
_ ,ХР1 , KV 1 TXW $B18
88^-
•A A 1 A
Ab v \ А 9П
/7<- Я7 4— RZ, R17
Df ЛО / - /ttf—| 820
АО ~ i— R19 ' A21
.88 V" /?5£7| -^B21
R6l ' _ -УА22
Dtf V“ I ->822
А104г D4f) Z— гаг—1 [~yRZ2 -> A23
А11 <- W4 Z— /?gf—1 RW, , * I ^823 A AM
о It /FfTri R25
Al2. x
YXS2.1 I R27
DO X- ->B25
818 ]R13 XS22
Ап V" ->A16
A18<r N | 828 j A15
B19<r t^VD2 >815
A26 828 <r Ы. J ->A28
Рис. 5.20. Схема ячейки связи С4-АИ
221
Конденсаторы СЗ, Сб, С7 и резистор Ц29 установлены на мон-
тажных лепестках, их можно заменять прн настройке схемы ячейки
на заданные параметры.
На лицевой панели ячейки размещены контрольные гнезда для
проверки работы схе;лы, а также органы настройки.
Технические,данные ячейки ФВ-2АИ
Входное напряжение (амплитуда), В............................ ю
Входное сопротивление, кОм-................................ Ю
Двойная амплиутда пульсаций выходного напряжения, мВ . . . 50
Постоянная времени, мс:
на частоте 50 Гц..................................... 150
на частоте 400—1000 Гц................................ 20
Коммутирующее напряжение (амплитуда), В. ...... . -^12—15
Сопротивление логических входов, кОм..................... 2,7
Ток замкнутого ключа, мА................................. 0+5
Напряжение на разомкнутом ключе, В 0+10
Ток потребления, мА:
от источника +15 В................................... 100
от источника —15 В ................................. 50
К-цепей и три /?С-цепи, которые
DR ilQl ХР*. or
II
11
DI V V DO
DO Z- II uv i A Rtf)
DJ II ^DtU
iiCV
о// II " 7nli
Ilfs’
и /□ 11 //l/J
lies
DI/ v" ^DiO
\\C7
D II ?D1O
PQ4 z 1|ДО
oZ/ V 7D&U
И C5 A D9IL
Г7О4Т
Рие. 5.21 . Схема япейкн фильт-
Ячейка связи С4-АИ. Ячейка (рис. 5.20) содержит И раздельных
можно включать на вход или в обрат-
ную связь операционных усилителей.
Каждая цепь содержит переменный
резистор для точной подгонки коэф-
фициентов передачи. Контакты реле
K.V1, KV2 типов РЭС55А используют-
ся для замыкания конденсаторов в
регуляторах ПИ, И-тнпов для исклю-
чения «натекания» усилителей прн
отключенных обратных связях по ре-
гулируемому параметру. Конструкци-
ей ячейки предусмотрена возмож-
ность многократной перепайки нере-
гулируемых резисторов и конденса-
торов, которая может потребоваться
в случае замены элементов прн на-
стройке конкретных систем управле-
ния на объектах применения.
Технические данные ячейки С4-АИ
Напряжение питания реле, В...................................30
Ток катушек реле, мА.........................................30
Ячейка фильтров Ф4-АИ. Ячейка (рис. 5.21) содержит девять
конденсаторов, которые могут применяться в обратных связях • опера-
ционных усилителей, а также в ДС-фильтрах входных цепей контуров
222
регулирования (при этом используются резисторы, расположенные в
ячейке связи С4-АИ). Конструкция ячейки предусматривает возмож-
ность многократной перепайки конденсаторов при настройке систем
управления на заданные параметры.
f
5.2. Специализированные функциональные устройства
для электроприводов переменного тока
Наряду с применением типовых средств управления,
с помощью которых, как указывалось ранее, могут быть по-
строены различные системы регулирования электроприво-
дов, в некоторых случаях целесообразно использовать спе-
циальные разработки, позволяющие существенно упростить
схему внешних соединений устройств, уменьшить габариты
аппаратной части и в то же время обеспечить достаточно
широкий диапазон применяемости специализированных
средств управления. Примером такого подхода могут слу-
жить системы управления частотно-регулируемым электро-
приводом переменного тока, обладающие определенной
спецификой и представляющие обширный класс систем уп-
равления. В табл. 5.7—5.9 приведены номенклатура и тех-
нические данные ряда опециализиройанных устройств
УБСР-АИ для этих систем.
Таблица 5.7
Параметр Тип блока
БВА-АИ БГ2-АИ» ВПК АИ БВФ-А№»
Амплитуда входных напря- жений, В 4—10 о+ю 0—10 0—10
Амплитуда выходных на- пряжений, В 10 0—10 0—10 0—10
Частота входных напря- жений, Гц 0- 200 '— - 0—200 0—50; 0—200
Входное сопротивление, кОм 4—20 5—/ 5 5
Частота выходных напря- жений, Гц 0—200 0—50; 0—200 0—200 0—50; 0—200
Сопротивление нагрузки, кОм, не менее 2—10 2 2 2
Сдвиг по фазе между вы- ходными напряжениями 90+2° 90+2° 904 2° 90+2°
Ток потребления от источ- ника питания +15 В, мА 250 300 220 750
* Диапазон регулирования по частоте 30, по амплитуде 5,
••Ослабление высших гармоник 20 дБ.
223
Таблица 5.8
Параметр Тип ячейки
У7-АИ» У8-АИ” У0-АИ У10-АИ
Амплитуда входных напряжений, в 0—10 0—10 0+10 0—10
Амплитуда выходных напряже- ний, В 0—10 0—10 0+10 0—10
Сопротивление нагрузки, кОм, не менее 2 2 2 2
Полоса пропускания, кГц 0—15 0—10 — 0—10
Ток потребления от источника питания +15 В, мА 30 30 45 45
Входное сопротивление, кОм — 20 20 20
Коэффициент передачи по вхо- дам — 1 1 1
•Частота входных сигналов в режиме преобразователя координат С—200 Гц.
••Уровень ограничения выходного напряжения ±(1,5—10) В.
Таблица 59
Параметр Тип ячейки
УИ-АИ М2-АИ» ПТ-2АИ
Входное напряжение, В 0—10 01-10 0—10
Входное сопротивление, кОм 20 10 30
Выходное напряжение, В 0—10 0—10 4-10
Сопротивление нагрузки, кОм, не ме- нее 2 2 2
Ток потребления от источника питания + 15 В, мА 45 25 25
Частота выходного напряжения, Гц Температурный дрейф нуля, мВ/°С — 1000+30 0—50
— 1 2
•Погрешность 1 %.
Блок векторного анализатора БВА-АИ. Блок предна-
значен для вычисления модуля результирующего вектора
в двухфазной ортогональной си-
стеме координат, а также синуса
и косинуса некоторого угла <р, оп-
ределяющего его положение по
отношению к ортогональным со-
ставляющим.
На рис. 5.22 изображена век-
торная диаграмма системы двух-
фазных напряжений, положенная
в основу работы блока. На диа-
грамме показаны результирую-
щий ректор А, вращающийся с
Рнс. 5.22. Векторная диаг-
рамма системы двухфазных
напряжений ’
224
угловой скоростью <о в направлении против часовой стрел-
ки, и его составляющие в виде входных напряжений Z/Bxi,
^вх2, расположенные по действительной Re и мнимой Im
осям ортогональной системы координат.
Работа блока предусмотрена в двух вариантах, которые
обеспечиваются соответствующими соединениями по внеш-
нему электрическому соединителю ХР.
В режиме работы по схеме рис. 5.23 на входы 1 и 2
поступает система двухфазных напряжений:
t/BXi—Л cos <р; 1/вх2—Л sin <р, (5.12)
где А — амплитуда входных напряжений; <p=co/-f-<po — ар-
гумент гармонической функции, представляющий собой
угол между вращающимся результирующим вектором и
действительной осью ортогональной системы координат;
t — координата времени; <р0 — начальный угол. .
