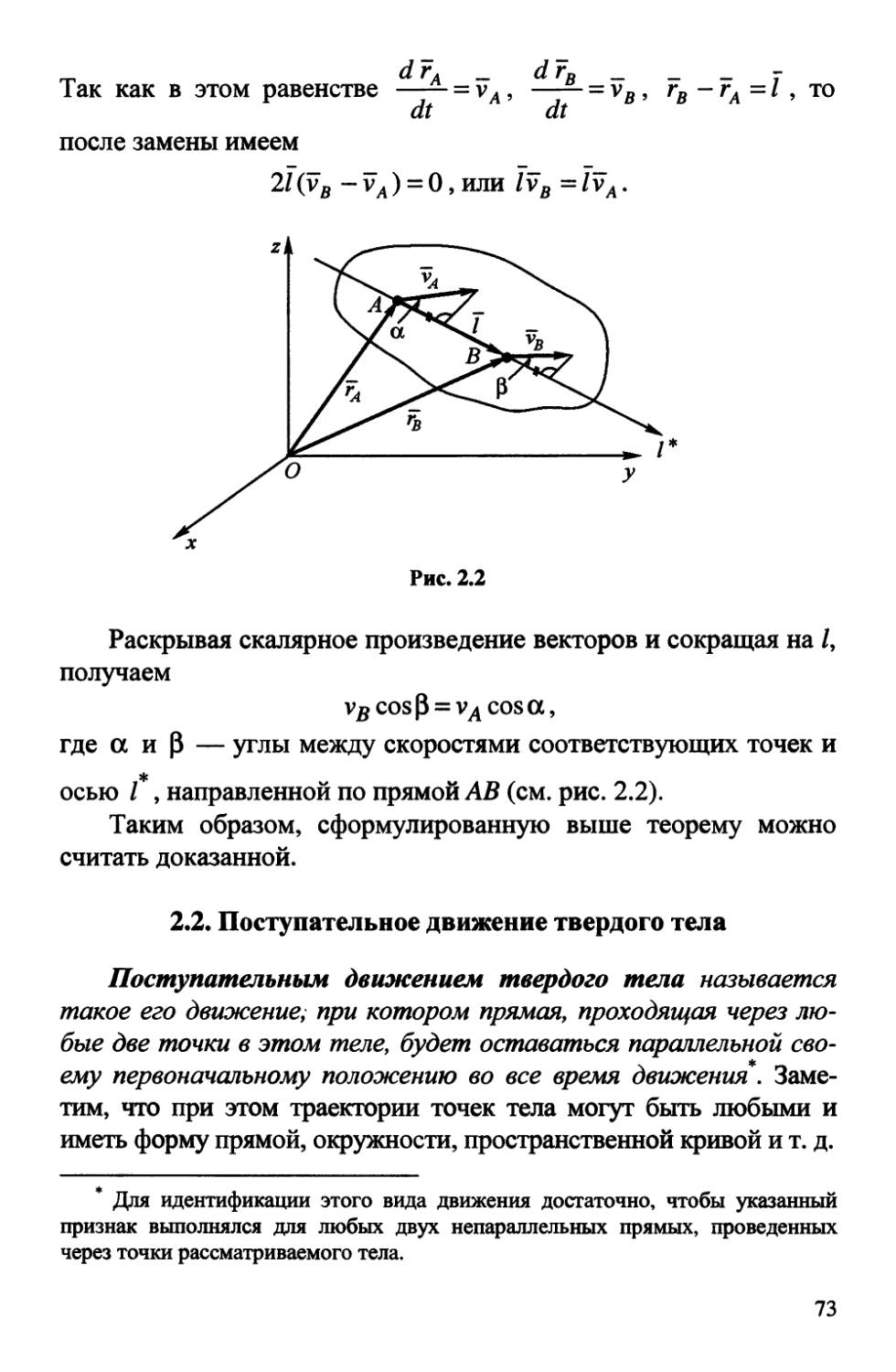
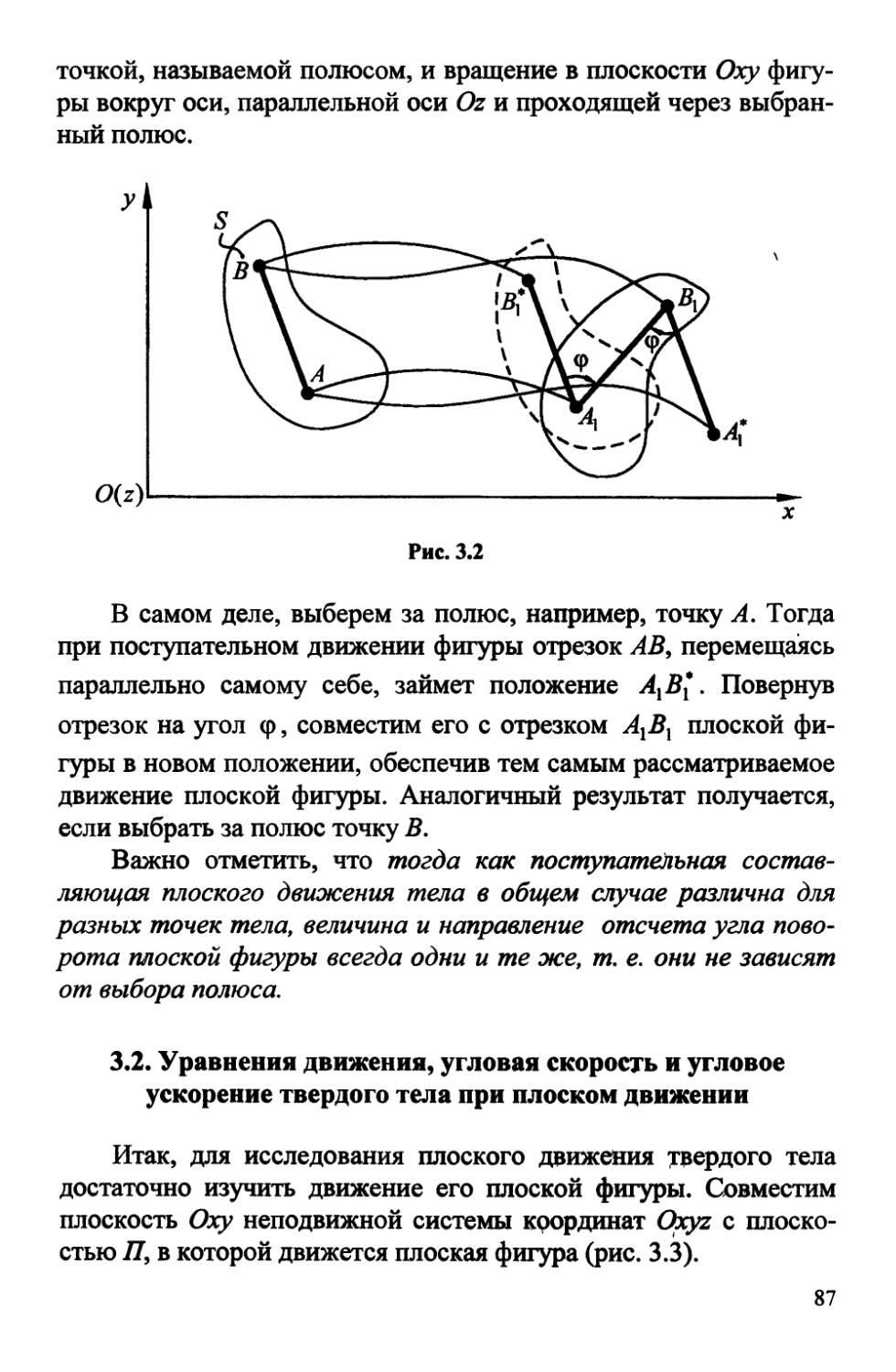
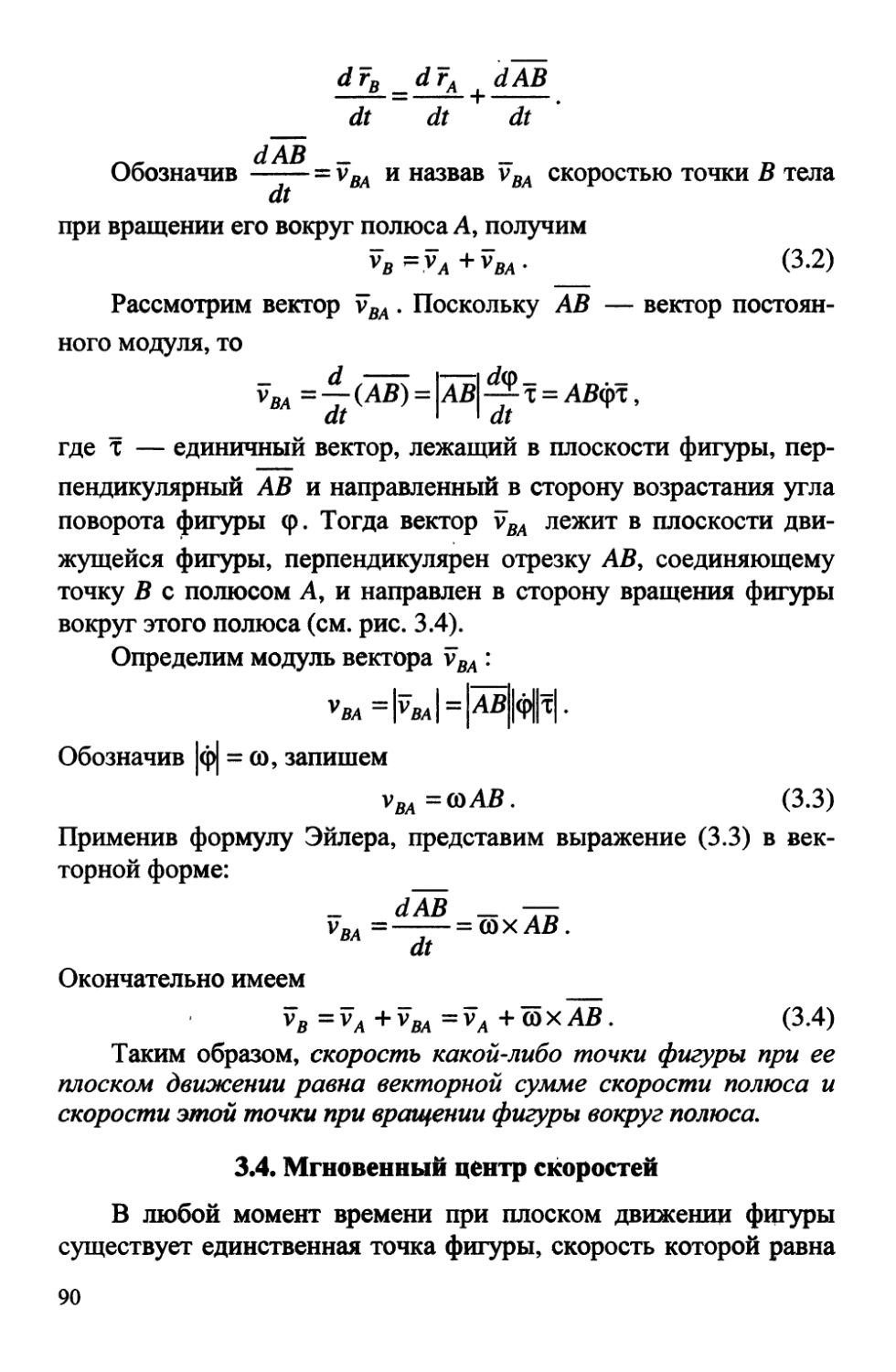
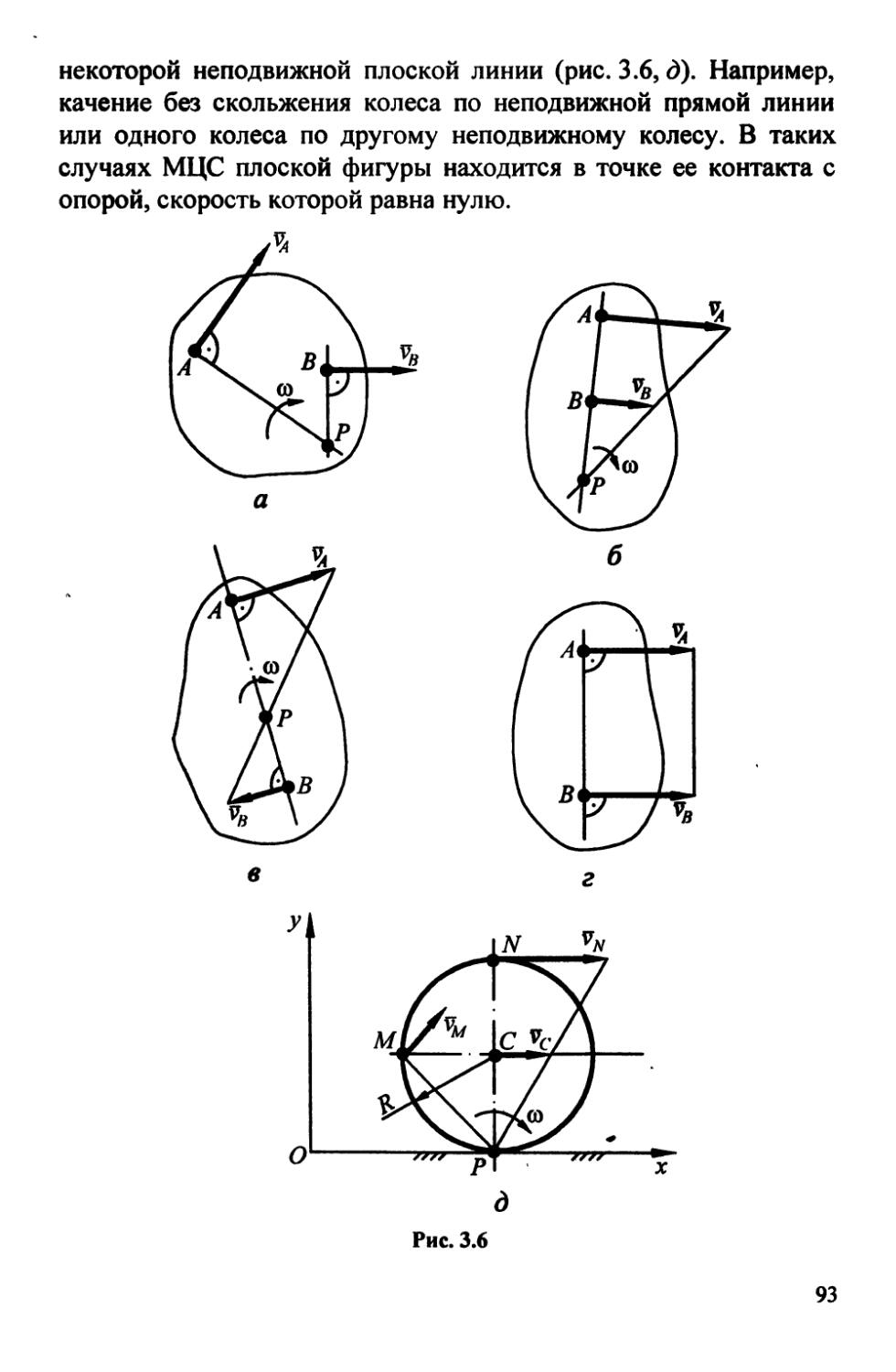
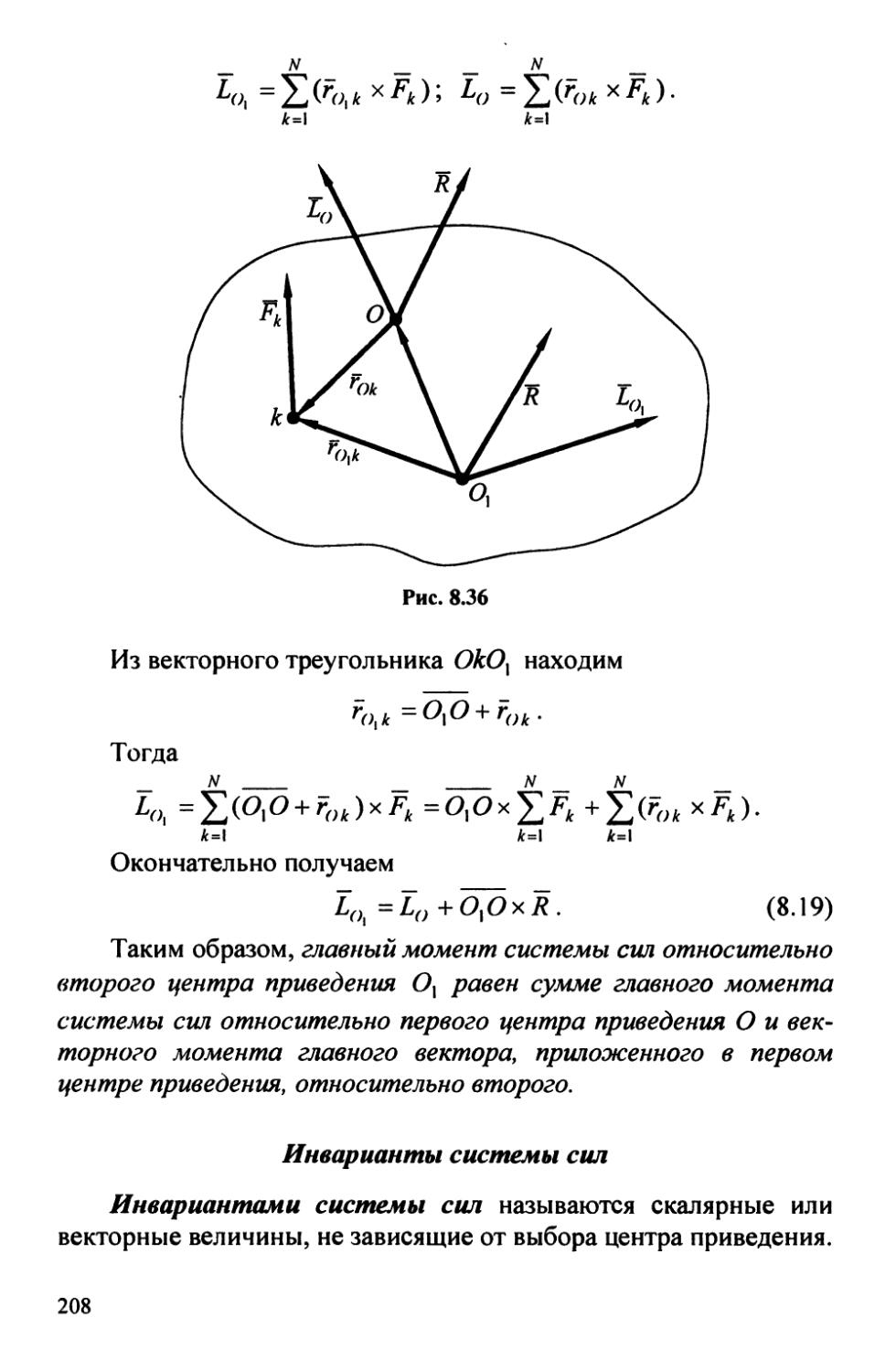
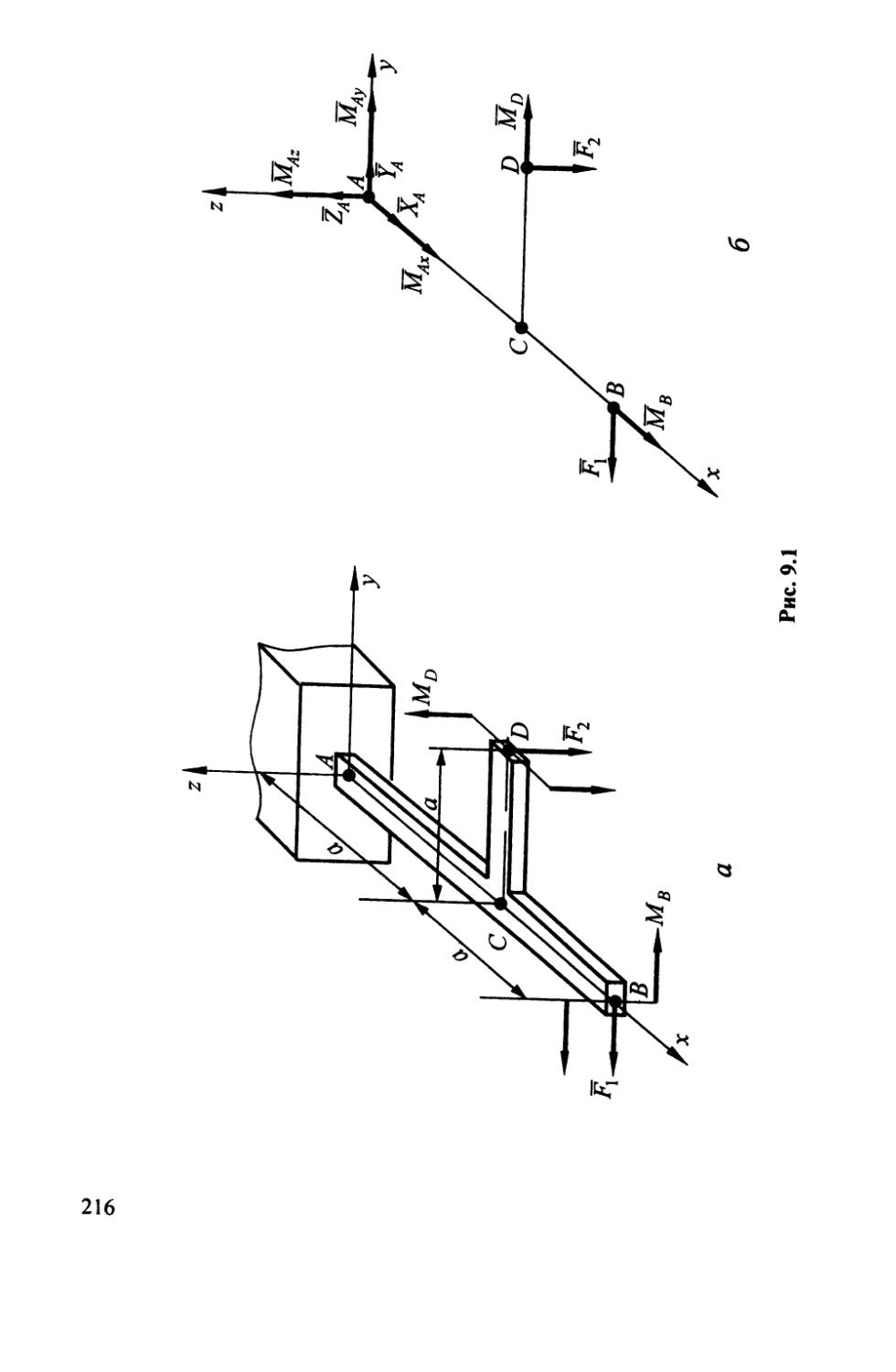
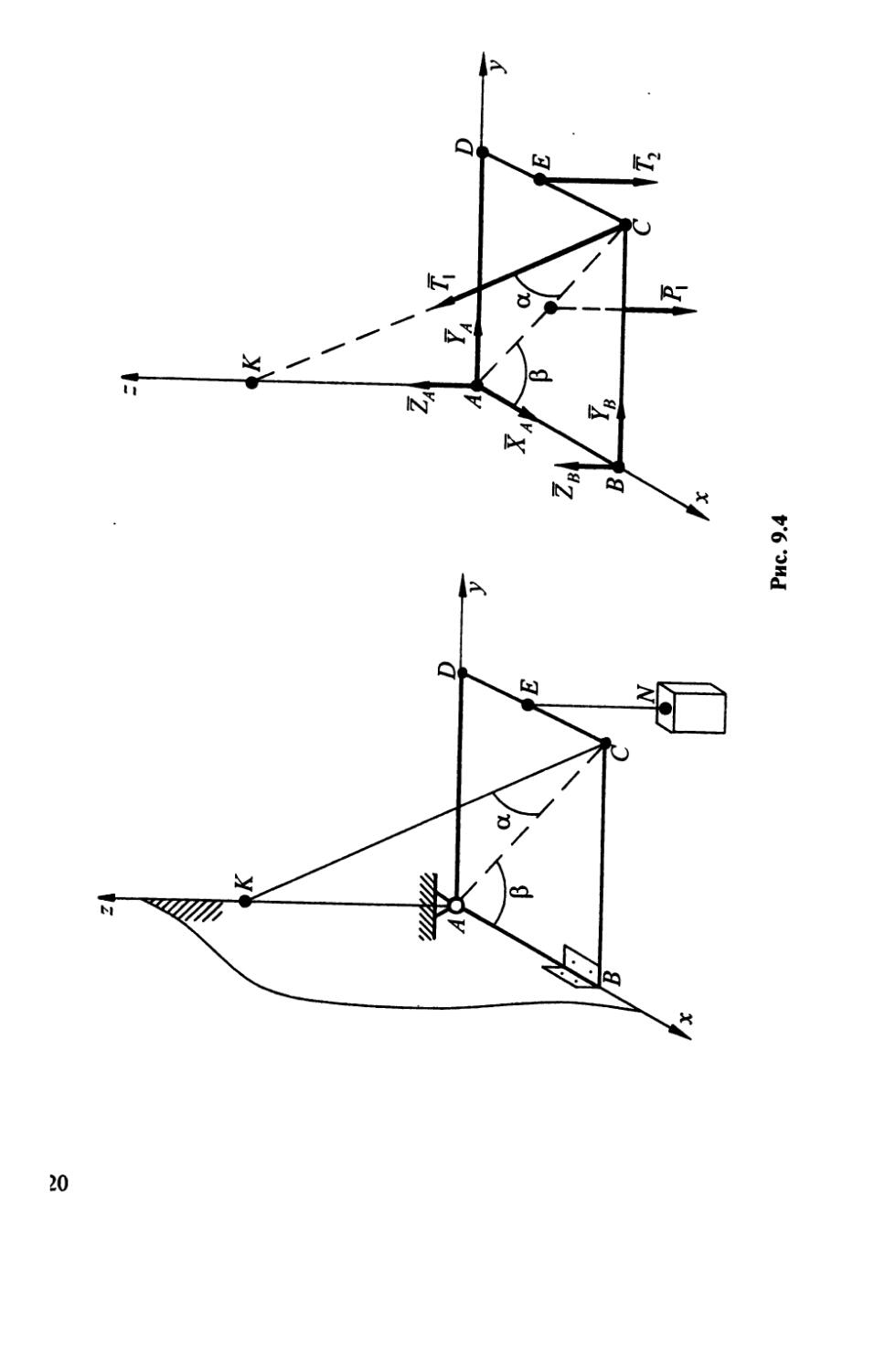
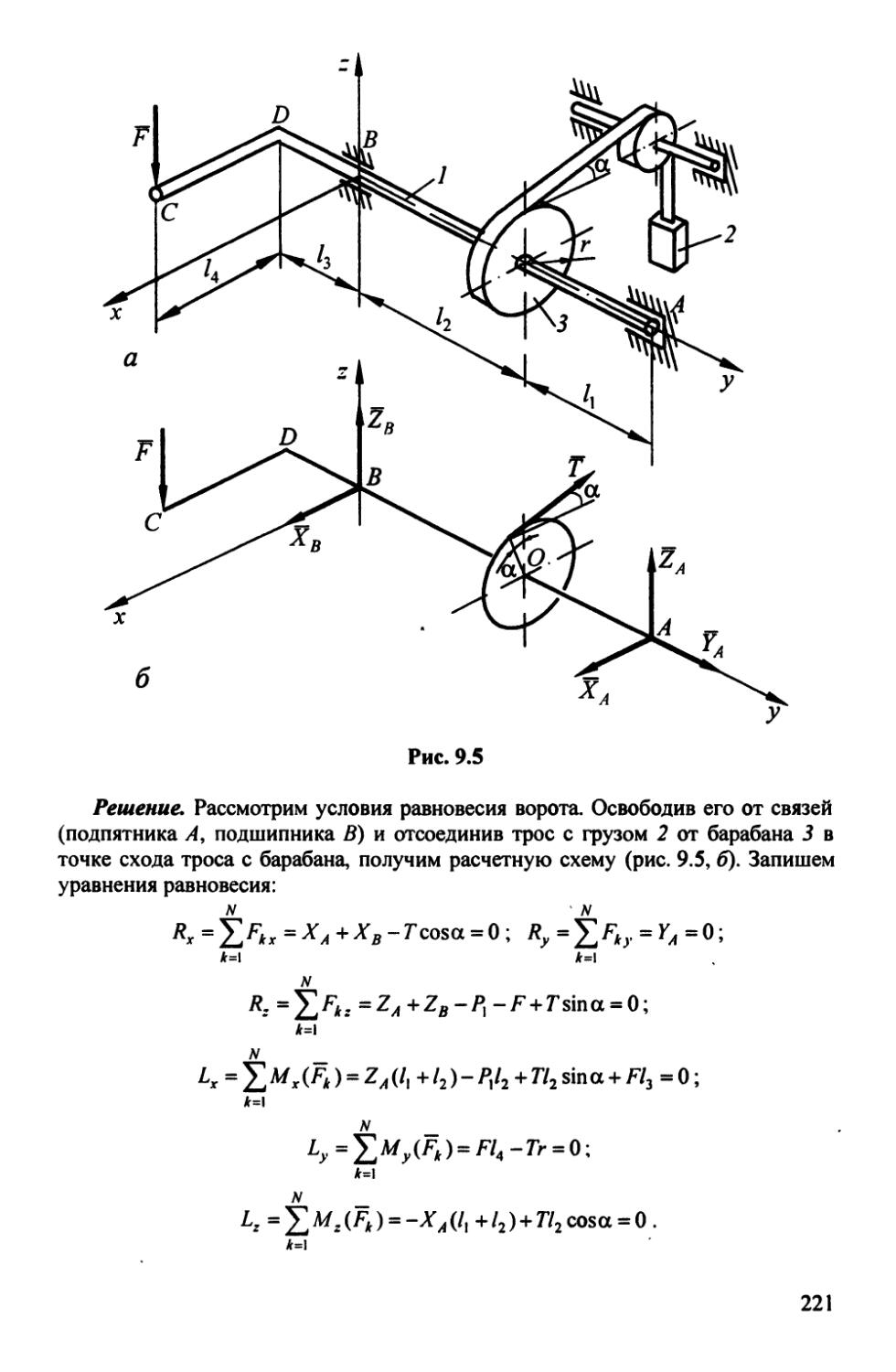
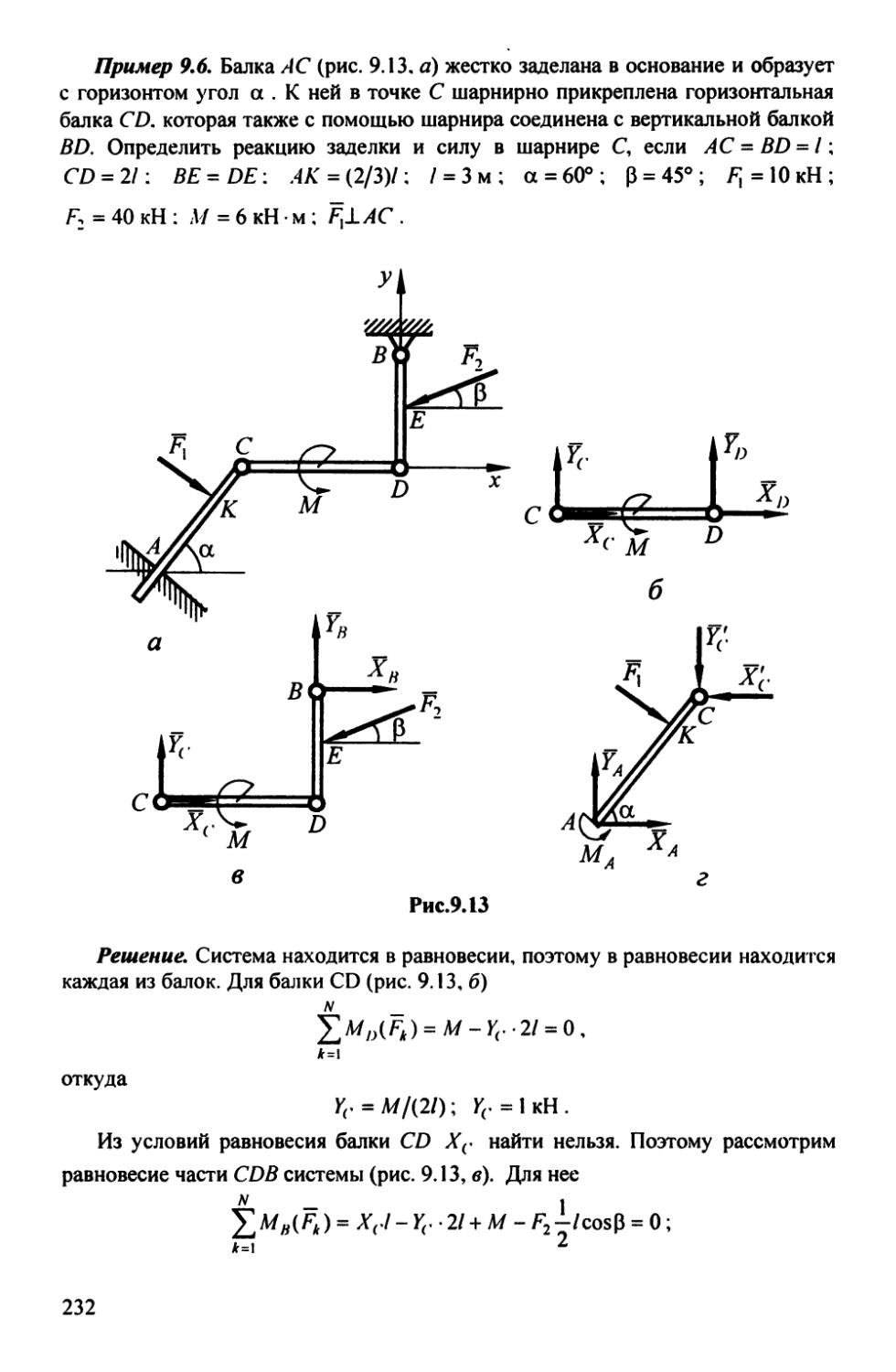
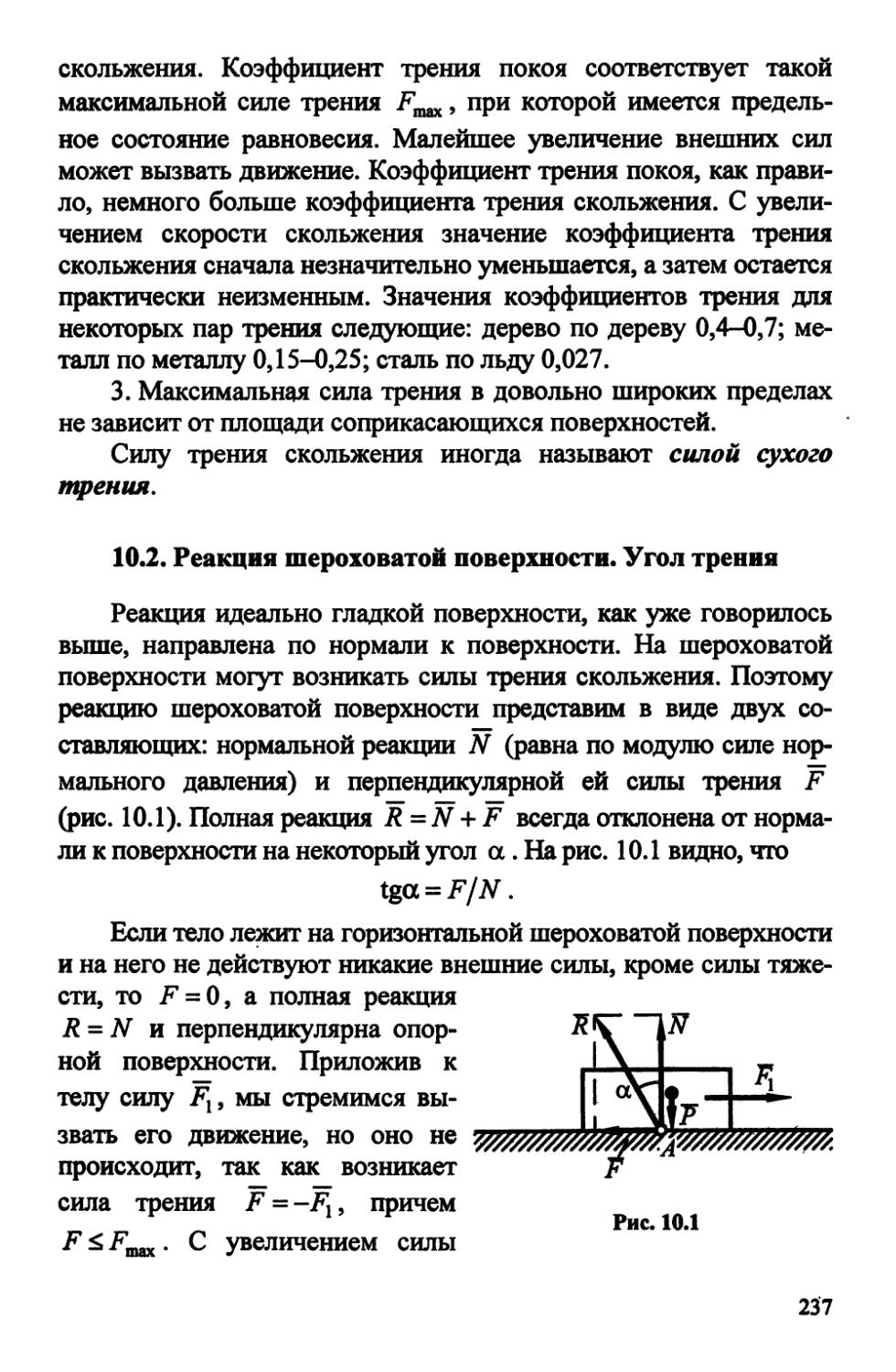
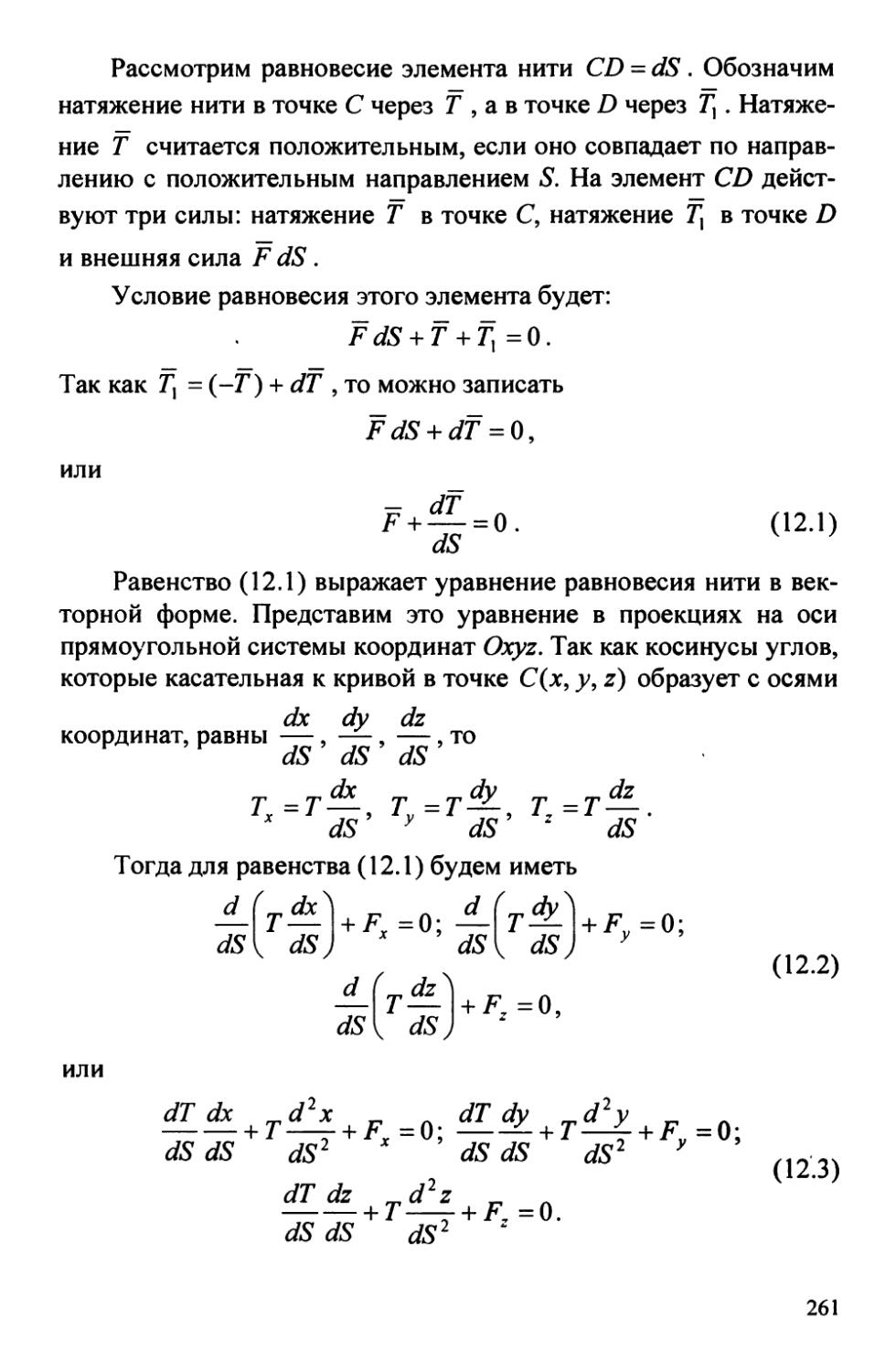
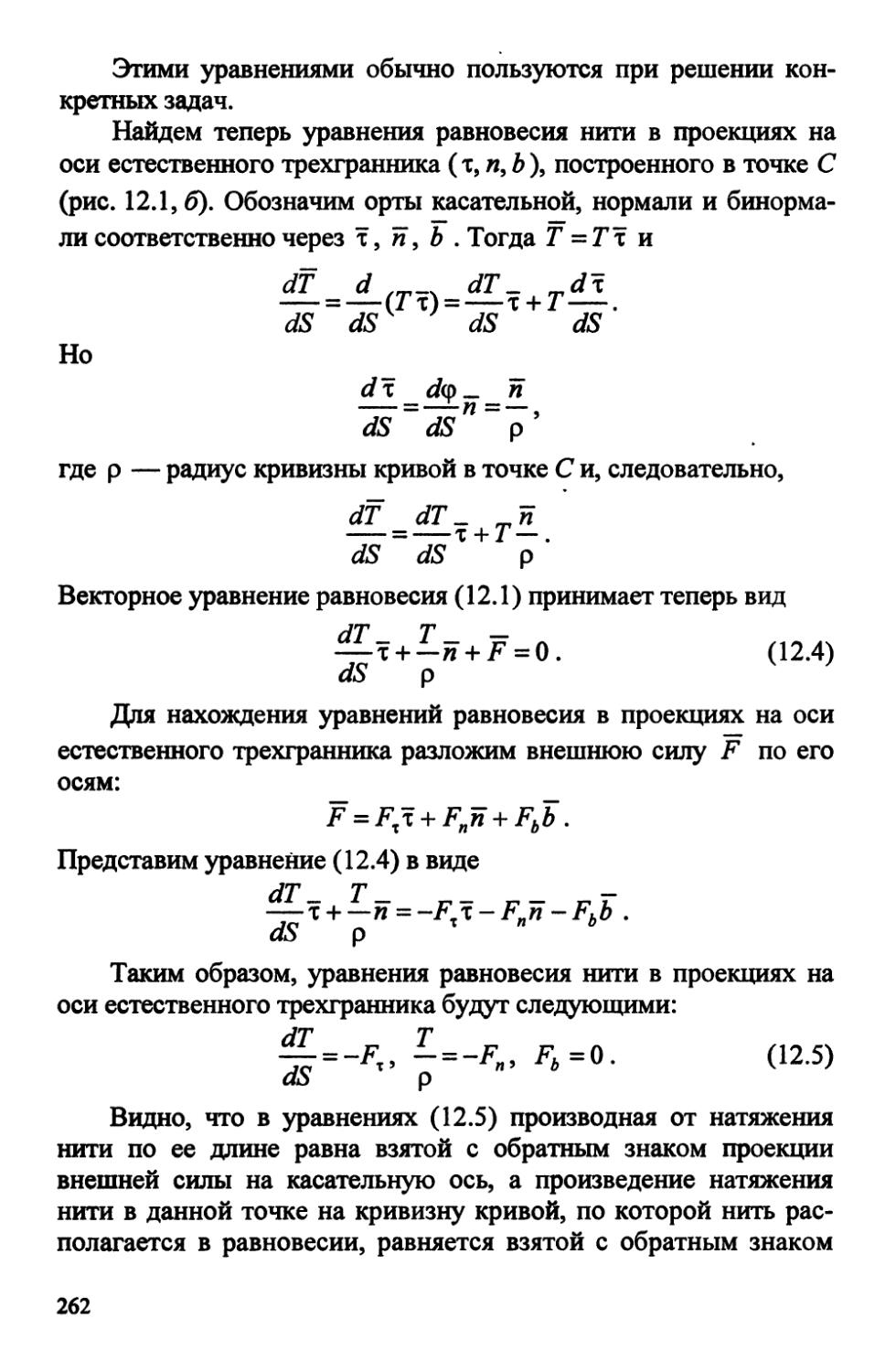
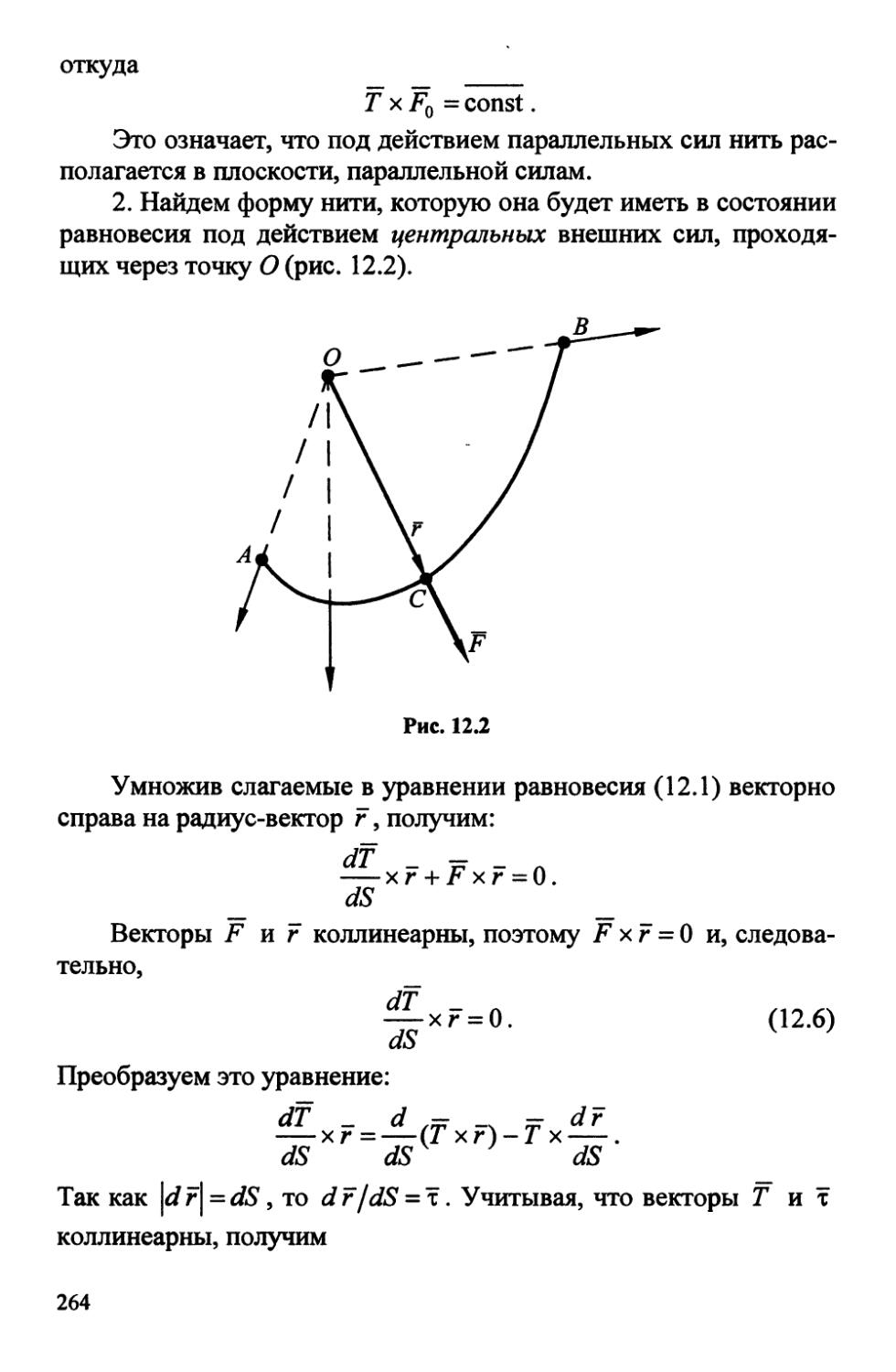
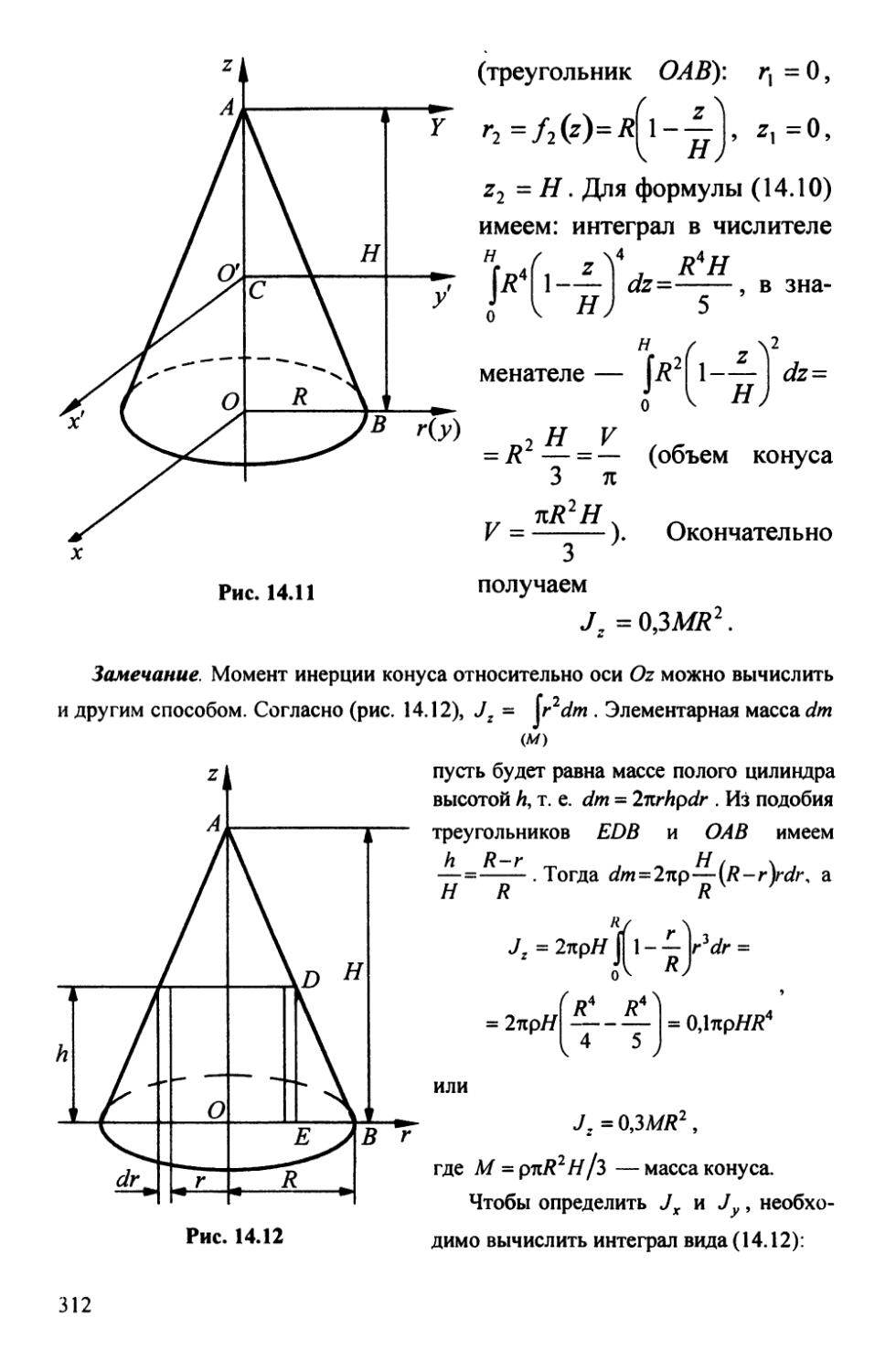
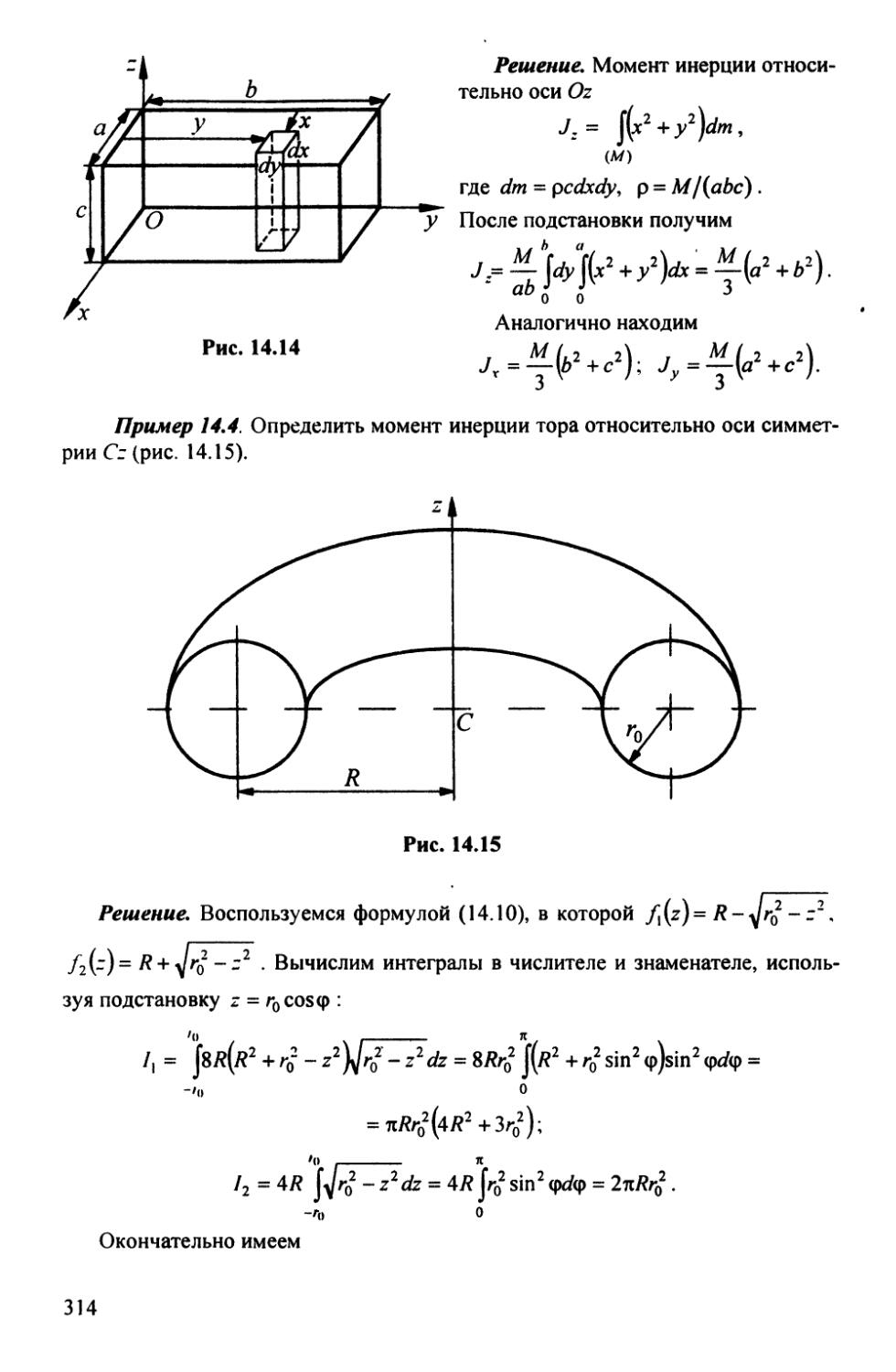
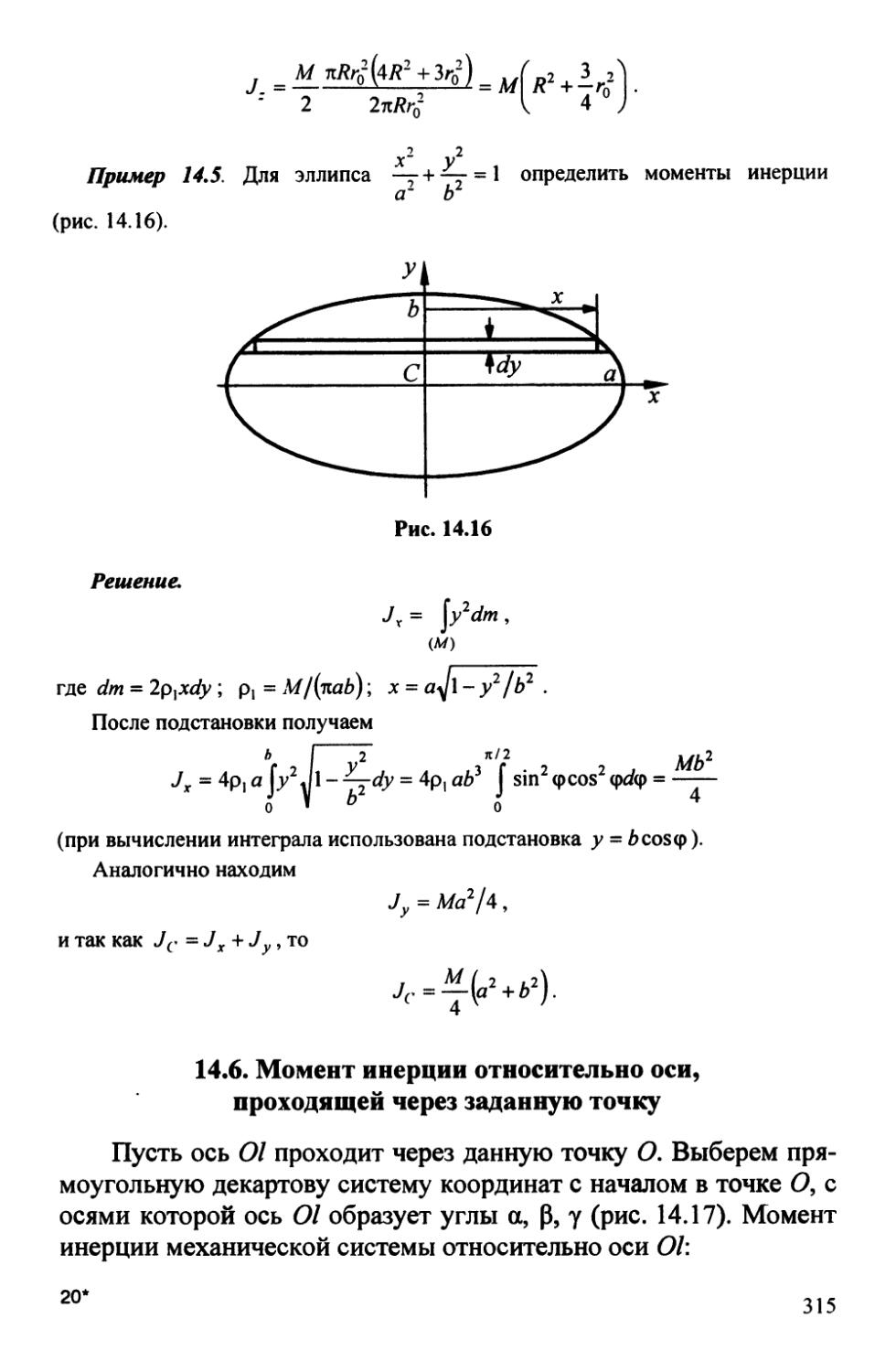
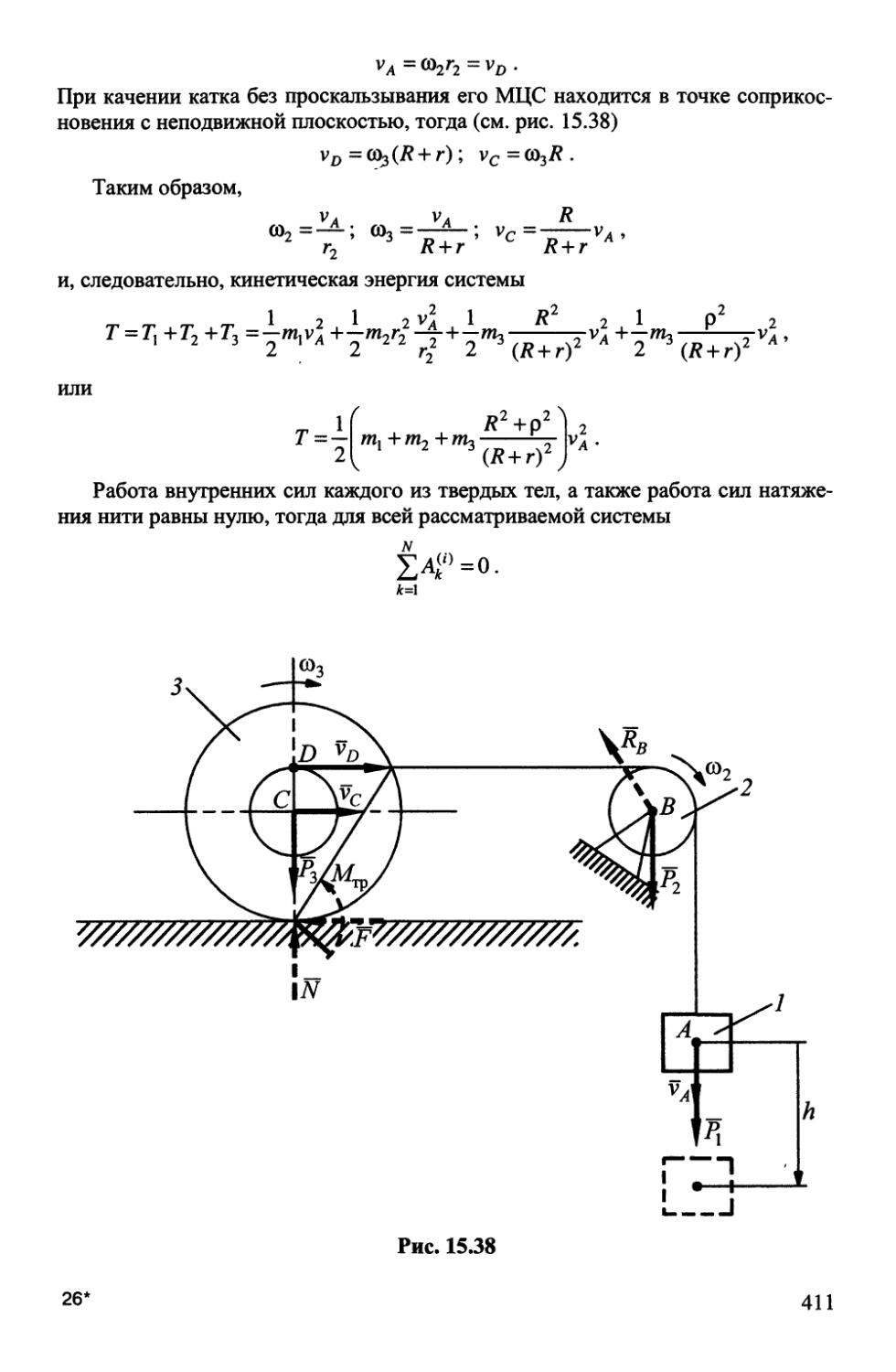
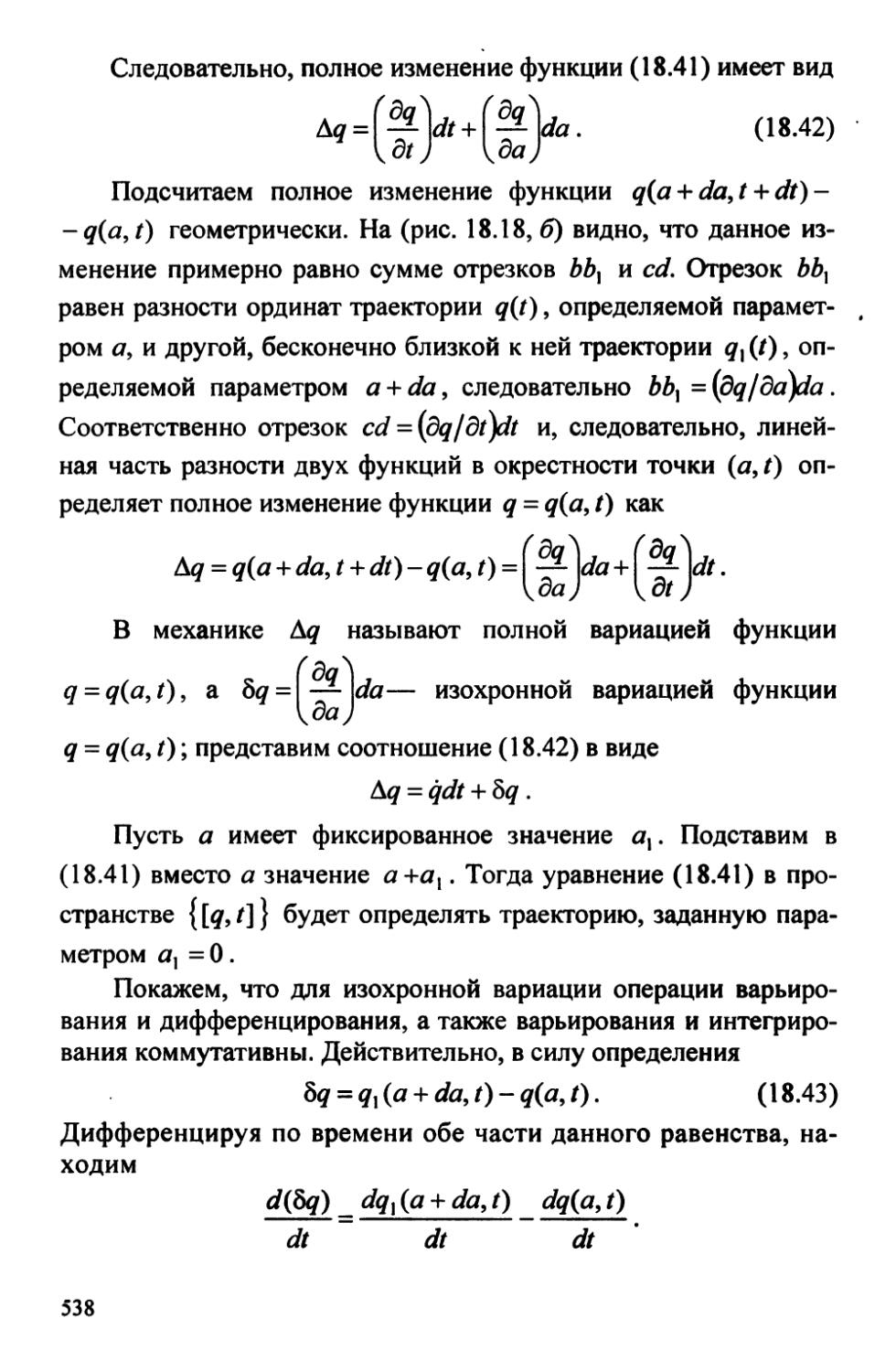
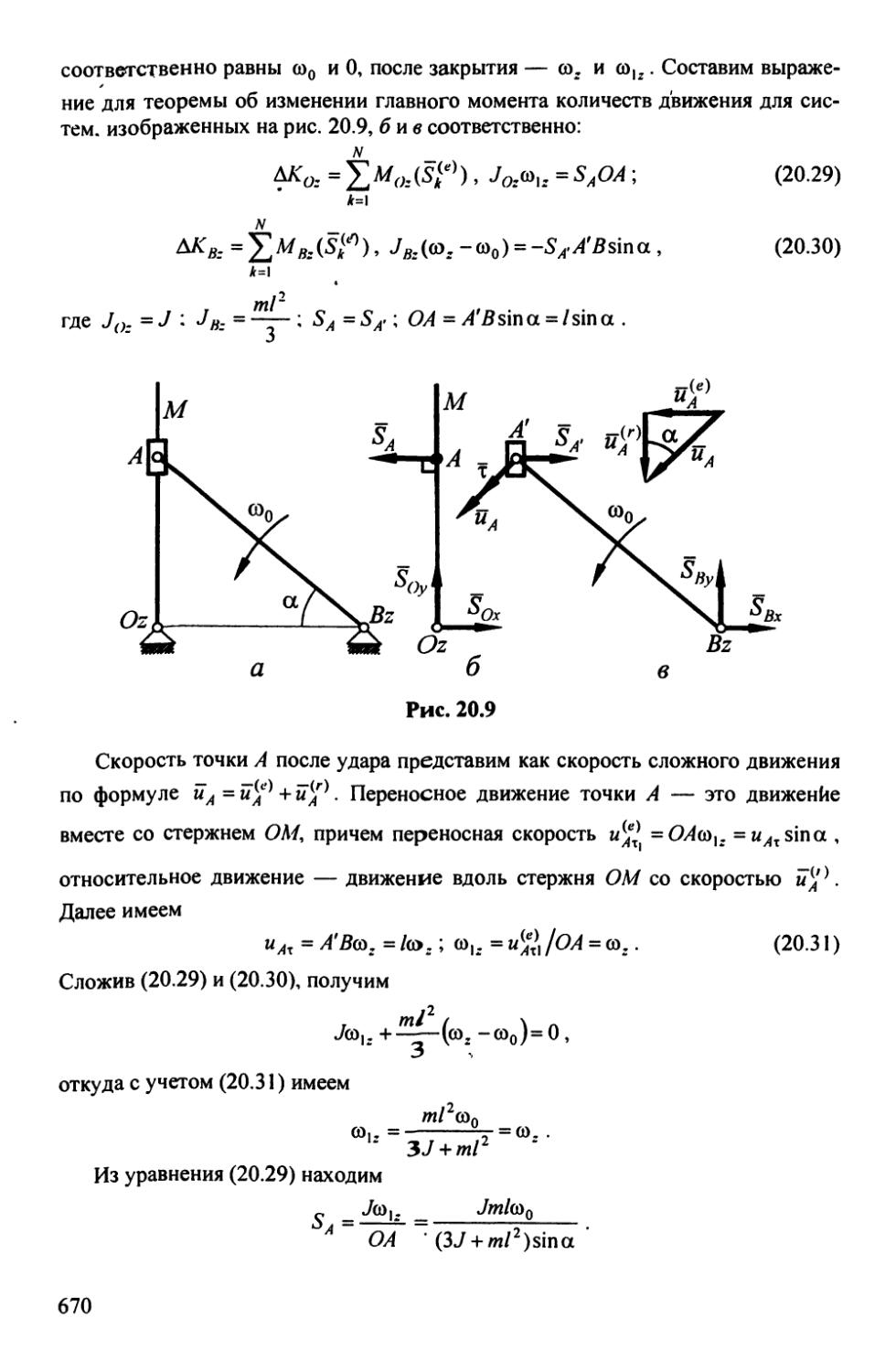
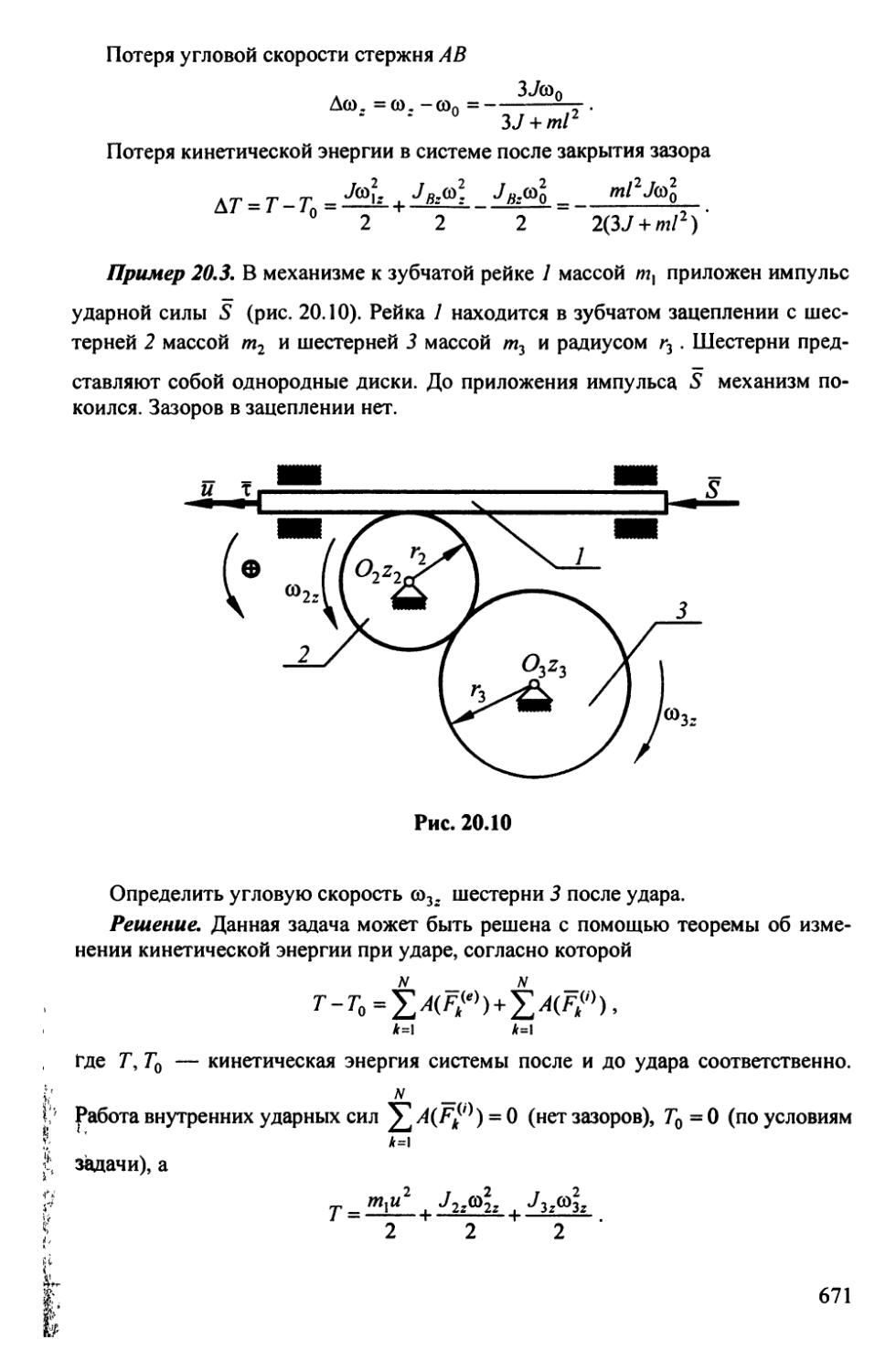
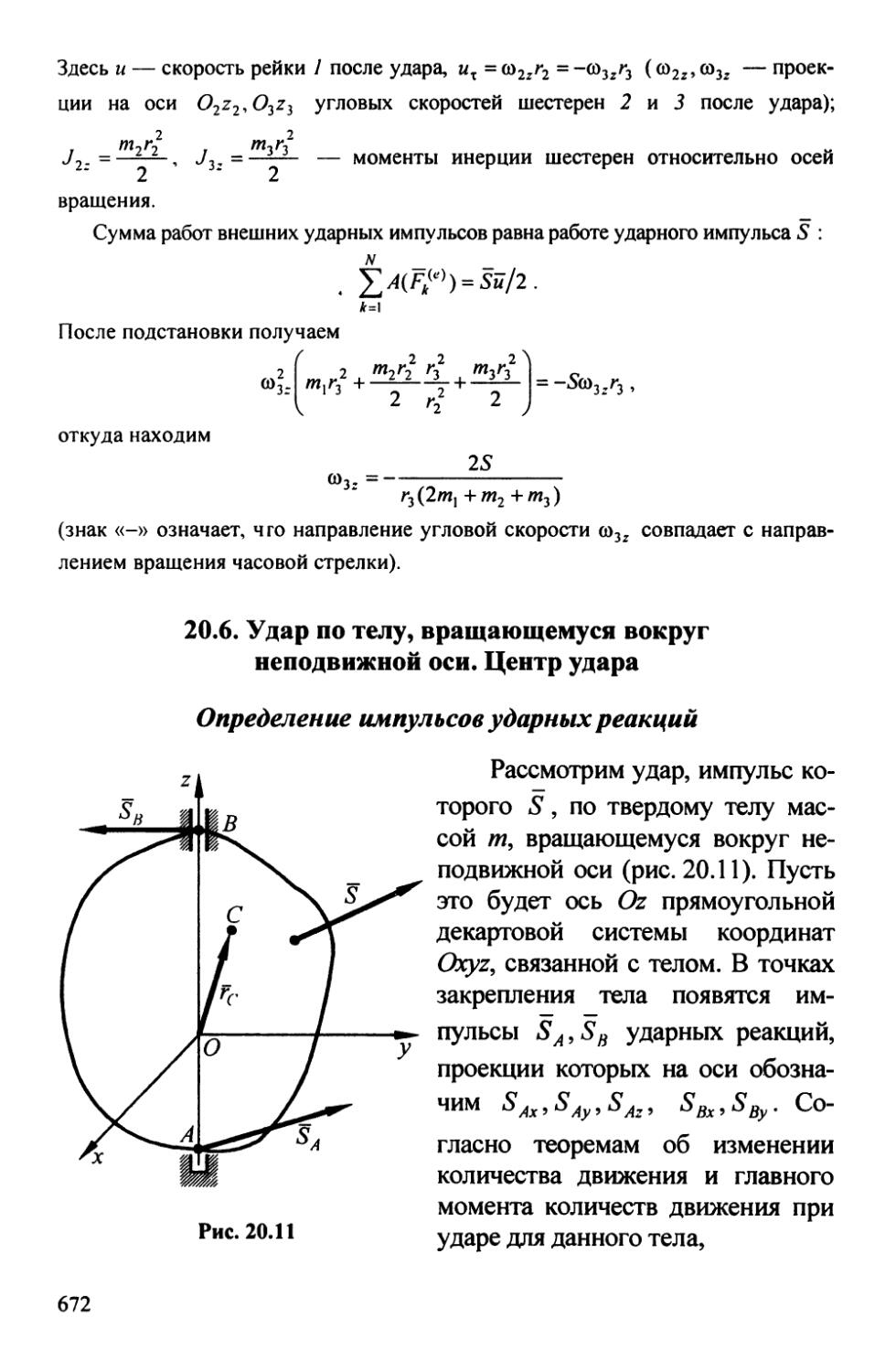
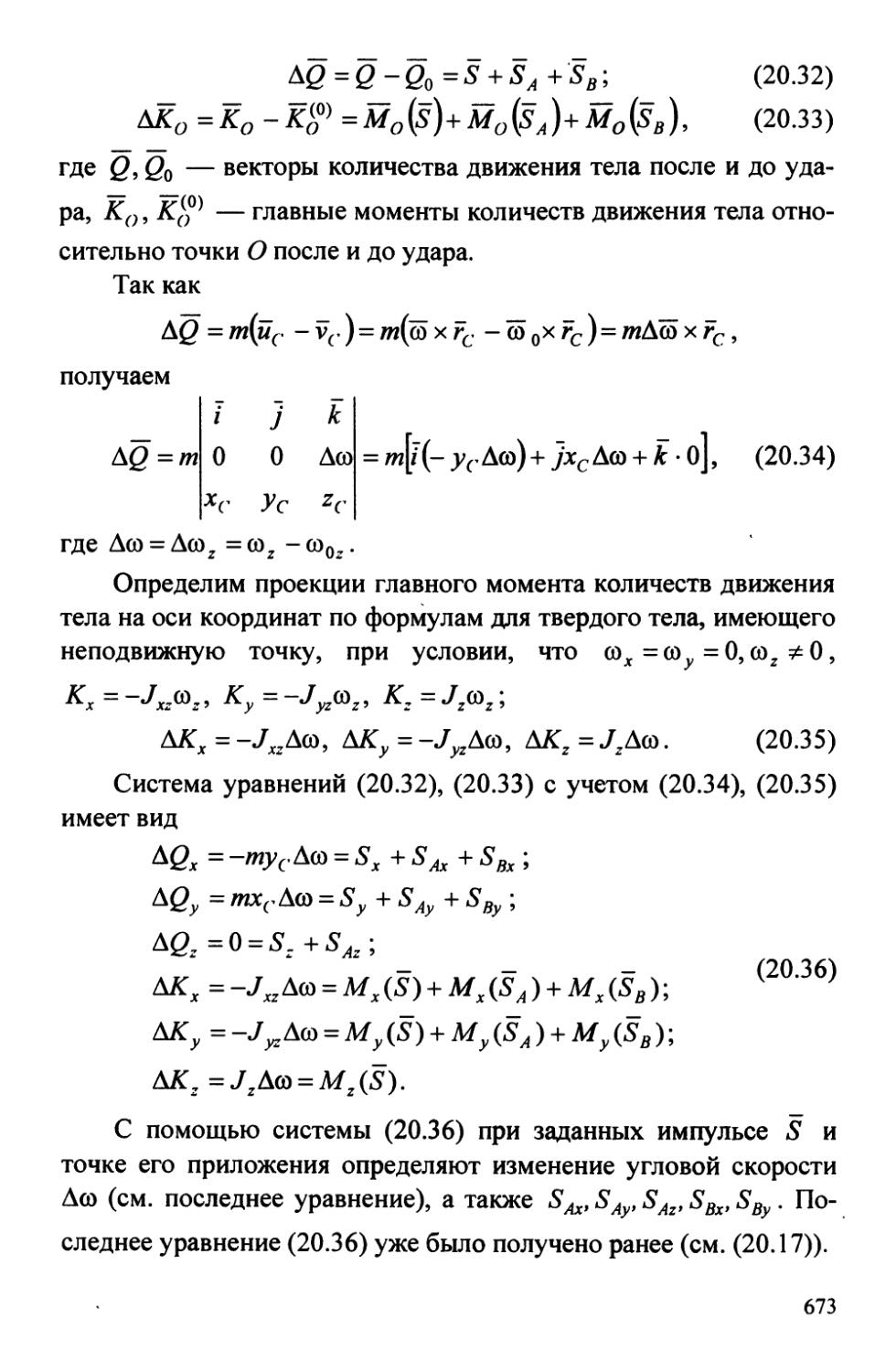
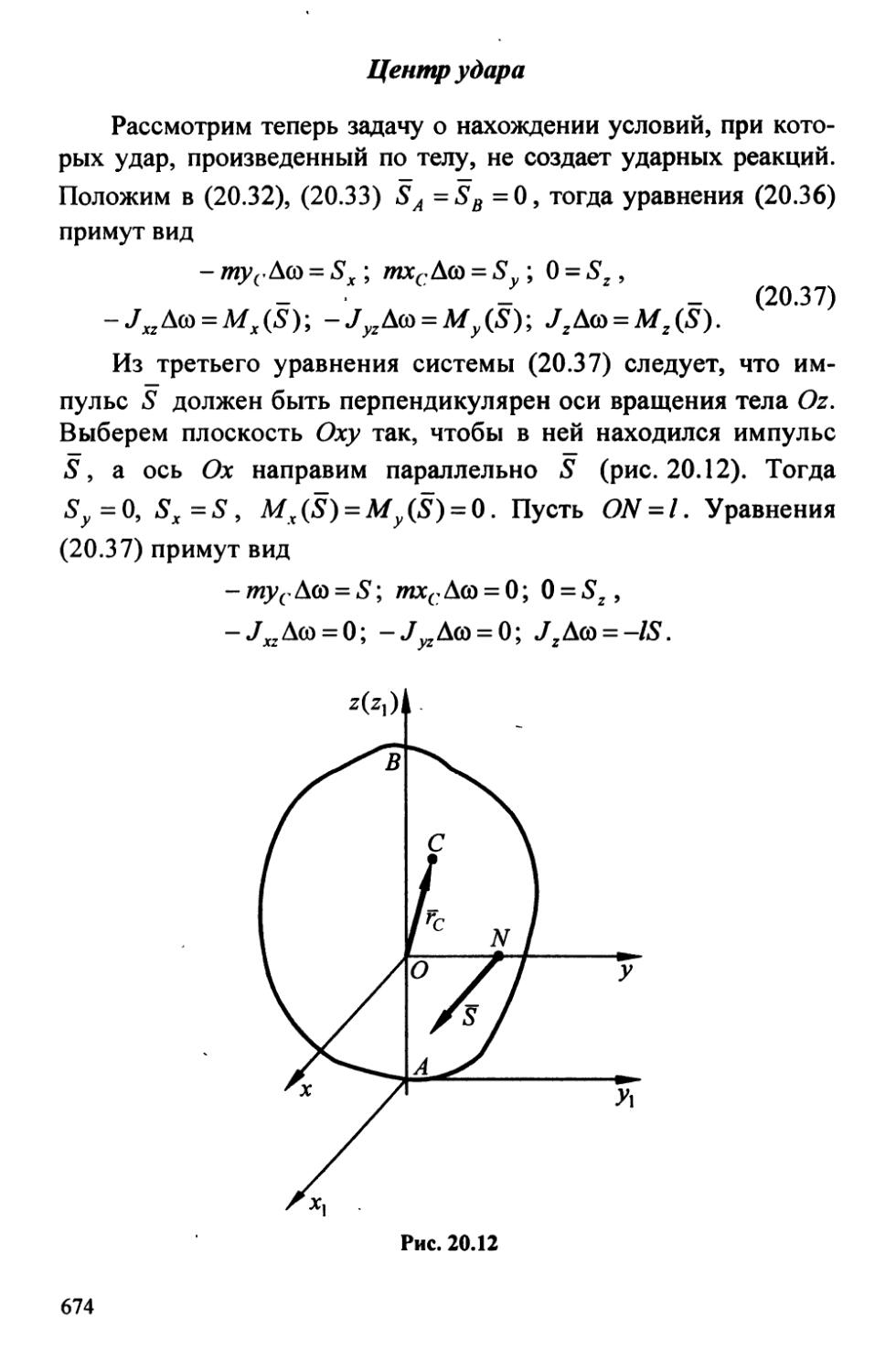
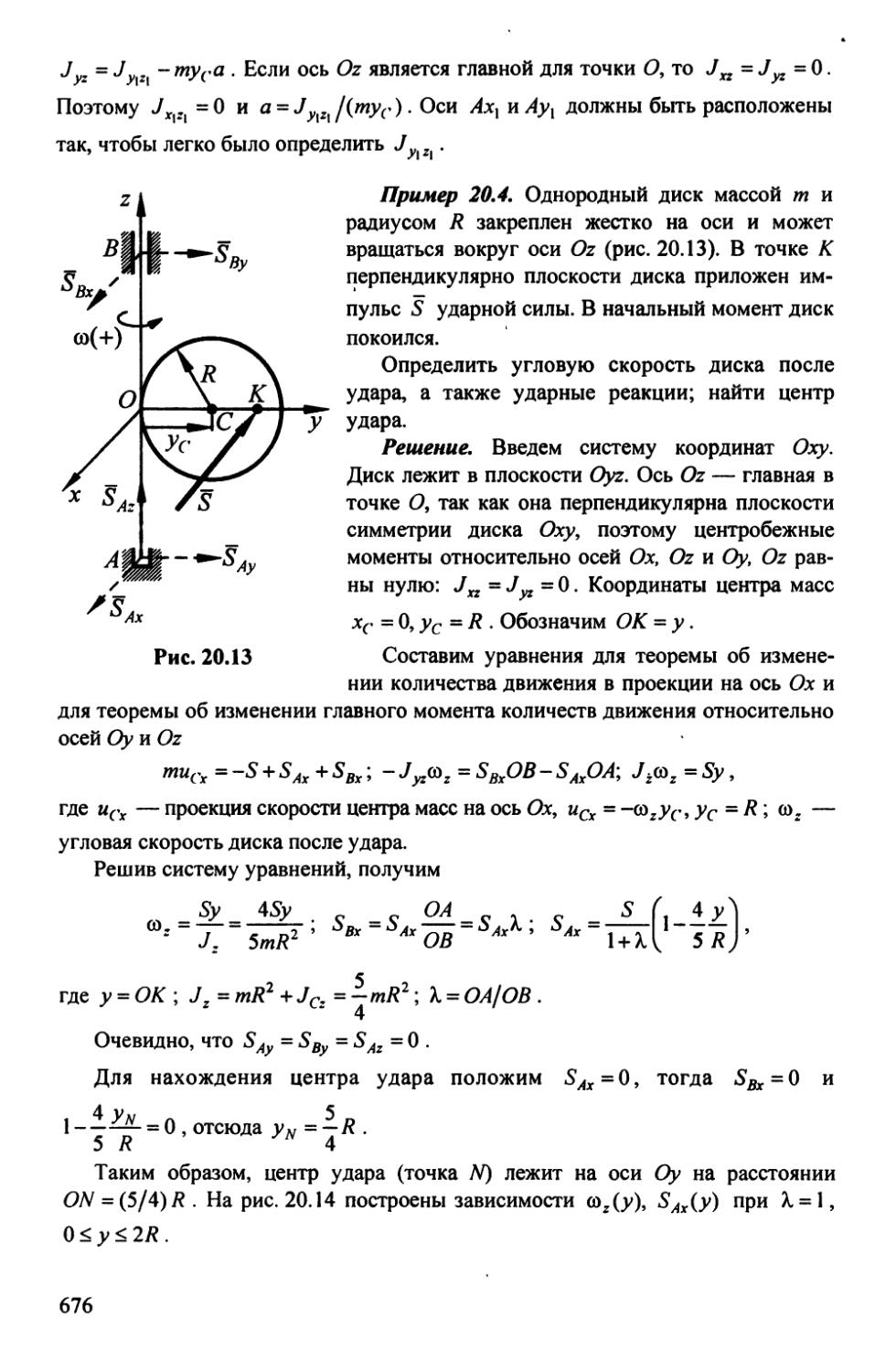
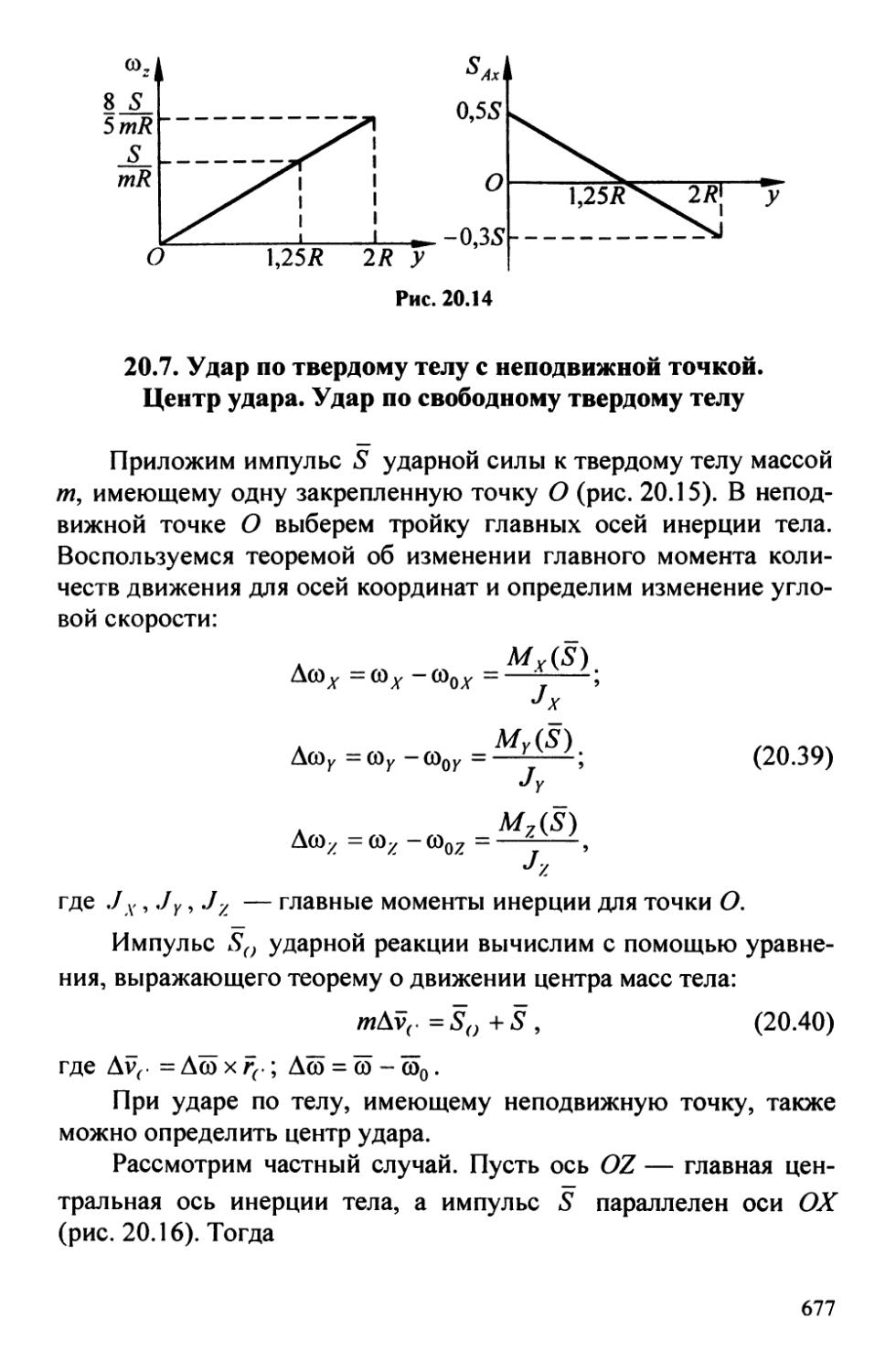
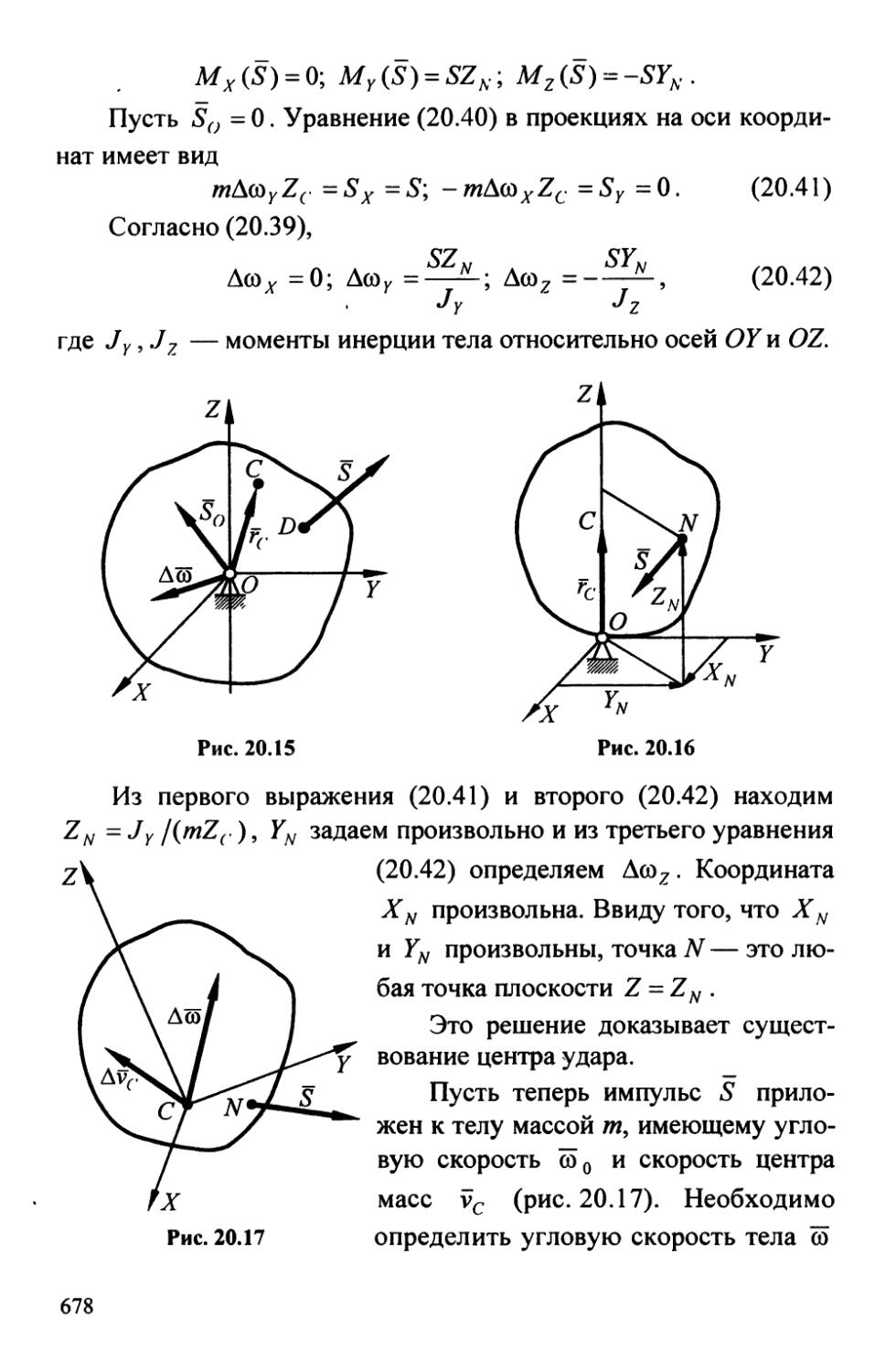
/












































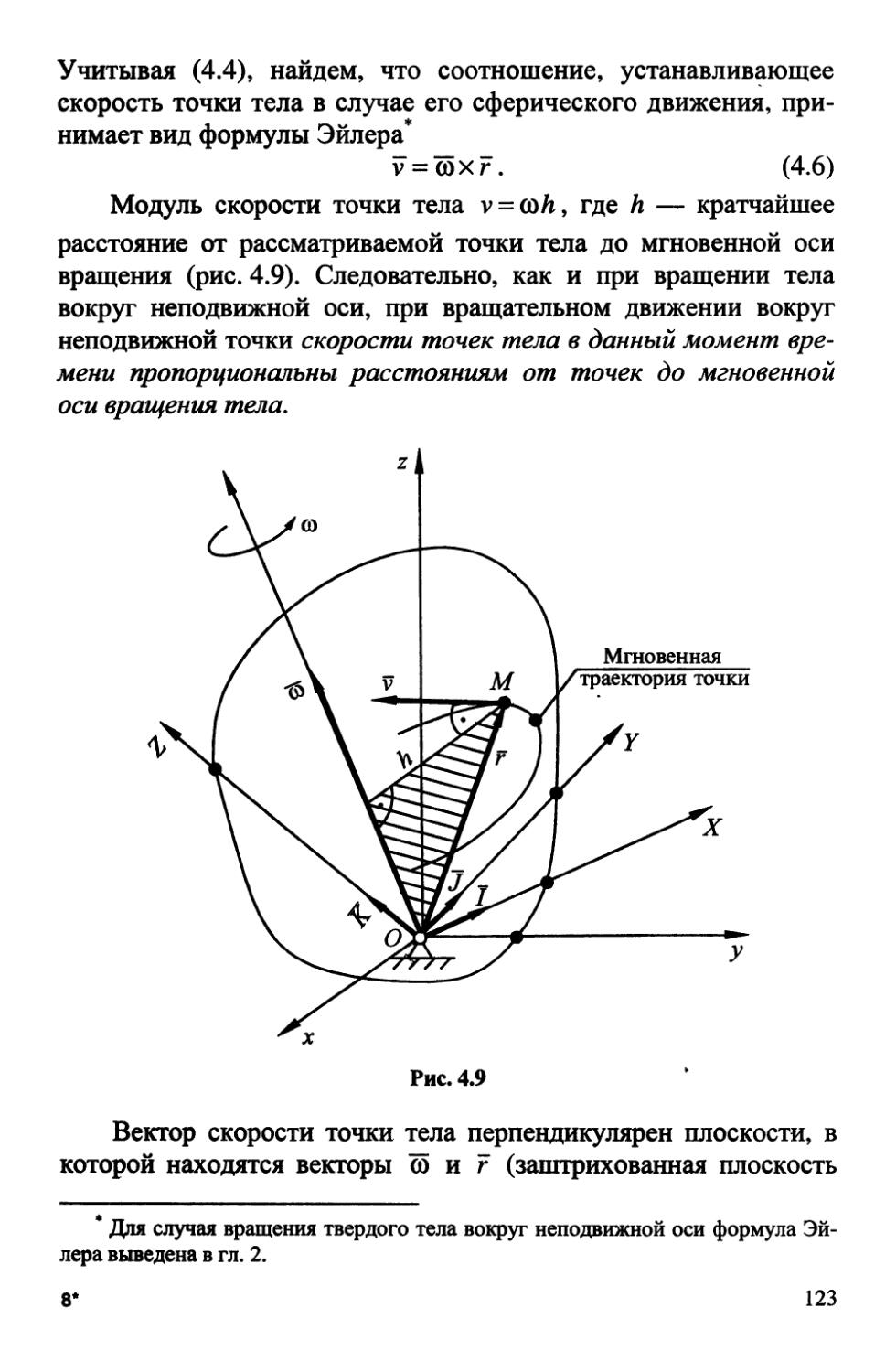

















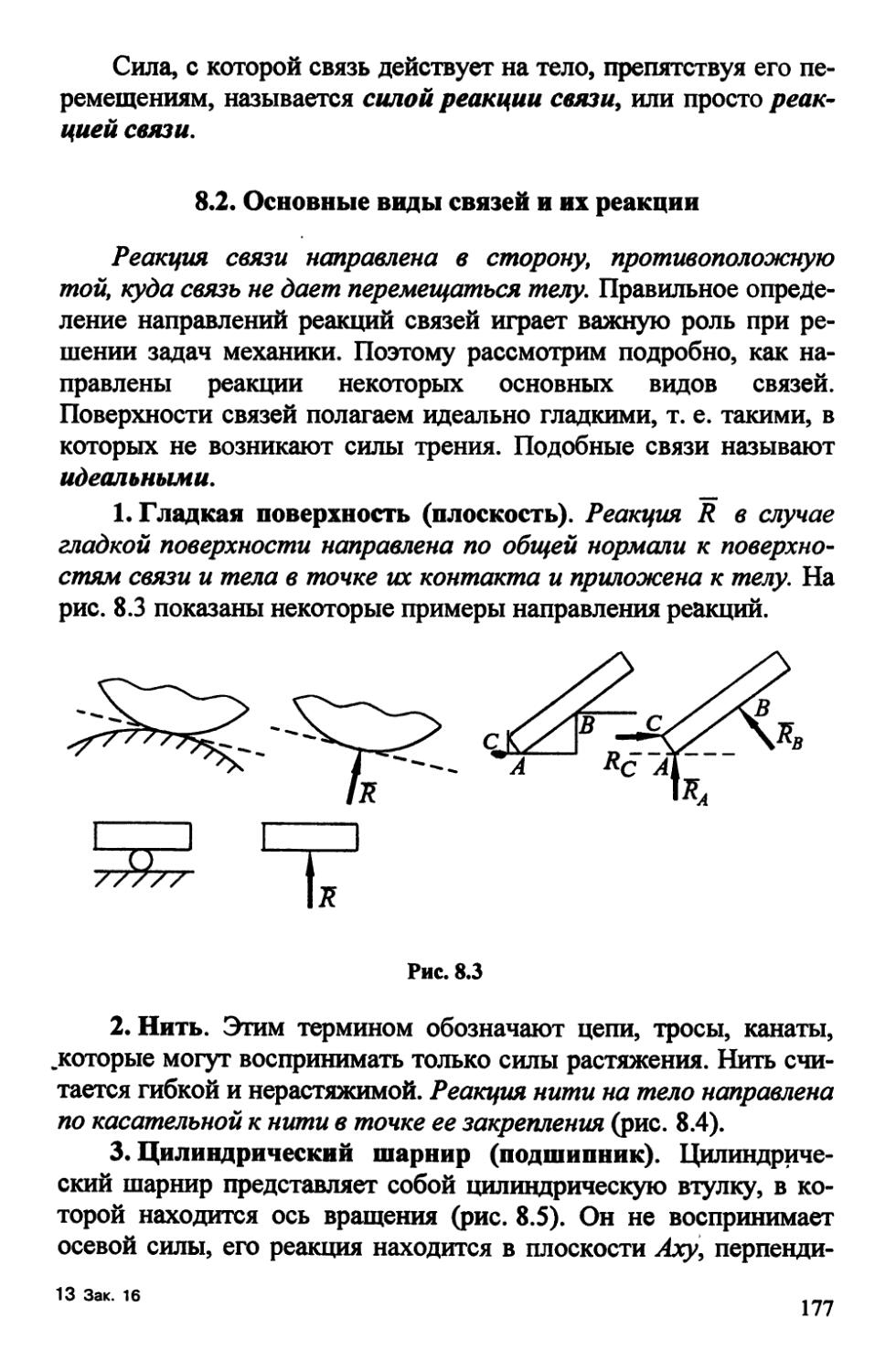













































































































































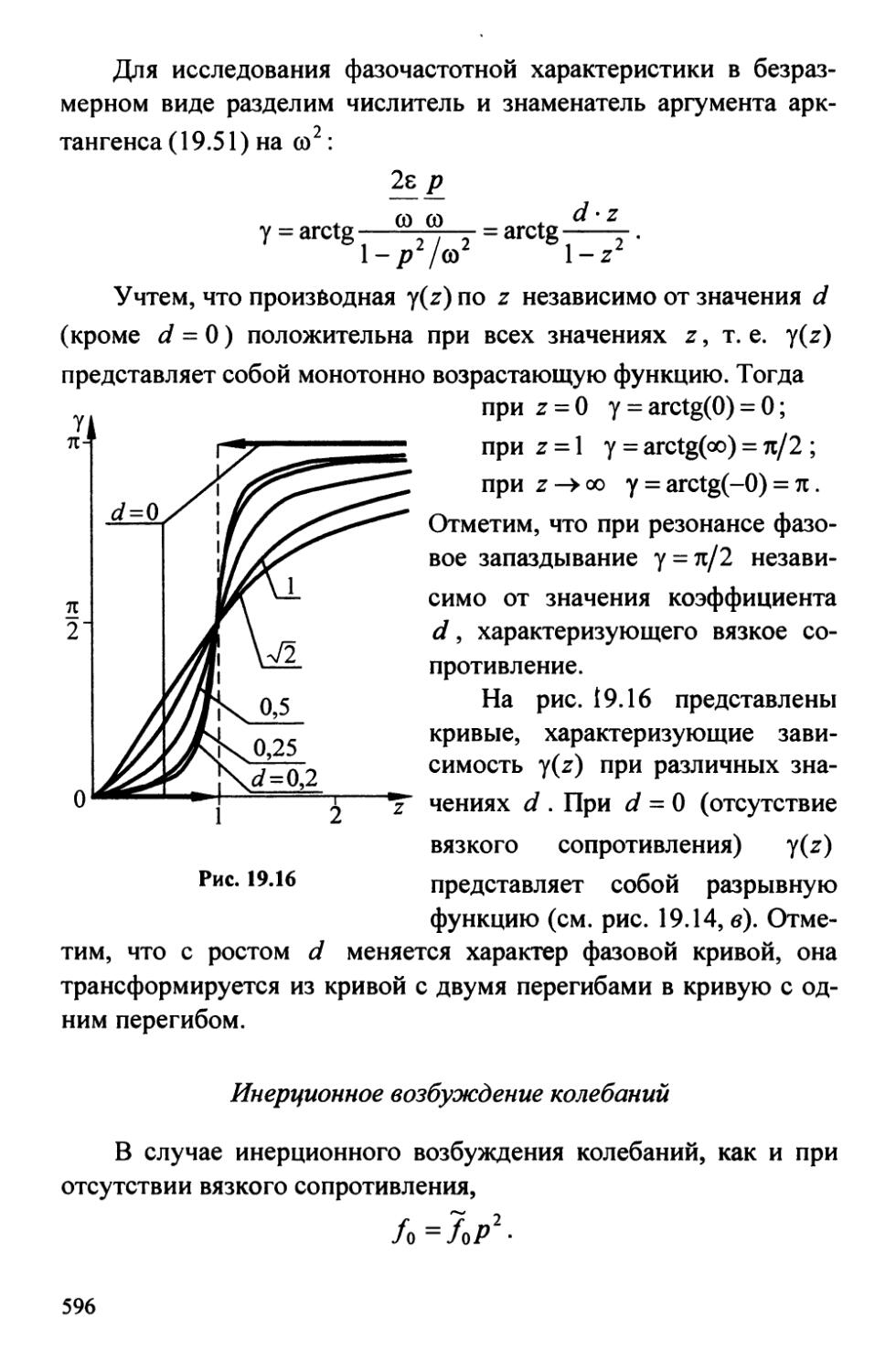













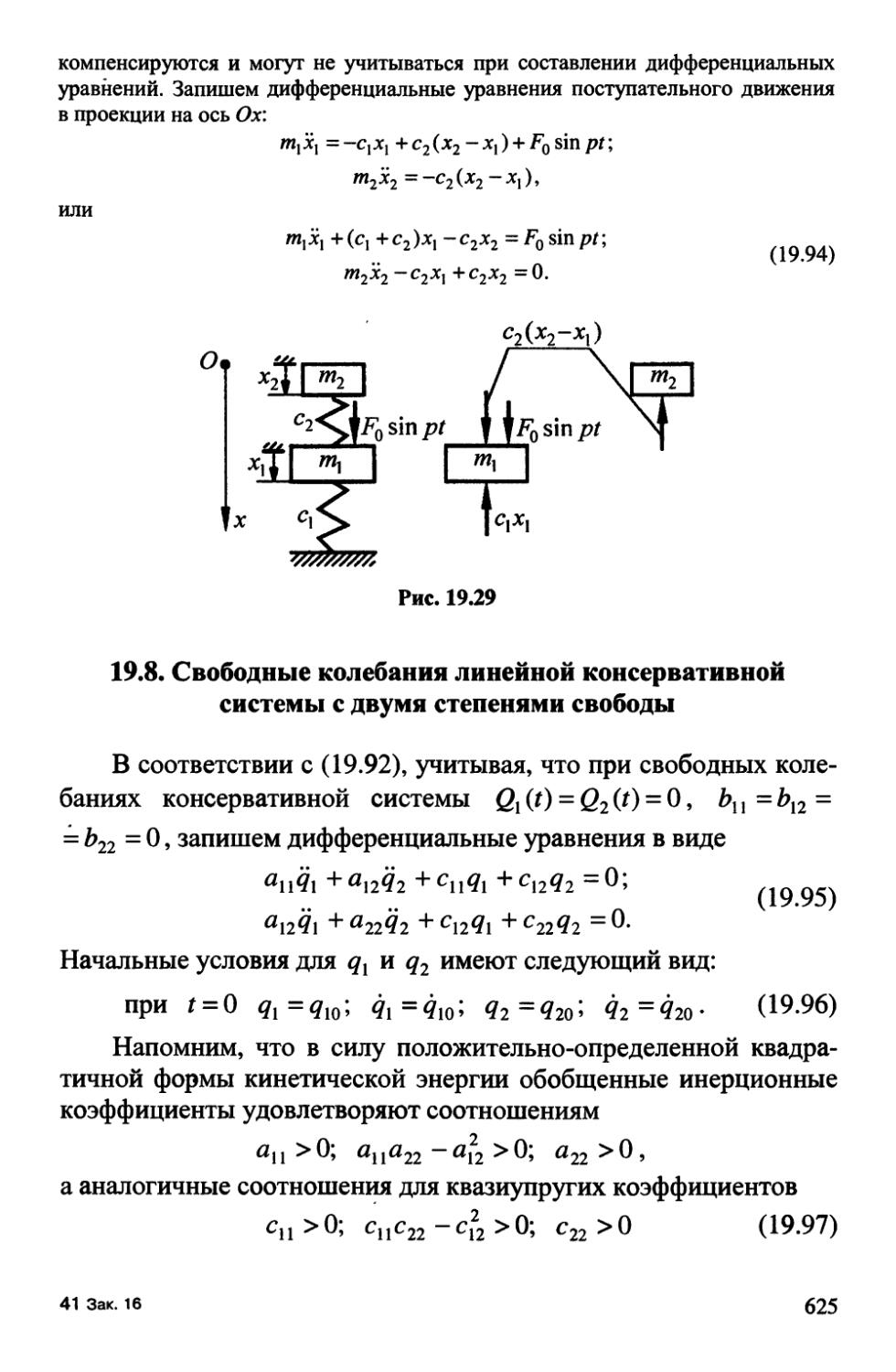










































Author: Колесников К.С.
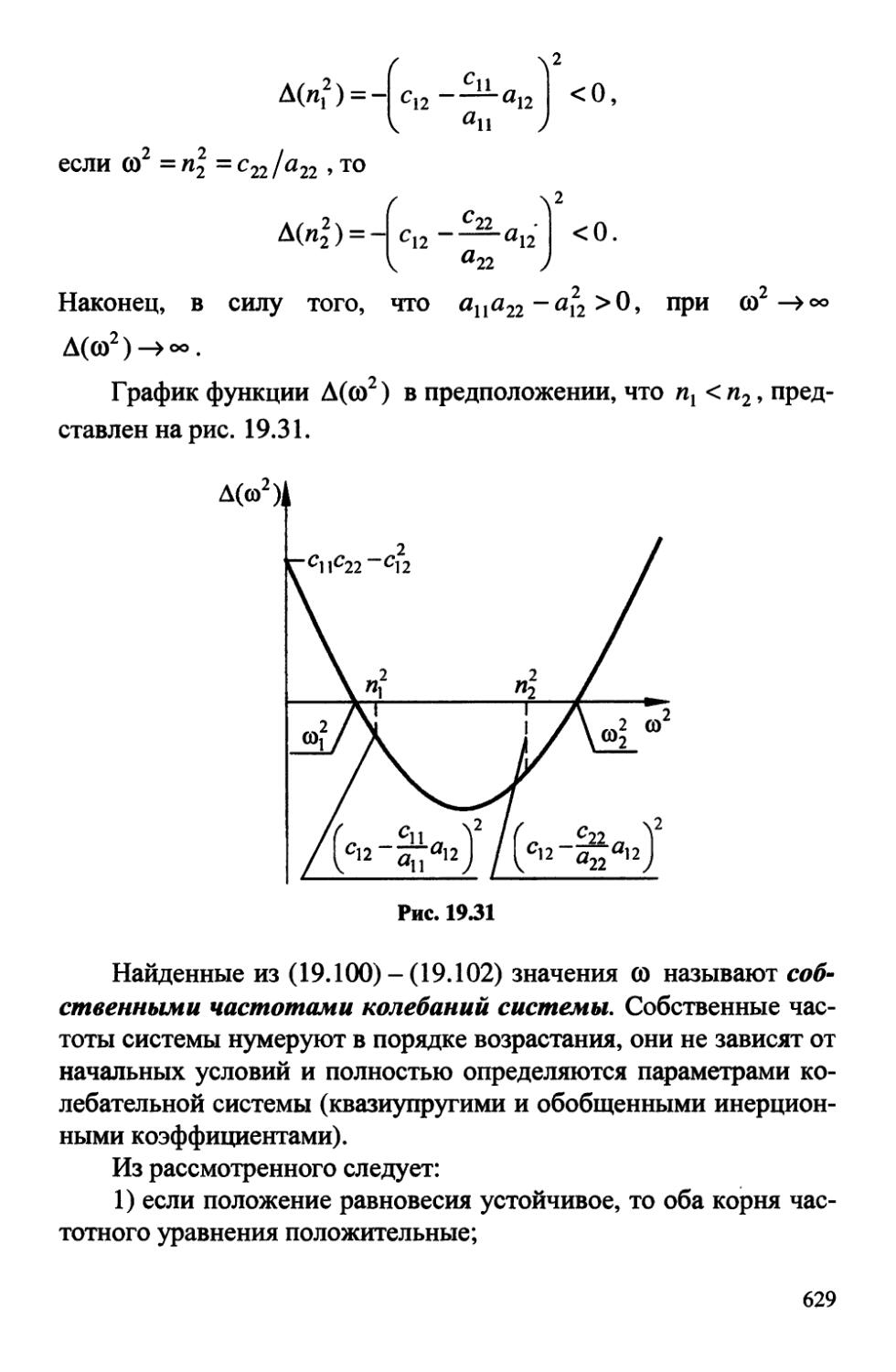
Tags: теория машин и механизмов общие вопросы технической механики механика теоретическая механика
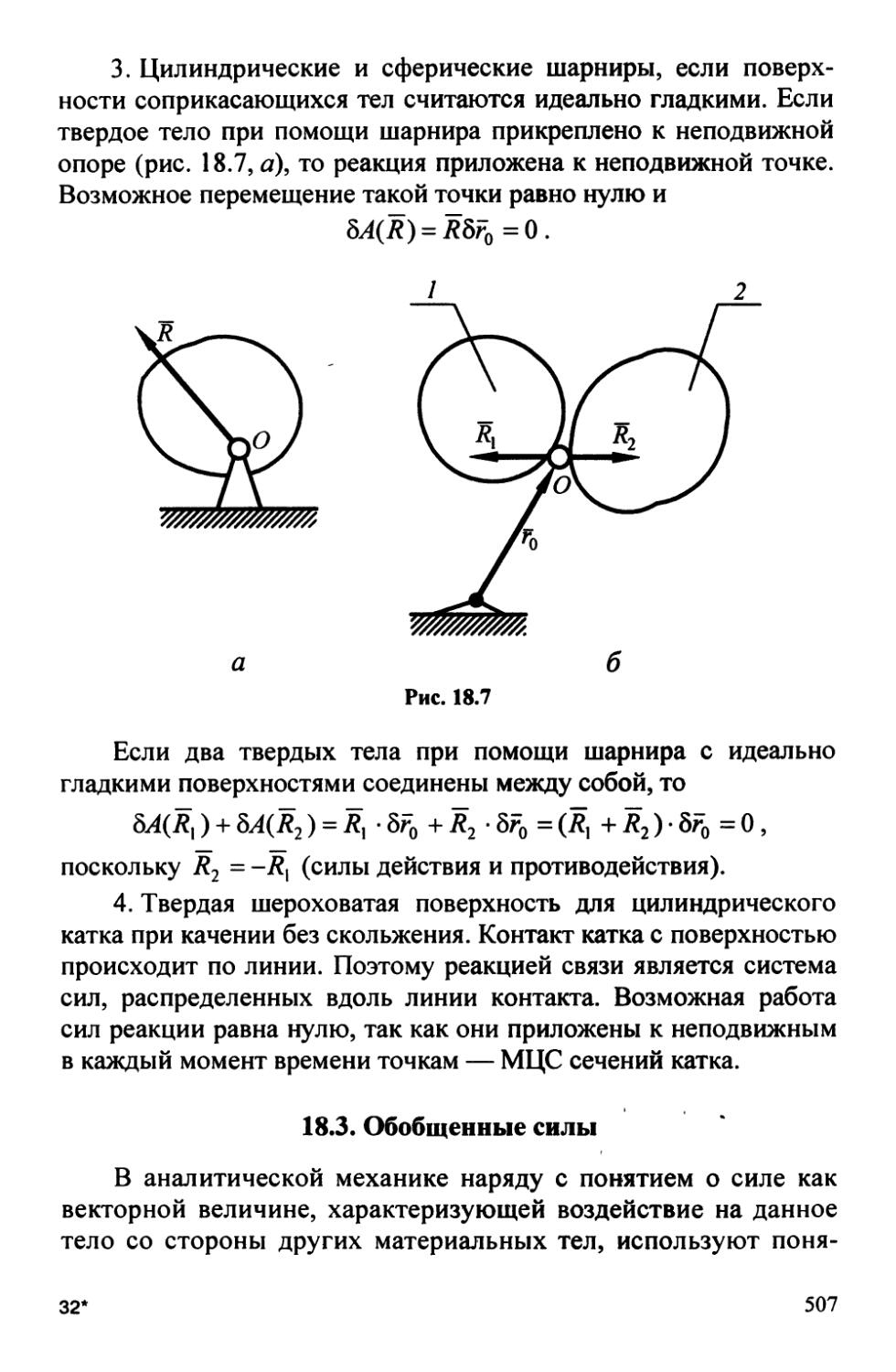
ISBN: 5-7038-1695-5
Year: 2005




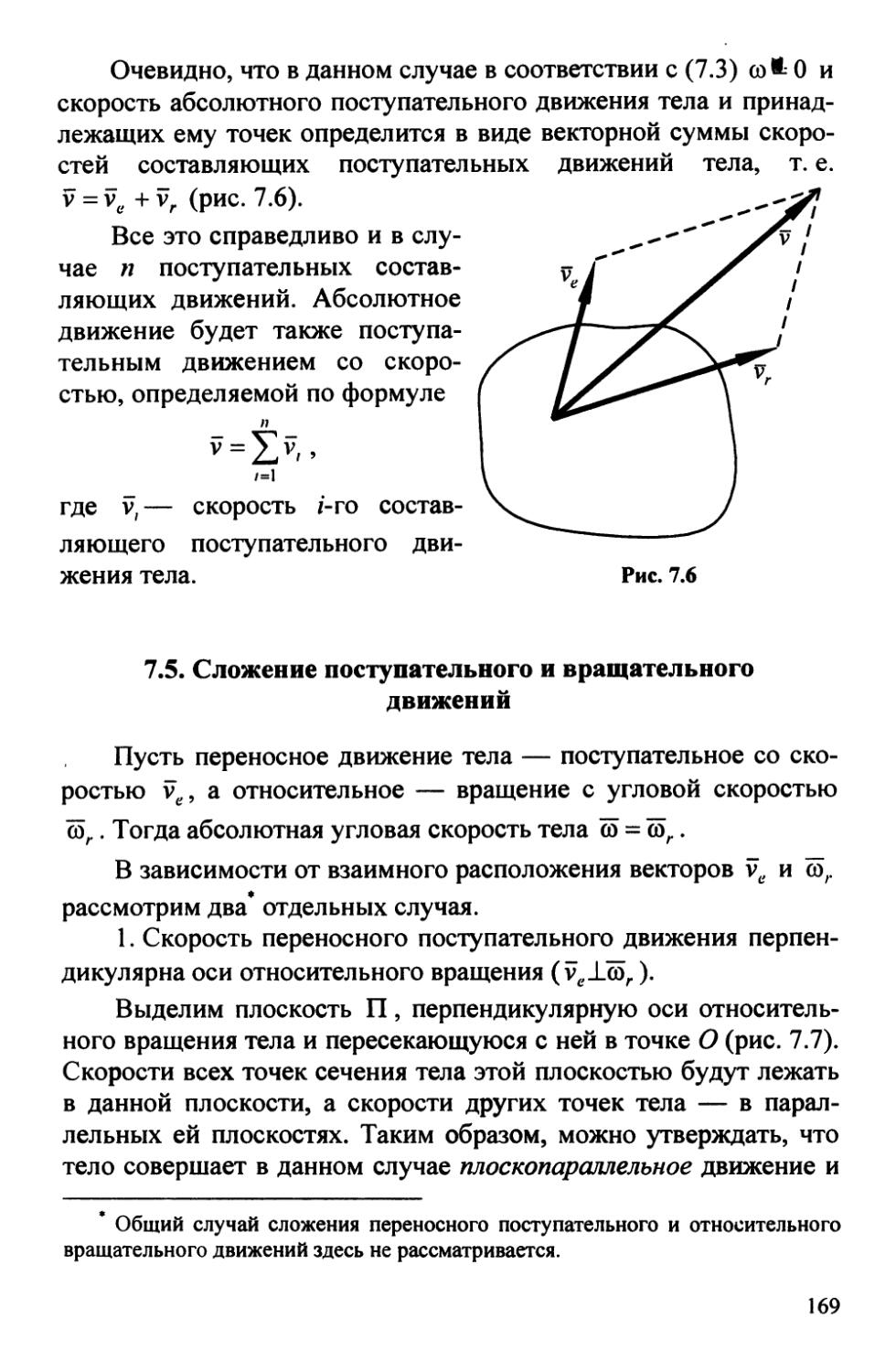
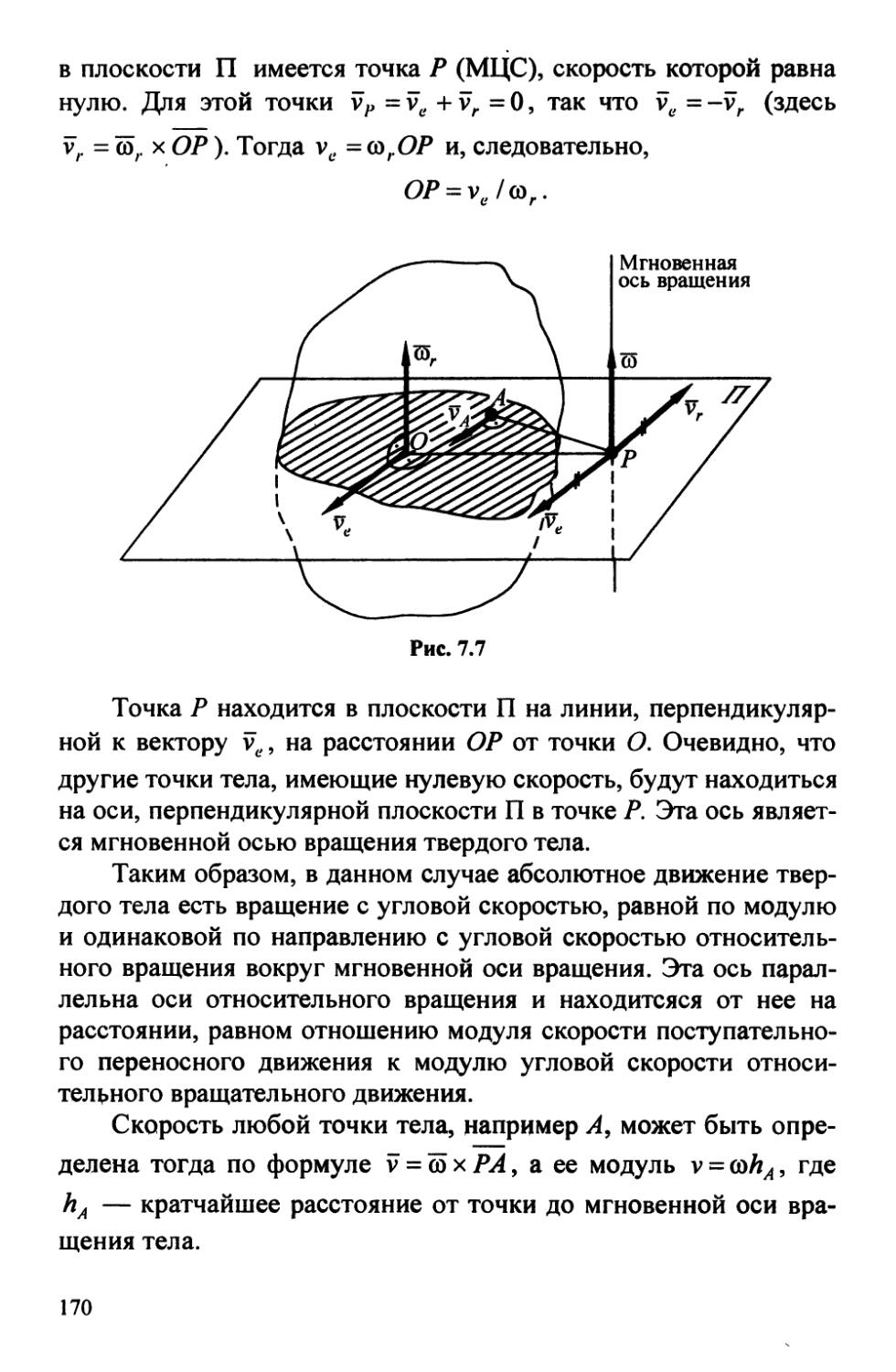
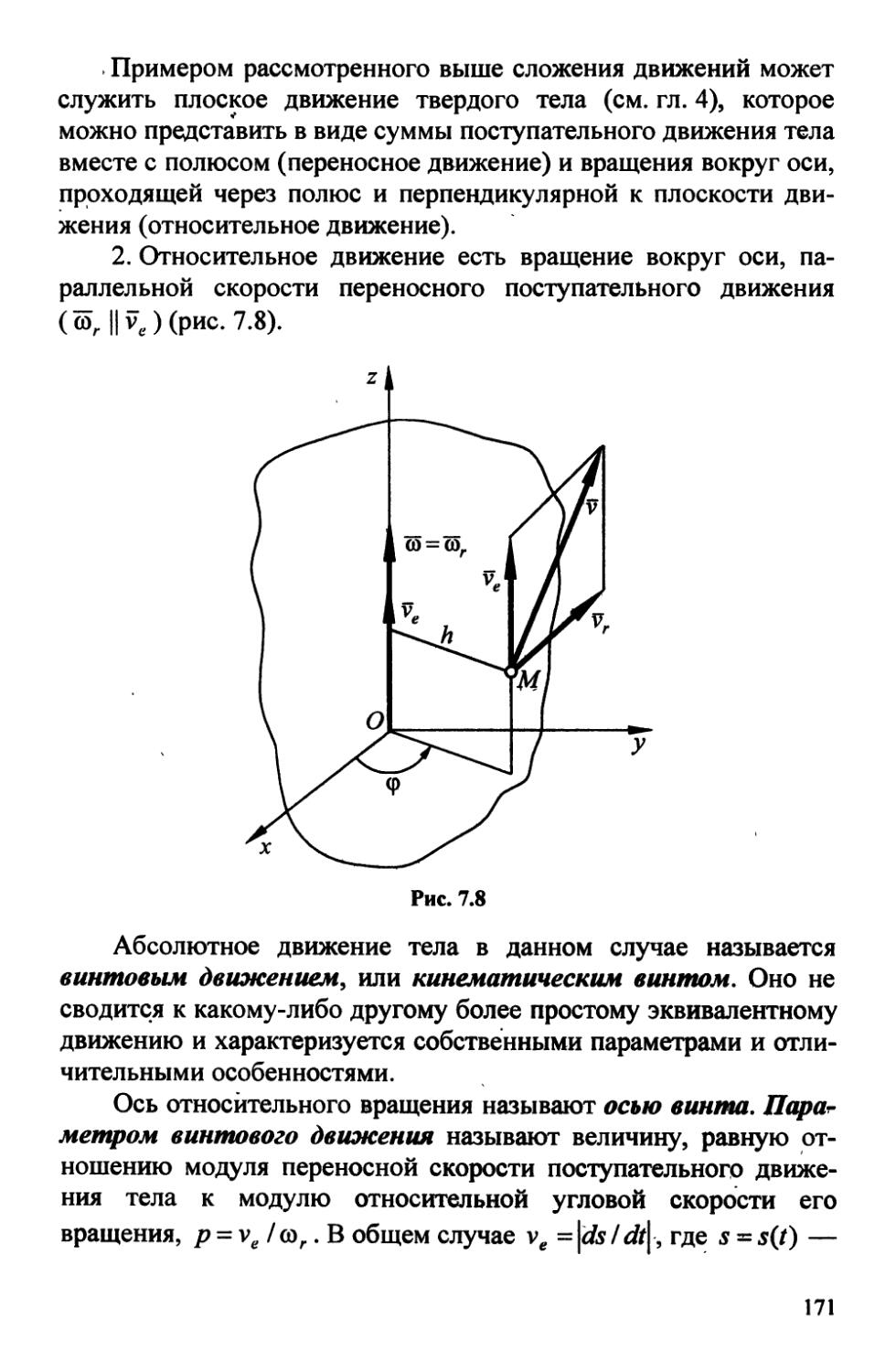
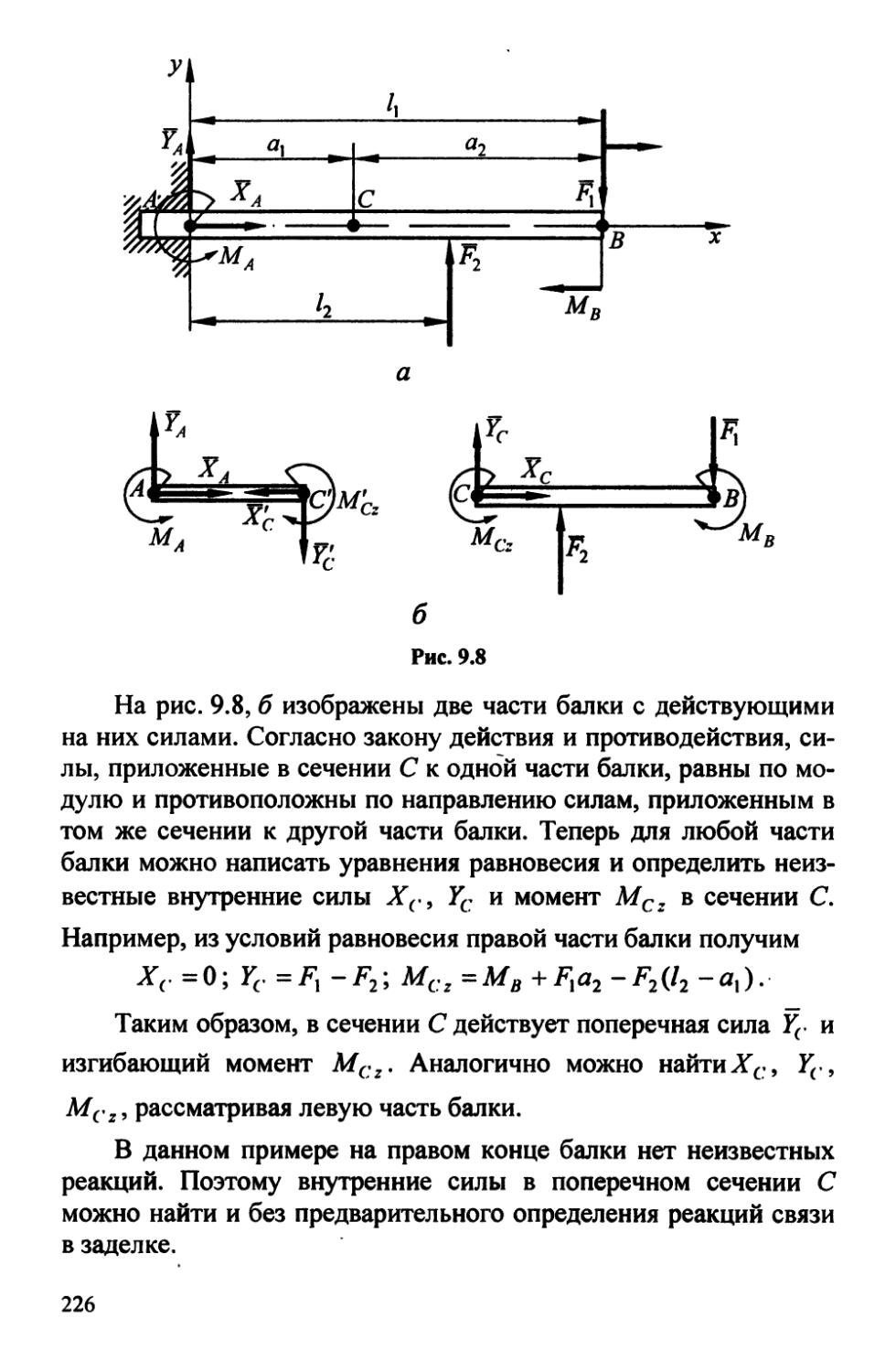
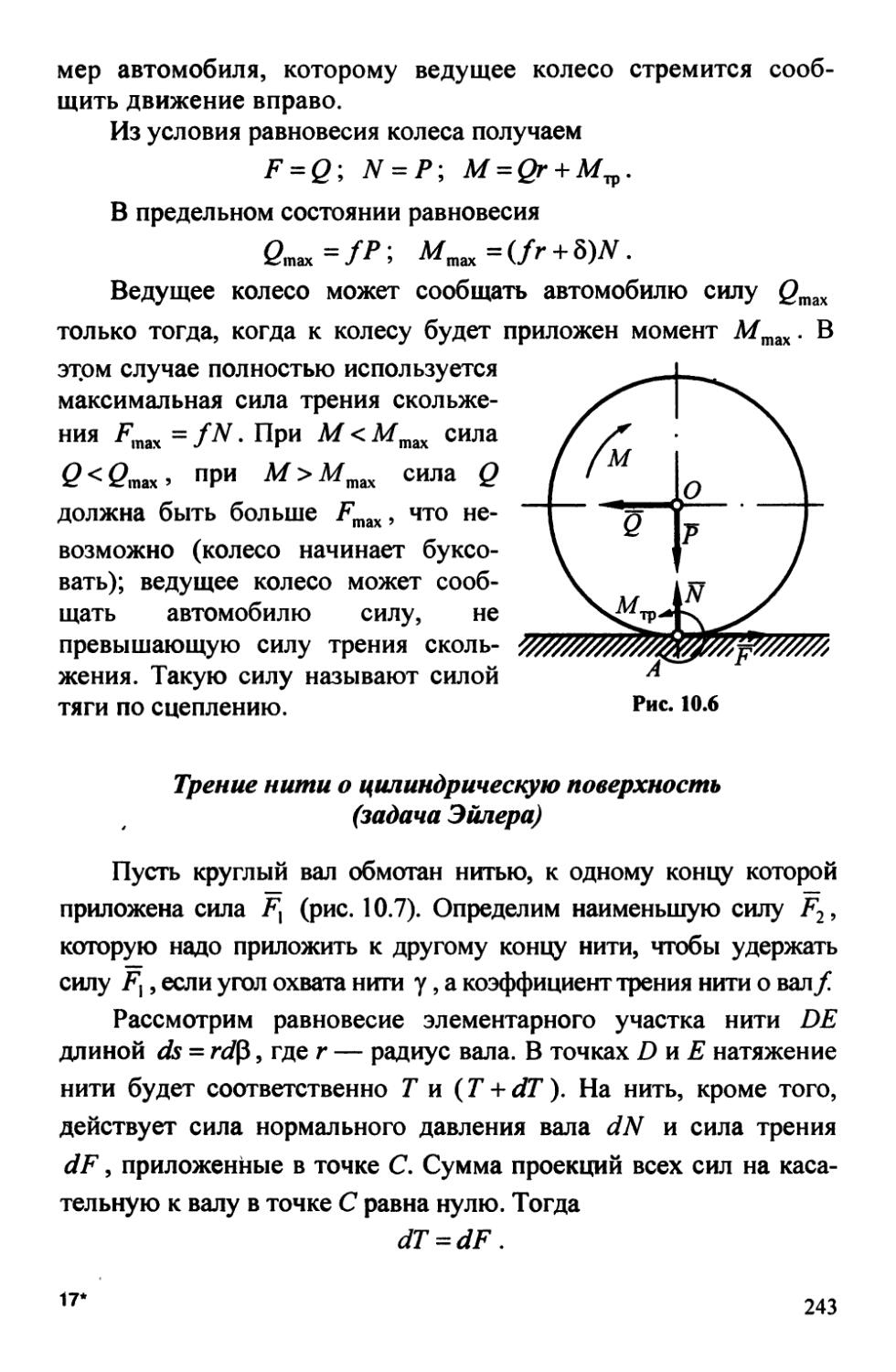
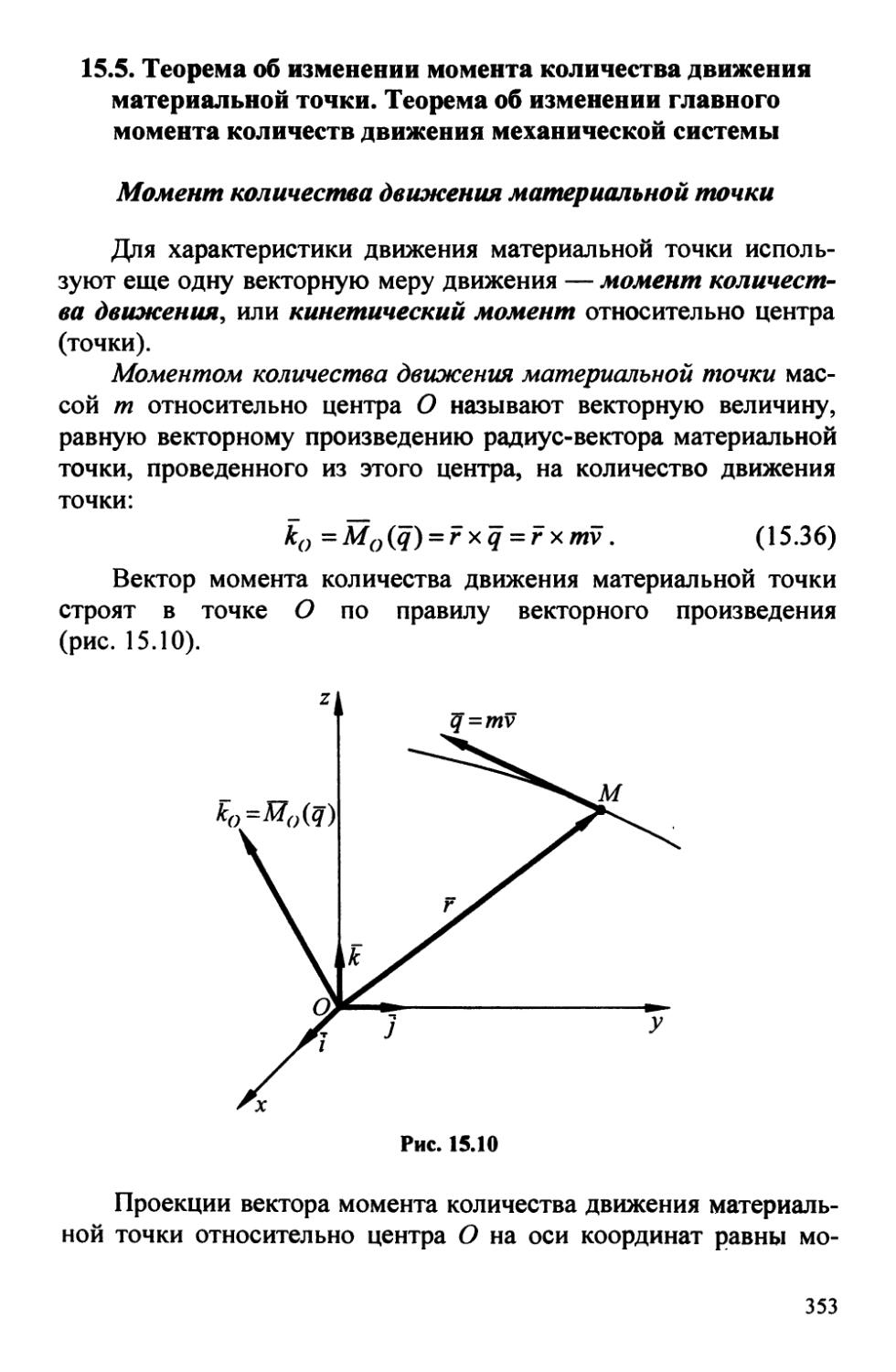
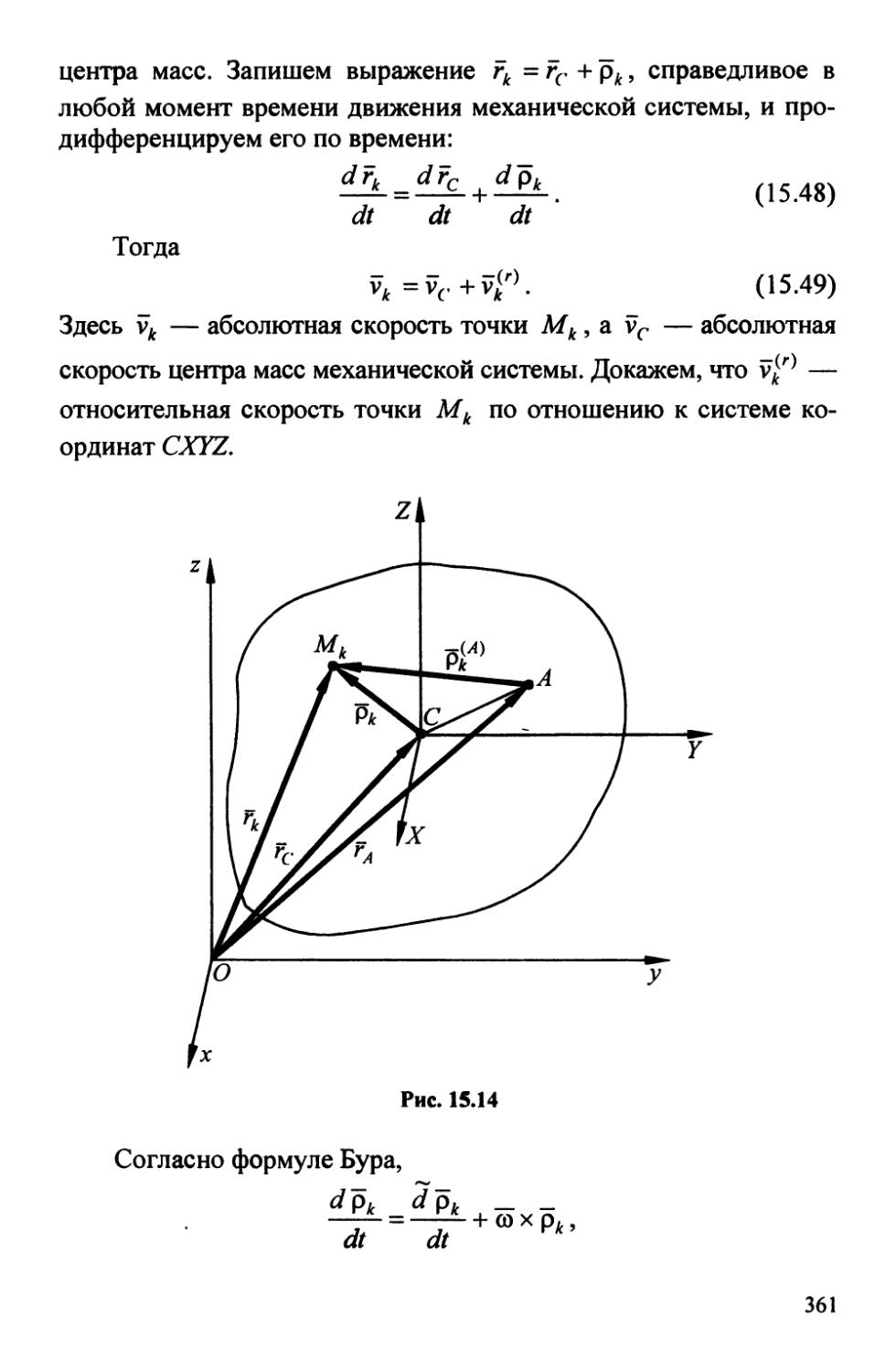
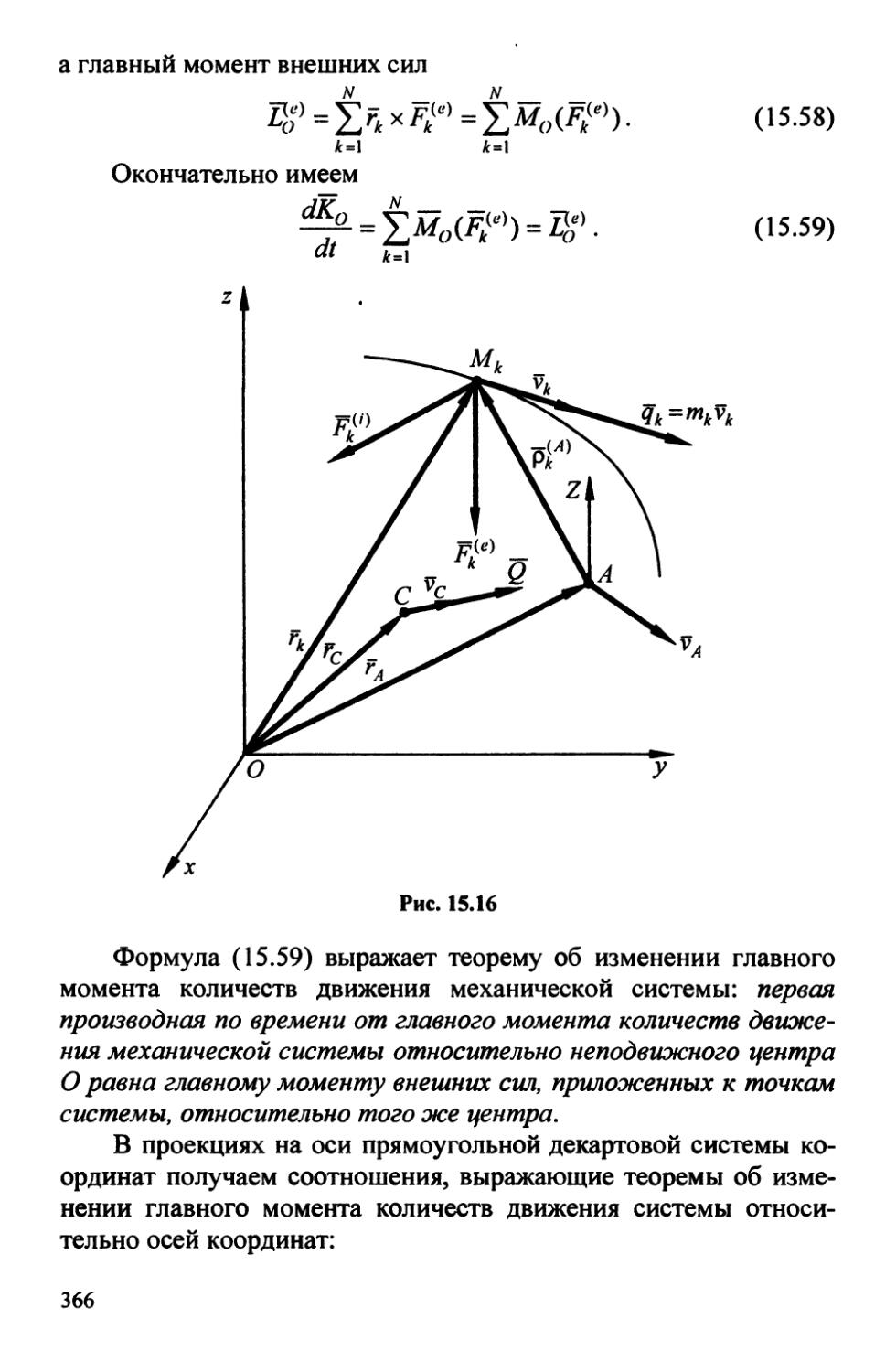
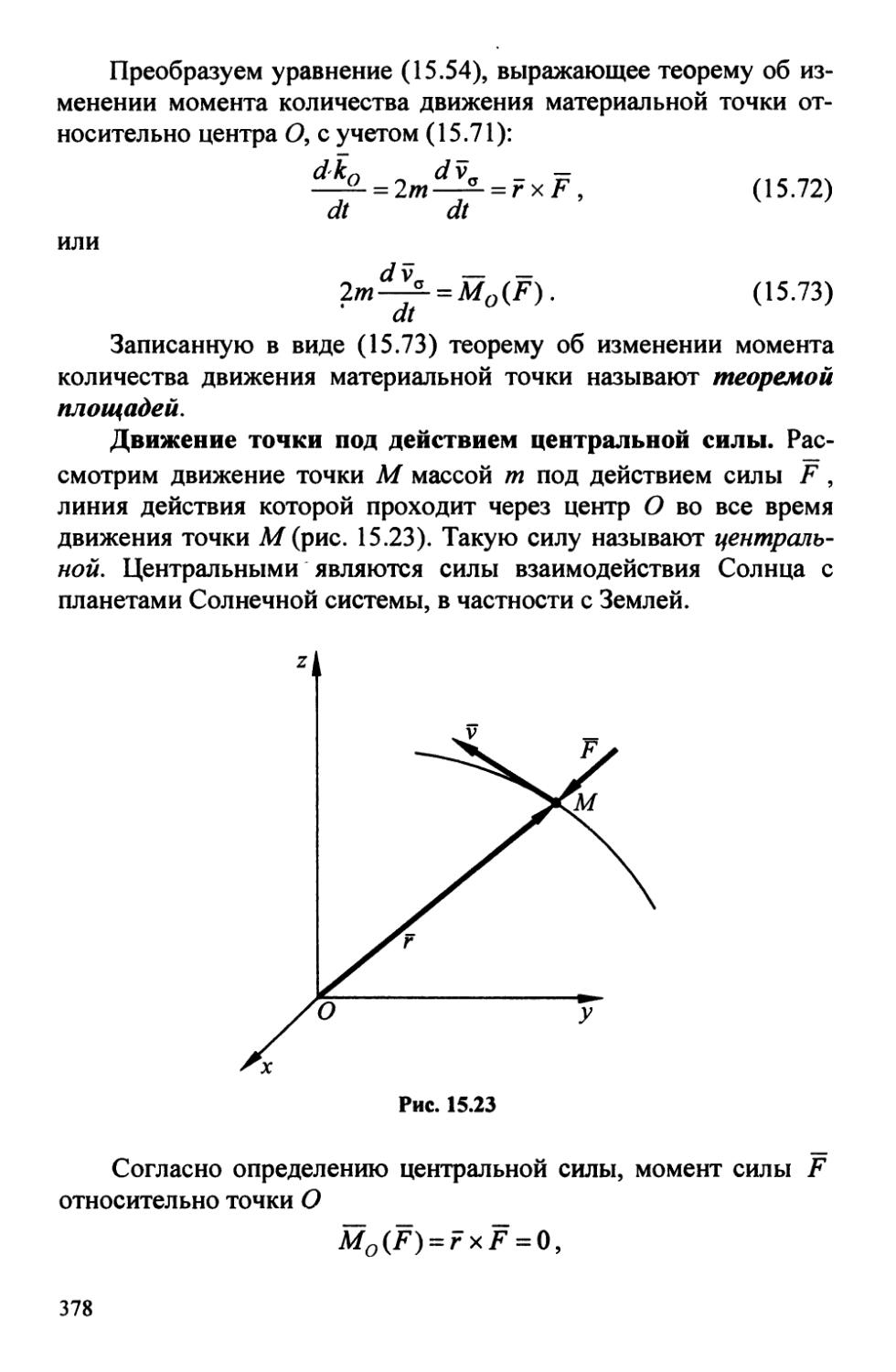
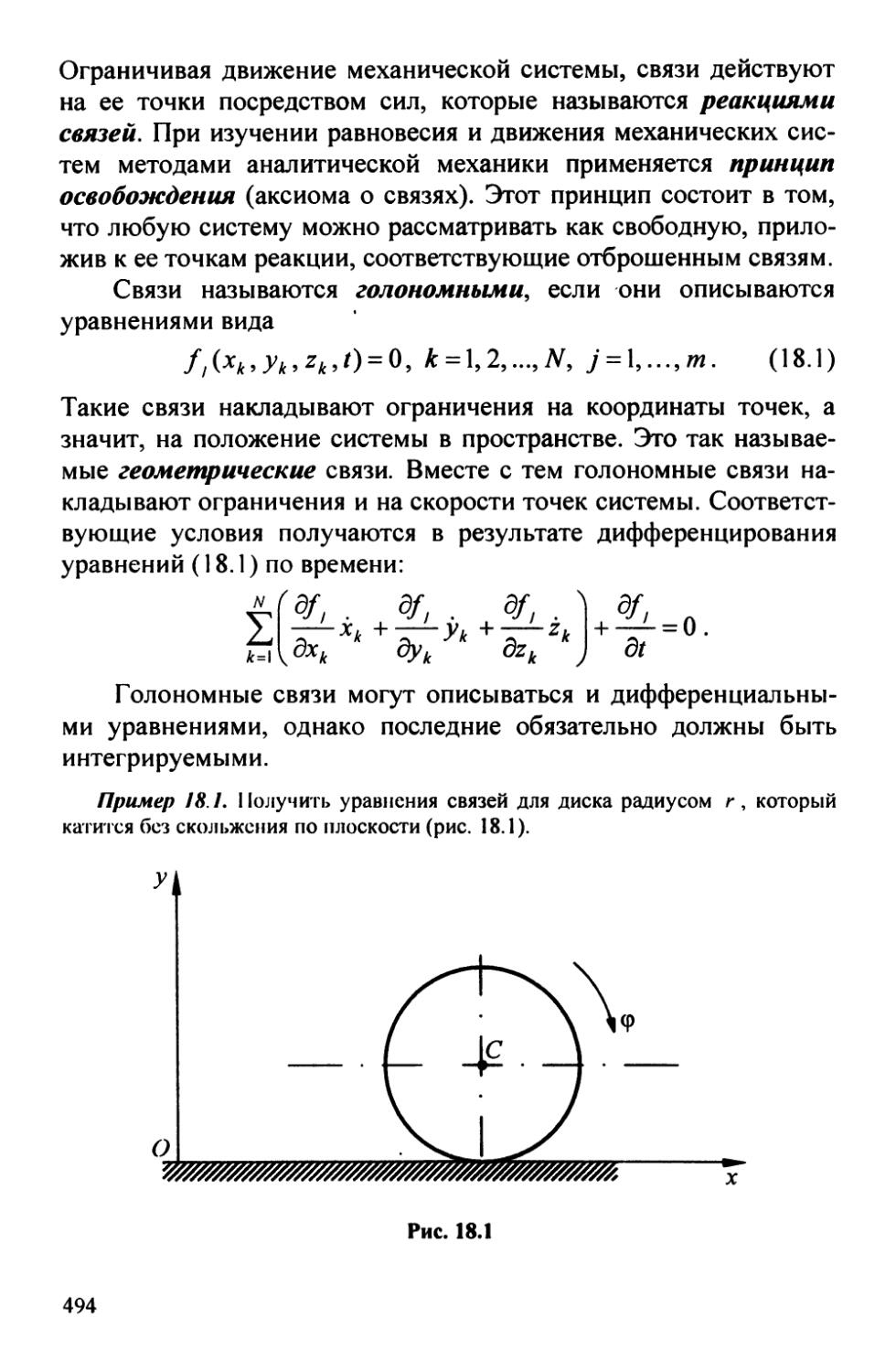
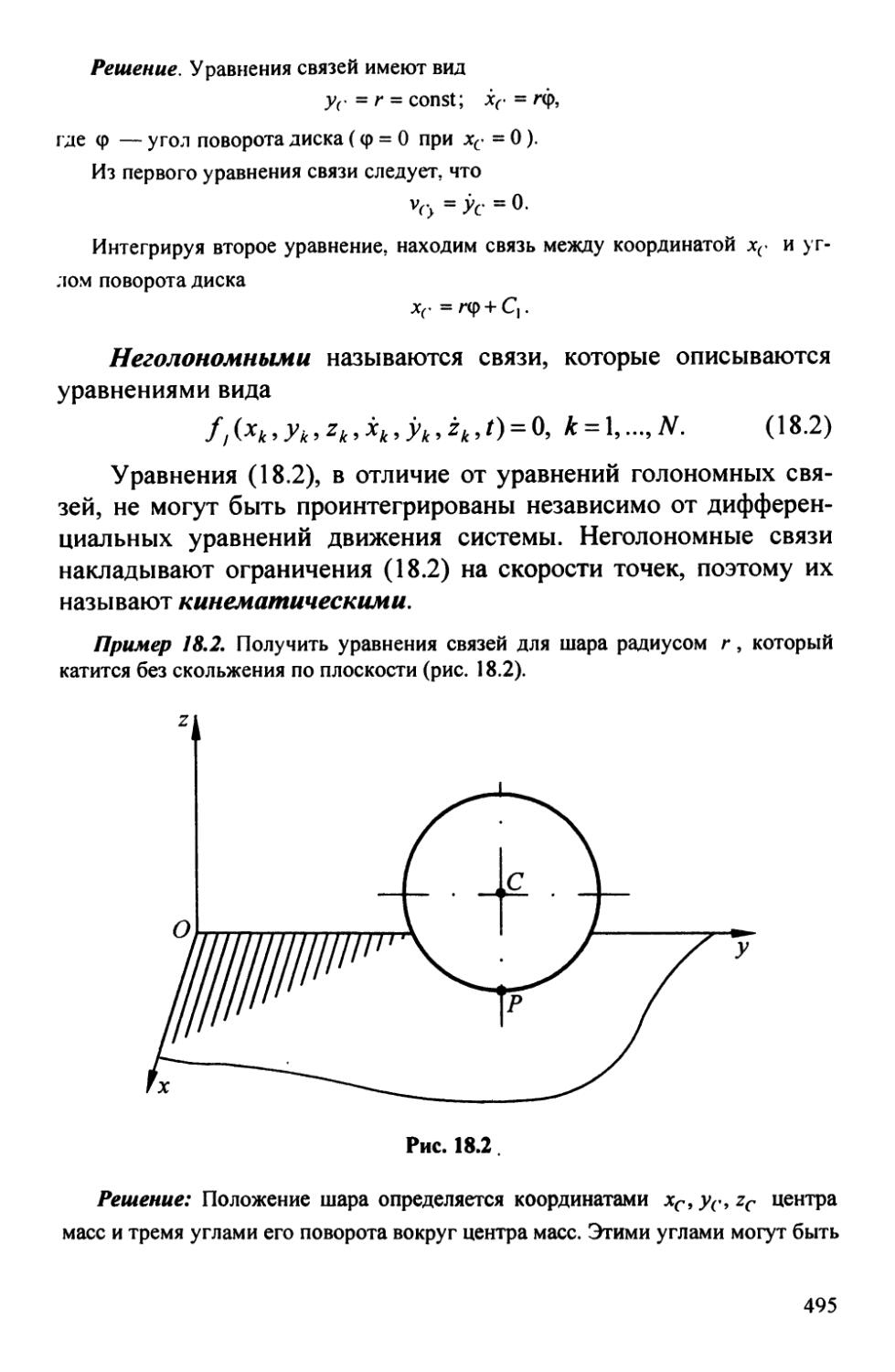
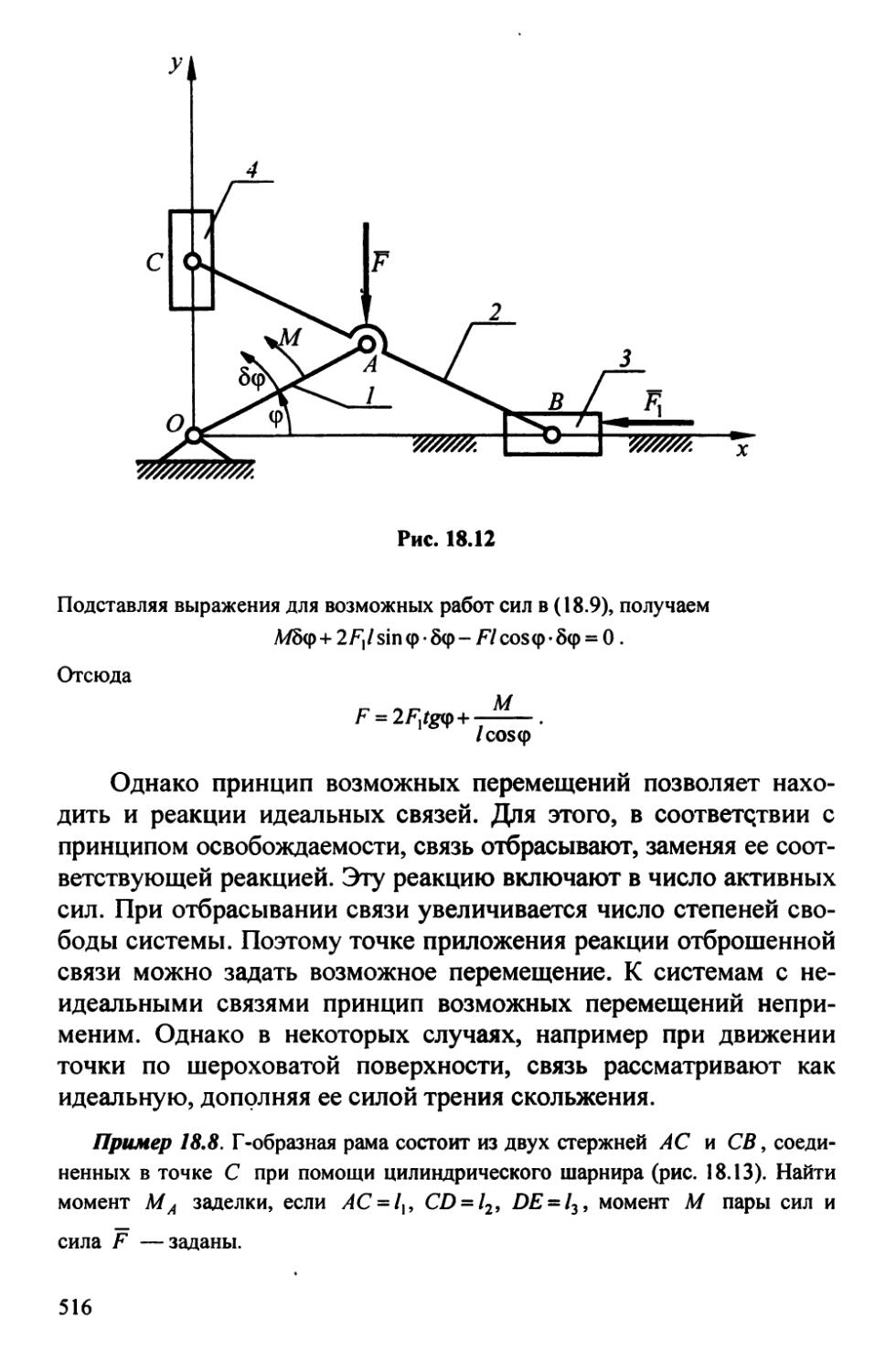
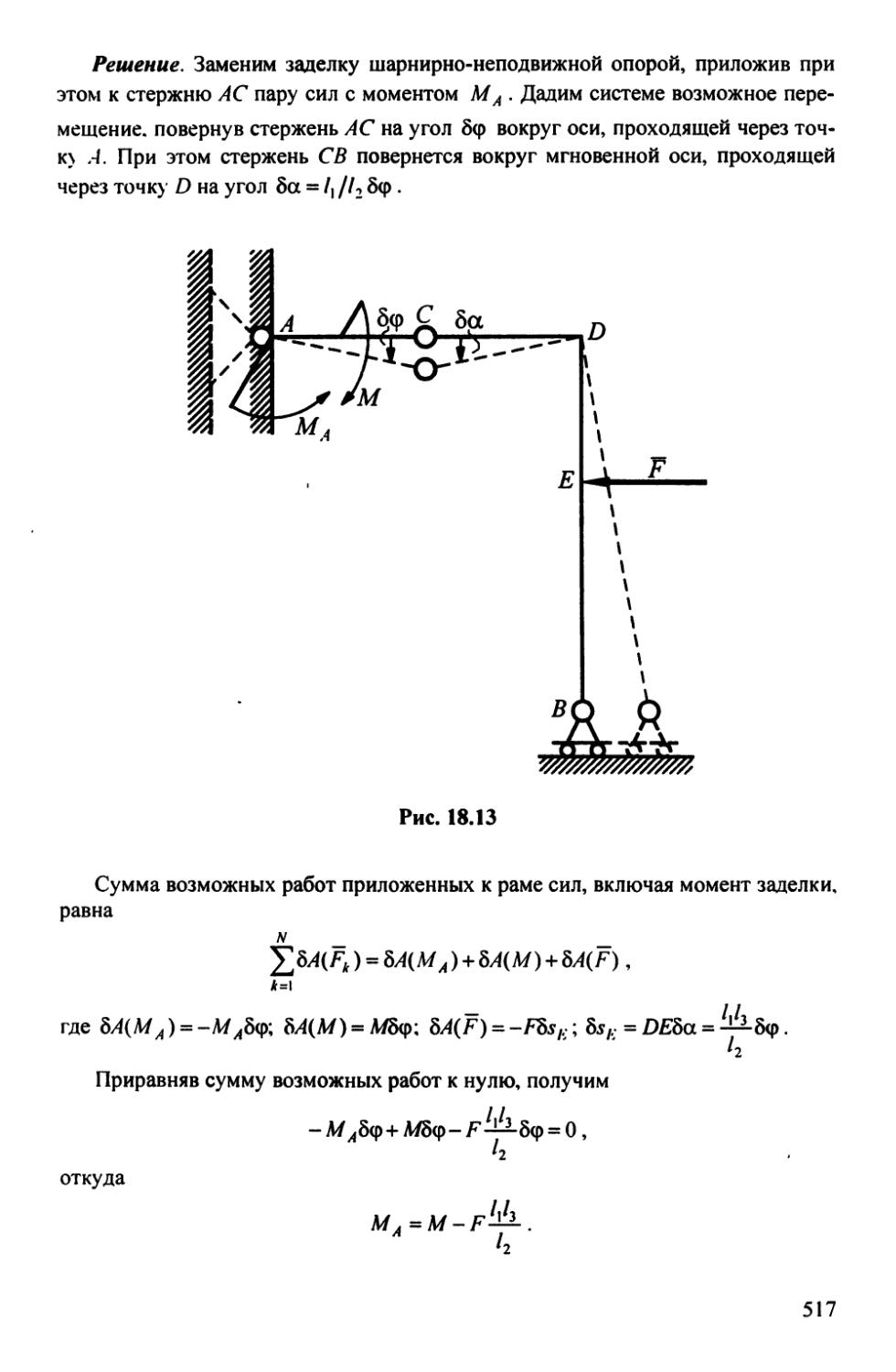
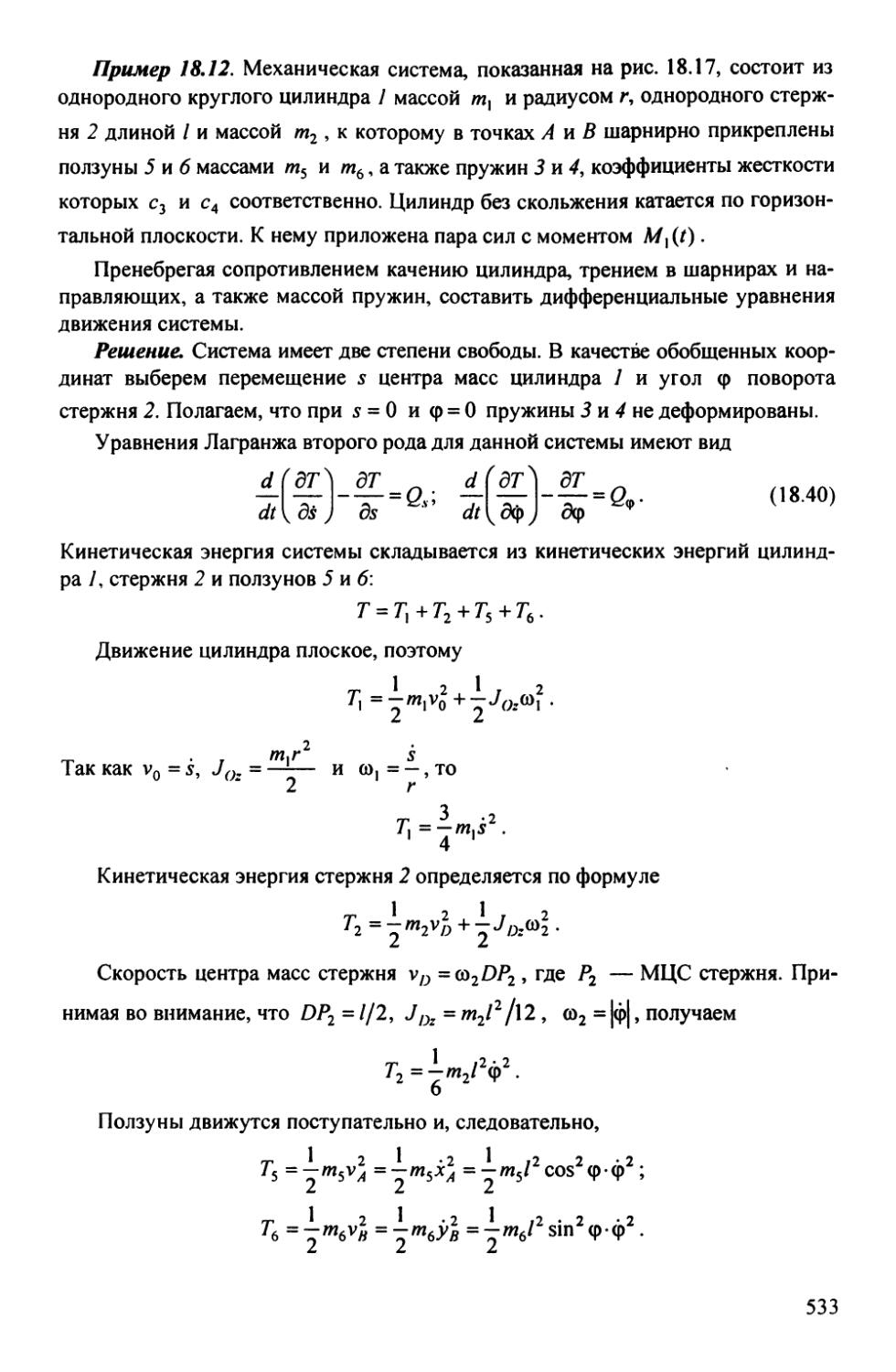
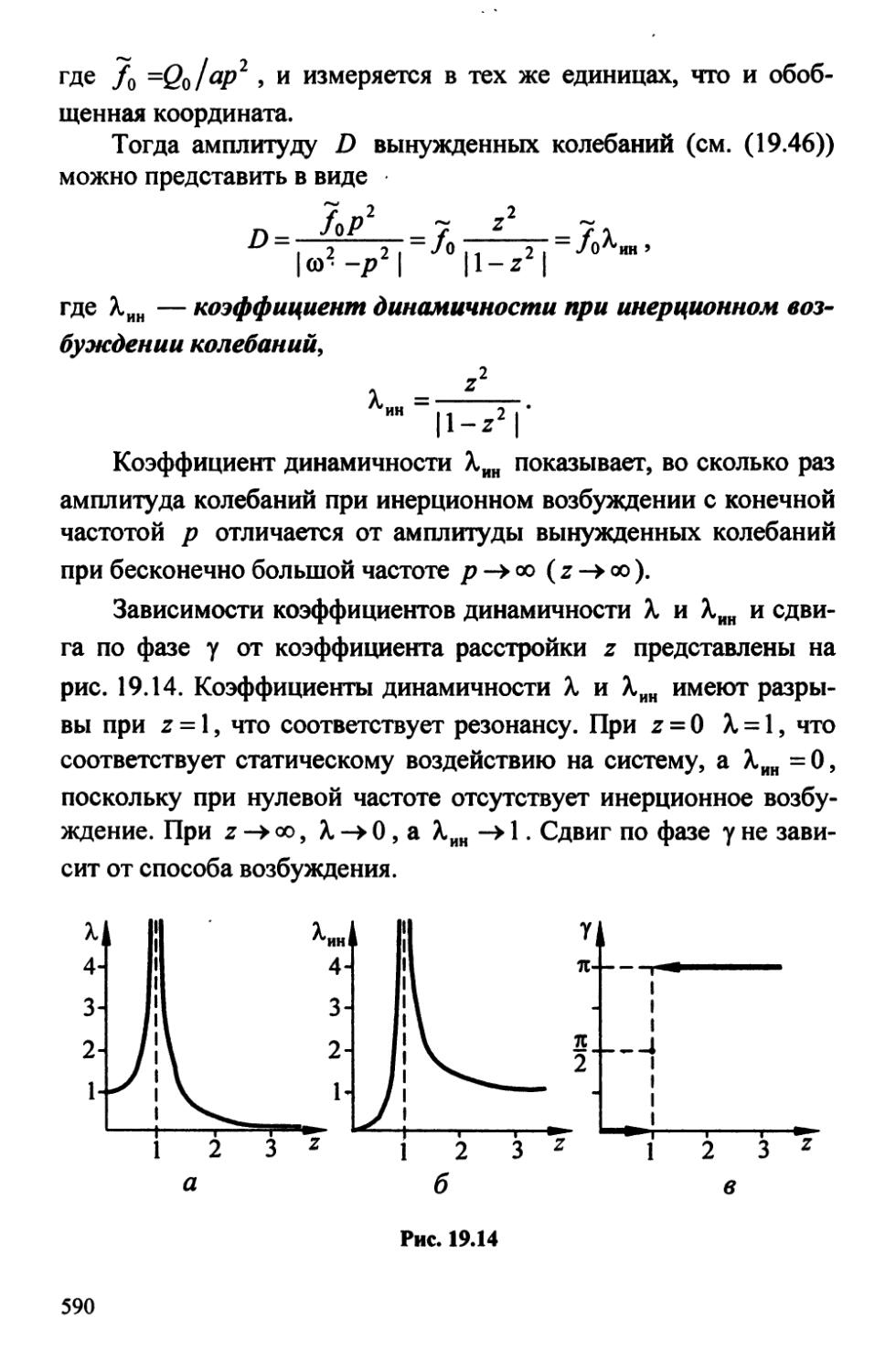
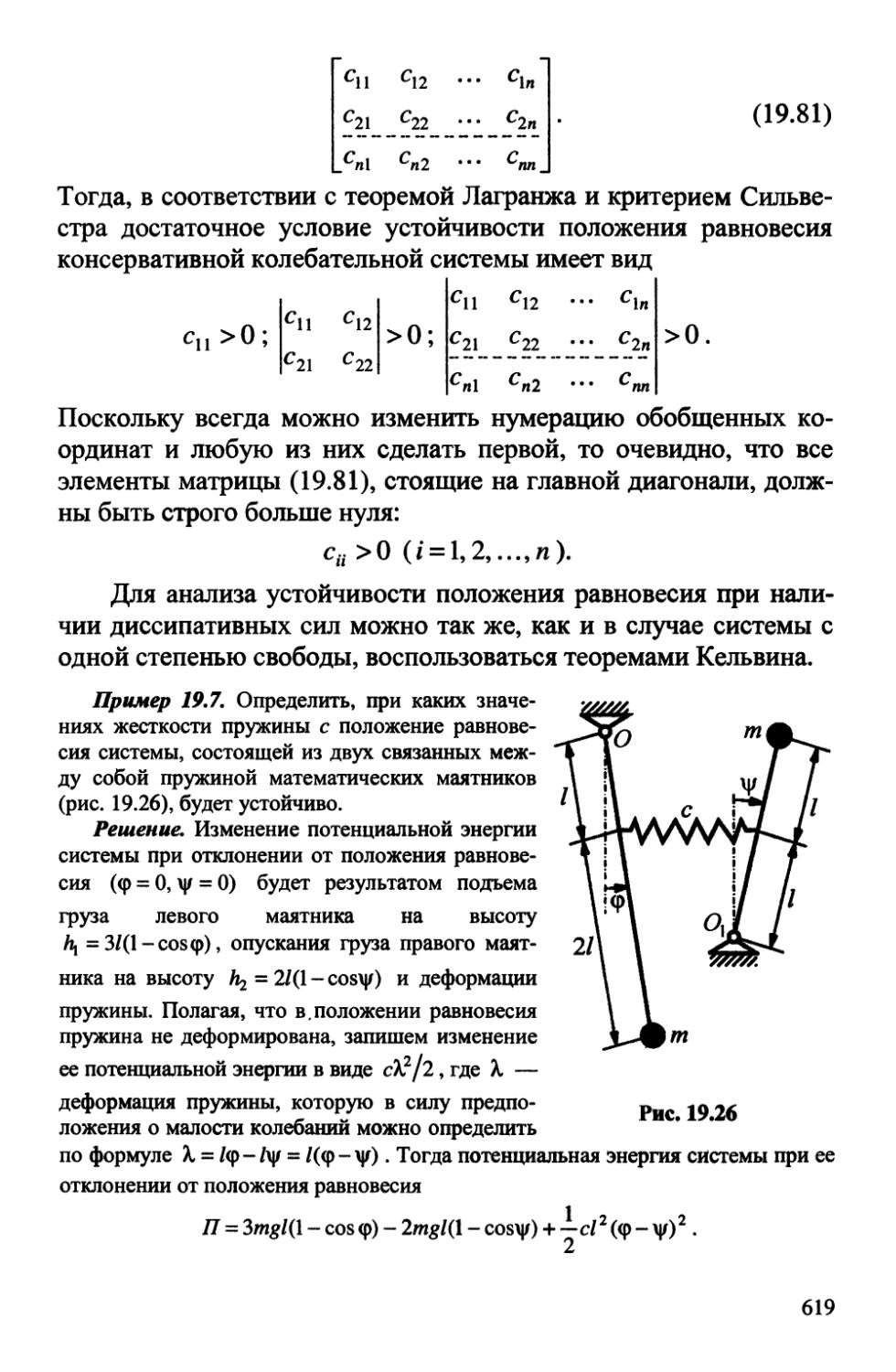
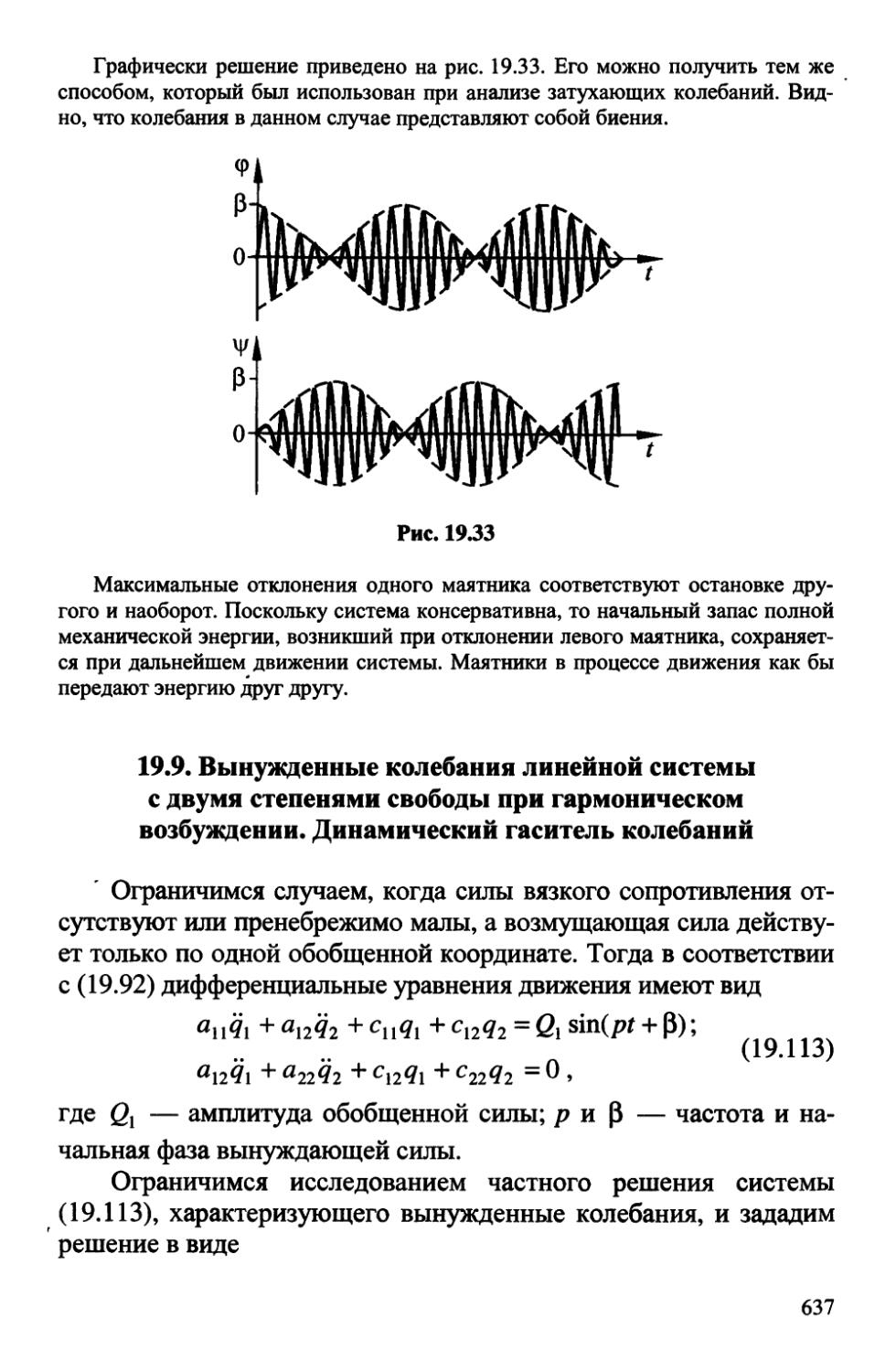
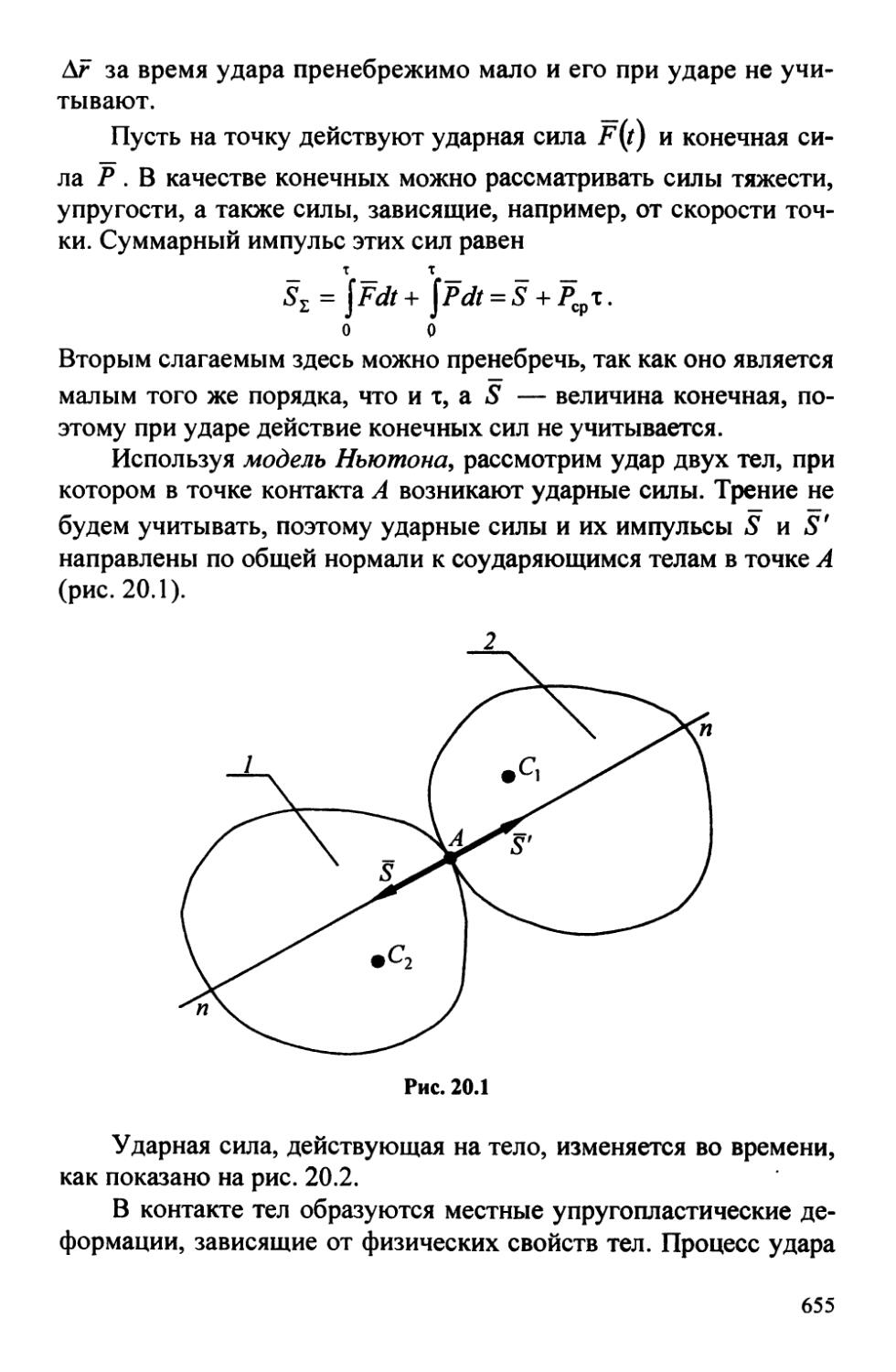
Text
«Механика в техническом университете»
Серия основана в 1999 году
В восьми томах
Том 1
Ответственный редактор К С. Колесников
Редакционный совет:
К. С. Колесников (председатель)
Н.А. Алфутов
О.С. Нарайкин
Д.Н. Попов
О А. Ряховский
В.А. Светлицкий
В.И. Усюкин
КВ. Фролов
И. С. Шумилов
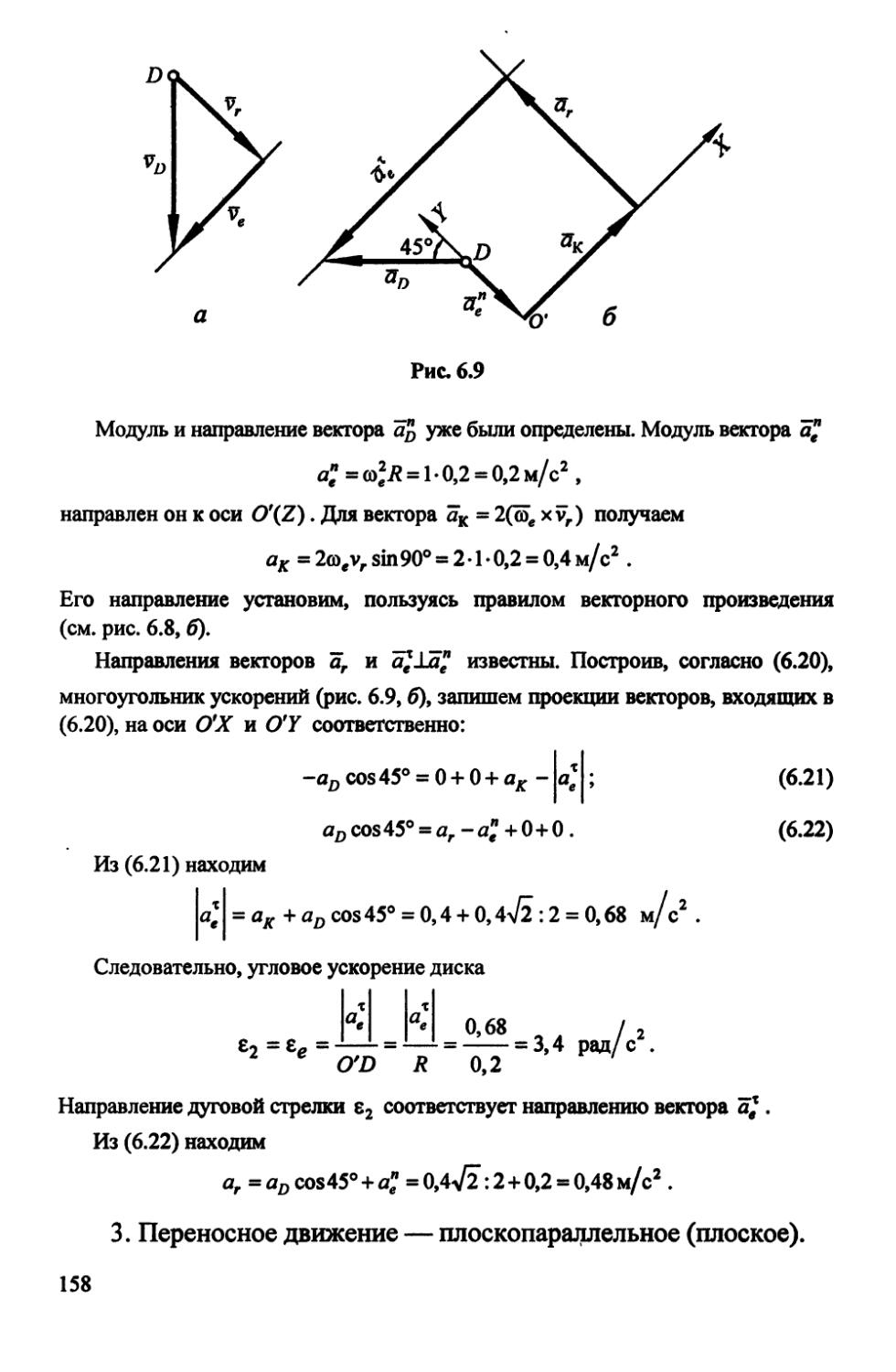
Москва
Издательство МГТУ имени Н.Э. Баумана
2005
КУРС
ТЕОРЕТИЧЕСКОЙ
МЕХАНИКИ
Под редакцией К.С. Колесникова
Издание третье, стереотипное
Допущено Министерством образования
Российской Федерации
в качестве учебника для студентов
высших учебных заведений, обучающихся
по направлению подготовки дипломированных специалистов
в области техники и технологии
Москва
Издательство МГТУ имени Н.Э. Баумана
2005
УДК 531.8 @75.8)
ББК 22.21
К93
Рецензенты: д-р физ.-мат. наук В. В. Сазонов, кафедра
теоретической механики Московского государственного
авиационного института (технического университета МАИ)
j
Авторы: В. И Дронг, В. В. Дубинин, М. М. Ильин,
К. С. Колесников, В. А. Космодемьянский, Б. П. Назаренко,
A. А. Панкратов, П. Г, Русанов, Ю. С Саратов, Ю. М. Степанчук,
Г. М. Тушева, Я. М. Шкапов
--?
