/







































































































































































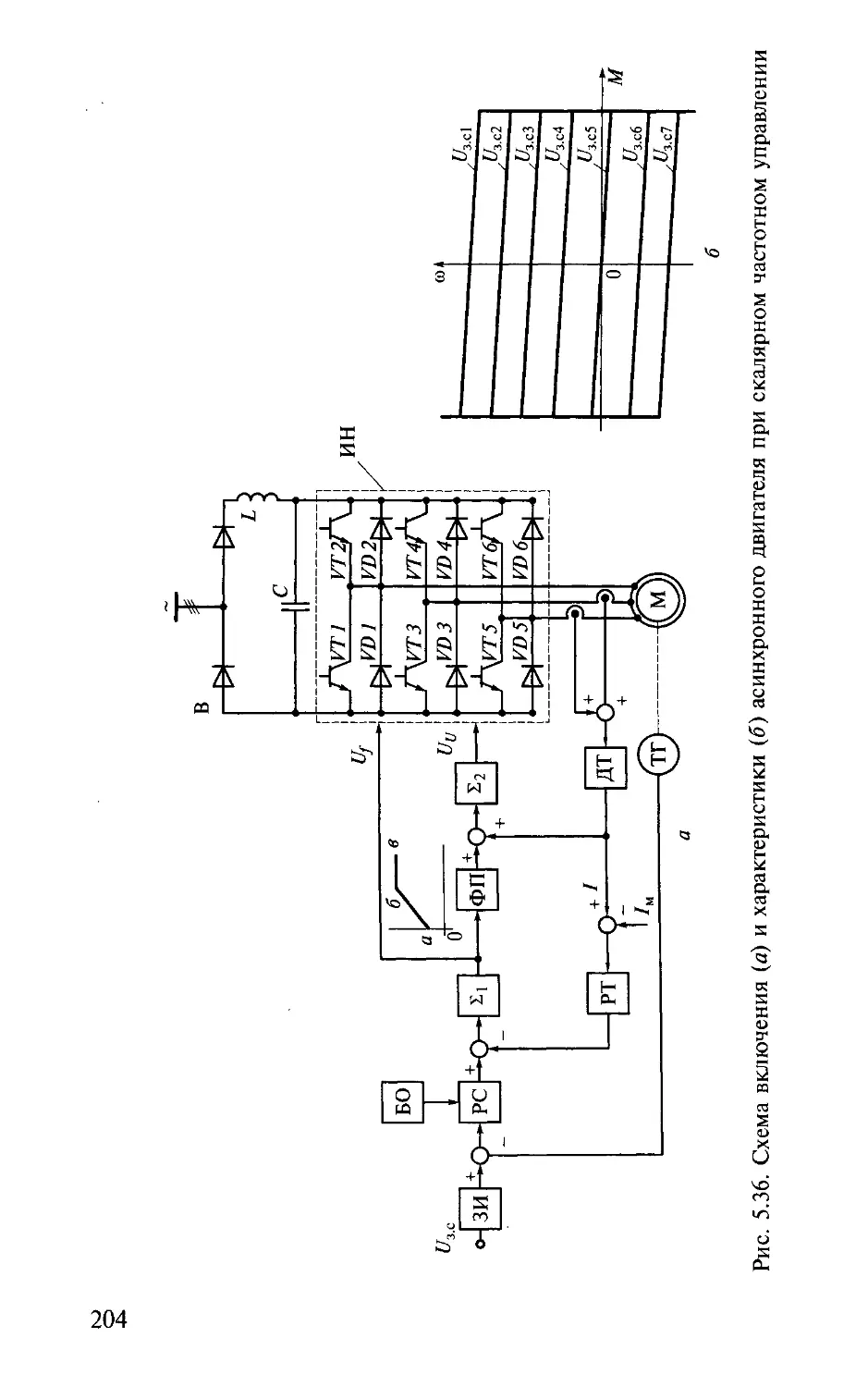
































































































































Author: Москаленко В.В.
Tags: характеристика машин по способу привода электроэнергетика электротехника
ISBN: 978-5-7695-2998-6
Year: 2007




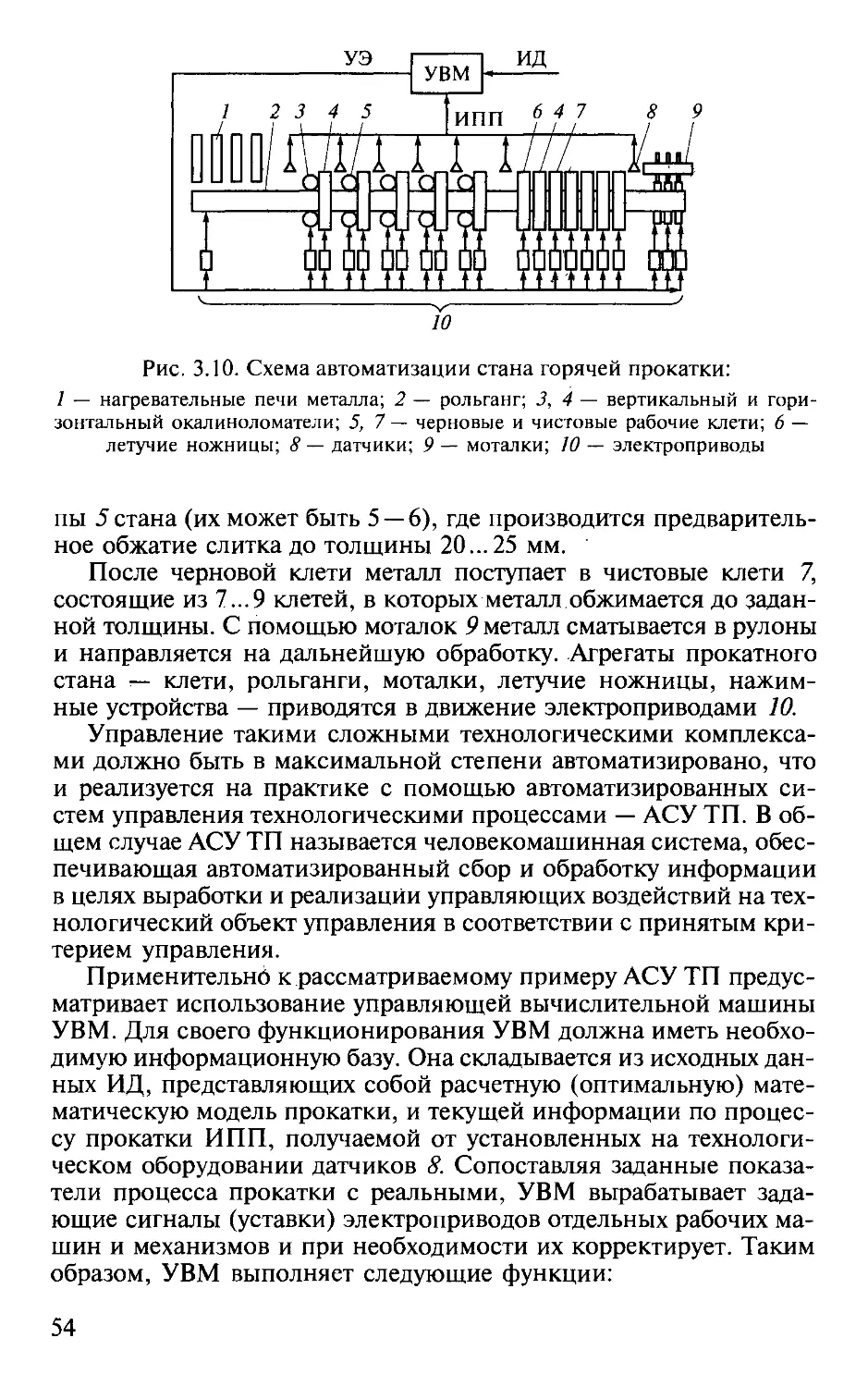
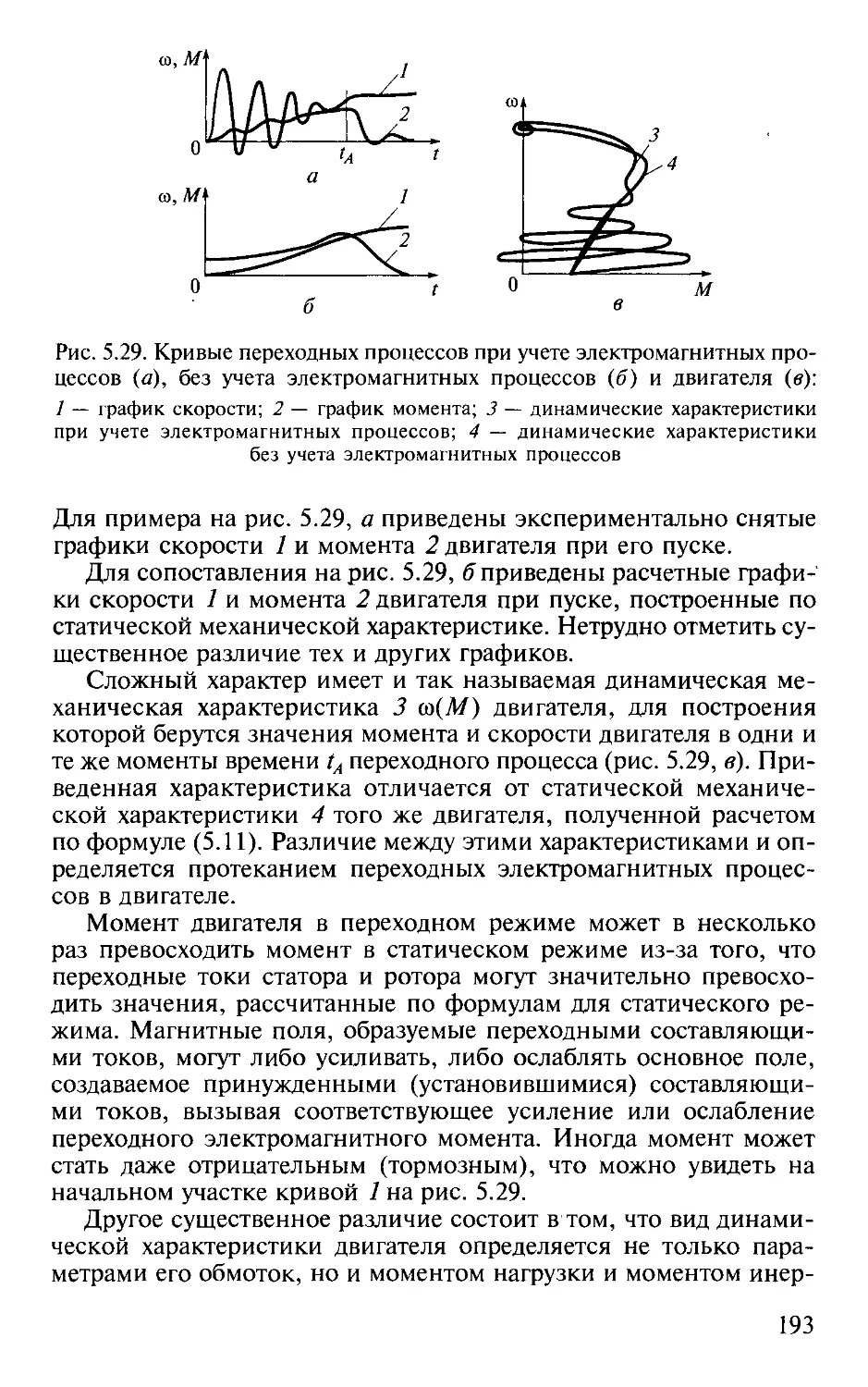
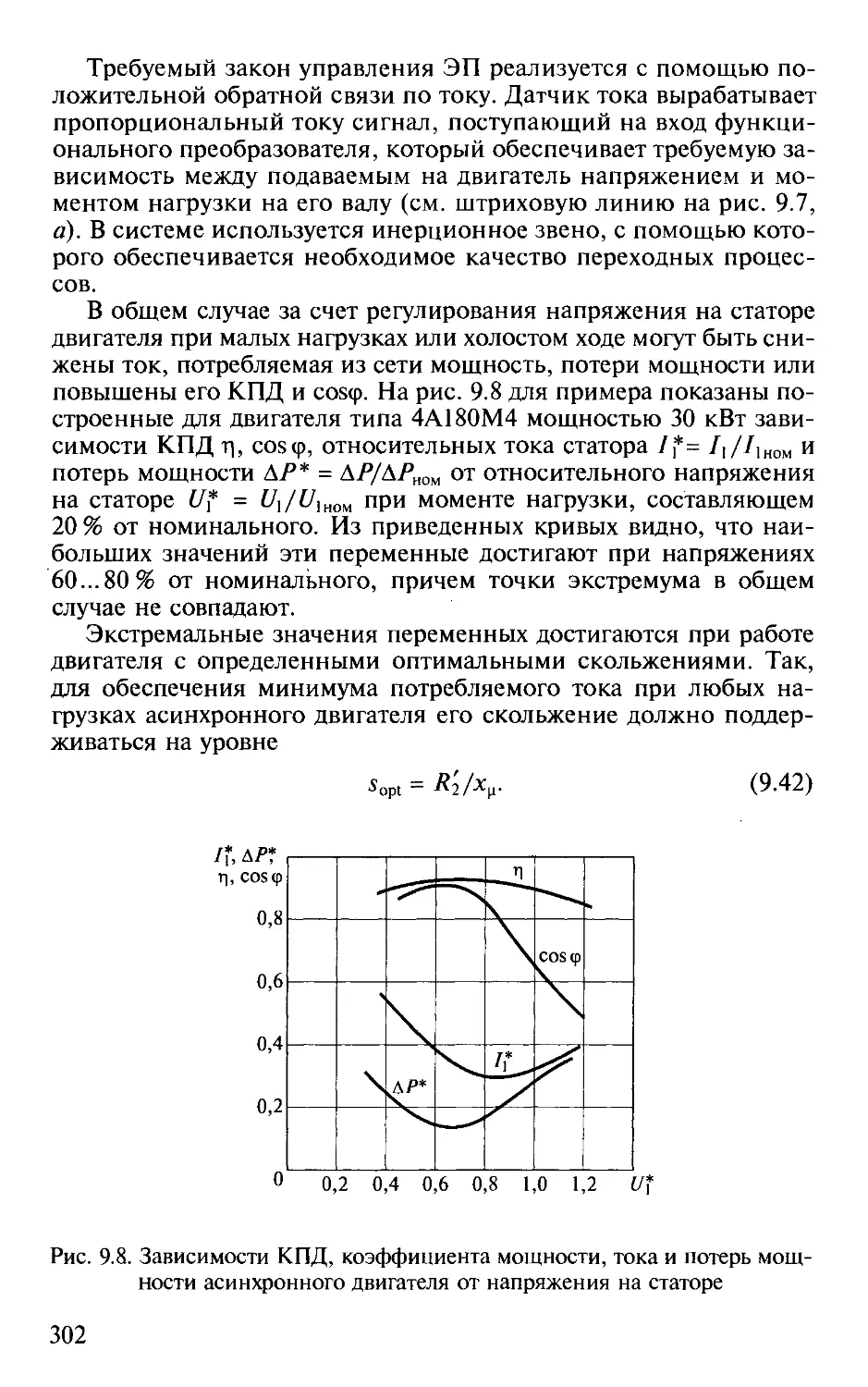
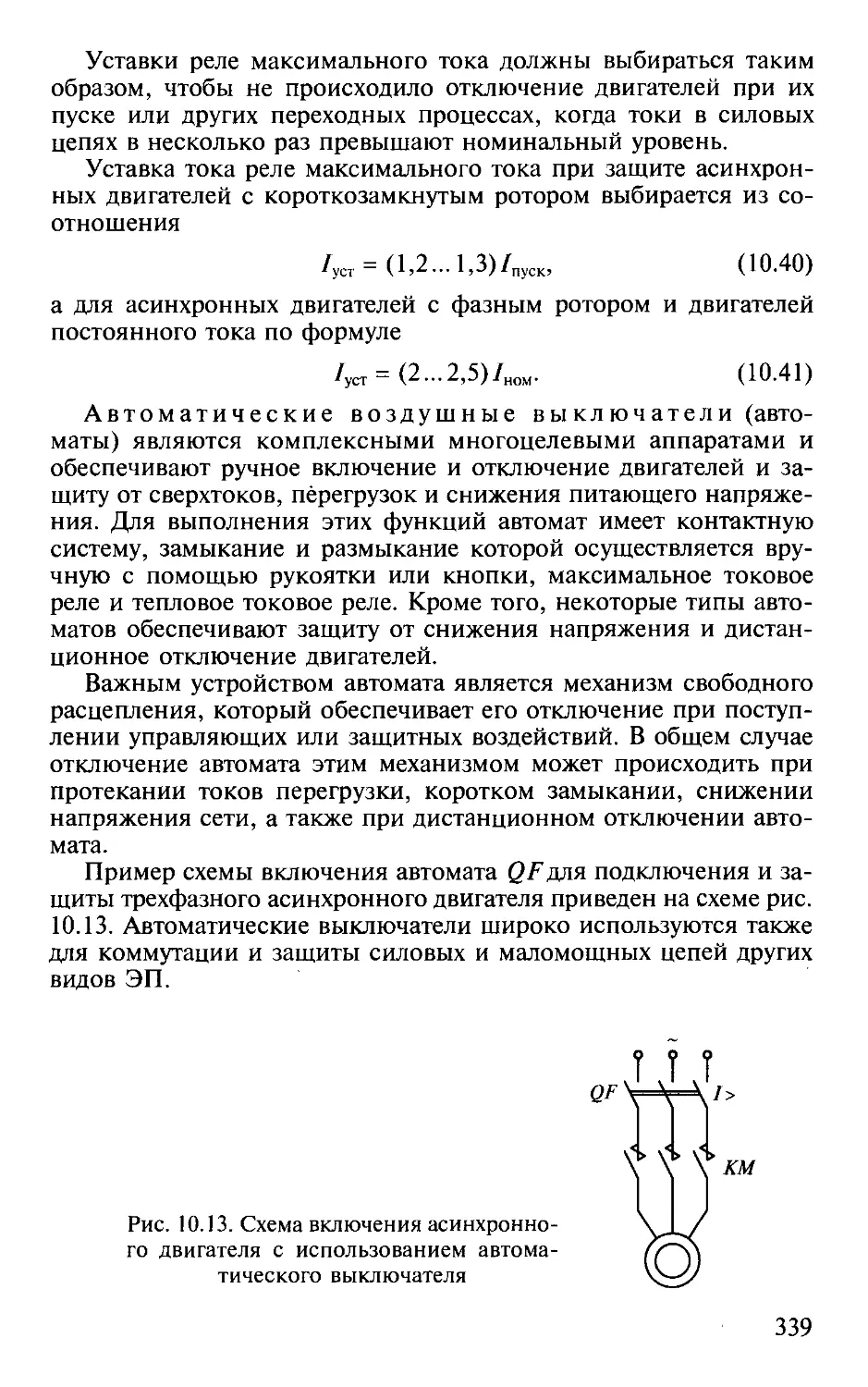
Text
ВЫСШЕЕ ПРОФЕССИОНАЛЬНОЕ ОБРАЗОВАНИЕ
В. В. МОСКАЛЕНКО
ЭЛЕКТРИЧЕСКИЙ
ПРИВОД
УЧЕБНИК
Допущено
Министерством образования и науки Российской Федерации
в качестве учебника для студентов высших учебных заведений,
обучающихся по направлению подготовки
«Электротехника, электромеханика и электротехнологии»
ACADEMA
Москва
Издательский центр «Академия»
2007
УДК 62-83(075.8)
ББК 31.291я73
М82
Рецензенты:
ученый секретарь АООТ «Электропривод», д-р техн, наук, проф. М. Г. Юньков’,
проф. кафедры механизации и автоматизации горных и геологоразведочных
работ Российского государственного геологоразведочного университета,
д-р техн, наук Ю. В. Шевырев
Москаленко В.В.
М82 Электрический привод : учебник для студ. высш. учеб, заве-
дений / В. В. Москаленко. — М.: Издательский центр «Акаде-
мия», 2007. — 368 с.
ISBN 978-5-7695-2998-6
Изложены основы электрического привода. Рассмотрены назначение
и реализации электроприводов с двигателями постоянного и переменно-
го токов, их схемы, характеристики, энергетические режимы. Приведены
краткие сведения по элементной базе электроприводов. Рассмотрены ра-
зомкнутые и замкнутые схемы управления электроприводов и даны при-
меры схем автоматизации технологических процессов, а также вопросы
проектирования электроприводов, энергетики и энергосбережения в элек-
троприводе и средствами электропривода. Изложение теоретического ма-
териала сопровождается примерами решения типовых задач и задачами
для самостоятельного решения.
Для студентов высших учебных заведений.
УДК 62-83(075.8)
ББК 31.291Я73
Оригинал-макет данного издания является собственностью
Издательского центра «Академия», и его воспроизведение любым способом
без согласия правообладателя запрещается
© Москаленко В. В., 2007
© Образовательно-издательский центр «Академия», 2007
ISBN 978-5-7695-2998-6 © Оформление. Издательский центр «Академия», 2007
ВВЕДЕНИЕ
В современном промышленном производстве, на транспорте,
в строительстве, в быту применяются различные технологические
процессы, для реализации которых человек создал тысячи самых
разнообразных машин. С их помощью осуществляется добыча по-
лезных ископаемых, обрабатываются различные материалы и из-
делия, перемещаются люди, предметы труда, жидкости и газы и
реализуются многие другие процессы, необходимые для жизне-
обеспечения человека. Так, добыча полезных ископаемых ведется
с помощью экскаваторов, буровых установок и угольных комбай-
нов, детали и материалы обрабатываются на разнообразных стан-
ках, люди и изделия перемещаются электрическим транспортом,
лифтами и эскалаторами, жидкости и газы транспортируются с
помощью насосов и вентиляторов.
Рабочая машина состоит из множества взаимосвязанных дета-
лей и узлов, один из которых непосредственно выполняет задан-
ный технологический процесс или операцию и поэтому называ-
ется исполнительным органом. В лифтах — это кабина, в экскава-
торах — ковш, у вентиляторов и насосов — рабочее колесо (крыль-
чатка), во фрезерном станке — фреза и т.д.
Отметим при этом одно очень важное обстоятельство — все
названные технологические процессы осуществляются за счет
механического движения исполнительных органов.
Исполнительный орган в процессе выполнения заданной тех-
нологической операции должен преодолевать сопротивление сво-
ему движению, обусловленное наличием сил трения или сил тя-
жести, упругой и пластической деформациями веществ или дру-
гими факторами. Для этого к нему должна быть подведена меха-
ническая энергия от устройства, которое в соответствии со своим
назначением получило название привод.
Механическая энергия вырабатывается приводом за счет ис-
пользования других видов энергии. В зависимости от вида исполь-
зуемой энергии различают гидравлический, пневматический, теп-
ловой и электрический приводы. В современном промышленном
производстве, коммунальном хозяйстве и в других областям наи-
большее применение находит электрический привод (ЭП), на долю
которого приходится более 60 % потребляемой в стране электро-
энергии.
3
Такое широкое применение ЭП объясняется целым рядом его
преимуществ по сравнению с другими видами приводов: исполь-
зование электрической энергии, распределение и преобразова-
ние которой в другие виды энергии, в том числе и в механичес-
кую, наиболее экономично; большой диапазон мощности элект-
роприводов и скорости их движения; разнообразие конструктив-
ных исполнений, что позволяет рационально сочленять привод с
исполнительным органом рабочей машины и использовать для
работы в различных условиях — в воде, среде агрессивных жидко-
стей и газов, космическом пространстве; простота автоматизации
технологических процессов; высокий КПД и экологическая чис-
тота.
Возможности использования современных ЭП продолжают
постоянно расширяться за счет достижений в смежных областях
науки и техники: электромашиностроении и электроаппарато-
строении, электронике и вычислительной технике, автоматике и
механике. Так, например, разработаны и применяются на прак-
тике регулируемые ЭП с двигателями переменного тока на рабо-
чие напряжения до 16 кВ и мощности в несколько десятков мега-
ватт.
ГЛАВА 1
ОБЩИЕ СВЕДЕНИЯ
1.1. Назначение и классификация
электроприводов
Большое число реализуемых с помощью электропривода тех-
нологических процессов определяет многообразие уже действу-
ющих и вновь создаваемых электроприводов. Между собой они
различаются назначением, степенью автоматизации, характером
движения двигателя, используемой элементной базой и многими
другими признаками, по которым осуществляется их классифи-
кация. История электропривода показывает процесс его развития
и совершенствования.
Общая структурная схема электропривода приведена на рис. 1.1,
где утолщенными линиями показаны силовые каналы энергии, а
тонкими линиями — маломощные (информационные) электри-
ческие цепи.
Основным элементом ЭП является электрический двигатель
(ЭД), который вырабатывает механическую энергию (МЭ) за счет
потребляемой от источника электроэнергии (ИЭЭ) электриче-
ской энергии (ЭЭ). В некоторых режимах работы ЭП электродви-
гатель осуществляет и обратное преобразование энергии, получая
механическую энергию от исполнительных органов (ИО) и рабо-
тая при этом в генераторном режиме.
От электродвигателя механическая энергия подается на испол-
нительный орган рабочей машины (РМ) через механическую пе-
редачу (МП). В некоторых случаях ИО непосредственно соединя-
ется с ЭД, что соответствует безредукторному ЭП.
Электрическая энергия поступает в ЭП от источника электро-
энергии через преобразователь электрической энергии (Пр).
Рис. 1.1. Структурная схема элект-
ропривода
5
Функции управления и автоматизации работы ЭП осуществ-
ляются устройством управления (УУ). Это устройство вырабаты-
вает сигнал управления Ц с использованием сигнала задания
(уставки) (/зад, задающего характер движения исполнительного
органа, дополнительных сигналов Uac (сигналов обратных свя-
зей), дающих информацию о ходе технологического процесса,
характере движения исполнительного органа и работе отдельных
элементов ЭП, а также сигналов системы защиты, блокировок и
сигнализации £/заш. Сигналы Uac и £/защ поступают от соответ-
ствующих датчиков переменных ЭП и технологического обору-
дования. Для преобразования этих сигналов в состав устройства
управления входят устройства сопряжения и обработки посту-
пающей информации. Преобразователь П вместе с устройством
управления УУ образуют систему управления (СУ) электропри-
вода.
Итак, электрическим приводом называется электромеханиче-
ская система, состоящая из взаимодействующих электрических,
электромеханических и механических преобразователей, а также
управляющих и информационных устройств и устройств сопря-
жения, предназначенная для приведения в движение исполни-
тельных органов рабочих машин и управления этим движением в
целях осуществления технологического процесса.
Назначение указанных на схеме рис. 1.1 элементов состоит в
следующем.
Электродвигатель — электромеханический преобразователь,
предназначенный для преобразования электрической энергии в
механическую (в некоторых режимах работы ЭП — для обратного
преобразования энергии).
Преобразователь электроэнергии — электротехническое устрой-
ство, предназначенное для преобразования электрической энер-
гии одних параметров или показателей в электроэнергию других
параметров или показателей и управления процессом преобразо-
вания энергии.
Механическая передача — механический преобразователь, пред-
назначенный для передачи механической энергии от электродви-
гателя к исполнительному органу рабочей машины и согласова-
ния вида и скоростей их движения.
Управляющее устройство — совокупность элементов и устройств,
предназначенная для формирования управляющих воздействий в
ЭП и обеспечивающая взаимодействие ЭП с сопредельными си-
стемами его отдельных частей.
Система управления ЭП— совокупность преобразователя элек-
троэнергии и устройства управления, предназначенная для уп-
равления электромеханическим преобразованием энергии в целях
обеспечения заданного движения исполнительного органа рабо-
чей машины.
6
Таблица 1.1
Реализация элементов ЭП
Название Обозначение на схеме Возможные виды
Эл е ктрод ви гател ь эд Двигатели постоянного тока с раз- личным возбуждением, асинхронные и синхронные двигатели, шаговый двигатель, вентильный двигатель, двигатели с катящимися и волновы- ми роторами, редукторные двигатели
Преобразователь электроэнергии п Выпрямитель, преобразователь ча- стоты, регуляторы напряжения по- стоянного и переменного тока, ин- верторы, импульсные преобразова- тели напряжения
Механическая передача МП Редуктор, волновая передача, пере- дача винт—гайка, реечная передача, цепная и ременная передачи, кри- вошипно-шатунный механизм
Устройство управления УУ Регулятор, микропроцессорные средства управления, программиру- емый контроллер, релейная схема, устройства памяти, логические уст- ройства, драйверы, цифроаналого- вые и аналого-цифровые преобразо- ватели (ЦАП, АЦП), датчики пере- менных ЭП и технологического про- цесса
Рабочая машина — машина, осуществляющая изменение фор-
мы, свойств, состояния и положения предметов труда.
Исполнительный орган рабочей машины — движущийся элемент
рабочей машины, выполняющий технологическую операцию.
В табл. 1.1 приведены наиболее распространенные примеры ре-
ализации элементов ЭП.
ЭП классифицируются по числу используемых электродвига-
телей, характеру движения, типам электродвигателя и силового
преобразователя, структурам и технической реализации систем
управления, наличию или отсутствию механической передачи и
т.д. Выделим наиболее важные ее составляющие.
1. По соотношению числа двигателей и исполнительных орга-
нов рабочих машин различают:
• групповой ЭП, обеспечивающий движение исполнительного
органа нескольких рабочих машин или движение нескольких ис-
полнительных органов одной рабочей машины;
7
• индивидуальный ЭП, обеспечивающий движение одного ис-
полнительного органа одной рабочей машины;
• взаимосвязанный ЭП, состоящий из двух или более двигате-
лей или механически связанных между собой ЭП, при работе ко-
торых поддерживается заданное соотношение их скоростей и (или)
нагрузок, и (или) положения исполнительных органов рабочих
машин. При наличии механической связи между ЭП взаимосвя-
занный ЭП называется многодвигательным, при наличии элект-
рической связи — электрическим валом.
2. По характеру движения исполнительных органов рабочих
машин различают:
• ЭП вращательного движения, обеспечивающий вращатель-
ное движение исполнительных органов рабочих машин;
• ЭП поступательного движения, обеспечивающий поступатель-
ное движение исполнительных органов рабочих машин;
• ЭП возвратно-поступательного движения, обеспечивающий
возвратно-поступательное (вибрационное) движение исполнитель-
ных органов рабочих машин;
• ЭП непрерывного движения, обеспечивающий непрерывное
движение исполнительных органов рабочих машин;
• ЭП дискретного движения, обеспечивающий дискретное пе-
ремещение исполнительных органов рабочих машин;
• реверсивный ЭП, обеспечивающий движение исполнитель-
ных органов рабочих машин в любом из двух противоположных
направлений;
• нереверсивный ЭП, обеспечивающий движение исполнитель-
ных органов рабочих машин только в одном направлении;
• многокоординатный ЭП, обеспечивающий движение испол-
нительных органов рабочих машин по двум или более простран-
ственным координатам;
• моментный ЭП, обеспечивающий заданный момент или уси-
лие на исполнительных органах рабочих машин;
• позиционный ЭП, обеспечивающий перемещение и установ-
ку исполнительных органов рабочих машин в заданное положе-
ние;
• многоскоростной ЭП, обеспечивающий движение исполни-
тельных органов рабочих машин с любой из двух или более фик-
сированных скоростей;
• регулируемый ЭП, обеспечивающий управляемое изменение
координат движения исполнительных органов рабочих машин;
• нерегулируемый ЭП, не обеспечивающий управляемое изме-
нение координат движения исполнительных органов рабочих ма-
шин;
• ЭП согласованного движения, обеспечивающий согласован-
ное движение двух или более исполнительных органов рабочих
машин.
8
3. По характеру и структуре системы управления различают:
• неавтоматизированные ЭП, операции по управлению кото-
рыми выполняет оператор;
• автоматизированные ЭП, все или часть операций управления
в которых выполняют устройства управления;
• следящие ЭП, обеспечивающие перемещение исполнитель-
ных органов рабочих машин в соответствии с произвольно изме-
няющимся входным задающим сигналом;
• ЭП с программным управлением, обеспечивающие переме-
щение исполнительных органов рабочих машин в соответствии с
заданной программой;
• адаптивные ЭП, автоматически избирающие структуру и (или)
параметры своей системы управления при изменении возмуща-
ющих воздействий;
• ЭП с регулированием энергетических показателей, обеспе-
чивающие заданный закон изменения одного или нескольких энер-
гетических показателей работы;
• ЭП с разомкнутой (замкнутой) системой управления, в ко-
торых отсутствуют (имеются) обратные связи по регулируемым
координатам и (или) возмущающему воздействию.
4. По технической (аппаратной) реализации элементов ЭП раз-
личают:
• ЭП постоянного (переменного) тока, содержащие двигатели
постоянного (переменного) тока;
• тиристорные (транзисторные) ЭП, содержащие тиристорные
(транзисторные) преобразователи электроэнергии;
• система «генератор—двигатель» (система «статический пре-
образователь-двигатель») — ЭП, в состав которых входят элек-
тромашинные (статические) преобразователи электроэнергии;
• ЭП с релейно-контакторным (бесконтактным) управлени-
ем, система управления которыми реализована на основе релей-
но-контакторной (бесконтактной) аппаратуры;
• ЭП с мехатронным модулем, объединяющим двигатель с элек-
тронными и электромеханическими компонентами управления,
диагностики и защиты;
• редукторные (безредукторные) ЭП, механическая передача
которых содержит (не содержит) редуктор;
• маховичные ЭП, механическая передача которых содержит
маховик;
• дифференциальные ЭП, представляющие собой многодви-
гательные ЭП, в которых скорость и момент двигателей алгеб-
раически суммируются с помощью механического дифферен-
циала;
• ЭП с тормозным устройством (управляемой муфтой), меха-
ническая передача которых содержит тормозное устройство (уп-
равляемую муфту).
9
1.2. История развития электропривода,
его роль в современных технологиях
История развития ЭП начинается с разработки русским акаде-
миком Б. С. Якоби первого двигателя постоянного тока вращатель-
ного движения. Установка этого двигателя на небольшой катер,
который в 1838 г. совершил испытательные рейсы по Неве, явля-
ется первым примером практической реализации ЭП. В дальней-
шем появились и другие применения ЭП, например для наведе-
ния артиллерийской установки, перемещения электродов дуго-
вой лампы, привода швейной машины. Однако из-за отсутствия
экономичных источников электроэнергии постоянного тока ЭП
долгое время не находил широкого применения.
Не изменило этого положения и создание в 1870 г. промыш-
ленного электрического генератора постоянного тока, а также
появление однофазной системы переменного тока.
Мощным импульсом для развития ЭП послужили разработка в
1889 г. М.О.Доливо-Добровольским системы трехфазного тока и
появление трехфазного асинхронного электродвигателя, что соз-
дало реальные технические и экономические предпосылки для
широкого использования электрической энергии и тем самым ЭП.
Первой научной работой по теории электропривода явилась
опубликованная в 1880 г. в журнале «Электричество» статья рус-
ского инженера Д.А.Лачинова «Электромеханическая работа», в
которой были научно обоснованы преимущества электрического
распределения механической энергии.
Электрификация нашей страны и широкое применение в на-
родном хозяйстве электроприводов начались после принятия и
реализации государственного плана электрификации России —
плана ГОЭЛРО, который предусматривал широкое строитель-
ство новых и реконструкцию старых электростанций, проведе-
ние новых линий электропередач, развитие электротехниче-
ской промышленности. Были построены тепловые и гидравли-
ческие электростанции, тысячи километров воздушных и ка-
бельных линий, десятки заводов по производству электриче-
ских машин, аппаратов и кабельной продукции, созданы нау-
чно-исследовательские и проектно-конструкторские институ-
ты и организации, решавшие крупные научно-технические про-
блемы по созданию и внедрению в народное хозяйство элект-
роприводов различного типа.
Одновременно происходило дальнейшее развитие теории элек-
тропривода. Впервые как самостоятельная дисциплина теория элек-
тропривода была представлена в книге С. А. Ринкевича «Электри-
ческое распределение механической энергии», вышедшей в 1925 г.
Теория электропривода развивалась в трудах советских ученых
В. П. Попова, А.Т. Голована, Д. П. Морозова, М.Г. Чиликина и
10
многих других. Большое внимание уделялось при этом и подготов-
ке инженерно-технических и научных кадров, призванных созда-
вать и эксплуатировать электрические приводы.
Значительно возрастает роль уровня электровооруженности
технологических процессов и тем самым электропривода в на-
стоящее время, когда важнейшим направлением научно-техниче-
ского прогресса стала автоматизация технологических процессов,
которая позволяет повысить производительность общественного
труда в экономике. Характерными чертами автоматизации явля-
ются быстрое развитие робототехники, внедрение гибких автома-
тизированных производств, автоматических линий, машин и обо-
рудования со встроенными средствами микропроцессорной тех-
ники, многооперационных станков с числовым программным уп-
равлением, роторных конвейерных комплексов.
Дальнейшее развитие электрификации и автоматизации тех-
нологических процессов, создание высокопроизводительных ма-
шин, механизмов и технологических комплексов во многом оп-
ределяется развитием электрического привода.
К основным направлениям развития современного ЭП отно-
сятся:
• переход от нерегулируемого ЭП к регулируемому;
• все более широкое использование регулируемых ЭП с асинх-
ронными и синхронными двигателями, в том числе и в высоко-
вольтном исполнении;
• разработка и выпуск комплектных регулируемых ЭП с ис-
пользованием современных полупроводниковых преобразователей
и микропроцессорных средств управления;
• повышение эксплуатационной надежности, унификации и
улучшение энергетических показателей ЭП;
• развитие научно-исследовательских работ по созданию мате-
матических моделей и алгоритмов технологических процессов,
компьютерных средств проектирования ЭП;
• подготовка инженерно-технических и научных кадров, спо-
собных проектировать, производить, налаживать и эксплуатиро-
вать современный автоматизированный электропривод.
Решение этих и ряда других проблем позволит существенно
улучшить технико-экономические характеристики ЭП и создать
тем самым базу для дальнейшего технического прогресса во всех
отраслях экономики.
Контрольные вопросы
1. Назовите характерные технологические процессы в промышлен-
ном производстве.
2. Приведите свои примеры рабочих машин и их исполнительных ор-
ганов, реализующих технологические процессы и операции.
3. Каковы особенности функционирования исполнительных органов
рабочих машин?
4. Дайте определение электрического привода и приведите примеры
реализации его элементов.
5. Каковы преимущества электрического привода?
6. Как классифицируются электрические приводы?
7. Назовите основные этапы развития электрического привода.
8. Охарактеризуйте основные направления развития современного
электрического привода.
ГЛАВА 2
МЕХАНИКА ЭЛЕКТРОПРИВОДА
2.1. Уравнение движения электропривода
Этот раздел посвящен анализу механического движения ЭП и
исполнительных органов рабочих машин. В нем рассматриваются
уравнения, описывающие механическое движение элементов,
определяются зависимости изменения во времени их скорости,
ускорения (замедления) и положения (угла поворота), выявляет-
ся устойчивость этого движения.
В механическом движении участвуют подвижная часть электро-
двигателя (ротор или якорь), элементы механической передачи,
образующие механическую часть ЭП, а также исполнительный
орган рабочей машины.
Движение любого элемента механической части ЭП или ис-
полнительного органа рабочей машины подчиняется известным
законам механики. Поступательное и вращательное движение опи-
сывается следующими уравнениями:
^F = mdv/dt + vdm/df, (2.1)
= Jdco/dr + codJ/dZ, (2.2)
где ^F и — соответственно совокупность сил и моментов,
действующих на элемент; т и J — соответственно масса и момент
инерции элемента; со и v — соответственно угловая и линейная
скорости движения элемента; t — время,
Уравнения движения по своему характеру являются дифферен-
циальными, поскольку содержат производные скорости, массы и
момента инерции. Если масса и момент инерции элементов при
движении не изменяются, то их производные в уравнениях (2.1)
и (2.2) оказываются равными нулю и эти уравнения упрощаются:
^F = mdv/dt = та', (2.3)
= /dco/dZ = Je, (2.4)
где а и £ — соответственно ускорения при поступательном и вра-
щательном движениях, а = dv/dt, е = dco/dz.
13
Уравнения (2.3) и (2.4) отражают известный закон механики:
ускорение движения элемента (материального тела) пропорци-
онально алгебраической сумме действующих на него сил (момен-
тов) и обратно пропорционально его массе (моменту инерции).
Из этих уравнений следует условие движения с постоянной
скоростью. Если
^F = 0 или ^М = 0, (2.5)
то dv/dt = da/dt= 0 и элемент движется с постоянной скоростью
или находится в состоянии покоя.
Другими словами, элемент будет двигаться с неизменной ско-
ростью (или находиться в состоянии покоя), если сумма сил или
моментов, к нему приложенных, будет равна нулю. Такое движе-
ние называют установившимся. Условия (2.5) используются для
определения параметров установившегося механического движе-
ния.
При ^F> 0 или > 0 элемент будет двигаться с ускорени-
ем, а при ^F< 0 или < 0 — с замедлением. Такие процессы
носят название неустановившихся, или переходных. Зависимости
изменения скорости элемента во времени (графики переходных
процессов) д(?) или со(/) получаются путем решения (интегри-
рования) уравнений (2.3) или (2.4) при известных действующих
суммах сил ^£или моментов массе т или моменте инерции
J, а также начальных значениях скорости.
Зависимости изменения во времени положения У или угла по-
ворота <р элемента получаются с использованием следующих со-
отношений:
У = Jt>(z)d/или ф = Jco(/)dr. (2.6)
2.2. Расчетные схемы механической части
электропривода
Элементы, образующие механическую часть ЭП, связаны между
собой и с исполнительным органом рабочей машины и оказыва-
ют тем самым друг на друга соответствующее воздействие. Поэто-
му при анализе механического движения какого-либо элемента
необходимо учитывать влияние на него других элементов, образу-
ющих кинематическую схему ЭП. Это достигается пересчетом по
определенным правилам входящих в уравнения (2.1) —(2.4) сил,
моментов, масс и моментов инерции к элементу, движение кото-
рого рассматривается. Такой расчет в теории ЭП получил назва-
ние операции приведения, пересчитанные переменные и парамет-
14
ры — приведенных, а элемент, к которому осуществляется при-
ведение, — элемент приведения.
Операцию приведения можно выполнять относительно любого
элемента, движение которого подлежит анализу. Обычно в каче-
стве такого элемента выбирают двигатель, являющийся источни-
ком механического движения, или (реже) исполнительный орган
рабочей машины.
В результате выполнения операции приведения получаются
расчетные схемы механической части ЭП, позволяющие легче
осуществить анализ механического движения. При их получении в
общем случае должны учитываться зазоры и люфты между меха-
ническими элементами, а также их упругость. В зависимости от
учета тех или иных факторов получаются различные расчетные
схемы.
Приведение масс и моментов инерции элементов, их упруго-
сти, сил и моментов, на них действующих, а также зазоров и
люфтов осуществляется на основе закона сохранения энергии.
Приведение моментов инерции и масс элемен-
тов к вращающемуся элементу приведения (валу двигателя вра-
щательного движения) осуществляется по формулам:
при вращательном движении £-го элемента —
Jnpk ~
при поступательном движении /-го элемента —
ЛР/ = w,p,2, (2.8)
где Jk — момент инерции к-т элемента; т, — масса /-го элемента;
ik — передаточное число кинематической цепи между к-м элемен-
том и элементом приведения, ik = со/со* (со, со* — соответственно
угловые скорости вращения элемента приведения и Л-го элемен-
та); р, — радиус приведения кинематической цепи между /-м эле-
ментом и элементом приведения, р, = д,/со (д, — скорость поступа-
тельного движения /-го элемента).
Как следует из формул (2.7) и (2.8), для выполнения опера-
ции приведения следует моменты инерции вращающихся элемен-
тов разделить на квадрат передаточного числа, а массы поступа-
тельно движущихся элементов умножить на квадрат радиуса при-
ведения кинематической схемы между этими элементами и эле-
ментом приведения.
Если приведение осуществляется к валу двигателя, то далее
определяется общий момент инерции как сумма момента инер-
ции якоря (ротора) двигателя и приведенных значений моментов
инерции и масс элементов механической части ЭП и исполни-
тельного органа рабочей машины.
Приведение моментов и сил осуществляется для оп-
ределения механической нагрузки двигателя, создаваемой испол-
15
нительным органом рабочей машины при выполнении им техно-
логической операции, а также элементами механической переда-
чи за счет действия сил трения. Нагрузка двигателя, обусловлен-
ная усилиями сопротивления (трения) элементов механической
передачи, обычно учитывается с помощью их КПД.
Приведение сил и моментов нагрузки, создаваемых исполни-
тельным органом рабочих машин, к валу двигателя вращательно-
го движения осуществляется по формулам:
при потоке энергии от двигателя к исполнительному органу
рабочей машины —
М: “ Мио/(Лмп*мп); Мс = ^иоРмп/Лмп; (2-9)
при потоке энергии от исполнительного органа рабочей маши-
ны к двигателю —
М = Л/ИОТ|МП//МП; Мс = /'иоЛмпРмш (2-Ю)
где Л/ио, Лио — соответственно момент и сила, действующие на
исполнительный орган рабочей машины; Мс — приведенные к
валу двигателя значения момента и силы; т|мп — КПД механиче-
ской передачи между исполнительным органом рабочей машины
и валом двигателя; /мп, рмп — соответственно передаточное чис-
ло и радиус приведения механической передачи между исполни-
тельным органом и валом двигателя.
Получаемый момент на валу двигателя называется моментом
нагрузки или моментом сопротивления, или статическим момен-
том. По тем же принципам осуществляется операция приведения
в случае использования двигателя поступательного движения.
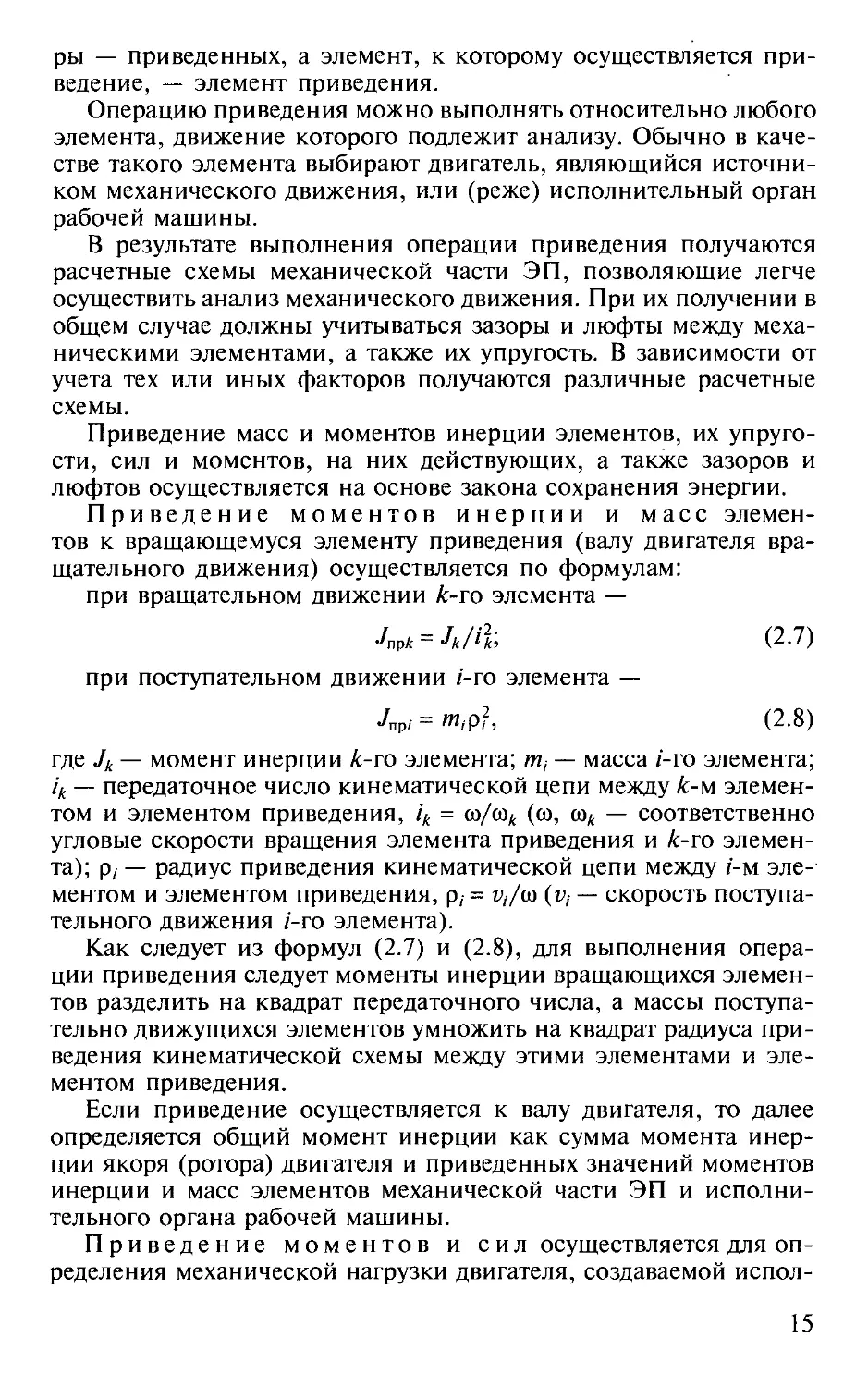
Одномассовая расчетная схема (жесткое приведен-
ное механическое звено) получается после выполнения операции
приведения, когда все механические элементы ЭП и исполни-
тельный орган рабочих машин принимаются абсолютно жестки-
ми, а зазоры в кинематической схеме не учитываются. Для наибо-
лее распространенного случая, когда элементом приведения яв-
ляется якорь или ротор двигателя вращательного движения, од-
номассовая расчетная схема может быть представлена рис. 2.1, на
котором М, Мс — соответственно момент двигателя и приведен-
ный момент нагрузки; J — общий момент инерции, определяемый
суммой момента инерции двигателя и приведенных к его валу мо-
ментов инерции и масс элементов механической части ЭП и ис-
\ с Рис. 2.1. Одномассовая расчетная схема механиче-
1 J ской части:
/ — двигатель
16
полнительного органа рабочей машины, J= (Ja + ^Jnp); со — угло-
вая скорость вращения вала двигателя (в дальнейшем — скорость).
В общем случае моменты двигателя Ми нагрузки Мс могут иметь
как положительные, так и отрицательные знаки. Уравнение дви-
жения (2.4) для одномассовой схемы может иметь вид
±М± Мс = Jdco/d/. (2.11)
Правило, по которому в формуле (2.11) определяются знаки
моментов, следующее. Одно из направлений движения принима-
ется положительным. Тогда моменты, направленные по движе-
нию, имеют знак, совпадающий со знаком скорости, а моменты,
направленные против движения — противоположный знаку ско-
рости.
В основном для ЭП режиме работы двигатель создает движу-
щий момент, а исполнительный орган рабочих машин — момент
сопротивления движению. Тогда уравнение движения принимает
следующий вид:
М - Мс = Jdw/dt. (2.12)
Левая часть этого уравнения, представляющая собой разность
моментов двигателя и нагрузки и определяющая вместе с момен-
том инерции J ускорение или замедление движения dco/dz, в те-
ории ЭП получила название динамического момента
= М - Мс. (2.13)
Таким образом, операция приведения позволяет перейти от
реальных схем механической части ЭП и исполнительного органа
рабочей машины к расчетной (эквивалентной) схеме, основой
которой является двигатель (элемент приведения) со своей ско-
ростью, а остальные элементы реальных схем представлены при-
веденными моментом нагрузки (сопротивления) Мс и своими
моментами инерции.
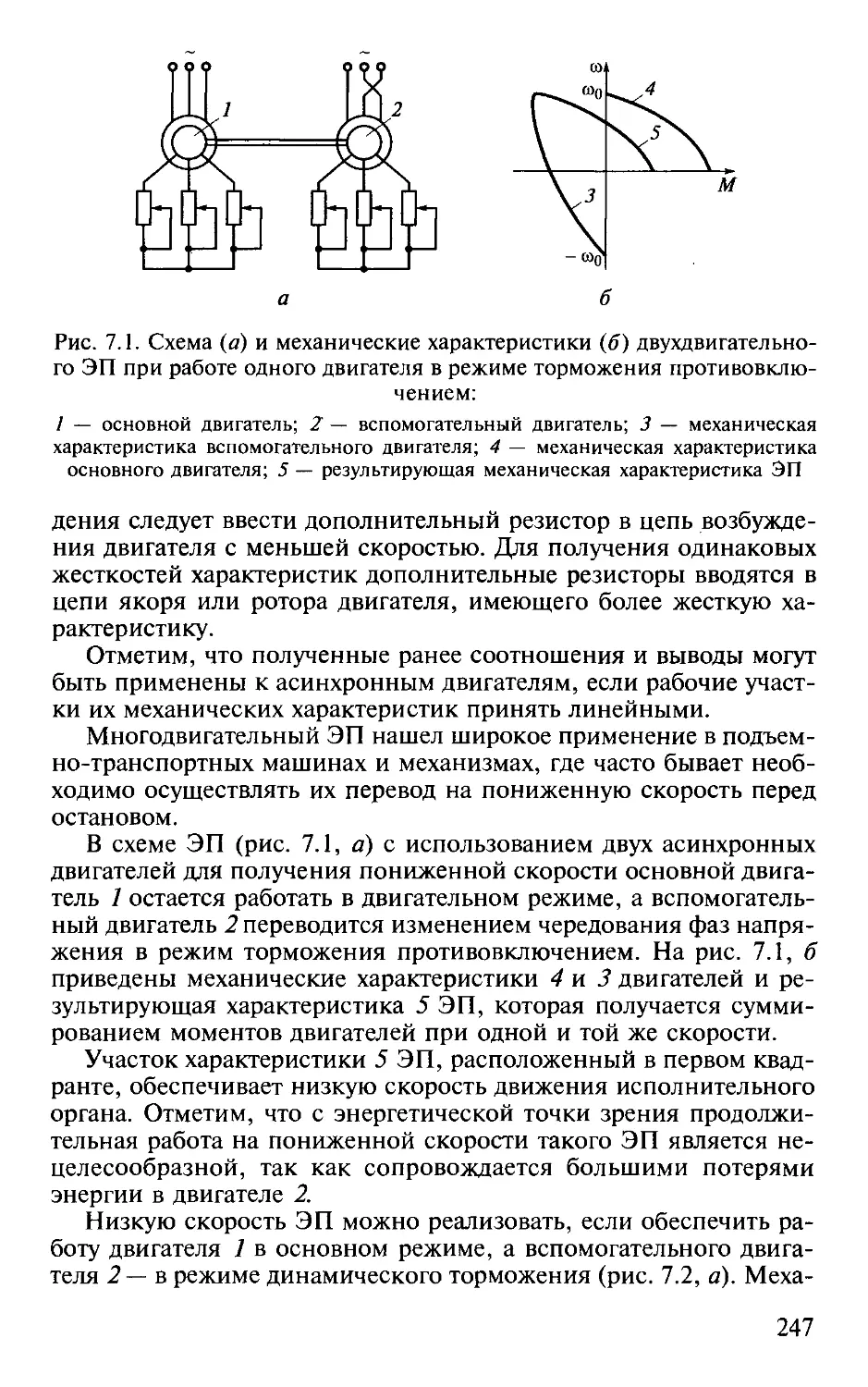
Задача 2.1*. На рис. 2.2 приведена схема ЭП подъемной лебедки.
Электродвигатель 7 вращательного движения со скоростью со че-
рез одноступенчатый редуктор 4 с парой шестерен 5 и 6 приводит
во вращение с угловой скоростью соб барабан 8 подъемной лебед-
ки, который с помощью троса 9 и крюка 10 поднимает или опу-
скает с линейной скоростью гио ГРУ3 И массой т. На схеме пока-
заны соединительные механические муфты 3 и 7, первая из кото-
рых служит также шкивом для механического тормоза 2.
Требуется получить одномассовую расчетную схему при следу-
ющих допущениях: все элементы кинематической схемы рис. 2.2
являются абсолютно жесткими и между ними отсутствуют зазоры.
Примечание. Звездочкой (*) помечены задачи, имеющие решение.
17
Рис. 2.2. Кинематическая схема электропривода подъемной лебедки:
/ — электродвигатель; 2— механический тормоз; 3, 7 — механические муфты;
4 — редуктор; 5, 6 — шестерни; 8 — барабан подъемной лебедки; 9 — трос; 10 —
крюк; 11 — груз
В качестве элемента приведения взять вал двигателя, операцию
приведения выполнить для случая подъема груза.
Исходные данные: момент инерции двигателя Ja = 0,1 кг м2;
момент инерции муфты 3 и шестерни 5 Jx = 0,02 кг • м2; момент инер-
ции шестерни 6, муфты 7 и барабана 8 J2 - 2 кг м2; т = 1 000 кг;
радиус барабана лебедки Лб = 1,15 м; числа зубцов шестерен 5 и 6
соответственно Zi = 14, z2 = 86; КПД редуктора 4 т|р = 0,97; КПД
барабана лебедки т|б = 0,96; ускорение свободного падения g =
= 9,81 м/с2.
1. Определяем передаточное число редуктора 4
i=Z2/Z\ = 86/14 = 6,14
и радиус приведения кинематической схемы
Р = уио/ю = R5/1 - 0,15/6,14 = 0,025 м.
2. Находим суммарный момент инерции для одномассовой схемы
J = /д + J, + J2/i2 + wp2 =
= 0,1 + 0,02 + 2/6,142 + 1 000 0,0252 = 0,8 кг м2.
3. Находим приведенный момент нагрузки
Мс = (OTgp)/npr|6 = 1 000 • 9,81 0,025/0,97 0,96 = 263 Н • м.
Задача 2.2. Для рассмотренного ранее примера определить J и
Мс в случае спуска груза, приняв те же значения параметров и
КПД кинематической схемы (см. рис. 2.2).
18
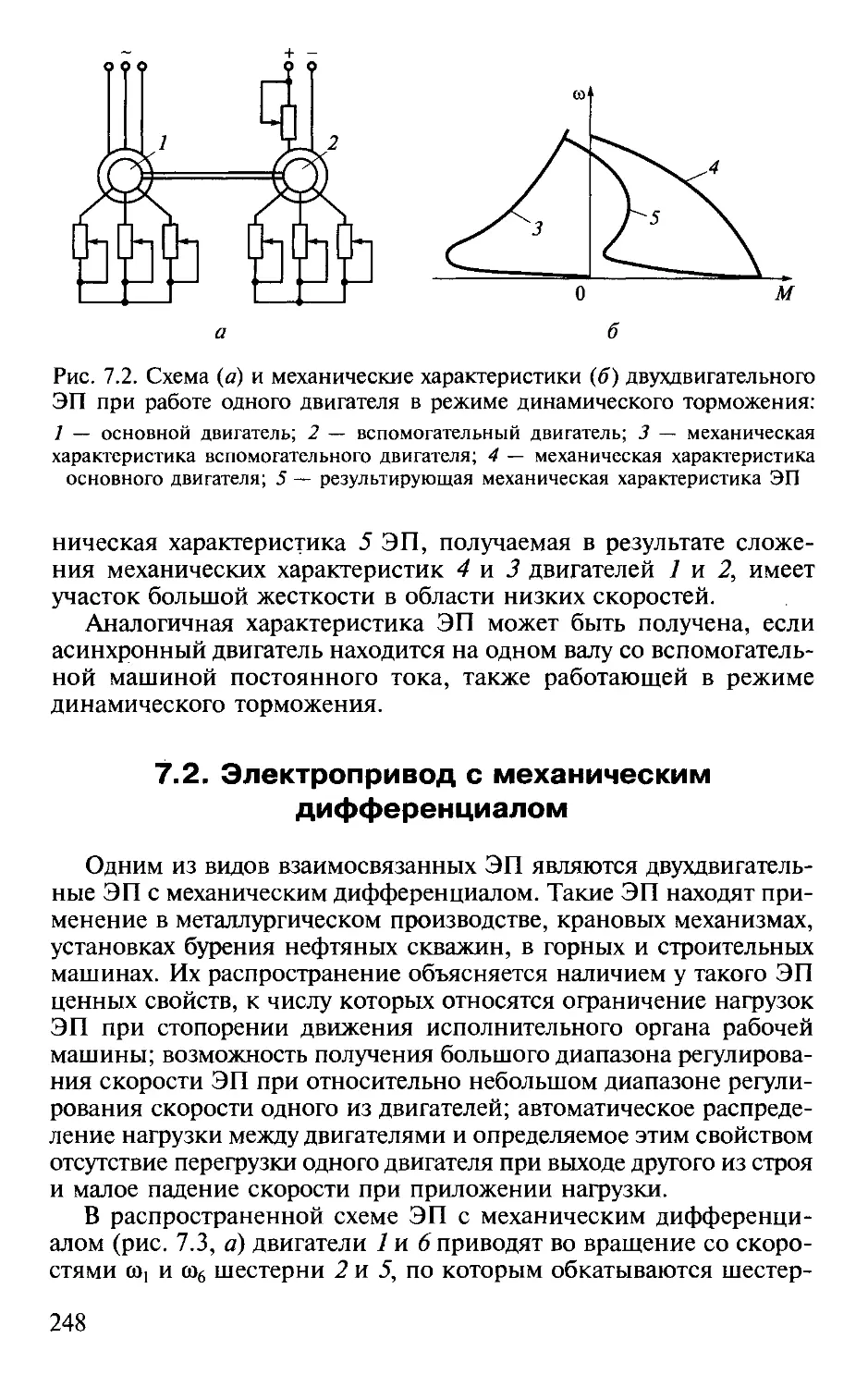
Рис. 2.3. Кинематическая схема элект-
ропривода лифта:
/ — тормоз; 2 — двигатель; 3 — муфта;
4 — редуктор; 5 — канатоведущий шкив;
6 — кабина; 7 — канат; 8 — противовес
Задача 2.3. Схема механической части ЭП лифта приведена на
рис. 2.3. Записать в общем виде формулы для определения J и Мс.
Исходные данные: грузоподъемность лифта тг, кг; скорость
движения кабины 6 г>ио, м/с; масса кабины тк, кг; масса проти-
вовеса 8 тпв, кг; диаметр канатоведущего шкива 5 dK ul, м; пере-
даточное число редуктора 4 ip; КПД механической передачи рмп;
длина канатов 7 Лк, м; масса погонного метра каната тк, кг/м;
моменты инерции элементов, вращающихся со скоростями со
и сок ш, соответственно и J2, а также момент инерции двигате-
ля 2 Ja. Двигатель 2 связан с тормозом 7 и через муфту 3 с редук-
тором 4.
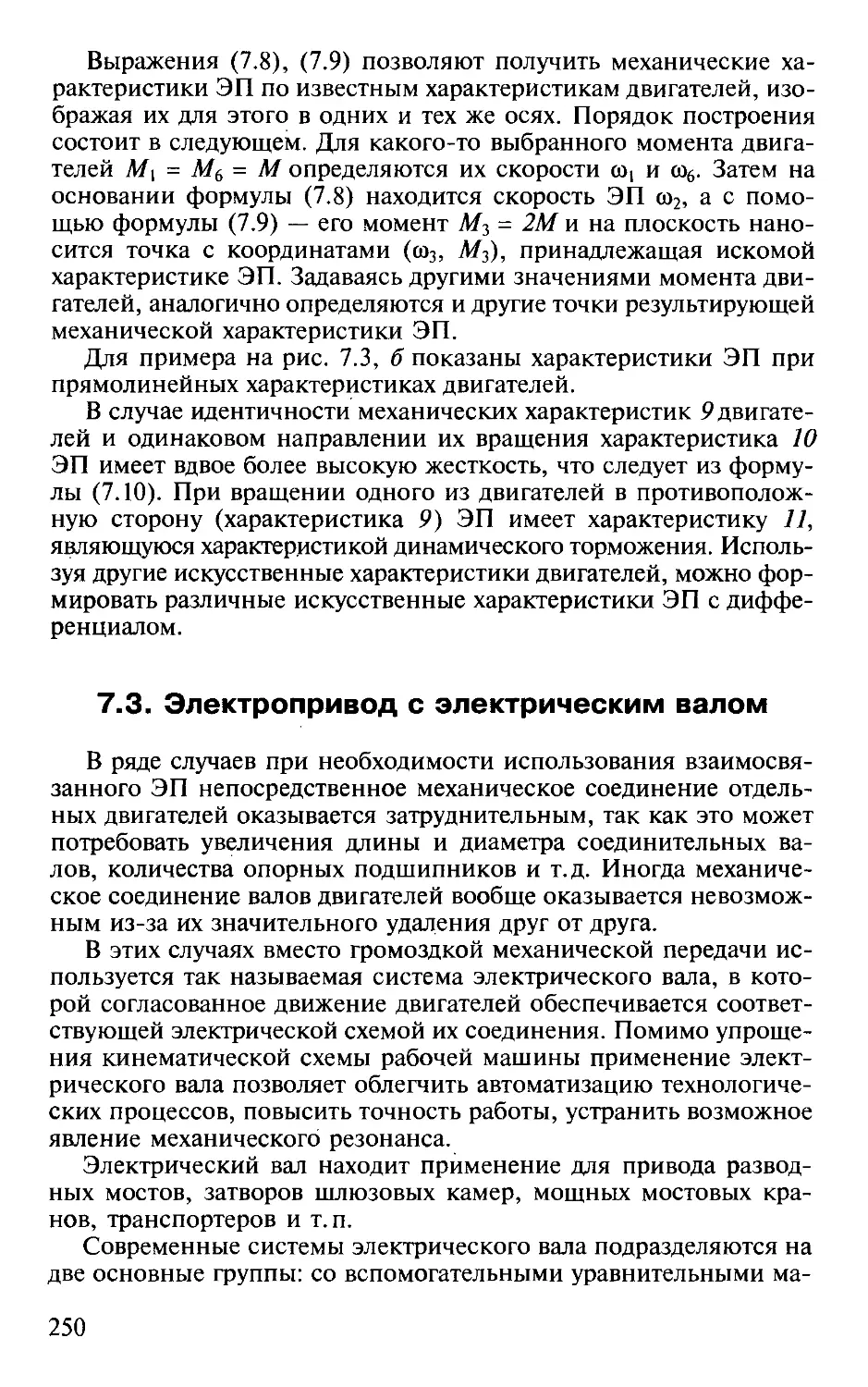
Задача 2.4. Схема механической части ЭП тележки мостового
крана приведена на рис. 2.4. Определить / и Л/с. Исходные данные:
скорость перемещения тележки гио = 0,8 м/с; диаметр ходовых
колес (ХК) с/Хк = 0,6 м; общая масса тележки с грузом =
= 8 500 кг; сила сопротивления движению тележки FM0 = 120 000 Н;
Уд = 0,1 кг - м2; J\ = 0,15 кг - м2; J2 = 0,01 кг - м2; = 0,05 кг - м2; Z\ = 20;
Z2 = 79; Z3 = 16; Zi = 83; КПД одной шестеренчатой пары т|п = 0,97.
Рис. 2.4. Кинематическая схема электропривода механизма передвижения:
/ — ходовые колеса; 2 — тормоз; 3 — двигатель; 4 — муфта; 5 — рельсы
19
2.3. Многомассовые расчетные схемы
Реальные кинематические схемы ЭП содержат упругие элементы
(элементы конечной жесткости), между которыми могут суще-
ствовать зазоры. Так, например, в схеме на рис. 2.2 таким упругим
элементом является трос 9, на котором подвешивается груз. При
значительной протяженности к упругим элементам относят и со-
единительные валы. Зазоры в этой схеме могут существовать в
муфтах 3 и 7, а также между шестернями 5 и 6 редуктора 4 и в его
подшипниках.
Наличие упругих элементов и зазоров усложняет расчетную
схему механической части ЭП, превращая ее в многомассовую.
Для учета упругих свойств движущихся механических элементов
используются следующие аналитические выражения.
Приведение коэффициента жесткости z-ro упругого поступа-
тельно движущегося элемента (стержня, каната, ремня) осуще-
ствляется по формуле
^пр/ — (2.14)
а Л-го упругого вращающегося элемента (вала, оси) — по формуле
Спрк~Ск/1к> (2-15)
где Ci и ск — соответственно коэффициенты жесткости z-ro посту-
пательно движущегося (Н/м) и Л-го вращающегося (Н • м) упру-
гих элементов, с, = SjEj/liVi ск = JkGiJlk (Gk — модуль упругости кру-
чения, Па; Jk = nRk/2 — момент инерции поперечного сечения к-
го элемента, м4); спр, и спрк — приведенные их значения, Н м; /к —
длина элемента, м; £,, /,• — соответственно площадь попереч-
ного сечения z-ro элемента, м2, модуль упругости растяжения и
сжатия, Па, длина z-ro элемента, м.
При параллельном соединении нескольких упругих элементов
с коэффициентами жесткости с2, с3, ... эквивалентная жест-
кость сэкв определяется по формуле
сэкв = С1 + с2 + с3 + ..., (2.16)
а при их последовательном соединении
। /сэкв = 1/с1 + 1/с2 + 1/сЗ + (2.17)
Податливостью упругого элемента е называют величину, об-
ратную жесткости:
е-1/с. (2.18)
20
Рис. 2.5. Двухмассовая расчетная схема ме-
ханической части:
1 — первая масса; 2 — упругий элемент; 3 — вто-
рая масса
Л/со] <р| ! 2 Л/уСО2ф2 5
Му Мс
Приведение углового <р0 и линейного 80 зазоров осуществляет-
ся по формулам:
<Рпр = Wo, или <рпр = 80/р0, (2.19)
где <рпр — приведенное значение зазора, рад; i0, р0 — соответ-
ственно передаточное число и радиус приведения кинематиче-
ской цепи между элементом приведения (валом двигателя) и за-
зором.
При использовании в ЭП двигателя поступательного движе-
ния (линейного двигателя) приведение осуществляется по тем же
принципам.
Если в расчет принимать упругость одного элемента и зазо-
ры при этом не учитывать, то выполнение операции приведе-
ния позволяет представить механическую часть ЭП в виде так
называемой двухмассовой расчетной системы, изображенной на
рис. 2.5.
В этой схеме упругий элемент 2 с коэффициентом жесткости с
соединяет две массы 1 и 3 с моментами инерции соответственно
J, и J2. Первая из масс включает в себя массу движущейся части
двигателя и жестко связанных с ним элементов кинематической
схемы и вращается со скоростью ®,. Вторая масса включает в себя
массу исполнительного органа рабочей машины и жестко снизан-
ных с ним элементов и вращается со скоростью ш2. К первой мас-
се приложен момент двигателя М, момент сопротивления Л/с1 и
упругий момент Му, а ко второй — упругий момент Му и момент
нагрузки Л/с2. Движение двухмассовой системы описывается в этом
случае совокупностью следующих уравнений:
М- Му - Мс1 = J|d®]/dZ;
Му - Мс2 = J2dm2/dr, (2.20)
Му = с((р, - <р2),
где <р|, <р2 — углы поворота соответственно первой и второй масс.
Коэффициент жесткости с, входящий в (2.20), определяется с
помощью формул (2.14) или (2.15).
Для случая, когда М и Мс2 не изменяются по величине, а Мс]
пренебрежимо мал и им можно пренебречь, получаемое из сис-
21
темы уравнений (2.20) исходное дифференциальное уравнение
для скорости первой массы со, имеет вид
Ty(d3®!/d/3) + dcoj/dz = (М-Мс2)/(Л + h) = еср, (2.21)
где Ту — период свободных колебаний в двухмассовой упругой
системе, Ту = y/J\J-2 /+J2)‘, £ср — среднее ускорение ЭП, еср =
= (М-Л/с2)/(Т, + Т2).
Решение уравнения (2.21) при Мунач = Мс2 и (О|Нач = (о2нач = 0
имеет следующий вид:
®| = Еср/ + (TyJ2Ecp/J1)sin(//Ty). (2.22)
Следовательно, наличие упругого элемента приводит к коле-
бательному характеру движения вала двигателя.
Если в расчет принимается упругость двух или более элемен-
тов, то расчетная схема получается соответственно трехмассовой,
четырехмассовой и т.д. Многомассовые расчетные системы полу-
чаются и в том случае, когда необходимо принять во внимание
зазоры в кинематической схеме ЭП. Движение элементов в мно-
гомассовых схемах более сложное и многообразное имеет, как
правило, колебательный характер и при его анализе целесообраз-
но применение вычислительной техники.
Задача 2.5*. Для механической части ЭП из задачи 2.1 (см. рис.
2.2) получить параметры расчетной схемы с учетом упругости тро-
са, коэффициент жесткости ск которого принять равным 1 • 105 Н/м.
Массу каната не учитывать.
Упругий элемент (трос) разделяет поднимаемый груз и меха-
ническую часть ЭП. Так как условием задачи предусматривается
учет только одной упругости, то расчетная схема будет двухмас-
совой и примет вид схемы, представленной на рис. 2.5.
1. Момент инерции J\ первой массы будет равен
J, = /д + Jx + J2/i2 = 0,1 + 0,02 + 2/6,142 = 0,175 кг - м2.
2. Момент инерции J2 второй массы будет равен
J2 = тр2 = 1 000 • 0,0252 = 0,625 кг • м2.
Приведенная жесткость каната с будет составлять величину
с = Qp2 = 1 • 105 0,0252 = 62,5 Н м.
Задача 2.6. Для кинематической схемы, приведенной на рис.
2.3, получить в общем виде расчетную схему при учете упругости
валов, имеющих коэффициенты жесткости св1 и св2.
22
2.4. Установившееся движение электропривода
и его устойчивость
Для расчетной одномассовой схемы рис. 2.1 установившееся
механическое движение ЭП будет определяться равенством мо-
ментов двигателя и нагрузки, т.е. условием М = Мс. Проверка вы-
полнения этого условия может производиться аналитически или
с помощью так называемых механических характеристик двигате-
ля и исполнительного органа.
Механической характеристикой двигателя называется зависи-
мость его скорости от развиваемого момента ®(Л/) (двигатель вра-
щательного движения) или усилия r(F) (двигатель поступатель-
ного движения). Различают естественную и искусственную харак-
теристики двигателей.
Естественная характеристика двигателя (она у него единствен-
ная) соответствует основной (паспортной) схеме его включения
и номинальным параметрам питающего напряжения. Естествен-
ные механические характеристики двигателей вращательного дви-
жения приведены на рис. 2.6, а. На естественной характеристике
располагается точка номинального (паспортного) режима двига-
теля с координатами соном, Л/иом.
Если включение двигателя происходит не по основной схеме
или в его электрические цепи включены какие-либо дополни-
тельные электротехнические элементы (резисторы, реакторы,
конденсаторы), или двигатель питается напряжением с неноми-
нальными параметрами, то его характеристики будут называться
искусственными. Таких характеристик у двигателя может быть сколь
угодно много. Поскольку эти характеристики получают в целях
регулирования переменных (координат) двигателя: тока, момен-
та, скорости, положения, то они иногда называются регулиро-
вочными.
Механической характеристикой исполнительного органа рабочей
машины или производственного механизма называется зависимость
скорости от возникающего при его движении усилия или момен-
та, т.е. ®ИО(Л/ИО) при вращательном движении исполнительного
органа и Гио(Лю) при его поступательном движении. В результате
выполнения операции приведения к валу двигателя эти характе-
ристики преобразуются в зависимость вида ®(Л/С), где ® — ско-
рость двигателя, а Мс — приведенный к его валу момент нагрузки
(сопротивления). Механические характеристики исполнительных
органов некоторых рабочих машин приведены на рис. 2.6, б. Сле-
дует отметить, что реальные механические характеристики ис-
полнительных органов сложны и обычно представляют собой со-
четание показанных на рис. 2.6, б зависимостей.
По характеру действия моменты нагрузки Мс подразделяются
на активные и реактивные. Активный момент имеет постоянное,
23
Рис. 2.6. Механические характеристики:
а — двигателей: / — синхронного; 2 — постоянного тока с независимым возбуж-
дением; 3— асинхронного; 4— постоянного тока с последовательным возбужде-
нием; б — исполнительных органов рабочих машин: 5 — механизма главного
движения металлообрабатывающего станка; 6 — транспортера, механизма пода-
чи станков; 7 — подъемного механизма; 8 — центробежных насосов, вентилято-
ров и компрессоров
не зависящее от скорости направление своего действия (характе-
ристика 7 на рис. 2.6, б). Такие моменты создаются так называе-
мыми потенциальными силами, к которым относятся сила при-
тяжения Земли, силы упругой деформации и т.д.
Реактивный момент, характеристика которого соответствует
зависимости 6 на рис. 2.6, б, создается в основном силами тре-
ния, он всегда противодействует движению и поэтому изменяет
свой знак с изменением направления скорости движения.
Количественно механические характеристики двигателя и ис-
полнительных органов оцениваются жесткостью
р = dM/d® = ДМ/Д®. (2.23)
Используя этот показатель, можно оценивать характеристику 1
синхронного двигателя (см. рис. 2.6, а, горизонтальная линия) как
абсолютно жесткую (Р - °°), характеристику асинхронного двигате-
ля 3 — как имеющую переменную положительную и отрицатель-
ную жесткости, характеристику грузоподъемных механизмов 7 (см.
рис. 2.6, б) — как имеющую нулевую жесткость (Р = 0) и т.д.
Понятие механических характеристик позволяет просто найти
параметры установившегося движения двигателя. Для этого в од-
ном и том же квадранте совмещаются механические характери-
стики двигателя Д и исполнительного органа ИО, как это показа-
но на рис. 2.7. Точки 7 и 2 пересечения этих характеристик, когда
моменты двигателя и исполнительного органа равны, будут соот-
ветствовать установившемуся движению со скоростями соответ-
ственно ®уСТ1 и ®уСт2 и моментом Муст = Мс.
24
Аналитический способ для такой проверки применяется в тех
случаях, когда механические характеристики двигателя и нагруз-
ки заданы в виде уравнений. Тогда совместное решение этих двух
уравнений при условии М = Мс дает искомое значение шуст. Под-
становка этого значения скорости в любое из двух уравнений ме-
ханических характеристик позволяет получить значение устано-
вившегося момента. Использование аналитического способа рас-
смотрено в примерах к подразд. 2.4.
Видом механических характеристик двигателя и исполнитель-
ных органов определяется устойчивость установившегося движе-
ния. Под устойчивостью в «малом» понимается свойство системы
«двигатель —исполнительный орган» поддерживать движение с
установившейся скоростью при возможных небольших отклоне-
ниях от нее.
Рассмотрим способ определения устойчивости движения с по-
мощью механических характеристик (см. рис. 2.7).
Предположим, что по какой-то причине скорость ЭП повыси-
лась до уровня и;. Выясним, что будет происходить со скоростью,
если вызвавшая ее изменение причина исчезнет. Из характеристик
двигателя и исполнительного органа видно, что при скорости со{
момент нагрузки Мс больше момента двигателя М{, т. е. М{ < Мс.
Тогда в соответствии с уравнением (2.12) в системе «двигатель—
исполнительный орган» будет действовать отрицательный дина-
мический момент. Начнется процесс торможения (dco/dr < 0), ко-
торый закончится при скорости ®усТ|.
Рассмотрим теперь положение, при котором кратковремен-
ное возмущение вызвало снижение скорости до уровня cof < ®уст|.
В этом случае М"> Мс и под действием уже положительного дина-
мического момента скорость начнет возрастать, пока не достиг-
Рис. 2.7. Определение установившейся скорости и устойчивости движения
25
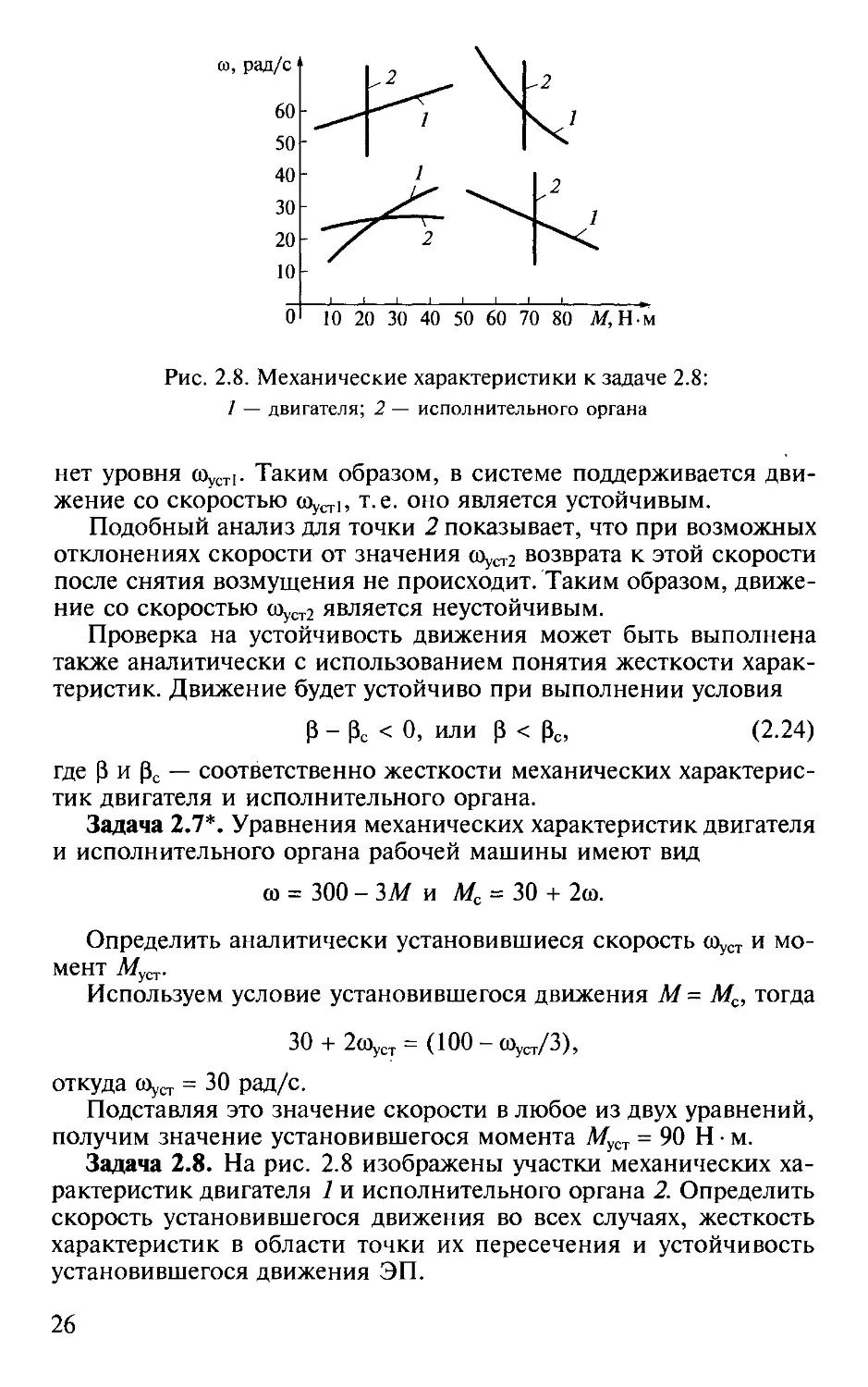
Рис. 2.8. Механические характеристики к задаче 2.8:
/ — двигателя; 2 — исполнительного органа
нет уровня шуст1. Таким образом, в системе поддерживается дви-
жение со скоростью соуст1, т.е. оно является устойчивым.
Подобный анализ для точки 2 показывает, что при возможных
отклонениях скорости от значения шуст2 возврата к этой скорости
после снятия возмущения не происходит. Таким образом, движе-
ние со скоростью шуст2 является неустойчивым.
Проверка на устойчивость движения может быть выполнена
также аналитически с использованием понятия жесткости харак-
теристик. Движение будет устойчиво при выполнении условия
Р - Рс < 0, или Р < рс, (2.24)
где Р и рс — соответственно жесткости механических характерис-
тик двигателя и исполнительного органа.
Задача 2.7*. Уравнения механических характеристик двигателя
и исполнительного органа рабочей машины имеют вид
со = 300 - ЪМ и Мс = 30 + 2со.
Определить аналитически установившиеся скорость шуст и мо-
мент Му<л.
Используем условие установившегося движения М - Мс, тогда
30 + 20^0,. = (100 - сОуст/3),
откуда сОуСТ = 30 рад/с.
Подставляя это значение скорости в любое из двух уравнений,
получим значение установившегося момента Л/уст = 90 Н м.
Задача 2.8. На рис. 2.8 изображены участки механических ха-
рактеристик двигателя 1 и исполнительного органа 2. Определить
скорость установившегося движения во всех случаях, жесткость
характеристик в области точки их пересечения и устойчивость
установившегося движения ЭП.
26
2.5. Неустановившееся движение
электропривода при постоянном динамическом
моменте
Неустановившееся движение ЭП имеет место, когда моменты
двигателя и нагрузки отличаются друг от друга, т. е. Л/V Мс. В этом
случае динамический момент Л/дин не равен нулю и происходит
увеличение или снижение скорости движения. Неустановившееся
движение имеет место при пуске, торможении и реверсе двигате-
ля, регулировании его скорости или при изменении нагрузки на
валу.
Неустановившееся движение возникает при переходе ЭП из
установившегося движения с одними параметрами к установив-
шемуся движению с другими параметрами (если, конечно, движе-
ние устойчиво). По этой причине неустановившееся движение на-
зывают также переходным процессом, или переходным режимом, ЭП.
Цель рассмотрения неустановившегося движения — получение
зависимостей механических переменных (координат) ЭП: момен-
та, скорости и угла поворота вала двигателя от времени. Рассмот-
рим переходные процессы в механической части ЭП, обуслов-
ленные инерционностью движущихся элементов и исполнитель-
ных органов рабочей машины. Иногда такие переходные процес-
сы называют механическими.
Искомые зависимости получаем решением (интегрированием)
дифференциального уравнения механического движения (2.12), а
также дифференциального уравнения со = d<p/d/, связывающего
угол поворота <р вала двигателя и его скорость со.
Для решения этих уравнений необходимо знать законы изме-
нения моментов двигателя и нагрузки, а также массы и моменты
инерции движущихся элементов и начальные значения перемен-
ных.
В общем случае моменты двигателя и нагрузки могут являться
функциями времени и координат движения. В некоторых, более
редких случаях в переходных процессах могут изменяться масса
или момент инерции движущихся элементов.
Рассмотрим наиболее простой случай, когда моменты двигате-
ля и нагрузки ЭП являются постоянными величинами, а массы
или моменты инерции элементов в переходных процессах не из-
меняются.
На рис. 2.9, а приведены отвечающие этому случаю механиче-
ские характеристики двигателя 2 и исполнительного органа (на-
грузки) 1. Уравнение движения (2.12) решается методом разделе-
ния переменных, и его решение имеет вид
(о = (M-Mc)t/J+ С. (2.25)
27
Рис. 2.9. Механические характеристики (а) и графики переходного про-
цесса (б) при постоянном динамическом моменте:
/ — механическая характеристика исполнительного органа; 2 — механическая
характеристика двигателя; 3 — график момента; 4 — график скорости
Постоянная интегрирования С находится из начального усло-
вия переходного процесса: 1 = 0; ® = шнач. Подставляя его в уравне-
ние (2.25), находим С = ®иач. Тогда формула (2.25) принимает вид
ш = ((Л/ - Mc)t/J) + шнач. (2.26)
Полученная формула показывает, что в рассматриваемом слу-
чае скорость <£>(/) линейно зависит от времени: при (Л/ - Л/с) > 0
она увеличивается (см. линию 4 на рис. 2.9, б), а при (Л/- Л/с) < 0
скорость снижается. Момент двигателя от времени не зависит (см.
линию 3 на рис. 2.9, б).
Время переходного процесса t„ п, за которое скорость изменит-
ся от некоторого начального ®нач до конечного ®кон уровня, опре-
делится из формулы (2.26) при подстановке t = tn,п и со = шкон:
'п.п = J (“кон - СОнач)/(Л/- М:)- (2-27)
Зависимость угла поворота вала двигателя от времени может
быть получена с помощью выражения (2.6), связывающего ско-
рость и угол поворота вала двигателя. Подстановка в него выраже-
ния (2.26) после интегрирования дает
ср = (Л/- Mc)/2/2J + (оиач/ + <рнач. (2.28)
Как видно из полученной формулы, зависимость угла поворота
вала двигателя от времени определяется квадратичной функцией.
Задача 2.9. Рассчитать и построить зависимости со(/) и <р(/).
Исходные данные: М= 50 Н • м; Мс = 100 Н • м; J= 0,1 кг • м2; сонач =
= 100 рад/с.
Задача 2.10. Для условий задачи 2.9 рассчитать время переход-
ного процесса, за которое скорость снизится в 2 раза.
28
Задача 2.11. Определить динамический момент, который при
J = 0,2 кг - м2 обеспечит увеличение скорости на 200 рад/с за вре-
мя /п.п = 1 с.
2.6. Неустановившееся движение при линейной
зависимости динамического момента
от скорости
Линейная зависимость динамического момента ЭП соответству-
ет линейным механическим характеристикам двигателя и испол-
нительного органа. Такие механические переходные процессы ха-
рактерны для ЭП с двигателями постоянного тока независимого
возбуждения и других двигателей с линейными характеристиками.
На рис. 2.10, а показаны линейные механические характери-
стики двигателя 1 и исполнительного органа 2, которые описыва-
ются следующими уравнениями:
л/ = л/к,-и
< = Л/с0+рсо, [ >
где Мкз и Мс0 — соответственно моменты двигателя и исполни-
тельного органа при нулевой скорости.
Подставляя эти выражения в уравнение движения (2.12), по-
лучим
М- Мс = MKS - Р&) - Мс0 - рссо = J(dco/d/). (2.30)
Рис. 2.10. Механические характеристики (а) и графики переходного про-
цесса (б) при динамическом моменте, линейно зависящем от скорости:
1 — механическая характеристика двигателя; 2 — механическая характеристика
исполнительного органа; 3 — график скорости; 4 — график момента
29
В обычной (канонической) для дифференциальных уравнений
форме уравнение (2.30) будет иметь вид
TM(dco/d/) + со = соуст, (2.31)
где Тм — электромеханическая постоянная времени, с, Ти = J/$ +
+ рс); (ОуСТ — установившаяся скорость, соответствующая точке
пересечения характеристик двигателя и исполнительного органа,
®уст = (М.з — ^Л:о)/(Р *" Рс)-
Выражение (2.31) представляет собой линейное неоднородное
дифференциальное уравнение первого порядка, решение которо-
го имеет вид
co(Z) = Ле‘,/7м + (оуст. (2.32)
Постоянный коэффициент А определяется из начальных усло-
вий переходного процесса (при / = 0, со = сонач):
А ®нач ^уст- (2.33)
Окончательно зависимость изменения скорости во времени с
учетом формулы (2.33) будет иметь вид
®(/) = (®нач - соуст)е“'/7м + (оуст. (2.34)
Запишем момент двигателя в функции времени исходя из фор-
мулы (2.29):
= Мкз - р(о(/). (2.35)
С учетом того, что р = ДЛ//Д® = Л/к,3/а>о = (Л/к,3 - Л/уст)/(ОуСТ = (Л/к з -
- Л/нач)/«>нач, после подстановки (Онач и (Оуст получим
M(t) = (Л/Нач - Муст)е-^ + Муст. (2.36)
При рс = 0 (механическая характеристика исполнительного орга-
на — вертикальная прямая линия) входящие в выражения (2.34)
и (2.36) параметры будут иметь вид:
Ты = J/$ = J(Oo/MK3-, = (Мкз - Л/с)/р. (2.37)
Время переходного процесса /п п, за которое скорость двигате-
ля изменится от некоторого начального значения ®нач до коне-
чного (0кОн, определяется из выражения (2.34) подстановкой в него
/= /п п и со = (ОуСТ. После преобразований получаем следующее выра-
жение:
Zn,n — (((Оуст — ®нач)/(®уст — ®кон))- (2.38)
Рассмотрение полученных выражений (2.34) и (2.36) пока-
зывает, что скорость и момент двигателя изменяются во време-
ни по экспоненциальному закону с постоянной времени Тм. На
рис. 2.10, б показаны графики переходного процесса для скорости
со(/) — кривая 3 и момента М (/) — кривая 4 при увеличении
30
скорости двигателя от сонач до соуст, соответствующие формулам
(2.34) и (2.36). Отметим, что начальные и установившиеся уровни
скорости и момента определяются из рис. 2.10, а.
Как следует из выражений (2.34) и (2.36), время достижения
установившихся уровней скорости и момента (т.е. время экспо-
ненциального переходного процесса) является бесконечно боль-
шим. Поэтому в технических расчетах используют так называемое
практическое время переходного процесса, принимаемое равным
трем постоянным времени, т.е. /пп = ЗГМ. После этого интервала
времени скорость будет отличаться от своего установившегося
значения менее, чем на 5 %.
Постоянная времени Ты имеет определенное графическое и
физическое выражения. На рис. 2.10, б она равна отрезку,
отсекаемому касательной, проведенной к кривой переходного
процесса в точке t = 0 на горизонтальной прямой, соответству-
ющей установившемуся значению переменной (скорости или мо-
мента). Количественно Тм равна времени разгона tp двигателя без
нагрузки (Мс = 0) из неподвижного состояния (сонач = 0) до ско-
рости идеального холостого хода coq = ®уст П°Д действием пусково-
го момента Л/кз. Действительно, из формул (2.37) для указанных
условий следует, что tn п = tp - Ло0/М<.з = Тм.
Задача 2.12. Выполнить расчет и построение кривых переход-
ного процесса со(/) и M(t) при пуске двигателя с линейной меха-
нической характеристикой.
Исходные данные: сонач = 0; соуст = 150 рад/с; Л/нач = Мк з = 150 Н м;
а»о = 200 рад/с; Л/уст = Мс = 40 Н м; J = 0,1 кг • м2. Оценить практи-
ческое время переходного процесса.
Задача 2.13. Рассчитать и построить зависимости со(/) и M(t)
при торможении двигателя, механическая характеристика кото-
рого приведена на рис. 2.11, если Мс - 100 Н • м; сонач = 200 рад/с.
Задача 2.14. Двигатель, механическая характеристика которого
приведена на рис. 2.12, работает в установившемся режиме (точка
А) и преодолевает момент сопротивления Мс\ = 150 Н м. В момент
31
Рис. 2.12. Характеристики к задаче 2.14:
1,2— механические характеристики
исполнительного органа; 3 — механи-
ческая характеристика двигателя
времени t - 0, принимаемый за начало отсчета, произошло скачко-
образное изменение момента нагрузки до уровня Мс2 = 250 Н • м и
точка А переместилась в положение Б. Рассчитать и построить за-
висимости со(/) и M(t), соответствующие такому увеличению на-
грузки.
Задача 2.15. Используя формулу (2.34), получить общее выра-
жение для изменения во времени угла поворота вала двигателя <р(/).
Рассчитать и построить эту зависимость для условий задачи 2.12.
2.7. Неустановившееся движение
электропривода при произвольном
динамическом моменте
Моменты двигателя и нагрузки, а следовательно, и динами-
ческие моменты ЭП могут быть различными функциями скоро-
сти, положения вала двигателя и исполнительного органа рабо-
чей машины или могут изменяться во времени. В зависимости от
исходных данных и требуемой точности расчета для получения
искомых зависимостей со(7), <р(/) и M(t) могут применяться раз-
личные методы.