Рис. 5.23. Структурная схема блока векторного анализатора
(вариант 1)
Напряжение на выходе 4 соответствует модулю резуль-
тирующего вектора, который равен амплитуде входных на-
пряжений. Вычисление этого модуля осуществляется на
основе реализации уравнений
с/вых4 = К10 Vo, 1 Д; (5.13)
1/2вх1=Л2С052<р; (5.14)
t72Bx2=42sin2<p; (5.15);
L72Bxi4-I72BX2=^2(cos2<p4-sin2(p) =Д2, (5.16)
где уЧО — коэффициент передачи устройства извлечения
квадратного корня; 0,1 — коэффициент передачи квадрато-
ров.
15—3169 225
Для возведения в квадрат входных напряжений приме-
нены умножители АЗ, А4, работающие в режиме квадра-
торов. Выходные сигналы квадраторов в данном случае
имеют отрицательную полярность. Такую же полярность
имеет напряжение на выходе 4.
Суммирование выходных напряжений квадраторов вы-
полнено на усилителе DA2, извлечение квадратного корня
из этой суммы — на элементе А5. Напряжение задания,
снимаемое с потенциометра R2 в схеме усилителя DA2,
в этом случае следует установить равным 0. Вычисление
cos гр и sin<p производится путем решения уравнений
cos ф={7Вых1=1О17ВХ|,/Л; (5.17)
sinip^=t/BbIx2:=10(^Bx2/^4> (5.18)
где 10 — коэффициент передачи делительных устройств.
Значения cos<p и sih ф, равные 1, соответствуют в дан-
ном случае выходному напряжению 10 В. -
Делительные устройства образованы из усилителей
DAI, DA3 и умножителей Al, А2, включенных.в цепь об-
ратной связи этих усилителей. Для согласования знаков
совф и sin(f с полярностью входных напряжений Ubui, (Лиз
установлены инвертирующие усилители DA4, DA6 с коэф-
фициентом передачи, равным 1. Входное сопротивление для
схемы рис. 5.23 составляет 4 кОм.
В режиме работы по схеме рис. 5.24 на входы 1, 2 бло-
ка также подается система двухфазных напряжений (5.12).
Значения соэф и з!пф определяются вышеуказанным спо-
собом на основании уравнений (5.17), (5.18).
Рис. 5.24. Структурная схема блока векторного анализатора (вари-
ант 2)
226
В отличие от схемы рис. 5.23 вычисление модуля резуль-
тирующего вектора А в схеме рис. 5.24 обеспечивается за-
мкнутой системой регулирования, которая поддерживает
постоянство заданной амплитуды U напряжений, пропор-
циональных cos ср и sin ф, определяемых только углом <р,
т. е. положением вращающегося вектора А, и не зависящих
от его модуля. Для этого на вход суммирующего усилителя
DA2 подано задание 4-0,1 U2—-}- Ю В, с которым сравнива-
ются возведенные в квадрат напряжения, пропорциональ-
ные cos ф и sintp. Благодаря наличию в контуре звена DA5
с ПИ-характеристикой результирующее напряжение квад-
раторов АЗ, А4 всегда стремится к заданию, и, следова-
тельно, обеспечивается постоянство амплитуды напряже-
ний выходов /, 2 блока.
Поскольку контур обратной связи замыкается через де-
лительные устройства DAI, А1 и DA3, А2, одновременно
обеспечивается также автоматическое слежение выходным
напряжением усилителя DA5 (сигнал делителя) за ампли-
тудой входных напряжений UBXi, (сигнал делимого).
В этом случае напряжение выхода 3 блока соответствует
модулю результирующего вектора А. Входное сопротивле-
ние для схемы рис. 5.24 составляет 20 кОм.
Схема блока БВА-АИ показана на рис. 5.25. Диод VD
в элементе А6 исключает перерегулирование в динамике,
предупреждая появление большого напряжения положи-
тельной полярности на выходе усилителя DA5. Цепочка
R23, С12 подбирается, исходя из минимизации пульсации
выходного напряжения усилителя DA5, обеспечения устой-
чивости работы схемы и максимального быстродействия
регулятора.
Режим работы блока по схеме рис. 5.23 обеспечивает
лучшее быстродействие, по схеме рис. 5.24 — большую точ-
ность.
В схеме блока ячейка усилителей У10-АИ (элемент А6)
представлена упрощенно. Полная схема ячейки дана на
рис. 5.26.
Переменные резисторы Rl, R3 предназначены для на-
стройки нулей выходного напряжения усилителей DA1,
DA3. Конденсаторы С1, СЗ должны иметь емкость по
1000 пФ для обеспечения устойчивости работы делитель-
ных устройств на высокой частоте. Конденсаторы С2, С9,
СЮ позволяют в случае необходимости сгладить высоко-
частотные составляющие выходного напряжения усилите-
лей DA2, DA4, DA6. Конденсаторы С4—С6, CH, С13, С14
корректируют частотные характеристики усилителей. С по-
15* 227
Рис. 5.25. Схема блока векторного анализатора БВА-АИ
228
мощью конденсаторов С7, С8 выполняется развязка цепей
питания по высокочастотным помехам. Резисторы R4, R11,
R16, R24, R25, конденсаторы С1—СЗ, С9, СЮ, С12 и диод
VD установлены на монтажных лепестках, и их можно
заменять в процессе настройки. Напряжение питания, вход-
ные и выходные сигналы ячеек и блока подключаются от-
носительно общего провода.
На лицевых панелях ячеек и блока расположены кон-
трольные гнезда для наблюдения за работой схемы.
Умножители А1—А4 приняты типа УМ-ЗАИ с отрица-
тельным выходом для однополярных входных сигналов,
элемент А5 для извлечения квадратного корня — типа
ПК-2АИ.
В24<г
В 25
Вх.1 В26 <-
Общ.
-15В В15<?
+15В 812
А124-
В214-
В20<г
В18<с
Рнс. 5.26. Схема ячейки усилителей У10-АИ
229
Блок двухфазного генератора БГ2-АИ. Блок (рис. 5.27)
предназначен для создания двухфазного напряжения, регу-
лируемого по частоте и амплитуде с помощью воздействия
электрических сигналов постоянного тока. В основу схемы
блока положен принцип работы квадратурного низкочас-
тотного автогенератора синусоидальных колебаний с ис-
пользованием операционных усилителей в режиме интегра-
торов.
Два интегратора на усилителях DAI, DA3, включенные
последовательно и охваченные петлей отрицательной об-
ратной' связи через умножители А2, А4, и инвертирующий
усилитель DA4 образуют резонансную систему, в которой
при определенных условиях возникают гармонические ав-
токолебания.
Рис. 5.27. Схема блока двухфазного генератора БГ2-АИ
230
Таким условием является обеспечение равенства
(1/«рез/?/С/)(1/Шрез/?^С7)=1, (5.19)
где <орез — резонансная частота системы.
Выходное напряжение инвертирующего интегратора на
90° опережает по фазе его входной сигнал, поэтому в дан-
ной схеме выходные напряжения интеграторов образуют
двухфазную систему.
Для возбуждения колебаний на выходе обоих интегра-
торов с одинаковой амплитудой постоянные времени инте-
граторов выбирают равными: R1=R14=R; С1=С7=С.
В этом случае частота собственных колебаний генера-
тора составит:
fo=l/2n/?C. (5.20)
В реальной схеме интеграторов всегда имеются потери,
приводящие к затуханию в резонансной системе. Для воз-
буждения незатухающих автоколебаний применяют допол-
нительно положительные обратные связи по одному или
двум интеграторам, компенсирующие эти потери. В схеме
блока используются положительные обратные связи, охва-
тывающие усилители интеграторов DAI, DA3 через умно-
жители А1, АЗ и резисторы R4, R16. Эти цепи входят так-
же в узел автоматического поддержания заданной ампли-
туды автоколебаний.
Перестройка частоты колебаний генератора осуществ-
ляется дискретно путем изменения постоянной времени ин-
теграторов T=RC в результате изменения емкости конден-
саторов С1 и С7 в зависимости от исполнения блока. При
этом диапазоны частот составляют 0—50 или 0—200 Гц.