К93 Курс теоретической механики: Учебник для вузов / В. И. Дронг,
B. В. Дубинин, М. М. Ильин и др.; Под общ. ред. К. С. Колесникова. 3-е
изд., стереотип. — М.: Изд-во МТУ им. Н. Э. Баумана, 2005. — 736 с:
ил. (Сер. Механика в техническом университете; Т. 1).
ISBN 5-7038-1695-5 (Т. 1)
ISBN 5-7038-1371-9
Изложены кинематика, статика, динамика точки, твердого тела и механи-
механической системы; аналитическая механика; теория колебаний; теория удара; вве-
введение в динамику тел переменной массы; основы небесной механики. Приведе-
Приведены примеры решения задач.
Содержание учебника соответствует программе и курсу лекций, которые
авторы читают в МГТУ им. Н. Э. Баумана.
Для студентов машиностроительных вузов и технических университетов.
Может быть полезен аспирантам и преподавателям, а также специалистам в
области статики и динамики механических систем.
УДК 531.8 @75.8)
ББК 22.21
© Коллектив авторов, 2002
ISBN 5-7038-1695-5 (Т. 1) © МГТУ им. Н.Э. Баумана, 2002
ISBN 5-7038-1371-9 © Издательство МГТУ
им. Н.Э. Баумана, 2002
Предисловие
Учебник является результатом многолетней преподавательской
деятельности авторов в МГТУ им. Н. Э. Баумана, выпускающем инжене-
инженеров-конструкторов и исследователей, которые специализируются в облас-
области машино- и приборостроения. Ему предшествовали учебники, написан-
написанные также преподавателями университета В. В. Добронравовым,
А. Л. Дворниковым, Н. Н. Никитиным, которые переиздавались не-
несколько раз и сыграли большую роль в обучении студентов.
Переход к университетскому инженерному образованию потребо-
потребовал расширения содержания курса, более полной физической трактовки
ряда вопросов и естественного усложнения используемого математиче-
математического аппарата. С этой целью в разделе «Кинематика» более полно из-
изложена глава «Общий случай движения твердого тела».
Статика излагается как самостоятельный раздел, поскольку такие
предметы, как сопротивление материалов, теория механизмов и меха-
механика машин, детали машин, предметы инженерного проектирования,
требуют от студента четкого представления о способах преобразования
и передачи силовых взаимодействий в механизмах машины.
Значительные дополнения сделаны в разделе «Динамика». Здесь
введены интегральные вариационные принципы, элементы небесной
механики; более полно изложены теория колебаний, теория удара и не-
некоторые другие вопросы.
Материал в учебнике распределен между авторами следующим
образом: Предисловие, Введение, главы 8-12 написаны К. С. Колесни-
Колесниковым (примеры в гл. 8-12 составлены В. И. Дронтом); § В1-В6, В8
гл. 6 — Г. М. Тушевой; § В7, § 4.2, гл. 5, § 16.2 и 16.3 — П. Г. Русановым;
главы 1, 2, 7, § 16.1 — П. М. Шкаповым; главы 3, 4 — Б. П. Назаренко;
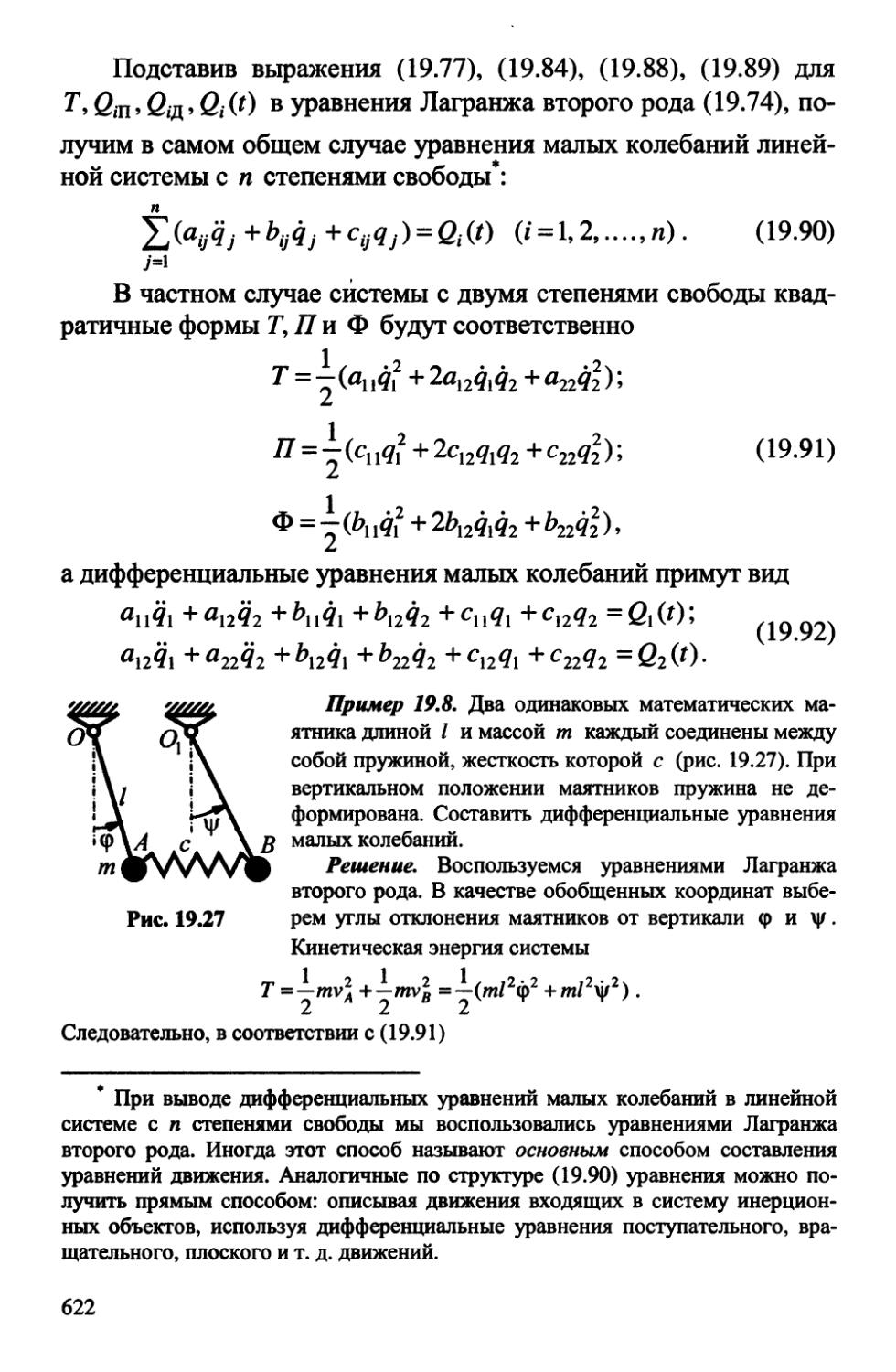
гл. 13, § 19.10 — Ю. С. Саратовым; главы 14, 15, 20 — В. В. Дубини-
Дубининым; § 15.6,15.7 — Ю. М. Степанчуком; главы 17, 18 — В. И. Дронтом;
§ 18.6 — В. А. Космодемьянским; гл. 19 — М. М. Ильиным; главы 21 и
22 — А. А. Панкратовым.
Авторы будут благодарны читателям, приславшим замечания и
пожелания по адресу: 105005, Москва, 2-я Бауманская, 5, Издательство
МГТУ им. Н.Э. Баумана.
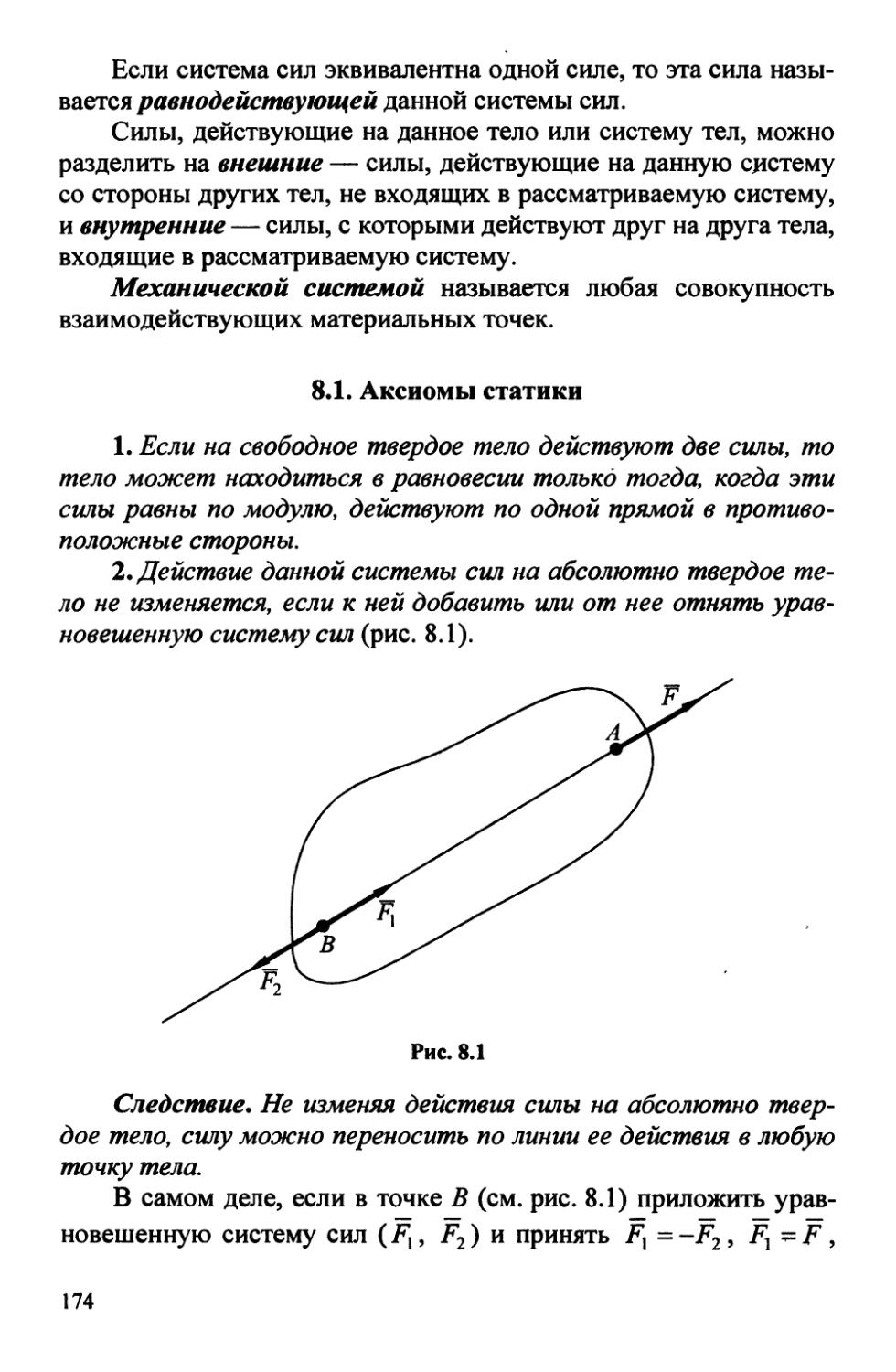
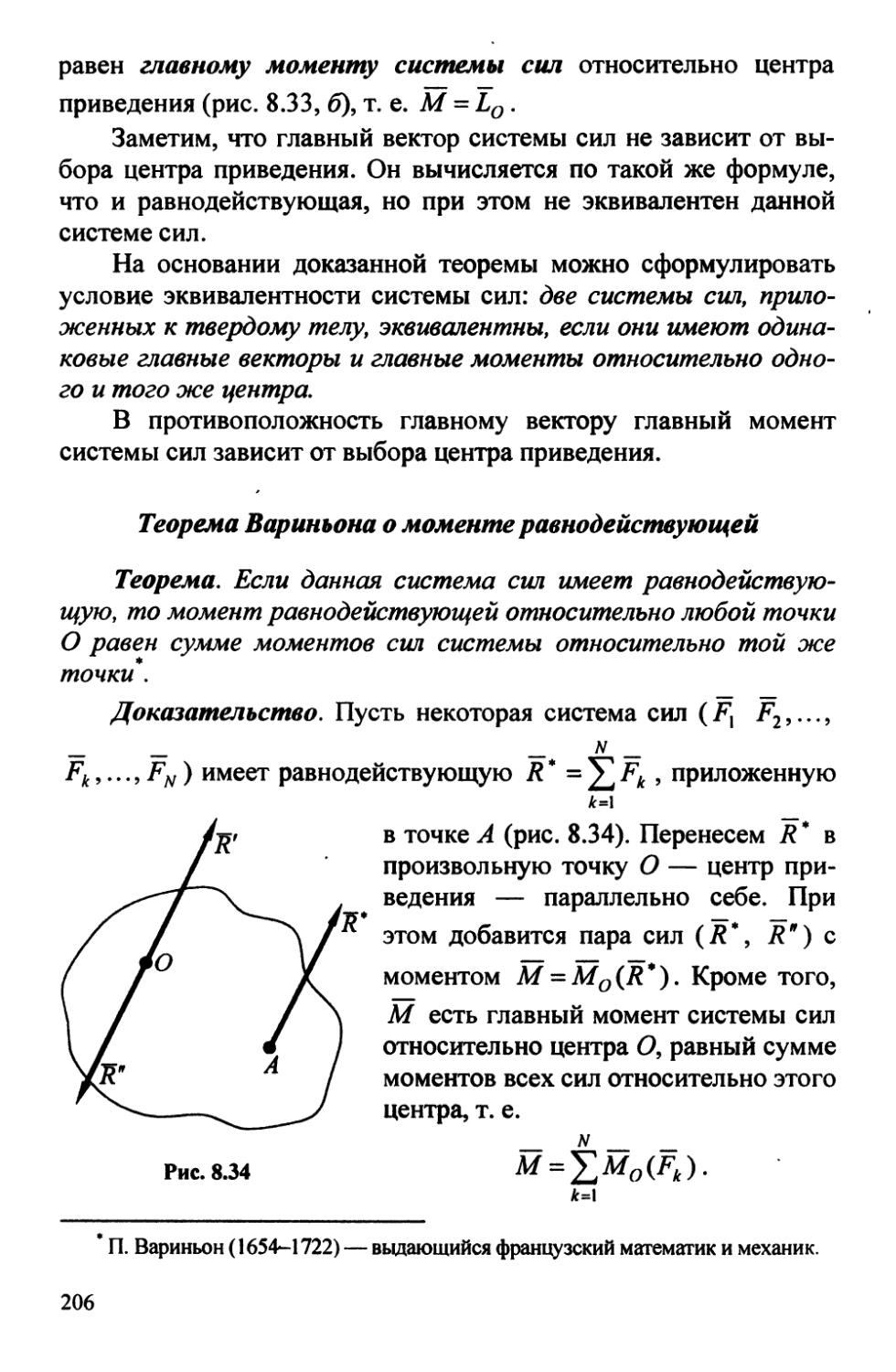
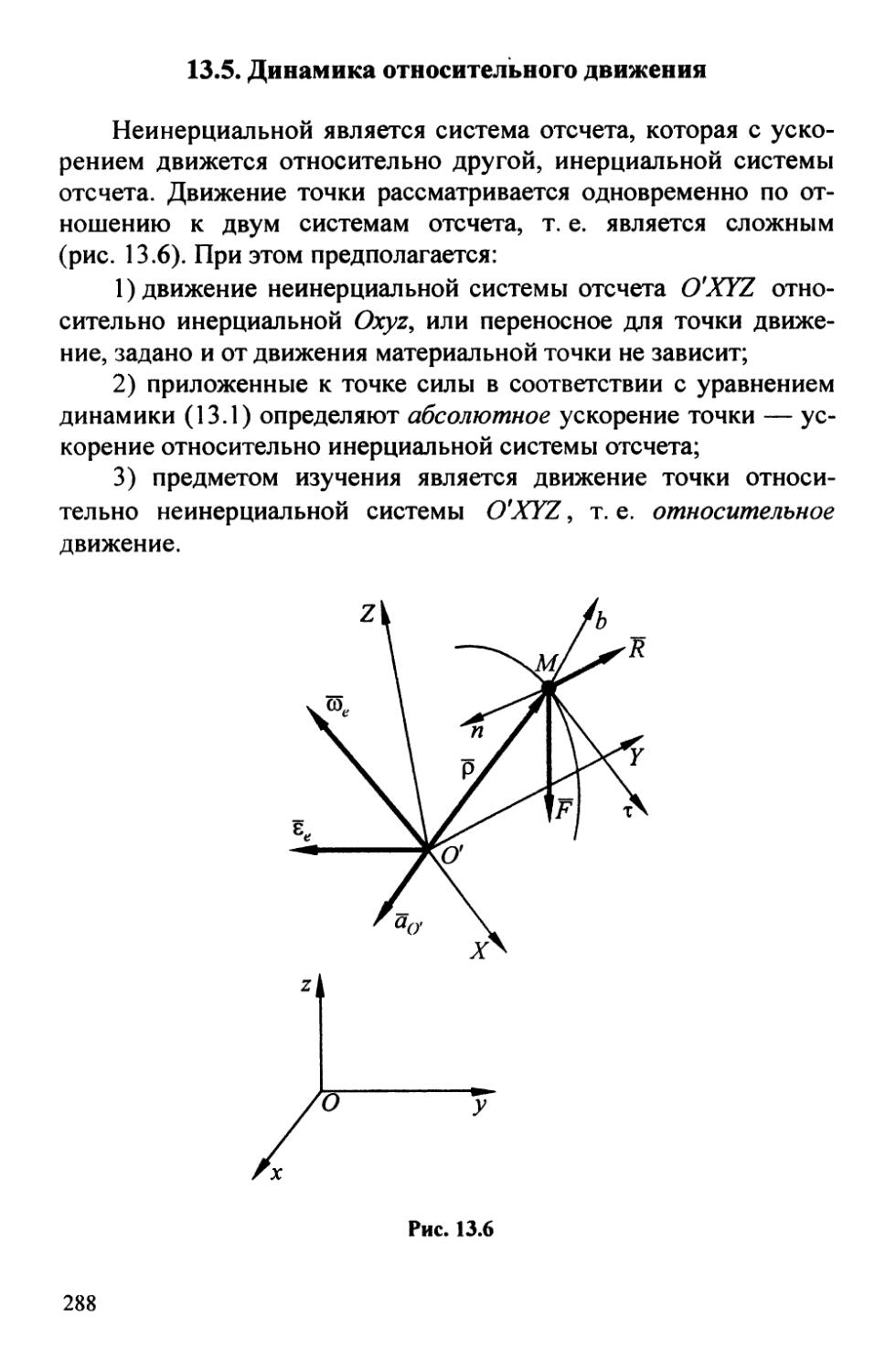
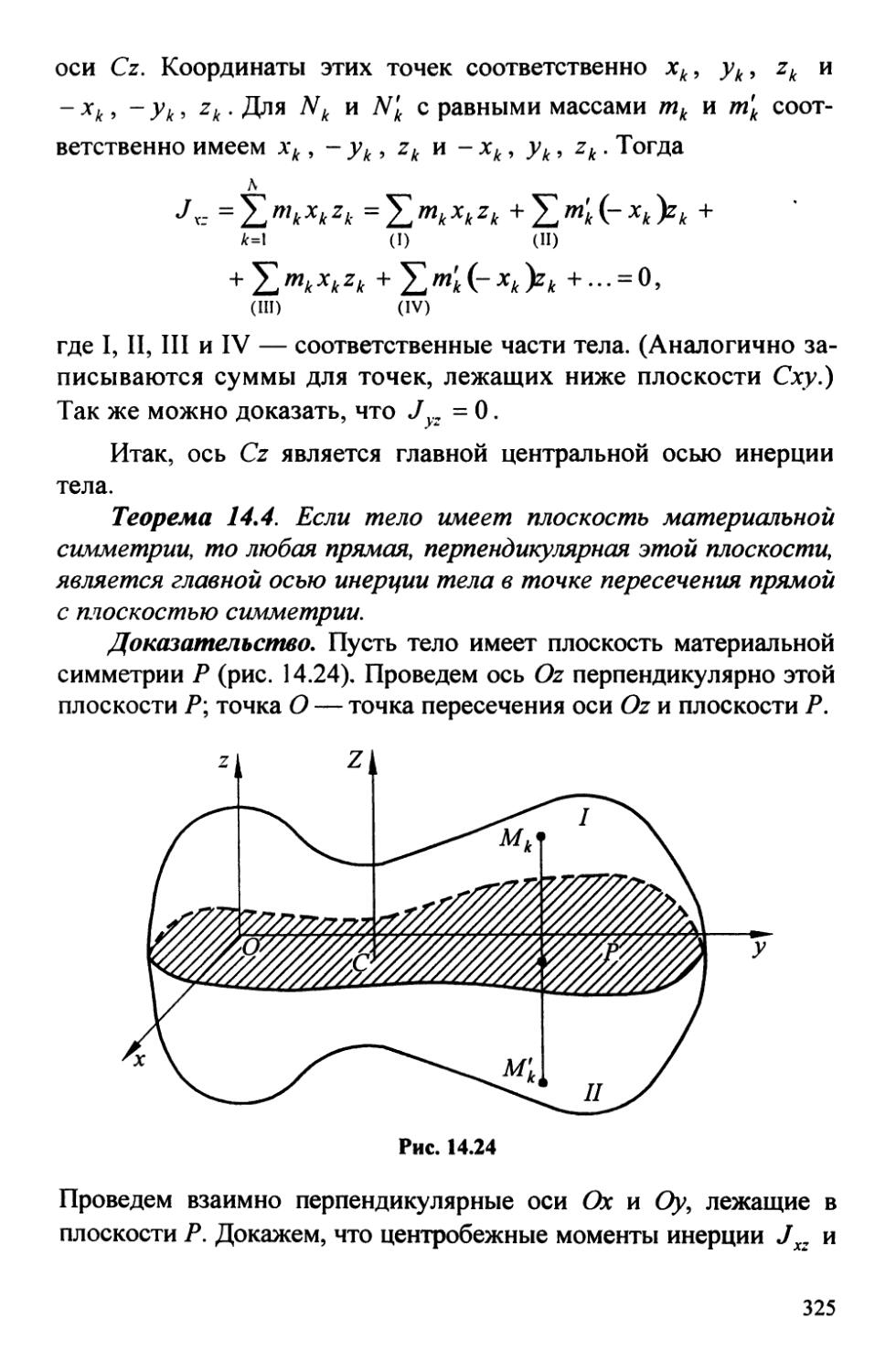
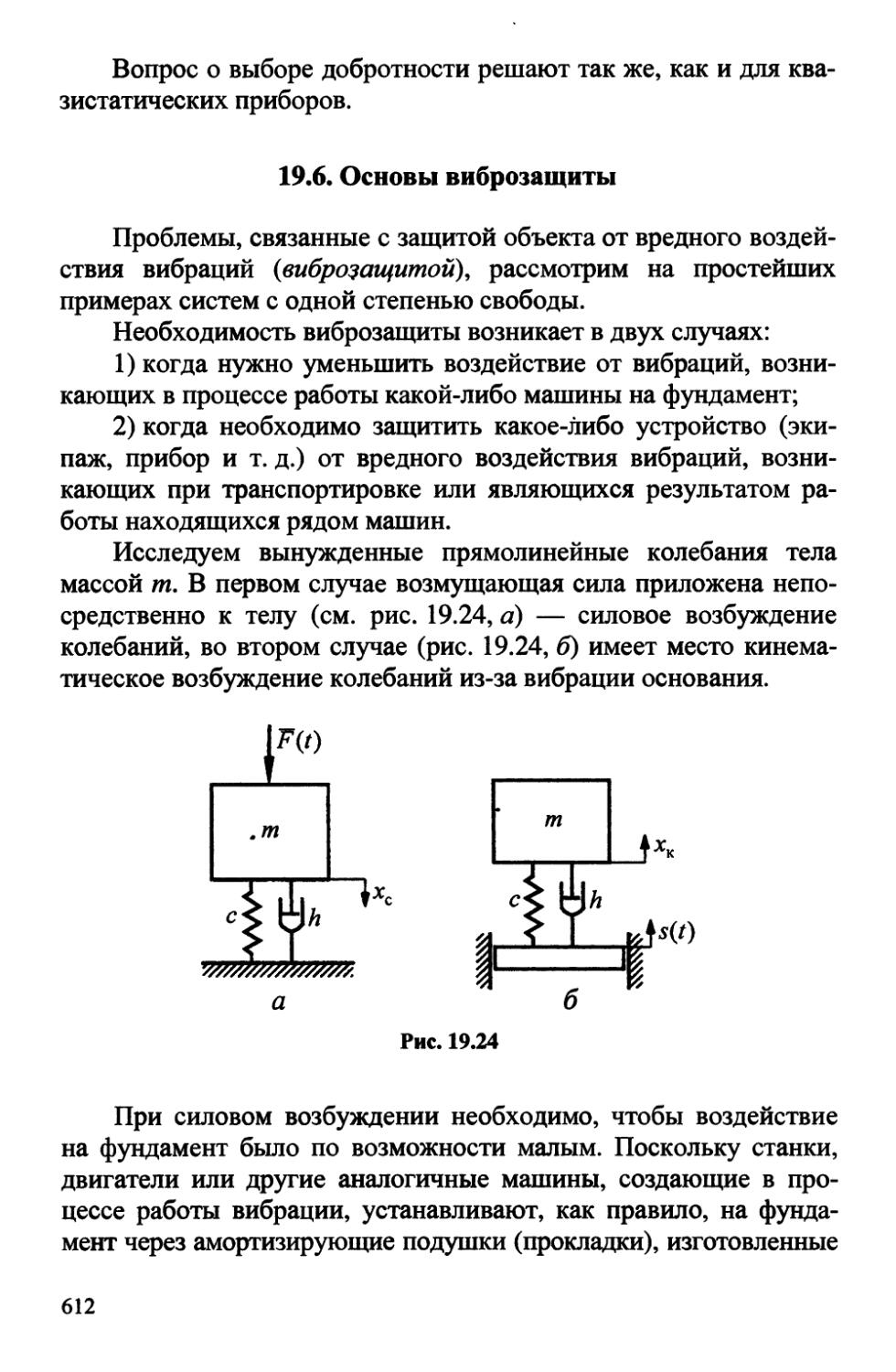
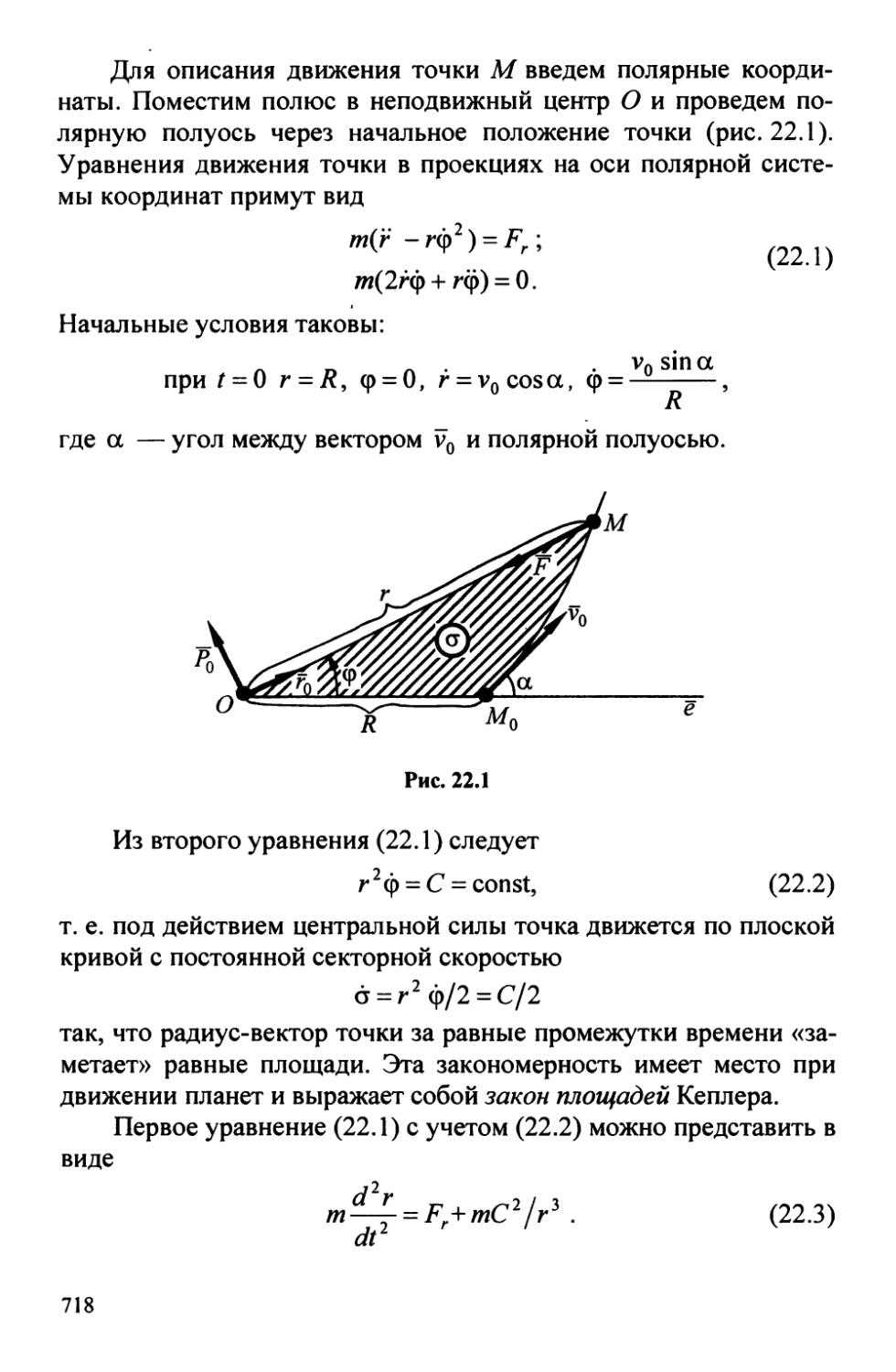
Введение
Теоретическая механика (классическая механика Галилея-
Ньютона) есть наука об общих законах механического движения
и взаимодействия материальных тел. Будучи по существу одним
из разделов физики, теоретическая механика выделилась в само-
самостоятельную дисциплину и получила широкое развитие благода-
благодаря своим обширным и важным приложениям в естествознании и
технике, одной из основ которой она является. Беря свое начало
от техники и развиваясь вместе с ней, теоретическая механика
особенно тесно связана с техническими науками, в которых зако-
законы и методы механики широко используются как при обоснова-
обосновании ряда исходных положений, так и при проведении многочис-
многочисленных конкретных инженерных расчетов.
Движение, рассматриваемое в самом общем смысле слова,
есть форма существования материи и охватывает все происходя-
происходящие во вселенной изменения м процессы. В теоретической меха-
механике изучается одна из форм движения — механическое, состоя-
состоящее в том, что тело изменяет с течением времени свое положение
в пространстве по отношению к другим телам.
Для учета меры механического взаимодействия между тела-
телами в классической механике, основание которой положили Гали-
лео Галилей A564-1642) и Исаак Ньютон A643-1727), вводится
понятие о силе. Для данного тела сила является внешним факто-
фактором, изменяющим его движение. Характер движения зависит как
от силы, так и от степени инертности тела. Чем больше инерт-
инертность тела, тем медленнее изменяется его движение под действием
данной силы, и наоборот. Мерой инертности тела является его
масса. Таким образом, понятиями, лежащими в основе классиче-
классической механики, являются: движущаяся материя (материальные те-
тела), пространство и время как формы существования движущейся
материй, масса как мера инертности материальных тел и сила как
мера механического взаимодействия между телами.
В классической механике Галилея-Ньютона пространство
считается трехмерным евклидовым, свойства которого не зависят
от движущихся в нем материальных объектов. Положение точки
в таком пространстве относительно какой-либо системы отсчета
определяется тремя независимыми параметрами, или координа-
координатами точки. Время в классической механике универсально. Оно
не связано с пространством и движением материальных объек-
объектов. Во всех системах отсчета, движущихся друг относительно
друга, оно протекает одинаково. Массы материальных объектов
не зависят от скорости их движения.
После Г. Галилея и И. Ньютона (Галилей опубликовал «Бе-
«Беседы о науках» в 1638 г., Ньютон — «Математические принципы
натуральной философии» в 1687 г.) методы механики начали бы-
быстро совершенствоваться благодаря применению мощного мате-
математического аппарата — анализа бесконечно малых. Основная
заслуга в приложении этих методов к решению задач динамики
принадлежит великому математику и механику Леонарду Эйле-
Эйлеру A707-1783), являвшемуся с 1727 г. действительным членом
молодой тогда Российской Академии наук и прожившему в Пе-
Петербурге 31 год. Л. Эйлер разработал аналитические методы
решения задач динамики путем составления и интегрирования
дифференциальных уравнений. Аналитическое направление в
развитии механики достигло наиболее широких обобщений в ка-
капитальном сочинении «Аналитическая механика» крупнейшего
французского ученого Жозефа Луи Лагранжа A736-1813), вы-
вышедшем в 1788 г.
Из наших соотечественников М. В. Остроградскому A801-
1861) принадлежит ряд существенных результатов в развитии тео-
теоретической механики по аналитическому пути, в частности, им
дан вариационный принцип динамики, который называется
принципом Остроградского-Гамильтона, так как независимо от
М. В. Остроградского в несколько менее общем виде он одно-
одновременно был сформулирован ирландским математиком Уилья-
Уильямом Гамильтоном A805-1865). К двум случаям, когда движение
твердого тела вокруг неподвижной точки можно аналитически
изучить до конца, С. В. Ковалевская A850-1891) добавила тре-
третий. Работы А. М. Ляпунова A857-1918) об устойчивости движе-
движения до сих пор в мировой науке являются непревзойденными.
Н.Е.Жуковский A847-1921) создал себе мировую известность
работами в области аэродинамики. Он значительно расширил
границы механики и разработал прочную теоретическую базу для
ряда разделов техники. Для него механика была не разделом при-
прикладной математики, а подлинной наукой о природе, использую-
использующей все средства математики, но во всех стадиях своего развития
опирающейся на эксперимент. Н. Е. Жуковский в 1878 г. органи-
организовал первую в России кафедру теоретической механики в ИМТУ
(МВТУ им. Н. Э. Баумана) и заведовал ею в течение 43 лет до
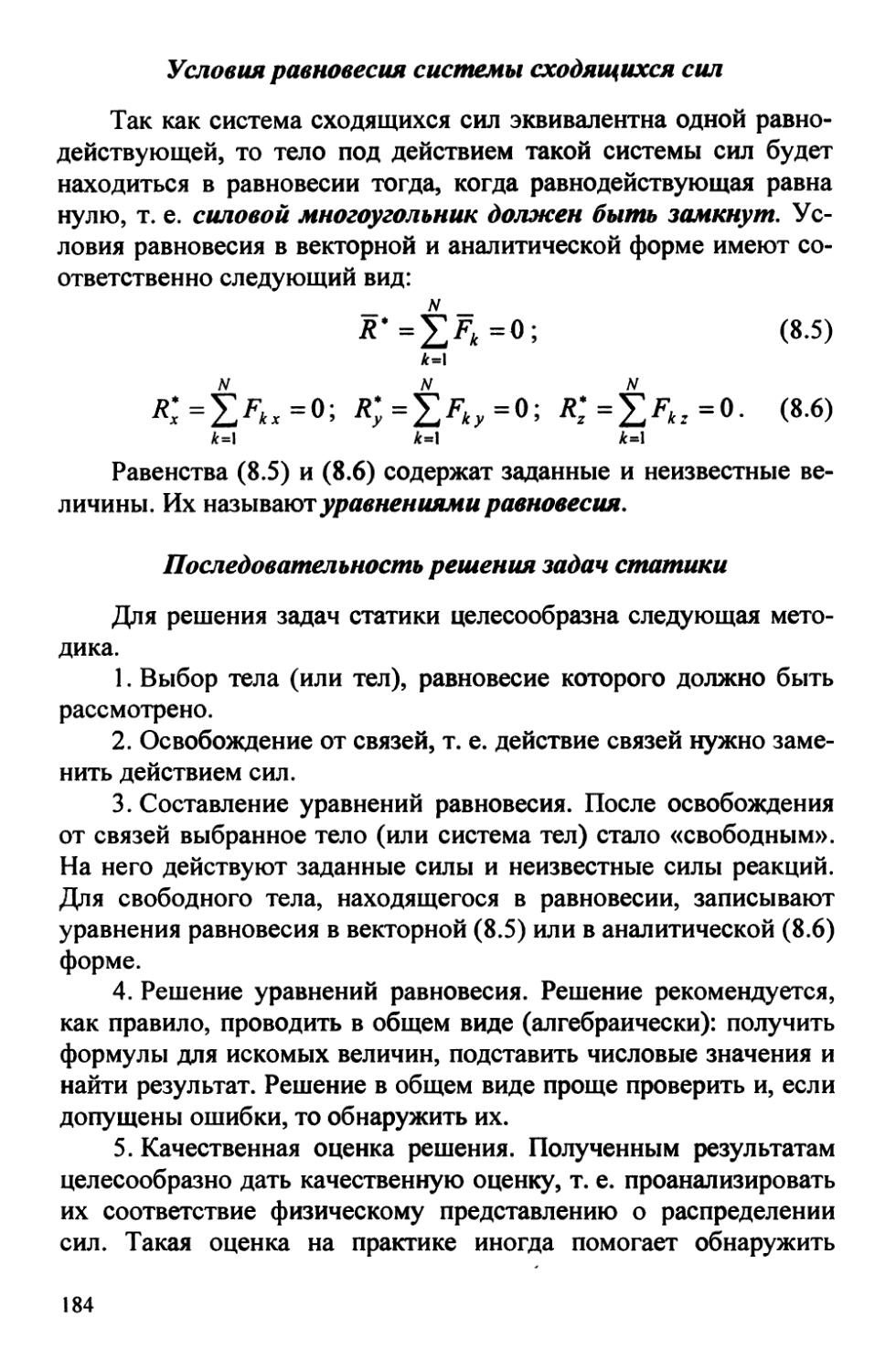
конца своей жизни. И. В. Мещерский A859-1935) впервые дал
уравнение движения точки переменной массы.
Успехи физики в начале XX в., ознаменовавшиеся новыми
исследованиями в области электродинамики и строения мате-
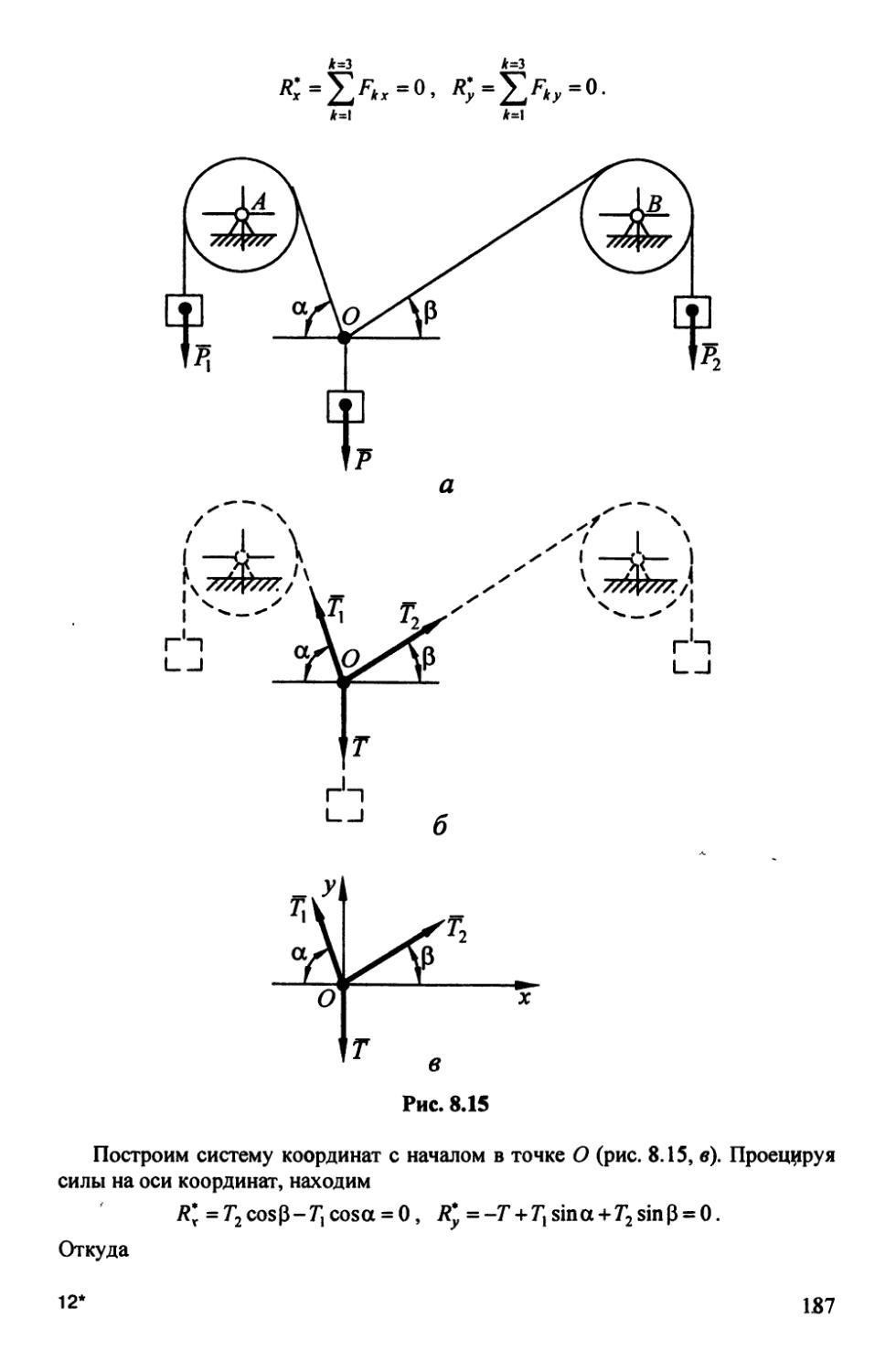
материи, показали, что законы классической механики Галилея-
Ньютона применимы только к движению тел, размеры которых
значительно больше размеров атома, а скорости — значительно
меньше скорости света. Для тел очень малых размеров и для
очень больших скоростей выводы классической механики теряют
свою силу.
В теории относительности, созданной Альбертом Эйнштей-
Эйнштейном A879-1955), свойства пространства зависят от материальных
объектов и их движения; пространство и время связаны между
собой, они рассматриваются как единое четырехмерное про-
пространство - время; время при этом зависит от того, в какой сис-
системе отсчета оно изменяется. Теория относительности внесла до-
довольно существенные изменения в основы механики и показала
ограниченность ньютоновских представлений о пространстве,
времени и материи, вследствие чего стало возможным дать тео-
теоретическое обоснование ряду явлений, которые не могли быть
объяснены с точки зрения классической механики. Кроме того,
классическая механика оказалась неприменимой к теории строе-
строения атома, и это обстоятельство явилось причиной возникнове-
возникновения атомной или квантовой механики.
Несмотря на это, классическая механика Галилея—Ньютона
продолжает сохранять свою огромную ценность как мощное
орудие научного исследования различных вопросов естество-
естествознания и техники, а ее законы дают при этом вполне достаточ-
достаточную для практики точность. Она явилась основой для создания
многих прикладных направлений, получивших большое разви-
развитие. Это механика жидкости и газа, механика деформируемого
твердого тела, теория колебаний, динамика и прочность машин,
гироскопия, теория полета и управления, навигация и др. Клас-
Классическая механика замечательна тем, что наряду со строгостью
изложения имеет широкое инженерное приложение. Все разно-
разнообразные технические сооружения и все современные расчеты,
связанные с космическими полетами, построены на основе за-
законов классической механики и, как показывает опыт, с успехом
выполняют свое назначение. Поправки и изменения, вносимые в
законы классической механики теорией относительности и
квантовой механикой, исчезающе малы в обычных условиях и
становятся заметными только при больших скоростях, близких к
скорости света, и для тел, размеры которых имеют порядок раз-
размеров атома. Поэтому классическая механика Галилея-Ньютона
никогда не потеряет своего научного значения и практической
ценности.
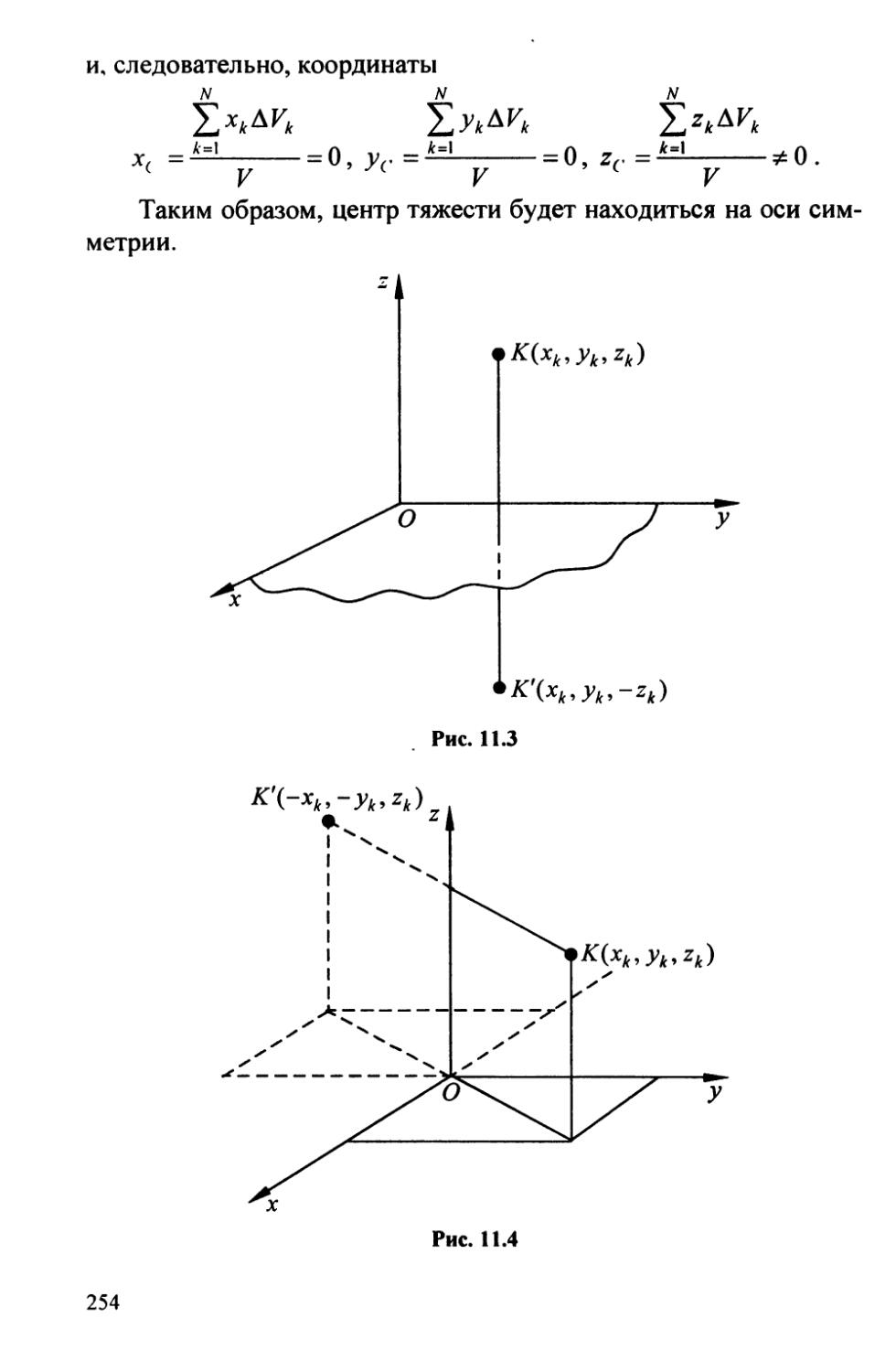
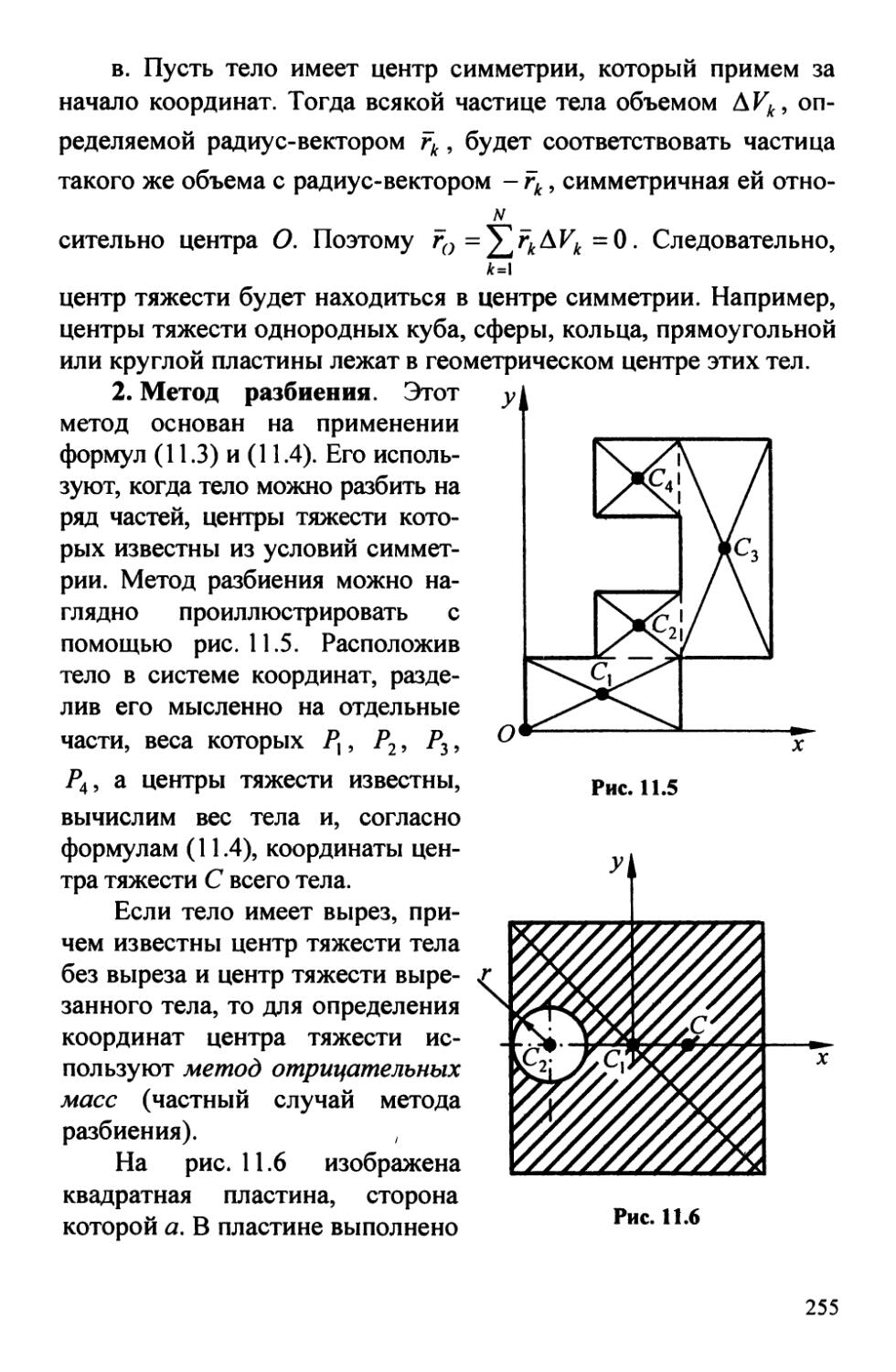
НЕКОТОРЫЕ СВЕДЕНИЯ ИЗ ТЕОРИЙ ВЕКТОРОВ
В.1. Скалярные и векторные величины.
Единичные векторы
В теоретической механике широко применяются методы
векторного исчисления, имеющие большое преимущество перед
координатным методом благодаря компактности и физической
наглядности векторных формул.
Главным преимуществом этих методов является независи-
независимость векторных формул от выбора системы координат.
В математической физике встречаются два типа величин:
скалярные и векторные.
Скаляром называется величина, которая не имеет направле-
направления, но выражается числовым значением, не зависящим от выбо-
выбора системы координат.
Вектором называется количественная характеристика,
имеющая как числовое значение, так и направление, и не свя-
связанная с выбором системы координат. Геометрический образ
вектора — это направленный отрезок прямой, определенным об-
образом ориентированный в евклидовом пространстве.
Точки А и В, ограничивающие вектор
АВ (рис. В.1), называют его началом и
концом. Длина отрезка АВ представляет
собой модуль вектора АВ:
\~АВ\=АВ.
Часто вектор обозначают одной бук-
Рис. В.1 вой с чертой над ней:
А=1в,
а его модуль — символом
\А\=А.
Если вектор не связан с какой-либо определенной линией
или точкой, он называется свободным. Вектор, связанный с
прямой, по которой он направлен, называется скользящим. Ес-
Если же вектор связан с точкой своего приложения, он называется
приложенным.
Рассмотрим далее основы векторного исчисления для сво-
свободных векторов.
Два вектора А и В называются равными, если они равны по
модулю и направлены вдоль параллельных прямых в одну сторо-
сторону: если А-В, ATtB ,то А -В .
Если два вектора равны по модулю, но противоположно на-
направлены, т. е. А- В, А\\>В , то А = -В .
Векторы, расположенные в одной плоскости, называются
компланарными.
Если А 11В, то векторы называются параллельными, или
коллинеарнымщ эти векторы могут быть одинаково или противо-
противоположно направленными.
Единичным вектором, или ортом, данного вектора А на-
называется вектор а0, по направлению совпадающий с данным
вектором А , а по модулю равный единице (рис. В.2). Тогда
А =Аа0, или а0 -А/А. (В.1)
10
Умножая вектор А на скаляр т9 полу-
получаем новый вектор
В = тА =тАао,
направленный в ту же или противопо-
противоположную сторону в зависимости от знака
скаляра т. _
Рис. В.2
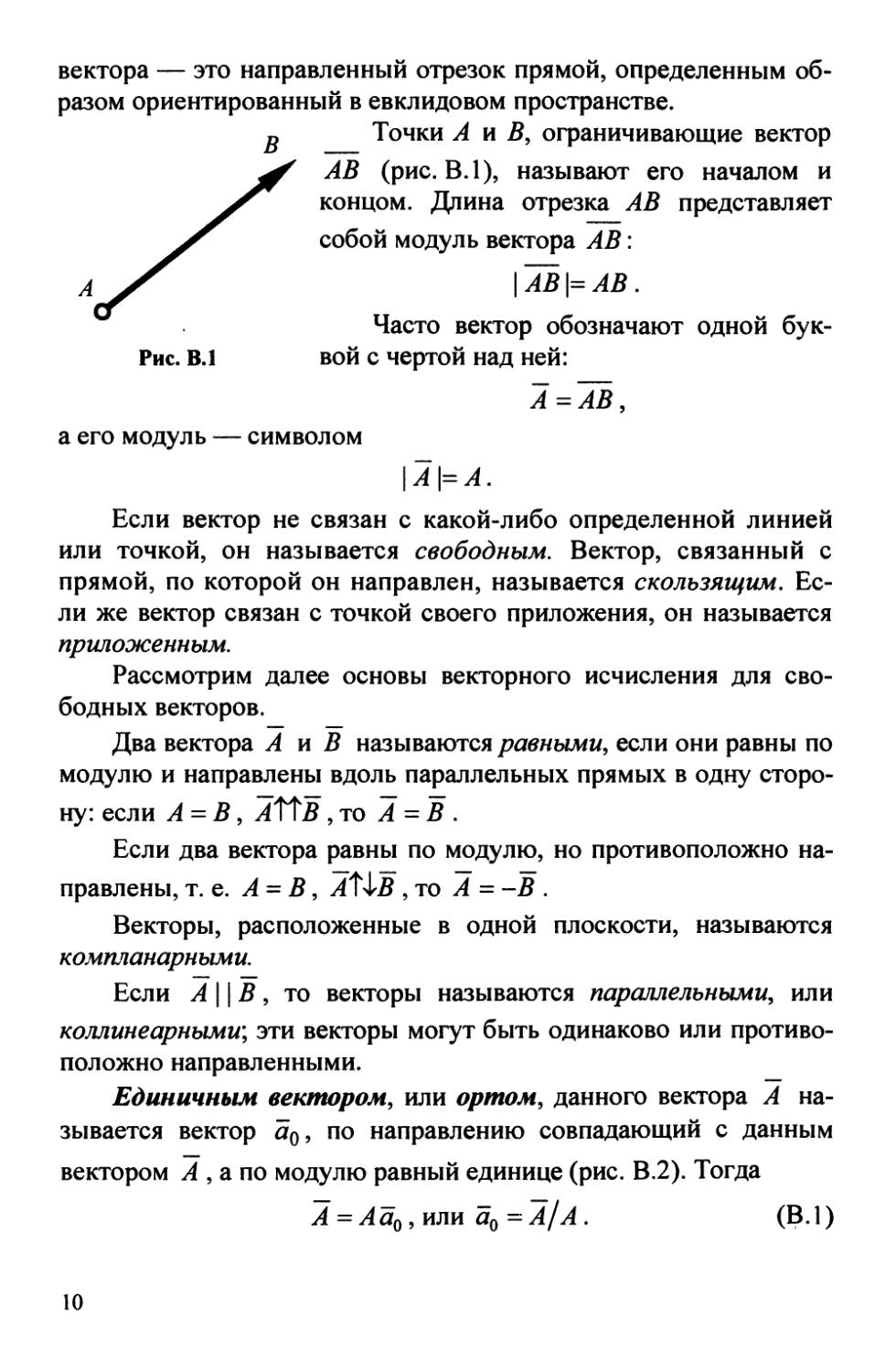
В.2. Проекции вектора на ось и плоскость
Осью называется прямая, на которой установлено положи-
положительное направление отсчета.
Ортогональной проекцией вектора А = АВ на ось I
(рис. В.З) называется отрезок А'В\ заключенный между ортого-
ортогональными проекциями на эту ось на-
начала и конца вектора АВ, или алгеб-
алгебраическая величина, равная произве-
произведению модуля вектора на косинус
угла между направлением вектора А
и положительным направлением оси'/:
(AB)t = ABcos(ABJ) = ± | A'B' |,
или
л
A{ = ^cosD,/). (В.2)
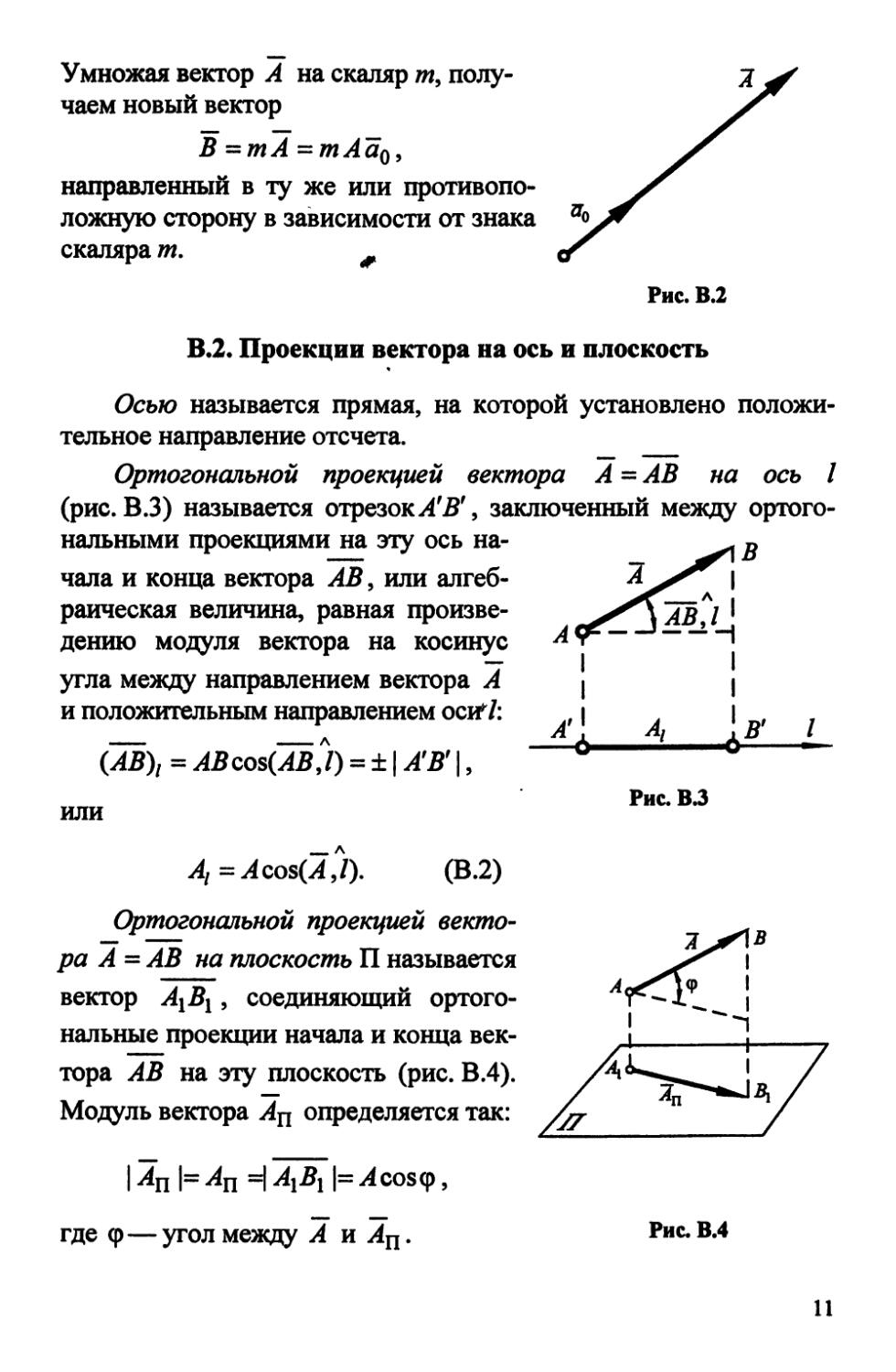
Ортогональной проекцией векто-
вектора А- АВ на плоскость П называется
вектор АХВХ, соединяющий ортого-
ортогональные проекции начала и конца век-
вектора АВ на эту плоскость (рис. В.4).
Модуль вектора Ап определяется так:
Рис. В.З
где ф—угол между А и Ап.
Рис. В.4
11
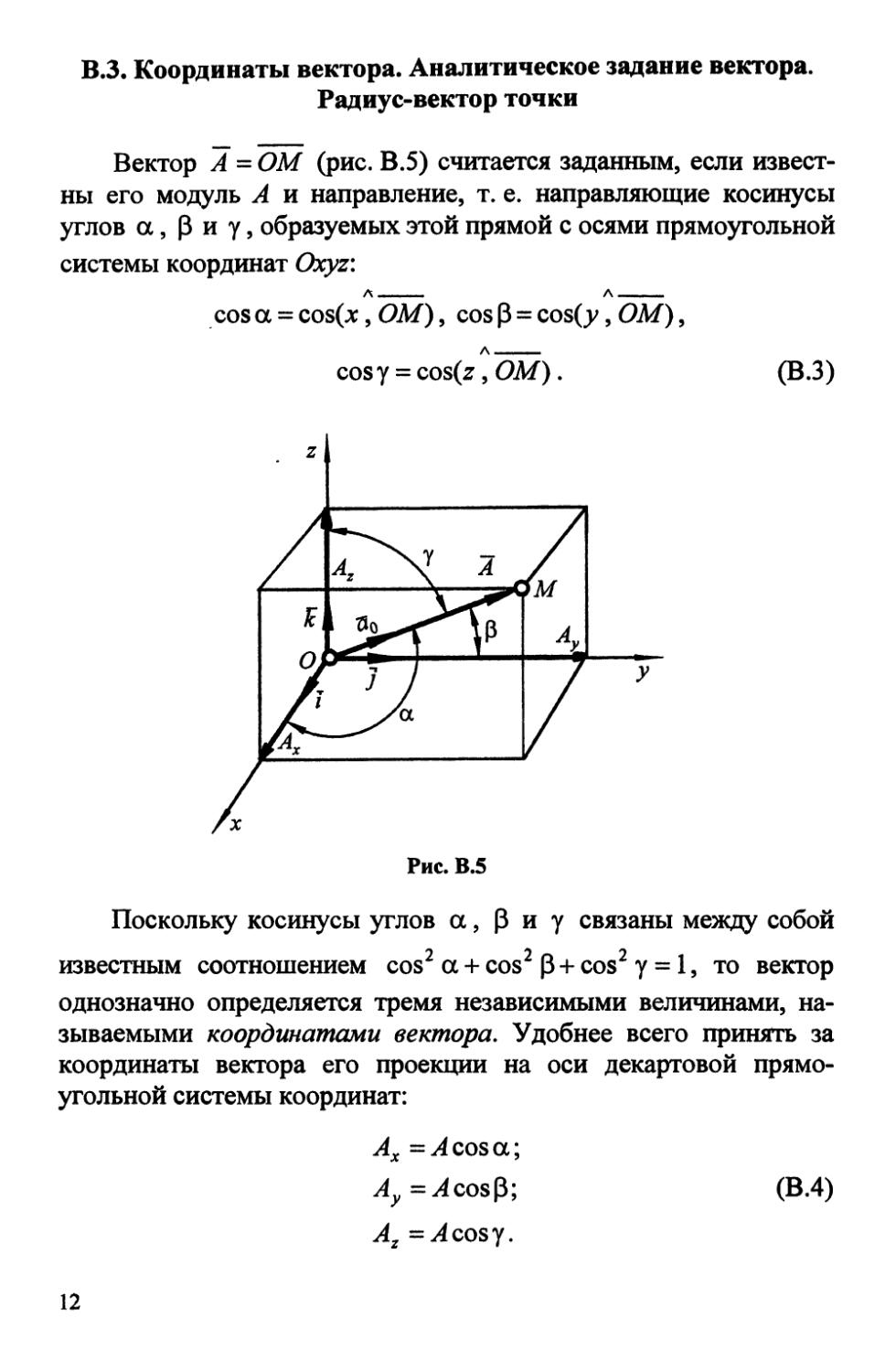
В.З. Координаты вектора. Аналитическое задание вектора.
Радиус-вектор точки
Вектор А = ОМ (рис. В.5) считается заданным, если извест-
известны его модуль А и направление, т. е. направляющие косинусы
углов а 5 р и у, образуемых этой прямой с осями прямоугольной
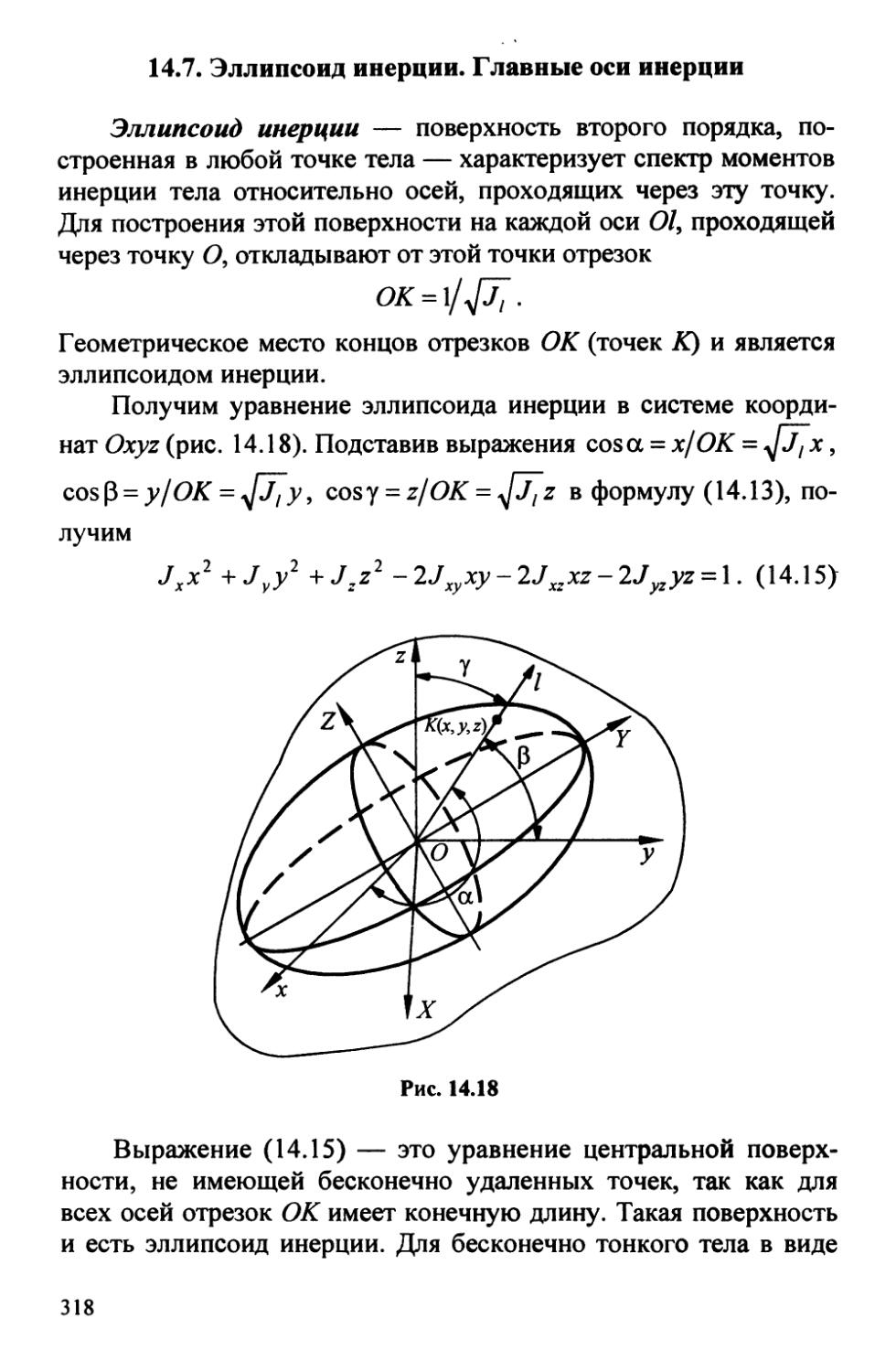
системы координат Oxyz:
cos a = cos(jc , ОМ), cos p = cos(y, ОМ),
= cos(z,0M).
(В.З)
Рис. В.5
Поскольку косинусы углов а, р и у связаны между собой
известным соотношением cos2 a + cos2 Р + cos2 у = 1, то вектор
однозначно определяется тремя независимыми величинами, на-
называемыми координатами вектора. Удобнее всего принять за
координаты вектора его проекции на оси декартовой прямо-
прямоугольной системы координат:
Ах =
Ау =
А2 =
(В.4)
12
Поскольку
**.х • "«
л_ — А «
то модуль вектора и направляющие косинусы, согласно выраже-
выражениям (В.З, В.4), определяются так:
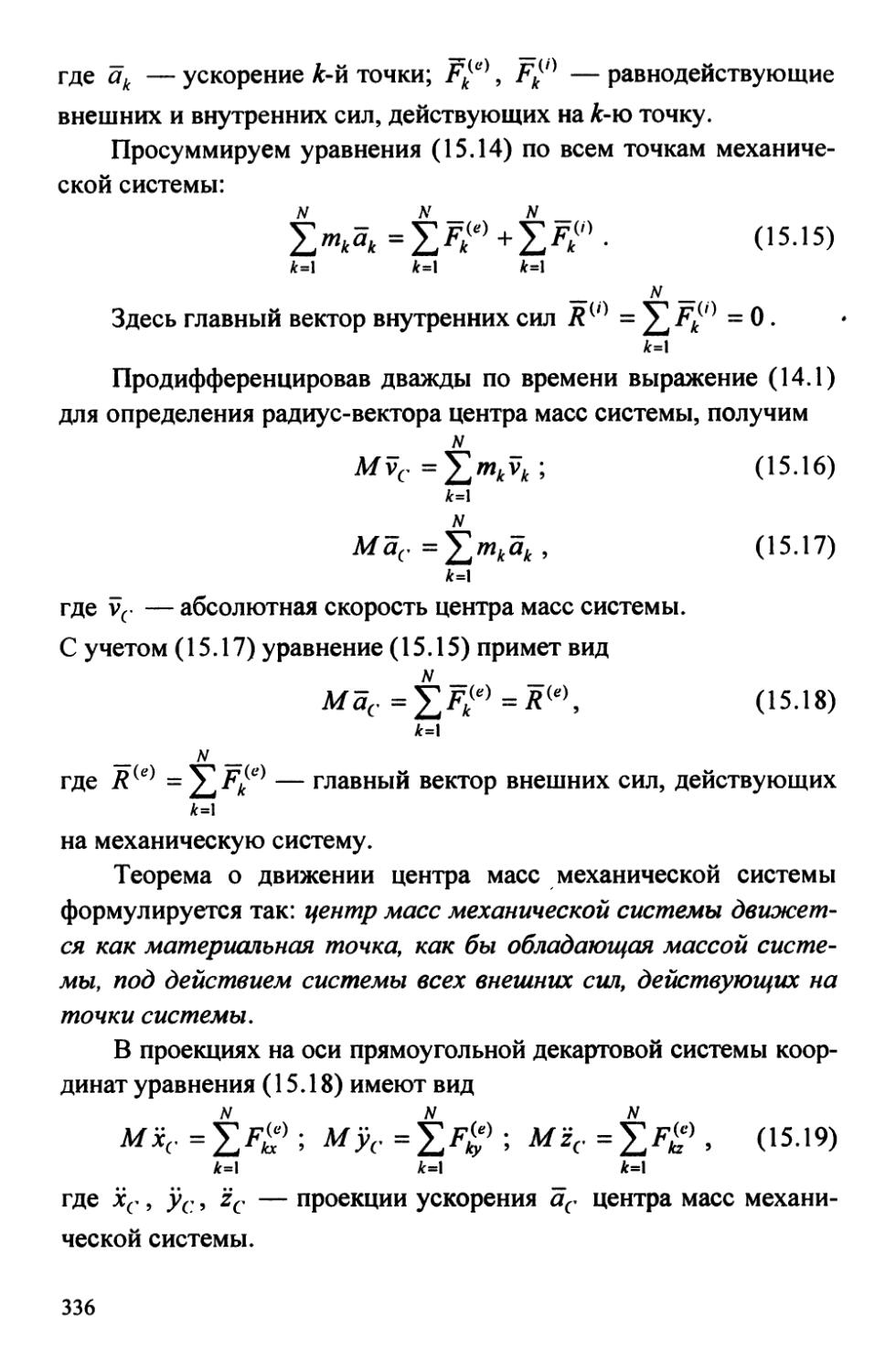
"" "; (в.5)
(В.6)
Ах о АУ Az
cosa=—¦=-, cosP = ——, cosy = —=-.
A A J A
Введем в рассмотрение единичные векторы (или орты) коор-
координатных осей. Обозначим их соответственно i,j9k (см.
рис.В.5). Тогда Ax=Axi=iAcosa9 Ay = Ay]^jAcosP, A2 =
= Azk = к Acosy- ортогональные составляющие вектора А , по-
поэтому
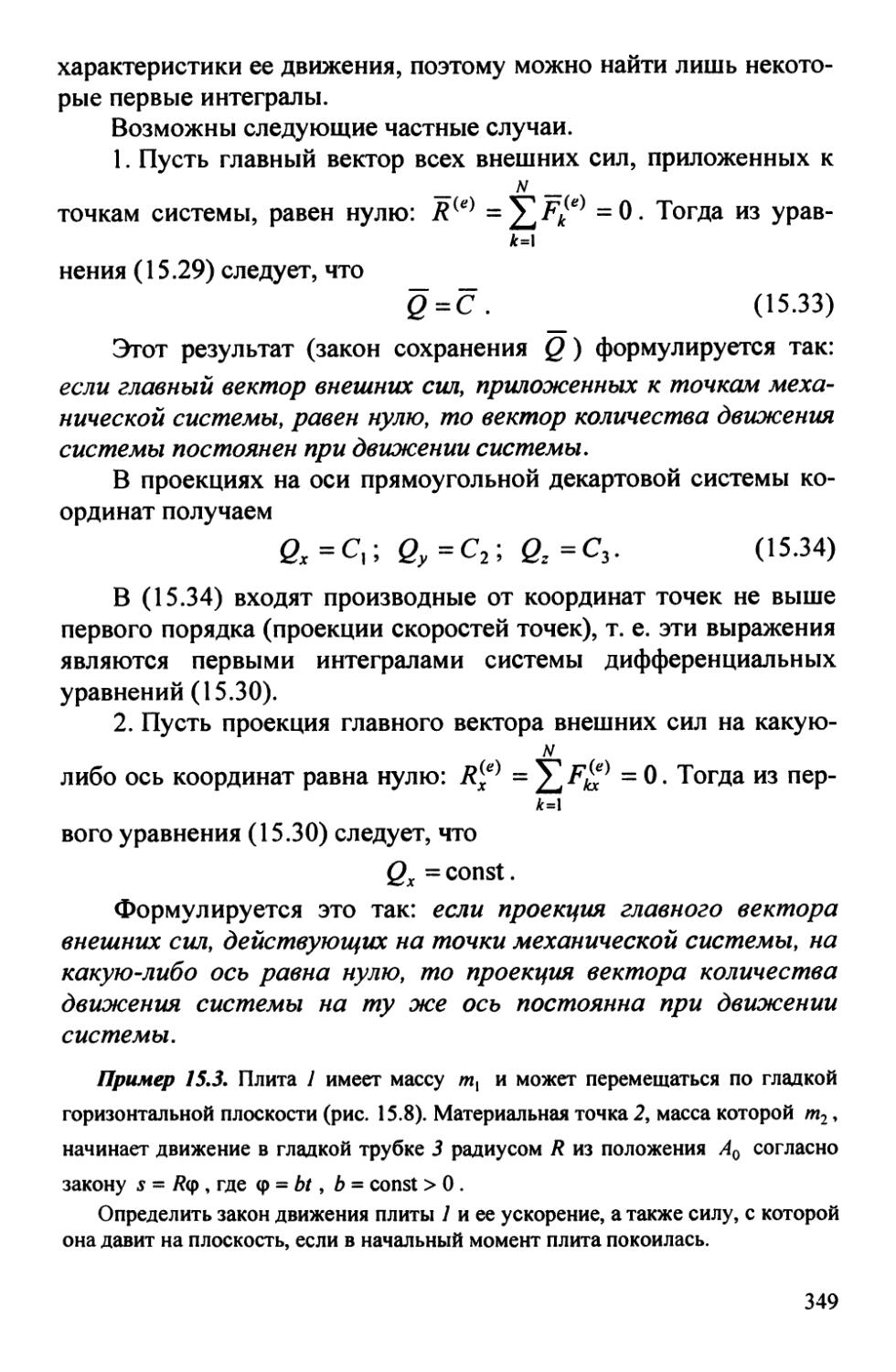
A = AX+Ay+Az= AxT + AyJ + Azk . (B.7)
Однако, согласно (В.1), А=Аа0, ао=А/А. Тогда аОх =
aQz =aOzk= к cosy.
aQy = cos
aOz = cos у,
(В.8)
= a0jc/=/cosa, aOy =a0yj =
Следовательно,
аОх = cos a,
т.е. проекции единичного
вектора а0 на оси коорди-
координат равны косинусам уг-
углов a, P, у для вектора
А.
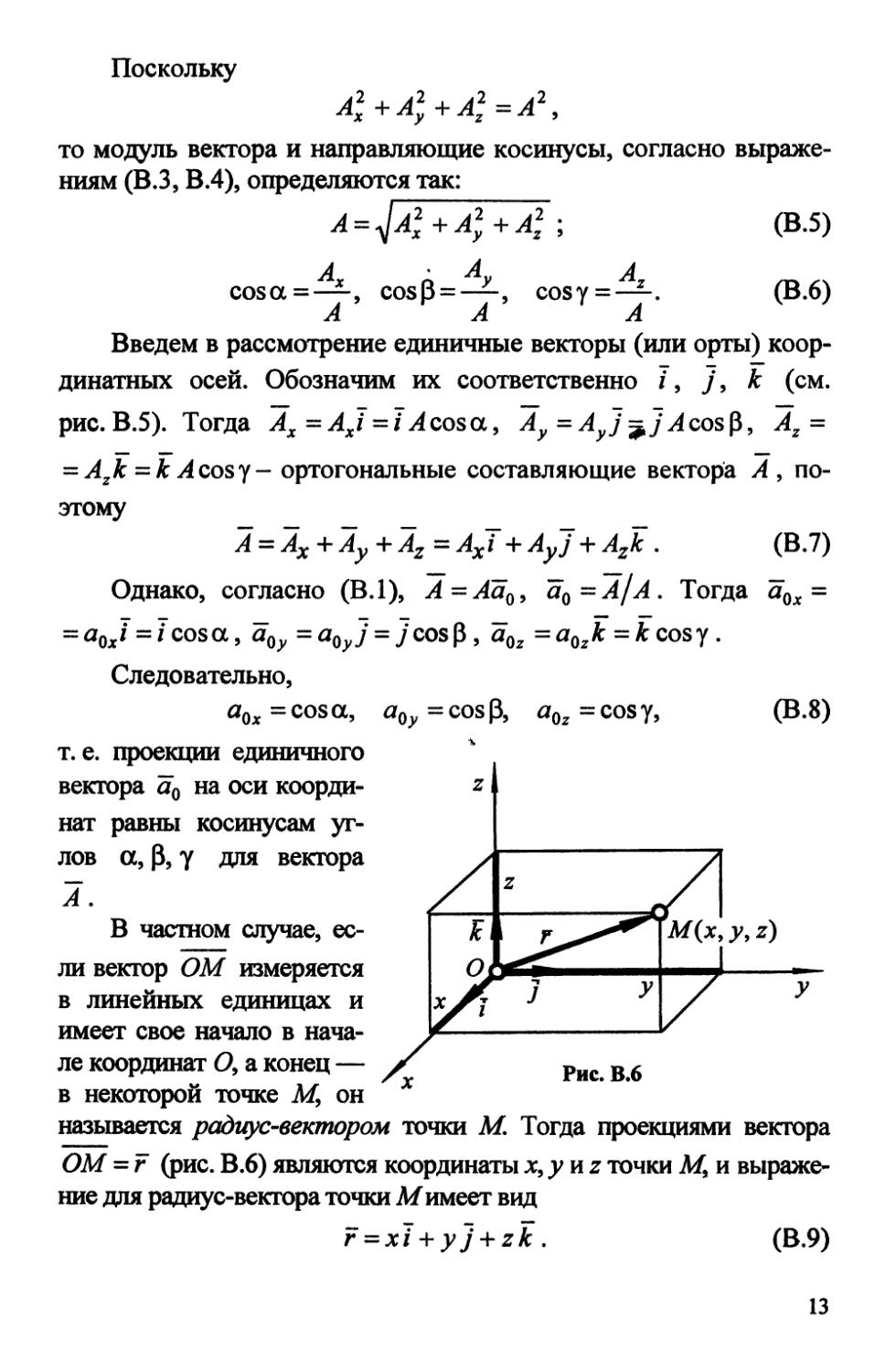
В частном случае, ес-
если вектор ОМ измеряется
в линейных единицах и
имеет свое начало в нача- ,
ле координат О, а конец— / Рис. В.6
в некоторой точке М9 он х
называется радиус-вектором точки М. Тогда проекциями вектора
ОМ = F (рис. В.6) являются координатыx9ynzточки М9 и выраже-
выражение для радиус-вектора точки М имеет вид
7 j zA. (B.9)
13
В.4. Сложение и вычитание векторов
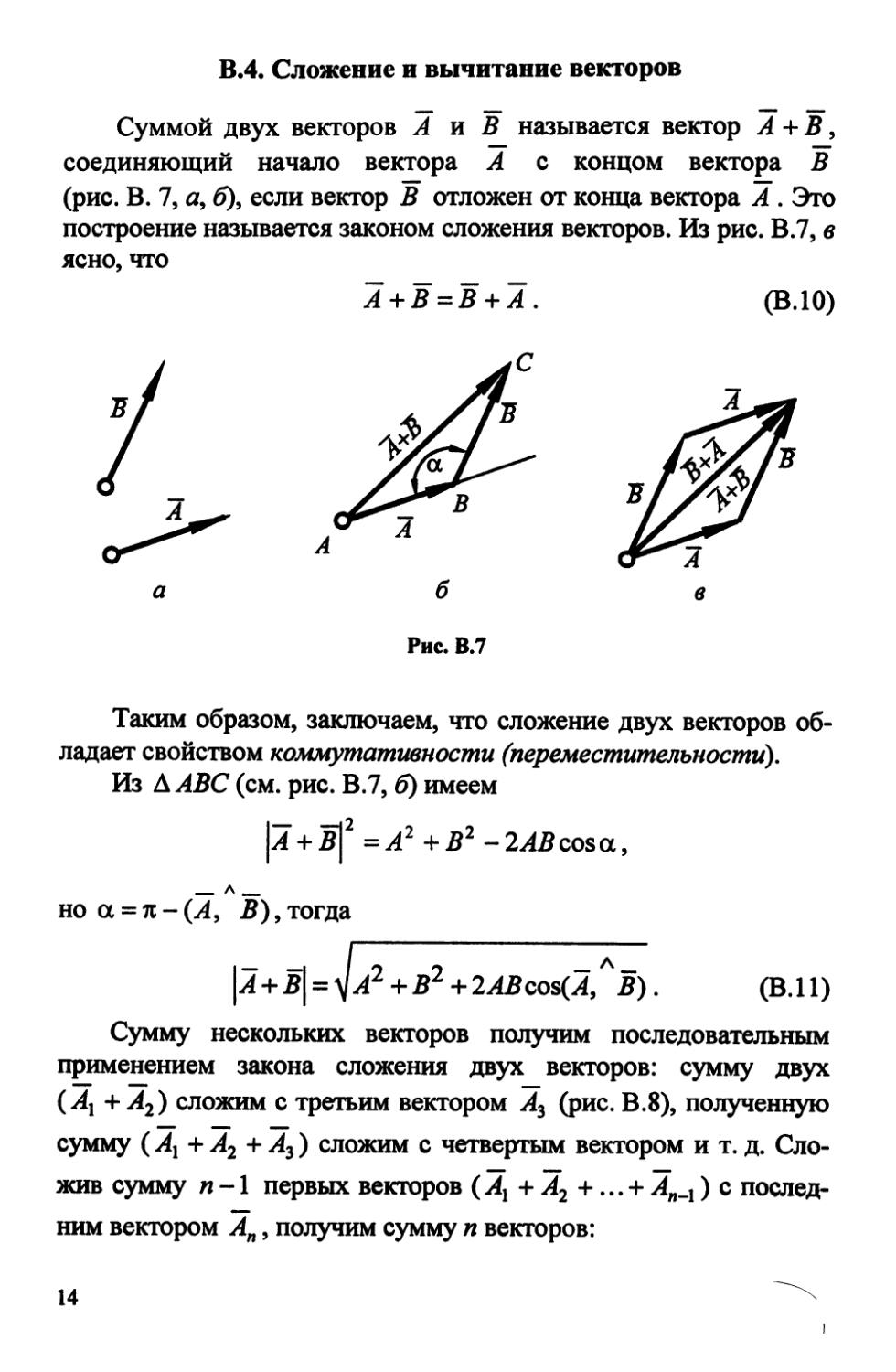
Суммой двух векторов А и В_ называется вектор А + В_,
соединяющий начало вектора А с концом вектора В
(рис. В. 7, а, б), если вектор В отложен от конца вектора А . Это
построение называется законом сложения векторов. Из рис. В.7, в
ясно, что
А+В=В + А. (В.10)
В
В
В
Таким образом, заключаем, что сложение двух векторов об-
обладает свойством коммутативности (переместительности).
Из А АВС (см. рис. В.7, б) имеем
=А2+В2 -lABcosa,
__ л
но а = п - (А, В), тогда
\A + B\ = yjA* +B* +2ABcos(A, В). (В.11)
Сумму нескольких векторов получим последовательным
применением закона сложения двух векторов: сумму двух
(Ах + А2) сложим с третьим вектором Аъ (рис. В.8), полученную
сумму (Ах + А2 + Аъ) сложим с четвертым вектором и т. д. Сло-
Сложив сумму п -1 первых векторов (Ах + А2 +... + Ап__х) с послед-
последним вектором Ап, получим сумму п векторов:
14
S = A} + A2 + Аъ +... + Д,, или # =
(B.12)
Таким образом, сумма п векто-
векторов есть вектор, который изображает-
изображается замыкающей стороной векторного
многоугольника, составленного из
слагаемых векторов. Замыкающий
вектор направлен от начала первого
вектора к концу последнего.
Сумма п векторов обладает так-
также свойством коммутативности.
На рис. В.8 видно также, что
сумма п векторов обладает и свойст-
свойством сочетательности (ассоциатив-
(ассоциативности):
Рис. В.8
S =
А2
Ап =
Таким образом, построение векторного многоугольника
можно осуществить, складывая векторы А],А2,...,Ап в любом
порядке, в любых сочетаниях.
Если векторный многоугольник ока-
оказался замкнутым (т. е. конец последнего из
слагаемых векторов совпадает с началом
первого), то сумма векторов равна нулю:
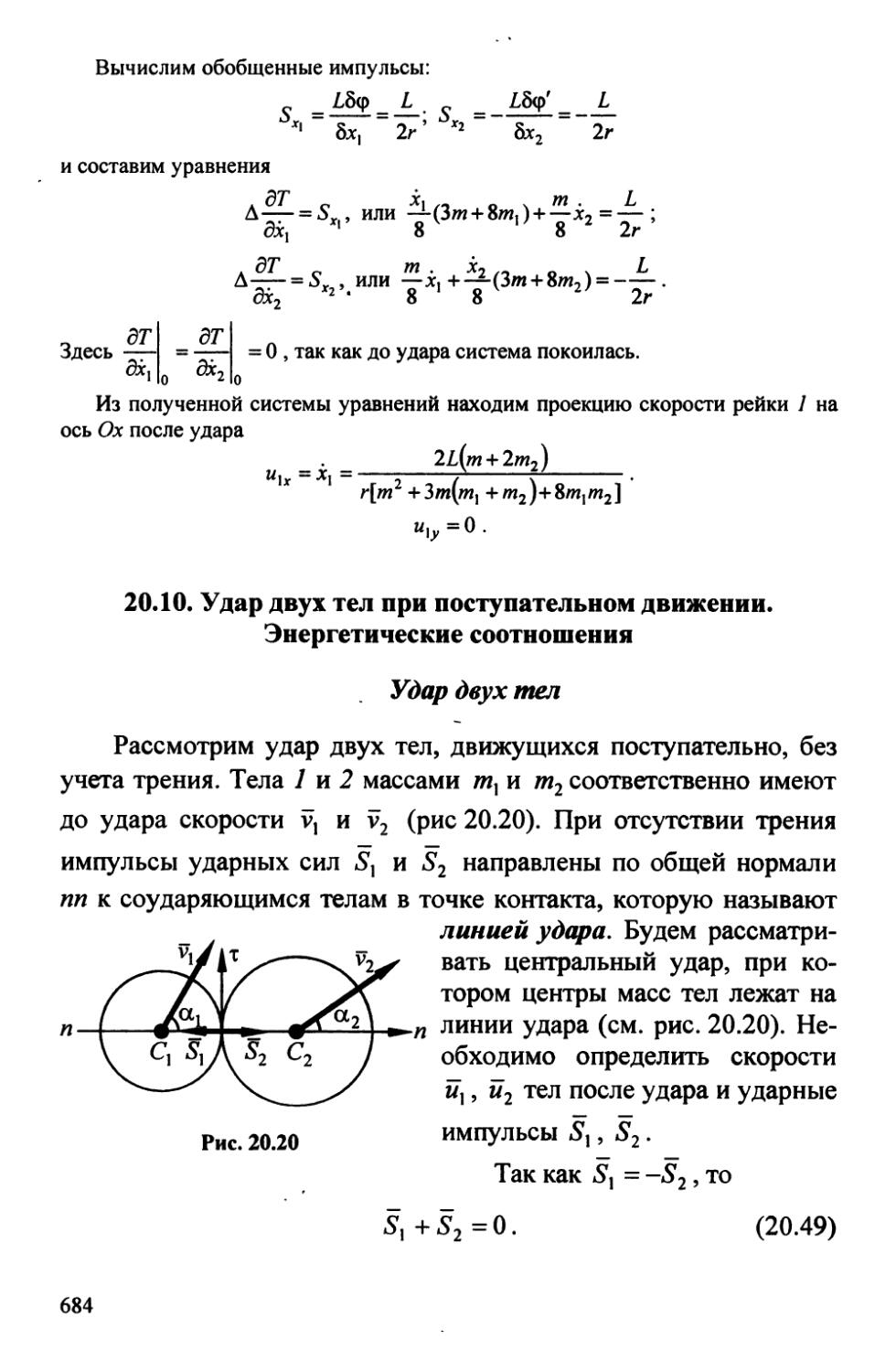
Разностью двух векторов А и В на-
называется вектор, полученный от сложения
векторов А и - В (рис. В.9)
А-В=А+(-В).
Видно, что сумма векторов А + В
есть одна диагональ параллелограмма,
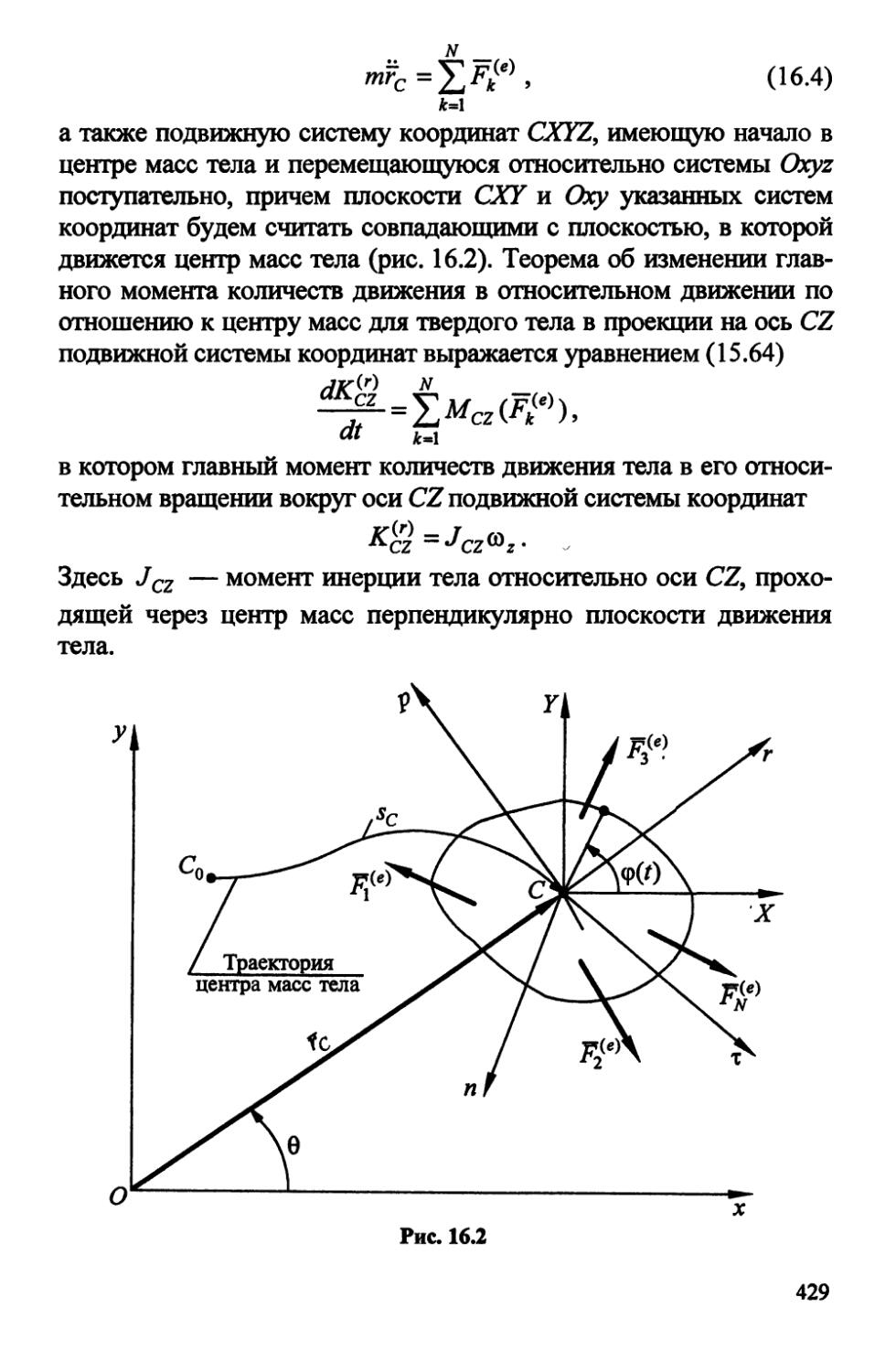
построенного на векторах А и В, а раз-
разность — другая его диагональ.
Рис. В.9
15
Чтобы определить модуль и направление вектора S вида
(В. 12), воспользуемся аналитическим способом сложения векто-
векторов. Пусть нужно сложить п векторов A],A2,...,Ai,An, где А, =
= Aixi + Ai}j + Aizk (/ = 1,2,..., и). Складывая эти векторы, со-
согласно (В. 12), получаем
Здесь
Sx = |Х , Sy=?Aiy , Sz =Y,Aiz . (B.14)
Согласно (В.5),
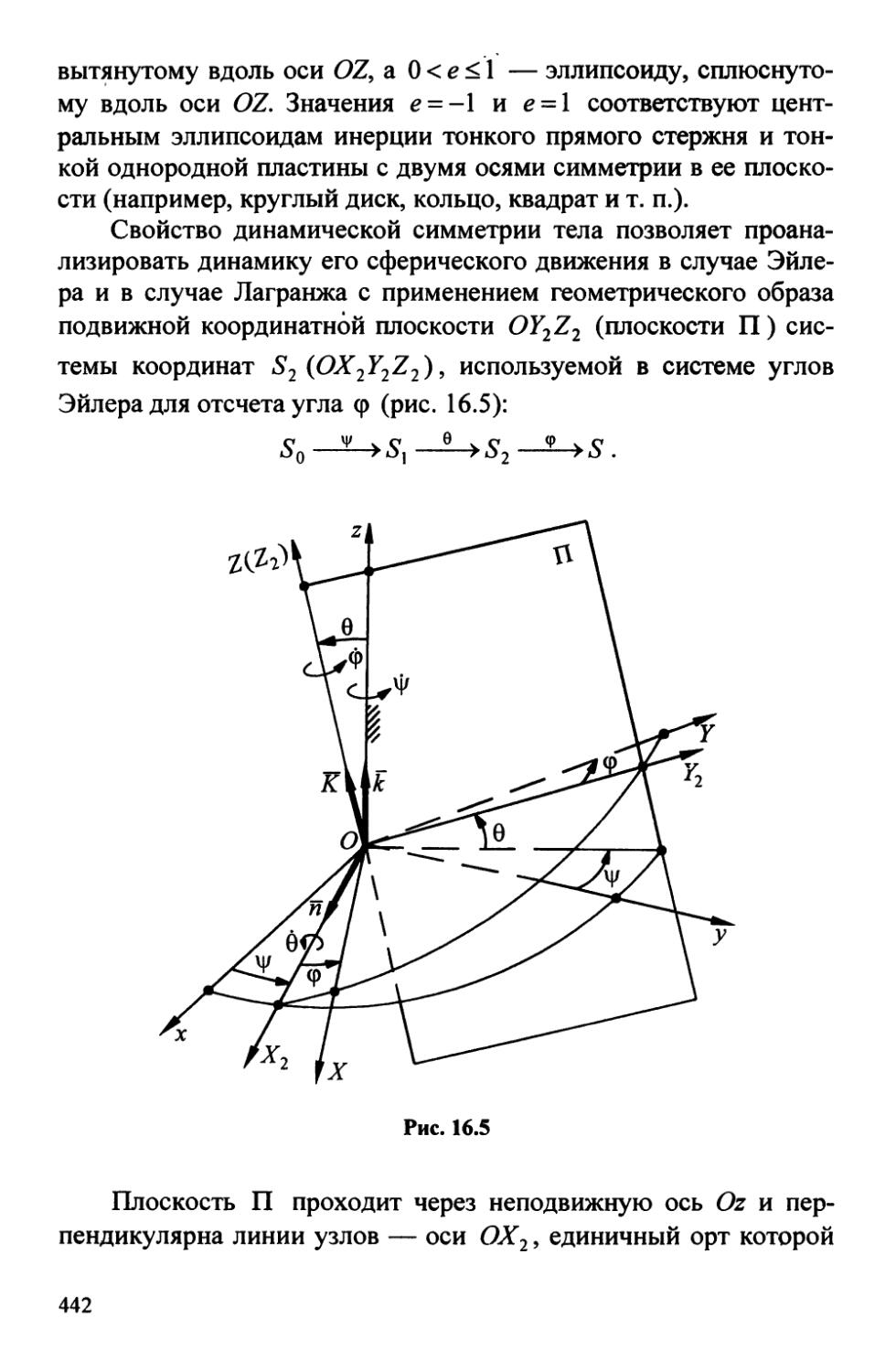
(В. 15)
а направление вектора ? определяется с помощью направляю-
направляющих косинусов из выражений, аналогичных (В.6).
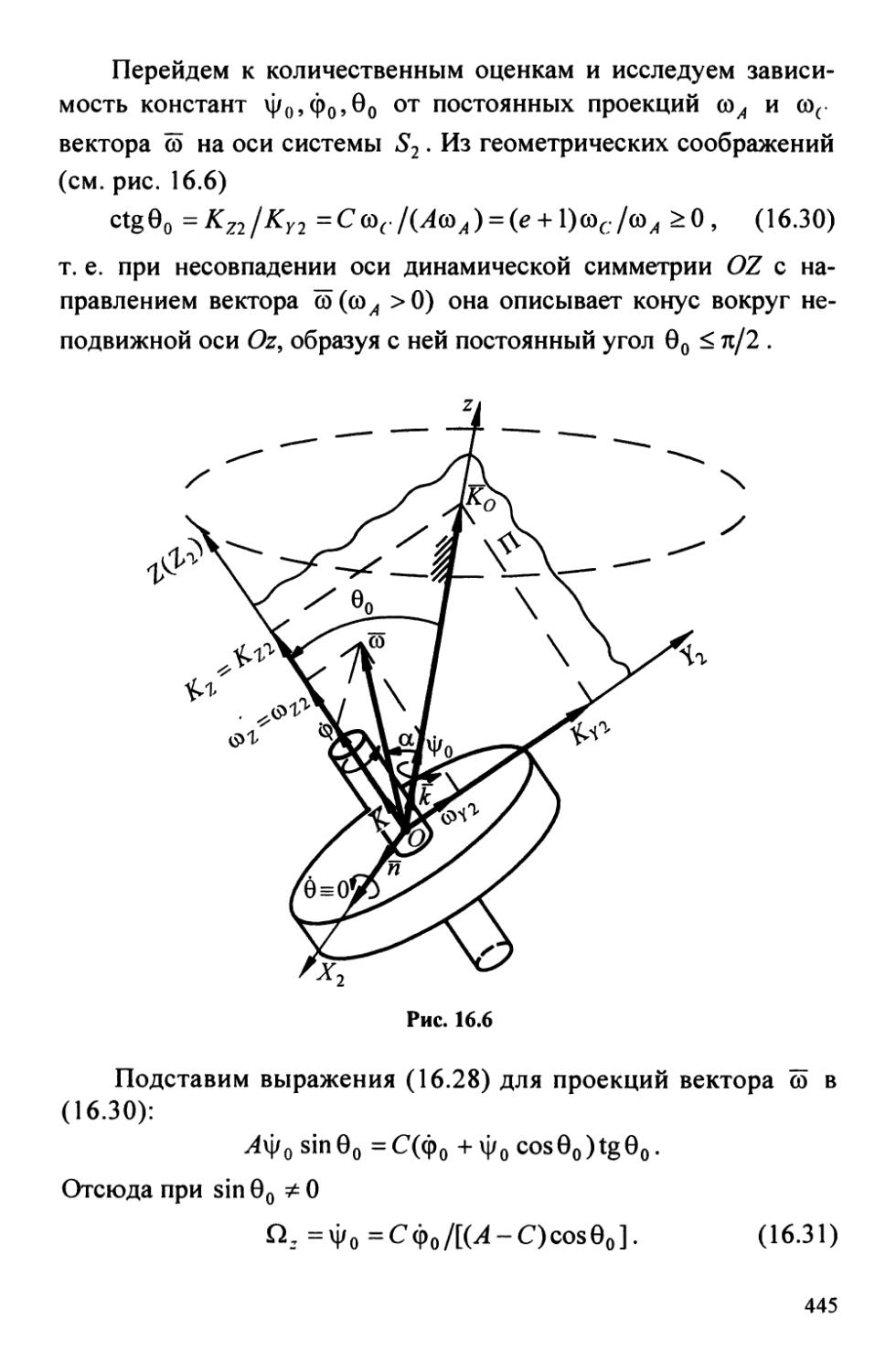
В.5. Умножение векторов
В векторном исчислении различают два вида произведений
векторов: скалярное и векторное.
Скалярное произведение двух векторов А и В есть скаляр-
скалярная величина, равная произведению модулей А и В этих векторов
л
на косинус угла (А ,В) между ними:
— — —_ % _ __ п ___
где А • В > 0, если 0<А,В< —, и АВ<0, если — < А , В < п.
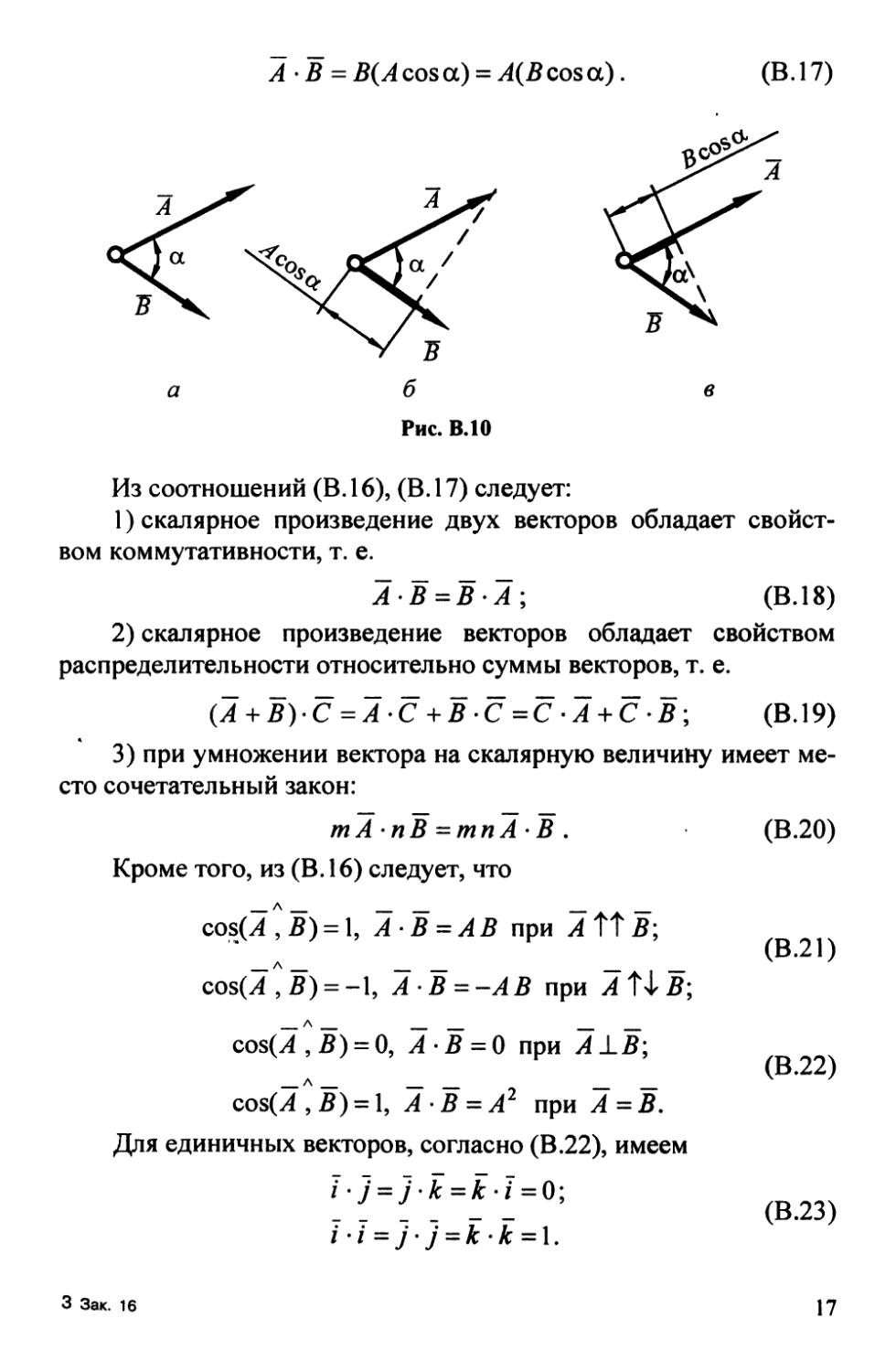
Как показано на рис. В. 10, скалярное произведение двух век-
векторов можно еще рассматривать как произведение модуля одного
вектора на проекцию на него другого вектора:
16
А • В =
= A(Bcosa).
(В. 17)
Из соотношений (В. 16), (В. 17) следует:
1) скалярное произведение двух векторов обладает свойст-
свойством коммутативности, т. е.
А-В=В-А; (В.18)
2) скалярное произведение векторов обладает свойством
распределительности относительно суммы векторов, т. е.
(А+В)С=АС+ВС=СА+СВ; (В.19)
3) при умножении вектора на скалярную величину имеет ме-
место сочетательный закон:
тАпВ=тпАВ. (В.20)
Кроме того, из (В. 16) следует, что
(В.21)
(B.22)
(B.23)
1 = 1, АВ=АВ при АТТВ;
cos(I*5) = -l, AB=-AB при 2НВ;
Я) = 0, АВ=0 при А±В;
2*) = 1, А-В=А2 при А=В.
Для единичных векторов, согласно (В.22), имеем
i • i = j • j = к к = 1.
3 Зак. 16
17
Используя соотношения (В. 19) и (В.23), запишем скалярное
произведение двух векторов через их проекции. Если А = Axi +
A-B=(Aj + AJ + A2k)(Bj + В j + B2k) =
_л_ (В.24)
= А В cos(A , Я) = АХВХ + АуВу + А2В2.
Таким образом, скалярное произведение двух векторов равно
сумме попарных произведений одноименных (по индексу) про-
проекций векторов на координатные оси.
Из (В.24) имеем выражение для косинуса угла между векто-
векторами А и В:
?±1А*+ЛВ*А*-. (В.25)
_ _ А-В А-В
Если AJlB ,to
АхВх+АуВу+АжВх=Ъ. (В.26)
Рассматривая выражение (В.2), видим, что
) = A To, (B.27)
где /о - единичный вектор оси /.
Из (В.25) следует, что косинус угла между единичными век-
векторами а0 и Ьо равен скалярному произведению этих векторов:
X) = *o А- _ __ (В.28)
Векторным произведением двух векторов АхВ называется
вектор, модуль которого равен произведению модулей пере-
перемножаемых векторов на синус угла между ними, а направление
перпендикулярно плоскости, проходящей через эти векторы
(рис. В. 11, а), и выбрано так, чтобы с конца полученного векто-
вектора, можно видеть, что для кратчайшего совмещения первого со-
сомножителя со вторым его нужно вращать против хода часовой
стрелки. Согласно определению, если
1х5=С, (В.29)
то
\С | = С = А В sin(I * В )=пл. CJODEF, (B.30)
18
т. е. модуль векторного произведения численно равен площади
параллелограмма ODEF, построенного на перемножаемых век-
векторах.
б
Рис. В. 11
По установленному соглашению направление векторного
произведения С определяетсяЛ правилом правого винта
(рис. В.11, б). В соответствии с этим правилом в правой системе
прямоугольных декартовых координат (рис. В. 12) направление
кратчайшего совмещения оси Ох с осью Оу видно с конца оси Oz
против направления движения часовой стрелки. Единичные век-
векторы i, j, к образуют правую систему единичных векторов.
В дальнейшем будем пользоваться именно правой системой
координат, чтобы иметь единообразный подход к рассмотрению
вопросов теории и к решению задач.
Векторное произведение двух векторов свойством перемес-
переместительности не обладает (рис. В.13):
АхВ=-(ВхА). (В.31)
При умножении вектора на скаляр векторное произведение
обладает свойством сочетательности:
(т А)х В = т(А х В). (В.32)
По отношению к сложению векторов векторное произведе-
произведение обладает свойством распределительности:*
(А+В)хС=АхС +ВхС .
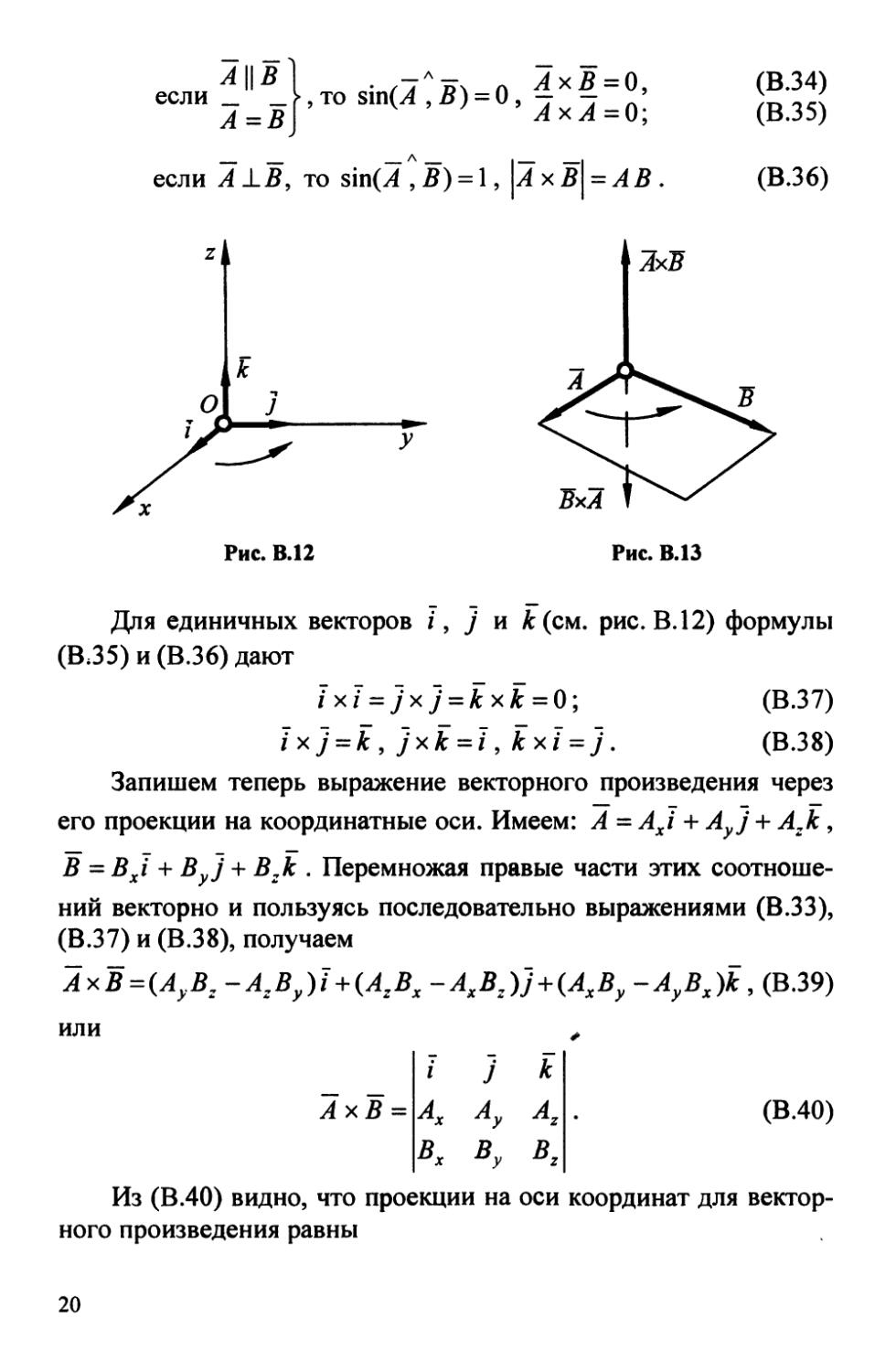
Отметим частные случаи векторного умножения:
(В.ЗЗ)
19
если А ±В, то sin(I*2*) =
(B.36)
Рис. В.12
Рис. В.13
Для единичных векторов z, j и к (см. рис. В.12) формулы
(В35) и (В.36) дают
JxI = ]x] = kxk=0; (B.37)
i х j = k , jxk = i, kxi =j. (B.38)
Запишем теперь выражение векторного произведения через
его проекции на координатные оси. Имеем: А = Axi + Ayj + Azk,
В =Bxi + Byj + Bzk . Перемножая правые части этих соотноше-
соотношений векторно и пользуясь последовательно выражениями (В.33),
(В.37) и (В.38), получаем
AxB=(AyBz -A2By)I + (AzBx -AxBz)j + (AxBy -AyBx)k, (B.39)
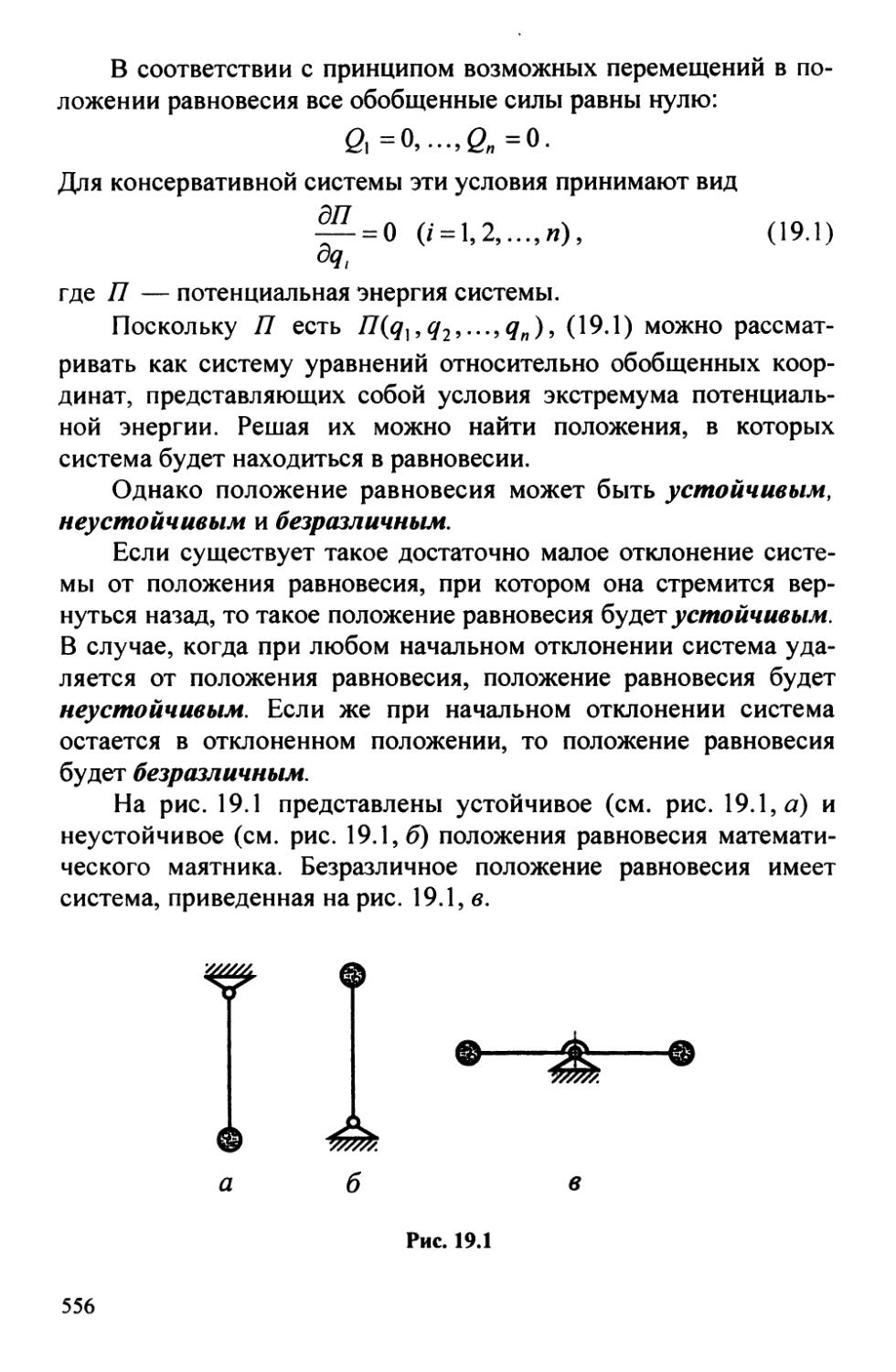
или ф
i J к
Ay. Аг) Az
в,
АхВ =
(В.40)
у
вх ву
Из (В.40) видно, что проекции на оси координат для вектор-
векторного произведения равны
20
А
У
By
А,
z
в:
; (АхВ)у =
Ат
Z
в2
Ах
X
вх
;(АхВ)г =
А
вх
А
By
(B.41)
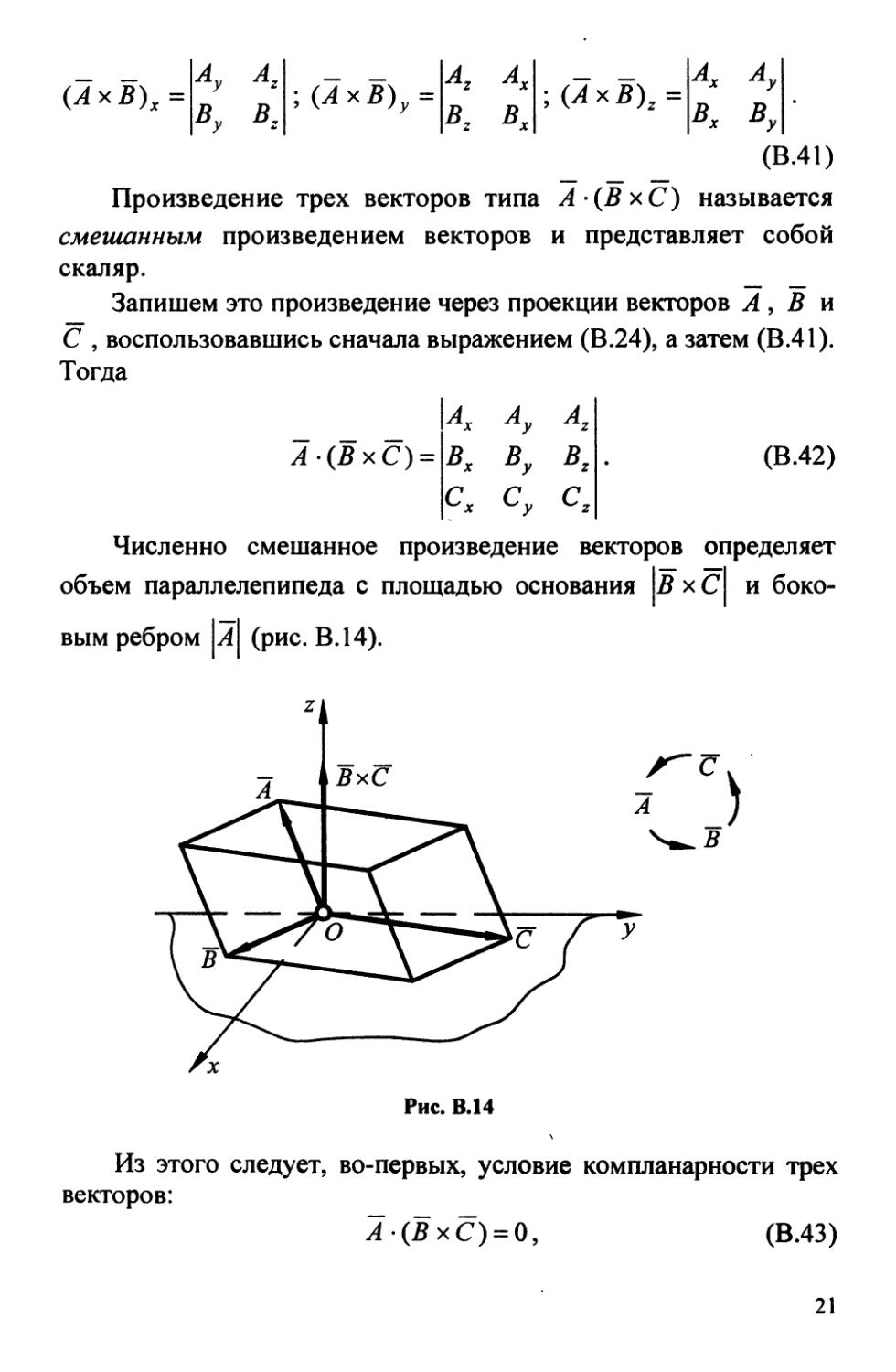
Произведение трех векторов типа А(ВхС) называется
смешанным произведением векторов и представляет собой
скаляр.
Запишем это произведение через проекции векторов А , В и
С , воспользовавшись сначала выражением (В.24), а затем (В.41).
Тогда
А(ВхС) =
Ах Ау А2
вх ву в2
сх су с2
(В.42)
Численно смешанное произведение векторов определяет
объем параллелепипеда с площадью основания 5хС и боко-
боковым ребром \а\ (рис. В. 14).
Рис. В.14
Из этого следует, во-первых, условие компланарности трех
векторов:
IExC) = 0, (B.43)
21
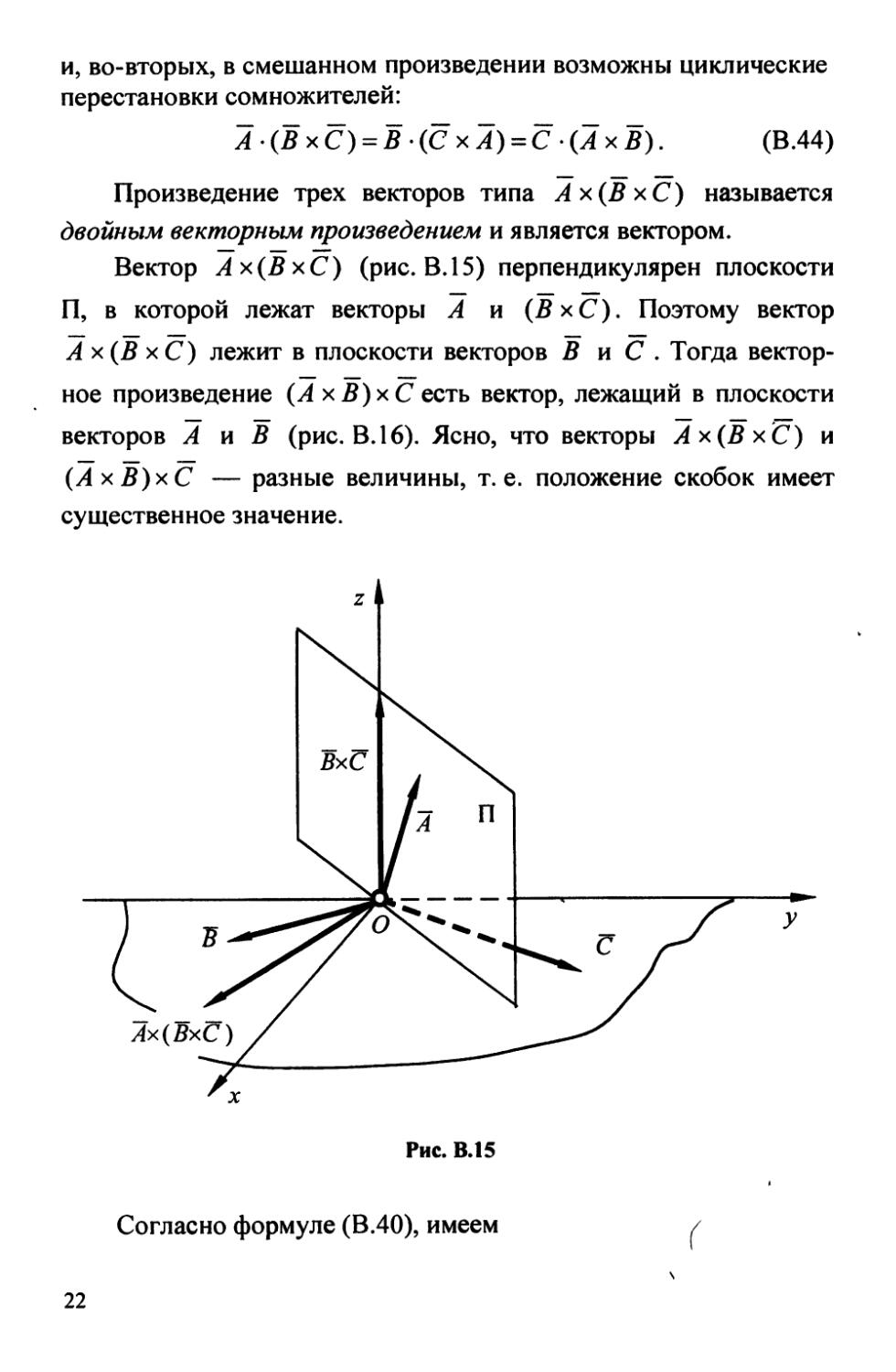
и, во-вторых, в смешанном произведении возможны циклические
перестановки сомножителей:
А-(ВхС) = В-(СхА) = С-(АхВ). (ВАЛ)
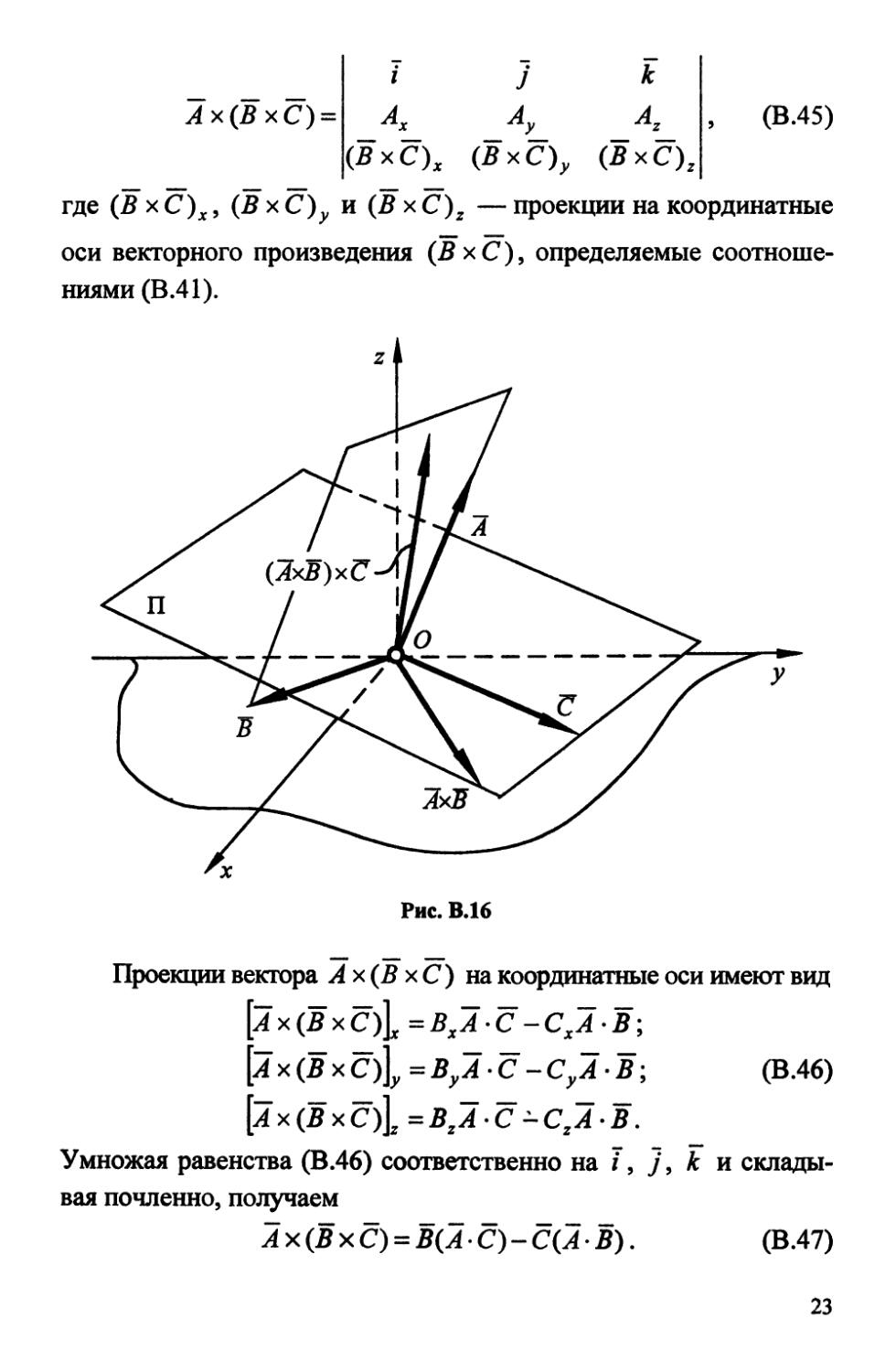
Произведение трех векторов типа Ах(ВхС) называется
двойным векторным произведением и является вектором.
Вектор Ах(ВхС) (рис. В. 15) перпендикулярен плоскости
П, в которой лежат векторы А и (В х С). Поэтому вектор
А х(В хС) лежит в плоскости векторов В и С . Тогда вектор-
векторное произведение (А х В) х С есть вектор, лежащий в плоскости
векторов А и В (рис. В. 16). Ясно, что векторы Ах(ВхС) и
(АхВ)хС — разные величины, т.е. положение скобок имеет
существенное значение.
Рис. В.15
Согласно формуле (В.40), имеем
22
Ах(ВхС) =
J j к
Ax Ay Az
(B.45)
(BxC)x (BxC)y (BxCJ
где (В хС)х, {ВхС)у и (В xCJ — проекции на координатные
оси векторного произведения (ВхС), определяемые соотноше-
соотношениями (В.41).
Рис. В.16
Проекции вектора А х (В х С ) на координатные оси имеют вид
\ах(В xC)L =BxA-C-CxA-B;
[ах(Вх С)\ =ВуАС- СуА • В; (В.46)
\ах(ВхСI =В2АС-С2АВ.
Умножая равенства (В.46) соответственно на /, ]\ к и склады-
складывая почленно, получаем
). (В.47)
23
В.6. Векторы и матрицы
Совокупность тхп величин aik, записанных в виде табли-
таблицы, содержащей т строк и п столбцов, образует прямоугольную
матрицу с размерами тхп:
аи ап ... аХп
А =
а
21
*22
а
т\
(В.48)
В записи элемента матрицы alk первый индекс указывает номер
строки, второй — номер столбца. Компактная запись выражения
(В.48) имеет вид
А = [*,-*] (/ = l,2,...,*i; * = 1,2,...,л). (В.49)
Равными считаются две матрицы А = В одинакового разме-
размера тхп, соответственные элементы которых равны, т. е.
Матрица, у которой т-п, называется квадратной, ее элемен-
элементы ап (/ = 1,...,«) составляют главную диагональ матрицы. Квад-
Квадратная матрица пхп называется симметричной, если ajk =aki.
Диагональной называется симметричная матрица, у которой эле-
элементы, расположенные вне главной диагонали, равны нулю:
', 0 ... О
D =
О d,
о
О 0 ... d
где d]9...9dn — любые числа.
Если в диагональной матрице dx -d2 =... = dn = d, то для
любой квадратной матрицы А размером пхп справедливо ра-
равенство
AD=DA.
Если dx =d2 =... = dri -1, диагональная матрица называется еди-
единичной и обозначается Е:
24
Е =
1
0
0
0 ...
1 ...
0 ...
Тогда справедливы соотношения
АЕ =
= ЕА =
0
0
1
А.
(В.50)
Таким образом, особая роль единичной матрицы Е анало-
аналогична той роли, которую играет число 1 при перемножении веще-
вещественных чисел.
Определитель, составленный из элементов квадратной мат-
матрицы, записанных в том же порядке, что и в матрице, называется
определителем матрицы и обозначается
detA =
а\
а
12
'22
4\п
а
2/»
(В.51)
ап\ ап2 ••• а
Для квадратной матрицы А, определитель которой detA от-
отличен от нуля, существует обратная матрица А, такая, что
выполняется условие
А"!А = Е,или АА =Е.
Если в выражении (В.48) поменять местами строки и столб-
столбцы, получится матрица размерами wx/w, которая по отношению
к матрице (В.48) называется транспонированной и обозначается
Ат. Симметричная матрица А размерами пхп равна своей
транспонированной:
А = АТ.
Сложение и вычитание матриц может быть выполнено с матри-
матрицами одинаковых размеров тхп. Суммой (разностью) двух та-
таких матриц А и В называется матрица С, элементы которой рав-
равны сумме (разности) соответствующих элементов матриц А и В:
С = А±В, (В.52)
если cik =aik ±bik (/ = !,...,m; ? = l,...,w).
23ак. 16
25
Суммы матриц обладают следующими свойствами:
Умножение матрицы на число означает, что каждый элемент
этой матрицы умножается на данное число:
(i = U.,m; * = l,...,/i). (B.53)
Умножение матрицы А порядка (т х р) на матрицу В поряд-
порядка (рх«) осуществимо лишь тогда, когда число столбцов А рав-
равно числу строк В. Тогда матрицы А и В называются конформны-
конформными, и их произведением С = А В называется матрица размерами
т х «, элемент cik /-й строки и k-го столбца которой равен сумме
произведений элементов i'-й строки матрицы А на элементы А>го
столбца матрицы В:
<ч*=|>,A* (i = l...,m; k = \,...,n). (B.54)
Представим теперь вектор А , определяемый совокупностью
п величин а,, а2,..., aw («-мерный вектор), в виде вектора-столбца
(В.55)
или матрицы (п х 1). Если компоненты ах, а2,..., ап расположить
горизонтально, получим матрицу A х п), т. е.
I = [a1?a2,...,aJT. (B.56)
Одномерный вектор есть скаляр.
Поскольку все операции над векторами, о которых пойдет
речь, можно проводить, лишь пользуясь векторами-столбцами,
будем применять термин «вектор» для величины, заданной фор-
формулой (В.55).
Трехмерный вектор А , заданный своими проекциями на оси
декартовой системы координат, имеет компоненты ах = Ах,
а2 = Av, аъ = Az и записывается в виде '
26
А =
Два вектора А и В одинаковых размеров п равны, если рав-
равны их соответствующие элементы:
а.=Ъг (J = l,...,it).
Сумма двух векторов одинаковых размеров п записывается в
соответствии с (В.52), как
rax +b
А+В =
а«+Ъ,
¦.
(В.57)
операция сложения векторов обладает свойством коммутативно-
коммутативности (как при сложении матриц) и ассоциативности:
А+В=В + А; (В.58)
А+(В + С)=(А+В) + С. (В.59)
Умножение вектора на скаляр осуществляется как умноже-
умножение матрицы на число, согласно (В.53),
с1А=Ас1 =
схах
схаг
(В.60)
Скалярное произведение векторов — это скалярная функция:
Из (В.61) следуют известные свойства скалярного произве-
произведения векторов:
BД) = AД); (сД5)=С1A,5);
(А + В, С + D) = (А, С) + (В, С) + (A, D) + (В, Б). (В.62)
* Здесь использовано обозначение операций для многомерных векторов.
2*
27
Тогда скалярную величину (А,А) можно рассматривать как
квадрат «длины» вещественного вектора.
Два вещественных вектора А и В называются ортогональ-
ортогональными, если они удовлетворяют соотношению
A,Я) = 0.
При умножении вектора С на матрицу А имеем
В=АС9 (В.63)
где В у С —векторы, связанные, согласно (В.54), соотношением
bi=i*ijcj a=u.,*). (в.64)
В сущности, выражение (В.бЗ) можно рассматривать как опера-
операцию преобразования вектора С в вектор В. Если, например,
нужно преобразовать один трехмерный вектор С (с проекциями
Сх=с}9 Су=с29 Сг=съ) в другой вектор В (Bx=bl9 By=b29
Bz = Ъъ), то, согласно (В.64), можно записать
Ъх=апсх+апс2+ахъсъ\
Ъ2 = а2Хсх + а22с2 + а2Ъсъ; (В.65)
Ь3 =аЪ1сг +апс2 +а33с3.
При этом в системе координат Oxyz существует матрица А —
тензор второго ранга с элементами atj (i, j = 1,2,3):
Л\. ттт
\
«11
«21
«31
«12
«22
«32
«13
«23
«33 J
(В.66)
Тензор А является самостоятельной физической величиной, спо-
способной преобразовать один трехмерный вектор в другой в любой
координатной системе. Так, вектор главного момента количеств
движения Ко твердого тела, вращающегося вокруг неподвижной
точки О, определяется через вектор угловой скорости ю по из-
известной зависимости
№9 (В.67)
28
где J — тензор инерции тела в точке О, его компонентами явля-
являются осевые и центробежные моменты инерции тела относитель-
относительно осей Ох, Оу и Oz\
J =
-J
X Z
'у х
-л
-J
Z X
(В.68)
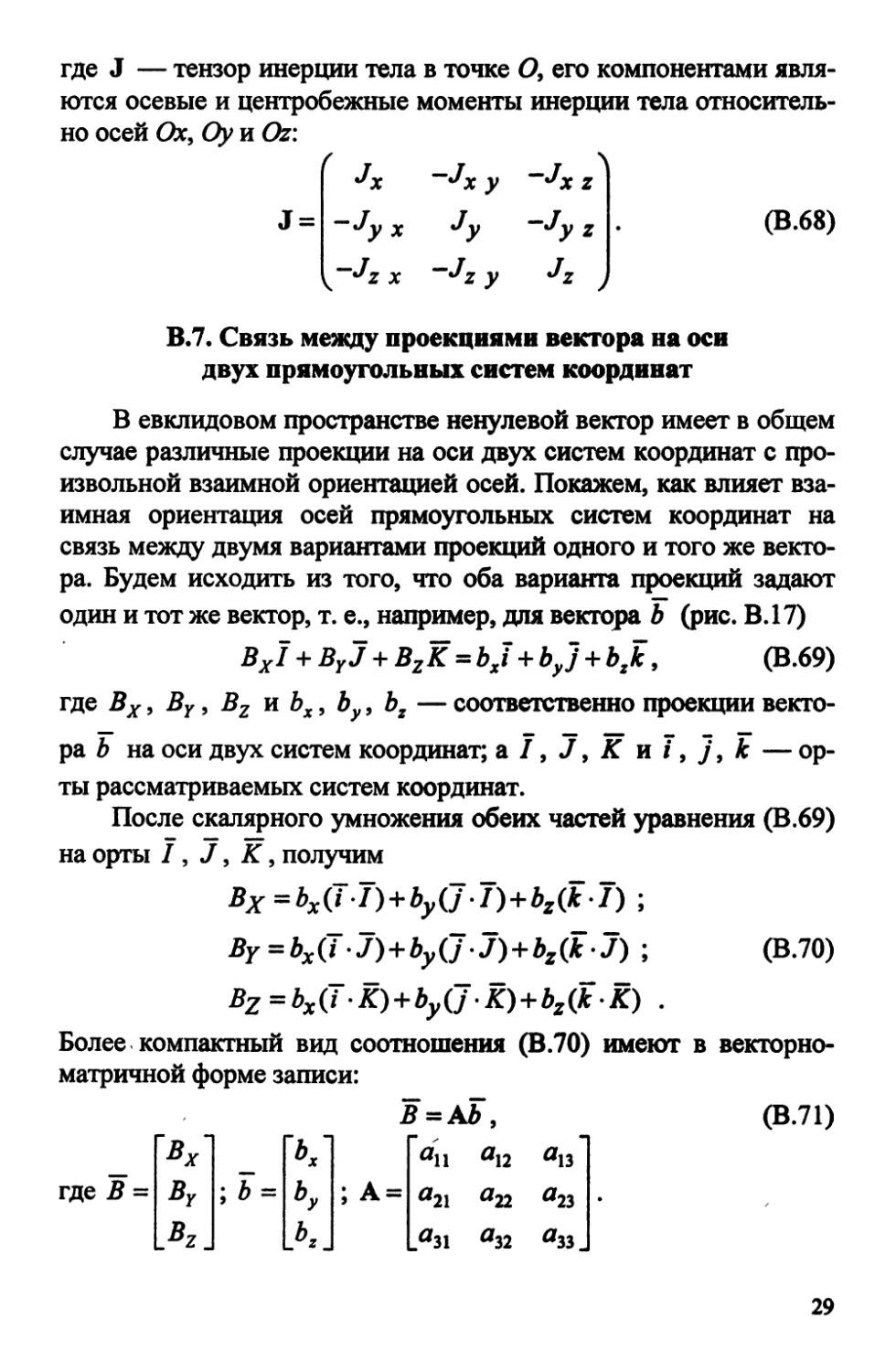
В.7. Связь между проекциями вектора на оси
двух прямоугольных систем координат
В евклидовом пространстве ненулевой вектор имеет в общем
случае различные проекции на оси двух систем координат с про-
произвольной взаимной ориентацией осей. Покажем, как влияет вза-
взаимная ориентация осей прямоугольных систем координат на
связь между двумя вариантами проекций одного и того же векто-
вектора. Будем исходить из того, что оба варианта проекций задают
один и тот же вектор, т. е., например, для вектора Ь (рис. В. 17)
ВХ1+ BYJ + BZK=bxi+byj + b2k, (B.69)
где ВХ9 BY9 Bz и bx, by, b2 — соответственно проекции векто-
вектора b на оси двух систем координат; aI9J,Kni9],k — ор-
орты рассматриваемых систем координат.
После скалярного умножения обеих частей уравнения (В.69)
на орты I, J, К, получим
ykJ) ; (B.70)
Bz=bx(f K) + by(jK) + bz(k К) .
Более компактный вид соотношения (В.70) имеют в векторно-
матричной форме записи:
2? = А6, (В.71)
где JS =
~*х'
By
Bz
; b =
'ь;
, А —
«и
«21
l«31
«12
13
«22 «23
32
29
В формуле (В.71) проекции одного и того же вектора Ъ на
оси соответствующих систем координат считаются элемен-
элементами векторов-массивов В и Ъ , а скалярные произведения
двух ортов — элементами матрицы А, т.е. ап =/•'/,
ап =jl и т. д.
Z i
1
Oj
I
J
X V
n
у
Рис. В.17
Отметим ряд важных свойств формулы (В.71) и матрицы А,
причем условимся называть систему координат с ортами I, ),
к — первой, а с ортами 7, J, К — второй.
1. Формула (В.71) определяет правила расчета проекций век-
вектора на оси второй системы координат по его известным проек-
проекциям на оси первой системы, при этом матрица А считается мат-
матрицей перехода от осей первой системы координат к осям
второй.
2. Согласно формуле (В.28), скалярные произведения соот-
соответствующих ортов разноименных осей координат равны косину-
косинусам углов между перемножаемыми ортами (или между соответ-
30
ствующими осями систем координат), т. е. аи =/ • 7 = cos(jc , X),
_ _ л
аХ1 = j • / = cos(j>, X) и т. д. Поэтому матрицу А называют мат-
матрицей направляющих косинусов.
3. Элементы каждой строки матрицы являются проекциями
соответствующего орта второй системы координат на оси пер-
первой, а элементы каждого столбца матрицы — проекциями соот-
соответствующего орта первой системы координат на оси второй,
например:
7 = (ап,а129а13)т; аи =1Х; а]2 =1у; аи =12.
i = (аи, а2Х, аъх )т; а„ = ix; а2Х = iY ; а31 = iz .
4. Сумма квадратов элементов каждой строки или каждого
столбца равна единице, так как такая сумма выражает квадрат
модуля орта, например:
а,2,+а?2+e|23=/x2+/J+/»=!.
5. Скалярное произведение двух различных строк или двух
различных столбцов равно нулю, так как такое произведение со-
соответствует скалярному произведению двух ортогональных век-
векторов, например:
аиа2] + апа21 + аиа2Ъ = IXJX + IyJy + I2JZ =0.
