/


















































































































































Text
ТИРИСТОРНЫЕ ПРЕОБРАЗОВАТЕЛИ ЧАСТОТЫ В ЭЛЕКТРОПРИВОДЕ
ПОД РЕДАКЦИЕЙ КАНД. ТЕХН. НАУК
Р. С. САРБАТОВА
765847
Кр“ВОрОА'СК;1Й горн "чыЧ :..1ститут
БИБЛИОТЕКА
МОСКВА «ЭНЕРГИЯ» 1980
ББК 31.264.5
Т44
УДК 62-83:621.314.26:621.382.2.072
Авторы: А. Я. Бернштейн, IO. М. Гусяцкнй, А. В. Кудрявцев, Р. С. Сарбатов.
Тиристорные преобразователи частоты в элек-Т44 троприводе/ А. Я. Бернштейн, Ю. М. Гусяцкнй, А. В. Кудрявцев, Р. С. Сарбатов; Под ред. Р.С.Сар-батова. — М.: Энергия, 1980.—328 с., ил.
В пер. 1 р. 30 к.
В книге рассматриваются принципы действия, рациональные схемы, особенности анализа электромагнитных процессов, внешние и регулировочные характеристики, энергетические показатели всех типов тиристорных преобразователей частоты, использование которых целесообразно в электроприводе. Дается методика расчета их параметров и выбора основных элементов. Приводятся примеры систем электропривода с разными типами преобразователей и рекомендации по их использованию.
Книга предназначена для инженерно-технических работников, занятых проектированием и эксплуатацией современных систем элек. тропривода.
30307-358
Т ------------ 146-80. 2302030000
051 (01 )-80
ББК 31.264.5
6П2.1.082
ig) Издательство «Энергия», 1980 г.
ПРЕДИСЛОВИЕ
При написании этой книги авторы ставили перед собой задачу обобщить накопленный к настоящему времени опыт по теории, разработке, созданию и практическому использованию тиристорных преобразователей частоты в электроприводе как в нашей стране, так и за рубежом. В какой мере это удалось — судить читателю.
Современный уровень теории и практики вентильных преобразователей частоты достигнут усилиями нескольких поколений ученых и инженеров, посвятивших свой труд этой области науки и техники. Мы не будем здесь перечислять тех, кто внес наиболее весомый вклад в эти отрасли знания и техники, — их имена достаточно полно отражены в списке литературы.
Регулируемые преобразователи частоты широко используются в электроприводе. Значение регулируемого электропривода в современном производстве непрерывно возрастает, так же как и его удельный вес в общей массе электроприводов. Это обусловлено двумя причинами. Во-первых, применение регулируемого электропривода позволяет существенно упростить кинематику машины и механизма, а в ряде случаев исключить редуктор или иную механическую передачу совсем, совместив в одно устройство электропривод и рабочий орган. Во-вторых, создание новых, более совершенных и тонких технологических процессов и стремление наилучшим образом организовать их путем применения адаптивных и оптимальных систем управления, систем программного управления и автоматизированных систем управления технологическими процессами требует также устанавливать и поддерживать с высокой точностью и быстродействием заданный оптимальный режим движения рабочих органов машин и механизмов. Такая возможность во многих случаях может быть реализована посредством регулируемого электропривода. Имен
3
но поэтому все большее число нерегулируемых электроприводов заменяется на регулируемые даже в тех машинах и механизмах, где был традиционным на протяжении многих десятилетий нерегулируемый электропривод.
Плавно регулируемый привод переменного тока не содержит коллектора и может быть выполнен вообще бесконтактным. Он обладает еще целым рядом достоинств по сравнению с приводом постоянного тока, в частности возможностью унификации типов электрических машин на данном объекте, более высоким быстродействием и меньшими массой, габаритами, моментом инерции двигателя. Этот привод обладает богатыми возможностями и большим разнообразием свойств, способных удовлетворить практически любым требованиям производства.
Авторы не претендуют на полный и детальный охват всех вопросов и тонкостей теории преобразователей, всех их схем и применений. Рассматривались лишь основные, принципиальные вопросы. Авторам не в полной мере удалось выполнить все задуманное в силу разных причин, в частности и по причине ограниченного объема книги. Так, недостаточно освещенными оказались системы регулирования, вопросы совместной работы преобразователя частоты с двигателем, защиты преобразователей и ряд других.
Работа между авторами была распределена следующим образом: гл. 1 и 2 написаны Р. С. Сарбатовым; гл. 3 — А. В. Кудрявцевым; гл. 4, 5 — Ю. М. Гусяцким; гл. 6, 7 — А. Я. Бернштейном.
Введение к книге авторы решили не писать, рассматривая в качестве такового гл. 1 и 2.
В книге нашли отражение результаты научно-исследовательских работ, выполненных авторами под руководством профессоров А. С. Сэндлера и Е. Л. Эттингера.
Все замечания читателей по содержанию книги авторы примут с благодарностью. Их следует направлять в адрес издательства «Энергия»: 113114, Москва, М-114, Шлюзовая наб., 10.
Авторы
ГЛАВА ПЕРВАЯ
ОБЩИЕ ПРИНЦИПЫ ПОСТРОЕНИЯ СТАТИЧЕСКИХ ПРЕОБРАЗОВАТЕЛЕЙ ЧАСТОТЫ И ТРЕБОВАНИЯ К НИМ
1-1. ОБЩИЕ ПРИНЦИПЫ ПРЕОБРАЗОВАНИЯ ЧАСТОТЫ В СТАТИЧЕСКИХ УСТРОЙСТВАХ. КЛАССИФИКАЦИЯ ПРЕОБРАЗОВАТЕЛЕЙ И КРАТКАЯ ХАРАКТЕРИСТИКА ИХ СВОЙСТВ
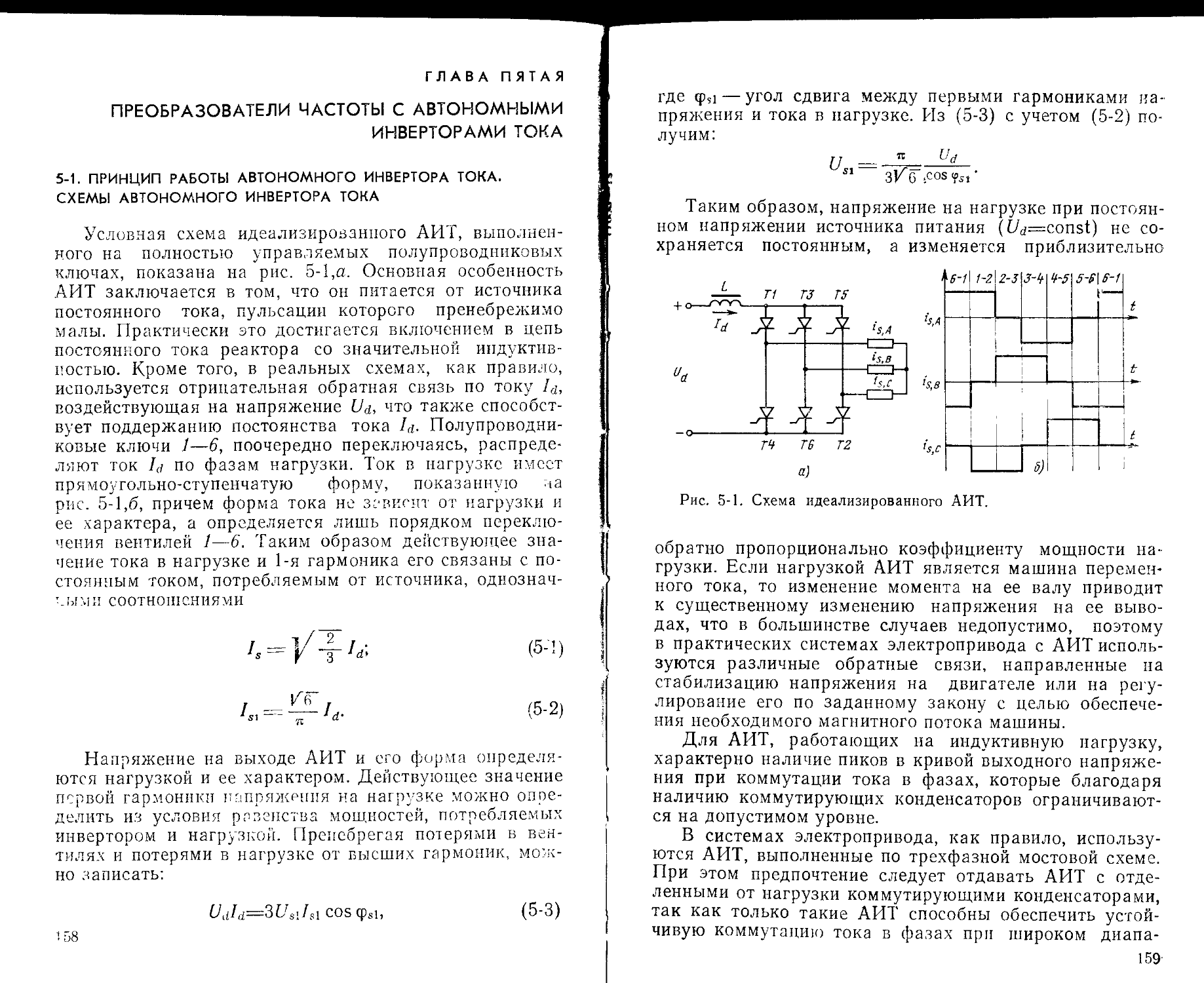
Силовые преобразователи частоты, предназначенные для регулируемого электропривода, должны преобразовывать напряжение сети (однофазной или трехфазной) промышленной частоты (значительно реже — напряжение сети или автономного источника высокой частоты) в переменное многофазное (обычно — трехфазное и лишь в' специальных случаях одно-, двух- или многофазное) напряжение (или ток), амплитуду, частоту и фазу которого можно изменять в определенном диапазоне.
Частота — это временной параметр переменного напряжения, определяющий по существу интервалы времени, через которые изменяется знак этого напряжения. Именно это представление о частоте и лежит в основе наиболее общего принципа преобразования частоты в статических устройствах, построенных на полностью или не полностью управляемых полупроводниковых ключевых элементах — транзисторах или тиристорах (вентилях). Сущность этого принципа состоит в организации такого соединения ключевых элементов и их включения и выключения по такому закону (алгоритму) в функции времени, которые обеспечивают подключение источника энергии к выходу преобразователя (к нагрузке) с задаваемой частотой смены знака среднего значения напряжения (тока) на этом выходе. Здесь среднее значение берется за половину периода выходного напряжения (тока) или на меньших интервалах времени.
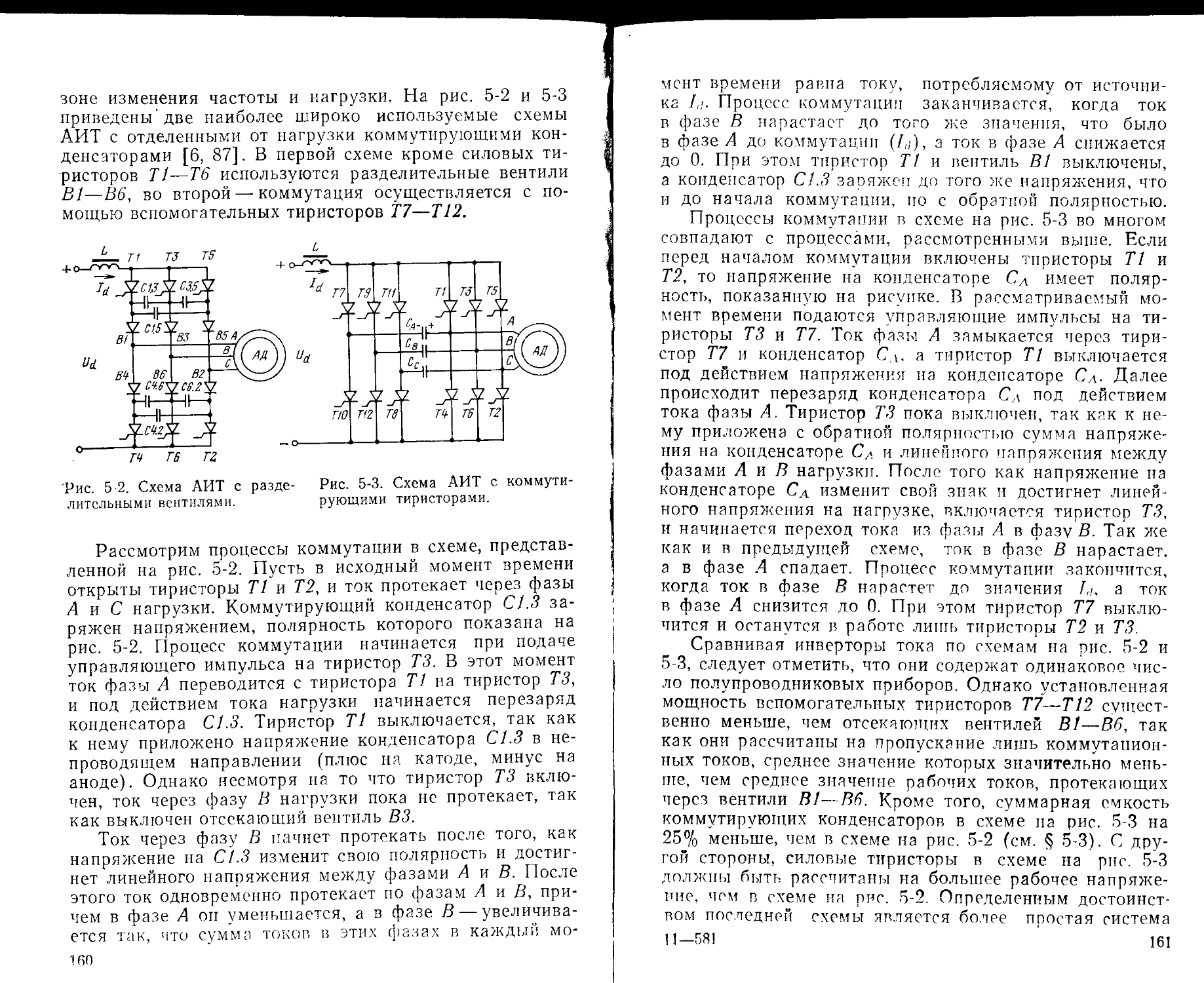
Процессы включения и выключения ключевых элементов сопровождаются переходом тока от одной ветви, содержащей вентили, к другой (или другим). В преобразовательной технике исторически принято называть
О
процесс перехода тока от одной ветви вентильной схемы I к другой коммутацией. Однако в последнее время термин «коммутация» в указанном смысле используется при описании процессов в устройствах, связанных с сетью переменного тока (выпрямителях, ведомых сетью инверторах и т. п.). Для автономных устройств понятие ком- j мутация отождествляется с понятием выключение вентиля.
Тиристорные преобразователи частоты (ТПЧ) по виду коммутации (выключения) тиристоров можно разделить на три класса;
1) с естественной коммутацией;
2) с принудительной (вынужденной, искусственной) коммутацией;
3) со смешанной коммутацией. '
Под естественной коммутацией понимается комму- s тация тиристоров, происходящая под действием переменного напряжения сети, от которой питается ТПЧ либо на которую он работает. Этот вид коммутации имеет место в выпрямителях, ведомых сетью инверторах, ТПЧ с непосредственной связью и т. п.
Если источником коммутирующего напряжения является отдельный (т. е. не относящийся непосредственно |
ни к питающей, ни к приемной сети) источник энергии, .]
то коммутацию называют принудительной. Именно этот вид коммутации используется в ТПЧ, работающих независимо от приемной или питающей сети (автономные инверторы, преобразователи постоянного напряжения и Др.).
Термин «принудительная коммутация» может быть распространен и на инверторы, выполняемые на полностью управляемых ключевых элементах, в которых функцию отдельных источников коммутирующего напряжения выполняют источники управляющих сигналов.
Преобразователь со смешанной коммутацией состоит из узлов, одна часть которых использует естественную коммутацию, а другая — принудительную.
По виду связи нагрузки с источником энергии или, точнее, по типу промежуточного преобразования первич- \ ного (сетевого) напряжения выделяют три типа (класса) ТПЧ:
1) с промежуточным звеном постоянного тока (сино- ' нимы: ТПЧ инверторного типа; ТПЧ, построенные на s основе инверторов); '
6
2) с непосредственной связью питающей сети и цепи нагрузки (синонимы: без звена постоянного тока, циклоконвертор и др.);
3) с промежуточным звеном переменного тока повышенной частоты.
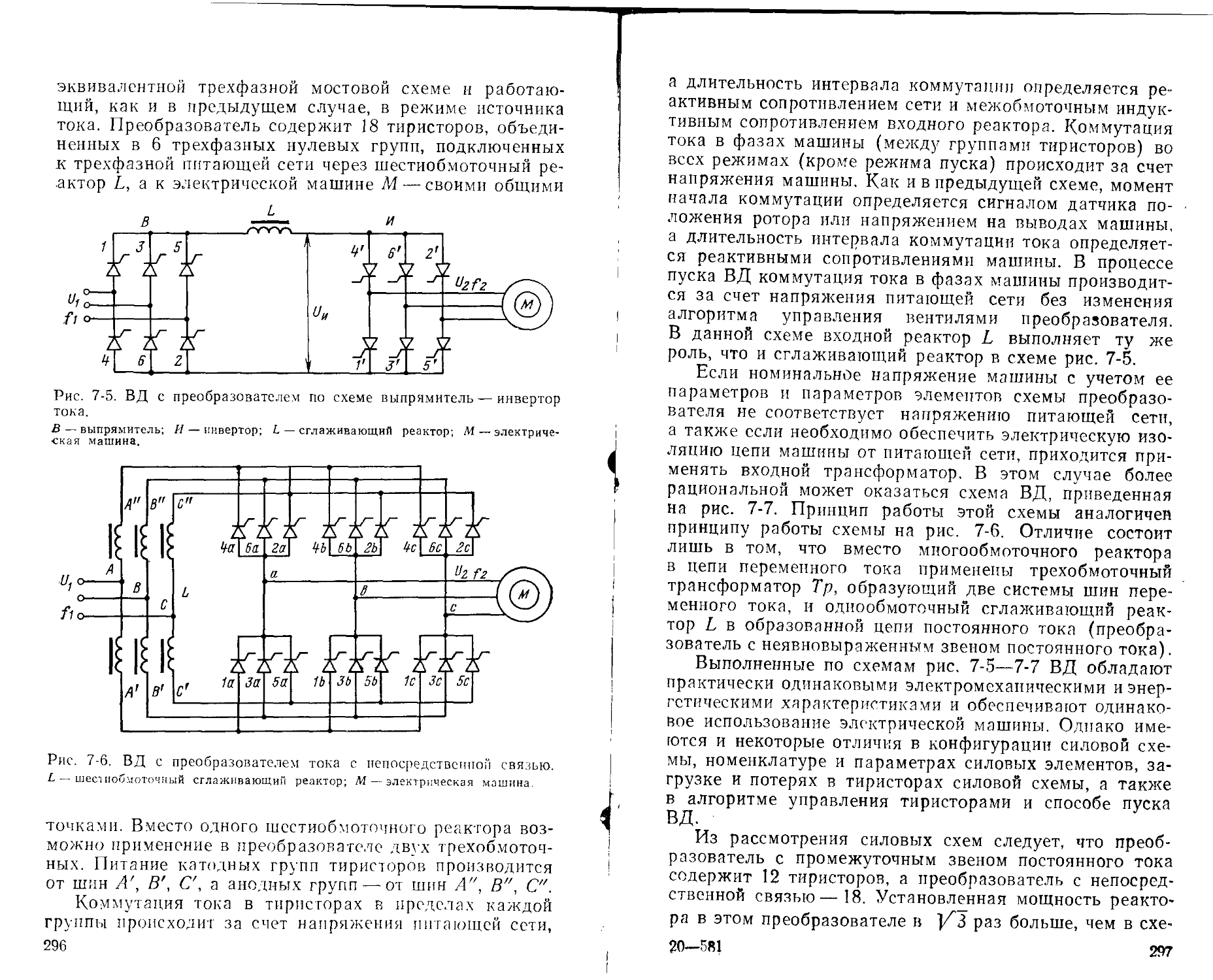
В ТПЧ с промежуточным звеном постоянного тока (рис. 1-1) производится двукратное преобразование на-напряжения (энергии) питающей сети: сначала оно выпрямляется выпрямителем В, а затем постоянное на-
В
''-fz-var
Рис. 1-1. Структурная схема силовой части преобразователя частоты с промежуточным звеном постоянного тока.
пряжение с помощью инвертора И преобразуется в переменное напряжение (или ток). Инвертор может быть как автономным, так и ведомым, т. е. нагруженным на приемную сеть с фиксированной частотой. Между выпрямителем и инвертором обычно включается фильтр Ф, сглаживающий пульсации либо выпрямленного напряжения, либо выпрямленного тока.
Выпрямитель и инвертор могут работать независимо друг от друга либо с естественной или с принудительной коммутацией, поэтому эти ТПЧ по типу коммутации могут быть представлены всеми тремя классами: 1) со смешанной коммутацией (выпрямитель, в частности, реверсивный, т. е. дополненный ведомым инвертором,— с естественной, а автономный инвертор — с принудительной); 2) целиком с естественной коммутацией (например, в случае бесколлекторной машины постоянного тока, при работе на перекомпенсированный синхронный двигатель и на другие виды нагрузки с опережающим коэффициентом мощности, в случае электропривода по схеме асинхронно-вентильного каскада, где роторный ТПЧ состоит из неуправляемого или управляемого выпрямителя и ведомого сетью инвертора, и т. п.); 3) полностью с принудительной коммутацией, когда и выпрямитель и инвертор выполняются с такой коммутацией.
Главным достоинством ТПЧ с промежуточным звеном постоянного тока является возможность получения на его выходе за счет автономного инвертора практи-
чески любой (требуемой в практике) изменяемой в широких пределах частоты, независимо от частоты питающей сети. Основной недостаток — двукратное преобразование энергии, что снижает его КПД и увеличивает массу и габариты.
Преобразователи частоты с непосредственной связью строятся на основе реверсивных управляемых выпрямителей (однофазных, многофазных, нулевых и мостовых)
Рис. 1-2. Трехфазно-однофазный преобразователь частоты с непосредственной связью с естественной коммутацией.
а — схема силовой части преобразователя; б — форма выходного напряжения при угле включения a=const«=0.
(рис. 1-2,а). В этих ТПЧ выпрямление переменного напряжения источника энергии и преобразование этого выпрямленного напряжения в переменное, требуемой частоты совмещено в одном устройстве, что обусловливает однократное преобразование энергии и высокое значение КПД ТПЧ этого типа, их малые габариты и массу.
Сущность преобразования частоты в этих устройствах сводится к подключению нагрузки к источнику энергии через две встречно-включенные вентильные группы В1 и В2, каждая из которых периодически открывается на время, равное полупериоду выходного напряжения. Благодаря такой поочередной работе вентильных групп напряжение на нагрузке периодически меняет знак. Изменяя время работы вентильных групп, можно изменять частоту выходного напряжения. Огибающая выходного напряжения при этом формируется из участков питающего напряжения (рис. 1-2,6).
На рис. 1-2,а представлена схема трехфазно-одно-фазного ТПЧ с непосредственной связью, построенная на 8
основе трехфазной нулевой схемы реверсивного выпрямителя. Форма напряжения на выходе ТПЧ с непосредственной связью (рис. 1-2,6) зависит от числа фаз и тактов выпрямления, от числа фаз сети, от частоты выходного напряжения, от закона изменения во времени угла включения тиристоров и ряда других факторов. При определенном алгоритме управления тиристорами обеспечивается возможность свободного обмена реактивной энергией между нагрузкой и сетью и возможность передачи активной энергии от нагрузки в сеть. Это является очень важным достоинством ТПЧ с непосредственной связью, особенно в случае питания от них двигателей переменного тока.
Недостатками ТПЧ с непосредственной связью являются: низкий коэффициент мощности со стороны питающей сети, большой процент высших гармоник в выходном напряжении, сложность системы управления и ограниченность максимального значения выходной частоты.
Максимальная выходная частота ТПЧ с непосредственной связью всегда ниже частоты сети, и тем ниже, чем меньше число фаз т.\ силовой схемы ТПЧ со стороны питающей сети. Так, при т,=3 отношение максимальной выходной частоты к частоте сети птах= =f2maxlf 1=0,25+0,33 (теоретическое значение птах= = 0,6); при mi=6 Птах=0,33-0,5 (теоретическое значение птах=0,75), т. е. для того чтобы иметь на выходе частоту /г=50 Гц, нужно либо повысить частоту питающей сети до 150—200 Гц, либо увеличивать число фаз до 24, что связано с дополнительным преобразованием энергии в случае стандартной частоты сети электроснабжения и имеет следствием резкое снижение технико-экономических показателей и сокращение преимуществ ТПЧ с непосредственной связью.
Так как ТПЧ с непосредственной связью построен на базе управляемых выпрямителей, коммутация вентилей которых обычно производится за счет напряжения сети, то наиболее характерна для преобразователей этого типа естественная коммутация, но известны ТПЧ с непосредственной связью с принудительной коммутацией ,134]. Применение принудительной коммутации в этих ГПЧ позволяет существенно увеличить максимальное значение выходной частоты и расширить возможности их использования.
9
Наиболее известными силовыми схемами ТПЧ с непосредственной связью являются схемы, построенные на основе трехфазных реверсивных выпрямителей, посредством которых производится преобразование трехфазного напряжения промышленной частоты в трехфазное напряжение низкой регулируемой частоты. Менее известными являются схемы ТПЧ, построенные на основе однофазных мостовых выпрямителей или двухтактных выпрямителей с нулевым выводом, используемые для преобразования однофазного напряжения промышленной частоты в трехфазное напряжение низкой регулируемой частоты [43, 67]. Эти ТПЧ называются фазорасщепите-лями [1]. Очевидно, что такие ТПЧ в силу меньшего числа фаз силовой схемы со стороны питающей сети имеют больший процент высших гармоник в выходном напряжении, меньшее максимальное значение выходной частоты и дискретное ее изменение. Эти существенные недостатки, а также отсутствие мощных однофазных сетей обусловили бесперспективность использования фа-зорасщепителей в электроприводе и их малую известность.
Однако схемы этих преобразователей были положены в основу разработанных в ВЭИ в 1962 г. ТПЧ с промежуточным звеном однофазного переменного тока повышенной частоты fn (рис. 1-3). Используя свойство обратимости ТПЧ и принудительную, например конденсаторную, коммутацию на стороне однофазного тока, можно посредством обращенного фазорасщепителя преобразовать трехфазное напряжение промышленной частоты в однофазное переменное напряжение высокой частоты (левая часть схемы на рис. 1-3). Этот узел ТПЧ обычно работает в режиме параллельного инвертора тока. Напряжение промежуточного звена однофазного переменного тока высокой частоты далее можно преобразовать в трехфазное переменное напряжение регулируемой низкой частоты с изменяемой амплитудой посредством обычной схемы ТПЧ — фазорасщепителя (правая часть схемы на рис. 1-3).
Чтобы получить на выходе такого ТПЧ частоту 50 Гц, частота напряжения промежуточного звена однофазного переменного тока должна быть не ниже 450 Гц. Преобразователь частоты с промежуточным звеном од* нофазного тока имеет смешанную коммутацию: в промежуточном звене однофазного тока, работающем по
10
добно параллельному инвертору, используется принудительная коммутация, а в ТПЧ однофазного тока в трехфазный с регулируемой частотой — естественная коммутация за счет напряжения промежуточного звена однофазного переменного тока повышенной частоты. Преобразователь данного типа обладает двусторонней
Рис. 1-3. Преобразователь частоты с промежуточным звеном однофазного переменного тока повышенной частоты.
проводимостью, что обеспечивает обмен реактивной энергией между сетью и нагрузкой и возможность генераторного режима работы двигателя с отдачей активной энергии в питающую сеть. Максимальное значение выходной частоты этого ТПЧ ограничено максимально допустимым значением частоты напряжения промежуточного звена однофазного тока и составляет примерно 50—60 Гц, но принципиально возможны и более высокие значения.
В ТПЧ с промежуточным звеном переменного тока повышенной частоты используются и более сложные схе
11
мы, построенные на базе трехфазных выпрямителей с нулевым выводом [67] и трехфазных мостовых реверсивных схем выпрямления. Известны также ТПЧ с промежуточным звеном трехфазного переменного тока повышенной частоты [28], в которых преобразование напряжения повышенной частоты в напряжение низкой регулируемой частоты осуществляется посредством
Рис. 1-4. Классификация статических преобразователей частоты по типу промежуточного преобразования первичного напряжения (по виду связи нагрузки с источником энергии) и по типу используемой в них коммутации.
обычных трехфазно-трехфазных ТПЧ с непосредственной связью с естественной коммутацией. Преобразователи этого типа не нашли практического применения в электроприводе вследствие относительной сложности силовой схемы и системы управления, двукратного преобразования энергии, меньшего по сравнению с ТПЧ с промежуточным звеном постоянного тока диапазона возможных выходных частот.
Предложенная классификация старческих ТПЧ представлена на рис. 1-4.
12
1-2. ПРИНЦИПЫ ПРЕОБРАЗОВАНИЯ ПОСТОЯННОГО ТОКА в переменный в статических устройствах.
КЛАССИФИКАЦИЯ ИНВЕРТОРОВ И КРАТКАЯ ХАРАКТЕРИСТИКА
ИХ СВОЙСТВ
Важнейшей составной частью ТПЧ с промежуточным звеном постоянного тока наряду с выпрямителем является инвертор.
Инвертирование—это процесс преобразования постоянного тока в переменный, или процесс передачи электрической энергии из цепи постоянного тока в цепь переменного тока с помощью управляемых ключевых элементов (тиристоров или транзисторов).
Устройство, посредством которого реализуется этот процесс, называется инвертором. Инверторы подразделяют обычно по виду нагрузки и по соотношению мощностей инвертора и приемной цепи на автономные (независимые) и зависимые (ведомые сетью).
Автономный инвертор — это инвертор, работающий на автономную нагрузку, не содержащую источников активной энергии той же частоты, что и выходная частота инвертора. При этом частота, напряжение и его форма на выходе автономного инвертора определяются его режимом работы или по крайней мере инвертор оказывает заметное влияние иа эти выходные параметры.
Инвертор, ведомый сетью (зависимый)—это инвертор, отдающий энергию в сеть переменного напряжения, в которой уже имеются источники активной энергии со значительно большей мощностью по сравнению с отдаваемой инвертором и той же частоты, что и выходная частота инвертора. Прн этом на параметры выходного напряжения зависимого инвертора не влияет режим его работы; эти параметры полностью определяются сетью, в которую инвертор отдает энергию.
Все инверторы (автономные и зависимые) по типу коммутации делятся на две группы: 1) с естественной коммутацией; 2) с принудительной коммутацией.
Для инвертора, ведомого сетью, характерна естественная коммутация тиристоров (что не исключает применения принудительной коммутации); система управления тиристорами такого инвертора обычно является ведомой (синхронизированной) сетью, 'как у выпрямителя.
Для автономного инвертора характерны принудительная коммутация и внешнее (не зависимое ни от питающей, пи от приемной сетей) управление тиристорами или транзисторами. Но возможны режимы работы автономного инвертора с естественной коммутацией тиристоров (при работе на перекомпенсированные синхронные двигатели, емкостную нагрузку и т. п.). Например, в бесколлскторной машине постоянного тока (в вентильном двигателе) переключения тиристоров инвертора зависят от углового положения и угловой скорости ротора этого двигателя, т. е. система управления таким инвертером должна быть синхронизированной, ведомой ротором. Однако это не превращает инвертор из автономного в зависимый. Согласно определению, он остается автономным, так как частота, амплитуда напряжения и его форма на выходе определяются режимом работы инвертора, а нагрузка не содержит источников активной энергии той же частоты, что и выходная частота инвертора.
Ведомый сетью (зависимый) инвертор вследствие большой мощности приемной сети не может влиять на частоту напряжения этой сети (Тем более задавать ее). Поэтому принцип его действия сво
13
дится к такому режиму управления тиристорами, при котором управляющие импульсы иа них подаются лишь в те моменты времени, когда ЭДС цепи постоянного тока оказывается больше встречно направленных мгновенных значений напряжения приемной сети, и ток через вентили может проходить из цепи постоянного тока в приемную сеть встречно направлению ее напряжения. Ведомые сетью инверторы (обычно с естественной коммутацией) используются в ТПЧ с промежуточным звеном постоянного тока чаще всего в качестве вспомогательных устройств: как составная часть реверсивного выпрямителя для рекуперации энергии в питающую сеть при генераторном режиме работы двигателя, управляемого от ТПЧ; как разрядное устройство для ограничения коммутационных перенапряжений в автономном инверторе тока и т. п. В качестве основного инвертора они используются лишь в роторных преобразователях частоты асинхронно-вентильных каскадов. Процессы в ведомых инверторах так же, как и в выпрямителях, свойства и методы проектирования их весьма подробно освещены как в литературе по преобразовательной технике, так и в книгах по каскадным и тиристорным электроприводам постоянного тока, поэтому в данной работе зависимые инверторы и выпрямители детально не рассматриваются.
Основным типом инвертора, используемым в ТПЧ с промежуточным звеном постоянного тока, является автономный инвертор.
Автономный инвертор — это по существу коммутатор, переключатель, который поочередно подключает фазы нагрузки в цепи переменного тока к положительному и отрицательному полюсам источника постоянного тока. Частота переключений определяет выходную частоту инвертора. В зависимости от режима работы источника постоянного тока и особенностей протекания электромагнитных процессов автономные инверторы можно разделить на инверторы напряжения и инверторы тока.
Автономный инвертор напряжения (АИН) — это инвертор, форма напряжения на выходе которого определяется только порядком переключения тиристоров (транзисторов) инвертора, а форма тока зависит от характера нагрузки. Питание АИН должно производиться от источника напряжения (ЭДС). При работе АИН на реактивную нагрузку должна быть обеспечена возможность обмена реактивной энергией между нагрузкой и источником постоянного напряжения, для чего параллельно входу АИН устанавливается конденсатор достаточно большой емкости, а встречно-параллелыю переключающей схеме АИН подключается так называемый обратный выпрямитель. Это позволяет току в нагрузке протекать со сдвигом по фазе по отношению к напряжению.
На рис. 1-5,а, б представлены схема однофазного АИН на полностью управляемых тиристорах и формы напряжения па активно-индуктивной нагрузке и тока в ней.
Автономный инвертор тока (АИТ)—это инвертор, форма тока па выходе которого определяется только порядком переключения тиристоров (транзисторов) инвертора, а форма напряжения зависит от характера нагрузки. Питание АИТ должно производиться от источника тока. Перевод выпрямителя в режим регулируемого источника тока при работе на АИТ обычно достигается либо путем включения сглаживающего реактора очень большой индуктивности, либо посредством охвата выпрямителя сильной отрицательной обратной связью по току и использования сглаживающего реактора, индуктивность которого достаточна для сглаживания пульсаций выпрямлен-
14
пого тока. Первый способ неприемлен для использования в регулируемом электроприводе, так как применение реактора с большой индуктивностью приводит к резкому увеличению массы, габаритов преобразователя частоты и его инерционности. Поэтому в регулируемом электроприводе наиболее целесообразен для использования второй способ, обеспечивающий приемлемые массо-габаритные показатели преобразователя и его достаточно высокое быстродействие.
На рис. 1-5,в, г приведены схема однофазного АИТ на полностью управляемых тиристорах и формы тока активно-емкостной нагрузки и напряжения на ней.
При работе АИН иа чисто емкостную нагрузку, при скачках напряжения на его выходе (при смеие полярности напряжения на нагрузке) возникают очень большие броски тока (в пределе — бесконечного значения). При работе на активно-индуктивную нагрузку пли па двигатель переменного тока АИН приближается по своим свойствам к идеальному.
Возможна работа АИН и на нагрузку с опережающим коэффициентом мощности, например в бесколлекториом двигателе постоянного тока, в тех случаях, когда броски тока при коммутации ограничиваются параметрами нагрузки на допустимом уровне и приняты меры по ограничению скорости нарастания тока в тиристорах и по обеспечению их надежного выключения (обеспечение достаточного для их выключения времени приложения к тиристорам обратного напряжения). Достаточно надежная работа АИН достигается лишь в случае принудительной коммутации. Указанные особенности работы АИН иа нагрузку с опережающим коэффициентом мощности и технические трудности обеспечения надежной коммутации его тиристоров при таком характере нагрузки практически исключают
Рис. 1-5. Схемы однофазных мостовых автономных инверторов с принудительной коммутацией по управляющим цепям.
а~ схема АИН; б — графики тока и напряжения на выходе АИН при активно-индуктивной нагрузке; в — схема АИТ; г—графики тока и напряжения иа выходе АИТ при актнвно-емкостной нагрузке.
15
использование АИН в качестве автономного инвертора с естественной коммутацией при опережающем коэффициенте мощности нагрузки.
Автономный инвертор тока не может работать на индуктивную нагрузку, так как при скачках тока на его выходе (при смене полярности тока на нагрузке) будут возникать недопустимо большие перенапряжения (в пределе — бесконечного значения). Автономный инвертор тока близок к идеальному инвертору тока при работе на чисто емкостную нагрузку или на нагрузку с опережающим коэффициентом мощности. Возможна работа АИТ и на активно-индуктивную нагрузку или на двигатель переменного тока. Но в этом случае необходимо ограничивать коммутационные перенапряжения, ограничивая скорость изменения тока при смене его полярности и принимая специальные меры для гашения или отдачи в питающую сеть накопленной в нагрузке реактивной энергии, например посредством маломощных выпрямителя, подключенного по входу к нагрузке, и ведомого сетью инвертора с большой противо-ЭДС н т. п. Возможность работы АИТ на нагрузку с опережающим коэффициентом мощности делает его наиболее пригодным для использования в качестве АИТ с естественной коммутацией.
Для АИН характерны однозначная зависимость выходного напряжения от входного и практическая независимость выходного напряжения от изменения нагрузки и ее коэффициента мощности. Это является существенным достоинством АИН при работе на двигатель переменного тока и обусловливает предпочтительное использование ТПЧ с АИН в разомкнутых системах управления скоростью двигателей переменного тока и при питании группы двигателей.
При переходе двигателя, питаемого от ТПЧ с АИН, в генераторный режим работы изменяется направление тока на входе АИН (если выход обратного выпрямителя подключен к входу АИН), но не изменяется полярность напряжения в звене постоянного тока. Однако ток через выпрямитель в силу его односторонней проводимости не может изменить своего направления. Поэтому оказывается невозможным передать энергию в сеть, и энергия, вырабатываемая машиной переменного тока, будет накапливаться в звене постоянного тока — в конденсаторе фильтра, что приведет к недопустимому возрастанию напряжения на нем. Для передачи энергии из звена постоянного тока в питающую сеть необходимо изменить направление тока в выпрямителе, что возможно в случае реверсивного выпрямителя, т. е. необходимо ввести в схему ТПЧ ведомый сетью инвертор, включенный встречно-параллельно основному выпрямителю. Другим приемом организации отдачи энергии от двигателя в сеть является подключение выхода обратного выпрямителя инвертора через ведомый инвертор к питающей сети.
Недостатками ТПЧ с АИН являются: большая установленная мощность и соответственно большая масса и габариты конденсаторов фильтра на входе АИН; необходимость введения в схему ТПЧ дополнительного ведомого сетью инвертора, включенного встречнопараллельно выпрямителю, в случае необходимости рекуперации активной энергии в сеть; большое количество силовых диодов и тиристоров, особенно при наличии ведомого инвертора; в случае установки в силовой цепи постоянного тока LC-фильтра — инерционность канала регулирования напряжения при амплитудном способе его регулирования и возможность возникновения автоколебаний в разомкнутой системе преобразователь — двигатель.
Однозначная зависимость выходного тока от входного и зависимость выходного напряжения от полного сопротивления н коэффициента мощности нагрузки долгое время считались существенными недостатками АИТ и препятствовали его использованию в регулируемом электроприводе до тех пор, пока применялись разомкнутые системы частотного управления и параллельные инверторы [47J. Для нормальной работы параллельного инвертора (классический тип АИТ) на асинхронный двигатель емкость конденсаторов, подключенных параллельно нагрузке, необходимо изменять обратно пропорционально квадрату частоты инвертируемого тока [6], что обусловливает чрезмерно большие габариты конденсаторов, необходимость изменения емкости при глубоком регулировании частоты и исключает его использование в регулируемом электроприводе, хотя такие-попытки были и иногда встречаются и в настоящее время. Существенный недостаток параллельного инвертора состоит в явлении са-мораскачивания двигателя [47], питаемого от такого устройства.
Для регулируемого электропривода в настоящее время используется главным образом АИТ с отделенными от нагрузки коммутирующими конденсаторами (например, АИТ с отсекающими диодами, см. гл. 5). Емкость этих конденсаторов достаточно мала, н ее не нужно изменять при регулировании выходной частоты АИТ в широком диапазоне.
Зависимость выходного напряжения АИТ от полного сопротивления и коэффициента мощности нагрузки в настоящее время также не является препятствием к использованию АИТ (с отделенными от нагрузки коммутирующими конденсаторами) в электроприводе: в современных системах частотно-управляемого привода ток на входе АИТ (т. е. ток статора двигателя) автоматически регулируется-в функции абсолютного скольжения, т. е. как бы в функции изменения полного сопротивления и коэффициента мощности нагрузки, что позволяет даже оптимизировать режимы работы двигателя.
Регулирование тока на входе АИТ обеспечивается с помощью управляемого выпрямителя, охваченного сильной отрицательной обратной связью по току. Однако принципиальная необходимость регулирования напряжения на выходе АИТ или тока на его входе в функции полного сопротивления и коэффициента мощности нагрузки предопределяет ограниченность области использования ТПЧ с АИТ только одиночным электроприводом.
К недостаткам АИТ относятся уже упоминавшиеся перенапряжения на его выходе, обусловленные активно-индуктивным характером нагрузки и высокой скоростью изменения тока при смене его полярности. Необходимость ограничения перенапряжений заставляет увеличивать время коммутации тиристоров, что в некоторых случаях ограничивает максимальное значение частоты на выходе АИТ (50— 100 Гц), п применять специальные схемные решения, обеспечивающие гашение или отдачу в питающую сеть накопленной в нагрузке реактивной энергии, что несколько усложняет силовую схему и схему управления ТПЧ. Кроме того, потери в двигателе от высших гармоник прн питании его от АИТ существенно больше (примерно в 2 раза при номинальном моменте на валу), чем в случае питания двигателя от АИН (см. § 1-4).
Достоинствами ТПЧ с АИТ (с отделенными от нагрузки коммутирующими конденсаторами) являются: отсутствие конденсаторного фильтра на входе АИТ, что уменьшает габариты и массу преобразователя; возможность рекуперации активной энергии в сеть без не-
2—581
7658^7
17
обходимости введения в схему ТПЧ дополнительного ведомого сетью инвертора; малое количество силовых диодов и тиристоров, что делает соизмеримым по стоимости, габаритам и массе реверсивный частотно-управляемый привод переменного тока с реверсивным приводом постоянного тока при лучших динамических качествах первого.
Преобразователь с АНТ по отношению к нагрузке является источником переменного тока, что в сочетании с частотно-токовым управлением двигателями позволяет создавать достаточно простые, экономичные и быстродействующие системы привода, обладающие высоким качеством переходных процессов. Эти положительные качества ТПЧ с АИТ предопределяют применение предпочтительно этого ТПЧ в одиночных реверсивных приводах, работающих в напряженном повторно-кратковременном режиме.
При переходе двигателя, питаемого от ТПЧ с АИТ, в генераторный режим работы изменяется знак протнво-ЭДС инвертора на его входе, и в силу неизменности направления тока в звене постоянного тока становится согласным с направлением тока, т. е. инвертор переходит в режим выпрямления тока и передает энергию от двигателя в цепь постоянного тока. Это должно было бы вызвать возрастание тока в этой цепи. Но за счет сильной отрицательной обратной связи по току, которой охвачен выпрямитель, последний переводится в режим ведомого сетью инвертора, что позволяет сохранить ток в звене постоянного тока на прежнем заданном уровне и передать энергию из этой цепи в питающую сеть. Это свойство ТПЧ с АИТ является его главным, определяющим преимуществом.
Автономные инверторы с принудительной коммутацией классифицируют по способу коммутации.
Автономные инверторы с принудительной коммутацией по способу коммутации можно разделить на три группы (рис. 1-6):
1) инверторы на полностью управляемых ключевых элементах (транзисторные инверторы и инверторы на двухоперационных тиристорах). В этих инверторах отсутствуют специальные устройства н цепи коммутации;
2) инверторы с конденсаторной (емкостной) коммутацией. В этих инверторах основным элементом узлов принудительной коммутации является конденсатор, предварительно запасенная энергия которого используется для выключения тиристоров;
3) инверторы с коммутацией тиристоров за счет энергии дополнительных импульсных или высокочастотных источников.
Последняя группа инверторов практически не используется в ТПЧ в силу неоправданной сложности их схем. Инверторы первой группы, отличаясь простотой силовых схем и хорошими показателями, используются в настоящее время лишь в маломощных преобразователях.
Наиболее распространенными в настоящее время являются тиристорные инверторы с конденсаторной коммутацией. Они могут быть по характеру и организации процесса коммутации разделены на две группы (рис. 1-6):
1) инверторы с одноступенчатой коммутацией;
2) инверторы с двухступенчатой коммутацией.
Под одноступенчатой понимается коммутация, при которой ток, протекающий через тиристор перед его выключением, переводится на включающийся рабочий тиристор другой фазы или на включающийся тиристор собственной фазы, причём процессы выключения
18
одного рабочего тиристора и включения другого происходят одновременно.
Под двухступенчатой понимается коммутация, которая осуществляется с помощью вспомогательного коммутирующего тиристора. Рабочий тиристор выключается при включении коммутирующего тиристора. При этом образуется контур, изменяющий полярность напряжения на выключаемом тиристоре. Включение следующего ра-
Рис. 1-6. Классификация автономных инверторов по типу коммутации и классификация видов коммутации тиристоров.
бочего тиристора производится и происходит независимо от процесса коммутации в выключаемом тиристоре, но обычно по окончании ттого процесса.
Инверторы с одноступенчатой и двухступенчатой коммутацией по виду коммутации делятся еще па подгруппы.
2* 19
Инверторы с междуфазной коммутацией имеют коммутационный узел, обеспечивающий попеременную коммутацию тиристоров двух фаз.
Инверторы с пофазной коммутацией обеспечивают попеременное переключение тиристоров одной фазы, независимо от процессов в других фазах.
В инверторах с групповой коммутацией содержится коммутационный узел для выключения всех тиристоров одной группы (анодной или катодной).
Инверторы с общей коммутацией имеют один коммутационный узел, используемый для выключения всех тиристоров.
Инверторы с индивидуальной коммутацией обеспечивают выключение каждого тиристора независимо от состояния других рабочих тиристоров.
Существенное влияние на свойства инвертора оказывает алгоритм переключения его тиристоров или тип управления инвертором, определяющий длительность проводящего состояния тиристоров. Находят применение алгоритмы переключения тиристоров: 1) с длительностью проводящего состояния, равной 2/3 полупериода выходной частоты (120-градусное управление); 2) с длительностью проводящего состояния, равной полупериоду выходной частоты (180-градусное управление); 3) с произвольной (в пределах полупериода) длительностью проводящего состояния, фиксированной или многократно изменяемой по какому-либо закону в течение полупериода выходной частоты. Очевидно, что не во всяком инверторе может быть реализован любой из указанных алгоритмов переключения.
В инверторах с междуфазной коммутацией возможно только 120-градусиое управление. Форма выходного напряжения АИН при таком управлении зависит от коэффициента мощности нагрузки. Достоинство инверторов с междуфазной коммутацией — простота силовой схемы и системы управления. Область применения таких инверторов — ТПЧ малой и средней мощности и высокоскоростной электропривод, где коэффициент мощности нагрузки мал (при малом коэффициенте мощности нагрузки в определенном диапазоне его изменения форма напряжения практически не меняется).
В инверторах с общей и групповой коммутацией возможен режим управления с произвольной, но фиксированной для полупериода выходной частоты длительностью открытого состояния тиристоров, так как выключение тиристоров возможно только сразу во всех фазах. Этот режим может быть использован для широтного регулирования выходного напряжения АИН. Но обычно в АИН с групповой коммутацией применяется 180-градусное управление. Его достоинством является независимость формы выходного напряжения от коэффициента мощности нагрузки.
Недостатками инверторов с групповой и общей коммутацией являются ограниченность режимов управления, провалы в выходном напряжении (при коммутации тиристоров) и высокая частота коммутации общего коммутирующего узла (шестикратная — по отношению к выходной частоте в случае общей и трехкратная — при групповой коммутации). В АИТ с общей коммутацией обычно используется 120-градусное управление. Достоинством всех инверторов с общей коммутацией является уменьшение числа коммутирующих элементов — конденсаторов, реакторов и вспомогательных коммутирующих тиристоров. Основная область применения АИН с обшей коммутацией — низкочастотные преобразователи малой и средней
20
мощности, а для АИТ — мощные регулируемые низкочастотные (до 50—60 Гц) преобразователи.
Наиболее универсальными по применению, регулировочным свойствам п режимам управления являются инверторы с фазной (теоретически — и с индивидуальной) коммутацией (обычно — это инверторы напряжения). Они могут работать при любом алгоритме переключения тиристоров. Это обусловливает их преимущественное применение в ТПЧ с широтно-импульсным регулированием и широтно-импульсной одно- и двухполярной модуляцией выходного напряжения (см. гл. 4). Недостаток инверторов с фазной коммутацией — усложнение силовой схемы и системы управления.
Одной из важнейших характеристик любого инвертора помимо отмеченных в этом разделе являются коммутационные потери. Эти потери существенным образом зависят от схемы инвертора, от организации процесса коммутации, от ее типа и используемых узлов коммутации. Коммутационные потери являются одним из важнейших критериев выбора схемы инвертора для конкретного ТПЧ, так как от этих потерь зависит не только КПД ТПЧ, но в ряде случаев и его работоспособность. Весьма существенным является также характер процесса коммутации, его длительность и стабильность во всем диапазоне изменения частоты, нагрузки и напряжения на выходе ТПЧ. Качество процесса коммутации и коммутационные потери определяются в результате анализа электромагнитных процессов в инверторах. Эти вопросы рассмотрены в гл. 3—5.
1-3. СПОСОБЫ РЕГУЛИРОВАНИЯ НАПРЯЖЕНИЯ
В СТАТИЧЕСКИХ ПРЕОБРАЗОВАТЕЛЯХ ЧАСТОТЫ
Преобразователи частоты с непосредственной связью и с промежуточным звеном переменного тока повышенной частоты построены на базе реверсивных управляемых выпрямителей, поэтому способ регулирования амплитуды выходного напряжения этих преобразователей такой же, как и в тиристорных выпрямителях, т. е. фазовое регулирование.
Классическим способом регулирования амплитуды выходного напряжения в ТПЧ с промежуточным звеном постоянного тока является регулирование напряжения на входе инвертора либо посредством управляемого выпрямителя с фазовым регулированием, либо посредством неуправляемого выпрямителя с широтно-импульсным преобразователем (ШИП)—так называемое «амплитудное регулирование напряжения», в равной мере пригодное как для АИТ, так и для АИН. Достоинства этого способа: возможность использования для любого типа инвертора с любым видом коммутации и алгоритмом переключения его вентилей, в том числе и для наиболее простых схем инверторов; независимость формы выходного напряжения от напряжения на входе инвертора; широкий диапазон регулирования.
21
Широтно-импульсные преобразователи не могут быть рекомендованы к практическому применению для амплитудного регулирования напряжения, так как их использование в цепи постоянного тока приводит к дополнительному преобразованию энергии, к снижению КПД и усложнению преобразователя. Кроме того, тиристорный ШИП обычно обладает лишь односторонней проводимостью энергии, что препятствует его применению в приводах, работающих в генераторном режиме. Поэтому для амплитудного регулирования используются главным образом управляемые выпрямители. Их недостатком является низкий коэффициент мощности для сети, необходимость фильтрации выпрямленного напряжения, что увеличивает габариты и массу ТПЧ и ухудшает его динамические показатели. Кроме того, при снижении напряжения на входе АИН уменьшается начальное напряжение на коммутирующих конденсаторах инвертора, что снижает его коммутационную устойчивость и требует либо увеличения емкости конденсаторов, либо уменьшения тока нагрузки, а также использования специальных устройств подзаряда коммутирующих конденсаторов, т. е. усложнения схемы.
Тем не менее регулирование напряжения посредством управляемого выпрямителя остается основным видом регулирования как в случае инверторов тока, так и напряжения. Для повышения быстродействия и повышения коэффициента мощности для сети можно использовать выпрямители с искусственной коммутацией.
Другие используемые способы регулирования амплитуды выходного напряжения связаны с совмещением функции регулирования напряжения и частоты в самом инверторе. Так как такое совмещение достигается с помощью достаточно сложного алгоритма переключения тиристоров инвертора, то эти способы могут быть реализованы лишь в инверторах на полностью управляемых элементах и в инверторах с двухступенчатой коммутацией. Реализуются эти способы только в инверторах напряжения. Известно три таких способа: широтное регулирование (ШР), широтно-импульсное регулирование (ШИР) и широтно-импульсная одно- и двуполярная модуляция (ШИМ). Первый способ наиболее прост и состоит в изменении длительности проводящего состояния всех тиристоров инвертора при фиксированных моментах включения 'тиристоров. При изменении длительности
22
проводящего состояния тиристоров инвертора от л до О амплитуда 1-й гармоники выходного напряжения изменяется от максимального значения до 0. Однако при этом резко возрастают амплитуды высших гармоник напряжения, что приводит к резкому увеличению потерь в двигателе [90]. Поэтому этот способ практического значения для ТПЧ, предназначенных для управления электроприводом, не имеет. Его можно использовать лишь в электроприводах с диапазоном регулирования не более чем 2:1 или в системах с постоянной частотой для • стабилизации выходного напряжения.
Существенно лучшими показателями (по составу и амплитуде высших гармоник напряжения) характеризуются ШИР и ШИМ. Сущность этих способов состоит в формировании полуволны выходного напряжения из двуполярных или однополярных импульсов с изменяемой скважностью (или шириной). При этом изменяется амплитуда 1-й гармоники выходного напряжения. Высшие гармоники в этом случае имеют высокие номера и за счет фильтрующих свойств двигателя хорошо сглаживаются (более подробно см. гл. 4). Различие между этими двумя способами состоит в том, что при ШИР заданная скважность однополярных импульсов остается неизменной (не в переходном процессе) в течение полупериода (периода) выходного напряжения, а при ШИМ — скважность однополярных или ширина двуполярных импульсов непрерывно изменяется по некоторому закону.
Достоинствами этих способов являются полное устранение недостатков амплитудного регулирования напряжения, высокое быстродействие, хорошая форма выходного напряжения или тока (близкая к синусоидальной при ШИМ), существенное упрощение выпрямителя— он может быть неуправляемым. В последнем случае коэффициент мощности преобразователя близок к единице во всем диапазоне регулирования. К недостаткам следует отнести усложненные схемы инверторов и систем управления; повышенные потери в инверторе, обусловленные высокой частотой коммутации тиристоров, что ограничивает максимальное значение выходной частоты преобразователей до 50—100 Гц. Из-за указанных недостатков эти способы регулирования напряжения применяются лишь в случаях крайней необходимости — в быстродействующих и точных приводах и в приводах
23
с очень глубоким регулированием скорости. Применение их в высокочастотном приводе практически исключено.
С другими способами регулирования выходного напряжения инверторов, обычно не используемыми в преобразователях, предназначенных для регулируемого электропривода, читатель может познакомиться, например, в [47].
Способ регулирования выходного напряжения ТПЧ с промежуточным звеном постоянного тока наряду с типом инвертора (инвертор напряжения или тока) существенным образом определяет как общие эксплуатационные (регулировочные, динамические и энергетические) свойства ТПЧ, так и структуру его силовой части и системы управления, а также выбор типа коммутации и схемы инвертора, поэтому целесообразно все ТПЧ с промежуточным звеном постоянного тока и автономными инверторами разделить по способу регулирования напряжения и типу инвертора на четыре группы:
1) преобразователи частоты с АИН с амплитудным регулированием напряжения;
2) преобразователи частоты с АИН с ШИМ;
3) преобразователи частоты с АИТ;
4) преобразователи частоты с инвертором, ведомым сетью.
В соответствии с этой классификацией преобразователей и ведется их рассмотрение в последующих главах.
1-4. ОСНОВНЫЕ ТРЕБОВАНИЯ, ПРЕДЪЯВЛЯЕМЫЕ К СТАТИЧЕСКИМ ПРЕОБРАЗОВАТЕЛЯМ ЧАСТОТЫ ДЛЯ РЕГУЛИРУЕМОГО ЭЛЕКТРОПРИВОДА
Предназначенный для регулируемого электропривода ТПЧ (в частности, тиристорный) является силовым устройством для питания электродвигателя или группы электродвигателей переменным напряжением (или током) с амплитудой, частотой и фазой, изменяемыми в некотором диапазоне с целью управления этим электродвигателем или одновременно всей группой электродвигателей. Этим функциональным назначением ТПЧ и определяются требования, предъявляемые к ним. Эти требования можно разделить на три группы:
1) общие требования к ТПЧ как к источнику и потребителю электроэнергии;
24
2) общие требования, обусловленные использованием ТПЧ в электроприводе;
3) специальные требования, зависящие от назначения привода и параметров питающей сети.
Рассмотрим кратко все три группы требований. К первой группе относятся следующие требования.
1. Высокий КПД во всем диапазоне изменения выходных параметров ТПЧ и его нагрузки. Это требование является важнейшим, поскольку ТПЧ является силовым устройством и через него передается вся мощность, потребляемая двигателем, или значительная ее часть. Коэффициент полезного действия ТПЧ зависит от типа ТПЧ, его схемы, мощности, выходной частоты и коэффициента мощности нагрузки. Современные отечественные и зарубежные тиристорные ПЧ удовлетворительно отвечают указанному требованию, имея в случае ТПЧ с промежуточным звеном постоянного тока на мощности от 60 кВ-А и более номинальный КПД около 90—94% при выходных частотах от 50 до 200—300 Гц, а в случае ТПЧ с непосредственной связью — около 93—97% при выходных частотах не выше 25 Гц. Преобразователи меньшей мощности и более высокой выходной частоты до 1000—2000 Гц (с промежуточным звеном постоянного тока) имеют несколько меньший КПД — 80—86%. Наличие в схеме ТПЧ силовых трансформаторов снижает КПД (например, при мощности 60 кВ-А КПД снижается с 90 до 85%). Следует отметить, что разработчики еще не исчерпали всех резервов для повышения КПД преобразователей.
2. Минимальные габариты и масса ТПЧ. Преобразователь является неотъемлемой частью электропривода и в большинстве случаев должен располагаться на рабочей машине или в непосредственной близости от нее, поэтому габариты и масса его должны быть минимальны. Выполнение этого требования способствует снижению массы и габаритов рабочих машин (а в случае транспортных или подъемно-транспортных машин — и повышению их КПД), экономии материалов, транспортных затрат и производственных площадей. Современные ТПЧ по своим удельным параметрам (массе и объему на 1 кВ-А установленной мощности) не могут в полной мере удовлетворить потребителя. Габариты ПЧ с инвертором напряжения типов ТПЧ и ЭКТ при установленной мощности 100 кВ-А примерно в 6—7,5 раз больше габа
25
ритов двухполюсного асинхронного короткозамкнутого двигателя мощностью 100 кВт, а масса — в 2—2,4 раза больше; при мощности же 15 кВ-А габариты преобразователя типа ТПЧ примерно в 8—10 раз больше габаритов асинхронного двухполюсного двигателя мощностью 14 кВт, а масса больше в 5,6 раза.
Удельные массо-габаритные показатели резко падают с ростом установленной мощности до 100— 200 кВ-А и слабо уменьшаются с ее дальнейшим увеличением. Преобразователи с АИН имеют большие значения удельных массы и объема, чем ТПЧ с АИТ.
Серийные ТПЧ с АИН общепромышленного применения имеют следующие удельные массо-габаритные показатели: удельный объем изменяется от 70—100 до 30 дм3/ (кВ- А), а удельная масса — от 52 до 15 кг/(кВ - А) при увеличении установленной мощности ПЧ соответственно от 12 до 100. кВ-A, достигая своего наименьшего значения по удельному объему 8,23 дм3/(кВ-А) и удельной массе 2,14 кг/(кВ-А) при мощности ПЧ 3500 кВ-А (СПЧР 3500/6). Однако ПЧ мощностью от 125 до 500 кВ-А типа ПЧИ выпадают по удельным показателям из этой монотонной зависимости: удельный объем их равен 47—32 дм3/(кВ-А). У высокочастотных преобразователей малой мощности эти показатели значительно хуже: например, при мощности 2 кВ-А (ПТЧ К.Ш) они равны соответственно 180 дм3/ (кВ-A) и 75 кг/(кВ-А).
Приведенные цифры относятся к бестрансформатор-ным ПЧ. Применение трансформаторных схем ухудшает массо-габаритные показатели ПЧ. Так, у преобразователей типа ТПЧ мощностью 63 кВ-А габариты в 1,7 раза, а масса — в 1,5 раза больше по сравнению с бестранс-форматорными ПЧ той же мощности.
В [83] имеются сведения о разработке опытных образцов ТПЧ с АИТ, имеющих удельный объем 2 дм3/(кВ-А) и удельную массу 1 кг/(кВ-А) при мощности ПЧ 500 кВ-А, что свидетельствует о больших возможностях снижения удельных массы и объема серийных ПЧ.
Удельные массо-габаритные параметры ТПЧ с непосредственной связью в целом значительно меньше, чем у ТПЧ с промежуточным звеном постоянного тока, но без учета компенсационных конденсаторов и при раздельном управлении группами тиристоров ТПЧ, что позволяет исключить уравнительные реакторы. Опытные 26
образцы таких ТПЧ имеют удельный объем около 2,6 дм3/(кВ-А) и удельную массу около 1,5 кг/(кВ-А). Для некоторых серийных ТПЧ с непосредственной связью удельные массо-габаритные показатели приведены в табл. 1-1.
В значительной степени массо-габаритные удельные показатели зависят от соответствующих удельных показателей комплектующих изделий, например конденсато-
Таблица 1-1
Тип ТПЧ Мощность, кВ-А Удельная масса, кг/(кВ- А) Удельный объем, дмэ/(кВ- А)
ПЧН-25, ТТС-40 ктэч ПЧС-200 35; 40 160—450 76 6; 4 20 14; 8 52—24 44
ров, но многое зависит от опыта конструкторов и разработчиков и ряда других факторов. Важное значение имеют выбор схемы, обеспечивающей минимум удельных массо-габаритных показателей, снижение установленной мощности отдельных узлов и элементов, а также рациональный выбор этих узлов и элементов и их экономная компоновка. Особое значение имеет рациональное решение вопроса отвода и рассеивания теплоты.
Следует отметить, что, несмотря на не вполне удовлетворительные массо-габаритные параметры серийных ТПЧ, они существенно превосходят по этим параметрам (особенно по занимаемой площади и массе) машинные агрегаты (преобразователи), способные выполнять те же функции. Так, при выходной мощности 75 кВ-А ТПЧ имеет несколько меньшие габариты (примерно в 1,3 раза) и в 2,6 раза меньшую массу, чем машинный агрегат такой же выходной мощности. Коэффициент полезного действия ТПЧ приблизительно в 1,5 раза выше, чем у машинного агрегата той же мощности.
3.. Высокие показатели надежности ТПЧ. Важность этого требования трудно переоценить. Выполнение его обеспечивает снижение эксплуатационных затрат на обслуживание и ремонт, а главное, нормальное функционирование рабочей машины в гарантированном интервале времени.
27
Каких-либо стандартов, регламентирующих показатели надежности ТПЧ, пока не существует, но за основу, видимо, можно принять стандарт (ГОСТ 5.764-71) для регулируемых тиристорных приводов постоянного тока, который предусматривает, в частности, средний срок службы 12 лет и вероятность безотказной работы, например, 0,9 в течение 8000 ч эксплуатации при доверительной вероятности 0,8. Правильнее было бы характеризовать безотказность ТПЧ как ремонтируемого устройства не вероятностью безотказной работы, а вероятностью наработки между отказами.
Высокая безотказность ТПЧ достигается не только выбором высоконадежных схем и элементов, снижением статических и динамических нагрузок этих элементов, минимизацией их количества и г. п., но и реализацией устойчивости режимов работы всех узлов, составляющих ТПЧ. Особое внимание должно быть уделено достижению устойчивой коммутации в ТПЧ с автономными инверторами. Эта устойчивость должна быть такой, чтобы в любом режиме предотвращались срывы инвертирования, особенно опасные в АИН. При использовании АИТ необходимо предусмотреть специальные схемные решения по ограничению перенапряжений на тиристорах.
В понятие надежности наряду с безотказностью и долговечностью входит и ремонтопригодность устройства. Очевидно, что ТПЧ должны иметь высокую ремонтопригодность (малое время восстановления) и быть простыми в обслуживании. Это требование является существенным, так как ТПЧ — достаточно сложное элек-ротехническое устройство. Для выполнения этого требования используется блочный принцип конструкции, резервные блоки, системы диагностики и индикации неисправностей.
В литературе не приводится никаких данных по надежности ТПЧ по результатам эксплуатации. Встречаются лишь отрывочные сведения об успешной работе ТПЧ в течение ряда лет (наиболее длительный срок, приведенный в литературе — десять лет) в химической, пищевой, металлургической, машиностроительной и ряде других отраслей промышленности.
Тиристорные преобразователи частоты являются принципиально высоконадежными устройствами, особенно ТПЧ с непосредственной связью с естественной коммутацией. Однако требуется еще много усилий, чтобы
28
достичь этой принципиально возможной высокой надежности. Весьма важен здесь широкий опыт эксплуатации (пока явно недостаточный), который позволил бы выявить малонадежные элементы и узлы и повысить их надежность.
4. Стоимость ТПЧ. Следует добиваться того, чтобы, стоимость ТПЧ вместе с двигателем переменного тока была бы не выше цены электропривода постоянного тока. Пока стоимость ТПЧ очень высока, что объясняется прежде всего мелкосерийностью производства. Высокая стоимость является одним из основных препятствий широкого внедрения регулируемого привода переменного-тока, безусловно, более перспективного, чем привод постоянного тока. Резервы для снижения стоимости ТПЧ есть. Одним из них является выбор наиболее экономичной (имеющей минимум установленной мощности элементов) схемы ТПЧ, а такие схемы уже известны. О реальности перспективы существенного снижения стоимости ТПЧ говорит информация о зарубежных преобразователях. Например, в [109] указывается, что за четыре года (данные на 1975 г.) стоимость частотноуправляемых тиристорных электроприводов переменного тока снизилась на 65%. В другом источнике [142] подчеркивается, что разница между стоимостью частотноуправляемых тиристорных электроприводов переменного1 тока и тиристорных приводов постоянного тока непрерывно уменьшается и на 1975 г. составляла 10%.
- 5. Низкие уровни шума и радиопомех. Малошум-ность — существенное достоинство любого устройства на современном уровне развития техники. Основными источниками шума в ТПЧ являются система воздушного принудительного охлаждения и электромагнитные элементы.. Отказ от принудительного воздушного охлаждения,, использование естественного воздушного, водяного или испарительного охлаждений, надежное крепление обмоток и магнитопроводов электромагнитных элементов, например посредством эпоксидных смол, и ряд других мер могут сделать ТПЧ полностью бесшумным. Одним' из средств борьбы с радиопомехами является экрани-пование.
6. Высокий коэффициент мощности и потребление минимального тока из сети. Преобразователь частоты является по отношению к первичной сети потребителем энергии и должен поэтому удовлетворять требованиям,
29-
предъявляемым к потребителям энергосистемой. Желательно, чтобы ТПЧ имел нормативный коэффициент мощности 0,9—0,92 и выше.
Серийные ТПЧ с промежуточным звеном постоянного тока имеют достаточно высокий номинальный коэффициент мощности — 0,87—0,9, но при регулировании напряжения вниз от номинального (при амплитудном способе регулирования напряжения посредством управляемого выпрямителя) этот показатель падает, как и в тиристорных преобразователях постоянного тока, и по тем же причинам. Поэтому и способы повышения коэффициента мощности при этом методе регулирования напряжения те же, что и для преобразователей постоянного тока, — использование компенсирующих устройств, применение многофазных схем выпрямления, поочередного управления последовательно включенными выпрямителями и т. д. Если применяются амплитудное регулирование напряжения с помощью ШИР или формирование выходного напряжения методом ШИМ, а также геометрическое суммирование выходных напряжений двух инверторов, коэффициент мощности ТПЧ как потребителя энергии практически равен единице, так как при перечисленных способах регулирования напряжения используется неуправляемый выпрямитель.
Преобразователи частоты с непосредственной связью с естественной коммутацией имеют коэффициент мощности ниже коэффициента мощности нагрузки, а при регулировании выходного напряжения вниз от номинального он резко снижается. Номинальное значение коэффициента мощности таких ТПЧ составляет 0,5—0,75. В этом случае в настоящее время практически единственным средством повышения этого показателя является установка компенсирующих конденсаторов.
Минимизация тока, потребляемого ТПЧ из сети, может быть достигнута как за счет повышения его коэффициента мощности, так и за счет соответствующего экстремального управления двигателем, являющимся нагрузкой ТПЧ.
7. Минимальные искажения напряжения сети, создаваемые ТПЧ. Лучше, если ТПЧ не будет вообще оказывать вредного влияния на сеть. Искажение напряжения сети могут создавать ТПЧ с непосредственной связью и ТПЧ с промежуточным звеном постоянного тока, имеющие на входе управляемые выпрямители.