Точное интегрирование уравнения движения. Этот метод исполь-
зуется в тех случаях, когда моменты двигателя и исполнительно-
го органа заданы аналитически (в виде формул). Нахождение за-
висимостей <»(/) и Л/(/) осуществляется подстановкой этих фор-
мул в уравнение (2.12) и его дальнейшим решением (интегриро-
ванием).
Динамический момент зависит от скорости. Случай линей-
ной зависимости моментов двигателя и нагрузки рассмотрен в под-
разд. 2.6. Другие варианты рассмотрены в качестве примеров в за-
дачах 2.16 и 2.17.
Задача 2.16*. Механическая характеристика асинхронного дви-
гателя (см. рис. 2.7) описывается уравнением
32
М = 2MJ(s/sK + sjs),
(2.39)
где 5 — текущее скольжение двигателя, 5 = (<»0 - со)/а>0; .sK — крити-
ческое скольжение, соответствующее критическому (максималь-
ному) моменту Л/к и скорости <»к, .sK = (<»0 - а>к)/со0; <»0 — скорость
идеального холостого хода двигателя, или скорость вращения маг-
нитного поля двигателя.
Получить выражения для зависимостей оэ(/) или s(t) и време-
ни переходного процесса для случая Л/с = const.
Подставив в уравнение (2.12) уравнение (2.39) и заменив dco =
= -co0d.s, получим исходное дифференциальное уравнение для из-
менения во времени скольжения 5:
2A/K/(.s/sK + sjs) - Мс = (2.40)
Интегрирование формулы (2.40) приводит к получению ис-
комой зависимости 5 (/). Для случая пуска двигателя вхолостую
(Л/с = 0) эта зависимость имеет вид
t = Гм((1 - ?)/2sK + 5К ln(l/s))/2. (2.41)
Динамический момент зависит от времени. Переходные про-
цессы этого вида могут иметь место в тех случаях, когда по тем
или иным причинам сформирован график момента двигателя.
Подстановка формул для этого графика в уравнение (2.12) при-
водит к дифференциальному уравнению, решаемому методом
разделения переменных. Рассмотрим это на примере решения за-
дачи 2.17.
Задача 2.17*. Получить аналитическую зависимость для графи-
ка скорости <»(/).
Исходные данные: момент двигателя изменяется во времени
по закону Л/ = 100- 15/; момент нагрузки постоянен и равен Мс =
= 40 Н м; приведенный к валу двигателя момент инерции состав-
ляет J = 1,5 кг - м2; начальная скорость двигателя сонач = 20 рад/с.
Запишем исходное дифференциальное уравнение, подставив в
формулу (2.12) заданные выражения для моментов двигателя и
исполнительного органа и значение момента инерции:
100- 15/-40 = 60- 15/= l,5dco/d/.
Решение (интегрирование) этого уравнения дает следующий
результат:
со(/) = -15/2 + 40/ + сонач = - 15/2 + 40/ + 20.
Задача 2.18. График динамического момента имеет вид, пока-
занный на рис. 2.13. Получить соответствующие ему графики ско-
33
Рис. 2.13. График динамического
момента к задаче 2.18
рости со(/) и угла поворота вала двигателя <р(/) при их нулевых
начальных значениях.
Задача 2.19. Получить аналитические зависимости для графи-
ков скорости со(г) и угла поворота <р(/) и определить время, при
котором скорость достигнет уровня юкон = 200 рад/с.
Исходные данные: момент двигателя изменяется во времени
по закону М= 20 + 25/; момент нагрузки постоянен и равен Мс =
= 15 Н м; приведенный к валу двигателя момент инерции состав-
ляет 7=0,1 кг м2; начальная скорость двигателя сонач = 40 рад/с.
Линеаризация нелинейных механических характеристик двига-
теля и исполнительного органа. Этот метод основан на представле-
нии (аппроксимации) этих характеристик или их отдельных уча-
стков прямыми линиями. В этом случае для расчета и построения
кривых переходного процесса или расчета его продолжительно-
сти могут использоваться полученные ранее формулы (2.28), (2.34)
и (2.36). Если механические характеристики аппроксимируются
несколькими прямыми или отрезками, то переходный процесс
строится по участкам, при этом конечное значение переменной
на предыдущем участке является начальным значением для сле-
дующего участка.
Рис. 2.14. Механические характеристи-
ки к задаче 2.20:
1,3— горизонтальный и вертикальный
участки идеализированной характеристи-
ки двигателя; 2 — реальная характеристи-
ка двигателя; 4 — характеристика испол-
нительного органа
34
Задача 2.20*. Оценить приближенно время пуска асинхронного
двигателя, механическая характеристика которого представлена
на рис. 2.14.
Исходные данные: соуст = 150 рад/с; J- 0,1 кг м2; Л/к - 220 Н м;
М„ = 180 Н м; Мс = 100 Н м.
Поскольку условием допускается приближенное решение, вы-
полним аппроксимацию механической характеристики 2 асин-
хронного двигателя двумя прямыми: горизонтальной 1, проходя-
щей через точку <»уст =150 рад/с, и вертикальной 3, проходящей
через точку Мср = (М„ + Л/к)/2 = (180 + 220)/2 = 200 Н • м.
Для полученной расчетной характеристики двигателя теперь
можно применить формулу (2.26), поскольку динамический мо-
мент при пуске будет постоянным. Тогда время пуска /пуск = tn п =
= J(cOyCT - 0)/(Л/ср - Мс) = 0,1 • 150/(200 - 100) = 0,15 с.
Методы численного интегрирования уравнения движения. Во
многих случаях, когда механические характеристики двигателя и
исполнительного органа заданы графически или в виде таблиц,
целесообразно применять для решения численные методы интег-
рирования дифференциальных уравнений, к которым и относит-
ся уравнение механического движения ЭП (2.12). Наиболее про-
стым методом является метод Эйлера, сущность которого рассмот-
рим на следующем примере.
Задача 2.21*. Получить зависимости со(/) и M(t) при пуске дви-
гателя, механические характеристики которого 1 и исполнитель-
ного органа 2 приведены на рис. 2.15, а. Момент инерции ЭП J =
- 0,2 кг- м2.
Рис. 2.15. Механические характеристики (а) и графики переходного про-
цесса (б) при произвольном динамическом моменте:
1 — механическая характеристика двигателя; 2 — механическая характеристика
исполнительного органа; 3 — график скорости; 4 — график момента
35
Таблица 2.1
Данные по расчету переходного процесса
Дсо, рад/с со, = w,_| + Дсо„ рад/с Л/„ Нм Л/с/, Н • м ДГ,-, с / = + Д/„ с
10 10 136 20 0,015 0,015
10 20 124 21 0,020 0,035
10 30 108 22 0,023 0,058
10 40 96 25 0,028 0,086
10 50 84 29 0,036 0,124
10 60 74 34 0,050 0,174
10 70 . 64 40 0,083 0,257
10 80 54 47 0,0286 0,543
Используем численный метод Эйлера, для чего заменим в урав-
нении (2.12) дифференциалы переменных на их конечные прира-
щения и запишем
Д/=/Дю/(Л/-Л/С). (2.42)
Для расчета кривых «>(/) и M(t) ось скорости разобьем на
ряд интервалов (приращений) Дю„ значения которых занесем
в табл. 2.1 (отметим, что интервалы скорости могут быть неодина-
ковыми по величине).
Суммируя значения скорости на предыдущем интервале и
приращения Д<»„ находим текущие значения скорости ®,.
По механическим характеристикам графически на каждом ин-
тервале скорости определим средние значения моментов двигате-
ля и исполнительного органа Л/с/.
По формуле (2.42) для каждого интервала скорости рассчита-
ем соответствующий интервал времени Д/,. Складывая последова-
тельно рассчитанные интервалы времени, получим текущее зна-
чение времени переходного процесса
Используя данные табл. 2.1, построим зависимости <»(/) и М(/) —
соответственно кривая 3 и кривая 4 на рис. 2.15, б.
Графоаналитические методы построения кривых переходного
процесса. Эти методы используются в случаях, когда механичес-
кие характеристики двигателя и исполнительного органа заданы
графически. В теории ЭП разработано несколько таких методов
(например, методы площадей и пропорций), основанных также
на решении уравнения (2.12).
Задача 2.22. Для изображенных на рис. 2.14 механических ха-
рактеристиках двигателя и исполнительного органа качественно
36
изобразить изменение во времени скорости со(/) и момента М(/)
двигателя при его пуске.
Контрольные вопросы
1. Какие элементы относятся к механической части ЭП?
2. Запишите уравнения, описывающие поступательное и вращатель-
ное движения механических элементов.
3. Какое движение называется установившимся и какое неустановив-
шимся?
4. Какие условия определяют установившееся и неустановившееся
движение?
5. Для чего выполняется операция приведения?
6. Поясните особенности расчета приведенного момента нагрузки при
различных направлениях потока энергии в механической части ЭП.
7. Поясните правило определения знаков моментов в уравнении дви-
жения.
8. Что такое динамический момент ЭП?
9. Чем обусловлено использование многомассовых расчетных схем ЭП?
10. Приведите примеры механических характеристик двигателя и ис-
полнительного органа.
11.Что такое жесткость механической характеристики?
12. Как с помощью механических характеристик двигателя и испол-
нительного органа определить скорость установившегося движения?
13. Как можно оценить устойчивость движения?
14. В каких случаях возникает неустановившееся движение ЭП?
15. Какова цель рассмотрения неустановившегося движения?
16. Какими уравнениями описывается неустановившееся движение?
17. Что такое динамический момент ЭП?
18. От каких факторов может в общем случае зависеть динамический
момент ЭП?
19. Поясните физический смысл электромеханической постоянной
времени и способ ее определения по кривым переходного процесса.
20. Как определяется практическое время экспоненциальных пере-
ходных процессов?
21. Назовите методы получения кривых переходного процесса при
произвольном характере динамического момента ЭП.
ГЛАВА 3
РЕГУЛИРОВАНИЕ ПЕРЕМЕННЫХ
ЭЛЕКТРОПРИВОДА, ЕГО СТРУКТУРЫ
И ЭЛЕМЕНТНАЯ БАЗА
3.1. Понятие о регулировании переменных
электропривода
Функционирование электропривода характеризуется необходи-
мостью управления движением исполнительных органов рабочих
машин.
Для выполнения этой функции электропривод должен распо-
лагать возможностью целенаправленно изменять (регулировать)
различные переменные, имея для этого соответствующие техни-
ческие средства и структуру.
Управление движением исполнительных органов рабочих ма-
шин осуществляется ЭП при их пуске, торможении и изменении
направления движения. Многие рабочие машины для надлежаще-
го выполнения заданных технологических операций требуют так-
же регулирования скорости, ускорения или положения (позиции)
своих исполнительных органов.
Примером такого регулирования может служить ЭП пассажир-
ского лифта. При пуске и остановке кабины лифта для обеспече-
ния комфортного самочувствия пассажиров ускорение и замедле-
ние ее движения не должны превосходить допустимого уровня.
Кроме того, кабина с заданной точностью должна останавливать-
ся на требуемом этаже, т.е. должно обеспечиваться ее заданное
позиционирование.
Во многих лифтах производится предварительное снижение ско-
рости движения кабины для обеспечения требуемой точности оста-
новки (позиционирования), которая необходима также при наладке
и ревизии электрического и механического оборудования лифта.
Таким образом, для работы лифта требуется регулировать три
переменные (координаты) движения кабины: ее ускорение, ско-
рость и положение.
Регулирование координат движения своих исполнительных
органов необходимо также металлообрабатывающим станкам,
прокатным станам, экскаваторам, буровым установкам, конвей-
ерам и транспортерам, насосам и многим другим рабочим маши-
нам и механизмам.
При изготовлении бумаги, тканей, кабельных изделий, раз-
личных пленок, прокатке металлов требуется создание и поддер-
38
жание в них натяжения, для чего ЭП должен обеспечивать регу-
лирование усилия или момента на исполнительных органах.
Регулирование необходимо и некоторым переменным самого
ЭП. Важнейшей из них является электрическйй ток двигателей,
который по ряду соображений должен быть ограничен при работе
ЭП на определенном уровне. Например, по условиям нормальной
работы коллекторно-щеточного узла требуется ограничивать ток
якоря двигателей постоянного тока при их пуске, торможении
или реверсе.
В некоторых случаях для предотвращения снижения напряже-
ния в системе электроснабжения требуется ограничение тока при
пуске мощных двигателей.
Регулированию могут подвергаться и другие переменные и по-
казатели работы ЭП: магнитный поток двигателей, потери элект-
роэнергии, коэффициенты мощности и полезного действия и ряд
других характеристик.
Регулирование переменных в общем случае может осуществ-
ляться:
для стабилизации — поддержания регулируемой переменной
на заданном уровне с требуемой точностью. Регулирование может
быть астатическим, при котором отсутствует отклонение регули-
руемой переменной от заданного значения в статическом режи-
ме, и статическим, характеризующимся наличием некоторого
отклонения, называемого обычно ошибкой регулирования;
слежения — осуществления изменения регулируемой перемен-
ной во времени по произвольному закону в зависимости от зада-
ющего входного сигнала;
программного регулирования — изменения регулируемой пере-
менной по определенной'заданной программе;
адаптивного регулирования — обеспечения оптимального регу-
лирования переменной по заданному показателю качества при
изменяющихся условиях функционирования рабочей машины или
ЭП. К разновидностям адаптивного регулирования относятся са-
монастройка, самоорганизация и самообучение.
Электропривод при его функционировании подвергается раз-
личным воздействиям. Со стороны системы управления — управ-
ляющее (регулирующее) воздействие, обеспечивающее требуемое
регулирование заданной переменной.
Со стороны окружающей среды и сопредельных объектов и
систем электропривод подвергается различным возмущающим
воздействиям, которые могут иметь как определенный, так и слу-
чайный характер.
К возмущающим воздействиям обычно относятся и различные
аварийные ситуации: исчезновение или значительные колебания
питающего напряжения, поломка в рабочей машине, выход из
строя элемента системы управления и т.д.
39
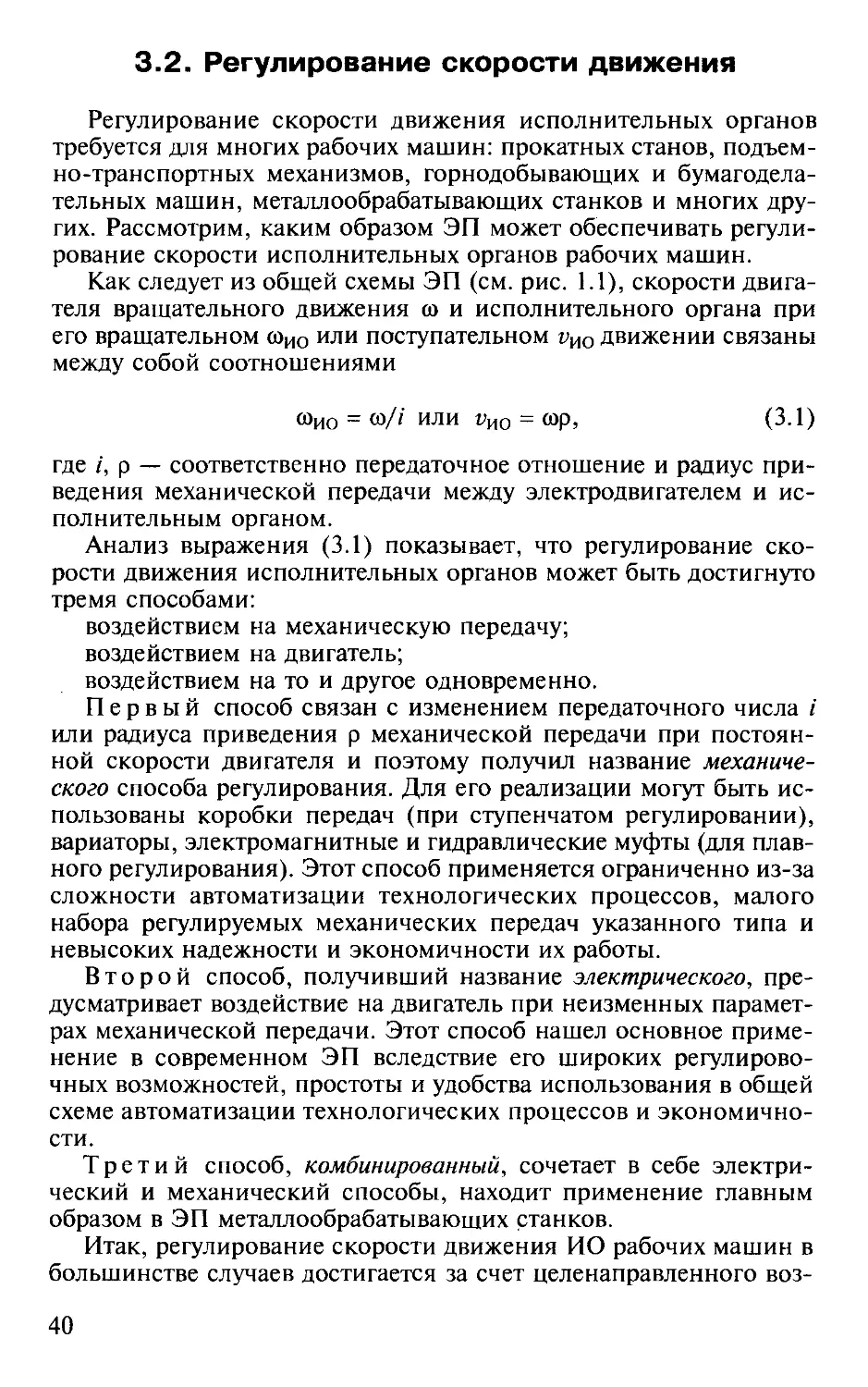
3.2. Регулирование скорости движения
Регулирование скорости движения исполнительных органов
требуется для многих рабочих машин: прокатных станов, подъем-
но-транспортных механизмов, горнодобывающих и бумагодела-
тельных машин, металлообрабатывающих станков и многих дру-
гих. Рассмотрим, каким образом ЭП может обеспечивать регули-
рование скорости исполнительных органов рабочих машин.
Как следует из общей схемы ЭП (см. рис. 1.1), скорости двига-
теля вращательного движения со и исполнительного органа при
его вращательном соио или поступательном гио движении связаны
между собой соотношениями
соИо = со// или ги0 = сор, (3.1)
где /, р — соответственно передаточное отношение и радиус при-
ведения механической передачи между электродвигателем и ис-
полнительным органом.
Анализ выражения (3.1) показывает, что регулирование ско-
рости движения исполнительных органов может быть достигнуто
тремя способами:
воздействием на механическую передачу;
воздействием на двигатель;
воздействием на то и другое одновременно.
Первый способ связан с изменением передаточного числа I
или радиуса приведения р механической передачи при постоян-
ной скорости двигателя и поэтому получил название механиче-
ского способа регулирования. Для его реализации могут быть ис-
пользованы коробки передач (при ступенчатом регулировании),
вариаторы, электромагнитные и гидравлические муфты (для плав-
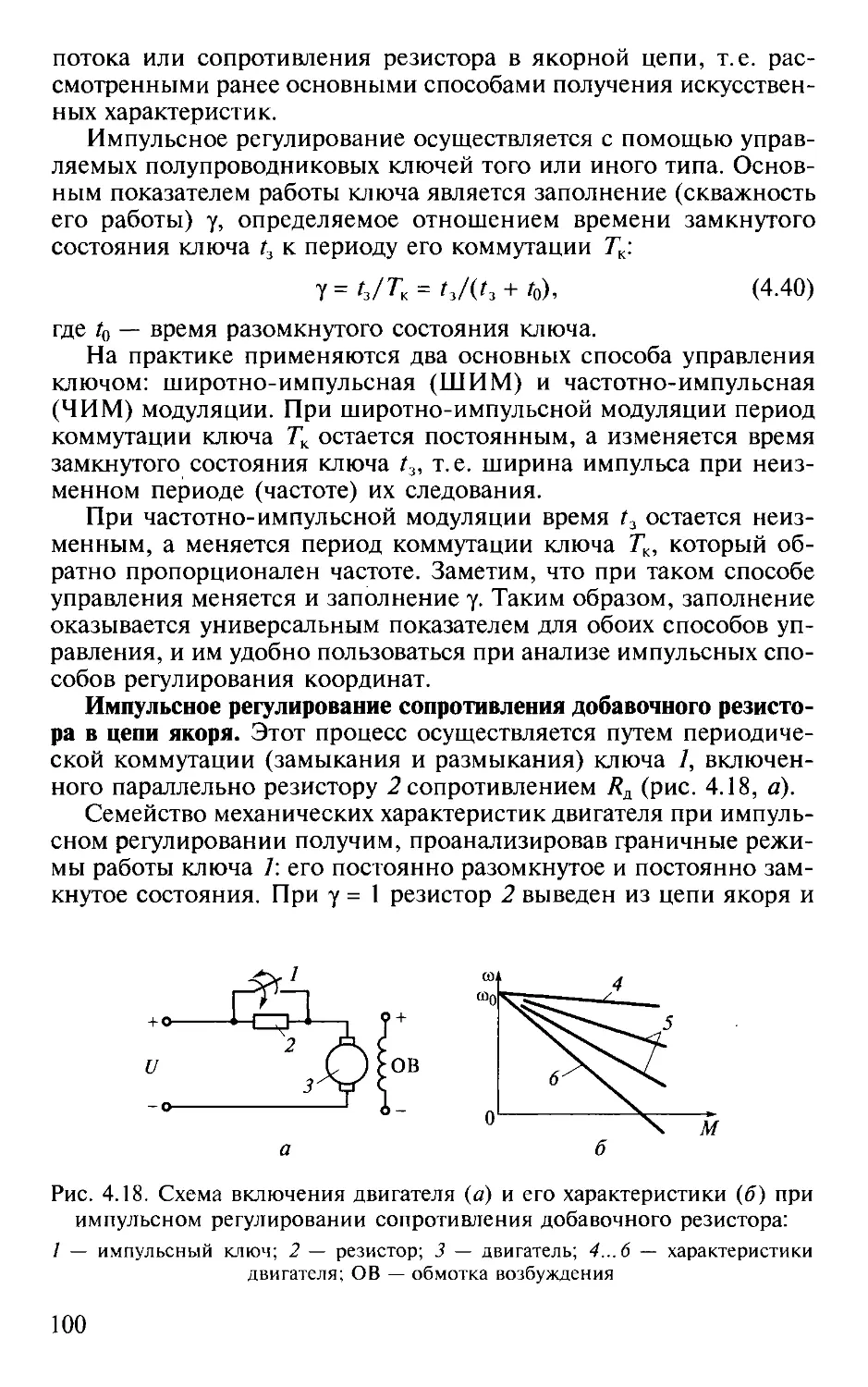
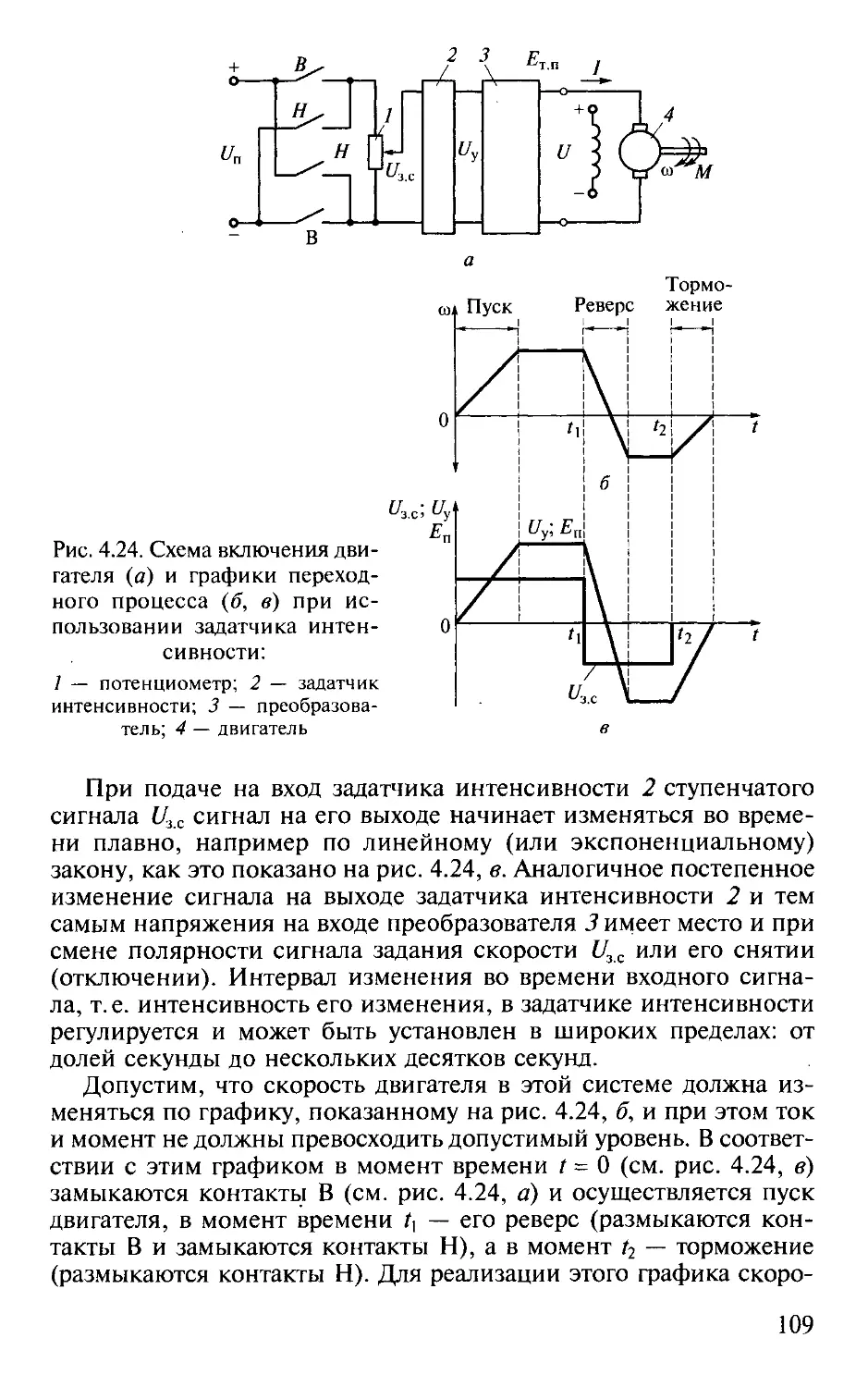
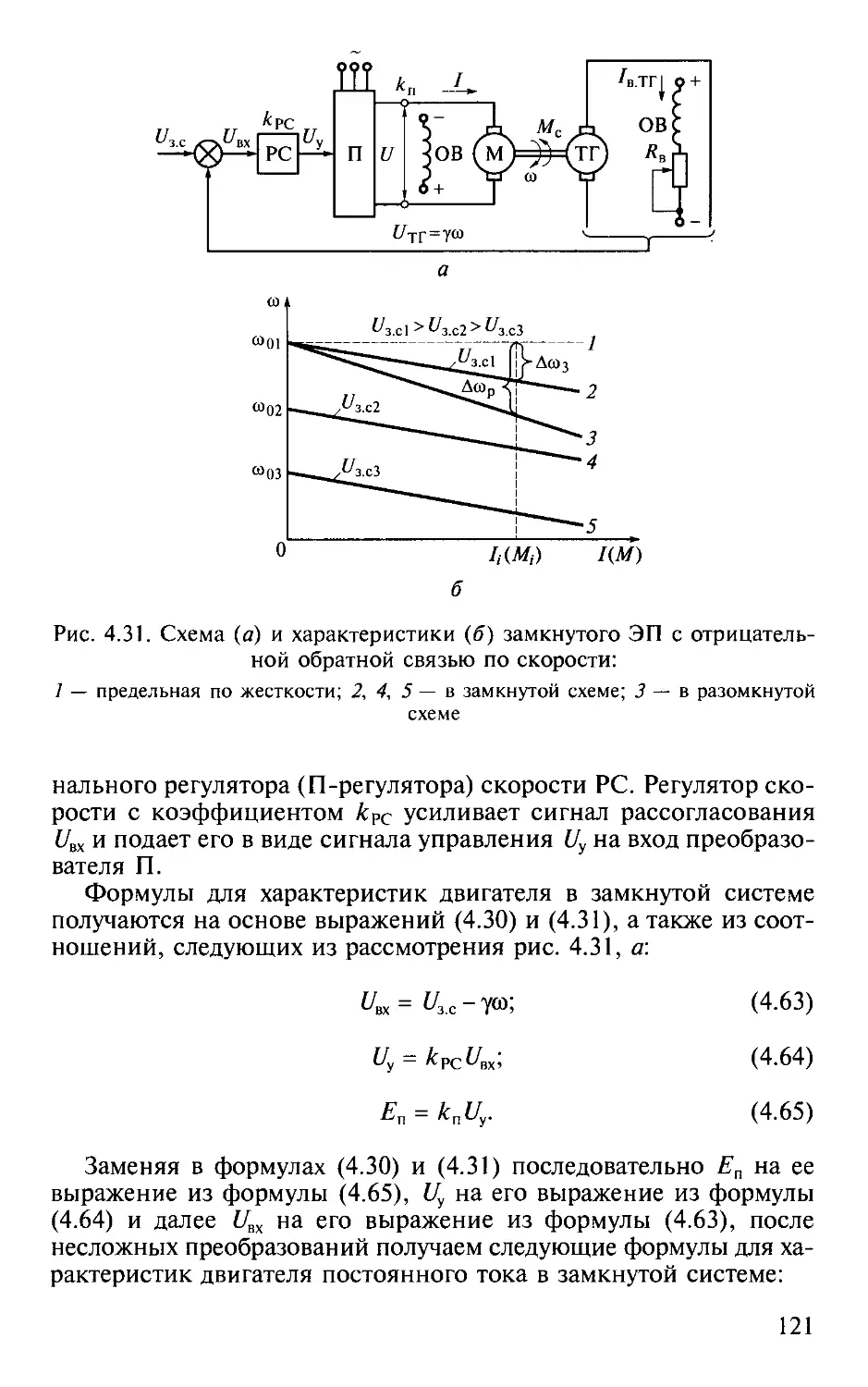
ного регулирования). Этот способ применяется ограниченно из-за
сложности автоматизации технологических процессов, малого
набора регулируемых механических передач указанного типа и
невысоких надежности и экономичности их работы.
Второй способ, получивший название электрического, пре-
дусматривает воздействие на двигатель при неизменных парамет-
рах механической передачи. Этот способ нашел основное приме-
нение в современном ЭП вследствие его широких регулирово-
чных возможностей, простоты и удобства использования в общей
схеме автоматизации технологических процессов и экономично-
сти.
Третий способ, комбинированный, сочетает в себе электри-
ческий и механический способы, находит применение главным
образом в ЭП металлообрабатывающих станков.
Итак, регулирование скорости движения ИО рабочих машин в
большинстве случаев достигается за счет целенаправленного воз-
40
действия на электродвигатель, осуществляемого с помощью его
системы управления.
При этом необходимо отметить: регулирование скорости мо-
жет быть осуществлено за счет получения соответствующих ис-
кусственных (регулировочных) механических характеристик дви-
гателя. Заметим также, что изменение скорости двигателя вслед-
ствие изменения нагрузки на его валу не является регулировани-
ем скорости.
Для примера на рис. 3.1 показаны естественная механическая
характеристика 1 двигателя постоянного тока независимого воз-
буждения и три искусственные (регулировочные): при введении в
цепь якоря добавочного резистора Ra (прямая 2), уменьшении
подаваемого на якорь напряжения U (прямая 3) и снижении маг-
нитного потока Ф (прямая 4). Искусственные характеристики 2 и
3 обеспечивают при моменте нагрузки Мс снижение скорости до
уровня сои2, а характеристика 4 — увеличение скорости до уровня
юИ1 при постоянном моменте нагрузки Мс.
Для количественной оценки и сопоставления различных спо-
собов регулирования скорости используются следующие показа-
тели.
Диапазон регулирования скорости. Этот показатель оп-
ределяется отношением максимальной скорости сотах к минималь-
ной comin при заданном изменении момента нагрузки Мс
D ~ ®max/®min-
Стабильность скорости. Этот показатель характеризует из-
менение скорости при возможных колебаниях момента нагрузки
на валу двигателя и определяется жесткостью механических ха-
рактеристик двигателя. Чем она больше, тем стабильнее скорость
при изменениях момента нагрузки, и наоборот. В рассматрива-
емом примере наибольшую стабильность скорости обеспечивает
искусственная характеристика 3.
Плавность регулирования скорости. Этот показатель
определяется перепадом скорости при переходе с одной искусст-
венной характеристики двигателя на другую. Чем больше в задан-
ном диапазоне регулирования скорости может быть получено ис-
Рис. 3.1. Механические характери-
стики двигателя постоянного тока
независимого возбуждения:
1 — естественная; 2 — при включении
резистора в цепь якоря; 3 — при сниже-
нии напряжения; 4 — при ослаблении
магнитного потока
41
кусственных характеристик, тем плавнее будет происходить регу-
лирование скорости. Наибольшая плавность обеспечивается при
использовании для регулирования координат силовых преобразо-
вателей электроэнергии. Плавность регулирования может быть оце-
нена коэффициентом плавности Кпл, определяемым отношением
скоростей со, и со,_, на двух ближайших характеристиках:
К™ = со,/со,_!. (3.2)
Направление регулирования скорости. В зависимости
от способа воздействия на двигатель и, следовательно, вида полу-
чаемых искусственных характеристик его скорость может увели-
чиваться или уменьшаться по сравнению с работой на естествен-
ной характеристике при данном моменте нагрузки. В первом слу-
чае говорят о регулировании скорости вверх от основной, во вто-
ром случае — о регулировании скорости вниз. Можно сказать, что
регулирование скорости вверх связано с получением искусствен-
ных механических характеристик, располагающихся выше есте-
ственной (характеристика 4 на рис. 3.1), а регулирование скорости
вниз обеспечивается характеристиками, располагающимися ниже
естественной (характеристики 2 и 3 на рис. 3.1).
Допустимая нагрузка двигателя. Электрический дви-
гатель спроектирован таким образом, что, работая на естествен-
ной характеристике с номинальными скоростью, током, момен-
том и мощностью, он не нагревается выше определенной темпе-
ратуры, на которую рассчитана его изоляция. В этом случае срок
его службы будет нормативным и составляет обычно 15 — 20 лет.
Поскольку нагрев двигателя определяется потерями мощности в
нем, пропорциональными квадрату тока, его нормативный (до-
пустимый) нагрев будет иметь место при протекании номиналь-
ного тока.
При регулировании скорости двигатель работает уже на искус-
ственных характеристиках при отличных от паспортных условиях.
Для сохранения нормативного нагрева двигателя и тем самым рас-
четного срока его службы нагрузка двигателя может быть только
такой, при которой в двигателе протекает ток не выше номиналь-
ного. Именно такая нагрузка и называется допустимой. Другими
словами, критерием допустимой нагрузки является номинальный
ток двигателя.
Все способы регулирования скорости подразделяются по это-
му признаку на две группы: одна характеризуется допустимой
нагрузкой, равной номинальному моменту; другая — нагрузкой,
равной номинальной мощности двигателя. При правильном вы-
боре способа регулирования скорости двигатель полностью исполь-
зуется по своим возможностям во всем диапазоне ее изменения.
Важно отметить, что при оценке допустимой нагрузки должны
быть учтены условия охлаждения двигателей. В частности, если
42
при снижении скорости двигателя ухудшаются условия его ох-
лаждения (двигатели с самовентиляцией), то по соображениям
допустимой нагрузки двигатель должен работать с током, меньше
номинального.
Экономичность регулирования скорости. Одни и те
же показатели регулирования скорости — диапазон, стабильность,
плавность — могут быть обеспечены различными ЭП и способами
регулирования их скорости. Для выбора наиболее рационального
вида регулируемого ЭП используются различные технико-эконо-
мические показатели: капитальные затраты на реализацию, эксп-
луатационные расходы, срок окупаемости, надежность, удобство
и простота эксплуатации, серийность и унификация средств уп-
равления и т.д. В результате анализа всех возможных вариантов
выявляется экономически обоснованное решение.
Обычно сопоставление вариантов регулируемого ЭП произво-
дится по капитальным затратам и эксплуатационным расходам с
учетом срока окупаемости. Если капитальные затраты на реализа-
цию ЭП окупаются за счет сокращения расходов при его эксплу-
атации за заданный срок окупаемости, то такое техническое ре-
шение считается экономически обоснованным. Могут использо-
ваться и другие технико-экономические показатели.
Сопоставление и экономическая оценка различных способов
регулирования скорости ЭП правомочны только в том случае,
когда все они обеспечивают в равной степени заданные техноло-
гические процессы рабочей машины.
3.3. Регулирование момента и тока двигателей
При формировании заданного графика движения исполнитель-
ных органов, например кабины пассажирского лифта, возникает
необходимость обеспечения требуемого ускорения и замедления.
В соответствии с выражениями (2.3) и (2.4) это реализуется за
счет регулирования прикладываемого к исполнительным органам
со стороны ЭП момента или усилия.
В некоторых технологических, процессах (прокатка металла,
изготовление проводов и кабелей, бумажное и текстильное про-
изводства) требуется, чтобы на ИО рабочих машин создавалось
необходимое натяжение в обрабатываемом материале или изде-
лии, которое обеспечивается с помощью ЭП за счет регулирова-
ния создаваемого им момента или усилия.
Ограничение момента ЭП требуется также для предотвраще-
ния поломки рабочей машины или механической передачи при
внезапном стопорении (прекращении) движения исполнитель-
ных органов (например, при копании грунта экскаватором, буре-
нии скважин, заклинивании механической передачи и т.д.).
43
Регулирование (ограничение) тока и момента двигателей тре-
буется также и для обеспечения нормальных условий работы са-
мих двигателей. Так, в динамических режимах ток якоря двигате-
лей постоянного тока обычного исполнения по соображениям
нормальной работы их коллекторно-щеточного узла должен быть
ограничен на уровне двух-трех раз от его номинального значения.
Необходимость ограничения тока возникает и в случае пуска мощ-
ных двигателей постоянного и переменного токов, когда большие
пусковые токи двигателей могут привести к недопустимому сни-
жению напряжения питающей сети.
Каким же образом можно изменять момент двигателя? Для этого
необходимо обратиться к формуле, определяющей развиваемый
электрическими двигателями момент М как произведение маг-
нитного потока Ф и тока якоря Г.
М=кФ/, (3.3)
где к — конструктивный коэффициент двигателя.
В соответствии с этой формулой регулирование (ограничение)
момента может быть достигнуто за счет изменения тока / или маг-
нитного потока Ф. На практике регулирование момента чаще все-
го осуществляется за счет регулирования тока. Основным показа-
телем для оценки того или иного способа регулирования (ограни-
чения) момента является точность поддержания заданного уси-
лия или момента.
Регулирование тока двигателя производится его системой уп-
равления (или оператором) за счет изменения подводимого к дви-
гателю напряжения с помощью преобразователей электроэнер-
гии или включением в его цепи добавочных резисторов. Отметим
при этом, что регулирование тока и момента может осуществ-
ляться только в динамическом (переходном) режиме ЭП, посколь-
ку в установившемся режиме ток и момент двигателей определя-
ются их механической нагрузкой.
Для анализа возможности регулирования тока используется
электромеханическая характеристика двигателя, которая представ-
ляет собой зависимость его скорости от тока со(/). Для двигателей
постоянного тока независимого возбуждения его электромехани-
ческая характеристика является зависимостью скорости от тока
якоря и при постоянном (нерегулируемом) магнитном потоке
повторяет механическую. Для асинхронного двигателя электроме-
ханическая характеристика представляет собой зависимость его
скорости от тока статора или ротора, а для синхронного двигате-
ля — зависимость его скорости от тока статора.
На рис. 3.2, а для примера показаны электромеханические и
механические характеристики двигателя постоянного тока неза-
висимого возбуждения, позволяющие регулировать (ограничивать)
ток I и момент М при пуске с помощью добавочного резистора Ra
44
Рис. 3.2. Характеристики двигателя при ограничении тока и момента:
а — с помощью резисторов; б — в системе «преобразователь—двигатель»; 1 — с
резистором в цепи якоря; 2 — без резистора в цепи якоря; 3, 4 — соответственно
вертикальный и горизонтальный участки характеристики в замкнутой Системе
в цепи якоря. Резистор включается в цепь двигателя на период
пуска (характеристика 7), а затем при достижении двигателем
скорости со2 закорачивается (шунтируется) с помощью коммута-
ционных аппаратов, и двигатель переходит на основную характе-
ристику 2. Как видно из рис. 3.2, а, регулирование тока и момента
производится ступенчато в пределах Ц...12 и М1...М2 и характери-
зуется невысокой точностью.
Для повышения точности необходимо использовать несколько
ступеней резисторов и несколько пусковых характеристик, в этом
случае ток I и момент М будут изменяться в меньших пределах.
Данный способ характеризуется простотой реализации, но отли-
чается малой точностью.
Наибольшая точность может быть получена в замкнутой систе-
ме «преобразователь—двигатель» за счет регулирования подводи-
мого к двигателю напряжения. В таком ЭП может быть получена
изображенная на рис. 3.2, б характеристика, наличие участка 3
которой обеспечивает ограничение тока и момента двигателя.
В пределе участок 3 характеристики может быть получен в виде
вертикальной линии, что определит максимально возможную то-
чность регулирования тока и момента.
3.4. Регулирование положения
Обеспечение технологических процессов ряда рабочих машин
требует перемещения их исполнительных органов в заданную точку
пространства и их установку там (фиксирование) с заданной точно-
стью. К таким рабочим машинам и механизмам относятся роботы и
манипуляторы, подъемно-транспортные механизмы, клапаны, зад-
вижки, механизмы подач станков и др. Перемещение и установка
45
Рис. 3.3. Оптимальные графики движения при регулировании положения:
1 — график момента; 2 — график скорости; 3 — график угла поворота вала дви-
гателя
исполнительных органов в заданное положение носит название
позиционирования, а обеспечивающие эти операции ЭП называ-
ются позиционными. Позиционирование обеспечивается соответ-
ствующим регулированием положения вала двигателя и может
осуществляться по двум вариантам.
В случаях невысоких требований к точности позиционирование
осуществляется с помощью путевых или конечных выключателей.
Выключатели устанавливаются в заданных позициях и при подхо-
де к ним исполнительного органа производятся отключение дви-
гателя и остановка исполнительного органа. Такой принцип пози-
ционирования находит применение, например, для обеспечения
точной остановки кабин лифтов массового применения.
При необходимости обеспечения высокой точности позици-
онирования формируется оптимальный (или близкий к нему) гра-
фик угла поворота вала двигателя во времени <р(/). Такой график,
показанный в виде кривой 3 на рис. 3.3, состоит из трех участков:
разгона, движения с установившейся скоростью и торможения.
Для его получения должны быть сформированы соответствующие
графики момента двигателя M(t) (кривая 7) и скорости со(/) (кри-
вая 2). Они позволяют реализовать так называемое оптимальное
по быстродействию позиционирование, при котором обеспечи-
ваются высокая точность и малое время позиционирования.
Рассмотренное позиционирование реализуется в замкнутой
системе «преобразователь—двигатель» с использованием обрат-
ных связей по току, скорости и положению. Отметим, что при
небольших перемещениях участок установившегося движения на
графике может отсутствовать.
46
3.5. Структуры электроприводов
В зависимости от выполняемых функций, вида и числа регули-
руемых переменных и степени автоматизации технологических
процессов реализация ЭП, которая иллюстрируется схемой на рис.
3.4, может быть самой разнообразной.
Все ЭП можно разделить на две группы: неавтоматизирован-
ные и автоматизированные. Неавтоматизированные — это элект-
роприводы, управление которыми выполняет человек (оператор).
Он с помощью простых средств управления осуществляет пуск,
остановку ЭП и изменение скорости в соответствии с заданным
технологическим циклом. Для помощи оператору ЭП снабжен
элементами защиты, блокировок и сигнализации.
В автоматизированном электроприводе большинство операций
управления выполняются системой управления (см. рис. 1.1). На
оператора возлагаются функции по включению и отключению ЭП
и общему контролю над его работой. Функционирование автома-
тизированного ЭП является более эффективным и экономически
целесообразным, так как позволяет освободить человека от уто-
мительного и однообразного труда, повысить производительность
рабочих машин и механизмов и качество выполняемых ими тех-
нологических процессов и операций.
Автоматизированные ЭП подразделяются, в свою очередь, еще
на две группы: разомкнутые и замкнутые. Работа разомкнуто-
го электропривода характеризуется тем, что все внешние возму-
щения (для ЭП самым характерным из них является момент на-
грузки Л/с) влияют на выходную переменную ЭП, например на
его скорость. Другими словами, разомкнутый ЭП не отстранен от
влияния внешних возмущений, все изменения которых отража-
ются на его работе. В разомкнутом ЭП по этой причине невозмож-
но обеспечить высокое качество регулирования переменных, хотя
он отличается простой схемой.
Рис. 3.4. Классификация электроприводов по степени их автоматизации
47
Разомкнутые ЭП обычно применяются для обеспечения пу-
ска, торможения или реверса двигателей и регулирования пере-
менных с невысоким качеством. Для автоматизации работы таких
ЭП используется информация о текущих значениях скорости,
времени, тока (момента) или пути.
Основным отличительным признаком замкнутого элект-
ропривода является полное или частичное устранение влияния
внешнего возмущения на регулируемую переменную ЭП. Напри-
мер, скорость такого ЭП может оставаться практически неизмен-
ной при возможных колебаниях момента нагрузки. В силу этого
обстоятельства замкнутый ЭП обеспечивает более качественное
управление движением исполнительных органов, хотя его схемы
оказываются более сложными.
Замкнутый ЭП может быть построен по принципам отклоне-
ния с использованием обратных связей или компенсации внеш-
него возмущения.
Принцип компенсации рассмотрим на примере компен-
сации наиболее характерного внешнего возмущения ЭП — мо-
мента нагрузки Мс при регулировании его скорости со (рис. 3.5, а).
Основным признаком такой замкнутой структуры ЭП является
наличие цепи, по которой на вход ЭП вместе с задающим сигна-
лом скорости f/3c подается сигнал UM = кмМс, пропорциональный
моменту нагрузки Мс. В результате этого управление ЭП осуществ-
ляется суммарным сигналом ошибки (7Д, который автоматически
изменяется в нужную сторону при колебаниях момента нагрузки,
обеспечивая с помощью системы управления поддержание ско-
рости ЭП на заданном уровне.
Несмотря на свою эффективность ЭП по схеме рис. 3.5, а вы-
полняются редко из-за отсутствия простых и надежных датчиков
момента нагрузки Мс (возмущающего воздействия).
В связи с этим подавляющее большинство замкнутых структур
ЭП используют принцип отклонения (принцип обратной
связи). Он характеризуется наличием цепи обратной связи, со-
единяющей выход ЭП с его входом, откуда и пошло название
замкнутых схем.
ИЭ
а
Рис. 3.5. Структуры замкнутых электроприводов:
а — с компенсацией возмущения; б — с обратной связью
48
Применительно к рассматриваемому примеру регулирования
скорости признаком этой замкнутой структуры является цепь об-
ратной связи (рис. 3.5, б), по которой информация о текущем
значении скорости (сигнал обратной связи) Uoc = кост подается
на вход ЭП, где он вычитается из сигнала задания скорости U3C.
Управление осуществляется сигналом отклонения = U3C - Uoc
(его также называют сигналом рассогласования или ошибки). Этот
сигнал при отличии скорости от заданного уровня автоматически
изменяется необходимым образом и устраняет (частично или пол-
ностью) с помощью системы управления эти отклонения.
Если требуется регулирование других переменных ЭП или ра-
бочей машины, то используются обратные связи по этим пере-
менным. При необходимости получения очень высокого качества
движения исполнительных органов используется сочетание
принципов компенсации и обратной связи, однако число та-
ких ЭП из-за их сложности весьма невелико.
Все виды применяемых в замкнутых ЭП обратных связей под-
разделяются на положительные и отрицательные, жесткие и гиб-
кие, линейные и нелинейные.
Положительной называется такая обратная связь, сигнал кото-
рой направлен согласно (складывается) с задающим сигналом, в
то время как сигнал отрицательной связи направлен ему встречно
(знак «минус» на рис. 3.5, б).
Жесткая обратная связь характеризуется тем, что она действу-
ет как в установившемся, так и в переходном режимах ЭП. Сиг-
нал гибкой обратной связи вырабатывается только в переходных
режимах ЭП и служит для обеспечения требуемого их качества,
например устойчивости движения, допустимого перерегулирова-
ния и т.д.
Линейная обратная связь характеризуется пропорциональной
зависимостью между регулируемой координатой и сигналом об-
ратной связи, в то время как при реализации нелинейной связи эта
зависимость не является пропорциональной.
В зависимости от вида регулируемых координат в ЭП использу-
ются все названные ранее связи по скорости, положению, току,
напряжению, магнитному потоку, ЭДС.
Для управления движением исполнительных органов рабочих
машин иногда требуется регулировать несколько переменных ЭП,
например ток, момент и скорость. В этом случае замкнутые ЭП
выполняются по одной из следующих структурных схем.
Схема с общим усилителем. На рис. 3.6 в качестве примера при-
ведена схема регулирования двух переменных двигателя Д: скоро-
сти со и тока I. Схема содержит силовой преобразователь электро-
энергии П, устройство управления У У, механическую передачу
МП и датчики тока ДТ, скорости ДС и устройство токоограниче-
ния (токовой отсечки) УТО.
49
Рис. 3.6. Схема электропривода с общим усилителем
Схема обеспечивает характеристику двигателя, показанную на
рис. 3.2, б. На интервале скорости 0 —со, за счет действия обратной
связи по току (сигнал С/Ост) обеспечивается ограничение тока и
момента двигателя и характеристика имеет близкий к вертикаль-
ному участок 3. При скорости со > со, узел УТО прекращает дей-
ствие связи по току и за счет наличия обратной связи по скорости
(ОСС) (сигнал СЬсс) характеристика двигателя становится жест-
кой (участок 4), что обеспечивает регулирование скорости. Под-
робнее эта схема рассмотрена в гл. 4.
Совокупность обратных связей, число которых может быть
больше двух, в схеме с общим усилителем образует так называ-
емый модальный регулятор, а переменные при этом носят на-
звание переменных состояния ЭП. Основной задачей модального
регулятора является обеспечение заданного качества динамиче-
ских процессов в ЭП — быстродействия, устойчивости и степе-
ни затухания переходных процессов. Это достигается выбором
видов и соответствующим расчетом коэффициентов обратных свя-
зей по переменным ЭП. Отметим, что система с суммирующим
усилителем относится к системам управления с параллельной кор-
рекцией.
В сложных ЭП, имеющих, в частности, разветвленные кине-
матические цепи с упругими элементами, число регулируемых
переменных может оказаться весьма значительным. При этом из-
мерение некоторых из них может быть по тем или иным причи-
нам затруднено. В таких случаях прибегают к использованию так
называемых наблюдающих устройств (наблюдателей).
Основу наблюдателя образует совокупность моделей звеньев ЭП,
выполненных на базе операционных усилителей или средств
микропроцессорной техники. Выходные сигналы (напряжения)
этих моделей, параметры которых соответствуют реальным звень-
ям ЭП, отражают приближенные значения переменных (дают
оценку реальных значений переменных).
Управление с использованием наблюдателя на примере регу-
лирования угла поворота вала двигателя <р поясняет схема на рис.
3.7, на которой приняты следующие обозначения: Д — двигатель,
П — преобразователь, УУ — управляющее устройство, МП —
механическая передача, НУ — наблюдающее устройство.
50
Рис. 3.7. Схема электропривода с наблюдающим устройством
ЭП предназначен для регулирования положения исполнитель-
ного органа <рио. Это достигается соответствующим регулировани-
ем угла поворота <р вала двигателя, при котором требуется также
регулирование и других переменных — тока /, момента М и ско-
рости со двигателя.
Для реализации рассматриваемого принципа регулирования
сигнал задания угла поворота <р3 подается на устройство управле-
ния УУ и одновременно на вход наблюдающего устройства НУ.
Наблюдающее устройство НУ вырабатывает с помощью моделей
звеньев ЭП сигналы, пропорциональные току, моменту и скоро-
сти, и направляет их устройству управления УУ.
Поскольку модели звеньев не могут учесть всех реальных воз-
мущений, действующих на ЭП и рабочую машину, и нестабиль-
ности параметров ЭП, НУ выдает в управляющее устройство не
точные значения переменных, а их оценки, что обозначено на
схеме звездочкой «*».
Для повышения точности получаемых оценок переменных со-
стояния может использоваться корректирующая обратная связь
по регулируемой переменной, показанная на схеме рис. 3.7 штри-
ховой линией. В этом случае значение выходной регулируемой пе-
ременной <р сравнивают с помощью обратной связи с ее оценкой
Ф* и затем в функции выявленного отклонения (ошибки) Дф кор-
ректируют показания отдельных моделей.
Схема с подчиненным регулированием координат. Эта схема (рис.
3.8) отличается тем, что в ней регулирование каждой координаты
осуществляется своими регуляторами тока РТ и скорости PC,
которые вместе с соответствующими обратными связями обра-
зуют замкнутые контуры. Они располагаются таким образом, что
входным, задающим сигналом для внутреннего контура тока U3T
является выходной сигнал внешнего по отношению к нему кон-
тура скорости. Тем самым внутренний контур тока подчинен
внешнему контуру скорости — основной регулируемой коорди-
нате ЭП.
Основное достоинство схемы рис. 3.8 заключается в возможно-
сти оптимальной настройки регулирования каждой переменной
как в статике, так и в динамике, в силу чего она находит в насто-
51
Рис. 3.8. Схема электропривода с подчиненным регулированием координат
ящее время основное применение в ЭП. Кроме того, подчинение
контура тока контуру скорости позволяет простыми средствами
осуществлять ограничение тока и момента, для чего необходимо
ограничить на соответствующем уровне сигнал на выходе регуля-
тора скорости (сигнал задания тока). Более подробно такая схема
рассмотрена в гл. 4.
3.6. Электроприводы в системах автоматизации
технологических процессов
Система автоматического регулирования. Для обеспечения тре-
буемых хода и качества технологических процессов управление
ЭП может осуществляться по заданиям, определяющим регули-
рование переменных технологических процессов, например тем-
пературы, натяжения, усилия резания, давления, расхода и т.д.
Для этого на вход ЭП подаются сигналы задания уровня техно-
логической переменной и датчиков ее текущего значения, в ре-
зультате чего ЭП вместе с рабочей машиной образуют систему
автоматического регулирования переменной технологического
процесса.
В этой системе (рис. 3.9) ЭП является силовым регулирующим
устройством, выходная координата которого %BMX (например, ско-
рость) является управляющим воздействием для рабочей маши-
ны РМ и обеспечивает заданный ход технологического процесса
при изменениях как его сигнала задания Х3 т, так и возмущающего
воздействия %возм2. Сигналом задания Х3 для ЭП в этом случае яв-
ляется сигнал отклонения (рассогласования) между сигналами
задания %зт технологического параметра и технологической об-
ратной связи (ТОС) %тос.
^возм 1
^возмЗ
Рис. 3.9. Схема регулирования перемен-
ной технологического процесса
52
Многие технологические процессы предусматривают объеди-
нение в единый комплекс нескольких рабочих машин и механиз-
мов, взаимодействующих между собой должным образом. Наи-
лучший результат работы такого единого технологического комп-
лекса достигается только при его автоматизации, где ЭП играет
важную роль. За счет соответствующего управления ЭП обеспечи-
вается требуемая последовательность всех технологических опера-
ций, достигаются наилучшие (оптимальные) режимы работы про-
мышленного оборудования и самого ЭП, осуществляются необ-
ходимые блокировки и защиты.
Степень автоматизации технологических процессов может быть
различной. На ранних этапах промышленного производства авто-
матизировалась работа отдельных рабочих машин и производствен-
ных механизмов, а функции принятия и реализации управлен-
ческих решений выполнял человек (оператор). По мере развития,
усложнения и интенсификации производства, а также появления
компьютерной техники стали создаваться системы управления,
выполняющие наилучшим образом весь комплекс задач управле-
ния технологическими объектами. В настоящее время с ними ста-
ли объединяться и системы автоматизированного проектирова-
ния (САПР) технологического и вспомогательного оборудования,
что позволяет оптимизировать по многим показателям как сами
технологические объекты, так и выполняемые ими технологиче-
ские процессы.
Промышленное производство может иметь несколько уровней
автоматизированной системы управления. Первый уровень, кото-
рый иногда называют локальным, составляют системы управле-
ния электроприводов отдельных рабочих машин. На этом уровне
для обеспечения заданного качества технологического процесса и
его автоматизации кроме обратных связей самого электропривода
могут использоваться обратные связи и по регулируемому техно-
логическому параметру.
Технологические процессы. Многие технологические процессы
реализуются с использованием нескольких взаимосвязанных ра-
бочих машин, например прокатка металла в прокатных станах,
изготовление деталей в машиностроении на поточных линиях,
производство бумаги и т.д. Рассмотрим это на примере стана го-
рячей прокатки, схема которого показана на рис. 3.10.
Технологический процесс прокатки металла состоит в следу-
ющем. Перед прокаткой металла с помощью специальных нажим-
ных устройств устанавливают необходимые растворы валков всех
клетей стана и окалиноломателей. Прокатка металла начинается с
разогрева слитков в нагревательных печах 1. Затем разогретые слитки
поступают на транспортирующий рольганг 2 и доставляются к
окалиноломателям 3 и 4, с помощью которых удаляется окалина
с их поверхности. Далее слиток поступает в клети черновой груп-
53
10
Рис. 3.10. Схема автоматизации стана горячей прокатки:
1 — нагревательные печи металла; 2 — рольганг; 3, 4 — вертикальный и гори-
зонтальный окалиноломатели; 5, 7 — черновые и чистовые рабочие клети; б —
летучие ножницы; 8 — датчики; 9 — моталки; 10 — электроприводы
пы 5 стана (их может быть 5 — 6), где производится предваритель-
ное обжатие слитка до толщины 20...25 мм.
После черновой клети металл поступает в чистовые клети 7,
состоящие из 7...9 клетей, в которых металл обжимается до задан-
ной толщины. С помощью моталок 9 металл сматывается в рулоны
и направляется на дальнейшую обработку. Агрегаты прокатного
стана — клети, рольганги, моталки, летучие ножницы, нажим-
ные устройства — приводятся в движение электроприводами 10.
Управление такими сложными технологическими комплекса-
ми должно быть в максимальной степени автоматизировано, что
и реализуется на практике с помощью автоматизированных си-
стем управления технологическими процессами — АСУ ТП. В об-
щем случае АСУ ТП называется человекомашинная система, обес-
печивающая автоматизированный сбор и обработку информации
в целях выработки и реализацйи управляющих воздействий на тех-
нологический объект управления в соответствии с принятым кри-
терием управления.
Применительнб к рассматриваемому примеру АСУ ТП предус-
матривает использование управляющей вычислительной машины
УВМ. Для своего функционирования УВМ должна иметь необхо-
димую информационную базу. Она складывается из исходных дан-
ных ИД, представляющих собой расчетную (оптимальную) мате-
матическую модель прокатки, и текущей информации по процес-
су прокатки ИПП, получаемой от установленных на технологи-
ческом оборудовании датчиков 8. Сопоставляя заданные показа-
тели процесса прокатки с реальными, УВМ вырабатывает зада-
ющие сигналы (уставки) электроприводов отдельных рабочих ма-
шин и механизмов и при необходимости их корректирует. Таким
образом, УВМ выполняет следующие функции;
54
• получение, переработка, хранение и поиск информации;
• формирование и выдача задания (уставок) электроприводам
технологического комплекса на основе математической модели
прокатки;
• коррекция математической модели при изменении парамет-
ров технологического процесса и соответственно выдаваемых за-
даний (уставок), что обеспечивает оптимизацию технологическо-
го процесса (адаптация или самонастройка системы);
• выдача полной информации по процессу прокатки.
Для получения объективной информации УВМ может осуще-
ствлять статистическую обработку сигналов технологических дат-
чиков.
Промышленное производство часто реализуется не одним, а
несколькими взаимосвязанными технологическими процессами.
Применительно к рассматриваемому примеру производства ме-
таллического листа исходным изделием является слиток металла,
который может быть получен, например, на установке непрерыв-
ной разливки стали. После получения листа он может быть на-
правлен на дальнейшую обработку, например покрытие защит-
ным слоем цинка. Совокупность технологических процессов и об-
разует промышленное производство, управление которым целе-
сообразно осуществлять с помощью автоматизированных систем
управления производством или предприятием АСУ П.
АСУ П должна в общем случае содержать подсистемы: АСУ
ТП; автоматизированной технологической подготовки производ-
ства; планирования; диспетчеризации; транспортно-накопитель-
ную; контроля качества; контроля исполнения; сбора, хранения,
обработки и выдачи информации.
Следующие, более высокие уровни управления обеспечивают
АСУ производственными объединениями, в которые могут вхо-
дить несколько предприятий, АСУ отрасли и АСУ общегосудар-
ственные.
3.7. Электрические и электромеханические
устройства силовой части электропривода
Силовую часть ЭП образуют устройства, по которым проходит
основной поток электрической и механической энергии. К ним
относятся электродвигатели, коммутационные электрические аппа-
раты и преобразователи электрической и механической энергии.
Электродвигатели. Электродвигатели являются неотъемлемой
частью любого ЭП и могут классифицироваться по нескольким
признакам.
По виду питающего напряжения различают двига-
тели постоянного и переменного тока. Двигатели постоянного тока
55
по способу возбуждения (способу создания магнитного потока)
делятся на двигатели с обмоткой возбуждения и двигатели с воз-
буждением от постоянных магнитов. Двигатели с обмотками воз-
буждения подразделяются на двигатели с параллельной, незави-
симой и последовательной обмоткой, а также на двигатели со
смешанным возбуждением, имеющие две обмотки: независимую
и последовательную.
Двигатели переменного тока, к числу которых относятся асин-
хронные и синхронные двигатели, могут быть однофазными и
трехфазными.
По исполнению ротора асинхронные двигатели под-
разделяются на двигатели с короткозамкнутым ротором, об-
мотка которых выполняется в виде так называемой беличьей
клетки, и двигатели с фазным ротором, которые имеют про-
водниковую обмотку с зажимами, выведенными на контакт-
ные кольца.
Ротор синхронных двигателей может иметь обмотку возбужде-
ния или быть выполненным в виде постоянных магнитов. В ЭП
используются также синхронные двигатели с так называемым
пассивным ротором, представляющим собой зубчатый цилиндр.
По уровню питающего напряжения двигатели
подразделяются на низковольтные с номинальным напряжением
до 1 кВ и высоковольтные с напряжением более 1 кВ.
По характеру движения якоря или ротора различают
двигатели вращательного, поступательного (линейного) и возврат-
но-поступательного движения непрерывного или дискретного (ша-
гового) характера.
Коммутационные электрические аппараты. К коммутационным
аппаратам низкого напряжения относятся контакторы, рубиль-
ники, пакетные и автоматические выключатели, магнитные пу-
скатели, а к аппаратам высокого напряжения — выключатели и
разъединители.
Контактор представляет собой электромагнитный аппарат
с дистанционным управлением, предназначенный для частных
коммутаций силовых цепей. Контакторы различаются:
по роду тока коммутируемой цепи (постоянного тока, пере-
менного тока, постоянного и переменного токов);
количеству главных контактов (одно-, двух- и многополюсные);
роду тока цепи катушки (с управлением напряжением посто-
янного и переменного токов);
номинальным току и напряжению коммутируемых цепей;
конструктивному исполнению (с механическими контактами
и полупроводниковые бесконтактные) и другим признакам.
Рубильники представляют собой простые коммутационные
аппараты, предназначенные для неавтоматического нечастого за-
мыкания и размыкания силовых электрических цепей постоянно-
56
го и переменного токов. Они различаются по величине коммути-
руемого тока, количеству полюсов (коммутируемых цепей), виду
привода рукоятки и числу ее положений (два или три).
Пакетные выключатели представляют собой разновид-
ность рубильников, отличающиеся тем, что их контактная систе-
ма набирается из отдельных пакетов по числу полюсов (коммути-
руемых цепей). Пакет состоит из изолятора, в пазах которого на-
ходятся неподвижный контакт с винтовыми зажимами для под-
ключения проводов и пружинный подвижный контакт с устрой-
ством искрогашения.
Автоматические выключатели (автоматы) низкого
напряжения представляют собой многоцелевой электрический ап-
парат и служат для нечастой коммутации электрических цепей и
защиты электрических цепей и оборудования от аварийных режи-
мов: токов короткого замыкания и перегрузки, снижения или ис-
чезновения напряжения и изменения направления тока. Для осу-
ществления функций защиты автоматические выключатели снаб-
жаются расцепителями, которые при возникновении аварийных
режимов приводят к их отключению.
Автоматические выключатели различаются между собой назна-
чением, уровнями номинальных токов и напряжения, набором и
исполнением применяемых защит, отключающей способностью
и временем отключения. В некоторых типах автоматов предусмот-
рено их дистанционное отключение.
Магнитный пускатель представляет собой специализи-
рованный аппарат, предназначенный для пуска, останова и ре-
верса электрических двигателей, главным образом асинхронных с
короткозамкнутым ротором. Кроме управления магнитные пуска-
тели обеспечивают с помощью тепловых реле защиту двигателей
от токовых перегрузок и сигнализацию об их работе. В соответ-
ствии с перечисленными функциями в состав пускателя могут
входить контактор, кнопки управления, тепловые реле защиты,
сигнальные лампы, размещаемые в одном корпусе.
Выпускаемые магнитные пускатели различаются между собой
по назначению (нереверсивные и реверсивные), наличию или
отсутствию тепловых реле и кнопок управления, степени защиты
от воздействия окружающей среды, уровням коммутируемых то-
ков, рабочему напряжению главной цепи.
Разновидностью пускателей являются так называемые полу-
проводниковые «мягкие» пускатели («мягкие» стартеры), позво-
ляющие за счет снижения подводимого к двигателю напряжения
уменьшать его токи при пуске. Эти устройства применяются глав-
ным образом для пуска асинхронных и синхронных двигателей
средней и большой мощности.
Контроллеры являются многопозиционными электриче-
скими аппаратами с ручным или ножным приводом для непос-
57
редственной коммутации силовых цепей электрических двигате-
лей. Силовые контроллеры бывают двух видов: кулачковые и маг-
нитные.
Кулачковые контроллеры характеризуются тем, что размыка-
ние и замыкание их контактов обеспечивается смонтированными
на барабане кулачками, поворот которых осуществляется с помо-
щью рукоятки, маховика или педали. За счет профилирования
кулачков обеспечивается необходимая последовательность комму-
тации контактных элементов.
Магнитные контроллеры представляют собой коммутационное
устройство, в состав которого входят маломощный командоконт-
роллер и контакторы. Командоконтроллер с помощью своих кон-
тактов управляет катушками контакторов, которые непосредствен-
но осуществляют коммутацию силовых цепей двигателей.
Преобразователи электрической энергии. Преобразователь — это
электротехническое устройство, преобразующее электроэнергию
одних параметров или показателей качества в электроэнергию с
другими значениями параметров или показателей качества. Пара-
метрами электрической энергии могут являться род тока и напря-
жения, их частота, число фаз, фаза напряжения.
По степени управляемости преобразователи подраз-
деляются на неуправляемые и управляемые. В управляемых пре-
образователях выходные переменные — напряжение, ток, час-
тота — могут регулироваться.
По элементной базе преобразователи электроэнергии
подразделяются на электромашинные (вращающиеся) и полупро-
водниковые (статические). Электромашинные преобразователи ре-
ализуются на основе применения электрических машин и в насто-
ящее время находят относительно редкое применение в электро-
приводах. Полупроводниковые преобразователи могут быть диод-
ными, тиристорными и транзисторными.
По характеру преобразования электроэнергии
силовые преобразователи подразделяются на выпрямители, ин-
верторы, преобразователи частоты, регуляторы напряжения пе-
ременного и постоянного тока, преобразователи числа фаз на-
пряжения переменного тока.
В современных автоматизированных электроприводах применя-
ются главным образом полупроводниковые — тиристорные и тран-
зисторные — преобразователи постоянного и переменного тока.
Достоинствами полупроводниковых преобразователей являются
широкие функциональные возможности управления процессом
преобразования электроэнергии, высокие быстродействие и КПД,
большие сроки службы, удобство и простота обслуживания при
эксплуатации, широкие возможности по реализации защит, сиг-
нализации, диагностирования и тестирования как самого ЭП, так
и технологического оборудования.
58
Вместе с тем для полупроводниковых преобразователей харак-
терны и определенные недостатки. К ним относятся высокая чув-
ствительность полупроводниковых приборов к перегрузкам по току
и напряжению и скорости их изменения, низкая помехозащи-
щенность, искажение синусоидальной формы тока и напряжения
сети.
Выпрямителем называется преобразователь напряжения пере-
менного тока в напряжение постоянного (выпрямленного) тока.
Неуправляемые выпрямители не обеспечивают регулирование
напряжения на нагрузке и выполняются на полупроводниковых
неуправляемых приборах односторонней проводимости — диодах.
Управляемые выпрямители выполняются на управляемых дио-
дах — тиристорах — и позволяют регулировать свое выходное на-
пряжение за счет соответствующего управления тиристорами.
Выпрямители могут быть нереверсивными и реверсивными. Ре-
версивные выпрямители позволяют изменять полярность выпрям-
ленного напряжения на своей нагрузке, а нереверсивные — нет.
По числу фаз питающего входного напряжения переменного тока
выпрямители подразделяются на однофазные и трехфазные, а по
схеме силовой части — на мостовые и с нулевым выводом.
Инвертором называется преобразователь напряжения постоян-
ного тока в напряжение переменного тока. Эти преобразователи
используются в составе преобразователей частоты в случае пита-
ния ЭП от сети переменного тока или в виде самостоятельного
преобразователя при питании ЭП от источника постоянного на-
пряжения.
В схемах ЭП наибольшее применение нашли автономные ин-
верторы напряжения и тока, реализуемые на тиристорах или тран-
зисторах.
Автономные инверторы напряжения (АИН) имеют жесткую
внешнюю характеристику, представляющую собой зависимость
выходного напряжения от тока нагрузки, вследствие чего при
изменении тока нагрузки их выходное напряжение практически
не изменяется. Тем самым инвертор напряжения по отношению к
нагрузке ведет себя как источник ЭДС.
Автономные инверторы тока (АИТ) имеют «мягкую» внешнюю
характеристику и обладают свойствами источника тока. Тем са-
мым инвертор тока по отношению к нагрузке ведет себя как ис-
точник тока.
Преобразователем частоты (ПЧ) называется преобразователь
напряжения переменного тока стандартных частоты и напряже-
ния в напряжение переменного тока регулируемой частоты.
Полупроводниковые ПЧ подразделяются на две группы: пре-
образователи частоты с непосредственной связью и преобразова-
тели частоты с промежуточным звеном постоянного тока. Преоб-
разователи частоты с непосредственной связью позволяют изме-
59
нить частоту напряжения на нагрузке только в сторону ее умень-
шения по сравнению с частотой напряжения источника питания.
Преобразователи частоты с промежуточным звеном постоянного
тока не имеют подобного ограничения и находят более широкое
применение в ЭП.
Регулятором напряжения переменного тока называется преоб-
разователь напряжения переменного тока стандартных частоты и
напряжения в регулируемое напряжение переменного тока той
же частоты. Они могут быть одно- и трехфазными и используют в
своей силовой части, как правило, однооперационные тиристоры.
Регулятором напряжения постоянного тока называется преоб-
разователь нерегулируемого напряжения источника постоянного
тока в регулируемое напряжение на нагрузке. В таких преобразова-
телях используются силовые полупроводниковые управляемые
ключи, работающие в импульсном режиме, а регулирование на-
пряжения в них происходит за счет модуляции напряжения ис-
точника питания.
Наибольшее распространение получил широтно-импульсный
способ модуляции, при котором изменяется длительность импуль-
сов напряжения при неизменной частоте их следования.
3.8. Управляющие элементы и устройства
электропривода
Техническая реализация управляющих устройств современно-
го ЭП весьма разнообразна. Они различаются по своей элемент-
ной базе, роду тока, мощности, конструктивному исполнению и
ряду других признаков.
Контактные устройства и элементы управления. Они характери-
зуются наличием механических контактов, и к ним относятся кноп-
ки и ключи управления, командоконтроллеры и реле.
Кнопки управления предназначены для подачи опера-
тором управляющего воздействия на ЭП, например для его вклю-
чения и выключения. Они различаются по величине (нормальные
и малогабаритные), числу замыкающих и размыкающих контак-
тов, форме толкателя. Две и более кнопки, смонтированные в од-
ном корпусе, образуют кнопочную станцию.
Ключи управления (универсальные переключатели)
предназначены для подачи управляющего воздействия на ЭП и
имеют два или более фиксированных положений рукоятки и не-
сколько замыкающих и размыкающих контактов. Количество кон-
тактов ключей и диаграмма их работы могут быть самыми разли-
чными.
Коман доко нтро л л л ер ы (командоаппараты) предназна-
чены для коммутации нескольких маломощных электрических це-
60
пей. Эти аппараты имеют ручное управление от рукоятки или пе-
дали с несколькими положениями. Командоаппараты классифи-
цируются по числу коммутируемых цепей, виду привода контак-
тной системы, числу рабочих положений рукоятки (педали), ди-
аграммы включения и выключения контактов.
Электромагнитное реле представляет собой аппарат,
предназначенный для коммутации слаботочных цепей управле-
ния ЭП в соответствии с электрическим сигналом, подаваемым
на его катушку. Область применения реле очень широкая. Они ис-
пользуются в качестве датчиков тока и напряжения, промежуто-
чных элементов для передачи команд из одной цепи в другую и
размножения сигналов, датчиков времени, выходных элементов
различных датчиков координат ЭП и технологических параметров
рабочих машин и механизмов. Они выполняют самые разнообраз-
ные функции управления, контроля, защиты и блокировок в ав-
томатизированном ЭП.
Особенность герконовых электромагнитных реле состоит в том,
что их контакты герметизированы. Это повышает их износостой-
кость и надежность в работе.
Аналоговые устройства и элементы. Они характеризуются на-
личием функциональной (линейной или нелинейной) зависи-
мости между входным и выходным сигналами, при этом вы-
ходной сигнал может принимать любые значения. Аналоговые
элементы и устройства оперируют с непрерывными (аналого-
выми) электрическими сигналами и выполняются, как прави-
ло, с использованием полупроводниковых (бесконтактных)
приборов.
Основным видом аналоговых устройств управления является
операционный усилитель, на базе которого создаются различные
регуляторы и функциональные преобразователи электрических
сигналов.
Операционный усилитель (ОУ) представляет собой
усилитель постоянного тока с большим коэффициентом усиле-
ния (до тысячи и более), охваченным отрицательной обратной
связью и выполненным на полупроводниковых элементах. Схема
ОУ приведена на рис. 3.11, где через zBX\, , zBXI обозначены в
общем случае комплексные активно-емкостные входные сопро-
тивления ОУ, а ^ос — комплексное сопротивление цепи обратной
связи.
Рис. 3.11. Схема операционного усилителя
*ос
61
ОУ, включенный по схеме рис. 3.11, осуществляет преобразо-
вание входных сигналов Umi в выходной сигнал UBbK в соответ-
ствии с выражением
т
ивых = -Zoc2(UBXi/zBXi), (3.4)
1
где т — число входных сигналов.
Когда на вход и в цепь обратной связи включены активные
резисторы, операционный усилитель осуществляет так называ-
емое масштабное преобразование входного сигнала с инвертиро-
ванием его знака.
При включении во входные цепи и цепи обратных связей на-
ряду с активными резисторами конденсаторов операционные
усилители позволяют осуществлять и другие преобразования вход-
ных сигналов, в частности реализовывать схемы регуляторов пе-
ременных ЭП (пропорциональных, пропорционально-интеграль-
ных и т.д.). Операционные усилители используются также в схе-
мах компараторов, формирователей импульсов, генераторов элек-
трических сигналов, ограничителей, усилителей и т.д.
Дискретные элементы и устройства. Тенденцией развития си-
стем управления и автоматизации ЭП является широкое приме-
нение в них дискретных элементов и создаваемых на их базе циф-
ровых устройств. Такие схемы характеризуются высокими точно-
стью, быстродействием и надежностью в работе, малым энерго-
потреблением и хорошей помехоустойчивостью. Они естествен-
ным образом сочетаются с ЭВМ, составляя с ними единую авто-
матизированную систему управления технологическим процессом,
предприятием или отраслью.
Во многих случаях целесообразным оказывается создание сме-
шанных цифроаналоговых схем, сочетающих в себе наилучшие
свойства аналоговых и дискретных элементов и устройств.
Дискретные элементы и устройства могут иметь только два уров-
ня выходного сигнала: нулевой и максимальный, который появ-
ляется иди исчезает при достижении входным сигналом опреде-
ленного значения.
Логическими элементами (ЛЭ) называются дискрет-
ные элементы, напряжения на входе и выходе которых могут
принимать или высокое (логическая единица), или низкое (ло-
гический нуль) значения. Они могут выполняться на электро-
магнитных реле, магнитных элементах и в виде интегральных
схем, являющихся современным их исполнением. К базовым от-
носятся логический элемент НЕ, выполняющий операцию от-
рицания (инвертирования), логический элемент ИЛИ, сигнал
на выходе которого появляется при наличии хотя бы одного вход-
ного сигнала, и логический элемент И, сигнал на выходе кото-
62
рого появляется только в том случае, когда все входные сигналы
равны единице.
Кроме этого логические элементы могут выполнять комбини-
рованные логические функции, запоминание определенного уров-
ня входного сигнала (операция «Память»), блокировку (операция
«ЗАПРЕТ»), выдержку времени на включение и отключение и
другие операции.
Триггер является одним из наиболее распространенных эле-
ментов цифровых устройств управления. Он обладает двумя ус-
тойчивыми состояниями и способен скачком переходить из одно-
го состояния в другое под воздействием внешнего управляющего
сигнала. С использованием триггеров строятся различные логиче-
ские и вычислительные узлы, а также генерирующие устройства
и устройства памяти. По способу записи информации различают
ЛУ-триггер, JX-триггер, 75-триггер, Т-триггер.
Вычислительные устройства предназначены для вы-
полнения различных арифметических операций. К вычислитель-
ным устройствам относятся счетчики, предназначенные для под-
счета числа входных сигналов (импульсов), сумматоры, выполня-
ющие операцию сложения двух чисел, и компараторы, использу-
емые для сравнения двух чисел.
Логические цифровые узлы осуществляют различные
логические операции над дискретными электрическими сигнала-
ми. К ним относятся распределители импульсов, шифраторы, де-
шифраторы и мультиплексоры.
Устройства памяти предназначены для запоминания,
хранения и выдачи информации. К ним относятся регистры, мат-
рицы-накопители и запоминающие устройства (ЗУ): оперативные
запоминающие устройства (ОЗУ) и постоянные запоминающие
устройства (ПЗУ).
Ц ифро а н а л о го в ы е (ЦАП) и аналого-цифровые
(АЦП) преобразователи применяются для взаимного пре-
образования цифровых и аналоговых сигналов. Они могут выпол-
няться в виде преобразователя код —напряжение (ПКН), преоб-
разующего двоичный или двоично-десятичный код в напряжение
постоянного тока, преобразователей частота—напряжение (ПЧН)
и напряжение —частота (ПНЧ), осуществляющих преобразование
частоты следования импульсов в напряжение постоянного тока и
обратное преобразование.
Микропроцессорные средства управления. Микропроцессор — это
программно-управляемое цифровое устройство, предназначенное
для обработки информации и управления этим процессом.
Микропроцессор выполняется на основе одной или несколь-
ких больших интегральных схем (БИС), которые состоят из не-
скольких десятков тысяч простых элементов и могут иметь 24, 40,
48 и 64 вывода.
63
Рис. 3.12. Схема микропроцессорной системы
В состав микропроцессора входят арифметико-логическое
устройство, предназначенное для выполнения арифметических и
логических операций над данными в виде двоичных чисел, уст-
ройство для управления блоками микропроцессора и запомина-
ющее устройство. Эти три основные части микропроцессора со-
единены тремя информационными линиями связи: шинами дан-
ных, адресов и управления.
Для выполнения функции управления объектами создается
микропроцессорная система (МПС), структура которой приведе-
на на рис. 3.12.
В состав МПС наряду с микропроцессором (МП) входят уст-
ройства памяти оперативной ОЗУ и постоянной ПЗУ, интер-
фейсное устройство ИУ, устройства сопряжения УС1 ...УС5 с вне-
шним объектом управления ОУ, внешние запоминающие уст-
ройства ВЗУ, устройства ввода-вывода информации УВВ, об-
щая шина ОШ, включающая в себя шины данных, адресов и
управления.
ОЗУ и ПЗУ служат для размещения подлежащих обработке дан-
ных программы, в соответствии с которой эта обработка должна
вестись, и результатов обработки. Для расширения возможностей
МПС кроме ОЗУ и ПЗУ могут использоваться внешние запоми-
нающие устройства (накопители информации на гибких или же-
стких дисках, магнитной ленте и кассетные накопители).
Устройства ввода-вывода информации УВВ предназначены для
обеспечения взаимодействия МПС и человека в удобной для него
форме. К устройствам ввода-вывода относятся клавиатура пульта
управления МПС, печатающее устройство (принтер), графопост-
роители, устройства визуального представления информации (дис-
плеи) и т.д.
64
Устройства сопряжения УС обеспечивают связь МПС с различ-
ными внешними (периферийными) устройствами. Они могут иметь
самые разнообразные схемные и элементные реализации. В част-
ности, для согласования сигналов датчиков Д объекта управления
ОУ с МПС используются аналого-цифровые и цифроаналоговые
преобразователи электрических сигналов, обозначенные на схеме
УС1 и УС2.
Устройства сопряжения УСЗ и УС4, предназначенные для свя-
зи МПС с ВЗУ и УВВ, представляют собой в простейшем случае
буферные (промежуточные) регистры памяти для хранения дан-
ных, передаваемых с ОШ на внешние устройства или обратно.
Устройства сопряжения, получившие название контроллеров (мик-
роконтроллеров), выполняют более сложные функции, и их ра-
бота может программироваться.
Устройства сопряжения УС5 выполняют согласование работы
данной МПС с другими МПС и ЭВМ. Устройства такого типа по-
лучили название адаптеров.
Интерфейс устройств (ИУ) — это совокупность электронных
схем, шин и алгоритмов (программ), обеспечивающая управле-
ние передачей информации между МП, памятью и внешними
устройствами, к которым относятся УВВ, ВЗУ и Д. ИУ обеспечи-
вает требуемое взаимодействие МПС с указанными внешними ус-
тройствами при изменении режима ее работы. Типичным приме-
ром является переход от выполнения одной программы к выпол-
нению другой при поступлении от какого-либо внешнего устрой-
ства сигнала управления. Такой переход получил название преры-
вания. После завершения прерывающей программы ИУ обеспе-
чивает возврат МПС к работе по прерванной программе. Приме-
рами ИУ являются таймер, блок прямого доступа к памяти, блок
организации прерываний.
Программа (совокупность команд) микропроцессора может
быть записана несколькими способами. Один из них предусматри-
вает запись команд непосредственно в виде двоичных чисел, т. е. в
виде так называемого машинного кода, понятного для данного
микропроцессора. Такой способ составления программ в большин-
стве случаев оказывается малоудобным и требует много времени,
особенно при создании больших программ.
Более удобным способом является использование языков про-
граммирования. Языки низкого уровня (например, Ассемблер)
как средство общения с микропроцессором включают в себя не-
сколько десятков типовых команд, представленных в условных
мнемокодах.
Еще большие возможности и удобства пользователю микропро-
цессорными средствами управления предоставляют языки програм-
мирования высокого уровня: Фортран, Паскаль, ПЛ/М, Бейсик,
СИ, АДА и их разновидности (диалекты). Составленные на этих
65
языках программы далее транслируются (переводятся) с помощью
специальных программ, получивших название кросс-программ, в
систему машинных кодов, понятных для микропроцессора.
По назначению и характеристикам различают:
• унифицированные блочные микропроцессорные комплексы,
которые предназначены для создания локальных систем автома-
тического управления отдельных агрегатов, технологических ком-
плексов и промышленных систем;
• специализированные мини- и микроЭВМ, ориентированные
на конкретный тип объекта управления и наиболее часто исполь-
зуемые как встраиваемые;
• мини- и микроЭВМ общего назначения, персональные ЭВМ,
управляющие мини- и микроЭВМ, которые имеют в своем соста-
ве широкий набор устройств сопряжения, ввода-вывода и обла-
дают возможностью выполнения больших объемов вычислитель-
ных операций. В связи с этим они применяются при решении слож-
ных задач управления, таких как оптимизация технологических
процессов, статистические методы их контроля, хранения и об-
работки больших объемов информации, управление в реальном
масштабе времени и др.;
• программируемые контроллеры (ПК) представляют собой
МПС, предназначенные для управления локальными объектами
в реальном масштабе времени. Появившиеся как средство для за-
мены релейной автоматики и устройств жесткой логики на ИС
малой и средней степени интеграции ПК в настоящее время пред-
ставляют собой класс МПС, ориентированных на широкое ис-
пользование в промышленной среде для решения самых разнооб-
разных задач автоматизации. Для этого ПК имеют соответству-
ющее конструктивное исполнение и специальное программное
обеспечение, легко осваиваемое персоналом, не имеющим спе-
циальной подготовки в области программирования.
Принцип действия ПК иллюстрирует рис. 3.13. Основную часть
схемы ПК образуют запоминающее устройство ЗУ, в котором
содержится программа его работы; логический процессор ЛП,
осуществляющий логические операции над последовательно вво-
димыми в него сигналами; коммутатор входных К1 и выходных
К2 сигналов; устройства сопряжения ПК с входными УС1 и вы-
Рис. 3.13. Схема программируемого контроллера
66
ходными УС2 сигналами; память П, в которую поступают резуль-
таты выполнения логических операций.
Входные сигналы wBX1, мвх2, мвх3, содержащие информацию о
ходе технологического процесса, режимах работы отдельных час-
тей управляемого объекта, состоянии защиты, поступают на вход
УС1, которое обеспечивает их гальваническую развязку и форми-
рование из них сигналов, соответствующих величине и виду ис-
пользуемых в данном ПК.
Сформированные таким образом сигналы поступают на вход
К.1, который последовательно подает на ЛП тот из них, адрес
которого содержится в очередной команде, поступающей из ЗУ.
После выполненных ЛП преобразований, которые также оп-
ределяются заложенной в ЗУ программой, сигналы через комму-
татор К2 поступают в регистр памяти П и далее через УС2 на
выход ПК.
В качестве входных допускаются сигналы напряжением от 5 до
250 В постоянного или переменного тока, общее число которых
может достигать более тысячи. Выходные устройства сопряжения
УС2 обычно строятся на основе оптронных тиристоров, обеспе-
чивающих гальваническую развязку выходных цепей и позволя-
ющих управлять достаточно мощными исполнительными устрой-
ствами: реле, контакторами, катушками электромагнитов и т.д.
Программирование ПК ведется на проблемно-ориентирован-
ных языках, специализированных для решения задач дискретного
логического управления. К ним относятся:
графические языки релейно-контакторных схем (РКС);
графические языки логических схем, использующие типовые
логические функции;
языки мнемонического символьного кодирования в виде набо-
ра строк-уравнений сложных булевых выражений;
языки ассемблерного типа;
проблемно-ориентированные языки высокого уровня (Граф-
сет, Ярус-2, Фокон-2) или модифицированные традиционные
языки программирования (Бейсик, Паскаль).
Датчики переменных электропривода. Для работы схем управле-
ния электропривода необходима информация о текущих значени-
ях его скорости, тока, момента и других координат, а также вре-
мени. Устройства, которые вырабатывают подобную информацию
в виде электрических сигналов, получили название датчиков.
При построении схем управления по принципу времени в ка-
честве датчиков времени используются электромагнитные,
моторные, электронные, анкерные и механические реле време-
ни. В микропроцессорных средствах управления в качестве датчика
времени используются таймеры и счетчики.
В качестве датчиков тока в схемах ЭП используются глав-
ным образом реле тока. Их катушки, изготовленные из толстого
67
провода с малым числом витков, непосредственно включаются
в цепь контролируемого (регулируемого) тока двигателя. При
достижении этим током уровней срабатывания или отпускания
происходит коммутация контактов реле тока, которые произ-
водят соответствующие переключения в схемах управления
двигателем.
Сигнал, пропорциональный току двигателя, может быть полу-
чен также с помощью шунта или непосредственно с обмотки до-
полнительных полюсов двигателя. В схемах ЭП с двигателями пе-
ременного тока в качестве датчиков тока применяются трансфор-
маторы тока, что позволяет осуществлять потенциальное разделе-
ние силовых цепей и цепей управления.
В замкнутых схемах ЭП находят применение датчики тока, ис-
пользующие эффект Холла. Такие датчики обеспечивают гальва-
ническую развязку электрических цепей и обеспечивают высокую
точность измерения тока.
В качестве датчиков напряжения используются реле напря-
жения, позволяющие получать информацию в дискретном виде о
контролируемых уровнях напряжения, например о его исчезнове-
нии. Для получения аналоговых сигналов об уровне напряжения
используются потенциометрические датчики, а в цепях перемен-
ного тока — трансформаторы напряжения.
Датчики магнитного потока (индукции) выполняются
на основе эффекта Холла и используются для получения инфор-
мации о магнитных полях двигателей.
Датчики усилия (момента) позволяют получать информа-
цию о развиваемом ЭП усилии или моменте. В ЭП в качестве дат-
чиков усилия (момента) применяются магнитострикционные и
пьезоэлектрические датчики, преобразующие действующее на них
механическое усилие в электрический сигнал. Разновидностью дат-
чиков усилия или момента являются датчики деформации, по-
скольку механическая деформация (в пределах закона Гука) ма-
териального тела пропорциональна действующему на него уси-
лию или моменту. В качестве этих датчиков применяются тензо-
метрические преобразователи, в которых при деформировании
чувствительного элемента — тензорезистора — изменяются его
электрическое сопротивление и электрический сигнал на выходе
тензодатчика.
Датчики скорости предназначены для измерения скорости
движения вала двигателя или исполнительного органа рабочей ма-
шины. Они представляют собой специализированные электриче-
ские машины небольшой мощности, выходное напряжение кото-
рых пропорционально скорости вращения их якоря (ротора). По
принципу своего действия и устройству тахогенераторы бывают
постоянного и переменного тока, выходной сигнал которых мо-
жет иметь аналоговый или импульсный характер.
68
Цифровые датчики скорости позволяют повысить точность
регулирования скорости исполнительных органов рабочих ма-
шин.
Информация о скорости ЭП может быть получена также и от
самого двигателя — якоря постоянного двигателя и ротора асинх-
ронного двигателя, поскольку наводимая в них ЭДС пропорци-
ональна скорости вращения.
Датчики положения подразделяются на две группы: кон-
тактные и бесконтактные, которые, в свою очередь, делятся на
дискретные и аналоговые.
К контактным датчикам положения относятся путевые и ко-
нечные выключатели различных типов. Они используются для
получения сигналов при достижении ЭП или ИО рабочей ма-
шины определенных положений, которые затем поступают в
цепи управления, защиты и сигнализации. Например, конечные
выключатели применяются для предотвращения выхода моста
подъемного крана за пределы подкрановых путей, а путевые
выключатели используются для подачи команд управления в
схему ЭП при подходе кабины лифта к месту остановки (эта-
жу).
Путевые и конечные выключатели могут быть бесконтактными
и контактными. Последние в зависимости от вида привода их кон-
тактной системы подразделяются на вращающиеся, рычажные и
нажимные.
В замкнутых схемах управления ЭП применяются аналоговые и
цифровые датчики.
К аналоговым датчикам относятся сельсины, вращающиеся
трансформаторы, мангнесины и индуктосины. Все они представ-
ляют собой электрические машины малой мощности, которые
обеспечивают преобразование угла поворота или положения дви-
жущегося тела в электрический сигнал.
Широкое распространение в ЭП находят дискретные фотоэлек-
трические датчики положения. Эти датчики могут вырабатывать
сигналы в виде импульсов напряжения или цифровом коде и от-
личаются высокой точностью, быстродействием, простотой и
надежностью конструкции. Применение в ЭП находят комбини-
рованные датчики этого типа, позволяющие получать информа-
цию как о положении, так и о скорости движения вала двигателя
или исполнительного органа.
Для реализации систем регулирования переменных технологи-
ческих процессов должна использоваться информация об их теку-
щих значениях, которая может быть получена от соответствующих
датчиков технологических переменных. К ним относят-
ся датчики температуры, давления и расхода жидкости и газа,
уровня жидкости, толщины полосового материала, влажности,
массы и др.
69
3.9. Элементы и устройства механической
передачи электропривода
Механическая передача ЭП служит для согласования парамет-
ров механического движения вала электродвигателя и ИО рабо-
чей машины. При этом важно отметить, что механическая переда-
ча не изменяет уровень передаваемой от двигателя к исполни-
тельному органу рабочей машины механической мощности. Ме-
ханическая мощность на выходе механической передачи равна
мощности на входе за вычетом потерь мощности в самой передаче.
В некоторых конструкциях ЭП механическая передача может по
тем или иным причинам отсутствовать.
К устройствам для преобразования вращательного движения
вала двигателя во вращательное движение исполнительного орга-
на относятся цилиндрические и червячные редукторы, ременные
и цепные передачи.
В качестве устройств для преобразования вращательного дви-
жения вала двигателя в поступательное движение исполнитель-
ного органа в ЭП применяются передачи винт—гайка, реечная
передача, барабанно-тросовая передача (для подъемных лебедок).
К устройствам для преобразования вращательного движения
вала двигателя в возвратно-поступательное движение исполни-
тельного органа относится кривошипно-шатунный механизм.
В целях регулирования скорости движения исполнительных
органов в механической передаче ЭП используются электромаг-
нитные и гидравлические муфты и вариаторы. Они позволяют ре-
гулировать скорость движения исполнительных органов рабочих
машин при использовании нерегулируемого по скорости двига-
теля.
Контрольные вопросы
1. Какие переменные электропривода регулируются при управлении
движением исполнительного органа рабочей машины?
2. Какими способами может осуществляться регулирование скорости
ЭП?
3. Какими показателями оценивается регулирование скорости?
4. С какой целью и за счет чего может регулироваться момент двига-
телей?
5. По каким причинам возникает необходимость регулирования (ог-
раничения) тока двигателей?
6. В чем сущность регулирования положения ЭП?
7. Какие структуры имеет ЭП?
8. Какие принципы построения замкнутых ЭП вы знаете?
9. Какие виды обратных связей применяются в ЭП?
10. Что называется автоматизированным ЭП?
70
11. Каковы особенности схем управления с общим усилителем?
12. Каковы особенности схем управления с подчиненным регулиро-
ванием координат?
13. Каковы особенности схем управления с наблюдающим устрой-
ством?
14. Охарактеризуйте роль ЭП при автоматизации технологических
процессов.
15. Каково назначение автоматизированных систем управления про-
изводством, предприятием и отраслью?
16. Какие виды силовых коммутационных аппаратов вы знаете?
17. Что называется преобразователем электрической энергии?
18. Какие виды силовых преобразователей вы знаете?
19. Что такое операционный усилитель и в чем состоит его назначе-
ние?
20. Какие дискретные элементы вы знаете?
21. Что такое микропроцессор и микропроцессорная система?
22. Каковы особенности структуры программируемого логического
контроллера?
23. Какие датчики применяются для получения информации о пере-
менных ЭП и технологического процесса?
24. Какие механические устройства применяются в составе механи-
ческих передач ЭП?