6. Определитель матрицы равен единице:
detA = l.
Этот результат можно получить, опираясь на формулу расчета
смешанного произведения трех векторов (/, j, к или I, J, i?),
образующих правую тройку. Он соответствует объему куба со
стороной, равной единице.
7. Обратная матрица А равна матрице, транспонированной
к матрице А:
А=А\
8. Формула обратного пересчета проекций вектора на оси
первой системы координат по его известным проекциям на оси
второй имеет вид
b=ATB. (B.72)
31
В.8. Вектор-функция. Годограф вектора.
Дифференцирование вектора по скалярному аргументу
Если модуль и направление вектора А зависят от значений,
принимаемых переменными /, и, v, w, то вектор А называется
векторной функцией этих переменных, или вектор-функцией.
Ограничимся рассмотрением вектор-функций только от од-
одной независимой переменной /:
A=A(t). (B.73)
При этом в общем случае с изменением скаляра / непрерыв-
непрерывно изменяются и модуль, и направление вектора А . Следова-
Следовательно, с учетом (В.1) можно записать
(B.74)
В частных случаях вектор А может изменяться или только
по модулю:
а0 = const, А = A(t)a0, (B.75)
или только по направлению:
А = const, A=Aao(t). (B.76)
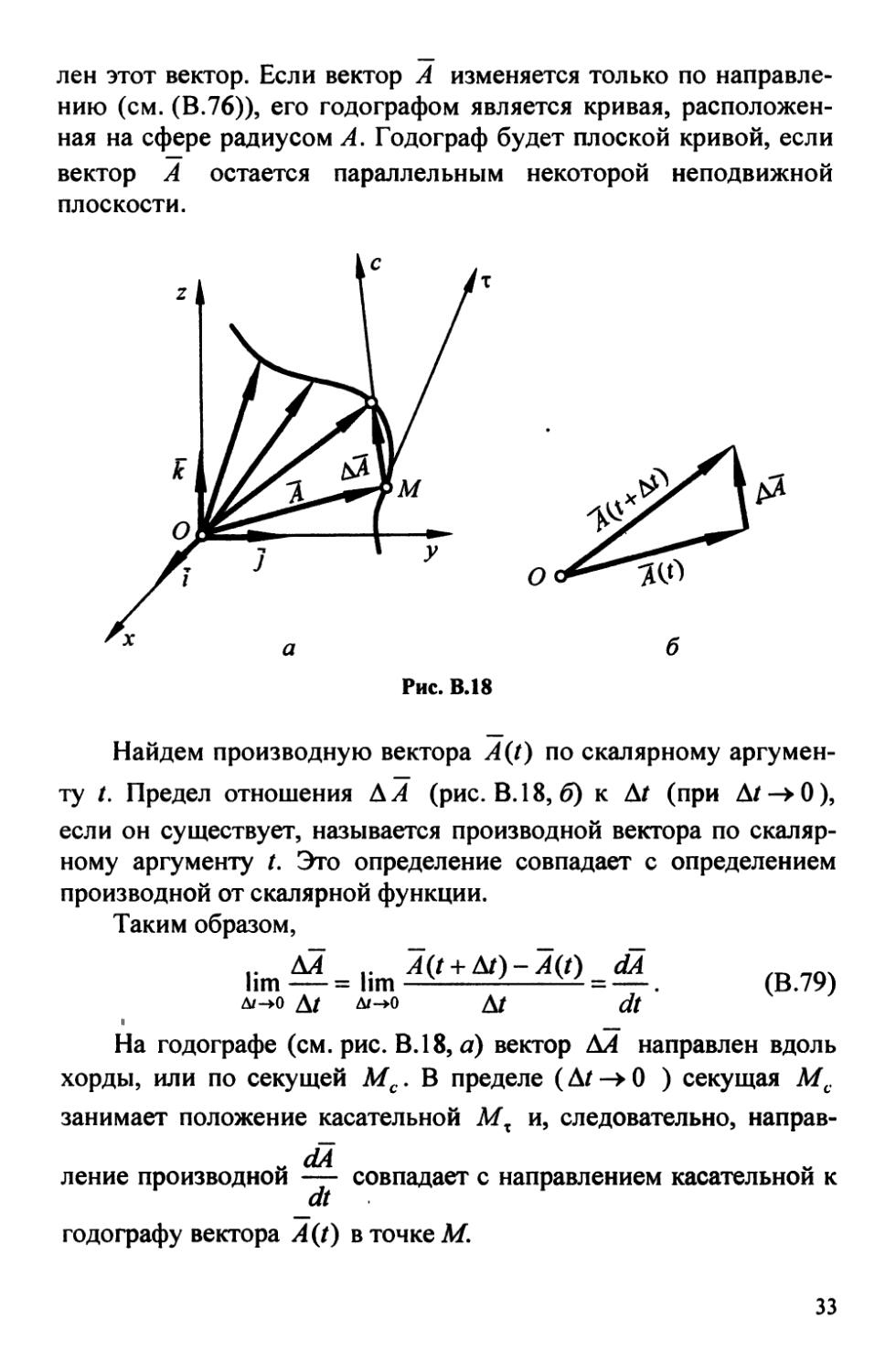
Если вектор А = A(i)-OM в процессе его изменения всегда
откладывается от общего начала (полюса) О (рис. В. 18, а), то
геометрическим местом концов этого вектора будет некоторая
кривая (плоская или пространственная), называемая годографом
вектора А .
Если полюс О принять за начало прямоугольной системы
координат, то, согласно (В.7),
А = Ax(t)i + Ay(t)j + Az(t)k , (В.77)
где Ax(t), Av(t)9 Az{t) — проекции вектора А на оси коорди-
координат. Тогда уравнения годографа вектора А, записанные в пара-
параметрической форме, имеют вид
х = Ах(О, y = Ay(t), z = A2(t). (B.78)
В частности, если вектор А изменяется только по модулю
(см. (В.75)), его годографом будет прямая, вдоль которой направ-
32
лен этот вектор. Если вектор А изменяется только по направле-
направлению (см. (В.76)), его годографом является кривая, расположен-
расположенная на сфере радиусом А. Годограф будет плоской кривой, если
вектор А остается параллельным некоторой неподвижной
плоскости.
Z {
Рис. В.18
Найдем производную вектора A{t) по скалярному аргумен-
аргументу /. Предел отношения А А (рис. В.18, б) к At (при At->0),
если он существует, называется производной вектора по скаляр-
скалярному аргументу t. Это определение совпадает с определением
производной от скалярной функции.
Таким образом,
At)-A(t) = dl
At dt '
,. АА ..
hm — = lim
(В.79)
На годографе (см. рис. В.18, а) вектор АА направлен вдоль
хорды, или по секущей Мс. В пределе (А/-»0 ) секущая Мс
занимает положение касательной Мх и, следовательно, направ-
направление производной — совпадает с направлением касательной к
dt
годографу вектора A (t) в точке М
33
Если вектор выражен через его проекции на неподвижные
оси (см., например, (В.77), где /, j, к — векторы, постоянные
по модулю и направлению), то
— = — (АХ1 + AJ + AJ) = ^I + —^j+'Q-k, (B.80)
dt dt x 'J - dt dt J dt
т. е. производная вектора по скалярному аргументу есть вектор,
проекции которого на неподвижные оси равны производным по
тому же аргументу от проекций дифференцируемого вектора. Это
утверждение справедливо и для производной «-го порядка:
_ • L7-I v ; I - Г /d on
— I I / т Л . I 1_/.О 1 I
dt" dt" dt" dt"
Как и для скалярных, для векторных функций справедливы
следующие выражения:
— (АВ) = В+А , (В.82)
dt dt dt
\Л X D ) — X D т Л X . yD.OJ)
dt dt dt
Рассмотрим теперь частный случай дифференцирования не-
некоторого вектора В, который изменяется только по направле-
направлению, т. е. В =В = const. Годограф такого вектора — кривая, рас-
расположенная на сфере радиусом В. Производная этого вектора
— есть вектор, перпендикулярный к дифференцируемому
dt
(рис. В. 19). Действительно, поскольку, согласно (В.21),
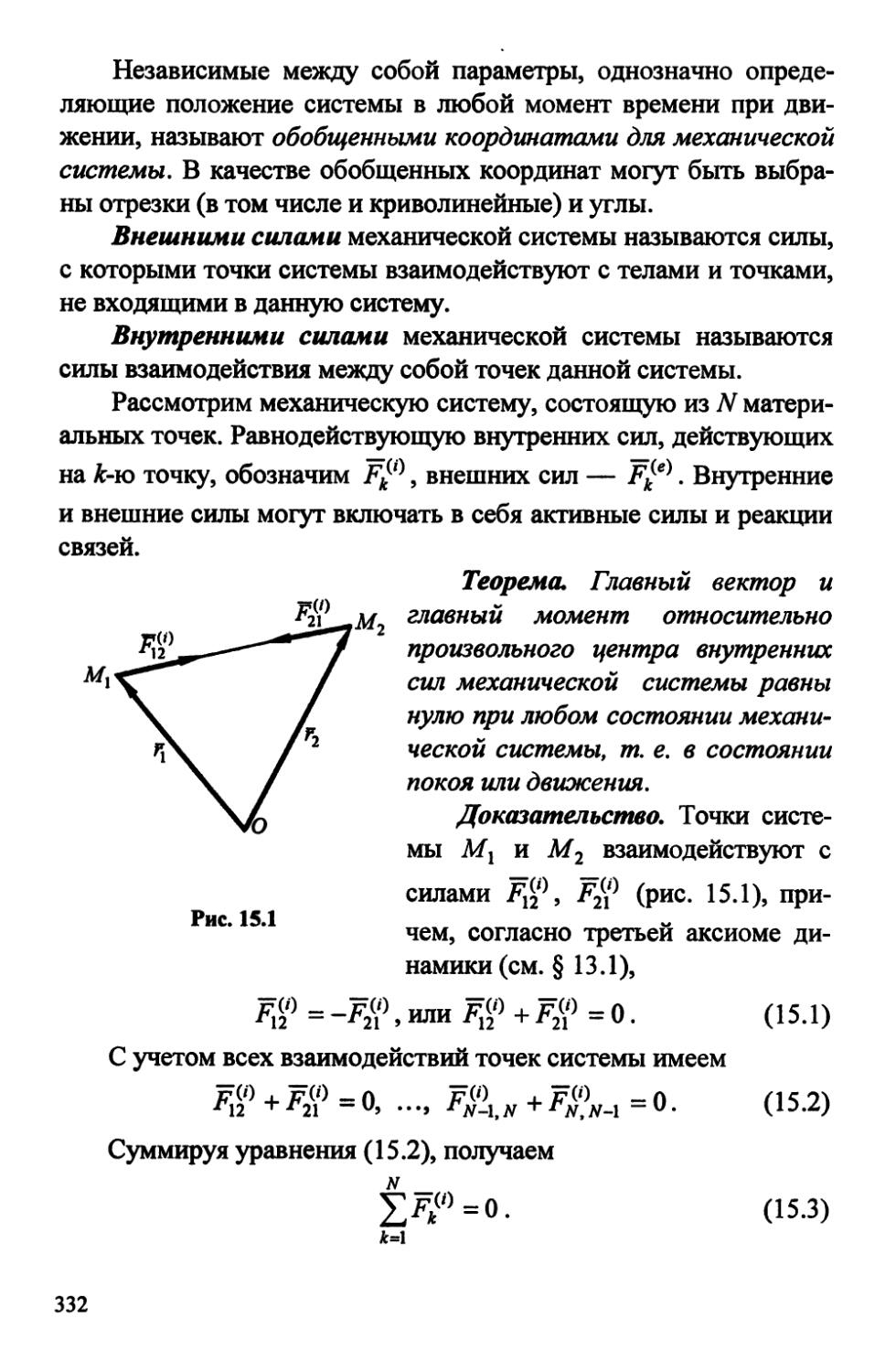
. ВВ=В2 =const,
то, дифференцируя это равенство, с учетом (В.82) получаем
Следовательно,
Hi
34
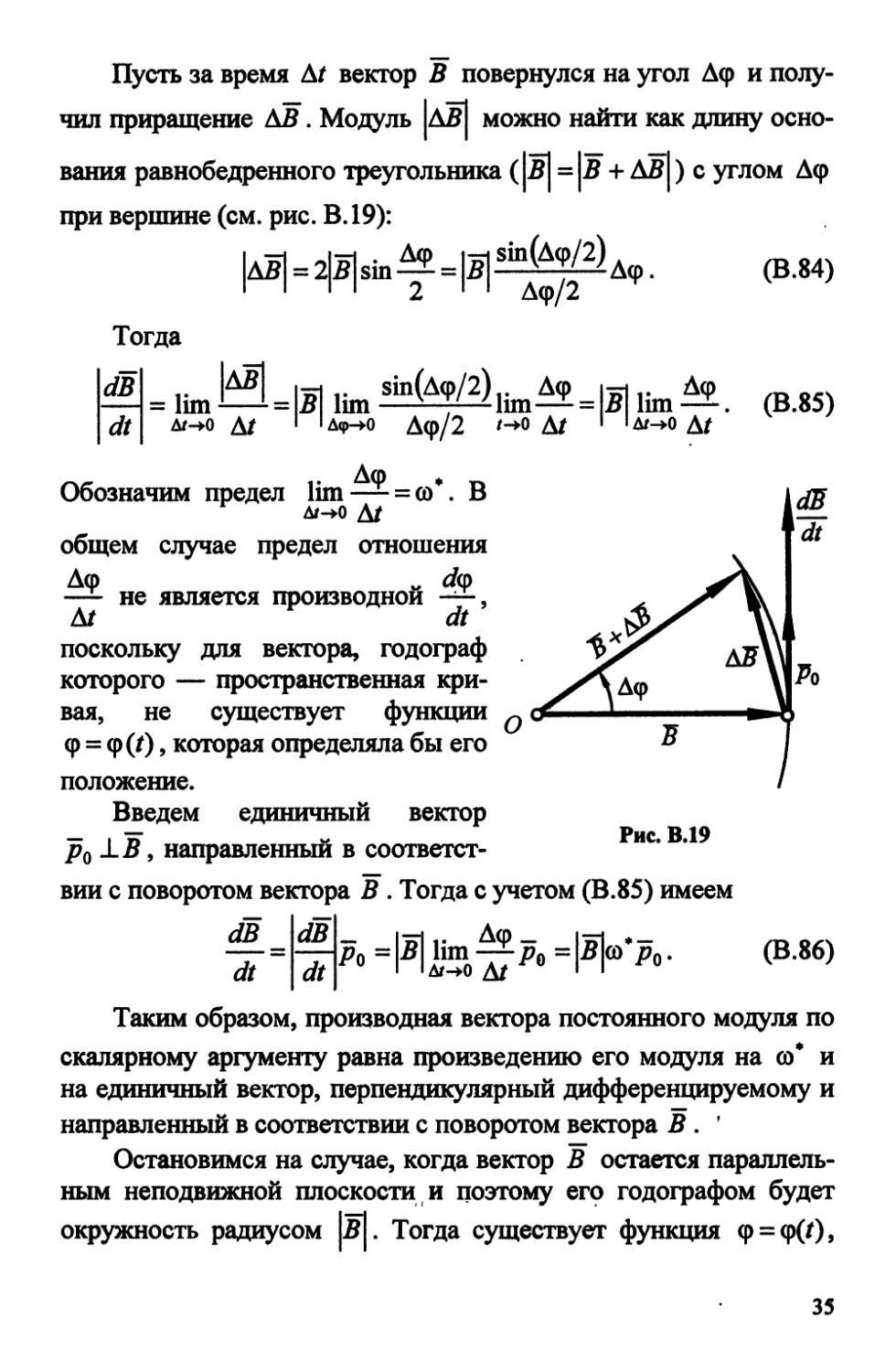
Пусть за время At вектор В повернулся на угол Аф и полу-
получил приращение АВ. Модуль \ав\ можно найти как длину осно-
основания равнобедренного треугольника (Щ = \в + АВ ) с углом Аф
при вершине (см. рис. В. 19):
-Аф. (В.84)
Тогда
dB
dt
Н
д/-*о
аф->о Дф/2 ^о At
^-а>\ В
At
(В.85)
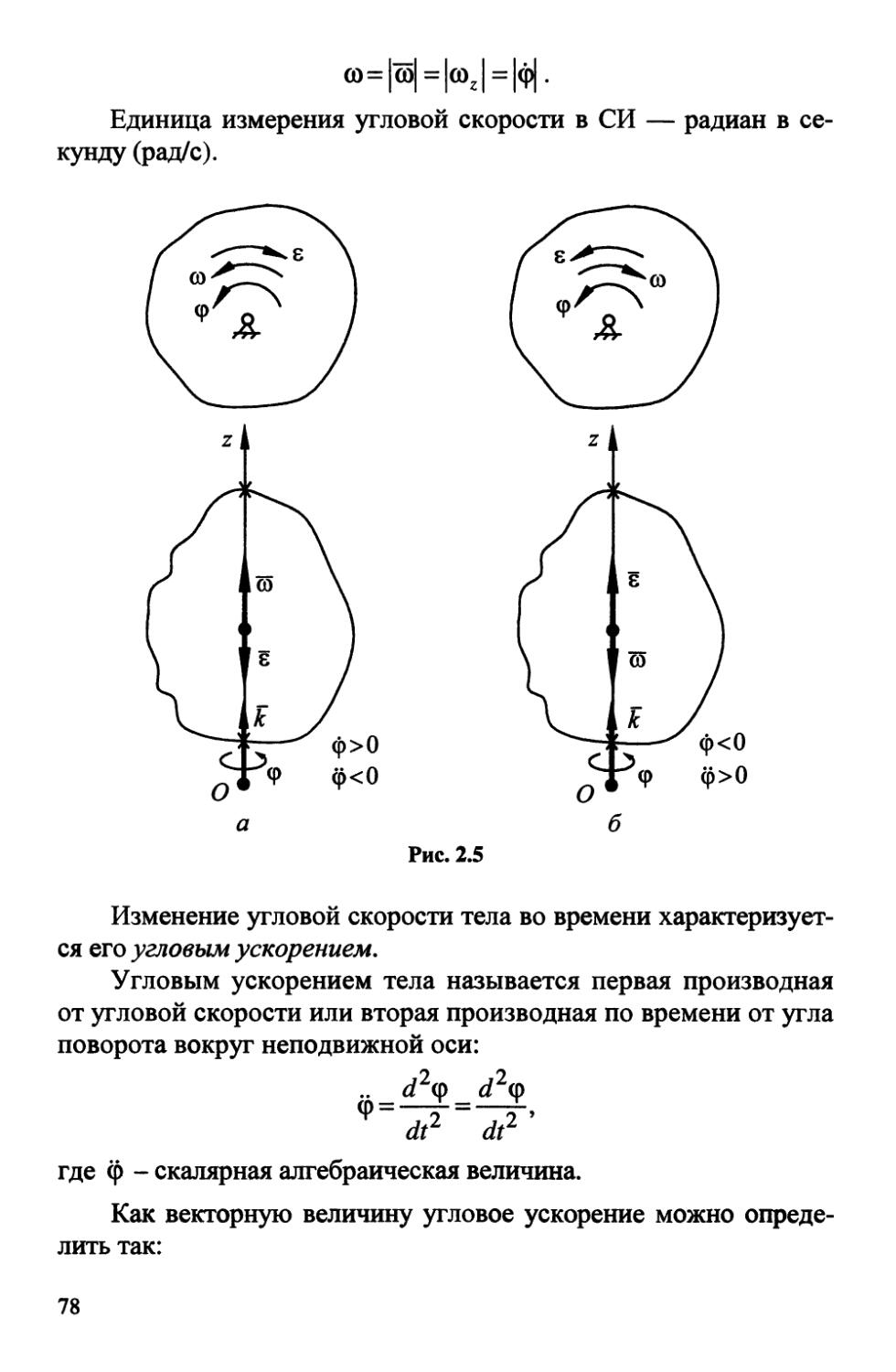
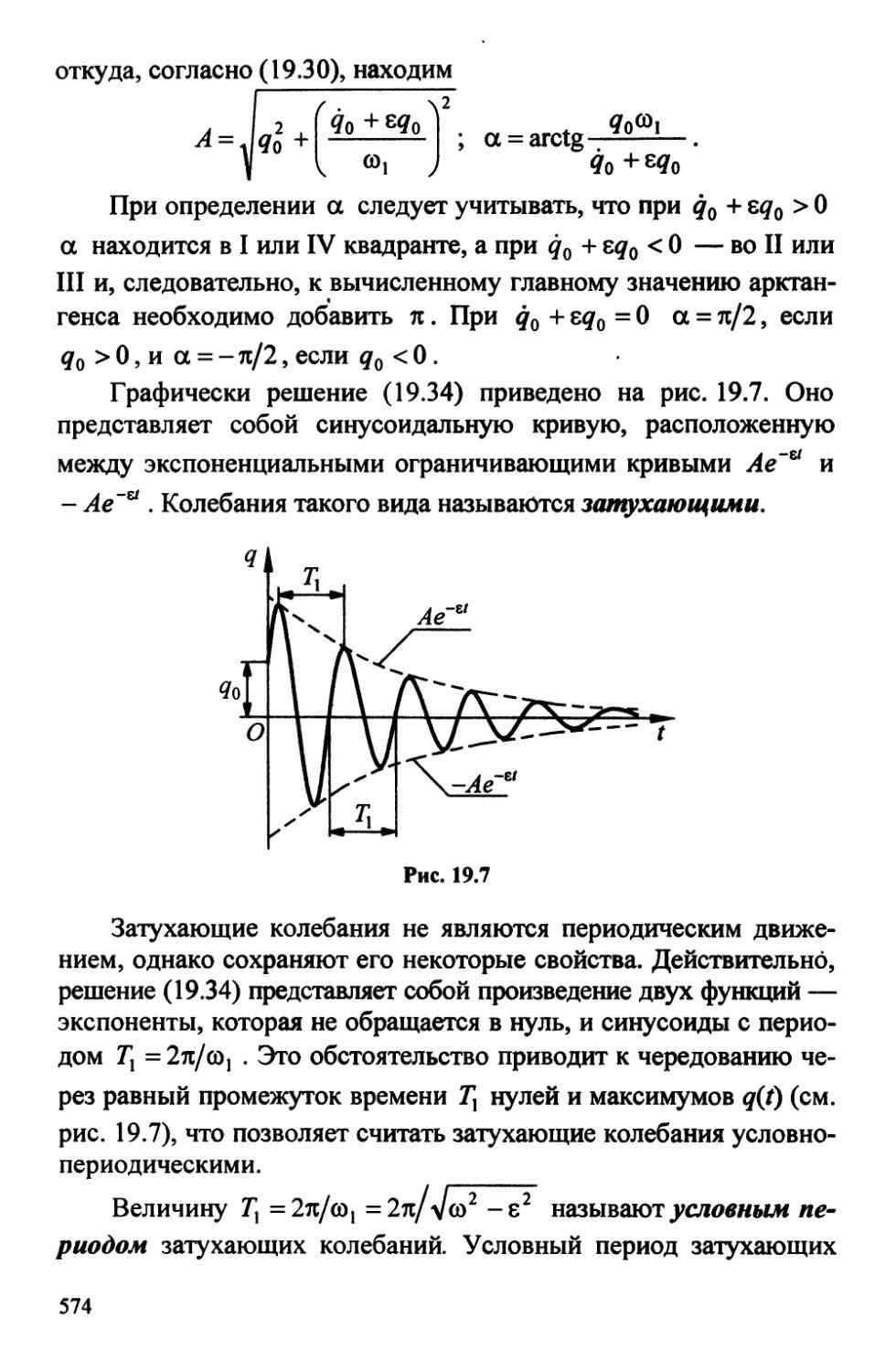
Обозначим предел lim
общем случае предел отношения
Аф w d®
—— не является производной -^,
At dt
поскольку для вектора, годограф
которого — пространственная кри-
кривая, не существует функции
ф = фG), которая определяла бы его
положение.
Введем единичный вектор
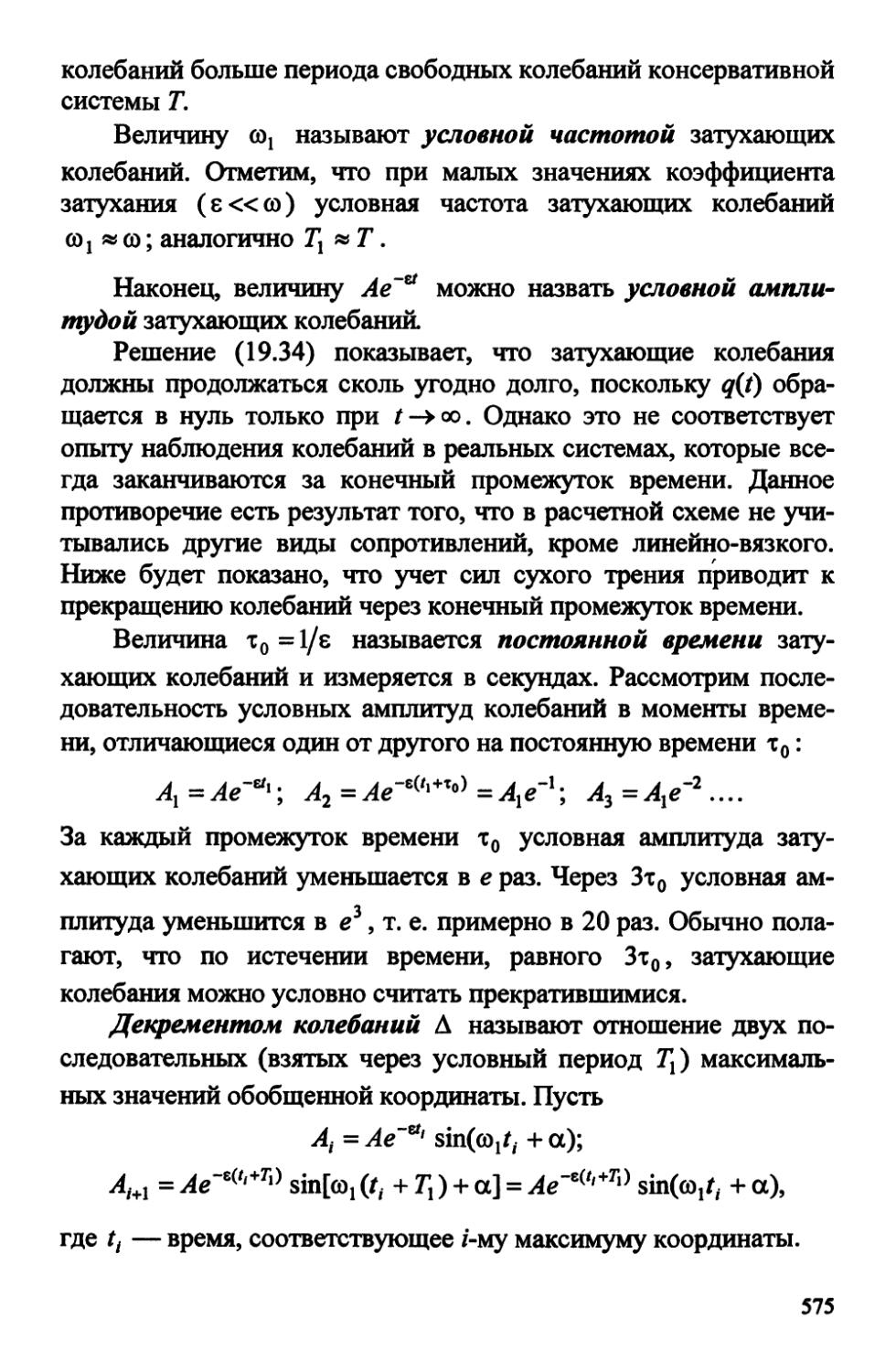
ро±В9 направленный в соответст-
соответствии с поворотом вектора В . Тогда с учетом (В.85) имеем
dB dB
~dt =
Ро
Рис. В.19
dt
(В.86)
Таким образом, производная вектора постоянного модуля по
скалярному аргументу равна произведению его модуля на со* и
на единичный вектор, перпендикулярный дифференцируемому и
направленный в соответствии с поворотом вектора В . '
Остановимся на случае, когда вектор В остается параллель-
параллельным неподвижной плоскости и поэтому его годографом будет
окружность радиусом |б|. Тогда существует функция ф =
35
Аф do>
определяющая вращение вектора, и hm—¦— = —ь. Поэтому из
^ОД1 dt
(В.86) следует
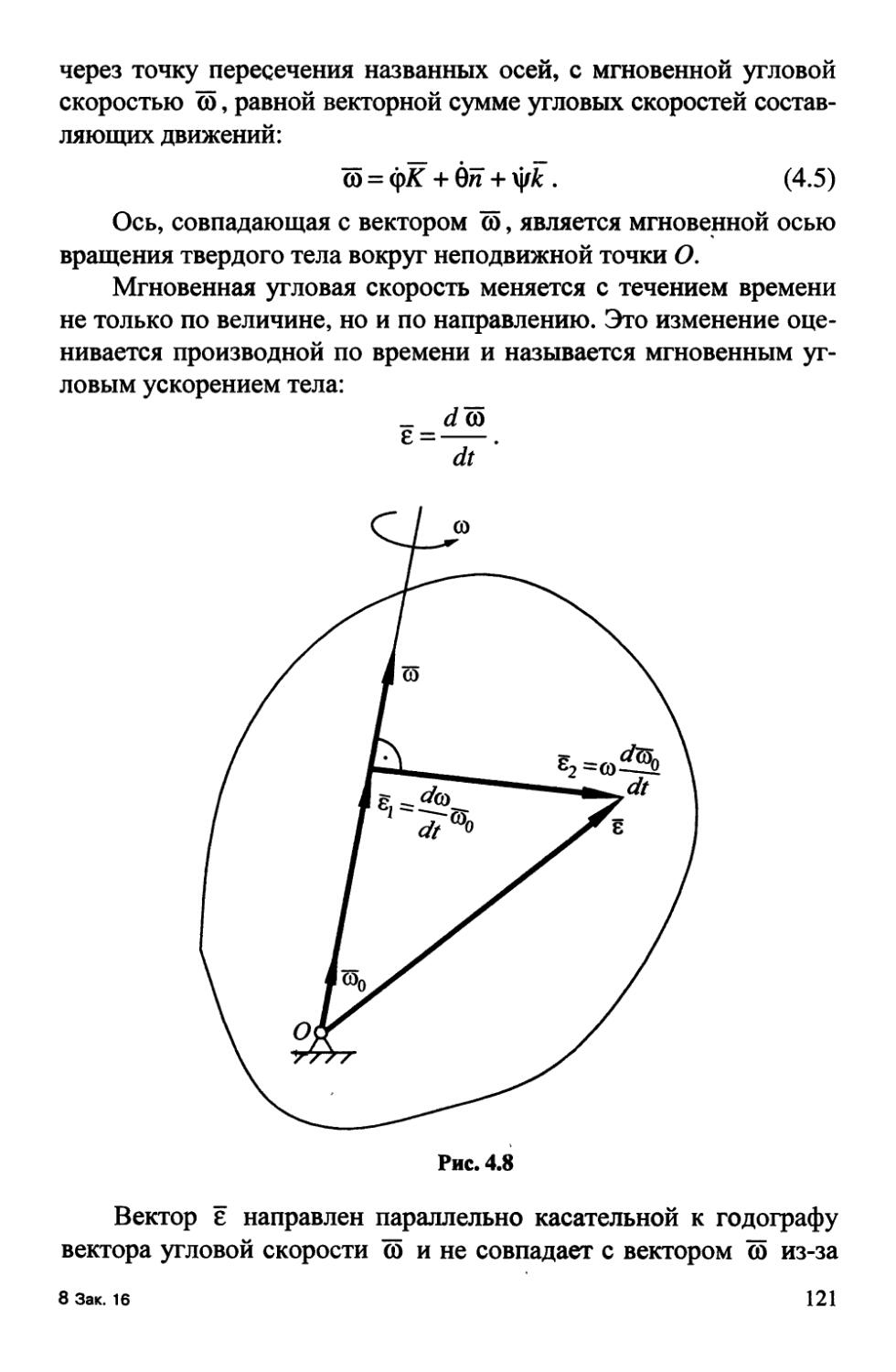
— = \Щ—Ро- (В-87)
В частном случае дифференцирования единичного вектора
а0 имеем
где
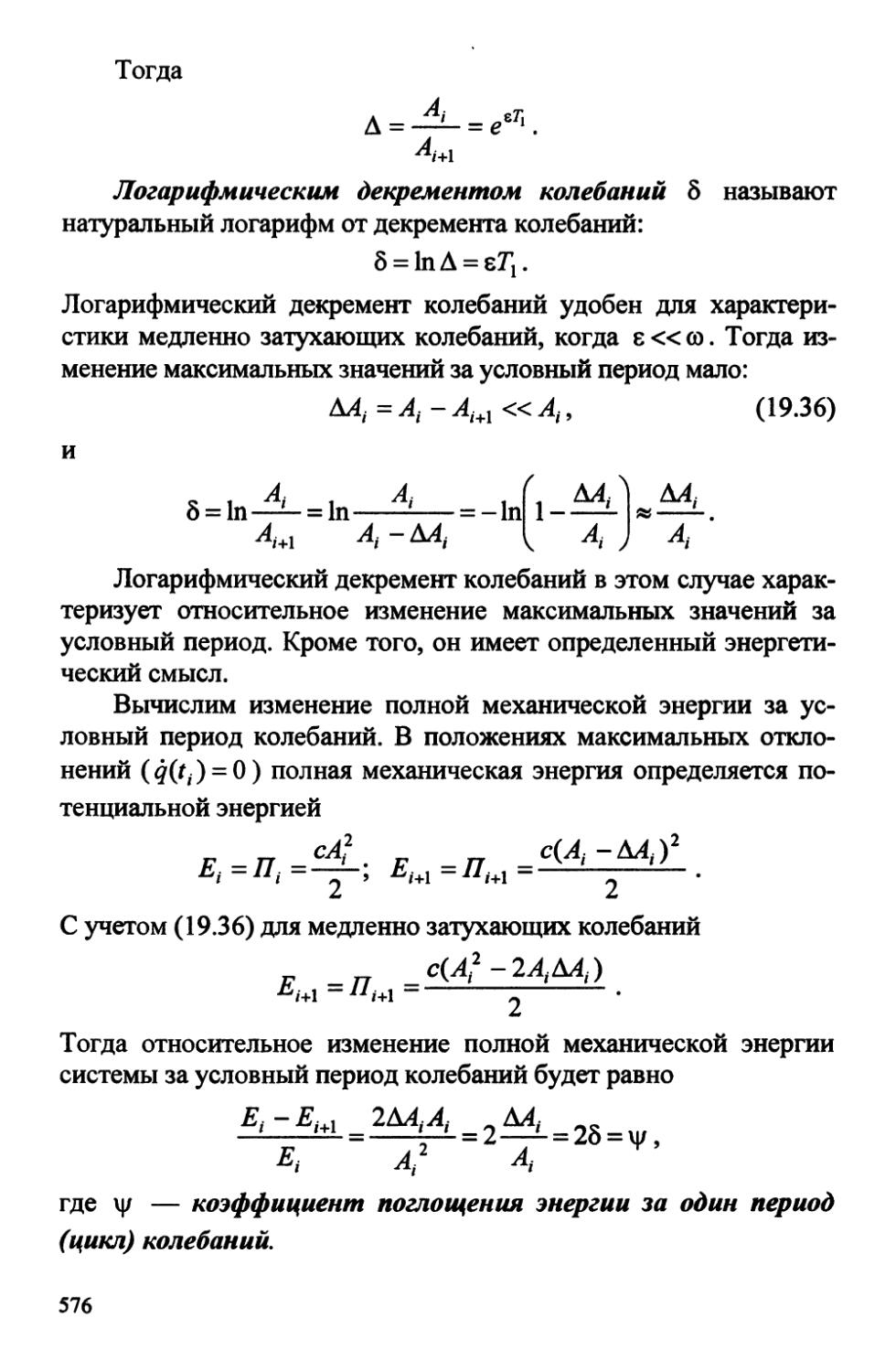
da0
dt
(В.88)
Учитывая теперь, что и модуль, и направление вектора А
изменяются, запишем его в виде (В.74):
A=A(t)ao(t).
Тогда производная вектора А по скалярному аргументу t может
быть представлена двумя взаимно перпендикулярными вектора-
векторами (рис. В.20):
dl dA_ Ada^ pM)
Рис. В.20
Очевидно, первый вектор в
уравнении (В.89) направлен вдоль
или. против вектора % и характе-
характеризует быстроту изменения векто-
вектора А по модулю. Согласно (В.86),
вектор А —- = А(о*р0 направлен
dt
перпендикулярно вектору А в со-
соответствии счего поворотом и оп-
определяет изменение вектора А по
направлению. Следовательно,
at
(в.9О)
36
Если вектор А остается параллельным некоторой непод-
неподвижной плоскости (т. е. годографом А является плоская кривая),
то из (В.87) и (В.90) следует:
dA dA __ с/ф _
Заметим, что равенство
dA
dt
(B.9I)
имеет место лишь в слу-
случае, когда направление вектора А не меняется.
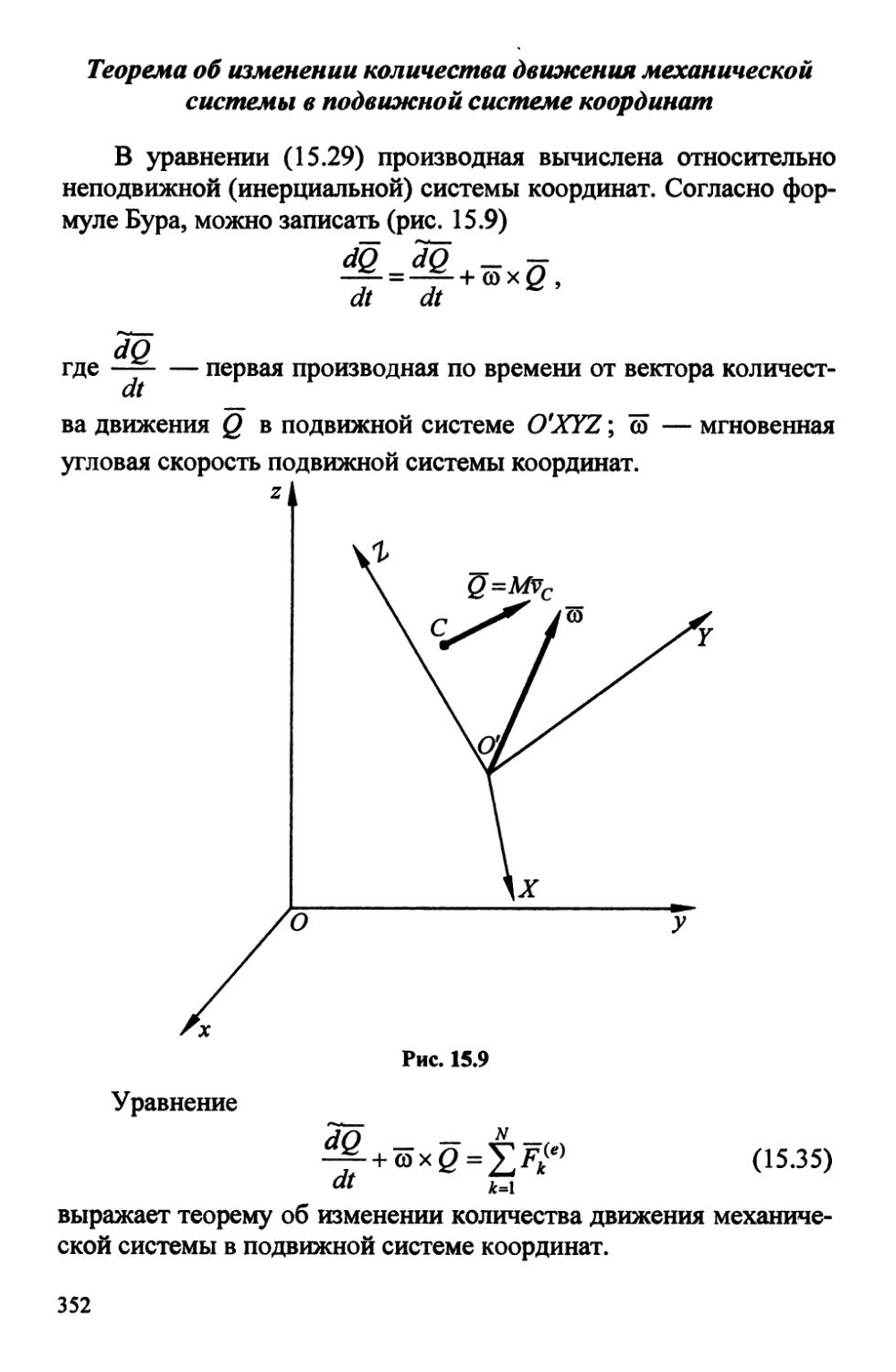
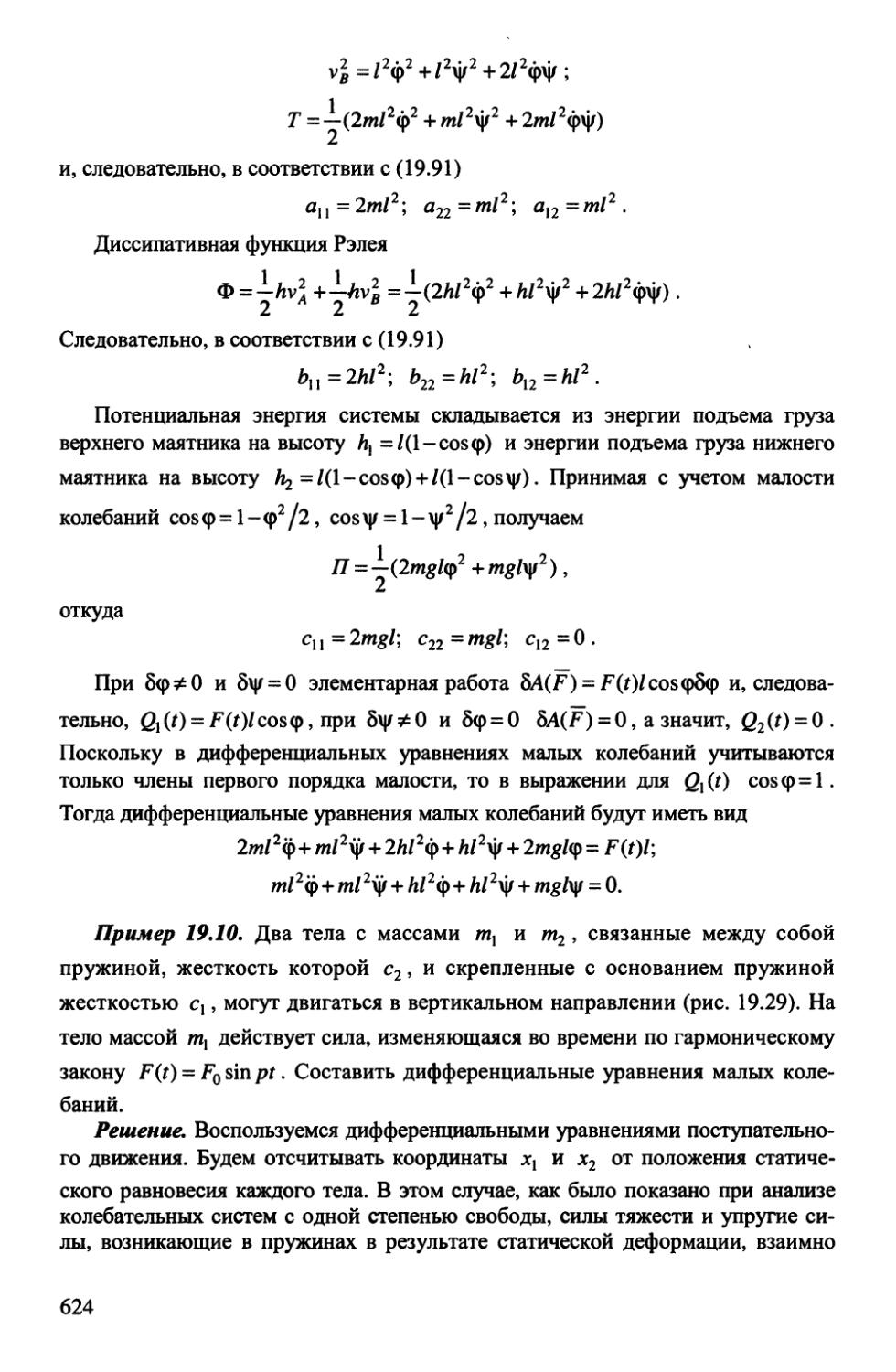
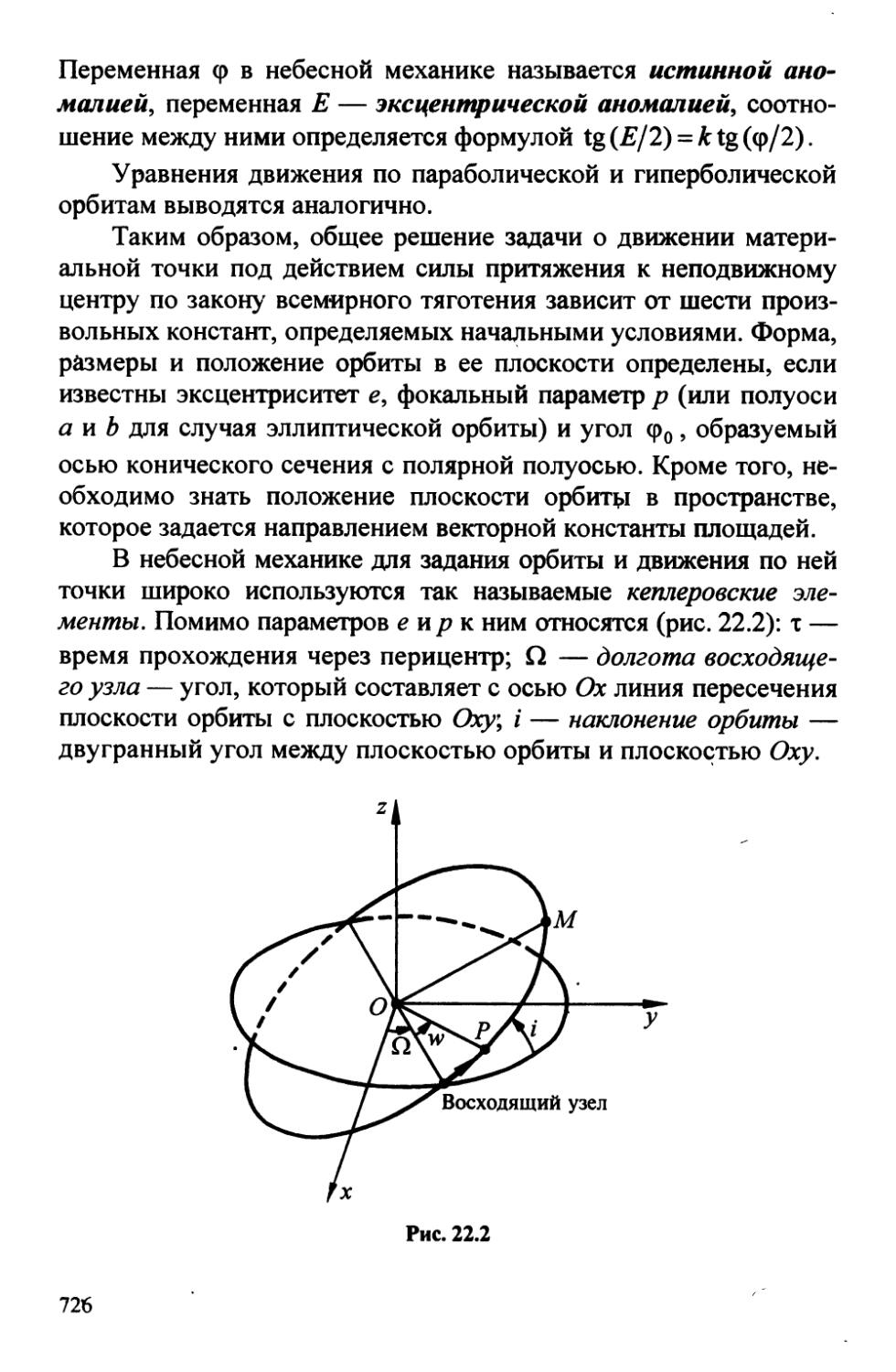
Раздел I
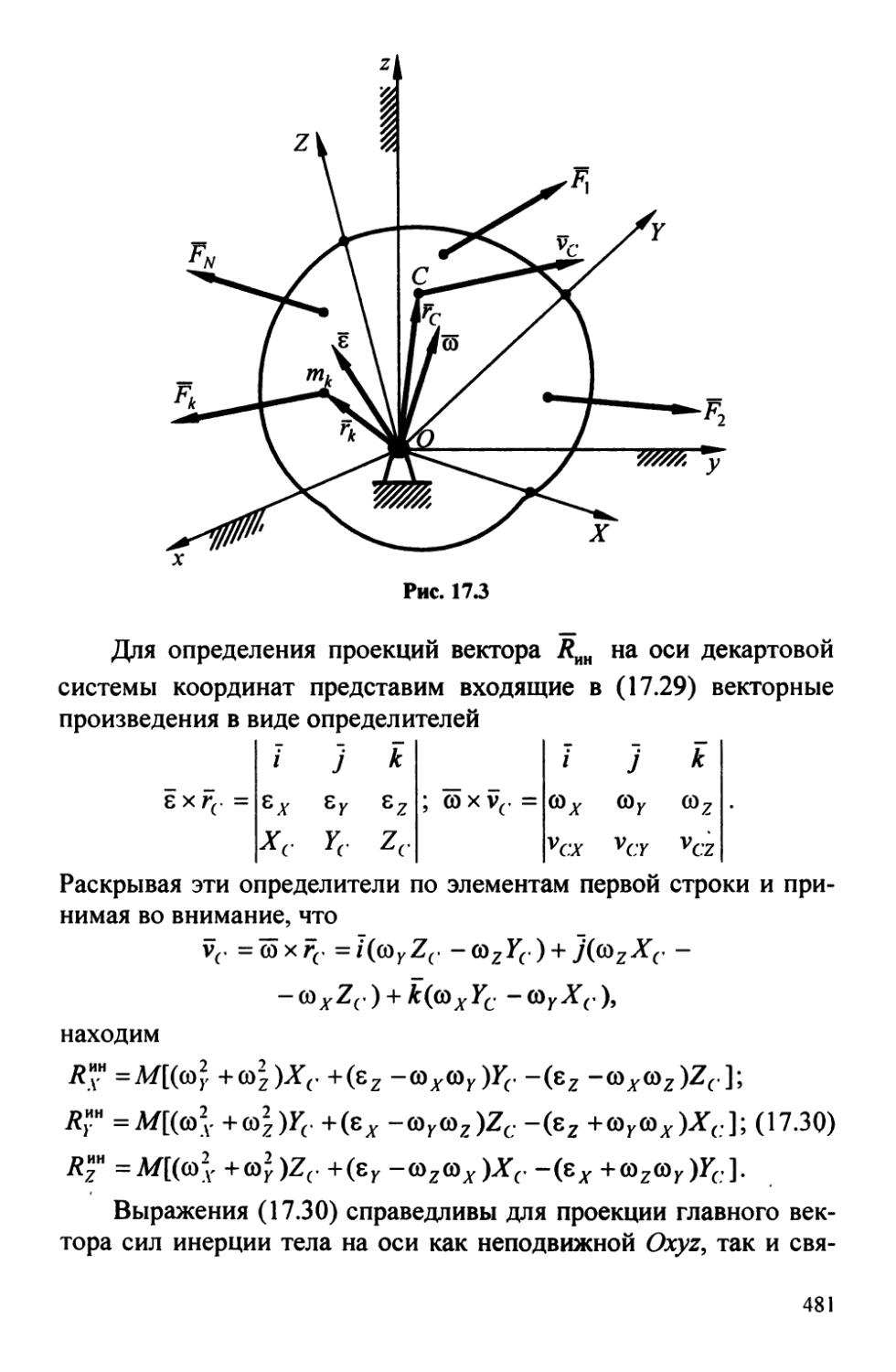
КИНЕМАТИКА
Кинематика — раздел теоретической механики, в кото-
котором изучается механическое движение тел без анализа опре-
определяющих это движение условий и причин (с геометрической
точки зрения).
Механическое движение, то есть изменение положения
материального тела в пространстве, определяется по отноше-
отношению к некоторому телу, которое называется телом отсчета.
С телом отсчета связывают систему координат, в которой
рассматривают перемещение исследуемого материального
тела или системы тел с течением времени. Начало отсчета
времени выбирают произвольно. Связанная с телом отсчета
система координат с принятым в ней отсчетом времени обра-
образуют систему отсчета.
Изучение механического движения в кинематике возможно
на основе задания движения материальных тел. Задать движе-
движение материального тела означает указать способ или алгоритм,
позволяющий однозначно определить положение рассматривае-
рассматриваемого материального тела в выбранной системе отсчета в любой
момент времени.
В данном разделе будут рассмотрены главы по кинематике
точки и абсолютно твердого тела.
Простейшей моделью материального тела, размерами
которого в условиях решаемой задачи можно пренебречь,
является материальная точка. При этом в кинематике поня-
понятие материальной точки тождественно понятию геометриче-
геометрической точки.
Абсолютно твердым, или просто твердым телом назы-
называется модельное представление материального тела в виде тела
(системы материальных точек), в котором расстояние между лю-
любыми точками является неизменным.
38
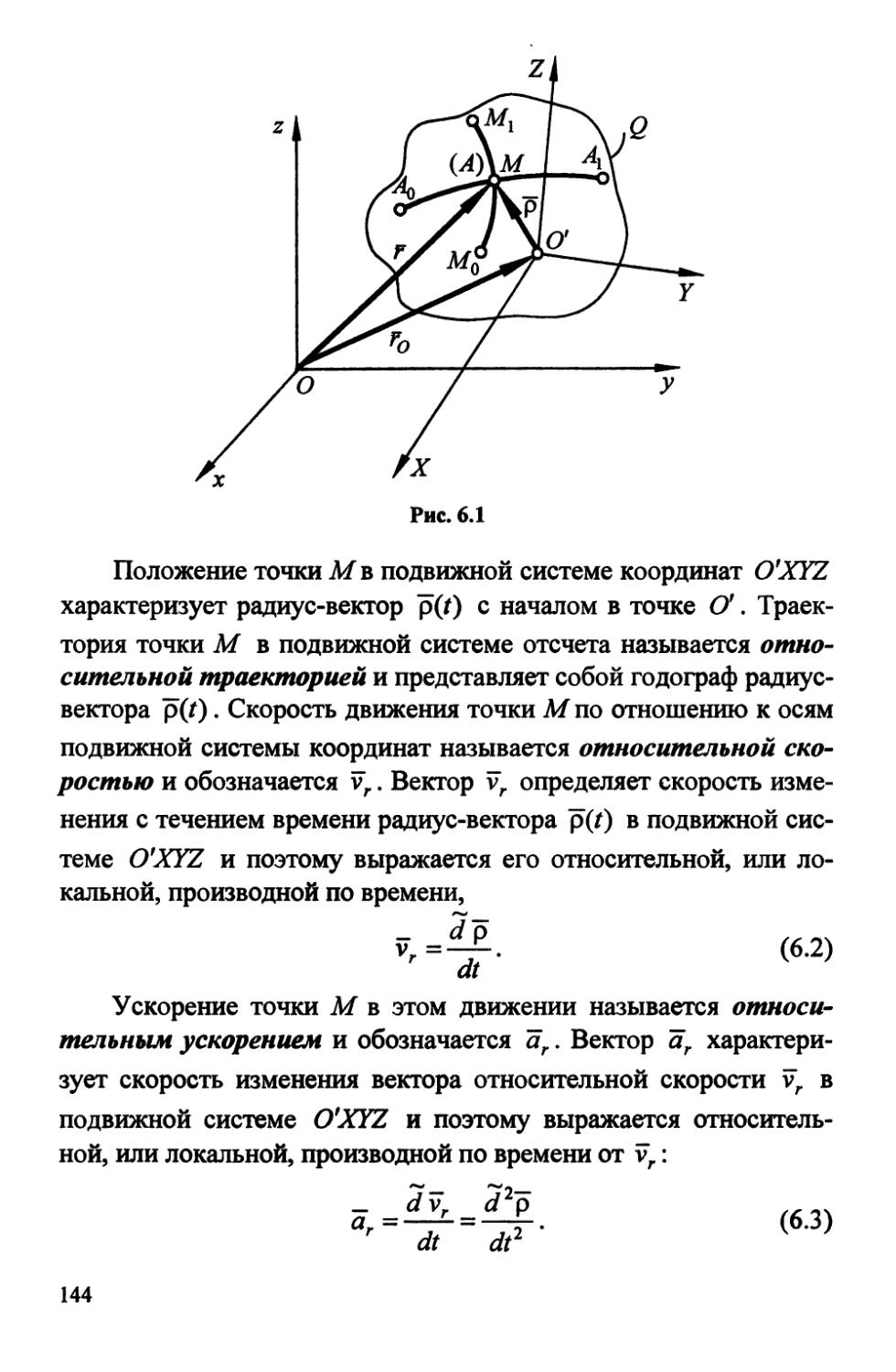
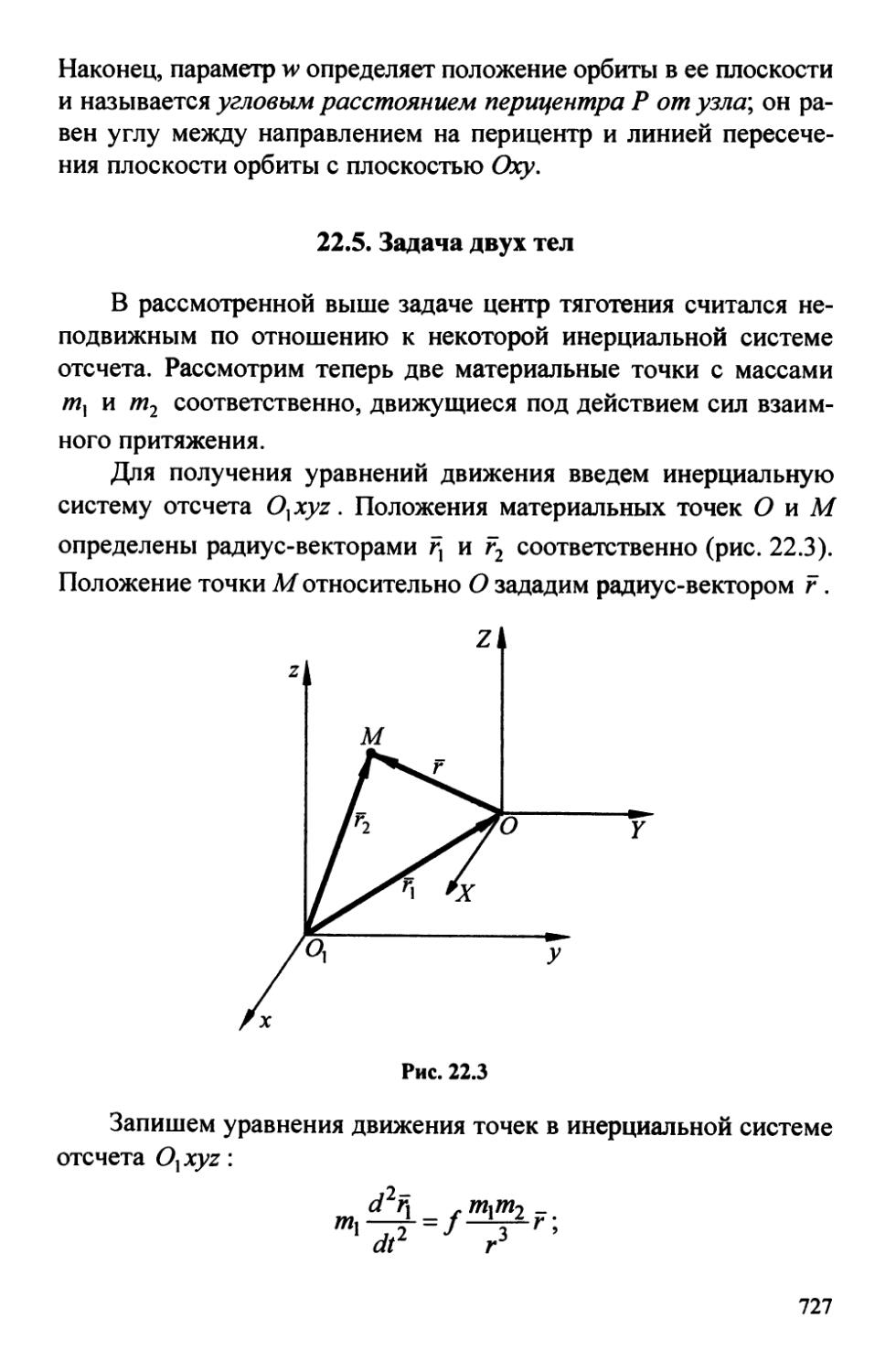
Глава 1
КИНЕМАТИКА ТОЧКИ
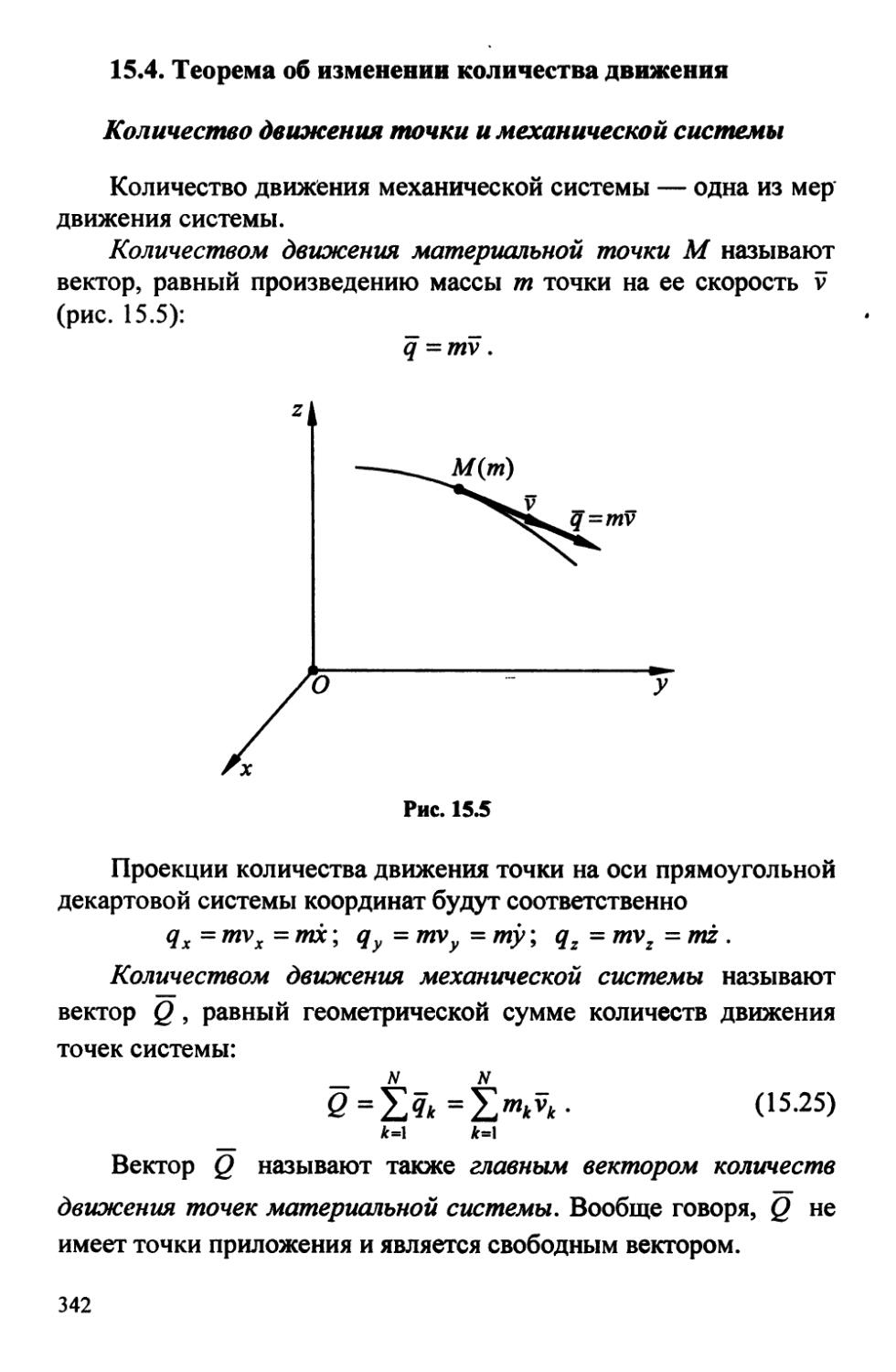
1Л. Скорость точки
Кинематика точки — раздел кинематики, в котором ис-
исследуется механическое движение материальных точек.
Одной из важных характеристик движения точки является
траектория, т. е. геометрическое место последовательных (с
течением времени) положений точки в пространстве, определяе-
определяемое в той или иной системе отсчета.
Другими кинематическими характеристиками движения точ-
точки являются скорость и ускорение.
Основными задачами кинематики точки являются задачи по
определению траектории, скорости и ускорения точки, а также
исследованию закономерностей их изменения.
Среди способов задания движения точки выделяют вектор-
ный9 координатный и естественный. Все три способа взаимо-
взаимосвязаны, т. е. возможен переход от одного способа задания дви-
движения точки к другому.
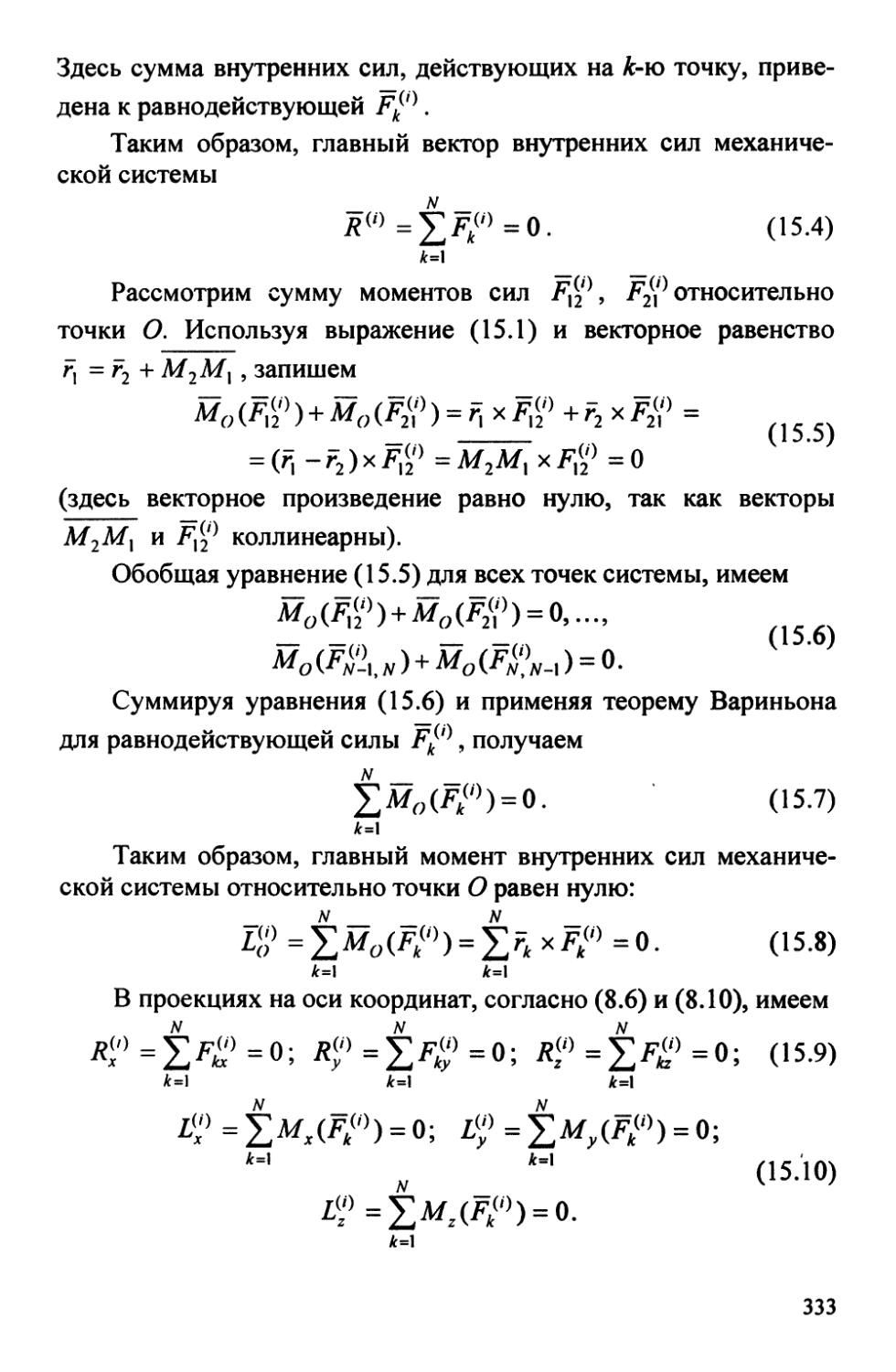
Предположим, что точка при движении по траектории в мо-
момент времени t совпадает с точкой М и ее положение определяет
радиус-вектор r(t), проведенный в некоторой системе отсчета из
неподвижной точки О, а в момент времени (t + At) — с точкой
Ml9 которой соответствует радиус-вектор r(f+ Af), (рис. 1.1).
Приращение радиус-вектора за промежуток времени At составит
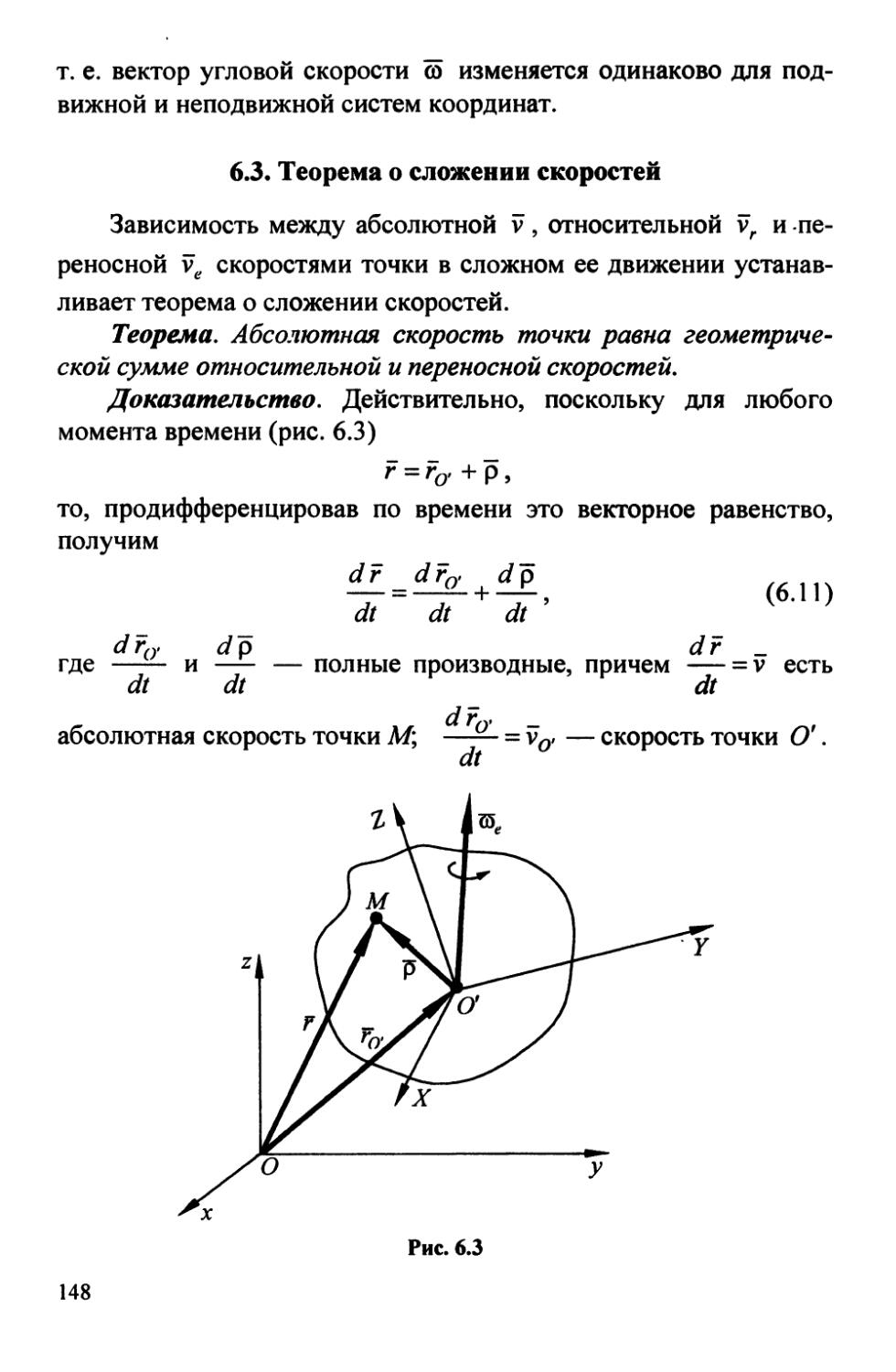
AF = F(f + At)-7(t). Отношение этого приращения к промежутку
времени At можно определить как среднюю скорость vcp точки за
время At, vCp = AF/ At. Предел этого отношения, когда промежу-
19
ток времени At стремится к нулю, называют скоростью точки в
момент времени L Такой предел есть производная от радиус-
вектора точки по времени, т. е.
v=lim — = — = г. A.1)
д*->о At at
Траектория
точки Ч %ж
Ad
по
Вектор vcp направлен по приращению Аг радиус-вектора
точки, т.е. по направлению секущей ММХ. При стремлении At к
нулю секущая в пределе становится касательной к траектории в
точке М, поэтому вектор v направлен также по касательной
(см. рис. 1.1).
Таким образом, скорость точки есть векторная физическая
величина, равная первой производной по времени от радиус-
вектора точки; скорость всегда направлена по касательной к
траектории, а ее численное значение определяется модулем |vj.
Единица измерения скорости в СИ — метр в секунду (м/с).
Путь L, пройденный точкой по траектории за промежуток
времени At = (t2 -tx)y можно определить как предел суммы мо-
модулей приращений радиус-вектора точки |Д^| за малые отрезки
40
времени Д/4, на которые разбивается промежуток времени
(t2 - /j), при условии, что ДгА -> 0, A?ft -» 0 :
-Atk = )v(t)dt. A.2)
Здесь v(t) = |v (t)\ — модуль скорости, выраженный в виде функ-
функции времени.
1.2. Ускорение точки
Если откладывать вектор v = v (/) точки в текущие моменты
времени из некоторой неподвижной точки Ох, то получим линию
в пространстве, называемую годографом скорости (рис. 1.2, а).
Очевидно, что приращение скорости за время At составит
Av = v(t + At) - v(t). Отношение этого приращения к промежутку
времени At, за который оно произошло, определяет среднее ус-
ускорение точки за рассматриваемый промежуток времени. Предел
этого отношения при At, стремящемся к нулю, называется уско-
ускорением точки в момент времени /, т. е.
_ Av dv ^ d2r n
я = lim -—= —- = v =—т- = г • A-3)
д/-»о At dt dt
По своему физическому смыслу ускорение есть скорость из-
изменения скорости, и направлено оно по касательной к годографу
скорости (см. рис. 1.2, а).
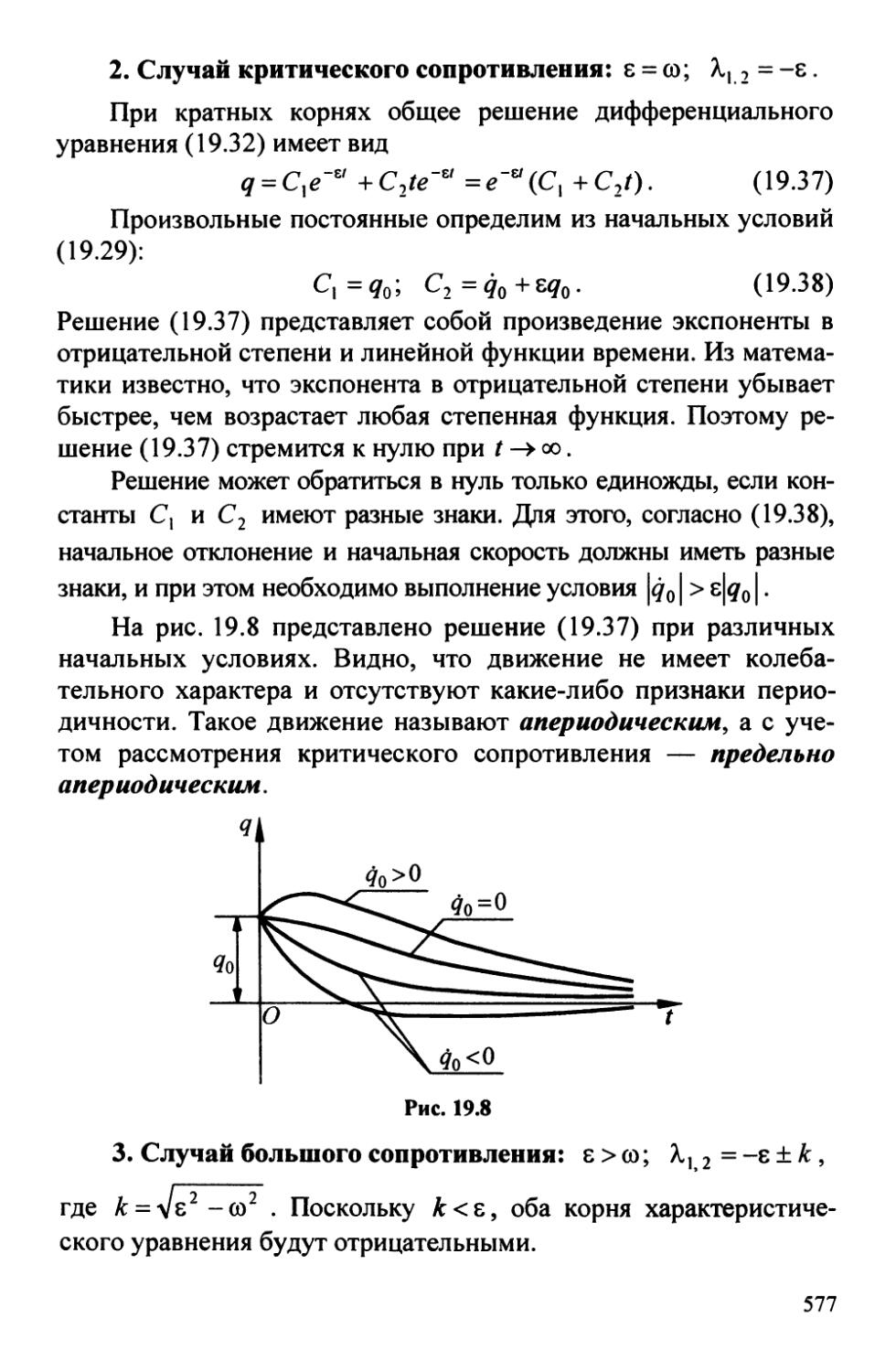
Определим направление вектора я, вычисляемого согласно
A.3), по отношению к траектории точки. Очевидно, что направ-
направление вектора Av / At всегда совпадает с направлением прираще-
приращения скорости Av . При А* -> 0 точка Мх на траектории прибли-
приближается к точке Му а плоскость, в которой лежат векторы v и Av ,
поворачиваясь вокруг вектора v , т. е. касательной к траектории в
точке My занимает свое предельное положение, совпадающее с
плоскостью, являющейся соприкасающейся плоскостью кривой
41
(траектории) в точке М (рис. 1.2, б)*. В итоге можно сделать за-
заключение, что вектор а лежит в соприкасающейся плоскости
траектории в точке М, причем направлен он всегда внутрь вогну-
вогнутости траектории точки в этой плоскости.
Годограф
скорости
а
Траектория
точки
Если траектория точки является плоской кривой, то соприка-
соприкасающаяся плоскость совпадает с плоскостью, в которой лежит
траектория точки.
Таким образом, ускорение точки а есть векторная физиче-
физическая величина, равная первой производной по времени от скорости
* Геометрически соприкасающаяся плоскость определяется как предельное
положение плоскости, образованной касательными к кривой в точке М и в со-
соседней точке Мх при неограниченном сближении этих точек.
42
точки или второй производной от радиус-вектора точки;
вектор а расположен в соприкасающейся плоскости и на-
направлен в сторону вогнутости траектории точки в этой
плоскости; численное значение ускорения определяется моду-
модулем \а\.
Единица измерения ускорения в СИ — метр на секунду в
квадрате (м/с2 ).
Если при движении точки по траектории модуль скорости
возрастает со временем (dv/dt>0)9ro такое движение называет-
ся ускоренным, причем, если <tfv/<if = const>0, то равноуско-
равноускоренным. Если же модуль скорости при движении точки умень-
уменьшается (dv/dt<0), то движение является замедленным, а при
dv/dt = const < 0 — равнозамедленным. В случае v(t) = const
(dv/dt = 0) движение называется равномерным.
Производную dv/dt можно интерпретировать как проек-
проекцию ускорения а на ось М xv, совпадающую по направлению с
направлением скорости v (см. рис. 1.2, б). Эта проекция может
быть найдена так: av =IIp7a=avxv, где xv=v/v — вектор,
имеющий направление скорости, и модуль, равный единице.
Тогда
_ v dv v I dv I dv ,л А.
Модуль проекции ускорения на ось Mxv9 равный |av| = |
характеризует собственно изменение скорости по величине. Знак
этой проекции определяет характер движения. Так, при
av=dv/dt>0 (угол а между векторами а и v меньше 90°)
движение ускоренное, при av=dv/dt<0 (угол сс>90°) — за-
замедленное, а при av=dv/dt = 0 — равномерное (v = const). В
общем случае равномерного движения точки по прямолинейному
участку траектории а = 0, v = const; при равномерном движении
по криволинейному участку траектории v = const, но v>const,
поэтому a±v, а * 0.
43
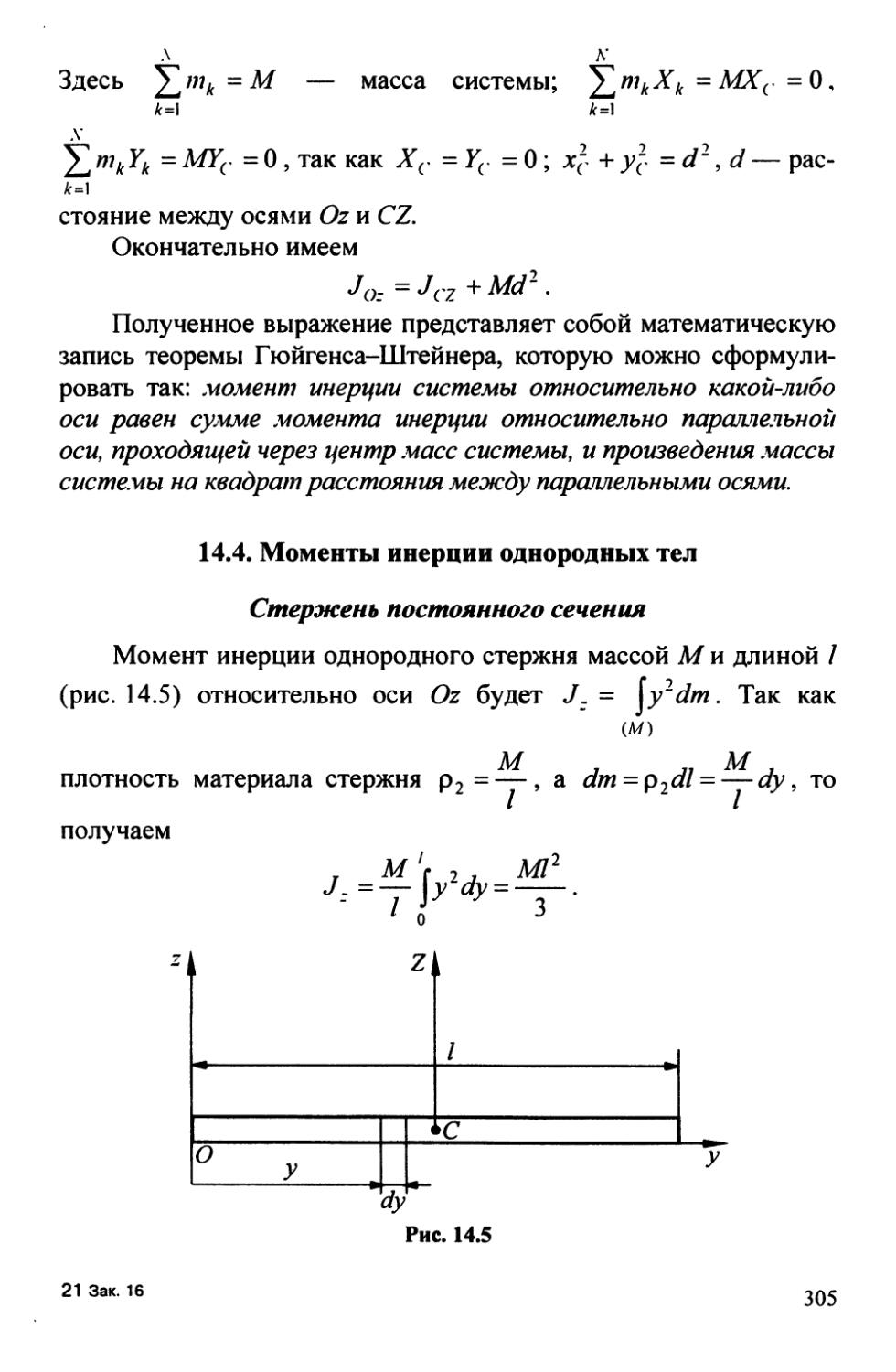
1.3. Векторный способ задания движения точки
Движение точки можно задать, если выразить ее радиус-
вектор в некоторой системе отсчета в виде функции времени
г=г(О- A.5)
Функция r(t) для определенности дальнейших рассуждений
предполагается непрерывной, дважды дифференцируемой. Такое
задание радиус-вектора точки предполагает наличие системы
отсчета, но не конкретизирует ее. В данном случае траекторию
точки молено определить как годограф ее радиус-вектора, т.е.
геометрическое место концов радиус-вектора г, изменяющего-
изменяющегося во времени согласно зависимости A.5). -
Определения скорости и ускорения точки при векторном
способе задания движения соответствуют приведенным в § 1.1 и 1.2.
Формулы для их выражения имеют вид A.1) и A.3).
Векторный способ задания движения точки ввиду своей про-
простоты и компактности широко применяется для введения основ-
основных понятий и кинематических характеристик движения точки,
которые в дальнейшем используются в том числе и при других
способах задания ее движения, а также в теоретическом изложе-
изложении различных разделов курса.
1.4. Координатный способ задания движения точки
Для задания движения точки координатным способом необ-
необходимо ввести систему отсчета с некоторой системой координат
и дать зависимости изменения координат точки в виде функций
времени*. Эти зависимости называются кинематическими урав-
уравнениями движения точки в соответствующей системе коор-
координат. Рассмотрим случаи задания движения тс^чки в конкрет-
конкретных системах координат.
* Функции, определяющие изменение координат во времени, во всех далее
рассматриваемых случаях будут полагаться непрерывными, дважды дифферен-
дифференцируемыми.
44
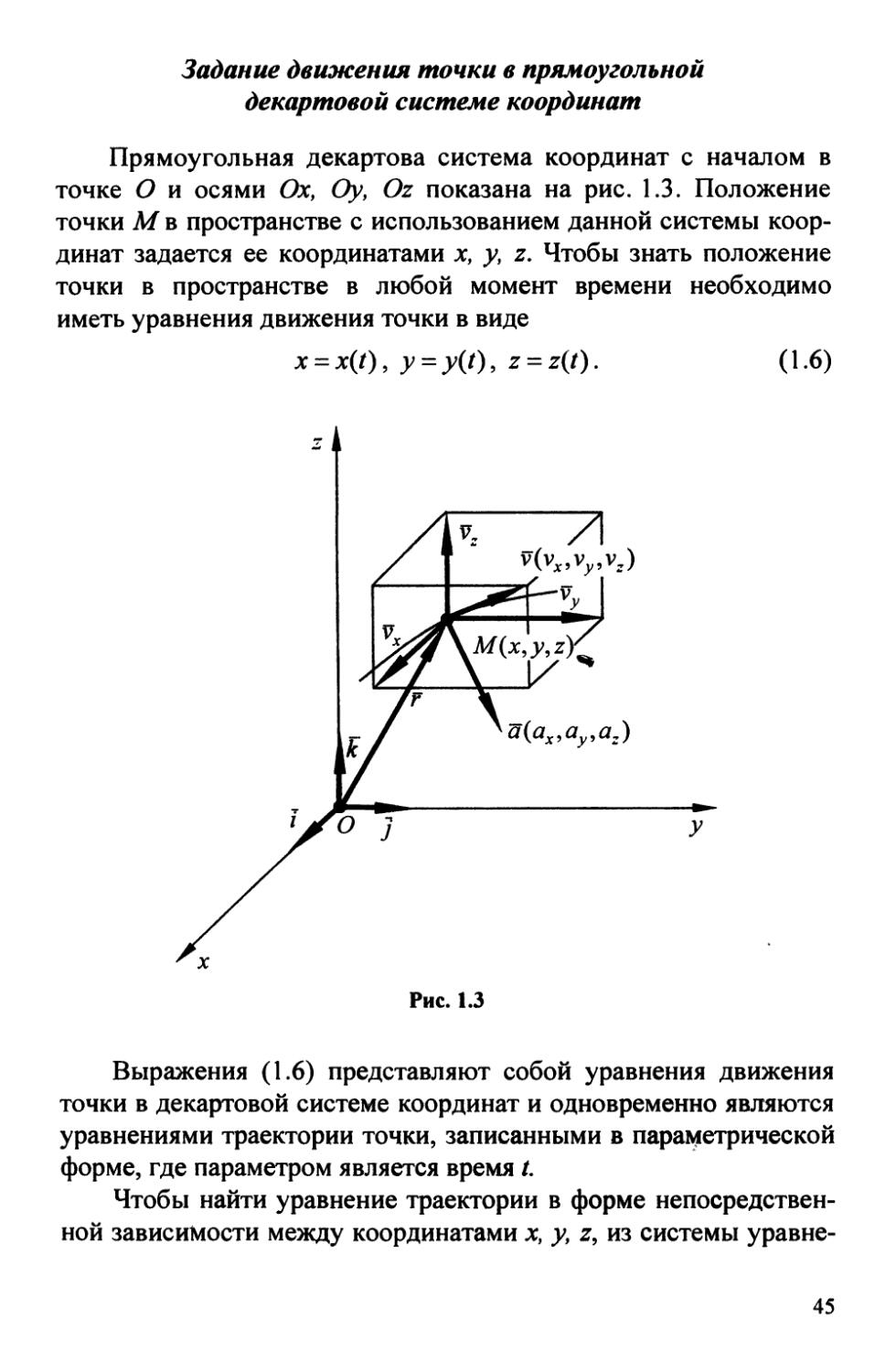
Задание движения точки в прямоугольной
декартовой системе координат
Прямоугольная декартова система координат с началом в
точке О и осями Ox, Оу, Oz показана на рис. 1.3. Положение
точки М в пространстве с использованием данной системы коор-
координат задается ее координатами х, у, z. Чтобы знать положение
точки в пространстве в любой момент времени необходимо
иметь уравнения движения точки в виде
A.6)
а(ах,а az)
Рис. 1.3
Выражения A.6) представляют собой уравнения движения
точки в декартовой системе координат и одновременно являются
уравнениями траектории точки, записанными в параметрической
форме, где параметром является время f.
Чтобы найти уравнение траектории в форме непосредствен-
непосредственной зависимости между координатами jc, у, z, из системы уравне-
45
ний A.6) необходимо исключить время. В таком случае траекто-
траекторию будет определять, например, система уравнений вида
jo.
Следовательно, траектория представляет собой линию пере-
пересечения цилиндрических поверхностей, уравнения которых со-
составляют систему A.7).
В частном случае задания движения точки на плоскости Оху, например в ви-
виде уравнений движения х = x(t), у = y(t), уравнение траектории будет
Д*,>0 = 0. A.Г)
Следует также заметить, что траекторией точки может быть не вся кривая, опи-
описываемая A.7) или A.7*), а только ее часть, соответствующая физически реали-
реализуемому процессу и положительным значениям времени /.
Проведем из начала декартовой системы координат (см.
рис. 1.3) радиус-вектор г точки Ми выразим его через коор-
динаты точки и орты i,j,k этой системы координат, состав-
составляющие ее векторный базис. С учетом уравнений A.6) будем
иметь
r=x{tji+y{t)j + z(tjk. A.8)
Из A.8) следует, что координаты точки есть проекции ее радиус-
вектора на оси декартовой системы координат, т. е.
х-г •/, у = г-у, z = гк . A.9)
Соотношения A.8) и A.9) устанавливают взаимный переход от
задания движения точки в декартовой системе координат к век-
векторному способу и наоборот.
На основании A.1) и A.8) скорость точки, при задании ее
движения в декартовой системе координат, определится так:
v = г = x(t)i + y(t)j + z(t)k . A.10)
В A.10) производные х, у, z, т. е. коэффициенты при /, ], к ,
имеют смысл проекций скорости точки на оси декартовой систе-
системы координат. Действительно,
vx=v-i=x(t), v =v-j = ><0, v,=v-*=i(/). A.11)
46
Таким образом, в рассматриваемом случае скорость точки
представляет собой сумму составляющих векторов, параллель-
параллельных осям декартовой системы координат:
V = Vх + Vу + V, ,
где vx = vx% vy = vy]\ vz = vzk , а ее численное значение (модуль)
определится по формуле
|| /2+v^v^. A.12)
Представление о направлении вектора v можно получить по значениям на-
направляющих косинусов углов, которые составляет этот вектор с осями декарто-
декартовой системы координат:
cosot = vv /v, cosp = vy /v, cosy = v, /v .
Здесь а, р. у — углы, которые составляет вектор v с осями Ох, Оу и Oz соот-
соответственно.
На основании A.3) и A.8) формула для расчета ускорения
примет вид
а = ? = x(t)i + №J + *@* , A-13)
проекции ускорения на оси декартовой системы координат будут
ax=a-i =x = vx;ay=a'j = y = vy; az=ak =z-v2, A.14)
составляющие ускорения, параллельные осям координат, опре-
определятся как ах =axi;ay =ayj;az =azk, а численное значение
ускорения будет равно модулю вектора а :
+a2z . A.15)
Представление о направлении ускорения можно получить по
значениям направляющих косинусов углов, которые составляет
вектор а с осями декартовой системы координат:
Проекцию ускорения на ось, совпадающую по направлению
с вектором v , для определения характера движения точки (т. е.
ускоренно или замедленно она движется) можно в данном случае
найти, согласно A.4), в виде
47
dv _
— = a
dt
axv,+a v +arvr
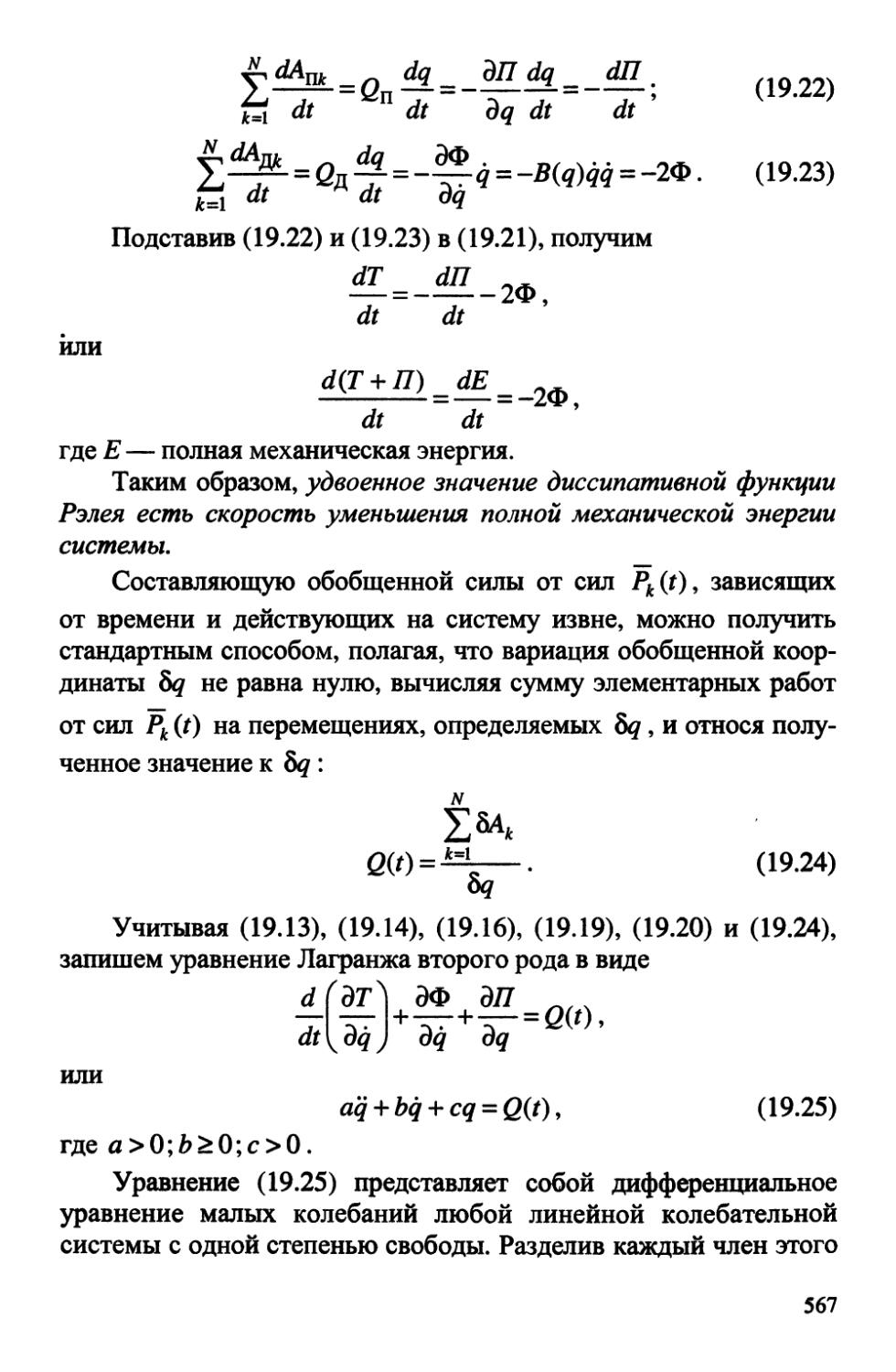
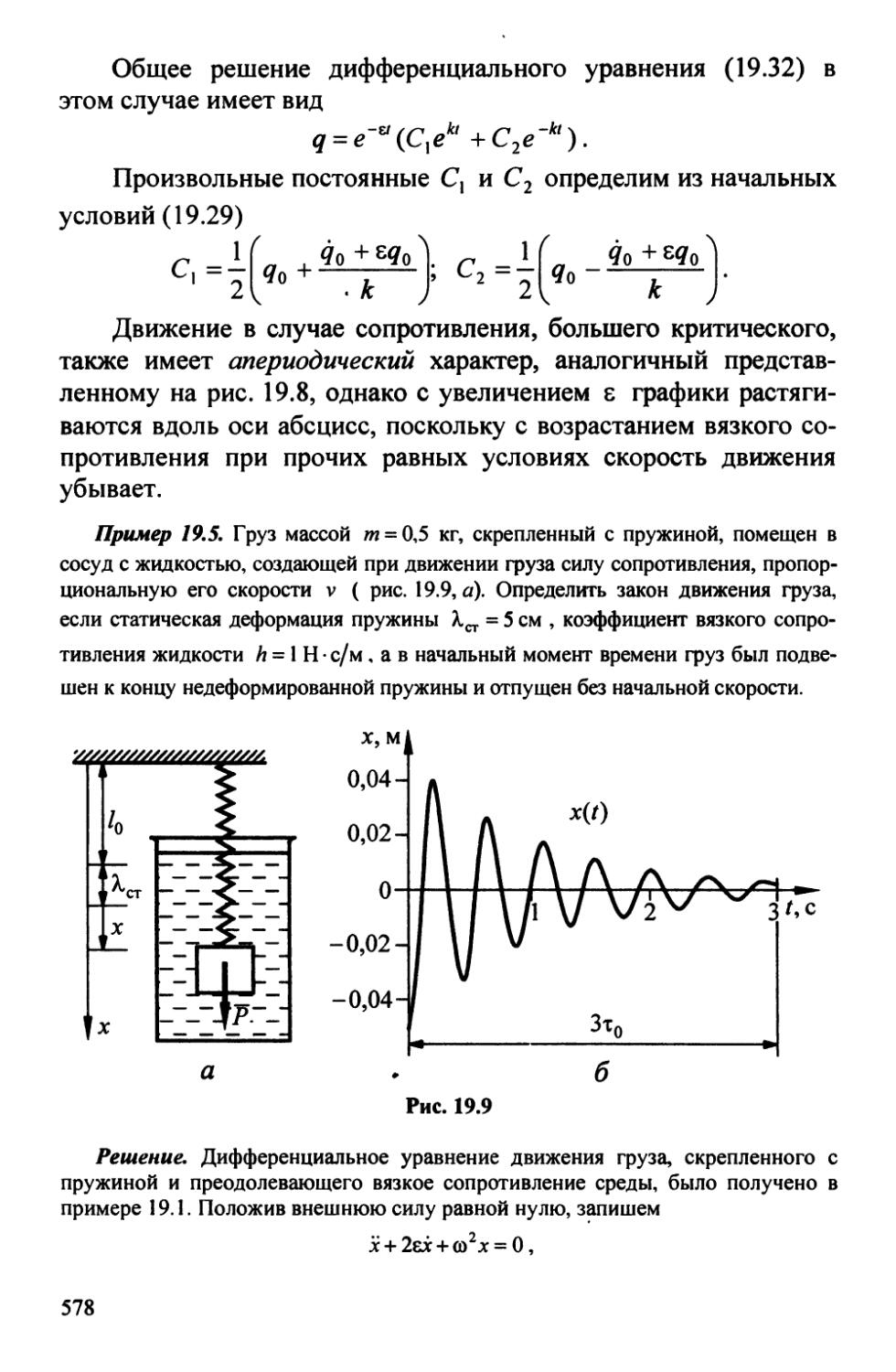
Пример 1.1. Движение точки задано на плоскости в декартовой системе коор-
координат уравнениями движения вида х = Ыг; у = ct, где 6 = 1 м/с2 ; с = 1 м/с .
Определить траекторию точки, а также для момента времени t = 1 с найти и
изобразить на чертеже ее скорость, ускорение и их составляющие.в декартовой
системе координат. Установить характер движения точки (ускоренное или за-
замедленное) для данного момента времени.
Решение. Исключив из уравнений движения время, получим уравнение траек-
траектории точки в виде x = (b/c2)y2, что соответствует уравнению параболы
(рис. 1.4). Траекторией будет являться лишь часть параболы, расположенная выше
оси абсцисс, так как координата у при t > О может быть только неотрицательной,
т. е. у > 0. Проекции скорости и ускорения точки на оси декартовой системы
координат, согласно A.11) и A.14), имеют вид: vx = 2bt; vy = с; ах = 2b ; ay = 0.
Для t = 1 с получаем jc = 1m, >> = 1м, vx=2 м/с , v^ = 1 м/с, ах = 2 м/с2 ,
Яу = 0. Составляющие скорости vx, v^ и ускорения ах точки, а также ее ско-
скорость v и ускорение я изображены на рис. 1.4. МоДули скорости и ускорения
равны
v2 =VJ«2,23m/c; a =
V4=2m/c2
Рис. 1.4
На чертеже видно, что угол между векторами v и а меньше 90°, так что
движение точки следует считать ускоренным (av>0). Действительно, в данном
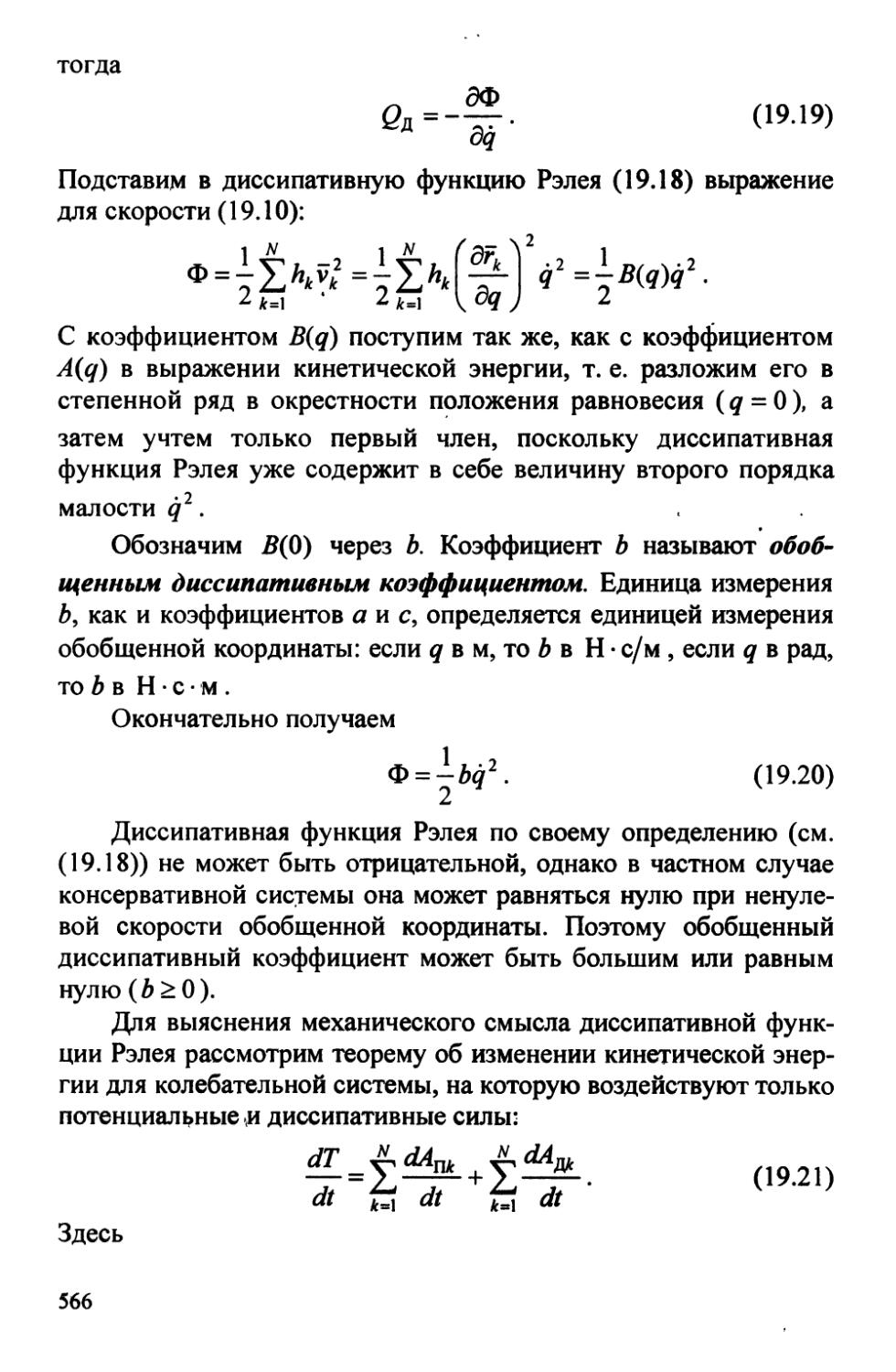
случае при * = 1 с
48
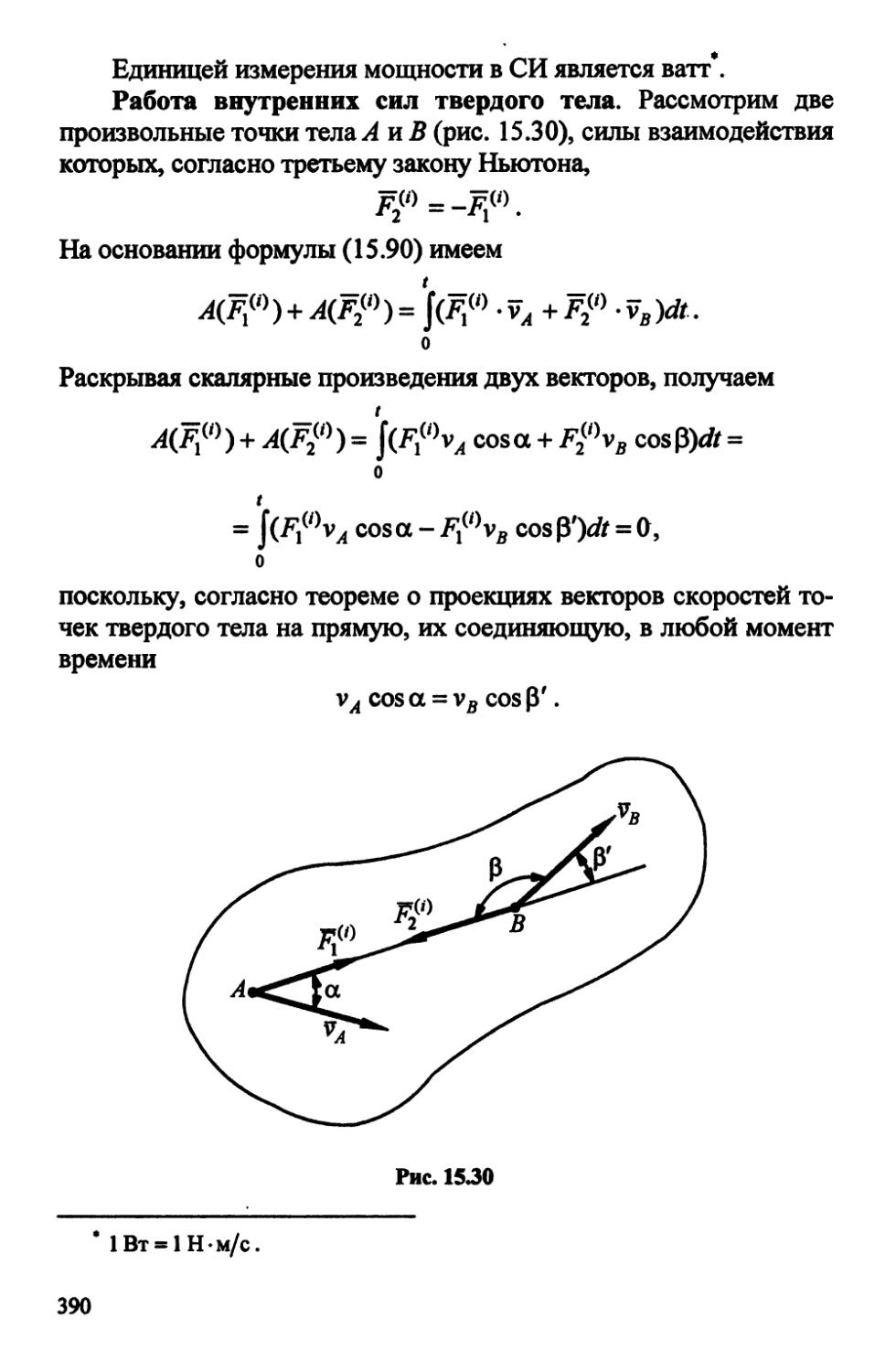
Задание движения точки в полярной системе координат
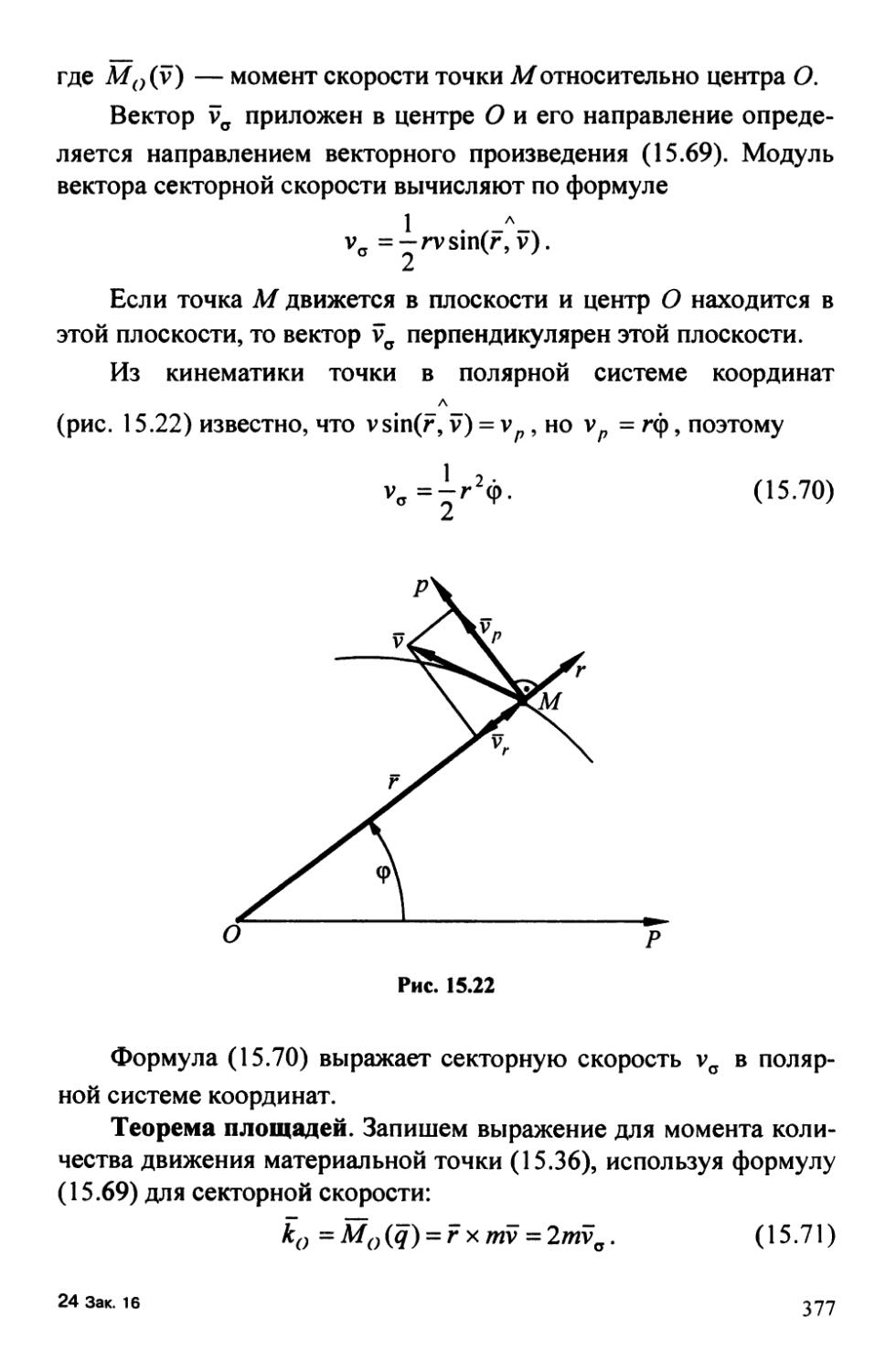
Если движение точки происходит в некоторой плоскости, то
иногда целесообразно использовать полярную систему коорди-
координат. Положение точки М в ней определяется координатами г и ср,
являющимися скалярными величинами (рис. 1.S).
РасЛЬложение полярной оси (луча, проведенного на плоско-
плоскости из некоторой точки О) выбирают в плоскости движения точки,
исходя из удобства решения задачи. Полярный радиус г — скаляр-
скалярный неотрицательный параметр, равный длине отрезка ОМ, т. е.
расстоянию от начала координат (точки О) до точки М. Полярный
угол ф — это угол между полярной осью и линией ОМ При от-
отсчете угла ф за положительное принимают направление, проти-
противоположное направлению движения часовой стрелки. Ортами
полярной системы координат, составляющими ее векторный ба-
базис, являются единичные векторы г0 и р0. Первый из них на-
направлен из начала координат О к точке М и задает положитель-
положительное направление радиальной оси Or. Второй ему перпендикуля-
перпендикулярен, находится путем поворота первого на 90° против направле-
направления движения часовой стрелки и определяет положительное на-
направление трансверсалщ т. е. поперечной оси Ор9 перпендику-
перпендикулярной радиальной оси (см. рис. 1.5, а)*. Орты полярной системы
координат г0 и р0 являются подвижными, изменяющими свое
направление с изменением угла ф.
Для задания движения точки в полярной системе координат
необходимо иметь уравнения движения в виде
Система A.16) является также параметрической формой за-
записи уравнения траектории точки. Если из A.16) исключить вре-
время, то уравнение траектории можно получить в форме
Как будет показано далее, для общего случая криволинейных координат,
частным случаем которых являются полярные координаты, начало указанных на
данном рисунке осей и единичных векторов может быть отнесено и в текущее
положение точки на траектории ее движения (см. рис. 1.5, б).
5 Зак. 16 лд
) = О. A.17)
В полярной системе координат радиус-вектор точки, проведен-
проведенный из центра О, равен г = гг0 и, согласно A.16), выражается так:
r=r(t)r0. A.18)
х(Р)
Рис. 1.5
Уравнение A.18) соответствует векторному уравнению дви-
движения точки в форме A.5). Тогда на основании A.1) скорость
точки
^^ = ^ ^
dt dt ° А
В A.19) производную dro/dt, согласно правилу дифференциро-
дифференцирования вектора постоянного модуля (см. формулу В.87), можно
определить так:
dr0 d^ _
dt dt™
С учетом A.20) выражение A.19) примет вид
v =
dt
*\п
ИГ
A.20)
(
A.21)
Из A.21) следует, что вектор v представляется в виде сум-
суммы двух векторов, каждый из которых является составляющей
скорости по направлению, задаваемому векторами г0 и р0 соот-
соответственно. Первое слагаемое в A.21) называется радиальной
составляющей, а второе — трансверсальной составляющей
скорости точки:
vr=rr0; vp=rq>p0. A.22)
50
Проекции скорости на радиальную и трансверсальную оси
имеют вид
vr =v-ro=r; vp=vp0=ry. A.23)
По знакам проекций vr и vp можно установить направления
составляющих скорости A.22) по отношению к направлениям
радиальной и трансверЬальной осей или единичных векторов г0
и р0 соответственно.
Так как составляющие скорости в A.22) взаимно перпенди-
перпендикулярны, то ее модуль
j2+vj. A.24)
Согласно A.3) и A.21), ускорение точки
_ dv d,._
a= — = —(rro
at at
Отсюда можно получить
а=—(гго+гфро) = гго+гго+г^ро+гфро+г^ро. A.25)
at
В правой части выражения A.25), согласно правилу диффе-
дифференцирования единичных векторов (В.87), г0 = ф/?0, р0 = -фг^ .
Таким образом,
а = (г - гф2 )г0 + (гф + 2гф),р0. A.26)
Из A.26) следует, что ускорение точки также можно пред-
представить в виде суммы двух слагаемых:
а=аг+ар9 A.27)
где аг = (г - г<р2)г0, ар = (гф + 2гф)/?0—радиальная и трансвер-
сальная составляющие ускорения точки соответственно.
Проекции ускорения на радиальную и трансверсальную оси*,
задаваемые единичными векторами г0 и р0, найдутся так:
Следует заметить, что в рассматриваемом случае направления осей проеци-
проецирования, задаваемые направлениями единичных векторов г0 и р0, изменяются в
пространстве с течением времени, поэтому в отличие от A.13) проекции уско-
ускорения на направления этих осей не равны производным от проекций скоростей
на те же оси: агФ\г\ ар *vp.
5* 51
ar = ar0 = f - гф2, ap=a p0 =rip + 2гф. A-28)
Так как составляющие ускорения в A.27) взаимно перпенди-
перпендикулярны, то его модуль
^ ""• A.29)
Для определения характера движения (ускоренное или замедленное) точки
по траектории следует найти проекцию ускорения на ось, совпадающую по
направлению с вектором v . В соответствии с A.4)
dv av arvr+apvp
av = a • tv = —- = = —. .
Если полагать, что полярная ось OP совпадает с осью Ох декартовой систе-
системы координат и движение точки происходит в плоскости Оху, то уравнения для
перехода от задания движения точки в полярной системе координат в форме
A.16) к заданию ее движения в декартовой системе координат в виде A.6) будут
выглядеть так:
.y = r(Osin[<p(O].
Уравнения для обратного перехода будут следующими:
<p = arctg[y(t)/x(t)].
Единичные векторы, образующие векторный базис полярной и декартовой
систем координат, связаны зависимостями
так что
xvr+yvv xvv—yvY *
^^ A23)
A.28*)
Несложно получить и обратные выражения для проекций скорости и ускорения
точки на оси декартовой системы координат через их проекции на оси полярной
системы координат.
Пример 1.2. В условиях задачи, сформулированной в примере 1.1 перейти к
заданию движения точки в полярной системе координат, полярная ось которой
совпадает с осью Ох декартовой системы координат. Для указанного момента
52
времени г = 1 с найти радиальную и трансверсальную составляющие скорости и
ускорения точки, показать их на чертеже.
Решение. В данном случае
I Ф = arctg[y(O /x(t)]
Проекции скорости и ускорения точки на радиальную и трансверсальную оси
полярной системы координат могут быть вычислены по формулам A.23) и
A.28) соответственно. Однако удобнее воспользоваться формулами A.23*) и
A.28*), подставив в них вычисленные в примере 1.1 для момента времени
/ = 1с значения координат точки и проекций скорости и'ускорения на оси
декартовой системы координат. В итоге получаем: vr =3/>/i2»2,12м/с;
vp=-l/V2«-0,707 м/с; аг = >/2« 1,41 м/с2; ар - -Л « -1,41 м/с2 . Ради-
Радиальные и трансверсальные составляющие скорости и ускорения точки изобра-
изображены на рис. 1.4.
Задание движения точки в криволинейных
координатах
Движение точки в пространстве можно считать заданным,
если известны законы изменения трех ее декартовых координат
х, у, z как функций времени (см. A.6)). Однако в некоторых слу-
случаях пространственного движения материальных точек (напри-
(например, в областях, ограниченных поверхностями различной формы)
использование уравнений движения в декартовых координатах
неудобно, так как они становятся слишком громоздкими. В таких
случаях можно выбрать другие три независимых скалярных па-
параметра qx, q2, q3, называемых криволинейными, или обобщен-
обобщенными координатами, которые также однозначно определяют
положение точки в пространстве. Тогда радиус-вектор точки мо-
может быть выражен функцией как декартовых, так и криволиней-
криволинейных координат:
r=r(x,y,z) = xi + у] + zk =F(ql9q2,q3). A.30)
При этом следует иметь в виду, что декартовы коордщщш точки
могут также быть выражены в виде функций, зависящих от кри-
криволинейных координат:
53
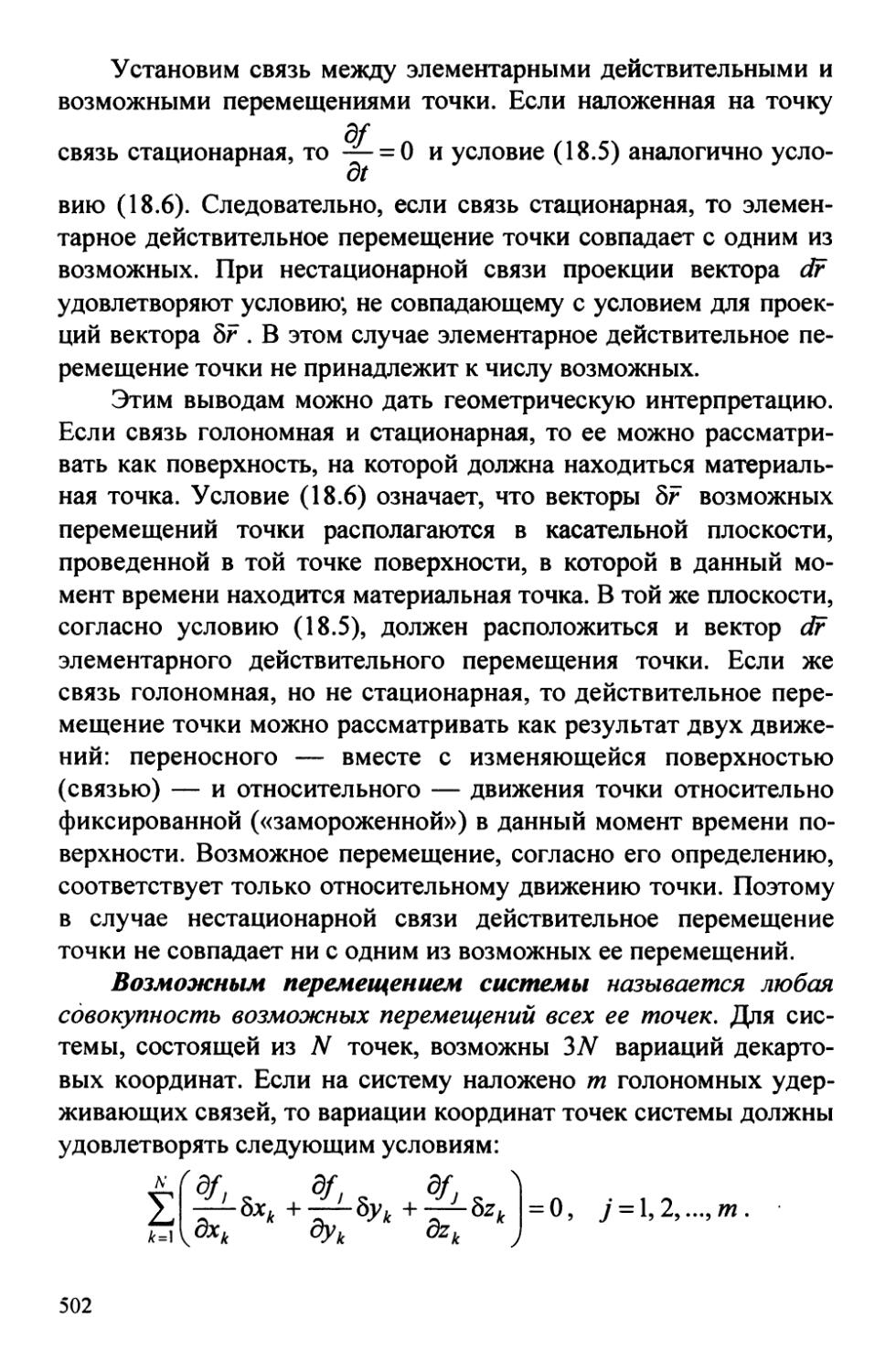
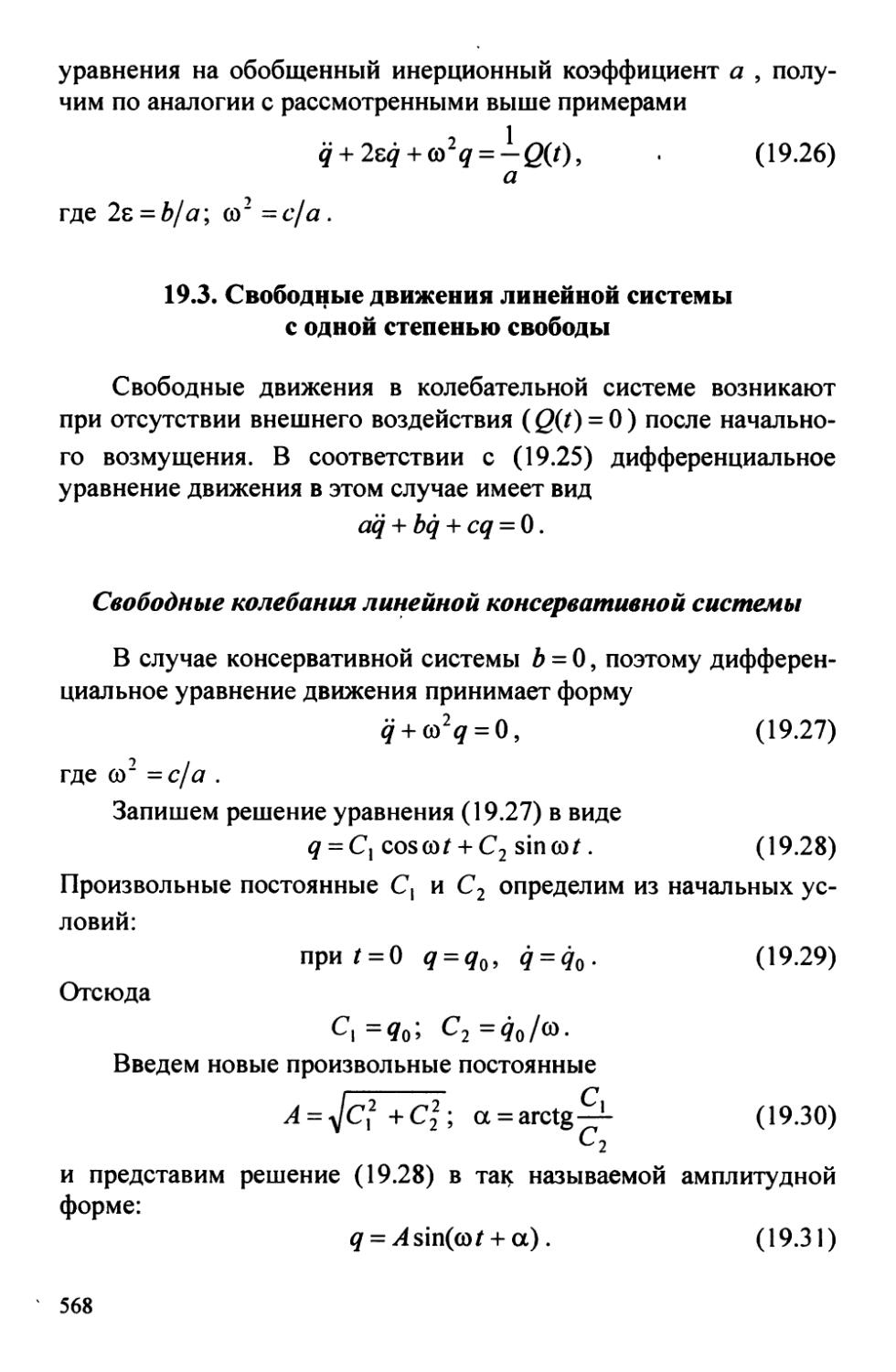
Для задания движения точки в криволинейных координатах
необходимо иметь уравнения движения точки в виде
^=^@;'=п. A.31)
Характеристиками криволинейной системы координат яв-
являются координатные линии и координатные оси.
Координатные линии (#,), проходящие через любую выде-
выделенную точку М пространства с фиксированными значениями
координат qm, q2M, q3M и соответствующие каждой i-й криво-
криволинейной координате, можно определить как годограф радиус-
вектора гм точки М9 изменяющегося в результате варьирования
одной выделенной z'-й криволинейной координаты при условии,
что другие сохраняются постоянными и равными их значениям в
выделенной точке:
A-32)
Касательная к /-й координатной линии в данной точке назы-
называется координатной осью Mqt, относящейся к /-й криволиней-
криволинейной координате в данной точке (рис. 1.6).
Положительные направления координатных осей задаются
единичными векторами, которые называются базисными. Они
определяются через частные производные от радиус-вектора точ-
точки по i-й обобщенной координате в данной точке М:
Здесь Нг = — параметр, который называется i-м коэф-
коэффициентом Ламе и равен значению модуля частной производ-
производной от радиус-вектора точки по /-й криволинейной координате,
вычисленной в данной точке М Каждый из векторов et имеет
направление, соответствующее направлению движения точки
конца радиус-вектора гм при возрастании *-й обобщенной коор-
координаты (см. A.32)).
54
Таким образом, в общем случае при любом текущем поло-
положении точки М в пространстве можно построить семейство ко-
координатных линий (q,), осей Mqi и базисных векторов е,, со-
соответствующих каждой из трех криволинейных координат qi
(см. рис. 1.6).
Рис. 1.6
Если базисные векторы ё, во всех точках пространства вза-
взаимно перпендикулярны, то такая система криволинейных коор-
координат называется ортогональной. При этом ег ej=O, если
i ^ j , i = 1,3, j = 1,3. В дальнейшем будем рассматривать только
такие системы.
С учетом A.30) коэффициенты Ламе могут быть выражены
через частные производные от декартовых по криволинейным
координатам в виде
дг
-т на на
A.34)
55
Скорость точки М при задании ее движения в криволиней-
криволинейных координатах определится в виде векторной суммы состав-
составляющих скоростей, параллельных координатным осям:
_ dr дг . дг . дг . _ _ _
Проекции скорости на соответствующие координатные оси
равны
v,/; =у.ё, =#,</,,/ = п- A.36)
Модуль скорости в ортогональной криволинейной системе
координат можно рассчитать по зависимости
В формулах A.34)-A.37) значения производных и коэффи-
коэффициентов Ламе вычисляют для текущего положения точки М в
пространстве.
Проекции ускорения точки М на оси криволинейной систе-
системы координат определяют в соответствии с A.3), A.33) и A.35)
по формуле
— / — — Л *
dv _ 1 f dv дг I . —г ,,,04
<4.e.,1._..,__[-r_j,,_|,3. (US)
Преобразуем выражение A.38) к удобной для расчетов фор-
форме. Для этого выражение в скобках представим в виде
dv дг d(_dr) _d( dr)
= — v -v— . A.39)
dt dq, dt{ dq,) dt{dq,)
В последнем слагаемом в A.39), изменяя порядок дифферен-
дифференцирования, проведем тождественное преобразование
\{\>*.. (,.40)
Дифференцируя левую и правую части выражения A.35), полу-
получаем
56
Соотношение A.41) называется тождеством Лагранжа.
С учетом A.39), A.40) и A.41) из A.38) можно последовательно
выразигць
dt
dt\dqt
d(-dv) _dv
V -V
dt{ dqj dqt
d(dv2l2\ dv2/2
dt{ dq,
v2
или, обозначив — = T , окончательно имеем
Т\ дТ
dtidqj dq,
A.42)
Таким образом, ускорение точки при задании ее движения в
криволинейных координатах определится в виде векторной
суммы составляющих ускорений, параллельных осям этой сис-
системы координат,
где aqi — проекции ускорения на оси, определяемые согласно
A.42),/ = п.
Модуль ускорения в ортогональной криволинейной системе
координат вычисляется по формуле
+<- (L43)
Задание движения точки в цилиндрической
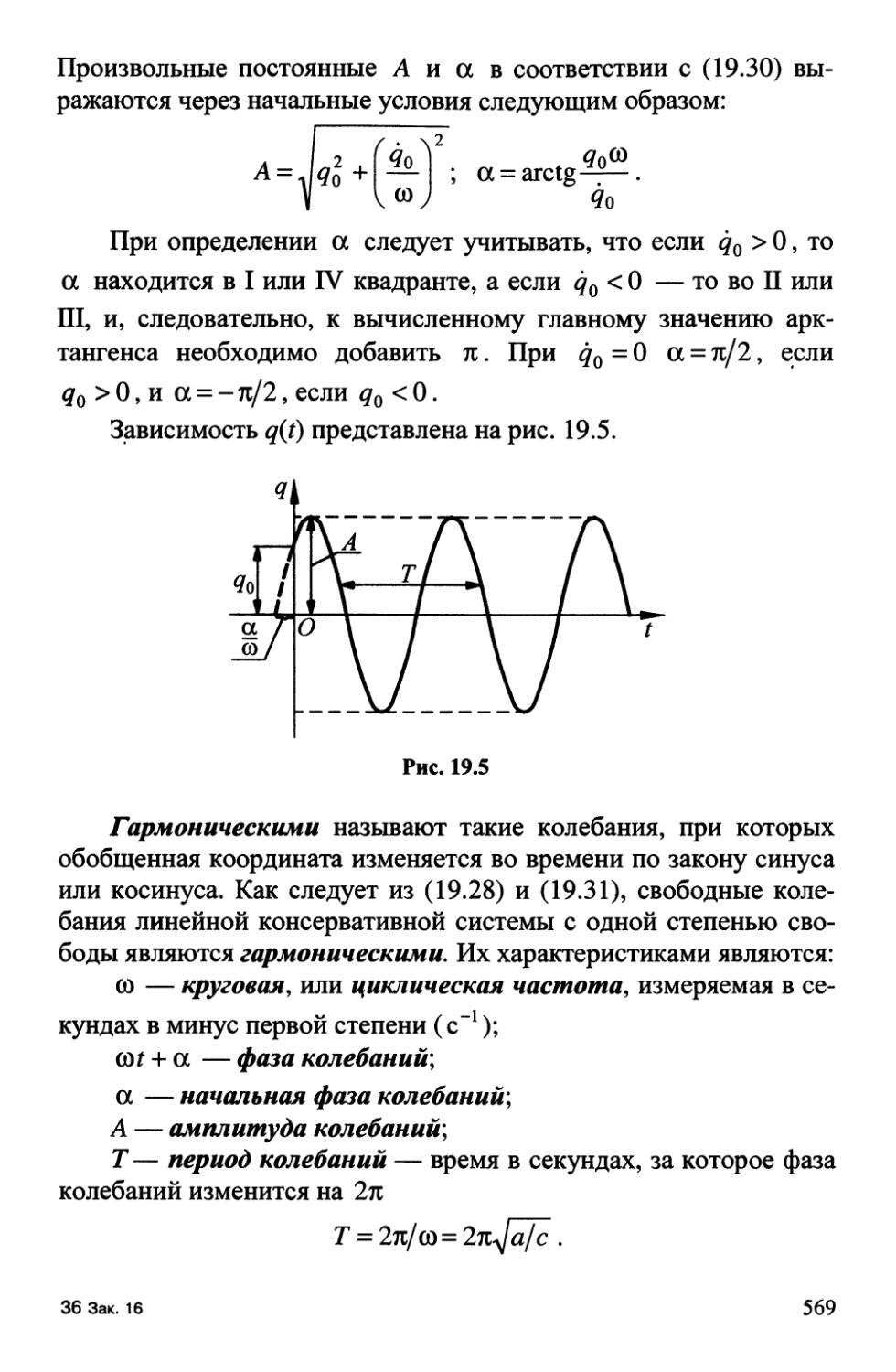
системе координат
Координатами точки в цилиндрической системе координат
являются скалярные параметры Д q>, Z. Система уравнений дви-
движения точки имеет вид
A.44)
4 Зак. 16
57
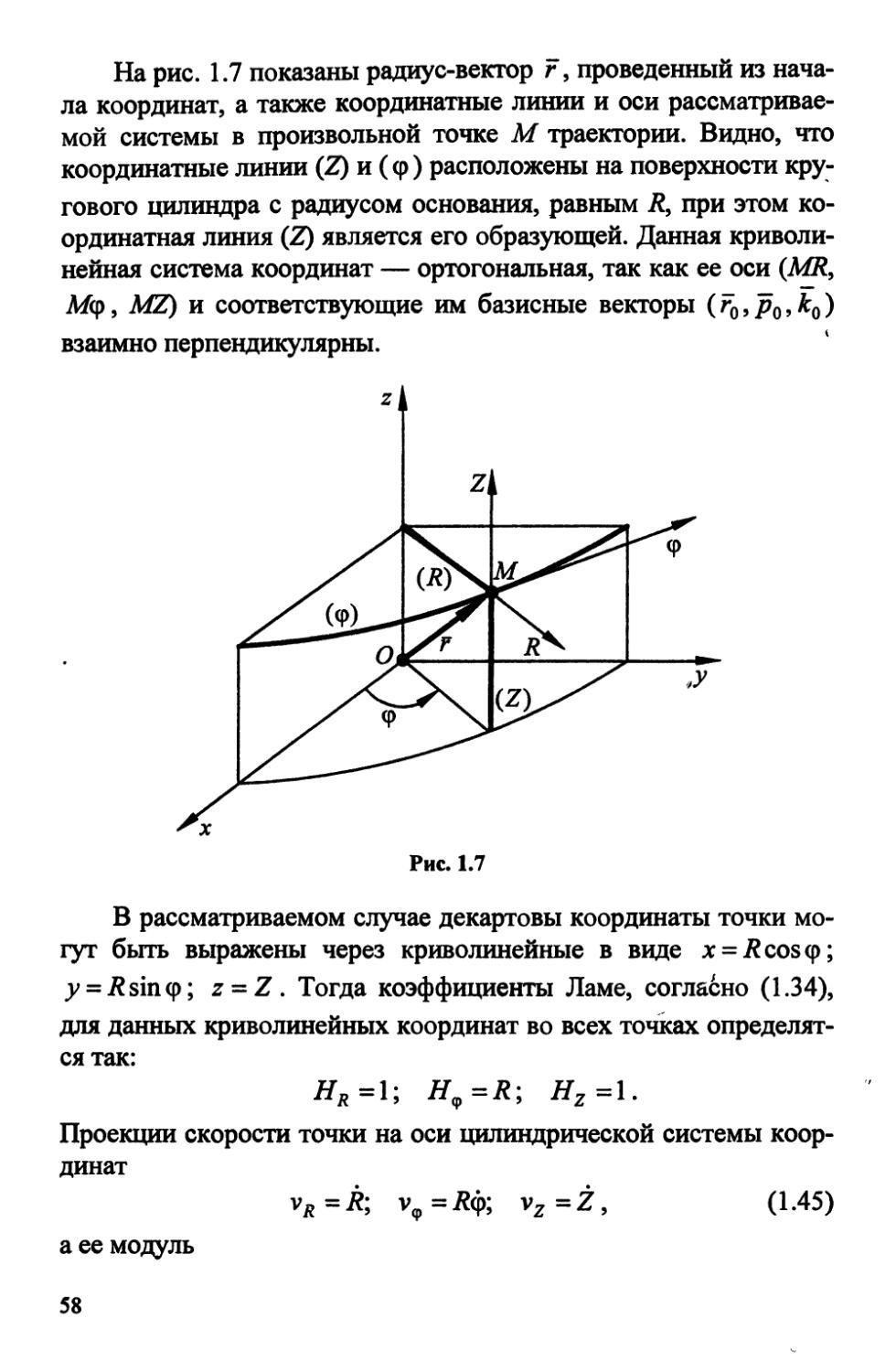
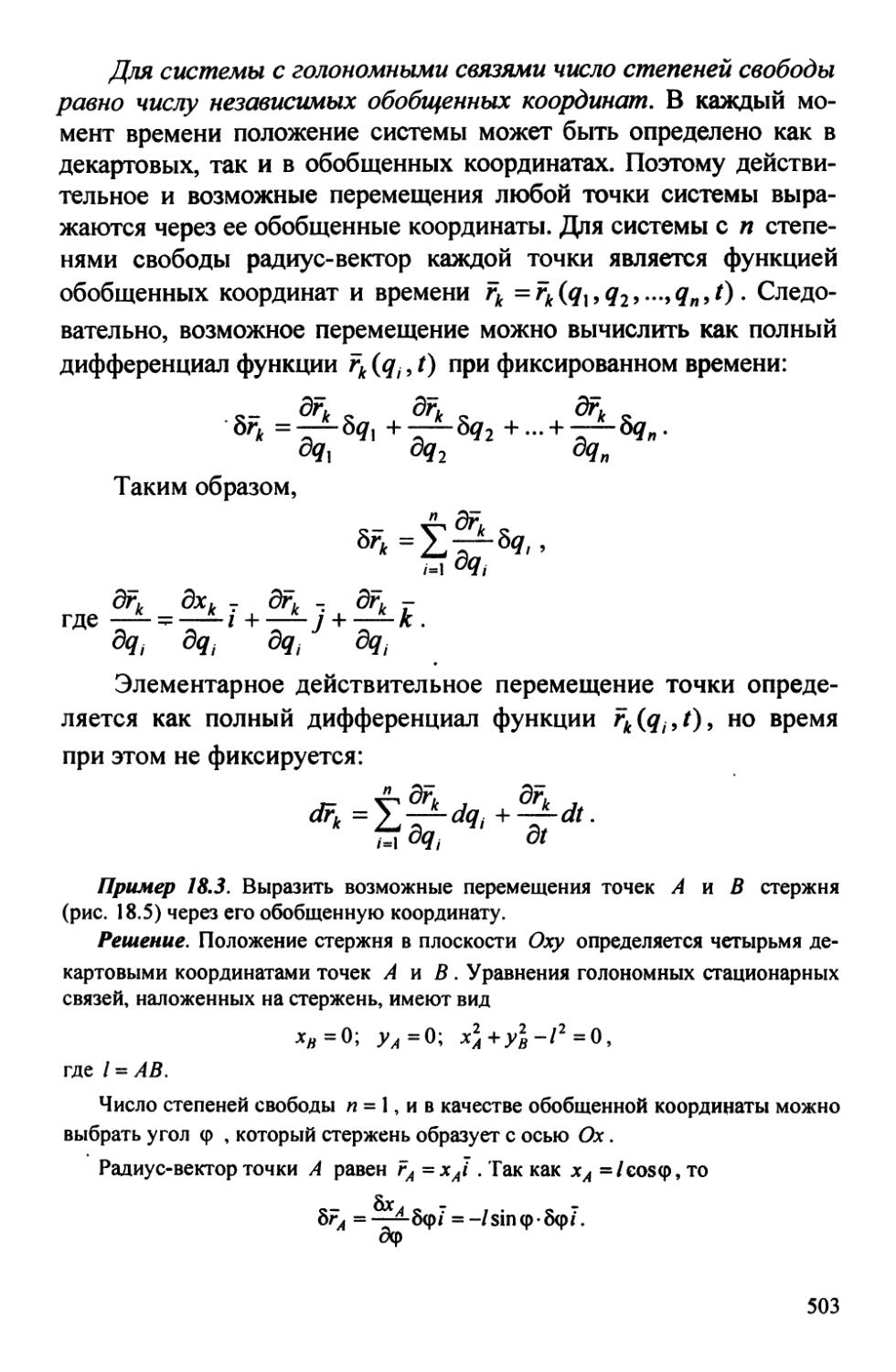
На рис. 1.7 показаны радиус-вектор г, проведенный из нача-
начала координат, а также координатные линии и оси рассматривае-
рассматриваемой системы в произвольной точке М траектории. Видно, что
координатные линии (Z) и (ср) расположены на поверхности кру-
кругового цилиндра с радиусом основания, равным R, при этом ко-
координатная линия (Z) является его образующей. Данная криволи-
криволинейная система координат — ортогональная, так как ее оси (MR,
Мф, MZ) и соответствующие им базисные векторы (го,ро,ко)
взаимно перпендикулярны.
Рис. 1.7
В рассматриваемом случае декартовы координаты точки мо-
могут быть выражены через криволинейные в виде x = Rcosy;
y = Rsin<p; z = Z. Тогда коэффициенты Ламе, согласно A.34),
для данных криволинейных координат во всех точках определят-
определятся так:
Проекции скорости точки на оси цилиндрической системы коор-
координат
Уд=Л; уф=Дф; vz=Z, A.45)
а ее модуль
58
Функция T = v2 /2 = (R2 +R2q>2 + Z2)/2. Тогда проекции
ускорения будут
ад=Л-/гф2; аф=Лф + 2Лф; az=Z, A.46)
а его модуль, согласно A.43),
Как частный случай, полагая в A.45) и A.46) Z = 0, можно
получить формулы для проекций скорости и ускорения на оси
полярной системы координат с полярной осью, совпадающей с
осью Ох (см. рис. 1.7), с полярной координатой г = R и поляр-
полярным углом ф (см. A.23), A.28)).
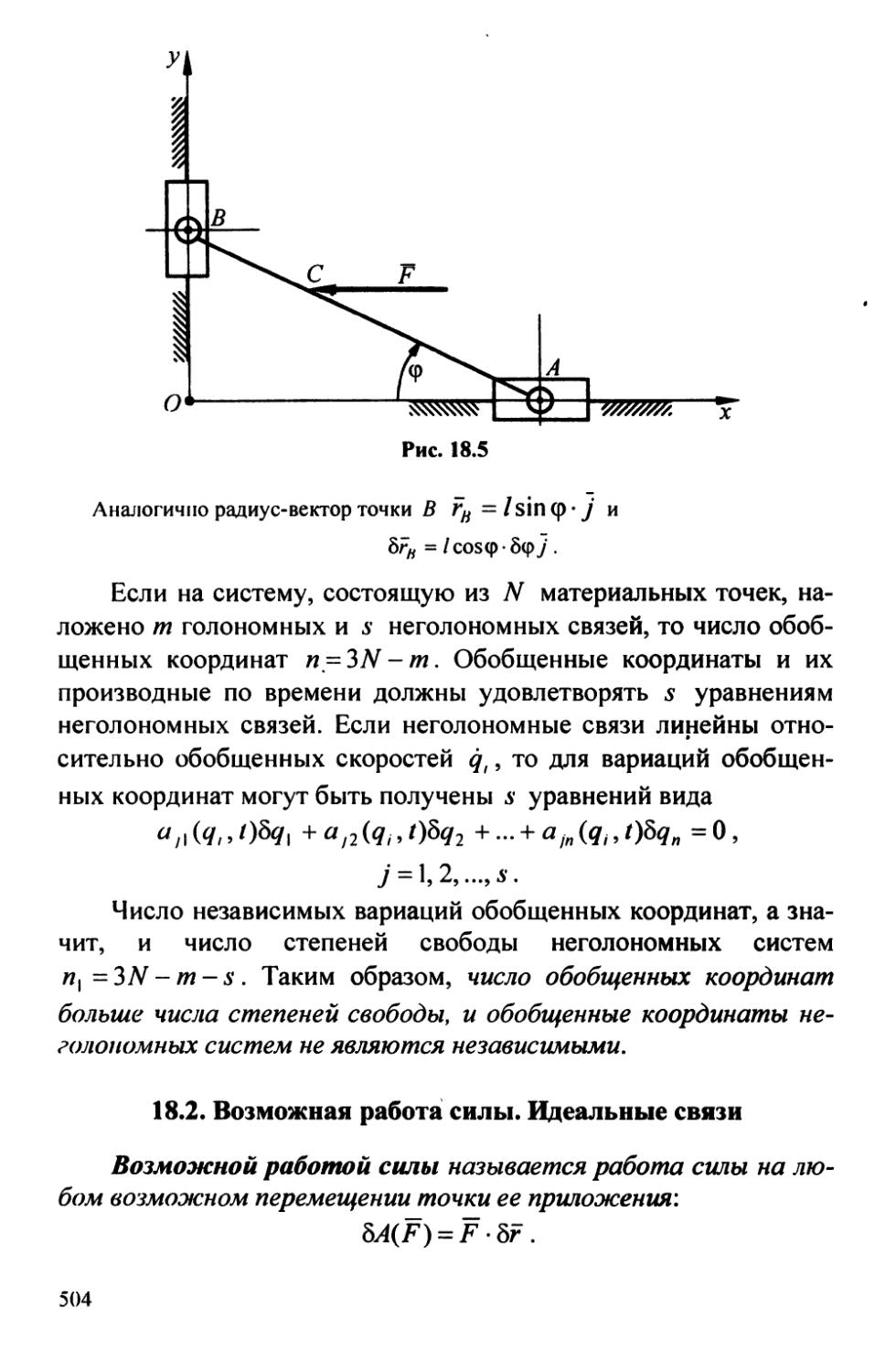
Задание движения точки в сферической
системе координат
Координатами точки в сферической системе координат яв-
являются скалярные параметры г, ф,9, отсчитываемые так, как
показано на рис. 1.8. Система уравнений движения точки в дан-
данном случае имеет вид
•fr = r(O;
ф=ф(О; A.47)
[0 = 9@.
На рис. 1.8 изображены радиус-вектор г, проведенный из
начала координат, углы ф и 6, а также координатные линии и
оси рассматриваемой системы в произвольной точке М траекто-
траектории*. Видно, что координатные линии (ф) и @) лежат йа по-
поверхности сферы радиусом г. Данная криволинейная система
координат также является ортогональной. Ее оси Mr, Mp иАЮ и
Приведенные ниже формулы даны для сферической системы координат с
углом 0, отсчитываемым от оси Oz, как показано на рис. 1.8. В некоторых дру-
других случаях угол 6 можно отсчитывать от проекции радиус-вектора точки на
плоскость Оху, и тогда приведенные здесь соотношения несколько изменятся.
4* 59
соответствующие им единичные векторы ег, еф, eQ, определяю-
определяющие положительные направления осей, взаимно перпендикулярны.
z
Рис. 1.8
Декартовы координаты точки в соответствии со схемой,
приведенной на рис. 1.8, могут быть выражены через криволи-
криволинейные координаты так:
jt = rcos(psinO; j/ = rsin(psin0; z = rcos0.
Тогда коэффициенты Ламе A.34)
Я, =1, tf^rsinG, #e=r;
проекции скорости точки на оси сферической системы координат
vr=>% v(p=^sin0, ve=r0, A.48)
а ее модуль
v =
202
+ v2+ve2 =Vr2+r2<p2sin2e + r2e2 .
Функция T = v2 /2 = (r2 + г2ф2 sin2 0 + r202)/2, следова-
следовательно проекции ускорения A.42) на оси сферической системы
координат
ar =r-np2sin20-r02;
яф =Apsin0 + 2/4psin0 + 2AJHcos0; A.49)
ае =гё + 2г0-гф2 sin0cos0,
60
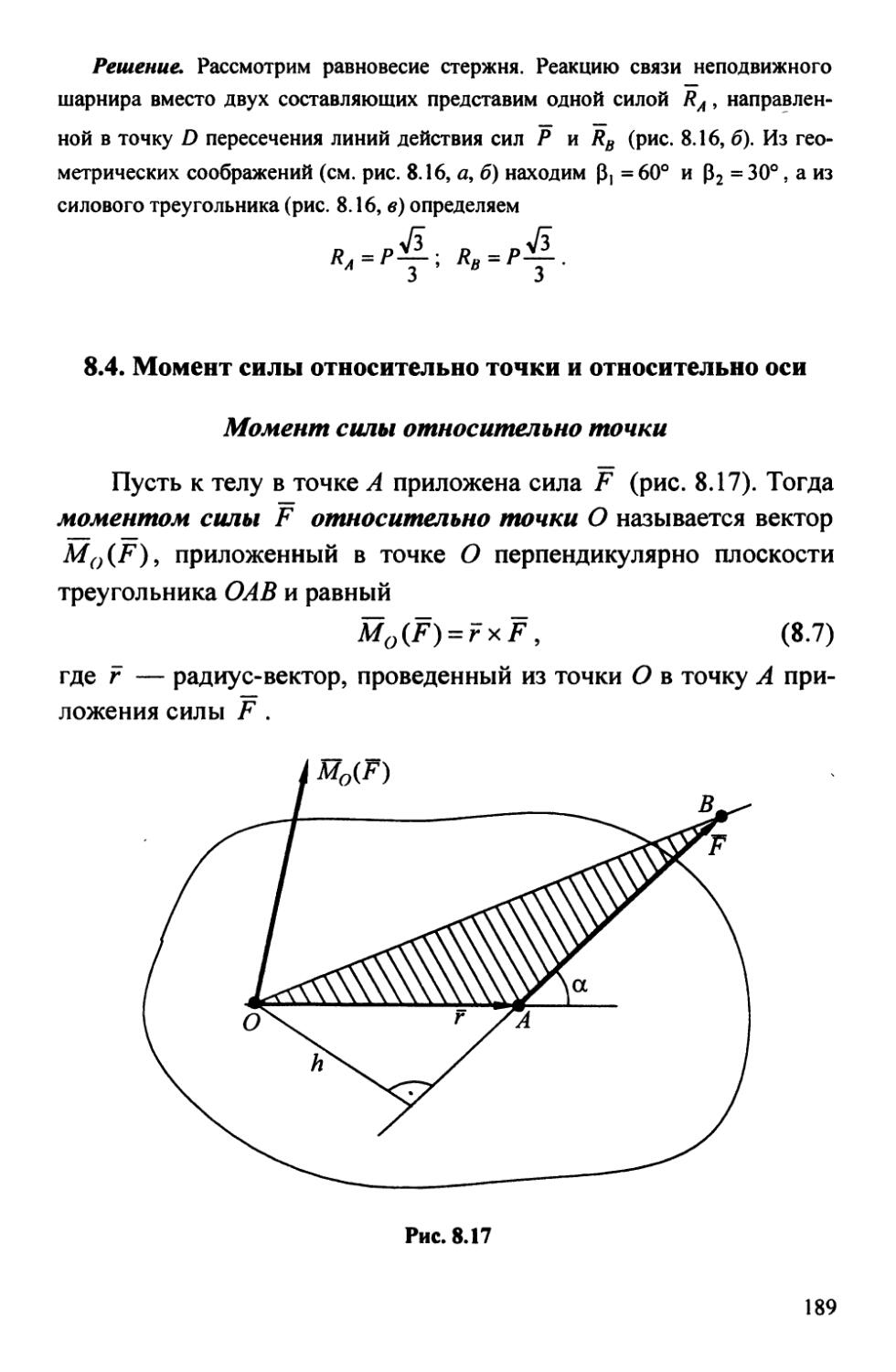
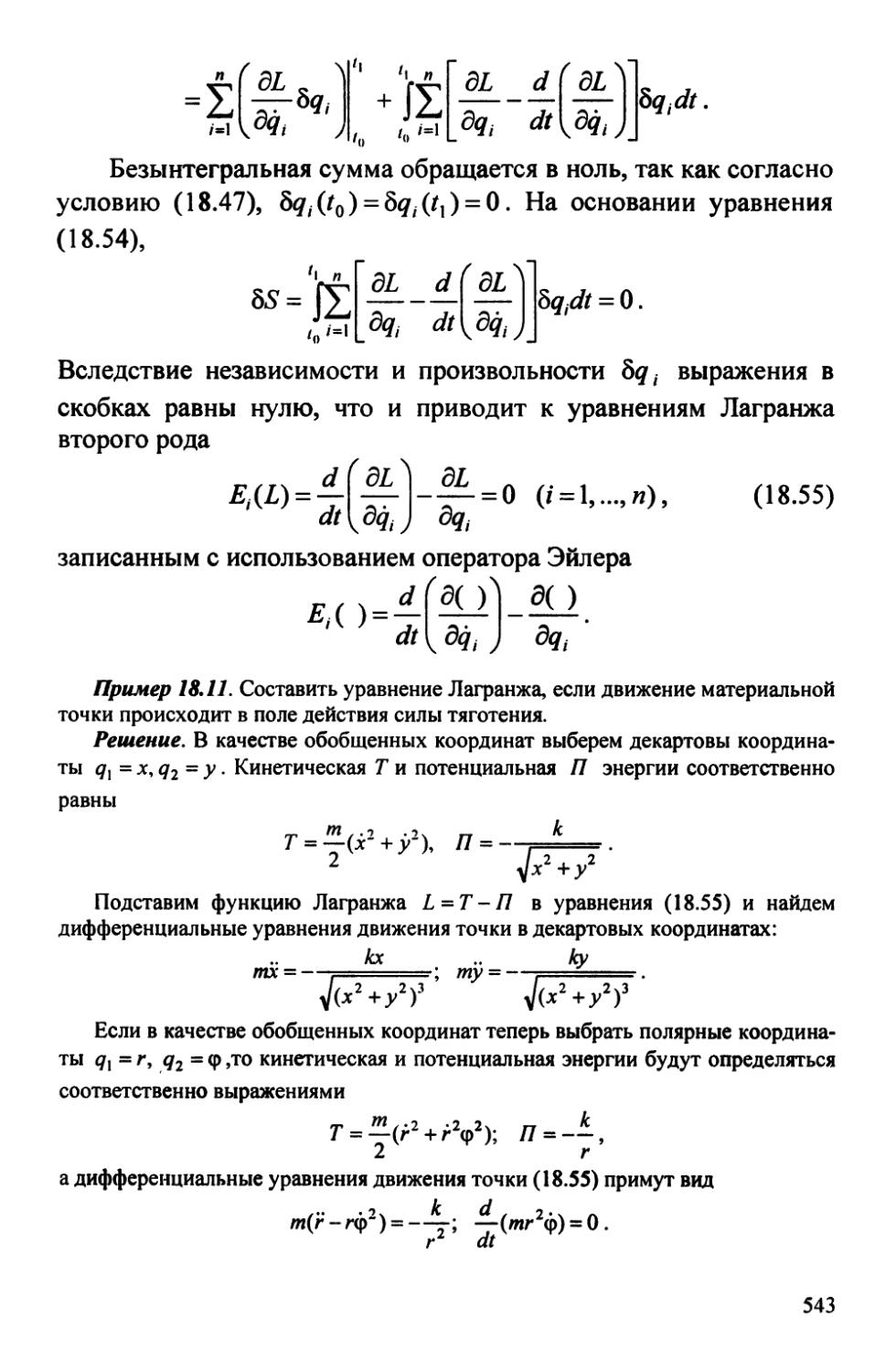
а его модуль
Как частный случай, полагая в A.48) и A.49) 0 шп/2, мож-
можно получить формулы для проекций скорости и ускорения на оси
полярной системы координат с полярной осью, совпадающей с
осью Ох (см. рис. 1.8), полярной координатой г и полярным уг-
углом ф (см. A.23), A.28)).