Плавная перестройка частоты генератора достигается элек-
трическим способом путем включения во входные цепи ин-
теграторов умножителей А2, А4, выполняющих роль регу-
лируемых сопротивлений. На один из входов умножителей
А2, А4 поступает выходное напряжение соответствующего
интегратора — на умножитель А4 с выхода интегратора
DA1, на умножитель А2 — с выхода интегратора DA3 че-
рез инвертор DA4. На второй вход умножителей А2, А4
подается входной сигнал постоянного тока t/BX, управляю-
щий частотой генератора и заводимый в блок’ через вывод
Вх. f электрического соединителя ХР. С помощью этого
входного сигнала регулируется выходное напряжение ум-
ножителей А2, А4, подаваемое на вход интеграторов DAi,
DA3, а следовательно, темп интегрирования и частота ко-
лебаний. Номинальному уровню ±10 В входного управля-
ющего напряжения соответствует максимальная частота
231
данного диапазона генератора, определяемая уравнением
(5.20). Рабочий диапазон плавного изменения частоты ге-
нератора в области инфранизких частот определяется воз-
можностью различения полезного малого выходного сигна-
ла умножителей на фоне его помех и дрейфа, т. е. стабиль-
ностью'и точностью работы умножителей в зоне малых
сигналов.
Инвертирующие усилители DA4, DA5 являются выход-
ными усилителями блока. Они обеспечивают отдачу в на-
грузку тока ±5 мА, поскольку полезный выход самих ин-
теграторов DAI, DA3 ограничен собственной нагрузкой
схемы генератора. Полярность входного управляющего на-
пряжения определяет фазу выходных напряжений ум-
ножителей А2,А4 и, следовательно, фазу выходных напря-
жений блока. Для положительной полярности Г7ВХ напря-
жение на выходе 1 опережает на 90° напряжение на вы-
ходе 2, а для отрицательной полярности UBX соответствен-
но отстает по фазе на 90°.
В состав узла задания и автоматического поддержания
амплитуды выходного напряжения генератора помимо
умножителей А1, АЗ входят также умножители в режиме
квадраторов А5, А6 и усилитель DA2 в режиме ПИ-регу-
лятора.
С потенциометра R2 на вход усилителя DA2 подается
напряжение задания UA отрицательной полярности, опре-
деляющее амплитуду колебаний генератора. Выходное на-
пряжение усилителя DA2 положительной полярности через
воздействие на умножители А1, АЗ задает глубину поло-
жительной обратной связи в цепи интеграторов DAI, DA3.
Происходит возбуждение автоколебаний генератора. Квад-
раторы А5, А6 подключены на выходе усилителей DA1,
DA3. Выходные напряжения квадраторов суммируются на
входе усилителя DA2, образуя сигнал отрицательной об-
ратной связи по отношению к заданию амплитуды.
Результирующий выходной сигнал квадраторов с посто-
янной положительной полярностью находится из уравнения
ПвыХА5.Аб=^2 sin2 ф-O.l+A2 cos2 ф-0,1=0,1 А2,
(5.21)
где А — амплитуда колебаний генератора; ф— аргумент
гармонического колебания; 0,1 — коэффициент передачи
квадраторов.
С учетом ПИ-характеристики усилителя DA2 результи-
рующий сигнал квадраторов А5, А6 при равенстве рези-
сторов R7—R9 всегда стремится к заданию амплитуды UA.
Таким образом, в схеме возбуждаются и автоматически
232
поддерживаются автоколебания с амплитудой, связанной
с заданием соотношением
А = V 3,16 уй~А. (5.22)
В статическом режиме выходное напряжение усилителя
DA2 близко нулю. Диод VD в обратной связи усилителя
исключает перерегулирование в динамике, предупреждая
появление большого напряжения отрицательной полярно-
сти на выходе DA2. Цепочка R12, С2 подбирается, исходя
из минимизации пульсации выходного напряжения DA2,
обеспечения устойчивости работы схемы и максимального
быстродействия в отслеживании регулятора амплитуды.
При работе в режиме быстрого изменения задания ампли-
туды диод VD отключается.
В схеме блока ячейка усилителей У11-АИ (элемент А7)
представлена упрощенно. Полная схема ячейки дана на
рис. 5.28.
Конденсаторы С5, С6 предназначены для развязки це-
пей питания по высокочастотным помехам. Конденсаторы
СЗ, С4, С9—СП корректируют частотные характеристики
усилителей. Резисторами R3, R13 осуществляется настрой-
ка нулей интеграторов DAI, DA3. С помощью конденсато- •
ров С8, С12 можно в случае необходимости сгладить высо-
кочастотные пульсации выходного напряжения усилителей
DA4, DA5. Напряжение питания блока подводится по от-
ношению к общему вводу электрического соединителя ХР.
На лицевых панелях ячеек и блока расположены кон-
трольные выводы для наблюдения за работой схемы.
Умножители А1—А6 в блоке приняты типа УМ-ЗАИ,
причем А1—А4 — с отрицательным выходом при однопо-
лярных входных сигналах, а А5, А6 — с положительным.
Блок преобразователя координат БПК-АИ. Блок (рис.
5.29) предназначен для преобразования одной двухфазной
ортогональной системы координат в другую двухфазную
ортогональную систему координат, сдвинутую относитель-
но первой на некоторый угол ф (преобразование П2-2).
При работе в режиме преобразования П2-2 блок вы-
полняет решение следующих уравнений:
прямое преобразование
na=0,luaAi cos ф—0,lugA| sin ф; (5.23)
i/p=0,l udA !sin ф+0,1пчА1 cos ф, (5.24)
где иа— выходное напряжение по выходу /; и₽ — выходное
напряжение по выходу 2, опережающее по фазе на 90° на-
233
XS3.2
Рис. 5.28. Схема ячейки усилителей УИ-АИ
234
пряжение t/a; Ud=Л2 sin (W+<po2)—напряжение входа 2;
uq=A2 cos ((о2/+фО2)—напряжение входа /; At cos ф— на-
пряжение входа 3; A|Sin<p-—напряжение входа 4\ ф=
=<01/+ф01 — аргумент гармонической функции; фоь ф02 —
начальный угол; <йь (о2— частота; Ль Л2— амплитуда гар-
"монического колебания; t — координата времени;
обратное преобразование
ud=0,lUaAi cos ф-|-0,1к₽Л i вШф; (5.25)
uq=—O.lnjcAi sin ф+0,1ырА1 cos ф; (5.26)
здесь ud — выходное напряжение по выходу 2; uq — выход-
ное напряжение по выходу /, опережающее по фазе на 90°
напряжением; t/a=A2sin (<о2/+фО2)— напряжение входа/;
up=A2cos (со2/-}-фо2) — напряжение входа 2.
Рис. 5.29. Схема блока преобразователя координат БПК-АИ
Указанные соотношения поясняются векторной диаграм-
мой на рис. 5.30. На векторной диаграмме представлены оси
ортогональных систем координат а, 0 и d, q с углом сдвига
Ф между ними, а также результирующий вращающийся
вектор U и его проекции на оси координат, образующие
соответственно напряжения Ua, t/p и Ud, Uq.
Уравнения (5.23) — (5.26) можно представить в несколь-
ко ином виде:
и«=0,1Л|Л2 sin [ (м2—<О1)/-}~фо2—Ф01] J (5.27)
Кр^О, 1Л |Л2 cos [ (и2—<|>1) /+ф02—Фо1 ] > (5.28)
235
Рнс. 5.30. Векторная диаграм-
ма блока в режиме П2-2
Па = 0,1Л|Л2sin [(<02~b<0i)t—J—срозН-*poi] > (5.29)
uq=O,lA 1Л2 COS [ (<L>2 hbJ|)/_|“Сро2 4_фО|] • (5.30)
Как видно из (5.27) — (5.30), при прямом преобразова-
нии выходные сигналы имеют разностную частоту по от-
ношению к входным, а при- обратном преобразовании —
суммарную.
Для решения (5.23) — (5.26) в схеме блока используют-
ся ячейки умножителей А1—А4 и усилители DAI, DA2
ячейки А5 в режиме работы
П2-2. Коэффициент 0,1 в
(5.23) — (5.30) является коэф-
фициентом передачи умножи-
телей. Все умножители Л/—
44 — типа УМ-ЗАИ с положи-
тельным выходом при однопо-
лярных входных сигналах.