ГЛАВА 4
ЭЛЕКТРОПРИВОД С ДВИГАТЕЛЯМИ
ПОСТОЯННОГО ТОКА
4.1. Схема включения и статические
характеристики двигателя постоянного тока
независимого возбуждения
В ЭП постоянного тока используются двигатели с независи-
мым, параллельным, последовательным и смешанным возбужде-
нием, а также с возбуждением от постоянных магнитов. ЭП с
двигателями постоянного тока являлись до недавнего времени
основным видом регулируемого ЭП. Созданные на базе системы
«управляемый выпрямитель—двигатель» (УВ—Д) замкнутые ЭП
обеспечивают регулирование координат движения исполнитель-
ных органов рабочих машин и механизмов во всех режимах с вы-
сокими показателями качества.
Основная схема включения двигателя представлена на рис. 4.1, а,
где приняты следующие обозначения: /я, /ов, — токи в цепях об-
моток якоря и возбуждения, А; Е — ЭДС якоря, В; со и М —
соответственно угловая скорость, рад/с, и момент, Н • м, двига-
теля; /?я — сопротивление якоря, состоящее из сопротивлений
обмотки якоря гоя, добавочных полюсов гдп, компенсационной
обмотки гко и щеточного контакта гщ, 7?я = гоя + гдп + гко + гщ, Ом;
/?ов — сопротивление обмотки возбуждения (ОВ), Ом; Ья и Ьоъ —
индуктивности обмоток якоря и возбуждения, Гн. На рис. 4.1, а
показаны добавочные резисторы в цепях обмоток якоря /?д и воз-
буждения /?в, а также отдельные источники питания обмоток якоря
и возбуждения с напряжениями соответственно U и UB.
Вывод уравнений для статических характеристик двигателя
проведем при следующих допущениях: реакция якоря двигателя
не учитывается, момент на валу двигателя равен электромагнит-
ному моменту. Уравнение напряжений для цепи якоря, выраже-
ния ЭДС якоря и электромагнитного момента записываются в сле-
дующем виде:
U = Е + IR; (4.1)
Е = к Фео; (4.2)
М=кФ1, (4.3)
где U — подводимое к якорю напряжение, В; R — полное сопро-
тивление цепи якоря, R= R„ + Ra, Ом; к — конструктивный коэф-
72
фициент двигателя, к = pN/(2na) (р — число пар полюсов; N —
число активных проводников обмотки якоря; а — число парал-
лельных ветвей обмотки якоря); Ф — магнитный поток, Вб.
Подставляя выражение (4.2) в (4.1), получаем формулу для
электромеханической характеристики двигателя со(/)
со = (JJ-1К)/(кФ). (4.4)
Формула для механической характеристики со(Л/) двигателя
получается из выражения (4.4) заменой в нем тока на момент в
соответствии с выражением (4.3):
со = и/(кФ) - МК/(кФ)2. (4.5)
В соответствии с формулами (4.4) и (4.5) электромеханиче-
ская и механическая характеристики двигателя с независимым
(параллельным) возбуждением представляют собой линейные за-
висимости угловой скорости (в дальнейшем скорости) от тока и
момента, вид которых для разных полярностей питающего якорь
напряжения показан на рис. 4.1, б. На рис. 4.1, б электромехани-
ческая и механическая характеристики совмещены, что в соот-
ветствии с формулой (4.3) справедливо в случае кФ = const. Их
характерными точками являются точка А холостого хода, в кото-
рой со = со0, а I - О, М = 0, и точка В короткого замыкания, где со =
= 0, а /= /к з и М= МК 3. Отметим, что режим короткого замыкания
для электрической машины соответствует неподвижному состо-
янию якоря при поданном на двигатель напряжении, а не замы-
канию его электрических цепей между собой или на корпус.
Режим короткого замыкания называется также пусковым ре-
жимом, поскольку является начальным при включении (пуске)
Рис. 4.1. Схема включения (а) и характеристики (б) двигателя постоян-
ного тока независимого возбуждения
73
двигателя. По этой причине ток и момент двигателя в момент его
включения носят название пусковых.
Уравнения (4.4) и (4.5) можно записать в сокращенной форме:
со = (Oq — Лео, (4.6)
где (о0 — скорость идеального холостого хода двигателя, опреде-
ляемая как
®о = и/(кФ\, (4.7)
Лео — изменение скорости относительно скорости идеального хо-
лостого хода,
Лео = IR/^кФ) = Л/Л/(А:Ф)2. (4.8)
На рис. 4.1, б показана также характеристика двигателя при U= О,
уравнения которой получаются при этом условии из (4.4) и (4.5):
со = -/Я/(А;Ф); (4.9)
со = -MR/(кФ)2. (4.10)
Зависимости со(/) и со(Л/) при U= 0 также являются линейны-
ми. Схема, в которой двигатель имеет такую характеристику, при-
ведена на рис. 4.2. Она носит название схемы генератора, работа-
ющего на автономную нагрузку 7?д, а двигатель в этой схеме рабо-
тает генератором независимо от сети постоянного тока.
Включение двигателя в режим генератора по схеме рис. 4.2 по-
зволяет создать на валу двигателя тормозной момент и, как и для
других видов генераторных режимов, используется для быстрого
торможения двигателя и называется динамическим торможением.
Выражения (4.4) и (4.5) позволяют назвать основные способы
получения искусственных характеристик двигателя, используемых
для регулирования переменных ЭП. К ним относятся изменения
сопротивления добавочного резистора в цепи якоря /?д, магнит-
ного потока Ф и подводимого к якорю напряжения U. Отметим,
что входящие в эти выражения ток и момент определяются толь-
Рис. 4.2. Схема динамического торможения дви-
гателя
74
ко механической нагрузкой двигателя Мс и не могут быть уста-
новлены произвольно.
Задача 4.1*. Для двигателя рассчитать и построить естествен-
ные характеристики.
Исходные (паспортные) данные: Рном = 300 кВт; (7НОМ = 440 В;
«ном = 1 250 об/мин; /ном = 750 А.
Для построения характеристик, представляющих собой пря-
мые линии, достаточно рассчитать координаты двух точек: номи-
нального режима и холостого хода.
Номинальные скорость двигателя и момент
соном = 2ллном/60 = 2-3,14-1 250/60 = 131 рад/с;
Мном •= /’ном/Юном = 300 000/131 = 2 306 Н • м.
Для нахождения скорости холостого хода по формуле (4.3)
определяем А;ФН0М
£ФНОм = Л/ном/Лом = 2 306/750 = 3,08 В с
и скорость идеального холостого хода
“о = г/ном/(ЛФном) = 440/3,08 = 144 рад/с.
По координатам точек холостого хода (со = о>о, I = М - 0) и
номинального режима (со = соном, /= /ном, М = Мном) строим есте-
ственные электромеханическую со(/) и механическую со(Л/) ха-
рактеристики.
Задача 4.2. Рассчитать и построить характеристики со (/) и ш(М)
при динамическом торможении при суммарном сопротивлении цепи
якоря R = 0,01 Ом. Данные двигателя соответствуют задаче 4.1.
4.2. Энергетические режимы работы двигателя
Электрическая машина обладает так называемым свойством
обратимости, в соответствии с которым она может работать как
двигателем, преобразуя электрическую энергию в механическую,
так и генератором, осуществляя обратное преобразование энер-
гии. При этом переход из одного режима в другой может происхо-
дить без изменения схемы включения. Работа двигателей в генера-
торном режиме важна для ЭП, так как при этом на валу электри-
ческой машины создается тормозной момент, обеспечивающий
интенсивное принудительное замедление (торможение) движе-
ния ЭП и тем самым исполнительного органа рабочей машины.
Это способствует расширению возможностей ЭП по управлению
движением исполнительного органа при его торможении и ре-
версе.
75
Энергетический режим работы электрической машины может
быть определен исходя из направлений двух переменных: элект-
рических — ЭДС Е и тока I, или механических — момента М и
скорости со. При одинаковых направлениях скорости и момента и
разных направлениях тока и ЭДС имеет место двигательный ре-
жим работы, а при противоположных направлениях скорости и
момента и одинаковых направлениях ЭДС и тока — генераторный.
Граничными между двигательным и генераторным являются ре-
жимы холостого хода и короткого замыкания, в которых одна из
электрических и механических переменных равна нулю. При хо-
лостом ходе нулю равны ток и момент, а при коротком замыка-
нии — ЭДС и скорость.
Рассмотрим режимы работы двигателя на различных участках
его характеристик (см. рис. 4.1, б) при положительной полярно-
сти напряжения U.
Режиму холостого хода соответствует точка А характери-
стики. Двигатель не получает энергии ни из электрической сети
(за исключением электроэнергии на возбуждение), ни с вала.
В этом режиме I = О, Е = U = &Фа>0, М = 0, со = со0. Иллюстрация
этого режима показана на схеме рис. 4.3, а.
Двигательному режиму соответствует участок I характе-
ристики (см. рис. 4.1, б) при скорости 0 < со < со0, т.е. в первом
квадранте, где со и М совпадают по направлению. В этом режиме
Е < U, ток якоря I = (U- E)/R совпадает по направлению с на-
пряжением сети Uи не совпадает с ЭДС двигателя, электрическая
энергия ЭЭ (рис. 4.3, б) поступает из сети, а механическая энер-
гия МЭ с вала двигателя передается исполнительному органу.
Генераторный режим работы машины параллельно с се-
тью, или торможение с рекуперацией энергии в сеть, имеет ме-
сто на участке II характеристики (см. рис. 4.1, б). На нем со > со0,
поэтому ЭДС больше напряжения сети, ток и момент изменяют
свои направления на противоположные. Двигатель получает меха-
ническую энергию от рабочей машины и отдает ее (рекупериру-
ет) в виде электроэнергии в сеть (рис. 4.3, в).
Режим короткого замыкания имеет место при со = 0 и
Е= 0. В этом режиме согласно формуле (4.1) I = /к з = U/R, элект-
рическая энергия ЭЭ (рис. 4.3, г), поступая из сети, рассеивается
в виде тепла в резисторах якорной цепи. Механическая энергия с
вала двигателя не отдается, так как со = 0.
Режим генератора при последовательном соедине-
нии с сетью, или торможение противовключением, насту-
пает при со < 0 (участок III характеристики на рис. 4.1, б). За
счет изменения направления скорости ЭДС меняет свою поляр-
ность. Ток в якоре совпадает по направлению с напряжением и
ЭДС и определяется их суммарным действием, т.е. /=(£/+ E)/R.
В результате этого электроэнергия поступает из сети (рис. 4.3, д)
76
Рис. 4.3. Схемы, иллюстрирующие энергетические режимы работы дви-
гателя:
а — режим холостого хода; б — двигательный режим; в — генераторный режим
параллельно с сетью; г — режим короткого замыкания; д — генераторный ре-
жим последовательно с сетью; е — генераторный режим независимо от сети
и вырабатывается самим двигателем за счет механической энер-
гии рабочей машины и рассеивается в виде тепла в резисторах
цепи якоря.
Режим автономного генератора, или динамическое
торможение, соответствует схеме рис. 4.2. Ток в якоре протекает
под действием ЭДС и совпадает с ней по направлению. Электро-
энергия (рис. 4.3, е) вырабатывается за счет поступающей с вала
механической энергии рабочей машины и рассеивается в виде тепла
в резисторах якорной цепи.
Эффективность электромеханического преобразования энергии
двигателя оценивается КПД (г|), который определяется отноше-
нием полезной механической мощности на его валу Рмех = Мы к
потребляемой из сети электрической мощности Рэл = UI + 7/в/в:
Л — Рмех /РЭЛ ^мех /(Рмех + АР),
где АР — потери мощности в двигателе.
Потери мощности в двигателе складываются из потерь в об-
мотках якоря и возбуждения двигателя, потерь в его магнитопро-
воде и механических потерь. Способы расчета потерь мощности
рассмотрены в подразд. 9.1.
77
4.3. Регулирование переменных электропривода
с помощью резисторов в цепи якоря
Включение резисторов в цепь якоря двигателя влияет как на
электромеханическую, так и на механическую характеристики
двигателя и может использоваться как для регулирования скоро-
сти, так и для ограничения тока и момента двигателя в переход-
ных процессах, в частности при его пуске. Этот способ, отличаясь
простотой реализации, применяется при невысоких требованиях
к качеству регулирования переменных.
Для получения искусственных (регулировочных) характеристик
двигателя проведем следующий анализ. Из (4.7) видно, что ско-
рость оо0 не зависит от /?д, а наклон характеристик, как это сле-
дует из (4.8), тем больше, чем больше Ra. Это позволяет изобра-
зить искомое семейство характеристик в виде совокупности ли-
ний (рис. 4.4) различного наклона (жесткости), проходящих через
одну и ту же точку на оси скорости с ординатой (Oq.
Характеристика 1 соответствует случаю Ra = 0 и является есте-
ственной, искусственные характеристики 2... 4 построены при на-
личии в цепи якоря резисторов с сопротивлениями соответствен-
но /?д] < /?д2 < Ra3.
Регулирование скорости данным способом характеризуется сле-
дующими показателями. Диапазон регулирования скоро-
сти небольшой и обычно не превосходит 2 — 3. Одна из причин
этого заключается в снижении жесткости характеристик по мере
увеличения Ra. Направление регулирования скорости —
вниз от естественной характеристики. Плавность регули-
рования скорости определяется характером изменения /?д. Если
сопротивление этого резистора изменяется плавно, то данный спо-
соб обеспечивает плавное регулирование скорости. Чаще всего рас-
сматриваемый способ обеспечивает ступенчатое регулирование
скорости. Стабильность скорости снижается по мере увели-
чения диапазона регулирования, так как уменьшается жесткость
регулировочных характеристик.
Рис. 4.4. Характеристики двигателя при
различных сопротивлениях добавочно-
го резистора в цепи якоря:
7 — Яд = 0; 2 — Ral; 3 — Rai, 4 — R^
78
Экономичность регулирования скорости оценим, со-
поставив требуемые капитальные затраты на реализацию данного
способа и стоимость потерь мощности (энергии) при регулирова-
нии. Капитальные затраты на приобретение добавочных резисто-
ров небольшие, так как их стоимость невелика.
В то же время потери мощности и соответственно потери элек-
трической энергии и ее стоимость оказываются существенными.
Убедимся в этом, оценив потери мощности в цепи якоря — ос-
новную долю потерь в двигателе.
Потери мощности в цепи якоря ДРЯ определяются разностью
мощностей: потребляемой из сети Рх - Рэл = UI и полезной меха-
нической на валу Р2 = Рмек = Маа. С учетом соотношений (4.3) и
(4.7):
\РЯ = UI- Мш = кФшД- кФкя = А;Ф(о0/((о0 - со)/со0 = Рх8, (4.11)
где 8 — относительный перепад скорости, 8 = (со0 - со)/со0 = Л(о/со0.
Из выражения (4.11) видно, что при снижении скорости, на-
пример, в 2 раза по сравнению с идеальной скоростью холостого
хода о>о, т.е. при 8 = 0,5 (диапазон регулирования скорости Д~ 2),
половина всей потребляемой из сети мощности Рх идет на потери
мощности в якоре двигателя, т.е. его КПД не превышает 50%.
При дальнейшем увеличении диапазона КПД снижается в еще
большей степени.
Допустимую нагрузку двигателя при его работе на ис-
кусственных характеристиках определяют исходя из номинально-
го тока, при котором двигатель не будет перегреваться выше нор-
мы. Так как при данном способе регулирования магнитный поток
не изменяется и равен номинальному, то подстановка в формулу
(4.3) Ф = ФНом и 1= /ном определяет допустимый момент нагрузки:
4/доП ~ ^ФномАюм = ^ном- (4.12)
Выражение (4.12) показывает, что при рассматриваемом спо-
собе регулирования скорости двигатель может без перегрева рабо-
тать на любой искусственной характеристике с моментом нагруз-
ки, равным номинальному. Отметим, что способы регулирования
скорости, характеризующиеся Мдоп = Л/ном, получили в теории ЭП
название «регулирование скорости при постоянном моменте».
Сделанный вывод о характере допустимой нагрузки справед-
лив для двигателей, у которых охлаждение не ухудшается по мере
снижения скорости. В тех же случаях, когда двигатель охлаждается
за счет вентилятора на своем валу, момент нагрузки при сниже-
нии скорости должен быть также уменьшен из-за ухудшения вен-
тиляции двигателя.
Рассмотренный способ применяется для регулирования скоро-
сти движения исполнительных органов при небольших диапазо-
нах или кратковременной работе на пониженных скоростях.
79
Ранее уже говорилось о том, что ток в якоре двигателя в пере-
ходных режимах не должен превосходить некоторых допустимых
значений. Такое регулирование (ограничение) тока (и одновре-
менно момента) осуществляется введением на время переход-
ных процессов в цепь якоря резистора Ra. Как и во всех случаях,
для регулирования переменных используются искусственные ре-
гулировочные характеристики. Обратимся к рис. 4.5, который
иллюстрирует регулирование тока и момента в переходных про-
цессах.
Пуск двигателя вначале происходит по искусственной (ре-
остатной) характеристике 1 с добавочным резистором в цепи
якоря, называемым пусковым. В момент включения двигателя его
ток и момент ограничиваются до заданного (допустимого) уров-
ня /, = 1аоп и М] = Маоп. По мере увеличения скорости и соответ-
ственно ЭДС ток в якоре снижается и при скорости СО] пусковой
резистор закорачивается (шунтируется). Двигатель переходит на
естественную характеристику 2, при этом броски тока и момента
также не превышают заданного уровня. Пуск двигателя заверша-
ется после достижения им скорости сОуСТ, определяемой пересече-
нием механических характеристик двигателя 2 (естественная) и
исполнительного органа 3.
Сопротивление пускового резистора определяется по заданным
значениям /доп или Л/Доп, которые для двигателей обычного ис-
полнения в 2 — 3 раза могут кратковременно превышать их номи-
нальные значения.
Динамическое торможение реализуется по схеме рис. 4.2 и про-
исходит по характеристике 4 (см. рис. 4.5). Сопротивление доба-
вочного резистора, на которое закорачивается якорь двигателя,
также находится по заданным значениям /доп или Мдоп.
Реверс и торможение противовключением двигателя, осуще-
ствляемые изменением полярности напряжения якоря или обмотки
возбуждения, происходят по характеристике 5 (см. рис. 4.5). Со-
противление добавочного резистора, включаемого при этом в цепь
якоря двигателя, находится по заданным значениям /доп или Маоп.
Для повышения точности регулирования тока и момента в цепь
якоря добавочный резистор секционируется на две или более сту-
пеней, что позволяет реализовать две или более искусственные
характеристики и сузить тем самым пределы изменений тока и
момента в переходных процессах.
Совокупность двух или более искусственных характеристик,
используемых при пуске двигателя, называется пусковой диаграм-
мой. При ее расчете и построении заданными параметрами явля-
ются: допустимые ток /доп или момент Л/доп, момент нагрузки Мс,
пределы изменения тока (момента) или число искусственных ха-
рактеристик т, соответствующее числу ступеней пускового рези-
стора.
80
Рис. 4.5. Характеристики при ограничении тока и момента двигателя в пе-
реходных процессах:
1 — реостатная при пуске; 2 — естественная двигателя; 3 — исполнительного
органа; 4 — реостатная при динамическом торможении; 5 — реостатная при ре-
версе
Рассмотрим порядок построения этой диаграммы, если зада-
ны /доп, Мс и число характеристик (ступеней пускового резисто-
ра) т = 2.
Строится естественная характеристика / двигателя (рис. 4.6, а).
Проводится вертикальная линия, соответствующая абсциссе /, =
= /доп или Л/, = Маоп. Через точки а и b с координатами (<о0, 0) и
(0, /|) проводится искусственная (реостатная) характеристика 3,
соответствующая включению в цепь якоря обеих ступеней пуско-
вого резистора /?д1 и /?д2 (рис. 4.6, б). Определяется ток переключе-
ния по приближенному соотношению /2 = (1,1 - 1,2) /с и прово-
дится вертикальная линия, соответствующая этому току. Через то-
чку с пересечения этой линии с характеристикой 3 (см. рис. 4.6, а)
проводим горизонтальную линию до ее пересечения в точке d с
вертикалью, имеющей абсциссу /(. Через точки and проводится
искусственная (реостатная) характеристика 2, а через точку е —
еще одна горизонталь до пересечения ее в точке f с естественной
характеристикой 1.
Для точного попадания точек с, d, е, f на вертикали с абсцис-
сами Л и /2 производится подбор величины тока /2.
Пуск двигателя начинается по характеристике 3. При скорости
со,, когда ток снизится до значения /2, ключом К1 закорачивается
Rai и двигатель переходит на характеристику 2, по которой про-
81
Рис. 4.6. Пусковая диаграмма двигателя (а) и схема включения пусковых
резисторов (б):
1 — естественная характеристика двигателя; 2, 3 — реостатные характеристики
двигателя
должает свой разбег. При скорости а>2 ключом К2 закорачивается
/?Д2 и двигатель выходит на естественную характеристику 1.
Число ступеней т добавочного резистора, или число исполь-
зуемых искусственных характеристик, связано с пределами из-
менения тока в якоре 1Х = /доп и током переключения /2 следу-
ющим соотношением:
т = (4.13)
В качестве ключей для шунтирования добавочных резисторов
используются контакторы. Отметим, что искусственные механи-
ческие характеристики пусковой диаграммы могут быть исполь-
зованы и для регулирования скорости.
4.4. Расчет пусковых и регулировочных
резисторов
В теории ЭП разработано несколько методов расчета добаво-
чных резисторов в цепи якоря. Задача расчета резисторов форму-
лируется следующим образом.
Допустим, что известны естественная электромеханическая или
механическая характеристика 1 двигателя (рис. 4.7) и его паспор-
тные данные. Требуется рассчитать сопротивление резистора 7?д,
при включении которого в цепь якоря желаемая искусственная
(реостатная) характеристика 2 пройдет через точку А с заданны-
ми координатами (сои, /и) или (сои, Л/и). Отметим, что эта реостат-
ная характеристика может быть задана как по условиям регулиро-
82
Рис. 4.7. Характеристика двигателя
для расчета резисторов методом от-
резков:
1, 2 — естественная и реостатная ха-
рактеристики двигателя
вания скорости, так и для ограничения тока и момента двигателя
в переходных процессах.
Метод пропорций. Этот метод основан на использовании фор-
мулы (4.8) для перепада скорости. Запишем отношение перепадов
скорости при токе /и или моменте Мк на естественной До>е и жела-
емой искусственной Дсои характеристиках:
Д(ое/Дсои = /иАя/(/и(Ая + Ад)) = АЯ/(АЯ + Ад). (4.14)
Теперь из (4.14) определяем Ад как искомую величину
Ад = Ая(Да>и/Д(ое - 1). (4.15)
Полученная формула позволяет рассчитать сопротивление до-
бавочных резисторов при расположении заданной точки в любом
квадранте.
Метод отрезков. Этот метод в отличие от предыдущего не тре-
бует данных о собственном сопротивлении якоря двигателя, ко-
торое не всегда указывается в его паспорте, и позволяет опреде-
лить его по известной естественной характеристике.
Для получения расчетной формулы этого метода запишем со-
гласно (4.4) выражение для скорости двигателя на заданной ис-
кусственной характеристике (см. рис. 4.7) при номинальных токе,
моменте, магнитном потоке и напряжении в следующем виде:
(0„= ^ном/(£Фном)(1-/ном R/UH0M).
(4.16)
С учетом выражения (4.7)
<»„ — ®оО 7?/Аном),
(4.17)
где Аном — номинальное сопротивление, являющееся базовой ве-
личиной при расчетах, Ом, Аном = ииоы/1ноы.
83
Из формулы (4.16) получаем следующее соотношение:
Я/Яном = (“о - ®и)/®о = 5, (4.18)
которое отражает важное свойство двигателя: относительный пе-
репад скорости 5 = Доо/соо равен относительному активному со-
противлению цепи якоря R/RHOM. Отметим, что это свойство ха-
рактерно и для других типов двигателей, в частности асинхрон-
ных.
Пропорцию (4.17) удобно решать с помощью характеристик,
для чего обратимся к рис. 4.7. Обозначим на нем характерные то-
чки а, Ь, с, d и отметим, что (<о0 - сои) = Дш = ас, а>0 = ad. Тогда
— /?номДа)/а)о — RH0Mac/ad, (4.19)
Ra = RHmtbc/ad-, (4.20)
R« = RHOtiab/ad. (4.21)
Таким образом, для нахождения /?д следует по характеристикам
определить длины отрезков Ьс и dd при номинальном токе или
моменте, рассчитать номинальное сопротивление 7?ном = UHOM//HOM
и затем воспользоваться формулой (4.20).
Для расчета сопротивлений резисторов, которые позволяют
получать показанные на рис. 4.5 характеристики, могут также ис-
пользоваться приближенные формулы, позволяющие непосред-
ственно находить величины сопротивлений резисторов по задан-
ным (допустимым) току и моменту при пуске, торможении и
реверсе. Исходными данными в этом случае являются максималь-
но допустимые ток /доп и момент Маоп. Сопротивление резистора
Rai при пуске (см. характеристику 1 на рис. 4.5) рассчитывается по
формуле (4.1) при Е = 0
2?д1 = г///Доп-Ля- (4-22)
Сопротивление резистора Ra2 при динамическом торможении
(см. характеристику 4 на рис. 4.5)
ЯД2 = ^/Лоп - R« « U/Iaon - R*. (4.23)
Сопротивление резистора /?д3 при реверсе или торможении
противовключением (характеристика 5 на рис. 4.5)
7?д3 = ({/+Е)//доп - 7?я = 2{7//доп - 7?я. (4.24)
При расчетах регулировочных резисторов в большинстве слу-
чаев требуется знать собственное сопротивление якоря /?я. Ука-
жем возможные способы его определения:
84
• в справочниках приводятся обобщенные зависимости отно-
сительного сопротивления якоря R* = R„/RHOM от мощности Рном;
• экспериментально путем непосредственного измерения со-
противления между щетками двигателя;
• по приближенной формуле при известных номинальных пас-
портных данных двигателя:
Кя « 0,5i/HOM(l -ЦНОМ)/7Н(>М = 0,5/?ном(1 - Ином), (4.25)
где г|ном — номинальный КПД двигателя;
• при наличии экспериментально полученной электромехани-
ческой или механической характеристики по методу отрезков;
• с помощью формул (4.3) и (4.4), записанных для точки но-
минального режима.
Задача 4.3*. Двигатель типа ПБСТ-53 имеет следующие паспор-
тные данные: Рном = 4,8 кВт; ином = 1 500 об/мин; UHOM = 220 В; /ном =
= 24,2 А; /?я = 0,38 Ом; /вном = 0,8 А. Определить сопротивление
резистора, включение которого обеспечит прохождение искусст-
венной характеристики через точку с координатами сои = 90 рад/с,
Л/и = 25 Н • м.
Для нахождения сопротивления используем метод пропорций,
предварительно определив ряд требуемых для расчета парамет-
ров:
номинальную скорость двигателя соном
®н<>м = 2лином/60 = 2-3,14- 1 500/60 = 157 рад/с
и номинальный момент двигателя Мном
4/ном = ЛомМом = 4 800/157 = 30,6 Н • м.
Зная эти данные, вычисляем:
произведение конструктивного коэффициента на магнитный
поток
£Фном = Л/ном//ном = 30,6/24,2 = 1,3 В с;
скорость холостого хода
®о = t/номДФном = 220/1,3 = 169 рад/с;
перепад скорости на естественной характеристике при момен-
те М„
Ао)е = Л/и/?я/(А:ФнОм)2 = 25 • 0,38/1,32 = 6 рад/с;
перепад скорости на искусственной характеристике при том
же моменте
А(ои = (Оо - (ои = 169 - 90 = 79 рад/с.
85
Искомое сопротивление резистора будет равно
Ra = Яя(Д(ои/Д(ое - 1) = 0,38(79/6 - 1) = 4,62 Ом.
Задача 4.4. Для условий задачи 4.3 найти сопротивление рези-
стора методом отрезков.
Задача 4.5. Определить, каким должно быть сопротивление до-
бавочного резистора по сравнению с сопротивлением якоря дви-
гателя для того, чтобы перепад скорости при заданном токе уве-
личился в 3 раза.
Задача 4.6. Для двигателя типа ПБСТ-53 (см. задачу 4.3) опре-
делить сопротивления резисторов, включение которых ограни-
чит ток при пуске и торможении противовключением до уровня
/ =3/
2 доп
Определяем сопротивление пускового резистора по (4.22)
Яд| = 6//доп - /?я = 220/(3 • 24,2) - 0,38 = 2,65 Ом.
Сопротивление используемого при торможении резистора оп-
ределяем по (4.24)
Ra3 = 2{///доп - /?я = (2 • 220)/(3 • 24,2) - 0,38 = 5,7 Ом.
Задача 4.7. Для двигателя типа ПБСТ-53 (см. задачу 4.3) пост-
роить пусковую диаграмму при следующих условиях: т = 2; /доп =
- 2,8/ном; Мс = 30 Н • м, и рассчитать сопротивления добавочных
резисторов.
Задача 4.8. Для двигателя типа ПБСТ-53 (см. задачу 4.3) опре-
делить число характеристик т пусковой диаграммы, при котором
изменение тока будет происходить в пределах Ц - 60 А; /2 = 10 А.
Задача 4.9. Рассчитать сопротивление резистора, при котором
характеристика двигателя в режиме динамического торможения
пройдет через точку с координатами ии - 100 рад/с; /и = -20 А.
Данные двигателя взять из задачи 4.3.
4.5. Регулирование скорости двигателя
изменением магнитного потока
Изменение магнитного потока используется главным образом
для регулирования скорости. Этот способ находит применение в
ЭП вследствие простоты его реализации и экономичности, так
как регулирование осуществляется в относительно маломощной
цепи возбуждения двигателя и не сопровождается большими по-
терями мощности.
Магнитный поток при использовании этого способа обычно
уменьшается (ослабляется) по сравнению с номинальным за счет
снижения тока возбуждения, что объясняется следующим. Увели-
чение магнитного потока требует повышения тока возбуждения
86
Рис. 4.8. Кривая намагничивания
двигателя постоянного тока
Рис. 4.9. Схемы регулирования тока
возбуждения с помощью резистора
(а) и управляемого выпрямителя (б)
выше номинального, что вызовет дополнительный нагрев обмот-
ки возбуждения. Кроме того, двигатель рассчитан и сконструиро-
ван таким образом, что его магнитная система близка к насыще-
нию (точка А на кривой намагничивания двигателя на рис. 4.8),
поэтому даже увеличение тока возбуждения не приведет к замет-
ному увеличению магнитного потока.
Регулирование тока в цепи возбуждения может осуществлять-
ся или с помощью добавочного резистора RB (рис. 4.9, а), или
изменением напряжения питания обмотки возбуждения, напри-
мер с помощью управляемого выпрямителя (УВ) (рис. 4.9, б),
выходное напряжение 1/в которого регулируется по сигналу уп-
равления Uy. Эта схема применяется для регулирования в широких
пределах тока возбуждения мощных двигателей, работающих в замк-
нутых структурах ЭП. Она может обеспечить также изменения на-
правления тока возбуждения при использовании реверсивного УВ.
Для получения искусственных характеристик двигателя при
уменьшении магнитного потока проведем следующий анализ.
В соответствии с формулой (4.7) уменьшение магнитного потока
приводит к увеличению скорости идеального холостого хода со0.
Ток короткого замыкания IK3 = U/R* от магнитного потока не
зависит и при его варьировании будет оставаться неизменным.
Отмеченные положения позволяют представить электромехани-
ческие характеристики при различных значениях магнитного по-
тока Фном > Ф, > Ф2 в виде линий 1... 3 на рис. 4.10, а.
Момент короткого замыкания Мкз = &Ф/К3 при уменьшении
магнитного потока Ф будет также снижаться, так как /кз = const.
В результате механические характеристики имеют вид прямых,
показанных на рис. 4.10, б.
Отметим показатели данного способа регулирования скорости
двигателя. Диапазон регулирования скорости при данном спо-
87
Рис. 4.10. Электромеханические (а) и механические (б) характеристики
двигателя при уменьшении магнитного потока:
1 — естественная; 2, 3 — при уменьшении магнитного потока
собе равен 3...4. Направление регулирования скорости — вверх
от естественной характеристики. Плавность регулирования ско-
рости определяется плавностью регулирования тока возбуждения.
Стабильность скорости достаточно высокая, хотя она и сни-
жается при уменьшении магнитного потока. Способ экономичен,
так как не сопровождается значительными потерями мощности,
а реализация его не требует больших капитальных затрат.
Допустимую нагрузку двигателя при его работе на искусствен-
ных характеристиках определим по обычному правилу, полагая в
формуле (4.3) ток I = 1НОМ:
мзоп = &Фи/ном, (4.26)
где Фи — магнитный поток на искусственной характеристике.
Так как при данном способе регулирования Фи < Фном, то и
Маоп < Мном, т.е. двигатель по условиям нагрева не может быть
нагружен на искусственных характеристиках номинальным момен-
том.
Для определения того, какую именно нагрузку он может не-
сти, сделаем дополнительные выкладки. Запишем выражение для
ЭДС якоря на естественной Ее и искусственной £и характеристи-
ках при номинальном токе:
^е — ^Фном^ном — ^ном —
— Фц^И — £ном ЛюМ^Я"
Так как UHOM - /ном/?я = const, то Ее = £и и из этого равенства
вытекает следующее соотношение:
Фи = ФномЮном/Юи, (4.27)
где (ои — скорость на искусственной характеристике при /= /ном.
Подставляя формулу (4.27) в формулу (4.26), получим
Л/цоп®и - 4/ном(0ном — Рном — £дОп - const. (4.28)
88
Как видно из формулы (4.28), при работе двигателя на искус-
ственных характеристиках он может быть нагружен на свою номи-
нальную мощность. Объяснение этого заключается в том, что, хотя
момент нагрузки при уменьшении магнитного потока снижается,
одновременно повышается скорость двигателя, а их произведе-
ние, определяющее механическую мощность, остается неизмен-
ным и равным номинальной мощности. Этим способом целесооб-
разно регулирование скорости при постоянной механической
мощности нагрузки, что обеспечивает полное использование дви-
гателя при работе на всех искусственных характеристиках.
Задача 4.10*. Для двигателя, данные которого приведены в за-
даче 4.3, определить магнитный поток и ток возбуждения, при
которых искусственная механическая характеристика пройдет че-
рез точку с координатами о>и = 250 рад/с; Мк = 15 Н м.
Решая (4.5) с учетом того, что R = /?я и U = t/HOM, получим
сои(^Фи)2 - 1/ном£Фи + МКЛЯ = 0.
Это уравнение имеет два решения: &Фи| = 0,85 В с, &Фи2 =
= 0,027 В с. Целесообразно выбрать большее из двух значений,
так как при этом момент двигателя Л/и будет обеспечен при мень-
шем токе якоря.
Для определения тока возбуждения /в и рассчитаем относитель-
ную величину найденного магнитного потока:
(£ФИ)/(&ФНОМ) = Ф£ = 0,85/1,3 = 0,61.
Получив это значение, с помощью кривой намагничивания
на рис. 4.8 определим относительный ток возбуждения /*и =
= 4.и/4.ном = 0,38 А. Искомый ток возбуждения /ви = /ВНом^*.н =
= 0,8 0,38 = 0,3 А.
Задача 4.11. Для рассмотренного в задаче 4.3 двигателя опреде-
лить магнитный поток, ток возбуждения и сопротивление доба-
вочного резистора в цепи обмотки возбуждения, при которых ско-
рость идеального холостого хода на искусственной характеристи-
ке будет на 75 % больше скорости холостого хода на естественной
характеристике.
4.6. Регулирование переменных электропривода
изменением напряжения на якоре двигателя.
Система «преобразователь—двигатель»
Данный способ широко используется для регулирования лю-
бых переменных ЭП во всех возможных режимах при высоких тре-
бованиях к показателям его качества. По этой причине данный
89
Рис. 4.11. Схема включения двигателя (а) и его характеристики (б) при ре-
гулировании напряжения на якоре:
1 — при питании двигателя от сети с номинальным напряжением; 2... 8 — при
питании от преобразователя при различных значениях его ЭДС
способ до недавнего времени являлся основным при создании
регулируемых ЭП с двигателями постоянного тока.
Реализация этого способа предусматривает питание якоря дви-
гателя от преобразователя, выходное напряжение которого регу-
лируется по величине и может изменяться при необходимости по
полярности. Поскольку основным источником питания ЭП слу-
жит сеть переменного тока, таким преобразователем является уп-
равляемый выпрямитель.
Если ЭП питается от источника постоянного тока, например
от аккумуляторной батареи, то в качестве преобразователя ис-
пользуются импульсные преобразователи с различным способом
модуляции. Питание двигателя в такой системе может происхо-
дить и от преобразователя со свойствами источника тока, приме-
нение которого рассмотрено в подразд. 4.8.
Схема ЭП при питании якоря двигателя от УВ, получившая
сокращенное название система УВ—Д, или система П —Д, пока-
зана на рис. 4.11, а, где Еп — ЭДС преобразователя; Rn — его
внутреннее сопротивление; кп — коэффициент усиления преоб-
разователя по напряжению, к„ = Ea/Uy (Uy — входной сигнал уп-
равления). Напряжение на выходе преобразователя вследствие на-
личия его внутреннего сопротивления R„ определяется как
U=En-IRn. (4.29)
Обмотка возбуждения двигателя питается от отдельного исто-
чника постоянного тока, например неуправляемого или управля-
емого выпрямителя.
Формулы для электромеханической и механической характе-
ристик получим из выражений (4.4) и (4.5) подстановкой в них
напряжения из выражения (4.29):
90
co = £П/(&Ф) - 7(Яя + ^п)/(^Ф) = ®о - (4.30)
(О = £П/(£Ф) - M(R„ + ЯП)/(£Ф)2 = со0 - А®. (4.31)
Из формул (4.30) и (4.31) видно, что при изменении ЭДС
преобразователя Еп пропорционально изменяется скорость иде-
ального холостого хода to0 на характеристиках, а их наклон не
изменяется. Получаемые искусственные характеристики в соот-
ветствии с (4.30) и (4.31) представляют собой прямые линии 2... 8
на рис. 4.11, би имеют по сравнению с естественной характерис-
тикой 1 двигателя больший наклон из-за наличия внутреннего
сопротивления преобразователя Rn (естественная характеристика
1 соответствует питанию двигателя от источника с нулевым внут-
ренним сопротивлением). Характеристики располагаются во всех
четырех квадрантах параллельно друг другу; при Еа - 0 двигатель
работает в режиме динамического торможения (характеристика 5
на рис. 4.11, б).
Характеристики 2... 8 соответствуют следующим соотношени-
ям ЭДС преобразователя: Епг > Еп3 > Еп4; Еп5 = 0; Еп6 = -Еп4; Еп7 =
~ ~^пЗ’ ^4i8 — ~^п2'
Управляемый выпрямитель может быть электромашинным в
системе «генератор—двигатель» (система Г—Д) или полупровод-
никовым в системе «тиристорный преобразователь—двигатель»
(система ТП—Д).
Система «генератор—двигатель» (Г—Д). В этой системе (рис.
4.12) якорь двигателя 4 непосредственно присоединяется к якорю
генератора 3, который вместе с приводным двигателем 7 образует
электромашинный выпрямитель 2 напряжения трехфазного пере-
менного тока в постоянный. Регулирование напряжения на якоре
двигателя происходит за счет изменения тока возбуждения гене-
ратора /вг с помощью потенциометра 8. Это приводит к измене-
Рис. 4.12. Схема системы «генера-
тор — дви гател ь»:
1 — двигатель генератора; 2 — электро-
машинный выпрямитель; 3 — генератор;
4 — приводной двигатель; 5 — обмотка
возбуждения двигателя; 6 — добавочный
резистор; 7 — обмотка возбуждения ге-
нератора; 8 — потенциометр
91
нию магнитного потока, ЭДС генератора Е{ и соответственно на-
пряжения U на якоре двигателя. Получаемые характеристики сис-
темы Г—Д соответствуют показанным на рис. 4.11, б.
Регулирование напряжения в этой системе может сочетаться с
воздействием на магнитный поток двигателя, что обеспечивает
двухзонное регулирование его скорости. Регулирование магнитно-
го потока двигателя осуществляется за счет включения в цепь об-
мотки возбуждения двигателя 5 резистора 6. В замкнутых ЭП пита-
ние обмотки возбуждения генератора 7 и двигателя происходит
от регулируемого источника постоянного тока, например полу-
проводникового УВ.
Основными достоинствами системы Г—Д являются большой
диапазон и плавность регулирования скорости двигателя, высо-
кая жесткость и линейность характеристик, возможность получе-
ния всех энергетических режимов работы в том числе и рекупера-
тивного торможения. В то же время для этой системы характерны
такие недостатки, как утроенная мощность установки, низкий
КПД, инерционность процесса регулирования скорости, шум при
работе.
Система «тиристорный преобразователь—двигатель» (ТП—Д).
Основным типом преобразователей, применяемых в современном
регулируемом ЭП постоянного тока, являются тиристорные ре-
версивные или нереверсивные выпрямители, собранные по нуле-
вой или мостовой однофазной или трехфазной схемам. Для им-
пульсного регулирования напряжения в ЭП небольшой и средней
мощности применяются также и транзисторные преобразователи.
а
Рис. 4.13. Схема включения двигателя (а) и его характеристики (б) при
регулировании напряжения на якоре с помощью тиристорного преобра-
зователя:
1 — естественная характеристика двигателя; 2... 7 — искусственные характери-
стики при различных углах регулирования тиристоров
92
Принцип действия, свойства и характеристики системы ТП—Д
рассмотрим на примере схемы рис. 4.13, а, в которой использован
однофазный двухполупериодный нереверсивный тиристорный
выпрямитель, собранный по нулевой схеме.
Преобразователь включает в себя согласующий трансформа-
тор Т, имеющий две вторичные обмотки, два тиристора VS1 и
VS2, сглаживающий реактор L и систему импульсно-фазового уп-
равления тиристорами СИФУ. Преобразователь обеспечивает ре-
гулирование напряжения на двигателе за счет изменения средне-
го значения ЭДС преобразователя Еп, достигаемое, в свою оче-
редь, изменением угла а управления тиристорами. Угол а опреде-
ляет задержку подачи импульсов управления Ua на тиристоры VS1
и VS2 относительно момента их естественного открытия, когда
потенциал на их анодах становится положительным по сравне-
нию с потенциалом катода.
Когда а = 0, т.е. тиристоры VS1 и VS2 получают импульсы уп-
равления от СИФУ в указанный момент, преобразователь осуще-
ствляет двухполупериодное выпрямление и к якорю двигателя
прикладывается полное напряжение. Если теперь с помощью
СИФУ осуществлять подачу импульсов управления Ua на тиристо-
ры VS1 и VS2 со сдвигом (задержкой) на угол а * 0, то ЭДС пре-
образователя снизится и этому случаю будет соответствовать уже
меньшее среднее напряжение, подводимое к двигателю. Управле-
ние СИФУ осуществляется сигналом управления Ur
Зависимость среднего значения ЭДС многофазного преобразо-
вателя от угла управления тиристорами а имеет вид
£ср = Етт sin (п/т) cos (а/л) = Eicosa, (4.32)
где Ет — амплитудное значение ЭДС преобразователя; т — число
фаз; Ёср0 — ЭДС преобразователя при a = 0.
Ввиду пульсирующего характера ЭДС преобразователя ток в цепи
якоря также является пульсирующим. Такой характер тока оказы-
вает вредное влияние на работу двигателя, приводя к ухудшению
условий работы его коллектора и дополнительным потерям энер-
гии и нагреву. Для уменьшения пульсации тока в цепь якоря обычно
включается сглаживающий реактор, индуктивность L которого
выбирается в зависимости от допустимого уровня пульсации тока.
Уравнения электромеханической и механической характери-
стик двигателя (рис. 4.13, б) получим при замене в формулах (4.30)
и (4.31) Еп на Еср из формулы (4.32):
со = Есросо8(ал)/(ЕФ) - /(Яя + ЯП)/(ЕФ); (4.33)
со = Е'ср0со8(ал)/(ЕФ) - М(/?я + /?П)/(ЕФ)2, (4.34)
где Rn — эквивалентное сопротивление преобразователя, Rn =
- хТт/(2п) + RT + Rl (хт, Rt — соответственно приведенные ко
93
вторичной обмотке индуктивное и активное сопротивления об-
моток трансформатора; RL — активное сопротивление сглажива-
ющего реактора £).
Особенностью характеристик двигателя при его питании от УВ
является наличие области, выделенной на рисунке 4.13, б пунк-
тирной линией и заштрихованной, где его характеристики нели-
нейны. В этой области имеет место режим прерывистого тока и
вызванное этим заметное изменение (уменьшение) жестких ха-
рактеристик.
Вследствие односторонней проводимости преобразователя ха-
рактеристики двигателя располагаются только в первом (характе-
ристики соответствующие а = 0; 30 и 60°) и четвертом (ха-
рактеристики 4... 7при а = 90, 120, 150 и 180°) квадрантах. Мень-
шим углам управления соответствует большая Еп и более высокая
скорость двигателя; при а = л/2 Еп - 0 и двигатель работает в режи-
ме динамического торможения.
Для получения характеристик двигателя во всех четырех квад-
рантах используются реверсивные управляемые выпрямители,
которые состоят из двух комплектов нереверсивных выпрямите-
лей (рис. 4.14). Комплект тиристоров VS1, УЕЗи И55 обеспечивает
работу двигателя при одном направлении тока в цепи якоря, а
комплект тиристоров VS2, VS4 и VS6 — при другом направлении
тока. Двигатель в такой схеме имеет характеристики, показанные
на рис. 4.11, б, позволяющие кроме реверса скорости и тока обес-
печивать режим торможения с рекуперацией энергии в сеть.
В реверсивных УВ используются два основных принципа управ-
ления комплектами вентилей: совместный и раздельный. Совме-
стное управление предусматривает подачу от системы импульс-
Рис. 4.14. Схема включения двигателя при использовании реверсивного
тиристорного преобразователя
94
но-фазового управления тиристорами СИФУ импульсов управле-
ния Ua одновременно на тиристоры обоих комплектов: VS1, VS3,
VS5 (катодная группа) и VS2, VS4, VS6 (анодная группа). При
этом за счет наличия угла сдвига между импульсами управления
двух комплектов, близкого к я, один из комплектов работает в
выпрямительном режиме и проводит ток, а другой — в инвертор-
ном режиме и ток не проводит. За счет разности мгновенных зна-
чений ЭДС между комплектами протекает так называемый урав-
нительный ток, для ограничения которого в схеме на рис. 4.14
предусмотрены уравнительные реакторы L1 и L2.
Для уменьшения уравнительных токов используется совмест-
ное нелинейное управление, при котором сумма углов а] и а2
несколько отличается от п. В этом случае имеет место заметное
увеличение скорости двигателя при переходе от двигательного ре-
жима к генераторному, что находит отражение в нелинейности
характеристик, поэтому нелинейное согласование применяется от-
носительно редко.
Раздельное управление используется для полного исклю-
чения уравнительных токов между комплектами реверсивного УВ.
Сущность его состоит в том, что импульсы управления подаются
только на один из комплектов, который должен в данный момент
проводить ток. На второй комплект импульсы не подаются, и он
не работает, «закрыт».
Управление преобразователем осуществляется с помощью спе-
циального логического переключающего устройства (ЛПУ). Это
устройство, осуществляя контроль за током преобразователя, обес-
печивает в функции входного сигнала Ц включение в работу и
выключение комплектов с небольшой паузой в 5... 10 мс. Вслед-
ствие этого при переходе двигателя из одного энергетического
режима в другой вблизи оси скорости имеет место режим преры-
вистых токов, что отражается в нелинейности характеристик дви-
гателя.
К достоинствам рассматриваемой системы ТП—Д относятся
плавность, быстродействие, значительный диапазон регулирова-
ния скорости, большая жесткость получаемых искусственных ха-
рактеристик, высокий КПД электропривода, определяемый не-
большими потерями мощности в преобразователе, бесшумность в
работе, простота в обслуживании и эксплуатации.
Наряду со значительными достоинствами системе ТП—Д при-
сущи следующие недостатки: преобразователь имеет односторон-
нюю проводимость; для получения характеристик во всех четырех
квадрантах требуется использовать реверсивный двухкомплектный
преобразователь; напряжение на якоре и ток имеют пульсиру-
ющий характер, что ухудшает условия работы двигателя; для сгла-
живания пульсации тока в большинстве случаев применяют сгла-
живающий реактор или более сложные многофазные схемы вып-
95
рямления; работа УВ характеризуется режимом прерывистого тока,
при котором резко падает жесткость характеристик и они стано-
вятся нелинейными; с ростом диапазона регулирования скорости
снижается коэффициент мощности coscp ЭП, определяемый для
системы ТП—Д по приближенной формуле coscp = cos а. Кроме
того, вентильный электропривод вносит искажения в форму тока
и напряжения источника питания, что отрицательно сказывается
на работе других приемников электроэнергии; полупроводнико-
вые преобразователи обладают также невысокой помехозащищен-
ностью и малой перегрузочной способностью по току и напряже-
нию.
Несмотря на отмеченные недостатки система ТП—Д является
высокоэффективным регулируемым ЭП постоянного тока и ши-
роко применяется для привода таких ответственных рабочих ма-
шин, как прокатные станы, металлорежущие станки, экскавато-
ры и т.д.
Задача 4.12. Двигатель типа 2ПФ250 имеет следующие пас-
портные данные: UHOM - 220 В; Рном = 45 кВт; лном = 1 000 об/мин;
/ном = 233 А; R„ = 0,07 Ом. Рассчитать и построить электромехани-
ческую и механическую характеристики двигателя при питании
его от ТП с внутренним сопротивлением Rn = 0,1 Ом при Еп = С/ном.
Определить величину Еп, при которой механическая характери-
стика пройдет через точку с координатами: ®и - 30 рад/с; Мн -
= 400 Н • м, и построить эту характеристику. Определить для рас-
считанной Еп угол управления тиристорами а, приняв Еср0 = 220 В.
4.7. Регулирование скорости двигателя
шунтированием якоря
Для ЭП ряда подъемно-транспортных машин и механизмов в
целях получения пониженных (посадочных) скоростей движения
их исполнительных органов применяется схема с шунтированием
якоря двигателя, показанная на рис. 4.15. В этой схеме параллельно
якорю двигателя включен шунтирующий резистор Яш и последо-
вательно ему — резистор Ra.
Рис. 4.15. Схема с шунтированием якоря дви-
гателя
96
Уравнения характеристик двигателя в этой схеме могут быть
получены на основании формул (4.2) и (4.3) и следующих соот-
ношений, вытекающих из рассмотрения схемы рис. 4.15:
Е+IRS +InRn- (4.35)
7/=/ш7?ш +/п/?п; (4.36)
/П = /+Ли- (4.37)
Подставляя в выражения (4.35) и (4.36) ток /п из формулы
(4.37), а затем исключая из полученных двух уравнений /ш, полу-
чим следующие выражения соответственно для электромехани-
ческой и механической характеристик:
со = аш0 - 1(R„ + aR^/c, (4.38)
со = й(О0 “ Л7(Т?Я + «Ап)/с2, (4.39)
где а = /?Ш/(ЛШ + 7?п); с = кФ.
Из (4.38) и (4.39) видно, что в схеме с шунтированием якоря
снижается скорость идеального холостого хода и падает жесткость
характеристик по сравнению с основной схемой включения дви-
гателя. Это нашло свое отражение в искусственных характеристи-
ках двигателя, построенных при условии 7?ш - const, Ra = var (рис.
4.16, а) и при условии Rn = const, /?ш = var (рис. 4.1, б). Характе-
ристика 7 является естественной, а остальные — искусственными.
Рассмотренный способ регулирования скорости по своим ха-
рактеристикам и показателям занимает промежуточное положе-
ние между способами, связанными с изменением напряжения на
якоре и сопротивлением в цепи якоря.
Рис. 4.16. Характеристики двигателя (а, б) при шунтировании якоря:
/ — естественная; 2, 3 — R„ = var, = const; 4... 6 — Лш = var, Лп = const
97
Диапазон регулирования скорости лежит в пределах 5...6,
плавность регулирования определяется плавностью изменения
сопротивлений 7?ш и Rn. Регулирование скорости осуществ-
ляется вниз от основной при постоянном моменте нагрузки,
жесткость получаемых искусственных характеристик относи-
тельно высокая в области малых скоростей.
Экономичность этого способа регулирования невысока из-за
значительных потерь мощности в цепи якоря. По этой причине
способ используется для регулирования скорости двигателей не-
большой мощности или при кратковременной работе ЭП на по-
ниженных скоростях.
4.8. Регулирование переменных электропривода
в системе «источник тока—двигатель»
В рассмотренных ранее схемах системы «преобразователь—дви-
гатель» якорь двигателя питался от преобразователя со свойства-
ми источника напряжения. Такой преобразователь имеет неболь-
шое (в идеале — нулевое) собственное внутреннее сопротивле-
ние, в результате падение напряжения в нем также невелико и
подаваемое на якорь напряжение изменяется мало. В пределе при
нулевом внутреннем сопротивлении преобразователя напряжение
на его выходе постоянно и не зависит от тока нагрузки.
Наряду с этим в электроприводе находят применение и преоб-
разователи другого типа — со свойствами источника тока. Они ха-
рактеризуются тем, что выдают в нагрузку мало изменяющийся (в
идеале — неизменный по величине) ток. Двигатель, питаясь от та-
кого преобразователя со свойствами источника тока, приобретает
свойства источника регулируемого момента, а при использовании
обратных связей возможно и регулирование скорости двигателя.
Схема такой системы, получившей название «источник тока —
двигатель» (ИТ—Д), показана на рис. 4.17, а. Якорь двигателя 2
подключен к источнику тока 1 и обтекается постоянным током
I = const. Величина тока /в в обмотке возбуждения 3 и его направ-
ление могут изменяться с помощью потенциометра 4 и ключей
К.1 и К2. Так как I - const, то электромеханическая характеристи-
ка двигателя будет представлять собой вертикальную прямую ли-
нию, показанную на рис. 4.17, б.
Семейство механических характеристик нетрудно получить на
основании формулы (4.3) для момента двигателя. Из нее видно,
что при / = const величина момента двигателя и его направление
определяются соответственно величиной магнитного потока и его
знаком. Таким образом, если в схеме рис. 4.17, а изменить с помо-
щью потенциометра 4 и ключей К1 и К2 величину тока возбужде-
ния и его направление, а тем самым и магнитный поток Ф, то
98
/= const
Рис. 4.17. Схема включения двигателя (а) и его электромеханическая (б)
и механические (е) характеристики при использовании источника тока:
1 — источник тока; 2 — двигатель; 3 — обмотка возбуждения; 4 — потенциометр;
5... 10 — механические характеристики при различных токах возбуждения
получатся (рис. 4.17, в) механические характеристики в виде вер-
тикальных прямых линий 5... 10. Такие характеристики обеспечи-
вают постоянство момента на валу двигателя при любой его ско-
рости, а ЭП приобретает свойства источника момента, управля-
емого по цепи возбуждения.
В данном ЭП для регулирования скорости может быть сформи-
рован и горизонтальный участок механических характеристик. Это
достигается путем введения нелинейной отрицательной обратной
связи по скорости двигателя. Такая замкнутая схема ЭП рассмот-
рена в под разд. 4.13.
4.9. Импульсное регулирование переменных
электропривода
В связи с развитием полупроводниковой техники распростра-
нение получил импульсный способ регулирования переменных
ЭП, в основном его скорости. Этот способ является практически
единственно возможным при питании двигателя от нерегулиру-
емого источника постоянного тока (аккумуляторной батареи, не-
управляемого выпрямителя, солнечной батареи и т.д.).
Регулирование скорости при использовании этого способа осу-
ществляется импульсным изменением напряжения, магнитного
99
потока или сопротивления резистора в якорной цепи, т.е. рас-
смотренными ранее основными способами получения искусствен-
ных характеристик.
Импульсное регулирование осуществляется с помощью управ-
ляемых полупроводниковых ключей того или иного типа. Основ-
ным показателем работы ключа является заполнение (скважность
его работы) у, определяемое отношением времени замкнутого
состояния ключа t3 к периоду его коммутации Тк:
Y= t3/TK = t3/(t3 + to), (4.40)
где t0 — время разомкнутого состояния ключа.
На практике применяются два основных способа управления
ключом: широтно-импульсная (ШИМ) и частотно-импульсная
(ЧИМ) модуляции. При широтно-импульсной модуляции период
коммутации ключа Тк остается постоянным, а изменяется время
замкнутого состояния ключа t3, т.е. ширина импульса при неиз-
менном периоде (частоте) их следования.
При частотно-импульсной модуляции время t3 остается неиз-
менным, а меняется период коммутации ключа Тк, который об-
ратно пропорционален частоте. Заметим, что при таком способе
управления меняется и заполнение у. Таким образом, заполнение
оказывается универсальным показателем для обоих способов уп-
равления, и им удобно пользоваться при анализе импульсных спо-
собов регулирования координат.
Импульсное регулирование сопротивления добавочного резисто-
ра в цепи якоря. Этот процесс осуществляется путем периодиче-
ской коммутации (замыкания и размыкания) ключа 7, включен-
ного параллельно резистору 2 сопротивлением Ra (рис. 4.18, а).
Семейство механических характеристик двигателя при импуль-
сном регулировании получим, проанализировав граничные режи-
мы работы ключа 7: его постоянно разомкнутое и постоянно зам-
кнутое состояния. При у = 1 резистор 2 выведен из цепи якоря и
а
Рис. 4.18. Схема включения двигателя (а) и его характеристики (6) при
импульсном регулировании сопротивления добавочного резистора:
1 — импульсный ключ; 2 — резистор; 3 — двигатель; 4...6 — характеристики
двигателя; ОВ — обмотка возбуждения
100
Рис. 4.19. Схема включения двигателя (а) и его характеристики (б) при
импульсном регулировании магнитного потока:
1 — двигатель; 2 — импульсный ключ; 3 — добавочный резистор; 4 — обмотка
возбуждения; 5... 7 — характеристики двигателя
двигатель 3 в соответствии с этим работает на естественной меха-
нической характеристике 4 (рис. 4.18, б). Если у= 0, то резистор 2
введен в цепь якоря и двигатель 3 работает на искусственной ха-
рактеристике 6. При 0 < у < 1 механические характеристики 5
располагаются между двумя граничными характеристиками.
Математическое выражение для семейства характеристик, ко-
торое приводится без вывода, имеет вид
го = t/ДЛФ) - Л/(ЛД(1 - у) + 7?Я)/(ЛФ)2. (4.41)
Импульсное регулирование магнитного потока двигателя. В этой
схеме регулирования (рис. 4.19, а) в цепь обмотки возбуждения 4
включается добавочный резистор 3, шунтированный ключом 2.
Заполнение у ключа может регулироваться в пределах от 0 до 1.
При у = 1 ключ постоянно замкнут, резистор 3 зашунтирован, по
обмотке 4 возбуждения протекает номинальный ток и двигатель 1
работает на естественной характеристике 7(рис. 4.18, б). При у = О
ключ 2 постоянно разомкнут, резистор 3 введен в цепь обмотки 4
возбуждения, ток возбуждения и магнитный поток уменьшены,
чему соответствует искусственная характеристика 5. При значени-
ях 0 < у < 1 двигатель работает на промежуточных характеристи-
ках 6.
Импульсное регулирование напряжения на якоре двигателя. Для
реализации этого способа (рис. 4.20, а) в цепь якоря включается
ипульсный ключ 7, с помощью которого якорь двигателя 2 пери-
одически подключается к источнику напряжением Uc. При замк-
нутом ключе 7 ток в якоре двигателя протекает под действием
напряжения Uc источника, а при разомкнутом — под действием
ЭДС самоиндукции, замыкаясь через диод VD. Регулируя заполне-
ние у ключа, можно получать различные механические характе-
ристики двигателя.
При у = 1 на якорь двигателя постоянно подается полное на-
пряжение источника, чему соответствует естественная характери-
101
a
Рис. 4.20. Схема включения двигателя (а) и его характеристики (б) при
импульсном регулировании напряжения на якоре двигателя:
1 — импульсный ключ; 2 — двигатель; 3...5 — характеристики двигателя
стика 3 (рис. 4.20, б). Если у = 0, то напряжение на якорь не
подается, двигатель оказывается включенным по схеме динами-
ческого торможения и его механическая характеристика 5 прохо-
дит через начало координат. Промежуточным значениям заполне-
ния 0 < у < 1 соответствуют механические характеристики 4, рас-
полагаемые между этими двумя граничными характеристиками.
При импульсном регулировании напряжения возможен режим
прерывистого тока. Область прерывистого тока, в которой харак-
теристики двигателя криволинейны, расположена на рис. 4.20, б
слева от пунктирной кривой. В остальной области характеристи-
ки двигателя прямолинейны и описываются следующим выраже-
нием:
го = у^с/(ЛФ) - М7?Я/(ЛФ)2. (4.42)
Показатели импульсного регулирования скорости в основном
соответствуют способам непрерывного регулирования. Вместе с
тем энергетические показатели импульсных электроприводов по-
стоянного тока несколько хуже. Это объясняется пульсациями тока
якоря, что приводит к дополнительным потерям энергии в двига-
теле.
4.10. Переходные процессы в электроприводе
при питании двигателя от сети
Переходные процессы в ЭП с двигателем постоянного тока с
независимым возбуждением являются в общем случае электроме-
ханическими и определяются как механической инерцией эле-
ментов ЭП и исполнительного органа рабочей машины, так и
электромагнитной инерцией обмоток якоря и возбуждения. Эти
процессы возникают при подаче (снятии) питающего двигатель
напряжения, представляющего собой управляющее воздействие
102
для ЭП, или при изменении момента нагрузки, который для элек-
тропривода является возмущающим воздействием.
При управлении двигателем подаваемым на его якорь напря-
жением U переходные процессы в ЭП описываются следующей
системой уравнений:
U = ЛФсо + iR + Aadz/dZ; (4.43)
М - Л/с = Jdco/dZ; (4.44)
М = кФ(, (4.45)
где R — активное сопротивление якорной цепи; Ья — индуктив-
ность якорной цепи.
Подстановка формул (4.44) и (4.45) в формулу (4.43) при ус-
ловии постоянства магнитного потока Ф и момента нагрузки Мс
после несложных преобразований позволяет получить следующее
исходное дифференциальное уравнение для анализа переходных
процессов этого вида:
TaTMd2a>/d/2 + TMdo)/dZ + со - сос, (4.46)
где Тя — электромагнитная постоянная цепи якоря, Тя = Ья/Кя, с;
Гм — механическая постоянная времени, Ти = J/|3, с; а>с — ско-
рость установившегося движения, соответствующая моменту на-
грузки Мс, о)с = RMJc2 (с = кФ).
Если Тм > 4ТЯ, то решение уравнения (4.46) имеет вид
го = сос + qef+ С2ер2, (4.47)
где р1,2--1/(2Тя)±А/1/4Гя2-1/(ТяГм).
Если Тм < 4ТЯ, то решение уравнения (4.46) имеет вид
со = о)с + (C^cosQZ + C2sinQ/)e“', (4.48)
где Q = 71/(ТяТм)-1/4Тя2; a = -1/2Тя.
Постоянные интегрирования С, и С2 находятся из начальных
условий переходного процесса по начальным значениям скорости
со и ее производной. Для этого следует вначале по соотношению
постоянных времени определить характер переходного процесса,
а затем, продифференцировав по времени (4.47) или (4.48), по-
лучить общее выражение для изменения во времени производной
скорости. Подставляя в это уравнение начальное значение ускоре-
ния, а в уравнения (4.47) или (4.48) — начальное значение ско-
рости, путем совместного решения этих двух уравнений находят-
ся постоянные интегрирования С, и С2.
Для получения зависимости изменения во времени момента
двигателя M(t) необходимо подставить выражения (4.47) и (4.48)
в формулу (4.44) и выполнить необходимые преобразования. Ха-
103
Рис. 4.21. Кривые переходного процес-
са при пуске двигателя
рактер изменения момента будет также определяться соотноше-
нием Ты и 4ТЯ.
На рис. 4.21 показаны графики скорости при пуске двигателя
для разных соотношений Тм и Тя. При Тм> 4ТЯ изменение скоро-
сти во времени имеет монотонный характер, а при Тм < 4ГЯ пере-
ходный процесс характеризуется колебательностью и перерегули-
рованием, т.е. превышением в определенные моменты времени
скорости своего установившегося значения юс.
Задача 4.13*. Двигатель постоянного тока независимого возбужде-
ния имеет следующие номинальные данные: нном = 1 500 об/мин;
UHOM = 220 В; /ном = 24,2 А; /?я = 0,38 Ом; Ья = 0,2 Гн. Определить
характер изменения скорости двигателя при пуске, если суммар-
ный момент инерции ЭП J= 0,5 кг м2, а кратность пусковых тока
и момента двигателя равна двум.
1. Определяем номинальные скорость и момент двигателя:
«>ном = 2лином/60 = 2-3,14-1 500/60 = 157 рад/с;
Л/ном = /’ном/Юном = 4 800/157 = 30,6 Н • м.
2. Находим с = ЛФНОМ:
С = ЛФном - (£4ом - /ном/?я)Мом = (220 - 24,2 • 0,38)/157 = 1,34 В с.
3. Определяем скорость холостого хода двигателя:
= ^номДФном = 220/1,34 = 164 рад/с.
4. Находим суммарное активное сопротивление цепи якоря, при
котором пусковые ток и момент будут в 2 раза превышать их но-
минальные значения:
R = t/H0M/(2/H0M) = 220/2-24,2 = 4,54 Ом.
5. Рассчитываем механическую Тм и электромагнитную Тя по-
стоянные времени:
Тм - У/р = 7«о/^пуск = Уоэо/2Л7НОМ = 0,5 • 164/(2 • 30,6) = 1,34 с;
Тя = LJR = 0,2/4,54 = 0,044 с.
104
Так как Ты = 1,34 > 4 Тя = 0,18, то переходный процесс будет
иметь монотонный характер.
Задача 4.14. Определить постоянные интегрирования и полу-
чить уравнения переходных процессов для скорости и момента
двигателя, используя условие задачи 4.13.
4.11. Переходные процессы в разомкнутой
системе «преобразователь—двигатель».
Формирование переходных процессов
Характер переходных процессов в такой системе определяется
видом преобразователя, в качестве которого может использовать-
ся электромашинный или полупроводниковый преобразователь,
и структурой ЭП. В настоящем разделе рассматриваются переход-
ные процессы в разомкнутой системе с использованием задатчи-
ка интенсивности как средства формирования переходных про-
цессов. Анализ и формирование переходных процессов в замкну-
той схеме с подчиненным регулированием переменных (коорди-
нат) рассмотрены в подразд. 4.13.
Переходные процессы в системе «генератор—двигатель». Осо-
бенностью переходных процессов в этой системе является
инерционность генератора постоянного тока, обусловленная зна-
чительной индуктивностью его обмотки возбуждения, с помо-
щью которой и осуществляется управление двигателем.
Управление двигателем в системе Г—Д (рис. 4.22) осуществля-
ется за счет регулирования тока возбуждения генератора /в г. В ча-
стности, пуск двигателя осуществляется замыканием контактов В
(Вперед) или Н (Назад), реверс — переключением этих контак-
тов, а торможение — отключением обмотки возбуждения 2 гене-
ратора (ОВГ) от источника напряжения и замыканием ее на раз-
рядный резистор 1. В результате процессы в цепи обмотки возбуж-
дения 2 генератора являются ведущими для ЭП, а процессы из-
Рис. 4.22. Схема системы «генератор—двигатель»:
7 — разрядный резистор; 2 — обмотка возбуждения генератора; ОВД — обмотка
возбуждения двигателя
105
менения остальных его переменных — тока, момента, скорости —
ведомыми, зависящими от параметров цепи якоря и механичес-
кой части ЭП.
Рассмотрим переходные процессы пуска, реверса и торможения
двигателя в системе Г—Д для случая холостого хода ЭП (Мс = 0)
без учета индуктивности якорных обмоток генератора и двигателя.
Рассмотрим изменение во времени ЭДС генератора ег(/), ЭДС
двигателя ea(t), которая согласно формуле Е= ЛФы в другом мас-
штабе иллюстрирует график изменения скорости ы(/) и тока яко-
ря /(/), пропорционального моменту двигателя M(t).
Для анализа переходных процессов будем использовать следу-
ющие основные соотношения между переменными ЭП при Мс = 0:
/ = (ег - ед)/Ля; (4.49)
dco/d t = M/J = k<$>i/J,
(4.50)
где /?я — суммарное сопротивление цепи якорей генератора и дви-
гателя; J — суммарный приведенный к валу двигателя момент
инерции.
Пуск двигателя начинается (см. рис. 4.22) после замыкания
контактов В (или Н) и сопровождается нарастанием тока возбужде-
ния и пропорциональной ему ЭДС генератора по экспоненциаль-
ному закону (кривая 1 на рис. 4.23, а). Экспоненциальная зависи-
мость сг(/) характеризуется постоянной времени Твг = -^овг/^овг-
Рис. 4.23. Кривые переходного процесса в системе «генератор—двига-
тель» при пуске (а), реверсе (б) и торможении (в):
1 — ЭДС генератора; 2 — ЭДС двигателя; 3 — ток якоря
106
График тока /(/) показан на рис. 4.23, а в виде кривой 3. Так
как момент нагрузки Мс на валу двигателя отсутствует, то началь-
ное и конечное значения тока равны нулю, а в промежутке между
этими нулевыми значениями ток в якоре достигает своего макси-
мального значения /тах в момент времени /тах.
Кривую 2 ЭДС двигателя ед(1) и его скорости со(/) строим с
учетом полученной зависимости /(/), которая в соответствии с
(4.50) определяет производную скорости dco/dz. Кривая 2 ea(t)
имеет горизонтальные касательные на начальном и конечном ин-
тервалах переходного процесса, а в момент времени /тах, когда
ток максимален, она имеет перегиб. Учитываем также и то, что
при Мс = 0 в соответствии с (4.49) Еау„ ~ Егу„, а £д нач = 0. Отме-
тим, что в момент времени /тах, когда i - /тах, согласно (4.49)
разность ЭДС генератора и двигателя максимальна.
Реверс двигателя осуществляется изменением полярности
возбуждения UB г, для чего (см. рис. 4.22) размыкаются контакты В
и замыкаются контакты Н. Вследствие этого начинают изменяться
по экспоненциальному закону с постоянной времени Гвг ток воз-
буждения и ЭДС генератора от начального значения Ег уст до ко-
нечного значения -£густ (рис. 4.23, б).
< Кривая тока при реверсе качественно повторяет кривую тока
при пуске, но максимум тока в 2 раза превышает максимум тока
при пуске, а сам ток имеет противоположное пуску направле-
ние.
Аналогично процессу пуска кривая 2 ea(J) (она же кривая со(/))
имеет горизонтальные касательные в начале и конце реверса, а в
момент максимума тока — перегиб. Кривые тока 3 и ЭДС 2 двига-
теля при реверсе показаны на рис. 4.23, б.
Торможение двигателя осуществляется отключением об-
мотки возбуждения от источника питания и замыканием ее на
разрядный резистор 1 (см. рис. 4.22) сопротивлением 7?р. В резуль-
тате этого начинают уменьшаться ток возбуждения и ЭДС генера-
тора по экспоненциальному закону с постоянной времени Твг =
= ^овг/(^овг + Лр)-
Процесс уменьшения ЭДС генератора при торможении пока-
зан на рис. 4.23, в. Характер изменения тока аналогичен характеру
рассмотренных режимов пуска и реверса: начальное и конечное
значения тока равны нулю, а в момент rmax имеет место максимум
тока /тах.
Аналогичный пуску и реверсу характер имеет кривая 2 ЭДС и
скорости двигателя в отношении касательных к начальному и ко-
нечному участкам и точки перегиба.
При торможении и реверсе до момента времени t\ ЭДС двига-
теля превышает ЭДС генератора. Вследствие этого двигатель Д ра-
ботает в генераторном режиме, генератор Г — в двигательном,
двигатель М — в генераторном режимах, отдавая энергию в сеть.
107
Другими словами, осуществляется торможение двигателя с реку-
перацией энергии в сеть.
Особенностью переходных процессов в системе Г—Д является
значительное время переходных процессов, определяемое боль-
шой постоянной времени обмотки возбуждения генератора. Так,
если значение электромагнитной постоянной времени обмоток
якоря двигателя и генератора обычно составляет сотые доли се-
кунды, то постоянная времени их обмоток возбуждения при
мощности до 15 кВт лежит в пределах 0,1...0,6 с, до 75 кВт —
0,8...0,9 с, а до 3 000 кВт и выше — 2...4 с.
Это обстоятельство приводит к тому, что переходные процессы
в системе Г—Д, если не предпринять специальных мер, оказыва-
ются затянутыми по времени. Такое положение является нежела-
тельным особенно для рабочих машин, в которых переходные про-
цессы составляют основную часть технологического цикла. К ним
относятся, например, реверсивные станы металлургической про-
мышленности, которые по условиям технологии должны произво-
дить 15...20 реверсов в минуту. Замедленные переходные процессы
приведут к существенному снижению их производительности.
Для устранения этого недостатка в системе Г—Д осуществля-
ют форсирование (убыстрение) переходных процессов. Для этого
на время переходного процесса на цепь возбуждения генератора
подается повышенное напряжение, избыток которого снимается
после окончания переходного процесса. В результате ток возбуж-
дения, ЭДС генератора и подаваемое на якорь двигателя напряже-
ние изменяются быстрее, что уменьшает длительность переход-
ных процессов в ЭП.
Переходные процессы в системе «полупроводниковый преобразо-
ватель-двигатель». В отличие от электромашинного полупровод-
никовый преобразователь отличается малой инерционностью, что
позволяет эффективно формировать желаемый характер переход-
ных процессов в этой системе. Так, в практических расчетах посто-
янная времени преобразователя принимается равной нескольким
сотым долям секунды или ею вообще пренебрегают из-за ее мало-
сти по сравнению с постоянными времени других элементов ЭП.
Один из простых и распространенных способов получения (фор-
мирования) желаемых динамических характеристик предусмат-
ривает использование специального устройства, называемого за-
датчиком интенсивности. Задатчик интенсивности используется
как в замкнутом, так и разомкнутом ЭП и позволяет формировать
желаемый график скорости и обеспечивать ограничение тока и
момента двигателя в переходных процессах. Схема разомкнутого
ЭП при использовании задатчика интенсивности приведена на
рис. 4.24, а. Назначение задатчика интенсивности состоит в фор-
мировании подаваемого на преобразователь сигнала управления
Uy, а тем самым ее ЭДС Еп и напряжения U на якоре двигателя.
108
Рис. 4.24. Схема включения дви-
гателя (а) и графики переход-
ного процесса (б, в) при ис-
пользовании задатчика интен-
сивности:
1 — потенциометр; 2 — задатчик
интенсивности; 3 — преобразова-
тель; 4 — двигатель
a
При подаче на вход задатчика интенсивности 2 ступенчатого
сигнала t/3C сигнал на его выходе начинает изменяться во време-
ни плавно, например по линейному (или экспоненциальному)
закону, как это показано на рис. 4.24, в. Аналогичное постепенное
изменение сигнала на выходе задатчика интенсивности 2 и тем
самым напряжения на входе преобразователя 3 имеет место и при
смене полярности сигнала задания скорости t/3C или его снятии
(отключении). Интервал изменения во времени входного сигна-
ла, т.е. интенсивность его изменения, в задатчике интенсивности
регулируется и может быть установлен в широких пределах: от
долей секунды до нескольких десятков секунд.
Допустим, что скорость двигателя в этой системе должна из-
меняться по графику, показанному на рис. 4.24, б, и при этом ток
и момент не должны превосходить допустимый уровень. В соответ-
ствии с этим графиком в момент времени t - 0 (см. рис. 4.24, в)
замыкаются контакты В (см. рис. 4.24, а) и осуществляется пуск
двигателя, в момент времени /, — его реверс (размыкаются кон-
такты В и замыкаются контакты Н), а в момент г2 — торможение
(размыкаются контакты Н). Для реализации этого графика скоро-
109
сти в момент t = 0 скачкообразно подается задающий сигнал по
скорости U3C, в момент времени он скачкообразно изменяет
свою полярность, а в момент временя этот сигнал снимается
(см. рис. 4.24, в).
На графике рис. 4.24, в показано требуемое изменение во вре-
мени сигнала управления Uy(t), которое вызывает в силу малой
инерционности преобразователя практически такое же измене-
ние ЭДС преобразователя Е„. За счет плавного изменения £п и
напряжения U на двигателе 4 график скорости двигателя будет
близок к показанному на рис. 4.24, б, а ток и момент в переход-
ных процессах за счет соответствующего выбора темпа изменения
напряжения U не превысят своих допустимых значений.
Рассмотрим более подробно вид графиков скорости, тока и мо-
мента при формировании переходных процессов с помощью за-
датчика интенсивности для самого простого случая, когда Мс = О
(двигатель без нагрузки), а электромагнитная инерция тиристор-
ного преобразователя и цепи якоря двигателя не учитывается.
В этом случае изменение скорости описывается дифференци-
альным уравнением
7Mdo)/dZ + со = coyCT(Z), (4.51)
в котором установившаяся скорость в его правой части является
функцией времени. Это является следствием того, что напряже-
ние на двигателе из-за наличия задатчика интенсивности изменя-
ется плавно, в заданной функции времени. Конкретно примени-
тельно к рассматриваемому случаю при Л/с - 0 имеем
соуст(/) = юо(О = еп({)/(кФ) ~ (4.52)
т.е. закон изменения во времени о)0(/) определяется изменением
ЭДС преобразователя еп(1), которая, в свою очередь, задается
сигналом Uy(f) (см. рис. 4.24, в).
Получим теперь математическое выражение для графика ско-
рости со(/), приняв, что сигнал управления Uy и тем самым ЭДС
преобразователя изменяются по линейному временному закону,
а Л/с = 0:
еп - ^п.нач + (4.53)
где Еп нач — начальное значение ЭДС преобразователя; кс — коэф-
фициент, характеризующий скорость изменения ЭДС во времени.
С учетом формул (4.52) и (4.53) исходное дифференциальное
уравнение для скорости (4.51) примет вид
7Mdo)/dZ + со = et + со0, (4.54)
ГДе 0)0 = £п.нач/(^Ф)-
Решение уравнения (4.54), учитывая, что при t = 0 о) = о)нач,
имеет вид
ПО
co = (е/ + со0нач - Тме)( 1 - е~'/7’м) + co0Ha4e-'/7V (4.55)
Изменение момента двигателя во времени найдем, используя
выражение (2.12) при Мс - 0:
М = 7е + 7(со0нач - сонач - Тие.)/Тие~,/Ты. (4.56)
Разделив обе части уравнения (4.56) на (&Ф), получим выра-
жение для изменения тока двигателя во времени
i = [Гме + (со0нач - 7ме)]е-'/7’м/со0уст. (4.57)
Полученные выражения (4.55) —(4.57) описывают переходные
процессы в системе «преобразователь—двигатель» без учета элект-
ромагнитной инерции преобразователя и цепи якоря двигателя при
линейном изменении во времени ЭДС преобразователя и Мс = 0.
Изменение угла поворота вала двигателя во времени <р(/) можно
найти путем решения уравнения ср = j cod/ после подстановки в
него выражения для скорости (4.55). Используя формулы (4.55) и
(4.56), рассмотрим конкретные виды переходных процессов.
При пуске двигателя график изменения во времена сигнала
управления Ц(/), ЭДС преобразователя етп(/) и скорости холо-
стого хода двигателя со0(/) состоит из двух участков. На первом
участке они изменяются по линейному закону от нуля до устано-
вившегося значения, а затем на втором участке пуска они остают-
ся неизменными. Скорость холостого хода:
со0(г) = еп/ при 0 < t < /п0;
(Oq — /ВдуСТ при t > /по,
где со0уст — скорость холостого хода после завершения пуска; /п0 —
время нарастания сигнала управления Uy с производной еп. Зави-
симость со0(/) имеет вид ломаной линии 7 (рис. 4.25, а).
а б
Рис. 4.25. Кривые переходных процессов (а) и фазовая траектория (б)
при пуске двигателя:
1 — скорость холостого хода; 2 — скорость двигателя; 3 — момент двигателя; 4 —
характеристики двигателя при различных напряжениях; 5 — фазовая траектория
движения
111
При пуске с нулевыми начальными условиями и Л/с = 0 (<вОнач =
= <внач = 0) выражения для скорости (4.55) и момента (4.56) для
первого интервала переходного процесса 0 < / < /п0 записываются
в следующем виде:
a = Ent-TMEn(\-e‘/T")-, (4.58)
Л/= Лп(1 -е-'/г«). (4.59)
Зависимости <в(/) и Л/(/), соответствующие (4.49) и (4.50), изоб-
ражены на рис. 4.25, а соответственно кривыми 2 и 3.
Так как при t > ЗТЫ е~,/т» ~ 0, то выражения (4.58) и (4.59)
могут быть преобразованы к виду:
со = вп/-Тмеп; (4.60)
М — Зеп — Л/тах. (4.61)
Таким образом, при t > 3 Ты скорость двигателя изменяется по
линейному временному закону, а его момент остается постоян-
ным, что и нашло свое отражение в кривых 2 и 3 на рис. 4.25, а.
Из выражений (4.51) и (4.52) следует также, что при t < /п0
скорость двигателя меньше скорости холостого хода на величину
<в0 —св = Гмвп, а ее отставание по времени численно равно механи-
ческой постоянной времени Ты. Отметим, что кривая 3 момента
M(f) в другом масштабе отражает кривую тока /(/).
На втором этапе переходного процесса при t > /п0 ЭДС преоб-
разователя ет п = Еп.уст = const; <в0(/) - const и зависимости скоро-
сти и момента соответствуют выражениям (2.34) и (2.36), полу-
ченным в гл. 2 для переходных процессов при постоянном напря-
жении источника питания двигателя.
На рис. 4.25, б процесс пуска двигателя показан на плоскости
механических характеристик 4 оз(М) в виде кривой 5, которая
может быть построена с помощью рис. 4.25, а. Для этого по кри-
вым <в(/) и М(1) для одного и того же момента времени опреде-
ляются значения <в; и Л/, и точка с этимй координатами наносится
на плоскость механических характеристик. Совокупность этих то-
чек для разных и образует кривую 5, которая называется фазо-
вой траекторией движения. Эта кривая также имеет два участка
(см. рис. 4.25, а), при этом второй участок движения начинается в
точке А, когда ЭДС преобразователя достигает своего установив-
шегося значения Еп у„.
Торможение и реверс двигателя осуществляются за счет
уменьшения ЭДС преобразователя и тем самым скорости идеаль-
ного холостого хода на интервале времени 0 < t < /0 по линейно-
му закону:
®о(0 ^Оуст Вт/ СОоуст Bq-t, (4.62)
112
Рис. 4.26. Кривые переходных процессов при торможении (а) и реверсе (б):
I — скорость холостого хода; 2 — скорость двигателя; 3 — момент двигателя
что соответствует линиям 1 на рис. 4.26, а, б. Конечное значение
соо при торможении равно нулю, а при реверсе----<о0уст.
Кривые скорости двигателя 2 <в(/) и момента 3 M(t) постро-
ены по формулам (4.55) и (4.56) с учетом формулы (4.62) (см.
рис. 4.26). Характер и основные закономерности их изменения ана-
логичны процессу пуска.
4.12. Разомкнутые релейно-контакторные схемы
управления электропривода
Релейно-контакторные схемы управления используются для
осуществления пуска, реверса и торможения двигателей и стро-
ятся с применением электрических аппаратов ручного и дистан-
ционного управления. Для автоматизации работы таких схем мо-
жет использоваться информация о скорости, ЭДС, угле поворота
и токе двигателя и времени, которую получают с помощью соот-
ветствующих датчиков. Рассмотрим работу типовых узлов и схем
управления, опуская при этом элементы коммутации, защиты и
сигнализации, применение которых рассмотрено в подразд. 10.5.
Отметим, что аппараты на схемах управления изображаются в так
называемом нормальном положении, когда на них не оказано
какое-либо управляющее воздействие.
Схема пуска двигателя постоянного тока с независимым воз-
буждением в функции времени. Эта схема (рис. 4.27, а) содержит
кнопки управления SB1 (пуск) и SB2 (останов, стоп двигателя),
электромагнитный контактор КМ1, обеспечивающий подключение
двигателя к сети, и контактор ускорения КМ2 для выключения
(закорачивания) пускового резистора Лд. В качестве датчика вре-
мени в схеме использовано электромагнитное реле времени КТ.
113
Рис. 4.27. Схема пуска двигателя в одну ступень в функции времени
(а), механические характеристики (б):
/ — реостатная; 2 — естественная; в — графики переходного процесса: 3 — ско-
рость двигателя; 4 — ток и момент двигателя
При подключении схемы к источнику питания с напряжением
U происходит возбуждение двигателя и срабатывает реле времени
КТ, размыкая свой контакт в цепи катушки контактора КМ2 и
подготавливая двигатель к пуску. Схема принимает так называе-
мое исходное положение.
Пуск двигателя начинается после нажатия кнопки SB1, в ре-
зультате чего получает питание катушка контактора КМ1, кото-
рый своим силовым контактом подключает двигатель к источни-
ку питания.
Двигатель начинает разбег с пусковым резистором 7?д в цепи
якоря. Одновременно замыкающий блок-контакт контактора КМ1
шунтирует кнопку SB1, и она может быть отпущена, а размыка-
ющий блок-контакт КМ1 разрывает цепь питания катушки реле
времени КТ.
После прекращения питания катушки реле времени КТ через
интервал времени Д/ууего размыкающий контакт замкнется в цепи
катушки контактора КМ2, который включится и главным контак-
том закоротит пусковой резистор 7?д в цепи якоря. Таким обра-
зом, при пуске двигатель в течение времени Мкт разгоняется по
искусственной (реостатной) характеристике 1 (рис. 4,27, б), а после
шунтирования резистора Ад — по естественной характеристике 2.
Величина сопротивления резистора 7?д выбрана таким образом,
что в момент включения двигателя ток Ц в цепи и соответственно
момент М{ не превосходят допустимого уровня.
За время Д/уу после начала пуска скорость вращения двигателя
достигает величины оф, а ток в цепи якоря снизится до уровня /2
(см. рис. 4.27, б). После шунтирования 7?д происходит скачок тока
114
в цепи якоря от /2 Д° Л, который не превысит допустимого уров-
ня. Изменение скорости, тока и момента во времени происходит
(при неучете электромагнитной инерции обмотки якоря) по экс-
поненциальным зависимостям и изображается кривыми 3 и 4 на
рис. 4.27, в.
Время изменения скорости от нуля до уровня юь определя-
ющее выдержку реле времени КТ, может быть рассчитано по урав-
нению (2.35).
Схема пуска двигателя в две ступени в функции ЭДС и динами-
ческого торможения в функции времени. В этой схеме (рис. 4.28, а)
в качестве датчика ЭДС использован якорь двигателя, к которому
подключены катушки контакторов ускорения КМ1 и КМ2. С помо-
щью регулировочных резисторов Rp2 и 7?pi эти контакторы могут
быть настроены на срабатывание при определенных ЭДС (скоро-
стях) двигателя. Для осуществления торможения в схеме предус-
мотрен резистор Адз, подключение и отключение которого осу-
ществляется контактором торможения КМЗ. Для обеспечения вы-
держки времени используется электромагнитное реле времени КТ,
размыкающий контакт которого включен в цепь катушки контак-
тора торможения КМ2.
После подключения схемы к источнику питания происходит
возбуждение двигателя, причем аппараты схемы остаются в ис-
ходном положении.
Рис. 4.28. Схема пуска двигателя в две ступени в функции ЭДС и динами-
ческого торможения в функции времени (а) и механические характери-
стики (б):
1, 2 — реостатные при пуске; 3 — естественная; 4 — реостатная при торможении
115
Пуск двигателя осуществляется нажатием кнопки SB1, что при-
водит к срабатыванию контактора КМ и подключению двигателя
к источнику питания. Двигатель начинает разбег с включенными
резисторами Ад, + Ад2 в цепи якоря по характеристике 1 (рис.
4.28, б). По мере увеличения скорости двигателя растут его ЭДС и
соответственно напряжение на катушках контакторов КМ1 и КМ2.
При скорости со| срабатывает контактор КМ1, закорачивая своим
контактом первую ступень пускового резистора АД|, и двигатель
переходит на характеристику 2. При скорости т2 срабатывает кон-
тактор КМ2 и закорачивает вторую ступень пускового резистора
7?д2. Двигатель выходит на естественную характеристику 3 и закан-
чивает свой разбег в точке установившегося режима, определя-
емой пересечением естественной характеристики 3 двигателя и
характеристики нагрузки <о(Л/с).
Для торможения двигателя нажимается кнопка SB2. Катушка
контактора КМ теряет питание, размыкается замыкающий сило-
вой контакт КМ в цепи якоря двигателя, и он отключается от
источника питания. Размыкающий блок-контакт КМ в цепи ка-
тушки контактора торможения КМЗ замыкается, последний вклю-
чается и своим главным контактом замыкает на резистор Ад3 якорь
двигателя М, переводя его в режим динамического торможения
по характеристике 4 (см. рис. 4,28, б).
Одновременно с этим размыкается замыкающий контакт кон-
тактора КМ к цепи реле времени КТ, оно теряет питание и начи-
нает отсчет времени. Через интервал времени, который соответ-
ствует снижению скорости двигателя до нуля, реле времени от-
ключается и своим контактом разрывает цепь питания контакто-
ра КМЗ. Резистор Ад3 отключается от якоря двигателя, торможе-
ние заканчивается, и схема возвращается в свое исходное поло-
жение.
Схема пуска двигателя постоянного тока (ДПТ) в одпу ступень
в функции времени и динамического торможения в функции ЭДС.
Управление двигателем при пуске (рис. 4.29) происходит по ана-
логии со схемой рис. 4.27. При включении двигателя и работе от
источника питания размыкающий контакт линейного контактора
КМ в цепи контактора торможения КМ2 разомкнут, что предотв-
ращает перевод двигателя в режим торможения.
Торможение осуществляется нажатием кнопки SB2. Контактор
КМ, потеряв питание, отключает двигатель от источника питания
и замыкает своим контактом цепь питания катушки контактора
КМ2. Последний от действия наведенной в якоре ЭДС срабатывает
и замыкает якорь М двигателя на резистор торможения Ад2. Про-
цесс динамического торможения происходит до тех пор, пока при
небольшой скорости двигателя его ЭДС не станет меньше напря-
жения отпускания контактора КМ2, который отключится, и схе-
ма вернется в исходное положение.
116
Рис. 4.29. Схема пуска двигателя в одну
ступень в функции времени и динами-
ческого торможения в функции ЭДС
Схема управления пуском ДПТ в функции времени, реверсом и
торможением противовключением в функции ЭДС. В этой схеме (рис.
4.30, а) предусмотрено два контактора КМ1 и КМ2, обеспечива-
ющих вращение двигателя в условных направлениях «Вперед» и
Рис. 4.30. Схема пуска, торможения и реверса двигателя в функции ЭДС
(а) и механические характеристики (б):
1 — естественная; 2 — реостатная при пуске; 3,4 — реостатные при торможении
117
«Назад». Главные контакты этих аппаратов образуют реверсивный
мостик, с помощью которого можно изменить полярность напря-
жения на якоре двигателя М. В якорной цепи помимо пускового
резистора Ral включен резистор противовключения /?д2, который
служит для ограничения тока при торможении и управляется кон-
тактором противовключения КМЗ.
Управление двигателем при торможении противовключением
и реверсе осуществляется с помощью двух реле противовключе-
ния KV1 и KV2. Их назначение заключается в том, чтобы в режиме
противовключения для должного ограничения тока обеспечить ввод
в цепь якоря в дополнение к пусковому резистору Лд1 резистор
противовключения Т?д2, что достигается выбором точки присо-
единения катушек реле KV1 и KV2 к резистору 7?д1 + Лд2.
Пуск двигателя в любом направлении осуществляется в одну
ступень в функции времени. При нажатии, например, кнопки SB1
срабатывает контактор КМ1 и подключает якорь двигателя М к
источнику питания. За счет падения напряжения на резисторе Т?д2
от пускового тока срабатывает реле времени КТ и размыкает свой
контакт в цепи контактора КМ4.
Включение КМ1 приведет также к срабатыванию реле KV1,
которое замкнет свой замыкающий контакт в цепи контактора
противовключения КМЗ. Это вызовет включение КМЗ, что приве-
дет к закорачиванию ненужного при пуске резистора противо-
включения /?д2 и одновременно катушки реле времени КТ. Двига-
тель начнет разбег по характеристике 2 (рис. 4.30, б), а реле вре-
мени КТ — отсчет своей выдержки времени.
По истечении выдержки времени реле КТ замкнет свой кон-
такт в цепи катушки контактора КМ4, он включится, закоротит
пусковой резистор 7?д1 и двигатель выйдет на свою естественную
характеристику 1.
Для осуществления торможения нажимается кнопка SB2, в
результате чего отключаются контактор КМ1, реле KV1, контак-
торы КМЗ и КМ4 и включается контактор КМ2. Напряжение на
якоре двигателя изменяет свою полярность, и он переходит в ре-
жим торможения противовключением с двумя добавочными ре-
зисторами в цепи якоря АД| и Лд2. Несмотря на замыкание контак-
та КМ2 в цепи реле KV2 оно в результате оговоренной ранее на-
стройки не включается и тем самым не дает включиться аппара-
там КМЗ и КМ4 и зашунтировать резисторы /?д| и /?д2.
Перевод двигателя в режим противовключения соответствует
его переходу с естественной характеристики 7 на искусствен-
ную характеристику 4 (см. рис. 4.30, б). Во всем диапазоне скоро-
стей 0 < св < <в0 на этой характеристике двигатель работает в ре-
жиме противовключения.
По мере снижения скорости двигателя растет напряжение на
катушке реле KV2 и при скорости, близкой к нулю, оно достиг-
118
нет напряжения срабатывания. Если к этому моменту времени
кнопка SB2 будет отпущена, то отключится контактор КМ2, схе-
ма вернется в исходное положение и на этом процесс торможе-
ния двигателя закончится.
Если же при достижении малой скорости кнопка SB2 остается
нажатой, то включается реле KV2 и повторяется процесс пуска
двигателя, но уже в противоположную сторону. Таким образом,
реверсирование двигателя включает в себя два этапа: торможение
противовключением и пуск в противоположном направлении. Вто-
рой этап реверса изображен на рис. 4.30, б переходом двигателя с
характеристики 4 на характеристику 3, соответствующую обрат-
ной полярности напряжения на якоре двигателя и наличию в якоре
добавочного резистора 2?д1.
Задача 4.15*. Двигатель постоянного тока типа 4ПФ1328 элек-
тропривода (см. рис. 4.27, о) имеет следующие номинальные пас-
портные данные: мощность Рном = 11 кВт, напряжение питания
1/ноы = 220 В, ток якоря /ном = 61,5 А; сопротивление якоря Ая -
= 0,8 Ом; частота вращения лном = 1 060 об/мин; КПД т|ном = 78,5 %.
Момент сопротивления на валу двигателя Мс равен номинально-
му, а суммарный момент инерции электропривода составляет J =
= 0,6 кг - м2.
Рассчитать величину сопротивления пускового резистора Ra,
при включении которого ток и момент двигателя при пуске не
будут превосходить трехкратного номинального значения, и вы-
держку времени реле времени КТ.
При решении задачи используем характеристики и обозначе-
ния рис. 4.27, б.
1. Определяем номинальную скорость вращения, произведение
конструктивного коэффициента и магнитного потока двигателя и
скорость холостого хода двигателя:
<вном = 2ллном/60 = 2-3,14-1 060/60 = 111 рад/с;
кФноы = с = (иноы-1ноиВя)/тнои = (220 — 61,5 - 0,8)/111 = 1,54 В-с;
®о = /с = 220/1,54 = 143 рад/с.
2. Рассчитываем моменты номинальный и заданный пусковой,
который при трехкратном пусковом токе будет равен трехкратно-
му номинальному моменту:
Мной = Мс = Рном/Ином = 11 000/111 = 99,1 Н • м;
М{ = ЗЛ/Н0М = 3 - 99,1 = 297,3 Н м.