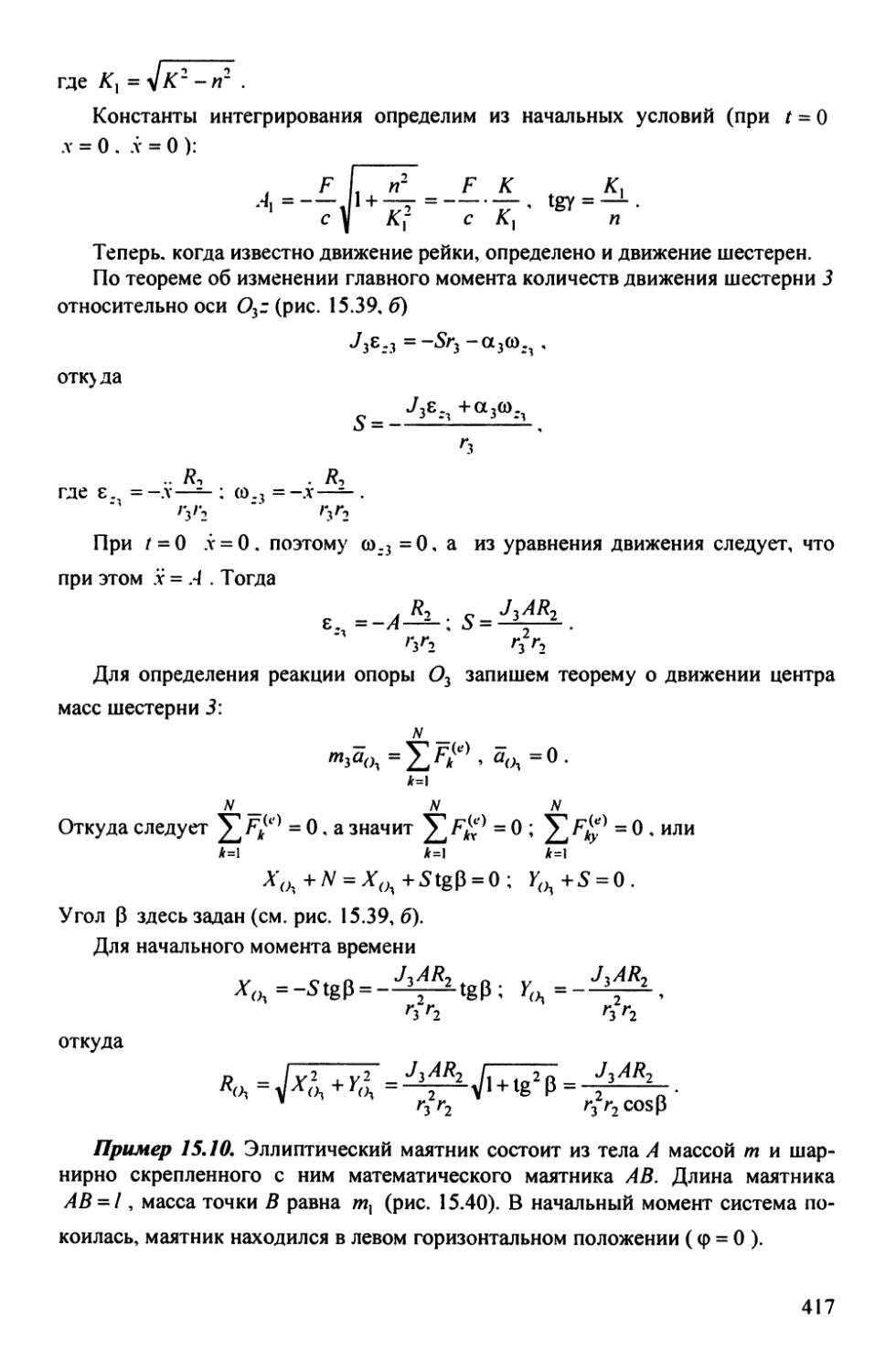
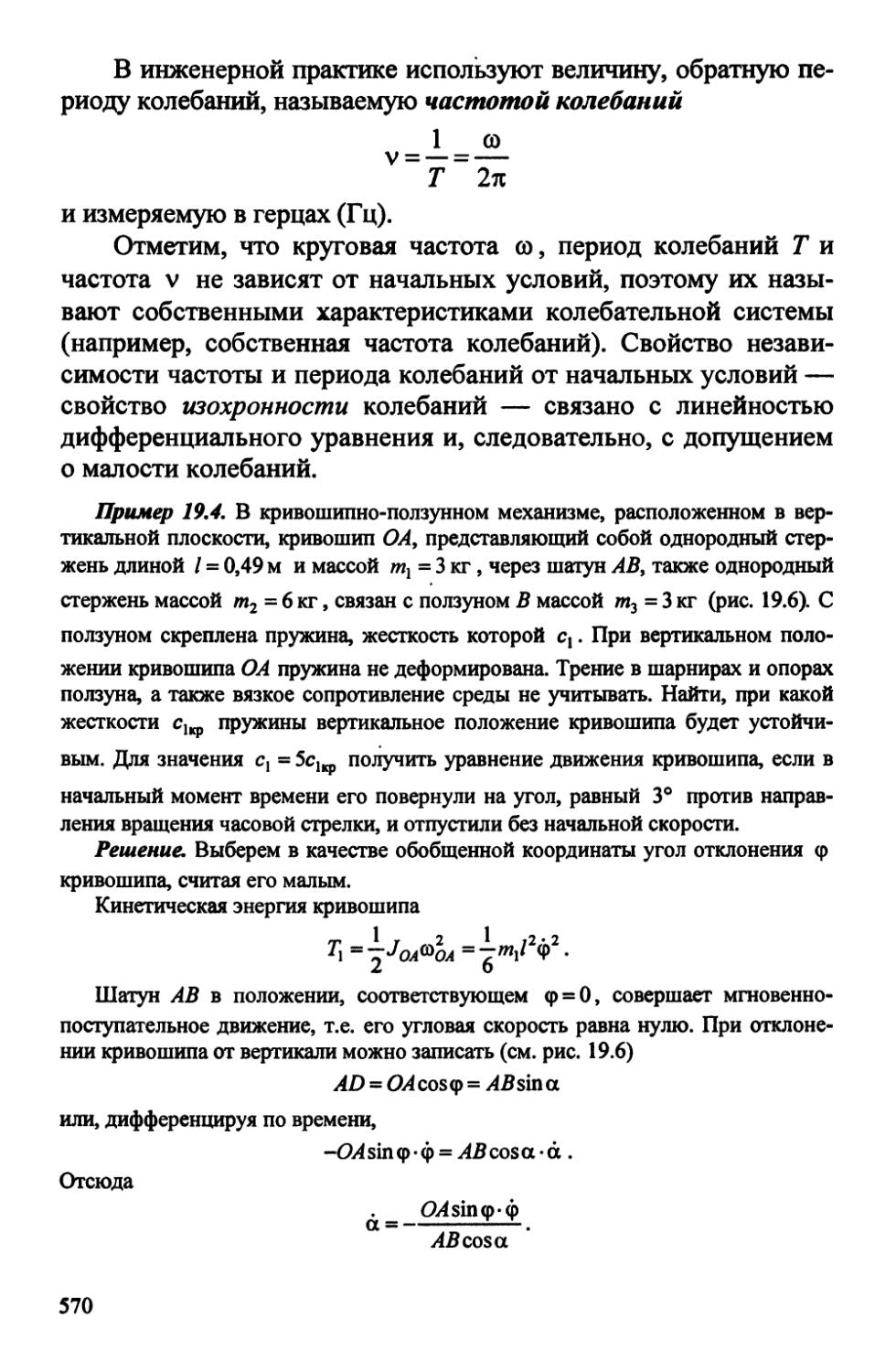
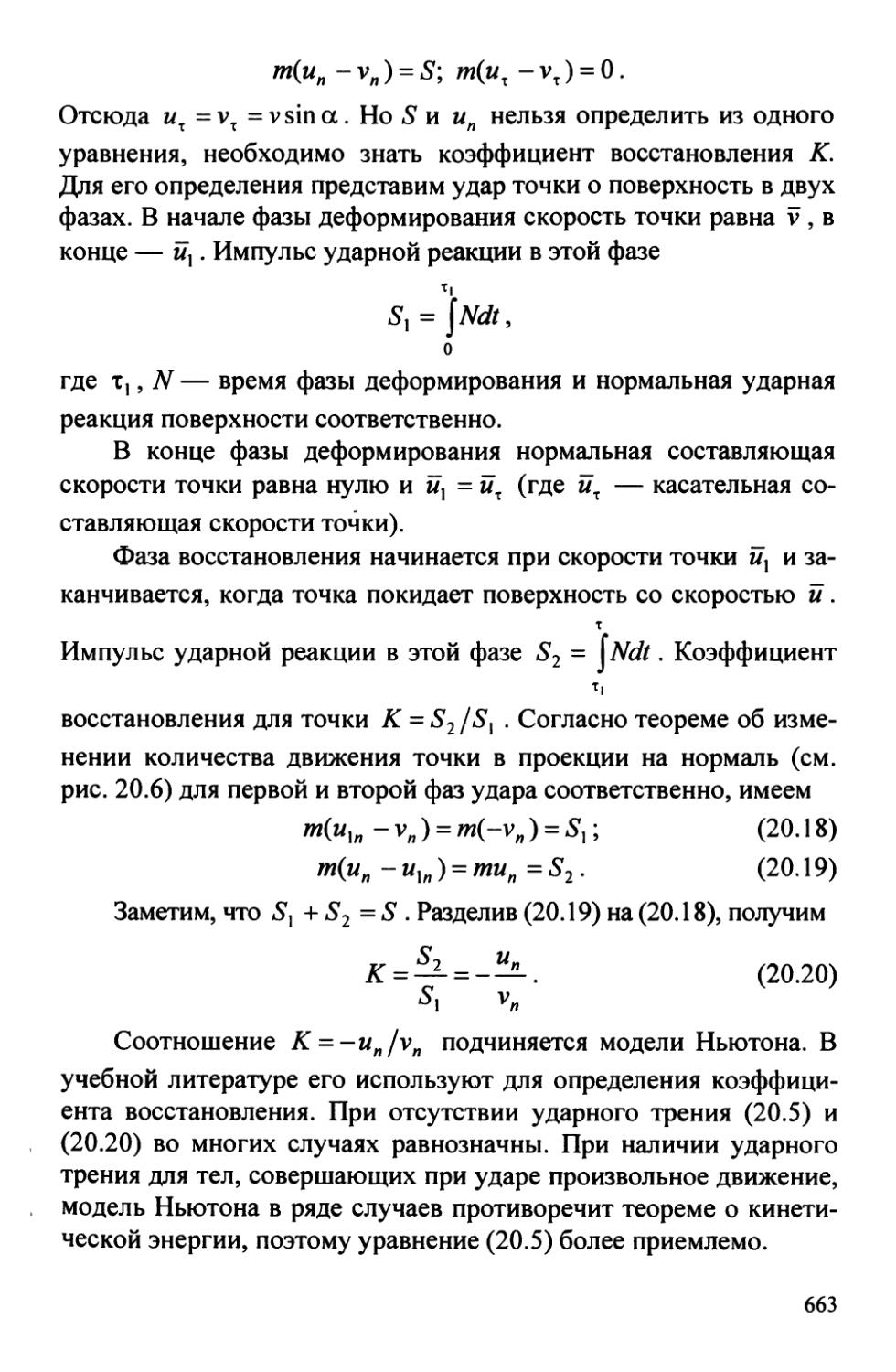
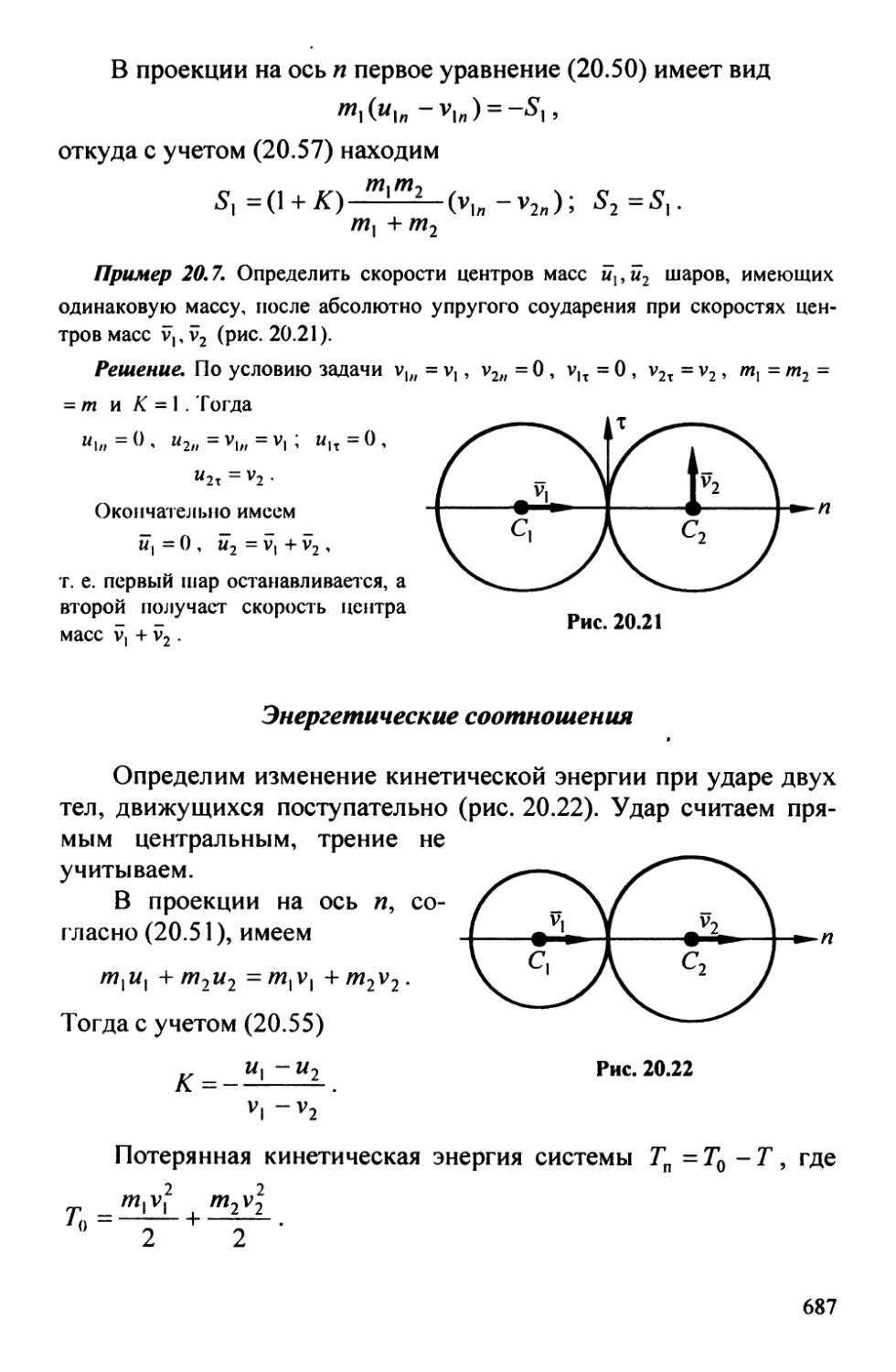
1.5. Естественный способ задания движения точки
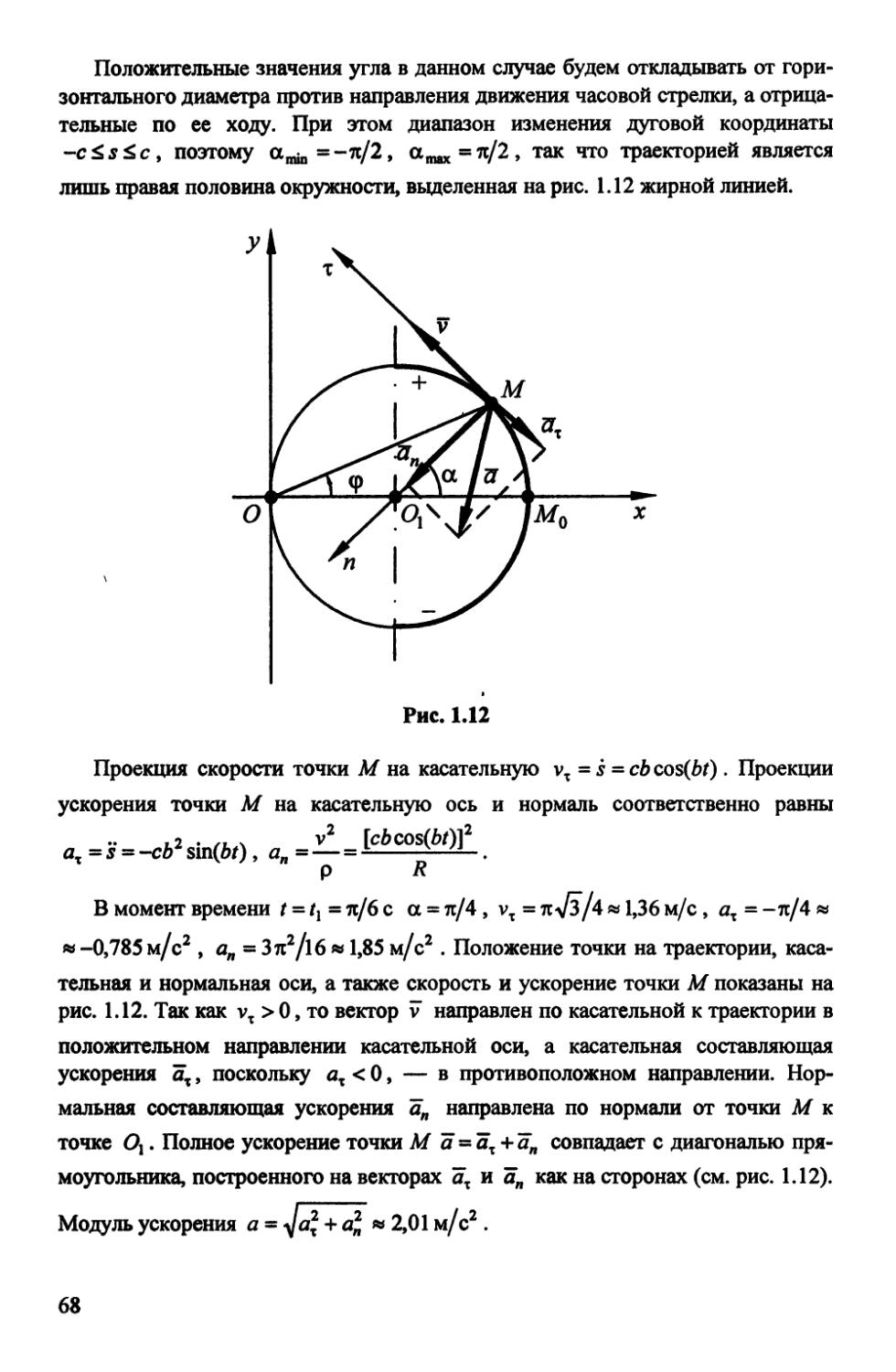
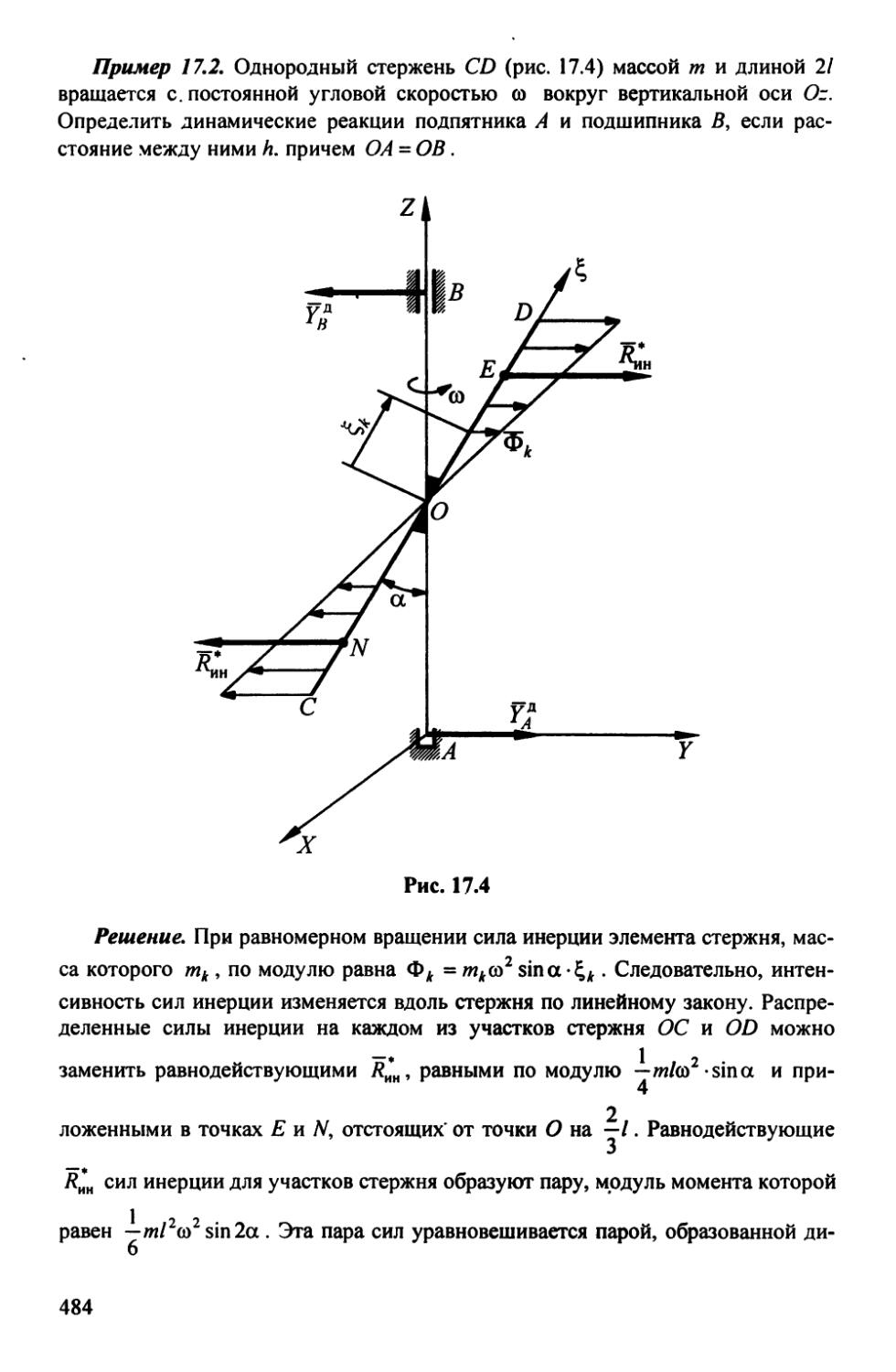
Если траектория точки известна (т. е. в некоторой системе
отсчета определена графически, с помощью уравнения или дру-
другим образом), то задать движение точки можно естественным
способом. Для этого необходимо: зафиксировать на траектории
точку начала отсчета, выбрать положительное и отрицатель-
отрицательное направления отсчета дуговой координаты и указать уравне-
уравнение движения точки по траектории в виде
s = s(t). A.50)
Всего этого в совокупности достаточно для однозначного
определения положения точки в пространстве в любой момент
времени.
Скалярный параметр s в данном случае имеет смысл криво-
криволинейной (дуговой) координаты, модуль которой определяет
текущее расстояние по траектории
от начала отсчета (точки О) до под-
подвижной точки Л/, а знак показывает,
по какую сторону от начала отсчета
находится точка М на траектории
(рис. 1.9).
Следует отметить, что уравне-
уравнение движения в форме A.50) опреде-
определяет текущее положение точки
именно на траектории, при этом мо-
может быть установлена взаимно одно-
однозначная связь между значениями Рис. 1.9
61
координаты s и радиус-вектором точки М в той системе отсчета,
в которой определена в рассматриваемом случае траектория
движения точки (см. рис. 1.9). Тогда радиус-вектор точки может
быть представлен в виде функциональной зависимости от пара-
параметра s в виде
r = r(s). A.51)
Прежде чем находить скорость и ускорение при рассматри-
рассматриваемом способе задания движения точки, определим естествен-
естественную систему осей и ее векторный базис, т. е. систему трех еди-
единичных векторов, задающих положительное направление этих
осей.
Первая ось естественной системы — ось, касательная к кри-
кривой (траектории) в данной точке М, может быть определена как
предельное положение секущей, проходящей через две близле-
близлежащие точки М и Мх кривой, когда расстояние между этими
точками стремится к нулю. При этом положительное направле-
направление касательной оси следует принимать в направлении возраста-
возрастания значений дуговой координаты s. Задавать это направление
оси можно с помощью единичного вектора т, касательного к
траектории в данной точке. Исходя из A.51), этот вектор можно
определить так:
1
Единичный вектор х всегда направлен по касательной к тра-
траектории в направлении возрастания значений дуговой координа-
координаты s.
Вторая ось естественной системы, которая называется нор-
нормальной осью (нормалью), расположена в соприкаса!шцейся плос-
плоскости. Она перпендикулярна касательной к траектории в точке и
направлена в сторону вогнутости траектории точки* по главной
нормали.
* Определение соприкасающейся плоскости дано в 1.1 и 1.2 как предельное
положение плоскости, проходящей через касательные в точке М и вблизлежа-
щей точке М{ на кривой при ее предельном сближении с точкой М. Там же
показано, что в этой плоскости находятся скорость и ускорение точки.
62
Здесь следует напомнить, что производная от единичного
вектора х по скалярному аргументу s есть вектор, перпендику-
перпендикулярный х и направленный по нормали к касательной траектории
движения точки в сторону ее вогнутости. Модуль этой производ-
производной равен кривизне кривой в данной точке:
К =
dx
ds
d2r
ds2
где p —радиус кривизны траектории в данной точке.
Тогда единичный вектор п, задающий положительное на-
направление нормальной оси, может быть определен так:
_ dx
n=—\
ds
ds
d2r
ds2
пЫ.
Вектор п лежит в соприкасающейся плоскости и направлен
по главной нормали в сторону вогнутости траектории к центру ее
кривизны в данной точке.
Третья ось естественной системы называется бинормальной
осью {бинормалью). Она перпендикулярна к касательной и нор-
нормальной осям, а ее положительное направление можно найти по
единичному вектору бинормали Ъ , который определяется как
результат векторного произведения единичных векторов х и п в
виде
Ъ = ххй , \Ъ 1=1.
Таким образом, векторный базис т, п и Ъ определяет по-
положительные направления соответствующих координатных
осей в каждой точке траектории.
Оси естественной системы (касательная [х], нормаль [п] и
бинормаль [Ь]), построенные в точке М траектории, образуют
естественный трехгранник. Грани его, определяемые каждой
парой пересекающихся осей, совпадают с соприкасающейся (х,
л), нормальной (п, Ь) и спрямляющей, или касательной, (&, х)
плоскостями (рис. 1.10). При движении точки Мпо своей траек-
траектории естественный трехгранник с вершиной в точке М также
движется и ориентация его граней и осей, их образующих, изме-
изменяется в пространстве.
63
Нормальная
плоскость
Соприкасающаяся
плоскость
ь
Спрямляющая
плоскость
Рис. 1.10
Теперь можно перейти к определению скорости при естест-
естественном способе задания движения точки. Согласно основному
определению скорости A.1) и A.51),
_ dr dr ds dr .
v = = = s,
dt ds dt ds
или, с учетом определения единичного вектора т = d rids,
A.52)
Из A.52) следует, что проекция скорости точки на ось, ка-
касательную к траектории точки, равна
Vx = V • X = S .
Очевидно, что v = vx = vxx .
При vx = s > 0 точка движется в положительном направле-
направлении отсчета s, а при vx = s < 0 — в противоположную сторону.
Модуль скорости, т. е. ее численное значение, при естест-
естественном способе задания движения точки определяется так:
Для ускорения на основании A.3) имеем
d{vJt)
_ dv
—
—
dt
dt
dvx- dx .._ .dx
dt dt dt
64
где
dx _dx ds _ds 1 _
dt ds dt dt p
Таким образом,
или
_ .._ s' _
a=51 + —n ,
P
v _
=vTx + —n
P
A.53)
Из A.53) следует, что ускорение представляет собой сумму
касательной
(рис. 1.11):
и нормальной ап =—п составляющих
Р
Рис. 1.11
Полученный результат подтверждает вывод о том, что век-
вектор а лежит в соприкасающейся плоскости (х, п) (см. § 1.2).
Проекции ускорения на оси естественной системы координат
(касательйую, нормаль и бинормаль) равны
65
i2 v2
an=a-n= — = — ; A.54)
_p p
ab =a-b =0.
Модуль проекции ускорения на касательную ось характери-
характеризует изменение скорости по величине, а знак показывает соответ-
соответствие направления касательной составляющей ускорения направ-
направлению единичного вектора т, т. е. выбранному положительному
направлению отсчета s.
Проекция ускорения на нормаль всегда неотрицательна* и
характеризует изменение скорости только по направлению. Если
точка на криволинейном участке траектории движется с постоян-
постоянной по модулю скоростью ( v = const), то она все же будет иметь
ускорение, направленное по нормали и определяющее изменение
направления вектора v , так что в этом случае а IV иа=ап.
Очевидно, что ах =ятт, ап =апп, ах1Лп, и модуль ускоре-
ускорения
+*F- О-55)
Характер движения точки по траектории (ускоренный или
замедленный) можно определить, исходя из знака скалярного
произведения ускорения и скорости: в случае a -v" = tfTvT >0 —
движение точки ускоренное ( v > 0 ), при этом ах и v направлены
в одну сторону; в случае av =axvx < О — движение точки за-
замедленное (v<0), при этом ах и v направлены в противопо-
противоположные стороны. При ax(t) = 0 движение точки равномерное
(|v| = const), в этом случае при движении по криволинейной тра-
траектории а =ап и a±v .
Заметим, что проекции ускорения на касательную (ах =Sr =
= vT) и на ось, совпадающую по направлению с вектором
v ( av = v ), равны по модулю, т. е. \ах\ = \av\.
Положительное направление нормали всегда принимается в сторону вогну-
вогнутости траектории точки в соприкасающейся плоскости.
66
Текущее значение пути L(t), пройденного точкой по траек-
траектории, и закон движения точки по траектории s(t) также могут
совпадать (с точностью до знака), но только в случае, если нача-
начало отсчета пути соответствует такому моменту времени *0, при
котором s(to) = O, и за рассматриваемый промежуток времени
t - t0 проекция скорости на касательную не меняла своего знака.
Тогда можно записать
L(t) = \s(t)\= \v(t)dt.
'о
Пример 1.3. В задаче, сформулированной в примере 1.1, дополнительно
определить закон движения точки М по ее траектории.
Решение. Согласно приведенному в примере 1.1 решению, движение точки
М происходит по траектории, являющейся частью параболы, расположенной
над осью Ох (см. рис. 1.4). Примем начало отсчета криволинейной координаты s
в точке О и будем считать положительным направление, соответствующее на-
направлению перемещения точки вверх по параболе. В рассматриваемом случае в
течение всего времени движения перемещение точки происходит по траектории
в положительном направлении (проекции скорости на оси координат vx = 2bt,
vy = с не меняют своего знака). Следовательно, закон движения точки по тра-
ектории имеет вид s(t) = гv(t)dt, где v(t) = Jv\ + v^ = ^BbtJ + с2 . После вы-
о
числения интеграла получаем
Значения констант Ъ и с даны в примере 1.1.
Пример 1.4. Движение точки М происходит в плоскости Оху по окружности
радиусом /? = 1м согласно закону s(t) = csin(bt), где с = л/2м, b = lc~l,t —
время в секундах. Начало отсчета (точка Мо) и положительное направление
отсчета координаты s(M0M) заданы на рис. 1.12. Для момента времени
t! = я/6 с найти скорость и ускорение точки М, показать ш на чертеже, ,
Решение. Положение точки на окружности удобно определять через значе-
значения центрального угла а , опирающегося на дугу окружности иМ0М с дли-
длиной, равной s:
a = s(t)/R. A.56)
67
Положительные значения угла в данном случае будем откладывать от гори-
горизонтального диаметра против направления движения часовой стрелки, а отрица-
отрицательные по ее ходу. При этом диапазон изменения дуговой координаты
-c?s?c9 поэтому а^^-п/!, атах=я/2, так что траекторией является
лишь правая половина окружности, выделенная на рис. 1.12 жирной линией.
У)
о
\ У
Рис. 1.12
Проекция скорости точки М на касательную vx = i = cb cos(bt). Проекции
ускорения точки М на касательную ось и нормаль соответственно равны
. 2 . /L ч v2 [cbcos(bt)]2
Р Я
В момент времени t«tx = тс/6 с а = я/4, vx = я>/з/4 »1,36 м/с, ат = -тс/4 «
« -0,785 м/с2 , дЛ = Зп2/\6 »1,85 м/с2 . Положение точки на траектории, каса-
касательная и нормальная оси, а также скорость и ускорение точки М показаны на
рис. 1.12. Так как vt > 0, то вектор v направлен по касательной к траектории в
положительном направлении касательной оси, а касательная составляющая
ускорения ах, поскольку ах < 0, — в противоположном направлении. Нор-
Нормальная составляющая ускорения а„ направлена по нормали от точки М к
точке О,. Полное ускорение точки М а -ах +а„ совпадает с диагональю пря-
прямоугольника, построенного на векторах ах и а„ как на сторонах (см. рис. 1.12).
Модуль ускорения а
2,01 м/с2 .
68
Пример 1.5. В задаче, решаемой в примере 1.4, перейти от естественного
способа задания движения точки М к заданию ее движения в декартовой систе-
системе координат Оху (см. рис. 1.12). Рассмотреть также движение точки в полярной
системе координат, полярная ось которой совпадает с осью Ох декартовой сис-
системы координат. Записать уравнения траектории точки М в этих системах коор-
координат.
Решение. Согласно чертежу, приведенному на рис. 1.12, геометрические со-
соотношения для декартовых координат точки М имеют вид
Уравнения движения точки в декартовой системе координат, с учетом A.56),
можно записать так:
х = R+Rcos[s(t)/R];
y = Rsin[s(t)/R]9
где закон движения точки по траектории s(t) имеет вид, приведенный в усло-
условии задачи из примера 1.4.
Уравнение траектории в данном случае можно получить в форме
(x-RJ у2
При этом следует учесть диапазоны изменения декартовых координат точки:
R<x<2R;
-R<y<R.
На рис. 1.12 видно, что полярный угол ср = а/2, а полярная координата г
равна длине отрезка ОМ, являющегося стороной равнобедренного треугольника
ОО^М . Из этого треугольника находим ОМ = 2/?cos<p .
Таким образом, уравнения движения точки М в полярной системе координат
имеют вид
r = 2Rcos[s(t)/BR)];
Уравнение траектории будет r = 2/?cos(p. При этом диапазоны изменения по-
полярных координат точки М следующие:
y[2R<r<2R;
Читателю предоставляется возможность самостоятельно ре-
решить вопрос о целесообразности и трудоемкости определения
кинематических характеристик движения точки в задачах, рас-
рассмотренных в примерах 1.1-1.5, для разных способов задания ее
движения.
Глава 2
ПРОСТЕЙШИЕ ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА
2.1. Степени свободы и теорема о проекциях скоростей
Кинематика твердого тела — раздел кинематики, в кото-
котором изучают кинематику абсолютно твердого тела.
Основным свойством твердого тела является неизменность
расстояния между любыми его точками. В кинематике форма
твердого тела не влияет на кинематические параметры его дви-
движения, и в данном случае можно использовать аксиому неогра-
неограниченного расширения тела, полагая, что в движение вместе с
ним увлекаются любые точки из примыкающей области про-
пространства, так что их также можно отнести к рассматриваемому
твердому телу.
Задачи кинематики твердого тела сводятся к разработке спо-
способов задания его движения, определению на этой основе харак-
характеристик движений самого тела и отдельных точек, ему принад-
принадлежащих.
Для задания движения твердого тела необходимо прежде
всего установить число степеней свободы, т. е. минимальное
число независимых скалярных переменных, в совокупности одно-
однозначно определяющих положение материального тела в про-
пространстве*.
В гл. 1 данного раздела показано, например, что для одно-
однозначного определения положения точки в пространстве в общем
случае надо знать три ее координаты (декартовы или криволи-
криволинейные), и, следовательно, свободная материальная точка имеет
три степени свободы. При движении на плоскости требуются две
* Эти переменные называются также обобщенными координатами.
70
координаты, однозначно определяющие положение точки на этой
плоскости; в этом случае материальная точка имеет две степени
свободы. Наконец, при движении точки по заданной траектории
одна координата определяет ее положение на траектории; в этом
случае точка имеет одну степень свободы.
При задании движения твердого тела следует исходить из
того, что его положение в пространстве можно считать опреде-
определенным, если известно положение трех его точек, не лежащих
на одной прямой, например А, В, С (рис. 2.1). В таком случае
для однозначного определения положения твердого тела в про-
пространстве необходимо знать по три координаты каждой из этих
точек, т. е. для точек А,ВиС нужно знать хА, уА, zA, хв, ув,
2в хс> Ус> zc- Однако все эти девять параметров нельзя счи-
считать независимыми, так как координаты тех же точек твердого
тела будут связаны тремя уравнениями, вытекающими цз усло-
условия неизменности расстояния между точками в твердом теле:
(хА -хвJ +(уА -увJ +(zA -zBJ =Z2^;
(хА -xcf +(yA -ycJ +(zA -zcJ =L2AC;
(xc -xBJ +(yc -yBJ +(zc -zBJ =4C,
где L^, LAC, LBC — расстояния между соответствующими точ-
точками в теле.
Рис. 2.1
71
Таким образом, можно сделать вывод, что число степеней
свободы для свободного, т. е. ничем не ограниченного в своем
движении, твердого тела в общем случае его перемещения в про-
пространстве равно шести Cx3-3 = 6). При этом в качестве неза-
независимых параметров могут выступать как любые шесть незави-
независимых координат точек А, В, С и (или) их комбинаций, так и
шесть других независимых скалярных переменных, конкретный
перечень которых будет определен при рассмотрении этого вида
движения твердого тела.
Кроме общего случая движения твердого тела могут быть
выделены и другие его виды, характеризующиеся некоторыми
отличительными признаками, позволяющими выделить их из
всей возможной совокупности движений. Простейшими движе-
движениями являются: поступательное движение твердого тела и его
вращение вокруг неподвижной оси, более сложными — плоское
и сферическое движения, а также общий случай движения твер-
твердого тела.
Для любого вида движения твердого тела справедлива тео-
теорема, которую иногда называют основной теоремой кинематики
твердого тела.
Теорема 2.1. Проекции скоростей точек тела на ось, совпа-
совпадающую с прямой, проходящей через них, равны.
Доказательство. Выделим в теле две точки Аи В, положение
которых в пространстве определяют радиус-векторы гА и гв соот-
соответственно (рис. 2.2). Тогда вектор АВ можно записать в виде
гв-гА=АВ.
При возведении в квадрат левой и правой частей этого выра-
выражения получим
(rB-rAJ=(ABJ=I\
где I = АВ; I2 = /2; / = АВ = const — расстояние между точками
А и В в рассматриваемом твердом теле.
Дифференцируя по времени последнее соотношение, получаем
\ dt dt
72
_ drA_drR___T
Так как в этом равенстве —— = vA, —— = vB, rB - rA = / , то
dt
dt
после замены имеем
21 (vB - vA) = 0, или ZvB = /vA.
^ г
Рис. 2.2
Раскрывая скалярное произведение векторов и сокращая на /,
получаем
где аир — углы между скоростями соответствующих точек и
осью / , направленной по прямой АВ (см. рис. 2.2).
Таким образом, сформулированную выше теорему можно
считать доказанной.
2.2. Поступательное движение твердого тела
Поступательным движением твердого тела называется
такое его движение, при котором прямая, проходящая через лю-
любые две точки в этом теле, будет оставаться параллельной сво-
своему первоначальному положению во все время движения . Заме-
Заметим, что при этом траектории точек тела могут быть любыми и
иметь форму прямой, окружности, пространственной кривой и т. д.
Для идентификации этого вида движения достаточно, чтобы указанный
признак выполнялся для любых двух непараллельных прямых, проведенных
через точки рассматриваемого тела.
73
Примерами поступательного движения служат движения
контактной рейки трамвайного пантографа относительно вагона,
кабины колеса обозрения в парке относительно земли, ступеней
эскалатора относительно пола в метро и т. д.
Свойства поступательного движения:
1) траектории всех точек тела, совершающего поступатель-
поступательное движение, конгруэнтны, т. е. одинаковы, и могут быть полу-
получены одна из другой параллельным переносом;
2) скорости всех точек тела одинаковы;
3) ускорения всех точек тела одинаковы.
Эти выводы можно подтвердить на основании следующего
анализа.
Для двух любых точек А и В тела, совершающего поступа-
поступательное движение (рис. 2.3), можно записать соотношение
гв=гА+АВ9
где АВ = const — вектор, имеющий постоянные модуль и на-
направление во время движения, так что траектории точек А и В как
годографы соответствующих радиус-векторов гА и гв оказыва-
оказываются смещенными в любой момент времени одна относительно
другой на одну и ту же величину в одном и том же направлении,
что и доказывает первое свойство.
Траектория
точки Л
Рис. 2.3
74
Дифференцируя левую и правую части приведенного выше
векторного соотношения и учитывая, что dAB/dt = 09 получаем
drB/dt = drA/dt, или vB = vA. Дифференцируя по времени ле-
левую и правую части полученного соотношения для скоростей,
находим dvB/dt = dvA/dt, или ав = аА.
На основании вышеизложенного можно сделать следующий
вывод: чтобы задать движение и определить кинематические
характеристики тела, совершающего поступательное движе-
движение, достаточно задать движение одной его любой точки (по-
(полюса) и найти ее кинематические характеристики.
Как и материальная точка, тело при его поступательном
движении будет иметь одну степень свободы при движении по
направляющей, задающей траекторию его точкам; две степени
свободы в случае движения на плоскости (при постоянном кон-
контакте с ней хотя бы одной точкой) и три степени свободы в об-
общем случае движения в пространстве.
2.3. Вращение твердого тела вокруг неподвижной оси
Вращением твердого тела вокруг неподвижной оси (или про-
просто вращательным движением) называется такое движение твер-
твердого тела, при котором в теле можно выделить прямую, все точки
которой будут оставаться неподвижными во время движения. Эта
прямая называется осью вращения твердого тела. Очевидно, что для
ее задания достаточно указать как минимум две неподвижные точки
в рассматриваемом теле, через которые она проходит.
Алгоритм задания вращательного движения может быть оп-
определен на основе следующего анализа.
Введем неподвижную прямоугольную декартову систему
координат Oxyz и аналогичную подвижную систему координат
OXYZ, жестко связанную с рассматриваемым телом, расположив
оси Oz и OZ на оси вращения тела (рис. 2.4).
Пусть в начальный момент времени оси координат подвижной
и неподвижной систем совпадали. Тогда положение вращающегося
тела относительно неподвижной системы координат в любой теку-
текущий момент времени однозначно определится значением дву-
двугранного угла ф между неподвижной плоскостью Oxz иподвиж-
75
zkZ
ной плоскостью OXZ, вращающейся вместе с рассматриваемым
телом. Таким образом, при вращении вокруг неподвижной оси
тело имеет одну степень свободы, так как его положение в не-
неподвижной системе координат Oxyz однозначно определяется
значением одного скалярного параметра — угла ср. Уравнение,
определяющее изменение этого угла как функции времени, об-
общего вида
где ф@ — непрерывная дважды дифференцируемая функция
времени, называется законом вращения твердого тела вокруг
неподвижной оси*.
* Угол ф также может быть углом между любой неподвижной плоскостью, про-
проходящей через ось вращения, и подвижной, связанной с телом и также проходящей
через указанную ось плоскостью.
76
Отношение изменения угла поворота тела вокруг неподвиж-
неподвижной оси к промежутку времени At называется средней угловой
скоростью вращения тела:
Аф _ (рО + At) - (рО)
"AT" Af '
Предел этого отношения при Af—»0 называется угловой
скоростью вращения тела в момент времени t:
. d(p л. Аф
ф = —L= lim—-.
dt д*->о Д^
Здесь ф — скалярная алгебраическая величина, которая может
принимать положительные и отрицательные значения.
На чертеже угол поворота тела и направление угловой ско-
скорости принято условно изображать дуговыми стрелками. При
этом за положительное направление отсчета угла ф обычно при-
принимают направление, противоположное направлению вращения
часовой стрелки, если смотреть с положительного направления
координатной оси, совмещенной с осью вращения тела. Это, в
частности, соответствует так называемой правой декартовой сис-
системе координат.
Угловую скорость можно определить и как вектор ш, рас-
расположенный на оси вращения и равный
где к — единичный вектор, задающий положительное направ-
направление оси вращения, или орт оси Oz (рис. 2.5).
Проекция вектора угловой скорости на ось вращения Oz
coz =Ш =ф,
т. е. она равна угловой скорости вращения тела. Положительные
направления отсчета ф, ф и оси Oz соответствуют правой декар-
декартовой системе координат.
Численное значение угловой скорости ш равно модулю век-
вектора со и определяется как модуль проекции coz либо как модуль
угловой скорости тела при его вращении вокруг неподвижной
оси:
77
Единица измерения угловой скорости в СИ — радиан в се-
секунду (рад/с).
Рис. 2.5
Изменение угловой скорости тела во времени характеризует-
характеризуется его угловым ускорением.
Угловым ускорением тела называется первая производная
от угловой скорости или вторая производная по времени от угла
поворота вокруг неподвижной оси:
2 '
dr dt
где ф - скалярная алгебраическая величина.
Как векторную величину угловое ускорение можно опреде-
определить так:
78
е = = ibk .
Л
Проекция углового ускорения на ось вращения Oz
т. е. она равна угловому ускорению тела. Положительные на-
направления отсчета ср, ф, ф и оси Oz соответствуют правой декар-
декартовой системе координат.
Значение (модуль) углового ускорения
Единица измерения углового ускорения в СИ — радиан на
секунду в квадрате (рад/с2 ).
На чертеже угловое ускорение условно изображают дуговой
стрелкой, направленной при ф > 0 так же, как и стрелка, задающая
положительное направление отсчета угла ф, и противоположно
при ф < 0. Угловое ускорение можно также изображать в виде
вектора, расположенного на оси вращения и совпадающего по
направлению с осью вращения Oz при г2 = ф > 0 или направлен-
направленного в противоположную сторону при г2 = ф < 0 (см. рис. 2.5).
Векторы ю и 8 являются скользящими векторами, распо-
расположенными на оси вращения тела и не имеющими на ней кон-
конкретной точки приложения.
Вращательное движение называется ускоренным, если произ-
производная от модуля угловой скорости положительна (d(u/dt>0), и
замедленным, если эта производная отрицательна (d(o/dt < 0 ). Эту
характеристику можно дать также исходя из знака скалярного про-
произведения @-8: при ю-8 = со282=фф>0 вращательное движе-
движение будет ускоренное, а при юе = (оге2=фф<0 — замедлен-
замедленное; при 8(/) = 0 тело вращается равномерно, в этом случае
со = const.
При вращательном движении твердого тела траектории всех
точек этого тела являются окружностями, лежащими в плоскостях,
перпендикулярных оси вращения. Центры всех этих окружностей
лежат на оси вращения, а радиусы равны кратчайшему расстоянию
79
от этих точек до оси вращения. На рис. 2.6 для точки А тела, вра-
вращающегося вокруг неподвижной оси Oz, показана ее траектория —
окружность радиусом А, а также единичные векторы х, п, Ъ ес-
естественной системы осей, причем вектор бинормали Ъ направлен
так же, как единичный вектор к на оси Oz. Запишем радиус-
вектор г этой точки, проведенный из точки О на оси вращения
^ где ОО\=ООхк;
Скорость точки
ОО\ = const.
OxA--hn, причем
А определим в виде
v= — = -й . Согласно правилу дифференцирования вектора
dt dt
постоянного модуля (В.87) в данном случае = -фх, так что
dt
v = йфтГ.Поскольку x = nxb =пхк ,то v" = Щпхк = <рк х(-/ш) =
= фА: х (ОС\ • А: - /ш). В итоге получаем
B.1)
Рис. 2.6
80
Формула B.1) называется векторной формулой Эйлера.
Численное значение (модуль) скорости точки тела при этом
определится как модуль соответствующего векторного произве-
произведения, т. е.
Скорости точек при вращении вокруг неподвижной оси на-
направлены по касательной к окружности радиусом h в соответст-
соответствии с направлением угловой скорости тела. Направление вектора
v можно определить, исходя из свойств векторного произведе-
произведения B.1).
Ускорение точки А тела
_ dv d(Exr) d!5 __ _ dr
a = = — - = xr + cox .
dt dt dt dt
В последнем выражении d lo/dt = e, d rfdt = v . Следовательно,
ZF = 8xF"+g>xv. B.2)
Слагаемые в правой части выражения B.2) представляют со-
собой касательную (тангенциальную) ах = е х F и нормальную
aw=caxv = G)x(G)xr) составляющие ускорения точки.
Действительно, направление ах, исходя из векторного произ-
произведения 8 х F, будет определено как направление вектора, каса-
касательного к окружности радиусом h в точке A, ax=hif>F. На
рис. 2.6 видно, что это направление также соответствует направ-
направлению углового ускорения тела. Модуль касательного ускорения
точки в данном случае равен
\ах | = |s х г | = sr sin(e, r ) = zh. B.3)
Вектор ап всегда направлен по нормали к траектории точки
А в сторону ее вогнутости (к оси вращения тела, перпендикуляр-
перпендикулярно к ней). Модуль нормального ускорения точки
|ал | = ап = |ш х v| = ©V sin(rc/2) = со2 h . B.4)
Полное ускорение точки тела, вращающегося вокруг непод-
неподвижной оси, а = ах + ап. Вектор а лежит в плоскости, перпенди-
перпендикулярной оси вращения тела (см. рис. 2.6), а его численное зна-
значение (модуль) определяется по формуле
7 Зак. 16 g.
B.5)
Таким образом, можно сделать вывод, что модули скоростей
и ускорений точек тела, вращающегося вокруг неподвижной оси,
прямо пропорциональны кратчайшему расстоянию от них до
оси вращения, причем, чем дальше находится точка от оси вра-
вращения, тем больше ее скорость и ускорение.
Пример 2.1. В механизме, изображенном на рис. 2.7, связь тел 7 и 2 с непод-
неподвижным основанием осуществляется с помощью цилиндрических шарниров О и
Oj, а тела 3 с телами 7 и 2 с помощью цилиндрических шарниров А и В соот-
соответственно. Тело 4 перемещается в вертикальных направляющих М и N и не
проскальзывает относительно тела 2 в точке Е. Известно, что ОА = О1В =
= L = 0,2m, ООх =Л# = </ = 0,4м , ?D = e = 0,5M, 7? = O,5L, А В LBD. Движе-
Движение стержня 7 задается уравнением изменения его угла поворота вокруг оси Oz,
проходящей через точку О перпендикулярно плоскости чертежа в виде
ф@ = bt-ct2 - тс, где Ь = 2я рад/с; с = Зя/4 рад/с2; t — время в секундах.
Для момента времени /, = 1 с определить угловые скорости и угловые уско-
ускорения тел 7 и 2, а также скорости и ускорения точек А , D , Е и тела 4. Все най-
найденные кинематические параметры движения тел и точек показать на чертеже
(включая траектории точек А и D).
Решение. В рассматриваемом механизме тела 7 и 2 совершают вращатель-
вращательное движение (их неподвижные оси вращения совпадают с осями цилиндриче-
цилиндрических шарниров О и О] соответственно). Тело 3 совершает поступательное дви-
движение (линия, проходящая через точки А и В, все время остается вертикальной,
а линия, проходящая через точки В и Д —^горизонтальной). Тело 4 также совер-
совершает поступательное движение, перемещаясь в вертикальных направляющих.
Проекции угловой скорости и углового ускорения тела 7 на ось вращения Oz
найдем по формулам
„ , я 7С рад Зя рад
При / = 1 с ф = — рад; со1г = — -—; е,, = -s-y-, а модули угловой ско-
. тс рад Зя рад
рости и углового ускорения тела 7 ю, = — -—; е, = — ¦*-=-.
2 с 2 с
Направление угловой скорости тела 7 показано на рис. 2.7, а дуговой стрел-
кой, совпадающей по направлению с дуговой стрелкой, указывающей положи-
положительное изменение угла ф, так как colz > 0; дуговая стрелка углового ускоре-
ускорения, для которого Е1г < 0, имеет противоположное направление.
Углы поворота тел 7 и 2 в их вращательных движениях одинаковы (ОА и
ОХВ являются противоположными сторонами подвижного параллелограмма
82
ОАВОХ), так что угловая скорость и угловое ускорение тела 2 идентичны анало-
аналогичным параметрам тела / (со2 = со,; ё2 = ё,).
т а Траектория >
к- —^ точки D
Рис. 2.7
Для точки Л, как точки, принадлежащей телу /, совершающему вращатель-
нос движение, vA = со,/, = (тс/2) 0,2 «0,314 м/с . Вектор vAlDA и направлен в
соответствии с направлением дуговой стрелки угловой скорости тела /
(см. рис. 2.7, а). Ускорение точки А аА=ахА +аА . Вектор аА1ОА , его направ-
направление соответствует направлению углового ускорения тела У, а модуль
\аА =*:,/, = (Зя/2)• 0,2 « 0,942 м/с2. Нормальная составляющая ускорения аА
направлена из точки А к точке О, аА = со2 • 0/1 = (тс/2J • 0,2 « 0,493 м/с2. Полное
ускорение точки Л расположено на диагонали прямоугольника, построенного на
83
векторах а\ и аА как на сторонах; его модуль аА = у(аАJ+(аАJ »
« 1,07 м/с2 (см. рис. 2.7, а).
Так как тело 3 совершает поступательное движение, то скорости и ускоре-
ускорения всех его точек одинаковы и равны скорости и ускорению самого тела 3,
поэтому v3 = vD = vA , яз = Я/;> = а^ . Траекторией точки А является окружность
радиусом г = L = 0,2 м с центром в точке 0@, 0), а точки D — окружность с
таким же радиусом и центром в точке О2 с координатами хОг = е = 0,5 м,
у0 --d- -0,4 м (см. рис. 2.7, а).
В месте контакта тел 2 и 4 в точке ? выделим точки ?2 и ?»» физически
принадлежащие телам '2 и 4 соответственно. Для точки Е2 имеем:
ve2 = со2/?« 0,157 м/с; вектор vEllOxE и его направление соответствует направ-
направлению дуговой стрелки угловой скорости тела 2; ускорение аЕг = aEl + а?2, где
вектор aJr2±O]E и направлен в соответствии с направлением углового ускоре-
ускорения тела 2,
а],2
=e2R = (Зп/2) • 0,1» 0,471 м/с2, а вектор аЕг направлен из точки
Е к точке О,, а = cd\R = (л/2J • 0,1» 0,247 м/с2; полное ускорение аЕг распо-
расположено на диагонали прямоугольника, построенного на векторах aEl и аЕг как
на сторонах, его модуль ahi = */я22Т + я2.-2„ « 0,532 м/с2 (см. рис. 2.7, б).
Из условия отсутствия проскальзывания между телами 2 и 4 в точке их кон-
контакта следует v/<4 = v/l2, т. е. скорости точек Е^ и ЕА одинаковы (равны и по
величине, и по направлению); %4 = а];2, т. е. полное ускорение точки Е4 равно
тангенциальной составляющей ускорения точки Е2 . Скорости и ускорения всех
точек тела 4, совершающего поступательное движение, одинаковы и равны
скорости и ускорению самого тела 4: v4 = vEa , a4 = аЕ^ (см. рис. 2.7).
Глава 3
ПЛОСКОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
3.1. Разложение плоского движения твердого тела
на поступательное и вращательное движения
Плоским, или плоскопараллельным, движением твердого
тела называют такое его движение, при котором точки тела
движутся в плоскостях, параллельных некоторой неподвижной
плоскости.
Примерами такого движения могут служить: качение шес-
шестерни с подвижной осью по другой неподвижной шестерне, ка-
качение колеса по прямолинейной направляющей, движение шату-
шатуна кривошипно-шатунного механизма.
Плоское движение твердого тела имеет большое практиче-
практическое значение, поскольку звенья большинства механизмов и ма-
машин, применяемых в технике, совершают в процессе их эксплуа-
эксплуатации именно такое движение.
При изучении плоского движения необходимо рассмотреть
способы задания этого движения, приемы и методы вычисления
скоростей и ускорений точек тела.
Пусть твердое тело совершает плоское движение. Тогда, со-
согласно определению, все точки тела будут перемещаться в плос-
плоскостях, параллельных между собой и некоторой неподвижной
плоскости По (рис. 3.1). Отсюда следует, что любая прямая АВ,
перпендикулярная этой плоскости и принадлеэюащая телу, бу-
будет в процессе его движения перемещаться вместе с ним по-
поступательно, т. е. траектории, скорости и ускорения всех точек
этой прямой будут одинаковыми. Таким образом, для изучения
движения точек, лежащих на рассматриваемой прямой, в соот-
85
ветствии с основной теоремой о поступательном движении дос-
достаточно знать движение одной из них, например точки А. Следо-
Следовательно, плоское движение твердого тела полностью определя-
определяется движением плоской фигуры 5, образованной пересечением
тела любой плоскостью 77, параллельной неподвижной плоско-
плоскости, и задание плоского движения твердого тела может быть све-
сведено к заданию движения плоской фигуры в плоскости, парал-
параллельной плоскости 770.
77777
7777/
I M I
Рис. 3.1
Рассмотрим твердое тело, участвующее в плоском движении
(рис. 3.2). Совместим координатную плоскость Оху системы коор-
координат Oxyz с плоской фигурой S тела. Выделим два любых поло-
положения фигуры 5, которые она занимает в процессе плоского дви-
движения тела. Поскольку положение плоской фигуры вполне опре-
определяется положением ее двух точек или отрезка, соединяющего
эти точки, то исследование движения плоской фигуры можно
свести к изучению движения принадлежащего ей отрезка АВ.
Перемещение фигуры из одного положения в другое можно
разложить на поступательное движение вместе с произвольной ее
86
точкой, называемой полюсом, и вращение в плоскости Оху фигу-
фигуры вокруг оси, параллельной оси Oz и проходящей через выбран-
выбранный полюс.
O(z)
w
(Si
А
^ и
\
^4 Т^Л
Рис. 3.2
В самом деле, выберем за полюс, например, точку А. Тогда
при поступательном движении фигуры отрезок АВ9 перемещаясь
параллельно самому себе, займет положение АХВ*. Повернув
отрезок на угол ср, совместим его с отрезком АХВХ плоской фи-
фигуры в новом положении, обеспечив тем самым рассматриваемое
движение плоской фигуры. Аналогичный результат получается,
если выбрать за полюс точку В.
Важно отметить, что тогда как поступательная состав-
составляющая плоского двиэюения тела в общем случае различна для
разных точек тела, величина и направление отсчета угла пово-
поворота плоской фигуры всегда одни и те лее, т. е. они не зависят
от выбора полюса.
3.2. Уравнения движения, угловая скорость и угловое
ускорение твердого тела при плоском движении
Итак, для исследования плоского движения твердого тела
достаточно изучить движение его плоской фигуры. Совместим
плоскость Оху неподвижной системы крординат Oxyz с плоско-
плоскостью Я, в которой движется плоская фигура (рис. 3.3).
87
У1
Ул
O(z)
( AB
Y *.
у I'
X
Рис. 3.3
Плоская фигура при движении имеет три степени свободы и
ее положение определяется тремя независимыми координатами:
декартовыми координатами хА и уА полюса А и углом поворота
ф отрезка АВ вокруг этого полюса. При движении плоской фигу-
фигуры координаты хА, уА полюса А и угол ф, изменяясь с течением
времени, являются некоторыми однозначными и непрерывными
функциями времени t. Уравнения
определяющие положение и движение плоской фигуры в непод-
неподвижной плоскости Оху, называются уравнениями плоского дви-
движения твердого тела.
В плоском движении вращение твердого тела вокруг под-
подвижной оси, проходящей через полюс, характеризуется углом ф.
Как и при вращении тела вокруг неподвижной оси, за положи-
положительное направление отсчета угла ф принимают направление,
противоположное направлению вращения часовой стрелки. Вве-
Введем проекцию угловой скорости coz и проекцию углового уско-
ускорения ez .на ось AZ для плоского движения твердого тела:
Алгебраические величины coz и ez могут быть как положитель-
положительными, так и отрицательными; они не зависят от выбора полюса.
88
При плоском движении твердого тела угловую скорость и
угловое ускорение считают векторами, направленными вдоль
подвижной оси, перпендикулярной плоской фигуре. Направление
вектора со должно быть таким, чтобы с его конца вращение фи-
фигуры виделось бы происходящим против вращения часовой
стрелки. При ускоренном вращении направления со и ? совпа-
совпадают, при замедленном — противоположны. Поскольку выбор
полюса произвольный, со и 8 являются свободными векторами.
Очевидно, при этом, что угловая скорость ф и угловое уско-
ускорение ф плоского движения твердого тела — суть проекции со-
соответствующих векторов на ось Z, а их знаки — свидетельство
совпадения или несовпадения направлений векторов со и е" с
положительным направлением оси Z(z).
3.3. Скорости точек тела при плоском движении
Представим движение плоской фигуры и ее отрезка АВ в не-
неподвижной системе координат Oxyz (рис. 3.4). Для произвольного
момента времени справедливо векторное равенство
гв=гА+АВ. C.1)
О
Рис. 3.4
При движении плоской фигуры векторы гА и гв изменяются
и по модулю, и по направлению, вектор же ,АВ изменяется толь-
только по направлению, так как его модуль равен постоянному для
твердого тела расстоянию между точками Аи В. Запишем произ-
производную по времени от обеих частей равенства C.1):
6 Зак. 16 89
drB _drA dAB
dt dt dt
Обозначив = vBA и назвав vBA скоростью точки В тела
dt
при вращении его вокруг полюса А, получим
Vn — Уд +уПл. C.2)
Рассмотрим вектор vBA. Поскольку АВ — вектор постоян-
постоянного модуля, то
d
VBA =
dt
dt
где т — единичный вектор, лежащий в плоскости фигуры, пер-
перпендикулярный АВ и направленный в сторону возрастания угла
поворота фигуры ф. Тогда вектор vBA лежит в плоскости дви-
движущейся фигуры, перпендикулярен отрезку АВ, соединяющему
точку В с полюсом А, и направлен в сторону вращения фигуры
вокруг этого полюса (см. рис. 3.4).
Определим модуль вектора vBA :
Обозначив |ф| = со, запишем
v^=coA5. C.3)
Применив формулу Эйлера, представим выражение C.3) в век-
векторной форме:
d~AB _ —
у». = = сох АВ.
ВА dt
Окончательно имеем
vB -vA +vBA =vA +юхАВ. C.4)
Таким образом, скорость какой-либо точки фигуры при ее
плоском движении равна векторной сумме скорости полюса и
скорости этой точки при вращении фигуры вокруг полюса.
3.4. Мгновенный центр скоростей
В любой момент времени при плоском движении фщуры
существует единственная точка фигуры, скорость которой равна
90
нулю* Эту точку называют мгновенным центром скоростей
(МЦС). Найдем эту точку, обозначив ее Р.
Возьмем за полюс точку А фигуры 5, скорость vA которой
известна (рис. 3.5). Пусть в этот момент времени угловая ско-
скорость фигуры равна со.
О
Рис. 3.5
Для определения скорости точки Р воспользуемся форму-
формулой C.2): ,
Отсюда следует, что векторы vA и vPA должны быть равны
по модулю и противоположны по направлению. Так кщ; вектдр
vPA перпендикулярен отрезку АР, то прямая, на которой должна
находиться точка Р, перпендикулярна вектору vA. Проведем таг
кую прямую MN через точку А. Чтобы выполнялось условие
vA =-vPA, точка Р должна находиться на луче AN. .Иосколь&у
jvA|^|vPA|,a vPA =co- АР,находим AP = vA/(b. J :
Таким образом, МЦС находится на перпендикулярел восста-
восстановленном к вектору скорости точки vA, на расст6янвд;
' ' ' ¦¦¦' '
91
Примем точку Р за полюс фигуры. Тогда для ее произволь-
произвольной точки В можно записать:
^=^+Удр=Удр; vB=vBP=(o-PB9 C.5)
где РВ — расстояние от МЦС — точки Р до точки В; вектор vB
перпендикулярен отрезку РВ, направлен в сторону вращения
фигуры вокруг МЦС (см. рис. 3.5), а его модуль пропорционален
расстоянию от МЦС до точки.
Таким образом, скорости точек плоской фигуры в данный
момент времени вычисляются так же, как если бы фигура вра-
вращалась вокруг неподвгиисной оси, проходящей через МЦС перпен-
перпендикулярно плоскости движения, с той же угловой скоростью <5.
Использование МЦС часто упрощает определение скоростей
точек твердого тела в плоском движении.
Рассмотрим случаи, когда положение МЦС может быть ус-
установлено либо с помощью геометрических построений, либо в
силу физических соображений.
Пусть известны направления скоростей двух точек А и В фи-
фигуры (рис. 3.6, а). Тогда МЦС будет находиться в точке пересе-
пересечения перпендикуляров, восстановленных в точках А и В к на-
направлениям их скоростей vA и vB.
В том случае, когда точки А и В лежат на общем перпенди-
перпендикуляре к их неравным скоростям, МЦС фигуры находится в точ-
точке пересечения перпендикуляра с прямой, соединяющей концы
векторов скоростей этих точек (рис. 3.6, б, в).
Если скорости двух точек А и В плоской фигуры параллель-
параллельны, направлены в одну сторону и равны между собой, то МЦС
лежит в бесконечности, а угловая скорость плоской фигуры рав-
равна нулю (так как vA =vB , то vBA = юх АВ = 0). Такое движение
тела называют мгновенно-поступательным. При нем скорости
всех точек фигуры одинаковы по направлению и модулю
(рис. 3.6, г). Однако следует иметь в виду, что ускорения точек
при таком движении различны.
В некоторых случаях, исходя из физических соображений,
удается сразу установить МЦС плоской фигуры. Речь идет о до-
довольно распространенном на практике классе задач, в которых
рассматривается качение без скольжения плоской фигуры по
92
некоторой неподвижной плоской линии (рис. 3.6, д). Например,
качение без скольжения колеса по неподвижной прямой линии
или одного колеса по другому неподвижному колесу. В таких
случаях МЦС плоской фигуры находится в точке ее контакта с
опорой, скорость которой равна нулю.
О
Рис. 3.6
93
Пример 3.1. Колесо радиусом R (см. рис. 3.6, д) катится без скольжения по
неподвижной прямой; скорость центра vc. Используя понятие МЦС, опреде-
определить скорости точек MnN обода колеса.
Решение. Поскольку колесо катится без скольжения, его МЦС находится в
точке Р контакта обода с неподвижной прямой. Тогда, в соответствии с C.5),
угловая скорость колеса
vc
оэ = ,
PC R
а направление его вращения определится направлением вектора vc по отноше-
отношению к МЦС (направление вращения колеса совпадает с направлением движения
часовой стрелки).
Теперь, так как РМ = JlR , a PN = 2R , то
vM =<oPM = <j2vc; vN =&PN = 2vc .
Векторы скоростей точек Ми N колеса перпендикулярны отрезкам прямых,
соединяющих эти точки с МЦС, и направлены в сторону вращения колеса во-
вокруг МЦС (см. рис. 3.6, д).
3.5. Мгновенный центр вращения. Центроиды
На рис. 3.6 видно, что скорости точек сечения тела при плос-
плоском движении распределены в каждый момент времени так, как
если бы движение сечения тела представляло собой вращение
вокруг МЦС. Поэтому МЦС называют мгновенным центром
вращения. Ось Pz, вокруг которой в данный момент времени
происходит вращение тела, перпендикулярную к его сечению и
проходящую через МЦС — точку Р, называют мгновенной осью
вращения.
Мгновенный центр вращения при плоском движении тела
меняет свое положение как на неподвижной плоскости, в которой
движется фигура, так и на связанной с ней подвижной.
Геометрическое место мгновенных центров вращения на не-
неподвижной плоскости называют неподвижной центроидой, а
геометрическое место этих же центров на подвижной плоскости,
связанной с движущейся фигурой, — подвижной центроидой.
Например, при качении диска по плоской кривой без сколь-
скольжения (рис. 3.7) неподвижной центроидой является кривая К, по
которой катится диск, а подвижной — окружность L диска. В
каждый момент времени подвижная и неподвижная центроиды
94
Рис. 3.7
имеют общую точку
касания Р, скорость ко-
которой равна нулю. Эта
точка является мгновен-
мгновенным центром скоростей
диска. Таким образом,
при действительном
движении плоской фигу~
ры подвижная центрои-
центроида катится без сколь-
скольжения по неподвижной.
Если вместо движе-
движения плоской фигуры рас-
рассмотреть плоское движе-
движение твердого тела, то неподвижная и подвижная центроиды будут
для него неподвижной и подвижной цилиндрическими поверхно-
поверхностями.
Теория центроид нашла широкое применение в специальных
курсах кинематики механизмов, в теории механизмов и машин
при профилировании зубчатых колес.
Рассматривая в качестве примера движение линейки эллип-
эллипсографа (рис. 3.8), убедимся, что оно тождественно движению
окружности Z,, катящейся без скольжения внутри неподвижной
окружности К вдвое большего радиуса, при котором точки В и А
первой окружности движутся соответственно по горизонтально-
горизонтальному и вертикальному диаметрам второй (см. рис. 3.8). В самом
деле, проведя перпендикуляры к направлениям скоростей точек А
и В эллипсографа, найдем МЦС — точку Р. Очевидно, что на
неподвижной плоскости Оху разным положениям линейки АВ
соответствуют разные положения центра Р9 но при этом ОР оста-
остается постоянным и равным АВ. Следовательно, неподвижная
центроида — это окружность К, описанная из центра О радиу-
радиусом, равным АВ. Положение центра Р в процессе движения меха-
механизма меняется и относительно линейки АВ9 но расстояние меж-
между серединой линейки С и центррм Р остается постоянным ц рав-
равным СР = АВ/2, Таким образом, окружность L с радиусом АВ/2
и центром в точке С будет подвижной центроидой.
95
Рис. 3.8
3.6. Вычисление угловой скорости твердого тела
при плоском движении
При решении задач на определение скоростей точек плоской
фигуры необходимым этапом является нахождение ее угловой
скорости. Рассмотрим ряд приемов определения со.
1. Если заданы уравнения движения плоской фигуры, то мо-
модуль угловой скорости можно определить как модуль производ-
производной от угла поворота по времени:
@ =
Вектор угловой скорости при этом направлен перпендикулярно
плоскости движения так, что с его конца направление вращения
плоской фигуры было бы противоположно направлению движе-
движения часовой стрелки.
Направление угловой скорости плоской фигуры удобно зада-
задавать дуговой стрелкой. Если в данный момент при выбранном вы-
выше положительном направлении отсчета угла поворота <р тела при
96
его плоском движении алгебраическое значение угловой скоро-
скорости ф>0, то направление дуговой стрелки со противоположно
направлению движения часовой стрелки, а если ф < 0, то совпа-
совпадает с ним.
2. В ряде задач модуль угловой скорости со можно опреде-
определить, разделив скорость какой-либо ее точки на расстояние меж-
между этой точкой и МЦС фигуры:
&=vA/AP.
Направление же вращения фигуры (дуговой стрелки со) опреде-
определяется при этом направлением вектора vA упомянутой точки по
отношению к МЦС.
3. Угловую скорость фигуры при плоском движении можно
установить из уравнения C.2), связывающего скорости двух то-
точек плоской фигуры, если задана vA и известно направление vB.
Проецируя векторы скоростей, входящие в уравнение C.2), на
направление, перпендикулярное vB, исключаем vB и определяем
со по формуле C.3).
Пример 3.2. Кривошип ОХА (рис. 3.9, а) вращается вокруг неподвижного
центра О, с угловой скоростью со,. Шатун АВ соединен шарнирно с кривоши-
кривошипом О, Л и диском, который может вращаться вокруг неподвижного центра О2.
Найти угловую скорость со2 шатуна АВ, если механизм занимает в данный
момент положение, указанное на рис. 3.9, а, а размеры его звеньев известны.
Решение. Построим для шатуна АВ механизма план скоростей — графиче-
графическое изображение векторного уравнения для скоростей точек плоской фигуры в
данный момент времени.
Так как скорость точки А известна из условия задачи (vA=(OlOlA,
vAlOx A), выберем эту точку за полюс. Тогда
Для построения векторного треугольника выберем вне плоской фигуры точ-
точку Во (см. рис. 3.9,6) и построим в некотором масштабе вектор vA. Через конец
этого вектора (точку а) проведем прямую аЫАВ (vBA±AB ) до пересечения ее в
точке Ь с прямой, проведенной из Во параллельно направлению искомой ско-
скорости точки В (vB±O2B). Тогда вектор аЪ представляет собой в выбранном
масштабе скорость точки В при вращении шатуна вокруг полюса Л, т. е. vBA, a
вектор ВОЬ — искомую скорость vB.
97
-3?
^_ Рис. 3.9
Спроецировав векторы, входящие в уравнение vB = vA + vBA , на направление
О2у , получим
или
0.
Откуда находим
со, =•
ABs'mfi
3.7. Ускорения точек тела при плоском движении
Перейдем теперь к определению ускорений точек плоской
фигуры. Выше было показано (см. § 3.3), что при движении пло-
плоской фигуры в любой момент времени справедливо соотношение
C.2) между скоростями двух ее точек. Продифференцировав его
по времени, получим
dvB dvA dvBA
~~ ¦ + ¦
л л
л
98
dvR _ dvA _
Здесь —— = ав, —— = aA — ускорения точек В и А относи-
dt dt
dvBA _
тельно неподвижной системы координат; —— = аВА — ускоре-
dt
ние точки В при вращательном движении плоской фигуры вокруг
подвижной оси, проходящей через полюс А перпендикулярно
плоскости фигуры, или просто вокруг полюса .4.
Таким образом,
Si^+SJM» ¦ C-6)
т. е. ускорение какой-либо точки плоской фигуры при плоском
движении равно векторной сумме ускорения полюса и ускорения
этой точки при вращательном двиоюении плоской фигуры вокруг
полюса.
Учитывая, что vM = со х АВ, найдем
dvBA d _ —ч dl5 — _ dAB
aRA=—— =—(<oxAB) = xAB + cox = •
BA dt dr J dt dt C.7)
dco _
где = 8 —угловое ускорение тела при плоском движении.
dt
Оценивая слагаемые в соотношении C.7), отмечаем, что
ускорение точки аВА при вращательном движении плоской
фигуры вокруг полюса, как и в случае вращения тела вокруг
неподвижной оси, состоит из касательной и нормальной со-
составляющих:
аВА =8х]45, аВА =юх(юх^5) = шхуА4, C.8)
модули которых
' \A=eAB9anBA=G>2AB. C.9)
Касательное ускорение аВА направлено перпендикулярно
отрезку АВ в сторону, указанную дуговой стрелкой 8
(рис. 3.10, а). Нормальное ускорение а^ направлено от точки В
к полюсу А. Таким образом,
99
= А5л/е2+со4.
C.10)
Обозначив угол между ускорением аВА и отрезком АВ через
а, найдем
C.11)
Угол а постоянен для заданных со и е, т. е. в данный мо-
момент времени, и не зависит от положения точек тела.
Рис. 3.10
Как и при определении скоростей точек движущейся пло-
плоской фигуры, в необходимых случаях рассматривают план уско-
ускорений точек фигуры. На рис. 3.10, б построен в масштабе много-
многоугольник ускорений.
Пример 3.3. Колесо радиусом R катится по неподвижной прямой
(рис. 3.11). Известны ускорение центра колеса ас, угловая скорость со и
угловое ускорение е . Определить в данный момент времени ускорения точек
А, В и Р, расположенных на концах вертикального и горизонтального диамет-
диаметров обода колеса.
100
У{
о
/
вл пс
V
А]
а\
г
зс
С ^с
•
.) j
—п Ш
аРС/
аАС
X
Рис. 3.11
Решение. Примем за полюс точку С, ускорение которой задано. Тогда, со-
согласно C.6) и C.8), ускорение точки А
где a\c=eCA = eR; апАС = со2СА = со2/?.
Ускорение о^с перпендикулярно отрезку С А и направлено в сторону, ука-
указанную дуговой стрелкой 8 , а ~а\с направлено от точки А к полюсу С. Постро-
Построив для точки А план ускорений, входящих в правую часть исходного равенства,
найдем искомый вектор как вектор аА (см. рис. 3.11). Его модуль
aA=yj(ac+axACJ+(anACJ =yj(ac +etfJ+co4/?2 .
Рассуждая аналогично, находим для точек В и Р соответственно:
ахвс=гСВ = гЯ; апвс = со2СВ = со2R ;
ав =yj(ac +anBCJ+(aACJ =^(ас +@2/?J +?2Я
o2D2
= со2 PC = со2/?;
aP=J(ac-axPCJ+(anPCJ =A/(ac-e/?J+co4/?2 .
В частном случае, если ас = аРС = ?/?, то аР = со2/? = а?с . Этот результат
возможен, очевидно, когда колесо катится по неподвижной прямой без сколь-
скольжения, то есть когда МЦС колеса совпадает с точкой контакта его с основанием —
точкой Р.
Таким образом, ускорение точки Р колеса при его качении по неподвижному
основанию не может быть равно нулю, поскольку нормальная составляющая
ускорения аРС = со2/? имеет ненулевое значение.
101
3.8. Мгновенный центр ускорений
При определении скоростей точек плоской фигуры было
установлено, что в каждый момент времени существует такая
точка Р фигуры (МЦС), скорость которой равна нулю. Пока-
Покажем, что в каждый момент времени существует точка фигуры,
ускорение которой равно нулю. Такая точка называется мгно-
мгновенным центром ускорений (МЦУ). Обозначим ее через Q.
Рассмотрим плоскую фигуру, совершающую движение в
плоскости рисунка (рис. 3.12). Примем за полюс какую-либо
точку А, модуль и направление ускорения аА которой известны
в рассматриваемый момент времени. Пусть в этот момент вре-
времени известны угловая скорость со и угловое ускорение ? фи-
фигуры. Из формулы C.6) следует, что точка Q будет МЦУ, если
аА + я од = 0, т. е. когда аА = -а^ . Так как вектор aQA состав-
составляет с линией AQ угол а (tg а = е/со2 ), то параллельный ему
вектор аА направлен к линии, соединяющей полюс А с точкой
Q, также под углом а (см. рис. 3.12).
О
Ф<0
Рис. 3.12
102
Проведем через полюс А прямую MN, составляющую с век-
вектором его ускорения угол а, откладываемый от вектора аА в
направлении дуговой стрелки 8. Тогда на луче AN найдется точ-
точка <2, для которой аА = -я?д •
Поскольку, согласно (ЗЛО), я^д =A(?V82 4-со4 , то точка Q
(МЦУ) будет отстоять от полюса А на расстоянии
AQ= . ' Л| =. C.12)
V82+C04
Таким образом, в каждый момент движения плоской фигу-
фигуры, если со и 8 не равны нулю одновременно, имеется единст-
единственная точка этой фигуры, ускорение которой равно нулю. В
каждый последующий момент времени МЦУ плоской фигуры
будет находиться в различных ее точках.
Если МЦУ — точку Q выбрать за полюс, то ускорение лю-
любой точки А плоской фигуры
а А = aQ + aAQ = aAQ,
так как aQ = 0. Тогда
C.13)
Ускорение аА составляет с отрезком QA, соединяющим эту
точку с МЦУ, угол а, откладываемый от QA в сторону, противо-
противоположную направлению дуговой стрелки углового ускорения 8
(см. рис. 3.12).
Ускорения точек фигуры при плоском движении пропорцио-
пропорциональны расстояниям от МЦУ до этих точек (см. C.13)).
Таким образом, ускорение всякой точки фигуры при. ее плос-
плоском движении определяется в данный момент времени так лее,
как и при вращательном движении фигуры вокруг МЦУ.
Выше (см. пример 3.3) было показано, что при качении ко-
колеса по прямой без скольжения ускорение его МЦС не равно
нулю. Следовательно, в общем случае МЦС и МЦУ являются
разными точками плоской фигуры.
Рассмотрим случаи, когда положение МЦУ можно опреде-
определить с помощью геометрических построений.
юз
1. Пусть известны направления ускорений двух точек пло-
плоской фигуры, ее угловые скорость и ускорение (рис. 3.13). Тогда
МЦУ лежит на пересечении прямых линий, проведенных к век-
векторам ускорений точек фигуры под одним и тем же острым уг-
углом
g
<x = arctg—т-*0,
со2
отложенным от векторов ускорений точек в направлении дуговой
стрелки углового ускорения.
Рис. 3.13
2. Пусть известны направления ускорений хотя бы двух то-
точек плоской фигуры, ее угловое ускорение 8 = 0, а угловая ско-
скорость со*0. Это возможно, например, когда плоская фигура
вращается в своей плоскости с постоянной угловой скоростью
или е = 0 в какой-либо момент времени. Тогда
tga = s/oo2 =0, a = 0,
и МЦУ лежит в точке пересечения прямых линий, по которым
направлены ускорения ее точек (рис. 3.14), а сами ускорения на-
направлены к этому центру, так как они представлены лишь нор-
нормальными составляющими от вращения фигуры вокруг МЦУ.
Следовательно, расстояния от них до МЦУ будут
104
У i
о
Рис. 3.14
У {
О
Ф<0
Рис. ЗЛ5
3. Пусть известны направления ускорений хотя бы двух то-
к плоской фигуры, ее угловая скорость со = 0, а угловое уско-
ние е*0. Это возможно, когда в процессе плоского движения
105
тела меняется направление его вращения. Поскольку
tga = e/(x>2 =oo, угол a — прямой. Следовательно, МЦУ лежит
на пересечении перпендикуляров, проведенных из точек фигуры
к векторам их ускорений (рис. 3.15). Расстояния от точек, уско-
ускорения которой известны, до МЦУ будут
AQ = aA/s,BQ = aB/s
(см. C.12)).
3.9. Способы вычисления углового ускорения тела
при плоском движении
Из C.7) следует, что для определения ускорения произволь-
произвольной точки плоской фигуры необходимо знать угловое ускорение
тела 8 . Рассмотрим некоторые способы его нахождения.
1. Угловое ускорение можно определить дифференцирова-
дифференцированием по времени угловой скорости или угла поворота плоской
фигуры, если они заданы как функции времени:
Причем, если в данный момент времени алгебраическое зна-
значение углового ускорения тела ф>0, то направление дуговой
стрелки 8 совпадает с принятым положительным направлением
отсчета угла поворота ср, если же ф < О — то противоположно
ему.
Во многих задачах зависимость угла поворота или угловой
скорости данного тела рассматриваемой системы от времени
неизвестна, но ее можно установить по параметрам движения
других тел этой системы, известным в рассматриваемый момент
времени. Например, в планетарном механизме (рис. 3.16) извес-
известен закон изменения угловой скорости С02=@2@ водила О А,
Требуется определить угловое ускорение ех планетарного коле-
колеса. Поскольку обкатывание его происходит без скольжения, то
его МЦС лежит в точке Р контакта колес. Следовательно,
_vA _ АО (. 1С
^"АР"®2 г
откуда
106
d(Ox d@2 (л
L = 4 1
dt dt{
л R
=?2 1 + —
Рис. 3.16
2. Угловое ускорение можно определить, зная вектор скоро-
скорости какой-либо точки плоской фигуры и положение ее МЦС.
Пусть известны скорость v A и расстояние от точки А до МЦС АР
как функции времени vA = v^@; АР = AP(t). Тогда
co=vA/AP.
Дифференцируя это соотношение по времени, получаем
8 =
1
АР
dvA
dt
dt{AP
Если АР = const (качение колеса радиусом R без скольжения,
точка А — центр колеса), то
1
АР
dvA
dt
R
3. Угловое ускорение плоской фигуры можно найти по урав-
уравнению, связывающему известные ускорения двух точек плоской
фигуры,
107
=аА +al
"В ~"А ^"ВА
Записывая данное равенство в проекциях на ось, перпендикуляр-
перпендикулярную вектору ускорения ав, и считая аА и со известными, полу-
получаем уравнение с одним неизвестным \ахВА\. Решив его относи-
тельно
ахВА , находим
8 =
а
ВА
ВА
Пример 3.4. Определить угловое ускорение е2 линейки АВ эллипсографа
(рис. 3.17), если в рассматриваемый момент времени, угловые скорость щ и
ускорение е1 кривошипа ОС известны, а размеры звеньев и положение меха-
механизма заданы.
\\\\\\\\
\\\\\\\\
Рис. 3.17
Решение. Так как ускорение шарнира С, по сути, задано, примем точку С за
цолюс, участвующей в плоском движении линейки АВ. Тогда, согласно C.14),
ав = ас +авс = апс +а^авс +^с.
В этом уравнении векторы о?, ~ахс и авс известны по модулю и направле-
направлению. Вектор 5*2 по модулю \а? = oof • ОС и направлен к оси вращения криво-
кривошипа O{z) . Вектор 5? по модулю равен 3? = гх • ОС и направлен в соответ-
соответствии с направлением дуговой стрелки углового ускорения еР Так как
108
vc =C01OC = 0JCP2, где Р2 — МЦС линейки АВ, ОС = СР2 и GJ =
= vc /CP2 =* ОС• G^ /ОС = COj, то, следовательно вектор авс по модулю
fc- = О^ВС = CofOC и направлен от точка 5 к полюсу С ). Векторы ав и
а^с известны лишь по направлению (а^с перпендикулярен ВС, а ав паралле-
параллелен оси Оу) (см. рис. 3.17). Спроецировав упомянутое векторное уравнение на
ось Ох, перпендикулярную неизвестному вектору ав, и полагая, что дуговая
стрелка углового ускорения ?2 линейки направлена против направления дви-
движения часовой стрелки, найдем
0 = -апс cos(p+tfx? sin<p+tf2c cos(p-axBC sincp.
(Здесь в силу принятого направления дуговой стрелки е2 проекция а1С на ось
Ох будет отрицательной.) Отсюда
а1с = Кс ~anc)ctgq+al =атс>0 (апвс = апс).
Поскольку а\с = г2ВС = е20С (ВС = ОС),
то
Направление дуговой стрелки углового ускорения линейки эллипсографа
определяется установленным знаком а^. Так как авс > 0, то это означает, что
выбранное ранее направление углового ускорения ?2 вернр, т. е. его дуговая
стрелка действительно в данный момент времени направлена против направле-
направления движения часовой стрелки.
Глава 4
ВРАЩЕНИЕ ТВЕРДОГО ТЕЛА ВОКРУГ
НЕПОДВИЖНОЙ ТОЧКИ
4.1. Число степеней свободы. Углы Эйлера.
Уравнения вращения
Движение твердого тела называется вращением вокруг
неподвижной точки, если во все время движения одна и та же
точка твердого тела остается неподвижной. Вращение твердо-
твердого тела вокруг неподвижной точки называют сферическим дви-
движением, поскольку траектория любой точки тела располагается
на поверхности сферы с центром в неподвижной точке тела.
Положение свободного твердого тела можно определить
тремя точками, не лежащими на одной прямой и неизменно свя-
связанными с телом. Поскольку на девять координат этих точек на-
наложено три ограничения, выражающих неизменность расстояний
между ними, можно сделать вывод, что число независимых пара-
параметров, задающих положение свободного тела в пространстве,
а значит, и число степеней его свободы, равно шести.
Если во время движения твердого тела одна и та же его точ-
точка остается неподвижной, то число степеней свободы такого тела
уменьшится по сравнению со свободным на три единицы. Следо-
Следовательно, тело, совершающее вращение вокруг неподвижной
точки, имеет три степени свободы, и для оценки его положения и
движения необходимо задать три независимых параметра (коор-
(координаты). Сделать это можно различными способами.
Например, в качестве таких параметров могут быть введены
предложенные А. Н. Крыловым так называемые корабельные
углы, определяющие положение тела (корабля) относительно
системы координат, связанной своим началом с его центром
110
тяжести С. Пусть система координат CXYZ (рис. 4.1), жестко свя-
связанная с кораблем, в исходном положении совпадает своими
осями с осями неизменного направления неподвижной системы
координат Cxyz. Тогда, если ось СХ направлена от кормы к носу
корабля, ось CY— к его левому борту, а ось CZ образует с ними
правую систему координат, то углы Крылова будут определены
следующим образом: угол дифферента \|/ — угол между осью
Сх и линией СК пересечения координатных плоскостей Cxz и
CXY; угол рыскания (р — угол между линией СК и осью СХ и,
наконец, угол крена S — угол между осью CZ и линией СМ пе-
пересечения плоскостей Cxz и CZy. Зная эти углы для каждого мо-
момента времени, можно всегда найти положение системы коорди-
координат CXYZ, а следовательно, и положение тела (корабля),
скрепленного с ней, относительно неподвижной системы коор-
координат Cxyz.
Mi
Рис. 4.1
В тех случаях, когда угловая скорость вращения в одном на-
направлении значительно больше угловых скоростей вращений в
ill
двух других направлениях (генераторы, моторы, турбины, гиро-
гироскопы), положение тела, как правило, определяется углами Эйле-
Эйлера: углом прецессии \у , углом нутации 0, углом собственного
вращения ср.
Чтобы задать эти углы, представим себе твердое тело, вра-
вращающееся вокруг неподвижной точки О (рис. 4.2). Введем не-
неподвижную систему координат Oxyz, имеющую начало в точке О.
Жестко свяжем с телом вторую, подвижную систему координат
OXYZ с началом в той же точке. Чтобы определить положение
твердого тела в неподвижной системе координат Oxyz, достаточ-
достаточно определить в ней положение неизменно связанной с телом
подвижной системы координат OXYZ.
Рис. 4.2
Линию ОК пересечения координатных плоскостей Оху (на
рис. 4.2 изображена в виде заштрихованного овала) и OXY (огра-
(ограничена белым оралом) назовем линией узлов. Тогда угол прецес-
прецессии \j/ определяет положение линии узлов ОК относительно не-
неподвижной координатной оси Ох. Для изменения этого угла тело
должно вращаться вокруг неподвижной оси Oz, называемой осью
прецессии. Угол нутации 6 определяет положение подвижной
112
оси OZ относительно неподвижной Oz и равен углу между этими
осями. Изменение угла 6 сопровождается вращением тела вокруг
линии узлов ОК, называемой осью нутации. Наконец, угол соб-
собственного вращения ф характеризует вращение тела вокруг оси
OZ, называемой осью собственного вращения. В подвижной
плоскости OXY это угол между линией узлов ОК и подвижной
осью ОХ.
Положительное направление отсчета углов Эйлера ц/, 0 и
Ф противоположно направлению движения часовой стрелки,
если смотреть на поворот тела с положительных направлений
осей Oz, OK и OZ соответственно.
Углы Эйлера являются независимыми параметрами, харак-
характеризующими положение тела с одной неподвижной точкой от-
относительно неподвижной системы координат. Они широко ис-
используются в теории гироскопов. Движение гироскопа —
симметричного тела, имеющего неподвижную точку на своей оси
симметрии, в общем случае можно представить состоящим из
трех движений (рис. 4.3): вращения с большой угловой скоро-
скоростью вокруг оси симметрии (оси собственного вращения), при
котором меняется угол собственного вращения ф; вращения
вместе с осью симметрии вокруг неподвижной оси Oz (оси пре-
прецессии), при котором меняется угол прецессии \|/, и движения
оси симметрии гироскопа относительно линии узлов ОК9 в ре-
результате которого меняется угол нутации 6 между осями OZ и
Oz. При прецессионном движении ось симметрии гироскопа OZ
описывает волнистую коническую поверхность, если же угол
нутации 9 не меняется, то описываемая ею поверхность будет
правильной конической.
При движении твердого тела около неподвижной точки углы
v|/, 9, ф являются некоторыми функциями времени:
vi/=/i(O;e=/2(O;<P=/3(O. D.1)
Эти выражения называются уравнениями вращения твердого
тела вокруг неподвижной точки. Бели уравнения D.1) заданы,
то положение твердого тела относительно неподвижной системы
координат Oxyz может быть определено для любого момента
времени.
9 3ак. 16 113
Рис. 4.3
4.2. Матрица направляющих косинусов.
Траектория точки тела
Пусть Х9 У, Z — координаты произвольной точки Мтела в
подвижной системе координат S, жестко связанной с ним, а лг,
у, z — ее же координаты в неподвижной системе координат So.
Очевидно, что при движении тела координаты Х9 У, Z остаются
постоянными в отличие от координат jc, у, z.
Полагая, что закон движения тела имеет вид DЛ), установим
зависимость координат jc, у, z от времени в явном виде: х = x(t),
у = y(t), z = z(t), что позволит судить о закономерностях движе-
движения точки М относительно неподвижной системы So.
В отношении вектора ОМ воспользуемся формулой (В.72),
устанавливающей взаимосвязь проекций вектора на оси двух
систем координат,
г=Атр, D.2)
114
где г = [х9 у, z]7 9 р = [X, Y, Z]T — проекции вектора ОМ на оси
координат систем So и S соответственно; Ат — матрица, транс-
транспонированная к матрице направляющих косинусов А C х 3 ), за-
задающей преобразование поворота от осей системы So к осям
системы S.
Получим выражение А = А(/), основываясь на взаимном по-
положении четырех систем So, S}, S2, S (рис. 4.4), из которых сис-
системы S] и S2 выполняют вспомогательную роль. Переход от
осей системы So к осям системы 5, осуществляется поворотом
на угол \|/ вокруг оси Oz системы So, от осей системы S} к осям
системы S2 — поворотом на угол 0 вокруг оси Ох] системы S]
и от осей системы S2 к осям системы S —' поворотом на угол ф
вокруг оси Oz2 системы S2.
Каждому из трех преобразований систем координат соответ-
соответствуют матрицы направляющих косинусов А^, Ае, Аф:
Сф 8ф О
- $ф сф О
О 0 1
(Здесь для краткости записи тригонометрических функций sin и
cos углов Эйлера вместо самих функций указаны лишь первые
буквы их названий.)
Тогда*
-SV|/
0
С\\)
0
0
0
1
1
0
0
0
ев
-S0
0"
S0
с9
С1|/8ф-8\)/С0Сф -
sv|/s0
— cvj/sG
c0
D.3)
При заданном законе сферического движения D.1) выраже-
выражение D.3) позволяет сформировать зависимость А ^ А(/), опреде-
Следует обратить внимание на порядок расположения сомножителей в
произведении матриц АфАвА4|/, поскольку он влияет на результат перемножения.
9*
115
ляющую искомый закон движения и траекторию выбранной точ-
точки тела: г(t) = Ат (/)р .
У\
О
xl9x2
Рис. 4.4
4.3. Мгновенная ось вращения. Аксоиды
Положение твердого тела в пространстве определяется по-
положением любых трех его точек, не лежащих на одной прямой.
При неподвижной точке О положение тела определится поло-
положением любых двух других точек, не лежащих на одной прямой
с точкой О. Перемещение твердого тела с неподвижной точкой
116
из одного заданного положения в другое может быть осуществ-
осуществлено различными способами, в частности путем изменения уг-
углов Эйлера при последовательных поворотах вокруг соответст-
соответствующих осей.
Докажем теорему о конечном перемещении твердого тела.
Теорема Эйлера-Даламбера. Самое общее конечное пере-
перемещение твердого тела, имеющего неподвиэюную точку О, есть
вращение вокруг неподвижной оси, проходящей через эту точку.
Доказательство. Возьмем в теле две точки Аи В, равноуда-
равноудаленные от неподвижной точки О, но не лежащие с ней на одной
прямой. Проведем через точки А и В сферу с центром в непод-
неподвижной точке О (рис. 4.5). Пусть в результате конечного переме-
перемещения тела точки Аи В займут положения Ах и Вх.
Рис. 4.5
Соединим дугами больших кругов, проведенных из непод-
неподвижной точки, между собой А и В, Ах и В{,Аи Ах, В и Вг. Оче-
Очевидно, АВ = АХВ{ (как расстояния между точками твердого тела).
117
Из середин дуг ВВХ и ААХ (точек D и С) проведем к этим дугам
сферические перпендикуляры — дуги больших кругов, гаюско-
сти которых перпендикулярны плоскостям цугААх и ВВХ . Пер-
Перпендикуляры пересекутся в точке Р сферы. В построенных таким
образом сферических треугольниках АРАХ и ВРВХ АР = АХР9 а
ВР = ВХР как дуги, имеющие равные проекции. Следовательно,
сферические треугольники АР В и АХРВХ равны (по трем сторо-
сторонам), и при повороте тела вокруг оси, проведенной через точки Р
и неподвижную О, сферический треугольник АРВ9 перемещаясь
по сфере, совпадет с треугольником АХРВХ. Что доказывает
теорему.
Ось ОР называют осью конечного вращения. Для любых
двух положений тела имеет место своя ось конечного вращения,
проходящая через неподвижную точку. Ось, вокруг которой сле-
следует вращать тело для перевода его из одного положения в дру-
другое, бесконечно близкое первому, называют мгновенной осью
вращения.
Мгновенная ось вращения представляет собой геометриче-
геометрическое место точек тела, скорости которых в данный момент вре-
времени равны нулю. Отсюда следует, что движение твердого тела
вокруг неподвижной точки можно представить непрерывной по-
последовательностью его вращений вокруг мгновенных осей вра-
вращения, проходящих через неподвижную точку. Положение мгно-
мгновенной оси вращения тела не остается неизменным: в различные
моменты времени она занимает различные положения в про-
пространстве, но всегда проходит через неподвижную точку.
Геометрическое место мгновенных осей вращения в про-
пространстве неподвижных осей координат называется неподвиж-
неподвижным аксоидом и является конической поверхностью (в частном
случае правильной) с вершиной в неподвижной точке. Геометри-
Геометрическое место мгновенных осей вращения в движущемся теле на-
называется подвижным аксоидом. Как и неподвижный, подвиж-
подвижный аксоид в общем случае сферического движения тела
представляет собой коническую поверхность с вершиной в не-
118
подвижной точке тела. При вращении твердого тела связанный с
ним подвижный аксоид перекатывается по неподвижному так,
что в каждый момент времени он касается неподвижного аксоида
по общей образующей ОР, являющейся мгновенной осью враще-
вращения тела.
4.4. Мгновенные угловая скорость и угловое ускорение
На основании теоремы Эйлера-Даламбера о мгновенной оси
вращения тела положим, что за малый промежуток времени At
поворот тела вокруг оси характеризуется углом Д7. Введем еди-
единичный вектор Ку, лежащий на этой оси вращения тела и на-
направленный так, что с конца его поворот тела на Дер виден про-
происходящим против направления движения часовой стрелки.
Тогда мгновенную угловую скорость тела в сферическом движе-
движении как характеристику изменения угла его поворота вокруг
мгновенной оси вращения можно определить как:
±КУ. D.4)
Вектор со лежит на мгно-
мгновенной оси вращения тела и его
считают приложенным в непод-
неподвижной точке. Поэтому мгновен-
мгновенная ось вращения тела есть пре-
предельное при At—>0 положение
оси, вокруг которой был совер-
совершен поворот на угол Д7
(рис. 4.6). Модуль угловой ско-
скорости
со=
lim^-
Д*->0 Д/
В приведенных формулах в
общем случае предел используе-
используемого отношения Ay/At нельзя
Рис. 4.6
119
заменить производной, так как угол поворота вокруг мгновенной
оси вращения не выражается скалярной функцией времени и
дифференциала этого угла не существует*.
Очевидно, что тело с одной неподвижной точкой в общем
случае участвует одновременно в трех вращениях, векторы угло-
угловых скоростей которых в случае использования углов Эйлера
определяются следующим образом: ук — вектор угловой ско-
скорости прецессии; вп — вектор угловой скорости нутации;
фАГ — вектор угловой скорости собственного вращения, где к,
п , К — единичные векторы осей Oz, OK и OZ соответственно
(рис. 4.7). Поскольку названные оси пересекаются в
точке О, то, как будет показано в гл. 7 этого раздела, абсолют-
абсолютное совокупное Движение тела представляет собой в каждый
момент времени вращение вокруг мгновенной оси, проходящей
со
Рис. 4.7
При вращении твердого тела вокруг неподвижной оси (частный случай
сферического движения тела) этот предел равен производной от угла поворота
тела вокруг его оси вращения (см. гл. 2).
120
через точку пересечения названных осей, с мгновенной угловой
скоростью со, равной векторной сумме угловых скоростей состав-
составляющих движений:
Тй = (рК + 6n+\j/Jt. D.5)
Ось, совпадающая с вектором со, является мгновенной осью
вращения твердого тела вокруг неподвижной точки О.
Мгновенная угловая скорость меняется с течением времени
не только по величине, но и по направлению. Это изменение оце-
оценивается производной по времени и называется мгновенным уг-
угловым ускорением тела:
_
? =
dt
(О
Рис. 4.8
Вектор е направлен параллельно касательной к годографу
вектора угловой скорости со и не совпадает с вектором со из-за
8 Зак. 16
121
изменения направления последнего, в чем нетрудно убедиться,
представив вектор со как произведение со на единичный вектор
аH, т. е. ю = соE0. Тогда
d , __ ч d<0—
или
ё = ё, + ё2,
где ё1 = — с50 — составляющая ё, направленная вдоль мгновен-
dt
ной оси вращения и характеризующая изменение со по величине;
0 -
s2 =со —составляющая 8, перпендикулярная вектору со0 и
dt
характеризующая изменение со по направлению (^J-ej).
Условимся вектор мгновенного углового ускорения 8 от-
откладывать от неподвижной точки О тела (рис. 4.8).
4.5* Скорости точек тела. Кинематические
уравнения Эйлера
Поворот тела за малый промежуток времени А/ на угол Ау
вокруг мгновенной оси вращения приводит к изменению прове-
проведенного из неподвижной точки тела радиус-вектора г на величи-
величину AF. Это изменение, если пренебречь изменением положения
мгновенной оси вращения тела за рассматриваемый малый про-
промежуток времени At, с точностью до величин второго порядка
малости может быть выражено так (см. рис. 4.6):
а его модуль
Дг = Ay r sin Р = Ay h.
Разделим обе части приведенной зависимости на А/ и найдем
пределы, устремив А/ к нулю:
limfJCT]limf
Д/ д/->о^ At J Д*-><\ А/
122
Учитывая D.4), найдем, что соотношение, устанавливающее
скорость точки тела в случае его сферического движения, при-
принимает вид формулы Эйлера*
v = coxF. D.6)
Модуль скорости точки тела v = oo&, где h — кратчайшее
расстояние от рассматриваемой точки тела до мгновенной оси
вращения (рис. 4.9). Следовательно, как и при вращении тела
вокруг неподвижной оси, при вращательном движении вокруг
неподвижной точки скорости точек тела в данный момент вре-
времени пропорциональны расстояниям от точек до мгновенной
оси вращения тела.
Рис. 4.9
Вектор скорости точки тела перпендикулярен плоскости, в
которой находятся векторы со и г (заштрихованная плоскость
* Для случая вращения твердого тела вокруг неподвижной оси формула Эй-
Эйлера выведена в гл. 2.
8* 123
(йх
X
J
Y
К
coz
Z
на рис. 4.9), а следовательно, перпендикулярен h и направлен по
касательной к мгновенной траектории точки в сторону дуговой
стрелки углЬвои скорости тела, вращающегося вокруг мгновен-
мгновенной оси. Найдем вектор V через его проекции на оси подвижной
системы координат OXYZ.
Представив правую часть равенства D.6) в виде определите-
определителя, получим
v =
где / , / , К — орты подвижной системы координат OXYZ; (Ох ,
cor, coz — проекции вектора мгновенной угловой скорости на
подвижные оси координат; X, Y, Z — координаты точки тела в
подвижной системе координат.
Развернув этот определитель по элементам верхней строки,
найдем
v = (wrZ -wzY)I + ((OZX -сохZ)J + (coxY -coYX)K .
Таким образом, проекции скорости v точки тела на координат-
координатные оси подвижной системы координат OXYZ будут равны
vx =(OYZ-(DZY;
vY =cozX-coxZ; D.7)
vz =coxF -(OyX.
Установим теперь проекции вектора со, определяемого со-
соотношением D.5), на оси той же подвижной системы координат
OXYZ (рис. 4.10).
Вектор \\fk угловой скорости прецессии разложим предва-
предварительно на две взаимно перпендикулярные составляющие, одна
из которых совпадает с осью OZ и равна \j/cos0, а вторая, равная
\j/sin0, принадлежит плоскости OXY и совпадает с вспомога-
вспомогательной осью OL, составляющей с осью OY угол ф. Тогда,
проецируя последнюю составляющую на оси плоскости, которой
она принадлежит, находим
\\fk =\j/sin9sin(p/+\j/sin6cos(p J
124
Вектор 0« угловой скорости нутации, совпадая с линией
узлов ОК9 располагается в плоскости OXY подвижной системы
координат и составляет с осью ОХ угол ср (см. рис. 4.10). Следо-
Следовательно, для него можно записать
0w = 0coscp/-0sirup J.
И, наконец, вектор угловой скорости собственного враще-
вращения, совпадающий с осью Сытела, будет равен (рК .
Составим вспомогательную таблицу проекций векторов, вхо-
входящих в соотношение D.5) на оси подвижной системы координат:
со
. У к
ей
vj/sinOsincp
Gcoscp
0
со,,
vj/sin9cosq>
-Ssincp
0
coz
\j/cos9
0
Ф
125
Таким образом, искомые проекции вектора угловой скорости
на оси подвижной (скрепленной с телом) системы координат
будут равны
&х =\j/sin6sin(p + Gcos(p;
соу =\j/sin0cos(p-9sin(p; D.8)
(Oz =\j/COS0 + (j).
Полученные соотношения носят название кинематических
уравнений Эйлера. Они устанавливают связь между проекциями
вектора угловой скорости тела ю, углами Эйлера \|/, 6, ф и их
первыми производными по времени.
Подстановка D.8) в D.7) и дает искомые проекции вектора
v на оси координат OXYZ.
Скорости точек тела, лежащих на мгновенной оси
(см. рис. 4.9), в рассматриваемый момент времени равны нулю, и
их проекции на оси координат должны удовлетворять следую-
следующим уравнениям:
coyZ-oozy = 0; <ozX -®xZ = 0; (dxY-g>yX = 0,
или
A = X = A. D.9)
(Ox CDr G)z
Соотношения D.9) являются уравнениями прямых, прохо-
проходящих через начало координат, и представляют собой уравнения
мгновенных осей вращения тела в подвижной системе коорди-
координат. Если величины, входящие в D.9), рассматривать как функ-
функции времени, то эти соотношения будут представлять собой па-
параметрическую форму уравнений подвижного аксоида.
Для неподвижной системы координат Oxyz в формулы D.7)
и D.9) вместо (ох, oor, coz и1, У, Z нужно подставить <ох9 <оу9
coz и х9 у, z, т. е. проекции угловой скорости со и радиус-вектора
F точки тела на неподвижные оси Ox, Оу, Oz.
Если положение мгновенной оси вращения установлено, то
для определения модуля угловой скорости тела со в данный мо-
момент времени достаточно модуль скорости какой-либо точки тела
в тот же момент времени разделить на кратчайшее расстояние от
нее до мгновенной оси вращения тела.
126
Пример 4.1. Найти неподвижный и подвижный аксоиды и угловую скорость
конуса высотой Н и углом полураствора при вершине а (рис. 4.11), если конус
катится по горизонтальной неподвижной плоскости без скольжения, его верши-
вершина О неподвижна, а скорость v центра С его основания постоянна.
Рис. 4.11
Решение. Так как движение конуса происходит без скольжения, то скорость
его точки А контакта с неподвижным основанием равна нулю. Неподвижной
точкой является и точка О. Следовательно, прямая ОА — мгновенная ось вра-
вращения конуса.
Геометрическое место мгновенных осей вращения в неподвижной системе
координат Oxyz — плоскость Оху, по которой катится конус (неподвижный
аксоид). В подвижной же системе, связанной с конусом, геометрическое место
мгновенных осей образует коническую поверхность, совпадающую с поверхно-
поверхностью самого конуса (подвижный аксоид).
Так как v = юЛ, a h = СЕ = #sina , то
0) = .
Я sin a
Если вектор скорости точки С конуса направлен в сторону, указанную на
рис. 4.11, то вектор его мгновенной угловой скорости направлен от вершины
конуса к основанию по мгновенной оси вращения ОА.
Учитывая, что скорость какой-либо точки тела, с одной сто-
стороны, есть первая производная по времени от ее радиус-вектора
127
г , проведенного из неподвижной точки тела, а с другой — опре-
определяется векторной формулой Эйлера D.9), можно записать
— = юхг. D.10)
dt
Поскольку модуль радиус-вектора г — расстояние между
двумя точками М и О твердого тела — постоянен (см. рис. 4.9),
равенство D.10) можно рассматривать как формулу для вычисле-
вычисления производной по времени от вектора постоянного модуля,
изменение которого сводится лишь к его повороту вокруг непод-
неподвижной точки. Если взять в качестве таких векторов единичные
векторы /, J, Кт подвижной системы координат OXYZ, вра-
вращающейся с угловой скоростью со (см. рис. 4.9), то
= сох/; = coxj; = ШхК. D.11)
dt dt dt
Формулы D.11) называют формулами Пуассона.
4.6. Ускорения точек тела
Рассмотрим твердое тело, вращающееся вокруг неподвиж-
неподвижной точки О, и выберем в нем какую-либо точку М (рис. 4.12).
Если в данный момент времени скорость точки тела равна v , то
ее ускорение может быть выражено формулой
a=dv/dt.
Полагая v = со х г , запишем
_ dv d _ „ do5 _ __ dr
a = — = —(coxr) = xr + cox — .
dt dt dt dt
Поскольку d7d/dt = г, a dr/dt = v = coxr , то
tf = exr + coxv. D.12)
Установленное соотношение называют формулой Ривальса.
Она дает представление о распределении ускорений точек в
твердом теле, движущемся вокруг неподвижной точки. Ускоре-
Ускорение а есть сумма двух ускорений. Первое
aBp=sxr D.13)
называют вращательным ускорением, второе
128
осестремительным ускорением точки. Таким образом,
а = апп + апг.
D.14)
D.15)
Рис. 4.12
Вектор вращательного ускорения явр направлен перпенди-
перпендикулярно к плоскости, образованной векторами 8 и г (заштрихо-
(заштрихованная плоскость на рис. 4.12), так, что с конца его поворот пер-
первого вектора до совмещения его со вторым виден происходящим
против направления движения часовой стрелки. Модуль вектора
явр равен
явр = |е х г | = б г sin(e , г ) = 8 Л,,
D.16)
где hx =rsin(e , r) — кратчайшее расстояние от точки до линии,
вдоль которой направлен вектор углового ускорения 8 в данный
момент времени (см. рис. 4.12).
Вектор осестремительного ускорения а^ (см. рис. 4.12),
являясь результатом векторного произведения с5 и v , перпенди-
129
кулярен к плоскости, образованной последними, и направлен от
точки Мпо перпендикуляру, проведенному из нее на мгновенную
ось вращения тела.
Модуль вектора аос, учитывая D.6) и то, что aoc±v , равен
л
аос = |ш х v| = соvsin(co , v) = соv = со2А. D.17)
Итак, ускорение точки тела, вращающегося вокруг непод-
неподвижной точки, равно векторной сумме вращательного и осе-
стремительного ускорений.
Модуль ускорения а равен
а = \ авР + Яос + 2^вРаос C0S(^bP ^oc) • D-18)
Отметим, что формула Ривальса D.12) напоминает формулу
B.2) для ускорения точки тела, вращающегося вокруг неподвиж-
неподвижной оси. Вращательному и осестремительному ускорениям здесь
соответствуют тангенциальное ах =sR и нормальное ап =со2Л
ускорения.
4.7. Вычисление углового ускорения тела
Для вычисления ускорения произвольной точки тела, вращаю-
вращающегося вокруг неподвижного центра, необходимо знать его угловое
ускорение 8. Рассмотрим один из способов его определения.
Если угловая скорость, а значит, и ее проекции сох, coy, coz
на неподвижные оси координат являются известными функциями
времени, то проекции углового ускорения тела на те же оси оп-
определяются следующим образом:
Зная проекции вектора 8, найдем его модуль и направление в
пространстве (косинусы тех углов, которые вектор 8 составляет с
осями координат).
Если угловая скорость постоянна по модулю, то
130
~ ^^ — — ГА ОЛЧ
8 = = cot, х со, D.20)
dt
где оос, — угловая скорость дифференцируемого по времени век-
вектора угловой скорости а>.
Рассмотрим пример вычисления угловой скорости и углово-
углового ускорения тела, а также скоростей и ускорений его точек при
вращении тела вокруг неподвижного центра.
Пример 4.2. Правильный конус с углом при Ьершине 2а и высотой Н ка-
катится по неподвижной горизонтальной плоскости без скольжения, при этом
вершина О конуса остается неподвижной, а центр С его основания движется по
окружности, расположенной в горизонтальной плоскости, с постоянной скоро-
скоростью v (рис. 4.13). Найти угловую скорость и угловое ускорение конуса, скоро-
скорости и ускорения точек А и В его основания.
Рис. 4.13
Решение. Введем неподвижную систему координат Oxyz с началом в точке
О конуса и осью Оу, направленной в данный момент по его образующей ОА,
вдоль которой конус касается неподвижной плоскости.
Поскольку конус катится без скольжения, то скорости всех его точек, лежа-
лежащих на образующей ОА, равны в данный момент нулю. Следовательно, мгно-
мгновенная ось вращения конуса совпадает с образующей ОА и направлена вдоль
оси Оу.
Установив положение мгновенной оси вращения, найдем модуль мгновен-
мгновенной угловой скорости конуса. Поскольку
vc=<oCD,
где CD = ОС sin a — кратчайшее расстояние от точки С до мгновенной оси, то
Vr V
G) = -
CD Я sin a
= const.
131
Учитывая заданное направление вектора vc = v , отложим от точки О вдоль
мгновенной оси ОА вектор со так, чтобы видеть с его конца вращение конуса
вокруг этой оси в направлении, противоположном направлению движения часо-
часовой стрелки (см. рис. 4.13).
Скорость точки A vA - 0, так как в данный момент времени эта точка при-
принадлежит мгновенной оси вращения конуса.
Скорость точки В
у
vB =о)Лд =(дВЕ = :—2//sina = 2v .
//sin a
Вектор vB перпендикулярен плоскости ОБЕ и в соответствии с направлени-
направлением вращения конуса вокруг мгновенной оси ОА направлен параллельно оси Ох
неподвижной системы координат.
Поскольку мгновенная угловая скорость со конуса постоянна, его угловое
ускорение определяется как производная от вектора постоянного модуля D.20):
_ (Ш _ _
б = — = сой х со .
dt
Кратчайшее расстояние от точки С до оси Oz равно CL « ОС cosa = Я cosa и
Ш' CL Я cosa '
Так как ©Дю , то
2v2
6 = COgOOSil^OO^ СО) = СОеСО =
Я2 sin 2a'
Ускорение какой-либо точки конуса определим в соответствии с D.15) как
геометрическую сумму вращательного и осестремительного ускорений.
Для точки А конуса
У а*/=гОА; a? A
Вектор аъ/ направлен перпендикулярно плоскости, в которой лежат векторы е
и ОА, т. е. параллельно оси Oz вверх. Поскольку vA = 0, то а* = 0 .
Таким образом,
Для точки В конуса
2v2
Я2 sin 2a
а$ =ЪхОВ\
2v2 Я
Я2 sin 2а cosa
Я
cosa
V
Я cos2
V
Ясов2
2
a sin a
2
a sin a
132
v2 2v2
af = (O2BE flHi
Я2зт2а Я sin а
Вектор agp перпендикулярен плоскости, образованной в точке В векторами
8, ОБ, принадлежит плоскости Oyz, а его направление определяется вектор-
векторным произведением гхОВ.
Вектор а™ перпендикулярен плоскости, образованной в точке В векторами
со, vB, и направлен от точки В к мгновенной оси вращения конуса
(см. рис. 4.13).
Полное ускорение точки В найдем как диагональ параллелограмма, постро-
построенного на векторах af , ajp :
cos a cos a
Глава 5
ОБЩИЙ СЛУЧАЙ ДВИЖЕНИЯ ТВЕРДОГО ТЕЛА
5.1. Число степеней свободы. Обобщенные координаты.
Уравнения движения
Движение твердого тела относительно рассматриваемой
системы отсчета So на интервале времени (f,, t2) называется
общим случаем движения, если на этом интервале времени нет
геометрических ограничений на положение и ориентацию тела. В
данном случае в отличие от ранее рассмотренных движений
предполагается, что тело может геометрически свободно дви-
двигаться в пространстве. Свобода движения тела здесь понимается
не как отсутствие препятствующих сил, а как принципиальная
возможность осуществления любого варианта движения тела из
занимаемого им положения. Такую возможность твердое тело
имеет, например, находясь в пустоте или в деформируемой сре-
среде — газе, жидкости. Если учитывать деформирование поверхно-
поверхностей всех смежных с ним тел в зонах контактов, то движение
твердого тела должно быть также отнесено к случаю общего
движения.
Термин «общий случай движения» дан в связи с тем, что все
иные типы движения твердого тела можно рассматривать как его
частные проявления. Формулы кинематики и динамики общего
случая движения справедливы для любых движений твердого
тела.
Приведем примеры общего случая движения твердого тела:
полеты самолета, ракеты, спутника относительно планеты; кач-
качка судна в воде относительно берегов; галопирование вагона
или подрессоренного корпуса автомобиля относительно грунта
при езде по неровной дороге; вибрация вращающегося ротора,
134
установленного в упругих опорах, относительно корпуса; движе-
движение груза, подвешенного на упругом тросе, при движении стрелы
подъемного крана.
Положение любой точки твердого тела, а следовательно, и
положение самого твердого тела в системе отсчета движения So
определяется положением каких-либо трех фиксированных его
точек, не лежащих на одной прямой, ибо такие точки позволяют
построить в теле базисную систему S с началом в одной из них.
Поскольку в системе S координаты любой точки тела постоянны,
то движение точек тела является следствием движения самой
системы S9 т. е. выбранных базисных точек.
Последнее доказывает, что характеристики движения произ-
произвольной точки полностью определяются движением трех вы-
выбранных базисных точек тела. Поэтому при изложении формули-
формулировок определений частных случаев движения твердого тела
достаточно указывать свойства геометрических ограничений
лишь для его базисных точек. Например, движение тела будет
поступательным относительно системы So, пока хотя бы два из
трех отрезков, соединяющих три базисные точки, не изменяют
своей ориентации в SQ.
Из девяти координат трех базисных точек тела лишь шесть
могут быть независимыми, поскольку длины трех отрезков меж-
между этими точками твердого тела должны сохраняться. Поэтому
положение тела в общем случае движения задается шестью неза-
независимыми переменными параметрами #,,...,#6, называемыми
обобщенными координатами тела. Это означает, что тело имеет
шесть степеней свободы относительно системы So. Большего
числа степеней свободы твердое тело как самостоятельный объект
изучения никогда не имеет.
Возможны различные варианты выбора обобщенных коор-
координат. Для наглядности восприятия в качестве последних обычно
выбирают геометрические параметры — прямолинейные или
криволинейные координаты и углы. Типовой вариант выбора
обобщенных координат для общего случая движения твердого
тела показан на рис. 5.1. Тело здесь изображено в виде прямо-
прямоугольного параллелепипеда, который надо воспринимать как не-
некоторый «кусочек» тела произвольной формы. Помимо основной
135
системы So отсчета движения здесь используются две вспомога-
вспомогательные подвижные системы ?, и S2. С некоторой точкой тела,
например А, связано начало осей системы S}, направления кото-
которых всегда совпадают с направлениями одноименных осей ис-
исходной системы So. При таком условии система S] движется
поступательно относительно системы So. Положение системы
5| относительно So может быть задано, например, с помощью
декартовых координат точки А.
Рис. 5.1
Система S2 с началом в точке А жестко связана с телом. По-
Поэтому любое нетривиальное движение тела (и осей системы S2)
относительно системы S] будет сферическим по определению
этого вида движения. Пространственная ориентация осей систе-
системы S-y относительно системы S} может быть задана, например,
тремя углами Эйлера.
Три декартовы координаты хА9 уАь zA точки А и три угла
Эйлера v|/, Э, ф являются обобщенными координатами тела в
системе So. Представленный вариант обобщенных координат не
является единственным. Начала систем ?, и ?2 можно совмес-
совместить с любой точкой тела. Вместо декартовых координат точки А
136
можно использовать, например, ее цилиндрические координаты,
а вместо углов Эйлера — иную систему углов.
Совокупность уравнений
<7, =/,(') O = U6), E-1)
определяющих зависимость обобщенных координат тела от
времени, называют законом движения тела, или уравнения-
уравнениями его движения, на некотором интервале времени (tl9 t2).
Например:
Информация, заключенная в уравнениях движения E.2),
является исчерпывающей для ^расчета любых кинематических
характеристик движения отдельных точек и пространственной
ориентации тела. Получение информации об общем случае дви-
движения тела в заданных физических условиях в виде E.1) обычно
составляет главную цель задач динамики твердого тела.
Любой вид движения твердого тела можно рассматривать
как частный случай общего движения. Нетрудно убедиться, что
частным случаям законов изменения обобщенных координат
твердого тела E.2) отвечают частные виды движений твердого
тела, в том числе и покой. Так, если углы Эйлера на некотором
интервале времени остаются постоянными, то движение тела со-
соответствует определению поступательного движения. Аналогич-
Аналогично, если координаты точки А остаются постоянными, то движе-
движение тела соответствует определению сферического движения.
Если же остаются постоянными координата zA и два угла Эйлера
v|/, 6(9 = 0), то движение тела соответствует определению плос-
плоского движения, параллельного плоскости осей Оху системы So.
Таким образрм, фиксируя некоторые обобщенные координаты,
можно генерировать различные частные случаи движения тела с
меньшим числом степеней свободы.
Другой вариант сокращения числа степеней свободы твердо-
твердого тела — установление какой-либо функциональной зависимо-
зависимости между двумя или несколькими исходными обобщенными ко-
координатами. Например, будем считать, что при движении тела
137
изменяются лишь две координаты: z A и угол ф, причем их изме-
изменения пропорциональны одно другому, т. е.
zA = г°+ЛФ/Bя).
Тогда движение тела соответствует одностепенному винтовому
движению с шагом винта Я, поскольку за полный оборот тела
(ф = 2л) точка А перемещается вдоль оси Oz на расстояние Я
(рис. 5.2). Закон такого винтового движения задается лишь одной
функцией, например ф = /(/).
z Взаимосвязь между исходными
обобщенными координатами может
иметь более сложный вид, например
при движении тела по поверхности
с непрерывным контактированием.
Аналитическое выражение такой
? i зависимости определяется формой
2[ тела и формой поверхности. Для
i простоты рассмотрим случай дви-
движения круглого тонкого диска —
монеты радиусом R по плоскости
стола (рис. 5.3). Расположим оси Ох
и Оу системы So в опорной плоско-
плоскости, а в качестве точки А системы
S2 возьмем центральную точку
диска, при этом ось AZ системы S2
направим перпендикулярно плос-
плоскости диска. При непрерывном кон-
контактировании тел значение координаты zA будет зависеть от угла
наклона плоскости монеты к плоскости стола:
Рис 5 1
где 0 — угол нутации в группе углов Эйлера, задающих про-
пространственную ориентацию осей системы S2 относительно сис-
системы So. Так как переменные параметры zA и 0 оказались взаи-
взаимозависимыми, то в данном случае движения диск не может
иметь более пяти степеней свободы.
138
о
Рис. 5.3
Вопросы кинематики движения тел произвольной формы по
поверхности без или со скольжением в точках контакта выходят
за рамки данного учебника.
5.2. Траектория произвольной точки тела
Покажем, как рассчитать траекторию произвольной точки
тела, если уравнения его движения записаны в форме E.2). Пусть
такой точкой является точка /?, находящаяся от точки А на рас-
расстоянии /. Радиус-векторы точек В и А в системе So связаны со-
соотношением
гв=гА+АВ. E.3)
Вектор АВ имеет различные проекции на оси координат двух
систем So и S2: в So AB = R=[lxJy,l2]\ а в S2 ~AB = p =
= [/v,/y,/z]T, причем lX9 lY, /z остаются постоянными при
движении тела.
На основании формулы (В.71) запишем связь проекций АВ
на оси координат систем So и52:
? = Атр, E.4)
где Ат — матрица, транспонированная к матрице А направляю-
направляющих косинусов углов между осями систем So, Sx и S2, элементы
139
которой, согласно D.3), могут быть выражены через углы Эйлера,
т.е. А = А[1|/@,в@,Ф@]-
Соотношение E.3) с учетом E.2) и E.4) позволяет получить
в явном виде уравнения движения точки В на заданном интервале
изменения времени V.
гв = хА @/ + У А (t)] + zA (t)k + Ат [ц/@,6@,
Представленное уравнение можно считать параметрической
формой задания траектории точки В относительно системы коор-
координат So.
5.3. Скорость произвольной точки тела
Отметим, что по уравнениям движения E.2) можно рассчи-
рассчитать проекции вектора скорости точки А на оси So:
а также проекции вектора угловой скорости сферического дви-
движения тела относительно системы S} на оси системы координат
S2 (см. формулы D.8)).
Вектор со и его производную по времени 8 = со будем назы-
называть соответственно векторами угловой скорости и углового ус-
ускорения тела в общем случае его движения.
Продифференцировав по времени уравнение E.3), полу-
получим
vB=vA+AB.
Так как АВ является вектором постоянного модуля, его произ-
производную по времени можно вычислить по формуле Эйлера D.6):
АВ = со х АВ.
Тогда
vB =vA +®хАВ. E.5)
При известном законе движения тела (см. E.2)) формула E.5)
позволяет рассчитать скорость произвольной точки В тела для
любого момента времени на заданном интервале времени.
140
Отметим важное свойство, характерное для общего, а сле-
следовательно, и для любого частного случая движения твердого
тела. Докажем, что вектор со , а следовательно, и вектор 8 не за-
зависят от выбора точки А в теле и ориентации осей системы S2 по
отношению к телу.
Предположим, что при выборе, например, точки В в качестве
начала координат системы S2 (с иным направлением'осей по от-
отношению к телу) угловая скорость щ изменения ориентации те-
тела отлична от со . Воспользуемся закономерностью E.5) для раз-
различных случаев выбора начала координат системы S2. Если
начало координат системы 1S2 находится в точке А, то
vB =vA +ыхАВ, если же в точке 5, то vA =vB +7o}xBA.
Суммируя эти равенства для одного и того же момента времени,
приходим к следующему условию:
О = (со - щ) х ~АВ .
Поскольку А и В — произвольные точки тела, это условие вы-
выполняется ЛИШЬ При СО = COj .
5.4. Ускорение произвольной точки тела
Отметим, что по уравнениям движения E.2) можно рассчитать
проекции вектора ускорения точки А на оси координат системы So:
а также проекции вектора углового ускорения сферического движе-
движения тела относительно системы S} на оси координат системы S2:
Дважды продифференцировав по времени уравнение E.3), получим
_ * ав=аА+АВ.
Так как вектор АВ жестко связан с твердым телом и его модуль
постоянен, вторая производная вектора АВ по времени может
быть вычислена по формуле Ривальса D.12):
141
АВ - е х АВ + со х (со х АВ).
Тогда
я*=^+а^+а°<, E.6)
где ajfr -sх АВ и а^ =Шх(юх,42?) — соответственно враща-
вращательное и осестремительное ускорения точки В при ее движении
вокруг точки А вследствие сферического движения тела относи-
относительно системы координат Sx. При известном законе движения
тела (см. E.2)) формула E.6) позволяет рассчитать ускорение
произвольной точки В тела для любого момента времени на за-
заданном интервале.
Обратим внимание на математическую особенность примене-
применения уравнений E.5) и E.6), правые части которых представляют
собой суммы векторов. При геометрическом суммировании этих
векторов не возникают какие-либо методические трудности, одна-
однако при выполнении аналитических расчетов вручную или с помо-
помощью компьютера к операции сложения векторов следует отнестись
неформально. Математическая операция аналитического сложе-
сложения векторов предполагает, что складываемые векторы заданы
своими проекциями на оси координат одной и той лее системы.
Согласно принятым обобщенным координатам и закону
движения тела E.2) векторы vA и аА были заданы проекциями
на оси системы So. В таком случае в формулах E.5) и E.6) ос-
остальные (прибавляемые) векторы должны быть также представ-
представлены в виде проекций на оси системы So. Следует иметь в виду,
что во многих задачах динамики свободного движения твердого
тела векторы со и 8 обычно предполагаются заданными своими
проекциями на оси подвижной системы S2, так как в этой систе-
системе осевые и центробежные моменты инерции тела постоянны.
Поэтому в этих случаях при применении формул E.5) и E.6) сна-
сначала рассчитывают проекции векторов, являющихся результата-
результатами произведений со х АВ, 8 х АВ, со х (со х АВ) на оси системы
S2 (как указывалось выше, в этой системе координат вектор АВ
предполагается заданным в форме вектора р), а затем с помо-
помощью соотношения (В.72) — на оси системы So.
Глава 6
СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ
6.1. Относительное, переносное и абсолютное
движения точки
В ряде задач механики оказывается целесообразным рассмотре-
рассмотрение движения точки одновременно в нескольких системах коорди-
координат, из которых одна (основная) условно принимается за неподвиж-
неподвижную, а другие определенным образом движутся относительно нее.
Так, движение космического корабля к Луне нужно рассматривать
одновременно и относительно Земли, и относительно Луны. Движе-
Движение точки, исследуемое одновременно в основной и подвижной
(подвижных) системах отсчета, называется сложным. В простей-
простейшем случае сложное движение точки состоит из относительного и
переносного движений. Определим эти движения.
Рассмотрим сложное движение точки М9 перемещающейся
по отношению к подвижной системе O'XYZ (рис. 6.1), связанной
с некоторым телом Q, которое в свою очередь совершает свобод-
свободное движение по отношению к основной, условно неподвижной
системе Oxyz.
Движение точки М по отношению к неподвижной системе
отсчета Oxyz называется абсолютным, или сложным, состоящим
из относительного движения по отношению к подвижной сис-
системе O'XYZ и переносного — движения подвижной системы
отсчета O'XYZ по отношению к неподвижной системе Oxyz.
Положение точки М в неподвижной системе Oxyz зададим векго-
ром г(f) с началом в точке О. Тогда абсолютная траектория М0М
точки М является годографом этого радиус-вектора r(t), а абсолют-
абсолютные скорость и ускорение точки М определяются выражениями
- dr _ dv d2r /? 1Ч
Л dt dt1
143
Q
7
Положение точки Мв подвижной системе координат O'XYZ
характеризует радиус-вектор p(f) с началом в точке О. Траек-
Траектория точки М в подвижной системе отсчета называется отно-
относительной траекторией и представляет собой годограф радиус-
вектора р@. Скорость движения точки Мпо отношению к осям
подвижной системы координат называется относительной ско-
скоростью и обозначается vr. Вектор v,. определяет скорость изме-
изменения с течением времени радиус-вектора р(*) в подвижной сис-
системе O'XYZ и поэтому выражается его относительной, или ло-
локальной, производной по времени,
-
V =
Л
F.2)
Ускорение точки М в этом движении называется относи-
относительным ускорением и обозначается аг. Вектор аг характери-
характеризует скорость изменения вектора относительной скорости vr в
подвижной системе O'XYZ и поэтому выражается относитель-
относительной, или локальной, производной по времени от vr:
j — 72—
_ dvr dp
F.3)
144
Движение подвижной системы O'XYZ по отношению к не-
неподвижной Oxyz является для точки М переносным движением,
а скорость и ускорение той неизменно связанной с подвижной
системой отсчета точки А, с которой в данный момент времени
совпадает точка М9 называют переносными скоростью и уско-
ускорением точки Ми обозначают ve и ае.
В рассматриваемом нами общем случае переносным являет-
является движение тела Q и связанной с ним системы O'XYZ. Напом-
Напомним, что тогда тело Q имеет шесть степеней свободы и его дви-
движение в каждый момент времени слагается из поступательного
движения вместе с полюсом О1 со скоростью v0, и ускорением
аа и мгновенного вращения вокруг этого полюса с угловой ско-
скоростью юе и угловым ускорением ге. Поэтому переносные ско-
скорость и ускорение точки М определяются по формулам
v.=vii=v + ®exp; F.4)
ае = аА = а0, + ге х р + ©е х (ше х р), F.5)
где v0, и а0. — скорость и ускорение точки О' подвижной сис-
системы координат.
В задачах кинематики сложного движения точки устанавли-
устанавливаются зависимости между абсолютными, относительными и
переносными скоростями и ускорениями точки. Для этого преж-
прежде всего определяют связь между изменениями вектора в под-
подвижной и неподвижной системах координат.
6.2. Абсолютная и относительная производные вектора.
Формула Бура
Рассмотрим изменение вектора b(t) (рис. 6.2) по отноше-
отношению к двум системам координат —подвижной O'XYZ и непод-
неподвижной Oxyz.
Абсолютной, или полной, производной вектора Ъ по аргу-
db
мешу t называется вектор , определяющий изменение векто-
dt
pa b(t) в неподвижной системе Oxyz. Относительная, или ло-
11 Зак. 16 145
кальная, производная определяет изменение вектора b(t) в
dt
подвижной системе O'XYZ.
О
Рис. 6.2
Найдем зависимость между этими производными. Если вос-
воспользоваться проекциями вектора b(t) на оси подвижной систе-
системы O'XYZ, то можно записать
и /*\ и У | l 7 I Ji F //с /с\
и\1) == их 1 ~ruyJ -tD7I\. 9 ^O.OJ
где 7, J, К — орты, не изменяемые в этой системе отсчета.
Поэтому локальная производная
d b dbx - dby - db7 —
dt dt
db
dt
dt
к,
F.7)
а полная производная с учетом изменения также ортов /,
dt
J , К имеет вид
db dbx 7 dby 7 db7 -
= —-1 + —- J + —- K + bx + bY+ b2
dt dt dt dt x dt Y dt z dt
dbx 7 dby 7 db7 - , dl , dJ .
= —-1 + —- J + —- K + bx — + bY + b
d x d Y d
dJ . dK /A оч
Y + b2 . F.8)
Y dt z dt
146
В правой части уравнения F.8) первые три слагаемые выра-
выражают локальную производную F.7), а производные от ортов 7,
J, К определяются формулами Пуассона D.11), т. е.
= + bxG5xI) + by((uxJ) + bz((oxK) =
dt ?_ F.9)
= + ю х (bx I + bY J + bz К).
С учетом F.6) получаем
db db г- /r i/44
= +cox6. F.10)
dt dt
Выражение F.10) носит название формулы Бура и устанав-
устанавливает, что абсолютная производная вектора равна сумме ло-
локальной производной этого вектора и векторного произведения
вектора угловой скорости подвижной системы отсчета на
дифференцируемый вектор.
Рассмотрим частные случаи.
1.Если со = 0,то
db Jib
dt " *-"
2. Если вектор Ь не меняется в подвижной системе отсчета
(?)
?¦•)-
db
3. Если b = #5), т. е. вектор 6 все время параллелен вектору
угловой скорости (@x6=0), то
dt dt
В Частности, если 6 = ©, то
11* 147
т. е. вектор угловой скорости со изменяется одинаково для под-
подвижной и неподвижной систем координат.
6.3. Теорема о сложении скоростей
Зависимость между абсолютной v, относительной vr и пе-
переносной ve скоростями точки в сложном ее движении устанав-
устанавливает теорема о сложении скоростей.
Теорема. Абсолютная скорость точки равна геометриче-
геометрической сумме относительной и переносной скоростей.
Доказательство. Действительно, поскольку для любого
момента времени (рис. 6.3)
г = * а + Р >
то, продифференцировав по времени это векторное равенство,
получим
df,
(У
dr _
где —— и —— — полные производные, причем — = v есть
dt dt dt
drn,
абсолютная скорость точки М\ —— = vo, — скорость точки О*.
dt
Рис. 6.3
148
Согласно формуле Бура,
dp _ _ _ _ _
: — 4- (Ое X р = Vr + (Ое X р .
dt
F.12)
zLZ
Здесь локальная производная —— = vr представляет собой отно-
dt
сительную скорость точки М Таким образом,
v = v(r+vr + ю, хр.
Поскольку vo. + cot> x p = ve — вектор переносной скорости точки
М, то, следовательно,
v=vr+ve. F.13)
Пример 6.1. Точка М движется с постоянной скоростью и вниз по образую-
образующей конуса, вращающегося вокруг оси Oz с постоянной угловой скоростью со
(рис. 6.4). Найти зависимость скорости точки М от расстояния s = А0М , если
угол а = 30° .
Решение. Абсолютное движение точ-
точки М по отношению к неподвижной сис-
системе Oxyz представим в виде суммы двух
движений: относительного по образую-
образующей АОАХ конуса (с которым свяжем
подвижную систему O'XYZ) и перенос-
переносного — вращения конуса вокруг оси Oz.
Тогда в произвольный момент времени /
точка М, находясь на расстоянии
s = AqM от вершины конуса, имеет отно-
относительную скорость vr = и = const, на-
направленную сверху вниз по образующей
конуса. Переносной скоростью для точки
М будет скорость точки А конуса, с кото-
которой в этот момент времени совпала точка
М: ve =а)Л = (ossin30° = ш/2, где h —
расстояние от точки М до оси вращения.
Вектор ve направлен по касательной к
траектории точки А. Поскольку в нашем
случае векторы vr и vt, взаимно перпен-
перпендикулярны, получаем
Рис. 6.4
149
6.4. Теорема о сложении ускорений, или кинематическая
теорема Кориолиса. Ускорение Кориолиса*
Найдем зависимость между абсолютным, относительным и
переносным ускорениями точки. С учетом F.13) абсолютное
ускорение точки
_ dv dvr dve dvr d ,_ — -ч ,,лл\
я = — = —- + —- =—- + — (vn, + оу, хр), F.14)
А Л А А А ° с
dvr dve
где —- и — полные производные векторов vr и ve, запи-
dt dt
санные для неподвижной системы координат.
Воспользовавшись формулой Бура, имеем
_ dvr _ _ dvn, d7oe __ __ dp
a = ——- + cot, x vr + —f- + —-- x p + coe x —f- =
dt dt dt dt
_ . _ _ . (dp _ -1
= ar 4- coe xvr+flo.+sexp + ©ex + ©e x p =
I*
= 5r+%-f6exp + (Dc> x (coe x p) + 2(®e x vr).
Так как
Яс;< +6exp + 5ex(fflexp) = fle,
получаем
fl=Sr+fle+2(©exvr),
или
a = ar +ae + aK, F.15)
где
aK=2(co,xvr) — F.16)
ускорение Кориолиса, или поворотное ускорение.
Формула F.15) выражает теорему о сложении ускорений,
или кинематическую теорему Кориолиса: абсолютное ускоре-
ускорение точки является векторной суммой трех ускорений: относи-
относительного, переносного и ускорения Кориолиса.
Остановимся на вычислении ускорения Кориолиса, опреде-
определяемого по формуле F.16).
Ускорение ак было получено Г. Кориолисом в 1833 г., К.Гауссом в
1803 г. и Л. Эйлером в 1765 г.
150
Ускорение Кориолиса равно удвоенному векторному произ-
произведению угловой скорости переносного движения на относи-
относительную скорость точки.
Согласно общему правилу векторного умножения, вектор
ак направлен перпендикулярно плоскости, содержащей 75е и vr
(рис. 6.5, а\ в ту сторону, откуда поворот юе к vr на наимень-
наименьший угол виден происходящим против направления движения
часовой стрелки. Если угол между векторами 7ое и vr обозначить
а, то по модулю ускорение Кориолиса
vr sin a.
Рис. 6.5
Заметим, что вектор vr* (см. рис. 6.5, а), равный по модулю
v* = vr sin a, представляет собой проекцию вектора относитель-
относительной скорости vr на плоскость Я, перпендикулярную вектору юе.
Сформулируем правило Жуковского, очень удобное для опреде-
определения ускорения Кориолиса: ускорение ак молено получить,
спроецировав вектор vr на плоскость, перпендикулярную векто-
вектору Ше,увеличив полученную проекцию v* в2сое раз и повернув ее
на 90° в направлении переносного вращения.
151
Если траектория относительного движения — плоская кри-
кривая, находящаяся в плоскости, перпендикулярной сое, то, соглас-
согласно правилу Жуковского, направление ак можно получить, по-
повернув на 90° в направлении переносного вращения сам вектор
относительной скорости vr (рис. 6.5, б).
Пусть точка М движется по гипотенузе АВ треугольника
О'АВ, вращающегося вокруг неподвижной оси Oz с угловой ско-
скоростью ©в (рис. 6.6). На рис. 6.6, а относительная траектория
точки М описывает коническую поверхность, а в случае, изобра-
изображенном на рис. 6.6, б, плоскость треугольника О'АВ перпенди-
перпендикулярна оси O(z) переносного вращения. Поэтому направление
вектора ак на рис. 6.6, б получено поворотом вектора vr на 90°
в направлении переносного вращения.
О'О{
Рис. 6.6
Остановимся на частных случаях, когда ускорение Кориоли-
са обращается в нуль.
1) cot, = 0, т. е. переносное движение — поступательное;
2) vr = 0, т. е. в те моменты времени, когда в относительном
движении точка останавливается, например, при изменении на-
направления относительного движения;
152
3) sin(©e, vr) = sin a = 0, когда вектор скорости относитель-
относительного движения параллелен вектору угловой скорости переносно-
переносного вращения ( vr || a>e).
Следует также отметить, что ускорение Кориолиса зависит
от выбора подвижной системы координат, т. е. при различном
разложении одного и того же абсолютного движения на относи-
относительное и переносное возможны разные ускорения Кориолиса.
6.5. Сложение ускорений в частных случаях
переносного движения
1. Переносное движение — поступательное.
В этом случае ускорение Кориолиса обращается в нуль
(сое = 0) и абсолютное ускорение складывается из относительно-
относительного и переносного:
а=аг+ае.
Если переносное движение — поступательное, равномерное и
прямолинейное, то абсолютное ускорение равно относительному:
а=аг.
Действительно, в этом случае ак = 0, ае = 0.
2. Переносное движение — вращение вокруг неподвиж-
неподвижной оси.
В этом случае переносные скорость и ускорение опреде-
определяются по формулам
a;=©ex(©exp), < =a#i; F.18)
ает=8ехр, axe=se2h, F.19)
где h — расстояние от точки до оси вращения.
Пример 6.2. Трубка (рис. 6.7, а\ имеющая форму полукольца радиусом
R = 0,1 м, закреплена на пластинке, вращающейся вокруг неподвижной оси Oz
по закону ф(/) = 4/ -t2 (ср — в рад, t — в с). Внутри трубки движется шарик Ы
10 Зэк. 16
153
по закону s(t) = 0,1(я/3)/2 (s — в м, t — в с). Для момента времени tx = 1 с
определить абсолютные скорость и ускорение шарика М.
Рис. 6.7
Решение. Введем неподвижную систему координат Oxyz, где ось Oz совпа-
совпадает с осью вращения пластинки. Подвижную систему координат OXYZ свя-
свяжем с пластинкой.
Принимая шарик М за точку, представим абсолютное движение точки М как
сумму относительного движения по трубке на пластинке и переносного враще-
вращения пластинки вокруг оси Oz.
В относительном движении траектория точки М — полуокружность радиу-
радиусом R = 0,1 м . К моменту времени tx = 1 с точка М переместилась по этой траек-
траектории на расстояние М0М = s\f чс = 0Д(я/3) м (рис 6.7, б). Тогда ZMQO'M =
, 3
Определим в этот момент времени положения касательной т и нормальной
п осей на относительной траектории точки. Относительная скорость точки М
vrx|
vrx| =0,21 м/с,
относительное ускорение
154
где апг = vf/R, <| = 0,212/0Д = 0,44 м/с2; a) = vr = if« const > 0, arT =
= 0,27t/3 = 0,21 м/с2.
Векторы vr и 5? направлены по касательной в сторону увеличения коорди-
координаты s.
Переносное движение для точки М— вращение пластинки вокруг оси Oz с
угловой скоростью
и угловым ускорением
8е* = ®ez = Ф = COnst < °» е« = -2 рад/с2 .
Векторы 5>в и ее указаны на рис. 6.7, б. В момент времени tx = 1 с точка М
находится на расстоянии h = R sin 60° = 0,086 м от оси вращения и совпадает с
той точкой пластинки, которая движется по окружности радиусом h = 0,086 м.
Следовательно, переносные скорость и ускорение точки М находим из выраже-
выражений F.17), F.18) и F.19):
ve = meh = 2 • 0,086 = 0,172 м/с;
ае =a?+at, ane =g>2/i = 4-0,086 = 0,344м/с2;
|aj| = |еех |Л = 2 • 0,086 = ОД 72 м/с2. *
Вектор ve направлен по касательной к окружности радиусом h в направле-
направлении переносного вращения, вектор а" — к оси вращения Oz, а вектор Ъ] (в
соответствии с ее) — противоположно вектору ve.
Как видно на рис. 6.7, б, векторы ve и "а] параллельны оси OZ.
Ускорение Кориолиса, согласно F.16),
Вектор ак (рис. 6.7, б) направлен перпендикулярно к плоскости пластинки,
содержащей векторы ©в и vr, так, что с конца вектора ак поворот вектора ®е
к vr на наименьший угол виден происходящим против направления движения
часовой стрелки.
Найдем абсолютные скорость и ускорение точки М. Известно, что
v=vr+ve.
Поскольку в рассматриваемом случае векторы v, и vr оказались взаимно пер-
перпендикулярными, то
Ю* 155
v = ^/v2+v2 = д/0,212 + 0,1722 = 0,27 м/с.
Для определения абсолютного ускорения точки М найдем проекции всех
векторов, входящих в выражение а = а" + а, + а" + ает + ак, на оси О'Х, Or Y и
O'Z:
O'Z:
ах =a/Tcos60°-<sin60°-<=0,21 --0,44—-0,344 = -0,62м/с2 ;
ау =fl/T sin 60° + a;'cos60° = 0,21 -^- + 0,44- - = 0,4 м/с2 ;
<*z = <Ч - % = 0,172 - 0,42 = -0,248 м/с2 .
Отсюда
= ^а\
+а\=
+ 0,42 + 0,2482 = 0,78 м/с2 .
Теоремы о сложении скоростей и ускорений удобно приме-
применять в случаях, когда, например, известно абсолютное движение
точки и требуется найти кинематические параметры переносного
и относительного движений.
Пример 6.3. В мальтийском механизме (рис. 6.8, а) кривошип вращается во-
вокруг оси O(z), перпендикулярной плоскости рисунка, с постоянной угловой
скоростью со, = V2 рад/с. Палец Д неподвижно закрепленный на кривошипе,
скользит вдоль паза диска и приводит его во вращение вокруг оси O'{Z), па-
параллельной оси O(z).
O(z) a
CO.
Рис. 6.8
Для показанного на рис. 6.8, а положения механизма определить угловую
скорость и угловое ускорение диска, а также относительное ускорение пальца D
относительно паза диска, если OD - OD = R = 0,2 м , а = 45°.
156
Решение. Свяжем неподвижную систему Oxyz с опорой О, а подвижную
систему O'XYZ — с вращающимся диском (рис. 6.8, б). Принимая палец D за
точку, рассмотрим движение точки D кривошипа как сложное, состоящее из
относительного движения точки D по пазу диска и переносного движения —
вращения диска вокруг оси O'(Z).
В абсолютном движении точка D перемещается по окружности радиусом
OD. Абсолютная скорость точки D
vD = щОИ = const, vD = >/2 • 0,2 = 0,2>/2 м/с
направлена перпендикулярно радиусу OD в сторону вращения кривошипа.
Абсолютное ускорение точки D
но azD = zx0D = 0, поскольку 8^0 при coj = const; тогда ускорение
и направлено,к оси вращения O(z) (см. рис. 6.8, б). Таким образом, абсолютное
движение точки D известно.
Получим теперь кинематические характеристики относительного и перенос-
переносного движений. Относительное движение точки D — прямолинейное, следова-
следовательно, векторы vr и аг = ~ахг должны быть направлены вдоль паза^В перенос-
переносном движении в заданном положении механизма точка D находится на окруж-
окружности радиусом O'D = R, поэтому вектор скорости ve JL07), а переносное уско-
ускорение определяется выражением
Воспользуемся теоремой о сложении скоростей
Направления относительной vr и переносной ve скоростей известны, поэтому с
учетом треугольника скоростей (рис. 6.9, а) можно записать
= 0,2 м/с.
Тогда, поскольку ve = а>207Э = а>2/?, угловая скорость диска
а>2 ж фе ж ve /R = 0,2:0,2 = 1 рад/с,
а направление дуговой стрелки <ое соответствует направлению вращения векто-
вектора ve вокруг оси O\Z) (см. рис. 6.8, б).
Согласно теореме о сложении ускорений, в рассматриваемом случае получа-
получаем выражение
157
б
Рис 6.9
Модуль и направление вектора anD уже были определены. Модуль вектора а"
а;=юе2д = 1.0,2 = 0,2 м/с2,
направлен он к оси O\Z). Для вектора ак = 2(юв х vr) получаем
Его направление установим, пользуясь правилом векторного произведения
(см. рис. 6.8, б).
Направления векторов аг и ~а)\мпе известны. Построив, согласно F.20),
многоугольник ускорений (рис. 6.9, б), запишем проекции векторов, входящих в
F.20), на оси О'Х и ОТ соответственно:
F.21)
F.22)
Из F.21) находим
aD cos45° = ar -a" + 0+0.
= ак + aD
cos45° = 0,4 + 0,4>/2 :2 = 0,68 м/с2
Следовательно, угловое ускорение диска
0,2
с2.
Направление дуговой стрелки е2 соответствует направлению вектора а).
Из F.22) находим
аг = aD cos45°+апе = 0,4>/2 :2+0,2 = 0,48 м/с2 .
3. Переносное движение — плоскопараллельное (плоское).
158
В этом случае переносные скорость и ускорение точки М на-
находим как скорость и ускорение точки тела, совершающего плос-
плоское движение. Пусть при этом за полюс выбрана точка С. Тогда
v^=v#=vc+v^; F.23)
F.24)
at* =
= аг + я а
+ «
МС >
= ееСМ, СМ—расстояние
где vMC = соеСМ, апмс = о
точки Мдо полюса С. %
Пример 6.4. Диск 7 радиусом Л = 0,4 м (рис. 6.10, а) катится без сколь-
скольжения по прямолинейной направляющей 2, закон вращения диска <р = 3/-;2
(ф в рад, t в с). Внутри паза 3 на диске 1 движется точка М по закону
М0М = s(t) = 0,23(/2 + 0, где s в м, t в с.
Для изображенного на рис. 6.10, а в момент времени tx = 1 с положения дис-
диска 7, когда а = 30°, определить абсолютные скорость и ускорение точки М.
«к
Рис. 6.10
Решение. Свяжем неподвижную систему отсчета Оху с направляющей 2, а
подвижную систему О'ЛТ с диском 7 (рис. 6.10, б). Тогда абсолютное движе-
движение точки М будет состоять «из относительного (прямолинейного) движения
точки М по пазу 3 и переносного (плоского) движения диска 7. В относительном
движении к моменту времени tx = 1 с точка М переместится на расстояние
M0M\t _1с = 0,46м . Поскольку О%М = А/0Л/ = XM(i) = 5@, то относительные
скорость vr и ускорение аг найдем так:
v* =*„=* = 0,23B*+ 1)>0, угД1=1с =0,69 м/с;
vr=v,^ =0,69 м/с.
159
<*rX = \x =*M= COnSt> °> ar = K^| = °>46
Векторы vr и аг направлены вдоль паза 3 в сторону возрастания координаты
XM{t) (см. рис. 6.10, б).
Вычислим теперь угловые скорость и ускорение диска 1 в переносном дви-
движении по заданному закону ф(/):
«>i, = «>** - Ф = 3-2r|/i=i с > 0, <йе2\^с = 1 рад/с;
^г=е„=(Ьвг=ф<0, ?„=-2рад/с2.
Таким образом, при t = 1 с диск катится замедленно, т. е. направления дуго-
дуговых стрелок шв и Ев противоположны (см. рис. 6.10, б).
При отсутствии скольжения точка контакта диска 7 с направляющей 2 являет-
является МЦС диска. Поэтому для точки С центра диска несложно определить ско-
скорость vc и ускорение ас:
Ру=ю1Л, vc=10,4 = 0,4m/c,
Направление вектора vc соответствует направлению вращения диска вокруг
МЦС, а вектора яс = й? — противоположно vc при замедленном движении
(см. рис. 6.10,6).
Переносные скорость и ускорение точки М найдем, согласно F.23) и F.24),
приняв за полюс точку С:
MC|/i=lc =0'A/sin3O° = 0,460,5 = 0,23м , v^l^ =10,23 = 0,23 м/с ;
а=а+а + а амс =о>гЛ/С = 12-0,23 = 0,23 м/с2 ,
20,23 = 0,46 м/с2.
Абсолютная скорость точки М
У=Уг+Ув,ИЛИ V =
Записав последнее равенство в проекциях на оси Ох и Оу (рис. 6.11, а):
vx = vr cos30°+vc + Vj^ = 0,69>/з : 2+0,4+0,23 = 1,23 м/с,
v^=vrsin30°, vy= 0,69 0,5 = 0,345м/с,
находим
v = ^v2+v2, v = VU32+0,3452= 1,28м/с.
Абсолютное ускорение точки М
160
a=ar+ae+aK,
или
F.25)
где ак =2(шехуг), ак = 2o>evr sin 90° = 2-1-0,69 = 1,38 м/с2 .
О
Рис. 6.11
Направление вектора ак получим, повернув вектор vr на 90° в направле-
направлении переносного вращения. На рис. 6.11, б изображен многоугольник ускорений
точки М, построенный с учетом F.25). Записав F.25) в проекциях на оси Ох и
Оу:
:2 = -1,19м/с2 ,
1,2 м/с2 .
ах * ar cos30°-ac -|ам;|+% sin30°
= 0,46л/3:2-0,8-0,46+1,380,5
найдем абсолютное ускорение точки М
а = Jal + а2у
V0»172
161
Глава 7
СЛОЖНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
7.1. Теорема о сложении угловых скоростей
при сложном движении твердого тела
Движение твердого тела так же, как и материальной точки,
может быть рассмотрено одновременно в нескольких системах
координат (см. гл. 6). Пусть одна из них является условно непод-
неподвижной, а другая движется относительно первой (рис. 7.1, а). То-
Тогда движение тела относительно неподвижной системы коорди-
координат (абсолютное движение) можно рассматривать как сложное,
состоящее из движения тела относительно подвижной системы
координат (относительное движение) и движения вместе с под-
подвижной системой координат как единого целого относительно
неподвижной системы координат (переносное движение). Таким
образом, сложное движение твердого тела представляется как
результат сложения двух движений: относительного и пере-
переносного .
Подобным образом движение твердого тела можно разло-
разложить на п составляющих движений при введении в рассмотрение
п систем координат, из которых одну принимают условно непод-
неподвижной, а движение каждой из последующих определяют отно-
относительно предыдущей (рис. 7.1,6).
Теорема. При любом виде переносного и относительного
движений твердого тела его абсолютная угловая скорость (в не-
В этой главе при рассмотрении задач на сложение соответствующих дви-
движений рассчитываются лишь угловые скорости тел и скорости их точек в задан-
заданный момент времени, считая, что ускорения могут быть определены, исходя из
конкретного вида движения (абсолютное, относительное или переносное) твер-
твердого тела либо на основании рассмотрения сложного движения точек тела.
162
подвижной системе координат) равна сумме относительной и
переносной угловых скоростей тела.
Рис. 7.1
Доказательство. Рассмотрим движение твердого тела от-
относительно подвижной системы O'XYZ, которая в свою очередь
движется относительно неподвижной системы Oxyz
(см. рис. 7.1, а). В каждом из рассматриваемых движений твердо-
твердого тела связь скоростей его точек А и В в любой произвольный
момент времени может быть установлена по формулам
G.1)
Ч =vA+vBA
vra=v'+vr
BA; vB
vcB=veA+ve
BA,
где vBA = со х АВ; vBA = cor х АВ; \ВА = сое х АВ; со, сое, со, —
соответственно абсолютная, относительная и переносная угловые
скорости движения тела.
Скорости точек А и В могут быть также определены, исходя
из теоремы о сложении скоростей точек
I"=V1+V"; G-2)
Из G.1) и G.2) последовательно несложно получить
х ,41?,
5Г х АВ + ®е х АВ.
Приравнивая правые части этих равенств, находим
vB = vA
* + * =v +75
163
со х АВ = сог х АВ + сое х АВ = (со,. + сое) х АВ.
Так как вектор АВ произвольный, то
со = со,.+сое. G.3)
Последнее и требовалось доказать.
В случае п составляющих движения тела, в каждой из кото-
которых угловая скорость равна со,, где / = 1,2,..., п, абсолютная уг-
угловая скорость тела определится как векторная сумма ее состав-
составляющих:
Так как абсолютная угловая скорость тела не зависит от
разложения двиэюения на составляющие, то ее моэ/сно рассмат-
рассматривать как кинематический инвариант.
7.2. Сложение вращений вокруг пересекающихся осей
В случае вращательных относительного и переносного дви-
движений твердого тела, когда оси их вращений пересекаются в точ-
точке О (рис. 7.2), абсолютное движение будет движением твердого
тела вокруг неподвижной точки О (сферическим движением) с
угловой скоростью, определяемой согласно G.3). Нетрудно убе-
убедиться, что скорости всех точек, лежащих на линии, по которой
направлен вектор со, равны нулю. В самом деле, например, ско-
скорость находящейся на этой линии точки А тела v = со х f = О (по
свойству произведения коллинеарных векторов ©иг). Таким
образом, прямая, на которой расположен вектор со , является
мгновенной осью вращения тела.
Скорость любой точки Мтела в данном случае можно опре-
определить так:
или
v=ve+vr,
где ve =юе xrM; vr=75rxrM.
Модули составляющих, а также абсолютной скорости точки
М равны модулям соответствующих векторных произведений и
могут быть вычислены по формулам
164
vc=(uehe; vr=G)rhr> v = a>h, fc
где he9 hr,h — кратчайшие расстояния от точки М до соответст-
соответствующих осей вращения (см. рис. 7.2).
Мгновенная
ось вращения
Рис. 7.2
7.3. Сложение вращений вокруг параллельных осей.
Пара вращений
Если оси вращательных движений тела параллельны, то век-
вектор результирующей угловой скорости со тела в неподвижной
системе координат, определяемый согласно G.3), будет коллинеа-
рен векторам ее составляющих ые и о5г. Положение мгновенной
оси вращения тела как оси, проходящей через неподвижную в дан-
данный момент точку Р тела, т. е. точку его МЦС в плоскости П,
перпендикулярной осям вращений (рис. 7.3), можно определить из
следующего анализа. Относительная скорость точки Р
v, =©, хОгР9 а переносная ve =юех0еР. Здесь Ог и Ое —
точки пересечения плоскости П с соответствующими осями вра-
вращения. Тогда скорость точки Р в неподвижной системе координат
vp = ve + vr, причем, согласно определению МЦС, vP = 0 . Отсюда
следует ve = -vr, так что ve = vr и о)е ОеР = сог ОГР .
В зависимости от взаимного расположения и численного
значения векторов сог и 7Бе можно выделить три случая сложе-
сложения вращательных движений.
165
1. При совпадении направлений векторов сог и сое абсолют-
абсолютное движение будет плоским (см. рис. 7.3).
Рис. 7.3
Абсолютная угловая скорость в этом случае будет иметь на-
направление, совпадающее с направлениями ее составляющих, а ее
модуль со = со,. + cot,.
Точка Р, через которую проходит мгновенная ось вращения
тела, лежит на отрезке, соединяющем точки Ог и Ое. При этом
ОеОг =ОГР + ОеР и положение точки Р можно найти из про-
пропорции
cot, сог со
ОГР ОеР ОеОг
G.4)
Скорость любой точки тела, например М9 в данном случае
может быть найдена по формуле v = со х РМ, а ее модуль
v = сойд, , где hM — кратчайшее расстояние от точки до мгновен-
мгновенной оси вращения, проходящей через точку Р.
2. При противоположных направлениях векторов со,, и &е,
когда (ог * ое, абсолютное движение, как и в первом случае, бу-
будет плоским (рис. 7.4).
Абсолютная угловая скорость при этом будет иметь направ-
направление, совпадающее с направлением большей по модулю состав-
составляющей угловой скорости, а ее модуль со = |©г - (ое\.
Точка Р, через которую проходит мгновенная ось вращения
тела, лежит в плоскости П, перпендикулярной осям вращатель-
166
ных движений, на прямой, проходящей через точки Ое и Ог;
расположена она внешним образом по отношению к этим точкам
со стороны той точки, через которую проходит ось вращения
движения с большей угловой скоростью. При этом *
ОеР = -ОеОг + ОГР, если сое > со,;
ОГР = -ОеОг + ОеР, если сое < сог.
Пропорции для нахождения положения точки Р имеют
вид G.4).
Рис. 7.4
3. При противоположных направлениях векторов сое и со,, и
равенстве их модулей (сог = сос), если условие сос = -<»,. выполня-
выполняется на отрезке времени /2 ~ *\ > абсолютное движение будет по-
поступательным*. Такой случай сложения вращательных движений
называется парой вращений.
Действительно, в данном случае <5е = -а>г, так что со =
= сос, + со, = 0, и для любой точки тела справедливы соотношения
v = EС х г, + со,, х г2 = сое х (г, - г2) = юе х О Л ~~
= сог х
где г,, г2 — радиус-векторы точки, проведенные из Ос и Ог
соответственно.
Следовательно, скорости всех точек тела в данном случае
одинаковы и равны скорости поступательного движения тела.
* Если условие о>с = -со, выполняется лишь в момент времени / = /,, абсо-
абсолютное движение будет мгновенным поступательным движением.
167
Примером такого движения может служить движение кабины
колеса обозрения (рис. 7.5). Кабина поворачивается вокруг оси под-
подвеса на ободе колеса относительно системы координат O'XY, свя-
связанной с колесом, на угол фг с угловой скоростью со,., а поворот
подвижной системы координат O'XY вместе с колесом относитель-
относительно системы координат Оху, связанной с неподвижным основанием,
на угол фе происходит с угловой скоростью сос,. Очевидно, что
Фе = фг, а направления изменения этих углов противоположны. От-
Отсюда следует, что переносная и относительная угловые скорости
равны по модулю и противоположны по направлению. В результате
движение кабины является поступательным (со = 0), поэтому ско-
скорости всех ее точек одинаковы и равны скорости движения самой
кабины v(). =vA = v, а ее модуль v = сос, 00' - со,. 00'.
Уи
ПА. Сложение поступательных движений
Если переносное и относительное движения твердого тела в его
сложном движении являются поступательными (мгновенно-посту-
(мгновенно-поступательными), т. е. сог =шв =0, то абсолютное движение твердого
тела будет также поступательным (мгновенно-поступательным).
168
Очевидно, что в данном случае в соответствии с G.3) со*- 0 и
скорость абсолютного поступательного движения тела и принад-
принадлежащих ему точек определится в виде векторной суммы скоро-
скоростей составляющих поступательных движений тела, т. е.
v = ve + vr (рис. 7.6).
Все это справедливо и в слу-
случае п поступательных состав-
составляющих движений. Абсолютное
движение будет также поступа-
поступательным движением со скоро-
скоростью, определяемой по формуле
где v;— скорость /-го состав-
составляющего поступательного дви-
движения тела.
Рис. 7.6
7.5. Сложение поступательного и вращательного
движений
Пусть переносное движение тела — поступательное со ско-
скоростью ve9 а относительное — вращение с угловой скоростью
сог. Тогда абсолютная угловая скорость тела со = ©г.
В зависимости от взаимного расположения векторов ve и со,.
рассмотрим два* отдельных случая.
1. Скорость переносного поступательного движения перпен-
перпендикулярна оси относительного вращения (veJJ5r).
Выделим плоскость П, перпендикулярную оси относитель-
относительного вращения тела и пересекающуюся с ней в точке О (рис. 7.7).
Скорости всех точек сечения тела этой плоскостью будут лежать
в данной плоскости, а скорости других точек тела — в парал-
параллельных ей плоскостях. Таким образом, можно утверждать, что
тело совершает в данном случае плоскопараллельное движение и
* Общий случай сложения переносного поступательного и относительного
вращательного движений здесь не рассматривается.
169
в плоскости П имеется точка Р (МЦС), скорость которой равна
нулю. Для этой точки vP = ve + vr = 0, так что ve = -vr (здесь
vr = со,, х OP). Тогда vc = (DrOP и, следовательно,
Мгновенная
ось вращения
Рис. 7.7
Точка Р находится в плоскости П на линии, перпендикуляр-
перпендикулярной к вектору ve, на расстоянии ОР от точки О. Очевидно, что
другие точки тела, имеющие нулевую скорость, будут находиться
на оси, перпендикулярной плоскости П в точке Р. Эта ось являет-
является мгновенной осью вращения твердого тела.
Таким образом, в данном случае абсолютное движение твер-
твердого тела есть вращение с угловой скоростью, равной по модулю
и одинаковой по направлению с угловой скоростью относитель-
относительного вращения вокруг мгновенной оси вращения. Эта ось парал-
параллельна оси относительного вращения и находитсяся от нее на
расстоянии, равном отношению модуля скорости поступательно-
поступательного переносного движения к модулю угловой скорости относи-
относительного вращательного движения.
Скорость любой точки тела, например А, может быть опре-
определена тогда по формуле v = Ш х РА, а ее модуль v = (ohA, где
hA — кратчайшее расстояние от точки до мгновенной оси вра-
вращения тела.
170
Примером рассмотренного выше сложения движений может
служить плоское движение твердого тела (см. гл. 4), которое
можно представить в виде суммы поступательного движения тела
вместе с полюсом (переносное движение) и вращения вокруг оси,
проходящей через полюс и перпендикулярной к плоскости дви-
движения (относительное движение).
2. Относительное движение есть вращение вокруг оси, па-
параллельной скорости переносного поступательного движения
(©,||ув)(рис.7.8).
Рис. 7.8
Абсолютное движение тела в данном случае называется
винтовым движением, или кинематическим винтом. Оно не
сводится к какому-либо другому более простому эквивалентному
движению и характеризуется собственными параметрами и отли-
отличительными особенностями.
Ось относительного вращения называют осью винта. Пара-
Параметром винтового движения называют величину, равную от-
отношению модуля переносной скорости поступательного движе-
движения тела к модулю относительной угловой скорости его
вращения, р = ve I юг. В общем случае ve = \ds I dt\, где s = s(t) —
171
закон перемещения тела вдоль оси винтового движения;
© = 0),. =\dq>/dt\, где <р — угол относительного поворота тела
вокруг оси винта.
Таким образом, параметр р численно равен расстоянию, на
которое переместится тело при винтовом движении вдоль оси
винта при повороте на один радиан (при данных значениях vc и
сог), и может быть вычислен по формуле
При совпадении направлений векторов ve и со винтовое движе-
движение (винт) называется правым, а при противоположных их на-
направлениях — левым.
Траекторией любой точки М тела является винтовая линия.
Скорость точки, удаленной от оси винта на расстояние А, склады-
складывается из ее скоростей в переносном и относительном движениях:
v = ve + vr, где vr = со х г , a vr = юА , причем скорости ve и v;.
взаимно перпендикулярны, так что v = сод//?2 + А2 .
В случае ve = const, со = const параметр р постоянен, и для
характеристики движения можно использовать понятие шаг
винта, который равен смещению тела вдоль оси винта при пово-
повороте на один оборот:
Уравнения движения произвольной точки М тела по винто-
винтовой линии в декартовой системе координат (см. рис. 7.8) в дан-
данном случае будут иметь вид
х = Acoscp = Acosco/;
Раздел II
СТАТИКА
Глава 8
АКСИОМЫ И ОСНОВНЫЕ ПОЛОЖЕНИЯ СТАТИКИ
Статика — раздел механики, в котором изучают условия
равновесия материальных тел, находящихся под действием сил,
и операции преобразования одних систем сил в другие.
При изучении равновесия используют принцип неизменно-
неизменности геометрических форм и размеров твердых тел, поскольку их
изменение под действием сил обычно мало по сравнению с пер-
первоначальными размерами. Поэтому в статике материальные тела
считают абсолютно твердыми.
Понятие «сила» в механике является одним из важнейших.
Силой называется векторная величина, являющаяся мерой меха-
механического действия одного материального тела на другое. Вектор-
сила характеризуется числовым значением, или модулем, и на-
направлением действия. Основной единицей измерения силы в Меж-
Международной системе единиц (СИ) является 1 ньютон A Н); приме-
применяется и более крупная единица 1 килоньютон A кН = 1000 Н).
Вектор-силу обозначают какой-либо буквой со знаком век-
вектора, например, F , а модуль силы — символом | F | или просто
буквой F. Прямая, вдоль которой направлена сила, называется
линией действия силы.
Приведем основные определения статики.
Системой сил называется совокупность сил, действующих
на твердое тело.
Если систему сил, действующих на свободное твердое тело,
можно заменить другой системой, не изменяя при этом механи-
механического состояния тела, то такие две системы сил называются
эквивалентными.
Система сил, под действием которой свободное твердое тело
может находиться в покое, называется уравновешенной, или
эквивалентной нулю.
173
Если система сил эквивалентна одной силе, то эта сила назы-
называется равнодействующей данной системы сил.
Силы, действующие на данное тело или систему тел, можно
разделить на внешние — силы, действующие на данную систему
со стороны других тел, не входящих в рассматриваемую систему,
и внутренние — силы, с которыми действуют друг на друга тела,
входящие в рассматриваемую систему.
Механической системой называется любая совокупность
взаимодействующих материальных точек.
8.1. Аксиомы статики
1. Если на свободное твердое тело действуют две силы, то
тело может находиться в равновесии только тогда, когда эти
силы равны по модулю, действуют по одной прямой в противо-
противоположные стороны.
2. Действие данной системы сил на абсолютно твердое те-
ло не изменяется, если к ней добавить или от нее отнять урав-
уравновешенную систему сил (рис. 8.1).
Рис. 8.1
Следствие. Не изменяя действия силы на абсолютно твер-
твердое тело, силу моэюно переносить по линии ее действия в любую
точку тела.
В самом деле, если в точке В (см. рис. 8.1) приложить урав-
уравновешенную систему сил (F,, F2) и принять Fx = -F2, FA ^F,
174
то можно образовать новую уравновешенную систему сил (F ,
F2) и отбросить ее. В результате на тело будет действовать толь-
только одна сила Fx = F , но приложенная не в точке А, а в точке В.
Вектор, изображающий силу F , называется скользящим.
Сформулированные по-
положения справедливы только
для сил, действующих на аб-
абсолютно твердое тело. В этом
нетрудно убедиться, рассмот-
рассмотрев, например, равновесие /-/
тонкого длинного стержня под
действием сжимающей силы
F (рис. 8.2). Для равновесия
абсолютно твердого стержня
безразлично, где приложена
сила — в точке А или В. Для
равновесия упругого стержня
это далеко не так. Сила, при-
приложенная в точке А, может
вызвать потерю устойчивости
прямого стержня и способст-
способствовать его изгибу, тогда как
сила, приложенная в точке Я, ^
таким действием обладать не
будет. Переносить силу вдоль рис 8 2
линии действия нельзя и то-
тогда, когда требуется опреде-
определить внутренние силы в какой-либо части конструкции. Напри-
Например, внутренняя сила в сечении /-/ равна F , когда внешняя си-
сила приложена в точке А, и нулю, если внешняя сила перенесена
в точку В.
3. При всяком действии одного материального тела на дру-
другое со стороны другого тела имеется противодействие, такое
же по величине, но противоположное по направлению.. Другими
словами, силы взаимодействия двух тел всегда равны по модулю
и направлены в противоположные стороны. Эту аксиому назы-
называют законом равенства действия и противодействия. Он был
175
сформулирован Ньютоном и принят в качестве третьего основно-
основного закона механики.
Например, груз лежит на поверхности Земли и давит на нее
силой, равной своему весу Р . Земля действует на груз такой же
силой Р1, но направленной в противоположную сторону. Сила
Р приложена к Земле, а Рг — к грузу. Таких примеров можно
привести сколь угодно много. Но нужно твердо усвоить, что силы
взаимодействия двух тел не создают уравновешенную или экви-
эквивалентную нулю систему (хотя равны по модулю и направлены
вдоль одной прямой в противоположные стороны), так как при-
приложены к разным телам. Действие одного тела может вызвать
движение другого, например электровоз вызывает движение же-
железнодорожного состава, действуя на него силой F , в то время
как железнодорожный состав сопротивляется этому движению и
действует на электровоз силой - F .
Следствие. Сумма всех внутренних сил всегда равна нулю.
Действительно, разделяя мысленно твердое тело или механиче-
механическую систему на отдельные части и принимая во внимание, что
все они взаимодействуют между собой с силами, равными по мо-
модулю и направленными по одной прямой в противоположные
стороны, приходим к выводу о равенстве нулю суммы всех внут-
внутренних сил. Это означает, что при рассмотрении условий равно-
равновесия тела или системы тел нужно учитывать только внешние
силы.
4. Две силы, приложенные к твердому телу в одной точке,
имеют равнодействующую, приложенную в той лее точке и изо-
изображаемую диагональю параллелограмма, построенного на этих
силах как на сторонах. Это так называемое правило параллело-
параллелограмма сил. Сила R* эквивалентна системе двух сил F} и F2.
Вектор R * равен геометрической сумме векторов F] и F29 т. е.
R'=Fi+F2.
5. Механическое состояние системы не изменится, если ос-
освободить ее от связей, приложив к точкам системы силы, рав-
равные реакциям связей. Эту аксиому называют аксиомой о связях.
Материальные тела, ограничивающие перемещение данного
тела в пространстве, называют связями.
176
Сила, с которой связь действует на тело, препятствуя его пе-
перемещениям, называется силой реакции связи, или просто реак-
реакцией связи.
8.2. Основные виды связей и их реакции
Реакция связи направлена в сторону, противоположную
той, куда связь не дает перемещаться телу. Правильное опреде-
определение направлений реакций связей играет важную роль при ре-
решении задач механики. Поэтому рассмотрим подробно, как на-
направлены реакции некоторых основных видов связей.
Поверхности связей полагаем идеально гладкими, т. е. такими, в
которых не возникают силы трения. Подобные связи называют
идеальными.
1. Гладкая поверхность (плоскость). Реакция R в случае
гладкой поверхности направлена по общей нормали к поверхно-
поверхностям связи и тела в точке их контакта и приложена к телу. На
рис. 8.3 показаны некоторые примеры направления реакций.
J L
Рис. 8.3
2. Нить. Этим термином обозначают цепи, тросы, канаты,
.которые могут воспринимать только силы растяжения. Нить счи-
считается гибкой и нерастяжимой. Реакция нити на тело направлена
по касательной к нити в точке ее закрепления (рис. 8.4).
3. Цилиндрический шарнир (подшипник). Цилиндриче-
Цилиндрический шарнир представляет собой цилиндрическую втулку, в ко-
которой находится ось вращения (рис. 8.5). Он не воспринимает
осевой силы, его реакция находится в плоскости Аху, перпенди-
13 3ак.16 П7
кулярной оси шарнира. Реакция RA может быть направлена по
любому радиусу шарнира в плоскости Аху.
Л
Рис. 8.4
Рис. 8.5
4. Сферический шарнир. Он позволяет телу поворачиваться,
но не разрешает линейные перемещения. Реакция сферического
шарнира R приложена к его центру и может быть направлена
по любому радиусу шарнира (рис. 8.6).
zJ(
5. Подпятник. Он отличается от цилиндрического шарнира
тем, что кроме радиальных сил может воспринимать и осевую
силу (рис. 8.7). Реакция подпятника, как и реакция сферического
шарнира, может иметь любое направление.
6. Невесомый стержень с шарнирами на концах (рис. 8.8).
Реакция прямолинейного невесомого стержня с шарнирами на кон-
концах направлена вдоль оси стержня. В отличие от нити такой стер-
стержень может передавать как силы растяжения, так и силы сжатия.
Если связью является криволинейный стержень, то его
реакция будет направлена по прямой АВ, соединяющей шар-
шарниры А и В.
178
в\
У\
П? Щ
Рис. 8.7
Рис. 8.8
При решении задач статики "реакции связей обычно являют-
являются неизвестными и подлежат определению, а зная силы, дейст-
действующие на систему, и силы реакций связей, можно определить
внутренние силы в телах, необходимые для расчета на проч-
прочность.
13*
179
На рис. 8.9 и 8.10 показаны реакции связей соответственно
для стержня АВ, опирающегося в точке А на гладкую стену и
подвешенного в точке В к стене нитью, и полукруглой плоской
арки, опирающейся в точке А на подвижный шарнир (каток), а в
точке В — на неподвижный шарнир.
Рис. 8.9
Рис. 8.10
180
8.3. Система сходящихся сил
Равнодействующая системы сходящихся сил
Систему сил, приложенных к твердому телу, называют
системой сходящихся сил, если линии действия всех сил пересе-
пересекаются в одной точке.
Пусть на тело действуют силы, линии действия которых рас-
расположены в пространстве и пересекаются в одной точке О
(рис. 8.11, а). Перенеся силы вдоль линий действия в эту точку и
сложив их последовательно по правилу параллелограмма, найдем
равнодействующую R* данной системы сил (рис. 8.11, б):
а
Рис. 8.11
В общем случае для системы сходящихся сил:
(8.1)
Результат сложения векторов не зависит от последователь-
последовательности их сложения. Графическое сложение векторов возможно
и без построения параллелограммов сил. Для этого нужно
181
от конца вектора одной силы отложить вектор другой силы, затем
от его конца отложить вектор какой-либо третьей силы и т. д.,
пока не будут отложены все силы. Для нахождения равнодейст-
равнодействующей системы сил нужно соединить начало первого вектора с
концом последнего (см. рис. 8.11, б). Многоугольник OABCD на-
называется силовым многоугольником.
Рис. 8.12
Таким образом, система сходящихся сил эквивалентна одной
равнодействующей силе, которую моэюно определить замыкаю-
замыкающим вектором R* силового многоугольника, построенного на
векторах-силах системы сходящихся сил. Другими словами, рав-
равнодействующая системы сходящихся сил равна их геометриче-
геометрической сумме.
Аналитический способ задания и сложения сил
Аналитический способ решения задач статики основывается
на представлении вектора силы в виде трех его составляющих по
182
направлениям осей прямоугольной декартовой системы коорди-
координат. Будем пользоваться правой системой координат (рис. 8.12).
В этой системе координат
Fx = Fcosoc, Fy=Fcos$, Fz=Fcosy;
Проекция вектора F на координатную ось есть скалярная
величина, которая может быть положительной, отрицательной
или равной нулю. Если равнодействующая
к=\
ТО
Ы\ к=\
Таким образом, проекция вектора равнодействующей систе-
системы сил на какую-либо ось равна алгебраической сумме проекций
векторов (составляющих) сил на ту же ось.
Модуль равнодействующей
а ее направление можно определить через направляющие коси-
косинусы:
R* К R*
cosa = —-; со8В = -^-; 0087 = -^-. (8.4)
R* R* R*
Кроме сложения сил иногда возникает необходимость их
разложения. Разложить данную силу на несколько составляющих
означает найти такую систему нескольких сил, для которой дан-
данная сила является равнодействующей. Задача разложения являет-
является обратной задаче сложения сил. Разложить вектор R по двум
заданным направлениям на плоскости или по трем направлениям
в пространстве труда не представляет. В первом случае вектор R
будет диагональю параллелограмма, во втором — диагональю
параллелепипеда, ребра которого параллельны заданным направ-
направлениям.
183
Условия равновесия системы сходящихся сил
Так как система сходящихся сил эквивалентна одной равно-
равнодействующей, то тело под действием такой системы сил будет
находиться в равновесии тогда, когда равнодействующая равна
нулю, т. е. силовой многоугольник должен быть замкнут. Ус-
Условия равновесия в векторной и аналитической форме имеют со-
соответственно следующий вид:
Дф=Х^=о; (8.5)
к=\
*; =!*•*, =0; Л;=2Х=О; *;=?f4,=0. (8.6)
к=\ к=\ Ы\
Равенства (8.5) и (8.6) содержат заданные и неизвестные ве-
величины. Их называют уравнениями равновесия.
Последовательность решения задач статики
Для решения задач статики целесообразна следующая мето-
методика.
1. Выбор тела (или тел), равновесие которого должно быть
рассмотрено.
2. Освобождение от связей, т. е. действие связей нужно заме-
заменить действием сил.
3. Составление уравнений равновесия. После освобождения
от связей выбранное тело (или система тел) стало «свободным».
На него действуют заданные силы и неизвестные силы реакций.
Для свободного тела, находящегося в равновесии, записывают
уравнения равновесия в векторной (8.5) или в аналитической (8.6)
форме.
4. Решение уравнений равновесия. Решение рекомендуется,
как правило, проводить в общем виде (алгебраически): получить
формулы для искомых величин, подставить числовые значения и
найти результат. Решение в общем виде проще проверить и, если
допущены ошибки, то обнаружить их.
5. Качественная оценка решения. Полученным результатам
целесообразно дать качественную оценку, т. е. проанализировать
их соответствие физическому представлению о распределении
сил. Такая оценка на практике иногда помогает обнаружить
184
ошибки. Например, если стержень АВ (рис. 8.13), поддержи-
поддерживающий балку, в результате решения задачи получился растя-
растянутым, то такое решение ошибочно, так как на самом деле
стержень сжат.
Рис. 8.13
Приведем примеры решения таких задач.