Ячейка А5 .типа У7-АИ
(рис. 5.31) имеет также само-
стоятельное назначение в ка-
честве преобразователя двух-
фазной системы в трехфазную
(режим П2-3) или трехфазной системы в двухфазную (ре-
жим ПЗ-2). Ячейка содержит три усилителя DA1—DA3 в
интегральном исполнении. Входные цепи усилителей позво-
ляют выполнять суммирование сигналов по инвертирующе-
му (на схеме обозначен знаком «—») и неинвертирующему
(на схеме обозначен знаком «+») входам микросхем. Схе-
ма операционного усилителя с комбинированными входами
показана на рис. 5.32.
Для этой схеоды выходное напряжение усилителя t/вых
определяется через входные сигналы t/BXi—t/BX4 соотноше-
нием
77 _ 77 R5 r, R5 , п R4 R1R2/(,R1±R2)+R5 .
вых - BX1R1 m2R2 ' ”^R3+R4 R1R2/(R1+R2)
, п R3 R1R2/(R14- R2)+R5
~'Ub^R3+R4 R1R2/(R1+R2} ‘ J
Если какой-либо из входов схемы не используется, то
соответствующие члены правой части уравнения (5.31) об-
ращаются в нуль, а значения резисторов по неиспользован-
ным входам принимаются равными бесконечности. *
При работе в режиме П2-2 ячейка выполняет одновре-
менное решение следующих уравнений:
Uвых2==1/с—t/^.
(5.32)
(5.33)
236
где Ua, Ub, Uc, Ud. — входные переменные величины, задан-
ные в виде напряжений постоянного или переменного тока.
Для решения (5.32), (5.33) входные сигналы, соответ-
ствующие правой части уравнений со знаком «Ц-», пода-
ются на неинвертирующие входы, а со знаком «—» — на
инвертирующий вход усилителей.
Рнс. 5.32. Схема операционно-
го усилителя с комбинирован-
ными входами
Рис. 5.31. Схема ячейки усилите-
лей У7-АИ
Коэффициент передачи сигналов по всем входам ра-
вен 1. Включение усилителей для работы в режиме П2-2
представлено на рис. 5.33. Обозначение элементов дано
в соответствии со схемой ячейки. Для получения единично-
го коэффициента передачи по входам все резисторы в схе-
ме имеют одинаковое сопротивление.
В режиме П2-3 для преобразования системы двухфаз-
ных напряжений в трехфазную с помощью усилителей
ячейки решаются уравнения
^вых1 — а' (5.34)
^ = -0.5^+0-5 (5.35)
(/вых,= -0,5(/я-0,5 V3t/6. (5.36)
237
где Uа — входное напряжение переменного тока, отстаю-
щее по фазе на 90° от входного напряжения Ub‘, UBbIxi —
выходное наряжение, соответствующее фазе А и совпада-
ющее по фазе с напряжением входа Ua; ивых2 — выходное
напряжение, соответствующее фазе С; С7Выхз— выходное
напряжение, соответствующее фазе В.
Схема включения усилителей для данного режима по-
казана на рис. 5.34.
Рис. 5.33. Схема включения
усилителей для работы в ре-
жиме преобразования П2-2
Рис. 5.34. Схема включения
усилителей для работы в ре-
жиме преобразования П2-3
Для обеспечения требуемых коэффициентов передачи
по входам все резисторы в цепи усилителя DA1 должны
иметь одинаковое сопротивление, а между остальными ре-
зисторами схемы'рис. 5.34 должны выполняться соотноше-
ния
R12 = R13 = 2R20-, R5 + R14 == 2R?0l(V3 - 1);
R16 = 2R21-, R18 = 0,5R21; R6 ±RI5 = 2R21/Уз.
В режиме ПЗ-2 для преобразования трехфазной систе-
мы напряжений в двухфазную решаются уравнения
UBMl=^f3Ua-ysUb^/2Uc-, (5.37)
иБЫМ=ЦУЗис-\1Узиь, (5.38)
где t/выхь t/выха — выходные напряжения двухфазной си-
стемы, причем ивых\ отстает по фазе на 90° от Г/Вых2; Ua,
Ub, Uс — входные напряжения, соответствующие фазам А,
В, С.
238 —
Схема включения усилителей для режима ПЗ-2 дана на
рис. 5.35. Для получения коэффициентов передачи по вхо-
дам усилителей согласно (5.37), (5.38) между резисторами
схемы рис. 5.35 должны выполняться соотношения
R1O=R19- R14=R20- R9=1,5R19-,
R1+R7=R2+>R8=3R19;
R3-\-Rll = R4 + RI3 = VT R20.
Для схем рис. 5.34, 5.35 амплитуда входных и выход-
ных сигналов одинакова. В схеме ячейки конденсаторы С1,
С2, С7,СЮ выполняют роль • фильтров в цепях питания.
Конденсаторы С6, С8, С9 пред-
назначены для коррекции час-
тотных характеристик усилите-
лей. Конденсаторы СЗ—С5 мо-
гут использоваться при необ-
ходимости для сглаживания
пульсаций в выходном напря-
жении усилителей. В блоке до-
полнительно установлена еще
одна ячейка У7-АИ (элемент
А6 на схеме не показан), кото-
рая может при необходимости
Рис. 5.35. Схема включения
усилителей для работы в ре-
J, жиме преобразования ПЗ-2
выполнять указанные выше
операции.
- Блок векторного фильтра
БВФ-АИ. Блок (рис. 5.36)
предназначен для выделения основной гармоники в систе-
ме двухфазных напряжений, содержащих высшие гармони-
ческие, без искажений фазы и амплитуды этих напряже-
ний.
В состав блока в качестве основных частей входят три
ячейки умножителей УМ-ЗАИ (элементы А2, А5, АЗ),
ячейка усилителей У9-АИ (элемент АЗ), две ячейки стаби-
лизаторов напряжения СН-4АИ (элементы А7, А8 на схеме
не показаны), блок преобразователя координат БПК-АИ
(элемент А1) и блок двухфазного генератора БГ2-АИ
(элемент А4). Умножитель А2 имеет положительный вы-
ход при однополярных входных сигналах, а умножители А5,
А6 — отрицательный.
Принцип работы блока основан на замене двухфазных
входных напряжений, содержащих высшие гармонические,
выходными напряжениями двухфазного генератора, син-
фазно управляемого по частоте в функции входных сигна-
239
Рис. 5.36. Схема блока векторного фильтра БВФ-АИ
240
лов блока. В качестве такого генератора используется
блок БГ2-АИ (элемент А4), управляемый по частоте вы-
ходным сигналом усилителя DA6 положительной полярно-
сти. Выходные напряжения генератора в точках 9, 10 'всег-
да имеют постоянную амплитуду, равную 10 В, вне зави-
симости от амплитуды входных сигналов блока. Для того .
чтобы выходное напряжение блока соответствовало ампли-
туде входных сигналов, применены умножители А5, А6. На
один из входов этих умножителей подано выходное напря-
жение генераторов с постоянной амплитудой, а на другой
вход поступает выходной сигнал отрицательной полярности
усилителя DA5, пропорциональный в следящем режиме
амплитуде входных напряжений блока. В результате на
выходе умножителей А5, А6 напряжение также будет про-
порционально амплитуде входных сигналов блока'.
Схема слежения за амплитудой, частотой и фазой
входных напряжений блока образует замкнутую систему
регулирования. Основным элементом в этой системе явля-
ется преобразователь координат БПК-АИ (элемент А1),
работающий в режиме прямого преобразования П2-2. На
входные выводы блока относительно общего провода по-
дается система двухфазных напряжений с содержанием
высших гармонических, причем напряжение, подаваемое
на вход 1, должно быть опережающим по фазе. На другие
входы элемента А1 поступает напряжение обратной связи
с выхода генератора А4. В синфазном режиме слежения
за основной гармонической напряжения по входам 1 и 3
элемента А1 совпадают по фазе, выходное напряжение в
точке 11 равно 0, а в точке 13 имеет положительную по-
лярность и равно амплитуде входных напряжений блока.