30
Искажения эти тем существеннее, чем больше мощность-ТПЧ и чем меньше мощность сети. Мощные ТПЧ указанного типа является для сети генераторами тока высших гармоник и создают провалы напряжения в моменты коммутации вентилей ТПЧ или управляемого выпрямителя.
Для снижения вредного влияния таких ТПЧ на сеть можно использовать те же способы, что и рекомендуемые, например, в [78] для преобразователей постоянного тока: уменьшение реактивных сопротивлений линий и трансформаторов, использование резонансных фильтров'-и эквивалентных многофазных схем выпрямления и т. и. Однако наиболее радикальным средством выполнения данного требования представляется использование в ТПЧ методов регулирования напряжения, позволяющих отказаться от фазового управления (выпрямителем или тиристорами ТПЧ с непосредственной связью), например метода ШИМ.
8. Надежная быстродействующая защита ТПЧ от коротких замыканий и возможных срывов инвертирования. Наиболее быстродействующими являются электронные устройства защиты. Защиту с помощью предохранителей и автоматических выключателей следует использовать как резервную.
9. Безопасность эксплуатации и ремонта ТПЧ.
Ко второй группе требований относятся следующие требования.
1. Малая несимметрия по фазам выходного напряжения (или тока) многофазного ТПЧ.
2. Свободный или управляемый обмен реактивной энергией между ТПЧ и двигателем, между сетью и двигателем или между фазами двигателя во всем диапазоне изменения выходной частоты, коэффициента мощности и нагрузки. Это требование является одним из определяющих при выборе схемы ТПЧ для регулируемого-электропривода и по существу сводится к схемному обеспечению возможности протекания тока через нагрузку с фазовым сдвигом по отношению к приложенному к нагрузке (двигателю) напряжению. Особенно важно, чтобы это требование выполнялось в широком диапазоне изменения выходных частот и напряжения ТПЧ, коэффициента мощности и нагрузки без существенного изменения характера процессов ТПЧ, без необходимости изменения параметров ТПЧ, без переключений в его
ЗГ
-силовой схеме. Этим последним условиям не удовлетворяют ТПЧ с параллельными и последовательными инверторами, что делает нецелесообразным их применение в регулируемых электроприводах.
3. Минимальное содержание высших гармоник в выходном напряжении (или токе). Это требование обусловлено, во-первых, стремлением уменьшить потери мощности в двигателе от токов высших гармоник, во-вторых, необходимостью обеспечения равномерности вращения вала двигателя при очень низких частотах статорного напряжения в приводах с очень широким диапазоном регулирования частоты вращения (более 20:1) и в ряде специальных случаев.
Достижение синусоидальной формы выходного напряжения (или тока) ТПЧ связано с усложнением схемы и увеличением потерь мощности в ТПЧ с промежуточным звеном постоянного тока или с необходимостью установки громоздких выходных фильтров, подавляющих высшие гармоники, что также влечет за собой увеличение потерь в ТПЧ. Поэтому с учетом фильтрующих свойств самого двигателя переменного тока при отсутствии требования равномерности вращения в зоне очень низких угловых скоростей или иных специальных требований считается нецелесообразным добиваться синусоидальной формы выходного напряжения (или тока) ТПЧ.
Для большинства ТПЧ, предназначенных для регулируемых электроприводов, допустимой и удовлетворяющей требованиям к приводу при диапазоне регулирования до 20:1 принимается такая форма, при которой в выходном напряжении (или токе) содержатся только нечетные гармоники, кроме 3-й и кратных ей, причем коэффициент искажения (отношение действующего значения 1-й гармоники к полному действующему значению) должен быть не ниже &и=0,955. Часто несинусоидаль-ность формы характеризуют коэффициентом нелинейных искажений kf (отношение действующего значения высших гармоник к действующему значению 1-й гармоники), который иногда называют процентом высших гармоник. Связь между коэффициентом искажений и коэффициентом нелинейных искажений определяется формулой
=юоК1/л2н—1 =юоКл2/л12 — 1, (i-i)
:32
где А — полное действующее значение, напряжения (или тока); Л] — действующее значение 1-й гармоники напряжения (или тока).
Тогда значению /д,—0,955 соответствует значение /г,=31 %, т. е. содержание в выходно?л напряжении (или гоке) ТПЧ до 31% высших гармоник (нечетных, кроме 3-й и кратных ей) считается допустимым.
При соблюдении указанных требований к форме выходных переменных, например в случае работы ТПЧ на асинхронный короткозамкнутый двигатель, максимальный момент последнего уменьшается иа 1—2%, ток при номинальной нагрузке возрастает приблизительно на 1—4% в зависимости от типа ТПЧ; КПД двигателя соответственно снижается на 1—3%, У высокоскоростных двигателей — несколько больше.
В ряде случаев (например, при малой мощности высокочастотного двигателя) оказывается выгодным в целях упрощения схемы ТПЧ допускать в его выходном напряжении (но не токе) при некоторых режимах до 60% высших гармоник.
Двигатель переменного тока, имея значительные индуктивности обмоток, обладает хорошими фильтрующими свойствами. Поэтому для оценки приемлемости какой-либо несинусоидальной формы выходного напряжения (но не тока) ТПЧ, предназначенного для регулируемого привода, недостаточно знания только процента содержания высших гармоник, а еще необходимо знание их состава (номеров) и минимального требуемого значения частоты основной гармоники. Так как токи высших гармоник, протекающие через двигатель, в первом, достаточно точном приближении обратно пропорциональны их номеру, то коэффициент нелинейных искажений тока равен:
(1-2)
где Um4lUm — амплитуда напряжения v-й гармоники, от несенная к амплитуде напряжения 1-й гармоники; v— номер гармоники, k — коэффициент пропорциональности, зависящий от параметров двигателя и от частоты выходного напряжения ТПЧ.
3—58! 33
Чем меньше сумма ряда отношений квадратов относительных амплитуд высших гармоник к квадратам их номеров и чем быстрее он сходится, тем меньше коэффициент нелинейных искажений (процент высших гармоник) тока, потребляемого от ТПЧ и тем меньше мощность потерь от высших гармоник в двигателе. Для случая питания от ТПЧ асинхронного короткозамкнутого двигателя формула (1-2) примет вид:
(1-3)
где /,Ч1 — действующее значение 1-й гармоники тока статора при данном действующем значении 1-й гармоники напряжения статора Us\', х1{— индуктивное сопротивление короткого замыкания двигателя при номинальной частоте; /s*=fs//s,HOM— относительная частота 1-й гармоники напряжения статора; USv —действующее зна
чение напряжения гармоники номера v.
Коэффициент нелинейных искажений тока зависит от частоты, нагрузки двигателя и от соотношения Us/fs. Поэтому для возможности сопоставления результатов целесообразно оценивать этот коэффициент при номинальном режиме, т. е. при равенстве действующих значений напряжения и тока 1-й гармоники номинальным значениям при номинальной частоте. Тогда
f, I, ном
1
#к*
(1-4)
где x!<*=Xi7siHoM/t7e!iIOM=X:-/Z6 — индуктивное сопротивление короткого замыкания двигателя при номинальной частоте, выраженное в относительных единицах при базовом сопротивлении Z^^=l^[„ow//,swv-
Для машин общепромышленного применения единых серий 0,16-?-0.23, где большие значения относятся к тихоходным (многополюсным) двигателям.
Для прямоугольно-ступенчатых форм напряжения с сотержаннем только нечетных гармоник, кроме гармоник нулевой последовательности, характерна обратно-нропорциональная зависимость относительной амплиту-34
ды напряжения гармоники от их номера. Тогда (1-4) примет вид:
, । 1 1^2,15- 1о~3 с
f!'~ *к, Л/ * *
f V^l
где v=6n + <? (n= 1, 2, 3, ..q— ± 1).
В этом случае коэффициент нелинейных искажений тока при номинальном режиме составит kfI^ (20—29) % при коэффициенте нелинейных искажений напряжения 31%. Столь небольшое фильтрующее действие двигателя здесь обусловлено низким наименьшим номером высшей (5-й) гармоники и ее значительной амплитудой. При более высоком наименьшем номере высшей гармоники фильтрующие свойства двигателя проявятся более резко, даже при том же значении ее амплитуды, как это видно из (1-4).
Для оценки фильтрующих свойств двигателя можно ввести коэффициент фильтрации двигателя q№, понимая его как отношение коэффициентов нелинейных искажений напряжения и тока статора при номинальном режиме. Используя (1-4), получаем:
Для случая применимости (1-5) коэффициент фильтрации двигателя будет равен:
(1-7)
что составит q№~ 1,07-5-1,54. Большие значения относятся к многополюсным двигателям.
'1* 35
В случае питания двигателей от ТПЧ типа источника тока, когда двигателю задается не только амплитуда, но и форма тока, использование понятия коэффициента фильтрации <7ДВ лишено смысла, поэтому для таких ТПЧ оценивать неспнусоидальность формы следует по коэффициенту нелинейных искажений тока, а требования к форме должны быть более жесткими, чем для ТПЧ типа источника напряжения.
Можно показать, что потери мощности в асинхронном двигателе (АД) от высших гармоник в точ-
ке номинального режима, отнесенные к номинальным потерям АРНом, равны:
—-----ЧД------- (1.8)
ДРцом cos?1,OM (1 ’Jhom)
где ц,— активное сопротивление короткого замыкания АД, выраженное в относительных единицах (для двигателей общепромышленного применения единых серий гк*«0,02-4-0,16, где меньшие значения относятся к АД большой мощности); cos фНом, т]пом — номинальные коэффициент мощности и КПД АД соответственно.
Из (1-8) следует, что для ТПЧ, работающих на двигательную нагрузку, главным является требование к форме выходного тока, а требование к форме напряжения — подчиненным.
Для ТПЧ типа источника напряжения формулу (1-8) можно записать с учетом (1-6) в виде
ДА/’ rj
____\ ________к* о 17______ / J-9j
ДРцОМ ?“дв l-°S <р(1О.М (1 Дюм)
Из сопоставления (1-8) и (1-9) следует, что при одинаковом значении коэффициентов нелинейных искажений выходного тока ТПЧ типа источника тока и выходного напряжения ТПЧ типа источника напряжения в последнем случае потери от высших гармоник в двигателе будут в раз меньше [для случая применимости (1-5) п (1-7) они будут в 1,14—2,37 раза меньше]. Это дает основание определять предельно допустимое значение ku, производя расчеты для случая использования ТПЧ тина источника тока.
В качестве предельно допустимого коэффициента нелинейных искажений выходного тока ТПЧ с непосредственной связью и Т11Ч с промежуточным звеном позе
стояниого тока при диапазоне регулирования выходной частоты до 20:1 может быть принято значение &/7=0,31 в точке номинального режима. При &/Г~0,31 по (1-8) получим для АД единых серий общепромышленного применения, что относительные потери от высших гармоник лежат в пределах SAP J АРпом ~0,04 -0,11, где меньшие значения соответствуют мощным быстроходным двигателям, а большие — тихоходным маломощным.
Для случая питания АД от ТПЧ типа источника напряжения при /г/д=0,31 эти потери составят соответственно SAPv/APao4 = 0,03 -т-'0,05.
Повышенные по сравнению со случаем ТПЧ типа источника напряжения потерн в АД (при одинаковой форме соответственно напряжения и тока) —это недостаток ТПЧ типа источника тока. Однако, как следует из (1-7) и (1-9), этот вывод справедлив лишь при хк*>0,15, что характерно для большинства серийных двигателей общепромышленного применения. При хк*=0,15 потери в АД для обоих типов ТПЧ будут одинаковы, а при хк*<0,15 потери в АД при питании его от ТПЧ типа источника напряжения окажутся больше, чем в случае ТПЧ типа источника тока.
Во избежание недопустимого превышения температуры изоляции АД при наличии дополнительных потерь от высших гармоник необходимо уменьшать нагрузку на валу. Допустимый по нагреву момент /Идоп АД при номинальной частоте и при питании его от ТПЧ типа источника тока может быть оценен по формуле
Мдоп _ 1_________
-Дюм / ХДР
I/ ] J- 1 ,64 ____1
1/ АР
urllOM
(1-10)
полученной из условия равенства полных потерь номинальным в предположении сохранения поминального значения потока АД для усредненного значения доли потерь от рабочего тока (тока ротора) от полных потерь, равного 0,61, а также с учетом пропорциональности потерь от высших гармоник квадрату действующего значения 1-й гармоники тока ротора.
При питании АД от ТПЧ типа источника напряжения
(1-П)
37
Формула (1-11) получена исходя из тех же положений, что и для (1-10), но с учетом независимости от тока ротора потерь от высших гармоник, которая имеет место в этом случае.
Расчет по (1-10) дает Л1Д0П/Л1Н0М«0,92-т-0,97, а по (1-11) —(Идоп/Мном«0,965-^-0,976, где большие значения соответствуют мощным быстроходным машинам, а меньшие — тихоходным маломощным.
Таким образом, если принять допустимым недоиспользование машин средней и большой мощности до 2— 3%, а машин малой мощности до 8%, то требование к форме выходных переменных ТПЧ с непосредственной связью и ТПЧ с промежуточным звеном постоянного тока с диапазоном регулирования частоты до 20:1 можно сформулировать так: содержание высших гармоник в токе нагрузки не должно превышать £^=31 % (коэффициент искажений йи=0,955); содержание высших гармоник в выходном напряжении ТПЧ типа источника напряжения не должно превышать (коэффи-
циент искажений /ги=0,95).
При недоиспользовании АД малой мощности по условиям применения их в механизме на 15—20%, что достаточно часто имеет место на практике, и при условии использования ТПЧ типа источника напряжения только в комплекте с данным приводом (комплектные приводы) можно в целях упрощения ТПЧ допустить содержание высших гармоник в кривой выходного напряжения до 60%. В этом случае потери от высших гармоник составят 13—18% номинальных потерь, что снизит допустимое по нагреву использование АД по мощности до 0,89—0,84 (большие значения по использованию относятся к мощным быстроходным АД), но КПД в точке номинального режима снизится соответственно на 1—4%.
Для приводов с очень широким диапазоном регулирования (более 20:1) требуется более близкая к синусоиде форма напряжения (пли тока) в целях исключения пульсаций скорости и дискретности движения привода. В этом случае содержание высших гармоник в выходном напряжении или токе ТПЧ не должно превышать 16%. Для улучшения формы выходного напряжения используют в основном два метода (фильтры на выходе ТПЧ нс следует применять в электроприводе): использование эквивалентных многофазных схем н ме-38
тод ШИМ. Например, применение эквивалентной 12-фазной схемы инвертора позволяет исключить из выходных переменных все гармоники с номерами 6Л + р (й=1, 3, 5 .... 7=±1), что позволяет снизить содержание высших гармоник до 16%.
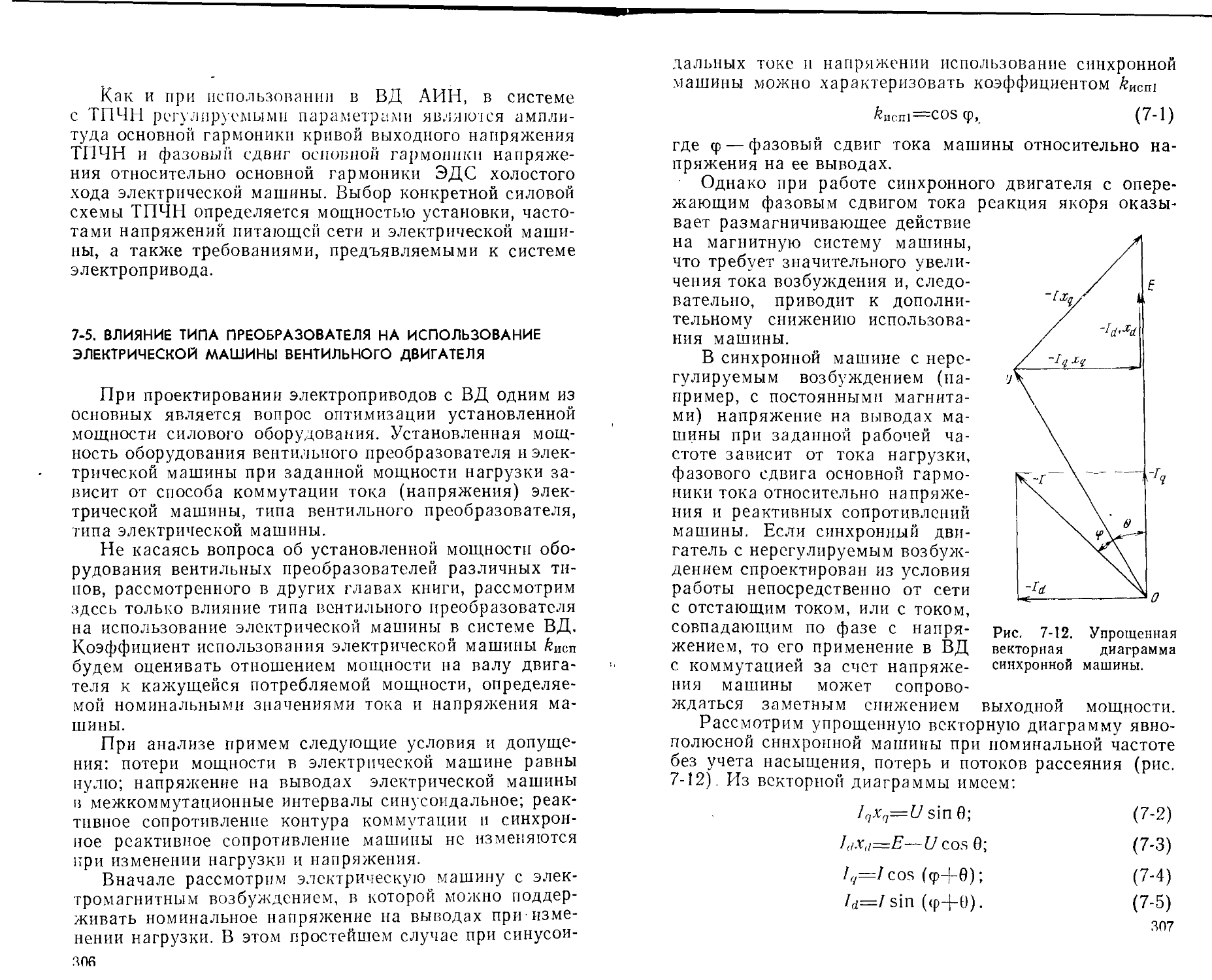
4. Поддержание с требуемой точностью заданных значении выходных переменных ТПЧ — напряжения (или тока) и частоты — при изменении коэффициента м.пн'ностн нагрузки в широких пределах, а также при колебаниях напряжения сети и температуры окружающей среды в заданных пределах.
В серийно выпускаемых промышленностью ТПЧ точность стабилизации частоты. составляет от ±2 до ±0,5%. точность стабилизации напряжения (щ— от ±2 до ±1,5%. В общем глупее требуемая точность стабилизации выходных параметров ТПЧ определяется на--’пдчением привода. Тоебованчя к точности стабилизации должны быть более жесткими для ТПЧ, используемых в разомкнутых системах приводов. Если же ТПЧ предназначен для работы в замкнутой системе привода, то тпебования к точности стабилизации выходных параметров ТПЧ, которые контролируются обратными связями привода, могут быть снижены. Например, при наличии достаточно сильной обратной связи по угловой скорости нет необходимости добиваться высокой стабильности заданного значения частоты на выходе ТПЧ.
5. Перегрузка по току и по напряжению ТПЧ для форсирования переходных пропессов АД в течение времени не менее длительности пуска нагруженного АД.
Допустимая перегрузка ТПЧ определяется перегрузочной способностью тиристоров и устройств искусственной коммутации. Необходимость работы преобразователя с перегрузкой в пусковых режимах вызывает значительное недоиспользование тиристоров ТПЧ в рабочем режиме.
Требуемая кратность пускового момента АД лежит в широких пределах (от 1,3 до 4—5) и определяется назначением привода. Указанной кратности пускового момента соответствует (при частотном управлении) кратность пускового тока примерно от 1,3 до 3—4. На такие, допустимые перегрузки по току и должны быть рассчитаны серийные ТПЧ.
6. Раздельное плавное регулирование частоты и амплитуды выходного напряжения (тока) ТПЧ в шипо-
39
ких пределах (в идеальном случае--от нуля до максимальных требуемых значений). Это требование определяется особенностями управления двигателями переменного тока и может быть реализовано в любом ТПЧ.
7. Высокое быстродействие по обоим каналам управления (частотой и амплитудой) ТПЧ и достаточная стабильность коэффициентов передачи этих каналов. Обычно канал управления частотой является практически безынерционным. Добиться же высокого быстродействия канала управления амплитудой напряжения в ряде случаев бывает очень трудно. Практически высоким быстродействием этого канала обладают лишь некоторые типы ТПЧ, например ТПЧ, использующие для формирования выходного напряжения метод ШИМ. Высокое быстродействие по указанным каналам управления необходимо для улучшения переходных процессов привода.
8. Малая мощность входных цепей каналов управления, позволяющая осуществлять управление от устройств, построенных на интегральных микросхемах.
9. Разработка и поставка ТПЧ в комплекте с тиристорным частотно-регулируемым приводом переменного тока (здесь имеются в виду все его разновидности, в том числе каскадные приводы, машины двойного питания и т. д.). Это требование пока скорее является желательным, чем обязательным. Выполнение его позволяет наиболее рационально и целесообразно строить ТПЧ и привод в целом. Опыт создания комплектных тиристорных приводов уже имеется. Подход к созданию ТПЧ как к элементу системы привода и изготовление его как части комплектного привода представляется наиболее разумным, так как ТПЧ и двигатель переменного тока в силу специфики управления последним взаимосвязаны более тесно, чем преобразователь и двигатель постоянного тока.
К третьей группе относятся самые разнообразные требования, перечислить которые полностью не представляется возможным. Эти требования большей частью являются уже не общими, а частными, индивидуальными, предъявляемыми только к конкретному типу привода. Отметим лишь некоторые из них, встречающиеся достаточно часто.
1. Чередование (реверс) фаз выходного напряжения ТПЧ в случае реверсивного привода.
40
2. Рекуперация энергии в питающую сеть при необходимости или целесообразности генераторного режима работы двигателя. Возможность рекуперации энергии в сеть обеспечивает экономичное и интенсивное генераторное торможение двигателя. Использование этого торможения наиболее рационально в приводе подъемных установок с интенсивным режимом работы. С возвратом энергии в сеть работают ТПЧ в каскадных приводах и в ряде других случаев. Наиболее просто реализуется режим рекуперации энергии в сеть в ТПЧ с непосредственной связью и в ТПЧ с промежуточным звеном постоянного тока с АИТ или с ведомым инвертором (в каскадных приводах). Несколько сложнее этот режим реализуется в ТПЧ с АИН.
3. Преобразование частоты до значения как более низкого, так и более высокого, чем частота сети. Это требование относится к определенным группам приводов— к высокочастотным и приводам с двигателями промышленной частоты при регулировании частоты вращения как вниз, так и вверх от основной (номинальной). Это требование может быть реализовано только в ТПЧ с промежуточным звеном постоянного тока (имеются, правда, пока еще мало исследованные возможности для реализации этого требования и в ТПЧ с непосредственной связью с искусственной коммутацией), что и предопределяет их наибольшее применение.
4. Отсутствие у ТПЧ входного и выходного трансформаторов. Выполнение этого требования позволяет резко уменьшить массу и габариты ТПЧ и повысить его КПД. Оно достаточно просто реализуется только в случае равенства максимального выходного напряжения ТПЧ напряжению сети. При нарушении этого условия применение трансформатора на входе или выходе ТПЧ оказывается неизбежным, за исключением случая, когда максимальное выходное напряжение ТПЧ меньше напряжения сети, но разница этих напряжений небольшая.
К третьей группе требований относятся и требования по защищенности от воздействия окружающей среды, по вибростойкости и т. п.
Как следует из сопоставления общих свойств ТПЧ, рассмотренных кратко в § 1-1 — 1-3, и требований к ним, универсального ТПЧ, который бы наиболее полно удовлетворял всем требованиям, предъявляемым к ТПЧ,
41
ника не существует. Это и является одной из причин существования большого многообразия схем и типов ТПЧ.
Область использования конкретного типа ТПЧ определяется тем, какой определенной группе требований он удовлетворяет наиболее полно.
В целом современные ТПЧ удовлетворяют почта всем предъявляемым требованиям. Путем применения ТПЧ с промежуточным звеном постоянного тока, содержащих неуправляемый выпрямитель (при необходимости рекуперации энергии — еще и инвертор, ведомый сетью), наиболее радикально может быть решена проблема повышения коэффициента мощности ТПЧ и практического устранения их отрицательного влияния на питающую сеть, чего трудно достигнуть при использовании тиристорных преобразователей постоянного тока.
ГЛАВА ВТОРАЯ
СИСТЕМЫ ЭЛЕКТРОПРИВОДА СО СТАТИЧЕСКИМИ ПРЕОБРАЗОВАТЕЛЯМИ ЧАСТОТЫ
2-1. ТРЕБОВАНИЯ К ХАРАКТЕРИСТИКАМ РЕГУЛИРУЕМОГО ЭЛЕКТРОПРИВОДА И ПУТИ ИХ ВЫПОЛНЕНИЯ
Требования к характеристикам регулируемого электропривода определяются технологическими требованиями, предъявляемыми к рабочей машине, и могут быть самыми разнообразными. Однако можно выделить наиболее общие и практически всегда предъявляемые требования. Они зависят в основном от режима работы привода и характера его нагрузки. Все регулируемые электроприводы по режиму работы можно разделить на две группы; 1) электроприводы, работающие преимущественно в длительном режиме работы с постоянной или мало изменяющейся нагрузкой, с редкими пусками и остановами; 2) электроприводы, работающие в напряженных повторно-кратковременных или перемежающихся режимах работы с частыми реверсами, пусками, торможениями и при переменной нагрузке, а в ряде случаев— с ударным приложением нагрузки.
Для электроприводов первой группы главными являются требования к статическим характеристикам: обеспечение требуемой (обычно более высокой, чем на естественной характеристике) жесткости механических 42
характеристик во всем диапазоне регулирования частоты вращения (обеспечение желаемой стабильности частоты вращения при изменении нагрузки); желаемая (обычно номинальная) перегрузочная способность электропривода в этом диапазоне регулирования; ограничение тока пли момента при пусках и перегрузках; устойчивость работы системы электропривода; экономичность и плавность регулирования частоты вращения. Никаких специальных требований к качеству переходных процессов и времени их протекания обычно не предъявляется. Лишь в некоторых случаях возникает требование плавности пуска с ограниченным динамическим моментом гли, наоборот, требование пуска за минимальное время пр;; ограниченном пусковом токе, как, например, для пж-одвигателей, некоторых центрифуг и т. п.
Для электроприводов второй группы главными являются требования к динамическим характеристикам и к качеству переходного процесса: минимальное время переходных процессов, достигаемое за спет больших (предельных) пусковых моментов, поддерживаемых в течение переходного процесса на заданном уровне; высокое качество переходного процесса, оцениваемое малым перерегулированием (обычно 4—5%) и слабой колебательностью, малым динамическим провалом частоты вращения и малым временем восстановления ее при ударном приложении нагрузки п т. п.; минимальные потопи энергии при пуска.х и торможениях.
Важнейшим общим для всех регулируемых электроприводов требованием является экономичность регулирования частоты вращения. Высокая экономичность регулирования частоты вращения достигается как за счет применения регулирующих устройств с высоким кпд, так п за счет использования таких способов регулирования, которые обеспечивают минимальные потери энергии в двигателе и преобразователе в широком диапазоне изменения частоты вращения.
Зшсь нужно особо отметить, что экономичность ре.гу. прования важна не только для повышения КПД элей г оэпривода: использование высокоэкономичного способ-1 регулирования позволяет существенно уменьшить габариты двигателя при заданных диапазоне регулирования, режиме его работы и характере нагрузки или увеличить диапазон регулирования ппч данном двигателе. Для машин переменного тока такими наиболее вы
43
сокоэкономичными способами регулирования частоты вращения являются: частотное регулирование со стороны статора (единственный способ для синхронных машин) или со стороны ротора (машина двойного питания), его разновидность — зависимое частотное управление (в бесколлекторной машине постоянного тока) и регулирование скорости посредством введения противо-ЭДС в пень выпрямленного тока ротора асинхронного двигателя (асинхронно-вентильный каскад как частный случай машины двойного питания). Для реализации всех этих способов требуется ТПЧ. Вместе с двигателем ТПЧ образует систему электропривода (см. § 2-2). Повышение экономичности регулирования в пределах данного способа и системы привода достигается применением систем экстремального управления [73].
Требование обеспечения желаемой перегрузочной способности во всем диапазоне частот вращения н нагрузок достигается в разомкнутых системах привода выбором соответствующего способа регулирования частоты вращения и закона управления. Под законами, например, частотного управления [18] понимаются соотношения между частотой и амплитудой напряжения, подаваемого на статор асинхронного двигателя, обеспечивающие соответствие характеристик двигателя характеристикам статической нагрузки, в частности, обеспечивающие неизменность перегрузочной способности при любой угловой скорости по отношению к предельному расчетному моменту нагрузки, зависящему в общем случае от угловой скорости. Это пли аналогичное понятие закона управления распространяется и па другие случаи многосвязного регулирования: на частотное управление синхронными и синхронно-гистерезисными двигателями; па управление машиной двойного питания при режимах асинхронном (связь между амплитудой и фазой вводимой в ротор ЭДС) и синхронном (связь между частотой и амплитудой вводимой в ротор ЭДС) и т. п. В случае синхронной машины может быть использовано еще третье управляющее воздействие — ток возбуждения ротора.
Для управления бесколлекторной машиной постоянного тока и асинхронно-вентильным каскадом обычно используется одно управляющее воздействие (амплитуда напряжения), в этом случае, естественно, понятие закона управления устраняется.
44
Конкретный влд закона управления определяется как свойствами самой управляемой машины и характером ее нагрузки, так и принятым критерием управления (заданная перегрузочная способность, желаемое значение коэффициента мощности и т. п.).
Закон управления предусматривает жесткое однозначное соотношение между управляющими воздействиями и используется в разомкнутых системах электропривода без применения управления по возмущению. Это предопределяет действенность законов управления обычно лишь в ограниченном диапазоне регулирования частоты вращения. Например, при частотном управлении АД с короткозамкнутым ротором закон управления обеспечивает номинальную перегрузочную способность АД при постоянном моменте статической нагрузки (MCTz=const) в диапазоне регулирования частоты вниз от номинальной не более (3—7):1 [73].
Требование обеспечения заданного статизма механических характеристик электропривода в разомкнутых системах невыполнимо, за исключением тех случаев, когда естественная жесткость механических характеристик электропривода выше требуемого статизма. Но и здесь указанное требование выполняется лишь в ограниченном диапазоне регулирования частоты вращения. При частотном управлении АД с короткозамкнутым ротором и требуемом статизме характеристик 6=0,1 и MCT = const предельный диапазон регулирования частоты вниз от номинальной в разомкнутой системе управления может быть не более (1,5—3):1 [73].
Требование плавности пуска с ограниченным динамическим моментом в разомкнутых системах привода выполняется обычно путем плавного изменения во времени управляющих воздействий. Поскольку темп изменения управляющих воздействий выбирается обычно из условий наиболее тяжелого случая пуска и по наименьшему значению динамического момента электропривода, то время переходных процессов оказывается чрезмерно затянутым.
Существенным недостатком разомкнутых систем электропривода с ТПЧ и с использованием законов управления является пониженная по сравнению с оптимальной экономичность режимов работы при нагрузках, мепыпих предельных расчетных, тля которых определялся закон управления.
45
Учитывая указанные недостатки разомкнутых систем электропривода с ТПЧ с использованием законов управления, можно рекомендовать применение этих систем только для случая стационарной вентиляторной нагрузки электропривода с редкими пусками (для электроприводов первой группы), при ограниченном диапазоне регулирования для AfCT=const и как вынужденное решение (при том же характере нагрузки и ограниченном диапазоне регулирования) для многодвигательного электропривода (рольганги, производство искусственного волокна и т. п.). Как показано в [73], разомкнутые системы частотного управления АД с короткозамкнутым ротором с вентиляторной нагрузкой обеспечивают перегрузочную способность не ниже номинальной и статизм характеристик не хуже 10% при постоянном соотношении напряжения и частоты статора практически в любом диапазоне регулирования частоты вращения.
В большинстве случаев для электроприводов первой группы и практически всегда для электроприводов второй группы требования, предъявляемые к характеристикам электроприводов, могут быть выполнены только в замкнутых системах или при использовании управления по возмущению.
Замкнутые системы электроприводов первой группы обычно содержат контуры стабилизации частоты вращения с различными обратными связями и контуры регулирования потока двигателя. Задача обеспечения плавности пуска обычно решается применением задатчиков интенсивности, а стабилизация системы обеспечивается использованием пассивной параллельной и реже последовательной коррекции. Оптимизация режимов работы при переменной нагрузке достигается либо посредством применения управления по возмущению с воздействием на поток двигателя, либо применением экстремальных регуляторов. В более редких случаях -ли системы привода содержат контуры стабилизации (ограничения) тока и контуры стабилизации абсолютного скольжения с положительной обратной связью по скорости электропривода. Применительно к частотному управлению асинхронными короткозамкнутыми двигателями эти системы подробно рассмотрены в [73].
В .замкнутой системе закон управления в том смысле, в кш-см он понимается в разомкнутых системах, лишен практического значения, так как он оказывается много
46
злачным и не учитывает реальные обратные связи системы и ограниченность ее коэффициента усиления. В замкнутых системах электропривода регулирование управляющих воздействий производится либо связно-чюзде.юно, либо раздельно.
Современные замкнутые системы электроприводов второй группы строятся по принципу систем подчиненного регулирования с последовательной коррекцией с оптимизацией переходных процессов. Основными контурами этих систем являются контуры регулирования тока, потока, момента и частоты вращения. Особенностью построения этих систем применительно к электроприводам переменного тока является компенсация перекрестных связей между каналами регулирования объекта путем введения компенсирующих сигналов, т. ?. устранения многосвязности объекта.
Достижение высокого быстродействия и качества процессов регулирования машин переменного тока требует перехода от скалярного к векторному управлению, когда контролируются не только переменные, но и пространственное положение и взаимное расположение результирующих векторов токов и потока двигателя. Следует отметить, что достижение предельного быстродей-стия связано с ухудшением энергетических показателей электропривода в установившихся режимах при переменных нагрузках вследствие необходимости постоянного поддержания потока двигателя на высоком («дежурном») уровне из-за большой инерционности регулирования этой переменной и в силу необходимости завышения установленной мощности оборудования для достижения требуемого форсирования переходных процессов.
Некоторые, аспекты векторного управления рассматриваются в гл. 4 и 5. В целях унификации аппаратной основы систем регулирования предполагается использование систем подчиненного регулирования и для электроприводов первой группы. Однако для них такие системы представляются излишне сложными.
2-2. ОСНОВНЫЕ СИСТЕМЫ ЭЛЕКТРОПРИВОДА СО СТАТИЧЕСКИМИ ПРЕОБРАЗОВАТЕЛЯМИ ЧАСТОТЫ И ОБЛАСТИ ИХ ПРИМЕНЕНИЯ
Статические ТПЧ применяются в электроприводе для плавного и экономичного регулирования частоты вращения п для обеспечения требуемого качества персход-
47
пых процессов. В электроприводе постоянного тока они используются в качестве бесконтактного коммутатора.
Известны четыре основные системы электропривода со статическими ТПЧ.
1. Система частотного управления асинхронными и синхронными двигателями (управление со стороны статора).
Рис. 2-1. Структурная схема системы частотного управления электроприводом.
2. Асинхронный электропривод по схеме вентильного электрического каскада (управление со стороны ротора).
3. Электропривод переменного тока по схеме машины двойного питания на базе АД с фазным ротором (управление со стороны ротора).
4. Вентильный двигатель (ВД) на базе синхронного двигателя или синхронизированного (с возбуждением постоянным током) АД с фазным ротором.
Самой распространенной из указанных является система частотного управления, поскольку только она может обеспечить наиболее экономичное регулирование частоты вращения АД с короткозамкнутым ротором и синхронных двигателей.
Структурная схема системы частотного управления представлена на рис. 2-1. Питание двигателя осуществляется через ТПЧ какого-либо типа. Частота и амплитуда выходного напряжения (тока) ТПЧ регулируются с помощью системы управления СУ. Система управления формирует импульсы управления тиристорами отдельных узлов ТПЧ и обеспечивает раздельное регулирование амплитуды и частоты выходного напряжения (тока).
48
Кроме системы управления обычно еще имеется система регулирования СР, формирующая заданные статические и динамические характеристики привода. Для этого необходима еще информация о текущем значении переменных, которую получают посредством датчиков скорости ДС, напряжения ДН, тока ДТ, потока ДП и т. п. Обязательными элементами всякой системы являются устройства защиты УЗ.
Для целей частотного управления ТИЧ должен выполняться на полную (максимальную) мощность, потребляемую двигателем. Это является одним из существенных недостатков данного способа регулирования.
Применение того или иного тина ТПЧ в системе частотного управления определяется соответствием его свойств требованиям, предъявляемым к нему электроприводом.
Для высокочастотных двигателей и двигателей, регулируемых вниз или вверх от номинальной угловой скорости, соответствующей частоте 50 Гц, в настоящее время используются только ТПЧ с промежуточным звеном постоянного тока. Причем для высокочастотных приводов и для нереверсивных приводов, работающих в основном в установившихся двигательных режимах с медленно меняющейся или постоянной нагрузкой, а также для многодвигательных приводов независимо от режима работы и характера нагрузки при диапазоне регулирования скорости вниз от номинальной до 20:1 применяются ТПЧ с АИН с амплитудным регулированием напряжения (типов ПТЧКШ, ТПЧ, ПЧИ, ЭКТ, ЭКТР, СПЧР 3500 и т. п.). Для одиночных приводов, работающих в напряженных повторно-кратковременных или перемежающихся режимах работы с интенсивными генераторными торможениями при том же диапазоне регулирования скорости, используют ТПЧ с АИТ с амплитудным регулированием. Эти же ТПЧ используют и для одиночного привода средней мощности независимо от режима работы. Для электроприводов с диапазоном регулирования скорости более 20:1 вниз от номинальной и в тех случаях, когда требуется улучшенная форма выходного напряжения, применяют ТПЧ с АИН — ШИМ (с максимальной выходной частотой до 50—100 Гц). На практике встречаются и другие случаи применения ТПЧ с АИН и АИТ.
4—581
49
Преобразователи частоты с непосредственной связью и с естественной коммутацией используюjch при частотном регулировании асинхронных двигателей тихоходных рольгангов (ТПЧ типа ПЧС), специальных низкочастотных синхронных двигателей, для одиночных тихоходных асинхронных приводов (ТПЧ типа КТЭЧ), для получения низких скоростей в быстроходных нерегулируемых приводах с односкоростными и многоскоростными АД на подъемниках и кранах (ТПЧ типов УКПЧ н ТТС). В области этих низких скоростей возможно регулирование скорости в некотором диапазоне. Использование в ТПЧ с непосредственной связью принудительной коммутации позволяет расширить диапазон выходных частот от 1,5—2 до 150—200 Гц [34]. Это дает возможность применять такие ТПЧ в тех же случаях частотного регулирования, что и ТПЧ с промежуточным звеном постоянного тока с автономным инвертором.
Наиболее традиционной областью применения системы частотного регулирования с ТПЧ является управление асинхронными короткозамкнутыми и синхронно-гистерезисными двигателями, особенно высокочастотными. Последние используются в электроприводе внутришли-фовальных и координатно-шлифовальных станков, в электроприводе машин по производству искусственного волокна, в электроприводе гироскопов, центрифуг, в безредукторном электроприводе мощных быстроходных турбомеханизмов (насосные станции магистральных нефте- и газопроводов, аэродинамические трубы и т. д.) и других специальных установок.
Традиционным является применение систем частотного регулирования для управления электродвигателями рольгангов. В [143] приводятся сведения об использовании уже в течение 10 лет ТПЧ с промежуточным звеном постоянного тока и синхронными двигателями в машинах для изготовления искусственного волокна, а в [142] сообщается о применении на металлургическом заводе ТПЧ мощностью 10 МВт для питания 1000 асинхронных двигателей рольгангов мощностью от 4 до 15 кВт. Относительно новыми областями применения частотного регулирования асинхронных и синхронных двигателей с помощью ТПЧ являются электроприводы кранов [7, 91, 106] и других подъемно-транспортных машин [80], тяговый электропривод [53], главный электропривод продольно-строгальных и ряда других стан
50
ков, электроприводы в пищевой, полиграфической, горнорудной [23], химической промышленности.
Имеются сведения об использовании частотно-регулируемых электроприводов на предприятиях цветной металлургии [14] и для регулирования производительности центробежных насосов [114]. Интересными областями применения систем частотного регулирования
Рис. 2-2. Структурная схема электропривода с управлением со стороны ротора.
а — по схеме асинхронно-вентильного электрического каскада- б — по схеме машины двойного питания.
являются м"гнитогидродинамические (МГД) приводы [38] и линейные асинхронные двигатели. Подобных примеров применения много, и, видимо, нет надобности приводить их все.
Новой областью использования ТПЧ является частотное управление специальными низкочастотными синхронными двигателями для тихоходных безредукторных электроприводов (в ряде случаев большой мощности — несколько тысяч и десятков тысяч киловатт) таких механизмов, как цементные печи, размольные мельницы п т. п. [58].
Структурные схемы каскадных электроприводов представлены на рис. 2-2,а, б (на этих схемах не показаны системы регулирования, блоки защиты и датчики, но подразумевается, что эти устройства в электроприводе имеются). Эти тины электропривода экономически целесообразны вследствие малой установленной мощности ТПЧ при относительно небольших диапазонах регулирования скорости до 3:1 вниз или вверх от номинальной, хотя принципиальных ограничений на диапазон регулирования нет.
4* 51
В электроприводе по схеме асинхронно-вентильного электрического (подсинхронного) каскада (рис. 2-2,а) используется простейший ТПЧ с промежуточным звеном постоянного тока с естественной коммутацией, связывающий роторную цепь двигателя с сетью [56, 57, 69]. Этот ТПЧ обычно состоит из неуправляемого (в редких случаях — управляемого) выпрямителя В и ведомого сетью инвертора И с соответствующей системой управления СУП. При диапазоне регулирования скорости АД 3:1 установленная мощность ТПЧ в цепи ротора должна составить 2/3 номинальной мощности АД РПом,а,д, так как установленная мощность ТПЧ в каскадных схемах РТпч ~ Рпом,ад5таж, где smr,x— максимальное рабочее скольжение АД при регулировании его скорости в каскадных схемах.
В случае неуправляемого выпрямителя электропривод не может работать в двигательном режиме при сверхсинхронной угловой скорости и в генераторном режиме при угловой скорости ниже синхронной, но возможно динамическое торможение с отдачей энергии в сеть. Использование управляемого выпрямителя с естественной коммутацией (что сопряжено с большими техническими трудностями создания его системы управления из-за низкой и изменяющейся частоты и низкого уровня напряжения ротора, особенно вблизи синхронной угловой скорости) позволяет осуществлять режим генераторного торможения при подсинхронной угловой скорости и в ряде случаев (при вентиляторной нагрузке) уменьшить установленную мощность ТПЧ. Простота схемы ТПЧ с неуправляемым выпрямителем — главное преимущество асинхронно-вентильных каскадов — делает целесообразным их использование и при больших диапазонах регулирования, когда установленная мощность ТПЧ уже приближается к номинальной мощности двигателя.
Управление АД с фазным ротором в каскадных схемах осуществляется со стороны ротора за счет введения добавочной ЭДС в роторную цепь машины посредством ТПЧ.
В подсинхронпых каскадах задачами ТПЧ, включенного в цепь ротора, являются преобразование энер!ии скольжения, рекуперация ее в сеть п регулирование амплитуды противо-ЭДС инвертора, что достигается изменением угла инвертирования. Преобразователь часто-52
ты выполняет здесь несколько необычную роль (хотя и осуществляется преобразование низкой изменяющейся частоты напряжения ротора в напряжение, постоянной сетевой частоты): он является регулятором скольжения двигателя и преобразователем энергии скольжения с целью передачи ее в сеть; преобразование частоты имеет здесь вспомогательное, значение и не используется для управления двигателем, в отличие, например, от случая частотного управления.
В электроприводе по схеме машины двойного питания (сверхсинхронпыс каскады, или каскады с двухзонным регулированием) в цепи ротора (рис. 2-2,6) обычно используется ТПЧ с непосредственной связью с естественной коммутацией, имеющий два канала регулирования— частоты и напряжения [56, 57, 69]. При таком типе преобразователя диапазон регулирования ограничивается его максимальной выходной частотой. При максимальной выходной частоте [-25 Гц минимальная угловая скорость машины двойного питания составит 0,бипом, а максимальная 1,5о1ЮМ, что ограничивает наибольший диапазон двухзонного регулирования скорости значением 3:1. Наибольшая установленная мощность ТПЧ в пени ротора в этом случае составит половину номинальной мощности регулируемого ЛД. Использование ТПЧ с непосредственной связью в этой схеме обеспечивает возможность работы привода во всех режимах (в двигательном и генераторном при под-синхронпой и сверхсинхронной угловых скоростях).
Различают два вида управления ТПЧ в цепи ротора в каскадах с двухзонным регулированием:
1) зависимое, когда частота ТПЧ следует за частотой ЭДС ротора, то есть регулируется в функции скольжения АД (асинхронный режим машины двойного питания), зависящего от нагрузки на валу;
2) независимое, когда частота ТПЧ задается независимо от частоты ЭДС ротора (синхронный режим машины двойного питания) и скорость ротора оказывается независимой от нагрузки (как у синхронной машины) и определяется частотой ТПЧ в соответствии с соотношением
о)=2л([.,±[г) 1рп, где fr — соответственно частота напряжения статора и ротора двигателя; рп— число пар полюсов двигателя.
53
При таком управлении машина двойного питания приобретает свойства и характеристики синхронной машины. Управляющими воздействиями в этом режиме являются частота и амплитуда ЭДС, вводимой в ротор машины посредством трехфазного ТПЧ.
При зависимом управлении ТПЧ в цепи ротора работа машины двойного питания подобна работе двигателя в схеме подсннхоошюго каскада. Различие состоит лишь в том, что в роторную цепь вводится ЭДС не постоянного тока, а частоты скольжения, и ТПЧ в цепи ротора обладает двусторонней проводимостью энергии, вследствие чего становятся возможными генераторный режим при подсинхронной и двигательный при сверх-синхрониой угловых скоростях. Переход через синхронную угловую скорость под нагрузкой связан с преодолением некоторых технических трудностей. Поскольку в ротор вводится ЭДС переменного тока, то число управляющих воздействий увеличивается до двух — это амплитуда и фаза вводимой ЭДС (частота этой ЭДС не является здесь управляющим воздействием, так как следует за частотой ЭДС ротора). В целом машина двойного питания при зависимом управлении ТПЧ в цепи ротора обладает свойствами п характеристиками трехфазной коллекторной машины переменного тока с параллельным соединением цепей статора и ротора [60].
Основным преимуществом использования двухзонного регулирования скорости по сравнению с однозонным считается уменьшение установленной мощности ТПЧ в цепи ротора при сохранении общего диапазона регулирования. Дополнительные преимущества машины двойного питания заключаются в универсальности возможных режимов работы и в использовании свойств синхронной машины, в частности в возможности регулирования реактивной мощности. В каскадах с двухзонным регулированием задачи ТПЧ резко расширяются. Помимо теперь уже двусторонней передачи энергии (как от ротора в сеть, так и обратно) ТПЧ должен обеспечивать возможность регулирования частоты, амплитуды и фазы ЭДС, вводимой в ротор АД, что вызывает существенное усложнение системы управления ТПЧ и всем электроприводом в целом. Известные трудности представляет также построение системы слежения за частотой ротора при асинхронном режиме машины двойного питания.
54
Каскадные асинхронные электроприводы находят применение главным образом в регулируемом электроприводе мощных нагнетателей (насосов, вентиляторов, компрессоров) и в специальных электроприводах и нагрузочных устройствах испытательных стендов различных машин (дизелей, турбин и т. п.).
Структурная схема вентильного двигателя (ВД) [19, 27, 29] представлена на рис. 2-3 (на схеме не показаны система регулирования, блок защиты и некоторые датчики). В ВД применяются в основном ТПЧ с промежуточным звеном постоянного тока с амплитудным способом регулирования напряжения, с АИН с принудительной коммутацией (транзисторные, тиристорные) и ЛИТ с естественной коммутацией, хотя в классических ВД использовались ТПЧ и с непосредственной связью [29]. В качестве двигателей в ВД используются синхронные машины различных конструкций или асинхронные синхронизированные (с возбуждением постоянным током со стороны статора или ротора) машины.
Автономные инверторы ТПЧ в ВД выполняют функцию коллектора (коммутатора) обычных машин постоянного тока вследствие использования зависимого управления ( в функции положения ротора двигателя и его скорости) тиристорами или транзисторами инвертора. В результате зависимого управления инвертором синхронный двигатель совместно с инвертором приобретает свойства и характеристики коллекторной машины постоянного тока и установившееся значение скорости его ротора определяется напряжением постоянного тока на входе инвертора, потоком возбуждения и приложенным к валу моментом нагрузки. Эту часть ВД обычно называют бесколлекторной машиной постоянного тока (БМПТ), или обращенной машиной постоянного тока.
Рис. 2-3. Структурная схема вентильного двигателя.
Обязательным элементом ВД наряду е самим двигателем и инвертором с его системой управления СУИ является датчик положения ротора ЦП. Правда, существуют вентильные двигатели, не содержащие явно датчик положения ротора. В этом случае положение ротора контролируется косвенно либо по положению максимума поля в воздушном зазоре (датчики Холла), либо управление вентилями осуществляется в функции фазы напряжения на выводах двигателя (подобно тому, как это происходит в ведомом инверторе).
Скорость ВД регулируется так же, как и у обычных машин постоянного тока: изменением подведенного к якорю напряжения или изменением потока возбуждения двигателя. Для ВД существует еще один способ регулирования скорости вверх от номинальной — путем регулирования угла инвертирования (изменение проти-во-ЭДС инвертора).
Бесколлекторные машины постоянного тока находят применение в качестве микромашин различных систем автоматики, требующих отсутствия коллектора у исполнительных двигателей, работающих от источников постоянного тока (в этом случае надобность в выпрямителе отпадает, а для регулирования напряжения может быть использован широтно-импульсный регулятор на входе инвертора). Вентильные двигатели используются также в мощных (в перспективе и в сверхмощных) электроприводах различных регулируемых нагнетательных установок. В частности, для регулирования электроприводов с номинальной частотой вращения 3000 об/мин и более при единичной мощности свыше 8000 кВт ВД представляется практически единственным вариантом наряду с обычным частотно-регулируемым синхронным двигателем, так как в этом случае могут быть использованы только синхронные машины.
Вентильные двигатели средней мощности пока не имеют традиционной стабильной области применения, хотя обладают рядом достоинств по сравнению с электроприводом постоянного тока (отсутствие коллектора, меньшие габариты и масса электрической машины, большее быстродействие) и имеют некоторое преимущество перед частотно-управляемым асинхронным электроприводом е короткозамкнутыми АД (упрощение систем управления), но уступают ему по другим показателям (наличие контактных колец, необходимость дополпитель-
56
ного источника постоянного напряжения для питания обмотки возбуждения и установки на валу датчика положения) ,
ГЛАВА ТРЕТЬЯ
ПРЕОБРАЗОВАТЕЛИ ЧАСТОТЫ С АВТОНОМНЫМИ ИНВЕРТОРАМИ НАПРЯЖЕНИЯ И АМПЛИТУДНЫМ
РЕГУЛИРОВАНИЕМ НАПРЯЖЕНИЯ
3-1. ОСНОВНЫЕ ОПРЕДЕЛЕНИЯ И ДОПУЩЕНИЯ
В этой главе рассматриваются ТПЧ с промежуточным звеном постоянного тока и АИН, в которых регулирование выходного напряжения обеспечивается изменением напряжения на входе АИН.
Идеальный АИН имеет нулевое внутреннее сопротивление и линейную зависимость выходного напряжения от входного. Наиболее близок к идеальному АИН реальный инвертор, у которого интервал открытого состояния тиристоров 0к=л, в цепи протекания тока нагрузки через преобразователь нет резисторов и реакторов п который работает при достаточно высоких напряжениях, когда (/и^>Дпв, где Пи— входное напряжение инвертора; Л«в — падение напряжения па вентильных элементах.
Электромагнитные процессы в АИН могут быть разделены на рабочие и коммутационные. Рабочие процессы связаны с протеканием в элементах АИН тока нагрузки п могут рассматриваться в идеализированной схеме, выполненной па полностью управляемых ключевых элементах. Коммутационные процессы связаны с наличием в схеме элементов, необходимых для закрывания тиристоров (конденсаторов, реакторов, дополнительных тиристоров, диодов, источников напряжения). Абсолютное время протекания коммутационных процессов А; зависит от выбранной схемы коммутирующих контуров и динамических свойств тиристоров.
При частотах выходного напряжения, меньших 1000—2000 Гн, расчет рабочих процессов не зависит от коммутационных процессов, а при анализе схем коммутирующих контуров рабочие процессы влияют только па начальные и конечные условия.
Анализ электромагнитных процессов в АИН будет проведен при следующих допущениях:
1) сопротивления вентилей в открытом и проводимости в закрытом состоянии равны нулю;
2) пульсации напряжения на входе ЛИН равны нулю;
3) момент включения тиристора совпадает с моментом появления управляющего импульса.
4) характер нагрузки АИН активно-индуктивный.
Рассмотрение рабочих процессов целесообразно начать с нахождения зависимости выходного напряжения АИН от нагрузки, закона переключения тиристоров и входного напряжения.
3-2. НАПРЯЖЕНИЕ НА ВЫХОДЕ АВТОНОМНОГО ИНВЕРТОРА НАПРЯЖЕНИЯ
На рис. 3-1 приведена схема трехфазного мостового АИН, выполненного на двухоперационных тиристорах Г/—Тб и диодах Д1—Д6. Порядок включения тиристоров соответствует их номерам — Tl, Т2, ТЗ и т. д. Зависимость выходного напряжения u.s от входного Uix можно получить с помощью коммутационной функции АИН, которая учитывает дискретный характер изменения проводимости вентильных элементов. Так как вентили АИН
Рис. 3-1. Автономный Инвертор напряжения.
Рис. 3-2. Диаграмма токов и напряжений в АИН при Ок=-ЩО°
58
могут находиться только в двух состояниях, то удобно характеризовать открытое состояние тиристора 1, а закрытое 0. В этом c,iyчао коммутационная функция представляется импульсной единичной функцией, которая может быть записана в виде тригонометрического (или степенного) ряда [45] или таблиц [26].
При длительности проводящего состояния тиристоров &К—Л запись коммутационной функции (1) соответствует табл. 3-1.
Таблица 3-1
Коммутационная функнкя (1) при .--л
Межкс-ммутациС'Нные интервалы
големе нт 0-к/3 к/3-.2г/3 2«/3—17. тс—4и/3 4тс/3-—“>тс/3 5тс /3—2 тс
Т1 сан 31 1 1 1 (J 0 0
Т2 к.аи Д2 0 1 1 1 0 0
ТЗ ит1 33 0 0 1 1 1 (1
Т4 и:и Д4 0 0 1 1 1
Т5 и.ш Д5 1 0 с. () 1 1
Тб .или Дб 1 1 0 0 0 1
Табмиа 3-2
'этеяцаалы л ланэйны? напряжения’пра 9К г.
1 La рам ci р Межкоммутационные интервалы
0—к /3 п/3- 2тй/3 2тс/3 --7С 7С — 4тс/3 4rt /3—5тс/3 5тс /3—2тс
1а +,Г/И + U11 тб'и 0 Г) (1
1а 0 0 +? 'и +?'и 0
1с +^и с 0 0 -Н'и +”и
"а, b Н;и +г;и 1) ~'и “ и 0
"b, с — (} +'и 0
11 с, а 0 -^И -^и +,;и
Принимаем потенциал отрицательного полюса источника постоянного напряжения <р_и зт пуль(^_и = 0, <р+и= — ^и) и- Учитывая, что с = <ри(Г)(., а иаЬ — ?а — ubc = иса — % — ?а. гДе (Ь/ — коммутационная
функция /'-го элемента, получаем таблицу потенциалов и линейных напряжений на выходе, АИН (табл. 3-2).
59
Изменение формы линейного тока i„ и тока, потребляемого от источника /11} при коэффициенте мощности активно-индуктивной нагрузки 0<созф8<1 иллюстрируют графики на рис. 3-2. Здесь момент времени ы/=0 соответствует моменту закрывания тиристора Т4 и подаче открывающего импульса управления на тиристор Т1. Так как при (?,;==л нагрузка всегда связана с источником постоянного напряжения, форма выходного па-
Рис. 3-3. Граничный коэффициент мощности в ЛИН.
Рис. 3-4. Диаграмма токов и напряжений в ЛИН при 0к=120°, COS ф,>С08 фгр.
пряжения не зависит от нагрузки (на рис. 3-2 напряжение На, Ь*——
Форма выходного напряжения АИН будет оставаться неизменной и при 0j,-<n, если коэффициент мощности меньше или равен граничному cos фгр.
На рис. 3-3 показана зависимость cos фгр от интервала проводимости тиристора.
Наибольшее распространение кроме способа управления тиристорами АИН при 0к=л получили режимы переключения, при которых 0к=2л/3 и 01(=5л/6, что вызвано, во-первых, простотой получения системы управляющих импульсов и, во-вторых, малым ухудшением выходного напряжения.
Если cos (ps>cos <ргр, то при 01(<л линейный ток на выходе АИН иосит прерывистый характер. Кривую мгновенных значении выходного напряжения АНН при 0|,^---2л/.3 построим с помощью коммутационной функции 60
(табл. 3-3), где межкоммутационный интервал дополнительно разделен на интервал проводимости диодов 0Я и интервал отсутствия линейного тока нагрузки 0О.
Таблицу потенциалов и линейных напряжений (табл. 3-4) составим аналогично табл. 3-2, учитывая, что независимо от схемы соединения трехфазной симметричной нагрузки потенциал на интервале 0о при ц=0 равен: <р0о = + Uи/2, что в табл. 3-3 условно обозначено (0).
Таблица 3-3
Коммутационная функция (1) при 0К—2л/3 и с os'? с os <f>rp
Элемент 0—тс/3 тс/3—2 тс /3 2тс/3—тс тс—4л /3 4fc /3—/ 3 5тс/3—2-г
9Д % 9о 9Д 9о Оо 9п 9Л 0о
Т1 (Д1) (1) (0) 1 1 1 1 0 0 О 0 0 0
Т2 (ЛЯ) 0 0 (’) ('>) 1 1 1 1 0 0 0 0
ТЗ (ЛЗ) 0 0 0 0 (1) (0) 1 1 1 1 0 0
7'4 (Д4) 0 0 0 0 а 0 (1) (ф 1 1 1 1
Т5 (Д5) 1 1 0 0 0 0 0 0 (1) (ф 1 1
Тб (Л.6) 1 1 1 1 0 0 0 0 0 0 (1) (ф
Диаграммы напряжений и токов, построенные на основании табл. 3-4, показаны па рис. 3-4. В режиме прерывистого тока интервал проводимости тиристоров остается постоянным и равным 0К=9Г (на рис. 3-4 0ri= —2л/3). Ток на входе АИН для всех коэффициентов мощности в пределах 1 >• cos tps^cos <рГр при каждой коммутации изменяется скачком на значение, равное =1 о-
Аналогично табл. 3-3 и 3-4 можно составить таблицы коммутационных функций и линейных напряжений для случая Эи=5тг/6; эти таблицы будут отличаться только большим числом коммутационных интервалов (межкоммутационный интервал л/6 следует в режиме coscps> 3>cos(prp разделить на подынтервалы 0Я и 0О).
Диаграммы токов и напряжений для 0к=5л/6 показаны па рис. 3-5. При 0к=5л/0 в режиме l>cos <ps> >cos(prp кривые мгновенных значений токов и напряжений зависят от интервала проводимости тока диодами 61
Потенциалы и линейные напряжения при 6К — 2я/3 и cos > cos <ргр
(N 1 _a 0 £и_ -* 2 + s a |сч 1 s a +
W 1
s s
E$ 1> r“~> a a
+ 1 +
. К CM .s s CN |cN >~о
to |co 1 -- 1 - +
I . s E
ttf f-~ -0
+ + 1
G? #' s= S !C4 к 2ГС‘
1 + + 1 + 1
s s
«3^ о a CT1 a a r~>
+ 1 +
О s a CN
1 + + + + 1
И
СЧ |cO
s К к s
«3^ Г—1 r~> a
+ + - H 1
s о -S s a 04 S ГЧ1 C‘
n I СЧ CO 1 + + 1
£ к
•s^ ro
+ + 1
si
о о :: 7 s' h
i + + + +
о s
rl . (—•
+ J_ 4-
и
"6 «о -
Э- 9-
2 3
62
0Й. При cos ф8<соэ срГр токи и напряжения аналогичны режиму 0*к=л.
Напряжение на выходе АИН может быть представлено суммой двух импульсных составляющих (рис. 3-6), одна из которых соответствует напряжению при 0к=л (составляющая u's), а вторая (составляющая u"s) зависит от интервала отсутствия тока в нагрузке (импульсы длительностью 0О и амплитудой 0,5Г7и).
Угол 0о зависит от коэффициента мощности нагрузки, но однозначно может быть
определен только при работе
63
на пассивную /?Л-пагрузку [90]. Зависимость интервала Оз от коэффициента мощности нагрузки показана на рис. 3-7.
Импульсные составляющие, напряжения при амплитуде Um и длительности импульса 0 могут быть представлены в виде тригонометрического ряда
00
v=l
где v — целые нечетные числа;
Л V (те- 0)
U — — COS ——п -'«'> rtv 2
Первая импульсная составляющая (полное напряжение па выходе АИН в режиме непрерывного тока) определится и.з (3-1) при подстановке 77тг=Ии,9 = 2х'3 u's = 1,\UK (sin®4------I- sin5wsl-sin7<os( ...); (3-2)
здесь ws/=0 при u'i6=0, т. е. за начало координат принят момент времени, когда 1-я гармоника 1-й импульсной составляющей равна нулю, что соответствует рис. 3-6.
Вторая импульсная составляющая для режима прерывистого тока из (3-1) при 77т=О,57/и и 0=0О равна:
u"s ^-1,1 И,, — cos sin -А—-J-
+-L- cos ° (п ~ 6о) siп 5 + -уг+~угj +
4—1- cos R<)- - sin 7^/ +-у7-+-тг)Н- --j. f3’3)
Полное напряжение на выходе АИН
us=u'f, + u"s=Umi sin (со.,/ + ерш) +
Um,s sin (5(1)44- ср5!т) +Umi sin (7o)s/4-ф7ст) + • -, (3-4) где U,n v j2 + (П"„;. J2 + 2U'mi , v c(^77-
амплитуда v-й гармонической составляющей напряжения;
l sin <p I 2
-. ...44.... . ’-<>™p-
G1
моники напряжения по отношению к 1-й гармонике 1-й импульсной составляющей u'ls; U'm^ и U"т v— амплитуды v-й гармоники соответственно в 1-й (u's) и 2-й (u"s) импульсных составляющих; <ру] 2— фазовый угол u"v s по отношению к u'v> s.
Рис. 3-8. Гармонический состав выходного напряжения АИН в режиме прерывистых токов при 0К=12О° и 0К=15О°.
ческих составляющих выходного напряжения АИН в режиме прерывистых токов при 91;=120°.
Рассчитанные по (3-4) значения амплитуд 1, 5, 7-й гармоник напряжения (отнесенные к С'и) показаны для режима прерывистого тока на рис. 3-8 (0т=2л/3 и 0Г= =5л/6). Гармонические составляющие напряжения, кратные трем, равны нулю в обоих случаях.
Фазовые углы v для этого случая, рассчитанные по (3-4), показаны на рис. 3-9, где для удобства построения фазовые углы 5-й и 7-й гармоник представлены с дополнительным углом л.
3-3. РАБОЧИЕ ЭЛЕКТРОМАГНИТНЫЕ ПРОЦЕССЫ В АВТОНОМНОМ ИНВЕРТОРЕ НАПРЯЖЕНИЯ
Анализ рабочих процессов в трехфазном мостовом АИН можно провести, воспользовавшись схемой на рис. 3-1. Цель анализа состоит в получении мгновенных 5—581 65
значений токов в нагрузке и элементах АИН. Знание токов в элементах АИН (рабочие составляющие) может быть использовано для окончательного выбора этих элементов в низкочастотных инверторах, а в высокочастотных— для предварительного выбора с последующим уточнением при учете коммутационных составляющих.
Рис. 3-10. Рабочие электромагнитные процессы в АИН.
Определение мгновенных значений напряжения на элементах АИН в рабочих режимах проводить не имеет смысла, так как на форму напряжения решающее влияние оказывают коммутационные процессы в АИН.
Мгновенные значения тока электродвигателя в установившемся режиме при питании несинусоидальным напряжением можно определить, использовав свернутую Т-образную схему замещения [45, 100].
На рис. 3-10 показаны графики мгновенных значений линейного тока is, напряжения us и их первых гармоник uls, its для наиболее общего случая — режима прерывистого тока. Здесь же показаны импульсные составляющие напряжения u's, u"s, первые гармоники напряжения wT.s, u">s и тока i'is, i"is импульсных составляющих. Мо-66
мент времени cos/=0 соответствует u/is=0. На рис. 3-10: 0Т и 0д — интервалы проводимости тиристоров и диодов АИН- 0о — интервал отсутствия тока в линейном проводе нагрузки; 0и=л/3 — интервал потребления тока от источника; ф0 — угол, при котором ток нагрузки при закрывании тиристора уменьшится до нуля; tp.]s—фазовый угол тока нагрузки для 1-й гармоники; фи,- — угол сдвига 1-й гармоники линейного напряжения по отношению к принятому началу координат (из рис. 3-9); <f>ls = =Фы+фш- В соответствии с рис. 3-10 линейный ток
С = 2 Л, sin W ~ 6) ~ ?v, sb
(3-5)
где цд v = и"' 9 = 1t/6— угол сдвига между фаз-
ными и линейными токами в симметричной трехфазной системе.
В принятой системе отсчета времени интервалы проводимости имеют следующие границы:
В режиме прерывистого тока фо+0о=л/2, непрерывного— 0о=О. Угол <р0 можно определить, решая (3-5) при is=0.
Среднее значение тока тиристора, диода и тока, потребляемого от источника, получим, интегрируя ток нагрузки, в пределах, соответствующих интервалам проводимости:
I __V 1'1'т ГПС Г v (fo + 0о) ™ 1 X,-
™ Cos[ 2
(3-6)
5*
67
=S -4г-si" *(1" si" I -(,J 7’/i5> - ?.. Л <3-7) 1
7и=4‘У]“^соз,л-- (3’8)
i
В режиме прерывистого тока фо=л/2—во, поэтому (3-6) и (3-7) принимают вид:
°° I
т СЛ 1 v. "Z УЛ / УЛ \ /О лх
т= 2j cos~ 1 —d; (3'9)
v (л '3 — 60) .Г
-^—2-----—Sin <f>
у (тс/з — е0)
(3-10)
В режиме непрерывного тока <ро=л/6+'0д; 0о=О, поэтому
00 I
7 __ Ж Л v/z, уВд / уВд\ /о , , \
/T=Jj — c°S^c°S^s-------------; (3-11)
1
CO r
JJ'4Fsin4a'sin(<f,v, s-4r)- (3'12)
i
В большинстве случаев расчет средних токов в элементах АИН можно провести по 1-й гармонике, что обеспечивает точность не хуже 5%.
Уравнениями (3-8) и (3-5) можно воспользоваться для определения емкости входного конденсатора С. Полагая, что от источника Пи протекает лишь постоянная составляющая тока инвертора 7И> т. е. индуктивность L в звене постоянного тока ТПЧ достаточно велика, найдем переменную составляющую тока инвертора г'и~, протекающего через конденсатор:
00
*и ~ = ‘и — 7И = У] Л, т {sin р + -г) “ V.] -
1
- 4rcos^,4- (3'13)
68
В (3-13) отсчет времени начинается в момент скачкообразного изменения тока (на рис. 3-10 <os^ = it/2). Период повторяемости тока ги—it/З. Напряжение на конденсаторе равно минимальному в момент скачка тока iw и достигает максимального значения при ги~ = 0. При этом изменение напряжения равно:
ДСи= f ги~ (3-14)
о
где 0т — момент времени, соответствующий 0Ит.
Определение 0т из (3-13) в общем виде приводит к громоздким результатам и выражениям, которыми практически трудно пользоваться. При учете в (3-13) только 1-й гармоники получим 0т^л/6. Этот результат в общем виде соответствует лишь <f>v s = it/2; при <pv s< <л/2 0т<л/6 и ошибка Однако для определе-
ния емкости конденсатора С обычно выбирается режим, при котором коэффициент мощности нагрузки минимален, потому допустимо принять 0?п—л/6.
Задаваясь допустимыми пульсациями напряжения на входе инвертора (обычно 7^0,05), из
(3-13), (3-14) можно определить емкость входного конденсатора АИН:
X Sin-jg- - COS .
При учете только 1-й гармоники тока нагрузки АИН
С == 4W„fsq •
3-4 КОММУТАЦИОННЫЕ ПРОЦЕССЫ В АВТОНОМНОМ
ИНВЕРТОРЕ НАПРЯЖЕНИЯ
Анализ коммутационных процессов может быть проведен только в полной схеме АИН, так как расчетные контуры образуются не только коммутирующими, но и
69
рабочими элементами. Выбор коммутирующих элементов АИН определяется током, протекающим в тиристоре к моменту его коммутации, /0 и динамическими параметрами примененных тиристоров, основные из которых: допустимое время выключения /в.д, критическая скорость нарастания прямого напряжения (du/dt)кр, критическая скорость нарастания тока (di/dt)Kp, мощность потерь при переключении Дрт [94].