Пример 8.1. Между вертикальной стенкой и заделанной в нее пластиной на-
находится цилиндр, вес которого Р (рис. 8.14, а). Определить силы давления ци-
цилиндра на стенку и пластину.
Решение. Рассмотрим равновесие цилиндра. Для этого освободим его от
связей. Приложим к центру тяжести цилиндра силу Р, а действие связей заме-
заменим действием сил. Силы N,, N2 реакций связей должны быть направлены по
нормалям к поверхностям в точках контакта (рис. 8.14, б).
Важно правильно наметить линию действия реакции связи. Если линии дей-
действия всех сил пересекаются в одной точке, то система сил будет системой схо-
сходящихся сил. Условием равновесия является равенство нулю равнодействую-
равнодействующей системы сил:
?*=?+#,+#2=0.
Построим векторный треугольник (рис. 8.14, в) и найдем
. #,=Pctga, N2=P/sina
(при малом угле a N} и N2 могут быть очень большими).
По условию задачи требуется найти силы давления цилиндра на стенку и
пластину. Применив закон действия и противодействия, получаем силы -N, и
- N2, показанные на рис. 8.14, г.
12 3ак. 16
185
Рис. 8.14
Пример 8.2. Нить, на концах которой закреплены грузы весом Рх и?2, пе-
перекинута через блоки А и В (рис. 8.15, а). В точке О к нити подвешен груз, вес
которого /> = 1000Н. Система грузов находится в равновесии при а = 60°,
Р = 30° . Пренебрегая трением на осях блоков, определить вес грузов Р] и Р2.
Решение. Силы натяжения Т, Г, и Т2 нити грузами равны по модулю их
весам. В данной задаче блоки не изменяют значений сил, а изменяют только их
направления. В точке О пересекаются линии действия всех сил (Т, Г,, Т2),
поэтому рассмотрим ее равновесие (рис. 8.15, б).
Для составления условий равновесия воспользуемся их аналитической фор-
формой (8.6):
186
*=|
Ar=1
Построим систему координат с началом в точке О (рис. 8.15, в). Проецируя
силы на оси координат, находим
/?;=r2cosp-7;cosa = 0, R*y =-
Откуда
12*
1.87
cosp
: cos a
или
Г-rJsina-^+sinpl.
L cosa J
Подставляя числовые значения, получаем
Г2 = />2=500Н; Г,=Р,=866Н.
Положительные значения Т} = Рх и Т2 = Р2 свидетельствуют о том, что их
направления выбраны правильно. Верно и то, что Рх > Р2, так как в противном
случае не будет соблюдаться условие равновесия /?* = 0.
При решении задач статики иногда удобно пользоваться
теоремой о трех силах. Если твердое тело находится в равно-
равновесии под действием трех непараллельных сил, леэюащих в одной
плоскости, то линии действия этих сил пересекаются в одной
точке.
Доказательство. Сложив две из трех сил, например
F, + F2 = R*, приходим к выводу, что тело находится в равнове-
равновесии под действием двух сил F3 и R *. Следовательно, силы F3 и
R* лежат на одной прямой, а линия действия силы F3 проходит
через точку пересечения линий действия сил F} и F2, что и тре-
требовалось доказать.
Пример 8.3. Однородный стержень весом Р и длиной 4/ опирается на непод-
неподвижный цилиндрический шарнир А и упор В (рис. 8.16, а). Угол наклона стерж-
стержня к горизонту a = 30° , АВ-Ъ1. Определить реакции связей.
188
Решение. Рассмотрим равновесие стержня. Реакцию связи неподвижного
шарнира вместо двух составляющих представим одной силой RA, направлен-
направленной в точку D пересечения линий действия сил Р и RB (рис. 8.16, б). Из гео-
геометрических соображений (см. рис. 8.16, а, б) находим Р, = 60° и Р2 = 30°. а из
силового треугольника (рис. 8.16, в) определяем
8.4. Момент силы относительно точки и относительно оси
Момент силы относительно точки
Пусть к телу в точке А приложена сила F (рис. 8.17). Тогда
моментом силы F относительно точки О называется вектор
MO(F), приложенный в точке О перпендикулярно плоскости
треугольника ОАВ и равный
M0(F) = rxF, (8.7)
где г — радиус-вектор, проведенный из точки О в точку А при-
приложения силы F .
\MO(F)
ВЛ
Рис. 8.17
189
Модуль вектора M0{F) равен произведению модуля силы
F на расстояние h от точки О до линии действия силы, которое
называется плечом силы относительно точки О, т. е.
Нетрудно заметить, что радиус-вектор г из точки О может
быть проведен не только в точку А, но и в любую другую точку,
лежащую на линии действия силы F , так как при этом будет из-
изменяться и г, и угол а, однако \r\ sin a = h останется без изме-
изменения.
Момент силы относительно точки равен нулю, когда линия
действия силы проходит через эту точку.
Момент системы сил относительно точки
Если мы имеем систему сил F],F2,...,Fk,...,FN (рис. 8.18),
то вектор Lo, равный сумме моментов всех этих сил относитель-
относительно точки О
Fk)>
(8.8)
называется главным моментом системы сил относительно
точки О.
Рис. 8.18
Если все силы приложены в одной точке (рис. 8.19), то
190
10=?(гх^) = гх?^=гхД\ (8.9)
Ы\ k=l
Вьфажение (8.9) представляет собой векторную запись теоремы
Вариньона: момент равнодействующей относительно какой-
либо точки равен сумме моментов составляющих сил относи-
относительно той же точки.
О
Момент силы относительно оси
Моментом силыР относительно оси называется проек-
проекция векторного момента этой силы, взятого относительно любой
точки оси, на эту ось, т. е.
Mz(F) = (rxFJ. _ (8.10)
Покажем, что проекция момента силы F, взятого относи-
относительно какой-либо точки О оси Oz9 на эту ось не зависит от по-
положения точки на оси (рис. 8.20).
Равенство (8.10) можно представить в виде
Из рис. 8.20 следует, что модуль векторного произведения (кхг)
есть величина постоянная для любой точки на оси. Численно он
равен удвоенной площади треугольника с основанием к и высо-
191
той d = rsin(k , г). Сила F тоже ос-
остается постоянной, следовательно,
величина (FxFJ не зависит от по-
ложения точки О.
Моменту силы относительно оси
можно дать другое определение: мо-
моментом силы F относительно произ-
произвольной оси Oz называется момент
проекции этой силы на плоскость,
перпендикулярную оси Oz, взятый от-
относительно точки Ох пересечения оси
с плоскостью П (рис. 8.21). При этом
момент силы рассматривается как ска-
скалярная величина
= MOi(Fn), (8.11)
Рис. 8.20
для которой берется знак «+», если проекция силы на плоскость,
перпендикулярную оси, стремится вращать тело вокруг оси про-
противоположно часовой стрелки, и знак «-» в противном случае. В
формуле (8.11) Mq^(Fyi) = ± Fjjh есть алгебраический момент
силы Fjj относительно точки О[.
Рис. 8.21
192
Покажем, что моменты силы относительно оси, вычислен-
вычисленные по формулам (8.10) и (8.11), являются одинаковыми. Так как
угол а между нормалями к плоскостям ОАВ и О^^ есть угол
между этими плоскостями, то
2 пл. AO^i?! = 2 пл. АОАВ cos a.
Отсюда получаем
M2(F) = \Mo(F)\cosa.
Момент силы относительно оси равен нулю, если линия дей-
действия силы пересекает ось или сила и ось параллельны, т. е. нахо-
находятся в одной плоскости.
Пример 8.4. На консольный брус длиной / и шириной а действуют силы F
и Fx (рис. 8.22). Определить моменты этих сил относительно координатных
осей Ох, Оу, Oz.
Рис. 8.22
Решение. Линия действия силы F пересекает ось Оу, поэтому My(F) = 0.
Чтобы вычислить моменты силы F относительно осей Ох и Oz, спроецируем ее
на плоскости, перпендикулярные этим осям, т. е. на плоскости Oyz и Оху.
193
Сила F} на плоскости Oxz и Oyz проецируется в натуральную величину.
С учетом правила определения момента силы относительно оси получаем
Моменты силы относительно осей декартовой
системы координат
Момент MO(F) относительно начала координат (см. (8.7))
можно представить в виде
= Mx(F)i+My(F)]
X
Fr
F F
Раскрывая определитель по элементам верхней строки, получаем
в виде множителей при /', у, к проекции момента MO(F) на
оси координат, равные моментам силы относительно осей:
= zFx-xFz;
(8.12)
Таким образом, чтобы вычислить моменты силы F относи-
относительно осей координат, надо знать координаты х, у, z точки при-
приложения силы и проекции самой силы на эти оси Fx9 Fy9 Fz
(рис. 8.23).
Пример 8.5. К торцу горизонтального Г-образного бруса в точке А приложе-
приложена сила F (рис. 8.24). Определить моменты силы F относительно осей коор-
координат с началом в центре заделки.
Решение. Вычислим координаты точки приложения силы:
х = 12+Ь, y = li+b, z = a.
Определим проекции силы F на оси координат
Fx=0, Fy =-Fcosa, Fz=-Fsina.
Согласно формулам (8.12), находим
MX(F) = -(/, + b)Fsina + aFcosa ,
194
Рис. 8.23
Рис. 8.24
195
8.5. Сложение параллельных сил. Пара сил
Параллельные силы, направленные в одну сторону
Пусть к твердому телу в точках Аи В приложены две парал-
параллельные силы Fx и F2 (рис. 8.25). Приложим в этих точках на
прямой АВ равные по величине и противоположно направленные
силы Тх и Т2. Заменим силы Fx, Тх и F2, T2 равнодействующи-
равнодействующими Rx и R2, которые перенесем в точку D пересечения их линий
действия. Теперь разложим Rx и R2 на две составляющие по на-
направлениям действия сил Fx, F2 и прямой, параллельной АВ.
Получим составляющие силы, соответствующие силам, прило-
приложенным в точках АиВ9т. е.
F{=FX\ TX'=TX; F2' = F2; F2' = f2.
Рис. 8.25
Отбросив систему сил (Тх 9Т2)9 эквивалентную нулю, полу-
получим две силы Fx и F2 , действующие вдоль прямой DC парал-
параллельно направлению заданных сил Fx и F2. Равнодействующая
таких сил
196
R*=Fl+F2.
Из подобия треугольников KED и DAC, а также MDL и BDC на-
находим
ВС _ Т{
dc f; ' dc f{ '
Разделив левые и правые части этих соотношений друг на друга,
получаем
AC F2 AC ВС АВ /в1_
= — или = = —. (8.13)
ВС Fx F2 F} R*
Таким образом, две параллельные силы, направленные в одну
сторону, имеют равнодействующую силу, параллельную им,
равную по модулю сумме их модулей и направленную в ту э/се
сторону. Линия действия равнодействующей сипы расположена
меэюду линиями действия заданных сил и делит отрезок прямой
меэюду линиями действия этих сил на части, обратно пропор-
пропорциональные модулям сил, внутренним образом.
Если две параллельные силы, направленные в одну сторону,
можно заменить одной силой, то и любую силу можно разложить
на две параллельные силы, направленные в ту же сторону.
Неравные параллельные силы, направленные
в противоположные стороны
Пусть сила F} больше силы F2 (рис. 8.26). Разложим силу
F, на две параллельные силы R * и F[, направленные в одну сто-
сторону, причем силу F[, равную по модулю силе F2, приложим к
точке В. Тогда F} = R * + F2, откуда R * = F} - F2 и R* = Fx - F2.
Точку С приложения силы R* определим из соотношений
(8.13), где за равнодействующую для сил R* и F2 следует при-
принять силу F}. В результате получаем
АС АВ _ ВС
Таким образом, две неравные параллельные силы, направ-
направленные в противоположные стороны, имеют равнодействую-
197
щую силу у равную по модулю разности модулей сил, параллель-
параллельную им и направленную в сторону большей силы. Линия дейст-
действия равнодействующей силы располосмсена за линией действия
большей из них и делит отрезок прямой между линиями дей-
действия заданных сил на части, обратно пропорциональные мо-
модулям сил, внешним образом.
Г
В
Рис. 8.26
Пара сил. Момент пары сил
Парой сил, приложенной к твердому телу, называется
система двух равных по модулю параллельных сил, направленных
в противоположные стороны (рис. 8.27). Сумма сил пары равна
нулю, но пара сил не уравновешена. Кратчайшее расстояние ме-
между линиями действия сил пары называется плечом пары сил.
Плоскость, в которой действуют силы пары, называется плоско-
плоскостью действия пары сил. Совокупность нескольких пар сил,
действующих на тело, называется системой пар сил.
Пара сил не приводится к равнодействующей. Докажем это
от противного. Пусть пара сил (F , F') имеет равнодействую-
равнодействующую R *, не параллельную силам пары (рис. 8.28). Тогда, приба-
прибавив к паре сил (F ,F') силу /?', противоположную равнодейст-
равнодействующей R *, мы получим уравновешенную систему трех сил (F ,
F', Л'). Но этого не может быть, так как линии действия сил F ,
198
Ff, R* не проходят через одну точку и, следовательно, не вы-
выполняется необходимое условие равновесия. Можно показать,
что пара сил не может иметь равнодействующей, параллельной
силам пары, так как не выполняется условие для точки приложе-
приложения равнодействующей.
Рис. 8.27
Рис. 8.28
Действие пары сил на тело характеризуется моментом пары
, F'), равным ±Fd. (На рис. 8.27 M(F, F') = Fd.)
Теорема о переносе пары в плоскости ее действия. Не из-
изменяя действия пары сил на тело, ее молено переносить куда
угодно в плоскости действия, изменять силы и плечо, сохраняя
неизменными модуль и направление момента пары сил.
Доказательство. Пусть на твердое тело действует пара сил
(F]9F2) с моментом M = -Fd (F}=F2=F) (рис. 8.29). Перене-
Перенесем F, в точку О,, a F2 в точку О2 и проведем через точки Ох и
О2 две параллельные прямые, пересекающие линии действия сил
пары и лежащие, следовательно, в плоскости ее действия. Соеди-
Соединив прямой точки О} и О2, разложим F} и F2 по правилу парал-
параллелограмма, как показано на рис. 8.29. Так как F} и F2 образуют
пару сил, то Fx = -F2 и, следовательно,
_ _
Поскольку (F}*9 F2 )<х>0, то эту систему двух сил можно от-
отбросить. Остается пара сил (F/, F2). Покажем, что моменты
199
исходной пары (/**,, F2) и образованной после переноса пары
(F{, F[) одинаковы. Направление вращения у них одно и то же.
Имеем
М = M(FX, F2) = -2 пл.
Af' = М(^', ^f) = -2 пл. ,2
Но площади ЬОхОгА и АОХО2В равны, так как эти тре-
треугольники имеют общее основание ОХО2 и равные высоты. Та-
Таким образом, теорема доказана.
Рис. 8.29
Действие пары сил на тело характеризуется не только моду-
модулем, но и положением плоскости действия пары в пространстве и
направлением, в котором она стремится вращать тело. Поэтому
момент пары сил можно рассматривать как вектор.
200
Векторный момент пары сил есть вектор М = M(F,F'),
перпендикулярный плоскости действия пары, направленный в ту
сторону, откуда видно, что пара сил стремится повернуть тело
против направления вращения часовой стрелки, и численно рав-
равный произведению модуля одной из сил пары на ее плечо.
Остается выяснить вопрос о точке приложения этого вектора.
Определим векторный момент пары сил относительно про-
произвольной точки О (рис. 8.30)
rA xF'.
Таккак F' = -F и гв -гА = ЛЯ,то
F l'). (8.14)
Рис. 8.Э0
Таким образом, векторный момент пары сил равен вектор-
векторному моменту одной из ее сил относительно точки приложения
другой силы или сумме векторных моментов ее сил относитель-
относительно произвольной точки О.
Так как выбор точки О произволен, то вектор М можно
считать приложенным в любой точке тела, т. е. этот вектор сво-
свободный. Поэтому пару сил можно переносить куда угодно в
плоскости и в параллельную плоскость, изменяя модуль силы и
плечо пары, но сохраняя при этом неизменными модуль момен-
момента пары и направление, в котором она стремится вращать твер-
твердое тело.
201
Две пары сил, имеющие одинаковые векторные моменты, эк-
эквивалентны независимо от того, где каждая из них расположена
(на одной плоскости или в параллельных плоскостях) и чему рав-
равны модули сил и плечи пар.
Если пары расположены в одной плоскости, то их векторные
моменты будут направлены перпендикулярно этой плоскости в ту
или иную сторону в зависимости от направления, в котором пара
стремится вращать тело. Поэтому в данном случае моменты пар
можно различать по модулю и знаку, т. е. можно рассматривать
как алгебраические величины. Условимся, придерживаясь правой
системы координат, считать момент пары сил положительным,
если она стремится вращать тело против направления движения
часовой стрелки, и отрицательным при противоположном на-
направлении вращения. Тогда для плоской системы пар сил
и
4-1 Ы\
Теорема о сложении пар сил. Вся совокупность пар сил,
действующих на тело, эквивалентна одной паре сил, векторный
момент которой равен сумме векторных моментов всех пар сил.
Доказательство. Если на тело действует несколько пар сил,
расположенных произвольным образом, то для их сложения и
приведения к одной паре сил можно применить выражение (8.14).
В самом деле, если векторные моменты пар сил равны Мх,
М2,..., Mk9...9MN, то сумма моментов всех сил, образующих
эти пары, относительно какой-либо точки О равна
kBkxFk=?Mk. (8.15)
к=\ к=\
Формула (8.15) выражает теорему о сложении пар сил.
На основании формулы (8.15) можно сформулировать усло-
условие равновесия системы пар сил, действующих на твердое тело.
При равновесии
М = ?л/,=0. (8.16)
к=\
202
Пример 8.6. На твердое тело, имеющее форму куба (рис. 8.31), по трем
его граням действуют пары сил F], F{ ; F2, F2 и F3, F3. Модули момен-
моментов пар А/, = 60Нм, М2=20Нм, М3 =20Нм. Найти результирующую
пару сил.
Рис. 8.Э1
Решение. В некоторой точке А построим векторы моментов пар сил А/,,
А72, А/3. Поскольку эти векторы взаимно перпендикулярны, то модуль резуль-
результирующей пары сил
М = >/л/,2+Л/22+Л/32 =>/б02+202+202 =20VTT Нм.
Направление вектора М определяется косинусами углов между векторами
A/j, М2, Мг и М :
cos(M,?F4 Mx 3
1
cos(M2?a7) = ^
л/
cos(A/^, М) = —- = -р=г
3 М ^
203
8.6. Приведение системы сил к простейшей системе
Теорема о параллельном переносе силы
Теорема. Сипу, приложенную к твердому телу, можно, не
изменяя ее действия, перенести параллельно самой себе в любую
точку тела, прибавляя при этом пару с моментом, равным мо-
моменту переносимой силы относительно точки, в которую она
переносится.
Доказательство. Пусть в точке А на тело действует сила F
(рис. 8.32, а). Приложив в точке Я, куда переносится сила F из
точки А, эквивалентную нулю систему сил F' = -F" = F
(рис. 8.32, б), получаем силу F', приложенную в точке В, и пару
сил (F , F"), векторный момент которой М= ВАх F = Мв (F),
что и требовалось доказать. На основании этой теоремы можно
любую систему сил, действующих на твердое тело, перенести в
одну точку и заменить одной силой и парой сил (рис. 8.32, в).
Рис. 8.32
Приведение системы сил к заданному центру
Точку, к которой приводят систему сил, называют центром
приведения данной системы сил.
Теорема. Произвольную систему сил, действующих на твер-
твердое тело, молено привести к какому-либо центру, заменив все
действующие силы одной силой, равной главному вектору систе-
системы сил, приложенному в этом центре, и одной парой сил с мо-
моментом, равным главному моменту системы сил относительно
того же центра.
204
Пусть на твердое тело (рис. 8.33, а) действует произволь-
произвольная система сил (Fx,F29...9Fk9...9FN). Возьмем какую-либо
точку О за центр приведения и, пользуясь теоремой о парал-
параллельном переносе силы, перенесем все силы в эту точку, при-
присоединяя при этом соответствующие пары. На тело теперь дей-
действует система сил (Fx\F{9...9Fk9...9F^)9 приложенных в
точке О9 и система пар сил, векторные моменты которых
М0(Ц)9 Mo(F2)9...9Mo(Fk)9...9Mo(FN). При этом F^Fk9
где ? = 1,2,...,JV.
Рис. 8.33
Силы, приложенные в точке О, заменяются одной силой R *,
которая равна главному вектору системы сил
(8.17)
k=\
Систему пар сил можно заменить одной парой, момент ко-
которой
к=\
(8.18)
205
равен главному моменту системы сил относительно центра
приведения (рис. 8.33, б), т. е. М = LO.
Заметим, что главный вектор системы сил не зависит от вы-
выбора центра приведения. Он вычисляется по такой же формуле,
что и равнодействующая, но при этом не эквивалентен данной
системе сил.
На основании доказанной теоремы можно сформулировать
условие эквивалентности системы сил: две системы сил, прило-
приложенных к твердому телу, эквивалентны, если они имеют одина-
одинаковые главные векторы и главные моменты относительно одно-
одного и того же центра.
В противоположность главному вектору главный момент
системы сил зависит от выбора центра приведения.
Теорема Вариньона о моменте равнодействующей
Теорема. Если данная система сил имеет равнодействую-
равнодействующую, то момент равнодействующей относительно любой точки
О равен сумме моментов сил системы относительно той лее
точки*.
Доказательство. Пусть некоторая система сил (F} F2,...,
— — — N —
Fk,...,FN) имеет равнодействующую R* = J]Fk, приложенную
в точке А (рис. 8.34). Перенесем R * в
произвольную точку О — центр при-
приведения — параллельно себе. При
этом добавится пара сил (/?*, R") с
моментом М = Мо (/?*). Кроме того,
М есть главный момент системы сил
относительно центра О9 равный сумме
моментов всех сил относительно этого
центра, т. е.
Рис. 8.34
* П. Вариньон A654-1722) — выдающийся французский математик и механик.
206
Сравнивая между собой полученные выражения для М, по-
получаем математическую запись теоремы Вариньона
Проецируя векторы, входящие в обе части этого равенства,
на любую ось, проходящую через центр О, находим, что теорема
Вариньона справедлива и для моментов относительно оси.
Реакция заделки
Связь, которая запрещает как линейные, так и угловые пере-
перемещения твердого тела, называется заделкой.
При приведении сил реакции заделки к точке А (рис. 8.35) на
основании теоремы о приведении системы сил к заданному центру
получим силу RA и пару сил с моментом МА . Модуль силы и мо-
момент пары сил в заделке могут быть определены из условий равно-
равновесия твердого тела, к которому они приложены. Например, для
балки, показанной на рис. 8.35 (плоская система сил), будем иметь
сю-ЕЕ
Рис. 8.35
Соотношение между главными моментами системы сил
относительно двух центров приведения
Допустим, что при приведении системы сил к центру О по-
получили главный вектор R и главный момент Lo. Найдем выра-
выражение главного момента Lo той же системы сил относительно
нового центра Ох (рис. 8.36)
207
Рис. 8.36
Из векторного треугольника ОкО} находим
с/| к I О к
Тогда
к=\
к=\
к=\
Окончательно получаем
i (8.19)
Таким образом, главный момент системы сил относительно
второго центра приведения О, равен сумме главного момента
системы сил относительно первого центра приведения О и век-
векторного момента главного вектора, приложенного в первом
центре приведения, относительно второго.
Инварианты системы сил
Инвариантами системы сил называются скалярные или
векторные величины, не зависящие от выбора центра приведения.
208
Первый инвариант — главный вектор системы сил. Для лю-
бого центра приведения R = ^ Fk .
Второй инвариант — скалярное произведение главного век-
вектора на главный момент системы сил. Для доказательства этого
утверждения умножим равенство (8.19) скалярно на главный век-
вектор R :
LO] R=LOR + (О^Ох R)R .
Поскольку (О,О х R) • R = 0, то LOiR = L0R .
Частные случаи приведения пространственной
системы сил к простейшему виду
Покажем, к какому простейшему виду можно привести про-
пространственную систему сил, не находящихся в равновесии.
В общем случае любая система сил эквивалентна силе, рав-
равной главному вектору R, и паре сил, момент М которой равен
главному моменту Lo относительно центра приведения О:
Частные случаи дальнейшего упрощения можно получить из
анализа второго инварианта системы сил. Допустим, что второй ин-
инвариант системы сил LOR = 0, тогда возможны следующие случаи.
1. Если для данной системы сил Lo = 0, a R ф 0, то система
сил приводится к равнодействующей R *, равной R и проходя-
проходящей через точку О.
2. Если R =0, a Lo *0, то система сил приводится к паре
сил с моментом М = LO, который на основании (8.19) не зависит
от выбора центра О.
3. Если R *0, Lo *0, но Lo ±R , то заданная система сил
приводится к равнодействующей R *, равной R , но проходящей
не через точку О, а через точку О], отстоящую от точки О на рас-
расстоянии
15 3ак.1б 209
R
(8.20)
Действительно, главный вектор R и пара сил с моментом Lo
лежат в одной плоскости. Представим момент пары сил в виде
произведения Lo = R'd и расположим пару (R\R*) так, как пока-
показано на рис. 8.37, причем выберем |Л'|= R* = R\. В результате
силы R и R' уравновесятся, а система сил будет эквивалентна
одной равнодействующей R *, проходящей через точку Ох.
Рис. 8.37
Теперь рассмотрим систему сил, для которой второй инва-
инвариант L0R *0. В простейшем виде такую систему можно пред-
представить совокупностью векторов Lo и R, расположенных на
одной линии и называемых динамическим винтом (рис. 8.38).
К одной силе (или одной паре сил) данную систему сил привес-
привести нельзя.
Докажем, что если LoR*09 причем в общем случае вектор
Lo не параллелен вектору R , то система сил приводится к дина-
динамическому винту. Разложим Lo на две составляющие: Lx, на-
210
правленную вдоль R, и ?2, перпендикулярную R (рис. 8.39).
Вектор L2 представим в виде пары сил R', R\ равных по мо-
модулю силе R , как это показано для вектора Lo на рис. 8.37, т. е.
L2 = R'd. Силы R и R" взаимно уравновешиваются, а вектор I,
как свободный перенесем в точку О,. В результате имеем дина-
динамический винт R\ Lx, проходящий не через точку О, а через точ-
точку Ох. Прямая, вдоль которой (через точку О,) направлен вектор
R', называется осью динамического винта.
Рис. 8.38
Рис. 8.39
15*
211
Пример 8.7. На твердое тело, выполненное в виде куба с длиной ребра а
(рис. 8.40), действует система, состоящая из девяти равных по модулю сил Fk
(к = 1,..., 9). Привести систему сил к вершине куба — точке О и упростить ее.
Рис. 8.40
Решение. Построим систему координат с началом в точке О и определим
проекции на оси координат главного вектора R и главного момента Lo :
к=9 к=9 Ы9
Y Z Х
к=9
к=\
к=9
А=9
*=1
Найдем модули главного вектора и главного момента
Второй инвариант системы сил
L0R = LXRX + LyRy + LZRZ = 6F2a .
212
Так как L0R*Q, то система сил приводится к динамическому винту. Мо-
Модуль момента динамического винта L, определим исходя из того, что
где L, направлен по R , a L2±R .
Следовательно,
R
Параметры динамического винта
Глава 9
РАВНОВЕСИЕ ТЕЛ
9.1. Условия равновесия системы сил
Условия равновесия произвольной пространственной
системы сил
Произвольная система сил, приложенных к твердому телу,
эквивалентна силе, равной главному вектору R, и паре сил с мо-
моментом, равным главному моменту Lo относительно какого-либо
центра О. Чтобы такая система находилась в равновесии, необхо-
необходимо и достаточно равенство нулю и главного вектора R, и
главного момента Lo. Поэтому условия равновесия пространст-
пространственной системы сил могут быть представлены в векторной форме
Z^?Mo(F,) = 0. (9.1)
Два векторных условия (9.1) эквивалентны следующим шес-
шести аналитическим условиям равновесия:
R* =Z/r*« =0' Ry =IX =0' Rz = IX =0;
*=1 *=1 *=1
Lx =2Х(/?,) = 0; Ly =?My(Fk) = 0; (9.2)
к=\ к=\
к=\
Условия равновесия (9.2) можно сформулировать так: для
равновесия произвольной системы сип, приложенных к твердому
214
телу, необходимо и достаточно, чтобы суммы проекций всех сил
на оси декартовой системы координат равнялись нулю и суммы
моментов всех сил относительно этих осей также равнялись
нулю.
Пример 9.1. На балку ABCD, заделанную одним концом, в сечениях (точках)
В и D действуют силы F, и F2 и пары сил с моментами Мв = 2Fa и МD = Fa
(рис. 9.1, а). Определить реакцию заделки, приняв F, = F, F2 = 2F .
Решение. Действие заделки на балку заменим силой RA и парой сил с мо-
моментом МА , направления которых неизвестны. Представим их в виде трех со-
составляющих, направленных по координатным осям. На рис. 9.1,5 изображена
освобожденная от связи балка, моменты Мв и Мо показаны в виде векторов,
сила RA представлена составляющими X А, YA, ZA , момент МА в виде трех
составляющих МАх, МАу, МАг. Балка находится в равновесии.
Составим условия равновесия в аналитической форме
k=\ k=\ k=\
YdMix = MB-2Fa + MAx=0;YlMt?
k=\ k=\
k=\
Учитывая, что Мв = 2Fa и МD = Fa, находим
ХАш0, YA=F, ZA=2F;
MAx=0, MAy=-3Fa, MAt=2Fa. .
Из полученных данных следует, что действительное направление МАу про-
противоположно изображенному на рис. 9.1, б.
Условия равновесия пространственной системы
параллельных сил
Если силы, действующие на твердое тело, параллельны меж-
между собой, то можно выбрать такую систему координат, когда од-
одна из ее осей, например Oz, параллельна направлению действия
сил (рис. 9.2). Тогда из шести аналитических условий равновесия
три выполняются тождественно, и система параллельных сил бу-
будет иметь только три условия равновесия:
215
216
N
к=\
N
к=\
(9.3)
к=\
Рис. 9.2
Условия равновесия плоской системы сил
Для плоской системы сил условия равновесия будут частным
случаем уравнений (9.2), определяющих условия равновесия про-
пространственной системы сил. Например, если силы расположены в
плоскости Оху, то аналитические условия равновесия можно за-
записать в виде
*, =1Х =0; Л, =|Х =0; Lo «? Mo(Fk) = Q. (9.4)
Ы\ Ы\ k=\
Для равновесия произвольной плоской системы сил необхо-
необходимо и достаточно, чтобы суммы проекций всех сил на каждую
из двух координатных осей и сумма алгебраических моментов
этих сил относительно любого центра О были равны нулю.
Алгебраическим моментом силы относительно точки назы-
называют момент силы относительно оси, проходящей через данную
точку перпендикулярно плоскости, в которой расположена сила и
точка (см. (8.11)).
Вместо (9.2) иногда удобно применить условия равновесия
в виде уравнений трех моментов: для равновесия произвольной
плоской системы сил необходимо и достаточно, чтобы суммы
14 Зак. 16
217
алгебраических моментов всех этих сил относительно любых
трех центров А, В, С, не лежащих на одной прямой, были равны
нулю:
fX(F,) = O; fX(FA) = O; ?мг(/;) = 0. (9.5)
k=\ k=\ *=1
Необходимость утверждения следует из того, что третье ус-
условие (9.4) справедливо для любой точки. Достаточность дока-
докажем методом от противного, используя теорему о приведении
произвольной системы сил к центру. Допустим, что плоская
система сил не находится в равновесии. Тогда, приводя ее пооче-
поочередно к точкам А, В, С, будем иметь в этих точках равнодейст-
равнодействующую R*. Для выполнения равенств (9.5) равнодействующая
должна пройти одновременно через все три точки, а это невоз-
невозможно, так как точки не лежат на одной прямой. Следовательно,
равнодействующая равна нулю и система сил, удовлетворяющая
равенствам (9.5), находится в равновесии.
Пример 9.2. Составить условия равновесия для плоской системы сил, при-
приложенных к балке (рис. 9.3).
Рис. 9.3
Решение. На основании уравнений (9.4) имеем
= 0; Ry
= YA-F2sma + YB-^ =0;
lc=\
или, согласно уравнениям (9.5),
218
1-Fx3l = 0;
-^2/ + F2/since - Fxl = 0;
= 0.
Пример 9.3. Однородная прямоугольная рама (рис. 9.4) весом Рх = 400 Н,
прикрепленная к стене с помощью сферического шарнира в точке А и петли в
точке В, удерживается в горизонтальном положении тросом СК. К раме в точке Е
подвешен груз весом Р = 50 Н . Определить натяжение троса СК9 а также реак-
реакции сферического шарнира и петли, если a = 60°, Р = 60°, СЕ-DE и ВС = /.
Решение. Условия равновесия рамы, согласно уравнениям (9.2), имеют сле-
следующий вид:
N
Д, = ]Tf*x = Хл - 7] cosacosP = 0;
k=\
N
Ry = y?iFky = 1^ + У5 -7JcosasinP = 0;
- ТхШа-Р±1-Тг1 = 0;
Ly
где /, = ^5; T2 = P.
Из уравнений находим
^= 72,17H; У^
YB = 0; ZB=-25U; 7; = 288,7H.
Пример 9.4. Ворот 7 (рис. 9.5, a\ предназначенный для подъема груза 2 ве-
весом Р, удерживается в равновесии вертикальной силой F, приложенной в точ-
точке С к горизонтальному рычагу CD. Определить реакции связей, а также модуль
силы F, если Р = 2кН; вес барабана /} = 0,08 кН; г = 0,1м; /!=/2=/3 =
= 0,3 м; /4 = 0,8 м . Угол а между наклонным участком троса и горизонтом
равен 30°, а ZCDB = 90°.
219
OS
го
б
Рис. 9.5
Решение. Рассмотрим условия равновесия ворота. Освободив его от связей
(подпятника Л, подшипника В) и отсоединив трос с грузом 2 от барабана 3 в
точке схода троса с барабана, получим расчетную схему (рис. 9.5, б). Запишем
уравнения равновесия:
Л,
; Ry
, = YA =0;
k=\
k=\
k=\
N
*=1
221
Сила Т натяжения троса равна (по модулю) весу Р груза 2. Из составленных
уравнений находим проекции на оси декартовой системы координат реакций
подшипников и модуль силы F :
; YA=0; Z^
; ZB =-0,085кН ; F = 0,25kH.
9.2. Равновесие системы тел
На практике во многих случаях приходится проводить ста-
статический расчет конструкций, состоящих из системы твердых
тел, соединенных связями. Связи, соединяющие части данной
системы тел, будем называть внутренними в отличие от внеш-
внешних связей, скрепляющих конструкцию с телами, в нее не вхо-
входящими.
Если внешние связи заменить силами, то условий равновесия
(9.2) будет недостаточно для их определения. Существуют два
метода решения.
1. Составляют, пользуясь свойствами внутренних связей, до-
дополнительные условия равновесия, из которых определяют неиз-
неизвестные реакции. Например, для плоской трехшарнирной арки,
показанной на рис. 9.6, а, четвертым уравнением будет равенство
нулю суммы моментов относительно шарнира С всех сил, дейст-
действующих на какую-либо одну половину арки. Тогда
ы\
Из этих четырех уравнений определяют неизвестные ХА, YA,
222
2. Мысленно расчленяют конструкцию на отдельные части,
заменяя внутренние связи силами. Поскольку все части конст-
конструкции находятся в равновесии, то для любой из них можно со-
составить условия равновесия и определить неизвестные реакции
связей.
Такое расчленение трехшарнирной арки показано на
рис. 9.6, б. На основании закона действия и противодействия
реакции связей в шарнире С попарно равны по модулю и проти-
223
воположны по направлению, т. е. Х'с = -Хс, Yc'- = -Yc . Для каж-
каждой половины арки (плоская система сил) имеем три независи-
независимых условия равновесия (всего их шесть), из которых находим
неизвестные ХА, YA, XH9 Ye, Xc, Yc.
Метод, связанный с расчленением системы на части, приме-
применяют, когда нужно определить силы во внутренних связях.
Пример 9.5. Две горизонтальные балки АС и DE длинами 21 и / соответст-
соответственно в точках А и Е прикреплены к неподвижному основанию цилиндриче-
цилиндрическими шарнирами (рис. 9.7). Концы балок С и D с помощью цилиндрических
шарниров соединены балкой СД длина которой /. Все три балки находятся в
одной плоскости, внешние силы приложены к серединам балок. Определить
реакции опор.
F
Рис. 9.7
Решение. Для трех тел можно написать девять независимых условий равно-
равновесия и найти все неизвестные. Поступим иначе, т. е. составим три условия рав-
равновесия для всей системы и два дополнительных условия: сумма моментов всех
сил, действующих на балку D?, относительно точки D равна нулю и сумма мо-
моментов всех сил, действующих на систему, состоящую из двух балок CD и DE,
относительно точки С также равна нулю. Получим пять уравнений для опреде-
определения пяти неизвестных:
А=1
224
f,MA(Fk) = /(-0,5P, + YB -\5Рг - 2P3 - 2,5РЛ -0.5F &YE + XE) = 0 ;
Приняв PlS=i>2=P3=P4=F = P, находим Л^ОДР; У,—1,5/>; ^=
9.3. Определение внутренних сил
Внутренними называются силы, с которыми одна часть тела
в каком-либо сечении действует на другую его часть. Внутренние
силы приходится определять, например, при расчетах на проч-
прочность. На основании закона действия и противодействия внут-
внутренние силы всегда попарно равны по модулю и противоположны
по направлению. Если левая часть тела действует на его правую
часть силой F 9 то, в свою очередь, правая часть действует на
левую силой - F.
Метод определения внутренних сил в телах аналогичен ме-
методу определения неизвестных реакций связей. Рассмотрим его
на примере балки (рис. 9.8, а). Балка АВ заделана левым концом и
нагружена силами Fx, F2 и парой сил с моментом Мв. Все силы
находятся в одной плоскости. Определить внутренние силы в по-
поперечном сечении С балки, находящемся от заделки на расстоя-
расстоянии ах.
Определим реакции связи в сечении .4:
Мысленно рассечем балку на две части и действие одной
части на другую заменим силами. Так как направления и модули
сил в поперечном сечении С неизвестны, то их можно предста-
представить в виде произвольно направленных векторов Rq и Мс . Для
рассматриваемой плоской системы сил
Re =XC+YC; Mc = MCz.
225
yi
Гл.
«A
a,
h
С
мв
а
м
На рис. 9.8, б изображены две части балки с действующими
на них силами. Согласно закону действия и противодействия, си-
силы, приложенные в сечении С к одной части балки, равны по мо-
модулю и противоположны по направлению силам, приложенным в
том же сечении к другой части балки. Теперь для любой части
балки можно написать уравнения равновесия и определить неиз-
неизвестные внутренние силы ХС9 Yc и момент MCz в сечении С.
Например, из условий равновесия правой части балки получим
Хс =0; Гс =FX -F2; МСг =МВ +Fta2 -F2(l2 -я,)-
Таким образом, в сечении С действует поперечная сила Yc и
изгибающий момент MCz. Аналогично можно найти ХС9 Yc,
MCz, рассматривая левую часть балки.
В данном примере на правом конце балки нет неизвестных
реакций. Поэтому внутренние силы в поперечном сечении С
можно найти и без предварительного определения реакций связи
в заделке.
226
9.4. Статически определимые и статически
неопределимые системы
При решении задач статики реакции связей являются неиз-
неизвестными и их определяют из уравнений равновесия. Бели число
неизвестных составляющих реакций связей равно числу незави-
независимых уравнений равновесия, то рассматриваемая система на-
называется статически определимой. Системы, в которых число
неизвестных составляющих реакций связей больше числа урав-
уравнений равновесия, называются статически неопределимыми.
На рис. 9.9, а, в показаны статически определимые, а на
рис. 9.9, б, г — статически неопределимые системы, поскольку в
последних число неизвестных составляющих реакций больше
числа уравнений равновесия. Связи, реакции которых не могут
быть определены с помощью уравнений равновесия, условно на-
называют лишними, хотя для прочности конструкции они необхо-
необходимы. Например, если двух крайних тросов недостаточно, чтобы
удержать груз, устанавливают третий трос, который обеспечивает
надежную подвеску груза.
а
г I'
Рис. 9.9
227
В инженерной практике нередко приходится встречаться со
статически неопределимыми системами. Определить реакции в
них методами, изложенными в этом разделе для абсолютно твер-
твердого тела, невозможно. Для решения статически неопределимых
задач необходимо считать тела деформируемыми и дополнитель-
дополнительно составлять уравнения деформаций, известные из курса сопро-
сопротивления материалов.
9.5. Расчет плоских ферм
Фермой называется жесткая конструкция, состоящая из пря-
прямолинейных стержней, соединенных на концах шарнирами. Мес-
Места соединения концов стержней называют узлами. Все внешние
силы, действующие на ферму, прикладываются только в узлах.
Силами тр#ения в узлах пренебрегают; веса стержней или не учи-
учитывают, если они малы по сравнению с действующими внешни-
внешними силами, или их распределяют по узлам. Таким образом, внеш-
внешние силы, приложенные в узлах фермы, будут вызывать сжатие
или растяжение стержней. Как правило, фермы являются стати-
статически определимыми.
Расчет фермы сводится к определению опорных реакций
связей и сил в ее стержнях. Метод решения основан на рассмот-
рассмотрении условий равновесия систем сил.
Разберем его на примере фермы, представленной на
рис. 9.10, а. Из условий равновесия найдем реакции X А, YA, YB
опор. Далее воспользуемся методом вырезания узлов. Узлы бу-
будем вырезать в такой последовательности, чтобы в каждом из них
было не более двух неизвестных сил, поскольку для системы
сходящихся в узле сил можно составить только два аналитиче-
аналитических условия равновесия. Для рассматриваемой фермы последо-
последовательность вырезания узлов может быть следующей: /, ///, //, IV,
V, VI, VII или VIII, VII, VI,IV, V, III, IL Узлы вырезают мысленно,
разрезая стержни 1-13 и прикладывая силы от узла вдоль стерж-
стержня (стержень считать растянутым). На рис. 9.10, б показаны сис-
системы сил в вырезанных узлах /, ///, //. Так как X А и YA уже най-
найдены из условий равновесия фермы, то из условий равновесия
узла / определяем силы 7] и Т2, узла ///— Г3 и Т6, узла II — Т4
228
и Т5 и т. д. В результате решения получаем, что Г3=0 и Г„=0,
т. е. для рассматриваемой конструкции стержни 3 и 11 лишние,
поскольку без них ферма также сохраняет свою жесткость.
9.6. Распределенные силы
В инженерных расчетах часто приходится встречаться с сила-
силами, распределенными по поверхности или объему тела. Наиболее
распространенными из них являются силы тяжести, давление воды
или газа на какую-либо поверхность, электромагнитные силы.
При рассмотрении равновесия тел распределенные на каком-
либо участке силы заменяют их равнодействующей. Приведем
некоторые простейшие примеры распределенных сил, лежащих в
одной плоскости. В этом случае распределенные силы характери-
229
зуются интенсивностью q, т. е. силой, приходящейся на единицу
длины. Единица измерения интенсивности силы — ньютон на
MjStp (Н/м).
На рис. 9.11 изображены примеры распределенных на отрез-
отрезке ОА-а параллельных сил. Для распределенных сил, изобра-
изображенных на рис. 9.11, равнодействующая R* будет соответствен-
соответственно равна
R;=qa; Д2*=^; R;=)q(x)dx.
О
а
Линию действия равнодействующей (точку В на этой линии)
согласно теореме Вариньона находим из условия, что момент
равнодействующей относительно какой-либо точки равен сумме
моментов распределенных сил относительно той же точки. Таким
образом, получаем
= ^; 02*2=^; OB3=-L]q(x)xdx.
2 3 R* л
230
Рассмотрим систему сходящихся равномерно распределен-
распределенных по дуге окружности сил (рис. 9.12). Такие силы возникают,
например, от гидростатического давления на боковые стенки ци-
цилиндрического бака.
Рис. 9.12
Для этой системы равнодействующая сила R * направлена по
оси симметрии Ох, причем /?*=/?*.
Для определения R* выделим на дуге элемент dS-rda, по-
положение которого определяется углом а, отсчитываемым от оси
симметрии Ох. Тогда qdS-qrda, а модуль равнодействующей
будет равен сумме проекций всех элементарных сил qdS только
на ось Ох:
R* = \qr cosa da = 2qr sin a0.
-a0
Так как 2r sin a0 = h, то R* = qh.
Следовательно, равнодействующая системы сходящихся
равномерно распределенных по дуге окружности сил равна про-
произведению интенсивности сил на длину хорды, стягивающей ду-
дугу: линия действия равнодействующей перпендикулярна хорде и
проходит через ее середину.
231
Пример 9.6. Балка АС (рис. 9.13, а) жестко заделана в основание и образует
с горизонтом угол а . К ней в точке С шарнирно прикреплена горизонтальная
балка CD. которая также с помощью шарнира соединена с вертикальной балкой
BD. Определить реакцию заделки и силу в шарнире С, если АС = BD = /;
CD = 2/: BE=DE: АК = B/3I: / = 3м; ot = 60°; P = 45°; ^=10кН;
F2 = 40 кН : Л/ = 6 кН • м ; FX±AC .
Рис.9.13
Решение. Система находится в равновесии, поэтому в равновесии находится
каждая из балок. Для балки CD (рис. 9.13, б)
откуда
Гг = М/B/); Гг=1кН.
Из условий равновесия балки CD Xc найти нельзя. Поэтому рассмотрим
равновесие части CDB системы (рис. 9.13, в). Для нее
232
ЛГС =14,14 кН; Re = ^Х% + Ус2 ; i^ =14,18 кН.
Теперь можно определить реакцию заделки. Для этого составим уравнения
равновесия балки А С (рис. 9.13, г):
-y^cosa = 0.
Решив эти уравнения, найдем Хл = 5,48 кН; YA = 6 кН; МА =
= -15,24 кНм.
Пример 9.7. К кривошипу О А кулисного механизма (рис. 9.14, а) приложена
пара сил с моментом М. Определить вертикальную силу F, необходимую для
уравновешивания механизма при a = 30°, а также силу взаимодействия между
ползуном и кулисой ОХВ, если B4 = 2/; АВ = 1; / = 0,2м; А/ = 100Н-м.
Трением между ползуном и кулисой, а также в шарнирах пренебречь.
Решение. Поскольку трение между ползуном и кулисой не учитывается, то
силы взаимодействия между ними перпендикулярны кулисе. Составим уравнение
равновесия кривошипа ОА с прикрепленным к нему ползуном (рис. 9.14, б)
N _
]Г M0(Fk) = М - RA since • 2/ = 0
и вычислим
А = 2/sina ' A~
Приравнивая к нулю сумму моментов сил, приложенных к кулисе ОХВ
(рис. 9.14, в) относительно точки Ох, получаем
^М^ (Fk) = RfA4l - F • 5/sina = 0,
откуда находим
5 sin a
Пример 9.8. Трехшарнирная полукруглая арка (рис. 9.15, а) нагружена па-
парой сил с моментом М и системой сходящихся распределенных на участке сил с
постоянной интенсивностью д. Найти опорные реакции, если М = 20 кН • м ;
q = 4 кН/м; г = 1 м.
Решение. Распределенные силы заменим их равнодействующей, модуль ко-
которой R* =qBC = qrjl .
233
о
Рис. 9.14
Запишем два уравнения равновесия всей арки (рис. 9.15, б)
к=\
и найдем
Y = -/Tsin45o--— • Y =
YH = R*sin45°-YA; Yh = \2kH.
Так как из третьего уравнения равновесия всей арки П? FA х = 0 силы Л'^
и А'^ вычислить нельзя, то запишем уравнение равновесия левой половины
арки (рис. 9.15, в)
234
и определим ХА:
yi
После этого вернемся к расчетной схеме (см. рис. 9Л 5, б), для которой
N
JV,, = ХА + Хв - R* cos45° = 0.
Отсюда
R*cos45°-XA;
Глава 10
ТРЕНИЕ
10.1. Законы трения скольжения
Между движущимися телами в плоскости их соприкоснове-
соприкосновения возникает сила трения скольжения. Обусловлено это преж-
прежде всего шероховатостью соприкасающихся поверхностей и на-
наличием сцепления у прижатых тел.
В инженерных расчетах обычно пользуются установленными
опытным путем закономерностями, которые с некоторой степе-
степенью точности отражают действие силы трения. Эти закономерно-
закономерности называют законами трения скольжения. Их можно сфор-
сформулировать следующим образом.
1. При стремлении сдвинуть одно тело относительно другого в
плоскости их соприкосновения возникает сила трения F , модуль
которой может принимать любые значения от нуля до Fmax, т. е.
Сила трения приложена к телу и направлена в сторону, про-
противоположную возможному направлению скорости точки прило-
приложения силы.
2. Максимальная сила трения равна произведению коэффи-
коэффициента трения/ на силу нормального давления N:
*тах=/^ (ЮЛ)
Коэффициент трения/— безразмерная величина, зависящая
от материалов и состояния поверхностей соприкасающихся тел
(шероховатость, температура, влажность и т. п.). Определяют его
опытным путем.
Различают коэффициенты трения покоя и трения скольже-
скольжения, причем последний, как правило, зависит и от скорости
236
скольжения. Коэффициент трения покоя соответствует такой
максимальной силе трения Fmax, при которой имеется предель-
предельное состояние равновесия. Малейшее увеличение внешних сил
может вызвать движение. Коэффициент трения покоя, как прави-
правило, немного больше коэффициента трения скольжения. С увели-
увеличением скорости скольжения значение коэффициента трения
скольжения сначала незначительно уменьшается, а затем остается
практически неизменным. Значения коэффициентов трения для
некоторых пар трения следующие: дерево по дереву 0,4-0,7; ме-
металл по металлу 0,15-0,25; сталь по льду 0,027.
3. Максимальная сила трения в довольно широких пределах
не зависит от площади соприкасающихся поверхностей.
Силу трения скольжения иногда называют силой сухого
трения.
10.2. Реакция шероховатой поверхности. Угол трения
Реакция идеально гладкой поверхности, как уже говорилось
выше, направлена по нормали к поверхности. На шероховатой
поверхности могут возникать силы трения скольжения. Поэтому
реакцию шероховатой поверхности представим в виде двух со-
составляющих: нормальной реакции N (равна по модулю силе нор-
нормального давления) и перпендикулярной ей силы трения F
(рис. 10.1). Полная реакция R=N + F всегда отклонена от норма-
нормали к поверхности на некоторый угол а. На рис. 10.1 видно, что
tgoc = F/N.
Если тело лежит на горизонтальной шероховатой поверхности
и на него не действуют никакие внешние силы, кроме силы тяже-
тяжести, то F = 0, а полная реакция
R = N и перпендикулярна опор-
ной поверхности. Приложив к
телу силу Fx, мы стремимся вы-
звать его движение, но оно не
происходит, так как возникает
сила трения F = -is, причем
. С увеличением силы
237
Fx будет возрастать и сила F . Наконец, при F{ = F^ наступит
предельное состояние равновесия, при котором полная реакция
R отклонится от вертикали на угол а^, называемый углом
трения. Обозначив его через <р, получим
Г. A0.2)
N
Тангенс угла трения равняется коэффициенту трения. Пол-
Полная реакция неидеальной связи при равновесии имеет направле-
направление в пределах угла трения.
10.3* Реакция связи при качении
Абсолютно твердых тел, как и абсолютно гладких поверхно-
поверхностей, в природе не существует. Поэтому круглое тело (цилиндр,
колесо), деформируясь, вдавливается в опорную поверхность.
При качении цилиндр вдавливается в опорную плоскость и кон-
контактирует с ней по некоторой поверхности, которая в плоскости
рисунка образует дугу СД сдвинутую относительно вертикаль-
вертикального диаметра цилиндра в направлении качения (рис. 10.2, а).
Полная реакция R опорной поверхности на цилиндр как сумма
системы распределенных сил, вызванных деформацией поверх-
поверхности, препятствует качению последнего. Это сопротивление,
возникающее при качении одного тела по поверхности другого,
условно называют трением качения.
со
оо4—Ц
238
Определение значений и направлений распределенных сил
представляет сложную задачу механики деформируемого твердого
тела. В инженерных расчетах нас интересует момент сопротивле-
сопротивления качению (рис. 10.2, б). Схематизируя явление, будем рассмат-
рассматривать качение по недеформируемой поверхности, а полную реак-
реакцию R (см. рис. 10.2, а) представлять в виде двух составляющих,
приложенных в точке В, смещенной от точки А в сторону возмож-
возможного качения на некоторую величину 6 (рис. 10.2, в). Сила F —
сила трения скольжения, а сила N — нормальная реакция, рав-
равная по модулю силе нормального давления.
Из условия равновесия цилиндра (см. рис. 10.2, в) будем
иметь
N = P, F = Q, QmaKr = W. A0.3)
Произведение 6N = (Мтр)тяк называется моментом сопро-
сопротивления качению, или моментом трения качения. Если сила Q
мала, то смещение силы N от вертикального диаметра цилиндра
также незначительно; с увеличением Q это смещение возрастает.
Наконец, при gmax цилиндр достигнет предельного состояния
равновесия и нормальная реакция N будет Ьтстоять от вертикаль-
вертикального диаметра на предельном расстоянии 6, которое называется
коэффициентом трения качения. Выражают 5 обычно в санти-
сантиметрах. Коэффициент 8 зависит от свойств материалов и состоя-
состояния поверхностей соприкасающихся тел, определяют его опытным
путем. Например, при качении колеса по рельсу 5 = 0,005см, за-
закаленного шарика по закаленной канавке (шариковый подшипник)
8 = 0,001 см.
10.4. Равновесие тела при наличии трения. Конус трения
Равновесие тел с учетом сил трения скольжения рассматри-
рассматривают обычно для предельного состояния, когда сила трения дос-
достигает максимального значения. Реакция неидеальной связи
представляется двумя составляющими: нормальной реакцией
N и максимальной силой трения Fmax. В зависимости от по-
поставленной задачи результат решения может быть выражен в ви-
виде равенства или в виде неравенства.
239
Равновесие тела на наклонной шероховатой плоскости
Рассмотрим вначале предельный случай равновесия тела на
наклонной шероховатой плоскости, когда F = Fm2iX (рис. 10.3).
Проецируя все силы, которые действуют на тело, на ось Ох, по-
получим
или
tg^max =/.
Но тело может находиться в покое на наклонной плоскости и
при меньших углах ее наклона. Поэтому условие равновесия тела
на наклонной плоскости выразим в виде неравенства
tga</.
Равенство / = tgamax можно использовать для опытного
определения коэффициента трения скольжения.
О
Рис. 10.3
Рассмотрим равновесие тела на наклонной шероховатой
плоскости, когда кроме силы тяжести на тело действует внешняя
сила F, (рис. 10.4). Здесь возможны две ситуации: 1)если
Fj < Ps'm a , то тело может начать скользить вниз, а сила трения
Fmax будет препятствовать этому скольжению (см. рис. 10.4);
2) если Fx >Psina, то тело будет стремиться перемещаться по
наклонной плоскости вверх, сила трения Fmax в этом случае бу-
будет направлена в противоположную сторону и будет это движе-
240
ние тормозить. Следовательно, чтобы тело не скользило вниз и
не начало двигаться вверх, необходимо выполнить следующие
условия:
F] > Ps'ma- fPcosa ;
F} <Ps'ma + fPcosa.
Рис. 10.4
Таким образом, условие равновесия тела на наклонной ше-
шероховатой плоскости выражается двойным неравенством
P(s'ma-fcosa)<F] <P(sina-f/cosa).
Конус трения
Рассмотрим равновесие невесомого тела на горизонтальной
шероховатой плоскости под действием наклонной силы F}, стре-
стремящейся его сдвинуть (рис. 10.5). Тело будет сдвинуто только
тогда, когда
Fxsma>Fnm = F,cosa-/ .
Предельному случаю равновесия соответствует такой угол
наклона a, при котором выполняется равенство F, sin a =
= /F, cosa, или tga = /. Если tga </, то как бы не возрастала
сила F], тело сдвинуть с места невозможно. Возрастающей сдви-
сдвигающей силе F} sin a будет противостоять пропорционально ей
увеличивающаяся сила трения F,/cosa.
17 3ак.16 241
Поворачивая вокруг вертикали
вектор силы F] и сохраняя при
этом предельное равновесие, опи-
опишем конус, называемый конусом
трения. Если свойства соприка-
соприкасающихся поверхностей во всех
направлениях одинаковы, то угол
а будет постоянным, а конус тре-
трения круговым.
Конус трения обладает тем за-
замечательным свойством, что если
действующая на тело сила нахо-
находится внутри него, то тело всегда
будет находиться в равновесии.
Этим объясняются известные явле-
явления заклинивания, или самотормо-
самоторможения тел.
Равновесие тела с учетом трения качения
Рассмотрим две схемы, широко встречающиеся на практике:
ведомого и ведущего колес.
Схема нагружения ведомого колеса изображена на рис. 10.2.
Если, согласно A0.3),
Q<-N, A0.4)
г
то колесо не сможет катиться; если же
Q<F=fN,
то колесо не будет скользить (без качения) и будет находиться в
равновесии. Как правило, 8/г « /, поэтому определяющим яв-
является неравенство A0.4). Чтобы вызвать качение, требуется зна-
значительно меньшая сила Q , чем для скольжения. Поэтому в техни-
технике, везде где возможно, скольжение стремятся заменить качением.
Ведущее колесо от ведомого отличается тем, что к нему
прикладывается пара сил с моментом М (рис. 10.6). Сила Q
характеризует сопротивление транспортного средства, напри-
242
мер автомобиля, которому ведущее колесо стремится сооб-
сообщить движение вправо.
Из условия равновесия колеса получаем
В предельном состоянии равновесия
Ведущее колесо может сообщать автомобилю силу Qmax
только тогда, когда к колесу будет приложен момент Мтах. В
этом случае полностью используется
максимальная сила трения скольже-
скольжения Fmax =fN. При M<Mmax сила
Q < Qmzx 9 при М > Л/тах сила Q
должна быть больше Fmax, что не-
невозможно (колесо начинает буксо-
буксовать); ведущее колесо может сооб-
сообщать автомобилю силу, не
превышающую силу трения сколь-
скольжения. Такую силу называют силой
тяги по сцеплению. Рис. 10.6
Трение нити о цилиндрическую поверхность
(задача Эйлера)
Пусть круглый вал обмотан нитью, к одному концу которой
приложена сила F, (рис. 10.7). Определим наименьшую силу F2,
которую надо приложить к другому концу нити, чтобы удержать
силу F,, если угол охвата нити у, а коэффициент трения нити о вал/
Рассмотрим равновесие элементарного участка нити DE
длиной ds = rrfp, где г — радиус вала. В точках D и Е натяжение
нити будет соответственно Г и (T + dT). На нить, кроме того,
действует сила нормального давления вала dN и сила трения
dF, приложенные в точке С. Сумма проекций всех сил на каса-
касательную к валу в точке С равна нулю. Тогда
17*
243
T+dT
Рис. 10.7
Наименьшее значение силы F2 будет соответствовать пре-
предельному случаю равновесия, поэтому dF = fdN.
Проецируя все силы на нормаль Су, находим
dN = (T + T + dT) sin(rfp/2) = 2Г(<ф/2) = 7V/p.
Подставим это значение dN в выражение dT = fdN :
Разделим переменные и проинтегрируем полученное урав-
уравнение в пределах от F2 до F, и от 0 до у:
Отсюда находим
или
При / = 0, как и следовало ожидать, F2 =F}. Увеличивая угол
охвата у, можно значительно уменьшить силу F2. Например,
при / = 0,5 и у = 4я F2= 0,002/;.
244
Рассмотренная задача часто встречается в практике, напри-
например при расчете Ленточных тормозов или швартовки кораблей к
причалу.
Пример 10.1, Цилиндрический каток весом Р, обмотанный двумя симмет-
симметрично расположенными нитями, находится на наклонной плоскости, образую-
образующей угол а с горизонтом (рис. 10.8, а). Найти, при каких значениях угла а
каток будет в равновесии, если коэффициент трения скольжения между катком
и плоскостью равен/ Трением качения пренебречь.
В
Рис. 10.8
Решение. Освободим каток от связей, заменив их реакциями (рис. 10.8, б).
При равновесии катка на плоскости
*=1
В предельном случае равновесия F = Fmax = /N , где N = Pcosa^. Следова-
Следовательно,
sinanp=2/cosanp.
Равновесие катка возможно, если
a < anp»
где anp =arctg2/.
Пример 10.2. Грузозахватный механизм (рис. 10.9, а) состоит из двух оди-
одинаковых рычагов У и 2, конуса 3 и стяжки 4. Определить значение коэффициен-
коэффициентов трения скольжения между пластинами механизма и грузом 5, при которых
245
возможно равновесие системы в заданном положении. Весом механизма по
сравнению с весом Р груза, а также трением между конусом и рычагами пре-
пренебречь.
Рис.10.9
Решение. В предельном случае равновесия системы сила трения скольже-
скольжения, приложенная к рычагу 1 в точке С,
где Nc — сила давления груза на рычаг.
Для определения Nc рассмотрим вначале условия равновесия конуса 3
(рис. 10.9,5). К конусу приложена система сходящихся сил. Следовательно,
условие равновесия имеет вид
NA + ND + T =0,
где Т — сила натяжения троса, равная по модулю весу Р груза 5.
Находим
N
А
2sina
Условия равновесия рычага 1 (рис. 10.9, в):
N'Acosa lx + N'Asina -/3 -F/3 - Л^с/2 = 0.
246
Так как F = NA sin a , то
Nc = N'A cosa • -1- = —Lrctga.
/2 2/2
Из условия равновесия груза 5 в проекции на ось Оу имеем
откуда
Следовательно,
и равновесие системы в заданном положении возможно, если
Глава 11
ЦЕНТР ТЯЖЕСТИ
11.1. Центр системы параллельных сил
Рассмотрим две направленные в одну сторону параллельные
силы Рх и Р2, приложенные к телу в точках А{ и А2 (рис. 11.1).
Равнодействующая этих сил
приложена в точке С, лежащей на прямой А, А2. Положение точ-
точки С найдем на основании теоремы Вариньона. Согласно этой
теореме,
Так как Мс (Р) = 0, то
Р1СА1=Р2СА2.
A1.1)
р
Рис. 11.1
А-,
Повернув силы Рх и Р2 в одну сторону на один и тот же про-
произвольный угол а вокруг точек Ах, А2, придем к выводу, что и
248
равнодействующая повернется в ту же сторону на угол а и будет
приложена в той же точке С. Такая точка называется центром
системы этих параллельных сил.
Приложим к телу в конкретных точках систему парал-
параллельных сил Р}, Р2,..., Рк,..., PN . Пусть она имеет равнодейст-
равнодействующую
? = Z^- (".2)
Последовательным сложением всех сил найдем точку С при-
приложения равнодействующей Р . При повороте сил Рк в одну сто-
сторону на один и тот же угол равнодействующая повернется на тот
же угол, оставаясь приложенной в точке С и параллельной силам
Рк. Точка С приложения равнодействующей системы параллель-
параллельных сил при любых поворотах этих сил около их точек приложе-
приложения в одну и ту же сторону и на один и тот же угол называется
центром системы параллельных сил.
Найдем координаты центра системы параллельных сил,
(рис. 11.2). На основании теоремы Вариньона
JU1
Рис. 11.2
16 Зак. 16
249
Запишем моменты сил в виде векторных произведений
где гс — радиус-вектор центра системы параллельных сил.
По направлению действия сил Рк введем единичный вектор е и
приведем полученное векторное равенство к виду
N
к=\
ИЛИ
( N N
V к=\ Ы\ )
В этом векторном произведении перемножаемые векторы непа-
непараллельны, поэтому
N N
к=\ к=\
В результате получаем формулу для определения положения цен-
центра системы параллельных сил в векторной форме
(П.З)
Записав векторное равенство A1.3) в проекциях на оси коор-
координат, находим координаты точки С
2 ?
N
В формуле A1.3) выражение ^Ркгк носит название стати-
статика
ческого момента системы параллельных сил относительно цен-
центра О. Этот статический момент равен произведению радиус-
вектора гс центра параллельных сил на сумму всех сил, т. е.
N N
11
250
JM
Точно так же входящее в первое равенство A1.4) выражение
N
^Ркхк называется статическим моментом системы парил-
парилка
лельных сил относительно плоскости Oyz и т. д.
11.2. Центр тяжести твердого тела
На каждую частицу тела, находящегося вблизи поверхности
Земли, действует направленная вертикально вниз сила, которая
называется силой тяжести. Силы тяжести каждой частицы тела,
строго говоря, направлены по радиусам к центру Земли и не
являются параллельными. Но для тел, размеры которых малы по
сравнению с размерами Земли, непараллельность настолько
незначительна, что в расчетах с большой точностью силы тяже-
тяжести их частиц можно считать параллельными, сохраняющими
свои значения, точки приложения и параллельность при любых
поворотах тела. Поэтому, обозначив силу тяжести частицы через
Рк, можно, согласно формулам A1.3) и A1.4), найти точку С, ко-
которая неизменно связана с телом и называется центром систе-
системы параллельных сил тяжести.
Таким образом, центром тяжести твердого тела называ-
называется центр системы параллельных сил тяжести частиц данного
тела. Точка С — это геометрическая точка, она может и не при-
принадлежать телу, но она всегда с ним связана, например центр тя-
тяжести баскетбольного мяча, кольца и др.
Выразим силу тяжести (вес) частицы тела через ее объем V.
Тогда величина
.. АР dP
у- lim = —
дг-ю AV dV
называется удельным весом, а величина
p=y/g
— плотностью тела в данной точке. Единицами измерения у и
р в СИ будут н/м3 и Нс2/м4 соответственно.
Для частицы тела будем иметь Рк = Vkyk =Vkpkg . Подста-
Подставив эти соотношения в выражения A1.3) и A1.4), получим фор-
формулы для гс и координат центра тяжести:
16* 251
к=\
N N
к=\ . _ к=\_
К! > ZC ~ КГ
к=\ Ы\ Ы\
После сокращения на g эти выражения представляют собой
соответственно радиус-вектор и координаты центра масс (цен-
(центра инерции) тела.
'г — ГГ
N
Х,.=*±
к=\ к=\ к=\
Для тела, находящегося в однородном поле тяготения
(g = const), положения центра тяжести и центра масс совпадают.
Однако понятие о центре масс является более общим, чем поня-
понятие о центре тяжести, так как оно имеет смысл не только для од-
одного твердого тела, но и для любой механической системы; кроме
того, это понятие не связано с тем, находится тело в поле тяготе-
тяготения или нет.
Если плотность тела во всех его точках одинакова, то в при-
приведенных соотношениях можно сократить р^. Тогда, заменяя
суммирование интегрированием по всему объему тела F, получаем
\rdV \xdV \ydV \zdV
{V) (V) (V) (V)
252
Эти формулы определяют гс и координаты центра тяжести объ-
объема тела.
Иногда тело выполнено в виде тонкой пластинки, имеющей
постоянную толщину и удельный вес, причем толщина пластинки
несоизмеримо мала по сравнению с двумя другими ее размерами.
В этом случае интеграл по объему заменяется интегралом по
площади S:
\rdS \xdS jydS
Эти формулы определяют радиус-вектор и координаты центра
тяжести пластинки в плоскости.
11.3. Методы определения координат центра тяжести тела
1. Метод симметрии. Покажем, что если однородное тело
имеет плоскость, ось или центр материальной симметрии, то его
центр тяжести находится соответственно в плоскости, на оси или
в центре симметрии.
а. Пусть тело симметрично относительно плоскости Оху
(рис. 11.3). Тогда вследствие симметрии каждому элементу К тела
объемом AVk(xk9yk9zk) будет соответствовать элемент К! того
же объема с координатами (xk,yk9-zk). Поэтому статический
момент объема ^zkAVk =0 и координата zc =
ы\ к=\
Следовательно, центр тяжести тела будет лежать в плоскости сим-
симметрии Оху.
б. Пусть тело симметрично относительно оси Oz (рис. 11.4).
Тогда всякому элементу К тела объемом AVk с координатами
(хк, ук, zk) будет соответствовать такой же по объему элемент
К1, расположенный симметрично относительно оси Oz и имею-
имеющий координаты (- хк, - ук, zk). Поэтому статические моменты
253
к=\ к=\ к=\
и, следовательно, координаты
Таким образом, центр тяжести будет находиться на оси сим-
симметрии.
Рис. 11.3
Рис. 11.4
254
в. Пусть тело имеет центр симметрии, который примем за
начало координат. Тогда всякой частице тела объемом AVk9 оп-
определяемой радиус-вектором гк, будет соответствовать частица
такого же объема с радиус-вектором - гк, симметричная ей отно-
n
сительно центра О. Поэтому ro=^FkAVk=0. Следовательно,
центр тяжести будет находиться в центре симметрии. Например,
центры тяжести однородных куба, сферы, кольца, прямоугольной
или круглой пластины лежат в геометрическом центре этих тел.
2. Метод разбиения. Этот у
метод основан на применении
формул A1.3) и A1.4). Его исполь-
используют, когда тело можно разбить на
ряд частей, центры тяжести кото-
которых известны из условий симмет-
симметрии. Метод разбиения можно на-
наглядно проиллюстрировать с
помощью рис. 11.5. Расположив
тело в системе координат, разде-
разделив его мысленно на отдельные
части, веса которых Рх, Р2, Р3,
Р4? а центры тяжести известны,
вычислим вес тела и, согласно
формулам A1.4), координаты цен-
центра тяжести С всего тела.
Если тело имеет вырез, при-
причем известны центр тяжести тела
без выреза и центр тяжести выре-
вырезанного тела, то для определения
координат центра тяжести ис-
используют метод отрицательных
масс (частный случай метода
разбиения).
На рис. 11.6 изображена
квадратная пластина, сторона
которой а. В пластине выполнено
Рис. 11.5
Рис. 11.6
255
круглое отверстие с радиусом г = 0,2а и координатами центра
дг2 =-0,3*; 72=0-
Координаты центра тяжести С, пластины без отверстия
Х] = 0, >>| = 0. Рассмотрим два тела: пластину без отверстия и
диск, соответствующий вырезанному отверстию. При использова-
использовании формул A1.4) вес диска будем считать отрицательным. Тогда
Р = р(а2-лг2);
хс <Л 22) Ф ^,)]^^;
1 i а —иг
ус=0,
гдер — вес единицы площади пластины.
3. Метод интегрирования. Когда тело нельзя разбить на со-
составные части, центры тяжести которых известны, используют
метод интегрирования, являющийся универсальным.
11.4. Определение центра тяжести простейших
однородных тел
1. Центр тяжести дуги окружности (рис. 11.7). Рассмотрим
дугу окружности радиусом R с центральным углом 2а0. Центр
тяжести дуги лежит на оси симметрии Ох. Для определения ко-
координаты хс выделим элемент дуги длиной ds и запишем
п <*„
xrS= \xds= [Rcosol- Rda ,
в -а0
где S = R • 2a0.
Выполнив интегрирование, найдем
xc = —i?sina0.
a0
2. Центр тяжести площади треугольника. Разобьем пло-
площадь треугольника ABD (рис. 11.8) на узкие полоски, параллель-
параллельные стороне AD. Центры тяжести этих полосок будут лежать на
медиане BE. Следовательно, центр тяжести площади всего тре-
треугольника также лежит на этой медиане. Проводя аналогичные
256
разбиения параллельно сторонам АВ и BD, найдем, что центр тя-
тяжести площади треугольника лежит в точке С пересечения его
медиан, поэтому
= B/3)ВЕ.
В
/ \
/ \
/
/
g
/
/
g _^^^
\ ^**^
\
\
Е
Рис. 11.8
D
257
Рис. 11.9
3. Центр тяжести площади
кругового сектора. Круговой сектор
радиусом R с центральным углом
2ос0 показан на рис. 11.9. Центр тя-
тяжести лежит на оси симметрии Ох.
Разобьем сектор на мелкие сектора и
отождествив каждый из них с тре-
х угольником, найдем дугу окружно-
окружности радиусом B/3)Л, на которой
расположены центры тяжести пло-
площадей мелких секторов. Теперь за-
задача свелась к уже известной — на-
нахождению центра тяжести дуги
окружности, для которой
B/3)/? sin а0
4. Центр тяжести прямого кругового однородного конуса.
Пусть R — радиус основания конуса, а А — его высота
(рис. 11.10). Элемент объема
dV = nr2dy = J^R) dy.
У,
\\. 2г
2R
Л/
О
Рис. 11.10
258
Объем конуса
" , nR2h
(П о
Положение центра тяжести
1 г .„ 1 h
F (V) v 0 V Л J V
{V) U v — у
Полученный результат справедлив для любой многоугс
пиоамилы.
ной пирамиды
Глава 12
РАВНОВЕСИЕ ГИБКОЙ И НЕРАСТЯЖИМОЙ НИТИ
12.1. Дифференциальные уравнения равновесия нити
Гибкую нерастяжимую нить будем рассматривать как систе-
систему материальных точек, равномерно расположенных по кривой.
Нить не оказывает сопротивление изгибу и может быть только
растянута. По смыслу понятие нити наиболее близко к такому
физическому объекту, как цепь, общая длина которой значитель-
значительно больше длины отдельного звена.
Пусть нить АВ находится в равновесии под действием внеш-
внешних сил, которые действуют на все ее точки (рис. 12.1, я). Обо-
Обозначим силу, действующую на единицу длины нити, через F ; эта
сила есть функция координат точки, на которую она действует.
Возьмем произвольную точку С, отстоящую от начальной точки
А на расстоянии S, причем положительное направление отсчета S
примем от А к В.
Рис. 12.1
260
Рассмотрим равновесие элемента нити CD - dS . Обозначим
натяжение нити в точке С через Т , а в точке D через Т}. Натяже-
Натяжение Т считается положительным, если оно совпадает по направ-
направлению с положительным направлением S. На элемент CD дейст-
действуют три силы: натяжение Т в точке С, натяжение Г, в точке D
и внешняя сила F dS .
Условие равновесия этого элемента будет:
Так как Г, = (-Г) + dT , то можно записать
FdS + dT = 0,
или
F + — = 0. A2.1)
Равенство A2.1) выражает уравнение равновесия нити в век-
векторной форме. Представим это уравнение в проекциях на оси
прямоугольной системы координат Oxyz. Так как косинусы углов,
которые касательная к кривой в точке С(лс, у9 z) образует с осями
dx dy dz
координат, равны —, -j-, —, то
аЬ аЬ аЬ
х~ ~dS* y~ ~dS* z~ ^'
Тогда для равенства A2.1) будем иметь
dS{ dS) х dS{ dS)
или
_____1_Т— _i_ р —О* У | т i_ j_ F —О*
dS dS dS2 x~ 'dSdS dS2 y~ ' A23)
- + T—t + F, =0.
dS dS dS2
261
Этими уравнениями обычно пользуются при решении кон-
конкретных задач.
Найдем теперь уравнения равновесия нити в проекциях на
оси естественного трехгранника (т, л,Ъ\ построенного в точке С
(рис. 12.1, б). Обозначим орты касательной, нормали и бинорма-
бинормали соответственно через x9n9b. Тогда Т = Тх и
Р1>*+т.
dS dS dS dS
Но
dx _dcp__ и
~dS~~ds"~~p'
где р — радиус кривизны кривой в точке С и, следовательно,
dS dS p
Векторное уравнение равновесия A2.1) принимает теперь вид
^ + 1* + ^0. A2.4)
dS p '
Для нахождения уравнений равновесия в проекциях на оси
естественного трехгранника разложим внешнюю силу F по его
осям:
Представим уравнение A2.4) в виде
dT T —-
rrr.rr Z7«f E7 XT Z7 Zk
dS p
Таким образом, уравнения равновесия нити в проекциях на
оси естественного трехгранника будут следующими:
4L.-F,.l.-,.,F..O. A2.5)
Видно, что в уравнениях A2.5) производная от натяжения
нити по ее длине равна взятой с обратным знаком проекции
внешней силы на касательную ось, а произведение натяжения
нити в данной точке на кривизну кривой, по которой нить рас-
располагается в равновесии, равняется взятой с обратным знаком
262
проекции внешней силы на главную нормаль. Поскольку Fh = 0,
то при равновесии нити внешняя сила лежит в соприкасающейся
плоскости.
Рассмотрим возможные варианты граничных условий.
1. Пусть к концам нити приложены внешние силы FA и FB.
Так как натяжение нити Т направлено всегда по касательной, то
на концах нити должно быть
TA*A=~FA> ТВ*В=-рВ-
2. Предположим, что один из концов нити, например А, на-
находится на гладкой поверхности. Тогда реакция RA поверхности
направлена по нормали к ней, т. е. RA = RAnA, и на этом конце
граничное условие будет следующим:
FA+TATA+RAnA=0.
В частности, если к концу нити не приложена внешняя сила
(FA = 0), то либо ТА =RA = 0 (конец нити лежит на гладкой по-
поверхности), либо ТА = -RA (конец нити перпендикулярен по-
поверхности).
12.2. Частные случаи внешних сил
1. Пусть внешние силы, действующие на нить, параллельны,
т. е. F = FF0, где Fo = const — единичный вектор. Умножив сла-
слагаемые дифференциального уравнения равновесия A2.1) вектор-
но на Fo, получим
Второй член полученного уравнения равен нулю, так как векторы
коллинеарны, следовательно,
dT*F -О
Поскольку Fo = const, то
263
откуда
TxF0 =const.
Это означает, что под действием параллельных сил нить рас-
располагается в плоскости, параллельной силам.
2. Найдем форму нити, которую она будет иметь в состоянии
равновесия под действием центральных внешних сил, проходя-
проходящих через точку О (рис. 12.2).
О
Рис. 12.2
Умножив слагаемые в уравнении равновесия A2.1) векторно
справа на радиус-вектор г, получим:
хг + /гхг=0.
dS
Векторы F и г коллинеарны, поэтому F х г = 0 и, следова-
следовательно,
хг =0.
dS
A2.6)
Преобразуем это уравнение:
dT _ </ - _ dr
хг =—(Гхг)-Гх .
dS dSK J dS
Так как \dr\ = dS, то <iг/<я?5 = т . Учитывая, что векторы Гит
коллинеарны, получим
264
T dr A
Т х — = 0.
dS
Следовательно, уравнение A2.6) принимает вид
(f xr) 0
dS
или после интегрирования
Т xr = const.
Таким образом, под действием центральных сил нить распо-
расположится в плоскости, проходящей через центр сил.
12.3. Цепная линия
Найдем форму, которую будет иметь однородная нить в од-
однородном поле силы тяжести (рис. 12.3, а). Обозначим вес еди-
единицы длины нити через у = const. Вследствие того, что силы тя-
тяжести частиц нити параллельны, нить при равновесии
расположена в вертикальной плоскости. Совместим с этой плос-
плоскостью координатную плоскость Оху9 причем ось Оу направим
вертикально вверх. Поскольку в данном случае Fx = 0, Fy=-y9
уравнения A2.2) равновесия нити примут вид
A2.7)
т
dS\ dS
(т
dS{ dS
о
a
X
б
Рис. 12.3
265
Из первого уравнения A2.7) следует, что
^ A2.8)
т. е. проекция силы натяжения нити на ось Ох есть величина по-
постоянная. Из A2.8) имеем
0 dx
Подставив это выражение во второе уравнение A2.7), получим
dS
или
^HdS.
с
Элементарная длина дуги
Следовательно,
яЬс. A2.9)
Для более компактной записи обозначим dy/dx = p. Тогда
уравнение A2.9) примет вид
Разделив переменные, получим
Т0
или, полагая То /у = а,
dp _dx
Jl + p2 a '
После интегрирования имеем
ух/а+С19
266
где Cj — постоянная интегрирования.
Проведем ось Оу через ту точку нити, где касательная к ней
параллельна оси Ох. В этом случае при у = а, jc = O, p =
= dy/dx = 0 и СХ =0. Тогда
p + jl + p2 =ex/a. A2.10)
Для определения/; возьмем обратные величины:
Умножив числитель и знаменатель левой части этого уравнения
на сопряженное знаменателю число, получим
-р + Ф + р2 =е'х/а. A2.11)
Вычтя из равенства A2.10) уравнение A2.11), будем иметь
p = 095(ex/a-e-x/a)=sh(x/a).
Так как р = dy/dx = sb(x/a), то
Интегрируя полученное уравнение, находим
где С2 — постоянная интегрирования.
При х = 0, у = а, так как ch 0 = 1, получаем С2 = 0 и
д; = асЬ- = -\е*+е~* . A2.12)
а 2^ J
Выражение A2.12) является уравнением формы однородной
нити, находящейся в равновесии в однородном поле силы тяже-
тяжести (рис. 12.3, б). Это уравнение называют уравнением цепной
линии.
Пример 12.1. Найти форму троса, удерживающего висячий мост, полагая,
что вес погонного метра моста постоянен (у = const), мост подвешен к тросу
так, что вертикальная нагрузка равномерно распределена по длине проекции
троса на горизонтальную ось, а трос нерастяжим (рис. 12.4, а).
267
с
У/////Л
Рис. 12.4
Решение. Внешние силы в вертикальной плоскости, в которой расположен
трос, параллельны. Направим ось Ох горизонтально, а ось Оу вертикально
вверх. Воспользуемся уравнениями равновесия A2.2). На элемент троса dS
действует сила ydx, поэтому внешняя сила, действующая на единицу длины
троса, будет F = ydx/dS. Уравнения равновесия A2.2) примут вид
Из первого уравнения получаем
откуда
Подставляя полученное выражение для Т во второе уравнение равновесия,
находим
-ydx,
268
или
d2v
Полагая Г0/у = а, имеем
откуда после интегрирования получаем
Из этого уравнения следует, что трос расположится по параболе, ось которой
вертикальна. Если ось Оу провести через вершину параболы, а Ох на расстоянии
Ъ ниже этой вершины, то граничные условия для определения произвольных
постоянных С, и С2 будут следующими:
Тогда С, = 0, С2 = Ь и уравнение параболы, по которой расположится трос,
будет
х2 .
у = — + Ь.
2а
Пример 12,2. В условиях предыдущей задачи определить натяжение троса в
точках А и М(рис. 12.4, б).
Решение. С учетом симметрии конструкции (см. рис. 12.4, а), рассмотрим
равновесие половины длины троса (рис. 12.4, б). Система внешних параллель-
параллельных вертикальных сил, действующих на половину троса AM, эквивалентна рав-
равнодействующей Р = уАВ/2 , где АВ-1 — расстояние между опорами. Натя-
Натяжение троса в точках AwM обозначим соответственно через ТА и Тм .
Силы ТА, Тм , Р , действующие на трос, составляют равновесную систе-
систему, т. е.
ТЛ+Ти+Р=0.
Откуда следует (рис. 12.4, в)
Р v/
Т 1T
cos a 2 cos а 2
Чем больше угол а , т. е. чем меньше стрела провисания троса по сравне-
сравнению с расстоянием между опорами, тем больше его натяжение как в точке А9 так
и в точке М. Если в точке А трос опирается на блок, в оси которого нет трения,
то его натяжение на участке А С равно ТА =ТА .
Раздел III
ДИНАМИКА
В динамике изучается механическое движение материальных
объектов с учетом их взаимодействия с окружающими матери-
материальными телами и средой, т. е. с учетом сил, действующих на эти
объекты. Из статики в динамику переносят аксиому освобожде-
освобождения от связей точек системы, теорию сложения сил и приведения
систем сил к простейшему виду, из кинематики — методы и
приемы описания движения и запись уравнений связей. В дина-
динамике в отличие от статики как активные силы, так и реакции свя-
связей — в основном переменные величины. Активные (заданные)
силы могут зависеть от времени, положения и скоростей точек в
системе, а реакции связей еще и от их ускорений.
В динамике ставятся следующие задачи: по заданному дви-
движению определить силы, вызвавшие его, и по заданным силам
установить движение системы. Встречаются также смешанные
задачи, в которых необходимо решать оба типа задач. Кроме
того, в динамике определяют силы взаимодействия точек (тел)
системы.
Свойства материальных объектов в динамике схематизируют,
из всей совокупности свойств во внимание принимают только те,
которые являются существенными для механического движения.
В зависимости от того, какую часть свойств учитывают при ре-
решении задач механики, получают различные модели материаль-
материальных объектов.
Простейшая модель материального тела в механике — мате-
материальная точка — представляет собой тело, которое независимо
от его формы и размеров можно принять за геометрическую точку,
обладающую определенной массой. Материальная точка — это не
обязательно тело малых размеров. Колесо, которое катится по ше-
шероховатой поверхности, нельзя рассматривать как материальную
точку при любых его размерах. В зависимости от постановки зада-
задачи одно и то же тело может либо выступать, либо не выступать как
материальная точка: все зависит от того, меняются силы, дейст-
действующие на тело при изменении его ориентации по отношению к
270
окружающим телам и среде, или нет. Например, спускаемый
космический аппарат вне пределов атмосферы движется под
действием сил тяготения, которые от ориентации аппарата
практически не зависят, и, следовательно, аппарат можно рас-
рассматривать как материальную точку. При движении того же ап-
аппарата в атмосфере появляются силы, зависящие от его ориента-
ориентации, и считать аппарат материальной точкой уже нельзя.
Движение материальных объектов представляет собой изме-
изменение их положения в пространстве и во времени по отношению
к другим телам. В рамках классической механики пространство
принимается трехмерным эвклидовым. Кроме того, пространство
и время считаются абсолютными, т. е. не зависящими друг от
друга, а также от материи и движения. Принимается также, что
масса точки не зависит от скорости ее движения.
Глава 13
ДИНАМИКА МАТЕРИАЛЬНОЙ ТОЧКИ
13.1. Аксиомы динамики
Основу классической механики составляют принятые как
аксиомы законы Ньютона, опубликованные им в 1686 г. в сочи-
сочинении «Математические начала натуральной философии». В со-
современной форме аксиомы формулируются применительно к
простейшей модели материального тела — материальной точке.
1. Существуют системы отсчета, называемые инерциаль-
ными, по отношению к которым материальная точка, не ис-
испытывающая действия или находящаяся под действием урав-
уравновешенной системы сил, сохраняет состояние покоя или
равномерного прямолинейного движения. Таким образом, первая
аксиома постулирует возможность существования тел и связан-
связанных с ними систем отсчета, движущихся без ускорения, т. е. по-
поступательно, равномерно и прямолинейно, причем любая из та-
таких систем отсчета может быть принята за неподвижную при
решении задач динамики.
Никакое тело во Вселенной не является полностью изолиро-
изолированным от воздействий, поэтому инерциальные системы отсчета
271
являются воображаемыми и могут быть введены с той или иной
степенью приближения. В частности, близкой к идеальной являет-
является гелиоцентрическая система отсчета, начало которой совпадает
с центром Солнца, а оси направлены на удаленные звезды.
2. Ускорение материальной точки относительно инерциаль-
ной системы отсчета пропорционально приложенной к точке
силе и совпадает с ней по направлению. Если F — приложенная
к точке сила, а — ускорение точки относительно инерциальной
системы отсчета, то
та - F .
Положительный коэффициент пропорциональности т харак-
характеризует инертные свойства точки и называется массой. Масса
материальных тел определяется методом сравнения с эталонами.
В случае F = О а = О , т. е. точка оказывается в состоянии движе-
движения по инерции. Таким образом, вторая аксиома устанавливает
причину нарушения инерциального состояния точки (действие на
точку других материальных тел), а также соотношение между
ускорением (мерой отклонения точки от инерциального состоя-
состояния) и силой/(мерой механического воздействия).
3. Силы взаимодействия двух материальных точек направ-
направлены по прямой, соединяющей эти точки, в противоположные
стороны и равны по модулю¦, т. е.
Следовательно, третья аксиома определяет условие взаимо-
взаимодействия между двумя материальными точками. Ее называют еще
законом о равенстве сил действия и противодействия, хотя здесь
имеет место только равенство модулей сил, сами же силы проти-
противоположны по направлению.
4. Ускорение, полученное точкой под действием системы
сил, равно векторной сумме ускорений от действия отдельных
сил, т. е. если (F}, F2,..., Fk,..., FN) — система сил, приложенных к
точке, то
N
к=\
где ак =Fk/m.
272
Таким образом, четвертая аксиома постулирует принцип
суперпозиции сил, или принцип независимого действия. В каче-
качестве четвертой аксиомы динамики может быть принята аксиома
статики о векторном сложении сил. Тогда принцип независимости
действия сил превращается в следствие: для системы сходящихся
сил справедливо выражение
Разделив на массу, получаем
к=\ к=\
13.2. Дифференциальные уравнения движения
материальной точки
Из второй и четвертой аксиом следует уравнение движения
точки в инерциальной системе отсчета
ma=F, A3.1)
где F = ^ Fk — равнодействующая всех сил, приложенных к
точке.
Так как ускорение точки связано с ее радиус-вектором соот-
соотношением a=d2r/dt2, а сила в рамках классической механики
может быть функцией времени, положения и скорости точки, из
A3.1) получаем векторное дифференциальное уравнение дви-
движения точки
m^- = F(t9r9—). A3.2)
dt dt
В проекциях на декартовы оси (базис i9j9k) дифференци-
дифференциальные уравнения движения точки имеют вид
mx = Fx(t9x9y9z9x9y9z);
ту = Fy(t9 х9 у, z, х9 y9 z); A3.3)
mi = FJt, jc, y, z, i, v, z).
19 3ак. 16 273
В частных случаях дифференциальных уравнений движения
точки может быть меньше. Так, при движении точки в плоскости
Оху уравнений движения будет два:
т'х = Fx(r,х,у,i,у); ту = Fy(t,x,у,х,у) .
В случае движения точки по прямой будем иметь одно диффе-
дифференциальное уравнение, например:
mx = Fx(t,x,x).
В проекциях на естественные оси (базис х,п,Ь ) уравнения
движения точки имеют вид
т s — р . W2L_- р • /7 -О ГП41
б/Г р
где v = |vT |, vT = ds/dt, р — радиус кривизны траектории. Первое
уравнение A3.4) является дифференциальным уравнением второ-
второго порядка относительно дуговой (естественной) координаты s,
второе уравнение имеет первый порядок, а третье является усло-
условием равновесия для проекций сил на бинормаль. Проекции силы
могут быть функциями переменных t, s, ds/dt.
В проекциях на оси криволинейной системы координат, на-
например цилиндрической, уравнения движения будут такими:
/!i(r-rq>2) = Fr; m(rip + 2гф) = Fp; m'z = Fz. A3.5)
13.3. Две основные задачи динамики
материальной точки
На основе дифференциальных уравнений движения мате-
материальной точки решают две задачи динамики точки.
Первая задача состоит в том, чтобы по заданному закону
движения точки массой т определить силу, под действием кото-
которой происходит это движение. Часто первую задачу рассматри-
рассматривают как задачу управления движением, в рампах которой тре-
требуется установить характеристики воздействия, обеспечивающие
заданный закон движения материальной точки. В зависимости от
способа задания движения при решении этой задачи используют
соответствующие скалярные уравнения A3.3-13.5).
274
Пример 13Л. Материальная точка, имеющая массу т, движется в верти-
вертикальной плоскости по баллистической траектории
= pi + sina —— +gT2
J cos a ^ v0tcos a >
в соответствии с уравнениями
х = v0xcosa[l-exp(-r/x)];
у = -git + T(gx + v0 sin a)[l - exp(-r/x)],
где g, v0, T — положительные константы, единицы измерения которых м/с2 ,
м/с несоответственно.
Найти силы, под действием которых происходит движение точки.
Решение. Из приведенных уравнений следует, что точка начинает движение
из начала координат (jto = O, yo=O)c начальной скоростью v0, направленной
под углом а к оси Ох.
Вычисляя производные координат, находим проекции равнодействующей
силы
Fx=mx = -(m/x)v0 cos a- ехр(-г/т);
Fy = my = ~(m/T)(gx + v0 sin a)exp(-f/x).
Учитывая выражения для проекций скорости точки
vx = i; = v0cosa-exp(-/l/T); v^ = у = -gr + (gT + vosina)exp(-f/T),
получаем
'Рх=-Р*х> Fy=-mg-\ivy ,
где ц = т/т —константа, Н • с/м . Откуда находим
F = FJ + Fy j = -mg j - \i(vxi + vyj) = -mg - JlLv .
Таким образом, исходные уравнения описывают движение точки под дейст-
действием силы тяжести и силы сопротивления, пропорциональной скорости точки.
Вторая задача состоит в определении движения точки по
заданным силам и начальным условиям движения, при этом силы
должны быть выражены как функции переменных, используемых
для задания движения. Решение этой задачи сводится к интегри-
интегрированию дифференциальных уравнений второго порядка, в про-
процессе которого в решениях появляются произвольные постоян-
постоянные, подлежащие определению. Так, в задаче о движении точки в
трехмерном пространстве, решаемой на основе дифференциаль-
дифференциальных уравнений A3.3), общие решения будут содержать шесть
произвольных постоянных:
19*
275
x = x(/,C1?...,C6); y = y(t,Cl9...\C6); z = z(t9Cl9...9C6)9
для определения которых потребуется постановка дополнитель-
дополнительных условий. Из математики известно, что если эти условия по-
поставлены для начальных (при t = О) значений функций и их пер-
первых производных, т. е. в виде х@) = х0, у@) = у0, z@) = z0,
х@) = х0, у@) = у0, z@) = i0, то задача (задача Коши) при неко-
некоторых ограничениях, налагаемых на правые части дифференци-
дифференциальных уравнений, имеет решение и причем единственное. Таким
образом, приложенные к точке силы определяют только ее уско-
ускорение, движение же точки помимо сил зависит от начальных ус-
условий — положения точки в рассматриваемой инерциальной сис-
системе отсчета и ее скорости.
Замечание. Первым интегралом системы дифференциальных уравнений
A3.3) называется функция Ф(/, х9 у, z, х, у, z), зависящая от координат, ско-
скоростей и времени, сохраняющая постоянное значение для любого конкретного
решения системы. Выражение
'</Ф\ дФ дФ . дФ . дФ . 1 (дФ ^ дФ ^ дФ „
) = + х + v + z + —\ FY+ Fv+ F7
dt I dt дх by dz т{дх х ду у dz z
называется производной по времени функции ФG, х, у9 z, x, у, z), вычислен-
вычисленной в силу дифференциальных уравнений A3.3). Аналогичные определения
можно дать для любой произвольной системы дифференциальных уравнений.
В курсе дифференциальных уравнений доказывается, что функция Ф бу-
будет первым интегралом системы дифференциальных уравнений тогда и только
тогда, когда ее производная, вычисленная в силу этих уравнений, будет тожде-
тождественно равняться нулю.
Для того чтобы полностью найти закон движения материальной точки, дос-
достаточно найти шесть функционально независимых первых интегралов. Действи-
Действительно, пусть
ФгA, х, у, z, х, у, z) = Cx;
Ф6(/, х, у, z, х, у, z) = C6
— шесть независимых первых интегралов системы A3.3). Так как по условию
Ф15 ..., Ф6 — функционально независимы, то, определяя х, у, z, x, у, z как
276
функции t и шести констант Сх, ..., С6, получаем общее решение системы
A3.3) в виде
x = x(t, Cl9 ..., С6); y = y(t9 Cl9 ..., Сб); z = z(/, С„ ..., Сб);
* = *(*, Q, ..., С6); y = y(t, СХ9 ..., Сб); i = i(f, С„ ..., Сб).
Отметим, что знание одного первого интеграла системы позволяет пони-
понизить ее порядок на единицу.
Возможность получить аналитическое решение задачи для
произвольных начальных условий существует не всегда и зависит
от того, насколько сложна система дифференциальных уравне-
уравнений. Даже при одномерном движении точки в соответствии с
уравнением
в случае, когда Fx = Fx (t, x, x) является произвольной функцией
всех своих переменных, аналитическое решение выполнить не
удается. В таких ситуациях приходится обращаться к прибли-
приближенным и численным методам интегрирования.
Пример 13.2. Материальная точка М9 имеющая массу т = 4,9 кг, брошена с
поверхности Земли с начальной скоростью, направленной вертикально и равной
vo=98,O м/с. Сила сопротивления воздуха R=-\ivv (R = \iv2), где ц =
= 0,02 Н с2 /м2. Определить, на какую высоту Н над поверхностью Земли и за
какое время tx поднимется точка, а также какова будет скорость vK ее призем-
приземления.
Решение. Систему отсчета, связанную с Землей, при исследовании кратко-
кратковременных движений можно считать достаточно близкой к инерциальной.
Направим ось Oz системы отсчета вертикально, совместив ее
начало с начальным положением точки (рис. 13.1). Сила тя-
тяжести Р = nig .
Векторное дифференциальное уравнение движения точки
dv _ -
т—=mg+R
dt
в проекции на ось Oz имеет вид
— при подъеме (vz=z>0)h
mz = -mg + \\z2
— при падении (v2 < 0, \vz \ = -vz).
P
R
Рис. 13.1
277
Полученные дифференциальные уравнения являются нелинейными, поэто-
поэтому решать их будем методом понижения порядка и разделения переменных.
Разделим в уравнениях все члены на коэффициент \х и введем обозначения:
X = т/у. = 245,0 м — характерная постоянная расстояния; и2 =gk = mg/\i =
= 2401 м2/с2 — квадрат предельной скорости падения точки (и = 49 м/с ) под
действием силы тяжести в среде с сопротивлением, пропорциональным квадра-
квадрату скорости (при такой скорости силы уравновешиваются R = mg).
Дифференциальное уравнение движения точки на этапе подъема примет вид
Разделив переменные, представим уравнение в виде
\ + (vz/uJ
где т = Х/и = 5,0 с — характерная постоянная времени.
Интегрируя, находим
arctg(v,/i/) = С,-//г.
В соответствии с начальными условиями движения (при t = 0 vz = v0) посто-
постоянная интегрирования С, = arctg(vo/tt). Время подъема f, точки до крайнего
верхнего положения, в котором vz = 0 ,
/, = т С, = т arctg(vo/w) = 5 arctg2 = 5,54 с.
Для определения высоты подъема выполним замену независимой перемен-
переменной dvjdt = (dvjdt)(dz/dz) = (dz/dt)(dvz/dz) = v2(dvz/dz) и представим диф-
дифференциальное уравнение движения в виде
и +vr
Общее решение этого уравнения будет
В соответствии с начальным условием vz = v0 при z = 0 постоянная интегри-
интегрирования С2 = (Х/2)\п(и2 + Vq). В высшей точке подъема vz = 0, и высота
Я = (A/2)ln(l +vo2/w2) = 122,5In5 « 197 м.
Для определения скорости приземления в дифференциальном уравнении,
описывающем движение точки на этапе падения, произведем замену независи-
независимой переменной и разделим переменные:
X-
В общем решении 1п(и2 - v2) = C3 +2z/X
278
в соответствии с начальными для этапа падения условиями (vz = 0 при z = Н )
постоянная интегрирования
С3 = 1п(м2)~2ЯД.
Таким образом, зависимость проекции скорости точки от координаты имеет
вид
vr = -и J\ - ехр[-2(Я - z)/X],
откуда скорость приземления точки
vK = |vr@)| = иф-ехр(-2Н/Х) = иф - ехр(-\,6) = 0,894м = 43,8 м/с.
Пример 13.3. Материальная точка массой т, находящаяся на некоторой вы-
высоте над поверхностью Земли, движется в условиях ветра, дующего равномерно
со скоростью и. Сила сопротивления,
действующая на точку со стороны
воздуха, R = -\xvr, где ц = const > 0,
v, — скорость точки относительно
воздуха. Точка начинает движение с
начальной абсолютной скоростью v0,
направленной горизонтально под
прямым углом к скорости ветра.
Решение. Совместим начало сис-
системы отсчета с исходным положением
точки, а связанные с Землей оси на-
направим как показано на рис. 13.2.
Векторное уравнение движения точки
т— = Р + R ¦•
dt
mg-ф-и)
в проекциях на координатные оси
имеет вид
j \xu; '
Рис. 13.2
= 0; mz+ \xz = mg .
Разделив эти уравнения на ц и обозначив т = m/ц, где т — постоянная времени,
получим
xjc + к = и; ту + у = 0; xz + i = gx .
Как видно, движение точки описывается системой несвязанных линейных
дифференциальных уравнений, общее решение которой
х = ш + С, -I- С2 ехрН/т);
Определив с помощью начальных условий:
*@) = у@) = z@) = 0, х@) = 0, Я0) = v0, z@}= 0 ,
279
произвольные постоянные интегрирования, приведем кинематические уравне-
уравнения движения точки к виду
х = ш- ит[1 - ехр(-*/т)];
>> = уот[1-ехр(-//т)];
z = gTt-gT2[\-exp(-t/x)).
Проекции скорости точки изменяются по закону
уг=и[1-ехрН/т)];
v, =уоехр(-//т);
Из этих уравнений следует, что при t -> оо vx -* и , vy -> 0, vz -» gx, т. е. со
временем точка будет двигаться практически в вертикальной плоскости с уста-
установившейся скоростью
v = ui + grk .
13.4. Движение несвободной материальной точки
В рассмотренных выше задачах движение материальной точ-
точки определялось начальными условиями и взаимодействием ее с
силовыми полями и окружающей средой. Все силы, приложен-
приложенные к точке, выступали как заданные, т. е. как известные функ-
функции г, г и v . Взаимодействие с другими телами путем прямого
контакта и связанные с этим взаимодействием какие-либо огра-
ограничения на движение в пространстве отсутствовали.
Если на движение материальной точки в пространстве не
налагаются ограничения, то она называется свободной. Однако
чаще движение материальной точки сопровождается непосредст-
непосредственным взаимодействием ее с другими материальными телами.
Аналогично схематизации свойств материальных тел это взаи-
взаимодействие также схематизируется в виде кинематических ог-
ограничений, налагаемых на движение. В такой ситуации точку
называют несвободной, а условия, стесняющие свободу ее дви-
движения, — связями.
Связь, выраженная уравнением
f(x,y,z) = 09 A3.6)
является геометрической и означает, что точка движется по неко-
некоторой неизменной (время t в уравнение связи явно не входит) по-
280
верхности и не может ее покинуть ни в какую сторону. Геомет-
Геометрическая связь такого типа называется стационарной и неосво-
бождающей. Освобоэюдающие связи выражаются неравенствами.
В случае движения по поверхности число степеней свободы ма-
материальной точки, определяемое числом независимых координат,
необходимых для однозначного задания положения, меньше, чем
у свободной точки, и равняется двум. Еще меньшим будет число
степеней свободы, если на точку наложены две связи. Это озна-
означает, что при движении точка должна все время оставаться на
линии пересечения поверхностей обеих связей.
Так как в соответствии с аксиомой о связях последние могут
быть отброшены, а их действие заменено соответствующими си-
силами, уравнение динамики несвободной материальной точки
примет вид
dv — —
m?- = F + R. A3.7)
dt
Здесь к активным силам, равнодействующая которых F , добав-
добавляется динамическая реакция связи R . Реакция R является пас-
пассивной силой, так как зависит от приложенных к точке активных
сил, физических свойств связи и движения точки. Последнее оп-
определяет ее отличие от реакции связи в статике, что подчеркива-
подчеркивается ее названием.
Реакцию связи R можно всегда разложить по двум направ-
направлениям на составляющие, одну из которых N направить по нор-
нормали к поверхности связи, определяемой A3.6), а другую — в
плоскости, перпендикулярной к нормали. Если второй состав-
составляющей пренебречь, то поверхность можно считать абсолютно
гладкой, а связь — идеальной. В этом случае реакцию связи пред-
представляют в виде N = A,grad(/), где X = N/grad(f) — скалярный
коэффициент, называемый множителем связи. Векторное урав-
уравнение движения несвободной точки с идеальной связью прини-
принимает вид
Ш dt"
В проекциях на оси декартовой системы координат получаем
уравнения
18 Зак. 16 281
y = Fy+X(df/dy); A3.8)
m'z = F2+X(df/dz),
известные как уравнения Лагранжа первого рода.
В случае движения по негладкой поверхности необходимо
учитывать действие связи на материальную точку в плоскости,
перпендикулярной нормали. Если оно обусловлено шероховато-
шероховатостью поверхности связи, то в векторном уравнении движения до-
добавляется сила сухого трения, предельное значение которой при
v ^ 0 определяется выражением
F=-)iXgrad(f)-,
1 v
где ц — коэффициент трения скольжения.
Три дифференциальных уравнения A3.8) и уравнение связи
A3.6) содержат четыре неизвестные функции, следовательно,
решение возможно. Однако в декартовых координатах при произ-
произвольном выборе системы отсчета аналитическое решение задачи
удается получить лишь для простейших связей первого порядка.
Более эффективными в ряде случаев являются уравнения движе-
движения точки в криволинейных координатах. Особенно удобно при
этом пользоваться такой системой координат, в которой поверх-
поверхность связи, определяемая уравнением A3.6), выступает в качест-
качестве одной из координатных поверхностей.
Пусть, например, точка движется по внутренней гладкой по-
поверхности цилиндрической трубы (рис. 13.3), уравнение которой
в декартовых координатах будет
В цилиндрических координатах уравнение примет вид
/(#•,9,*) = /^ -г = 0,
а сама поверхность трубы будет координатной поверхностью.
Вектор-градиент ее направлен по радиусу, и, следовательно, про-
проекции нормальной реакции на две другие координатные оси рав-
равны нулю. Сила тяжести Р - nig. Уравнения движения точки при-
принимают вид
= 0; mr^dp2 -~mgcoscp + N. A3.9)
282
Рис. 13.3
С решением этой системы уравнений связана смешанная за-
задача динамики точки: сначала на основе первого и второго урав-
уравнений по активным силам и начальным условиям определяется
движение точки (вторая задача динамики точки), а затем из
третьего уравнения определяется динамическая реакция N (пер-
(первая задача динамики точки).
Пример 13,4. Материальная точка массой т начинает движение по гладкой
внутренней поверхности трубы радиусом г^ из крайнего нижнего положения с
начальной скоростью v0, вектор которой расположен в касательной плоскости
под углом а к образующей поверхности трубы (см. рис. 13.3). Определить, при
каких условиях точка будет двигаться, не покидая стенок трубы.
Решение. Неудерживающая связь, налагаемая на точку стенкой трубы, вы-
выражается в цилиндрических координатах неравенством г^ - г > О и находится в
напряжении (действует), если N >0 . Как видно из третьего уравнения системы
A3.9), N является функцией координаты ф и ее производной. Выполнив в пер-
первом уравнении A3.9) замену независимой переменной <р = ф(а?фД/ф), разделим
переменные и найдем первый интеграл
ф2/2 = C + te/r^ )cos<p.
В соответствии с начальными условиями движения (при ф = 0 <р = фо =
/jp ) произвольная постоянная интегрирования
18*
283
Подстановка полученного выражения в третье уравнение A3.9) дает зависи-
зависимость
Л' = /иг-трфо -mg{2-
Точка при движении будет оставаться на внутренней поверхности тр\бы.
если в любом ее положении, в том числе и в крайнем верхнем, при ф = я
= -1 ). .V > 0 . Отсюда получаем
гтрфо = (v0 since)" /гтр > 5g . или v/;@)>
где v/;(O) = vosina — начальное значение трансверсальной проекции скорости
точки.
Расчеты показывают, что. если условие vp @) > J5grjp выполнено, точка
никогда не отделится от стенок трубы и движение ее будет длиться вечно. Та-
Такой рез\льтат. несогласующийся с опытом, объясняется несовершенством при-
принятой расчетной схемы, а именно идеализацией свойств связи. Если же принять
во внимание шероховатость поверхности трубы, то в первом и втором уравне-
уравнениях A3 9) нужно учесть проекции силы сухого трения
Тогда эти уравнения примут вид
'*трФ
тгтр ф = -mgsin ф - |
а Л: будет определяться третьим уравнением системы A3.9).
Нелинейные уравнения этой системы являются связанными, так как все три
функции — две координаты (г, ф ) и сила N — присутствуют в каждом из урав-
уравнений. Система уравнений может быть проинтегрирована только численно при
конкретных значениях параметров, при этом обе задачи динамики точки здесь
не разделяются, а решаются параллельно.
Если движение точки стеснено двумя связями вида A3.6),
векторное уравнение движения с неопределенными множителями
принимает вид
dv -
dt ] ] 2 2
Интегрирование системы скалярных уравнений, включаю-
включающей три дифференциальных уравнения и два уравнения связи,
принципиально возможно, но практически весьма затруднитель-
затруднительно. Решение таких задач целесообразно проводить на основе
дифференциальных уравнений движения точки, записанных в
проекциях на естественные оси.
284
В случае движения точки по абсолютно гладкой линии, т. е.
при идеальной связи, в уравнениях движения A3.4), которые
примут следующий вид:
m's = FT, mv2/p = Fn+Nn, 0 = Fb+Nb,
проекции реакции связи N будут присутствовать только во вто-
втором и третьем уравнениях. Опять имеет место смешанная задача
динамики точки, причем задачи разделяются — сначала из перво-
первого уравнения по заданным активным силам и начальным услови-
условиям определяют движение точки, а затем из второго и третьего
уравнений находят реакцию связи.
В случае неидеальной связи появится третья составляющая
реакции, проекция которой будет зависеть от физических усло-
условий взаимодействия точки со связью и войдет в первое уравне-
уравнение. Задачи динамики могут не разделиться, так как уравнения
окажутся связанными.
Пример 13.5. Материальная точка М начинает движение из положения,
близкого к крайней верхней точке А сферического купола, радиус которого г,
Р = mg (рис. 13.4). Пренебрегая трением, определить, на какой высоте от плос-
плоскости основания нарушится контакт точки с поверхностью купола.
Рис. 13.4
Решение. В проекциях на естественные оси уравнения движения точки
имеют вид
dvx ¦ V2
т—L = mgsinф ; т — = mgcosц>- N .
dt r
285
Выполнив замену независимой переменной dvx/dt =vxdvx/(rdq>), приведем пер-
первое уравнение к виду
vxdvx = gr sin ydq>
и после интегрирования при начальных условиях v = 0 при ф = ф0 получим
v2 = 2#г(со8ф0 - совф),
где совфо » 1.
Данное выражение определяет зависимость скорости точки от угловой ко-
координаты только на участке ее движения в контакте с поверхностью купола. Из
второго уравнения находим
N = mg cosy-mv2/г = mgCcosq>-2).
Контакт нарушится в положении, где N = 0 , т. е. при совф* = 2/3 . Высота
точки над основанием в этом положении h = rcosy* = 2r/3.
Пример 13.6. Разгонный участок лыжного трамплина выполнен в виде дуги
окружности радиусом г = 50м. Лыжник, масса которого т = 80кг, начинает
разгон без начальной скорости из точки
старта Л, расположенной на высоте
h = г/2 над точкой отрыва В (рис. 13.5).
На лыжника действует сила сопротивле-
сопротивления воздуха R = -|xv • v (R = \iv2), где
|X = 0,16 H • с2/м2 — аэродинамический
коэффициент, сила трения о снег, коэффи-
коэффициент трения скольжения / = ОД и сила
тяжести Р = mg . Рассматривая лыжника
как материальную точку, найти его ско-
скорость в конце участка разгона.
Решение. Определим положение
лыжника на участке разгона естественной
координатой s = AM = гф (см. рис. 13.5).
Рис. 13.5 Векторное дифференциальное уравнение
движения
dv _- — - -
dt w
спроецируем соответственно на касательную и нормаль естественного трех-
трехгранника:
m^L = m sinoc-F - v2-
т dt -т8$1Па * ЦУ' A3ло)
V
т — = -mgcosa + N,
г
286
где а = 7с/3 - <р .
Найдем из второго уравнения N и подставим выражение
/Vp = /N = /(mgcosa + mv2/r)
в первое уравнение A3.10). Получим нелинейное дифференциальное уравнение
т—L = -{\x + fmjr)v\ + mg(sina-/cosa). A3.11)
dt
Выполним замену независимой переменной dvx/dt = vxch>z/(rd(p), введем новую
переменную z = v2 = v2 и представим уравнение A3.11) в виде
— + 2kz = u2[sin(n/3 - ф) - /cos(tc/3 - q>)],
d(p
где к = {r\xjm) + / = 0,2 — приведенный коэффициент трения; и2 = 2gr =
= 980 м2/с2 .
В частном решении
z* = A sinGi/3 - ф) + Bcos(n/3 - ф)
этого линейного уравнения константы А и В, определенные методом неопреде-
неопределенных коэффициентов, равны
л 2k + f 2 D 1-2*/ 2
Постоянная интегрирования С общего решения
z = C exp(-2fap) + A sin(rc/3 - ф) -f Bcos(n/3 - ф)
в соответствии с начальным условием (z = 0 при ф = 0) равна
С = -As\n(n/3) - Bcos(n/3) = -0,787м2.
Тогда в конечной точке В участка разгона при ф = я/3 скорость лыжника будет
vH = <jB + CQxp(-2kn/3) = Uyj24/29-0,787ехр(-0,4189) = 0,5567м = 17,4 м/с .
Движение лыжника без учета сопротивления воздуха описывается более
простым дифференциальным уравнением, которое можно получить из A3.11),
положив в нем \х = 0 и / = 0 . Решение
z = и2 [cos(tt/3 - ф) - cosGt/3)]
этого уравнения при тех же начальных условиях позволяет найти другое значе-
значение скорости в конце участка разгона:
v* = ij2gr[\ - cos(*/3)] = ^2ф = 22,1 м/с,
которое показывает, что сопротивление воздуха заметно снижает скорость
лыжника.
287
13.5. Динамика относительного движения
Неинерциальной является система отсчета, которая с уско-
ускорением движется относительно другой, инерциальной системы
отсчета. Движение точки рассматривается одновременно по от-
отношению к двум системам отсчета, т. е. является сложным
(рис. 13.6). При этом предполагается:
1) движение неинерциальной системы отсчета O'XYZ отно-
относительно инерциальной Oxyz, или переносное для точки движе-
движение, задано и от движения материальной точки не зависит;
2) приложенные к точке силы в соответствии с уравнением
динамики A3.1) определяют абсолютное ускорение точки — ус-
ускорение относительно инерциальной системы отсчета;
3) предметом изучения является движение точки относи-
относительно неинерциальной системы O'XYZ, т. е. относительное
движение.
Рис. 13.6
288
Представим абсолютное ускорение точки в виде трех состав-
составляющих
а = аг+ае+аК9
где аг,ас,ак — соответственно переносное, относительное и
кориолисово ускорения, и подставим в уравнение A3.1). Разре-
Разрешая полученное выражение относительно аг, находим
mar = F + {-тас) + (~так ).
Произведения, содержащиеся в скобках, имеют единицу из-
измерения силы, хотя силами в истинном смысле этого термина,
т. е. характеристиками взаимодействия с другими материальными
телами, они не являются, а выступают в качестве некоторых по-
поправок на неинерциальность системы отсчета. Их называют соот-
соответственно переносной силой инерции Фе = - тае и кориолисовой
силой инерции Фк=-так. Поскольку переносное движение
предполагается заданным, то силы инерции являются известными
функциями времени, относительных координат и скорости точки.
Формулы для ускорений в общем случае переносного движения
известны из кинематики:
ае =а(У + s х р + со х-(а> хр); 5K=2©xvr
Таким образом, векторное уравнение движения точки в не-
инерциальной системе отсчета, или основной закон динамики
относительного движения, имеет следующий вид:
mar=F + Q>e + Фк. A3.12)
Если учесть кинематические соотношения ar -d\rjdt-
= d2p/dt2 , уравнение A3.12) можно представить в форме диф-
дифференциального уравнения относительного движения точки,
причем, если точка является несвободной, то к активным силам
добавится реакция связи
md2p/dt2 =Р + 1 + Фе +ФК. A3.13)
Записывая векторное уравнение A3.13) в проекциях на те или
иные оси неинерциальной системы отсчета, получают соответст-
соответствующие скалярные дифференциальные уравнения, которые отли-
отличаются от скалярных уравнений движения точки в инерциальной
289
системе отсчета A3.3) - A3.5) лишь тем, что в их правых частях
к проекциям приложенных сил добавляются проекции сил
инерции.
Приведем частные случаи относительного движения точки в
динамике.
1. При поступательном движении неинерциальной системы
отсчета O'XYZ в силу того, что переносные угловые скорость и
ускорение отсутствуют (сое = 0, ге =0), кориолисово ускорение
ак = 0, и относительное движение точки определяется уравне-
уравнением
mar =F + Фс,,
где Фе = - т ае, ае = аа.
2. При поступательном, равномерном и прямолинейном
движении системы отсчета O'XYZ Фе =ФК =0, mar =F, т. е.
эта система превращается в одну из инерциальных. Уравнения
движения точки как по отношению к основной инерциальнои, так
и по отношению к любой другой инерциальнои системам отсчета
оказываются одинаковыми. Невозможность путем наблюдения за
механическим движением тел отличить одну инерциальную
систему отсчета от другой составляет содержание принципа от-
носительности Галилея.
3. Равномерный и прямолинейный характер относительного
движения материальной точки (аг = 0) имеет место при условии
равновесия системы приложенных к точке сил и ее сил инерции:
F + Фе + Фк = 0.
4. Условием покоя точки по отношению к неинерциальной
системе отсчета является равенство F + Фе = 0.
Пример 13.7. При аварийном покидании самолета кресло с пилотом общей
массой т = 250 кг с помощью катапультирующего устройства отделяется от
самолета с начальной скоростью v0 = 20,0 м/с . В момент катапультирования
самолет пикирует под углом а к горизонту со скоростью и0 = 20,0 м/с и уско-
ускорением tf = (g/2)sinot (в м/с2) (рис. 13.7). Сила, действующая на кресло со
стороны неподвижного (предполагаем отсутствие ветра) воздуха, R = -\xva ,
где |! —аэродинамический коэффициент, ц = 50Нс/м; va —абсолютная
290
(относительно воздуха) скорость кресла. Полагая кресло с пилотом материаль-
материальной точкой, найти координаты точек пересечения траекторий кресла и самолета
при пикировании с а = 0...300 .
Решение, Опасной при ката-
катапультировании является ситуация
встречи кресла при его падении с
самолетом. Поэтому движение
кресла будем рассматривать в свя-
связанной с самолетом системе коор-
координат, Эта система отсчета движет-
движется поступательно и прямолинейно,
но ускоренно, и поэтому является
неинерциальной. Векторное урав-
уравнение движения кресла
dv — — ~
т-
dt
= Р + R + Ф„
Рис. 13.7
где Р = mg , R = -|iva = -ц(м + v), Фе = -та , спроецируем на оси координат:
тХ = -\i(X -и)- mg sin a + та; mY = -mgcosa - \xY,
или
хХ + X = и0 + at - (gsina - а)х; xY +Y = -gxcosa,
где х = m/ix = 5,0 с — постоянная времени.
Частное решение первого уравнения X = At л- Bt2/l; методом неопределен-
неопределенных коэффициентов находим константы В = а, А = MoT-gxsina . Частное ре-
решение второго уравнения Y = -gxcosa • /.
В общем решении уравнений
Ar = C1+C2exp(-r/x) + (tt0~<gxsina)^ + a/2/2;
Y = C3+C4 exp(- t/x)- gxcosa-1
постоянные интегрирования определяем в соответствии с начальными условия-
условиями Х@) = Г@) = 0 , ^@) = 0, Г@) = v0:
-С, = С2 = (и0 -gxsina)x, С3 = -С4 = (v0 + gxcosa)x.
Тогда уравнения движения примут вид
X = («о ~ gxsina)x[y/x -1 + ехр(-//х)] + at2/2;
У = (vo + gxcosa)x[l -ехр(-//х)]- gxcosa t.
Из условия Y = 0 находим моменты времени, соответствующие точке пере-
пересечения траекторий кресла и самолета при различных углах a . Решив численно
трансцендентное уравнение
У (О = (vo + grcosa)x[l - ехр(-г*Д)]- g^cosa • t* = 0,
A3.14)
291
из первого уравнения A3.14) определяем координату
X(t*) = (uo-g%sma)x[t*/T-l + exp(
Ниже приведены рассчитанные значения t* и X* при различных углах а:
а.
t\ с
Х\м
0
3,65
21,1
10
3,70
18,3
20
3,85
16,2
30
4,15
15,1
Таким образом, при падении кресла опасности его встречи с самолетом при
а = 0...300 нет при условии, что расстояние от кабины до хвоста самолета ме-
менее 15 м.
Пример 13.8. Материальная частица М массой т движется в горизонталь-
горизонтальной плоскости под действием лопатки вентилятора, вращающегося вокруг вер-
вертикальной оси с постоянной угловой скоростью со (рис. 13.8). Лопатка выполне-
выполнена в виде дуги окружности, радиус которой равен радиусу г вала; центр С
окружности лежит на поверхности ва-
U U
ла, а длины дуг АС и АВ равны меж-
между собой и соответствуют углу тс/3.
Движение частицы начинается от корня
(положение А) лопатки с начальной
относительной скоростью, полученной
вследствие столкновения с лопаткой и
равной v0 = cor/2 .
Пренебрегая трением о поверхность
лопатки, определить относительную
скорость, с которой частица отделится
от лопатки, и нормальное давление ее
на лопатку в этом положении.
Решение. Материальная частица
(точка) совершает сложное движение.
Переносным для нее является извест-
известное движение ротора. Требуется найти
относительное движение точки вдоль
Рис. 13.8 лопатки. Система отсчета, связанная с
вращающимся ротором, является не-
инерциальной, поэтому движение точки определяется векторным уравнением
dvr - - — —
т—- = тя + N + Фе + Фк .
dt 6 е К
В проекциях на естественные оси
т dvxr /dt = Фе cos(rc/6+(p/2);
mvr2/r = OK+Nn; A3.15)
292
где vj=ds/dt, s = AM = rq>\ Фе=т@20М, ОМ = 2rsinGi/6 + <p/2); Фк=2тсо\', .
Первое уравнение системы A3.15), определяющее движение точки, можно
привести к виду
dvxjdt - (o2rsm(n/3 + ф).
Полученное уравнение является нелинейным, однако, выполнив замену не-
независимой переменной dv] /dt = (dvxr/dt)ds/(rdq>) = vxdvxr/(rd(p) и разделение
переменных, можно найти его первый интеграл
v2 = С - 2o)V2 cosGt/3 + ф).
В соответствии с начальными условиями (при ф = 0 и 5 = 0 vr= cor/2 ) по-
постоянная интегрирования
С = (сог/2J + 2coV cosGt/3) = 5со2 г2/4.
Таким образом, зависимость относительной скорости частицы от координа-
координаты имеет вид
v2 = о V[5/4 - 2cos(tt/3 + ф)].
В момент отделения от лопатки при ф = я/3 относительная скорость части-
частицы v' = v, (я/З) = Зсо г/2 и давление ее на лопатку
Q = _W/; = 2mcov - m(v'J/r = mcoVC - 9/4) = 0,75mco2r .
13.6. Равновесие и движение материальной точки
относительно Земли
Все мы живем на Земле, поэтому задачи динамики движения
материальных тел относительно Земли имеют исключительное
значение. Так как к точности решения этих задач могут предъяв-
предъявляться самые различные требования, возникает необходимость
установить, насколько существенным является отличие системы
отсчета, связанной с Землей, от инерциальной.
Движение Земли относительно инерциальной гелиоцентри-
гелиоцентрической системы отсчета является довольно сложным. Без учета
эффектов, обусловленных влиянием Луны и планет Солнечной
системы, Земля участвует в следующих движениях:
обращается вокруг Солнца по близкой к круговой орбите ра-
радиусом около 150 млн км;
вращается вокруг собственной оси с практически постоянной
угловой скоростью, совершая один оборот в сутки.
293
Переносная сила инерции точки в системе отсчета, связанной
с Землей, определяется формулой
Фе = -тае = -т(ао + а" + а]).
Ускорение а0 от орбитального движения Земли вокруг Солнца
составляет 5,9 10 м/с2 . Влияние сил инерции от такого уско-
ускорения может оказаться заметным лишь для весьма долговремен-
долговременных движений точки. Если этим ускорением можно пренебречь,
инерциальной становится геоцентрическая система отсчета. По
отношению к такой системе отсчета переносная сила инерции
определяется только нормальным ускорением а" во вращатель-
вращательном движении Земли вокруг собственной оси:
Ф" = т(й2г3 coscp = m(ove,
где со = 2я/24 • 60 • 60 = 7,3 • 10~5 рад/с; г3 « 6370 км — соответ-
соответственно угловая скорость вращения Земли и ее радиус; ф — гео-
географическая широта места; ve — переносная скорость точки.
Максимальное переносное нормальное ускорение имеют точки
на экваторе (а")тгх =со2г3 = 3,3-10~2 м/с2.
Свободная материальная точка может находиться в состоя-
состоянии покоя относительно Земли при условии, что
р + ф;=о,
т. е. если сила тяготения Земли и переносная сила инерции урав-
уравновешиваются. Такое возможно только для точки, которая нахо-
находится в экваториальной плоскости Земли на расстоянии h от ее
поверхности, при котором равны модули сил тяготения и инер-
инерции. На поверхности Земли сила тяготения точки массой т
где g = 9,8 м/с2 — ускорение силы тяготения на экваторе. Тогда
на высоте h
г2
mg-—^. 2(A)
( + h
294
и высота стационарной орбиты
[]
-1]= r3 [Vg/« )max -1]« 36000 км .
Условие равновесия несвободной материальной точки на по-
поверхности Земли (рис. 13.9) помимо силы тяготения и переносной
силы инерции включает реакцию связи:
mg + Ф" +N=0 .
Рис. 13.9
Равнодействующая двух первых сил есть вес тела. Она мо-
может быть представлена в виде mg' = /w(g - а"), где g' — ускоре-
ускорение тяготения с учетом неинерциальности (вращения) системы
отсчета. Величина g' зависит от широты местности: максималь-
максимально оно на полюсах, минимально — на экваторе. Линия действия
равнодействующей определяет местную вертикаль (т. е. линию
отвеса в данной точке поверхности Земли). Только на полюсах и
экваторе местная вертикаль проходит через центр Земли.
Уравнение относительного движения материальной точки в
системе отсчета, связанной с Землей, помимо веса и других при-
приложенных сил включает также кориолисову силу инерции
Фк =-так =-2m((D х vr),
295
модуль которой зависит от ориентации вектора v,. относительно
оси вращения Земли. Значение кориолисовой силы инерции
Фк = 2mcov,. максимально при движении точки в плоскости, пер-
перпендикулярной оси вращения Земли, и не зависит от географиче-
географического положения точки. На первый взгляд может показаться, что
поскольку Фк линейно зависит от со (величины высокого порядка
малости), кориолисова сила инерции велика по сравнению с Ф" . В
действительности отношение модулей этих сил определяется за-
зависящим от географического положения точки отношением от-
относительной и переносной скоростей: Фк/ф" =2vr/ve.
При движении точки по параллели кориолисова сила инерции
направлена по той же линии, что переносная сила инерции Ф"
(рис. 13.10). В случае движения на восток обе силы оказываются
направленными в одну сторону и модули их складываются. При
движении на запад силы противоположны, модули вычитаются, а
при скорости относительного движения vr = vc/2 = 230coscp ко-
кориолисова сила инерции полностью компенсирует переносную.
Таким образом, при движении точки по параллели изменяется
лишь ее вес.
Рис. 13.10
296
При движении в меридиональной плоскости Земли кориоли-
сова сила инерции перпендикулярна этой плоскости и в северном
полушарии направлена вправо по отношению к направлению
движения точки. Так как значения переносного и кориолисова
ускорений малы по сравнению с ускорением силы тяготения (от-
(отличие составляет несколько порядков), влияние соответствующих
им сил становится заметным только в длительных движениях с
небольшими относительными ускорениями, например в атмо-
атмосферных процессах, в течении рек, орбитальных движениях
спутников и тому подобных явлениях. В задачах динамики ма-
машин, для которых характерны значительные относительные ус-
ускорения, влияние этих сил несущественно, поэтому систему от-
отсчета, связанную с Землей, обычно считают инерциальной.
Глава 14
ГЕОМЕТРИЯ МАСС
14.1. Центр масс механической системы
При движении системы материальных точек большую роль
играют величины, характеризующие распределение масс точек.
Называют эти величины моментами и определяют как суммы
произведений масс тк (к = 1,2,..., N) точек системы на однород-
n
ную функцию их координат: ^rnkx%y%zyk, где а + Р + у = / —
степень момента. Моменты вычисляют относительно точки, оси
или плоскости.
Момент первой степени So =^щгк называют статиче-
ским моментом масс точек относительно какого-либо центра
N
О, а момент второй степени Jo =^mkrk —моментом инерции
*=i
системы относительно центра О.
Систему материальных точек называют также механической
системой. Механическая система - совокупность материальных
точек, положение или движение каждой из которых определяется
положением или движением других точек этой совокупности.
Рассмотрим систему, состоящую из конечного числа N ма-
материальных точек с массами тк и определим положение мате-
материальных точек относительно точки О с помощью радиус-
векторов гк (рис. 14.1). Для механической системы важное зна-
значение имеет центр масс, характеризующий распределение масс
материальных точек в системе. Центр масс системы — это
298
геометрическая точка С, поло-
положение которой определяется ра-
радиус-вектором гс, проведенным
из точки О (см. рис. 14.1).
Статический момент массы
механической системы относи-
относительно какой-либо точки О ра-
равен произведению массы сис-
Мк(тк)
темы М =
на радиус-
ы\
вектор центра масс гс:
Рис. 14.1
ы\
откуда
к=\
М
A4.1)
Проецированием A4.1) на оси прямоугольной декартовой
системы координат получаем выражения для вычисления коор-
координат центра масс механической системы:
х -
хс -
М
N
Выражения
М
N
z -
zc -
М
N
A4.2)
к=\
называют статическими моментами массы системы относи-
относительно координатных плоскостей Oyz, Oxz, Оху. Из A4.2) имеем
SOyz = Мхс ; SOxz = Мус; SOxy = Mzc .
Для сплошных однородных тел So можно записать в виде
интеграла по массе тела:
So = lim 2^rkAmk = \rdm.
*тк~*°к=\ (A/)
299
Тогда
\fdm
г -W± A4.3)
и
\xdm \ydm jzdm
_ (М) if _ (М) _{М)
хс - ГГ~ ' Ус - Г7~ ' zc ~ ТТ~ •
МММ
Если тело имеет постоянную плотность р, то dm-pdV и
масса тела М = pV, где dV, V— элементарный объем частицы и
объем тела соответственно. Тогда
\rdV
и
\xdV jydV jzdm
v _(Л . „ _{V) . „ _{M)
с у sc vC V
Для материальной поверхности будем иметь dm
М = Pi5\ где pj - поверхностная плотность; dS — площадь по-
поверхности элементарной частицы; S — площадь рассматриваемой
материальной поверхности. Формула для радиус-вектора в этом
случае примет вид
\rdS
( S
Для материальной линии dm = p2dl, M = p2/, где р2 —ли-
—линейная плотность; dl — длина элемента линии; / — длина матери-
материальной линии, а радиус-вектор
\rdl
Если в качестве точки, относительно которой нужно вычис-
вычислить статический момент системы, выбрать центр масс С, то
300
k=]
так как радиус-вектор центра масс относительно этой же точки
равен нулю, т. е. рс = 0.
14.2. Моменты инерции
При рассмотрении вращательных движений твердых тел
вводят понятия моментов инерции, которые характеризуют рас-
распределение массы тела по отношению к точке (полюсу), оси или
плоскости.
Моментом инерции материальной точки М относительно
точки О называется произведение массы т этой точки на квадрат
ее расстояния г до точки О:
Jo=mr2-
Рассмотрим механическую систему, состоящую из N мате-
материальных точек с массами тк (к = 1,2,..., N). Момент инерции
механической системы, состоящей из N материальных точек Мк,
относительно точки (полюса) О равен сумме моментов инерции
этих точек (рис. 14.2):
*=1 Ы\
Момент инерции относительно точки называют полярным
моментом инерции.
Моментом инерции механической системы материальных
точек относительно оси О1 называется сумма произведений масс
этих точек на квадраты их расстояний до оси О1 (см. рис. 14.2):
N
X2
к=\
Для тела, имеющего непрерывное распределение массы,
имеем соответственно интегралы по массе М:
Jo= \r2dm\ J{ = \h2dm.
(М) (М)
Величина
301
A4.4)
называется радиусом инерции тела относительно оси OL Тогда
момент инерции можно представить как
Рис. 14.2
Значения р, для различных тел приведены в справочниках.
Для тел произвольной формы р, можно вычислить по формуле
A4.4), при этом Ми Jt определяют экспериментально.
Единица измерения момента инерции — килограмм на квад-
квадратный метр (кг • м2).
Моменты инерции относительно декартовых осей Ox, Oy, Oz
и полюса О определяют по формулам (рис. 14.3)
N
к=\
A4.5)
302
N
*=1
N
k=\
A4.6)
k=\
Рис. 14.3
Сложив левые и правые части уравнений системы A4.5), по-
получим
2J()=JX+Jy+J2. A4.7)
Моменты инерции относительно координатных плоскостей
Оху, Oyz, Oxz соответственно равны:
N N N
ll2
k=\
k=\
Из A4.6) и A4.8) следует зависимость
Для тела, имеющего непрерывное распределение массы, осе-
осевые моменты инерции относительно осей координат определяют-
определяются интегралами по массе М:
Jx= \(y2+z2)dm;Jy= \(x2+z2)dm;J2= \{x2+y2)dm.
(М) (М) (М)
303
14.3. Зависимость моментов инерции относительно
параллельных осей (теоремаГюйгенса-Штейнера)
Найдем зависимость между моментами инерции механиче-
механической системы относительно параллельных осей Oz и CZ (рис. 14.4).
/
9/
^ J
Ус
/
&CL /c n
Ук
/xk/
\ "
/ *Y
Рис. 14.4
Выберем две системы прямоугольных декартовых координат
Oxyz и CXYZ, оси которых параллельны, а точка С — центр масс
системы. Моменты инерции относительно осей Oz и CZ будут
соответственно равны
J<b=t»te+yl}- Jcz=t>»Ml+YZ\
Координаты точки Мк в рассматриваемых системах связаны
уравнениями
хк=Хк+хс; yk=Yk+yc.
Подставив в выражение для JOz эти соотношения, получим
k+X(:f+(Yk+ycf}=
N ( \ N
к=\ к=\
к=\
к=\
к=\
304
Здесь
масса системы;
=МХС =0*
Аг=1
л
^Г mkYk = MYC = 0, так как Хс = YC = О; *2 + j? = d2 ,d — рас-
к=\
стояние между осями Oz и CZ.
Окончательно имеем
Jo= = Л-z + м/2 •
Полученное выражение представляет собой математическую
запись теоремы Гюйгенса-Штейнера, которую можно сформули-
сформулировать так: момент инерции системы относительно какой-либо
оси равен сумме момента инерции относительно параллельной
оси, проходящей через центр масс системы, и произведения массы
системы на квадрат расстояния между параллельными осями.
14.4. Моменты инерции однородных тел
Стержень постоянного сечения
Момент инерции однородного стержня массой М и длиной /
(рис. 14.5) относительно оси Oz будет J:= \y2dm. Так как
плотность материала стержня р2 = —, a dm = p2dl = — dy9 то
получаем
' 2 , М2
° У .
Z
— •—
/
*с
У
Рис. 14.5
21 Зак. 16
305
Момент инерции относительно оси CZ
I2 Ml2
Jr7 =J_-M— =
'CZ
12
Круглый диск
Момент инерции однородного круглого диска массой М и
радиусом R (рис. 14.6) относительно оси Cz равен Jz = \r2dm .
(АО
Плотность материала диска
Pj =M/\nR2), масса элементарного
кольца радиусом г и шириной dr
„ , М 2Мг . ^
dm - Inrdr —- = —г- dr . Оконча-
Rl
х тельно имеем
2MRt
J =
R2
MR2
Рис. 14.6
Из A4.7) следует, что
откуда
В силу симметрии
Моменты инерции относитель-
относительно точки С и оси Oz равны между
собой:
2Jr=Jx+Jv+J:,
j;=jx+jy.
, J. MR2
Для тонкого кольца или колеса радиусом R, масса которого
распределена по его ободу, имеем
Л - \R2dm = R2 \dm = MR2.
(М) (М)
306
Прямоугольная пластина
Момент инерции однородной прямоугольной пластины
массой М относительно оси Oz (рис. 14.7) равен Jz = \y2dm.
(М)
Плотность материала пластины р, = M/(ab), dm = pxady =— dy
b
(см. полоска 1 на рис. 14.7), следовательно,
М
Mb2
a
У
Рис. 14.7
Момент инерции пластины относительно оси Оу равен
Jy - jz2dm. Здесь dm = pxbdz = —dz (см. полоска 2 на
(А/)
рис. 14.7). Тогда
а
Jn
12
Момент инерции пластины относительно оси Ох равен
Jx= \v +z2)dm9 где dm =—dydz (см. прямоугольник 3 на
аЪ
(М)
рис. 14.7). Таким образом,
21*
307
al}h
Учитывая, что Jo = Jx, тот же результат можно получить из
формулы 2JO = 2JX =JX+Jy+Jz, или Jx =Jy+Jz.
Прямой круговой цилиндр
Момент инерции однородного прямого кругового цилиндра
массой Ми радиусом R (см. рис. 14.8) относительно продольной
оси симметрии Cz будет равен Jz = у1 dm . Плотность материала
(М)
ММ. ,т. __- , 2М , _
цилиндра р = — = —-—, dm = paV = pH2nrdr = ——rdr. После
подстановки имеем
, 2M'\3. MR2
к 0 j.
A4.9)
Рис. 14.8
308
Момент инерции цилиндра относительно оси Су определим
согласно теореме Гюйгенса-Штейнера: Jу = \z2dm + Jy>, где
(АО
dm = pnR2dz = — dz\ Jy, = J dm—. Откуда
H (a/) 4
\A Hl2 \4 Hl2 ( TJ2 J?2 Л
Jv =— \z2dz + R2 \dz = M\ + — .
y И J AH J 19 4
Л -Я/2 ^* -Я/2 V 1Z ^ J
Момент инерции для полого цилиндра с внешним R и внут-
внутренним Ro радиусами относительно оси Cz представим как раз-
разность моментов инерции сплошных цилиндров радиусами R и
RQ. С учетом формулы A4.9) будем иметь
где pnH[R2 -R^)-M — масса полого цилиндра; р — плотность
его материала.
Шар
Момент инерции однородного шара, масса которого М и ра-
радиус R (рис. 14.9), относительно любой оси одинаков в силу его
симметрии, т. е.
jx=jy=jz=ho.
Полярный момент инерции
(Л/)
где dm — элементарная масса полой
сферы с радиусами г и r + dr, dm =
= p4nr2dr ; р = MjV = ЗМ/\
Итак dm-3Mr2dr откуда
*тгак. am — —j- r ar , откуда рИСв ^.9
R
309
Следовательно,
Для полого шара с внешним R и внутренним Ro радиусами
имеем
5 3 PV ^У 5 Я3-*3
где М =—яр(/?3 - 7?q ) - масса полого шара.
Для тонкой сферической оболочки предельным переходом
получаем
J0=MR\ JX=J=J2=-MR2.
14.5. Моменты инерции однородных тел вращения
Воспользуемся цилиндрической системой координат
(рис. 14.10). Сечение тела вращения плоскостью, проходящей
через ось вращения Oz, ограничено кривой Z, уравнение которой
на участках АА'Ах и АА"АХ соответственно
Момент инерции тела массой М относительно оси вращения Oz
Jz= jr2dm = p jr2dV.
(A/) (V)
Подставив выражение для элементарного объема тела вращения в
виде dV - rdrdydz, получим
Jz =p
0
310
А
Рис. 14.10
Объем тела вращения
К-
(V) О 2Х
Окончательно находим
'' 2
A4.10)
Из
условия симметрии Jjc2?Uit = jy2dm = — J (дс2 + j>2 )(i/w =
(M) (A/) 2 (M)
= —Jz, следовательно,
(A/)
(A/)
(М)
2 г'
A4.11)
где
A4,12)
(M)
Для определения момента инерции однородного прямого
кругового конуса массой М относительно оси Oz (рис. 14.11) за-
запишем уравнения прямых, ограничивающих тело вращения
311
(треугольник ОАВ): г, =0,
z2 = Я. Для формулы A4.10)
имеем: интеграл в числителе
H
менателе —
Я
3
= R2 — = — (объем конуса
nR2H
). Окончательно
Рис. 14.11
получаем
Jz =0,3MR2.
Замечание. Момент инерции конуса относительно оси Oz можно вычислить
и другим способом. Согласно (рис. 14.12), Jz = у1 dm . Элементарная масса dm
(М)
пусть будет равна массе полого цилиндра
высотой И, т. е. dm = 2nrhpdr . Из подобия
треугольников EDB и ОАВ имеем
—= .Тогда dm = 2np—(R-r)rdr, a
Н R R
J2
= 2тгр# = 0,1тфЯД4
или
Л=0,ЗЛ/Д2,
где М = ртсЯ2#/3 — масса конуса.
Чтобы определить Jx и У^, необхо-
необходимо вычислить интеграл вида A4.12):
dr
Рис. 14.12
312
30
Согласно A4.11),
Л тер/?2//
2//3
30
= м(о,15/?2+О,1#2).
Пример 14.1. Определить моменты инерции конуса относительно осей Су'
и AY(см. рис. 14.11).
Решение. Согласно теореме Гюйгенса-Штейнера,
J(y = Jy - M(OCf ,
где ОС = А//4 , тогда
( ^
0.15/
16
Аналогично
где АС = 3/4И .Откуда
Пример 14.2. Определить момент
инерции треугольника относительно
оси О.х(рис. 14.13).
Решение Момент инерции
(М)
I дс dm = р,/^; р, = M/S ; /^ =
= — {h-y) (p,, 'V — плотность и
треугольника соответствен-
соответственно). После подстановки имеем
S Av
Откуда находим
J' =
Рис. 14.13
- ^ an • S - —
Mh2
Пример 14.3. Определить моменты инерции прямоугольного параллелепи-
параллелепипеда относительно координатных осей (рис. 14.14).
20 3ак. 16
313
У
о
Решение. Момент инерции относи-
относительно оси Oz
(М)
где dm = pcdxdy, p = M/(abc) .
у После подстановки получим
tJ b a
"" о о
Аналогично находим
Рис. 14.14
Пример 14.4. Определить момент инерции тора относительно оси симмет-
симметрии Cz (рис. 14.15).
Рис. 14.15
Решение. Воспользуемся формулой A4.10), в которой /j(z)=/?--^г02-г2,
/2(г)= R + ^Tq -z2 . Вычислим интегралы в числителе и знаменателе, исполь-
используя подстановку г = r0cos(p :
R2 + r02 - z2)Jr?-z2dz = 8Дг02 J(/?2 + r02 sin2 9)sin
'о it
/2 = 4/? J^/аь2 -z2dz = 4R |r02 sin2 ф^/ф = 2nRr
Окончательно имеем
314
inRr;
I 4
~2 2
Пример 14.5. Для эллипса —+ -?~- = 1 определить моменты инерции
а' Ъ
(рис. 14.16).
Рис. 14.16
Решение.
(М)
где dm = 2р,ди/у ; р, = M/(iiab); * = а^\ - y2/b2 .
После подстановки получаем
b | 2~ я/2
Jx = 4р, a JV2ijl - ^-jdy = 4р, аЪъ \ sin2
о ' ^ о
(при вычислении интеграла использована подстановка у
Аналогично находим
Jy = Ma2/4,
и так как Jr = J^ + Jy, то
14.6. Момент инерции относительно оси,
проходящей через заданную точку
Пусть ось О1 проходит через данную точку О. Выберем пря-
прямоугольную декартову систему координат с началом в точке О, с
осями которой ось О1 образует углы а, Р, у (рис. 14.17). Момент
инерции механической системы относительно оси Oh
20*
315
k=\
Из прямоугольного треугольника ОМкАк имеем hk =
Рис. 14.17
Запишем векторное произведение
/ j
х П =
cos a cos P cos у
h Ук zk
= i (zk cos P - yk cos y) + j(xk cos y-zk cos a) +
+ k{yk cos a - xk cosp).
Представим /0 x rk\ в виде
1-2 ~)
= (zk cosP - yk cosyJ + (xk cosy - zk cos aJ +
+ (yk cos a - xk cos pJ
и преобразуем полученное выражение:
hi = (xl + y2k )cos2 у + (x2k + z2 )cos2 p + (y2k + z2 )cos2 a -
-2xkyk cos a cos P - 2xk zk cos a cos у - 2yk zk cos P cos у.
316
Для Jj получаем
Jl = cos2
k=\
k (y2k
cos2
(
k \x
mk \xl
k=\
cos2
y\)-
k=\
k=\
N
k=\
k=\
ИЛИ
J, = J' cos2 a + Jv cos2 P + У, cos2 у -
- 2 J cos a cos P - 2УХ. cos a cos у - 2J cos p cos y.
A4.13)
В этой формуле
N
I
k=\ k=\ k=\
моменты инерции системы относительно осей координат, а
N
к=\ к=\ к=\
— центробежные моменты инерции относительно тех же осей.
Как следует из A4.13), для определения момента инерции
относительно произвольной оси необходимо знать углы ориента-
ориентации этой оси a, P, у и моменты инерции относительно осей коор-
координат с началом в рассматриваемой точке О: Jx, Jy, Jz, Jxy,
Jxz, Jyz. Эти моменты инерции записывают в виде матрицы
-Jz
xy
-Jzy J2
A4.14)
где Jxy = Jyx; Jxz = Jzx; Jyz = Jzy.
Матрица A4.14), составленная из осевых и центробежных
моментов инерции относительно прямоугольных декартовых
осей координат, называется тензором инерции. Эта матрица —
симметричная и с действительными элементами.
317
14.7. Эллипсоид инерции. Главные оси инерции
Эллипсоид инерции — поверхность второго порядка, по-
построенная в любой точке тела — характеризует спектр моментов
инерции тела относительно осей, проходящих через эту точку.
Для построения этой поверхности на каждой оси 01, проходящей
через точку О, откладывают от этой точки отрезок
Геометрическое место концов отрезков ОК (точек К) и является
эллипсоидом инерции.
Получим уравнение эллипсоида инерции в системе коорди-
координат Oxyz (рис. 14.18). Подставив выражения cos а = х/ОК = yjJt x,
cos$ = y/OK = yJJ)y, cosy = z/OK = Jj)z в формулу A4.13), по-
получим
Jxx2 + Jyy2 + Jzz2 -2Jxyxy-2Jxzxz-2Jyzyz = l. A4.15)
Рис. 14.18
Выражение A4.15) — это уравнение центральной поверх-
поверхности, не имеющей бесконечно удаленных точек, так как для
всех осей отрезок ОК имеет конечную длину. Такая поверхность
и есть эллипсоид инерции. Для бесконечно тонкого тела в виде
318
прямолинейного отрезка эллипсоид инерции вырождается в ци-
цилиндр, если точка О принадлежит отрезку или прямой, содержа-
содержащей этот отрезок.
Для каждой точки тела существует свой эллипсоид инерции.
Если оси координат направить по взаимно перпендикулярным
главным осям эллипсоида инерции {OX, OY, OZ на рис. 14.18), то
его уравнение будет иметь следующий вид:
JXX2 +JYY2 +JZZ2 =1. A4.16)
Главные оси (оси симметрии) эллипсоида инерции, по-
построенного в точке твердого тела, называются главными ося-
осями инерции для данной точки тела. Следовательно, в каждой
точке тела имеются три главные оси инерции, которые являют-
являются главными осями эллипсоида инерции, построенного в дан-
данной точке.
Эллипсоид инерции, построенный для центра масс тела,
называется центральным эллипсоидом инерции, а его глав-
главные оси — главными центральными осями инерции тела. Мо-
Моменты инерции тела относительно главных осей инерции в
точке называются главными моментами инерции для этой
точки тела. В формуле A4.16) это Jx, JY, Jz. Моменты
инерции относительно главных центральных осей инерции на-
называют главными центральными моментами инерции тела и
обозначают Jcx , JCY , Jcz .
Сравнив уравнение A4.16) с уравнением эллипсоида инер-
инерции, записанным в канонической форме:
а2
1 _ 1 . _ 1
а — . , о — . , с —
получим
Рх
т. е. большей оси эллипсоида инерции соответствует меньший
главный момент инерции тела для данной точки.
Эллипсоид инерции называется трехосным, если все глав-
главные моменты инерции для точки тела различны, и эллипсоидом
вращения, если два главных момента инерции для точки тела
равны. Все прямые, расположенные в плоскости, перпендику-
319
лярной оси вращения, являются главными осями инерции тела в
точке. Эллипсоид инерции становится сферой, если все главные
моменты инерции тела в точке равны. Все оси инерции, прохо-
проходящие через центр сферы, являются главными.
Уравнения эллипсоида инерции A4.16), A4.17) не содержат
центробежных моментов инерции, т. е. центробежные моменты
инерции относительно главных осей инерции равны нулю:
JXY =JXZ =JYZ =0. A4.18)
Справедливо и обратное утверждение: чтобы оси прямоугольной
системы координат были главными осями инерции, необходимо
и достаточно выполнить условия A4.18).
Запишем формулу A4.13), когда оси ОХ9 OY, OZ являются
главными осями инерции в точке О. В этом случае все центро-
центробежные моменты инерции равны нулю и
У, =JX cos2a + JY cos2p + yz cos2 у. A4.19)
С помощью этой формулы при известных главных моментах
инерции в точке О определяют момент инерции относительно
оси OL
Моменты инерции относительно произвольной оси О1
(рис. 14.19), согласно выражению A4.19) и теореме Гюйгенса-
Штейнера, вычисляют по формуле
Уу = Jr + Md2 = Jcx cos2 a + JCY cos2 p + Jcz cos2 у + Md2,
Рис. 14.19
320
где Jcx, JCY, Jcz, M,d — главные центральные моменты инер-
инерции тела, его масса и расстояние между осью О1 и параллельной
ей осью С/', проходящей через центр масс тела.
14.8. Свойства главных осей инерции тела
Теорема 14. L Если одна из осей координат, проведенных в
точке, является главной осью инерции тела для этой точки, то
два центробежных момента инерции, которые содержат ин-
индекс главной оси инерции, равны нулю (рис. 14.20).
Рис. 14.20
Доказательство. Пусть ось OZ является главной осью
инерции для точки О, т. е. одной из осей симметрии эллипсоида
инерции, построенного для этой точки тела. Проведем в точке О
две взаимно перпендикулярные и перпендикулярные оси OZ оси
Ох и Оу. Уравнение эллипсоида инерции в этих осях имеет вид
Jxx2 + Jyy2 +JZZ2- 2Jxyxy - 2JxZxZ - 2JyZyZ = 1.
Так как OZ — ось симметрии эллипсоида инерции, то най-
найдутся в плоскости OxZ точки M(jc, 0, Z) и А/, (-*, 0, Z), лежащие
на поверхности эллипсоида. Координаты этих точек удовлетво-
удовлетворяют равенствам
Jxx2+ JzZ2-2JxZxZ = \;
321
Jxx2 +JZZ2 +2JxZxZ = \.
Вычитая из второго уравнения первое, получаем
4JxZxZ = 0.
Так как jc и Z не равны нулю, то Jх7 = 0 . Аналогично рас-
рассуждая для двух точек, расположенных в плоскости OyZ, можно
показать, что и J у7 = 0.
Замечание 1. Уравнение эллипсоида инерции в осях Ox, Оу, OZ прини-
принимает вид
x2 + Jy2 + JZ2
Jxx2 + Jyy2 + JZZ2 - U^xy = 1. A4.20)
Замечание 2. Среди осей, перпендикулярных между собой и оси OZ, нахо-
находятся главные оси инерции ОХи OY для точки О.
Определим положение этих осей из условия J^ = 0. Координаты Xк , Yk
и хк, ук материальной точки Мк массой /и* (см. рис. 14.20) связаны между
собой следующим образом: Хк - хк cos а + ук sin а, Yk = -хк sin а + ук cos а .
Координата Zk при повороте осей Ох, Оу не изменяется.
Вычислим центробежный момент инерции Jху :
J ху - ^ тк Хк Yk = ^Г flfy (jfy cosot + >^ sin aX~ xk sin а + ук cosa) =
N , ч N'_ i ч .N
где 2^/
Проведя преобразование и приравняв нулю Jху, получаем выражение
sin 2a i
^со82а = 0,
тг , . , _ 1 ...... 2J»
из которого находим при Jx = Jy a = — рад, а при Jx*Jy a = — arctg
4 2 Jy — Jx
Замечание 3. Справедливо обратное утверждение: при Jxz = J^ = 0 ось OZ
является главной осью инерции.
Действительно, при /^ = J^ = 0 уравнение эллипсоида инерции имеет вид
A4.20), а следовательно, ось OZ— главная ось эллипсоида инерции, т. е. глав-
главная ось инерции тела для точки О.
Теорема 14.2. Главная центральная ось инерции твердого
тела является главной осью инерции для всех своих точек.
322
Доказательство. Пусть ось CZ есть главная центральная ось
инерции тела. Проведем через центр масс тела С две взаимно
перпендикулярные и перпендикулярные оси CZ оси Сх и Су
(рис. 14.21). Тогда
Лг=^=0;*г=*.=0. A4.21)
0 z,,
Vе
7
7
\ У]
ь
У "
Рис. 14.21
Выберем на оси CZ произвольную точку О и покажем, что ось
CZ является главной и для точки О. Проведем в точке О оси Охх и
Оух, параллельные осям Сх и Су; ОС = Ъ . Координаты произволь-
произвольной точки Мк массой тк следующие: х]к = хк, у]к = ук,
z]k -Zk -b. Необходимо доказать, что центробежные моменты
инерции относительно осей Ох]9 OZ(z}) и Оу,, OZ(z}) равны
нулю. Это будет означать, что ось CZ есть главная для точки О.
Имеем
N N
N
Щтк
к=\
N
t—U АС
N
xkZk -Ь^Щ
N
к=\
N
ykZk -b^mk
к=\
Хк "" «Л
N
к=]
У к =J
:Z-bMxc;
ъуА к-
vz-bMyc.
A4.22)
323
С учетом A4.21) из A4.22) следует Jц2 = Jь2 = 0, что и до-
доказывает теорему.
Замечание, Главная ось инерции, не проходящая через центр масс тела,
является главной осью инерции только для одной точки (рис. 14.22). Пусть
теперь ось OZ - главная ось инерции для точки О, т. е. JxZ = Jу7 = 0, а центр
масс тела не лежит на этой оси (хс Ф О, ус * О), тогда, согласно A4.22),
УХJ = ~ЬМхс , JyiZ = -ЬМус. Эти центробежные моменты не равны нулю. т. е.
ось OZ не является главной для точки О,.
Рис. 14.22
Теорема 14.3. Если тело имеет ось материальной симмет-
симметрии, то эта ось является главной центральной осью инерции
этого тела.
Доказательство. Пусть ось Oz
является осью материальной симмет-
симметрии тела, тогда центр масс С лежит на
этой оси (рис. 14.23). Проведем через
центр масс С две перпендикулярные
между собой и перпендикулярные оси
Cz оси Сх и Су. Докажем теперь, что
У центробежные моменты Jxz и J
равны нулю. Всегда можно найти ма-
материальные точки тела Мк и М'к с
равными массами тк, т'к, симмет-
симметрично расположенные относительно
Рис. 14.23
324
оси Cz. Координаты этих точек соответственно хк9 ук9 zk и
- хк, -ук9 zk. Для Nk и Nk с равными массами тк и тк соот-
соответственно имеем хк, - ук, zk и - хк, ук, zk. Тогда
(I)
(Н)
Z Z
(III) (IV)
где I, II, III и IV — соответственные части тела. (Аналогично за-
записываются суммы для точек, лежащих ниже плоскости Сху.)
Так же можно доказать, что Jyz = 0.
Итак, ось Cz является главной центральной осью инерции
тела.
Теорема 14.4. Если тело имеет плоскость материальной
симметрии, то любая прямая, перпендикулярная этой плоскости,
является главной осью инерции тела в точке пересечения прямой
с плоскостью симметрии.
Доказательство. Пусть тело имеет плоскость материальной
симметрии Р (рис. 14.24). Проведем ось Oz перпендикулярно этой
плоскости Р\ точка О — точка пересечения оси Oz и плоскости Р.
Рис. 14.24
Проведем взаимно перпендикулярные оси Ох и Оу, лежащие в
плоскости Р. Докажем, что центробежные моменты инерции Jxz и
325
Jyz равны нулю. Так как плоскость Р есть плоскость материальной
симметрии тела, то для каждой материальной точки Мк тела с
массой тк и координатами хк, ук9 zk найдется точка Мк рав-
равной массы с координатами хк, ук9 - zk. Тогда
N
к=\ (D (II)
Аналогично можно доказать, что Jyz = 0. Следовательно,
ось Oz является главной осью инерции тела в точке О.
Замечание /. Центр масс тела С лежит в плоскости материальной симмет-
симметрии, ось Cz является главной центральной осью инерции тела.
Замечание 2. Если тело однородно, то плоскость или ось материальной
симметрии являются просто плоскостью или осью геометрической симметрии.
14.9. Определение направления главных осей инерции
Пусть в точке О тела проведена произвольная система коор-
координат Oxyz. Уравнение эллипсоида инерции в точке О имеет вид
- 2Jxzxz - 2Jyzyz -1 = 0,
т. е. тензор инерции для этой точки будет J.
Определим направления главных осей инерции и главных
моментов инерции для этой точки О (рис. 14.25).
Выберем в качестве осей координат в точке О оси OX, OY,
OZ, направленные по главным осям эллипсоида инерции в точке
О. Тогда радиус-вектор г точки Л/, лежащей на главной оси
инерции и поверхности эллипсоида инерции, совпадет по на-
направлению с вектором нормали к эллипсоиду.
Направления осей определим из уравнения
или
dF dF 3F /ЛЛПАЛ
A4.24)
326
dF'-¦>
дх
gradF = Xr
dF -x •
dy~ y'
dF
dz
С учетом A4.23) уравнения A4.24) преобразуются к виду
(Jx-X)x-Jxyy-JX2z = 0;
- Jyxx + (Jy - Х)у - J^z = 0; A4.25)
Система уравнений A4.25) определяет координаты точки
M(x,y,z) главной оси инерции (см. рис. 14.25). Ненулевое ре-
решение эта система имеет при условии, что
Jx-X -Jxy -Jx
-Л
ух
-Л
= 0.
A4.26)
Уравнение A4.26) имеет три действительных корня Хи Х2,
Х3 в случае симметричности тензора инерции и действительности
его компонент. Допустим, что все корни различные. Подставив
их значения в A4.25), получим три системы уравнений, из кото-
которых найдем три точки пересечения главных осей инерции для
точки О с эллипсоидом инерции. Из системы уравнений A4.25)
при известных А,;(/ = 1,2,3) определим отношения x/z и yfz. Из
первых двух уравнений A4.25) получим решение в форме
v V Z
— У - A4.27)
327
где АДА,,), (у = 1, 2,3) —алгебраические дополнения элементов
последней строки определителя A4.26).
Выражения A4.27) представляют собой уравнения прямых,
проходящих через точки (9@,0,0) и M(jc, y9z)9 и являются
уравнениями главных осей инерции.
Если в системе A4.25) одно уравнение независимое, то лю-
любое из уравнений этой системы является уравнением плоскости, в
которой лежат главные оси инерции для точки О.
Докажем, что двум различным корням А,, и Хк соответст-
соответствуют два ортогональных направления главных осей инерции. Для
X, и Хк координаты точек М, и Мк будут соответственно х},
У,, z, и хк9 ук 9zk.
Из уравнений A4.24) имеем
dF) (dF) (8F) ,
-у* -Х- ——— Л) -Л- ——— V — к I V V
Лг, Т уI, f Zr, — /V.iA.Aj,
^ К ^ -'л \ ~ \ К I \ I К
dF) (dF) fdF} ,
+[] = k
[ду] Лдг)
Вычитая из первого уравнения второе, получаем
(Х|-^)(^Л+ЛЛ+гЛ) = 0. A4.28)
Если X, ^Хк, то должен быть равен нулю второй множитель
в уравнении A4.28). Этот множитель представляет собой скаляр-
скалярное произведение радиус-векторов главных направлений и
Следовательно, их направления ортогональны.
Выберем теперь в качестве осей координат главные оси
инерции в точке О. Для оси ОХ имеем Y = Z = 0 и из первого
уравнения A4.25) получаем (jx - Х} )Х = 0 . Здесь X Ф 0, поэто-
поэтому Х} - Jх - Аналогично можно показать, что Х2 - JY > Хъ = Jт7 .
Таким образом, корни А,,, Х2, Х3 уравнения A4.26) равны
соответственно главным моментам инерции Jx , JY, J7 тела для
точки О.
328
Пример 14.6. Для однородной квадратной пластины OABD, масса которой
М, а сторона а, определить тензор инерции для осей системы координат Oxyz
(рис. 14.26).
Рис. 14.26
Решение. Моменты инерции относительно осей декартовой системы коор-
координат равны
2Ма2
. Ма2
Jv =
у 3
Ма
. М ( 2 2\
;JX =—[а +а 1
3 * 3 V ;
В точке О Ох - главная ось инерции, так как она перпендикулярна плоскости
симметрии пластины, поэтому Jxy = Jxz=Q.
Определим центробежный момент инерции J)t2 = \yzdm. Пусть dm =
= p^dydz, где р, = м/а2 ; dm = —^dydz . Тогда
а
\4 а а КА *
= — jzdz \ydy = -у
(М)
¦/„«V
" (А/)
Тензор инерции имеет вид
о -
-J,
j2
Пример 14.7. Для условий предыдущего примера определить главные оси
инерции пластины для точки О и главные моменты инерции относительно этих
осей.
Решение. Для нахождения главных моментов инерции составим опреде-
определитель
329
A =
л - х о о
О Jy-k -Jy
о -л, л-
который должен быть равен нулю для нетривиального решения характеристиче-
характеристического уравнения
Из уравнений
находим
^. = л
Л/а2
12
12
Главные моменты инерции равны
, 2Л/а2
-M?L. j -1Ma
Jx~Jx~ з ' Jy~ 12 ' z~ 12
Определим теперь уравнения главных осей инерции для точки О. Запишем
систему уравнений:
(Jy-Xi)y-Jy2z = 0-,
Подставляя Х; (где / = 1,2,3), получаем три решения:
Из первого решения следует, что главная ось ОХ совпадает с осью Ох, вто-
второе и третье решения дают уравнения осей OY и OZ. Угол а = тс/4 .
Глава 15
ОБЩИЕ ТЕОРЕМЫ ДИНАМИКИ
15.1. Механическая система. Внешние и внутренние силы
Реальные задачи динамики системы требуют изучения дви-
движения материальных точек и тел с учетом взаимного влияния их
движений.
Твердое тело представляет собой неизменяемую систему ма-
материальных точек. Возможна модель механической системы, ко-
когда ряд тел в ней представляется материальными точками, а для
других тел при движении необходимо учитывать именно свойст-
свойства твердых тел.
Движение механической системы всегда рассматривают по
отношению к каким-либо системам отсчета (как инерциальным,
так и неинерциальным). В декартовой системе координат поло-
положение системы, состоящей из N материальных точек, определяет-
определяется совокупностью 3N координат хк, ук, zk, где к = 1,2,..., N.
Для точки можно использовать, например, криволинейные коор-
координаты, а положение твердого тела определять с помощью углов
Эйлера и координат некоторой точки тела (полюса). Если меха-
механическая система состоит из нескольких твердых тел, то ее поло-
положение задается координатами некоторых точек тел (полюсов) и
значений углов Эйлера для этих тел.
Следует различать свободные и несвободные механические
системы. На движение несвободных систем наложены связи. Для
однозначного определения положения механической системы в
любой момент времени необходимо иметь такие координаты, ко-
которые не связаны между собой какими-либо уравнениями. Если
уравнений связей т, то для системы материальных точек будет
3N -т = п независимых координат.
331
Независимые между собой параметры, однозначно опреде-
определяющие положение системы в любой момент времени при дви-
движении, называют обобщенными координатами для механической
системы. В качестве обобщенных координат могут быть выбра-
выбраны отрезки (в том числе и криволинейные) и углы.
Внешними силами механической системы называются силы,
с которыми точки системы взаимодействуют с телами и точками,
не входящими в данную систему.
Внутренними силами механической системы называются
силы взаимодействия между собой точек данной системы.
Рассмотрим механическую систему, состоящую из N матери-
материальных точек. Равнодействующую внутренних сил, действующих
на Аню точку, обозначим F^, внешних сил — FJf*. Внутренние
и внешние силы могут включать в себя активные силы и реакции
связей.
Теорема. Главный вектор и
главный момент относительно
произвольного центра внутренних
сил механической системы равны
нулю при любом состоянии механи-
механической системы, т. е. в состоянии
покоя или движения.
Доказательство. Точки систе-
системы Мх и М2 взаимодействуют с
силами F?\ F2(p (рис. 15.1), при-
причем, согласно третьей аксиоме ди-
динамики (см. § 13.1),
, или FJP + Щ? = 0. A5.1)
С учетом всех взаимодействий точек системы имеем
F$ + F$ =0, ..., F$lx N + iFtfVi = 0. A5.2)
Суммируя уравнения A5.2), получаем
Рис. 15.1
Х
A5.3)
332
Здесь сумма внутренних сил, действующих на к-ю точку, приве-
приведена к равнодействующей F^l).
Таким образом, главный вектор внутренних сил механиче-
механической системы
Я(/)=?^(/)=0. A5.4)
Рассмотрим сумму моментов сил F^\ /^относительно
точки О. Используя выражение A5.1) и векторное равенство
rj = г2 + М2М], запишем
Мо(?№) + Мо{Щ?) = ?у^ + г2 xF2</> =
= (r1-r2)x/;</>=A/2A/IxFl<()=0
(здесь векторное произведение равно нулю, так как векторы
М2М} и F^ коллинеарны).
Обобщая уравнение A5.5) для всех точек системы, имеем
0,...,
Суммируя уравнения A5.6) и применяя теорему Вариньона
для равнодействующей силы F^l), получаем
?mo(F«) = 0. A5.7)
к=\
Таким образом, главный момент внутренних сил механиче-
механической системы относительно точки О равен нулю:
i xF« =0. A5.8)
к=\ к=\
В проекциях на оси координат, согласно (8.6) и (8.10), имеем
IFW-O; *«=i*g>-0; Я? =1^=0; A5.9)
к=\ к=\ Ы\
4
A5.10)
333
15.2. Дифференциальные уравнения движения
механической системы
Рассмотрим движение механической системы, состоящей из
N точек. На точку Мк массой тк системы действуют равнодей-
равнодействующая внутренних сил Fkl) и равнодействующая внешних
сил Щв) (рис. 15.2).
(щ)
Рис. 15.2
Дифференциальные уравнения движения системы матери-
материальных точек в векторной форме имеют вид
Щ^г = Щ'!)+Щ1\ A5.11)
или
at
где v^ — абсолютная скорость к-й точки.
Систему N дифференциальных уравнений называют диффе-
дифференциальными уравнениями движения механической системы в
векторной форме.
В проекциях на оси инерциальной прямоугольной декарто-
декартовой системы координат Oxyz получаем 3N дифференциальных
уравнений движения механической системы:
334
;
Начальные условия имеют следующий вид:
при t = /0
Хк =zXk09 У к = УкО> Zk =2кО> ,*с ,^ч
Хк =Хк0> У к ~УкО> Zk ~ Zk0'
Проинтегрировать систему уравнений A5.12) аналитически и
даже численно очень трудно. Процесс интегрирования еще более
усложняет то обстоятельство, что силы реакций связей, наложен-
наложенных на систему, часто необходимо определять в процессе реше-
решения задачи о движении механической системы.
Ряд задач небесной механики требует подробного знания
движения точек во времени. Это задачи о движении двух, трех и
более точек (тел) под действием сил тяготения. Здесь применимы
уравнения A5.12).
Для решения некоторых других задач необходимо систему
уравнений A5.11) преобразовать так, чтобы в них содержались
зависимости некоторых обобщенных мер движения (количества
движения, главного момента количеств движения, кинетической
энергии) от характеристик приложенных сил (главного вектора и
главного момента относительно центра). Из таких уравнений час-
часто удается исключить внутренние силы и найти необходимые
решения, описывающие движение механической системы.
Получают эти уравнения из закономерностей, описываемых
общими теоремами динамики для механической системы: о дви-
движении центра масс, об изменении количества движения, об изме-
изменении главного момента количеств движения, об изменении ки-
кинетической энергии.
Теоремы формулируют для инерциальных систем отсчета;
если система неинерциальна, то это специально оговаривают.
15.3. Теорема о движении центра масс
механической системы
Запишем уравнения движения механической системы в виде
VP = 1,2,...,#), A5.14)
335
где ак — ускорение к-и точки; F?e), F/° — равнодействующие
внешних и внутренних сил, действующих на к-ю точку.
Просуммируем уравнения A5.14) по всем точкам механиче-
механической системы:
*=1 Ы\ Ы\
_ N __
Здесь главный вектор внутренних сил Л(/) = J]/*1/'* = 0.
к=\
Продифференцировав дважды по времени выражение A4.1)
для определения радиус-вектора центра масс системы, получим
,v*; О5-16)
Аг=1
ткак9 A5.17)
ы\
где vr — абсолютная скорость центра масс системы.
С учетом A5.17) уравнение A5.15) примет вид
Mac=JTFk{e) =Rie\ A5.18)
— N —
где R(c) = J] F/6>) — главный вектор внешних сил, действующих
ы\
на механическую систему.
Теорема о движении центра масс механической системы
формулируется так: центр масс механической системы движет-
движется как материальная точка, как бы обладающая массой систе-
системы, под действием системы всех внешних сил, действующих на
точки системы.
В проекциях на оси прямоугольной декартовой системы коор-
координат уравнения A5.18) имеют вид
Мхс = &Р ; Мус = j^Ftf ; Mzc = ?/?> , A5.19)
k=\ k=\ Ы\
где хс, ус, zc — проекции ускорения ас центра масс механи-
механической системы.
336
Из теоремы о движении центра масс вытекают два следствия.
1. Если главный вектор внешних сил, действующих на сис-
систему, равен нулю, т.е. R{c) = 0, то из A5.18) следует, что
ас = —— = 0, откуда после интегрирования получаем
dt
4 ,. A5.20)
at
Интегрируя A5.20), находим
fc =C{t + C2. A5.21)
Постоянные С,, С2 определяем из начальных условий: при t = 0
гс = г( 0, v( = vro. Для текущего момента времени при R{e) = 0
окончательно имеем
v(. =vro; fc =rro+vro/.
Таким образом, если главный вектор внешних сил, дейст-
действующих на точки механической системы, равен нулю, то центр
масс механической системы движется прямолинейно и равно-
мерно.
Если vro = 0, т. е. центр масс в начальный момент времени
находится в покое, то
vr=0, Fc=rCO9 A5.22)
т. е. центр масс покоится в течение всего времени движения сис-
системы при условии, что R{c) = 0.
Замечание. Воспользуемся условием A5.22) и запишем для текущего и на-
N N
чального положений механической системы Мrc =^mkrk и Мгсо = ^щгко
к = \ к=\
(см. рис. 15.2). Вычитая из первого выражения второе, получаем
W N
^тк^к ~ ho) = ?m*AF* = 0 •
к=\ *=1
Следовательно, отдельные точки системы могут перемещаться при Rie) = 0 и
покоящемся центре масс.
2. Пусть теперь проекция главного вектора внешних сил,
действующих на систему, на одну из осей (например, ось Ох)
23 Зак. 16 337
N
равна нулю Rxe) = ]Г/Г^) =0, тогда из первого уравнения A5.19)
к=\
следует аСх = хс = 0, а значит vCx = хс =СХ, хс =C}t + С2.