3. Находим из подобия треугольников на рис. 4.27, б скорость
вращения <в,:
<В| = (в0-A/i(<Bo-<BHOM)/A/HOM = 143 - 3 -(143 - 111) = 47 рад/с.
119
4. Рассчитываем сопротивление пускового резистора:
Яд = t/ном/ЗЛом - яя = 220/3 61,5 - 0,8 = 0,4 Ом.
5. Находим механическую постоянную времени электроприво-
да при работе на реостатной искусственной характеристике, ско-
рость <вс1 двигателя на этой характеристике, соответствующую
моменту нагрузки, и выдержку времени реле времени КТ:
Тм = = 0,6 • 143/297,3 = 0,29 с;
<вс1 = <в0(1 - Мс/М>) = 143(1 - 99,1/297,3) = 95,3 рад/с;
btKT = Тм1п[<вс1 /(аэс1 - го,)] = 0,29In [95,3/(95,3 - 47)] = 0,2 с.
4.13. Замкнутые схемы управления
электропривода
Характеристики разомкнутых ЭП, построенных по схеме «пре-
образователь-двигатель», имеют относительно невысокую жест-
кость из-за влияния внутреннего сопротивления преобразователя.
Для получения больших диапазонов и высокой точности регули-
рования скорости требуется иметь более жесткие характеристики,
которые можно получить лишь в замкнутой системе с использо-
ванием обратных связей. Кроме того, характеристики разомкну-
той системы не обеспечивают точного регулирования (ограниче-
ния) тока и момента, что также требует применения замкнутой
структуры ЭП. Рассмотрим замкнутые схемы регулирования ско-
рости, тока, момента и положения с использованием обратных
связей, не рассматривая аппараты коммутации, защиты и сигна-
лизации.
Замкнутая система «преобразователь—двигатель» с отрицатель-
ной обратной связью по скорости двигателя. Основу системы со-
ставляет разомкнутая схема «преобразователь—двигатель». Для
создания замкнутой системы на вал двигателя устанавливается
датчик скорости — тахогенератор ТГ (рис. 4.31, а), выходное на-
пряжение которого Стг = у<в, пропорциональное скорости двига-
теля, является сигналом обратной связи. Коэффициент пропор-
циональности у носит название коэффициента обратной связи по
скорости и может регулироваться за счет изменения тока возбуж-
дения ТГ /в ТГ.
Сигнал обратной связи 7/гг = у<в сравнивается с задающим
сигналом скорости U3C, и их разность в виде сигнала рассогласо-
вания (ошибки) UBX = U3C - у<в поступает на вход пропорцио-
120
a
0 ISMi) I(M)
Рис. 4.31. Схема (а) и характеристики (б) замкнутого ЭП с отрицатель-
ной обратной связью по скорости:
1 — предельная по жесткости; 2, < 5 — в замкнутой схеме; 3 — в разомкнутой
схеме
нального регулятора (П-регулятора) скорости РС. Регулятор ско-
рости с коэффициентом кРС усиливает сигнал рассогласования
UBX и подает его в виде сигнала управления Uy на вход преобразо-
вателя П.
Формулы для характеристик двигателя в замкнутой системе
получаются на основе выражений (4.30) и (4.31), а также из соот-
ношений, следующих из рассмотрения рис. 4.31, а:
£4х=£4с-у®; (4.63)
f/y = ^PCi/BX; (4.64)
£п = k„Uy. (4.65)
Заменяя в формулах (4.30) и (4.31) последовательно Еп на ее
выражение из формулы (4.65), Uy на его выражение из формулы
(4.64) и далее t/BX на его выражение из формулы (4.63), после
несложных преобразований получаем следующие формулы для ха-
рактеристик двигателя постоянного тока в замкнутой системе:
121
_ ^-у^-п^Аз.с с(1 +^с) I(Ra+Rn} -^.^(Оо-Аох (4.66) с(1 + £с)
^у^п^з.с (й = - с(1 + кс) M(R„ + ЛП) — у = ®о -ащ (4.67) с2(1 + £с)
где с = £ФН0М; ~ общий коэффициент усиления системы уп-
равления электропривода, кс = укРскп/с.
Для анализа жесткости получаемых характеристик сопоставим
перепады скорости в разомкнутой Аюр и замкнутой А®3 системах
при одном и том же токе или моменте. Согласно выражениям (4.30),
(4.31), (4.66) и (4.67) имеем:
А(ор = /(7?я + Лп)/с; (4.68)
Д®3 = 7(/?я + Rn)/c (1 + кс) = Дсор/(1 + кс). (4.69)
Так как кс > 0, то всегда А®3 < Д®р, т. е. жесткость получаемых
характеристик в замкнутой системе больше жесткости характери-
стик в разомкнутой системе. Сами характеристики, показанные
на рис. 4.31, б, представляют собой прямые параллельные линии
2, 4 и 5, расположение которых определяется уровнем задающего
сигнала по скорости U3 с. Здесь же для сравнения приведена более
мягкая характеристика двигателя (прямая 3) для разомкнутой
системы.
Для нахождения предельной по жесткости характеристики при-
мем коэффициент усиления системы кс -> °°. Из выражения (4.69)
видно, что при кс -> оо А®3 -> 0, т. е. в пределе в данной замкнутой
системе может быть получена абсолютно жесткая характеристи-
ка, которая изображена на рис. 4.31, б в виде штриховой линии 1.
Рассмотрим физическую сторону процесса регулирования ско-
рости в данной системе. Предположим, что двигатель работает в
установившемся режиме и по каким-то причинам увеличился
момент нагрузки Мс. Так как развиваемый двигателем момент стал
меньше момента нагрузки, его скорость начнет снижаться и соот-
ветственно будет снижаться сигнал обратной связи по скорости
UTr = у®. Это, в свою очередь, согласно формулам (4.62) —(4.65)
вызовет увеличение сигналов рассогласования UBX и управления
Uy и приведет к повышению ЭДС преобразователя, напряжения и
скорости двигателя.
При уменьшении момента нагрузки обратная связь действует в
другом направлении, приводя к снижению ЭДС преобразователя.
Таким образом, благодаря наличию обратной связи осуществля-
ется автоматическое регулирование ЭДС преобразователя и тем
122
самым подводимого к двигателю напряжения, за счет чего полу-
чаются более жесткие его характеристики. В разомкнутой системе,
напротив, при изменении момента нагрузки ЭДС преобразовате-
ля не изменяется, в результате чего жесткость характеристик ока-
зывается меньше.
Для получения жестких характеристик в ЭП могут использо-
ваться также отрицательная обратная связь по напряжению, по-
ложительная обратная связь по току двигателя и их сочетания.
Схемы ЭП и получаемые характеристики при использовании этих
связей рассмотрены в [15].
Регулирование (ограничение) тока и момента двигателя посто-
янного тока с помощью нелинейной отрицательной обратной связи
по току. В качестве датчика тока (рис. 4.32, а) в этой системе ис-
пользуется шунт с сопротивлением 7?ш, падение напряжения на
котором пропорционально току якоря I. В результате сигнал об-
ратной связи по току
t/0.T = р/, (4.70)
где р — коэффициент обратной связи по току, Ом.
Отметим, что в качестве резистора может использоваться
обмотка дополнительных полюсов или компенсационная обмотка
двигателя.
Сигнал обратной связи по току t/0T поступает на узел токоог-
раничения УТО, называемый также иногда узлом токовой отсе-
чки, вместе с сигналом задания тока U31. Этот сигнал определяет
уровень тока отсечки /отс, с которого начинается регулирование
(ограничение) тока.
Работа УТО в соответствии с его вольт-амперной характери-
стикой U0 J(I) (см. рис. 4.32, а) происходит следующим образом.
Рис. 4.32. Схема (а) и характеристики (б) замкнутого ЭП с отрицатель-
ной обратной связью по току с отсечкой
123
При токе в якоре, меньшем заданного тока отсечки, т.е. пока / <
< /отс, сигнал обратной связи на выходе УТО равен нулю. Другими
словами, ЭП в диапазоне тока 0.../отс является разомкнутым и
имеет характеристики, изображенные на рис. 4.32, б в зоне I.
При токе в якоре / > /отс на выходе УТО появляется сигнал
отрицательной обратной связи Uoy = р/. ЭП становится замкнутым
и начинает работать в зоне II (см. рис. 4.32, б). Для пояснения вида
характеристик ЭП в этой зоне запишем выражение для сигнала
рассогласования
UBX= (/зс-₽/. (4.71)
Из формулы (4.71) видно, что при увеличении тока / сигнал
UBX уменьшается. Это приведет к уменьшению сигналов Uy и £п, и
соответственно к уменьшению напряжения на якоре двигателе U
и снижению тока в нем. Характеристики двигателя становятся мяг-
кими, чем и достигается регулирование (ограничение) тока и
момента.
При увеличении коэффициента усиления системы характери-
стики в зоне II все больше приближаются к вертикальным лини-
ям. Уровень ограничения тока определяется задающим сигналом
(уставкой) t/3T. Ток при нулевой скорости двигагеля получил на-
звание тока стопорения /стоп.
Замкнутая схема электрического привода с двигателями посто-
янного тока с обратными связями по скорости и току. Для получе-
ния характеристик ЭП, пригодных как для регулирования скоро-
сти, так и для ограничения тока и момента, применяется схема
ЭП с нелинейными обратными связями по скорости и току (рис.
4.33, а). Нелинейность обратных связей, позволяющая разделить
области их действия и получить тем самым требуемые характери-
стики для регулирования переменных, обеспечивается в этой схе-
ме узлами токоограничения УТО и узлами ограничения скорости
УОС, характеристики которых показаны на рис. 4.33, а внутри
соответствующих условных изображений. Нелинейность обратных
связей приводит к разделению области механических характери-
стик (рис. 4.33, б) на три зоны (I, II и III).
В зоне I в диапазоне токов 0.../отс действует только обратная
связь по скорости, обеспечивая жесткий участок характеристик
двигателя. В зоне II при / > /отс вступает в действие обратная связь
по току и характеристики становятся мягче. При дальнейшем уве-
личении тока и уменьшении скорости ниже скорости отсечки сйотс
перестает действовать обратная связь по скорости и за счет дей-
ствия связи по току характеристики становятся еще мягче (зона
III), обеспечивая требуемое ограничение тока и момента.
После формирования требуемых статических характеристик в
замкнутом ЭП, построенном по схеме с общим усилителем, мо-
жет оказаться, что его динамические характеристики неприем-
124
Рис. 4.33. Схема (а) и характеристики (б) замкнутого ЭП с отрицатель-
ными обратными связями по скорости и току с отсечкой
лемы, так как движение в переходных процессах оказывается
или неустойчивым, или оно характеризуется недопустимыми пе-
ререгулированием и колебаниями или значительным временем
протекания. В этих случаях требуется коррекция законов управле-
ния ЭП.
Сущность коррекции динамических характеристик ЭП заклю-
чается в том, что в его схему включаются дополнительные (кор-
ректирующие) устройства, позволяющие нужным образом изме-
нять эти характеристики. Коррекция динамических характеристик
ЭП предусматривает использование дополнительных гибких об-
ратных связей, которые проявляют себя только в переходных про-
цессах, участвуя в формировании заданных динамических харак-
теристик ЭП и не изменяя в то же время полученных с помощью
жестких обратных связей статических характеристик.
Замкнутые электроприводы с подчиненным регулированием ко-
ординат (переменных). Эффективное и качественное регулирова-
ние координат в системе «преобразователь—двигатель» в стати-
ческом и динамическом режимах ее работы обеспечивает прин-
цип подчиненного регулирования, реализуемый по структурной
схеме рис. 3.8. Этот принцип предусматривает регулирование каж-
125
дой координаты с помощью своего отдельного регулятора и соот-
ветствующей обратной связи. Регулирование каждой координаты
происходит в своем замкнутом контуре, и требуемые характери-
стики ЭП могут быть получены за счет выбора схемы и парамет-
ров регулятора этой координаты и цепи ее обратной связи.
Управление внутренним контуром с помощью выходного сиг-
нала внешнего контура определяет еще одно ценное свойство та-
ких систем. Оно заключается в возможности простыми средствами
ограничивать любую регулируемую координату, например ток и
момент, на заданном уровне. Для этого требуется всего лишь огра-
ничить сигнал, поступающий с внешнего контура.
Рассмотрим ЭП с подчиненным регулированием координат
(переменных), выходной регулируемой координатой которого
является скорость. Схема управления (рис. 4.34, а) состоит из двух
замкнутых контуров: контур регулирования тока (момента), со-
держащий регулятор тока РТ и датчик тока ДТ, и контур регули-
рования скорости, содержащий регулятор скорости РС и датчик
скорости (тахогенератор ТГ). Регуляторы тока и скорости в этой
схеме выполнены на базе операционных усилителей. Условиями
выбора схемы и параметров цепей регуляторов является желае-
мый характер переходных процессов в ЭП и вид статических ха-
рактеристик двигателя.
Наличие активного резистора в цепи обратной связи 7?Oci и
активных входных резисторов R1 и R2 обеспечивает изменение
сигналов задания скорости t/3C и обратной связи по скорости Uoc
соответственно с коэффициентами передачи к\ = R0Cl/Rl и к2 =
= R0C\/R2. Такой регулятор получил название пропорционального
регулятора скорости.
Схема РТ с включением в цепь обратной связи конденсатора
Сос последовательно с резистором Roc2 позволяет получить сиг-
нал Uy на выходе РТ в виде суммы двух составляющих
Uy = k3UBX + k4jUBXdt, (4.72)
где UBX — суммарный входной сигнал РТ.
Сигнал Uy содержит пропорциональную и интегральную со-
ставляющие входного сигнала UBXt т. е. РТ является в этом случае
пропорционально-интегральным регулятором (ПИ-регулятором).
Оптимальным графиком переходного процесса считается гра-
фик с затухающими колебаниями регулируемой переменной, по-
казанный для примера на рис. 4.34, б для некоторой переменной
X при отработке ступенчатого воздействия. Он позволяет обеспе-
чить устойчивые переходные процессы при небольших времени
переходных процессов tn п и перерегулированиях АХ.
Одной из возможных настроек регуляторов в схемах с подчи-
ненным регулированием координат является так называемый тех-
126
VD1 VD2
a
Рис. 4.34. Схема (а), график переходного процесса (б) и статические ха-
рактеристики (в) замкнутого ЭП с подчиненным регулированием коор-
динат
нический оптимум, при котором перерегулирование XX = Хтал -Ху„
(см. рис. 4.34, б) составляет 4,3 % от установившегося уровня, а
время переходного процесса tn n = 4,17’п, где Гп — электромагнит-
ная постоянная времени преобразователя, принимаемая обычно
равной 0,01 с. Именно такое регулирование обеспечивается в схе-
ме на рис. 4.34, а.
Как уже отмечалось, схема подчиненного регулирования ко-
ординат позволяет простыми средствами ограничивать перемен-
ные ЭП на заданном уровне. В схеме на рис. 4.34, а для ограниче-
ния тока и момента в цепь обратной связи регулятора скорости
PC включены стабилитроны VD1 и VD2. В результате этого выход-
ное напряжение PC, являющееся входным задающим сигналом
(уставкой) тока t/3T, ограничивается, ток и момент двигателя не
могут превзойти заданного уровня.
На рис. 4.34, в приведены статические характеристики ЭП с
подчиненным регулированием координат и настройкой на техни-
127
ческий оптимум. Их особенностями являются наличия вертикаль-
ного участка I, обеспечивающего ограничение тока и момента, и
жестких участков II характеристик, наклон которых зависит от.
соотношения двух постоянных времени: механической двигателя
Тм и электромагнитной Тп преобразователя.
В схемах подчиненного регулирования используется и другой
критерий настройки регуляторов по так называемому симметри-
чному оптимуму, который позволяет получить абсолютно жест-
кие статические характеристики на участке II (см. рис. 4.34, в).
Переходные процессы в этом случае характеризуются большим пе-
ререгулированием, доходящим до 55 %, а PC выполняется как ПИ-
регулятор.
В силу своих значительных функциональных возможностей схе-
мы с подчиненным регулированием координат нашли очень ши-
рокое распространение в регулируемом ЭП как постоянного, так
и переменного тока. Более подробно схемы с подчиненным регу-
лированием координат рассмотрены в [6] и [8].
Замкнутая схема управления электроприводом по системе «ис-
точник тока—двигатель». Силовую часть этой схемы (рис. 4.35, а)
образуют источник тока ИТ и якорь двигателя М, обмотка возбуж-
дения которого ОВ подключена к усилителю У (регулятору тока воз-
буждения), имеющему два входа. По первому входу на усилитель с
задающего потенциометра момента ЗПМ поступает сигнал задания
момента (/зм, уровень которого определяет величину момента на
вертикальном участке механической характеристики (рис. 4.35, б).
На второй вход У подается сигнал нелинейной отрицатель-
ной обратной связи по скорости Uocc, которую образуют тахоге-
Рис. 4.35. Схема (а) и характеристики (б) замкнутого ЭП с питанием от
источника тока и отрицательной обратной связью по скорости
128
нератор обратной связи ТГ, диод VD и задающий потенциометр
скорости ЗПС. Цепь обратной связи собрана таким образом, что
диод VD начнет пропускать ток по этой цепи только тогда, когда
ЭДС тахогенератора превышает задающий сигнал по скорости U3 с,
что произойдет при скоростях, больших соотс. При скоростях со <
< (оотс диод VD закрыт и обратная связь по скорости не действует
(^осс = 0).
Нелинейный характер обратной связи по скорости определяет
наличие двух зон на плоскости механических характеристик (см.
рис. 4.35, б). При со < ®отс (зона I) t/Occ = 0 и на вход У подается
неизменный по величине сигнал задания момента U3M, напряже-
ние на его выходе UB, ток возбуждения /в и определяемый им
момент М постоянны, что и определяет вертикальные участки
характеристик.
При со > ®отс (зона II на рис. 4.35, б) открывается диод VD и на
входе У появляется сигнал обратной связи по скорости, противо-
положный по знаку сигналу U3 м. Суммарный сигнал Су на входе У
станет равным
t/y= t/3.M-f/occ= (4.73)
Как видно из выражения (4.73), при увеличении скорости сиг-
нал Uy на входе У будет снижаться, пропорционально ему будут
уменьшаться напряжение UB на выходе У, ток возбуждения /в дви-
гателя и в соответствии с (4.3) его момент. Механические харак-
теристики приобретают вид наклонных прямых, показанных на
рис. 4.35, б в зоне II. Таким образом, рассматриваемая схема ЭП
обеспечивает регулирование двух координат: скорости и момента.
Величина сигнала U3M определяет уровень момента двигателя в
зоне I характеристик, а величина сигнала (/зс — уровень скорости
отсечки (излома) механических характеристик. Жесткость меха-
нических характеристик в зоне II определяется общим коэффи-
циентом усиления ЭП.
Схема позиционного цифроаналогового электрического привода
с использованием микропроцессора. На практике широкое приме-
нение находят ЭП с цифровыми и цифроаналоговыми системами
управления. Рассмотрим схему ЭП с двигателем постоянного тока
для регулирования положения исполнительного органа робото-
технического устройства с использованием микропроцессорного
управления (рис. 4.36, а).
Этот ЭП должен обеспечивать перемещение и точное позици-
онирование исполнительного органа робота в соответствии с ди-
аграммой рис. 3.3, для чего в нем также используется обратная
связь по положению. Схема построена по принципу подчиненно-
го регулирования координат, поэтому в ней также предусмотре-
ны контуры регулирования тока (момента) и скорости двигателя.
129
Рис. 4.36. Схема (а) и алгоритм работы (d) ЭП с микропроцессорным
управлением
Силовая часть ЭП образована трехфазным мостовым реверсив-
ным тиристорным преобразователем ТП, питаемым от трансфор-
матора ТР.
Регулирование тока производится аналоговым пропорциональ-
но-интегральным регулятором тока РТ, на вход которого посту-
пают сигналы обратной связи по току от датчика тока ДТ и зада-
ния тока t/3 T с выхода регулятора скорости.
Аналоговый П-регулятор скорости РС формирует сигнал зада-
ния тока t/3T на основе своего задающего сигнала U3C, поступа-
ющего на него с внешнего контура положения, и сигнала обрат-
ной связи по скорости, вырабатываемого тахогенератором ТГ. Ста-
билитроны VD1 и VD2 ограничивают сигнал на выходе РС, чем
обеспечивается ограничение тока и момента двигателя.
130
Регулирование положения осуществляется с помощью мик-
ропроцессорной системы, включающей в себя микропроцессор
МП, устройства памяти ОЗУ и ПЗУ, устройства сопряжения
УС1...УСЗ, цифровой датчик положения ДП, цифроаналоговый
преобразователь ЦАП. Сигнал задания положения 5З П поступает
(задается) с терминала Т, подключаемого к микропроцессорной
системе через УСЗ.
Работа цифрового регулятора положения в микропроцессор-
ной системе может основываться на одном из двух принципов.
Первый из них предусматривает реализацию статической харак-
теристики регулятора положения РП в виде параболы, которая
обеспечивает оптимальный график движения ЭП, показанный на
рис. 3.3. Такой регулятор можно реализовать программным путем,
записав в ПЗУ эту нелинейную характеристику РП.
Второй принцип работы РП основан на вычислении момента
начала торможения ЭП, что позволяет получить показанные на
рис. 3.3 графики движения. Рассмотрим этот способ подробнее.
Реализация способа основана на том, что при известных ско-
рости соуст и ускорении е = (М- MQ)/J могут быть рассчитаны вре-
мя /т и путь ST на участке торможения ЭП в конце отработки
заданного перемещения 5З П по следующим формулам:
/т = соуст/е; Ут = <»уст/(2е). (4.74)
Алгоритм работы микропроцессорной системы при выработке
сигнала на торможение приведен на рис. 4.36, б. Для его реализа-
ции в микропроцессорную систему вводятся данные по величинам
<ВуСТ, е, У3.п и сигнал 5П датчика положения, пропорциональный
текущему положению вала двигателя. Микропроцессорная система
производит вычисление по (4.74) /т и 5Т и разности 5) - S3 п - 5Т.
Затем сопоставляются величины этой разности У, с сигналом дат-
чика положения 5П. Как только 5] станет равным 5П, от микро-
процессорной системы выдается команда на торможение ЭП, на-
чинается отсчет выдержки времени /т и по истечении этого ин-
тервала выработается команда на отключение ЭП.
Задача 4.16*. Электропривод выполнен по схеме рис. 4.31, а.
Двигатель имеет следующие номинальные данные: номинальная
мощность Рноы = 8 кВт; напряжение питания L/HOM = 220 В; номи-
нальная скорость соном = 157 рад/с; номинальный ток якоря /ном -
= 43,5 А; сопротивление цепи якоря 7?я = 0,27 Ом. Преобразователь
имеет коэффициент усиления кп - 23, а коэффициент передачи
тахогенератора составляет у = 0,2 В/(рад/с).
Требуется рассчитать коэффициент усиления регулятора ско-
рости £рс, при котором перепад скорости в замкнутой системе
уменьшится в 9,5 раз (или жесткость механической характеристи-
ки возрастет в 9,5 раз):
131
1. Находим произведение с - А:ФНОМ:
С = £ФНОМ - (t/ном- /номЛяУШном = (220-43,5 • 0,27)/157 = 1,33 В с.
2. Используя соотношение (4.68), находим необходимый об-
щий коэффициент усиления системы управления ЭП:
кс = Ас0р/Аа)3 - 1 = 9,5 - 1 = 8,5.
3. Определяем необходимый коэффициент усиления регулято-
ра скорости, используя формулу (4.66):
к?с = скс/ук„ = 1,33- 8,5/0,2 • 23 = 2,57.
Задача 4.17*. Электропривод выполнен по схеме рис. 4.34, а.
Двигатель имеет следующие номинальные данные: номинальная
мощность Рноы = 14 кВт; напряжение питания UHOM = 220 В; но-
минальная скорость соном = 104,7 рад/с; номинальный ток якоря
/ном = 82 А; номинальный КПД т|ном = 82%; сопротивление цепи
якоря 7?я = 0,22 Ом; индуктивность цепи якоря Ья = 4,4 мГн; сум-
марный момент инерции электропривода J = 0,8 кг - м2.
Параметры других элементов схемы ЭП, которые имеют зна-
чения: коэффициент усиления преобразователя кп = 23; постоян-
ная времени преобразователя Т„ = 0,01 с; внутреннее сопротивле-
ние преобразователя Rn = 0,15 Ом; коэффициент передачи тахоге-
нератора у = 0,6 В/(рад/с); сопротивление шунта /?ш = 0,00075 Ом;
коэффициент передачи датчика тока £дт - 100.
Требуется рассчитать по критерию технического оптимума па-
раметры регуляторов тока и скорости и определяющие их пара-
метры цепей операционных усилителей.
1. Определяем суммарное сопротивление якорной цепи Яя ц
/?я ц = Яя + /?п = 0,22 + 0,15 = 0,37 Ом.
2. Находим постоянную времени цепи якоря двигателя
Тя = Ья/Яя = 0,0044/0,22 = 0,02 с.
3. Находим коэффициент обратной связи по току ко т. При Я3 =
= ЯА он равен
Л.т = ка1-Яш = 100 • 0,00075 = 0,075.
4. Рассчитываем постоянную интегрирования ПИ-регулятора
тока
Т= 2Т„колк„/ЯЯЛ1 = 2• 0,01 • 0,075• 23/0,37 = 0,093 с.
132
5. Определяем коэффициент усиления регулятора тока
к3 = Тя/Т = 0,02/0,093 = 0,22.
6. Задавая ROC2 = 10 кОм, находим параметры операционного
усилителя, на котором реализован регулятор тока:
Сое = TJRqci = 0,02/10 000 = 2 мкФ;
R3 = /?4 = Roc2/k3 = 10/0,22 = 45,45 кОм.
7. Для нахождения параметров П-регулятора скорости опреде-
ляем следующие параметры двигателя и электропривода:
произведение конструктивной постоянной двигателя на маг-
нитный поток
С = £Фном = (Сном - /ном*я)/<0ном = (220 - 82 • 0,22)/104,7 = 1,93 В с;
скорость вращения холостого хода
wo = U/c = 220/1,93 = 114 рад/с;
механическую постоянную времени электропривода
Тм = JR^/c2 = 0,8 • 0,37/1,932 = 0,08 с.
8. Определяем коэффициент передачи регулятора скорости
к\ = кРС = (ТмЛ0.тссоо)/(4Гп/?я.цСз.стах)/(0,08 0,075 1,93 114)/
/(4-0,01 0,37 10) = 8,92.
9. ЭДС тахогенератора при скорости со0 будет равна
£тг = уа>0 = 0,6 114 = 68,4 В.
10. Задавая 7?Oci - Ю0 кОм, получим:
R{ = /?oci /крс = ЮО/8,92 =11,2 кОм;
R2 = £Tr^i/C3.cmax = 68,4 - 11,2/10 = 76,7 кОм.
4.14. Схема включения, характеристики
и режимы работы двигателя последовательного
возбуждения
В ЭП грузоподъемных машин, механизмов транспорта и ряде
других рабочих машин и механизмов находят применение двига-
тели постоянного тока последовательного возбуждения. Основной
особенностью этих двигателей является включение обмотки 2 воз-
буждения последовательно с обмоткой / якоря (рис. 4.37, а), вслед-
133
Рис. 4.37. Схема включения (а) и характеристики (б) двигателя постоян-
ного тока последовательного возбуждения:
1 — якорь; 2 — обмотка возбуждения; 3 — резистор; 4, 5 — кривые намагничивания
ствие чего ток якоря одновременно является и током возбужде-
ния.
Согласно уравнениям (4.1) —(4.3) электромеханическая и ме-
ханическая характеристики двигателя выражаются формулами:
co^(t/-/Л)/[(А:Ф(/)]; (4.75)
со = и/[кФ(1)] - МК/[кФ(1)]2, (4.76)
в которых отмечена зависимость магнитного потока от тока якоря
(возбуждения) Ф(/), a R = R„ + Ros + /?д.
Магнитный поток и ток связаны между собой кривой намаг-
ничивания (линия 5 рис. 4.37, б). Кривую намагничивания можно
описать с помощью какого-либо приближенного аналитического
выражения, что позволит в этом случае получить формулы для
характеристик двигателя.
В простейшем случае кривую намагничивания представляют
прямой линией 4. Такая аппроксимация по существу означает пре-
небрежение насыщением магнитной системы двигателя и позво-
ляет выразить зависимость потока от тока следующим образом:
Ф = al, (4.77)
где а = tgcp.
При принятой линейной аппроксимации момент, как это сле-
дует из формулы (4.3), является квадратичной функцией тока
М= кФ/= kal2. (4.78)
Подстановка (4.77) в (4.75) приводит к следующему выраже-
нию для электромеханической характеристики двигателя:
со = U/(kaI) - R/(ka). (4.79)
Если теперь в (4.79) с помощью выражения (4.78) выразить
ток через момент, то получится следующее выражение для меха-
нической характеристики:
134
co = U/>JkaM -R/(ka).
(4.80)
Для изображения характеристик <в(/) и со(Л/) проведем ана-
лиз полученных формул (4.79) и (4.80).
Найдем вначале асимптоты этих характеристик. Для этого устре-
мим ток и момент к двум их предельным значениям: нулю и беско-
нечности. При / ч 0 и Мч 0 скорость, как это следует из (4.79)
и (4.80), принимает бесконечно большое значение, т.е. со °°. Это
означает, что ось скорости является первой искомой асимптотой
характеристик.
При /ч<»и.Мч“ скорость со -R/ka, т.е. прямая с ордина-
той соа = -R/(ka) является второй, горизонтальной асимптотой ха-
рактеристик.
Зависимости «>(/) и со(Л/) в соответствии с формулами (4.79)
и (4.80) имеют при этом гиперболический характер, что позволя-
ет с учетом сделанного анализа представить их в виде кривых,
показанных на рис. 4.38.
Особенность полученных характеристик состоит в том, что при
небольших токах и моментах скорость двигателя принимает боль-
шие значения, при этом характеристики не пересекают ось ско-
рости. Таким образом, для двигателя последовательного возбуж-
дения в основной схеме включения (см. рис. 4.37, а) не существу-
ют режимы холостого хода и генераторного хода параллельно с
сетью (рекуперативного торможения), так как нет участков ха-
рактеристик во втором квадранте.
С физической стороны это объясняется тем, что при / ч 0 и
Л/-э 0 магнитный поток Ф —> 0 и скорость в соответствии с (4.79)
и (4.80) резко возрастает. Отметим, что из-за наличия в двигателе
потока остаточного намагничивания Фост практически скорость
холостого хода существует и равна а>0 = и/(кФ0СГ).
Остальные режимы работы двигателя аналогичны режимам
работы двигателя с независимым возбуждением. Двигательный
Рис. 4.38. Характеристики двигателя постоянного тока последовательного
возбуждения:
а — электромеханическая; б — механическая
135
Рис. 4.39. Универсальные характеристи-
ки двигателя постоянного тока после-
довательного возбуждения:
1 — зависимость скорости от тока; 2 — за-
висимость момента от тока
режим имеет место при 0 < со < °°, режим короткого замыкания —
при со = 0, а режим генератора последовательно с сетью (тормо-
жение противовключением) имеет место в четвертом квадранте
при со < 0. Кроме перечисленных для этого двигателя может быть
реализован также генераторный режим работы независимо от сети
(динамическое торможение), подробно рассмотренный в под-
разд. 4.16.
Полученные выражения (4.79) и (4.80) могут быть использо-
ваны для приближенных инженерных расчетов, поскольку двига-
тели могут работать и в области насыщения магнитной системы.
Для точных практических расчетов используются так называемые
универсальные характеристики двигателя, приведенные на рис. 4.39.
Они представляют собой зависимости относительной скорости
со* = со/соном (кривые 7) и момента М* = М/Матл (кривая 2) от
относительного тока 7* = 7/7ном. Для получения характеристик с
большей точностью зависимость со*(7*) представлена двумя кри-
выми: для двигателей до 10 кВт и выше. Рассмотрим использова-
ние этих характеристик на конкретном примере.
Задача 4.18*. Рассчитать и построить естественные характери-
стики двигателя с последовательным возбуждением типа Д31.
Таблица 4.1
Расчет характеристик двигателя
Переменные Численные значения
7* 0,4 0,8 1,2 1,6 2
М* 0,3 0,7 1,3 1,9 2,6
СО* 1,8 1,1 0,9 0,8 0,6
СО = СО*СОиом 151 92 75 63 50
Л/=Л/*Мном 28,7 66,9 124 181 248
7=7*7НОМ 18,6 37,2 55,8 74,7 93
136
Рис. 4.40. Характеристики двигателя:
а — электромеханические: 1 — естественная; 2 — реостатная; 6 — механическая:
3 — естественная
Исходные данные: Рном = 8 кВт; лном = 800 об/мин; С/ном = 220 В;
Люм — 46,5 А, т|ном — 0,78.
1. Определяем номинальные скорость соном и момент Л/ном:
(Ином = 2ллном/60 = 2 • 3,14 • 800/60 = 83,7 рад/с;
Мном = Люм/Юном = 8 000/83,7 = 95,5 Н м.
2. Задавая вначале относительные значения тока /*, по универ-
сальным характеристикам двигателя (см. рис. 4.39) находим отно-
сительные значения момента М* и скорости со*. Затем, умножая
полученные относительные величины переменных на их номи-
нальные значения, получаем точки для построения искомых ха-
рактеристик двигателя (табл. 4.1).
По полученным данным строим естественные характеристики
двигателя: электромеханическую со(/) — кривая 1 и механиче-
скую со(М) — кривая 3 на рис. 4.40.
4.15. Регулирование переменных электропривода
с двигателем последовательного возбуждения
Регулирование переменных двигателя в соответствии с выра-
жениями (4.79) и (4.80) может осуществляться с помощью доба-
вочных резисторов в цепи якоря изменением магнитного потока
двигателя и подводимого к нему напряжения.
Регулирование тока, момента и скорости двигателя с помощью
резисторов. Оно отличается простотой своей реализации (см. рис.
4.37, а).
137
Рис. 4.41. Электромеханические (а) и механические (б) характеристики
двигателя при различных сопротивлениях добавочного резистора в цепи
якоря:
1 — естественные; 2 — реостатные
Для получения семейства искусственных характеристик двига-
теля при 7?д = var проведем анализ выражений (4.79) и (4.80). Так
как при / —> 0 и Л/ —> 0 магнитный поток Ф —> 0, а со —> то все
искусственные характеристики имеют своей вертикальной асим-
птотой ось скорости.
Из формул (4.75) и (4.76) следует, что при фиксированных
значениях тока (момента) и магнитного потока включение /?д
приводит к снижению скорости. Поэтому изображенные на рис.
4.41 искусственные реостатные электромеханические и механи-
ческие характеристики 2 располагаются ниже естественной 1 (при-
чем, чем больше Ra, тем больше снижение скорости).
Регулирование скорости двигателя данным способом характе-
ризуется следующими показателями: диапазон равен 2...3; направ-
ление регулирования скорости — вниз; плавность регулирования
определяется плавностью изменения 7?д; стабильность скорости
на характеристиках снижается по мере увеличения 7?д; допусти-
мая нагрузка — постоянный момент, равный номинальному. При-
менение способа экономически целесообразно при небольших ди-
апазонах регулирования скорости или кратковременной работе на
пониженных скоростях, так как сопровождается большими поте-
рями мощности в цепи якоря и снижением жесткости характери-
стик.
Рассмотрим способы расчета регулировочных резисторов, вклю-
чаемых в цепь якоря двигателя. Известны паспортные данные дви-
гателя и его естественная характеристика. Определите величину
сопротивления резистора Ял, который позволит получить требу-
емую искусственную электромеханическую или механическую ха-
рактеристику, проходящую через точку с координатами (сои, /и)
или (сои, Ми).
Найдем отношение скоростей двигателя на естественной и ис-
кусственной характеристиках при заданных значениях тока якоря
/и или момента Л/и, используя формулу (4.75) или формулу (4.76).
138
Поскольку ток или момент один и тот же, то и магнитный
поток в том и другом случае одинаков и при нахождении отноше-
ния скоростей он может быть сокращен. После простых преобра-
зований получаем
®и/®е = ( ^ном - /и(*я + ^ОВ + /?д))/( t/ном - Л(^я + ^Ов))- (4.81)
Выражая теперь из этого соотношения Ял как искомую вели-
чину, получаем следующую расчетную формулу:
/?д = (1 - (0и/(0е)(^Ном/Лом - - ^ов)- (4.82)
Порядок расчета Rn состоит в следующем: по естественной ха-
рактеристике для заданного тока /и или Л/и определяют скорость
о)е, все данные подставляют в (4.82) и находят Ra.
Отметим, что необходимые для расчета значения Ra и ROB мо-
гут быть найдены по справочным данным, экспериментально или
приближенным расчетом по формуле
Яд + ^ОВ ~ 0,757/НОМ(1 — Т|ном)//ном. (4.83)
Регулирование скорости изменением магнитного потока. Этот
способ реализуется включением параллельно обмотке возбужде-
ния 3 регулируемого резистора 2, как это показано на рис. 4.42, а.
При этом снижается при том же токе якоря ток в обмотке возбуж-
дения, что приводит к уменьшению магнитного потока двигателя.
Отметим, что регулирование магнитного потока в такой схеме не
является полностью независимым, так как ток возбуждения по-
прежнему пропорционален току якоря 7, определяемому нагруз-
кой ЭП.
Для определения вида и расположения искусственных механи-
ческих характеристик двигателя, получаемых при различных ве-
личинах 7?ш, проведем следующий анализ.
Рис. 4.42. Схема включения (а) и характеристики (5) двигателя постоян-
ного тока последовательного возбуждения при изменении магнитного
потока:
1 — якорь двигателя; 2 — добавочный резистор; 3 — обмотка возбуждения двига-
теля; 4 — естественная характеристика; 5 — искусственные характеристики
139
При Лш = °° (разрыв шунтирующей цепи) двигатель оказывает-
ся включенным по своей основной схеме, чему соответствует ес-
тественная характеристика 4 (рис. 4.42, б).
При 0 < < “° часть тока якоря ответвляется в шунтирующую
цепь (7Ш * 0), поэтому ток возбуждения /в и магнитный поток Ф
уменьшаются, что в соответствии с формулами (4.75) и (4.76)
вызывает увеличение скорости двигателя, при этом искусствен-
ные механические характеристики 5 располагаются выше естествен-
ной.
При Л/ -> 0, / -> 0, /в -» 0, Ф -> 0 скорость со т. е. и в этом
случае ось скорости является асимптотой для всех искусственных
механических характеристик.
Регулирование скорости этим способом характеризуется теми
же показателями, что и для двигателя с независимым возбужде-
нием.
Регулирование скорости изменением напряжения. В этом случае
двигатель 2 (рис. 4.43, а) подключается к преобразователю (уп-
равляемому выпрямителю) 7, выходное напряжение которого U
задается входным управляющим сигналом L/y. При U = UHOM и пре-
небрежении внутренним сопротивлением управляемого выпрями-
теля двигатель работает на естественной характеристике 3. При
уменьшении напряжения в соответствии с (4.75) и (4.76) ско-
рость двигателя снижается и искусственные характеристики 4 рас-
полагаются ниже естественной. При / ^ОЛ/^О, Ф^О скорость
со —> т.е. ось скорости является асимптотой характеристик дви-
гателя. Механические характеристики двигателя при различных
выходных напряжениях преобразователя показаны на рис. 4.43, б.
Показатели регулирования скорости изменением напряжения
соответствуют показателям для ЭП с двигателем постоянного тока
независимого возбуждения.
Рис. 4.43. Схема включения (а) и характеристики (б) двигателя постоян-
ного тока последовательного возбуждения при изменении напряжения:
1 — преобразователь; 2 — двигатель; 3 — естественная характеристика; 4 — ис-
кусственные характеристики
140
Рис. 4.44. Схема включения двигателя
постоянного тока последовательного
возбуждения при шунтировании якоря:
1 — якорь двигателя; 2 — обмотка возбуж-
дения двигателя
Регулирование скорости шунтированием якоря резистором. Этот
способ используется для получения пониженных скоростей и оп-
ределенной скорости идеального холостого хода. Схема включе-
ния двигателя, показанная на рис. 4.44, содержит шунтирующий
якорь 1, резистор Кш и последовательно включенный резистор Rn.
Эти резисторы вместе с обмоткой возбуждения 2 образуют дели-
тель напряжения, за счет чего к якорю двигателя подводится по-
ниженное напряжение и его характеристики располагаются ниже
естественной.
Другой особенностью рассматриваемой схемы является то, что
при нулевом токе якоря (холостой ход двигателя) ток возбужде-
ния за счет наличия резистора не равен нулю, поэтому отли-
чен от нуля магнитный поток и двигатель имеет определенную
скорость идеального холостого хода со0.
При скорости двигателя, большей со0, ток в якоре меняет свбе
направление и ток возбуждения по мере роста скорости уменьша-
ется. При стремлении тока якоря к значению I = ~и/Кш ток воз-
буждения и магнитный поток стремятся к нулю, а скорость — к
бесконечности. Другими словами, вертикальная линия с абсцис-
сой I = -U/Rm является асимптотой электромеханической харак-
теристики (рис. 4.45, а).
Для изображения механической характеристики во втором квад-
ранте обратимся к формуле для электромагнитного момента двига-
теля (4.3). При со = со01= 0 и М — 0, а при /-> -U/Rm поток Ф -> О
и М -» 0, т.е. ось скорости является вертикальной асимптотой
механической характеристики. Момент двигателя, равный нулю
при со = 0 и со —> в промежуточном интервале скорости имеет
Рис. 4.45. Электромеханическая (а) и механическая (б) характеристики
двигателя при шунтировании якоря
141
максимум Мтзх. Проведенный анализ позволяет представить ис-
кусственную механическую характеристику двигателя в виде кри-
вой, показанной на рис. 4.45, б.
4.16. Торможение электропривода с двигателем
последовательного возбуждения
Для осуществления принудительного электрического торможе-
ния двигатель должен быть переведен в генераторный режим ра-
боты.
Этот режим может быть реализован по двум схемам: с незави-
симым возбуждением и самовозбуждением.
Динамическое торможение двигателя с независимым воз-
буждением реализуется по схеме рис. 4.2 и аналогично режи-
му, рассмотренному для двигателя с независимым возбуждением.
Характеристики описываются уравнениями (4.9) и (4.10) и име-
ют вид прямых, проходящих через начало координат. Как следует
из (4.9) и (4.10), с увеличением сопротивления резистора Ла на-
клон характеристик к горизонтальной оси увеличивается.
Динамическое торможение с самовозбуждением реали-
зуется в схеме рис. 4.46, а при последовательном соединении об-
моток якоря 7, возбуждения 2 и резистора 3, который может от-
сутствовать.
Для возникновения и существования режима самовозбужде-
ния необходимо выполнение следующих условий: наличие оста-
точного магнитного потока Фост в двигателе; совпадение по на-
правлению Фост и основного магнитного потока Ф, создаваемого
током возбуждения; сопротивление цепи обмотки якоря (с уче-
том сопротивления Ra резистора 3) должно быть меньше крити-
ческого.
Рис. 4.46. Схема включения (а) и характеристики (б) двигателя при тор-
можении с самовозбуждением:
1 — якорь двигателя; 2 — обмотка возбуждения; 3 — резистор; 4... 6 — характери-
стики при различном сопротивлении добавочного резистора
142
Динамическое торможение с самовозбуждением происходит
следующим образом. При наличии остаточного магнитного поля и
вращении якоря в нем наводится ЭДС, под действием которой по
якорю и обмотке возбуждения двигателя начнет протекать ток. Этот
ток создает основной магнитный поток Ф, который, совпадая по
направлению с остаточным потоком Фост, приведет к увеличению
ЭДС. Это, в свою очередь, повлечет за собой увеличение тока в
двигателе, и такой процесс его самовозбуждения будет продол-
жаться до тех пор, пока ЭДС не станет равной суммарному паде-
нию напряжения в цепи якоря.
Универсальные характеристики 4... 6 двигателя в этом режиме,
соответствующие различным сопротивлениям 7?д1 < Т?д2 < /?д3,
показаны на рис. 4.46, б.
Режим торможения противовключением осуществляет-
ся изменением полярности напряжения на обмотке якоря при со-
хранении того же направления тока в обмотке возбуждения (или
наоборот). При этом в соответствии с (4.3) изменяется знак мо-
мента двигателя. Для ограничения тока в этом режиме в цепь яко-
ря 7 вводится добавочный резистор 2. Схема включения двигате-
ля, имеющая те же обозначения, что и схема на рис. 4.37, а, при-
ведена на рис. 4.47, а.
Процесс торможения иллюстрируется рис. 4.47, б. До торможе-
ния двигатель работал в точке а характеристики 3, преодолевая
момент сопротивления Мс. После указанных переключений и вво-
да в цепь якоря добавочного резистора Ла двигатель переходит на
характеристику 5 в точку Ь. Начинается процесс торможения про-
тивовключением, которому соответствует участок Ьс характери-
стики 5. В точке с торможение заканчивается (скорость двигателя
равна нулю), и схема управления отключает двигатель от сети.
Рис. 4.47. Схема включения (а) и характеристики (6) двигателя при тор-
можении противовключением:
1 — якорь; 2 — добавочный резистор; 3 — естественная характеристика; 4, 5 —
характеристики при торможении
143
Торможение противовключением также реализуется и в том
случае, когда двигатель нагружен активным моментом Мс, пре-
вышающим момент короткого замыкания Л/кз. Рассмотрим этот
вариант торможения с помощью рис. 4.47, б.
Допустим, что двигатель в исходном режиме работает в точке а
на характеристике 3, преодолевая активный момент нагрузки Мс.
Если теперь, не изменяя полярность напряжения на двигателе,
ввести в его якорную цепь дополнительный резистор Л, то двига-
тель будет иметь характеристику вида 4 и перейдет в точку е этой
характеристики. Так как момент двигателя при этом стал меньше
момента нагрузки, то он начнет вначале тормозиться, а затем под
действием активного момента нагрузки Мс > Мк з будет разгоняться
в противоположном направлении, пока в точке d моменты на-
грузки и двигателя не сравняются. Двигатель при этом будет рабо-
тать в режиме торможения противовключением. Такой способ
торможения часто используется в ЭП грузоподъемных машин и
механизмов, создающих на валу двигателя активный момент на-
грузки.
Задача 4.19*. Для двигателя Д31, рассмотренного в задаче 4.18,
рассчитать сопротивление добавочного резистора Ra, при вклю-
чении которого электромеханическая характеристика пройдет че-
рез точку с координатами (<ви = 50 рад/с, 7И = 40 А), и построить
эту характеристику.
1. Определяем суммарное сопротивление обмоток якоря и воз-
буждения двигателя по (4.83)
Аа + ^OB “ 0,757/НОМ(1 — Ц ном)/Люм —
= 0,75 • 220 (1 - 0,78)/46,5 = 0,78 Ом.
2. По естественной характеристике 1 (см. рис. 4.40, а) для тока
/и = 40 А найдем <ве - 90 рад/с.
3. Подставляя все данные в (4.82), вычислим
Яд — О — ®и/®е)(^ном/Л1ом — Яя ~ ^Ов) —
= (1 - 50/90)(220/40 - 0,78) = 2,1 Ом.
4. Задаваясь рядом значений тока, по естественной характери-
стике 7 определим значения скорости <ве. Далее по (4.66) вычис-
лим скорости сои на искусственной характеристике 2 при тех же
токах. Используя полученные данные:
7, А................20 40 60 80 100
(ое, рад/с..........130 90 74 60 48
ши, рад/с........... 103 50 20 -4 -23
построим искусственную электромеханическую характеристику (см.
рис. 4.40, а).
144
Задача 4.20. Для двигателя Д31(см. задачу 4.18) рассчитать Ra
включение которого в цепь якоря двигателя позволит снизить ско-
рость двигателя в 3 раза при номинальном моменте нагрузки.
Задача 4.21. Для двигателя Д31 (см. задачу 4.18) найти величи-
ну резистора Ra, включение которого позволит снизить ток дви-
гателя в первый момент пуска до уровня 2/ном.
Задача 4.22. Для двигателя Д31 (см. задачу 4.18) определить
сопротивление резистора Ra, при включении которого механи-
ческая характеристика пройдет через точку с координатами сои =
= 0,2<пном; Мн = 0,9Л7НОМ.
4.17. Схема включения, характеристики
и свойства электропривода с двигателем
смешанного возбуждения
Двигатель этого типа (рис. 4.48, а) имеет две обмотки возбуж-
дения: независимую 1, подключаемую к источнику питания через
резистор 2, и последовательную 4, включаемую последовательно
с резистором 3 и обмоткой якоря 5. Вследствие этого магнитный
поток двигателя представляет собой сумму двух составляющих:
потока ФнОв, создаваемого обмоткой 1, и потока Фпов, создавае-
мого обмоткой 4.
Зависимость этих потоков и суммарного потока Ф от тока яко-
ря показана на рис. 4.48, б соответственно в виде штриховых ли-
ний 6 и 7 и сплошной линии 8. Важно отметить, что при токе
якоря, стремящемся к значению (-7,), магнитный поток Ф стре-
мится к нулю и двигатель размагничивается.
Рис. 4.48. Схема включения (а) и характеристики (б) двигателя постоян-
ного тока смешанного возбуждения:
1 — независимая обмотка возбуждения; 2, 3 — добавочные резисторы; 4 — пос-
ледовательная обмотка возбуждения; 5— якорь двигателя; 6— график магнитно-
го потока, создаваемого независимой обмоткой возбуждения; 7 — график маг-
нитного потока, создаваемого последовательной обмоткой возбуждения; 8 — ре-
зультирующий график магнитного потока
145
Рис. 4.49. Универсальные характери-
стики двигателя постоянного тока
сме-
шанного возбуждения:
1 — зависимость скорости от тока; 2— за-
висимость момента от тока
Электромеханическая и механическая характеристики двига-
теля выражаются соответственно формулами (4.75) и (4.76), в
которых магнитный поток Ф — также функция тока якоря.
Для практических расчетов используются универсальные харак-
теристики двигателя, которые приводятся в справочной литерату-
ре и показаны на рис. 4.49. Они представляют собой зависимости 1
и 2 относительных скорости со* = со/соном и момента М* = М/Мноы
от относительного тока якоря I* = ///ном. Эти характеристики во
многом схожи с универсальными характеристиками двигателя с
последовательным возбуждением за одним существенным исклю-
чением: двигатель со смешанным возбуждением имеет определен-
ную скорость идеального холостого хода, определяемую Фнов-
Поскольку характеристики двигателя располагаются и во вто-
ром квадранте, то он может работать во всех возможных энергети-
ческих режимах.
Регулирование переменных ЭП с этим типом двигателя может
осуществляться изменением напряжения, магнитного потока и
сопротивления добавочного резистора в цепи якоря. Двигатель
обеспечивает режимы торможения: динамического с независимым
возбуждением и самовозбуждением, противовключением и реку-
перативного.
Отметим, что наличие двух обмоток возбуждения существенно
увеличивает расход материалов на изготовление двигателя и, сле-
довательно, его массу, габаритные размеры и стоимость. По этой
причине такой тип двигателя в настоящее время применяется толь-
ко в тех случаях, когда его использование диктуется какими-либо
специфическими требованиями со стороны рабочей машины и
обосновывается технико-экономическими расчетами.
Контрольные вопросы
1. Какие типы двигателей постоянного тока применяются в ЭП?
2. Опишите основную схему включения двигателя постоянного тока
независимого возбуждения.
146
3. Какие допущения были приняты при выводе формул для характе-
ристик этого двигателя?
4. Назовите виды и признаки энергетических режимов двигателя.
5. Назовите основные способы регулирования координат ЭП с двига-
телем постоянного тока с независимым возбуждением.
6. Охарактеризуйте основные способы регулирования скорости этого
двигателя.
7. Что такое пусковая диаграмма двигателя и как она строится?
8. Какими методами можно рассчитать сопротивление добавочных
резисторов в цепях якоря двигателя?
9. Каковы достоинства и недостатки системы Г—Д?
10. Каковы достоинства и недостатки системы ТП—Д?
11. В чем цель и какова сущность формирования статических и дина-
мических характеристик ЭП?
12. В каких случаях целесообразно использование схемы с шунтирова-
нием якоря двигателя с независимым возбуждением?
13. Каковы схема и характеристики системы «источник тока—двига-
тель»?
14. В чем сущность импульсного регулирования переменных ЭП?
15. Каковы особенности переходных процессов в двигателе при пита-
нии его якоря от сети?
16. Каковы особенности переходных процессов в двигателе при пита-
нии его якоря от электромашинного и полупроводникового преобразо-
вателей?
17. Какими методами осуществляется формирование переходных про-
цессов?
18. По каким принципам осуществляется автоматизация релейно-кон-
такторных схем управления двигателем?
19. С помощью каких обратных связей осуществляется регулирование
скорости, положения, тока и момента двигателя?
20. В чем особенности и достоинства замкнутых схем управления дви-
гателя с подчиненным регулированием координат (переменных)?
21. Что такое универсальные характеристики двигателей постоянного
тока последовательного и смешанного возбуждения?
22. В чем состоят особенности схемы включения и характеристик дви-
гателя с последовательным возбуждением?
23. Назовите способы регулирования скорости двигателя с последова-
тельным возбуждением.
24. Назовите способы торможения двигателя с последовательным воз-
буждением.
25. В чем заключаются особенности схемы включения и характеристик
двигателя со смешанным возбуждением?
ГЛАВА 5
ЭЛЕКТРОПРИВОД С АСИНХРОННЫМИ
ДВИГАТЕЛЯМИ
5.1. Схемы включения, характеристики
и режимы работы трехфазного асинхронного
двигателя
Электропривод с трехфазным асинхронным двигателем явля-
ется самым массовым видом привода в промышленности, комму-
нальном и сельском хозяйстве. В бытовой технике широко приме-
няются и однофазные асинхронные двигатели. Такое положение
определяется простотой изготовления и эксплуатации этих двига-
телей, их меньшими по сравнению с двигателями постоянного
тока массой, габаритными размерами и стоимостью, а также
надежностью в работе.
Основной областью применения асинхронных двигателей до
недавнего времени являлся нерегулируемый ЭП. В последние годы
в связи с разработкой и серийным выпуском электротехнической
промышленностью полупроводниковых преобразователей часто-
ты и регуляторов напряжения стали создаваться и широко ис-
пользоваться регулируемые асинхронные ЭП с характеристика-
ми, не уступающими по своим показателям ЭП с двигателями
постоянного тока. Применение таких ЭП в силу отмеченных пре-
имуществ асинхронных двигателей представляет собой прогрес-
сивную тенденцию развития современного автоматизированного
ЭП.
Трехфазный асинхронный двигатель имеет обмотку статора,
подключаемую к трехфазной сети переменного тока с напряже-
нием Ui и частотой /, и обмотку ротора, которая может быть
выполнена по двум вариантам (рис. 5.1).
Первый вариант предусматривает выполнение обычной трех-
фазной обмотки из проводников с выводами на три контактных
кольца. Такую конструкцию имеет двигатель с фазным ротором
(рис. 5.1, а), и это позволяет включать в роторную цепь различные
электротехнические элементы, например резисторы для регули-
рования скорости, тока и момента ЭП, и создавать с той же це-
лью специальные схемы включения двигателя.
Другой вид обмотки получают заливкой алюминия в пазы ро-
тора, в результате чего образуется конструкция, известная под
названием «беличья клетка». Схема двигателя с такой обмоткой,
не имеющей выводов и получившей название короткозамкнутой,
148
Рис. 5.1. Схема включения асинхрон-
ного двигателя с фазным (а) и ко-
роткозамкнутым (б) роторами
а
о о о
представлена на рис. 5.1, б. На схемах также показано включение
добавочных активных резисторов в цепи статора и ротора.
Для получения выражений для электромеханической и меха-
нической характеристик асинхронного двигателя используется его
схема замещения, на которой цепи статора и ротора представле-
ны своими активными и индуктивными сопротивлениями. Осо-
бенность схемы замещения двигателя состоит в том, что ток, ЭДС
и параметры цепи ротора приведены (пересчитаны) к цепи ста-
тора, что и позволяет изобразить эти две цепи на схеме соединен-
ными электрически, хотя в действительности связь между ними
осуществляется через электромагнитное поле. Приведение осуще-
ствляется с помощью коэффициента трансформации двигателя
по ЭДС:
к = Et/E2K = 0,95f4.HOM/£2K, (5.1)
где Е{ и Е2к — фазные ЭДС статора и ротора при неподвижном
роторе; t/ф.ном — фазное номинальное напряжение сети.
Расчетные формулы приведения имеют следующий вид:
Е2 = Е2к = Ей 12 = 12/к-, R2 = R2k.2-, х2 = х2к.\ (5.2)
где I2, R2, х2 — соответственно ток, активное и индуктивное со-
противления цепи ротора, а штрихом обозначены их приведен-
ные значения.
В теории электрических машин разработаны и применяются две
основные схемы замещения двигателя: более точная Т-образная и
Рис. 5.2. П-образная схема заме-
щения асинхронного двигателя
149
упрощенная П-образная. На рис. 5.2 представлена П-образная (уп-
рощенная) схема замещения, которая в дальнейшем и использу-
ется при выводе формул для характеристик двигателя. На схеме
приняты следующие обозначения: йх, йф — линейные и фазные
напряжения сети; Ц, 12 — фазные токи статора, намагничи-
вания и приведенного ротора; х1; х2 — индуктивные сопротивле-
ния от потоков рассеяния фазы обмотки статора и приведенное фазы
ротора; хц — индуктивное сопротивление контура намагничива-
ния; Rc, R\a, R। — активные фазные сопротивления обмотки ста-
тора, добавочного резистора и суммарных фаз статора, Rx = Rc +
+ 7?|Д; Rp, R'^,, R2 — активные приведенные к обмотке статора
фазные сопротивления обмотки ротора, добавочного резистора и
суммарное фазы ротора, R2 = R'p + R2a; s — скольжение двигателя,
5 = (<n0 - со)/со0; ®о — угловая скорость магнитного поля двигателя
(скорость идеального холостого хода), со0 = ?.nf\lp\ f — частота
питающего напряжения; р — число пар полюсов двигателя.
Как видно из рис. 5.2, ЭДС статора равна приведенной ЭДС
ротора, а ток намагничивания 1Р,определяющий основной маг-
нитный поток двигателя, протекает под действием йф по цепи,
состоящей из сопротивлений контура намагничивания хц и Rp, и
представляет собой векторную сумму токов статора и приведен-
ного роторного, т.е. = /, + i2.
Электромеханическая характеристика Эта характеристи-
ка описывается выражением, получаемым непосредственно из рас-
смотрения схемы на рис. 5.2:
12 =иф/7(Л+ад2+Хк2, (5.3)
где лк — индуктивное фазное сопротивление короткого замыка-
ния, Хк = X] + х2.
В отличие от двигателей постоянного тока электромеханиче-
ская характеристика асинхронного двигателя представляется в виде
зависимости тока ротора от скольжения, а не скорости. В этом
случае аналитическое выражение для характеристики имеет ком-
пактную форму записи и удобно для анализа и вычислений. Пере-
ход к зависимости вида со(/'2) осуществляется с помощью форму-
лы для скольжения
со = со0(1 - s). (5.4)
Для графического изображения электромеханической характе-
ристики двигателя проанализируем характерные точки этой зави-
симости и ее асимптоты, придавая скольжению 5 и скорости со
значения в пределах ±°°:
5 = 0, со = со0, 12 = 0 — точка идеального холостого хода;
150
Рис. 5.3. Электромеханическая характеристика s, со
асинхронного двигателя ~х
+ 00
“1
s = 1, со = О, Г2 - 1К З = иф/y(Ri + Д )2 + х2 — точка короткого
замыкания;
5i = -Д/Д, Ю1 = ®о(1 + 5i), 1'г = Лпах = Ц)/*к — точка максималь-
ного значения тока ротора, лежащего в области отрицательных
скольжений;
5 -» ±оо, и -» +°о, Г2 -» =иф/yjltf + х2 — асимптотическое
значение тока ротора при бесконечно большом увеличении сколь-
жения и скорости.
На рис. 5.3 показана электромеханическая характеристика дви-
гателя, при этом по вертикальной оси указаны соответствующие
друг другу скорость и скольжения двигателя, связанные соотно-
шением (5.4).
Механическая характеристика. Формулу для этой характери-
стики найдем, используя выражения для потерь мощности в цепи
ротора. Потери мощности ДР2 в цепи ротора, выраженные через
механические переменные двигателя, представляют собой разность
электромагнитной мощности Рэ м = Мсо0, поступающей со статора
на ротор, и полезной механической мощности на валу Р2 = Мео,
т.е.
ДР2 = Дм - Д = Л/ео0 ~ Мео = Мсо05.
(5.5)
Отметим, что потери в роторе из-за их зависимости от сколь-
жения часто называют потерями скольжения. Те же потери мощ-
ности, выраженные через электрические переменные и парамет-
ры, определяются как
ДД = ЗД'2Л2.
Приравнивая (5.5) и (5.6), получим
М= ЗД2Д/(ео0Д
Подставляя в (5.7) значение тока Г2 из (5.3), получим
м= з ц,2д71^((Д + Д'Л)2 + х2)].
(5.6)
(5.7)
(5.8)
151
Исследование полученной зависимости M(s) на экстремум,
которое осуществляется нахождением производной dM/ds и при-
равниванием ее нулю, обнаруживает наличие двух экстремальных
точек в зависимости момента от скольжения:
Мк = 3^/[2со0 (Л, ±7я,+хк2)]; (5.9)
•Ь’к = ±R1/, <5-10)
причем знак «+» в (5.9) и (5.10) относится к области скольжения
5 > 0, а знак «-» — к значениям 5 < 0. Значения момента Мк и
скольжения sK двигателя, соответствующие экстремальным точ-
кам, получили название критических.
Если разделить выражение (5.8) на (5.9) и выполнить неслож-
ные преобразования, то можно получить другую, более компакт-
ную и удобную форму записи для формулы механической харак-
теристики
М — 2Л/К(1 + asK)/(sK/s + s/sK + 2osK), (5.11)
где а = R\/Ri.
Характерные точки механической характеристики следующие:
5 = 0; со - со0; М = 0 — точка идеального холостого хода;
s = 1; со = 0; М= Мк з = Мп — точка короткого замыкания;
5 = 5КД; М= Мкл; s = -sKr; М = -Мкт — координаты точки экст-
ремума;
5 -> ±о°; со -э ±о°; М -э 0 — асимптота механической характери-
стики, которой является ось скорости (скольжения).
На рис. 5.4 приведена механическая характеристика двигателя.
Отметим, что она соответствует определенному чередованию фаз
питающего напряжения сети U\ на зажимах статора двигателя. При
изменении порядка чередования двух фаз двигатель имеет анало-
Рис. 5.4. Механическая характеристи-
ка асинхронного двигателя
152
гичную механическую характеристику, которая располагается сим-
метрично относительно начала координат.
В некоторых случаях при построении механической характери-
стики используют приближенные формулы. Упрощение может быть
получено, если пренебречь активным сопротивлением статора,
т.е. считать а = 0. В этом случае выражения (5.11), (5.9) и (5.10)
принимают .следующий вид:
M=2MJ{s/sK + sJsy, (5.12)
JI/K = 3t/£/(2co0xK); (5.13)
$к = Я2'/хк. (5.14)
Если в (5.12) вместо текущих значений момента и скольжения
подставить их номинальные значения Мнои и 5Н0М и обозначить
кратность максимального момента Л/к/Л/ном через Хм, то из (5.12)
может быть получена формула, связывающая критическое и но-
минальное скольжения:
5к = 5ном ± лД'М ~ 1 ) (5.15)
Эта формула может использоваться для определения sK по ка-
таложным (паспортным) данным двигателя. Для двигателей об-
щепромышленных серий коэффициент Хм, определяющий пе-
регрузочную способность двигателей, лежит в пределах 1,8... 2,6.
В результате критическое скольжение 5К превышает номинальное
5Н0М (при знаке «+» в (5.15)) примерно в 3 — 4 раза.
Дальнейшее упрощение (5.12) может быть выполнено для об-
ласти малых скольжений, в которой ввиду небольших значений
можно пренебречь отношением s/sK. В этом случае выражение (5.12)
принимает вид
M=2MKs/sK. (5.16)
Полученная формула (5.16) описывает так называемый рабо-
чий, близкий к линейному, участок характеристики двигателя,
на котором находится точка номинального режима с координата-
ми. Мном, соном, 5НОМ (см. рис. 5.4).
Асинхронный двигатель может работать во всех возможных энер-
гетических режимах, которые определяются величиной и знаком
скольжения, а именно:
5 = 0; со = со0 — режим идеального холостого хода;
5 = 1; со = 0 — режим короткого замыкания;
0<5<1;0<со<со0 — двигательный режим;
5 < 0; со > со0 — генераторный режим параллельно с сетью (ре-
жим рекуперативного торможения);
153
s > 1; со < 0 — генераторный режим последовательно с сетью
(режим торможения противовключением).
Кроме того, двигатель может работать в генераторном режиме
независимо от сети переменного тока, который называется также
режимом динамического торможения. В этом режиме обмотка ста-
тора двигателя отключается от сети переменного тока и подклю-
чается к источнику постоянного тока, а цепь ротора замыкается
накоротко или на добавочные резисторы. Подробно схема вклю-
чения двигателя и его характеристики в этом режиме рассмотре-
ны в подразд. 5.8.
Полученные формулы для электромеханической и механиче-
ской характеристик позволяют назвать возможные способы регу-
лирования переменных двигателя, которые нужны для получения
искусственных характеристик двигателя. Из (5.3) следует, что ре-
гулирование (ограничение) токов в роторе и статоре в переход-
ных режимах может быть обеспечено изменением подводимого к
статору двигателя напряжения, а также с помощью добавочных
резисторов в цепях статора и ротора.
Формула (5.8) определяет возможные способы получения ис-
кусственных механических характеристик, требуемых при регули-
ровании момента и скорости двигателя. Эти способы связаны с
изменением уровня и частоты подводимого к двигателю напряже-
ния, включением в цепи статора и ротора добавочных активных и
реактивных резисторов, изменением числа пар полюсов магнит-
ного поля двигателя. Применяются и другие способы регулирова-
ния координат, реализуемые с помощью специальных схем вклю-
чения асинхронного двигателя — каскадные схемы и схемы элек-
трического вала.
Задача 5.1*. Двигатель типа МТН—312-6 имеет следующие ис-
ходные данные: Рном = 17,5 кВт; пном = 945 об/мин; t/1H0M = 380 В;
/1 = 50 Гц; /]ном = 43 A; Rc = 0,34 Ом; х, = 0,43 Ом; Rp = 0,12 Ом;
х2 = 0,25 Ом; к = 2,66; Хм = Мк/Мном = 2,5.
Рассчитать и построить естественные электромеханическую и
механическую характеристики двигателя.
1. Определяем скорость идеального холостого хода
(Do = 'Infx/p = 2-3,14- 50/3 = 104,8 рад/с.
2. Рассчитываем приведенные значения сопротивлений обмот-
ки ротора и индуктивное сопротивление короткого замыкания:
х2 = х2к2 = 0,25 • 7,08 = 1,8 Ом; R'p = Rpk7 = 0,12 7,08 = 0,89 Ом;
хк = х, + х2 = 0,43 + 1,8 = 2,23 Ом.
3. Определяем координаты характерных точек характеристики
/Д5):
154
Лс.з — Ллуск — ^1ф/\(,^с -^р) ”
= 2 2о/ 7(0,34 + 0,89)2 + 2,232 = 87,1 А;
5, =-Я;/Яс =-0,89/0,34 =-2,6; /тах = 1/1ф/хк = 220/2,23 = 99,5 А;
Л = и.ф/^Rl+xl = 22оД/О,342 + 2,232 = 98,4 А.
4. Для расчета электромеханической характеристики I'2(s) ис-
пользуем формулу (5.3), подставляя в нее найденные значения
параметров:
П = и1ф/7(Лс+Л'рМ2+х2к = 220/7(0,34 + 0,89Д)2 +2,232.
5. Рассчитываем механическую характеристику по формуле
(5.11), определяя вначале координаты точек номинального режи-
ма и критического момента:
Юном = ллном/30 = 3,14 945/30 = 99 рад/с;
*ном = («о - юНОм)/юо = (Ю4,8 - 99)/104,8 = 0,07;
Л/ном = Лом/«ном = 17 500/99 = 177 Н м;
Мк = ХмЛ/Ном = 2,5 177 = 442 Н • м;
5К = +х2к = о,89/7о,342 + 2,232 = 0,4;
а = Rc/R'p = 0,34/0,89 = 0,34.
6. Расчетная формула принимает вид
М = 2МК( 1 + asK)/(s/sK + sK/s + 2«5К) = 1 018/(5/0,4 + 0,4/5 + 0,3).
7. Задаваясь скольжением s, рассчитываем значения тока и мо-
мента:
5 -3 -2,6 -0,5 0 0,07 0,4 1 1,5
со, рад/с.... 419,2 337 157,2 104,8 99 62,9 0 -52,4
Л А 99,4 99,5 83,4 0 16,6 64,7 87,1 91,8
М, Н м .... -120 -160 -582 0 177 442 316 234
Используя полученные данные, построим естественные элект-
ромеханическую 1 (рис. 5.5, а) и механическую 2 (рис. 5.5, б)
характеристики.
155
Рис. 5.5. Расчетные электромеханическая (а) и механические (б) харак-
теристики двигателя:
1 — электромеханическая; 2 — естественная механическая; 3 — реостатная меха-
ническая
Задача 5.2*. Двигатель с короткозамкнутым ротором типа 4A160S
имеет следующие паспортные данные: Рном = 15 кВт; пном = 1 465
об/мин; /1ном = 29,3 А; Хм = Л/К/Мном = 2,3; X/- 7,n/7iHOM = 7, р = 2,
/1НОМ = 50 Гц; 7/1ном = 380 В.
Рассчитать естественную механическую характеристику двига-
теля.
1. Определяем номинальную угловую скорость
юном = 2лпном/60 = 2 3,14 • 1465/60 = 153 рад/с.
2. Определяем скорость идеального холостого хода, номиналь-
ные момент и скольжение:
ю0 = 2л/ /р = 2-3,14- 50/2 = 157 рад/с;
Л/ном = -Рном/йном = 15 000/153 = 98 Н • м;
Яном = (Юо - <Д,ом)/к>0 = (157 - 153)/157 = 0,025.
Полученных данных достаточно для приближенного постро-
ения рабочего участка механической характеристики двигателя по
двум точкам: номинальной (соном, Л/ном) и холостого хода (со0, 0).
3. Для получения полной механической характеристики про-
должаем расчет. Определяем критический момент двигателя для
двигательного режима работы
Мк = Хм Л/ном = 2,3 - 98 = 225 Н • м.
4. По формуле (5.15) находим критическое скольжение двига-
теля, принимая в ней знак «+» перед корнем,
156
*к = Shom (xm + T^T) = о,025(2,3 + ^2,32 -1) = 0,11.
Подставляем найденные значения Мк и л-к в упрощенную фор-
мулу (5.12) и получаем
М = 2MK/(s/sK + sK/s) = 2 225/(5/0,11+0,11Д).
5. Задаваясь рядом значений 5 от 1 до 0 (двигательный режим
работы), определяем по этой формуле соответствующие значения
момента:
5 ...............
со, рад/с........
М, Н м...........
1 0,8 0,6 0,4 0,2 0,11 0
0 31,4 62,8 94,2 126 151 157
48,9 60,7 79,8 115 190 225 0
5.2. Регулирование переменных электропривода
с помощью резисторов
Данный способ регулирования переменных, называемый ча-
сто реостатным, может быть осуществлен введением добавочных
активных резисторов в статорные или роторные цепи двигателя
(см. рис. 5.1). Он прост в реализации, но в то же время имеет невы-
сокие показатели качества регулирования и экономичности.
Включение добавочных резисторов Rla в цепь статора. Этот спо-
соб применяется главным образом для регулирования (ограниче-
ния) в переходных процессах тока и момента двигателя с корот-
козамкнутым ротором. Как следует из формулы (5.3), включение
резистора в цепь статора ведет при данной скорости (скольже-
нии) к снижению токов статора и ротора. Другими словами, все
искусственные электромеханические характеристики располага-
ются в первом квадранте ниже и левее естественной. С учетом того,
что скорость идеального холостого хода со0 = 2n/j/p при включе-
нии /?1Д не изменяется, получаемые искусственные электромеха-
нические характеристики можно представить семейством кривых
на рис. 5.6, а, для которых Л1д1 < /?|д2 < /?1д3- Получаемые характе-
ристики позволяют ограничивать ток двигателя при пуске и дру-
гих переходных процессах.
Для получения искусственных механических характеристик
проанализируем влияние /?1д на координаты их характерных то-
чек.
Скорость холостого хода со0 = 2л//р не изменяется при RXa =
= var, т.е. все искусственные характеристики проходят через эту
точку на оси скорости (скольжения).
Координаты точки экстремума Мк и sK изменяются при варьи-
ровании Rla, а именно: в соответствии с (5.9) и (5.10) при увели-
157
Рис. 5.6. Электромеханические (а) и механические (б) характеристики
двигателя при включении добавочного резистора в цепь статора
чении 7?1д критический момент Мк и критическое скольжение 5К
уменьшаются. Уменьшается и пусковой момент, который опреде-
ляется формулой (5.8) при 5=1. Проведенный анализ позволяет
представить искусственные механические характеристики двига-
теля при /?|д = var в виде, показанном на рис. 5.6, б. Такие харак-
теристики позволяют при необходимости снижать в переходных
процессах момент двигателя, в том числе и пусковой.
В то же время искусственные характеристики на рис. 5.6, б мало
пригодны для регулирования скорости двигателя: они обеспечи-
вают небольшой диапазон изменения скорости; жесткость харак-
теристик двигателя и его перегрузочная способность, характери-
зуемая критическим моментом, по мере увеличения /?1д снижает-
ся; способ отличает и низкая экономичность.
В силу этих недостатков регулирование скорости двигателя с
помощью активных резисторов в цепи его статора применяется
редко. Этот способ обычно используется для ограничения токов и
моментов двигателя' с короткозамкнутым ротором в различных
переходных процессах: при пуске, реверсе и торможении.
Например, такая схема применяется в ЭП лифтов, имеющем
двухскоростной двигатель. В таких ЭП при переходе с высокой
скорости на пониженную в цепь низкоскоростной обмотки стато-
ра вводятся добавочные резисторы, которые обеспечивают огра-
ничение тока и момента двигателя. Отметим, что в некоторых ЭП
ограничение тока и момента осуществляется включением /?1д в
одну фазу (так называемые несимметричные схемы), что позво-
ляет получить эффект уменьшения тока и момента при меньшем
числе резисторов.
Задача по расчету резисторов в цепях двигателя формулируется
следующим образом: известны паспортные данные двигателя; тре-
буется рассчитать величину сопротивления добавочных резисто-
ров в цепях двигателя, при включении которых искусственные
158
характеристики пройдут соответственно через точки с координа-
тами (юи, /и) или (сои, Ми). Вид характеристик задается по сообра-
жениям регулирования скорости или получения требуемых (допу-
стимых) значений пусковых тока или момента двигателя.
Рассмотрим расчет сопротивления добавочного резистора,
включенного во все три фазы статора двигателя (симметричная
схема). Включение резистора должно обеспечить заданную крат-
ность пускового тока а = /щ.и/Лп.е или момента ц = Л/п.и/Мпе, где
/1пи, Лп.е и Л/П.и, Мп е — соответственно пусковые токи и момен-
ты двигателя при включении добавочного резистора и без него.
Введем в рассмотрение понятие полного комплексного сопро-
тивления короткого замыкания zK, соответствующее моменту пуска
двигателя:
ZK =и1ф/^31^, (5.17)
а также активного гк и реактивного хк сопротивлений короткого
замыкания, определяемых по формулам:
rK = zKcosipn; (5.18)
хк =ylzZ-rt, (5.19)
где cos фп — коэффициент мощности двигателя в момент его пуска.
Тогда для получения заданных кратностей пусковых тока а или
момента ц требуемое сопротивление добавочного резистора опре-
делится как:
Л1д = 7Uk/«)2 ~Хк ~ Гк; (5-20)
Я1Д = ^к/ц)2 -X* - Гк. (5.21)
Для использования формул (5.18) —(5.21) необходим созфп -
= со8фкз, величина которого обычно не приводится в справочни-
cosq>n
0 10 20 30 40 50 60 70 80 90 РНОм> кВт
Рис. 5.7. Зависимость коэффициента мощности асинхронных двигателей
при пуске от номинальной мощности
159
ках и каталогах. На рис. 5.7 приведены усредненные зависимости
коэффициента мощности асинхронных двигателей от их номи-
нальной мощности в режиме короткого замыкания (пуска), рас-
считанные по паспортным данным двигателей серий 4А (кривая 2)
и МТК (кривая 7) для различных скоростей вращения. Прибли-
женно для серии двигателей 4А с короткозамкнутым ротором
можно принять cos фп = 0,3... 0,5, а для двигателей краново-метал-
лургической серии MTF и МТН cos<pn = 0,6...0,7.
Включение добавочных резисторов Rla в цепь ротора. Этот спо-
соб (см. схему рис. 5.1, о) применяется как в целях регулирования
в переходных процессах тока и момента двигателя с фазным рото-
ром, так и его скорости.
Искусственные электромеханические характеристики при Л2д =
= var имеют вид, показанный на рис. 5.6, а для случая /?1д = var, и
могут использоваться для регулирования (ограничения) пусково-
го тока.
Для построения получаемых при этом способе искусственных
механических характеристик проведем анализ влияния /?2д на ко-
ординаты их характерных точек. Скорость идеального холостого
хода двигателя и максимальный (критический) момент двигателя
в соответствии с (5.9) остаются неизменными при регулирова-
нии R2n, а критическое скольжение, как это следует из (5.10),
изменяется пропорционально сопротивлению этого резистора.
Выполненный анализ позволяет построить естественную (R2ji =
= 0) и искусственные 1 и 2 при /?2д2 > 7?2д] характеристики, прй-
веденные на рис. 5.8. Из этих характеристик видно, что за счет
Рис. 5.8. Механические характеристики асинхронного двигателя при вклю-
чении дополнительных резисторов в цепь ротора:
1 — реостатная при Л2я|; 2 — реостатная при /?2я2
160
изменения /?2д имеется возможность повышать пусковой момент
двигателя вплоть до критического момента Л/к (характеристика
2), что позволяет сохранить перегрузочную способность двигате-
ля при регулировании его скорости.
В остальном рассматриваемый способ характеризуется такими
же показателями, что и для двигателей постоянного тока. Диа-
пазон регулирования скорости равен примерно 2...3 из-за сни-
жения жесткости характеристик и роста потерь мощности по мере
его увеличения. Плавность регулирования скорости, которая
в двигательном режиме может только снижаться, определяется
плавностью изменения добавочного резистора /?2д.
Затраты, связанные с созданием данной системы ЭП, неве-
лики, так как для регулирования обычно используются простые и
дешевые ящики металлических резисторов. В то же время эксплу-
атационные затраты оказываются значительными, поскольку при
снижении скорости (увеличении скольжения 5) возрастают поте-
ри в роторной цепи. Поэтому регулирование скорости этим спо-
собом целесообразно осуществлять при небольшом диапазоне или
кратковременной работе на пониженных скоростях. Например, этот
способ нашел широкое применение в ЭП подъемно-транспорт-
ных машин и механизмов.
Для расчета резисторов в цепи ротора обычно требуется опре-
делить сопротивление дополнительного резистора Т?2д, при вклю-
чении которого двигатель будет иметь искусственную характери-
стику, проходящую через заданную точку с координатами (сои,
5И, Л/и). При этом предполагается, что естественная механическая
характеристика двигателя известна (рассчитана или снята экспе-
риментально), а требуемая искусственная характеристика задана
по условиям пуска или регулирования скорости.
Расчет сопротивления добавочного резистора Т?2д может быть
выполнен несколькими способами в зависимости от формы зада-
ния требуемой искусственной механической характеристики.
Если искусственная характеристика задана полностью и опре-
делена точка критического момента, то в этом случае расчет ос-
новывается на формуле (5.10), с помощью которой находится
отношение критических скольжений двигателя на естественной
5ке и искусственной $ки характеристиках:
^к.еАк.и = ^р/(^р + ^2д) = ^р/(Лр + ^2д)> (5.22)
где 7?р — сопротивление фазы обмотки ротора двигателя.
Из формулы (5.22) определяем искомое значение /?2д:
Л2д= Лр(5киАк.е-1). (5.23)
Формула (5.23) справедлива не только для критического мо-
мента Л/к, но и для любого заданного момента Л/и. Таким обра-
161
зом, если задана, например, некоторая точка f искусственной ха-
рактеристики 2 (см. рис. 5.8) с координатами Л/и, 5И, то искомое
сопротивление резистора Т?2д2 может быть найдено по формуле
Я2д2 = ЯАЛе - 1), (5.24)
где 5е — скольжение двигателя на естественной характеристике,
соответствующее моменту Л/и.
Отметим, что при отсутствии данных о значении сопротивле-
ния обмотки ротора Rp оно может быть найдено по следующей
приближенной формуле, использующей паспортные данные дви-
гателя:
“ ^2к^ном/(Л/
2ном ) • (5.25)
Если искусственная характеристика задана своей рабочей ча-
стью, то можно использовать метод отрезков, который рассмат-
ривался в гл. 4 применительно к двигателю постоянного тока. На
рис. 5.8 выполнено построение при использовании этого метода,
для чего проведена вертикальная линия, соответствующая номи-
нальному моменту Л/Ном и отмечены характерные точки a, b, с, d,
е. Тогда, например, сопротивление резистора Т?2д|, которое обес-
печит характеристику 1 на рис. 5.8, определится как
Я2д, = RH0Mbc/ae, (5.26)
где 7?ном — номинальное сопротивление АД, 7?ном = £2кД>/3/2ном)
(£2к — ЭДС ротора при 5=1; /2ном — номинальный ток ротора).
С помощью метода отрезков из рис. 5.8 по естественной харак-
теристике 7 может быть найдено и сопротивление фазы обмотки
ротора
Яр = R2H0Mab/ae. (5.27)
Типовой задачей для ЭП с асинхронным двигателем с фазным
ротором является расчет резисторов в цепи ротора, обеспечива-
ющих заданную пусковую диаграмму двигателя. Напомним, что
пусковая диаграмма представляет собой совокупность нескольких
искусственных механических характеристик двигателя, которые
используются при его пуске.
Пусковая диаграмма асинхронного двигателя обычно строится
по аналогии с двигателем постоянного тока независимого воз-
буждения (см. подразд. 4.5), предполагая, что рабочий участок
механических характеристик асинхронного двигателя близок к
линейному. При построении пусковой диаграммы двигателя мак-
симальный момент Л/] (см. рис. 4.6) обычно принимается не более
162
0,8...0,9 Мк, а момент М2 должен составлять 1,1... 1,2 Мс. Число
характеристик (ступеней) пусковой диаграммы т и значения мо-
ментов Mi и М2 связаны между собой следующим соотношением:
/n = lg(l/5HOMA/1)/lg(M,/M2). (5.28)
Расчет пусковых резисторов, обеспечивающих требуемую пу-
сковую диаграмму, производится с помощью формул (5.24) или
(5.26).
Задача 5.3*. Для асинхронного двигателя типа 4A160S, данные
которого приведены в задаче 5.2, рассчитать 7?1д, включение кото-
рого в три фазы двигателя уменьшит пусковой ток в 2 раза (а = 0,5).
1. Определяем пусковой ток двигателя при отсутствии резисто-
ров в цепи статора
Лп.е = ^1Лном = 7-29,3 = 205 А.
2. Определяем по формуле (5.17) полное сопротивление корот-
кого замыкания
ZK = £/1ном/(Л/1ном) = 380/1,73-205 = 1,08 Ом.
3. Принимая по рис. 5.8 cos<pn = 0,4, определяем по (5.18)
А = ZKcos <рп = 1,08 • 0,4 = 0,43 Ом
и по (5.19)
хк = -гк - л/1,082 - 0,432 = 1 Ом.
4. Теперь находим по (5.20) искомое сопротивление
Я|д = yl(zK/a)2-x2K -rK= 7(1,08/0,5)2 -12 - 0,43 = 1,5 Ом.
Задача 5.4*. Для двигателя типа МТН—312-6 из задачи 5.1 рас-
считать добавочное сопротивление R2a, при включении которого
в цепь ротора механическая характеристика пройдет через точку с
координатами: сои = 0,6 соном; Л/и = 0,9Л/НОМ. Рассчитать и построить
эту искусственную характеристику.
1. Рассчитываем координаты заданной точки, используя коор-
динаты номинальной точки (см. задачу 5.1):
сои = 0,6соном = 0,6 99 = 59,4 рад/с;
5И = (со0 - сои)/со = (104,8 - 59,4)/104,8 = 0,43;
Мн = 0,9Л/НОМ - 0,9 • 177 = 159 Н • м.
163
и нанесем ее на плоскость механических характеристик (см. рис.
5.5, б).
2. Для момента Мн - 159 Н м определяем скольжение хс на
естественной характеристике 2, которое оказывается равным 0,06.
По формуле (5.24) определяем требуемое добавочное сопро-
тивление
/?2д = - 1) = 0,89 (0,43/0,06 - 1) = 5,5 Ом.
3. Критическое скольжение при включении добавочного сопро-
тивления на искусственной характеристике 3 будет равно
5К.И = (^2д + Л'р = (о, 89 + 5,5)Д/0,342 + 2,232 = 2,83,
а критический момент в соответствии с формулой (5.9) не изме-
нится и будет равен Л/к = 442 Н • м.
Подставляя sK H, Мк и новое значение а = R\/R'i = 0,34/6,39 =
= 0,05 в (5.11), получаем следующую расчетную формулу для ме-
ханической характеристики:
М = 2 442 • (1 + 0,05 • 2,83)/(.у/2,83 + 2,83Д + 2 • 0,05 • 2,83).
4. Задаваясь рядом значений скольжения s, определяем ско
рость и момент двигателя:
5 ....................... 0
со, рад/с........... 104,8
М, Нм................... 0
0,43 0,6 0,8 1 2,83
59,4 41,9 21 0 -192
159 194 246 291 442
Задача 5.5. Для двигателя типа 4A160S (см. задачу 5.2) рассчи-
тать сопротивление резистора /?2д, включение которого в цепь ста-
тора обеспечивает снижение пускового момента на 20 % (ц = 0,8).
Задача 5.6. Для двигателя типа МТН—312-6 (см. задачу 5.1)
рассчитать сопротивление /?2д, включение которого в цепь ротора
позволит получить пусковой момент двигателя, равный крити-
ческому (максимальному).
Задача 5.7*. Для двигателя типа МТН —312-6 (см. задачу 5.1)
построить пусковую диаграмму и рассчитать сопротивление пу-
сковых резисторов в цепи ротора, обеспечивающих пуск двигате-
ля в две ступени (т = 2) при Л/с = Л/ном. Рабочий участок механи-
ческих характеристик двигателя принять линейным.
5.3. Регулирование переменных электропривода
изменением напряжения на статоре двигателя
Изменение величины напряжения, подводимого к статору асин-
хронного двигателя, позволяет осуществлять в статических и ди-
164
намических режимах регулирование его переменных, а также по-
вышать энергетические показатели его работы.
Для регулирования переменных двигателя между сетью пере-
менного тока (рис. 5.9, а) со стандартным напряжением 6/, и ста-
тором двигателя 2 включен регулятор напряжения 1, выходное
напряжение которого (/|рег изменяется с помощью сигнала управ-
ления Uy. Изменяя величину этого сигнала, можно регулировать
напряжение на статоре двигателя (/)рег в пределах от величины
сетевого напряжения £/|ном и практически до нуля. При этом ча-
стота напряжения на двигателе не изменяется и равна стандарт-
ной (50 Гц для РФ).
Анализ электромеханических характеристик, который может
быть проведен с использованием формулы (5.3), показывает, что
снижение напряжения при фиксированном скольжении двигате-
ля приводит к снижению токов ротора и статора. При этом в соот-
ветствии с формулой для скорости холостого хода со0 = ^f\/p из-
менение напряжения не влияет на ее величину. Тем самым элект-
ромеханические характеристики принимают вид кривых, пока-
занных на рис. 5.6, а.
Анализ влияния напряжения на механические характеристики
показывает следующее. Как и для электромеханических характе-
ристик, регулирование напряжения на статоре не приводит к из-
менению скорости холостого хода. Напряжение также не влияет
на критическое скольжение (см. формулу (5.10)), но существенно
изменяет величину критического (максимального) момента Л/к.
Как следует из (5.9), снижение напряжения приводит к уменьше-
нию Л/к пропорционально квадрату питающего напряжения.
В результате при U^ = var искусственные характеристики имеют
вид кривых, показанных на рис. 5.9, б. Они малопригодны для
целей регулирования скорости, так как по мере уменьшения на-
пряжения резко снижаются критический момент двигателя и тем
самым его перегрузочная способность, а диапазон регулирования
скорости очень мал.
По указанным причинам разомкнутая схема ЭП на рис. 5.9, а
может использоваться для управления в переходных процессах
моментом двигателя, что требуется, например, для обеспечения
Рис. 5.9. Схема включения (а) и
механические характеристики (б)
асинхронного двигателя при регу-
лировании напряжения на статоре:
1 — регулятор напряжения; 2 — двига-
тель; 3 — естественная механическая ха-
рактеристика; 4... 6 — искусственные
характеристики при регулировании на-
пряжения
165
заданных ускорения движения ЭП или регулирования момента
(усилия) на исполнительном органе рабочей машины. При ис-
пользовании различных обратных связей в этой системе ЭП могут
быть сформированы механические характеристики, пригодные для
целей регулирования скорости двигателя. Такая схема рассмотре-
на в подразд. 5.11.
Для регулирования напряжения на статоре двигателя могут
использоваться различные электротехнические устройства; авто-
трансформаторы, магнитные усилители и тиристорные регулято-
ры напряжения (ТРН), которые получили в настоящее время на-
ибольшее распространение из-за высокого КПД, простоты в об-
служивании и позволяют реализовывать самые разнообразные
функции по управлению и оптимизации режимов ЭП с асинх-
ронными двигателями.
На рис. 5.10 показана упрощенная схема асинхронного трех-
фазного ЭП с использованием ТРН. Силовая часть ТРН образо-
вана шестью тиристорами VS1... VS6, включенными попарно в
каждую фазу двигателя по так называемой встречно-параллель-
ной схеме. Такая схема обеспечивает протекание тока в двигате-
ле в два полупериода синусоидального напряжения сети U\. Ти-
ристоры получают импульсы управления Ua от системы импуль-
сно-фазового управления СИФУ, которая обеспечивает также
их сдвиг на угол управления а в функции внешнего сигнала уп-
равления Uy.
Если на тиристоры VS1... VS6 не подаются импульсы управле-
ния от СИФУ, то они закрыты и напряжение на двигателе С,рег
равно нулю. При подаче на тиристоры импульсов управления Ua с
углом управления а = 0 они будут полностью открыты и к нагрузке
будет приложено все напряжение сети £/, = С1рег. Если осуществ-
лять подачу импульсов управления на тиристоры с некоторой за-
держкой относительно точки естественного открытия тиристоров
(угол управления а 0), то к нагрузке будет прикладываться часть
напряжения сети. Изменяя угол управления а от нуля до л, можно
регулировать напряжение на нагрузке от полного напряжения сети
до нуля.
Рис. 5.10. Схема реализации тиристорного регулятора напряжения
166
В таких схемах вместо одной пары встречно-параллельно вклю-
ченных тиристоров может применяться один симметричный ти-
ристор (симистор), обеспечивающий протекание тока в фазе дви-
гателя в обоих направлениях. Его применение сокращает число
электронных приборов вдвое и упрощает схему СИФУ.
Важно отметить, что форма напряжения на нагрузке является
несинусоидальной. Несинусоидальное напряжение можно пред-
ставить как совокупность нескольких синусоидальных напряже-
ний — гармоник, каждая из которых изменяется с определенной
частотой. Частота изменения первой из них (основной гармони-
ки) равна частоте питающего напряжения, а частоты других гар-
моник больше, чем первой. Обычно первая гармоника имеет на-
ибольшую амплитуду, и по ней ведутся все основные расчеты.
Кроме регулирования переменных двигателя ТРН позволяет
осуществить изменение направления его скорости, т.е. его реверс.
Для этого в схему рис. 5.10 добавляются еще две пары встречно-
параллельно включенных тиристоров, что позволяет изменять че-
редование фаз напряжения t/lper и тем самым направления скоро-
сти вращения магнитного поля и в конечном итоге направления
скорости ротора двигателя. С помощью ТРН можно обеспечивать
также принудительное электрическое торможение двигателя про-
тивовключением и динамическое торможение.
Для регулирования (ограничения) в переходных процессах ЭП
тока и момента используются выполненные на основе ТРН уст-
ройства, получившие название «мягких» стартеров (пускателей).
Они позволяют за счет снижения в переходных процессах прикла-
дываемого к двигателю напряжения формировать нужным обра-
зом динамические характеристики ЭП.
ТРН позволяют также реализовывать режимы работы асинх-
ронного двигателя с наилучшими энергетическими показателями
работы при малых его нагрузках. Такое использование ТРН рас-
смотрено в подразд. 9.5.
Еще одно из возможных применений ТРН связано с реализа-
цией так называемого квазичастотного регулирования скорости
асинхронного двигателя, которое рассмотрено в подразд. 5.4.
5.4. Регулирование скорости двигателя
изменением частоты питающего напряжения
Данный способ широко используется для регулирования ско-
рости асинхронных двигателей с высокими показателями каче-
ства. Одновременно с этим он позволяет эффективно регулиро-
вать и другие переменные ЭП с асинхронными двигателями.
Принцип действия этого способа заключается в том, что изме-
нение частоты/ питающего двигатель напряжения U\ в соответ-
167
Рис. 5.11. Схема включения (а) и механические характеристики (о) при
регулировании частоты напряжения на статоре и закон регулирования
частоты (в):
1 — преобразователь частоты и напряжения; 2 — двигатель; 3... 7 — характери-
стики
ствии с выражением со0 = 'Infjp приводит к изменению скорости
соо, за счет чего получаются различные искусственные характери-
стики.
Схема включения двигателя при регулировании частоты при-
ведена на рис. 5.И, а. Необходимым элементом ЭП является пре-
образователь частоты и напряжения 7 (в дальнейшем использует-
ся обозначение ПЧ), на вход которого подается стандартное на-
пряжение сети £/, (220, 380 В и т.д.) промышленной частоты /, =
= 50 Гц, а с его выхода снимается переменное напряжение (/|рС1
регулируемой частоты fper.
Регулирование выходной частоты и напряжения осуществля-
ется с помощью управляющего сигнала £/у, который задает требу-
емое значение частоты и тем самым скорости двигателя 2.
Этот способ обеспечивает плавное регулирование скорости в
широком диапазоне ее изменения, а получаемые характеристики
обладают высокой жесткостью. Частотный способ отличается еще
одним весьма важным свойством: регулирование скорости двига-
теля не сопровождается увеличением его скольжения, поэтому
потери мощности при регулировании скорости, определяемые по
формуле (5.5), оказываются небольшими.
Для лучшего использования двигателя и получения высоких
энергетических показателей его работы — коэффициентов мощ-
ности, полезного действия и перегрузочной способности — одно-
временно с частотой необходимо изменять и подводимое к двига-
телю напряжение. Соотношение частоты и напряжения, называ-
емое часто законом частотного регулирования, определяется ха-
рактером зависимости момента нагрузки Мс от скорости. При пре-
небрежении активным сопротивлением цепи статора и при по-
стоянном моменте нагрузки Л/с = const напряжение на статоре
должно регулироваться пропорционально его частоте:
168
£/, /j\ = const. (5.29)
При пренебрежении активным сопротивлением цепи статора
Л, критический момент двигателя определяется формулой (5.13).
Так как со0 ~ f\ и хк ~f. то при таком соотношении критический
момент Мк ~ U\/f\~ U\/f = const и двигатель сохраняет свою
перегрузочную способность.