Значение тока /0 определяется из (3-5) для ®st= =7л/6 (см. рис. 3-10):
Л = sin yls + lim sin ?5„ -|- Iim sin (3-15)
вило, энергия, запасенная в
4)
%
Рис. 3-11. Эквивалентная схема коммутирующего контура. а — параллельного; б — последовательного.
где для режима прерывистого тока <р]:. = <pIS Д- у[£/; <р5!. — = = определяется по гра-
фикам, приведенным на рис. 3-9, а для режима непрерывного тока <р)(7 = 0.
Для выключения тиристора используется, как пра-шденсаторе, который в момент t0 (момент начала коммутации) подключается к выключаемому тиристору Т ключом К (рис. 3-11,а, б). В практических схемах АИН роль ключа X выполняет или другой рабочий тиристор, или специальный коммутирующий тиристор. Для формирования коммутационных процессов контур содержит основной коммутирующий реактор L.
Если реактор L вклю-
чен в цепь рабочего тока тиристора (рис. 3-11,а), то к началу коммутации it0 = iL0=IQ. При t>t0 тиристор Т закрыт, диод Д — открыт. Токи и напряжения (диаграмма на рис. 3-12,а) можно представить в виде
/0 = const;
iL'-: ic--- /0cos<uKt— Хсо у sin<vK£;
70
LlC — I !С0
COS «>,7 —
z'c Л’
&UC = L СО (1 — COS шк0 + /„sin Ш[Д
где »К=1//ЛС.
Диод Д открыт, конденсатор С и реактор L образуют колебательный контур с. собственной круговой частотой <йн, а закрывшийся тиристор включен параллельно конденсатору С, т. е. щ=ис.
стара3’12' Диаграмма токов и напряжений при коммутации тори-о-в параллельном контуре; б-в последовательном контуре.
ш,тВрпеМЯ’ пРеД°ставляемое тиристору для выключения интервал ti~t0, когда uT<0),
~-t, — t0^]fLC arctg (3-16)
71
Основная задача расчета коммутационных процессов сводится к отысканию уравнений, связывающих условия выключения тиристоров в анализируемой схеме (tB, duT/dt, di-tIdt) с параметрами коммутирующих контуров (индуктивности и активные сопротивления реакторов, емкости конденсаторов) и параметрами нагрузки АИН. Найденные уравнения, подобные (3-16) — (3-21) для элементарных контуров, используются для выбора параметров коммутирующих элементов (Л, С, R) по известному току нагрузки 70 и известным каталожным данным тиристоров (/в, д, du^jdt, di-rldt).
Вторая задача, решаемая при анализе коммутационных процессов, заключается в составлении уравнений, определяющих зависимость средних и действующих значений коммутационных токов в элементах АИН, необходимых для их конструктивного выбора, от параметров L, С, R и частоты fs.
Так как во все уравнения, описывающие коммутационные процессы, входит напряжение UCo на коммутирующем конденсаторе к началу коммутации, то анализ начинают с отыскания обобщенных зависимостей Uco*= — Uco/U и и от тока нагрузки 10.
Многоконтурность эквивалентных схем и непостоянство их структур в течение коммутации, приводят к тому, что из сравнительно большого числа методов анализа [95] обычно находят применение два; метод решения дифференциальных уравнений на отдельных интервалах с припасовыванием конечных и начальных условий и метод фазовой плоскости.
Решение дифференциальных уравнений на интервалах удобно проводить операторным методом. Нахождение обобщенных зависимостей может быть получено либо решением задачи при анализе квазиустановившегося процесса за один период выходной частоты АИН, либо решением переходного процесса включения АИН на заданную нагрузку вплоть до выхода в квазиустановив-шийся режим.
Метод фазовой плоскости применим в тех случаях, когда коммутационные процессы описываются дифференциальным уравнением второго порядка (многие АИН с фазными и общими узлами коммутации). Наиболее полно этот метод разработан для АИН с двухступенчатой коммутацией [24, 26].
74
3-6. ПРИМЕНЕНИЕ МЕТОДА ФАЗОВОЙ ПЛОСКОСТИ ДЛЯ АНАЛИЗА КОММУТАЦИОННЫХ ПРОЦЕССОВ
Метод фазовой плоскости широко используется в теории автоматического управления для анализа переходных процессов в нелинейных системах второго порядка. Применительно к АИН он позволяет проанализировать процессы включения и изменения нагрузки. Ниже изложены общие принципы использования этого метода для анализа коммутационных процессов, которые иллюстрируются частным примером расчета АНН, схема одной фазы которого показана
Рис 3-13. АИН с двухступенчатой коммутацией и ЛС-коммутирую-щим контуром..
а — схема; б —диаграмма токов и напряжений.
иа рис. 3-13,а. Трехфазиое исполнение этого АИН (в этом случае точка 0—нулевая точка трехфазной нагрузки) не изменит принципиально протекание коммутационных процессов, которые в каждой фазе протекают совершенно изолированно.
Тиристоры Т2, Т4 — рабочие, Т1 и ТЗ— коммутирующие. Момент включения па рис. 3-13,6 соответствует точке Л, когда включаются тиристоры Т2 и ТЗ, нагрузка Zo подключается к источнику — напряжение и ток нагрузки), коммутирующий конденсатор заряжается. Процессы в коммутирующем контуре описываются уравнениями
ill Q
L ~71Г + гс'- + иС’
duc
~ С ~dT' откуда
d2uc dac
LC +rC ~7ir + “С . (3-22>
75
Процесс заряда конденсатора протекает так же, как в элементарной схеме на рис. 3-11,6, и заканчивается при гс = 0, ис = (/с,к. Для выключения тиристора Т2 включают тиристор Т1 (момент времени t2 на рис. 3-13,6). Первый этап коммутации состоит из двух интервалов: 1) интервал, на котором r’c</oi н ток в тиристоре Т2 уменьшается, но он больше нуля; 2) интервал, на котором ic>/oi и тиристор Т2 выключен, а диод Д1 проводит ток.
Физическое изменение структуры контура не изменяет характера перезаряда конденсатора. Уравнение процесса перезаряда имеет вид:
d2uc duc
LC^t^+rC~dr+!lc = Q- (3-23)
Первый этап коммутации закончится при Zc = /oi на спадающей части синусоиды тока ic (момент t2 на рис. 3-12,6). После этого откроется диод Д2, обеспечивающий протекание тока нагрузки в' прежнем направлении, а напряжение на нагрузке изменит знак. Если напряжение на конденсаторе при гс = /о меньше (/и, то появляется интервал дозаряда конденсатора постоянным током, равным току /о, а диод Д2 откроется только при достижении нс = Пи. Появление этого интервала при реальных коэффициентах затухания коммутирующего контура характерно для. режима малых токов.
Открывшийся диод Д2 образует контур дозаряда конденсатора С от источника и отдачи ему энергии коммутирующего реактора, накопленной к концу первого этапа коммутации O,5L/2oi. Начальные условия: напряжение на конденсаторе и ток в реакторе равны соответствующим конечным значениям для первого этапа. Второй этап коммутации закончится при 1с = 0. Процесс дозаряда конденсатора описывается (3-22).
В момент времени /з (рис. 3-13,6), отличающийся от момента прихода управляющего импульса на коммутирующий тиристор Т1 (момент t2) на время задержки t3, поступает импульс управления на рабочий тиристор Т4. Ток в нем появится только в момент Ц, зависящий от коэффициента мощности нагрузки, когда закроется диод Д2. Задержка t3 между моментами включения рабочих и коммутирующих тиристоров необходима для предотвращения короткого замыкания источника 6'и через рабочие тиристоры Т2 и Т4 в начале первого этапа коммутации.
Для выключения тиристора Т4 (момент /5) включается тиристор ТЗ и процесс коммутации проходит аналогично предыдущему.
Уравнения (3-22), (3-23), описывающие перезаряд коммутирующего конденсатора на разных этапах коммутации, могут быть записаны в общем виде:
d2ac duc
— k[LC + krrC Uq t (3-24)
где k^^LyJL и £г = Гк/г — численные коэффициенты; LK и r«— индуктивность и сопротивление контура для данного этапа; UK — напряжение источника постоянного тока, включенного в контур коммутации (в АИН, показанном на рис. 3-13,а, (7К= при наличии в схеме АИН источников дозаряда UK = Un, здесь Un— напряжение источника питания контура дозаряда).
76
Уравнение (3-24) можно упростить, если его записать в относительных единицах, приняв за базовое напряжение напряжение на входе АИН = базовый ток I^ — U^Vc/L, базовое время t6^VLC. Тогда
62аСф
Нк* = kL + 2ferfe5 iCt + ис*; (3-25)
ic<.—duc.[dtt. (3-26)
Из (3-26) и (3-25) получим первую производную тока конденсатора:
dic* 1
~ uc*) 2feffeS (’с*’ (3-27)
В (3-25) и (3-27) коэффициент затухания контура kb = = rVC/2VL = S/tOfc, где 8 = r/2L; ык — \/V LC.
Решая совместно (3-26) и (3-27), получаем уравнение фазовой траектории:
^С» 1 / ^к* — Иг* \
=-- тЛ------- <3-28>
Уравнения изоклин находятся из (3-28), если приравнять А = = dic„lduct, где 0<:Лг<оо. Возможно построение фазового портрета Zc.(uc») классическим методом, т. е. построением полигонов от начальной точки. Но в реальных схемах АИН коэффициент затухания коммутирующих контуров мал и фазовая траектория (3-28) хорошо аппроксимируется окружностью.
Зная последовательность включения тиристоров в АИН, процесс коммутации разбивают на расчетные этапы, для которых определяют начальные значения «со» и ZCo«, коэффициенты kL н kr, напряжение. (7).» (для этапа свободного перезаряда UK* = 0) и граничные условия существования контуров на этапах. Для АИН, изображенного на рис. 3-13,а, этапы коммутации, начиная с момента включения, описаны выше. При включении (/| на рис. 3-13,6): исо=О; гсо* = О; kL=l; kr=l; Ук.= 1; окончание этапа при <с» = 0. Для первого этапа коммутации прн выключении любого рабочего тиристора (начало /2, f5 и т. д. на рис. 3-13,6): 1/Со. определится конечным значением напряжения для процесса включения; (Со* = О; kr,~ = 1; £г=1; С/к. = 0. Окончание первого этапа (момент G на рис. 3-12,6)—при ic=lai, где /0{ должен быть определен из анализа рабочих процессов.
В'орой этап коммутации при выключении любого рабочего ти-рис.эра (Z2—/3 на рис. 3-12,6): ZCo« = /oi»; uco равно конечному значению напряжения конденсатора на первом этапе; fez, = fer=l; U к* = 1 .
На фазовой плоскости г» (и.) для всех этапов коммутации наносятся нулевые изоклины [71 = 0 в (3-28)]:
/с* ~ (3-29)
77
Процесс заряда конденсатора протекает так же, как в элементарной схеме на рис. 3-11,6, и заканчивается при гс = 0, ис = (/с,к. Для выключения тиристора Т2 включают тиристор Т1 (момент времени Z2 на рис. 3-13,6). Первый этап коммутации состоит из двух интервалов: 1) интервал, на котором r’c</oi н ток в тиристоре Т2 уменьшается, но он больше нуля; 2) интервал, на котором ic>/oi и тиристор Т2 выключен, а диод Д1 проводит ток.
Физическое изменение структуры контура не изменяет характера перезаряда конденсатора. Уравнение процесса перезаряда имеет вид:
d2uc duc
LC^t^+rC~dr+!lc = Q- (3-23)
Первый этап коммутации закончится при Zc = /oi на спадающей части синусоиды тока ic (момент G на рис. 3-12,6). После этого откроется диод Д2, обеспечивающий протекание тока нагрузки в' прежнем направлении, а напряжение на нагрузке изменит знак. Если напряжение на конденсаторе при гс = /о меньше ПИ) то появляется интервал дозаряда конденсатора постоянным током, равным току /о, а диод Д2 откроется только при достижении нс = Пи. Появление этого интервала при реальных коэффициентах затухания коммутирующего контура характерно для. режима малых токов.
Открывшийся диод Д2 образует контур дозаряда конденсатора С от источника и отдачи ему энергии коммутирующего реактора, накопленной к концу первого этапа коммутации O,5L/2oi. Начальные условия: напряжение на конденсаторе и ток в реакторе равны соответствующим конечным значениям для первого этапа. Второй этап коммутации закончится при 1с = 0. Процесс дозаряда конденсатора описывается (3-22).
В момент времени /з (рис. 3-13,6), отличающийся от момента прихода управляющего импульса на коммутирующий тиристор Т1 (момент t2) на время задержки t3, поступает импульс управления на рабочий тиристор Т4. Ток в нем появится только в момент Ц, зависящий от коэффициента мощности нагрузки, когда закроется диод Д2. Задержка t3 между моментами включения рабочих и коммутирующих тиристоров необходима для предотвращения короткого замыкания источника 6'и через рабочие тиристоры Т2 и Т4 в начале первого этапа коммутации.
Для выключения тиристора Т4 (момент /5) включается тиристор ТЗ и процесс коммутации проходит аналогично предыдущему.
Уравнения (3-22), (3-23), описывающие перезаряд коммутирующего конденсатора на разных этапах коммутации, могут быть записаны в общем виде:
d2ac duc
— k[LC ^2 + krrC Uq t (3-24)
где k^^LyJL и £г = Гк/г — численные коэффициенты; LK и r«— индуктивность и сопротивление контура для данного этапа; UK — напряжение источника постоянного тока, включенного в контур коммутации (в АИН, показанном на рис. 3-13,а, (7К= при наличии в схеме АИН источников дозаряда UK = Un, здесь Un— напряжение источника питания контура дозаряда).
76
Уравнение (3-24) можно упростить, если его записать в относительных единицах, приняв за базовое напряжение напряжение на входе АИН = базовый ток I^ — U^Vc/L, базовое время t6^VLC. Тогда
= kL d2ac* + 2k-rk-b ^с* + ис*> (3-25)
Из (3-26) и (3-25) ic*~duc*[dt*. получим первую производную тока (3-26) конден-
сатора: diC* dit ~ 1 " kL UcJ ic*’ (3-27)
В (3-25) и (3-27) коэффициент затухания контура kb =
= г V С/2 V L = о/со^, где 8 = r/2L; ык — \/VlC.
Решая совместно (3-26) и (3-27), получаем уравнение фазовой
траектории:
di с* 1 ( ^к* — UQ*
duC* lc*
(3-28)
Уравнения изоклин находятся из (3-28), если приравнять А = = dic*/duс,, где 0<:Лг<оо. Возможно построение фазового портрета /с«(ис») классическим методом, т. е. построением полигонов от начальной точки. Но в реальных схемах АИН коэффициент затухания коммутирующих контуров мал и фазовая траектория (3-28) хорошо аппроксимируется окружностью.
Зная последовательность включения тиристоров в АИН, процесс коммутации разбивают на расчетные этапы, для которых определяют начальные значения иСо» и /со», коэффициенты kL н kr, напряжение. (7).» (для этапа свободного перезаряда UK* = 0) и граничные условия существования контуров на этапах. Для АИН, изображенного на рис. 3-13,а, этапы коммутации, начиная с момента включения, описаны выше. При включении (/| на рис. 3-13,6): исо=О; гсо* = О; kL=l; kr=l; Ук.= 1; окончание этапа при <с» = 0. Для первого этапа коммутации при выключении любого рабочего тиристора (начало /2, f5 и т. д. на рис. 3-13,6): 1/Со. определится конечным значением напряжения для процесса включения; (Со* = О; kr,~ = 1; £г=1; t/K. = 0. Окончание первого этапа (момент G на рис. 3-12,6)—при ic = l-u, где должен быть определен из анализа рабочих процессов.
В'орой этап коммутации при выключении любого рабочего ти-рис.ора (Z2—/3 на рис. 3-12,6): ZCo« = /oi»; uco равно конечному значению напряжения конденсатора на первом этапе; fez, = fer=l; U к* = 1 .
На фазовой плоскости г» (и.) для всех этапов коммутации наносятся нулевые изоклины [77=0 в (3-28)]:
,/с* ~ (^к* (3-29)
77
Нулевые изоклины (3-29) — прямые, пересекающие ось и„ в точках С/к». Знание их и координат начальной точки фазовой траектории для этапа позволяет найти центр аппроксимирующей окружности t/ц» и ее радиус, учитывая, что центр Оц» лежит на осн и,, а аппроксимирующая окружность проходит через известную начальную точку «со., /со* (конечная точка предыдущего этапа коммутации) и пересекает нулевую изоклину А = 0 в точке А, абсцисса которой равна (7Ц*.
Рис. 3-14. Фазовая траектория включения АИН с двухступенчатой коммутацией и LC-коммутирующим контуром с подключенной нагрузкой (k 5=0,1; /о»=О,5).
Коэффициент затухания /г?. при расчетах может быть либо известен (расчет характеристик конкретного АИН), либо быть заданным в качестве переменного параметра при расчете обобщенных характеристик АИН.
Построим фазовую траекторию для АИН (рис. 3-13,л) при fej = = 0,1, начиная с момента и заканчивая построение предельной траекторией, которая характеризует установление коммутационных процессов для заданных условий. Нулевые изоклины (3-29): для включения — А01
ic*=(l— ис»)/0,2; (3-30)
для первого этапа коммутации — <V|
ic, =—
78
для второго этапа коммутации — N2 уравнение пулевой изоклины совпадает с (3-30).
Построение приведено на рис. 3-14.
Через точки ц., = 0, и, = ±1 проведены нулевые изоклины АЛ, д', и Л'оь совпадающая с N2 при и. = ±1. На график наносятся уровни тока нагрузки к моменту коммутации: /oi» = O,9 (первая коммутация — выключение Т2), /ог* = О,6 (вторая коммутация — выключение Т4), /0. = 0,5 — установившееся значение тока нагрузки к моменту коммутации (третья и все последующие коммутации) (см. § 3-3).
Рис. 3-15. Обобщенные установившиеся характеристики С/со»(/о»), /в*(7о.) АИН с LC-коммутнрующим контуром при k& =0,025; 0,05 и 0,1.
Центр окружности, аппроксимирующей, фазовую траекторию ict(uc*) при включении, находится в точке а, участок траектории 00. Первый этап первой коммутации — дуга 0.1.2., центр — точка Ь; второй этап первой коммутации — дуга 2.3., центр — точка с. Начало и конец фазовой траектории для первой коммутации — на оси и,. Конец первого этапа—точка пересечения фазовой траектории с линией тока нагрузки Ли* (точка 2). Фазовая траектория для второй коммутации — 3.4.5.6., третьей — 6.7.8. и т. д., вплоть до пятой, конечная точка которой 13. совпала с начальной для четвертой коммутации 8. Фазовая траектория 8.9.—13. — предельная, характеризующая квазиустановивщиеся коммутационные процессы для данного тип : АИН при =0,1 и /о. = 0,5.
Амплитуды коммутационного тока /с.т* для любой по номеру коммутации определяются как ординаты точек пересечения фазовой траектории с пулевыми изоклинами: аа', ЬЬ' и т. д. Напряжение на конденсаторе к моменту коммутации Uсо. представляет собой абсциссы точек пересечения фазовой траектории с осью и»: переходные значения — 0—0., О—3. и т. д.,; установившееся 0—11.—0—8.
79
Процесс изменения тока и напряжения конденсатора во времени можно построить, если учесть, что
t = bVkLLC, (3-31)
где О — центральный угол дуги фазовой траектории (<£0.Ы. = 0Gi; <8. dQ.и т. д.).
По (3-31) можно определить времена отдельных этапов коммутации и, в частности, время iB, предоставляемое в схеме для выключения тиристора, равное времени существования на тиристоре обратного напряжения (например, при /о* = 0,5):
^LC.
Построение обобщенных зависимостей времени, предоставляемого тиристору для выключения /в*, и напряжения на конденсаторе Uco. для переменных значений тока нагрузки /о» и коэффициента затухания контура k,. производится с помощью фазовых траекторий, подобных изображенным на рис. 3-14. Зависимости £/Со»(/о.) и 1в*(1о*) показаны на рис. 3-15.
Увеличение радиуса аппроксимирующих окружностей при увеличении нагрузки говорит о накоплении энергии в коммутирующем конденсаторе. От коэффициента затухания контура kb напряжение UCot зависит мало (рис. 3-15), если /*0<1. Поэтому целесообразно выполнять элементы контуров так, чтобы kb—»-0, а ограничение роста напряжения обеспечить выбором параметров L и С, при которых /о.< 1.
При уменьшении коэффициента затухания увеличивается число коммутаций до момента достижения установившихся значений tic* и /с», а при k^=0 квазнустановившиеся коммутационные процессы в АИН но схеме, показанной на рис. 3-13,а, вообще не достигаются [26].
3-7. КОММУТАЦИОННЫЕ ПРОЦЕССЫ В АВТОНОМНОМ ИНВЕРТОРЕ НАПРЯЖЕНИЯ С ФАЗНОЙ КОММУТАЦИЕЙ И КОММУТИРУЮЩИМ РЕАКТОРОМ, ВКЛЮЧЕННЫМ В КОНТУР ТОКА НАГРУЗКИ
Коммутационные процессы в АИН с фазной коммутацией и коммутирующим реактором, включенным в контур тока нагрузки, могут быть рассмотрены на примере одной фазы, так как коммутация в каждой фазе проходит независимо от остальных.
Включение коммутирующего реактора в контур тока нагрузки (рис. 3-16,а) изменяет характер коммутационных процессов. Принципиально они протекают так же, как в элементарном коммутационном контуре, схема которого показана на рис. 3-12,а. Порядок включения тиристоров аналогичен АИН с реактором, вынесенным из 80
цепи тока нагрузки (см. рис. 3-13,а). Для выключения рабочего тиристора Т2 (или Т4) в момент времени h (рис. 3-16,6) включается коммутирующий тиристор Т1 (или ТЗ), второй рабочий тиристор Т4 (или Т2) пока выключен. Коммутационный процесс проходит в два этапа. Первый этап (интервал ti—12 до момента ic=
Рис. 3-16. АИН с двухступенчатой коммутацией и коммутирующим, реактором в цепи тока нагрузки.
а — схема; б —диаграмма токов и напряжений.
=/о) — свободный колебательный перезаряд конденсатора С в контуре, образованном диодом Д1 и тиристором Т1 при мгновенном выключении тиристора Т2 в момент времени it (контур С, Д1, L, Tl, С):
d'Ur*
Ter+2*.w+“c.=0' <3'32>
так как kL—kr=l.
Второй этап (4—t2) начинается при равенстве токов, конденсатора и нагрузки на спадающей части синусоиды коммутационного тока, а заканчивается в момент t3, когда 1с=0. В течение второго этапа через тиристор TI (или ТЗ) и диод Д2 (или Д1) происходит дозаряд конденсатора от источника напряжения 17и:
(TuCi,
_. diir*
+ ~dt~
Ь ис* 1 •
(3-33).
6—581
81
При установившемся процессе коммутации Uc,k= —Uco- Так как при tV=0 L/c,k>^c,ki, то при увеличении нагрузки АИН и реальных коэффициентах затухания коммутационного контура (й6<0,05 -—0,1) растет напряжение Uc,k- Для ограничения его в пределах (1,5—2,0) X У^ии следует выбирать кратность амплитуды комму-•тационного тока /с>т//о<2.
Рис. 3-17. Фазовая траектория при переходе из режима холостого хода АИН с реактором в цепи тока нагрузки при Л,Х0 (fes=0,05).
На рис. 3-16 диаграммы процессов соответствуют способу управления АИН при 0К=л(1—2/3)8)<л, где t3>tK. Для низкочастотных АИН может быть выбран режим /3=const, при котором 0K=var, если fs=var. Однако рабочие процессы соответствуют практически режиму 0к=л, так как 2Z3/S<C1- В АИН, предназначенных для высокоскоростных электроприводов, целесообразнее осуществить режим t3fs—const, выбрав, например 0к=5л/6, что обеспечит в режиме прерывистых токов сравнительно благоприятный гармонический состав выходного напряжения (см. рис. 3-8).
Установившиеся коммутационные процессы могут быть исследованы методом фазовой плоскости. Пример
• 82
построения фазовой траектории ффис,) при Ао=О,О5 приведен на рис. 3-17. Построенная фазовая траектория соответствует процессу установления коммутационных токов и напряжений при включении активной нагрузки /0,=1. Аналогично построению рассмотренных ранее фазовых траекторий (см. рис. 3-14) в соответствии с (3-32), (3-33) строятся нулевые изоклины для первого (NiNi) и второго (N2N2) этапов коммутации и дуги аппроксимирующих окружностей. Отличие состоит в том, что' в начале первого этапа коммутации ток /с* скачком возрастает до значения /о*, что вызывает появление в фазовой траектории вертикально направленных участков: 1.2., 4.5. и т. д.
В соответствии с (3-16) и рис. 3-16 время, предоставляемое рабочему тиристору для выключения, равно (в относительных единицах) tn*=<£8ab. Амплитуда тока конденсатора в установившемся режиме при /0*=1 предкоммутационное напряжение на конденсаторе U со*=О,6.=О7.
По фазовым траекториям, соответствующим установившимся коммутационным процессам [26] при k. = =var и 70*=:var, строятся обобщенные характеристики Псо(/о*) и /в*(/0*), приведенные на рис. 3-18, для = 0,025; 0,05; 0,1.
Из сравнения характеристик, показанных на рис. 3-15 и 3-18, следует, что внесение коммутирующего реактора в цепь нагрузки несущественно меняет зависимость t/со.(Л*), характеристики /в*(/о.) становятся более жесткими, но абсолютное значение /в* уменьшается почти вдвое.
В АИН с реактором, вынесенным из цепи нагрузки (рис. 3-13,а), во время выключения к тиристору приложено небольшое обратное напряжение, что приводит к увеличению допустимого значения /в>д [48]. Теоретически обратное напряжение во время выключения в этом случае равно Аил (рис. 3-11,6; 3-12,6). Реально контур коммутационного тока содержит активные и индуктивные LJT сопротивления монтажных шин, поэтому обратное напряжение, приложенное к тиристору:
нт— - Л«д-[- Uc Ц) (3-34)
6* 83
Ток конденсатора равен:
lC Cm SItl “14 I С, т 5*П >
«и (3-34) принимает вид:
«Т= Дмд + (Zc, т sin — 4) ^м 4-------cos ®к£
Зависимость ит(0> характерная для реальных АИН -с реактором, вынесенным из цепи тока нагрузки, показана на рис. 3-19. Начальная амплитуда £,тО=20 --30 В и
Рис. 3-18. Обобщенные установившиеся характеристики </со»(7о*)-/в.(/о«) АИН с реактором в цепи тока нагрузки при = 0,025; -0,05 и 0,1.
Рис. 3-19. Напряжение в процессе коммутации на рабочем тиристоре АИН с АС-коммути-рующим контуром.
I — Г. =*160 мкГн, с = 8 мкФ, 1С т — = 110 А; 2— L=35 мкГн, С=32 мкФ, ‘с. ,»=700 А-
увеличивается обычно при увеличении мощности АИН (график 1 на рис. 3-19): £=160 мкГн, С—8 мкФ, 1с,т— = 110А; график 2-. L=3& мкГн, С=32 мкФ, 1с,т= =700 А).
Выше отмечалось, что построение фазовой траектории на рис. 3-17 приведено для режима, соответствую- : щего набросу нагрузки, коэффициент мощности которой 1 равен единице. Действительно, так как в АИН, схема | которого показана на рис. 3-16,а, через коммутирующий реактор £ во время коммутации протекает и рабочий ток, я то напряжение на коммутирующем конденсаторе при | включении АИН |
ис = [7И-2 (icr + £^-Lr + £^-L (3-35) *
Ь г 1 X. (111 \ Lil /
84
где is — Ток нагрузки АИН, являющийся функцией параметров нагрузки и времени.
В (3-35) при коэффициенте мощности нагрузки, равном единице, dis/dt=O, и оно может быть сведено к уравнению второго порядка, для решения которого удобен метод фазовой плоскости. Если коэффициент мощности нагрузки не равен единице, то метод фазовой плоскости может быть применен для анализа переходных процессов в АИН такого типа только при использовании специальных приемов [26] или можно построить переходный процесс с помощью последовательного решения уравнений, соответствующих этапам коммутации (см. § 3-9).
3-8. КОММУТАЦИОННЫЕ ПРОЦЕССЫ В АВТОНОМНОМ ИНВЕРТОРЕ НАПРЯЖЕНИЯ С ОБЩЕЙ КОММУТАЦИЕЙ
В инверторах этого типа коммутирующие конденсатор и реактор являются общими для коммутации либо всех рабочих тиристоров, либо для тиристоров одной группы (анодной или катодной). Основной коммутирующий реактор, как правило, вынесен из контура рабочего тока. Главная схемная особенность заключается в отделении контура коммутации от контура рабочих токов некоммутируемых фаз. С этой целью используются либо вспомогательные тиристоры, либо токоограничивающие реакторы в цепи источника питания.
Схема АИН, в котором для разделения рабочих и коммутационных процессов использованы тиристоры, показана на рис. 3-20. Интервал проводимости рабочих тиристоров Т1—Тб равен 0к=л—93, в высокочастотных АИН предпочтительнее 0к=5л/6, т. е. 03=n/6=const. Коммутационная пауза 03 предотвращает короткое замыкание источника (7И. Вспомогательные тиристоры Т1.1—Т6.1 открываются раньше рабочих соответственно порядковому номеру. Групповые вспомогательные тиристоры Т7 и Т8 открываются три раза за период, синхронно с вспомогательными тиристорами своей группы (Т7 синхронно с Tl.l, Т3.1, Т5.1; Т8 — с Т2.1, Т4.1, Т6.1).
Процесс коммутации начинается с момента поступления импульса управления на вспомогательные тиристоры Т8 и Т4.1 (выключение рабочего тиристора Т1).
85
В течение первого этапа напряжение на коммутирующем конденсаторе изменяется согласно уравнению
d2ur „ dur
LC-^+rC^- + uc=0. (3-36)
При O<t'c</o открыт тиристор Т1, при 1С">1й— ДИОД Д1, где /о — значение тока is,a к моменту выключения тиристора Т1. Свободный перезаряд конденсатора со-
+
Рис. 3-20. АИН с общим AC-коммутирующим контуром.
гласно (3-36) происходит до момента, соответствующего t'c=/o на нисходящем участке синусоиды тока конденсатора (см. рис. 3-12,6, момент /2). Когда закроется диод Д1, откроется диод Д4 и начнется второй этап коммутации— дозаряд коммутирующего конденсатора источником /7И в соответствии с уравнением
d2ur „ dur
LC~dT2 ^rC —di Нс-^И
(3-37)
Второй этап коммутации закончится при tc=0, одновременно выключаются и вспомогательные тиристоры Т8 и Т4.1. Приход управляющих импульсов на рабочий тиристор Т4 и вспомогательные Т8 и Т4.1 в момент времени л + 0з не вызовет включения вспомогательных тиристоров Т8 и Т4.1, так как Uc>Uh и к ним приложено в это время обратное напряжение:
Уравнения (3-38) и (3-37) аналогичны (3-22) и (3-23), и процесс коммутации протекает так же, как 86
в АИН, схема которого показана на рис. 3-13,а. Для анализа установившихся и переходных коммутационных процессов можно применить метод фазовой плоскости, фазовые траектории коммутационных процессов соответствуют рис. 3-14, обобщенные характеристики 7/со*(7о*) и ДД/оД аналогичны показанным на рис. 3-15.
Несмотря на шестикратную частоту тока в коммутирующем узле, габариты реактора и конденсатора в АИН, выполненном по схеме рис. 3-20, оказываются меньше, чем суммарные габариты коммутирующих конденсаторов и реакторов в АИН с междуфазовой коммутацией.
3-9. КОММУТАЦИОННЫЕ ПРОЦЕССЫ В АВТОНОМНОМ
ИНВЕРТОРЕ НАПРЯЖЕНИЯ С МЕЖДУФАЗОВОЙ КОММУТАЦИЕЙ
Инверторы этого типа содержат минимальное число тиристоров — шесть, которые одновременно выполняют функции и рабочих, и коммутирующих. Конкретные схемы АИН с междуфазовой коммутацией отличаются друг от друга схемой включения коммутирующих элементов: конденсаторов и реакторов [63]. На рис. 3-21,а показана схема АИН с LC-коммутирующими контурами. Порядок включения тиристоров, соответствует их номерам на схеме, длительность проводящего состояния 0к=2л/3.
Для включения инвертора необходимо включить один тиристор в анодной и один в катодной группах, например Т1 и Т2. Начальные условия в схеме нулевые: 17со= =0, 7оо=0, Лчо=О (эквивалентная схема приведена на рис. 3-21,6). Значения рабочего тока is, 0=—is, с в любой момент времени легко получить, зная параметры нагрузки АИН. Изменение напряжения на коммутирующих конденсаторах при включении:
Д«с, f*=Auci*=Auc3*——0,5Auc5*=
=0,5 А «2*=—Аыс4*=—А«С6*,
где Дис 1Ф=1 — е kb * (k6 sin Д-|- cos Д); kb = г ]ЛС/2]/£;
(см. § 3-4).
Здесь и далее полярность напряжения на коммутирующем конденсаторе принята положительной, если возможна коммутация тиристора, имеющего тот же номер, что и конденсатор (С1 при выключении Т1 должен
87
иметь плюс напряжения на левой пластине, С2 при выключении Т2 — плюс на левой и т. д.). Соответственно за положительное направление тока ic выбрано направление, при котором происходит увеличение положительного напряжения на конденсаторе.
Рис. 3-21. АИН с LC-коммутирующими контурами.
а —схема; б — эквивалентная схема при включении; в эквивалентная схема для первого этапа коммутации; г — эквивалентная схема для второго этапа коммутации.
Процесс заряда коденсаторов будет происходить до момента гс=0; так как
ic.. = 0,5e sinf*,
то ?к*=л и конечное значение напряжений на коммутирующих конденсаторах при включении АИН
_ —
= • (3-38)
88
Рис. 3-22. Диаграмма токов и напряжений при коммутации в АИН с ЛС-коммутирующими контурами.
После окончания процесса заряда конденсаторов гс /* = 0 и напряжение на конденсаторах не изменится до начала-очередной, в данном случае первой коммутации (t = = Ts/3, выключается тиристор Т1). Изменение тока нагрузки и тока в отключаемой фазе 7о можно определить из расчета рабочих процессов (3-15).
Для выключения тиристора, например Т1 в момент /=Ts/3, открывается очередной тиристор этой же группы (ТЗ для выключения Tl, Т4 для выключения Т2 и т. д.). Процесс коммутации происходит так же, как в элементарной схеме, показанной на рис. 3-11,6,
и состоит из двух этапов:
этапа свободного перезаряда и этапа дозаряда конденсаторов от источника. Процесс коммутации иллюстрируется диаграммой токов и напряжений, показанной на
рис. 3-22.
При включении тиристора ТЗ (7=0 на рис. 3-22) об-
разуются контур свободного перезаряда конденсатора С], контуры перезаряда конденсаторов СЗ, С5 от источ
ника ии через диод Д5.1 и контур дозаряда конденсаторов С2, С4, С6 через диод Д3.1 (см. рис. 3-21,s). Токи
89
в конденсаторах на первом этапе коммутации
• __ г 7 . 1
1сз*==(’ I- соз*)е sin/*,
ZC5* = 0 ~1“ UСОЪ*) е SZn
1Сб*= ^сг*= ^С4*~ (1 +^соб*) е sin/*. )
При 0 </<:/) (на рис. 3-22) ток в выключающемся тиристоре tT=70 + ici—is>0 и тиристор проводит ток. В момент t=ti tT=0, тиристор Т1 выключается и включается диод Д1, что не изменит уравнения (3-39), так как прямое падение напряжения на тиристорах и диодах при расчетах не учитывается. Поэтому перезаряд конденсаторов С1, СЗ, С5 согласно (3-39) будет проходить в течение 0</</2 (см. рис. 3-22). Изменение напряжения на конденсаторах группы, в которой происходит выключение тиристора:
Дис1*=—^coul1 — e~kl (Min^ + cos^)];
Дысз* = (1 — исоз*) [1 — е 4 *' (К sin 4 + cos /*)];
Д«С5*= — U + I1 — e (k& sin/* 4- cos /*)].
(3-40)
Напряжение на конденсаторах Cl, СЗ, C5 к концу первого этапа коммутации равно:
U'c,ki* — Ucoi* + А U с,к,it,
где At/C,K,<* определяется из (3-40) при /*=/2*=/к1».
Время окончания первого этапа ZIti* определится из условия les*—;’ci*=4* для значения /К1*>л/2:
— k'c. t'
е sin/K].A
1 С01* ^С05* “ 1
(3-41)
Время, предоставляемое в схеме для выключения тиристору, /П1=/2*—Л*. Значение Л* определится из (3-41) для /*<л/2.
Процесс дозаряда конденсаторов группы, в которой не происходит выключение тиристора, протекает только при —7/соб*<1- Это условие выполняется обычно при 90
нескольких первых коммутациях после включения АИН. Дозаряд проходит в один этап:
I +^coJ + (3-42)
ДПС2к*=±Д17С4к*=-0,5Д^сбк.>. (3-43)
При Z>4 (рис. 3-22) закрывается диод Д1, открывается диод Д4, начинается второй этап коммутации (см. рис. 3-21,г). Состояние диода Д5.1 зависит от значений токов ici и Zes в этот момент времени. Обычно ids>ic5 и в схеме присутствует интервал t3—tz выравнивания этих токов, в течение которого диод Д5.1 остается открытым.
Токи в конденсаторах в течение интервала равны:
—t*
—Zci*==(1 +^'с,К1*) с sln4 +
+ гс, К1Х"*5 U (kb sin t* + cos U: (3-44)
гсз* = гС5* = 0,5(1— U'c к3$ — U'Ci e~~ki ** sin 4 Д-
+ /,с.кз*е^5 (^sinf# + cosfj. (3-45)
Длительность второго этапа коммутации определится из условия —ici* + ics*=0:
= arcctg (— 1,5 L С°‘—1—р kJ • (3-46)
В (3-44) — (3-46) U'c,K,i* и I'c,x,i* — конечные для первого этапа коммутации значения токов и напряжений, определяемые по (3-39) — (3-41).
Изменение напряжения на конденсаторах в течение второго этапа коммутации:
— ДиГсц = (1 -^ (^sinZ. + cos Z.J] Д-
+ sin Д; (3-47)
Ды сз. = Ды'со. = ——д' К'~ [1 - e~kit^kb sin t* 4-
—|— cos £#)]-|— ITq кз & * sin (3-48)
91
Напряжение на конденсаторах к концу второго этапа коммутации (/4 на рис. 3-22) Uc>Ki = U'c,Ki^r\U'c,w. Уравнения (3-39) — (3-48) могут быть распространены на коммутацию любого тиристора. В этом случае первым считается тиристор, выключающийся при рассматриваемой коммутации, а вторым, третьим и т. д. — тиристоры, момент включения которых отстает от первого на Ts[§, Ts/3 и т. д.
Рис. 3-23. Обобщенные установившиеся ^в*(/о») АИН с LC-коммутирующими 0,1; 0,2.
характеристики ПСо*(/о*), контурами при йь=0,05;
Последовательным решением (3-38) — (3-48) находятся начальные значения напряжений на конденсаторах при всех последующих коммутациях, вплоть до установившегося значения. При решении (3-39) — (3-48) одновременно определяется время /в* для каждой коммутации. Так как коммутация тиристоров в анодной и катодной группах проходит независимо, то расчет проводится лишь для одной группы.
Полученные в результате такого решения обобщенные характеристики £7Со*(Л)*) и /в.(/0*) Для установившегося режима при Zr=var приведены на рис. 3-23. Их главная особенность — малая жесткость при увеличении коэффициента затухания, поэтому для*устойчивой коммутации такого инвертора коммутирующие контуры должны иметь высокую добротность.
92
3-10. ВЫБОР ЭЛЕМЕНТОВ ПРЕОБРАЗОВАТЕЛЯ ЧАСТОТЫ
Параметры коммутирующих элементов можно определить, если задаться временем, предоставляемым тиристору для выключения tB, и кратностью тока нагрузки; в момент коммутации к амплитуде коммутационного то-
Рис. 3-24. Характеристики Uсо* (/0/А, т) и /B,(/o//K, т) АИН’ с двухступенчатой коммутацией и АС-коммутирующим контуром-при й5 = 0,025; 0,05 и 0,1.
В АИН с фазной и общей коммутацией (см. рис. 3-13,. 3-16, 3-20), где в процессе выключения любого тиристора используется лишь один конденсатор, амплитуда коммутационного тока равна:
(3-49).
Так как /0 = УС/L, то с учетом (3-49)
1^1к,т = 1^/2/исог (3-50).
На основании (3-50) и обобщенных характеристик для этих схем АНН (см. рис. 3-15, 3-18) построены характеристики Uco*(Io/IK,m) и (рис. 3-24,3-25).
В АИН с междуфазовой коммутацией (например, схема на рис. 3-21,а — г) коммутационный ток
*К=--l'cl + 1С5,
поэтому амплитуда коммутационного тока в относительных единицах
(3-51).
93-
Для АИН с ЛС-коммутирующими (рис. 3-21,а—г) из (3-41), (3-51) имеем:
/„ Zo„ c^5:i*sin/Kls: /к,„г - й-^/2
контурами
(3-52)
При построении обобщенных характеристик значение sin /ь1,. определялось для нахождения времени окон-
Рис. 3-26. Характеристики £До*(А/А, т) и A*(A/A, Trt) АИН с ЛС-коммутирующими контурами при k 5 =0,05; 0,1 и 0,2.
Рис. 3-25. Характеристики t/соДА/А. т) И А.(Л//К, т) АИН с двухступенчатой коммутацией и коммутирующим реактором в цепи тока нагрузки при = 0,025; 0,05 и 0,1.
чания первого этапа /к1„ По (3-52) для АИН с ЛС-ком-мутирующими контурами на рис. 3-26 построены характеристики Исо*(/о//К,т) И АДА/Д.т).
Значение 1о/1к,т Для принятой схемы АИН выбирают так, чтобы ЙСо*^(1,8-е-2,О) и А*^ (0,5-:-0,7)где Ао* соответствует /о*=О.
Параметры коммутирующих элементов L и С находятся при совместном решении уравнений
А — A* LC',
(3-53)
где амплитуда тока 1к<т записана в абсолютных единицах для принятой схемы АИН (3-49), (3-51).
'94
По выбранному значению 1о!1к,т из графиков £7со*(/о//к,т) И /в*(/о/Л<,7п) определяют /в* и £7С0*. Затем находят Uco=Uco*Uw а абсолютное значение времени /в выбирается с коэффициентом 1,2—1,4 [94].
Для выбора тиристоров и диодов определяются средние значения тока через них. Эти токи должны быть меньше классификационного значения предельного тока прибора. Для конструктивного расчета обмоток реактора используется действующее значение тока.
Токи в элементах АИН имеют рабочую /р и коммутационную /к составляющие. Для j-го элемента суммарное среднее значение тока
Л—Л.р + Л>, суммарное действующее значение
I. — 1/ /С 4-/2.
1,0 г ‘ i,v, о. \ 1, к, о.'
Среднее значение рабочей составляющей тока Д,р. определяется по (3-8) — (3-12), коммутационной — интегрированием мгновенных значений тока в течение-интервала проводимости; действующие значения рабочей /;,р,д и коммутационной составляющих — интегрированием квадратов мгновенных значений соответственно рабочего и коммутационного тока в данном элементе:
где Др и i,.K — мгновенные значения рабочей и коммутационной составляющих тока в элементе; 0t и 02—границы интервала проводимости для этих составляющих; Тк— период собственной частоты коммутационного контура; Т„— период частоты на выходе АИН.
Выражения для мгновенных значений тока Дк, границы интервалов проводимости зависят от конкретных схем АИН, и универсальные выражения в общем виде-не могут быть получены.
95.
Автономный инвертор напряжения по схеме на
1 Для АИН, схемы которых были рассмотрены выше, 1 основные зависимости, необходимые для выбора элемен-1 тов, приведены в табл. 3-5.
J Напряжение на входе АИН зависит от параметров источника (7И, который содержит тиристорный регулятор (управляемый выпрямитель или широтно-импульсный регулятор) и сглаживающий реактор (см. рис. 1-5,а). Влияние параметров звена постоянного тока на выходное напряжение АИН и характеристики двигателя, управляемого ТПЧ, рассмотрено в [45, 102].
Требуемая индуктивность сглаживающего реактора определяется по формуле [102]
Г min
где qi и — коэффициент пульсаций соответственно до и после реактора; f — частота пульсаций.
Габаритная мощность реактора фильтра
_____ Ld! И, max оЧм кь г > ^^З* ДОП
где Qo и QM — соответственно площадь окна и активного сечения магнитопровода реактора; /и тах—максимальное значение гладкой составляющей тока реактора; В — допустимая индукция; /доп — допустимая плотность тока в обмотке; k3— коэффициент заполнения окна обмоткой.
Число витков обмотки реактора
i W = ФсЛзЛюп/ , max'
j Конструктивный немагнитный зазор
, __ ^И, max “'P'S .
; пьВ ’
здесь — магнитная проницаемость воздуха; пь — число физических немагнитных зазоров для полного потока магнитопровода.
3-11. КОММУТАЦИОННАЯ УСТОЙЧИВОСТЬ АВТОНОМНОГО ИНВЕРТОРА НАПРЯЖЕНИЯ В ПЕРЕХОДНЫХ ПРОЦЕССАХ
В переходных процессах, т. с. при сбросе или набро-се нагрузки, включении АИН, устойчивая коммутация в АИН возможна только при выполнении условия Д> 7-581 97
>Д,д, где /в,д — минимально допустимое время выключения тиристора.
Изменение /в в переходных процессах для ряда последовательных коммутаций может быть получено теми же методами, что и получение зависимости ДД/о*) в статике, т. е. либо методом фазовой плоскости, если
Рис. 3-27. Переходные коммутационные процессы в АИН, выполненные по различным схемам.
а— по схемам рис. 3-13,а и 3-20; б — по схеме рис. 3-16,a; I— включение при 70, = 1; // —наброс НЭ1РУЗКИ Л/о,= +0,5; HI — сброс нагрузки Д/. =—0,5; Д =0,05.
98
он применим, либо решением системы уравнений, описывающих коммутационный процесс. Не повторяя здесь построения фазовых траекторий или решения уравнений коммутационных процессов и не приводя аналогичных им траекторий или решений для режимов, не рассмотренных при получении статических коммутационных характеристик (например, включение АИН на постоянную нагрузку /о*¥=0 или сброс нагрузки), приведем полученные в результате переходные характеристики АИН: для АИН по схеме на рис. 3-13,а и 3-20 — рис. 3-27,а; для АИН по схеме на рис. 3-16,а — рис. 3-27,6 (7— включение при /0,= 1; II — iA/o*=+O,5; III — Мо*= =—0,5; fes = 0,05).
Так как здесь представляют интерес лишь предком-мутациоиное значение напряжения на коммутирующем конденсаторе и время, предоставляемое тиристору в переходном процессе для выключения при каждой коммутации /в,гт*, то процессы изменения этих параметров удобно представить в виде графиков решетчатых функций, где по оси абсцисс отложены порядковые номера коммутаций п, а непрерывная гладкая огибающая не имеет физического смысла в интервалах между коммутациями, связывая значения функций лишь графически и увеличивая наглядность изображенного.
При значениях тока, отличных от 10*, для которых изображены графики на рис. 3-27, абсолютные значения /в,п и U*co при каждой коммутации будут иными, но качественная картина переходного процесса сохранится, т. е. независимо от места включения реактора /В|П* достигает минимального значения при первой коммутации после включения АИН или набросе нагрузки. Следовательно, устойчивость коммутации в АИН при переходных процессах можно оценить, получив зависимость минимального значения от изменения нагрузки А/о* и коэффициента затухания коммутирующего контура.
В АИН, в которых основной коммутирующий реактор вынесен из цепи тока нагрузки, процесс заряда коммутирующего конденсатора в момент включения не за-ви( от от тока нагрузки и напряжение перед первой коммутацией в АИН с фазной и общей коммутациями (схемы ЛИН на рис. 3-13,а, 3-20) равно:
^=1+^- (3-54)
у*
99
а в АИН с междуфазовой коммутацией (рис. 3-21,а—г)
Ьа,=0,5(1+е-Д
(3-55)
Время, предоставляемое тиристору для выключения при первой коммутации в этих АИН, соответственно может быть получено из уравнений
e~klt* sin t* 4т2- - —(3-56) исо„ +е~^’ >
где определяется по (3-54):
sin t* = la* 2Л* (3-57)
где Псои и (/cos* —из (3-55).
Из (3-56) и (3-57) определяются два значения времени: ij* (равенство токов нагрузки и коммутационного на нарастающем участке синусоиды) и /2* (на участке уменьшения коммутационного тока), а затем /в*= -—^2* ^1*-
При включении ЛИН, коммутирующий реактор которого внесен в цепь тока нагрузки (например, см. рис. 3-16,а), процесс заряда конденсатора зависит от тока нагрузки и ее коэффициента мощности, так как через коммутирующий реактор протекает составляющая рабочего тока. Предварительно рассмотрим систему управляющих импульсов трехфазпого АИН такого типа. Фронт управляющих импульсов рабочих тиристоров Т1 — Тб отстает от фронта импульсов управления соответствующих коммутирующих тиристоров Т1.1—Т6.1 на интервал задержки 03 (рис. 3-28,а), а номер тиристора соответствует порядку подачи импульсов управления через интервал л/3. Длительность управляющих импульсов (л—93)>9у>л/3, что обеспечивает самозапуск инвертора при включении. Сиад импульсов управления коммутирующих тиристоров совпадает с окончанием соответствующих импульсов управления рабочих тиристоров (Г 1.1 с TI, Т2.1 с Т2 и т. д.), что обеспечивает заряд коммутирующего конденсатора перед первой коммутацией.
100
На рис. 3-28,а показаны импульсы управления для тиристоров TI; Т1.1; Т2; Т2.1; ТЗ; Т3.1 (последовательность импульсов для тиристоров Т4; Т4.1; Т5; Т5.1; Тб; Т6.1 очевидна). Отметим, кроме того, что перенос коммутирующего реактора в цепь конденсатора никак не отразится на системе управляющих импульсов.
S)
Рис. 3-28. Включение АИН с фазными узлами коммутации и реактором в цепи тока нагрузки.
а — диаграмма управляющих импульсов; б— эквивалентная расчетная схема,
В зависимости от момента включения силового на-пряжения UK возможны два режима заряда коммутирующего конденсатора. Если напряжение <7И включается
в интервале О 9 <( то КО1’Де1’сатор заряжа-
ется через Т1 и Т1.1 при отсутствии рабочего тока и напряжение па нем к моменту первой коммутации (9 = = т.) можно определить по (3-54). Если момент включения находится в интервале ^~4~93j < 9< 2тз/3, то одновременно починается рост тока и в конденсаторе, и в нагрузке АИН.
При включении двигатель неподвижен, поэтому может быть заменен эквивалентной активно-индуктивной нагрузкой RSLS. Так как время коммутационных процессов существенно меньше длительности половины периода рабочей частоты (времени нарастания рабочего тока is), то при рассмотрении процесса заряда конденса-
101
тора нагрузка может быть заменена чисто индуктивной, т. е. /?з=0. Кроме того, для упрощения анализа перенесем активные сопротивления коммутирующих реакторов в цепь конденсатора, т. е. не будем учитывать падение напряжения на активном сопротивлении коммутирующего реактора от тока нагрузки [26]. Эквивалентная расчетная схема АИН для этих условий показана на рис. 3-28,6. Система уравнений в операторной форме, описывающая электромагнитные процессы в схеме, имеет вид:
-у- = (ic + С)pL + ic \pL + 2r + ;
^-^2(ic-]-is)pL~yispLs-, (3-58)
. 1
UC — lC ~p(P •
Для переходного процесса из (3-58) можно записать и =_____________________.......
с 2LCр + Зп)2 + wKi п]
или
«С (0 = UHkL [ 1 — е sin СОк, 1/ + COS »к, п^] ,
где
8П = r!2kLL-, k, = 1 — L'{2L Д- Д);
“к, п = /“2к, п, о —82п‘.
®к, no = 1 / J/2VC; 8ПЧ, п = К = k- У 2^. п
Процесс заряда коммутирующего конденсатора проходит в один этап и закончится при Д=0, т. е. при t= =Л /(Як, п*
или
U к (3-59)
Время, предоставляемое рабочему тиристору для выключения, можно определить из условия uc=Uco—\ис= =0, что верно для любой коммутации и для первой 102
в частности. В общем случае
Дмс, = 7оЛ~^*sin Z* + (Zco* 11 ~ е~^' sin Z* + cos Ш
= Ia,e~ht'sin Z* ~ Ua>,e~klt' (kisin {* + cosZJ. (3-60)
Приравняв тиристор}'- для тока нагрузки
ис„=О, найдем время, предоставляемое выключения в АИН с реактором в цепи
(рис. 3-16,а):
i zzco, ^=arctg, • •'ll* '‘У'СО,
(3-61)
Для первой после включения коммутации по (3-61) и (3-59)
fet[l -\-е HW)]
A, min* arctg у •
It*-k6kL\\ +
(3-62)
Так как О,5<Д£^<С1 и уменьшение L по сравнению с Ls приводит к увеличению KL, то из (3-62) следует, что для увеличения коммутационной устойчивости АИН при его включении на двигатель индуктивность коммутирующего реактора L должна выбираться минимально возможной.
Характеристики 6>,min*(/o*) для первой после включения коммутации, соответствующие различным схемам АИН, рассчитаны по (3-56), (3-57), (3-62) и приведены на рис. 3-29. Кривая 1 соответствует АИН по схемам на рис. 3-13,а, 3-20; кривая 2 — АИН по схемам на рис. 3-21,а — г; кривые 3, 4 — АИН по схеме на рис. 3-16 при kL=0,8 и 0,6 соответственной. Расчет проведен для /гй=0,05. Из рис. 3-29 следует, что включение коммутирующего реактора в цепь тока нагрузки увеличивает коммутационную устойчивость АИН, так как характеристики /в,т(П*(/о*) становятся более жесткими. Более того, при /0*>1,5 работа АИН, в которых коммутирующий реактор включен последовательно с конденсатором и не проводит составляющую тока нагрузки, становится практически невозможной.
Коммутационная устойчивость АИН при скачкообразном изменении тока нагрузки характеризуется зависимостью /B,min*(A^o*), которая может быть построена по (3-56), (3-57) или (3-61). В этих уравнениях значения Uco„ определяются по характеристикам t/co*(/o*),
103
полученным для установившегося режима, для значений тока Tot* (ток к моменту предыдущей коммутации), а ток ^о*==/о2*=/о1*+ДЛ- Так как {7Со* в АИН зависит от предкоммутационного тока нагрузки /01*, то и время при одних и тех же скачках тока нагрузки Д/о* зависит от первоначального значения тока /и*.
Рис. 3-29. Время, предоставляемое тиристору для выключения при первой коммутации АИН, выполненного по различным схемам.
1 — по схеме рис. 3-13,а или 3-20; 2 — по схеме рис. 3-21,а; 3 — по схеме 3-16,а при /гь=0,8; 4 — по схеме рис. 3-16,а при -0,6.
Рис. 3-30. Время, предоставляемое тиристору для выключения при первой коммутации после наброса нагрузки в АИН с фазными узлами коммутации (kh -0,05).
1 — АИН по слеме рис. 3 13,а, /0|1 = 0; 2 — АИН по схеме рис. 3-13,а, 1 = 0,75; 3 —АИН по схеме рис. 3-16,а, /01>.-0; 4 —АИН по схеме рис. 3-16,0, ^О1» = о,75-
104
На рис. 3-30 показаны характеристики t^mint (Д/о*) при 7о1*=0 (графики 1, 3) и Ди*=0,75 (графики 2,4), для рассмотренных выше АИН с фазными узлами коммутации: графики 1 и 2 для АИН по схеме рис. 3-13,а; 3'и 4 — рис. 3-16. Так же как и при включении коммутационная устойчивость АИН при набросе нагрузки повышается, если коммутирующий реактор включен в цепь тока нагрузки. Но не следует забывать, что это обеспечивается повышением напряжения на коммутирующем конденсаторе и, следовательно, на силовых элементах ЛИН.
3-12. ОСОБЕННОСТИ МОЩНЫХ И ГЛУБОКО РЕГУЛИРУЕМЫХ АВТОНОМНЫХ ИНВЕРТОРОВ НАПРЯЖЕНИЯ
В мощных и глубоко регулируемых АИН рабочие элементы обычно включены по трехфазной мостовой схеме. Если токи превышают допустимые значения для выпускаемых тиристоров и диодов, то используется параллельное включение' их через индуктивные делители тока, а снижение напряжения до допустимого значения обеспечивается последовательным соединением элементов с обязательным шунтированием их цепочками, выравнивающими распределение напряжения между элементами в статических и динамических режимах [94].
При использовании выходного трансформатора или нагрузки с расщепленными фазными обмотками предпочтение следует отдать схемам, в которых инверторные блоки соединены параллельно (по входу) [44, 47]. Если система управления обеспечивает получение фазового угла между управляющими импульсами отдельных инверторных блоков, то достигается не только увеличение мощности АИН, но и переход к m-фазным АИН (;п>3), что улучшает гармонический состав выходного напряжения, позволяя уменьшить амплитуды низкочастотных гармонических составляющих (5-й, 7-й и т. п.).
Увеличение диапазона регулирования напряжения на выходе АИН и его мощности, как правило, делает нецелесообразным использование элементарных коммутирующих узлов, рассмотренных выше. Это связано с двумя обстоятельствами: 1) необходимость выбора параметров коммутирующих контуров при пусковых режимах для минимальных частоты и напряжения приводит к избыточной коммутационной устойчивости на максимальной частоте (/к.т^/о), что вызывает неоправданные потери и увеличение габаритов силовых элементов; 2) получение достаточной коммутационной устойчивости возможно лишь при Л;,т> (1,5—;--2)/0, а «излишек» iK—/0 вы-ii.ie.icT дополнительный нагрев элементов.
Первое обстоятельство существенно и для мощных и для глубоко регулируемых АИН, второе — в основном для мощных.
Уменьшение изменения напряжения на коммутирующем конденсаторе нрн регулировании напряжения иа входе АЙН достигается включением в контур коммутации специальных нерегулируемых источников. Возможно последовательное или параллельное включение источников по отношению к коммутирующим конденсаторам.
105
При последовательном введении источников в контур коммутации схемы предельно просты, но установившееся значение напряжения £7соЗ>Пи. Напряжение Uco определяется коэффициентом затухания контура Мощность источников подзаряда в этой схеме достаточно велика, так как их ток равен полному току коммутирующего контура.
Параллельное подключение источников подзаряда Uia, Uw к коммутирующему контуру (рис. 3-31,а), как правило, требует применения дополнительных коммутирующих тиристоров [6, 63, 93], и только в маломощных низкочастотных АИН возможно подключение источников через резисторы.
Рис. 3-31. Параллельное подключение источников подзаряда к кои-туру коммутации.
а — принципиальная схема; б —диаграмма управляющих импульсов.
Если момент открывания тиристоров группы подзаряда не совпадает с моментом коммутации рабочих тиристоров, как показано на рис. 3-31.6, то ток подзаряда равен:
J’n — (Уп ^с, к)
—г t
е п sin<onH
(3-63)
где Uc,k — конечное значение напряжения на конденсаторе после предыдущей коммутации; 6П = (r+гп) /2(А+АП);
<оп — ^/Г(°2по ®2п! ^по — С (L -|- Ап).
Напряжение на коммутирующем конденсаторе к концу процесса подзаряда (напряжение перед следующей коммутацией)
f7C0 = ,JC. к + ДГ/С, п = + (?4 - иС, к) (3-64)
106
Из (3-63) и (3-64) следует, что контуры подзаряда работают при Ua>Uc,K и напряжение на коммутирующем конденсаторе UcO~Ua, еслийг ->-0, Т. е. при выборе Ua=UcOmax, где UcOmax—
максимально возможное напряжение при отсутствии источников подзаряда, получим практически неизменное предкоммутационное напряжение на конденсаторе во всех режимах АИН.
Полный коммутационный ток, как и в АИН без источников Ua, протекает в основных и коммутирующих тиристорах TI, Tl.l, Т2 п т. д. Среднее значение тока тиристоров группы подзаряда (Т.1.2, Т2.2 и г. д.)
ТС
/т п ~т I tn sinconZt/0
1 s J
О
2/n, mfs (Оп
где
1». m = (Ц1 — ''с. к) L + Ln В 1 '
Среднее значение тока источника годзаряда
1п ---иДт.п,
где т~3 для трехфазного АИН.
Действующее значение тока источников подзаряда
Индуктивность реактора в контуре подзаряда определяется из уелонпя
ДДщ/сОп, откуда
Ац</Д/.н2С-Д
Если принять tn = Tg/6, то Z-nSjl /36л2/Д,тС—L.
Как отмечалось выше, при увеличении мощности АИН желательно так выполнить коммутирующие элементы, чтобы превышение амплитуды коммутационного тока над током нагрузки к моменту коммутации было минимальным. Так как время, предоставляемое тиристору для выключения, не может быть меньше допустимого значения, то это условие выполнимо только при несинусоидалыюй форме коммутационного тока. Для формирования прямоугольной формы коммутационного тока применяется нелинейный коммутирующий реактор. Оп выполняется на магнитопроводе из материала с коэффициентом прямоугольпости, близким к единице, и кроме рабочей обмотки имеет обмотку управления (рис. 3-32,а).
На рис. 3-32,а показана только анодная группа одной фазы АИН с двухступенчатой коммутацией. В таком АИН коммутирующий реактор включен в цепь тока нагрузки. В обмотку управления от независимого источника подается ток управления Д. Обычно обмотки управления реакторов анодной и катодной групп всех фаз АИН включаются последовательно [6].
107
Если ток в рабочей обмотке реактора равен нулю, ip = 0, (О на рис. 3-32,в), то магнитопровод насыщен: В =—Bs; Н {рис. 3-32,6). После открывания рабочего тиристо
О Л
tpffi’p — iywy Т
коммутации 7/<0, В = —Ва.
но !yWy>(pje>p и до начала
Рис. 3-32. Нелинейный коммутирующий реактор в АИН.
a — схема включения; б —диаграмма электромагнитного состояния; в —диаграмма токов и напряжений,
При открывании коммутирующего тиристора напряжение конденсатора через диод обратного тока оказывается приложенным к рабочей обмотке реактора uc=uL. Начинается процесс перемагничивания магнитопровода, при котором В = 4-ДВ—В, и
«pWp—
Wy
т. е. — = const. Конденсатор перезаряжается постоянным
108
током (интервал на рис. 3-32,в):
. wy t
иС = иС0 — 1 ~С • <3-65)
Время, предоставляемое тиристору для выключения, определится и,< (3-65) при ис = 0:
^С0^а’р
° iyWy
При <>fB напряжение на реакторе меняет знак, индукция начинает уменьшаться. При возвращении рабочей точки в точку, где В = —В„ (рис. 3-32,6), ток tp = O, коммутирующий тиристор закрывается, процесс коммутации заканчивается.
3-13. ПРОМЫШЛЕННЫЕ ПРЕОБРАЗОВАТЕЛИ ЧАСТОТЫ
С АВТОНОМНЫМИ ИНВЕРТОРАМИ НАПРЯЖЕНИЯ
Технические данные основных серий ТПЧ с АИН, выпускаемых отечественной промышленностью, приведены в табл. 3-6. Все перечисленные в таблице преобразователи (кроме ПТЧ-0,7-800) рассчитаны на подключение к промышленной трехфазной сети с напряжением 380 В и частотой 50 Гц (ПТЧ-0,7-800 соответственно 440 В, 60 Гц). Роль источника постоянного напряжения исполняет трех-фа шый мостовой управляемый выпрямитель, выполненный, как правило, по симметричной трехфазной мостовой схеме. Рекуперация дк-ргпп в сеть в тормозных режимах не предусматривается.
В ПЧИ-400-380-70/2 используются два силовых модуля от ПЧП-200-380-70/2, включенных параллельно. Возможна поставка ТПЧ, содержащих три или четыре силовых модуля (ПЧИ-600-380-70/2 п ПЧИ-800-380-70/2), выходная мощность которых увеличивается таким образом до 3X125 кВ-А или 4X125 кВ-А.
Преобразователь ПТЧ-9-150 может поставляться комплектно со специальными электродвигателями типа 4АП, 4АХП (от 2,2 до 5,5 кВт, 750 — 3000 об/мин при /s = 50 Гц) или 4АШ, 4АХШ (от 2,2 до 4,0 кВт, 6000 об/мин при /3=100 Гц).
Рабочие тиристоры АИН во всех ТПЧ, приведенных в табл. 3-6, включены по трехфазной мостовой схеме. Схемы АИН отличаются исполнением коммутирующих узлов. Находят применение все виды АИН: с фазными, общими и междуфазовыми узлами коммутации. В зависимости от мощности используются как линейные коммутирующие реакторы, так н нелинейные. Источники подзаряда применяются в более мощных ТПЧ. Основные сведения о выполнении АИН в серийных ТПЧ приведены в табл. 3-7.
Зарубежными фирмами выпускаются ТПЧ с АИН [15], предназначенные для управления как низкоскоростными электродвигателями «1=60-1-180 Гц), гак и высокоскоростными 2500ч-
4000 Гц). Большинство ТПЧ строится по схеме УВ — АИН (УВ — управляемый выпрямитель), но находит применение и структура В — П—АИН (В — неуправляемый выпрямитель; УВ — управляемый; П — тиристорный переключатель, работающий в режиме широтноимпульсного регулятора). Максимальная мощность ТПЧ, предназна-
109
Выходные параметры
ценных для управления низкоскоростными двигателями,— (100-^-200) кВ-А, в отдельных случаях — до 500 кВ-А (фирма «Дженерал Электрик»)’, для управления высокоскоростными — до 20 кВ-А. Обычный диапазон регулирования частоты 20: 1, расширенный — до (200-г-1000) : 1. Применяются аналоговые системы управления, обеспечивающие стабильность частоты не хуже (0,5ч-1) %, или цифровые, увеличивающие стабильность поддержания частоты до 0,01%. Большинство ТПЧ обеспечивают управление ускорением и замедлением электродвигателя.
Таблица 3-7
Тип Схема 9к
ТПЧ-160/380 Рис. 3-16 л—63
ТПЧ-160/220; ТПЧ-120/220 Рис. 3-16 «—83
ТПЧ-100; ТГ1Ч-63 Рис. 3-20 5л/6
ТПЧ-40; ТПЧ-15* — 2л/3
ПЧИ-200-380-70/2 — л— 63
ПТЧ-9-150 Рис. 3-21 2л;/3
ПТЧ-3-1600; ПТЧ-0.7-8С0 Рис. 3-13 л—93
птчкш* Рис. 3-21 2т:/3
* Нет подзаряда коммутирующих конденсаторов.
3-14. ПРИМЕР РЕАЛИЗАЦИИ СИСТЕМЫ УПРАВЛЕНИЯ АВТОНОМНЫМ ИНВЕРТОРОМ НАПРЯЖЕНИЯ
Электроприводы с частотным управлением на основе АИН в зависимости от технологических требований могут быть выполнены по различным структурным схемам. Приведенную здесь структурную схему электропривода (рис. 3-33) следует рассматривать только как пример системы, позволяюший проиллюстрировать аппаратурное исполнение основных блоков, что, в свою очередь, не должно вос-
Рис. 3-33. Структурная схема системы управления.
111
110
приниматься как единственное и окончательное решение, так как реализация блоков системы зависит от состава серий выпускаемых интегральных микросхем, многообразие которых и степень интеграции непрерывно увеличиваются.
Приведенная на рис. 3-33 система обеспечивает разбег двигателя М с заданными током статора /, и частотой тока ротора }т [93]. Аналоговый сигнал управления для каналов частоты и напряжения один и тот же — f/y2; ki—блок преобразования тока статора !„ в аналоговый сигнал Ur, kw—блок преобразования частоты вращения /ш двигателя в сягнал Пш; kf — задающий генератор схемы управления АИН. Частота выходных импульсов задающего генерато-
Рис. 3-34. Принципиальная схема блока пересчета, а —схема; б —диаграмма состояний.
112
pa f=6f8. Блок пересчета БП содержит распределитель импульсов-по шести каналам и логическую часть, формирующую необходимую форму импульсов; В А—выходной каскад системы управления АИН.
На рис. 3-34,а показан блок пересчета, предназначенный для управления АИН, выполненным по схеме на рис. 3-21,а с источниками подзаряда [93]. Для управления рабочими тиристорами необходима система импульсов длительностью 0—л/2, тиристорами подзаряда — система «коротких» импульсов. Распределитель импульсов собран на шести D-триггерах (Dl-=-D6) с начальной установкой логической единицы на прямом выходе триггера D1 и логических нулей на прямых выходах триггеров D2—D6. Диаграмма состояний
элементов олока переключения приведена на рис. 3-34.6.
Переключение триггеров распределителя происходит при поступлении импульса от задающего генератора (положительные фронты напряжения на вход С. Длительность импульсов задающего генератора 0=я/6. Выходные импульсы блока пересчета длительностью л/2 и л/6 получены с помощью элементов НЕ, И—НЕ, И. Конструктивно логическая часть блока переключения собрана на микросхемах серии К511; трех микросхемах К511ПУ2 (D7, D8, D13, D14— один корпус; D9, DIO, D15, D/6 —второй; Dll, D12, D17, D18 — третий) и шести микросхемах К511ЛИ1 (D19—D30).
Выходные каскады системы управления АИН выполнены па тиристорных оптронах (рис. 3-35). Светодиод оптрона VO через токоограничивающий резистор подлючен непосредственно к микросхеме К511ЛИГ блока пересчета (показан пунктиром). Необходимо учитывать, что тиристор оптрона VO должен иметь статические и динамические параметры не хуже, чем у силового, которым он управляет.
Узел суммирования сигналов и регулируемый ограничитель собраны на одном операционном усилителе У1 (рис. 3-36). Сигнал U3 определяет ток статора 1„ и частоту тока ротора f > в процессе пуска. Напряжение ограничения Uor пропор-
113.
Рис. 3-35. Выходной каскад системы управления.