Эти напряжения подведены ко входам усилителей DA1,
DA2. Усилитель DA2 совместно с умножителем А2 образу-
ет делительное устройство, выходное напряжение которого
пропорционально тангенсу разностного угла рассогласова-
ния фаз и поступает, как сигнал ошибки, на ПИ-регулятор
DA4, стремящийся уменьшить эту ошибку до. 0. Усилитель
DA6, непосредственно управляющий частотой генератора
А4, по сигналу с усилителя DA4 работает как повторитель
с коэффициентом передачи, равным 1. Кроме того, на ин-
вертирующий вход DA6 через стабилитроны VD2, VD3 по-
ступает сигнал с выхода усилителя DA2. Эта цепочка всту-
пает в работу в переходных процессах рассогласования по
углу при значительном рассогласовании, обладает хорошим
быстродействием и препятствует нарушению режима син-
хронизации по частоте в системе регулирования. Резисто-
16—3169 941
ром /?/ настраивают коэффициент передачи делительного
устройства на значение, равное 1Q. Цепочку R15, С7 в об-
ратной связи усилителя DA4 подбирают, исходя из требо-
ваний обеспечения максимального подавления в тракте
высших гармоник, получения минимальной постоянной
времени и устойчивой работы регулятора.
Таким образом, благодаря действию регулятора выход-
ные напряжения блока соответствуют основной гармонике
одноименных входных напряжений.
Комбинация усилителей DAI, DA3, DA5 образует ак-
тивный фильтр низкой частоты в тракте регулирования ам-
плитуды. Коэффициент передачи фильтра по напряжению
постоянного тока равен 1. Цепочка R10, С2 в обратной
связи усилителя DA1 должна по параметрам соответство-
вать цепочке R15, С7 усилителя DA4. Постоянная времени
/?//, С5 интегратора DA3 должна равняться постоянной
времени генератора А4. Диод VD1 предотвращает прохож- .
дение напряжения делителя отрицательной полярности в
переходных процессах самосинхронизации по углу.
Ячейка усилителей У9-АИ. Полная схема ячейки усили-
телей У9-АИ (элемент АЗ) дана на рис. 5.37. Конденсато-
ры СЗ, С4, С6, С8, СЮ, СИ корректируют частотные ха-
рактеристики усилителей. Конденсатор С1 емкостью
1000 пФ предназначен для устранения самовозбуждения 4
усилителя DA2 в схеме делительного устройства. Конден-
саторы С12, С13 служат для развязки цепей питания по
высокочастотным помехам. С помощью резистора R3 на-
страивают нуль выходного напряжения усилителя DA5 в
схеме активного фильтра при отсутствии входного сигнала.
Резисторы R18, R24 и конденсаторы С1, С2, С5, С7,С9
установлены на монтажных лепестках. Их можно заменять
при настройке блока в системе электропривода.
Ячейка усилителей У8-АИ. Эта ячейка (рис. 5.38) пред-
назначена для работы в качестве регулятора фазных токов.
Усилители ячейки могут использоваться также как суммато-
ры и инверторы с общим регулируемым ограничением вы-
ходных сигналов. Ячейка содержит три усилителя DA1 —
DA3 в интегральном исполнении. Каждый усилитель имеет
по три входные цепи с коэффициентом передачи по напря-
жению, равным 1. Резисторами R3, Rll, R19 устанавлива-
ют сигнал смещения на входе усилителей, обеспечиваю-
щий нулевой уровень выходного напряжения при отсутст- _
вии основных входных сигналов.
В цепь обратной связи каждого усилителя включена
схема регулируемого двухполярного ограничения выходно-
242
го напряжения, выполненная на транзисторах VT1—VT6
и диодах VD1 — VD6. Уровень ограничения, общий для
всех усилителей, устанавливают подачей на базы транзи-
сторов опорного напряжения, снимаемого с переменных
резисторов Rl, R2. Выходное напряжение усилителей при-
мерно на 1 В больше установленного опорного напряжения
за счет прямого падения напряжения на диодах и перехо-
дах коллектор — эмиттер транзисторов. Резисторы Rl, R2
подключают к источнику питания ячейки или к регулируе-
мому парафазному источнику сигнала в случае, когда нуж-
на автоматическая корректировка уровня ограничения.
-$В23
Вых.1
$817
Вых.2
$814-
Рис. 5.37. Схема ячейки усилителей У9-АИ
$811
Вых.З
^вго
Конденсаторы С/, С2, С5, С6, С9, СЮ устраняют само-
возбуждение схемы на высокой частоте. Конденсаторы С4,
С8, С12 предназначены для коррекции частотных характе-
ристик усилителей. Конденсаторы С13, С14 выполняют
роль фильтров для исключения возможных паразитных
связей по цепям питания. С помощью конденсаторов СЗ,
С7, СП можно осуществить фильтрацию высокой частоты
в цепях входных сигналов. Эти конденсаторы, а также ре-
зисторы обратной связи RIO, R18, R26, определяющие ко-
эффициент передачи усилителей, установлены на монтаж-
ных лепестках для возможности ик подбора.
16* 243
Ячейка модуляторов М2-АИ. Ячейка (рис. 5.39) пред-
назначена для получения синусоидального напряжения,
амплитуда и фаза которого определяются двумя входными
сигналами постоянного тока, а частота — входными задаю-
щими импульсами, и служит для построения систем управ-
ления частотно-регулируемыми электроприводами пере-
менного тока.
Вых.1 Вх.2 Вых? Вх.З Вых.З
Рис. 5.38. Схема ячейки усилителей У8-АИ
Схема ячейки состоит из двух модуляторов, сумматора,
фильтра нижних частот и инвертирующего усилителя. Мо-
дуляторы построены на усилителях DAI, DA2 и служат
для. формирования импульсов прямоугольной формы, ам-
плитуда которых определяется входным сигналом напря-
жения постоянного тока. Для модуляции входного сигнала
в цепи неинвертирующих входов усилителей установлены
аналоговые ключи DA6.1, DA6.2. Ключи управляются пря-
моугольными положительными импульсами коммутирую-
щего напряжения с частотой следования 1000 Гц и скваж-
ностью, равной 2, причем импульсы, поступающие на
DA6.2, отстают на 90° от импульсов, подаваемых на ключ
244
Рис. 5.39. Схема ячейки модуляторов М2-АИ
А12<
245
DA6.1. При наличии коммутирующего импульса ключ зам-
кнут и усилитель работает как инвертор, а при его отсут-
ствии ключ разомкнут и усилитель работает как' повтори-
тель.
Выходной сигнал модулятора представляет собой раз-
нополярное симметричное напряжение прямоугольной фор-
мы со скважностью, равной двум, а его амплитуда зави-
сит от входного сигнала постоянного тока. Резисторы на
входах и в цепях обратной связи усилителей DA1 и DA2
обеспечивают коэффициент передачи модуляторов, рав-
ный 1. С помощью резисторов R9, R10 устанавливается
симметрия выходного напряжения модуляторов. Симмет-
ричные прямоугольные напряжения с выходов модулято-
ров, сдвинутые относительно друг друга на 90°, поступают
на суммирующий усилитель DA3, коэффициент передачи
которого принят равным 1/1,5. Суммарное напряжение с
выхода усилителя DA3 подается на вход фильтра нижних
частот третьего порядка, реализованного на усилителе
DA5. С помощью фильтра, рассчитанного на частоту среза
/о = Ю00 Гц, выделяется синусоидальное напряжение пер-
вой гармоники. Фильтр реализован на основе структуры
Рауха.
Напряжение на выходе фильтра для первой гармони-
ческой
uB,„=4- v* (5.39)
где Къ= 1/1,5 — выбранный коэффициент передачи сум-
матора; Лф=1,18 — коэффициент передачи на постоянном
токе выходного фильтра (выбран из условия — ^Кф=1);
Г^вх! — входное напряжение первого модулятора; L/BX2 —
входное напряжение второго модулятора.
Из этого выражения видно, что при подаче на один из
входов ячейки напряжения ±10 В на выходе получим
синусоидальное напряжение с амплитудой 10 В. Сочетание
входных сигналов должно быть таким, чтобы подкоренное
выражение не превышало 100. Резистор R19 предназначен
для установки нуля выходного напряжения цри отсутст-
вии входных сигналов. Резистором R25 устанавливают ко-
эффициент передачи выходного усилителя DA5.