Для вентиляторного характера момента нагрузки закон частот-
ного регулирования имеет вид
UJf} = const, (5.30)
а при моменте нагрузки, обратно пропорциональном скорости,
он запишется в виде
6/,A/7i= const. (5.31)
Таким образом, при реализации частотного способа регулиро-
вания скорости двигателя должен использоваться преобразователь
частоты, который позволяет также регулировать и напряжение на
статоре двигателя в определенной пропорции.
Анализ механических характеристик двигателя показывает сле-
дующее. Скорость идеального холостого хода двигателя в соответ-
ствии с формулой со0 = 2nf\/p изменяется пропорционально ча-
стоте напряжения. Механические характеристики двигателя раз-
деляются на два семейства: характеристики, соответствующие ча-
стотам ниже номинальной (сетевой)/1Н0М, когда происходит сни-
жение напряжения, и выше ее, когда напряжение остается неиз-
менным на уровне номинального значения.
В области частот/|реГ </|ном выполняется соотношение U\/f =
= const, так как напряжение, подводимое к двигателю, регулиру-
ется от номинального (сетевого) в сторону уменьшения. Поэтому
Л/к = const и двигатель имеет характеристики 6 и 7, показанные на
рис. 5.11, б.
Отметим, что из-за влияния сопротивления /?,, которое не
учитывалось при выводе формулы (5.13), критический момент Л/к
в области малых скоростей двигателя снижается, поэтому для под-
держания Л/к = const напряжение при малой частоте должно умень-
шаться не пропорционально ей, а в несколько меньшей степени.
Такой скорректированный закон частотного регулирования пока-
зан на рис. 5,11, в, где зависимость U\(f) в зоне малых частот
отличается от линейной.
В области частот/рег >/ном по условиям нормальной работы
двигателя нельзя повышать напряжение выше номинального (пас-
портного). Поэтому регулирование скорости в этой области ведет-
ся при U\ = ЦНом “ const, что отражено на рис. 5.11, в. Таким
образом, критический момент Л/к при/1рег >/,ном в соответствии с
169
(5.13) будет уменьшаться и характеристики будут иметь вид кри-
вых 3 и 4, показанных на рис. 5.11, б.
Рассмотрим показатели регулирования скорости двигателя. Ре-
ализуемый диапазон регулирования скорости в разомкнутых си-
стемах составляет 10... 15, а в замкнутых (при использовании об-
ратных связей) его значение может достигать 10 000 и более.
Регулирование скорости в этой системе может осуществляться
плавно, в широком диапазоне, в обе стороны от естественной
характеристики, т.е. двигатель может иметь скорость как больше,
так и меньше номинальной. При этом регулировочные характери-
стики имеют высокую жесткость, а двигатель сохраняет свою пе-
регрузочную способность.
Частотное регулирование скорости асинхронного двигателя не
сопровождается выделением дополнительных потерь мощности,
поскольку работа двигателя происходит при небольших скольже-
ниях.
В силу отмеченных высоких показателей частотный способ на-
ходит широкое применение. Кроме того, можно назвать приме-
ры, когда использование частотно-управляемого асинхронного ЭП
является единственно возможным. Это привод высокоскоростных
электрошпинделей, электроверетен, вентиляторов высокоскоро-
стных аэродинамических труб, различных испытательных стендов
и т.д.
Виды преобразователей частоты. Рассмотрим теперь виды при-
меняемых в этой системе ЭП преобразователей частоты.
По используемым техническим средствам ПЧ подразделяются
на электромашинные (вращающиеся) ПЧ, в которых использу-
ются электрические машины, и полупроводниковые (статиче-
ские). На рис. 5.12 приведена схема электромашинного ПЧ
с синхронным генератором 4, от которого питаются, например,
Рис. 5.12. Схема ЭП с электромашинным преобразователем частоты:
1 — двигатель генератора; 2 — генератор постоянного тока; 3 — двигатель; 4 —
синхронный генератор переменного тока; 5... 7 — асинхронные двигатели
170
три асинхронных двигателя 5... 7. Преобразователь состоит из аг-
регата постоянной скорости, включающего асинхронный двига-
тель 1 (вместо него может быть использован любой тип двигате-
ля) и приводимый им генератор постоянного тока 2, и агрегата
переменной скорости, состоящего из регулируемого двигателя по-
стоянного тока 3, приводящего во вращение синхронный генера-
тор 4 переменного тока. Двигатель 1 питается от сети со стандарт-
ной частотой f = 50 Гц, а на выводах синхронного генератора 4
частота и напряжение могут регулироваться.
С помощью резистора R1 в цепи обмотки возбуждения генера-
тора 2 изменяются напряжение, подводимое к якорю двигателя
3, и тем самым его скорость и скорость генератора 4. При этом
меняется частота напряжения на выводах синхронного генератора
4, определяемая выражением /ре| =/н»сг/(2л), и на двигателях 5... 7.
Напряжение на этих двигателях регулируется с помощью рези-
стора R3, включенного в цепь обмотки возбуждения синхронного
генератора 4.
Применение ПЧ позволяет плавно регулировать скорость дви-
гателей 5... 7 в широком диапазоне, однако процессу регулирова-
ния частоты в этой системе свойственны существенные недостат-
ки. Для создания преобразователя необходимы четыре электри-
ческие машины, рассчитанные на полную мощность потребите-
лей (группы двигателей), что определяет громоздкость установки
и ее дороговизну, особенно при больших мощностях нагрузки.
Двойное преобразование энергии — энергии переменного тока
частоты = 50 Гц в энергию постоянного тока и затем опять в
энергию переменного тока регулируемой частоты — сопровожда-
ется выделением потерь энергии во всей цепи преобразования,
что определяет невысокий КПД системы. Например, если КПД
каждой из четырех машин 7... 4 системы составляет 0,9, то общий
КПД такого электромашинного ПЧ будет равен 0,66, т.е. треть
потребляемой из сети мощности идет только на потери в агрегате.
Кроме того, использование коллекторных машин постоянного тока
требует непрерывного надзора и ухода, а их работа сопровождает-
ся шумом. И, наконец, процессу изменения частоты в этой систе-
ме свойственна инерционность регулирования, связанная с изме-
нением скорости электромашинного агрегата, обладающего ме-
ханической инерцией.
Известны также и другие схемы вращающихся ПЧ, использу-
ющих как обычные, так и специальные электрические машины.
В настоящее время большое распространение получили ста-
тические полупроводниковые ПЧ, названные так по-
тому, что в них используются не имеющие движущихся частей
элементы и устройства (полупроводниковые приборы, реакторы,
конденсаторы и т.д.). Использование статических ПЧ позволило
повысить технико-экономические показатели регулируемого ча-
171
стотного ЭП за счет увеличения его КПД и быстродействия, рас-
ширения функциональных возможностей по управлению, защите
и диагностике, устранения шума и упрощения обслуживания.
Статические полупроводниковые ПЧ подразделяются на два
вида: ПЧ с непосредственной связью питающей сети и нагрузки
и ПЧ с промежуточным звеном постоянного тока.
Упрощенная схема тиристорного трехфазного ПЧ с непо-
средственной связью приведена на рис. 5.13. Этот ПЧ обес-
печивает формирование напряжения на двигателе непосредствен-
но за счет сетевого напряжения, что и нашло свое отражение в
его названии.
Схема ПЧ состоит из трех одинаковых комплектов 2... 4 тирис-
торов, обеспечивающих питание обмоток статора двигателя za, Ze
и Zc- Каждый из трех комплектов содержит шесть тиристоров, три
из которых анодами, а три других катодами подсоединены ко вто-
ричным обмоткам трансформатора /. В схеме нулевая точка транс-
форматора соединена с общей точкой трехфазной обмотки стато-
ра, поэтому схема на рис. 5.13 называется нулевой.
Регулирование частоты напряжения на статоре двигателя осу-
ществляется последовательностью и частотой включения тири-
сторов и может происходить лишь в сторону уменьшения этой
частоты по сравнению с сетевой в диапазоне примерно/^ < 0,4/]сети.
Регулирование напряжения £/|рсг на двигателе достигается тем,
что управляющие импульсы подаются на тиристоры с задержкой
на угол управления а относительно момента их естественного от-
крытия. Более подробно принцип действия ПЧ с непосредствен-
ной связью рассмотрен в [10].
Особенностями ПЧ этого вида кроме ограниченного диапазо-
на регулирования частоты являются возможность рекуперации
энергии в сеть при торможении двигателя и высокий КПД (от
Рис. 5.13. Схема ЭП с непосредственным преобразователем частоты:
/ — обмотки трансформатора; 2... 4 — тиристоры соответственно фаз а, вис
172
Рис. 5.14. Схема ЭП с преобразователем ча-
стоты с промежуточным звеном постоян-
ного тока:
/ — блок управления выпрямителем; 2 — вы-
прямитель; 3 — инвертор; 4 — двигатель; 5 —
блок управления инвертором; 6 — фильтр
0,95 до 0,97). Силовая часть ПЧ выполняется на простых, надеж-
ных и недорогих однооперационных тиристорах, поскольку в этом
ПЧ осуществляется естественная коммутация тиристоров за счет
напряжения сети.
Схема ПЧ с промежуточным звеном постоянного тока
(рис. 5.14) состоит из выпрямителя 2, фильтра 6 и инвертора 3 с
блоками управления / и 5. Напряжение сети Ut стандартной ча-
стоты подается на вход выпрямителя 2, преобразующего пере-
менное напряжение L\ в постоянное Ео. Это напряжение может
регулироваться с помощью блока управления / или в некоторых
схемах ПЧ может быть нерегулируемым. Наличие выпрямителя в
этой схеме и определило название ПЧ.
Выпрямленное напряжение Ео подается на силовой фильтр 6,
обеспечивающий две функции: сглаживание выходного напря-
жения выпрямителя и циркуляцию реактивной мощности в ПЧ.
После фильтра напряжение постоянного тока подается на вход
инвертора 5, который преобразует напряжение постоянного тока
Ео в трехфазное напряжение Ё|рс| регулируемой частоты /,рег и
подает его на двигатель 4. Частота выходного напряжения /jper
инвертора регулируется блоком управления 5 в функции сигнала
управления Uy.
Реализация блоков в схеме на рис. 5.14 может быть самой раз-
нообразной и определяется желанием получить необходимые свой-
ства ПЧ. На практике получили распространение три разновидно-
сти ПЧ этого типа.
1. ПЧ вида «неуправляемый выпрямитель—фильтр —автоном-
ный инвертор напряжения с широтно-импульсной модуляцией»
имеет схему силовой части, показанной на рис. 5.15. Неуправляе-
мый мостовой выпрямитель В реализован на шести диодах
VD1... VD6, фильтр — на конденсаторе С, а автономный инвертор
173
VD1... VD6 VT1... VT6
в АИН VD7...VD12
Рис. 5.15. Схема ПЧ с автономным инвертором напряжения
напряжения АИН — на шести силовых биполярных транзисторах
VT1... VT6 и шести обратных диодах VD7... VD12. Регулирование
напряжения на двигателе осуществляется за счет широтно-импуль-
сной модуляции напряжения постоянного тока, осуществляемого
транзисторами VT1... VT6.
В этой схеме может быть также использован управляемый вы-
прямитель, тогда АИН выполняется без ШИМ. В качестве сило-
вых ключей VT1... VT6 в таком ПЧ могут также применяться запи-
раемые тиристоры типа GTO или однооперационные тиристоры
с искусственной коммутацией.
Наличие конденсатора С придает ПЧ этого вида свойства ис-
точника напряжения, позволяющего формировать при использо-
вании ШИМ близкую к синусоидальной форму кривой тока в
статоре двигателя.
Свойства данного ПЧ характеризуются:
• большим (от долей герц до нескольких килогерц) диапазо-
ном регулирования частоты;
• возможностью параллельной работы нескольких двигателей
от одного ПЧ;
• высоким коэффициентом мощности (до 0,95...0,98 в ПЧ с
неуправляемым выпрямителем);
• невозможностью рекуперации энергии в сеть при торможе-
нии (реверсе) двигателя при использовании ПЧ с неуправляемым
выпрямителем;
• более низким КПД (0,94...0,96) по сравнению с ПЧ с непо-
средственной связью.
2. ПЧ вида «управляемый выпрямитель—фильтр —автономный
инвертор тока» имеет схему силовой части, показанной на рис.
5.16. Управляемый мостовой выпрямитель В реализован на шести
тиристорах VS1... VS6, фильтр представлен в виде реактора боль-
шой индуктивности L, автономный инвертор тока АИТ — на ше-
сти запираемых тиристорах VS7... VSI2, коммутация которых осу-
ществляется конденсаторами С. Управляемый мостовой выпрями-
тель В вместе с реактором L работает в режиме источника тока, а
инвертор АИТ обеспечивает коммутацию обмоток статора двига-
теля силовыми ключами VS7... VS12.
174
Рис. 5.16. Схема ПЧ с автономным инвертором тока
Свойства данного ПЧ характеризуются:
• возможностью рекуперации энергии в сеть при торможении
(реверсе) двигателя;
• относительно небольшим (до 100... 150 Гц) диапазоном регу-
лирования частоты;
• невозможностью параллельной работы нескольких двигате-
лей от одного ПЧ;
• более низким КПД (0,94...0,96) по сравнению с ПЧ с непо-
средственной связью;
• более низким коэффициентом мощности по сравнению с ПЧ
с АИН и неуправляемым выпрямителем;
• несинусоидальностью тока в обмотках статора двигателя.
3. Схема и свойства ПЧ с векторным управлением, в котором
используются различные обратные связи для получения больших
диапазонов регулирования скорости асинхронного двигателя, рас-
смотрены в подразд. 5.11.
Квазичастотное управление асинхронными двигателями. Частот-
ное управление двигателя, обеспечивая качественное и экономи-
чное регулирование скорости асинхронных ЭП, требует для своей
реализации относительно дорогих и сложных ПЧ. Наладка и эксп-
луатация таких ЭП особенно при невысокой квалификации об-
служивающего персонала и сложных условиях работы ЭП связана
с определенными трудностями. Желание сохранить преимущества
частотного способа регулирования скорости при более простых
схемах преобразователей привело к разработке так называемого
квазичастотного («подобно частотному») способа управления
асинхронными двигателями.
Этот принцип управления характерен тем, что позволяет по-
лучать пониженную и регулируемую частоты напряжения на ста-
торе двигателя с помощью тиристорных регуляторов напряжения.
Этот способ обеспечивает получение низких скоростей асинхрон-
ного ЭП, которые необходимы при работе, например, различных
грузоподъемных механизмов.
Основу схемы асинхронного ЭП с квазичастотным управле-
нием (рис. 5.17, а) составляет стандартный тиристорный регу-
лятор напряжения 1, состоящий из трех пар встречно-парал-
175
Рис. 5.17. Схема включения (а), механические характеристики (б) и кри-
вые напряжения (в) при квазичастотном регулировании:
/ — тиристорный регулятор напряжения; 2 — блок управления; 3 — блок ква-
зичастотного управления; 4— асинхронный двигатель; 5... 7 — характеристики дви-
гателя при разных частотах
лельно включенных тиристоров VS1... и блока управления 2.
Сигнал управления Ц, поступающий на вход блока управле-
ния 2, формируется с помощью специального блока квазича-
стотного управления 3, который обеспечивает такое управле-
ние тиристоров VS1... VS6, при котором частота/рег подводимо-
го к асинхронному двигателю 4 напряжения оказывается ниже
частоты сети
176
На диаграмме (рис. 5.17, б) показаны кривые фазных напря-
жений сети иА, ив, ис и графики напряжений Uci, Uc2 и (/с3 на
зажимах Cl, С2 и СЗ обмотки статора двигателя, сформирован-
ные из сетевого напряжения за счет соответствующего управле-
ния тиристорами VS1... VS6. Напряжение фаз статора двигателя
имеет несинусоидальную форму и изменяется с частотой, мень-
шей частоты сети. Рассматриваемый принцип получения пони-
женной частоты во многом повторяет принцип действия ПЧ с
непосредственной связью, однако в этом случае регулирование
частоты достигается с помощью более простой схемы преобразо-
вателя.
Регулируемая частота, на статоре двигателя может принимать
дискретные значения в соответствии с формулой
/per = a/i/(a + Z»),
где а и b — произвольные целые числа от 1 до 15.
Из этой формулы следует, что регулирование частоты при ква-
зичастотном управлении двигателя может происходить от уровня
0,5/ и ниже:
Жесткость рабочих участков искусственных механических ха-
рактеристик 6, 7 (рис. 5.17, в) примерно соответствует естествен-
ной характеристике 5, а максимальный момент составляет 60... 90 %
критического момента двигателя на естественной характеристике.
Недостатком этого способа регулирования скорости двигателя
является пульсирующий характер его момента, что создает при
работе ЭП повышенные вибрацию, шум и дополнительные поте-
ри мощности.
5.5. Регулирование скорости двигателя
изменением числа пар полюсов
Возможность регулирования скорости эти способом следует из
формулы для скорости вращения магнитного поля
®0= Infjp,
где р — число пар полюсов магнитного поля двигателя.
Изменяя число пар полюсов, можно получать искусственные
механические характеристики двигателя и регулировать его ско-
рость. Так как число пар полюсов двигателя может принимать толь-
ко дискретные значения (р = 1, 2, 3, 4 ...), то и скорость таким
способом может регулироваться лишь ступенчато.
Этот способ регулирования скорости может быть реализован
при использовании специальных двигателей, получивших назва-
177
Рис. 5.18. К принципу изменения числа пар полюсов асинхронного дви-
гателя:
а — исходная схема; б, в — схемы при изменении числа пар полюсов
ние многоскоростных. Двигатели имеют на статоре одну или две
обмотки, состоящие из двух одинаковых секций (полуобмоток).
За счет соответствующих схем соединения этих полуобмоток мо-
жет быть изменено число пар полюсов р двигателя. Ротор много-
скоростных двигателей выполняется короткозамкнутым.
Рассмотрим принцип получения различного числа пар полю-
сов при переключении секций обмотки статора на следующем
примере.
Пусть фаза статорной обмотки состоит из двух одинаковых сек-
ций 1н— 1к, 2н—2к, имеющих каждая по два проводника (рис.
5.18, а) и соединенных последовательно и согласно. По обмотке
статора протекает ток, имеющий в данный момент времени пока-
занное стрелками направление. Используя известное правило бу-
равчика, определим для схемы на рис. 5.18, а направление маг-
нитных силовых линий, создаваемых протекающим по проводни-
кам током 1. Нетрудно заметить, что магнитное поле имеет в этом
случае четыре полюса или р = 2.
Изменим теперь схему соединения секций, включив их после-
довательно и встречно (рис. 5.18, б), оставив то же направление
подводимого к обмотке тока. В этом случае статорная обмотка об-
разует уже магнитное поле с вдвое меньшим числом пар полюсов.
Уменьшение вдвое числа пар полюсов достигается и в схеме на
рис. 5.18, в, где обе секции соединены параллельно. В том и другом
случаях уменьшение числа пар полюсов достигается изменением
направления тока на противоположное в одной из секций (в дан-
ном случае во второй). При этом диапазон изменения скорости
вращения магнитного поля равен двум.
Наиболее часто на практике применяются две схемы переклю-
чения статорной обмотки многоскоростных двигателей: с треу-
гольника на двойную звезду и со звезды на двойную звезду. Рас-
смотрим схемы соединения статора и механические характери-
стики двигателя для этих случаев.
178
Рис. 5.19. Схемы соединения обмотки статора в треугольник (а), двойную
звезду (б) и механические характеристики асинхронного двигателя при
этих схемах (в):
1 — двойной звезды; 2 — треугольника
Схема «треугольник—двойная звезда». Для получения большего
числа пар полюсов р\ секции каждой фазы статора включены пос-
ледовательно и согласно и соединены в треугольник (рис. 5.19, а),
где Л1н и Л2н — начала соответственно первой и второй секций
фазы Л; Л]К и Л2к — их концы (выводы фаз В и С включены анало-
гично). Соединение секций по схеме рис. 5.19, б аналогично схеме
рис. 5.18, ей вызывает уменьшение в 2 раза числа пар полюсов р2
двигателя. Схема на рис. 5.19, б, в которой фазы статора образова-
ны двумя параллельно включенными секциями, получила назва-
ние двойной звезды.
Механические характеристики двигателя для схем соединения
обмоток в треугольник 2 и двойную звезду 1 показаны на рис.
5.19, в.
Схема «звезда—двойная звезда». В этом варианте низкая ско-
рость (большее число пар полюсов р,) получается в схеме одинар-
ной звезды (рис. 5.20, а), каждую фазу которой образуют последо-
Рис. 5.20. Схема соединения обмотки статора в звезду (а) и механические
характеристики асинхронного двигателя при этих схемах (б):
1,2— механические характеристики
179
вательно соединенные секции (см. обозначения к рис. 5.19, а).
Переключение на двойную звезду осуществляется по схеме рис.
5.19, б, при этом число пар полюсов р2 уменьшится вдвое. Полу-
чаемые механические характеристики при соединении обмоток в
звезду 2 и двойную звезду / двухскоростного двигателя изображе-
ны на рис. 5.20, б.
Помимо рассмотренных двухскоростных двигателей применя-
ются также трех- и четырехскоростные двигатели. Первые из них
помимо переключаемой обмотки статора, .выполняемой анало-
гично рассмотренной ранее, имеют также и одну непереключа-
емую обмотку. Четырехскоростные двигатели имеют две переклю-
чаемые обмотки статора с различным числом пар полюсов р{, рг,
ръ р^ и позволяют получить четыре регулировочные механиче-
ские характеристики.
Рассматриваемый способ регулирования скорости двигателя
характеризуется рядом положительных показателей, что опреде-
ляет широкое его применение в регулируемом ЭП переменного
тока. К ним, в первую очередь, следует отнести экономичность,
так как регулирование скорости не сопровождается выделением в
роторной цепи дополнительных потерь энергии, вызывающих из-
лишний нагрев двигателя и ухудшающих его КПД.
Механические характеристики (см. рис. 5.19, в и 5.20, б) мно-
госкоростных двигателей отличаются хорошей жесткостью и пе-
регрузочной способностью.
Схему переключения «звезда —двойная звезда» целесообразно
применять при постоянном моменте нагрузки Мс, а схему «треу-
гольник—двойная звезда» при нагрузке ЭП, имеющей характер
постоянной мощности.
Недостатком рассмотренного способа является ступенчатость
изменения скорости двигателя и относительно небольшой диапа-
зон ее регулирования, не превышающий обычно 6...8.
5.6. Регулирование скорости двигателя
в каскадных схемах включения
Регулирование скорости двигателя при использовании некото-
рых из уже рассмотренных способов сопровождается выделением
в цепи ротора потерь мощности, называемых иногда потерями
скольжения, что значительно снижает экономические показатели
асинхронного ЭП.
Первые схемы, в которых полезно использовалась энергия по-
терь в цепи ротора, создавались путем специального соединения
двигателя с другими электрическими машинами. Поэтому эти схе-
мы получили название каскадных. В настоящее время существуют
схемы, использующие энергию скольжения двигателя без доба-
180
вочных электрических машин, а с помощью полупроводниковых
приборов и трансформаторов. Однако эти схемы также называют
каскадными.
Каскадными называют такие схемы включения двигателя, ко-
торые, обеспечивая регулирование его скорости, позволяют од-
новременно полезно использовать энергию потерь. Этот способ
может быть использован только для двигателей с фазным рото-
ром.
По способу использования этой энергии различают схемы
электромеханического и электрического машинно-вентильных
каскадов.
В электромеханическом машинно-вентильном каскаде
(рис. 5.21, а) обмотка ротора двигателя 2, приводящего в движе-
ние исполнительный орган 7, подключается к трехфазному неуп-
равляемому выпрямителю 4, собранному на полупроводниковых
вентилях V. К выводам выпрямителя присоединен якорь вспомога-
тельной машины 3 постоянного тока, ЭДС которой Ев м направле-
на навстречу ЭДС выпрямителя Ев. Двигатель 2 и машина 3 соеди-
нены одним валом. Рассмотрим баланс мощности в этой схеме.
Поступающая из сети мощность Р\ за вычетом потерь в стато-
ре двигателя 2 передается на ротор. Большая часть этой мощно-
сти, называемая электромагнитной и определяемая выражением
Лм - в виде полезной механической мощности Р2 = Мт от-
дается рабочей машине 7. Оставшаяся часть, определяющая мощ-
ность потерь скольжения Л А = MmQs, за вычетом потерь в цепях
ротора двигателя 2, выпрямителя 4 и вспомогательной машины
3, с помощью последней преобразуется в механическую мощность
и возвращается на вал ИО рабочей машины 7.
Если пренебречь потерями в схеме, то можно установить, что
рабочей машине 7 передается вся электромагнитная мощность Рэм.
Действительно, на приводной вал рабочей машины от двигателя
Рис. 5.21. Схемы электромеханического (а) и электрического (б) каскадов:
1 — исполнительный орган; 2 — двигатель; 3 — вспомогательная машина посто-
янного тока; 4 — выпрямитель; 5 — синхронный генератор
181
2 поступает мощность А = Л/со, от вспомогательной машины 3 —
мощность Рв м = Л А = Л/®05, в результате суммарная механическая
мощность на валу рабочей машины Рр м = Р2 + Рв м = Моз + Mo30s =
= Моз0 = Рэм.
В электрическом машинно-вентильном каскаде (рис. 5.21,
б) в отличие от. электромеханического вспомогательная машина
3 не имеет механической связи с двигателем 2, а соединена валом
с синхронным генератором 5, подключенным к сети переменно-
го тока. В результате энергия потерь передается не на вал рабочей
машины /, а с помощью генератора 5 отдается в сеть, в то время
как рабочей машине передается только механическая мощность
Р2 = Моз.
Рассмотрим принцип регулирования скорости в каскадных схе-
мах. Регулирование происходит за счет изменения ЭДС Ея м вспо-
могательной машины 3 при регулировании тока возбуждения 1В
этой машины.
Предположим, что при работе ЭП в установившемся режиме
происходит увеличение тока возбуждения /в. Это повлечет за со-
бой увеличение ЭДС £вм и вследствие этого уменьшение вып-
рямленного тока Id, который определяется выражением
/^ = (£в - £в.м)/7?с, (5.32)
где £в — ЭДС выпрямителя 4; Rc — суммарное активное сопро-
тивление цепи выпрямленного тока.
Уменьшение Id и тем самым тока ротора двигателя вызовет
снижение его момента, который станет меньше момента нагруз-
ки Мс, создаваемого рабочей машиной 7. В результате скорость
двигателя начнет снижаться, а его скольжение и ЭДС роторной
обметки Е2 = E2ks начнут возрастать. Увеличение ЭДС ротора при-
ведет к увеличению тока ротора и тем самым момента двигателя,
который вновь станет равным моменту нагрузки, и скорость дви-
гателя перестанет изменяться. Двигатель опять будет работать в
установившемся режиме, но уже при более низкой скорости,
что и определяет эффект регулирования скорости. В случае умень-
шения тока 7В скорость двигателя будет изменяться в сторону уве-
личения.
Механические характеристики двигателя в рассмотренных ка-
скадных схемах приведены на рис. 5.22.
При рассмотрении механических характеристик электромеха-
нического каскада для разных значений токов 7В (рис. 5.22, а)
видно, что максимальный момент по мере снижения скорости
каскада возрастает, поскольку по мере увеличения тока возбуж-
дения вспомогательной машины ее момент также возрастает. При
этом максимальная механическая мощность каскада, определя-
емая произведением максимального момента на соответствующую
182
Рис. 5.22. Механические характеристики электромеханического (а) и элект-
рического (б) каскадов:
/ — естественные; 2...4 — искусственные при регулировании тока возбуждения
этому моменту скорость, при разных токах возбуждения вспомо-
гательной машины примерно одинакова. Поэтому электромеха-
нический каскад называют каскадом постоянной мощности.
При токе возбуждения вспомогательной машины, близком к
нулю, механическая характеристика электрического каскада (рис.
5.22, б) близка к естественной характеристике двигателя. По мере
увеличения тока возбуждения искусственные характеристики 2... 4
располагаются ниже естественной 1, причем номинальному току
возбуждения /вном соответствует самая низкая характеристика.
Максимальный момент каскада, определяемый только моментом
двигателя 2 (см. рис. 5.21), сохраняется на разных характеристиках
примерно постоянным. Поэтому электрический каскад называют
каскадом постоянного момента.
В настоящее время в связи с широким распространением сило-
вых тиристорных преобразователей появилась возможность заме-
нять ими электромашинные вращающиеся преобразователи. В ча-
стности, электромашинный агрегат (см. 3...5 рис. 5.21, б) пред-
ставляет собой преобразователь энергии постоянного тока, по-
ступающей от выпрямителя 4, в энергию переменного тока, от-
даваемую в сеть. Такой машинный агрегат может быть заменен на
статический преобразователь, состоящий из трансформатора 2 и
инвертора 3 (рис. 5.23). В этой схеме к обмотке ротора двигателя
подключен неуправляемый выпрямитель 5, инвертор 3 и реактор
4, который служит для сглаживания пульсации выпрямленного
тока. Асинхронный ЭП по схеме рис. 5.23 получил название асин-
хронного вентильного каскада.
Инвертор представляет собой преобразователь энергии посто-
янного тока в энергию переменного тока, ЭДС которого можно
регулировать аналогично ЭДС машины постоянного тока. Поэто-
му механические характеристики асинхронного вентильного ка-
183
Рис. 5.23. Схема асинхронного вентиль-
ного каскада:
/ — двигатель; 2 — трансформатор; 3 — ин-
вертор; 4 — реактор; 5 — выпрямитель
скада аналогичны характеристикам вентильно-машинного элект-
рического каскада.
Существуют и другие схемы асинхронных вентильных каскадов.
Эти схемы отличаются по своей сложности, техническим возмож-
ностям регулирования скорости, энергетическим показателям и т.д.
Однако принцип действия и назначение этих схем аналогичны:
использование энергии скольжения для совершения полезной ра-
боты и возможность плавного регулирования скорости двигателя.
Назовем основные показатели регулирования скорости двига-
теля в каскадных схемах включения.
Практический диапазон регулирования скорости в каскад-
ных схемах обычно не превышает двух. Вызвано это тем обстоя-
тельством, что по мере роста диапазона регулирования скорости
и скольжения двигателя требуется увеличивать установленную мощ-
ность всех устройств в его роторной цепи. Так, при диапазоне
регулирования, равном двум, установленная мощность машин-
но-вентильного электрического каскада составляет 250 % номи-
нальной мощности двигателя, из них асинхронный двигатель —
100%, выпрямитель, вспомогательная машина и синхронный ге-
нератор — по 50 % номинальной мощности.
Плавность регулирования скорости двигателя в каскадных
схемах высокая и определяется плавностью изменения ЭДС вспо-
могательной машины или преобразователя. Регулирование
скорости производится вниз от естественной характеристики, хотя
некоторые специальные каскадные схемы обеспечивают и двух-
зонное регулирование скорости.
Несмотря на значительные капитальные затраты при реализации
данного способа регулирования скорости применение каскадных схем
за счет полезного использования энергии скольжения оказывается
экономически целесообразным для мощных асинхронных ЭП с
небольшим (не более 2 — 3) диапазоном регулирования скорости.
К ним относятся ЭП мощных вентиляторов, центробежных насо-
сов, компрессоров, воздуходувок, испытательных установок.
184
5.7. Импульсное регулирование переменных
электропривода с асинхронным двигателем
Развитие полупроводниковой техники активизировало приме-
нение импульсного способа для регулирования переменных дви-
гателя. Сущность его заключается в периодическом (импульсном)
изменении параметров цепей двигателя или питающей сети. При-
менительно к асинхронному ЭП чаще всего осуществляется им-
пульсное изменение подводимого к двигателю напряжения или
сопротивлений резисторов в цепях ротора или статора. Эти спосо-
бы применяются главным образом для регулирования скорости,
хотя при необходимости они позволяют регулировать (ограничи-
вать) ток и момент двигателя.
Для импульсного регулирования сопротивления резисторов Я2д
в цепи ротора двигателя 1 с фазным ротором (рис. 5.24, а) парал-
лельно резистору 3 включены контакты управляемого ключа 2
(например, электромагнитного или тиристорного контактора),
работающего с изменяемым заполнением (скважностью) 0 < у < 1.
Принцип действия и показатели регулирования скорости в такой
схеме аналогичны рассмотренным применительно к двигателю
постоянного тока (см. рис. 4.18).
Аналогично работает схема на рис. 5.24, б, в которой использу-
ются выпрямитель 4 и резистор 5, включенный в цепь выпрям-
ленного тока ротора. Шунтирование резистора 5 осуществляется с
помощью тиристорного ключа 6, который также работает с уп-
равляемым заполнением (скважностью) у.
Рис. 5.24. Схемы включения (а, б) и механические характеристики (в)
асинхронного двигателя при импульсном регулировании сопротивления
резистора в цепи ротора:
/ — двигатель; 2 — импульсный ключ; 3 — резистор; 4 — выпрямитель; 5 — ре-
зистор; 6 — импульсный тиристорный ключ; 7... 10 — характеристики двигателя
185
Использование рассмотренных схем обеспечивает получение
семейства искусственных механических характеристик двигателя
при различных значениях у. Проанализируем характеристики
асинхронного двигателя при работе управляемого ключа со скваж-
ностью у = 1 и у = 0.
При у= 1 (ключ 2 постоянно замкнут или тиристорный ключ 6
постоянно открыт) резистор закорочен и двигатель работает на
естественной механической характеристике 7 (рис. 5.24, в).
При у = 0 (ключ 2 постоянно разомкнут или тиристорный ключ
6 постоянно закрыт) резистор полностью введен в цепь ротора и
двигатель работает по искусственной характеристике 10. При про-
межуточных значениях заполнения 0 < у < 1 эквивалентное со-
противление Т?2экв резистора в цепи ротора изменяется в соответ-
ствии с формулой )?2экв = (1 - у)Л2д и искусственные характеристи-
ки 8, 9 располагаются между граничными.
Таким же образом могут быть получены характеристики двига-
теля при импульсном регулировании сопротивления добавочного
резистора Ria в цепи статора. Включение управляемых ключей па-
раллельно резисторам в схеме рис. 5.1, б и их работа с переменным
заполнением у обеспечивает искусственные электромеханические
и механические характеристики двигателя в виде кривых, пока-
занных на рис. 5.6.
Импульсное регулирование напряжения на статоре двигателя
может быть реализовано с помощью тиристорного регулятора на-
пряжения. В этом случае реализуются искусственные механиче-
ские характеристики, аналогичные изображенным на рис. 5.8.
Для улучшения показателей регулирования координат двига-
теля импульсным способом создаются замкнутые ЭП с использо-
ванием различных обратных связей. В результате за счет автомати-
ческого регулирования у механические характеристики двигателя
становятся жесткими и обеспечивают регулирование его скорости.
Схема, позволяющая получить такие характеристики, рассмотре-
на в подразд. 5.11.
Использование импульсных способов позволяет в ряде случаев
осуществлять регулирование координат ЭП с помощью более про-
стых схем управления.
5.8. Способы торможения асинхронного
двигателя
Принудительное электрическое торможение двигателя можно
осуществить как при питании от сети переменного тока, так и
при подключении цепи статора к источнику постоянного тока
(динамическое торможение), а также при его самовозбуждении.
Во всех случаях торможение двигателя осуществляется переводом
186
его в режим генератора, в котором он развивает на своем валу
тормозной момент.
При питании двигателя от сети переменного тока могут быть
осуществлены торможение противовключением и рекуперативное
торможение.
Торможение противовключением. Этот режим может быть реа-
лизован двумя путями. Один из них связан с изменением чередо-
вания на статоре двух фаз питающего двигатель напряжения. До-
пустим, что двигатель работает на механической характеристике
1 в точке а (рис. 5.25, а) при чередовании фаз напряжения на
статоре АВС. Тогда при переключении двух фаз (например, В и С)
двигатель переходит на характеристику 3 в точку d, участок db
которой соответствует торможению противовключением. Отметим,
что при реализации торможения для ограничения тока и момента
двигателя производится включение добавочных резисторов в цепь
ротора или статора.
Другой путь перевода двигателя в режим торможения противо-
включением может быть использован при активном характере
момента нагрузки Мс. Допустим, что требуется осуществить спуск
груза при работе грузоподъемного механизма, обеспечивая при
этом его торможение с помощью двигателя (так называемый тор-
мозной спуск груза). Для этого двигатель включается на подъем с
большим добавочным резистором сопротивлением R2a в цепи ро-
тора (характеристика 2 на рис. 5.25, а). Вследствие превышения
моментом нагрузки Мс пускового момента двигателя Мп и его
активного характера груз начнет опускаться с установившейся
скоростью -(0уСТ|. Двигатель при этом будет работать в режиме тор-
можения противовключением.
Рекуперативное торможение. Этот режим осуществляется в том
случае, когда скорость двигателя превышает синхронную <в0 и он
работает в генераторном режиме параллельно с сетью, отдавая
(рекуперируя) энергию в сеть. Такой режим возникает при пере-
ходе двухскоростного двигателя с высокой скорости на низкую,
как это показано на рис. 5.25, б. Предположим, что в исходном
положении двигатель работал на характеристике 7 в точке а, вра-
щаясь со скоростью <оуст]. При увеличении числа пар полюсов асин-
хронный двигатель переходит на характеристику 2 в точку Ь, уча-
сток Ьс которой соответствует торможению с рекуперацией (отда-
чей) энергии в сеть.
Этот же вид торможения может быть реализован в системе «пре-
образователь частоты—двигатель» при торможении, реверсе или
переходе двигателя с характеристики на характеристику. Для это-
го осуществляется уменьшение частоты выходного напряжения
ПЧ и тем самым синхронной скорости <о0. В силу механической
инерции текущая скорость двигателя св будет изменяться медлен-
нее, чем скорость вращения магнитного поля <о0, и будет ее пре-
187
Рис. 5.25. Механические характеристики при торможении противовклю-
чением (а) и рекуперативном торможении (б):
1 — исходная характеристика; 2, 3 — характеристики торможения
вышать. За счет этого и возникает режим рекуперативного тормо-
жения с отдачей энергии в сеть. Подробнее этот режим торможе-
ния рассмотрен в подразд. 5.9.
Рекуперативное торможение также может быть реализовано в
ЭП грузоподъемных механизмов при спуске грузов. Для этого дви-
гатель включается в направлении спуска груза (характеристика 3
рис. 5.25, а). После окончания разбега он будет работать в точке с
со скоростью -а>уст2- При этом осуществляется процесс тормозно-
го спуска груза с отдачей энергии в сеть.
Рекуперативное торможение является наиболее экономичным
видом торможения двигателя.
Динамическое торможение. Для осуществления режима дина-
мического торможения обмотку статора двигателя отключают от
сети переменного тока и подключают к источнику постоянного
тока, как это показано на рис. 5.26, а. Обмотка ротора двигателя 1
при этом может быть закорочена накоротко или в ее цепь включа-
ется добавочный резистор 3 с сопротивлением Л2д.
Постоянный ток /п, протекая по обмоткам статора, создает
неподвижное в пространстве магнитное поле (возбуждает двига-
тель). При вращении ротора в нем наводится ЭДС, под действием
которой в обмотке ротора протекает ток, создающий магнитный
поток, также неподвижный в пространстве. Взаимодействие тока
ротора с результирующим магнитным полем двигателя создает
тормозной момент, за счет чего достигается эффект торможения.
Двигатель работает в режиме генератора независимо от сети пере-
менного тока, преобразовывая кинетическую энергию движущихся
188
Рис. 5.26. Схема включения (а) и характеристики (б) асинхронного дви-
гателя при динамическом торможении:
/ — двигатель; 2— регулировочный резистор; 3 — резистор в цепи ротора; 4... 6 —
искусственные механические характеристики; 7 — электромеханическая харак-
теристика
частей ЭП и рабочей машины в электрическую, которая рассе-
ивается в виде теплоты в цепи ротора.
Формулы для характеристик двигателя в режиме динамическо-
го торможения выводятся на основании рассмотрения его схемы
замещения. Опуская вывод, приведем формулы для электромеха-
нической и механической характеристик двигателя:
Г1 = (5.33)
М = 2Mm/(s/sm + хм/х), (5.34)
где /экв — переменный ток статора, эквивалентный по величине
намагничивающей силы обмотки постоянному току /п.
Если обмотки статора включены в звезду, то токи /экв и /п
связаны соотношением /экв = 0,82/п, при схеме соединения об-
мотки статора в треугольник это соотношение принимает следу-
ющий вид: /экв = 0,47/п.
Отметим, что по своему виду формула для механической ха-
рактеристики двигателя в режиме динамического торможения
аналогична формуле для основной схемы включения (5.12). Вхо-
дящие в формулу максимальный момент Мы и соответствующее
ему скольжение хм определяются по следующим формулам:
Л/м = /[2гоо(хм + х0]; (5.35)
= Л27(хм + х2). (5.36)
Важно отметить, что при возбуждении асинхронного двигате-
ля постоянным током его скольжение х определяется по формуле
189
5 = tt>/(O0.
(5.37)
Для построения электромеханической характеристики дви-
гателя с помощью формулы (5.36) определяем, что при 5=0 ток
/2 = 0, а при 5 -> оо ток /2 Дкв- Можно представить графически
электромеханическую характеристику в виде кривой 7 на рис.
5.26, б.
Механические характеристики двигателя могут быть получены
с помощью формулы (5.34). При 5 = 0 момент двигателя М = 0; при
5 —> момент М —> 0; при 5М момент принимает значение Мм.
Механические характеристики двигателя приведены во втором
квадранте на рис. 5.26, б в виде кривых 4, 5 и 6.
Такие механические характеристики двигателя могут быть полу-
чены изменением добавочного резистора 3 в цепи ротора или по-
стоянного тока /п, подаваемого в обмотки статора (см. рис. 5.26, а).
На рис. 5.26, б показаны механические характеристики двигателя
для различных сочетаний 1п и Т?2д. Некая исходная характеристика
6 соответствует току /П1 и сопротивлению резистора /?2д1, макси-
мальный момент на ней равен Л/м1, а скольжение, ему соответ-
ствующее, — 5М|.
Увеличение сопротивления Т?2д2 > Л2д1 резистора 3 при /п = const
не приводит в соответствии с формулой (5.35) к изменению мак-
симального момента, в то время как максимальное скольжение 5М
в соответствии с формулой (5.36) пропорционально возрастает,
что отражено при построении характеристики 4.
Увеличение тока /п до значения /п2 > /п1 при Т?2д1 = const вызы-
вает в соответствии с формулой (5.35) увеличение максимально-
го момента пропорционально квадрату тока при неизменном сколь-
жении. Характеристика двигателя имеет вид кривой 5. Варьируя
значения величин /п и Т?2д, можно получить желаемый вид меха-
нических характеристик двигателя в режиме динамического тор-
можения и тем самым регулировать интенсивность торможения
асинхронного ЭП.
Торможение двигателя при самовозбуждении. Этот вид тормо-
жения основан на том, что после отключения двигателя от сети
его магнитное поле затухает (исчезает) не мгновенно, а в течение
некоторого, пусть и небольшого, интервала времени. За счет энер-
гии этого незатухшего поля и использования специальных схем
включения двигателя можно обеспечить его самовозбуждение и
реализовать тормозной режим. На практике применение нашли
так называемые конденсаторное и магнитное торможения двига-
теля.
При конденсаторном торможении возбуждение двигате-
ля 1 осуществляется с помощью конденсаторов 2, подключаемых
к статору двигателя (рис. 5.27, а). Конденсаторы могут подклю-
чаться к статору двигателя постоянно (глухое подключение) или
190
Рис. 5.27. Схема включения (а) и характеристики (б) асинхронного дви-
гателя при конденсаторном торможении:
1 — двигатель; 2 — конденсаторы; 3... 5 — механические характеристики
с помощью контактора, будучи при этом соединенными в схему
«треугольник» или «звезда».
Определяющим фактором, от которого зависят вид и располо-
жение характеристик 3... 5 (рис. 5.27, б) и интенсивность тормо-
жения, является величина емкости С конденсаторов. Чем она боль-
ше, тем больше максимум тормозного момента, а сами характе-
ристики смещаются в область низких скоростей двигателя.
Магнитное торможение реализуется после отключения ста-
тора двигателя 2 от сети (рис. 5.28, а) и замыкания с помощью
ключей 1 его выводов накоротко.
За счет запасенной в двигателе электромагнитной энергии осу-
ществляется возбуждение двигателя и на его валу создается тор-
мозной момент. Особенностью этого вида торможения является
его быстротечность, определяемая небольшим временем затуха-
ния магнитного поля двигателя. Несмотря на это возникающие
тормозные моменты достаточно велики и обеспечивают интен-
сивное торможение ЭП.
Рис. 5.28. Схема ЭП при торможении асинхронного двигателя замыкани-
ем обмотки статора (а) и при комбинированном торможении (б):
I — ключи; 2 — двигатель
191
Практические возможности торможения двигателя существен-
но расширились в связи с использованием тиристорных пускоре-
гулирующих устройств, которые позволяют осуществлять как пуск
двигателя, так и его торможение.
Для обеспечения интенсивного торможения двигателя часто
используется комбинированный способ торможения, например
динамическое торможение в сочетании с торможением коротким
замыканием. Этот способ может быть реализован пусковым тири-
сторным устройством (рис. 5.28, б), состоящим из двух пар встре-
чно-параллельно включенных тиристоров VSl... VS4 для подклю-
чения или отключения двигателя и дополнительного тиристора
VS5 для реализации торможения коротким замыканием обмоток
статора.
Торможение осуществляется в два этапа. На первом этапе
после закрытия тиристоров VSl... VS4 и отключения двигателя
от сети подается сигнал управления на тиристор VS5, который
замыкает накоротко две фазы статора. На втором этапе, когда
интенсивность торможения коротким замыканием обмоток ста-
тора уменьшится, подается сигнал управления на тиристор VS1,
с помощью которого в цепь статора подается выпрямленный
ток и тем самым обеспечивается режим динамического тормо-
жения.
Выпускаемые серийно тиристорные пускорегулирующие уст-
ройства обеспечивают и другие варианты торможения двигателя,
а также его так называемый безударный пуск, при котором сни-
жаются броски электромагнитного момента (см. подразд. 5.9).
5.9. Особенности переходных процессов
в электроприводах с асинхронными
двигателями и их формирование
В общем случае в асинхронном ЭП переходные процессы опре-
деляются электромагнитной инерционностью обмоток двигателя
и механической инерцией движущихся элементов ЭП и исполни-
тельного органа рабочей машины.
Электромагнитные переходные процессы. Двигатель представля-
ет собой электромеханический преобразователь энергии с несколь-
кими магнитосвязанными между собой обмотками статора и ро-
тора, взаимное положение которых при вращении ротора непре-
рывно изменяется. Вследствие этого возникающие при пуске,
реверсе и торможении двигателя переходные токи в обмотках
статора и ротора изменяются по сложным временным зависи-
мостям, а определяемый ими электромагнитный момент имеет
колебательный характер и является сложной функцией времени.
192
Рис. 5.29. Кривые переходных процессов при учете электромагнитных про-
цессов (а), без учета электромагнитных процессов (б) и двигателя (в):
1 — график скорости; 2 — график момента; 3 — динамические характеристики
при учете электромагнитных процессов; 4 — динамические характеристики
без учета электромагнитных процессов
Для примера на рис. 5.29, а приведены экспериментально снятые
графики скорости 1 и момента 2 двигателя при его пуске.
Для сопоставления на рис. 5.29, б приведены расчетные графи-
ки скорости 1 и момента 2 двигателя при пуске, построенные по
статической механической характеристике. Нетрудно отметить су-
щественное различие тех и других графиков.
Сложный характер имеет и так называемая динамическая ме-
ханическая характеристика 3 со(Л/) двигателя, для построения
которой берутся значения момента и скорости двигателя в одни и
те же моменты времени tA переходного процесса (рис. 5.29, в). При-
веденная характеристика отличается от статической механиче-
ской характеристики 4 того же двигателя, полученной расчетом
по формуле (5.11). Различие между этими характеристиками и оп-
ределяется протеканием переходных электромагнитных процес-
сов в двигателе.
Момент двигателя в переходном режиме может в несколько
раз превосходить момент в статическом режиме из-за того, что
переходные токи статора и ротора могут значительно превосхо-
дить значения, рассчитанные по формулам для статического ре-
жима. Магнитные поля, образуемые переходными составляющи-
ми токов, могут либо усиливать, либо ослаблять основное поле,
создаваемое принужденными (установившимися) составляющи-
ми токов, вызывая соответствующее усиление или ослабление
переходного электромагнитного момента. Иногда момент может
стать даже отрицательным (тормозным), что можно увидеть на
начальном участке кривой 1 на рис. 5.29.
Другое существенное различие состоит в том, что вид динами-
ческой характеристики двигателя определяется не только пара-
метрами его обмоток, но и моментом нагрузки и моментом инер-
193
ции ЭП. Кроме того, характер переходного электромагнитного
момента двигателя зависит от вида переходного процесса (пуск,
реверс, торможение), а также от начального уровня магнитного
поля двигателя.
Анализ этих зависимостей позволяет отметить, что при боль-
шом суммарном моменте инерции и моменте нагрузки кривая
момента двигателя в начале переходного процесса имеет много
пиков, затухание которых происходит медленно. При малых мо-
ментах инерции и нагрузки наблюдается обратная картина.
Большое влияние на характер переходных процессов при ре-
версе и торможении двигателя оказывает оставшееся магнит-
ное поле, так как при отключении двигателя от сети его маг-
нитный поток не может мгновенно снизиться до нуля. Наличие
этого потока оказывает неблагоприятное воздействие на пере-
ходные процессы и вызывает увеличение максимальных пере-
ходных моментов двигателя при реверсе и торможении. Пики
переходных электромагнитных моментов двигателя при пуске в
3 — 5, а при реверсе в 12—18 раз превышают номинальный мо-
мент двигателя.
Переходные процессы в двигателе описываются системой диф-
ференциальных уравнений, которые по своей природе нелиней-
ны и содержат периодические коэффициенты. Их решение для
нахождения зависимостей со(/) и Л/(7) обычно производится с
помощью ЭВМ.
Механические переходные процессы. Эти процессы в асинхрон-
ном ЭП описываются основным уравнением механического дви-
жения (2.12), в котором моменты двигателя и исполнительного
органа в общем случае являются нелинейными функциями ско-
рости (скольжения). Получение искомых зависимостей s(t), со(/)
и M(t) может быть осуществлено несколькими способами, рас-
смотренными в подразд. 2.7.
Переходные процессы в системе «преобразователь частоты—асин-
хронный двигатель» (ПЧ—АД). В системе ПЧ—АД могут быть сфор-
мированы переходные процессы, близкие по своему характеру к
процессам в системе «управляемый выпрямитель—двигатель посто-
янного тока независимого возбуждения» (см. подразд. 4.11). Для это-
го также используется задатчик интенсивности 1 (рис. 5.30, а),
который за счет формирования во времени сигнала управления Uy
на входе ПЧ 2 при ступенчатом изменении сигнала задания ско-
рости U3 с позволяет получить требуемые графики изменения ско-
рости и момента двигателя 3 в переходном процессе. Графики сиг-
нала t/3c и сигнала на выходе задатчика интенсивности 1 приве-
дены на рис. 5.30, б. Важно отметить, что реализуемые при этом
плавные изменения частоты и величины подаваемого на двига-
тель напряжения позволяют частично или полностью устранить
влияние электромагнитных переходных процессов.
194
Рис. 5.30. Схема включения (а), графики сигналов управления (б) и ха-
рактеристики (е) асинхронного двигателя при формировании переход-
ных процессов:
1 — задатчик интенсивности; 2 — преобразователь частоты; 3 — двигатель
На рис. 5.30, б показаны на плоскости механических характе-
ристик траектории пуска, реверса и торможения вхолостую дви-
гателя при линейном законе изменения частоты и тем самым ско-
рости магнитного ноля двигателя со0(/). Пуск двигателя соот-
ветствует участку ОаЬ, реверс — участку bed, торможение — уча-
стку deb этой траектории. На участке торможения двигатель рабо-
тает в генератором режиме с рекуперацией (отдачей) энергии в
сеть.
Для построения кривых переходного процесса со(/) и Л7(г) могут
быть использованы формулы подразд. 4.11 для системы «преобра-
зователь-двигатель», считая при этом, что работа двигателя про-
исходит на линейных участках его механических характеристик.
Формирование переходных процессов в системе «регулятор на-
пряжения—двигатель». Как уже отмечалось ранее, переходные про-
цессы в асинхронном ЭП в общем случае сопровождаются значи-
тельными по амплитуде пиками переходного электромагнитного
момента, что приводит к дополнительным динамическим усили-
ям в механической части ЭП и может вызвать даже поломку ее
элементов.
В тех случаях, когда нежелательно или недопустимо воздей-
ствие переходного электромагнитного момента на кинематиче-
скую схему ЭП, прибегают к формированию момента двигателя в
переходных процессах. Такое формирование достигается при ис-
пользовании тиристорных регуляторов напряжения за счет изме-
нения скорости нарастания подводимого к двигателю напряже-
ния или при определенной последовательности подключения его
195
фазных обмоток. В результате могут быть получены кривые пере-
ходных процессов, близкие к показанным на рис. 5.29, б.
Отметим также, что одновременно с получением желаемых
графиков момента и скорости двигателя применение ТРН по-
зволяет обеспечить и ограничение токов в переходных процес-
сах ЭП.
5.10. Разомкнутые релейно-контакторные
схемы управления
Схемы релейно-контакторного управления асинхронными дви-
гателями строятся по принципам времени, скорости, ЭДС, тока
и пути по аналогии со схемами управления двигателями постоян-
ного тока.
Схемы управления асинхронным двигателем с короткозамкну-
тым ротором. Двигатели этого типа малой и средней мощности
обычно пускаются прямым подключением к сети без ограниче-
ния пусковых токов. В этих случаях они управляются с помощью
магнитных пускателей, которые одновременно обеспечивают и
некоторые виды их защиты.
Схема управления асинхронным двигателем с использовани-
ем нереверсивного магнитного пускателя (рис. 5.31) вклю-
чает в себя магнитный пускатель, состоящий из контактора КМ
и трех встроенных в него тепловых реле защиты КК. Схема обес-
печивает прямой (без ограничения тока и момента) пуск двига-
теля, отключение его от сети, а также защиту от коротких замы-
каний (предохранители FA) и перегрузки (тепловые реле защи-
ты КК).
Для пуска двигателя замыкают автоматический выключатель
QF и нажимают кнопку пуска SB1. При этом получает питание
Рис. 5.31. Схема управления асин-
хронным двигателем с использова-
нием нереверсивного магнитного
пускателя
196
Рис. 5.32. Схема управления асинхронным двигателем с использованием
реверсивного магнитного пускателя
катушка контактора КМ, который, включившись, своими глав-
ными силовыми контактами в цепи статора двигателя подключает
его к источнику питания, а вспомогательным контактом шунти-
рует кнопку SB1. Происходит разбег двигателя по его естествен-
ной характеристике.
Для отключения двигателя нажимается кнопка останова SB2,
контактор КМ теряет питание и отключает двигатель от сети. На-
чинается процесс торможения двигателя выбегом под действием
момента нагрузки на его валу.
В схеме управления асинхронным двигателем с использовани-
ем реверсивного магнитного пускателя основным элемен-
том является реверсивный магнитный пускатель, который вклю-
чает в себя два линейных контактора КМ1 и КМ2 и два тепловых
реле защиты КК (рис. 5.32). Схема обеспечивает прямой пуск и
реверс двигателя, а также торможение противовключением при
ручном (неавтоматическом) управлении.
В этой схеме предусмотрена защита от перегрузок двигателя
(реле КК), коротких замыканий в цепи статора (автоматический
выключатель QF) и управления (предохранители FA). Кроме того,
в схеме управления обеспечивается нулевая защита от исчезнове-
ния (снижения) напряжения питающей сети, которая выражает-
ся в невозможности самостоятельного включения контакторов КМ1
и КМ2 после их отключения.
Пуск двигателя в условных направлениях «Вперед» или «На-
зад» при включенном автоматическом выключателе QFосуществ-
ляется нажатием соответственно кнопок SB1 или SB2. Это приво-
дит к срабатыванию контактора КМ1 или КМ2 и подключению
двигателя к сети.
Для реверса или торможения двигателя вначале нажимают кноп-
ку SB3, что приводит к отключению включенного до сих пор кон-
197
тактора, например КМ1, после чего нажимается кнопка SB2. Это
приводит к включению контактора КМ2 и подаче на двигатель
напряжения сети с другим порядком чередования фаз. Магнитное
поле двигателя изменяет свое направление вращения, и начина-
ется процесс реверса, состоящий из двух этапов: торможения про-
тивовключением и разбега двигателя в противоположную сторону.
Если необходимо только затормозить двигатель при достиже-
нии им нулевой скорости, должна быть вновь нажата кнопка
SB3, что приведет к отключению двигателя от сети и возвраще-
нию схемы в исходное положение. Если кнопка SB3 нажата не
будет, то это приведет к разбегу двигателя в другую сторону, т. е.
к его реверсу.
Во избежание короткого замыкания в цепи статора, которое
может возникнуть в результате одновременного ошибочного на-
жатия кнопок SB1 и SB2, в реверсивных магнитных пускателях
иногда предусматривается специальная механическая блокировка.
Она представляет собой рычажную систему, которая предотвра-
щает одновременное включение двух контакторов.
В дополнение к механической блокировке используется типо-
вая электрическая блокировка, применяемая в реверсивных схе-
мах управления. Она предусматривает перекрестное включение
размыкающих (нормально замкнутых) контактов аппарата КМ1 в
цепь катушки аппарата КМ2, и наоборот.
Отметим, что повышению надежности и удобства в эксплуата-
ции способствует использование в схеме автоматического выклю-
чателя QF. Его наличие исключает возможность работы привода
при обрыве одной фазы при однофазном коротком замыкании,
как это может иметь место при установке предохранителей, а так-
же автоматический выключатель не требует замены элементов за-
щиты (как в предохранителях при сгорании их плавкой вставки).
Схема управления многоскоростным асинхронным дви-
гателем (рис. 5.33) обеспечивает получение двух скоростей двига-
теля путем соединения секций (полуобмоток) обмотки статора в
треугольник или двойную звезду, а также его реверсирование. За-
щита ЭП осуществляется тепловыми реле КК1 и КК2 и предохра-
нителями FA.
Для пуска двигателя на низкую скорость вращения нажимается
кнопка SB4, после чего срабатывают контактор КМ2 и блокиро-
вочное реле KV. Статор двигателя оказывается включенным по схеме
«треугольник», а реле КУ, замкнув свои контакты в цепях кату-
шек аппаратов КМЗ и КМ4, подготавливает двигатель к подклю-
чению в сеть. Далее нажатие кнопки SB1 или SB2 приводит к вклю-
чению контакторов КМЗ или КМ4 и пуску двигателя соответственно
в направлении «Вперед» или «Назад».
После разбега двигателя до низкой скорости может быть осу-
ществлен его разгон до высокой скорости. Для этого нажимают
198
Рис. 5.33. Схема управления многоскоростным асинхронным двигателем
кнопку SB5, что приведет к отключению контактора КМ2 и вклю-
чению контактора КМ1 и пересоединению тем самым секций об-
моток статора с треугольника на двойную звезду.
Останов двигателя производится нажатием кнопки SB3, что
вызовет отключение всех контакторов от сети и торможение дви-
гателя выбегом.
Применение в схеме двухцепных кнопок управления не допу-
скает одновременного включения контакторов КМ1 и КМ2, КМЗ
и КМ4. Этой же цели служит перекрестное включение размыка-
ющих блок-контактов контакторов КМ1 и КМ2, КМЗ и КМ4 в
цепи их катушек.
В схеме управления асинхронным двигателем, обеспечивающей
прямой пуск и динамическое торможение в функ-
ции времени пуск двигателя осуществляется нажатием кнопки SB1
(рис. 5.34), после чего срабатывает линейный контактор КМ, под-
ключающий двигатель к источнику питания. Начинается прямой
(без токоограничения) пуск двигателя. Одновременно с этим за-
мыкание контакта КМ в цепи реле времени КТ вызовет его сраба-
тывание и замыкание его контакта в цепи контактора торможе-
ния КМ1. Однако последний не срабатывает, так как перед этим
разомкнулся размыкающий контакт КМ.
Для останова двигателя нажимают кнопку SB2. Контактор КМ
отключается, размыкая свои контакты в цепи статора двигателя и
отключая его от сети переменного тока. Одновременно с этим за-
мыкается контакт КМ в цепи катушки аппарата КМ1 и размыка-
ется контакт КМ в цепи реле КТ. Это приводит к включению кон-
199
Рис. 5.34. Схема управления пуском и динамическим торможением асин-
хронного двигателя с короткозамкнутым ротором
тактора торможения КМ1, подаче в обмотки статора постоянного
тока от выпрямителя V через резистор 7?т и переводу двигателя в
режим динамического торможения.
Реле времени КТ, потеряв питание, начинает отсчет выдержки
времени. Через интервал времени, соответствующий времени ос-
танова двигателя, реле КТ размыкает свой контакт в цепи контак-
тора КМ1, который отключается, прекращая подачу постоянного
тока в цепь статора. Схема возвращается в исходное положение.
Интенсивность динамического торможения регулируется ре-
зистором Rv с помощью которого устанавливается необходимый
постоянный ток в статоре двигателя.
Для исключения возможности одновременного подключения
статора к источникам переменного и постоянного тока использу-
ют типовую блокировку с помощью размыкающих контактов КМ
и КМ1, включенных перекрестно в цепи катушек этих аппаратов.
Схемы управления асинхронными двигателями с фазным рото-
ром. Схемы управления двигателей с фазным ротором, которые
выпускаются в основном на среднюю и большую мощности,
должны предусматривать ограничение токов при их пуске, ре-
версе и торможении с помощью добавочных резисторов в цепи
ротора. В некоторых случаях резисторы в цепь ротора включаются
в целях увеличения момента двигателя при пуске.
Схема пуска асинхронного двигателя в одну ступень в функ-
ции времени и торможения противовключением в функции ЭДС
(рис. 5.35) содержит контакторы КМ1... КМ4, автоматический вык-
лючатель QF, реле времени КТ и напряжения КУ, кнопки управ-
ления SB1 и SB2, выпрямители VI и V2, электромагнитный тор-
моз YB, предохранители FA, добавочные 7?д1 и /?д2 и регулирово-
чный 7?р резисторы.
200
Рис. 5.35. Схема управления пуском и торможением противовключением
асинхронного двигателя с фазным ротором
После подачи напряжения с помощью автоматического вык-
лючателя QF происходит включение реле времени КТ, которое
своим размыкающим контактом разрывает цепь питания контак-
тора КМЗ, предотвращая тем самым его включение и преждевре-
менное закорачивание пусковых резисторов в цепи ротора.
Включение двигателя производится нажатием кнопки SB1,
после чего включается контактор КМ1. Статор двигателя подсо-
единяется к сети, электромагнитный тормоз YB растормаживает-
ся, и начинается разбег двигателя по реостатной характеристике,
соответствующей наличию резистора 7?д1 в цепи ротора.
Включение КМ1 приводит к срабатыванию контактора КМ4,
который своими контактом шунтирует не нужный при пуске ре-
зистор противовключения Т?д2, а также разрывает цепь катушки
реле времени КТ. Последнее, потеряв питание, начинает отсчет
выдержки времени, после чего замыкает сдой контакт в цепи ка-
тушки контактора КМЗ, который срабатывает и шунтирует пу-
сковой резистор 7?д1 в цепи ротора, и двигатель выходит на свою
естественную характеристику.
Управление торможением обеспечивает реле торможения KV,
контролирующее уровень ЭДС (скорости) ротора. С помощью ре-
зистора Rp оно отрегулировано таким образом, что при пуске,
когда 0 < 5 < 1, наводимая в роторе ЭДС будет недостаточна для
его включения, а в режиме противовключения, когда 1 < 5 < 2,
уровень ЭДС для этого достаточен.
201
Для осуществления торможения двигателя нажимается сдвоен-
ная кнопка SB2, размыкающий контакт которой разрывает цепь
питания катушки контактора КМ1, и он отключается. После этого
двигатель отключается от сети, разрывается цепь питания контак-
тора КМ4 и замыкается цепь питания реле КТ. В результате этого
контакторы КМЗ и КМ4 отключаются и в цепь ротора двигателя
вводится сопротивление (7?д1 + /?д2).
Нажатие кнопки SB2 приводит одновременно к замыканию
цепи питания катушки контактора КМ2, который, включившись,
вновь подключает двигатель к сети, но уже с другим чередова-
нием фаз сетевого напряжения на статоре. Двигатель переходит в
режим торможения противовключением. Реле KVсрабатывает и
после отпускания кнопки SB2 будет обеспечивать питание кон-
тактора КМ2 через свой контакт и замыкающий контакт этого
аппарата.
В конце торможения, когда скорость будет близка к нулю и
ЭДС ротора уменьшится, реле KV отключится и своим размыка-
ющим контактом разорвет цепь катушки контактора КМ2. Послед-
ний, потеряв питание, отключит двигатель от сети, и схема при-
дет в исходное положение. После отключения КМ2 тормоз YB,
потеряв питание, обеспечит фиксацию (торможение) вала двига-
теля.
5.11. Замкнутые схемы управления асинхронного
электропривода
Замкнутый ЭП с использованием преобразователей частоты (си-
стема ПЧ—АД). Эта система в силу своих широких функциональ-
ных возможностей становится одним из основных видов регули-
руемого ЭП. При не очень высоких требованиях к показателям,
диапазону и точности регулирования переменных ЭП может при-
меняться разомкнутая структура такой системы, рассмотренная в
подразд. 5.5. При необходимости получения высоких показателей
качества регулирования переменных, в частности диапазона ре-
гулирования скорости, создаются замкнутые структуры, некото-
рые из которых мы рассмотрим.
В общем случае частотное управление двигателя, реализуемое
с помощью преобразователей частоты, может быть реализовано
по трем вариантам:
• параметрическое управление, при котором управляющим воз-
действием на двигатель являются частота и действующее значение
подаваемого на двигатель напряжения;
• частотно-токовое управление, при котором управляющим
воздействием на двигатель являются частота и действующее зна-
чение тока двигателя;
202
• векторное управление, связанное с регулированием мгновен-
ных значений питающих напряжений и токов для формирования
электромагнитного момента двигателя нужной величины.
Одна из возможных схем замкнутого электропривода с пара-
метрическим (скалярным) частотным управлением [15]
представлена на рис. 5.36, а.
В качестве силового преобразователя в этой схеме используется
преобразователь частоты со звеном постоянного тока, состоящий
из неуправляемого выпрямителя В и инвертора напряжения ИН.
Инвертор выполнен на шести силовых модулях, состоящих из
силовых транзисторов VT1... VT6 и обратных диодов VD1... VD6.
Между выпрямителем и инвертором включен фильтр, состоящий
из реактора L и конденсатора С, обеспечивающий сглаживание
выходного напряжения выпрямителя и циркуляцию реактивной
энергии в силовой части схемы.
Инвертор работает в режиме широтно-импульсной модуляции
и преобразует нерегулируемое напряжение постоянного тока на
выходе фильтра в регулируемое по частоте и амплитуде напряже-
ние на статоре двигателя М. Силовая схема электропривода нере-
версивная и не предусматривает электрического торможения.
Управление инвертором осуществляется сигналами Uf и Uv,
определяющими соответственно значения выходных частоты и
напряжения преобразователя частоты. Формирование этих сигна-
лов осуществляется схемой управления, в состав которой входят
регулятор скорости РС, регулятор тока РТ, тахогенератор ТГ (дат-
чик скорости) и датчик тока ДТ, суммирующие усилители (про-
порциональные регуляторы) и блок ограничения БО
выходного сигнала РС, функциональный преобразователь ФП,
задатчик интенсивности ЗИ.
Регулятор скорости РС в совокупности с задатчиком интенсив-
ности ЗИ и сумматором обеспечивают требуемое регулирова-
ние скорости и ускорения двигателя в установившемся и переход-
ных режимах работы электропривода с помощью сигнала Uf.
Регулирование (ограничение) тока статора и момента двигате-
ля производится регулятором тока РТ. При токе статора двигате-
ля, меньшем тока уставки /м, сигнал на выходе РТ равен нулю и
схема управления обеспечивает режим поддержания заданной ско-
рости. Когда ток статора превысит уставку тока /м, происходит
увеличение сигнала на выходе РТ, из-за чего снижается и сигнал
на выходе сумматора ^Р|. Это приводит к уменьшению частоты и
величины напряжения на статоре двигателя и тем самым к огра-
ничению тока статора и момента двигателя.
Функциональный преобразователь ФП, характеристика кото-
рого в виде ломанной линии 0 — а — б— в показана над его услов-
ным изображением на рис. 5.36, а, обеспечивает требуемое соот-
ношение между частотой и выходным напряжением преобразова-
203
N->
О
-Р»
„ скаляоном частотном управлении
„ характеристики (ft асинхронное жигателя при скалярном
Рис. 5.36. Схема включения (а) и Р
теля частоты. Отрезком 0 —а создается начальное напряжение на
выходе преобразователя, необходимое для преодоления падения
напряжения на обмотке статора двигателя при малых частотах
напряжения. Участок а—б обеспечивает пропорциональное из-
менение частоты и напряжения (закон частотного управления
U/f = const), при котором магнитный поток двигателя поддержи-
вается примерно постоянным. На участке б— в величина напряже-
ния на статоре остается неизменной, хотя при этом его частота
может увеличиваться.
Для уменьшения влияния падения напряжения в цепи статора
на величину магнитного потока двигателя и тем самым на его
момент в схеме предусмотрена положительная обратная связь по
току (так называемая IR-компенсация), сигнал которой поступа-
ет на вход сумматора ^Г2- При увеличении нагрузки двигателя воз-
растает его ток и увеличивается сигнал Uv, за счет чего возрастает
выходное напряжение преобразователя и тем самым компенсиру-
ется падение напряжения в цепи обмотки статора.
В современных электроприводах этого типа реализация блоков
управления схемы (см. рис. 5.36, а) осуществляется с использова-
нием микропроцессорных средств, а настройка их параметров и
характеристик производится программным путем. Получаемые в
этой схеме механические характеристики двигателя при разли-
чных сигналах задания скорости U3C показаны на рис. 5.36, б.
При небольших диапазонах (порядка 10... 15) требуемое регу-
лирование скорости может быть получено и в разомкнутой схеме
без обратной связи по скорости. В этом случае в схеме отсутствуют
PC и ТГ, а сигнал с выхода ЗИ непосредственно поступает на
вход сумматора
Схема ч а с т о т н о-т о к о в о г о управления двигателем пред-
ставлена на рис. 5.37. Тиристоры VS1... VS6 образуют схему управ-
ляемого выпрямителя УВ, а тиристоры VS7... VS12 — схему авто-
номного инвертора тока АИТ. Между этими блоками включен ре-
актор L большой индуктивности, чтобы придать инвертору свой-
ства источника тока. Конденсаторы С1... Сбс диодами VD1... VD6
образуют цепи искусственной коммутации тиристоров VS7... VS12.
Остальные элементы схемы имеют следующее назначение: СУВ и
СУИ — схемы управления тиристорами выпрямителя и инверто-
ра; РТ, ДТ — соответственно регулятор и датчик тока статора;
ДС — датчик скорости; УО — усилитель-ограничитель; ФП — фун-
кциональный преобразователь. Схема работает следующим обра-
зом.
Задающий сигнал U3C задает частоту переключения тиристо-
ров инвертора и тем самым частоту тока статора двигателя М. После
вычитания из сигнала U3C сигнала обратной связи по скорости Ua
получается сигнал U$, пропорциональный относительной часто-
те ротора р = /2//ном (величину р называют также абсолютным
205
Рис. 5.37. Схема ЭП при частотно-токовом управлении асинхронным дви-
гателем
скольжением двигателя). Она связана со скольжением .v двигателя
следующим соотношением:
р = as,
где a — f /f |НОМ.
Сигнал пройдя через УО, вместе с сигналом £/ш поступает
на вход СУИ. Частота на выходе инвертора определяется сигналом
UbK = Ua + U$; СУИ настроена таким образом, что пока УО рабо-
тает в линейной зоне, частота на выходе инвертора будет посто-
янной и не будет зависеть от нагрузки. Двигатель при этом имеет
жесткие механические характеристики.
Сигнал после прохождения через ФП является также сиг-
налом для контура регулирования тока. Так как этот сигнал про-
порционален абсолютному скольжению, то и ток двигателя при
всех частотах будет ему пропорционален.
При резких изменениях задающего сигнала или при значитель-
ных перегрузках двигателя УО входит в зону ограничения (посто-
янства) своего выходного сигнала U$, ограничивая тем самым на
требуемом уровне и задание для тока. Двигатель при этом работает
при любой скорости с постоянными значениями абсолютного
206
скольжения и тока, т. е. механическая характеристика становится
абсолютно мягкой.
В результате двигатель имеет характеристики, аналогичные по-
казанным на рис. 5.36, б.
Схема позволяет осуществлять торможение двигателя с реку-
перацией (отдачей) энергии в сеть, для чего инвертор переводит-
ся в режим выпрямления, а выпрямитель — в режим инвертиро-
вания тока.
При необходимости получения высокого качества и очень боль-
ших диапазонов регулирования скорости асинхронного электро-
привода применяются так называемые схемы векторного уп-
равления асинхронными двигателями, в которых решение этих
задач обеспечивается за счет точного формирования электромаг-
нитного момента двигателя. Принцип формирования момента
может быть показан следующим образом.
Уравнение электромагнитного момента асинхронного двигате-
ля может иметь различные формы записи в зависимости от ис-
пользуемых в этих уравнениях переменных и выбранной системы
координат для их представления. При построении систем вектор-
ного управления удобно процессы в двигателе рассматривать в
системе координат X— Y, в которой ось X совпадает по направле-
нию с потокосцеплением ротора Т2 и вращается с его скоростью.
В этом случае уравнение электромагнитного момента трехфазного
асинхронного двигателя имеет вид
M=3pLn'¥2iXY/{2L2), (5.38)
где р — число пар полюсов двигателя; Ln — взаимоиндуктивность
между статором и ротором; г — составляющая тока статора по
оси У; £2 ~ полная индуктивность ротора.
Так как составляющая тока статора i]X по оси X определяет
потокосцепление ротора *Р2, то из формулы (5.38) следует, что за
счет регулирования i[X и йг можно обеспечивать формирование
момента двигателя. Составляющая iiX может рассматриваться как
намагничивающая реактивная составляющая тока статора двига-
теля, a i\y — его активная составляющая, идущая на создание
момента двигателя.
Уравнение (5.38) по своему виду аналогично формуле момен-
та двигателя постоянного тока. В нем Т2 отражает магнитный по-
ток двигателя постоянного тока, a z, Y — ток его якоря.
Принцип построения схемы векторного управления иллюст-
рирует рис. 5.38. Асинхронный двигатель М, на валу которого ус-
тановлен датчик скорости (тахогенератор) ДС, получает питание
от преобразователя частоты ПЧ. Регулирование момента произво-
дится регуляторами PTW активной Iw и РТЦ реактивной состав-
ляющих тока. Значения этих переменных получаются косвенным
207
Рис. 5.38. Схема ЭП при векторном управлении асинхронным двигателем
путем с помощью модели асинхронного двигателя «Модель АД»,
на вход которой подаются сигналы фазных токов 1А, 1В, 1С, на-
пряжений UA, UB, Uс и угловой скорости двигателя со. Модель дви-
гателя выдает информацию о скольжении двигателя $ и составля-
ющих токов Iw и /м.
Регулирование скорости производится по принципу подчинен-
ного регулирования координат с использованием ПИ-регулятора
скорости PC, задатчика интенсивности ЗИ и блока ограничения
БО тока. Управление ПЧ осуществляется системой трехфазных
напряжений U3A, U3B, U3C, которые формируются преобразовате-
лем координат ПК на основе сигналов регуляторов PTW и РТЦ и
сигнала, пропорционального частоте f.
Векторное регулирование момента асинхронного двигателя
обеспечивает его точное поддержание во всем диапазоне регули-
рования скорости, включая режимы работы электропривода на
упор и очень низкие «ползучие» скорости, что отличает его от
параметрического (скалярного) регулирования.
Схема управления замкнутого асинхронного ЭП, выполненного
по системе «тиристорный регулятор напряжения — асинхронный дви-
гатель» (система ТРН—АД). В этой системе (рис. 5.39) для получе-
ния приемлемых для регулирования скорости жестких механиче-
ских характеристик двигателя используется отрицательная обрат-
ная связь по его скорости.
В схеме между сетью и статором двигателя включен ТРН, сило-
вую часть которого образуют три пары встречно-параллельно со-
208
Рис. 5.39. Схема (а) и характеристики (б) замкнутого асинхронного ЭП
с использованием регулятора напряжения и обратной связи по скорости
единенных тиристоров VS1... VS6. Управляющие электроды тири-
сторов подсоединены к выходам системы импульсно-фазового уп-
равления СИФУ ТРН, которая вырабатывает и распределяет уп-
равляющие импульсы на тиристоры и осуществляет их фазовый
сдвиг в зависимости от входного сигнала управления Uy. К валу
двигателя для реализации обратной связи по скорости подсоеди-
нен тахогенератор ТГ. Его ЭДС ЕТ1 сравнивается с задающим на-
пряжением скорости t/3C, снимаемым с задающего потенциомет-
ра скорости ЗП, причем эти напряжения действуют навстречу друг
другу. Разность этих напряжений образует сигнал управления
t/y = U3.c - ЕТг = U3.c -
(5.39)
который поступает на вход СИФУ.
При увеличении этого сигнала угол управления тиристорами а
уменьшается, подаваемое на двигатель напряжение увеличивает-
ся, и наоборот. Важно отметить, что при снижении скорости дви-
209
гателя в цепи ротора выделяются потери мощности (потери сколь-
жения), которые вызывают дополнительный нагрев двигателя и
снижают экономичность работы ЭП. Для облегчения теплового
режима двигателя при его работе на пониженных скоростях в цепь
его ротора в рассматриваемой схеме может быть включен доба-
вочный резистор Я2д, показанный на рис. 5.39, а.
Рассмотрим работу ЭП при изменении момента нагрузки Мс
на валу двигателя и постоянном задании скорости [/хс2. Допустим,
что в исходном положении двигатель работал в точке 1 при мо-
менте нагрузки Л/с1 (рис. 5.39, б), а затем происходит его увеличе-
ние до значения Л/с2.
При увеличении нагрузки на валу двигателя его скорость начи-
нает снижаться, соответственно начинает уменьшаться и пропор-
циональная ей ЭДС тахогенератора £тг. Уменьшение скорости и
£тг вызывает согласно формуле (5.39) увеличение напряжения
управления Uy, что приведет к уменьшению угла а и увеличению
тем самым подаваемого на двигатель напряжения. Момент двига-
теля будет увеличиваться и в точке 2 сравняется с Л/с2. Таким об-
разом, увеличение момента нагрузки приведет к небольшому сни-
жению скорости двигателя, т.е. его характеристики в схеме рис.
5.39, а станут жесткими.
При уменьшении момента нагрузки Мс будет автоматически
происходить снижение напряжения на двигателе и поддержание
его скорости вращения на заданном уровне.
Изменяя с помощью потенциометра ЗП значение задающего
напряжения t/3C, можно получить ряд механических характери-
стик электропривода с относительно высокой жесткостью и не-
обходимой перегрузочной способностью двигателя.
Реализация этого ЭП требует из-за больших потерь скольже-
ния завышения мощности двигателя или применения двигателя
специальной конструкции.
Замкнутая схема импульсного регулирования скорости двигате-
ля с помощью резистора в цепи ротора. В схеме ЭП (рис. 5.40, а) с
импульсным регулированием сопротивления в цепи выпрямлен-
ного тока ротора для получения жестких характеристик использо-
вана отрицательная обратная связь по скорости двигателя.
В роторную цепь двигателя включен неуправляемый трехфаз-
ный выпрямитель В, к выходу которого подключен резистор Т?2д.
Параллельно резистору включен управляемый полупроводнико-
вый ключ К.
Управление ключом происходит от широтно-импульсного мо-
дулятора ШИМ, на вход которого поступают сигналы задания
U3C и обратной связи Сос по скорости. При поступлении на вход
блока ШИМ сигнала ошибки t/y = U3C- Uoc он начинает генериро-
вать импульсы управления Ur Эти импульсы с помощью схемы
управления ключом СУК подаются на ключ, размыкание и замы-
210
~Ui.fi
Рис. 5.40. Схема (а) и характеристики (б) замкнутого асинхронного ЭП
с импульсным регулированием сопротивления добавочного резистора в
цепи ротора
кание которого вызывают периодическое включение и закорачи-
вание резистора R2a.
Принцип получения жестких характеристик ЭП соответствует
рассмотренному ранее механизму действия обратной связи по ско-
рости и состоит в следующем. Допустим, что двигатель работает в
установившемся режиме при каком-то заполнении (скважности)
ключа К и соответствующем эквивалентном сопротивлении цепи
ротора.
Пусть по каким-то причинам произошло увеличение момента
нагрузки двигателя, в результате чего начнет снижаться его ско-
рость. Тогда в соответствии с формулой (5.39) сигнал управления
Uy начнет повышаться, что вызовет увеличение заполнения у ра-
боты ключа К и уменьшение тем самым эквивалентного сопро-
тивления в цепи ротора Л2экв = (1 _ У)^2Д- Это, в свою очередь,
приведет к увеличению тока в роторе и моменте двигателя и пре-
кращению снижения скорости, что соответствует жестким харак-
теристикам ЭП, показанным на рис. 5.40, б.
В схеме может быть достигнуто и регулирование (ограничение)
тока и момента, для чего она должна быть дополнена контуром
регулирования тока. В этом случае механические характеристики
имеют вертикальный участок, соответствующий заданному уров-
ню ограничения тока и момента.
Следует отметить, что работа этого ЭП, как и ЭП с ТРН,
характеризуется при регулировании скорости двигателя выделе-
нием в цепи ротора потерь мощности, пропорциональных сколь-
жению, что ухудшает экономические показатели работы ЭП и
должно учитываться при выборе двигателя и добавочного рези-
стора.
211
5.12. Электропривод с однофазными
асинхронными двигателями
Когда источником электроэнергии является однофазная сеть
переменного тока, что имеет место для жилых и административ-
ных зданий, в сельскохозяйственных районах, применение нахо-
дят однофазные асинхронные двигатели. Эти двигатели выпуска-
ются, как правило, на небольшую мощность (до 5... 10 кВт) и
используются в приводе стиральных машин, холодильников, ме-
дицинских аппаратов, пылесосов, доильных аппаратов, центри-
фуг, небольших станков, электроинструментов и т.д.
Разновидностью однофазных двигателей являются так называ-
емые исполнительные двигатели, которые применяются в раз-
личных устройствах автоматического управления и характеризу-
ются возможностью широкого регулирования скорости.
Следует отметить, что однофазные двигатели по сравнению с
трехфазными имеют несколько худшие технические характери-
стики и удельные показатели. Так, мощность однофазного двига-
теля составляет не более 70 % от мощности трехфазного двигателя
при тех же габаритных размерах. Кроме того, однофазные двига-
тели имеют и более низкую перегрузочную способность.
Схема включения и характеристики однофазного двигателя. Од-
нофазные двигатели имеют на статоре две обмотки: основную (ра-
бочую) и пусковую, которая используется для пуска двигателя.
Ротор однофазного двигателя выполняется короткозамкнутым в
виде беличьей клетки. Рассмотрим сначала работу однофазного
двигателя в режиме, когда пусковая обмотка отключена.
Рис. 5.41. Схема включения («) и механические характеристики (б) одно-
фазного асинхронного двигателя:
1 — обмотка возбуждения; 2 — результирующая механическая характеристика;
3, 4 — составляющие результирующей механической характеристики
212
Рабочая обмотка 7 двигателя (рис. 5.41, а) подключается к од-
нофазной сети переменного тока с напряжением 7/, и частотой/.
Однофазный ток 7, этой обмотки создает пульсирующее магнит-
ное поле, которое можно разложить на две составляющие: Фя и
Фв, имеющие равные амплитуды и вращающиеся в противопо-
ложные стороны с одинаковой скоростью <о0 = 'Infx/p.
Этим составляющим магнитным полям соответствуют меха-
нические характеристики 3 — оз(МА) и 4— оз(Мв), показанные на
рис. 5.41, б. Результирующая характеристика двигателя 2— со(Л7)
получается алгебраическим суммированием моментов МА и Мв при
одной и той же скорости. Эта характеристика напоминает меха-
ническую характеристику трехфазного двигателя, за исключени-
ем точки короткого замыкания. При неподвижном роторе (со = О,
5=1) магнитные поля Фя и Фв создают одинаковые по величине,
но противоположные по знаку моменты Л/, и М2. Поэтому при
пуске результирующий момент Мп = - М2 равен нулю и двига-
тель не может прийти во вращение даже при отсутствии момента
нагрузки на его валу.
В связи с этим для пуска однофазного двигателя используется
дополнительная пусковая обмотка, которая позволяет получить
вращающееся магнитное поле при подключении двигателя к сети
и за счет этого обеспечить определенный пусковой момент.
Разновидности однофазного двигателя. Из теории электрических
машин известно, что для получения вращающегося магнитного
поля на статоре двигателя должны быть расположены как мини-
мум две обмотки, смещенные в пространстве на определенный
угол и обтекаемые переменными токами со сдвинутыми во вре-
мени максимумами. В соответствии с этим пусковая обмотка ук-
ладывается на статоре двигателя со смещением ее оси на 90° по
отношению к оси рабочей обмотки, а сдвиг токов обеспечивается
включением в ее цепь дополнительного фазосдвигающего элемента.
На рис. 5.42 показаны возможные схемы включения фазосдвига-
ющего элемента — резистора, катушки индуктивности или кон-
денсатора.
Рабочая 1 и пусковая 5 обмотки (рис. 5.42, а) подключаются к
одной и той же однофазной сети переменного тока U\. Для сдвига
фазы тока /1п относительно тока /)р в цепь пусковой обмотки вклю-
чается фазосдвигающий элемент 4 сопротивлением Zn, в качестве
которого могут быть использованы активный резистор, катушка
индуктивности или конденсатор. В результате при пуске двигателя
образуется вращающееся магнитное поле и двигатель будет разви-
вать определенный момент.
При пуске двигателя вначале замыкают ключи 2 и 3, подклю-
чающие обе обмотки к сети, и двигатель начинает разгоняться.
При определенной скорости с помощью ключа 3, который может
управляться автоматически с помощью реле времени, токовым
213
Рис. 5.42. Схемы включения обмоток однофазного асинхронного двигате-
ля с резистором (а), катушкой индуктивности (б) и конденсатором (в):
1 — рабочая обмотка; 2, 3 — ключи; 4 — фазосдвигающий элемент; 5 — пусковая
обмотка; 6 — вторая рабочая обмотка; 7 — конденсатор
реле или центробежным регулятором, пусковая обмотка отклю-
чается от сети и двигатель продолжает работать только с рабочей
обмоткой.
Наиболее благоприятные характеристики однофазный двига-
тель имеет при использовании в качестве фазосдвигающего эле-
мента конденсатора. Величина емкости этого конденсатора может
быть подобрана таким образом, что ток пусковой обмотки при
неподвижном роторе будет сдвинут относительно тока рабочей
обмотки на угол 90°. Тогда двигатель при трогании с места будет
иметь круговое вращающееся магнитное поле и развивать значи-
тельный пусковой момент.
Пусковая обмотка с конденсатором может и не отключаться
после окончания пуска двигателя и его работе в основном режиме.
В этом случае она уже является не вспомогательной, а второй ра-
бочей обмоткой. Такой двигатель называется конденсаторным (рис.
5.42, б) и имеет существенно лучшие технические показатели,
нежели двигатель с пусковой обмоткой. Конденсаторный двига-
тель тем самым представляет собой двухфазный двигатель с об-
мотками 1 и 6. Вторая рабочая обмотка 6 посредством конденсато-
ра 7 подключается к однофазной сети.
В качестве однофазных двигателей могут быть при необходимо-
сти использованы и обычные трехфазные двигатели с коротко-
замкнутым ротором. Одна из возможных схем включения трехфаз-
ного двигателя для этого случая приведена на рис. 5.42, в, в кото-
рой обмотки фаз а и b статора соединены последовательно и под-
ключены напрямую к питающей сети, а обмотка фазы с подклю-
чается к той же сети через конденсатор 7. Существуют и другие
схемы соединения обмоток трехфазного двигателя при его под-
ключении к однофазной сети, но во всех случаях он приобретает
свойства и характеристики однофазного двигателя.
214
Разновидностью однофазного двигателя является двигатель с
экранированными полюсами. Такой двигатель имеет на статоре
явно выраженные полюсы с однофазной рабочей обмоткой. Часть
каждого полюсного наконечника охвачена (экранирована) ко-
роткозамкнутым витком. В результате такого исполнения двига-
теля при протекании тока по его рабочей обмотке возникает маг-
нитное поле, приближающееся по своему характеру к враща-
ющемуся, благодаря чему и создается определенный пусковой
момент.
Отдельную группу однофазных двигателей составляют испол-
нительные двигатели. Они представляют собой двигатели, име-
ющие на статоре две обмотки (рис. 5.43, а): возбуждения 1 и уп-
равления 3. Первая из них постоянно подключена к сети и обеспе-
чивает возбуждение исполнительного двигателя. Вторая обмотка
питается от специального блока управления 2, с помощью кото-
рого может регулироваться амплитуда подводимого к ней напря-
жения Uoy или его фаза относительно напряжения возбуждения
U\, или то и другое. В первом случае говорят об амплитудном уп-
равлении исполнительным двигателем, во втором — о фазовом и
в третьем — о смешанном управлении.
Изменение амплитуды или фазы напряжения t/oy осуществля-
ется по внешнему входному сигналу управления Ur Вид механи-
ческих характеристик 4... 7 исполнительного двигателя при амп-
литудном управлении, построенных в относительных единицах, в
которых за базовые приняты их номинальные значения, приведе-
ны на рис. 5.43, б. Характеристики 4... /построены соответственно
при f/y/t/y.HOM = 1; 0,75; 0,5 и 0,25.
Разновидностью исполнительных двигателей являются мало-
инерционные двигатели, у которых ротор имеет уменьшенную
Рис. 5.43. Схема включения (а) и механические характеристики (б) ис-
полнительного двигателя:
1 — обмотка возбуждения; 2 — блок управления; 3 — обмотка управления (ОУ);
4... 7 — регулировочные механические характеристики
215
массу и пониженный момент инерции. Распространение нашли
двигатели с полым немагнитным и полым ферромагнитным ро-
торами.
Двигатели с полым немагнитным ротором имеют два выпол-
ненных из обычной электротехнической стали статора: внешний
и внутренний. Между ними располагается ротор, представляющий
собой тонкостенный (до 1 мм толщины) цилиндр из алюминие-
вого сплава, имеющий форму стаканчика. Двухфазная обмотка
обычно располагается на внешнем статоре.
Малоинерционные двигатели второго типа имеют ферромаг-
нитный ротор, выполненный в виде полого цилиндра. Такая кон-
струкция ротора возможна по той причине, что магнитный поток
при работе двигателя проходит только по его небольшому поверх-
ностному слою, тем самым металл внутри ротора не используется
и может быть без ущерба удален.
Пример использования исполнительного однофазного двига-
теля в следящем ЭП рассмотрен в гл. 8.
5.13. Электропривод с линейным асинхронным
двигателем
В подавляющем большинстве асинхронных ЭП применяется
двигатель вращательного движения. При его использовании для
привода рабочих машин и механизмов с поступательным дви-
жением исполнительных органов (механизмов подач металло-
обрабатывающих станков, передвижения мостовых кранов, куз-
нечно-прессовых машин, транспортеров, задвижек и т.д.) тре-
буется применение механических передач для преобразования
вращающегося движения вала двигателя в поступательное. К их
числу относятся кривошипно-шатунный механизм, передачи
шестерня —рейка, винт —гайка и ряд других механических пе-
редач.
Естественным выглядит стремление использовать в таких ЭП
двигатель поступательного движения, что позволило бы отказать-
ся от применения механической передачи и таким образом повы-
сить технические и экономические показатели работы ЭП и тех-
нологического оборудования. Реализация этого стремления выра-
зилась в разработке линейных двигателей постоянного и перемен-
ного тока, в частности линейных асинхронных двигателей (ЛАД).
Представление об устройстве ЛАД можно получить, если мыс-
ленно разрезать вдоль по образующей статор и ротор двигателя
вращательного движения и развернуть их в плоскость, как это
показано на рис. 5.44, а.
Принцип действия ЛАД аналогичен принципу действия вра-
щающегося двигателя. При подключении обмотки 4 статора 3 ЛАД
216
} X 2 з
Id о о о о о'о|/
|О О О О О Ф О]
4
Рис. 5.44. ЛАД плоской (а), трубчатой (б) конструкций и схема ЭП транс-
портера с ЛАД (в):
1 — обмотка ротора; 2 — ротор; 3 — статор; 4 — обмотка статора; 5 — трубчатый
статор; 6 — катушки статора; 7 — металлические шайбы; 8 — подвижный эле-
мент; 9 — перемещаемые изделия; 10 — металлическая лента; 11 — барабаны;
12 — статор
к сети переменного тока она создает поступательно движущееся
магнитное поле с линейной скоростью
Ц = 2т/,
где f — частота питающего напряжения; т — длина полюсного
деления статора.
Это линейно перемещающееся магнитное поле наводит в об-
мотке 1 ротора 2 ЭДС, под действием которой в ней начнет про-
текать ток. Взаимодействие этого тока с магнитным полем и со-
здает на роторе (его называют вторичным элементом) тяговое
усилие, которое приведет его в поступательное движение.
Вторичный элемент ЛАД может выполняться длиннее или ко-
роче статора (первичного элемента), с обмоткой или без нее,
плоской или цилиндрической формы. Рассмотрим для примера
конструкцию трубчатого (цилиндрического) ЛАД (рис. 5.44, б),
статор которого выполнен в виде цилиндра (трубки) 5, внутри
которого расположены катушки 6, образующие обмотку статора,
и металлические шайбы 7, являющиеся частью магнитопровода.
Внутри статора помещается подвижный вторичный элемент 8 также
трубчатой формы, выполненный из ферромагнитного материала.
Плоский вторичный элемент без обмотки выполняется в виде
листа, полосы или рельса, которые могут помещаться между дву-
мя статорами (ЛАД с двусторонним статором) или статором и
ферромагнитным сердечником (ЛАД с односторонним статором
и сердечником). Принцип действия ЛАД со вторичным элементом
в виде полосы аналогичен обычному АД с массивным ферромаг-
нитным ротором.
ЛАД могут работать и в обращенном режиме, когда вторичный
элемент неподвижен, а перемещается статор. Такие ЛАД обычно
применяются на транспортных средствах, когда в качестве вто-
ричного элемента используется рельс (или специальная полоса),
а статор размещается на подвижном транспортном средстве.
217
Для ЛАД, как и для обычного вращающегося двигателя, регу-
лирование координат осуществляется с помощью резисторов,
изменением частоты и подводимого напряжения, а торможение
может быть динамическим или противовключением.
Рассмотрим пример использования ЛАД для привода конвейе-
ра (рис. 5.44, в), предназначенного для перемещения изделий 9 с
помощью металлической ленты 10, укрепленной на барабанах 11.
Лента 10 проходит между двумя статорами 12 ЛАД, являясь его
вторичным элементом. Применение ЛАД для конвейера позволя-
ет повысить скорость движения ленты и устранить ее проскальзы-
вание, отказаться от механической передачи. Установка несколь-
ких ЛАД позволяет выполнять длинные конвейеры, что затрудни-
тельно при использовании традиционного ЭП с вращающимися
двигателями.
Применение ЛАД целесообразно для привода кузнечно-прес-
совых машин, задвижек и клапанов с поступательным движени-
ем штока, ткацких станков, механизмов привода дверей лифта.
Отдельную большую область применения линейных двигателей
представляет собой электрический транспорт.