Рис. 3-36. Суммирующий усилитель с регулируемым ограничением.
ционально установившемуся значению напряжения управления 6\2. т. е. установившемуся значению fs. В качестве усилителя У/ использовалась микросхема КДУТ402Л или КДУТ531А.
ГЛАВА ЧЕТВЕРТАЯ
ПРЕОБРАЗОВАТЕЛИ ЧАСТОТЫ С АВТОНОМНЫМИ ИНВЕРТОРАМИ НАПРЯЖЕНИЯ С ШИРОТНО-ИМПУЛЬСНОЙ МОДУЛЯЦИЕЙ
Наличие в АИН узлов искусственной коммутации, позволяющих обеспечить закрывание тиристора в любой заданный момент времени, открывает широкие возможности по использованию принципов управления, направленных на улучшение регулировочных свойств как самого инвертора, так и электропривода в целом. Это в первую очередь относится к автономным инверторам с широтно-импульсной модуляцией (ШИМ), анализу которых посвящена настоящая глава.
114
4-1. ПРИНЦИП ШИРОТНО-ИМПУЛЬСНОЙ МОДУЛЯЦИИ. ОСНОВНЫЕ СООТНОШЕНИЯ ПРИ ШИРОТНО-ИМПУЛЬСНОЙ МОДУЛЯЦИИ
Принцип работы АИН с ШИМ удобно рассмотреть с помощью эквивалентной схемы, представленной на рис. 4-1,а. Здесь нагрузка Z„ включена в диагональ моста, образованного двумя источниками напряжения Пи/2 и полупроводниковым ключом К, который переключается из положения 1 в положение 2 с высокой
Рис. 4-1. К пояснению принципа действия инвертора с ШИМ.
а — эквивалентная схема инвертора с ШИМ по синусоидальному закону; б — диаграмма напряжения и тока на выходе инвертора.
частотой /к, называемой в дальнейшем несущей частотой, или частотой коммутации. Если время Aii нахождения ключа в положении 1 равно времени А/2 нахождения ключа в положении 2, то среднее значение напряжения на нагрузке равно 0. В общем случае напряжение на нагрузке, усредненное за период несущей частоты,.
Г'и Af, - Д<2 ^п, f— ~~~ ’
; де т—A/i + A/г — период несущей частоты.
Если при постоянной несущей частоте менять соотношение между А/i и Д/2 в соответствии с синусоидальным законом
(А/i- А/?)/т=ц sin <а8/, (4-1)
то среднее значение напряжения на нагрузке также будет меняться по синусоидальному закону:
uH, f =—gi-p.sin«V- (4-2)
3 *
115
В (4-1) и (4-2) приняты следующие обозначения: <i)s — круговая частота модуляции; т — период несущей частоты; ц— коэффициент глубины модуляции, который показывает, в каких пределах изменяются длительности интервалов и А£2 в течение периода частоты модуляции. При полной модуляции (ц=1) и А^2 изменяются от 0 до т и амплитуда среднего значения напряжения на нагрузке равна С7И/2. При произвольном значении [1 интервалы и А^2 изменяются за период частоты модуляции от 0 до р,т и вновь до 0. Амплитуда усредненного по несущей частоте напряжения при этом равна ц(/и/2. Если нагрузка имеет индуктивный характер, то ток в нагрузке близок к синусоидальному (рис. 4-1,6).
Таким образом, меняя значения параметров ц и Д, можно осуществлять независимое регулирование напряжения и частоты тока в нагрузке при постоянной несущей частоте и неизменном питающем напряжении.
4-2. СХЕМЫ ТИРИСТОРНЫХ ИНВЕРТОРОВ НАПРЯЖЕНИЯ
С ШИРОТНО-ИМПУЛЬСНОЙ МОДУЛЯЦИЕЙ
Принципиальная схема однофазного тиристорного АИН с ШИМ, соответствующая эквивалентной схеме на рис. 4-1,а, представлена на рис. 4-2 [132]. Здесь роль ключей выполняют тиристоры / и 2, которые коммутируются с помощью конденсатора С1 и С2 и индуктивности L таким образом, что при открывании тиристора 2 закрывается тиристор 1 и наоборот. Так как тиристоры обладают лишь односторонней проводимостью, то для пропускания обратного тока их необходимо зашунтпро-вать неуправляемыми вентилями 1' и 2'.
При формировании положительной полуволны тока проводит тиристор 1 и ток нагрузки потребляется от верхней по схеме половины источника питания. При открывании тиристора 2 происходит закрывание тиристора 1, однако ток нагрузки не может мгновенно изменить направление протекания, поэтому открывается вентиль 2' и ток возвращается в нижнюю половину источника питания. После изменения полярности тока в нагрузке проводит тиристор 2, а во время закрытого состояния тиристора 2 — вентиль
Когда открыт тиристор 2, ток нагрузки потребляется из нижней половины источника питания, когда открыт вентиль 1' — возвращается в верхнюю половину.
116
Закон модуляции для однофазного АИН соответствует (4-1), однако здесь ДА — время включенного состояния тиристора 1, или, что то же самое, время отключенного состояния тиристора 2; ДА— время включенного состояния тиристора 2 или время отключенного состояния тиристора 1.
Рис. 4-2. Однофазный тиристорный инвертор с ШИМ.
Рис. 4-3. Трехфазный тиристорный инвертор с ШИМ.
В качестве трехфазного АИН с синусоидальной ШИМ можно использовать схему, представленную на рис. 4-3. При работе этого АИН в режиме ШИМ тиристоры 1—6 переключаются попарно с несущей частотой fI{, а закон модуляции выбран таким образом, что средние значения фазных напряжений двигателя образуют симметричную трехфазную систему. В связи с этим исчезает необходимость в нулевом проводе и разделении источника питания на две половины.
Закон модуляции для фаз А, В, С трехфазного АИН может быть записан следующим образом:
——==!*sin(»^—2it'3); I (4-3)
---- -----p, sin (wst 2т:/3),
здесь ДА — время включенного состояния тиристора анодной группы.
Следует отметить, что в трехфазных АИН с ШИМ моменты коммутации тиристоров, формирующих напря-
117
жения различных фаз, могут быть никак не связаны между собой, т. е. пары тиристоров 1—2, 3—4, 5—6 могут работать независимо одна от другой и даже на разных несущих частотах. Единственным необходимым условием при этом является выполнение закона модуляции (4-3). Однако более рациональной будет такая система, в которой все тиристоры переключаются с одинаковой несущей частотой. Можно показать, что в этом случае лучше используется установленная мощность АЙН и двигателя, а система управления АИН более простая. Еще более систему управления можно упростить, если подавать открывающие импульсы одновременно на все три тиристора одной из групп (например, анодной группы). Закрывание же тиристоров будет происходить в разное время в соответствии с законом модуляции для каждой фазы. При этом для каждой фазы период несущей частоты начинается и заканчивается в один и тот же момент. Это приводит к улучшению формы тока в нагрузке, так как высшие гармоники напряжения различных фаз, кратные несущей частоте, не имеют фазового сдвига и исчезают из кривой выходного напряжения, если используется нагрузка без нулевого провода (см. § 4-7).
Инвертор напряжения, представленный на рис. 4-3, является наиболее простым, однако он обладает существенным недостатком, связанным с накоплением энергии в коммутирующих реакторах. Сущность этого явления заключается в следующем. При коммутации тока, например, с тиристора 1 на тиристор 2 ток в нижней полуобмотке реактора L1 возрастает до значения, превышающего ток нагрузки. После окончания процессов коммутации этот ток замыкается по контуру L1 — тиристор 2 — вентиль 2' — L1, имеющему большую постоянную времени. Так как указанный ток спадает довольно медленно, то между тиристорным мостом и мостом обратного тока устанавливается постоянно циркулирующий ток, который бесполезно загружает как тиристоры, так и неуправляемые вентили.
Отмеченный недостаток особенно заметно проявляется в АИН с ШИМ из-за высокой частоты переключения тиристоров, приводя к снижению КПД АИН и бесполезной загрузке вентилей свободно циркулирующими токами. В связи с этим рассмотренный АИН (рис. 4-3) может быть использован лишь для управления двигате-118
лями незначительной мощности (доли и единицы киловатт) .
Достаточно просты АИН с групповой коммутацией [124], в которых производится выключение одновременно всех тиристоров АИН. Однако обеспечить с их помощью режим синусоидальной ШИМ чрезвычайно трудно по двум причинам.
Во-первых, в АИН с синусоидальной ШИМ всегда •существует такой режим, когда в соответствии с законом модуляции интервал времени между коммутациями тиристоров разных фаз меньше, чем время протекания процесса коммутации. Вследствие этого сигнал на повторную коммутацию будет подан раньше, чем восстановится напряжение на коммутирующем конденсаторе, что приведет к срыву инвертирования. Можно ввести в систему управления дополнительное устройство, которое ограничит минимальное время между соседними коммутациями, однако это неизбежно приведет к искажению закона синусоидальной модуляции.
Во-вторых, так как коммутация всех силовых тиристоров производится одним коммутирующим устройством, а силовых тиристоров в АИН шесть, то коммутирующее устройство работает на шестикратной частоте по отношению к несущей частоте (в АИН с одним общим узлом коммутации, когда три тиристора анодной или катодной групп переключаются одновременно, эта частота будет четырехкратной). Несущая частота в инверторах с ШИМ достаточно высока, поэтому коммутирующее устройство оказывается в довольно тяжелом режиме.
Инверторы с междуфазовой коммутацией для работы с синусоидальной ШИМ непригодны, так как в этом случае, как отмечено ранее, необходимо обеспечить коммутацию тока между противолежащими тиристорами одной фазы.
Близкий к оптимальному процесс коммутации можно сформировать в АИН с двухступенчатой коммутацией, в которых кроме силовых тиристоров присутствуют вспомогательные, предназначенные для закрывания силовых тиристоров в заданный момент времени. Инверторы напряжения с двухступенчатой коммутацией могут быть выполнены по схеме с индивидуальной коммутацией, в которой к каждому силовому тиристору подключено свое коммутирующее устройство. Такие АИН
119
по своим свойствам близки к АИН на полностью управляемых вентилях [107]. Естественно, что в таких схемах можно осуществить любой закон коммутации тиристоров, в том числе и синусоидальную ШИМ. Однако эти схемы сложны и содержат большое число элементов.
Близкими по своим свойствам к АИН с индивидуальной коммутацией являются АИН с фазной коммутацией. Они проще АИН с индивидуальной коммутацией, но несмотря на это позволяют выключить силовой тиристор в любой момент времени путем включения соответствующего вспомогательного тиристора.
В заключение следует отметить, что при использовании АИН инверторов с двухступенчатой коммутацией возможны два различных принципа построения системы управления. В первом случае коммутируется с несущей частотой лишь тот силовой тиристор, для которого ток фазы двигателя в данный момент времени протекает в проводящем направлении. Противолежащий тиристор в это время выключен и управляющие импульсы на него не подаются. По истечении полупериода частоты модуляции ток в фазе меняет направление и в работу вступает противолежащий тиристор; первый тиристор в это время выключен и т. д.
Другой способ аналогичен рассмотренному выше для АИН на рис. 4-3, т. е. независимо от направления тока в фазе поочередно подаются управляющие импульсы на противолежащие тиристоры. Оба способа управления полностью идентичны по последовательности работы силовых тиристоров и форме выходного напряжения, так как независимо от того, подан управляющий импульс на тиристор или нет, он выключен, если ток фазы протекает по отношению к нему в непроводящем направлении. Однако первый способ требует более сложной системы управления, так как он предполагает наличие датчиков направления тока в нагрузке с соответствующей логической схемой, поэтому в дальнейшем будет рассматриваться лишь второй способ управления.
4-3. РАБОЧИЕ ЭЛЕКТРОМАГНИТНЫЕ ПРОЦЕССЫ В СИСТЕМЕ АВТОНОМНЫЙ ИНВЕРТОР НАПРЯЖЕНИЯ С ШИРОТНОИМПУЛЬСНОЙ МОДУЛЯЦИЕЙ —АСИНХРОННЫЙ ДВИГАТЕЛЬ
Так как различные АИН с синусоидальной ШИМ отличаются лишь цепями коммутации и характером протекания коммутационных процессов, то при допущениях, 120
аналогичных принятым в гл. 3, можно проанализировать рабочие электромагнитные процессы в общем виде на основании упрощенной схемы АИН, в которой опущены цепи коммутации, а тиристоры представляются идеалы ными полностью управляемыми ключами (рис. 4-4). Результаты анализа с достаточной степенью точности мож
но распространить на любой инвертор с ШИМ по синусоидальному закону. Расчет коммутационных электромагнитных процессов, разумеется, необходимо вести самостоятельно для каждого отдельного инвертора.
Кроме допущений, ко-
Рис. 4-4. Упрощенная схема инвертора с ШИМ без цепей коммутации.
торые обычно принимаются при анализе любых инверторов с отдельными от нагрузки коммутиру-щими конденсаторами
(см. гл. 3), для исследования АИН с синусоидальной ШИМ можно дополнительно принять следующие два до
пущения:
1) несущая частота во много раз больше частоты модуляции;
2) ток в фазах двигателя синусоидален; высокочастотными пульсациями тока можно пренебречь.
Как показала экспериментальная проверка, указанные допущения не приводят к существенным ошибкам, если е=Д{/К^8 -5—10, что в большинстве случаев выполняется.
В случае питания АИН от источника с односторонней проводимостью (выпрямитель) компенсация реактивной энергии, потребляемой двигателем, за счет сети невозможна. Основным показателем того, что реактивная энергия компенсируется внутри АИН, является однонаправленность тока, потребляемого АИН. В противном случае на шинах источника питания могут возникнуть перенапряжения, опасные для полупроводниковых вентилей. Чтобы избежать этого, на вход АИН подключают компенсирующий конденсатор значительной емкости, который заряжается, когда ток направлен от АИНкисточ-
121
нику, и разряжается, когда ток направлен от источника в АИН.
Для решения вопроса о компенсации реактивной, энергии в системе АИН—АД и расчета емкости компенсирующего конденсатора необходимо в первую очередь определить ток, потребляемый АИН и найти зависимость этого тока от тока и коэффициента мощности двигателя.
В результате анализа токов, усредненных по несущей частоте, в [70] получена формула, позволяющая определить среднее за период несущей частоты значение тока, потребляемого от источника питания:
__ 3
‘и, f — ~4~рЛ, mcos?n, (4-4),
где Is,m— амплитуда тока нагрузки; <psi — фазовый угол между первыми гармониками напряжения и тока нагрузки.
Из (4-4) следует, что усредненное по несущей частоте значение тока, потребляемого от источника питания, постоянно и положительно, поэтому не существует такого периода несущей частоты, на котором среднее значение тока, потребляемого от источника питания, имело бы отрицательное значение. Таким образом, что очень важно, в трехфазных АИН с ШИМ по синусоидальному закону реактивная мощность, усредненная по несущей частоте, скомпенсирована при всех значениях коэффициента мощности.
Анализ мгновенных значений токов позволил установить, что при <р81>л/6 существуют моменты времени, когда ток, потребляемый от источника питания, /и имеет отрицательное значение, т. е. ток направлен от АИН в источник. Следовательно, угол <рв1=зт/6 является тем граничным углом, до которого реактивная энергия в любой момент времени полностью компенсируется внутри АИН.
При питании АИН от источника с односторонней проводимостью (от выпрямителя) при фз1>л/6 возникает необходимость в установке на входе АИН компенсирующего конденсатора, который принимает энергию в моменты времени, когда ток направлен от АИН к источнику питания. Емкость компенсирующего кон-122
денсатора может быть найдена по следующей формуле:
(’иЛ
= (4-5)
где А/ — интервал времени, в течение которого ток направлен от АИН к источнику; A Uc — допустимое перенапряжение на конденсаторе.
Решив (4-5), получим [70]:
Анализ (4-6) показывает, что:
1) емкость компенсирующего конденсатора не зависит от выходной частоты, что хорошо согласуется с выводом, сделанным ранее на основании (4-5); это обстоятельство позволяет использовать АИН с ШИМ по синусоидальному закону для работы на весьма низких выходных частотах;
2) емкость компенсирующего конденсатора обратно пропорциональна несущей частоте. Благодаря тому что несущая частота достаточно высока, емкость компенсирующего конденсатора в АИН с ШИМ, как правило, меньше, чем в АИН без ШИМ [88].
4-4. ЭЛЕКТРОМАГНИТНЫЕ ПРОЦЕССЫ В СИСТЕМЕ ИНВЕРТОР НАПРЯЖЕНИЯ С ШИРОТНО-ИМПУЛЬСНОЙ МОДУЛЯЦИЕЙ — ДВИГАТЕЛЬ ПРИ РАБОТЕ АСИНХРОННОГО ДВИГАТЕЛЯ
В ГЕНЕРАТОРНОМ РЕЖИМЕ
При генераторном торможении электрическая энер-1ия с зажимов асинхронной машины передается в источник питания через обратные неуправляемые вентили АИН. Естественно, что в этом случае источник питания должен обладать двусторонней проводимостью, т. е. он должен работать в зависимости от режима асинхронной машины как источником, так и потребителем энергии.
При питании АИН с ШИМ от сети переменного тока через неуправляемый выпрямитель двусторонний обмен энергией между сетью и АИН не обеспечивается. В этом случае необходимо встречно-параллельное подключение второго комплекта выпрямителя, собранного на управ
123
ляемых вентилях и работающего в режиме инвертора, ведомого сетью. Две такие схемы — трехфазная нулевая и мостовая — представлены на рис. 4-5,а, б. Эти схемы напоминают схемы управляемых выпрямителей для реверсивного электропривода постоянного тока. Основное отличие заключается в том, что в данном случае напряжение на выходе выпрямителя [7И остается постоянным при всех режимах работы привода, в связи с чем выпрямитель, передающий энергию от сети к АД, может быть собран на неуправляемых вентилях. При работе АД в генераторном режиме напряжение на входе АИН с ШИМ также не меняется ни по значению, ни по знаку,
а изменяется направление тока в звене постоянного то-
ка, вследствие чего в работу
Рис. 4-5. Схемы питания инвертора с ШИМ, обеспечивающие двусторонний обмен энергией между сетью и инвертором.
а—трехфазная нулевая схема реверсивного выпрямителя, б — трехфазная мостовая.
вступает инвертор, ведо-мый сетью. Особенностью этого инвертора является то, что он работает с постоянным углом инвертирования [3. Регулирование напряжения на АД при работе его в генераторном режиме, так же как и при двигательном режиме, осуществляется с помощью изменения коэффициента модуляции АИН с ШИМ.
Выпрямители с дву-стороней проводимостью для питания АИН с ШИМ обладают рядом особенностей, поэтому остановимся подробнее на анализе этих схем и выведем основные соотношения, необходимые для их расчета.
Эквивалентная расчет-
ная схема выпрямителя с двусторонней проводимостью приведена на рис. 4-6. Здесь ев — ЭДС выпрямителя; ев и — ЭДС ведомого инвер
тора; /у в и iv и—уравнительные токи выпрямителя и ведомого инвертора. При анализе полагаем, что пульса-
124
циями напряжения на конденсаторе Со можно пренебречь. Это допущение не приводит к заметным погрешностям, так как пульсации неуправляемого выпрямителя невелики, а при расчете емкости конденсатора Со по (4-6) обычно задаются пульсациями, не превышающими 5—10% напряжения питания АИН 77и.
Рис. 4-6. Эквивалентная расчетная схема выпрямителя с двусторонней проводимостью.
В этом случае уравнительный ток в цепи выпрямителя z в, протекающий под действием разности напряжений — Пи, и уравнительный ток в цепи инвертора zv и, протекающий под действием разности напряжений. [7 — ев , могут рассчитываться отдельно [99]. Реакторы £в и Ли предназначены для ограничения уравнительных токов. Для того чтобы уравнительный ток имел начально-непрерывный характер, необходимо соблюдение следующего условия:
Е„ = Е „ = (4-7)
В в, И И* ' '
где Д, и Ев и — средние значения ЭДС выпрямителя ведомого инвертора соответственно.
Если Е.,^Ев и, то между выпрямителем и ведомым инвертором устанавливается уравнительный ток, который может достигнуть большого значения, так как он ограничивается лишь незначительным с(противлением контура, в который входят ЭДС выпрямителя, ЭДС ведомого инвертора и реакторы Д, и £и. Если Дв < Ев и, то уравнительный ток незначителен и „имеет прерывистый характер. Однако в этом случае при изменении направления тока в звене постоянного тока изменяется напряжение от Еп до Ев и, что, как правило, нежелательно.
125
Средние значения ЭДС выпрямителя и ведомого 11 инвертора связаны с действующими значениями пере- * менного напряжения на входе выпрямителя и ведомого I инвертора следующими известными соотношениями i [19].:
£BV2-^sin-^B; (4-8)
^H^l/^sin-^-cos^B.H- (4-9)
где Дв — действующее значение фазного напряжения, питающего выпрямитель, для нулевой схемы и действующее значение линейного напряжения для мостовой схемы; UB и — то же для инвертора, ведомого сетью; т — число фаз выпрямителя (инвертора).
Для расчета выпрямителя необходимо прежде всего определить напряжение питания АИН. В трехфазном АИН с ШИМ, так же как и в однофазном АИН [см. (4-2)], справедливо следующее соотношение:
= (4-Ю) J
i где (Д,ф,т—амплитуда основной гармоники фазного напряжения на выходе АИН с ШИМ для случая соединения нагрузки в звезду.
Переходя к действующему значению линейного на- |
пряжения на нагрузке, можно записать: :
Н-И) !
Формула (4-11) справедлива для соединения нагрузки как в звезду, так и в треугольник, так как линейное напряжение на выходе АИН не зависит от схемы соединения нагрузки. Пользуясь (4-11), можно рассчитать напряжение источника питания АИН с ШИМ:
9 И ? II
z Г Z 1'У, л, н
3 Р-тах
(4-12)
где Пз.л.н — поминальное значение линейного напряжения на статоре двигателя; цтаж— максимально допустимое значение коэффициента модуляции.
126
Для идеализированного АИН ртаж=1. Практически всегда цтаж<1, так как определенную часть периода несущей частоты занимают процессы коммутации. Рекомендации по расчету ц„1ах даны в § 4-6.
Угол инвертирования [3 необходимо принимать по-возможности меньшим, так как при этом улучшается кривая ЭДС ведомого инвертора, увеличивается коэффициент мощности, рекуперируемой в сеть, а также-улучшается использование тиристоров инвертора по напряжению*. Однако минимальное значение угла ограничивается условием устойчивого инвертирования при максимальном значении тока Д,т в звене постоянного-тока. Исходя из этого условия угол инвертирования может быть определен по следующей формуле [19]:
cos р = costocZB —
С, /тЛ-р
Г 2UB и sin п'т ’
(4-13)
где сое — угловая частота сети; Д — время выключения тиристора; хтр — суммарное индуктивное сопротивление рассеяния трансформатора и сети, приведенное к обмотке трансформатора, питающей ведомый инвертор.
Используя (4-7) — (4-9) и (4-13), можно определить напряжения на входе выпрямителя и инвертора, ведомого сетью:
(4-14)
ги
.z— т л
V 2 sin cos р
(4-15),
Остановимся подробнее на расчете уравнительных токов и выборе ограничивающих реакторов LB и Ьи. На рис. 4-7, а, б приведены кривые ЭДС ведомого инвертора ев и, напряжения в звене постоянного тока Ди и .уравнительного тока Z и, протекающего под действием разности этих двух напряжений. При расчете уравнительного тока активным сопротивлением в уравнительном контуре пренебрегаем, так как оно весьма незначительно,
* Здесь и далее угол р отсчитывается от предельной точки инверторного режима, сдвинутой на угол л относительно точки естественного открывания тиристоров.
127’
и считаем, что уравнительный ток ограничивается только реактором LK. В зависимости от угла инвертирования следует рассмотреть два случая [99].
Первый случай (рис. 4-7,а) соответствует малым углам инвертирования: В этом случае период
Рис. 4-7. Диаграммы ЭДС инвертора и уравнительного тока.
а — при малых углах инвертирования;
Ъ — при больших углах инвертирования.
уравнительного тока следует разбить на два уча-стка (I и II), причем на каждом из участков уравнительный ток описывается различными уравнениями.
Второй случай (рис. 4-7,6) соответствует большим углам инвертирования: Prp^₽s<90o. В этом случае уравнительный ток на всем периоде может быть описан одним уравнением. Для удобства рассмотрения на рис. 4-7 ЭДС ведомого инвертора и напряжение звена постоянного тока приняты положительными. Нетрудно показать, что для трехфазной нулевой схемы (т=3)
ргр=20°4Г.
Для мостовой схемы (m—Q)
ргр = ю°05/.
(4-16)
(4-17)
Для первого случая (О^ргС0Гр) максимальное значение уравнительного тока ведомого инвертора
У, и, т <оДи
128
f m
— arccos | — sin
(4-18)
Среднее значение этого тока
— arccos 1-^- sin-^- cos p j — tg [3 — p
(4-19)
Для второго случая (prp< p<90°)
у, И, m
— arccos
(— sin — cosfA-f-B-------— ctg — igB
n tn r / 1 1 m ь ь r
(4-20)
Зж/m—3
. tn C . J .
7y, И — J Hd®</ — соЛи
3
(4-21)
По (4-18)--(4-21) на рис. 4-8,а, б построены кривые, позволяющие определить индуктивность ограничивающего реактора Ди в зависимости от угла инвертирования р при заданном среднем или максимальном уравнительном токе / и, /у и т. Из рис. 4-8,а, б видно, что увеличение (5 приводит к увеличению тока при заданной индуктивности £и или к увеличению индуктивности ограничивающего реактора при заданном значении тока. 9—581 129
Ток в трехфазной нулевой схеме (рис. 4-8,о) в 4—8 раз превышает ток в трехфазной мостовой схеме (рис. 4-8,6).
На рис. 4-9 приведены кривые ЭДС неуправляемого выпрямителя ев, напряжения в звене постоянного тока и уравнительного тока выпрямителя гУ(В. В результате анализа кривой уравнительного тока выпрямителя
Рис. 4-8. Зависимости требуемой индуктивности ограничивающего реактора от угла инвертирования.
а — для трехфазной нулевой схемы; б — для трехфазной мостовой.
получена формула, позволяющая определить его среднее значение:
) __
'В ДТ"
(4-22)
Из (4-22) по заданному среднему значению уравнительного тока выпрямителя (как правило, следует принимать /у, в= Л, и) можно найти индуктивность ограничивающего реактора Lb-
Для трехфазной нулевой схемы (т=3)
L„ = 0,0828—^—. (4-23)
в ®с/у, в
Для трехфазной мостовой схемы (т=6)
л =0,0095-^2— (4-24)
В “сД, в
130
Для ряда электроприводов, где тормозной режим не имеет решающего значения, допускается использование для питания АИН обычного неуправляемого выпрямителя. При этом рекуперация энергии в сеть невозможна, однако АД может работать в генераторном режиме с ограниченными тормозными моментами за счет рассеивания эперг и инверторе. В этом случ .'!\'!ощсо iMpai’CHCTBo:
Рв = Л4«><
Рис. 4-9. Диаграмма ЭДС выпрямителя и уравнительного тока.
ни в виде потеть з зв.цителе ае должно соблюдаться сле-
И-25)
где Др — мощность на валу АД; .’Л и о — момент и скорость АД; ДРдв— потери в АД;ДР и — потери в АИН.
Если неравенство (4 25) соблюдается, то потери в системе АИН с ШИМ — АД покрываются частично за счет сети, а частично за счет электрической энергии, вырабатываемой АД. Если
М»>ДРдв + ДРи,
то энергия, вырабатываемая АД, превышает потери в системе, а так как рекуперация энергии в сеть невозможна, то избыток энергии идет на заряд конденсатора Со. При этом напряжение конденсатора резко увеличивается и может достигнуть значения, опасного для тиристоров АИН.
Если
М<о--=ДРдв + ДДи, (4-26)
то электрическая энергия, вырабатываемая АД, полностью расходуется на покрытие потерь в системе и ток, потребляемый из сети, равен 0. Этот случай является граничным, поэтому из равенства (4-26) может быть найдено максимально допустимое значение тормозного момента, который может развить АД без рекуперации энергии в сети.
На рис. 4-10 приведены механические характеристики АД типа А42-6 (РцОм=1,7 кВт) в области геператор-
9*
131
Рис. 4-10. Механические характеристики АД в области генераторного режима.
кого режима при ф=ф„ом=сопз1. Там же построена кривая граничного момента, рассчитанная в результате анализа потерь в АД и АИН. Область допустимых моментов лежит ниже кривой со штриховкой. Если моменты выше допустимых, неуправляемый выпрямитель закрывается и возрастает напряжение питания АИН 17и. На механических характеристиках отмечены экспериментальные точки, соответствующие граничному моменту. Эти точки получены при вращении АД с помощью вспомогательной нагрузочной машины, причем отмечались такие моменты АД, при которых ток, потребляемый от выпрямителя, становится равным нулю. Как видно на рис. 4-10, при высоких частотах допустимы незначитель
ные моменты (Л4*<0,2). При fs,<0,5 допустимый момент. увеличивается и при fs*<0,2 ограничение по моменту отсутствует, т. е. при /5*<0,2 при любом тормозном моменте, реально возможном для данного АД потери в системе АИН—АД больше, чем мощность на валу АД.
не. 4-11. Зависимости граничного момента АД от частоты статора в области генераторного режима без рекуперации энергии в сеть для ряда мощностей двигателей.
Рис. 4-12. Подключение тормозного резистора в схеме без рекуперации энергии в сеть.
132
На рис. 4-11 построены кривые граничных моментов в функции относительной частоты fs* для ряда АД единой серии. Характер кривых для всех АД приблизительно одинаков, однако с ростом мощности уменьшается относительный допустимый момент. Это объясняется тем, что с увеличением мощности привода уменьшаются относительные потери в АД и АИН.
Таким образом, генераторное торможение без рекуперации энергии в сеть достаточно эффективно лишь при малых частотах и для АД небольшой мощности.
Для увеличения допустимого тормозного момента в схеме без рекуперации энергии в сеть можно использовать включение на время торможения специального тормозного резистора Дт (рис. 4-12). Сопротивление этого резистора должно выбираться таким образом, чтобы во время торможения не происходило запирация выпрямителя, т. е.
А\т г ,
1И, max
где /и т<7(. — максимальное значение постоянного тока, направленного во время торможения от АИН к выпрямителю.
Ток /и т может быть рассчитан с помощью (4-4). Однако такая схема может быть использована лишь для АД небольшой мощности и при сравнительно редких тормозных режимах, так как этот способ торможения связан с выделением значительных потерь энергии в тормозном резисторе Дт.
4-5. ОСОБЕННОСТИ КОММУТАЦИОННЫХ ЭЛЕКТРОМАГНИТНЫХ ПРОЦЕССОВ В ИНВЕРТОРАХ НАПРЯЖЕНИЯ С ШИРОТНОИМПУЛЬСНОЙ МОДУЛЯЦИЕЙ
Для коммутационных процессов в АИН с ШИМ характерны следующие основные особенности.
Если в обычных АИН в интервале между двумя коммутациями тиристора ток в фазе АД, подключенной к данному тиристору, дважды изменяет свое направление, то в АИН с ШИМ тиристор многократно коммутируется при одном направлении тока нагрузки, пропуская полуволну синусоиды тока АД. В АИН с ШИМ нет поочередного переключателя тока нагрузки с тиристора
133
анодной группы на тиристор катодной группы и наоборот. Здесь тиристор анодной группы, осуществляя ряд коммутаций, пропускает положительную полуволну тока нагрузки и лиш, при изменении направления тока вступает в работу тиристор катодной группы.
В АИН без ШИМ при постоянном напряжении питания и неизменных пз.паметрах нагрузки коммутируемый ток постоянен. В АИН с ШИМ коммутируемый ток непрерывно меняется, в результате пего расчет коммутационных процессов с’.тпествсп.чо усложняется. Для устойчивой паботы АИН с ШИМ. необходимо рассчитать параметры коммутирующие: элементов таким об; а-зом. чтобы обеспечить надежную коммутацию амплитудного значения тока нагрузки ([..
Коммутационные процессы в АИН с ШИМ во многом определяют энергетические и регулировочные свойства АИН, а также вследствие высокой частоты коммутации оказывают существенное влияние на загрузку вентилей по току. Анализ коммутационных процессов в АИН с ШИМ с целью расчета параметров элементов коммутирующего устройства и определения основных технико-экономических показателей АИН может быть выполнен с помощью расчетных соотношений, приведенных в гл. 3.
4-6. РАСЧЕТ ТОКОВ И НАПРЯЖЕНИЙ ДЛЯ ОСНОВНЫХ ЭЛЕМЕНТОВ ИНВЕРТОРА НАПРЯЖЕНИЯ С ШИРОТНОИМПУЛЬСНОЙ МОДУЛЯЦИЕЙ
На основании уравнений, выведенных при анализе рабочих и коммутационных электромагнитных процессов в АИН с ШИЛА, можно получить соотношения, позволяющие рассчитать средние значения токов в различных элементах схемы АИН. Расчет средних значений токов удобно проводить отдельно для рабочих и коммутационных токов с последующим их суммированием. Коммутационные составляющие токов необходимо определять для конкретной схемы АИН по методике, приведенной в 3-11. Расчет рабочих токов справедлив для любого АИН с сип усоидальной ШИМ и может быть выполнен на базе обобщенной схемы АИН (см. рис. 4-4).
Среднее значение рабочего тока через силосон тиристор. Пусть несущая частота fK в е раз выше частоты модуляции К и за начало координат принят момент. 134
когда ток нагрузки (фазы двигателя) проходит через нуль.
Будем считать, что в начале каждого периода несущей "частоты открывается силовой тиристор и пропускает ток нагрузки. Через определенное время силовой ти-оистор закрывается и ток нагрузки протекает через вентиль обратного тока. Диаграмма рабочего тока через силовой тиристор приведена на рис. 4-13,а.
Рис. 4-13. Диаграммы рабочего тока в вентилях инвертора с ШИМ. а — ток силового тиристора; б — ток диода обратного моста; 0, 1, 2, . . ., п, . . . . . е/2 — I — порядковые номера периодов несущей частоты.
Мгновенное значение тока нагрузки в начале п-го периода несущей частоты
г . 2те
I s,n = 4>mSln — П,
где п—порядковый номер периода несущей частоты, отсчитываемый от начала координат.
Мгновенное значение тока нагрузки в момент закрывания силового тиристора для п-го периода несущей частоты
i"s, n=ls, т sin (2лп/е + й.,А(1и),
где Д(1П — продолжительность включенного состояния силового тиристора в течение л-го периода несущей частоты.
В соответствии с синусоидальным законом модуляции
-у-[1 Д-psin (2г.п Д -НЛ
•35
Тогда среднее значение тока через тиристор за время его открытого состояния в zi-м периоде несущей частоты
Ar, (*’s, п s, т sin ---!“%“ j 1 Ь
4-p.sin cos <-J-11 4-p.sin .
\ /Ji I L \ J J J
Среднее за период частоты модуляции значение тока через тиристор
е/2—1 е/2—1
/,=4- g Х £ sinj-^+к [1 + п=0 л=0
, . /2лл । \]] п Г, . . /2лч .
+ (*sin — +<f>s cos— 1 4-p.sm —+<ps ) X
\ /JI L \ / >
x[l+^sin(^+^j. (4-27)
Учитывая, что в большинстве случаев несущая частота существенно выше частоты модуляции, формулу (4-27) можно упростить. Положив в (4-27) е-> сю, получим: тс
Л TXT J sin 11 + Р sin Ы + %)1 о
или после преобразований
(4-28>
Расчеты показывают, чго (4-28) можно пользоваться при еХ6. При е=6 погрешность расчетов по (4-28) по сравнению с (4-27) не превышает 6%.
Если АИН должен работать при весьма низкой выходной частоте, то наиболее тяжелым режимом для тиристора будет случай, когда он в течение длительного времени коммутирует амплитудное значение тока нагрузки. Тогда среднее значение рабочего тока через тиристор
(4-29)
136
Среднее значение тока через диоды обратного тока. Диаграмма рабочего тока через диод обратного тока приведена на рис. 4-13,6.
Среднее значение рабочего тока через диоды обратного тока при
Т 1 С 1 ’ J. ^2 Л j.
/п = -й~ I Л —awst,
о
где Л?2 — часть периода несущей частоты, в течение которой ток нагрузки проводит вентиль обратного тока.
После преобразований
= (4-30>
В режиме максимальной загрузки вентиля при работе АИН на весьма низких частотах (доли герца)
/д--^(1-(*). (4-31)
При выборе вентилей из двух значений среднего тока, полученных по (4-30) и (4-31), следует взять большее.
Зная среднее значение тока через вентиль, можно ориентировочно выбрать тип вентиля. Разумеется, такой выбор носит лишь предварительный характер, однако вследствие ограниченности шкалы номинальных токов силовых полупроводниковых вентилей в большинстве случаев можно остановиться на предварительном выборе вентиля по среднем}' значению тока через него.
Выбор ио напряжению тиристоров и диодов АИН следует производить, ориентируясь па максимальные значения прямого и обратного напряжения, приведенные в гл. 3. Предварительно по номинальному напряжению АД необходимо рассчитать напряжение источника питания АИН
В соответствии с (4-12)
п = f-Д.
11 Из Ш'.тсл-
Теоретически, как отмечалось, максимальное значение коэффициента модуляции равно 1. Однако практически оно всегда несколько ниже из-за того, что максимальное время открытого состояния силового тиристора не может быть равно периоду несущей частоты (так же
137
как и минимальное время открытого состояние тиристора не может быть равно 0), так как определенную часть периода несущей частоты занимают коммутационные
процессы.
При уменьшении напряжения на
выходе инвертора
Рис. 414. к определению максимального значения коэффициента модуляции. а — для максимального времени от крытого состояния тиристора /, б --для минимального времени о-ь.-ры-того состояния тиристора 1. Арабскими цифрами обозначены номера вентилей, открытых на данном интервале времени. Соответствие между цифрами и обозначениями на схеме рис. 3-13; J — T2; 2 — Т4; 1-Д1- 2 — Д2- 7—77; 8 — ТЗ.
для получения того же самого P's,л, н, как видно из (4-12), приходится увеличивать напряжение источника питания и, следовательно, выбирать вентили на более высокое напряжение. С помощью диаграмм коммутирующего тока, приведенных на рис. 4-14 для инвертора по схеме рис. 3-13,а, можно определить практически достижимый коэффициент МОДУЛЯЦИИ Цтах- Как видно из диаграммы рис. 4-14,а, построенной для случая, когда время открытого состояния тиристора 1 равно максимально допустимому, тиристор 1 закрывается, а вентиль 2' открывается через время h с момента подачи импульса управления на вспомогательный тиристор 7, где /j — продолжительность ком .нутационною интервала /. Импульс управления па тиристор 8, являющийся командой на закрывание тиристора 2 и повторное открывание ти
ристора 1, не может быть подан раньше, чем тиристор 7 закроется и восстановит свои запирающие свойства. В противном случае произойдет короткое замыкание источника питания через открывающийся тиристор 8 и не успевший восстановить свои запирающие свойства тиристор 7. Через время Zj после открывания тиристора 8 откроется вентиль Г и начнется следующий период несущей частоты.
138
Таким образом, максимально возможное время открытого состояния силового тиристора 1 в течение периода несушсй частоты
AZimax1—Т (/д + Т" ^j) 2^в>
где — продолжительность II коммутационного интервала; %,— время выключения вспомогательного тиристора.
Из диаграммы рис. 4-14,6, построенной для случая, когда время открытого состояния тиристора 1 равно минимально допустимому, видно, что минимально возможное время открытого состояния тиристора 1 &ilmin= —^п+ /в+
Следовательно, максимальное значение коэффициента модуляции
Ыах - —1 - 4/Л- (4-32)
Из (4-32) следует, что с увеличением несущей частоты уменьшается максимально возможное значение коэффициента модуляции, что приводит к ухудшению использования тиристоров по напряжению. Например, при )в= ==25 мкс и /к—1000 Гц цтсг.=0,9, что соответствует снижению использования тиристоров по напряжению на 10%.
4-7. ГАРМОНИЧЕСКИЙ АНАЛИЗ КРИВЫХ ВЫХОДНОГО НАПРЯЖЕНИЯ ИНВЕРТОРА НАПРЯЖЕНИЯ С ШИРОТНОИМПУЛЬСНОЙ МОДУЛЯЦИЕЙ. ПОТЕРИ В ИНВЕРТОРЕ И ДВИГАТЕЛЕ
Для определения основных характеристик АД (момент, ток статора, КПД) при питании его от АИН с ШИМ необходимо знание •значений высших гармоник напряжения и тока, возникающих при шпротно-импульсном методе формирования напряжения на АД. Кривые тока, фазного и линейного напряжений АД для различных значений частоты модуляции и постоянной несущей частоты, равной 400 Гц, представлены на осциллограммах рис. 4-15,а—г и 4-16,а—г.
Осциллограммы па рис. 4,15.а—г сняты при включения обмоток АД в звезду с. нулевы'1 проводом. На рпс. 4- 15.,г частота модуляции ” зг'. 50 Гц, иа рис. 4-15,6 — 5 Гц; на рис. 4-15,в — 0,1 Гц; па рае. 1-15,г — модулирующий сигнал отсутствует. uv;(— фазное на-|по,.-!<ен1;е АД; и,.л — линейное напряжение АД; /,.ф —фазный ток. Фазное игшряжсгпе АД при вклю'|е::ш1 его в звезду с нулевым проводом предо।авляет собой последовательность двухполярных импульсов с амплитудой ’'ч-'2 и переменной длительностью, промодулиро-ванной в соответствии с синусоидальным законом. Форма фазного
139
**7WM***W*WVU
w«»t-n. ....Х/^^^уии*адшиииыци<иц»мцм».^ч.
......................................... i-riim,, —-ХЧ- ,.,,ит1ЯЮТМПИМ»14
•“~«*«ЧИ«МЛМИИМШИИ1ИИМ«Ш«»«-^»_ ^S,A fj}
Рис. 4-15. Осциллограммы напряжений и токов АД при включении его обмоток статора в звезду с нулевым проводом. Несущая частота 400 Гц.
а — частота модуляции 50 Гц; б — частота модуляции 5 Гц; в — частота модуляции 0,1 Гц; г — без модулирующего сигнала.
напряжения в этом случае полностью совпадает с напряжением на выходе однофазного АИН с ШИМ (рис. 4-1,6).
Осциллограммы на рис. т-16,а—г сняты при включении обмоток АД в звезду без нулевого провода. На рис. 4-16,а частота модуляции равна 50 Гц; на рис. 4-16,6 — 5 Гц; на рис. 4-16,а — 0,1 Гц; па рис. 4-1б,г — модулирующий сигнал отсутствует. Фазное напряжение при отсутствии нулевого провода имеет более сложную форму. Здесь в различные части периода частоты модуляции напряжение имеет форму как однополярных, так и двухполярных импульсов переменной длительности, причем положительные и отрицательные импульсы могут иметь два различных уровня, а именно 1 ЗГ'И 2/ЗГ’и> 140
11 s л
11ГП'1'1‘Н11|И11Ц11П Irrllll------------------|“*— - -----------------..........................
1 11ИИ11-‘"1“"Г”.................................................... .«.HHMtMMUHMO
6)
HWHMKWUWimi ««» aSJJ ......
«WWtUWWttwwWUMtWWMjtMUiiiiHliHHH»»».....•l''WWVWW}IWHUUHWiUUU4HWw»*»**’<
«чмни«ииШЖ*ШМчМ<Ц1м*Мни>м~>~ в)
Рис. 4-16. Осциллограммы напряжений и токов АД при включении его обмоток статора в звезду без нулевого провода. Несущая частота 400 Гц.
а — частота модуляции 50 Гц; б — частота модуляции 5 Гц; в — частота модуляции 0,1 Гц; г — без модулирующего сигнала.
Линейное напряжение во всех случаях имеет форму однополярных импульсов переменной длительности с амплитудой ии.
Анализ гармонического состава напряжений АД начнем с кривой фазного напряжения при наличии нулевого провода (рис. 4-1,6 и 4-15,а—г). Для исследования частотных спектров напряжения, модулированного широтно-импульсным способом, удобно использовать двойные ряды Фурье [75]. Кривую фазного напряжения «8,ф(0 можно представить в виде функции двух переменных F(x, у), где
141
x = <nKt и здесь а>к=2л/к— угловая несущая частота; со5 =
= 2л)8— угловая частота модуляции.
Закон изменения длительности положительных импульсов напряжения в соответствии с (4-1) имеет вид:
Д/j = (1 + p.sin<os/).
Умножив обе части равенства на сок, получим:
01 = л+лр sin <nst, (4-33)
где 0, — угловая продолжительность положительного импульса напряжения на несущей частоте;
02=2л—01,
здесь 02 — угловая продолжительность отрицательного импульса напряжения на несущей частоте.
Любую кусочно-гладкую функцию двух переменных F(x, у), периодичную относительно переменных х и у, можно представить при помощи двойного ряда Фурье:
00
F (х, «/) = (Ло„ cos 4- B„nsinny) +
n=l
QO
4- J] (Лто cos ту + Bmtt sin ту) 4-т=1
00 ±00
+ [Лт> п cos (их + пу) 4- Вт, „ sin (их 4- пу)], (4-34)
т=1 п=±1
где
2тс 2тс
j J F (х, t/) cos (ш + ny} dx dyt о о
2ic 2n:
Bm, Г( = J [ F (X, у) sin (mx 4- ny) dx dy. о 0
I
(4-35),
Используя комплексную форму записи и учитывая, что «У(ф (0 = ^W2 ПРИ 0> > Si.
= —Цд/2 при 9, ><ок/ > 2л,
получаем:
Лт, п + 1^т. и —
"2тс01 и
\d (тх+п!П dx dy—
• о о
142
2х2? 11 п
— \ — е1 vnx + ny) ,/у
0 0,
Подставляя значение 01 нз (4-37) и производя преобразования, получаем окончательно:
СО р/’И <1 и и
'X Ф (0 = ~2~ sin a>st + s1n ,пи>^ +
m=l
ОО Л= + оО у
+ (—i)m+ra + 1 J(! (M sin (и<ок + n<as) t, (4-36)
m=l л——oo
где Jn — функция Бесселя первого рода.
Таким образом, в кривой фазного напряжения при наличии нулевого провода кроме основной гармоники с частотой модуляции присутствуют гармоники с частотой, кратной нссу,цей частоте, и комбинационные гармоники. Частота комбинационных гармоник равна сумме или разности частот, кратных несущей частоте и частоте модуляции.
Перейдем к рассмотрению гармонического состава трехфазного выходного напряжения инвертора с ШИМ.
Пусть (4-36) соответствует напряжению фазы А. Тогда, произведя замену ы.Т на <nst—2п/3 и cos/+2n;/3, получим формулы гармонического ряда для напряжений фаз В и С при наличии нулевого провода:
оо Т!
Vй./,
«во (0 = —2~sin — 2"/3) + ZJ пт s п ™“kZ +
00 Q0 у
+S S
m=l л=—oo
Г 2т: "|
X sin (wzcoK + лсо?) t — — п ; ( >37)
00 г 1
«со (0 = -2~sin + 2л/3) + s;n mU)Kt + m=l
00 00 и
+ S L ^bnm+n+1Jn(^)X
m=l n=— oo
Г 2л 1
X sin J (m<oK + rt(os) t + — n . (4-38)
143
Анализируя (4-36)—(4-38), можно заметить, что гармоники напряжения с частотой, кратной несущей частоте, образует нулевую последовательность напряжений. Комбинационные гармоники при п—0, ±3, ±6........±3 k, где k — произвольное целое число, также
образуют нулевую последовательность; при п=±3 &+1—прямую последовательность; при га=+3 k—1 — обратную последовательность. Линейные напряжения
UsAB =U,A0---иаво;
ия в С = UsBO-WsCOl
WsCA = W«C0-WsAO
по гармоническому составу отличаются от фазных напряжений отсутствием гармоник нулевой последовательности и увеличением всех остальных гармоник в И 3 раз.
Рис. 4-17. Гармонический состав фазного напряжения АД при питании его от инвертора с ШИМ.
а — отношение несущей частоты к частоте модуляции.
Фазные напряжения в системе без нулевого провода также не имеют гармоник нулевой последовательности, поэтому кривая фазного тока АД в системе без нулевого провода имеет более благоприятную форму, что наглядно подтверждается сравнением осциллограмм рис. 4-15,а—г и 4-16,а—г. Отсюда следует, что включение обмоток двигателя в звезду с пулевым проводом при питании его от АИН с ШИМ нецелесообразно.
144
Линейные напряжения иа выходе АИН одинаковы для всех случаев, независимо от схемы включения обмоток двигателя.
По приведенным выше соотношениям на рис. 4-17 построены кривые, которые представляют собой зависимость амплитуды гармонических составляющих фазного напряжения Hv>s>n; от коэффициента модуляции при различных v, где v— порядковый номер высшей гармоники. Кривые построены для случая включения обмоток АД в звезду без нулевого провода. При включении АД в треугольник амплитуды всех гармоник должны быть увеличены в К3 раз.
Потери в АД от высших гармоник при питании его от АИН с ШИМ зависят от соотношения между несущей частотой и частотой модуляции и могут быть сведены до минимума путем увеличения несущей частоты. Однако увеличение несущей частоты приводит к увеличению потерь в АИН, поэтому для АИН с ШИЛУ большое значение имеет правильный выбор оптимального значения несущей частоты, для которого суммарные потери в системе АИН — АД минимальны.
В [70] показано, что оптимальное соотношение между несущей частотой и частотой модуляции лежит в пределах е-= 8-н10. Это означает, что для АД единой серии, регулируемого частотным методом с помощью АИН с ШИМ, при максимальной частоте модуляции, равной 50 Гц, оптимальное по потерям значение несущей частоты составляет 400—500 Гц. Режимы С е<6 нежелательны, так как при этом резко возрастают потери в системе АШ1 — АД за счет увеличения потерь в двигателе. При е>10 потери возрастают не столь существенно, однако с увеличением е уменьшается максимально допустимое значение коэффициента модуляции и ухудшается использование напряжения источника питания [см. соотношения (4-32) и (4-12)].
4-8. СИСТЕМЫ УПРАВЛЕНИЯ АВТОНОМНЫМИ ИНВЕРТОРАМИ НАПРЯЖЕНИЯ С ШИРОТНО-ИМПУЛЬСНОЙ МОДУЛЯЦИЕЙ
Система управления АИН с ШИМ должна выполнять следующие основные функции:
1) обеспечивать плавное регулирование выходной частоты от 0 до максимального значения при сохранении неизменного фазового сдвига 2л/3 между первыми гармониками выходных напряжений различных фаз во всем диапазоне регулирования частоты;
2) осуществлять бесконтактный реверс АД при переходе частоты через нуль;
3) обеспечивать плавное регулирование коэффициента модуляции от 0 до Цтах, что соответствует регулированию выходного напряжения от 0 до максимального значения;
4) закон модуляции должен макс.чма.ишо приближаться к синусоидальному.
При разработке систем управления АНН с ШНМ ввиду их сравнительной сложности следует ио возможности шире использовать интегральные микросхемы и унифицированные устройства на их базе, так как это позволит уменьшить габариты системы, повысить ее надежность и существенно упростить технологию серийного изготовления и наладки.
10—581 145
Система управления, как правило, содержит два основных блока: задающий генератор и блок модуляторов. Задающий генератор вырабатывает трехфазную систему синусоидальных управляющих напряжений с регулируемыми амплитудой и частотой. Амплитуда управляющего напряжения определяет коэффициент модуляции и выходное напряжение АИН; частота управляющего напряжения определяет частоту модуляции или частоту выходного напряжения
Рис. 4-18. Схема задающего генератора, построенная по принципу стробирования.
ЛИН. Управляющие напряжения подаются на б.иж модуляторов, который в соответствии с амплитудой и частотой управляющего стлала осуществляет широтно-импульсную модул щпю сигналов управления, открывающих в необходимый момент времени тиристоры АИН.
Схема одного нз возможных вариантов задающего генератора представлена на рис. 1-18. В ней используется эффект стробирования вспомогательного однофазного синусоидатьн ио напряжения с помошыо трехфазной системы импульсов близкой частоты. Источником синусоидального напряжения является генератор синусоидальных колебаний ГСК, частота которого постоянна. Амплитуда этого напряжения изменяется с помощью управляющего с игпа лп и На выходе генератора стробирующих импульсов ГС’! формируются узкие прямоугольные импульсы, частоту которых можно изменять 146
с помощью управляющего сигнала в пределах от 3(/с,г—/в) Дс где fc,r — частота синусоидального генератора. Пересчет-ная’кольцевая схема, собранная на триггерах D1—D3, служит для распределения этих импульсов по трем каналам, после чего они используются для управления тремя схемами выборки н хранения, в которые входят аналоговые ключи А1—АЗ и операционные усилители А4—А6.
Из пеняя сигналы «„ f и и. ,,, можно осуществлять тезынсимо У> / У> г-
регулирование частоты и амплитуды управляющих напряжений «у,л, Uy,в, и7,с< форма которых весьма близка к синусоидальной. Поскольку частота этих напряжений определяется как разность между частотой генератора ГСК и частотой коммутации ключей, то ее стабильность довольно низкая. Это является основным недостатком рассмотренной схемы.
Свободной от указанного недостатка является схема задающего генератора, представленная на рис. 4-19. Эта схема работает по принципу аппроксимации синусоидального сигнала многоступенчатой кривой. Задающий генератор управляется положительными прямоугольными импульсами, подаваемыми на входы вперед ВП нли назад ИЗ в зависимости от требуемого порядка чередования фаз. Частота выходных управляющих напряжений иу,л, иу,в, «у.е пропорциональна частоте синхронизирующих импульсов, поступающих от генератора ГСП. Синхронизирующие импульсы управляют восьмиразрядным реверсивным кольцевым счетчиком, собранным на микросхемах D1 и D2. С помощью вентилей D4, D5 и триггера иа микросхемах D6, D7 обеспечивается исключение запрещенных состояний кольцевого счетчика.
Полный цикл работы кольцевого счетчика соответствует 1 /2 периода выходного сигнала. Каждые 1/4 периода на вход реверсивного счетчика D3 поступают управляющие импульсы, причем направление его переключения определяется тем, по какому каналу (ВП нли НЗ) пришел входной импульс. Состояние счетчика D3 определяет программу работы логической схемы (D8—D15), управляющей цифро-аналоговым преобразователем ЦАП, собранным па ключах А1—А9, резисторах R1—R8 и операционных усилителях А10, All. Усилитель А10 служит для суммирования токов через резисторы R1—R8, а АП позволяет изменить полярность выходного сигнала.
Логическая схема D8—D15 может работать в двух режимах: в режиме формирования синусоидального или косинусоидального сигнала. Это зависит от значения логической переменной Х13. Допустим, что Х13=1, что соответствует режиму формирования синусоидального сигнала. Тогда во время первой четверти периода выходной частоты на входы ключей А1—А8 через логическую схему поступают сигналы XI—Х8 с инверсных выходов кольцевого счетчика. Во время второй четверти периода на А1—А8 поступают сигналы с прямых выходов XI—Х8, что приводит к изменению последовательности коммутации ключей на обратную (см. диаграммы на Рчс. 4-20,а). Программа работы ключей в третьей и четвертой четвертях аналогична соответственно работе в первой и второй четвертях, только при этом с помощью ключа А9 меняется полярность выходного напряжения.
При изменении сигнала Х13 схема работает аналогично, по со сдвигом на 1/4 периода. Для одновременного формирования на выходах задающего генератора как синусоидального, так и косипусои-
10*
147
дального сигнала служит коммутатор (логические элементы D16— D27) и две схемы выборки и хранения (ключи А12, А13 и операционные усилители А14, А15). Коммутатор обеспечивает изменение сигнала Х13 с высокой частотой, существенно превышающей частоту на входе задающего генератора. Он содержит генератор частоты коммутации (D16—D19) и логическую схему на элементах D20—D27, предназначенную для исключения влияния переходных процессов в преобразователе ЦАП на форму выходного напряжения задающего генератора и для исключения одновременного замыкания ключей АГ2 и А13. С этой целью схемы выборки и хранения управляются сигналами Х14 н Х15, имеющими скважность 1/4 и расположенными относительно сигнала Х13, как показано на диаграмме рис. 4-20,6. С помощью суммирующих усилителей А16 и А17 двухфазная система синусоидальных напряжений преобразуется в трехфазную.
Рассмотренная схема задающего генератора может быть практически реализована на восемнадцати микросхемах серии 155, четы-
Рис. 4-19. Схема задающего генератора, построенная по принципу 148
рех аналоговых ключах типа К284КН1 и шести операционных усилителях типа К1УТ531А.
Приведенные схемы задающего генератора могут также использоваться в системах управления ТПЧ с непосредственной связью, имеющими квазисинусоидальную форму выходного напряжения (см. гл. 6).
На рис. 4-21 представлена схема блока модуляторов, который предназначен для управления силовыми и вспомогательными тиристорами АИН с двухступенчатой коммутацией (см., например, рис. 3-13,а). Часть схемы, собранная на логических элементах D1— D10, операционном усилителе А2 и аналоговом ключе А1, является общей для всего АНН, а часть, собранная на элементах D11—D15 и Аз, принадлежит тиристорам фазы А. Для управления тиристорами фаз В и С необходимы еще две идентичные схемы.
Блок модуляторов содержит генератор опорной частоты D1—D3, частота которого в 32 раза больше несущей частоты, пятиразрядный двоичный счетчик D4—D5, схему формирования промежуточных логических сигналов D6—D10, генератор пилообразного напряжения
аппроксимации.
149
Рис. 4-20. Диаграммы состояний элементов и напряжений задающего генератора по схеме рис. 4-19.
а — ЦАП; б — коммутатор.
Al, А2, компаратор АЗ, одновибратор D12—D14 и логическую схему формирования управляющих сигналов для тиристоров. Предполагается, что на выходы блока модуляторов подключены светодиоды оптронов, которые управляют тиристорами АИН. Таким образом, наличие управляющего сигнала на тиристоре соответствует нулевому логич''скому сигналу па соответствующем выходе.
Управляющий сигнал на выходе D10 служит для одновременного открывания всех вспомогательных тиристоров катодной группы Т8, Т10, Т12 и для синхронизации генератора пилообразного на-150
пряжения. По истечении одного периода опорной частоты, что соответствует времени t3, управляющий сигнал с тиристора Т8 снимается и подается на Т1 (рис. 4-22). Сигнал на Т1 присутствует до тех пор, пока не сработает компаратор (компаратор срабатывает, когда сравниваются напряжение на выходе генератора пилообразного напряжения «г.п.н и сумма напряжений смещения (7СМ и управления иу,л) и сигнал на его выходе примет нулевой логический уровень (Х7 = 0). Одновременно со снятием управляющего сигнала с Т1 запускается одновибратор, который в течение времени С обеспечи-
Рис. 4-21. Схема блока модуля'10ров.
вает наличие управляющего сигнала Т7. По истечении этого времени сигнал подается на Т2 и остается на нем до тех пор, пока вновь не включится Т2.
Для исключения срывов инвертирования при превышении максимально допустимого коэффициента модуляции независимо от состоя-ию компаратора управляющий сигнал на Т1 подается в теченис-о,т । периода опорной частоты после снятия управляющего сигнала <’ Т8 и запрещается подача управляющего сигнала на Т1 в тече-н к .чух периодов опорной частоты до подачи сигнала па 7’3. Такое по.! роение схемы кроме повышения надежности работы инвертора даст возможность авт магического перехода при работе на высоких частотах от синусоидального закона модуляции к трапецеидальному, что несколько улучшает использование тиристоров АИН по напряжению
Асинхронный электропривод, управляемый АИН с ШИМ, как и любой электропривод с частотным управлением, помимо системы управления АНН содержит систему регулирования, обеспечивающую взаимосвязанное изменение частоты и напряжения на двигателе в статических и динамических режимах и тем самым формирующую требуемые характеристики электропривода. В простейшем случае система регулирования может состоять из задающего органа и не-151
линейного (или линейного) блока, обеспечивающего связь между частотой и напряжением. Однако такие системы не позволяют обеспечить высокое качество статических и динамических характеристик при широком диапазоне регулирования скорости. Наилучшие результаты могут быть получены с помощью систем, в которых осуществляется обработка информации о состоянии двигателя в каждый момент времени и формируется ток двигателя, имеющий требуемые
Т2=Т7-Тв-Т1
Рис. 4-22. Диаграмма напряжений в схеме блока модуляторов.
бенностью является то, что на выходе системы регулирования формируются сигналы, которые можно непосредственно использовать для управления модуляторами и, таким образом, необходимость в задающем генераторе отпадает.
Принцип работы системы «Тгаii:>vektor» основан па использовании регуляторов, которые обеспечивают необходимое мгновенное значение основных переменных машины в функции ее состояния в соответствии с дифференциальными уравнениями приведенной двухфазной машины. Использование системы координат, вращающейся синхронно с результирующим вектором иотс.косцеплений ротора, позволяет существенно упростить дифференциальные уравнения и соответственно структуру системы регулирования п обеспечить раздельное регулирование момента и потока при высоком качестве переходных процессов. Дифференциальные уравнения асинхронной машины в выбранной системе координат имеют следующий вид:
4 <ЛРГ, х , / L-o \ dis>x
Lr dt p dt
152
+ — £ у ls, + Ms, v; (4-40)
dVr х 1 Lo
0 = -^ + — ^r.x-^r.—is,x; (4-41)
d4Sr.y . 1 Lo
n = “17- + — Фг .u + ’Pr. A - ~Y^ i,:, ('4-42)
4f = ~ рп -!ц- (Us , xis,,, — Ф,. _ s/p _ x); (4-43)
Is.x, Is,у — co-потокосцепле-= <Ds—w — круговая — активное сопротивление статора;
здесь ив,х, us,y — составляющие напряжения статора; ставляющие тока статора; 'JC.x, ЧС.у— составляющие ний ротора; М — электромагнитный момент; частота скольжения ротора;
Ls, LT — полные индуктивности статора и ротора; 'I'T = LrtrT— электромагнитная постоянная времени ротора.
Сориентировав ось х по направлению результирующего вектора потокосцепления ротора, получим Чгг>х= |ЧГГ|; Чгг>у = 0. Тогда уравнения (4-39) — (4-43) примут следующий вид:
^|ФГ|
L, dt
L-.
Ш
у )
dt
(4-44)
\ ' dis
dt
(4-45)
. г/|Фг| |Ф,-| La .
dt Тг ‘ Tr ls-:-'
0 = -|Ф,|<ог +-77C. у,
3 L.„
44 9 Ри 1^/1 С-, (, •
(4-46)
(4-47)
(4-48)
Из (4-46) н (4-48) следует, что модуль потокосцсилепий ротора оиреле.iin-тся проеiшеи вектора тока статора на направление потока ротор;., а момент — произведением модуля потокосцеплении ротора на составзяющую тока статора, ортогональную потоку ротора. Рассматриваемая система регулирования выполнена так, что измеренные реальные ;щн|с:шя потокосцеплении ротора н тока статора преобразуются к ортогональной системе координат, сосриентирован-
153
ной по направлению вектора потокосцеплений ротора. В результате образуются постоянные сигналы, пропорциональные |'4rr|, ts,x и is.y, которые используются при раздельном регулировании этих параметров. При этом контур регулирования составляющей i3,x является внутренним по отношению к контуру регулирования потокосцеплений, а контур регулирования — по отношение к контуру регулирования скорости. На выходе регуляторов iStX и iS|V образуются управляющие напряжения, которые после обратного преобразования
Рис. 4-23. Структурная схема системы управления с ориентацией оси координат по направлению результирующего вектора потокосцепления ротора.
154
в неподвижную систему координат используются для управления АИН с ШИМ.
Структурная схема системы показана на рис. 4-23. Здесь ДТ и ДП — соответственно датчики тока и потокосцепления ротора. В качестве датчика ДП могут исполь овагься датчики Холла, помещенные в зазор машины, или специальная измерительная обмотка, у ю-жепная в пазы статора. Кроме, того, возможно применение вычислительного устройства, которое определяет значение нотокосцепленнй ротора по “ ’мер злым
COS
Рис. 4-24. Структурная схема коорди.чл гяого индикатора
значениям напряжения п .ока : гааоп- .
Координатные преобразователи КП 1 п КП2 нредвлзп; ••••чы для преобразования измеренных фазных значений Ч1’,,.,. 'Рг.з, К,д, Кв к ортогональной системе координат. Оба преобразователя ш.п,отмены на суммирующих усилителях по идентичный схемам. Их работа
-•сновапа на следующих соотнож'сляях:
>Рг, » = Фг, Щ Ф',-. ? - уд- \А^,.А 'г у
. _ . . 2 /J_ .
(s. a 's, Л’ 's, Р ' “ уд- 1 У
Для последующего преобразования полученных веды-д;.:] к системе координат, ориентированной по полю, необходимо определить угол fv между направлением вектора Ч?г и псиодвнж'шм.! осями статора. Для этой цели служит координатный индикатор КП. В координатном индикаторе вычисляется модуль потокосдеплсвий ротора и нормированные сигналы, пропорциональные sin и cosy^.. При этом используются следующие соотношения:
’Рщ , = I I cos ?ф;
Ф,., р=|’Prising,
Схема координатного индикатора представлена на рис. 4-24.
Вектор потокосцеплении ротора во вращающейся системе координат, ориентированной по полю ротора, однозначно определяется модулем |ЧГГ|- Для приведения составляющих тока статора is , G, g к вращающейся системе координат (is,x, (s,v) стужит устройство векторного поворота ПП1 (см. рис. 4-23). Это устройство работает в соответствии со следующими соотношениями;
К- х — is, я ' os Д- is 3 sin !рф;
*s, и ~ у g cos is а s.n
Схема векторного поворота представлена па рис. 4-25. Она включает четыре блока умножения и два суммирующих усилителя.
155
На выходе регуляторов составляющих тока статора ia,x и ia,v РТ1, РТ2 (см. рис. 4-23) формируются сигналы, определяющие напряжение на выходе АНН. Предварительно эти сигналы проходят через блок развязки БР, устраняющий взаимное влияние контуров регулирования is,x и is,y. Схема устройства приведена на рис. 4-26. Оно работает в соответствии с (4-44), (4-45).
Сигналы Uy,x и ну,и с выхода блока развязки подаются на устройство векторного поворота ВП2. Это устройство по схеме идентично ВП1 и выполняет обратное преобразование переменных к не-
Рис. 4-26. Структурная схема бло ка развязки.
Рис. 4-25. Структурная схема устройства векторного поворота ВП1.
подвижной системе координат
в соответствии со следующими урав
нениями:
“у, а. = “у. х с OS <Р)р — ну у sin <fц,;
“у, з = “у- -v sin + “у- у cos у'1г-
Координатный преобразователь КПЗ преобразует полученные сигналы к трехфазной системе координат, в результате чего формируются сигналы иу,л, Uy,в н иу,с, которые непосредственно используются для управления блоком модуляторов АИН с ШИМ. Координатный преобразователь КПЗ выполнен на суммирующих усилителях. Он реализует следующие соотношения:
Uy, Д Иу, а,
1 Кз“ иу, в ~ 9 иу. а ‘ 2 иу» Э *
1 КТ
“у.С = -“Иу,а-----2~“у, Г
156
4-9. ПРОМЫШЛЕННЫЕ ПРЕОБРАЗОВАТЕЛИ ЧАСТОТЫ С ШИРОТНО-ИМПУЛЬСНОЙ МОДУЛЯЦИЕЙ
Преобразователи частоты с ШИМ благодаря отмеченным выше-достоинствам перспективны для использования в электроприводах как малой, так и большой мощности. Помимо возможности получения практически неограниченного диапазона регулирования скорости ТПЧ с ШИМ удобны, так как позволяют использовать в качестве источника постоянного напряжения простой неуправляемый выпрямитель, что существенно уменьшает отрицательное влияние ТПЧ на питающую сеть. Высокочастотная коммутация способствует уменьшению потерь в двигателе от высших гармоник и тем самым улучшает его использование.
Зарубежными фирмами выпускается широкая гамма ТПЧ с ШИМ, рассчитанных на различные условия работы электропривода и различные мощности — от единиц до нескольких сотен киловатт [15].
Основные данные ТПЧ с ШИМ, серийно выпускаемых зарубежными фирмами, приведены в табл. 4-1.
Таблица 4-1
Фирма (страна) Модель Мощность, кВт Основной диапазон регулирования частоты, Гц Дополнительный диапазон, Гц
„Итон" (США) „Dymhertz" 1—200 12—120
„Дженерал Электрик" (США) ,Луис Алис" (США) AF-3060 30—500 7—200 200—500
„Lancer 4410“ 5—GO 50—100 0—180
„Рамзей контрол" (США) — 1—3 20—100 15—200'
„Рилейнс электрик" (США) vs 100 0—200 —
„Вестпнгаус электрик" (США) 22-2000 AF 5—500 0—GO 0—120
„Сежерон" (Франция)" — 20. 70, 180 0—100 —
Все АИН с ШИМ имеют двухступенчатую конденсаторную коммутацию и позволяют раздельно регулировать частоту и напряжение. При частоте, превышающей номинальную, напряжение остается постоянным, а его форма приближается к прямоугольно-ступенчатой (как у АИН без ШИМ). Таким образом удается повысить амплитуду 1-й гармоники напряжения по сравнению с синусоидальной ШИМ, а дополнительные гармоники практически не сказываются па характеристиках привода, так как имеют весьма высокую частоту. В простейшем случае, когда не требуется широкий диапазон регулирования скорости, АИН выполняются с постоянным отношением несущей и выходной частот.