Постоянные определяем из начальных условий: при / = 0
хс = хсо, vCx = хс = лгс0. Для любого момента времени при
Rxe) = 0 окончательно имеем
хс = хсо, дсг = xcot + хсо.
Если хсо = 0, т. е. проекция скорости центра масс на ось Ох
в начальный момент времени равна нулю, то
ic=0, jcc. =jcro A5.23)
в любой момент времени.
Замечание. Воспользуемся условием A5.23) и, согласно A4.2), запишем для
W N
текущего и начального моментов времени Мхс -^щхк , Мхсо = ^щхк0 .
Вычитая из первого уравнения второе, получим
N N
^Г1тк(хк-хк0) = ^Г^ткАхк =0 . A5.24)
*=1 к=\
Из уравнения следует, что перемещение ?-й точки Ахк=хк- хк0 вдоль оси
Ох существует при R^e) = 0 и отсутствии перемещения вдоль этой оси центра
масс.
Пример 15.1. Тело У массой тх имеет паз, в котором движется материаль-
материальная точка 2 массой т2, ZO'AB = а , (УА = / (рис. 15.3, а).
Определить силу, с которой тело 1 действует на плоскость, и скорость тела 1
в момент, когда точка 2 достигнет конца паза (точки А), если в начальный мо-
момент система покоилась, а точка 2 находилась в верхней точке паза. Трением
пренебречь.
Решение. Внешними для рассматриваемой системы являются силы тяжести
р] = mxg, Р2 = m2g и нормальная реакция N . Воспользуемся теоремой о дви-
движении центра масс системы и запишем уравнение
к=\
В проекции на ось Оу имеем
к=]
338
где
y = ^-(m,
n
С учетом второго уравнения A5.19) и М ус = ^ЩУь получаем
где ук = ак> — проекции абсолютных ускорений тела и точки на ось Оу.
Рис. 15.3
Пусть абсолютное ускорение тела У равно а . Точка 2 совершает сложное
движение — относительное по пазу с относительным ускорением аг и пере-
переносное вместе с телом У (ае = а ). Абсолютное ускорение точки 2 а2 = аг + ав =
= а,.+а. Уравнение для определения нормальной реакции N будет иметь вид
N = ?П\пу + nt^Clfy + Qy) + (/Я| + /W2)g =s m2ary "*" ("*| "*" ^2)^ ~
= (Wj + M2)g — #!25SinCt,
где ay = 0 ; a^ = -arvsince = -i'sina .
Составим уравнение движения центра масс в проекции на ось Ох, а также
уравнение движения точки 2 в проекции на ось O's (рис. 15.3, б):
М хс = тхах + n^ia^ + ax) = 0 , или (m1 + m2Kr- /^i'cosa = 0;
W2(arv + av) = m2gsina, s -iccosa = gsina,
где ax = x ; a^ =-,ycosa ; av = -a-cosa = -ircosa .
23*
339
Определив
s = gsina ! ^т— = А = const,
/и, + пг2 sin a
получаем выражение для вычисления нормальной реакции N :
N = (/Hj + m2)g - m2ssina = (m, + m2)g -m2gsin a
m,+m2sin a
= (mx+m2)mxg
/и, + m2sin2a
Сила, с которой тело У действует на плоскость, равна по модулю N и противо-
противоположна ей по направлению.
Для нахождения скорости тела У в момент, когда точка 2 достигнет конца
паза, запишем уравнение
2 cosa ..
^ s .
После интегрирования получаем
w2cosa . „
х = — j +С,
Из начальных условий задачи (при / = 0 х = s = 0, i = i = 0) находим
С,=0.
После интегрирования уравнения
.. ids
= А
ds
имеем
где С2 = 0 .
При ^ = / получаем следующие выражения для проекции скорости тела У на
ось Ох:
/г-77 I 2g/sina
\2Al = m2cosa I
^ (m, + тзХ/я, + m
= х = \2Al m2cosa Iг
m]+m2 ^ (m, + тзХ/я, + m2 sin a)
v,-0.
Пример 15.2. На гладкой плоскости находится плита У массой т,, на кото-
которой закреплен механизм, состоящий из трех стержней (рис. 15.4). Стержни 2, 3,
имеющие одинаковую массу m и длину / отклонены от вертикали на угол a .
Масса стержня 4 равна ш4 .
Определить перемещение плиты У, когда стержни 2 и 3 займут нижнее вер-
вертикальное положение, если в начальный момент система тел покоилась.
340
Рис. 15.4
Решение. Внешние для данной системы тел силы тяжести плиты Рх - m}g и
стержней Р = mg , Р4 = m4g и реакция гладкой плоскости N перпендикуляр-
ны оси Ох и
0. Поэтому, согласно теореме о движении центра масс
(см. первое уравнение A5.19)), имеем Мхс = 0, где М— масса всей механиче-
механической системы. Так как проекция начальной скорости центра масс системы vCx
равна нулю, то справедливо выражение A5.24), в котором в данном случае
Ах* — перемещения центров масс плиты и стержней вдоль оси Ох
Уравнение A5.24) будет иметь вид
т. Ах, + тАх2 + тДх3 + т4Ах4 = 0 .
Здесь Ах, — перемещение плиты, Ах2-Ах4 перемещения вдоль оси Ох центров
масс стержней, равные соответственно
Ах2 = Ах, + —sina = Ах3; Дх4 = Ах, + /sina .
Подставив эти выражения в основное уравнение и разрешив его относитель-
относительно Ах,, получим
. _ (/w + m4)/sina
/и, + 2т + т4
Знак минус означает, что плита У переместится влево.
341
15.4. Теорема об изменении количества движения
Количество движения точки и механической системы
Количество движения механической системы — одна из мер
движения системы.
Количеством двююения материальной точки М называют
вектор, равный произведению массы т точки на ее скорость v
(рис. 15.5):
q=mv.
M(w)
О
Рис. 15.5
Проекции количества движения точки на оси прямоугольной
декартовой системы координат будут соответственно
qx = mvx =mx; qy = mvy =my; q2 = mv2 = mi .
Количеством движения механической системы называют
вектор Q, равный геометрической сумме количеств движения
точек системы:
1
A5-25>
к=\
Вектор Q называют также главным вектором количеств
двююения точек материальной системы. Вообще говоря, Q не
имеет точки приложения и является свободным вектором.
342
Проекции вектора количества движения Q на оси прямо-
прямоугольной декартовой системы координат равны
N N N N
QX = Y*mkvkx = 2>л ' Qy = ШткукУ = Т*ткУк;
Ы\ к=\ к=\ Ы\
N N
Qz =YamkVkz =Z/W*i* •
Аг=1 к=\
Единица измерения количества движения в СИ —
килограмм • метр в секунду (кг • м/с )*.
С учетом A5.16) выражение A5.25) принимает вид
Q=Mvc
(рис. 15.6).
Рис. 15.6
Проекции вектора количества движения системы на оси
прямоугольной декартовой системы координат будут соответст-
соответственно равны
1 кг • м/с = 1 Н • с.
343
=A/ic; Qy=MvCy =Myc;
Qz=MvCz=Mzc.
Если механическая система состоит из твердых тел, то
где Мi, vc — масса и скорость центра масс /-го тела.
Векторы количеств движения Qt тел можно приложить в
центрах масс этих тел.
Элементарный и полный импульсы силы
Элементарным импульсом силы F, действующей в течение
времени Л, называют вектор
Проекции элементарного импульса dS на оси прямоуголь-
прямоугольной декартовой системы координат равны
dSx = Fxdt\ dSy =Fydt; dS2 = Fzdt.
Полным импульсом силы F, действующей на материальную
точку в течение времени t, называют вектор
S(F)=JFA.
о
Проекции полного импульса силы F на оси прямоугольной
декартовой системы координат выражаются формулами
SX(F) = )fxA ; Sy(F) = *\FyA; S2(F) = \Fzdt.
0 0 0
Единица измерения импульса силы—ньютон-секунда (Не).
Теорема об изменении количества движения
материальной точки
Запишем дифференциальное уравнение движения материаль-
материальной точки М в виде
344
dv -
m— = F
dt
или, так как масса точки постоянна,
d^lj_±^f^ A5.26)
dt dt
Уравнение A5.26) выражает теорему об изменении количе-
количества движения для точки в дифференциальной форме: первая
производная по времени от вектора количества движения точки
равна равнодействующей активных сил и реакций связей, дейст-
действующих на материальную точку.
В проекциях на оси прямоугольной декартовой системы ко-
координат имеем
Согласно уравнению A5.26),
d(mv) = dq=Fdt. A5.27)
Таким образом, дифференциал количества движения точки
равен элементарному импульсу равнодействующей силы, дейст-
действующей на точку.
В проекциях на оси координат получаем
dqx = Fxdt; dqy = Fydt; dqz = Fzdt.
Проинтегрируем дифференциальное уравнение A5.27) в
пределах от 0 до V.
V
jd(mv) =
0 0
Тогда
mv-mvo=S(F), A5.28)
где v , v0 — абсолютная скорость точки в текущий и начальный
моменты времени соответственно (рис. 15.7); S(F) — полный
импульс равнодействующей силы за время и
Уравнение A5.28) выражает теорему об изменении количе-
количества движения точки в интегральной форме: изменение количест-
количества движения точки за промежуток времени от 0 до t равно пол-
22 Зак. 16
345
ному импульсу равнодействующей силы, действующей на точку,
за тот же промежуток времени.
Рис. 15.7
В проекциях на оси прямоугольной декартовой системы ко-
координат получаем
m(Vx -VOx) = Sx'> m(Vy ~V0y) = Sy ; m(Vz ~ V0z ) = S= •
Теорема об изменении количества движения
механической системы
Запишем теорему о движении центра масс механической
системы в виде
откуда получим
dt
d(Mvc)dQ
dt dt
346
Окончательно имеем
^ Z^)^)- A5.29)
Уравнение A5.29) выражает теорему об изменении количе-
количества движения механической системы: первая производная по
времени от вектора количества движения механической систе-
системы равна главному вектору внешних сил, действующих на мате-
риальные точки этой системы.
В проекциях на оси прямоугольной декартовой системы
координат уравнение A5.29) имеет вид
at *=1 at *=1 at k=x
т. е. первые производные по времени от проекций количества
движения механической системы на оси координат равны сумме
проекций внешних сил, действующих на точки системы, на эти
же оси координат.
Из уравнения A5.29) получим еще одну дифференциальную
форму теоремы
). A5.31)
*=1 к=\
Таким образом, дифференциал количества движения меха-
механической системы равен сумме элементарных импульсов внешних
сил, действующих на материальные точки системы.
В проекциях на оси координат имеем
dQx = ? Fgdt, dQy = ? Fffdt, dQ: = ? F^dt.
k=\ k=\ k=\
Проинтегрируем A5.31) по времени в пределах от 0 до / и
поменяем местами операции интегрирования и суммирования:
0 *=l k=\ о *=1
22* 347
_ N _ N
Здесь Q =^Timkvk, Qo =^mkvk0 — соответственно количества
движения механической системы в произвольный и начальный
моменты времени; Ske) — полный импульс внешней силы, дей-
действующей на к-ю материальную точку.
Выражение A5.32) представляет собой математическую за-
запись теоремы об изменении количества движения механической
системы в интегральной форме: изменение количества движения
системы за время t равно векторной сумме полных импульсов
внешних сил, действующих на точки механической системы за
то же время.
В проекциях на оси координат имеем
tsiy. g,-a, =
k=\ Ar=l *=1
Законы сохранения количества движения
механической системы
Законы сохранения количества движения следуют из тео-
теоремы об изменении количества движения механической систе-
системы, как частные случаи описания ее движения. Напомним, что
внутренние силы не влияют на изменение количества движения
механической системы. Математически законы сохранения опре-
определяют первые интегралы системы дифференциальных уравне-
уравнений, описывающих движение материальной точки и механиче-
механической системы.
Первыми интегралами для дифференциальных уравнений
движения механической системы называют соотношения вида
или
которые справедливы при любых начальных условиях. Первые
интегралы связывают время, координаты и проекции скоростей
точек и произвольные постоянные Су. При решении задач о
движении системы часто требуется определить лишь некоторые
348
характеристики ее движения, поэтому можно найти лишь некото-
некоторые первые интегралы.
Возможны следующие частные случаи.
1. Пусть главный вектор всех внешних сил, приложенных к
— N _
точкам системы, равен нулю: R^e) =X^*) =^* Тогда из урав-
ы\
нения A5.29) следует, что
Q=C. A5.33)
Этот результат (закон сохранения Q) формулируется так:
если главный вектор внешних сил, прилолсенных к точкам меха-
механической системы, равен нулю, то вектор количества движения
системы постоянен при движении системы.
В проекциях на оси прямоугольной декартовой системы ко-
координат получаем
0Х=С,; Qy=C2; Q2=C3. A5.34)
В A5.34) входят производные от координат точек не выше
первого порядка (проекции скоростей точек), т. е. эти выражения
являются первыми интегралами системы дифференциальных
уравнений A5.30).
2. Пусть проекция главного вектора внешних сил на какую-
N
либо ось координат равна нулю: R^e) = ^F^ = 0. Тогда из пер-
к=\
вого уравнения A5.30) следует, что
Qx = const.
Формулируется это так: если проекция главного вектора
внешних сил, действующих на точки механической системы, на
какую-либо ось равна нулю, то проекция вектора количества
движения системы на ту лее ось постоянна при движении
системы.
Пример 15.3, Плита I имеет массу /и, и может перемещаться по гладкой
горизонтальной плоскости (рис. 15.8). Материальная точка 2, масса которой т2,
начинает движение в гладкой трубке 3 радиусом R из положения Ао согласно
закону s = Дер , где ср = Ы , Ь = const > 0 .
Определить закон движения плиты 7 и ее ускорение, а также силу, с которой
она давит на плоскость, если в начальный момент плита покоилась.
349
У
О'
х Н
1
—ч
JJ
ч \
—**
4
4
Л
Is
ч
ш
1
'Ж *
Рис. 15.8
Решение. Согласно теореме об изменении количества движения системы в
проекции на ось Ох,
Количество движения системы
где v,, v2 — абсолютные скорости плиты, совершающей поступательное дви-
движение, и материальной точки соответственно.
Точка 2 совершает сложное движение: относительное по окружности радиу-
радиусом R со скоростью vr и переносное вместе с плитой со скоростью ve = vj. Та-
Таким образом, v2 = vr + v,. Окончательно имеем
Q = WjV, + пф, + v,) = (m, + m2)v, + m2vr.
При этом
Qx = (mj + m2)v]x + WjV^ = (/w, + /w2)jc - m2R<p sin ф,
где vlx = i:, v/T = -ЛфБШф .
Внешние силы системы — силы тяжести Рх = mxg, Р2 = rr^g и реакция
плоскости N — перпендикулярны оси Ох9 поэтому
350
ИЛИ
—[(/и, + т2)х - т2/?ф5Шф] = 0 .
dt
Проинтегрировав это уравнение, получим
(/и, + т2)х- m2/ftj>sin(p = С,.
Из начальных условий задачи при / = О * = О,<р = О(.у = О), *
определяем С, = 0, т. е.
(т, + т2)х - /H2/ftpsin(p = 0,
или
(т, + m2)dfr ~ m2/?sin9<icp = 0.
После второго интегрирования находим
(m, +m2)jc + /H2/?cos(p = C2.
Из начальных условий определяем С2 = m2R, а следовательно,
х - —2—^| _ С08ф) = —2 ^ _ cos^)
Ускорение плиты найдем из уравнения —^ = 0 :
dt
(m, +m2)x- m2R((psin(p + ф2 cos(p) = 0,
.. m2Rb2cosbt .. . . ,
где х = —^ ; ф = 0; ф = Ь.
Реакцию опоры N определим из теоремы об изменении количества движе-
движения в проекции на ось Оу:
dt i
N
где Qy = -m2R<pcos(p ; J]^ = N - (m, + w2)g .
После подстановки имеем
-т2/?(фСО8ф-ф25Шф) = N -(mi + m2)g ,
откуда
N = (mx+ m2)g + m2Rb2sin6f.
Сила, с которой плита давит на плоскость, по модулю равна реакции N, но
противоположна ей по направлению.
351
Теорема об изменении количества движения механической
системы в подвижной системе координат
В уравнении A5.29) производная вычислена относительно
неподвижной (инерциальной) системы координат. Согласно фор-
формуле Бура, можно записать (рис. 15.9)
dt dt
dQ
где —— первая производная по времени от вектора количест-
dt
ва движения Q в подвижной системе O'XYZ; со — мгновенная
угловая скорость подвижной системы координат.
\Х
Рис. 15.9
Уравнение
A5.35)
выражает теорему об изменении количества движения механиче-
механической системы в подвижной системе координат.
352
15.5. Теорема об изменении момента количества движения
материальной точки. Теорема об изменении главного
момента количеств движения механической системы
Момент количества движения материальной точки
Для характеристики движения материальной точки исполь-
используют еще одну векторную меру движения — момент количест-
количества движения, или кинетический момент относительно центра
(точки).
Моментом количества движения материальной точки мас-
массой т относительно центра О называют векторную величину,
равную векторному произведению радиус-вектора материальной
точки, проведенного из этого центра, на количество движения
точки:
ko = Mo(q) = rxq=rxmv. A5.36)
Вектор момента количества движения материальной точки
строят в точке О по правилу векторного произведения
(рис. 15.10).
q=mv
ko=Mo(q)
М
Рис. 15.10
Проекции вектора момента количества движения материаль-
материальной точки относительно центра О на оси координат равны мо-
353
ментам количества движения относительно соответствующих
осей координат, т. е. (ко)х = кх, (ко)у = ку, (ко)г = ?2.
Так как
к
ко = Mo(q) = rxmv = m
то моменты количества движения материальной точки относи-
относительно осей координат имеют вид
кх = Мх(mv) = m(yvz -zvy) = m(yz-zy)\
ky =My(mv) = m(zvx -xvz) = m(zx-xz); A5.37)
kz = Mz(mv) = m(xvy - yvx) = m(xy - yx).
Единица измерения момента количества движения в СИ —
килограмм-метр в квадрате на секунду (кг • м2/с )\
Главный момент количеств движения
механической системы
Главным моментом количеств движения, или кинетическим
моментом механической системы, относительно центра О назы-
называют геометрическую сумму векторов моментов количеств движе-
движения материальных точек системы относительно того же центра О:
_ N N N
к() =2><* =ХА/«ш=Е'г* *щ*к • о5-38)
/Ы к=) к=\
Вектор главного момента количеств движения Ко меха-
механической системы относительно центра О строят в точке О
(рис. 15.11).
Проекции главного момента количеств движения Ко систе-
системы на оси координат равны главным моментам количеств движе-
движения системы относительно соответствующих осей координат:
(&о)х = Кх, (Ко)у = Ку9 (Ko)z = Kz.
1 кгм2/с = 1 Н-м-с .
354
Рис. 15.11
С учетом A5.38) запишем главные моменты количеств дви-
движения механической системы относительно осей координат:
N N
Ку =
zkxk -xkzk); A5.39)
k=\
к=\
к=\
Замечание. Главный момент количеств движения материальных точек мож-
можно вычислить и относительно произвольной точки А:
К^ЕрГ'*****- A5.40)
Найдем связь главных моментов количеств движения данной механической
системы относительно двух различных центров О и А. Согласно рис. 15.11,
*=Ъ+Й")- О5-41)
Из A5.38) и A5.41) имеем
355
Л' _
где ^mkvk -Mv^-0 — количество движения механической системы.
Окончательно получаем
K0=?AxQ + KA=M0(Q) + KA. A5.42)
Точки О и А произвольно выбраны, vk — абсолютная скорость точки в
инерциальной системе отсчета (см. рис. 15.11).
Спроецировав A5.42) на оси Oz и параллельную ей AZ, получаем
Пусть теперь обе точки А и В — произвольные (подвижные) (см. рис. 15.11).
Запишем
Выполнив преобразования:
получаем
где KA=Y
Главный момент количеств движения относительно оси
вращения при вращательном движении твердого тела
Пусть твердое тело вращается вокруг неподвижной оси Oz с
угловой скоростью со (рис. 15.12). Определим главный момент
количеств движения этого тела относительно оси Oz. Согласно
определению,
Kz=j^Mz{mkvk). A5.43)
Проекция скорости точки Ак тела на касательную к траекто-
траектории ее движения
а момент количества движения относительно оси Oz
356
где со.* О (cov=cov=0). Подставив M2(mkvk) в выражение
A5.43), получим
К. =
^ =согЛ,
где J. =
момент инерции тела относительно оси
к=\
вращения Oz. Окончательно имеем
К: =Лю.. A5.44)
Знак К. — главного момента количеств движения твердого тела
относительно оси вращения — определяется знаком проекции
угловой скорости со..
Рис. 15.12
357
Таким образом, главный момент количеств движения вра-
вращающегося тела относительно неподвижной оси вращения ра-
равен произведению момента инерции тела относительно оси вра-
вращения на проекцию угловой скорости вращения тела на ось
вращения.
Замечание. Главный момент количеств движения вращающегося тела отно-
относительно точки О
к() = кх1 + ку] + кл .
Здесь
Кх = -Jx:g>2 ; Ку = -Jyzaz; Kz = Лсог, A5.45)
где Jxz. J)z — центробежные моменты инерции.
Формулы для вычисления Кх, Ку приведены без вывода. Они могут быть
получены из общих формул для случая движения тела с одной неподвижной
точкой. Если ось вращения Oz тела является главной для точки О, то
Jxz = Jv. = 0 и, следовательно, Кх = Ку = 0, а Ко = КМ . В общем случае Ко
не направлен по оси вращения тела.
Главный момент количеств движения твердого тела
при сферическом движении
Твердое тело с закрепленной точкой при движении в любой
момент времени имеет угловую скорость со. Главный момент
количеств движения тела относительно неподвижной точки
_ N
где v^ = со х rk .
Тело разбито на N элементов с массой тк и абсолютной
скоростью уДрис. 15.13).
Проекции Ко на оси Oxyz, а следовательно, и главные мо-
моменты количеств движения тела относительно осей координат, и
проекции скорости точки v^ на оси координат определяются
формулами A5.39) и D.7). С учетом A5.39) и D.7) для оси Ох по-
получаем
358
к=\
Хк ) - Zk (<*2Хк - ®XZk )] =
N N
*=1 Аг=1 к=\
Проекции угловой скорости здесь являются кинематическими
инвариантами и вынесены за знаки сумм, а суммы есть осевой Jx
и центробежные J^, Jxz моменты инерции. Аналогично можно
получить зависимости для Ку, Kz.
Z
Рис. 15.13
Окончательно формулы для главных моментов количеств
движения тела относительно осей координат с началом в непод-
неподвижной точке примут вид
Ку = -Jyxcox +Jycoy -
A5.46)
359
Уравнения A5.46) имеют одинаковый вид как для непод-
неподвижных, так и для подвижных, например, жестко связанных с
телом, осей.
Осевые и центробежные моменты инерции относительно не-
неподвижных осей при движении тела являются функциями време-
времени, так как положение тела относительно неподвижных осей из-
изменяется. Моменты инерции относительно подвижных осей,
связанных с телом, постоянны, так как со временем положение
тела относительно этих оеей не изменяется.
Главный момент количеств движения твердого тела относи-
относительно точки О определяется по формуле
независимо от того, какие оси координат выбраны.
Использовав выражение для тензора инерции A4.14) и пра-
правило умножения тензора на вектор-столбец проекций мгновенной
угловой скорости тела, получим
где
Ку
.Kz_
; © =
(Ох
(Од,
Выражения A5.46) упрощаются, если для тела выбранные
оси являются главными осями инерции в точке О (т. е.
jxy =
*** X —
* Y —
' > Z "~* '
A5.47)
Главный момент количеств движения
при сложном движении механической системы
Введем подвижную систему координат CXYZ, которая дви-
движется поступательно по отношению к инерциальной системе от-
отсчета Oxyz и начало которой связано с центром масс С системы.
Подвижную систему CXYZ называют кениговой системой коор-
координат (рис. 15.14).
Для краткости движение механической системы по отноше-
отношению к CXYZ будем называть движением системы относительно ее
360
центра масс. Запишем выражение гк = гс + р^, справедливое в
любой момент времени движения механической системы, и про-
продифференцируем его по времени:
dr
k _
A5.48)
dt dt dt
Тогда
vk =vc+v*(r). A5.49)
Здесь v^ — абсолютная скорость точки Мк, a vr — абсолютная
скорость центра масс механической системы. Докажем, что v[r) —
относительная скорость точки Мк по отношению к системе ко-
координат CXYZ.
Рис. 15.14
Согласно формуле Бура,
Л dt
361
d Pk
где - локальная производная в подвижной системе коор-
dt
динат. Но при поступательном движении системы CXYZ
<*Рк = -(г) _
dt к dt '
Главный момент количеств движения механической системы
относительно неподвижного центра О для абсолютного движения
системы относительно неподвижной (инерциальной) системы
координат Oxyz равен (см. рис. 15.11)
«о=ЙхИ1?,. A5.50)
к=\
Подставляя в A5.50) выражения для гк и vk9 после некоторых
преобразований получаем
— N
Ко = ?(* + pk)*mk(vc +v{kr)) =
N N N
= rc *vc^mk +rc x2)да^(г) +У?ткрк xvc + A5.51)
Аг=1 к=\ к=\
N
Здесь ]Г тк 1рк = Мрс = 0, так как радиус-вектор центра масс
к=\
относительно центра масс рс. = 0, а следовательно,
4r
*=i at \ы\ )
т. е. количество движения системы в ее движении относительно
центра масс равно нулю.
Таким образом, уравнение A5.51) принимает вид
Ко =rc xMvc+K<cr)=Mo(Q)+Ky, A5.52)
_ N
где K^r) = J] рк х mkv[r) — главный момент количеств движений
к=\
механической системы относительно центра масс для относи-
362
тельного движения системы по отношению к центру масс (по
отношению к системе координат CATZ, движущейся поступа-
поступательно вместе с центром масс).
Таким образом, главный момент количеств движения меха-
механической системы относительно неподвижного центра О для
абсолютного двгююения системы равен векторной сумме момен-
момента вектора количества абсолютного движения системы (при-
(приложенного в центре масс) относительно того же центра, и
главного момента количеств двилсения системы относительно
центра масс для относительного двгююения системы по отно-
отношению к центру масс.
В проекции на ось Oz (CZ) формула A5.52) принимает вид
K2=M2(Q)^K^Z, A5.53)
где К$ — главный момент количеств движения системы отно-
относительно оси CZ, проходящей через центр масс системы парал-
параллельно оси Oz.
При плоскопараллельном движении твердого тела, если ось
CZ перпендикулярна плоскости движения тела, К$ = JCz^z » гДе
Jcz — момент инерции тела относительно оси CZ (относитель-
(относительным движением тела является его вращение вокруг оси CZ).
Замечания: 1. Из A5.51) следует, что главный момент количеств движения
механической системы относительно центра масс для абсолютного движения
системы:
*=i *=i *=i
2. Главный момент количеств движения системы относительно подвижной
точки А для относительного движения системы по отношению к центру масс
равен
)xm v'(r)
Xmkvk
где p(kA) = pk + AC. Тогда
так как ^rnkvjtl) = 0.
363
Теорема об изменении момента количества движение
материальной точки
Запишем уравнение движения материальной точки
dv -
т—-F
dt
и умножим его векторно слева на радиус-вектор г (рис. 15.15)
- & - ъ
гхт—-гxF.
Л
q =mv
Рис. 15.15
Преобразуем левую часть полученного уравнения:
dv d ,„ _ч dr
г хт — = — (г xmv) xmv .
dt dt dt
Ho — xmv -v xmv =0 как векторное произведение коллинеар-
dt
ных векторов.
Далее получаем
at
at
или
364
^ MO(F). A5.54)
at
Формула A5.54) выражает теорему об изменении момента
количества движения материальной точки: первая производная по
времени от момента количества движения точки относительно
центра О равна моменту равнодействующей силы относительно
того же центра О.
В проекциях на оси прямоугольной декартовой системы
координат имеем
*% ^ ^ A5.55)
dt *x " dt yx ' dt
Теорема об изменении главного момента количеств
движения механической системы
Рассмотрим механическую систему Мк (? = 1,2,...,N), со-
состоящую из N материальных точек, к каждой из которых приложе-
приложены равнодействующие внешних Fke) и внутренних Fj^ сил. Для
каждой точки Мк запишем теорему об изменении момента количе-
количества движения относительно неподвижного центра О (рис. 15.16):
d —< ч —/л
— (г хт v }-r xF(e) +F xF(/) П5 56^
V к к к * — к к к к ' ^ "Jvj
Просуммировав A5.56) по всем точкам
+?rt х j?
и преобразовав левую часть уравнения, получим
л=1 at at k=z] at
Здесь Ko =^rkxmkvk — главный момент количеств движения
к=\
механической системы относительно центра О.
Главный момент внутренних сил
3?|0, A5.57)
365
а главный момент внешних сил
к=\
Окончательно имеем
A5.58)
A5.59)
Рис. 15.16
Формула A5.59) выражает теорему об изменении главного
момента количеств движения механической системы: первая
производная по времени от главного момента количеств движе-
движения механической системы относительно неподвижного центра
О равна главному моменту внешних сил, приложенных к точкам
системы, относительно того лее центра.
В проекциях на оси прямоугольной декартовой системы ко-
координат получаем соотношения, выражающие теоремы об изме-
изменении главного момента количеств движения системы относи-
относительно осей координат:
366
dK
Теорема об изменении главного момента количеств движения
механической системы относительно подвижного центра
Используя полученные ранее выражения A5.40) -A5.42) и
A5.59), запишем
dK d t_ - - ч dfA -p- _ dQ dKA
?Гя**л?я*%+
Преобразуем это выражение с учетом, что
л
N
или
N __ __
где Z plA) х F/c'} = L^ — главный момент внешних сил относи-
относительно точки А.
В проекции на какую-либо ось, например AZ (см. рис. 15.16),
получаем
-(УлХ&лг- A5.62)
Уравнение A5.62) выражает теорему об изменении главного
момента количеств движения системы относительно подвижной
367
оси. Подчеркнем, что уравнения A5.61) и A5.62) записаны для
абсолютного движения механической системы.
Теорема об изменении главного момента количеств движения
механической системы для ее относительного движения
по отношению к центру масс
Пусть подвижная система координат CXYZ связана с цент-
центром масс и движется поступательно относительно неподвижной
системы Oxyz (рис. 15.17). Согласно теореме об изменении глав-
главного момента количеств движения системы относительно центра
О для абсолютного движения механической системы,
а также с учетом A5.52) и rk = rc + lpk запишем
Но —— xg=vrxMvc = О как векторное произведение коллине-
dt
арных векторов. Используя теорему об изменении количества
движения механической системы —=- = ^Fke), получаем
dt
Окончательно имеем
ЪкхРк(е)=^\ A5.63)
N _ _
где ^рк x^(t) =^с} — главный момент внешних сил относи-
к=\
тельно центра масс С.
Сформулируем теорему: первая производная по времени от
главного момента количеств движения системы, вычисленного
368
относительно центра масс для относительного двиэ/сения меха-
механической системы по отношению к центру масс (по отношению
к системе координат, движущейся поступательно вместе с
центром масс), равна главному моменту внешних сил, дейст-
действующих на точки системы, относительно центра масс.
Рис. 15.17
В проекциях на оси подвижной системы координат CXYZ
имеем
CX \Гк ) - LCX 9
k=\
CY
CY *
A5.64)
S. - У M (F{e)} - L{e)
Уравнения A5.64) выражают теорему об изменении главного
момента количеств движения механической системы относитель-
25 Зак. 16
369
но осей, проходящих через центр масс, при относительном дви-
движении механической системы по отношению к центру масс.
Законы сохранения главных моментов
количеств движения системы
Законы сохранения моментов количества движения и глав-
главных моментов количеств движения при движении материальной
точки и механической системы записываются одинаково, так как
материальная точка есть механическая система, состоящая из од-
одной точки. Рассмотрим частные случаи теоремы об изменении
главного момента количеств движения механической системы.
1. Пусть главный момент внешних сил системы относитель-
относительно центра О равен нулю, т. е. L^ = 0. Тогда, согласно A5.59),
^ . A5.65)
0.
dt
Интегрируя A5.65), получаем
Ко = const,
т. е. главный момент количеств движения механической системы
относительно центра О постоянен по модулю и направлению. Это
уравнение выражает закон сохранения главного момента коли-
количеств движения механической системы относительно центра О в
векторной форме: если главный момент внешних сил относи-
относительно неподвижного центра О равен нулю, то главный момент
количеств движения механической системы относительно это-
этого центра постоянен по модулю и направлению.
В проекциях на оси прямоугольной декартовой системы
координат получаем уравнения
КХ=СХ; Ку-С2\ Kz = С3,
которые выражают законы сохранения главных моментов коли-
количеств движения системы относительно осей координат (частные
случаи теоремы об изменении главного момента количеств дви-
движения системы относительно осей координат) и представляют
собой первые интегралы дифференциальных уравнений для ме-
механической системы.
370
2. Пусть сумма моментов внешних сил, действующих на ме-
механическую систему, относительно оси Ох равна нулю, т.е.
1(/} = 0. Тогда, согласно A5.60),
dKY Л __
—?- = 0;А:,= const.
dt
Следовательно, если главный момент внешних сил, дейст-
действующих на механическую систему* относительно какой-либо оси
равен нулю, то главный момент количеств движения механиче-
механической системы относительно этой оси постоянен.
Если рассматривается тело или система тел, вращающихся
вокруг неподвижной оси Oz с угловой скоростью сог и L^ = 0,
то Kz=Jzcoz = const. Если в начальном состоянии угловая ско-
скорость и момент инерции системы относительно оси Oz будут со-
соответственно соО2 и Jz0, то
Jz0®0z = COnSt И Jz®z = Jz0®0z • A5.66)
Скамья Жуковского позволяет продемонстрировать закон
сохранения главного момента количеств движения системы отно-
относительно оси. Человек с грузами в руках встает на скамью (плат-
(платформу), которая приводится во вращение вокруг неподвижной
оси Oz с угловой скоростью co0z, при этом руки человека с гру-
грузами опущены, момент инерции равен Jz0. Так как силы тяжести
Р и Рх человека и платформы параллельны оси вращения, а
реакции RA, Ro ее пересекают (рис. 15.18), то I(ze) =0 и выпол-
выполняется закон сохранения A5.66).
Если человек разведет руки с грузами, т. е. его момент инер-
инерции относительно оси Oz станет больше (Jz >Jz0), то угловая
скорость со2 всей системы (человек, грузы, скамья) уменьшится
Если главный момент внешних сил относительно оси CZ,
проходящей через центр масс, ifgl = 0, то после интегрирования
уравнения A5.64) получаем
25* 371
Kqz = const.
Закон сохранения главного момента
количеств движения относительно центра
масс используют акробаты, прыгуны,
танцоры для создания вращения. Приме-
Применяется он и в космической технике.
Пример 15.4. Однородная пластина массой /и,
имеет наклонный паз, внутри которого может дви-
двигаться материальная точка Л/ массой т. Пластина
приводится во вращение вокруг неподвижной оси
Az с начальной угловой скоростью соо, материаль-
материальная точка при этом находится в положении Л/о
(рис. 15.19, а). Определить угловую скорость пла-
пластины в момент, когда точка Л/ вылетает из паза.
Трением и массой материала паза пренебречь.
Принять m, = 10m, соо = 5,2 рад/с.
Решение. Воспользуемся теоремой об измене-
изменении главного момента количеств движения систе-
системы относительно оси Az.
Механическая система состоит из пластины и
материальной точки. Внешними для системы явля-
являются силы тяжести Р , Рх и реакции опор А н В. Моменты сил тяжести и реак-
реакций опор А и В относительно оси Az равны нулю, так как силы тяжести парал-
лельны, а реакции опор пересекают ось Az, т.е. ]TA/r(F/e)) = 0. Согласно
Рис.15.18
A5.60),
at
и Kz = const.
Определим теперь главный момент количеств движения системы относи-
относительно оси Az в произвольный момент времени:
Главный момент количеств движения пластины
момент количества движения материальной точки М
где J. — момент инерции пластины, Jz « щха2/3.
Так как q=mv = m(ve + vr) = mve + mvr, то
К„ = AS2(mv,)+Mg(mvr).
372
5,0
3,0
1,0
0
а 5 sin a
2
f
б
Рис 15.19
Вектор mv, во все время движения точки А/ пересекает ось Az, поэтому
Mt(nwr) = 0. Окончательно получаем
373
Jz+m —+5psina \a>z=C}.
Постоянную Сх определим из начальных условий (при
г
Тогда
Uz+m\-+ssxua\ K=Jr+— ю0;
при
2+12m(-+jsinaj
При вылете точки М из паза ssina = д/2, следовательно,
1- _ 4/^+3/я
4(wj + 3 т)
или
43
°^52(
На рис. 15.19, б изображена зависимость
Рис 15.20
Пример 15.5. Орбитальная космическая
станция совершает вращение вокруг своей оси
симметрии с угловой скоростью со. Вокруг
оси CZ раскручивается до относительной угло-
угловой скорости оо^ по отношению к станции
маховик. Отношение моментов инерции стан-
станции и маховика Jc/Ju =200 (рис. 15.20). Оп-
Определить оо^, если требуется погасить угло-
угловую скорость станции в 10 раз.
Решение. Пусть силы притяжения, дейст-
действующие на космический аппарат, приводятся к
равнодействующей, проходящей через его
центр масс С. Тогда ZJ0** 0.
Главный момент количеств движения сис-
системы относительно поступательно переме-
перемещающейся оси CZ постоянен: Kcz = const.
374
До раскручивания маховика
после раскручивания
Откуда
соB;} = J'+J» • 0,9о) = 180,9ю.
Теорема об изменении главного момента
количеств движения механической системы
для подвижной системы координат
В полученном ранее уравнении A5.59), выражающем теоре-
теорему об изменении главного момента количеств движения механи-
механической системы относительно неподвижного центра О, произ-
производные взяты относительно инерциальной (неподвижной)
системы координат. В подвижной системе координат уравнение
A5.59) приобретает вид
—^ + ©xAfo=Z?\ A5.67)
dt
Здесь со — мгновенная угловая скорость подвижной системы
Зк0
координат; — локальная производная по времени от главного
момента количеств движения системы относительно центра О.
В проекциях на оси подвижной системы координат получаем
dt
dKY
dt
dKz ,_
I.
В подвижной системе координат выражение A5.61) для под-
подвижной точки примет вид
375
j —
dt
+v4xQ=Ly.
Движение точки под действием центральной силы
Секторная скорость. Рассмотрим положения материальной
точки М в моменты времени /и t + At при ее движении по траек-
траектории, которые характеризуются радиус-векторами r(t) и
гх = г (/ 4- At) .
Площадь Да части конической
поверхности, ометаемая радиус-
вектором г за время А/, прибли-
приближенно равна площади треугольника
ОММХ (рис. 15.21). Наряду с векто-
вектором v, используемым в кинематике
точки, введем понятие секторной
скорости vaточки.
Средняя за время А/ секторная
скорость
Да
М
Рис. 15.21
v = •
а секторная скорость точки Мъ момент времени t
.. Да do
va = hm —- = —. A5.68)
Д'->о д/ dt
При At -» 0 вектор Да приближенно равен по модулю пло-
площади треугольника ОММХ и направлен перпендикулярно плос-
плоскости ОММ] в сторону, откуда движение радиус-вектора г
представляется происходящим против направления движения
часовой стрелки. Для Да можно записать
Aa«—(F х Дг),
тогда
v = lim— = -lim|Fx— ) = -(rxv) = -
a а/->од/ 2Д'-><\ At) 2 2
A5.69)
376
где Мо(у) — момент скорости точки М относительно центра О.
Вектор vc приложен в центре О и его направление опреде-
определяется направлением векторного произведения A5.69). Модуль
вектора секторной скорости вычисляют по формуле
1 _А_
vCT = -rvsin(r,v).
Если точка М движется в плоскости и центр О находится в
этой плоскости, то вектор vo перпендикулярен этой плоскости.
Из кинематики точки в полярной системе координат
Л
(рис. 15.22) известно, что vsin(r, v) = vp, но vp = гф, поэтому
va=ir2cj>. A5.70)
О Р
Рис. 15.22
Формула A5.70) выражает секторную скорость vCT в поляр-
полярной системе координат.
Теорема площадей. Запишем выражение для момента коли-
количества движения материальной точки A5.36), используя формулу
A5.69) для секторной скорости:
A5.71)
24 Зак. 16 377
Преобразуем уравнение A5.54), выражающее теорему об из-
изменении момента количества движения материальной точки от-
относительно центра О, с учетом A5.71):
dk^ = 2rn^- = rxF, A5.72)
dt
dt
или
at
A5.73)
Записанную в виде A5.73) теорему об изменении момента
количества движения материальной точки называют теоремой
площадей.
Движение точки под действием центральной силы. Рас-
Рассмотрим движение точки М массой т под действием силы F ,
линия действия которой проходит через центр О во все время
движения точки М (рис. 15.23). Такую силу называют централь-
центральной. Центральными являются силы взаимодействия Солнца с
планетами Солнечной системы, в частности с Землей.
Рис. 15.23
Согласно определению центральной силы, момент силы F
относительно точки О
378
и из A5.72) следует, что
—- = 0,или ко = const. A5.74)
dt
В проекциях на оси прямоугольной декартовой системы
координат, согласно A5.37), имеем
кх = m(yz-zy) = Cl; ky = m(zx-xz) = C2;
kz=m(xy-yx) = C3.
С), С2, С3 — постоянные.
Умножая первое уравнение A5.75) на х9 второе — на >>, третье —
на z и складывая полученные выражения, получаем
хкх + уку + zkz = Схх + С2у + C3z = 0,
т. е. координаты точки М(х9 у, z) удовлетворяют уравнению
плоскости, проходящей через начала координат.
Итак, траектория материальной точки, движущейся под
действием центральной силы, является плоской кривой, лежа-
лежащей в плоскости, проходящей через центр силы.
Закон площадей. Согласно выражениям A5.71) и A5.74),
ko = 2mva = const.
Отсюда
° dt
а следовательно,
г.-%-С. (.5.76,
ИЛИ
ve=^A/0(v) = C. A5.77)
Интегрируя A5.76), получаем (при t = 0 а = а0)
G = G0+Ct.
Уравнение A5.76) выражает закон, или интеграл площадей:
при двиэюении материальной точки под действием центральной
силы секторная скорость точки постоянна, а значит, площадь,
ометаемая радиус-вектором точки, пропорциональна времени
движения точки.
24* 379
В полярной системе координат закон площадей имеет вид
г2ф = const.
Пример 15.6. Рассматривая планету Солнечной системы как материальную
точку, движущуюся по эллипсу, в одном из фокусов которого находится Солн-
Солнце, определить отношение наибольшей и наименьшей скоростей планеты
(рис. 15.24).
min
Рис. 15.24
Решение. Согласно формуле A5.77), M0(v) = const, или rminvmax =rmaxvmin.
Отсюда vmax /vmin = rmax /rmin , т. е. отношение наибольшей и наименьшей скоро-
скоростей движения планеты равно отношению наибольшего и наименьшего рас-
расстояний планеты от Солнца.
Теорема Резаля
Теореме об изменении главного момента количеств движе-
движения механической системы относительно неподвижного центра
О, определяемой выражением A5.59), можно дать кинематиче-
кинематическое толкование. Запишем формулу для вычисления скорости
движущейся точки М(рис. 15.25, а):
_ dr
v = —.
dt
Здесь скорость v точки является также и скоростью конца радиус-
вектора г, проведенного в точку М9 при движении по годографу
этого вектора, а траектория точки М и есть годограф радиус-
вектора г.
380
м
а
Рис. 15.25
Выражения для г и Ко позволяют трактовать производную
по времени от вектора главного момента количеств движения сис-
системы как скорость движения конца этого вектора по годографу
главного момента количеств движения системы (рис. 15.25, б), т. е.
dt
Возвращаясь к уравнению A5.59), получаем
Это и есть математическая запись теоремы Резаля: при
двиэюении механической системы скорость конца вектора глав-
главного момента количеств движения системы относительно не-
некоторого центра при двиэюении по годографу этого вектора
геометрически равна главному
моменту всех внешних сил, дей-
действующих на систему, относи-
относительно того же центра.
В виде теоремы Резаля
можно также записать теорему
об изменении главного момента
количеств движения механиче-
механической системы для ее относи-
относительного движения (см. A5.63)):
п -
ив -
(рис. 15.26).
Рис. 15.26
381
15.6. Теорема об изменении кинетической энергии
Кинетическая энергия
Кинетическая энергия точки и системы. Кинетическую
энергию материальной точки массой т, движущейся с абсолют-
абсолютной скоростью v , определяют по формуле
где v2 = v2.
Кинетическая энергия механической системы равна сумме
кинетических энергий всех точек этой системы:
?^? A578)
2
Кинетическая энергия — положительная скалярная величи-
величина. Единицей измерения кинетической энергии в СИ является
джоуль*.
Теорема Кенига. Рассмотрим движение механической систе-
системы в неподвижной системе отсчета Oxyz (рис. 15.27). В качестве
подвижной выберем систему CXYZ с началом в центре масс —
точке С, движущуюся поступательно вместе с центром масс. Аб-
Абсолютное движение механической системы при этом можно рас-
рассматривать как совокупность переносного (вместе с центром
масс) и относительного (по отношению к центру масс) движений
системы.
Для любого момента времени положение произвольной точ-
точки Мк системы по отношению к неподвижному центру О опре-
определяет радиус-вектор
где рЛ — радиус-вектор точки Mk по отношению к центру масс
С (см. рис. 15.27). Продифференцировав это равенство по време-
времени, найдем абсолютную скорость произвольной точки системы
382
где v/r) = d pk jdt — относительная скорость точки (в данном
случае полная производная по времени от р* равна локальной,
так как система CXYZ движется поступательно, т. е. сое = 0).
Рис. 15.27
Учитывая, что квадрат вектора равен квадрату его модуля,
преобразуем выражение A5.78) к виду
А/ | // j N N
11У 2>л2 Z Е
Аг=1
Ы\
кш\
Здесь
2
кш\
d
7
383
поскольку сумма статических моментов масс точек относительно
N
центра масс ^ткрк = 0.
Таким образом,
+52>*КЧ ' A5-79>
N
где М = ^тк — масса механической системы.
Формула A5.79) выражает теорему Кенига: кинетическая
энергия механической системы в ее абсолютном движении равна
сумме кинетической энергии центра масс, в предположении, что
в нем сосредоточена масса всей системы, и кинетической энер-
энергии двиэюения системы относительно центра масс.
Кинетическая энергия твердого тела. При поступа-
поступательном движении твердого тела скорости всех его
точек одинаковы и равны скорости центра масс, поэтому
k=\ Z k={ Z I к=] Z
где М — масса твердого тела.
При вращении твердого тела вокруг непод-
неподвижной оси скорость его произвольной точки
где hk — кратчайшее расстояние отточки Мк до оси вращения.
Тогда
^ к=\ *• к=\ **
N
где ./_ =^тк^к — момент инерции тела относительно оси
к = \
вращения Oz.
При плоском движении твердого тела, которое
можно рассматривать как совокупность поступательного движе-
движения вместе с центром масс С и вращения вокруг подвижной оси
CZ, движущейся поступательно вместе с центром масс, относи-
384
тельная скорость произвольной точки тела v[r) = (ohk, и, следо-
следовательно, согласно формуле Кенига,
где Jcz — момент инерции тела относительно оси CZ.
При сферическом движении твердого тела
скорость произвольной точки определяется формулой Эйлера
vk =ИБхгк. A5.80)
Преобразуем формулу A5.78) с учетом выражения A5.80)
1
Л=х® -Ко.
Здесь Ко = ^]гл х mkvk — главный момент количеств движе-
к = \
ния системы относительно неподвижной точки О.
С учетом A5.46) кинетическую энергию твердого тела при
сферическом движении A5.81) можно представить в виде
Д- JXZ(S>X - Jyztoy + J2G>Z)\
где Jx,Jy,...,Jyz — осевые и центробежные моменты инерции
твердого тела в системе координат Oxyz (см. гл. 14).
Если оси системы координат Oxyz направить по главным
осям инерции тела для точки О, то, согласно формулам A5.47),
выражение A5.82) примет вид
? 2\ A5.83)
В общем случае движения свободного твер-
твердого тела в пространстве, которое можно рассматри-
рассматривать как совокупность поступательного переносного движения
вместе с центром масс и сферического движения по отношению к
этому центру (рис. 15.28), относительная скорость произвольной
385
точки тела у|г)=шхр^ и, следовательно, согласно A5.79) и
A5.81), кинетическая энергия тела
T = -Mv2c + -ш-фг). A5.84)
Здесь К^г) — главный момент количеств относительного движе-
движения относительно центра масс. Отметим, что для кинетической
энергии относительного (сферического вокруг центра масс) дви-
движения тела несложно пблучить формулы типа A5.82), A5.83).
.у*
Ус
Рис. 15.28
Таким образом, в данном случае кинетическая энергия твер-
твердого тела определяется как сумма кинетической энергии тела в
его переносном поступательном движении вместе с центром масс
и кинетической энергии тела в сферическом движении относи-
относительно центра масс.
Работа силы, мощность
Изменение кинетической энергии механической системы
связано с работой сил, приложенных к этой системе.
Элементарная работа силы. Пусть точка приложения силы
F перемещается по криволинейной траектории из положения
386
Мо в положение Л/, (рис. 15.29). Разобьем перемещение точки М
по дуге МОМХ на элементарные (бесконечно малые) перемещения
ds и определим работу силы на каждом таком перемещении
d'A(F) = Fdscosa, A5.85)
где а — угол между векторами F и v в точке М.
Рис. 15.29
Формула A5.85) определяет элементарную работу силы, обо-
обозначение d' используется для того, чтобы подчеркнуть, что вы-
выражение для элементарной работы не всегда является полным
дифференциалом. Величина d'A скалярная, ее знак определяется
знаком функции cos а. Если а = я/2, то */'Л = 0, если проекция
силы направлена в сторону, противолежащую перемещению, то
d'A < О . Так как Fcosot = Fx, то формулу A5.85) можно предста-
представить в виде
Fxds. A5.86)
Таким образом, элементарная работа силы равна произве-
произведению элементарного перемещения на проекцию силы на это пе-
перемещение.
387
Поскольку ds = \dr\, то, согласно A5.85),
d'A=\F\\dr\Qosa,
или
d'A = Fdr. A5.87)
Следовательно, элементарная работа силы равна скалярно-
скалярному произведению векторов силы и дифференциала радиус-
вектора точки ее приложения.
Так как dr = vdt, представим выражение A5.87) в виде
d'A = Fvdt = (Fdt)v. A5.88)
Таким образом, элементарная работа силы равна скалярно-
скалярному произведению элементарного импульса силы на скорость
точки ее приложения.
Если скалярное произведение записать в аналитическом ви-
виде, то формулу A5.87) можно представить в следующем виде:
Полная работа силы. Полную работу силы F на переме-
перемещении точки из положения Мо в положение М определяют как
предел суммы ее элементарных работ, т. е.
A(F)= limY^'A , A5.89)
где d'Ak — работа силы F на k-м элементарном перемещении,
на которые разбита криволинейная дуга МОМ.
Так как сумма A5.89) является интегральной суммой опре-
определения криволинейного интеграла, то
_ м
A(F)= \d'A.
Используя различные формулы для определения элементарной
работы, получаем
A(F)= JFxds9
или
388
М А/
м0 м0
Если же сила является функцией времени, то, согласно
A5.88), работа силы F на промежутке времени от 0 до *, соот-
соответствующем точкам М0 и А/, определяется выражением
A(F)=JF-vdt. A5.90)
о
Работа силы зависит от характера движения точки приложе-
приложения силы. Так, А = 0, если сила приложена к неподвижной точке
или к точке, скорость которой во время движения равна нулю
(например, в МЦС).
Работа равнодействующей силы. Рассмотрим систему сил
(Fl9Fl9...9FN)9 приложенную к рассматриваемой точке. Эта
система имеет равнодействующую R*, причем
R* =FX +F2 +... + Ftf.
Тогда работа силы R* на перемещении точки из положения Мо
в текущее положение М равна алгебраической сумме работ со-
составляющих сил на том же перемещении:
А= \d'A= JR*dr= \Fxdr+ $F2dr + ...+ lFNdr^Ak.
A/o Mo Mo Mo Mo *-l
Единицей измерения работы в СИ является джоуль*.
Мощность. Отношение элементарной работы силы к про-
промежутку времени, за которое оно произошло, называется мощно-
мощностью:
dt
Так как d'A = F • vdt, то
W = F-v.
Таким образом, мощность силы равна скалярному произве-
произведению силы на скорость точки ее приложения.
' 1Дж = 1Нм.
389
Единицей измерения мощности в СИ является ватт*.
Работа внутренних сил твердого тела. Рассмотрим две
произвольные точки тела А и В (рис. 15.30), силы взаимодействия
которых, согласно третьему закону Ньютона,
-vB)dt.
Раскрывая скалярные произведения двух векторов, получаем
На основании формулы A5.90) имеем
A(Fx
{i)
cosot +
поскольку, согласно теореме о проекциях векторов скоростей то-
точек твердого тела на прямую, их соединяющую, в любой момент
времени
Рис. 15.30
1Нм/с.
390
Твердое тело можно рассматривать как систему взаимодей-
взаимодействующих пар материальных точек (при неизменной геометрии
тела). Для каждой из пар сумма работ внутренних сил твердого
тела будет равна нулю. Если геометрия тела меняется (например,
N
в случае деформируемого тела), то ]|Г А^ Ф О.
Работа внутренних сил трения сочлененных тел. В ряде
механических систем, конструктивные элементы которых могут
двигаться один относительно другого, между движущимися те-
телами возникают силы трения скольжения (рис. 15.31). Эти силы
приложены к разным телам (F,(l) к телу A, F2(/) к телу В)9 поэто-
поэтому при рассмотрении движения каждого тела отдельно они будут
внешними, а при рассмотрении совместного движения тел —
внутренними.
и
Рис. 15.31
Вычислим работу внутренних сил трения в этом случае.
Пусть тело А движется со скоростью v , а тело В скользит по не-
нему в том же направлении с относительной скоростью и . Между
телами возникают силы трения скольжения F^ и ^2 > причем,
согласно третьему закону Ньютона, Fj(l) = -F2(l). Применив фор-
формулу A5.90), получим
- (v + п)]Л = р;(|) • [v - (v + и)]Л =
391
Поскольку udt = ds, где s — перемещение тела В относительно
тела А, то
л/,
При постоянной силе трения А^2 = -Ffl)s.
Работа силы при поступательном движении твердого тела.
При поступательном движении твердого тела векторы скоростей,
а также элементарные перемещения всех точек тела одинаковы.
Тогда элементарная работа силы
d'A(F) = F vkdt = F vdt = F dr.
Полная работа силы на каком-либо перемещении будет
_ Л/_
A(F)= JFdr.
"о
Работа силы при вращении твердого тела вокруг непод-
неподвижной оси. Разложим силу F, приложенную в произвольной
точке М тела, по осям х, и, Ъ естественного трехгранника
(рис. 15.32):
F = FX+Fn+Fb.
Работы составляющих силы по нормали и бинормали равны ну-
нулю, ибо они направлены всегда перпендикулярно к вектору ско-
скорости точки М приложения силы. Следовательно, элементарная
работа силы F совершается только ее составляющей Fx по каса-
касательной к траектории, т. е.
Поскольку ds = h dq>, то
где h — кратчайшее расстояние от точки приложения силы до
оси вращения.
Учитывая, что Fxh = MZ(F) — момент силы относительно
оси Oz, получаем
392
Таким образом, элементарная работа силы, приложенной к
какой-либо точке тела, вращающегося вокруг неподвиэюной оси,
равна произведению момента этой силы относительно оси вра-
вращения на дифференциал угла поворота тела.
Полная работа
В случае, когда момент силы относительно оси вращения тела
постоянен, полная работа А = М2<р.
Мощность силы в рассматриваемом случае
W = d'A = ***<?*** =А<
dt dt
где со 2 = dy/dt — проекция на ось Oz угловой скорости тела.
Работа силы в общем случае движения свободного твер-
твердого тела. Скорость точки М приложения силы F (рис. 15.33) в
рассматриваемом случае равна
v = vА + ш х г ,
393
где vA — скорость полюса Л; г = AM. Тогда
О
Рис. 15.33
Так как
vAdt = drA,
то
или
где MM(F) —проекция MA(F) на вектор To; dq> —элементар-
—элементарный угол поворота тела вокруг мгновенной оси относительного
вращения.
Таким образом, элементарная работа силы, приложенной в
какой-либо точке твердого тела, в общем случае его движения
равна сумме элементарных работ на элементарном поступа-
поступательном перемещении вместе с полюсом и элементарном вра-
вращательном перемещении вокруг мгновенной оси, проходящей че-
через полюс.
394
Работа системы сил, приложенных к твердому телу.
Пусть к твердому телу приложена система сил (F]9F2,...,FS).
Вычислим сумму элементарных работ сил, составляющих систему:
т. е.
Y^RdrA+l^LAdt, A5.91)
_ N _ _ N _
где R=Y*Fk, LA =^MA(Fk) — главный вектор и главный
ы\ ы\
момент системы сил относительно полюса А
Таким образом, элементарная работа системы сил, прило-
приложенных к твердому телу, равна сумме элементарных работ
главного вектора на элементарном поступательном перемеще-
перемещении вместе с полюсом и главного момента (относительно того
же полюса) на элементарном вращательном перемещении вокруг
мгновенной оси, проходящей через полюс.
Так как главный вектор и главный момент внутренних сил
равны нулю, то из формулы A5.91) следует, что сумма работ (как
элементарных, так и полных) всех внутренних сил, приложенных
к твердому телу, равна нулю.
Теоремы об изменении кинетической энергии
Теорема об изменении кинетической энергии материаль-
материальной точки. Движение точки массой т под действием силы F
определяется уравнением
dv -=
m — = F,
dt
которое можно также записать в виде
mdv=Fdt. A5.92)
Умножив обе части уравнения A5.92) скалярно на v , после преоб-
преобразований
395
= F cjF = d'A(F)9
w ; v z ;
получим
d(^) = d'A(F). A5.93)
Формула A5.93) выражает теорему об изменении кинетиче-
кинетической энергии точки в дифференциальной форме: дифференциал
кинетической энергии точки равен элементарной работе силы,
действующей на точку.
Разделив обе части уравнения A5.93) на dt9 получим еще од-
одну запись теоремы об изменении кинетической энергии точки:
~Л~ =
Интегрируя обе части уравнения A5.93) по криволинейной
траектории от положения Мо до М(см. рис. 15.29), имеем
T-T0=A(F), A5.94)
где Г, То — кинетическая энергия точки в положении М и Мо
соответственно.
Формула A5.94) выражает теорему об изменении кинетиче-
кинетической энергии в интегральной форме: изменение кинетической
энергии точки на любом перемещении равно работе силы, дейст-
действующей на точку, на том лее перемещении.
Теорема об изменении кинетической энергии для меха-
механической системы. Для механической системы, на которую дей-
действуют как внешние, так и внутренние силы, уравнение A5.93)
можно представить в виде
[,2,...,W. A5.95)
Суммируя левые и правые части этих уравнений по всем точкам
системы и вынося знак дифференциала за знак суммы, получаем
или
396
). A5.96)
*=i k=\
Формула A5.96) выражает теорему об изменении кинетиче-
кинетической энергии системы в дифференциальной форме: дифференциал
кинетической энергии системы равен сумме элементарных ра-
работ всех внешних и внутренних сил, действующих на систему.
Разделим обе части уравнения A5.96) на Л. Тогда
at ы\ k=\
Таким образом, первая производная по времени от кинети-
кинетической энергии системы равна сумме мощностей всех внешних и
внутренних сил, действующих на точки системы.
Проинтегрируем каждое уравнение A5.95) по соответст-
соответствующей ему криволинейной траектории от положения Мк0 до
положения Мк . Просуммировав полученные выражения по всем
точкам системы, имеем
r~ro=X^(F^L-X^(/)), A5.97)
к=\ к=\
где То, Т— кинетическая энергия системы в начальном и текущем
_ ^*_ _
положениях соответственно; A(F^e))= \Fke)-drk, A(Fk')) =
= \Fkl) • drk — соответственно работа внешней и внутренней
силы, действующей на к-ю точку системы при ее перемещении по
соответствующей криволинейной траектории из начального по-
положения Мк0 в положение Мк.
Формула A5.97) выражает теорему об изменении кинетиче-
кинетической энергии системы в интегральной форме: изменение кинети-
кинетической энергии системы при ее перемещении из одного положе-
положения в другое равно сумме работ всех внешних и внутренних сил,
действующих на систему, на соответствующих перемещениях
точек приложения этих сил.
397
Пример IS.7. К кривошипу ОА эпициклического механизма, расположенно-
расположенного в горизонтальной плоскости (рис. 15.34, а), приложен постоянный вращаю-
вращающий момент L Масса кривошипа т,, масса подвижной шестерни т2. К под-
подвижной шестерне приложен постоянный момент сопротивления Л/с. Считая
кривошип тонким однородным стержнем, а подвижную шестерню однородным
круглым диском с радиусом г2, определить угловую скорость кривошипа в
зависимости от угла его поворота. Радиус неподвижной шестерни г,. В началь-
начальный момент система находилась в покое.
б
Рис. 15.34
Решение. Запишем теорему об изменении кинетической энергии в инте-
интегральной форме A5.97) для рассматриваемого механизма:
+Z^0 A5.98)
(То = 0, так как движение начинается из состояния покоя).
Кинетические энергии кривошипа и подвижной шестерни соответственно
равны
J^ т Л + JG}
где JOz =(l/3)m}(r, +r2J ; JAZ =(l/2)m2r22 .
При обкатывании подвижной шестерни по неподвижной точка их контакта
является МЦС подвижной шестерни. Следовательно,
v^=u>Oi4(r1+r2) = aJr2. A5.99)
Таким образом, кинетическая энергия механизма при вращении кривошипа
398
~т,(г1 + r2J<o2OA +|w2(r, +г2Jф20А
2 \(тх 3 Y ч2 2
г 0А = 2"ll^+Im2J(ri +Г2) "'
Сумма работ внутренних сил каждого из твердых тел (кривошипа и подвиж-
подвижной шестерни) равна нулю. Также равна нулю сумма работ сил взаимодействия
между кривошипом и подвижной шестерней (точки приложения этих сил имеют
одинаковые скорости, а по третьему закону Ньютона силы равны по модулю и
противоположны по направлению). Следовательно,
1
При движении механизма сила тяжести кривошипа и сила тяжести подвиж-
подвижной шестерни работы не совершают, так как механизм расположен в горизон-
горизонтальной плоскости и_эти силы перпендикулярны перемещению точек их прило-
приложения. Реакции Л и F от неподвижной шестерни (см. рис. 15.34,6)
приложены к МЦС, и работа их равна нулю. Работы реакций Хо, Yo равны
нулю, так как они приложены к неподвижной точке. Таким образом, из внешних
сил, приложенных к рассматриваемому механизму, работу совершают момент
привода L и постоянный момент сопротивления Мс, т. е.
где (р0А — угол поворота кривошипа ОА; ф2 — угол поворота подвижной шес-
шестерни.
Из кинематического соотношения A5.99) находим
Тогда
Г2
Подставив найденные соотношения в уравнение A5.98), получаем
1 т 2 .
2пр СЛ4 Пр • СА4 '
где Упр —приведенный момент инерции, J^A^+—m1\rx^r1J\ /,пр —
приведенный момент внешних сил,
Таким образом,
399
15.7. Потенциальное силовое поле
Силовое поле. Силовая функция
Силовым полем называется часть пространства, в котором
на материальную точку действует сила, зависящая от координат
точки и времени:
F=F(x,y9z,t).
Если сила явно не зависит от времени, то силовое поле назы-
называется стационарным.
Стационарное силовое поле называется потенциальным,
если проекции силы F на оси Ox, Oy, Oz можно выразить через
скалярную функцию U(x9 у, z) по формулам
F ди f ди f ди п
т.е.
где grad?/ = —-i +-г~7+^г"* •
ох ду oz
Функция U(x, у, z) называется силовой функцией. Из формул
A5.100) следует, что силовая функция U определяется с точно-
точностью до аддитивной постоянной.
Свойства стационарного потенциального поля
1. Элементарная работа силы стационарного потенциального
поля равна полному дифференциалу силовой функции:
dU . dU , dU . JTT A5.101)
= dx + dy + dz = dU.
дх ду dz
2. Полная работа силы стационарного потенциального поля
не зависит от траектории, по которой перемещается точка, и оп-
определяется лишь начальным и конечным положением точки:
$ j = U(x,y,z)-U(x09y09z0). A5.102)
400
3. Работа силы F стационарного потенциального поля по
любому замкнутому перемещению равна нулю (см. A5.102)), так
как значение силовой функции в начальной и конечной точках
одинаковы (если внутри замкнутого контура нет особых точек
силовой функции), т. е.
§Fdr=0.
4. Для того чтобы стационарное силовое поле было потенци-
потенциальным, необходимо и достаточно, чтобы поле было безвихре-
безвихревым, т. е. сила F удовлетворяла условиям:
»L_?..O;f^.O;?-?-O. (.5.103)
ду dz dz дх дх ду
Если использовать вектор вихря
CFZ dF \ (dFx dF-Y (dFy
{ду dz J { dz dx )J [ дх ду
то условия A5.103) можно записать короче:
rotF=0.
Необходимость условий A5.103) доказывается просто. Дей-
Действительно, пусть поле потенциально, тогда существует силовая
функция U(x,y, z\ и, согласно A5.100), имеем
&и_ш dFy _ д (диЛ_д2Ц
(
ду ду v дх ) дудх ' дх дх \ ду ) дхду
Для дважды дифференцируемой функции U(x, у, z) порядок вы-
вычисления вторых смешанных производных не имеет значения,
поэтому
ду дх
Аналогично можно доказать, что
dz дх ду dz
Достаточность условий A5.103) доказывается в курсе мате-
математического анализа.
27 3ак. 16 401
Потенциальная энергия
Для потенциального силового поля наряду с силовой функ-
функцией U используют другую функцию, характеризующую запас
энергии в данной точке поля, — потенциальную энергию П в
этой точке.
Потенциальной энергией материальной точки в данной
точке потенциального силового поля называют работу, произво-
производимую силой, действующей на точку в потенциальном силовом
поле, при ее перемещении из рассматриваемой точки поля М в
начальную Мо, условно принимаемую за нулевую:
м0
П = АММ{)= jdU = U(M0)-U(M).
ы
Поскольку U(M0) = Со, то
П = С0-и9 A5.104)
т. е. потенциальная энергия в какой-либо точке поля с точностью
до произвольной постоянной Со равна силовой функции в той же
точке, взятой со знаком минус. На основании формул A5.100),
A5,101), A5.104) имеем
F =??- = -<Ш-' F = — = - — • F = — = -—•
дх дх ' у ду ду ' z dz dz
где Uq9 По — произвольные постоянные, равные значениям си-
силовой функции и потенциальной энергии в начальной точке.
Поверхности уровня потенциального силового поля
Поверхность
U(x,y,z) = C, A5.105)
на которой силовая функция U имеет постоянное значение, назы-
называется эквипотенциальной поверхностью, или поверхностью
уровня. Для конкретного поля эти поверхности образуют семей-
семейство поверхностей с параметром С; задавая С разные значения,
можно получать разные поверхности уровня, которые в случае,
когда функция U однозначна, не пересекаются и разделяют по-
потенциальное поле на слои.
402
Свойства поверхностей уровня
1. Если начальная и конечная точки расположены на одной и
той же поверхности уровня, то работа силы стационарного по-
потенциального поля по перемещению материальной точки из на-
начального положения в конечное равна нулю. Действительно, из
формулы A5.102) и определения поверхности уровня A5.105)
следует
А = U(x, у, z) - Щх0, у0, z0) = 0,
так как U(x,у,z) = U(x0,уо,го) = Со (начальная и конечная точ-
точки расположены на одной и той же поверхности уровня).
2. Сила F потенциального поля направлена по нормали к по-
поверхности уровня в сторону возрастания силовой функции U. Этот
результат вытекает из соотношения Fdr=dU (см. A5.101)).
Рассмотрим элементарное перемещение dr=dx, направленное
по касательной х к поверхности уровня в некоторой ее точке М.
Так как на поверхности уровня U(x, y9 z) = С dU = 09 то
F dr= F-dx- dU = 0 . Таким образом, сила F = grad U направ-
направлена перпендикулярно к касательной плоскости, проведенной в
точке М к поверхности уровня, т. е. по нормали к. этой поверх-
поверхности. Если рассмотреть элементарное перемещение dr=dn,
направленное в сторону действия силы, то на этом перемещении
F dii>0. Следовательно, и dU > 0 (так как dU = F dr =
= F dn ), т. е. в направлении действия силы F = gradt/ силовая
функция U возрастает.
Если построить семейство поверхностей уровня
UN(х,у,z) = 0 (где UN(x9y9z) = U(x,y9z)-W; ^ = const;iV —
натуральное число), то при переходе с любой из этих поверхно-
поверхностей на соседнюю поверхность уровня работа силы потенциаль-
потенциального поля будет одна и та же и равна X при переходе от поверх-
поверхности UN к UN+] или -X при переходе от поверхности UN+] к
UN . Отсюда следует, что сила будет больше в тех областях поля,
где расстояния между соседними поверхностями уровня меньше,
т. е. где поверхности уровня расположены гуще.
27* 403
Силовой линией называют кривую, касательная т к которой
в каждой точке параллельна силе F стационарного силового по-
поля в данной точке. Несложно записать дифференциальное урав-
уравнение для силовой линии. Действительно,
поэтому
* ' = dy = dz
Fx (х, у, z) Fy (х, у, z) Fz (x, у, z)
Уравнения A5.106) представляют собой дифференциальные
уравнения для силовой линии стационарного силового поля. В
случае потенциального поля уравнения A5.106) примут вид
dx _ dy _ dz
'dU(x,у,z)\
~дх~ ) { ду
Отмеченные свойства поверхностей уровня и силовые линии
позволяют наглядно представить картину распределения сил в
потенциальном силовом поле.
Определение силовой функции, потенциальной энергии,
поверхностей уровня и работы сил
Рассмотрим примеры нахождения силовой функции, потен-
потенциальной энергии и поверхностей уровня для однородного поля
силы тяжести, поля линейной силы упругости и ньютоновского
гравитационного поля. Для вычисления работы этих сил вначале
покажем, что элементарная работа является полным дифферен-
дифференциалом, т. е. d'A = dU, а затем проинтегрируем dU.
Однородное поле силы тяжести. Рассмотрим материальную
точку массой /w, находящуюся в однородном поле силы тяжести.
Направим ось Oz вертикально вверх, а оси Ох и Оу произвольно в
горизонтальной плоскости (рис. 15.35).
Проекции силы тяжести Р = nig на оси координат будут
равны
Рх=0; Ру=0; Pz=-mg.
404
,м2
/1
Рис. 15.35
Элементарная работа силы тяжести
d'A = Pxdx + Pydy + Pzdz = -mgdz = d(-mgz). A5.107)
Так как элементарная работа силы тяжести является полным
дифференциалом и d'A = dU = -dII, то, интегрируя A5.107), на-
находим
U = -mgz + С};
A5.108)
М2
2
А = \{Pxdx + Pydy + Pzdz) = -wg
- z,
Mx
где ^4 — работа силы тяжести материальной точки массой т на
перемещении М}М2.
Уравнение A5.108) можно представить в виде
А = -mgH,
где Н = z2 -z} — высота подъема точки.
Если точка М, расположена выше точки М2, т. е. при дви-
движении точка опускается, то работа силы тяжести положительная,-
в противном случае — отрицательная. Таким образом,
A = ±mgh, A5.109)
405
где знак «+» соответствует перемещению точки вниз, а знак «-» —
перемещению вверх ( h = \Н\ = \z2 - zx |).
Как следует из формулы A5.109), работа силы тяжести не за-
зависит от формы траектории, по которой перемещается точка при-
приложения силы. Работа силы тяжести равна нулю, если точки А/,
и М2 совпадают (траектория — замкнутый контур) или распо-
расположены в одной и той же горизонтальной плоскости.
Поверхностями уровня U(x, y,z) = C однородного поля си-
силы тяжести будут плоскости, перпендикулярные оси Oz, а сило-
силовыми линиями — прямые, параллельные оси Oz, так как из
U = -mgz = С
следует z = const.
Поле линейной силы упругости. Линейная сила упругости
(рис. 15.36) подчиняется закону Гука: F = -сг , где с — коэффи-
коэффициент упругости; г — радиус-вектор точки М9 отсчитываемый от
точки равновесия, где сила равна нулю. Элементарная работа
этой силы
J- — \9 A5.110)
так как rdr =d — (r2) = d — r2 =rdr. Интегрируя A5.110), нахо-
находим
tf = —+ C2; A5.111)
м-,
Г~~2
А= j(-crdr) = -c)rdr = -Url -r?),
М, г,
т. е.
= -(х2 +у2
406
Щх,у,г)
Рис. 15.36
Таким образом, силовая функция и потенциальная энергия
линейной силы упругости является квадратичной формой коор-
координат точки М, отсчитываемых от полоэюения равновесия.
Как следует из формулы A5.111), работа силы упругости не
зависит от формы траектории, по которой перемещается точка.
При перемещении же точки из положения равновесия работа си-
силы упругости будет отрицательной;
Поверхностями уровня U(x, у, z)-C линейной силы упру-
упругости будут концентрические сферы с центром в начале коорди-
координат, а силовыми линиями — прямые, проходящие через начало
координат, так как из
---(* +у
следует
х2 + у2 + z2 - const.
Ньютоновское гравитационное поле. На материальную
точку М массой т действует сила тяготения, направленная к цен-
центру Земли и равная F = к/г2 , где г = ОМ (рис. 15.37). Для Земли
407
к = mgrl, где r3 — радиус Земли, g — ускорение силы тяготения
на ее поверхности, поэтому сила гравитационного поля Земли,
действующая на точку М9 обратно пропорциональна квадрату
расстояния от материальной точки до центра Земли (для случая
г > г3, а также в предположении, что Земля — однородный шар
либо шар с концентрическим распределением масс), т. е.
F = mgr32/r2.
M(x,y,z)
Рис. 15.37
Введем единичный вектор г0. Тогда F = —-г0 и так как
г
7 = г70, то F =-kr/r3 . Элементарная работа силы тяготения
d'A = Fd7 = ~7dr = -Ardr = jf-1.
Г r1 \r)
Отсюда силовая функция
а потенциальная энергия
r
Поверхностями уровня U(x, y9z) = C ньютоновского грави-
гравитационного поля будут концентрические сферы с центром в на-
408
чале координат, а силовыми линиями — прямые, проходящие
через начало координат, так как из
следует г = д/jc2 + у2 + z2 = const, или х2 + у2 + z2 = const.
Отметим, что изложенное в § 15.7 применимо как для одной
материальной точки, так и для механической системы, так как
выполняется закон суперпозиции силовых полей.
Закон сохранения механической энергии
Пусть все силы (как внешние, так и внутренние), действую-
действующие на механическую систему, потенциальны, т. е. существует
функция U(xY9yl9zl9...9xN9yN,zN)9такая,что
dU „ 8U „ dU
где Ffoi + Ftyj + Fbk = Fk — равнодействующая всех сил, при-
приложенных к ?-й точке.
Теорему об изменении кинетической энергии системы в
дифференциальной форме представим в виде
A5.113)
Так как, согласно A5.112),
N N
k=\ k=l
dyk+ dzk \ = dU9
П dz k)
dxk+dyk+
Udxk k dyk П dzk
то уравнение A5.113) примет вид
или
где n = -U(xl9yl,zl,...9xN,yN,zN) + const — потенциальная
энергия системы.
Следовательно,
26 Зак. 16 409
отсюда получаем
Т + П = const
и
Е = Т + П = Т0+П0=сопЫ. A5.114)
Сумма кинетической и потенциальной энергии называется
полной энергией Е механической системы. Системы, для кото-
которых выполняется закон, сохранения механической энергии, назы-
называются консервативными.
Формула A5.114) выражает закон сохранения механической
энергии для механической системы: если все силы, действующие
на систему, потенциальны, то при движении системы ее полная
механическая энергия постоянна.
Следует отметить, что закон сохранения механической
энергии справедлив и в том случае, когда кроме потенциальных
имеются и непотенциальные силы, но которые при движении
системы не совершают работы.
Пример 15.8. Груз 1 массой тх с помощью нерастяжимой нити, перебро-
переброшенной через блок 2 массой т2, приводит в движение ступенчатый каток 3
массой тъ (рис. 15.38). Нить намотана на меньшую ступень катка, радиус кото-
которой г, и по блоку 2 не скользит. Каток, большая ступень которого имеет радиус
R, катится без скольжения по горизонтальной плоскости; его радиус инерции
относительно центра масс р, а коэффициент трения качения 5.
Определить скорость груза в зависимости от высоты его опускания h, если в
начальный момент система покоилась. Трением в оси блока, а также массой
нити пренебречь. Принять, что масса блока равномерно распределена по ободу.
Решение. К движению механической системы, состоящей из груза, нити,
блока и катка, применим теорему об изменении кинетической энергии в форме
A5.97):
05.115)
к=\ к=\
в которой То = 0, так как в начальный момент времени система покоилась. Обо-
Обозначим через Тх, Т2 и Тъ кинетическую энергию соответственно груза, блока и
катка после опускания груза на высоту h. Тогда
Т\\щ*л> T2\jbz<*\\ T3m3vc+
где JBz = m2r22 ; r2 — радиус блока 2; Jcz= m3p2 .
Так как нить нерастяжима и относительно блока и катка не скользит, то
410
При качении катка без проскальзывания его МЦС находится в точке соприкос-
соприкосновения с неподвижной плоскостью, тогда (см. рис. 15.38)
Таким образом,
V, V
со2= —;
со3 =
R
R + r
R + r
vA.
и, следовательно, кинетическая энергия системы
-1+2+ 3-^"Va+~
или
^-t
Т=—
2
Работа внутренних сил каждого из твердых тел, а также работа сил натяже-
натяжения нити равны нулю, тогда для всей рассматриваемой системы
к=\
\ I
Рис. 15.38
26*
411
Работа силы тяжести Р2 блока и работа реакции RB его оси равны нулю,
так как эти силы приложены к неподвижной точке В. Сила тяжести катка
^з = Щё перпендикулярна перемещению, а силы реакции поверхности N и
F (см. рис. 15.38) приложены к МЦС, поэтому их работа также равна нулю.
Таким образом, из внешних сил, действующих на систему, работу совершают
сила тяжести груза Рх = mxg и момент трения качения М^ , препятствующий
качению катка по плоскости, т. е.
где ф — угол поворота катка при опускании груза 1 на высоту h.
Поскольку М^ = 5Р3 = bm^g, а ср = , то
Подставив найденные соотношения в уравнение A5.115), получим
где т1пр, /и2пр — приведенные массы системы,
2 2 8
Отсюда скорость груза
2 , т2пр = тх -т3
-
mlnp
15.8. Примеры использования общих теорем динамики
Общие теоремы динамики применяют для составления ди-
динамических дифференциальных уравнений движения механиче-
механической системы при заданных внешних силах для выбранных
обобщенных координат. Решение получают интегрированием
уравнений движения в виде зависимостей этих координат от вре-
времени, определив произвольные постоянные из начальных усло-
условий задачи. После этого находят скорости и ускорения тел, а сле-
следовательно, и силы, действующие в системе.
В ряде практических задач движение по одной или не-
нескольким обобщенным координатам бывает задано кинематиче-
412
ски. В этом случае определяют движение по остальным коорди-
координатам, а также силы, вызвавшие движение, заданное кинематиче-
кинематическим уравнением. Как и выше, находят все кинематические пара-
параметры системы и внутренние силы. В этих задачах некоторые
начальные условия определены заданными кинематическими
уравнениями.
В ряде случаев из дифференциальных уравнений движения
механической системы получают первые интегралы, т. е. реше-
решения в виде функций (равных произвольным постоянным), в кото-
которые не входят ускорения.
Анализ сил, действующих на механическую систему, дает
ответ, какую теорему динамики лучше использовать при решении
задачи. Так, если равен нулю главный вектор внешних сил, дей-
действующих на механическую систему, то по теореме об изменении
количества движения системы устанавливают закон сохранения
вектора количества движения системы, из которого получают три
первых интеграла. Произвольные постоянные определяют из на-
начальных условий движения механической системы — ее началь-
начального положения и начальных скоростей точек системы. Проекции
количества движения системы содержат координаты и проекции
скоростей точек, т. е. первые производные от координат, и не со-
содержат проекций ускорений, т. е. вторых производных от коор-
координат.
Если проекции действующих на систему внешних сил на од-
одну или две оси координат равны нулю, то получают один или два
первых интеграла, описывающих движение системы. Если в ме-
механической системе есть тела, движение которых содержит вра-
вращательное или сферическое движение, то необходимо применять
теорему об изменении главного момента количеств движения
системы. Если главный момент внешних сил относительно како-
какого-либо центра равен нулю во все время движения системы, то по
теореме об изменении главного момента количеств движения
системы относительно этого центра устанавливают закон сохра-
сохранения вектора главного момента количеств движения системы
относительно этого центра, из которого получают три первых
интеграла системы (равенства произвольным постоянным трех
главных моментов количеств движения системы относительно
осей координат). При этом, если один или два главный момента
413
внешних сил относительно соответствующих осей координат
равны нулю, может быть один или два первых интеграла.
Теорема об изменении кинетической энергии является более
универсальной, так как в ней учитываются все движения тел в
системе, а кроме того, рассматривается работа как внешних, так и
внутренних сил.
Использование закона сохранения механической энергии
также позволяет получить первый интеграл уравнений движения.
Его называют интегралом энергии, или интегралом «живых» сил.
Закон сохранения механической энергии выполняется при дейст-
действии на систему потенциальных сил (внешних и внутренних), по-
поэтому работа этих сил может быть вычислена до исследования
движения системы.
Пример 15.9. Механизм состоит из зубчатой рейки / массой т, к которой
приложена сила F , и шестерен 2 и 3, находящихся в зацеплении (рис. 15.39, а).
Моменты инерции шестерен относительно осей O2z и Ozz равны соответст-
соответственно J2 и «У3. К рейке прикреплена пружина, имеющая коэффициент жестко-
жесткости с. В начальный момент пружина не напряжена. К шестерне 2 приложен мо-
момент сил сопротивления MZ2 =-а2а>Г2, к шестерне 3 — момент сил
сопротивления Мz^ = -a3o)Zl, а2, а3 = const > 0 . Механизм расположен в гори-
горизонтальной плоскости и в начальный момент находится в покое.
Определить уравнение движения рейки и реакцию оси шестерни 3 в началь-
начальный момент (при / = 0).
Решение. По теореме об изменении кинетической энергии системы в диф-
дифференциальной форме,
Кинетическую энергию системы определим как сумму кинетических энер-
энергий отдельных ее тел :
mv2
2 2 2
ivie v — скорость рейки; G)Z2, coZi — проекции угловых скоростей шестерен 2 и
3 на оси O2z , O3z соответственно.
Запишем уравнения, связывающие кинематические параметры:
откуда
414
R2 . R2
7- = -^
где vx — проекция скорости рейки на ось Ох (vx = х, v2 =
фиксирующая положение рейки.
:); х — координата.
N
Рис. 15.39
415
Подставив эти выражения в формулу для кинетической энергии, получим
Л J3R2)x2 Вх2
I г{ г'г; ) 2 2
Л J3R*
где В = т + -=- + -^-=-.
К г{г2'
Дифференциал кинетической энергии
Определим сумму элементарных работ сил, если рейке сообщено элемен-
элементарное перемещение dx . Так как dx = r2dq>2, a R2dq>2 = -'з^Фз - то
dcp3 = —=-<^ф-, = ——dx .
Сумма элементарных работ внутренних сил равна
Внешними для рассматриваемой механической системы являются: сила F .
сила упругости пружины, силы тяжести и реакции опор А* В, О->, О3, а также
пары сил сопротивления с моментами MS2 , Л/Г1. Сумма элементарных работ
сил тяжести и реакций опор равна нулю, так как они либо перпендикулярны
dx . либо приложены в неподвижных точках:
^dA\Ffie))=Fdx-cxdx-ciL<y<uw d<p2 ~азюг,^Фз = F~cx—\-х \-%-х
ы\ { Ъ г3г2
Подставим полученные выражения в формулу для теоремы об изменении
кинетической энергии:
Bxdx = (F-cx- Dx)dx,
_ а2 аЛ*
^5?
Преобразовав это уравнение с учетом, что xdx/dx = х , получим
F или
где 2n = D/B,K2=c/B4A = F/B.
Решение линейного дифференциального неоднородного уравнения с посто-
постоянными коэффициентами представим в виде суммы х = *, + х2. Пусть К > п ,
тогда х] = Axe~nl sin(AT,r-I-у), х2 = а/к2 = F/c и
г?
х = Ахе~"' sin(AT,/ + у)+ —,
с
416
где Кх=1К2-п2 .
Константы интегрирования определим из начальных условий (при t - О
Л- = 0 . х = 0):
—J^T^""—T"' tgY= •
К К
х п
Теперь, когда известно движение рейки, определено и движение шестерен.
По теореме об изменении главного момента количеств движения шестерни 3
относительно оси 03г (рис. 15.39, б)
отк>да
4J — ~" "
.. Л, . Л,
где е., = -л—— ; @_3 = -л—— .
При / = 0 х = 0 , поэтому сог3 = 0, а из уравнения движения следует, что
при этом .V = А . Тогда
Для определения реакции опоры О3 запишем теорему о движении центра
масс шестерни 3:
/Wv
N __ N N
Откуда следует V F^e) = 0, а значит V F/Vc) = 0 ; V F^ = 0 , или
Угол C здесь задан (см. рис. 15.39, б).
Для начального момента времени
откуда
Пример 15.10. Эллиптический маятник состоит из тела А массой т и шар-
нирно скрепленного с ним математического маятника АВ. Длина маятника
АВ = 1, масса точки В равна тх (рис. 15.40). В начальный момент система по-
покоилась, маятник находился в левом горизонтальном положении (ф = 0 ).
417
X
m v а
ы А
\n
X
О
Рис. 15.40
Определить при ф = — рад, m = 3/и,: 1) угловую скорость стержня АВ и ко-
6
ординату х тела А; 2) ускорение тела А и угловое ускорение маятника; 3) силу, с
которой система действует на плоскость. Трением пренебречь.
Решение. 1. Для определения положения системы (эллиптического маятни-
маятника) введем обобщенные координаты х и (р.
Внешними для рассматриваемой механической системы являются силы тя-
тяжести тела Р = mg , Р] = /и,? и нормальная реакция гладкой поверхности N .
Эти силы перпендикулярны оси Ох, поэтому сумма их проекций на ось Ох равна
нулю: ^/^е) =0 . По теореме об изменении количества движения в проекции
на ось Ох
A5.116)
После интегрирования имеем Qx = Сх. Таким образом, согласно закону со-
сохранения проекции количества движения на ось Ох, первый интеграл диффе-
дифференциального уравнения для рассматриваемой системы определен.
Количество движения для эллиптического маятника Q =mv + mxvB, где v ,
Уд — соответственно абсолютные скорости тела А и точки В. Тело А совершает
поступательное движение. Движение точки В представим как сложное: относи-
относительное по окружности радиусом АВ с относительной скоростью v?r) и пере-
переносное с переносной скоростью v^ , равной скорости v груза Л. Имеем
418
Уравнение A5.116) принимает вид
)=Cx, или (т + т])Ьс-т|/ф8тф = С1. A5.117)
Для определения угловой скорости стержня АВ требуется еще одно уравне-
уравнение, которое получим с помощью теоремы об изменении кинетической энергии
системы в интегральной форме:
к=\ к=\
Кинетическая энергия эллиптического маятника
^ _ mv2 t тху\
' 2
где v^ = (у^' +у) =/ ф"-2/фх8Шф + д: .
Окончательно имеем
_ (т + тЛх2 .... /и,/2ф2 .,.,,..
Г = - — /и,/фх81Пф + —•——-. A5.118)
2 2
Здесь сумма работ внутренних сил ^у4(^/;))=0 ; сумма работ внешних сил
к=\
определяется выражением ^A\Fk^)= A(mxg)+ A(mg)+ A\N), в котором работы
к=\
силы тяжести тела А и нормальной реакции N равны нулю, так как перемеще-
перемещение тела А перпендикулярно этим силам во все время движения.
Работа силы тяжести точки В
^im\g)- \m\g{dx + ds)= \mxgds (ds = ldq>),
(/-) (v)
так как j/w, JfdEc = 0 ввиду того, что вектор Рх = mxg перпендикулярен dx .
Для решения задачи необходимо сформулировать начальные условия:
при Г = 0 х = 0, ф = 0, ir = 0, ф = 0. A5.119)
Тогда с учетом начальных условий A5.119) в уравнениях A5.117) С, =0, а из
A5.118) следует, что начальное значение кинетической энергии системы равно
нулю, т. е. То = 0, и
ф
A(mxg)= \mxgds = mxgl Гсовф^ф = mxglsmф .
(л) 0
Получаем систему уравнений
Ч>8Шф = 0; A5.120)
т,/2ф2
m,g/sm(p, A5.121)
419
из которой при ф = я/6 рад находим <p = <oz= 4J— .
Уравнение A5.121) есть интеграл энергии. Уравнение A5.120) можно запи-
записать в виде
(m + m^jdx-mJsinydv^O. A5.122)
Интегрируя A5.122) с учетом начальных условий, находим
т + /и,
откуда при ф = я/6 рад получаем х = 0,0335/.
2. Для определения ускорения тела А и углового ускорения маятника А В
применим дифференциальную форму записи теорем об изменении количества
движения в проекции на ось Ох —— = 0 и кинетической энергии
\ dt )
k=\
(m + m])x- /w,/((psin ф+ф2 созф)= 0;
)x - /w,/((psinф + ф2 соэф)]* фт^/ф-icsinф) = фт
Упростив второе уравнение с помощью первого, получим следующую
систему:
(т + т, )х - Wj/((psin ф + ф2 соБф]= 0;
x'sin<p-l<p--gcosq>, A5.123)
из которой при ф = я/6 рад находим х = 0,362g = 3,56 м/с2 , /<p = l,047g =
= 10,27 м/с2.
Ускорение тела/i а = аг, ау = 0, <зх = Зс, угловое ускорение маятника ф = е, .
3. Сила, с которой тело А действует на плоскость, равна по модулю реакции
N. Запишем выражение для теоремы об изменении количества движения в про-
проекции на ось Оу:
&-±&
л ft * '
где в рассматриваемом случае Qy - т,/фсозф, ^F^ = -N + mg + mxg .
Отсюда
Л^ = (w + m,)g — = (т + m,)g~m1/((pcosф-ф2 sinф]=3,63т^ .
Замечание. Уравнение A5.123) можно получить, используя теорему об из-
изменении главного момента количеств движения системы относительно подвиж-
420
ной оси Az, проходящей через подвижную точку А перпендикулярно плоскости
рис. 15.40:
^ ЕА/АЙ«). A5.124)
at k=l
Запишем
(векторное произведение коллинеарных векторов равно нулю),
Сумма моментов внешних сил относительно оси Az
к=\
Подставим эти выражения в A5.124):
—[/и,/(/ф - jcsinq>)]+ Ш\1щ cos ф = m,g/coscp .
dt
После несложных преобразований можно легко получить уравнение A5.123).
Пример 15.1L На плите массой т, установленной на гладкой плоскости, на-
находится лебедка, с помощью которой по плите катится ступенчатый каток
(рис. 15.41, а). Массы блока лебедки и катка и их моменты инерции относитель-
относительно осей O]Z и Cz, перпендикулярных плоскости рис. 15.41, а, равны соответст-
соответственно тх, т2 и J, Jc . Каток по плите катится без скольжения. Вращение блока
лебедки подчиняется закону ф = zt2J2 , где 8 = const > 0 .
Определить: 1) движение плиты, если в начальный момент она покоилась;
2) мощность двигателя, сообщающего блоку лебедки вращение; 3) силу натяже-
натяжения каната.
Решение. 1. Применим для решения задачи теорему об изменении количест-
количества движения системы и введем обобщенные координаты хи (р для рассматри-
рассматриваемой системы.
Закон ф = ф(*) задан, поэтому движение определяем по координате х.
Внешние силы системы — силы тяжести Р , Р{, Р2 и реакция N гладкой
плоскости — перпендикулярны оси Ох, поэтому
?F«=0, 4sL = 0, откуда &-С,.
к=\ М
Количество движения системы
Q = wv + m,vOi + m2vc,
где v , vOi , vr — абсолютные скорости соответственно плиты и центров масс
О, лебедки и С катка. В данном случае vO| = v , vc = v/.c) + v/,r).
421
Рис. 15.41
Переносная скорость центра масс катка у?в) = v , относительная v?r). Про-
Проекции на ось Ох этих скоростей равны
r2 + /?2 r2+R2 r2+R2
Закон сохранения проекции количества движения системы на ось Ох имеет
вид
{- rR2 Л _
\ х —б/ =С,.
гг + *г )
Из начальных условий для плиты: при
Сх = 0. Тогда
0, i = 0, определяем
r2+R,
-zt
/И + /И] + /Я2
где Л = * ^— .
/и + т, + т2
Интегрируя это уравнение, находим
422
_At2 _
Из начальных условий определяем С2 = 0 . Таким образом, уравнение движения
плиты имеет вид
m2rR2zt2
2(г2+Я2)
2. Определим мощность двигателя лебедки, обеспечивающего заданный за-
закон ф@. Применим теорему об изменении кинетической энергии системы в
форме
at k=\ *=i
Для данной задачи правая часть уравнения равна мощности двигателя лебедки W.
Кинетическая энергия системы
тх2 тхх2
2 2
тх2 тхх2 Мх m2v
2 2 2 2 2 '
где соГ1, юГ2 — проекции угловых скоростей блока лебедки и катка соответст-
соответственно, coZj = ф = е/, юГ2 = , причем угловые ускорения блока лебедки
re .. .
бГ] = 8 и катка eZ2 = ю22 = , а ускорение плиты а = ах=х = А .
r2 + R2
ИТ
Мощность двигателя найдем из уравнения W = — , т. е.
at
... . (. rR2 Y" гЛ28
V Г2+/С2 A r2+K2
После преобразований получим
r2R2
c
m2 (R2+r2J
3. Для определения силы натяжения каната воспользуемся теоремами о
движении центра масс системы в проекции на ось Ох (рис. 15.41, б) и об изме-
изменении главного момента количеств движения относительно центра масс для
катка (рис. 15.41, в) и запишем
Отсюда
{m + m)xR + Jz гг
1 J с + ———————— I .
1_ m + m\+m2 J
Глава 16
ДИНАМИКА ТВЕРДОГО ТЕЛА
16.1. Поступательное движение твердого тела.
Вращение твердого тела вокруг неподвижной оси.
Плоское движение твердого тела
Задачи динамики твердого тела могут быть решены на осно-
основе системы дифференциальных уравнений движения, выведен-
выведенных, например, из общих теорем динамики для общего случая
движения твердого тела: теоремы о движении центра масс (или
теоремы об изменении количества движения) и теоремы об изме-
изменении главного момента количеств движения механической
системы (в данном случае твердого тела) в относительном дви-
движении по отношению к центру масс. Эта система должна быть
дополнена геометрическими и кинематическими соотношениями
для используемых координат в соответствии с видом наложен-
наложенных связей и числом степеней свободы твердого тела, а также
начальными условиями, которые определяют положение тела, его
угловую скорость и скорость центра масс в момент времени /0
(как правило /0 = 0) в выбранной системе отсчета. Однако для
решения многих задач можно использовать не полную систему
дифференциальных уравнений движения тела, полученную для
общего случая его движения, а только дифференциальные урав-
уравнения, выведенные для описания конкретного вида движения,
полагая при этом, что вид движения определяется связями, нало-
наложенными на тело, и системой приложенных к нему активных сил.
Поступательное движение твердого тела
При поступательном движении тела его угловая скорость, а
следовательно, и главный момент количеств движения относи-
424
тельно центра масс тождественно равны нулю. На основании
теоремы о движении центра масс механической системы, уравне-
уравнение A5.18) применительно к рассматриваемому случаю имеет
вид
та=^Щ<\ A6.1)
к=\
где т — масса тела; а — ускорение центра масс тела, равное
ускорению любой его точки при поступательном движении.
Уравнение A6.1) можно также записать в виде векторного
дифференциального уравнения поступательного движения твер-
твердого тела:
mt = YFle). A6.2)
k=\
В общем случае поступательного движения тело имеет три
степени свободы и его движение можно задать, определив движе-
движение центра масс тела в декартовой системе координат. В проек-
проекциях на оси декартовой системы координат для A6.2) получаем
k=\ k=\ /Ы
Начальные условия в данном случае имеют вид: при t -10
х = *о> У = Уо> z = zo> x = *o> У = Уо> z = zQ.
В проекциях на оси естественной системы координат (при
естественном способе задания движения центра масс в данном
случае тело имеет одну степень свободы) уравнения A6.2) запи-
записывают так:
k=) P k=\
где s = s(t) — закон движения центра масс тела по траектории.
Начальные условия в этом случае принимают следующий вид:
при / = /0 s = so,s = so.
Аналогичным образом можно записать дифференциальные
уравнения движения твердого тела в проекциях на оси любой
другой инерциальной системы координат и сформулировать на-
начальные условия. Видно, что эти уравнения подобны дифферен-
425
циальным уравнениям движения материальной точки в соответ-
соответствующей системе координат (см. гл. 13).
Вращение твердого тела вокруг неподвижной оси
В случае вращения вокруг неподвижной оси тело имеет одну
степень свободы. Для получения дифференциального уравнения
вращательного движения твердого тела воспользуемся теоремой
об изменении главного момента количеств движения механиче-
механической системы относительно оси вращения Oz9 записав A5.60) в
виде
где для твердого тела К2 = J2co2 = У2ф. Тогда
^(^(е)). A6.3)
Выражение A6.3) называется дифференциальным уравнением
вращения твердого тела вокруг неподвижной оси. Его можно
также записать в виде
/ifл N — N —
<# *-i ы\
Начальные условия для случая вращения твердого тела во-
вокруг неподвижной оси следующие: при t = t0 cp = <р0, ф = сог = ф0.
Пример 16.1. Тело 1 с валом 2, вращающееся свободно с угловой скоростью
соо вокруг вертикальной оси Oz (рис. 16.1, а), начинает тормозить под действием
момента сил аэродинамического сопротивления относительно оси вращения,
пропорционального угловой скорости тела: \Мгс\ = асо. После того как угловая
скорость тела уменьшилась вдвое, дополнительно включается механическая
тормозная система, и к валу 2 тела 7, имеющего радиус R, пружиной прижи-
прижимается тормозная колодка 3 (см. рис. 16.1, а). Сила сжатия пружины постоянна
и равна Q; коэффициент трения скольжения колодки о вал / Определить:
1) число оборотов, совершенных телом с начала торможения до момента вклю-
включения механической тормозной системы; 2) закон изменения угловой скорости
тела от времени с момента включения тормозной системы; 3) время от момента
включения тормозной системы до полной остановки тела Принять, что момент
инерции тела с валом относительно оси вращения равен У, трением в опорах
вала пренебречь.
426
а
Рис. 16.1
Решение. 1. В соответствии с расчетной схемой, приведенной на рис. 16. К б,
для первого этапа движения тела дифференциальное уравнение A6.3) его вра-
вращения вокруг вертикальной оси Oz имеет вид
где J2-J\ Mzc - -асо..
Понизим порядок производной в левой части этого уравнения и перейдем от
производной по времени к производной по углу:
dt dt dip z dip
Тогда
Разделяя переменные и интегрируя, последовательно получаем
—ого. = -dip; —оо, = -<р + С..
a * a *
Для определения константы интегрирования С, используем начальные условия:
при t = 0 ф = 0, со. = о)о. Отсюда С, = (J/a)<o0 , так что
Ф = (У/а)(со0-со,)-
427
Число оборотов, совершенное телом до момента уменьшения его угловой
скорости в два раза,
_ (J/a)(oH-0,5oH) _ Мо
2п 2л
2. Дифференциальное уравнение A6.3) вращения твердого тела вокруг не-
неподвижной оси Oz на втором этапе движения (с момента включения механиче-
механической тормозной системы), согласно расчетной схеме, приведенной на
рис. 16.1, в, имеет вид
Здесь момент сил сухого трения относительно оси Oz будет равен Мггр =
= -FWR , где Fw = /Q — модуль силы трения скольжения. После всех подста-
подстановок имеем
J
Ш
Разделяя переменные и интегрируя, последовательно получаем
Константу интегрирования С2 найдем из начального условия, по которому
угловая скорость в начале второго этапа движения равна угловой скорости в
конце первого, т. е. при t = 0 coz = 0,5со0. В таком случае
С2 = 1п@,5ю0+/BД/а),
и, следовательно,
toz=@,5(o0+fQR/a)Qxp(-at/J)-fQR/a.
3. Время tK с момента включения тормозной системы до полной остановки
тела /, когда его угловая скорость станет равной нулю, найдем из последнего
выражения, полагая, что при t - tK o>2 = 0:
Плоское движение твердого тела
Дифференциальные уравнения плоского движения твердого
тела получим на основании теорем о движении центра масс и об
изменении главного момента количеств движения в относитель-
относительном движении по отношению к центру масс.
Введем неподвижную систему координат, например Oxyz9 в
которой, согласно A5.18), для центра масс тела будем иметь
428
A6.4)
Jbl
а также подвижную систему координат CXYZ9 имеющую начало в
центре масс тела и перемещающуюся относительно системы Oxyz
поступательно, причем плоскости CXY и Оху указанных систем
координат будем считать совпадающими с плоскостью, в которой
движется центр масс тела (рис. 16.2). Теорема об изменении глав-
главного момента количеств движения в относительном движении по
отношению к центру масс для твердого тела в проекции на ось CZ
подвижной системы координат выражается уравнением A5.64)
в котором главный момент количеств движения тела в его относи-
относительном вращении вокруг оси CZ подвижной системы координат
Здесь Jcz — момент инерции тела относительно оси CZ, прохо-
проходящей через центр масс перпендикулярно плоскости движения
тела.
Рис. 16.2
429
Следовательно, дифференциальное уравнение, описывающее
вращение твердого тела относительно оси CZ, имеет вид
./rz(p = f>cz№(e))- A6.5)
Дифференциальные уравнения A6.4) и A6.5) полностью
описывают плоское движение твердого тела.
Векторное уравнение A6.4) можно записать в проекциях на
оси любой инерциальной системы координат. Так, в проекциях
на оси Ох и Оу декартовой системы координат получаем
A6.6)
к=\ к=\
В проекциях на оси полярной системы координат имеем
iif(ri.-rre2) = XF«; m(rcQ + 2rcQ) = jrF%\ A6.7)
Ы\ к=\
где гс и 0 — полярные координаты центра масс тела в непод-
неподвижной системе отсчета (на рис. 16.2 полярная ось совмещена с
осью Ох, а полярная координата гс = ОС =| Fc |).
Наконец, в проекциях на касательную и нормальную оси ес-
естественной системы координат уравнение A6.4) принимает сле-
следующий вид:
М 2Х 06.8)
к=\ Р к=\
Здесь sc = sc (t) — закон движения центра масс по траектории
(на рис. 16.2 начало отсчета sc принято в точке Со); р — радиус
кривизны траектории центра масс тела.
Системы уравнений A6.5) и A6.6), A6.5) и A6.7), A6.5) и
A6.8) называются дифференциальными уравнениями плоского
движения твердого тела в соответствующей системе координат.
Начальные условия в общем случае можно задать, например,
так: при t = t0
хс =*о> Ус =Уо> Ф = Фо> *с =*о> Ус =Уо> Ф = Фо>
или
гс =го5 0 = 0о. Ф = Фо? гс =г0, ё = 0о, ф = ф0?
430
или
sc=s09 Ф = Ф05 sc =s0, ф = <?0.
В зависимости от числа степеней свободы тела для описания
его плоского движения можно использовать от одной до трех
обобщенных координат, при необходимости выражая через них
координаты, используемые в приведенных выше уравнениях и
начальных условиях.
Пример 16.2. Однородный цилиндр массой т с горизонтальной осью и ра-
радиусом г начинает катиться из состояния покоя по шероховатой поверхности,
имеющей на первом участке цилиндрическую форму с радиусом R, а на втором
участке плавно переходящей в наклонную плоскость с углом наклона к гори-
горизонту а0 (рис. 16.3). В начальный момент времени центр масс цилиндра нахо-
находился в точке Со и линия С0О, составляла угол р с вертикалью. Определить:
1) минимально возможный коэффициент трения скольжения цилиндра о по-
поверхность, чтобы его качение происходило без проскальзывания; 2) закон дви-
движения центра масс цилиндра по наклонной плоскости, принимая на всем участ-
участке движения цилиндра коэффициент трения скольжения / > /min. Трением
качения пренебречь.
Рис. 16.3
431
Решение. l.Ha основании расчетной схемы, соответствующей движению
тела на первом участке по цилиндрической поверхности (см. рис. 16.3), система
дифференциальных уравнений плоского движения A6.5), A6.8) будет иметь вид
msc =mgs\na-FTp;
где sc — дуговая координата с началом в точке Со, определяющая положение
центра масс; а — угол, отсчитываемый от вертикали, а = Р + 5с/(/? + г);
р = (R + г) — радиус кривизны траектории центра масс тела; Jcz = 0,5/wr2; ф —
угол поворота цилиндра; sc - vT — проекция скорости центра масс на ось Сх .
При отсутствии проскальзывания должно выполняться неравенство
В этом случае <p = sc/r , ф = sc /r . С учетом приведенных кинематических со-
соотношений из системы дифференциальных уравнений находим
FTp =— mgs'ina ; TV = mgcosa-mv*/(R + r); sr=—gsinot.
Перейдем в левой части последнего выражения от производной по времени
к производной по координате:
dv. dsr dvr
c dt dsc xdsc
После разделения переменных и интегрирования имеем
vx =--
Начальные условия запишем в виде: при t = 0 sc = 0, sc = vt0 = 0. Тогда
C
vT2 = -g(R + r)(cosP - cosa);
N = -mg[7cosa-4cosp].
Подставив найденные выражения для силы трения и нормальной реакции в при-
приведенное выше неравенство, находим
— mg sin a uf—mg(l cosa- 4cosP).
Считая, что последнее соотношение выполняется для всех значений a < a0 , и при
этом N >0, получаем выражение для минимального значения коэффициента
трения скольжения:
432
f sina0
min 7cosa0-4cosC'
2. Систему дифференциальных уравнений плоского движения A6.5), A6.6)
на втором участке движения цилиндра по наклонной плоскости (см. рис. 16.3)
можно записать так:
тхс = mg sin ao-FTp;
тус = -mgcosa0 + N;
—mr2(p = F^r,
2
где ус = 0, так как ус = г - const.
В соответствии с условиями задачи проскальзывание отсутствует, поэтому
q) = xc/r и <р = хс/г. В итоге из приведенной системы дифференциальных
уравнений находим
^тР = T^gsincto; хс = аСх = -gsina0 = const.
3 3
Интегрируя последнее соотношение, получаем
хс = V(,x = ас
Повторное интефирование дает
1 л
Начальное значение скорости центра масс цилиндра на втором участке дви-
движения равно его значению в конце первого участка, так что начальные условия
имеют вид: при t = 0 хг = 0, хс = vT(a0).
Из начальных условий следует, что константы интегрирования
; C3=0,
поэтому окончательно имеем
*r=f-
gsinaojy+ J-jg(/? + r)(cosP-cosa0) /
Пример 16.3. В механизме, изображенном на рис. 16.4, а, рычаг 1 массой аи,
связанный с маховиком 2 цилиндрическим шарниром А, движется в горизонталь-
горизонтальной плоскости Охху. свободно перемещаясь в поворотной муфте 3. Определить:
1) составляющие реакций шарнира А и муфты 3, лежащие в горизонтальной плос-
плоскости; 2) момент сил от привода, задающих движение маховику 2, относительно
оси вращения 0}z , при которых движение рычага 1 в диапазоне изменения угла
О < ф < тг/2 происходит с постоянной угловой скоростью со. Принять, что оси
поворота муфты и маховика вертикальные, ООХ =ОХА = АС = Ь (точка С —
центр масс рычага). Массой, размерами муфты 3 и силами трения пренебречь.
29 Зак. 16 433
о
Рис. 16.4
434
Решение. 1. В рассматриваемом механизме маховик 2 совершает враща-
вращательное движение вокруг оси Oxz, а рычаг 1 — плоское. В расчетной схеме,
приведенной на рис. 16.4, б, выбрана полярная система координат с центром в
точке О и горизонтальной полярной осью, а в системе сил, приложенных к телу
У, показаны лишь силы, лежащие в плоскости движения рычага. При этом реак-
реакция цилиндрического шарнира А представлена в виде двух составляющих Rr и
Rp, направленных по соответствующим осям полярной системы координат, а
реакция муфты 3 — трансверсальной составляющей Nр. Дифференциальные
уравнения плоского движения рычага 1 A6.5) и A6.7), так как здесь полярный
угол 0 является и углом поворота тела /, запишутся так:
где J(Z — момент инерции рычага / относительно оси CZ.
На рисунке видно, что полярная координата центра масс С рычага 1
rr=OC = 2LcosQ + L, а полярный угол 0 = ф/2. По условию задачи 0 = со =
= const и, следовательно, 0 = 0, а 0 = ш. При этом можно записать
rc = -2Lcosin0 , rc = -2Lco2 cos0 .
С учетом полученных соотношений из системы уравнений найдем зависи-
зависимости для проекций реакций шарнира А и муфты 3 на оси полярной системы
координат:
Rr =m(rc-
R"='\-L/rc
pp
rc
2. В соответствии с расчетной схемой, приведенной на рис. 16.4, в, диффе-
дифференциальное уравнение A6.3) вращательного движения маховика 2 вокруг оси
O,z имеет вид
где JOiZ — момент инерции маховика 2 относительно оси его вращения 6),z ;
Ф = 20 = 2@/, ф = 0 . Отсюда
М2пр =-RrLsinQ + RpLcosQ .
435
Полученные выражения для проекций реакций шарнира А, муфты 3 и мо-
момента сил от привода зависят от угловой скорости со и угла 8 поворота рычага /
и являются неявными функциями времени. Несложно получить те же зависимо-
зависимости как функции угла ф поворота маховика 2. В явной форме зависимости этих
параметров от времени слишком громоздки и здесь не приводятся (читатель
может вывести их самостоятельно).
16.2. Сферическое движение твердого тела
Задачи динамики сферического движения твердого тела
имеют более высокий уровень сложности в сравнении с рассмот-
рассмотренными выше. Дифференциальные уравнения динамики сфери-
сферического движения твердого тела являются нелинейными, и для
них, как правило, не удается найти общего аналитического ре-
решения в элементарных функциях. Поэтому теперь такие задачи
решают в основном численными методами, а известные анали-
аналитические решения используют для выработки качественных
представлений о возможном характере движения твердого тела в
близких физических условиях.
Дифференциальные уравнения сферического движения
твердого тела
Влияние внешних сил на кинематические характеристики
сферического движения твердого тела вокруг точки О, неподвиж-
неподвижной в инерциальной системе отсчета, изучим с помощью теорем
об изменении главного момента количеств движения и кинетиче-
кинетической энергии для системы материальных точек (см, § 15.5, 15.6):
KO=LO9 t = W^'\
поскольку они позволяют исключить из уравнений динамики си-
силы, сходящиеся в точке О.
Помимо инерциальной системы отсчета So с осями Ох, Оу,
Oz и ортами i,j,k введем жестко связанную с твердым телом
вспомогательную систему координат S с началом в точке О, ося-
осями OX, OY, OZ и ортами I,J,К . Угловая скорость системы S
относительно системы So тождественно равна угловой скорости
самого тела со . Система S удобна тем, что в ней постоянны три
436
осевых Jv,Jy,Jz и три центробежных Jxy> Jxz>Jyz момента
инерции тела.
Направим оси системы S не произвольно, а так, чтобы они
совпадали с главными осями инерции твердого тела в точке О. В
таких осях для твердого тела упрощается расчет проекций его
главного момента количеств движения относительно точки О и
его кинетической энергии:
Кх =Аюх; KY =BwY; K7 =C&Z, A6.9)
T = 0,5A:0cocosa = 0,5(coA.A:^ +(OYKY +<ozK7). A6.10)
Здесь и далее буквами А, В, С обозначены соответствующие
осевые моменты инерции тела относительно трех ортогональных
главных осей инерции. При А = В эллипсоид инерции тела в точ-
точке О имеет форму поверхности вращения вокруг оси OZ, которую
в этом случае называют осью динамической симметрии твердо-
твердого тела, а само тело — динамически симметричным. На практике
для выполнения равенства А-В телу из однородного материала
придают форму тела вращения.
Согласно A6.9), A6.10), вектор Ко образует острый угол а с
вектором со . При этом Ко параллелен главной оси инерции тела,
если со направлен по этой оси инерции тела, и Ко перпендикуля-
перпендикулярен главной оси инерции тела, если ей перпендикулярен со .
В соответствии с формулой Бура, запись вектора Ко твер-
твердого тела в проекциях на оси системы S (см. A6.9)) влечет за
собой необходимость применения теоремы о его изменении в
специальном виде
dt u U7
предполагающем последующее проецирование именно на оси
системы S:
Веду + (А — C)(Oz(x)x —Ly\ A6.11)
СF7 н- {В — А)(йх(ду = L7.
Систему уравнений A6.11) называют динамическими урав-
уравнениями Эйлера. Они устанавливают связь между моментами
437
внешних сил и проекциями угловой скорости со тела. Каждое
уравнение системы A6.11) содержит произведение проекций век-
вектора со, поэтому динамические уравнения Эйлера являются не-
нелинейными дифференциальными уравнениями относительно этих
проекций.
Но поскольку расчет проекций вектора ю на подвижные оси
системы S не является конечной целью анализа, ибо остается не-
нерешенной задача о пространственной ориентации этих осей, то
динамические уравнения Эйлера дополняют кинематическими
уравнениями Эйлера D.8), устанавливающими связь между про-
проекциями вектора со и скоростями изменения углов Эйлера. Отно-
Относительно углов Эйлера система D.8) также является системой
нелинейных дифференциальных уравнений, поскольку содержит
тригонометрические функции углов.
Для простоты далее полагаем, что вектор Lo явно зависит
только от времени t и параметров кинематики.
К настоящему времени известны только три случая совмест-
совместной интегрируемости этих систем в аналитическом виде для тела
с произвольным или специальным соотношением главных мо-
моментов инерции при произвольных начальных условиях для уг-
углов Эйлера и их первых производных по времени, когда вектор
Lo представляет собой момент единственной силы — силы тя-
тяжести тела в однородном поле.
1. Случай Эйлера: форма эллипсоида инерции в точке О —
любая, Lo = 0.
2. Случай Лагранжа: форма эллипсоида инерции в точке О —
поверхность вращения, центр масс тела расположен на оси дина-
динамической симметрии.
3. Случай Ковалевской*: форма эллипсоида инерции в точке
О — поверхность вращения с осью динамической симметрии
0Z, причем А = В = 1С, центр масс расположен в плоскости
OXY.
Общие аналитические решения системы динамических и кинематических
дифференциальных уравнений с произвольными начальными условиями пред-
предложены Л. Эйлером в 1756 г., Ж. Лагранжем в 1784 г. и С. Ковалевской в 1889 г.
Решение С. Ковалевской получило наивысшую оценку в конкурсе, объявленном
академией наук Франции.
438
В связи с тем, что теорема об изменении вектора Ко имеет
инвариантную запись для случаев движения механической сис-
системы относительно инерциальной системы отсчета So (точка О
неподвижна в So) и относительно осей Кенига (точка О является
центром масс механической системы), система дифференциальных
уравнений сферического движения A6.11) применима и для изуче-
изучения сферического движения твердого тела относительно осей
Кенига. Поскольку запись теоремы об изменении кинетической
энергии также инвариантна для указанных вариантов систем от-
отсчета движения, то последующее изложение данной темы следует
считать справедливым для двух физически различных случаев:
когда точка О твердого тела неподвижна в инерциальной системе
отсчета и когда она неподвижна в осях Кенига, т. е. является цен-
центром масс тела.
Случай Эйлера. Движение по инерции
Рассмотрим простейший случай системы A6.11), когда на
некотором интервале времени Lo (t) = О, а следовательно, Lx =
= juy = Ljу =U И
А(йх + (С-2?)согсог =0;
Buy +(A-C)(ozg>x = 0; A6.12)
СF7 +(В-А)(ох(йу = 0.
Сферическое движение твердого тела, подчиненное уравне-
уравнениям A6.12), называют случаем Эйлера. Согласно A6.12), кине-
кинематические параметры движения тела не зависят от внешних сил,
поэтому случай Эйлера иногда называют также сферическим
движением тела по инерции.
Система A6.12) принципиально может быть решена отно-
относительно трех неизвестных функций времени / для проекций
вектора со. Однако, если среди моментов инерции А, В, С нет
одинаковых, то ее общее аналитическое решение (т. е. пригодное
для любых начальных условий) представимо через специальные
функции Якоби. При этом движение тела может быть как перио-
периодическим, так и непериодическим.
439
Первые интегралы в случае Эйлера. Несмотря на то что
система уравнений A6.12) не имеет общего решения в элемен-
элементарных функциях, путем несложных преобразований A6.12)
можно вывести два независимых, достаточно простых алгебраи-
алгебраических соотношения в элементарных функциях от проекций век-
вектора со. Такие соотношения называют первыми интегралами
уравнений A6.12), поскольку, являясь прямым следствием
A6.12), они уже не содержат производных от неизвестных проек-
проекций вектора со . Ниже они используются для анализа кинематиче-
кинематических параметров движения твердого тела.
Первые интегралы системы A6.12) легко вывести косвенным
образом, опираясь на общую запись теорем об изменении главного
момента количеств движения относительно точки О (Ко =LO) и
об изменении кинетической энергии Gт = ЙГ(с'/)). Применим эти
теоремы для исследуемого твердого тела в системе отсчета So.
Мощность внутренних сил твердого тела равна нулю, а мощность
внешних сил можно рассчитать через мощность эквивалентной
системы сил, т. е. с помощью главного вектора и главного момен-
момента внешних сил: W{c*l) - W(e) = R • v() + L() • со . В случае Эйлера
v() =0, Lo =0, поэтому fF(e/) =0. Тогда теоремы имеют оче-
очевидные интегралы
A6.13)
Физический смысл этих интегралов состоит в том, что пока
Lo =0, вектор главного момента количеств движения относи-
относительно точки О и кинетическая энергия тела остаются постоян-
постоянными, т. е. нетривиальное движение тела в случае Эйлера безос-
безостановочно. Однако, сохраняя модуль и направление в
инерциальном пространстве, вектор Ко может изменять направ-
направление по отношению к движущемуся телу.
Выразим A6.13) через проекции векторов Ко и со на глав-
главные оси инерции тела. Для этого первое уравнение A6.13) умно-,
жим скалярно само на себя:
Ко-Ко =К2Х +KJ+KI ^const, A6.14)
440
а во втором уравнении применим формулу A6.10):
2T = Ko(dcosa = (uxKx +(uyKy +(OZKZ =const. A6.15)
Для главных осей инерции тела эти интегралы имеют вид
К2О =(АсохJ +(В(ОуJ +(CcozJ =const; A6.16)
2Т = Асо2х +B(xJY +C(O2Z s const A6.17)
и представляют собой ограничения для проекций угловой скоро-
скорости тела на оси системы S, закон движения которых пока неиз-
неизвестен.
Соотношения A6.16), A6.17) можно вывести непосредствен-
непосредственно из A6.12). Например, умножив каждое уравнение A6.12) на
соответствующую проекцию угловой скорости оз^, соr, coz, а за-
затем, сложив все три полученные уравнения и проинтегрировав,
находим A6.17). Если же каждое уравнение системы A6.12) ум-
умножить соответственно на Awx,5coy,Ccoz, а затем сложить и
проинтегрировать, то получим A6.16).
Регулярная прецессия и стационарное вращение при
А = В. Покажем, что в случае Эйлера для динамически симмет-
симметричного тела система дифференциальных уравнений сферическо-
сферического движения имеет общее решение в элементарных функциях,
справедливое при произвольных начальных условиях.*
При А-В тип формы эллипсоида вращения может быть за-
задан параметром е = (С - А)/А, -1 < е < 1. Значение е = 0 соответ-
соответствует шаровому эллипсоиду инерции, -1 < е < 0 — эллипсоиду,
* К настоящему времени большая часть известных решений задач динамики
сферического движения получена лишь для динамически симметричного тела.
Анализу движения тела при условии А - В посвящена теория гироскопа. Впер-
Впервые термин "гироскоп" применил французский физик Ж. Фуко в 1852 г., назвав
им сферический маятник, регистрирующий в закрытом помещении вращение
Земли относительно инерциального пространства. В переводе с греческого ги-
гироскоп означает указатель вращения (гирос — вращение, скопео — вижу).
Теперь гироскопом традиционно называют динамически симметричное
твердое тело, совершающее сферическое движение вокруг неподвижной точки,
расположенной на оси динамической симметрии. Теорию гироскопа используют
для анализа динамики тяжелого волчка, летящего снаряда, планет Солнечной
системы, ротора в упругих опорах, гироскопических приборов и др. Гироскопи-
Гироскопические приборы позволяют регистрировать движение корпуса прибора относи-
относительно инерциального пространства.
28 3ак. 16 441
вытянутому вдоль оси 0Z, а 0 < е < 1 — эллипсоиду, сплюснуто-
сплюснутому вдоль оси OZ. Значения е = -1 и е = \ соответствуют цент-
центральным эллипсоидам инерции тонкого прямого стержня и тон-
тонкой однородной пластины с двумя осями симметрии в ее плоско-
плоскости (например, круглый диск, кольцо, квадрат и т. п.).
Свойство динамической симметрии тела позволяет проана-
проанализировать динамику его сферического движения в случае Эйле-
Эйлера и в случае Лагранжа с применением геометрического образа
подвижной координатной плоскости OY2Z2 (плоскости П) сис-
системы координат S2 (OX2Y2Z2), используемой в системе углов
Эйлера для отсчета угла ф (рис. 16.5):
Рис. 16.5
Плоскость П проходит через неподвижную ось Oz и пер-
перпендикулярна линии узлов — оси ОХ2, единичный орт которой
442
обозначают символом п. Система S2 вращается относительно
системы So с угловой скоростью Q = ц/к + 0и , а твердое тело и
система S вращаются относительно системы S2 с угловой скоро-
скоростью <рК . Для динамически симметричного тела оси системы S2
также являются его главными осями инерции.
Ниже в случае Эйлера доказывается, а в случае Лагранжа пред-
предполагается, что при движении тела угол нутации не изменяется:
0 = const = 0o; 9 = 0. A6.18)
При постоянном 0
Q = y\fk; 7o = \\fk + yK; A6.19)
(йХ2 =0; соУ2 =4/sin0o; wz2 = <j> + vj/cos0o. A6.20)
Поэтому оба вектора со и Ко расположены в плоскости П, дви-
движение которой относительно системы So есть вращение вокруг
неподвижной оси Oz с угловой скоростью прецессии Q. Ниже
будет доказано, что в рассматриваемых физических условиях век-
векторы со и Ко не только расположены в плоскости П, но и непод-
неподвижны в ней. Поэтому скорости изменения удовлетворяют форму-
формуле Эйлера для расчета производной вектора постоянного модуля:
ю=Охю; A6.21)
to=QxKo=Lo. A6.22)
В A6.22) вектор Lo включен на основании теоремы об измене-
изменении главного момента количеств движений системы материаль-
материальных точек. Формула A6.22) отражает влияние внешних сил на
угловую скорость движения оси динамической симметрии твер-
твердого тела, когда вектор Ко неподвижен в плоскости П .
Для динамически симметричного тела в случае Эйлера диф-
дифференциальные уравнения сферического движения и их первые
интегралы примут вид
<ях =-ecor(Dz; соу =e<uz(ux; cbz =0; A6.23)
с4 +(o2Y +о4(С/ЛJ = const; A6.24)
®2Х + ®2у + coz С/А = const. A6.25)
28* 443
Из последнего уравнения A6.23) следует
coz = const = сог . A6.26)
На основании A6.25), A6.26) получаем
(о2х + со? = const = (o2A. A6.27)
Решения A6.26) и A6.27) означают, что при движении тела
модуль его угловой скорости вращения остается постоянным, т. е.
со2 =(о2х +со2 +а>2 = const.
Тогда, согласно A6.15) и A6.17), вектор со образует с не-
неподвижным вектором К() постоянный угол а. Следовательно,
при а Ф 0 постоянный по модулю вектор со может лишь вра-
вращаться вокруг вектора К(), а при а = 0 он совпадает с непод-
неподвижным вектором К(), т. е. в обоих случаях поведение вектора
со соответствует уравнению A6.21), в котором Q — пока неиз-
неизвестная угловая скорость вектора со .
Направим ось Oz системы So по вектору К(), а оси OY2 и
OZ2 системы S2 так, чтобы проекции KY2 = A(dY2 и К72 -К7 -
= С(х)( = const были неотрицательны (рис. 16.6). Тогда будут не-
неотрицательны угол нутации 6, проекции соК2 =со^ й coz =сог.
Из формулы К7 = К() cos 9, связывающей модуль вектора с
его проекцией на ось OZ, следует, что при постоянных К7 и К()
угол нутации в процессе движения тела не изменяется:
9 = const = 0o >0; 0 = 0.
При угловой скорости нутации 0 = 0 вектор со = \ук + <$К распо-
расположен в плоскости П, образуя с вектором К() постоянный угол
а . Это означает, что вектор со неподвижен в плоскости П :
со^з =0;соК2 =cosin@o -a) = vj/sin0o = const = со, >0;
A6.28)
а>72 =cocos@o -а) = ф + vj/cos0o = const = сог >0,
и поэтому
Qr =ij/ = const = \j/0 >0; (p = const = ф0. A6.29)
444
Перейдем к количественным оценкам и исследуем зависи-
зависимость констант vj/(),(j>0,90 от постоянных проекций со^ и сог
вектора со на оси системы S2. Из геометрических соображений
(см. рис. 16.6)
ctg0o =KZ2/KY2 =С®с/(А<йА) = (е + 1)<йс/<оА >0, A6.30)
т. е. при несовпадении оси динамической симметрии OZ с на-
направлением вектора п>((дА >0) она описывает конус вокруг не-
неподвижной оси <9z, образуя с ней постоянный угол 90 < я/2 .
Рис. 16.6
Подставим выражения A6.28) для проекций вектора со в
A6.30):
A\\f0 sin0o =C(y0 + vj/0 coseo)tg0o.
Отсюда при sin 0О ф 0
Qz =ij/0 =Сф0/[(^-С)со8в0]. A6.31)
445
Соотношение A6.31) указывает на то, что угловая скорость
собственного вращения <рК в зависимости от формы эллипсоида
инерции тела либо совпадает по направлению с осью OZ при
С < А — прямая регулярная прецессия, либо противоположна
ей при С > А — обратная регулярная прецессия.
Итак, на основании формул A6.28)-A6.31) параметры регу-
регулярной прецессии удовлетворяют следующим уравнениям:
ctg60 = (е + 1)©г/ю/;О2 =\j/0 =©
ф0 е®с;
AO.32)
\|/ = со At/sm 90 + v|/0; ф = -e<oct + ф0.
Из двух первых формул A6.32) следует, что если со^ -» 0, то
угол 0О -> 0, а угловая скорость прецессии
П2 = vj/0 -> A + е)сос . A6.33)
Наглядное представление о регулярной прецессии можно получить, рас-
рассматривая, например, твердое тело в виде однородного кругового конуса, кото-
которое равномерно перекатывается без скольжения по внешней поверхности не-
неподвижного кругового конуса при условии, что вершины конусов совпадают в
точке О (рис. 16.7). Ось симметрии подвижного конуса является его осью дина-
динамической симметрии OZ. В каждый момент времени вектор со направлен по
линии контакта конусов. При регулярной прецессии вектор главного момента
количеств движения тела относительно вершины О неподвижен, т. е. его на-
направление не зависит от текущего положения тела. Следовательно, в этом слу-
случае по соображениям симметрии он должен быть направлен по оси Oz непод-
неподвижного конуса. Подвижная плоскость П проходит через оси OZ и Oz конусов.
Постоянный угол между этими осями является углом нутации 0. Равномерное
вращение оси OZ вокруг оси Oz соответствует изменению угла прецессии \\), a
вращение тела вокруг оси OZ относительно плоскости П — изменению угла
собственного вращения ср. Если неподвижный конус расположен по отноше-
отношению к подвижному внешним образом (см. рис. 16.7, а), то его движение соот-
соответствует прямой регулярной прецессии, а если внутренним образом (случай
полого подвижного конуса) — то обратной регулярной прецессии (см.
рис. 16.7,6).
Пусть при этом со^ = сог = 1 рад/с, А = В = 1 кг • м2, С = 2 кг • м2 (рис. 16.8).
Тогда со = ^2 рад/с, y = arctg((oA/(oc) = 45°, е = (С-А)/А = \, КУ2=А(дА =
= 1Нмс, KZ2=Ccor=2H.M-c, Л:0=л/5Нмс, tg0o = KY2/KZ2 =0,5 ,
0О = 26,5° , \\i0=(oA /sin 0О = л/5 рад/с, ф0 = -есог = -1 рад/с, а = 0О - у =
= -18,5° . Можно доказать, что всегда |а| < 19,28° .
446
Этот пример является лишь наглядной иллюстрацией регулярной прецессии.
Не следует думать, что для реальных конусов с произвольными углами при
вершинах вектор Ко подвижного тела будет направлен по оси неподвижного
конуса, поскольку угол а не может быть произвольным.
а
Рис. 16.7
447
Соотношения A6.32) существенно упрощаются при
есоА(ос = 0. Покажем, что в этом случае регулярная прецессия
вырождается в стационарное вращение тела вокруг неподвижной
оси Oz, совпадающей по направлению с вектором Ко, причем с
этой осью будет совпадать и одна из осей системы S.
Убедимся, что при а = const вектор со имеет постоянное
направление. В начальный момент, когда вектор со направлен по
какой-либо главной оси инерции тела (<оА(йс = 0), векторы со и
Ко параллельны, поэтому а = 0 и в дальнейшем а = 0, т. е. век-
вектор со неподвижен. Следовательно, движение тела представляет
собой равномерное вращение вокруг неподвижной главной оси
инерции*.
Исследуем влияние начальных условий на поведение углов
Эйлера при стационарном вращении. Рассмотрим два возможных
случая, когда ось динамической симметрии OZ совпадает с осью
Oz (рис. 16.9, а) и перпендикулярна ей (рис. 16.9, б). Вариант тела с
шаровым эллипсоидом инерции (е = 0) отнесем к первому случаю.
Z(z)
Рис. 16.9
* Примечательно, что такое движение может иметь тело с любой формой эл-
эллипсоида инерции в точке О. При этом вращение тела вокруг главной оси инер-
инерции со средним значением осевого момента инерции неустойчиво.
448
При 0О =0 (см. рис. 16.9, а) со^ = 0 и сос =со. Поэтому, со-
согласно A6.32) и A6.33),
\j/0 =(\ + е)со; ф0 = -есо.
Отметим, что при sin Эо = 0 кинематические уравнения Эйлера
имеют вырожденный вид независимо от того, для каких осей
(системы So или S) они записаны, и без учета соотношения
A6.33) не имеют однозначного решения.
При 0О =я/2 (см. рис. 16.9,6) &А=(о и сог =0. Поэтому,
согласно A6.32),
vj/0 =co, ф0 =0.
Рассмотренные случаи стационарного вращения нашли при-
применение в гироскопических приборах для решения задач навига-
навигации благодаря естественной способности динамически симмет-
симметричного твердого тела с одной неподвижной точкой О при
условии Lo = 0 сохранять в инерциальном пространстве направ-
направление главной центральной оси инерции без приложения каких-
либо управляющих сил, если сообщить телу вращение только во-
вокруг нее. Наглядным примером может служить многовековая
стабильность направлений осей суточного вращения у планет
Солнечной системы по отношению к эклиптике. Этим объясняет-
объясняется периодическая смена времен года на континентах Земли.
Заметим, однако, что при Lo = 0 таким же свойством облада-
обладают любые оси любого твердого тела, если это тело до начального
момента времени не имело вращения относительно инерциального
пространства. Преимущество первого технического решения перед
вторым состоит в том, что при нестрогом соблюдении условия
L() = 0 направление оси вращения будет тем более стабильным,
чем больше первоначально заданная угловая скорость. Указанное
свойство центральной оси динамической симметрии вращающего-
вращающегося одиночного тела при Lo * 0 пояснено ниже.
Случай Лагранжа. Тяжелый волчок
К случаю Лагранжа относят движение твердого тела с одной
неподвижной точкой О в однородном поле силы тяжести при
449
условии, что центр тяжести тела (точка С)
лежш на оси его динамической симметрии
OZ. Наглядным примером может служить
движение быстровращающегося симмет-
симметричного тяжелого волчка (А = В), опираю-
опирающегося острым носиком на неподвижную
точку О (рис. 16.10). Название «тяжелый
ролчок» подчеркивает необходимость учета
момента его силы тяжести Р = nig относи-
относительно точки О (ОС = I).
Используем A6.11) для вывода диффе-
дифференциальных уравнений движения волчка.
Считаем, что для волчка главный момент
внешних сил относительно точки О равен
моменту постоянной силы тяжести Р : Lo = Мо(Р) = ОСхР.
Направим ось Oz вертикально вверх, а ось OZ так, чтобы в систе-
системе S Zc = +/. Моменты силы Р относительно осей OZ и Oz по-
постоянно равны нулю: Mz (Р) - М2(Р) = 0 .
Получим выражения для моментов силы Р относительно
осей OX OY:
Рис. 16.10
J
0
к
I
Проекции силы Р на оси системы S равны
Рх =-PsinGsin(p; PY =-Psin6cos(p; P7 =-Pcos6. A6.34)
Поэтому моменты силы Р относительно осей OX, OY зави-
зависят от 0 и ф:
Мх =P/sin0cos(p; MY =-P/sin9sin(p,
а динамические уравнения Эйлера имеют вид
А(ох + (С - A)(oY(oz = /У sin 0 cos ср;
+(A-C)(uz(ox = -Р/sin 6 sin ф; A6.35)
Ccoz =0
450
т. е. в данном случае уравнения D.8) и A6.35) необходимо ре-
решать совместно. Прямые методы интегрирования этой системы,
состоящей из шести дифференциальных уравнений, при произ-
произвольных начальных условиях приводят к эллиптическим инте-
интегралам. Интегрирование данной системы является принципиаль-
принципиально выполненным, если для нее найдены в явном виде четыре
независимых первых интеграла. Тогда дальнейшие расчеты сво-
сводятся к решению алгебраической системы относительно четырех
независимых неизвестных, в роли которых могут выступать про-
проекции угловой скорости тела и какая-либо комбинация тригоно-
тригонометрических функций от углов Эйлера.
К числу трех независимых первых интегралов системы
A6.35) относят:
1) интеграл сохранения полной механической энергии
где IJ = Pzc =P/cos0 —потенциальная энергия тела;
2) интеграл сохранения главного момента количеств движе-
движения тела относительно вертикальной оси Oz
К2 = Кок = Кхкх + KYkY + К7к2 = const = К\;
3) интеграл сохранения проекции вектора ш на ось динами-
динамической симметрии
coz = const = (DC. A6.36)
Второй из указанных интегралов следует из теоремы об из-
изменении вектора Ко, записанной в проекции на неподвижную
ось Oz, поскольку М2(Р) = 0, а третий — из последнего уравне-
уравнения системы A6.35).
Для кинематических уравнений Эйлера первым интегралом
служит соотношение к2 =к2х + к2 +к\ =1, удовлетворяющее
дифференциальному уравнению — = -сох?, полученному для
dt
неподвижного орта к на основании формулы Бура для двух сис-
систем So и5,и отражающее постоянство модуля орта к .
Наличие четырех интегралов указывает на существование
при произвольных начальных условиях общего аналитического
451
Рис. 16.11
решения для углов Эйлера. Однако это решение может быть за-
записано лишь через эллиптические функции.
Представление о характере дви-
движения центральной оси динамиче-
динамической симметрии волчка при доста-
достаточно большой угловой скорости
собственного вращения можно полу-
получить с помощью рис. 16.11, где пока-
показан след одной из ее точек, остав-
оставляемый на неподвижной сфере.
Поскольку направление этой оси оп-
определяется углами прецессии v|/ и
нутации 6, данный след отражает
только их изменение. След не имеет
точек возврата и петель самопересе-
самопересечения, пока сохраняется знак vj/.
Отметим, что к данному случаю
также относится пространственное
движение маятника, подвешенного на одной неподвижной точке.
Его движение может быть неравномерным вращением — ротацией
вокруг неподвижной горизонтальной оси — или периодическими
колебаниями — осцилляцией в окрестности нижнего положения
равновесия. Последний вариант движения имеет маятник, отпу-
отпущенный из состояния покоя, при котором ось динамической сим-
симметрии отклонена от вертикали. Еще один несложный вариант
движения тела в случае Лагранжа — равномерное вращение во-
вокруг вертикальной оси динамической симметрии, когда центр
масс расположен ниже точки подвеса. Если центр масс располо-
расположен выше точки опоры, то вертикальное направление оси дина-
динамической симметрии устойчиво лишь при достаточно быстром
вращении («спящий волчок»).
Предыдущая схема анализа движения тела в случае Лагран-
Лагранжа относилась к произвольным начальным условиям. Существует
простое решение данной задачи, но для специальных начальных
условий. При этом движение волчка внешне выглядит как регу-
регулярная прецессия, в связи с чем оно названо псевдорегулярной
прецессией.
452
Предположим, что движение волчка (рис. 16.12) удовлетво-
удовлетворяет условию A6.18). В этом случае векторы со и Ко располо-
расположены в подвижной вертикальной плоскости П. Убедимся, что
эти векторы также неподвижны в плоскости П .
Сначала покажем, что угловая скорость со тела постоянна по
модулю. При условии A6.18) в неподвижной системе So аппли-
аппликата центра масс zc =/cos0o = const, и, следовательно, постоян-
постоянна не только потенциальная /7, но, согласно интегралу сохране-
сохранения полной механической энергии, и кинетинеская энергия Т
волчка. А так как в случае Лагранжа coz = const (см. A6.36)), то
на основании выражения A6.25) приходим к выводу, что
00\ + о>у = const и со^ + Юу + со^ = const, т. е. угловая скорость
волчка постоянна по модулю.
453
При I со I = const (OX2 = 0, coZ2 = goz = const = coc, третья
проекция также постоянна: (OY2 = const = (OA. Поэтому вектор со,
а следовательно, и вектор Ко неподвижны в плоскости П
системы 52 и удовлетворяют соответствующим уравнениям
A6.21), A6.22) при вертикальном направлении вектора угловой
скорости прецессии Q = \\fk . Заметим, что, согласно уравнению
A6.22), регулярная прецессия (Lo = 0) является частным случаем
псевдорегулярной прецессии (Lo Ф О).
Очевидно, что помимо уже перечисленных констант при псев-
псевдорегулярной прецессии а = const; \j/ = const = \j/0; ф = const = ф0,
т. е. законы изменения углов Эйлера аналогичны случаю регулярной
прецессии.
Рассмотрим теперь влияние силы тяжести и начальных зна-
значений проекций сос, соА на постоянные 0О, \j/0 и ф0. Раскроем
Lo в выражении A6.22):
Ко =QxK0 =ОСхР . A6.37)
Векторы ОС и Р лежат в плоскости П , поэтому вектор М0(Р)
параллелен горизонтальной оси ОХ2, т. е. направлен по линии
узлов. В проекции на эту ось выражение A6.37) имеет вид
UY2KZ2 - &Z2KY2 = PI sin 90, A6.38)
или
[С(ф0 + \j/0 cos 0O) - A\j/0 cos 90 ]\j/0 sin 90 = PI sin 90.
После сокращения на sin Go Ф 0 (при sin 60 = 0 имеем случай Эй-
Эйлера Lo = 0) получаем
[C(q>0 +\j/0 cos0o)- A\j/o cosG0]y0 =P/. A6.39)
Это уравнение является квадратным относительно Q, = \j/0:
(С - A)Q2 cos 90 + Суоп - Р1 = 0. A6.40)
При cos0o=O оно имеет один корень ?2 = Р//Сф0, а при
cos 90 Ф 0 — два:
454
ls 2 = Сф0/[2(С-Л) cos 0o]x
х [-1 ± <у]\ + 4ЩС - A)cosQj(Cq>0J].
Уравнение A6.40) имеет действительные корни при cos60 *0,
если
(Сф0J + 4Pl(C-A)cosQ0 >0. A6.41)
Соотношение A6.41) является необходимым условием существо-
существования псевдорегулярной прецессии. Данный вид движения воз-
возможен лишь при достаточно большой угловой скорости ф0 *:
ф02 ><п = 4PlcosQ0(A-C)/C2. A6.42)
Допустим условие A6.42) выполнено, а угловая скорость ф0
настолько высока, что
Ц = («>тщ/ФоJ = 4Pl\(A-C)cosQ0\/(Cq>0J «1. A6.43)
Используем малость \х для нахождения корней уравнения
A6.40):
Приближенно вычислив дискриминант ^/l + (i * 1 + 0,5ц, полу-
получаем
-1 + A + 0,5ц)«0,5ц; -1-A + 0,5ц)«-2-0,5ц.
Таким образом, корни уравнения A6.39)
ах «-Сфо/(С-Л)cos00 -Р//(Сф0); A6.44)
О2«Р//(Сф0). A6.45)
Первое слагаемое в A6.44) не зависит от силы тяжести волч-
волчка и соответствует «быстрой» скорости регулярной прецессии
A6.31) в случае Эйлера, прямо пропорциональной скорости соб-
собственного вращения ф0. Этот вид движения волчка возможен при
малом моменте Р1 и быстром собственном вращении.
* Установлено, что требование фо ^ 4Р1(А - С)/С2 является необходимым и
достаточным условием устойчивости «спящего волчка» ( zc > 0, 0О з 0 ). При
этом волчок, эллипсоид инерции которого вытянут вдоль оси OZ (А>С), дол-
должен иметь более высокую скорость собственного вращения, чем волчок с эл-
эллипсоидом инерции, сплюснутым вдоль оси OZ (С > А).
455
Второй корень A6.45) соответствует «медленной» прецессии
оси динамической симметрии также при малом моменте PL Ско-
Скорость медленной прецессии обратно пропорциональна скорости
собственного вращения ф0. Поскольку скорость прецессии в
этом случае зависит от силы тяжести, этот вид движения также
называют вынужденной прецессией.
Дадим математическое объяснение полученным результатам.
При условиях A6.18), A6.36) уравнения A6.35) вырождаются в
систему линейных дифференциальных уравнений относительно
проекций со v , cor. Ее решение можно представить в виде суммы
функций, одна из которых является общим решением однород-
однородной, а другая — частным решением неоднородной системы. Об-
Общее решение описывает собственное движение, а частное — вы-
вынужденное движение.
Формулы A6.44), A6.45) этому полностью соответствуют.
На практике при наблюдении за движением быстровращающегося
волчка глаза фиксируют именно вынужденную прецессию в виде
достаточно медленного движения оси волчка, описывающей конус
вокруг вертикали. Собственная (быстрая) регулярная прецессия
почти мгновенно затухает из-за естественных потерь на трение.
Таким образом, псевдорегулярная прецессия обобщает слу-
случай регулярной прецессии; она возможна при любом угле нута-
нутации, но лишь при специальных начальных условиях.
Приближенная теория гироскопа
Для быстрой оценки параметров движения гироскопа в задан-
заданных физических условиях используют приближенные аналитиче-
аналитические методы, называемые приближенной, или прецессионной,
теорией гироскопа. При условии быстрого вращения тела она
применима для тел с произвольной формой эллипсоида инерции в
точке Д В ее основу положены свойства вынужденной регулярной
прецессии. Благодаря некоторым допущениям данная теория сво-
сводит анализ сферического движения твердого тела к изучению лишь
прецессионного движения оси собственного вращения без учета
изменений угловой скорости собственного вращения и угла нута-
нутации. Приближенная теория гироскопа построена на теореме об
изменении вектора Ко в форме, аналогичной A6.22):
456
Ko=aKxKo=Lo. A6.46)
Здесь приближенно считают, что неподвижный относительно
твердого тела постоянный по модулю вектор Ко вращается отно-
относительно системы SQ с угловой скоростью Q^ .
Рассмотрим допущения, которые позволяют обосновать
уравнение A6.46).
1. Модуль проекции вектора со на главную ось инерции OZ
тела много больше модулей остальных проекций:
+ °°
A6.47)
Из кинематических уравнений Эйлера в этом случае следует
ф2 »vjr+02. A6.48)
Поэтому в приближенной теории наиболее быстрым считается
собственное вращение. Это допущение совпадает с аналогичным
требованием в условии существования вынужденной прецессии
A6.45). В современных гироскопических приборах угловые ско-
скорости собственного вращения роторов достигают 10000 рад/с.
Отметим, что неравенству A6.47) могут удовлетворять и сравни-
сравнительно малые угловые скорости, например для Земли угловая ско-
скорость собственного вращения составляет всего 7,26 • 10 рад/с .
Условия A6.47), A6.48) не следует дословно понимать как
стремление полностью пренебрегать значениями угловых скоро-
скоростей vj/ и 0. Их малость используют только на стадии прибли-
приближенной оценки модуля и направления вектора Ко, чтобы затем с
помощью вектора Ко получить информацию о поведении углов
vj/ и 6.
2. Проекция вектора со на главную ось инерции Сытела по-
постоянна по модулю:
coz = const = сог >0. A6.49)
3. Модуль проекции вектора Ко на OZ много больше ос-
остальных проекций (рис. 16.13):
К\ »К2Х л-К), A6.50)
или
457
(CwzJ »(АсохJ +(ВщJ.
Для тел с соотношением главных моментов инерции С>А,
С>В условие A6.50) является следствием A6.47).
Из рассмотренных трех вытекают еще два допущения при-
приближенной теории гироскопа.
4. Вектор Ко имеет постоянный модуль, равный его проек-
проекции на ось собственного вращения OZ:
Ко =yj(A(oxJ
+(CoozJ
» Ccoz = Ссос = К2 = const.
A6.51)
Ко =A(OXI
5. Вектор Ко направлен по оси Сытела:
/ + СсдуК. ж Cco-gK = CobgK . A6.52)
Соотношения A6.51), A6.52) оп-
оправдывают возможность применения
теоремы об изменении вектора Ко в
форме A6.46), позволяющей по поведе-
поведению вектора Ко судить о движении оси
OZ, так как теперь угловая скорость
вращения оси OZ является и угловой
скоростью вращения вектора Ко.
Наконец, еще одно допущение по-
постулирует направление вектора главно-
главного момента внешних сил Lo.
6. Вектор главного момента внеш-
внешних сил Lo перпендикулярен к вектору
Ко. Неперпендикулярность Lo и Ко
Рис. 16.13 приводит к изменению модуля Ко, что
противоречит четвертому допущению.
В приближенной теории гироскопа многие выводы строятся
на основании геометрической интерпретации теоремы об измене-
изменении главного момента количеств движений, предложенной фран-
французским ученым Резалем (см. § 15.5). Так как в рамках этой теории
вектор Ко постоянен по модулю, его изменение может быть вы-
458
звано лишь поворотом, т. е. скорость движения конца вектора Ко
по его годографу может быть вычислена по формуле Эйлера
п = ПхКо, A6.53)
указывающей на то, что ненулевой вектор п обязательно пер-
перпендикулярен вектору Ко (рис. 16.14). Здесь и=К0, а, согласно
теореме об изменении главного момента количеств движений,
КО=1О. A6.54)
С учетом A6.53), A6.54) в приближенной теории гироскопа
С помощью A6.55) несложно рассчи-
рассчитать скорость прецессии оси OZ гироскопа
по известному моменту внешних сил Lo и
дополнительные силовые воздействия вра-
вращающегося ротора на пару опорных под-
подшипников при известной скорости поворо- Годограф^
та собственной оси вращения OZ ротора.
При этом следует иметь в виду, что по
формуле A6.55) вектор Q можно рассчи-
рассчитать лишь с точностью до Xcoz К, где X — О
произвольное число. В самом деле, так как Рис 16.14
векторы (OZK и Ко коллинеарны, то
Формула A6.55) позволяет объяснить ряд важных свойств
прецессионного движения оси OZ.
1. Если на некотором интервале времени Lo == 0, то и = О.
Следовательно, на этом интервале времени ось OZ не имеет вы-
вынужденной прецессии (Q = 0) и сохраняет свое направление в
инерциальной системе отсчета. Данное свойство используется в
технике при построении навигационных систем.
2. Вынужденное прецессионное движение оси OZ не обладает
инерционным свойством. Пока Lo * О, то и * 0, Q * 0 и ось OZ
прецессирует. Но как только Lo = 0, то сразу «sO, Q = 0 и
459
ось OZ становится неподвижной, в отличие от невращающегося
тела с одной неподвижной точкой, которое после, например, уда-
удара начинает двигаться.
3. Чем больше модуль
скорости ф собственного
вращения тела (сос «| ф |), тем
больше главный момент коли-
честв движений Ко и меньше
скоРость прецессии Q при
одном и том же главном мо-
моменте внешних сил Lo
(рис. 16.15).
4. Если на точку D, распо-
расположенную на оси OZ вращаю-
вращающегося гироскопа, подейство-
подействовать силой F перпендикуляр-
перпендикулярно оси OZ (рис. 16.16), то точ-
точка D начнет двигаться не в на-
направлении силы F , а перпен-
перпендикулярно ей — в направлении
вектора момента Lo силы F
неподвижной
п
относительно
точки О.
5. Вектор Q вынужден-
вынужденной прецессии оси OZ перпен-
перпендикулярен вектору Lo . Для
быстрого нахождения направ-
направления вектора Q по извест-
известным направлениям векторов
Ко и Lo можно использовать
правило Н. Е. Жуковского, со-
согласно которому направление
круговой стрелки скорости
прецессии Q совпадает с направлением кратчайшего поворота
вектора К() к вектору Lo (рис. 16.17).
Рис. 16.16
460
1---Г-
П
Q=vj/
Рис. 16.17
Приведем примеры анализа динамики гироскопа с использо-
использованием формулы A6.55).
Пример 16.4. Рассчитать угловую
скорость вынужденной прецессии
волчка (рис. 16.18) в случае Лагранжа,
если ось OZ динамической симметрии v
тяжелого быстровращающегося волчка
составляет с вертикальной осью Oz
инерциальной системы произвольный
угол 0 (sin 0 ф 0) и скорость вращения
волчка вокруг оси OZ coz = const =
= o)r > 0 .
Решение. В выражении A6.55) нам
известен горизонтальный вектор
L() = ОС х Р , модуль которого зависит
от угла 0 наклона оси. Рассчитаем
кинематику движения оси волчка, т. е.
законы изменения углов нутации и
прецессии, полагая, что вектор Ко
направлен по оси OZ волчка.
Из условия u-L0 следует, что
вектор п горизонтален, поэтому годо-
годограф вектора Ко является горизон- рис# 16.18
461
тальной кривой. Поскольку модуль вектора Ко остается постоянным, то этой
кривой может быть только окружность с центром на вертикальной оси Oz. Угол
нутации при этом будет постоянным и равным своему начальному значению:
0 = const = 0О.
Таким образом, движение оси OZ волчка сопровождается изменением лишь
угла прецессии у . Скорость Q вынужденного вращения (вынужденной пре-
прецессии) оси волчка направлена по вертикали.
Найдем модуль скорости прецессии Q оси волчка OZ вокруг оси Oz с по-
помощью основной формулы приближенной теории гироскопа A6.55). Сравним
модули векторов п и L():
После сокращения на sin0o Ф 0 имеем
|Q| = \Р1/КО\ = \Pl/Kz\ = |/>//(Сюг)| = const.
При указанном на рис. 16.18 направлении вектора п, если смотреть на вол-
волчок сверху, равномерное вращение вектора К() вокруг вертикали с угловой
скоростью С1 будет происходить в направлении, противоположном направле-
направлению движения часовой стрелки, т. е. векторы Q, К(), Lo образуют правую
тройку: Q х К() = L().
Полученный результат для Q совпадает с выражением A6.45) для вынуж-
вынужденной прецессии волчка, т. е. скорость прецессии постоянна, не зависит от угла
наклона оси волчка, прямо пропорциональна максимально возможному момен-
моменту силы тяжести вокруг точки О и обратно пропорциональна угловой скорости
собственного вращения.
Пример 16,5. Пусть уравновешенный ротор быстро вращается относительно
корпуса, например, статора мотора с постоянной угловой скоростью о),, а кор-
корпус принудительно поворачивают в инерциальной системе с угловой скоростью
со2 вокруг неподвижной оси Oz, проходящей через центр масс ротора. Рассчи-
Рассчитать гироскопическую реакцию ротора на пару опорных подшипников
(рис. 16.19).
Решение. Оценим дополнительную реакцию оси ротора на две ее опоры —
подшипники Ао и Во . Для простоты предположим, что ускорение центра масс
ротора в инерциальной системе отсчета незначительно. Тогда при отсутствии
вращения корпуса реакция уравновешенного ротора на две опоры определится
лишь положением линии действия силы тяжести ротора между подшипниками.
Ротор будем считать гироскопом с неподвижным центром масс, располо-
расположенным в точке О. При расчете динамических реакций силу тяжести гироскопа
учитывать не будем. В этом случае, согласно теореме о движении центра масс,
динамическая реакция опор на ротор может быть лишь парой сил: N А = -Л^ .
462
Для ротора оJ = со, » о>2. Постоянный модуль и направление вектора К()
известны: К() = Ссо,. вектор Ко направлен по оси OZ ротора. Скорость вын\ж-
денной прецессии оси OZ гироскопа равна угловой скорости корпуса: Q = со2.
При постоянном угле 0 = 0О между осями Oz и OZ годограф вектора К() от
вынужденного вращения с угловой скоростью Q = со2 будет дугой окружности
с центром, расположенном на оси вынужденной прецессии Oz. Скорость движе-
движения конца вектора К() по его годографу п = со2 х Ко.
Рис. 16.19
Согласно формуле A6.55), для обеспечения вынужденной прецессии на ро-
ротор должны действовать такие внешние силы, главный момент которых вокруг
точки О
10=й = Б2х^;. A6.56)
В рассматриваемом случае ими могут быть лишь реакции опор. Нас же интере-
интересует реакция ротора на опоры, т. е.
ГО=-1О, A6.57)
где Г() — главный момент сил, приложенных к опорам со стороны ротора.
463
С учетом A6.56) выражение A6.57) примет вид
Го =-п = К()х~щ - Ссо, щ
откуда
Го - Ca),co2sin0.
Так как силы реакции ротора на опорные подшипники образуют пару сил
( NA = Nв = N ) независимо от расположения центра масс относительно опор, то
и N = ro/AoB0
Поскольку NA и NB обусловлены динамическими свойствами гироскопа,
эта пара сил называется гироскопической реакцией, а сами силы — гироскопи-
гироскопическими давлениями. Для отыскания направления сил NA , NB , приложенных
к опорам со стороны ротора, можно использовать правило Н. Е. Жуковского
(рис. 16.20), согласно которому гироскопические давления направлены так, буд-
будто они стремятся повернуть вектор Ко или со, вокруг точки О кратчайшим
образом до совмещения с вектором угловой скорости вынужденной прецессии
шз. Здесь слово «будто» означает, что на самом деле гироскопические давления
приложены не к ротору, а к опорам.
Рис. 16.20
464
16.3. Общий случай движения твердого тела
В общем случае движения твердое тело имеет шесть степе-
степеней свободы. Поэтому для исследования его движения необходи-
необходимо располагать шестью независимыми дифференциальными
уравнениями динамики для шести обобщенных координат, за-
задающих положение тела в инерциальной системе отсчета. Окон-
Окончательный вид уравнений зависит от выбора обобщенных коор-
координат и теоретических основ, используемых для вывода.
Введем инерциальную систему координат So с осями Ох,
Оу, Oz. а также жестко связанную с твердым телом систему S с
ортогональными главными осями инерции СХ, СУ, CZ в его цен-
центре масс (рис. 16.21). Обобщенными координатами могут слу-
служить три декартовы координаты хс,у( , zc центра масс твердого
тела в системе So и три угла Эйлера ц/, 9, ф, задающих положе-
положение системы & относительно осей Кенига, параллельных осям
системы So.
У
Рис. 16.21
31 Зак. 16
465
Первые три уравнения динамики составим на основе теоре-
теоремы об изменении количества движения. Спроецируем векторное
выражение этой теоремы на оси системы So:
Мхс =?/?>; Мус =?^;>; Mzc = ?*?> . A6.58)
*=1 А:=1 *-1
Вторые три уравнения динамики составим на основе теоре-
теоремы об изменении главного момента количеств движений относи-
относительно осей Кенига. В проекции на подвижные оси системы S
динамические уравнения Эйлера имеют вид A6.11).
Уравнения A6.11), A6.58) легко разрешимы относительно
первых производных от проекций вектора скорости центра масс
на оси системы So и проекций вектора угловой скорости тела на
оси системы S. Такую форму записи дифференциальных уравне-
уравнений несложно преобразовать к форме Коши, традиционно ис-
используемой в алгоритмах численного интегрирования уравнений.
Дополним уравнения A6.11) системой кинематических урав-
уравнений Эйлера D.8), позволяющих выразить проекции угловой
скорости вращения тела на оси системы S через углы Эйлера и их
первые производные по времени. Рациональность выбора указан-
указанных обобщенных координат состоит в том, что они позволяют
представить общий случай движения в виде составного и в связи
с этим разделить дифференциальные уравнения на две подгруп-
подгруппы A6.58) и D.8), A6.11), не связанные между собой по вторым
производным от обобщенных координат. Тем не менее такая сис-
система уравнений в общем случае является связанной, поскольку
главный вектор R^ и главный момент L^ внешних сил отно-
относительно центра масс могут зависеть не только от времени, но и
от полного набора обобщенных координат и их первых произ-
производных по времени:
__ N _
&{е) =%Ркв) =Ф\(*>Хс>Ус>2с>Хс>Ус>*с>У>ЬъуАуI
к=\
_ N _
(e) = ]Г М (F(e)) =
L((e) = ]Г Мс (Fk(e)) = Ф2 (/, хс, ус, zc, хс, ус, zc, у, 9, ф, ij/, 6, ф).
Аг=1
Например, при движении тела, подвешенного к неподвиж-
неподвижному основанию на пружинах, силы натяжения пружин зависят
466
от положения центра масс и пространственной ориентации тела, а
моменты этих сил относительно главных центральных осей
инерции — от пространственной ориентации тела. Для каждого
локального участка поверхности тела распределенные силы со-
сопротивления воздуха зависят от скорости движения этого участ-
участка, которая, в свою очередь, определяется скоростями изменения
всех обобщенных координат.
Поиск аналитического решения системы нелинейных диф-
дифференциальных уравнений D.8), A6.11) и A6.58) двенадцатого
порядка представляет собой сложную, в большинстве случаев
неразрешимую математическую проблему. Поэтому на практике
решение задач динамики общего случая движения твердого тела
выполняют численными методами.
Систему дифференциальных уравнений D.8), A6.11), A6.58)
можно применять для любых частных случаев движения с мень-
меньшим числом степеней свободы. При этом в число неизвестных
функций помимо обобщенных координат будут входить харак-
характеристики реакций со стороны соседних твердых тел. Например,
при вращении тела вокруг неподвижной оси неизвестными будут
законы изменений угла поворота тела и реакций подшипников.
Вначале рассмотрим случай, когда соседнее твердое тело не-
неподвижно. Если связь с ним принадлежит к числу идеальных (без
учета сил трения), то дифференциальные уравнения движения
следует дополнить уравнениями ограничивающей поверхности
(в частных случаях линии или точки), записанными в обобщен-
обобщенных координатах. Если при этом необходимо также учитывать
силы сухого трения и моменты трения качения и верчения, то
дополнительно следует использовать уравнения математических
моделей фрикционных сил и моментов.
В тех случаях, когда соседнее тело подвижно в So, возмож-
возможны два варианта: 1) движение соседнего тела заранее известно и
задано в обобщенных координатах; 2) движение соседнего тела
неизвестно и подлежит расчету. Второй вариант обобщает исход-
исходную задачу на случай движения кинематически связанной систе-
системы твердых тел.
В каждом из этих вариантов дополнительные уравнения гео-
геометрической связи и моделей фрикционных сил следует выразить
31* 467
через обобщенные координаты и их производные по времени
обоих тел. Для первого варианта система, состоящая из D.8),
A6.11), A6.58) и дополнительных уравнений связи, должна быть
полной относительно неизвестных обобщенных координат и си-
силовых характеристик реакций между рассматриваемыми телами.
Во втором варианте система, содержащая те же уравнения, запи-
записанные для каждого из подвижных тел, и дополнительные урав-
уравнения связи и моделей фрикционных сил, должна быть полной
относительно всех двенадцати обобщенных координат и силовых
характеристик реакций между подвижными телами. Указанную
стратегию формирования полной системы уравнений движения
можно применять и для большего числа тел.
Глава 17
ПРИНЦИП ДАЛАМБЕРА. ДИНАМИЧЕСКИЕ
РЕАКЦИИ СВЯЗЕЙ
17.1. Принцип Даламбера. Сила инерции
Принцип Даламбера сформулирован в 1743 г. и первона-
первоначально, в отличие от законов Ньютона, был предназначен для
изучения движения несвободных механических систем. В на-
настоящее время этот принцип и вытекающий из него метод кине-
кинетостатики рассматривают как удобный прием для определения
реакций связей и сил взаимодействия, а также для составления
дифференциальных уравнений движения механических систем.
В соответствии с аксиомами динамики основное уравнение
движения материальной точки имеет вид
ma=F + R, A7.1)
где F — равнодействующая активных сил; R — равнодейст-
равнодействующая реакций связей; я =—- абсолютное ускорение точки.
dt
Уравнение A7.1) можно также записать в виде
F + R + (-та) = О.
Слагаемое (-та) обозначают Ф и называют даламберовой си-
силой инерции (или просто силой инерции). Основное уравнение
динамики материальной точки при использовании силы инерции
принимает следующий вид:
F + R + O = 0. A7.2)
Так как указанные выше силы образуют систему сходящихся
сил, то уравнение A7.2) можно рассматривать как условие равно-
равновесия системы сил (F, R, Ф). В этом и состоит принцип Далам-
469
бера для материальной точки. Формулируется он так: при движе-
движении материальной точки в любой момент времени приложенные
к ней активные силы и реакции связей вместе с силой инерции
образуют систему сил, эквивалентную нулю (уравновешенную
систему сил), т. е.
(F,?,O)co0. A7.3)
Отметим, что в формулировке принципа Даламбера речь идет об
уравновешенности определенной системы сил, а не о равновесии
(покое) материальной точки.
Таким образом, дополняя систему активных сил и реакций
связей, приложенных к точке, силой инерции, получаем уравно-
уравновешенную систему сходящихся сил, для которой должно выпол-
выполняться условие равновесия A7.2). В проекциях на оси декартовой
системы координат имеем
Fx +RX+Q>X=O; Fy+Ry+<&y=0\ F2 + Rz + Ф2 = 0,
где Фх = -тх\Фу =-/иу;Ф, =-mz; в проекциях на оси естест-
естественной системы координат получаем
FT+*T+OT=0; ^+Я„+Ф„=0; Fb+Rb=09
где Фт =-тах =-т—-;Ф„ =-тап =-т—.
dt p
Представление основного уравнения динамики материаль-
материальной точки в виде A7.2) следует рассматривать как прием, удоб-
удобный для решения некоторых задач, например для определения
сил взаимодействия и реакций связей.
Пример 17.1. Определить силу, с которой груз 2 давит на упор У тележки
(рис. 17.1), если масса груза т, а ускорение тележки а . Трением между грузом
и тележкой пренебречь.
Решение. К грузу приложены сила тяжести Р2, нормальная реакция N и
реакция R упора. Добавляя в соответствии с принципом Даламбера силу инер-
инерции Ф = -та груза, получаем уравновешенную систему сил (Р2, Ny R, Ф).
Проецируя силы на ось Ох, находим
470
Рис.17.1
17.2. Принцип Даламбера для механической системы
Рассмотрим механическую систему, состоящую из N мате-
материальных точек. Применяя принцип Даламбера к каждой точке
системы, получаем
Fk +Rk +Фк = 0, Jt = l,2,...,tf, A7.4)
где Ф* =-ткак; Fk и Rk — равнодействующие активных сил и
реакций связей, приложенных к к-й точке. Условие A7.4) можно
представить в виде
Таким образом, для системы материальных точек принцип
Даламбера формулируется так: при движении механической сис-
системы в любой момент времени приложенные к каждой точке
системы активные силы и реакции связей вместе с силами инер-
инерции образуют систему сил, эквивалентную нулю.
Суммируя левые части уравнений A7.4) по всем точкам сис-
системы, получаем
A7-5)
к=\
471
Умножив каждое уравнение в A7.4) векторно слева на радиус-
вектор. гк к-й точки и просуммировав их, имеем
N _ N __ N
jLFk xF* +Z'* X** +ZF* ХФ* =0»
к=\ к=\ к=\
ИЛИ
i % %o@k) = 0. A7.6)
Из A7.5) и A7.6) следует, что равны нулю главный вектор и
главный момент относительно произвольного центра приведе-
приведения О активных сил, реакций связей, приложенных ко всем точ-
точкам механической системы, и сил инерции. В проекциях на оси
декартовой системы координат, начало которых совпадает с
центром О, эти условия принимают вид известных уравнений
равновесия произвольной пространственной системы сил:
к=\
N
N N N
*-1 ft-1 Ы\ .j77^
N N N V '
к=\
к=\
Если силы, приложенные к к-ii точке системы, разложить не
на активные и реакции связей, а на внешнюю F/ и внутреннюю
Fk , то уравнение A7.4) примет вид
472
Так как главный вектор и главный момент относительно произ-
произвольного центра приведения внутренних сил системы равен ну-
нулю, то для A7.5) и A7.6) имеем соответственно
1^(с)+1Ф*=0;ХЛ/о(^») + ХМо(Ф,) = 0. A7.8)
к=\ к=\ к=\ к=\
Проецируя A7.8) на оси декартовой системы координат, получаем
шесть уравнений равновесия системы сил, аналогичных уравне-
уравнениям A7.7). Особенность этих уравнений состоит в том, что в них
не входят внутренние силы.
Понятие о силе инерции и принцип Даламбера составляют
основу метода кинетостатики, который ставит своей целью
применение методов статики, в частности, к задачам динамики
машин и механизмов.
17.3. Главный вектор и главный момент сил инерции
Применяя принцип Даламбера для изучения движения меха-
механических систем, состоящих из многих или множества (напри-
(например, твердое тело) точек, силы инерции целесообразно привести
к какому-либо центру, например центру масс. Получим общие
формулы для главного вектора и главного момента сил инерции
относительно произвольно выбранного центра приведения.
Главный вектор сил инерции
В соответствии с определением главного вектора
N N
- drk
1ак как ускорение точки ак = —^-, а ее масса тк постоянна, то
( N
dt2
M
dt1
303ак.16 473
Таким образом, при любом движении механической системы
главный вектор сил инерции равен взятому со знаком «Минус»
произведению массы системы на ускорение центра масс:
Яш=-Мас. A7.9)
Главный момент сил инерции относительно произвольно
выбранного центра приведения
Определим главный момент сил инерции относительно неко-
некоторого неподвижного центра О:
_ _ dvk d ,_ _ ч
Так как гк х тк —- = — (rk х mkvk), то
dt dt
к=\ к=\ Ы\ «*
vk d
—- = —
dt dt
) dKo
—.
Следовательно, главный момент сил инерции относительно
неподвижного центра приведения О равен взятой со знаком «ми-
«минус» производной по времени от главного момента количеств
движения механической системы относительно того же центра.
Если движение точек механической системы рассматривать
как сложное, т. е: гк -гс + р^, то
_ N
где К^г) = ^ р* х mkvkr) — главный момент количеств движения
системы в ее относительном движении по отношению к системе
координат, движущейся поступательно вместе с центром масс. В
этом случае главный момент сил инерции относительно непод-
неподвижного центра приведения О
^fxac. A7.10)
Силы инерции точек механической системы можно привести
к центру масс, который может быть подвижной точкой. В этом
случае главный момент сил инерции относительно центра масс С
474
z
dt
(производная в A7.11) полная, поскольку угловая скорость под-
подвижной системы координат равна нулю).
Формулы A7.9) и A7.10) дают возможность определить
главный вектор и главный момент сил инерции твердого тела при
разных видах его движения. При поступательном движении тела
силы инерции его точек эквивалентны равнодействующей, гео-
геометрически равной главному вектору /?ин =-Л/аг и приложен-
приложенной в центре масс тела. Главный момент сил инерции относи-
относительно центра масс тела равен нулю, так как равна нулю скорость
каждой точки тела относительно его центра масс ( v[r) = 0).
При приведении сил инерции точек тела, вращающегося во-
вокруг неподвижной оси, к произвольному центру О, расположен-
расположенному на этой оси, в центре О в общем случае должны быть при-
приложены главный вектор Rm =-Mac и главный момент
L™ = — сил инерции. Если ось Oz вращения тела является
dt
его центральной и главной осью инерции, то Rm = 0, а
Если твердое тело имеет плоскость Оху материальной сим-
симметрии и совершает плоскопараллельное движение, то, приведя
силы инерции к центру масс тела, получим главный вектор
Яии =-Мас и главный момент Z,™ относительно центра масс
сил инерции. При принятом допущении о наличии плоскости
симметрии ось Cz будет главной центральной осью инерции тела
и поэтому Z"H = -JCzz .
17.4. Динамические реакции опор
Одной из задач динамики твердого тела, для решения кото-
которой эффективно применение метода кинетостатики, является за-
задача определения реакций опор и уравновешивания тела, вра-
вращающегося вокруг неподвижной оси.
30" 475
Вывод уравнений для определения реакций опор
Рассмотрим твердое тело, закрепленное при помощи под-
подшипника в точке В и подпятника в точке А (рис. 17.2), вра-
вращающееся вокруг неподвижной оси AZ под действием сил
F,,F2,...,FV, и определим реакции опор. Масса тела А/, его
угловая скорость и угловое ускорение в некоторый момент
времени соответственно равны со и е, трением в опорах пре-
пренебрегаем.
Рис. 17.2
Уравнения для определения реакций опор можно составить в
проекциях на оси как неподвижной, так и подвижной системы
координат, жестко связанной с вращающимся телом. В первом
случае при вращении тела будет изменяться распределение мас-
массы, а значит, и моменты инерции тела относительно осей коорди-
координат. Во втором случае моменты инерции тела относительно осей
связанной с ним системы координат и координаты центра масс
476
vcz
будут некоторыми постоянными величинами. Поэтому будем
полагать, что система координат AXYZ жестко соединена с твер-
твердым телом.
За центр приведения сил инерции точек твердого тела при-
примем точку А. Определим проекции на оси координат главного
вектора и главного момента относительно точки А сил инерции
тела.
Главный вектор сил инерции
RHH=-Mac=-Ma^-Ma^.
Касательное а((т) и нормальное а[п) ускорения центра масс тела
соответственно равны
1 ] к I j
О О ez ; а{п) =©xvr = О О
Хс Yc Zc vcx vCY
A7.12)
Раскрывая определители A7.12) по элементам первой строки и
принимая во внимание, что vr = ш х гс, получаем
я/т) = -е ,У( 1 + ?ZXC] + 0 • к;
5/.я) =-(*2zXci-<o2zYcj + Ok.