Контрольные вопросы
1. Какие основные части составляют конструкцию асинхронного дви-
гателя?
2. Что такое схема замещения асинхронного двигателя?
3. В каких энергетических режимах может работать двигатель?
4. Какими способами могут быть получены искусственные механи-
ческие характеристики асинхронного двигателя?
5. Какие достоинства и недостатки имеет способ регулирования пере-
менных асинхронного двигателя с помощью резисторов?
6. Какие возможности по управлению двигателем имеет способ, свя-
занный с регулированием напряжения на его статоре?
7. В чем состоит сущность регулирования скорости двигателя за счет
изменения частоты питающего напряжения?
8. С какой целью при частотном способе производится также и регу-
лирование подводимого к двигателю напряжения?
9. Какие типы ПЧ вы знаете?
10. За счет чего в частотно-управляемом асинхронном ЭП может произ-
водиться регулирование величины подводимого к двигателю напряжения?
11. Поясните принцип изменения числа пар полюсов многоскорост-
ного двигателя.
12. Какие причины вызвали появление каскадных схем включения
двигателя?
13. Назовите виды каскадных схем и поясните принцип регулирова-
ния скорости двигателя в этих схемах.
14. В чем сущность импульсного способа регулирования координат ЭП
с асинхронным двигателем?
218
15. Для чего создаются замкнутые ЭП с импульсным регулированием
переменных электропривода?
16. Какими способами может быть осуществлено торможение двига-
теля в основной схеме его включения?
17. Что такое динамическое торможение двигателя?
18. В чем основная особенность переходных процессов в асинхронном
ЭП?
19. Какими путями достигается формирование переходных процессов
в асинхронном ЭП?
20. По каким принципам строятся релейно-контакторные схемы уп-
равления асинхронными двигателями?
21. Какие существуют разновидности регулируемых ЭП с преобразо-
вателями частоты?
22. Как выполняется ЭП с использованием тиристорного регулятора
напряжения для регулирования скорости?
23. В чем заключается сущность широтно-импульсной модуляции ра-
боты импульсных схем управления?
24. Каковы области использования однофазных асинхронных двигате-
лей?
25. В чем состоят основные особенности работы однофазного двигате-
ля?
26. Какие основные виды однофазных двигателей применяются?
27. Что такое ЛАД и в каких рациональных областях его применяют?
ГЛАВА 6
ЭЛЕКТРОПРИВОД С СИНХРОННЫМИ
ДВИГАТЕЛЯМИ
6.1. Схема включения, статические
характеристики и режимы работы синхронного
двигателя
Синхронные трехфазные двигатели широко применяются в ЭП
самых разнообразных рабочих машин и механизмов, что объясня-
ется их высокими технико-экономическими показателями. КПД
современных синхронных двигателей составляет 96...98 %, что на
1... 1,5 % выше КПД асинхронных двигателей тех же габаритных
размеров и скорости. В синхронных двигателях возможно регули-
рование перегрузочной способности за счет регулирования тока
возбуждения, причем перегрузочная способность меньше зависит
от напряжения сети по сравнению с асинхронными двигателями.
Синхронный двигатель обладает абсолютно жесткой механиче-
ской характеристикой.
Способность синхронных двигателей работать с опережающим
costp и отдавать при этом в сеть реактивную мощность позволяет
улучшать режим работы и экономичность системы электроснаб-
жения. Важным преимуществом конструкции синхронных двига-
телей является большой воздушный зазор, вследствие чего его
характеристики мало зависят от износа подшипников и неточно-
сти монтажа ротора.
Статор синхронных двигателей выполняется как и статор асин-
хронного двигателя с трехфазной обмоткой, подключаемой к сети
переменного тока. Ротор синхронных двигателей может иметь об-
мотку возбуждения, быть выполненным в виде постоянных маг-
нитов или представлять собой зубчатый стальной цилиндр. Пер-
вая из названных конструкций ротора характерна для синхронных
двигателей в основном средней и большой мощности. Двигатели с
ротором в виде постоянного магнита или зубчатого колеса выпол-
няются небольшой и средней мощности и находят главное при-
менение в регулируемых электроприводах.
На рис. 6.1, а приведена схема включения трехфазного синх-
ронного двигателя с обмоткой возбуждения. Конструктивно ротор
двигателя может быть выполнен неявнополюсным или иметь явно
выраженные полюсы.
В качестве источника для питания обмотки возбуждения в схе-
ме используется небольшой генератор постоянного тока 2, назы-
220
ваемый возбудителем и устанавливаемый на валу синхронного дви-
гателя (см. рис. 6.1, а). Регулирование тока возбуждения двигателя
/вд осуществляется изменением с помощью резистора 3 в цепи
тока /в в возбуждения возбудителя 4. В современных схемах возбуж-
дения синхронных двигателей широко применяются тиристорные
управляемые выпрямители (тиристорные возбудители).
Вращающий момент синхронного двигателя обусловлен вза-
имодействием вращающегося магнитного поля, создаваемого об-
мотками статора, и магнитного поля, создаваемого обмоткой воз-
буждения или постоянными магнитами на роторе. Взаимодействие
этих полей может создать постоянный по направлению враща-
ющий момент двигателя только в том случае, когда ротор будет
вращаться со скоростью магнитного поля со0 = т. е. синх-
ронно с вращающимся полем. Таким образом, механическая
характеристика синхронного двигателя w(Af) (рис. 6.1, б) пред-
ставляет собой горизонтальную линию с ординатой со0. Эта харак-
теристика имеет место до некоторого максимального момента на-
грузки Мтах, превышение которого приведет к выпадению двига-
теля из синхронизма, т.е. к нарушению синхронного вращения
ротора и магнитного поля.
Для определения максимального момента Мтах двигателя, до
которого сохраняется синхронная работа двигателя с сетью, слу-
жит угловая характеристика двигателя. Она представляет собой
зависимость момента М от угла 0 сдвига между векторами ЭДС
статора Е и фазного напряжения сети £/ф. Для неявнополюсного
синхронного двигателя при пренебрежении активным сопротив-
лением цепи статора она выражается следующей формулой:
Рис. 6.1. Схема включения (а) и рабочая механическая характеристи-
ка (б) синхронного двигателя:
1 — двигатель; 2 — возбудитель; 3 — регулировочный резистор; 4 — обмотка
возбуждения возбудителя
221
Рис. 6.2. Угловая характеристика синхронного
двигателя
М = 3 t/ф £sin 0/(сооХ|) = Afmaxsin0, (6.1)
где t/ф — фазное значение напряжения сети; Е — ЭДС в обмотке
статора двигателя; а>о — скорость вращения магнитного поля; xt —
индуктивное сопротивление фазы обмотки статора двигателя.
Угловая характеристика двигателя показана на рис. 6.2. В соот-
ветствии с формулой (6.1) момент двигателя достигает своего
максимального значения при 0 = л/2. Эта величина характеризует
собой перегрузочную способность двигателя. При больших значе-
ниях угла двигатель выпадает из синхронизма, при меньших углах
0 его работа устойчива.
Номинальное значение угла 0НОМ составляет обычно 25...30°, ему
соответствует номинальный момент Л/Ном. При таком значении 0НОМ
кратность максимального момента составляет А,м = Мтах/Мном =
= 2...2,5.
На рис. 6.1, б показаны участки механической характеристики
двигателя двигательного и генераторного режимов.
6.2. Регулирование скорости электроприводов
с синхронными двигателями. Схема вентильного
двигателя
Основной областью применения синхронных двигателей до не-
давнего времени были нерегулируемые по скорости ЭП большой
мощности, используемые при этом для компенсации реактивной
мощности. Появление силовых полупроводниковых преобразовате-
лей определило практические возможности создания регулируемых
по скорости ЭП с синхронными двигателями, выполняемых по
так называемой схеме вентильного двигателя.
Схема вентильного двигателя (рис. 6.3) состоит из синхронно-
го двигателя СД, обмотка статора которого питается от электрон-
ного коммутатора ЭК. Схема силовой части СЧ электронного ком-
мутатора аналогична схеме трехфазного инвертора. Силовые по-
лупроводниковые ключи коммутатора (тиристоры или транзисто-
ры) управляются датчиком положения ДП ротора, установлен-
222
ным на валу двигателя. Датчик положения ротора генерирует пе-
риодические сигналы, которые вместе с сигналом задания скоро-
сти U3 C поступают на систему управления СУ коммутатора.
Сигналы датчика положения обеспечивают подключение к
источнику пйтания с напряжением Un той фазы обмотки статора,
при работе которой сохраняется взаимное положение магнитных
полей статора и ротора. При этом двигатель развивает постоянный
по направлению вращающий момент.
Коммутатор напряжения с датчиком положения аналогичен по
своему действию коллекторно-щеточному узлу двигателей посто-
янного тока, вследствие чего вентильный двигатель имеет харак-
теристики и свойства этих двигателей.
Если ЭП питается от сети переменного тока, то напряжение
постоянного тока U„ получается за счет использования выпрями-
теля, включаемого между сетью и электронным коммутатором ЭК.
Преимущество вентильного двигателя по сравнению с двигате-
лем постоянного тока состоит в том, что у него нет механического
коллекторно-щеточного узла и поэтому он является полностью бес-
контактным двигателем при возбуждении от постоянных магнитов
или имеет два контактных кольца при использовании обмотки воз-
буждения. По этой же причине вентильные двигатели часто назы-
вают бесконтактными двигателями постоянного тока (БДПТ).
Регулирование скорости других переменных вентильного дви-
гателя может осуществляться, как и для двигателей постоянного
тока, за счет регулирования подаваемого на статор двигателя на-
пряжения или изменения тока возбуждения /в. Регулирование на-
пряжения в схеме рис. 6.3 осуществляется методом широтно-им-
пульсного управления полупроводниковыми ключами коммута-
тора ЭК или при использовании управляемого выпрямителя его
выходным напряжением. Получаемые регулировочные характери-
стики и показатели регулирования скорости аналогичны приве-
денным в гл. 4 для двигателя постоянного тока.
Рис. 6.3. Схема вентильного двигателя
223
Коммутация тока в ключах (вентилях) силовой части ЭК мо-
жет быть естественной или искусственной. Естественная коммута-
ция осуществляется за счет ЭДС трехфазной обмотки двигателя.
Естественная коммутация вентилей, позволяющая использовать
простой ЭК, может быть осуществлена только при сравнительно
большой ЭДС двигателя, когда его скорость не ниже 10 % от но-
минальной. В связи с этим пуск вентильных двигателей затруднен
и требуется применение специальных мер для устранения этого
недостатка.
Инвертор с искусственной коммутацией вентилей — это пре-
образователь постоянного напряжения или тока в переменный с
принудительной коммутацией вентилей, вследствие чего его ра-
бота практически не зависит от режима работы двигателя. При
использовании искусственной коммутации устраняются трудно-
сти при пуске вентильных двигателей.
Проблема пуска вентильных двигателей не возникает также при
использовании в качестве ЭК преобразователей частоты с непос-
редственной связью. В этих преобразователях коммутация венти-
лей осуществляется естественным путем при переходе сетевого
напряжения через нуль. Однако, как отмечалось ранее, преобра-
зователи частоты с непосредственной связью обладают ограни-
ченными регулировочными возможностями.
6.3. Пуск и торможение синхронных двигателей
Пуск синхронных двигателей. Он имеет ряд особенностей, отли-
чающих его от других типов двигателей. Первая особенность свя-
зана с тем, что при неподвижном роторе и подключении обмоток
статора и возбуждения к источникам питания двигатель будет раз-
вивать не постоянный по направлению, а в соответствии с форму-
лой (6.1) знакопеременный вращающий момент из-за постоянно
изменяющихся взаимных направлений магнитных полей статора и
ротора. Причина этого состоит в том, что из-за механической инер-
ции ротора он не успевает быстро увеличить свою скорость до ско-
рости вращения магнитного поля. В соответствии с этим двигатель
не сможет разогнаться до своей рабочей синхронной скорости со0 и
поэтому требуются специальные меры по его запуску.
Один из вариантов пуска связан с использованием небольшо-
го по мощности вспомогательного двигателя, устанавливаемого
на валу синхронного двигателя. С его помощью ненагруженный
синхронный двигатель разгоняется до синхронной скорости, пос-
ле чего осуществляется синхронизация с сетью. В агрегатах «синх-
ронный двигатель—генератор постоянного тока» в качестве тако-
го вспомогательного двигателя может быть использован сам гене-
ратор, работающий в период пуска в двигательном режиме.
224
Рис. 6.4. Пусковые механические характе-
ристики синхронного двигателя:
1 — при небольшом пусковом и повышенном
входном моментах; 2 — при повышенном пус-
ковом и небольшом входном моментах
В настоящее время для пуска синхронных двигателей применя-
ются асинхронный и частотно-управляемый способы пуска.
Для реализации асинхронного пуска на роторе двигателя укла-
дывается дополнительная пусковая обмотка, выполняемая анало-
гично короткозамкнутой обмотке асинхронного двигателя типа
беличьей клетки. В этом случае при подключении двигателя к сети
переменного тока происходит его разбег аналогично асинхронно-
му двигателю до подсинхронной скорости, после чего он втягива-
ется в синхронизм с сетью.
В зависимости от своих параметров пусковая обмотка двигателя
обеспечивает две основные разновидности механической пуско-
вой характеристики (рис. 6.4). Характеристика 1 обеспечивает бо-
лее высокий синхронизирующий (входной) момент Мв1 по срав-
нению с характеристикой 2, но меньший начальный (пусковой)
момент < Мп2, и наоборот. Выбор вида пусковой характери-
стики двигателя определяется конкретными условиями его рабо-
ты и видом производственного механизма.
В схеме вентильного двигателя реализуется частотный способ
пуска двигателя. При этом способе с помощью специального за-
датчика скорости осуществляется плавное увеличение частоты
питающего двигатель напряжения и тем самым скорости враще-
ния его магнитного поля. При этом ротор «успевает» за магнит-
ным полем и двигатель работает синхронно с источником пита-
ния уже с самых малых своих скоростей. Такой способ пуска ха-
рактеризуется к тому же и пониженными потерями энергии в дви-
гателе.
Вторая особенность пуска двигателя связана с моментом по-
дачи тока в обмотку его возбуждения. При пуске двигателя ис-
пользуются два основных способа его возбуждения: с возбужде-
нием перед синхронизацией двигателя и при постоянно (глухо)
подключенном источнике питания цепи возбуждения.
При использовании первого варианта, который реализуется по
схеме на рис. 6.5, на первом этапе пуска ключ 6разомкнут, а ключ
4 замкнут. Обмотка возбуждения двигателя 2 оказывается замкну-
той на резистор 3, и асинхронный пуск происходит в благоприят-
ных условиях.
225
Рис. 6.5. Схема возбуждения синхронного двига-
теля:
1 — возбудитель; 2 — двигатель; 3 — резистор; 4, 6 —
ключи; 5 — регулировочный резистор; 7 — обмотка
возбуждения возбудителя
В конце пуска при достижении подсинхронной скорости по
команде специального реле управления, в качестве которого мо-
гут быть использованы реле частоты, тока или времени, ключ 4
размыкается, а ключ 6замыкается. В результате в обмотку возбуж-
дения подается ток от возбудителя 1 и двигатель 2 втягивается в
синхронизм. Регулирование тока возбуждения осуществляется ре-
зистором 5 в цепи обмотки 7 возбуждения возбудителя.
Второй вариант возбуждения двигателя соответствует схеме на
рис. 6.1, а, являющейся более простой и получившей название
схемы с постоянно (глухо) подключенным возбудителем. В этой
схеме обмотка возбуждения с самого начала пуска постоянно под-
ключена к возбудителю В. При скорости ш = О,7со0 происходит
самовозбуждение возбудителя 7 и в обмотку возбуждения двига-
теля подается ток возбуждения, благодаря чему при достижении
подсинхронной скорости двигатель втягивается в синхронизм.
Пуск по схеме рис. 6.1, а происходит в менее благоприятных
условиях, так как пусковой момент СД оказывается ниже, чем в
случае применения схемы рис. 6.5, что затрудняет его синхрони-
зацию. Поэтому схема на рис. 6.1, а применяется при относитель-
но легких условиях пуска двигателя, когда момент нагрузки на его
валу не превосходит 40...50 % его номинального момента, а инер-
ционные массы ЭП и исполнительного органа невелики. При бо-
лее трудных условиях пуска применяется схема рис. 6.5.
Третья особенность пуска определяется необходимостью ог-
раничения пускового тока мощных двигателей при их асинхрон-
ном пуске. В случае соизмеримых мощностей двигателя и пита-
ющей сети значительные пусковые токи приводят к заметному
падению напряжения в питающей сети, что неблагоприятно ска-
зывается на работе других потребителей электроэнергии.
Ограничение пусковых токов может обеспечиваться включе-
нием на время пуска в цепь статора добавочных резисторов или
реакторов или же снижением на время пуска подводимого к дви-
гателю напряжения с помощью автотрансформаторов или тири-
сторных пусковых устройств.
226
При реакторном пуске двигателей (рис. 6.6, а) замыкают вык-
лючатель 1 при отключенном выключателе 2 и осуществляют пуск
двигателя 4 с реактором 3 в цепи статора, обеспечивающего сни-
жение пускового тока до допустимого уровня. При достижении
двигателем подсинхронной скорости замыкают выключатель 2,
который шунтирует реактор 3, и двигатель оказывается подклю-
ченным на полное напряжение сети. Автоматизация пуска осуще-
ствляется обычно в функции времени. В некоторых схемах вместо
реактора 2 применяются более дешевые активные резисторы.
В случае использования автотрансформатора 5 (рис. 6.6, б) при
пуске замыкаются выключатели 1 и 6 и к двигателю подводится
пониженное напряжение. При достижении им подсинхронной
скорости отключается выключатель 6, замыкается выключатель 2
и двигатель подключается непосредственно в сеть.
Сопоставление рассмотренных схем показывает, что при ис-
пользовании автотрансформатора пусковой ток снижается про-
порционально квадрату отношения напряжений двигателя и сети
(t4/t/c)2, а при использовании реакторов или резисторов — пер-
вой степени этого отношения. Однако автотрансформаторный спо-
соб пуска является более сложным, дорогим и менее надежным
по сравнению с реакторным (резисторным) и применяется реже.
Для ограничения пусковых токов двигателей, в том числе и
высоковольтных, все большее распространение находят тиристор-
ные регуляторы напряжения в качестве «мягких» пускателей или
стартеров, обладающие более широкими функциональными воз-
можностями по управлению двигателями и меньшей стоимостью.
Рис. 6.6. Схемы при ограничении пускового тока с использованием реак-
торов (а) и автотрансформатора (б):
1 — автоматический выключатель; 2, 6 — выключатели; 3 — реактор; 4 — двига-
тель; 5 — автотрансформатор
227
Рис. 6.7. Схема динамического торможения син-
хронного двигателя:
1 — резисторы в цепи ротора; 2 — двигатель; 3 — регу-
лировочный резистор
Ограничение пусковых токов обеспечивается и в схеме вентиль-
ного двигателя при реализации частотного пуска двигателя.
Торможение синхронных двигателей. Как и у других электродви-
гателей, оно осуществляется переводом их в генераторный ре-
жим, в котором они развивают на своем валу тормозной момент.
Наиболее часто при этом используется схема динамического тор-
можения (рис. 6.7), которая соответствует генераторному режиму
двигателя при его работе независимо от сети переменного тока.
В этой схеме обмотки статора двигателя 2 отключаются от сети
переменного тока и закорачиваются на добавочные резисторы 1
(или накоротко), а обмотка возбуждения остается подключенной
к источнику возбуждения UB через регулировочный резистор 3.
Двигатель при этом будет иметь механические характеристики,
аналогичные характеристикам асинхронного двигателя, представ-
ленным на рис. 5.26, б.
Торможение противовключением используется очень редко, так
как перевод двигателя в этот режим сопровождается значитель-
ными бросками тока и момента, требует токоограничения и при-
менения сложных схем управления.
6.4. Синхронный двигатель как компенсатор
реактивной мощности
Возможность работы синхронного двигателя в качестве исто-
чника (компенсатора) реактивной мощности иллюстрируют так
называемые {/-образные характеристики (рис. 6.8). Они представ-
ляют собой зависимости тока статора двигателя Ц и его коэф-
фициента мощности cos <р от тока 1В возбуждения при {/ф = const,
J\ = const и Рх = const. Зависимости /)(/в) имеют минимум, кото-
рому соответствует максимум коэффициента мощности coscp = 1.
Объяснение такому характеру указанных зависимостей можно дать
с помощью фрагмента векторной диаграммы двигателя, приве-
денного на рис. 6.9. На этой диаграмме показаны взаимное распо-
ложение векторов напряжения сети иф, тока статора Ц, его ак-
тивной /1а и реактивной /,р составляющих при различных токах
возбуждения двигателя.
228
Рис. 6.8. {/-образные характеристики
синхронного двигателя:
1 — зависимость тока статора от тока воз-
буждения при номинальной нагрузке; 2 —
зависимость тока статора от тока возбужде-
ния при холостом ходе; 3 — зависимость
коэффициента мощности от тока возбужде-
ния при номинальной нагрузке; 4 — зави-
симость коэффициента мощности от тока
возбуждения при холостом ходе; 5 — гео-
метрическое место точек минимума тока
При небольших токах возбуждения ток статора 1\ отстает от
напряжения t/ф на угол ф, что соответствует работе двигателя с
отстающим cos ф и потреблению им реактивной энергии из пита-
ющей сети. Активная составляющая полного тока /1а = /|СО8ф сов-
падает по направлению с вектором напряжения сети Щ, а реак-
тивная составляющая /1р отстает от него на 90°, что и определяет
потребление реактивной мощности из сети.
При своей работе двигатель потребляет из сети активную мощ-
ность
Л = з t/ф /, cos Ф = 3 t/ф /1а. (6.2)
Если механическая нагрузка двигателя постоянна, то из фор-
мулы (6.2) следует, что при Р\ = const активная составляющая
тока статора /1а = const. Поэтому при увеличении тока возбужде-
ния двигателя конец вектора полного тока 1\ будет перемещаться
вверх по штриховой вертикальной линии (см. рис. 6.9), что означа-
ет уменьшение реактивной составляющей тока. При некотором
токе возбуждения, близком к номинальному, реактивная состав-
ляющая тока станет равной нулю, т.е. ток статора будет чисто
активным Ц = /]а. Этому режиму и будет соответствовать точка
минимума в кривых 1, 2 на рис. 6.8 и максимально возможное
значение совф = 1.
При дальнейшем увеличении тока возбуждения вновь появит-
ся реактивная составляющая тока /1р, но уже опережающая на-
пряжение сети на 90°. За счет этого ток статора Ц будет также
опережать напряжение сети и двигатель будет работать с опережа-
ющим cos ф, отдавая реактивную энергию в питающую сеть.
Рис. 6.9. Фрагмент векторной диаграммы синх-
ронного двигателя
229
На рис. 6.8 показаны зависимости /,(/в) 1, 2 и cosep (/в) 3, 4
при двух уровнях механической нагрузки двигателя: номинальной
Рном (кривые 1 и 3) и его холостом ходе (кривые 2 и 4). Область
характеристик справа от штриховой линии 5 соответствует работе
двигателя с опережающим cos<p, слева от нее — с отстающим, на
самой линии cos<p = 1. Отметим, что двигатель без механической
нагрузки на валу носит название компенсатора реактивной мощ-
ности и часто используется в этой .функции в системах электро-
снабжения.
Как видно из рис. 6.8, с ростом мощности нагрузки область
генерации реактивной мощности (опережающего cos<p) смещает-
ся в сторону больших токов возбуждения. Таким образом, если
двигатель работает с переменной нагрузкой на валу, то для пол-
ного использования его компенсирующих свойств требуется соот-
ветствующее изменение его тока возбуждения.
Регулирование тока возбуждения позволяет не только исполь-
зовать синхронный двигатель как компенсатор реактивной мощ-
ности в системе электроснабжения, но и обеспечивать другие
необходимые режимы синхронного ЭП и питающей сети. К ним
относятся повышение устойчивости работы двигателя при ко-
лебаниях механической нагрузки; поддержание нормального на-
пряжения в узле системы электроснабжения, к которому при-
соединен двигатель; обеспечение минимума потерь энергии в
двигателе и системе электроснабжения; регулирование cos<p дви-
гателя или в узле подключения его к системе электроснабже-
ния.
В общем случае регулирование тока возбуждения двигателя осу-
ществляется в автоматических схемах, в которых используются
тиристорные возбудители и различные виды обратных связей,
получившие название систем автоматического регулирования воз-
буждения (АРВ).
6.5. Схемы управления синхронными
двигателями
Схемы управления синхронными двигателями можно условно
разделить на релейно-контакторные, применяемые для пуска,
синхронизации с сетью и останова нерегулируемых по скорости
электроприводов, и замкнутые схемы с силовыми преобразовате-
лями, предназначенные для регулирования переменных ЭП с син-
хронными двигателями.
Релейно-контакторные схемы управления. Эти схемы кроме опе-
раций по включению и отключению двигателя, ограничению пу-
сковых токов и его синхронизации с сетью должны обеспечивать
соответствующее регулирование тока возбуждения.
230
Рассмотрим типовую схему управления возбуждением двигате-
ля в функции скорости. Подключение обмотки возбужде-
ния к источнику питания UB осуществляется контактором КМ2
(рис. 6.10, а), который управляется реле скорости KR. Катушка это-
го реле связана с частью разрядного резистора 7?р через диод VD.
При включении контактора КМ1 (его цепи управления на рис.
6.10, а не показаны) обмотка статора двигателя подключается к
сети переменного тока и образует вращающееся магнитное поле,
под действием которого он начнет разбег, и которое наведет ЭДС
в обмотке возбуждения двигателя. Под действием ЭДС по катушке
реле KR начнет протекать выпрямленный ток, оно включится и
разомкнет цепь питания контактора КМ2. Разбег двигателя будет
происходить без тока возбуждения с закороченной на разрядный
резистор 7?р обмоткой возбуждения.
По мере роста скорости ротора его ЭДС и ток в катушке реле
KR снижаются. При подсинхронной скорости ток в катушке реле
KR станет меньше тока отпускания, реле отключится и вызовет
тем самым включение контактора КМ2, который подключит об-
мотку возбуждения к источнику питания. Далее происходит про-
цесс синхронизации СД с сетью.
Схема управления возбуждением двигателя в функции тока
(рис. 6.10, б) содержит реле тока КА, обмотка которого питается
от трансформатора тока ТА, и реле времени КТ. При подключе-
нии двигателя к сети контактором КМ1 в цепи обмотки статора
возникает бросок пускового тока, что приводит к срабатыванию
реле КА. Контакт этого реле замыкает цепь питания реле времени
КТ, что вызовет отключение контактора возбуждения КМ2. Разбег
двигателя, как и в предыдущем случае, осуществляется с закоро-
ченной на разрядный резистор 7?р обмоткой возбуждения.
В конце пуска при подсинхронной скорости двигателя и умень-
шении тока в статоре реле КА отключается и катушка реле време-
Рис. 6.10. Схемы управления пуском двигателя с использованием прин-
ципа скорости (а) и тока (б)
231
ни КТ теряет питание. Через заданную выдержку времени включа-
ется контактор КМ2, и через его контакты обмотка возбуждения
подключается к источнику питания Ua, после чего двигатель втя-
гивается в синхронизм.
Отметим, что в рассмотренных схемах после срабатывания кон-
тактора возбуждения КМ2 разрывается цепь разрядного резистора
7?р, что облегчает тепловой режим его работы и повышает эконо-
мичность схемы.
Электротехническая промышленность выпускает типовые па-
нели и шкафы управления синхронными двигателями разных ти-
пов. Рассмотрим в качестве примера схему одной из таких пане-
лей.
Схема панели типа ПУ 7502 управления низковольтным двига-
телем приведена на рис. 6.11. Панель управления обеспечивает пря-
мой (без токоограничения) пуск с глухоподключенным возбуди-
телем G и форсировку возбуждения при снижении уровня пита-
ющего напряжения. В схеме предусмотрены также защиты: тепло-
вая (реле КК и трансформаторы тока ТА1 и ТА2), токовая (авто-
маты QF1 и QF2), от снижения напряжения сети переменного
тока (реле KV2, KV3) и постоянного тока (реле KV1).
Пуск двигателя может быть осуществлен только при нормаль-
ных уровнях питающих схему напряжений постоянного и пере-
менного тока. В этом случае, если рукоятка командоконтроллера
SA находится в среднем положении и включены автоматы QF1 и
Рис. 6.11. Схема синхронного электропривода с использованием типовой
панели управления
232
Рис. 6.12. Замкнутая схема вентиль-
ного двигателя
QF2, срабатывают реле напряжения КУ2, КУЗ и реле времени КТ,
что подготавливает схему к пуску двигателя.
При переводе рукоятки SA в положение «Вкл.» срабатывает реле
KV1 и катушка линейного контактора КМ1 подключается к источ-
нику питания, к обмотке статора двигателя подводится напряже-
ние переменного тока и он начинает разбег. При подсинхронной
скорости происходит возбуждение возбудителя G и соответствен-
но двигателя, который втягивается в синхронизм.
При резком снижении питающего напряжения происходит
включение контактора КМ2, который при этом шунтирует рези-
стор форсировки /?ф. В результате возрастают токи возбуждения
возбудителя и двигателя, увеличивается его ЭДС, что приводит к
увеличению максимального момента и соответственно перегру-
зочной способности двигателя. О включении контактора форси-
ровки КМ2 сигнализирует указательное реле КН.
Для контроля тока статора двигателя в схеме предусмотрен
амперметр РА1, а тока возбуждения — амперметр РА2, питаемый
от шунта RS.
Замкнутая схема ЭП с вентильным двигателем. Эта схема, пред-
назначенная для регулирования скорости ЭП, приведена на рис.
6.12. Она построена по принципу подчиненного регулирования
координат и включает в себя управляемый выпрямитель УВ, ком-
мутатор (инвертор) К, реактор L, регуляторы тока РТ и скорости
PC, датчики тока ДТ, скорости ДС и положения ДП. Схема обес-
печивает механические характеристики ЭП, аналогичные пока-
занным на рис. 5.36, б.
По замкнутым структурам построены схемы автоматического
регулирования возбуждения синхронных двигателей.
6.6. Особенности переходных процессов
в электроприводах с синхронными двигателями
Переходные процессы в ЭП с синхронными двигателями от-
личаются большим разнообразием и сложностью. Они возникают
233
при пуске и' торможении (останове) двигателей, при синхрони-
зации их с сетью, увеличении (набросе) и снижении (сбросе)
механической нагрузки, регулировании тока возбуждения, изме-
нениях напряжения питающей сети, вызываемых в том числе и
короткими замыканиями в электрических сетях и линиях элект-
ропередач.
Изучение этих переходных процессов представляет собой слож-
ную задачу. Определяется это тем, что двигатель имеет несколько
обмоток: статора, возбуждения, пусковую, обтекаемые перемен-
ным и постоянным током, которые магнитно связаны друг с дру-
гом и при работе двигателя непрерывно меняют свое взаимное
положение. Кроме того, во многих случаях необходимо учитывать
взаимодействие двигателя и питающей сети.
В общем случае переходные процессы в синхронном ЭП явля-
ются электромеханическими, т.е. связанными друг с другом про-
цессами в электрической и механической частях ЭП, и имеют,
как правило, колебательный характер. Анализ таких переходных
процессов обычно выполняется с использованием компьютерной
техники.
6.7. Электропривод с шаговым двигателем
Исполнительные органы некоторых рабочих машин и механиз-
мов должны совершать строго дозированные перемещения с фик-
сацией своего положения в конце движения. В ЭП таких машин и
механизмов успешно применяются шаговые двигатели (ШД) раз-
личных типов, образующие основу дискретного ЭП.
Широкое распространение дискретного ЭП определяется еще
и тем обстоятельством, что он естественным образом сочетается
с цифровыми управляющими машинами, программными устрой-
ствами и микропроцессорами, которые находят широкое приме-
нение во всех отраслях техники. Например, дискретный ЭП ис-
пользуется для металлообрабатывающих станков с числовым про-
граммным управлением (ЧПУ), роботов и манипуляторов, в гиб-
ком автоматизированном производстве, в электронной и часовой
промышленности и т.д.
В настоящее время ЭП с ШД используется на мощности от
долей ватта до нескольких киловатт, что определяется мощно-
стью серийно выпускаемых ШД. Расширение шкалы мощности
дискретного ЭП может быть достигнуто использованием в нем
серийных асинхронных двигателей, которые за счет соответству-
ющего управления могут работать в шаговом режиме.
Шаговый двигатель по принципу своего действия является син-
хронным двигателем. Однако в отличие от последнего магнитное
поле ШД перемещается (вращается) не непрерывно, а дискрет-
234
Ось магнитного
г
Рис. 6.13. Схема включения (а) и работа двигателя при шаговом переме-
щении (б— г)\
1 — электронный коммутатор; 2 — статор; 3 — обмотки горизонтальных полю-
сов; 4 — обмотки вертикальных полюсов; 5 — ротор двигателя
но, шагами. Это достигается за счет импульсного возбуждения
обмоток ШД с помощью электронного коммутатора, который
преобразует одноканальную последовательность управляющих
импульсов в многофазную систему напряжений, прикладываемых
к обмоткам (фазам) ШД.
Дискретному характеру напряжения на фазах ШД соответству-
ет дискретное вращение (перемещение) электромагнитного поля
в воздушном зазоре, вследствие чего движение ротора состоит из
последовательных элементарных поворотов или шагов.
Принцип получения дискретного перемещения ротора рассмот-
рим на примере простейшей схемы двухфазного ШД (рис. 6.13).
ШД имеет на статоре две пары явно выраженных полюсов, на
которых находятся обмотки возбуждения (управления): обмотка 4
с выводами Ш—1К и обмотка 3 с выводами 2Н—2К. Каждая из
обмоток состоит из двух частей, находящихся на противополож-
ных полюсах статора 2 ШД. Ротор в рассматриваемой схеме пред-
ставляет собой двухполюсный постоянный магнит 5.
Питание обмоток ШД осуществляется импульсами напряже-
ния, поступающими с электронного коммутатора 1, который пре-
образует одноканальную последовательность входных импульсов
управления с частотой fy в многоканальную по числу фаз ШД.
Рассмотрим работу ШД, предположив, что в начальный момент
времени напряжение подано на обмотку 4. Прохождение тока по
этой обмотке вызовет появление магнитного поля статора 2 с вер-
тикально расположенными полюсами N — S. В результате взаимо-
действия поля с постоянным магнитом ротора последний займет
указанное на рис. 6.13, а равновесное положение, в котором оси
магнитных полей статора и ротора совпадают. Положение будет
устойчивым, поскольку при отклонении от него на ротор будет
235
действовать момент (называемый синхронизирующим), который
стремится вернуть ротор в положение равновесия:
Л/= A/maxsina, (6.3)
где Л/тах — максимальный момент; а — угол между осями магнит-
ных полей статора и ротора.
Допустим, что с помощью электрического коммутатора 1 уп-
равления напряжение снимается с обмотки 4 и подается на об-
мотку 3. В этом случае образуется магнитное поле статора с гори-
зонтальными полюсами (рис. 6.13, б), т.е. магнитное поле статора
дискретно совершило поворот на четверть окружности статора. При
этом между осями статора и ротора появится угол рассогласова-
ния а = 90° и на ротор будет действовать в соответствии с форму-
лой (6.3) максимальный вращающий момент М = Л/тах. Под его
воздействием ротор повернется на четверть окружности статора и
займет новое устойчивое равновесное положение, показанное
сплошной линией на рис. 6.13, б. Таким образом, вслед за шаго-
вым перемещением поля статора совершит такое же шаговое пе-
ремещение и ротор двигателя.
Предположим, что отключилась обмотка 3 и вновь подано пи-
тание на обмотку 4, но с противоположной по сравнению с рис.
6.13, а полярностью напряжения. Магнитное поле статора опять
будет иметь вертикально расположенные полюсы, но другую по
сравнению с рис. 6.13, а полярность. Это означает, что поле со-
вершит еще один шаг на четверть окружности. Снова на ротор
будет действовать синхронизирующий момент, который повернет
его в положение, показанное на рис. 6.13, в. Следующий шаг в том
же направлении ротор может совершить, если будет отключена
обмотка 4 и подключена обмотка 3 с обратной полярностью на-
пряжения. И, наконец, ротор завершит полный оборот при сня-
тии напряжения с обмотки 3 и подаче напряжения на обмотку 4.
Кроме рассмотренного порядка коммутации обмоток двигате-
ля, обеспечивающего шаговое перемещение ротора на 90°, мож-
но использовать другой способ их коммутации, позволяющий при
той же конструкции ШД уменьшить шаг ротора вдвое.
Допустим, что исходное положение ШД соответствует схеме,
показанной на рис. 6.13, а. Подключим обмотку 3 с полярностью,
соответствующей магнитному полю рис. 6.13, б, не отключая об-
мотку 4. При этом образуется вторая, горизонтальная система по-
люсов и магнитное поле будет складываться из магнитных полей
горизонтальных и вертикальных полюсов. Ось такого результиру-
ющего поля будет располагаться между полюсами с одинаковой
полярностью, как это показано на рис. 6.13, г, т.е. ось магнитного
поля совершит поворот на 45°. Поэтому ротор при таком порядке
возбуждения обмоток ШД повернется тоже на 45, а не на 90°, как
было ранее.
236
Для совершения следующего шага достаточно снять напряже-
ние с обмотки 4, в результате чего магнитное поле будет соответ-
ствовать схеме рис. 6.13, б. Следующее перемещение магнитного
поля и ротора на 45° совершится при возбуждении обмотки 4 без
отключения обмотки 3 и т.д. Схема коммутации, при которой
подключаются поочередно одна или две обмотки, называется не-
симметричной в отличие от рассмотренной вначале симметрич-
ной схемы.
Угловое перемещение а ШД в общем случае определяется вы-
ражением
а = 2тг/(рл), (6.4)
где р — число пар полюсов ротора; п — число переключений (так-
тов) в цикле, равное числу фаз ШД при симметричной и удвоен-
ному числу фаз при несимметричной коммутации.
Таким образом, шаговое перемещение ротора соответствует
последовательности управляющих импульсов, при этом каждому
импульсу соответствуют одно переключение обмотки ШД (один
такт коммутации) и один шаг ротора. Суммарный угол поворота
ШД пропорционален числу импульсов, а его скорость — частоте
коммутации обмоток f,
со = а/к. (6.5)
Для реверса ШД, например, при симметричной схеме комму-
тации необходимо изменить полярность напряжения обмотки,
которая была отключена на данном такте коммутации. Тогда ро-
тор ШД совершит шаг в противоположном направлении.
Основным режимом работы шагового привода является дина-
мический. В отличие от СД ШД рассчитаны на вхождение в синх-
ронизм из состояния покоя и принудительное электрическое тор-
можение. Благодаря этому в шаговом ЭП обеспечиваются пуск,
торможение, реверс и переход с одной частоты управляющих
импульсов на другую. Пуск ШД осуществляется скачкообразным
или постепенным увеличением частоты входного сигнала от нуля
до рабочей, торможение — снижением ее до нуля, а реверс —
изменением последовательности коммутации обмоток ШД.
На рис. 6.14 показан пример переходного процесса ф(?) в
шаговом ЭП при отработке им трех импульсов управления, где
Ф — полный угол поворота вала ШД, а а — единичный угол
поворота (единичный шаг). Как видно из рис. 6.14, переходный
процесс отработки заданного перемещения имеет колебатель-
ный характер.
Обеспечение заданного характера переходных процессов явля-
ется для ЭП с ШД основной и наиболее сложной задачей, так
как вследствие электромагнитной инерции обмоток ШД, меха-
нической инерции его ротора и момента нагрузки на валу при
237
Рис. 6.14. Изменение угла поворота вала двигателя
во времени
резких изменениях частоты следования импульсов управления
ротор ШД может не успеть отработать полностью все импульсы.
Максимальная частота управляющих импульсов, при которой воз-
можен пуск ШД из неподвижного состояния без выпадения из
синхронизма (пропуска шагов), называется частотой приемисто-
сти. Чем выше электромагнитная и механическая инерция ШД и
больше момент его нагрузки, тем меньше частота приемистости.
Современные ШД различны по конструктивному исполнению.
В зависимости от числа фаз ШД и устройства магнитной системы
ШД бывают однофазными, двухфазными и многофазными с ак-
тивным или пассивным ротором.
Активный ротор у ШД выполняется из постоянных магнитов
или снабжается обмоткой возбуждения, как у обычных СД. Вслед-
ствие высокой экономичности и надежности в работе, техноло-
гичности изготовления, небольших габаритных размеров и массы
широкое распространение получили ШД с ротором из постоян-
ных магнитов, называемые магнитоэлектрическими ШД (см. рис.
6.13). Обычно ШД с активным ротором из-за сложности его изго-
товления с малыми полюсными делениями имеют шаг от 15 до
90°. Для уменьшения шага в таких ШД увеличивают число фаз и
тактов коммутации, а также используют двухстаторную или двух-
роторную конструкцию.
При необходимости получения небольших единичных переме-
щений ротора и в то же время больших частот используются ШД
с пассивным ротором, которые подразделяются на реактивные и
индукторные. Работа таких ШД основана на взаимодействии маг-
нитного поля и ферромагнитного тела. Статор и ротор реактивно-
го ШД имеют явно выраженные полюсы, называемые обычно
зубцами. На зубцах статора размещаются обмотки возбуждения,
питаемые от электронного коммутатора. Ротор выполнен из фер-
ромагнитного материала и не имеет обмоток возбуждения, вслед-
ствие чего и назван пассивным.
Отличительная особенность реактивного ШД заключается в
неравенстве зубцов статора zc и ротора zp, причем zp > Zc- Вслед-
ствие такой конструкции при каждом переключении обмоток ро-
тор совершает поворот (шаг), равный разности полюсных деле-
ний статора тс и ротора тр:
а = тс-тр = 360°Дс-360°Др. (6.6)
238
Уменьшая разность чисел зубцов zc и zp, можно снизить шаг
ротора. Практически эту разность выбирают четной, что улучшает
использование ШД. Для уменьшения шага полюсы статора вы-
полняют с несколькими зубцами.
Реактивные ШД при простоте и технологичности имеют суще-
ственные недостатки — незначительные мощность и синхронизи-
рующий момент, что ограничивает их применение. Эти недостат-
ки отсутствуют в индукторных ШД, в которых для увеличения
синхронизирующего момента ротор подмагничивается со сторо-
ны статора с помощью постоянных магнитов или дополнитель-
ной обмотки возбуждения.
Развитие дискретного электропривода привело к созданию спе-
циальных видов ШД — линейных, волновых, с малоинерцион-
ным и катящимся роторами.
На базе цилиндрических линейных ШД созданы двухкоорди-
натные линейно-поворотные ШД, суммирующие на своем валу
два независимых движения: вращательное и поступательное.
Важным достижением в области дискретного электропривода
является создание так называемых многокоординатных ШД, осу-
ществляющих перемещение исполнительных органов по трем коор-
динатам в пространстве. Двигатели такого рода, отличаясь высокой
точностью позиционирования и скоростью, используются в при-
водах манипуляторов, роботов и автоматических линиях станков.
Управление ШД, как уже отмечалось, обеспечивается элект-
ронным блоком управления. Современные блоки управления ШД
состоят из нескольких функциональных узлов, выполняемых по
различным схемам и с использованием разнообразных элементов.
Стремление расширить области применения дискретного приво-
да, повысить качество и точность его движения, надежность, удоб-
ство и простоту в наладке и эксплуатации отразилось в унифика-
ции схем управления ШД.
Рассмотрим обобщенную функциональную схему ЭП с ШД
(рис. 6.15). Основная ее часть, обычно называемая разомкнутой
схемой, выделена штриховой линией.
Сигнал управления fy в виде импульсов напряжения поступает
на вход формирователя импульсов 2 от программного или другого
внешнего командного устройства. Формирователь импульсов 2
видоизменяет эти импульсы, формируя их по длительности и ам-
плитуде, как необходимо для нормальной работы последующих
блоков схемы управления. Распределитель импульсов 3 преобразу-
ет последовательность сформированных импульсов, например, в
четырехфазную систему однополярных импульсов напряжения,
соответствующую числу фаз (обмоток) двигателя.
Импульсы с выхода распределителя 3 усиливаются с помощью
промежуточного усилителя 4 и поступают на коммутатор 5, пита-
ющий обмотки ШД 8. Обычно коммутатор питается от источника
239
Рис. 6.15. Схема ЭП с шаговым двигателем:
1 — задатчик интенсивности; 2— формирователь импульсов; 3 — распределитель
импульсов; 4— промежуточный усилитель; 5— коммутатор; 6— цифровой регу-
лятор; 7 — датчик скорости ротора; 8 — шаговый двигатель; 9 — узел сравнения;
10 — усилитель обратной связи по току; 11 — частотно-импульсный регулятор
напряжения; 12 — источник постоянного тока; 13 — блок электронного дробле-
ния шага
постоянного тока (выпрямителя) 12 и обеспечивает в обмотках
ШД пульсирующий ток одного направления.
Рассмотренная разомкнутая схема управления ШД не всегда
обеспечивает высокие динамические свойства, точность и энер-
гетические показатели ЭП. Поэтому современные схемы управле-
ния ШД содержат дополнительные узлы, с помощью которых
характеристики ЭП улучшаются. К таким узлам (см. рис. 6.15) от-
носятся частотно-импульсный регулятор напряжения 11, усили-
тель обратной связи по току 10, блок электронного дробления
шага 13, блок 1 плавного разгона и торможения (задатчик интен-
сивности), датчик скорости ротора 7 и цифровой регулятор 6.
Регулятор 11 и усилитель 10, связанные с узлом сравнения 9,
служат для автоматической стабилизации тока в обмотках ШД и
поддержания момента ШД, что существенно улучшает энергети-
ческие показатели его работы. Стабилизация тока осуществляется
введением отрицательной обратной связи по току, с помощью
которой за счет регулирования частоты переключения регулятора
11 изменяется среднее значение напряжения питания и тем са-
мым регулируется ток в обмотках ШД.
Та же задача формирования тока в обмотках ШД решается при
использовании коммутатора 5, обладающего свойствами источника
тока. В этом случае отпадает надобность в обратной связи по току
и блоках 77 и 10.
Для улучшения качества движения ШД при низких частотах и
повышения точности отработки входных импульсов управления с
помощью блока 13 уменьшается единичный шаг ШД.
240
Улучшение динамических свойств дискретного ШД, в частно-
сти увеличение диапазона рабочих частот входного сигнала, зна-
чительно превышающих частоту приемистости ШД, может быть
достигнуто введением в схему задатчика интенсивности 1, обес-
печивающего разгон и торможение ШД с заданным темпом, при
котором еще не происходит пропуска управляющих импульсов.
При использовании блока 1 область рабочих частот шагового элек-
тропривода может быть увеличена в 2 — 3 раза.
Возможности дискретного ЭП расширяются при создании зам-
кнутых схем управления, выполняемых с помощью датчика 7 и
регулятора 6. В таком дискретном приводе информация о действи-
тельном положении вала и скорости ШД поступает на вход циф-
рового регулятора 6, который обеспечивает заданный характер
движения привода.
Перспективы дальнейшего развития ЭП с ШД связаны с ис-
пользованием микропроцессорных средств управления. В этом слу-
чае функции всех показанных на рис. 6.15 блоков управления, за
исключением силового коммутатора, датчиков скорости и поло-
жения, выполняет микропроцессор по соответствующей программе.
В таких случаях говорят, что аппаратная реализация схемы управ-
ления ШД заменяется более гибкой и функционально богатой
программной.
Область применения дискретного привода постоянно расши-
ряется. Его используют кроме указанных ранее случаев в газореза-
тельных и сварочных автоматах, приборах времени, нажимных
устройствах прокатных станов, лентопротяжных и регистрирующих
устройствах, в медицинской технике, производстве элементов
микроэлектроники и т.д.
6.8. Вентильно-индукторный
электропривод
Для ряда рабочих машин и производственных механизмов при-
менение находит так называемый вентильно-индукторный при-
вод (ВИП). Основными достоинствами такого ЭП являются про-
стота, технологичность и дешевизна применяемого в таком ЭП
индукторного электродвигателя, которые сочетаются в то же вре-
мя с хорошими регулировочными возможностями ЭП. Мощности
таких ЭП могут лежать в пределах от единиц до нескольких сотен
киловатт и более.
Структурная схема силовой части ВИП в случае питания его
от трехфазной сети переменного тока представлена на рис. 6.16, а.
В ее состав входят индукторный двигатель ИД, электронный ком-
мутатор К с выпрямителем В, датчик положения ДП ротора дви-
гателя и система управления СУ ВИП. Особенность ВИП состоит
241
Рис. 6.16. Схема включения (а) и механические характеристики (б) ЭП
с вентильно-индукторным двигателем
в применении индукторного двигателя с неодинаковым количе-
ством полюсов статора и зубцов ротора, лежащими обычно в пре-
делах 4... 12. На рис. 6.16 в качестве примера показан трехфазный
двигатель, имеющий шесть полюсов статора и четыре зубца на
роторе.
На полюсах статора ИД расположены обмотки А—а, В—Ь,
С—с, подключенные к электронному коммутатору, выполня-
емому обычно на силовых транзисторах того или иного типа. В схе-
ме на рис. 6.16, а в качестве управляемых ключей коммутатора
используются силовые биполярные транзисторы VT1... VT6 с изо-
лированным затвором типа IGBT. Управление ключами осущест-
вляет схема управления СУ, обеспечивающая подачу на них им-
пульсов управления с необходимыми последовательностью и ча-
стотой, которые определяются сигналами задания скорости U3 C и
датчика положения 6АДП.
Принцип действия ВИП состоит в следующем. При подаче
импульсов управления на пару транзисторов (ключей) одной фазы
коммутатор подключает обмотку этой фазы двигателя к выходу
выпрямителя В. По обмотке начинает протекать ток, создающий в
242
двигателе магнитное поле. Это магнитное поле вызовет появление
электромагнитных сил притяжения между полюсами статора и
ближайшими к ним зубцами ротора, которые создадут враща-
ющий момент на валу двигателя. Под его действием ротор переме-
стится в согласованное положение, в котором оси возбужденных
полюсов статора и ближайших к ним зубцов ротора будут совпа-
дать.
Так как число полюсов статора и зубцов ротора различно, то в
согласованном положении ротора для работающей фазы следу-
ющая фаза оказывается в рассогласованном положении и подго-
товлена к очередному подключению к источнику питания. Требу-
емая последовательность подключения фаз двигателя к источнику
питания, при которой на его валу обеспечивается постоянное на-
правление вращающего момента, осуществляется с помощью на-
ходящегося на валу датчика положения.
Скорость вращения ротора определяется следующей формулой:
со = 'litfjmn, (6.7)
где /к — частота коммутации обмоток; т — число фаз двигателя;
п — число зубцов ротора.
Формула (6.7) показывает возможности выполнения ВИП на
различные скорости. При высокой частоте коммутации обмоток
могут быть реализованы двигатели на большие скорости враще-
ния, а выполнение их с большим числом полюсов статора и зуб-
цов ротора позволяет получить низкие скорости ВИП. При низких
скоростях двигателя из кинематической схемы ВИП могут быть
исключены редукторы.
Механические характеристики двигателя в разомкнутой струк-
туре ВИП при различных напряжениях питания U показаны на
рис. 6.16, б. При помощи различных обратных связей могут быть
сформированы характеристики, обеспечивающие регулирование
координат ЭП с требуемым качеством. В ВИП может быть реали-
зован и тормозной режим работы, осуществляемый за счет выбо-
ра моментов включения и отключения обмоток двигателя.
Показанные на схеме рис. 6.16, а диоды VD1... VD6 служат для
обеспечения возможности циркуляции электромагнитной мощ-
ности в ЭП при отключении силовых транзисторов, а конденса-
тор С играет роль фильтра на выходе выпрямителя.
В современных схемах ВИП широко используются микропро-
цессорные средства управления. При их использовании в ряде слу-
чаев оказывается возможным отказаться от применения в ЭП дат-
чика положения, а необходимую для работы ЭП информацию о
положении ротора получить косвенным путем. Это позволяет уп-
ростить кинематическую схему ВИП и сделать его более простым
и надежным.
243
Контрольные вопросы
1. Какие достоинства характеризуют синхронный двигатель?
2. Что такое угловая характеристика синхронного двигателя?
3. В чем состоят особенности пуска синхронного двигателя?
4. Как может включаться обмотка возбуждения синхронного двигате-
ля при пуске?
5. Как могут ограничиваться токи при пуске синхронного двигателя?
6. Что такое [/-образные характеристики синхронного двигателя?
7. Что представляет собой вентильный двигатель?
8. В чем особенности переходных режимов синхронного двигателя?
9. Какие типы коммутаторов используются в вентильном двигателе?
10. Объясните принцип действия шагового двигателя.
11. Что входит в состав схемы управления шагового двигателя?
12. Назовите типы шагового двигателя и их особенности.
13. Назовите особенности вентильного индукторного ЭП.
ГЛАВА 7
ВЗАИМОСВЯЗАННЫЙ ЭЛЕКТРОПРИВОД
7.1. Электропривод с механическим
соединением валов двигателей
Для приведения в движение исполнительных органов ряда ра-
бочих машин в электроприводе используются не один, а два или
более электродвигателей. Такие ЭП позволяют получить некото-
рые специфические механические характеристики, снизить сум-
марные моменты инерции системы по сравнению с однодвига-
тельными ЭП, обеспечить возможность создания мощных ЭП на
базе серийных двигателей относительно небольшой мощности,
повысить надежность работы ЭП за счет резервирования, а в ряде
случаев — упростить механическую часть ЭП и рабочих машин.
Два или несколько электрически или механически связанных
между собой ЭП, при работе которых поддерживается заданное
соотношение их скоростей, нагрузок или положение их подвиж-
ных частей, называются взаимосвязанным ЭП.
Если два или несколько ЭП работают на общий вал (механи-
чески связаны между собой), то такой взаимосвязанный ЭП на-
зывается многодвигательным. Взаимосвязанный ЭП, обеспечива-
ющий совместную работу двух или нескольких двигателей, валы
которых не имеют непосредственной механической связи, а их
взаимодействие обеспечивается электрической схемой, называет-
ся электрическим валом.
В качестве примеров можно назвать взаимосвязанные ЭП по-
воротной платформы мощных экскаваторов, крупных портальных
кранов, шлюзового затвора, аэродинамической трубы.
При механическом соединении валов двигателей скорость их оди-
накова, а момент ЭП представляет собой алгебраическую сумму
моментов отдельных двигателей. Для двух двигателей, имеющих пря-
молинейные характеристики, суммарный момент определяется как
М = М\ + М2 = Мк, (со0| - со)/(0о1 + AfK2(o>o2 - со)/со02, (7.1)
или М = |p,|(cooi -со) + |р2|(<»02 - <»), (7.2)
где Мк1, Л/к2, со01, (0о2, |Pi|, IP2I ~ соответственно моменты корот-
кого замыкания, скорости холостого хода и модули жесткости ме-
ханических характеристик каждого двигателя.
245
Из формулы (7.2) можно найти уравнение механической ха-
рактеристики двухдвигательного ЭП
со = (OoilPil + CO02IP2I /(IP11 + IP2I) - Wil + |р2|). (7.3)
Если двигатели имеют абсолютно одинаковые характеристи-
ки, т.е. cooi = со02 = со,, и |pj = |р2| = |р|/2, то
со = соо - М/|р|. (7.4)
Как следует из (7.4), механическая характеристика ЭП в этом
случае имеет в 2 раза большую жесткость, а скорость его идеаль-
ного холостого хода соответствует скорости холостого хода каж-
дого двигателя. Нагрузка электродвигателей с идентичными ха-
рактеристиками распределяется между ними равномерно.
В большинстве случаев механические характеристики двигате-
лей не являются идентичными и могут иметь различные скорости
идеального холостого хода или жесткости. В этом случае при сов-
местной работе таких двигателей распределение нагрузки между
ними происходит неравномерно.
При одинаковых скоростях идеального холостого хода, но раз-
личных жесткостях характеристик момент нагрузки Л/с = Мх + Л/2
в соответствии с формулой (7.2) распределяется между двигате-
лями следующим образом:
Mt^lP^coo-oJ+Me/lpI);
(7.5)
М-|р2|(Юо-Ю+Мс/|р|),
где |р| = |Р1| + |р2|.
Из формулы (7.5) следует, что двигатель, имеющий более же-
сткую характеристику, нагружается в большей степени и, наобо-
рот, двигатель с «мягкой» характеристикой оказывается менее
загруженным.
При различных скоростях холостого хода и одинаковых жест-
костях характеристик распределение нагрузки между двигателями
происходит в соответствии со следующими соотношениями:
Л/, = |₽11(®о1-ю + Л/с/|₽|);
(7.6)
M2 = lp2l(®02-®+Mc/|P|).
Как видно из формулы (7.6), двигатели с большей скоростью
холостого хода нагружаются в большей степени.
Для обеспечения одинаковой загрузки совместно работающих
двигателей необходимо обеспечивать идентичность их механиче-
ских характеристик. Так, при различных скоростях идеального хо-
лостого хода двигателей постоянного тока независимого возбуж-
246
Рис. 7.1. Схема (а) и механические характеристики (б) двухдвигательно-
го ЭП при работе одного двигателя в режиме торможения противовклю-
чением:
1 — основной двигатель; 2 — вспомогательный двигатель; 3 — механическая
характеристика вспомогательного двигателя; 4 — механическая характеристика
основного двигателя; 5 — результирующая механическая характеристика ЭП
дения следует ввести дополнительный резистор в цепь возбужде-
ния двигателя с меньшей скоростью. Для получения одинаковых
жесткостей характеристик дополнительные резисторы вводятся в
цепи якоря или ротора двигателя, имеющего более жесткую ха-
рактеристику.
Отметим, что полученные ранее соотношения и выводы могут
быть применены к асинхронным двигателям, если рабочие участ-
ки их механических характеристик принять линейными.
Многодвигательный ЭП нашел широкое применение в подъем-
но-транспортных машинах и механизмах, где часто бывает необ-
ходимо осуществлять их перевод на пониженную скорость перед
остановом.
В схеме ЭП (рис. 7.1, а) с использованием двух асинхронных
двигателей для получения пониженной скорости основной двига-
тель 7 остается работать в двигательном режиме, а вспомогатель-
ный двигатель 2 переводится изменением чередования фаз напря-
жения в режим торможения противовключением. На рис. 7.1, б
приведены механические характеристики 4 и 3 двигателей и ре-
зультирующая характеристика 5 ЭП, которая получается сумми-
рованием моментов двигателей при одной и той же скорости.
Участок характеристики 5 ЭП, расположенный в первом квад-
ранте, обеспечивает низкую скорость движения исполнительного
органа. Отметим, что с энергетической точки зрения продолжи-
тельная работа на пониженной скорости такого ЭП является не-
целесообразной, так как сопровождается большими потерями
энергии в двигателе 2.
Низкую скорость ЭП можно реализовать, если обеспечить ра-
боту двигателя 7 в основном режиме, а вспомогательного двига-
теля 2 — в режиме динамического торможения (рис. 7.2, о). Меха-
247
Рис. 7.2. Схема (а) и механические характеристики (б) двухдвигательного
ЭП при работе одного двигателя в режиме динамического торможения:
1 — основной двигатель; 2 — вспомогательный двигатель; 3 — механическая
характеристика вспомогательного двигателя; 4 — механическая характеристика
основного двигателя; 5 — результирующая механическая характеристика ЭП
ническая характеристика 5 ЭП, получаемая в результате сложе-
ния механических характеристик 4 и 3 двигателей 7 и 2, имеет
участок большой жесткости в области низких скоростей.
Аналогичная характеристика ЭП может быть получена, если
асинхронный двигатель находится на одном валу со вспомогатель-
ной машиной постоянного тока, также работающей в режиме
динамического торможения.
7.2. Электропривод с механическим
дифференциалом
Одним из видов взаимосвязанных ЭП являются двухдвигатель-
ные ЭП с механическим дифференциалом. Такие ЭП находят при-
менение в металлургическом производстве, крановых механизмах,
установках бурения нефтяных скважин, в горных и строительных
машинах. Их распространение объясняется наличием у такого ЭП
ценных свойств, к числу которых относятся ограничение нагрузок
ЭП при стопорении движения исполнительного органа рабочей
машины; возможность получения большого диапазона регулирова-
ния скорости ЭП при относительно небольшом диапазоне регули-
рования скорости одного из двигателей; автоматическое распреде-
ление нагрузки между двигателями и определяемое этим свойством
отсутствие перегрузки одного двигателя при выходе другого из строя
и малое падение скорости при приложении нагрузки.
В распространенной схеме ЭП с механическим дифференци-
алом (рис. 7.3, о) двигатели 7 и 6 приводят во вращение со скоро-
стями <х>! и со6 шестерни 2 и 5, по которым обкатываются шестер-
248
Рис. 7.3. Схема (а) и механические характеристики (б) ЭП с механиче-
ским дифференциалом:
1,6— двигатели; 2, 3, 4, 5, 8 — шестерни; 7 — исполнительный орган; 9 —
механические характеристики двигателей; 10 — характеристика ЭП при одина-
ковом направлении вращения двигателей; 11 — характеристика ЭП при проти-
воположном направлении вращения двигателей
ни 4, называемые сателлитами. Вращение сателлитов приводит к
вращению жестко связанной с ними выходной шестерни 3, от
которой движение через дополнительную шестерню 8 передается
исполнительному органу /рабочей машины.
Движение исполнительного органа в общем случае может быть
осуществлено либо от одного двигателя, либо от двух. При работе
одного из двигателей (другой неподвижен) схема на рис. 7.3, а
будет представлять собой обычный однодвигательный ЭП, в ко-
тором скорость со3 выходной шестерни 3 будет определяться ско-
ростью работающего (вращающегося) двигателя.
В случае работы двух двигателей (основной режим) выходная
скорость ЭП определяется величинами и направлением скоростей
<Х>1 И (02.
При одинаковых диаметрах шестерен 2, 5 и 4 скорость враще-
ния сателлитов ®ст относительно вертикальной оси определится
выражением
сост = (со, - со2)/2, (7.7)
а угловая скорость шестерни 3 при этом
со3 = (<х>1 + <х>2)/2. (7.8)
Если пренебречь потерями момента на преодоление сил тре-
ния в дифференциале, то момент на шестерне 3 определится сум-
мой моментов двигателей 1 и 6, равных по величине в установив-
шемся режиме:
М3 = М} + М6 = 2М. (7.9)
Жесткость механической характеристики ЭП с дифференци-
алом определяется следующим выражением:
Р = 4р,р6/(р! + р6), (7.10)
где р|, рб — жесткости характеристик двигателей 1 и 6.
249
Выражения (7.8), (7.9) позволяют получить механические ха-
рактеристики ЭП по известным характеристикам двигателей, изо-
бражая их для этого в одних и тех же осях. Порядок построения
состоит в следующем. Для какого-то выбранного момента двига-
телей М\ = М6= М определяются их скорости <х>] и со6. Затем на
основании формулы (7.8) находится скорость ЭП со2, а с помо-
щью формулы (7.9) — его момент Л/3 = 2М и на плоскость нано-
сится точка с координатами (со3, Л/3), принадлежащая искомой
характеристике ЭП. Задаваясь другими значениями момента дви-
гателей, аналогично определяются и другие точки результирующей
механической характеристики ЭП.
Для примера на рис. 7.3, б показаны характеристики ЭП при
прямолинейных характеристиках двигателей.
В случае идентичности механических характеристик 9 двигате-
лей и одинаковом направлении их вращения характеристика 10
ЭП имеет вдвое более высокую жесткость, что следует из форму-
лы (7.10). При вращении одного из двигателей в противополож-
ную сторону (характеристика 9) ЭП имеет характеристику 77,
являющуюся характеристикой динамического торможения. Исполь-
зуя другие искусственные характеристики двигателей, можно фор-
мировать различные искусственные характеристики ЭП с диффе-
ренциалом.
7.3. Электропривод с электрическим валом
В ряде случаев при необходимости использования взаимосвя-
занного ЭП непосредственное механическое соединение отдель-
ных двигателей оказывается затруднительным, так как это может
потребовать увеличения длины и диаметра соединительных ва-
лов, количества опорных подшипников и т.д. Иногда механиче-
ское соединение валов двигателей вообще оказывается невозмож-
ным из-за их значительного удаления друг от друга.
В этих случаях вместо громоздкой механической передачи ис-
пользуется так называемая система электрического вала, в кото-
рой согласованное движение двигателей обеспечивается соответ-
ствующей электрической схемой их соединения. Помимо упроще-
ния кинематической схемы рабочей машины применение элект-
рического вала позволяет облегчить автоматизацию технологиче-
ских процессов, повысить точность работы, устранить возможное
явление механического резонанса.
Электрический вал находит применение для привода развод-
ных мостов, затворов шлюзовых камер, мощных мостовых кра-
нов, транспортеров и т.п.
Современные системы электрического вала подразделяются на
две основные группы: со вспомогательными уравнительными ма-
250
шинами и с основными рабочими машинами. Для первой группы
характерным является наличие дополнительных синхронных или
асинхронных машин, служащих для выравнивания нагрузки на
валах основных двигателей. Во второй группе уравнительные ма-
шины отсутствуют, а их функции выполняют основные машины.
Электрический вал с синхронными уравнительными машинами.
На валах 1 и 6 главных асинхронных двигателей 2 и 5 установлены
идентичные уравнительные синхронные машины 3 и 4, статор-
ные обмотки которых включены таким образом, что наводимые в
них ЭДС и Ё^ направлены навстречу друг другу (рис. 7.4, а).
К каждому валу 1 и 6 рабочей машины приложена соответственно
механическая нагрузка Л/с1 и Л/с2.
При одинаковых скоростях и нагрузках первой 2—3 и второй
4— 5 пар машин векторы ЭДС синхронных машин 3 и 4 будут рав-
ны по величине и направлены противоположно друг другу (рис.
7.4, 5). При этом ток в цепи статоров этих машин будет равен
нулю и машины не будут развивать моментов.
Если в процессе работы нагрузка на одном из валов, например
на втором, возрастет, то вектор ЭДС машины 4 Ё^ повернется в
сторону отставания на некоторый угол 0 (рис. 7.4, в). В результате
этого в цепи статорных обмоток начнет действовать разностная
ЭДС АЕ, под действием которой по обмоткам статоров машин 3 и
4 потечет ток 7, (его часто называют уравнительным) и они на-
чнут развивать момент.
Так как проекция вектора тока /, на вектор ЭДС Ё^ положи-
тельна, а на вектор Ё^ отрицательна, машина 3 начнет работать
генератором, создавая на валу 7 тормозной момент, а машина 4 —
двигателем. В соответствии с этим суммарный движущий момент
на валу 6 возрастет и его скорость увеличится, а на валу 7 умень-
Рис. 7.4. Схема электрического вала с синхронными уравнительными ма-
шинами (а) и фрагменты векторной диаграммы (б, в):
1, 6 — валы основных двигателей; 2, 5 — основные двигатели; 3, 4 — вспомога-
тельные синхронные машины
251
шится и его скорость снизится. Валы 1 и 6 вновь будут вращаться
с одинаковой скоростью (синхронно).
Синхронизирующий момент синхронных машин определяется
в соответствии с формулой (6.1) следующим выражением:
Мсин = ±£Р£Р sin ), (7.П)
где 0 — угол сдвига фаз между ЭДС и Е^; — синхронное
индуктивное сопротивление синхронной машины.
Рассмотренная система электрического вала обладает существен-
ным недостатком, выражающимся в отсутствии синхронизиру-
ющего момента при нулевой скорости, так как при этом ЭДС
машин равны нулю. По этой причине наиболее часто в качестве
уравнительных машин используются асинхронные машины.
Электрический вал с асинхронными уравнительными машинами.
Схема электрического вала с использованием в качестве уравни-
тельных машин асинхронных.двигателей с контактными кольца-
ми приведена на рис. 7.5, а. Эта схема по принципу своего дей-
ствия во многом схожа со схемой на рис. 7.4, а.
Уравнительные машины 3 и 4, находящиеся на валах 1 и 6
основных двигателей 2 и 5, представляют собой идентичные асин-
хронные двигатели с одинаковыми напряжением, числом фаз и
полюсов, статорные обмотки которых подключены к общей трех-
фазной сети переменного тока, а роторные соединены между со-
бой таким образом, чтобы наводимые в них ЭДС были направле-
ны навстречу друг другу.
Работа электрического вала происходит следующим образом.
Если нагрузка обоих валов одинакова, то они вращаются синх-
ронно (и синфазно) с одинаковой скоростью. Вследствие встре-
Рис. 7.5. Схема электрического вала с асинхронными уравнительными
машинами (а) и фрагмент векторной диаграммы (5):
1,6— валы основных двигателей; 2, 5 — основные двигатели; 3, 4 — вспомога-
тельные асинхронные машины
252
чного направления ЭДС вспомогательных машин £2|) и Е™ и их
равенства ток в цепи их роторов /2 будет отсутствовать и машины
3 и 4 моменты развивать не будут.
Предположим теперь, что по каким-то причинам увеличился
момент нагрузки на валу 6. Вследствие этого ротор асинхронной
машины 4 начнет отставать от ротора асинхронной машины 3 и
вектор ЭДС этой машины Е 22) повернется в пространстве на угол
0 относительно своего прежнего положения (рис. 7.5, б). В резуль-
тате в роторной цепи машин 3 и 4 появится разностная ЭДС Д£2,
под действием которой по роторам начнет протекать уравнитель-
ный ток /2.
Так как проекция вектора этого тока на вектор ЭДС Д£2 будет
положительной, то машина 4 начнет развивать дополнительный
движущий момент на валу 6, за счет чего его скорость будет вы-
равниваться со скоростью вала 1.
Уравнительное действие машин 3 и 4 определяется уравнитель-
ным (синхронизирующим) моментом
Л/ур = Л/вм3 — Мв.м4 — MH.cssine/sK, (7.12)
где Мн с — момент вспомогательных асинхронных машин 3 и 4 в
нормальной (основной) схеме включения, Л/нс = 2MK(s/sK + sK/s).
Уравнительное действие вспомогательных машин тем больше,
чем больше угол 0. Увеличение уравнительного момента происхо-
дит до значений 0 = л/2, после чего уравнительный момент умень-
шается и система электрического вала может выпасть из синхро-
низма. Уравнительный момент пропорционален скольжению, при
котором работают вспомогательные машины. Поэтому при созда-
нии системы электрического вала стремятся обеспечить работу
этих машин при возможно большем их скольжении. Для этого
выбирают вспомогательные машины на более высокие номиналь-
ные скорости по сравнению с номинальными скоростями основ-
ных двигателей или используют вращение вспомогательных ма-
шин против поля со скольжениями больше единицы.
Первый из указанных путей позволяет обеспечивать скольже-
ние вспомогательных машин не более единицы. Например, если
основные двигатели электрического вала имеют номинальную
скорость в 2 раза меньшую, чем вспомогательные машины, то
работа последних будет происходить при скольжениях s > 0,5.
Второй путь, связанный с обеспечением вращения вспомога-
тельных машин против поля, реализуется на практике чаще, так
как не связан с использованием разнотипных машин и дает боль-
ший уравнительный эффект. Вместе с тем следует отметить, что
при вращении вспомогательных машин против поля в цепях их
роторов имеют место повышенные потери мощности из-за увели-
ченной частоты тока ротора.
253
Рис. 7.6. Схема электрического вала без уравнительных машин:
1,2 — двигатели; 3 — регулировочные регистры
Электрический вал с основными рабочими машинами. Система
электрического вала может быть создана также только из основ-
ных двигателей, которые в этом случае выполняют функции как
рабочих, так и уравнительных машин. Для этого статорные обмот-
ки двигателей 1 и 2 (рис. 7.6) подключены параллельно к пита-
ющей сети, а роторные соединены встречно. Параллельно обмот-
кам ротора во все три фазы включены регулировочные резисторы
3 сопротивлением /?2д. При Я2д - 0 электрический вал превращает-
ся в обычные, работающие независимо друг от друга асинхрон-
ные двигатели с короткозамкнутыми роторами.
При R2& * 0 и вращении асинхронных двигателей с одинаковой
скоростью угол 0 = 0 и они развивают одинаковые моменты, ра-
ботая на реостатных характеристиках. При увеличении нагрузки
одного из двигателей угол 0 между векторами ЭДС машин стано-
вится не равным нулю, появляются уравнительные ток и момент.
Уравнительный момент будет разгружать машину с большей на-
грузкой и загружать менее нагруженную машину, при этом ско-
рости двигателей выравняются, а положение их роторов будет
характеризоваться некоторым углом рассогласования 0*0. Мак-
симальный допустимый угол рассогласования для рассматрива-
емой схемы, как и для системы с уравнительными машинами,
составляет л/2.
Основным достоинством электрического вала с основными
рабочими машинами является отсутствие вспомогательных машин.
Однако для увеличения уравнительного момента путем повыше-
ния скольжения в роторную цепь двигателей необходимо вклю-
чать дополнительные сопротивления, что приводит к дополни-
тельным потерям мощности. Обычно электрический вал с основ-
ными рабочими машинами применяется лишь при небольшой
разнице моментов нагрузки, приложенных к разным валам.
254
Контрольные вопросы
1. Что называется взаимосвязанным ЭП?
2. Какие виды взаимосвязанного ЭП вы знаете?
3. Каковы отличительные свойства ЭП с механическим дифференци-
алом?
4. За счет чего происходит выравнивание скоростей основных двига-
телей в схеме электрического вала с уравнительными машинами?
5. Поясните принцип действия электрического вала без уравнитель-
ных машин.
ГЛАВА 8
ЭЛЕКТРОПРИВОДЫ СО СПЕЦИАЛЬНЫМИ
СВОЙСТВАМИ
8.1. Следящий электропривод
Ряд рабочих машин при реализации технологических и произ-
водственных процессов требуют специфических законов управле-
ния движением своих исполнительных органов. К таким движени-
ям относятся, например, перемещение антенн локаторов и теле-
скопов при слежении за перемещающимися в пространстве объек-
тами, перемещение инструментов станков при обработке деталей
сложного профиля, движение захватывающих и перемещающих
устройств роботов и манипуляторов. Некоторые технологические
процессы совершаются при изменяющихся, в том числе и слу-
чайным образом, условиях и внешних воздействиях. ЭП, способ-
ные реализовать такие движения, иногда относят к специальным.
Следящим называется ЭП, который воспроизводит с заданной
точностью движение исполнительного органа рабочей машины в
соответствии с произвольно изменяющимся входным сигналом
управления. Этот сигнал может изменяться во времени по произ-
вольному закону и иметь механическую или электрическую при-
роду. Обычно входной сигнал представляет собой скорость или
угол поворота оси (вала) задающего устройства.
В состав следящего ЭП (рис. 8.1) входят датчики входного 7 и
выходного 5 сигналов, измеритель рассогласования 2, система
управления 3 и электродвигатель с механической передачей 4, при-
водящий в движение исполнительный орган 6 рабочей машины.
Рис. 8.1. Схема следящего электропривода:
1 — датчик входного сигнала; 2 — измеритель рассогласования; 3 — система
управления; 4 — электродвигатель с механической передачей; 5 — датчик выход-
ного сигнала; 6 — исполнительный орган рабочей машины
256
Датчики входной и выходной величин преобразуют скорость
или угол поворота в электрические входной сигнал t/BX и сигнал
обратной связи t/Oc- Измеритель рассогласования 2, суммируя эти
сигналы, вырабатывает сигнал рассогласования t/д, поступающий
на вход системы управления электродвигателем 3. Следящий ЭП
по структуре представляет собой замкнутую систему, действую-
щую по принципу отклонения.
Система управления 3 состоит из регулятора и силового преоб-
разователя, которые обеспечивают преобразование сигнала рас-
согласования t/д в напряжение U, поступающее на двигатель 4. За
счет выбора схем регулятора и преобразователя или введения кор-
ректирующих устройств обеспечивается необходимый закон из-
менения этого напряжения во времени U(t) при отработке вход-
ного воздействия <овх(/) или <рвх(/).
Электродвигатель с механической передачей 4 в соответствии
с законом изменения /Д7) обеспечивает перемещение исполни-
тельного органа 6. Иногда двигатель с механической передачей
называют исполнительным механизмом (сервомеханизмом).
Основным показателем, по которому оценивается работа следя-
щих ЭП, является точность воспроизведения входного сигнала, ко-
торая характеризуется ошибкой воспроизведения входного сигнала
в статическом и динамическом режимах работы следящего ЭП.
Классификация следящего ЭП может быть выполнена по не-
скольким признакам. Если следящий ЭП предназначен для вос-
произведения с заданной точностью скорости движения испол-
нительного органа, то он называется скоростным, а если положе-
ния — то позиционным.
Различают следящие ЭП с непрерывным или прерывным уп-
равлением.
В следящих ЭП непрерывного действия существует непре-
рывная связь между сигналом рассогласования (ошибки) и пода-
ваемым на двигатель напряжением. При этом напряжение может
изменяться пропорционально ошибке или по более сложным за-
кономерностям, например пропорционально ошибке и ее произ-
водным, ошибке и ее интегралу.
Следящие ЭП с прерывным управлением подразделяются на
релейные и импульсные.
Следящий ЭП релейного действия характеризуется тем, что
напряжение на двигатель подается только в том случае, когда сиг-
нал рассогласования достигает определенного значения.
Импульсный следящий ЭП отличается тем, что управля-
ющее воздействие на двигатель подается в виде импульсов напря-
жения, амплитуда, частота или заполнение (скважность) кото-
рых изменяются в зависимости от сигнала рассогласования. В этих
случаях говорят соответственно об амплитудно-, частотно- и ши-
ротно-импульсной модуляции сигнала управления.
257
Рассмотрим несколько схем реализации следящих ЭП с раз-
личными типами двигателей и систем управления.
Следящий ЭП постоянного тока релейного действия. В схеме (рис.
8.2) используется двигатель постоянного тока последовательного
возбуждения М, имеющий две обмотки возбуждения ОВ1 и ОВ2.
Управление двигателем осуществляется с помощью силовых тран-
зисторов VT1 и VT2. Каждый из транзисторов работает при опре-
деленной полярности сигнала согласования ил, обеспечивая одно
из направлений вращения двигателя. Если открыт транзистор VT1,
ток проходит по ОВ2 и двигатель вращается в одном направле-
нии, если же открыт транзистор VT2, ток проходит по ОВ1 и он
вращается в другом направлении. Направление тока якоря в обоих
случаях остается неизменным.
Разрядные диоды VD3 и VD4 служат для снятия перенапряже-
ний, возникающих при отключении обладающих значительной
индуктивностью обмоток возбуждения и якоря. (На схеме вспомо-
гательные диоды VD1 и VD2 не показаны.)
В рассматриваемом следящем ЭП в качестве датчиков входной
и выходной величин используются кольцевые потенциометры П1
и П2, которые образуют так называемый потенциометрический
измеритель рассогласования.
Движок потенциометра П1 (датчика входной величины) свя-
зан с выходным валом задающего устройства ЗУ, который пред-
ставляет собой в данном случае редуктор с ручным приводом. Дви-
жок потенциометра П2 (датчика выходной реличины), связан с
валом редуктора Р, расположенного на валу двигателя и рабочей
машины РМ. Редукторы ЗУ и Р имеют одинаковое передаточное
Рис. 8.2. Схема следящего электропривода релейного действия с двигате-
лем постоянного тока
258
число. Питание потенциометров П1 и П2 осуществляется напря-
жением постоянного тока Un.
Сигнал рассогласования U& снимается с движков потенциомет-
ров П1 и П2. При их одинаковом угловом положении, что соответ-
ствует нулевому углу рассогласования (ошибке) Д<р = <рвх - <рвых,
сигнал U& - 0. При этом равен нулю и сигнал 1/л на выходе усили-
теля У, оба транзистора закрыты и двигатель неподвижен.
При возникновении рассогласования между угловыми поло-
жениями движков потенциометров П1 и П2, вызванного поворо-
том рукоятки ЗУ, сигналы U'^ и С/д становятся отличными от нуля.
В зависимости от полярности сигнала U&, которая определяется
знаком угла рассогласования (ошибки) Д<р, сигнал U& подается
на транзистор VT1 (по цепи диод VD10— стабилитрон KD5— ре-
зистор R3—диод VD7) или VT2 (по цепи диод VD9— стабилит-
рон VD6— резистор R4—диод VD8). Если этот сигнал превышает
порог срабатывания стабилитронов VD5 или VD6, то соответству-
ющий транзистор откроется, подключая двигатель к источнику
питания с напряжением U. Двигатель начнет вращаться, повора-
чивая вал рабочей машины РМ и ось движка потенциометра П2 в
направлении, при котором возникшее рассогласование в системе
будет уменьшаться и стремиться к нулю. Когда сигнал С/д станет
меньше напряжения открывания стабилитронов VD5 или VD6,
работающий транзистор (VT1 или VT2) закроется и отключит
двигатель от источника питания.
Таким образом, ЭП в данной схеме отрабатывает заданное пе-
ремещение <рвх с некоторой погрешностью, обусловленной нечув-
ствительностью системы из-за порога срабатывания стабилитро-
нов VD5, VD6. Зону нечувствительности системы стараются де-
лать возможно меньшей в пределах 2...3° угла рассогласования.
Однако снижение зоны нечувствительности может привести к воз-
никновению нежелательного колебательного режима работы ЭП
около положения равновесия.
Эффективным средством устранения такого режима является
введение в систему дополнительных сигналов по первой и второй
производным сигнала рассогласования, а также использование
электрического торможения после отключения двигателя.
Достоинствами следящих ЭП релейного принципа действия
являются их простота, надежность и возможность получения оп-
тимальных траекторий движения исполнительных органов рабо-
чих машин. К недостаткам таких систем следует отнести их склон-
ность к колебаниям и наличие определенной нечувствительности
(неточности) при слежении.
Следящий ЭП переменного тока пропорционального действия.
В следящем ЭП применение находят асинхронные двигатели, ко-
торые отличаются надежностью в работе и долговечностью. При
создании маломощных (до 1 кВт) следящих ЭП в них могут ис-
259
пользоваться двухфазные двигатели, в том числе и с полым рото-
ром. Пример схемы с таким двигателем приведен на рис. 8.3.
Двигатель М имеет обмотки возбуждения ОВ и управления ОУ,
которые питаются сдвинутым по фазе на 90° напряжением. Регу-
лирование скорости двигателя осуществляется изменением дей-
ствующего значения напряжения на ОУ, которое получает пита-
ние от фазы А трехфазной сети переменного тока через тиристо-
ры VS1... VS4. Обмотка возбуждения ОВ связана с фазами В, С че-
рез тиристоры VS5... VS6. Тиристоры VS1... VS6 образуют стандар-
тные схемы регуляторов напряжения переменного тока. Они по-
парно включены по встречно-параллельной схеме, что обеспечи-
вает протекание тока по обмоткам в оба полупериода питающего
напряжения.
Рассогласование между задающей осью и валом ЭП измеря-
ется с помощью сельсинной пары, состоящей из сельсина-дат-
чика СД и сельсина-приемника СП. Положение ротора СД зада-
ет входной сигнал <рвх, а положение ротора СП определяет угол
поворота вала ЭП <рВЬ1Х. Сигнал рассогласования f/д, снимаемый
с обмотки статора СП, пропорционален разности углов <рвх и
Фвых, а фаза этого напряжения определяется знаком этой разно-
сти (ошибки).
Сигнал рассогласования U& подается на вход фазочувствитель-
ного усилителя У1. После прохождения через корректирующее
260
звено, состоящее из резисторов Rl, R2 и конденсатора С1, сиг-
нал рассогласования усиливается усилителем У2 и в виде напря-
жений и^\ и 6/д2 поступает на блок управления тиристорами.
Схема работает следующим образом. При появлении сигнала
рассогласования U'A в зависимости от его фазы на выходе усилите-
ля У2 появляются напряжения 6/д| или U&2. При возникновении,
например, напряжения 6/д1 СИФУ подает импульсы управления
на тиристоры VS1, VS2, VS5, VS6. Тиристоры открываются, и на
ОУ и ОВ подаются напряжения 6/Оу и 6/Ов> которые пропорци-
ональны сигналу рассогласования 6/д1. Двигатель М начинает вра-
щаться, уменьшая угол рассогласования Д<р = <рвх - <рвых между ося-
ми сельсинов СД и СП.
При другой фазе сигнала что имеет место при изменении
знака угла рассогласования Д<р, на выходе усилителя У2 появля-
ется напряжение 6/д2. Этот сигнал вызывает включение тиристо-
ров VS3, VS4, и на обмотку управления ОУ будет подано напря-
жение Uoy, сдвинутое по фазе на 180° по сравнению с предыду-
щим случаем. Поскольку одновременно с этим откроются тири-
сторы VS5 и VS6 и ОВ также получит питание, двигатель М на-
чнет вращаться, но уже в другом направлении. Таким образом,
за счет изменения фазы напряжения 6/Оу осуществляется реверс
двигателя М, что обеспечивает отработку угла рассогласования
любого знака.
Конденсаторы С2... С5 и резисторы R3, R4 предназначены для
сглаживания пульсаций напряжения на обмотках двигателя.
Цифроаналоговый позиционный следящий ЭП постоянного тока.
При необходимости получения высокой точности слежения в со-
временном ЭП применяются цифровые датчики координат, ко-
торые вместе с другими цифровыми устройствами управления (за-
датчиками, сумматорами, счетчиками и т.д.) образуют измери-
тельную часть следящего ЭП. Цифровая измерительная часть со-
четается с аналоговой частью, выполненной по принципу подчи-
ненного регулирования координат. В результате такого соедине-
ния образуются так называемые цифроаналоговые схемы ЭП, со-
четающие в себе положительные свойства цифровых и аналого-
вых систем.
Аналоговая часть ЭП (рис. 8.4) выполнена по структуре под-
чиненного регулирования координат, в которой внешний кон-
тур регулирования положения выполнен цифровым, а внутрен-
ние контуры регулирования тока и скорости — аналоговыми. Ана-
логовая часть содержит регулятор тока РТ, на который поступа-
ют сигналы задания по току 6/зт и обратной связи по току 6/от,
подаваемые соответственно с регулятора скорости PC и датчика
тока ДТ.
Выходной сигнал регулятора тока Uy является управляющим
для реверсивного преобразователя ПУ, питающего якорь двигате-
261
Рис. 8.4. Схема цифроаналогового следящего электропривода
ля постоянного тока независимого возбуждения М. Регулятор ско-
рости PC в свою очередь получает сигналы обратной связи по
скорости Uoc от датчика скорости (тахогенератора) BR и сигнал
задания скорости 6/зс от задатчика интенсивности ЗИ, входным
сигналом которого является выходной сигнал 6/зс аналогового
регулятора положения РП.
В состав цифровой измерительной части ЭП, формирующей
сигнал рассогласования 6/д, входят датчики входного ДП1 и вы-
ходного ДП2 положения ЭП, арифметическое суммирующее уст-
ройство АСУ, преобразователь кода в напряжение ПКН (преоб-
разователь код—аналог) и преобразователь кода положения вала
ДПТ в двоичный код ПК.
Работа цифровой части следящего ЭП происходит следующим
образом. Требуемое перемещение исполнительного органа рабо-
чей машины вырабатывается задатчиком ДП1 в виде числа N3 n в
двоичном коде. Этот сигнал подается на вход сумматора АСУ вме-
сте с числовым сигналом N„ (также в двоичном коде), соответ-
ствующим действительному положению исполнительного органа
рабочей машины.
Сумматор АСУ обеспечивает суммирование этих двух цифро-
вых сигналов и выделение сигнала рассогласования (ошибки) в
цифровом коде Ад. Далее цифровой сигнал Ад с помощью преоб-
разователя ПКН преобразуется в аналоговый сигнал UA (напря-
жение постоянного тока), который поступает на вход регулятора
положения РП.
Развитие микропроцессорных средств управления сделало воз-
можным реализацию регуляторов переменных ЭП на их основе,
что позволяет унифицировать системы управления следящих ЭП
и расширять их функциональные возможности.
262
8.2. Электропривод с программным
управлением
Электропривод с программным управлением обеспечивает дви-
жение исполнительного органа рабочей машины по определен-
ной, заранее заданной программе.
Чаще всего ЭП с таким управлением применяется при обра-
ботке деталей на металлообрабатывающих станках. Например,
партия деталей должна пройти обработку на многооперационном
станке, позволяющем осуществлять сверление, фрезерование,
точение и другие технологические операции. При использовании
программного управления перед обработкой детали соответству-
ющим образом составляется программа, в которой задаются по-
рядок смены инструмента, необходимые перемещения стола, на
котором крепится деталь, режимы работы инструментов и другие
технологические данные. После этого ЭП исполнительных орга-
нов станка реализуют выполнение этой программы.
Наибольшее распространение получило числовое программное
управление станков, что позволило увеличить их производитель-
ность, сократить сроки подготовки производства и технологичес-
кой оснастки при смене детали, уменьшить брак, перейти к мно-
гостаночному обслуживанию и тем самым получить значитель-
ный экономический эффект. Использование ЧПУ особенно эф-
фективно при мелкосерийном производстве и частой смене
номенклатуры обрабатываемых деталей.
Обобщенная структура ЭП с ЧПУ приведена на рис. 8.5. От
программного устройства ПУ сигнал управления U„ поступает на
ЭП, который обеспечивает отработку этого сигнала управления,
перемещая соответствующим образом исполнительный орган ИО
станка. Совокупность программного устройства ПУ и ЭП называ-
ют системой программного управления (СПУ).
В СПУ могут использоваться все рассмотренные ранее виды
ЭП постоянного и переменного тока, которые выполняются ра-
зомкнутыми и замкнутыми, с аналоговым и цифровыми элемен-
тами управления и т.д.
Вся совокупность существующих программных устройств де-
лится на нечисловые (цикловые) и числовые программные уст-
ройства.
Электропривод с нечисловыми (цикловыми) программными ус-
тройствами. Эти приводы используются для обеспечения повторя-
Рис. 8.5. Схема электропривода с числовым про-
граммным управлением
СПУ
263
ющихся одинаковых циклов движения исполнительных органов.
Программные устройства таких ЭП выполняются с применением
различных контактных и бесконтактных аппаратов релейного дей-
ствия: конечных и путевых выключателей, шаговых искателей,
счетчиков, средств программируемой логики, программируемых
контроллеров. К ЭП с нечисловыми программными устройствами
относятся также системы с использованием шаблонов и копиров,
которые нашли применение в различных копировальных станках
и автоматах. В таких системах обычно используется следящий ЭП
релейного действия.
В нечисловой СПУ (рис. 8.6) электродвигатель М приводит в
движение исполнительный орган ИО, которым может быть, на-
пример, суппорт строгального станка, рука манипулятора и т.д.
В крайних положениях исполнительного Органа ИО установлены
конечные выключатели SQ1 и SQ2, которые вместе с контактора-
ми К1 и К2 и кнопками управления SB1 и SB2 образуют схему
управления двигателем.
При включенном контакторе К1 двигатель М обеспечивает дви-
жение ИО в условном направлении «Вперед», а при включенном
контакторе К2 — в условном направлении «Назад». Предположим,
что в исходном положении исполнительный орган ИО находится
в промежуточном положении и ни один из конечных выключате-
лей не нажат. Для начала работы ЭП нажимается кнопка SB1, в
результате чего включается контактор К1 и двигатель М, будучи
подключенным к питающей сети, обеспечивает движение ИО в
направлении «Вперед».
Рис. 8.6. Схема нечисловой (цикловой) системы программного управления
264
При подходе ИО к конечному выключателю SQ2 и воздействии
на него происходит разрыв цепи катушки контактора К1 и под-
ключение к источнику питания контактора К2. За счет переклю-
чения этих аппаратов изменится на противоположную полярность
напряжение на якоре двигателя М и он начнет вращаться в обрат-
ную сторону, обеспечивая движение ИО в направлении «Назад».
При подходе ИО к конечному выключателю SQ1 и воздействии
на него произойдет обратное переключение в схеме — отключит-
ся контактор К2 и включится контактор К1, после чего исполни-
тельный орган вновь начнет двигаться в направлении «Вперед».
Такое цикловое возвратно-поступательное движение будет про-
исходить до тех пор, пока не будет нажата кнопка SB2.
Схема рис. 8.6 может быть дополнена счетчиком, с помощью
которого можно обеспечить определенное число циклов движе-
ния ИО и его останов после этого.
В последнее время широкое применение в схемах программно-
го управления электропривода находят программируемые контрол-
леры, представляющие собой специализированные ЭВМ для ав-
томатизации цикловых и последовательных производственных и
технологических процессов. Они позволяют реализовывать как
простые схемы управления цикловым движением электроприво-
дов, так и сложные системы комплексной автоматизации про-
мышленного оборудования. Их применение оказывается эконо-
мически целесообразным при реализации схем управления, тре-
бующих использования нескольких десятков или сотен обычных
электрических аппаратов — реле, логических элементов, счетчи-
ков и т.д.
Рассмотрим работу цикловой системы программного управле-
ния с применением ПК (рис. 8.7, а), считая что в программиру-
емое запоминающее устройство (ПЗУ) с помощью устройства вво-
да программ (УВП) введена программа, определяющая порядок
функционирования системы.
Рабочий цикл работы схемы включает в себя три этапа. На пер-
вом этапе с помощью сканатора (генератора тактовых импуль-
сов) обеспечиваются циклический и последовательный опросы
всех входов ПК, на которые подаются сигналы от командных ус-
тройств и элементов системы: кнопок и ключей управления, ко-
нечных и путевых выключателей, других ЭВМ. Получаемая ин-
формация загружается в запоминающее устройство.
На втором этапе процессор ПК в соответствии с введенной в
ПЗУ программой осуществляет логические операции, преобразу-
ющие состояние входных сигналов в заданное состояние выход-
ных сигналов. Если состояние входов не изменилось по сравне-
нию с предыдущим циклом сканирования, процессор сохраняет
неизменным состояние выходов, в противном случае процессор
изменяет их состояние в соответствии с заданной программой.
265
Язык РКС
Символ Значение
Замыкающий контакт
‘"-ЧТ" Размыкающий контакт
t Начало ветвления
г Конец ветвления
— Функция (выход)
б
SB2 SQ2
1001 1002
\SQ1 \SQ1
1003 I 1003
1
SB1
1008
Рис. 8.7. Схема (д), символы языка РКС (б) и преобразованная схема
электропривода с программируемым контроллером (в)
Опрос участков программы осуществляется циклично, один за
другим, в порядке их расположения с возращением к началу про-
граммы после окончания полного цикла опроса.
На третьем этапе осуществляется вывод выходных сигналов на
исполнительные устройства электроавтоматики станка — элект-
роприводы исполнительных органов, электромагниты и электро-
магнитные муфты, реле, контакторы и т.д.
Программа может записываться в ПК с помощью различных
языков, например в виде уравнений булевой алгебры, мнемокода
и стандартных описаний релейных схем, а также языков высокого
уровня — ПЛ/М, Фортран IV и др. Рассмотрим в качестве приме-
ра использование языка релейно-контактных символов (РКС),
который прост, нагляден и не требует специальных знаний пер-
сонала при программировании.
266
Язык РКС имеет пять основных логических компонентов (сим-
волов) (рис. 8.7, б): аргумент (замыкающий контакт), инверсный
(обратный) аргумент (размыкающий контакт), начало и конец
ветвления параллельной цепи и функцию (выход), например ка-
тушка электрического аппарата или электромеханического уст-
ройства. К дополнительным компонентам языка относятся счет
импульсов (счетчик), выдержка времени (таймер) и запомина-
ние (память).
Основу для программирования на языке РКС составляют прин-
ципиальные релейно-контакторные схемы управления, которые
перед программированием должны быть преобразованы по следу-
ющим правилам.
Каждая цепь преобразованной схемы должна иметь одинако-
вое число (например, четыре) последовательно или параллельно
включенных контактов, каждый из которых располагается в од-
ной из четырех зон: А, В, С, D. Пятая позиция цепи отводится
функции (выходу). Если контактов в цепи меньше, чем четыре, их
дублируют, если их больше, в схему ПК вводится промежуточное
(фиктивное) реле (память), не нарушающее логики работы ис-
ходной цепи. Контакты (входы) и функции (выходы, катушки)
нумеруются.