157
ГЛАВА ПЯТАЯ
ПРЕОБРАЗОВАТЕЛИ ЧАСТОТЫ С АВТОНОМНЫМИ
ИНВЕРТОРАМИ ТОКА
5-1. ПРИНЦИП РАБОТЫ АВТОНОМНОГО ИНВЕРТОРА ТОКА. СХЕМЫ АВТОНОМНОГО ИНВЕРТОРА ТОКА
Условная схема идеализированного АИТ, выполненного на полностью управляемых полупроводниковых ключах, показана на рис. 5-1,а. Основная особенность АИТ заключается в том, что он питается от источника постоянного тока, пульсации которого пренебрежимо малы. Практически это достигается включением в цепь постоянного тока реактора со значительной индуктивностью. Кроме того, в реальных схемах, как правило, используется отрицательная обратная связь по току А, воздействующая на напряжение Ud, что также способствует поддержанию постоянства тока Id- Полупроводниковые ключи 1—6, поочередно переключаясь, распределяют ток Id по фазам нагрузки. Ток в нагрузке имеет прямоугольно-ступенчатую форму, показанную ла рис. 5-1,6, причем форма тока не зависит от нагрузки и ее характера, а определяется лишь порядком переключения вентилей 1—6. Таким образом действующее значение тока в нагрузке и 1-я гармоника его связаны с постоянным током, потребляемым от источника, однозначными соотношениями
4-/4^ (5-!)
Напряжение на выходе АИТ и его форма определяются нагрузкой и ее характером. Действующее значение первой гармоники гюпряжеция на нагрузке можно определить из условия равенства мощностей, потребляемых инвертором и нагрузкой. Пренебрегая потерями в вентилях и потерями в нагрузке от высших гармоник, можно записать:
UdId=3UslIsi cos(ps!,
(5-3)
1 58
где q)si — угол сдвига между первыми гармониками напряжения и тока в нагрузке. Из (5-3) с учетом (5-2) получим:
U —п Ud
si
Таким образом, напряжение на нагрузке при постоянном напряжении источника питания (t/d=const) не сохраняется постоянным, а изменяется приблизительно
Рис. 5-1. Схема идеализированного АИТ.
обратно пропорционально коэффициенту мощности нагрузки. Если нагрузкой АИТ является машина переменного тока, то изменение момента на ее валу приводит к существенному изменению напряжения на ее выводах, что в большинстве случаев недопустимо, поэтому в практических системах электропривода с АИТ используются различные обратные связи, направленные на стабилизацию напряжения на двигателе или на регулирование его по заданному закону с целью обеспечения необходимого магнитного потока машины.
Для АИТ, работающих на индуктивную нагрузку, характерно наличие пиков в кривой выходного напряжения при коммутации тока в фазах, которые благодаря наличию коммутирующих конденсаторов ограничиваются на допустимом уровне.
В системах электропривода, как правило, используются АИТ, выполненные по трехфазной мостовой схеме. При этом предпочтение следует отдавать АИТ с отделенными от нагрузки коммутирующими конденсаторами, так как только такие АИТ способны обеспечить устойчивую коммутацию тока в фазах при широком диапа-
159-
зоне изменения частоты и нагрузки. На рис. 5-2 и 5-3 приведены две наиболее широко используемые схемы АИТ с отделенными от нагрузки коммутирующими конденсаторами [6, 87]. В первой схеме кроме силовых тиристоров Т1—Тб используются разделительные вентили В1—В6, во второй — коммутация осуществляется с помощью вспомогательных тиристоров Т7—Т12.
Рис. 5 2. Схема АИТ с разде- Рис. 5-3. Схема АИТ с коммути-литсльными вентилями. рующими тиристорами.
Рассмотрим процессы коммутации в схеме, представленной на рис. 5-2. Пусть в исходный момент времени открыты тиристоры Т1 и Т2, и ток протекает через фазы А и С нагрузки. Коммутирующий конденсатор С1.3 заряжен напряжением, полярность которого показана на рис. 5-2. Процесс коммутации начинается при подаче управляющего импульса на тиристор ТЗ. В этот момент ток фазы А переводится с тиристора Т1 на тиристор ТЗ, и под действием тока нагрузки начинается перезаряд конденсатора С1.3. Тиристор Т1 выключается, так как к нему приложено напряжение конденсатора С1.3 в непроводящем направлении (плюс на катоде, минус на аноде). Однако несмотря на то что тиристор ТЗ включен, ток через фазу В нагрузки пока нс протекает, так как выключен отсекающий вентиль ВЗ.
Ток через фазу В начнет протекать после того, как напряжение на Ct.3 изменит свою полярность и достигнет линейного напряжения между фазами А и В. После этого ток одновременно протекает по фазам А и В, причем в фазе А он уменьшается, а в фазе В — увеличивается так, что сумма токов в этих фазах в каждый мо-160
мент времени равна току, потребляемому от источника Процесс коммутации заканчивается, когда ток в фазе В нарастает до того же значения, что было в фазе А до коммутации (/,;), а ток в фазе А снижается до 0. При этом тиристор Т1 и вентиль В1 выключены, а конденсатор С1.3 заряжен до того же напряжения, что и до начала коммутации, по с обратной полярностью.
Процессы коммутации в схеме на рис. 5-3 во многом совпадают с процессами, рассмотренными выше. Если перед началом коммутации включены тиристоры Т1 и Т2, то напряжение на конденсаторе Сл имеет полярность, показанную на рисунке. В рассматриваемый момент времени подаются управляющие импульсы на тиристоры ТЗ и Т7. Ток фазы А замыкается через тиристор Т7 и конденсатор Сд, а тиристор Т1 выключается под действием напряжения на конденсаторе Сл- Далее происходит перезаряд конденсатора Сл под действием тока фазы А. Тиристор ТЗ пока выключен, так как к нему приложена с обратной полярностью сумма напряжения на конденсаторе Сл и линейного напряжения между фазами А и В нагрузки. После того как напряжение па конденсаторе Сл изменит свой знак и достигнет линейного напряжения на нагрузке, включается тиристор ТЗ, и начинается переход тока из фазы А в фазу В- Так же как и в предыдущей схеме, ток в фазе В нарастает, а в фазе А спадает. Процесс коммутации закончится, когда ток в фазе В нарастет до значения /,/, а ток в фазе А снизится до 0. При этом тиристор Т7 выключится и останутся в работе лишь тиристоры Т2 и ТЗ.
Сравнивая инверторы тока по схемам на рис. 5-2 и 5-3, следует отметить, что они содержат одинаковое число полупроводниковых приборов. Однако установленная мощность вспомогательных тиристоров Т7—Т12 существенно меньше, чем отсекающих вентилей В1—В6, так как они рассчитаны на пропускание лишь коммутационных токов, среднее значение которых значительно меньше, чем среднее значение рабочих токов, протекающих через вентили В1—В6. Кроме того, суммарная емкость коммутирующих конденсаторов в схеме на рис. 5-3 на 25% меньше, чем в схеме на рис. 5-2 (см. § 5-3). С другой стороны, силовые тиристоры в схеме на рис. 5-3 должны быть рассчитаны на большее рабочее напряжение, чем в схеме на рис. 5-2. Определенным достоинством последней схемы является более простая система 11—581 161
управления. Таким образом, оба рассматриваемых АИТ близки по своим показателям, и выбор той или иной схемы должен производиться в результате технико-экономических расчетов с учетом конкретных условий работы электропривода.
5-2. АНАЛИЗ РАБОЧИХ ЭЛЕКТРОМАГНИТНЫХ ПРОЦЕССОВ В СИСТЕМЕ АВТОНОМНЫЙ ИНВЕРТОР ТОКА — АСИНХРОННЫЙ ДВИГАТЕЛЬ
При расчете систем с АИТ обычно заданным считается ток нагрузки. Напряжение зависит от нагрузки и ее характера и определяется в результате анализа электромагнитных процессов в системе. Рассмотрим наиболее сложный случай, когда нагрузкой АИТ является асинхронный двигатель (АД). Для упрощения анализа удобно принять допущения о том, что коммутация тока в фазах происходит мгновенно, и ток имеет прямоугольно-ступенчатую форму (см. рис. 5-1,6). Основанием для этого допущения является кратковременность коммутационных процессов, в результате чего они практически не сказываются на электромагнитных процессах в АД. Кроме того, использованы допущения, общепринятые при анализе дифференциальных уравнений асинхронной машины: фазные обмотки выполнены одинаковыми и расположены по окружности статора (ротора) симметрично; воздушный зазор равномерен; потери в стали статора и ротора не учитываются; отсутствует эффект вытеснения тока; насыщение магнитопровода учитывается «в среднем» путем введения в расчет параметров, соответствующих насыщенному магнитопроводу.
Анализ выполнен методом результирующих пространственных векторов [42], позволяющим наиболее просто определить мгновенные значения основных переменных АД. Дифференциальные уравнения асинхронной машины с короткозамкнутым ротором в системе координат а, р, 0, неподвижной относительно статора, имеют
следующий вид:
us= isrs 4- dWsIdt-, (5-4)
0=7/;+^/^—(5-5)
= Lsis 4- Loi'r; (5-6)
= + (5-7)
16?
ГДё «s, ts —результирующие пространственные векторь! напряжения и тока статора; — векторы потоко-
сцепления статора и ротора; 1'т— вектор тока ротора, приведенного к статору; rs, г'г — активные сопротивления фаз соответственно статора п ротора; ZzS=L0 + ^i; Lr=Z,0 + Z/2 — полные индуктивности статора и ротора; Li, L2, Lo — соответственно индуктивность рассеяния ротора и индуктивность намагничивания (взаимная индуктивность статора и ротора); <о — угловая скорость ротора.
Из (5-5) и (5-7) найдем связь между векторами потокосцепления ротора и тока статора [121]:
dWrld& + а,Ч? = L0a2Ts; (5-8)
здесь — независимая переменная;
Ui=U2—/v; (5-9)
a2=l /®sTr-, (5-10)
v=®/®s; (5-11)
®s —угловая скорость поля статора; Tr — электромаг-
нитная постоянная времени ротора.
Решая (5-8), находим:
__ а _
Tr = u2L0 exp (— а,&) exp (а,&) is (&) d& -L- Фг0 exp (—а,»);
б
(5-12) здесь — значение вектора потокосцепления ротора! при i9=0.
Вектор тока статора
1в = (Z's, а 4“ ah, В a \ с)’ (5-13)
где а=ехр (/2зт/3).
Учитывая прямоугольно-ступенчатую форму тока статора, получаем: на первом расчетном интервале (0< &^Сл/3)
= l<|=^rfexp (/л/6); (5-14)
на втором расчетном интервале (л/3<'0<72л/3)
— 2
II “уд - еХР (5-15)
И*
163
на произвольном л-м интервале
— 2
= ^=^ехр/(ад/3 —ir/6j.
(5-16)
Таким образом, результирующий вектор тока статора при каждой коммутации мгновенно перемещается на угол л/3, а в течение 1/6 части периода частоты тока статора остается постоянным по модулю и аргументу. Учитывая это, а также полагая на расчетном интервале скорость ротора неизменной, получаем из (5-12)
Ц^^-+«:гоехр(-а1&), (5-17)
где
i~ /(077=а,/а«- (5‘18)
Значение Т'го находится из условия равенства модуля вектора потокосцепления ротора в начале и в конце расчетного интервала и отличия аргумента на угол л/3, т. е.
(5-19)
Тогда
ц/ __~7 т ai___1 ~ СХР ( Д,тг/3) ,г
* ГО — Й2 ехр (/л/3) _ ехр (_Й1Л/3) •
Анализ (5-17) показывает, что значения вектора потокосцепления ротора Тг в конце предыдущего и начале последующего интервалов равны, т. е. при коммутации этот вектор остается постоянным по модулю и аргументу.
Рассчитанный по (5-17) для случая питания АД мощностью 50 кВт от АИТ при номинальной нагрузке и частоте 50 Гц годограф вектора потокосцепления ротора представляет собой окружность, а кривая изменения потокосцепления фазы во времени — синусоиду (рис. 5-4,а, б). На рис. 5-4 штриховой линией показана траектория вектора потокосцепления ротора на одном интервале при тех же условиях, но при частоте питания 2,5 Гц. Максимальное отклонение модуля вектора 'Иг незначительно и не превышает 4‘Уо- Таким образом, несмотря на несинусоидальность тока статора, потокосцепление ротора с достаточной степенью точности мож-164
йо считать синусоидальными при широком диапазоне изменения частоты тока статора.
С учетом этого можно записать:
Ф,. = | | ехр / (Э- — tpri),
(5-21)
где фн—фазовый угол между первыми гармониками токй статора и потокосцепления ротора. Угол фг! находится путем решения уравнения цепи ротора (5-5), которое для установившегося режима в ортогональнойси-
Рис. 5-4. Потокосцепления ротора АД при питании от АИТ. а — годограф вектора; б — график мгновенных значений.
стеме координат, вращающейся синхронно с вектором потокосцеплении ротора, имеет следующий вид:
O=Wr(}/Tr-\-jWr)-LoIsJTr, (5-22)
где Иг — круговая частота тока ротора; Isl—вектор 1-й гармоники тока статора.
Запишем уравнение (5-22) через проекции на координатные оси:
О Ф, | - Lo | /S11 cos¥n; (5-23)
0 = <or|^r| —^|7sl|sinTrl, (5-24)
откуда
ф,. [==arctg югТг. (5-25)
Результирующий вектор приведенного к статору тока ротора находится путем совместного решения (5-7) и (5-17):
!]+т; ехр (-aft). (5-26)
165
Модуль и аргумент вектора тока ротора при Коммутации тока статора меняются скачкообразно, а на интервалах между коммутациями — непрерывно. Годограф вектора тока ротора и кривая его фазных значений показаны на рис. 5-5,а, б.
Рис. 5-5. Ток ротора.
а — годограф вектора; б — график мгновенных значений.
Учитывая, что вектор тока намагничивания
(5-27) получаем:
Г + ехР Н.»). (5-28)
откуда пространственный вектор потокоскопления в воздушном зазоре
пг —7г — 7L''« Г 1 —ехр(—я,а)
' £s Lf 1—/с»7’г Т
+тг]+т;^<>ехРЬ«Л). (5-29)
При коммутации^ тока статора изменение модуля и аргумента вектора Чг0 определяется индуктивностью рассеяния ротора Ь'ч. В течение времени между коммутациями вектор вращается непрерывно, максимальное изменение модуля при этом незначительно и на примере, приведенном на рис. 5-6,а, б (для того же АД, работающего в номинальном режиме), не превышает 3%. 166
Как показывают расчеты и эксперимент, потокосцепление в воздушном зазоре имеет близкую к синусоидальной форму при широком диапазоне изменения частоты статора. На рис. 5-7 приведена экспериментальная осциллограмма, иллюстрирующая работу АД с номи-
Рис. 5-6. Потокосцепление в воздушном зазоре АД. а — годограф вектора; б — график мгновенных значений.
нальной нагрузкой при частоте статора 1,5 Гц. Потокосцепление в воздушном зазоре, полученное путем интегрирования ЭДС двигателя, на осциллограмме практически синусоидально.
Определим вектор потокосцепления статора 4% подставив в (5-6) расчетные формулы векторов тока статора и ротора:
1 — ехр (—«,$)
+^Угоехр(-аЛ). (5-30)
На интервалах между коммутациями вектор потокосцепления статора вращается непрерывно, а при коммутациях скачкообразное изменение вектора по модулю и фазе составляет ориентировочно 10—12% (рис. 5-8,а, б).
Для вектора напряжения статора можно записать с учетом (5-4), (5-6) и (5-17)
+ (5-31)
5 5 5 1 \ л Lr / at » Lr at v 7
Если учесть, что вектор потокосцепления ротора, как показано выше, вращается равномерно с угловой часто
IQ7
той статора т. е. Чгг=Чг7-о exp то (5-21) можно записать в следующем виде:
41 • (5-32)
15,3об/мин 5/об/мии
Ч'и
0,025
Рис. 5-7. Осциллограмма процессов в электроприводе с АД при fa=l,5 Гц.
Напряжение статора в основном определяется последним членом формулы (5-32), который представляет синусоидальную составляющую напряжения. Первый член соответствует падению напряжения на активном сопротивлении статора. Второй член, который определяет коммутационные пики напряжения, при принятых допущениях представляет собой импульсную функцию Дирака. Однако реальное значение коммутационных пиков напряжения, которое рассчитывается при анализе коммутационных процессов, пропорционально индуктивностям рассеяния ротора и статора и скорости изменения тока статора при коммутации.
Несинусоидальность тока статора приводит к существенным пульсациям электромагнитного момента, которые в свою очередь вызывают пульсации скорости ротора. Пульсации скорости особенно заметно проявляются при низких частотах, приводя к ограничению предельного диапазона регулирования скорости. В связи с этим представляет интерес исследование пульсаций момента и определение максимального диапазона регулирования, исходя из заданной допустимой неравномерности вращения ротора.
Мгновенное значение электромагнитного момента АД может быть выражено через векторное произведение векторов тока статора и потокосцепления ротора [42]
3 1 __ —
(5-33)
где р1( — число пар полюсов. 168
Более удобная форма записи (5-33)
М = 4-I?1т (~^Х7). (5-34)
где is — сопряженный вектор тока статора.
Совмещая вектор тока статора с осью а системы координат (| ia | = i7, J и учитывая (5-17), получаем вы
Рис. 5-8. Потокосцепление статора АД.
а — годограф вектора; б — график мгновенных значений.
ражение для электромагнитного момента на расчетном интервале (0<0^л/3):
м=^грп{1 f г/2'' г+4г; texP (—sin +
-[-<oTr exp (—a£) cos — a>Tr] -|-
+lX 177 exp (—a2&) (TfOa sin Ф 0? cos v&) I; (5-35)
здесь проекция вектора Tr0 на ось координат а.
ПГ — Ре |Z*I£° _____________ ~ ехр_(—_ 5
гО» "-е (_ 1 _ уорг ехр (/л/3) — схр(—«,71/3)] ’ ' '
проекция вектора Ф,.о на ось координат (3
ф — Im [-1 — °хр (—я,л/3)
г11? [ 1 — ;<о?ехр (/л 3) — ехр (— я^/З)
(5-37)
16Э
Рис. 5-9. Электромагнитный момент двигателя при номинальной нагрузке в двигательном и тормозном режимах и прн холостом ходе.
На рис. 5-9 приведены кривые электромагнитного момента АД для номинальной нагрузки в двигательном режиме, холостого хода и номинальной нагрузки в тормозном режиме. Кривая момента на межкоммутационных интервалах представляет собой отрезки синусоид. Это объясняется тем, что в промежутках между коммутациями вектор тока постоянен, а вектор потокосцепления вращается равномерно с практически постоянным Модулем. Учитывая это
обстоятельство, можно существенно упростить формулу момента. Подставив (5-14) и (5-21) в (5-34), получим:
*5 7 _
4M-IMsin(?„+”/6-&), (5-38)
где 0<л%5Д/3.
Амплитуда пульсирующего момента
ЛМ—(Мтах Мтгп)/2. (5-39)
Из (5-38) следует, что максимум момента имеет место при 0=0 для |<рн|^л/3 и при &=<рг1—л/3 для л/3^|фГ1|^л/2.
Минимум момента для всех- значений <рг) соответствует <Ь=л/3.
Тогда из (5-38) и (5-39) для |<рн|<л/3
AM = -^-pnb-|Tr[-|/;|cos<f>ri. (5-40)
На основании (5-16) можно записать:
а из (5-2) следует, что
— 9 КТ"
(5-42)
170
Таким образом,
lbH^-1/nl- (5-43)
Тогда преобразовав (5-40) с учетом (5-23) и (5-43), получим:
ДМ=-^рп^. (5-44)
Аналогично для л/З^срн | <л/2
ДЛ4 = Рп 77 I "X IIXI [1 — sin (I ?n I — 1t/6)L (5-45) откуда с учетом (5-23)
ДЛ4 * Д11^12 (5-46)
4 гп Lr cos<pz] х '
Таким образом, в зоне нагрузок от 0 до номинальной при двигательном и генераторном режимах работы АД, что приблизительно соответствует |<pri |^л/3, пульсации электромагнитного момента определяются лишь значением потокосцепления ротора и не зависят от нагрузки. При увеличении нагрузки, когда |tpri|^n/3, пульсации момента уменьшаются.
Пульсации скорости ротора можно определить на основании уравнения движения электропривода, записанного в следующей форме:
М—М с—Iт gd&/(!&, (5-47)
где Мс — момент сопротивления нагрузки; J— суммарный момент инерции электропривода, приведенный к валу АД.
Подставив в (5-47) значение электромагнитного момента АД из (5-38), получим:
d(ii/d'&=[k sin (фн + л/б—'&)—(5-48) а г _____ _
где k = -^ д, | 11 zs
Коэффициент k может быть определен из условия равенства среднего момента АД Мср на расчетном интервале моменту сопротивления нагрузки:
7Г/3
М —/И f Mdb, (5-49)
о
171
откуда
~ Л-?с
3 sin<?rI
(5-50)
Значение k зависит от принятого закона регулирования и нагрузки на валу АД. Учитывая, что k на расчетном интервале неизменен, получаем после интегрирования (5-48):
<0 = [k COS (<pfl 4- 7t/6 — &)------------------------ k COS (<prl -|- tc/6)-----------Л4С&] 4-C.
(5-51)
Постоянная интегрирования С находится из условия равенства установившегося значения угловой скорости ротора к>с среднему значению угловой скорости на расчетном интервале wcp:
(а) с—
(5-52)
где ©re — круговая частота скольжения (круговая частота тока ротора), соответствующая данному моменту нагрузки Мс-
тс/З
(5-53)
о
Решив совместно (5-52) и (5-53), получим:
п 1 Г 3
с - - «гс - [— k cos ?rl -
— fccos (?rl 4- tc/6)----J- M c I, (5-54)
или после подстановки в (5 51)
(D — 0)fc
4~— k cos <рп 4~ Л1С (к/6 — S) 1. (5-55)
Значение находится путем исследования (5-55) на максимум. Найдем максимальное и минимальное зна-172
чение угловой скорости
«>тпХ = - “гс + | k COS (Tfl + Tt/6 - &J +
+4Acos?rl-4-/Wc(7C/6-&m)]; (5-56)
»min = - <Drc + 7^ [k cos (cprl + it/6) -f
+-|-^C0S?rl + -^-^c], (5-57)
где
-= ?ri + «/6 - arcsin
или с учетом (5-50)
/3 \
Л = <p„, —чг/6 — arcsin (— sin<pri j. (5-58)
Амплитуда пульсаций угловой скорости, равная половине разности между максимальным и минимальным значениями угловой скорости, выражается формулой
Д“ = [2^7 cos 6 ~
— k cos (<prl + тс/6) — МЛ],
(5-59)
а относительная ^пульсация угловой скорости
Д<о_____ fe cos (?rl ~Р П/'й — Sff,) — fe cos -|- n/6) — МЛп
W? 2Zcos (w6. — W,.c)
(5-60)
или с учетом (5-50)
в-=-5-мс
cos (?rl + тг/6 — Sm) — cos (?rl + re/6) — — bn sin <fn 2 sin ?rl/cos (co.s —• <orc)
(5-61)
173
Относительная пульсация угловой скорости зависит от закона управления АД, момента сопротивления нагрузки, момента инерции электропривода и частоты статора. Пульсация 6 тем больше, чем меньше момент инерции и частота статора и чем больше момент нагрузки. Наиболее существенны пульсации угловой скорости при малых частотах, когда демпфирующее действие маховых масс привода незначительно.
п
33 об/мин 31,7об/мин
Рис. 5-10. Осциллограмма процессов в электроприводе с АД при /,=1,33 Гц в режиме холостого хода.
Рис. 5-11. Осциллограмма процессов в электроприводе с АД в режиме холостого хода при /.,=0,87 Гц.
На рис. 5-10 и 5-11 представлены осциллограммы, снятые при холостом ходе АД и питания его от АИТ для частот соответственно 1,33 и 0,87 Гц. Характер пульсаций угловой скорости достаточно точно описывается (5-55). Различия между экспериментальными данными и расчетными значениями <отм, оы» и б, полученными по (5-56), (5-57), (5-61), не превышает 10%.
Найдем минимальную частоту, для которой относительное значение пульсаций скорости не превышает допустимого значения бдоп- Решая (5-61) относительно частоты статора, получаем:
1 s, min
рпМс [cos (<?п + п/6 — вт) —
3
— cos (<рг, - п/6) — — %, sin <fn
________ (5-62)
174
Используя (5-62), можно рассчитать диапазон регулирования угловой скорости, определяемый как отношение средней скорости при максимальной частоте к средней скорости при минимально допустимой частоте для заданного момента, нагрузки и заданного значения допустимых пульсаций угловой скорости:
D= (2nfs, max (Or,с) / (2nfs, min (Or,c) • (5-63)
Расчеты no (5-62) и (5-63) показывают, что при регулировании угловой скорости вниз от номинальной с постоянным номинальным моментом нагрузки, постоянным потоком и бдОП= 10% диапазон регулирования составляет (30—40): 1.
5-3. ПРОЦЕССЫ КОММУТАЦИИ В АВТОНОМНОМ ИНВЕРТОРЕ ТОКА
Для расчета коммутационных процессов в АИТ, нагруженном на АД, можно в соответствии в (5-32) принять схему замещения фазы АД, состоящую из последовательно включенных активного сопротивления фазы (rs), эквивалентной индуктивности La и эквивалентной ЭДС АД Дэ, где
= Д + (5-64)
<5’65)
Чтобы воспользоваться принятой схемой замещения, необходимо знать ток в фазе АД и значение эквивалентной ЭДС к началу коммутации. Ток в отключаемой фазе АД к началу коммутации всегда равен току, потребляемому АИТ от источника Id. Эквивалентную ЭДС можно рассчитать, подставив в (5-65) значение потокосцепления ротора из (5-22):
Е3 = u’s Щ-2" —т~ ht > (5-66)
® s Lr 1 + )ч>гТг S1 4 ’
ИЛИ
Ез =(Bs47 S1 ехр (5'67)
175
где — угол между первыми гармониками тока статора и эквивалентной ЭДС £э. Угол <p7il находится из (5-66):
?£1=arctg^7=’c/2 — Vn- (5-68)
Учитывая, что в соответствии с (5-43) и (5-14)
7SI == v! bl ехР (- Г/6) = Id exp (—jit/6), (5-69) получаем:
—. 2УГ L2 1 *
= Т~~ехР I/ + ?М1 - ’/бЯ (5-7°)
и для линейного напряжения
я. л=4- ехр [/ ы+?£i)] • (5*7
откуда линейное значение эквивалентной ЭДС в момент коммутации И—0)
! Д -- J / щ 0 81П-Ув| /Г У2Ч
ДЧл— „ /Л Lr (5-72)
Учитывая, что на межкоммутационном интервале падение напряжения па эквивалентной индуктивности £э равно 0 и пренебрегая активным сопротивлением статора, получаем:
Ea^Us—\t7s| ехр [/(cos^+tpsi—л/6)] (5-73)
£э, Дз,л,;?1 sin <psi, (5-74)
где £Д,л,т — амплитуда линейного напряжения статора; Фя—угол между первыми гармониками напряжения и тока статора.
Формулы (5-73) и (5-74) дают достаточно точные результаты для огС^(0,3-*-0,4) со5)НОМ, когда влияние активного сопротивления статора на характеристики машины незначительно.
Перейдем к анализу коммутационных процессов в АИТ, представленном на рис. 5-2, считая, что перед началом коммутации были открыты тиристоры Т1 и Т2, а коммутация начинается после подачи управляющего импульса на тиристор ТЗ. На первом коммутационном 176
интервале происходит перезаряд конденсатора С1.3. Поскольку помимо конденсатора С1.3 одновременно перезаряжаются последовательно включенные конденсаторы С3.5 и С1.5, то эквивалентная емкость цепи перезаряда:
сэ=4с> (5-75)
где С — емкость каждого коммутирующего конденса-
тора.
Рис. 5-12. Эквивалентные схемы АИТ с разделительными вентилями а — для первого коммутационного интервала; б — для второго коммутационного интервала.
Эквивалентная схема, соответствующая первому ком-мутационному интервалу, представлена на рис. 5-12,а, а диаграммы напряжений на коммутирующем конденса
торе ис и тока через Heroic, а также токов в фазах А и В нагрузки is,л и i S,B — на рис. 5-13. Уравнение напряжения на коммутирующем конденсаторе в это время имеет следующий вид:
<5-76) о э
где Uсц—начальное напряжение на конденсаторе.
Коммутационный интервал I заканчивается, когда напряжение на коммутирующем конденсаторе изменит свой знак и достигнет значения линейного напряжения
12—581
Рис. 5-13. Токи и напряжения в ЛИТ при коммутации.
177
между фазами А и б, определяемого с помощью (5-72) или (5-74). Подставив значение этого напряжения в (5-7б), получим продолжительность интервала 7:
. ^СО + л „
(5-77)
Коммутационный интервал II начинается после открывания вентиля ВЗ. Эквивалентная схема, соответствующая второму этапу коммутации, представлена на рис. 5-12,6. Уравнения процесса коммутации, записанные в операторной форме, имеют следующий вид:
^+4^- ~LJ‘+pL^- *« +
+ Es. А (Р) = PLJS, В (Р) + £э, В (Р)'
(5-78)
Полагая, что за время коммутации эквивалентная линейная ЭДС АД остается неизменной и равной Еа, л, и переходя к оригиналам, получаем:
i. . = ic = Id cos , ; (5-79)
S-A c a V2L3C3 V
(5-М)
(5-8')
Этап II заканчивается, когда is A—ic=0. Таким образом, продолжительность этапа II, как это следует из (5-79), равна:
= (5-82)
Напряжение на конденсаторе к концу этапа II, как следует из (5.81), равно по модулю напряжению в начале этапа I, т. е.
(5-83)
Расчеты по (5-79) — (5-83) дают достаточную для практики точность, если
/ <(0,09^-0,11)^-. (5-84)
Шу
178
Увеличение продолжительности интервала II выше значения, определяемого соотношением (5-84), нецелесообразно, так как это приводит к увеличению емкости коммутирующих конденсаторов и существенному изменению продолжительности процессов коммутации при изменении режима работы двигателя. Последнее обстоятельство нежелательно, так как оно вызывает заметные погрешности в работе системы регулирования при формировании переходных процессов в электроприводе.
Рис. 5-14. Эквивалентные схемы АИТ с коммутирующими тиристорами.
а— для первого этапа коммутации; б — для второго этапа коммутации.
На рис. 5-14,а, б приведены эквивалентные схемы контуров коммутации для АИТ, представленного на рис. 5-3, соответственно для этапов коммутации I и II. Как видно из сравнения рис. 5-12,а, б и 5-14,а, б, структуры контуров коммутации для обоих АИТ одинаковы, в результате чего приведенные выше расчетные соотношения пригодны и для анализа коммутационных процессов в АИТ по рис. 5-3. Отличие состоит лишь в том, что в последнем случае значение эквивалентной емкости равно емкости одного коммутирующего конденсатора.
Напряжение UCo оказывает определяющее влияние на загрузку элементов АИТ по напряжению. Отношение начального напряжения на коммутирующих конденсаторах к амплитуде номинального линейного напряжения АД можно определить нз (5-83) с учетом (5-2) и (5-74):
l’co
k
। . /Ж "fef кштА+У сэ 6/?б>
(5-85)
12*
179
где kt=Isi,max/1s,HOm — отношение максимального тока АД к номинальному; коэффициент k, выбирается в зависимости от требуемой кратности максимального момента; Дб=^«,ном/Д,ном — базовое сопротивление АД.
Эквивалентная емкость коммутирующего конденсатора может быть определена из (5-82) по заданному времени /ц:
Сэ=2/2п/л2Лэ. (5-88)
После подстановки в (5-85) получим:
Л2
-с sin <pSI-| g-
Xs*kj
,HOM ’
(5-87)
где хэ*=Аэ(>)я.ном/Дб — относительное эквивалентное
индуктивное сопротивление контура коммутации [см. (5-64)].
Положим, например, коэффициент мощности АД равным 0,8 (sin (psi:=0,6), относительное эквивалентное индуктивное сопротивление хэ*=0,2. Длительность интервала II в соответствии с (5-84) примем равной /п=0,1 л/аз,ном, a ki—2. Тогда после подстановки в (5-87) получим kv~~2,1, т. е. на
Рис. 5-15. Эквивалентная схема АИТ для третьего этапа коммутации.
пряжение на коммутирующих конденсаторах будет в 2,7 раза больше амплитуды линейного напряжения АД.
Как правило, значения коэффициента ku> > (1,8-1-2,0) нежелательны, так как это связано с
существенным увеличением рабочего напряжения элементов АИТ. В тех случаях, когда значение коэффициента kv, рассчитанное по (5-87), оказывается чрезмерно большим (это обычно соответствует большим кратностям максимального момента АД), следует принимать специальные меры для ограничения коммутационных перенапряжений.
С этой целью в контур коммутации вводится специальное устройство, которое принимает на себя ток отключаемой фазы, когда напряжение на коммутирующем конденсаторе достигает определенного заданного
180
значения Ud2, и поддерживает его на этом уровне неизменным. При наличии такого устройства коммутационный интервал II заканчивается, когда напряжение на коммутирующем конденсаторе достигнет значения Ud2, после чего начинается интервал коммутации III. Эквивалентная схема для коммутационного интервала III представлена на рис. 5-15. Здесь устройство ограничения коммутационных напряжений условно изображено в виде последовательно включенных неуправляемого вентиля ВО и ЭДС Ud2-
При наличии устройства ограничения перенапряжений продолжительность коммутационного интервала II определяется из (5-81) после подстановки Mc=t/d2:
tn = У2ЬЭСЭ arcsin У—....э,л-• (5-88)
П ДИ2£Э/СЭ 1
По окончании интервала II ток коммутирующего конденсатора становится равным 0, а ток фазы А замыкается через вентиль ВО. Значение тока отключаемой фазы в конце интервала II находится путем подстановки (5-88) в (5-79):
4, л п = /- Яэ.лЛ (5-89)
Если подкоренное выражение отрицательно, то это означает, что коммутационный интервал II заканчивается раньше, чем напряжение на коммутирующем конденсаторе достигнет значения Ud2 (Uco<Ud2), т. е. необходимость в устройстве ограничения отпадает.
Уравнение тока в отключаемой фазе на интервале III
г - - I _ f __ уУ п IJJ р чг f '</2 .
ls,A 1s, ЛИ 2Z./ V 2L,t d2 п».л' 2Л,
(5-90)
Продолжительность интервала III
2L3{ AJl 2ЛЭ — 2/7 (Е^2 Еэ,л)2
----------Й-------------(5-91)
Практически устройство ограничения коммутационных напряжений представляет собой противо-ЭДС, подключенную через диодный мост на выход АИТ и являю-
181
щуюся потребителем энергии. Как показывают расчеты, мощность, проходящая через устройство ограничения, составляет 5—8% номинальной мощности АД, поэтому если мощность АД сравнительно невелика, то в качестве источника противо-ЭДС может быть использован резистор, зашунтированный конденсатором (рис. 5-16). Емкость этого конденсатора должна быть достаточной для того, чтобы пульсации напряжения на нем были незначительны.
Рис. 5-16. ТПЧ с АИТ и резисторно-емкостным ограничением коммутационных напряжений.
Для АД большей мощности в качестве источника противо-ЭДС целесообразно использовать маломощный тиристорный инвертор, ведомый сетью (рис. 5-17). Этот АИТ, работая с постоянным углом инвертирования, рекуперирует в сеть энергию, выводимую из контуров коммутации [5]. Реакторы L и Ео, помимо сглаживания тока в звене постоянного тока АИТ и устройства ограничения, ограничивают уравнительные ^оки между управляемым выпрямителем и ведомым инвертором на тиристорах Т01 — Т06.
Устройство ограничения коммутационных перенапряжений, кроме того, что оно защищает элементы АИТ от перенапряжений, позволяет существенно уменьшить габариты коммутирующих конденсаторов. Если при отсутствии такого устройства коммутирующие конденсаторы выбираются из условия ограничения максимального напряжения на них, то теперь их емкость должна быть достаточна лишь для того, чтобы обеспечить необходимое время выключения тиристоров АИТ, что позволяет снизить емкость в несколько раз.
Рассмотренные схемы АИТ обладают высокой коммутационной устойчивостью. Время, предоставляемое тиристорам АИТ для выключения, как это следует из 182
(5-76) равно:
tn=UcaCalld. (5-92)
Подставив значение Uco из (5-83), получим:
,(5-93)
т. е. минимально возможное в схеме время выключения
Рис. 5-17. ТПЧ с АИТ и тиристорным ограничителем коммутационных напряжений.
Рис. 5-18. Схема АИТ с устройством предварительного заряда коммутирующих конденсаторов.
18'3
что, как правило, с большим запасом достаточно для современных тиристоров во всех режимах работы ЛИТ. При наличии устройства ограничения начальное напряжение на коммутирующих конденсаторах практически всегда постоянно, независимо от нагрузки АИТ, и равно Un-
Таким образом, устойчивая коммутация тиристоров обеспечивается при всех режимах работы ЛИТ, и необходимость в специальных устройствах подзаряда коммутирующих конденсаторов отсутствует. Однако для обеспечения первой коммутации тиристоров при включении АИТ необходимо, чтобы коммутирующие конденсаторы были предварительно заряжены до определенного напряжения. Требуемая мощность источника предварительного заряда конденсаторов весьма мала, так как на время заряда практически не накладывается никаких ограничений, и оно может быть принято достаточно большим.
На рис. 5-18 приведен пример схемы устройства предварительного заряда конденсаторов, состоящего из шести диодов (В3.1—В3.6) и шести резисторов (R1—R6), подключенных с одной стороны к коммутирующим конденсаторам, а с другой — к одной из фаз питающей сети. При использовании такого устройства в ТПЧ мощностью 80 кВт суммарная мощность, выделяющаяся на шести резисторах, не превышала 100 Вт.
5-4. РАСЧЕТ ПАРАМЕТРОВ И ВЫБОР ЭЛЕМЕНТОВ ПРЕОБРАЗОВАТЕЛЯ ЧАСТОТЫ С АВТОНОМНЫМ ИНВЕРТОРОМ ТОКА
Исходными данными при расчете ТПЧ являются параметры АД и максимальные значения тока и напряжения АД Is и Us, которые определяются при расчете его характеристик.
По заданному значению тока статора Д определяем с помощью (5-2) ток в звене постоянного тока Ц. Все вентили АИТ и управляемого выпрямителя должны быть рассчитаны на средний ток, равный IdjZ. Исключение составляют вспомогательные тиристоры Т7—Т12 АИТ, представленного на рис. 5-3. Эти тиристоры должны быть импульсного типа, и амплитуда тока через них равна Id-
184
Напряжение в звене постоянного тока можно ориентировочно определить исходя из баланса мощностей на входе и выходе АИТ;
Cos ?S14- ДЦ,4- 2 (ДПТ+ ДДВ), (5-94)
где ЛЕР— среднее падение напряжения на сглаживающем реакторе; At7T — падение напряжения на открытом тиристоре; ДПВ— падение напряжения на проводящем неуправляемом вентиле.
Действующее значение линейного напряжения на входе ТПЧ
Ur=-^ + 2^- (5-95)
с з у 2 cos amin
где amin — минимальный угол включения тиристоров в управляемом выпрямителе.
Если напряжение, рассчитанное по (5-95), оказывается больше напряжения питающей сети, тона вход ТПЧ необходимо установить повышающий трансформатор. Если это напряжение меньше напряжения сети, то возможна установка понижающего трансформатора. В тех случаях, когда первостепенное значение имеют габариты ТПЧ, а жестких требований по коэффициенту мощности, потребляемой из сети, не предъявляется, понижающий трансформатор можно не устанавливать. Согласование напряжений тогда производится путем увеличения 4min, т. е. использованием зарегулированного выпрямителя.
Выбор коммутирующих конденсаторов производится следующим образом. В соответствии с (5-84) примем:
t,, = (0,09 -г- 0,11)—^—, (5-96)
11 , max
где cos,max — максимальная рабочая частота АД, после подстановки в (5-82) находим эквивалентную емкость коммутирующих конденсаторов.
Затем, подставив найденное значение Са в (5-83), определим начальное напряжение па коммутирующих конденсаторах ((7СС).
Максимальное напряжение, па которое должны быть выбраны тиристоры АИТ по схеме на рис. 5-2, составляет Uco, а отсекающие вентили t/co + Е'э, л- Для АИТ по схеме па рис. 5-3 максимальное напряжение тиристоров ( оставляет t/co + Ey, л-
185
Если рассчитанные по приведенным формулам напряжения оказались недопустимо большими, следует использовать устройство ограничения коммутационных перенапряжений. В этом случае емкость коммутирующих конденсаторов рассчитывается в соответствии с (5-92) по формуле
C3=Jd/B/t/co, (5-97)
а начальное напряжение Uco=-Ud2-
Для нормального функционирования устройства ограничения необходимо, чтобы ограничивающее напряжение Ud2 было больше амплитуды линейного напряжения АД с учетом возможных пульсаций, т. е.
t7d2^(l,2-4-.'I,3)K6’J7s. (5-98)
Среднее значение тока, протекающего через устройство ограничения,
г __ fs.A п д
----§-----Ь2Г’
или после подстановки Д.лп и fni из (5-89) и (5-91)
Ws 2/, £э.л)г]
4 —----------4;---------— • <5")
По току /d2/3 и напряжению Ud2 выбираются диоды устройства ограничения. Если в этом устройстве используется гасящий резистор, то его сопротивление
R0=Ud2/Id2, (5-100)
а мощность, выделяющаяся в нем,
Pr^Ud2Id2. (5-101)
В случае применения ведомого инвертора его тиристоры рассчитываются на средний ток Id2/3 и максимальное напряжение V2Uc,. Угол инвертирования этого инвертора:
cos8--—-^_ (5-102)
г 3/2 Uc 4 ’
Для упрощения системы управления ведомого инвертора целесообразно принять р=л/6 и, исходя из этого, выбрать Ud2- Это позволит использовать в системе 18$
управления В Качестве опорных напряжений фазные напряжения сети без применения дополнительных фазосдвигающих устройств.
Индуктивность сглаживающего реактора в цепи ведомого инвертора в соответствии с (4-20)
— arccos
(5-103)
где А/й2 — допустимые пульсации тока в реакторе.
Емкость сглаживающего конденсатора в устройстве ограничения коммутационных напряжений Со находится следующим образом. Размах пульсаций напряжения на этом конденсаторе в соответствии с (5-90)
*1П
24,-V~A j о
Производя интегрирование и подставляя значения Л, ап и fin из (5-89) и (5-91), получаем:
(5'104>
Задаваясь пульсациями напряжения на конденсаторе, по (5-104) рассчитываем значение его емкости.
Сглаживающий реактор в звене постоянного тока АИТ необходим для ограничения пульсаций тока Id, возникающих вследствие пульсаций напряжения на выходе управляемого выпрямителя (УВ) и на входе АИТ. Пульсации напряжения на выходе УВ максимальны, когда угол открывания тиристоров а=л/2. В этом случае размах пульсаций тока
2Д/d = ~ J ]/2 f7c sin (n.td'n.t. (5-105)
о
где <Ос—круговая частота сетевого напряжения; Md — амплитуда пульсаций тока в звене постоянного тока.
187
Из (5-105) после интегрирования L l:c 1 — Из-д/^Wc |Л<г
Учитывая дополнительные пульсации тока Id от переключения тиристоров АИТ, значение индуктивности, полученное по (5-106), следует увеличить приблизительно в 2 раза. Заданное значение пульсаций должно лежать в пределах 5—10% номинального значения тока Л/. Увеличение пульсаций приводит к ухудшению формы тока и напряжения АД и увеличению напряжения на элементах АИТ. Уменьшение пульсаций связано с увеличением габаритов сглаживающего реактора.
5-5. ХАРАКТЕРИСТИКИ АСИНХРОННОГО ДВИГАТЕЛЯ, УПРАВЛЯЕМОГО ПРЕОБРАЗОВАТЕЛЕМ ЧАСТОТЫ
С АВТОНОМНЫМ ИНВЕРТОРОМ ТОКА. ПРИНЦИПЫ ПОСТРОЕНИЯ СИСТЕМ РЕГУЛИРОВАНИЯ
Для управления АД с помощью ТПЧ с АИТ целесообразно использовать так называемый принцип частотно-токового управления [16]. Сущность этого принципа заключается в том, что за основной контролируемый параметр принимается не напряжение на выводах АД, а потребляемый им ток. Контроль заданного значения тока осуществляется с помощью контура подчиненного регулирования тока с воздействием на угол открывания тиристоров УВ.
Удобство частотно-токового способа управления заключается в том, что в ТПЧ с АИТ ток двигателя является наиболее просто измеряемой переменной, так как, во-первых, он пропорционален току в звене постоянного тока и току, потребляемому из сети, а во-вторых, он достаточно хорошо сглажен силовым реактором. Кроме того, как показано ниже, частотно-токовый способ управления позволяет обеспечить высокое качество статических и динамических характеристик электропривода при наиболее простой структуре системы регулирования.
Рассмотрим особенности статических характеристик АД при питании его от источника тока. Учитывая, что влиянием высших гармоник тока на среднее значение момента и потока можно пренебречь [45], из (5-23), (5-24) и (5-34) найдем соотношения, связывающие мо-188
мент и поток АД с действующим значением тока статора:
= <5-107)
и учитывая, что ЧД=Ф,. ]/ 1-|-(шДД/г,.)2,
Ф.= Д
1 + <a2r^,2/r'r г
1 +ыггТгг lsi'
(5-109)
Анализируя (5-107) —(5-109) при заданном значении тока статора, можно сделать следующие выводы:
1) механические характеристики АД имеют постоянную жесткость и постоянный максимальный момент при всех частотах как в двигательном, так и в генераторном режиме;
2) момент и поток АД однозначно связаны с частотой скольжения ротора и не зависят от частоты статора.
Однако при управлении с постоянным током статора АД будет иметь неблагоприятные характеристики. Действительно, из (5-109) следует, что наибольший поток в этом случае соответствует холостому ходу машины, а при увеличении нагрузки поток резко уменьшается, поэтому систему регулирования целесообразно построить таким образом, чтобы при увеличении нагрузки (частоты скольжения) увеличивался ток статора по какому-либо закону /si=f(<Or). Очевидно, что отмеченные выше положительные свойства частотно-токового управления сохранятся и в этом случае, но, кроме того, появляется возможность формировать характеристики, близкие к оптимальным по энергетическим показателям и с большими перегрузочными моментами.
Одним из законов частотного регулирования АД, часто применяемых на практике, является закон, обеспечивающий постоянство магнитного потока машины во всех режимах ее работы. При этом удается максимально использовать магнитную систему АД и получить при всех рабочих частотах высокую перегрузочную способность, превышающую в 2—2,5 раза перегрузочную способность АД на естественной характеристике. Зависи-
189
Мость между током статора и частотой скольжения ротора для этого случая может быть получена, если положить в (5-109) Чго=Чг0ном. Характер этой зависимости иллюстрируется рис. 5-19, кривая 1.
Недостаток управления с повышенными потерями
Рис. 5-19. Зависимость тока статора от частоты скольжения ротора.
1 — при постоянном потоке; 2 — при регулировании по минимуму тока;
3, 4, 5 — аппроксимирующие прямые.
этом потери в АД близки к
с постоянным потоком связан з магнитопроводе при малых моментах нагрузки. Для устранения этого недостатка необходимо уменьшать значение потока при уменьшении момента нагрузки. Наилучшие результаты достигаются с помощью так называемых законов оптимального регулирования [73]. Наиболее просто реализуемым является закон регулирования по минимуму тока, при котором каждому значению момента АД соответствует минимальное значение тока, потребляемого обмоткой статора. Соблюдение этого закона позволяет обеспечить высокую перегрузочную способность АД и хорошие энергетические характеристики, так как при минимальным в широком диа
пазоне изменения частоты и момента.
Зависимость между током статора и частотой сколь-
жения ротора, соответствующая регулированию с минимумом тока, приведена на рис. 5-19, кривая 2. Кривая 2 отличается от кривой 1 меньшими частотами скольжения (большими потоками) в зоне больших нагрузок и большими частотами скольжения (меньшими потоками) в области малых нагрузок.
Для упрощения системы регулирования кривая 1 может быть аппроксимирована прямой 3, а кривая 2 — прямой 4 или 5. Регулирование в соответствии с прямой 3 в зоне больших нагрузок (больше половины номинальной) дает результаты, близкие к регулированию с постоянным потоком. В зоне малых нагрузок прямая <3 существенно отклоняется от кривой 1, однако это дает
1 90
положительный эффект, так как приводит к уменьшению магнитного потока, и потерь в АД [45]. Уравнение прямой 3
• (5-ИО)
где k^' ISi НОМ"
Прямая 4 дает приемлемое приближение к закону регулирования с минимумом тока. Уравнение прямой 4 совпадает с (5-110), однако здесь г = Л1ном/и г, ном, опт, где ©г, ном, опт — частота скольжения ротора, соответствующая максимальному моменту при номинальном токе статора.
Лучшее приближение к закону регулирования с минимумом тока получается при регулировании в соответствии с прямой 5. Ее уравнение
Л1=А,г( HI—шго) при Ы>шго; (5-1П)
/„ = 0 при | сог ] < сог0,
где
•ш, г ^stKOM./^r, ном, опт и}гв>
Структурная схема системы, реализующей рассмотренный принцип управления, показана на рис. 5-20 [72]. Здесь
РТ — регулятор тока, СУ — система управления АИТ, ДТ•—датчик тока статора, ДС— датчик угловой скорости, УО— усилитель-ограничитель, ФП— функциональный преобразователь. Задающий сигнал иа определяет частоту переключения тиристоров АИТ, а следовательно, и скорость ротора АД (характеристика задающего генератора предполагается линейной). После вычитания из
Рис. 5-20. Структурная схема аналоговой системы, реализующей управление по минимуму тока.
задающего сигнала напряжения ищ, пропорционального скорости ротора, образуется сигнал нш> г, пропорциональный частоте скольжения ротора. Этот сигнал через функциональный преобразователь ФП, реализующий
191
один из рассмотренных выше законов связи между частотой скольжения и током статора, подается в контур подчиненного регулирования тока. Частота на выходе АИТ определяется напряжением и: s=um-^-ua г. Система настроена таким образом, что пока УО работает в линейной зоне, частота на выходе постоянная и не зависит от нагрузки («ш s=m3). При достижении моментом нагрузки максимального заданного значения (ыш, г = иШ1 г, тах) УО входит в ограничение, и АД работает с постоянной частотой скольжения, постоянным током и, следовательно, с постоянным моментом.
При переходе АД в генераторный режим АИТ переходит в режим выпрямителя. Полярность напряжения на его входе меняется и оказывается согласованной с полярностью напряжения на выходе УВ. Это приводит к увеличению тока. В результате действия отрицательной обратной связи по току напряжение управления УВ ил уменьшается, а затем меняет свой знак, что вызывает перевод УВ в режим инвертора, ведомого сетью. Таким образом, переход электропривода от двигательного режима работы к генераторному происходит автоматически при изменении знака момента на валу и не связан с каким-либо изменением структуры системы.
На рис. 5-21 приведены экспериментальные механические характеристики АД, работающего в рассмотренной системе регулирования. Характеристики проходят через все четыре квадранта. Зона отсечки соответствует приблизительно 1,5ЛТП„М. Принятая система регулирования позволяет получить п существенно большие значения момента, однако это требует соответствующего увеличения мощности ТПЧ.
Особенностью рассмотренной системы является
Рис. 5-21. Экспериментальные механические характеристик!! АД при управлении по минимуму тока.
192
то, что сигнал частоты скольжения, который является задающим для контура регулирования тока, образуется как разность двух аналоговых сигналов н3 и иш, каждый
из которых существенно больше, чем их разность. Вследствие этого незначительные ошибки в канале измерения угловой скорости и задания частоты вызывают существенные погрешности в сигнале частоты скольже-
ния. Поэтому к точности измерения и преобразования сигнала угловой скорости предъявляются весьма высокие требования, которые не всегда могут быть удовлетворены на практике.
От указанного недостатка свободна система, структурная схема которой представлена на рис. 5-22 .Здесь измерение частоты вращения ротора производится с помощью частотного датчика ЧДС,
Рис. 5-22. Структурная схема с цифровым сложением частот.
а частота импульсов
управления АИТ образуется путем цифрового сложения частоты вращения ротора и заданного значения частоты скольжения с помощью сумматора частот СЧ. Импульсы, частота которых пропорциональна частоте скольжения, формируются с помощью генератора частоты скольжения ГЧС, имеющего линейную зависимость частоты от управляющего сигнала иш г_ При разомкнутой внеш
ней обратной связи по скорости АД независимо от значения угловой скорости развивает постоянный момент, так как частота скольжения п ток статора постоянны [см. (5-107)]. Момент определяется сигналом г. Для формирования механических характеристик с высокой жесткостью в систему введена внешняя по отношению к контуру регулирования тока обратная связь по скорости, которая подается на вход регулятора скорости PC.
Для преобразования сигнала частоты вращения, снимаемого с ЧДС, в аналоговую форму служит частотно-аналоговый преобразователь ЧАП.
13—581
193
Удобство такой системы состоит в том, что измерение и обработка сигнала частоты вращения производится в цифровой форме, вследствие чего обеспечивается высокая точность задания частоты АИТ (<os) и снижаются требования к точности остальных узлов системы. При необходимости поддержания скорости с высокой степенью точности обратную связь по скорости можно также выполнить в цифровой фо-рме. В этом случае ЧАП из системы исключается, а алгебраическое суммирование измеренной скорости и заданной <о3 производится цифровым сумматором.
К системе управления АИТ предъявляются такие же требования, как к системе управления АИН (см. гл. 3), поэтому они могут быть выполнены по идентичным схемам. Особый интерес представляют системы регулирования ТПЧ с АИТ, обеспечивающие заданное качество статических и динамических характеристик электропривода.
Для формирования интенсивных переходных процессов пуска и торможения • электропривода необходимо обеспечить на все время переходного процесса максимально допустимое значение момента АД, определяемое максимальным током, на который рассчитан ТПЧ. Как правило, время установления заданного значения тока существенно меньше времени протекания переходного процесса, поэтому с достаточной степенью точности регулятор тока можно считать идеальным. В таком случае переходные процессы пуска и торможения в рассмотренных системах будут протекать при постоянных значениях тока статора и частоты скольжения ротора.
Однако выполнение этих условий обеспечивает постоянство электромагнитного момента АД лишь в установившихся режимах. Определить характер изменения момента в переходных режимах можно на основании дифференциальных уравнений АД (5-4) — (5-7). Записав эти уравнения в ортогональной системе координат X, У, О, вращающейся синхронно с результирующим вектором тока статора, и приняв в качестве переменных ток статора и потокосцепления ротора, получим:
сЮ у 1 Lo
~Г= - Г7 , X + “X, У + 77 is, X: (5-112)
tW у 1 Lo
-т7 *+ т7 (5-!13)
194
4 А. ^r. xh, У - ЛхУ (5-114)
Допущение об идеальности регулятора тока позволяет в данном случае не рассматривать уравнения статора машины. Ввиду малого влияния высших гармоник на момент ток статора при расчете переходных процессов можно считать синусоидальным. Если при этом ось X системы координат совместить с направлением вектора тока статора, то
is, х = Psi I ’ 7, у — О-
Уравнения (5-112) — (5-114) в этом случае принимают следующий вид:
т = - 7? х + “X, у+ Рп I; (5-115)
-“Л.х; (5-116)
^ = -4-^^-Ч.уРРР- (5-117)
Решив (5-115) — (5-117) для случаев пуска и торможения электропривода с нулевым начальным потоком, найдем:
1ТГ ’ ®г7-п7'г I У | Г i / j I sin / t \ 1
*^7 у ] _|_ <o2r7’2,. I 7i I p pOS <ort j exp j j;
(5-118)
3 TrL-,
2 Pn~T7
_____________\ I 12 1 —• (cos ш/ -+-I-f-<o2r7’2f 1 s' 1 [ V
+s-57)«p(-7]' ,5'll9)
Проанализировав (5-118), (5-119), отметим, что наличие свободных составляющих потокосцеплений обусловливает колебания электромагнитного момента в переходных режимах. При этом частота колебаний равна заданной частоте скольжения ротора, а декремент затухания равен обратному значению электромагнитной постоянной времени ротора.
13* 195
Для оценки качества переходного ’процесса воспользуемся следующими показателями: -временем достижения первого максимума момента, относительным перерегулированием и продолжительностью электромагнитного переходного процесса.
В нашем случае время достижения первого максимума момента
1тах=л / аг- (5-120)
Относительное перерегулирование
Мтах— AfycT / " X _
V—=ехрЬ^Х7- (5'121)
Продолжительность переходного электромагнитного процесса
/п.п« 3-М Тг. (5-122)
Таким образом, основные показатели качества переходного процесса определяются заданным значением частоты скольжения и электромагнитной постоянной времени ротора. С увеличением частоты (скольжения растет перерегулирование и уменьшается время достижения первого максимума момента. Продолжительность переходного процесса определяется лишь электромагнитной постоянной -времени ротора. Увеличение постоянной времени ротора ведет ik росту перерегулирования и увеличению времени переходного процесса. Значение постоянной времени ротора зависит от типа АД и его мощности. Так как АД большей мощности имеют большие постоянные времени ротора, то у них электромагнитные переходные процессы будут проявляться более существенно.
На рис. 5-23,я—в приведены экспериментальные осциллограммы пуска и торможения АД мощностью 50 кВт при <ог—const и /Sl=const. Осциллограммы на рис. 5-23,а—в сняты при номинальном значении частоты скольжения и различных токах статора, соответствующих установившимся значениям потока в воздушном зазоре 1,3; 1,0 и 0,7 номинального. Сравнение расчетных данных с экспериментальными показывает, что расчетные формулы дают удовлетворительную точность лишь при потоках, меньших номинального, когда нелинейность кривой намагничивания проявляется несущественно.
19G
Рис. 5-23. Осциллограммы переходных процессов пуска и торможения АД.
с —при 1,ЗУ0н; 6 — ЧГОН: а —при 0,7ifOH.
Как видно из сравнения осциллограмм на рис. 5-23,а—в, насыщение магнитной системы оказывает существенное демпфирующее действие на электромагнитные переходные процессы, причем чем больше установившееся значение потока, тем меньше время переходного процесса и меньше перерегулирование в кривых момента и потока. Так, в приведенных осциллограммах установившемуся значению -потока 0,7 номинального соответствуют перерегулирования в кривой потока 45%, при номинальном потоке 15%, а при 1,3 номинального не превышают 5%. Расчеты по приведенным формулам дают для всех значений потока перерегулирования в кривых потока и момента 56%.
Таким образом, расчет переходных процессов АД, управляемого от АИТ, во избежание больших погрешностей следует производить с учетом насыщения магнит-
197
ной цепи. Такие расчеты, выполненные на ЭВМ, дали хорошее совпадение с экспериментом и показали, что работа с большими потоками позволяет не только минимизировать потери в АД, как это отмечалось ^анее, но и обеспечить удовлетворительное качество переходных процессов.
Проанализировав (5-112) — (5-114), отметим, что принципиально возможно такое управление АД, когда электромагнитные переходные процессы будут полностью подавлены, и момент будет безынерционно следовать за составляющими тока статора, которые в свою очередь определяются управляющим воздействием — частотой скольжения ротора. Для этого необходимо, чтобы в переходном процессе обе составляющие потоко-сцеплений ротора оставались неизменными. Определим, как нужно управлять током статора, чтобы это условие соблюдалось. Для этого положим в (5-112) и (5-113)
d*r. х ^Г, г.... п
dt — dt —
Так как начальное положение вращающейся системы координат является произвольным, то координатные оси можно сориентировать так, чтобы ось X совпадала с направлением вектора потокосцепления ЧА. Тогда 4fr,x = = |4A|=const; ЧА,у = 0.
Из (5-112) и (5-113) следует, что эти условия выполняются, если
А. 1/Ао = const; (5-123)
iS'Y=WrTr\Wr\IL0. (5-124)
Подставив (5-123) и (5-124) в (5-114), получим:
М = 4 Р* Z?I I А, У = Г (5-125)
Из (5-123) следует, что для поддержания потоко-сцеплений ротора во время переходного процесса постоянными необходимо обеспечить постоянство проекции вектора тока статора на направление вектора потокосцепления ротора. В этом случае, как следует из (5-124) и (5-125), момент будет безынерционно следо-198
вать за составляющей вектора тока статора, ортогональной вектору Wr, которая, в свою очередь, должна быть пропорциональна частоте скольжения.
Таким образом, для эффективного управления электромагнитным моментом АД необходимо контролировать не только модуль тока статора, но и его положение относительно вектора потокосцепления ротора. Для этой цели в системы регулирования (см. рис. 5-20 и 5-22) необходимо ввести устройство регулирования фазы тока статора, которая обеспечивает требуемую взаимную ориентацию вектора тока статора и иотокосцеп-лений ротора в соответствии с (5-123), (5-124).
Интересно отметить, что при рассмотренном способе управления статические и динамические характеристики АД идентичны характеристикам машины постоянного тока, причем составляющая тока статора is,x соответствует току возбуждения, а составляющая i5,y— току якоря. Учитывая, что АД имеет меньший момент инерции ротора и позволяет развивать большие моменты, чем аналогичная машина постоянного тока, асинхронный электропривод с частотно-токовым управлением обеспечивает большее быстродействие, чем привод постоянного тока. Это определяет перспективность разработки и использования подобных систем.
5-6. ПРОМЫШЛЕННЫЕ ПРЕОБРАЗОВАТЕЛИ ЧАСТОТЫ С АВТОНОМНЫМ ИНВЕРТОРОМ ТОКА
В последнее время отечественной и зарубежной промышленностью освоен серийный выпуск ТПЧ с АИТ. Повышенный интерес к ТПЧ этого типа объясняется тем, что они, как правило, имеют более простую силовую схему, чем ТПЧ с АИН, и позволяют обеспечить высокое качество характеристик электропривода при сравнительно простой системе регулирования. Необходимость использования более высоковольтных полупроводниковых вентилей в настоящее время не является серьезным препятствием при разработке АИТ. Особенно существенно преимущества ТПЧ с АИТ сказываются, когда по условиям работы механизма требуется обеспечить рекуперативное торможение двигателя илн необходимы частые пуски, торможения и реверсы электропривода. В этих случаях электропривод переменного тока с АИТ по сложности и стоимости приближается к реверсивному тиристорному приводу постоянного тока, а по техническим и эксплуатационным показателям превосходит его.
В Советском Союзе осваивается серия ЭКТ комплектных электроприводов переменного тока с АИТ и АД типа 4А н ВАО [92].
199
В еснову разработки положена схема АНТ, представленная на рнс. 5-2. Первые пять типоразмеров ТПЧ выпускаются на мощности 160, 250, 315, 400, 500 кВ-A. Максимальная выходная частота 60 Гц. Габариты ТПЧ мощностью 160 и 250 кВ-А— 1000X2800X2400 мм, мощностью 315, 400 и 500 кВ-А—1000X3800X2400 мм. Система управления выполнена на дискретных и аналоговых интегральных схемах серий 133 и 140. Конструкция шкафов блочная, предусмотрена возможность взаимозаменяемости однотипных блоков.
Большой интерес представляет серийный ТПЧ типа СПЧР-3500,'6. В нем используется АИТ с двухступенчатой коммутацией, который содержит, кроме основных, два вспомогательных тиристора [84]. Выходная мощность ТПЧ 3500 кВт, выходное напряжение питания 6000 В. Преобразователь предназначен для плавного регулирования угловой скорости АД с короткозамкнутым ротором в диапазоне от 100 до 1000 об/мин. Диапазон регулирования частоты — от 5 до 50 Гц. Масса преобразователя 7500 кг, габариты 1250Х8000Х Х3000 мм.
Зарубежными фирмами выпускается широкая гамма ТПЧ с АИТ для регулируемого электропривода [15]. Так, фирмой «Луис Алис» (США) выпускается 26 типоразмеров преобразователен модели «Lancer 44XL». Первые 18 типоразмеров охватывают диапазон мощностей от 1 до 150 кВт. Они выполнены по мостовой схеме (см. рис. 5-2) и обеспечивают регулирование частоты от 0 до 100 Гц. Кроме того, предусмотрена возможность увеличения частоты до 200 Гц. Другие 8 типоразмеров выполнены по двенадцатитактной схеме н включают ТПЧ на мощности от 200 до 800 кВт. Основной диапазон регулирования частоты от 0 до 60 Гц, дополнительный до 120 Гц. Гарантированная стабильность частоты в обоих случаях в зависимости от применяемого способа регулирования (аналогового или цифрового) составляет 0,5—0,05%.
ГЛАВА ШЕСТАЯ
ПРЕОБРАЗОВАТЕЛИ ЧАСТОТЫ С НЕПОСРЕДСТВЕННОЙ СВЯЗЬЮ
6-1. ОБЩИЕ СВОЙСТВА ПРЕОБРАЗОВАТЕЛЕЙ ЧАСТОТЫ
С НЕПОСРЕДСТВЕННОЙ СВЯЗЬЮ
Существует широкий класс ТПЧ, у которых имеется непосредственная связь питающей сети и цепи нагрузки— ТПЧ с непосредственной связью (ТПЧН). У ТПЧН отсутствует цепь постоянного тока. Вследствие этого формирование кривой выходного напряжения ТПЧН производится из отрезков кривых напряжения питающей сети благодаря циклическому подключению нагрузки на определенные интервалы времени к различным фазам питающей сети. Отсюда название «циклоконвер-200
тор», иногда применяющееся в зарубежной технической литературе.
Отсутствие устройств принудительной коммутации тока не является обязательным. Имеются схемы ТПЧН, в которых -коммутация тока производится комбинированно, как за счет напряжения питающей сети, так и за счет энергии, накопленной в реактивных элементах коммутирующих устройств. Имеются также ТПЧН, в которых используется исключительно принудительная коммутация.
Тем не менее наиболее широкое распространение получили ТПЧН с естественной коммутацией тока в вентилях, осуществляемой за счет напряжения (реактивной мощности) питающей сети. Указанные особенности построения таких ТПЧН достаточно полно определяют их достоинства и недостатки.
К достоинствам ТПЧН с естественной коммутацией относятся:
1) отсутствие звена постоянного тока, а следовательно, и необходимости двойного преобразования энергии, характерного для ТПЧ, выполненных по схеме выпрямитель— инвертор. Благодаря этому повышается КПД ТПЧ за счет снижения потерь мощности в силовых вентилях;
2) возможность без принятия дополнительных схемных мер осуществлять двустороннюю передачу мощности: из питающей сети в цепь нагрузки и из цепи нагрузки в питающую сеть. Это свойство имеет большое значение в установках электропривода, так как позволяет осуществлять рекуперативное торможение двигателей и работать на нагрузку с любым значением коэффициента мощности;
3) возможность осуществлять плавное регулирование амплитуды и частоты основной гармоники выходного напряжения от нуля до номинального значения, необходимое для частотного управления двигателями переменного тока;
4j возможность с помощью системы управления получать на выходе напряжение, форма гладкой составляющей которого близка к синусоидальной. Это особенно полезно, а в отдельных случаях и просто необходимо при работе ТПЧН на двигатели средней и большой мощности.
201
Из принципа построения ТПЧН с естественной коммутацией вытекают и недостатки:
1) относительно низкий коэффициент мощности, потребляемой из питающей сети, обусловленный отстающим фазовым сдвигом основной гармоники потребляемого тока и присутствием в кривой этого тока широкого спектра высших гармоник. Применение дополнительных мероприятий позволяет в большой степени уменьшить вредное влияние ТПЧН на питающую сеть;
2) разветвленность силовой схемы, вследствие чего для ее реализации требуется относительно большое число вентилей;
3) ограничение верхнего предела рабочих частот по условиям обеспечения естественной коммутации тока в вентилях и устойчивой работы системы импульснофазового управления.
Указанные особенности ТПЧН с естественной коммутацией тока обусловливают области их применения в установках автоматизированного электропривода. Наиболее целесообразно применять ТПЧН в установках относительно тихоходного электропривода средней и большой мощности с короткозамкнутыми АД, с АД с фазным ротором; в схеме машины двойного питания; с синхронными двигателями и в установках вентильного двигателя.
В последние годы системы электропривода с ТПЧН получают все более широкое распространение, а исследованию процессов в ТПЧН посвящено довольно большое число работ различных авторов [3, 10, 30, 37, 46,].
В простейшем виде силовая схема ТПЧН с однофазным выходом аналогична силовой схеме реверсивного выпрямителя (рис. 6-1). Имеются две группы тиристоров I, II, включенные встречно-параллельно. Питание групп тиристоров может производиться от одной или раздельно от двух трехфазных обмоток силового трансформатора Тр либо непосредственного от сети. Нагрузка Н подключается к точкам соединения вентильных групп между собой. Путем соответствующего управления тиристорами обеих групп в выпрямительном и инверторном режимах при циклическом изменении угла управления на выходе ТПЧН может быть получено напряжение переменного тока, амплитуда и частота основной гармоники которого определяется параметрами сигнала управления.
202
Управление группами тиристоров может быть совместным или раздельным. В последнем случае управляющие импульсы подаются на вентили различных групп поочередно. Переключения в системе управления производятся через ’каждый полупериод частоты выходного напряжения, после того как ток, протекающий че
рез данную группу тиристоров, спадает до нуля и вентили перейдут в закрытое состояние. При раздельном управлении нет необходимости в установке во внутреннем контуре схемы реактора L. При согласованном управлении реакторы служат для ограничения уравнительных токов, обусловленных разностью мгновенных значений напряжений групп вентилей.
Тиристорный преобразователь частоты с непосредственной связью с многофазным выходом образуется из соответствующего числа однофазных, управляемых с необходимым фазовым сдвигом и включенных на вторичной стороне в зависимости от выбранной схемы либо в звезду, либо в треугольник, либо выполняемых с независимым включением
ным выходом.
Тр — трансформатор; L —реак« торы; //—нагрузка; / и II — группы тиристоров.
фаз.
В ТПЧН (С естественной коммутацией имеются широкие возможности для реализации различных законов формирования кривой выходного напряжения.
Из многообразия 'методов формирования кривой выходного напряжения, регулирования частоты и амплитуды основной гармоники напряжения рассмотрим лишь некоторые, применяемые наиболее часто. В ТПЧН с естественной коммутацией тока реализация различных способов формирования напряжения может производиться плавным или дискретным изменением фазы управляющих импульсов, подаваемых на тиристоры силовой схемы, либо путем периодической подачи и пе-
203
риодического снятия управляющих импульсов. Часто в алгоритме управления ТПЧН используют оба метода. При оценке основных принципов управления ТПЧН будем вначале считать, что отношение частот питающей сети и цепи нагрузки велико, длительность коммутации мала по сравнению с межкоммутационным интервалом, а ток нагрузки имеет отстающий фазовый сдвиг.