При изменении входных сигналов выходное напряжение
изменяется не только по амплитуде, но и по фазе. Измене-
ние фазы выходного напряжения при ПВх1 = Пвх2=7,07 В
для различных сочетаний полярности входных сигналов
представлено в табл. 5.10.
246
Таблица 5.10
УВХ1 ^вха di °вх. "вх. ^вых
+ + 0° — 4-180*
— + +90° + — +270°
Отсюда видно, что изменение фазы выходного напря-
жения происходит в сторону отставания. Это справедливо
для случая, когда коммутирующее напряжение 17кг отста-
ет по фазе на 90° от коммутирующего напряжения Um.
В случае отставания по фазе UKi от UKz на 90° изменение
фазы выходного напряжения произойдет в сторону опере-
жения. Отключение одного из входных сигналов дает
сдвиг фазы выходного напряжения на 45°.
Инвертирующий усилитель DA4 служит для (получения
инверсного напряжения на выходе ячейки.
Делитель напряжения R26, R27 предназначен для по-
дачи входного сигнала от источника питания ячейки. Для
этого вывод.В/2 соединяют с выводом В10 либо А12 в за-
висимости от необходимой полярности входного сигнала.
Вывод А22 соединяют с одним из входных выводов.
Ячейка трехфазного преобразователя ПТ-2АИ. Эта
ячейка (рис. 5.40) служит для получения системы двух-
фазных и трехфазных синусоидальных напряжений с регу-
лируемой частотой и амплитудой. Схема позволяет полу-
чить два синусоидальных напряжения, сдвинутых относи-
тельно друг друга на 90°, а также систему трехфазных
синусоидальных напряжений, сдвинутых относительно друг
друга на 120°. Частота выходных напряжений может ме-
няться от 0 до 50 Гц при изменении частоты входных ком-
мутирующих импульсов. Амплитуда выходных напряжений
может изменяться от 0 до 10 В при изменении амплитуды
входных синусоидальных сигналов, подаваемых на входы
1 и 2.
Функционально схема ячейки состоит из двух коммутато-
ров напряжения DA5, DA6, двух фильтров нижних частот на
усилителях DAI, DA2 и выходных усилителей DA3, DA4,
предназначенных для преобразования двухфазной системы
синусоидальных напряжений в трехфазную. Каждый ком-
мутатор построен на двух аналоговых ключах и предназ-
начен для амплитудной модуляции прямоугольного сигна-
ла синусоидальным напряжением. На входы 1 и 2 соответ-
ственно подают прямое и инверсное синусоидальные на-
пряжения с одинаковой амплитудой, которая может изме-
няться от 0 до 10 В, и частотой следования 1000 Гц.
247
Рис. 5.40. Схема ячейки трехфазиого преобразователя ПТ-2АИ
Модулируемые сигналы коммутатора (7кь C^i, Дк2, 0к2
представляют собой напряжения прямоугольной формы со
скважностью, равной 2, и изменяемой частотой следова-
ния от 950 до 1050 Гц.
На управляющие входы ключей элемента DA5.подают
коммутирующие напряжения UKi, UKi, причем Окл отстает
по фазе от UKi на 180°. В отличие от DA5 на элемент DA6
подают коммутирующие импульсы UK2, U,&, отстающие
соответственно от Йкь iPki на 90°.
Напряжения с выходов коммутаторов DA5, DA6 посту-
пают на входы фильтров нижних частот. Оба фильтра
абсолютно идентичны. Они реализованы на основе струк-
туры Рауха и рассчитаны на частоту среза fo, равную
100 Гц. Данные фильтры предназначены для выделения
первой гармонической разностной частоты коммутирующих
импульсов и входного синусоидального напряжения. Коэф-
фициент передачи фильтров по постоянному току должен
составлять л/2.
При равенстве частот коммутирующих импульсов и
входных синусоидальных напряжений на выходах фильтров
будут напряжения, не изменяющиеся во времени. При не-
совпадении частот входных сигналов на выходе фильтров
появятся синусоидальные напряжения разностной частоты,
сдвинутые относительно друг друга на 90°.
Если частота коммутирующих импульсов больше часто-
ты входного синусоидального напряжения, то напряжение
Uа опережает по фазе напряжение U? на 90°. Для случая,
когда частота коммутирующих импульсов меньше частоты
синусоиды, напряжение UA отстает от U? на 90°.
Резисторы R3, R4 предназначены для установки нуля
выходного напряжения фильтров при отсутствии сигналов
на их входах. Резисторами R15, R16 устанавливают коэф-
фициент передачи фильтров по постоянному току. Выход-
ные напряжения фильтров поступают на схему преобразо-
вания двухфазной системы напряжений в трехфазную, реа-
лизованную на усилителях ЬАЗ, DA4. С помощью этой
схемы решаются следующие уравнения:
Ц,=-i/®« + vW,; uc=-i/w-
-Узри,.
где Ua — выходное напряжение первого фильтра; UA —
выходное напряжение, соответствующее фазе А и сов-
падающее по фазе с напряжением Ua; Д₽— выходное на-
пряжение второго фильтра; Ug— выходное напряжение,
249
соответствующее фазе В;' Uc — выходное напряжение, соот-
ветствующее фазе С.
Для обеспечения требуемых коэффициентов передачи
входные сопротивления и сопротивления обратной связи
усилителей DA3 и DA4 должны удовлетворять следующим
соотношениям:
RI8= R19=R24\ R20 = 2R25; R17+ R21 = 2R25]V3 .
Для установки коэффициента передачи V3/2 по вто-
рому входу усилителя DA4 регулируют сопротивление ре-
зистора R17.
В ячейке конденсаторы С1 — С7 установлены на мон-
тажных лепестках для возможности замены их цри работе
фильтров в режимах, отличающихся от указанных. Кон-
денсаторы СП, С12 выполняют роль фильтров в цепях пи-
тания. Конденсаторы С6, С8—СЮ предназначены для
коррекции частотных характеристик усилителей.
5.3. Электромеханический датчик положения ротора
В § 2.25 дано описание электромеханического устройства, совме-
щающего функции датчика положения и преобразователя координат
ВС. В тех случаях, когда совмещения указанных функций не требу-
ется, ВС выполняется с одной обмоткой на роторе и питается напря-
жением прямоугольной формы (2.55).
На статорных обмотках ВС индуктируются напряжения, которые
зависят от взаимного расположения осей ротора и статора. Если ко-
эффициент'трансформации между статорными и роторной обмотками
равен 1, то
4 V sin(2n+ 1)<W . fl .
°1Л»~ иттах л У. 2п + 1 ЯП °”
п=0
4 р sin (2n + 1) ь>т/
и2т=’1-'тта* я / j 2п | 1 COSB0,
п—0
где Щт — напряжение на статорной обмотке, которая контролирует
положение продольной оси ротора машины; Ujm — напряжение на ста-
торной обмотке ВС, которая контролирует положение поперечной оси
ротора машины; 0О — начальный угол между осями обмоток статора
и ротора.
250
При равномерном вращении ротора с угловой скоростью ы йй
статорных обмотках ВС появляются напряжения
,, 4 Г sin(2n+ l)<omf
uim—Utnmax n 2n-f-l sin (и/+ 60),
я=0
n 4 V sin(2n+ l)<omf
utm — Um max n 2n-f-l COS (orf + 60).
n=0
Эти напряжения подаются на входы демодуляторов. На их соот-
ветствующих выходах напряжения будут равны:
ut=Vт max sin(ci>H-0o); и2=1/m max cos(<i>/+0o).
Напряжения и, и u2 характеризуют положение осей ротора отно-
сительно статорных осей в любой момент времени. Эти напряжения
вводятся в САР и используются для преобразований сигналов из
неподвижной системы координат (а, Р) во вращающуюся (d, q) и
наоборот.
Список литературы
1. А. с. 517126 (СССР). Электропривод с асинхронной машиной
с фазным ротором/ Л. X. Дацковский, Л. М. Тарасенко, И. Л. Локте-
ва и др. Опубл, в Б. И., 1976, № 21.
2. А. с. 529537 (СССР). Устройство управления асинхронным ко-
роткозамкнутым двигателем/ В. А. Скрыпник, В. А. Безуглый,
Б. Л. Коринев и др. Опубл, в Б. И., 1976, № 35.