Для примера на рис. 8.7, в приведена преобразованная таким
образом схема циклового управления (см. рис. 8.6). В эту схему в
соответствии с указанными правилами введено промежуточное
реле 1, а контакт конечного выключателя SQ1 сдублирован.
Ввод программы после составления такой схемы осуществля-
ется с клавишной панели ПК (см. блок УВП на рис. 8.7, а), клави-
ши которой соответствуют тому или иному логическому символу
языка. Кроме того, на панели располагаются декадные переклю-
чатели набора номеров цепей и контактов, а также клавиши вы-
бора типа функции (логической, счетной, временной или запо-
минания).
Вводимая программа записывается в ПЗУ, после чего ПК мо-
жет выполнять функции, предусмотренные принципиальной схе-
мой. Выполнение программы будет производиться последователь-
но по цепям цикловым образом, при этом каждая цепь обрабаты-
вается слева направо.
Электропривод с числовым программным управлением. Такой
ЭП представляет собой универсальную СПУ. Применительно к
обработке различных изделий на станках, где она находит основ-
ное применение, эта система обеспечивает существенное повы-
шение производительности труда и качества обработки деталей.
При использовании ЭП с ЧПУ все технологические данные по
обработке изделий — скорости и перемещения изделий или обра-
батывающего инструмента, их направления, последовательность
операций при обработке — задаются в виде чисел. Совокупность
267
всех чисел образует программу обработки данного изделия, кото-
рая предварительно соответствующим образом рассчитывается,
кодируется, записывается на тот или иной программоноситель.
Перед обработкой изделия программа вводится в программное
устройство ЭП, который в дальнейшем обеспечивает обработку
изделия без непосредственного участия рабочего. Для обработки
другого изделия требуется лишь сменить программу, что значи-
тельно сокращает время обработки за счет исключения вспомога-
тельных операций (подвод и отвод инструмента, измерение дета-
ли, установка величин подачи и скорости резания и т.д.).
Таким образом, СПУ с ЧПУ представляет собой разновидность
цифрового ЭП с программным управлением.
Системы ЧПУ бывают аналоговые (непрерывные) и дискрет-
ные (импульсные). В аналоговых системах ЧПУ совокупность чи-
сел, образующих программу обработки изделия, преобразуется в
какую-либо непрерывно изменяющуюся аналоговую физическую
величину (напряжение постоянного тока, фазу или амплитуду
синусоидального напряжения и т.д.), которая и является вход-
ным управляющим воздействием на ЭП.
В дискретных системах ЧПУ программа в конечном итоге пред-
ставляется последовательностью управляющих импульсов, каж-
дому из которых соответствует определенное перемещение инст-
румента или изделия. Число импульсов определяет величину пе-
ремещения, а их частота — скорость перемещения.
Системы ЧПУ работают в одном из двух режимов: режиме по-
зиционирования или режиме контурной обработки. Позици-
онные (координатные) системы ЧПУ обеспечивают точную ус-
тановку инструмента относительно изделия или их прямолиней-
ное перемещение. Такие режимы необходимы при фрезеровании,
сверлении или расточке нескольких отверстий, а также при точе-
нии и строгании изделий. Инструмент или изделие при этом пе-
ремещаются по кратчайшим, прямолинейным путям между то-
чками установки (позициями) инструмента.
Контурные (функциональные) системы ЧПУ обеспечива-
ют перемещение инструмента или изделия по произвольным тра-
екториям, что требуется при контурной обработке изделий раз-
личной конфигурации.
Системы ЧПУ могут быть замкнутыми и разомкнутыми. В замк-
нутых системах с помощью датчиков измеряется действитель-
ное положение инструмента или изделия и эта информация в виде
сигнала обратной связи подается в сравнивающее устройство, в
котором она сопоставляется с сигналами программного устрой-
ства.
При отличии действительного положения от заданного в си-
стему управления ЭП поступают дополнительные управляющие
сигналы, обеспечивающие необходимую коррекцию положения
268
инструмента или изделия. Тем самым замкнутые системы ЧПУ
обеспечивают большую точность обработки изделий.
В разомкнутых системах ЧПУ движение инструмента или
изделия не контролируется и непосредственно не сопоставляется
с заданным. Поэтому случайное изменение параметров системы
или каких-либо внешних возмущений, например момента сопро-
тивления на валу привода, вызывает снижение точности отработ-
ки программы. Вместе с тем разомкнутые системы оказываются
проще замкнутых в наладке и эксплуатации.
Процессу обработки изделия на станке с системой ЧПУ пред-
шествует подготовка программоносителя, которая состоит из не-
скольких этапов.
Исходными данными для составления программы обработки
изделия являются технологические данные: размеры заготовки и
чертеж изделия, материал заготовки, характеристика инструмен-
та, степень точности изготовления изделия, характер и вид обра-
ботки.
По своим техническим возможностям и особенностям струк-
туры системы ЧПУ подразделяются на четыре группы, имеющие
в соответствии с международной классификацией обозначения
HNC, SNC, CNC и DNC.
Система HNC (Hand numerical control) обеспечивает опера-
тивное управление с ручным заданием программы с пульта уп-
равления. Система SNC (Stored numerical control) содержит уст-
ройство памяти для хранения программ и обеспечивает обработку
партии одинаковых заготовок с однократным считыванием про-
граммы перед обработкой. Система CNC (Computer numerical
control) базируется на применении микроЭВМ, позволяющей
программировать свою работу и вырабатывать требуемый алгоритм
управления. Система DNC (Direct numerical control) позволяет
осуществлять прямое цифровое управление группой станков с ЧПУ
систем SNC и CNC. Система DNC также предусматривает исполь-
зование в своей структуре ЭВМ.
В настоящее время наибольшее развитие получили системы ЧПУ
с применением микропроцессоров и микроЭВМ (рис. 8.8).
Управляющая программа вводится в ЭВМ с программоносите-
ля ПН (или пульта управления ПУ) через блок ввода программы
ВВП и устройства ввода—вывода УВВ1. Далее она поступает в
устройство памяти микроЭВМ. В постоянном запоминающем уст-
ройстве ПЗУ хранятся постоянные части программы, данные для
декодирования, интерполирования и необходимых вычислений.
В оперативное запоминающее устройство ОЗУ поступает кроме
данных управляющей программы текущая информация от датчи-
ков обратной связи ДОС о ходе технологического процесса, со-
стоянии защит и блокировок, на основании чего вырабатывается
управляющее воздействие на ЭП и устройства электроавтоматики
269
Рис. 8.8. Схема электропривода с ЧПУ
ЭА станка. Связь микроЭВМ с электрооборудованием станка осу-
ществляется через устройства ввода—вывода УВВ2... УВВ4. Кроме
указанных блоков ЭВМ включает в себя микропроцессор МП и
таймер Т.
Применение микроЭВМ в системах ЧПУ расширяет их функ-
циональные возможности, а именно: позволяет воздействовать
программным путем на функционирование станка, осуществлять
диалоговый режим общения оператора со станком, вводить диаг-
ностику работы станка и системы ЧПУ, реализовывать универ-
сальный — как позиционный, так и контурный — режим обра-
ботки деталей.
Кроме того, микроЭВМ позволяет осуществлять управление
несколькими электроприводами, обеспечивающими движение
инструмента (детали) по различным координатам.
8.3. Электропривод с адаптивным управлением
Работа некоторых рабочих машин и производственных меха-
низмов характеризуется изменением в широких пределах и слу-
чайным образом условий технологических процессов и различных
возмущающих воздействий. Для обеспечения наилучшего хода та-
ких технологических процессов ЭП должен обладать свойствами
изменять соответствующим образом характер своей работы.
Электропривод, в котором способ функционирования его си-
стемы управления автоматически и целенаправленным образом
изменяется для осуществления наилучшего протекания техноло-
гического процесса рабочей машины, называется ЭП с адаптив-
ным или самоприспосабливающимся управлением. Другими сло-
вами, ЭП с адаптивным управлением обеспечивает наилучший
ход технологического процесса по заданному показателю каче-
ства при изменяющихся возмущениях и условиях работы. Автома-
270
тическое изменение способа функционирования системы управ-
ления ЭП называют адаптацией, или самоприспособлением.
ЭП с адаптивным управлением, в котором целенаправленно
изменяются параметры системы управления, называется самона-
страивающимся. Если изменяются параметры и структура системы
управления, то ЭП называется самоорганизующимся, если изме-
няются параметры, структура и закон управления с использова-
нием опыта функционирования ЭП, то он называется самообуча-
ющимся.
Для осуществления адаптивного управления в структуру ЭП
вводится устройство адаптивного управления (УАУ), в задачу ко-
торого входит формирование сигналов управления, обеспечива-
ющих заданный показатель качества технологических процессов,
например наивысшей производительности рабочей машины, ми-
нимальной стоимости обрабатываемой детали и т.д.
В общем случае УАУ должно обеспечивать или поддержание
этого показателя качества на заданном уровне (системы стабили-
зации), или получение экстремального его значения (экстремаль-
ные системы).
Системы стабилизации чаще всего выполняются с исполь-
зованием модели технологического процесса. Целью их работы яв-
ляется обеспечение близости характеристик реального технологи-
ческого процесса и целесообразного (оптимального) процесса,
который воспроизводится с помощью модели этого технологи-
ческого процесса.
В экстремальных адаптивных системах настройка парамет-
ров системы управления осуществляется так, чтобы заданный по-
казатель качества технологического процесса достигал экстремаль-
ного значения.
По способу получения информации о текущем значении пока-
зателя качества экстремальные системы бывают поисковые и бес-
поисковые. В поисковых системах нахождение показателя ка-
чества достигается за счет введения в систему дополнительных
поисковых сигналов. В беспоисковых (аналитических) систе-
мах этот показатель рассчитывается аналитически с помощью спе-
циального вычислительного устройства.
Поисковые системы по способу поиска, в свою очередь,
подразделяются на системы с автоколебательным и принудитель-
ным поиском экстремума. Если поисковые сигналы генерируются
самой системой, то она относится к экстремальным системам с
автоколебательным поиском экстремума. При использовании спе-
циального дополнительного источника поисковых сигналов экст-
ремальная система относится к системам с принудительным по-
иском экстремума.
По количеству переменных, от которых зависит показатель
качества, экстремальные системы бывают одномерные и много-
271
мерные. Классификация экстремальных систем выполняется так-
же по виду метода поиска алгоритма нахождения экстремума, среди
которых применение нашли методы Гаусса—Зейделя, градиента,
наискорейшего спуска и ряд других.
Примером поисковой адаптивной системы управления ЭП
может служить система поиска минимального значения тока ста-
тора асинхронного двигателя в системе ТРН—АД (см. подразд. 9.5),
при котором потери в двигателе оказываются минимальными. Ре-
гулируемой координатой двигателя как объекта управления в этом
случае является ток статора, управляющей — напряжение пита-
ния двигателя, а возмущающим воздействием — момент нагрузки
на валу двигателя.
Контрольные вопросы
1. Какой ЭП называется следящим?
2. По каким признакам классифицируется следящий ЭП?
3. Каким основным показателем характеризуется работа следящего
ЭП?
4. Охарактеризуйте ЭП с программным управлением.
5. В чем особенности работы ЭП с ЧПУ?
6. Что называется адаптивным ЭП?
ГЛАВА 9
ЭНЕРГЕТИКА ЭЛЕКТРОПРИВОДОВ
9.1. Потери мощности и энергии
в установившемся режиме работы
электропривода
Назначение ЭП заключается в обеспечении движения испол-
нительных органов рабочих машин и механизмов и управлении
этим движением. Однако при этом совсем не безразлично, какой
ценой это достигается, т.е. какое потребление электроэнергии и
какие ее потери имеют место, как ЭП влияет на сеть и другие
электроустановки. Оценка этих свойств ЭП осуществляется с по-
мощью так называемых энергетических показателей, к числу ко-
торых относятся коэффициент полезного действия (КПД), коэф-
фициент мощности (cos <р), потери мощности ДР и энергии ДЛ.
Иногда к этим показателям относят потребляемые из сети полез-
ные мощность и энергию.
Эти показатели широко используются как при создании но-
вых, так и оценке работы уже действующих ЭП. Очевидно, что
предпочтение должно быть отдано такому ЭП, который, обеспе-
чивая заданный технологический процесс рабочей машины или
механизма, имеет более высокие по сравнению с другими вари-
антами энергетические показатели.
Эти же показатели позволяют оценить и эффективность уже
работающих ЭП. В том случае, когда они оказываются существен-
но худшими по сравнению с номинальными, целесообразна по-
становка вопроса о модернизации ЭП с целью их повышения.
Отметим, что решение о модернизации ЭП должно приниматься
только на основании экономического расчета, предусматрива-
ющего сопоставление дополнительных капитальных затрат на мо-
дернизацию с сокращением эксплуатационных расходов за счет
повышения КПД и cos <р.
Подчеркнем, что обеспечение высоких энергетических показа-
телей работы ЭП весьма актуально в настоящее время, когда эко-
номия энергетических и материальных ресурсов превратилась в
задачу первостепенной важности.
В общем случае потери мощности и энергии в ЭП складывают-
ся из потерь в электродвигателе, механической передаче, сило-
вом преобразователе и системе управления (см. рис. 1.2). Основная
доля потерь при этом выделяется в силовом канале электроприво-
273
да — электродвигателе, силовом преобразователе и механической
передаче.
Потери мощности и энергии в двигателе. Потребляемая двигате-
лем электрическая мощность расходуется на выработку полезной
механической мощности и на покрытие потерь, к которым отно-
сятся потери в обмотках двигателя, магнитопроводе и механиче-
ские потери.
Потери в обмотках двигателя, называемые также электри-
ческими потерями или потерями в меди, определяются протека-
ющими по ним токами и активным сопротивлением электриче-
ских цепей.
Потери в магнитопроводе, называемые также потерями
в стали, включают в себя потери на гистерезис и вихревые токи,
вызванные перемагничиванием сердечников. К ним относятся и
добавочные потери, вызванные зубчатой конструкцией серде-
чников.
Механические потери состоят из потерь в подшипниках,
потерь на трение щеток о коллектор или контактные кольца и
ветиляционные потери, определяемые трением частей двигателя
о воздух или охлаждающую жидкость.
Точное определение потерь мощности в двигателях представ-
ляет собой трудно разрешимую задачу, так как заводы-изгото-
вители не сообщают в справочниках необходимую информацию.
В связи с этим потери мощности ДР в практических расче-
тах представляют суммой двух составляющих: постоянных К и пе-
ременных И потерь:
ДР=К+У. (9.1)
При этом к постоянным относятся потери мощности, которые
принимают не зависящими от нагрузки двигателя, а именно: по-
тери в магнитопроводе, механические потери и вентиляционные
потери. Для синхронных двигателей с электромагнитным возбуж-
дением и двигателей постоянного тока с независимым возбужде-
нием к постоянным потерям обычно относят и потери в обмотках
возбуждения.
Постоянные потери в действительности не являются неизмен-
ными, а зависят от скорости двигателя, амплитуды и частоты
питающего его напряжения и ряда других факторов. Однако, по-
скольку постоянные потери изменяются мало, они обычно при-
нимаются неизменными и равными номинальным постоянным
потерям.
Под переменными подразумеваются потери, выделяемые в об-
мотках двигателей при протекании по ним токов, определяемых
механической нагрузкой ЭП. Переменные потери мощности в дви-
гателе могут быть в общем случае определены через электриче-
ские или механические переменные и параметры.
274
Для двигателя постоянного тока переменные потери мощно-
сти V в цепи якоря определяются по формуле
И= I2R, (9.2)
где I, R — соответственно ток и сопротивление цепи якоря двига-
теля.
Для трехфазных асинхронных двигателей
V=VX+V2 = 3/?/?, + 3/'22/?'2, (9.3)
где V\, V2 — потери мощности соответственно в цепях обмоток
статора и ротора. При использовании П-образной схемы замеще-
ния (см. рис. 5.2), когда по резистору Rx протекает ток Г2, потери
в статоре составляют
И = 3/(7?! » З/'г2/?!^/^ = W^R'i, (9.4)
а полные переменные потери
V= З/ЗД + Л2) = И2(1 + RJR2). (9.5)
Для синхронных двигателей
V= 3I]R{. (9.6)
Постоянные потери мощности К определяются как разность
полных потерь мощности в номинальном режиме и номинальных
переменных потерь по следующей формуле:
А'= ДРН0М - Ином. (9.7)
При этом полные потери мощности при работе двигателя в
номинальном режиме определяются по паспортным данным дви-
гателя с помощью номинального КПД т|ном
~ ^номО Пном)/П НОМ’ (9.8)
Эти же потери мощности могут быть найдены как разность
между потребляемой электрической мощностью и мощностью на
валу двигателя в номинальном режиме.
За время работы tp двигателя с постоянной нагрузкой полные
потери энергии составят
ДЛ = ДР/р. (9.9)
275
При работе двигателя с циклически изменяющейся нагрузкой
полные потери энергии за весь цикл могут быть определены как
дл= }др(,)ф = £д^„ (9.Ю)
0
т
где tu — время цикла, /ц =£/,; т — число отдельных участков
/=1
цикла; ДР,, /,• — соответственно потери мощности и время работы
на /-ом участке цикла.
Приведенные ранее формулы позволяют выполнить расчет по-
терь мощности и энергии при известных токах и сопротивлениях
электрических цепей двигателей. Эти же потери могут быть рас-
считаны по механическим переменным и параметрам двигателей.
Переменные потери мощности, выделяющиеся в якоре двига-
теля постоянного тока и роторе асинхронного двигателя, могут
быть также определены с помощью выражения (4.11) или (5.5)
через механические переменные и параметры как
И= И2 = Мо)08 = McoqS, (9.11)
где 8, s — относительная скорость двигателя постоянного тока и
скольжение асинхронного двигателя, 8 - s - (со0 - <х»)/сх>о -
Переменные потери в статоре асинхронного двигателя в соот-
ветствии с формулой (9.4) в этом случае составят
И = V2 Ri/R'i = M(oqsRi/R2. (9.12)
Полные переменные потери в асинхронном двигателе
V= V\ + V2 = Мсо05(1 + Ri/R'i). (9.13)
Формула (9.13) позволяет рассчитывать потери мощности в
асинхронном двигателе по известным моменту, скорости идеаль-
ного холостого хода (скорости вращения магнитного поля), сколь-
жению и отношению сопротивлений R\ и R2.
Потери энергии в двигателях рассчитываются по (9.9) или (9.10).
Потери мощности и энергии в преобразователе. Эти потери яв-
ляются электрическими и могут определяться по их КПД и фор-
мулам (9.2) и (9.9). При использовании для управления двигате-
лями полупроводниковых преобразователей эти потери складыва-
ются из потерь в вентилях, трансформаторах, сглаживающих и
уравнительных реакторах, фильтрах и элементах устройств искус-
ственной коммутации, а также в системе вентиляции, если они
предусмотрены. Потери в полупроводниковых элементах преобра-
зователей обычно относительно малы (несколько процентов от
номинальной мощности).
276
При расчете потерь в трансформаторах и реакторах берется со-
противление их обмоток или используется эквивалентное сопро-
тивление преобразователя, определяемое формулой (4.34).
При использовании электромашинных преобразователей поте-
ри в них определяются рассмотренными в этом разделе способа-
ми.
Потери мощности в механической передаче. Эти потери опреде-
ляются главным образом трением в движущихся частях и суще-
ственно зависят от передаваемого момента.
Потери в механической передаче обычно оцениваются с помо-
щью КПД, значение которого для разных ее видов и нагрузок
приводятся в справочной литературе по деталям машин и меха-
низмов. На рис. 9.1, а для примера приведены зависимости КПД
зубчатых передач от коэффициента их загрузки по моменту к3 =
= Мс/Мсхасч, а на рис. 9.1, б — зависимости КПД червячной пере-
дачи от угла подъема винтовой линии червяка.
Потери мощности в элементах системы управления. Эти потери
обычно не превышают нескольких десятков ватт и принимаются
Рис. 9.1. Зависимости КПД:
а — зубчатой передачи от коэффициента нагрузки; б — червячной передачи от
угла подъема нарезки; 1 — червяк и колеса чугунные необработанные смазан-
ные; 2 — фрезерованный стальной червяк по бронзе, масляная ванна; 3 — тща-
тельно выполненная конструкция в масляной ванне
277
во внимание только при выполнении точных энергетических рас-
четов.
Задача 9.1*. Асинхронный двигатель типа 4AH160S4 имеет сле-
дующие номинальные данные: мощность Риом = 18,5 кВт; скорость
«ном = 1 450 об/мин; ток статора /1ном = 36,5 А; КПД т|ном = 88 %;
cos Фном = 0,87; кратность пускового момента Мпуск/Мном = 1,3; крат-
ность максимального момента Мтах/Мном = 2,1; момент инерции
ротора J - 0,37 кг • м2.
Рассчитать потери мощности в асинхронном двигателе при его
работе с моментом Мс = 0,9Л/Ном на естественной характеристике,
если соотношение R\/R2 = 0,6.
Так как режим работы задан величиной момента нагрузки,
используем формулы расчета через механические переменные и
параметры.
1. Определяем скорости асинхронного двигателя в номиналь-
ном режиме и при холостом ходе:
соном = 2л«ном/60 = 2 - 3,14 - 1 450/60 = 152 рад/с;
<х»0 = 'lnflp = 2-3,14- 50/2 = 157 рад/с.
2. Определяем номинальные скольжение и момент асинхрон-
ного двигателя:
«ном = (®0-®ном)/®0 = (157 - 152)/157 = 0,033;
Мном = Рном/(0„ом = 18 500/152 = 122 Н • м.
3. Принимая рабочий участок механической характеристики дви-
гателя линейным, из (5.16) при Mz = 0,9Л/НОМ = 0,9 • 122 = 110 Н м
находим
«с = shomMc/Mhom = 0,033 • 0,9 = 0,03.
4. По формуле (9.13) определяем переменные потери мощно-
сти в заданной точке
И= И + И2 = Мсо05(1 + Rt/R'i) = 110-157 0,03 (1 + 0,6) = 829 Вт.
5. Для получения постоянных потерь мощности находим по (9.6)
полные потери в асинхронном двигателе в номинальном режиме
ДЛом = Лом(1 - Хном)Аном = 18 500(1 - О,88)/О,88 = 2 523 Вт.
6. Переменные потери в номинальном режиме также находим
по формуле (9.13)
Гном = Мномсо05ном (1 + Ъ/R'i) = 122 157 0,033 (1 + 0,6) = 1011 Вт.
7. Постоянные потери мощности в асинхронном двигателе
К- ДРНОМ - Ином = 2 523 - 1 011 = 1 512 Вт.
278
Задача 9.2*. Двигатель постоянного тока независимого воз-
буждения типа 2ПН—132 имеет следующие номинальные дан-
ные: Рном = 5,5 кВт; UH0M = 110 В; /ном - 59 А; пном = 1 500 об/мин;
Лном - 80 %; Ля = 0,146 Ом; J = 0,05 кг- м2.
Определить потери энергии в якоре (переменные потери энер-
гии) двигателя за цикл работы, в котором он в течение времени
t\ = 10 мин работает с моментом нагрузки МС1 - 0,6Мном, в тече-
ние времени t2 = 3 мин работает с номинальной нагрузкой Мс2 =
= Мном и в течение времени t3 = 15 мин работает с моментом Мс3 =
= 0,8Мном. Ток возбуждения двигателя в цикле не изменяется и
равен номинальному.
1. Поскольку магнитный поток двигателя не изменяется, по
известным кратностям момента с помощью формулы (4.3) мож-
но найти токи в цепи якоря на отдельных участках цикла:
41 = 4ом^с1/А/Ном = 59 • 0,6 = 35,4 А; /с2 = /ном = 59 А;
4з = 0,8/ном = 47,2 А.
2. Потери энергии в обмотке якоря в соответствии с формулой
(9.9)
1 1
= 0,146 (35,42 600 + 592180 + 47,22 •900)= 493,8 кДж.
Задача 9.3. Для условий задачи 9.1 * определить количество энер-
гии, потребляемой из сети асинхронным двигателем в номиналь-
ном режиме и при Мс - 0,9Мном за время 1 ч.
Задача 9.4. Для условий задачи 9.2* определить количество по-
требляемой из сети электроэнергии за время цикла.
9.2. Потери энергии в переходных режимах
электропривода
Возникающие при пуске, реверсе, торможении и изменении
нагрузки токи, как правило, превышают номинальный уровень.
По этой причине выделяющиеся в двигателе и других элементах
ЭП потери могут быть весьма значительными и существенно вли-
ять на энергетические показатели работы ЭП. Отметим также, что
выделяющиеся в двигателе повышенные потери вызывают его
дополнительный нагрев, что подчеркивает важность правильной
их оценки.
Особенно большое значение имеет определение потерь элект-
роэнергии в переходных процессах для ЭП, у которых динамиче-
ский режим является основным. К ним относятся, например, ЭП
।
279
прокатных станов, подъемных кранов, строгальных станков, лиф-
тов и т.д.
В общем случае потери энергии в двигателе за время tn „ пере-
ходного процесса могут быть определены с помощью следующего
выражения:
ЛА = J APd/= j J Vdt = ЛАК +ЛАУ, (9.14)
о оо
где ЛАК и ЛАУ — потери энергии, обусловленные соответственно
постоянными и переменными потерями мощности.
Потери энергии ЛАК могут быть найдены в соответствии с фор-
мулой (9.9) как
Д^=^,п- (9-15)
Потери энергии ЛА v могут быть определены при использова-
нии формул (9.2) —(9.4), выражающих переменные потери мощ-
ности через ток и сопротивление:
ДЛГ= р2(/)Яск. (9.16)
о
Использование выражения (9.16) для определения ДЛиво мно-
гих случаях оказывается затруднительным из-за того, что необхо-
димо знать закон изменения тока двигателя в переходном процес-
се i(t) и сопротивление R. В связи с этим более удобные расчет-
ные соотношения получаются в том случае, если переменные
потери мощности выражаются через механические переменные и
параметры в соответствии с формулами (9.11) и (9.12).
Потери энергии при работе ЭП без нагрузки (Ме = 0). Потери
мощности в якоре двигателя постоянного тока и роторе асинх-
ронного двигателя определяются формулой (9.11), и поэтому пе-
ременные потери энергии в этих частях двигателей определяются
идентичным выражением
ДЛио = ДЛ2о= j M(Oosd/= J М (coo — co)d/, (9.17)
о о
где s — скольжение или относительный перепад скорости двига-
телей, s = 8 = (®о - СО)/(Оо-
Исключим из выражения (9.17) время как переменную, вос-
пользовавшись для этого уравнением механического движения
(2.16). При Мс = 0 с учетом (5.4) получим
d? = Jdw/M = -Ja^ds/M. (9.18)
280
Заменим в выражении (9.17) d/ согласно формуле (9.18) и из-
меним одновременно пределы интегрирования. Начальному мо-
менту времени t = 0 будет соответствовать скольжение 5 = 5нач, а
конечному времени переходного процесса /п п — скольжение 5 =
= 5К0Н. Тогда выражение (9.17) перепишется как
ДЛ20 = j d5/M)=
5нач
$кон
= -/cog J sds = /cog(s^a4-s2OH)/2. (9.19)
^нач
Полученное выражение (9.19) удобно для определения потерь
энергии, так как при пользовании им не требуются зависимости
изменения переменных ЭП во времени, а необходимо лишь зна-
ние параметров J, со0 и значений 5нач и 5КОН.
Определим, например, с помощью формулы (9.19) потери
энергии в якоре двигателя постоянного тока и роторе асинхрон-
ного двигателя при их пуске, торможении и реверсе вхолостую.
При пуске двигателей сонач = 0 и сокон = ©о, поэтому 5нач = 1,
5кон = 0, в соответствии с этим
АЛ "о = Jcoq/2. (9.20)
Отметим, что потери энергии оказались равными кинетиче-
ской энергии, которая будет запасена к концу пуска в движущих-
ся механических частях ЭП.
При динамическом торможении потери энергии, по-
скольку 5нач = 1 и 5К0Н = 0, оказываются равными потерям энергии
при пуске, т. е. ДЛ20 - ДЛ 20. В этом режиме весь запас кинетической
энергии превращается в потери энергии, выделяемые в двигателе
в виде тепла.
При торможении противовключением 5нач = 2, 5К0Н = 1,
при этом потери энергии
ДЛ20 = 3Jcoq/2, (9.21)
т.е. они равны тройному запасу кинетической энергии ЭП. Поте-
ри энергии при торможении противовключением в 3 раза превы-
шают потери при динамическом торможении.
При реверсе 5нач = 2, 5К0Н = 0 и потери энергии
ДЛ20 = 4Ло§/2, (9.22)
т. е. будут равны сумме потерь при торможении противовключени-
ем и пуске.
Выражение (9.19) определяет полные переменные потери энер-
гии в двигателе постоянного тока, т.е. ДЛ20 - ДЛИ0. Для определе-
281
ния полных переменных потерь энергии в асинхронном двигателе
необходимо найти еще потери в цепи статора.
Для их определения воспользуемся выражением (9.12), из ко-
торого следует, что
АЛ|о = АЛ2оЛ|//?2- (9.23)
Полные потери энергии в асинхронном двигателе составят
АЛ)/о = АЛ|0 + АЛ20 = Xd + /?1/^2)(5нач - 5кон)/2- (9.24)
Важно отметить, что потери энергии в роторе асинхронного
двигателя не зависят от его сопротивления, в то время как потери
в статоре асинхронного двигателя обратно пропорциональны его
величине.
Потери энергии при работе ЭП с нагрузкой (Мс * 0). Для опре-
деления потерь энергии при работе двигателей под нагрузкой спра-
ведлива формула (9.17).
Как видно из этой формулы, для определения потерь энергии
в якоре двигателя постоянного тока и роторе асинхронного дви-
гателя необходимо знать, каким образом в переходных процессах
изменяются скорость двигателя и момент его нагрузки, т. е. распо-
лагать зависимостями со(О и M(t~). Подстановка этих зависимо-
стей в формулу (9.17) и взятие интеграла позволяет решить по-
ставленную задачу.
Для оценочных расчетов энергетических показателей выпол-
няют упрощенный расчет потерь энергии. Считают, что момент
двигателя в переходных процессах не изменяется и равен некото-
рому среднему моменту Мср, при котором продолжительность пе-
реходных процессов остается примерно той же самой, что и при
реальном изменении момента двигателя. Для получения расчет-
ной формулы используется исходная формула (8.17), в которой
дифференциал времени определяется выражением
d/ = -Jco0d5/(A/± Л/с),
где знак «-» соответствует пуску; а знак «+» — торможению двига-
теля.
Подстановка dt в (9.17) с одновременной заменой пределов
интегрирования и момента двигателя М на Мср = const приводит к
следующему итоговому выражению:
АЛ2н = АЛ20Мср/(Мср ± Мс), (9.25)
где Мср — средний, неизменный за время переходного процесса
момент двигателя.
Выражение (9.25) определяет потери энергии под нагрузкой в
переходных процессах в роторе асинхронного двигателя и якоре
двигателя постоянного тока. Для определения потерь в статоре АЛ,Н
282
и полных потерь в асинхронном двигателе ДЛН используются фор-
мулы (9.23) и (9.24).
Отметим, что в соответствии с выражением (9.25) выделяе-
мые в двигателе потери энергии при его работе под нагрузкой по
сравнению с потерями при работе вхолостую увеличиваются в
режиме пуска и уменьшаются в режиме торможения. Последнее
объясняется тем, что при торможении часть запасенной кине-
тической энергии расходуется на преодоление момента нагруз-
ки. В результате, в двигателе в виде потерь выделится уже только
оставшаяся часть кинетической энергии.
Потери энергии в системе «преобразователь—двигатель». Поло-
жительным свойством системы «преобразователь—двигатель» (П —
Д) является возможность существенного сокращения потерь энер-
гии в переходных процессах. Это достигается путем плавного из-
менения в переходных процессах напряжения с помощью управ-
ляемого выпрямителя (преобразователя) для двигателя постоян-
ного тока или частоты с помощью преобразователей частоты для
асинхронного двигателя, за счет чего происходит постепенное
изменение задаваемой ими скорости идеального холостого хода
двигателей.
При этом разность между скоростью со0 и скоростью якоря или
ротора со оказывается меньше, чем при скачкообразном измене-
нии напряжения или частоты, что определяет работу двигателя с
меньшими перепадами скорости и ведет тем самым к сокраще-
нию потерь энергии в двигателе. В пределе, когда Мс = 0 и ско-
рость со0 изменяется бесконечно медленно, отдаваемая источни-
ком энергия идет только на сообщение двигателю кинетической
энергии, а потери энергии отсутствуют.
Рассмотрим, чему будут равны потери энергии в двигателе при
линейном изменении во времени напряжения или частоты и тем
самым скорости идеального холостого хода. Переходные процессы
для этого случая, рассмотренные в подразд. 4.8, разбиваются на два
этапа. На первом из них в пределах отрезка времени 0 < t < t0
скорость идеального холостого хода со0 меняется по линейному
закону:
со0 = ±е/ + (Оонач, (9.26)
где е — темп (производная) изменения скорости <ю0, £ = dco0(Z)/dt
Скорость и момент двигателя изменяются в соответствии с вы-
ражениями (4.49) и (4.50). На втором этапе при t > t0, со0 = const
скорость и момент изменяются согласно (2.30) и (2.32).
Соответственно этому потери энергии во время переходного
процесса могут быть найдены в виде суммы двух составляющих
для каждого из этапов.
Потери энергии в якоре двигателя постоянного тока и роторе
асинхронного двигателя на первом этапе переходного процесса
283
могут быть получены с помощью исходной формулы (9.17) при
подстановке в нее выражения <»(/) (см. формулу (4.49)) и зависи-
мости M(t) (см. формулу (4.50)). На втором этапе переходного про-
цесса потери энергии определяются также с помощью формулы
(9.17), но при подстановке в нее выражений m(t) и M(t) из (2.30)
и (2.32).
В общем случае расчет потерь энергии в системе «преобразова-
тель-двигатель» представляет собой непростую задачу. Для част-
ного случая, когда осуществляется пуск двигателя вхолостую, ито-
говое выражение для потерь энергии имеет вид
ДЛэд = A^o^T^Z/no, (9.27)
где ДЛ2о — потери энергии при ступенчатом изменении скорости
(о0, определяемые по формуле (9.19); Тм — электромеханическая
постоянная времени; /п0 — время линейного нарастания скорости
<в0 от нуля до установившейся скорости.
Как видно из выражения (9.27), увеличение времени /п0 при-
водит к снижению потерь энергии в двигателе. Эффект снижения
потерь энергии в переходных процессах в двигателе постоянного
тока происходит при его питании от генератора (система «гене-
ратор-двигатель»), В этой системе ЭДС генератора вследствие инер-
ционности его цепи возбуждения изменяются в переходных ре-
жимах по экспоненциальной характеристике. Для режима пуска
вхолостую потери энергии в двигателе определятся как
АА2о = А^ио = *^®о/[2(/я + 1)], (9.28)
где m — отношение постоянных времени, m - Тъ/Тм (Тв — посто-
янная времени цепи возбуждения генератора).
Из формулы (9.28) видно, что потери энергии в двигателе
уменьшаются в (m + 1) раз по сравнению с соответствующими
потерями в нем при скачкообразном изменении напряжения на
якоре. Другими словами, чем больше инерция цепи возбуждения
генератора и чем медленнее изменяется напряжение на якоре дви-
гателя постоянного тока, тем меньше будут в нем потери энергии
в переходных процессах.
Способы снижения потерь электроэнергии в переходных процес-
сах. Уменьшение потерь электроэнергии в переходных процессах
имеет важное значение, поскольку позволяет улучшить энергети-
ческие показатели работы ЭП.
Анализ полученных формул, в частности (9.19), определяет
следующие основные способы снижения потерь электроэнергии в
переходных процессах: уменьшение момента инерции ЭП J и по-
степенное изменение в переходных процессах скорости идеально-
го холостого хода двигателей со0.
284
Уменьшение момента инерции ЭП J возможно за
счет снижения момента инерции применяемых электродвигате-
лей. Это реализуется за счет использования малоинерционных дви-
гателей, имеющих пониженный момент инерции якоря (двигате-
ли с повышенным отношением длины якоря к его диаметру, по-
лым или дисковым якорем), рационального конструирования ме-
ханической передачи путем выбора оптимального передаточного
числа редуктора, рациональных размеров и форм элементов меха-
нической передачи и замены одного двигателя двумя, имеющими
половинную номинальную мощность заменяемого двигателя.
Расчеты показывают, что суммарный момент инерции двух
двигателей половинной мощности оказывается меньше момента
инерции одного двигателя на полную мощность. Например, два
двигателя типа 4АН200 мощностью по 45 кВт имеют суммарный
момент инерции 2 -1,38 = 2,76 кг - м2. Двигатель 4АН250 мощно-
стью 90 кВт на ту же скорость имеет момент инерции 3,53 кг • м2,
т. е. почти на 30 % больше.
Плавное изменение скорости идеального холос-
того хода может обеспечиваться для двигателей постоянного
тока при изменении напряжения на якоре в системе «управля-
емый выпрямитель—двигатель», а для асинхронного двигателя —
изменением частоты питающего напряжения в системе «преобра-
зователь частоты —асинхронный двигатель» или числа пар полю-
сов многоскоростного асинхронного двигателя. Эффект снижения
потерь энергии в переходных процессах в указанных системах уже
рассмотрен, поэтому остановимся на снижении потерь в ЭП с
многоскоростным асинхронным двигателем.
В качестве примера определим потери электроэнергии в роторе
двухскоростного асинхронного двигателя при разбеге до высокой
скорости (характеристика 7) и торможении с высокой скорости
при отсутствии нагрузки (рис. 9.2).
Пуск асинхронного двигателя на высокую скорость возможен
двумя способами: включением обмотки статора сразу на число
Рис. 9.2. К способам торможения и реверса
асинхронного двигателя:
1 — исходная механическая характеристика; 2 —
характеристика при увеличенном числе пар по-
люсов; 3, 4 — характеристики при изменении
чередования фаз питающего напряжения
285
пар полюсов pi (прямой пуск, характеристика 7) или включени-
ем обмотки статора вначале на число полюсов р2 = 2рх (характери-
стика 2), а затем переключением обмотки статора на число по-
люсов pi (ступенчатый пуск).
Потери энергии в роторе асинхронного двигателя при прямом
пуске по характеристике 1 в соответствии с (9.19) с учетом того,
что 5нач = 1, а 5К0Н = 0, составят АЛ2п = 2«>oi/2.
Потери энергии при ступенчатом пуске при разбеге асинх-
ронного двигателя по характеристике 2 (первая ступень пуска)
АЛ2с1 с учетом того, что 5нач = 1, 5К0Н = 0 и со02 = «>01/2, составляют
АЛ2с1 = /«>02/2 - /о>01/8, а при разбеге асинхронного двигателя по
характеристике 1 (вторая ступень пуска) с учетом того, что 5нач = 0,5,
5кон = 0, составляют АЛ2с2 = Jcooi/8.
Суммарные потери при ступенчатом пуске
АЛ2с = АЛ2с1 + АЛ2с2 = JcOqi/4.
Сопоставление потерь при прямом и ступенчатом пусках пока-
зывает, что при ступенчатом пуске произошло снижение потерь
электроэнергии в 2 раза. Таким образом, за счет изменения в пе-
реходном процессе скорости холостого хода произошло сниже-
ние потерь энергии в роторе асинхронного двигателя. Уменьше-
ние потерь энергии в роторе вызовет снижение потерь в статоре и
полных потерь в двигателе.
В общем случае, если скорость идеального холостого хода в
переходном процессе имеет п ступеней регулирования, потери
энергии в роторе уменьшатся в п раз:
АЛ2 = Лооя/2и,
где сооя — максимальная скорость идеального холостого хода дви-
гателя, соответствующая последней ступени.
Торможение многоскоростного асинхронного двигателя на
интервале скорости <»oi - (о02 может быть осуществлено с рекупе-
рацией (отдачей) энергии в сеть, для чего обмотка статора пере-
ключается на число пар полюсов р2. Этот способ торможения яв-
ляется наиболее целесообразным с позиции энергосбережения.
Задача 9.5*. Для асинхронного двигателя типа 4AH160S4, пас-
портные данные которого приведены в задаче 9.1*, определить
переменные потери энергии при пуске вхолостую и при номи-
нальном моменте нагрузки.
1. При пуске вхолостую 5нач = 1, 5КОН = 0. По формуле (9.24)
определяем переменные потери в двигателе
АЛ ИО = -М(1 + 7?]/7?2)(52ач - 4он)/2 -
= 0,37 1572 • (1 + 0,6)( 12 - 02)/2 = 7 296 Дж.
286
2. Для расчета потерь энергии при пуске под нагрузкой вос-
пользуемся приближенной формулой (9.25). Средний момент дви-
гателя при пуске примем равным полусумме пускового и макси-
мального (критического) моментов
Мер = (Мпуск + Л/тах)/2 = (1,ЗМном + 2,1Мном)/2 =
= 122(1,3 + 2,1)/2 = 207 Н м.
3. Потери при пуске с номинальной нагрузкой Мс = Мном
АД^ном ~ АД иоМСр/(Л/Ср ~ Мс) ~
= 7 296 • 207/(207 - 122) = 17 685 Дж.
Задача 9.6*. Для двигателя постоянного тока с независимым
возбуждением типа 2ПН—132 (см. задачу 9.2*) сопоставить поте-
ри энергии в якоре при его пуске вхолостую от сети и от управ-
ляемого преобразователя со временем нарастания его выходного
напряжения (напряжения на якоре) /п0 = 1 с. Суммарный приве-
денный к валу двигателя момент инерции составляет 0,1 кг м2.
1. Потери энергии в якоре при пуске двигателя вхолостую на-
ходим по формуле (9.19), предварительно определив:
номинальную скорость
®ном = ЯИНОМ/30 = 3,14-1 500/30 = 157 рад/с;
произведение £ФНОМ> используя формулу электромеханической
характеристики (4.4) для точки номинального режима:
^Фном — (UH0M — /ном 7?я)/соном —
= (НО- 59 • 0,146)/157 = 0,65 В с;
скорость холостого хода
= t/номДФном = 110/0,65 = 169 рад/с.
2. Определим потери энергии в якоре при пуске двигателя от
сети (ступенчатая подача напряжения)
АД ио = -М О2нач - 52кон)/2 = 0,1 1692 (I2 - О2) = 1 428 Дж.
3. Определим номинальный момент двигателя и электромеха-
ническую постоянную времени ЭП:
Мном = Лом/®ном = 5 500/157 = 35 Н м;
287
Тм = = J(co0 - ®ном)/Мном = 0,1 • (169 - 157)/35 = 0,03 с.
4. По формуле (9.31) вычисляем потери энергии в якоре при
линейном нарастании напряжения в течение 1 с
АЛ "о = 2АЛи0Тм//п0 = 1428•2• 0,03/1,0 = 86 Дж.
При плавном нарастании напряжения потери снизились в
/п0/2Тм = 1/2 0,03 = 16,7 раза.
Задача 9.7. Для асинхронного двигателя из задачи 9.5 опреде-
лить переменные потери энергии в двигателе при динамическом
торможении и реверсе вхолостую и при номинальном моменте
нагрузки Мс = Мном. Принять, что при торможении и реверсе дви-
гатель развивает момент Мср = 207 Н • м = const.
Задача 9.8. Двухскоростной асинхронный двигатель типа
4A180S4/2 имеет следующие паспортные данные: Рном = 22/26,5 кВт;
«1ном = 2 920 об/мин; л2ном = 1 470 об/мин; J - 0,21 кг - м2.
Сопоставить переменные потери в его роторе при прямом и
ступенчатом пуске вхолостую.
9.3. Коэффициент полезного действия
электропривода
КПД электропривода как электромеханической системы опре-
деляется произведением КПД силового канала, а именно: произ-
ведением КПД преобразователя т|п, двигателя т|д и механической
передачи г|м.п
П = ПпПдПмп- (9-29)
В общем случае, когда ЭП работает в некотором цикле с раз-
личными скоростями или нагрузками на валу как в установив-
шемся, так и переходном режимах, КПД двигателя определяется
Т|ц — -^пол/^потр — -4пОл/(-4пОЛ +АЛ) —
И К п п '
= X Лол/// / X Лол//, + X А^// > (9-30)
1 /11 1 ;
где Лпол, Лпотр — полезная механическая и потребленная электри-
ческая энергии двигателя; АЛ — потери энергии; Рпол/ — полезная
механическая мощность на z-м участке цикла; АР, — потери мощ-
ности на z-м участке цикла; п — число участков работы ЭП.
Рассчитанный по формуле (9.30) КПД называют цикловым,
или средневзвешенным. Если ЭП работает в установившемся ре-
жиме, то формула (9.30) упрощается и принимает вид
П = ЛолЛЛол + АЛ- (9.31)
288
Рис. 9.3. Зависимости номинального КПД двигателя от номинальной мощ-
ности (а) и КПД двигателя от коэффициента нагрузки (б)
Закономерность изменения номинального КПД двигателей в
зависимости от их номинальной мощности Рном иллюстрирует рис.
9.3, а.
С ростом уровня номинальной мощности номинальный КПД
растет, что объясняется уменьшением потерь мощности относи-
тельно полезной мощности двигателя.
КПД работающего двигателя зависит от развиваемой им по-
лезной механической мощности на валу. При малых нагрузках КПД
двигателя небольшой (рис. 9.3, б), по мере увеличения нагрузки
он растет.
Отметим, что своего максимального значения r|max КПД боль-
шинства двигателей достигает при нагрузке, которая меньше но-
минальной.
Существует условие, при котором двигатель будет работать с
максимальным КПД при данном коэффициенте нагрузки двига-
теля:
кн ~ Л/^ном,
где Рс — механическая мощность нагрузки. КПД двигателя т| мож-
но записать следующим образом:
и = рс/(Л + др) ” ^н^ном + К+ £2НИНОМ). (9.32)
Найдем условие работы двигателя с максимальным КПД при
данном коэффициенте нагрузки, взяв производную dr] /d£H и при-
равняв ее нулю. Максимальное значение КПД будет иметь место
при оптимальной нагрузке, определяемой следующим соотноше-
нием постоянных К и номинальных переменных Ином потерь мощ-
ности:
н.опт */ином.
(9.33)
289
Из формулы (9.33) следует, что при К > Ином максимальный
КПД может быть получен при нагрузке двигателя, превышающей
номинальную, что неприемлемо. Максимальный КПД к„ опт при
А' < Кюм имеет следующие значения:
K/VH0K....... 0,1 0,3 0,5 0,7 0,9
Лнопт........ 0,32 0,55 0,71 0,84 0,95
Анализируя работу электропривода с конкретным двигателем,
можно с помощью соотношения (9.33) определить нагрузку дви-
гателя, при которой он будет работать с наименьшими потерями
мощности, т. е. при данной нагрузке с максимальным КПД.
Анализ работы действующих электроприводов показывает, что
большинство двигателей имеют завышенную номинальную мощ-
ность по сравнению с той, которая требуется от электропривода
для реализации заданного технологического процесса. В европей-
ских странах коэффициент нагрузки (коэффициент использова-
ния) двигателей кп составляет величину порядка 0,6, а в нашей
стране наиболее вероятное значение этого коэффициента лежит в
пределах 0,3...0,5.
Другая типичная ситуация характеризуется тем, что электро-
приводы ряда рабочих машин и производственных механизмов
часть своего цикла работают с малыми механическими нагрузка-
ми или на холостом ходу. К ним относятся, например, электро-
приводы обрабатывающих станков, кузнечно-прессового обору-
дования, подъемно-транспортных механизмов.
Исходя из этого можно назвать следующие способы повыше-
ния КПД двигателей при их эксплуатации:
• замена малозагруженных двигателей двигателями меньшей
мощности. Такая замена целесообразна в тех случаях, когда это
приведет к снижению потерь энергии в электроприводе и системе
электроснабжения, что позволит окупить капитальные затраты при
такой модернизации за приемлемый срок. Расчеты показывают,
что при коэффициенте нагрузки к„< 0,4 в большинстве случаев
замена малозагруженных двигателей оказывается экономически
целесообразной, при к„ > 0,7 — нецелесообразной, а при соотно-
шении 0,4 < кн < 0,7 требуется выполнение технико-экономиче-
ских расчетов;
• ограничение времени работы двигателей при их холостом ходе.
Отключение двигателей при их холостом ходе оправдано в том
случае, когда потери энергии при новом пуске двигателя оказы-
ваются меньше, чем за время работы на холостом ходу. Отключе-
ние двигателя целесообразно проводить при времени холостого
хода в пределах 10 с и более. Электротехническая промышлен-
ность выпускает устройства, позволяющие автоматически отклю-
чать двигатели при их переходе в режим холостого хода.
290
Задача 9.9*. Для условий задачи 9.2* рассчитать КПД двигателя
2ПН—132 при его работе в заданном цикле.
Поскольку двигатель работает с переменной нагрузкой на валу,
КПД должен рассчитываться по формуле (9.30).
1. Определим по формуле (9.7) полные потери мощности в но-
минальном режиме
АЛом = Рном(1 -ПномУПном = 5 500(1 -0,8)/0,8 = 1 375 Вт
и постоянные потери мощности
К = ДРНОМ - Кном = 1 375 - 508 = 867 Вт.
2. Определим скорости двигателя, соответствующие моментам
нагрузки на отдельных участках цикла, используя для этого фор-
мулу (4.5). Для этого предварительно определим:
номинальный момент двигателя
4/ном = Лом/Юном = 5 500/157 = 35 Н • м;
произведение /сФН0М
/сФном = Л/ном//ном = 35/59 = 0,6 В • с;
скорость холостого хода
«о = i/номДФном = 110/0,6 = 183 рад/с.
Тогда скорости двигателя на участках цикла составят:
®ci = ®о- Л/с1/?я//сФном = 183 - 0,6 • 35 • 0,146 = 167 рад/с;
®с2 = «ном = 157 рад/с, ®с3 = 162 рад/с.
3. Учитывая, что Рпол = Рмех = Л/с®с и ДР = К + V, находим
Пц = / ^Л/с/со,/ + Л'^/ + ^Д^/ =
U )/ I 1 1 1 )
= (21•176•600 + 35-157-180 + 28-162•900)/
/(7167 + 867-1680 + 0,146((0,6 • 59)2 • 600 +
+592 1 80+ (0,8 - 59)2 - 900)) = 0,83.
Задача 9.10. Для данных задачи 9.1* рассчитать КПД двигателя
4AH160S4 при его работе в заданной точке.
9.4. Коэффициент мощности электропривода
ЭП, подключенный к сети переменного тока, потребляет из
нее активную Ра и реактивную Q мощности. Активная мощность
291
расходуется на полезную работу ЭП и покрытие потерь в нем, а
реактивная мощность обеспечивает создание электромагнитных
полей двигателя и других его элементов и непосредственно полез-
ной работы не совершает. Отметим, что в отношении реактивной
мощности лучше говорить не о потреблении, а об обмене (цирку-
ляции) мощности между сетью и двигателем.
ЭП, потребляя реактивную мощность, нагружает ею систему
электроснабжения, вызывая дополнительные потери напряжения
и энергии в ее элементах. По этой причине всегда следует стре-
миться к обеспечению максимально возможного costp ЭП.
Работа ЭП в цикле характеризуется средневзвешенным, или
цикловым, коэффициентом мощности, который определяется от-
ношением потребленной активной энергии за цикл Аа к полной
или кажущейся энергии Ап в соответствии с формулой
cos<pu-^а/Лп = Х (9.34)
i=i / /=1
где S, — полная или кажущаяся мощность на i-м участке цикла,
+ (22 (Ль 2/— соответственно активная и реактивная
мощности на i-м участке цикла).
При работе ЭП в установившемся режиме с постоянной ско-
ростью коэффициент мощности рассчитывается как
со8ф=Л/£ = лА/Л2+<22- (9-35)
Угол <р, как известно из электротехники, определяет сдвиг фаз
между напряжением сети и потребляемым током электропривода:
если привод потребляет реактивную мощность, то существует сдвиг
фаз ф ф 0 и созф ф 1. Если реактивная мощность ЭП не потребляет-
ся, ТО ф = О И СОвф - 1.
Коэффициентом мощности характеризуется работа ЭП с дви-
гателями переменного тока, а также ЭП постоянного тока, вы-
полненного по системе «управляемый выпрямитель—двигатель
постоянного тока».
Коэффициент мощности асинхронного двигателя. Входящие в
формулы (9.34) и (9.35) активная Ра и реактивная Q мощности
применительно к трехфазному асинхронному двигателю могут быть
рассчитаны для установившегося режима его работы по следу-
ющим формулам:
Ра = = 3 (/1ф /,cos ф = Рмех + АР = Мол + К + И, + И2; (9.36)
Q = 3/2хи + 3/fr, + 3/22х2. (9.37)
292
Рис. 9.4. Зависимости номинального коэффициента мощности асинхрон-
ных двигателей серии 4А от номинальной мощности и скорости враще-
ния (о) и коэффициента мощности асинхронных двигателей от коэффи-
циента нагрузки (б):
1 — р = 2; 2 — р = 4; 3 — cosq>HOM = 0,6; 4 — cos<pH0M = 0,8; 5 — cos<pHOM = 0,9
Для П-образной схемы замещения асинхронного двигателя (см.
рис. 5.2) при ~ 0 ток намагничивания равен = иф/хц и выра-
жение (9.35) можно записать в следующем виде:
2=3 2Ф7И + ЗГ22хк = 3 иф1ц + MmoSxJR'i. (9.38)
На рис. 9.4, а приведены зависимости номинального коэффи-
циента мощности для асинхронных двигателей различных номи-
нальных мощностей Рном и чисел пар полюсов р (кривая 7 для р-2,
кривая 2 для р = 4). Характерным для них является более высокое
значение cos<pHOM для двигателей больших номинальных мощнос-
тей и скоростей вращения.
Для большинства асинхронных двигателей cos<pHOM » 0,8...0,9.
Для этих значений Q= (0,5...0,75)/’], т.е. асинхронный двигатель
на каждый киловатт активной мощности потребляет из сети
(0,5...0,75) квар реактивной мощности. Чем ниже coscp, тем боль-
шую реактивную мощность потребляет асинхронный двигатель из
сети, загружая ее дополнительным током и вызывая в ней допол-
нительные потери.
Коэффициент мощности асинхронного двигателя зависит от
его нагрузки. При холостом ходе коэффициент мощности двигате-
ля невелик, так как относительно велика доля реактивной мощ-
ности по сравнению с активной. По мере увеличения нагрузки
возрастает и costp, достигая своего максимального значения
примерно в области номинальной нагрузки асинхронного двига-
теля. В качестве примера на рис. 9.4, б приведены зависимости
coscp от кратности механической нагрузки Рс/Рноы для двигателей
серии 4А при различных уровнях номинальных coscpHOM = 0,9 (кри-
вая 5), 0,8 (кривая 4) и 0,6 (кривая 3).
Асинхронные двигатели являются основными потребителями
реактивной мощности в системах электроснабжения, поэтому
293
Рис. 9.5. Зависимости токов ротора и
намагничивания асинхронного дви-
гателя от напряжения на его статоре
повышение коэффициента их мощности представляет собой важ-
ную технико-экономическую задачу. Перечислим основные ме-
роприятия по повышению coscp асинхронных двигателей.
1. Замена малозагруженных двигателей двигателями меньшей
мощности.
2. Ограничение времени работы двигателей на холостом ходу.
Эти возможности объясняются характером зависимости coscp от
нагрузки двигателя, приведенной на рис. 9.4, б.
3. Снижение подводимого к двигателю напряжения, которое
можно показать с помощью зависимостей на рис. 9.5. Из их рас-
смотрения следует, что при снижении напряжения U{ уменьша-
ется ток намагничивания /ц, что приводит к снижению потреб-
ляемой двигателем реактивной мощности и тем самым к умень-
шению потерь мощности в двигателе и элементах системы элек-
троснабжения.
Вместе с тем при неизменном моменте нагрузки Мс происхо-
дит увеличение тока ротора Г2, что может привести к дополни-
тельному нагреву двигателя. Поэтому такой способ энергосбере-
жения может использоваться при пониженных нагрузках двигате-
ля, не превышающих 40...50 % от номинальной.
Практически этот способ повышения coscp может быть реали-
зован двумя способами: переключением обмоток двигателя со схе-
мы треугольника на схему звезды и с использованием тиристор-
ных регуляторов напряжения.
Первый способ снижения напряжения возможен при равен-
стве номинального фазного напряжения обмотки статора двига-
теля и линейного напряжения сети. При нагрузках двигателя, близ-
ких к номинальному уровню, обмотки статора включены по схе-
ме треугольника «А» и двигатель работает при номинальном на-
пряжении обмоток статора с полным магнитным потоком.
При снижении нагрузки обмотки статора двигателя переклю-
чаются на схему звезды «Y», к ним подводится пониженное в 1,73
раза напряжение, за счет чего снижаются ток намагничивания и
294
реактивная мощность. Важно отметить, что при этом потери мощ-
ности в двигателе в зависимости от коэффициента его нагрузки
кн могут как уменьшаться, так и увеличиваться.
Анализ показывает, что при коэффициенте нагрузки кн < 0,7
потребляемая двигателем реактивная мощность в схеме звезды все-
гда меньше, чем в схеме треугольника. Снижение потерь мощно-
сти в двигателе при переходе на схему звезды будет иметь место
начиная со значений коэффициента нагрузки двигателя кн < 0,4.
Способ снижения напряжения с использованием тиристорных
регуляторов напряжения рассмотрен в подразд. 9.5.
4. Применение устройств компенсации реактивной мощности.
Для компенсации реактивной мощности и повышения тем самым
coscp электроприводов могут использоваться различные средства
компенсации. К их числу относятся:
фильтрокомпенсирующие и фильтросимметрирующие устрой-
ства, обеспечивающие одновременно компенсацию реактивной
мощности, фильтрацию высших гармоник и уменьшение откло-
нений напряжения по фазам;
синхронные двигатели, использование которых в качестве ком-
пенсаторов реактивной мощности рассмотрено в подразд. 6.4;
синхронные компенсаторы, представляющие собой синхрон-
ные двигатели, работающие без нагрузки;
конденсаторные установки;
тиристорные источники реактивной мощности.
Реактивная мощность компенсирующей установки QK у опре-
деляется как
2кУ= (tgcpi - tgcp2), (9-39)
где Р— потребляемая электроприводом активная мощность; tg<p,,
tg<p2 — тангенсы угла <р до и после компенсации.
Коэффициент мощности системы «управляемый выпрямитель —
двигатель постоянного тока» (УВ—ДПТ). Система УВ—ДПТ пита-
ется от сети переменного тока и потребляет при этом реактивную
мощность. Это определяется тем, что регулирование напряжения
на якоре двигателя происходит за счет задержки открытия тири-
сторов управляемого выпрямителя. Вследствие этого происходит
сдвиг фазы потребляемого ЭП тока по отношению к напряжению
сети и ЭП начинает потреблять реактивную мощность из сети.
Кроме того, работа системы У В—ДПТ вызывает искажение си-
нусоидальной формы напряжения системы электроснабжения. Это
оказывает вредное воздействие на другие ЭП, что выражается в
повышенном нагреве электродвигателей, снижении их мощности
и КПД, усилении вибрации и шума при их работе.
Искажение синусоидальной формы напряжения приводит к
появлению высших гармоник напряжения, которые нарушают
нормальную работу других потребителей электроэнергии, устройств
295
автоматики, защиты и сигнализации, создает помехи в линиях
связи. Несинусоидальность напряжений и токов приводит к до-
полнительным погрешностям измерительных приборов, а также
оказывает отрицательное воздействие на батареи конденсаторов,
применяемых для компенсации реактивной мощности, вызывая
их перегрузку по току и напряжению.
Коэффициент мощности системы УВ—ДПТ определяется двумя
факторами: углом сдвига <р( основной первой гармоники потреб-
ляемого из сети тока относительно напряжения сети и коэффи-
циентом искажения v этого тока
cos<p = vcos<pi, (9.40)
где coscpi ~ cos(a + у/2).
В этих выражениях v — коэффициент искажения, v = /) //; /) —
действующее значение первой гармоники этого тока; I — дей-
ствующее значение потребляемого из сети тока; а, у — соответ-
ственно углы управления и коммутации вентилей.
Из приведенного выражения следует, что коэффициент мощ-
ности вентильного ЭП постоянного тока определяется углом уп-
равления тиристоров УВ а и его нагрузкой, от которой зависит
угол коммутации у. Снижение скорости (увеличение диапазона
регулирования) приводит к уменьшению коэффициента мощно-
сти ЭП. Анализ зависимости coscp от относительной скорости ю* =
= со/соое при номинальной нагрузке на валу двигателя (рис. 9.6, а)
показывает, что уменьшение коэффициента мощности происхо-
дит пропорционально снижению скорости, т.е. увеличению диа-
пазона регулирования. Это видно также и из следующего прибли-
женного выражения для коэффициента мощности при регулиро-
вании скорости, получаемого из (9.40) при v = 1 и у = 0:
cos фр» cos a = Ed/Edmm = со0/®ое, (9.41)
где Ed — ЭДС преобразователя; со0 — скорость идеального холо-
стого хода, соответствующая Ed.
Рис. 9.6. Зависимости коэффициента мощности системы «преобразова-
тель-двигатель» от относительной скорости (а) и диапазона регулиро-
вания (б)
296
При регулировании скорости с одинаковым временем работы
двигателя на каждой скорости при Мс = const зависимость сред-
невзвешенного циклового коэффициента мощности cos <рсв от ди-
апазона регулирования D показана на рис. 9.6, б.
Повышение коэффициента мощности и уменьшение несину-
соидальности напряжения сети при работе системы УВ—ДПТ
может быть достигнуто рассмотренными ранее средствами ком-
пенсации реактивной мощности. Кроме того, повышение коэф-
фициента мощности можно получить путем использования спе-
циальных законов управления УВ и способов коммутации их вен-
тилей. К их числу относятся поочередное и несимметричное уп-
равление преобразователями, а также искусственная коммутация
вентилей преобразователей.
Задача 9.11*. Асинхронный двигатель типа МТКН 412 — 6 име-
ет следующие паспортные данные: Рнтл = 36 кВт при продолжи-
тельности включения ПВ = 25 %; лном = 920 об/мин; /|Н0М = 81 А;
4i= Лх.х = 41,5 А; /?, = 0,13 Ом; х, = 0,2 Ом; R'2 = 0,24 Ом; х2 = 0,25 Ом.
Определить коэффициент мощности при его работе на есте-
ственной характеристике с моментом нагрузки Л/с = 0,5Л/НОМ.
1. Определяем скорости в режимах идеального холостого хода и
при номинальной нагрузке двигателя:
оэо = lnf\/p = 2-3,14- 50/3 = 105 рад/с;
®ном = лином/30 = 3,14 • 920/30 = 96,3 рад/с.
2. Находим номинальные скольжение и момент двигателя:
Яном = (®о - Юном)/Wo = (105 - 96,3)/1О5 = 0,08;
Л/ном = ЛомМом = 36 000/96,3 = 374 Н • м.
3. Рассчитываем скольжение на естественной характеристике, со-
ответствующее моменту нагрузки Мс = 0,5Л/НОМ = 0,5 • 374 = 187 Н • м,
принимая рабочий участок характеристики линейным:
яс = яномЛ/с/Л/ном = 0,08 • 0,5 = 0,04.
4. По формуле (5.7) определяем приведенный ток в роторе дви-
гателя при моменте нагрузки Л/с = 187 Н м
/2' = 7л/с®ьяс/3/?2 = 7187 105 0,04/(3 0,24) = 33 А.
5. Определяем по формуле (9.36) номинальную активную по-
требляемую мощность из сети
Лном = 3 6/|ф/]HOMcos <рном = 3 • 220 81 0,82 = 43 873 кВт.
6. Вычисляем полные номинальные потери мощности
АРном = ^1ном - Рном = 43 873 - 36 000 = 7 837 Вт.
297
7, Находим номинальный приведенный ток ротора
Л'ном = >/^ноМозо5ном/ЗЯ2' = ^374 105 0,08/(3 0,24) = 66 А.
8. Определяем постоянные потери мощности
К — ЛРНОМ — И|ном — р2НОм —
= 7 837 - 3 • 812 0,13 - 3 - 662-0,24 = 2 142 Вт.
9. Потребляемая активная мощность при заданном моменте
нагрузки равна
Р= Л/са>с + К + И]с + 1^2С =
= 187 - 105(1 -0,04) + 2 142 + 3 332(0,13 + 0,24) = 22 200 Вт.
10. Находим по формуле (9.37) реактивную мощность
Q - 3 t/ф/,х.х + 3/22хк = 3 • 220 • 41,5 + 3 • ЗЗ2• 0,45 = 28 860 вар.
11. Определяем по формуле (9.34) искомый коэффициент мощ-
ности при работе двигателя в заданной точке
cosip = PjjP^+Q2 = 22200/7222002 + 28 8602 = 0,57. •
Задача 9.12*. Определить мощность и емкость конденсаторной
батареи, которую необходимо использовать для повышения ко-
эффициента мощности трехфазного асинхронного электроприво-
да от cos ф] = 0,8 (tgф, = 0,75) до cos ф2 = 0,96 (tg<p2 = 0,29). Потреб-
ляемая электроприводом активная мощность составляет 220 кВт,
а номинальное напряжение — 380 В частотой f = 50 Гц.
1. Требуемая мощность конденсаторной батареи находится по
формуле (9.34) как
2к.у = ^(tgФ1 - ^фз) = 220(0,75 - 0,29) = 101 квар.
2. Емкость конденсаторной батареи на одну фазу составит
С= 0,у/(3 • 2тг/(/2ом) =
= 101 1 000/(3 2 3,14 - 50 3802) = 744 мкф.
Задача 9.13. Двигатель МТКН 412 — 6 (данные двигателя приве-
дены в задаче 9.11) работает в течение 7 мин с моментом нагрузки
Л/с, = 0,9Л/НОМ, в течение 12 мин — с моментом Мс2 = 0,4Л/НОМ и в
течение 4 мин — с моментом Л/с3 = Л/ном. Определить средневзве-
шенный коэффициент мощности двигателя за этот цикл работы.
298
9.5. Энергосбережение в электроприводе
и средствами электропривода
Эффективное использование энергии является одной из важ-
нейших проблем народного хозяйства. Ее решение позволит сни-
зить потребление энергетических и материальных ресурсов при
производстве промышленной и сельскохозяйственной продукции,
уменьшить большие непроизводительные расходы государства и
населения в сфере жилищно-коммунального хозяйства, улучшить
экологическую обстановку в стране. Наибольший эффект в реше-
нии проблемы энергосбережения может быть достигнут в элект-
роприводах, которые являются основными потребителями элект-
рической энергии.
Энергосбережение может осуществляться как в самом ЭП, так
и в обслуживаемых им технологических процессах, где использу-
ется вырабатываемая им механическая энергия. При этом приме-
нение регулируемого ЭП позволяет обеспечить энергосбережение
при реализации многих технологических процессов, иногда во
много раз превосходящее экономию энергии в самом ЭП.
Например, регулирование скорости ленты транспортера за счет
ЭП, подающего детали в закалочную печь, позволяет минимизи-
ровать количество тепловой энергии на их закалку в зависимости
от их сортамента, технологии закалки и других факторов. Весьма
эффективно регулируемый по скорости ЭП может обеспечить энер-
госбережение в таких рабочих машинах, как насосы, вентилято-
ры и компрессоры. Поскольку эти рабочие машины широко ис-
пользуются в промышленности, на транспорте, в сельском и жи-
лищно-коммунальном хозяйствах, потребляя по различным оцен-
кам 30...40 % вырабатываемой электроэнергии, энергосбережение
в этой сфере средствами ЭП оказывается очень эффективным.
Энергосбережение в ЭП может быть достигнуто как на стадии
его проектирования и конструирования, так и при эксплуата-
ции ЭП.
Проектирование и конструирование ЭП должно со-
ответствовать современному уровню развития теории и практики
ЭП и смежных областей науки и техники: электромеханики, элек-
троники, автоматики, механики и вычислительной техники. Энер-
госбережение при этом может осуществляться следующими мето-
дами и средствами.
1. Обоснованный расчет требуемой мощности двигателя испол-
нительного органа рабочей машины или производственного ме-
ханизма с учетом всех условий его работы. В подразд. 9.3 и 9.4 было
показано, что двигатель завышенной мощности имеет низкие энер-
гетические показатели работы и при этом также имеет место не-
доиспользование заложенных в него материальных ресурсов.
299
С другой стороны, применение двигателя недостаточной мощ-
ности снижает производительность технологического оборудова-
ния, приводит к перегрузке двигателя и преждевременному выхо-
ду его из строя. Подробно процедура расчета мощности и выбора
двигателя рассмотрена в гл. 10.
2. Выбор силовых элементов ЭП, характеризующихся при сво-
ей работе минимальными потерями энергии. Это'относится к вы-
бору двигателей, в отношении которых можно назвать следующие
возможности энергосберегающих решений:
применение энергосберегающих двигателей, в которых за счет
увеличенных объемов активных материалов (меди и стали) поте-
ри мощности снижены не менее чем на 15...20 %. В российских
каталогах такие двигатели имеют в обозначении букву «е»;
применение двигателей с уменьшенным моментом инерции
ротора (якоря), в которых в соответствии с формулой (9.25) име-
ет место пониженный уровень потери энергии в переходных про-
цессах. К таким двигателям относятся двигатели с удлиненным
ротором (например, асинхронные двигатели краново-металлур-
гической серии 4МТ и 4МТК) и двигатели с полым ротором (яко-
рем). Снижение момента инерции ЭП можно получить при ис-
пользовании вместо одного двигателя двух двигателей половин-
ной мощности на ту же скорость вращения.
Задачу энергосбережения решают с помощью имеющих высо-
кий КПД полупроводниковых преобразователей и механических
передач с небольшими потерями мощности.
3. Ориентирование на применение регулируемого ЭП по систе-
ме «преобразователь—двигатель», что позволяет реализовывать
экономичные способы регулирования переменных ЭП в устано-
вившихся и переходных режимах. В количественном отношении
получаемый эффект энергосбережения в переходных процессах
рассмотрен в подразд. 9.2.
4. Выбор рациональных способов и технических средств регу-
лирования переменных ЭП, использование которых не вызывает
дополнительных потерь энергии при его работе. К таким способам
относится, например, регулирование скорости двигателей пере-
менного тока с помощью полупроводниковых преобразователей
частоты (см. подразд. 5.4 и 6.2).
При эксплуатации электроприводов энергосбережение мо-
жет быть достигнуто за счет правильного технического обслужи-
вания и проведения мероприятий по их модернизации.
Техническое обслуживание ЭП должно проводиться персона-
лом в соответствии с правилами устройства и эксплуатации элект-
роустановок и предусматривать периодические осмотры и профи-
лактические мероприятия по элементам ЭП — смазку подшипни-
ков и других движущихся механических частей двигателя и меха-
нической передачи, очистку коллекторов и контактных колец дви-
300
гателей и контактов электрической аппаратуры, затяжку болто-
вых электрических соединений и т.д.
Энергосбережение в эксплуатируемых ЭП может достигаться
их модернизацией, возможные способы и средства которой были
рассмотрены в подразд. 9.3 и 9.4.
Наибольшие возможности по энерго- и ресурсосбережению как
при проектировании новых, так и при модернизации действу-
ющих электроприводов предоставляют регулируемые электропри-
воды. Рассмотрим возможности энерго- и ресурсосбережения при
использовании электроприводов переменного тока по системе
«тиристорный регулятор напряжения —асинхронный двигатель»
и «преобразователь частоты —асинхронный двигатель».
В системе «тиристорный регулятор напряжения —асинхронный
двигатель» возможность энергосбережения при использовании
тиристорных регуляторов напряжения иллюстрируют графики на
рис. 9.7, а, представляющие собой зависимости тока статора асин-
хронного двигателя Ц от напряжения Z7, при разных моментах
нагрузки А/с. При каждой нагрузке имеется такое напряжение,
при котором потребляемый двигателем ток минимален.
При этом важно отметить два обстоятельства: точка минимума
соответствует напряжениям, меньше номинального, а миними-
зация тока происходит за счет снижения реактивной составля-
ющей тока.
Штриховая линия на рис. 9.7, а, проведенная через точки ми-
нимумов тока для каждой нагрузки, определяет закон регулиро-
вания напряжения в функции тока, при реализации которого при
любом Мс из сети потребляется минимальный ток.
Схема ЭП с минимизацией потребляемого двигателем тока
приведена на рис. 9.7, б. В его состав входят асинхронный двига-
тель АД, тиристорный регулятор напряжения ТРН с системой
управления СУ ТРН, датчики тока ДТ и напряжения ДН, функ-
циональный преобразователь ФП и инерционное звено ИЗ.
Рис. 9.7. С-образные характеристики (д) и схема асинхронного ЭП (б)
при минимизации потребляемого тока
301
Требуемый закон управления ЭП реализуется с помощью по-
ложительной обратной связи по току. Датчик тока вырабатывает
пропорциональный току сигнал, поступающий на вход функци-
онального преобразователя, который обеспечивает требуемую за-
висимость между подаваемым на двигатель напряжением и мо-
ментом нагрузки на его валу (см. штриховую линию на рис. 9.7,
а). В системе используется инерционное звено, с помощью кото-
рого обеспечивается необходимое качество переходных процес-
сов.
В общем случае за счет регулирования напряжения на статоре
двигателя при малых нагрузках или холостом ходе могут быть сни-
жены ток, потребляемая из сети мощность, потери мощности или
повышены его КПД и cosip. На рис. 9.8 для примера показаны по-
строенные для двигателя типа 4А180М4 мощностью 30 кВт зави-
симости КПД т), cosip, относительных тока статора /,*= Ц//1ном и
потерь мощности АР* = АР/АРНОМ от относительного напряжения
на статоре U* = при моменте нагрузки, составляющем
20 % от номинального. Из приведенных кривых видно, что наи-
больших значений эти переменные достигают при напряжениях
60...80% от номинального, причем точки экстремума в общем
случае не совпадают.
Экстремальные значения переменных достигаются при работе
двигателя с определенными оптимальными скольжениями. Так,
для обеспечения минимума потребляемого тока при любых на-
грузках асинхронного двигателя его скольжение должно поддер-
живаться на уровне
sopt = Т?2/хц. (9.42)
Рис. 9.8. Зависимости КПД, коэффициента мощности, тока и потерь мощ-
ности асинхронного двигателя от напряжения на статоре
302
Поддержание скольжения на требуемом оптимальном уровне
может быть получено в системе с отрицательной обратной связью
по скорости (см. рис. 5.39, а).
Тиристорные регуляторы напряжения широко используются в
качестве так называемых «мягких» пускателей или «мягких» стар-
теров. За счет постепенного повышения подаваемого на двигатель
напряжения они обеспечивают ограничение пусковых токов и
моментов асинхронных и синхронных двигателей. При этом не
происходит снижение потерь энергии в электроприводе, поскольку
не изменяется скорость вращения магнитного поля, но вследствие
ограничения тока и момента существенно снижаются усилия, дей-
ствующие на проводники обмоток двигателей, их подшипники и
на элементы механической передачи и исполнительного органа
рабочих машин. За счет этого повышается надежность работы элек-
тропривода и технологического оборудования, уменьшается ко-
личество ремонтов, что в конечном итоге ведет к экономии энер-
гетических и материальных ресурсов.
Ранее уже отмечалось, что регулирование скорости асинхрон-
ных двигателей при использовании преобразователей частоты не
сопровождается дополнительными потерями мощности, а при-
менение частотно-управляемых пуска и торможения двигателей
обеспечивает снижение потерь энергии в переходных процессах и
возможность ее рекуперации в сеть при торможении. Рассмотрим
теперь эффект энергосбережения в сфере технологии на примере
частотно-регулируемого ЭП центробежного насоса.
Особенностью работы многих насосных установок является
изменение количества (расхода) подаваемой ими потребителю
жидкости (воды). Например, потребление воды в жилых зданиях
меняется в течение суток, что иллюстрирует (рис. 9.9) характер-
ный для них суточный график расхода воды Q (t), имеющий два
максимума: утренний и вечерний.
Основной характеристикой насоса является зависимость созда-
ваемого им напора (давления) Н от расхода воды Q. На рис. 9.10
Рис. 9.9. График суточного недопо-
требления для жилого здания
303
показаны эти характеристики для двух скоростей приводного дви-
гателя: номинальной а>ном и пониженной Юр Рассмотрим с их по-
мощью возможности энергосбережения при использовании регу-
лируемого ЭП насосных установок, работающих с переменным
расходом Q.
Допустим, что в исходном положении насос работал на харак-
теристике I с номинальными расходом (?ном и напором Нном в
точке 1. При снижении расхода воды до значения Q2 при неиз-
менной скорости ЭП напор насоса в соответствии с характери-
стикой возрастет до значения Н2. Для создания этих напора и рас-
хода ЭП будет потреблять из сети мощность
^потр — Р^&ЛПнПэп), (9.43)
где р — плотность воды, р = 1 000 кг/м3; g — ускорение свободного
падения, g- 9,81 м/с2; т|н, т)эп — соответственно КПД насоса и ЭП.
Тот же расход воды может быть обеспечен при меньшем напо-
ре если с помощью ЭП снизить скорость насоса до уровня cot.
В этом случае насос будет работать в точке 5 на характеристике II
и из сети будет потребляться (при тех же КПД насоса и ЭП)
меньшая мощность
Л = Pgtf,Q2/(r1Hr13n). (9.44)
Экономия электроэнергии ЭЭ за время работы Тр насоса с рас-
ходом Q2 при тех же значениях КПД насоса и ЭП при этом соста-
вит
ЭЭ = р^//2-Я|)е2Гр/(пн11эп). (9.45)
Примеры реализации регулируемого ЭП насосов показывают,
что экономия электроэнергии в системах водоснабжения может
доходить до 50 % и более в зависимости от вида и режимов работы
насосных установок.
Кроме того, работа сетей с меньшими напорами будет харак-
теризоваться и меньшими утечками воды в сетях и арматуре,
достигающими иногда 15...20 % и более. Применение регулиру-
емого ЭП позволяет также за счет частотно-управляемых пуска и
торможения насосного агрегата устранить такое нежелательное
явление, как гидравлические удары в гидравлической системе.
На основе преобразователей частоты может быть при необхо-
димости реализована замкнутая система регулирования (поддер-
жания) напора жидкости в заданной точке гидравлической си-
стемы. С этой целью выпускаемые для насосных установок преоб-
разователи частоты имеют встроенный регулятор и задатчик дав-
ления и вход для подключения датчика давления. Пример реали-
зации такой системы показан на рис. 9.11.
Схема предназначена для поддержания в магистрали давления
воды, перемещаемой насосом. Она включает в себя асинхронный
304
Рис. 9.11. Замкнутая схема регулиро-
вания давления
Вода
двигатель АД, преобразователь частоты ПЧ с регулятором давле-
ния РД, задатчик ЗД и датчик ДД давления, обеспечивающий
отрицательную обратную связь по давлению в магистрали.
Схема работает следующим образом. При изменениях давле-
ния в магистрали, вызванных изменением расхода воды, проис-
ходит изменение в нужном направлении сигнала управления Uy =
- U3a - Цдд, частоты подаваемого напряжения U\ на АД и его
скорости со, за счет чего происходит восстановление заданного
уровня давления (характеристика III на рис. 9.10). При использо-
вании ПИ-регулятора давление в магистрали в статическом режи-
ме будет поддерживаться на постоянном уровне.
Задача 9.14*. Насос обеспечивает водоснабжение здания и в
течение года работает с номинальным расходом 0НОМ = 0,014 м3/с
и напором Ниоы = 50 м в течение времени Тр1 = I 600 ч, с расхо-
дом Qi = 0,0056 м3/с в течение времени Гр2 - 4 000 ч и с расхо-
дом Q2 = 0,0028 м3/с и напором Н2 = 62 м в течение времени Тр3 =
= 2 400 ч.
Насос приводится во вращение асинхронным двигателем, име-
ющим КПД т]дд = 88 %. КПД насоса т]н = 63 %.
Определить экономию электроэнергии при использовании ре-
гулируемого электропривода. Принять, что КПД насоса при из-
менении его расхода и двигателя при регулировании его скорости
не изменяются.
Таблица 9.1
Данные по расчету потребления электроэнергии
Переменные Интервал 1 Интервал 2 Интервал 3
С, м3/с 0,014 0,0056 0,0028
Н, м 50 60,5 62
Гр, ч 1 600 4 000 2 400
^потр, кВт 12,63 6,11 3,13
Лотр, кВт ч 20208 24 440 7512
305
Таблица 9.2
Данные по расчету потребления электроэнергии
Переменные Интервал 1 Интервал 2 Интервал 3
0, м3/с 0,014 0,0056 0,0028
Н, м 50 9,7 2,5
Гр,ч 1600 4 000 2 400
^потр, кВт 12,63 0,4 0,025
Лпотр, кВт ч 20208 1 600 60
Экономию электроэнергии находим, сопоставляя потребление
электроэнергии нерегулируемого и регулируемого по скорости
электропривода. КПД насоса и ЭП примем неизменными и рав-
ными номинальным.
1. Нерегулируемый по скорости электропривод.
Для каждого уровня расхода Q и напора Н по формуле (9.43)
находим потребляемые мощность Рпотр и энергию Лпотр = РпотрТр.
Результаты расчета представлены в табл. 9.1.
Потребление электроэнергии за все время работы насосной
установки составит 52 160 кВт • ч.
2. Регулируемый электропривод.
При использовании регулируемого электропривода за счет сни-
жения скорости двигателя при тех же расходах уменьшаются на-
пор и потребляемые мощность и электроэнергия. Пересчет уров-
ней напора и мощности для каких-то двух скоростей СО] и со2 осу-
ществляется с помощью формул подобия, имеющих вид:
01/02 = «бМ; (9.46)
Я,/Я2 = (со!/со2)2; (9.47)
Р,/Р2 = (coj/co2)3. (9.48)
Данные расчета представлены в табл. 9.2.
Потребление электроэнергии в этом случае составит 21 868
кВт • ч, а искомая экономия Лэк = 30 292 кВт • ч.
С использованием данных по тарифу на электроэнергию далее
может быть рассчитана и экономия в рублевом выражении.
9.6. Экономическая оценка эффективности
энергосбережения
Энергосбережение в электроприводах и средствами электропри-
вода в сфере технологии может обеспечиваться различными мето-
306
дами и средствами. При проектировании новых электроприводов
рассматриваются нисколько вариантов, из которых должен быть
выбран тот, который отличается наилучшими технико-экономи-
ческими показателями. Модернизация действующих электроприво-
дов в целях энергосбережения требует соответствующих капиталь-
ных затрат, эффективность которых должна быть экономически
оправдана. Таким образом, возникает задача экономической оцен-
ки энергосберегающих мероприятий (проектов) и их результатов.
Экономическая эффективность ЭЭ энергосберегающих меро-
приятий (проектов) и их результатов, как и любых инвестицион-
ных проектов, производится путем сопоставления стоимостных
оценок получаемых результатов (выгод) Р и проведенных затрат 3
на их реализацию по следующей формуле:
ЭЭ = Р-3. (9.49)
При ЭЭ > 0 энергосберегающее мероприятие экономически
эффективно, в противном случае — нет.
Экономическая эффективность может быть также оценена по
отношению Р/3. При Р/3 > 1 энергосберегающее мероприятие эко-
номически оправдано, и наоборот.
Для энергосберегающих проектов результаты (выгоды) обус-
ловливаются получаемой экономией энергии и материальных ре-
сурсов при общем повышении технического уровня обслужива-
емого технологического процесса.
Методы расчета экономической эффективности подразделяются
на статические, когда не учитывается фактор времени, и динами-
ческие с использованием фактора времени.
Особенностью большинства энергосберегающих проектов в
электроприводе являются небольшие сроки реализации, т.е. их
краткосрочность. В соответствии с этим для определения их эко-
номической эффективности в отечественной и зарубежной прак-
тике чаще всего применяются статические методы, связан-
ные с расчетом срока окупаемости проекта.
Метод, основанный на расчете срока окупаемости Ток, исполь-
зуется для оценки эффективности производимых капитальных зат-
рат (инвестиций). Срок окупаемости представляет собой период
времени, в течение которого капитальные вложения окупаются
за счет снижения эксплуатационных (текущих) затрат.
Этот показатель может использоваться для оценки экономиче-
ской эффективности модернизации электроприводов и при вы-
боре наиболее выгодного варианта реализации электропривода. При
модернизации расчет срока окупаемости производится по формуле
Ток = К/{С,- С2) = К/\С, (9.50)
где К — капитальные затраты при модернизации; С,, С2 — эксп-
луатационные затраты до и после модернизации; АС — снижение
307
эксплуатационных затрат, получаемое за счет производимых ка-
питальных затрат, АС= (С, - С2).
В затраты С входят амортизационные отчисления, затраты на
обслуживание и ремонт оборудования, стоимость технологической
электроэнергии и заработная плата обслуживающего персонала.
Капитальные затраты К включают в себя стоимость оборудова-
ния, затраты на его транспортировку, строительные и монтажно-
наладочные работы, проведение научно-исследовательских опыт-
но-конструкторских разработок (НИОКР) по проекту. При модер-
низации уточнение суммы капитальных затрат может быть выпол-
нено за счет учета ликвидной стоимости заменяемого оборудования.
По аналогичной формуле может быть оценен срок окупаемо-
сти более дорогого варианта энергосберегающего проекта:
Ток = (К}-К2)/(С2-С}), (9.51)
где К\, Ct — капитальные и эксплуатационные затраты более ка-
питалоемкого варианта проекта; К2, С2 — капитальные и эксп-
луатационные затраты менее капиталоемкого варианта.
Рассчитанный по приведенным формулам срок окупаемости
сопоставляется с приемлемым (нормативным) для хозяйствующего
субъекта периодом времени и делается вывод о принятии или
непринятии данного проекта для реализации.
Динамические методы расчета применяются в тех случа-
ях, когда срок реализации энергосберегающего проекта составля-
ет несколько лет и рассматривается весь период его использова-
ния. Учет фактора времени осуществляется выполнением опера-
ции дисконтирования, которая позволяет привести (пересчитать)
будущие стоимости БС к современной стоимости СС по следу-
ющей формуле:
СС, = а,БС, = БС,/(1 + Е,)‘, (9.52)
где а, — коэффициент дисконтирования, at = (1 + £,)'; Е — норма
дисконта (в ее качестве могут быть взяты норма доходности на
капитал, уровень рентабельности или норма чистой прибыли); t —
участок дисконтирования (шаг по годам).
В качестве показателей экономической эффективности исполь-
зуются чистый дисконтированный доход ЧДД, индекс доходно-
сти ИД, срок окупаемости Гок и внутренняя норма доходности ВИД.
Задача 9.15*. Для условий задачи 9.14 определить срок окупа-
емости модернизации ЭП насосной установки путем создания ре-
гулируемого ЭП с использованием преобразователя частоты сто-
имостью Цпч = 65 160 руб. Оценить срок окупаемости производи-
мой модернизации за счет экономии электроэнергии.
Условия расчета.
1. Одноставочный тариф на потребляемую электроэнергию со-
ставляет 1,3 руб./кВт • ч.
308
2. Затраты на проведение НИОКР отсутствуют.
3. Затраты на монтажные и пусконаладочные работы составля-
ют 18 %, а транспортные расходы принимаются в размере 1 % от
стоимости преобразователя частоты.
4. Годовые амортизационные отчисления по преобразователю
частоты составляют 5 %.
5. Численность и заработная плата обслуживающего персонала
насосной станции после модернизации ЭП не изменились.
Экономия электроэнергии по данным примера 9.14 составляет
Лэк = 30 292 кВт ч. Тогда срок окупаемости модернизации в соот-
ветствии с формулой (9.50) будет равен
Ток = К/КС = 65 160(1 + 0,18 + 0,0Г)/(30 292 1,3 - 65 160 0,05) = 2,15 г.
Срок окупаемости уменьшится, если в расчет принять умень-
шение потерь воды из-за снижения ее давления.
Контрольные вопросы
1. Какие показатели используются для характеристики энергетичес-
ких режимов ЭП?
2. Что входит в состав постоянных и переменных потерь мощности?
3. Как связаны между собой потери мощности и энергии?
4. Почему расчет потерь мощности и энергии в якоре двигателя по-
стоянного тока и роторе асинхронного двигателя может быть выполнен
по одной формуле?
5. Как упрощенно учитывается нагрузка ЭП при расчете потерь энер-
гии в переходных процессах?
6. Что дает применение задатчика интенсивности в системе «преобра-
зователь-двигатель» с позиции энергосбережения?
7. Какие существуют способы снижения потерь энергии в переходных
процессах ЭП?
8. Что такое средневзвешенный КПД?
9. Каким образом можно повысить КПД ЭП?
10. Что такое коэффициент мощности?
11. Какими путями можно достичь повышения коэффициента мощ-
ности ЭП?
12. В чем важность задачи по эффективному использованию энергии?
13. Какие мероприятия позволяют осуществлять энергосбережение при
проектировании ЭП?
14. Какие мероприятия позволяют осуществлять энергосбережение
средствами ЭП при его модернизации?
15. Какими возможностями энергосбережения характеризуется при-
менение тиристорных регуляторов напряжения?
16. Какими возможностями ресурсосбережения характеризуется при-
менение регулируемого электропривода для насосных установок?
17. Какими методами можно оценить экономическую эффективность
энергосберегающих мероприятий?
ГЛАВА 10
ЭЛЕМЕНТЫ ПРОЕКТИРОВАНИЯ
ЭЛЕКТРОПРИВОДОВ
10.1. Расчет мощности и выбор двигателей
Современный электропривод, в первую очередь автоматизиро-
ванный, является сложной электромеханической системой. Про-
ектирование такой системы требует учета большого числа разно-
образных факторов и критериев, к числу которых относятся усло-
вия функционирования электропривода и его элементов, надеж-
ность и экономичность его работы, безопасность для обслужива-
ющего персонала и окружающей среды, совместимость электро-
привода с другими электротехническими установками.
Задача расчета мощности и выбора двигателя состоит в поиске
такого серийно выпускаемого двигателя, который обеспечивает
заданный технологический цикл рабочей машины, его конструк-
ция соответствует условиям окружающей среды и компоновки с
рабочей машиной, и при этом его нагрев не превышает норма-
тивный (допустимый) уровень.
Выбор двигателя недостаточной мощности может привести к
невыполнению заданного технологического цикла и снижению
производительности рабочей машины. При этом из-за перегрузки
может иметь место повышенный нагрев двигателя и преждевре-
менный выход его из строя.
Недопустимым является также использование двигателей за-
вышенной мощности, так как при этом повышается первоначаль-
ная стоимость ЭП, а его работа происходит при пониженных КПД
и коэффициенте мощности.
Выбор электродвигателя производится в следующей последо-
вательности: расчет мощности и предварительный выбор двигате-
ля, проверка выбранного двигателя по условиям пуска и пере-
грузки, проверка по нагреву.
Если выбранный двигатель удовлетворяет всем условиям про-
верки, то на этом выбор двигателя заканчивается. Если же двига-
тель не удовлетворяет условиям проверки на каком-то этапе, то
выбирается другой двигатель (как правило, большей мощности)
и проверка повторяется.
При выборе двигателя в общем случае одновременно должна
выбираться и механическая передача ЭП. В данной главе рассмат-
310
ривается задача, когда механическая передача уже выбрана и из-
вестны ее передаточное число (или радиус приведения) и КПД.
Основой для расчета мощности и выбора электродвигателя яв-
ляются нагрузочная диаграмма и диаграмма скорости (тахограм-
ма) исполнительного органа рабочей машины. При этом также
должны быть известны масса (момент инерции) исполнительно-
го органа и элементов механической передачи.
Нагрузочная диаграмма исполнительного органа ра-
бочей машины представляет собой график изменения приведен-
ного к валу двигателя статического момента нагрузки во времени
Mc(t). Эта диаграмма рассчитывается на основании технологиче-
ских данных и параметров механической передачи. Для примера
приведем формулы, по которым можно рассчитать моменты со-
противления Мс, создаваемые на валу двигателя при работе ис-
полнительных органов некоторых машин и механизмов:
для подъемной лебедки —
Мс GR/(ix\), (10.1)
где G — сила тяжести поднимаемого груза, Н; R — радиус бара-
бана подъемной лебедки, м; /, т| — передаточное число и КПД
механической передачи соответственно;
для подъемных кранов —
Мс = к^г+Шт), (10.2)
где к] — коэффициент, учитывающий увеличение сопротивле-
ния движению из-за трения реборд ходовых колес о рельсы, к{ =
= 1,8...2,5; G — сила тяжести перемещаемой массы, Н; ц — коэф-
фициент трения в опорах ходовых колес, р = 0,015...0,15; г —
радиус шейки оси ходового колеса, м; f — коэффициент трения
качения ходовых колес по рельсам, м, f= (5... 12)10^;
для вентиляторов —
Мс = k3QH/(x\BnBx\i), (10.3)
где к3 — коэффициент запаса, к3 = 1,1...1,5; Q — производитель-
ность вентилятора, м3/с; Н — напор (давление) газа, Па; г|в — КПД
вентилятора, т|в = 0,4...0,85; сов — скорость вентилятора, рад/с;
для насосов —
Мс = k3gpQ(Hc + ДЯ)/(т|н®вт|/), (Ю.4)
где к3 — коэффициент запаса, к3 = 1,1... 1,3; g — ускорение сво-
бодного падения, м/с2, g = 9,81; р — плотность перекачиваемой
жидкости, кг/м3; Q — производительность насоса, м3/с; Яс — ста-
тический напор, м; ДЯ — потери напора в трубопроводе, м; т|н —
КПД насоса, т|н = 0,45...0,75; сон — скорость насоса, рад/с.
311
Рис. 10.1. Диаграммы для расчета мощ-
ности двигателя:
а — нагрузочная диаграмма исполнитель-
ного органа; б — тахограмма движения ис-
полнительного органа; в — график дина-
мического момента; г — нагрузочная диа-
грамма двигателя
Диаграмма скорости,или
тахограмма, представляет собой за-
висимость скорости движения ис-
полнительного органа от времени
Гио(?) или (£>ио(')-
После выполнения операции
приведения эти зависимости изоб-
ражаются в виде графика скорости
вала двигателя во времени «>(/).
На рис. 10.1, а приведен пример нагрузочной диаграммы. Она
показывает, что данный исполнительный орган создает при сво-
ей работе в течение времени момент нагрузки МсХ, а в течение
времени /2 — момент нагрузки Л/с2.
Из тахограммы видно (рис. 10.1, б), что движение ИО состоит
из участков разгона, движения с установившейся скоростью, тор-
можения и паузы. Продолжительности этих участков соответственно
равны /р, ty, tT, t0, а полное время цикла составляет 1Ц = tp + ty + tT +
+ - 6 + h-
Порядок расчета мощности, предварительного выбора и про-
верки двигателя рассмотрим на примере диаграмм (см. рис. 10.1,
а, б).
Определение расчетной мощности двигателя. Ориентировочно
расчетный момент двигателя
Mpac4 > к3Мсэ, (10.5)
где к3 — коэффициент запаса, учитывающий динамические ре-
жимы электродвигателя, когда он работает с повышенными то-
ками и моментами; Л/Сэ — эквивалентный момент нагрузки.
Если момент нагрузки Мс изменяется во времени и нагрузоч-
ная диаграмма имеет несколько участков, как это показано на
рис. 10.1, а, то Мс э определяется как среднеквадратичная величина;
312
(Ю.6)
V 7=1
где n — число участков цикла; Л/с„ t-t — соответственно момент и
длительность z-ro участка нагрузочной диаграммы.
Для рассматриваемого графика движения расчетная скорость
двигателя а»расч = о\ст. Если скорость исполнительного органа регу-
лируется, то расчетная скорость определяется более сложным пу-
тем и зависит от ее способа регулирования [3].