Рис. 6-2. Диаграмма работы ТПЧН с раздельным программным управлением.
В простейшем случае управление тиристорами групп схемы ТПЧН производится по определенной, наперед заданной программе. Диаграмма работы ТПЧН и форма гладких составляющих тока и напряжения на нагрузке приведены на рис. 6-2.
В момент 0] управляющие импульсы с определенной по отношению к анодному напряжению фазой, соответствующей выпрямительному режиму работы, начинают подаваться на тиристоры группы /. Это продолжа
ется до момента 02. На этом интервале ток в цепи нагрузки нарастает. В момент 02 изменяется фаза управляющих импульсов и тиристоры группы I переводятся в инверторный режим. Напряжение в цепи нагрузки изменяет
знак, а так начинает 'опадать и достигает нуля к моменту 0з. Далее следует пауза от 0з до 04, необходимая для восстановления запирающих свойств тиристоров. В момент 04 управляющие импульсы с фазой, соответствующей выпрямительному режиму, начинают подаваться на тиристоры группы II и происходит формирование отрицательной полуволны тока нагрузки. В связи с возможностью нарушения коммутационной устойчивости в инверторном режиме углы управления тиристорами в выпрямительном и инверторном режимах могут быть
различными.
В ТПЧН с программным управлением каждая полуволна выходного напряжения обычно состоит из целого числа интервалов проводимости тиристоров, поэтому
204
ZOO 11
частоту основной гармоники тока в цепи нагрузки обычно изменяют лишь дискретно. Правда, при достаточно большом отношении частот первичной и вторичной цепей и при использовании многофазных силовых схем ближайшие соседние значения выходной частоты отличаются незначительно. Нет принципиальных затруднений для получения на выходе ТПЧН напряжения с плавно изменяющейся частотой. При этом, однако, следует учитывать возможность появления иесимметрии положительной и отрицательной полуволн тока и напряжения на нагрузке, а при некратных частотах — возможность появления низкочастотной модуляции.
Тиристорные преобразователи частоты с непосредственной связью с раздельным программным управлением обладают существенным недостатком, ограничивающим их область применения установками электропривода относительно небольшой мощности. Система управления таких ТПЧН должна быть предварительно настроена на определенный, наперед заданный коэффициент мощности нагрузки. При повышении коэффициента мощности нагрузки возрастает пауза между полуволнами тока (интервал 03—64), и, следовательно, ухудшается форма кривых тока и напряжения нагрузки и коэффициент мощности ТПЧН. При снижении коэффициента мощности нагрузки ток в ее цепи к моменту 04 может не достигнуть нуля, что .вызовет протекание аварийного тока во внутреннем контуре схемы. Затруднена также рекуперация энергии из цепи нагрузки в питающую сеть, что бывает, как правило, необходимо в установках автоматизированного электропривода средней и большой мощности.
Более целесообразно переключение групп вентилей производить не по заранее заданной программе, а непосредственно после перехода кривой тока нагрузки через нуль по сигналу датчика тока или датчика состояния вентилей. При этом снимаются ограничения в отношении коэффициента мощности нагрузки ТПЧН и рекуперации энергии. Одновременно интервал 03—04 может быть сведен к минимуму.
Регулирование выходного напряжения ТПЧН производится путем изменения фазы управляющих импульсов в выпрямительном и инверторном режимах. Если считать, что абсолютные значения напряжения при работе вентильных групп в выпрямительном и инверторном
205
режимах одинаковы, выражения для значений углов включения вентилей групп имеют вид:
для вентилей группы Г.
При 91<(£>2^<02
О1=л/2—arcsin р;
(6-1)
ПРИ 02<®2^<03
ai=n/2 + arcsin р;
аналогично для вентилей группы II: При 04<®2^<05
ац=л/2—arcsin р;
При 05<®2^<06
ац—л/2 +arcsin р,
(6-2)
(6-3)
(6-4)
где р — глубина регулирования выходного напряжения ТПЧН, определяемая отношением действительного значения выходного напряжения к наибольшему возможному значению выходного напряжения при данной силовой схеме, \i=U2/U2m.
Момент перехода кривой тока нагрузки через нуль зависит от коэффициента мощности нагрузки и может быть определен по формулам, приведенным в [10].
Кривая выходного напряжения содержит полный спектр нечетных высших гармоник, амплитуды которых убывают обратно пропорционально порядковому номеру гармоники. В ТПЧН с трехфазным выходом при отсутствии в цепи нагрузки нулевого провода гармонический состав выходного напряжения улучшается, так как из кривой напряжения исключаются гармоники, кратные трем.
Можно усовершенствовать закон управления вентилями ТПЧН с целью улучшения гармонического состава кривой выходного напряжения. Для этого перевод вентилей из выпрямительного режима в инверторный (а при произвольном значении коэффициента мощности нагрузки — и из инверторного режима в выпрямительный) производится не скачкообразно, как показано на рис. 6-2, а постепенно, например при изменении угла включения вентилей (или напряжения) по линейному закону.
206
Наиболее часто в ТПЧН применяют алгоритм управления тиристорами, при котором гладкая составляющая кривой выходного напряжения имеет синусоидальную форму. В предельном 'случае, когда р,= 1, изменение углов включения тиристоров производится по линейному закону, как показано на рис. 6-3. В течение первой четверти периода частоты выходного напряжения угол включения тиристоров группы I изменяется от л/2 до О, что соответствует выпрямительному режиму работы. При этом формируется восходящая часть положительной полуволны выходного напряжения. Эта же часть полуволны выходного напряжения может быть сформирована тиристорами группы II, работающими в инверторном режиме при изменении угла включения от л/2 до л. Какая из групп тиристоров будет проводить ток нагрузки, зависит от коэффициента мощности нагрузки ТПЧН. В течение второй четверти периода выходной частоты угол включения тиристоров группы I изменяется от 0 до л/2, а группы II — от л до л/2. В течение следующей половины периода работа схемы протекает аналогичным образом с той лишь разницей, что функции группы I выполняет группа II, а группы II — группа I.
При необходимости регулировать амплитуду выходного напряжения (т. е. при р<1) закон изменения углов включения отличается от линейного. Выражения для углов включения вентилей обеих групп имеют вид:
a, =arccos(p. cosco^); 1
(6-5) an = arccos(—p.cos<»2/). J
Такой алгоритм управления группами вентилей получил название арикосинусоидального.
В реальных условиях углы включения изменяются дискретно в соответствии с дискретным характером работы отдельных тиристоров, поэтому кривые изменения углов а, приведенные на рис. 6-3, следует понимать в том смысле, что любые возможные значения углов отпирания располагаются только на этих кривых.
При совместном управлении тиристорами встречнопараллельно включенных групп и скачкообразном переводе вентилей из выпрямительного режима в инверторный и обратно вследствие неполной управляемости тиристоров во внутреннем контуре схемы ТПЧН возникают броски уравнительного тока. Это в большой степени
207
ограничивает возможности построения схем ТПЧН с совместным управлением при прямоугольном законе формирования кривой выходного напряжения.
В случае арккосинусоидального закона управления углы включения вентилей изменяются относительно медленно, вследствие чего не происходит резких изменений уравнительного тока в течение периода выходной частоты.
Рис. 6-3. Алгоритм управления тиристорами ТПЧН при синусоидальной форме гладкой составляющей выходного напряжения.
Схемы ТПЧН с совместным управлением наиболее целесообразны для применения в установках электропривода большой мощности, когда отношение частот питающей сети и цепи нагрузки относительно велико и используются многофазные силовые схемы. В этом случае наличие ограничивающего реактора не вызывает чрезмерного падения выходного напряжения, увеличения установленной мощности оборудования и снижения КПД. Обычно снижение выходного напряжения, обусловленное наличием реактора, не превышает 5—10% номинального.
По сравнению с реверсивными преобразователями постоянного тока в ТПЧН вследствие циклического изменения угла включения определение уравнительного тока усложняется. При этом приходится учитывать конечное значение индуктивности в цепи нагрузки .ТПЧН. Анализ уравнительных токов и метод их расчета даны в [10].
208
В ТПЧН с раздельным управлением группами вентилей принципиально отсутствуют уравнительные токи. Такой ТПЧН характеризуется меньшей установленной мощностью элементов силовой схемы и более высокими энергетическими характеристиками.
Однако ТПЧН с раздельным управлением группами вентилей обладают и некоторыми недостатками. Так, при малых нагрузках ТПЧН в режиме прерывистых токов увеличивается коэффициент искажения формы кривой выходного напряжения ТПЧН. Искажение также увеличивается с ростом выходной частоты. Одновременно в кривой выходного напряжения появляются субгармонические составляющие, обусловленные дискретностью работы вентилей и некратностью частот питающей сети и цепи нагрузки, поэтому в установках электропривода, где к качеству кривой выходного напряжения ТПЧН предъявляются высокие требования, целесообразно применять совместное управление, принимая одновременно меры по оптимизации параметров внутреннего контура схемы ТПЧН.
6-2. АНАЛИЗ ФОРМЫ КРИВОЙ ВЫХОДНОГО НАПРЯЖЕНИЯ ПРЕОБРАЗОВАТЕЛЯ ЧАСТОТЫ С НЕПОСРЕДСТВЕННОЙ СВЯЗЬЮ
Дискретный характер формирования кривой выходного напряжения ТПЧН и произвольное отношение частот питающей сети и цепи нагрузки вызывают серьезные трудности математического характера при анализе формы кривой выходного напряжения и тока, потребляемого ТПЧН из питающей сети.
Наибольшие трудности в расчете возникают при плавном изменении угла включения, характерном для арккосииусоидального закона управления, который является наиболее рациональным для установок электропривода средней и большой мощности, поэтому важно определить степень и область применимости допущения о бесконечном отношении частот питающей сети и цепи нагрузки У=(01/(02- Заслуживает внимания также вопрос о том, какое минимальное значение N можно считать приемлемым при создании реальных установок.
Ниже приведены результаты исследования формы кривой и основной гармоники выходного напряжения ТПЧН при конечных значениях .V и числа фаз силовой схемы ТПЧН на стороне питающей сети mi. Рассмотрим 14—581 209
ограничивает возможности построения схем ТПЧН с совместным управлением при прямоугольном законе формирования кривой выходного напряжения.
В случае арккосинусоидального закона управления углы включения вентилей изменяются относительно медленно, вследствие чего не происходит резких изменений уравнительного тока в течение периода выходной частоты.
Рис. 6-3. Алгоритм управления тиристорами ТПЧН при синусоидальной форме гладкой составляющей выходного напряжения.
Схемы ТПЧН с совместным управлением наиболее целесообразны для применения в установках электропривода большой мощности, когда отношение частот питающей сети и цепи нагрузки относительно велико и используются многофазные силовые схемы. В этом случае наличие ограничивающего реактора не вызывает чрезмерного падения выходного напряжения, увеличения установленной мощности оборудования и снижения КПД. Обычно снижение выходного напряжения, обусловленное наличием реактора, не превышает 5—10% номинального.
По сравнению с реверсивными преобразователями постоянного тока в ТПЧН вследствие циклического изменения угла включения определение уравнительного тока усложняется. При этом приходится учитывать конечное значение индуктивности в цепи нагрузки .ТПЧН. Анализ уравнительных токов и метод их расчета даны в [10].
208
В ТПЧН с раздельным управлением группами вентилей принципиально отсутствуют уравнительные токи. Такой ТПЧН характеризуется меньшей установленной мощностью элементов силовой схемы и более высокими энергетическими характеристиками.
Однако ТПЧН с раздельным управлением группами вентилей обладают и некоторыми недостатками. Так, при малых нагрузках ТПЧН в режиме прерывистых токов увеличивается коэффициент искажения формы кривой выходного напряжения ТПЧН. Искажение также увеличивается с ростом выходной частоты. Одновременно в кривой выходного напряжения появляются субгармонические составляющие, обусловленные дискретностью работы вентилей и некратностью частот питающей сети и цепи нагрузки, поэтому в установках электропривода, где к качеству кривой выходного напряжения ТПЧН предъявляются высокие требования, целесообразно применять совместное управление, принимая одновременно меры по оптимизации параметров внутреннего контура схемы ТПЧН.
6-2. АНАЛИЗ ФОРМЫ КРИВОЙ ВЫХОДНОГО НАПРЯЖЕНИЯ ПРЕОБРАЗОВАТЕЛЯ ЧАСТОТЫ С НЕПОСРЕДСТВЕННОЙ СВЯЗЬЮ
Дискретный характер формирования кривой выходного напряжения ТПЧН и произвольное отношение частот питающей сети и цепи нагрузки вызывают серьезные трудности математического характера при анализе формы кривой выходного напряжения и тока, потребляемого ТПЧН из питающей сети.
Наибольшие трудности в расчете возникают при плавном изменении угла включения, характерном для арккосииусоидального закона управления, который является наиболее рациональным для установок электропривода средней и большой мощности, поэтому важно определить степень и область применимости допущения о бесконечном отношении частот питающей сети и цепи нагрузки У=(01/(02- Заслуживает внимания также вопрос о том, какое минимальное значение N можно считать приемлемым при создании реальных установок.
Ниже приведены результаты исследования формы кривой и основной гармоники выходного напряжения ТПЧН при конечных значениях .V и числа фаз силовой схемы ТПЧН на стороне питающей сети mi. Рассмотрим 14—581 209
вначале основную гармонику выходного напряжения ТПЧН.
На рис. 6-4 показана диаграмма изменения углов включения вентилей одной группы ТПЧН >с однофазным выходом и характер изменения интервалов проводимости вентилей в течение периода частоты 'вторичной сети при конечном отношении частот (jV=3) и аркко'синусо-
Рис. 6-4. Интервалы проводимости тиристоров при формировании кривой выходного напряжения ТПЧН.
идальном законе управления [11]. Через М обозначено отношение масштабов 0 и а'. Из рис. 6-4 видно, что кривая выходного напряжения формируется из отрезков синусоид питающего напряжения, сдвинутых между собой на интервал 2n/mj в угловой мере частоты питающей сети И]. Если угол включения вентилей а' отсчитывается не от момента их естественного отпирания (а=0), а от момента, соответствующего а=л/2 (когда при непрерывном токе в цепи нагрузки среднее значение выходного напряжения вентильной схемы равно нулю), т. е. а'—л/2—а, то выражение для а' имеет вид:
а' = ± arcsin (р sin . (6-6)
При этом значение а' может изменяться в пределах —л/2 <(*'•< л/2. Знак « + » относится к той группе вентилей, которая от момента 6 = 0 работает в выпрямительном режиме, а знак «—» к группе вентилей, начинающей в момент 0 = 0 работать в инверторном режиме. Значения а и 0 измеряются в угловой мере частоты питающей сети. 210
Определим положение синусоид питающего напряжения относительно начала отсчета (0 = 0), соответствующего началу положительной полуволны кривой а'(0). В момент 0 = 0, когда а'=0, фаза питающего напряжения может 'быть любой. Обозначив через 0Н интервал от момента 0 = 0 до момента перехода через нуль управляющего сигнала, ’соответствующего а'=0 для тиристора, вступающего в работу 'первым при 0^0, 'получаем следующие трансцендентные уравнения для определения момента начала любого k-ro интервала проводимости вентилей ('кроме нулевого):
О + arcsin (ц sin (6-7)
и длительности k-ro интервала проводимости вА+1 — 0А = ^- 4: ^arcsin sin — arcsin (р. sin .
(6-8)
В (6-7) и (6-8) знак «—» относится к группе вентилей, вначале проводящей ток в выпрямительном режиме. Анализ (6-7) показывает, что в общем случае при ц=/=1 интервалы проводимости вентилей изменяются в процессе формирования кривой выходного напряжения. Так, для группы, формирующей положительную полуволну тока нагрузки, при увеличении выходного напряжения (переход из инверторного режима в выпрямительный) интервалы проводимости вентилей меньше, чем 2л/гп\, а при уменьшении выходного напряжения (переход из выпрямительного режима в инверторный) больше, чем 2л/ть Из (6-7) и (6-8) также следует, что независимыми переменными, определяющими моменты начала и конца интервала проводимости каждого вентиля, являются 0н, т\, N и р.
При произвольном значении N кривая выходного напряжения ТПЧН не является периодической кривой с частотой юг и может иметь любой период повторяемости. Поскольку гармонический анализ для произвольного значения N связан со значительными математическими трудностями и, как будет показано ниже, не является практически необходимым, ограничим задачу условием, что в одном периоде частоты &>2 содержится целое число интервалов проводимости длительностью по 14* 21!
2л//П1, выражаемое произведением Nmi. При этом кривая выходного напряжения становится периодической с круговой частотой ®2-
Обозначим число интервалов проводимости за период «>2 в виде Afmi = m] + z, где параметр х, выражающийся целым положительным числом, может принимать значения от 1 до со. Тогда наименьшее предельное значение Nmi = mi + l. Это соответствует предельному условию возможности работы системы управления, построенной по вертикальному принципу при условии, что опорное и управляющее напряжения имеют синусоидальную форму, а ц может принимать значения от 0 до 1. Нетрудно видеть, что при принятых условиях N и х связаны между собой соотношением
JV=l+z/m1. (6-9)
Принимая за начало отсчета времени момент перехода через нуль функции а'(0) и используя разложение в тригонометрический ряд кривой мгновенных значений напряжения, получаем выражения для амплитуд косинусной Я] и синусной Ь] составляющих основной гармоники выходного напряжения и постоянной составляющей йо- Выражения для относительных значений амплитуд составляющих кривой выходного напряжения группы вентилей ТПЧН (в долях напряжения при больших значениях N и гщ) при условии, что ток нагрузки непрерывен, а коммутация тока в вентилях происходит мгновенно, имеют вид:
1 «. =----------
2^, sin —
1
W+ 1
*==о
(2k— 1)- ен) - cos (Ш. к - (2k- 1) - 6Н))+
+ J] {C0S(~V~ ®k+'~^2k~~ 0 — 6н)~ *=o
-cos(^±^-^(2fe- (6-10)
212
bt =
1
я
2^1 sin —
0, + 1-^- (2k -
— 1)— eH)-sin(^T- 6*~^(2A:~ 1)~0h)}~
/
SJ sin Г—rr—— 6^+1 —-—* (2fe-l)-oj-1 У Й + 1 mi ’ aj
&=o v
(611)
1
a, = ———-• я
2^, sin —
4-S(C0S ?‘«-57(24-‘»-4=0
-6H)-cos (0a--±-(2£-1)-6h)I
(6-12)
При рассмотрении полученных уравнений необходимо иметь в виду, что в общем случае, когда 0Н¥=О, кривая выходного напряжения за период иг содержит /+1 участок проводимости (/=JVmi=i/n1+и), как показано на рис. 6-4. При этом условие 0о=О соответствует началу нулевого участка, а условие 0;+i = 2nV соответствует окончанию /-го участка.
В реальном ТПЧН с однофазным выходом попеременно работают две группы тиристоров, каждая из которых формирует одну полуволну тока нагрузки. При согласованном управлении, если уравнительные токи малы, выходное напряжение ТПЧН можно рассматривать как среднее значение напряжений обеих групп.
Отметим также, что при mi = 6 или 12 значение 0Н одинаково для группы тиристоров, формирующей положительную полуволну тока и для группы, формирующей отрицательную полуволну (здесь и далее под группой тиристоров, формирующей положительную полуволну тока, подразумевается та группа, включение которой вначале происходит в области выпрямительного режима). Таким образом, при mi = 6 или 12 0н+—0Н~ При
213
ml = 3 углы 0H групп тиристоров не равны между собой. Если 0<: Эн+^л/З, то 0н— Вн+Ч- л/3. При л/3^^0н+^^ 2л/3 0н-= 0н+—л/3.
Для получения данных в широком диапазоне изменения параметров 0Н, mb N и ц был проведен расчет на ЭВМ, обобщенные результаты 'которого, приведенные ниже, позволяют сделать ряд полезных для практического использования выводов.
Оценим полученные результаты вначале качественно. При малых значениях и амплитуда синусной составляющей основной гармоники напряжения каждой из групп тиристоров (bi+ и bi~), совпадающей по фазе с функцией а'(0), а также амплитуда среднего значения напряжений обеих групп (bicp) могут заметно отличаться от 1. Соответствующие значения косинусных составляющих (а1+, at- и а1Ср) при этих условиях отличаются от 0. При этом наибольшие отклонения ai и bi от значений при х=оо (0 и 1) примерно одинаковы. Постоянные составляющие напряжений групп (а0+ и ао_) также могут достигать заметных значений, хотя и меньших, чем fli и bj. В то же время среднее значение постоянной составляющей напряжения обеих групп аОср в одних случаях (при нечетных х) превышает |Ь1ср—1| и а^р, а в других— (при 'четных и) равно нулю.
Указанные параметры зависят от значений mi и ц. При увеличении mi значения |bj—11, а\ и а0 уменьшаются примерно пропорционально mi. Значения этих параметров быстро снижаются и при уменьшении ц, причем с ростом mi это снижение проявляется более резко.
И наконец, все указанные параметры зависят от 0Н, изменяясь циклически при изменении 0Н от 0 до 2л/ть
Рассмотрим 'более подробно характер изменения ai, bi и а0 для т\ — Ч, 6, 12 при ц=1 и малых значениях х (х=1, 2, 3, 4).
На рис. 6-5,а—в приведены кривые напряжения группы тиристоров для mi = 3, р.= 1, х=1 и трех значений 0И. Аналогичные кривые для х=2 приведены на рис. 6-6,а—в. На рис. 6-7,а—в приведены зависимости аь bi и йо от 0н при х= 1 и ц=1 для mi=3, 6, 12. Анализ кривых рис. 6-7, а—в позволяет отметить следующее. Значения Ь)+, bj_, ai+ и aj_ изменяются циклически, причем полный цикл изменения соответствует изменению 0Н от 0 до 2л/ть При этом циклы изменения парамет
214
ров, соответствующих положительной и отрицательной группам, сдвинуты относительно друг друга на л/тр В соответствии с характером изменения составляющих напряжения групп средние значения составляющих bwp и а1ср также изменяются циклически. Полный цикл изменения средних значений соответствует изменению 0Н на л/mi (вместо 2п/т\ для составляющих напряжения
Рис. 6-5. Кривые мгновенных значений напряжений групп тиристоров, выходного напряжения и уравнительного напряжения ТПЧН при х=1, /П1=3 и ц=1.
а — 0Н=О; б — ен-л/6; в — 0Я=Л/3.
групп), а диапазон изменения средних значений существенно меньше диапазона изменения составляющих напряжения групп. Можно также отметить, что aicp — — | ^1ср—11.
Постоянная составляющая напряжения групп (с0+ и По-) и среднее значение постоянной составляющей обеих групп (аопр) также изменяются циклически, причем пол-
215
ный цикл изменения соответствует изменению 0„ от 0 до 2л//П1, а величина аОср мало отличается от д0+ и а0—
Из сравнения кривых для mi = 3, 6 и 12 видно, что при возрастании mi значения |bi—11, а\ и уменьшаются практически обратно пропорционально (следует учесть различный масштаб по осям ординат для кривых рис. 6-7,а—в при разных mi).
Рис. 6-6. Кривые мгновенных значений напряжений групп тиристоров, выходного напряжения й уравнительного напряжения ТПЧН при z=2, /П]=3 и ц=1.
а — 0Н = О; б — ен=л/6; в — 0П- я/З.
Таким образом, при х=1 значения синусной, косинусной и постоянной составляющих кривых напряжения групп тиристоров изменяются при изменении 0Н. При включении двух групп тиристоров встречно-параллельно соответствующие изменения имеют место в синусной, косинусной и постоянной составляющих напряжения на выходе ТПЧН. Поскольку при встречно-параллельном включении групп тиристоров образуется замкнутый контур внутри схемы ТПЧН, необходимо учитывать уравнительные напряжения в этом контуре, обусловленные 216
Рис. 6-7. Зависимость составляющих напряжения групп тиристоров и выходного напряжения ТПЧН от 0Н при
217
разностью составляющих основной гармоники и постоянных составляющих напряжений групп (oi+ и Щ-; 61+ и bi-, а0+ и ай-).
Следует отметить, что если ток, вызванный уравнительным напряжением, обусловленным составляющими основной гармоники напряжений групп тиристоров, и являющийся знакопеременным с выходной частотой ТПЧН, принципиально может быть ограничен с помощью реактора, то ток от уравнительного напряжения, обусловленного разностью постоянных составляющих напряжений гоупп вентилей (хотя и значительно меньшего), таким способом ограничить нельзя. Если, кроме того, учесть, что наличие значительной постоянной составляющей в кривой выходного напряжения ТПЧН, работающего на двигатель переменного тока, вообще недопустимо, то приходим к выводу, что условие х=1 при р, близких к 1, для реализации неприемлемо.
Рассмотрим случай, соответствующий х=2, р=1 (рис. 6-8,а—в). В отличие от предыдущего случая х—1 циклы изменения bi+ и Ь}-, а также Oi+ и а{- совпадают для положительной и отрицательной групп, поэтому bicp=bi+=bi- и aicp=ai+=ai-, причем весь цикл изменения bicp и «юр соответствует изменению 0Н от 0 до 2л//П1. Очевидно также, что вследствие этого отсутствуют составляющие основной гармоники уравнительного напряжения при встречно-параллельном включении групп тиристоров. Между тем колебания а)Ср и bicp превышают соответствующие колебания в случае х=1.
Постоянные составляющие напряжений групп тиристоров при любых 9Н равны и противоположны по знаку, т. е. а0+=—а0-. Вследствие этого постоянная составляющая в кривой выходного напряжения ТПЧН всегда отсутствует, но имеет место постоянная составляющая уравнительного напряжения, причем ее значение существенно превышает значение постоянной составляющей при х=1. Что же касается зависимости рассмотренных параметров от числа фаз схемы mi, то, как видно из кривых рис. 6-8,а—в, характер ее остается примерно таким же, как и в случае х=1.
Несмотря на то что в кривой выходного напряжения отсутствует постоянная составляющая, из-за наличия постоянной составляющей уравнительного напряжения случай х=2 при ц близких к 1 также практически неприемлем.
218
Рис. 6-8. Зависимость составляющих напряжения групп тиристоров и выходного напряженияТПЧН от 0Н при х=2 и и=1.
219
На практике, однако, реализовать режим работы ТПЧН при |т=1 удается относительно редко. Это связано, в частности, с тем, что при время, предоставляемое на коммутацию тока и выключение тиристоров, в инверторном режиме при согласованном управлении становится равным нулю. Обычно расчет элементов схемы ведут таким образом, чтобы при наибольшем выходном напряжении ц=0,8ч-0,9.
В табл. 6-1 приведены обобщенные результаты расчета параметров выходного напряжения ТПЧН при различных значениях mi, х и ц. Из рассмотрения данных табл. 6-1 следует, что значения параметров |&i—11, О| и а0 при уменьшении it быстро снижаются, особенно для случаев mj = 6 и 12 и уже при ц=0,8 в ряде случаев ими можно пренебречь даже при х=1.
Если же от х=1 перейти к следующему нечетному значению х=3, то происходит дополнительное резкое уменьшение изменений at и bi при всех значениях ц. При этом изменения средних значений а1Ср, bicp и аагр практически отсутствуют при любых значениях it. Практически отсутствует при любых ц также изменение а0, что является весьма важным, поскольку означает отсутствие постоянной составляющей уравнительного напряжения. Наличие изменений ai+, а}-, bi+ и Ь}_ указывает на то, что уравнительное напряжение, обусловленное этими составляющими, имеется.
Для четных значений х характер изменения параметров выходного напряжения ТПЧН несколько иной. При х=2 с уменьшением ц резко падают значения fli и Ьь причем при любых ц уравнительное напряжение основной гармоники отсутствует. Что касается а0, то, несмотря на его быстрое уменьшение при уменьшении р, постоянная составляющая уравнительного напряжения имеет место из-за того, что «о+ и ао- имеют противоположные знаки. При х = 4 колебания а} и bt вообще отсутствуют, а колебания а0 хотя и уменьшаются, но не исключают наличия постоянной составляющей уравнительного напряжения. При ц^0,8 это напряжение становится пренебрежимо малым.
Проведенный анализ позволяет сделать следующие основные выводы:
1. Основная гармоника кривой напряжения групп тиристоров ТПЧН помимо синусной составляющей, совпадающей по фазе с сигналом управления, содержит еще
220
Наибольшие абсолютные значения параметров при изменении вн от 0 до 2n/Hit
221
to
Продолжение табл. 6-1
Nb п/п Параметр Обозначение параметра X = 1* х — 2 х = 3* х — 4
р.= 1,0 (1=0,8 Ц—1,0 (1=0,8 |А=1,0 ц — 0,8 11=1,0 (1=0,8
"h = 6
I Отклонение синусной составляющей основной гармоннкн нип|жженпя группы вентилей от единицы |Ь1 + -1 1 1 Ь,_-1 1 0.1303 0,0558 0,0714 0,0187 0.0293 0,0036 <0,0001 <0,0001
2 Косинусная составляющая основной гармоники напряжения группы вентилей ’«.+1 |а,_ 1 0,1232 0,0600 0,0714 0,0187 0,0223 о.оозз <0,0001 <0,0001
3 Постоянная составляющая напряжения группы вентилей 1 “о + 1 1“.- । 0,0714 0,9187 0,0255 0,0035 0,0009 <0,6001 0,0039 <0,0001
4 Отклонение синусной составляющей основной гармоники кривой выходного напряжения от единицы I b,d। 0,0385 0,0026 0,0714 0,0187 <0,0001 <0,0001 <0,0001 <0,0001
5 Косинусная составляющая основной гармоники кривой выходного напряжения l"icp । 0,0385 0,0026 0,6714 0,0187 <0,0001 <0,0001 <0,0001 <0,0001
6 11остоянная составляющая в кривой выходного напряженья Чер । 0,0714 0,0187 <0,0001 <0,0001 <0,0001 <0,0001 <0,0001 <0,0001
7 Синусная составляющая уравнительного напряжения основной гармоники 16iyp 1 0,1837 0.1064 <0,0001 <0,0001 0,0592 0,0072 <0,0001 <0,0001
8 Косинусная составляющая уравнительного напряжения основной гармоники laiyp! 0,2464 0,1200 <0,0001 <0,0001 0,0446 0,0066 <0,0001 <0,0061
9 Постоянная составляющая уравнительного напряжения 1 Лур 1 0,0294 0,0009 0,0510 0,0070 0,0018 <0,0001 0,0078 0,0002
П родолжение. табл. 6-1
№ п/п. Параметр Обозначение параметра X = 1* х = 2 X - з* х = 4
(1=1,0 (1=0,8 (1=1,0 (1=0,8 (1=1,0 (1=0,8 (1=1,0 | ц=0,8
тх = = 12
1 Отклонение синусной составляющей основной гармоники напряжения группы вентилей от единицы । 61-F—1 । 1 0,0640 0,0092 0,0385 0,0026 0,0174 0,0004 <0,0001 <0,0001
2 Косинусная составляющая основной гармоники напряжения группы вентилей 1«,+ 1 । “1 - 1 0,0716 0,0099 0,0385 0,0026 0,0126 0,0004 <0,000! <0,0001
3 Постоянная составляющая напряжения группы вентилей > “о+ 1 1 Л-1 0,0385 0,0026 0,0147 0,0004 0,0006 <0,0001 0,0025 <0,0001
4 Отклонение синусной составляющей основной гармоники кривой выходного напряжения от единицы 16>ср-Ч 0,0200 <0,0001 0,0385 0,0026 <0,0001 <0,0001 <0,0001 <0,0001
5 Косинусная составляющая основной гармоники кривой выходного напряжения 1 Лер 1 0,0200 <0,0001 0,0385 0,0026 <10,0001 <0,0001 <0,0001 <0,0001
6 Постоянная составляющая в кривой выходного напряжения 1 Лер । 0.0385 0,0026 <0,0001 <0,0001 <0,0001 <0,0001 <0,0001 <0,0001
7 Синусная составляющая уравнительного напряжения основной гармоники 1\р| 0,0880 0,0182 <0,0001 <0,0001 0,0348 0,0008 <0,0001 <0,0001
8 Косинусная составляющая уравнительного напряжения основной гармоники |Я.ур1 0,1264 0,0198 <0,0001 <0,0001 0,0252 0,0008 <0,0001 <0,0001
9 Постоянная составляющая уравнительного напряжения 1 Лур 1 0,0160 <0,0001 0,0294 0,0008 0,0012 <0,0001 0,0050 <0,0001
* Цикличность изменения параметров 4—6 и 9 соответствует изменению 9 от 0 до ъ]1щ, цикличность изменения остальных параметров при любых х — изменению 8н от 0 до 2-]т
223
и косинусную составляющую, находящуюся в квадратуре с первой. В кривой напряжения групп тиристоров имеется также и постоянная составляющая. Эти же составляющие содержатся и в кривой выходного напряжения ТПЧН, образованного встречно-параллельным включением двух групп тиристоров.
2. Во внутреннем контуре ТПЧН действует уравнительное напряжение, обусловленное неравенством составляющих основной гармоники и постоянной составляющей напряжения групп тиристоров (это напряжение следует отличать от уравнительного напряжения, обусловленного разностью мгновенных значений напряжений групп тиристоров и имеющего частоту, кратную частоте питающей сети).
3. Синусная, косинусная и постоянная составляющие и уравнительные напряжения изменяются циклически при изменении 0„ от 0 до 2л./гП1. Характер изменения значений составляющих определяется параметром jV= = l + x//7ii, причем для четных и нечетных х характер изменения составляющих различен. При возрастании х или снижении ц синусная составляющая стремится к 1, а косинусная и постоянная — к 0.
4. С точки зрения работы силовой схемы ТПЧН позволяет при реальных условиях получить на 'выходе частоту, достаточно близкую к частоте питающей сети, причем значения .¥^2 можно считать приемлемыми практически во всех случаях. С другой стороны, без большой погрешности для расчета ТПЧН в широком диапазоне частот может применяться метод основной гармоники. При этом максимальная погрешность может быть определена заранее. Допущение о бесконечном отношении частот и числа фаз на первичной стороне ТПЧН может применяться во всех практических случаях определения основной гармоники выходного напряжения.
Проведенный анализ относится к случаям, когда период выходной частоты ТПЧН соответствует целому числу интервалов проводимости вентилей , формирующих кривую выходного напряжения. Это означает, что полученные данные справедливы для отношений частот N, приведенных в табл. 6-2, и соответствующих натуральному ряду чисел х.
Из табл. 6-2 видно, что ступени изменения выходной частоты ТПЧН достаточно малы, особенно при т, = 6 и 12. Поэтому при анализе реальных случаев
224
когда х не 'Выражается целым числом, можно рассматривать два ближайших значения N и /V2), удовлетворяющих условиям табл. 6-2, одно из которых больше, а другое меньше реального, т. е. A^1<jV,p<jV2 [55].
Рассматривая параметры ТПЧН для N\ и N2, можно полагать, что при №р отклонения параметров не превысят отклонений для Ад и N2.
Таблица 6-2
гощего. Если отношение частот на входе и выходе ТПЧН выражается 'Произвольным числом, не соответствующим целому числу интервалов проводимости за период частоты вторичной цени, то переход от одного периода выходной частоты к следующему с точки зрения параметров кривой выходного напряжения можно рассматривать как плавное изменение 0„.
Как показано выше, при изменении 0ц от 0 до (а в некоторых случаях — в 2 раза чаще) завершается полный цикл изменения синусной, косинусной составляющих основной гармоники кривой групп тиристоров и выходного напряжения, а также постоянной составляющей.
Циклическое изменение синусной и косинусной составляющих означает модуляцию амплитуды и фазы основной гармоники напряжения на выходе ТПЧН, напряжений групп вентилей и уравнительного напряжения. Циклическое изменение постоянной составляющей означает наличие низкочастотной составляющей в кривых напряжения па выходе ТПЧН, напряжения групп тиристоров и уравнительного напряжения. Период модуля-15-581 225
ции низкочастотной составляющей равен времени, в течение которого происходит изменение 0Н на 2л//И1 (или л/mi), а амплитуда соответствует наибольшим значениям отклонений параметров.
Рассмотрим высшие гармоники в кривой выходного напряжения ТПЧН.
Поскольку кривая выходного напряжения ТПЧН формируется и? отрезков синусоид питающего напряжения, в ней содержится широкий спектр высших гармоник, определяемый как частотой питающей сети сщ, гак и частотой цепи нагрузки (в2. В общем случае амплитуды и частоты гармоник в кривой выходного напряжения определяются основными параметрами ТПЧН: ГП\, N, |1, COS ф21-
В [55] предложен общий метод анализа высших гармоник в кривой выходного напряжения ТПЧН. Пусть значение N выражается рациональной дробью, т. е. N = aja2, где at и а2 — целые положительные числа, причем ci\I>a2. Любое W можно с заданной точностью представить в виде рациональной дроби. При этом ®i — = «iQ, «2=^2^, а период повторяемости кривой выходного напряжения составляет Т=2л/П. Такую кривую можно разложить в тригонометрический ряд. Рассмотрим кривую выходного напряжения ТПЧН при аркко-сипусоидальном законе управления тиристорами, характеризующуюся наиболее сложным гармоническим составом.
В предельном случае наибольшего выходного напряжения (/1=1) уравнения (6-2) — (6-3), определяющие моменты включения тиристоров, из трансцендентных превращаются в алгебраические. Рассмотрим два крайних (с точки зрения номеров высших гармоник напряжения) случая, соответствующих чисто индуктивной (ф21 = л/2) н чисто емкостной (ф2=—л/2) нагрузкам. Как следует из рис. 6-3, при индуктивной нагрузке группа тиристоров I проводит ток нагрузки в течение нисходящей части кривой выходного напряжения (от л/2 до Зл/2 в угловой мере выходной часто:ы ТПЧН), а группа тиристоров II— в течению восходящей части кривой напряжения (от 0 до л/2 и от Зл/2 до 2л). Обратная картина имеет место при емкостной нагрузке, когда группа I проводит ток в течение восходящей части кривой напряжения, а группа П — в течение нисходящей части. При этих условиях в обоих режимах в течение всего
226
периода частоты вторичной цепи ТПЧН интервалы при-видимисти тиристоров ДВ остаются неизменными и составляют:
ври чисто индуктивной нагрузке
-1);
при чисто емкостной нагрузке
Admin=2nN/mla[ (N +1).
Из различия интервалов проводимости тиристоров следует, что частоты соответствующих высших гармоник ’ кривой выходного напряжения при индуктивной ла-I рузке ниже, чем при емкостной, вследствие того что интервалы проводимости вентилей при индуктивной нагрузке больше, чем интервалы проводимости вентилей при емкостной нагрузке.
Номер п амплитуду высших гармоник выходного напряжения ТПЧН при чисто индуктивной нагрузке можно определить по формулам [55]
v = /wii (Лг--I) +1; (6-13)
и, -----111 тщ ж 1), (6-14)
где /г=--1, 2, 3 а и ~и„ !Ъ' —относительное зпа-чение амплитуды v-й гармоники напряжения, -выраженное в долях амплитуды основной гармоники кривой выходного напряжения.
При чисто емкостной нагрузке
v=/zm1 (W+1) =F 1; (6-15)
и, = 1 + 1). (6-16)
Знаки в каждой паре соотношений (6-13) — (6-1G) следует брать соответственно либо верхние, либо нижние одновременно.
Из приведенных выражений (6-14), (6-16) следует, что амплитуды высших гармоник напряжения не зависят от N и определяются голько номерами гармоник и числом фаз силовой сгемы иа стороне питающей сети.
При чисто акышной нагрузке в кривой выходного напрялжш г ТП'-П1 содержи-ся весь спектр высших гармоник, определяемый выражениями (6-13) и (6-15), причем амплтуда кажд.ш из гармоник уменьшена вдвое 15* 227
но сравнению co случаем чисто реактивной нагрузки.
При изменении <р21 в пределах л/2><р2| >—л/2спектр высших гармоник в -кривой выходного напряжения ТПЧН остается неизменным, хотя амплитуды гармоник изменяются. По море изменения <pi от л/2 до —л/2 уменьшаются амплитуды гармоник с номерами но (6-13) и возрастают амплитуды гармоник с номерами по (6-15).
Рис. 6-9 Содержание высших гармоник в кривой выходного напряжения ТПЧН.
Из рассмотрения (6-13) и (6-15) также следует, что при р = 1 числа, отражающие порядок гармоник, располагаются на оси симметрично относительно значения nni\N, хотя гармоники такого порядка в кривой выходного напряжения отсутствуют. При уменьшении р в кривой выходного напряжения ТПЧН появляются гармоники ряда ni)iiN и уменьшаются амплитуды гармоник с номерами ио (6-13) и (6-15). Одновременно становится слабее зависимость гармонического состава от характера нагрузки ТПЧН. При р = 0 гармоники с номерами по (6-13) и (6-15) вовсе исчезают и остаются лишь гармоники ряда /zz/Zj/V.
На рис. 6-9 показан гармонический состав кривой выходного напряжения ТПЧН при пи — б, W = 8, р=1 и ф21--л/2 и --л/2.
228
Соотношения (6-13)- (6-16) справедливы для ТПЧН с раздельным управлением. При совместном управлении падение напряжения на ограничивающем реакторе приводит к выравниванию мгновенных значений напряжений обеих групп вентилей, благодаря чему спектр высших гармоник в ‘Кривой выходного напряжения в меньшей степени зависит от характера нагрузки ТПЧН и глубины регулирования его выходного напряжения. Исследованиям гармонического состава кривой выходного напряжения ТПЧН при различных алгоритмах управления в значительной мере посвящена работа [86].
При работе ТПЧН па двигатель вследствие относительно высокого порядка гармоник напряжения и сглаживающего действия индуктивности рассеяния двигателя пульсации в кривой тока выражены довольно слабо и не приводят к значительным пульсациям электромагнитного момента и увеличению потерь электрической машины. Однако в установках электропривода большой мощности, когда к форме кривой выходного напряжения ТПЧН предъявляются повышенные требования, может оказаться целесообразной установка сглаживающего фильтра. При больших значениях N, когда порядок гармоник мало зависит от глубины регулирования выходного напряжения ТПЧН и характера нагрузки, а определяется в основном часютой питающей сети и числом фаз силовой схемы, целесообразно применять двойные резонансные фильтры, настроенные на крайние значения частот гармоник данного порядка.
6-3. ЭНЕРГЕТИЧЕСКИЕ ХАРАКТЕРИСТИКИ ПРЕОБРАЗОВАТЕЛЯ ЧАСТОТЫ С НЕПОСРЕДСТВЕННОЙ СВЯЗЬЮ
Энергетические характеристики весьма важны при анализе и синтезе любой мощной электрической установки. Применительно к ТПЧН, которые представляют собой промежуточное звено между питающей сетью переменного тока и нагрузкой, энергетические характеристики определяются параметрами напряжения на стороне нагрузки и тока на стороне питающей сети.
Анализ выходного напряжения ТПЧН проведен в предыдущем параграфе.
Первичный ток определяет коэффициент мощности, потребляемой ТПЧН и.з питающей сети. Коэффициент мощности является одним из наиболее важных показа-
229
телей любой силовой преобразовательной установки, питающейся от сети переменного тока, так как определяет установленную мощность оборудования преобразователя и загрузку питающей сети.
В общем случае можно рассматривать следующие составляющие полной мощности Si, потребляемой ТПЧН из питающей сети; активную мощность Plt определяемую нагрузкой и потерями в установке; реактивную мощность Qi, определяемую фазовым сдвигом основной гармоники первичного тока относительно кривой питающего напряжения; мощность искажения /?у1, определяемую высшими гармониками первичного тока; мощность искажения /? ,, определяемую низкочастотной модуляцией кривой первичного тока; мощность, определяемую несимметрией трехфазной системы первичного тока.
Для ТПЧН вследствие циклического изменения углов включения тиристоров характерна довольно сложная форма кривой тока, потребляемого из питающей сети. В принципе ТПЧН потребляет все указанные составляющие полной мощности. Исключение составляет последняя составляющая, -которой можно пренебречь при достаточно большом отношении частот питающей сети и цепи нагрузки при использовании симметричной системы импульсно-фазового управления тиристорами. Не-симметрия токов в фазах питающей сети проявляется слабо и лишь при довольно малых значениях N. Практического влияния па коэффициент мощности ТПЧН мощность несим-метрии не оказывает.
В связи с тем что коммутация тока в вентилях ТПЧН происходит за счет напряжения питающей сети, фазовый сдвиг основной гармоники тока, протекающего через каждый тиристор силовой схемы, является всегда отстающим, а коэффициент мощности установки принципиально меньше единицы. Относительно низкий коэффициент мощности является характерной особенностью ТПЧН с естественной коммутацией при любой силовой схеме, любом принципе управления и характере нагрузки.
Из принципа действия ТПЧН следует, что фазовый сдвиг между основными гармониками тока и напряжения на стороне питающей сети при любом законе управления циклически изменяется с частотой, кратной частоте выходного напряжения. Эта особенность ТПЧН 230
характерна как для схем с однофазной нагрузкой, так и для трехфазной.
Используя понятия полной мощности активной мощности Pi, реактивной мощности сдвига Qi и мощности искажения /ф, коэффициент мощности ТПЧН можно представить в виде
КР2, + Q2, + R\ s
(6-17)
Параметры Pi и Qi определяются основной гармоникой тока, потребляемого ТПЧН из питающей сети, а параметр Pi— остальными гармониками в кривой тока. Практически удобнее общий коэффициент мощности ТПЧН kM представить в виде
(6-18)
где kc, — коэффициент сдвига, обусловленный фазовым сдвигом основной гармоники тока относительно синусоиды напряжения питающей сети; kn— коэффициент искажения, обусловленный остальными гармониками в кривой первичного тока.
Для получения результатов, пригодных для практического использования, приняты следующие условия и допущения:
силовая часть ТПЧН построена на базе двухтактных вентильных схем, причем в качестве исходной ячейки силовой -схемы принят трехфазный мост;
отношение частот питающей сети и цепи нагрузки N достаточно велико, вследствие чего длительность интервалов проводимости тиристоров неизменна в течение периода выходной частоты и составляет 120°;
в кривой выходного тока ТПЧН отсутствуют гармоники с частотой, кратной частоте питающей сети;
управление группами вентилей раздельное, а пауза между кривыми полуволн тока нагрузки достаточно мала;
длительность коммутации тока в вентилях равна 0, что соответствует условию бесконечной мощности питающей сети (при этом амплитуды гармоник тока, потребляемого ТПЧН, получаются наибольшими по сравнению со случаями, когда учитывается реальная мощность питающей сети);
231
питающий трансформатор имеет схему соединения обмоток звезда — звезда при коэффициенте трансформации, равном 1;
характер нагрузки активно-индуктивный при изменении коэффициента мощности в диапазоне от 0 до 1.
Необходимо определить следующие параметры:
1) активную и реактивную составляющие, а также полную мощность, потребляемую ТПЧН из питающей сети (по основной гармонике);
2) коэффициент мощности ТПЧН на стороне питающей сети;
3) коэффициент модуляции основных гармоник активной и реактивной составляющих тока, потребляемого ТПЧН;
4) гармонический состав тока, потребляемого ТПЧН;
5) коэффициент искажения синусоидальности кривой потребляемого тока.
Характер изменения указанных параметров определяется за период повторяемости, который является частью периода выходной частоты ТПЧН. При принятых условиях для ТПЧН с трехфазным выходом период повторяемости составляет 60°.
В данном разделе проведено исследование энергетических характеристик ТПЧН с учетом лишь основных гармоник потребляемого тока и питающего напряжения.
Влияние, которое оказывают высшие гармоники потребляемого тока на энергетические характеристики ТПЧН и работу питающей сети, анализируется в § 6-4.
Рассмотрим следующие два характерных случая:
1. Управление типисторами ТПЧН производится таким образом, что гладкая составляющая фазного выходного напряжения имеет прямоугольную форму с длительностью полуволны в 180° выходной частоты, а основные гармоники напряжений фаз сдвинуты относительно друг друга на угол 120°, образуя симметричную трехфазную систему. Нагрузка включена в трехфазную группу без нулевого провода. Благодаря этому линейное напряжение ТПЧН (и фазное напряжение на нагрузке) имеет ступенчатую форму, в которой отсутствуют гармоники, кратные трем (рис. 6-10,а, б). Питание каждой фазы ТПЧН производится от отдельной вторичной обмотки трансформатора или от отдельного трансформатора.
232
2. Преобразователь частоты с непосредственной связью выполнен по схеме рис. 6-10,а, но управление вентилями производится по арккосинусоидальному закону, в результате чего гладкая составляющая выходного' напряжения имеет синусоидальную форму (рис. 6-10,в). На выходе ТПЧН образуется симметричная |рехфазная система синусоидальных напряжений. /. Энергетические характеристики ТПЧН с выходным нипрллсением ступенчатой формы
Рис. 6-10. ТПЧН с трехфазным входом и трехфазным выходом.
ci — силовая схема; б, в— диаграммы выходных напряжений.
Диаграммы напряжений и токов на входе и выходе ТПЧН приведены на рис. 6-11,а, б. При этом на рис 6-11,а приведена диаграмма изменения токов и напряжений на выходе ТПЧН за период выходной частоты, а на рис. 6-11,5 — диаграмма первичных токов и напряжений в течение малого интервала отме-
ченного на рис. 6-11,а, на котором изменениями выходных напряжений и токов пренебрегаем.
233
Рис. 6-11. Диаграммы напряжений и токов ТПЧН с трехфазным выходом при ступенчатой форме кривой выходного напряжения.
а — на выходе; б — на входе.
284
Амплитудное значение фазного напряжения на нагрузке составляет:
= (6-19)
где U\ — действующее значение фазного напряжения на входе ТПЧН; р — степень регулирования выходного напряжения.
Действующее значение основной гармоники выходного напряжения Уц выражается соотношением
и,.
(6-20)
Текущие значения токов на выходе ТПЧН в течение интервала 0^со2^л/3 описываются выражениями
: Um f . Uzm f . — 'Jim f ffi-911
*24-22, 'A' l2B 2Z, 'В’ 2C 2Z2 'C' >
где Z2— полное сопротивление нагрузки при круговой частоте ®2; /Д, fs, fc — экспоненциальные функции a>zt:
____ 1____ Л _ 2б>а + е2а/3 — М/3 -W/tg Y
A cos<p21 \ 1 + еа ./'
: ____ (2 — + 2е2а/3 + ga/3 g-^/tg-bA. 1 (6-22)
в cos <р2, у 1 + еа '
р .___1 (, _ — еа + g2a/3 + 2са/3 —<o3i/tg v21
С cos <р2, \ 1 + еа ,
здесь ф21 — фазовый угол нагрузки при круговой частоте со2 ио 1-й гармонике; а = л/1£<р2|.
Момент перехода тока в фазе А нагрузки через нуль <оДо при значениях ®2^о^л/3 определяется по формуле 2ла 4- Д“/3— />а/3
®г4 = 1g' 9М to —-г---------> (6-23)
а при значениях (тДоТгл/З — по формуле . . . еа + 2е2а/3 + еа13
®2^ = tg?2,to------2(1+Т5)---- (6'24)
При расчетах по (6-22) — (6-24) при значениях cos<p2i—1 и coscp2i = 0 получаются неопределенности. Раскрывая неопределенности, имеем: при cos<p2i=l (02^0=0, }а~ 2/3, fB = 4/3, fc = 2l3\ при cos(p2i=0 235
«2^о=л/2, }а=‘2/3 (W—2jr/3), fB = 2/3 (W—л/3), /с = = 2/3 (со2/~Ь л/3).
Из принципа работы ТПЧН и диаграмм рис. 6-11,а, б следует, что кривые 12а, i2b и i2C являются огибающими амплитудных значений составляющих первичного тока, обусловленных всеми тремя фазами нагрузки. Для двухтактной силовой схемы при определении амплитуд первичного тока необходимо учитывать модуль функций
Текущее действующее значение основной гармоники каждой из составляющих тока на первичной стороне ТПЧН 7[ 1, обусловленной током в одной фазе нагрузки, выражается соотношением
/п = К1|/2|. (6-25)
Фаза основной гармоники составляющих первичного тока зависит от степени регулирования выходного напряжения и режима работы тиристоров данной фазы ТПЧН (выпрямительный или инверторный).
Если W=SW/3, то в течение интервала OsCWsCWo тиристоры фазы А работают в инверторном режиме, а в течение оставшегося интервала и2ф^о)2/^л/3— в выпрямительном режиме. Тиристоры фаз В и С в течение всего интервала 0^&)2/^л/3 работают в выпрямительном режиме, поэтому
ал = it — arccos р при 0 <и>270;
аА = arccos р при (6-26)
ав = ас—arccos |* при 0<<o2f<it/3.
Если же л/3^со2/о^л/2, то тиристоры фазы А в течение всего интервала 0^ы2/^л/3 работают в инверторном режиме, тиристоры фазы В в течение интервала О^(02^ (Wo—л/3) также работают в инверторном режиме, а в течение интервала (софо—л/3) W=C ^л/3— в выпрямительном режиме. Тиристоры фазы С в течение всего интервала 0^C(o2Wn/3 работают в выпрямительном режиме, поэтому
в, st—arccos р при 0<(o7<ir/3; j
а_—-. и — arccosu. при 0--r'3); I
в ’ С6’27)
ад = arccos р. при (ю21 — it'3) < W < т.'З; j
асarccos р. при 0 < »>2П< it, 3. J
236
С учетом полученных соотношении текущие значения активной и реактивной составляющих мощности, потребляемой ТПЧН (по основной гармонике) в долях максимальной полной мощности на (выходе при активной нагрузке, в зависимости от основных параметров схемы выражаются соотношениями
p.=§-=-f-(±lf,,i±lfBl+(fcll; «о»)
Q.=57=-!^?Z1lf,.i+if»l+licil' <6-29)
где Pi и Q[ — соответственно текущие значения активной и реактивной мощностей на первичной стороне ТПЧН; S2 — полная мощность на выходе ТПЧН.
Под текущими значениями составляющих полной мощности на стороне питающей сети понимаются значения, изменяющиеся с частотой, кратной частоте на выходе ТПЧН.
Знак « + » в (6-28) соответствует интервалам работы фаз Л и В ТПЧН в выпрямительном режиме, а «—»--в инверторном. Если составляющие полной мощности относить к максимальной полной мощности по основным гармоникам напряжения и тока, то в (6-28) и (6-29) нужно ввести дополнительный множитель л2/9.
Текущие значения полной мощности, потребляемой ТПЧН, и коэффициента мощности выражаются соотношениями
5, Н’ф'ЕрР; (6.30)
PJS., = P,J^P\TQ\. (6-31)
Зависимости параметров Р.х, Q*, S{! и йм от ш2/ для ТПЧН с трехфазным выходом и ступенчатой формой напряжения при различных значениях р и ф21=30° приведены на рис. 6-12. Штриховкой отмечена область значений Йз рассмотрения кривых на рис. 6-12 следует, что в течение периода повторяемости значения Р*, Q», S„ и /гм изменяются в довольно широких пределах. Анализ показывает, что диапазон изменения указанных параметров возрастает с увеличением фазового сдвига основной гармоники тока в цепи нагрузки.
237
Рис. 6-12. Составляющие полной мощности и коэффициент мощности ТПЧН с трехфазиым выходом при ступенчатой форме кривой выходного напряжения и cp2i=3O°. В скобках указаны значения р.
оценки характеристик ТПЧН рас-
Для интегральной смотрим средние и действующие значения параметров Р*, Q*. S* и kM за период повторяемости, выражаемый в угловой мере выходной частоты:
3 Г
П О
(6 32)
Р.
Q*ep-
— \ P\d («\t);
о
тс/З
\ Q,fd (<о2/);
О
(6-33)
(6-34)
) Q\d(u>zt)-
6
(6-3,5)
-\~О2 • Г Ч -х-ср»
^.р
(6-36)
(6-37)
238
^М, <:р Р ‘ip/'SiCp', (6-38)
kKA=P^S^. (6-39)
При оценке энергетических характеристик ТПЧН не-сбходимо знать характер изменения активной и реактивной мощностей, потребляемых из питающей сети в течение периода повторяемости явлений. Колебания активной и реактивной составляющих полной мощности можно характеризовать коэффициентом модуляции, который
выходом при ступенчатой форме кривой выходного напряжения.
определяется как отношение разности максимального и минимального значений исследуемого параметра к сумме этих значений. Выражения для коэффициентов модуляции активной и реактивной составляющих мощности (Лмод.р и ймо,••..?) имеют вид:
k. ______P*'fu:x P*mifi
мод, Г — Pt!nax + r\mi:, ;
о -о . (б-40)
М‘-Д, Q Qtmax + Qtmiu ' I
239
Использование силового оборудования ТПЧН можно оценить С Помощью коэффициента использования Лпсм, представляющего отношение активной мощности на выходе ТПЧН по основным гармоникам тока и напряжения к действующему значению полной мощности, потребляемой ТПЧН:
, P*v(i)_________ cos y3J
Т1СП С ~ т-дС °-мД 71
(6-41)
Зависимости параметров, рассчитанных по (6-32) — (6-41). <н тс--; и и для ТПЧН с. трехфазным выходом и
Рис. 6-14. Зависимо. т>> А’,./. и knen от «р,, и jt для ТПЧП
<• трехфачиым и I ,i у о то м при ст уп<-пчи joii форме кривой выходного напри женив.
ступенчатым напряжением приведены на рис. G-13, 6-14.
В связи с относительно малыми отличиями действующих •щачеанй реактивной составляющей мощности, полный мощности п коэффициента мощности от соответ-ств\ ющпх еретиих ..начеши'! на рис. 6-13, 6-14 даны общие кривые ,! тя действующих и средних значений Q., S* и Лм.
240
Анализ полученных результатов позволяет сделат!, следующие выводы:
в ТПЧН с трехфазным выходом и ступенчатой формой кривой выходного напряжения составляющие полной мощности в течение интервала повторяемости изменяются в довольно широких пределах;
изменение активной составляющей мощности превышают изменения реактивной составляющей н возрастаю г с увеличением фазового угла нагрузки. При углах, превышающих 60°, имеет место изменение знака активной составляющей мощности в течение интервала повторяемости.
2. Энергетические характеристики ТПЧН с синусоидальным выходным напряжением
Диаграммы напряжений и токов на входе и выходе ТПЧН с трехфазным выходом и синусоидальным напряжением приведены на рис. 6-15,а, б, причем рис. 6-15,а соответствует напряжению и току на выходе ТПЧН, а рис. 6-15,6 — на входе в течение интервала Д(а>2^), отмеченного на рис. 6-15,а.
Как и в предыдущем случае, период повторяемости явлений составляет 60° частоты выходного напряжения.
Действующее значение синусоиды выходного напряжения выражается соотношением
~Uv (6-42)
Текущие значения тока фаз на выходе ТПЧН выражаются соотношениями
Чд- ^sin ЬП-?21);
УТи
—тгsln — 2я/з -- ?2.); } (6-43)
]/"2U
sinb/ + 27r/3-?21).
)
Как и при ступенчатой форме выходного напряжения, кривые г'гл, Чл и /ас являются огибающими амплитудных значений составляющих первичного тока, обусловленных всеми фазами нагрузки. Поскольку в ТПЧН применена двухтактная силовая схема, при определении 1 6—581 241
Рис. 6-15. Диаграммы напряжений и токов ТПЧН с трехфазным выходом при синусоидальной форме кривой выходного напряжения.
а — на выходе; б — на входе.
амплитудных значений первичного тока будем учитывать модуль синусоидальных функций, приведенных в (6-43). Поэтому текущее действующее значение основной гармоники каждой из составляющих тока на первичной стороне ТПЧН 7ц, обусловленной током в одной фазе нагрузки, выражается соотношением (6-25).
242
Фазы основных гармоник составляющих первичного гока изменяются в течение периода повторяемости в соответствии с принятым арккосинусоидальным законом оправления.
Если ф21^л/3, имеют .место следующие условия для режима работы тиристоров фаз ТПЧН. На интервале 0 ^ф21 тиристоры фазы А работают в инвертор-
ном режиме, а на интервале ф21^и2^л/3— в выпрямительном. Тиристоры двух других фаз в течение всего интервала 0^co2^n/3 работают в выпрямительном режиме, поэтому имеют место следующие соотношения для углов включения тиристоров фаз ТПЧН:
ад — arccos (— р sin «у) при 0 < <»,t < <рг1;
ад= arccos ф sin «U) при <<п^<чс/3;
ав = arccos [—p,sin(<n2Z — 2-п/З)] при 0<<о2г'<it/3;
ас — arccos [р. sin (w2Z2ic/3)J при 0 У <o.,i < it/3.
1 (6-44)
i
При ф21>л/3 условия работы тиристоров фаз ТПЧН изменяются. Тиристоры фазы А в течение всего интервала 0Со12/С;л/3 работают в инверторном режиме, фазы В — в течение интервала СкСсог^Фг!—л/3 работают в инверторном режиме, а оставшуюся часть интервала —в выпрямительном режиме. Тиристоры фазы С в течение всего интервала работают в выпрямительном режиме. Условия изменения углов включения вентилей выражаются соотношениями:
— arccos ( — р. sin u\J) при 0 u>J <тг '3;
пп-— arccos [--р. sin (<»./-’-т ’З)] при 0 <с»2/ы гр21 — чс'З;
а&=--arccos [—psin((o2/~-2to'3j| приср,,—
стсarccos [р. sin —I—2-п/З)] при 0<co2/<tE3.
Воспользовавшись (6-45), выразим активную и реак-Iявную составляющие мощности, потребляемой ТПЧН (по основной гармонике), в долях максимальной полной мощности на выходе:
Р — pcoscf>21; (6-46)
о2
16’
243
[|/ 1 — posin'2 оД| sin («>/ — cp2]) 14-
4" 1^1 — Д sin2 (<o2/ — 2it/3) | sin (<o^ — 27C/3 — <p21) | 4~
Н-Ю ~ P-2 sin2 (w2t 4- 2if3) | sin (w2t 4- 2тг/3 — ?21) []. (6-47)
Из рассмотрения (6-46), (6-47) следует, что с частотой, кратной выходной частоте ТПЧН, изменяется лишь реактивная составляющая полной мощности, а активная мощность потребляется равномерно, не изменяясь во времени.
Для остальных энергетических параметров ТПЧН с синусоидальным выходным напряжением (5*, Р»ср,
Рис. 6-16. Составляющие полной мощности и коэффициент мощности ТПЧН с трехфазным выходом при синусоидальной форме кривой выходного напряжения и ф21=30°.
244
Рис, 6-17. Зависимость Р,. Q„ и S, от cp2i и Н Для ТПЧН с трех-фазпым выходом при синусоидальной форме кривой выходного напряжения.
j *д» \ср, '1’мдр> ^м. ;ъ «ли-д, Р,
справедливы выражения (6-30) — (6-31).
На рис. 6-16 приведены зависимости параметров Р„, Qt, S. и от и2^ при различных значениях ц и ср21 = 30° для ТПЧН с трехфазным выходом и синусоидальным выходным напряжением. Штриховкой отмечена область значений S*.
Зависимости усредненных параметров от <с2] и ц для ТПЧН с трехфазным выходом и синусоидальным напряжением приведены на рис. 6-17, 6-18. Действующие значения параметров в ТПЧН с синусоидальным выходным напряжением с достаточной для практических расчетов 245
Рис. 6-18. Зависимости /г, ,, kv. q от p2, и д ня ТПЧН с трехфазным выходом при синусоидальной форме кривой выходного напряжения.
a~kf,i' и *».д, Q,.
точностью совпадают со средними значениями, а коэффициент использования kwu не отличается от коэффициента мощности kK.
Из рассмотрения полученных результатов можно сделать следующие выводы:
в ТПЧН с трехфазным выходом и синусоидальным выходным напряжением в течение интервала повторяемости изменяется лишь реактивная составляющая мощности. Наибольших значений эти изменения достигают при значениях фазового угла цепи нагрузки около 30° и значениях ц, близких к единице;
246
коэффициент мощности ТПЧН с синусоидальным напряжением ниже, чем ТПЧН с выходным напряжением ступенчатой формы.
Компенсация реактивной мощности в системах с ТПЧН
В большинстве практических случаев, в частности при работе ТПЧН в системе электропривода с АД, cos Ф21 обычно не превышает значений 0,8—0,85, а ц из условия обеспечения надежной 'коммутации тока в тиристорах, работающих в инверторном режиме, не превышает 0,85—0,9. При регулировании частоты вращения может потребоваться длительная работа ТПЧН при
Рис. 6-19. Коэффициент мощности ТПЧН при компенсации средней реактивной мощности.
1—при ступенчатой форме кривой выходного напряжения; 2 — при синусоидальной форме кривой выходного напряжения.
Рис. 6-20. Относительная мощность конденсаторов для компенсации средней реактивной мощности, потребляемой ТПЧН.
1 и 2 см. на рис. 6-19.
пониженном выходном напряжении, т. е. при значениях ц, изменяющихся в широком диапазоне, начиная с 0,1 — 0,2. При таких условиях ТПЧН с любым принципом управление обладает весьма низким коэффициентом мощности.
247
Повышение коэффициента мощности принципиально возможно с помощью компенсирующих конденсаторов, устанавливаемых на первичной стороне ТПЧН. Выбор емкости компенсирующих конденсаторов целесообразно производить, исходя из среднего значения реактивной мощности.
Следует отметить, что в ТПЧН с синусоидальным выходным напряжением можно обеспечить достаточно хорошую компенсацию реактивной мощности и повысить коэффициент мощности до значений, достаточно близких к единице, тогда как в ТПЧН со ступенчатым напряжением из-за значительных пульсаций активной мощности возможности повышения коэффициента мощности ограничены.
Зависимости коэффициента мощности йм.к, ТПЧН от cos ф21 и Ц при компенсации средней реактивной мощности приведены на рис. 6-19, а относительной мощности компенсирующих конденсаторов Q*c — на рис. 6-20 (штриховые кривые соответствуют ступенчатому, а сплошные — синусоидальному выходному напряжению) .
4. Энергетические характеристики ТПЧН с поочередным управлением
В мощных установках вентильного электропривода для обеспечения заданных выходных характеристик ТПЧН бывает целесообразно устанавливать в каждой ветви одной фазы силовой схемы две (или более) вентильные группы, включенные последовательно. При наличии в каждой ветви силовой схемы двух трехфазных тиристорных мостов (рис. 6-21) можно применять различные алгоритмы управления вентилями [12], обеспечивающие синусоидальную форму гладкой составляющей выходного напряжения.
В простейшем случае включение вентилей мостов 1А п 2А (или 1В п 2В) производится синфазно, т. е. в любой момент времени углы включения вентилей одинаковы и изменяются в течение периода выходной частоты по арккосинусоидальному закону. Вследствие этого напряжения, формируемые последовательно соединенными мостами, получаются одинаковыми. Снижение выходного напряжения ТПЧН обеспечивается уменьшением диапазона изменения углов включения, причем напряжение на выходе каждого из мостов снижается одинаково.
248
Вентилями последовательно включенных мостов мож
но управлять с фазовым сдвигом по частоте вторичной цепи. В этом случае углы включения вентилей каждого моста с выходной частотой изменяются также по арккосинусоидальному закону. Действующее значение напряжения на выходе каждого из мостов остается неиз-
менным и равным половине наибольшего напряжения на выходе ТПЧН. Очевидно, что наибольшее напряжение на выходе ТПЧН имеет место при синфазном управлении обоими последовательно включенными мостами каждой группы и представляет собой сумму абсолютных значений напряжений обоих мостов. Уменьшение выходного
Рис. 6-21. Схема ТПЧН с двумя группами тиристоров в каждой ветви.
напряжения достигается за счет фазового сдвига между гладкими составляющими кривых выходного напряжения после-
довательно включенных мостов, получаемого с помощью системы управления. Для получения нулевого выходного напряжения ТПЧН сдвиг фаз должен составлять 180° в угловой мере выходной частоты. При таком управлении происходит «геометрическое» сложение напряжений мостов.
Можно осуществлять поочередное управление вентилями последовательно включенных мостов [13, 32]. При таком управлении формирование кривой выходного напряжения каждой фазы ТПЧН производится следующим образом. В течение первой четверти периода частоты вторичной сети, соответствующей началу положительной полуволны кривой выходного напряжения, тиристоры одного из двух последовательно включенных мостов 1А и 2А максимально открыты в выпрямительном режиме, а углы включения тиристоров другого моста изменяются в предельном случае от л (в угловой мере частоты питающей сети) до 0. В течение второй четверти периода интервалы проводимости тиристоров одного моста ма-
249
ксимальны в выпрямительном режиме, а углы включения тиристоров другого моста изменяются от 0 до л. Закон изменения углов устанавливается таким образом, чтобы гладкая составляющая суммарного напряжения обоих мостов изменялась в соответствии с формой положительной полуволны синусоиды.
В течение второй половины периода частоты вторичной сети, соответствующей отрицательной полуволне кривой выходного напряжения ТПЧН, формируемой теми же мостами 1А и 2А, тиристоры одного моста максимально открыты в инверторном режиме, а углы включения тиристоров другого моста вначале изменяются от О до л, а затем вновь до 0.
Управление тиристорами второй пары мостов 1В и 2В производится аналогично, по со сдвигом на половину периода частоты вторичной сети.
При рассмотренном алгоритме управления напряжение на выходе ТПЧН получается наибольшим. Регулирование выходного напряжения производится за счет уменьшения диапазона изменения углов включения тиристоров моста, управляемого в течение данного полупериода выходного напряжения.
Преобразователи частоты с непосредственной связью с синфазным управлением тиристорами последовательно включенных мостов характеризуются наибольшим потреблением реактивной мощности. Энергетические характеристики ТПЧН в этом случае получаются аналогичными приведенным на рис. 6-17, 6-18.
Применение метода геометрического сложения напряжений мостов позволяет несколько улучшить энергетические характеристики ТПЧН, особенно при глубоком регулировании напряжения (при малых значениях ц). Если при |д==1 ТПЧН с синфазным управлением и с управлением с фазовым сдвигом потребляют одинаковую реактивную мощность (Q*cp=0,638 при cosq>2i=l и <5лСр=1,00 при cos q>2i=0), то при малых значениях ц (р—>0) потребление реактивной мощности при переходе от синфазного управления к управлению с фазовым сдвигом уменьшается (с Q*cp=l,275 до Q*cp=0,638 при cos ф21=1 и с Q*np=l,275 до Qwep=l,00 при cos <p2i=0) [12].