3. А. с. 551785 (СССР). Электропривод с синхронным двигателем/
А. М. Вейнгер, Ф. И. Андреев, И. М. Серый и др. Опубл, в Б. у.,
1977, № 11.
4. А. с. 615583 (СССР). Электропривод с синхронным двигателем/
А. М. Вейнгер, Л. X. Дацковский, И. В. Жильцов. Опубл, в Б. И.,
1978, № 26.
5. А. с. 603082 (СССР). Электропривод с синхронным двигате-
лем/ А. М. Вейнгер, Л. X. Дацковский, И. В. Жильцов и др. Опубл,
в Б. И., 1978, № 14.
6. А. с. 658690 (СССР). Электропривод с синхронным двигателем/
Е. Л. Эттингер, Л. X. Дацковский, И. С. Кузнецов и др. Опубл, в
Б. И., 1979, № 15.
7. А. с. 649114 (СССР). Электропривод с машиной переменного
тока/ Л. X. Дацковский, Л. М. Тарасенко, ГО. Г. Пикус. Опубл, в
Б. И., 1979, № 7.
8. А. с. 699643 (СССР). Устройство для управления асинхронным
короткозамкнутым электродвигателем/ В. А. Скрыпиик, Г. А. Пименов,
Л. X. Дацковский и др. Опубл, в Б. И., 1979, № 43.
9. А. с. 809460 (СССР). Электропривод с синхронным двигате-
лем/ А. М. Вейнгер, Л. X. Дацковский, В. Б. Мордухович и др.
Опубл, в Б. И., 1981, № 8.
10. Автоматически регулируемый по скорости электропривод с
асинхронизированиым синхронным двигателем/ И. В. Бородина,
А. М. Вейнгер, И. М. Серый и др. — Электричество, 1975, № 7,
с. 41—46.
11. Александров Н. А., Краснов В. Е. Исследование асинхронных
двигателей серии 4А при питании их от тиристорных преобразователей
частоты. —Тр. ВНИИЭМ, 1976, т. 45, с. 122—126.
12. Бернштейн И. Я. Тиристорные преобразователи частоты без
звена постоянного тока.—М.: Энергия, 1968. 88 с.
13. Бернштейн И. Я. Исследование статического вентильного пре-
образователя частоты без звена постоянного тока для регулирования
скорости асинхронного двигателя. — Автореф. дис. на соиск. уч. сте-
пени канд. техн. наук. М.: ВНИИЭМ, 1968.
14. Бернштейн И. Я- Энергетические характеристики преобразова-
теля частоты с непосредственной связью при различных законах уп-
равления вентилями. — Электротехническая промышленность. Преобра-
зовательная техника. 1973, № 2 (37), с. 11—13.
15. Ботвинник М. М„ Шакарян Ю. Г. Управляемая машина пере-
менного тока. М.: Наука, 1969. 140 с.
252
16. Бродовский В. Н., Иванов Ё. С. Приводы с частотно-токовым
управлением. М.: Энергия, 1974. 169 с.
17. Булгаков А. А. Частотное управление асинхронными электро-
двигателями. М.: Наука, 1966. 300 с.
18. Вейнгер А. М. Подчиненное регулирование для частотного
электропривода с синхронным двигателем.— Электротехническая про-
мышленность. Электропривод, 1974, № 9 (35), с. 7—10.
19. Вейнгер А. М., Петрухновский С. И. Принцип подчиненного
регулирования с последовательной коррекцией для сложных объек-
тов.—Электротехническая промышленность. Электропривод, 1974,
Xs 8 (34), с. 18—21.
20. Вейнгер А. М., Вейнгер М. И., Янко-Триннцкий А. А. О пре-
дельном быстродействии систем регулирования тока и напряжения ти-
ристорных преобразователей частоты без звена постоянного тока.—
В кн.: Асинхронный тиристорный электропривод. Свердловск: УПИ,
1971, с. 60—64.
21. Влияние колебаний напряжения питающей сети на работу ре-
гулируемого по скорости электропривода с асиихронизированным
синхронным двигателем/ И. В. Бородина, А. М. Вейнгер, А. А. Кленов
и др. — Электротехническая промышленность. Электропривод, 1975,
Xs 2 (37), с. 1—4.
22. Выбор схемы электронной модели асинхронного двигателя при
переменной скорости вращения/ А. Д. Гильдебрант, Н. И. Зенкин,
В. М. Кирпичников и др. — Изв. вузов. Электротехника, 1967, Xs 2,
с. 131—137.
23. Дацковский Л. X., Кочетков В. Д., Кузнецов И. С. Преобра-
зователь пониженной частоты с раздельным управлением группами
вентилей. — Электричество, 1969, № 4, с. 41—45.
24. Дацковский Л. X., Тарасенко Л. М. Выбор структур асинхрон-
ного двигателя для систем подчиненного регулирования параметров.—
Электротехническая промышленность. Электропривод. 1974, Xs 2 (28),
с. 3—6.
25. Жемеров Г. Г. Влияние преобразователей частоты с непосред-
ственной связью на питающую сеть. — Электричество,. 1968, Xs 4,
с. 24—30.
26. Жемеров Г. Г. Тиристорные преобразователи частоты с непо-
средственной связью. М.: Энергия, 1977. 280 с.
27. Зиновьев Г. С. Выходное напряжение вентильных преобразо-
вателей частоты с непосредственной связью. — Изв. СО АН СССР,
1965, Xs 10, вып. 3, с. 19—27.
28. Казовский Е. Я. Переходные процессы в электрических маши-
нах переменного тока. М.: Изд:во АН СССР, 1962. 624 с.
29. Лабунцов В. А., Нопираровский И. Спектр выходного напря-
жения преобразователей частоты с непосредственной связью при бес-
конечном числе фаз. — В кн.: Силовая полупроводниковая техника.
М.: Информстандартэлектро, 1968, вып. II. с. 47—54.
30. Морозовский В. Т. Многосвязные системы автоматического ре-
гулирования. М.: Энергия, 1970. 288 с.
31. О возможностях регулируемого электропривода с синхронным
двигателем/ А. М. Вейнгер, А. С. Гусев, Ю. С. Тартаковский и др.—
Электричество, 1971, Хе 9, с. 60—64.
32. Об особенностях регулирования возбуждения частотно-управ-
ляемого синхронного двигателя/ А. М. Вейнгер, И. М. Серый,
Ю. С. Тартаковский и др. — Электротехника, 1973, Xs 12, с. 22—26.
33. Онищенко Г. Б., Локтева И. Л., Новиков В. И. Методы иссле-
дования переходных процессов вентильных каскадов. — Электричество,
1973, Xs 3, с. 46—50.
253
34. Онищенко Г. Б., Локтева И. Л. Примёненйе метода колеблю-
щихся координат для построения систем регулирования асинхронных
двигателей. — Электротехническая промышленность. Электропривод
1973, № 9 (26), с. 6—9.
35. Онищенко Г. Б. Асинхронный ветильный каскад. М.: Энергия,
1967. 150 с.
36. Подчиненное регулирование параметров в машине двойного
питания/ Л. X. Дацковскнй, Л. М. Тарасенко, И. Л. Локтева и др,—
Электротехническая промышленность. Электропривод, 1974, № 6 (32),
с. 10—14.
37. Подчиненное регулирование параметров в системе «непосред-
ственный преобразователь частоты.— асинхронный двигатель»/
Л. X. Дацковский, Л. М. Тарасенко, И. С. Кузнецов и др. — Электро-
техническая промышленность. Электропривод, 1974, Хе 1 (27), с. 10—
13.
38. Пат. 3859578 (США). Способы и устройства для управления
асинхронизированной синхронной машиной / М. М. Ботвинник,
Ю. Г. Шакарян, И. Я. Довганюк и др.
39. Рудаков В. В. Динамика электроприводов с обратными свя-
зями. Л.: Ленинградский горный институт, 1980. 114 с.
40. Саидлер А. С., Сарбатов Р. С. Автоматическое частотное уп-
равление асинхронными двигателями. М.: Энергия, 1974. 328 с.