Таким образом, для проекций главного вектора сил инерции
тела на оси подвижной системы координат AXYZ имеем следую-
следующие выражения:
R™ =Me7Yc+M@2zXc;
R™ =-MzzXc +Mco2zYc; A7.13)
RZH = 0.
Так как для определения реакций опор используется связан-
связанная с вращающимся телом система координат, то главный мо-
момент сил инерции относительно точки А можно представить в
соответствии с формулой Бура в виде
dt
dKA _ -
—— + ю х К л
dt A
A7.14)
477
Известно, что главный момент количеств движения твердого
тела относительно точки А определяется по формуле A5.45). Так
как при вращении тела вокруг неподвижной оси Oz со^ =сог = 0, то
*л =-Jxz®7j-JYz<»zJ + Jz<*zk, A7.15)
N N
где Jж = ^TimkXkZk,JYZ = ^mkYkZk — центробежные момен-
Ы\ к=\
^ N
ты инерции тела; Jz =^мк(Хк +Yk) — момент инерции тела
к=\
относительно оси OZ.
Принимая во внимание A7.15) и учитывая, что
из A7.14) получим следующие выражения для проекций главного
момента сил инерции тела относительно точки А на оси системы
координат AXYZ:
Lx -^xzzz ~~Jyz®z>
L?=JYz*z+Jxz<i>h A7.16)
В соответствии с методом кинетостатики приравняем к нулю
проекции на оси координат главного вектора и главного момента
относительно точки А активных сил (Fk), реакций связей
(RA, RB) и сил инерции точек тела. Учитывая полученные выше
выражения A7.13) и A7.16), запишем
ДГГ=О; A7.17)
с +M(O2ZYC =0; A7.18)
A7.19)
-JYZa>l =0; A7.20)
478
= 0; A7.21)
fMz№)-/z6z=0. A7.22)
Уравнение A7.22) не содержит реакций опор. При известном
моменте инерции J7 и заданных внешних силах оно позволяет
определить угловое ускорение zz(t) и угловую скорость ooz =
= \г7 {t)dt + С} твердого тела.
Уравнения A7.17) -A7.21) дают возможность вычислить
проекции на оси координат реакций подшипника ( Хв, YB) и под-
подпятника (XA9YA,ZA).B них входят слагаемые, зависящие как от
заданных сил Fk, так и от сил инерции, обусловленных вращением
тела с угловой скоростью coz и угловым ускорением sz. Так как
эти уравнения линейны, то каждую из реакций опор можно раз-
разделить на две составляющие, называемые условно статической и
динамической.
Статические реакции опор вызываются только внешними
силами; силы инерции при определении статических реакций по-
полагают равными нулю. В этом случае
k=] k=\
Динамические реакции опор зависят только от сил инерции.
Уравнения для определения проекций динамических реакций
подшипника и подпятника имеют вид
479
Xv =0; A7.23)
Г? + Удд - Mz7Xc + M(o2zYc = 0; A7.24)
=0; A7.25)
=0. A7.26)
Определив из уравнений A7.26) и A7.25)
получаем
Аналогично находим
A7.27)
(I I.Ao)
Как видно, динамические реакции подшипника и подпятника
зависят от угловой скорости и углового ускорения тела, а также
от распределения массы тела относительно оси его вращения.
Реакция опоры твердого тела, вращающегося
вокруг неподвижной точки
Применим метод кинетостатики для определения реакции
опоры твердого тела, вращающегося вокруг неподвижной точки О
(рис. 17.3). Если трением в опоре пренебречь, то реакция опоры —
сила, приложенная к твердому телу в точке О. Сила Ro не создает
момент относительно точки О и осей координат, проходящих че-
через эту точку. Поэтому для определения реакции опоры доста-
достаточно найти проекции на оси декартовой системы координат
главного вектора системы сил, в которую входят активные силы
Fk, реакция опоры Ro и силы инерции Ф* точек тела.
Главный вектор сил инерции тела
Rm =-Mac =-M(sxrr +©xvr). A7.29)
480
Рис. 17.3
Для определения проекций вектора Rm на оси декартовой
системы координат представим входящие в A7.29) векторные
произведения в виде определителей
ехгг =
j к
8 о
у к» у
j к
vcx vcr
г ; со х vr =
Хс Yc Z,
Раскрывая эти определители по элементам первой строки и при-
принимая во внимание, что
vc. =75xrc =J((OYZC -(OZYC) + ]((OZXC -
находим
=M[(co2v
rr]; A7.30)
Выражения A7.30) справедливы для проекции главного век-
вектора сил инерции тела на оси как неподвижной Oxyz, так и свя-
481
занной OXYZ с телом систем координат. Проецирование вектора
Лин на связанные с телом оси координат предпочтительнее, так
как распределение массы тела относительно таких осей фиксиро-
фиксировано, и, следовательно, координаты центра масс — некоторые
постоянные величины.
В соответствии с принципом Даламбера система сил, вклю-
включающая активные силы, реакцию опоры и силы инерции точек
тела, уравновешена. Поэтому равны нулю проекции на оси коор-
координат главного вектора этой системы сил, т. е.
N
Xo+Y<Fkx +M(co2K +CD* )*(; +(ez -
-(ox(oY)Yc -(ez -co^coz)Zr] = 0;
JlFkY +№1 +®\)YC + (zx
Ы\ A/.3Z)
Уравнения A7.31)-A7.33) позволяют вычислить реакцию
опоры (сферического шарнира), если известны угловая скорость
и угловое ускорение тела. Динамическая реакция опоры опреде-
определяется силами инерции и может быть найдена с помощью урав-
уравнений A7.31)-A7.33) при условии, что все Fk=0.
17.5. Статическая и динамическая уравновешенность
твердого тела, вращающегося вокруг неподвижной оси
Статическая уравновешенность
Твердое тело, вращающееся вокруг неподвижной оси, назы-
называют статически уравновешенным, если ось вращения прохо-
проходит через его центр масс. В этом случае главный вектор сил
инерции равен нулю, и из уравнений A7.23) и A7.24) получаем
Х% = -X*, Yg = -Y*. Это значит, что R? = -/?jf, т. е. динамиче-
482
ские реакции подшипника и подпятника образуют пару. Модули
сил этой пары в соответствии с A7.27) и A7.28) определяются
выражением
Полученный результат не зависит от выбора центра приве-
приведения системы сил. Действительно, если в качестве центра при-
приведения выбрать произвольную точку О на оси вращения тела
(см. рис. 17.2), то уравнение A7.26) будет иметь следующий вид:
f,y Jyzzz + JXZ<*\ = 0.
к=\
Так как ось вращения тела — центральная, то ХАА = -ХАН и тогда
что аналогично выражению для Х\ в случае, когда за центр при-
приведения системы сил была принята точка А. Такой же результат
получается для. Y* и Y?. He меняются при изменении центра
приведения и центробежные моменты инерции тела, т. е.
Jху = JХ2 и JY7 = J yz. Например:
N N N N
J* =Zm***z* =2>***(Z* -OA)=?mkXkZk -OA^mkXk .
k=\ k=\ k=\ k=\
N
Так как ^ mk Xk = MXC = 0, то
k=\
N
xz
k=\
Таким образом, в случае статической уравновешенности тела
динамические реакции опор приводятся к паре сил и могут быть
не равны нулю. Пара сил инерции может быть уравновешена
только парой — динамическими реакциями опор. Модули реак-
реакции зависят от угловой скорости oz и углового ускорения г7
твердого тела, распределения массы по его объему (что характе-
характеризуется центробежными моментами инерции J^ и JYZ ), а также
от расстояния между опорами.
483
Пример 17.2. Однородный стержень CD (рис. 17.4) массой т и длиной 2/
вращается с. постоянной угловой скоростью со вокруг вертикальной оси Oz.
Определить динамические реакции подпятника А и подшипника В, если рас-
расстояние между ними h. причем ОА = ОБ.
Рис. 17.4
Решение. При равномерном вращении сила инерции элемента стержня, мас-
масса которого тк , по модулю равна Ф* = тка>2 sin а ?А . Следовательно, интен-
интенсивность сил инерции изменяется вдоль стержня по линейному закону. Распре-
Распределенные силы инерции на каждом из участков стержня ОС и OD можно
заменить равнодействующими R*H, равными по модулю —/и/со2-since и при-
4
ложенными в точках Е и N, отстоящих от точки О на —/. Равнодействующие
R*H сил инерции для участков стержня образуют пару, модуль момента которой
равен — w/2co2sin2a . Эта пара сил уравновешивается парой, образованной ди-
6
484
намическими реакциями подшипника и подпятника. Так как расстояние между
опорами И, то Ifj1 = Yg = —ml2(o2sin2a .
i oh
Такой же результат может быть получен при использовании уравнений
A7.23)-A7.26). По условию данной задачи 6 = 0. Ось АХ является главной
осью инерции стержня CD в точке А, так как она перпендикулярна плоскости
симметрии стержня. Поэтому из A7.23) и A7.26) следует, что Х% = Х% =0. Из
уравнения A7.25) получаем Y? = —-Jrz(o2.
h
Центробежный момент инерции стержня
' N N j
JY7 = ^mkYkZk = ^Г *иД^ sina(OA + %к cos a) -—ml2 sin 2а.
Следовательно.
1 /2,Л2,
Гвд=-—/и/V sin 2а,
в 6h
Динамическая уравновешенность
Твердое тело, вращающееся вокруг неподвижной оси, на-
называют динамически уравновешенным, если равны нулю дина-
динамические реакции подшипника и подпятника. Из уравнения
A7.27) следует, что динамическая реакция R? подшипника бу-
будет равна нулю, если JХ7 = JYZ = 0, т. е. если ось AZ вращения
тела будет его главной осью инерции в точке А. Чтобы при этом
была равна нулю и динамическая реакция подпятника, необхо-
необходимо, как это следует из A7.28), чтобы равнялись нулю не толь-
только центробежные моменты инерции J^ и JYZ, но и координа-
координаты Хс и Yc центра масс тела. Второе условие может быть
выполнено, если ось AZ будет проходить через центр масс тела,
т. е. будет центральной осью. Таким образом, вращающееся во-
вокруг неподвижной оси твердое тело будет динамически уравно-
уравновешено, если ось вращения является его главной центральной
осью инерции.
В случае, когда ось OZ вращения тела является его главной
осью инерции в какой-либо точке О (см. рис. 17.2), но не прохо-
485
дит через центр масс, центробежные моменты инерции J^ = 0,
Jn = 0 и уравнения для определения динамических реакций
подпятника А и подшипника В принимают вид
Xl+XZ+MezYc+Mu>2zXc=0; A7.34)
Г* + Гйд - Мг7Хс + Ma>2zYc = 0; A7.35)
$ ; A7.36)
0. A7.37)
Отсюда находим
ПА
¦ *S** \ е 2 4 ч ./• *г 2 . тт 2 ч /< я л /Л\
В этом случае главный момент сил инерции тела относи-
относительно точки О равен нулю, и система сил инерции приводится к
равнодействующей, приложенной в точке О и равной по модулю
М^{г\ + <*4 Х^г + Ус ) • Поэтому динамическими реакциями
опор будут параллельные силы R% и /??, которые направлены
противоположно равнодействующей сил инерции тела, а их мо-
модули A7.38), A7.39) обратно пропорциональны расстояниям от
центра приведения О до соответствующей опоры.
Пример 17.3. Однородный диск массой М равномерно вращается вокруг оси
OZ с угловой скоростью со (рис. 17.5). Расстояние от оси OZ до центра масс
диска (точки О равно к. Найти динамические реакции опор.
Решение. Поместим начало связанной с диском системы координат в точку
О пересечения оси OZ с горизонтальной плоскостью симметрии диска. Ось OY
направим так, чтобы она проходила через центр масс диска. В этом случае ось
OZ будет главной одью инерции диска в точке О, и, следовательно, J^ = 0,
JYZ =0 и Хс =0. Это значит, что система сил инерции диска приводится к
равнодействующей, которая приложена в точке О и расположена вдоль оси OY.
При принятых условиях из уравнений A7.34) и A7.37) находим Х*А = Х% = 0, а
из уравнений A7.35) и A7.36) получаем
удв.^Ш2Л; YS=-—M<o2h.
АВ н АВ
486
Z(z)
(Г)
Рис. 17.5
На основании вышеизложенного, можно сделать следующие
выводы:
1. Динамические реакции могут существовать даже тогда,
когда ось вращения тела проходит через его центр масс. Динами-
Динамические реакции опор образуют пару сил, модули которых зависят
от центробежных моментов инерции тела, угловой скорости и
углового ускорения.
2. Если ось вращения тела является его главной и централь-
центральной осью инерции, то динамические реакции подшипника и под-
подпятника равны нулю, а статические реакции зависят только от
внешних сил.
17.6. Балансировка роторов
Детали машин, как правило, изготавливают с некоторыми
погрешностями, да и их материал может быть неоднородным по
плотности. Поэтому трудно предположить, что ось вращения
487
такой детали, например ротора, будет ее главной центральной
осью инерции. Следовательно, при вращении ротора будут воз-
возникать нежелательные динамические реакции опор. Эти реакции
тем больше, чем больше масса, размеры, моменты инерции и уг-
угловая скорость ротора. Для уменьшения динамических реакций в
инженерной практике применяют балансировку роторов после их
изготовления. Задача балансировки заключается в том, чтобы по
возможности сделать ось вращения ротора его главной централь-
центральной осью инерции. Наиболее актуальна балансировка для быст-
ровращающихся роторов (например, турбины), поскольку дина-
динамические реакции пропорциональны квадрату угловой скорости
ротора. Различают статическую и динамическую балансировки
роторов.
Задачей статической балансировки является совмещение
центра масс ротора с осью его вращения. Такую балансировку
называют статической потому, что ее можно провести не приводя
ротор во вращение.
На рис. 17.6 показан диск, центр масс которого (точка С)
смещен от оси вращения на расстояние d. Вследствие этого
дебаланс диска равен Md, где М— масса диска с валом. Если
установить диск в призмах с малым трением так, чтобы его ось
была горизонтальной, и предоставить самому себе, то после
некоторого вращения диск займет положение, при котором
точка С окажется на вертикальном диаметре ниже оси вра-
вращения.
D
Рис. 17.6
488
Совместить центр масс диска с осью вращения можно двумя
способами. Во-первых, можно в точке А, расположенной на том
же диаметре, что и точка С, убрать часть материала, масса т ко-
которого определяется из соотношения —mD = Md. Дебаланс Md
диска при этом должен быть известен. Во-вторых, можно в точ-
точке 5, лежащей на том же вертикальном диаметре диска, доба-
добавить материал, масса которого также должна быть т. Нетрудно
показать, что после такой доработки центр масс будет нахо-
находиться на оси вращения и диск после вращения будет останавли-
останавливаться в любом произвольном положении. В действительности
при статической балансировке для определения дебаланса и ра-
радиуса, на котором находится центр масс, используют вращение
диска с постоянной угловой скоростью. Если дебаланс диска ра-
равен Md, то сила инерции, равная М/со2, может быть определена в
виде динамических реакций опор. При расположении диска посе-
посередине между опорами их динамические реакции будут равны
/?д = 0,5МЛо2. Следовательно, дебаланс Md = 2R*/co2 . Будет
известен и радиус, на котором находится центр масс диска, по-
поскольку этот радиус расположен на линии, параллельной дина-
динамическим реакциям опор.
Таким образом, при вращении диска замеряют динамиче-
динамическую реакцию RR = 0,5Mdico2 опоры и в подвижной системе ко-
координат, связанной с диском, находят радиус, на котором рас-
располагается центр масс. После устранения дебаланса путем
удаления части материала на линии ОА или добавления его на
линии ОВ центр масс диска будет на оси вращения. При конт-
контрольном вращении диска динамические реакции опор должны
отсутствовать.
Статическая балансировка дает приближенный результат,
поскольку при этом не принимаются в расчет центробежные
моменты инерции диска. Погрешность будет тем меньше, чем
тоньше диск. При небольшой толщине малым будет момент
пары сил инерции, который выражается через центробежные
моменты инерции диска, а значит, незначительными будут и
соответствующие составляющие динамических реакций опор.
489
Следовательно, статическая балансировка дает удовлетвори-
удовлетворительный результат для роторов, выполненных в виде тонких
дисков.
Динамическую балансировку проводят для ротора, длина
которого соизмерима с его диаметром или превосходит его.
Если полагать, что такой ротор статически отбалансирован, то
задача динамической балансировки состоит в том, чтобы урав-
уравновесить пару сил инерции, которая обусловлена несимметрич-
несимметричностью распределения массы ротора относительно оси его вра-
вращения. Силу инерции каждой точки ротора можно разложить на
две параллельные составляющие, расположенные в параллель-
параллельных плоскостях, перпендикулярных оси вращения ротора. Эти
плоскости называют плоскостями коррекции и выбирают так,
чтобы при балансировке в этих плоскостях на роторе можно
было установить балансировочные грузы или убрать часть ма-
материала ротора. При равномерном вращении ротора силы инер-
инерции в каждой из плоскостей коррекции образуют систему схо-
сходящихся сил, которая приводится к равнодействующей
/?ин/ (i = 1,2). Равнодействующая сил инерции может быть урав-
уравновешена силой инерции балансировочного груза, установлен-
установленного в той же плоскости коррекции. Очевидно, что
Яш1 =/юб1-г/.(ю2, где m6i9r( — соответственно масса балансиро-
балансировочного груза и расстояние от оси вращения ротора до точки
размещения груза.
При динамической балансировке ротор устанавливают на
специальном стенде (балансировочном станке), приводят во вра-
вращение и при этом фиксируют воздействие ротора на опоры стен-
стенда. Балансировочные стенды подразделяются на две группы:
стенды с неподвижной осью вращения ротора и стенды, в кото-
которых ось вращения ротора подвижна. У стендов первой группы
(рис. 17.7, а) действие сил инерции проявляется в виде сил давле-
давления цапф ротора на подшипники. Эти силы регистрируются при
помощи датчиков, и определяются линии действия этих сил в
связанной с ротором системе координат. После этого баланси-
балансировка сводится к установке в выбранных плоскостях коррекции
на радиусах, параллельных линиям действия сил R% и R? в свя-
490
занной с ротором системе координат, балансировочных грузов 1
и 2. Если ротор предварительно статически отбалансирован, то
момент пары сил инерции грузов должен быть равен моменту
пары сил R%, R?. Вместо установки балансировочных грузов
можно удалить часть материала ротора в точках 3 и 4, располо-
расположенных симметрично точкам 7 и 2 относительно оси вращения
ротора (см. рис. 17.7, а).
КА
ф,
3»
в
Рис. 17.7
491
При использовании стендов второй группы (рис. 17.7, б) де-
баланс устраняют поочередно в каждой из плоскостей коррекции.
Для этого ось О, качания рамы совмещают с одной из плоско-
плоскостей коррекции, а упругую опору, допускающую движение оси
ротора только в одной плоскости, — с другой. Действие сил
инерции проявляется в виде деформации упругой опоры. При
известном коэффициенте жесткости опоры эта деформация про-
пропорциональна квадрату.угловой скорости ротора и дебалансу.
Установка в плоскости коррекции П2 балансировочного груза с
таким же дебалансом позволяет уравновесить силы инерции ро-
ротора и груза в этой плоскости. После перестановки ротора (или
перестановки опор) проводят балансировку в другой плоскости
коррекции (П^.
Глава 18
ОСНОВЫ АНАЛИТИЧЕСКОЙ МЕХАНИКИ
18.1. Основные понятия
Аналитическая механика — это раздел теоретической ме-
механики, в котором изучение равновесия и движения механиче-
механических систем основано на дифференциальных и интегральных
принципах механики. В отличие от векторной механики Ньютона
в аналитической механике используются энергетические харак-
характеристики движения. Подчинение этих характеристик принципам
механики позволяет получить наиболее общие формы как усло-
условий равновесия, так и дифференциальных уравнений движения
механических систем.
Связи и их классификация
Механическая система, точки которой могут занимать любое
положение в пространстве и иметь любые скорости, называется
свободной. Например, свободной системой является космический
аппарат, движущийся по орбите вокруг Земли. Его движение не
ограничено другими телами и поэтому, прикладывая к аппарату
соответствующие силы, можно изменять траекторию его центра
масс и поворачивать аппарат вокруг центра масс. Если на коор-
координаты и скорости точек системы наложены ограничения, то
система называется несвободной, а ограничения называются
связями. Механические связи реализуются в виде различных
устройств или тел (стержни, нити, шарниры и т. п.). Аналитиче-
Аналитически связь описывается уравнением вида
493
Ограничивая движение механической системы, связи действуют
на ее точки посредством сил, которые называются реакциями
связей. При изучении равновесия и движения механических сис-
систем методами аналитической механики применяется принцип
освобождения (аксиома о связях). Этот принцип состоит в том,
что любую систему можно рассматривать как свободную, прило-
приложив к ее точкам реакции, соответствующие отброшенным связям.
Связи называются голономными, если они описываются
уравнениями вида
f/(xk,yk,zk,t) = 0, ? = l,2,...,N, 7 = 1,...,/w. A8.1)
Такие связи накладывают ограничения на координаты точек, а
значит, на положение системы в пространстве. Это так называе-
называемые геометрические связи. Вместе с тем голономные связи на-
накладывают ограничения и на скорости точек системы. Соответст-
Соответствующие условия получаются в результате дифференцирования
уравнений A8.1) по времени:
dt
= 0.
Голономные связи могут описываться и дифференциальны-
дифференциальными уравнениями, однако последние обязательно должны быть
интегрируемыми.
Пример 18 I. Получить уравнения связей для диска радиусом г, который
катится без скольжения по плоскости (рис. 18.1).
Рис. 18.1
494
Решение. Уравнения связей имеют вид
ус = г = const; хс = гф.
где ф — угол поворота диска (ф = 0 при хс = 0).
Из первого уравнения связи следует, что
vr> = ус = 0.
Интегрируя второе уравнение, находим связь между координатой хс и уг-
углом поворота диска
xr = ry + Q.
Неголономными называются связи, которые описываются
уравнениями вида
ff(xk,yk,zk,xk,yk,zk,t) = Q, k = \,...9N. A8.2)
Уравнения A8.2), в отличие от уравнений голономных свя-
связей, не могут быть проинтегрированы независимо от дифферен-
дифференциальных уравнений движения системы. Неголономные связи
накладывают ограничения A8.2) на скорости точек, поэтому их
называют кинематическими.
Пример 18.2. Получить уравнения связей для шара радиусом г, который
катится без скольжения по плоскости (рис. 18.2).
Рис. 18.2
Решение: Положение шара определяется координатами хс,ус, zc центра
масс и тремя углами его поворота вокруг центра масс. Этими углами могут быть
495
\ глы Эйлера. При любом положении шара расстояние от точки С до плоскости
Ох\ равно его ради\с\. Поэтому одно из уравнений связи имеет вид гг =/•.
Др>гие \ равнения связи определим из условия качения без скольжения:
vp = v( + со х г = 0: г = СР.
где Р — точка соприкосновения шара с плоскостью.
Проецируя это векторное уравнение на оси неподвижной системы коорди-
координат. пол\чаем
хс -гсох = 0: ус+гых=0: zС = 0.
Интегрирование последнего уравнения дает полученное выше геометрическое
\ словие гг = г .
Кинематические уравнения в проекциях на оси неподвижной системы коор-
координат имеют вид
cov =c
CDj =-(j>sin6cosv|/ + 0sini|/.
Таким образом, уравнениями связей для шара являются
хс +r((j)sin0cosi|;-0siniy)= 0 ;
ус + r(9sin0sinv|y + 0cosv^)= 0;
Первые два из них не интегрируются, т. е. являются уравнениями неголо-
номных связей.
Связи подразделяются на стационарные и нестационар-
нестационарные в зависимости от того, входит в явном виде время в урав-
уравнение связи или нет. Связь, уравнение которой имеет вид
f,{xk, yk, zk) = 0, является голономной и стационарной. Для
голономной нестационарной связи уравнение будет таким:
f/(xk,yk,zk,t) = 0.
Например, жесткий стержень длиной /, прикрепленный к
неподвижной опоре, является стационарной связью для мате-
материальной точки, находящейся на его свободном конце. Уравнение
связи в декартовой системе координат, начало которой совпадает с
точкой закрепления стержня, имеет вид х2 л-у1 +z2 -I2 =0.
(При вращении стержня вокруг опоры точка находится на сфе-
сфере радиусом /.) Если длина стержня изменяется по заданному
закону, то связь является нестационарной и ее уравнение
х2 +y2+z2-l2(t) = 0.
496
Связь называется удерживающей (двухсторонней), если она
описывается уравнением (равенством). Голономную стационар-
стационарную удерживающую связь, наложенную на материальную точку,
можно представить в виде двух бесконечно близких одинаковых
поверхностей, между которыми только и может находиться точка.
Неудерживающая (односторонняя) связь описывается неравен-
неравенством. Например, если математический маятник представляет
собой тонкий стержень длиной /, вращающийся вокруг непод-
неподвижной оси и к свободному концу которого прикреплен груз (ма-
(материальная точка), то связь для груза будет удерживающая. Если
же груз прикреплен к свободному концу нерастяжимой нити дли-
длиной /, то связь будет неудерживающая, поскольку груз может на-
находиться как на поверхности сферы радиусом /, так и внутри нее.
Обобщенные координаты
Пусть механическая система состоит из N материальных
точек. Положение такой системы в пространстве определяется
3N декартовыми координатами. Если на систему наложено т
голономных удерживающих связей, то независимыми между со-
собой будут не 3N, а п = 3N - т координат. Выбрав п декартовых
координат системы в качестве независимых, остальные т коор-
координат можно найти при помощи уравнений связи. Выбор декар-
декартовых координат в качестве независимых для ряда задач механи-
механики оказывается нерациональным, так как приводит к громоздким
выкладкам. Поэтому целесообразно использовать и другие неза-
независимые координаты. Независимые между собой координаты,
которые однозначно определяют положение механической систе-
системы в пространстве, в любой момент времени называются обоб-
обобщенными координатами. Их обозначают #,•(/), где / = 1, 2,..., п.
В качестве обобщенных координат можно использовать отрезки
прямых, дуги, углы, а также любые другие параметры, удовле-
удовлетворяющие определению обобщенных координат. Отметим, что
для одной и той же механической системы может быть несколько
вариантов выбора обобщенных координат. Так, для системы, по-
показанной на рис. 18.3, в качестве обобщенных координат могут
33 Зак. 16 497
быть выбраны: 1) координаты хс центра масс катка 1 и sB центра
масс цилиндра 3; 2) координата хс центра масс катка и угол <р3
поворота цилиндра 3; 3) координаты хс и srB центра масс ци-
цилиндра 3 относительно фиксированной точки D нити. Конкрет-
Конкретный выбор обобщенных координат определяется поставленной
задачей.
Рис. 18.Э
Для системы, состоящей из N точек, на которые наложено т
голономных удерживающих связей, через обобщенные могут
быть выражены п - 3N - т независимых декартовых координат.
Остальные декартовы координаты выражаются через те же
обобщенные координаты с помощью т уравнений связей. Следо-
Следовательно, и радиус-векторы всех точек системы выражаются че-
через обобщенные координаты:
498
Например, положение кривошипно-ползунного механизма,
показанного на рис. 18.4, определяется двумя его точками А и
В. Из четырех декартовых координат (хА,уА>хв,ув) независи-
независимой будет только одна, так как число т голономных удерживаю-
удерживающих связей равно трем:
ОА-1Х - const, АВ = /2 = const, ув = 0.
У////////////.
ШШШШШ1Ш
Рис. 18.4
Если за независимую декартову координату принять хА, а за
обобщенную — угол ф поворота кривошипа 7, то хА =l} cos (р.
Другие декартовы координаты точек системы определим при по-
помощи уравнений связей. Из уравнения х\ +у\ -/,2 =0 находим
уА = /, sin ф. Ордината ув = 0. Из условия (хв - хА J + у\ -1\ -
= 0 получаем х\ - 21ххв созф +1\ - /,2. Если /2 = 1Х, то хн -
Таким образом, все декартовы координаты точек системы
выражены через угол ф.
Возможные перемещения. Число степеней свободы
механической системы
Перемещение материальной точки зависит от ее массы, при-
приложенных к точке сил, связей и начальных условий. Определение
33*
499
действительного перемещения сводится к решению задачи ди-
динамики точки. В аналитической механике в качестве одного из
основных используется понятие о возможном перемещении
точки.
Возможным называется любое допускаемое связями пере-
перемещение материальной точки из положения, занимаемого ею в
данный момент времени, в бесконечно близкое полоэюение, кото-
которое она может занимать в тот же момент времени. Возмож-
Возможные перемещения не связаны ни с движением точки, ни с изме-
изменением наложенных на нее связей. Они представляют собой
воображаемые перемещения, которые можно представить сово-
совокупностью бесконечно малых векторов Ъг , зависящих только от
структуры связей, зафиксированных в рассматриваемый момент
времени. Вектор Ъг называют вариацией радиус-вектора точки,
а проекции Ъг на оси декартовой системы координат— вариа-
вариациями координат. Их обозначают Ъх, Ъу, Ъг. Возможные пере-
перемещения точки должны удовлетворять дифференциальным соот-
соотношениям, вытекающим из уравнений связей при условии, что
время является фиксированным. Получим эти соотношения и
установим различие между бесконечно малым действительным
dr и возможными Ъг перемещениями точки.
Пусть на материальную точку наложена голономная удержи-
удерживающая связь, уравнение которой
f(x9y,z,t) = 0. A8.3)
Этому уравнению удовлетворяют координаты точки в момент
времени t. Через бесконечно малый промежуток времени dt
координаты (х + dx\ (у + dy\ (z + dz) точки также должны удов-
удовлетворять уравнению связи, т. е.
f(x + dx,y + dy,z + dz,t + dt) = O. A8.4)
Раскладывая функцию A8.4) в ряд Тейлора с точностью до сла-
слагаемых выше первого порядка малости и учитывая, что связь
имеет вид A8.3), получаем
dx+dy + dz + Ldt = o. A8.5)
дх ду dz dt
500
Выражение A8.5) представляет собой условие, которому
должны удовлетворять проекции вектора dr элементарного дей-
действительного перемещения точки.
Представим теперь, что перемещение точки из положения,
занимаемого ею в данный момент времени, в бесконечно близкое
положение, допускаемое связями, происходит в результате изме-
изменения координат точки при фиксированном времени. Координа-
Координаты точки с учетом их вариации должны удовлетворять уравне-
уравнению связи
f{x + 5х, у + 5у, z + 8z, t) = 0.
Раскладывая эту функцию в ряд Тейлора с точностью до слагае-
слагаемых выше первого порядка малости и учитывая, что связь имеет
вид A8.3), получаем
. . ;-bz = O. A8.6)
ox су dz
Таким образом, при наличии связи вида A8.3) вариации коор-
координат точки должны удовлетворять условию A8.6). При выводе
условия A8.6) время полагалось фиксированным, поэтому данное
условие должно выполняться как при стационарных, так и при
нестационарных связях, наложенных на точку.
Используя понятие вектор-градиент^ выражение A8.6) мож-
можно рассматривать как скалярное произведение векторов:
— /+ — / +—к
дх ду dz
и
8F = 5xi +8yj + dzk .
Вектор-градиент расположен вдоль главной нормали к по-
поверхности /(х, у, z, t) = О. Поэтому условие A8.6) означает, что
вектор Ьг ортогонален главной нормали и, следовательно, рас-
расположен вдоль касательной. Таким образом, если на точку на-
наложена голономная удерживающая связь, то возможными пере-
перемещениями точки из положения, занимаемого ею в какой-либо
момент времени, являются бесконечно малые векторы 5г ,
расположенные в касательной плоскости к поверхности
/(х, у, z, t) - 0, зафиксированной в этот момент времени.
501
Установим связь между элементарными действительными и
возможными перемещениями точки. Если наложенная на точку
связь стационарная, то — = 0 и условие A8.5) аналогично усло-
dt
вию A8.6). Следовательно, если связь стационарная, то элемен-
элементарное действительное перемещение точки совпадает с одним из
возможных. При нестационарной связи проекции вектора dr
удовлетворяют условию; не совпадающему с условием для проек-
проекций вектора Ъг . В этом случае элементарное действительное пе-
перемещение точки не принадлежит к числу возможных.
Этим выводам можно дать геометрическую интерпретацию.
Если связь голономная и стационарная, то ее можно рассматри-
рассматривать как поверхность, на которой должна находиться материаль-
материальная точка. Условие A8.6) означает, что векторы Ъг возможных
перемещений точки располагаются в касательной плоскости,
проведенной в той точке поверхности, в которой в данный мо-
момент времени находится материальная точка. В той же плоскости,
согласно условию A8.5), должен расположиться и вектор dr
элементарного действительного перемещения точки. Если же
связь голономная, но не стационарная, то действительное пере-
перемещение точки можно рассматривать как результат двух движе-
движений: переносного — вместе с изменяющейся поверхностью
(связью) — и относительного — движения точки относительно
фиксированной («замороженной») в данный момент времени по-
поверхности. Возможное перемещение, согласно его определению,
соответствует только относительному движению точки. Поэтому
в случае нестационарной связи действительное перемещение
точки не совпадает ни с одним из возможных ее перемещений.
Возможным перемещением системы называется любая
совокупность возможных перемещений всех ее точек. Для сис-
системы, состоящей из N точек, возможны 3N вариаций декарто-
декартовых координат. Если на систему наложено т голономных удер-
удерживающих связей, то вариации координат точек системы должны
удовлетворять следующим условиям:
502
Для системы с голономными связями число степеней свободы
равно числу независимых обобщенных координат. В каждый мо-
момент времени положение системы может быть определено как в
декартовых, так и в обобщенных координатах. Поэтому действи-
действительное и возможные перемещения любой точки системы выра-
выражаются через ее обобщенные координаты. Для системы с п степе-
степенями свободы радиус-вектор каждой точки является функцией
обобщенных координат и времени rk = rk(q}9q29...,#„, О. Следо-
Следовательно, возможное перемещение можно вычислить как полный
дифференциал функции rk (qi, t) при фиксированном времени:
?- ^к я ^к с ^к о
dqx ' dq2 2 '" dqn
Таким образом,
дгк дхк - дгк - дгк г
dqf dq> dqt dqt
Элементарное действительное перемещение точки опреде-
определяется как полный дифференциал функции rk(qj9t), но время
при этом не фиксируется:
м dqt dt
Пример 18,3, Выразить возможные перемещения точек А и В стержня
(рис. 18.5) через его обобщенную координату.
Решение. Положение стержня в плоскости Оху определяется четырьмя де-
декартовыми координатами точек А и В . Уравнения голономных стационарных
связей, наложенных на стержень, имеют вид
*я=0; ^=0; х2А+у2в-12=0,
где / = АВ.
Число степеней свободы « = 1,ив качестве обобщенной координаты можно
выбрать угол ф , который стержень образует с осью Ох.
Радиус-вектор точки А равен гА =хА1. Так как хА =/cos<p,to
ЪгА =—^5(p7
Эф
503
о
Рис. 18.5
Аналогично радиус-вектор точки В Гн = /sin(p-y и
Ьгн = /cos(p-5(py.
Если на систему, состоящую из N материальных точек, на-
наложено т голономных и s неголономных связей, то число обоб-
обобщенных координат n = 3N-m. Обобщенные координаты и их
производные по времени должны удовлетворять s уравнениям
неголономных связей. Если неголономные связи линейны отно-
относительно обобщенных скоростей qi, то для вариаций обобщен-
обобщенных координат могут быть получены s уравнений вида
",\<<ЯпФЯ\ +<*12(ЯпФЯг +» + а1п(Я1>ФЯп =0,
7 = 1,2,...,*.
Число независимых вариаций обобщенных координат, а зна-
значит, и число степеней свободы неголономных систем
и, =3N-m-s. Таким образом, число обобщенных координат
больше числа степеней свободы, и обобщенные координаты не-
неголономных систем не являются независимыми.
18.2. Возможная работа силы. Идеальные связи
Возможной работой силы называется работа силы на лю-
любом возможном перемещении точки ее прилолсения:
504
Для вычисления возможной работы можно применять из-
известные формулы для элементарной работы силы, подставляя
вместо элементарного действительного d r возможное Ъг пере-
перемещение точки. При использовании декартовых координат
bA(F) = Fxbx + Fyby + F2bz.
Например, возможная работа горизонтальной силы F , при-
приложенной к стержню в точке С (см. рис. 18.5), равна 8A(F) =
= Fxbx( .Таккак Fx =-F 9 xc =BCcosq> и 8хг = -2?С8тф-8ф,то
bA(F) = FBC sinq> -8ф.
Если к твердому телу, вращающемуся вокруг неподвижной
оси Oz приложена сила F, момент которой относительно оси
равен Л/2,то
где 8ф — возможный угол поворота тела вокруг оси Oz.
Установив понятие возможной работы силы, можно рас-
расширить классификацию связей, разделяя их на идеальные и
неидеальные.
Связи называются идеальными, если равна нулю сумма эле-
элементарных работ реакций этих связей на любом возможном пе-
перемещении системы (из занимаемого в данный момент времени
положения).
Для идеальных связей
N ___
к=\
ИЛИ
к=\
Полагая связи идеальными, можно решить задачу динамики
несвободной системы. Эта задача состоит в том, что для данной
системы с заданными активными силами и начальными условия-
условиями нужно найти уравнения движения и реакции связей. Напри-
Например, если материальная точка движется по гладкой поверхности,
уравнение которой f(x,y, z) = 0, то нормальная реакция
N = A,grad/, где X — неопределенный множитель Лагранжа.
32 Зак. 16 505
Уравнение связи совместно с дифференциальными уравне-
уравнениями движения точки образует замкнутую систему уравнений.
Эта система уравнений позволяет определить как уравнения дви-
движения точки, так и множитель Лагранжа, а значит, и нормальную
реакцию связи
Приведем примеры идеальных связей.
1. Гладкая поверхность (плоскость) для материальной точки
(рис. 18.6). В этом случае
8A(R) = R • 8? = |л| ¦ |8г| cos(?, 6F) = 0,
так как вектор R расположен вдоль нормали к поверхности и,
следовательно, ортогонален вектору 8г возможного перемеще-
перемещения точки.
Рис. 18.6
2. Нерастяжимая нить. Реакция нити — сила ее натяжения —
ортогональна возможному перемещению точки ее приложения.
Поэтому
506
3. Цилиндрические и сферические шарниры, если поверх-
поверхности соприкасающихся тел считаются идеально гладкими. Если
твердое тело при помощи шарнира прикреплено к неподвижной
опоре (рис. 18.7, а), то реакция приложена к неподвижной точке.
Возможное перемещение такой точки равно нулю и
7///////////////////,
Рис. 18.7
Если два твердых тела при помощи шарнира с идеально
гладкими поверхностями соединены между собой, то
+R2
=0,
поскольку /?2 = -/?| (силы действия и противодействия).
4. Твердая шероховатая поверхность для цилиндрического
катка при качении без скольжения. Контакт катка с поверхностью
происходит по линии. Поэтому реакцией связи является система
сил, распределенных вдоль линии контакта. Возможная работа
сил реакции равна нулю, так как они приложены к неподвижным
в каждый момент времени точкам — МЦС сечений катка.
18.3. Обобщенные силы
В аналитической механике наряду с понятием о силе как
векторной величине, характеризующей воздействие на данное
тело со стороны других материальных тел, используют поня-
32*
507
тие об обобщенной силе. Для определения обобщенной силы
рассмотрим возможную работу сил, приложенных к точкам
системы,
Если механическая система при наложенных на нее голономных
удерживающих связях имеет п степеней свободы, то положение
этой системы определяется #i,<72>—>#w обобщенными координа-
координатами и rk = rk (qx, q2,..., qn, t). Возможное перемещение к-й точки
Подставляя 8гк в формулу для возможной работы сил, получаем
[N — ЙГ ^
V Fk —— = Qt называют обобщен-
обобщенны tyli)
ной силой, соответствующей /-й обобщенной координате.
Таким образом, обобщенной силой, соответствующей 1-й
обобщенной координате, называется величина, равная коэффи-
коэффициенту при вариации данной обобщенной координаты в выра-
выражении возможной работы сил, действующих на механическую
систему.
В общем случае обобщенная сила является функцией обоб-
обобщенных координат, скоростей точек системы и времени. Из опре-
определения следует, что обобщенная сила — скалярная величина,
которая зависит от выбранных для данной механической системы
обобщенных координат. Это значит, что при изменении набора
обобщенных координат, определяющих положение данной сис-
системы, изменятся и обобщенные силы. Так, для диска радиусом г
и массой т, который катится без скольжения по наклонной
плоскости (рис. 18.8), за обобщенные координаты можно принять
либо s — координата центра масс диска, либо ф — угол пово-
поворота диска. Если пренебречь сопротивлением качению, то в пер-
508
вом случае обобщенной силой будет Qs = mg sin a, а во втором —
бф = mgr sin a. Обобщенная координата определяет и единицу
измерения соответствующей обобщенной силы. Из выражения
N п
следует, что единица измерения обобщен-
ны i=i
ной силы равна единице измерения работы, деленной на единицу
измерения обобщенной координаты. Если в качестве обобщенной
координаты qt принять координату какой-либо точки, то едини-
единица измерения обобщенной силы Qt будет ньютон, если же в ка-
качестве qt будет принят угол поворота тела, то единицей измере-
измерения будет ньютон на метр.
Ф
Рис. 18.8
Существуют различные способы вычисления обобщен-
обобщенных сил.
1. Согласно определению, обобщенная сила
Принимая во внимание, что гк = хкг + ykj + zkk , получаем
509
A8.5)
Этот способ определения обобщенных сил называют анали-
аналитическим.
Пример 18.4. Найти обобщенную силу ??ф, если в кривошипно-ползунном
механизме (рис. 18.9) OA = AB = l, Fx —вертикальная, a F2 —горизонтальная
силы.
У
ШШх
Рис. 18.9
Решение. Так как FXx = О и F2y = 0, то обобщенная сила
Эф Эф
Проекции сил и координаты точек их приложения равны
Fly=-Fx; F2x=-F2; yA=lsmq>; xB=2lcosq>.
Следовательно,
бФ =-/Г1/СО8ф+2^/8И1ф .
2. Обобщенные силы для механических систем с п > 1 целе-
целесообразно вычислять последовательно, учитывая, что обобщенные
координаты, а значит, и их вариации независимы между собой.
Системе всегда можно сообщить такое возможное перемещение,
при котором изменяется только одна обобщенная координата, а
другие при этом не варьируются. В этом случае
510
откуда
Q,=
A8.6)
Индекс 9, в A8.6) означает, что возможная работа сил, дейст-
действующих на систему, определяется на перемещениях точек при-
приложения этих сил, соответствующих вариации только одной /-и
обобщенной координаты.
Пример 18.5. Найти обобщенные силы Qs и ?>ф для системы, показанной
на рис. 18.10. Масса груза / равна М , масса цилиндра 2 равна т , а его радиус
г . Нить по блоку 3 и цилиндру 2 не скользит. Центр масс цилиндра движется
вдоль вертикали.
Рис. 18.10
Решение. Для определения обобщенной силы Qs зададим приращение bs
координате груза 7, а для угла <р поворота цилиндра 2 будем считать 5ф = 0.
511
При этом цилиндр будет иметь перемещение, равное перемещению груза. Сле-
Следовательно,
где Px = Mg; P2 = mg .
Определяя (?ф , будем полагать, что 8^ = 0, а 8ф Ф 0 . Тогда
= mgrbip; 2ф = mgr .
3. Если силы, действующие на механическую систему, по-
потенциальные, то для определения обобщенных сил можно ис-
использовать силовую функцию U или потенциальную энергию П
системы. Потенциальная сила
= _at/T dU_ -. dU г
дх ду dz
Подставляя проекции силы Fk в A8.5), получаем
Щи** ^, Ф^ dq, dzk dqj dq,
Так как U = -П + const, то
Пример 18.6. В системе, показанной на рис. 18.11, массы груза У и цилиндра
2 равны М и /и соответственно, радиус цилиндра г , а коэффициент жесткости
пружины с .
Полагая, что трение между грузом У и наклонной плоскостью отсутствует, а
траектория точки А — вертикаль, найти обобщенные силы Qs и бф, если при
5 = 0 пружина не деформирована.
Решение. Потенциальная энергия системы
Тогда
512
П = —cs2 + Mg sin a s - mg(s + пр).
Qs =—r- = -cj-(A/sina-m)g; (?ф = ——-
ds dcp
ф
Рис. 18.11
18.4. Дифференциальные принципы
аналитической механики
Принципы механики являются основой эффективных методов
изучения равновесия и движения механических систем. Их приня-
принято разделять на вариационные и невариационные. Невариационные
принципы устанавливают общие для всех движений систем свой-
свойства, которые имеют место как в определенные моменты, так и на
конечных интервалах времени. К ним относятся аксиомы механики,
принцип независимости действия сил, принцип Даламбера и т. п.
Вариационные принципы устанавливают критерии, позволяющие
отличить истинное состояние системы от возможного. Вариацион-
Вариационные принципы разделяют на дифференциальные и интегральные.
Дифференциальные принципы устанавливают критерии истинного
состояния системы для фиксированного момента времени, а инте-
интегральные — на конечном интервале времени.
Принцип возможных перемещений
Аналитические условия равновесия механических систем
были сформулированы Ж. Лагранжем в его фундаментальной
работе «Аналитическая механика» A788 г.) как «принцип воз-
513
можных скоростей». В настоящее время принцип, определяющий
в общей форме условия равновесия системы, называется прин-
принципом возможных перемещений, или принципом Лагранжа:
чтобы данное полоэюение механической системы со стационар-
стационарными идеальными связями было положением равновесия, необхо-
необходимо и достаточно, чтобы сумма элементарных работ актив-
активных сил на любом возмоэюном перемещении системы из этого
положения была равна нулю.
Данной формулировке соответствует условие равновесия
системы
'8г*=0 A8.7)
или в декартовых координатах
N
)=0.
Положением равновесия называется такое положение меха-
механической системы, в котором она может находиться сколь угодно
долго, если в начальный момент времени система была приведе-
приведена в это положение с нулевыми скоростями (v^ = 0).
Необходимость условия A8.7) для равновесия системы мож-
можно доказать следующим образом. Пусть механическая система,
состоящая из N материальных точек, находится в равновесии.
Тогда приложенные к каждой точке активные силы и реакции
связей уравновешены, т. е.
Fk+Rk=0, k = \929...9N. A8.8)
Умножив каждое равенство A8.8) на возможное перемещение
Ьгк соответствующей к-й точки и просуммировав скалярные
произведения, получим
^Fk8rk +^Rkbrk = 0.
к=\ *=1
N _
Если наложенные на систему связи идеальные, то ]Г Rk • Ъгк = 0
N _
и условие ^Fk Ьгк =0 является необходимым условием равно-
к=\
весия системы.
514
Доказательство достаточности принципа Лагранжа проведем
методом от противного. Предположим, что условие A8.7) выпол-
выполнено, а система не находится в равновесии. Значит под действием
активных сил и реакций связей система за малый промежуток
времени совершит некоторое действительное перемещение. При
стационарных связях это действительное перемещение совпадает
с одним из возможных, поэтому
N __ N _
Так как связи идеальные, то ^ Rk • Ьгк = 0 и тогда ^Fk •8Fk Ф О,
*=i к=\
что противоречит принятому выше предположению. Таким
образом* достаточность принципа возможных перемещений
доказана.
Принцип возможных перемещений дает возможность опре-
определить положение равновесия несвободной системы, не рассмат-
рассматривая реакции идеальных связей, так как они не входят в форму-
формулировку этого принципа.
Пример 18.7. Найти вертикальную силу F, приложенную в точке А к
линейке 2 эллипсографа (рис. 18.12), которая обеспечит равновесие системы
при заданном угле ф @ < ф < тг/2). Сила Fx и момент М пары сил известны.
Трением в шарнирах и направляющих, а также массой элементов системы
пренебречь.
Решение. Условие равновесия эллипсографа имеет вид
O. A8.9)
Дадим системе возможное перемещение, повернув кривошип 1 на угол 5ф.
Возможная работа пары сил с моментом М равна Мкр. Вычислим возможную
работу сил F, и F :
Так как
F} х = -Fx, хв= 2/ cos ф, Ьхв = -2/ sin ф5ф;
Fy = -F, уА = /вшф, ЪуА
то
515
Рис. 18.12
Подставляя выражения для возможных работ сил в A8.9), получаем
Мкр + 2F,/ sin ф • оЧр - FI соБф • бф = 0.
Отсюда
М
Однако принцип возможных перемещений позволяет нахо-
находить и реакции идеальных связей. Для этого, в соответствии с
принципом освобождаемости, связь отбрасывают, заменяя ее соот-
соответствующей реакцией. Эту реакцию включают в число активных
сил. При отбрасывании связи увеличивается число степеней сво-
свободы системы. Поэтому точке приложения реакции отброшенной
связи можно задать возможное перемещение. К системам с не-
неидеальными связями принцип возможных перемещений непри-
неприменим. Однако в некоторых случаях, например при движении
точки по шероховатой поверхности, связь рассматривают как
идеальную, дополняя ее силой трения скольжения.
Пример 18.8. Г-образная рама состоит из двух стержней АС и СВ, соеди-
соединенных в точке С при помощи цилиндрического шарнира (рис. 18.13). Найти
момент МА заделки, если AC = lx, CD = l2, DE = l3, момент М пары сил и
сила F —заданы.
516
Решение. Заменим заделку шарнирно-неподвижной опорой, приложив при
этом к стержню АС пару сил с моментом МА . Дадим системе возможное пере-
перемещение, повернув стержень АС на угол 8<р вокруг оси, проходящей через точ-
к> А. При этом стержень СВ повернется вокруг мгновенной оси, проходящей
через точку D на угол 5а = /, //2 6ф.
¦1
а
"* ——
ГмА
-№?
Г ^
5а
/г
561
D
\
\
\
\
i F
1
\
\
\
\
\
\
\
\
\
\
Рис. 18.13
Сумма возможных работ приложенных к раме сил, включая момент заделки,
равна
N
к=\
где
,,:; Ss,.: = DEba =
/.Л
Приравняв сумму возможных работ к нулю, получим
откуда
517
Условия равновесия механической системы
в обобщенных силах
Положим, что механическая система, состоящая из N точек, в
силу наложенных на нее голономных удерживающих связей имеет
п степеней свободы. Положение такой системы в пространстве
определяется обобщенными координатами 9i>?2 »-"'?*' и радиус-
вектор к -й точки есть функция обобщенных координат:
Возможное перемещение каждой точки системы
Подставляя выражение для 8гк в условие A8.7) равновесия сис-
системы, получаем:
После изменения порядка суммирования это условие принимает вид
п ( N Л«
Так как обобщенные координаты независимы, то их вариации
8<71,5<72,--55#„ тоже независимы между собой. Поэтому условие
A8.10) будет выполнено, если равны нулю обобщенные силы,
соответствующие'всем обобщенным координатам системы:
й=0, / = 1,2,...,л.
Таким образом, условия равновесия механической системы
можно сформулировать так: для равновесия системы, подчинен-
подчиненной голономным удерживающим связям, необходимо и доста-
достаточно, чтобы обобщенные силы, соответствующие всем обоб-
обобщенным координатам системы, были равны нулю.
Если силы, приложенные к точкам механической системы,
потенциальные, то
dU дП
518
В этом случае условия равновесия имеют вид
— = 0 или — = 0, / = 1,2,...,л. A8.11)
dq, dqt
Выражения A8.11) являются необходимыми условиями су-
существования экстремумов функций U и 77. Таким образом, при
равновесии системы, находящейся под действием потенциальных
сил, все частные производные от силовой функции и потенциаль-
потенциальной энергии по обобщенным координатам равны нулю.
Принцип Даламбера-Лагранжа. Общее уравнение динамики
Рассмотрим систему, состоящую из N материальных точек. В
соответствии с принципом Даламбера, приложенные к каждой
точке активные силы, реакции связей и силы инерции в любой
момент времени образуют уравновешенную систему сходящихся
сил. Эта система сил удовлетворяет условию равновесия
Fk+Rk + Ф*=0, A8.12)
где Fk и Rk — равнодействующие активных сил и реакций свя-
связей, приложенных к k-и точке; Ф^ = -mkak.
Умножим обе части уравнения A8.12) скалярно на возмож-
возможное перемещение Ъгк k-Pi точки и просуммируем полученные для
всех точек системы произведения. В результате имеем
Л,+Ф,)-8г,=0. A8.13)
Это уравнение называется общим уравнением динамики.
Выражение A8.13) является условием, которое должно выпол-
выполняться для любого совместного со связями движения системы
под действием заданных активных сил. Общему уравнению ди-
динамики соответствует принцип Даламбера-Лагранжа: при
движении механической системы в любой момент времени сум-
сумма работ активных сил, сил реакций связей и сил инерции на лю-
любом возможном перемещении из занимаемого положения равна
нулю. Принцип Даламбера-Лагранжа является вариационным и
дифференциальным, потому что в нем рассматривается возмож-
возможная работа активных сил, сил реакции и сил инерции в произ-
произвольный, но фиксированный момент времени. Отметим, что усло-
519
вие A8.13) выполняется только для истинного движения систе-
системы. Общее уравнение динамики можно записать и в других фор-
формах. Раскрывая скалярные произведения, получаем
Ibk + *ь +Фь)8** +(Fky + Rky
Аг=1
Так как Фь = -ткхк? Фку = -ткук, Ф^ = -mkzk, то
N
к=\
+(Fky+Rky -тк'ук)Ьук
Выражение A8.14) определяет аналитическую форму записи
общего уравнения динамики.
Если связи, наложенные на систему, идеальные, то
N _
^Rk8rk = О и общее уравнение динамики принимает вид
к=\
A8.15)
Таким образом, при движении системы с идеальными связя-
связями в любой момент времени должна быть равна нулю сумма воз-
возможных работ активных сил и сил инерции.
Если для изучения движения системы применяют обобщен-
обобщенные координаты, то rk =rk(q]9q2,...,qn,t) и Ьгк =^—-bqt.
Подставив выражение для возможного перемещения Ьгк в A8.13)
и изменив порядок суммирования, получим
N _ __
^Rj.+Ф,,)^^ 8?,=0. A8.16)
N — — дг
Так как ^ (Fk + Rk) —— = Qt — обобщенная сила, соответст-
w ор
вующая 1-й обобщенной координате, то ^ Ф^ —— = Q™ —
обобщенная сила инерции, соответствующая той же координате.
520
Если вариации обобщенных координат независимы между
собой, условие A8.16) принимает вид
Q. +?/'"=0, i = l,2,...,и. A8.17)
Выражение A8.17) называется общим уравнением динами-
динамики в обобщенных силах.
При изучении движения твердого тела с помощью принципа
Даламбера-Лагранжа силы инерции точек тела нужно привести к
какому-либо центру, например центру масс тела. Тогда сумму воз-
возможных работ сил инерции можно вычислить следующим образом:
где Rm, Z,™ — главный вектор и главный момент сил инерции
относительно мгновенной оси вращения, проходящей через центр
масс; Ьгс — возможное перемещение центра масс; 8ср — воз-
возможный угол поворота тела вокруг мгновенной оси вращения.
Пример 18.9. Определить ускорение центра масс диска радиусом г, кото-
который без скольжения скатывается по наклонной плоскости, образующей угол а
с горизонтом (рис. 18.14). Коэффициент трения качения равен /к.
Рис. 18.14
521
Решение. Общее уравнение динамики для диска имеет вид
2> ( (
Возможные работы сил нормальной реакции N и трения скольжения F^
равны нулям, так как они приложены к неподвижной в каждый момент времени
точке — МЦС диска. Зададим диску возможное перемещение, при котором точ-
точка С получит перемещение bsc. Тогда
Момент трения качения
) ^ф r
Главный вектор и главный момент сил инерции точек диска относительно оси
Cz соответственно равны
/>_ гИН Рг2
а,
где s, =
г
g
_ "с
Возможные работы
g
Таким образом,
У 64 = Ps\na6sc -P^6
с g ( c 2g
Отсюда находим
ас =— g\ sina-—cosa .
Пример 18.10. В механизме, показанном на рис. 18.15, кривошип У массой
тх и длиной /, вращаясь вокруг неподвижной горизонтальной оси Oz, при по-
помощи шатуна 2 такой же длины приводит в движение ползун 3 массой т3. Пол-
Ползун 3 соединен пружиной 5 с ползуном 4 массой т4 .К кривошипу приложена
пара сил с постоянным моментом М{. Коэффициент жесткости пружины с.
Пренебрегая трением в шарнирах и направляющих, а также массой шатуна и
принимая кривошип за однородный стержень, составить дифференциальные
уравнения движения механизма.
522
«Г о
Решение. Система имеет две степени свободы. В качестве обобщенных
координат выберем угол ф поворота кривошипа 1 и координату s ползуна 4.
При ф = 0 и s = О пружина 5 не деформирована. Задавая системе возможные
перемещения, при которых 5ф* 0,5s = 0 и 6ф = 0, bs*O,c помощью принципа
Даламбера-Лагранжа получим два уравнения
Л/18ф+15!8ф+ Р1уЪуЕ +RgbxB + FJ2!&xB =0; A8.18)
Fgbs + Rgbs^O. A8.19)
Главный момент сил инерции кривошипа 1 относительно оси Oz и главные
векторы сил инерции ползунов Зи4 соответственно равны
Ц" =-JO2q> = --mll2q>; Л3ин=-т35; Д?" = -щао,
где а3=^ Зсд=-2/(фзтф+ф2со8ф); aD=sl.
Кроме того,
Flb = ^[^ + 2/A - совф)], F^ = -c[s + 2/A -
Подставляя выражения для проекций сил и возможных перемещений в
A8.18), A8.19) и сокращая на 8ф и bs, получаем
А/! —т,/2ф-4т3/2ф8т2ф-2т3/2ф28т2ф т,?/со5ф-
- 4c/2(l - СО8ф)8Шф - 2с/58Шф « 0;
mA's + cs + 2c/(l - совф) = 0.
Принцип Гаусса (принцип наименьшего принуждения)
Рассмотрим механическую систему, состоящую из N матери-
материальных точек, на которую наложены идеальные связи. Пусть по-
положение к-й точки в момент времени / определяется радиус-
вектором гк @. Тогда в момент времени t + dt при движении по
истинной траектории радиус-вектор этой точки будет rk (t + dt),
причем
ak(t)A +.... A8.20)
Рассмотрим движение к-й точки по кинематически возмож-
возможной траектории. Кинематически возможной является траектория,
524
координаты точек которой удовлетворяют голономным связям,
наложенным на систему. В момент времени / положение точки
определяется радиус-вектором r? (t), а в момент времени t + dt —
радиус-вектором
где vA*@» я* (О — кинематически возможные скорость и уско-
ускорение к~н точки системы в момент времени t.
Положим, что гл (/) = г/(/). Тогда, вычитая A8.20) из A8.21),
получим следующее выражение для возможного перемещения
точки:
Ъгк = гк* (/ + dt) -rk(t + dt) = [v{ @ - vk (t)] dt +
1 , A8.22)
+ -[г;@-^@]Л2+»-
Если vk(t) = v^(t)9 то, пренебрегая в правой части A8.22) слагае-
слагаемыми, содержащими dt в третьей и более высоких степенях, на-
находим:
8гк=18акА2. A8.23)
Подставив A8.23) в общее уравнение динамики A8.15) и разде-
разделив обе части выражения на —dt2, получаем
-mkak)-bak=0. A8.24)
Массы точек и приложенные к системе активные силы зада-
заданы и не изменяются, поэтому
Подставляя вариацию ускорения 8ак в A8.24), находим
N К )
_ — \ Ы ¦* к ^-г- I о
к=]
525
Выражение ]?—-Ч —^--а* =Z введено Гауссом и назы-
называется принуждением. Принуждение является мерой отклонения
действительного движения от того движения, которое совершала
бы данная система, если начиная с некоторого момента времени
она двигалась под действием только активных сил, а связи были
бы отброшены. Условие A8.24) можно записать так:
5Z = 0.
Принцип Гаусса формулируется так: при действительном
движении механической системы с идеальными связями при-
принуждение Z принимает значение, наименьшее из всех воз-
возможных значений при движениях, совместимых с наложен-
наложенными связями.
Принцип Гаусса можно рассматривать как модификацию
принципа Даламбера-Лагранжа, в которой используется понятие
экстремальности некоторого выражения, называемого принужде-
принуждением.
Пример 18.11. Определить ускорение материальной точки, которая движет-
движется под действием силы тяжести по гладкой плоскости, наклоненной под углом
а к горизонту (рис. 18.16). Начальная скорость точки равна нулю.
Рис. 18.16
526
Решение. Возможные траектории точки располагаются в наклонной плоско-
плоскости, и возможные перемещения Ad =—afbt2. При свободном движении под
действием силы тяжести перемещение точки за такой же промежуток времени
равно AB = —gbt2. Наименьшим из отрезков ЛС, будет отрезок АС}, распо-
расположенный вдоль линии наименьшего ската. Так как
fit2 AC 4#i
ВС? =^j-(g2 +a? -2aigs\na).
AC,=-afit2 и AC* =,4#sino:
2 2
то
a, =gsina .
Такой же результат можно получить при использовании принуждения. Для
данной задачи оно пропорционально квадрату длины отрезка ВС]:
Производная
если
я, =gsincc.
18.5. Уравнения Лагранжа второго рода
Вывод уравнений
Уравнения Лагранжа второго рода представляют собой
дифференциальные уравнения движения несвободной механи-
механической системы, составленные в обобщенных координатах. Рас-
Рассмотрим движение системы, состоящей из N материальных то-
точек, относительно инерциальной системы отсчета. Наложенные
на систему связи — голономные, удерживающие, идеальные.
Если некоторые связи не идеальные, то соответствующие им
реакции следует добавить к действующим на систему активным
силам.
Общее уравнение динамики для такой системы имеет вид
A8.25)
527
Пусть система имеет и степеней свободы и ее положение оп-
определяется qx, q2,..., qn обобщенными координатами гк =
= Пс(Я\> 92» •••» Яп>0-Возможноеперемещениек-йточки
о8-26)
м
Подставляя A8.26) в A8.25) и изменяя порядок суммирования,
получаем
п
dt \dqt
8^=0. A8.27)
N — дг
В этом выражении ^ Fk • —— = Qt — обобщенная сила, соот-
ветствующая /-й обобщенной координате. Преобразуем выраже-
выражение
dt [dq,
dt{k dqj *
A8.28)
Так как гЛ = 2^-r^^
, то
ZL = Z±. A8.29)
dqt dqt
Равенство A8.29) называется первым тождеством Ла-
гранжа. Заменив на основании этого тождества производную
—— на —— в первом слагаемом выражения A8.28), получим
dqt dqt
= — П
dt\k dqj dt\k dqk) dt
dq\ 2
Следовательно,
=•2
dqt
A8.30)
528
где Т— кинетическая энергия механической системы.
Преобразуем теперь производную — —*- . Так как
( дг Л
rk = rk(q],q2,...,qn,t), то —- —функция обобщенных коор-
\dcli)
динат и времени. Поэтому, с одной стороны,
д2гк . д2гк . д2гк
q2 +--. + —Яп + • A8.31)
dqdq dtdq
— —L = —q^ + —q2 +--. + —Яп
dt{dqj dq]dqi dq2dqi dqndqi
С другой стороны,
д2гк . Э2г, Э2г, 52r,
<7| н g2 +...H ^„ н . A8.32)
dqtdq2 dq,dqn dq,dt
Сопоставляя A8.31) и A8.32), заключаем, что
dtydq,) dq,'
Это второе тождество Лагранжа. С учетом данного тождества
получаем
Подставляя в общее уравнение динамики A8.27) выражение
для обобщенной силы Qf, а также результаты преобразований
A8.30) и A8.33), находим
л ( ят >\ ят
5^=0. A8.34)
Вариации обобщенных координат независимы между собой,
поэтому условие A8.34) будет выполнено, если равны нулям
множители при всех 5qf, т. е. если
35 Зак. 16 529
Уравнения A8.35) называются уравнениями Лагранжа вто-
второго рода. Число этих уравнений равно числу степеней свободы.
В уравнения Лагранжа не входят заранее неизвестные реакции
идеальных связей.
Бели силы, действующие на систему, потенциальные, то
fi=-—, i = l,2,...,w.
В таком случае уравнения Лагранжа второго рода принимают
следующий вид:
±(К\-К—Ш. /-12 п
Функция, равная разности кинетической и потенциальной
энергий механической системы, называется функцией Ла-
Лагранжа:
Ь = Т-П.
Так как потенциальная энергия системы является функцией толь-
dL ЭГ _
ко обобщенных координат, то -— = ——. При использовании
функции Лагранжа уравнения A8.35) имеют вид
ife-l-—-о- 0««)
dt\dq,) Bq,
Обобщенная координата, которая явно не входит в выраже-
выражение функции Лагранжа, называется циклической координатой.
Если q — циклическая координата, то = 0 и из A8.36) на-
dqj
ходим первый интеграл —7— = С,. Таким образом, если в качест-
качеству
ве обобщенных удается выбрать циклические координаты, то
вместо системы дифференциальных уравнений второго порядка
получаем уравнения первого порядка.
530
Структура уравнений
Кинетическая энергия механической системы, состоящей из
1 N
N материальных точек, определяется по формуле T =—^mkrf.
Если данная система с голономными нестационарными связями
имеетп степеней свободы,то rk = rk(q},ql9...,qn,t) и скорость k-й
точки
^ ^drk . drk
Принимая во внимание выражение для rk, кинетическую энер-
энергию системы можно записать так:
л N ( п Я fif Л 1 п п п 1
A8.37)
где
fir
Если наложенные на систему связи стационарные, то — = О
dt
и тогда 5, = О, С = 0 . В этом случае кинетическая энергия систе-
системы является однородной квадратичной формой обобщенных ско-
скоростей:
1 '=1 7=1
Производные от кинетической энергии A8.38), соответст-
соответствующие левой части уравнений Лагранжа, равны
Так как
35* 531
то
dfdT) ^ . .. т
Подставляя эти выражения в уравнения Лагранжа, получаем
п QA 1
/ = 1,2,..., л.
Обобщенные силы являются функциями обобщенных коор-
координат, времени и, возможно, обобщенных скоростей, поэтому
каждое из уравнений Лагранжа имеет второй порядок. Порядок
уравнений не изменится и при нестационарных связях, так как в
этом случае в выражения A8.39) войдут слагаемые, зависящие
только от обобщенных координат, скоростей и времени.
Таким образом, уравнения Лагранжа второго рода для меха-
механической системы с голономными связями представляют собой
систему обыкновенных дифференциальных уравнений порядка
2п относительно обобщенных координат.
Последовательность действий при использовании уравнений
Лагранжа второго рода для решения задач аналитической дина-
динамики следующая:
1) определить число степеней свободы системы и выбрать
наиболее удобные обобщенные координаты;
2) вычислить кинетическую энергию системы в ее абсолют-
абсолютном движении и выразить эту энергию через обобщенные коор-
координаты qf и обобщенные скорости qf;
3) вычислить производные от кинетической энергии, входя-
входящие в левую часть уравнений Лагранжа;
4) определить обобщенные силы, соответствующие выбран-
выбранным обобщенным координатам;
5) подставить все вычисленные величины в уравнения Ла-
Лагранжа.
532
Пример 18.12. Механическая система, показанная на рис. 18.17, состоит из
однородного круглого цилиндра У массой /и, и радиусом г, однородного стерж-
стержня 2 длиной / и массой т2 , к которому в точках А и В шарнирно прикреплены
ползуны 5 и 6 массами т5 и т6, а также пружин 3 и 4, коэффициенты жесткости
которых с3 и сА соответственно. Цилиндр без скольжения катается по горизон-
горизонтальной плоскости. К нему приложена пара сил с моментом Л/,(/).
Пренебрегая сопротивлением качению цилиндра, трением в шарнирах и на-
направляющих, а также массой пружин, составить дифференциальные уравнения
движения системы.
Решение. Система имеет две степени свободы. В качестве обобщенных коор-
координат выберем перемещение s центра масс цилиндра У и угол ф поворота
стержня 2. Полагаем, что при 5 = 0 и <р = 0 пружины 3 и 4 не деформированы.
Уравнения Лагранжа второго рода для данной системы имеют вид
— = бФ- A8.40)
Кинетическая энергия системы складывается из кинетических энергий цилинд-
цилиндра У, стержня 2 и ползунов 5 и б:
Т = Г, + Т2 + Т5 + Ть.
Движение цилиндра плоское, поэтому
т 1 2 1
TJ-2^0 + 2
Так как v0 = i, JOz - —— и со, = —, то
Т =-ms2
Кинетическая энергия стержня 2 определяется по формуле
^ 1 2.1
Скорость центра масс стержня vD =g>2DP2 , где Р2 — МЦС стержня. При-
Принимая во внимание, что DP2 = //2, JDz = m2l2/\2 , со2 = |ф|, получаем
6
Ползуны движутся поступательно и, следовательно,
Ts =^sva =-m5*2A=-m5l2cos2q> у2;
1 2 ] -2 * /2О:„2,Л -2
тв =-^ЩУ2в =^тьУ2в =-w6/2sinV<j>2.
533
534
Таким образом, кинетическая энергия системы, выраженная через обобщен-
обобщенные координаты и обобщенные скорости, равна
Т = -( -m,i2 + -т2/2ф2 + msl2 cos2 ф • ф2 + ш612 sin2 <р • ф2 .
Вычислим производные от кинетической энергии системы:
дТ 3 . d(dT) 3 .. дТ п
ds 2 ' dt\ds) 2 l ds
r^T 1
—г = -т2/2ф+/2(m5 cos2<p + m6sin2ф) ф ;
дф 3
— —г =—ш,/2ф + /2(т5cos2ф+т6sin2ф)ф + /2sin2ф(т6 -т5)ф2;
^// \^ ^Фу 3
Л71
Для нахождения обобщенных сил Qs и Q^ разделим приложенные к систе-
системе силы на потенциальные и непотенциальные (потенциальными для данной
системы являются силы тяжести и упругости пружин, а непотенциальными —
силы пары с моментом M{(t), а затем каждую обобщенную силу определим как
сумму:
Потенциальная энергия системы
СE/8тфJ+С/2A-СО5фJ
—С3E-/8тф)+—С4/2A-СО5фJ /
Тогда
Таким образом,
Qs =-с3E-
^/
—т2+т6
535
Подставляя значения производных от кинетической энергии и выражения
для обобщенных сил Qs и Qo в > равнения A8.40). получаем дифференциаль-
дифференциальные > равнения движения системы
—
-т J2<p + /: (/и5 cos2 ф + ть sin2 <p)ip- c3/(s - /sin ф)со5ф +
— пг2
18.6 Интегральные вариационные принципы механики
Интегральные вариационные принципы механики характе-
характеризуют свойство движений механических систем на конечных
промежутках времени. Системе дифференциальных уравнений,
определяющих движение механической системы с п степенями
свободы, на временном отрезке [ t0, г, ] соответствует определен-
определенный интеграл (действие) вида
S[q(t)]= )ф(д, q,t)dt,
где Ф(#, q,t) — заданная функция п обобщенных координат
9,@? п обобщенных скоростей qf(t) и времени /, с помощью
которой описывается движение механической системы.
Для определения S[q(t)] строят однопараметрическое се-
семейство траекторий, содержащих заданную траекторию (прямой
путь) и траектории сравнения (окольные пути), и делают вывод о
вариационных свойствах движения по заданной траектории, где
действие имеет минимальное значение.
Вариационные принципы отличаются по виду действия, экс-
экстремум которого реализуется, и по выбору класса допустимых
траекторий, на которых рассматривается экстремум действия.
Вариационный принцип объединяет положения механики и, бу-
будучи принятым за аксиому, позволяет вывести все законы меха-
механики; при этом вариационная форма закона не зависит от кон-
конкретного выбора обобщенных координат.
536
Изменение функции. Вариации функции
Пусть механическая система имеет одну степень свободы.
Примем, что ее положение определяется координатой q. Тогда
дифференциальное уравнение движения в разрешенной относи-
относительно ускорения форме имеет вид
Решение данного дифференциального уравнения при начальных
условиях [qo,qo] в заданный момент времени /0 определяет
движение механической системы в виде
и образует двухпараметрическбе семейство линий. Если зафик-
зафиксировать точку q0, через которую будут проходить линии семей-
семейства, и изменять лишь направление касательной, то полученное
семейство линий будет однопараметрическим. Представим урав-
уравнение данного семейства, обозначив q0 = а, в виде
q = q(q0, /) = q(a, t). A8.41)
Тогда изменения функции, связанные с изменением аргумен-
аргументов t и а, будут соответственно (рис. 18.18, а)
<Ч1
41
da.
34 Зак. 16
537
Следовательно, полное изменение функции A8.41) имеет вид
A8-42)
Подсчитаем полное изменение функции q(a + da9
-q(a9t) геометрически. На (рис. 18.18, б) видно, что данное из-
изменение примерно равно сумме отрезков bb] и cd. Отрезок bb]
равен разности ординат траектории q(t), определяемой парамет-
параметром а, и другой, бесконечно близкой к ней траектории q} (/), оп-
определяемой параметром a + da, следовательно bb} = (dq/da)da.
Соответственно отрезок cd-{pqjdi)dt и, следовательно, линей-
линейная часть разности двух функций в окрестности точки (а9 t) оп-
определяет полное изменение функции q = q(a9t) как
Aq = q(a + da9t + dt) - q(a91) = f |0dto + f &
В механике А^ называют полной вариацией функции
q = q(a, t), a 89 = — \da— изохронной вариацией функции
\д)
q = q(a, t); представим соотношение A8.42) в виде
Aq = qdt + 5qr.
Пусть а имеет фиксированное значение а,. Подставим в
A8.41) вместо а значение а+а{. Тогда уравнение A8.41) в про-
пространстве {[q91]} будет определять траекторию, заданную пара-
параметром а, = 0.
Покажем, что для изохронной вариации операции варьиро-
варьирования и дифференцирования, а также варьирования и интегриро-
интегрирования коммутативны. Действительно, в силу определения
bq = qx{a + da9t)-q(aj). A8.43)
Дифференцируя по времени обе части данного равенства, на-
находим
d{bq)^dqx(a + da9t) dq(a9t)
dt dt dt
538
Правая часть полученного уравнения представляет собой раз-
разность между производными однопараметрического семейства,
подсчитанными в фиксированный момент времени. Следова-
Следовательно,
dqx {a + da, t) dq(a, t) _ dq
dt ~dt~~ ~dt*
или
«М = Ш. A8.44)
dt dt
Проинтегрировав A8.43) по времени на отрезке [/0, t{\, получим
jdqdt = JVj (a + da, t)dt - jq(a9 t)dt.
Так как правая часть найденного уравнения представляет со-
собой разность между интегралами от линий соответствующего
однопараметрического семейства, то
i i
+ da, t)dt - \q(a, t)dt = 8 \q{a, i)dt
'0
и, 'следовательно,
A8.45)
, Вычислим полную вариацию интеграла с переменными
верхним и нижним пределами. Пусть интеграл S определен на
однопараметрическом семействе линий Q = Q(a91), т. е.
= \f[t,Q(a,t\Q{a,t)\dt.
'о (в)
Дифференцируя S(a) по параметру а, получаем
f(a,t0)
да
}\dQda dQda
Преобразуем второе подынтегральное слагаемое найденного
уравнения, используя коммутативность операций дифференци-
дифференцирования (d/dt) и (д/да):
34* 539
Окончательно имеем
dt. A8.46)
Отметим, что для механической системы с п степенями сво-
свободы траектории qu (a, t) могут быть заданы параметрическими
уравнениями
Ям (*> 0 = Яг @ + 8?, (я, 0; Яи («э 0 = Яг @ + bit (*, 0 0' = 1,.-, л) .
Принцип наименьшего действия Гамильтона
Рассмотрим механическую систему с идеальными связями в
потенциальном поле сил. Пусть у^— траектория к-й точки систе-
системы, по которой происходит перемещение точки из положения
Ак, занимаемого точкой в момент времени /0, в положение Вк,
соответствующее момешу времени tx. Таким образом, время
движения всех точек системы из исходного положения в конеч-
конечное одинаково и равно /, -10.
Наряду с истинной будем рассматривать кинематически воз-
возможную траекторию (допускаемую наложенными связями), по
которой рассматриваемая точка может перемещаться из положе-
положения Ак в Вк за тот же промежуток времени. Если в некоторый
момент времени t (to<t<tx) к-я точка системы занимает в ис-
истинном движении положение Мк, а в возможном М'к, то вектор
Ъгк =МкМ*к определит изохронную вариацию радиус-вектора
данной точки. Так как все возможные траектории начинаются в
Ак и заканчиваются в Вк, то
8r*('o) = »ift) = O. A8.47)
Представим общее уравнение механики в виде
540
^)srkO A8.48)
k=\\ dt J
Интегрируя A8.48) на отрезке [to,t} ], получаем
A8.49)
Преобразуем первое слагаемое равенства A8.49), принимая
во внимание, что действующие на механическую систему актив-
N _
ные силы потенциальны. Так как ^Fkbrk = -5#, где П- потен-
к=\
циальная энергия системы, на основании свойства A8.45) изо-
изохронной вариации можно записать
JZ F^kdt = f- mdt=-5 \ndt • (] 8-5°)
Каждое из слагаемых, входящих во вторую сумму уравне-
уравнения A8.49), преобразуем, применяя правило интегрирования по
частям:
Л тк —jj- fhdt = тк \brkdvk = тк{vkbrk)\^ -тк \vkd(bfk).
Безынтегральное слагаемое в последнем уравнении равно
нулю, поскольку вариации координат на границе, согласно свой-
свойству A8.47), равны нулю. На основании свойства изохронной ва-
вариации A8.44), меняя порядок варьирования и дифференцирова-
дифференцирования, находим
Суммируя в соответствии с уравнением A8.49) полученные соот-
соотношения, окончательно имеем
fV \, A8.51)
541
1 N
где ^ = — X w* v* — кинетическая энергия системы.
Принимая во внимание соотношения A8.50), A8.51), преоб-
преобразуем уравнение A8.49) к виду
8|(Г-Я)Л = 8|1Л = 0, A8.52)
'о, 'о
где L = Т - П — функция Лагранжа.
Выражение
S=JLdt A8.53)
'о
называется действием по Гамильтону, и соотношение A8.52)
примет вид
65 = 0. A8.54)
Равенство A8.54) выражает принцип наименьшего дейст-
действия Гамильтона: среди кинематически возможных движений
системы, совершаемых за один и тот же промежуток времени,
истинным будет то движение, для которого действие по Га-
Гамильтону S имеет стационарное значение.
Пользуясь принципом Гамильтона, можно вывести уравне-
уравнения Лагранжа второго рода.
Выразим функцию Лагранжа L в зависимости от обобщен-
обобщенных координат qt и скоростей qt:
L = L(ql9...9qn;ql9...9qn)
и применим принцип Гамильтона. Вычислим вариацию действия
используя правило интегрирования по частям слагаемых, содер-
содержащих производные, меняя порядок варьирования и дифферен-
дифференцирования:
542
и '=1
dL dfdL
dq, dt[dq,
Безынтегральная сумма обращается в ноль, так как согласно
условию A8.47), 8q,(to) = 8qi(tx) = O. На основании уравнения
A8.54),
. '=1
dqt dt у dqt
Вследствие независимости и произвольности bqt выражения в
скобках равны нулю, что и приводит к уравнениям Лагранжа
второго рода
л ( ят \ яг
A8.55)
dt\dqi) dq,
записанным с использованием оператора Эйлера
IW dt{dqj dq,
Пример 18.11. Составить уравнение Лагранжа, если движение материальной
точки происходит в поле действия силы тяготения.
Решение. В качестве обобщенных координат выберем декартовы координа-
координаты ql=x4q2=:y. Кинетическая Ти потенциальная П энергии соответственно
равны
Подставим функцию Лагранжа L = T-fl в уравнения A8.55) и найдем
дифференциальные уравнения движения точки в декартовых координатах:
кх .. ку
т ;
Если в качестве обобщенных координат теперь выбрать полярные координа-
координаты <у, = г, q2 = Ф ,то кинетическая и потенциальная энергии будут определяться
соответственно выражениями
7-_fL(r'+rV); я—i,
а дифференциальные уравнения движения точки A8.55) примут вид
/и(г-/чр2) = —-; --(тг2ф) = 0.
г at
543
Тот факт, что координата (р не входит в выражение для функции Лагранжа,
дает возможность получить из уравнений движения первый интеграл, выра-
выражающий закон сохранения момента количества движения, в виде тг2ф = Сх.
Таким образом, вид уравнений Лагранжа сохраняется независимо от выбора
обобщенных координат, однако удачный их выбор (полярные) существенно
упрощает структуру уравнений движения, а следовательно, и анализ движения.
Принцип наименьшего действия был установлен ирландским
математиком У. Гамильтоном в работах 1833-1835 гг. для случая
стационарных голономных связей и был обобщен М. В. Остро-
Остроградским в 1848 г. на случай нестационарных связей. В работах
Л. Больцмана A866), Р. Клаузиуса A871), Г. Гельмгольца A895)
показано, что принцип наименьшего действия Гамильтона дает
общую основу методики исследования разных физических про-
процессов в механике, оптике, электрогидродинамике.
Принцип наименьшего действия Мюпертюи-Лагранжа
Рассмотрим движение механической системы в поле дейст-
действия потенциальных сил. За класс допустимых линий выберем
траектории, переводящие систему из начальной конфигурации А9
соответствующей моменту времени t0, в конечную В, соответст-
соответствующую моменту времени tx. При этом считаем, что на всех
траекториях сравнения система обладает одной и той же механи-
механической энергией.
Поскольку силы потенциальны, выполняется закон сохране-
сохранения механической энергии Т + П = h, где h — постоянная вели-
величина. Следовательно, скорости точек зависят от положения сис-
системы в данный момент времени, и потому время, в течение
которого система переходит из точки А в В, зависит от траекто-
траектории движения, и система, совершая перемещения по различным
кинематически допустимым траекториям, будет приходить в точ-
точку В в разные моменты времени tx. Индекс «1» указывает на то,
что переменная величина tx определяет момент прихода системы
в точку В.
Рассмотрим действие по Гамильтону A8.53) и подсчитаем
полную вариацию S в соответствии с формулой A8.46), учитывая
переменность верхнего предела tx:
544
A dL
+ A8.56)
dL d ( dL
bq,A.
Преобразуем безынтегральную часть полной вариации AS .
Из соотношения A8.43) следует
Aqi(to) = dqi(to) + q,dto; A4r/(/I) = 5g/(/,) + g/6/1 (/ = 1,...,л).
Выразив из данных уравнений 5д,(/0), б^Д/,) и подставив их в
безынтегральные слагаемые уравнения A8.56), получим
Время /0 фиксировано, поэтому 5/0 =0. Так как началь-
начальная А и конечная В точки движения механической системы
известны: qi (f0) = const, qf (/,) = const, то Д#,(/0) = 0, kqt(/,) = 0
(i = l,..., л).
Потенциальная энергия П зависит от обобщенных коорди-
(дп Л dL ат v
нат — = 0 и, следовательно, = . Кинетическая энергия
{dq, ) dqt dqt
представляет однородную квадратичную относительно скоростей
форму, поэтому
Таким образом, безынтегральная часть уравнения A8.56) бу-
будет равна
545
а полная вариация действия S примет вид
или
Поскольку траектории движения удовлетворяют уравнениям Ла-
гранжа A8.55), из последнего уравнения следует
A(S + h$x) = 0. A8.57)
Принимая во внимание закон сохранения механической энергии
Т + П = h, из соотношения A8.53) находим
'i 'i 'i
S= $Ldt= j(T-II)dt= \2Tdt-h{tx -/0),
или
5 + to,=-j27» + to0. A8.58)
'»
Определенный интеграл
j A8.59)
называется действием по Лагранжу.
Вычислим полную вариацию от обеих частей уравнения
A8.58) и, учитывая, что вариация постоянной равна нулю
(Д(Л/0) = 0), представим соотношение A8.57) в виде
Таким образом, при действительном движении AFF = 0 и
принцип Мюпертюи - Лагранжа формулируется следующим об-
образом: действительное движение голономной консервативной
546
системы между двумя заданными конфигурациями А и В отли-
отличается от кинематически возможных движений, совершаемых
между теми же конфигурациями и с той же полной механиче-
механической энергией, тем, что для действительного движения, дейст-
действие по Лагранжу имеет стационарное значение.
Из принципа наименьшего действия в форме Лагранжа мож-
можно получить уравнения движения голономной консервативной
системы. Вычислив в соответствии с A8.59) полную вариацию
функции W, находим соотношение
откуда вследствие произвольности и независимости вариаций
Ьс], приходим к уравнениям Лагранжа A8.55).
Рассмотрим применение принципов Гамильтона и Лагранжа к исследованию
движения материальной точки массой т по гладкой поверхности при отсутст-
отсутствии активных сил.
Согласно закону сохранения энергии, — mv2 = const и, следовательно
v = const.
В соответствие с принципом Гамильтона, действие 5 имеет минимальное
значение для действительного движения по сравнению с кинематически воз-
возможными движениями, совершаемыми за один и тот же промежуток времени.
Для рассматриваемого случая
а значит,
„2
minS = min —mv2 \t = /min —mv
Отсюда следует, что v = vmin. Из всех кинематически возможных движений,
совершаемых между точками А и ? за один и тот же промежуток времени /, но с
различными постоянными скоростями, действительным будет то, для которого
v = vmin . Но так как dS/dt = vmin , то S = vmin/ и движение по поверхности про-
происходит в кратчайшее время и по кратчайшему пути, т. е. по геодезической ли-
линии.
В соответствии с принципом Лагранжа, действие W имеет минимальное зна-
значение для действительного движения по сравнению с кинематически возмож-
возможными движениями, совершаемыми между точками А и В с одной и той же энер-
энергией. Для рассматриваемого случая
547
J(mv2 )dt = (mv2 )t,
о о
а значит,
minW = min(/wv2)/ = (mv2)mm(t).
Отсюда следует, что / = tmm, поскольку на основании закона сохранения
энергии mv2 для кинематически реализуемых движений имеет одно и то же
значение.
Таким образом, из всех кинематически возможных движений, совершаемых
между точками А и В с одной и той же энергией, но за различное время, дейст-
действительным будет то, для которого t = /min. Но dS/dt = v = Jlhjm = const. Сле-
Следовательно, S = v/min и движение точки по поверхности происходит в кратчай-
кратчайшее время и по кратчайшему пути, т. е. по геодезической линии.
Принцип стационарного действия Якоби
Принцип Мюпертюи - Лагранжа позволяет выяснить харак-
характер движения механической системы в пространстве обобщенных
координат qt. Принимая во внимание формулы перехода к
обобщенным координатам:
представим соответствующий дифференциал drk в виде
Тогда квадрат длины дуги ds\ определится как
Введем в w-мерном координатном пространстве риманову
метрику, определив элементарное расстояние между двумя со-
соседними точками q и q + dq формулой
ds2 =2>Ж =SZZ/w*rLriL^^ =SZa^^y •
к к i j Щ1 °<lj i j
Сопоставляя данную формулу с выражением A8.38) для кинети-
кинетической энергии, находим
548
A8.60)
т. е. кинетическая энергия системы совпадает с кинетической
энергией изображающей точки в «-мерном пространстве обоб-
обобщенных координат, если массу точки т принять равной единице.
В соответствии с законом сохранения энергии 2Т = 2(А - П),
тогда из формулы A8.60) находим
ds
Подставив полученные выражения для Ти Л в формулу A8.59),
определяющую действие по Лагранжу, получим
A8.61)
Интеграл W, представленный в форме A8.61), называется
действием по Якоби. Принцип стационарного действия в этом
случае принимает вид
В такой форме принцип стационарного действия, открытый в
1837 г. К. Якоби, формулируется следующим образом: действи-
действительное двиэюение голономной консервативной системы меэюду
двумя заданными конфигурациями А и В отличается от кинема-
кинематически возможных движений, совершаемых меэюду теми же
конфигурациями и с той же полной механической энергией, тем,
что для действительного движения действие по Якоби имеет
стационарное значение.
Пусть на механическую систему не действуют активные си-
силы. Тогда на основании формулы A8.61) действие FT с точностью
до произвольной постоянной будет
- \ds
549
и принцип стационарного действия имеет вид
Следовательно, движение голономной системы по инерции в
пространстве обобщенных координат эквивалентно движению
изображающей точки по геодезической линии этого пространст-
пространства. Длина дуги геодезической линии меньше длины дуги любой
другой линии, соединяющей заданные точки.
При движении механической системы под действием потен-
потенциальных сил в пространстве обобщенных координат вводят
метрику
ds1 = 2(h-n)ftaydqidqJ ^bijdqidqj , A8.62)
У У
где bif = 2(h - П)а/;, поэтому
'о
Таким образом, движение голономной системы под действием
потенциальных сил эквивалентно движению изображающей точ-
точки по инерции в пространстве Римана, метрика которого опреде-
определяется выражением A8.62). Согласно принципу наименьшего
действия, в форме Якоби движение происходит по геодезической
линии пространства Римана.
При доказательстве справедливости интегральных принципов
показано, что соответствующие действия (Гамильтона, Мюпер-
тюи-Лагранжа, Якоби) имеют стационарные значения. Установ-
Установление типа экстремума связано с рассмотрением второй вариа-
вариации, минимум которого реализуется при 82*S' > 0.
Канонические уравнения Гамильтона
Рассмотрим Bи + 1)- мерное расширенное фазовое про-
пространство, в котором координатами точки являются qi, pt и t.
Величины р, называются обобщенными импульсами и опреде-
определяются равенствами
550
Pi=^L = Pi(^q,0 (i = 1,2,...,я). A8.63)
dqi
Введем также функцию фазовых переменных H(q, р, t), связан-
связанную с функцией Лагранжа L(q, p91) равенством
п
О8-64)
Для вывода уравнений движения в пространстве фазовых
координат воспользуемся принципом наименьшего действия
A8.54):
Обратим внимание на математическую особенность решаемой
задачи: время t и позиционные координаты q, фиксированы в
концевых точках, переменные р, свободны. Следовательно, в
пространстве фазовых переменных q9p9t мы имеем задачу со
свободными концевыми условиями. Но эти условия не вносят
особенностей в решение, поскольку подынтегральная функция не
зависит от р.
В новых переменных вариация действия имеет вид
8 ^Ц
Принимая во внимание краевые условия bqt (/0) = bqt (/,) = 0,
преобразуем первый член подынтегрального выражения:
\1 С
'о ° 'о
Выражение для hS примет вид
Равенство нулю вариации действия 55 при произвольных и неза-
независимых вариациях 5^,8/?, будет при условии равенства нулю
соответствующих сомножителей при 5^,, 5р,.
551
Таким образом, получаем дифференциальные уравнения
движения механической системы в фазовом пространстве, назы-
называемые каноническими уравнениями Гамильтона:
LjJL_EL = JJL (/ = 1,...,w). A8.65)
а/ ф, а/ cty,
С учетом уравнений Лагранжа и определения обобщенного
импульса A8.63), находим
Сравнивая эти уравнения со второй системой уравнений Гамиль-
Гамильтона, приходим к выводу, что
Ы дН .. . .
— = -т— A = 1,-., и)
а^, а?,
и уравнения A8.63), а также первая система уравнений A8.65)
могут быть получены из соотношения A8.64) формальной опера-
операцией частного дифференцирования в предположении независи-
независимости переменных q,,P/,t.
Для голономных стационарных систем
и функция Гамильтона
определяет полную механическую энергию системы.
Канонические уравнения Гамильтона представляют собой
нормальную (разрешенную относительно первых производных
фазовых переменных р(, qi) систему 2л дифференциальных
уравнений первого порядка, что упрощает как аналитическое, так
и численное исследование движения механических систем.
При составлении канонических уравнений Гамильтона для
голономных систем следует придерживаться следующего поряд-
порядка проведения операций:
1) выделить механическую систему, определить число сте-
степеней свободы, ввести обобщенные координаты;
552
2) вычислить кинетическую и потенциальную энергии сис-
системы как функции обобщенных координат и скоростей;
дТ
3) ввести обобщенные импульсы системы рг = и в вы-
ражении полной механической энергии выразить q, через /?,.
Полученная функция и будет Гамильтонианом Я данной механи-
механической системы;
4) составить канонические уравнения A8.65).
Пример 18.12. Составить канонические уравнения для линейного осцилля-
осциллятора, полагая, что масса движущейся точки равна /и, а коэффициент жесткости
пружины с.
Решение. Осциллятор имеет одну степень свободы, поэтому в качестве
обобщенной координаты выберем q. Кинетическая энергия точки
Т = mv2/2 = mq1 jl, потенциальная П = cq1/l. Вводим импульс р = dT/dq =
= mq и выражаем q = p/m. Следовательно, функция Гамильтона Н = Т + П
имеет вид
В соответствии с A8.65) получаем
dt dp m' dt dq
Отметим, что первое уравнение определяет количество движения точки
p-mq , что и обусловливает название переменных р, как импульсов. Выражая
импульс из первого уравнения и подставляя во второе, находим уравнение дви-
движения в форме Ньютона mq = -cq .
Пример 18.13. Составить канонические уравнения движения материальной
точки под действием силы тяготения.
Решение. Точка на плоскости имеет две степени свободы, поэтому в качест-
качестве обобщенных выбираем полярные координаты qx = r, q2 = (р . Кинетическая и
потенциальная энергии имеют вид
Вводим импульсы
Р\ = — = гпг, г = ?Ц р2 = —- = mr>, ф
Эг m Эф wr*
Следовательно, функция Гамильтона Н = Т + П имеет вид
553
Заметим, что импульс рг = /иг2ф определяет момент количества движения точ-
точки относительно неподвижного центра.
В соответствии с уравнениями A8.65)
dip дН р2
dt др] т ' Л1 дг г2 тгъ ' Л ф
Координата ф циклическая, поскольку не входит в функцию Лагранжа L. В
функцию Гамильтона И ф также не входит, что указывает на то, что свойство
цикличности обобщенной координаты не зависит от того, в какой механике —
Лагранжа или Гамильтона изучается данное движение.
Глава 19
ТЕОРИЯ КОЛЕБАНИЙ
Колебаниями называется процесс, сопровождающийся мно-
многократным чередованием возрастания и убывания некоторых фи-
физических величин.
Физическая природа колебательных процессов различна. Ко-
Колебания могут быть механические, акустические, электромагнит-
электромагнитные, в электрических контурах и т. д. В теоретической механике
рассматривают колебания в механических системах — механиче-
механические колебания.
Изучение свойств колебательных движений необходимо для
понимания многих физических явлений, с которыми приходится
сталкиваться в инженерной практике. Движение машин и меха-
механизмов практически всегда сопровождается возникновением ко-
колебаний или, как еще говорят, вибраций. Инженеру необходимо, с
одной стороны, уметь бороться с колебаниями там, где они вред-
вредны, а с другой стороны, уметь использовать их. как полезный
процесс в таких устройствах, как вибротранспортеры, виброуп-
виброуплотнители, сита и т. д.
Ниже рассматриваются малые колебания в системах с одной,
двумя и конечным числом степеней свободы, описываемых ли-
линейными дифференциальными уравнениями, относительно по-
положения устойчивого равновесия.
19.1. Устойчивость положения равновесия
механической системы
Рассмотрим механическую систему с голономными, стацио-
стационарными и неосвобождающими связями с п степенями свободы,
движение которой определяется обобщенными координатами
555
В соответствии с принципом возможных перемещений в по-
положении равновесия все обобщенные силы равны нулю:
а=о,...,ея=о.
Для консервативной системы эти условия принимают вид
у- = 0 A = 1,2,...,л), A9.1)
где П — потенциальная энергия системы.
Поскольку 77 есть I7(q],q2,...9qn)9 A9.1) можно рассмат-
рассматривать как систему уравнений относительно обобщенных коор-
координат, представляющих собой условия экстремума потенциаль-
потенциальной энергии. Решая их можно найти положения, в которых
система будет находиться в равновесии.
Однако положение равновесия может быть устойчивым,
неустойчивым и безразличным.
Если существует такое достаточно малое отклонение систе-
системы от положения равновесия, при котором она стремится вер-
вернуться назад, то такое положение равновесия будет устойчивым.
В случае, когда при любом начальном отклонении система уда-
удаляется от положения равновесия, положение равновесия будет
неустойчивым. Если же при начальном отклонении система
остается в отклоненном положении, то положение равновесия
будет безразличным.
На рис. 19.1 представлены устойчивое (см. рис. 19.1, а) и
неустойчивое (см. рис. 19.1, б) положения равновесия математи-
математического маятника. Безразличное положение равновесия имеет
система, приведенная на рис. 19.1, в.
У//Ш
б
Рис. 19.1
556
При устойчивом положении равновесия система после дос-
достаточно малого начального возмущения совершает колебания
около положения равновесия или возвращается в это положение
без колебании. При неустойчивом положении равновесия система
после любого начального возмущения при дальнейшем движении
все более удаляется от положения равновесия.
Строгое определение понятия устойчивости положения рав-
равновесия было дано в конце XIX в. А. М. Ляпуновым. Условимся
отсчитывать обобщенные координаты ql9 q29 ..., qn от поло-
положения равновесия, т. е. считать их в положении равновесия рав-
равными нулю. Выведем систему из положения равновесия, сообщив
обобщенным координатам в начальный момент времени возму-
возмущения (отклонения 01О, 02О?..., qnQ И СКОРОСТИ 0iO,02O>"->0/to)-
Обозначим обобщенные координаты и их скорости при дальней-
дальнейшем движении через ql(t)9q2(t)9...9qn(t)nql(t)9q2(t)9...9qn(t)
соответственно.
По Ляпунову, равновесие системы называется устойчивым,
если для любых сколь угодно малых положительных чисел
&!,...,е„; г[9...,е'п можно выбрать 2п других таких положи-
положительных чисел r\l9...9r\n; t|J,...,Ли» что пРи начальных возму-
возмущениях системы, удовлетворяющих условиям
010
при дальнейшем движении системы будут выполняться неравен-
неравенства
В противном случае равновесие будет неустойчивым. Без-
Безразличное положение равновесия в соответствии с данным опре-
определением относится к неустойчивым, поскольку при наличии на-
начальной скорости система будет удаляться от начального
положения.
Если при устойчивом положении равновесия все обоб-
обобщенные координаты и скорости с течением времени стремятся
к нулю
lim 0,(f) = O,
/->00
557
то рассматриваемое положение равновесия называется асимпто-
асимптотически устойчивым.
Достаточное условие устойчивости положения равновесия
консервативной системы определяется теоремой Лагранжа: дос-
достаточным условием устойчивости положения равновесия кон-
консервативной системы является наличие в нем локального {изоли-
{изолированного) минимума потенциальной энергии.
Однако в реальной механической системе всегда существуют
силы сопротивления движению, возникающие благодаря трению
или вязкости среды. Такие силы Кельвином названы диссипа-
диссипативными.
При наличии в системе диссипативных сил для оценки ус-
устойчивости положения равновесия можно дополнительно вос-
воспользоваться тремя теоремами Кельвина.
1. Если положение равновесия консервативной системы
устойчиво при одних только потенциальных силах, то оно бу-
будет оставаться устойчивым и при добавлении диссипативных
сил.
2. Устойчивое положение равновесия становится асимпто-
асимптотически устойчивым при добавлении диссипативных сил с пол-
полной диссипацией .
3. Изолированное и неустойчивое при одних потенциальных
силах положение равновесия не может быть стабилизировано
диссипативными силами.
Доказательства этих теорем могут быть получены как след-
следствие теоремы Ляпунова об устойчивости движения, выходящей
за рамки данного курса.
Первые две теоремы Кельвина указывают на то, что дисси-
пативные силы не могут нарушить устойчивость положения рав-
равновесия, а третья — что диссипативные силы не в состоянии
трансформировать неустойчивое положение равновесия консер-
консервативной системы в устойчивое. Следовательно, для оценки
устойчивости положения равновесия реальную колебательную
систему с диссипативными силами можно заменить ее консерва-
консервативной моделью.
* Понятие полной диссипации существенно для систем с числом степеней
свободы п > 1 и будет определено в § 19.7.
558
19.2. Дифференциальные уравнения малых колебаний
линейной системы с одной степенью свободы
Отметим, что наличие в механической системе хотя бы одно-
одного упругого (деформируемого) тела автоматически превращает ее
в систему с бесконечным числом степеней свободы, поскольку у
таких тел каждая материальная частица имеет возможность дви-
двигаться относительно других материальных частиц и, следова-
следовательно, ее движение должно описываться своими обобщенными
координатами, а таких частиц бесконечное множество.
В теоретической механике используется модель абсолютно
твердого тела, для описания движения которого требуется конеч-
конечное число координат, а все упругие элементы — пружины прини-
принимаются безынерционными, т. е. масса их считается пренебрежимо
малой по сравнению с массами твердых тел, входящих в систему.
Только в этом случае можно говорить о системе с конечным чис-
числом степеней свободы. Рассмотрим несколько примеров.
Пример 19.1. Тело массой т, подвешенное к пружине АВ (рис. 19.2, а),
движется поступательно в вертикальном направлении под действием силы
F(t), преодолевая вязкое сопротивление среды. Составить уравнение малых
колебаний.
Решение. На рис. 19.2, б представлена зависимость реакции F' цилиндри-
цилиндрической пружины растяжения — сжатия от деформации X. Предположив, что
деформации пружины относительно малы, т. е. мала амплитуда колебаний тела,
характеристику пружины можно аппроксимировать наклонной прямой, тангенс
угла а наклона которой называется коэффициентом жесткости, или просто
жесткостью с пружины.
При сделанном допущении о малых деформациях пружины линейная вос-
восстанавливающая сила будет противоположна по направлению деформации
пружины:
F' = ck. A9.2)
На рис. 19.2, в представлена зависимость силы вязкого сопротивления среды
F" от скорости движения в ней тела v . Только при достаточно малых скоро-
скоростях движения тела можно аппроксимировать характеристику наклонной пря-
прямой, тангенс угла наклона у которой называется коэффициентом линейного
вязкого сопротивления h и имеет единицу измерения ньютон-секунда на метр
(Н • с/м ). При сделанном допущении о малых скоростях движения тела сила
вязкого сопротивления
F" = hv,
всегда линейна и направлена противоположно скорости движения тела.
559
VSS//SSS/SSS/SSA
Рис. 19.2
Если АВ=10 (см. рис. 19.2, а) длина нерастянутой пружины, то АО представ-
представляет собой статическое удлинение пружины Хст под действием силы тяжести
тела, равное
Кш"*/с. A9.3)
Будем отсчитывать координату х от положения статического равновесия О,
тогда дифференциальное уравнение поступательного движения тела имеет вид
тх ш F(t) + mg -c(XCT + х) - hx. A9.4)
В силу A9.3) mg и сХст взаимно уничтожаются, и уравнение A9.4) принимает вид
Если F(t) = Fo sin(pf+Р), то
Fo sin(p/+P),
или
A9.5)
где 2е = h/m, со2 = с/т, /0 = F0/m .
560
?*)
Пример 19.2. Однородный диск А, момент инерции которого J, через упру-
упругий безынерционный стержень скреплен с телом В, вращающимся по закону
vj/(O = \\i0 sin(pt + Р) (рис. 19.3). Составить
уравнение малых колебаний диска.
Решение. Выберем в качестве координаты
угол поворота ср и составим дифференциальное
уравнение вращательного движения диска (ось
Oz при этом остается прямолинейной). Полагая,
что ф > ц/, а сами углы ф и vj/ малы, запишем
выражение для момента М (см. рис. 19.3) в виде
Рис. 19.3
или
где с — жесткость стержня на кручение.
При вращении однородного диска вязкое
сопротивление среды мало и его можно не учи-
учитывать. Тогда дифференциальное уравнение
вращательного движения диска будет иметь вид
Jcp = -Л/ = -с[ф - ц/0 sin(p/ + P)],
A9.6)
где G>2=c/J;f0=c\\f0/J.
Пример 19.3. Материальная точка (бусинка) массой т закреплена на струне,
имеющей предварительное значительное натяжение Т (рис. 19.4). Учитывая
I', вязкое сопротивление среды, составить урав-
? нение малых колебаний. Изменением натяже-
* ния струны при движении бусинки, массой
струны и влиянием силы тяжести бусинки пре-
пренебречь.
Решение. Полагая, что колебания бусинки
малы (х «/), можно записать sin а « х/1.
Принимая вязкое сопротивление среды ли-
линейным: F" = hx , получим дифференциальное
уравнение движения бусинки
Рис. 19.4
тх = -2Т sin а - F" = -2Т — hx,
или
A9.7)
где 2е = h/m, ю2 = IT/ml.
Приведенные примеры показывают, что при сделанном до-
допущении о малости колебаний, колебательные системы описы-
описываются одинаковыми по структуре линейными дифференциаль-
37 Зак. 16
561
ными уравнениями A9.5)-A9.7). Они могут быть полными (см.
19.5), в них может отсутствовать обобщенная скорость (при пре-
пренебрежении силами вязкого сопротивления (см. 19.6)) или правая
часть (в случае отсутствия вынуждающей силы (см. 19.7)). Одна-
Однако условие малости колебаний еще не гарантирует линейность
дифференциальных уравнений. Так, при учете сил сухого трения
дифференциальное уравнение остается нелинейным даже при
сделанном допущении.о малости колебаний.
Получим теперь дифференциальное уравнение малых коле-
колебаний в общем случае. Рассмотрим механическую систему, со-
состоящую из N материальных точек и имеющую одну степень
свободы, на которую наложены голономные, стационарные и
неосвобождающие связи. Предположим, что система имеет устой-
устойчивое положение равновесия, от которого будем отсчитывать
обобщенную координату q,
В соответствии с предположением о малости колебаний
обобщенную координату, ее скорость и ускорение полагаем вели-
величинами первого порядка малости. В дифференциальных уравнени-
уравнениях движения будем учитывать величины первого порядка малости,
а в выражениях для кинетической энергии Г, потенциальной энер-
энергии П и вводимой ниже диссипативной функции Рэлея Ф — вели-
величины до второго порядка малости, поскольку использование
уравнения Лагранжа второго рода
dt[dq) dq *
приводит вследствие дифференцирования к понижению порядка
малости на единицу.
В общем случае сила, действующая на к-ю точку системы,
может быть функцией от положения точки гк, ее скорости vk и
времени V.
Fk=Fk(rk9vk9t).^
С учетом малости колебаний представим Fk в виде
Fk=F;(rk) + Fk\vk) + Pk(t)9 A9.8)
где все силы Fk(rk) — потенциальные, и будем полагать, что
силы Fk(vk) являются диссипативными, т. е. уменьшающими
562
полную механическую энергию, и линейно зависящими от
скорости:
F? = -hkvk. A9.9)
Кинетическая энергия системы
N
В силу стационарности наложенных на систему связей радиус-
векторы точек зависят только от обобщенной координаты:
г* = г*(д). Тогда
v,=§ = ^ A9.10)
at oq
и, следовательно, кинетическая энергия
Х2 09.11)
2
Здесь A{q\ как и rk , является в общем случае функцией обоб-
обобщенной координаты q.
Разложим A(q) в окрестности положения равновесия ( q = 0)
в степенной ряд:
Индексом «0» здесь и далее отмечены величины, вычисленные в
положении равновесия.
В силу малости колебаний в выражении A9.11) для кинети-
кинетической энергии будем учитывать величины не выше второго по-
порядка малости. Но в этом уравнении уже содержится квадрат
обобщенной скорости q2 — величина второго порядка малости,
поэтому в разложении A9.12) удерживаем только первый член,
который обозначаем
Коэффициент а называется обобщенным инерционным
коэффициентом. Его единица измерения определяется едини-
единицей измерения обобщенной координаты: если q в м, то а в кг, ес-
если q в рад, то а в кг • м2.
37* 563
Окончательно получаем
T = -aq2. A9.13)
Таким образом, в предположении о малости колебаний, ки-
кинетическая энергия системы является функцией только обобщен-
обобщенной скорости. Тогда в уравнении Лагранжа второго рода состав-
дТ
ляющая — тождественно равна нулю. Поскольку кинетическая
dq
энергия — величина положительная, обобщенный инерционный
коэффициент может быть только положительным (а > 0).
Согласно A9.8), представим обобщенную силу Q в виде
где Qu — составляющая обобщенной силы от потенциальных
сил; ??д — составляющая обобщенной силы от диссипативных
сил; Q(t) — составляющая обобщенной силы от сил, зависящих
от времени и действующих извне.
Составляющая обобщенной силы от потенциальных сил равна
о —^
где lJ(q) — потенциальная энергия системы, отсчитываемая от
положения равновесия. Так как обобщенная координата также
отсчитывается от положения равновесия, то
#@) = 0. A9.15)
Разложим потенциальную энергию в степенной ряд в окре-
окрестности положения равновесия:
2п) 1 (д3
Первый член в разложении II(q) равен нулю согласно A9.15);
второй также равен нулю, поскольку в положении равновесия
потенциальная энергия имеет экстремум; четвертый и после-
последующие члены отбрасываем, так как в силу предположения о ма-
малости колебаний потенциальная энергия должна содержать члены
не выше второго порядка малости. Тогда
564
\1&П) _2
2W
„, ч \{дП\
Обозначим —у через с и назовем его квазиупругим ко-
коэффициентом. Единица измерения с определяется единицей из-
измерения обобщенной координаты: если q в м, то с в Н/м, если q
в рад, то с в Н • м .
Окончательно имеем
II(q) = ±cq2. A9.16)
Достаточным условием устойчивости положения равновесия,
в соответствии с изложенными выше теоремами Лагранжа и
Кельвина, является наличие в положении равновесия локального
минимума потенциальной энергии. Для минимума функции
необходимо равенство нулю первой производной и положитель-
положительность второй. Тогда условие
с>0 A9.17)
является достаточным условием устойчивости положения рав-
равновесия колебательной системы с одной степенью свободы.
Составляющая обобщенной силы от диссипативных сил
A9.9) равна
Учитывая тождество Лагранжа, вытекающее из A9.10):
dq dq
получаем
hkk dgdgh 2 dgh 2 dgh 2 '
Введем функцию, называемую диссипативной функцией
Рэлея
* = t:thrf=\thkvl 09-18)
565
тогда
dq
Подставим в диссипативную функцию Рэлея A9.18) выражение
для скорости A9.10):
2
С коэффициентом B(q) поступим так же, как с коэффициентом
A(q) в выражении кинетической энергии, т. е. разложим его в
степенной ряд в окрестности положения равновесия (# = 0), а
затем учтем только первый член, поскольку диссипативная
функция Рэлея уже содержит в себе величину второго порядка
малости q2. .
Обозначим 5@) через Ь. Коэффициент Ь называют обоб-
обобщенным диссипативным коэффициентом. Единица измерения
Ь, как и коэффициентов а и с, определяется единицей измерения
обобщенной координаты: если q в м, то Ь в Н • с/м , если q в рад,
то Ъ в Нем.
Окончательно получаем
Ф^-bq2. A9.20)
Диссипативная функция Рэлея по своему определению (см.
A9.18)) не может быть отрицательной, однако в частном случае
консервативной системы она может равняться нулю при ненуле-
ненулевой скорости обобщенной координаты. Поэтому обобщенный
диссипативный коэффициент может быть большим или равным
нулю(?>0).
Для выяснения механического смысла диссипативной функ-
функции Рэлея рассмотрим теорему об изменении кинетической энер-
энергии для колебательной системы, на которую воздействуют только
потенциальные и диссипативные силы:
h л h
Здесь
566
dth л +h л ¦ A921)
_ dq _ ЬП dq _ Ш .
22 \_Jf-t ———— 22 — —^—— —— 22 •"— ——— ш
A9.23)
:Gn^L = _^L^. = _m; A9.22)
]~i ш dt dq dt dt
?} dt dt dq
Подставив A9.22) и A9.23) в A9.21), получим
dt dt
или
2ф
где ? — полная механическая энергия.
Таким образом, удвоенное значение диссипативной функции
Рэлея есть скорость уменьшения полной механической энергии
системы.
Составляющую обобщенной силы от сил Pk(t)9 зависящих
от времени и действующих на систему извне, можно получить
стандартным способом, полагая, что вариация обобщенной коор-
координаты bq не равна нулю, вычисляя сумму элементарных работ
от сил Рк @ на перемещениях, определяемых 8#, и относя полу-
полученное значение к Sq:
A9.24)
Учитывая A9.13), A9.14), A9.16), A9.19), A9.20) и A9.24),
запишем уравнение Лагранжа второго рода в виде
или
aq + bq + cq = Q(t), A9.25)
где а>0;6>0;с>0.
Уравнение A9.25) представляет собой дифференциальное
уравнение малых колебаний любой линейной колебательной
системы с одной степенью свободы. Разделив каждый член этого
567
уравнения на обобщенный инерционный коэффициент а , полу-
получим по аналогии с рассмотренными выше примерами
q + 2zq + @2q = -Q(t), . A9.26)
а
где 2г = Ь/а; со2 =с/а.
19.3. Свободные движения линейной системы
с одной степенью свободы
Свободные движения в колебательной системе возникают
при отсутствии внешнего воздействия (Q(t) = 0) после начально-
начального возмущения. В соответствии с A9.25) дифференциальное
уравнение движения в этом случае имеет вид
aq + bq + cq = 0.
Свободные колебания линейной консервативной системы
В случае консервативной системы Ъ = О, поэтому дифферен-
дифференциальное уравнение движения принимает форму
q + (iJq = 0, A9.27)
где со2 =с/а .
Запишем решение уравнения A9.27) в виде
q = Cl cosco/ + C2 sin со/. A9.28)
Произвольные постоянные С, и С2 определим из начальных ус-
условий:
при / = 0 q = q0, q = q0. A9.29)
Отсюда
С, =q0; C2=q0/(O.
Введем новые произвольные постоянные
А = д/С,2 + С2; а = arctg-^- A9.30)
С2
и представим решение A9.28) в так называемой амплитудной
форме:
A9.31)
568
Произвольные постоянные Л и а в соответствии с A9.30) вы-
выражаются через начальные условия следующим образом:
+ —
а = arctg
При определении а следует учитывать, что если q0 > 0, то
а находится в I или IV квадранте, а если q0 < 0 — то во II или
Ш, и, следовательно, к вычисленному главному значению арк-
арктангенса необходимо добавить п. При q0 = 0 а = я/2, если
q0 > 0, и а = - л/2, если <?0 < 0.
Зависимость q(i) представлена на рис. 19.5.
Рис. 19.5
Гармоническими называют такие колебания, при которых
обобщенная координата изменяется во времени по закону синуса
или косинуса. Как следует из A9.28) и A9.31), свободные коле-
колебания линейной консервативной системы с одной степенью сво-
свободы являются гармоническими. Их характеристиками являются:
со — круговая, или циклическая частота, измеряемая в се-
секундах в минус первой степени (с);
ш + а —фаза колебаний;
а — начальная фаза колебаний;
А — амплитуда колебаний;
Т— период колебаний — время в секундах, за которое фаза
колебаний изменится на 2л;
T = 2n/(O=2n<yJa/c .
36 Зак. 16
569
В инженерной практике используют величину, обратную пе-
периоду колебаний, называемую частотой колебаний
и измеряемую в герцах (Гц).
Отметим, что круговая частота ©, период колебаний Т и
частота v не зависят от начальных условий, поэтому их назы-
называют собственными характеристиками колебательной системы
(например, собственная частота колебаний). Свойство незави-
независимости частоты и периода колебаний от начальных условий —
свойство изохронности колебаний — связано с линейностью
дифференциального уравнения и, следовательно, с допущением
о малости колебаний.
Пример 19.4. В кривошипно-ползунном механизме, расположенном в вер-
вертикальной плоскости, кривошип ОА, представляющий собой однородный стер-
стержень длиной / = 0,49 м и массой т1 = 3 кг, через шатун АВ, также однородный
стержень массой т2 = 6 кг, связан с ползуном В массой тъ = 3 кг (рис. 19.6). С
ползуном скреплена пружина, жесткость которой сх. При вертикальном поло-
положении кривошипа ОА пружина не деформирована. Трение в шарнирах и опорах
ползуна, а также вязкое сопротивление среды не учитывать. Найти, при какой
жесткости с1кр пружины вертикальное положение кривошипа будет устойчи-
устойчивым. Для значения сх = 5с1кр получить уравнение движения кривошипа, если в
начальный момент времени его повернули на угол, равный 3° против направ-
направления вращения часовой стрелки, и отпустили без начальной скорости.
Решение. Выберем в качестве обобщенной координаты угол отклонения <р
кривошипа, считая его малым.
Кинетическая энергия кривошипа
Шатун АВ в положении, соответствующем ф = 0, совершает мгновенно-
поступательное движение, т.е. его угловая скорость равна нулю. При отклоне-
отклонении кривошипа от вертикали можно записать (см. рис. 19.6)
AD = ОА cos<p = ABsin ос
или, дифференцируя по времени,
-0/4sincp-<p = ABcoscc-d .
Отсюда
OAsinqto
ос = — -"" .
ABcosa
570
Рис. 19.6
Так как (риф малы, угловая скорость d будет иметь второй порядок ма-
малости и, следовательно, при вычислении кинетической энергии шатуна его дви-
движение можно считать поступательным, т. е.
Тогда суммарная кинетическая энергия
г-Ifa
Сопоставив это уравнение со стандартным выражением A9.13) для кинетиче-
кинетической энергии в системе с одной степенью свободы, получаем обобщенный
инерционный коэффициент
а = (т} /3 + /и2 + т3 )/2.
При вычислении потенциальной энергии учтем деформацию пружины и
опускание центров тяжести кривошипа и шатуна. С учетом малости (р дефор-
деформация пружины X = /ф . Поскольку центры тяжести кривошипа С, и шатуна С
при движении механизма находятся на одной горизонтали (см. рис. 19.6), их
опускание
36*
571
Тогда
1 Г 1 1 1
П = — [Cj/ ф - (Щ + /W^g/O - СО5ф)].
Учитывая в разложении coscp величины до второго порядка малости:
получаем
откуда, согласно A9.16), квазиупругий коэффициент
c = cll2--(ml+m2)gl.
Отметим интересное обстоятельство. Если при определении кинетической
энергии движение шатуна можно считать поступательным, то при вычислении
потенциальной энергии необходимо учитывать его поворот, поскольку измене-
изменение потенциальной энергии шатуна, так же как и изменение потенциальных
энергий кривошипа и пружины, имеет второй порядок малости.
Для устойчивости положения равновесия необходимо выполнение условия
A9.17). Приравнивая с к нулю, находим критическое значение с1кр жесткости
пружины:
По условию сх = 5с1кр =450 Н/м .
Таким образом, дифференциальное уравнение движения системы получи-
получилось в виде
Ф+а>2<р = 0,
V !2 ;со = 6 рад/с.
'а ^ A/3m, +w2+m3)/
В соответствии с A9.28) получаем общее решение в виде
Ф = Cj cosoof + C2 sin со/.
В начальный момент кривошип отклонили от вертикали на угол ф = 3° и
отпустили без начальной скорости, т. е. начальные условия A9.29) будут такими:
при t = О, ф = Фо = 3 = 0,052 рад, ф = ф0 = 0 .
180
Определив Сх = 0,052 рад; С2 = 0, находим
572
Свободные движения линейной неконсервативной системы
В самом общем случае дифференциальное уравнение сво-
свободного движения такой системы в соответствии с A9.26) имеет
вид
q + 2zq + co2q = 0, A9.32)
где е = Ь/2а — коэффициент затухания, единица измерения
которого (рад/с) совпадает с единицей измерения со.
Представив решение уравнения A9.32) в виде q = еи, полу-
получим характеристическое уравнение
А,2 + 2еА, + со2 = 0,
корни которого
Xl2 =-e±Vs2-co2 . A9.33)
Характер движения системы будет существенно зависеть от
соотношения между величинами 8 и со. Возможны следующие
три случая:
при 8 < со — случай малого сопротивления — уравнение
A9.33) имеет комплексно-сопряженные корни;
при 8 = со — случай критического сопротивления — уравне-
уравнение A9.33) имеет кратные корни;
при 8 > со — случай большого сопротивления — уравнение
A9.33) имеет два вещественных отрицательных корня.
Рассмотрим эти случаи по отдельности.
1. Случай малого сопротивления: 8 < со; А,, 2 = -8 ± /(Oj,
где ©j =л/со2 -е2 .
Общее решение дифференциального уравнения A9.32) будет
иметь вид
q = e~ (C| cos©jf + C2 sin (Ojf),
или
q = Ае'* sin(co1r + а). A9.34)
При начальных условиях A9.29)
С^. . /^ * О Ч. О /|Л <5 с\
1 =#0> ^2 = 9 (ly.JSJ
COi
573
откуда, согласно A9.30), находим
= arctg-
При определении а следует учитывать, что при q0 + sq0 > О
а находится в I или IV квадранте, а при qQ + eq0 < О — во II или
III и, следовательно, к вычисленному главному значению арктан-
арктангенса необходимо добавить п. При q0 + sq0 =0 а = тс/2, если
q0 > 0, и а = - 7г/2, если q0 < 0.
Графически решение A9.34) приведено на рис. 19.7. Оно
представляет собой синусоидальную кривую, расположенную
между экспоненциальными ограничивающими кривыми Ае~а и
- Ае~а . Колебания такого вида называются затухающими.
Лё
Рис. 19.7
Затухающие колебания не являются периодическим движе-
движением, однако сохраняют его некоторые свойства. Действительно,
решение A9.34) представляет собой произведение двух функций —
экспоненты, которая не обращается в нуль, и синусоиды с перио-
периодом Тх = 271/со, . Это обстоятельство приводит к чередованию че-
через равный промежуток времени Тх нулей и максимумов q(i) (см.
рис. 19.7), что позволяет считать затухающие колебания условно-
периодическими.
Величину Тх =271/@, =2п/у1(о2 -г2 называют условным пе-
периодом затухающих колебаний. Условный период затухающих
574
колебаний больше периода свободных колебаний консервативной
системы Т.
Величину CD] называют условной частотой затухающих
колебаний. Отметим, что при малых значениях коэффициента
затухания (е«со) условная частота затухающих колебаний
©! «со; аналогично Тх » Т.
Наконец, величину Ае~* можно назвать условной ампли-
амплитудой затухающих колебаний.
Решение A9.34) показывает, что затухающие колебания
должны продолжаться сколь угодно долго, поскольку q(t) обра-
обращается в нуль только при f-»oo. Однако это не соответствует
опыту наблюдения колебаний в реальных системах, которые все-
всегда заканчиваются за конечный промежуток времени. Данное
противоречие есть результат того, что в расчетной схеме не учи-
учитывались другие виды сопротивлений, кроме линейно-вязкого.
Ниже будет показано, что учет сил сухого трения приводит к
прекращению колебаний через конечный промежуток времени.
Величина Tq^/8 называется постоянной времени зату-
затухающих колебаний и измеряется в секундах. Рассмотрим после-
последовательность условных амплитуд колебаний в моменты време-
времени, отличающиеся один от другого на постоянную времени х0:
4= Л*-*1; A2=Ae^ti+4)=Ale'1; А3=Аге'2....
За каждый промежуток времени х0 условная амплитуда зату-
затухающих колебаний уменьшается в е раз. Через Зт0 условная ам-
амплитуда уменьшится в еъ, т. е. примерно в 20 раз. Обычно пола-
полагают, что по истечении времени, равного Зт0, затухающие
колебания можно условно считать прекратившимися.
Декрементом колебаний А называют отношение двух по-
последовательных (взятых через условный период Тг) максималь-
максимальных значений обобщенной координаты. Пусть
Аг = Ае~*' sinCoO]^ + a);
Ам = Ae-*'+Tl) sint®! (/, + Тг) + а] = Ae~z(t'+Tl) sinCco,*, + а),
где tt — время, соответствующее /-му максимуму координаты.
575
Тогда
А = -
4+1
Логарифмическим декрементом колебаний 5 называют
натуральный логарифм от декремента колебаний:
Логарифмический декремент колебаний удобен для характери-
характеристики медленно затухающих колебаний, когда s « со. Тогда из-
изменение максимальных значений за условный период мало:
и
4
= 1п
4+i 4-М I 4J 4
Логарифмический декремент колебаний в этом случае харак-
характеризует относительное изменение максимальных значений за
условный период. Кроме того, он имеет определенный энергети-
энергетический смысл.
Вычислим изменение полной механической энергии за ус-
условный период колебаний. В положениях максимальных откло-
отклонений (?(^) = 0) полная механическая энергия определяется по-
потенциальной энергией
п сА?
м = м =
2'
С учетом A9.36) для медленно затухающих колебаний
с(А?-2АМ)
Ьм =-",+i = •
Тогда относительное изменение полной механической энергии
системы за условный период колебаний будет равно
_ M,
где у — коэффициент поглощения энергии за один период
(цикл) колебаний.
576
2. Случай критического сопротивления: 8 = со; Кх 2 = -е.
При кратных корнях общее решение дифференциального
уравнения A9.32) имеет вид
q = C}e'Et +C2te-" =^"e/(C1 +C2t). A9.37)
Произвольные постоянные определим из начальных условий
A9.29):
С\=Яош> C2=q0+zq0. A9.38)
Решение A9.37) представляет собой произведение экспоненты в
отрицательной степени и линейной функции времени. Из матема-
математики известно, что экспонента в отрицательной степени убывает
быстрее, чем возрастает любая степенная функция. Поэтому ре-
решение A9.37) стремится к нулю при t -> оо.
Решение может обратиться в нуль только единожды, если кон-
константы С, и С2 имеют разные знаки. Для этого, согласно A9.38),
начальное отклонение и начальная скорость должны иметь разные
знаки, и при этом необходимо выполнение условия \q01 > z\q01.
На рис. 19.8 представлено решение A9.37) при различных
начальных условиях. Видно, что движение не имеет колеба-
колебательного характера и отсутствуют какие-либо признаки перио-
периодичности. Такое движение называют апериодическим, а с уче-
учетом рассмотрения критического сопротивления — предельно
апериодическим.
i
О
40>0
Рис. 19.8
3. Случай большого сопротивления: е > со; A,12=-s±A:,
где к = у1г2 -со2 . Поскольку к<г, оба корня характеристиче-
характеристического уравнения будут отрицательными.
577
Общее решение дифференциального уравнения A9.32) в
этом случае имеет вид
Произвольные постоянные С, и С2 определим из начальных
условий A9.29)
Движение в случае сопротивления, большего критического,
также имеет апериодический характер, аналогичный представ-
представленному на рис. 19.8, однако с увеличением 8 графики растяги-
растягиваются вдоль оси абсцисс, поскольку с возрастанием вязкого со-
сопротивления при прочих равных условиях скорость движения
убывает.
Пример 19.5. Груз массой /и = 0,5 кг, скрепленный с пружиной, помещен в
сосуд с жидкостью, создающей при движении груза силу сопротивления, пропор-
пропорциональную его скорости v ( рис. 19.9, а). Определить закон движения груза,
если статическая деформация пружины А.ст = 5 см , коэффициент вязкого сопро-
сопротивления жидкости h = 1 Н • с/м, а в начальный момент времени груз был подве-
подвешен к концу недеформированной пружины и отпущен без начальной скорости.
V////////////S/SS/S/S////.
Рис. 19.9
Решение. Дифференциальное уравнение движения груза, скрепленного с
пружиной и преодолевающего вязкое сопротивление среды, было получено в
примере 19.1. Положив внешнюю силу равной нулю, запишем
х + 2гх + со2 х = 0,
578
где х — координата груза, отсчитываемая от положения статического равнове-
равновесия вниз; е = h/2m = 1 рад/с ; (О=^с/т .
Поскольку статическая деформация пружины А,ст связана с жесткостью с
пружины и весом груза Р соотношением A9.3) (где P-mg ), то
= J—= 4ПГ~» со = 14 рад/с.
Начальные условия в данном случае имеют вид
при f = 0; jc = -A,ct; i = 0.
Так как г < со, имеют место затухающие колебания. Условная частота затухаю-
затухающих колебаний а\ = vco2 -e2 =13,96 рад/с.
Согласно A9.34),
где A =
— ,А = 0,0501м.
Главное значение ot' = arctg—- = 1,5 рад. Учитывая, что *0+?х0<0 и,
следовательно, а лежит в Ш квадранте, добавим к главному значению а' ве-
величину я. Тогда решение будет иметь вид
х = 0,050te~' sinA3,96f + 4,641), где х в м.
Зависимость x(t) представлена на рис. 19.9, б. Выше было отмечено, что
затухающие колебания рассматривают на промежутке времени Зт0 = 3/е = 3 с.
За это время условная амплитуда колебаний уменьшится примерно в 20 раз.
Влияние на свободные колебания сил сухого трения
Дифференциальное уравнение движения тела, скрепленного
с пружиной и находящегося на горизонтальной шероховатой по-
поверхности (рис. 19.10), имеет вид
mx + cx±F^ = 0, A9.39)
где F^ — сила сухого трения
скольжения, равная максимальной
силе трения покоя (зависимость силы
трения скольжения от значения ско-
скорости скольжения не учитывается),
знак «+» соответствует движению
слева направо, «-» — наоборот.
579
Уравнение A9.39) является нелинейным даже с учетом ма-
малости колебаний, однако при определенных начальных условиях:
при/ = 0 х = хо, х = 0 A9.40)
можно легко найти его решение, рассматривая последовательно
интервалы движения, где знак скорости постоянен и, следова-
следовательно, уравнение A9.39) является линейным и может быть пред-
представлено в виде
JCj +co2jc1 =0,
где jc, = х ± а; а = F™** /с представляет собой отклонение тела
от положения равновесия под действием силы, равной макси-
максимально возможной силе трения покоя.
При начальных условиях A9.40) на первом интервале тело
движется влево, а его уравнение имеет вид
х + (о2х = (й2а.
При начальном отклонении тела от положения равновесия на
величину х0 < а движение не начнется, поскольку упругая сила
пружины окажется недостаточной для преодоления силы трения.
Полосу -а<х<а называют зоной застоя (рис. 19.11).
\ T* p
^
'\~JT~J
.Л
1л--
***x
Рис. 19.11
При хо>а решение с учетом A9.40) будет иметь следую-
следующий вид:
х = а + (х0 -a)cos(ut,
580
т. е. на первом интервале решение — косинусоида с амплитудой
х0 -а, смещенная вверх на величину а (см. рис. 19.11). Полу-
Полученное решение справедливо, пока х < О. Так как
jc = -co(x0 -a) sin со/,
то скорость остается отрицательной до /* = я/со. В этот момент
времени тело остановится и его смещение от положения равнове-
равновесия будет равно
хх = а + (л:0 -a)cos7i = -(х0 - 2а),
т. е. по абсолютной величине уменьшится на 2а по сравнению с
начальным.
Если |jc, | > а, то движение начнется в обратную сторону и
его уравнение примет вид
Отсчитывая время от начала движения в обратную сторону, по-
получаем начальные условия для второго интервала движения:
при f = О дс = (х1, я; = 0.
Решение на этом интервале имеет вид
х = (х} + a)cos<ot-a
и представляет собой косинусоиду с амплитудой \хх + а\ = х0 -За,
смещенную вниз на величину а (см. рис. 19.11). Через t* = тг/со
тело остановится в крайнем правом положении, имея смещение
от положения равновесия, равное х2 = -х} - 2а = х0 - 4а (см.
рис. 19.11) и т. д.
Движение тела будет продолжаться до тех пор, пока при
очередной остановке его в крайнем положении смещение от по-
положения равновесия не окажется по абсолютной величине мень-
меньше а. Хотя рассмотренное движение и не является периодиче-
периодическим, можно, как и в случае затухающих колебаний при наличии
линейно-вязкого сопротивления, ввести условный период коле-
колебаний Тх =2я/ю (см. рис. 19.11), характеризующий чередование
нулей и максимумов. Период Г, совпадает с периодом колебаний
консервативной системы и не зависит от наличия сухого трения.
За каждый период 7] амплитуда колебаний уменьшается на вели-
величину 4а, т. е. убывает во времени по линейному закону.
581
19.4. Вынужденные колебания линейной системы
с одной степенью свободы
Дифференциальное уравнение вынужденных колебаний
линейной системы с одной степенью свободы имеет вид
A9.25).
В случае, когда обобщенная сила Q(t), характеризующая
внешнее воздействие на колебательную систему, изменяется во
времени по закону синуса или косинуса:
где Go, р, Р — соответственно амплитуда, частота и начальная
фаза обобщенной силы, имеет место гармоническое возбуждение
колебаний.
Способы возбуждения вынужденных колебаний.
Определение обобщенной силы Q(t)
Способы возбуждения колебаний можно условно разделить
на группы. На рис. 19.12 приведены три наиболее характерных
способа возбуждения вынужденных колебаний простейшей коле-
колебательной системы. Система представляет собой тело массой т,
имеющее возможность двигаться по гладкой горизонтальной по-
поверхности. С телом скреплена пружина, жесткость которой с.
Обобщенная координата х отсчитывается от положения равнове-
равновесия системы (при отсутствии внешнего воздействия), когда пру-
пружина не напряжена.
1. Силовое возбуждение (см. рис. 19.12, а). Система нахо-
находится под воздействием силы F(t) = FQ sin(pt + Р), приложенной
извне и не зависящей от параметров системы.
В этом случае для получения Q(t) необходимо задать вариа-
вариацию обобщенной координаты 5jc и, вычислив возможную работу
только от действия силы F{t), разделить ее на Ъх:
582
583
2. Кинематическое возбуждение (см. рис. 19.12, б). Вынуж-
Вынужденные колебания возникают в результате задаваемого извне пе-
перемещения точки крепления пружины s(t) = s0 s\n(pt + Р), не за-
зависящего от параметров системы.
Изменение условной потенциальной энергии пружины при
одновременном перемещении ее концов равно
П' = 1/2сХ2 =l/2c[x-s(t)]2.
Тогда
йг =-?f-=-cx+cs(t)=Qu +6@,
дх
где Qn = -ex; Q(t) = cs0 sin(pt + Р).
3. Инерционное возбуждение. Возможны два случая.
A. Вынужденные относительные колебания (см. рис. 19.12, в).
Механическая система находится на подвижном основании, пе-
перемещение которого, независящее от параметров системы, зада-
задается извне, причем необходимо исследовать относительные (по
отношению к подвижному основанию) колебания.
Система координат, связанная с подвижным основанием,
движется вместе с ним поступательно, прямолинейно, но неравно-
неравномерно. Поэтому при составлении дифференциального уравнения
вынужденных относительных колебаний необходимо учитывать
переносную силу инерции Фе = -тае, направление которой про-
противоположно направлению переносного ускорения. Переносное
ускорение ае = ?(/) при этом считается сонаправленным с s(t).
Обобщенная сила Q(t) будет определяться Фе, т. е.
0@ = ^— = -ms(t) = mp2s0 sm(pt + р).
B. Вынужденные колебания, вызываемые вращающимся экс-
эксцентриком (см. рис. 19.12, г). Тело скреплено с эксцентриком,
имеющим массу т] «т9 эксцентриситет /j и вращающимся с
постоянной угловой скоростью. Обозначив через (р = pt + Р угол
отклонения эксцентрика от вертикали, выразим Q(t) через про-
проекцию на горизонталь центробежной силы тхр21х\
584
л m,p2L s'm( pt + BMx 2, . ,
Q{t) = {P ] ^ PJ = m,p2lx sxn(pt + p).
Отметим, что при инерционном возбуждении колебаний, в отли-
отличие от силового и кинематического возбуждений, амплитуда Qo
обобщенной силы пропорциональна р2.
Приведенные примеры, естественно, не охватывают все спо-
способы возбуждения вынужденных колебаний, например возбуж-
возбуждение колебаний вследствие перемещения точки прикрепления
демпфера. Возможно и комбинированное возбуждение колеба-
колебаний, объединяющее несколько способов.
Вынужденные колебания при отсутствии
вязкого сопротивления
При гармоническом возбуждении, согласно A9.25), диффе-
дифференциальное уравнение движения имеет вид
aq + cq = Qo s\n(pt + Р),
или
^ + o2? = /0sin(/?/ + p), A9.41)
Силовое и кинематическое возбуждения
колебаний
Известно, что общее решение линейного неоднородного
уравнения A9.41) можно представить в виде суммы общего ре-
решения qoo однородного уравнения ij + (o2q = 0 и частного реше-
решения qllu неоднородного уравнения:
Общее решение однородного уравнения
q0 0 = С, cos Ш + С2 sin ю/. A9.43)
Частное решение неоднородного уравнения определяется в зави-
зависимости от соотношения частот свободных колебаний и возму-
возмущающей силы. Возможны два случая: отсутствие резонанса
р ф со и резонанс р = со.
585
1. Отсутствие резонанса. В этом случае (/?*со) частное
решение следует искать в виде
где G — искомая постоянная величина.
Подстановка q4H в A9.41) приводит к соотношению
откуда
/о
G =
В соответствии с A9.42) общее решение уравнения A9.41)
будет иметь вид
# = С, coscof + С2 sin со/ + ° sin(/7/ + Р), A9.44)
со -/?
или
# = Л sin(co/ + а) + /° , sinQtf + Р). A9.45)
со - р
Произвольные постоянные С], С2 определим из начальных
условий A9.29), используя полное решение A9.44):
со -р со со(со -р )
При необходимости произвольные постоянные А и а мож-
можно вычислить через С, и С2 по формулам A9.30).
Как следует из A9.44) и A9.45), движение состоит из двух
гармонических колебаний с частотами со и р соответственно.
Первые (с частотой со) можно по аналогии со случаем отсутст-
отсутствия возмущающей силы условно назвать свободными колеба-
колебаниями, а вторые (с частотой р) — вынужденными колебания-
колебаниями системы.
Условность названия «свободные колебания» связана с тем,
что определяющие их произвольные постоянные зависят не толь-
только от начальных условий (9о>9о)> но и от параметров возму-
возмущающей силы (/о,/?,Р), и, следовательно, первые колебания в
586
решении фактически также являются вынужденными колебания-
колебаниями. Однако данное название получило широкое распространение
лишь потому, что вторые колебания имеют частоту р возму-
возмущающей силы, в то время как первые — частоту со свободных
колебаний (собственную частоту).
Отметим, что в реальных системах, где всегда присутствуют
силы вязкого сопротивления, колебания с частотой со со временем
затухают и устанавливаются не зависящие от начальных условий
стационарные вынужденные колебания с частотой р, т. е.
g= / sinQrf + p),
СО -/Г
Если р < со, то установившиеся вынужденные колебания бу-
будут совпадать по фазе с возмущающей силой, если же р > со, то
вынужденные колебания будут находиться в противофазе (сдви-
(сдвинуты по фазе на п) по отношению к возмущающей силе.
Введем амплитуду D вынужденных колебаний:
/ A9.46)
/ 2Г
со -р \
Тогда установившиеся вынужденные колебания можно предста-
представить в виде
q = D sin(pt + p - у), A9.47)
где у — сдвиг по фазе вынужденных колебаний от колебаний
возмущающей силы,
ГО при р < со;
[я при р > со.
Разделим числитель и знаменатель A9.46) на со2. Принимая
во внимание, что /0/со2 =Q0/c = DCT (где /)ст — статическое
смещение системы от положения равновесия под действием по-
постоянной силы, совпадающей по величине с амплитудой Qo), по-
получаем
D-D l
'
587
где z = р/(о — коэффициент расстройки, или относительная
частота вынужденных колебаний.
Величину
*--ч-
|l-z2|
называют коэффициентом динамичности. Коэффициент дина-
динамичности показывает, во сколько раз амплитуда вынужденных
колебаний при гармоническом воздействии больше статического
смещения.
2. Резонанс. В случае совпадения частоты возмущающей си-
силы с частотой свободных колебаний (собственной частотой) воз-
возникает явление резонанса.
При отсутствии сил вязкого сопротивления в случае резо-
резонанса амплитуда вынужденных колебаний, нарастая во времени,
стремится к бесконечности. Это объясняется тем, что, если коле-
колебания происходят с собственной частотой, то инерционные силы
уравновешиваются квазиупругими (ар2 =с) при любых ампли-
амплитудах колебаний. Возмущающая сила оказывается при этом не-
неуравновешенной и увеличивает амплитуду колебаний.
Будем искать частное решение уравнения A9.41) при /> = ©
в виде
Определив q4H = -2Gp sin(pt + р) - Gtp1 cos(pt + P) и подставив
его вместе с q4H в A9.41), получим
- 2Gpsin(pt + р) = /о sin(pt + р).
Отсюда
и, следовательно,
*« = H^cosQ* + Р) = ^sfaO* + Р - Ъ. A9.48)
2р 2р 2
Анализируя решение A9.48), можно сделать вывод, что, с
одной стороны, вынужденные колебания при резонансе смещены
588
по фазе от возмущающей силы на я/2. С другой стороны, можно
заметить, что вынужденные колебания при резонансе происходят
с нарастающей пропорционально времени амплитудой. Зависи-
Зависимость q4H(f) представлена на рис. 19.13.
Рис. 19.13
Отметим, однако, что в реальной колебательной системе, во-
первых, всегда имеется сопротивление, во-вторых, при достиже-
достижении больших амплитуд колебаний нарушается допущение о их
малости и становятся существенными нелинейные восстанавли-
восстанавливающие силы. Все это приводит к тому, что амплитуда колебаний
при резонансе в реальной колебательной системе хотя и может
достигать больших значений, но не является неограниченно воз-
возрастающей.
Резонанс, сопровождающийся нарастанием амплитуды коле-
колебаний пусть до конечных, но больших значений, может стать
причиной разрушения конструкции или возникновения опасных
напряжений, сокращающих срок ее службы. Поэтому при проек-
проектировании машиностроительных конструкций надо, по возмож-
возможности, избегать резонанса.
Инерционное возбуждение колебаний
В случае инерционного возбуждения колебаний
589
где /о =QolaP2 > и измеряется в тех же единицах, что и обоб-
обобщенная координата.
Тогда амплитуду D вынужденных колебаний (см. A9.46))
можно представить в виде
где А,ин — коэффициент динамичности при инерционном воз-
возбуждении колебаний,
Коэффициент динамичности Хт показывает, во сколько раз
амплитуда колебаний при инерционном возбуждении с конечной
частотой р отличается от амплитуды вынужденных колебаний
при бесконечно большой частоте /?-»оо ( z -юо).
Зависимости коэффициентов динамичности X и А,ин и сдви-
сдвига по фазе у от коэффициента расстройки z представлены на
рис. 19.14. Коэффициенты динамичности X и А,ин имеют разры-
разрывы при z = 1, что соответствует резонансу. При z = О X = 1, что
соответствует статическому воздействию на систему, а ХИН = 0,
поскольку при нулевой частоте отсутствует инерционное возбу-
возбуждение. При z->oo, A,->0,a А,ин->1. Сдвиг по фазе у не зави-
зависит от способа возбуждения.
3 z 12 3
Рис. 19.14
590
Вынужденные колебания при наличии вязкого
сопротивления
При гармоническом возбуждении, согласно A9.25), диффе-
дифференциальное уравнение движения имеет вид
aq + bq + cq = Qo sm(pt + р),
или
2 = f0 sm(pt + р). A9.49)
Силовое и кинематическое возбуждения колебаний
Решение A9.49) будем искать в виде суммы A9.42) общего
решения однородного уравнения q + 2sq + o&2q = 0 и частного
решения неоднородного..
В § 19.3 было показано, что общее решение однородного
уравнения может быть представлено в зависимости от соотноше-
соотношения между s и со в одной из трех форм:
q00 =e~*(Cx cosoo^ + Cj sin со,/) при е<ш;
q0Q =е-"(С} +С20 при е = со; A9.50)
qoo =e"el(C]ekt +C2e~kt) при 8>со.
Для определения частного решения уравнения A9.49) вос-
воспользуемся методом комплексных амплитуд. Известно, что
(где i — мнимая единица) и, следовательно,
/osin(^ + p) = Im/oe/(/7/+P).
Поэтому можно ввести вспомогательное уравнение
найти его частное решение учм, а затем, воспользовавшись ли-
линейностью вспомогательного уравнения, для которого справед-
справедлив принцип суперпозиции, получить q4H как 1тучн.
Задав учм в виде уцм = Ge'(/7/+p), где G — комплексная ам-
амплитуда, получим
591
откуда
Здесь
Тогда
J/?2
(со1 -р* +2sip)G = f0,
G = -
/о
/о
(о2 -р2 +2sip) D*eh
; y = arctg /8/? A9.51)
(О -/Г
где
A9.52)
A9.53)
Отсюда
9чн = Im>>4H =
Общее решение A9.49) будет иметь вид
q=e~Et(Cx coscOjZ + Cj sinco^+Dsinipt + p-y) при 8<ю;
^ = е~* (С, + С20 + Dsin(pt + р - у) при г = ю; A9.54)
^ = в"8" (С,** + С2е"^) + D sin(pt + Р - у) при е >ю,
где С, иС2 — константы, определяемые из начальных условий
A9.29) с использованием полного решения A9.54).
Структура общего решения A9.50) однородного уравнения
такова, что при любых отличных от нуля значениях 8 с течением
~8/
времени из-за наличия множителя е8/ оно стремится к нулю, и в
решении A9.54) остается только частное решение. В этом случае
говорят об установившихся вынужденных колебаниях.
На основании решения A9.53) можно сформулировать ос-
основные свойства установившихся вынужденных колебаний:
1)это незатухающие колебания; они длятся так долго, как
долго действует возмущающая сила;
2) эти колебания не зависят от начальных условий;
3) при гармоническом возбуждении они происходят с часто-
частотой возмущающей силы;
592
4) эти колебания отстают по фазе от возмущающей силы на
величину у, изменяющуюся, как будет показано ниже, от 0 до л.
Амплитуда D установившихся вынужденных колебаний и
сдвиг по фазе у зависят в силу A9.51) и A9.52) от соотношения
между частотами р и со и от коэффициента затухания 8. Про-
Проанализируем эти зависимости, называемые амплитудно-
частотной и фазочастотной характеристиками.
Для большей общности результатов перейдем к безразмер-
безразмерным параметрам.
Безразмерным коэффициентом затухания d называют от-
отношение
Если s «со и, следовательно, Тх » Т, то безразмерный коэффи-
коэффициент затухания можно связать с логарифмическим декрементом
колебаний:
, 2s Тх Т 2гТг Т 8 Т 8
со Т Тх 2п Тх п Тг ~ п '
Добротностью Д называют величину, обратную d :
Очевидно, что при малом затухании добротность, как и безраз-
безразмерный коэффициент затухания, может быть выражена через ло-
логарифмический декремент колебаний: Д = я/8.
Разделив числитель и знаменатель амплитуды A9.52) на со2,
получим
Здесь DCT=eo/c,a
i A9.55)
— коэффициент динамичности при наличии вязкого сопротивления.
Исследуем зависимость коэффициента динамичности X от z
и d, представляющую собой амплитудно-частотную характери-
характеристику системы в безразмерном виде:
при z = О X = 1;
39 Зак. 16 593
при
при z = 1 А. = \/d = Д.
Таким образом, добротность Д представляет собой значе-
значение коэффициента динамичности при резонансе; она показывает,
во сколько раз амплитуда колебаний при резонансе отличается
от статического смещения. В отличие от случая отсутствия вяз-
вязкого сопротивления, амплитуда при резонансе имеет конечное
значение.
Если частота р изменения возмущающей силы мала по
сравнению с частотой со свободных колебаний, т. е. р « со, то
амплитуда вынужденных колебаний близка к статическому сме-
смещению, а коэффициент динамичности близок к единице. Если же
р»со9 то колебательная система ведет себя как фильтр, т. е.
практически не воспринимает возмущения с частотами, сущест-
существенно превышающими собственную частоту.
Выражение для коэффициента динамичности A9.55) показы-
показывает, что при малых значениях d вязкое сопротивление стано-
становится существенным лишь в достаточно узкой зоне в окрестности
резонанса, когда величина d2z2 становится соизмеримой с
A-z2J. Это же демонстри-
демонстрирует график X(z) при t/ = 0,
приведенный на рис. 19.15.
Поэтому при определении ам-
амплитуды вынужденных коле-
колебаний в реальных системах с
малым вязким сопротивлением
последнее можно не учитывать,
если известно, что частота р
возмущающей силы далека от
собственной частоты со.
Для определения экстре-
экстремальных значений коэффици-
коэффициента динамичности достаточно
исследовать подкоренное вы-
выражение в уравнении A9.55),
Рис. 19.15
594
поскольку его максимум в силу структуры уравнения A9.55) бу-
будет соответствовать минимуму X, и наоборот.
Вычислим производные по z от подкоренного выражения
y(z) = (\-z2J+d2z2:
y\z) = -4z(] -z2) + 2d2z = 2z(d2 - 2 + 2z2) ,
y\z) = 2(d2 -2 + 2z2) + Sz2 =\2z2 -4(\-d2/2).
Приравняв к нулю yr(z), получим два значения z, соответст-
соответствующие экстремумам:
(второе значение имеет место только при d<V2, причем при
d = л/2 оно совпадает с первым).
Если d < V2 , то вторая производная y"{z) отрицательна при
z, и положительна при z2, следовательно, z] соответствует мак-
максимуму y(z) и локальному минимуму X(z), a z2 — минимуму
y(z) и максимуму X(z). Максимальное значение коэффициента
динамичности при этом будет равно
*>. ' - д
При d>42 остается только одно экстремальное значение
Zj =0; в этом случае имеет место минимум y(z) и максимум
На рис. 19.15 представлены кривые, определяющие зависи-
зависимость X(z) при различных значениях коэффициента d. При
d>42 максимальное значение коэффициента динамичности
X = 1 соответствует z = 0, т. е. амплитуда установившихся выну-
вынужденных колебаний равна или меньше статического смещения.
При других значениях d максимум X(z) оказывается всегда
сдвинутым влево от резонансной частоты.
39* 595
Для исследования фазочастотной характеристики в безраз-
безразмерном виде разделим числитель и знаменатель аргумента арк-
арктангенса A9.51) на со2:
2е/?
у = arctg РР = arctg -^.
1 - р /со 1 -z
Учтем, что производная y(z) no z независимо от значения d
(кроме d = О) положительна при всех значениях z, т. е. y(z)
представляет собой монотонно возрастающую функцию. Тогда
при z = 0 у = arctg(O) = 0;
при z = 1 у = arctg(oo) = я/2 ;
при z-»oo у = arctg(-O) = я.
Отметим, что при резонансе фазо-
фазовое запаздывание у = я/2 незави-
независимо от значения коэффициента
d, характеризующего вязкое со-
сопротивление.
На рис. 19.16 представлены
кривые, характеризующие зави-
зависимость y(z) при различных зна-
О - I I ^Г чениях d . При d - 0 (отсутствие
вязкого сопротивления) y(z)
Рис. 19.16 представляет собой разрывную
функцию (см. рис. 19.14, в). Отме-
Отметим, что с ростом d меняется характер фазовой кривой, она
трансформируется из кривой с двумя перегибами в кривую с од-
одним перегибом.
Инерционное возбуждение колебаний
В случае инерционного возбуждения колебаний, как и при
отсутствии вязкого сопротивления,
fo=foP2-
596
Тогда
я = 7(А<н-
Здесь коэффициент динамичности Хин при инерционном возбуж-
возбуждении
f4eV y[(}-z2J+d2z2
Для исследования амплитудно-частотной характеристики,
заменив коэффициент расстройки z обратной ему величиной
\ = со/р, получим
1
По структуре ^ин(?) полностью совпадает с \{z) при силовом
или кинематическом возбуждении. Следовательно,
при z = 0 § -» оо, Хин = 0;
при z->oo 4 = 0, ^„„=1;
при z = \ 4 = 1, km=l/d = R.
При d<y[l имеет место максимальное значение
, которому соответствует ?> = J\-d2/2 или
^2/4
1
z = , г, т. е. в отличие от силового или кинематического
возбуждения максимальное значение коэффициента динамично-
динамичности смещено вправо от резонансной частоты.
При d > ы2 максимальное значение Л,ин = 1, z -> оо.
Зависимость A,HH(z) при различных значениях коэффициента
d представлена на рис. 19.17. Как и в случае силового или кине-
кинематического возбуждения, при определении амплитуды вынуж-
вынужденных колебаний в реальных системах с малым вязким сопро-
сопротивлением последнее можно не учитывать, если известно, что
частота р возмущающей силы далека от собственной частоты со.
Фазочастотная характеристика не зависит от способа возбу-
возбуждения (см. рис. 19.16).
Рис. 19.17
Переходные процессы
Важной характеристикой колебательной системы является
временная характеристика — изменение колебаний во времени.
Анализ решения A9.54) показал, что по истечении определен-
определенного промежутка времени с начала колебаний свободное дви-
движение затухает. Однако оно возникает каждый раз, когда из-
изменяется возмущающая сила: возникает, меняется ее амплитуда,
или частота, и наконец, прекращает действовать. Возникнув,
свободное движение осуществляет плавный переходный про-
процесс от одного установившегося режима вынужденных колеба-
колебаний к другому.
Для того чтобы получить переходный процесс, необходимо
зафиксировать значения отклонения и скорости в момент изме-
изменения возмущающей силы, а затем, считая эти значения началь-
начальными условиями, использовать полное решение A9.54), опреде-
определив в нем произвольные постоянные.
598
Пример 19.6. К телу массой т = 1 кг (см. рис. 19.2, я), подвешенному на
пружине АВУ жесткость которой с = 144 Н/м, приложена сила Fit) = Fo sin pt,
где FQ = 2 H; p = 8 рад/с. При движении тело преодолевает силу вязкого со-
сопротивления F" = -hv , где Л = 1Н • с/м. В начальный момент тело смещено от
положения равновесия на 4 см и отпущено без начальной скорости. Через 200 с
после начала движения амплитуда приложенной силы увеличилась в полтора
раза, а еще через 200 с действие силы прекратилось. Исследовать движение тела.
Решение. Рассмотрим три временных интервала движения: О...2ООс,
200...400 с и более 400 с.
На первом интервале (промежуток времени от 0 до 200 с) дифференциаль-
дифференциальное уравнение движения в каноническом виде A9.5) при р = 0 имеет вид
где е = h/2m = 0,5 рад; (й = у[с/т =12 рад; /0 =F0/m = 2 м/с2 .
Поскольку ? < со, запишем решение в виде
где Си и С21 — произвольные постоянные на первом интервале движения;
ю.=л/(О2-е2 = 11,99рад; ?> = . ^° =0,025 м; y=arctg ?*
/B2J4У
. 0,025 м; yarctg ? . =
Л/(со2-р2J+4еУ rt-P
= 0,1 рад.
Подставив в общее решение начальные условия:
при/ = 0 д: = 0,04м; д: = 0,
определим произвольные постоянные Сп = 0,042 м; С2\ =-0,015 м . Следова-
Следовательно,
Процесс перехода от начального смещения к установившимся вынужден-
вынужденным колебаниям представлен на рис. 19.18, а. Видно, что продолжительность
переходного процесса составляет примерно 9 с. Поскольку она существенно
меньше 200 с, можно при определении параметров движения в конце первого
интервала учитывать только частное решение, определяющее установившиеся
вынужденные колебания:
* = 200с;
jcB00) = Dsin(pt - у) = -0,018 м;
i:B00) = Dpcos(pt-y) = -0,134 м/с.
Эти значения будут начальными условиями на втором интервале движения.
На втором интервале (промежуток времени от 200 до 400 с) решение с уче-
учетом линейной зависимости D(F0) будет иметь вид
599
где t2 =<-200c ; Cl2, С22 — произвольные постоянные на втором интервале
движения, Сп = -0,015 м; С22 = -0,037 м .
о-
-0,04-
х,м
0,04-
0
-0,04
а
4 6 8 10
Переходный процесс
198 200
208
, Переходный процесс ,
398 400 402 404 406 408
Рис. 19.18
Подставив числовые значения, получим
х = -<r°'5'2 @,015cosl l,99f2 + 0,037sin 11,99/2) + 0,037sin(8/2 -0,1).
Процесс перехода от установившихся вынужденных колебаний с амплиту-
амплитудой D к установившимся вынужденным колебаниям с амплитудой 1,5 D пред-
представлен на рис. 19.18,6. Продолжительность переходного процесса на втором
интервале движения составляет примерно 7 с.
Используя, как и на первом интервале, только частное решение, получим
параметры в конце второго интервала, являющиеся начальными условиями для
третьего интервала движения:
г2 = 200с;
*B00) = l,5Z)sin(pf - у) = -0,0275 м;
*B00) = \,5DpQOs(pt - у) = -0,2015 м/с.
600
На третьем интервале (продолжительность более 400 с) решение при от-
отсутствии возмущающей силы можно записать в виде уравнения затухающих
колебаний
х = е~щ (Cj з cos 0)^3 + С23 sin ау3),
где f3=f-400c.
Определив произвольные постоянные С13 и С23 из начальных условий для
этого интервала по формулам A9.35):
С,з = -0,0275 м; С23 = -0,018 м ,
получим следующее решение:
х = -е"'5'3 @,0275cosl l,99f3 -hO,O18sinll,99r3).
Процесс перехода от установившихся вынужденных колебаний с амплитудой
1,5 D к состоянию покоя представлен на рис. 19.18, в. Его продолжительность
составляет примерно 6 с.
Вынужденные колебания в случае периодической
возмущающей силы
Часто в технических задачах возмущающая сила является
периодической, но негармонической. Примеры такой силы при-
приведены на рис. 19.19.
ею*
Рис. 19.19
38 Зак. 16
601
Дифференциальное уравнение движения механической сис-
системы в этом случае может быть представлено в виде
acj + bq + cq = Q(t)9 A9.56)
где Q(t) = Q(t + Гв); Тв — период возмущающей силы.
Ограничимся случаями силового и кинематического возбуж-
возбуждений. Пусть функция Q(i) удовлетворяет условиям Дирихле,
т.е. она ограничена, имеет разрывы первого рода и конечное
число экстремумов на конечном интервале. Тогда Q{f) можно
разложить в ряд Фурье:
00
6@ = во + У](я„ cos npt + Ъп sin npt), A9.57)
где Q0=^=^r]Q(t)dt; an=l-)Q(t)cosnptdt; bn =
1 *в о ^в о
т
~ ]Q(t)sinnptdt (« = 1,2,...).
ув о
Тригонометрический ряд A9.57) можно представить в ам-
амплитудной форме
6@ = О. +Sensm(^ + pn), A9.58)
Qn =^а2п+Ъ2п\рп =пр; Рй =arctg(ajbn) .
Отдельные члены этого ряда называют гармониками', значе-
значениям п-1,2,3... соответствуют гармоники первого, второго,
третьего и т.д. порядков.
Подставив A9.58) в A9.56) и разделив каждый член полу-
полученного выражения на а, получим дифференциальное уравнение
в канонической форме:
оо
? + со2? =/0 + ]Г/w sin(pnf + р„).
Решение этого уравнения, как и в случае гармонической возму-
возмущающей силы, можно представить в виде суммы общего решения
однородного уравнения, характеризующего свободное движение,
602
и частного решения неоднородного уравнения, характеризующе-
характеризующего установившиеся вынужденные колебания.
В силу линейности дифференциального уравнения частное
решение будет представлять сумму
где q^ =Qo/c — смещение центра установившихся крлебаний
от положения равновесия при Qo * 0; q^l =Dn sm(pnt+$n -уя);
Dn, yn — амплитуда и сдвиг фазы и-й гармоники установивших-
установившихся вынужденных колебаний, определяемые по формулам A9.51),
A9.52) после замены в них р на рп.
В силу кратности частот установившиеся вынужденные ко-
колебания будут периодическими с периодом Гв, однако закон
изменения q4 H во времени не будет соответствовать закону из-
изменения вынуждающей силы. Здесь действуют следующие за-
закономерности. С одной стороны, последовательность амплитуд
Qn представляет собой дискретный линейчатый спектр с тен-
тенденцией уменьшения Qn с ростом п. В зависимости от закона
изменения Q(t) ряд Фурье может сходиться достаточно быстро
как, например, для силы, представленной на рис. 19.19, а, так и
относительно медленно (в случае импульсной нагрузки, приве-
приведенной на рис. 19.19, в). Сама механическая система при этом
ведет себя как фильтр: пропускает практически без искажения
гармоники с частотами, много меньшими собственной частоты
со , усиливает гармоники с частотами, близкими к резонансной,
и не пропускает гармоники с частотами, много большими со.
Из-за этого возникают амплитудные искажения . Последнее об-
обстоятельство, кстати, всегда позволяет ограничиться конечным
числом гармоник п0.
С другой стороны, при наличии вязкого сопротивления у
; гармоник оказываются различными фазовые сдвиги, что при
! суммировании приводит к возникновению фазовых искажений.
j Таким образом, при выборе щ возможны две ситуации:
i
L 38* 603
у1
1) р = 2п/Тв <со. В этом случае какое-либо значение рп
может оказаться близким к ю (резонансный режим) и из-за воз-
возрастания Хп доля этой гармоники в частном решении будет зна-
значительно больше остальных, поэтому щ должно быть больше л,
соответствующего резонансному режиму.
2) р = 2п/Тв >со. В этом случае резонанс невозможен, коэф-
коэффициенты динамичности монотонно убывают с увеличением п и
можно ограничиться достаточно малым щ.
Вынужденные колебания в случае произвольной
возмущающей силы
При отсутствии вязкого сопротивления (е = 0) дифферен-
дифференциальное уравнение вынужденных колебаний имеет вид
Q A9.59)
а
В соответствии с методом вариации произвольных постоян-
постоянных представим решение A9.59) в виде
9 = C,(/)coscD/ + C2(Osina>/, A9.60)
где С,(/), C2(t) —искомые функции времени.
Дифференцируя по времени, получаем
q = C1(/)cosco/ + C2(t)sin(ot -C,(/)(Dsin<D/ + C2(t)(ocos(Dt.
Ta^c как неизвестные функции две — Cx(t) и C2(t), то в соответ-
соответствии с методом вариации произвольных постоянных их можно
связать дополнительным условием, потребовав, чтобы выражение
для q имело тот же вид, что и при постоянных Q и С2, т. е.
приняв
C1(Ocoso>r + C2(Osina)/ = 0. A9.61)
Тогда
q = -С, (f)cDsin со/ + C2(OG>cosoDf. A9.62)
Продифференцировав q по времени:
604
q = -С, (/)cosin со/ + C2 (/)cocosco/ -
A9.63)
- со2[C, (/)cosco/ + С2 (/)sin со/]
и подставив A9.60) и A9.63) в A9.59), получим
-C,(/)sinco/ + C2(/)cosco/ = — Q(t). A9.64)
асо
Уравнения A9.61) и A9.64) представляют собой неоднород-
неоднородную алгебраическую систему относительно С, (/) и С2(/), не-
невырожденную при любых значениях со, поскольку определитель
системы А = cos2 со/ + sin2 со/ = 1. Решая систему по способу Кра-
Крамера, находим
С, (/) = - — Q{t)sin со/; С2(/) = — ?(/)cosco/.
асо аса
Откуда следует
1 '<
С, (/) = #,-
асоп
, A9.65)
С2 (/) = #2 4- fg(x)COSC0Xrfl,
aco0J
где х — текущее время от 0 до /; Н]9 Н2 — произвольные по-
постоянные, равные значениям С, и С2 при / = 0 и определяемые
из начальных условий A9.29).
В соответствии с выражениями A9.60) и A9.62)
Подставив с учетом начальных условий A9.65) в A9.60), по-
получим
q = q0 cosco/ + —sinсо/ +
со
+ — sin о/ Jg(x)cosQx<tfx-cosco/Jg(x)sincoxtfr
a® L о о
Множители sin со/ и cosco/, стоящие перед интегралами и неза-
независящие от переменной интегрирования х, можно внести под
знаки интегралов. Тогда
605
q = q0 cosco/ + — sin со/+
CO
i t
+ — f g(x)(sin со / • cos сот - cos со / • sin cox)*/x =
aco0
= q0 cos со/ + —sin со/ + — fg(x) sin co(/ -
со aco j
Если сила Q(t) начинает действовать на покоящуюся систему
(q0 =0, q0 =0),то решение имеет вид
q = — fg(x)sin со(/ -
acoJ
aco0
Слагаемое q0 cosco/ + — sin со/ описывает свободные колебания,
со
возникающие в результате начального возмущения.
При наличии вязкого сопротивления дифференциальное
уравнение движения будет следующим:
q + 2sq + <o2q = -Q(t). A9.66)
а
Ограничимся важным для инженерной практики случаем ма-
малого вязкого сопротивления (8 < со ). Сделаем замену переменных:
q = e*y\ A9.67)
q = -ze~zty + e~"y;
где у — новая переменная.
После подстановки q, q, q в A9.66) имеем
e~etу + (а2 -г2)е-"у = -Q(t).
а
Разделив на e~el и учитывая, что со2 -s2 =co2, находим
а
Решение полученного уравнения аналогично решению урав-
уравнения A9.59) с заменой со на C0j и Q(t) на Q(t)ezl':
606
1 t
y = Hx cos со,/ + Я2 sin со,/ + |б(х)еет sin со, (/ - x)ch.
асо, 0
Умножая в соответствии с A9.67) на е~* и внося е~* под знак
интеграла, получаем
q = е~8' (Я, cos со,/ + Я2 sin со,/) + ffi(T)e~8(/~T) sin со, (/ - х)Л,
асо, j
где Нх, Н2 — произвольные постоянные, определяемые из на-
начальных условий A9.29), Я, =#0; Я2 =(^0 +8^0)/со, .
Слагаемое
е~е' (^о cos°V + — — sin ©iO
CD,
описывает свободные затухающие колебания, возникающие в
результате начального возмущения, а
sin со, (/ -
есть решение в случае, когда движение начинается при нулевых
начальных условиях или при произвольных начальных условиях,
но по истечении времени, равного Зх0.
19.5. Основы теории регистрирующих приборов
Рассмотрим принципы работы некоторых приборов, пред-
предназначенных для регистрации переменных во времени физиче-
физических величин. Ограничимся случаем, когда измеряемая величи-
величина является периодической (и, следовательно, может быть
представлена в виде суммы гармоник) либо, в частном случае,
гармонической.
Практически все приборы в качестве одного из основных
элементов имеют пружину того или иного типа, деформация ко-
.. торой, порождаемая воздействием измеряемой величины (непо-
(непосредственно или через систему датчик — усилитель — преобра-
преобразователь), и определяет показания прибора.
\: 607
F
А А А Л
vVVVV
Простейшая схема прибора
представлена на рис. 19.20, где F —
сила, определяемая измеряемой ве-
личиной х; у — показания прибора,
пропорциональные деформации пру-
ГТ^ТТ1"! жины под действием силы F . Пока-
у зания прибора есть у = /(*).
Рис. 19.20 Основным требованием, предъяв-
предъявляемым к прибору, является соответ-
соответствие его показаний измеряемой функции. В идеале должно вы-
выполняться условие y(t) = Kx(t), где К — постоянная величина.
Отметим, что получить такой результат практически невозможно,
если не ввести ограничений на измеряемые процессы и не подоб-
подобрать для них прибор. Действительно, каждый прибор дает иска-
искажения, и сделать эти искажения минимальными можно только
для определенного по частотным характеристикам процесса.
Остановимся на приборах двух типов: квазистатических и
сейсмических.
Квазистатическими называют такие приборы, принцип из-
измерения переменных величин у которых тот же, что и при изме-
измерении постоянных (статических) величин. Идеальным прибором
такого типа была бы пружина со стрелкой без массы, представ-
представленная на рис. 19.20. Однако в действительности и стрелка, и не-
некоторые другие части приборов обладают массой и движутся при
измерении физических величин, поэтому нельзя пренебрегать как
инерцией подвижных частей, так и возникающим при движении
вязким сопротивлением. То есть необходимо рассматривать при-
прибор как некоторую колебательную систему с одной степенью
свободы, подверженную силовому воздействию измеряемой ве-
величины.
Одним из самых распространенных квазистатических прибо-
приборов является гилейфовый осциллограф, предназначенный для оп-
оптической записи колебаний тока, в который преобразуется изме-
измеряемая величина. Основой прибора является шлейф — петля из
тонкой высокопрочной проволоки, натянутая на изоляторы в по-
постоянном магнитном поле, к которой приклеено небольшое зер-
зеркальце (рис. 19.21). При протекании тока через петлю проволочки
608
i
i
¦MB
—
Рис. 19.21
отклоняются в магнитном поле в разные сто-
роны (на рисунке видно, что направление тока
в них противоположное) и зеркальце повора-
поворачивается. На зеркальце направляется сфокуси-
сфокусированный световой луч, отражение которого
фиксируется на рулонной фотобумаге (или ки-
кинопленке), движущейся с фиксированной ско-
скоростью, что и создает запись процесса.
Собственная частота шлейфа определяется
натяжением нитей (их толщиной и допусти-
допустимыми нагрузками в материале), массой и раз-
размерами зеркальца, а также массой нитей. По-
Последнее обстоятельство не позволяет получить
сколь угодно большую собственную частоту, поскольку, уве-
увеличивая натяжение нитей, мы должны увеличивать их толщи-
толщину, а следовательно, и массу. Можно получить собственную
частоту порядка 15 кГц, но чувствительность такого шлейфа
будет невысокой. Обычно собственная частота лежит в преде-
пределах 2-5 кГц. Для обеспечения необходимого значения коэффи-
коэффициента затухания шлейф помещают в прозрачное масло опре-
определенной вязкости.
Если обратиться к графикам коэффициента динамичности при
силовом возбуждении (см. рис. 19.15) и фазового сдвига (см.
рис. 19.16), то кажется, что решение проблемы точности прибора
очевидно. Поскольку коэффициент динамичности при 2 = 0 имеет
экстремум и, следовательно, в некоторой окрестности z = 0 изме-
изменяется достаточно слабо, можно потребовать, во-первых, чтобы
собственная частота прибора значительно превышала максималь-
максимальную частоту учитываемых гармоник в разложении в ряд периоди-
периодической измеряемой величины. Тогда коэффициент динамичности
по всем учитываемым гармоникам будет примерно равен единице,
что исключит амплитудные искажения, на которые указывалось в
§ 19.4 при рассмотрении вынужденных колебаний в случае перио-
периодической возмущающей силы. Во-вторых, нужно чтобы фазовые
сдвиги по любой из учитьюаемых гармоник были близки к нулю
(что исключает фазовые искажения). Для этого необходимо, чтобы
прибор имел как можно большую добротность Д и соответственно
как можно меньший безразмерный коэффициент затухания d .
609
Однако не все так очевидно. Прежде всего, нельзя использо-
использовать приборы с большой добротностью, если реальные регистри-
регистрируемые процессы не являются периодическими, поскольку воз-
возникающие в этом случае свободные колебания (переходные
процессы) будут затухать очень медленно и сильно искажать по-
показания прибора. Поэтому приходится выбирать достаточно ма-
малые значения добротности, близкие к единице. Что касается пер-
первого условия, то оно в целом выполнимо при регистрации
относительно низкочастотных процессов. В случае высокочастот-
высокочастотных процессов, в силу естественной ограниченности собственной
частоты прибора, необходимо увеличивать зону в окрестности
z = 0, в которой коэффициент динамичности незначительно от-
отличается от единицы.
На графике (см. рис. 19.15) видно, что при значениях доб-
добротности, близких к единице, зона малых амплитудных искаже-
искажений значительно расширяется. Наилучший результат получается
при добротности, равной 0,91 (рис. 19.22), когда отклонение ко-
коэффициента динамичности от единицы на всем диапазоне z от 0
до 1 не превышает 9%. Но максимальный фазовый сдвиг на
этом диапазоне будет достигать 90°, а это недопустимо. Даже
при использовании половины ширины области (до z = 0,5) мак-
максимальный фазовый сдвиг для высшей гармоники будет состав-
составлять 30-35°.