Поочередное управление вентилями последовательно включенных мостов позволяет значительно уменьшить реактивную мощность, потребляемую ТПЧН, поэтому 250
рассмотрим чанный метол более подробно с учетом ранее принятых условий и допущений.
Б ТПЧН с однофазным выходом потребляемая реактивная мощность изменяется циклически с периодом повторяемости, равным половине периода частоты вторичной сети. При произвольном числе п последовательно включенных вентильных мостов изменение реактивной мощности описывается выражением
п Q.s^-^-sin(<o20 JJsina^ Л=1
(6-48)
где а* — текущее значение угла включения тиристоров /г-го моста.
По (6-48) Q, определяется в долях произведения действующих значений наибольшего выходного напряжения и номинального тока.
При л=1 изменение Q* в течение половины периода частоты вторичной сети описипае тея выражением
2sin (и>2/; |/1 — •/2itsm2("V + ?21). (6-49)
При л=2 изменение Q* в течение половины периода частоты вторичкой сети описывается выражением
Q* = sin (<ог() [/1—[7\т 4-
+ И -[2(7., sin W + (6-50)
где (7„м1— максимально возможное относительное значение выходного напряжения ТПЧН при заданном ограничении углов включения атаж в инверторном режиме; (7*m=COS (jT Ctmax) •
Условия изменения ушив включения тиристоров мостов определяются выражением
a=arccos [2(7* sin (ы2(+ф21)±^7*т]. (6-51)
В табл. 6-3 указаны условия изменения переменных и приведены данные для определения реактивной мощности и изменения углов включения тиристоров в течение половины периода частоты вторичной сети для п=2.
251
2Г>2
Дополнительные условия выражаются соотношениями «шол-л—arccos U*m; (6-52)
у0 = arcsin(6-53)
На рис. 6-22 приведены диаграммы изменения относительной реактивной мощности для ТПЧН с однофазным выходом при ограничении и без ограничения углов включения тиристоров при индуктивном характере на-
Рис. 6-22. Диаграмма изменения реактивной мощности ТПЧН с поочередным управлением группами тиристоров в течение половины периода выходной частоты.
грузки (<p2i=30°) для п=1 и п—2. За начало отсчета времени принято начало положительной полуволны тока нагрузки. Заштрихованная область характеризует уменьшение реактивной мощности при переходе от одновременного к поочередному управлению двумя мостами с ограничением в инверторном режиме, соответствующем Д,.,,„=0,9.
На рис. 6-22 приняты следующие обозначения кривых: 1 — реактивная мощность при п— 1, 2 — то же при п=2 без ограничения углов включения в выпрямительном и инверторном режимах, 3—при п—2 с ограничением углов только в инверторном режиме, 4 — при п~2 с симметричным ограничением углов в выпрямительном п инверторном режимах.
Диаграммы изменения углов включения для некоторых случаев приведены на рис. 6-23. Обозначения те же, что и па рис. 6-22.
В (6-50) и (6-51) знак «Д-» соответствует интервалу времени, когда один из мостов работает с неизменным углом включения в инверторном режиме, а «—» — интервалу, когда неизменным остается угол включения
253
Рис. 6-23. Диаграмма изменения углов включения тиристоров ТПЧН с поочередным управлением группами тиристоров в течение периода выходной частоты.
тиристоров моста, работающего в выпрямительном режиме.
Для предельного теоретического случая 11=00, соответствующего при естественной коммутации наименьшему возможному потреблению реактивной мощности, вы-ра/Кения для Q* принимают вид [13]:
при ограничении углов включения только в инверторном режиме
Г// П — '4 sin (°4 + since Ч (6-54)
при симметричном ограничении угл^в включения в выпрямительном и инверторном режимах
Q., - 2 J I - sin «V. (6-55)
Для ТПЧН с трехфазным выходом при /г=2, ф2]—30° изменение реактивной мощности показано на рис. 6-22 (кривая Д). Вследствие малых пульсаций реактивной мощности достоверную количественную оценку энергетических характеристик ТПЧН с трехфазным выходом можно производить по среднему значению потребляемой реактивной мощности Q*cp. Кривые зависимостей Q*cp= ф21) для рассмотренных способов управления приведены на рис. 6-24. Сплошные линии соответствуют ограничению углов только в инверторном режиме, а пунктирные — симметричному ограничению углов.
Анализ полученных результатов исследования ТПЧН
254
Рис, 6-24. Зависимость среднего значения реактивной мощности, по требляемой ТПЧН с поочередным управлением, от относительного значения выходного напряжения.
--------соответствуют ограничению углов включения только в инвертном режиме;------- — соответствуют симметричному ограничению углов.
с поочередным управлением позволяет сделать следующие выводы:
применение в каждой ветви одной фазы силовой схемы ТПЧН нескольких последовательно включенных тиристорных групп позволяет при поочередном управлении значительно уменьшить потребление из питающей сети реактивной мощности;
снижение потребления реактивной мощности тем значительнее, чем больше число последовательно включенных тиристорных групп;
в реальных условиях, когда необходимо ограничивать углы включения тиристоров в инверторном режиме, лучшие энергетические характеристики получаются при управлении без ограничения углов включения в выпрямительном режиме.
955
6-4. ВЛИЯНИЕ НА ПИТАЮЩУЮ СЕТЬ ПРЕОБРАЗОВАТЕЛЯ ЧАСТОТЫ С НЕПОСРЕДСТВЕННОЙ СВЯЗЬЮ
При питании ТПЧН от источника или сети ограниченной мощности в системе ТПЧН — источник питания возникает ряд явлений, оказывающих значительное влияние на работу сети и других потребителей.
Характер потребления ТПЧН основной гармоники тока рассмотрен в § 6-3.
Помимо основной гармоники тока ТПЧН потребляет из питающей сети широкий спектр высших гармоник. Поскольку в качестве исходной принята трехфазная мостовая схема, в кривой потребляемого тока отсутствуют четные гармоники и гармоники, кратные трем.
Высшие гармоники тока удобно выражать в долях действующего значения основной гармоники тока
I -=I (6-56)
где — относительное действующее значение v-й гармоники тока, а 7 у и /д] —• соответственно действующие значения v-й и 1-й гармоник тока.
Общее количественное содержание высших гармоник в кривой тока, потребляемого ТПЧН, можно характеризовать коэффициентом нелинейных искажений синусоидальности кривой тока:
/~м
у =-5
где М — общее число учитываемых высших гармоник тока.
Значение kfj в общем случае изменяется в течение периода повторяемости. Для интегральной оценки искажения синусоидальности кривой тока, потребляемого ТПЧН, можно использовать среднее значение k/tl за период повторяемости Т:
т
f6'58)
О
При определении необходимо учитывать составляющие первичного тока, обусловленные всеми фазами нагрузки, с учетом фазового сдвига основных гармоник со-256
ставляющих тока относительно кривой питающего напряжения.
Выражение для текущего значения имеет вид:
где т.2 — число фаз на выходе ТПЧН; fj— функция, описывающая изменение тока в /’-й фазе нагрузки; а, — текущее значение угла включения вентилей в /-й фазе цепи нагрузки.
Первые члены в числителе и знаменателе дроби, стоящей под корнем, соответствуют синусным составляющим соответственно высших и основной гармоник тока, а вторые— косинусным составляющим.
В ТПЧН с трехфазным выходом и напряжением ступенчатой формы выражение для I v можно представить в виде
1 Ч М I sin Vtt4 + I /в I sin + | fc 1 sin vac]2 +' v V Н/л Isin aA + Ий I sin I fc I + I fc Isin “d2 +
+ I I fc I cos удд +1 fc Icos +1 fc I cos vad~ + [ I fc I COS ад + | fc I COS aB + ) fc I COS ac]2
(6-60)
Выражения для функций /д, fB и fc и условия изменения ад, ав и ас в течение периода повторяемости, составляющего 60°, даны в § 6-3 [(6-22) и (6-26)].
На рис. 6-14 приведены кривые, характеризующие зависимость коэффициента нелинейных искажений синусоидальности кривой тока, потребляемого ТПЧН, рассчитанного по десяти первым высшим гармоникам, от <р21
и ц.
В ТПЧН с трехфазным выходом и напряжением синусоидальной формы выражение для имеет вид:
V
[ | sin (со2/—<р21) | sin чаА + | sin (w2f— 2я/3—?2J) | sin vag -j-[ | sin (к>2/ — y2J) | sin aA + | sin(co2Z — 2л/3 — y2J) | sin as +
17—581
257
+ (sin (<o2i + 2n/3 — <f21) | sin vac]2 4- [ | sin(to2i — <f21) | cos viA 4-
+ |sin (co2Z — 2л/3 — ip21) sin ac]2 + [ | sin (co2i — <p21) | cos <хд -I- "*
+ | sin(w2/ —2n/3— | cos vag 4- | sin(<o2Z 4- 2~ '3—<p21) | cos vacj2
+ I sin(co2i — 2л/3 — <p21) I cos aB 4- I sin (w2i 4- 2л;3—<s21) | cos ac]-
(6-61)
Условия изменения ад, ав и ас в течение периода повторяемости приведены в § 6-3 (6-44), а зависимость коэффициента нелинейных искажений синусоидальности кривой тока, потребляемого ТПЧН, от <р21 и ц приведены на рис. 6-18.
Полученные результаты соответствуют принятому условию мгновенной коммутации тока в тиристорах. Это условие эквивалентно тому, что сеть, от которой питается ТПЧН, имеет бесконечную мощность, а трансформатор на входе вентильной схемы отсутствует или его сопротивление рассеяния равно нулю.
В ряде случаев, в основном касающихся промышленных установок электропривода малой и средней мощности, это допущение вполне оправдано. Естественно, что при этом форма кривой питающего напряжения остается синусоидальной при любой нагрузке ТПЧН.
В тех же случаях, когда мощность установки электропривода с ТПЧН соизмерима с мощностью питающей сети, необходимо учитывать длительность коммутации тока в тиристорах и соответствующее искажение формы кривой питающего напряжения.
В качестве параметра, характеризующего реактивное сопротивление сети ха, удобно взять у0, представляющий угол коммутации тока в неуправляемом выпрямителе, среднее значение выпрямленного тока которого равно амплитудному значению тока нагрузки ТПЧН 12т-
Из теории вентильных преобразователей известно, что угол у0 связан с параметрами сети и нагрузки соотношением
cos Y — 1___________ ______
io /21/, sin^/m,) ’
(6-62)
где Ui—действующее значение фазного напряжения на выводах вентильной схемы ТПЧН.
258
Вводя обозначение kj—IJIi, где 1\ и /2 — действующие значения тока на входе и выходе вентильной схемы, для ТПЧН с трехфазным выходом имеем:
1
COS Yo = 1 — . , -Г ,—г- , 10 kI sin (Д/И,) ’
(6-63)
где ик — выраженное в относительных единицах напряжение короткого замыкания питающей сети по отношению ко входу вентильной схемы ТПЧН.
При учете длительности процесса коммутации выражения для высших гармоник тока значительно усложняются. Для получения приемлемых для практического использования формул коэффициенты синусного и косинусного рядов для v-й гармоники тока, потребляемого ТПЧН (соответственно а. и bj, целесообразно выражать в долях амплитудного значения тока нагрузки.
Рассмотрим ТПЧН с трехфазным выходом и синусоидальным выходным напряжением. Если считать, что в процессе коммутации ток в тиристоре изменяется линейно (трапецеидальная форма составляющих первичного тока), а наибольший угол коммутации уо^п/3, то выражения для коэффициентов ряда для v-й гармоники тока принимают вид:
V7C г Vf,
8 cos — | sin —q—
«V = —— —Y7" ! sin (°V — ?21) i sin V (a, + Yi /2)-f-
| sin (wst — 2it/3 — <p21) | sin v (a2 y2 /2) -J-
sm —
—-— I sin ы + 2tc/3 — ?21), sin v (a3 Д- y3/2)
(6-64)
- Vyt
8 cos sin - —
b, ——2— —у— I sin Ы - ?21) I cos V (a, + Y, /2)+
sin -~2~
~— i sin — 2-к/З — <f>21) | cos v (a2 Д- y2/2) +
17*
259
. VY3 sin—~
—-----|sin(a>^-[-2Tt/3 — <p21)[cosv(a,-f-Y,/2) , (6-65)
где через у2 и у3 обозначены текущие значения углов коммутации, изменяющиеся с частотой со2 и зависящие от уо и других параметров ТПЧН в соответствии с уравнениями
у,— arccos [cos -j- (cos — 1) | sin fat — <p21) [] — a,; (6-66)
Y2 = arccos [cos a2 (созу0 — 1) | sin («>,/ — 2it/3 — <p2]) |]—a2;
(6-67)
Y3 = arccos [cos a3 -ф- (cos — 1) | sin fat 2it/3 — <p21) |J—a,.
(6-68)
Гармоники первичного тока обусловливают падения напряжения на реактивном сопротивлении питающей сети. Коэффициент нелинейных искажений синусоидальности кривой питающего напряжения kf,u выражается формулой
«=5,7,11,13...
Ь -------------------------
f-lJ V fa/UK-aiy-b\
(6-69)
где Д = +
Относительное содержание любой v-й гармоники спектра в кривой питающего напряжения U ь, на входе вентильной схемы можно определить по формуле
(6-70)
гармо-
может
п U j v ___________________
*’v f7i у ffa/iiK — а.)2— Ь\ ’
где Cfa — абсолютное действующее значение v-й ники напряжения.
Знание гармонического состава напряжения
оказаться необходимым для определения параметров сглаживающих фильтров или для оценки влияния ТПЧН на другие потребители, особенно чувствительные к определенным гармоникам напряжения и подключенные к той же питающей сети.
260
Если известно содержание любой v-й гармоники напряжения или коэффициент нелинейных искажений синусоидальности напряжения k/,u на входе вентильной схемы ТПЧН, то по известным параметрам сети можно рассчитать содержание этой гармоники или коэффициент нелинейных искажений k/,u в любой другой точке сети между вентильной схемой ТПЧН и выводами генератора при условии, что сеть содержит лишь линейные индуктивности, а емкостные связи между проводами и активные сопротивления проводов невелики. Так, в произвольной точке а значения параметров составят:
1/ i <^д)а
, _ v=5, 7, 11, 13,,,
U-a~
t7. и= - ЬА'‘--------------г (6-72)
где /=Li/(L1+L2); L\ — индуктивность сети (а также трансформаторов и реакторов) от точки а до выводов источника; L2 — индуктивность сети от точки а до входа тиристорной схемы ТПЧН.
При таком расчете индуктивность рассеяния генератора следует формально относить к сети и рассматривать источник питания как источник ЭДС без внутреннего сопротивления.
Расчет коэффициента нелинейных искажений по (6-71) вызывает затруднения вычислительного характе-00
ра из-за того, что ряд (VA)3 сходится до-
»=5,7, 11, 13 ...
вольно медленно, особенно при малых значениях у0. Это можно пояснить графически для случая управляемого выпрямителя. Искажение синусоидальности кривой питающего напряжения обусловлено коммутационными провалами и всплесками, как показано на рис. 6-25. Если из кривой действительного напряжения на входе вентильной схемы (рис. 6-25,в) выделить основную гармонику напряжения холостого хода (рис. 6-25,а), то оставшаяся кривая (рис. 6-25,а) с учетом знака будет характеризовать падение напряжения, обусловленное коммутацией тока в вентилях (рис. 6-25,6).
261
Рис. 6-25. Искажение формы кривой питающего напряжения, обусловленное коммутационными процессами в вентильной схеме.
а — основная гармоника напряжения холостого хода; б—ток; в — напряжение на входе вентильной схемы; г — падение напряжения.
Очевидно, что для получения достаточно точных результатов необходимо учитывать большое число членов разложения в тригонометрический ряд, а при одинаковом числе членов точность повыша
ется с увеличением длительности коммутации.
Проведенный качественный анализ подсказывает другой метод расчета коэффициента нелинейных искажений синусоидальности кривой напряжения. Рассмотрим действующее значение кривой коммутационных провалов в питающем напряжении на входе трехфазной мостовой схемы ЛГУ]. Разлагая эту кривую в тригонометрический ряд, получаем:
где Д«ь — гармонические функции ряда с частотой кратности V.
Поскольку интегралы произведений гармонических функций различных частот в пределах от 0 до л равны О, выражение (6-73) можно преобразовать:
Ди]у^ d^t. (6-74) б 0 4=5,7,11,13
Исходя из (6-74), действующее значения всех высших гармоник кривой коммутационных провалов, обусловливающее искажение кривой напряжения сети, можно оп-262
ределить через действующее значение кривой провалов и основную гармонику этой кривой. Коэффициент нелинейных искажений рассчитывается следующим образом. Определяется квадрат действующего значения кривой коммутационных провалов и составляющих основной । гармоники этой кривой. По полученным данным рассчитываются действующее значение всех высших гармоник кривой провалов, действующее значение основной гармоники напряжения сети и коэффициент нелинейных искажений как отношение этих параметров.
Для получения расчетных формул принимаем условие, что коммутация тока в вентилях различных фаз ТПЧН происходит независимо. Это допущение при реальных значениях углов коммутации не вносит заметной погрешности в результаты.
Из рис. 6-25,г видно, что если за начало отсчета времени принять начало положительной полуволны синусоиды фазного напряжения питающей сети с амплитудой Ulm, то кривые провалов при любом а описываются отрезками синусоид с фазовым сдвигом ±л/6 и ампли-i/’T
тудой -у- Uim.
Для ТПЧН с трехфазным выходом квадрат действующего значения кривой провалов выражается формулой
з з
n=l Л = 1
(6-75)
Зависимость yn(yi, уг, ?з) от параметров ТПЧН выражается соотношениями (6-76) — (6-78).
] Выражение для синусной составляющей основной
I гармоники кривой провалов имеет вид:
I sinco/siny„cos(2a„ + у„)]| sin=
* Л=1 '
(6-76)
263
а косинусная составляющая выражается в виде
।
cos (В,/ = J sin Y„ sin (2ап у„) I cos <о/ =
. -/2—1 J
(3 к
| cost»,/. (6-77)
п—\ '
Пользуясь (6-75) — (6-76), можно определить коэффициент нелинейных искажений напряжения kf,u на входе вентильной схемы, а введя параметр I, определить его в любой точке а сети:
Для приближенных расчетов можно принять:
kf,V,a=lkf,U- (6-79)
Расчеты kftU показывают, что коэффициент нелинейных искажений напряжения практически не зависит от коэффициента мощности нагрузки ТПЧН. На рис. 6-26 показан характер зависимости среднего за период повторяемости значения ^/,tz,cp от параметров ц и у0.
В § 6-3 показано, что в ТПЧН при арккосинусоидаль-ном законе управления тиристорами можно повысить коэффициент мощности, потребляемой из сети, до значения, близкого к 1, путем установки на первичной стороне компенсирующих конденсаторов. Между тем в реальных условиях при конечной мощности питающей сети установка компенсирующих конденсаторов приводит к возникновению дополнительных явлений, связанных со взаимным влиянием ТПЧН, сети и компенсирующих конденсаторов.
На рис. 6-27,а приведена схема замещения одной фазы системы для основной гармоники тока. Преобразователь частоты с непосредственной связью с нагрузкой в этом случае можно представить в виде последовательной цепи из активного сопротивления Дп, определяюще-264
11044
б и в — для высших гармоник тока.
го потребляемую активную мощность, и индуктивных сопротивлений хп и хтр, определяющих соответственно' реактивную мощность, потребляемую ТПЧН, и реактивную мощность рассеяния питающего трансформатора. Генератор в питающей сети представлен в виде источника ЭДС и вынесенного внутреннего сопротивления хг. Схема содержит также сопротивление хл, соответствующее индуктивности линии, и компенсирующие конденсаторы с сопротивлением хс.
На рис. 6-27,6 приведена схема замещения одной фазы системы для высших гармоник тока. В этом случае
265.
отно-а и б тока:
(6-80)
Ха, б. С
можно исключить из рассмотрения основную гармонику ЭДС генератора, а ТПЧН представить в виде источника тока v-й гармоники.
При рассмотрении полагаем, что активные сопротивления элементов схемы пренебрежимо малы.
При наличии компенсирующих конденсаторов для высших гармоник тока ТПЧН образуется цепь, состоящая из параллельно включенных индуктивных сопротивлений v(xr i хл) и емкостного сопротивления xdv. Рассматривая ТПЧН как источник тока, определяем сительное значение сопротивления между точками схемы замещения (рис. 6-27,6) для v-й гармоники
°- б* ~~ | 1 — V2, ХС* | ’
ГДе ХС*'== XciXW ХУ[==ХГ'~\~Хл> Ха,б* = Ха,б,с!Ха,б'
и хаб—соответственно абсолютные значения сопротивления при наличии и отсутствии компенсирующих конденсаторов.
Нетрудно видеть, что при v —vp=p4xc*HMeeT место резонанс токов в контуре, образованном источником питания и компенсирующими конденсаторами. При этих условиях падение напряжения на входе ТПЧН от гармоники тока резонансной частоты может в несколько раз превышать соответствующее падение напряжения при отсутствии компенсирующих конденсаторов. При уменьшении мощности источника (увеличении хг) и неизменных параметрах ТПЧН резонанс токов возникает при более низких частотах. Наличие других потребителей в сети, например АД, оказывает влияние, аналогичное увеличению мощности источника. Эквивалентное сопротивление цепи нагрузки (х„, /?„) показано на рис. 6-27 пунктиром.
Можно избежать резонанса токов в широком диапазоне изменения параметров питающей сети и значительно уменьшить искажение синусоидальности кривой питающего напряжения, если последовательно с компенсирующими конденсаторами включить линейный реактор (рис. 6-27,в). В этом случае выражение для сопротивления между точками а и б схемы замещения для v-й гар-266
моники тока принимает вид:
у, а, б*
V (1 — У2Хф*' ХС#)
* у2 (1 + /ХС*
(6-81)
где Лф* = хф/хи.
В этом случае резонанс токов в контуре, образованном источником питания и компенсирующими конденсаторами, может иметь место при vp= у xcJ(x&t 1).
денсаторов на входе от номера гармоники.
Характер зависимости а от у показан на рис. 6-28. Нетрудно видеть, что значение vp не должно превышать номера первой из высших гармоник тока, потребляемого ТПЧН. Так как в первичном токе преобразователя, выполненного по трехфазной мостовой схеме, содержатся гармоники с v—5, 7, И, ..., то при определении параметров входного фильтра следует исходить из условия vp<5. При этом на основной гармонике частоты питающей сети обеспечивается заданная степень компенсации реактивной мощности, потребляемой ТПЧН, и 267
исключается возможность резонанса на высших гармониках тока. При vp<5 установленная мощность реакторов фильтра на основной гармонике не превышает 5% установленной мощности компенсирующих конденсаторов. Увеличение напряжения на конденсаторах на основной гармонике также не превышает 5%. Одновременно в кривой тока, потребляемого ТПЧН из сети, резко уменьшается 5-я гармоника, а остальные гармоники также уменьшаются пропорционально ху а д> замыкаясь частично через входной фильтр.
Эффективным средством уменьшения влияния на питающую сеть ТПЧН, применяемых в установках электропривода средней и большой мощности, является применение многофазных схем как на стороне питающей сети, так и в цепи нагрузки. Наиболее рациональным это оказывается в тех случаях, когда для увеличения мощности установки приходится прибегать к параллельному или последовательному соединению управляемых вентилей в каждом плече схемы.
Одним из проявлений влияния ТПЧН на питающую сеть является модуляция напряжения питания, обусловленная пульсациями активной и реактивной составляющей основной гармоники потребляемого тока (см. § 6-3). В ТПЧН с трехфазным выходом и синусоидальным выходным напряжением имеют место колебания амплитуды только реактивной составляющей тока. При этом активная составляющая тока в течение периода повторяемости не изменяется. Путем регулирования потребления реактивной составляющей тока можно стабилизировать полный ток, потребляемый ТПЧН. Для этого на вход ТПЧН подключается быстродействующий регулятор реактивной мощности, выполненный по любой из известных схем.
В простейшем случае регулятор содержит три линейных реактора, каждый из которых соединен последовательно с двумя встречно-параллельно включенными тиристорами. Все три элемента регулятора соединены в трехфазную группу. Для уменьшения установленной мощности регулятора с его помощью целесообразно осуществлять стабилизацию только пульсирующей составляющей реактивной мощности, потребляемой ТПЧН.
Применение индуктивно-емкостного регулятора реактивной мощности приводит к некоторому снижению общего коэффициента мощности установки. Однако обу-268
словленное этим увеличение установленной мощности компенсирующих конденсаторов незначительно и компенсируется подавлением низкочастотной модуляции напряжения питающей сети.
6-5. ОСОБЕННОСТИ ПОСТРОЕНИЯ СИЛОВЫХ СХЕМ
ПРЕОБРАЗОВАТЕЛЕЙ ЧАСТОТЫ С НЕПОСРЕДСТВЕННОЙ СВЯЗЬЮ
При выборе силовой схемы ТПЧН необходимо учитывать следующие факторы: номинальную мощность нагрузки и мощность в переходных режимах; отношение частот на входе и выходе ТПЧН; требования, предъявляемые к форме кривой выходного напряжения и тока ТПЧН; требования, предъявляемые в отношении влияния ТПЧН на питающую сеть; требования, предъявляемые к установке в отношении массы и габаритных размеров; требования в отношении надежности.
При конкретном проектировании силовой схемы может оказаться необходимым учесть и другие факторы, например, параметры применяемых тиристоров, необходимость применения трансформатора для согласования значений напряжений питающей сети и цепи нагрузки или гальванического разделения этих цепей.
Одна из важных задач при проектировании ТПЧН заключается в правильном определении загрузки элементов силовой схемы, и в первую очередь, тиристоров. Характер загрузки тиристоров в большой степени зависит от принятого алгоритма управления вентилями ТПЧН. В дабл. 6-4 <[10] даны выражения для расчета амплитудного, среднего и действующего значений токов тиристоров в схемах ТПЧН с синусоидальным выходным напряжением, а также в ТПЧН с напряжением прямоугольной формы (при наличии в кривой гармоник, кратных трем) и с выходным напряжением ступенчатой формы (без гармоник кратных трем) при двух крайних значениях коэффициента мощности нагрузки.
Приведенные данные показывают, что ТПЧН с синусоидальным выходным напряжением с точки зрения загрузки тиристоров практически во всех случаях превосходят ТПЧН с прямоугольным и ступенчатым выходным напряжением.
Питание ТПЧН может производиться как от однофазной, так и от трехфазной сети. Нагрузка ТПЧН также может быть однофазной, трехфазной или многофазной. В связи с этим может существовать весьма большое число работоспособных силовых схем [86].
Питание ТПЧЦ от однофазной сети применяется довольно редко и лишь в установках электропривода малой мощности. Это вызвано главным образом тем, что применение ТПЧН с однофазным входом приводит к неравномерной загрузке трехфазных промышленных сетей переменного тока н повышенному содержанию гармоник в кривой выходного напряжения. Тем не менее одновременное подключение ряда одинаковых ТПЧН с однофазным входом группами к различным фазам питающей трехфазной сети позволяет существенно выровнять загрузку сети.
В установках электропривода средней и большой мощности схемы с питанием от однофазной сети практически не применяются.
Рассмотрим схемы ТПЧН, питание которых производится от трехфазной сети. Поскольку речь идет об установках для электро-
269
KoacJxjjH- Относительна значение тока через вентиль в дол ix действующего значения (сновной гармоники Форма напряжения на циент тока нагрузки
выходе преобразователя мощности_______________________________________ ____________________________
270
привода, наибольший практический интерес представляют схемы с трехфазным выходом.
С учетом отмеченного выше, простейшая схема ТПЧН (рис. 6-29) содержит 18 тиристоров, объединенных в 6 групп, включенных попарно встречно-параллельно. Достоинством схемы является относительно малое число тнрнсторов и возможность включения нагрузки в трехфазную группу без применения многообмоточного трансформатора. К недостаткам схемы относится большое содержание высших гармоник в кривой выходного напряжения, что может потребовать, установки на выходе ТПЧН сглаживающих фильтров. Другим недо-
Рис. 6-29. ТПЧН по трехфазной нулевой схеме с трехфазным выхо дом.
Тр — трансформатор; Т — группы тиристоров; Р — ограничивающие реакторы; Н — нагрузка.
1 статком схемы является наличие в кривой потребляемого тока суб-। гармоник, частоты которых определяются частотой и формой кривой выходного напряжения. Эти субгармоники дополнительно загружают ! питающую сеть, а при наличии на входе схемы силового трансфор-
| матора вызывают увеличение его установленной мощности. При
совместном управлении группами тиристоров эта схема требует установки довольно мощных реакторов для ограничения уравнительных токов. Преобразователи по схеме на рнс. 6-29 применяются в уста-I новках электропривода относительно малой мощности (десятки ки-
J ловатт).
Наиболее распространенными являются ТПЧН, в силовых схемах которых применены трехфазные мостовые схемы. Трехфазный мост может выполнять роль группы тиристоров, формирующей одну | полуволну тока нагрузки, или же являться ячейкой более сложных схем. Рассмотрим сначала ТПЧН, в которых кривая тока каждой I фазы нагрузки формируется двумя трехфазными мостами, включен-
". пыми встречно-параллельно.
Схема ТПЧН, выполненного по мостовой схеме с трехфазным | выходом, приведена на рис. 6-30. Минимальное число тиристоров в такой схеме 36.
К достоинствам ТПЧН, выполненных с использованием трехфазных мостов, следует отнести то, что амплитуда пульсаций в кривой выходного напряжения по сравнению с трехфазной нулевой схемой уменьшается примерно в 2 раза при одновременном увеличении , вдвое частоты пульсаций. Это позволяет в большинстве случаев при < работе на АД обойтись без установки сглаживающего фильтра.
271
!
При наличии на стороне питающей сети силового трансформатора его параметры в значительной степени влияют на параметры ТПЧН.
Влияние трансформатора на параметры ТПЧН выражается в следующем:
количество, схема включения и компоновка обмоток определяют установленную мощность трансформатора и, следовательно, влияют на массогабаритные показатели трансформатора и ТПЧН в целом;
количество и схема включения обмоток определяют возможность включения нагрузки ТПЧН в трехфазную группу;
Рис. 6-30. ТПЧН по трехфазной мостовой схеме с трехфазным выходом.
Обозначения те же, что на рис. 6-29.
при совместном управлении группами вентилей ТПЧН схема включения обмоток трансформатора определяет контуры протекания уравнительных токов, значения этих токов, установленную мощность ограничивающих реакторов и оказывает влияние на энергетические характеристики ТПЧН;
сопротивления рассеяния обмоток трансформатора, а при наличии нескольких вторичных обмоток, и соотношения между их сопротивлениями рассеяния, определяют падение напряжения ТПЧН, обусловленное коммутацией тока как в тиристорах данной фазы ТПЧН, так и в тиристорах других фаз;
значения сопротивлений рассеяния обмоток трансформатора наряду с реактивным сопротивлением питающей сети определяют скорость изменения тока в тиристорах силовой схемы в процессе коммутации.
В простейшем случае питающий трансформатор имеет одну вторичную обмотку. Установленная мощность трансформатора в этом 272
случае получается минимальной и равной полной мощности ТПЧН, потребляемой им из питающей сети. В случае совместного управления из-за связи тиристорных групп ТПЧН между собой через вторичную обмотку трансформатора значения уравнительных токов получаются такими же, как и в ТПЧН, выполненном по трехфазной нулевой схеме. В рассматриваемой схеме ТПЧН из-за образования короткозамкнутых контуров недопустима гальваническая связь между цепями нагрузки отдельных фаз. Провалы и всплески в кривых напряжения вторичной обмотки трансформатора, возникающие при коммутации тока в тиристорах одной фазы ТПЧН, присутствуют также в кривых напряжения, прикладываемого к тиристорным схемам двух других фаз, что оказывает влияние на внешние характеристики ТПЧН.
В ряде случаев целесообразно применять схему ТПЧН с трансформатором, имеющим три вторичные обмотки, каждая из которых питает два тиристорных моста, образующих одну фазу ТПЧН [I0j. Установленная мощность трансформатора в атом случае увеличивается незначительно. Действующее значение тока в каждой из обмоток в 2 раза превышает действующее значение тока через тиристор, а ток первичной обмотки, как и в предыдущем случае, определяется полной мощностью, потребляемой ТПЧН из сети. При совместном управлении уравнительный ток, а следовательно, и мощность ограничивающих реакторов практически не изменяются по сравнению со схемой с одной обмоткой. Основным достоинством схемы является то, что нагрузка ТПЧН может быть включена в трехфазную схему (звезда, треугольник). Кроме того, путем рациональной компоновки обмоток трансформатора могут быть улучшены внешние характеристики ТПЧН.
В ТПЧН с совместным управлением целесообразно применение схем с относительно большим числом вторичных обмоток питающих трансформаторов.
Значительными достоинствами обладает схема ТПЧН с трансформатором, имеющим шесть вторичных обмоток по числу вентильных мостов силовой схемы. Действующее значение тока в обмотке при этой схеме в К2 раз превышает действующее значение тока через тиристор. Эта схема позволяет примерно в 4 раза уменьшить уравнительные токи по сравнению со схемой с трансформатором имеющим одну вторичную обмотку. Некоторое усложнение конструкции трансформатора и увеличение его установленной мощности в значительной степени компенсируется уменьшением мощности ограничивающих реакторов.
Могут применяться три трехфазных питающих трансформатора каждый из icoTopi.ix связан с одной фазой ТПЧН. Применение трех трансформаторов позволяет г,о всех случаях соединять нагрузку в трехфазную систему. При згой схеме также отсутствуй взаимное влияние фаз ТПЧН при коммутации тока в вентилях. Как и в случае одного общего трехфазиого питающего трансформатора, от каждой из вторичных обмоток трансформатора может питаться один или оба мост,), образующих одну фазу цсин ТПЧН.
Применение трсх трансформаторов вместо одного приводит к заметному увс'1ИЧС1П1Ю общей массы трансформаторов. При этом увеличение массы опережает увеличение установленной мощности. Если •исходить из одинаковых электромагнитных нагрузок (индукция в магнит(шрово.'1с и плотность тока в обмотках), и учесть, что масса .активных мац-риал,->ц трансформатора пропорциональна мощности
18—581
273
s
в степени 3/4, получаем, что при переходе от одного к трем трансформаторам увеличение массы составит несколько более 30%.
При расчете напряжения трансформатора, питающего ТПЧН, необходимо учитывать закон управления тиристорами и схему силовой части. Также необходимо учитывать минимально допустимый угол включения тиристоров в выпрямительном и инверторном режимах, обусловленный временем коммутации тока в тиристора:; во всем диапазоне изменения нагрузки ТПЧН, временем выключения тиристоров, свойствами системы управления и требованиями в отношении стабильности выходного напряжения ТПЧН при колебаниях напряжения питающей сети.
Расчет действующего значения фазного напряжения вторичной обмотки питающего трансформатора ТПЧН Пгтр.ф можно производить по следующим формулам [6]:
для ТПЧН с синусоидальным выходным напряжением
2л
^2Тр,ф=^21 ут,- » (6-82)
m, V 3 cos (fo
для ТПЧН с прямоугольным илн ступенчатым выходным напряжением I
^2Тр, ф = ^21 ~ , (6-83) I
2/И] V 3 cos <f0 I
где С/21 — наибольшее действующее значение основной гармоники на- 1 пряжения на выходе ТПЧН при холостом хрде; /п> — эквивалентное | число фаз силовой схемы ТПЧН на стороне, связанной с питающей j сетью; фо—минимально допустимый угол открытия вентилей. *
В табл. 6-5 приведены сравнительные данные ТПЧН с трехфаз-ным выходом, выполненных на базе трехфазных тиристорных мостов. ' В качестве базовых значений установленной мощности трансформа- | торов и реакторов приняты значения для ТПЧН с трехфазным выходом, выполненным по трехфазной нулевой схеме с совместным управлением.
В установках вентильного электропривода средней и большой мощности с ТПЧН целесообразно применять многофазные схемы как t на стороне питающей сети, так и на стороне нагрузки. Наиболее рациональным это оказывается в тех случаях, когда для увеличения * мощности установки приходится использовать параллельное или последовательное соединение тиристоров в каждом плече схемы.
Преобразователь, схема которого приведена на рис. 6-31, содержит шесть пар трехфазных тиристорных мостов, включенных в пределах каждой пары встречно-параллельно. Питание вентильной схемы производится от сети переменного тока, причем обеспечивается фазовый сдвиг в 30° между системами напряжений, питающих две половины групп мостов ТПЧН (например, мосты 1—6 и 7—12)-.
«41 = Hjmsin
иА2 sin (oijt — n/G);
«а1 = ^гот sinw2r;
«аг ~ чт sin ('o2^ nil).
(6-84)
274
Данные ТПЧН с трехфазным выходом
I
18*
275
Тиристорные мосты 1—6 формируют одну систему трехфазного выходного напряжения, а мосты 7—12— другую систему со сдвигом в 30° выходной частоты по отношению к первой системе.
Двигатель нагрузки АД должен иметь две трехфазные обмотки, питание каждой из которых производится от одной системы выходного напряжения ТПЧН.
Наличие фазового сдвига в 30° между системами питающего напряжения групп тиристорных мостов позволяет снизить содержание высших гармоник в кривой первичного тока путем исключения
Рис. 6-31. Система электропривода с ТПЧН, выполненным по эквивалентной двенадцатифазной схеме.
Тр1, Тр2 — силовые трансформаторы; АД — асинхронный двигатель; /—/2— группы тиристоров, включенных по трехфазной мостовой схеме.
5-й и 7-й гармоник, вызывающих наибольшие трудности при фильтрации в ТПЧН, выполненном по обычной мостовой схеме. При использовании схемы рис. 6-31 коэффициент нелинейных искажений кривой потребляемою тока снижается до 17—20%.
Фазовый сдвиг в 30° в угловой мере частоты вторичной сети между двумя системами выходного напряжения позволяет снизить модуляцию основной гармоники первичного тока более, чем в 2 раза, и повысить вдвое частоту модуляции.
При дальнейшем увеличении мощности установки вместо каждого из тиристорных мостов в схеме на рис. 6-31 целесообразно применять два трехфазных .моста с поочередным управлением. В такой схеме значительно улучшаются энергетические характеристики иа стороне, связанной с питающей сетью (§ 6-3).
При работе ТПЧН в системе электропривода важным параметром вентильной схемы, оказывающим большое влияние иа работу всей установки, является наклон внешней характеристики. В общем 276
случае наклон характеристики определяется: падением напряжения в питающей сети (пли трансформаторе), обусловленным коммутацией тока в тиристорах ТПЧН; падением напряжения в реакторах, ограничивающих уравнительные токи; падением напряжения в активных сопротивлениях силовой схемы (тиристоры, активные сопротивления обмоток трансформаторов и реакторов).
Все указанные составляющие падения напряжения подробно исследованы в [10]. Здесь же кратко рассмотрим падения напряжения, обусловленные процессом коммутации тока в тиристорах ТПЧН
Рис. 6-32. Диаграмма напряжений, тока и падения напряжения в ТПЧН с однофазным выходом.
Рис. 6-33. Векторная диаграмма напряжений для выходной цепи ТПЧН.
с многофазным выходом, и рекомендации по конструированию питающих трансформаторов, вытекающие из результатов анализа.
На рис. 6-32 приведена диаграмма гладких составляющих тока и напряжения на вторичной стороне ТПЧН с однофазным выходом и арккосинусоидальным законом управления при активно-индуктивной нагрузке и достаточно большом отношении частот питающей сети и цепи нагрузки. Из диаграммы следует, что основная гармоника падения напряжения Д«а совпадает по фазе с током нагрузки, т. е. имеет «активный» характер. При любом значении и характере тока нагрузки мгновенное значение выходного напряжения «21 выражается соотношением
19—581
м21 = V4 U2K, х р. sin (n2t — £ша; (6-85)
1^2/г1ха
Диа -= — sin — ’ О5’86)
277
где фг— фазовый сдвиг между током и напряжением холостого хода; Ха — индуктивное сопротивление рассеяния фазы трансформатора или питающей сети; — действующее значение наибольшего выходного напряжения ТПЧН при холостом ходе; /21 — действующее значение тока нагрузки ТПЧН.
В ТПЧН с многофазным выходом падение напряжения и каждой фазе определяется не только коммутацией тока тиристорами данной фазы, но также и коммутацией тока тиристорами других фаз при питании схемы от одного общего трансформатора. В [10] проведен подробный анализ явлений, определяющих появление падения напряжения вследствие коммутации тока в различных фазах ТПЧН. Установлено, в частности, что гладкая составляющая этого падения напряжения не является синусоидой н содержит широкий спектр высших гармоник, которые могут заметно искажать форму кривой выходного напряжения ТПЧН. Основная гармоника этого падения напряжения отстает на 90° от тока нагрузки, т. е. имеет «индуктивный» характер и может значительно (более чем в 2 раза) превышать падение напряжения, обусловленное коммутацией тока в тиристорах данной фазы ТПЧН. В отличие от составляющей Лиа, которая зависит только ог параметров схемы ТПЧН и его тока нагрузки, составляющая довольно сложно зависит от cos tp2i н р..
На рис. 6-33 приведена векторная диаграмма напряжений на выходе ТПЧН. Нетрудно видеть, что Лпа наиболее сильно влияет на значение выходного напряжения ТПЧН при относительно высоком коэффициенте мощности нагрузки, тогда как влияние Д.ир в основном проявляется при работе ТПЧН на нагрузку с низким коэффициентом мощности.
Если питание каждой фазы ТПЧН производится от отдельного трансформатора (см. табл. 6-5), а мощность сети значительно превышает мощность ТПЧН, взаимное влияние процесса коммутации тока в вентилях различных фаз на падение вторичного напряжения вообще отсутствует, и реактивная составляющая падения напряжения Лпр равна 0.
Если же питание всех фаз ТПЧН производится от одного трансформатора, имеющего несколько вторичных обмоток, то степень взаимного влияния различных фаз зависит от соотношений между реактивными сопротивлениями рассеяния обмоток трансформатора. Путем рационального выбора значений реактивных сопротивлений рассеяния при проектировании трансформатора можно в значительной степени уменьшить взаимное влияние коммутации тока в тиристорах различных фаз на падение вторичного напряжения ТПЧН [49].
6-6. ПРЕОБРАЗОВАТЕЛИ ЧАСТОТЫ С НЕПОСРЕДСТВЕННОЙ СВЯЗЬЮ И ПРИНУДИТЕЛЬНОЙ КОММУТАЦИЕЙ ТОКА
Рассмотренный выше недостаток ТПЧН с естественной коммутацией, выражающийся в относительно низком коэффициенте мощности на стороне питающей сети, может быть преодолен в ТПЧН, снабженных узлами принудительной коммутации тока. Наличие узлов принудительной коммутации позволяет производить включение п выключение вентилей ТПЧН в любые моменты времени в течение периода частоты питающей сети (0<а<360°), а не только в течение половины периода частоты питающей сети (0<а<180°), как это производится в ТПЧН с естественной коммутацией. Такая особен-2-78
Рис. 6-34. Диаграмма формирования кривой выходного напряжения ТПЧН с принудительной коммутацией.
ч —при ТМ<Г,; б —при ТМ>Т,.
ность ТПЧН с принудительной коммутацией оказывает влияние на энергетические характеристики установки, алгоритм управления вентилями и гармонический состав входного тока и выходного напряжения. В ТПЧН могут применяться различные типы узлов прнну* цительной коммутации. В значительной мере они рассмотрены в предыдущих главах, поэтому здесь не будем касаться вопросов оптимизации параметров узлов коммутации, а лишь кратко остановимся на особенностях алгоритма управления вентилями и принципах построения силовых схем ТПЧН с принудительной коммутацией.
Наиболее широкое распространение получил циклический алгоритм управления. Сущность его заключается в том, что фазы питающей сети периодически через равные интервалы времени в определенной последовательности подключаются к фазам нагрузки. Частота переключения (модуляции) <оы может быть выше или ниже частоты питающей сети он. При этом частота выходного напряжения ТПНЧ определяется разностью указанных частот: ц>2=|«>2— —<0м|- Каждый вентиль схемы ТПЧН включен в течение определенной части периода частоты юм. В трехфазных силовых схемах длительность включенного состояния вентилей обычно составляет 120° частоты <Ом. Преобразователи, управляемые по указанному алгоритму, называют ТПЧН с однократной модуляцией [33, 41, 51].
Процесс формирования кривой выходного напряжения ТПЧН с принудительной коммутацией, выполненного по двухтактной грехфазпой схеме с трехфазным выходом, показан на рис. 6-34,а, б. Диаграмма на рис. 6-34,а соответствует случаю, когда wM>w1; а на рис. 6-34,6 — случаю, когда (0м<(1)1. В обоих случаях основная гармоника напряжения имеет одинаковую частоту. Отличие состоит в том. что в первом случае из-за более высокого значения (ом частоты высших гармоник в кривой выходного напряжения и потребляемого тока получаются выше, чем во втором. Однако более важным является то, что при (ом>Ы) знаки реактивной мощности на входе и выходе ТПЧН получаются противоположными, благодаря чему при отстающем коэффициенте мощности нагрузки .можно получить опережающий коэффициент мощности иа стороне питающей сети. Поэтому в ТПЧН с принудительной коммутацией наиболее целесообразно применять алюритм управления, при котором coM>o)i. Гар-19* 279
ионический состав выходного напряжения и потребляемого тока ТПЧН с принудительной коммутацией подробно исследован в [33, 511-
Существует множество силовых схем ТПЧН рассматриваемого типа, реализуемых на полностью управляемых ключах. Однако при указанном выше алгоритме управления силовые схемы ТПЧН с принудительной коммутацией можно реализовать с ограниченным числом полностью управляемых ключей. Одна из таких схем [33] с трехфазным выходом приведена на рис. 6-35. Силовая схема ТПЧН
Рис. 6-35. ТПЧН с принудительной коммутацией по трехфазной мостовой схеме.
Тр— трехфазный четырехобмоточный трансформатор; Д1—Д4—трехфазные диодные мосты; К1—К4 — полностью управляемые полупроводниковые ключи; И — нагрузка.
содержит три основных трехфазных диодных моста Д1, Д2, ДЗ, присоединенных к концам трех вторичных обмоток трансформатора Тр, первичная обмотка которого присоединена к питающей сети. Начала вторичных обмоток трансформатора присоединены к шинам нагрузки Н. К выводам постоянного тока диодных мостов присоединены полностью управляемые однонаправленные ключи КЛ К2, ДЗ, управляемые с частотой сом со сдвигом в 120°. Каждый из ключей может быть замкнут в течение 120° частоты периода Четвертый диодный мост Д4 с ключом Д4, присоединенный к шипам нагрузки ТПЧН, предназначен для широтного регулирования выходного напряжения. Управление ключом К4 производится с частотой, кратной частоте w4.
Регулирование выходного напряжения ТПЧН с принудительной коммутацией можно производить также путем «геометрического» сложения напряжений двух ТПЧН, управляемых с частотой соч, но с определенным регулируемым фазовым сдвигом по этой частоте.
Несмотря на довольно хорошие электрические и особенно энергетические характеристики ТПЧН с принудительной коммутацией пока не получили широкого промышленного применения. Основная причина этого состоит в необходимости устанавливать в каждом 280
ТПЧН несколько полностью управляемых ключей, работающих с циклически изменяющимся током. Совершенствование схем и аппаратуры узлов принудительной коммутации тока, а также более широкое внедрение полностью управляемых вентилей ускорит применение ТПЧН с принудительной коммутацией в установках автоматизированного электропривода.
6-7. ОСОБЕННОСТИ СИСТЕМ УПРАВЛЕНИЯ ПРЕОБРАЗОВАТЕЛЕЙ ЧАСТОТЫ С НЕПОСРЕДСТВЕННОЙ СВЯЗЬЮ
Системы управления ТПЧН во многом аналогичны системам управления быстродействующими реверсивными тиристорными преобразователями постоянного тока, рассмотренным в литературе достаточно подробно, например в [61], поэтому в настоящем разделе рассмотрим лишь некоторые особенности, отличающие системы управления ТПЧН от систем управления реверсивных выпрямителей. При этом будем ориентироваться на традиционные многоканальные синхронные системы импульсно-фазового управления, работающие по «вертикальному» принципу и имеющие наиболее широкое распространение. Такие системы управления ТПЧН содержат следующие функциональные узлы (рис. 6-36):
устройство синхронизации УС, связывающее каналы системы управления с питающей сетью (7С;
формирователь опорного сигнала Ф; при использовании в качестве опорного сигнала синусоиды напряжения питающей сети формирователь содержит в своем составе пассивный или активный фильтр;
задающий генератор ЗГ, формирующий периодический сигнал, регулируемой амплитуды и частоты и определяющий соответствую-,щие параметры выходного напряжения ТПЧН;
компаратор К, формирующий импульсные сигналы в моменты равенства опорного сигнала и сигнала задающего генератора;
формирователь импульсов ФИ, вырабатывающий импульсный сигнал заданной длительности;
логическое устройство ЛУ, обеспечивающее в ТПЧН с раздельным управлением регулярное снятие управляющих импульсов с тиристоров выходящей из работы группы и подачу импульсов на тиристоры группы, вступающей в работу;
датчик состояния вентилей ДСВ, подающий команду на ЛУ по окончании протекания полуволны тока через данную группу вентилей н по окончании времени, предоставляемого тиристору для выключения;
выходные устройства ВУ, формирующие сигналы с заданными параметрами для подачи их в цепь управляющих электродов силовых тиристоров.
Схема системы управления, приведенная на рис. 6-36, дана в однолинейном изображении и соответствует одному каналу управления. Следует также отметить, что элементы, указанные на рис. 6-36, могут быть выполнены по различным принципиальным схемам с использованием различных дискретных и интегральных элементов. При построении многоканальных систем возможно также применение различных связей между каналами. Так, при управлении тиристорами при помощи «широких» импульсов момент окончания импульса в предыдущем канале управления может определяться мо
281
ментом начала импульса в последующем канале. Связь между каналами может также осуществляться в задающем генераторе, формирующем многофазную систему сигналов. В ТПЧН с совместным управлением элементы ЛУ и ДСВ отсутствуют, а управляющие импульсы подаются непрерывно на вентили, формирующие «положительную» и «отрицательную» полуволны тока нагрузки. Ряд конкретных схем узлов систем управления ТПЧН дан в [86].
Для обеспечения высокого качества выходного напряжения ТПЧН и хороших входных энергетических характеристик необходимо, чтобы при изменении знака сигнала управления с неизменным его значением абсолютный сдвиг фазы импульса, выраженный в гра-
Управление
Рис. 6-36. Структурная схема системы управления ТПЧН.
дусах, не изменялся прн заданном диапазоне частот управления. Если принять, что управляющим сигналом является напряжение иу, а сдвиг фазы импульса обозначить через а, то должно соблюдаться соотношение
а(//у) =—a(—Uy).
(6-87)
Это условие выполняется в системах управления с опорным напряжением пилообразной формы при хорошей линейности сигнала. При амплитуде опорного напряжения Спи зависимость изменения угла включения тиристоров Ла от управляющего сигнала иу имеет вид:
uv
Да =. k -г— (6-88)
t;on
Если кривая опорного напряжения имеет синусоидальную форму, соотношение (6-87) выполняется только при условии, что при отсутствии сигнала управления фронт включающего импульса соответствует моменту перехода кривой опорного сигнала через 0. В этом случае зависимость Ла от и-, имеет вид:
Uy
Да — arcsin -тг— • сщп
(6-89)
Очевидно, что Ла может изменяться в пределах —л/2<Ла-< С л/2.
282
Амплитудное значение гладкой составляющей кривой выходного напряжения ТПЧН также зависит от формы кривой опорного сигнала. При сигнале пилообразной формы
«V O2im=-k jsin-rr-. (6-90)
Lon
а при синусоидальной
nv
~ 77 ’’ (6-91)
°оп
Коэффициенты ki и /<7 определяются принятой силовой схемой ТПЧН. Для получения на выходе ТПЧН напряжения прямоугольной (ступенчатой) формы управляющий сигнал также должен иметь прямоугольную форму. При необходимости получить на выходе ТПЧН синусоидальное напряжение управляющий сигнал в случае системы управления с синусоидальным опорным сигналом должен также иметь синусоидальную форму, а при работе с системой, у которой опорный сигнал изменяется пилообразно, управляющий сигнал должен изменяться по соотношению
иу ~ks arcsin (ц sin <ог0- (6-92)
Принципиально управление ТПЧН можно производить с помощью сигналов различной формы при различной форме кривой опорного сигнала. Анализ для нескольких возможных сочетаний формы кривой опорного и управляющего напряжений приведен в '[37].
Несмотря на высокое быстродействие систем импульсно-фазового управления, работающих по «вертикальному» принципу, имеются принципиальные ограничения верхнего предела частот ТПЧН. Предельная частота управления определяется из условия, чтобы в любой момент пересечения кривых опорного и управляющего сигналов durfdi<duon/dt. Если в качестве опорного и управляющего сигналов используется синусоида, то предельная частота управления соответствует условию N>\i. Это, в частности, означает, что при ц<1 система управления может обеспечить на выходе ТПЧН напряжение, частота которого превышает частоту питающей сети. Естественно, что реализация такой возможности зависит от выбранной силовой схемы ТПЧН. Практически ограничение верхнего предела частот ТПЧН обусловлено не работой системы управления, а характеристиками силовой части.
6-8. ПРИМЕНЕНИЕ ПРЕОБРАЗОВАТЕЛЕЙ ЧАСТОТЫ
С НЕПОСРЕДСТВЕННОЙ СВЯЗЬЮ
Особенности силовых схем, систем управления и электрические характеристики ТПЧН, рассмотренные в предыдущих параграфах, в большой степени определяют рациональные области применения таких преобразователей.
Отметим следующие три важных особенности, свойственных ТПЧН:
1. Схема ТПЧН (особенно при питании от многофазной сети и при многофазной нагрузке) принципиально содержит относительно большое число силовых вентилей, поэтому применение ТПЧН целесообразно в преобразовательных установках большой мощности, когда использование преобразователей других типов связано с не-
283
обходимостью параллельного или последовательного соединения вентилей. <
2. В установках большой мощности вопросы повышения КПД имеют первостепенное значение, В этом отношении ТПЧН имеют определенные преимущества перед преобразователями других типов, так как в них происходит лишь однократное преобразование энергии и, как правило, отсутствуют устройства принудительной коммутации I гока в вентилях; •>
3. В ТПЧН существуют ограничения верхнего предела частот.
Для получения хороших электрических характеристик наибольшая выходная частота ТПЧН должна быть значительно ниже частоты питающей сети. Между тем в ТПЧН не вызывает затруднений получить многофазную систему напряжений при частоте, равной О, поэтому ТПЧН часто применяют в преобразовательных установках с выходной частотой, регулируемой от 0.
^Отмеченные особенности ТПЧН. определяют их следующие основ-ные*о(эласти применения в электроприводе: относительно тихоходный частотно-регулируемый электропривод с /короткозамкнутым АДг относительно тихоходный частотно-регулируемый электропривод с синхронными двигателями; частотно-регулируемый электропривод с АД с фазным ротором при включении ТПЧН в цепь ротора (машина двойного питания); частотно-регулируемый электропривод с вентильными двигателями.
Ниже даио краткое описание некоторых из разработанных установок электропривода с ТПЧН.
В СССР разработаны и выпускаются ТПЧН, предназначенные для электроприводов систем управления и защиты энергетических реакторов. Преобразователи типа ПНЧ обеспечивают питание обмоток приводных двигателей постоянным током для удержания органов регулирования в заданном положении, а также питание трех- ! фазных двигателей напряжением низкой частоты '[17]. В преобразователях типов ПНЧ-1 и ПНЧ-2 применена трехфазиая нулевая схема при совместном управлении группами вентилей. Преобразователи типов ПНЧ-1 и ПНЧ-2 имеют номинальную мощность 5 кВ-А, диапазон рабочих частот 0—8 Гц, наибольшее выходное напряжение 50, 85 и 94 В. Масса преобразователей 750 кг, габаритные размеры 950X500X1900 мм. В преобразователях типов ПНЧ-3 и ПНЧ-4 применена эквивалентная шестифазная схема с уравнительным реактором. Номинальная мощность преобразователей обоих исполнений : 23 кВ-А, диапазон рабочих частот соответственно 0—3 Гц и 0—4,1 Гц, масса ИЗО и 1250 кг, габаритные размеры одинаковые 1500X600X1850 мм.
Разработаны серийные комплектные тиристорые электроприводы типа КТЭЧ на мощности 160, 225, 315 и 450 кВ-A с диапазоном регулирования частоты 0,5—25 Гц при напряжении 0—320 или О—160 В; номинальный коэффициент мощности 0,6—0,65; точность поддержания угловой скорости двигателя — статическая 1%, динамическая 3—4%.
Для рольгангов разработаны серийные преобразователи типа 1 ПЧН (ПЧС) иа токи от 140 до 1800 А с диапазоном регулирования частоты от 0,5—1 до 12,5—25 Гц при напряжении от 0 до 100— 300 В.
Для крановых механизмов приняты к серийному производству электроприводы с многоскоростными АД и ТПЧН, разработанные заводом «Динамо» совместно с ВНИИэлектромаш ►
284
Серийно выпускаются однофазно-трехфазные ТПЧН средней мощности типа АОТР-200/280 и АОТР-400/280 [4]. Преобразователи выполнены на основе нулевых схем и содержат в первом случае 12, а во втором случае 24 тиристора типа ВКДУ-150. При однофазном питающем напряжении 380 В, 50 Гц на выходе ТПЧН можно получить напряжение, регулируемое в пределах 36—280 В с частотой, изменяемой дискретно в диапазоне 2,8—16,7 Гц. Номинальный: ток нагрузки для ТПЧН первого типа 200 А, а второго типа 400 А. Коэффициент мощности не ниже 0,5, а КПД — не ниже 0,93. Агрегаты состоят из шкафа ТПЧН и шкафа с силовым трансформатором. Габаритные размеры шкафов: 800X900X2000 мм.
Большое внимание исследованиям и разработкам ТПЧН удетяют зарубежные электротехнические фирмы. За последние годы введен в эксплуатацию ряд установок электропривода с ТПЧН.
В [119] описана система многодвигательного электропривода с ТПЧН и короткозамкнутыми АД. Система предназначена для привода рольгангов прокатного стана. Преобразователь выполнен по-трехфазной нулевой схеме. Диапазон регулирования выходной частоты 0—И Гц, напряжения 0—140 В. Двигатели имеют мощность в диапазоне 20—НО кВт. Суммарная мощность двигателей 10 000 кВт.
Фирмой «Броун-Бовери» (Швейцария) изготовлено электрооборудование для безредукторного привода цементной шаровой мельницы с синхронным двигателем мощностью 6400 кВт при частоте вращения 15 об/мин [1128]. Питание двигателя производится от ТПЧН с раздельным управлением группами вентилей;. Каждая фаза цепи нагрузки образуется двумя трехфазными мостами тиристоров, включенными встречно-параллельно. Питание каждой пары трехфазных мостов производится от отдельного двухобмоточного трансформатора. На время пуска двигателя нулевая точка его обмотки с помощью силового контактора соединяется с нулевой точкой силовой' схемы ТПЧН. Частота напряжения на выходе ТПЧН может изменяться в диапазоне от 0 до 5,5 Гц. Время разгона двигателя от неподвижного состояния до номинальной скорости составляет 10— 30 с. При этом в процессе пуска вращающий момент поддерживается постоянным и равным 1,6 номинального момента двигателя.
В Канаде для фирмы «Лоуренс Цемент» разработана система безредукторного электропривода цементной печи с электродвигателем мощностью 6500 кВт на напряжение 1,9 кВ и частоту 4,84 Гц,, питающимся от ТПЧН, выполненного по трехфазпым мостовым схемам [1.08]. Трансформатор ТПЧН имеет установленную мощность 12 МВ-А. Применение компенсирующих конденсаторов позволяет обеспечить входной коэффициент мощности установки не ниже 0,9. Система электропривода обеспечивает номинальную синхронную частоту вращения двигателя 14,5 об/мин. Для выполнения технологических требований предусмотрена возможность регулирования частоты вращения в широких пределах вниз от номинальной.
В процессе разработки проводилось сравнение двух вариантов электропривода: безредукторного (с ТПЧН) и редукторного (двухступенчатого при питании двигателя непосредственно от сети). Первый вариант оказался более целесообразным с точки зрения площади, занимаемой оборудованием, без существенного увеличения капитальных затрат. Дополнительные преимущества безредукторного-привода состоят в том, что отсутствие значительных бросков тока при пуске позволило ограничить падение напряжения на шинах
285-
заводской подстанции значением 5% при относительно малой мощности короткого замыкания системы (208 МВ-А). <
В СССР также ведутся работы по созданию безредукторных электроприводов по системе ТПЧН — низкочастотный синхронный двигатель на мощности 3200—16 000 кВт н основные частоты вращения 12,5—60 об/мин для размольных мельниц. Изготовлен головной комплект мощностью 3200 кВт на 16 об/мин. ;
Для турбомеханизмов разрабатывается ряд комплектных регу-тируемых электроприводов по системе машина двойного питания (МДП) на мощности 500—6000 кВт с регулированием скорости ла ±30%.
ГЛАВА СЕДЬМАЯ
ПРЕОБРАЗОВАТЕЛИ ДЛЯ ВЕНТИЛЬНЫХ ДВИГАТЕЛЕЙ
7-1. ПРИНЦИП ПОСТРОЕНИЯ ВЕНТИЛЬНОГО ДВИГАТЕЛЯ
Вентильным двигателем (ВД) обычно называют машинно-вентильную систему, содержащую следующие -основные элементы: электрическую машину, по конструкции аналогичную синхронной машине, тиристорный или транзисторный (вентильный) преобразователь, обеспечивающий переключение тока в обмотках или формирование напряжения на выводах электрической машины, и датчик, определяющий моменты коммутации тока или форму кривой напряжения, синхронизированный с мй' шиной. Помимо этого ВД содержит устройства управления тиристорами (транзисторами) для регулирования угловой скорости двигателя, устройства для регулирования тока возбуждения двигателя (при использовании машины с электромагнитным возбуждением), устройства для защиты, режимной автоматики и сигнализации, устройства регулирования, обеспечивающие заданные характеристики электропривода в установившихся и переходных режимах.
Таким образом, ВД представляет собой по существу •комплектный электропривод. При разработке и применении электропривода с ВД необходимо учитывать следующие факторы: тип и параметры источника питания (сеть переменного тока, источник постоянного тока, внутренние сопротивления источника питания); тип и параметры электрической машины (электромагнитное возбуждение, возбуждение с помощью постоянных магнитов, внутренние сопротивления электрической машины); мощность установки; характер зависимости момента со-'.286
противления нагрузки от скорости (постоянный, линейный, квадратичный и т. д.); значение момента сопротивления трогания механизма; диапазон регулирования скорости двигателя; требования в отношении пульсаций скорости двигателя; соотношение рабочих частот питания и двигателя (при питании от сети переменного тока); требования в отношении стоимости.
Принцип действия ВД известен и достаточно подробно рассмотрен в литературе [19, 20, 35, 36, 52, 96, 97, 131, 136, 138]. Здесь отметим лишь, что имеется определенная аналогия между ВД и коллекторным двигателем постоянного тока, питающимся от источника тока или напряжения. В обоих случаях при подаче питания на выводы машины по ее обмоткам начинает протекать ток, в результате взаимодействия которого с магнитным потоком возбуждения возникает электромагнитный момент, вызывающий поворот ротора. При этом в коллекторном двигателе постоянного тока происходит последовательное переключение ветвей обмоток с помощью коллектора и щеток, а в ВД — переключение фаз обмоток с помощью вентильного преобразователя, благодаря чему обеспечивается непрерывное вращение ротора с определенным средним моментом.
Для обеспечения коммутации тока в цепях ВД необходима определенная реактивная мощность. Эта мощность может поступать в систему различным путем. Во-первых, определенным запасом реактивной мощности обладает сама электрическая машина. Реактивная мощность машины зависит от магнитного потока в зазоре, реактивных сопротивлений и частоты вращения. Во-вторых, реактивная мощность может поступать в систему из питающей сети переменного тока. Возможность использования этой мощности для коммутации зависит от параметров питающей сети, схемы вентильного преобразователя и соотношения частот напряжений сети и электрической машины. И, наконец, в третьих, реактивная мощность необходимая для коммутации, может поступать от накопителей энергии, входящих в состав преобразователя.
Принятый способ коммутации в ВД оказывает влияние на коммутационную устойчивость ВД и установленную мощность его оборудования. Если реактивная мощность поставляется преобразователем, то требование повышения коммутационной устойчивости ВД при неиз-
287
менных параметрах электрической машины вызывает увеличение установленной мощности оборудования преобразователя. Если же коммутация тока обеспечивается за счет реактивной мощности машины, повышение коммутационной устойчивости требует увеличения установленной мощности машины.
Таким образом, с точки зрения установленной мощности оборудования в зависимости от конкретных требований, предъявляемых к ВД может оказаться целесооб-
Рис. 7-1. Упрощенные векторные диаграммы ВД.
а, б — с преобразователем, выполненным по схеме источника напряжения; в — по схеме источника тока с естественной коммутацией; г — по схеме источника тока с принудительной коммутацией.
разным применять тот или иной принцип коммутации тока в ВД.
Тип преобразователя также оказывает большое влияние и на другие характеристики ВД. Различают преобразователи для ВД, работающие в режимах источника напряжения и источника тока.
В первом случае преобразователь обеспечивает формирование кривой подводимого к машине напряжения с определенными амплитудой и формой. С помощью системы управления обеспечивается требуемый фазовый сдвиг между основной гармоникой этого напряжения U и основной гармоникой ЭДС холостого хода Е машины угол 0. Форма кривой тока машины, значение тока /, фазовый сдвиг его основной гармоники относительно основной гармоники напряжения, а также угловая скорость машины зависят от внутренних сопротивлений машины и ее нагрузки.
Регулирование угловой скорости со такого ВД может осуществляться за счет изменения угла 0 и подводимого 288
к выводам электрической машины напряжения. Вентильный преобразователь в этом случае должен обеспечивать работу как при индуктивной (угол <р<0), так и при емкостной (угол ср>0) реакции нагрузки (рис. 7-1,а, б). Схемная реализация преобразователя определяется требованиями в отношении формы кривой напряжения на выводах электрической машины, коэффициентом мощности машины, диапазоном регулирования скорости и типом источника питания. Если питание ВД должно производиться от источника постоянного тока, целесообразно использовать преобразователь, выполненный по схеме регулируемого АИН. Если же питание производится от сети переменного тока, а частота питающей сети соизмерима с максимальной частотой электрической машины, наиболее целесообразной является система: УВ — АИН. Если же частота напряжения питания значительно превышает максимальную рабочую частоту электрической машины, целесообразно применять преобразователь с непосредственной связью с естественной коммутацией, работающий в режиме источника напряжения, с гладкой составляющей кривой выходного напряжения синусоидальной или ступенчатой формы.
Во втором случае ток, создаваемый вентильным преобразователем, последовательно с изменением полярности переключается с одной фазы электрической машины на другую. Моменты переключения тока с помощью системы управления устанавливаются с определенным фазовым сдвигом по отношению к кривой ЭДС холостого хода электрической машины (угол ф) или по отношению к основной гармонике напряжения Uo машины за коммутационным реактивным сопротивлением Ак, как показано на диаграмме рис. 7-1,в (угол р).
Кривая тока электрической .машины имеет прямоугольную форму при мгновенной коммутации или близкую к трапецеидальной при наличии коммутационного интервала длительностью у. Форма кривой напряжения машины в межкоммутационные интервалы близка к синусоидальной. Фазовый сдвиг основной гармоники тока машины относительно основной гармоники напряжения на ее выводах зависит от внутренних сопротивлений машины и ее нагрузки. Регулирование скорости такого ВД может производиться за счет изменения подводимого к выводам электрической машины тока и изменения угла р.
289
Норегулируеыыи Регулируемый источ- Источник с частотой, Источник повышенной
источник питания ник питания соответствующей час- частоты
тоте иаьины
Рис. 7-2. Структура силовых схем ВД.
290
Если коммутация тока в фазах машины производится за счет реактивной мощности, обеспечиваемой преобразователем, угол q> может быть как опережающим (дДзО), так и отстающим (qx^O), как показано на рис. 7-1,г. Если же для коммутации тока используется реактивная мощность, генерируемая самой машиной, то всегда ф>0„
Рис. 7-3. Схемы преобразователей ВД при питании от промышленной сети переменного тока при различных характеристиках механизмов, и диапазонах частоты вращения.
причем во всех режимах должен обеспечиваться запас,, определяемый утлом 6=р—у>0, гарантирующий надежное выключение тиристоров преобразователя.
Если питание ВД осуществляется от источника постоянного тока, то в качестве преобразователя используют АИТ с искусственной (за счет реактивных элементов инвертора) или естественной (за счет реактивной энергии электрической машины) коммутацией. Если же питание ВД производится от сети переменного тока, в качестве преобразователя могут быть применены АИТ в сочетании с входными выпрямителями либо преобра-
291
зователи с непосредственной связью с естественной коммутацией, также работающие в режиме источника тока.
Одним из важных вопросов, возникающих при создании ВД, является обеспечение их надежного пуска. Система с источником напряжения, способным работать при «нулевой частоте», обеспечивает надежный пуск ВД без принятия каких-либо дополнительных мер. Также легко обеспечивается пуск ВД при выполнении преобразователя в виде источника тока по схеме с непосредственной связью. При выполнении преобразователя в виде источника тока по схеме управляемый выпрямитель—• инвертор пуск ВД может быть обеспечен изменением .алгоритма .управления вентилями преобразователя.
Наиболее серьезной проблема пуска становится :в случае, когда в ВД используется АИТ, питающийся от нерегулируемого источника постоянного тока. Обеспечение пуска и регулирования скорости ВД в этом случае требует применения либо специального регулятора на стороне постоянного тока, либо регулирования в самом АИТ. Структура построения силовых схем ВД показана на рис. 7-2.