Определим расчетную мощность двигателя
^расч — ^расч^расч — ^з^с.э®уст- (Ю.7)
Выбор двигателя и проверка его по перегрузке и условиям пуска.
По каталогу выбираем двигатель большей мощности и скорости.
Выбираемый двигатель при этом должен по роду и величине на-
пряжения соответствовать параметрам сетей переменного или по-
стоянного тока или силовых преобразователей, к которым он под-
ключается; по конструктивному исполнению — условиям его ком-
поновки с исполнительным органом и способам крепления на
рабочей машине; по способу вентиляции и защиты от действия
окружающей среды — условиям его работы.
Выбранный двигатель проверяется по перегрузочной способ-
ности. Для этого рассчитывается зависимость момента двигателя
от времени M(f), называемая нагрузочной диаграммой двигателя.
Она строится с помощью уравнения механического движения
(2.12), записанного в виде
М = Мс + Jdto/dz1 = Мс + Л/дин. (10.8)
Динамический момент Л/дин определяется суммарным приве-
денным моментом инерции J и заданными ускорением на участке
разгона и замедлением на участке торможения диаграммы скоро-
сти ®(/) (см. рис. 10.1, б). Если принять график со(/) на участках
разбега и торможения линейным, то динамический момент на
этих участках:
Мдин.р = JtMa/kt = J®ycT//p = const;
-^дин.т — —^®уст/^тф (10.9)
Зная график динамического момента (рис. 10.1, в) при посто-
янных ускорении и замедлении и зависимость M(t), построенную
на основании (10.8), сопоставим максимально допустимый мо-
мент двигателя Л/тах с максимальным моментом М\ (рис. 10.1, г).
Для рассматриваемого случая должно выполняться соотношение
Мтах>М,. (10.10)
313
Если соотношение (10.10) выполняется, то двигатель обеспе-
чит заданное ускорение на участке разгона (см. рис. 10.1), если
нет — график движения на этом участке будет отличаться от за-
данного.
Для обеспечения заданного графика скорости необходимо вы-
бирать другой более мощный двигатель и вновь повторять провер-
ку по перегрузке до нахождения подходящего двигателя.
Для двигателя постоянного тока обычного исполнения и синх-
ронного двигателя Мтак = M„im = (1,5... 2,5)Л7НОм, для асинхронного
двигателя с фазным ротором этот момент может быть принят при-
мерно равным критическому.
При выборе асинхронного двигателя с короткозамкнутым ро-
тором двигатель должен быть проверен также по условиям пуска,
для чего сопоставляется его пусковой момент Мп с моментом на-
грузки при пуске Мс„
мп>мс.п- (Ю.И)
Для рассматриваемого примера Мс n = Mci. Если выбранный дви-
гатель удовлетворяет рассмотренным условиям, то далее осуще-
ствляется еГо проверка по нагреву.
Задача 10.1*. Движение исполнительного органа характеризует-
ся графиками рис. 10.1, а, б, при этом: Л/с1 = 40 Н - м; Л/с2 = 15 Н - м;
Z, = 20 с; /2 = 60 с; — 2 с; /т = 1 с; tv - 77 с; а»уст = 140 рад/с; J =
= 0,8 кг • м2.
Определить расчетный момент и мощность двигателя и пост-
роить его нагрузочную диаграмму.
1. Расчетный момент двигателя определяем по (10.5) с учетом
(10.6), а расчетную мощность по (10.7):
Л/расЧ = к3Мсэ = 1,2^(402 -20 + 152 -60)/(20 + 60) = 28,7 Н • м;
Ррасч = А/расчсорасч = 28,7 • 140 = 4 006 Вт = 4 кВт.
2. Для построения нагрузочной диаграммы двигателя Л/(Г) оп-
ределяем вначале динамические моменты на участках разбега Л/дин р
и торможения Л/динт:
Л/дин.р = ЛОустЛр = 0,8 • 140/2 = 56 Н м;
Л/Динт = = -0,8 • 140/1 = -112 Н • м.
3. Моменты двигателя на участках разбега Мх и торможения М2
определяем по (10.8):
Mi = Мс1 + Л/дин.р = 40 + 56 = 96 Н • м;
М2 = Мс2 + Л/Дин.т = 20 - 112 = -92 Н • м.
314
Моменты двигателя на участках установившегося движения
(/] - tp) и (?2 - /т) равны моментам нагрузки Мс1 и Мс2, поскольку
динамический момент на них равен нулю.
10.2. Проверка двигателей по нагреву
Проверка электродвигателя по нагреву производится как при
проектировании электроприводов, так и при их эксплуатации.
Электрический двигатель при своей работе может нагреваться
лишь до определенной допустимой температуры, определяемой в
первую очередь нагревостойкостью применяемых изоляционных
материалов. Соблюдение установленных заводом-изготовителем
ограничений по допустимой температуре нагрева, что заложено в
номинальные (паспортные) данные двигателя, обеспечивает нор-
мативный срок его службы в пределах 15... 20 лет. Превышение
допустимой температуры ведет к преждевременному старению
изоляции обмоток и сокращению срока службы электрических
двигателей. Так, для изоляции класса А превышение допустимой
температуры нагрева на 8... 10 °C сокращает срок ее службы вдвое.
В современных двигателях применяются несколько классов изо-
ляции, допустимая (нормативная) температура нагрева которых
составляет: для класса А — до 105 °C, Е — до 120 °C, В — до 130 °C,
F - до 155 °C, Н - до 180 °C, С - свыше 180 °C.
Основными классами изоляции, применяемыми в настоящее
время при изготовлении электрических двигателей, являются клас-
сы В, F и Н.
Сущность проверки двигателя по нагреву состоит в сопостав-
лении допустимой для него температуры с той, которую он имеет
при работе. Очевидно, что если рабочая температура двигателя
не превышает допустимую, то двигатель работает в допустимом
тепловом режиме, и наоборот. Обычно оценивается не абсолют-
ная температура, а так называемый перегрев т, который пред-
ставляет собой разность температур двигателя t и окружающей
среды /ос, °C:
т = t - /о.с-
При выполнении тепловых расчетов принимается стандартная
температура окружающей среды, равная 40 °C, которой соответ-
ствует номинальная мощность двигателя, указанная на его щитке.
При более низкой температуре окружающей среды двигатель мо-
жет быть нагружен несколько выше номинальной мощности, а
при более высокой температуре его нагрузка должна быть сниже-
на или следует предпринять меры по дополнительному охлажде-
нию двигателя или его замене на более мощный двигатель.
315
При использовании понятия перегрева двигатель будет рабо-
тать в допустимом тепловом режиме при выполнении условия
'Сраб < Тдоп, (10.12)
где траб — перегрев при работе двигателя; тдоп — допустимый (нор-
мативный) перегрев двигателя, определяемый классом его изо-
ляции.
В качестве траб при проверке выбирается средний или макси-
мальный перегрев за время (цикл) работы двигателя. При ориен-
тировании на средний перегрев будет иметь место наиболее пол-
ное использование двигателя, хотя в некоторые периоды его ра-
боты перегрев будет превышать средний. Если же ориентировать-
ся на максимальный перегрев, то рабочий перегрев двигателя всегда
будет меньше нормативного, но при этом двигатель будет недоис-
пользован по своей мощности.
Проверка выполнения условия (10.12) может быть выполнена
прямым или косвенными методами.
Использование прямого метода предусматривает расчет и по-
строение кривой перегрева т(/) за цикл работы двигателя. Из этой
кривой непосредственно определяется максимальный или сред-
ний перегрев, который сопоставляется с допустимым, и на осно-
вании этого делается суждение о тепловом режиме двигателя. При
использовании косвенных методов не требуется рассчитывать эту
зависимость, а о нагреве двигателя судят по косвенным показате-
лям — потерям мощности, эквивалентным току, моменту или
мощности.
Прямой метод проверки двигателя по нагреву. Для использова-
ния прямого метода необходимо иметь математическое описание
(математическую модель) теплового режима двигателя. Точное
описание процессов нагрева и охлаждения двигателей является
очень сложной задачей. Двигатель представляет собой совокупность
деталей и узлов различной конфигурации, выполненных из мате-
риалов с различными тепловыми параметрами. Неодинаковыми
являются условия нагрева и охлаждения отдельных частей двига-
теля, а направление тепловых потоков зависит от режима работы
двигателя. В связи с трудностью проведения точного анализа при
анализе тепловых режимов двигателей обычно принимаются оп-
ределенные допущения.
Для простейшей тепловой модели двигателя, которая рассмат-
ривается далее, эти допущения следующие: двигатель рассматри-
вается как однородное тело, имеющее бесконечно большую теп-
лопроводность и одинаковую температуру во всех своих точках;
теплоотдача во внешнюю среду пропорциональна первой степени
разности температур двигателя и окружающей среды; окружающая
среда обладает бесконечно большой теплоемкостью, т.е. в про-
316
цессе нагрева двигателя ее температура не изменяется; теплоем-
кость двигателя и его теплоотдача не зависят от температуры.
При этих условиях можно записать следующее исходное урав-
нение теплового баланса:
APdr= Tcd/ + Cdx, (10.13)
где ДР — потери мощности в двигателе, Вт; А — теплоотдача дви-
гателя, Дж/(с - °C); С — теплоемкость двигателя, Дж/°С.
Решение уравнения (10.13) имеет вид
т = (тна.,-Туст)е'/7т + Туст, (10.14)
где тНач — начальный перегрев двигателя, °C; туст — установив-
шееся превышение температуры двигателя, °C, туст = ДР/А; Тт —
тепловая постоянная времени нагрева или охлаждения двигате-
ля, с, Тт = С/А.
Выражение (10.14) может быть использовано для анализа как
нагрева, так и охлаждения двигателя. Необходимо лишь в это вы-
ражение подставлять соответствующие значения туст, 'Сач и тепло-
вой постоянной времени Тт.
Процессы нагрева и охлаждения некоторых типов двигателей
могут характеризоваться различными тепловыми постоянными
времени. Это связано с тем, что тепловая постоянная времени,
характеризующая процесс изменения температуры, обратно про-
порциональна теплоотдаче двигателя. Если при охлаждении дви-
гателя, вызванном его остановом, условия его теплоотдачи изме-
няются, то изменяется и постоянная времени.
Количественно ухудшение теплоотдачи характеризуется коэф-
фициентом ухудшения теплоотдачи при неподвижном роторе:
₽о = ЛМ, (10.15)
где Ао, А — теплоотдача соответственно при неподвижном двига-
теле и номинальной скорости его вращения.
Примерные значения коэффициента р0 для двигателей
С независимой вентиляцией........................ 1
Без принудительного охлаждения.................0,95...0,98
Самовентилируемых..............................0,45... 0,55
Защищенных самовентилируемых...................0,25...0,35
Постоянная времени охлаждения двигателя То с учетом фор-
мулы (10.15) связана с постоянной времени нагрева Тн следую-
щим соотношением:
То = тн/р0.
Так как 0О < 1, то То > Тн, т. е. охлаждение неподвижного двига-
теля происходит медленнее, чем нагрев.
317
Рис. 10.2. Графики при нагреве двигателя:
1 — при ненулевом начальном перегреве; 2 —
при нулевом начальном перегреве; 3 — при
меньшем значении потерь мощности
На рис. 10.2 приведены кривые нагрева двигателя для разных
тнач и АР. При принятых допущениях нагрев двигателя происходит
по экспоненциальному закону и характеризуется постоянной вре-
мени Т„. Более высоким потерям мощности в двигателе соответ-
ствует большее значение установившегося перегрева (кривые 1 и
2 соответствуют АРН а кривая 3 — ДР2 < АР^.
Время достижения перегревом своего установившегося значе-
ния при экспоненциальном законе его изменения теоретически
бесконечно большое. Практически процесс нагрева можно счи-
тать установившимся, когда превышение температуры двигателя
достигнет уровня (0,95...0,98)туст за время tyCT = (3...4)ГН.
Таким образом, время достижения перегревом своего устано-
вившегося значения зависит от постоянной времени нагрева дви-
гателя. Так как теплоемкость двигателя пропорциональна его объе-
му, а теплоотдача — площади его поверхности, то двигатели боль-
шей мощности, имеющие большие габаритные размеры, имеют,
как правило, и большую постоянную времени нагрева. Обычно
постоянная времени нагрева двигателей лежит в пределе от не-
скольких минут до нескольких часов.
Отметим, что физический смысл постоянной времени нагрева
Тт состоит в том, что она равна времени нагрева двигателя до
установившегося перегрева туст, если бы отсутствовала отдача тепла
в окружающую среду.
Охлаждение двигателей сопровождается снижением перегрева
по кривой 1 (рис. 10.3) при уменьшении нагрузки и по кривым 2
и 3 при отключении двигателя от сети.
Порядок проверки электродвигателей по нагреву прямым ме-
тодом состоит в следующем. По известному графику нагрузки дви-
гателя определяются потери мощности на отдельных участках цикла
и с их помощью находятся значения установившегося перегрева
на каждом участке по формуле туст, = АР,//!,. Далее для участков
работы (нагрева) и пауз (охлаждения) двигателя определяются
постоянные времени нагрева и охлаждения. Затем по формуле (10.14)
318
Рис. 10.3. Графики при охлаждении двига-
теля:
1 — при охлаждении до не нулевого перегре-
ва; 2 — при охлаждении до нулевого перегре-
ва; 3 — при охлаждении с небольшого уровня
перегрева
для каждого участка цикла строится кривая перегрева x(t), при
этом начальным значением тнач,- на каждом следующем участке яв-
ляется его конечное значение ткон(,_1; на предыдущем участке.
Из построенной таким образом кривой перегрева нахо-
дится его максимальное или среднее значение и проверяется вы-
полнение условия (10.12).
Косвенные методы проверки двигателей по нагреву. Рассмотрен-
ный прямой метод проверки двигателей по нагреву имеет один
существенный недостаток — для его использования необходимо
знать тепловые параметры: теплоотдачу А и теплоемкость С. Так
как в справочниках по двигателям эти параметры обычно не ука-
зываются, то практическое использование прямого метода про-
верки оказывается затруднительным. В связи с этим на практике
проверка двигателей по нагреву осуществляется косвенными ме-
тодами, не требующими построения графика x(t). К их числу от-
носятся методы средних потерь и эквивалентных величин.
Метод средних потерь является наиболее точным из кос-
венных методов. Сущность этого метода заключается в определе-
нии средних потерь мощности ДРср за цикл работы двигателя и
сопоставлении их с номинальными потерями мощности ДРНОМ,
после чего делается заключение о нагреве двигателя.
При использовании метода средних потерь рассматривается
достаточно удаленный цикл работы двигателя, в котором сред-
ний перегрев двигателя не изменяется.
Режим работы двигателя, в котором количество выделившейся
теплоты в двигателе за цикл равняется отданному в окружающую
среду, называют квазиустановившимся. В этом режиме средний
перегрев двигателя за время цикла /ц не изменяется и определяет-
ся как
тср = )дРд//(Л/ц) = ДРср/Л, (10.16)
о
Al
где ДРср — средние потери мощности за цикл, ДРср = j ДР d//zu.
о
319
В соответствии с формулой (10.16) средние потери за цикл
определяют средний перегрев двигателя тср. По аналогии номи-
нальные потери мощности в двигателе определяют его допусти-
мый (нормативный) нагрев тдоп, т.е. тдоп = АРНОМ/Л.
С учетом выражения (10.12) допустимый нагрев двигателя бу-
дет при выполнении условия
АРср < АРНОМ, (10.17)
которое и является основным расчетным соотношением метода
средних потерь.
В том случае, когда на отдельных участках цикла нагрузка по-
стоянна, как, например, на рис. 10.4, средние потери определя-
ются по формуле
п ! п
АРср = (АЛА + AP2Z2 + AР3/3 )/(Г, +12 + t3) = X д/ X • (10Л 8)
I / ।
Номинальные потери мощности двигателя определяются по
каталожным данным по формуле
ДРцОМ — Рном(1 Пном)/П НОМ' (10.19)
Метод средних потерь позволяет оценить тепловой режим ра-
боты двигателя по среднему превышению температуры тср. В этом
заключается определенная погрешность метода, поскольку макси-
мальный перегрев двигателя на отдельных участках цикла может
превышать тср. Этот метод дает тем более точную оценку нагрева
двигателя, чем больше постоянная нагрева двигателя Ти будет пре-
вышать значение /тах наиболее продолжительного участка цикла,
т. е. в случае выполнения неравенства /тах < Тн. При этом тср = ттах.
Метод эквивалентного тока целесообразно использо-
вать в том случае, когда известен график изменения тока двигателя
во времени, который может быть получен расчетным или опыт-
Рис. 10.4. Графики при изменении на-
грузки ЭП
320
ным путем. Для получения расчетной формулы метода эквивалент-
ного тока представим в соответствии с формулой (9.1) средние
потери мощности в двигателе как сумму постоянных К и перемен-
ных И потерь:
1 п 1 и In ( J Y
41 I 41 1 41 I H HOM
(10.20)
где APZ, I,, t, — потери мощности, ток двигателя и продолжитель-
ность z-ro участка рабочего цикла; п — число участков в цикле.
С учетом формулы (10.20) условие (10.17) проверки двигателя
по нагреву после некоторых преобразований запишется в виде
^Х(/^)/^=/экв^/ном. (10.21)
Ток /экв эквивалентен по условиям нагрева действительному
изменяющемуся во времени току двигателя.
Итак, в соответствии с формулой (10.21) нагрев двигателя не
будет превосходить допустимого (нормативного) уровня, если
эквивалентный ток за цикл его работы не будет превосходить но-
минального (паспортного) тока.
Формула (10.21) дает точную оценку нагрева в том случае,
если постоянные потери мощности и сопротивления электриче-
ских цепей двигателя не изменяются за цикл работы. Следова-
тельно, если постоянные потери или сопротивление главных це-
пей двигателя изменяются, то метод эквивалентного тока дает
погрешность в оценке теплового состояния двигателя.
Отметим, что метод эквивалентного тока удобно использовать
для проверки нагрева работающих двигателей. В этом случае с по-
мощью измерительных приборов определяется среднеквадрати-
чный ток при работе двигателя и сопоставляется с номинальным
током.
Метод эквивалентного момента удобно использовать
в том случае, когда известен график изменения момента двигате-
ля во времени M(t). В дополнение к указанным условиям приме-
нимости метода эквивалентного тока при использовании метода
эквивалентного момента должно соблюдаться еще одно условие —
постоянство магнитного потока двигателя во всем цикле работы.
Если это условие выполняется, то умножение обеих частей
выражения (10.21) на £ФНОМ приводит к следующей формуле:
Jt = ^экв s Мном, (10.22)
где Л/экв — эквивалентный по условиям нагрева среднеквадрати-
чный момент двигателя за рабочий цикл.
321
Метод эквивалентной мощности используется, если
известен график изменения мощности во времени, а также при
выполнении условия применимости метода эквивалентного мо-
мента и постоянства скорости двигателя на всех участках рабочего
цикла.
Допустим, что скорость двигателя на всех участках цикла равна
номинальной. Умножая обе части соотношения (9.22) на соном,
получаем
МэквЮном = Дкв /’ном, (Ю.23)
где Рэкв — эквивалентная по условиям нагрева мощность, опреде-
ляемая как среднеквадратичная механическая мощность двигате-
ля за рабочий цикл.
Если выполняется соотношение (10.23), то при соблюдении
указанных ранее условий нагрев двигателя не превысит допусти-
мого уровня.
Работа двигателей по характеру изменения нагрузки на их валу,
а тем самым по виду их нагрева и охлаждения подразделяется на
восемь режимов с условными обозначениями от S1 до S8.
Продолжительный номинальный режим работы (S1) двигателя
характеризуется неизменной нагрузкой в течение времени, за ко-
торое перегрев всех его частей достигает установившегося значения.
Графики изменения мощности на валу Р, момента М, потерь мощ-
ности АР и перегрева т для этого режима приведены на рис. 10.5.
Признаком режима S1 является выполнение условия tp > 3 Тн, где
tp — время работы (включения) двигателя. Работа двигателя в ре-
жиме S1 может происходить с постоянной или переменной цик-
лической нагрузкой.
Графики работы двигателя с постоянной нагрузкой соответствуют
рис. 10.5. Так как двигатель выбирается по условию Р < Рноы, то
выполняется и условие
АР<АРНОм (Ю.24)
и тогда ттах = Туст < тдоп.
Таким образом, при постоянной продолжительной нагрузке не
требуется дополнительных расчетов по определению нагрева дви-
гателя.
Переменная циклическая нагрузка характеризуется графиками
рис. 10.4. Если при продолжительном режиме работы нагрузка на
валу двигателя не остается постоянной, то в этом случае также
будут изменяться его ток, момент и потери. Проверка двигателя в
этом случае выполняется методами средних потерь или эквива-
лентных величин.
322
Кратковременный номинальный режим (S2) характеризуется
чередованием периодов неизменной нагрузки с периодами от-
ключения двигателя (рис. 10.6). Режим S2 соответствует условиям
tp < ЗТН, t0 > ЗТ0. При этом за время включения tp температура не
достигает установившегося уровня, а за время отключения (пау-
зы) to все части двигателя охлаждаются до температуры окружа-
ющей среды. Стандартные значения продолжительности рабочего
периода составляют 10, 30, 60 и 90 мин.
Если двигатель расчитан на продолжительный режим работы,
то при кратковременном режиме его превышение температуры к
концу рабочего периода tp не достигнет установившегося значе-
ния, т. е. в этом случае двигатель будет недоиспользован по нагре-
ву, а тем самым по своей мощности.
Для полного использования в кратковременном режиме рабо-
ты двигателя, предназначенного для продолжительного режима,
его следует перегружать по мощности на валу. В этом случае к кон-
цу рабочего периода его перегрев достигнет допустимого (норма-
тивного) уровня.
Для количественной оценки перегрузки и нагрева двигателя
используются коэффициенты термической и механической пере-
грузок.
Коэффициентом термической перегрузки рТ, называется отноше-
ние потерь мощности при кратковременном режиме ЛРК к номи-
нальным потерям мощности APH0M:
рт = ДРК/ДРНОМ = 1/(1 - (Ю.25)
где Тн — постоянная времени нагрева двигателя.
Рис. 10.5. Графики при длительном
режиме работы ЭП
Рис. 10.6. Графики при кратковре-
менном режиме работы ЭП
323
На рис. 10.7 кривая 1 показывает зависимость коэффициента
термической перегрузки рт при кратковременном режиме работы
от относительной длительности рабочего периода tp/T„.
Коэффициентом механической перегрузкирм называется отноше-
ние мощности нагрузки двигателя в кратковременном режиме Рк
к номинальной мощности Рном в продолжительном режиме:
Рм ~ Л^НОМ-
Коэффициент механической перегрузки может быть выражен
с помощью коэффициента термической перегрузки:
Pt = (а + рм)/(а + 1),
(10.26)
где а — коэффициент потерь, а = К/ V.
Из формулы (10.26) следует, что
Рм = д/(1-о)а + о. (10.27)
При отношениях tp/TH = 0,3...0,4 допустимый по условиям на-
грева коэффициент механической перегрузки ры примерно равен
2,5 (см. рис. 10.7, кривая 2), что в среднем соответствует перегру-
зочной способности двигателей общепромышленных серий. Вслед-
ствие этого при меньших tp/TH полное использование таких дви-
гателей по нагреву ограничивается их перегрузочной способно-
стью.
Другими словами, при малых отношениях tp/TH двигатели не-
доиспользуются по нагреву, поэтому в этом случае можно вообще
Рис. 10.7. Определение коэффициентов термической и механической пе-
регрузок:
1 — график коэффициента термической перегрузки; 2 — график коэффициента
механической перегрузки
324
не производить проверку двигателя по нагреву, а следует ограни-
читься только его проверкой по условиям перегрузки.
Промышленность выпускает специальные электродвигатели,
рассчитанные для кратковременного режима работы. Основная их
особенность заключается в повышенной перегрузочной способ-
ности, что позволяет полнее использовать их по нагреву.
Время работы этих двигателей нормируется и составляет 10,
30, 60 и 90 мин.
Это значит, что двигатель, имеющий, например, номиналь-
ную мощность Рном = 10 кВт при Zp = 30 мин может развивать в
течение 30 мин мощность 10 кВт, не перегружаясь. Затем он дол-
жен быть отключен от сети до тех пор, пока полностью не охла-
дится до температуры окружающей среды.
Необходимо отметить, что двигатели, предназначенные для
кратковременного режима работы, нецелесообразно использовать
в продолжительном режиме из-за присущих им повышенных по-
стоянных потерь мощности. Иногда такие двигатели вследствие
указанного свойства не могут работать в продолжительном режи-
ме даже вхолостую, перегреваясь при этом выше допустимого уров-
ня.
Повторно-кратковременный номинальный режим работы (S3)
(рис. 10.8) характеризуется периодами tp нагрузки (рабочие пери-
оды), которые чередуются с периодами t0 отключения двигателя
(паузами), причем как рабочие периоды, так и паузы не настоль-
ко длительны, чтобы превышения температуры могли достигнуть
установившихся значений. Этому режиму соответствуют условия
tp < ЗТН, t0 < зт0.
Рис. 10.8. Графики при повторно-кратковременном режиме работы ЭП
325
Этот режим характеризуется относительной продолжительно-
стью включения (ПВ) двигателя, %:
ПВ = tp/(tp + О100 = (Zp/Zu)100. (10.28)
К показанному на рис. 10.8 стандартному для режима S3 графи-
ку нагрузки могут быть сведены более сложные графики путем
расчета эквивалентных мощности, момента и тока на рабочих уча-
стках цикла.
Для повторно-кратковременного режима работы выпускаются
специальные серии двигателей. В каталогах на них указывается
номинальная мощность Рноы при нормативной продолжительно-
сти включения ПВН0М = 15, 25, 40, 60 и 100 %. Длительность рабо-
чего цикла ?ц для них не должна превышать 10 мин, в противном
случае двигатель считается работающим в продолжительном ре-
жиме.
Если при повторно-кратковременном режиме ПВ и мощность
нагрузки равны (или близки) номинальным данным двигателя,
то проверка его по нагреву не требуется, поскольку работа при
таких параметрах нагрузочной диаграммы гарантируется заводом-
изготовителем.
Рассмотрим проверку двигателя по нагреву для случая, когда
относительная продолжительность включения двигателя в реаль-
ном цикле ПВ] заметно отличается от нормативной ПВНОМ. Допу-
стим, что ПВ] соответствует нагрузке Рх, а стандартной ПВН0М
соответствует номинальная мощность Рном (рис. 10.9). На основа-
нии метода средних потерь можно утверждать, что среднее пре-
вышение температуры двигателя не будет превышать допустимой
температуры, если средние потери мощности за цикл при Р\ и
ПВ, не будут превышать потери за тот же цикл при Рном и ПВНОМ,
т. е. если
АР,ПВ, < АРНОМПВНОМ. (10.29)
Отсюда следует, что для того чтобы при работе с мощностью
Р\ и ПВ] средняя температура двигателя не превышала допусти-
Рис. 10.9. Приведение графиков при
повторно-кратковременном режиме
работы ЭП
326
мую, между потерями мощности должно существовать соотноше-
ние
АР,ПВ,/ПВНОМ< АРНОМ. (10.30)
Порядок проверки двигателя по нагреву состоит в следующем.
Определяются потери в двигателе за время его работы АР, и ре-
альная продолжительность включения ПВ,. Затем по паспортным
данным двигателя для ближайшей нормативной ПВНОМ находятся
номинальные потери двигателя ДРНОМ и проверяется условие (10.30).
При его выполнении нагрев двигателя не будет превосходить нор-
мативного.
Проверка двигателя по нагреву может быть произведена также
сопоставлением номинальных и эквивалентных тока, момента и
мощности двигателя, определяемых по нагрузочным диаграммам.
Заменяя в (10.30) потери мощности через постоянные К и пере-
менные Кном потери, после преобразований получим
Лом Zi ^/ПВ,/[о(ПВном-ПВ,) + ПВНОМ]. (10.31)
При условии постоянства магнитного потока за цикл работы
из (10.31) следует
Л/ном > М, 7пв,/[о (ПВНОМ - ПВ,) + ПВН0М ], (10.32)
а из (10.32) при условии неизменности скорости двигателя
Лом > 717ПВ1 /[«(пвном - ПВ,) + ПВН0М]. (10.33)
Если условия (10.31) —(10.33) выполняются, то температура
двигателя не будет превосходить допустимого значения.
В часто встречающихся случаях, когда реальная продолжитель-
ность включения мало отличается от нормативной, в формулах
(10.31) —(10.33) произведением о(ПВ, - ПВН0М) можно пренеб-
речь.
Проверка по нагреву двигателей, предназначенных для про-
должительного режима работы, но используемых для повторно-
кратковременной нагрузки, может быть выполнена с помощью
формул (10.31) —(10.33), если положить в них ПВН0М = 100%.
Для двигателей продолжительного режима работы, у которых
теплоотдача в период пауз ухудшается, целесообразно учитывать
этот фактор при оценке нагрева. Расчетные формулы для этого
случая рассмотрены в [3], [8].
Рассмотренные режимы SI, S2, 55 являются основными и наи-
более характерными для электродвигателей. Кроме них классифи-
кация предусматривает еще пять режимов S4...S8, которые явля-
327
ются разновидностями первых трех и встречаются реже. Проверка
двигателей по нагреву в этих режимах производится методами сред-
них потерь или эквивалентных величин.
Задача 10.2*. Двигатель постоянного тока типа 2ПФ—200 имеет
следующие паспортные данные: Рном = 30 кВт; «ном = 2 200 об/мин;
/ном = 74 А; 1/ном = 440 В; т]ном = 90 %.
Оценить тепловой режим двигателя при его работе по следую-
щему циклу: время первого участка Ц = 12 мин, момент нагрузки
Мс1 = 120 Н • м; время второго участка t2 = 25 мин, момент нагруз-
ки Мс2 = 145 Н м; время третьего участка Z3 = 18 мин, момент
нагрузки Л/с3 = 100 Н • м. Ток возбуждения и сопротивление якор-
ной цепи не изменяются.
Заданный цикл относится к продолжительному режиму с пе-
ременной нагрузкой. Так как ток возбуждения и сопротивление
цепи якоря не изменяются, то для проверки двигателя по нагреву
можно воспользоваться методом эквивалентного момента.
1. Определяем номинальные угловую скорость и момент двига-
теля:
юном = ллном/30 = 3,14-2 200/30 = 230 рад/с;
Л/ном = Рном/Юном - 30 000/230 = 130,3 Н • м.
2. Рассчитаем по (10.23) эквивалентный среднеквадратичный
момент нагрузки двигателя
Мэкв = =
= ^(1202 -12 + 1452 -25 + 1002 -18)/(12 + 25 + 18) = 126,4 Н м.
3. Сопоставляем рассчитанный эквивалентный момент Мэкв с
номинальным. Так как Л/экв = 126,4 < 130,3 = Л/ном, то двигатель не
будет перегреваться выше допустимого уровня.
Задача 10.3*. Асинхронный двигатель краново-металлургической
серии типа МТКВ 511—8 имеет номинальные мощность Рном =
= 28 кВт при ПВНОМ = 25 % и скорость лном = 700 об/мин.
Оценить нагрев двигателя, если он будет периодически вклю-
чаться на 3 мин и преодолевать при этом момент нагрузки Л/с =
= 350 Н • м, после чего будет отключаться на 5 мин. Данный цикл
работы относится к повторно-кратковременному режиму.
1. Определяем номинальную угловую скорость и номинальный
момент при ПВН0М двигателя:
«ном = я«ном/30. = 3,14 • 700/30 = 73,3 рад/с;
Л/ном = /’hom/Whom = 28 000/73,3 = 382 Н м.
328
2. Находим продолжительность включения двигателя в цикле ПВ,
ПВ, = /р/(/р + /о)100 % = 3/(3 + 5)100% = 37,5%.
3. Вычисляем момент нагрузки при стандартной ПВНОМ = 25 %
ЛЛ,0Ч = МсЛ/ПВ,/ПВном = 350^37,5/25 = 429 Н м.
4. Сопоставляем приведенные к одной стандартной ПВНОМ = 25 %
Л/экв и Л/ном. Так как Л/экв = 429 Н • м > 382 Н • м = Л/Ном, то двига-
тель при работе в таком цикле будет перегреваться сверх допусти-
мого уровня.
Задача 10.4. Для условий задачи 10.2* выполнить проверку дви-
гателя по нагреву методами средних потерь и эквивалентного тока.
Задача 10.5. Для условий задачи 10.3* при тех же паузе и мо-
менте нагрузки определить время работы двигателя, при котором
перегрев двигателя не будет превосходить допустимого уровня.
10.3 . Выбор и проверка силовых резисторов
по нагреву
Включение резисторов в цепи электродвигателей производит-
ся в целях регулирования их скорости и для ограничения их тока и
моментов при пуске, реверсе и торможении.
Расчет сопротивлений резисторов, обеспечивающих требуемые
искусственные характеристики двигателей, был рассмотрен в под-
разд. 4.4 и 5.3.
Резистор выбирается по двум основным параметрам: сопро-
тивлению и току. При этом сопротивление должно равняться рас-
четному, а номинальный ток должен соответствовать рабочему току
двигателя, что обеспечит нормативный нагрев резистора. Подбор
величины сопротивления осуществляется за счет последователь-
ного, параллельного и смешанного соединений отдельных эле-
ментов в секции.
Проверка резистора по нагреву обычно производится методом
эквивалентного тока в зависимости от режима его работы. Если
расчетный эквивалентный ток не превышает номинального тока
резистора, то его температура находится в допустимых пределах и
он может работать в таком режиме сколь угодно долго.
Для продолжительного режима работы проверка резистора по
нагреву состоит в сопоставлении по формуле (10.21) эквивалент-
ного рабочего тока резистора с его номинальным значением. Вы-
полнение условия (10.21) свидетельствует о нормальном тепло-
вом режиме резистора.
329
Рис. 10.10. Графики для выбора резисторов при кратковременном (а) и
повторно-кратковременном (б) режимах работы ЭП:
Кк — расчетный коэффициент для кратковременного режима; Кпк — расчетный
коэффициент для повторно-кратковременного режима; Т„ — постоянная време-
ни нагрева
Кратковременный и повторно-кратковременный режимы ра-
боты характеризуются, как и для двигателя, графиками нагрузки,
приведенными на рис. 10.6 и 10.8. Для этих режимов расчет экви-
валентных токов производится с помощью расчетных коэффици-
ентов, зависящих от времени работы резистора и его постоянной
времени нагрева. Эти зависимости приведены на рис. 10.10.
Порядок проверки предварительно выбранного резистора по
нагреву следующий. С помощью графика работы двигателя опре-
деляются эквивалентный (рабочий) ток /э, протекающий по ре-
зистору, время его протекания tp для кратковременного режима и
продолжительность включения ПВР для повторно-кратковремен-
ного режима.
Далее для найденных tp или ПВр по постоянной времени на-
грева Тн резистора, значение которой вместе с номинальным про-
должительным током резистора приводится в справочной литера-
туре, с помощью кривых рис. 10.10 находятся коэффициенты Кк
или /TnK. Далее определяется расчетный ток резистора
-^расч — Л/*к ИЛИ /расч — 1э/Кпк (10.34)
и производится его сопоставление с номинальным током рези-
стора /ном. При /расч < /ном нагрев резистора не будет превосходить
допустимого (нормативного).
Применяемые в ЭП резисторы выполняются с использовани-
ем нихромовой, фехралевой или константановой проволоки или
330
ленты, намотанной на изолятор, или чугунных элементов. Отдель-
ные элементы объединяются в ящики резисторов.
Допустимое превышение температуры в продолжительном ре-
жиме для фехралевых элементов составляет 350 °C, а для констан-
тановых — 250 °C.
Задача 10.6*. Двигатель работает в кратковременном режиме со
временем включения tp = 25 с.
Оценить нагрев постоянно включенного в его цепь резистора
типа НС 413/0,4 (/ном = 30 А, Тн = 132 с), если по нему протекает
ток 1Э = 56 А.
Для заданных условий по кривым рис. 10.10, а находим Кк = 2,3.
Определяем расчетный ток резистора
/рас, = 4/^к = 56/2,3 - 24,3 А.
Так как /расч = 24,3 А < 30 А = /ном, то резистор по нагреву
проходит.
Задача 10.7. Двигатель пускается через равные промежутки вре-
мени с частотой 300 включений в час. Пусковой резистор обтека-
ется током 1Э - 245 А в течение 1,5 с.
Определить, может ли быть применен в качестве этого резисто-
ра ящик типа ЯСЧ—0,5, элементы которого имеют номинальный
продолжительный ток 91 А и постоянную времени нагрева 270 с.
10.4 . Выбор силовых преобразователей,
электрических аппаратов и механических
передач
Выбор силовых преобразователей. Основой для выбора силовых
преобразователей для регулируемых электроприводов являются тип
и данные применяемого двигателя и условия работы преобразова-
теля. Выбор осуществляется по следующим показателям и пара-
метрам преобразователей:
уровень и частота напряжения питающей сети;
величина номинальной мощности или тока двигателя;
число фаз двигателя;
диапазон регулирования выходного напряжения и (или) ча-
стоты;
возможность реверса и торможения двигателя;
режим работы электропривода (SI, S2, S3);
допустимая перегрузка преобразователя по току;
наличие требуемых защит и сигнализации;
наличие средств диагностики;
климатическое исполнение и категория размещения;
степень защиты 1Р;
331
высота над уровнем моря;
условия эксплуатации.
В качестве дополнительных факторов при выборе преобразова-
телей могут учитываться КПД, массогабаритные и стоимостные
показатели, показатели надежности (наработка на отказ, средний
срок службы, среднее время восстановления и т.д.), уровень со-
здаваемых помех. При учете этих факторов целесообразно исполь-
зовать интегральные показатели качества и весовые коэффициен-
ты (коэффициенты значимости) отдельных показателей преобра-
зователей.
Полупроводниковые пусковые устройства для двигателя выби-
раются по тем же показателям, что и преобразователи. Дополни-
тельно к ним должны учитываться:
реверсивный или нереверсивный характер работы двигателя;
способ ограничения пускового тока (целесообразный характер
изменения напряжения при пуске, определяемый видом механи-
ческой нагрузки двигателя);
необходимость электрического торможения двигателя;
способ подачи сигнала управления на пускатель — электроме-
ханический контакт (кнопка, ключ управления) или потенци-
альный сигнал управления (напряженческий или токовый);
износостойкость пускателя;
допустимая частота включений.
Выбор электрических аппаратов. К силовым электрическим ап-
паратам относятся автоматические выключатели, контакторы и
магнитные пускатели. Выбор производится по следующим пока-
зателям и параметрам:
коммутируемые аппаратом токи и мощности двигателя;
напряжение двигателя;
число коммутируемых цепей;
напряжение и токи цепей управления;
напряжение катушки аппарата;
режим работы аппарата — кратковременный, длительный,
повторно-кратковременный;
условия работы аппарата — температура, влажность, давление,
наличие вибрации и др.;
способы монтажа аппарата;
экономические и массогабаритные показатели;
удобство сопряжения и электромагнитной совместимости с
другими устройствами и аппаратами;
стойкость к электрическим, механическим и термическим пе-
регрузкам;
климатическое исполнение и категории размещения;
степень защиты IP;
требования техники безопасности;
высота над уровнем моря.
332
Способность электрического аппарата к перегрузкам опреде-
ляется его предельной коммутационной способностью, электро-
динамической и термической стойкостью.
Предельной коммутационной способностью электрического ап-
парата называют максимальное значение тока короткого замыка-
ния, которое он способен отключить несколько раз, оставаясь
исправным.
Электродинамическая стойкость характеризуется амплитудой
ударного тока короткого замыкания, который способен пропу-
стить аппарат без своего повреждения.
Термическая стойкость характеризуется допустимым количе-
ством тепла, которое может быть выделено в аппарате за время
действия тока короткого замыкания.
Для определения соответствия этих параметров электрических
аппаратов условиям работы электроустановки должны быть пред-
варительно определены токи короткого замыкания.
Автоматические выключатели рекомендуется при-
менять в ответственных установках при необходимости быстро-
го восстановления напряжения питания, дистанционного уп-
равления и комплексной защиты, в асинхронных электропри-
водах для предотвращения однофазного режима работы двига-
телей. Их использование целесообразно также в электроприво-
дах с малой частотой включения, где они обеспечивают включе-
ние и защиту двигателя и могут применяться вместо магнитных
пускателей.
Автоматические выключатели выбираются по номинальным
току и напряжению, роду тока, предельной коммутационной спо-
собности, электродинамической и термической стойкости, соб-
ственному времени отключения. Все параметры автоматов долж-
ны соответствовать их работе как в обычном, так и аварийном
режимах, а конструктивное исполнение — условиям размеще-
ния.
Номинальный ток автомата должен быть не ниже тока продол-
жительного режима установки, а сам аппарат не должен отклю-
чаться при предусмотренных технологических перегрузках.
Проверка выбираемого автомата по условию защиты электро-
установки от токов короткого замыкания состоит в сопоставле-
нии тока короткого замыкания в установке с предельной комму-
тационной способностью автомата, которая должна быть выше
этого тока.
Защита установки от перегрузок по току будет обеспечена, если
номинальный ток автомата с тепловым расцепителем будет равен
или несколько больше номинального тока защищаемого объекта.
Уставка тепловой и максимальной защит электродвигателей
должна соответствовать уровням соответствующих токов двигате-
ля. Максимальная токовая защита не должна срабатывать при пу-
333
ске двигателя, для чего ее уставка /усттах выбирается по соотноше-
нию
-^уст max — ^н-^пуск? (10.35)
где кн — коэффициент, учитывающий вид расцепителя и воз-
можный разброс тока его срабатывания относительно уставки,
кн = 1,5...2,2; /пуск — пусковой ток двигателя.
Защита от перегрузки (тепловая защита) считается эффектив-
ной при следующем соотношении ее тока уставки /уст и номи-
нального тока двигателя:
/уст = (1,2... 1,4)/ном. (10.36)
К числу показателей, по которым выбираются контакторы
и магнитные пускатели, относятся характер и величина
напряжений главной цепи и цепи управления (включающих кату-
шек); коммутационная способность контактов и их количество,
допустимая частота включений; режим работы; категория разме-
щения; степень защиты от воздействия окружающей среды.
Выключатели и переключатели выбираются по роду
и величине напряжения, току нагрузки, количеству переключе-
ний, которое они допускают по условиям механической и элект-
рической износостойкости, а также конструктивному исполне-
нию.
Выбор механической передачи. Механическая передача служит
для согласования движения вала двигателя и исполнительного
органа рабочей машины. Основными показателями при ее выборе
являются передаточное число или радиус приведения и требу-
емая характеристика преобразования движения. По характеристи-
ке преобразования движения различают следующие виды механи-
ческих передач:
• механические передачи для преобразования вращательного
движения вала двигателя во вращательное движение исполнитель-
ного органа рабочей машины. К таким передачам относятся все
виды редукторов, ременные и цепные передачи и вариаторы;
• механические передачи для преобразования вращательного
движения вала двигателя в поступательное движение исполни-
тельного органа рабочей машины. К таким передачам относятся
передачи «винт—гайка», реечные передачи и кривошипно-ша-
тунные механизмы.
За счет выбора передаточного числа (радиуса приведения) ме-
ханической передачи могут быть оптимизированы определенные
показатели работы электропривода.
Одна из типовых задач такого рода связана с обеспечением
минимального времени пуска или торможения двигателя, т.е. с
334
получением максимального быстродействия электропривода. Это
достигается за счет оптимизации передаточного числа редуктора,
которому будет соответствовать минимальный запас кинетиче-
ской энергии и тем самым минимальные потери энергии в пере-
ходных процессах. Покажем эту связь и найдем оптимальное пере-
даточное число редуктора.
Допустим, что моменты двигателя и нагрузки в переходных
процессах постоянны. Тогда, относя потери в механической пере-
даче к моменту нагрузки и используя основное уравнение движе-
ния, можно для времени переходного процесса t„ п записать
tn.n = /£(ОС/(МД ± Мс) = ф/д + /ио//2)/(Мд ± МИо/П, (10.37)
где Мд, Мио, Мс — моменты двигателя, исполнительного органа
и нагрузки на валу двигателя; /д, /ио — моменты инерции двига-
теля и исполнительного органа; р — коэффициент, учитывающий
момент инерции элементов редуктора; i — передаточное число
редуктора. Знак «минус» в этой формуле соответствует пуску дви-
гателя, знак «+» — его торможению.
Заменяя в выражении (10.37) передаточное число отношением
скоростей двигателя и исполнительного органа на i = ©с/® ио, по-
лучаем после преобразований
*п.п = (РЛ®с + Л4ОюИо)/(^д®с ± ^ИО®Ио) =
= 2(РРК + РГио)/(Рд + Рио), (10.38)
где Wa, Иио — запасы кинетической энергии двигателя и испол-
нительного органа при скорости сос, = /д<»с/2, Иио = 4ю®ио/2;
Рд, Рио — мощности двигателя и нагрузки.
Из формулы (10.38) следует, что минимальному времени пе-
реходного процесса соответствует минимальный запас кинетиче-
ской энергии в электроприводе и исполнительном органе рабо-
чей машины и тем самым минимальные потери энергии в дина-
мических режимах.
Найдем оптимальное передаточное число редуктора для случая
пуска двигателя (знак «минус» в формулах), при котором время
пуска и, следовательно, потери энергии будут минимальными. Для
этого находим производную d/„ п /d/ и приравниваем ее нулю. После
преобразований получаем следующее выражение:
/’опт = -Л^ио/^д + 7(-^Ио/-^д) + Лю/(РА)- (10.39)
В табл. 10.1 в качестве примера приведены рассчитанные по
формуле (10.39) значения ionT для случая Ми0/Мд = 0,5 и разли-
чных отношениях Лю/(РЛ) ПРИ Р = 1-
335
Таблица 10.1
Значения оптимального КПД редуктора
Лю/Л 0,1 0,5 1 5 10 50 100
^ОПТ 1,09 1,37 1,62 2,79 3,7 7,59 10,5
Важно отметить, что найденное оптимальное передаточное
число, кроме обеспечения минимальных времени и потерь энер-
гии в переходных процессах, должно обеспечить также и необ-
ходимую рабочую скорость исполнительного органа рабочей ма-
шины.
Далее приведены ориентировочные значения КПД ряда меха-
нических передач при их номинальной нагрузке.
Цилиндрическая передача:
со шлифованными прямыми зубьями............. 0,99
нарезными прямыми зубьями....................... 0,98
необработанными прямыми зубьями................. 0,96
косыми зубьями.................................. 0,975
шевронными зубьями.............................. 0,985
Коническая зубчатая передача....................... 0,975
Червячная передача............................. 0,6...0,8
Ременная передача.............................. 0,94...0,96
Клиноременная передача......................... 0,8...0,98
Цепная передача.................................... 0,98
Фрикционная передача........................... 0,7...0,8
Цапфы опор:
плохая смазка.................................. 0,94
хорошая смазка.................................. 0,97
кольцевая смазка................................ 0,98
шариковый подшипник............................. 0,99
Блоки......................................... 0,96... 0,97
Полиспасты..................................... 0,92... 0,98
Барабан цепной..................................... 0,97
Задача 10.8*. Асинхронный двигатель с короткозамкнутым ро-
тором типа 4A132S4Y3 имеет следующие номинальные данные: мощ-
ность Рном = 7,5 кВт; напряжение обмотки статора t/H0M = 220 В;
КПД т|ном = 87,5 %; коэффициент мощности cos<pHOM = 0,86; крат-
ность пускового тока по отношению к номинальному току стато-
ра — 7,5.
Выбрать автоматический выключатель, обеспечивающий вклю-
чение двигателя и его максимальную и тепловую защиты.
1. Определяем номинальный, пусковой и ударный ток статора
двигателя:
Лном = /’номЛЗ ^homTIhomCOS <рном) = 7 500/3 • 220 • 0,875 • 0,86 = 15 А;
336
/|п = 7,5/|ном = 7,5-15 = 113,25 А;
/|уд= 1,8 1,43/1П = 1,8 1,43 • 113,25 = 288,3 А.
2. Находим ток срабатывания токовой отсечки (электромагнит-
ного расцепителя)
Л.о= 1,171Уд = 1,1 • 288,3 = 317,13 А.
3. Рассчитываем ток срабатывания тепловой защиты
/т.з= 1,2/1ном = 1,2-15= 18А.
Выбираем автомат типа АЗ 120 с номинальным током автома-
та, электромагнитного и теплового расцепителя 15 А, уставкой
максимальной токовой защиты 430 А и тепловой защиты 18 А.
10.5. Защиты, блокировки и сигнализация
в схемах электропривода
Для обеспечения надежной и безопасной работы ЭП и техно-
логического оборудования в его схемах предусматриваются необ-
ходимые виды защит. Этой же цели служат различные блокиров-
ки, обеспечивающие заданный порядок операций по управлению
одним или несколькими ЭП и технологическим оборудованием и
предотвращающие при этом ошибочные действия оператора. Кроме
того, во многих случаях целесообразно осуществлять контроль за
состоянием и режимом работы отдельных узлов ЭП и технологи-
ческого оборудования, что обеспечивается с помощью средств
сигнализации, измерительных и регистрирующих приборов.
Максимальная токовая защита. При работе ЭП может произой-
ти замыкание электрических цепей между собой или на землю
(корпус), а также увеличение тока в силовых цепях сверх допусти-
мого предела, вызванное, например, стопорением движения ис-
полнительного органа рабочей машины, обрывом одной из фаз
питающего напряжения, резким снижением тока возбуждения
двигателей постоянного тока. Для защиты ЭП и питающей сети от
появляющихся в этих случаях недопустимо больших токов пре-
дусматривается максимальная токовая защита, которая может ре-
ализовываться различными средствами: с помощью плавких пре-
дохранителей, реле максимального тока и автоматических вык-
лючателей.
Плав кие предохранители FU включаются в каждую ли-
нию (фазу) питающей двигатель сети между выключателем Q на-
пряжения сети и контактами линейного контактора Of д ля асин-
хронного двигателя (рис. 10.11, а) и двигателя постоянного тока
337
К схеме
управления
Рис. 10.11. Схемы защиты с использованием плавких предохранителей
асинхронного двигателя (а), двигателя постоянного тока (б) и цепей
управления (е)
(рис. 10.11, б). Цепи управления также могут защищаться плавки-
ми предохранителями (рис. 10.11, в).
Выбор плавкой вставки предохранителей силовой части элект-
ропривода производится таким образом, чтобы при пуске двига-
телей она не перегорала от пускового тока двигателя.
Реле максимального т о к а используются в основном в
ЭП средней и большой мощности. Катушки этих реле FA1 и FA2
(рис. 10.12, а, б) включаются в фазы трехфазных двигателей пе-
ременного тока и в один или два полюса двигателя постоянного
тока между выключателем Q и контактами линейного контактора
КМ. Размыкающие контакты этих реле включены в цепь катушки
КМ линейного контактора (рис. 10.12, в). При возникновении сверх-
токов в контролируемых цепях, превышающих уставки реле FA1
и FA2, эти контакты размыкаются и силовые контакты линейного
контактора КМ отключают двигатель от питающей сети.
Рис. 10.12. Схемы защиты с использованием максимальных токовых реле
асинхронного двигателя (а), двигателя постоянного тока (б) и схема це-
пей управления (в)
338
Уставки реле максимального тока должны выбираться таким
образом, чтобы не происходило отключение двигателей при их
пуске или других переходных процессах, когда токи в силовых
цепях в несколько раз превышают номинальный уровень.
Уставка тока реле максимального тока при защите асинхрон-
ных двигателей с короткозамкнутым ротором выбирается из со-
отношения
/уст = (1,2... 1,3)/пуск, (10.40)
а для асинхронных двигателей с фазным ротором и двигателей
постоянного тока по формуле
/уст = (2...2,5)/ном. (10.41)
Автоматические воздушные выключатели (авто-
маты) являются комплексными многоцелевыми аппаратами и
обеспечивают ручное включение и отключение двигателей и за-
щиту от сверхтоков, перегрузок и снижения питающего напряже-
ния. Для выполнения этих функций автомат имеет контактную
систему, замыкание и размыкание которой осуществляется вру-
чную с помощью рукоятки или кнопки, максимальное токовое
реле и тепловое токовое реле. Кроме того, некоторые типы авто-
матов обеспечивают защиту от снижения напряжения и дистан-
ционное отключение двигателей.
Важным устройством автомата является механизм свободного
расцепления, который обеспечивает его отключение при поступ-
лении управляющих или защитных воздействий. В общем случае
отключение автомата этим механизмом может происходить при
протекании токов перегрузки, коротком замыкании, снижении
напряжения сети, а также при дистанционном отключении авто-
мата.
Пример схемы включения автомата б^для подключения и за-
щиты трехфазного асинхронного двигателя приведен на схеме рис.
10.13. Автоматические выключатели широко используются также
для коммутации и защиты силовых и маломощных цепей других
видов ЭП.
Рис. 10.13. Схема включения асинхронно-
го двигателя с использованием автома-
тического выключателя
339
Рис. 10.14. Схема нулевой защиты
Нулевая защита. При значительном снижении напряжения сети
или его исчезновении эта защита обеспечивает отключение дви-
гателей и предотвращает самопроизвольное их включение (само-
запуск) после восстановления напряжения.
В тех случаях, когда двигатели управляются от кнопок кон-
такторами или магнитными пускателями, нулевая защита осуще-
ствляется без применения дополнительных средств. Например, если
в схемах рис. 10.12 исчезло или сильно понизилось напряжение
сети, катушка линейного контактора КМ потеряет питание и он
отключит двигатель от сети. При восстановлении напряжения вклю-
чение двигателя может быть произведено только после нажатия
на кнопку управления SB2.
При управлении ЭП от командоконтроллера или ключа с фик-
сированным положением их рукояток нулевая защита осуществля-
ется с помощью дополнительного реле напряжения /У (рис. 10.14).
В этой схеме реле FV включается в нулевом положении коман-
доконтроллера (ключа) через контакт SM0, после чего оно стано-
вится на самопитание через свой собственный контакт. При пере-
воде рукоятки командоконтроллера (ключа) в положение пуска 1
питание всей схемы управления осуществляется через этот кон-
такт, поэтому при исчезновении напряжения реле FV отключит-
ся, прекратит ее питание и линейный контактор КМ отключит
двигатель от сети.
При восстановлении напряжения питания повторное включе-
ние двигателя может быть произведено лишь после установки ру-
коятки вновь в нулевое (среднее) положение, что исключает воз-
можность его самозапуска.
В схеме на рис. 10.14 реле FVявляется исполнительным элемен-
том еще двух защит: от токов короткого замыкания (контакты
реле максимального тока FA) и тепловой защиты (контакты теп-
лового реле FP), что часто практикуется в схемах управления.
Тепловая защита. Эта защита отключает двигатель от источника
питания, если вследствие протекания по его цепям повышенных
токов имеет место более высокий нагрев его обмоток. Увеличение
тока возникает, в частности, при перегрузках двигателей или об-
рыве одной из фаз трехфазных асинхронных или синхронных дви-
гателей.
340
а б
Рис. 10.15. Схемы тепловой защиты с использованием тепловых реле асин-
хронного двигателя (а, б) и двигателя постоянного тока (в)
Тепловая зашита двигателей может быть осуществлена с помо-
щью тепловых, максимально-токовых реле и автоматических вык-
лючателей.
Тепловые реле FP включаются в две фазы трехфазных двигате-
лей переменного тока непосредственно (рис. 10.15, а) или через
трансформаторы тока ТА (рис. 10.15, б), если ток двигателя пре-
вышает номинальный ток реле. Для защиты двигателей постоян-
ного тока реле включаются в один или два полюса цепи их пита-
ния (рис. 10.15, в). Размыкающие контакты тепловых реле включа-
ются или в цепи катушек главных (линейных) контакторов, или
в цепь защитного реле (см. рис. 10.14).
Действие теплового реле основано на эффекте изгибания би-
металлической пластинки при ее нагревании за счет различных
температурных коэффициентов линейного расширения образу-
ющих ее металлов.
Номинальный ток теплового элемента реле /т э выбирают рав-
ным или несколько большим номинального тока двигателя /ном:
/тэ = (1... 1,15)/ном. (10.42)
Тепловая защита двигателей может осуществляться автомати-
ческими выключателями и магнитными пускателями, если они
имеют встроенные тепловые расцепители, как, например, в схе-
ме автомата.
При повторно-кратковременных режимах работы ЭП, когда
процессы нагрева реле и двигателя различны, защита двигателей
от перегрузок осуществляется с помощью максимально-токовых
реле FA1 и FA2 (см. рис. 10.12). Токи уставок реле при этом выбира-
ются на 20... 30 % выше номинального тока двигателя. Так как ус-
тавкц реле ниже пускового тока, то при пуске его контакты шун-
тируются контактами реле времени, имеющего выдержку време-
ни, несколько большую времени пуска двигателя.
Минимально-токовая защита. Этот вид защиты применяется в
ЭП с двигателями постоянного тока и синхронными двигателями
341
Рис. 10.16. Схема минимально-токовой за-
щиты
для защиты от обрыва их цепей возбуждения. Исчезновение тока
возбуждения опасно тем, что оно вызывает исчезновение проти-
воЭДС двигателей и приводит к значительному возрастанию тока
в их силовых цепях.
Эта защита осуществляется с помощью минимально-токово-
го реле KF, катушка которого включается в цепь обмотки воз-
буждения двигателя (рис. 10.16). Замыкающий контакт реле KF
включается в цепь катушки контактора КМ, что позволяет вклю-
чать двигатель только при наличии тока возбуждения в обмотке
возбуждения мотора ОВМ. При работе ЭП в случае исчезнове-
ния или резкого снижения тока возбуждения контакт реле KF
разомкнется и контактор КМ, потеряв питание, отключит дви-
гатель от сети.
Специальные виды защиты. К ним относится защита от пере-
напряжения на обмотке возбуждения двигателя постоянного тока,
повышения напряжения в системе преобразователь—двигатель,
превышения скорости ЭП, затянувшегося пуска синхронных дви-
гателей и ряд других.
Защита от перенапряжения на обмотке возбуж-
дения двигателя постоянного тока требуется при ее отключе-
нии от источника питания. В этом режиме вследствие быстрого
спадания тока возбуждения и соответственно магнитного потока
в обмотке возникает значительная (до нескольких киловольт) ЭДС
самоиндукции, которая может вызвать пробой ее изоляции.
Защита осуществляется с помощью так называемого разрядно-
го резистора /?р, включаемого параллельно обмотке возбуждения
мотора ОВМ (см. рис. 10.16) сопротивлением 7?овм. Его сопротив-
ление выбирается равным (4...5)7?ОВМ при напряжении питания
220 В и (6... 8)7?ОВМ при напряжении 110В. Для устранения потерь
энергии в разрядном резисторе последовательно с ним включает-
ся диод VD. Он не пропускает через резистор ток при включенной
обмотке возбуждения, но позволяет протекать току под действи-
ем ЭДС самоиндукции, возникающей при отключении обмотки.
Выбор Rp в указанных пределах позволяет снизить темп спадания
тока в обмотке возбуждения и ограничить величину ЭДС самоин-
дукции до допустимых пределов.
342
Защита от превышения напряжения применяется глав-
ным образом в системе «преобразователь—двигатель». Она ре-
ализуется с помощью реле напряжения, включаемого на выход
преобразователя и своими контактами воздействующего на цепи
отключения напряжения ЭП. Эта защита косвенно защищает дви-
гатель постоянного тока от чрезмерного увеличения скорости при
появлении повышенного напряжения.
Зашита от превышения скорости применяется в ЭП
рабочих машин, не допускающих превышения скорости движе-
ния своих исполнительных органов (лифты, подъемные лебедки,
эскалаторы, шахтные подъемники). Для предотвращения недопу-
стимых скоростей движения в ЭП используется защита, которая
может быть выполнена с помощью тахогенераторов или центро-
бежных выключателей, соединенных с валом двигателя. Центро-
бежные выключатели непосредственно воздействуют на цепь уп-
равления, а в случае применения тахогенератора это воздействие
осуществляется с помощью реле напряжения, включаемого на его
якорь.
Защита от затянувшегося пуска синхронных двигате-
лей обеспечивает его прекращение, если к концу расчетного вре-
мени пуска ток возбуждения синхронных двигателей не достиг
заданного уровня. Осуществляется эта защита с помощью реле
минимального тока KF, включаемого аналогично реле обрыва поля
в цепь обмотки возбуждения синхронных двигателей (см. рис. 10.16),
и реле времени КТ (рис. 10.17). Если за время выдержки реле КТ,
равное времени нормального пуска синхронного двигателя, ток
возбуждения окажется недостаточным, то после замыкания кон-
тактов реле КТ сработает реле защиты KVF и даст команду на
прекращение пуска.
Путевая защита обеспечивает отключение ЭП при достиже-
нии исполнительным органом рабочей машины крайних положе-
ний. Она осуществляется с помощью конечных выключателей, ус-
танавливаемых в этих положениях исполнительного органа и раз-
мыкающих цепи реле защиты или непосредственно линейных кон-
такторов.
Защита от выпаде ния синхронных двигателей из
синхронизма применяется для ЭП с синхронными двигате-
лями, работающих с резко изменяющейся нагрузкой на валу и
питающихся от сети, в которой возможно снижение напряжения.
Защита осуществляется с помощью реле напряжения KV (рис.
10.18), включенного на напряжение сети и реле (контактора) фор-
Рис. 10.17. Схема защиты от затянувшегося пуска
синхронного двигателя
343
Рис. 10.18. Схема защиты синхронного двигателя от выпадания из син-
хронизма
сировки возбуждения KF, замыкающий контакт которого вклю-
чен параллельно добавочному резистору Ra в цепи обмотки воз-
буждения ОВВ возбудителя В.
При нормальном уровне напряжения сети реле KV включено,
а реле KF не включено, поэтому резистор Ra введен в цепь ОВВ и
по ней протекает номинальный (или близкий к нему) ток. При
снижении напряжения сети на 15...20 % реле KV отключается и
замыкает свой контакт в цепи катушки реле KF. Последнее вклю-
чается и своим контактом шунтирует резистор Ra. Ток возбужде-
ния возбудителя, его напряжение и ток возбуждения синхронно-
го двигателя /в м возрастают, а тем самым увеличивается его ЭДС.
Это приводит к увеличению максимального момента и перегру-
зочной способности синхронного двигателя и обеспечивает его
синхронную работу с сетью при увеличении нагрузки на валу.
Электрические блокировки в схемах ЭП. Блокировки служат для
обеспечения заданной последовательности операций при работе
Рис. 10.19. Схемы блокировок в ЭП:
а — при перекрестном включении контактов контакторов и двухцепных кнопок;
б — технологическая блокировка
344
ЭП, предотвращения нештатных и аварийных ситуаций и непра-
вильных действий со стороны оператора, что в итоге повышает
надежность работы ЭП и технологического оборудования. Так,
например, при работе двух контакторов КМ1 и КМ2 (рис. 10.19, а)
перекрестное включение их размыкающих контактов в цепи кату-
шек этих аппаратов не допускает включение одного контактора
при включенном другом. Такой вид блокировки применяется в
реверсивных ЭП, где недопустимо одновременное включение двух
контакторов, или в ЭП с электрическим торможением двигате-
ля, где торможение может начаться только после отключения дви-
гателя от сети.
Одновременное включение двух контакторов может быть пре-
дотвращено с помощью использования двухцепных кнопок уп-
равления, имеющих замыкающий и размыкающий контакты (см.
рис. 10.19, а).
Нажатие любой из кнопок приводит к замыканию цепи ка-
тушки одного из контакторов и одновременному размыканию цепи
другого контактора.
Схема на рис. 10.19, б иллюстрирует пример некоторой техно-
логической блокировки двух ЭП, работающих совместно в комп-
лексе. Она допускает включение контактора КМ1 одного ЭП толь-
ко после включения контактора КМ2 другого ЭП и при нажатом
путевом выключателе SQ.
Сигнализация в схемах управления ЭП. Для контроля хода тех-
нологического процесса или последовательности выполняемых
операций, состояния защиты и наличия напряжения питания или
какого-либо электрического сигнала применяется сигнализация.
Она может быть световой и осуществляться с помощью сигналь-
ных лампы и табло, звуковой (звонок, сирена) и визуальной (ука-
зательные реле, измерительные приборы).
Для примера на рис. 10.20 показаны возможные сигнализации
в схеме управления ЭП. Лампа HL1 сигнализирует о подаче на-
пряжения на схему (включение автомата QF), лампа HL2 — о
включении контактора КМ, лампа HL3 — о срабатывании реле
Рис. 10.20. Пример схемы сигнализации в ЭП
345
максимальной токовой защиты FA, лампа HL4 — о срабатывании
конечного выключателя SQ.
Задача 10.9. Двигатель постоянного тока типа 4ПФ1608 включен
по схеме рис. 10.11, б и имеет следующие номинальные данные: мощ-
ность Рноы = 11 кВт; напряжение 6/ном = 220 В; КПД т|ном = 70,5 %.
Рассчитать номинальный ток плавкой вставки FU.
Задача 10.10. Асинхронный двигатель с короткозамкнутым ро-
тором типа A14P100L4 включен по схеме рис. 10.11, а и имеет
следующие номинальные данные: мощность Рном = 4 кВт; напря-
жение t/HOM = 220 В; КПД т|ном = 85 %; коэффициент мощности
cos Фном = 0,84; кратность пускового тока по отношению к номи-
нальному току статора — 6.
Рассчитать номинальный ток плавкой вставки FUдля двух случаев:
при небольшой частоте включения двигателя и легких услови-
ях пуска продолжительностью до 5... 10 с;
при повторно-кратковременном режиме и тяжелых условиях
пуска с продолжительностью более 10 с.
Задача 10.11. Асинхронный двигатель с короткозамкнутым ро-
тором типа 4AH200L4Y3 включен по схеме рис. 10.12, а и имеет
следующие номинальные данные: мощность Рном = 55 кВт; напря-
жение 6/ном = 220 В; КПД т|ном = 92 %; коэффициент мощности
cos(pHOM = 0,89; кратность пускового тока по отношению к номи-
нальному току статора — 6,5.
Рассчитать уставку реле максимального тока FA и выбрать его
по каталогу.
Задача 10.12. Асинхронный двигатель с фазным ротором типа
4AK250S6Y3 имеет следующие номинальные данные:
мощность Рном = 37 кВт;
напряжение t/HOM = 220 В;
КПД пном = 89%;
коэффициент мощности cos<pHOM = 0,8.
Рассчитать уставку реле максимального тока, обеспечивающе-
го защиту двигателя от короткого замыкания и недопустимых бро-
сков тока.
Задача 10.13. Асинхронный двигатель с короткозамкнутым ро-
тором типа 4AH200L4Y3 включен по схеме рис. 10.12, а. Рассчи-
тать параметры и по ним выбрать контактор КМ для следующих
условий работы электропривода: категория применения АС—4;
коммутационная износостойкость — не менее 0,3 млн циклов;
механическая износостойкость — не менее 10 млн циклов; режим
работы аппарата — длительный; климатическое исполнение и ка-
тегория размещения — УЗ. Контактор должен иметь три силовых
контакта и по два размыкающихся и замыкающихся вспомога-
тельных контакта.
Задача 10.14. Для схемы на рис. 10.16 рассчитать величину раз-
рядного резистора Rp, если напряжение сети 220 В.
346
10.6. Диагностирование электроприводов
Одно из направлений совершенствования электроприводов свя-
зано с диагностированием их состояния, что повышает надеж-
ность функционирования электроприводов и обслуживаемого ими
технологического оборудования. Диагностирование имеет своей
целью выявление соответствия свойств, характеристик и пара-
метров электропривода технической документации на него. Ре-
зультатом диагностирования является информация о техническом
состоянии электропривода с указанием (при наличии несоответ-
ствия) вида, места и причин дефекта.
Диагностирование осуществляется путем измерения и контро-
ля количественных и качественных значений параметров электро-
привода, анализом и обработкой их результатов. Разнообразие элек-
троприводов определило большое число методов и средств диаг-
ностирования, отличающихся способами реализации, конструк-
тивным исполнением и расположением относительно электропри-
вода, степенью автоматизации и универсальности, принципами
воздействия на электропривод, формой обработки и представле-
ния информации о состоянии объекта, режимами работы и рядом
других признаков. Классификация средств диагностирования элек-
троприводов представлена на рис. 10.21.
К аппаратурным средствам диагностирования относятся
приборы, пульты, стенды и специальные вычислительные уст-
ройства. Аппаратурные средства, объединенные с электроприво-
дом конструктивно, называются встроенными. К ним отно-
сятся приборы для измерения тока, напряжения, частоты, мощ-
ности, устройства индикации, реле, светоизлучающие диоды, ус-
тройства контроля изоляции и др.
Внешние аппаратурные средства выполнены отдельно от
электропривода и подключаются к нему лишь в процессе ди-
агностирования. Такими средствами являются комбинирован-
ные приборы для измерения в цепях постоянного и переменно-
го тока, тестеры логического состояния, электронно-лучевые
и цифровые осциллографы, переносные измерительные комп-
лекты и т.п.
Средства диагностирования называются специализированными,
если они предназначены только для однотипных электроприво-
дов, и универсальными, если они предназначены для различных
по конструктивному решению и функциональному назначению
электроприводов. Последние технически более сложны и включа-
ют в себя, как правило, вычислительные машины с гибкими ус-
тройствами управления и программирования.
Программные средства диагностирования представляют со-
бой программы, записанные в устройства памяти программиру-
347
Рис. 10.21. Классификация средств диагностирования электроприводов
емых контроллеров, микропроцессорных систем управления элек-
троприводами, управляемых вычислительных машин. Програм-
мы могут обеспечивать диагностирование электропривода в про-
цессе использования его по прямому назначению (рабочие про-
граммы) либо при кратковременном прерывании функциони-
рования электропривода (специальные испытательные програм-
мы). Программные средства в сочетании с аппаратурными обра-
зуют программн о-a ппаратурные средства диагностирова-
ния, позволяющие решать задачи самодиагностирования элект-
ропривода.
По степени автоматизации средства могут быть ручными,
требующими участия человека-оператора, автоматизирован-
ными (сигнатурные, логические анализаторы), требующими уча-
348
стия оператора лишь в подключении их к электроприводам и вы-
боре режимов его диагностирования. Автоматические сред-
ства решают задачи диагностирования без участия оператора.
В зависимости от форм обработки и представления информа-
ции средства диагностирования могут быть аналоговыми,
цифровыми, аналого-цифровыми.
Средства диагностирования могут быть активными (при воз-
действии тестового сигнала на электропривод и оценки реакции
на этот сигнал) и пассивными (выполняют лишь измерения,
обработку и оценку сигналов, характеризующих техническое со-
стояние электропривода).
Из всего многообразия средств диагностирования наиболее
перспективны и по мере внедрения в электроприводе микропро-
цессорных устройств находят основное применение автомати-
ческие программно-аппаратные цифровые средства.
Совокупность средств и объекта диагностирования, осущест-
вляющая диагностирование по правилам, установленным соот-
ветствующей нормативно-технической документацией, представ-
ляет собой систему диагностирования.
Обобщенные схемы систем тестового и функциональ-
ного диагностирования приведены на рис. 10.22. В системах те-
стового диагностирования (рис. 10.22, а) специальные воздействия
на электропривод поступают со стороны средств его диагности-
рования СД. Состав и последовательность этих воздействий опре-
деляются алгоритмами диагностирования электропривода ЭП. Те-
стовые воздействия могут поступать на объект как перед началом,
так и во время его рабочего функционирования. В последнем слу-
чае они не должны мешать работоспособности электропривода.
Наиболее распространенными тестовыми воздействиями являют-
ся единичные импульсы, скачки и гармонические сигналы.
В системах функционального диагностирования (рис. 10.22, б)
воздействия, поступающие на электропривод, заданы его рабо-
чим алгоритмом функционирования или возможными внешними
возмущениями и потому не могут выбираться из условий наибо-
Тестовые
Результаты
диагностирования
а
Результаты
диагностирования
Рис. 10.22. Схемы диагностирования:
а — тестовая; б — функциональная
349
лее эффективной организации диагностирования электропривода.
Достоинство систем функционального диагностирования состоит
в отсутствии внешнего целенаправленного вмешательства в рабо-
ту электропривода. Однако техническая реализация средств диаг-
ностирования в подобных системах более сложна, поскольку при-
ходится обрабатывать и анализировать, как правило, случайные
сигналы в схеме электропривода.
Назовем основные дефекты применительно к силовым цепям
электропривода, которые могут возникать при работе электро-
приводов:
отсутствие фазы сетевого напряжения питания электропривода;
недопустимая асимметрия напряжений питания электропри-
вода;
превышение по отношению к допустимому сетевого напряже-
ния питания электропривода;
недопустимо низкий уровень сопротивления изоляции сило-
вых цепей электропривода относительно земли;
превышение максимально допустимого тока в сети питания
электропривода;
разрыв плавких вставок предохранителей в силовых цепях элек-
тропривода;
пробой силового полупроводникового элемента преобразова-
теля;
превышение максимально допустимого тока в цепях нагрузки
полупроводникового преобразователя;
превышение максимально допустимого напряжения на сило-
вом полупроводниковом элементе преобразователя;
превышение допустимой температуры перехода силового по-
лупроводникового элемента (тиристора, транзистора) преобра-
зователя;
превышение допустимой температуры электродвигателя;
превышение времени стоянки двигателя под током;
превышение допустимой частоты вращения электродвига-
теля;
несоответствие между заданным и действительным значени-
ями частоты вращения электродвигателя.
В системах управления электроприводов к дефектам могут от-
носиться отклонение от допустимых напряжений питания эле-
ментов управления; обрыв входных цепей управления; дефект со-
единений в разъемах между блоками управления; ошибки при
определении действительного значения контролируемых перемен-
ных электропривода и ряд других дефектов.
Диагностирование электроприводов представляет собой акту-
альную и непростую по своему содержанию научно-техническую
задачу, по решению которой в настоящее время ведется активная
работа.
350
10.7. Электромагнитная совместимость
электроприводов
Электроприводы во время работы подвергаются вредным воз-
действиям в виде помех, которые могут привести к нарушениям
(сбоям) в работе электропривода, а в некоторых случаях — и к
аварийным ситуациям.
Помехи — это электромагнитные величины, источниками ко-
торых могут являться различные электротехнические или элект-
ронные устройства и физические процессы, например искровые
разряды при замыкании и размыкании контактов электрических
аппаратов, коммутационные процессы в полупроводниковых пре-
образователях, грозовые разряды в атмосфере и многие другие
устройства и процессы. Особенно сильное влияние помехи оказы-
вают на электронные элементы и устройства электроприводов.
В то же время и сами электроприводы могут быть источниками
таких помех, оказывая вредное влияние на другие устройства и
системы и нарушая тем самым их нормальное функционирова-
ние.
Из сказанного следует, что электроприводы, с одной сторо-
ны, должны обладать помехоустойчивостью, а с другой стороны,
сами не должны быть источниками помех. Эти качества соответ-
ствуют понятию «электромагнитная совместимость», под кото-
рой понимают способность электроприводов функционировать в
условиях реальной электромагнитной обстановки, сохраняя свою
работоспособность и не создавая помех в работе других устройств
и систем.
Обеспечение электромагнитной совместимости электроприво-
да как важного показателя качества должно осуществляться на
всех этапах его жизненного цикла: при проектировании, констру-
ировании, изготовлении и эксплуатации. Сложность решения этой
задачи определяется тем, что внешние помехи могут поступать на
электроприводы по линиям питания, информационным каналам
и из окружающей среды, что требует применения в каждом слу-
чае соответствующих методов и технических средств. То же самое
относится и к создаваемым электроприводами помехам. Назовем
некоторые методы и средства обеспечения электромагнитной со-
вместимости.
Установка помехоподавляющих фильтров на лини-
ях силового питания и информационных каналах. Фильтры пред-
ставляют собой устройства, обеспечивающие затухание помех,
поступающих по проводникам. Параметры фильтров выбираются
таким образом, чтобы они уменьшали уровень помехи, не иска-
жая полезный электрический сигнал. Основными элементами филь-
тров являются конденсаторы и катушки индуктивности. Приме-
351
ром применения этого вида помехозащитного устройства являет-
ся использование фильтров для преобразователей частоты.
Экранирование элементов электропривода позволяет как
ослаблять воздействие на них внешних электромагнитных полей,
так и подавить исходящие от них помехи. Экранированию могут
подвергаться электротехнические установки и их части, силовые
и информационные линии, а в ряде случаев и целые помещения.
В качестве экранов используются фольга, металлические пла-
стины, ленты, оплетки, сетки и ряд других изделий и материалов.
По условиям обеспечения безопасности (защиты от напряжения
прикосновения) корпусы приборов и экраны помещений зазем-
ляются в определенных точках.
Гальваническая развязка позволяет устранить взаим-
ное влияние электрических цепей, в первую очередь силовых и
информационных каналов внутри устройств. В качестве раздели-
тельных элементов, обеспечивающих гальваническую развязку, ис-
пользуются оптико-электронные приборы, электромагнитные
реле, трансформаторы, специальные разделительные схемы.
Ограничители перенапряжений представляют собой
специальные устройства, предназначенные для защиты от пере-
напряжений, вызываемых молниями, разрядами статического элек-
тричества, коммутационными процессами и другими причинами.
В их качестве могут использоваться лавинные диоды, варисторы,
газонаполненные и воздушные разрядники и их комбинации.
10.8. Комплектные и интегрированные
электроприводы
Прогрессивным явлением при проектировании систем управ-
ления и автоматизации технологических процессов является при-
менение комплектных ЭП (КЭП) постоянного и переменного тока.
КЭП представляет собой регулируемый ЭП, в поставляемый за-
казчику комплект которого входят все его функциональные эле-
менты (см. рис. 1.1), согласованные по всем своим характеристи-
кам и параметрам уже на стадии проектирования, конструирова-
ния и изготовления.
Комплектные ЭП находят широкое применение во многих от-
раслях промышленности — станкостроительной, бумагоделатель-
ной, металлургической, машиностроительной и др. Распростра-
нение КЭП определяется более низкой трудоемкостью при его
разработке и изготовлении, сокращении времени на электромон-
тажные и наладочные работы, удобством эксплуатации.
Комплектные ЭП различаются по напряжению питающей сети,
числу двигателей (одно-, двух- или многодвигательные), виду и
номинальным параметрам силового преобразователя, наличию или
352
отсутствию реверса двигателя, виду основной регулируемой ко-
ординаты (ЭП с регулируемыми скоростью, положением, натя-
жением, мощностью), диапазону и направлению регулирования
скорости (однозонные и двухзонные), составу аппаратуры сило-
вой цепи (с линейным контактором или без него), наличию или
отсутствию торможения, способу связи с питающей сетью (связь
через трансформатор, реактор или без них).
Комплектньй ЭП с двигателями постоянного тока. В его состав
входят двигатель постоянного тока с тахогенератором и (или)
датчиком положения, тиристорные преобразователи для питания
обмоток возбуждения и якоря, силовой трансформатор или реак-
тор, сглаживающий реактор, коммутационная и защитная аппа-
ратура (автоматические выключатели, линейные контакторы, ру-
бильники), устройство динамического торможения (при необ-
ходимости), схема управления ЭП, блоки питания обмотки воз-
буждения тахогенератора и электромагнитного тормоза, шкаф
высоковольтного ввода (при необходимости) и комплект аппа-
ратов, приборов и устройств для управления и контроля состоя-
ния ЭП.
Датчики технологических параметров рабочих машин и меха-
низмов, а также управляющие и сигнальные устройства, монти-
руемые на пультах управления, ввиду их специфичности в комп-
лект поставки обычно не входят.
Примером комплектного электропривода постоянного тока
могут служить ЭП серии КТЭУ, которые обладают широким спек-
тром функциональных возможностей. Они выпускаются в одно-
двигательном и многодвигательном вариантах реверсивного и не-
реверсивного исполнения как с динамическим торможени-
ем, так и без него. КТЭУ мощностью до 2 000 кВт обеспечивают
регулирование скорости, положения, ЭДС, мощности и натяже-
ния, а КТЭУ мощностью до 12000 кВт — только регулирование
скорости и мощности. На основе этих КЭП могут быть реализова-
ны ЭП и со специальными характеристиками.
Комплектные электроприводы серий ЭКТ и КТЭ мощностью
соответственно до 2 000 и 1 000 кВт имеют примерно те же функ-
циональные возможности, что и серия КТЭУ, и отличаются на-
бором и исполнением отдельных блоков. Они могут применяться
в различных ЭП, требующих регулирования скорости, положе-
ния и натяжения.
Большая группа КЭП разработана и широко применяется для
привода механизмов станков, роботов, манипуляторов и ряда
других подобных рабочих машин и механизмов. К их числу отно-
сятся КЭП серий ЭТУ3601, ЭТЗ, ЭТ6, ЭТРП, ЭПУ1, ЭПУ2, ПРП,
ЭШИР—1. В этих КЭП применяются высокомоментные двигатели
типов ПБСТ, ПГТ, 2П, ПБВ, ДК1, обеспечивающие высокие
динамические показатели работы привода. Эти двигатели имеют
353
встроенные тахогенераторы, с помощью которых реализуется об-
ратная связь по скорости. В состав этих КЭП кроме двигателя с
тахогенератором входят силовой преобразователь, устройство уп-
равления, автоматический выключатель, трансформатор питания,
сглаживающий реактор, аппараты защиты и сигнализации. Неко-
торые из этих КЭП (ЭТУ3601, ЭТЗ) имеют блоки связи с систе-
мами ЧПУ станков.
Большинство указанных КЭП имеют силовые тиристорные
преобразователи, построенные по однофазным или трехфазным,
мостовым и нулевым, нереверсивным и реверсивным схемам.
В КЭП типов ПРП и ЭШИР—1 используется транзисторный пре-
образователь с широтно-импульсной модуляцией напряжения
(ШИМ).
Схемы управления большинства станочных КЭП построены
по принципам подчиненного регулирования координат с П- и
ПИ-регуляторами тока и скорости, что обеспечивает большие
диапазоны регулирования скорости, лежащие в пределах тыся-
чи и более. В КЭП для главных движений станка (ЭТЗ, ЭТРП,
ЭПУ1 и др.) предусматривается управление током возбужде-
ния двигателя с помощью тиристорных преобразователей (воз-
будителей), чем достигается увеличение диапазона регулирова-
ния скорости.
Мощность станочных КЭП составляет единицы и десятки ки-
ловатт.
Комплектный электропривод с двигателями переменного тока.
Вследствие широкого применения регулируемых ЭП с двигателя-
ми переменного тока выпускается широкая номенклатура КЭП с
преобразователями частоты и регуляторами напряжения. В состав
таких КЭП могут входить двигатель переменного тока с необхо-
димыми датчиками переменных ЭП, преобразователь частоты или
регулятор напряжения, коммутационная аппаратура и тормозной
резистор.
К первым сериям КЭП относятся серийные ЭП типа ЭКТ и
ЭКТ2 и типа «Размер 2М», нашедшие применение в станках с
ЧПУ. Примерами современных КЭП с асинхронными двигателя-
ми служат ЭП типов АП—140, ЭПА и ЭТА.
Во многих отраслях промышленности применение находят КЭП
с синхронными двигателями. К таким приводам можно отнести
все виды вентильных двигателей, в состав которых входят элект-
ронный коммутатор (преобразователь частоты) и датчик положе-
ния ротора.
В станкостроении и робототехнике применяются специализи-
рованные ЭП типа ЭПБ, ЭПБ—2 и ЭПБ—3, выполненные по
схеме вентильного двигателя. Они находят применение для при-
водов станков, роботов и манипуляторов и ряда других устано-
вок.
354
На предприятиях промышленности и жилищно-коммунально-
го хозяйства применение находят станции группового управления
несколькими двигателями. К ним, в частности, относятся стан-
ции для управления электроприводами нескольких насосных ус-
тановок, устройства пуска нескольких однотипных двигателей от
«мягкого» пускателя и ряд других.
Интегрированный ЭП. В последние годы для привода некоторых
станков и специальных механизмов стали разрабатываться и при-
меняться ЭП с объединением в единую конструкцию двигателя,
механической передачи, датчиков координат, а в некоторых слу-
чаях — и силового преобразователя. Такой электромеханический
модуль, называемый иногда мехатронным, позволяет в ряде слу-
чаев получать более высокие технико-экономические показатели
работы ЭП и технологического оборудования.
Контрольные вопросы
1. В чем заключается задача выбора двигателя?
2. На основании каких исходных данных производится расчет мощности
двигателя?
3. Что такое нагрузочная диаграмма исполнительного органа рабочей
машины и двигателя?
4. В чем сущность проверки двигателя по перегрузке и условиям пуска?
5. В чем заключается проверка двигателя по нагреву?
6. На чем основывается прямой метод проверки двигателя по нагреву?
7. Что такое метод средних потерь?
8. Охарактеризуйте методы эквивалентных величин.
9. В каких основных режимах может работать двигатель и чем они
характеризуются?
10. Каким образом производится проверка по нагреву силовых
резисторов в цепях двигателей?
11. По каким показателям производится выбор силовых преобразова-
телей и электрических аппаратов?
12. С какой целью может быть выполнена оптимизация передаточного
отношения в схеме ЭП?
13. Какие виды защит применяются в схемах ЭП?
14. В чем состоит назначение применяемых в ЭП блокировок?
15. Для чего в схемах ЭП применяется сигнализация?
16. Что представляет собой диагностирование электроприводов и для
чего оно осуществляется?
17. Что называется электромагнитной совместимостью электроприводов
и как она обеспечивается?
18. Что такое комплектный ЭП?
19. В чем состоит особенность мехатронной конструкции ЭП?
СПИСОК ЛИТЕРАТУРЫ
1. Белов М. П. Автоматизированный электропривод типовых производ-
ственных механизмов и технологических комплексов : учебник для вузов /
М. П. Белов, В. А. Новиков, Л. Н. Рассудов. — М.: Изд. центр «Академия»,
2004.
2. Выбор электрических аппаратов для электропривода, электриче-
ского транспорта и электроснабжения промышленных предприятий /
[Е. Г. Акимов, Ю. С. Коробков, А. В. Савельев и др.] ; под ред. А.А.Чуни-
хина, Ю. С. Коробкова. — М. : Изд-во МЭИ, 1990.
3. Голован А.Т. Основы электропривода/А.Т.Голован. — М.: Госэнер-
гоиздат, 1959.
4. Дискретный электропривод с шаговыми двигателями / под ред.
М.Г.Чиликина. — М. : Энергия, 1971.
5. Ильинский Н. Ф. Основы электропривода : учеб, пособие для студ.
высш. учеб, заведений. — 2-е изд., перераб. и доп. — М. : Изд-во МЭИ,
2003.
6. Ильинский Н. Ф. Электроприводы постоянного тока с управляемым
моментом / Н.Ф. Ильинский. — М. : Энергоиздат, 1981.
7. Ключев В. И. Теория электропривода / В. И. Ключев. — М. : Энерго-
атомиздат, 2001.
8. Ковчин С. А. Теория электропривода : учебник для студ. высш. учеб,
заведений / С. А. Ковчин, Ю. А. Сабинин. — СПб. : Энергоатомиздат,
1994.
9. Лезнов Б. С. Энергосбережение и регулируемый электропривод в
насосных установках / Б. С. Лезнов. — М. : ИК Ягорба—Биоинформсер-
вис, 1998.
10. Москаленко В. В. Электрический привод : учеб, пособие / В. В. Мос-
каленко. — М.: Изд. центр «Академия», 2004.
11. Онищенко Г. Б. Электрический привод: учебник для студ. высш. учеб,
заведений / Г. Б. Онищенко. — М. : РАСХН, 2003.
12. Осипов О. И. Частотно-регулируемый асинхронный электропривод :
учеб, пособие / О. И. Осипов. — М.: Изд-во МЭИ, 2004.
13. Соколов М. М. Автоматизированный электропривод общепромыш-
ленных механизмов / М.М. Соколов. — М. : Энергия, 1976.
14. Терехов В.М. Системы управления электроприводов : учебник для
студ. высш. учеб, заведений / В. М. Терехов, О. И. Осипов; под ред. В. М. Те-
рехова. — М.: Изд. центр «Академия», 2005.
15. Усынин Ю. С. Системы управления электроприводов: учеб, пособие /
Ю. С.Усынин. — Челябинск : Изд-во ЮУрГУ, 2001.
356
16. Электротехнический справочник. В 4 т., т. 4. Использование элект-
рической энергии / под общ. ред. профессоров МЭИ В. Г. Герасимова и
др. (гл. ред. А. И. Попов) — 8-е изд. — М. : Изд-во МЭИ, 1998.
17. Энергосберегающая технология электроснабжения народного хо-
зяйства / под ред. В. А. Веникова. Кн. 2. Энергосбережение в электропри-
воде / Н.Ф. Ильинский, Ю. В. Рожанковский, А. О. Горнов. — М. : Высш,
шк., 1989.
18 ГОСТ Р 50369 — 92. Электроприводы. Термины и определения. —
М. : Изд-во стандартов, 1993.
ОГЛАВЛЕНИЕ
Введение...................................................... 3
Глава 1. Общие сведения........................................5
1.1. Назначение и классификация электроприводов............ 5
1.2. История развития электропривода, его роль в современных
технологиях..............................................10
Глава 2. Механика электропривода..............................13
2.1. Уравнение движения электропривода.....................13
2.2. Расчетные схемы механической части электропривода.....14
2.3. Многомассовые расчетные схемы.........................20
2.4. Установившееся движение электропривода и его
устойчивость................................................23
2.5. Неустановившееся движение электропривода при постоянном
динамическом моменте........................................27
2.6. Неустановившееся движение при линейной зависимости
динамического момента от скорости ........................... 29
2.7. Неустановившееся движение электропривода при
произвольном динамическом моменте...........................32
Глава 3. Регулирование переменных электропривода, его
структуры и элементная база................................38
3.1. Понятие о регулировании переменных электропривода.....38
3.2. Регулирование скорости движения.......................40
3.3. Регулирование момента и тока двигателей...............43
3.4. Регулирование положения...............................45
3.5. Структуры электроприводов.............................47
3.6. Электроприводы в системах автоматизации технологических
процессов...................................................52
3.7. Электрические и электромеханические устройства силовой
части электропривода........................................55
3.8. Управляющие элементы и устройства электропривода......60
3.9. Элементы и устройства механической передачи
электропривода..........................:...................70
Глава 4. Электропривод с двигателями постоянного
тока.......................................................72
358
4.1. Схема включения и статические характеристики двигателя
постоянного тока независимого возбуждения...................72
4.2. Энергетические режимы работы двигателя.................75
4.3. Регулирование переменных электропривода с помощью
резисторов в цепи якоря ....................................78
4.4. Расчет пусковых и регулировочных резисторов............82
4.5. Регулирование скорости двигателя изменением магнитного
потока......................................................86
4.6. Регулирование переменных электропривода изменением
напряжения на якоре двигателя. Система «преобразователь —
двигатель»..................................................89
4.7. Регулирование скорости двигателя шунтированием якоря...96
4.8. Регулирование переменных электропривода в системе
«источник тока—двигатель»...................................98
4.9. Импульсное регулирование переменных электропривода.....99
4.10. Переходные процессы в электроприводе при питании
двигателя от сети..........................................102
4.11. Переходные процессы в разомкнутой системе
«преобразователь—двигатель». Формирование переходных
процессов..................................................105
4.12. Разомкнутые релейно-контакторные схемы управления
электропривода.............................................113
4.13. Замкнутые схемы управления электропривода............120
4.14. Схема включения, характеристики и режимы работы
двигателя последовательного возбуждения.....................133
4.15. Регулирование переменных электропривода с двигателем
последовательного возбуждения...............................137
4.16. Торможение электропривода с двигателем последовательного
возбуждения................................................142
4.17. Схема включения, характеристики и свойства электро-
привода с двигателем смешанного возбуждения................145
Глава 5. Электропривод с асинхронными двигателями.............148
5.1. Схемы включения, характеристики и режимы работы
трехфазного асинхронного двигателя.........................148
5.2. Регулирование переменных электропривода с помощью
резисторов..................................................157
5.3. Регулирование переменных электропривода изменением
напряжения на статоре двигателя.............................164
5.4. Регулирование скорости двигателя изменением частоты
питающего напряжения........................................167
5.5. Регулирование скорости двигателя изменением числа пар
полюсов.....................................................177
5.6. Регулирование скорости двигателя
в каскадных схемах включения...............................180
5.7. Импульсное регулирование переменных электропривода
с асинхронным двигателем...................................185
5.8. Способы торможения асинхронного двигателя.............186
359
5.9. Особенности переходных процессов в электроприводах
с асинхронными двигателями и их формирование ............192
5.10. Разомкнутые релейно-контакторные схемы
управления................................................196
5.11. Замкнутые схемы управления асинхронного
электропривода............................................202
5.12. Электропривод с однофазными асинхронными
двигателями............................................;.. 212
5.13. Электропривод с линейным асинхронным двигателем.....216
Глава 6. Электропривод с синхронными двигателями............220
6.1. Схема включения, статические характеристики и режимы
работы синхронного двигателя.............................220
6.2. Регулирование скорости электроприводов с синхронными
двигателями. Схема вентильного двигателя.................222
6.3. Пуск и торможение синхронных двигателей.............224
6.4. Синхронный двигатель как компенсатор реактивной
мощности...........;.....................................228
6.5. Схемы управления синхронными двигателями.......... 230
6.6. Особенности переходных процессов в электроприводах
с синхронными двигателями.............................. 233
6.7. Электропривод с шаговым двигателем..................234
6.8. Вентильно-индукторный электропривод.................241
Глава 7. Взаимосвязанный электропривод......................245
7.1. Электропривод с механическим соединением валов
двигателей...............................................245
7.2. Электропривод с механическим дифференциалом.........248
7.3. Электропривод с электрическим валом.................250
Глава 8. Электроприводы со специальными свойствами..........256
8.1. Следящий электропривод..............................256
8.2. Электропривод с программным управлением.............263
8.3. Электропривод с адаптивным управлением..............270
Глава 9. Энергетика электроприводов.........................273
9.1. Потери мощности и энергии в установившемся режиме
работы электропривода....................................273
9.2. Потери энергии в переходных режимах электропривода...279
9.3. Коэффициент полезного действия электропривода.......288
9.4. Коэффициент мощности электропривода.................291
9.5. Энергосбережение в электроприводе
и средствами электропривода..............................299
9.6. Экономическая оценка эффективности энергосбережения..306
360
Глава 10. Элементы проектирования электроприводов.............310
10.1. Расчет мощности и выбор двигателей...................310
10.2. Проверка двигателей по нагреву.......................315
10.3. Выбор и проверка силовых резисторов по нагреву.......329
10.4. Выбор силовых преобразователей, электрических
аппаратов и механических передач..........................331
10.5. Защиты, блокировки и сигнализация в схемах
электропривода............................................337
10.6. Диагностирование электроприводов.....................347
10.7. Электромагнитная совместимость электроприводов.......351
10.8. Комплектные и интегрированные электроприводы.........352
Список литературы.............................................356
Учебное издание
Москаленко Владимир Валентинович
Электрический привод
Учебник
Редактор И. В. Могилевец
Технический редактор Н. И. Горбачева
Компьютерная верстка: Р.Ю. Волкова
Корректор Н.Л. Котелина
Изд. № 101112321. Подписано в печать 28.02.2007. Формат 60x90/16.
Гарнитура «Таймс». Бумага тип. № 2. Печать офсетная. Усл. печ. л. 23,0.
Тираж 4 000 экз. Заказ № 7700.
Издательский центр «Академия», www.academia-moscow.ru
Санитарно-эпидемиологическое заключение № 77.99.02.953.Д.004796.07.04 от 20.07.2004.
117342, Москва, ул. Бутлерова, 17-Б, к. 360. Тел./факс: (495)330-1092, 334-8337.
Отпечатано с электронных носителей издательства.
ОАО "Тверской полиграфический комбинат", 170024, г. Тверь, пр-т Ленина, 5.
Телефон: (4822) 44-52-03,44-50-34, Тслефон/факс: (4822) 44-42-15
Home page - www.tverpk.ru Электронная почта (E-mail) - sales@tverpk.ru
*