В некоторых случаях можно до-
допустить такие искажения, но их надо
иметь в виду. Например, при регист-
регистрации гармонических колебаний запи-
записанные показания прибора будут от-
отставать от регистрируемого процесса
по фазе на величину, которую можно
_ определить по паспорту прибора. При
регистрации же периодических (поли-
(полигармонических) процессов приходится
идти на компромисс между искаже-
искажениями по фазе и амплитуде, несколько
Р 19 22 увеличивая добротность прибора. При
этом, если есть такая возможность,
610
надо всегда стремиться к уменьшению диапазона измеряемых
частот по отношению к собственной частоте прибора, поскольку
при zwmax=0,l добротность прибора практически не влияет на
амплитудные искажения и очень мало влияет на фазовые.
Сейсмическими называются приборы, используемые для за-
замера вибраций подвижных объектов ( автомобилей, железнодо-
железнодорожных вагонов, самолетов и т. д.), поскольку они построены по
такому же принципу, что и сейсмографы — приборы для регист-
регистрации колебаний земной коры. При этом проблема состоит в том,
что необходимо замерить абсолютные колебания изучаемого
объекта, т. е. его колебания относительно некоторой реально не-
несуществующей «неподвижной» системы отсчета. Следовательно,
в приборе должно быть тело, покоящееся относительно такой
«неподвижной» системы отсчета, чтобы измерять колебания ис-
исследуемого объекта относительно этого тела.
Таким телом отсчета может служить тело А, упруго скреплен-
скрепленное с исследуемым объектом В (рис. 19.23). В соответствии с гра-
графиком, приведенном на рис. 19.15 при z »1 (в случае, когда соб-
собственная частота колебаний тела на пружине — собственная
частота прибора существенно меньше частоты низшей гармоники),
коэффициент динамичности X » 0, т. е. тело А остается практи-
практически неподвижным. При этом запись движения объекта относи-
относительно тела с точностью до знака будет соответствовать колеба-
колебаниям объекта.
В
Рис. 19.23
Таким образом, в сейсмических приборах соотношение меж-
? ду собственной частотой и частотами регистрируемых гармоник
i' обратно тому, которое имеет место в квазистатических приборах.
f
i 611
Вопрос о выборе добротности решают так же, как и для ква-
квазистатических приборов.
19.6. Основы виброзащиты
Проблемы, связанные с защитой объекта от вредного воздей-
воздействия вибраций {виброзащитой), рассмотрим на простейших
примерах систем с одной степенью свободы.
Необходимость виброзащиты возникает в двух случаях:
1) когда нужно уменьшить воздействие от вибраций, возни-
возникающих в процессе работы какой-либо машины на фундамент;
2) когда необходимо защитить какое-либо устройство (эки-
(экипаж, прибор и т. д.) от вредного воздействия вибраций, возни-
возникающих при транспортировке или являющихся результатом ра-
работы находящихся рядом машин.
Исследуем вынужденные прямолинейные колебания тела
массой т. В первом случае возмущающая сила приложена непо-
непосредственно к телу (см. рис. 19.24, а) — силовое возбуждение
колебаний, во втором случае (рис. 19.24, б) имеет место кинема-
кинематическое возбуждение колебаний из-за вибрации основания.
Fit)
т
V///////////////////.
а
Рис. 19.24
При ершовом возбуждении необходимо, чтобы воздействие
на фундамент было по возможности малым. Поскольку станки,
двигатели или другие аналогичные машины, создающие в про-
процессе работы вибрации, устанавливают, как правило, на фунда-
фундамент через амортизирующие подушки (прокладки), изготовленные
612
из специальных сортов резины, обладающих помимо упругости
большим внутренним неупругим сопротивлением, эти подушки
можно аппроксимировать пружиной жесткостью с и демпфером с
коэффициентом вязкого сопротивления h (см. рис. 19.24, а). То-
Тогда динамическое воздействие на фундамент будет равно
A9.68)
где хс — перемещение тела относительно положения статиче-
статического равновесия.
При кинематическом возбуждении колебаний необходимо,
чтобы как можно более малыми были абсолютные перемещения
тела хк (см. рис. 19.24, б).
При силовом возбуждении, учитывая, что сила тяжести ком-
компенсируется статической деформацией пружины, уравнение дви-
движения тела имеет вид
тхс + hxc + схс = F(t), A9.69)
а при кинематическом возбуждении
тхк + h[xK - s(t)] + c[xK - s(t)] = 0,
или
тхк + hxK + схк = cs(t) + hs(t). A9.70)
Будем считать, что возмущающая сила и вибрация основания
изменяются во времени по гармоническому закону, и воспользу-
воспользуемся изложенным выше методом комплексных амплитуд. Зада-
Зададимся частным решением уравнения A9.69) в виде хс =Geipt и,
подставив хс в A9.68) и A9.69), получим
F(t) = {-mp2 + hip + c)Geipt.
Следовательно, отношение динамического воздействия на фун-
фундамент к действующей силе
R(t) (с + hip) со2 + Шр
F(t) (с - тр2 + hip) (со2 - р2 + 2eip)'
В рассматриваемом случае важно только соотношение меж-
между амплитудами R(t) и F(t) , а фазовый сдвиг между ними инте-
интереса не представляет. Обозначим отношение амплитуд через
613
При кинематическом возбуждении, подставив xK=Geipt и
s(t)=soeipt в A9.70), получим
(с - тр2 + /ф)хк @ = (с + hip)s(t),
откуда
*к @ _ 2
^@ (с-тр2 + hip) (со2 -/?2 + 2eip)
Как и в случае силового возбуждения, интерес представляет
только отношение амплитуд хк (t) и s(t). Обозначим через
(.9.72)
Сопоставив A9.71) и A9.72), приходим к выводу, что усло-
условия виброзащиты для случаев силового и кинематического воз-
возбуждений совпадают. Для этого необходимо, чтобы выполнялось
условие
* <1. A9.73)
222
Введем, как и ранее, коэффициент расстройки z = /?/co и
безразмерный коэффициент затухания d = 2е/ю. Тогда, разделив
числитель и знаменатель A9.73) на (о2, получим условие вибро-
виброзащиты в виде
Откуда имеем
A-z2J +d2z2>\
или
r2(z2-2)>0.
Это неравенство имеет место при z > V2 или р >ш л/2 .
614
Зависимость P(z) пред-
представлена на рис. 19.25.
Видно, что для виброза-
виброзащиты необходимо, чтобы
независимо от способа воз-
возмущения и вязкого сопротив-
сопротивления частота собственных
колебаний системы была бы
значительно ниже (по край-
крайней мере в л/2раз) частоты
возбуждения.
Как видно на графике
P(z), при р > ayjl, т. е. в
области виброзащиты, демп-
демпфирование играет отрица-
отрицательную роль, поскольку чем
меньше демпфирование, тем
больше эффект виброзащиты. Казалось бы, что нужно уменьшать
демпфирование, однако это не всегда так.
Необходимо учитывать, что при силовом возбуждении любая
машина при пуске проходит режим раскрутки, а при остановке —
режим торможения. Частота возбуждения при этом меняется от ну-
нуля до р и наоборот. То есть система проходит через резонанс, что
вынуждает консфуктора вводить в ущерб виброзащите достаточное
демпфирование с целью уменьшить амплитуду резонансных коле-
колебаний. При кинематическом возбуждении возможно скачкообразное
перемещение основания (наезд на препятствие, попадание колеса в
яму и т. д.), что при отсутствии демпферов (амортизаторов) может
привести к недопустимым перемещениям и, следовательно, пере-
перегрузкам виброзащищаемого объекта, а также к длительному процес-
процессу затухания возникающих свободных колебаний.
Рис. 19.25
19.7. Дифференциальные уравнения малых колебаний
линейной системы с конечным числом степеней свободы
Рассмотрим механическую систему, состоящую из N мате-
материальных точек и имеющую п степеней свободы, на которую
615
наложены голономные стационарные связи. Предполагая, что
система имеет устойчивое положение равновесия, будем от-
отсчитывать от этого положения обобщенные координаты qt
(i = 1,2,..., п). Сохраним допущения относительно сил, дейст-
действующих на систему, сделанные при выводе дифференциально-
дифференциального уравнения малых колебаний системы с одной степенью сво-
свободы.
Воспользуемся уравнениями Лагранжа второго рода:
Т||?1| аеш+б(д+а@ 0* = 1,2,...,п). A9.74)
di{dqj bqt
В соответствии с предположением о малости колебаний будем
считать обобщенные координаты, их скорости и ускорения вели-
величинами первого порядка малости. В силу стационарности нало-
наложенных на систему связей радиус-векторы точек зависят только
от обобщенных координат:
rk=rk(ql9...,qn).
Тогда
*,.?5..?Щ A9.75)
и, следовательно, кинетическая энергия системы
. . Iff . . .
(=, ,-=11=1 d?,- d^; 2 I=1 y=1
Здесь масса А:-й материальной точки тк, ее скорость vk, a
причем А&. являются в общем случае, как и г^, ф)шкциями обоб-
обобщенных координат.
Разложим A(j в ряд Маклорена в окрестности положения
равновесия:
616
В силу малости колебаний будем учитывать только первые члены
разложения, которые обозначим
и назовем обобщенными инерционными коэффициентами,
причем, согласно A9.76), аг] =я;/.
Окончательно имеем
4
Z /=1 7=1
Кинетическая энергия оказалась квадратичной формой обобщен-
обобщенных скоростей. Известно, что кинетическая энергия механиче-
механической системы может быть либо положительна, если отлична от
нуля хотя бы одна обобщенная скорость, либо равна нулю при
всех равных нулю обобщенных скоростях. Следовательно, квад-
квадратичная форма кинетической энергии A9.77) является положи-
положительно-определенной.
Составляющая обобщенной силы от потенциальных сил
Разложим потенциальную энергию системы II(qi,q2,...,qn) в
ряд Маклорена в окрестности положения равновесия:
A9.79)
A9-78)
Первый член в разложении A9.79) равен нулю, поскольку потен-
потенциальная энергия и обобщенные координаты отсчитываются от
положения равновесия; вторые члены, включающие в себя
617
fan
—- , также равны нулю, поскольку в положении равновесия
Л Л
потенциальная энергия имеет экстремум; четвертые и последую-
последующие члены отбрасываем в силу предположения о малости коле-
колебаний. Тогда
Обозначим ——— через с., и назовем их квазиупругими
.,
коэффициентами, причем ctj = cjt.
Окончательно имеем
?АЧ;, A9.80)
L 1=1 ;=i
т. е. потенциальная энергия представляет собой квадратичную
форму обобщенных координат.
Выясним, в каком случае положение равновесия колебатель-
колебательной системы будет устойчивым. Согласно теореме Лагранжа,
достаточным условием устойчивости положения равновесия кон-
консервативной системы является наличие в нем локального миниму-
минимума потенциальной энергии. Выше было принято, что потенциаль-
потенциальная энергия в положении равновесия равна нулю. Следовательно,
для устойчивости положения равновесия достаточно, чтобы в не-
некоторой окрестности положения равновесия она была строго
больше нуля и обращалась в нуль только при всех нулевых зна-
значениях обобщенных координат. Другими словами, достаточно,
чтобы квадратичная форма A9.80) была положительно-
определенной.
В соответствии с критерием Сильвестра, для того чтобы
квадратичная форма была положительно-определенной, необхо-
необходимо и достаточно, чтобы все главные диагональные миноры
матрицы коэффициентов квадратичной формы были строго
больше нуля.
Запишем в соответствии с A9.80) матрицу коэффициентов
квадратичной формы
618
^11 42 ••• Чп
с„ съ ... с1п . A9.81)
Сп\ Сп2 ••• Ст_
Тогда, в соответствии с теоремой Лагранжа и критерием Сильве-
Сильвестра достаточное условие устойчивости положения равновесия
консервативной колебательной системы имеет вид
сп сп ... сХп
си
'21
22
'21
22
-2/1
п\
-п2
Поскольку всегда можно изменить нумерацию обобщенных ко-
координат и любую из них сделать первой, то очевидно, что все
элементы матрицы A9.81), стоящие на главной диагонали, долж-
должны быть строго больше нуля:
си>0 (/ = 1,2,...,п).
Для анализа устойчивости положения равновесия при нали-
наличии диссипативных сил можно так же, как и в случае системы с
одной степенью свободы, воспользоваться теоремами Кельвина.
Пример 19.7. Определить, при каких значе-
значениях жесткости пружины с положение равнове-
равновесия системы, состоящей из двух связанных меж-
между собой пружиной математических маятников
(рис. 19.26), будет устойчиво.
Решение. Изменение потенциальной энергии
системы при отклонении от положения равнове-
равновесия (ф = 0, \|/ = 0) будет результатом подъема
груза левого маятника на высоту
Л, = 3/A - cos ф), опускания груза правого маят-
маятника на высоту /^ = 2/A —cos\|/) и деформации
пружины. Полагая, что в .положении равновесия
пружина не деформирована, запишем изменение
ее потенциальной энергии в виде сА?/2, где X —
деформация пружины, которую в силу предпо-
предположения о малости колебаний можно определить
по формуле X = /ф - l\\f = /(ф - у). Тогда потенциальная энергия системы при ее
отклонении от положения равновесия
П = 3mgl(l - cos ф) - 2mgl(l - cosy) + — cl2 (ф - \|fJ .
Рис. 19.26
619
Так как в выражении для потенциальной энергии нужно учитывать вели-
величины до второго порядка малости, представив cos(p и cosy в виде
coscp = 1 -ф2/2 и cos\|/ = 1 -\|f2/2, получим
n = -(cuq>2+2cl2<w+c22y2),
где си = с/2 + 3mgl; сп = с21 = -с/2; с22 = с/2 - 2mgl.
Из условий
с22>0
hi cl2i
\с21 с22
>0
соответственно имеем
с > 2mg/l; A9.82)
с > 6mg/l. A9.83)
Сопоставляя A9.82) и A9.83), получаем, что для устойчивости положения
равновесия необходимо выполнение условия A9.83).
Подставив выражение для потенциальной энергии A9.80)
в A9.78), получим составляющую обобщенной силы от потен-
потенциальных сил
Составляющая обобщенной силы от диссипативных сил равна
ад=|?'
где Ф — диссипативная функция Рэлея.
Учитывая выражение для скорости A9.75), запишем диссипа-
тивную функцию Рэлея Ф для системы с п степенями свободы:
? м y=i A:=l Щ °4j l /=1 y=l
Здесь By являются в общем случае функциями обобщенных
координат:
620
" й a», *г.
Так как диссипативная фикция Рэлея уже содержит величи-
величины второго порядка малости (произведения скоростей обобщен-
обобщенных координат), в разложении Btj в ряд Маклорена, как и в раз-
разложении коэффициентов Atj, будем учитывать только первые
члены разложения — значения коэффициентов Btj в положении
равновесия.
Обозначим (By H через btj и назовем их обобщенными дис-
сипативными коэффициентами, причем Ьу = bJt. Тогда
L 1=1 7=1
В общем случае Ф представляет собой, согласно A9.86),
неотрицательную квадратичную форму. Если же Ф является
положительно-определенной квадратичной формой, диссипация
называется полной.
Подставив выражение для диссипативной функции A9.87) в
A9.85), получим составляющую обобщенной силы от диссипа-
тивных сил:
7=1
Составляющую обобщенной силы Q{ (t) от сил Pk (t), зави-
зависящих от времени и действующих на систему извне, можно по-
получить стандартным способом, полагая, что вариация только i'-й
обобщенной координаты bqt Ф 0, вычисляя сумму элементар-
элементарных работ от сил Pk (t) на перемещениях, определяемых bqt, и
относя полученное значение работы к вариации обобщенной
координаты:
6,@= ' • A9.89)
621
Подставив выражения A9.77), A9.84), A9.88), A9.89) для
Т, Qin, б/д, Qi (t) в уравнения Лагранжа второго рода A9.74), по-
получим в самом общем случае уравнения малых колебаний линей-
линейной системы с п степенями свободы*:
/ = 1,2,....,и).
A9.90)
В частном случае системы с двумя степенями свободы квад-
квадратичные формы Т9 П и Ф будут соответственно
Г =—
2);
A9.91)
а дифференциальные уравнения малых колебаний примут вид
= Ql @ •
Рис. 19.27
Пример 19.8. Два одинаковых математических ма-
маятника длиной / и массой m каждый соединены между
собой пружиной, жесткость которой с (рис. 19.27). При
вертикальном положении маятников пружина не де-
деформирована. Составить дифференциальные уравнения
малых колебаний.
Решение. Воспользуемся уравнениями Лагранжа
второго рода. В качестве обобщенных координат выбе-
рем углы отклонения маятников от вертикали ф и \|/.
Кинетическая энергия системы
T=-mv2A+-mv2B =~
Следовательно, в соответствии с A9.91)
* При выводе дифференциальных уравнений малых колебаний в линейной
системе с п степенями свободы мы воспользовались уравнениями Лагранжа
второго рода. Иногда этот способ называют основным способом составления
уравнений движения. Аналогичные по структуре A9.90) уравнения можно по-
получить прямым способом: описывая движения входящих в систему инерцион-
инерционных объектов, используя дифференциальные уравнения поступательного, вра-
вращательного, плоского и т. д. движений.
622
an=a22=ml2; я,2=0.
Потенциальная энергия системы
П = mgl(\ - cos ф) + mgl{\ - cos \|f) +—c\2 ,
где X — деформация пружины.
С учетом малости колебаний
со8ф = 1-ф2/2, cos\|/ = l-\|/2/2 , Х, = /ф-/у.
Тогда
П = |
Следовательно, в соответствии с A9.91)
~c(/\|f - /фJ = |
2 )ф2-
с,! = с22 = mgl + с/2; с12 = -с/2
и дифференциальные уравнения малых колебаний имеют вид
Пример 19.9. Двойной математический
маятник (рис. 19.28) состоит из двух связан-
связанных шарнирно одинаковых математических
маятников массой т и длиной /. К верхне-
верхнему маятнику приложена горизонтальная сила
F{t). При движении на грузы маятников ^.
действуют силы вязкого сопротивления
F" = -hv, где h — коэффициент вязкого
сопротивления; v — скорость движения
груза. Составить дифференциальные уравне-
уравнения малых колебаний.
Решение. Воспользуемся уравнениями
Лагранжа второго рода. В качестве обобщен-
обобщенных координат выберем углы отклонения (р
и \|/ маятников от вертикали. Кинетическая энергия системы
A9.93)
где vA =/ф; vB =
vBA
2
А 2 в
Согласно теореме косинусов,
v2B =(/фJ
Поскольку в выражении для кинетической энергии при малых колебаниях нуж-
нужно учитывать члены до второго порядка малости, со8(\|/-ф) заменяем едини-
единицей. Тогда
623
у2=/2ф2+/2\|/2+2/2фу ;
Т = -Bт/2ф2 + m/V + 2ml2 щ)
и, следовательно, в соответствии с A9.91)
au=2ml2; a22=ml2; al2=ml2.
Диссипативная функция Рэлея
Ф = -Ь2 +-Uv2 =—BЫ2ф2 +/i/2\j/2 +2/г/
Следовательно, в соответствии с A9.91)
bn=2hl2; b22=hl2; bl2=hl2.
Потенциальная энергия системы складывается из энергии подъема груза
верхнего маятника на высоту /г, =/(l-cos<p) и энергии подъема груза нижнего
маятника на высоту /^ =/A - cos ф) + /A-cosy). Принимая с учетом малости
колебаний cos <р = 1 - (р2 /2, cos \|/ = 1 - \|/2 /2, получаем
Я = — Bmg/(p2 + mg/\|/2),
откуда
cn=2mgl; c22=mgl; c12=0.
При 5(р*0 и 5\|/ = 0 элементарная работа 5A(F) = F@/cos(p5<p и, следова-
следовательно, Qj @ = F(f)/ cos ф, при 8\|/ ?t 0 и 5ф = О 5A(F) = 0, а значит, б2 (г) = 0 .
Поскольку в дифференциальных уравнениях малых колебаний учитываются
только члены первого порядка малости, то в выражении для Qx(t) со8ф = 1.
Тогда дифференциальные уравнения малых колебаний будут иметь вид
т/2ф+т/2\|/ + /г/2ф+ /i/2\j/ + mg/\|/ = 0.
Пример 19.10. Два тела с массами тх и щ , связанные между собой
пружиной, жесткость которой с2, и скрепленные с основанием пружиной
жесткостью с,, могут двигаться в вертикальном направлении (рис. 19.29). На
тело массой тх действует сила, изменяющаяся во времени по гармоническому
закону F{t) = Fo sin pt. Составить дифференциальные уравнения малых коле-
колебаний.
Решение. Воспользуемся дифференциальными уравнениями поступательно-
поступательного движения. Будем отсчитывать координаты хх и х2 от положения статиче-
статического равновесия каждого тела. В этом случае, как было показано при анализе
колебательных систем с одной степенью свободы, силы тяжести и упругие си-
силы, возникающие в пружинах в результате статической деформации, взаимно
624
компенсируются и могут не учитываться при составлении дифференциальных
уравнений. Запишем дифференциальные уравнения поступательного движения
в проекции на ось Ох:
тххх - -сххх + с2(х2 - хх) + Fo sin pt;
m2x2=-c2(x2-xl)i
или
О
m, хх + (q + с2 )хх -с2х2= FQ sin pt;
т2х2 -с2хх +с2х2 =0.
с2(х2-хх)
A9.94)
Рис. 19.29
19.8. Свободные колебания линейной консервативной
системы с двумя степенями свободы
bu= bl2 =
A9.95)
В соответствии с A9.92), учитывая, что при свободных коле-
колебаниях консервативной системы Qx (t) = Q2 (t) = (
= b22 = 0, запишем дифференциальные уравнения в виде
anql+anq2+cuql+cl2q2=0;
anqx +a22q2+cnqx +c22q2 = 0.
Начальные условия для qx и q2 имеют следующий вид:
* П у» п • Л Л • у» •» • Л Л /0 О/>Л
при *—U tfj —^f ю' ~zl —^ 10 ' i2 —f/20 ' ^2 —Tt20 * \l-'.7O^
Напомним, что в силу положительно-определенной квадра-
квадратичной формы кинетической энергии обобщенные инерционные
коэффициенты удовлетворяют соотношениям
ап>0; апа22 - а\2 > 0; а22 > 0,
а аналогичные соотношения для квазиупругих коэффициентов
сп>0; cnc72-c^2>0i c22>0 A9.97)
41 Зак. 16
625
являются достаточными условиями устойчивости положения
равновесия системы.
Коэффициенты ап и с12, связывающие в уравнениях A9.95)
обобщенные координаты qx и q2, называют соответственно
коэффициентами инерционной и упругой связи. Если в коле-
колебательной системе коэффициент ап = 0, ее называют системой
с упругой связью, а если сХ2 = 0 — системой с инерционной
связью.
Системы с упругой связью представлены в примерах 19.8 и
19.10, а система с инерционной связью — в примере 19.9.
Парциальной системой, соответствующей обобщенной
координате qi9 называют условную колебательную систему с
одной степенью свободы, получаемую из исходной системы,
если наложить запрет на изменение всех обобщенных коорди-
координат, кроме qi. Число парциальных систем равно числу степеней
свободы. Дифференциальные уравнения движения парциальных
систем получают из дифференциальных уравнений исходной
системы, положив условно все коэффициенты связи равными
нулю. Для системы с двумя степенями свободы, согласно
A9.95), имеем
a22q2+c22q2=0.
Парциальными называют собственные частоты пЛ, п2 пар-
парциальных систем:
п?=сп/ап; п2=с22/а22.
Парциальные системы, соответствующие рассмотренным в
примерах 19.8-19.10 колебательным системам с двумя степенями
свободы (см. рис. 19.27-19.29), представлены на рис. 19.30, а-в
соответственно.
В силу того, что уравнения A9.95) coдepжat только обоб-
обобщенные координаты и их вторые производные по времени, ищем
их решения в виде
q{ = Ах sin(Gtf + a); q2 = A2 sin(GM + а), A9.98)
где А1,А2,(й, а — пока не определенные величины.
626
в
Рис. 1930
Подставив A9.98) в A9.95) и сократив на sin(co* + <x), полу-
получим однородную относительно Ах и А2 алгебраическую систему
(си -<в>2ап)Ах +(с12 -<о2а12)А2 = 0;
(с12 -ю2в12)А1 +(си -ю2а22)А2 =0.
Поскольку однородная алгебраическая система всегда имеет ну-
нулевое решение (А1=0,А2=0), а любая невырожденная алгеб-
A9.99)
41*
627
раическая система имеет единственное решение, то для того что-
чтобы система A9.99) имела ненулевое решение, она должна быть
вырожденной, т. е. ее определитель должен равняться нулю:
Следовательно, решение A9.98) будет иметь смысл не при любых
значениях со, а только при тех, которые удовлетворяют условию
A9.100).
Раскрывая A9.100), получим
(сп -со2ап)(с22 -<о2а22)-(сп -<о2я12J =0, A9.101)
или
(апа22 -а?2)(О4-(спа22+с22ап-2спап)(й2 +спс22 -с\2 =0.
A9.102)
Уравнение, представленное в форме A9.100) - A9.102), на-
называют частотным. Как следует из A9.102), частотное уравне-
уравнение биквадратное. Обозначим его корни в порядке возрастания
через oof и ю2 • Важно убедиться, что оба корня положительные,
ибо в противном случае (если один или оба корня окажутся от-
отрицательными) частоты ©! и со2 (или одна из них) будут мни-
мнимыми. Такой аргумент в решении A9.98) приведет к трансфор-
трансформации тригонометрического синуса в гиперболический и,
следовательно, к неограниченному возрастанию во времени qx
и q2, что противоречит предположению об устойчивости поло-
положения равновесия.
Введем функцию А(ю2), равную левой части частотного
уравнения A9.101) или A9.102), т. е.
A(w2) = (cn -<о2аи)(с22 -а>2а22)-(с12 -ю2я12J,
или
А((й2)=(апа22 -а22)со4 ~(сиа22 +с22аи -2спа12)а>2 +спс22 -с22,
и построим ее график.
Если положение равновесия устойчивое, то в силу A9.97)
А@) = спс22 - с22 > 0. Если со2 = п\ = си/ап , то
628
си
ап
(О2 =И2 =c2lla22 ' TO
«
22
Наконец, в силу того, что апа22-а?2>0, при <о2 —»<»
График функции А(со2) в предположении, что пг < п2, пред-
представлен на рис. 19.31.
Л(а>2)|
ГСПС22~~С12
/
У
/
/
/
ОJ
ч2
М
Рис. 1931
Найденные из A9.100)-A9.102) значения со называют соб-
собственными частотами колебаний системы. Собственные час-
частоты системы нумеруют в порядке возрастания, они не зависят от
начальных условий и полностью определяются параметрами ко-
колебательной системы (квазиупругими и обобщенными инерцион-
инерционными коэффициентами).
Из рассмотренного следует:
1) если положение равновесия устойчивое, то оба корня час-
частотного уравнения положительные;
629
2) первая собственная частота системы всегда меньше мень-
меньшей парциальной частоты, а вторая — больше большей.
Отметим, что для колебательных систем с упругой связью
В этом случае график функции Д(со2), представляющий собой
параболу, оказывается, симметричным относительно вертикали,
проходящей через точку со2 = 0,5(и2 + п\), и справедливо равен-
равенство
и2-со2 = со2-и2. A9.103)
Запишем два частных независимых решения, соответствую-
соответствующих частотам C0j и со2, в виде
g2l=A2l si
422=A22sin(oo2f
где второй индекс соответствует номеру частоты, или номеру
тона колебаний.
Отметим, что константы Ап, А21 и А12, А22 не являются не-
независимыми. Действительно, подставив решения в уравнения
движения, мы получим вырожденную систему A9.99), у которой
одно уравнение будет иметь коэффициенты, пропорциональные
коэффициентам другого уравнения. Так, для частоты cOj имеем
(сп ~(otan)Au +(c12 -G)?a12)A21 =0;
(с12 - (О*ап )АИ + (с22 - ю2я22 )А21 = 0,
откуда
А21=л21Ап, A9.105)
где Т|21
сп-щап с21-(йха22
Аналогично получаем для ю2:
А22=Т122А12, A9.106)
630
где ц22 - ^ - .
с12-ю2я12 с22-со^22
С учетом A9.105) и A9.106) частные решения A9.104) будут
иметь вид
qn = АП si
= A12sin(co2f+ a2);
Эти решения называют главными колебаниями. Они пред-
представляют собой гармонические колебания с частотами щ и ю2
соответственно. Коэффициенты ЛгрЛгг называют коэффициен-
коэффициентами распределения амплитуд. Они характеризуют соотношение
между амплитудами в главных колебаниях, или формы главных
колебаний. Коэффициенты распределения амплитуд, а следова-
следовательно, и формы главных колебаний, как и собственные частоты,
определяются параметрами самой колебательной системы, т. е.
обобщенными инерционными и квазиупругими коэффициентами,
и не зависят от начальных условий. Поэтому формы колебаний
называют так же, как и частоты, собственными формами колеба-
колебаний при колебаниях по соответствующему тону.
В выбранной нами структуре частных решений содержатся
пока не определенные произвольные постоянные Ап и А12, по-
поэтому для получения общего решения достаточно частные реше-
решения сложить:
= Ai sin(<V + a1) + A12sin(ffl2f+ a2);
q2 =q2l +q22 =T|2iAi sra(Flt + al) + y\22Al2 sin(co2f + CX)
Общее решение содержит четыре неопределенные величины
Ап, А12, а! и а2. Воспользуемся начальными условиями A9.96).
Подставляя A9.107) в A9.96), получаем систему
ql0 = Ап sin ах + А12 sin a2;
420 =ThlAl sinOtl ^П22А12 Sina2 J
ql0 =co1A11'cosa1 +co2A12 cosa2 ;
q20 =T|2icoiAi cosa! +r[22@2Al2 cosa2,
631
из которой определяем Аи, А12,at иа2.
Отметим, что при произвольных начальных условиях обе
константы Аи и Ап получаются отличными от нуля. Это оз-
означает, что изменение во времени каждой обобщенной коор-
координаты будет представлять собой сумму гармонических коле-
колебаний с частотами с^ и со2, а такая сумма представляет собой
не только не гармонический, но и в общем случае не периоди-
периодический процесс.
Для того чтобы процесс был одночастотным и гармониче-
гармоническим, необходимо специальным образом подобрать начальные
условия. Начальные отклонения и скорости должны быть свя-
связаны между собой через один из коэффициентов распределе-
распределения амплитуд. Например, если выполнить условия q20 =T|2i#io>
q20 =T|214r10> то в соответствии с A9.107) константа А12 =0, и в
системе возникнут одночастотные гармонические колебания с
частотой щ. Для этого достаточно, чтобы только начальные
отклонения были связаны одним из коэффициентов распреде-
распределения амплитуд, а начальные скорости равнялись нулю, или
наоборот.
Возможен и другой подход — найти новые обобщенные
координаты 0! и 02, называемые нормальными, или главными,
для которых при любых начальных условиях движение будет од-
одночастотным и гармоническим. Анализируя решение A9.107),
убеждаемся, что исходные и нормальные координаты должны
быть связаны соотношениями
*1==е1+б2; A9.108)
^2=Г|2161+Г|2202.
Можно показать, что переход от исходных координат к нор-
нормальным приводит квадратичные формы кинетической и потен-
потенциальной энергий к каноническим. Подставим qx и q2, выражен-
выраженные согласно A9.108) через Qx и 02, в квадратичные формы
кинетической и потенциальной энергий системы с двумя степе-
степенями свободы A9.91):
632
-{(ап+2а12Ц21 +a22Ti|l)ef +2[а„ + а,2(л21 + Л22Н
^ +21l +N,2 +2[с„ +с,2(Т121
2 +(с„ +2с12л22 +с22л22)в22},
и покажем, что коэффициенты а'п = ап + ап(г\2\ + Ц22)+
+ Д!22Т|21Т|22 И СП =СИ +С12(ТJ1 +Л22) + С22Т121Т122> ВХОДЯЩИв В ВЫ-
ражения для кинетической и потенциальной энергий, равны нулю.
Из выражения A9.105) для коэффициента распределения ам-
амплитуд Т|2, имеем
A9.109)
(Oj \^*22^21 12 ' — 12 22^21 *
Умножив второе равенство A9.109) на ц22 и сложив с первым,
находим
ttfKl +Я12СП21 + Th2) + fl22Thl1
= сп+с12(Т121ч
Точно та1сим же путем из выражения для коэффициента Г|22
получаем, что
(О2[аи + Й!12(Т|21 +Л22) + О22Л21Л22]=: /j^ 22^4
= cM+c12(Ti21
Вычтем A9.110) из A9.111):
(ю2. -a>2)[an +а12(л2, +Л22) + а22Л21Л22] = (о>2 -0J)а;2 =0.
Так как со2 Ф(?>\, то ап =0. Тогда из вьфажения A9.110) или
A9.111) следует, что с'п =0, а значит, квадратичные формы ки-
кинетической и потенциальной энергий будут каноническими:
7 = |(a16f+a2e2); Я = |(с,92 +с292), A9.112)
где а, = ап + 2апт\21 + a22r\22i; а2 = ап + 2апц22 + а22л22; с, =
= с„ +2с12ТJ1 +с22Л21; С2 =си +2c12Tl22
403ак. 16 633
Подставив выражения A9.112) для Г и Я в уравнения Ла-
гранжа второго рода, получим уравнения малых колебаний сис-
системы в нормальных координатах
axQx+cxQx=0; я2ё2+с292=0,
причем cxjax =cof; сг/а2 =со2.
Выразив с помощью A9.108) Qx и 02 через qx и q2:
1 2
Л21-Л22 ^гх
можно из начальных условий для qx и q2 получить начальные
условия для нормальных координат.
Нормальные координаты находят широкое применение при
решении задач о вынужденных колебаниях при произвольном
возмущении, при наличии или отсутствии вязкого сопротивле-
сопротивления, а также при решении задач о свободном движении в некон-
неконсервативных системах.
Пример 19.11. Два одинаковых математических маятника длиной / и мас-
массой т соединены между собой пружиной, имеющей жесткость с (см.
рис. 19.27). При вертикальном положении маятников пружина не деформирова-
деформирована. В начальный момент времени левый маятник отклонен на угол C и маятни-
маятники отпущены без начальной скорости. Исследовать движение системы.
Решение. Дифференциальные уравнения малых колебаний системы были
получены в примере 19.8 (см. A9.93)).
Дифференциальные уравнения парциальных систем имеют вид
т/2ф+(mgl + с/2)ф = 0;
В силу симметрии задачи (маятники одинаковые) парциальные частоты сов-
совпадают:
пг=пг g
l2
ml2
Зададим решение в виде A9.98)
ф = Ах sin(cor + a); \j/ = A2 sin(cor + а)
и, подставив его в уравнения движения, получим алгебраическую систему отно-
относительно Ах и А2 :
(mgl + cl2 -ml2(O2)Al-cl2A2=0',
~cl2Ax+(mgl+cl2 -mlW)A2 =0.
Частотное уравнение имеет вид
634
(mgl+cl2 -m/2co2J -(d2J =0 ,
или
Отсюда
m/2 / 2 m/2 / m
Отметим справедливость утверждения A9.103):
П2 -CD2 = (О2 ~п2 = c/m •
Два частных решения (главные колебания) имеют вид
ф2 = At! sinCco^ + (Xj); ф2 = Л12 sin(co2f + cc2);
у i = А21 sin(o>|r+cx1);\j/2 = ^22 sin(co2r + ос2).
Учитывая, что
Л21
_ А21 _ mgl + cl2 -ml2to2 _ mgl + ci1 -mgl _1
""~^"~ Л ~ Л ~1;
с/
l2 -ml2(ol
с/
Л22
_ Л22 _ mgl + cl2 -ml2(ol _ mgl + cl2 -mgl-2cl2 _
а
получаем
); ф2 = A12 sin(co2f + oc2);
ос,); \j/2 =~A12sin(oo2r + a2).
В первом главном колебании маятники движутся в фазе (рис. 19.32, а), пру-
пружина остается недеформированной, и поэтому первая собственная частота о^
совпадает с частотой математического маятника.
<»2;т]22=-1
<р
а б
Рис. 19 32
Во втором главном колебании маятники движутся в противофазе
(рис. 19.32, б), при этом на пружине имеется неподвижная точка, назьюаемая
узлом формы колебаний.
Подставив общее решение
40*
635
ф = ф2 + ф2 = Aj! sin^f + а\) + А12 sin(a>2f + <х2);
у = \|/1 + \|/2 = Aj j sinCco^ + а,) - А12 sin(co2f + ос2)
в начальные условия
при f = 0 ф = Р; ф = 0; \|/ = 0; \j/ = 0,
получим
Aj j sin a! + Л12 sin а2 = Р;
Ах! sin ах - А12 sin а2 = 0;
A12co2cosa2 =0;
! -A12(o2cosa2 =0.
Из последних двух уравнений следует
Aj^cosocj =0; A12co2cosa2 = 0 .
Так как Ап и А12 не могут равняться нулю, то cos a, =0 и cosa2 =0. От-
Отсюда
_ к Зя 5я _к Зп 5к
а'~2":Т;Т;-: а2-7;Т:Т;-
Поскольку Ап и А12 пока не определены, можно выбрать любые ^ и а2.
Пусть GCj = а2 = я/2. Тогда первые два уравнения из начальных условий будут
иметь вид
Ап+А12=р; Ап-А12=0,
откуда
АП=А12 =р/2;
ф = — sin(ov + — ) + sin(co2f + —) =—
—) =—(
—) - sin(aw + —) I = — (cos со.t - cos ow) >
или с учетом известных тригонометрических соотношений для суммы и разно-
разности косинусов
ф = Pcos— —t - cos— -t;
Y к 2 2
o . CO,+C02 . C02-C0,
\\f = psin—¦ -t sin— -t.
2 2
Наибольший интерес при анализе полученного результата представляет слу-
случай достаточно слабой пружины с/т «g/l, когда со2 ~ щ. Решение для ф и
\|/ тогда представляет собой произведение двух косинусоид (синусоид), период
одной из которых значительно больше периода другой:
4я 4я
щ-щ со1+со2
636
Графически решение приведено на рис. 19.33. Его можно получить тем же
способом, который был использован при анализе затухающих колебаний. Вид-
Видно, что колебания в данном случае представляют собой биения.
Рис. 19.33
Максимальные отклонения одного маятника соответствуют остановке дру-
другого и наоборот. Поскольку система консервативна, то начальный запас полной
механической энергии, возникший при отклонении левого маятника, сохраняет-
сохраняется при дальнейшем движении системы. Маятники в процессе движения как бы
передают энергию друг другу.
19.9. Вынужденные колебания линейной системы
с двумя степенями свободы при гармоническом
возбуждении. Динамический гаситель колебаний
' Ограничимся случаем, когда силы вязкого сопротивления от-
отсутствуют или пренебрежимо малы, а возмущающая сила действу-
действует только по одной обобщенной координате. Тогда в соответствии
с A9.92) дифференциальные уравнения движения имеют вид
axxqx + ax2q2 + cxxqx +ci2q2 = QX sinQrt+ p);
aX2qx + a22q2 + cX2qx + c22q2 = 0 ,
где Qx — амплитуда обобщенной силы; р и P — частота и на-
начальная фаза вынуждающей силы.
Ограничимся исследованием частного решения системы
A9.113), характеризующего вынужденные колебания, и зададим
решение в виде
637
^2 = Grx sin(prH-p); q2 = G2sin(pf + p). A9.114)
Подставив A9.114) в A9.113), получим неоднородную алгеб-
алгебраическую систему относительно G{ и G2. Воспользуемся пра-
правилом Крамера, согласно которому
^Т' 2~~д"'
Здесь
д = (с — п2а )О ' А =— (с — р2п )О ' A9.115)
А =
Отметим, что структура определителя А полностью совпа-
совпадает со структурой функции А(со2), рассмотренной в предыду-
предыдущем параграфе и имеющей корни cof и со2 . Поэтому А можно
представить в виде
~(О22).
Тогда
п (c22-p2g22)Q1
(апа22-ап\г ^ ^ ~л, Aдлщ
Полученные решения для Gx и G2 имеют смысл для всех р,
кроме значений, совпадающих с cOj и со2. При р = (йх и р = ш2 в
системе при отсутствии сил вязкого сопротивления наблюдаются
резонансы. Как было показано выше для системы с одной степе-
степенью свободы, решение в этом случае надо искать в особой форме.
Отметим, что отношение G2/Gx при резонансах имеет ко-
конечную величину:
G2 = сХ2 - р ах2
Gx c22-p2a22
638
Учитывая A9.105), получаем, что при р = <
G2 _ сх2
Следовательно, при резонансе на частоте (йх форма вынуж-
вынужденных колебаний (отношение G2/Gx) совпадает с собственной
формой колебаний по первому тону. Аналогичный результат по-
получается и при резонансе на частоте <о2.
Пусть ап = 0 (система с упругой связью) и с12 < 0. Отме-
Отметим, что знак коэффициента сп определяется субъективным фак-
фактором — выбором положительных направлений отсчета обоб-
обобщенных координат.
Так, для рассмотренного в примере 19.8 случая свободных
колебаний связанных пружиной маятников направления отсчета
обобщенных координат ф и \|/ совпадают и коэффициент
с12=-с/2. При противоположных направлениях-отсчета обоб-
обобщенных координат ф и \|/ деформация пружины А,==/ф + /\|/ и
коэффициент сп = cl2.
Выражения A9.116) для G{ и G2 при ап =0 имеют вид
G
1
Зависимости Gx и G2 от р2 представлены на рис. 19.34.
Интерес представляет случай при р2=п2, когда Gx=0. При
этом можно определить G2, используя для нахождения А выра-
выражение A9.115). При p2=n2=-2L и а12=0 A = -Cj22 и тогда
а22
G2 =Ql/C\2 •
Этот эффект — нулевое значение Gx при конечном G2 —
носит название антирезонанса, или эффекта динамического га-
гашения колебаний, и широко используется в технике.
639
i
I 2 ^f
if
ill
f
/ ]
Рис. 1934
Обратимся к уже рассмотренному примеру 19.10
(см. рис. 19.29). Здесь тело массой тх, на которое непосредствен-
непосредственно действует вынуждающая сила Fo sin pt, является объектом,
колебания которого необходимо погасить, а упруго скрепленное
с ним тело массой т2 — динамическим гасителем колебаний.
Дифференциальные уравнения движения системы были получе-
получены выше (см. A9.94)) и имеют вид
тх'хх + {сх + с2)хг -с2х2 = Fo sinpt;
т2х2 —с2хх +с2х2 =0,
где тх =ап; сх +с2 =сп; с2 =с22; FQ=QX\ m2 =а22.
Если подобрать параметры гасителя таким образом, чтобы
\ =
п\ =с2/т2 =р2, то перемещения объекта будут равны нулю, а
перемещение гасителя х2 = G2 sin pt = —-sin pt.
Тогда в любой момент времени упругая сила в пружине га-
гасителя будет компенсировать возмущающую силу, действующую
на объект (рис. 19.35).
Отметим следующее.
640
1. Настройка гасителя только по частоте не-
недостаточна. Действительно, нельзя с помощью
объекта, масса т2 которого мала, погасить коле-
колебания тела большой массы ml9 поскольку малая
масса т2 означает малую жесткость с2=т2р2 и
в результате необходимая для гашения амплитуда рис. 19.35
колебаний гасителя Fo /c2 может оказаться очень
большой и технически нереализуемой.
2. Полное гашение в реальной системе, где всегда имеются
диссипативные силы, невозможно.
Рассмотрим возможность использования динамического га-
гасителя для подавления колебаний объекта при резонансе. Введем
следующие обозначения: со0 = yJcl /m} — собственная частота
колебаний объекта; п2 = ^c2jm2 — парциальная частота гасителя;
Р = т2 jmx — отношение масс гасителя и объекта; GCT = Fo /c} —
статическое смещение объекта под действием постоянной силы
Fo; 8 = п2 /со0, у = р/(о0 — безразмерные частоты гасителя и
возмущающей силы; w,=|G,/Gcm| и w2=|G2/Gcm| — безраз-
безразмерные амплитуды колебаний объекта и гасителя.
Тогда из A9.117) с учетом выражений A9.115) получаем
(И
0-
-рб2
ьCб2
б
-у2
-у2
2 -у
)(б2
б2
Х52
2
-у2
-у2
>-рв«
)-(Зб4
и, =
Амплитудно-частотная характеристика щ при Р = 0,1; 5 = 1
приведена на рис. 19.36. Поскольку объект с гасителем представ-
представляют собой систему с двумя степенями свободы, наряду с гаше-
гашением колебаний на частоте со0 на частотах со, =0,854а>0 и
со2 =1,17со0 появляются два новых резонанса, соответствующих
собственным частотам двухстепенной системы. Поэтому подоб-
подобные гасители можно использовать только в тех случаях, когда
частота возмущения жестко фиксирована.
641
ЯЕ
™2
щ
Рис.19.37
Устранить резонансные колебания с большими амплитудами
на частотах со1 и со2 оказывается возможным, если ввести в кон-
конструкцию гасителя демпфирование. Ди-
Динамический гаситель в этом случае
представляет собой дополнительное те-
тело массой т2, соединенное с объектом
пружиной жесткостью с2 и демпфером
с коэффициентом вязкого сопротивле-
сопротивления А (рис. 19.37).
При наличии демпфера полное га-
гашение колебаний становится невозмож-
невозможным, поскольку гаситель оказывает через
него дополнительное воздействие на объект. Однако демпфер по-
позволяет при рациональном подборе параметров гасителя получить
ограниченную амплитуду колебаний на всем диапазоне частот.
Дифференциальные уравнения системы с демпфером имеют
вид
тххх +hxx + (сх + с2)хх - hx2 -c2x2= FQ sinp/;
т2х2 -hxx -c2xx +hx2 +c2x2 = 0.
Добавим к введенным выше безразмерным параметрам р, 8, у
безразмерный коэффициент вязкого сопротивления т| = .
2/w2coo
642
Тогда, после достаточно громоздких преобразований получаем
выражение для безразмерной амплитуды колебаний объекта
щ = J
E2-у2J+4лУ
¦у2)E2 -у2)-р82у2]2
На рис. 19.38 представлены амплитудно-частотные характе-
характеристики щ (у) при р = 0,1; 5 = 1 и различных значениях т|.
«1
12-
8-
4-
0
1
o;s
i 1^
/
V
0,9.
sL=» 1
\\ 11=0,6
\
531,0 '
1
Г
1,2
¦шиш
У
Рис. 19.38 ""
При t\ = 0 характеристика имеет два резонанса и тождест-
тождественна представленной на рис. 19.36. При г|->оо относительное
движение гасителя становится невозможным, система как бы
трансформируется в одностепенную с резонансом на частоте
...г
= 0,953<о0.
Как видим на рис. 19.38, при этих и любых других значениях
г| амплитудно-частотные характеристики проходят через точки
ShT.
Поскольку избавиться от этих точек нельзя, а снижение од-
одной вызывает подъем другой, то, очевидно, что параметры гаси-
гасителя станут оптимальными, если точки S и Г будут находиться
на одной высоте, а коэффициент демпфирования будет выбран
643
таким образом, чтобы в одной из точек амплитудно-частотная
характеристика имела максимум (при этом, как показывают рас-
расчеты, и второй максимум будет незначительно превышать орди-
ординаты точек S и 7). Чтобы выполнить первое условие, необходимо
подобрать параметры т2 и ^ гасителя так, чтобы выполнялось
условие 8 = . При этом ординаты точек S и Т будут равны
Определение оптимального г\ более сложно и требует ис-
использования ЭВМ или специальных номограмм. Для рассматри-
рассматриваемого примера оптимальное г| = 0,168. На рис. 19.39 представ-
представлена амплитудно-частотная характеристика объекта при
оптимально подобранном гасителе для случая р = 0,1. Значения
параметров при этом 8 = 0,9091, щ = 4,59.
0,8 0,9091 1,0
Рис. 19.39
1,2
Для расширения зоны гашения и уменьшения амплитудных
значений щ необходимо в разумных пределах увеличивать массу
гасителя по отношению к массе объекта.
644
19.10. Колебания линейных систем с конечным числом
степеней свободы
Матричная форма дифференциальных уравнений движения
Дифференциальные уравнения движения линейной системы
с конечным числом степеней свободы были выведены в § 19.7 и
имеют вид A9.90), или в развернутой форме
[
1
Введем обозначения для вещественных симметрических
квадратных размера и х п матриц инерционных, диссипативных и
квазиупругих коэффициентов:
аи ап ... аХп
а
21
'22
а
2/1
= \Ьу]; С = [с,],
а также для матриц-столбцов (векторов) обобщенных координат
системы и соответствующих им обобщенных возмущающих сил:
92
Qiif)
Тогда уравнения движения можно представить в матричной фор-
форме следующим образом:
Aq + Bq + Cq = Q(t). A9.118)
В силу положительной определенности кинетической
энергии Т системы матрица А инерционных коэффициентов
как матрица квадратичной формы от обобщенных скоростей
является положительно определенной во всех случаях. Матрица
С квазиупругих коэффициентов является положительно опре-
определенной только при движении около положения устойчивого
645
равновесия, где в силу теоремы Лагранжа потенциальная энер-
энергия имеет минимум. В этом случае выполняется условие кри-
критерия Сильвестра — главные диагональные миноры ее матрицы
коэффициентов должны быть строго положительны.
Если матрица В диссипативных коэффициентов является по-
положительно определенной, то, как указывалось выше, диссипация
называется полной (проявляется во всех главных движениях).
Определение собственных характеристик системы
Частоты и формы колебаний системы определяют из мат-
матричного уравнения, описывающего свободное движение консер-
консервативной системы,
Aq + Cq = 0, A9.119)
решение которого ищут в виде
q = Vsin(co/ + a), A9.120)
где V = [FJ — матрица-столбец (вектор) амплитуд обобщенных
координат.
Подстановка выражения A9.120) в A9.119) дает алгебраиче-
алгебраическое матричное однородное уравнение
(C-co2A)V = 0. A9.121)
Условие существования нетривиального решения уравнения
A9.121) приводит к характеристическому уравнению задачи
Aе1(С-со2А) = 0,или det(A"lC-©2E) = 0, A9.122)
где Е = diag[l] — единичная матрица, элементы которой
[1, если / = у;
еп =<
[0, если i*j.
Упорядоченная в порядке возрастания и пронумерованная
совокупность положительных корней уравнения A9.122)
со2 < cl>2 <... < со2 образует так называемый спектр собственных
значений системы, а соответствующая ему совокупность
со, <со2 <...<со„ — спектр собственных частот. Если в спек-
646
тре собственных значений существует нулевой корень, то такой
случай рассматривается как особый; он имеет место, когда мат-
матрица С не является положительно определенной.
Каждой собственной частоте (Ок, к = 1,2,..., п, соответствует
свой вектор \к амплитуд обобщенных координат, удовлетво-
удовлетворяющий уравнению A9.121), т. е.
=О A9.123)
или в развернутой форме
(ctj - (О2каи)VJk = О U = 1,2,..., п).
7=1
Уравнение A9.123) содержит п неизвестных координат век-
вектора \к, однако, так как, согласно A9.122), матрица коэффици-
коэффициентов однородной системы алгебраических уравнений является
вырожденной, число независимых уравнений в системе меньше
п. Если характеристическое уравнение A9.122) имеет простые
корни (т. е. в спектре нет кратных корней), число независимых
уравнений будет равно л-1, и компоненты вектора амплитуд
определятся с точностью до множителя. Найденное таким обра-
образом (с точностью до множителя) распределение амплитуд в соб-
собственном колебании с частотой (Ок называется собственной
формой колебаний. Задание множителя определяет процедуру
нормирования, которая может быть выполнена различными спо-
способами. В качестве нормирующего может выступать какой-либо
из компонентов вектора амплитуд \к , например Vlk или V^,
либо модуль вектора (эвклидова норма) V^ =
Примем в качестве нормирующего множителя вектора \к
его компонент V^ и введем векторы формы цк =Vk/Vkk. Число
неизвестных компонентов вектора цк равно и-1 (т|^ =1). От-
Отбросив одно из уравнений в A9.123), получим невырожденную
систему алгебраических уравнений вида
647
n-1
?(с0.-со^;.)Лд = @2kakk-ckk G = 1,2,..., л),
из которой последовательно определяются все векторы цк. Про-
Пронумерованная совокупность векторов i^, ц2,..., цп образует
спектр собственных форм колебаний системы.
Свойства собственных частот и форм колебаний
В силу симметричности и положительной определенности
матриц А и С из теорем линейной алгебры следует:
1) все корни характеристического уравнения A9.122) положи-
положительны, а в особых случаях, когда возможны и нулевые значения,
неотрицательны и, таким образом, собственные частоты — веще-
вещественные;
2) собственные формы попарно ортогональны по отношению
к матрицам А и С, т. е. при к Ф п
fi;Aiu=<Ciu=O. A9.124)
Для доказательства последнего запишем уравнение A9.123)
для собственных форм, соответствующих двум разным частотам
щ и сог (А:,г = 1,2,...,п):
(й2кАцк=Сцк,
а>2Ах\г=Сцг.
Умножим слева первое уравнение на цТг, а второе — на цтк. Так
как в силу симметричности АТ=А, Ст = С,то после транспони-
транспонирования и вычитания второго уравнения из первого получаем
Отсюда
K2-G^)<Aiu=0
и, следовательно,
4;Afu=i,;Ciu=0.
Свободные колебания консервативных систем
Собственным частотам щ (к = 1,2,..., п) отвечают частные
решения уравнения A9.119)
648
q(k) = ц^^ sin((okt + a*) = цк (Pk cos@kt + Rk sin co^),
где Рк, Rk — произвольные постоянные.
Свободные колебания системы представляют собой суперпо-
суперпозицию главных колебаний, т. е.
п п
5 =
к к A9.125)
п
к
или в векторной форме
к
Произвольные постоянные определяют по начальным усло-
условиям q@) = q0, q(O) = qo с учетом ортогональности собственных
форм A9.124). Подстановка в A9.125) f = 0 и умножение обеих
частей полученного равенства слева на ц^А дает
откуда следует
Аналогично
Rk =(Ч*А<Ы/<МЧ*А%). A9.126)
Если распределение начальных отклонений и скоростей с
точностью до множителя совпадает с какой-либо собственной
формой, т. е. qo = яц,-, qo —Ьщ ? то отличными от нуля, согласно
формулам A9.126), будут только две константы: Р( = а и Щ = Ь.
Это означает, что при таком специальном задании начальных ус-
условий возбуждаются главные колебания системы, причем, если
6 = 0, реализуются так называемые переходные, а при а = 0 —
импульсные характеристики.
Нормальные (главные) координаты
Из A9.125) следует, что свободные колебания системы
представляют собой суперпозицию гармонических колебаний.
649
Специальным подбором начальных условий движения можно
создать условия, когда система будет совершать гармонические
колебания с какой-то одной из возможных собственных частот,
т. е. будут возбуждаться главные колебания системы.
Как было показано в § 19.8, этого же возможно добиться,
если найти такие новые координаты, каждая из которых будет
изменяться по гармоническому закону с какой-либо собственной
частотой при любых начальных условиях. Путь решения этой
задачи подсказывает сама структура общего решения A9.125).
Введем новые переменные
9^ =Vkksin((okt + ak) (? = 1,2,...,л).
Тогда, согласно A9.125), будем иметь
jkQk G=1,2,..., л),
к
или в матричной форме
q = H0, A9.127)
где H = [ni,n2,...,4n] — матрица, столбцами которой являются
нормированные собственные векторы; в = [$х, 92,..., 0П ]т — век-
вектор новых координат. Линейное преобразование координат
A9.127) приводит квадратичную форму потенциальной энергии к
каноническому виду:
n=j.qTCq=J_eTHTCHo=J_eTc*e,
2Ч Ч 2 2
где
* J
Аналогично для кинетической энергии
НтАН = А* = diag(a*); ак = цтк Ацк .
В новых координатах, называемых нормальными, или глав-
главными, дифференциальные уравнения свободного движения кон-
консервативной системы становятся несвязанными относительно
координат, т. е. принимают вид
650
ё* +юХ =° (k = l,29...n),
где со^ = ck /ak — квадраты собственных частот, определенные
теперь по элементам диагональных матриц коэффициентов, соот-
соответствующих новым координатам.
Формула A9.127) определяет прямое преобразование коор-
координат, при котором обобщенные координаты выражаются через
нормальные. Обратное преобразование имеет вид
где G — обратная к Н матрица, которая показывает, что каждой
нормальной координате соответствует линейная комбинация
обобщенных координат Qk =g?q (g* — вектор-строка матрицы
G). Эта линейная комбинация сводится к одному числу только в
случае, когда распределение координат в векторе q соответствует
к-и собственной форме, т. е. q = q^ =%в. Таким образом, каждая
нормальная координата представляет собой совокупность обоб-
обобщенных координат, распределенных в ней в соответствии с соб-
собственной формой.
Решение общей задачи
Применив линейное преобразование координат A9.127) к
уравнению A9.118) и умножив его слева на Нт, получим
нт Ане+нтвне+нтсне=htq .
В силу невозможности одновременного приведения к кано-
каноническому виду трех квадратичных форм — кинетической Т и
потенциальной П энергий, а также диссипативной функции Ф —
действительные нормальные координаты для уравнения A9.118)
существуют только при определенных ограничениях, налагаемых
на матрицу В диссипативных коэффициентов. В двух простей-
простейших частных случаях, когда такое приведение возможно, нор-
нормальные координаты диссипативной системы совпадают с нор-
нормальными координатами консервативной системы. Первый
случай — это когда матрица диссипативных коэффициентов про-
пропорциональна матрице инерционных коэффициентов, т. е.
В = 2еА, где е = const. Демпфирование такого типа называют
внешним. Во втором случае, когда матрица В пропорциональна
651
матрице С квазиупругих коэффициентов: В = хС, где х = const,
демпфирование называют внутренним.
Если диссипативные силы появляются в системах в силу
естественных причин, определить их путем прямых измерений
затруднительно. Поэтому часто в практических расчетах характе-
характеристики и распределение по системе диссипативных сил неиз-
неизвестны, и исследователь вправе принимать любой вариант демп-
демпфирования, добиваясь лишь удовлетворительного совпадения с
результатами опыта.
Обозначив вектор обобщенных возмущающих сил, соответ-
соответствующих нормальным координатам, через F = HTQ, получим
матричное уравнение движения системы в виде
A*e+B*e+c*e=F
или в развернутой форме
Qk +2skQk + со*6* =Fk/ak (* = 1,2,...,«).
Здесь гк =е в случае внешнего и гк =ш2к /2 в случае внутрен-
него демпфирования; Fk =
/ •
Глава 20
ТЕОРИЯ УДАРА
20.1. Основные понятия и допущения. Модель удара
В курсе теоретической механики теорию удара рассматри-
рассматривают как процесс соударения материальных точек и тел со срав-
сравнительно малыми относительными скоростями. Для этого исполь-
используют модель Гюйгенса-Ньютона, в которой интегрально учиты-
учитываются потери энергии при наличии местных упругопластиче-
ских деформаций.
Более точной является физическая модель удара, в которой
рассматриваются происходящие во времени местные деформа-
деформации сплошной среды. Для изучения процессов деформирования
при этом привлекают теории упругости, пластичности и распро-
распространения волн в теле. При значительных относительных скоро-
скоростях удара (до нескольких километров в секунду) применяют
гидродинамическую или специальную теорию высокоскорост-
высокоскоростного удара.
В излагаемой ниже теории удара рассматривают такие
ударные явления, при которых происходит конечное изменение
скоростей точек механической системы за весьма малый про-
промежуток времени х, называемый временем удара.
Запишем дифференциальное уравнение движения матери-
материальной точки массой т в виде
d(mV) = Fdt = dS B0.1)
и проинтегрируем его в пределах от 0 до х
т
т(п - v) = JFdt = S . B0.2)
653
Здесь V — скорость точки в процессе удара; v, и — скорости
точки до и после удара соответственно; S — импульс ударной
силы F за время х . Изменение скорости точки Av = и - v за вре-
время удара есть величина конечная, что следует из эксперимента.
Из B0.2) следует, что импульс ударной силы также величина
конечная.
Запишем импульс ударной силы с помощью теоремы о сред-
среднем значении функции: *
B0.3)
0
где Fcp — среднее значение ударной силы за время удара.
Из B0.2) и B0.3) получаем
- т(п-у)
ср== х '
т. е. при конечном значении произведения в числителе и очень
малом знаменателе (х«10~2 -10 с) Fcp очень велико (порядка
1/х). В связи с этим при х -> 0 и Fcp -> оо импульс S есть вели-
величина конечная.
Согласно принятому допущению,~в уравнениях теории удара
время отсутствует, поэтому вместо ударных сил будем опериро-
оперировать их импульсами.
Уравнение B0.2) выражает теорему об изменении количест-
количества движения точки при ударе. Покажем, что перемещение Аг
точки за время удара бесконечно мало. Интегрируя уравнение
mV —т— — S л-ту
dt
от 0 до х, получаем
( s.A
B0.4)
т /
Здесь З^р = isdt/x — средний ударный импульс силы; S = [Fdt
о о
при 0</<х. При конечных v, 5cp и х->0 перемещение точки
654
Аг за время удара пренебрежимо мало и его при ударе не учи-
учитывают.
Пусть на точку действуют ударная сила F\t) и конечная си-
сила Р . В качестве конечных можно рассматривать силы тяжести,
упругости, а также силы, зависящие, например, от скорости точ-
точки. Суммарный импульс этих сил равен
о о
Вторым слагаемым здесь можно пренебречь, так как оно является
малым того же порядка, что и т, a S — величина конечная, по-
поэтому при ударе действие конечных сил не учитывается.
Используя модель Ньютона, рассмотрим удар двух тел, при
котором в точке контакта А возникают ударные силы. Трение не
будем учитывать, поэтому ударные силы и их импульсы S и S'
направлены по общей нормали к соударяющимся телам в точке А
(рис. 20.1).
Рис. 20.1
Ударная сила, действующая на тело, изменяется во времени,
как показано на рис. 20.2.
В контакте тел образуются местные упругопластические де-
деформации, зависящие от физических свойств тел. Процесс удара
655
разбивается на две фазы. В первой фа-
фазе — фазе деформирования происхо-
происходит сближение тел в точке А по общей
нормали до тех пор, пока нормальная
составляющая относительной скорости
точки контакта тел не обратится в нуль
в момент времени х,. Фаза деформи-
деформирования характеризуется импульсом
ударной силы S,. Далее начинается
вторая фаза — фаза восстановления,
при которой тела в месте контакта восстанавливают свою форму
вследствие упругих сил. Нормальная составляющая относитель-
относительной скорости точки контакта меняет знак и возрастает, но из-за
пластических деформаций не достигает своего первоначального
значения. Импульс ударной силы в этой фазе равен S2 •
Введем коэффициент восстановления К, который характери-
характеризует свойства материалов соударяющихся тел:
Рис. 20.2
S['
B0.5)
где S}, S[9 S2,S2 — импульсы ударных сил в фазах деформиро-
деформирования и восстановления для первого и второго тел соответст-
соответственно.
Коэффициент восстановления определяют эксперименталь-
экспериментально. Так как после удара в общем случае полного восстановления
формы тел не происходит, то 0 < К < 1. При К = 1 удар называют
абсолютно упругим и при К = 0 — абсолютно неупругим, а
при 0 < К < 1 —упругим. В случае, когда К = 0, нормальная со-
составляющая относительной скорости точки соприкосновения тел
после удара равна нулю и фаза восстановления отсутствует. Оба
тела либо движутся совместно, либо одно тело скользит по дру-
другому после максимального сближения в точке контакта.
Теорию удара при изложенных допущениях можно приме-
применять с достаточным приближением на практике для сравнительно
небольших относительных скоростей точек контакта при ударе
(до десятков метров в секунду); для компактных соударяющихся
656
тел, близких по форме к сферическим, а также для компактного
тела, ударяющегося о полупространство.
Формулы классической механики справедливы и при соуда-
соударении удлиненных тел, если время т удара в несколько C-5) раз
превышает время Т двойного пробега упругих волн по соуда-
соударяющимся телам, т. е. т > (з... 5O\ Это означает, что время удара
должно быть велико, чтобы из места соударения не была безвоз-
безвозвратно удалена упругая энергия волнами возмущения.
Например, для стержней Г = 2//с, с = yJE/p , где /, ?, р —
длина, модуль упругости и плотность стержня. Для стального
стержня скорость распространения упругих волн (скорость звука)
с « 5000 м/с . Пусть время удара т « 0,001 с, тогда длина стерж-
стержней, при которых можно использовать данную теорию, должна
тс
быть / <
¦ = 0,5...0,83м.
6...10
На рис. 20.3 представлены экспериментальные зависимости
коэффициента восстановления при соударении сфер из одинако-
одинакового материала (бронзы или свинца), но различной массы и от-
отношения масс, от начальной относительной скорости удара v.
Значение коэффициента восстановления К, как видно на рисунке,
зависит от v, поэтому выбирают некоторое среднее значение К в
определенном диапазоне изменения v. Это среднее значение при-
принимают постоянным (в определенном диапазоне изменения v) и
используют при решении практических задач.
1,2 2,4 3,6 4,8 6,0 7,2 8,4 v,m/c
Рис. 20.3
43 Зак. 16
657
20.2. Теоремы об изменении количества движения
и о движении центра масс системы при ударе
Для материальной точки теорема об изменении количества
движения при ударе имеет вид B0.2), т. е. изменение количества
движения точки за время удара равно импульсу ударной силы,
действующей на точку.
В проекциях на оси прямоугольной декартовой системы
координат получаем *
тих - mvx = Sx; muy - mvy = Sy; muz — mvz = Sz.
Для ударных внутренних сил механической системы имеем
t^=0; ?а?о<*?'>) = 0.
к=\ к=]
Проинтегрировав по времени удара, получаем
0;?Mo(Sjt(')) = 0. B0.6)
к=\ к=\
Рассмотрим механическую систему, состоящую из N мате-
материальных точек. Применим теорему об изменении количества
движения для к-й точки системы:
S(kl)> k = \,...,N. B0.7)
Здесь uk,vk — скорости к-й точки после и до удара; Sjf\ S^ —
импульсы внешней и внутренней ударных сил. Суммируя урав-
уравнения B0.7) по точкам системы, получаем
N
к=\
_ N
Обозначив Q =]Tj
к=\
B0.6) из B0.7) находим
N
к=\
ткпк
—
hvk
,Qo
N _
к=\
N
к=\
N
N
к=\
vk , с
к
учетом
свойства
. B0.8)
к=\
гДе Q> Qo — количества движения системы после и до удара
соответственно.
658
Таким образом, изменение количества движения механиче-
механической системы за время удара равно векторной сумме импульсов
всех внешних ударных сил, действующих на точки системы.
В проекциях на оси прямоугольной декартовой системы ко-
координат имеем
а -ft, =IX?; Q> -ft, =tsif; Q, -Q0: =?s?>. Bo.9)
k=\ k=\ Ы\
Запишем Q =Мп( , Q0=Mvc, где M9uC9vc —соответст-
—соответственно масса системы и скорости ее центра масс после и до удара.
Согласно B0.8), выражение для теоремы о движении центра масс
системы имеет вид
w _
Muc-Mvc=^S(kc) . B0.10)
k=\
В проекциях на оси координат получаем
М(иСк - vCx ) = f S?>; M(uCy - vCy) = X Sff;
k=] *=1 B0.11)
k=\
Получим законы сохранения, вытекающие из этих теорем.
N —
1. Если ]Г S{ka) = 0, то из B0.8), B0.10) следует
?=1
Q=Qo, uc=vc. B0.12)
Таким образом, если векторная сумма импульсов внешних
ударных сип равна нулю, то вектор количества движения и ско-
скорость центра масс системы остаются постоянными.
В проекциях на оси координат имеем
Qx=Qoxi Qy=Qoy; Qx=Qozi
исх =vcx\ Щу =vCr; uCz =vCz.
N
2. Если J^Sk? = ° >то из B0.9), B0.11) получаем
Лг=1
Qx=Qox> Ucx=Vcx-
43* 659
20.3. Теорема об изменении главного момента
количеств движения системы при ударе
Умножим векторно равенство B0.2) слева на радиус-вектор
г (рис. 20.4):
г х тп - г х mv =rx S , или Мо (тп) - Мо (mv) = Мо (S), B0.13)
где М0(тп\ Afo(/wv), M0(S) —моменты количества движения
материальной точки после и до удара и момент импульса ударной
силы относительно точки О соответственно.
Уравнение B0.13) выражает теорему
об изменении момента количества дви-
движения материальной точки относительно
точки О при ударе.
Sim В проекциях на оси прямоугольной
декартовой системы координат получаем
Мх (тп) - Мх (mv) = Мх (S);
Рис.20.4
Mz (тп) - Mz (mv) = A/, (S ).
Запишем уравнение, выражающее теорему об изменении
момента количества движения для любой из 7V точек механиче-
механической системы:
гк хтпк -rk
=rk xSJ;c) +rk
B0.14)
где uk,vk — скорости к-и точки после и до удара; S^.S^ —
импульсы внешней и внутренней ударных сил, действующих на
к-ю точку системы.
Суммируя B0.14) по всем точкам системы, получаем
itMoiSP), B0.15)
где Ко =
xmkuk,
xmkvk — главные моменты
количеств движения системы относительно точки О после и до
N _ Л/ _
удара, ^dMo(Ske)) = y?rk *Skc) — сумма моментов импульсов
к=\
к=\
660
N _
внешних ударных сил относительно точки О (^MO(SJ^ )=¦
Ъ х $к° = О по свойству внутренних сил).
Сформулируем теорему: изменение главного момента коли-
количеств движения системы относительно какой-либо точки за
время удара равно векторной сумме моментов импульсов внеш-
внешних ударных сил, приложенных к материальным точкам систе-
системы, относительно той же точки.
Для главных моментов количеств движения системы относи-
относительно осей координат имеем
B0.16)
к=\
Получим законы сохранения, вытекающие из этой теоремы.
1. Если главный момент импульсов внешних ударных сил
N _
относительно точки О равен нулю: ]jT Mo {S[e)) = 0, то, согласно
ы\
B0.15), К() = ЩР, откуда Кх = К^0), Ку = К™, Kz = К^0).
2. Если главный момент импульсов внешних ударных сил
w _
относительно оси Ох равен нулю: ^AfJCE'^)) = 0, то, согласно
к=\
B0.16), Кх =КХО).
Рассмотрим теперь, как изменяется угловая скорость вра-
вращающегося тела при ударе. Пусть твердое тело вращается вокруг
неподвижной оси Az с угловой скоростью со 0 (рис. 20.5). К телу
приложены импульсы S^ {k = l9..., N). Определим изменение
угловой скорости со тела после их приложения.
Главные моменты количеств движения тела относительно оси
Az после и до удара равны: Kz =J2(oz,Kz0) =У2соО2, где Jz —
661
момент инерции тела относительно
оси вращения. Из третьего уравнения
B0.16) имеем
N
.Ь=1
le)), B0.17)
откуда
где Acoz,coz — изменение угловой
скорости при ударе и проекция на ось
Az угловой скорости тела после удара
(см. рис. 20.5). Моменты импульсов
SA,SB ударных реакций относитель-
относительно оси Az при этом равны нулю.
20.4. Коэффициент восстановления
Пусть материальная точка массой т падает на гладкую по-
поверхность со скоростью v , направленной под углом а к нормали
к поверхности (рис. 20.6). После удара скорость точки п соста-
составит с нормалью угол р. Угол а называют углом падения, угол Р —
углом отражения. Если а Ф 0, то
удар точки о поверхность называют
косым, если а = 0 — прямым. Им-
Импульс S ударной реакции поверх-
поверхности направлен по нормали к по-
поверхности.
Определим скорость п точки
после удара и импульс S ударной
реакции. Согласно теореме об изме-
изменении количества движения точки, в
проекциях на нормаль п и касатель-
касательную т имеем
Рис. 20.6
662
Отсюда uT =vT =vsina. Ho S и ип нельзя определить из одного
уравнения, необходимо знать коэффициент восстановления К.
Для его определения представим удар точки о поверхность в двух
фазах. В начале фазы деформирования скорость точки равна v , в
конце — щ . Импульс ударной реакции в этой фазе
о
где т,, N — время фазы деформирования и нормальная ударная
реакция поверхности соответственно.
В конце фазы деформирования нормальная составляющая
скорости точки равна нулю и щ = пх (где пх — касательная со-
составляющая скорости точки).
Фаза восстановления начинается при скорости точки щ и за-
заканчивается, когда точка покидает поверхность со скоростью п.
т
Импульс ударной реакции в этой фазе S2 = \Ndt. Коэффициент
восстановления для точки K = S2 /S{ . Согласно теореме об изме-
изменении количества движения точки в проекции на нормаль (см.
рис. 20.6) для первой и второй фаз удара соответственно, имеем
m(u]n-vn) = m(-vn) = S}; B0.18)
m(un-u]n) = mun=S2. B0.19)
Заметим, что S^ + S2 = S . Разделив B0.19) на B0.18), получим
к = ^ = _^ B020)
Si vw
Соотношение K = -un/vn подчиняется модели Ньютона. В
учебной литературе его используют для определения коэффици-
коэффициента восстановления. При отсутствии ударного трения B0.5) и
B0.20) во многих случаях равнозначны. При наличии ударного
трения для тел, совершающих при ударе произвольное движение,
модель Ньютона в ряде случаев противоречит теореме о кинети-
кинетической энергии, поэтому уравнение B0.5) более приемлемо.
663
Формула B0.20) позволяет определить с помощью простого
эксперимента значение коэффициента восстановления К.
При прямом ударе а = 0, vn = -v, un =u и
K = u/v. В то же время v = yj2gh}, и = <yj2gh2
(рис. 20.7). Подставив выражения для v и и в
формулу для К, получим
и
Измерив высоты падения h} и отскока h2 мате-
риальной точки, можно рассчитать значение
коэффициента восстановления.
При косом ударе а * 0 (см. рис. 20.6)
Рис. 20.7
К
vn vw uT tgC
Измерив экспериментально углы падения а и
отражения |3, можно вычислить значение коэф-
коэффициента восстановления.
При известном коэффициенте восстановления К можно ре-
решить задачу об определении п и S с помощью дополнительной
зависимости un =-Kvn = Ал; cos а, так как vn =-vcosot.
20.5. Теорема об изменении кинетической энергии
системы при ударе. Теорема Карно
Теорема Кельвина
Получим выражение для работы ударных сил. Умножив ска-
лярно члены уравнения B0.2) на п и v , получим
ти2 - muv = Su, muv - mv2 = Sv .
Сложив эти уравнения и разделив на 2, находим
ти
mv2 S(u+v)
B0.21)
2 2 2
Из теоремы B0.21) следует, что изменение кинетической энергии
точки при ударе равно работе А ударной силы F :
664
Сформулируем теорему Кельвина: работа ударной силы,
приложенной к материальной точке, за время удара равна ска-
скалярному произведению ударного импульса на полусумму скоро-
скоростей точки после и до удара.
Теорема об изменении кинетической энергии
Рассмотрим механическую систему, состоящую из N точек.
Запишем теорему Кельвина для k-й точки:
— 1, Z,, ..., 1\ ,
где St = S<e)+S<'\
Суммируя по точкам левую и правую части уравнения, по-
получаем уравнение, выражающее теорему об изменении кинетиче-
кинетической энергии системы при ударе:
B0.22)
^ тки\ Л тк\\
где Т = 2^ , Го = 2^ кинетические энергии системы
к=\ 2 ^=) 2
после и до удара соответственно.
Согласно B0.22), сумма работ ударных сил, приложенных к
материальным точкам механической системы, равна
fA _f ^fo+vJ.f Sy(uk+vk)
Сформулируем теорему об изменении кинетической энер-
энергии: изменение кинетической энергии механической системы при
ударе равно сумме работ внешних и внутренних ударных сил, вы-
выраженной через суммы скалярных произведений внешних и внут-
внутренних ударных импульсов на полусуммы скоростей точек после
и до удара.
42 Зак. 16 665
Теорема Карно
В выражении B0.22) присутствуют неизвестные ударные
импульсы. Чтобы использовать теорему об изменении кинетиче-
кинетической энергии при ударе для решения практических задач, необ-
необходимо эти неизвестные импульсы исключить. Для этого нужно
воспользоваться теоремой об изменении количества движения
при ударе. Теорема Карно соединяет эти две теоремы.
Выведем теорему Карно для материальной точки (см.
рис. 20.6). При падении материальной точки на гладкую поверх-
поверхность происходит наложение идеальной стационарной неупругой
связи. В начале фазы деформирования скорость точки равна v , в
конце и, = мт; импульс в фазе деформирования Sx. Так как удар-
ударная поверхность гладкая, Sxux = 0. Запишем для фазы деформи-
деформирования уравнения, выражающие теорему Кельвина и теорему об
изменении количества движения:
ти} mv2 Sx(ux + v) Sxv * _ч -
—¦ = —Li-! i = —!—; т\щ -v) = Si.
2 2 2 2 _
Умножив второе уравнение скалярно на Sx, получим
mSxv _ S2
Окончательно имеем
^--^- = -Т-<0. B0.23)
2 2 2т
При мгновенном наложении связи на точку происходит
потеря ее кинетической энергии. Для фазы восстановления,
скорости точки в начале и в конце фазы будут соответственно
пх и п, импульс ударной реакции S2. Так как S2 перпендикуля-
перпендикулярен щ , ?2г7, = 0. Далее аналогично записываем
ти2 ти2 _S2(u + w,)_ S2u /_ - \ «
~2 2~~ 2 ~~2~' mVw~wib 2-
Умножив второе уравнение скалярно на S2, получим
muS2 S2
666
Окончательно имеем
^l_^ = ?L>0. B0.24)
2 2 2т
В фазе восстановления происходит мгновенное снятие связи.
При мгновенном снятии связи изменение кинетической энергии
точки положительное.
Сложив B0.23) и B0.24), получим
ти2 mv2 = S2-S22 (S, + S2)(S, -S2)
2 2 2m 2/и
Кроме того, S = S} + S2, S2 = KS}. Отсюда
S, = -^—; Ss-S, =]—^S. B0.26)
Из B0.25) с учетом B0.26) запишем
mS_ mv2 __\-K^Sl
————— ——— _— — —^^^—— m \4*\J,A*I\
2 2 \ + K2m
Согласно теореме об изменении количества движения точки
при ударе S = т(п - v). Подставив это выражение в B0.27), по-
получим
ти2 mv2 = \-К т(у-пJ B0 28)
2 2 1 + А" 2
Величину v - п называют потерянной скоростью точки, а
m(v-uJ „
кинетической энергией точки, соответствующей
потерянной скорости. Из B0.28) следует, что в результате удара
при 0 < К < 1 происходит потеря кинетической энергии точки, а
при К = 1 (при абсолютно упругом ударе) потери кинетической
энергии отсутствуют.
Рассмотрим теперь систему, состоящую из N точек. Предпо-
Предположим, что коэффициент восстановления К одинаков для всех
соударений (налагаемых связей). Тогда для Л-й точки теорема
Карно будет выражаться уравнением
mkv2k
' ' '¦"' '
2 2 \ + К 2
Суммируя по всем точкам, получаем
42* 667
т-то =
\-KJ,mk(vk-ukJ
* mku] . n mkv]
где Т = 2^ > Т{) =2^ кинетические энергии системы
после и до удара соответственно.
Обозначим кинетическую энергию системы, соответствую-
соответствующую потерянным скоростям точек, через Тп с. Тогда
1 — К
Т —Т — Т
1 0 1 ~ л Tr l п
-щJ
. Величину То-Т = Гпот называют еще
к=\
потерянной кинетической энергией при ударе.
Сформулируем теорему Карно для механической системы:
потеря кинетической энергии системы при упругом ударе в слу-
случае мгновенного наложения идеальных связей равна кинетиче-
кинетической энергии системы, которая соответствует потерянным
,, \-К
скоростям точек системы, умноженной на коэффициент .
Пример 20.1. Однородный диск радиусом R и массой т имеет угловую ско-
скорость аH . По ободу диска вдоль линии N-N, отстоящей от оси Oz на расстоянии
R/2 (рис. 20.8) со скоростью v ударяет материальная точка массой /и,.
Определить угловую скорость диска после удара и импульс ударной реак-
реакции опоры, если удар абсолютно неупругий, а угол а = 30° .
Решение. Механическая система состоит из диска
дг| - • и материальной точки. Согласно теореме об измене-
11 нии главного момента количеств движения системы
чсо0 относительно оси Oz,
N
Рис. 20.8
Внешний ударный импульс — это импульс удар-
ударной реакции оси вращения So, который пересекает
ось, и его момент относительно оси равен нулю. По-
Поэтому К2 = К^о), где К2, К^о) — главные моменты
количеств движения системы относительно оси Oz
после и до удара.
668
Найдем К{.0) как сумму главного момента количеств движения диска и мо-
момента количества движения точки относительно оси Or.
А<0) = К^ + К™ = Лсо0 + M;(mxv) .
Окончательно имеем
Так как удар точки абсолютно неупругий, то вектор скорости точки после
\дара направлен по касательной к ободу диска и ux=(o.R. где со. — угловая
скорость диска после удара. Тогда
где J. = mRrjl. и
A". =J.(OZ + /я,мтЛ = <»..(./. +mlR2).
co.(J. +m]R2) = Jz(o0 + w,v— .
Отсюда
со. =-
—
.Согласно теореме об изменении количества движения системы
SOx = AQY, S(h = AQ) . Количества движения системы до и после удара соот-
соответственно O0=w,v и O = w,m. Тогда AQ = m](u-v). Количества движения
однородного диска до и после удара равны нулю, так как скорости центра масс
диска равны нулю
В проекциях на оси координат при а = 30° получаем
1— ai
Пример 20.2. В кулисном механизме между ползуном /4 и стержнем (ЗЛ/
имеется зазор (рис. 20.9, а). Стержню АВ сообщается угловая скорость со0 . По-
После закрытия зазора стержню ОМ сообщается угловая скорость при обычном
(беззазорном) контакте. Однородный стержень АВ длиной / и массой т может
вращаться вокруг оси Bz. Момент инерции стержня ОМ относительно оси. вра-
вращения Oz равен J. Угол а задан. Массой и размерами ползуна А, а также трени-
трением пренебречь.
Определить угловую скорость стержня ОМ после закрытия зазора, ударный
импульс в соединении А, потерю угловой скорости стержня АВ и потерю энер-
энергии в системе при ударе.
Решение. Закрытие зазора в соединении А будем рассматривать как удар-
ударный процесс, так как при этом происходит мгновенное изменение угловых ско-
скоростей стержней. До закрытия зазора угловые скорости стержней АВ и ОМ
669
соответственно равны соо и 0, после закрытия — &г и со,г. Составим выраже-
выражение для теоремы об изменении главного момента количеств движения для сис-
систем, изображенных на рис. 20.9, бив соответственно:
n
т/2
где
; SA = SA>;
о,, = SAOA;
z -©0) = -5/1'i4'5sina,
/sina .
B0.29)
B0.30)
Скорость точки А после удара представим как скорость сложного движения
по формуле пА = и^ + пАг). Переносное движение точки А — это движение
вместе со стержнем ОМ, причем переносная скорость и^А] =OA(d]z =M/lTsina ,
относительное движение — движение вдоль стержня ОМ со скоростью пА ).
Далее имеем
им = А'Ва>2 = /о>,; ю,. = и{А}х /ОА = <ог. B0.31)
Сложив B0.29) и B0.30), получим
Лео,. + (со2 -со0)=0,
откуда с учетом B0.31) имеем
0)lz =
Из уравнения B0.29) находим
//Л
/Я/ Юл
О4
670
Потеря угловой скорости стержня АВ
Асо. =со, -со0 =
Потеря кинетической энергии в системе после закрытия зазора
Пример 20.3. В механизме к зубчатой рейке / массой /я, приложен импульс
ударной силы S (рис. 20.10). Рейка 7 находится в зубчатом зацеплении с шес-
шестерней 2 массой т2 и шестерней 3 массой т3 и радиусом г3. Шестерни пред-
представляют собой однородные диски. До приложения импульса S механизм по-
покоился. Зазоров в зацеплении нет.
и т.
Рис. 20.10
Определить угловую скорость со32 шестерни 3 после удара.
Решение. Данная задача может быть решена с помощью теоремы об изме-
изменении кинетической энергии при ударе, согласно которой
5>2
к=\
Где Г, То — кинетическая энергия системы после и до удара соответственно.
f/ работа внутренних ударных сил ^ A(F^) = 0 (нет зазоров), То = 0 (по условиям
!;
I задачи), а
к=\
,t/ t 72Х t
671
Здесь и — скорость рейки / после удара, uz = (o2zr2 - -Щггъ (со2г, со3г — проек-
проекции на оси O2z2,O2z} угловых скоростей шестерен 2 и 3 после удара);
J2_ = 2 2 , J3z = 3 3 — моменты инерции шестерен относительно осей
вращения.
Сумма работ внешних ударных импульсов равна работе ударного импульса S :
N
После подстановки получаем
со2 ' ~ ~2
откуда находим
2 М2
3_
2
2S
r3 Bm, + m2 + т3)
(знак «-» означает, чго направление угловой скорости со3г совпадает с направ-
направлением вращения часовой стрелки).
20.6. Удар по телу, вращающемуся вокруг
неподвижной оси. Центр удара
Определение импульсов ударных реакций
Рассмотрим удар, импульс ко-
которого S, по твердому телу мас-
массой т, вращающемуся вокруг не-
неподвижной оси (рис. 20.11). Пусть
это будет ось Oz прямоугольной
декартовой системы координат
Oxyz, связанной с телом. В точках
закрепления тела появятся им-
импульсы SA,SB ударных реакций,
проекции которых на оси обозна-
обозначим SAx,SAy,SAz, SBx,SBy. Со-
Согласно теоремам об изменении
количества движения и главного
момента количеств движения при
ударе для данного тела,
Рис. 20.11
672
Q-Q0=S + SA+SB; B0.32)
AKO =KO -K^ =MO(S)+MO(SA)+MO(SB), B0.33)
Q,Qo — векторы количества движения тела после и до уда-
удара, Ко, К^Р — главные моменты количеств движения тела отно-
относительно точки О после и до удара.
Так как
AQ =m(uc -vr) = /w(cGxrc - co0xrc)
получаем
AQ=m
хс
J
о
Ус
Асо
zc
= /w[/(- усАсо) + ]хсАсо + к • о], B0.34)
где Асо = Acoz = со2 - со0,.
Определим проекции главного момента количеств движения
тела на оси координат по формулам для твердого тела, имеющего
неподвижную точку, при условии, что (йх = со^ = 0, со2 ф 0,
АКХ = -JXZA(*>, АКу = -JyzAa, AKZ = Л Асо. B0.35)
Система уравнений B0.32), B0.33) с учетом B0.34), B0.35)
имеет вид
AQX = -тус Аю = Sx + SAx + 5ejc;
AQy =
= Sy+ SAy
By
AKX =-
AKy =-
С помощью системы B0.36) при заданных импульсе S и
точке его приложения определяют изменение угловой скорости
Асо (см. последнее уравнение), а также S^, SAy, SAz, SBx, SBy . По-
Последнее уравнение B0.36) уже было получено ранее (см. B0.17)).
673
Центр удара
Рассмотрим теперь задачу о нахождении условий, при кото-
которых удар, произведенный по телу, не создает ударных реакций.
Положим в B0.32), B0.33) SA = SB = 0, тогда уравнения B0.36)
примут вид
B0.37)
Из третьего уравнения системы B0.37) следует, что им-
импульс S должен быть перпендикулярен оси вращения тела Oz.
Выберем плоскость Оху так, чтобы в ней находился импульс
S, а ось Ох направим параллельно S (рис. 20.12). Тогда
5^=0, SX=S, Mx(S) = My(S) = 0. Пусть ON = l. Уравнения
B0.37) примут вид
Рис. 20.12
У\
674
Из второго уравнения имеем хс — 0, из четвертого и пятого
находим JХ2 = Jyz = О. Это означает, что центр масс тела лежит в
плоскости Oyz, ось Oz является главной для точки О, а импульс
S ударной силы перпендикулярен плоскости, проходящей через
ось вращения и центр масс тела. Из первого и последнего урав-
уравнений получаем
l = Jz/(myc). B0.38)
Из B0.38) следует, что знаки ус и / одинаковы, т. е. центр
масс системы и точка N лежат в плоскости Oyz по одну сторону
от оси Oz.
Точка N, в которой приложен импульс S при отсутствии
ударных реакций подшипников, называется центром удара.
Если центр масс системы находится на оси вращения, то
ус =0 и / = оо, т. е. в этом случае центр удара отсутствует (из
уравнения B0.32) следует SA + SB = -S). Отметим, что удары по
уравновешенным вращающимся валам машин передаются на
подшипники.
Итак, чтобы при приложении к телу, вращающемуся вокруг
неподвижной оси, ударного импульса не возникали ударные реак-
реакции в опорах, т. е. чтобы существовал центр удара, необходимо и
достаточно выполнить следующие условия:
1) ударный импульс должен быть перпендикулярен плос-
плоскости, проходящей через ось вращения тела и его центр масс;
2) точка N пересечения линии действия ударного импульса с
плоскостью, проходящей через ось вращения тела и его центр
масс, должна лежать в этой плоскости по одну сторону от оси
вращения вместе с центром масс;
3) ударный импульс, произвольный по величине, должен ле-
лежать в плоскости, перпендикулярной оси вращения и проходя-
проходящей через точку О, для которой ось вращения является главной
осью инерции тела.
Замечание. Покажем, как на оси Oz определить точку О, для которой ось
вращения является главной. Проведем оси Ахх, Аух, параллельные осям Ох, Оу
(см. рис. 20.12), тогда д- = хх, у = ух, z = z, - а (ОА = а). Далее для центробежных
моментов относительно осей систем Oxyz и Axlylz] имеем Jxz=JXiZl,
675
jyz = jy^ - myca . Если ось Oz является главной для точки О, то JX2=Jyz=zO.
Поэтому JX{2{ = 0 и а = JУ{2] /(тус). Оси Ахх и Аух должны быть расположены
так, чтобы легко было определить Jy{2i.
Пример 20.4. Однородный диск массой т и
радиусом R закреплен жестко на оси и может
вращаться вокруг оси Oz (рис. 20.13). В точке К
перпендикулярно плоскости диска приложен им-
импульс 5 ударной силы. В начальный момент диск
покоился.
Определить угловую скорость диска после
удара, а также ударные реакции; найти центр
удара.
Решение. Введем систему координат Оху.
Диск лежит в плоскости Oyz. Ось Oz — главная в
точке О, так как она перпендикулярна плоскости
симметрии диска Оху, поэтому центробежные
моменты относительно осей Ox, Oz и Оу, Oz рав-
равны нулю: У„ = Jyg = 0. Координаты центра масс
хс = 0,yc=R. Обозначим ОК = у.
Составим уравнения для теоремы об измене-
изменении количества движения в проекции на ось Ох и
для теоремы об изменении главного момента количеств движения относительно
осей ОуиОг
тыСх = -S + SAx + SBx; - У^оJ = SBxOB - SAxOA; J2(o2 = Sy,
где uCx — проекция скорости центра масс на ось Ox, uCx = -<о2ус, ус = R; ю2 —
угловая скорость диска после удара.
Решив систему уравнений, получим
о О А о Л о
Ау
Рис. 20.13
_ Sy _ 4Sy
5mR2
1--^
где у =
J2=
c. = -mR2; X =
4
ОА/ОВ.
Очевидно, что SAy = SBy = SAz = 0 .
Для нахождения центра удара положим SAx = 0, тогда
.=0 и
1-т-^~- = 0, отсюда yN=jR.
Таким образом, центр удара (точка N) лежит на оси Оу на расстоянии
ON = E/4)/?. На рис. 20.14 построены зависимости <д2(у), SAx(y) при Х-\,
0<y<2R.
676
1,25/Г
20.7. Удар по твердому телу с неподвижной точкой.
Центр удара. Удар по свободному твердому телу
Приложим импульс S ударной силы к твердому телу массой
т, имеющему одну закрепленную точку О (рис. 20.15). В непод-
неподвижной точке О выберем тройку главных осей инерции тела.
Воспользуемся теоремой об изменении главного момента коли-
количеств движения для осей координат и определим изменение угло-
угловой скорости:
Лсок =
_MZ(S)
B0.39)
где Jx, JY, Jу — главные моменты инерции для точки О.
Импульс S() ударной реакции вычислим с помощью уравне-
уравнения, выражающего теорему о движении центра масс тела:
mAvr =SO+S, B0.40)
где Avr = Асо х ?с; Дсо = а> - ш0.
При ударе по телу, имеющему неподвижную точку, также
можно определить центр удара.
Рассмотрим частный случай. Пусть ось OZ — главная цен-
центральная ось инерции тела, а импульс S параллелен оси ОХ
(рис. 20.16). Тогда
677
Пусть S() = 0. Уравнение B0.40) в проекциях на оси коорди-
координат имеет вид
mAcoyZr = SX =S', -mAcoxZc = SY =0. B0.41)
Согласно B0.39),
= 0; AcoK =——; Aco7 =
J у J у
B0.42)
где JY, ./z — моменты инерции тела относительно осей OY и OZ.
Zl
Рис. 20.15
Из первого выражения B0.41) и второго B0.42) находим
ZN = JY /(mZr), У^ задаем произвольно и из третьего уравнения
B0.42) определяем Acoz. Координата
XN произвольна. Ввиду того, что XN
и YN произвольны, точка N — это лю-
любая точка плоскости Z = ZN .
Это решение доказывает сущест-
существование центра удара.
Пусть теперь импульс S прило-
приложен к телу массой т, имеющему угло-
угловую скорость со 0 и скорость центра
масс vc (рис. 20.17). Необходимо
определить угловую скорость тела со
678
(или Лео = со - со 0) и скорость центра масс тела ис (или
Avc =пс - v( ) после удара.
Согласно теореме о движении центра масс, мгновенное при-
приращение скорости центра масс тела в проекциях на главные цен-
центральные оси инерции — оси координат CXYZ равно
Av = ^L. Av = ^_ . Av = h.. B0.43)
т т т
Для определения мгновенного приращения угловой скорости
воспользуемся теоремой об изменении главного момента коли-
количеств движения относительно осей координат CXYZ:
АКСХ =JCxb®x =MCX(S)\
AKCY =У0Дсо} =МО.E);
AKcz=JczAxoz=Mcz(S)9
откуда
; А«,г =^^>, B0.44)
где Jcx 9JCY, Jcz — главные центральные моменты инерции тела.
Если тело совершает плоскопараллельное движение парал-
параллельно плоскости САГ, то уравнения движения в этом частном
случае определяются из B0.43), B0.44):
^ д SY A MCZ(S)
20.8. О связях при ударе. Общее уравнение механики
Классификация связей
Связи при ударе в механической системе отличаются от рас-
рассмотренных ранее. В основном их подразделяют на сохраняю-
сохраняющиеся и не сохраняющиеся после удара*. Кратко это можно пред-
представить так:
Классификация связей при ударе дана в книге П. Аппеля «Теоретическая
механика» (М.: ГИФМЛ, 1960. Ч. II).
679
1) связи, существующие до, во время и после удара (как в
большинстве обычных систем);
2) связи, не существующие до, возникающие во время и со-
сохраняющиеся после удара;
3) связи, существующие до, сохраняющиеся во время и не
сохраняющиеся после удара;
4) связи, существующие только во время удара, но не сохра-
сохраняющиеся после него. ,
Первые два типа связей сохраняющиеся, вторые — несохра-
няющиеся. Соответственно этим связям возникают различные
задачи удара в системах, в которых удар вызван либо приложен-
приложенными ударными импульсами, либо мгновенным наложением или
мгновенным снятием связей.
Общее уравнение механики
Рассмотрим механическую систему, состоящую из N мате-
материальных точек. Импульсы ударных сил, действующих на точки
системы, разделим на активные (заданные) SkA) и ударные SkR)
импульсы реакций связей. Для k-й точки запишем теорему об
изменении количества движения: тк(пк -vk) = SkA) + SkR),
к = \, 2,..., N, где изменение скорости к-й точки при ударе обо-
обозначим пк - vk = Avk. Запишем уравнения в виде
SlA) + S{kR) +(-ш*Д^) = 0 (* = 1,2,...,#). B0.45)
Соотношения B0.45) выражают принцип Даламбера для
системы материальных точек при ударе. Зададим механиче-
механической системе возможное перемещение Ъгк, к = 1,2,..., N . Умно-
Умножим B0.45) скалярно на 8^ и просуммируем полученные вы-
выражения по всем точкам системы, учитывая, что для идеальных
связей
N _
{R) =0. B0.46)
Общее уравнение механики при ударе в механической сис-
системе имеет вид
680
JT(St(
ЦА) -mkAvk)tfk =0. B0.47)
ы\
Если отсутствуют активные (заданные) ударные импульсы, то
B0.47) принимает вид
N
к=\
Следует обратить внимание на выбор возможных переме-
перемещений системы. Если связи, наложенные на систему при ударе
не меняются, то возможные перемещения определяют традици-
традиционным путем. Если же при ударе возникают новые связи, то вы-
выгоднее выбирать возможные перемещения для системы с нало-
наложенными идеальными связями, так как при этом выполняется
условие B0.46). Можно воспользоваться и принципом освобож-
освобождения от связей, заменив их действие приложением импульсов
ударных реакций к точкам системы. В этом случае возможные
перемещения задают без учета дополнительных связей, а им-
импульсы ударных реакций вводят в уравнение B0.47) как задан-
заданные (но неизвестные).
Пример 20.5. В механизме, приведенном на рис. 20.18, в зацеплении ступен-
ступенчатой шестерни 2 с рейкой 3 имеется зазор. До закрытия зазора угловая ско-
скорость шестерни / равна со0 < 0. Массы шестерен и рейки соответственно равны
/72,, т2, т , радиусы шестерен — г, и г2, г3, радиус инерции шестерни 2 относи-
относительно ее оси вращения равен р.
Определить скорость рейки после закрытия зазора. Шестерню / считать од-
однородным диском. Трением пренебречь.
Решение. В зацеплении шестерен / и 2 нет зазора, поэтому до закрытия за-
зазора в зацеплении В соог, = -со20г2, а скорость рейки равна нулю. После закры-
закрытия зазора в зацеплении В (удара) система имеет одну степень свободы и ско-
скорость рейки их =oJ.r3. Так как м,т = -а>,,г, =оJгг2 > то их = —~®\z • В соот-
ветствии с наложенными связями возможные перемещения системы выберем в
конце удара (при закрытии зазора):
ОГ = Г5Оф2, Г,Оф, = -Г9Офл, ОГ = LjLO©1 .
r2
Общее уравнение механики имеет вид
JZx (о),г -0HM9! + Л2 (Ю22 -ю2о)^Ф2 + muxbr = 0,
где JZ] =m]r{L/2 , Л2 =m2p2.
681
со,
Подставив в уравнение все зависимости, получим
-f-2w2p2)o)or3rl
+ 2m2p2 + 2mr32)
20.9. Уравнение Лагранжа второго рода при ударе
в механической системе
Рассмотрим механическую систему, состоящую из N матери-
материальных точек, на которую до и после удара наложены голоном-
ные связи fj(xk9yk9zk9i) = 0, у = 1,2,...,/и. Тогда число незави-
независимых координат п = 3N - т.
Запишем для такой системы уравнения Лагранжа второго
рода
d дТ дТ
— ^-^r- = Qi (i = l,2,...,л), B0.48)
dt oqi oqi
где T,qitQi — соответственно кинетическая энергия системы,
обобщенные координаты, обобщенные силы.
Проинтегрировав уравнения B0.48) по времени от 0 до т, по-
получим
дТ
дТ
= л|^ = 5/ (i = l,2,..,*),
dq
682
т.
где St = [Qjdt — импульсы обобщенных ударных сил. Так как
о
(дт) \дт ,
есть величина конечная за время удара, то Ш =
= • х -> О (обращается в нуль).
Пример 20.6. Рейки 7 и 2 массами т, и пг2 соответственно находятся в за-
зацеплении с шестерней С (однородным диском) массой m и радиусом г
(рис. 20.19). К шестерне С приложена пара ударных импульсов с моментом L.
Рис. 20.19
Определить скорость рейки 1 после удара, если до удара система покоилась.
Трением пренебречь.
Решение. Применим уравнения Лагранжа второго рода. Обобщенные коор-
координаты хх,х2 указаны на рис. 20.19, связи в системе при ударе не меняются.
Кинетическая энергия системы
C2] tf
2 2
m2k
T
2 2 2 2'
Скорость центра масс и угловая скорость шестерни С соответственно рав-
равны vCx = (ir, + х2 )/2 , vCy = 0 и o)z = (i, - х2 )/2г , где д:, = vlx, х2 = v2x
(v,,=v2,=0).
После подстановки и математических преобразований выражение для кине-
кинетической энергии принимает вид
683
Вычислим обобщенные импульсы:
L8cp L
и составим уравнения
А—— = Sx , или —(
di, 8
2г
Здесь ¦—-
= 0 , так как до удара система покоилась.
Из полученной системы уравнений находим проекцию скорости рейки / на
ось Ох после удара
( )
г[т2 +3т(тх +т2)+8/и1/и2]
20.10. Удар двух тел при поступательном движении.
Энергетические соотношения
Удар двух тел
Рассмотрим удар двух тел, движущихся поступательно, без
учета трения. Тела 1 и 2 массами тх и т2 соответственно имеют
до удара скорости vx и v2 (рис 20.20). При отсутствии трения
импульсы ударных сил Sx и S2 направлены по общей нормали
пп к соударяющимся телам в точке контакта, которую называют
линией удара. Будем рассматри-
рассматривать центральный удар, при ко-
котором центры масс тел лежат на
линии удара (см. рис. 20.20). Не-
Необходимо определить скорости
щ, п2 тел после удара и ударные
импульсы S}, S2.
Так как 5, = -S2, то
= 0. B0.49)
Рис.20.20
684
Нормальные составляющие скоростей тел до удара
vn\ =v,cosa,; vw2=v2cosa2.
Чтобы удар состоялся, должно выполняться условие vwl > vn2.
Согласно теореме об изменении количества движения при
ударе,
m](u]-v]) = S]; m2(u2-v2) = S2. B0.50)
Сложив уравнения B0.50) с учетом B0.49), получим
тхщ +т2п2 -mxvx + m2v2. B0.51)
Из B0.51) нельзя определить скорости щ, п2 в общем случае,
однако при абсолютно неупругом ударе щ = п2 = и, т. е. неиз-
неизвестной становится общая скорость тел после удара, которую
можно вычислить.
Уравнение B0.51) показывает, что выполняется закон сохра-
сохранения количества движения системы двух тел.
Для решения поставленной выше задачи необходимо знать
коэффициент восстановления. Получим формулу для его опреде-
определения.
Запишем уравнения для фаз деформирования (?A)) и восста-
восстановления EB)) тел 7 и 2 соответственно:
где п', п — скорости тел 7 и 2 в конце фазы деформирования
соответственно.
В проекции на ось т имеем
m](u'x-vu) = 0; тх(ии-и'х) = 0 —
для тела 7 и
ml(UT -V2t) = °; "*2(W2t -Wt) = 0 —
для тела 2.
Отсюда
ии =и[ =vlT ^v, since,;
685
2t = Ux = V2t = V2 S*n a2
В проекции на ось п получаем
Щ
- vln ) = -
для тела 1 и
т2(и2п -ип) = S?>; m2(«„ -v2w) = S
для тела 2.
Из уравнений B0.52) и B0.53) находим
= —— - — , А - —77Г .
?,A) <"-vi, ^° ^~V2W
B0.52)
B0.53)
B0.54)
Условием окончания первой фазы — фазы деформирования явля-
является и'„=и„. Тогда из B0.54) получаем
к = _Щп-«2п B0.55)
Теперь определим щ, w2 и S} = -^2 при условии, что задан
коэффициент восстановления К. В проекции на ось п уравнение
B0.51) имеет вид
ЩЩп + »*2W2* = WlV1/i + ™2V2* • B0.56)
Из B0.55) и B0.56) находим
Здесь
А, =
А2 =
А =
1 -1
щ т2
Щ
= vIn (w, - Кт2) + m2v2n Q + K);
0
Окончательно имеем
vln
m2v2n
К) + v2n(m2 -Kmx)
B0.57)
686
В проекции на ось п первое уравнение B0.50) имеет вид
откуда с учетом B0.57) находим
тхт
l'
т] + т2
Пример 20.7. Определить скорости центров масс м,,м2 шаров, имеющих
одинаковую массу, после абсолютно упругого соударения при скоростях цен-
центров масс v,, v2 (рис. 20.21).
Решение. По условию задачи v,/; = v,, v2w = 0 , vlT = 0 , v2x = v2, m, = m2 =
= m и К = 1 . Тогда
«ы = 0 , и2н = vl/f = v, ; и]х = 0 ,
«2т = V2 •
Окончательно имеем
«1=0, U2 = V, + V2 ,
т. е. первый шар останавливается, а
второй получает скорость центра
масс v, + v2.
Рис. 20.21
Энергетические соотношения
Определим изменение кинетической энергии при ударе двух
тел, движущихся поступательно (рис. 20.22). Удар считаем пря-
прямым центральным, трение не
учитываем.
В проекции на ось я, со-
согласно B0.51), имеем
+m2v2
Тогда с учетом B0.55)
Рис. 20.22
V, -V-,
Потерянная кинетическая энергия системы ТП = То - Т, где
_/я,У|2 от2у22
У /\ — "т~ .
0 2 2
687
Кинетическая энергия системы после удара
r = ^VfL + ^2^2_ B0.58)
2 2 V
Здесь, согласно B0.57),
_ (т, - m2K)v} + т2A + K)v2
Щ + ™2 B0.59)
Шг A + A^)v, + (т2 - m,?)v7
и2=-1 ! 2- ! =-.
/г?! + т2
После подстановки B0.59) в B0.58) и преобразований полу-
получаем
_ aw,v, m-sV-y тхт-) \ — К, Ч2
2 2 т]+т2 2
B0.60)
Следовательно,
Г„ = ОТ'ОТ2 '"^(v, -v2J. B0.61)
Кинетическая энергия тел, соответствующая потерянным
скоростям,
Тп с = \ Щ (v, - Щ J + X-m2 (v2 - и2 J. B0.62)
Используя B0.59), определим разность скоростей тел до и
после удара:
V' ~M| = 2 w +w ?~'
тA + Ю(?-у) B063)
v2 -и2 =—! ^—^!_.
Подставив B0.63) в B0.62), находим
Тпс=- Щт2 (l + ii:J(v, -v2J. B0.64)
Сравнивая B0.61) и B0.64), получаем
Таким образом, можно сделать вывод, что для данного со-
соударения справедлива теорема Карно.
688
Коэффициенты использования кинетической энергии
при ударе
Ковка металла. При ковке металла полезной является та до-
доля кинетической энергии молота, которая тратится на работу пла-
пластического деформирования металла поковки. Будем считать, что
работа пластического деформирования равна потере кинетиче-
кинетической энергии ТП молота, а полная кинетическая энергия молота
То = /77, v,2 /2. Если скорость наковальни v, = 0, то
\-к2 ,
—r~vr-
<х»
\т2
/77,
/779
7, + /779
КПД процесса ковки равен
т2
¦О-*2)-
Пусть /77, /т2 = х, тогда
B0.65)
где /77,, /7?2 — соответственно массы молота и наковальни с по-
поковкой.
На рис. 20.23 построен график зависимости B0.65). Видно,
что г|тах = 1 - К2 при х = 0 (т. е. реально при х, близком к нулю).
Следовательно, чтобы повысить эффективность ковки, необхо-
необходимо уменьшить массу молота.
\-К1-
Рис. 20.23
45 Зак. 16
689
Забивка свай. В этом случае полезной будем считать энер-
энергию сваи после удара r,=/w7W9/2. Исходная энергия молота
2r0=iwlvl2/2.
КПД процесса забивки сваи
При условии, что скорость сваи до удара была равна нулю
(v2 =0), из B0.59) определим скорость сваи после удара
/77, A + ЮУ,
и, =
/и, + ш2
Тогда для КПД имеем
/и,/я.
Л| =¦
Обозначив /;;, //и-, = х, из B0.66) находим
B0.66)
B0.67)
Если принять К = const, то r|j =т],(х). Согласно B0.67),
г|, =0 при х = 0 и г|, —> 0 при д: —>оо, поэтому имеется макси-
максимум. Определим его:
dx (I + ху
Максимум достигается при jc = 1. Зависимость r|, =r\l(x) пред-
представлена на рис. 20.24, а.
О1 1
690
а
Рис. 20.24
1 К
Из B0.67) при х = 1 имеем
где 0 < К < 1. Зависимость B0.68) изображена на рис. 20.24, б.
20.11. Удар материальной точки о неподвижную
шероховатую поверхность
Рассмотрим косой упругий удар материальной точки массой
т о неподвижную поверхность с учетом сухого трения. В этом
случае импульс ударной реакции поверхности
s=sH+sT,
где Sn,ST — нормальная и касательная составляющие импульса.
Коэффициент восстановления
К = ^-, B0.69)
где Sn],Sn2 — нормальная составляющая импульса ударной ре-
реакции в фазах деформирования и восстановления соответственно,
причем
Sn=Snl+Sn2. B0.70)
Составляющая импульса, учитывающая сухое трение
Sx=-fSnsignvx, B0.71)
где / — коэффициент трения скольжения, sign vT — функция,
учитывающая знак касательной составляющей скорости vT точки.
Скорости точки до и после удара
соответственно (рис. 20.25)
v=vn +vT; п = пп +пх.
Рассмотрим различные возможные
движения точки при ударе и определим
условия, при которых эти движения
реализуются.
1. Материальная точка скользит в
течение всего времени удара т. Фаза Рис. 20.25
45* 691
деформирования начинается при / = 0и заканчивается при / = х,.
Составляющие скорости точки в начале удара vn, vT, в конце фа-
фазы деформирования v*,v*. Фаза восстановления начинается при
t = х, и заканчивается при / = х. Составляющие скорости точки в
начале фазы восстановления v*, v*% в конце удара ип,их.
Согласно теореме об изменении количества движения точки
при ударе,
т(и - v) = S = Sn + ST. B0.72)
В проекциях на оси них уравнение B0.72) для фазы деформиро-
деформирования имеет вид
m{vn - vn) = Sn]; m(vx - vt) = ?tl. B0.73)
В конце фазы деформирования v* = 0. Из B0.71) получаем
S«=-fSnl9 B0.74)
где STl < 0, / > 0, Sn] > 0 (см. рис. 20.25). Кроме того,
vn =-vcosct, vT =vsina>0, signvT =1.
Из B0.73) имеем
Sn} = ~mvn = mvcosa . B0.75)
Из B0.74) и B0.75) получаем
5т1 = -/ mv cos a < 0. B0.76)
Из B0.73) и B0.76) находим
S
v* = vT + — = v(sin a - / cos a).
m
Для фазы восстановления соответственно имеем
т(и„ -vn) = Sn2; m(ux -vt*) = Sx2,
5л2>0, Sz2 <0.
Согласно B0.69),
Sn2=KSn]
B0.77)
B0.78)
B0.79)
B0.80)
Из B0.75) и B0.80) определяем
?„2 = Aiwvcosa,
692
а из B0.70) получаем полную нормальную составляющую им-
импульса ударной реакции
Sn=mvcosa(\ + K). B0.81)
Подставив ?„2 в B0.79), находим
Sx2 = -f Kmv cos a < 0. B0.82)
Касательная составляющая импульса ударной реакции
ST = 5т1 + St2 . С учетом B0.76) и B0.82) получаем
?т = -/wvcosa(l + K)f. B0.83)
Согласно B0.75) и B0.78), нормальная составляющая ско-
скорости точки после удара
un=^ = ^ = -Kvn, B0.84)
т т
т. е. для материальной точки при наличии трения для вычисления
коэффициента восстановления можно использовать кинематиче-
кинематическую модель Ньютона. Из B0.84) получаем
un=Kvcosa. B0.85)
Согласно B0.78), касательная составляющая скорости после
удара
их = vT* + ^- = v [sin a - / cos a(l + К)]. B0.86)
m
Теперь определим условия, при которых возможно скольже-
скольжение точки в течение всего времени удара, т. е. когда
v* >0, их >0. Из B0.77) и B0.86) имеем v(sina-/cosa)>0 и
v[sina-/cosa(l + #)]>0, откуда получаем tga>/ и
tga > /A + К). Таким образом, общее условие скольжения при
ударе имеет вид
tga>/(l + tf).
Модули скорости точки после удара и полного импульса
ударной силы соответственно равны
и = д/г/т2 + и2п = v-/[sin a - /A + AT) cos a]2 +(?cosaJ ;
S = Jsf+sf = mv{\
Если в этих формулах положить / = 0, то
693
w = vvsin2 a + К2 cos2 a ; S = mv(\ + K)cosa,
т. е. получаем решение для случая удара материальной точки о
неподвижную поверхность без учета трения (см. § 20.4).
2. Скольжение материальной точки заканчивается в фазе
деформирования. В этом случае фаза деформирования разделяет-
разделяется на два этапа: 0-т' — скольжение точки, х'-хх — движение
точки без скольжения (движение по нормали). В момент времени
t - т' касательная составляющая скорости точки станет равной
нулю (т. е. v^ = 0) и скольжение точки прекратится.
Первый этап фазы деформирования начинается при / = 0
(vn, vT) и заканчивается при / = т' (v'n, v^ = 0). Необходимые
уравнения имеют вид
где S$9 S^ — нормальная и касательная составляющие
импульса ударной реакции за время от 0 до т', S^ = -fS$.
Откуда
S!^ = -mvT = -mv sin a < 0 ;
S^ mvsina
— -^y->05
f^l B0.87)
m \ f
Второй этап фазы деформирования начинается при t = х'
(v'n, v'T) и заканчивается при / = х} (v* = 05 v* = 0).
Уравнения удара будут следующими:
где S^, ^J0 — нормальная и касательная составляющие им-
импульса ударной реакции на втором этапе фазы деформирования.
Из уравнений следует:
694
Составляющие импульса ударной реакции в фазе деформирования
5tl =S(X\] + SJJ0 =-mvsinct; Sn] =S$> + 5<|° = mvcosct.
Для фазы восстановления, которая начинается при t = xx и
заканчивается при / = т, составляющие скорости будут соответ-
соответственно v* = 0, v* = 0 имт=0,«„. Уравнения удара имеют вид
™(Мп -О = ?„2; т{их -vT*) = ST2 и Sn2 =KSn].
Отсюда получаем
Тогда
т
Sn = SHl + Sn2 = A + K)mv cos a ;
*^t = ^ti + ^t2 = -wv sin a .
Чтобы скольжение точки при ударе закончилось в фазе де-
деформирования, необходимо выполнение кинематического усло-
условия
v;<0. B0.88)
Из B0.87) и B0.88) получаем
tga</. B0.89)
При отсутствии скольжения в конце фазы деформирования и
в конце удара должны быть соблюдены динамические условия
отсутствия скольжения: \SxX \</Sn]9 \SX | < / Sn . Легко проверить,
что эти условия подтверждают требование B0.89).
3. Скольжение материальной точки заканчивается в фазе
восстановления. Получим сначала решение для фазы деформиро-
деформирования (f = O...x,). Скольжение в этой фазе присутствует, т.е.
vT > 0 и v* > 0, а нормальные составляющие скорости точки бу-
будут Vj, и v* = 0. Необходимые уравнения имеют вид
Отсюда
Sn] = -mvn = mv cos a; 5Tl = -ftnv cos a;
695
v* = ——+ vT =v(sina-/cosa).
m
Фазу восстановления разобьем на два этапа. На первом этапе
(t = х,... т") составляющие скорости будут соответственно
v* = 0, v* > 0 и v*, v" = 0, а уравнения удара имеют вид
тК - v;) = S$; m(v; - vT*) = fifg> и S«> = -/ S<$.
Отсюда получаем
=-mv(sina-/cosa); Sf« =-^ = wvf^
ir ^я2 * Г sin a ^
v= + v=v
Г sin a ^
vw= + vw=v —— -cosa ,
w V / J
где iS^^, 5^2 — касательная и нормальная составляющие им-
импульса ударной реакции; v* > 0.
На втором этапе фазы восстановления (/ = хЙГ...х) состав-
составляющие скорости точки будут v*, v^ = 0 и ип , wT = 0, а уравне-
уравнения примут вид
Отсюда
V /
Г sinal
= mv \(\ + K)cosa ;
Для касательной и нормальной составляющих импульса
ударной реакции имеем
5(} S!g> = -wvsin a,
Sn =
696
Для реализации данного случая удара необходимо выполне-
выполнение условия v" > 0, или
fsina "\ Л
v cos a > 0, откуда
tga>/. B0.90)
При этом также должно выполняться динамическое условие
mvsina</(l + K)mvcosa,
откуда следует
tga</(l + /Q. B0.91)
Объединив неравенства B0.90) и B0.91), получим
где 0 < a < 90°.
На рис. 20.26 построены зависимости a = arctg[/(l + К)] при
# = 0,5 и # = 0.
а
60 Н
40-
20-
К=0,5
= 0
0.2 0,4 0,6
Рис. 20.26
0,8
При К = 0 кривая а(/) является общей нижней границей для
всех случаев удара. Кривые разделяют области I—III, в которых
точка движется при ударе различным образом. При / = 0,5 зона /
определяется углом а = 26,6°. При а < 26,6° скольжение точки
заканчивается в фазе деформирования. При / = 0,5 и К = 0,5 зона
44 Зак. 16
697
//определяется углом а = 36,9°. При 26,6°<а<36,9° при ударе
материальной точки о шероховатую поверхность скольжение
точки заканчивается в фазе восстановления. Зона /// определяется
изменением а в пределах 36,9° < а < 90°. В этом диапазоне изме-
изменения угла падения материальной точки на шероховатую поверх-
поверхность скольжение точки при ударе не прекращается до конца
удара. При построении кривых коэффициент трения скольжения
изменялся в пределах 0 < / < 1. Однако этот диапазон не часто
практически реализуется. При больших значениях / эта модель
может отличаться от результатов эксперимента.
Анализ полученных решений в случае прекращения сколь-
скольжения в фазах деформирования и восстановления показывает, что
окончательные значения скоростей и импульсов у них одинако-
одинаковые, различия наблюдаются в промежуточных значениях.
Для этих случаев имеем при tgot < /A + К)
u = Kv cos a;
S = j
jcos2 аA + КJ + sin2 а .
Ha рис. 20.27 построены зависимости безразмерных скорости
точки после удара и = u/v и полного импульса ударной реакции
S = S/(mv) в зависимости от угла падения а (К = 0,5; / = 0,5 ).
15
30 45 60
Рис. 20.27
90
698
Так как tg P = их /и„ , то
^] при
= O при
Зависимость C(a) приведена на рис. 20.28 (К = 0,5; / = 0,5 ).
90-
80-
60-
40-
20-
0
I
15
30
45 60
Рис. 20.28
75
90
20.12. Удар двух шаров. Модель Герца
Покажем, как при решении задачи об ударе двух шаров
можно использовать зависимость силы упругого сжатия шаров от
величины местного упругого смятия, полученную Герцем при
решении задачи о статическом сжатии шаров. Предположим, что
такая же зависимость существует и для ударной силы.
При ударе шары, массы которых тх и т2, движутся посту-
поступательно. Уравнения движения шаров будут иметь вид
(рис. 20.29)
тх'хх=-Р\ т2х2=Р. B0.92)
44*
699
Рис. 20.29
Расстояние между центрами масс шаров / = х2 - jc, . До удара
это расстояние было /0 = Rx + R2.
В процессе удара / = /0 - а = Я, + R2 - а, откуда
Здесь а — местное смятие шаров, или относительное смещение
центров масс шаров при их деформировании в процессе удара.
Из уравнений B0.92) получаем
1
x}-x2=-F\— + —=-
+т2
тхт
B0.93)
хтг
При упругом деформировании шаров Герцем была решена
задача об их сжатии и получена зависимость силы в контакте тел
от местного смятия:
.3/2
B0.94)
где
; \i]9\i2,El9E2 — коэф-
коэффициенты Пуассона и модули упругости шаров соответственно.
Зависимость B0.94) получена в предположении, что в зоне
контакта шары деформируются как упругие полупространства.
Радиус площадки контакта гк много меньше /?, и R2, поэтому это
допущение приемлемо, а решение дает хорошее согласование с
экспериментом.
700
Экспериментально показано, что зависимость B0.94) можно
также использовать при ударе при условии, что время пробега
поперечной волны по радиусу площадки контакта много меньше
времени нарастания силы. Из B0.93) получаем
~3/2
та =
B0.95)
где т = ¦
ШлГП
\т2
т2
Начальные условия задачи имеют вид
при / = 0 а = 0, d = v0,
где d = x} -x2=v] -v2.
Запишем уравнение B0.95) в виде
B0.96)
т
da
и проинтегрируем с учетом начальных условий B0.96). После
интегрирования получим
т(а2 -Ур)= 2К а5/2
2 5 °
Отсюда можно определить otmax при а = 0, т.е. в момент наи-
наибольшего сближения шаров:
mv2 2 fs mv
~ = ^0ami 9 ИЛИ amax = '
r% г \J max 7 max л j*-
2 5 ^0
При этом
,2/5
Р -К
3/2
чЗ/5
~7ТГ
V 4А0
B0.97)
Определим время нарастания контактной силы:
Л
5 т
mvl
а
ч5/2
B0.98)
После интегрирования имеем
701
B0 99)
o J\(/f2
Пусть а = а/атах — безразмерное смятие шаров, тогда вы-
выражение B0.99) примет вид •
°г da <xmax
0
где 1а — интеграл, рассчитываемый численно, так как его нельзя
выразить через элементарные функции.
Время удара
Вычислив /
/= Г—iL= = 1,4716,
находим
x = 2,9432amax/v0.
Из выражений B0.94) и B0.97) получаем
хЗ/2
— ,илиР=й3/2, B0.100)
где Р, а — безразмерные ударная сила и смятие соответственно.
Введем безразмерное время 7 = t/x и преобразуем уравнение
B0.98) к безразмерному виду
4O
2/ J_^o] 21с&
Отсюда с учетом B0.100) получаем
~' Ч\-Р5/3 . B0.101)
Уравнение B0.101) интегрируется численно. На рис. 20.30
представлена рассчитанная зависимость безразмерной ударной
силы от безразмерного времени.
702
Аналогично можно решить задачу об ударе поступательно
движущихся тел, имеющих другие геометрические формы. В
формуле B0.94) коэффициент Ко в общем случае имеет вид
, где функция q = q(A/B) заранее рассчи-
рассчитана; 8,.=
(/ = 1,2). Напри-
мер, при ударе сферы радиусом R} 1
по образующей прямого кругового
цилиндра с радиусом R2 имеем
чае соударения двух прямых кру-
круговых цилиндров с радиусами /?,,
R2, при котором оси цилиндров
перпендикулярны между собой,
1 ^ 1
А =
2R,
В модели Ньютона скорости шаров при ударе изменяются
скачкообразно. Уравнения движения шаров после интегрирова-
интегрирования имеют вид
Щ(*i -*ю) = @; т2(х2 -х20) = 5@, B0.102)
где i10, х20 — начальные скорости шаров; S(t) = \P(t)dt — им-
о
пульс ударной силы в момент времени t. Если положить t = т, то
в уравнениях будут записаны скорости шаров после удара и пол-
полный импульс ударной силы.
Интегрируя B0.95), получаем
m[ct(T)-d@)] = -S, B0.103)
т
где S = jP(t)dt.
о
Введем, согласно B0.55), коэффициент восстановления
703
^ -*-(T>-*2(T)=_»l-»2, B0.104)
d@) *,@)-i2@) v,-v2
где *,(т) = и,, jc2(x) = m2, jc,@) = v,, *2@) = v2 —скорости шаров
после и до удара соответственно.
С учетом B0.104) из B0.103) находим
S = A + K)mv0 = A + К) JOlHl-. (V) _ V2),
/Ю] + Wl2
где v0 = v, - v2.
Из B0.102) определяем
A + K)mv0 _ (wj - Km2 )v, + A + K)m2v2
u] -v, - ;
A + K)mv0 A + K)m] v, + (/w2 - X/w, )v2
w2 = v2 + = .
2 2
m2 m} + /w2
Решения для ?, w1, w2 совпадают с выражениями B0.59), по-
полученными с использованием модели Ньютона.
В качестве примера рассмотрим соударение двух одинако-
одинаковых стальных шаров (/?, = R2 = 1 см , т] =т2= 32,7 г) при
v0 =5,13см/с. После расчета по приведенным выше формулам
получаем т = 110 мкс, otmax = 1,91 • 10~3 мм , т. е. х -> 0, атах -> 0 .
Замечание. Энергия удара расходуется на энергию местного деформирова-
деформирования и энергию колебаний соударяющихся тел. В простейшем случае соударения
двух одинаковых шаров отношение энергий (по Рэлею) равно Т/То =0,02vo/c,
где Т— максимальная кинетическая энергия колебаний шаров; То = mvljl; m —
масса шара; v0 — скорость соударения; с ~ ^Е/р (для стали с « 5000 м/с ).
Упругий удар будет в том случае, когда vo/c «10~2 ...10~3, при этом отношение
Таким образом, анализ соударения тел с применением моде-
модели Герца показывает справедливость модели Ньютона.
Глава 21
ВВЕДЕНИЕ В ДИНАМИКУ ТЕЛ
ПЕРЕМЕННОЙ МАССЫ
21.1. Основные понятия и допущения
В некоторых задачах механики предпочтительнее рассмат-
рассматривать не движение системы материальных точек, а движение
некоторого объекта, ограниченного замкнутой поверхностью,
через которую движется поток материальных частиц. К такому
типу относятся задачи, связанные с движением жидкостей, расче-
расчетом двигательных установок различных аппаратов (в частности,
ракетных двигателей) а также задачи, связанные с движением
ракет, при котором двигатель выбрасывает поток газа. Нас, есте-
естественно, интересует движение корпуса ракеты, а не центра масс
системы «ракета-сгоревший газ». Ракета является ярким приме-
примером движущегося тела переменной массы.
Примеров движущихся тел, масса которых заметно изменяет-
изменяется в процессе движения, множество как в различных областях
производства (вращающееся веретено, на которое навивается
нить; рулон газетной бумаги, разматывающийся на валу печатной
машины и т. п.), так и в природе (изменение массы ядра кометы,
возрастание массы Земли вследствие падения на ее поверхность
метеоритов, таяние плавающей льдины и др.).
Следует отметить, что в теоретической механике перемен-
переменность массы понимается не в смысле ее возникновения или ис-
исчезновения, а в смысле присоединения или отделения либо со-
совместного -присоединения и отделения частиц. Предметом
дальнейшего рассмотрения будет система частиц с постоянными
массами, состав которой изменяется: некоторое количество час-
70*
тиц покидает рассматриваемую систему, новые частицы к ней
присоединяются.
Хотя изменение массы мы наблюдаем лишь в случае тел ко-
конечных размеров, тем не менее, в динамике тел с переменной
массой (переменным составом), введение понятия материальной
точки переменной массы (ТПМ) упрощает и облегчает изложе-
изложение материала. ТПМ можно определить как множество частиц (с
постоянной массой), которые в момент времени t находятся внут-
внутри области, ограниченной некоторой контрольной поверхностью,
причем предполагается, что эта область движется поступательно
(вместе с некоторой своей геометрической точкой). Переходом к
пределу при стремлении к нулю объема области, ограниченной
контрольной поверхностью, придем к понятию, аналогичному
понятию материальной точки постоянной массы. Таким образом,
ТПМ — это геометрическая точка с некоторой конечной массой,
изменяющейся в процессе движения.
Основное уравнение движения ТПМ было получено
И. В. Мещерским в 1897 г. в его магистерской диссертации. В
1898 г. результаты диссертации были им обобщены на случай
одновременного присоединения и отделения частиц. Обобщенное
уравнение Мещерского является основным в разделе «Динамика
тел переменной массы», составляющем теоретическую базу раке-
тодинамики.
Принципиальным допущением, позволяющим получить
дифференциальное уравнение движения ТПМ, является гипотеза
близкодействия (контактного взаимодействия), согласно которой
частицы изменяют количество движения ТПМ только в момент
их непосредственного контакта. Как только отделяющаяся части-
частица получает относительную скорость по отношению к ТПМ, ее
воздействие на точку прекращается. Присоединяющаяся частица
до момента контакта с ТПМ не взаимодействует. Ввиду того, что
скорости присоединяющихся или отделяющихся частиц в момент
контакта, вообще говоря, отличаются от скорости ТПМ, она бу-
будет испытывать удары со стороны этих частиц. Для случая не-
непрерывного изменения массы точки воздействие таких ударов на
нее аналогично действию некоторых дополнительных сил, назы-
называемых реактивными.
706
21.2. Обобщенное уравнение Мещерского,
реактивные силы
Ограничимся рассмотрением тех случаев, для которых про-
процесс изменения массы происходит непрерывно. При скачкооб-
скачкообразном изменении массы соответствующие задачи решаются пу-
путем непосредственного применения общих теорем динамики тел
постоянной массы, а также методами теории удара
Для вывода уравнения движения ТПМ воспользуемся теоре-
теоремой об изменении количества движения механической системы.
Для этого рассмотрим механическую систему, состоящую из час-
частиц постоянной массы, которые в момент времени t составляют
материальную точку М (обозначим массу точки М, скорость
v ) и за время At присоединятся к материальной точке ТА (обо-
(обозначим их массы \х\1\ ..., ц^, скорости в момент времени t —
v,A),..., v^l} соответственно). Пусть ц{2),..., ц^ —массы тех
частиц, которые за время А/ отделятся от точки М, а
v,B),..., у{ц} — их абсолютные скорости в момент времени
/ + Д/. Введем также обозначения
B1.1)
; v2
Ат] Ат2
где Am, = ?ц^ ; Ат2 = ?ц^2).
* = l k = \
Запишем количество движения этой механической системы в
моменты времени / и / + At. С учетом B1.1) будем иметь
Q(t + At) = (М + A/Wj - Ат2)(v + Av) + Am2v2.
Тогда
v-v2)+ B1.2)
(Am{ -Am2)Av.
707
Учитывая, что —^- = lim , из B1.2) получаем
dt Д<->о At
B1.3)
dt v " dt ч l/ dt '
.. L^YL^,/ix л .. AvAm2 л
так как lim L = 0 и lim - = 0.
д*-»о Д/ д*->о At
Теорему об изменении количества движения системы
-^- = V Fk(e) с учетом B1.3) запишем в виде
dt k=]
M — = F + (v} -v)-^--(v2 -v)-^-. B1.4)
Ж dt dt
Так как при At -> 0 Ат} и Д/ю2 также будут стремиться к нулю,
то в уравнении B1.4) F является равнодействующей сил, при-
приложенных к точке М . Отметим, что и v2 в формулах B1.3) и
B1.4) будет скоростью центра масс отделяющихся частиц в мо-
момент времени t (ранее v2 — скорость центра масс отделяющихся
частиц в момент времени t + АО-
Уравнение B1.4) называется обобщенным уравнением Ме-
Мещерского. Если относительные скорости присоединяющихся и
отсоединяющихся частиц обозначить соответственно
щ = v, - v, п2 = v2 - v ,
то обобщенное уравнение Мещерского примет вид
M^- = F + ut^-u2^. B1.5)
Ж ' Ж 2 dt V '
Поскольку AM - Ат] - Ат2, то после деления на А* и перехода
к пределу при А/ —» 0 получаем так называемое уравнение нераз-
неразрывности
dM _ dmx dm2
dt dt dt
Система уравнений B1.4), B1.6) или B1.5), B1.6) даже при
известных щ и п2 и заданном значении силы F незамкнута (со-
(содержит шесть неизвестных величин г, Л/, т],т2, где г в общем
случае задается тремя обобщенными координатами) и должна
708
быть дополнена еще двумя уравнениями вида
/(/, г, г, М, тх, т2 )= О, например зависимостями /и, = тх (t) и
/и, = m2(t). В ракетодинамике эту систему дополняют условиями
экстремума функционала, оптимизирующего расход топлива,
время полета и т. п.
Представляет также интерес следующая форма обобщенного
уравнения Мещерского, которую легко получить из B1.4) и
B1.6):
d f dmx _ dm2
-v2—¦+-. B1.7)
dt
dt ' l dt L dt
Обозначив
— _ dmx — _ dm? • , лч
Р\=Щ—L, P2=~Uo—L> B1.8)
dt " dt
запишем обобщенное уравнение Мещерского B1.5) в следующей
форме:
M^- = F + PX+P2, B1.9)
at
или
M— = F + P. B1.10)
dt
Сила Р называется реактивной и представляет собой гео-
геометрическую сумму реактивных сил, обусловленных присоеди-
присоединением Рх и отделением Р2 частиц.
Заметим, что вывод обобщенного уравнения Мещерского
применим не только к ТПМ, но и к поступательно движущемуся
телу переменной массы.
21.3. Частные случаи уравнения Мещерского
А. Пусть имеет место лишь процесс отделения масс. Тогда
тх ееО, -т^О, — = --+ и уравнения B1.4), B1.5), B1.7),
at at at
B1.8) принимают вид
dv — / \ dM
М — = F + (v2 - v)—; B1.4а)
at dt
709
Ajfdv ¦= _ dM
M — = F + u2-—; B1.5a)
at at
±(Mv) = F + v2^ B1.7a)
=0, Р=Р,=п2^-. B1.8a)
Б. Пусть происходит лишь присоединение частиц. Тогда
= 0, = —- и обобщенное
dt dt
представить в следующих формах:
т2 = 0, = —- и обобщенное уравнение Мещерского можно
dt dt
B1.46)
at at
M^ = F + U™, B1.56)
dt dt
|(Mv) = F + v,^. B1.76)
Реактивные силы при этом будут
Л=0; Ршр]=щ^-. B1.86)
at
В. Пусть абсолютные скорости частиц в момент присоедине-
присоединения и отделения равны нулю, т. е. v, = v2 = 0, либо, если проис-
происходит только присоединение или только отделение частиц, то
соответственно v, = 0 или v2 = 0. В этом случае обобщенное
уравнение Мещерского принимает вид
?-(№) = F, B1.7b)
at
а реактивная сила
P=-v™. B1.8b)
dt
Г. Пусть относительные скорости частиц в моменты присое-
присоединения и отделения равны нулю, т. е. щ = п2 = 0, либо, если
происходит только присоединение или только отделение, то соот-
соответственно щ = 0 или п2 = 0. В этом случае обобщенное уравне-
уравнение Мещерского имеет вид
710
M-^- = F, B1.5г)
а реактивная сила
Р=0. B1.8г)
Д. Пусть одновременно происходит присоединение и отде-
отделение частиц при равных скоростях центров масс присоединяю-
присоединяющихся и отделяющихся частиц, т. е. v, = v2 = v0 (при этом
щ = п2 = п0). Обобщенное уравнение Мещерского в этом случае
можно представить в следующих формах:
A/—- = F + (v0 - v)—- ; B1.4д)
dt dt
*,dv — _ JM
M—- = F + w0—-; B1.5д)
dt dt
d , ъ ,_ч r= - dM
— (Afv) = F + v0 —, B1.7д)
а реактивная сила
P=«o^- B1-8Д)
dt
E. Пусть масса присоединившихся частиц за любой проме-
промежуток времени равна массе отделившихся частиц. В этом случае
т] =т2, М-const и обобщенное уравнение Мещерского при-
примет одну из следующих форм:
A/-^- = F + (v1-v2)-^ B1.4e)
или
М— = F + (щ -"i)-^-. B1.5e)
Реактивные силы при этом определяются выражениями
Рх=щ^-,Рг=-п^-Р^+Р^{щ-п2)^. B1.8е)
С помощью дифференциальных уравнений движения B1.4)—
B1.7) формулируют различные задачи динамики ТПМ, которые
711
(аналогично задачам динамики точки постоянной массы) условно
подразделяют на прямые и обратные.
21.4. Некоторые классические задачи динамики
точки переменной массы
Задача Кейли (о движении опускающейся тяжелой цепи)
Пусть с горизонтальной подставки опускается вниз тяжелая
цепь, элементы которой непрерывно присоединяются к движу-
движущейся части цепи. Оставшаяся часть цепи находится в состоянии
покоя у края подставки. Предполагая, что цепь движется по вер-
вертикальной прямой, исследовать процесс падения цепи с подстав-
подставки, пренебрегая силами сопротивления*.
По сути, эта задача относится к динамике механической сис-
системы. Но так как свешивающаяся часть цепи представляет собой
поступательно движущееся тело переменной массы, в котором
отсутствует относительное движение частиц, то, как указывалось
выше, при решении задачи можно использовать уравнение Ме-
Мещерского.
Пусть х — длина, am —
масса свешивающейся и дви-
движущейся части цепи (рис. 21.1).
Эта масса непрерывно увели-
увеличивается за счет присоединения
элементов dm части цепи, ле-
лежащей на подставке. При этом
скорость присоединяющихся
элементов возрастает в момент
присоединения от нуля до ско-
скорости движущейся части. Та-
Таким образом, при решении
данной задачи можно восполь-
воспользоваться уравнением B1.76),
которое в проекции на верти-
вертикальную ось Ох имеет вид
Рис. 21.1
" Эта задача была решена английским математиком А. Кейли в 1857 г.
712
4(/m>) = /wg. B1.11)
at
Обозначим через у вес единицы длины цепи. Тогда
= ух/ g, v = i и уравнение B1.11) будет иметь вид
(/) ()
(yxx/g) yx,vum (xx) = gx. B1.12)
at at
df df dx .df
Так как — = — = jc-:L-?to уравнение B1.12) можно пред-
dt dx dt dx
ставить следующим образом:
Axx) = gx. B1.13)
dx
Умножив уравнение B1.13) на х, запишем полученное уравне-
уравнение в виде
d(xxJ =2gx2dx. B1.14)
После интегрирования имеем
(*xJ=!gx3+C. B1.15)
В качестве начальных условий выберем следующие:
при tQ = 0 х = 0, х = 0. B1.16)
Из формул B1.15) и B1.16) находим С = 0. Сократив B1.15) на
х2, получим
(iJ=|gx. B1.17)
Продифференцировав B1.17) по t и сократив на 2х, найдем
X = ig. B1.18)
Интегрируя уравнение B1.18) с начальными условиями B1.16),
окончательно получаем
* = ^gt2- B1.19)
о
Решение B1.19) не является единственным: начальным усло-
условиям B1.16) и дифференциальному уравнению B1.12) можно
удовлетворить, полагая х = 0. Если считать, что в момент / = 0
713
точка А не имеет ускорения (см. рис. 21.1), то цепь будет оста-
оставаться в покое; если же точка А имеет ускорение (с подставки
свешивается бесконечно малый элемент цепи), то цепь придет в
движение. Нетривиальное решение B1.19) соответствует второму
случаю.
Первая задача Циолковского (о движении ракеты
вне силового поля)
Пусть ТПМ движется в безвоздушном пространстве вне си-
силового поля, причем имеет место лишь один процесс отделения
частиц. Движение такой точки моделирует движение ракеты в
космическом пространстве, если пренебречь внутренним движе-
движением частиц, силами сопротивления космической среды, грави-
гравитационным притяжением, силами светового давления и т. п.
Тогда F = 0 и из уравнения Мещерского B1.5а) получим
векторное уравнение движения ракеты
где иг — относительная скорость отделения продуктов сгорания
топлива.
Полагая, что пг постоянна по величине и направлена проти-
противоположно скорости v ракеты, найдем скорость и закон движе-
движения ракеты.
Направим ось Ох вдоль вектора скорости v ракеты
(рис. 21.2). В проекции на ось Ох уравнение B1.20) с учетом, что
vx = v, urx = -иг, имеет вид
= -urdM. B1.21)
и.
О
Рис. 21.2
714
Разделяя в B1.21) переменные и интегрируя, находим
М
v = vQ+urln—°-, B1.22)
0 r M(t)
где v0 — начальная скорость ракеты; Мо — масса ракеты в на-
начальный момент времени.
Так как Мо = Мк + Мт, где Мк — масса корпуса ракеты со
всем оборудованием и полезным грузом; Мт — масса топлива в
начальный момент времени, из формулы B1.22) легко найти пре-
предельную скорость, которую получит ракета, когда будет израсхо-
израсходовано все топливо:
vK=v0+nrlnf 1 + ^-1 B1.23)
Выражение B1.23) — это известная формула К.Э.Циол-
К.Э.Циолковского, опубликованная в его работе 1903 г. Из нее следует, что
предельная скорость vK ракеты зависит только от относительного
запаса топлива и относительной скорости истечения продуктов
его сгорания. От закона изменения массы ракеты (режима работы
двигателя) предельная скорость ракеты не зависит. Если задано
отношение Мт /Мк = Z, где Z — число Циолковского, то пре-
предельная скорость vK = v0 + ur In A + Z) будет вполне определен-
определенной независимо от того, быстро или медленно происходило сго-
сгорание топлива.
Путь, пройденный ракетой на активном участке траектории
(соответствующий этапу сгорания топлива), зависит от закона
сгорания топлива. Полагая при / = 0 х = 0, из уравнения B1.22)
получаем
x(t) = vot + ur fin —°-dt. B1.24)
В теоретических работах по ракетодинамике обычно рас-
рассматривают два закона изменения массы: экспоненциальный
Af = A/oe"p/, B1.25)
где Р = const, и линейный
B1.26)
715
где а} = Моа; а] = const > 0; а = const > 0.
Из формул B1.25), B1.26) найдем время Г сгорания топлива.
Для экспоненциального закона имеем
для линейного —
Z
Т-
л ot(l + Z)'
Интегрируя B1.24) при экспоненциальном законе изменения
массы B1.25), получаем закон движения ракеты
x = v0t + ^ur$t2 @<t<T3).
Если же сгорание топлива происходит по линейному закону,
то, согласно B1.24) и B1.26),
х = vQt + —[at + A - at) In A - at)] @ < / < Гл).
Отметим, что при линейном законе изменения массы B1.26) ее
расход
dM »/
= Моа = const
dt
и реактивная сила
dM *,
Р = -иг = Moaur = const.
dt
При экспоненциальном законе изменения массы B1.25) рас-
расход массы и реактивная сила переменны (изменяются по экспо-
экспоненте), но ускорение, вызванное действием на ракету одной лишь
реактивной силы, постоянно, т. е.
Р ur dM p/
а = = =
М М dt
a
= Bwr = const.
r
Глава 22
ОСНОВЫ НЕБЕСНОЙ МЕХАНИКИ
Небесная механика изучает движение искусственных и ес-
естественных небесных тел под действием сил, определяемых за-
законом всемирного тяготения Ньютона, сил светового давления,
сопротивления среды и др.
Классическими задачами небесной механики являются зада-
задача о движении материальной точки под действием центральной
силы, задача двух тел, в которой рассматривается движение двух
материальных точек в пространстве под действием сил взаимного
притяжения, а также задачи трех и п тел.
22.1. Формулы Бине
Сила, линия действия которой проходит через неподвижную
точку, называется центральной. Такая сила может быть как при-
притягивающей, так и отталкивающей.
Рассмотрим движение материальной точки А/, имеющей
массу /ю, под действием силы F , линия действия которой все
время проходит через неподвижную точку О, принимаемую за
начало координат. В § 15.5 было доказано, что в задаче о дви-
движении точки под действием центральной силы существует инте-
интеграл площадей
Ко =rxmv -С (С = const),
а траекторией точки М будет кривая, расположенная в неподвиж-
неподвижной плоскости, перпендикулярной вектору С и проходящей че-
через центр О центральной силы (случай С = О исключим из рас-
рассмотрения). В небесной механике эту плоскость называют
плоскостью Лапласа.
717
Для описания движения точки М введем полярные коорди-
координаты. Поместим полюс в неподвижный центр О и проведем по-
полярную полуось через начальное положение точки (рис. 22.1).
Уравнения движения точки в проекциях на оси полярной систе-
системы координат примут вид
m(r -rdp2) = Fr;
B2-О
Начальные условия таковы:
Л . v0 sin a
при / = 0 r = R9 (p = 0, r = v0cosa, ф = — ,
где а — угол между вектором v0 и полярной полуосью.
Из второго уравнения B2.1) следует
r2y = C = const, B2.2)
т. е. под действием центральной силы точка движется по плоской
кривой с постоянной секторной скоростью
так, что радиус-вектор точки за равные промежутки времени «за-
«заметает» равные площади. Эта закономерность имеет место при
движении планет и выражает собой закон площадей Кеплера.
Первое уравнение B2.1) с учетом B2.2) можно представить в
виде
m^~ = F+mCz r* . B2.3)
dt2 r ' К }
718
Если Fr не зависит от ф, т.е. Fr = F(r), уравнения движения
точки решают последовательно: сначала из B2.3) определяют
закон изменения во времени полярного радиуса г = r{t), а затем
из B2.2) — зависимость ф = ф(/). Если же Fr =F(r,q>), уравне-
уравнения будут связанными и их решают совместно.
Выведем такое дифференциальное уравнение, из решения
которого можно сразу определить траекторию. Заменим диффе-
дифференцирование по / дифференцированием по ф, учитывая сущест-
существование интеграла площадей B2.2):
. С
dr=v ^dydr ^ С dr = d{\/r)m
dt r dt dy r2 dy dq>
d2r = rip <frr = С d f c djl/r)} = C2 d\\/r)
dt2 dt dq r1 rip[ д?ф J r2 d^2
Тогда получим первую формулу Бине
v2-
B2.6)
позволяющую находить скорость в различных точках орбиты,
если известны траектория г = г(ф) и постоянная С секторной
скорости.
Подставив выражение B2.5) в B2.3), получим вторую фор-
мулу Бине
mC2(d2(\/r) Г
г2 I rip2
B2.7)
Формулы Бине позволяют находить решения как прямой, так
и обратной задач динамики, т. е. определять центральную силу,
если известна траектория движения точки, или определять траек-
траекторию, зная центральную силу. Если Fr явно не зависит от вре-
времени, для решения достаточно одного уравнения B2.7), пред-
представляющего собой дифференциальное уравнение траектории
719
точки. В задачах небесной механики центральная сила зависит
только от расстояния (Fr =Fr(r)) и, следовательно, является по-
потенциальной. В таком случае существует интеграл энергии
mv2/2 + n(r) = h}, B2.8)
где П(г)--\f dr ~-\Fr{r)dr — потенциальная энергия сило-
силового поля центральной силы; А, — константа интегрирования.
Подставив первую формулу Бине B2.6) в интеграл энергии,
получаем уравнение
2г4 Г. _, . тС2
dy) тС2 2г
решение которого сводится к квадратуре и зависит от конкретно-
конкретного вида функции Ff = Fr (r) .
22.2. Закон всемирного тяготения. Законы Кеплера
Закономерности в движении планет были установлены Иоган-
Иоганном Кеплером A571-1630) путем обработки многочисленных ас-
астрономических наблюдений, полученных астрономом Тихо Браге
A546-1601). Они были сформулированы Кеплером в виде трех
законов:
1. Орбита каждой планеты есть эллипс, в одном из фокусов
которого находится Солнце.
2. Площади, заметаемые радиус-векторами планет относи-
относительно Солнца, пропорциональны временам движения планет.
3. Квадраты периодов обращения планет вокруг Солнца
относятся как кубы больших полуосей их орбит, т. е. Г/а3 =
= const.
На основе этих законов, используя сложный геометрический
метод, И. Ньютон в 1666 г. установил закон всемирного тяготе-
тяготения. В наше время это можно сделать проще. Действительно, из
второго закона Кеплера следует, что существует интеграл площа-
площадей, т. е. сила, действующая на планеты, является центральной,
720
причем ее центром является Солнце. Первый закон Кеплера оп-
определяет орбиту планеты и позволяет найти центральную силу
при помощи формул Бине. Уравнение эллипса в полярной систе-
системе координат имеет вид
U1 + gC0S(p B2.9)
р
где e = yj\-(b/aJ —эксцентриситет; р = Ь2/а — фокальный
параметр; а, Ъ — большая и малая полуоси эллипса, причем по-
полярная ось направлена от фокуса к ближайшей вершине эллипса.
Подставив B2.9) во вторую формулу Бине B2.7), получим
F mQ { gC0SCp i 1 + gC0S(pV mC B2 10)
r2 I P P ) r2p'
Таким образом, действующая на планету центральная сила
является притягивающей и обратно пропорциональной квадрату
расстояния планеты от Солнца.
Обозначим в формуле B2.10) C2/p = C2a/b2 = ц, где ц —
постоянная Гаусса. Так как за период обращения Т радиус-вектор
планеты «заметает» с постоянной секторной скоростью С/2 всю
площадь эллипса, то СГ/2 = nab. Тогда
С2а Ап2аъ
* 1 B2.11)
Fr=-\i—.
г
Так как согласно третьему закону Кеплера отношение а3/Т2
постоянно, постоянная Гаусса ц есть величина, одинаковая для
всех планет, движущихся под действием силы притяжения Солн-
Солнца, и должна зависеть от массы Солнца.
Для тел, движущихся под действием притяжения Земли или
других планет, существуют свои постоянные Гаусса, обозначим
их ц,. Сила, с которой Солнце будет притягивать планету,
4бЗак. 16 - 721
где /и, — масса /-й планеты. Сила, с которой планета притягивает
Солнце,
где А/с — масса Солнца. По третьему закону Ньютона FiC = FC/,
или \imjr2 =yLiMc/r2 , откуда ц/Мс =^ii/mi = const. Следова-
Следовательно, отношение постоянной Гаусса ц,- любой планеты к ее
массе nij есть величина постоянная, равная отношению постоян-
постоянной Гаусса Солнца к массе Солнца.
Постоянную Гаусса для Земли легко определить из следую-
следующих условий: на поверхности Земли сила тяготения FT равна весу
тела, т. е. при г = R3 FT =mg, откуда |и3 = gR% « 4 • 1014 м3/с .
Если обозначить / = ц/Мс , то сила, действующая на плане-
планету, может быть представлена в виде
F = -f^r0, B2.12)
где Fo = F/r.
Формула B2.12) выражает собой закон всемирного тяготе-
тяготения, справедливый для любых двух материальных тел (точек).
Коэффициент /» 6,67-101 м3/(кгс2) называется гравитаци-
гравитационной постоянной.
Рассмотрим обратную задачу — выведем законы Кеплера из
закона всемирного тяготения. Так как сила, определяемая форму-
формулой B2.12), центральная, то существует интеграл площадей и
соответственно выполняется второй закон Кеплера. Для вывода
первого закона Кеплера воспользуемся второй формулой Бине.
Подставив проекцию Fr силы тяготения, определяемую вторым
соотношением B2.11), в формулу B2.7), получим дифференциаль-
дифференциальное уравнение траектории планеты:
d2(Vr) 1 _ ц
2 г "С2' B2ЛЗ)
<*р2 г С
общее решение которого имеет вид
722
l/r =
или
B2.14)
где А, В, e, ф0 — произвольные постоянные интегрирования.
Выражение B2.14) представляет собой уравнение кониче-
конического сечения с эксцентриситетом е и фокальным параметром
р = С21\\, фокус которого совпадает с притягивающим центром.
Таким образом, получен обобщенный первый закон Кеплера, так
как в зависимости от эксцентриситета орбиты небесных тел мо-
могут быть не только эллиптического (е < 1), но и параболического
(е = 1) и гиперболического (е > 1) видов.
Если в формуле р-Ъ2/а-С2/(/М) константу С выразить,
согласно B2.11), через период Г обращения планеты, то получим
а»{ Т ) rV '
откуда следует третий закон Кеплера
а3 Ц
—г = -^г- = COIlSt .
Т2 4тг2
Конкретный вид орбиты, определяемый выражением B2.14),
зависит от значений постоянных интегрирования ей ф0, т. е. от
начальных условий. Надлежащим выбором положения полярной
полуоси всегда можно обеспечить ф0 = 0. Для этого следует
провести полярную полуось через точку Р орбиты, ближайшую к
притягивающему центру О, которая называется перицентром.
Положение этой точки заранее не известно и подлежит определе-
определению по начальным условиям.
22.3. Энергетическая классификация орбит
Рассмотрим движение материальной точки, масса которой w,
под действием силы тяготения B2.12). Если начальное расстоя-
расстояние R точки от центра О задано (здесь R — расстояние до пери-
46* 7?3
центра), то вид ее орбиты будет определяться начальной ско-
скоростью v0. Для доказательства этого факта найдем зависимость
между эксцентриситетом орбиты и значениями R и v0. Потен-
Потенциальная энергия поля силы тяготения, согласно B2.12),
Щг) = - \Fr {r)dr = \т J* = -ц mlr +C, ,
где константа интегрирования С, = 0, так как при г -> оо
П(г)->0.
Разделив в выражении B2.8) все члены на массу т и учиты-
учитывая B2.9), представим интеграл энергии в виде
v2 =2ц/г + Л =
(
Р
где h — константа энергии, h = 2А, //w = v% - 2 \i/R.
Подстановка же B2.9) в первую формулу Бине дает
С2
v2 =—r-(l + 2ecos(p + e2).
Р
Приравнивая правые части полученных выражений и учитывая,
что р = С2/\х, получаем
e2=l + (C/ixJh. B2.15)
Из равенства B2.15) следует, что при h = v] -2ц//? = 0
е = 1, т. е. орбита имеет вид параболы. Скорость v0 = yf2\x[R на-
называется параболической, или второй космической vn, и пред-
представляет собой наименьшую скорость, которую нужно сообщить
точке, находящейся в перицентре (на расстоянии R от точки О),
чтобы она удалилась на сколь угодно большое расстояние от цен-
центра тяготения О. Для условий Земли (R3 = 6370 км )
vn = p\i3 /R3 = pgR3 = 11,2 км/с.
При v0 < vn константа энергии h < 0, в этом случае е < 1 и
орбита будет эллиптической; скорости, удовлетворяющие этому
неравенству, называются эллиптическими. При v0 > vn кон-
константа h > 0 и орбиты будут гиперболическими (е > 1).
724
Для случая круговой орбиты (е = 0) константа площадей
С = Rv0. Подставив эти значения в B2.15), получим
1 + (Rv0 /цJ (v02 -2 ц/Л) = 1 - 2 ?v02 + (Лу02 /цJ =
И*
= A-Лу2/цJ=0,
откуда следует, что скорость движения точки по круговой орби-
орбите, или первая космическая скорость
Для условий Земли vx = ^[X3/R3 = ^Л3 = vn /л/2 = 7,9 км/с.
22.4. Движение точки по орбите
Для окончательного решения задачи, т. е. для определения
закона движения точки по орбите, воспользуемся интегралом
площадей, представив его в виде
dt' r2'
Заменив согласно B2.9) в этом уравнении г, получим
С A+ecoscp)
откуда
С 0J(l+ecos9J
t-to=-
где t0 — момент времени, когда точка проходит через пери-
перицентр.
В случае эллиптической орбиты для вычисления интеграла
выполняют следующие подстановки: tg(cp/2) = jt, tgCE/2) = for,
где к = A - е)/(\ + ё), что приводит к уравнению, известному в
небесной механике как уравнение Кеплера
725
Переменная ф в небесной механике называется истинной ано-
аномалией, переменная Е — эксцентрической аномалией, соотно-
соотношение между ними определяется формулой tg (Е/2) = k tg (ф/2).
Уравнения движения по параболической и гиперболической
орбитам выводятся аналогично.
Таким образом, общее решение задачи о движении матери-
материальной точки под действием силы притяжения к неподвижному
центру по закону всемирного тяготения зависит от шести произ-
произвольных констант, определяемых начальными условиями. Форма,
размеры и положение орбиты в ее плоскости определены, если
известны эксцентриситет е, фокальный параметр р (или полуоси
аи b для случая эллиптической орбиты) и угол ф0, образуемый
осью конического сечения с полярной полуосью. Кроме того, не-
необходимо знать положение плоскости орбиту в пространстве,
которое задается направлением векторной константы площадей.
В небесной механике для задания орбиты и движения по ней
точки широко используются так называемые кеплеровские эле-
элементы. Помимо параметров е и/? к ним относятся (рис. 22.2): т —
время прохождения через перицентр; Q — долгота восходяще-
восходящего узла — угол, который составляет с осью Ох линия пересечения
плоскости орбиты с плоскостью Оху; i — наклонение орбиты —
двугранный угол между плоскостью орбиты и плоскостью Оху.
Восходящий узел
Рис. 22.2
726
Наконец, параметр w определяет положение орбиты в ее плоскости
и называется угловым расстоянием перицентра Р от узла; он ра-
равен углу между направлением на перицентр и линией пересече-
пересечения плоскости орбиты с плоскостью Оху.
22.5. Задача двух тел
В рассмотренной выше задаче центр тяготения считался не-
неподвижным по отношению к некоторой инерциальной системе
отсчета. Рассмотрим теперь две материальные точки с массами
т} и т2 соответственно, движущиеся под действием сил взаим-
взаимного притяжения.
Для получения уравнений движения введем инерциальную
систему отсчета O}xyz. Положения материальных точек О и М
определены радиус-векторами г, и г2 соответственно (рис. 22.3).
Положение точки М относительно О зададим радиус-вектором г .
Рис. 22.3
Запишем уравнения движения точек в инерциальной системе
отсчета O}xyz:
dh
_
*» -'-?
727
m ^ = fm\m^T.
Так как г -r2 - F,, то отсюда следует, что
d2r _ /я, _ ,/w2__
2_—_ — — Т р — т у _ — / I 7!
аг Г Г г"
Если ввести обозначение
• A = /(т,+т2), B2.16)
то получим
^Т = -Ц-Т- B2.17)
Дифференциальное уравнение B2.17) описывает движение
точки М в подвижной системе отсчета OXYZ (где оси системы
OXYZ параллельны соответствующим осям системы Oxxyz). Это
уравнение также можно интерпретировать как дифференциаль-
дифференциальное уравнение движения точки М относительно неподвижного
притягивающего центра О под действием центральной силы
F --\xm2r/r3. Таким образом, все полученные ранее результа-
результаты применимы к рассматриваемой задаче. Если вектор-функция
г = r(t) найдена, то определение движения относительно системы
координат Oxxyz не представляет труда. Точка С — центр масс
точек О и М — движется равномерно и прямолинейно; ее ско-
скорость полностью определяется начальными скоростями точек О и
М Если гс — радиус-вектор центра масс, то
_ _
гх=гс
2с
т] + т2 тх+ т2
Исходя из результатов, полученных в § 22.2, найдем поправ-
поправку к третьему закону Кеплера. Рассмотрим движение вокруг
Солнца двух планет с массами тх и т2 без учета взаимного
влияния. Согласно формулам B2.11) и B2.16), для первой и вто-
второй планет соответственно имеем
Г,2
728
|2
Разделив первое равенство на второе, получим
аЦТ; " M + m2 ~Y+
т. е. третий закон Кеплера носит приближенный характер и вы-
выполняется постольку, поскольку массы планет тх и т1 малы по
сравнению с массой Солнца Мс .
22.6. О задаче // тел и о других задачах небесной механики
Задача п тел (п>3) является одной из наиболее известных
проблем классической динамики. В ней рассматривается движе-
движение п материальных точек в пространстве под действием сил вза-
взаимного гравитационного притяжения и требуется определить по-
положения всех точек в произвольный момент времени, если в
момент t = t0 заданы их координаты и скорости. В указанной по-
постановке эта задача не решена и до сих пор. Исследования этой
задачи, а особенно задачи трех тел (и = 3), оказали огромное
влияние на развитие всей динамики. Многие из наиболее важных
результатов современной динамики в той или иной степени свя-
связаны с этой задачей.
При решении различных проблем космонавтики и астроно-
астрономии большую роль играет так называемая ограниченная задача
трех тел. Она заключается в изучении движения точки, имею-
имеющей малую массу в поле тяготения двух тел (материальных то-
точек), массы которых конечны. Предполагается, что точка малой
массы не оказывает влияния на движение тел конечной массы,
которые движутся по орбитам, определяемым в задаче двух тел,
т.е. движение тел конечной массы считается известным. Эта за-
задача гораздо проще общей {неограниченной) задачи трех тел. Но
и она до конца не проинтегрирована, хотя для многих частных
случаев этой задачи, возникающих в астрономии, удается по-
построить приближенное решение с очень высокой степенью точ-
729
ности. Примерами ограниченной задачи трех тел являются задачи
движения систем Земля - Луна - спутник, Солнце - планета -
комета и т. д.
Важнейшими проблемами небесной механики являются сле-
следующие:
1) определение движения центров масс небесных тел;
2) нахождение движения небесных тел вокруг их центров
масс.
Если вопросы, относящиеся к первой проблеме, разработаны
в научной и учебной литературе достаточно хорошо и имеют
многолетнюю историю, то работы, связанные со второй пробле-
проблемой, опубликованы в основном за последние два-три десятилетия
в научных журналах и являются менее доступными.
Следует отметить, что задачи, в которых изучается движение
небесных тел вокруг их центров масс, сформулированы либо в
ограниченной постановке (движение их центров масс считается
известным), либо в общей или неограниченной постановке (диф-
(дифференциальные уравнения поступательных движений центров
масс и вращений вокруг центров масс взаимосвязаны и решаются
совместно).
ОГЛАВЛЕНИЕ
Предисловие 5
Введение 6
Некоторые сведения из теории векторов 9
8.1. Скалярные и векторные величины. Единичные векторы 9
8.2. Проекции вектора на ось и плоскость 11
8.3. Координаты вектора. Аналитическое задание вектора. Радиус-
вектор точки 12
8.4. Сложение и вычитание векторов 14
8.5. Умножение векторов 16
8.6. Векторы и матрицы 24
8.7. Связь между проекциями вектора на оси двух прямоугольных
систем координат 29
8.8. Вектор-функция. Годограф вектора. Дифференцирование
вектора по скалярному аргументу 32
Раздел 1. КИНЕМАТИКА
Глава 1. Кинематика точки 39
1.1. Скорость точки 39
1.2. Ускорение точки 41
1.3. Векторный способ задания движения точки 44
1.4. Координатный способ задания движения точки 44
1.5. Естественный способ задания движения точки 61
Глава 2. Простейшие движения твердого тела 70
2.1. Степени свободы и теорема о проекциях скоростей 70
2.2. Поступательное движение твердого тела 73
2.3. Вращение твердого тела вокруг неподвижной оси 75
Глава 3. Плоское движение твердого тела 85
3.1. Разложение плоского движения твердого тела на поступательное
и вращательное движения 85
3.2. Уравнения движения, угловая скорость и угловое ускорение
твердого тела при плоском движении 87
3.3. Скорости точек тела при плоском движении 89
3.4. Мгновенный центр скоростей 90
3.5. Мгновенный центр вращения. Центроиды 94
731
3.6. Вычисление угловой скорости твердого тела при плоском
движении 96
3.7. Ускорения точек тела при плоском движении 98
3.8. Мгновенный центр ускорений 102
3.9. Способы вычисления углового ускорения тела при плоском
движении 106
Глава 4. Вращение твердого тела вокруг неподвижной точки 110
4.1. Число степеней свободы. Углы Эйлера. Уравнения вращения 110
4.2. Матрица направляющих косинусов. Траектория точки тела 114
4.3. Мгновенная ось вращения. Аксоиды 116
4.4. Мгновенные угловая скорость и угловое ускорение 119
4.5. Скорости точек тела. Кинематические уравнения Эйлера 122
4.6. Ускорения точек тела 128
4.7. Вычисление углового ускорения тела 130
Глава 5. Общий случай движения твердого тела 134
5.1. Число степеней свободы. Обобщенные координаты. Уравнения
движения 134
5.2. Траектория произвольной точки тела 139
5.3. Скорость произвольной точки тела 140
5.4. Ускорение произвольной точки тела 141
Глава 6. Сложное движение точки 143
6.1. Относительное, переносное и абсолютное движения точки 143
6.2. Абсолютная и относительная производные вектора. Формула
Бура 145
6.3. Теорема о сложении скоростей 148
6.4. Теорема о сложении ускорений, или кинематическая теорема
Кориолиса. Ускорение Кориолиса 150
6.5. Сложение ускорений в частных случаях переносного
движения 153
Глава 7. Сложное движение твердого тела 162
7.1. Теорема о сложении угловых скоростей при сложном
движении твердого тела 162
7.2. Сложение вращений вокруг пересекающихся осей 164
7.3. Сложение вращений вокруг параллельных осей. Пара
вращений 165
7.4. Сложение поступательных движений 168
7.5. Сложение поступательного и вращательного движений 169
Раздел П. СТАТИКА
Глава 8. Аксиомы и основные положения статики 173
8.1. Аксиомы статики 174
8.2. Основные виды связей и их реакции 177
8.3. Система сходящихся сил 181
8.4. Момент силы относительно точки и относительно оси 189
732
8.5. Сложение параллельных сил. Пара сил 196
8.6. Приведение системы сил к простейшей системе 204
Глава 9. Равновесие тел 214
9.1. Условия равновесия системы сил 214
9.2. Равновесие системы тел 222
9.3. Определение внутренних сил 225
9.4. Статически определимые и статически неопределимые
системы тел 227
9.5. Расчет плоских ферм 228
9.6. Распределенные силы 229
Глава 10. Трение 236
10.1. Законы трения скольжения 236
10.2. Реакции шероховатой поверхности. Угол трения 237.
10.3. Реакция связи при качении 238
10.4. Равновесие тела при наличии трения. Конус трения 239
Глава 11. Центр тяжести 248
11.1. Центр системы параллельных сил 248
11.2. Центр тяжести твердого тела 251
11.3. Методы определения координат центров тяжести тел 253
Глава 12. Равновесие гибкой и нерастяжимой нити 260
12.1. Дифференциальные уравнения равновесия нити 260
12.2. Частные случаи внешних сил 263
12.3. Цепная линия 265
Раздел III. ДИНАМИКА
Глава 13. Динамика материальной точки 271
13.1. Аксиомы динамики 271
13.2. Дифференциальные уравнения движения материальной точки 273
13.3. Две основные задачи динамики материальной точки 275
13.4. Движение несвободной материальной точки 280
13.5. Динамика относительного движения 288
13.6. Равновесие и движение материальной точки относительно
Земли 293
Глава 14. Геометрия масс 298
14.1. Центр масс механической системы 298
14.2. Моменты инерции 301
14.3. Зависимость моментов инерции относительно параллельных
осей (теорема Гюйгенса-Штейнера) 304
14.4. Моменты инерции однородных тел 305
14.5. Моменты инерции однородных тел вращения 310
14.6. Момент инерции относительно оси, проходящей через
заданную точку 315
14.7. Эллипсоид инерции. Главные оси инерции 318
733
14.8. Свойства главных осей инерции тела : 321
14.9. Определение направления главных осей инерции 326
Глава 15. Общие теоремы динамики 331
15.1. Механическая система. Внешние и внутренние силы 331
15.2. Дифференциальные уравнения движения механической
системы 334
15.3. Теорема о движении центра масс механической системы 335
15.4. Теорема об изменении количества движения 342
15.5. Теорема об изменении момента количества движения
материальной точки. Теорема об изменении главного момента
количеств движения механической системы 353
15.6. Теорема об изменении кинетической энергии 382
15.7. Потенциальное силовое поле 400
15.8. Примеры использования общих теорем динамики 412
Глава 16. Динамика твердого тела 424
16.1. Поступательное движение твердого тела. Вращение твердого
тела вокруг неподвижной оси. Плоское движение твердого
тела » 424
16.2. Сферическое движение твердого тела 436
16.3. Общий случай движения твердого тела 465
Глава 17. Принцип Даламбера. Динамические реакции связей 469
17.1. Принцип Даламбера. Сила инерции 469
17.2. Принцип Даламбера для механической системы 471
17.3. Главный вектор и главный момент сил инерции 473
17.4. Динамические реакции опор 475
17.5. Статическая и динамическая уравновешенность твердого
тела, вращающегося вокруг неподвижной оси 482
17.6. Балансировка роторов 487
Глава 18. Основы аналитической механики 493
18.1. Основные понятия 4 493
18.2. Возможная работа силы. Идеальные связи 504
18.3. Обобщенные силы 507
18.4. Дифференциальные принципы аналитической механики ,513
18.5. Уравнение Лагранжа второго рода 527
18.6. Интегральные вариационные принципы механики 536
Глава 19. Теория колебаний 555
19.1. Устойчивость положения равновесия механической системы 555
19.2. Дифференциальные уравнения малых колебаний линейной
системы с одной степенью свободы 559
19.3. Свободные движения линейной системы с одной степенью
свободы 568
19.4. Вынужденные колебания линейной системы с одной
степенью свободы 582
19.5. Основы теории регистрирующих приборов 607
734
19.6. Основы виброзащиты 612
19.7. Дифференциальные уравнения малых колебаний линейной
системы с конечным числом степеней свободы 615
19.8. Свободные колебания линейной консервативной системы
с двумя степенями свободы 625
19.9. Вынужденные колебания линейной системы с двумя
степенями свободы при гармоническом возбуждении.
Динамический гаситель колебаний 637
19.10. Колебания линейных систем с конечным числом степеней
свободы 645
Глава 20. Теория удара 653
20.1. Основные понятия и допущения. Модель удара 653
20.2. Теоремы об изменении количества движения и о движении
центра масс системы при ударе 658
20.3. Теорема об изменении главного момента количеств движения
системы при ударе : 660
20.4. Коэффициент восстановления 662
20.5. Теорема об изменении кинетической энергии системы
при ударе. Теорема Карно 664
20.6. Удар по телу, вращающемуся вокруг неподвижной оси. Центр
удара 672
20.7. Удар по твердому телу с неподвижной точкой. Центр удара.
Удар по свободному твердому телу 677
20.8. О связях при ударе. Общее уравнение механики, 679
20.9 Уравнение Лагранжа второго рода при ударе в механической
системе , 682
20.10. Удар двух тел при поступательном движении. -
Энергетические соотношения 684
20.11. Удар материальной точки о неподвижную шероховатую
поверхность 691
20.12. Удар двух шаров. Модель Герца .699
Глава 21. Введение в динамику тел переменной массы 705
21.1. Основные понятия и допущения 705
21.2. Обобщенное уравнение Мещерского, реактивные силы 707
21.3. Частные случаи уравнения Мещерского 709
21.4. Некоторые классические задачи динамики точки переменной
массы 712
Глава 22. Основы небесной механики 717
22.1. Формулы Бине 717.
22.2. Закон всемирного тяготения. Законы Кеплера 720
22.3. Энергетическая классификация орбит 723
22.4. Движение точки по орбите 725
22.5. Задача двух тел 727
22.6. О задаче л тел и о других задачах небесной механики 729
735
Учебное издание
Дронг Владислав Иванович
Дубинин Владимир Валентинович
Ильин Михаил Михайлович
Колесников Константин Сергеевич
Космодемьянский Вадим Аркадьевич
Назаренко Борис Петрович
Панкратов Александр Алексеевич
Русанов Павел Григорьевич
Саратов Юрий Сергеевич
Степанчук Юрий Михайлович
Тушева Галина Михайловна
Шкапов Павел Михайлович
КУРС ТЕОРЕТИЧЕСКОЙ МЕХАНИКИ
Редактор Е. Н. Ставицкая
Художник С. С. Водчиц
Корректоры О. В. Калашникова, О. Ю. Соколова
Компьютерная верстка И. М. Зверева
Компьютерная графика В. В. Белыпюкова, С. А. Холодова
Санитарно-эпидемиологическое заключение
Ж77.99.02.953.Д.005683.09.04 от 13.09.2004 г.
Подписано в печать 31.01.2005. Формат 60x90/16. Печать офсетная.
Бумага офсетная. Усл. печ. л. 46. Уч.-изд. л. 46,14.
Тираж 3000 экз. Заказ 16
Издательство МГТУ им. Н. Э. Баумана,
107005, Москва, 2-я Бауманская, 5
Отпечатано с диапозитивов в ГП «Облиздат»
248640, г. Калуга, пл. Старый Торг, 5
ISBN 5-7038-1695-5
785703 816950