Выбор типа преобразователя зависит также от требуемых характеристик электропривода. Влияние особенностей электропривода на выбор типа преобразователя при питании установки от промышленной сети переменного тока отражено на рис. 7-3.
7-2. ОСОБЕННОСТИ СИСТЕМ УПРАВЛЕНИЯ ПРЕОБРАЗОВАТЕЛЕЙ ДЛЯ ВЕНТИЛЬНЫХ ДВИГАТЕЛЕЙ
Системы управления преобразователей для ВД во многом сходны с системами управления преобразователей для частотного регулирования АД и имеют в своем составе аналогичные устройства.
Для переключения тиристоров преобразователей с частотой питающей сети имеется соответствующее устройство импульсно-фазового управления. Устройство импульсно-фазового управления с выходной частотой преобразователя обеспечивает формирование и регулирование фазы управляющих импульсов с частотой, соответствующей частоте вращения электрической машины. Принципы построения систем импульсно-фазового управления тиристорами и наиболее рациональные схемы подробно описаны в [61].
Рассмотрим особенности систем управления тиристорами преобразователей для ВД, обусловленные спецификой работы этих систем.
Основная особенность управления преобразователем ВД состоит в том, что работа преобразователя должна быть синхронизирована с работой машины, поэтому вместо автономного задающего генера-292
тора регулируемой частоты, обычно применяемого в системах вентильного электропривода с АД, для системы электропривода с ВД необходимо задающее устройство — датчик положения ротора — синхронизированное с работой машины.
Существует много способов реализации датчиков положения, отличающихся типом чувствительного элемента и имеющих вследствие этого существенные схемные и конструктивные отличия. В любом случае датчик положения содержит, как правило, чувствительные элементы, логические устройства и усилители, обеспечивающие получение сигналов с требуемыми параметрами. Характеристики датчика положения в большой степени определяются типом чувствительного элемента.
Рис. 7-4. Датчик положения двухполюсного ВД.
а — эскиз конструкции; б — схема включения чувствительных элементов; / — неподвижные чувствительные элементы; 2—вращающийся диск.
Положение ротора электрической машины можно контролировать с помощью датчика индуктивного типа (рис. 7-4,а, б). В этом случае чувствительные элементы 1 устанавливают неподвижно относительно статора машины и располагают по окружности со смещением относительно друг друга на угол 2n/mspn, где ms — число фаз электрической машины, а рп— число пар полюсов. Каждый чувствительный элемент может быть выполнен в виде двух катушек с ферромагнитным, например ферритовым, магнитопроводом (рис. 7-4,а). Катушки каждой пары располагают строго коаксиально с определенным зазором в осевом направлении. В зазоре перемещается металлический экран с вырезами, выполненный, например, в форме диска 2, установленного на валу машины. Угловой размер выреза составляет л/ра. Число вырезов диска соответствует числу пар полюсов электрической машины. При вращении ротора машины периодически с частотой, пропорциональной частоте вращения, изменяется индуктивная связь между катушками чувствительных элементов. Наименьшему значению коэффициента взаимной индукции соответствуют интервалы прохождения экрана в зазоре между катушками, а наибольшему — интервалы прохождения вырезов.
Чувствительные элементы могут быть использованы в системе управления по-разному. Их можно включать в схему высокочастотного (десятки килогерц) LC-генератора. При этом изменение взаимной индуктивности катушек будет приводить к периодическому срыву и восстановлению колебаний генератора.
293
В другом случае чувствительдые элементы используются в качестве трансформаторов. При этом одну из катушек подключают к генератору высокочастотных колебаний, а с другой снимают сигнал в виде «пакетов» высокочастотных колебаний (рис. 7-4,6). Полученные сигналы обрабатываются и усиливаются, а затем подаются в систему управления тиристорами преобразователя ВД.
В качестве чувствительных элементов датчика положения можно использовать оптоэлектрические устройства. При этом выходной сигнал будет формироваться в интервалы времени, когда между источником и приемником света находятся вырезы экрана.
Датчики положения рассмотренного типа обладают следующими достоинствами: длительность импульсных сигналов датчика в угловой мере частоты вращения ВД не зависит от частоты вращения; датчик обеспечивает работу при нулевой частоте (неподвижном роторе) .
Недостатком датчика являются относительная сложность конструкции и существенные размеры чувствительных элементов, размещаемых в электрической машине.
Датчик положения может быть реализован с помощью чувствительных элементов, контролирующих магнитный поток машины. В качестве чувствительных элементов широко используют гальваномагнитные приборы, такие как датчики Холла, магниторезисторы и магнитодиоды, устанавливаемые непосредственно в воздушном зазоре электрической машины.
Применение магниточувствительных элементов в датчике положения позволяет получить весьма компактную конструкцию устройства. К недостаткам датчиков такого типа следует отнести зависимость формы кривой сигнала на выходе чувствительного элемента от нагрузки ВД из-за влияния реакции якоря. Требование гальванического разделения цепей питания и нагрузки элементов Холла вызывает усложнение электрической схемы датчика положения. На характеристики датчика отрицательное влияние может оказать зависимость параметров элементов Холла и магниторезисторов от температуры.
Следует отметить отличие, существующее между датчиками положения, контролирующими непосредственно положение ротора машины и датчиками, контролирующими результирующий магнитный поток (напряжение на выводах) машины.
В первом случае сигнал датчика оказывается сфазированным с кривой ЭДС холостого хода машины. При изменении нагрузки ВД в этом случае необходимо компенсировать изменение фазового сдвига между напряжением на выводах машины и ее ЭДС холостого хода, обусловленного действием реакции якоря. При использовании датчика положения, контролирующего результирующий магнитный поток (напряжение на выводах машины), такой необходимости нет. Поэтому в случае применения датчика положения, выходной сигнал которого связан с кривой результирующего магнитного потока или напряжения на выводах машины, несколько упрощается система импульсно-фазового управления тиристорами преобразователя с частотой электрической машины и регуляторы скорости и тока.
Отметим также отличия в функциях датчиков положения в преобразователях, работающих в режимах источников тока или напряжения. В первом случае сигнал датчика положения определяет лишь момент начала коммутации тока в фазах электрической машины. При этом форма сигнала в межкоммутационный интервал не ока
294
зывает влияния на работу системы. Иными словами, информация от датчика положения может поступать дискретно. Во втором случае сигнал, получаемый от датчика положения, используется для формирования кривой выходного напряжения преобразователя. При многоступенчатой или близкой к синусоидальной форме выходного напряжения преобразователя информация с датчика о положении ротора (или результирующего магнитного потока машины) должна поступать в течение всего периода частоты вращения машины.
Вследствие этих особенностей для управления ВД с преобразователями, работающими в режиме источников напряжения, достаточно широко используют электромеханические датчики положения модуляционного типа, работающие на повышенной несущей частоте. После демодуляции выходной сигнал такого датчика положения может иметь синусоидальную или иную желаемую, например трапецеидальную, форму.
7-3, ПРЕОБРАЗОВАТЕЛИ С ЕСТЕСТВЕННОЙ КОММУТАЦИЕЙ ДЛЯ ВЕНТИЛЬНЫХ ДВИГАТЕЛЕЙ
Преобразователи для ВД с естественной коммутацией обычно выполняют по схемам источников тока. Простейшей и наиболее распространенной схемой преобразователя ВД при питании его от промышленной сети переменного тока является схема, приведенная на рис. 7-5.
Принцип действия этой схемы достаточно известен (см. гл. 5), поэтому остановимся лишь на некоторых особенностях, которые необходимо учитывать при ее использовании в ВД. Напряжение на выходе инвертора U% зависит от напряжения в звене постоянного тока Ди, от нагрузки и угла включения тиристоров, а частота fz определяется частотой вращения машины М. Коммутация тока в тиристорах инвертора во всех режимах (за исключением режима пуска) происходит за счет напряжения машины. При этом момент начала коммутации определяется сигналом датчика положения ротора ВД или мгновенным значением напряжения на ее выводах, а длительность коммутации тока — реактивными сопротивлениями машины. Если номинальное напряжение машины с учетом падений напряжения в машине и элементах схемы преобразователя соответствует напряжению питающей сети, преобразователь может быть подключен непосредственно к питающей сети. В противном случае необходимо применять разделительный согласующий трансформатор.
На рис. 7-6 приведена другая схема ВД с естественной коммутацией, содержащая в своем составе преобразователь с непосредственной связью, выполненный по
295
эквивалентной трехфазной мостовой схеме и работающий, как и в предыдущем случае, в режиме источника тока. Преобразователь содержит 18 тиристоров, объединенных в 6 трехфазных нулевых групп, подключенных к трехфазной питающей сети через шестиобмоточный реактор L, а к электрической машине М — своими общими
Рис. 7-5. ВД с преобразователем по схеме выпрямитель — инвертор тока.
В — выпрямитель; И — инвертор; —сглаживающий реактор; М — электрическая машина.
в
Рис. 7-6. ВД с преобразователем тока с непосредственной связью. L — шест «обмоточный сглаживающий реактор; М— электрическая машина.
точками. Вместо одного шестиобмоточного реактора возможно применение в преобразователе двух трехобмоточных. Питание катодных групп тиристоров производится от шин А', В', С', а анодных групп — от шин Л", В", С".
Коммутация тока в тиристорах в пределах каждой группы происходит за счет напряжения питающей сети, 296
а длительность интервала коммутации определяется реактивным сопротивлением сети и межобмоточным индуктивным сопротивлением входного реактора. Коммутация тока в фазах машины (между группами тиристоров) во всех режимах (кроме режима пуска) происходит за счет напряжения машины. Как и в предыдущей схеме, момент ; начала коммутации определяется сигналом датчика положения ротора или напряжением на выводах машины, а длительность интервала коммутации тока определяет-: ся реактивными сопротивлениями машины. В процессе
I пуска ВД коммутация тока в фазах машины производится за счет напряжения питающей сети без изменения I алгоритма управления вентилями преобразователя.
। В данной схеме входной реактор L выполняет ту же
роль, что и сглаживающий реактор в схеме рис. 7-5.
Если номинальное напряжение машины с учетом ее параметров и параметров элементов схемы преобразователя не соответствует напряжению питающей сети, а также если необходимо обеспечить электрическую изоляцию цепи машины от питающей сети, приходится применять входной трансформатор. В этом случае более * рациональной может оказаться схема ВД, приведенная на рис. 7-7. Принцип работы этой схемы аналогичен принципу работы схемы на рис. 7-6. Отличие состоит лишь в том, что вместо многообмоточного реактора в цепи переменного тока применены трехобмоточный трансформатор Тр, образующий две системы шин переменного тока, и однообмоточный сглаживающий реактор L в образованной цепи постоянного тока (преобразователь с неявновыраженным звеном постоянного тока).
Выполненные по схемам рис. 7-5—7-7 ВД обладают практически одинаковыми электромеханическими и энергетическими характеристиками и обеспечивают одинаковое использование электрической машины. Однако имеются и некоторые отличия в конфигурации силовой схемы, номенклатуре и параметрах силовых элементов, загрузке и потерях в тиристорах силовой схемы, а также в алгоритме управления тиристорами и способе пуска ВД.
Из рассмотрения силовых схем следует, что преобразователь с промежуточным звеном постоянного тока содержит 12 тиристоров, а преобразователь с непосредственной связью—18. Установленная мощность реактора в этом преобразователе в ]/3 раз больше, чем в схе-20—581 297
ме с промежуточным звеном постоянного тока. При наличии входного трехобмоточного трансформатора (см. рис. 7-6) его установленная мощность примерно на 20% превышает мощность, потребляемую ВД, а установленная мощность сглаживающего реактора — такая же, как в схеме на рис. 7-5.
Рис.’ 7-7. ВД с преобразователем тока с непосредственной связью и трехобмоточным трансформатором.
Тр — трансформатор; L — сглаживающий реактор; М — электрическая машина.
Рассматриваемые схемы требуют различных алгоритмов управления тиристорами. Диаграммы управляющих импульсов, соответствующих интервалам включенного состояния тиристоров, при большой индуктивности сглаживающего реактора и малой длительности коммутации для схем выпрямитель — инвертор и преобразователь с непосредственной связью приведены на рис. 7-8,а, б и 7-9,а, б. Диаграммы на рис. 7-8,а и 7-9,а соответствуют случаю, когда выходная частота преобразователя в несколько раз (на диаграммах в 3 1/3 раза) ниже частоты питающей сети, а диаграммы на рис. 7-8,6 и 7-9,6 — случаю, когда частоты напряжений на входе и выходе равны. Диаграммы построены для произвольных фазовых соотношений между токами на входе и выходе преобразователя.
В преобразователе с промежуточным звеном постоянного тока (см. рис. 7-5) на тиристоры 1—6 выпрямителя регулярно подаются управляющие импульсы с ча-29В
Рис. 7-8. Диаграмма управляющих импульсов тиристоров преобразователя по схеме выпрямитель — инвертор тока.
стотой питающей сети fh а на тиристоры 1'—6' инвертора— управляющие импульсы с частотой цепи нагрузки 12 (рис. 7-8,а, б). В каждый межкоммутационный интервал в схеме имеется четыре тиристора, проводящих ток. Так, в момент t0 ток проводят тиристоры 2, 3, 4', 5' (рис. 7-8,а) или 1, 2, 2' (рис. 7-8,6). Регулирование тока
в звене постоянного тока, а следовательно, и на выходе преобразователя, производится изменением фазы импульсов, подаваемых на тиристоры выпрямителя.
20* 299
Рис. 7-9. Диаграмма управляющих импульсов тиристоров преобразователя тока с непосредственной свизью.
В преобразователе с непосредственной связью (см. рис. 7-7) управляющие импульсы на все 18 тиристоров подаются с частотой питающей сети /), но лишь в интервалы времени, когда существуют «разрешающие» сигна-300
Лы с частотой /2 (рис. 7-9,а, б). Эти сигналы по форме совпадают с управляющими импульсами, подаваемыми на тиристоры инвертора в преобразователе с промежуточным звеном постоянного тока. Регулирование напряжения на выходе преобразователя, как и в предыдущем случае, производится изменением фазы импульсов, подаваемых на тиристоры с частотой j\. В преобразователе с непосредственной связью режим работы тиристоров отличается от режима их работы в преобразователе с промежуточным звеном постоянного тока. В каждый межкоммутационный интервал проводят ток лишь два тиристора. Например, в момент t0 ток протекает через тиристоры Зс и 2а (рис. 7-9,а) или 1а и 2с (рис. 7-9,6).
Таким образом, несмотря на то что в схеме преобразователя с непосредственной связью число тиристоров в полтора раза превышает число вентилей в схеме преобразователя с промежуточным звеном постоянного тока, суммарные потери мощности в тиристорах получаются значительно меньше. Наибольшее значение этот фактор имеет в мощных установках, в которых требования в отношении энергетических характеристик приобретают первостепенное значение.
Следует отметить еще одно достоинство преобразователя с непосредственной связью по сравнению с преобразователем с промежуточным звеном постоянного тока, которое проявляется при работе ВД на низких частотах (по сравнению с частотой питающей сети). В схеме с промежуточным звеном постоянного тока каждый из тиристоров инвертора проводит ток в течение 1/3 периода выходной частоты преобразователя. При низкой выходной частоте длительность проводящего состояния тиристоров инвертора может оказаться соизмеримой с тепловой постоянной времени тиристора, в результате чего возможно чрезмерное увеличение температуры его структуры. Условия нагрева тиристоров значительно улучшаются в преобразователе с непосредственной связью, интервалы проводимости всех тиристоров которого при условии мгновенной коммутации не превышают 1/3 периода частоты питающей сети.
И наконец, кратко отметим различия в условиях пуска ВД с преобразователями двух рассмотренных типов. В случае преобразователя с явно выраженным звеном постоянного тока при пуске ВД, когда ЭДС машины отсутствует, необходимо обеспечить принудительную ком-
301
мутацию тока в фазах нагрузки. В случае применения преобразователя с непосредственной связью коммутацию можно обеспечить за счет напряжения питающей сети без изменения алгоритма управления или введения в схему дополнительных силовых элементов именно благодаря непосредственной связи питающей сети и нагрузки.
Таблица 7-1
Наименование Преобря -зователь со звеном И «СТОЯН-ного тока Преобразователь с непосред-ственноч СВ13ЬЮ
Число тиристоров силовой схемы 12 18
Относительная установленная мощность сглаживающего реактора без входного трансформатора 1 1 ,7
с двухобмоточным т ранс-форматор ом 1 1,7
с трелобмоючнь’м трансформа тором — 1
Относительная установленная мощность в ход ।. ого т ра и с фо рм а -тора двухобмоточного 1 1
трехобмоточного — 1 ,2
Относительные суммарные потери в вентилях 1 0,5
Необходимость специальных мер по обеспечению пуска Есть Нет
Сравнительные характеристики преобразователей с промежуточным звеном постоянного тока и с непосредственной связью для ВД приведены в табл. 7-1. В качестве базовых значений установленной мощности и потерь приняты значения для преобразователя со звеном постоянного тока.
7-4. ПРЕОБРАЗОВАТЕЛИ С ПРИНУДИТЕЛЬНОЙ КОММУТАЦИЕЙ
ДЛЯ ВЕНТИЛЬНЫХ ДВИГАТЕЛЕЙ
Преобразователи, обеспечивающие коммутацию тока (напряжения) в фазах ВД без помощи электрической машины, можно разделить на три группы: преобразова-302
тсли с принудительной коммутацией, работающие в режиме источника тока; преобразователи с принудительной коммутацией, работающие в режиме источника напряжения; преобразователи с непосредственной связью, работающие в режиме источика напряжения.
Хотя коммутация тока в тиристорах преобразователя производится не за счет напряжения машины, а внешними средствами, управление тиристорами, как и в случае естественной коммутации, синхронизировано с работой машины.
Применение преобразователей с принудительной коммутацией, как правило, связано с усложнением схемы и конструкции ВД, но в то же время позволяет обеспечить электрические характеристики установки, не достижимые при использовании для коммутации только реактивной энергии машины. Благодаря принудительной коммутации можно повысить использование электрической машины ВД, увеличить перегрузочную способность установки, обеспечить высокий пусковой момент двигателя и снизить дополнительные потери в электрической машине от высших гармоник тока. Электрическая машина в таком ВД может работать как с опережающим, так и с отстающим фазовым сдвигом тока относительно напряжения на выводах.
В ряде случаев только применение преобразователей с принудительной коммутацией позволяет обеспечить все требования, предъявляемые к электроприводу с ВД.
Преобразователи, работающие в режиме источника тока
В качестве таких преобразователей, как правило, применяют АИТ с принудительной коммутацией. Обычно инвертор содержит трехфазный мост и коммутирующее устройство, выполняемое по различным схемам. На рис. 7-10 приведена схема преобразователя с АИТ (см. гл. 5). Схема широко применяется в ВД. В тех случаях, когда требуется обеспечить высокий пусковой момент ВД и его работу с высоким моментом на низких частотах, узлы искусственной коммутации снабжают дополнительным источником подзаряда.
Одна из таких схем приведена па рис. 7-11. Помимо наличия независимого источника подзаряда коммутирующего конденсатора эта схема отличается от приведенной на рис. 7-10 тем, что частота напряжения на кондеи-
303
саторе в 3 раза превышает частоту f2. В остальном коммутационные процессы в обеих схемах протекают аналогично.
Анализ показывает, что в инверторах тока для ВД могут применяться все те же типы узлов принудительной коммутации, что и в других схемах АИТ для частотного
Рис. 7-10. ВД с преобразователем по схеме выпрямитель — инвертор тока с принудительной коммутацией.
13 — выпрямитель; И —инвертор; L — сглаживающий реактор; М — электрическая машина.
Рис. 7-11. ВД с преобразователем по схеме выпрямитель — инвертор тока с принудительной коммутацией н цепью дополнительного подзаряди коммутирующего конденсатора.
Обозначения те же, что на рис. 7-10.
регулирования АД [65, 66, 105 и гл. 5]. Следует отметить, что применение узлов принудительной коммутации в АИТ для ВД в зависимости от схемы узла коммутации и требований, предъявляемых в отношении коммутационной устойчивости ВД, приводит к увеличению 304
установленной мощности оборудования преобразователя по меньшей мере на 10—30%.
Алгоритм управления тиристорами преобразователя с принудительной коммутацией практически не отличается от алгоритма управления в преобразователе с естественной коммутацией. Необходимо лишь дополнительно обеспечить формирование управляющих импульсов для коммутирующих тиристоров.
Преобразователи с инверторами напряжения
В ВД могут применяться различные типы регулируемых АИН.
Следует отметить особенности, связанные с применением в ВД АИН (см. гл. 3).
Так как АИН по принципу действия — это источник напряжения, то в случае применения его в ВД регулируемыми параметрами являются амплитуда основной гармоники кривой выходного напряжения и фазовый сдвиг основной гармоники напряжения относительно основной гармоники ЭДС электрической машины.
Во избежание значительных пульсаций электромагнитного момента машины и обусловленных ими пульсаций скорости (особенно при низких частотах) необходимо стремиться к тому, чтобы в кривой выходного напряжения АИН или в кривой выходного тока АИТ содержалось минимальное количество высших гармоник, особенно низких порядков.
Преобразователи частоты с непосредственной связью
Преобразователи частоты с непосредственной связью, работающие в режиме источника напряжения и рассмотренные в гл. 6, также могут использоваться в ВД. И; применение целесообразно в тех же случаях, что и для частотного управления (см. § 6-8).
Применение арккосинусоидального закона управления вентилями ТПЧН позволяет исключить из криво;, выходного напряжения гармоники низких порядков и избавиться от пульсаций электромагнитного момента, что имеет важное значение в установках тихоходною электропривода. Требования по обеспечению рекуперативного тормож 'ия ВД не вызывают каких-либо усложнений силовой < Мы ТПЧН.
3: Г
Как и при использовании в ВД АИН, в системе с ТПЧН регулируемыми параметрами являются амплитуда основной гармоники кривой выходного напряжения ТПЧН и фазовый сдвиг основной гармоники напряжения относительно основной гармоники ЭДС холостого хода электрической машины. Выбор конкретной силовой схемы ТПЧН определяется мощностью установки, частотами напряжений питающей сети и электрической машины, а также требованиями, предъявляемыми к системе электропривода.
7-5. ВЛИЯНИЕ ТИПА ПРЕОБРАЗОВАТЕЛЯ НА ИСПОЛЬЗОВАНИЕ ЭЛЕКТРИЧЕСКОЙ МАШИНЫ ВЕНТИЛЬНОГО ДВИГАТЕЛЯ
При проектировании электроприводов с ВД одним из основных является вопрос оптимизации установленной мощности силового оборудования. Установленная мощность оборудования вентильного преобразователя и электрической машины при заданной мощности нагрузки зависит от способа коммутации тока (напряжения) электрической машины, типа вентильного преобразователя, типа электрической машины.
Не касаясь вопроса об установленной мощности оборудования вентильных преобразователей различных типов, рассмотренного в других главах книги, рассмотрим здесь только влияние типа вентильного преобразователя на использование электрической машины в системе ВД. Коэффициент использования электрической машины &Исп будем оценивать отношением мощности на валу двигателя к кажущейся потребляемой мощности, определяемой номинальными значениями тока и напряжения машины.
При анализе примем следующие условия и допущения: потери мощности в электрической машине равны нулю; напряжение на выводах электрической машины в межкоммутационные интервалы синусоидальное; реактивное сопротивление контура коммутации и синхронное реактивное сопротивление машины не изменяются при изменении нагрузки и напряжения.
Вначале рассмотрим электрическую машину с электромагнитным возбуждением, в которой можно поддерживать номинальное напряжение на выводах при изменении нагрузки. В этом простейшем случае при синусои-зоб
дальних токе и напряжении использование синхронной машины можно характеризовать коэффициентом /гисп!
&ИСП1—COS ф, (7-1)
где ф — фазовый сдвиг тока машины относительно напряжения на ее выводах.
то двигателя с опере-реакция якоря оказы-
Однако при работе синхроннс жающим фазовым сдвигом тока вает размагничивающее действие на магнитную систему машины, что требует значительного увеличения тока возбуждения и, следовательно, приводит к дополнительному снижению использования машины.
В синхронной машине с нерегулируемым возбуждением (например, с постоянными магнитами) напряжение на выводах машины при заданной рабочей частоте зависит от тока нагрузки, фазового сдвига основной гармоники тока относительно напряжения и реактивных сопротивлений машины. Если синхронный двигатель с нерегулируемым возбуждением спроектирован из условия работы непосредственно от сети с отстающим током, или с током, совпадающим по фазе с напряжением, то его применение в ВД с коммутацией за счет напряжения машины может сопровождаться заметным снижением
Рис. 7-12. Упрощенная векторная диаграмма синхронной машины.
выходной мощности.
Рассмотрим упрощенную векторную диаграмму явнополюсной синхронной машины при номинальной частоте без учета насыщения, потерь и потоков рассеяния (рис. 7-12). Из векторной диаграммы имеем:
Iqxq=U sin 0; (7-2)
I<iXtl=E—U cos 0; (7-3)
/y=7cos (ф+0); (7-4)
/d=/sin (ф+0). (7-5)
307
Из (7-2) — (7-5) получаем:
Ixq cos (ф+0) =U sin 0; (7-6)
Ixd sin (ф4-0)=£—I7cos0, (7-7)
где E и U—соответственно ЭДС холостого хода и напряжение на выводах синхронной машины; xd и xq— составляющие синхронного реактивного сопротивления машины по продольной и поперечной осям; I, Id, Iq — ток синхронной машины и его составляющие по продольной и поперечной осям; 0 — фазовый угол между ЭДС машины и напряжением на выводах.
Разделим обе части соотношений (7-6) и (7-7) на Е и выразим xd, xq, U в относительных единицах
^'d*===7X(//^; Xq*—~1XqlЕ\
U.=UIE- z<,=EU-, (7-8)
xq* cos (ф+0) —U* sin 0; (7-9)
Xd.sin (ф+0)=1—f7.cos0. (7-10)
Решая совместно (7-9) и (7-10) относительно U* и исключая 0, получаем:
П =- xy + Sx^sin^+l
* ~ xqtXd* +(xd* + sin <р + 1 •
Введем параметр k=Xd*lxq*. Тогда
__ V'x2„ + 2x^sin? + l
* ЬЛ^+(1+fe) x^sinf+1-
Для неявнополюсной машины xd*=xq*=xc* и k— 1, поэтому
* 1Л “5—Гл-----:---;—1 • \' 1
и x2c*+2xc,sin<?+ 1
Зависимости U* от xq*, k и ф приведены на рис. 7-13,а—в. Утолщенные кривые соответствуют неявнополюсной синхронной машине. Полученные зависимости показывают, что по мере изменения фазы тока в сторону опережения при неизменной ЭДС холостого хода напряжение на выводах машины уменьшается, что при заданном токе соответствует худшему использованию электрической машины. Коэффициент использования 308
в этом случае kncu2 можно представить в виде &исп2:=^исп1 COS ф. (7-14)
Полученные соотношения справедливы при условии, что напряжение и ток машины синусоидальные. Без заметной погрешности их можно применять, когда в ВД
Рис. 7-13. Зависимость напряжения электрической машины от составляющих синхронного реактивного сопротивления при различных значениях фазового сдвига тока.
309
используется преобразователь, источника напряжения с кривой близкой по форме к синусоиде.
Рис. 7-14. Диаграммы фазного напряжения и тока на входе электрической машины ВД.
выполненный по схеме выходного напряжения,
Оценим использование электрической машины в том случае, когда преобразователь выполнен по схеме источника тока, а машина выполнена с регулируемым возбуждением. При отсутствии в схеме дополнительных накопителей реактивной энергии (например, конденсаторов) кривая тока электрической машины имеет форму, близкую к трапецеидальной, как показано на рис. 7-14.
Мощность ВД, Рв,д, определим за интервал одной полуволны тока с учетом общего числа no-кривой
луволн за период, формы кривой тока и формы напряжения электрической машины
—з+т
Р — —
д 2zt
Um sin f<ot j iK1 d<ot -|-
2«/3—0+т
2«/3—0
2те/3—0
-Ж
(7-15)
где Um — амплитуда фазного напряжения двигателя; i’ki» i'k2 — токи двигателя на интервалах коммутации; I — амплитудное значение тока электрической машины; 0— угол опережения включения тиристоров, отсчитываемый от момента равенства значений напряжений коммутируемых фаз; у — угол коммутации.
310
Так как абсолютные значения напряжений в интер-
валах коммутации одинаковы, длительность интервалов коммутации неизменна, a Iki~Hk2=^ в любой момент времени, то при определении мощности два интервала длительностью по у с токами iIti и tK2 можно заменить одним интервалом длительностью у с током I. При этом можно интегрировать выражение напряжения, действующего на любом интервале коммутации, например на первом, по-
этому
— U I —
- -?+т
J sin (со/ 4- dwt 4-
-в
(7-16)
Интегрируя, получаем:
Рв, ,= Ф- cos (р - cos—-. (7-17)
Выразим действующие значения тока /д и напряжения /7Д электрической машины через 1 и Um, приняв, что ток в процессе коммутации изменяется линейно:
ил=итЦ/2. (7-19)
В результате выражение для Рв_ д принимает вид:
^.д = 317д/д
V6 cos (|J — у/2) cos -y-л/2/3— у4л
(7-20)
Коэффициент использования электрической машины с регулируемым возбуждением в этом случае &Испз зависит от р и у в соответствии с выражением
Кб cos — у '2) cos -тр л К2 3 — у/Зге
(7-21)
311
Для обеспечения лучшего использования электрической машины целесообразно угол [3 выбирать минимально возможным из условия обеспечения надежной коммутации тока. Представим [3 в виде
Р=?+б, (7-22)
где б — угол, предоставляемый тиристору для выключения.
Тогда выражение для коэффициента использования принимает вид:
К6 cos (у/2 +/) cos ~^-
^исп. = --Т7=----------. (7-23)
и ’ л/2/3 — т/Зл
Зависимости к1№11Э от у и б приведены на рис. 7-15.
Для определения коэффициента использования электрической машины с неизменным потоком возбуждения, работающей в ВД с преобразователем в режиме источника тока, при условии, что коммутация тока происходит за счет реактивной энергии машины, необходимо коэффициент /еИсиз умножить иа относительное значение напряжения на выводах машины [7* [(7-11) — (7-13)]:
/ 6 cos (у/2 + Э) cos -g-
^ИСП4 = -- ——. (7-24)
ИСП4 ИСПЗ * * л/2/3—Y-Зл v
Значение фазового сдвига <р основной гармоники тока относительно напряжения, необходимое для определения напряжения па выводах машины [см. (7-12) и рис. 7-13], в этом случае можно рассчитать по формуле
Ф^у/2+б=р—у/2. (7-25)
Угол б определяется временем выключения тиристоров и при промышленной частоте не превышает нескольких электрических .градусов, поэтому угол ср практически определяется временем коммутации тока, выражаемым углом у. В свою очередь угол у при заданных напряжении и токе определяется реактивными сопротивлениями машины.
Таким образом, применение ВД, коммутация тока в которых происходит за счет напряжения электрической машины, вызывает снижение использования электриче-312
Рис. 7-15. Зависимость коэффициента использования электрической машины ВД от углов коммутации и восстановления.
ской машины, но позволяет упростить силовую схему и уменьшить установленную мощность оборудования.
Если коммутация тока ВД обеспечивается за счет реактивной энергии преобразователя или питающей сети, использование электрической машины повышается благодаря уменьшению длительности коммутации и возможности изменения фазовых соотношений между основными гармониками тока
и напряжения машины, влияющих на реакцию якоря. Однако при этом усложняется схема и увеличивается установленная мощность оборудования преобразователя.
7-6. ПРИМЕНЕНИЕ ВЕНТИЛЬНЫХ ДВИГАТЕЛЕЙ
Достижения последних лет в области электрических машин и силовой преобразовательной техники открыли широкие перспективы промышленного применения ВД. Обладая электрическими характеристиками, близкими к характеристикам коллекторных машин постоянного тока независимого возбуждения, ВД лишены недостатков первых, связанных с наличием коллекторно-щеточного узла. Это определяет необходимость применения ВД в тех случаях, когда требуется обеспечить характеристики, присущие электроприводу постоянного тока, но машина постоянного тока не может быть применена из-за ограничений, связанных с большой мощностью установки, высокой частотой вращения, высокими рабочими напряжениями, взрыво- и пожароопасностью окружающей среды, требованиями по надежности н другими показателями. В ряде случаев целесообразность применения ВД может быть обоснована и чисто экономическими соображениями. К настоящему времени ВД получили довольно широкое распространение в ряде стран. Имеются установки с ВД и в СССР.
Электроприводы с ВД малой мощности (около нескольких ватт) в большом количестве выпускаются ведущими зарубежными электротехническими фирмами. В качестве вентилей коммутатора используются транзисторы. Вентильные двигатели предназначены для привода магнитофонов, проигрывателей и другой аппаратуры. Фирма 21—581 313
«Сименс» (ФРГ) выпускает серию таких двигателей под названием «Simotron-К» [130]. Двигатель одного из типов этой серии имеет максимальную частоту вращения 60 000 об/мин при моменте иа валу 50 Н-см, погрешность регулирования ±1% при изменении нагрузки от 0 до номинальной, диапазон регулирования частоты вращения 20: 1. Коэффициент полезного действия двигателя с транзисторным коммутатором, выполненным по четырехтактной схеме, составляет 70%. В датчике положения используются элементы Холла.
Зарубежными фирмами разработаны серии унифицированных электроприводов с ВД средней мощности (до 200 кВт) общепромышленного применения. Одной нз первых разработок была серия «Simotron» фирмы «Сименс» (ФРГ). Серия включает в себя ряд электроприводов мощностью от 20 до 200 кВт '[112]. Преобразователь выполнен по схеме выпрямитель — инвертор с естественной коммутацией. В некоторых исполнениях обмотка возбуждения ВД включается последовательно в цепь постоянного тока. Пуск ВД производится за счет напряжения питающей сети. С этой целью сглаживающий реактор в звене постоянного тока иа время пуска шунтируется тиристором в обратном направлении для создания прерывистых токов.
Позднее состав серии был расширен в сторону меньших мощностей (7,5; 11; 15; 22 и 30 кВт), для которых применяются электрические машины, возбуждаемые от постоянных магнитов. Диапазон регулирования частоты вращения—-до 50: 1 при постоянном моменте. Для ряда исполнений ВД применяются преобразователи по схеме выпрямитель — инвертор с принудительной коммутацией [ИЗ]. Исследования показали, что в ВД часто целесообразно повышать рабочую частоту машины до нескольких сотен герц по условиям оптимизации конструкции машины, для получения электроприводов с повышенной частотой вращения и снижения пульсаций электромагнитного момента при низких частотах вращения. Электроприводы «Simotron» малой мощности с машинами, возбуждаемыми постоянными магнитами, в большом количестве используются в текстильной промышленности, а установки большей мощности — для приводов насосов.
Аналогичные разработки серий ВД средней мощности выполнили японские фирмы «Хитачи», «Мицубиси», «Тойо электрик».
Фирма «Тойо электрик», в частности, широко применяет в ВД преобразователи с непосредственной связью, работающие в режиме источника тока.
Одной из последних разработок ВД средней мощности является серия «МС Permotron» японской фирмы «Фудзи» [118]. Силовая часть содержит преобразователь, выполненный по схеме управляемый выпрямитель — инвертор тока с естественной коммутацией, и трехфазную машину с электромагнитным возбуждением. Диапазон номинальных мощностей ВД 3,7—200 кВт, частот вращения 500— 3000 об/мин. Преобразователи с аппаратурой управления, регулирования и защиты установлены в комплектных шкафах высотой 2300 мм, выпускаемых в трех конструктивных исполнениях по длине и ширине в зависимости от мощности установки (600X800, 800Х Х1000 или 1000X1200 мм).
Перспективной областью применения ВД являются установки средней и большой мощности для приводов насосов и компрессоров [118].
314
В СССР для приводов дымососов конверторов завода «Азов-сталь» разработаны ВД с синхронными машинами типа ДСЗ-170/74-4 мощностью 5000 кВт прн частоте вращения 1500 об/мин [59]. Преобразователь выполнен по схеме выпрямитель — инвертор тока с естественной коммутацией. Рабочее напряжение двигателя 6 кВ. В каждом плече мостового преобразователя установлено по 16 тиристоров типа Т-320-10. Разрабатывается ряд таких комплектных приводов с ВД на мощности 500—25 000 кВт при частотах вращения 375—3000 об/мин.
В мощных установках тихоходного электропривода с ВД для повышения использования электрической машины н снижения пульсаций электромагнитного момента обычно применяют преобразователи частоты с непосредственной связью, работающие в режиме источника напряжения. Одна из таких установок мощностью 6500 кВт с частотой вращения 14,5 об/мин (частота выходного напряжения 4,84 Гц) для привода шаровой мельницы описана в [108].
21
СПИСОК ЛИТЕРАТУРЫ
1. Абрамович М. И., Сакович А. А. Определение параметров элементов и энергетических показателей преобразователей частоты — фазорасщепителей. — Труды ВЭИ. Силовые полупроводниковые устройства, 1967, вып. 75, с. 83—93.
2. Автоматическое регулирование тиристорных частотных электроприводов с синхронными двигателями/ А. Н. Вейнгер, Ф. И. Андреев, И. В. Бородина и др. — В кн.: Тиристорные электроприводы с асинхронными двигателями. — Свердловск: УПИ, 1974, с. 53—54.
3. Агеев В. И., Сакович А. А. Метод расчета коэффициента мощности преобразователя частоты с непосредственной связью.— Электротехническая промышленность Преобразовательная техника, 1970, № 1, с. 8—10.
4. Агрегаты преобразования частоты типов АОТР-200/280 и АОТР-400/280. — Электротехническая промышленность. Преобразовательная техника, 1970, № 3, с. 3.
' 5. Андриенко П. Д., Яцук В. Г. Комплектные тиристорные электроприводы переменного тока для регулирования скорости электродвигателей.— В кн.: Проблемы автоматизированного электропривода,— М.: МДНТП, 1974, с. 54—65.
6. Аранчий Г. В., Жемеров Г. Г., Эпштейн И. И. Тиристорные преобразователи частоты для регулируемых электроприводов. — М.: Энергия, 1968. — 128 с.
7. Асинхронный электропривод с частотным управлением для грузоподъемных механизмов./ А. С. Сандлер, Ю. М. Гусяцкий, Е. М. Певзнер и др. — В кн.: Тиристорные электроприводы. — Свердловск: УПИ, 1974, с. 83—84.
8. Баранов Б. К., Стромин Б. А. Вентильный электродвигатель. — Электричество, 1967, № 5, с. 18—21.
9. Бедфорд Б., Хофт Р. Теория автономных инверторов/ Пер. с англ. — М.: Энергия, 1969. — 280 с.
10. Берштейн И. Я. Тиристорные преобразователи частоты без звена постоянного тока. — М.: Энергия, 1968. — 88 с.
11. Бернштейн И. Я. Исследование кривой выходного напряжения непосредственного преобразователя частоты.—Труды ВНИИЭМ, 1974, т. 41, с. 134—148.
12. Бернштейн И. Я. Энергетические характеристики преобразователя частоты с непосредственной связью при различных законах управления вентилями. — Электротехническая промышленность. Преобразовательная техника, 1973, № 2 (37), с. 11—13.
13. Бернштейн И. Я.. Хорт М. А. Энергетические характеристики преобразователя частоты при поочередном управлении группами вентилей. — Электричество, 1975, № 1, с. 69—73.
14. Бобков В. А., Патрик А. А. Опыт применения тиристорных преобразователей частоты для регулирования привода технологических механизмов. — Промышленная энергетика, 1976, № 1. с. 21—23.
316
15. Брейтер Б. 3., Найдис В. А. Электроприводы переменного тока зарубежных фирм с частотным регулированием. — Электротехническая промышленность. Электропривод, 1973, № 7 (24),
с. 44—52,
16. Бродовский В. Н„ Иванов Е. С. Приводы с частотно-токовым управлением. — М.: Энергия, 1974. — 169 с.
47. Будяков А. А. Статические преобразователи частоты для электроприводов систем управления и защиты. — Электротехническая промышленность. Преобразовательная техника, 1972, № 6 (30), с. 4—5.
у 18. Булгаков А. А. Частотное управление асинхронными электродвигателями.— М.: Наука, 1966. — 297 с.
У 19. Бутаев Ф. И., Эттингер Е. Л. Вентильный электропривод.— Мд Госэнергоиздат, 1951. — 248 с.
20. Бутаев Ф. И. Вентильный двигатель с раздельным питанием фаз статора. — Электротехника, 1971, № 7, с. 6—8.
21. Быков Ю. М., Пар И. Т. Низкочастотные гармонические на выходе циклоконверторов с прямоугольным управляющим напряжением.— Электротехническая промышленность. Электропривод, 4973, вып. 1 (18), с. 7—8, 2 (19), с. 10—12.
22. Вевюрко И. А. Выбор схемы бесщеточного микродвигателя постоянного тока. — Труды ВНИИЭМ, т. 30, 1969, с. 221—240.
23. Волотковский С. А., Пироженко В. X., Ремха Ю. С. Частотно-регулируемый привод горных машин. — В кн.: Тиристорные электроприводы с асинхронными двигателями. — Свердловск: УПИ, 1974, с. 87—88.
24. Глазенко Т. А. Применение метода фазовой плоскости для расчета электромагнитных процессов в инверторах с двухступенчатой емкостной коммутацией. — Электричество, 1967, № 9, с. 47—50.
25. Глазенко Т. А., Яхнина Т. Н. Некоторые вопросы проектирования тиристорных инверторов коммутаторного типа для систем электроприводов с частотным управлением. — Материалы конференции «Состояние и перспективы развития производства и внедрения полупроводниковых вентилей и преобразовательных устройств на их основе». — М.: МДНТП, 1967, с. 15—19.
26. Глазенко Т. А., Гончаренко Р. Б. Полупроводниковые преобразователи частоты в электроприводах. — Л.: Энергия, 1969, 184 с.
27. Глебов И. А., Левин В. Н., Ровинский П. А. Вентильные преобразователи в цепях электрических машин. — Л.: Наука, 1971.— 228 с.
28. Грабовецкий Г. В., Семенов В. В., Федоткин В. И. Автономный инвертор повышенной частоты без явновыраженного звена постоянного тока. — В кн.: Тиристорный управляемый асинхронный электропривод. — Свердловск: УПИ, 1968, с. 169—172.
29. Дубенский А. А. Бесконтактные двигатели постоянного тока.— М.: Энергия, 1967.— 144 с.
30. Жемеров Г. Г. Токовые нагрузки элементов силовой цепи преобразователей частоты с непосредственной связью. — Электричество, 1969, № 12, с. 38—42.
31. Жемеров Г. Г. Установленная мощность преобразователей частоты с непосредственной связью. — В кн.: Устройства преобразовательной техники.—Киев: Паукова Думка, вып. 1, 1969, с. 132—139.
317
32. Жемеров Г. Г., Левитин И. И. Коэффициент мощности каскадных управляемых выпрямителей. — Электричество, 1971, № Ю, с. 27—30.
33. Журавлев А. И. Энергетические характеристики непосредственных преобразователен частоты с искусственой коммутацией.— Труды ВНИИЭМ, 1974, т. 41, с. 179—195.
34. Загорский В. Т. Непосредственный преобразователь частоты с принудительной коммутацией. — В кн.: Тиристорный управляемый асинхронный электропривод. — Свердловск: УПИ, 1968, с. 172—177.
,,3 5. Завалишин Д. А., Вегнер О. Г. Теория и основы расчета вентильного двигателя. — Труды Ленинградского индустриального института, 1936, № 5, с. 24—27.
'V 36. Завалишин Д. А. Современное состояние и перспективы развития электромашинно-вентильпых систем. — Известия АН СССР. Энергетика и транспорт, 1966, № 1, с. 17—30.
37. Зиновьев Г. С. Основные соотношения для преобразователей частоты с непосредственной связью. Переменный угол регулирования.— Известия СО ЛИ СССР, ОТН, 1966, № 2, вып 2, с. 69—83.
38. Ирс Р. Р., Тийсмус X. А. Тиристорный частотно-управляемый магнитогидродпиамический (МГД) привод. — В кн.: Тиристорные электроприводы с асинхронными двигателями. — Свердловск: УПИ, 1974, с. 90—93.
39. Иньков Ю. М. Вентильные преобразователи частоты с непосредственной связью. — М.: Информэлектро, 1974. — 64 с.
40. Каганов И. Л. Электронные и ионные преобразователи. Ч. III, — М.: Госэнергоиздат, 1956.—528 с.
41. Карташов Р. П., Корнилов Б. В., Чехет Э. М. Основные схемы тиристорных преобразователей частоты с однократной модуляцией.— В кн.: Современные задачи преобразовательной техники. Ч. IV.— Киев: АН УССР, 1975, с. 136—144.
— 42. Ковач К. П., Рац И. Переходные процессы в машинах переменного тока. — М.: Госэнергоиздат, 1963. — 735 с.
43. Костенко М. П., Завалишин Д. А. Состояние и задачи развития электроприводов с частотным электромашинным и электронно-ионным управлением. — Научно-технические проблемы автоматизированного электропривода. — М.: АН СССР, 1957, с. 82—98.
44. Кочетков В. Д., Дацковский Л. X., Роговой В. И. Принципы построения быстроходных частотно-регулируемых асинхронных электроприводов большой мощности. — Электротехника, 1974, № 10, с. 20-23.
45. Кривицкий С. О., Эпштейн И. И. Динамика частотно-регулируемых электроприводов с автономными инверторами. — М.: Энергия, 1970. — 152 с.
46. Лабунцов В. А. Тиристорные преобразователи частоты для регулируемого привода переменного тока. — Тиристорные электроприводы в машиностроении. — М.: МДНТП, 1965, с. 23—31.
47. Лабунцов В. А., Ривкин Г. А., Шевченко Г. И. Автономные тиристорные инверторы. — М.: Энергия, 1967.— 160 с.
48. Лебедев А. А. К теории процесса выключения р-п-р-п структур под действием обратного напряжения. — Физика и техника полупроводников, 1968, т. 2, № 7, с. 1022—1045.
49. Лейтес Л. В., Пинцов А. М. Схемы замещения многообмоточных трансформаторов.—М.; Энергия, 1974. — 192 с.
318
50. Маевский 0. Л. Коэффициент мощности и составляющие полной мощности вентильных преобразователей частоты. — Известия вузов. Электромеханика, 1965, № 12, с. 1377—1390.
51. Мыцык Г. С. Расчет параметров входного и выходного токов полностью управляемых непосредственных преобразователен с циклическим алгоритмом управления. — Электричество, 1977, № 1, (;. 62—67.
'у 52. Наумычева К. И. Электропривод и автоматизация промышленных установок. Электропривод с вентильными двигателями. - -В кп.: Итоги пауки и техники. — М.: ВИНИТИ, 1974. — 219 с.
53. Некоторые вопросы разработки и анализа систем тиристорного электропривода переменного тока в транспортных установках/ А. М. Алексеев, В. В. Алексеев, Е. А. Андреев и др. — В кн.: Тиристорные электроприводы с асинхронными двигателями.—Свердловск: УПИ, 1974, с. 82—83.
54. Непосредственный преобразователь частоты типа ПЧТ-1Э мощностью 600 кВт для централизованного электроснабжения поездов/ Ю. П. Григорьев, Ю. М. Иньков, 3. С. Иоспа и др. — Электротехническая промышленность. Преобразовательная техника. — 1973, № 10 (45), с. 4-6.
55. Нопираковский И. Исследование преобразователей частоты с переменным углом управления: Лвтореф. дне. на соиск. уч. степени каид. техн, наук/ МЭИ. М.: 1965.
56. Онищенко Г. Б. Асинхронный вентильный каскад. — М.: Энергия, 1967.— 153 с.
57. Онищенко Г. Б., Юньков М. Г. Электропривод турбомеханизмов.— М.: Энергия, 1972. — 240 с.
58. Основные технические направления в разработке тиристорных электроприводов переменного тока./ О. В. Слежаповскпй, В. Д. Кочетков, Н. П. Кутлер и др. — В кн.: Тиристорные электроприводы с асинхронными двигателями. — Свердловск: УПИ, 1974, с. 3—6.
59. Перспективы внедрения вентильных двигателей/ Б. С. Александровский, И. И. Эпштейн, Е. Л. Эттингер и др. — Электротехническая промышленность. Электропривод, 1976, № 4 (48), с. 4—6.
60. Петров Г. Н. Электрические машины. Ч III. — М.: Энергия, 1968.— 224 с.
61. Писарев А. Л., Деткин Л. П. Управление тиристорными преобразователями (системы импульсно-фазового управления). — М.: Энергия, 1975. — 264 с.
62. Преобразователи частоты иа тиристорах для управления высокоскоростными двигателями/ А. С. Сандлер, Г. К. Аввакумова, А. В. Кудрявцев и др. — М.: Энергия, 1970. — 80 с.
63. Преобразователи частоты на основе автономных инверторов для электроприводов переменного тока/ И. А. Акиньшин, И. А. Антонов. Л. X. Дапковскпй и др. — М.: Информэлектро, 1974. — 39 с.
64. Ровинский П. А., Тикан В. А. Вентильные преобразователи частоты без звена постоянного тока. — М.; Л.: Наука, 1965. — 76 с.
65. Рытвин А. Ф., Семенов В. В. Преобразователь с искусственной коммутацией для вентильного электропривода. — Электротехника, 1974, № 3, с. 40—42.
66. Рытвин А. Ф. Схемы н регулирование преобразователей с искусственной коммутацией для вентильных двигателей. — В кн.: Современные задачи нреобразовзтелыгш техники. — Киев: Паукова Думка, 1975, е. 140—143.
319
67. Сандлер А. С., Сарбатов Р. С. Преобразователи частоты для управления асинхронными двигателями. — М.: Энергия, 1966.— 144 с.
68. Сандлер А. С., Сарбатов Р. С. Частотное управление асинхронными двигателями. — М.: Энергия, 1966.— 144 с.
69. Сандлер А. С. Регулирование скорости вращения мощных асинхронных двигателей. — М.: Энергия, 1966.—320 с.
1/7 0. Сандлер А. С., Гусяцкий Ю. М. Тиристорные инверторы с широтно-импульсной модуляцией.—М.: Энергия, 1968.—95 с.
71. Сандлер А. С., Тарасенко Л. М. Синтез технически оптимальных систем управления вентильным каскадом. — В кн.: Асинхронный тиристорный электропривод. — Свердловск: УПИ, 1971, с. 83—85.
72. Сандлер А. С., Гусяцкий Ю. М., Нгуен Ван Тхан. Характеристики асинхронного двигателя, управляемого автономным инвертором тока. — Труды МЭИ. Электрооборудование промышленных предприятий, 1972, вып. 149, с. 104—111.
•V 73. Сандлер А. С., Сарбатов Р. С. Автоматическое частотное управление асинхронными двигателями. — М.: Энергия, 1974. — 328 с.
74. Сергеев П. С., Горяйнов Ф. А., Виноградов Н. В. Проектирование электрических машин. — М.: Энергия, 1969. — 632 с.
75. Сетюков Л. И. Применение двойных рядов Фурье для определения частотных спектров различных видов импульсной модуляции.— Труды МЭИ, Радиотехника и электроника, 1961, вып. 34, с. 33—37.
76. Синтез структуры быстродействующего электропривода по системе машины двойного питания/ Л. X. Дацковскнй, Л. М. Тарасенко, И. С. Кузнецов и др. — В кн.: Тиристорные электроприводы с асинхронными двигателями. — Свердловск; УПИ, 1974, с. 54—55.
77. Современное состояние и перспективы развития электроприводов переменного тока с преобразователями частоты с непосредственной связью/ О. В. Слежановский, Л. X. Дацковскнй, В. Д. Кочетков и др. — Электричество, 1973, № 11, с. 1—9.
78. Солодухо Я. Ю., Замараев Б. С. Вентильные преобразователи н их влияние на электроснабжающие сети. — Новая техника в электроснабжении и электрооборудовании промышленных предприятий,—М.: МДНТП, 1975, с. 197—203.
79. Состояние и перспективы разработок оптимизированных систем частотного управления асинхронными электроприводами/ Р. Т. Шрейнер, Н. И. Томашевский, М. С. Карагодин и др. — В кн..-Тиристорные электроприводы с асинхронными двигателями.— Свердловск: УПИ, 1974, с. 49—52.
80. Структура н исследование позиционных систем частотнорегулируемого асинхронного привода шахтной подъемной установки/ Д. И. Родькин, А. Т. Рябошапка, В. М. Чермалых и др. — В кн.: Тиристорные электроприводы с асннхроннымн двигателями.—Свердловск: У-ПИ, 1974, с. 85—86.
81. Тиристорный преобразователь частоты для асинхронного привода турбомеханизма мощностью 3500 кВт/ Ю. Г Толстов, А. В. Наталкин, С. М. Гордюшкин и др. — В кн.: Асинхронный тиристорный электропривод. — Свердловск: УПИ, 1971, с. 209—212.
82 Тихменев Б. Н. Коммутация в вентильном двигателе. — Труды МЭМИИТ, 1939, вып. 23, с. 76—111.
320
83. Толстов Ю. Г, Выбор схем мощных тиристорных преобразователей— В кн.: Тиристорные преобразователи. — М.: Наука, 1970, с. 3—18.
84. Толстов Ю. Г., Наталкин А. В. Тиристорные преобразова тели частоты для мощного электропривода. — Электротехника, № 12, 1972, с. 42—45.
85. Усышкин Е. И. Спектры напряжения инверторов с ШИМ. — Электричество, № 1, с. 12—16.
86. Фираго Б. И., Готовский Б. С., Лисс 3. А. Тиристорные циклокоиверторы. — Минск: Наука и техника, 1973.—296 с.
87. Хамудханов М. 3. Частотное управление асинхронным электроприводом при помощи автономного инвертора. — Ташкент, АН УзССР, 1959, —335 с.
88. Хасаев О. И. Работа асинхронного двигателя от преобразователя частоты на полупроводниковых триодах.—Электричество. № 9, 1961, с. 22—26.
89. Хасаев О. И., Коссов О. А. Регулирование напряжения в системе транзисторный инвертор — асинхронный двигатель. — Электричество, 1965, № 9, с. 18—22.
90. Хасаев О. И. Транзисторные преобразователи напряжения и частоты. — М.: Наука, 1966.— 176 с.
91 .Частотное управление многодвигательиым электроприводом/ В. Ф. Беляи, В. С. Красовский, Ю. Т. Портной и др. — Тиристорные электроприводы с асинхронными двигателями. — Свердловск: УПИ, 1974, с. 88—89.
92. Андриенко П. Д., Буряк С. Ф., Грабовецкий Г. В. и др. Частотно-регулируемые электроприводы массовых серий. — Электротехническая промышленность. Электропривод, 1976, 3 (47), с. 1—3.
У 93. Частотно-управляемый электропривод с высокоскоростным асинхронным двигателем/ А. С. Сандлер, Г. К. Аввакумова, А. В. Кудрявцев и др. — Электротехника, 1974, № 8, с. 52—55.
54. Чебовский О. Г., Моисеев Г. Л., Сахаров Ю. В. Силовые полупроводниковые приборы/ Справочник. — М.: Энергия, 1975.— 512 с.
95. Чиженко И. М., Руденко В. С., Сенько В. И. Основы преобразовательной техники. — М.: Высшая школа, 1974. — 430 с.
96. Чиликин М. Г., Аракелян А. К., Афанасьев А. А. О некоторых возможностях бесколлекторного электропривода постоянного тока. — Электричество, 1965, № 9, с. 7—12.
97. Чиликин М. Г., Аракелян А. К-, Афанасьев А. А. Переходные процессы синхронной машины, работающей совместно с зависимым преобразователем частоты. — Электричество, 1970, № 10 с. 7—11.
98. Ширман Я. Ф. Частотные спектры при временной (фазовой) и частотно-импульсиой модуляции. — Радиотехника № 7—8 1964, с. 16—19.
99. Шипилло В. П., Сирица В. В., Булатов О. Г. Электромагнитные процессы в быстродействующем ионном реверсивном преобразователе.— М.: Госэнергонздат, 1963.—80 с.
100. Шубенко В. А., Браславский И, Я., Шрейиер Р. Т. Асинхронный электропривод с тиристорным управлением. — М.: Энергия, 1967. — 96 с.
101. Шукалов В. Ф. Электромагнитные процессы в трехфазном мостовом инверторе с ограниченными коммутирующими конденсаторами.—Л.: Труды ЛИАП, 1962, вып. 36, с. 82—118.
321
102. Электрошпинделн для внутреннего шлифования/ А. С. Санд-лер, Г. К. Аввакумова, А. В. Кудрявцев и др.—М.: Машиностроение, 1977 — 136 с.
103. Эттингер Е. Л. Ионный электропривод с бесколлекторными двигателями. — Электричество, 1963, № 2, с. 42—50.
104. Яцук В. Г., Талов В. В. Принципы построения и схемная реализация системы защиты тиристорного преобразователя частоты для регулируемого электропривода. — Разработка и внедрение быстродействующих систем защиты силовых преобразовательных устройств. — М.: ГПИ «Тяжпромэлектропроект», 1975, с. 62—67.
105. Янук В. Г, и др. Принципы построения частотно-регулируемых электроприводов на базе ТПЧ со звеном постоянного тока.— Промышленная энергетика, 1978, № 11, с. 39—43.
Юб. Яуре А. Г., Певзнер Е. М., Ровнпскнй П. А. Частотно-ре-гулнруемые электроприводы грузоподъемных механизмов с непосредственными преобразователями частоты. — В кн.: Тиристорные электроприводы с асинхронными двигателями. — Свердловск: УПИ, 1974, с. 84-85.
107. Abraham L., Heutnan К-, Koppeltnan F. Wecliselrichter zur Drehzahlsteuerung von Kafiglaufermotoren.— AEG-Mitt., 1964, Bd54, № 1/2, S. 89—106.
108. Electrical aspects of the 8750 hp gearless ball-mill drive of St. Lawrence Cement Company/ J. A. Allan, W. A. Wyeth, G. W. Herzog, Joung J. A. I. — IEEE Transactions on Industry Application, 1975, vol. II, № 6, p. 681—687.
109. Beatson C. Reliable and efficient electric motors control.— Engineer (Gr. Brit.), 1975, vol. 241, № 6237, p. 34—35, 41.
110. Blaschke F., Ripperger H., Steinkonig H. Regelung umrich-tergespeister Asynchronmaschinen mit eingepragtem Standerstrom. — Siemens-^, 1968, Bd 42, S. 743—777.
111. Deich C.-D. Vergleich einiger Ausfuhriingstormen der Gleich-strommaschine mit elektronischen Kommutator. — Elektrie, 1972, Bd. 26, № 1, S. 26—28.
112. Ettlinger G., Leitgeb W., Poppinger H. Simotron-Antriebe mittlerer Leistung. — Siemens-Z., 1971, Bd 45, № 4, S. 186—188.
113. Ettner N., Kappner A. Stromriclitergespeiste drehzahleveran-derbare elektrische Antriebe in der chemischen Industrie.—Siemens-Z., 1973, Bd. 47, № 6, S. 454—461.
114. Fisher B., Cota R. Efficency spurs adjustable frequency drive use.— Water and Wastes Engineering, 1975, vol. 12, № 10, p. 41—44, 64.
115. Flairty C. W. A 500 kVA adjustable frequency 24-phase controlled rectifier inverter utilizing digital techniques and harmonic cancellation. — NASA, Technical Note D 602, Washington, May, 1962, p. 824—824.
116. Floter W., Ripperger H. Die Transvektor—Regelung ffir den feldorientierten Betrieb eincr Asynchronmaschine. — Siemens-Z, 1971, Bd 45, S. 761—764.
117. Franke J., Schonung A. Steuerung statischer Unformer zum Speisen der Antriebe von Chemiefasserspinmaschinen. — Elektrotechn.-Z., 1968, Bd 20, № 21, S. 516—621.
118. Habock A., Kollensperger D. Anwendting nnd Wciterentwick-lung des Stromrichtermotors.— Sicmcns-Z., 1971, Bd 45, № 4, S. 180—182.
322
119. Hamilton R. A., Lesan G. R. Thyristor adjustable frequencypower supplier lor hot strip mill run-out tables. — IEEE Transactions on Industry and General Application, 1967, vol. IGA-3, № 2, p. 168.
120. Hasse K- Drehzahlregelverfahren fiir schnelle Umkehran-triebe mit stromrichtergespeisten Asynchron-Kurzschlusslaufermoto-ren. — Regelungstechn. und Prozcss-Datenverarb., 1972, Bd 20, № 2, S. 60—66.
121. Herwig K. Das Verhalten der Indnktionsrnaschine bei Spei-sung fiber Strom -Zwischenkreisumrichler.— ETZ-A, 1974, Bd 95, №5, S. 283—287.
122. Herwig K. Asynchronmaschinenantrieb mit Strom-Zwischen-kreisumrichtern.— Siemens-Z., 1976, Bd 50, № 1, S. 23—28.
123. Heumann K., Jordan K. G. Einfluss von Spannungs- und Stromoberschwingungeri auf den Betrieb von Asynchronmaschinen. — AEG-Mitt. 1964, Bd 54, № 1—2, S. 117—122.
124. King K. G. Variable frequency thyristor inverters for induction motor speed control. — Direct Current, 1965, vol. 10, p. 26.
125. Kleinrath H. Der Kommutierungsvorgang beim Asynchron-motor mit Speisung fiber Umrichter mit Gleichstromzwischenkreis. — Archiv fiir Elektrotechnik, 1974, Bd 59, S. 12—24.
126. Klerfors B. Frequency converters for electric traction supplies.— ASEA Journal, 1973, vol. 46, Ks 5, p. 119—122.
127. Kollensperger D. Die Synchronmaschine als selbstgesteuer-ter Stromrichtermotor. — Siemens-Z., 1967, Bd 41, № 10, S. 830—836.
128. Langer J. Umricliterspeisunz von Synchronmotoren fiir Rohrmiihlen. — Brown Boveri Mitt., 1970, Bd 57, № 3, S. 112—120.
129. Lienau W., Miiller-Hellman A. Drehstromtraktionsantrieb mit stromeinpriigendem Zwischenkreisumrichter. — ETZ-A, 1976, Bd 97, S. 84—86.
130. Liska M. Simotron-K, drehzahl geregelte Kleinantriebe mit Elektronikmotoren fiir industrielle Anwendnngen. — Siemens-Z., 1972, Bd 46, № 4, S. 274—276.
131. Maeno T., Kobata M. AC commutatorless and brushless motor.—IEEE Transactions on Power Apparatus an Systems, 1972, vol. 91, № 4, p. 1476—1484.
132. McMurray W., Shattuck D. P. A silicon-controlled-rectifier inverter with improved commutation. — Trans. AIEE (Comm, and Electr.), 1961, vol. 80, p. 531—542.
133. Naunin D. Berechnung des Drehmomentverlaufs einer Asyn-chronmaschine bei Speisung mit Rechtecksromen.— ETZ-A, 1969, Bd 90, S. 179—182.
134. Nelson R. H., Radomski T. A. Desing methods for current source inverter induction motor drive systems. — Power Electronics Specialists Conference, Murray Hill, N. J., 1974, p. 321—326.
135. Ostermaim H. Der fremdgesteuerte Stromrichtersynchronmo-tor. — Archiv fiir Elektrotechnik, 1963, Bd 48, № 3, S. 167—189.
136. Sato N., Semenov V. V. Adjustable speed drive with a brushless DC motor. — IEEE Transactions on Industry and General Application, 1971, vol. 7, № 4, p. 539—543.
137. Scheming A., Stemmier H. Geregelter Drehstrom-Umkehr-..mtrieb mit gesteuertem Umrichter nach dem Unterschwingungsver-faliren. — BBC-Mitt., 1964, № 8/9, S. 555—577.
138. Slemon G. R., Forsithe J. B., Dewan S. B. Controlled-power-angle synchronous motor inverter drive system.-—IEEE Transactions on Industry and General Application, 1973, vol. 9, № 2, p. 216—219.
323
139. Sperling P. Die nmrjchtergespeiste Asynciirminiaschine itfi Betrieb mit eingepragtem Rechteckstromen.— Siemens-Z., 1971, Bd 45, S. 508- 514.
140. Takeda M., Yanai A. Standard series of «МС Permotron.»— Fuji Electric Journal, 1975, vol. 48, № 12, p. 625—630.
141. Turbnbull F. G. Selected harmonic reduction in static DC-AC inverters. — IEEE Trans, on Communication and Electronics, 1964, vol. 83, p. 374.
142. Turnbull A, Cheaper thyristors make small variable frequency drives more competitive. — Electricel Times, 1975, № 4350, p. 7—8.
143. Zwisclienkreisumrichter fur Chemiefaserindustrie.—Ind.-Ana., 1976, Bd 98. № 8, S. 140.
Оглавлений
Предисловие................................................ 3
Глава первая. Общие принципы построения статических преобразователей частоты и требования к ним................ 5
1-1. Общие принципы преобразования частоты в статических устройствах. Классификация преобразователей и краткая характеристика их свойств . ....................... 5
1-2. Принципы преобразования постоянного тока в переменный в статических устройствах. Классификация инверторов и краткая характеристика их свойств .... 13
1-3. Способы регулирования напряжения в статических преобразователях частоты...................................21
1-4. Основные требования, предъявляемые к статическим преобразователям частоты для регулируемого электропривода 24
Глава вторая. Системы электропривода со статическими преобразователими частоты................................. 42
2-1. Требования к характеристикам регулируемого электропривода и пути их выполнения............................42
2-2. Основные системы электропривода со статическими преобразователями частоты и области их применения ... 47
Глава третья. Преобразователи частоты с автономными инверторами напряжения и амплитудным регулированием напряжения ..................................................57
3-1. Основные определения и допущения......................57
3-2. Напряжение на выходе автономного инвертора напряжения ....................................................58
3-3. Рабочие электромагнитные процессы в автономном инверторе напряжения.........................................65
3-4. Коммутационные процессы в автономном инверторе напряжения ...............................................69
3-5. Схемы автономных инверторов напряжения, этапы проектирования, методы расчета...............................73
3-6. Применение метода фазовой плоскости для анализа коммутационных процессов...................................75
3-7. Коммутационные процессы в автономном инверторе напряжения с фазной коммутацией и коммутирующим реактором, включенным в контур тока нагрузки .... 80
3-8. Коммутационные процессы в автономном инверторе напряжения с общей коммутацией............................85
3-9. Коммутационные процессы в автономном инверторе напряжения с междуфазовой коммутацией.....................87
3-10. Выбор элементов преобразователя частоты .... 93
325
3-11. Коммутационная устойчивость автономного инвертора напряжения в переходных процессах...........................97
3-12. Особенности мощных и глубоко регулируемых автономных инверторов напряжения...............................165
3-13. Промышленные преобразователи частоты с автономными инверторами напряжения.....................................109
3-14. Пример реализации системы управления автономным инвертором напряжения......................................111
Глава четвертая. Преобразователи частоты с автономными инверторами напряжения с широтно-импульсной модуляцией ....................................................114
4-1. Принцип широтно-импульсной модуляции. Основные со-
отношения при широтно-импульсной модуляции . . . 115
4-2. Схемы тиристорных инверторов напряжения с широтноимпульсной модуляцией . ............................116
4-3. Рабочие электромагнитные процессы в системе автономный инвертор напряжения с широтно-импульсной модуляцией— асинхронный двигатель................................120
4-4. Электромагнитные процессы в системе инвертор напряжения с широтно-импульсной модуляцией — двигатель при работе асинхронного двигателя в генераторном режиме ......................................................123
4-5. Особенности коммутационных электромагнитных процессов в инверторах напряжения с широтно-импульсной модуляцией ..................................................133
4-6. Расчет токов и напряжений для основных элементов инвертора напряжения с широтно-импульсной модуляцией 134
4-7. Гармонический анализ кривых выходного напряжения инвертора напряжения с широтно-импульсной модуляцией.
Потери в инверторе и двигателе.........................139
4-8. Системы управления автономными инверторами напряжения с широтно-импульсной модуляцией......................145
4-9. Промышленные преобразователи частоты с широтно-импульсной модуляцией........................................157
Глава пятая. Преобразователи частоты с автономными инверторами тока...........................................158
5-1. Принцип работы автономного инвертора тока. Схемы автономного инвертора тока.................................158
5-2. Анализ рабочих электромагнитных процессов в системе автономный инвертор тока —. асинхронный двигатель . . 162
5-3. Процессы коммутации в автономном инверторе тока . . 175
5-4. Расчет параметров и выбор элементов преобразователя частоты с автономным инвертором тока.......................184
5-5. Характеристики асинхронного двигателя, управляемого преобразователем частоты с автономным инвертором то-
ка. Принципы построения систем регулирования . . . 188
5-6. Промышленные преобразователи частоты с автономным инвертором тока .......................................... 199
Глава шестая. Преобразователи частоты с непосредственной связью............................................2С0
6-1. Общие свойства преобразователей частоты с непосредственной связью............................................200
326
6-2. Анализ формы кривой выходного напряжения преобразователя частоты с непосредственной связью .... 209
6-3. Энергетические характеристики преобразователя частоты с непосредственной связью .............................. 229
6-4. Влияние на питающую сеть преобразователя частоты с непосредственной связью .............................. 256
6-5. Особенности построения силовых схем преобразователей частоты с непосредственной связью........................2G9
6-6. Преобразователи частоты с непосредственной связью и принудительной коммутацией тока..........................278
6-7. Особенности систем управления преобразователей частоты с непосредственной связью ...............................281
6-8. Применение преобразователей частоты с непосредственной связью...............................................283
Глава седьмая. Преобразователи для вентильных двигателей ......................................................286
7-1. Принцип построения вентильного двигателя .... 286
7-2. Особенности систем управления преобразователей для вентильных двигателей....................................292
7-3. Преобразователи с естественной коммутацией для вентильных двигателей.......................................295
7-4. Преобразователи с принудительной коммутацией для вентильных двигателей ......................................302
7-5. Влияние типа преобразователя на использование электрической машины вентильного двигателя.............. 30G
7-6. Применение вентильных двигателей.......................313
Список литературы...........................................31G