41. Синтез структур частотно-регулируемых тихоходных синхрон-
ных электроприводов/ О. В. Слежановский, Л. X. Дацковский,
Л. М. Тарасенко и др. — Электротехника, 1974, № 10, с. 13—19.
42. Синтез систем подчиненного регулирования параметр'ов в асин-
хронных электроприводах на основе непосредственных преобразовате-
лей/ Л. X. Дацковский, Л. М. Тарасенко, И. С. Кузнецов и др.—
Электричество, 1975, № 9, с. 48—56.
43. Скрыпиик В. А. Исследование и разработка частотно-токового
управления асинхронным приводом шахтных подъемных машин.—
Автореф. дис. на соиск. уч. степени канд. техн, наук/ М.: ВНИИэлект-
ропривод, 1977.
44. Техническая направленность разработок частотно-регулируе-
мых тихоходных синхронных электроприводов большой мощности/
О. В. Слежановский, Л. X. Дацковский, В. Д. Кочетков и др.—
Elektrotechnicky obzor, 1975, № 5, S. 258—267.
45. Тартаковский Ю. С. Разработка системы автоматического ре-
гулирования и исследование режимов частотно-управляемого синхрон-
ного двигателя. — Автореф. на соиск. уч. степени канд. техн. наук.
Свердловск/ УПИ им. С. М. Кирова, 1974.
46. Тищенко П. А. Обращенная синхронная машина как средство
повышения интенсификации работы оборудования. — Электротехниче-
ская промышленность. Электрические машины, 1972, № 2, с. 5—6.
47. Управление вентильными электроприводами постоянного тока/
Е. Д Лебедев, В. Е. Неймарк, М. Я. Пистрак и др. М.: Энергия, 1970.
199 с.
48. Шакаряи Ю. Г. Исследование режимов работы управляемой
машины переменного тока в электрических системах.’—Автореф. дис.
иа соиск. уч. степени доктора техн, наук/ М.: ЭНИН, 1974.
49. Шипилло В. П. Автоматизированный вентильный электропри-
вод. М.: Энергия, 1969. 400 с.
50. Шубенко В. А., Шрейнер Р. Т., Гильдебранд А. Д. Управле-
ние потокосцеплением ротора асинхронного двигателя при частотно-то-
ковом управлении.—Электричество, 1971, № 10, с. 13—18.
254
51. Blaschke F. Daz Prinzip der Feldorientierung— die Grundlage
fur die Transvektor-Regelung von Drehfeldmaschinen.— Siemens-Z., 1971,
Bd 45, № 10, S. 757—760.
52. Blaschke F. Das Verfahren der Feldorientierung zur Regelung
der Asynchronmaschine.— Siemens-Forsch. und Entwicklungsber, 1972,
№ 1, S. 184—193.
53. Пат. 2.144.422 (ФРГ). Einrichtung zum Steuern oder Regeln
einer Asynchronmaschine/ Blaschke F
54. Blaunstein E. Der erste getriebelose Rohrmiihlenantrieb. — Brown
Boveri Mit't., 1970, Bd 57, № 3, S. 96—105.
55. Bland R. I. Factors effecting the operation of a phase-controlled
cycloconvertor. — Proc. IEE, 1967, vol. 114, № 12, p. 1908—1916.
56. Fink R., Golde E. Die Motorerregung des Netzkupplungsumfor-
mers Neu-Ulm mit statischen Umrichtern. — Techn. Mitt. AEG-Telefunken,
1973, Bd 63, N 7, S. 257—288.
57. Floter W., Ripperger H. Die Transvektor-Regelung fiir den feldor-
ientierten Betrieb einer Asynchronmaschine. — Siemens-Z., 1971, Bd 45,
№ 10, S. 761—764.
58. Hasse K. Zum dynamischen Verhalten der Asynchronmaschine bei
Betrieb mit variabler Standerfrequenz und Standerspanming. — Elektr.
Zeitschr.-A, 1968, Bd 89, № 4, S. 77—81.
59. Kessler C. Uber die Vorausbercchming optimal abgestimmter Re-
gelkreise. — Regelungstechnik, 1954, № 12, S. 274—281; 1955, № 1,
S. 16—22; № 2, S. 40—49.
60. Kessler C. Das symmetrische Optimum. — Regelungstechnik, 1958,
№ 11, S. 396—400.
.61 . Ковач К. П., Рац И. Переходные процессы в машинах пере-
менного тока/ Пер. с нем. М. — Л.: Госэнергоиздат, 1963. 735 с.
62. Кимбарк Э. Синхронные машины и устойчивость электриче-
ских систем. М.— Л.: Госэнергоиздат, 1960. 392 с.
63. Langer Jii. Umrichterspeisung von Synchronmotoren fiir Rohr-
miihlen. — Brown Boveri Mitt. 1970,, Bd 57, № 3, S. 112—120.
64. Langweiler F., Richter. Mr Flusserfassung in Asynchronmaschi-
nen. — Siemens-Z., 1974, Bd 45, № 10, S. 768—771.
65. Pfaff G. Zur Dynamik des Asynchronmotors bei Drehzahlsteue-
rung mittels veranderlicher Speisenfrequenz. — Elektrotechn. Zeitschr.-A,
1964, Bd 85, № 22, S. 719—724.
66. Stemmier H. Antriebssystem und elektronische Regeleinrichtung
der getriebelosen Rohrmiihle. — Brown Boveri Mitt., 1970, Bd 57, № 3,
S. 121—129.
67. Steinegger J. 6400 KW-Synchronmotor als Ringmotor fiir eine
Zementrohrmiihle.— Brown Boveri Mitt, 1970, Bd 57, № 3, S. 106—111.
68. Naunin D. Der Einfluss der Lauferfrequenz auf das Drehmoment-
verhalten von frequenzgesteuerten Asynchronmaschinen. — Bull, schweiz.
elektrotechn. Vereins. 1970, Bd 61, № 3, S. 118—123.
Оглавление i'
Предисловие................................................... g
Введение...................................................... J
Глава первая. Основные положения ..... 7
1.1. Электрическая машина как объект регулирования . . 7
1.2. Непосредственный преобразователь частоты как элемент
системы электропривода . -........................... 33
1.3. Общие принципы построения систем подчиненного ре-
гулирования ". ... 59
Глава вторая. Электропривод по системе непосредственный
преобразователь частоты — синхронный двигатель ... 74
2.1. Рациональные законы связанного управления синхрон-
ным двигателем.........................................74
2.2. Регулирование момента................................83
2.3. Система регулирования скорости синхронного двигателя
при ¥,=const .............................................96
2.4. Система регулирования скорости синхронного двигателя
при управлении с переменной структурой . . 99
2.5. Частотно-токовая система регулирования скорости ЮЗ
Глава третья. Электропривод по системе непосредственный
преобразователь частоты — короткозамкнутый асинхронный
двигатель................................................109
3.1. Рациональные законы связанного управления асинхрон-
ным двигателем........................................... 109
3.2. Регулирование момента............................. 1-15
3.3. Система - регулирования скорости двигателя . 125
3.4. Система' регулирования скорости двигателя при управ-
лении с переменной структурой ........................... 129
3.5. Частотно-токовая система регулирования скорости . 130
Глава четвертая. Электропривод по схеме машина двой-
ного питания.............................................137
4.1. Общие замечания................................... 137
4.2. Рациональные законы связанного управления асинхрон-
ным двигателем............................................139
4.3. Регулирование момента...............................144
4.4. Система регулирования скорости двигателя . . . . 153
4.5. Система регулирования реактивной мощности и ско-
рости ................................................... 156
Глава пятая. Унифицированная блочная система регулято-
торов УБСР-АИ.............................................Ю1
5.1. Номенклатура типовых средств управления и их харак-
теристики .................................. . ... 161
5.2. Специализированные функциональные устройства для
электроприводов переменного тока .... 223
5.3. Электромеханический датчик положения ротора 250
Список литературы *52
г СИСТЕМЫ
ПОДЧИНЕННОГО
РЕГУЛИРОВАНИЯ
ЭЛЕКТРОПРИВОДОВ
ПЕРЕМЕННОГО ТОКА
С ВЕНТИЛЬНЫМИ
ПРЕОБРАЗОВАТЕЛЯМИ
ЭНЕРГОАТОМИЗДАТ